





























































































































































































































































































































































































































































































































Автор: Кирилин А.Н. Ахметов Р.Н. Ткаченко С.И. Аншаков Г.П.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника астрономия космонавтика сборник материалов материалы конференции
ISBN: 978-5-93424-743-1
Год: 2015




IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
СБОРНИК
МАТЕРИАЛОВ КОНФЕРЕНЦИИ
ТОМ II
АО «РКЦ «Прогресс», Самара, Россия
14 -18 сентября 2015 г.
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
СБОРНИК
МАТЕРИАЛОВ КОНФЕРЕНЦИИ
Том 2
АО «РКЦ «Прогресс», Самара, Россия
14-18 сентября 2015 г.
УДК 629.7
Под общей редакцией
доктора технических наук, профессора
А.Н. Кирилина
РЕДАКЦИОННАЯ КОЛЛЕГИЯ:
А.Н. Кирилин, Р.Н. Ахметов, С.И. Ткаченко, Т.П. Аншаков,
Н.Р. Стратилатов, А.Д. Сторож, А.И. Мантуров,
А.В. Соллогуб, Ю.Н. Горелов, В.В. Салмин
Рецензент: д.т.н., профессор Ю.Н. Лазарев
Материалы IV Всероссийской научно-технической конференции «Актуальные проблемы
ракетно-космической техники» (IV Козловские чтения) (14-18 сентября 2015 года,
г.Самара); под общ. ред. А.Н. Кирилина/СамНЦ РАН - Самара, 2015.-
стр.
УДК 629.7
ISBN 978-5-93424-743-1
© СамНЦ, Самара, 2015
© Коллектив авторов, 2015
СОДЕРЖАНИЕ
СЕКЦИЯ 4: ДВИГАТЕЛИ. ЭНЕРГЕТИЧЕСКИЕ УСТАНОВКИ И СИСТЕМЫ
ТЕРМОРЕГУЛИРОВАНИЯ КА. МЕХАНИЗМЫ СПЕЦИАЛЬНЫХ СИСТЕМ
ОТРАБОТКА КОНТУРНЫХ ТЕПЛОВЫХ ТРУБ ДЛЯ СОТР МКА 17
«АИСТ-2»
В.В. Соболев, А.А. Великанов (ГНЦ ФГУП «Центр Келдыша», г. Москва),
В.А. Николаев (АО «РКЦ «Прогресс», г. Самара)
УЧЁТ ОСОБЕННОСТЕЙ ТЕПЛОВЫХ ПРОЦЕССОВ В ЖИДКИХ 21
УГЛЕВОДОРОДНЫХ ГОРЮЧИХ И ОХЛАДИТЕЛЯХ ПРИ
ПРОЕКТИРОВАНИИ И СОЗДАНИИ ПЕРСПЕКТИВНЫХ ЖРД
МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ
В.А. Алтунин, К.В. Алтунин (КАИ им. А.Н. Туполева, г. Казань),
В.П. Демиденко (МВАА, г. Санкт-Петербург), Е.Н. Платонов,
Л.А.Обухова, А.А. Терентьев, С.Я. Коханова (КАИ им. А.Н. Туполева,
г. Казань), М.Л. Яновская (ЦИАМ им. П.И. Баранова, г. Москва)
ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ 24
КОСМИЧЕСКОГО АППАРАТА С РЕЗКО ПЕРЕМЕННОЙ
ЦИКЛОГРАММОЙ НАГРУЗКИ
М.М. Черная, Ю.А. Шиняков, А.В. Осипов (ТУСУР, г. Томск)
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ 27
НИЗКОТЕМПЕРАТУРНЫХ ТЕПЛОВЫХ ТРУБ ПОВЫШЕННОЙ
ТЕПЛОВОЙ ПРОВОДИМОСТИ
В.В. Бирюк (СГАУ им. академика С.П. Королева, г. Самара), А.И. Китаев
(АО «РКЦ «Прогресс», г. Самара), А.Л. Лукс, А.Г. Матвеев (СамГУ,
г. Самара), А.В. Порядин (АО «РКЦ «Прогресс», г. Самара)
АЛГОРИТМ ВЫЧИСЛЕНИЯ КОМПЛЕКСА ГЕОМЕТРИЧЕСКИХ 36
ПАРАМЕТРОВ ЭЛЕМЕНТОВ ПЕРА ЛОПАТОК КОМПРЕССОРА ГТД
В.А. Печенин, И.С. Степаненко, Н.В. Рузанов, М.А. Болотов
(СГАУ им. академика С.П. Королева, г. Самара)
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ НАПЫЛЕНИЯ 40
ПЛАЗМЕННЫХ ГАЗОТЕРМИЧЕСКИХ ПОКРЫТИЙ В
ПРОИЗВОДСТВЕ ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В.И. Богданович, МГ. Гиорбелидзе (СГАУ им. академика С.П. Королева,
г. Самара)
СИСТЕМНО-МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ 43
ПНЕВМОГИДРАВЛИЧЕСКИХ СРЕДСТВ ДВИГАТЕЛЬНОЙ
УСТАНОВКИ
Н.Р. Горюнова, А.А. Горюнов (АО «РКЦ «Прогресс», г. Самара)
3
ПРАВИЛА ОТБОРА ПРУЖИН ПРОЦЕССА СБОРКИ КЛАПАНОВ В 46
ИЗДЕЛИИ
Е.В. Белое (АО «РКЦ «Прогресс», г. Самара)
ПОСТРОЕНИЕ ПРОЦЕССА СБОРКИ ПРИ УСЛОВИИ ДИНАМИКИ 51
ДРЕНАЖНО-ПРЕДОХРАНИТЕЛЬНОГО КЛАПАНА
И.К. Рыльцев (СамГТУ, г. Самара), Е.В. Белов (АО «РКЦ «Прогресс»,
г. Самара)
СЕКЦИЯ 5. НАПРАВЛЕНИЕ 1: ИСПЫТАНИЯ РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ
ОПРЕДЕЛЕНИЕ СТЕПЕНИ ВЛИЯНИЯ ВНЕШНИХ ФАКТОРОВ, 61
ВОЗНИКАЮЩИХ В ПРОМЕЖУТКАХ ВРЕМЕНИ МЕЖДУ
ИСПЫТАНИЯМИ СИСТЕМ ИЗ СОСТАВА ИЗДЕЛИЙ РКТ, В
ПРОЦЕССЕ ИХ ПОДГОТОВКИ К ПУСКУ
Д.Ю. Шайкина (АО «РКЦ «Прогресс», г. Самара)
КОНТРОЛЬ СТАБИЛЬНОСТИ УГЛОВОГО ПОЛОЖЕНИЯ 66
ЭЛЕМЕНТОВ КОНСТРУКЦИЙ С ПОМОЩЬЮ ЛАЗЕРНОЙ
ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ
А.С. Нонин, А.С. Ткаченко, Д.Н. Вобликов (АО «РКЦ «Прогресс»,
г. Самара), Н.А. Сазонникова. (СГАУ им. академика С.П. Королева,
г. Самара)
ОЦЕНКА НАДЕЖНОСТИ ПОДГОТОВКИ РАКЕТ-НОСИТЕЛЕЙ НА 69
ОСНОВЕ ПОКАЗАТЕЛЕЙ ОБНАРУЖЕНИЯ ОТКАЗОВ И
НЕИСПРАВНОСТЕЙ
И.В. Муштакова (АО «РКЦ «Прогресс», г. Самара)
ПРИМЕНЕНИЕ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ ПРИ 74
ПРОВЕДЕНИИ СТАТИЧЕСКИХ ИСПЫТАНИЙ ИЗДЕЛИЙ РАКЕТНО-
КОСМИЧЕСКОЙ ТЕХНИКИ
Д.Н. Гребнев, В.К. Дуплихин, Я.А. Зуперман, А.И. Аистов, В.Е. Кукушкин
(АО «РКЦ «Прогресс», г. Самара)
СИСТЕМА АВТОМАТИЗИРОВАННОГО АНАЛИЗА 77
ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ
С.В. Бочков (АО «РКЦ «Прогресс», г. Самара)
АДАПТИВНЫЕ МЕТОДЫ ДЕШИФРОВКИ ТМИ 78
Д.Ю. Чайка (Филиал АО «РКЦ «Прогресс» - ОКБ «Спектр», г. Рязань)
АКТУАЛЬНЫЕ ПРОБЛЕМЫ СОПРОВОЖДЕНИЯ ИСПЫТАНИЙ 81
ИЗДЕЛИЙ РКТ
Д.Ю. Чайка (Филиал АО «РКЦ «Прогресс» - ОКБ «Спектр», г. Рязань)
4
СЕКЦИЯ 5. НАПРАВЛЕНИЕ 2: ЭКСПЛУАТАЦИЯ РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ
НАУЧНО-ТЕХНИЧЕСКИЕ ПРОБЛЕМЫ ОБЕСПЕЧЕНИЯ 87
ЭКСПЛУАТАЦИИ РАКЕТНОЙ И РАКЕТНО-КОСМИЧЕСКОЙ
ТЕХНИКИ
С.А. Лысенко (ФГУП «ЦНИИмаш», г. Королев М.о.)
ОЦЕНКА РЕАЛИЗУЕМОСТИ ОПЕРАТОРОМ РОССИЙСКИХ 90
КОСМИЧЕСКИХ СРЕДСТВ ДЗЗ ЗАЯВОК НА КОСМИЧЕСКУЮ
СЪЕМКУ
А.Л. Федотов, Д.И. Бубненков, Л.А. Гршианцева, А.А. Емельянов, КС.
Емельянов, А.Л. Федотов («НЦ ОМЗ» ОАО «Российские космические
системы», г. Москва)
ТРАНСПОРТНО-ПУСКОВОЙ КОНТЕЙНЕР ДЛЯ НАНОСПУТНИКОВ 93
ТИПОРАЗМЕРА 3U, 3U+
Д.С. Зарецкий, А.А. Кирсанов, Е.В. Космодемьянский, А.М. Романов,
М.Е. Сивов, М.Г. Трусов, В.В. Юдинцев (АО «РКЦ «Прогресс»,
г. Самара)
ОСНОВНЫЕ НАПРАВЛЕНИЯ РАЗВИТИЯ НАЗЕМНОЙ 96
КОСМИЧЕСКОЙ ИНФРАСТРУКТУРЫ КОСМОДРОМА
«ВОСТОЧНЫЙ»
С.С. Пастухова, А.М. Гераськин, Ф.Ф. Деду с (ФГУП «ЦНИИмаш»,
г. Королев М.о.)
СИСТЕМА МОНИТОРИНГА И ПРОГНОЗИРОВАНИЯ 99
РАДИАЦИОННОЙ ОБСТАНОВКИ В ОКП НА ОРБИТАХ
ФУНКЦИОНИРОВАНИЯ ИЗДЕЛИЙ РАЗРАБОТКИ АО «РКЦ
«ПРОГРЕСС»
Е.А. Буренина, А.С. Дементьев, А.М. Привалова, Е.В. Чурилин
(АО «РКЦ «Прогресс», г. Самара)
СЕКЦИЯ 6: МАТЕМАТИЧЕСКИЕ МЕТОДЫ МОДЕЛИРОВАНИЯ, УПРАВЛЕНИЯ
И ОПТИМИЗАЦИИ
ОБЕСПЕЧЕНИЕ ТЕПЛОВОГО РЕЖИМА БОКЗ СИСТЕМЫ 102
АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ОСНОВЕ
РЕШЕНИЯ СВЯЗАННОЙ ТЕРМОУПРУГОЙ ЗАДАЧИ
С.В. Цаплин, С.А. Колычев (СамГУ, г. Самара)
УНИВЕРСАЛЬНЫЙ ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ 113
МОДЕЛИРОВАНИЯ И ОТЛАДКИ СИСТЕМ ОРИЕНТАЦИИ
КОСМИЧЕСКИХ АППАРАТОВ
А.В. Лебедев (ОАО «Корпорация «ВНИИЭМ», г. Москва)
5
РАЗРАБОТКА МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ДЛЯ ВЫБОРА 115
ОПТИМАЛЬНЫХ ПРОЕКТНЫХ ХАРАКТЕРИСТИК СИСТЕМЫ
ОБЕСПЕЧЕНИЯ ТЕПЛОВОГО РЕЖИМА КОСМИЧЕСКОГО
АППАРАТА
В.В. Купцов (СГАУ им. академика С.П. Королева, г. Самара)
РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДЛЯ ВЫБОРА 118
ОПТИМАЛЬНЫХ ПРОЕКТНЫХ ХАРАКТЕРИСТИК
ЭНЕРГОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА
А. В. Письмаров (СГАУ им. академика С.П. Королева, г. Самара)
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ КОЛЕБАНИЯ ТОПЛИВА В 121
ИЗМЕРИТЕЛЬНОМ КАНАЛЕ СУРТ
Н.П. Клюев (СамГУ, Самара), Ю.А. Крюков (АО «РКЦ «Прогресс»,
г. Самара)
РАЗЛИЧНЫЕ РЕЖИМЫ ЦИКЛИЧЕСКОГО НАГРУЖЕНИЯ 124
КОНСТРУКЦИЙ: КОНЕЧНО-ЭЛЕМЕНТНЫЙ АНАЛИЗ ДВУХОСНОГО
НАГРУЖЕНИЯ УПРУГОПЛАСТИЧЕСКОЙ ПЛАСТИНЫ С ВЫРЕЗОМ
В.А. Туркова (АО «РКЦ «Прогресс», г. Самара)
ЗАДАЧА ВЫБОРА ОПТИМАЛЬНОЙ КОНФИГУРАЦИИ БОРТОВЫХ 126
СРЕДСТВ КОСМИЧЕСКОГО АППАРАТА
А.Ю. Кулаков (ФГУП «КБ «Арсенал», г. Санкт-Петербург)
ТЕЧЕНИЕ ВЯЗКОЙ ЖИДКОСТИ В ТОНКОМ СЛОЕ НА 129
ПОЛУПЛОСКОСТИ
Н.И. Клюев (СамГУ, Самара), Е.И. Бакулин (АО «РКЦ «Прогресс»,
г. Самара)
РАСЧЕТ ДОЛГОВЕЧНОСТИ СИЛЬФОНА ПО КРИТЕРИЯМ 132
МАЛОЦИКЛОВОЙ ПРОЧНОСТИ
А.И. Аистов, Ю.В. Скворцов, С.А. Чернякин, С.В. Глушков (СГАУ им.
академика С.П. Королева, г. Самара)
ПРИВЕДЕНИЕ ОРБИТЫ К ПЛОСКОСТИ ПРИ ДВИЖЕНИИ 134
КОСМИЧЕСКОГО АППАРАТА С ЭЛЕКТРОРАКЕТНЫМИ
ДВИГАТЕЛЯМИ ВБЛИЗИ АСТЕРОИДА
А.Ю. Шорников, М.К. Файн, Р.М. Хабибуллин (СГАУ им. академика
С.П. Королева, г. Самара)
УПРАВЛЕНИЕ ПЛОСКИМИ ПАРАМЕТРАМИ ОРБИТЫ 142
ГЕОСТАЦИОНАРНОГО СПУТНИКА С ПОМОЩЬЮ ДВИГАТЕЛЯ
МАЛОЙ ТЯГИ
В.В. Салмин, А.С. Четвериков (СГАУ им. академика С.П. Королева,
г. Самара)
6
ОБЕСПЕЧЕНИЕ КОНТРОЛЯ НАД ЗАДАННОЙ ТОЧНОСТЬЮ 145
ИЗДЕЛИЙ КОСМИЧЕСКОГО КОМЛЕКСА НА ЭТАПЕ РАЗРАБОТКИ
КОНСТРУКТОРСКОЙ ДОКУМЕНТАЦИИ
В.Д. Еленев (СГАУ им. академика С.П. Королева, г. Самара),
Ю.П. Шупляк (АО «РКЦ «Прогресс», г. Самара
ОСОБЕННОСТИ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ 156
КОНСТРУКТОРСКОЙ ПОДГОТОВКИ ПРОИЗВОДСТВА В ЕДИНОМ
ИНФОРМАЦИОННОМ ПРОСТРАНСТВЕ ПРЕДПРИЯТИЯ
И.В. Никашина, Е.В. Головненко, С.М. Микушкина, А.Н. Филатов
(АО «РКЦ «Прогресс», г. Самара)
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВУХЗАХОДНОЙ 160
КОНИЧЕСКОЙ ЛОГОСПИРАЛЬНОЙ АНТЕННЫ НА ОСНОВЕ
ИНТЕГРАЛЬНЫХ ПРЕДСТАВЛЕНИЙ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ
Д.П. Табаков (ПГУТИ, г. Самара), С.Б. Филиппов, А.С. Мальцев
(АО «РКЦ «Прогресс», г. Самара)
КОМПЛЕКС МЕТОДИК И ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ 168
ВЕРОЯТНОСТНОГО ПРОЕКТИРОВАНИЯ СУРТ И РКС РАКЕТ-
НОСИТЕЛЕЙ
Л.Н. Бельский, Т.Н. Ложкина, Г.П. Лосев, Е.Н. Маханек, П.Л. Селезнев,
С.В. Слепцова, С.Н. Цуканова, В.А. Якимов (ОАО «НПОА им. академика
НА. Семихатова», г. Екатеринбург)
МОДЕЛИРОВАНИЕ ПРОЦЕССОВ УПРАВЛЕНИЯ РАЗВЁРТЫВАНИЕМ 172
ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ С ОГРАНИЧЕНИЯМИ НА
СКОРОСТЬ ВЫПУСКА ТРОСА
С.А. Ишков, Г.А. Филиппов, Сюй Сяое (СГАУ им. академика
С.П. Королева, г. Самара)
МЕТОДИКА ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ РАБОЧЕЙ ЖИДКОСТИ В 181
ГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ СИСТЕМАХ
В.В. Бирюк (СГАУ им. академика С.П. Королева, г. Самара),
В.М. Бронштейн, А.С. Алчина, М.Ю. Шатилова, С.Ф. Ильмурзина
(АО «РКЦ «Прогресс», г. Самара)
ИССЛЕДОВАНИЯ ВЛИЯНИЯ ИЗМЕНЕНИЙ КОНСТРУКТИВНЫХ 185
ПАРАМЕТРОВ ОБЛЕГЧЕННОГО ЗЕРКАЛА НА ЕГО МАССУ И
СОХРАННОСТЬ ФОРМЫ РАБОЧЕЙ ПОВЕРХНОСТИ В ПОЛЕ СИЛ
ТЯЖЕСТИ
С.А. Архипов, М.А. Сальникова, С.А. Морозов (ПАО «Красногорский
завод им. С.А. Зверева», г. Красногорск)
АВТОМАТИЗИРОВАННОЕ ПРОЕКТИРОВАНИЕ ЭЛЕКТРИЧЕСКИХ 192
СЕТЕЙ
В.В. Бирюк (СГАУ им. академика С.П. Королева, г. Самара),
В.М. Бронштейн (АО «РКЦ «Прогресс», г. Самара), А.Н. Коптев
(СГ4 У им. академика С.П. Королева, г. Самара), НА. Надеев,
В.Р. Рахмеева (АО «РКЦ «Прогресс», г. Самара)
7
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ АСИМПТОТИЧЕСКОГО 199
РАЗЛОЖЕНИЯ М. УИЛЬЯМСА ПОЛЯ НАПРЯЖЕНИЙ В
ОКРЕСТНОСТИ ВЕРШИН ДВУХ КОЛЛИНЕАРНЫХ ТРЕЩИН ПРИ
ОДНООСНОМ СИММЕТРИЧНОМ РАСТЯЖЕНИИ ПЛАСТИНЫ
77. С. Росляков (АО «РКЦ «Прогресс», г. Самара)
АНАЛИТИЧЕСКИЙ СИНТЕЗ ЗАКОНА УПРАВЛЕНИЯ 208
КОСМИЧЕСКИМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ
Б.К. Чостковский (СамГТУ, г. Самара), В. Ю. Денисов
(АО «РКЦ «Прогресс», г. Самара)
АЛГОРИТМ ДИНАМИЧЕСКИ ПЕРЕСТРАИВАЕМОЙ СЕТКИ В 213
ЗАДАЧЕ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ ОБТЕКАНИЯ БОКОВЫХ
БЛОКОВ РАКЕТЫ-НОСИТЕЛЯ «СОЮЗ» В ПРОЦЕССЕ ИХ
РАЗДЕЛЕНИЯ
А.А. Костарев (АО «РКЦ «Прогресс», г. Самара)
СЕКЦИЯ 7: ИНФОРМАТИКА И ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ
СИСТЕМЫ. МЕТОДЫ И СРЕДСТВА ЗАЩИТЫ ИНФОРМАЦИИ
О ВОЗМОЖНОСТИ ОРГАНИЗАЦИИ ОБЛАЧНЫХ ВЫЧИСЛЕНИЙ ДЛЯ 216
МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ
ВЫСОКОЙ ИНТЕНСИВНОСТИ НА АЭРОКОСМИЧЕСКОЕ
ОБОРУДОВАНИЕ
Д.Л. Головашкин (ИСОИ РАН, г. Самара)
АВТОМАТИЗИРОВАННАЯ ОБРАБОТКА И АНАЛИЗ ИНФОРМАЦИИ 221
ПРИ УПРАВЛЕНИИ РИСКАМИ КАЧЕСТВА ПРОДУКЦИИ:
МЕТОДОЛОГИЯ И РЕАЛИЗАЦИЯ КОМПЛЕКСНОГО ПОДХОДА
О.П. Скоробогатов, А.В. Василевский, Н.С. Кулиш, А.Н. Баутов
(ФГУП «ЦНИИмаш», г. Королев М.о.)
УСОВЕРШЕНСТВОВАНИЕ ПРОЦЕССА РАЗРАБОТКИ 223
ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ НПОА НА ПРИМЕРЕ
КОМПЛЕКСА ПРОГРАММ ПРОВЕРОК АППАРАТУРЫ СУ
Д.О. Пехотин, М.А. Горшков, НВ. Соловьева (ОАО «НПОА
им. академика НА. Семихатова», г. Екатеринбург)
СИСТЕМА УПРАВЛЕНИЯ ДАННЫМИ ИНЖЕНЕРНОГО АНАЛИЗА И 226
ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ
Д.В. Авдеев (АО «РКЦ «Прогресс», г. Самара)
НЕОБХОДИМОСТЬ ВНЕДРЕНИЯ НОВОГО ПОДХОДА К ВЫПУСКУ 232
ЭКСПЛУАТАЦИОННОЙ ДОКУМЕНТАЦИИ НА ПРЕДПРИЯТИЯХ
РАКЕТНО-КОСМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
ГС. Канчер, О.В. Космодемьянская (АО «РКЦ «Прогресс», г. Самара)
8
ОПТИМИЗАЦИЯ ПРОЦЕССА РАЗРАБОТКИ И ВЫПУСКА 236
ЭКСПЛУАТАЦИОННОЙ ДОКУМЕНТАЦИИ
А.Н. Филатов, С.М. Микушкина, О.В. Космодемьянская, Г.С. Канчер
(АО «РКЦ «Прогресс», г. Самара)
ПЕРЕДАЧА ИНФОРМАЦИИ МЕТОДОМ ЧАСТОТНОЙ МОДУЛЯЦИИ 240
ХАОТИЧЕСКИХ АВТОКОЛЕБАНИЙ
В.В. Зайцев, А.Н. Шилин (АО «РКЦ «Прогресс», г. Самара)
ИСПОЛЬЗОВАНИЕ МУЛЬТИАГЕНТНЫХ ТЕХНОЛОГИЙ В 243
УПРАВЛЕНИИ КАЧЕСТВОМ
М.Н. Скобленков (АО «РКЦ «Прогресс», г. Самара)
ОБНАРУЖЕНИЕ СИГНАЛОВ ПЕРВИЧНЫХ ПОЛЬЗОВАТЕЛЕЙ НА 247
ЧАСТОТАХ ОВЧ ЧМ РАДИОВЕЩАНИЯ ДЛЯ СИСТЕМЫ
КОГНИТИВНОГО РАДИО
Е.Д. Струфелев (АО «РКЦ «Прогресс», г. Самара), С.Н. Елисеев
(ПГУТИ, г. Самара)
СЕКЦИЯ 8. ПЕРСПЕКТИВНЫЕ МАТЕРИАЛЫ И ТЕХНОЛОГИИ
В АЭРОКОСМИЧЕСКОЙ ОТРАСЛИ
ЭЛЕКТРОХИМИЧЕСКАЯ РЕЗКА ТОНКОСТЕННЫХ ТРУБОК 253
В.А. Исаченко, Е.А. Митрюшин, Б.П. Саушкин (ФГУП «НПО
«Техномаш», г. Москва)
БАЛАНСИРОВКА РОТОРОВ ГИРОСКОПОВ С ЛАЗЕРНОЙ 258
КОРРЕКТИРОВКОЙ МАСС
В.С. Кузнецов, А.М. Камалдинов (ФГУП «НПО «Техномаш», г. Москва)
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ И ОБОРУДОВАНИЯ 261
КОНТРОЛЯ МОМЕНТНЫХ ХАРАКТЕРИСТИК ДИНАМИЧЕСКИ
НАСТРАИВАЕМЫХ ГИРОСКОПОВ
Е.Э. Чурюмова, А.М. Камалдинов (ФГУП «НПО «Техномаш», г. Москва)
РАЗРАБОТКА ТЕХНОЛОГИИ И ОБОРУДОВАНИЯ ДЛЯ 263
ЭЛЕКТРОННО-ЛУЧЕВОЙ СВАРКИ КРУПНОГАБАРИТНЫХ
СОСТАВНЫХ ШПАНГОУТОВ ИЗ АЛЮМИНИЕВЫХ СПЛАВОВ
Р.В. Машко, В.И. Кулик (ФГУП «НПО «Техномаш», г. Москва)
РАСЧЕТ ТЕОРЕТИЧЕСКОЙ МОДЕЛИ ПИЛОТИРУЕМОГО 270
ЛЕТАТЕЛЬНОГО АППАРАТА С ПИТАНИЕМ ОТ СОЛНЕЧНОЙ
ЭНЕРГИИ
И.Н. Васимова (АО «НПП «Квант», г. Москва)
ПРИМЕНЕНИЕ И ВОЗМОЖНОСТИ ЖИДКОСТЕЙ С ПЕРЕМЕННЫМИ 273
ХАРАКТЕРИСТИКАМИ В ЭЛЕКТРИЧЕСКИХ МЕТОДАХ ОБРАБОТКИ
Н.В. Боброва, С. В. Сухоруков (ВМЗ - филиал ФГУП «ГКНПЦ им.
М.В. Хруничева», г. Воронеж)
9
ПРАКТИЧЕСКОЕ ПРИМЕНЕНИЕ МИКРОПРОЦЕССОРНОЙ 279
ТЕХНИКИ В СОСТАВЕ ЭНЕРГОПРЕОБРАЗУЮЩЕЙ АППАРАТУРЫ
СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА
КГ. Гордеев, К.В. Тараканов, В.В. Лейман В.О. Нагорный (АО «НПЦ
«Полюс», г. Томск)
ВЫРАВНИВАНИЕ НАПРЯЖЕНИЙ АККУМУЛЯТОРОВ ЛИТИЙ- 281
ИОННОЙ БАТАРЕИ МЕТОДОМ ИНДИВИДУАЛЬНОГО ДОЗАРЯДА
М.М. Хандорин, В.Г. Букреев (АО «НПЦ «Полюс», г. Томск)
СХЕМОТЕХНИКА ЗАРЯДНЫХ УСТРОЙСТВ 284
ЭНЕРГОПРЕОБРАЗУЮЩЕЙ АППАРАТУРЫ ПРОИЗВОДСТВА АО
«НПЦ «ПОЛЮС»
В.И. Апасов (АО «НПЦ «Полюс», г. Томск)
ШТАМП ДЛЯ ГИБКИ ЛИСТОВОГО МАТЕРИАЛА 287
А.О. Кузин (АО «РКЦ «Прогресс», г. Самара)
РАЗРАБОТКА СИСТЕМЫ АДАПТИВНОГО УПРАВЛЕНИЯ 290
МЕХАНООБРАБОТКОЙ НА ОСНОВЕ МОДЕЛЕЙ
ТЕХНОЛОГИЧЕСКИХ РЕЖИМОВ
А.А. Степанов (АО «РКЦ «Прогресс», г. Самара)
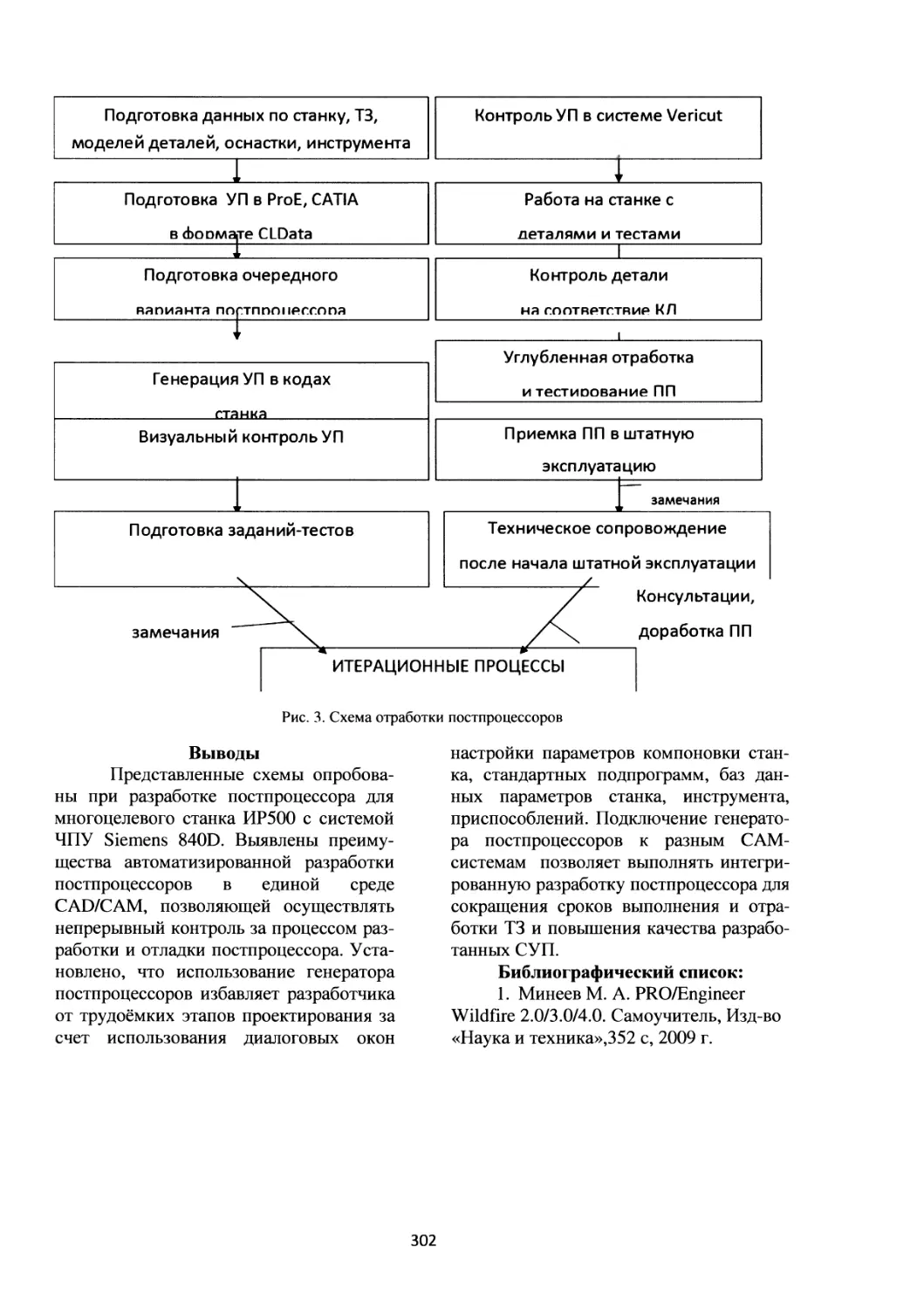
АВТОМАТИЗИРОВАННАЯ РАЗРАБОТКА ПОСТПРОЦЕССОРОВ ДЛЯ 298
МНОГОЦЕЛЕВЫХ СТАНКОВ
А. А. Степанов (АО «РКЦ «Прогресс», г. Самара)
ИССЛЕДОВАНИЕ ПРОЦЕССА ОБРАЗОВАНИЯ 304
ВЫСОКОНАГРУЖЕННЫХ СОЕДИНЕНИЙ В ТРЕХСЛОЙНЫХ
КОНСТРУКЦИЯХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
О.Б. Кудрявцев, А.М. Булаев (АО «РКЦ «Прогресс», г. Самара)
НАНЕСЕНИЕ ЗАЩИТНОГО ПОЛИМЕРНОГО ПОКРЫТИЯ НА 308
ПЕЧАТНЫЕ УЗЛЫ
В.Ю. Маликов, В.Г. Небога (АО «РКЦ «Прогресс», г. Самара)
КОНСТРУКТИВНОЕ РЕШЕНИЕ ДЛЯ УСТРОЙСТВА СБОРА ДАННЫХ 311
О ПАРАМЕТРАХ ДВИЖЕНИЯ МИКРОМЕТЕОРОИДНЫХ ТЕЛ
Е.А. Щелоков, А.В. Рузанов (АО «РКЦ «Прогресс», г. Самара)
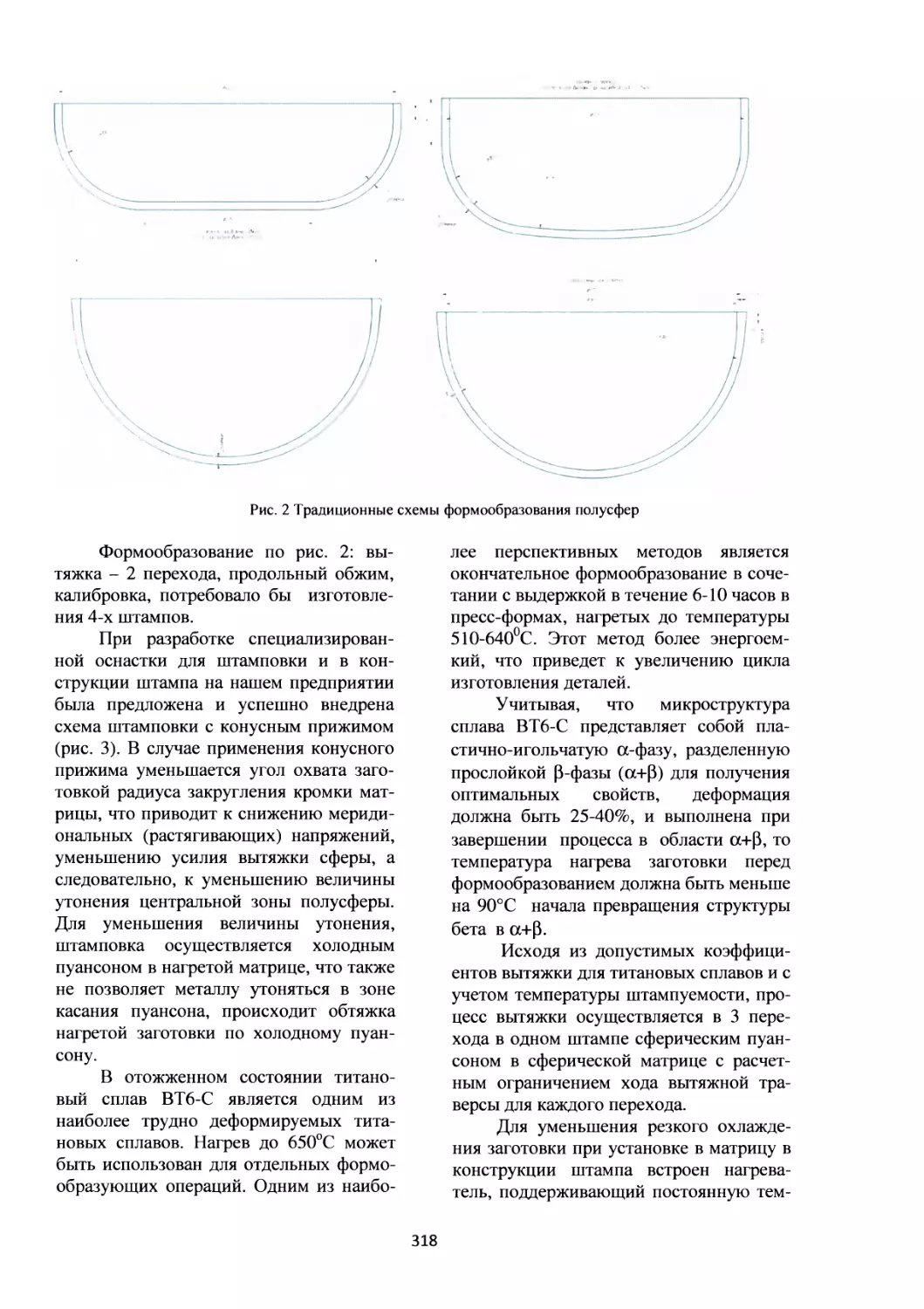
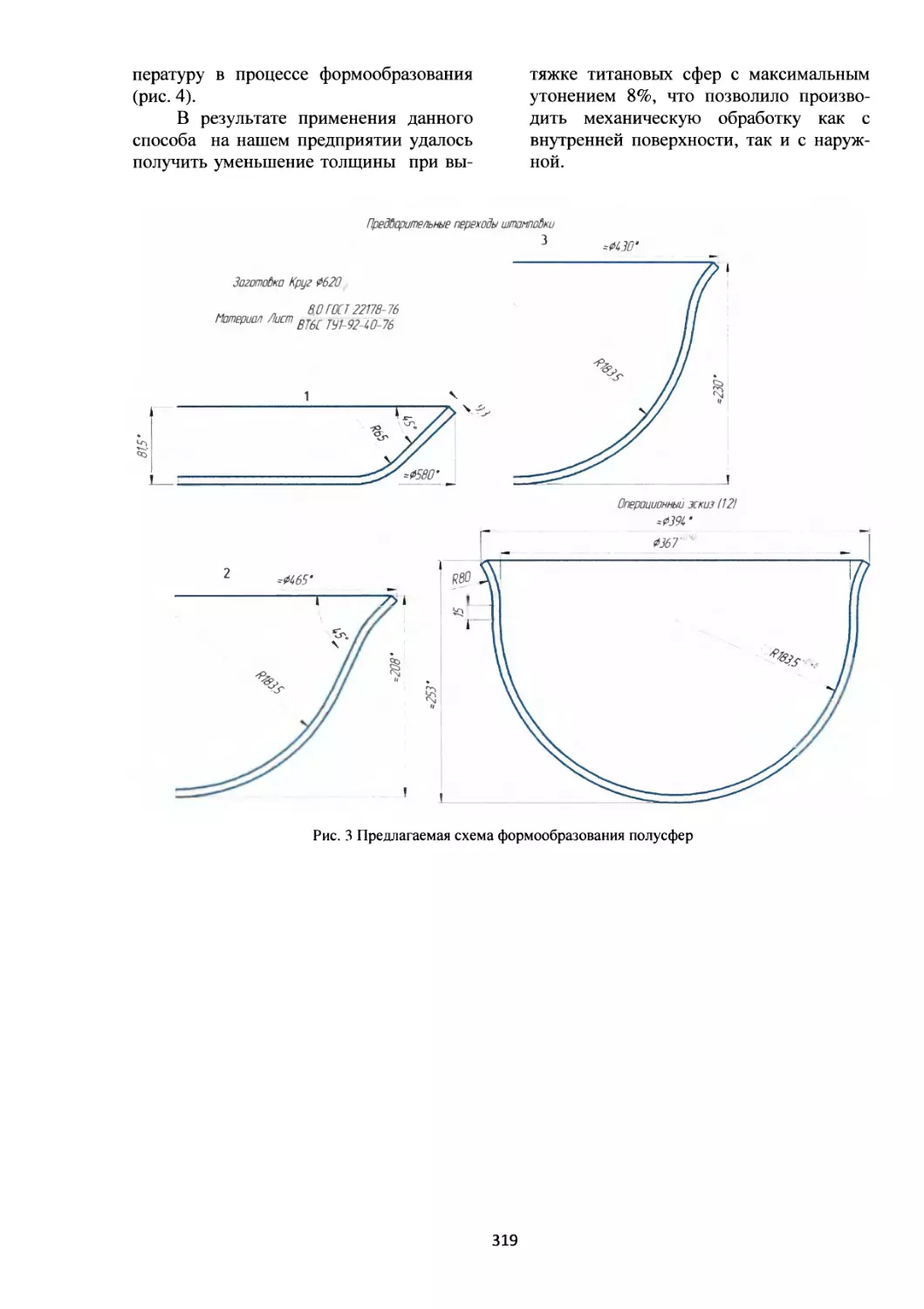
РАЗРАБОТКА ПРОМЫШЛЕННОЙ ТЕХНОЛОГИИ И 316
СПЕЦИАЛИЗИРОВАННОЙ ОСНАСТКИ ДЛЯ ФОРМООБРАЗОВАНИЯ
ПОЛУСФЕР, ВХОДЯЩИХ В КОНСТРУКЦИЮ ВЫСОКОПРОЧНЫХ
ШАРОБАЛЛОНОВ ВЫСОКОГО ДАВЛЕНИЯ (330 КГ/СМ2), ИЗ
ПЕРСПЕКТИВНЫХ ТИТАНОВЫХ СПЛАВОВ
И.Т. Коптев, С.С. Юхневич, Л.Д. Гладкова, Ю.Д. Золотухин,
Г. А. Сиделева (ВМЗ - филиал ФГУП «ГКНПЦ им. М.В. Хруничева»,
г. Воронеж)
10
ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЛИНЕЙНОГО 323
ПЕРЕМЕЩЕНИЯ С ЗАКРЫТЫМ ОПТИЧЕСКИМ КАНАЛОМ
Г. И. Леонович (СамГУ, г. Самара), Н.В. Рясной, С. В. Некое,
Н.А. Лиеочкина (АО «РКЦ «Прогресс», г. Самара)
ТЕСТОПРИГОДНОЕ ПРОЕКТИРОВАНИЕ И ПРОИЗВОДСТВЕННАЯ 328
ДИАГНОСТИКА ЭЛЕКТРОННЫХ МОДУЛЕЙ РАКЕТНО-
КОСМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
В.М. Гречишников, А.А. Курицкий, И.Ю. Мануйлов, А.Д. Бутько (СГАУ
им. академика С.П. Королева, г. Самара)
АВТОМАТИЗАЦИЯ РАЗРАБОТКИ КД И 3D МОДЕЛЕЙ МОНТАЖА 332
БКС И КАБЕЛЕЙ В СРЕДЕ ELEMENTS/PRO «CABLING» НА
ИЗДЕЛИЯХ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
О.Б. Кудрявцев (АО «РКЦ «Прогресс», г. Самара)
ВЫЯВЛЕНИЕ НИЗКОПЛАВКИХ СОСТАВОВ В РЯДУ 335
ЦИКЛОДОДЕКАН - Н-АЛКАН С ЦЕЛЬЮ СОЗДАНИЯ НОВЫХ
ТЕПЛО АККУМУЛИРУЮЩИХ МАТЕРИАЛОВ ДЛЯ ИЗДЕЛИЙ РКТ
Е.П. Петров, Н.А. Журавлев (АО «РКЦ «Прогресс», г. Самара)
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ СБОРКИ УЗЛОВ С 338
КОНСТРУКЦИЯМИ ИЗ КОМПОЗИТНЫХ МАТЕРИАЛОВ
Р.В. Абдуллов (АО «РКЦ «Прогресс», г. Самара), И.К. Рыльцев (СамГТУ,
г. Самара)
ОТРАБОТКА ТЕХНОЛОГИИ ПОВЕРХНОСТНОГО МОНТАЖА ЭРИ С 340
ПРИМЕНЕНИЕМ КАПЛЕСТРУЙНОГО ПРИНТЕРА MY-500 И
АВТОМАТИЗИРОВАННОГО УСТАНОВЩИКА ATOZ-PP050
А.В. Иванов, А.С. Пахомов (АО «РКЦ «Прогресс», г. Самара)
КОМБИНИРОВАННАЯ ОБРАБОТКА ТЕПЛОЗАЩИТНЫХ ПОКРЫТИЙ 349
ТИПА «КЕРМЕТ»
С.С. Юхневич, ГА. Сухочев, Д.В. Силаев (ВМЗ-филиал ФГУП «ГКНПЦ
им. М.В. Хруничева», г. Воронеж)
ПЕРСПЕКТИВНЫЕ ТЕХНОЛОГИИ КОМБИНИРОВАННОЙ 352
ОБРАБОТКИ ДЕТАЛЕЙ АЭРОКОСМИЧЕСКОЙ ОТРАСЛИ
НЕПРОФИЛИРОВАННЫМ ЭЛЕКТРОДОМ-ЩЕТКОЙ
А.Ю. Рязанцев, О.Н. Кириллов (ВМЗ - филиал ФГУП «ГКНПЦ им. М.В.
Хруничева», г. Воронеж)
РАЗРАБОТКА НОВОГО ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ПАЙКИ 355
КРУПНОГАБАРИТНОГО СОПЛА КАМЕРЫ СГОРАНИЯ ДВИГАТЕЛЯ
РД191 С ПОДГОТОВКОЙ ПОВЕРХНОСТИ БЕЗ ПЕСКОСТРУЙНОЙ
ОБРАБОТКИ И НИКЕЛИРОВАНИЯ ДЕТАЛЕЙ ИЗ
СЛОЖНОЛЕГИРОВАННОЙ СТАЛИ 06Х16Н5МВФ
А.С. Грибанов, О.Г. Кудашов, Г.И. Козырева, В.А. Мячина,
С.Н. Подгорное (ВМЗ - филиал ФГУП «ГКНПЦ им. М.В. Хруничева»,
г. Воронеж)
11
СЕКЦИЯ 9: МАЛЫЕ КОСМИЧЕСКИЕ АППАРАТЫ: ПРОЕКТЫ,
ЭКСПЛУАТАЦИЯ
НАУЧНАЯ АППАРАТУРА ДЧ-01 362
М.П. Канаев, Д.М. Рязанов, Н.Д. Сёмкин (СГА У им. академика
С.П. Королева, г. Самара)
РАЗВИТИЕ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ УПРАВЛЕНИЯ 365
МАЛЫМИ КОСМИЧЕСКИМИ АППАРАТАМИ
Р.Н. Ахметов, Р.Р. Халилов, В.С. Якунин, Д.Е. Готин (АО «РКЦ
«Прогресс», г. Самара)
МОНОСТАТИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС 369
Р-ДИАПАЗОНА ДЛЯ ПЕРСПЕКТИВНОГО КА
О.В. Горячкин (ПГУТИ, г. Самара), Б.Г. Женгуров, И.В. Маслов (АО «РКЦ
«Прогресс», г. Самара)
МАЛЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ИССЛЕДОВАНИЯ 376
МИКРОМЕТЕОРИДОВ И ЧАСТИЦ КОСМИЧЕСКОГО МУСОРА
Н.Д. Семкин, А.М. Телегин (СГА У им. академика С.П. Королева,
г. Самара)
МЕТОДЫ И АЛГОРИТМЫ НАВИГАЦИОННО-БАЛЛИСТИЧЕСКОГО 378
ОБЕСПЕЧЕНИЯ МАЛОГО КОСМИЧЕСКОГО АППАРАТА «МАЯК»
А.А. Недогарок, А.Ю. Шаенко, Р.Э. Аюпов, И.А. Просвирина (НУК СМ
МГТУ им. Н.Э. Баумана, г. Москва)
БОРТОВОЙ АЛГОРИТМ ДЛЯ СИСТЕМЫ ОРИЕНТАЦИИ И 381
СТАБИЛИЗАЦИИ НАНОСПУТНИКА 8АМ8АТ-218Д
А.В. Крамлих (СГАУ им. академика С.П. Королева, г. Самара),
М.Е. Мельник (АО «РКЦ «Прогресс», г. Самара)
ОСОБЕННОСТИ РЕАЛИЗАЦИИ ПАРИРОВАНИЯ СБОЕВ И 390
ВОССТАНОВЛЕНИЯ ВЫЧИСЛИТЕЛЬНОГО ПРОЦЕССА
УПРАВЛЯЮЩЕГО БОРТОВОГО ВЫЧИСЛИТЕЛЯ СУ МКА
Н.В. Соловьева, А.Б. Уманский, А.В. Леонтьев, А.В. Есиповский
(ОАО «НПОА им. академика Н.А. Семихатова» г. Екатеринбург)
РАЗРАБОТКА ОПЫТНО-ТЕХНОЛОГИЧЕСКОГО МАЛОГО 394
КОСМИЧЕСКОГО АППАРАТА «АИСТ-2Д»
Р.Н. Ахметов, Н.Р. Стратилатов, В.И. Абрашкин, А.В. Никитин
(АО «РКЦ «Прогресс», г. Самара)
ВЫБОР ПРОЕКТНЫХ ПАРАМЕТРОВ АЭРОДИНАМИЧЕСКИ 396
СТАБИЛИЗИРОВАННОГО НАНОСПУТНИКА
И.В. Белоконов, И.А. Тимбай (СГАУ им. академика С.П. Королева,
г. Самара)
12
ВЫБОР ПАРАМЕТРОВ ПРОГРАММЫ ОТДЕЛЕНИЯ ГРУППИРОВКИ 406
НАНОСПУТНИКОВ ПРИ КЛАСТЕРНОМ ЗАПУСКЕ ИЗ
ПЕРЕХОДНОГО ОТСЕКА ОРБИТАЛЬНОЙ СТУПЕНИ PH «СОЮЗ»
М.С. Щербаков, Д.П. Аваряскин (СГАУ им. академика С.П. Королева,
г. Самара)
ПОВЫШЕНИЕ ХАРАКТЕРИСТИК СИМПЛЕКСНЫХ 411
ВЫСОКОСКОРОСТНЫХ РАДИОЛИНИЙ ПЕРЕДАЧИ ИНФОРМАЦИИ
С МАЛЫХ НИЗКООРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ НА
ЗЕМНЫЕ СТАНЦИИ
А.П. Кирпичева, В.М. Колосов (ЗАО «Меркурий», г. Москва)
МАГНИТО-ИМПУЛЬСНОЕ УСТРОЙСТВО ОТДЕЛЕНИЯ 413
НАНОСПУТНИКОВ: АНАЛИЗ ВОЗМОЖНЫХ ТЕХНИЧЕСКИХ
РЕШЕНИЙ
З.И. Гимранов, О.В. Филонин (СГАУ им. академика С.П. Королева,
г. Самара)
СЕКЦИЯ 10: ВОПРОСЫ ЭКОНОМИКИ АЭРОКОСМИЧЕСКОЙ ОТРАСЛИ.
ПОВЫШЕНИЕ КАЧЕСТВА ПОДГОТОВКИ СПЕЦИАЛИСТОВ ДЛЯ
АЭРОКОСМИЧЕСКОЙ ОТРАСЛИ
ФОРМИРОВАНИЕ БЮДЖЕТА РАСХОДОВ И ДОХОДОВ В УСЛОВИЯХ 418
КОНКУРЕНТНОГО ВЗАИМОДЕЙСТВИЯ МЕЖДУ ПРЕДПРИЯТИЯМИ
ПО ПРОИЗВОДСТВУ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
С.А. Кирилина, ГМ. Гришанов (АО «РКЦ «Прогресс», г. Самара)
ОЦЕНКА ФИНАНСОВОЙ УСТОЙЧИВОСТИ ПРЕДПРИЯТИЯ ПО 423
ПРОИЗВОДСТВУ РКТ
С.А. Кирилина (АО «РКЦ «Прогресс», г. Самара)
ФИНАНСОВЫЕ РЕСУРСЫ ПРЕДПРИЯТИЙ РАКЕТНО- 427
КОСМИЧЕСКИЙ ПРОМЫШЛЕННОСТИ В УСЛОВИЯХ ИЗМЕНЕНИЯ
ОРГАНИЗАЦИОННО-ПРАВОВОЙ ФОРМЫ
И.В. Зиновьева (АО «РКЦ «Прогресс», г. Самара)
МОДЕЛИ МОТИВАЦИИ И СТИМУЛИРОВАНИЯ РАБОТНИКОВ 435
ПРЕДПРИЯТИЯ ПО ПРОИЗВОДСТВУ РКТ
Д.А. Щелоков (АО «РКЦ «Прогресс», г. Самара)
ОРГАНИЗАЦИЯ ВЗАИМОДЕЙСТВИЯ В ПРОИЗВОДСТВЕННОЙ 437
СИСТЕМЕ ПРИ КОМПЛЕКСНОМ ВЫПУСКЕ ПРОДУКЦИИ РКТ
КА. Пекина (АО «РКЦ «Прогресс», г. Самара)
ПЕРСПЕКТИВЫ РАЗВИТИЯ СРЕДСТВ ВЫВЕДЕНИЯ СВЕРХЛЕГКОГО 441
КЛАССА
Е.В. Кирилина (АО «РКЦ «Прогресс», г. Самара)
13
ЧЕЛОВЕЧЕСКИЙ КАПИТАЛ КАК ОСНОВНОЙ ФАКТОР 444
ПРОИЗВОДСТВА В СОВРЕМЕННОМ МИРЕ
Н.И. Верховых, М.Ю. Давыдова (ОАО «НПО А им. академика НА.
Семихатова», г.Екатеринбург)
ПСИХОЛОГИЧЕСКАЯ ПОДГОТОВКА СПЕЦИАЛИСТОВ ПО 447
ОРГАНИЗАЦИИ И УПРАВЛЕНИЮ ПЕРЕВОЗКАМИ НА ТРАНСПОРТЕ
Ю.В. Гатен (СГАУ им. академика С.П. Королева, г. Самара)
ОБРАЗОВАТЕЛЬНАЯ ПРОГРАММА ДОПОЛНИТЕЛЬНОГО 449
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ (ПОВЫШЕНИЯ
КВАЛИФИКАЦИИ) ПО ТЕМЕ: «ТЕСТОПРИГОДНОЕ
ПРОЕКТИРОВАНИЕ И ПРОИЗВОДСТВЕННАЯ ДИАГНОСТИКА
ВЫСОКОИНТЕГРИРОВАННЫХ ЭЛЕКТРОННЫХ МОДУЛЕЙ»
В.М. Гречишников, А.А. Курицкий, А.Д. Бутько (СГАУ им. академика
С.П. Королева, г. Самара)
ВЗАИМОДЕЙСТВИЕ МЕЖДУ ПРЕДПРИЯТИЕМ ПО ПРОИЗВОДСТВУ 452
РКТ И РАБОТНИКАМИ НА РЫНКЕ ТРУДА
Д.А. Щелоков (АО «РКЦ «Прогресс», г. Самара)
ОЦЕНКА ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ ПРОВЕДЕНИЯ 454
ФУНДАМЕНТАЛЬНЫХ КОСМИЧЕСКИХ ИССЛЕДОВАНИЙ В
УСЛОВИЯХ ОГРАНИЧЕННОГО ФИНАНСИРОВАНИЯ (НА ПРИМЕРЕ
КОСМИЧЕСКИХ ЭКСПЕРИМЕНТОВ «КОНУС А» И «НУКЛОН»)
П.А. Карасев, А.С. Карасев, Е.Ю. Морозова (ФГУП «КБ «Арсенал»,
г. Санкт-Петербург)
СЕКЦИЯ 11: ИСТОРИЯ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ И
КОСМОНАВТИКИ
ПОДГОТОВКА К ЛЕТНЫМ ИСПЫТАНИЯМ РАКЕТЫ Р-5 В 1952 ГОДУ 464
77.77. Вершинина (ФГУП «ЦНИИмаш», г. Королёв М.о.)
ИСТОРИЯ ЧЕРЕЗ ЛИЧНОСТЬ: ПРОБЛЕМЫ РЕКОНСТРУКЦИИ 465
БИОГРАФИИ ЛИДЕРОВ РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА
СССР
В.Н. Парамонов (СамГУ, г. Самара)
ЖИЗНЬ И ТВОРЧЕСТВО ПИОНЕРА КОСМОНАВТИКИ А.А. 475
ШТЕРНФЕЛЬДА (К 110-ЛЕТИЮ СО ДНЯ РОЖДЕНИЯ)
С.Г. Морозова (Политехнический музей, г. Москва)
ОБЗОР ФОНДОВ ФИЛИАЛА РГАНТД ПО ИСТОРИИ СОЗДАНИЯ И 479
РАЗВИТИЯ ОТЕЧЕСТВЕННОЙ КОСМОНАВТИКИ ЗА 1928-1996 ГГ.
Л.Е. Антонова (Филиал РГАНТД, г. Самара)
ВОЗДУШНО-КОСМИЧЕСКИЙ САМОЛЕТ - ДИПЛОМНЫЙ ПРОЕКТ 485
КОСМОНАВТОВ 1-ГО НАБОРА
В.В. Лебедев (СПбФ ИИЕТ им. С.И. Вавилова РАН, г. Санкт-Петербург)
14
«КОЗЛОВУ Д.И. ПРЕДОСТАВЛЯЕТСЯ ПРАВО ОКОНЧАТЕЛЬНОГО 489
РЕШЕНИЯ ВОПРОСОВ...»: О ПОЛНОМОЧИЯХ РУКОВОДИТЕЛЯ
ФИЛИАЛА № 3 ОКБ-1 В 1960-1961 ГГ.
С.В. Семенов (АО «РКЦ «Прогресс», г. Самара)
ПЕРВЫЕ ЛАУРЕАТЫ ЛЕНИНСКОЙ ПРЕМИИ ЗА РАЗРАБОТКУ 492
РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
В.И. Ивкин (BA РВСН им. Петра Великого, г. Москва)
К 55-ЛЕТИЮ НАЧАЛА ЗАПУСКОВ РАКЕТЫ-НОСИТЕЛЯ 8К78 497
«МОЛНИЯ»: САМАРСКИЕ РАКЕТЫ-НОСИТЕЛИ В ПРОГРАММАХ
ИССЛЕДОВАНИЙ ЛУНЫ, ВЕНЕРЫ И МАРСА
Н. В. Богданова (СГА У им. академика С.П. Королева, г. Самара)
Н.Н. ПОЛИКАРПОВ И РАКЕТНАЯ ТЕХНИКА СССР В ГОДЫ 500
ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ
В.П. Иванов ( СПИИРАН, г. Санкт-Петербург)
АРТЕМЬЕВ ВЛАДИМИР АНДРЕЕВИЧ: У ИСТОКОВ СОВЕТСКОГО 505
РАКЕТОСТРОЕНИЯ
Р.П. Парамонова (СГ.А У им. академика С.П. Королева, г. Самара)
ИЗ ИСТОРИИ СОЗДАНИЯ ПЕРВОГО ОТЕЧЕСТВЕННОГО КА ДЗЗ 508
«ЯНТАРБ-2К» С БАЗОВОЙ ЦИФРОВОЙ СУД И НЕКОТОРЫЕ
ПЕРСПЕКТИВНЫЕ НАПРАВЛЕНИЯ ЕЕ ДАЛЬНЕЙШЕГО РАЗВИТИЯ
Ю.В. Белов (СГАУ им. академика С.П. Королева, г. Самара) Т.А.
Тимонина (АО «РКЦ «Прогресс», г. Самара)
АЭРОСТАТНЫЙ КОМПЛЕКС ПРОЕКТА АМС «ВЕГА» В ФОНДАХ 515
ПОЛИТЕХНИЧЕСКОГО МУЗЕЯ
В. Г Иванов (Политехнический музей, г. Москва)
КРАТКИЙ ОБЗОР НАУЧНОГО НАСЛЕДИЯ УЧЕНЫХ САМГТУ С 517
УЧЕТОМ ЕГО ВАЖНОСТИ ДЛЯ РАЗВИТИЯ РАКЕТНО-
КОСМИЧЕСКОЙ ТЕХНИКИ
А.А. Барсова (СамГТУ, г. Самара)
КОСМИЧЕСКАЯ БЕЗЫМЯНКА: ОТ ЗАВОДА № 24 ДО ОАО 521
«КУЗНЕЦОВ»
Н.Н. Аладьева (ОАО «КУЗНЕЦОВ», г. Самара)
МКС - ИСТОРИЯ В ПОЛЕТАХ КОСМИЧЕСКИХ КОРАБЛЕЙ. ПРАВДА, 523
ВЫМЫСЛЫ, ФАКТЫ
ГЕ. Фомин (почетный работник АО «РКЦ «Прогресс», г. Самара)
АЛФАВИТНЫЙ УКАЗАТЕЛЬ
525
15
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 4: Двигатели. Энергетические установки и
системы терморегулирования КА.
Механизмы специальных систем
16
УДК 536.2
ОТРАБОТКА КОНТУРНЫХ ТЕПЛОВЫХ ТРУБ ДЛЯ СОТР МКА «АИСТ-2»
©2015 В.В. Соболев1, А.А. Великанов1, В.А. Николаев2
'Государственный научный центр Российской Федерации — федеральное
государственное унитарное предприятие «Исследовательский центр
имени М.В. Келдыша» (ГНЦ ФГУП «Центр Келдыша»), г. Москва
2АО «РКЦ «Прогресс», г. Самара
Приведены результаты отработки контурных тепловых труб для термостабилизации корпуса малого
космического аппарата. Проведена доработка конструкции КТТ для повышения надежности и теплофизиче-
ских характеристик. Отработаны методики финишной промывки натурным теплоносителем, дозированной
заправки аммиаком особой чистоты и герметизации методом лазерной сварки. Эффективность проведенных
работ подтверждена экспериментально.
Ключевые слова: система терморегулирования КА, контурная тепловая труба, тепловые испыта-
ния, контроль качества, энергодисперсионный микроанализ
Контурные тепловые трубы (КТТ) -
высокоэффективные теплопередающие
устройства, работающие по принципу
переноса тепла скрытой теплотой испа-
рения двухфазного теплоносителя. Такие
устройства нашли широкое применение в
системах обеспечения теплового режима
КА, поскольку кроме отличных массо-
энергетических характеристик и высокой
надежности, значительно расширяют
возможности гибкой компоновки СОТР -
испаритель и радиатор КТТ связаны тон-
кими гладкостенными трубками. Контур-
ные тепловые трубы, рассматриваемые в
данной работе, являются первым опытом
АО «РКЦ «Прогресс» в создании таких
устройств. По сложившейся для произ-
водства аксиальных тепловых труб (АТТ)
кооперации, отработка, заправка тепло-
носителем и тепловые испытания КТТ
проводились в ГНЦ ФГУП «Центр Кел-
дыша»[1]. КТТ предназначены для вы-
равнивания полей температур по корпусу
малого космического аппарата «Аист-2»
[2], перераспределяя тепло между тепло-
выми сотовыми панелями, образующими
его корпус. КТТ должны обеспечивать
отвод тепловой мощности не менее 40
Вт, при перепаде температур между пла-
стинами испарителя и конденсатора не
более 15°С, при температуре пластины
теплообменника конденсатора 20 ± 5 °C.
Устройства разработаны и изготовлены
АО «РКЦ «Прогресс» в 2014 году на базе
капиллярной структуры спеченной из по-
рошка титана в Институте теплофизики
УрО РАН (г. Екатеринбург). Корпус ис-
парителя и магистрали контура изготов-
лены из нержавеющей стали, теплооб-
менные поверхности из алюминиевого
сплава. Теплоноситель - аммиак особой
чистоты. На рис. 1 приведен общий вид
КТТ.
Для обеспечения заданных пара-
метров при возможности запуска КТТ на
минимальной мощности на стенде тепло-
вых труб ГНЦ ФГУП «Центр Келдыша»
[3] проведены испытания по определе-
нию оптимальной массы теплоносителя
заправляемого в КТТ. Испытания прово-
дились с различной массой заправленно-
го в КТТ теплоносителя с расчетным ша-
гом от минимальной до максимально
возможной. Контроль осуществлялся по
заполнению конденсатора КТТ паровой
фазой теплоносителя во время её работы
при штатной нагрузке. Оптимальная мас-
са аммиака по результатам испытаний
9,5 г.
После заправки аммиаком особой
чистоты КТТ должна быть герметично
закрыта и отделена от системы заправки
таким образом, чтобы исключить утечку
заправленного теплоносителя и не нару-
шить высокие требования по чистоте
внутренней полости. Герметизация про-
водилась путем предварительной
17
1590
Рисунок 1. Общий вид КТТ
холодной деформации с последующей
лазерной сваркой. Отработка методики
проводились на 20 образцах, рабочие
участки которых полностью повторяли
геометрию участка сварки, материал и
качество обработки штатных КТТ.
Герметичность образцов контроли-
ровалась гелиевым течеискателем. Об-
разцы с внутренней электрополировкой
показали лучшие результаты, как при хо-
лодной деформации, так и при сварке
плавлением, это обусловлено высокой
чистотой обработки внутренней поверх-
ности, способствующей лучшей адгезии
при сжатии стенок.
С целью повышения надежности
устройства произведена замена паяных
соединений трубопроводов КТТ на свар-
ные с последующим контролем герме-
тичности и финишной промывкой перед
заправкой аммиаком особой чистоты.
Для подготовки внутренней поло-
сти КТТ к заполнению теплоносителем и
удаления следов пайки разработана мето-
дика многократной промывки полости
теплоносителем с контролем чистоты ме-
тодом сканирующей электронной микро-
скопии с рентгеновским микродисперси-
онным анализом. Определена необходи-
мая кратность промывок, приводящая к
практически полному отсутствию в смы-
вах химических элементов, вступающих
в реакцию с аммиаком.
Дозированная заправка КТТ тепло-
носителем и теплофизические испытания
проводились на установке, включающей
гидравлический контур, системы подвода
и отвода тепла, термостабилизации гид-
роаккумулятора, системы продувки и ва-
куумирования, систему управления и ре-
гистрации показаний измерительной ап-
паратуры. Заправка КТТ осуществляется
из предварительно заполненной термо-
статируемой ёмкости по методике отра-
ботанной при оптимизации массы тепло-
носителя. Устройство работает при за-
данной мощности, достигается заполне-
ние контура, при котором паровой фазой
теплоносителя будет занято -75% длины
конденсатора (контроль по датчикам
температуры на трубке), затем произво-
дится отделение устройства от системы
заправки. В процессе заправки в обяза-
тельном порядке производится останов и
перезапуск контура с требуемой мини-
мальной мощности (5 Вт). Такой способ
заправки позволяет получить оптималь-
ную массу заправляемого теплоносителя
на работающей КТТ при гарантирован-
ном соблюдении заданных требований по
тепловым характеристикам.
После заправки КТТ и сварки про-
верка герметичности замыкающего шва
18
проводилась методом индикаторных
масс.
Проведенная отработка КТТ позво-
лила достичь требуемых характеристик
СОТР малого КА «Аист-2» и сформиро-
вала необходимый научно-технический
задел для создания высокоэффективных
систем терморегулирования с КТТ для
перспективных КА средней и высокой
энерговооруженности.
Библиографический список:
1. A.I. Kitaev, A.L. Luks, V.V. Sobo-
lev et al. “Thermal pipes application at
«TSSKB-PROGRESS» enterprise and re-
sults of their tests” // 1st International con-
ference «Heat pipes for space applications»,
Khimki, Russia, 2009.
2. http://samspace.ru/products/ satel-
lites_of_scientific_purpose/mka_aist/.
3. Беднов C.M., Вежневец П.Д.,
Лукоянов Ю.М., Соболев В.В. Комплекс-
ный стенд для заправки и испытаний ам-
миачных тепловых труб систем тер-
морегулирования космических аппаратов
// Пятый Международный аэрокосмиче-
ский конгресс 1АС’О6, Москва, Россия,
2006.
References:
1. A.L Kitaev, A.L. Luks, V.V. Sobo-
lev et al. “Thermal pipes application at
«TSSKB-PROGRESS» enterprise and re-
sults of their tests” // 1st International con-
ference «Heat pipes for space applications»,
Khimki, Russia, 2009.
2. http://samspace.ru/products/ satel-
lites_of_scientific_purpose/mka_aist/
3. Bednov S.M., Vezhnevets P.D.,
Lukoyanov Yu.M., Sobolev V.V.
“The complex facility for filling and testing
of ammonia heat pipes for thermal control
systems of spacecraft” // Fifth International
aerospace congress IAC’06, Moscow, Rus-
sia, 2006.
WORKING OUT OF LOOP HEAT PIPES FOR TCS OF SMALL
SPACECRAFT “AIST-2”
©2015 V.V. Sobolev1, A.A. Velikanov1, V.A. Nikolaev2
1 SSC FSUE «Keldysh Research Centre», Moscow
2 JSC «SRC «Progress», Samara
The results of working out of loop heat pipes for thermal stabilization of small spacecraft are presented. LHP
design enhancement was carried out to improve the reliability and thermal characteristics. The methods of final
cleaning with coolant, dosed filling with high purity ammonia and sealing by laser welding were worked out. The
effectiveness of this work confirmed experimentally.
Key words: spacecraft thermal control system, loop heat pipes, thermal tests, quality control, energy disper-
sive microanalysis
Информация об авторах:
Соболев Виктор Владимирович, начальник сектора, ГНЦ ФГУП «Центр
Келдыша», 125438, Россия, г. Москва, ул. Онежская 8, т. +7(495)456-64-64,
handgum@mail.ru.
Область научных интересов: тепловые режимы космических аппаратов, наземные
испытания.
Великанов Александр Анатольевич, ведущий инженер, ГНЦ ФГУП «Центр
Келдыша», 125438, Россия, г. Москва, ул. Онежская 8, т. +7(495)456-64-64,
velikanov a@bk.ru.
Область научных интересов: тепловые режимы космических аппаратов, наземные
испытания.
Николаев Вадим Александрович, начальник отдела АО «РКЦ «Прогресс», 443086,
Россия, г. Самара, Московское ш. 34, т. +7(846)228-93-75, vadim-nik82@mail.ru.
19
Область научных интересов: тепловые режимы космических аппаратов.
Sobolev Viktor Vladimirovich, head of science sector, SSC FSUE Keldysh Research
Centre, 125438, Russia, Moscow, Onezhskaya 8, tel.: +7(495)456-64-64, handgum@mail.ru.
Area of research: spacecraft thermal control systems, ground tests.
Velikanov Aleksandr Anatolyevich, leading engineer, SSC FSUE Keldysh Research
Centre, 125438, Russia, Moscow, Onezhskaya 8, tel.: +7(495)456-64-64, velikanov a@bk.ru.
Area of research: spacecraft thermal control systems, ground tests.
Nikolaev Vadim Aleksandrovich, head of department, JSC SRC Progress, 443009,
Russia, Samara, Zemetsa str., 18, tel.: +7(846)228-93-75, vadim-nik82@mail.ru.
Area of research: spacecraft thermal control systems.
20
УДК 629.194.34:536.468
УЧЁТ ОСОБЕННОСТЕЙ ТЕПЛОВЫХ ПРОЦЕССОВ В ЖИДКИХ УГЛЕВОДО-
РОДНЫХ ГОРЮЧИХ И ОХЛАДИТЕЛЯХ ПРИ ПРОЕКТИРОВАНИИ И СОЗДА-
НИИ ПЕРСПЕКТИВНЫХ ЖРД МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ
©2015 ’В.А. Алтунин, ’К.В. Алтунин, 2В.П. Демиденко, ’Е.Н. Платонов,
’Л.А. Обухова, ’А.А. Терентьев, 'С.Я. Коханова, 3М.Л. Яновская
’Казанский национальный исследовательский технический университет
им. А.Н. Туполева-КАИ, г. Казань
2Михайловская военная артиллерийская академия, г. Санкт - Петербург
Центральный институт авиационного моторостроения им. П.И. Баранова, г. Москва
На основе экспериментальных исследований показаны особенности позитивных и негативных тепло-
вых процессов в жидких углеводородных горючих и охладителях, которые очень слабо учитываются при
проектировании и создании перспективных ЖРД многоразового использования, или не учитываются вооб-
ще. Разработаны новые методики учёта позитивных и негативных процессов в топливно-охлаждающих
трактах ЖРД и ЖРД многоразового использования без применения, с применением электростатических по-
лей, гибридно. Подробно показаны новые запатентованные конструктивные схемы перспективных ЖРД
многоразового использования на жидких углеводородных горючих и охладителях. Применение результатов
экспериментальных исследований, новых методик учёта особенностей тепловых процессов в жидких угле-
водородных горючих и охладителях, новых запатентованных конструктивных схем топливно-охлаждающих
каналов- позволит создавать новые отечественные ЖРД и ЖРД многоразового использования повышенных
характеристик по ресурсу, надёжности, эффективности и экономичности.
Ключевые слова: жидкостной ракетный двигатель (ЖРД) многоразового использования (ЖРДМИ),
жидкое углеводородное горючее (УВГ), жидкий углеводородный охладитель (УВО), осадкообразование,
теплоотдача, термоакустические автоколебания (ТААК) давления, критические и сверхкритические пара-
метры по давлению и температуре, ресурс, надёжность, эффективность
В ходе проведения эксперимен-
тальных исследований были обнаружены
и выявлены особенности позитивных и
негативных тепловых процессов в жид-
ких УВГ и УВО: увеличение коэффици-
ента теплоотдачи в 2-3 раза за счёт теп-
лофизических свойств в зоне критиче-
ских давлений УВГ и УВО; термоакусти-
ческие автоколебания (ТААК) давления,
из-за которых происходит увеличение
коэффициента теплоотдачи на 40%, отка-
лывание твёрдых углеродистых осадков и
засорение топливно-охлаждающих кана-
лов, образование локально-
чередующихся зон перегревов и прогаров
топливно-охлаждающих каналов в зоне
критических сечений ЖРД, ЖРДМИ с
дальнейшим пожаром и взрывом; нега-
тивный процесс осадкообразования, из-за
которого происходит частичное или пол-
ное закоксовывание форсунок, фильтров,
каналов с частичной или полной потерей
тяги, происходит несанкционированный
и внезапный перегрев и прогар рубашки
охлаждения в зоне критического сечения
сопла ЖРД, ЖРДМИ с дальнейшим по-
жаром и взрывом.
Эти особенности очень слабо учи-
тываются при проектировании и созда-
нии перспективных ЖРД и ЖРДМИ, или
не учитываются вообще. Разработаны
новые методики учёта позитивных и
негативных процессов в топливно-
охлаждающих трактах ЖРД и ЖРДМИ
без применения, с применением электро-
статических полей, гибридно. Созданы
новые запатентованные конструктивные
схемы перспективных ЖРД, ЖРДМИ на
жидких УВГ и УВО. Результаты иссле-
дований внедрены в космические энерго-
установки «Курс» и «Барьер», в перспек-
тивные отечественные энергоустановки
аэрокосмических систем 5 поколения и в
другие техносистемы
21
Библиографический список:
1. Алемасов В.Е., Дрегалин А.Ф.,
Тишин А.П. Теория ракетных двигателей.
(Под ред. акад. В.П. Глушко). М.: Изд-во
«Машиностроение», 1989. 464с.
2. Алтуни В.А. Способ повышения
надёжности ЖРД одно-и многоразового
использования //Патент на изобретение
РФ № 2287715. Бюлл. № 32 от
20.11.2006 г.
3. Алтунин В.А., Алтунин К.В.,
Демиденко В.П., Обухова Л.А., Платонов
Е.Н., Яновская М.Л. Некоторые пробле-
мы развития жидкостных ракетных дви-
гателей многоразового использования
(90-летию со дня рождения академика
В.Е. Алемасова - посвящается) // Ма-
тер.докл. 48 научных Чтений памяти К.Э.
Циолковского. РАН. ИНЕТ РАН. РАКЦ.
Сек. №2: «Проблемы ракетной и косми-
ческой техники». Калуга: Изд-во «Наша
Полиграфия», 2013. С. 88-90.
4. Алтунин В.А., Алтунин К.В.,
Демиденко В.П., Гуреев В.М., Обухова
Л.А., Платонов Е.Н., Терентьев А.А.,
Яновская М.Л. Новые конструктивные
схемы форсунок для силовых установок
гиперзвуковых и воздушно-космических
летательных аппаратов // Матер.докл. 39
академических чтений по космонавтике,
посвящ. памяти акад. С.П. Королёва и др.
выдающихся отечественных учёных -
пионеров освоения космического про-
странства «Актуальные проблемы Рос-
сийской космонавтики». Сек №15: «Ком-
бинированные силовые установки для
гиперзвуковых и воздушно-космических
летательных аппаратов». РАН. М.: Изд-
во МГТУ им Н.Э. Баумана, 2015. С. 393-
394.
THE CONSIDERATION OF THE THERMAL CHARCTERISTICS OF THE
LIQUIDHYDROCARBONE FUELSFULS AND COOLANS DURING DESIGNING AND
PRODUCING PERSPECTIVE LIQUID REUSABLE ROCKET ENGINES
©2015 'V.A. Altunin, ’K.V. Altunin, 2V.P. Demidenko, ’E.N. Platonov, 'L.A. Obukhova,
*A.A. Terentyev, *S.J. Kokhanova, 3M.L. Yanovskaya
’Kazan National Research Technical University named after A.N.Tupolev- KAI, Kazan
2Mikhailovskaya Military Artillery Academy, Saint - Petersburg
Ventral Institute of Aviation Motors named after P.I. Baranov, Moscow
Some aspects of positive and negative heat processes in liquid hydrocarbon fuels and refrigerants based on
experimental researches are shown in the article. Unfortunately these heat processes are said to have been paid very
slight attention while designing and creating the most perspective reusable liquid rocket engines. The novel account-
ing methods of positive and negative processes in the fuel and cooling paths of reusable rocket engine without the
use and with the use of electrostatic fields, and simultaneously, have been created. The new patented design schemes
of perspective reusable rocket engines on liquid hydrocarbon fuels and coolants are presented in detail. The applica-
tion of experimental studies, new accounting methods of the thermal processes in liquid hydrocarbon fuels and cool-
ants, new patented design schemes of fuel and cooling channels will result in the creation of new domestic reusable
rocket liquid engines with enhanced properties such as high life, reliability, efficiency and economy.
Key words: reusable liquid rocket engine (LRE), liquid hydrocarbon fuel (HCG), liquid hydrocarbon refrig-
erant (SVR), deposit formation, heat interchange, thermoacoustic oscillations of pressure, critical and supercritical
parameters of pressure and temperature, life, reliability, efficiency
Информация об авторах:
Алтунин Виталий Алексеевич - профессор кафедры «Теплотехники и энергетиче-
ского машиностроения» (ТиЭМ) Казанского национального исследовательского техниче-
ского университета - КАИ им. А.Н. Туполева (КНИТУ-КАИ), д.т.н., академик Российской
академии космонавтики им. К.Э. Циолковского, Президент Казанского отделения Россий-
ской академии космонавтики им. К.Э. Циолковского (КазРО РАКЦ), г. Казань.
22
E-mail: altspacevi @ yahoo.com.
Алтунин Константин Витальевич - доцент кафедры ТиЭМ КНИТУ-КАИ, к.т.н.,
г. Казань.
Демиденко Владимир Петрович - профессор Михайловской военной артиллерий-
ской академии, Заслуженный деятель науки и техники РТ и РФ, Заслуженный изобрета-
тель РТ и РФ, академик Академии тыла и транспорта, академик Российской академии ра-
кетных и артиллерийских наук, д.т.н., профессор, генерал-майор запаса, г. Санкт - Петер-
бург.
Платонов Евгений Николаевич - докторант кафедры ТиЭМ, старший научный со-
трудник КНИТУ-КАИ, к.т.н., г. Казань.
Обухова Лариса Александровна - зам. директора института «Авиации, наземного
транспорта и энергетики» (ИАНТЭ) КНИТУ-КАИ, соискатель учёной степени к.т.н.,
г. Казань.
Терентьев Александр Андреевич - студент КНИТУ-КАИ, активный участник сту-
денческого научного общества кафедры ТиЭМ, г. Казань.
Коханова Светлана Яковлевна - доцент кафедры ТиЭМ КНИТУ-КАИ, к.т.н.,
доцент, г. Казань.
Яновская Мария Леонидовна - младший научный сотрудник ЦИАМ им. П.И. Ба-
ранова, к.т.н., г. Москва.
Vitaly Alekseevich Altunin - Professor of the department "Heat and power engineering" of
Kazan National Research Technical University named after A.N. Tupolev (KNRTU-KAI),
Doctor of Engineering Science, Academician of the Russian Academy of Cosmonautics named
after K.E. Tsiolkovsky, the President of the Kazan Branch of the Russian Academy of Cosmo-
nautics named after K.E. Tsiolkovsky, Kazan.
E-mail: altspacevi@yahoo.com
Konstantin Vitalyevich Altunin - associate Professor of the department "Heat and power
engineering" of Kazan National Research Technical University named after A.N. Tupolev
(KNRTU-KAI), Ph.D., Kazan
Demidenko Vladimir Petrovich - Professor of Mikhailov Military Artillery Academy,
Honored Science and Technology worker of the Russian Federation and the Republic of
Tatarstan, Honored Inventor of the Republic of Tatarstan and the Russian Federation, academi-
cian of the Academy of Logistics and Transport, academician of the Russian Academy of Missile
and Artillery Sciences, Professor, retired Major General, St.Petersburg
PlatonovEvgeniyNikolaevich - doctoral candidate of the department "Heat and power en-
gineering" of Kazan National Research Technical University named after A.N. Tupolev
(KNRTU-KAI), senior researcher of KNRTU-KAI, Ph.D., Kazan
Obukhova Larisa Aleksandrovna - vice-principal of the Institute, " INSTITUTE of
AVIATION, LAND VEHICLES and ENERGETICS " KNRTU-KAI, the competitor of a scien-
tific degree of candidate of technical sciences, Kazan.
Terentyev Alexander - student of Kazan National Research Technical University named
after A.N.Tupolev (KNRTU-KAI).
Kokhanova Svetlana Yakovlevna - associate Professor of the department "Heat and pow-
er engineering" of Kazan National Research Technical University named after A.N. Tupolev
(KNRTU-KAI), Ph.D., Associate Professor, Kazan.
Yanovskaya Maria Leonidovna - Junior Researcher of The Central Institute of Aviation
Motors named after P. I. Baranov, Ph.D., Moscow
23
УДК 621.311
ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО
АППАРАТА С РЕЗКО ПЕРЕМЕННОЙ ЦИКЛОГРАММОЙ НАГРУЗКИ
©2015 М.М. Черная, Ю.А. Шиняков, А.В. Осипов
Томский государственные университет систем управления и радиоэлектроники, г. Томск
Приведена структура высоковольтной системы электропитания космического аппарата на основе ре-
гулируемых инверторов тока с резко переменной циклограммой нагрузки, которая позволяет регулировать
напряжение на солнечной батарее в широком диапазоне и обеспечивать режим экстремального регулирова-
ния мощности солнечной батареи. Методами математического и имитационного моделирования исследова-
на работа системы электропитания в различных режимах функционирования космического аппарата.
Ключевые слова: Высоковольтная система электропитания, космический аппарат, инвертор тока,
экстремальное регулирование мощности
Система электропитания (СЭП)
космического аппарата (КА) обеспечива-
ет гарантированное питание бортовых
потребителей при различных соотноше-
ниях мощностей солнечных, аккумуля-
торных батарей и нагрузки. При этом,
выбор наиболее энергоэффективной
структуры СЭП определяется цикло-
граммой нагрузки КА и совокупностью
режимов работы. В России в настоящее
время наибольшее распространение по-
лучила параллельно-последовательная
структура с реализацией экстремального
регулирования мощности СБ, используе-
мая на КА, разработанных ведущими го-
ловными предприятиями Федерального
космического агентства - АО «Информа-
ционные спутниковые системы» имени
академика М.Ф. Решетнёва» (г. Железно-
горск), ФГУП «НПО им. С.А. Лавочки-
на» (г. Химки) и АО «РКЦ «Прогресс»
(г. Самара) и др.
За долгие годы научными коллекти-
вами наработан значительный научно-
технический задел в области разработки
и создания низковольтных КА (27-28 В),
однако, требование повышения энергово-
оруженности космических аппаратов
привело к росту выходной мощности
СЭП КА и к увеличению токов в кабель-
ной сети. Что поспособствовало переходу
к высоковольтной выходной шиной пи-
тания нагрузки до 100 В.
Основной проблемой, связанной с
использованием солнечных батарей,
имеющих ярко-выраженный максимум
мощности вольт-ваттных характеристик,
при шине питания нагрузки до 100 В
является повышение напряжения холо-
стого хода СБ при их выходе из теневых
участков орбиты, что создает условия для
возникновения электростатических раз-
рядов между цепочками фотодиодов СБ
или элементами токосъема. Проблема
была решена путем применения парал-
лельной структуры СЭП КА с шунто-
выми стабилизаторами напряжения на СБ
[1]. Однако, это сказалось на недоисполь-
зовании СБ по мощности и не позволило
достичь оптимальных массогабаритных
характеристик СЭП.
Радикальным методом решения по-
ставленных задач является построение
высоковольтных СЭП автоматических
КА на основе инверторно-
трансформаторных преобразователей со
звеном повышенном частоты [2, 3].
Предложен вариант реализации высоко-
вольтной СЭП КА с резко переменной
циклограммой нагрузки и с регулятором
напряжения и зарядным устройством на
основе регулируемых инверторов тока. В
работе описан принцип функционирова-
ния СЭП КА. Определены крайние зна-
чения оптимальных напряжений СБ при
воздействии внешних факторов окружа-
ющей среды с целью проведения даль-
нейших исследований. Проведено мате-
матическое и имитационное моделирова-
ние системы. Показаны результаты рас-
пределения энергии в системе между
преобразующими устройствами в зави-
24
симости от изменяющейся мощности
нагрузки. Обосновано преимущество по-
строения СЭП КА на основе инверторов
тока, что позволяет достаточно просто
согласовывать источники энергии и
нагрузки, в том числе применять СБ с
напряжением как ниже, так и выше ста-
билизируемого значения напряжения на
нагрузке, регулировать напряжение на СБ
в широком диапазоне, включающем точ-
ку ВАХ СБ с максимальной мощностью,
и использовать АБ любых типов.
Работа выполнена в рамках реали-
зации постановления Правительства Рос-
сийской Федерации от 09.04.2010 г. №
218 "О мерах государственной поддерж-
ки развития кооперации российских
высших учебных заведений и организа-
ций, реализующих комплексные проекты
по созданию высокотехнологичного про-
изводства" и в рамках Программы страте-
гического развития Томского государ-
ственного университета систем управле-
ния и радиоэлектроники 2014, проект
2.3.1., подпроект 2.3.1.2.
Библиографический список:
1. Лесных А.Н., Сарычев В.А.
Исследование высоковольтных систем
электропитания космических аппаратов
со стабилизаторами напряжения вольто-
добавочного типа // Вестник Сибирского
государственного аэрокосмического уни-
верситета имени академика М.Ф. Решет-
нева, 2006. № 6. с. 63-66.
2. Осипов А.В., Шиняков Ю.А.,
Отто А.И., Черная М.М. Системы элек-
тропитания космических аппаратов на
основе регулируемых преобразователей с
промежуточным звеном повышенной ча-
стоты // Известия Томского политехниче-
ского университета, 2013. Т. 323. №. 4. с.
126-132.
3. Осипов А.В., Шиняков Ю.А.,
Отто А.И., Черная М.М., Ткаченко А.А.
Системы электропитания космических
аппаратов на основе регулируемых ин-
верторов тока// Известия Томского поли-
технического университета, 2014. Т. 324.
№. 4. с. 102-109.
References:
1. Lesnykh A.N., Sarychev V.A.
The research of high-voltage power supply
systems for space crafts with boost converter
// Bulletin of Siberian state aerospace uni-
versity named after academician M.F. Resh-
etnev, 2006. № 6. pp. 63-66.
2. Osipov A.V., Shinyakov Yu.A.,
Otto A.L, Chernaya M.M. Power supply
systems of spacecrafts based on controlled
converters with intermediate high frequency
link // Bulletin of the Tomsk Polytechnic
University, 2013. V. 323. №. 4. pp. 126-132.
3. Osipov A.V., Shinyakov Yu.A.,
Otto A.L, Chernaya M.M., Tkachenko A.A.
Power supply systems of spacecraft based
on adjustable current inverters // Bulletin of
the Tomsk Polytechnic University, 2014. V.
324. №. 4. pp. 102-109.
HIGH-VOLTAGE POWER SUPPLY SYSTEM OF SPACECRAFT WITH VARYING
LOAD CYCLOGRAM
©2015 M.M. Chernaya, Yu.A. Shinyakov, A.V. Osipov
Tomsk State University of Control System and Radio Electronics, Tomsk
The structure of the high-voltage power supply system of the spacecraft on the basis of regulated current inverters
with varying load cyclogram, which allows to adjust the voltage on the solar battery in a wide range and to provide
maximum power point control of the solar battery are shown. The power supply system in various modes of opera-
tion of the spacecraft studied by mathematical modeling and simulation.
Key words: High-voltage power supply system, spacecraft, current inverter, maximum power point tracker
25
Информация об авторах:
Черная Мария Михайловна, аспирантка, младший научный сотрудник, ТУСУР,
634050, Россия, г. Томск, пр. Ленина, 40, 205 мк, т. 8 (3822) 900-106, cmm91 @ inbox.ru.
Область научных интересов: силовая электроника, системы электропитания косми-
ческих аппаратов, математическое моделирование, компьютерное моделирование.
Шиняков Юрий Александрович, д.т.н., директор, ТУСУР, 634050, Россия,
г. Томск, пр. Ленина, 40, 205 мк, т. 8 (3822) 900-106, shua@main.tusur.ru.
Область научных интересов: силовая электроника, системы электропитания косми-
ческих аппаратов, математическое моделирование, компьютерное моделирование.
Осипов Александр Владимирович, к.т.н., старший научный сотрудник, ТУСУР,
634050, Россия, г. Томск, пр. Ленина, 40, 205 мк, т. 8 (3822) 900-106, ossan@mail.nj.
Область научных интересов: силовая электроника, системы электропитания косми-
ческих аппаратов, математическое моделирование, компьютерное моделирование.
Chernaya Mariya Mikhailovna, junior researcher, TUSUR, 634050, Russia, Tomsk,
Lenina avenue, 40, 205, 8 (3822) 900-106, cmm91 @inbox.ru.
Area of research: power electronics, power supply systems of space crafts, mathematic
simulation and simulation modeling.
Shinyakov Yuriy Aleksandrovich, Dr. Sc., director, TUSUR, 634050, Russia, Tomsk,
Lenina avenue, 40, 205, 8 (3822) 900-106, shua@main.tusur.ru.
Area of research: power electronics, power supply systems of space crafts, mathematic
simulation and simulation modeling.
Osipov Aleksandr Vladimirovich, Cand. Sc., senior researcher, TUSUR, 634050, Russia,
Tomsk, Lenina avenue, 40, 205, 8 (3822) 900-106, ossan@mail.ru.
Area of research: power electronics, power supply systems of space crafts, mathematic
simulation and simulation modeling.
26
УДК 629.786.048:536.248
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ НИЗКОТЕМПЕРАТУРНЫХ
ТЕПЛОВЫХ ТРУБ ПОВЫШЕННОЙ ТЕПЛОВОЙ ПРОВОДИМОСТИ
©2015 В.В. Бирюк ', А.И. Китаев 2, А.Л. Лукс 3, А.Г. Матвеев 3, А.В. Порядин 2
1 Федеральное государственное бюджетное образовательное учреждение высшего профес-
сионального образования «Самарский государственный аэрокосмический университет
имени академика С.П. Королёва» (Национальный исследовательский университет),
г. Самара
2 Акционерное общество «Ракетно-космический центр «Прогресс», г. Самара,
3 Федеральное государственное бюджетное образовательное учреждение высшего профес-
сионального образования «Самарский государственный университет», г. Самара
Проведён анализ основных теплофизических характеристик аммиачных тепловых труб повышенной
тепловой проводимости с каплевидной капиллярной структурой конструкционного фитиля из алюминиевых
сплавов различных типоразмеров и конфигураций по результатам испытаний.
Ключевые слова: тепловые трубы, системы терморегулирования (СТР), излучающие теплообменни-
ки.
Работа представляет собой
экспериментальное исследование
теплофизических характеристик ТТ,
выполненное по заказу с АО «РКЦ
«Прогресс», применяемых в системах
терморегулирования (СТР) космических
аппаратов (КА). Проведён сравнительный
анализ основных расчётных и
экспериментальных теплофизических
характеристик аммиачных ТТ
повышенной тепловой проводимости с
Q- образной (каплевидной) капиллярной
структурой конструкционного фитиля из
алюминиевых сплавов АД31 (6060, 6061,
6063) различных типоразмеров и
конфигураций по результатам испытаний
в лаборатории «Теплоэнерготехника»
Управления научных исследований
СамГУ, в научно-исследовательском
центре им. М.В. Келдыша (Центре
Келдыша), а также в корпорации
Лавочкина, осуществляемых по
программе квалификационных
испытаний в строгом соответствии с
европейским стандартом ESA PSS-049 и
отечественными стандартами.
Полуэмпирические зависимости для
теплопередающей способности и
термических сопротивлений при рабочей
температуре теплоносителя
удовлетворительно описывают опытные
данные. Даны рекомендации для
проектирования и эксплуатации
улучшенных артериальных тепловых
труб.
Согласно государственному стан-
дарту ГОСТ23073-78 тепловыми трубами
(ТТ) называются испарительно-
конденсационные устройства для пере-
дачи тепла. В них конвективный перенос
скрытой теплоты парообразования осу-
ществляется за счет испарения жидкости
в зоне подвода тепла (испарителя) и кон-
денсации ее паров в зоне отвода (конден-
сатора), то есть при фазовых переходах.
При этом замкнутая циркуляция тепло-
носителя внутри корпуса поддерживает-
ся действием капиллярных или массо-
вых сил (гравитационных, центробежных
и др.).
К важнейшим универсальным теп-
лофизическим характеристикам ТТ отно-
сятся удельное термическое сопротивле-
ние и коэффициент теплопередачи.
Термическое сопротивление ТТ опреде-
ляется как величина, численно равная
отношению разности среднеповерхност-
ных температур корпуса в зонах испаре-
ния и конденсации к тепловому потоку
(K/Вт), а ей обратная величина - как
тепловая проводимость (Вт/К).
27
В соответствии с законом тепло-
проводности Фурье тепловой поток, воз-
никающий как следствие температурного
перепада (Т1-Т2) по длине ТТ, вычисля-
ется по уравнению
е = 1(т;-т2), (1)
К
где R- термическое сопротивление.
Конвективный теплоперенос насы-
щенным паром описывается уравнением
Клаузиуса-Клайперона. Оно связывает
температуру и давление насыщенного
пара внутри канала ТТ с перепадом тем-
пературы по длине:
Т>~Тг = Т^. (2)
PvrJ
Тепловая труба работает ниже пре-
делов (ограничений) передаваемой теп-
ловой мощности. Ограничение рабочих
параметров (максимальной переносимой
мощности) в ТТ связано с предельной
перекачивающей способностью капил-
лярной структуры или капиллярным впи-
тыванием фитиля (капиллярное ограни-
чение), с запиранием парового потока в
паровом канале (звуковой предел), уно-
сом (срывом) капель жидкости с межфаз-
ной границы жидкость - пар фитиля па-
ром, который движется с большой скоро-
стью, чем жидкая пленка (ограничение по
уносу), разрушением потока жидкости
пузырьковым кипением в фитиле (огра-
ничение по кипению или высыхание
фитиля).
Основными теплофизическими ха-
рактеристиками тепловых труб с кон-
струкционными фитилями, определяю-
щими эффективность их использования,
являются максимальная теплопередаю-
щая способность и удельное термическое
сопротивление, а также коэффициент
теплопередачи.
Из многих ограничений теплопере-
дающей способности тепловых труб низ-
котемпературным тепловым трубам при-
сущи два ограничения:
1) максимальный передаваемый
тепловой поток QMax, связанный с капил-
лярными и транспортными возможно-
стями пористой структуры фитиля;
2) максимальная радиальная плот-
ность теплового потока в зоне нагрева
q™, определяемая кризисом кипения в
пористой структуре фитиля.
Обычно более жестким ограниче-
нием для передаваемой мощности для
низкотемпературных ТТ являются преде-
лы по капиллярному впитыванию и ки-
пению.
Эти ограничения имеют различную
физическую природу, однако превыше-
ние любого из них приводит к одинако-
вому результату - резкому увеличению
температуры стенки в зоне подвода тепла
и, соответственно, к резкому увеличению
перепада температур по длине тепловой
трубы.
В экспериментах тепловой поток
QMax обычно фиксируется по резкому воз-
растанию температуры испарителя, кото-
рое имеет место в результате осушения
его внутренней поверхности фитиля.
Работа ТТ характеризуется коэффи-
циентом теплопередачи Кгг , который
определяется из уравнения
Q-AKriATpe-Tpc), (3)
где Q - передаваемая мощность или
тепловая нагрузка; Т е,Т - температура
наружной поверхности испарителя и
конденсатора тепловой трубы.
В качестве А может быть взята
площадь поперечного сечения трубы Ар,
площадь поверхности испарителя Ае,
площадь поверхности конденсатора Д.
или любая другая площадь.
Из уравнения (3) следует равенство
тепловых проводимостей при стационар-
ном режиме:
ЛК„ =ЛгК^г=Л,К,-,,=ЛгКПл. (4)
Для универсальности в качестве ос-
новной в расчёте выбирается Ар. Это
уравнение является опорным при прове-
дении экспериментов и позволяет увязать
проводимости источника, ТТ и стока теп-
лоты.
Теплообмен в зоне испарения
характеризуется, как правило, наличием
двух режимов: испарение и кипение. В
испарительном режиме теплообмен
осуществляется теплопроводностью,
через пропитанную жидкостью
28
капиллярную структуру (КС) фитиля, а
затем испарением жидкости с
поверхности менисков. Конвективный
перенос теплоты через капиллярную
структуру мал и им пренебрегаем.
Тепловой поток Q условно разде-
лим на составляющие:
1) тепловой поток, передаваемый
через элементы капиллярной структуры
рёбра канавок;
2) поток, передаваемый теплопро-
водностью через жидкость в канавках.
Составляющие суммарного тепло-
вого потока Q находятся в сложной за-
висимости от теплопроводности матери-
ала капиллярной структуры и жидкости,
пористости и однородности структуры,
определяющих размеров элементов КС.
Их аналитическое определение за-
трудняется из-за отсутствия достаточно
надёжных данных о закономерностях
теплообмена между каркасом структуры
и насыщающей жидкостью.
Поэтому при исследованиях интен-
сивности теплообмена в зоне испарения
ТТ пользуются результирующей характе-
ристикой теплопереноса через насыщен-
ную жидкостью КС - коэффициентом
эффективной теплопроводности Aef e или
коэффициентом теплообмена испарением
«. = Л”'/е . (5)
/ ик.с
где Зкс - толщина КС, полностью
насыщенной жидким теплоносителем.
На величину ае значительно влияет
переменное положение границы раздела
фаз жидкость-пар в КС, когда толщина
жидкости 8 < 8КС. Толщина плёнки из-
меняется в поперечном сечении канавки
и в продольном.
Поэтому результаты исследований
теплообмена при испарении жидкости в
канавках отличаются друг от друга. Но
они свидетельствуют об автомодельности
коэффициентов теплообмена относитель-
но плотности теплового потока, но о зна-
чительном влиянии теплопроводности
материала ребра канавки, его конфигура-
ции, технологии изготовления на интен-
сивность теплообмена. Это подтвержда-
ется и результатами теплообмена испаре-
нием в ТТ повышенной проводимости с
Q- образной (каплевидной) капиллярной
структурой фитиля, которые отличаются
более низкими значениями пористости
£ = 0,35-г-0,46, чем у КС с прямоуголь-
ными или трапецевидными канавками
е ~ 0,6. В них коэффициент эффективной
теплопроводности КС фитиля, как пока-
зывают расчёты при £ = 0,354-0,46, зна-
чительно превышает Ле} е = 2-5-3 Вт/(м К),
сдвигаясь в сторону теплопроводности
материала корпуса ТТ.
Коэффициент теплопередачи ТТ
находим как величину, обратную сумме
термических сопротивлений элементов
ТТ в зоне испарения, конденсации и
транспорта
2LrAp 2L,r,A„, p.rJQ 2Lrr,A„. 2Lcr,Ap
, K77. p = [*„,f + RK,e + Rv + Rwc + • (6)
Высокая эффективная теплопро-
водность ТТ повышенной проводимости
с Q- образной КС достигается за счёт
весьма низких значений термических со-
противлений отдельных теплопроводя-
щих элементов. В частности, термиче-
ское сопротивление потока пара Rv име-
ет порядок 10 й, а термические сопро-
тивления стенки и насыщенного фитиля в
зонах испарителя и конденсатора
RP,e^Rw,e^Rw,c^Rp.c - от 1°5 Д° Ю7- Малое
термическое сопротивление потока пара
Rv является следствием закона
Клаузиуса-Клапейрона. Поэтому значе-
нием Rv будем пренебрегать
Для анализа основных теплофизи-
ческих характеристик ТТ с Q- образной
капиллярной структурой фитиля из про-
филей АС-КРА7,5-Р 1-120(30),
АС-КРА7,0-Р2, АС-КРА7,5-Р2,
АС-КРА8,6-Р2 использовались результа-
ты экспериментальных исследований
корпорации Лавочкина, исследователь-
ского центра им. М.В. Келдыша (Центр
Келдыша), лаборатории «Теплоэнерго-
техника» УНИ СамГУ. Особенно это ка-
салось профилей ТТ с одной и той же ба-
29
зовой геометрией капиллярной структу-
ры фитиля. Объекты испытаний, как бу-
дет показано ниже, отличаются геомет-
рией зон испарения, транспорта, конден-
сации (или общей длиной), способами
подвода и отвода теплоты, расположени-
ем источников и стоков теплоты и дру-
гими параметрами.
Величины коэффициентов теплоот-
дачи при испарении и конденсации (ка-
сающихся внутренней поверхности) в ис-
парителе и конденсаторе для 3 различных
профилей тепловых труб представлены в
табл. 1.
Табл. 1 - Реализуемые значения коэффициентов теплоотдачи в зонах испарения и
конденсации ТТ.
AC-KPA7.0-P2 AC-KPA7.5-P2 AC-KPA8.6-P2
OCevi w/m2K 13850 18100 16770
Otcond; w/m2K 19800 7280 6250
Были получены большие величины
коэффициентов теплоотдачи в испарите-
ле и конденсаторе по сравнению с из-
вестными аналогами. Увеличение коэф-
фициента теплоотдачи в испарителе и
конденсаторе отмечено для профиля
АС-КРА7.0-Р2. По нашему мнению, это
результат не только производства техни-
ческой неравномерно расположенной
шероховатости на верхней поверхности
большего количества канавок круглой
формы.
Анализ ограничений по кипению
затрагивает теорию пузырькового кипе-
ния. Она включает в себя:
1) формирование пузырьков (заро-
дышеобразование) ;
2) последующий рост и движение
пузырьков.
Q-образная капиллярная канавчатая
структура фитиля обладает рядом осо-
бенностей. В капиллярных каналах одно-
временно происходит эвакуация пара и
непрерывная подпитка жидкостью, под-
текающей сюда под действием сил по-
верхностного натяжения. Кипение про-
исходит как внутри канавок фитиля, так и
на его поверхности. Реализуемые значе-
ния коэффициентов теплоотдачи в испа-
рителе и конденсаторе oteV свидетель-
ствуют о том, что Q-образная капилляр-
ная канавчатая структура фитиля, соче-
тающая круглую артерию с узкой щелью,
создаёт весьма благоприятные условия
для зарождения и роста паровых пузы-
рей. Чтобы очаг новой паровой фазы мог
возникнуть и расти в перегретой жидко-
сти, его размер должен быть больше не-
которого критического. Очаги новой фа-
зы критических размеров называют заро-
дышами. Критический размер зародыша
определяется перегревом жидкости ДТ,
а также физическими свойствами тепло-
носителя при данном давлении и темпе-
ратуре. С увеличением давления (темпе-
ратуры) радиус парового зародыша
уменьшается. По расчёту: 7?Kps2,4-10’6 м.
Парообразование в открытых каплевид-
ных канавках в основном соответствует
парообразованию в тонком слое. Пузырь-
ки влияют на сопротивление потоку
жидкости, но, по- видимому, не приводят
к отказу ТТ АС-КРА. Весь процесс изме-
нения формы пузырька происходит взры-
вообразно в течение 10’8с. При этом пу-
зырьки образуют поверхностные волны.
Но образование сплошной паровой плен-
ки не происходит, не наступает в ТТ
АС-КРА и кризис.
Толщина пленки меньше толщины
фитиля с каплевидной КС, но заглубле-
ние ее поверхности трудно определить.
Жидкость отступает вглубь фитиля до
уровня, где капиллярные силы макси-
мальны, а потери на трение при течении
жидкости минимальны. Наличие фитиля
с каплевидной КС затрудняет или даже
препятствует процессу образования
больших пузырей, с которыми обычно
связано пузырьковое кипение. Поскольку
нет паровой пленкт, которая обычно
сопровождает пузырьковое кипение, то
30
ТТ AC-KPA, как показывают результаты
испытаний, способны к теплопередаче
при больших тепловых нагрузках.
Как показывают эксперименты с
аммиачными алюминиевыми ТТ, поверх-
ность фитиля занята паровыми пузырями
уже при д = (1-5-1,5)104Вт/м2. При этом
устойчивое развитое кипение на внут-
ренней поверхности ТТ с Q-образной ка-
пиллярной канавчатой структурой фити-
ля устанавливается при весьма незначи-
тельных температурных напорах (пере-
гревах жидкости). Основная причина -
поверхности раздела фаз возникают и
внутри Q-образной капиллярной канав-
чатой структуры фитиля. При выбросе
паровой фазы из канавчатой структуры
фитиля в ней всегда остаются паровые
включения (зародыши), обволакивающие
стенки капиллярных каналов. Испарение
микропленки жидкости происходит по
всей поверхности капиллярного канала.
Элементы Q-образной капиллярной ка-
навчатой структуры фитиля сами явля-
ются центрами зарождения паровой фа-
зы. Размеры каналов фитиля имеют поря-
док 10'3 4- Ю'4 м и больше критического
диаметра обычного центра парообразова-
ния. Поэтому испарение плёнки в паро-
вые включения или с поверхности капил-
лярной щели требует значительно мень-
шего перегрева. Перегрев поступающий в
капиллярную щель жидкости в испарите-
ле происходит в условиях весьма высо-
кой интенсивности теплообмена. Разме-
ры малого диаметра цилиндрической ар-
терии (1,0мм) и щели (0,3-5-0,4 мм), дви-
жение жидкости в них ламинарное.
Как показывают расчёты для с Q-
образной капиллярной канавчатой струк-
туры фитиля а ~ 1,5 • 105 Вт/(м2К). В усло-
виях сильно развитой поверхности такого
фитиля только за счёт подогрева жидко-
сти можно отводить весьма большие теп-
ловые потоки. Снижение необходимого
перегрева, а также интенсивный подогрев
жидкости в ТТ с Q-образной капилляр-
ной канавчатой структурой фитиля суще-
ственно уменьшает время «молчания»
центров парообразования, что интенси-
фицирует теплообмен. С увеличением
перегрева жидкости в процесс генерации
пара вовлекаются новые зародыши с
меньшим радиусом кривизны, чем и обу-
словлен рост числа действующих на теп-
лоотдающей поверхности центров паро-
образования Z при увеличении плотно-
сти теплового потока q .По существу,
плотность теплового потока q , Вт/м2
влияет косвенным образом на Z, т.к. с
ростом q увеличивается температурный
напор, т.е. перегрев жидкости в пристен-
ном слое. Как следует из испытаний ТТ
из профилей типа АС-КРА высотой 12,5,
14, 17, коэффициенты теплоотдачи ае,ас
с теплоотдающей поверхности покрытых
плёнками Q-образной капиллярной ка-
навчатой структуры фитиля при переходе
к более меньшим типоразмерам увеличи-
ваются практически в двое, на что без-
условно влияет различная технологиче-
ская обработка теплоотдающей поверх-
ности щели и артерии. Например, если
теплоотдающую поверхность отполиро-
вать, а жидкость дегазировать, то для
возникновения процесса парообразова-
ния потребуется больший перегрев, чем
при кипении той же жидкости на необра-
ботанной технологической поверхности
без соответствующей подготовки жидко-
сти. Это объясняется тем, что с повыше-
нием класса чистоты обработки капил-
лярной структуры фитиля на поверхности
остаются всё более мелкие микровпади-
ны с меньшим радиусом кривизны.
Автомодельность процесса тепло-
обмена при кипении относительно вели-
чины шероховатости на поверхности фи-
тиля ТТ со стороны парового канала свя-
зана не только с появлением на теплоот-
дающей поверхности смачиваемых мик-
ровпадин. По-видимому, паровые пу-
зырьки, которые появляются на доста-
точно крупных микротрещинах перекры-
вают собой соседние более мелкие ак-
тивные зародыши парообразования. То
есть появление с увеличением шерохова-
тости новых центров может компенсиро-
ваться захлопыванием более мелких за-
родышей, которые были активными при
меньшей шероховатости. Поэтому про-
исходит стабилизация центров парообра-
31
зования и вырождение влияния шерохо-
ватости при переходе от менее шерохова-
той поверхности к более шероховатой с
ростом плотности теплового потока. При
переходе от крупных типоразмеров ТТ к
меньшим на формирование геометрии
профиля в условиях усиливающейся
стеснённости прессуемого жидкого пото-
ка все большее влияние оказывают силы
внутреннего трения о стенки охлаждае-
мой матрицы. Ансамбль «гребешков»
технической шероховатости при измене-
нии плотности теплового потока закла-
дывает механизм зародышеобразования
(парообразования) аммиака при их испа-
рении с поверхности. В соответствии с
ТУ550.1 -02070921.007-03 на профили
прессованные из алюминиевого сплава
АД31 (6060) глубина задиров, царапин
должна быть не более 0,05 мм. На полке
глубина рисок, задиров, царапин не более
0,12 мм. Зачистка дефектов на поверхно-
сти профиля не допускается. На лицевой
поверхности профиля особой точности не
допускаются механические повреждения,
пузыри глубиной 0,03 мм, продольные
следы от матрицы глубиной более 0,03
мм, а также поперечные следы от матри-
цы, образующиеся при остановке пресса.
Но в ТУ не оговаривается выполнение
«острых» сопряжений (ребер с поверхно-
стью щели, щели с круглой артерией), где
следы от матрицы при прессовании по
размерам могут быть больше указанных.
Экспериментальные исследования
ТТ с различными канавками Q-образной
формы были проведены при наземных
условиях испытаний.
При использовании различных средств
подвода и отвода теплоты в центре Кел-
дыша (нагреватель и технологическая
термоплата) и в лаборатории СамГУ
(гибкий нагреватель и четыре кулера)
теплофизические характеристики при ис-
пытании ТТ из профиля АС-КРА 7.5-Р1-
30 длиной 1762 мм хорошо подтвержда-
ются. Максимальная теплопередающая
способность ТТ из профиля АС-КРА7.5-
Р2 незначительно отличается от величи-
ны (Qmax) ТТ из профиля АС-КРА7.0-Р2.
Сказывается влияние неравномерно рас-
положенной технической шероховатости
на поверхности канавок фитиля, влияю-
щих на зарождение пузырьков парообра-
зования, что интенсифицирует теплооб-
мен. Это подтверждается резким ростом
коэффициента теплоотдачи при испаре-
нии (ае = 15800 Вт/(м2 К) для
ТТ из профиля АС-КРА7.0-Р2.
При испытании ТТ были получены
большие величины коэффициентов теп-
лоотдачи при испарении и конденсации.
Выявленная автомодельность значений
коэффициентов теплоотдачи в зонах ис-
парения и конденсации ТТ повышенной
тепловой проводимости от плотности
теплового потока в них открывает воз-
можность для более надёжного опреде-
ления в расчётах эффективной теплопро-
водности конструкционных фитилей с
каплевидной канавчатой структурой, ко-
торая значительно выше, чем у прямо-
угольных и трапецеидальных канавчатых
фитилей.
32
Табл. 2 - Влияние местоположения источников нагрева и охлаждения на теплофизические
характеристики ТТ АС-КРА7.0-Р2 (площадь поперечного сечения
Фитиля Атт = 1,2266 • 10’4м2)
№ п/п Местоположение источника нагрева и охлаждения АС-КРА7.0-Р2 (Атт = 1,2266 • 10’4м2)
(QL)max. Втм Qmax Вт R, К/Вт Rrr, Ю'6, м2- К/Вт ТСтт, Вт/м2- К Ктт 'Атт— 7?’,Вт/К &Ттг, К
1 ▼▼▼ 1 1 ▼▼▼ 226 133,7 0,024 2,94384 339692,4 41,67 3,208
2 ▼▼▼ АЛЛ 1 1 230 136,1 0,016 1,96256 509538,6 62,50 2,177
3 ▲АЖ ▼▼▼ 243 143,8 0,019 2,33054 429085,1 52,63 2,723
4 ▲▲▲ 1 1 ▲▲▲ 235 139,1 0,014 1,71724 582329,8 71,43 1,947
5 235 139,1 0,019 2,33054 429085,1 52,63 2,642
Таблица 3 - Влияние местоположения источников нагрева и охлаждения на
теплофизические характеристики ТТ АС-КРА7.5-Р2 (площадь поперечного сечения
фитиля Атт = 1,5386 10‘4м2)
№ Местоположение источника и стока теплоты АС-КРА7.5-Р2 (Атт= 1,5386 • 10'4м2)
($2Д1тах Втм Qmax Вт R, К/Вт Rtt , Ю'6, м2- К/Вт Ктт, Вт/м2- К Ктт -Атт— R ', Вт/К АТтг, К
1 ▼▼▼ 1 1 ▼▼▼ 218 129,0 0,015 2,30790 433294,3 66,67 1,935
2 ▼▼▼ ▲▲▲ 1 1 221 130,7 0,016 2,46176 406213,44 62,50 2,091
3 1 J ▲▲▲ ▼▼▼ 243 143,8 0,018 2,76948 361078,6 55,56 2,588
4 ▲▲▲ 1 1 ▲▲▲ 235 139,0 0,015 2,30790 433294,3 66,67 2,085
5 251 148,5 0,018 2,76948 361078,6 55,56 2,673
33
Таблица 4 - Влияние местоположения источников нагрева и охлаждения на
теплофизические характеристики ТТ АС-КРА8.6-Р2 (площадь поперечного сечения
фитиля Атт = 2,26865 • 10’4м2)
№ n/n Местоположение источника нагрева и охлаждения AC-KPA8.6-P2 (Apr =2,26865 • 10'4m2)
( QL)ma.x Btm Qmax Вт R K/Bt Rtt , IO’6, m2- K/Bt Ktt, Bt/m2 К Ktt Att — /?',Вт/К АТтг, К
1 ▼▼▼ 1 1 ▼▼▼ 302 178,7 0,050 1,13430 88160,0 20,00 8,935
2 ▼▼▼ AAA 1 1 310 183,4 0,018 4,08357 244883,8 55,56 3,301
3 1 1 ▲▲▲ ▼▼▼ 352 208,3 0,020 4,53730 220395,4 50,00 4,166
4 AAA AAA 335 198,2 0,051 1,15701 86429,6 19,61 10,108
5 ► 328 194,1 0,013 2,94925 339069,0 76,92 2,523
Библиографический список:
1. Barantsevich V.L., Barkova L.V.
"Investigation of the Aluminum-Ammonia
Heat Pipe service life characteristics and
corrosion resistance." Proc, of the IX Inter-
national Heat Pipe Conference, May 1-5,
1995, Albuquerque, New-Mexico, v II, pp
947-954.
2. V. Barantsevich, K. Goncharov,
A. Orlov, O. Golovin, "Investigation Results
of Axial, Grooved Heat Pipes With High
Thermal Capacity. " Lavochkin Association,
Khimky, Moscow region, Russia, 011CES-
75.
3. Лукс А.Л., Матвеев А.Г.
Исследование высокоэффективных
аммиачных тепловых труб
энергосберегающих систем
терморегулирования крупногабаритных
конструкций космического аппарата /
А.Л. Лукс, А.Г. Матвеев. - Вестник
Самарского государственного
университета. Естественнонаучная серия.
- № 6(56). - 2007. - С. 401-418.
References:
1. Barantsevich V.L., Barkova L.V.
"Investigation of the Aluminum-Ammonia
Heat Pipe service life characteristics and
corrosion resistance." Proc, of the IX Inter-
national Heat Pipe Conference, May 1-5,
1995, Albuquerque, New-Mexico, v. II, pp
947-954.
2. V. Barantsevich, K. Goncharov,
A. Orlov, O. Golovin, "Investigation Results
of Axial, Grooved Heat Pipes With High
Thermal Capacity. " Lavochkin Association,
Khimky, Moscow region, Russia, 011CES-
75.
3. A.L.Luks, A.G.Matveev, Study of
High-Efficient Ammoniac Heat-Pipes with-
in Energy-Efficient Systems for Tempera-
ture Control of Large Dimension Construc-
tions of Space Vehicle, Bulletin of Samara
State University, Science Series, № 6(56). -
2007. - pp. 401-418 (in Russian).
34
EXPERIMENTAL RESEARCH OF LOW-TEMPERATURE OF HEAT-PIPES OF
INCREASED HEAT CONDUCTION
©2015 Biryuk V.V.,1 Kitaev A.L,2 Luks A.L.3, Matveev A.G.3, Poryadin A.V.2
1 Federal State-Financed Educational Facility of Higher Professional Education
Samara State Aerospace University named after S.P. Korolev, Samara;
2 JSC «SRC «Progress», Samara;
3 Federal State-Financed Educational Facility for Higher Professional Education
Samara State University, Samara
Comparative analysis of main calculated and experimental thermo-physical characteristics of advanced heat-
transfer rate heat-pipes with ammoniac filling that have Q-shaped (tear-shaped) capillary structure of wick, which
made of aluminum alloy of different types, sizes and configurations was done. Recommendations for design and
usage of advanced arterial heat-pipes are proposed.
Keywords: Heat-pipes, systems of thermal control, radiation heat-exchangers
Информация об авторах:
Бирюк Владимир Васильевич, д.т.н., профессор, СГАУ, 443086, Россия, г. Самара,
Московское ш. 34, т. 267-45-66.
Область научных интересов: теплотехника, газодинамика, тепловые двигатели и энерге-
тические установки.
Китаев Александр Ирикович, зам. нач. отделения АО «РКЦ «Прогресс», 443009, Рос-
сия, г. Самара, ул. Земеца 18, т. 228-58-92, kain56@mail.ru.
Область научных интересов: теплофизика.
Лукс Александр Леонидович, к.т.н., вед. научн. сотрудник, почётный работник выс-
шего профессионального образования РФ, СамГУ, 443011, Россия, г. Самара, ул. Академика
Павлова 1, т. 337-99-21.
Область научных интересов: теплофизика, системы терморегулирования, газодинамика.
Матвеев Андрей Григорьевич, заведующий научно-исследовательской лабораторией
«Теплоэнерготехника», СамГУ, 443011, Россия, г. Самара, ул. Академика Павлова 1, т. 337-
99-21, matveevl974@yandex.ru.
Область научных интересов: системы терморегулирования, гидравлика, газодинамика.
Порядин Александр Владимирович, зам. нач. отдела 2612 АО «РКЦ «Прогресс»,
443009, Россия, г. Самара, ул. Земеца 18, т. 228-63-45.
Область научных интересов: системы терморегулирования.
Biryuk Vladimir Vasilievich, professor, doctor of technical sciences, SSAU, 443 086, Russia,
Samara, Moscow highway, 34,267-45-66.
Area of research: thermotechnics, flow dynamics, heat engines and power plants.
Kitaev Aleksander Irikivich, Deputy Head of Department of JSC «SRC «Progress»,
443009, Russia, Samara, Zemetsa str. 18, 228-58-92, kain56@mail.ru.
Area of research: thermo physics.
Luks Alexander Leonidovitch, candidate of technical sciences, Senior Research Scientist,
Honorary Worker of Higher Professional Education of Russian Federation, SSU, 443 011, Russia,
Akademika Pavlova str. 1,337-99-21.
Area of research: thermo physics, systems of thermal control, flow dynamics.
Matveev Andrey Grigorievich, Deputy Head of Scientific Research Laboratory «Thermo-
Power Engineering», SSU, 443 011, Russia, Akademika Pavlova str. 1, 337-99-21,
matvecv 1974@yandex.ru.
Area of research: systems of thermal control, hydraulics, flow dynamics.
Poryadin Aleksander Vladimirovich, Deputy Head of 2612 Section of JSC «SRC «Pro-
gress», 443009, Russia, Samara, Zemetsa str. 18,228-63-45.
Area of research: systems of thermal control.
35
УДК 62.181.1
АЛГОРИТМ ВЫЧИСЛЕНИЯ КОМПЛЕКСА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ
ЭЛЕМЕНТОВ ПЕРА ЛОПАТОК КОМПРЕССОРА ГТД
©2015 В.А. Печении, И.С. Степаненко, Н.В. Рузанов, М.А. Болотов
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Приведен алгоритм для вычисления комплекса геометрических элементов пера лопаток компрессора
ГТД (точки спинки, корыта, входной и выходной кромок) на координатно-измерительных машинах. Прове-
дено сравнительное исследование погрешностей измерения геометрии элементов с использованием предло-
женного алгоритма и с использованием традиционного алгоритма.
Ключевые слова: перо лопатки, координатно-измерительная машина, итерационный алгоритм, от-
клонение формы, отклонение расположения
При контроле пера лопаток ком-
прессора ГТД на контактных координат-
но-измерительных машинах особую
сложность составляют области входной и
выходной кромок. Контроль сечения ло-
паток осуществляется, как правило, ме-
тодом сканирования, при котором изме-
ряется множество точек вдоль всего про-
филя. Плотность точек измерения на
входной и выходной кромках целесооб-
разно брать выше, чем на спинке и коры-
те. Радиусы кромок близки к радиусам
измерительных наконечников, и при
наличии относительно высокого откло-
нения расположения и/или формы пера
погрешности измерения кромок слишком
велики. Вышесказанное было апробиро-
вано с помощью моделирования процесса
координатных измерений серии профи-
лей с отклонениями формы и расположе-
ния, сгенерированных случайным обра-
зом.
Изготавливаемые поверхности
сложной формы всегда отличаются от их
CAD-моделей на величину отклонений
формы и расположения [1]. Координату
точки измеряемой поверхности с откло-
нениями формы и расположения можно
выразить формулой:
Р.„„ = dF)- R„, +f„, (1)
где pmeiis, PCAD - вектор координат точек
(x,y,z) соответственно измеряемой (мо-
делируемой) и номинальной поверхно-
стей;
N -
1x3 - вектор нормали в точке pCAD ;
dF - величина отклонения формы в точ-
ке Рсао ;
7?3х3 ;Т|х3 - матрица поворота и вектор
транспонирования координат точки pCAD
Было смоделировано 100 сечений
корневой части пера лопаток компрессо-
ра ГТД, предельные значения, отклоне-
ния формы которых изменялись по нор-
мальному закону. На основании стати-
стических данных по измерениям этого
типа деталей и согласно [2] принято, что
максимальное значение отклонения фор-
мы не превышает 0,16 мм в тело детали.
Диапазон изменения амплитуды волни-
стости составил ±0,01 мм. Погрешность
измерения определялась, как значения
расстояний между кривыми измеренного
и действительного профиля пера лопатки
в точках действительного профиля.
Максимальное смещение сечения
относительно системы координат хвосто-
вика лопатки составляет 0,2 мм, угол раз-
ворота профиля изменяется в
пределах ±15’.
По полученным значениям погреш-
ности измерения в точках профиля рас-
считывались средние, нижние и верхние
границы распространения погрешностей
вдоль профиля.
Было установлено, что точность из-
мерения кромок по методу однократного
сканирования не позволяет измерить их с
достаточной точностью и адекватно рас-
36
считать величины радиусов входных и
выходных кромок, конечные точки сред-
ней линии профиля и прочие геометриче-
ские параметры.
Для снижения погрешности изме-
рения предлагается следующий усовер-
шенствованный алгоритм:
1) Предварительно измерить точ-
ки спинки или корыта с 5% отступом от
границ этих участков и невысокой плот-
ностью точек (20-30).
2) Выполнить процедуру наилуч-
шего совмещения измеренного профиля с
его номинальным значениям при помощи
итерационного алгоритма ближайших
точек (ICP) [3]. Это часто используемый
в координатных измерениях итерацион-
ный алгоритм, у которого на каждой ите-
рации методами нелинейного оптимиза-
ционного поиска рассчитываются углы
поворота и перемещения вдоль коорди-
натных осей. Целевую функцию алго-
ритма можно представить в виде:
f(.R,t) = -jjR-Pl+T-4,l —>0, (2)
И ,=1
где п - количество точек совмещения;
qi- координаты точки на CAD-модели;
р, - координаты точки измеренной по-
верхности, соответствующей qt.
Таким образом, определяются па-
раметры отклонения расположения (мат-
рицы Т и R из (1)).
3) Произвести компенсацию от-
клонения расположения измеряемого
профиля путем поворота и транспониро-
вания координат точек номинального
профиля.
4) Произвести полное измерение
профиля.
Как следует из результатов, ве-
личина погрешности измерения кромок
снизилась в 1,5-2 раза и не превышает 10
мкм. Наиболее вероятная погрешность
измерения спинки и корыта также снизи-
лась, в случае применения обоих методик
не превышает 1 мкм и существенно не
влияет на результаты оценки геометриче-
ских параметров.
В табл.1 представлены максималь-
ные значения погрешностей из встреча-
ющихся на корыте, спинки, входной и
выходной кромках до и после примене-
ния усовершенствованного алгоритма
измерения.
Таблица 1 - Средние, верхние и нижние границы величин погрешностей измерения на
различных участках пера лопаток
Измеряемые области пера Корыто Входная кромка Спинка Выходная кромка 10 т э
Метод однократного сканирования
Наиболее вероятное значение, мм 0,0004 0,0025 0,001 0,0032
Максимальное отклонение, мм 0,0015 0,0111 0,0046 0,0152
Минимальное отклонение, мм 6.2*10'7 1.7*10б 1.2*10'6 1.6*106
Использование компенсации отклонения располо- жения
Наиболее вероятное значение, мм 0,0003 0,001 0,0003 0,0019
Максимальное отклонение, мм 0,0013 0,0052 0,0012 0,098
Минимальное отклонение, мм 5.9*106 1.2*10’5 5.5* 10’6 3.2*106
Таким образом, в ходе моделирова- постановления №218 от 09.04.20 ния процесса координатных измерений (шифр темы 2013-218-04-4777). был разработан алгоритм, позволяющий измерять точки входной и выходной кро- Библиографический список: мок с достаточной точностью для даль- 1- Savio Е., Chiffre L. De, Schmitt I нейшей оценки геометрических парамет- Metrology of freeform shaped parts; - CIR1
ров пера.
Работа выполнена при финансовой
поддержке Правительства Российской
Федерации (Минобрнауки) на основании
37
2. Annals - Manufacturing Technolo-
gy, 2007. -56 (2)-810-835 p.
3. OCT 1 02571-86. Лопатки ком-
прессоров и турбин. Предельные откло-
нения размеров, формы и расположения
пера.
4. Besl P.J., Mckay N.D. A method
for registration of 3-D shapes; - IEEE
Transactions on Pattern Analysis and Ma-
chine Intelligence, 1992. - 14(2) -239-256 p.
References:
1. Savio E., Chiffre L. De, Schmitt R.
Metrology of freeform shaped parts; - CIRP
Annals - Manufacturing Technology, 2007. -
56 (2)-810-835 p.
2. OST 1 02571-86. Compressor and
turbine blades. Tolerances size, shape and
location of feather.
3. Besl P.J., Mckay N.D. A method
for registration of 3-D shapes; - IEEE
Transactions on Pattern Analysis and Ma-
chine Intelligence, 1992. - 14(2) -239-256 p.
ALGORITHM FOR CALCULATING THE GEOMETRICAL PARAMETERS
COMPLEX OF ELEMENTS OF GTE COMPRESSOR BLADES
©2015 V.A. Pechenin, I.S. Stepanenko, N.V. Ruzanov, M.A. Bolotov
Samara State Aerospace University, Samara
The algorithm for calculating complex geometric elements of GTE compressor blades (back and face points,
points of leading and trailing edge) on coordinate measuring machines described. Implemented a comparative study
of errors, arising during measurement of geometry elements using the proposed and traditional algorithms.
Key words: feather of blade, coordinate measuring machine, iterative algorithm, form deviation, location de-
viation
Информация об авторах:
Болотов Михаил Александрович, к.т.н, доцент кафедры технологий производства
двигателей, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 267-47-76,
maikl.bol@gmail.com.
Область научных интересов: координатные измерения, процессы сборки, матема-
тические методы.
Печении Вадим Андреевич, аспирант кафедры технологий производства двигате-
лей, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 267-47-76,
vadim. pechenin2011 @ yandex.ru.
Область научных интересов: координатные измерения, процессы сборки, математи-
ческие методы
Рузанов Николай Владимирович, аспирант кафедры технологий производства
двигателей, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 267-47-76,
kinform @mail.ru.
Область научных интересов: координатные измерения, математические методы, раз-
работка информационных систем.
Степаненко Илья Сергеевич, инженер кафедры технологий производства двигате-
лей, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 267-47-76,
iliya.stcpancnko.ssau@gmail.com.
Область научных интересов: инженерный анализ, координатные измерения, матема-
тические методы
38
Bolotov Michael Aleksandrovich, candidate of technical science, docent of chair of
engine production technology, SSAU, 443 086, Russia, Samara, Moscow highway, 34, tel.:
267-47-76, maikl ,bol @ email .com.
Area of research: coordinate measuring, assembly processes, mathematical methods.
Pechenin Vadim Andreevich, post-graduate student of chair of engine production tech-
nology, SSAU, tel.: 267-47-76. vadim.pechenin2011 @yandex.ru.
Area of research: coordinate measuring, assembly processes, mathematical methods.
Ruzanov Nikolaj Vladimirovich, post-graduate student of chair of engine production
technology, SSAU, tel.: 267-47-76, kinform @mail.ru.
Area of research: coordinate measuring, mathematical methods, development of infor-
mation systems.
Stepanenko Ilya Sergeevich, engineer of chair of engine production technology of Sama-
ra State Aerospace University, tel.: 267-47-76. iliya.stepanenko.ssau@gmail.com.
Area of research: engineering analysis, coordinate measuring, mathematical methods.
39
УДК 621.793: 621.453/.457: 621.452.3
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ НАПЫЛЕНИЯ ПЛАЗМЕННЫХ
ГАЗОТЕРМИЧЕСКИХ ПОКРЫТИЙ В ПРОИЗВОДСТВЕ ДВИГАТЕЛЕЙ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
©2015 В.И. Богданович, М.Г. Гиорбелидзе
Федеральное государственное автономное образовательное учреждение высшего
образования «Самарский государственный аэрокосмический университет имени
академика С.П. Королёва (национальный исследовательский университет)», г. Самара
Проведён анализ основных проблем, возникающих при нанесении плазменным газотермическим ме-
тодом теплозащитных композиционных покрытий типа металл-керамика. Определены основные направле-
ния совершенствования технологии нанесения покрытий. Разработаны математические модели процессов
ускорения, нагрева, плавления и транспортировки порошкового материала. На основе проведённых иссле-
дований сформулированы новые требования и рекомендации к режимам напыления. Получены опытные
образцы покрытия с комплексом высоких эксплуатационных свойств.
Ключевые слова: адгезионная прочность, кластерная структура, математическое моделирование,
плазменное покрытие, порошковый материал, режимы напыления, сепарация частиц, теплозащита, тер-
мовыносливость.
Одной из основных проблем при
создании современных авиационных га-
зотурбинных двигателей и ракетных дви-
гателей является проблема защиты их от-
ветственных элементов от воздействия
высоких тепловых нагрузок. Возможно-
сти металлургии по созданию новых кон-
струкционных материалов, работающих
при высоких температурах, практически
исчерпаны, а применение специальных
систем охлаждения не всегда эффектив-
но. В связи с этим, актуальным направле-
нием защиты деталей и конструкций, ра-
ботающих при высоких тепловых нагруз-
ках, является применение специальных
теплозащитных покрытий. Плазменный
газотермический метод нанесения тепло-
защитных покрытий является более уни-
версальным, высокопроизводительным,
экономически эффективным и обладает
большим количеством преимуществ, чем
другие существующие методы получения
теплозащитных покрытий. Данный метод
обеспечивает высокие эксплуатационные
свойства благодаря возможности созда-
ния упорядоченной кластерной структу-
ры, расположенной параллельно поверх-
ности основы, ориентированной перпен-
дикулярно внешним тепловым воздей-
ствиям и возможным направлениям рас-
пространения усталостных и термиче-
ских трещин. Основным хорошо зареко-
мендовавшем себя плазменным теплоза-
щитным покрытием является двухслой-
ная композиционная система с градиент-
ным изменением свойств, состоящая из
внешнего керамического слоя состава
ZrO2 — 8%У2(93 и металлического под-
слоя Me — Cr — Al — Y. Однако, при
формировании таких покрытий возникает
ряд проблем, связанных с несовершен-
ством типовых технологий. Некоторые
явления, возникающие в процессе плаз-
менного нанесения покрытий, в боль-
шинстве публикаций не рассмотрены или
рассмотрены не в полном объеме, либо
не вполне корректно, отсутствуют кор-
ректные математические модели, позво-
ляющие определять скорости и темпера-
туры напыляемых частиц, приобретаемые
при их движении в плазменной струе.
Проводилось исследование процес-
сов ускорения, нагрева, плавления и
транспортировки порошкового материала
в плазменной струе, а также влияния
дисперсности используемых фракций и
режимов напыления на адгезионную
прочность и термовыносливость тепло-
защитных покрытий. Разработана мате-
матическая модель ускорения и движения
частицы порошкового материла, обеспе-
чивающая корректный учет феноменоло
40
гического закона для коэффициента ло-
бового сопротивления в соответствии с
фактическим изменением числа Рейноль-
дса, учтены потери импульса плазменной
струей. Разработана математическая мо-
дель движения частицы порошкового ма-
териала в пограничном слое при попада-
нии на напыляемую поверхность. Пока-
зано, что при определенных диаметрах
частиц возникает ситуация, при которой
частицы малого диаметра попадают на
поверхность основы под малыми углами,
что приводит к снижению адгезионной и
когезионной прочности покрытия, а так-
же к нарушению кластерной структуры.
Разработана математическая модель
нагрева и плавления частицы порошково-
го материла в плазменной струе. Показа-
но, что при существующей дисперсности
материла, частицы разных размеров
нагреваются до разных температур и в
различной степени проплавляются. Про-
веденные исследования позволили по ре-
зультатам математического моделирова-
ния сформулировать требования к допу-
стимой дисперсии материала, используе-
мого для напыления, и за счет выбора
способа подачи порошка в анодный канал
плазмотрона уменьшить сепарацию ча-
стиц в пятне напыления. На основе полу-
ченных результатов разработаны научно-
обоснованные рекомендации на назначе-
ние режимов напыления. В соответствии
с разработанной технологией напыления
получены опытные образцы покрытия, на
которых зарегистрированы высокие зна-
чения адгезионной прочности и термо-
выносливости.
IMPROVEMENT OF THERMAL SPRAY COATINGS DEPOSITION TECHNOLOGY
IN THE MANUFACTURE OF AIRCRAFT ENGINES
©2015 V.I. Bogdanovich, M.G. Giorbelidze
Federal Autonomous Educational Institution of Higher Education
«Samara State S.P. Korolyov Aerospace University», Samara
Incipient main problems during application thermal-barrier composite coatings «metal-ceramics» type by
thermal spray method were analyzed. Main directions of coating application technology improvement were defined.
Mathematical models of the acceleration, heating, melting and transport processes of powder material were devel-
oped. On the base of the research are formulated new requirements and recommendations for deposition modes.
Coating prototypes with high service properties were taken.
Key words: adhesion strength, cluster structure, mathematical modelling, thermal spray coating, powder ma-
terial, deposition modes, particle separation, thermal protection, heat resistance
Информация об авторах:
Богданович Валерий Иосифович, д.т.н., профессор, профессор кафедры «Произ-
водство летательных аппаратов и управление качеством в машиностроении», СГАУ,
443086, Россия, г. Самара, Московское ш. 34, тел. 267-46-31, bogdanovich@ssau.ru.
Область научных интересов: плазменные покрытия, гетерогенный синтез.
Гиорбелидзе Михаил Георгиевич, аспирант кафедры «Производство летательных
аппаратов и управление качеством в машиностроении», СГАУ, 443086, Россия, г. Самара,
Московское ш. 34, тел. 267-46-31, M.Giorbelidze@ssau.ru.
Область научных интересов: плазменные покрытия
Bogdanovich Valeriy Iosifovich, professor, doctor of technical sciences, professor of
«Aircraft manufacturing and quality management» department, Samara State Aerospace
41
University, 443086, Russia, Samara, Moskovskoye Chaussee, 34, phone 267-46-31,
bogdanovich@ssau.ru.
Area of research: thermal spray coatings, heterogeneous synthesis.
Giorbelidze Mikhail Georgievich, post-graduate student of «Aircraft manufacturing and
quality management» department, Samara State Aerospace University, phone 267-46-31,
M.Giorbelidze@ssau.ru.
Area of research: thermal spray coatings.
42
УДК 629.7
СИСТЕМНО-МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ПНЕВМОГИДРАВЛИЧЕСКИХ СРЕДСТВ ДВИГАТЕЛЬНОЙ УСТАНОВКИ
©2015 Н.Р. Горюнова, А.А. Горюнов
АО «РКЦ «Прогресс», г. Самара
Рассмотрен системный подход к проектированию пневмогидравлических средств жидкостной ракет-
ной двигательной установки на примере системы подачи компонентов топлива. Представлены результаты
математического моделирования гидравлических процессов в турбинном преобразователе расхода на не-
штатном режиме работы
Ключевые слова: математическая модель, гидравлические характеристики, двигательная установ-
ка, пневмогидравлическая система, турбинный преобразователь расхода
На современном этапе развития
космической техники жидкостные ракет-
ные двигательные установки (ЖРДУ)
наиболее востребованы при разработке
ракет космического назначения (РКН).
Параметры пневмогидравлической си-
стемы ЖРДУ во многом определяют мас-
совые и баллистические характеристики,
а также надежность РКН. В связи с этим,
на этапах разработки технического и эс-
кизного проектов, необходим детальный
анализ возможных вариантов и нахожде-
ния оптимального решения с помощью
математических моделей пневмогидрав-
лических средств.
В работе ставится задача описания
взаимодействия жидкостного ракетного
двигателя (ЖРД) и пневмогидравличе-
ской системы (ПГС) подачи компонентов
топлива, на основе которой возможно
определить влияние режима работы от-
дельного элемента ПГС на характеристи-
ки ЖРДУ.
Для решения поставленной задачи
были разработаны следующие модели.
1. Математическая модель турбин-
ного преобразователя расхода (ТИР), ре-
гистрирующего объемный расход потока
жидкости в трубопроводах и установлен-
ного в магистралях подачи компонентов
топлива к ЖРД.
Для построения расчетной модели
ТПР был выбран модуль CFX программ-
ного комплекса Ansys, в котором были
заданы следующие параметры: стацио-
нарная постановка задачи, модель турбу-
лентности Shear-Stress-Transport с мас-
штабируемой функцией стенки, физиче-
ские свойства керосина Т-1 и жидкого
кислорода, опорное давление в расчетной
области. Рассмотрены следующие режи-
мы работы ТПР: расчетный - с вращаю-
щимся ротором, для которого гидравли-
ческие характеристики заданы в доку-
ментации и нештатный - с остановлен-
ным ротором.
В результате проведенного анализа
были выявлены основные особенности
потока компонентов топлива через рас-
четную область на нештатном режиме
работы ТПР (рис. 1):
Рис. 1 - Линии тока и поле скоростей в различных сечениях расчетной области
43
- сжатие, ускорение и закручивание
потока между лопастями и расширение
потока за лопастями;
- срыв потока с кромок лопастей,
образование за ними вихрей и обратных
токов;
- наибольшее изменение полного и
статического давления на лопастях.
Гидравлические потери (Арм) в
ТПР определяются как разность полного
давления (Арр) на входе (рТвх) и выходе
( Ртвых
АРм -ДРт = РТвх ” Ртвых
2. Математическая модель маги-
стралей подачи компонентов топлива к
ЖРД. В качестве входных параметров
модели заданы гидравлические потери на
ТПР. Выходным параметром модели яв-
ляется давление компонентов топлива на
входе в ЖРД.
Указанные параметры связаны
между собой следующим соотношением:
Рвх =Рп+РсТ-Ргп
J
где рвх -давление компонента топлива
на входе в ЖРД, рп - давление в газовой
полости топливного бака, рст- давление
столба жидкости над входом в ЖРД с
учетом действующей перегрузки, ргп-
гидравлические потери в магистрали по-
дачи компонента топлива к ЖРД.
Гидравлические потери в магистра-
ли подачи компонента топлива к ЖРД
(ргп) определяются как сумма потерь на
трение в трубопроводах (Артр) и потерь
на местных сопротивлениях (Арм), к ко-
торым относится, в том числе, и потери
ТПР:
РГп=ДРтр+ДРм
3. Математическая модель ЖРД,
основанная на уравнении влияния внеш-
них факторов, таких как давление компо-
нентов топлива на входе в ЖРД на харак-
теристики ЖРД: расход компонентов
топлива, тягу, удельный импульс. В каче-
стве входного параметра задано давление
компонентов топлива на входе в ЖРД.
Выходными параметрами модели явля-
ются расходы компонентов топлива, тяга
и удельный импульс ЖРД.
Уравнение влияние внешних фак-
торов имеет следующий вид:
AXj = Lcj Al),
i
где AXj- изменение характеристики
ЖРД, AFj - изменение внешнего фактора,
Cj -коэффициент.
Таким образом, была получена ма-
тематическая модель взаимодействия со-
ставных частей ЖРДУ, которая позволяет
определить влияние режима работы от-
дельного элемента ПГС на внешние ха-
рактеристики двигательной установки:
тягу и удельный импульс
В результате проведенного анализа
было определено, что особенности тече-
ния компонентов топлива через ротор
обуславливают основные потери давле-
ния на ТПР и вызывают повышенные
гидравлические потери в магистралях
подачи компонентов топлива на нештат-
ном режиме работы. Выявлено, что не-
смотря на повышение гидравлических
потерь на ТПР при нештатном режиме
работы на 144 % по магистрали горючего
и на 96 % по магистрали окислителя,
снижение давления на входе в двигатели
относительно номинального не превыша-
ет 4,2 % по горючему и 2,9 % по окисли-
телю, а изменение расхода компонентов
топлива через двигатель не превышает
0,18%.
Библиографический список:
1. Беляев Н.М., Расчет пневмогид-
равлических систем ракет; - М., 1983. -
219с.
2. ANSYS для инженеров: Спра-
вочное пособие; - М., 2004. - 407с.
References:
1. Beliayev N.M.,The rocket pneu-
matichydraulic systems calculation;-
Moscow,1983.- 219 c.
2. ANSYS for engineers: Directory-
Moscow, 2004. - 407 c.
44
SYSTEM-MATHEMATICAL SIMULATION OF ENGINES
PNEUMAHYDRAULIC POWER SUPPLY
©2015 N.R. Goryunova, A.A. Goryunov
JSC «SRC «Progress», Samara
The system approach for modelling of pneumatichydraulic power supply was considered in this work. The
simulation of supply systems of propellant components is presented as an example. The results of mathematical
modelling of hydraulic processes in the turbine expense converter on unnominal operational mode was presented.
Keywords: Mathematical model, hydraulic characteristics, boundary conditions, propulsion system, pneu-
mahydraulic system, the turbine expense converter
Информация об авторах:
Горюнова Нэлли Рашитовна, инженер-конструктор 2кат., аспирант САМГТУ,
АО «РКЦ «Прогресс», ул. Земеца 18, 2286547 E-mail: th0104@yandex.ru.
Область научных интересов: математическое моделирование, пневмогидравлические
системы, двигательные установки.
Горюнов Александр Александрович, ведущий инженер-конструктор АО «РКЦ
«Прогресс», ул. Земеца 18, 2286547 E-mail: al.goryunov@gmail.com.
Область научных интересов: гидрогазодинамика, математическое моделирование.
Goryunova Nelly, is a candidate SAMGTU, design engineer, JSC SRC “Progress”,
Zemetsa street 18, 2286547, E-mail: th0104@yandex.ru.
Research area: mathematical modelling, pneumatichydraulic systems, engines.
Goryunov Aleksandr, design engineer, JSC SRC “Progress”, Zemetsa street 18, 2286547,
E-mail: al.goryunov@gmail.com.
Research area - fluid dynamics, mathematical modeling.
45
УДК 621.075
ПРАВИЛА ОТБОРА ПРУЖИН ПРОЦЕССА СБОРКИ КЛАПАНОВ В ИЗДЕЛИИ
©2015 Е.В. Белов
АО «РКЦ «Прогресс», г. Самара
Представлен процесс сборки и испытаний дренажно - предохранительных клапанов, исследование
усилия пружины на ручной пресс и влияние неустойчивости пружины на герметичность клапана.
Ключевые слова: процесс сборки, клапан, узел, ручной пресс, пружины, фотометрических волны,
распределений неустойчивость
Дренажно-предохранительный кла-
пан (ДПК) — трубопроводная арматура,
предназначенная для защиты от механи-
ческого разрушения оборудования и тру-
бопроводов избыточным давлением, пу-
тём автоматического выпуска избытка
жидкой, паро- и газообразной среды из
систем и сосудов с давлением сверх
установленного. Клапан также должен
обеспечивать прекращение сброса среды
при восстановлении рабочего давления.
Предохранительный клапан являет-
ся арматурой прямого действия, работа-
ющей непосредственно от рабочей среды,
наряду с большинством конструкций
защитной арматуры и регуляторами дав-
ления прямого действия. Деталь которую
мы будем рассматривать входит в состав
сборки «Клапан». Пружина - упругий
элемент, предназначенный для накапли-
вания или поглощения механической
энергии. Пружины сжатия — рассчитаны
на уменьшение длины под нагрузкой.
Витки таких пружин без нагрузки не ка-
саются друг друга. Концевые витки под-
жимают к соседним и торцы пружины
шлифуют. Пружина, устройство, которое
благодаря собственной упругости вос-
станавливает свою первоначальную фор-
му после деформации. Сборка клапана
происходит так: сначала притирается де-
таль фланец и тарель с сохранением ан-
тикоррозионных свойств. На фланец
устанавливается прокладка и сильфон
затягивается на 2,5-3 грани. Во фланец
вкручивается штуцер. После этого про-
веряется герметичность прокладок по п.5.
Установить с помощью приспособления
пружину, сильфон закручивают на 90
градусов. На фланец поз 4 устанавлива-
ется корпус закручивается болтами.
После сборки проходит испытания по
п 6,7,8 тт чертежа.
В процессе сборки клапан проверя-
ется на герметичность мест уплотнения
прокладок, сильфона, посадки тарели.
Проводится испытание на срабатывание.
В процессе сборки ДПК сначала регули-
руется на избыточное давление в емко-
сти. Затем проверяют на герметичность
тарели, испытания на сохранность регу-
лировки, на расход. Для подтверждения
партии отбираются несколько ДПК для
прохождения периодических испытаний.
По этим испытаниям сборка проходит
более 150 срабатываний. Проведут кли-
матические испытания с температурой
+50+53, -50-53 и в парах азота. После
каждого из этих испытаний сборку про-
верят на герметичность и срабатывание.
После этих испытаний ДПК разберут.
Возьмем пружину соответствующую чер-
тежу. Постепенно нагружая пружину за-
мерим диаметры внутреннего и наружно-
го, межвиткового расстояния и высоту
пружины. Пружину нагружали постелен
46
но, с шагом 10 кгс от 0 до 80кгс. Базиру-
ется в 3 точках, прижимается сверху пла-
стиной. Усилие будет подаваться через
ручку ручного пресса. Результаты полу-
ченные сведены в табл. № 1.
Рис. 1 Испытать клапан на срабатывание 3 раза путем подачи и
сброса сжатыбаго боздуха доблением 43 кгс/см 2
Табл. № 1.
Кол-во за- меров Усилие Р,кгс Высота L, мм Межвитковое рас- стояние, I мм Нар. Диаметр, 2R мм Внутр. диа- метр, 2г мм
1 10 148,9 30,2 51,83 63,83
2 20 138,78 29 51,8 63,8
3 30 129,06 27,32 51,78 63,78
4 40 119,02 26,2 51,44 63,44
5 50 109,23 24,1 51,57 63,53
6 60 99,01 22,1 51,99 63,99
7 70 89,02 21 52,25 64,25
8 76 83,56 20 52,23 64,23
9 80 79,65 19,3 52,27 63,27
Рис. 2 Показан спектр Х<1 нелинейного взаимодействия изменения
внутреннего диаметра после 9 замеров.
47
Колебательная мода(к) витков (и)
пружины энергии будет перетекать к
другим модами из-за нелинейного взаи-
модействия. Рассмотрим одномерную
пружину с закрепленными концами вит-
ками (и = 0; и, = 6; п = 8 = N). Предпо-
ложим, что потенциал взаимодействия
(Н) содержит:
H=i . со
1 /=i Lz z J
х() — xN — 0.
Пусть пружина, имеет нормальные
координаты с помощью соотношения
витков:
где сок - собственные частоты (<у) пру-
жины с линейной моды (к) связанны
витками (w),
сок - 2sin(irk/lN}при (~N<k<N), ао-О,
и их амплитуды а,.
Максимальное значение номера мод
\к + к'+ к* + к"\ есть количество витков
47V.
Имеем следующие функции моды:
к + к'+ к* + к" = 0, D(o)=l, (3)
к + к'+ к* + к" = ±2N, £>(± 2/V) =-1, (4)
k + k' + k' + k” = +4N, £>(±4W) = 1. (5)
Функции моды
D(k + к’ + к" + кт) = 0 для остальных зна-
чений моды (к + к' + к" + к'”). Уравнение
(3) дает правило отбора пружин.
Если возбуждена к0 мода, а для
остальных мод в начальный момент вре-
мени ак =0, то ускорение движения рав-
но:
а” - -й)к ак -ЗЛй)^ ак , (6)
*0 к() к() к() к()
что позволяет выразить первоначально
возбужденное колебание амплитуд ак
через эллиптические функции сечений
витков пружин. Спектр связанных состо-
яний (|2| > 1) и их асимптотический вид
сборки более существенны для распро-
странения нелинейных колебаний, чем
состояния [Л]< 1 непрерывного спектра.
При числе полных витков имеют
следующие наборы к^к^к", которые
позволят удовлетворить условию (3),
накладывающему требования на моды
\к + к + к + к |:
к' = -к,к” = -к” = к0 и эквивалентные
(6 наборов), (7)
-к' = к" -—к" -к и эквивалентные
(3 набора), (8)
Если никакие члены не удовлетво-
ряют условию пружины
D(k + к'+ к" + к1”) / 0 и в начальный мо-
мент времени ак = 0, то все время сборки
ак - 0. Это означает, что мода к не воз-
буждается модой к0. Однако для особых
значений больших давлений клапана, та-
ких как моды kt = 3 к0 или
к} =±(2У-3£0) (9)
а _и^еют три набора значений:
^=\к"\ = кл' = к0, (10)
которые удовлетворяют условиям
(3) или (4), т.е. D(kt + к' + к" + к’*) * 0.
Член 6 Л Яд слева возник из-за (7),
и в этом случае к-к + к0-к0 = 0.
Если для примера взяли за основу
теорию нелинейных решеток М. Тогда
при этом пружина имеет витки
N = 8, к0 = 5, а начальное состояние
процесса сборки есть амплитуда:
а5 = a cos to5t. (11)
Это состояние после сборки клапа-
на сохраняется в течение некоторого
времени, и (11-13) имеют уравнения
Матье:
^-^ + (ак + 2hk cos2r)a*, (12)
а т
где
т = й)5 Z,
<ак =(бУЛ/<У5)2(1 + ЗЛа2),. (13)
hk =(й)к/й)5УзЛа2/2
Параметры системы ординат оси ак и
среднее расстояние между витками
апсцис hk определяются как функции от
48
коэффициентов амплитуды Л а2 и частот
индекса моды а>к из (13) таблица №2.
Табл. №2. Расчет амплитуды функции от А а2 и сок пружины клапана
к 2 ak 2 a2 sin (я к/2 /V) (^M)2
1 72,42/102,62 0,5 0,27 0,19 0,39 0,06
3 75,30/102,62 0,52 0,28 0,56 1,11 0,45
5 78,50/102,62 0,59 0,31 0,83 1,66 1,00
7 81,62/102,62 0,63 0,33 0,98 1,96 1,39
Первый вывод: если из групп
пружин надо выбрать одну пружину по
правилу отбора, тогда положение сборки
является решение устойчивости пружины
клапана.
Второй вывод: если пружина рабо-
тает нормально, то клапан будет герме-
тичен.
рис.З Область устойчивости и
неустойчивости пружины
Рис. 3 Связывает уравнение (12), где видна область сборки.
Когда 2 а2 =0,28, только к=5 находится в
области неустойчивости. Поэтому един-
ственной модой пружины, чья энергия
возрастает в клапане, будет решение ко-
лебаний сборки.
Библиографический список:
1. Рыльцев И.К., Журавлев А.Н.
Структурно упорядоченная технология
сборки изделий тяжелого машинострое-
ния // М.: Машиностроение-1, 2007. 329
с.
2. Советов Б.Я. Теория информации
// JI.: Изд-во Ленингр. ун-та, 1977. 184 с.
3. Тода М. Теория нелинейных ре-
шеток // М.: Мир. 1984. 264 с.
References:
1. Ryltsev I.K., Zhuravlyov A.N.
Structurally the ordered technology of as-
semblage of products of heavy mechanica
49
engineering//M: Машиностроение-1, 2007.
329 with.
2. Information B.Ja.Teorija's Coun-
cils//JI: Publishing house Leningr. Un y,
1977. 184 with.
3. Toda M. Theory of nonlinear lattic-
es. M.: Mir. 1984. 264 p. (In Russ.).
RULES OF TAKEOFF OF SPRINGS OF PROCESS OF ASSEMBLY
OF VALVES IN AN ARTICLE.
©2015 E.V. Belov
JSC «SRC «Progress», Samara
Process of assembly and trials дренажно - pressure-relief valves, spring pressure probe on a hand press and
influence of instability of a spring on leakproofness of the valve is presented.
Key words: assembly process, the valve, a node, a hand press, springs, photometric waves, distributions
instability
Информация об авторах:
Белов Евгений Валерьевич - инженер лаборатории сборки изделий и является по
совместительству аспирантов на кафедре факультета МиАТ Самарского государственного
технического университета belovjenua@mail.ru, АО РКЦ Прогресс ул. Земеца, 18,
г. Самара, Россия, 443009; Тел.: 89649762013
Belov Evgenie Valerevich - the engineer of laboratory of assembly of articles also is in
combination post-graduate students on chair of faculty MiAt of the Samara state technical uni-
versity belovienua@mail.ru, JSC SRC Progress Street Zemetsa, 18, Samara, Russia, 443009;
Bodies.:89649762013
50
УДК 621.075, 519.722
ПОСТРОЕНИЕ ПРОЦЕССА СБОРКИ ПРИ УСЛОВИИ ДИНАМИКИ
ДРЕНАЖНО-ПРЕДОХРАНИТЕЛЬНОГО КЛАПАНА
©2015 И.К. Рыльцев1, Е.В. Белов2
1 ФГБОУ ВПО «Самарский государственный технический университет», г. Самара
2 АО «РКЦ «Прогресс», г. Самара
Процесс сборки рассматривает динамику узла изделий при условии отсутствия информации в закры-
том аппарате на производстве. В сборке участвуют четыре детали клапана, связанные с нелинейной пружи-
ной, при этом формируется функция распределений случайных состояний величин. Фотометрические гра-
фики пружины дают вычисление максимума энтропии. Динамика узлов, как выход на стационарное состоя-
ние, асимптотическая сходимость, связаны с математической информацией. Получены явления индукции
пружины перед процессами сборки клапана в изделии.
Ключевые слова: процесс сборки, клапан, узел, ручной пресс, пружины, максимизация энтропии, фо-
тометрических волны, распределений неустойчивость.
Испытать клапан на срабатывание 3 раза путем подачи и
сдроса сжатыдаго Воздуха давлением 43 кгс/см 2
1. Введение. Дренажно-
предохранительный клапан (ДПК) —
трубопроводная арматура, предназначен-
ная для защиты от механического разру-
шения оборудования. ДПК срабатывают
если появляется избыточное давление в
системе, автоматически выпускает жид-
кой, пара- и газообразной среды из си-
стемы. Клапан должен обеспечивать пре-
кращение сброса среды при восстановле-
нии рабочего давления. Предохранитель-
ный клапан является арматурой прямого
действия, работающей непосредственно
от рабочей среды. Наряду с большин-
ством конструкций защитной арматуры
рис.1 дают регуляторами давления пря-
мого действия. Основная деталь входит в
состав сборки клапана, при этом мы бу-
дем рассматривать правило выбора пру-
жин.
Нестационарных процессов являет-
ся упругий элемент пружины, предназна-
ченный для накопления или поглощения
механической энергии [2]. Сжатия пру-
жины Ls - f(l,P) рассчитаны на умень-
шение ее длины под нагрузки Р * 0. Вит-
ки ие Ане касаются, друг друга без
нагрузки Р = 0 таких пружин. Концевые
витки пн, пк шлифуют торцы пружины с
шероховатости Ru = 0,24 мкм при задан-
ных внутренней ограничениях. Пружина
связано с устройством, в котором благо-
даря собственной упругости восстанав-
ливает свою первоначальную форму по-
сле деформации. Операция сборки клапа-
на происходит с детали притирки фланец
51
при этом сохранением антикоррозионных
свойств. На фланец устанавливается про-
кладку, и сильфон затягивается на 2,5-3
грани. Во фланец вкручивается штуцер.
После этого проверяется герметичность
прокладок. Установить с помощью при-
способления пружину, сильфон закручи-
вают на угол 90градусов.На фланец уста-
навливается корпус, и закручиваются
болтами. После процесса сборки прохо-
дит циклами испытаний ДПК стремиться
к состоянию системы, в которой сборки
дает с максимально возможной скоро-
стью закрытого клапана.
В процессе сборки клапан прове-
ряется на герметичность мест уплотнения
прокладок, сильфона, посадки тарели.
Проводит испытание на срабатывания
при этом системы получить недостаю-
щую информацию и процесса сборки ре-
жим положения и выбора пружины кла-
пана. В процессе сборки ДПК с начало
регулируют на избыточное давление в
емкости. Затем проверяют на герметич-
ность тарели, испытания на сохранность
регулировки, на расход. Для подтвержде-
ния партии отбираются несколько ДПК
для прохождения периодических испыта-
ний. По этим испытания сборка проведет
циклы 150 срабатываний. Для проверки
климатических испытаний от температу-
ры 0И = (+50; + 53)° С до температуры
0К = (-50;-53)°С в парах азота. При
постоянном объеме внутри клапана вели-
чина Cv изменяется на длину пружины.
При постоянном давлений Ср изменение
в том же диапазоне температур. При этом
имеет сложный характер операции сбор-
ки ДПК. После каждого из этих испыта-
ний сборку проверят на герметичность и
срабатывание пружин. После этих испы-
таний ДПК разобрав. После разборки
клапана деталь пружины надо испытать
на установке прессом. Решив постепенно
нагружая пружину замерить диаметры
внутреннего и наружного, межвитковое
расстояние и высоту пружины. Пружину
нагружали постепенно силой с шагом 10
кгс от 0 до 80кгс. Базируется в 3 точках,
прижимается сверху пластиной. Усилие
пружины изменяются при работе ручного
пресса. Результаты испытанийснеравно-
весным процессом пружины, полученные
в табл. 1.
Табл. 1. Статистической случайные величины пружины
i- Усилие Р,кгс Высота Н, мм Межвитковое рас- стояние!мм Наружного диаметра D=2R,mm Внутреннего диаметра d=2r,MM
1 10 148,9 30,2 51,83 63,83
2 20 138,78 29 51,8 63,8
3 30 129,06 27,32 51,78 63,78
4 40 119,02 26,2 51,44 63,44
5 50 109,23 24,1 51,57 63,53
6 60 99,01 22,1 51,99 63,99
7 70 89,02 21 52,25 64,25
8 76 83,56 20 52,23 64,23
9 80 79,65 19,3 52,27 63,27
52
Рис. 2
На рис. показано спектр А,<1 нели-
нейного взаимодействия изменения внут-
реннего диаметра после 9 замеров внеш-
него воздействия.
Максимума информации от прин-
ципов энтропии надо использовать для
анализа динамики деталей ДНК, из кото-
рых параметры устойчивости и скорости
затухания переходных процессов явля-
ются оценки отклонения от предельных
режимов.
2. Принцип максимума энтропии
узла пружины под сборки клапанов.
Получить статистической переходных
процессов на основе информационной
энтропии. Изобразим переходного про-
цессом волны действия пружины от дей-
ствия жидкости волны, когда два дей-
ствий в емкости резервуаре, как фото-
метрии ае А амплитуда и времени t.
53
Рис. 3. Графики ансамблей волн связаны с четных витков пружины
Исследует нелинейной динамики
пружины в неравновесную систему с
объемом V и границей волны Q жидко-
сти при этом использует состояния вит-
ков со времени перед сборкой. Метод оп-
тимального управления положений ди-
намики витков пружины для построения
моделей механических клапана сложных
закрытой пространства системы ДПК. На
основе экстремальных параметров мате-
матической ожиданий и дисперсии зада-
ем принцип сборки как целевого функци-
онала модели динамики узлов на движе-
нии пружины, определить уравнения ди-
намики системы. На открытом простран-
ство устройстве фотометрии графиков,
является траекторий витков пружины с
непрерывными распределениями мно-
жеств значений параметров состояний.
После данных экспериментальных
на фотометрии волны получены табл.2
функции распределения многомерной
Р (a, t) случайной величины а.
Табл. 2. Дискретных распределения динамики переходных режимов узел клапана.
Амплитуд А, мм Время1с 1
0 3 6 9 12 15 18 21 24 27 30
«п 4 -1 0,5 -1,2 0 -1,1 -0,5 -0,7 -1,8 -1,3 -0,9
а12 5 0,1 -0,5 0,2 -0,3 -0,1 -0,5 -0,2 -0,5 -0,3 -0,3
а] 3 3 -0,5 -1 0,5 -1 0,1 -0,5 -0,7 -0,3 -0,1 -0,2
Из данных графики фотометрии
волны жидкости рис. 3 учитывается три
уровня базовой угловых пружины функ-
ции амплитуд а,; е A, i = 0,..., л-; j -1,2,3
табл.2. Определяется независимые и оди-
наково распределение параметров веро-
ятностей математическое ожидания и
дисперсии Dj
к
где w - частота появления данного
события; N - общее количество измерен-
ных волн; к - количество интервалов. Эта
функции неизвестна от действий пружи-
ны с динамики деталей узла [1]и, опреде-
лить информации о системы закрытого
свойство объектов ДПК. Устройство от-
крытых механических систем, модели
динамики узла базой пружины нелиней-
ным оператором описывается дифферен-
циальных уравнений:
54
x = f(x,u,t), (3)
где xe Rn - вектор состояния реаль-
ного узла, и - вектор входных перемен-
ных параметром пружин, t > 0.
Минимизация функционала реально
открытых механических систем возмож-
ные траектории {%(/), и (г)} ограниченная
пространство устройств. Для процесса
сборки метода скоростного градиента [5]
нелинейного движений клапана, что яв-
ляются управления, пружены ДПК. Мо-
дель движений пружины зависит от алго-
ритмов скоростного градиента в конеч-
ной форме управлений:
u = -rVuQr (4)
Здесь Qt - скорость изменения це-
левого функционала вдоль траектории
клапана системы ДПК (3).Схему ско-
ростного градиента класса моделей ди-
намики (3) является отношением:
х — и. (5)
Соотношение (4) означает измене-
ния скоростей переменных состояния уз-
лов клапана. Процесс сборки системы
ДПК нужно иметь целевой функцию
иметь уменьшению текущего значения
<2(x(f)), после чего динамики может быть
выписан в виде (4) как правило, процесса
обратим устойчивости волны на базовой
пружины [6] и скорости затухания пере-
ходных режимов.
Допустим, что синтез сборки объек-
та имеет информации[3] о некоторых
средних значениях работы ДПК в устано-
вившемся режиме принципу максимума
энтропии.
Для функции плотности распреде-
ления примерно верно:
J р(а, t)da = l, при tmax= const, (6)
где Q - компакт волны жидкости от
волны витков пружины P(a,t) - плотность
вероятности амплитуда во времени.
Условий (6) в общем сборки не хва-
тает P(a,t) для работы ДПК и требует
разборки. В случае под сборки жидкой
среды наиболее объективный способ
определить функции распределения фо-
тометрии с помощью максимизации ин-
формационной энтропии:
=-jp(a,t)log(p(a,t)) da. (7)
Поиск максимума S, с использо-
ванием дополнительных условий (3,4)
выполняется при помощи множителей
Лагранжа Лт и надо приводить к резуль-
татам:
p(a,t) = yexp
т=1,2....М (8)
где Lm=(nxd+hx <5 п)т - длина пру-
жины от уровней давлений, <5 п- зазоры
между витков ne N,
те М - индексов зависимости тремя
уровней волновой жидкости от внешних
воздействий пружины.
Используя в качестве плотность
распределений (8) условий длины пру-
жины связанные с разносных колебаний,
которые может повторяться многократно,
вычисляется по траекториям случайного
процесса нелинейных алгебраических
системы ДПК. С помощью сборки выбо-
ра скалярного произведений (a,t)случай-
ных величин показывает максимум ин-
формационной энтропии, что узла клапа-
на, отождествлен с динамической систе-
мы. Результатов информации энтропии
при подготовке сборки узлов. Витков и
фазовых опорных торцевых пружин эк-
вивалент колебаний жидкости показано
натабл.З.
55
Рис.4 фотография пружины.
Таблица 3. Энтропии Hj(n, ф )колебаний жидкости от динамики пружины
переходных режимов.
Эксперимента фазо- вых углами пружины Витков пружины
П=1 п=3 п=5
0 4 2,6 0,7
30 -3,46 2,25 0,606
60 2 1,3 0,35
180 4 2,6 0,7
3. Правила выбора пружины пе-
ред процессами сборки клапанов. Ко-
лебательную моду (К) витков (и) пру-
жины энергии будет перетекать к другим
мода из-за нелинейного взаимодействия
системы [4]. Рассмотрим одномерную
пружину с закрепленными концами вит-
ками (и = 0; и, = 6; п = 8 = 7V). Предполо-
жим, что потенциал взаимодействия (Я)
содержит:
= xN = 0.
(8)
Пусть пружина, имеет нормальные
координаты с помощью соотношения
витков:
g-iTT jk/N
(9)
где сок - собственные частоты (<у) пру-
жины с линейной моды (к) связанные
витками (я),
й)к = 2sin(xк/2N)при (- N < к < N), л() = 0, ак=а_к
и их амплитуды a i.
Максимальное значение номера мо-
ды |А:+ есть количество вит-
ков 4N . Имеем функции моды:
к + к'+ к" + к" = 0, £>(о)=1, (10)
к + к' + к' + к” = +2N, £>(±2У) = -1, (11)
к + к' + к' + к" = ±4N, D(±4N)=\. (12)
Функции моды
D(k + к'+к*+к'"') = 0 для остальных зна-
чений моды (к + к'+ к" + к1”). Уравнение
(10) дает правила отбора пружин. Если
возбуждена к0 мода, а для остальных мод
56
в начальный момент времени ак =0, то
ускорение движения равно:
ак = ~tolak -ЗЛсо^ а3к , (13)
К() Kq Kq kg к0 v 7
что позволяет выразить первона-
чально возбужденное колебание ампли-
туд через эллиптические функции се-
чений витков пружин. Спектр связанных
состояний (|Л| > 1) и их асимптотический
вид сборки более существенны для рас-
пространения нелинейных колебаний.
При числе полных витков имеют следу-
ющие наборы к', к”, к", которые позволят
удовлетворить условию (10), накладыва-
ющему требования на моды
|Л + Г+к'+к”\:
к' - -к, к" - -к" = к0 и эквивалентных (6
наборов), (14)
-к'- к' =-к" = к и эквивалентным (3
набора), (15)
Если не удовлетворяют условию
пружины,D(k + k' + к” + к”}* все
время сборки амплитуда ак =0 не дает
поток энергии. Это означает, чтоа^ =0
мода к не возбуждается модой к0. Одна-
ко для особых значений больших давле-
ний клапана, таких как моды к{ = 3 к0
или к, =±(27V-3fc0). имеют три набора
значений: 'j = К *| = = , которые
удовлетворяют условиям (10) или (11),
т.е. D(kt + к'+ к" + к") * 0. Член бЛако
слева возник из-за (14), и в этом случае
Табл 3.
к-к + к0-к0 = 0. В дальнейшем энергия
пружины будет перетекать и к другим
модам. Однако не может увеличиваться
энергии закрытие клапана. Энергия моды
может увеличиваться только в том слу-
чае, если она находится в области неста-
бильности. Для пружины есть энергия
моды, которая может возбуждаться в
клапане. Будем возрастать только тогда,
когда удовлетворены два условия сборки:
1) правила отбора пружин перед сборка-
ми, 2) условия неустойчивости клапана.
Если для примера взяли за основу теории
нелинейных решеток при этом пружина
имеет витков N = 8, к0 = 5, то началь-
ное состояние процесса сборки есть ам-
плитуда: а 5 = a cos 6У51. Это состояние
после сборки клапана сохраняется в те-
чение некоторого времени уравнений
Матье:
- ~+[ак + 2h2k cos2r)ak, (16)
d т
где
Т = а>51,
<ак =(^/<У5)2(1 + ЗЛа2),. (17)
h2k =(й)к/й)5)2 ЗЛа2 /2
Параметры системы ординат оси
ак и среднее расстояние между витками
абсцисс hk определяются как функции от
коэффициентов амплитуда Ла2 и частот
индекса моды а>к из (17) табл. 3.
к ак at Ла2 sin(^ к/2 N) Ч НИ)2
1 72,42/102,62 0,5 0,27 0,19 0,39 0,06
3 75,30/102,62 0,52 0,28 0,56 1,11 0,45
5 78,50/102,62 0,59 0,31 0,83 1,66 1,00
7 81,62/102,62 0,63 0,33 0,98 1,96 1,39
57
Расчет функции от Я. а2 и (ок пру-
жины клапана связывает уравнений(17) и
видна область сборки пружин при посто-
янном объеме Cv и постоянном давлении
Ср. Когда Я а2 =0,28, только к=5 нахо-
дится в области неустойчивости. Поэто-
му единственной модой пружины, чья
поток энергии возрастает в клапане, бу-
дет решения колебаний сборки.
Заключение. Первой вывод: если
из групп пружин надо выбрать одну пру-
жину по правилу отбора, тогда положе-
ний сборки является решений устойчиво-
сти клапана. Второй вывод: если работает
устойчивости пружины, то будет свой-
ства герметичности клапана. Информа-
ционной энтропии работы ДПК учитыва-
ет экстремальной принципы динамики
пружины и определяется систем и их
процессов. Построения моделей динами-
ки нестационарных процессов клапана
имеет оценки информации условия, от
которых использует управления ограни-
чений угловых параметров деталей пру-
жины относительно процессами их сбор-
ки. Целенаправленного среды колебаний
пружины термодинамике и жидкой воз-
действия учитывается недостающую ин-
формацию, и определить выбор направ-
ления угловых параметры пружины явля-
ется уравнениями динамической функции
плотности распределения для ограниче-
ний в виде закона сохранения массы и
закона сохранения энергии колебаний
системы. В качестве функции для рас-
пределения колебаний пружины с жид-
кой среды и совпадает с распределением
функции неустойчивости системы, и
определяли траекторию пружины ДПК.
Библиографический список:
1. Зубарев Д.Н. Статистическая ме-
ханика неравновесных процессов //М.:
Физматлит, 2002. 432 с.
2. Рыльцев И.К., Журавлев А.Н.
Структурно упорядоченная технология
сборки изделий тяжелого машинострое-
ния // М.: Машиностроение-1, 2007. 329
с.
3. Советов Б.Я.Теория информации
// Л.: Изд-во Ленингр. ун-та, 1977. 184 с.
4 Toda М. Теория нелинейных ре-
шеток // М.: Мир. 1984. 264 с.
5. Фрадков А.Л., Кривцов
Л. АТ Принцип скоростного градиента в
описании динамики систем, подчиняю-
щихся принципу максимум энтропии // В
кн.: Нелинейные проблемы теории коле-
баний и теории управления. Вибрацион-
ная механика. СПб.: Наука, 2009.
6. Циглер Г. Экстремальные прин-
ципы термодинамики необратимых про-
цессов и механика сплошной среды // М.:
Мир. 1966. 134 с.
References:
1. Zubarev D.N. Statisticheskaja me-
hanika neravnovesnyh processov[Statistical
mechanicsof nonequilibrium processes]. M.:
Fizmatlit. 2002. 432 p. (In Russ.).
2. Ryltsev I.K., ZhuravlyovA.N.
structurally the ordered technology of as-
semblage of products of heavy mechanical
engineering//M: Машиностроение-1, 2007.
329 with.
3. Information B.Ja.Teorija's Coun-
cilsZ/Л: Publishing house Leningr. Un y,
1977. 184 with.
4. Toda M.Theory of nonlinear lattic-
es. M.: Mir. 1984. 264 p. (In Russ.).
5. Fradkov A.L., Krivcov A.M.
[Speed-gradient principle to describe the
dynamics of systems
subject to the principle of maximum
entropy]. Nelinejnyeproblemyteoriikolebanij
iteoriiupravlenija. V ibracionnaj ame-
hanika - Nonlinear problems of oscillation
theory
and control theory, vibrational me-
chanics. SPb.:Nauka, 2009. (In Russ.).
6. Cigler G. Jekstremal'nyeprin-
cipytermodinamikineobratimyh pro-
cessovimehanika
sploshnojsredy[Extreme principles of
irreversible thermodynamics and continuum
mechanics]. M.: Mir. 1966. 134 p. (In
Russ.).
58
CONSTRUCTION OF PROCESS OF ASSEMBLAGE UNDER CONDITION OF DY-
NAMICS OF A DRENAZHNO-SAFETY VALVE.
©2015 1-K.Ryltsev1, E.V.Belov2
1 The Samara State technical university, Samara
2 JSC «SRC «Progress», Samara
Assembly process considers dynamics of a node of articles under condition of absence of the information of
the enclosed device on manufacture. In assemblies four details of the valve linked with a nonlinear spring opened by
a plant thus shapes functions of distributions of casual conditions of magnitudes. Photometric a phase drawing of a
spring gives evaluations of a maximum of an entropy. Dynamics of nodes as an exit on a steady state asymptotic
convergence, are linked from the mathematical information. The phenomena of an induction of a spring before pro-
cesses of assembly of the valve in an article are received.
Keywords: assembly process, the valve, a node, a hand press, springs, maximisation of an entropy, photo-
metric waves, distributions instability
Информация об авторах:
Белов Евгений Валерьевич - инженер лаборатории сборки изделий, является ас-
пирантом на кафедре факультета МиАТ Самарского государственного технического уни-
верситета belovienua@mail.ru, АО «РКЦ «Прогресс» ,ул. Земеца, 18, г. Самара, Россия,
443009; Тел.:89649762013
Рыльцев Игорь Константинович - д-р техн, наук, профессор кафедры технологии
машиностроения ФГБОУ ВПО «Самарский государственный технический университет».
Область научных интересов: управление технологии сборочных машин и математическое
моделирование с упорядоченных системами. Число научных публикаций - 95., СамГТУ;
ул. Молодогвардейская, 244, г. Самара, Россия, 443100; Тел.: 332-10-90 ikryltsiev@mail.ru.
Bels Evgenie Valerevich - the engineer of laboratory of assembly of articles also is in
combination post-graduate students on chair of faculty MiAt of the Samara state technical uni-
versity belovienua@mail.ru , JSC «SRC «Progress», Street Zemetsa, 18, Samara, Russia,
443009; Bodies.:89649762013
Ryltsev Igor Konstantinovich - a Dr.Sci.Tech., the professor, chairs of technique of ma-
chine industry of FGBOU ВПО «Samara state technical university». Area of scientific interests:
control of technique of assembly cars and mathematical simulation with arranged by systems.
Number of scientific publications - 95.ikryltsiev@mail.ru, SamGTU; street Molodogvardejsky,
244, Samara, Russia, 443100; Ph.: 332-10-90
59
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 5. Направление 1: Испытания ракетно-
космической техники
60
УДК 629.7.018
ОПРЕДЕЛЕНИЕ СТЕПЕНИ ВЛИЯНИЯ ВНЕШНИХ ФАКТОРОВ,
ВОЗНИКАЮЩИХ В ПРОМЕЖУТКАХ ВРЕМЕНИ МЕЖДУ
ИСПЫТАНИЯМИ СИСТЕМ ИЗ СОСТАВА ИЗДЕЛИЙ РКТ,
В ПРОЦЕССЕ ИХ ПОДГОТОВКИ К ПУСКУ
©2015 Д.Ю. Шайкина
АО «РКЦ «Прогресс», г. Самара
Предложена методика определения степени влияния внешних факторов, возникающих в промежутках
времени между испытаниями систем из состава изделий РКТ, в процессе их подготовки к пуску. Определен
подход к оценке эффективности конкретных испытаний с учетом влияния внешних факторов.
Ключевые слова: эффективность, испытание, система, внешний фактор, воздействие, вероятность
обнаружения, отказ
При оценке эффективности испыта-
ний систем, входящих в полный цикл
подготовки изделий РКТ, учитываются
отказы системы, которые были выявлены
по результатам этих испытаний, и те от-
казы, которые не были выявлены.
При этом, в одних случаях, отказ
системы мог быть обнаружен в ходе ис-
пытания, так как возник до его начала, а в
других - отказ произошел в результате
влияния внешних факторов, которые воз-
никли уже после проведения испытания,
и оно фактически не могло этот отказ об-
наружить.
Таким образом, возникает необхо-
димость определить, мог ли произошед-
ший отказ быть обнаружен в ходе прове-
дения испытания, или нет.
В настоящей статье автором пред-
ложена методика учета влияния внешних
факторов, возникающих в промежутках
времени между испытаниями системы,
которая позволяет ответить на этот во-
прос.
Для общего описания методики бе-
рется условная система АВС, состоящая
из неделимых элементов (неделимый
элемент (НЭ) - это отдельный блок, ко-
торый весь период подготовки системы
испытывают целиком).
В общем виде технология подго-
товки системы из состава изделия РКТ до
запуска его в космос соответствует схе-
ме, представленной на рис. 1
Полный цикл подготовки системы
61
(I)
Количество испытаний изменяется
от i=l до п.
Количество промежутков изменяет-
ся 0Tj=l до к.
Задача подготовки системы АВС
состоит в том, чтобы предупредить воз-
никновение отказов системы при эксплу-
атации. При этом с точки зрения надеж-
ности система АВС рассматривается как
последовательное соединение ее элемен-
тов, т.е. отказом системы АВС считается
отказ хотя бы одного из НЭ, входящих в
ее состав.
Таким образом, технология подго-
товки эффективна тогда, когда в про-
цессе эксплуатации система работает без
сбоев.
При этом можно выделить коэффи-
циент эффективности испытания, вхо-
дящего в цикл подготовки:
•ЗД.НЭ ___Оисп 1_
•^Тисп i ~ пнэ . пнэ
Vисп i-’"’* исп i+n
где ЭфисП t - это коэффициент эффектив-
ности i-ro испытания неделимого эле-
мента (НЭ) системы ;
Оисп/- это количество отказов НЭ,
обнаруженное по результатам i-ro испы-
тания;
Оисп i+n~ это количество отказов
НЭ, которое было обнаружено в ходе по-
следующих после i-ro испытаний.
Коэффициент эффективности испы-
тания учитывает количество отказов, вы-
явленных в ходе его проведения и коли-
чества отказов, которое оставалось не
выявленным до проведения этого испы-
тания.
Если Эф^п( = I, то испытание счи-
тается абсолютно эффективным, если
Эфисп i = 0 , то испытание считается аб-
солютно неэффективным.
Но если испытание абсолютно эф-
фективно, то дальнейшие испытания, в
которых участвует данная система, не
нужны, они излишни. На сто процентов
это можно сказать только тогда, когда на
систему не воздействуют абсолютно ни-
какие внешние факторы. Но любое изде-
лие РКТ и входящие в его состав системы
в процессе подготовки к пуску подверга-
ются воздействию различных внешних
факторов, которые возникают как в про-
цессе испытания, так и в промежутке
между ними. И, если отказы системы,
возникшие в процессе самого испытания,
обнаруживаются сразу на месте, то отка-
зы, которые возникли в процессе, напри-
мер, длительной транспортировки, или
хранения, или переключения датчиков во
время входного контроля, могут быть об-
наружены только в ходе последующих
испытаний.
Собственно, поэтому и возникает
необходимость проведения нескольких
испытаний, повторяющих друг друга.
При этом, нельзя с точностью сказать,
является ли испытание неэффективным
(если на последующих этапах был обна-
ружен отказ системы), не учитывая коли-
чество внешних факторов (воздействий)
на систему (после проведения испытания
и до обнаружения отказа), их тяжесть и
вероятность возникновения отказов в
процессе влияния этих внешних факто-
ров.
Для того, чтобы учесть влияние
внешнего воздействия на систему в про-
цессе проведения ее подготовки, необхо-
димо ввести поправку Кпопр к формуле
(1).
В общем виде для системы АВС,
состоящей из неделимых элементов(НЭ)
А, В и С, методика определения степени
влияния внешних факторов, возникаю-
щих в промежутках времени между ис-
пытаниями систем из состава изделий
РКТ в процессе их подготовки к пуску
будет выглядеть следующим образом:
I. Проводится изучение технологии
подготовки системы, по результатам ко-
торого определяют, какие именно испы-
тания системы и ее элементов проводят-
ся, какие существуют промежутки вре-
мени между испытаниями, какие внеш-
ние факторы могут воздействовать на
элементы и систему в целом в эти про-
межутки времени.
Такими факторами могут быть кли-
матические (скачки температуры, давле-
ния, повышение влажности выше допу-
стимой), механические (удар, тряска),
биологические (плесень, грибки, грызу-
ны), радиационные, электромагнитные,
ошибочные действия персонала и тд.
62
В случае систем из состава ракетно-
космической техники, эти данные фикси-
руются специализированными система-
ми, устанавливаемыми на контейнерах во
время перевозки системы (СКРУТ - си-
стема контроля и регистрации условий
транспортирования), на технических
комплексах (СКРВ - система контроля
регистрации воздействий) и т.д, а так же
обнаруживаются в процессе многосту-
пенчатого контроля над проведением ис-
пытаний.
2. Проводится статистический ана-
лиз отказов системы и ее элементов в
процессе подготовки в прошлые перио-
ды (в случае отсутствия наработанной
базы проводится анализ систем-
аналогов). Статистический анализ прово-
дится по соответствующей базе данных,
которая пополняется по результатам
оценки телеметрической информации.
В результате анализа выявляются
следующие данные:
- количество отказов элементов си-
стемы, выявленных в процессе наземной
подготовки и эксплуатации.
- выявление испытаний, по резуль-
татам которых эти отказы был обнаруже-
ны
- выявление предположительной
причин возникновения отказов (эксперт-
ная оценка, которая так же приводится в
базе данных)
3. По результатам, полученным в п.
1 и 2, рассчитывается условная вероят-
ность возникновения отказа НЭ в к-м
промежутке между испытаниями по
формуле (2):
Гнэ
НЭ ____ ПРОМ * /п\
пром к ук i/НЭ ’
^7=1 * пром j
где Wnp0M к - это вероятность возникно-
вения отказа НЭ на промежутке к;
УПром к это количество внешних факто-
ров, влияющих на НЭ в промежутке к;
УПром/ _ это сумма внешних факто-
ров, влияющих на НЭ во всех промежут-
ках до испытания, в котором был обна-
ружен отказ.
Вероятность возникновения отказа
является здесь условной потому, что дан-
ные по количеству зарегистрированных
внешних воздействий не всегда совпада-
ют с реальным количеством воздействий,
повлиявших на систему в процессе под-
готовки, несмотря на то, что эти данные,
как говорилось выше, регистрируются
специальными системами, такими как
СКРУТ, СКРВ и т.д.
4. По результатам, полученным в
пункте 3, делается вывод о том, на каком
именно промежутке времени между ис-
пытаниями мог произойти отказ.
Для большей достоверности выво-
дов полученный результат сравнивается с
экспертной оценкой, указанной в базе.
Если данные совпали, приступают к
шагу 5. В противном случае - проводится
дополнительная экспертная оценка при-
чин возникновения отказа системы, либо
перепроверяются расчеты по представ-
ленной методике и данные, полученные в
предыдущих пунктах.
5. Суммируется количество отказов
НЭ, возникших из-за воздействия внеш-
них факторов на данном промежутке
(выявлено в п. 4)за все время проведения
испытаний системы АВС и ее НЭ по ис-
следуемой технологии, и получаем зна-
чение A^np0Mfc.- количество проведенных
испытаний, когда был зарегистрирован
отказ НЭ, возникший после воздействия
внешних факторов на k-м промежутке;
6. Определяем частоту возникнове-
ния отказов конкретного НЭ из состава
системы АВС на k-м промежутке между
испытаниями за все время существования
системы АВС по формуле (3):
ЛГНЭ .
дНЭ _ "npoMfc р'
^пром к мнэ , IP 7
1'пром к
А„р0М к - частота возникновения отказов
НЭ на промежутке к;
Мпром к ~ общее количество проведен-
ных испытаний НЭ по исследуемой тех-
нологии.
Этот показатель характеризует тя-
жесть воздействия внешних факторов,
влияющих на систему и ее НЭ, возника-
ющих в выбранный промежуток между
испытаниями.
7. По табл. 1 находим поправочный
коэффициент Кпопр к формуле (1)
Этот коэффициент и будет показа-
телем того, насколько испытание, «про-
63
пустившее» отказ, могло этот отказ обна-
ружить.
Табл. 1 Коэффициент поправки для оценки эффективности испытания
^попр дНЭ пром к Характеристика
1 1 В процессе испытания i не мог быть обнаружен отказ, воз- никший в дальнейшем, так как отказ произошел в результате по- следующих внешних воздействий
0.9 (0.8-0.9) В процессе испытания i не мог быть обнаружен отказ, возник- ший в дальнейшем, так как отказ, скорее всего, произошел в ре- зультате последующих внешних воздействий
0.8 (0.7-0.8] В процессе испытания i обнаружение возникшего отказа было маловероятно, так как отказ мог произойти в результате последу- ющих внешних воздействий
0.7 (0.6-0.8] В процессе испытания i обнаружение возникшего отказа было маловероятно, так как возможность возникновения отказа в даль- нейшем выше средней
0.6 (0.5-0.6] В процессе испытания i обнаружение возникшего отказа было вероятно, так как возможность возникновения отказа в дальней- шем средняя
0.5 (0.4-0.5] В процессе испытания i обнаружение возникшего отказа было вероятно, так как вероятность возникновения отказа в дальней- шем низкая
0.4 (0.3-0.4) В процессе испытания i обнаружение возникшего отказа было очень вероятно, так как вероятность возникновения отказа в дальнейшем низкая
0.3 (0.2-0.3] Отказ мог быть обнаружен в процессе испытания i, так как по- следующие внешние воздействия мало повлияли на систему (НЭ)
0.2 (0.1-0.2] Отказ должен был быть обнаружен в процессе испытания i, так как последующие внешние воздействия крайне мало повлияли на систему (НЭ)
0.1 (0.01-0.1] Отказ должен был быть обнаружен в процессе испытания i, так как последующие внешние воздействия почти не повлияли на си- стему (НЭ)
0 <0.01 Отказ должен был быть обнаружен в процессе испытания i, так как последующие внешние воздействия не повлияли на систему (НЭ)
Рассчитываем эффективность испы-
тания каждого НЭ по формуле (4)
нэ
+ кпопр (4)
^исп 1-г’<исп i+n
Данный показатель учитывает уже
не только количество отказов, обнару-
женных и «пропущенных» по результа-
там испытаний, но и учитывает тот факт,
мог ли быть данный отказ обнаружен в
принципе.
Коэффициент эффективности будет
неопределенным для испытания, если в
ходе его проведения не было обнаружено
отказов НЭ и в дальнейшем отказов этого
НЭ не последовало.
Испытания со значением
О < Эф^п i < 0,5 следует исключить как
неэффективные (если это возможно), а в
проведении испытания со значением
0,5 < Эфисп i < 1 следует учесть отказы,
выявленные в ходе эксплуатации преды-
дущих систем АВС.
Представленная методика позволит
оценить эффективность каждого испыта-
ния системы в цикле подготовки, осно-
вываясь не только на том, сколько отка-
64
зов было выявлено по результатам этого
испытания, но и на возможности обнару-
жения исследуемым испытанием каждого
конкретного отказа. Кроме того, она дает
представление о тяжести последствий
влияния внешних факторов на систему в
промежутки времени между испытания-
ми, что позволит планировать транспор-
тировку, технологию подготовки с уче-
том полученных данных.
Библиографический список:
1. Пискунов Н.С. Дифференциаль-
ное и интегральное исчисления для вту-
зов, т. 2: Учебное пособие для втузов.—
13-е изд.— М.: Наука, Главная редакция
физико-математической литературы,
1985,— 560 с.
2. Надежность и эффективность в
технике (справочник в 10 томах). Том 3.
Эффективность технических систем - под
общ. Ред. В.Ф. Уткина и Ю.В. Крючкова
- М.: Машиностроение, 1988 г. - 327 с.
3. Под ред. А.Н. Кирилина «Орга-
низационно-технические системы подго-
товки и обеспечения полета ракет-
носителей и космических аппаратов:
учеб. Пособие - Самара: Изд-во Самар-
ского государственного аэрокосмическо-
го университета, 2007-208 с
References:
1. Piskunov of N.S. Differential and
integrated calculations for technical colleg-
es, t. 2: Manual for technical colleges. —
13th prod. — M.: Science, Main edition of
physical and mathematical literature, 1985.
— 560 pages.
2. Reliability and efficiency in equip-
ment (the reference book in 10 volumes).
Volume 3. Efficiency of technical systems -
under a general Edition V.F. Utkina
and Yu.V. Kryuchkova - M.: Mechanical
engineering, 1988 - 327 pages.
3. Under the editorship of A.N. Kirilin
"Organizational and technical systems of
preparation and ensuring flight of carrier
rockets and spacecrafts: studies, a grant -
Samara: Publishing house of the Samara
state space university, 2007-208 pages.
DEFINITION OF EXTENT OF INFLUENCE OF THE EXTERNAL
FACTORS ARISING IN PERIODS BETWEEN TESTS OF SYSTEMS
OF PRODUCTS SPACE ROCKET TECHNOLOGY IN THE COURSE
OF THEIR PREPARATION FOR LAUNCH.
©2015 D.Yu. Shaykina
JSC «SRC «Progress», Samara
The technique of definition of extent of influence of the external factors arising in periods between tests of
systems from structure of products space rocket technology in the course of their preparation for start-up is offered.
Approach to an assessment of efficiency of concrete tests taking into account influence of external factors is defined.
Keywords: efficiency, test, system, external factor, influence, probability of detection, refusal
Информация об авторе:
Шайкина Дарья Юрьевна, аспирант самарского государственного аэрокосмиче-
ского университета (СГАУ), инженер-конструктор 2 категории, АО «РКЦ «Прогресс»,
443009, г. Самара, ул. Земеца, 18, т. 8(846)-228-95-65, Shaikina89femail.ru.
Shaykina Darya Yurevna, graduate student of the Samara state aerospace university
(SSAU), design engineer of 2 categories of JSC «SRC «Progress», 443009, Samara, Zemets St.,
18, t. 8(846)-228-95-65, Shaikina89femail.ru,
65
УДК 621.373.876
КОНТРОЛЬ СТАБИЛЬНОСТИ УГЛОВОГО ПОЛОЖЕНИЯ ЭЛЕМЕНТОВ
КОНСТРУКЦИЙ С ПОМОЩЬЮ ЛАЗЕРНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ
©2015 Нонин А.С.1, Ткаченко А.С.1, Вобликов Д.Н.1, Сазонникова Н.А.2
1 АО «РКЦ «Прогресс», г. Самара
2 Самарский государственный аэрокосмический университет имени академика
С.П. Королева (Национальный исследовательский университет), г. Самара
С целью совершенствования контроля положений деталей при сборке, заключительных операциях и
последующей эксплуатации разработана лазерная измерительная система для контроля углового положения
элементов конструкции. Для решения поставленной задачи выбран метод ’’прямой угловой засечки”. Изме-
рительный канал реализует триангуляционный метод. В соответствии с методом каждая видеокамера изме-
ряет углы визирования лазерного диода, расположенного в контрольной точке. Контроль поверхности пло-
щадок проходит в два этапа: контроль положения посадочных мест проводится без технологических нагру-
зок и после проведения нагружения.
Ключевые слова: лазерные измерительные системы, угловое положение, элементы конструкции
Метрологическое обеспечение мно-
гих измерительных задач производствен-
ной и научной деятельности при созда-
нии элементов конструкций летательных
аппаратов и двигателей предусматривает
измерение пространственного положения
объектов контроля относительно единой
жесткой базы в процессе их перемеще-
ния. Совершенствование технологий из-
готовления и современных средств про-
изводства летательных аппаратов и дви-
гателей требует точного контроля поло-
жений деталей при сборке, заключитель-
ных операциях и последующей эксплуа-
тации.
Вес и температура, действующие на
элементы конструкции, вызывают де-
формацию основного зеркала, изменение
позиции и линейный сдвиг каждой плос-
кой секции отражающей поверхности от-
носительно теоретической параболы. Для
компенсации этих воздействий необхо-
димо реализовать систему для измерения
отклонения отражающей поверхности
относительно теоретической трехмерной
параболы.
Рассмотрим методику измерения
пространственного положения элементов
конструкции на примере системы изме-
рения деформаций элементов посадоч-
ных мест под оптические элементы.
Для решения поставленной задачи
выбран метод ’’прямой угловой засечки”.
Метод предусматривает две ПЗС-камеры,
расположенные на фиксированном рас-
стоянии друг от друга на базовом объек-
те. На объекте контроля расположены
элементы, определяющие его простран-
ственное положение.
Каждый из измерительных каналов
состоит из одной видеокамеры, первая
закреплена на контррефлекторе, вторая
расположена на элементе конструкции
телескопа - базовом кольце. Жесткое ба-
зовое кольцо расположено в вершине
главного зеркала корпуса конструкции и
является неподвижной базой измери-
тельной системы.
Измерительный канал реализует
триангуляционный метод. В соответ-
ствии с методом каждая видеокамера из-
меряет углы визирования лазерного дио-
да, расположенного в контрольной точке.
Измеряются углы визирования в гори-
зонтальной и вертикальной плоскостях.
Для этого ПЗС-матрицы, расположенные
в фокальных плоскостях объективов ви-
деокамер, измеряют по две координаты
изображений в горизонтальной и верти-
кальных плоскостях изображений свето-
диода соответственно.
Контроль поверхности площадок
проходит в два этапа. На первом - кон-
троль положения посадочных мест про-
водится без технологических нагрузок.
На втором этапе контроль посадочных
66
мест проводится после проведения испы-
таний. Отражающие зеркала от смещений
вдоль оптической оси и от поперечных
смещений предохраняют металлические
пластины, установленные на площадках.
Данный способ позволяет выявить ста-
бильность положения посадочных пло-
щадок под чувствительные элементы и
оценить воздействие внешней среды.
Оптические оси базовой и иссле-
дуемой площадок лежат в одной плоско-
сти. Если они параллельны друг другу, то
задается условие перекрестия. Расстоя-
ние и углы между зеркалами в процессе
проведения измерений не изменяют свою
величину. После каждого вида испыта-
ний узел посадочной площадки индиви-
дуально устанавливается в схему верти-
кального контроля. От торцевых разгру-
зок требуется минимизировать деформа-
цию поверхности зеркал в заданных пре-
делах. В соответствии с комплексной
программой экспериментальной отработ-
ки собранный узел посадочного места
зеркала подвергается испытаниям с це-
лью подтверждения сохранности его ха-
рактеристик: транспортные технологиче-
ские испытания; испытания на прочность
к воздействию линейных ускорений по
осям X и Y (вдоль оптической оси зерка-
ла и в поперечном направлении); испы-
тания на кратковременные динамические
ускорения по осям X и Y; испытания на
прочность к воздействию пониженной
температуры (-50°С); испытания на
прочность к воздействию повышенной
температуры (+50°С); термовакуумные
испытания, при которых температура
зеркала изменялась в пределах ±5°С; при
этом во всем диапазоне изменения тем-
пературы от +12°С до +28°С контролиру-
ется качество зеркала.
В качестве источника излучения
использовался полупроводниковый ла-
зер. Точность измерений составляла 0,1”.
При длине базовой оси 3 м влияние
внешних воздействий не наблюдается.
В результате проведенного анализа
выявлены следующие первичные по-
грешности, определяющие точность из-
мерения линейных и угловых координат
контролируемого объекта: погрешность
измерения координат центра изображе-
ния измерительной марки на ПЗС-
матрице измерительного оптико-
электронного преобразователя, обуслов-
ленная шумами и дискретностью прием-
ной площадки и погрешность измерения,
определяемая отклонением величины
фокусного расстояния объективов от но-
минального значения.
THE STABILITY CONTROL OF THE ANGULAR POSITION OF STRUCTURAL
ELEMENTS BY USING A LASER MEASURING SYSTEM
©2015 A.S. Nonin1, A.S. Tkachenko1, D.N. Voblikov1, N.A. Sazonnikova2
1 JSC «SRC «Progress», Samara
2 Samara State Aerospace University, Samara
In order to improve monitoring of the provisions of parts during assembly, final operations and subsequent
operation the laser measuring system is designed to control the angular position of the structure. The method of
"straight angled serifs" was constructed to solve this problem. Measuring channel implements a triangulation meth-
od. In accordance with the method of each video camera measures the viewing angles of the laser diode, located at
the checkpoint. Control surface areas has two phases: the control position of seats held without technological loads
and after loading.
Key words: laser measuring systems, the angular position, structural elements
Информация об авторах:
Нонин Александр Сергеевич, заместитель начальника отдела АО «РКЦ
«Прогресс», аспирант кафедры автоматических систем энергетических установок, СГАУ,
443086, Россия, г. Самара, Московское ш. 34, т. 8-927-701-6351, aleksandr-noninf^mail.ru.
67
Область научных интересов: лазерные информационно-измерительные системы для
контроля положения элементов конструкций.
Ткаченко Александр Сергеевич, ведущий инженер-конструктор АО «РКЦ
«Прогресс», т. 8-927-655-0144, tkachenko-asfebk.ru.
Область научных интересов: лазерные информационно-измерительные системы.
Вобликов Дмитрий Николаевич, инженер-конструктор АО «РКЦ «Прогресс»,
т. 8-927-708-4208, rndm22femail.ru.
Область научных интересов: лазерные информационно-измерительные системы.
Сазонникова Надежда Александровна, к.т.н., доцент кафедры автоматических си-
стем энергетических установок, СГАУ, 443086, Россия, г. Самара, Московское ш. 34,
т. 267-46-65, nasazonnikovafeyandex.ru.
Область научных интересов: создание лазерных информационно-измерительных си-
стем.
Nonin Alexander Sergeevich, deputy chief of department, JCS «SRC «Progress», gradu-
ate student of Automatic systems of energy devices of Samara State Aerospace University,
aleksandr-noninfemail.ru, tel. 8-927-701-6351
Area of search: laser information-measuring systems to control the position of structural
elements.
Tkachenko Alexander Sergeevich, leading design engineer, JCS «SRC «Progress»,
tel. 8-927-655-0144 tkachenko-asfebk.ru/
Area of search: laser information-measuring systems.
Voblikov Dmitriy Nikolaevich, design engineer, JCS «SRC «Progress», tel.
8-927-708-4208 rndm22femail.ru.
Area of search: laser information-measuring systems.
Sazonnikova Nadezhda Alexandrovna, candidate of engineering sciences, associate pro-
fessor of Automatic systems of energy devices department, SSAU, 443086, Russia, Samara,
Moscow highway, 34, tel. 267-46-65 nasazonnikovafeyandex.ru.
Area of search: Creation of laser information-measuring systems.
68
УДК 629.7.018
ОЦЕНКА НАДЕЖНОСТИ ПОДГОТОВКИ РАКЕТ-НОСИТЕЛЕЙ НА ОСНОВЕ
ПОКАЗАТЕЛЕЙ ОБНАРУЖЕНИЯ ОТКАЗОВ И НЕИСПРАВНОСТЕЙ
©2015 И.В. Муштакова
АО «РКЦ «Прогресс», г. Самара
Поведен анализ существующих показателей надежности, подготовки ракеты-носителя, описаны осо-
бенности процесса подготовки изделия к пуску на техническом и стартовом комплексах. Предложены новые
показатели оценки надежности подготовки ракет-носителей.
Ключевые слова: Подготовка, процесс, надежность, ракета-носитель, отказ системы, технический
комплекс, стартовый комплекс
Введение
Развитие современной ракетно-
космической технике позволяет вести ак-
тивные работы по изучению и освоению
космического пространства. На сего-
дняшний день на околоземной орбите
находиться большое количество спутни-
ков. При этом ведется активная научно-
исследовательская работа на междуна-
родной космической станции (МКС).
Выведение космических спутников
и доставка различных грузов на МКС
стала возможной, благодаря высокому
уровню надежности разрабатываемых
PH. Ракета-носитель (PH) состоит из ряда
систем, проверка функционирования ко-
торых на техническом и стартовом ком-
плексе направлена на обеспечение выве-
дения полезного груза на заданную орби-
ту с заданным уровнем надежности. Под-
держание заданного уровня надежности
PH обеспечивается за счет проведения
большого количества испытаний.
Испытываемое изделие допускается
к следующему этапу испытаний только
при условии успешного проведения
предыдущих этапов испытаний, в том
числе устранения всех замечаний, полу-
ченных на данном этапе, поэтому при
планировании испытаний между разными
стадиями закладывается интервал време-
ни для их устранения.
Испытания проводятся в несколько
этапов:
• стендовые испытания;
• автономные испытания;
• комплексные испытания;
• натурные (лётные) испытания.
Первый этап испытаний проводится
на позиции разработчика (изготовителя)
средств выведения, сам по себе состоит
из множества различных испытаний.
Остальные этапы испытаний прово-
дятся на позиции эксплуатации.
Автономные испытания, как прави-
ло, аналогичны по объёму и методике их
проведения регламентным (регулярным)
проверкам изделия, его компонентов и
обслуживающего оборудования, прово-
димых при эксплуатации в процессе под-
готовки к каждому пуску.
Комплексные испытания включают
в себя автономные испытания, полный
цикл проверок и подготовки изделия на
технической позиции, вывоз и установку
изделия на стартовый комплекс, прове-
дение предстартовых проверок на ком-
плексе до максимально близкого к мо-
менту пуска момента, достижимого тех-
нически без проведения собственно пус-
ка.
Из выше написанного следует, что
оценка надежности подготовки является
одной из основных показателей качества
проводимых работ по обеспечению свое-
временности и успешности пуска PH.
Анализ существующего подхода к
оценке надежности подготовки PH.
На сегодняшний день в соответ-
ствии с требованиями действующих в от-
расли методик оценка надежности подго-
товки ракеты-носителя к пуску осу-
ществляется путем оценки вероятности
69
подготовки ракеты-носителя к пуску из
различных степеней готовности за время,
не превышающее нормативное значение.
При серийной эксплуатации оценка
осуществляется статистическим методом
(при достаточно большом количестве ис-
пытаний) на основе представления ре-
зультатов испытаний в схеме испытаний
Бернулли и методами оценивания на ос-
нове сетевых моделей процесса подго-
товки ракеты-носителя к запуску.
Основным показателем надежности
подготовки ракеты-носителя за заданное
время является вероятность ее подготов-
ки к пуску из соответствующей готовно-
сти за время, не превышающее норма-
тивное значение.
Среди методов оценки времени, за-
траченного на проведение всех работ по
подготовке, наибольшее распространение
получили традиционные сетевые графики
и метод GERT. Использование этих ме-
тодов позволяет детально оценить коли-
чество времени, затраченное на реализа-
цию всего технологического подготовки
и возможность его прогнозирования для
вновь разрабатываемых изделий.
Традиционные сетевые графики яв-
ляются частным случаем GERT-сетей,
когда все узлы сети реализуют логиче-
скую функцию «И», а работы (ветви) се-
тевой модели имеют лишь один аддитив-
ный параметр - время выполнения, кото-
рое в данном случае является детермини-
рованным.
Возможные работы по поиску и
устранению неисправностей и связанные
с ними повторения операций контроля
невозможно описать традиционными се-
тевыми графиками, в связи с этим было
предложено использовать метод GERT,
где вероятности реализации таких опера-
ций учитываются мультипликативными
параметрами.
Для описания технологических
процессов с учетом влияния перечислен-
ных случайных факторов применяется
аналитический метод оценки параметров
сетевых моделей GERT [2, 3, 4]. В методе
GERT исследуемый технологический
процесс также представляется в виде сети
как при использовании стандартного ме-
тода, но работы (ветви), представляющие
сеть, могут иметь передаточные функции
с двумя параметрами: аддитивным (время
выполнения, которое может быть слу-
чайным) и мультипликативным (вероят-
ность выполнения ветви или работы).
Для оценки вероятности подготовки
ракеты-носителя к пуску из соответству-
ющих готовностей за время, не превы-
шающее нормативно заданное, исполь-
зуются следующие исходные данные:
- результаты подготовок ракет-
носителей в предыдущие периоды (коли-
чество подготовок, число успехов и чис-
ло отказов);
- технологические графики подго-
товки ракеты-носителя на техническом и
стартовом комплексах космодрома;
- расчетные оценки продолжи-
тельности выполнения операций техно-
логического графика подготовки ракеты
носителя на техническом и стартовом
комплексах космодрома;
- результаты хронометража в про-
цессе летных испытаний, выполнения
операций технологического графика под-
готовки ракеты-носителя на техническом
и стартовом комплексах космодрома.
Существующий подход не учитыва-
ет количество выявленных и устранен-
ных отказов и неисправностей, что не
позволяет оценить надежность процесса
подготовки с точки зрения свойства - хо-
рошо обнаруживать дефекты.
Оценка надежности процесса под-
готовки с учетом основного назначе-
ния процесса
Исходя из основного назначения
процесса подготовки, он должен обла-
дать свойствами хорошо обнаруживать
отказы и неисправности. Следовательно,
в качестве показателей надежности про-
цесса подготовки должны быть выбраны
параметры, количественно оценивающие
это свойство.
Показатели надежности процесса
подготовки должны обладать: полнотой,
ясным физическим смыслом, простотой
расчетов, устойчивостью, чувствительно-
стью к управляемым и малой чувстви-
тельностью к неуправляемым парамет-
70
рам, учитывать случайный характер
условий функционирования.
Показатели должны характеризо-
вать надежность процесса подготовки,
поэтому в качестве показателя надежно-
сти процесса подготовки выбрана веро-
ятность того, что дефекты изделия в про-
цессе подготовки будут обнаружены.
Обнаружение дефекта - случайное
событие, что подтверждается опытом ис-
пытаний при подготовке, что позволяет
представить обнаружение дефектов в ви-
де последовательности событий, насту-
пающих одно за другим в случайные мо-
менты времени, т.е. в виде потока собы-
тий. Практика контроля и испытаний по-
казала, что этот поток является стацио-
нарным пуассоновским [1].
На этой основе рассмотрим показа-
тели, количественно характеризующие
способность системы к обнаружению от-
каза или неисправности, отказа или неис-
правности не могут быть обнаружены до
начала испытаний, которые начинаются в
момент t = 0, и остаётся необнаруженным
до случайного момента t = т, когда про-
исходит его обнаружение. При такой мо-
дели испытаний показатели, характери-
зующие способность системы обнаружи-
вать отказа или неисправности, опреде-
ляются характеристиками случайной ве-
личины т - временем до обнаружения от-
каза или неисправности.
Обозначим функцию распределения
величины т через
W(t) = вер(т < t), (1)
которая представляет собой вероят-
ность обнаружения отказа или неисправ-
ности.
Плотность вероятности обнаруже-
ния отказа или неисправности обозначим
через
<-(t) = (2)
Поскольку полная группа событий
при контроле состоит из обнаружения и
не обнаружения дефекта, то функция ве-
роятности не обнаружения отказа или
неисправности есть
S(t) = 1 - W(t) = вер(т > t). (3)
Функции W(t), w(t), S(t) исчерпы-
вающе характеризуют случайную вели-
чину т. На их основе может быть введен
еще ряд важных показателей.
Интенсивность обнаружения отка-
зов определяется для рассматриваемого
момента времени при условии, что до
этого момента дефект не был обнаружен.
По определению она связана с плотно-
стью вероятности обнаружения отказа
или неисправности выражением
0(t) =
v 7 S(t)
Значение интенсивности обнаруже-
ния отказа или неисправности характери-
зует средства и методы испытаний. Со-
вершенствование средств и методов ве-
дёт к увеличению интенсивности обна-
ружения отказа или неисправности. В
случае, если они не изменяются в течение
всего времени испытаний, то 0 (t) = 0 =
const, то выражения (3) и (1) примут вид
S(t) = e-et; (4)
W(t) = 1 - e-et. (5)
Функции S(t), W(t), 0(t) всесторонне
характеризуют случайный процесс обна-
ружения дефектов при подготовке, зави-
сят от характеристик средств и методов
контроля и испытаний и от затраченного
времени, а следовательно, могут быть
приняты за показатели надежности под-
готовки PH на техническом и стартовом
комплексах. При этом они отвечают ос-
новным требованиям к показателям
надежности подготовки PH, перечислен-
ным выше.
Реальный процесс подготовки
включают в себя ряд последовательных
этапов контроля и испытаний: на уровне
подсистем, систем и изделия в целом.
При оценке надежности подготовки бу-
дем рассматривать два процесса: подго-
товка на техническом и стартовом ком-
плексах.
Оценки показателей надежности
процесса подготовки могут быть получе-
ны статистически по числу дефектов, вы-
явленных на последующих этапах экс-
плуатации PH. После проведения К эта-
пов подготовки, в нашем случае это под-
готовка на техническом и стартовом
комплексах одного изделия, состоящей
из N систем, выявляется и устраняется
= dTK + dCK дефектов, где dTK и dCK -
число дефектов, обнаруженных на этапе
71
подготовки на техническом и стартовом
комплексах.
Из-за несовершенства методов и
средств испытаний или влияния челове-
ческого фактора некоторое число do де-
фектов выявляется в полете. Информация
по количеству отказов и неисправностей,
выявленных в эксплуатирующей органи-
зации, поступает к производителю в виде
рекламаций, что позволяет получить ста-
тистическую оценку общего числа де-
фектов.
D = dK + d3.
Количество отказов и неисправно-
стей, выявленных на последующих эта-
пах, характеризует качество работ, про-
водимых на анализируемом этапе подго-
товки. После проведения подготовки на
техническом и стартовом комплексах по-
лучаем следующие статистические оцен-
ки интенсивности и вероятности обнару-
жения отказов:
14/ ^СК. 14/ ^Э.
WTK - “jp WCK - р
с _ D-dCK. с _ О-йэ
- —5—, Ътк - —
Показатели интенсивности и веро-
ятности обнаружения отказов позволяют
более полно оценить надежности процес-
са подготовки PH на техническом и стар-
товом комплексах.
Результаты
Автором предлагается дополнить
существующую методику оценки надёж-
ности подготовки показателями, позво-
ляющими дать количественную оценку
процесса поиска и устранения отказов и
неисправностей PH на техническом и
стартовом комплексах.
Заключение
Предложенные показатели оценки
надежности наземной подготовки изде-
лий ракетно-космической техники позво-
ляет с определенной точностью сделать
вывод о том, надежна ли подготовка,
чтобы в процессе полета изделия не воз-
никло отказов его систем.
Библиографический список:
1. В. И. Куренков, В. А. Капитонов,
Методы расчета и обеспечения надежно-
сти ракетно-космических комплексов:
учеб, пособие /- Самара: изд-во Самар-
ского государственного аэрокосмическо-
го университета, 2007. - 18 с.
2. Роберт В. Миллер. GERT - си-
стема управления. - М.: Экономика,
1965, 202 с.
3. Голенко Д.И. Статистические ме-
тоды сетевого планирования и управле-
ния. - М.: Наука. 1968.
4. Ю.В. Богданов, В.А. Меньшиков.
Отработка системы эксплуатации РКК.
М.: «Космос». 1997.
APPROACH FORMATION ТО RELIABILITY PREDICTION
OF LAND PREPARATION OF LAUNCH VEHICLES ON THE BASIS OF DEFINITION
OF COMPLETENESS OF LAND CHECKS AND RESULT OF FULFILMENT
OF THE TASK IN VIEW OF LAUNCH
© 2015 LV. Mushtakova
JSC «SRC «Progress», Samara
The analysis of lacks of methods of reliability prediction of preparation of launch vehicles applied now in
time, not exceeding standard value and statisticans of launches of launch vehicles of type "Soyuz" are resulted. By
results of the analysis the new approach to reliability prediction of preparation of the launch vehicles, based on an
estimation of completeness of land checks and result of fulfilment of a task in view of launch is offered.
Key words: The preparation, the test, the reliability, the launch vehicle, the system failure, the technical
complex, the launch complex
72
Информация об авторах:
Муштакова Ирина Викторовна, инженер-конструктор 3 категории отдела обра-
ботки и анализа телеметрической информации ракет-носителей и космических аппаратов
АО «РКЦ «Прогресс», аспирант кафедры космического машиностроения Самарского гос-
ударственного аэрокосмического университета. E-mail: Mushtakovai(d;mail.ru.
Mushtakova Irina Viktorovna, the design engineer of 3 categories of department of pro-
cessing and the analysis of the telemetric information of launch vehicles and space vehicles, the
post-graduate student of chair of space engineering of the Samara state space university.
E-mail: Mushtakovaifaimail.ru.
73
УДК 629.7.02
ПРИМЕНЕНИЕ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ
ПРИ ПРОВЕДЕНИИ СТАТИЧЕСКИХ ИСПЫТАНИЙ ИЗДЕЛИЙ
РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
©2015 Д.Н. Гребнев, В.К. Дуплихин, Я.А. Зуперман, А.И. Аистов, В.Е. Кукушкин
АО «РКЦ «Прогресс», г. Самара
Изложены принципы применения технологии имитационного моделирования при проведении стати-
ческих испытаний изделий ракетно-космической техники. Отмечен технико-экономический эффект и пер-
спективы применения метода имитационного моделирования для отработки прочности изделий РКТ.
Ключевые слова: Имитационное моделирование, статические испытания, напряженно-
деформированное состояние, валидация имитационной модели
Применение конечно-элементных
моделей в анализе прочности и жестко-
сти конструкций ракетно-космической
техники, а также возрастающие возмож-
ности ЭВМ позволяют переходить к ими-
тационному моделированию как методу
эффективного исследования и обеспече-
ния прочности конструкций.
Наиболее важным этапом создания
имитационной модели, адекватно отра-
жающей свойства реальной конструкции,
является валидация расчетной модели в
процессе статических испытаний, вклю-
чающая в себя тестирование модели, рас-
чет-прогноз результатов статических ис-
пытаний, уточнение имитационной моде-
ли с целью наиболее близкого совпаде-
ния результатов расчета и испытаний.
Статические испытания как метод
экспериментального исследования и под-
тверждения прочности конструкций ха-
рактеризуется рядом особенностей и
ограничений в реализации нагружения и
возможностей измерения напряжений и
деформаций.
На этапе подготовки статических
испытаний должны быть проведены
предварительные (виртуальные) стати-
ческие испытания методом имитацион-
ного моделирования. Эти испытания
представляют собой расчет напряженно-
деформированного состояния конструк-
ции экспериментальной установки при
воздействии испытательных нагрузок.
Этот расчет проводится с помощью рас-
четной модели, использованной для тео-
ретического обоснования прочности кон-
струкции изделия, с отражением в этом
расчете условий опирания (имитаторов
жесткости смежных отсеков) и оснастки,
влияющей на жесткость конструкции.
По результатам такого расчета со-
ставляется прогноз поведения конструк-
ции при проведении натурных статиче-
ских испытаний, в том числе показания
датчиков напряжений и перемещений в
местах их установки. Эти материалы ис-
пользуются для валидации имитационной
модели.
Отработанная на статических испы-
таниях расчетная модель конструкции
может быть использована для расширен-
ного уточненного анализа прочности
конструкции.
Вместе с тем успешная отработка
расчетной модели возможна только при
наличии достоверных исходных данных
о свойствах конструкции - механических
свойствах материалов и размерах элемен-
тов. Это особенно важно для наиболее
нагруженных мест конструкции при
наличии больших разбросов свойств.
Например, для механических свойств де-
талей из композиционных материалов,
или для размеров литых деталей с необ-
работанными поверхностями.
Применение метода имитационного
моделирования позволяет сократить объ-
ем статических испытаний, оставив толь-
ко схемы, отличающиеся характером
нагрузок и условиями опирания кон-
струкции. Технико-экономический эф-
фект от применения метода имитацион-
ного моделирования при статических ис-
74
пытаниях состоит в сокращении сроков
экспериментальной отработки прочности
и сокращении затрат на изготовление
оснастки.
Развитие методов имитационного
моделирования при отработке прочности,
совершенствование программных
средств и применение мощных вычисли-
тельных средств позволит в перспективе
проводить валидацию расчетных моделей
на штатной материальной части с приме-
нением неразрушающих методов испы-
таний.
THE USE OF IMITATING MODELLING IN CARRYING OUT STATIC TESTS
OF THE PRODUCTS OF ROCKET-SPACE DEVICES
©2015 D.N. Grebnev, V.K. Duplihin, J. A. Zuperman, A.I. Aistov, V.E. Kukushkin
JSC «SRC «Progress», Samara
The principles of using the technology of imitating modelling in carrying out static tests of the products
of rocket-space technology are described. Technical- economic effect and the prospects for applying the method of
imitating modelling for testing the durability the products of rocket-space devices are outlined.
Key words: Imitating modelling, static tests, the stress-deformed state, the validation of the imitation
model
Информация об авторах:
Гребнев Дмитрий Николаевич - главный конструктор, начальник отделения 1200
АО «РКЦ «Прогресс», 443009, Россия, г. Самара, ул. Земеца, д.18, т. 992-64-82,
urebnevfesamspace.ru.
Область научных интересов: оптимизация методов наземной отработки РКТ.
Дуплихин Владимир Константинович - начальник отдела 1205 АО «РКЦ «Про-
гресс», 443009, Россия, г. Самара, ул. Земеца, д. 18,, тел. 228-99-75, duplihinnsamspacc.ru.
Область научных интересов: имитационное моделирование.
Зуперман Яков Абрамович - начальник сектора отдела 1205 АО «РКЦ «Прогресс»,
443009, Россия, г. Самара, ул. Земеца, д.18, тел. 228-99-87, zupermannsamspace.ru.
Область научных интересов: методы отработки прочности РКТ.
Аистов Алексей Иванович - начальник сектора отдела 1205 АО «РКЦ «Прогресс»,
аспирант СГАУ, 443009, Россия, г. Самара, ул. Земеца, д. 18, тел. 228-99-75,
aistovnsanispacc.ru.
Область научных интересов: математическое моделирование РКТ.
Кукушкин Валерий Евгеньевич - инженер-конструктор 2 категории отдела 1205
АО «РКЦ «Прогресс», 443009, Россия, г. Самара, ул. Земеца, д. 18, тел. 228-99-87,
kukushkinnsttmspacc.ru.
Область научных интересов: имитационное моделирование статических испытаний.
Grebnev Dmitriy Nikolaevich - Chief Designer, Head of Department 1200 JSC «SRC
«Progress», 443009, Russia, Samara, Zemetsa St., 18, tel. 992-64-82, grcbnevnsamspacc.ru.
Area of research: optimisation of the methods of ground tests of RSD.
Duplihin Vladimir Konstantinovich - Head of Department 1205 JSC «SRC «Progress»,
443009, Russia, Samara, Zemetsa St., 18, tel. 228-99-75, duplihinnsamspace.ru.
Area of research: imitating modelling.
Zuperman Jakov Abramovich - Head of Sector of Department 1205 JSC «SRC «Pro-
gress», 443009, Russia, Samara, Zemetsa St., 18, tel. 228-99-87, zupermannsamspacc.ru.
Area of research: methods of durability tests of RSD.
75
Aistov Aleksey Ivanovich - Head of Sector of Department 1205 JSC «SRC «Progress»,
post-graduate student Samara State Aerospace University, 443009, Russia, Samara, Zemetsa St.,
18, tel.228-99-75, aistovfesamspace.ru .
Area of research: mathematical modelling of RSD.
Kukushkin Valeriy Evgenyevich - Design Engineer 2nd category Department 1205 JSC
«SRC «Progress», 443009, Russia, Samara, Zemetsa St., 18, tel. 228-99-87,
kukushkinfesamspace.ru
Area of research: imitating modelling of static tests.
76
УДК 004.414
СИСТЕМА АВТОМАТИЗИРОВАННОГО АНАЛИЗА ТЕЛЕМЕТРИЧЕСКОЙ
ИНФОРМАЦИИ
©2015 С.В. Бочков
АО «РКЦ «Прогресс», г. Самара
Показана целесообразность и возможность создания системы автоматизированного анализа телемет-
рической информации, получаемой при испытаниях.
Система анализа, телеметрическая информация, человеческий фактор, логика работы
Контроль исправности бортовой си-
стемы контроля и управления ведется при
помощи телеметрической информации
(ТМИ). Полученная при испытаниях ТМИ
оценивается вручную на основе логики ра-
боты системы и списка заданий каждой
конкретной проверки. При ручной оценке
ТМИ возникает большая вероятность про-
пуска замечаний вследствие человеческого
фактора. Одновременно данный вид кон-
троля требует большого количества време-
ни для анализа и получения замечаний, что
в свою очередь увеличивает длительность
проведения испытаний.
Для исключения влияния человече-
ского фактора на качество оценки ТМИ и
сокращения длительности проведения ис-
пытаний предлагается разработать систему
автоматизированного контроля телеметри-
ческой информации на языке C++. За ис-
ходную информацию по оценке ТМИ
предлагается взять следующее:
- файлы ТМИ, полученные при ис-
пытаниях,
- список заданий проверки,
- логика проведения телеметрических
параметров (ТМП).
В системе автоматизированного ана-
лиза ТМИ будет реализован алгоритм
сравнения значений ТМП из файла, сфор-
мированного при проведении испытаний с
эталонными значениями ТМП. В случае
несоответствия полученного и эталонного
значений ТМП в файл отчета будет запи-
сываться обозначение ТМП и время, в ко-
торое было зафиксировано данное несоот-
ветствие.
Внедрение данной системы позволит:
- устранить влияние человеческого
фактора на анализ ТМИ,
- получать замечания к работе аппа-
ратуры по ТМИ в масштабе времени,
близком к реальному.
SYSTEM OF AUTOMATED ANALYSIS OF TELEMETERING
©2015 S.V. Bochkov
JSC «SRC «Progress», Samara
It is shown expediency and possibility of creation of system of the automated analysis of received at tests te-
lemetering information.
Analysis system, telemetering information, human factor, logic of work.
Информация об авторе:
Бочков Сергей Владимирович, инженер АО «РКЦ «Прогресс». E-mail:
se.bvfemail.ru.
Область научных интересов: автоматизированный анализ ТМИ.
Bochkov Sergey Vladimirovich, engineer of JSC «SRC «Progress». E-mail:
se.bvfemail.ru.
Area of research: automated analysis of telemetering information.
77
УДК 621.398
АДАПТИВНЫЕ МЕТОДЫ ДЕШИФРОВКИ ТМИ
©2015 Д.Ю. Чайка
Филиал АО «РКЦ «Прогресс» - Особое конструкторское бюро «Спектр» (г. Рязань)
В статье рассматривается нетрадиционный подход к обеспечению испытаний изделий ракетно-
космической техники, в ходе которых возможно изменение не только перечня параметров телеметрической
системы, но и переход от одного типа к другому. Представлены способы представления параметров в реаль-
ном времени. Сформулированы основные принципы функционирования адаптивных систем обработки те-
леметрической информации.
Ключевые слова: телеметрическая информация, телеметрическая система, декоммутация пара-
метров
При испытаниях изделий ракетно-
технической техники (РКТ) огромное
внимание уделяется сбору и обработке
телеметрической информации (ТМИ) о
функционировании узлов и агрегатов из-
делия путём получения сигналов от раз-
личного рода датчиков и преобразовате-
лей. С помощью согласующего коммута-
ционного оборудования формируется
групповой телеметрический сигнал, со-
держащий значения параметров датчиков
и преобразователей, который передаётся
по кабельной сети монтажно-
испытательного комплекса, технической
или стартовой позиции (при наземном
этапе испытаний) или посредством бор-
товых передатчиков (в процессе полёта
изделия РКТ) на наземные антенные
комплексы, сопряжённые с приёмно-
регистрирующими станциями (ПРС). В
самом общем представлении, ПРС обра-
батывают и регистрируют принимаемую
телеметрическую информацию в виде
последовательности кадров ТМИ, где
каждый кадр может быть идентифициро-
ван порядковым номером и уникальным
временным значением. Задача обратного
представления значений измерений кон-
кретных датчиков и преобразователей
является трудоёмкой, даже несмотря на
то, что основные принципы декоммута-
ции параметров из ТМИ практически не
менялись с середины ХХ-го века.
Обработка параметров телеметри-
ческой системы (ТМС) обычно осу-
ществляется посредством анализа струк-
туры кадров ТМИ и декомпозиции каж-
дого кадра в соответствии с описанием
параметров ТМС в заранее подготовлен-
ном конфигурационном файле, в котором
представлены полные сведения по адре-
сации конкретных приборов и парамет-
ров, принципы представления и преобра-
зования. Кроме того, прочие конфигура-
ционные файлы описывающие образ кад-
ра ТМИ позволяют последовательно и
достаточно быстро обрабатывать цикли-
ческие типы файлов ТМИ. В наиболее
общем случае, в процессе обработки те-
леметрического кадра циклически прове-
ряется необходимость извлечения изме-
рения из определённой позиции. Доста-
точным условием безусловного извлече-
ния значений определённого датчика
ТМС является следующий перечень
свойств:
а) объём количества информации в
одном кадре ТМИ («размер» в байтах,
битах);
Ь) частота опроса датчика;
с) начальное смещение первого из-
мерения параметра относительно начала
кадра ТМИ;
d) период повторения значений па-
раметра в пределах кадра;
е) разрядность параметра;
f) последовательность бит (прямая
или обратная).
Основное преимущество традици-
онного метода обработки ТМИ заключа-
ется в том, что процесс декоммутации
параметров осуществляется в рамках
требований обеспечения реального вре-
мени обработки информации и не требу-
ет значительных аппаратно-программных
78
ресурсов или специализированного сете-
вого оборудования, так как вычислитель-
ная нагрузка соответствует современным
возможностям применяемых при испы-
таниях ЭВМ. Однако существует ряд не-
достагков данного метода:
а) исходный поток ТМИ претерпе-
вает преобразование в промежуточный
формат;
Ь) в процессе декоммутации в ре-
жиме реального времени на основе фик-
сированного перечня выбранных пара-
метров ТМС невозможно добавить новые
параметры;
с) реализация традиционного мето-
да обработки параметров ТМИ требует
создания программного комплекса под-
готовки исходных данных и формирова-
ние заданий на обработку;
d) для каждого типа параметров и
подсистем (функциональных, контакт-
ных, температурных, вибрационных,
цифровых и навигационных параметров)
необходим специализированный модуль
обработки.
Устранить указанные недостатки
позволяет нетрадиционный подход к де-
коммутации телеметрических парамет-
ров, который можно назвать адаптивным
или универсальным. Особенность данно-
го метода заключается в том, что на ос-
нове описания ТМС необходимо про-
граммно формировать в памяти ЭВМ де-
рево объектов, отражающих внутреннюю
структуру и особенности ТМС изделия
РКТ. При этом возможны два основных
метода формирования наборов парамет-
ров ТМС, необходимых для текущего
этапа испытаний изделия:
а) на основе формуляров представ-
ления информации (формируются на ос-
нове текущего описания ТМС);
Ь) на основе непосредственного
выбора параметров ТМС из полного
иерархического дерева ТМС (коммутато-
ров, приборов и параметров).
Данный метод обработки имеет по
сравнению с традиционным подходом
преимущество в части адаптивности, ва-
риативности и защиты от человеческого
фактора в процессе обеспечения испыта-
ний изделия РКТ. Это позволяет непо-
средственно в процессе репортажа ТМИ
в реальном времени изменять/расширять
список обрабатываемых параметров ТМС
таким же образом, что и на этапе воспро-
изведения ТМИ при экспресс-анализе
или полной послеполётной обработке.
Недостатками адаптивного метода
обработки параметров ТМС:
а) большая вычислительная нагруз-
ка, высокие требования к производитель-
ности к средствам вычислительной тех-
ники;
Ь) непригодность метода к обеспе-
чению испытаний РКТ в условиях пере-
дачи от удалённых измерительных пунк-
тов при пропускной способности спутни-
кового канала порядка 2 Мбит/с;
с) сложность управления и
настройки деревом параметров при нали-
чии нескольких передатчиков и различ-
ных ТМС;
d) избыточность потока ТМИ для
выполнения задач репортажа в реальном
времени.
Однако, необходимо отметить, что
для изделий РКТ, оснащаемых перспек-
тивной БРТС «РТСЦ» в различных мо-
дификациях, применение адаптивного
метода обработки параметров ТМС, ос-
нованный на формировании в памяти
ЭВМ дерева объектов, отражающего
структуру ТМС, наиболее обосновано и
целесообразно. При этом обеспечивается
необходимые функциональные возмож-
ности по выбору программы сбора. Так
как в процессе лётных испытаний или
пуска изделия РКТ может производиться
смена нескольких программ передачи и
сбора ТМИ. При этом идентификация
программ передачи и сбора определяется
специализированными признаками в
ТМИ.
Большинство современных балли-
стических ракет оснащаются БРТС
«Скут», БРТС «Орбита-1 V МО», МРТС
«Оникс» и МРТС «Астра». Традицион-
ный метод обработки параметров ТМИ
позволяет успешно выполнять задачи
обеспечения испытательных работ. Од-
нако рассмотренные характеристики и
преимущества адаптивного метода обра-
ботки параметров ТМС делают его пер-
79
спективным и достаточно эффективным
даже для изделий РКТ данного класса.
Библиографический список:
1. Назаров А.В., Козырев Г.И. Со-
временная телеметрия в теории и на
практике - СПб.: Наука и техника, 2007. -
672 с.
2. Меньшиков В.А. Полигонные
испытания. - М.: «КОСМО», 1999. -
237с.
References:
1. Nazarov A.V., Kozyrev G.l. mod-
em telemetry in theory and practice - SPb .:
Science and Technology, 2007. - 672 p.
2. Menshikov V.A. Field testing. - M.:
"COSMO", 1999.-237 p.
ADAPTIVE METHODS OF PROCESSING OF TELEMETRY DATA
©2015 D.Y. Chaika
JCS «SRC «Progress» - Special design bureau “Spektr”, Ryazan
The article deals with an unconventional approach to test rocket and space technology, in which you can
change not only the list of parameters telemetry system, but also the transition from one type to another. We present
ways of presenting the parameters in real time. The basic principles of operation of adaptive systems for processing
telemetry data.
Keywords: telemetry data, telemetry system, the processing parameters.
Информация об авторе:
Чайка Дмитрий Юрьевич, инженер-программист 2 категории, филиал АО «РКЦ
«Прогресс» - «ОКБ «Спектр», 390005, г. Рязань, ул. Гагарина 59а, тел.: 8(4912)76-87-53,
доб. 2-98.
Область научных интересов: цифровая обработка сигналов, системы космической
связи.
Chaika Dmitriy Yourievich, 2-grade engineer, JCS «SRC «Progress» - Spectr, 390005,
Ryazan, st. Gagarina 59a, ph.: 8(4912)76-87-53, add. 2-98.
Scientific interest area: digital processing signal, space data-transmission system.
80
УДК 629.7
АКТУАЛЬНЫЕ ПРОБЛЕМЫ СОПРОВОЖДЕНИЯ ИСПЫТАНИЙ
ИЗДЕЛИЙ РКТ
©2015 Д.Ю. Чайка
Филиал АО «РКЦ «Прогресс» - ОКБ «Спектр», г. Рязань
В статье рассматриваются тенденции и особенности современного этапа развития изделий РКТ, акту-
альные проблемы обеспечения испытаний изделий РКТ. Представлена методология проведения испыта-
тельных работ в условиях закрытия ТМИ. Принципы формирования программных комплексов для обеспе-
чения испытательных работ с изделиями РКТ на технических и стартовых позициях.
Ключевые слова: телеметрия, ракетно-космическая техника, испытания
Тенденции развития современных
изделий ракетно-космической техники
(РКТ), особенности их функционирова-
ния, испытательных и пусковых работ
приводят к увеличению объёмов обраба-
тываемой информации. В тоже время
прогресс в области программирования,
развитие средств вычислительной техни-
ки, активное внедрение сетевых техноло-
гий, появление научно-методического
обеспечения проектирования телеметри-
ческих систем создали реальную базу для
повышения качества проектных работ,
унификации средств телеизмерений и со-
здания средств обработки телеметриче-
ской информации (ТМИ) нового поколе-
ния. Использование средств автоматизи-
рованного проектирования позволяет оп-
тимизировать структуру системы обра-
ботки ТМИ, оценить производительность
и возможности её адаптации и масштаби-
рования при увеличении объёма и слож-
ности решаемых задач.
При этом необходимо отметить ряд
особенностей, характерных для совре-
менного этапа испытательных и пуско-
вых работ с изделиями РКТ:
а) преобразование аналоговой ин-
формации в цифровой код происходит на
стадии предобработки приёмно-
регистрирующими комплексами (пре-
имущественно - малогабаритной приём-
но-регистрирующей станцией (МПРС)
или станцией «Источник-М»);
Ь) поступление информации от
приёмно-регистрирующих станций про-
исходит в реальном масштабе времени с
одновременным формированием носите-
ля информации (файл TLM или DAT) и
сетевого потока для потребителей
(ЕГНАКУ или CCSDS);
с) при функционировании в рамках
сложной распределённой системы необ-
ходимо выполнять преобразование ис-
ходного потока ТМИ в сокращенный по-
ток для функционирования в сегментах
сети с ограниченной пропускной способ-
ностью;
d) процесс шифрования ТМИ («за-
крытия ТМИ») многократно усложняет
схему обработки ТМИ, процесс экспресс-
анализа ТМИ невозможен без обработки
ТМИ аппаратурой дешифровки;
е) количество потоков, параметров
телеметрической системы (ТМС) может
варьироваться от одной испытательной
работы к другой;
f) современный комплекс приёма,
анализа и обработки ТМИ должен быть
инвариантным к типу ТМС и форматам
регистрации ТМИ;
g) отсутствует критерий однознач-
ного выбора временной шкалы для фик-
сации ключевых моментов функциони-
рования изделия в ходе лётных испыта-
ний;
h) нестабильный, изменчивый ха-
рактер регистрации относительного
станционного времени приёмно-
регистрирующими станциями, зависящий
от места расположения станции по трассе
полёта изделия РКТ.
Кроме того, увеличение объёмов
ТМИ, необходимость достоверного пред-
ставления результатов обработки требует
полноценной автоматизации процесса
обработки и анализа ТМИ с минимизаци-
ей «ручных» операций по настройке про-
81
граммного обеспечения, анализу резуль-
татов на предмет исключительных ситуа-
ций по сравнению с результатами обра-
ботки аналогичных предыдущих работ,
признанными достоверными. Таким об-
разом, программное обеспечение обра-
ботки и анализа ТМИ должно удовлетво-
рять требования различных специали-
стов, отвечающих за отдельные узлы и
подсистемы изделия РКТ.
При этом разработчики подобных
систем обработки и анализа ТМИ сталки-
ваются с различными проблемами на
стадии разработки и отладки. В настоя-
щее время головные предприятия-
разработчики изделий РКТ используют
операционные системы разных семейств
с разными требованиями обеспечения
информационной безопасности, что,
естественным образом, увеличивает ва-
риативность и узконаправленность кон-
кретных систем обработки и анализа
ТМИ. При этом возможности кроссплат-
форменного (межплатформенного) про-
граммирования не всегда позволяют со-
здать идентичные программные комплек-
сы и системы обработки ТМИ для раз-
личных операционных систем для без-
условного обеспечения испытаний изде-
лий РКТ.
Современные требования по обес-
печению конфиденциальности информа-
ции вносят новые требования к системам
обработки ТМИ в ходе испытательных
работ на технических и стартовых пози-
циях. Во-первых, система обработки
ТМИ должна иметь возможность функ-
ционирования в закрытом сегменте (по-
мещения, сетевое оборудование). Во-
вторых, система обработки ТМИ должна
быть согласована по форматам информа-
ции с аппаратурой дешифровки ТМИ. В-
третьих, система обработки ТМИ взаи-
модействуя с аппаратурой дешифровки
должна обеспечивать выполнение требо-
ваний по обеспечению реального време-
ни и не вносить дополнительных искаже-
ний в исходную ТМИ.
Методология проведения испыта-
тельных работ на ТП при закрытии
(шифровании) ТМИ может быть пред-
ставлена следующим образом:
а) регистрация полного потока за-
шифрованной информации, запись на
НМЖД;
Ь) дешифровка ТМИ с помощью
специальной аппаратуры;
с) обработка открытой ТМИ, ана-
лиз результатов обработки ТМИ, провер-
ка режимов функционирования подси-
стем изделия РКТ, формирование отчётов
и заключений «НОРМА/НЕ НОРМА»;
d) фиксация неисправностей и ано-
малий функционирования изделия РКТ
при их наличии;
е) формирование заключений о го-
товности изделия к последующим испы-
таниям на стартовой позиции.
Методология проведения испыта-
тельных работ на СП при закрытии ТМИ
с использованием информации от всех
антенных комплексов приёма информа-
ции измерительных пунктов:
а) формирование перечня обяза-
тельные параметров и показаний для
адекватной оценки функционирования
изделия РКТ во время лётного экспери-
мента;
Ь) включение в схему приёма ин-
формации подсистемы формирования
сокращенных репортажных потоков для
обеспечения прохождения информации
от удалённых измерительных пунктов по
каналам связи, не превышающих 1-2
Мбит/с;
с) преобразование сокращенного
потока информации до входного формата
аппаратуры дешифровки с обеспечением
обработки ТМИ в реальном времени;
d) протоколирование исходной и
преобразованной ТМИ;
е) дешифровка закрытой ТМИ спе-
циальной аппаратурой, обработка ин-
формации с учётом требований режима
экспресс-анализа;
f) сбор полных потоков ТМИ, об-
работка аппаратурой дешифровки ТМИ;
g) проведение полной обработки
ТМИ;
h) формирование отчётных матери-
алов по результатам анализа результатов
обработки ТМИ;
i) выдача заключений об успешно-
сти лётных испытаний изделия РКТ.
82
Современная система обработки и
анализа ТМИ должна проектироваться на
основе следующих основных принципов
и выполнения основных задач:
подготовка исходных данных на
приём, репортаж, обработку, анализ и
контроль ТМИ:
описание телеметрической системы
и тарировочных характеристик;
описание бортового цифрового вы-
числительного комплекса (БЦВК) и бор-
товой навигационной аппаратуры потре-
бителей (БНАП);
описание допусков параметров
(уровней, состояний и т.д.);
подготовка формуляров отображе-
ния репортажа;
формирование и рассылка заданий
на репортаж ТМИ;
расчёт и рассылка целеуказаний для
измерительных средств;
оценка областей радиовидимости и
интервалов уверенного приёма измери-
тельных средств;
репортаж телеметрической инфор-
мации:
формирование и передача сокра-
щённых потоков ТМИ по заданию от из-
мерительных пунктов в вычислительный
центр;
приём и обработка полных и со-
кращённых потоков ТМИ;
объединение (мультиплексирова-
ние) репортажных потоков по результа-
там сравнения качества (достоверности
приёма);
обработка и отображение телемет-
рических параметров;
обработка и отображение траектор-
ной информации;
расчёт и рассылка оперативных це-
леуказаний по текущим навигационным
параметрам (результатам обработки
БНАП);
отображение оперативных целеука-
заний операторам измерительных средств
на измерительных пунктах;
сбор телеметрической информации
- фрагментарный и полный, с возможно-
стью восстановления после сбоя канала
дальней связи;
контроль телеметрической инфор-
мации на соответствие требованиям си-
стемы измерения (методик обработки,
технических условий) - допусковый кон-
троль исходных уровней и состояний,
контроль времени срабатывания;
оперативная автоматизированная
обработка всех видов параметров, отоб-
ражение их значений в таблице или в ви-
де «бегущих графиков», отображение
траекторных параметров на карте, фик-
сация времени срабатывания параметров
по результатам репортажа и экспресс-
анализа с определением ближайшей к
срабатыванию точки траектории, зареги-
стрированной из БНАП;
представление трёхмерной модели
изделия РКТ по заранее согласованному
набору параметров и подсистем;
обработка телеметрической инфор-
мации после сеанса:
первичная обработка и повышение
качества ТМИ - «резка» и объединение
файлов ТМИ, монтаж единого носителя
ТМИ, монтаж подпотоков НП и ЗУ;
извлечение телеметрических пара-
метров и цифровых кадров БЦВК;
графический анализ и документи-
рование результатов;
информационный обмен со смеж-
ными системами-потребителями;
обеспечение обмена сообщениями
между пользователями вычислительных
центров и измерительных пунктов:
телефонная связь (1Р-телефония);
текстовыми сообщениями - инди-
видуально и по группам абонентов;
диагностирование информационной
сети - оценка готовности каналов связи к
сеансу (в том числе каналов дальней свя-
зи (спутниковых каналов связи)).
83
Рис. 1 - Структурная схема системы обработки и анализа ТМИ
Современная система обработки и
анализа ТМИ должна поддерживать сле-
дующие форматы входной ТМИ:
а) потоки ЕГНАКУ от ИТМК,
ССПД МИРС и системы «Приморка»;
Ь) потоки CCSDS от ИТМК, ССПД
МПРС и станции «Источник-М»;
с) структуры TLM от МПРС;
d) структуры DAT от станции «Ис-
точник-М»;
е) выходные структуры кадров
ТМС от станции ИТМК;
О репортажные потоки «индекс-
параметр»;
g) выходные форматы станции
ИТМК.
Таким образом, для решения акту-
альных проблем обеспечения испытаний
современная система обработки и анали-
за должна обеспечивать выполнение всех
требований, предъявляемых при испыта-
тельных работах изделий РКТ. Кроме то-
го, подобные системы должны обладать
еще и важным свойством адаптивности и
расширяемости для своевременного ре-
шения задач обработки ТМИ и выполне-
ния испытательных работ при дальней-
шем развитии изделий РКТ. Это возмож-
но на основе использования возможно-
стей кроссплатформенных средств разра-
ботки программного обеспечения, уни-
версальных сетевых протоколов, под-
держки всего перечня применяемых
форматов ТМИ.
Библиографический список:
1. Назаров А.В., Козырев Г.И.
Современная телеметрия в теории и на
практике - СПб.: Наука и техника, 2007. -
С.270-373.
2. Степкин В.С., Шмыголь С.С.
Автоматизированная обработка и анализ
телеметрической информации. — МО
СССР, 1980.-515 с.
References:
1. Nazarov A.V., Kozyrev G.L
Modem telemetry in theory and practice -
SPb .: Science and Technology, 2007 -
S.270-373.
84
2. Styopkin V.S., Shmygol S.S. Au-
tomated processing and analysis of teleme-
try data. - Ministry of Defense of the USSR,
1980.-515 p.
CURRENT PROBLEMS OF SUPPORT FOR TESTING
PRODUCTS ROCKET AND SPACE TECHNOLOGY
©2015 D.Y. Chaika
JCS «SRC «Progress» - Special design bureau “Spektr”, Ryazan
The article examines the trends and characteristics of the present stage of development of rocket and space
technology, current problems of the test rocket and space technology. The methodology of testing works in a closed
telemetry. Principles of formation of software systems for test work on rocket and space technology engineering and
a starting position.
Keywords: telemetry, missile and space technology, test.
Информация об авторе:
Чайка Дмитрий Юрьевич, инженер-программист 2 категории, филиал АО «РКЦ
«Прогресс» - «ОКБ «Спектр», 390005, г. Рязань, ул. Гагарина 59а, тел.: 8(4912)76-87-53,
доб. 2-98.
Область научных интересов: цифровая обработка сигналов, системы космической
связи.
Chaika Dmitriy Yourievich, 2-grade engineer, JCS «SRC «Progress» - Spectr, 390005,
Ryazan, st. Gagarina 59a, ph.: 8(4912)76-87-53, add. 2-98.
Scientific interest area: digital processing signal, space data-transmission system.
85
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 5. Направление 2: Эксплуатация
ракетно-космической техники
86
УДК 629.78.083:389.6
НАУЧНО-ТЕХНИЧЕСКИЕ ПРОБЛЕМЫ ОБЕСПЕЧЕНИЯ ЭКСПЛУАТАЦИИ
РАКЕТНОЙ И РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
©2015 С.А. Лысенко
Федеральное государственное унитарное предприятие
«Центральный научно-исследовательский институт машиностроения», г. Королев
Успешная реализация космических программ и проектов во многом определяется решением про-
блемных вопросов эксплуатации ракетно-космических комплексов (РКК) при отработке их систем эксплуа-
тации.
Ключевые слова: система эксплуатации; эксплуатация РКТ
Проблемные вопросы эксплуатации
ракетной и ракетно-космической тех-
ники
Основные проблемные вопросы
эксплуатации РКТ:
1. В последнее десятилетие
прошлого века РКТ не обновлялась, а
поддерживалась за счёт ремонта и
выполнения мероприятий по продлению
технического ресурса оборудования,
входящего в состав объектов наземной
космической инфраструктуры
космодромов Байконур и «Плесецк».
2. Несоответствие ГОСТов (СРПП)
сложившейся практике эксплуатации
РКТ (выполнение мероприятий
авторского, технического надзоров,
продления ресурса, обслуживания и
ремонта).
3. В ТТЗ не в полном объёме
задаются требования к эксплуатации,
хранению, удобству технического
обслуживания и ремонта составных
частей (изделий) РКК в соответствии с
ГОСТ РВ 15.201-2003. Требования к
отработке системы эксплуатации РКК и
его составных частей согласно ОТТ
11.1.4-88 части 5 отсутствуют.
4. Программа отработки системы
эксплуатации РКК и его составных
частей как основной руководящий
документ по организации отработки
системы эксплуатации и её элементов в
процессе испытаний РКТ, проводимых на
космодроме (ОТТ 11.1.4-88, часть 5), в
отличие от других программных
документов (ПОН, ПОБ, КПЭО и др.),
предусмотренных Положениями РК-98-
КТ и РК-П-КТ головными
организациями-разработчиками не всегда
разрабаты ваются.
5. Несовершенство документов,
регламентирующих организацию
процессов эксплуатации РКТ с
применением современных АСУ,
позволяющих использовать технические
средства диагностирования, мониторинга
и т.п.
6. Отсутствует единая информа-
ционная база с результатами научно-
исследовательских и опытно-
конструкторских работ.
7. Эффективность использования
РКТ снижается, а эксплуатационные
расходы возрастают вследствие
несоответствия достигнутых показателей
качества РКТ требованиям,
определённым в ОТТ и заданным в ТТЗ,
а также низкого уровня организации
работ и контроля процессов
эксплуатации, недостаточной квали-
фикации эксплуатирующего персонала.
Предложения по решению проблемных
вопросов эксплуатации ракетной и ра-
кетно-космической техники
Анализ проблем обеспечения
эксплуатации РКТ показывает
целесообразность принятия Заказчиком
управленческих решений по
организации:
1. Проведения исследований по
оценке систем эксплуатации РКК,
находящихся на этапах ввода в
87
эксплуатацию и эксплуатации, анализу
опыта и учёту результатов разработок
ГН ИО РКП по проблематике управления
полным ЖЦИ.
2. Работ по корректировке ГОСТов,
ОТТ, регламентирующих порядок
обеспечения эксплуатации РКК и его
составных частей.
3. Научно-технического и
технологического сопровождения
ГН ИО РКП научно-исследовательских и
опытно-конструкторских работ на всех
этапах ЖЦИ, в том числе эксплуатации
составных частей (изделий) РКК.
4. Разработки проекта концепции
системы мониторинга технического
состояния РКК и его составных частей
(изделий).
5. ГН ИО РКП совместно с
головными организациями РКП
воссоздания системы сбора и анализа
информации о качестве и надёжности
изделий РКК в эксплуатации,
позволяющей обеспечивать
разработчиков и изготовителей изделий
РКК оперативной информацией об
отказах техники (как гарантийной, так и
не гарантийной), а также аналитическими
данными о состоянии надёжности
изделий РКК в ходе эксплуатации.
6. Разработки стандартов по
созданию и использованию электронной
эксплуатационной и ремонтной
документации.
7. Разработки типовых нормативно-
методических документов по
организации эксплуатации изделий РКК
и их составных частей с учётом
современных требований и возможностей
передовых информационных технологий
и созданию типовой автоматизированной
подсистемы технической поддержки
эксплуатации изделий РКК в течение
ЖЦИ.
Направления развития системы
эксплуатации для преодоления
недостатков
Основные направления
совершенствования и развития системы
эксплуатации РКК и его составных
частей можно представить следующим
образом:
1. Совершенствование
нормативного правового и нормативно-
технического обеспечения в интересах
применения современных технологий
управления мероприятиями ЖЦИ.
2. Переход на контракты полного
жизненного цикла (ПЖЦ) РКТ.
3. Совершенствование системы
сбора, обработки и обмена информацией
о ходе эксплуатации изделий РКК за счёт
внедрения современных
информационных технологий в
автоматизированные системы
управления.
4. Создание и внедрение
современных средств объективного
контроля технического состояния, с
возможностью их автоматизированного
взаимодействия со средствами
автоматизации.
5. Обеспечение эксплуатирующих
организаций квалифицированным персо-
налом и современными средствами
диагностирования и технического
обслуживания.
6. Создание условий, позволяющих
эксплуатирующей организации
представлять объективные
диагностические и фактические
эксплуатационные характеристики по
изделиям РКК, находящимся в
эксплуатации.
7. Развитие и внедрение средств
автоматической идентификации в
интересах совершенствования системы
учёта материальных средств,
мониторинга хода эксплуатации изделий
РКК, повышения оперативности
снабжения эксплуатирующих
организаций (эксплуатационных
подразделений).
8. Включение в ФКП (ФЦП)
научно-исследовательских и опытно-
конструкторских работ по
совершенствованию системы
эксплуатации РКТ.
Представленные направления
совершенствования и развития системы
88
эксплуатации РКК и его составных
частей позволят обеспечить:
- совершенствование нормативно-
правовой базы для создания системы
управления ПЖЦ (полным
индустриальным циклом производства от
моделирования и проектирования до
серийного выпуска изделий, обеспечения
их эксплуатации и дальнейшей
утилизации), регламентирующей порядок
сопровождения эксплуатационных
процессов, начиная с этапа
проектирования РКК (его составных
частей);
- распределение функций между
органами управления эксплуатацией
составных частей (изделий) РКК на
объектах наземной космической
инфраструктуры космодромов;
- разработку новых основных
требований к системе эксплуатации РКК
и его составных частей, а также
требований к эксплуатации, хранению,
удобству технического обслуживания и
ремонта взамен устаревшим требованиям
из системы общих технических
требований к видам вооружения и
военной техники (ОТТ);
- разработку и формирование
системы эксплуатационных свойств и
характеристик в соответствии с уровнями
системы эксплуатации;
- определение показателей
эффективности и разработку общей
методической схемы отработки системы
эксплуатации РКК;
- создание и развитие: системы
дистанционного (удалённого) контроля
технического состояния изделий РКК;
системы удалённой информационной
поддержки устранения замечаний,
неисправностей, возникающих при
эксплуатации изделий РКК; системы
дистанционного обучения
обслуживающего (эксплуатирующего)
персонала на современных тренажёрных
комплексах;
- обеспечить гарантийный,
авторский, технический надзоры при
эксплуатации РКТ;
- продление срока службы РКТ.
SCIENTIFIC AND TECHNICAL PROBLEMS OF OPERATION OF ROCKET AND
SPACE TECHNOLOGY
©2015 S.A. Lysenko
Federal state unitary enterprise «Central research Institute of machine building», Korolev
Successful implementation of space programs and projects is largely determined by the resolution of prob-
lematic issues, the operation of the rocket-space complex (RSC) when developing their systems of operation.
Keywords: system operation; operation of RSC
Информация об авторе:
Лысенко Сергей Александрович, начальник отделения, ФГУП ЦНИИмаш, ул.
Пионерская, д. 4, г. Королев, Московская область, 141070, (495) 513-50-49,
LysenkoSACa4sniimash.ru.
Область научных интересов: исследования проблем эксплуатации ракетно-
космической техники.
Lysenko Sergey Aleksandrovich, head of Department, FSUE TsNIIMash, Pionerskaya
str., 4, Korolev, Moscow region, 141070, (495) 513-50-49, LysenkoSAfetsniimash.ru.
Area of scientific interests: research of problems of operation of rocket and space
technology.
89
УДК 528.88
ОЦЕНКА РЕАЛИЗУЕМОСТИ ОПЕРАТОРОМ РОССИЙСКИХ КОСМИЧЕСКИХ
СРЕДСТВ ДЗЗ ЗАЯВОК НА КОСМИЧЕСКУЮ СЪЕМКУ
©2015 Д.И. Бубненков, Л.А. Гришанцева, А.А. Емельянов, К.С. Емельянов, А.Л. Федотов
Научный центр оперативного мониторинга Земли
ОАО «Российские космические системы», г. Москва
В работе предлагается системный подход к формированию методического задела для повышения эф-
фективности целевого применения российских средств ДЗЗ в части выполнения Оператором заявок на кос-
мическую съемку. В статье описывается анализ проблемных вопросов в части выполнения Оператором за-
явок.
Ключевые слова: дистанционное зондирование Земли (ДЗЗ), планирование целевого применение, реа-
лизуемость заявок потребителей
Основным неформальным показа-
телем возможности удовлетворения ко-
личественных и качественных требова-
ний пользователей является степень реа-
лизуемости плановых и оперативных за-
явок пользователей на проведение съем-
ки и/или создание конечного информаци-
онного продукта. В мировой практике
оценка реализуемости заявок пользовате-
лей - неотъемлемая составляющая рабо-
ты оператора космических систем и дис-
трибьюторов данных ДЗЗ, вне зависимо-
сти от того, кто выступает пользователем
- орган власти и подведомственная ему
организация, коммерческая организация
или частное лицо. В общем случае, по-
добная оценка является составляющей
любого бизнес-процесса, нацеленного на
получение прибыли или, в крайнем слу-
чае, на безубыточную работу.
КС ДЗЗ представляют собой слож-
ные организационно-технические систе-
мы, отличающиеся большим разнообра-
зием типов и характеристик ЦА, режимов
и условий ее применения, составом и
функциональными возможностями
наземной инфраструктуры приема, обра-
ботки, хранения и распространения ин-
формации ДЗЗ.
Учитывая, что большинство заявок
пользователей не ограничивает Операто-
ра КС ДЗЗ в выборе средств получения
той или иной информации, определяя
требования к выходному стандартному
или базовому продукту обработки дан-
ных ДЗЗ, первостепенную роль приобре-
тает необходимость планирования сов-
местной работы КА ДЗЗ, позволяющих
получать однотипную информацию. В
настоящее время основным организаци-
онным фактором, ограничивающим при-
менение такого подхода к оценке реали-
зуемости заявок, является отсутствие
унификации уровней обработки инфор-
мации даже с однотипных КА, с техниче-
ской стороны - отсутствует система ав-
томатического (автоматизированного)
планирования работы для всей ОГ КА
ДЗЗ одновременно.
Во многом на возможность реали-
зации конкретной заявки влияют требо-
вания к качеству данных наблюдения по
углам визирования, освещенности, гео-
метрическим искажениям и др. Факторы,
влияющие на степень реализуемости за-
явок потребителей на получение инфор-
мации ДЗЗ, можно разделить на три ос-
новные группы:
- метеорологические;
- технические;
- организационные.
Первая группа факторов, как видно
из названия - это метеорологические
условия в районе наблюдения (облач-
ность, прозрачность атмосферы).
Ко второй, технической, группе
факторов можно отнести:
- ограничения на эксплуатацию
КА, включая баллистические и динами-
ческие возможности КА, техническое со-
стояние бортовых систем КА и ограниче-
ния по их работе;
90
- ограничения, связанные с недо-
статочной пропускной способностью
ВРЛ;
- ограничения, связанные с коли-
чеством и конфигурацией ППИ, включая
их различное оснащение аппаратурой
криптозащиты.
К организационным факторам от-
носятся: приоритетность съемки, органи-
зация приема информации НКПОР, вре-
мя обработки заявки (от ее получения до
закладки на борт рабочей программы
включения ЦА).
Наличие заведомых технических
ограничений, прежде всего, в части объ-
ема и качества информационного ресур-
са, что характерно для существующей и
перспективной (как минимум, на период
до 2020 г.) российской ОГ КА ДЗЗ, уси-
ливает потребность в разработке методи-
ки оценки реализуемости заявок пользо-
вателей.
В работе предлагается системный
подход к формированию методического
задела для повышения эффективности
целевого применения российских средств
ДЗЗ в части выполнения Оператором за-
явок на космическую съемку. Предложе-
но осуществлять оценку реализуемости
заявок следующих основных видов:
- заявки на съемку и создание про-
дуктов стандартной обработки КИ сред-
него, высокого и детального простран-
ственного наблюдения;
- заявки на создание БП в рамках
соответствующего регламента потоковой
обработки КИ;
- заявки на получение стандарт-
ных продуктов ДЗЗ и БП, содержащихся
в соответствующих банках данных
(ЕБГД ЕТРИС ДЗЗ и ББП).
В ходе работы выполнен анализ
проблемных вопросов в части выполне-
ния Оператором заявок на космическую
съемку, в т.ч. в части количественных и
качественных требований к информаци-
онным продуктам ДЗЗ, проведена оценка
достаточности современных информаци-
онных ресурсов с точки зрения их даль-
нейшего тематического использования
потребителями, выявлены проблемы,
возникающие при выполнении заявок на
космическую съемку, в т.ч. организаци-
онно-технического и нормативного ха-
рактера.
В качестве общего (интегрального)
показателя качества работы Оператора
российских КС ДЗЗ с потребителями вы-
бран суммарный коэффициент реализуе-
мости заявок, рассчитываемый в виде
взвешенной суммы коэффициентов реа-
лизуемости частных требований. При
этом коэффициент реализуемости зави-
сит от требуемого и фактического объема
и качества предоставляемой КИ.
ASSESSING THE FEASIBILITY OF REQUESTS FOR SPACE IMAGERY
BY OPERATOR OF RUSSIAN REMOTE SENSING SPACE FACILITIES
©2015 D.l. Bubnenkov, L.A. Grishantseva, A.A. Emelyanov, K.S. Emelyanov, A.L. Fedotov
Research Center for Earth Operative Monitoring of
JSC «Russian Space Systems», Moscow
The paper considers a system approach to forming the methodology advance for increased efficiency of tar-
get use of the Russian remote sensing facilities with respect to fulfilling the requests for space imagery by Operator.
The problem points relevant to fulfilling the requests by Operator are analyzed.
Keywords: Earth remote sensing, target use planning, consumer request feasibility
Информация об авторах:
Бубненков Дмитрий Иванович, инженер 1 категории НЦ ОМЗ ОАО «Российские
космические системы», Россия, г. Москва, ул. Декабристов, владение 51, строение 25, т.
(495) 925-04-19, bubncnkovtantsomz.ru.
91
Область научных интересов: геоинформационные системы, Python D, OpenSource,
MySql, PostgreSql, сети.
Гришанцева Любовь Александровна, к.т.н., начальник сектора НЦ ОМЗ ОАО
«Российские космические системы», Россия, г. Москва, ул. Декабристов, владение 51,
строение 25, т. (495) 925-04-19, grishantseva lafentsomz.ru.
Область научных интересов: ДЗЗ, разработка программного обеспечения.
Емельянов Андрей Александрович, к.т.н., заместитель начальника НЦ ОМЗ ОАО
«Российские космические системы», Россия, г. Москва, ул. Декабристов, владение 51,
строение 25, т. (495) 925-04-19, eaafentsomz.ru.
Область научных интересов: методы и алгоритмы обработки данных ДЗЗ, информа-
ционные системы спутникового мониторинга, технология целевого применения космиче-
ских средств ДЗЗ.
Емельянов Кирилл Сергеевич, начальник отдела НЦ ОМЗ ОАО «Российские
космические системы», Россия, г. Москва, ул. Декабристов, владение 51, строение 25, т.
(495) 925-04-19, eksfejntsomz.ru.
Область научных интересов: дистанционное зондирование земли.
Федотов Алексей Леонидович, к.г.н., главный специалист НЦ ОМЗ ОАО «Россий-
ские космические системы», Россия, г. Москва, ул. Декабристов, владение 51, строение
25, т. (495) 925-04-19, afedotovfentsomz.ru.
Область научных интересов: дистанционное зондирование земли, геоинформацион-
ные системы, разработка программного обеспечения, Web-технологии, базы данных.
Authors:
Dmitry I. Bubnenkov, Engineer, NTs OMZ of JSC “Russian Space Systems”, Deka-
bristov St., b.51, h.25, Moscow, Russia, 127490. Tel: (495) 925-04-19, bubnenkovfentsomz.ru.
Research interests: Geoinformation systems, Python, D, OpenSource, MySql, PostgreSql,
networks.
Lubov A. Grishantseva, PhD in Technical Sciences, Head of Sector, NTs OMZ of JSC
“Russian Space Systems”, Dekabristov St., b.51, h.25, Moscow, Russia, 127490. Tel: (495) 925-
04-19, grishantseva lafentsomz.ru.
Research interests: Remote sensing, software development.
Andrey A. Emelyanov, PhD in Technical Sciences, Deputy Chief, NTs OMZ of JSC
“Russian Space Systems”, Dekabristov St., b.51, h.25, Moscow, Russia, 127490. Tel: (495) 925-
04-19, eaafentsomz.ru .
Research interests: Techniques and algorithms of remote sensing data processing, infor-
mation systems of satellite monitoring, target use of space remote sensing facilities technology.
Kirill S. Emelyanov, Head of Division, NTs OMZ of JSC “Russian Space Systems”, Dek-
abristov St., b.51, h.25, Moscow, Russia, 127490. Tel: (495) 925-04-19, cksfefetsomz.ru.
Research interests: Earth remote sensing.
Aleksey L. Fedotov, PhD in Geographical Sciences, Chief Specialist, NTs OMZ of JSC
RKS, Dekabristov St., b.51, h.25, Moscow, Russia, 127490. Tel: 8 (495) 925-04-11,
afedotovfentsomz.ru.
Research interests: Earth remote sensing, geographic information systems, software devel-
opment, Web technologies, databases.
92
УДК 531.36
ТРАНСПОРТНО-ПУСКОВОЙ КОНТЕЙНЕР ДЛЯ НАНОСПУТНИКОВ
ТИПОРАЗМЕРА 3U, 3U+
©2015 Д.С. Зарецкий, А.А. Кирсанов, Е.В. Космодемьянский, А.М. Романов,
М.Е. Сивов, М.Г. Трусов, В.В. Юдинцев
АО «РКЦ «Прогресс», г. Самара
Рассматриваются особенности конструкции транспортно-пускового контейнера, разработанного АО
“РКЦ “Прогресс” для запуска наноспутников формата кубсат типоразмеров 3U, 3U+. Транспортно-пусковой
контейнер может устанавливаться в качестве попутной полезной нагрузки на ракетах-носителях семейства
«Союз», блоке выведения «Волга» и космических аппаратах разработки АО “РКЦ “Прогресс”.
Ключевые слова: наноспутник, кубсат, средства отделения, транспортно-пусковой контейнер
Наиболее эффективный способ под-
готовки высококвалифицированных инже-
неров аэрокосмических специальностей -
привлечение студентов к разработке кос-
мических аппаратов [1]. Цикл разработки
больших КА не позволяет студентам прой-
ти весь путь разработки в рамках обычного
учебного процесса и охватить весь круг
решаемых задач. Такую возможность
предоставляет разработанная в 1999 году
профессором Ж. Суари из Калифорнийско-
го политехнического университета и Б.
Твиггсом из Стэндфордского специфика-
ция, описывающий формат наноспутников
- малых КА массой меньше 10 килограмм
[2]. Эта спецификация стала своего рода
стандартом, позволившим упростить изго-
товление и запуск наноспутников, что от-
крыло дорогу в космос непрофессионалам
- небольшим научным группам ВУЗов и
школ. Последние несколько лет задачи,
решаемые при помощи наноспутников,
вышли за рамки учебных или демонстра-
ционных проектов: более половины нано-
спутников формата кубсат, запущенных в
2014 году и планируемых к запуску до
2016 года это спутники дистанционного
зондирования Земли.
С целью упрощения использования
ракет-носителей, космических аппаратов и
разгонных блоков производства АО “РКЦ
“Прогресс” для попутного выведения
наноспутников, предприятие разработало
собственный тип транспортно-пускового
контейнера (ТПК) для кубсатов различных
типоразмеров.
Конструкция контейнера
При разработке ТПК одним из ос-
новных требований было требование его
простой адаптации к используемым сред-
ствам выведения: интерфейсам систем
управления и систем измерения PH или
КА, на которых может устанавливаться
контейнер. Большое внимание уделялось
надёжности работы всех его составных ча-
стей. В конструкции использовались отра-
ботанные элементы с высоким уровнем
надёжности.
Контейнер состоит из трёх модулей:
основного несущего модуля, модуля тол-
кателя и модуля крышки. Эта особенность
конструкции позволяет при необходимости
из нескольких стандартных элементов
быстро разработать и изготовить контей-
нер для выведения наноспутника требуе-
мого типоразмера от ШдоЗи+ (рис. 1).
Основной модуль объединяет все
остальные модули контейнера и включает
в себя направляющие, для поступательного
движения наноспутника внутри контейне-
ра и элементы крепления контейнера к но-
сителю. Модуль толкателя состоит из по-
движной платформы с направляющими и
пружины, которая сообщает наноспутнику
заданную скорость. Модуль крышки со-
держит узлы вращения, пружины кручения
для надёжного открытия крышки, устрой-
ство фиксации крышки в раскрытом поло-
жении, механизм открытия крышки и
устройство, удерживающее наноспутник в
контейнере до момента разворота крышки
на безопасный угол, позволяющее без-
93
опасно отделить наноспутник с заданной
скоростью.
В конструкции ТПК предусмотрен
датчик, контролирующий отделение нано-
спутника от платформы толкателя, и дат-
чик, измеряющий температуру внутри
контейнера. Для поддержания теплового
режима наружные поверхности контейнера
закрыты ЭВТИ.
При разработке ТПК для снижения
угловой скорости наноспутника типораз-
мера 3U ход толкателя был уменьшен до
200 мм. При разработке ТПК для нано-
спутников типоразмера 1U целесообразно
уменьшить ход толкателя до 50 мм, что
обеспечит угловую скорость отделения не
более 10 градусов в секунду.
Набор пружин для
разных масс КА
Датчик температуры
Датчик отделения
Механизм открытия крышки
Кубсат типоразмера
5U,5U+
Корпуса
со съёмными
панелями
Крышка
Рис. 1 - Транспортно-пусковой контейнер для запуска наноспутников типоразмера 3U, 3U+
Транспортно-пусковой контейнер
прошёл полный цикл экспериментальной
отработки, в результате чего были под-
тверждены все требования, заложенные в
проектной документации, включая требо-
вания к угловым скоростям наноспутника
после его выхода из контейнера.
Размещение транспортно-
пускового контейнера
Первый запуск наноспутника при
помощи разработанного ТПК планируется
осуществить в конце 2015 года. На орбиту
будет выведен наноспутник «Контакт-
наноспутник» формата 3U, разработанный
студентами СГАУ. «Контакт-
наноспутник» будет установлен как попут-
ная полезная нагрузка БВ “Волга” с малым
КА “Аист-2” и КА “Ломоносов”. Размеще-
ние контейнера на адаптере блоке выведе-
ния «Волга» предоставляет большую сво-
боду выбора направления и скорости отде-
ления наноспутников.
Контейнеры с наноспутниками могут
размещаться на космических аппаратах.
Так в верхней части спускаемого аппарата
КА “Бион-М” установлена платформа
средств отделения, на которой в 2013 году
были размещены 5 пусковых контейнеров
для наноспутников различных типоразме-
ров.
Транспортно-пусковой контейнер
может размещаться внутри переходного
отсека ракет-носителей семейства “Союз”.
Средняя высота орбиты, на которой проис-
ходит отделение основной полезной
нагрузки от орбитальной ступени состав-
ляет 200 километров, поэтому этот вариант
размещения можно использовать для нано-
спутников с небольшим планируемым
сроком существования.
Библиографический список:
[1] Swartwout М. University-Class
Satellites: From Marginal Utility to
“Disruptive” Research Platforms, Proc, of
18th Annu. AIAA/USU Conf. SMALL Satell.
2004, pages 9-13.
[2] Munakata R. et al. Cubesat design
specification rev. 13 // The CubeSat Program,
California Polytechnic State University. 2014.
94
CUBESAT DEPLOYER FOR 3U, 3U+ NOSATELLITES
©2015 D.S. Zaretskiy, A.A. Kirsanov, E.V. Kosmodemyanskii, A.M. Romanov,
M.E. Sivov, M.G. Trusov, V.V. Yudintsev
JCS «SRC «Progress», Samara
Design features of a new cubesat deployer developed by JSC SRC Progress are presented that ensure high re-
liability and make it possible to launch 3U-3U+ nanosatellites at a specified velocity and with minimal angular dis-
turbances. The deployer can be used as a piggyback payload of Soyuz launch vehicles, the Volga Upper Stage, and
spacecraft developed by JSC SRC Progress.
Key words: nanosatellite, cubesat, cubesat deployer, design.
Информация об авторах:
Зарецкий Дмитрий Сергеевич - инженер-конструктор 1 кат. АО «РКЦ «Прогресс»,
г. Самара, ул. Земеца, 18а.
Область научных интересов: средства разделения КА.
Кирсанов Александр Александрович - начальник отдела АО «РКЦ «Прогресс»,
г. Самара, ул. Земеца, 18а.
Область научных интересов: механизмы специальных систем, средства разделения и
отделения.
Космодемьянский Евгений Владимирович - зам. генерального конструктора по
научной работе, г. Самара, ул. Земеца, 18а.
Область научных интересов: проектирование КА.
Романов Александр Михайлович - инженер-конструктор 3 кат. АО «РКЦ
«Прогресс», г. Самара, ул. Земеца, 18а.
Область научных интересов: средства разделения КА.
Сивов Максим Евгеньевич - инженер-конструктор 2 кат. АО «РКЦ «Прогресс»,
г. Самара, ул. Земеца, 18а.
Область научных интересов: механизмы специальных систем.
Трусов Максим Геннадьевич - зам. начальника отдела АО «РКЦ «Прогресс»,
г. Самара, ул. Земеца, 18а.
Область научных интересов: механизмы специальных систем.
Юдинцев Вадим Вячеславович- к. т. н., доцент СГАУ, ведущий инженер-
конструктор АО «РКЦ «Прогресс», г. Самара, ул. Земеца, 18а, тел. (846) 228-91-91
Область научных интересов: динамика систем тел, вычислительная механика.
Zaretskiy D.S. - engineer at JCS «SRC «Progress», Samara, uL Zemetsa, 18a.
Research interests: separation subsystems.
Kirsanov A.A. - Head of the department at JCS «SRC «Progress», Samara, uL Zemetsa,
18a. Research interests: mechanisms of special systems.
Kosmodemyanskii E.V. - Ph. D. Deputy General Designer for Research & Academic
Activities at JCS «SRC «Progress», Samara, uL Zemetsa, 18a.
Research interests: spacecraft design.
Romanov - A.M. engineer at JSC SRC Progress, Samara, uL Zemetsa, 18a.
Research interests: separation subsystems.
Sivov M.E. - engineer at JSC SRC Progress, Samara, uL Zemetsa, 18a.
Research interests: mechanisms of special systems.
Trusov M.G. - Deputy Head of the department at JCS «SRC «Progress», Samara, uL Ze-
metsa, 18a.
Research interests: mechanisms of special systems.
Yudintsev V.V.- Ph. D., associate professor. JCS «SRC «Progress», Samara, uL Zemetsa,
18a, tel. (846) 228-91-91
Research interests: multibody systems dynamics, computational mechanics.
95
УДК 629.7.08
ОСНОВНЫЕ НАПРАВЛЕНИЯ РАЗВИТИЯ НАЗЕМНОЙ КОСМИЧЕСКОЙ
ИНФРАСТРУКТУРЫ КОСМОДРОМА «ВОСТОЧНЫЙ»
©2015 Ф.Ф. Дедус, А.М. Гераськин, С.С. Пастухова
ФГУП «ЦНИИмаш», г. Королев, Московская область
11риведены основные данные об этапности создания космодрома «Восточный» и возможные направ-
ления развития его инфраструктуры.
Ключевые слова: наземная космическая инфраструктура, космодром, космодром «Восточный»,
основные и обеспечивающие объекты.
Пути развития наземной космиче-
ской инфраструктуры определяются ис-
ходя из основных целей космической де-
ятельности России, одной из которых яв-
ляется гарантированный доступ России в
космос со своей территории в обеспече-
ние полного спектра приоритетных задач
в интересах удовлетворения потребно-
стей обороны и безопасности страны, ее
социально-экономической сферы и науки
[1,2].
Задачи космической деятельности
России в настоящее время решаются с
использованием космодромов Байконур и
Плесецк. С космодрома Байконур, кото-
рый РФ арендует у Республики Казах-
стан, осуществляются запуски автомати-
ческих космических аппаратов (КА) на
геостационарную, геопереходные и кру-
говые орбиты с целью обеспечения связи,
телевещания, метеообеспечения, навига-
ции, дистанционного зондирования Зем-
ли, а также запуски по пилотируемой
программе.
Инфраструктура космодрома Пле-
сецк позволяет в основном решать задачи
оборонного характера. Развитие космо-
дрома Плесецк, в том числе расширение
его возможностей путем создания инфра-
структуры для подготовки и пусков пер-
спективных ракет-носителей тяжелого
класса с использованием кислородно-
водородных разгонных блоков, преду-
смотрено в качестве одного из главных
направлений развития его наземной кос-
мической инфраструктуры.
Перспективная космическая дея-
тельность России неразрывно связана с
созданием и эксплуатацией нового кос-
модрома «Восточный».
Космодром «Восточный» предна-
значен для обеспечения подготовки и за-
пуска КА различного назначения, транс-
портных грузовых кораблей и модулей
орбитальных станций, выполнения про-
грамм по пилотируемым запускам и пер-
спективных космических программ по
изучению и освоению небесных тел, в
том числе в рамках международного со-
трудничества [1]. При этом предусмотре-
на следующая этапность создания космо-
дрома:
1) к 2015 году - готовность основ-
ных и обеспечивающих объектов назем-
ной космической инфраструктуры (НКИ)
к запускам автоматических КА ракетами
космического назначения (РКН) типа
«Союз-2» этапа 1 а;
2) до 2021 года - дооснащение и мо-
дификация основных и обеспечивающих
объектов наземной космической инфра-
структуры космического ракетного ком-
плекса (КРК) с РКН «Союз-2» этапов 16
и 1в, а также создание наземного техно-
логического оборудования и технических
средств стартовых и технических ком-
плексов КРК «Амур» с ракетой-
носителем (PH) тяжелого класса «Анга-
ра-AS» и инфраструктуры для перспек-
тивной пилотируемой транспортной си-
стемы;
3) до 2025 года - создание объектов
НКИ КРК «Амур» с PH тяжелого класса
повышенной грузоподъемности «Ангара-
А5В» для обеспечения в том числе пус-
96
ков по пилотируемой и лунной програм-
мам.
4) после 2025 года - создание объек-
тов для подготовки, пуска и межполетно-
го обслуживания демонстратора многора-
зовой первой ступени многоразовой ра-
кетно-космической системы (МРКС) и
объектов КРК сверхтяжелого класса.
Перспективными направлениями
развития наземной космической инфра-
структуры космодрома «Восточный» яв-
ляются создание объектов для обеспече-
ния подготовки к пуску и пусков много-
разовых ракет космического назначения,
а также РКН сверхтяжелого класса. В ос-
нову проектного облика технических и
стартовых комплексов перспективных
средств выведения закладывается унифи-
кация объектов [3].
Унификация вновь создаваемых
объектов может позволить сократить со-
став сооружений, численность обслужи-
вающего персонала наземной космиче-
ской инфраструктуры и объемы финансо-
вых средств на создание и ввод в эксплу-
атацию.
Библиографический список:
1. Основные положения «Основ
государственной политики Российской
Федерации в области космической дея-
тельности на период до 2030 года и даль-
нейшую перспективу», утвержденные
Президентом Российской Федерации от
19 апреля 2013 года № Пр-906.
2. Федеральное космическое
агентство. Официальный сайт
www.federalspace.ru.
3. Сайт www.vostokdrom.ru.
References:
1. Basic provisions «Bases of a state
policy of the Russian Federation in the field
of space activity for the period till 2030 and
further prospect», № Пр-906 approved by
the President of the Russian Federation of
April 19,2013.
2. Federal Space Agency. Official site
of www.federalspace.ru.
3. Site www.vostokdrom.ru.
MAIN DIRECTIONS OF DEVELOPMENT OF GROUND SPACE INFRASTRUCTURE
OF THE VOSTOCHNY COSMODROME
©2015 F.F. Dedus, A.M. Geraskin, S.S. Pastukhova
Federal State Unitary Enterprise TsNIIMash, Korolev
Specification on staging of creation of the Vostochny spaceport and the possible directions of development of
its infrastructure is given in theses.
Key words: ground space infrastructure, cosmodrome, the Vostochny cosmodrome, main and supporting
facilities
Информация об авторах:
Дедус Федор Флоренцевич, к.т.н., с.н.с., заместитель генерального директора (по
системным исследованиям) - начальник центра системного проектирования ФГУП
ЦНИИмаш, 141070, Россия, г. Королев, ул. Пионерская, д.4, т. 8(495) 513-44-00,
corpfu'tsniimash.ru.
Область научных интересов: проектно-поисковые и системные исследования пер-
спектив развития средств выведения и космодромов, организация программно-целевого
планирования космической деятельности.
Гераськин Александр Михайлович, к.т.н., и.о. начальника отдела 1202 ФГУП
ЦНИИмаш, 141070, Россия, г. Королев, ул. Пионерская, д.4, т. 8(495) 513-42-67,
GeraskinAM(aitsniimash.ru.
Область научных интересов: проектно-поисковые и системные исследования пер-
спектив развития объектов НКИ космодромов
Пастухова Светлана Сергеевна, ведущий инженер отдела 1202 ФГУП ЦНИИмаш,
141070, Россия, г. Королев, ул. Пионерская, д.4, т. 8(495) 513-56-87, Sunny35(« list.ru.
97
Область научных интересов: научно-техническое сопровождение создания стартовых
и технических комплексов
Dedus Fedor Florentsevich, candidate of technical sciences, senior research associate, the
deputy CEO (on system researches) - the chief of the center of system design Federal State Uni-
tary Enterprise TsNIIMash, 141070, Russia, Korolev, Pionerskaya str., 4, t. 8(495) 513-44-00,
corpfetsniimash.ru.
Area of research: design-search and system researches of prospects of development of
means of removal and spaceports, organization of program and target planning of space activity
Geraskin Alexander Mikhailovich, candidate of technical sciences, acting chief of the
division 1202 Federal State Unitary Enterprise TsNIIMash, 141070, Russia, Korolev,
Pionerskaya str., 4, t. 8(495)513-42-67, GeraskinAMfetsniimash.ru.
Area of research: design-search and system researches of prospects of development of ob-
jects of GSI of cosmodromes
Pastukhova Svetlana Sergeyevna, leading engineer of department 1202, Federal State
Unitary Enterprise TSNIIMash, 141070, Russia, Korolev, Pionerskaya str., 4, t.
8(495)513-56-87, Sunny35felist.ru.
Area of research: scientific and technical maintenance of creation of launch sites and tech-
nical complexes
98
УДК 629.765
СИСТЕМА МОНИТОРИНГА И ПРОГНОЗИРОВАНИЯ РАДИАЦИОННОЙ
ОБСТАНОВКИ В ОКП НА ОРБИТАХ ФУНКЦИОНИРОВАНИЯ ИЗДЕЛИЙ
РАЗРАБОТКИ АО «РКЦ «ПРОГРЕСС»
©2015 Е.А. Буренина, А.С. Дементьев, А.М. Привалова, Е.В. Чурилин
АО «РКЦ «Прогресс» г. Самара
Представлена система мониторинга и прогнозирования радиационной обстановки в околоземном
пространстве на орбитах функционирования изделий разработки АО «РКЦ «Прогресс» и направления ее
использования
Ключевые слова: радиационная обстановка, околоземное космическое пространстве, мониторинг,
прогнозирование
В настоящее время в АО «РКЦ
«Прогресс» функционирует разработан-
ная специалистами НИИЯФ МГУ систе-
ма мониторинга и прогнозирования ради-
ационной обстановки околоземного кос-
мического пространства (ОКП) на орби-
тах функционирования изделий разра-
ботки АО «РКЦ «Прогресс».
Текущие значения характеристик
ОКП, влияющих на работоспособность
изделий разработки АО «РКЦ
«Прогресс» и их БА, а также динамика их
изменений позволяют сотрудникам АО
«РКЦ «Прогресс» прогнозировать воз-
можность появления сбоев и отказов БА
при достижении характеристик ОКП
«критичных» значений, что позволяет
своевременно принять решение об огра-
ничении работы аппаратуры и реализо-
вать его.
Информация о состоянии ОКП на
орбитах функционирования изделий так-
же используется при анализе и поиске
возможных причин возникновения не-
штатных ситуаций в процессе эксплуата-
ции изделий разработки АО «РКЦ
«Прогресс».
Информация, предоставляемая си-
стемой мониторинга состояния ОКП на
орбитах функционирования изделий раз-
работки АО «РКЦ «Прогресс», выложе-
на на информационного портале
АО «РКЦ «Прогресс» и доступна для
всех его сотрудников.
THE SYSTEM OF MONITORING AND FORECASTING RADIATION
ENVIRONMENT IN NEAR-EARTH SPACE IN OPERATIONAL ORBITS
OF PRODUCTS DEVELOPED BY JSC SRC PROGRESS
©2015 E.A. Burenina, A.S. Dement’ev, A.M. Privalova, E.V. Churilin
JSC «SRC «Progress», Samara
The article represents the system of monitoring and forecasting radiation environment in near-earth space in
operational orbits of products developed by JSC SRC Progress and lines of its application.
Keywords: radiation environment, near-earth space, monitoring, forecasting
Информация об авторах:
Буренина Екатерина Андреевна, к.ф.-м.н., ведущий инженер-конструктор,
АО «РКЦ «Прогресс», 443009 Россия, г. Самара, ул. Земеца, 18 тел. 276-11-84,
csdbftrsamspace.ru.
99
Дементьев Александр Сергеевич, зам. начальника отдела, АО «РКЦ «Прогресс»,
443009 Россия, г. Самара, ул. Земеца, 18 тел. 276-11-84, csdbfesamspace.ru.
Чурилин Евгений Валерьевич, начальник отдела, АО «РКЦ «Прогресс», 443009
Россия, г. Самара, ул. Земеца, 18 тел. 228-52-53, csdbfesamspace.ru.
Привалова Анна Михайловна, инженер-конструктор 2 категории,
АО «РКЦ «Прогресс», 443009 Россия, г. Самара, ул. Земеца, 18 тел. 276-11-84,
csdbfesamspace.ru.
Burenina, Ekaterina Andreevna, Cand. Sci. Phys.-Math., leading design-engineer, JSC
«SRC «Progress», 443009 Russia, Samara, ul. Zemetsa, 18, tel. 276-11-84, csdbfesamspace.ru.
Dement’ev, Aleksandr Cergeevich, deputy head of department, JSC «SRC «Progress»,
443009 Russia, Samara, ul. Zemetsa, 18, tel. 276-11-84, csdbfesamspace.ru.
Churilin, Evgenii Valer’evich, head of department, JSC «SRC «Progress», 443009 Rus-
sia, Samara, ul. Zemetsa, 18, tel. 228-52-53, csdbfesamspace.ru.
Privalova, Anna Mikhailivna, design-engineer of the 2nd category,
JSC «SRC «Progress», 443009 Russia, Samara, ul. Zemetsa, 18, tel. 276-11-84,
csdbfesamspace.ru.
100
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 6: Математические методы моделирования,
управления и оптимизации.
101
УДК 539.3
ОБЕСПЕЧЕНИЕ ТЕПЛОВОГО РЕЖИМА БОКЗ СИСТЕМЫ
АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ОСНОВЕ
РЕШЕНИЯ СВЯЗАННОЙ ТЕРМОУПРУГОЙ ЗАДАЧИ
©2015 С.В. Цаплин, С.А. Болычев
Самарский государственный университет, г. Самара
Работа посвящена исследованию теплового режима платформы чувствительных элементов космиче-
ского аппарата, предназначенной для астроориентации космического аппарата при воздействии условий
эксплуатации. Проведено математическое моделирование течения теплоносителя в каналах платформы и
температурного поля платформы с помощью программного пакет ANSYS. По рассчитанному полю темпе-
ратур проведено математическое моделирование деформированного состояния платформы под действием
тепла. Найдены угловые отклонения посадочных мест БОКЗ-ов по сравнению с первоначальным недефор-
мированным состоянием.
Ключевые слова: космический аппарат, астроориентация, блок определения координат звезд, тем-
пературное поле, поле деформаций, угловое отклонение.
В настоящее время для ориентации
приборы астроориентации - блоки
определения координат звезд (БОКЗ),
установленные на специальной платфор-
ме. На борту КА платформа БОКЗ под-
вержена влиянию тепловых и механиче-
ски воздействий, поэтому для обеспече-
ния точности астроориентации необхо-
димо прогнозировать ее термомеханиче-
ское состояние с учетом всех факторов,
воздействующих на КА.
Существенное значение имеют та-
кие факторы, определяющие тепловой
баланс конструктивных элементов плат-
формы как: тепловой поток от Солнца (в
том числе и отраженный от поверхности
Земли), тепловыделение от аппаратуры в
соответствии с режимами эксплуатации,
циркуляция воздуха в гермообъемах, ра-
бота системы обеспечения тепловых ре-
жимов (СОТР). На распределение темпе-
ратуры также влияют геометрические ха-
рактеристики самой системы охлажде-
ния, величина расхода теплоносителя и
его теплофизические свойства. Среди
остальных факторов, воздействующих на
чувствительные элементы платформы и
определяющих его надежное функциони-
рование, следует выделить динамические
нагрузки (гармонические и случайные)
воздействующие на КА как на этапе
транспортировки, так и на этапе выведе-
ния на орбиту. Определяющее значение в
космического аппарата (КА) используются
этом случае имеют силовая схема плат-
формы, схема крепления платформы, фи-
зико-механические характеристики мате-
риала конструкции, в особенности для ее
силовых элементов. При превышении
значений напряжений, возникающих в
результате воздействия внешних нагру-
зок на различных этапах функционирова-
ния, величины предела текучести для со-
ответствующих материалов следует ожи-
дать появления необратимых пластиче-
ских деформаций в наиболее нагружен-
ных зонах конструкции.
Допустимыми считаются угловые
отклонения осей БОКЗ-ов, вследствие
деформаций конструктивных элементов
платформы, не более чем на 5" по срав-
нению с первоначальным недеформиро-
ванным состоянием.
В данной работе рассматривается
влияние внутренних источников тепла на
терморасстраиваем ость платформы
БОКЗ.
Общий вид платформы блоков
определения координат звезд приведен
на рис. 1.
102
Рис. 1. Общий вид платформы БОКЗ:
1 - платформа, 2 -БОКЗ-ы, 3 - посадочные места БОКЗ-ов
Приборы, установленные на плат-
форме в процессе работы потребляют
электрическую энергию, которая, преоб-
разуясь в тепловую, нагревает платфор-
му. Для обеспечения минимального гра-
диента температуры платформы необхо-
димо провести развязку по источникам
тепла, исходя из конструктивных, темпе-
ратурных особенностей ЧЭ платформы.
Развязка источников тепла осуществляет-
ся путем подачи теплоносителя с учетом
расположения каналов в платформе и по-
садочных местах ЧЭ.
Для вычисления угловых отклоне-
ний конструктивных элементов платфор-
мы по сравнению с недеформированным
состоянием необходимо последовательно
решить следующие задачи:
расчет стационарного поля скоро-
стей теплоносителя;
расчет стационарного поля темпе-
ратур конструктивных элементов плат-
формы;
расчет стационарного поля дефор-
маций конструктивных элементов плат-
формы.
Общий вид расчетной модели при-
веден на рис. 2.
103
Рис. 2. Общий вид расчетной модели
Схемы каналов теплоносителя платформы и посадочных мест БОКЗ-ов приведены
на рис. 3 и 4.
Рис. 3. Расположение каналов теплоносителя в платформе
104
Рис. 4. Расположение каналов теплоносителя в посадочных местах БОКЗ
Каналы теплоносителя платформы
и посадочных мест БОКЗ-ов соединены
между собой связующими магистралями
в следующем порядке: канал платформы
- посадочное место левого БОКЗ-а - по-
садочное место центрального БОКЗ-а -
посадочное место правого БОКЗ-а (рис.
1, 2). Сами связующие магистрали в рас-
чете не рассматриваются, однако, для
обеспечения непрерывности течения теп-
лоносителя граничные условия задаются
следующим образом: компоненты скоро-
сти и температура теплоносителя на вы-
ходе из предыдущего канала задаются
как входные условия на вход в следую-
щий канал.
Радиусы входного и выходного се-
чений каналов теплоносителя в платфор-
ме посадочных местах БОКЗ-ов состав-
ляет 10мм, сечения самих каналов имеют
прямоугольную форму (см. рисунки 3, 4).
На вход в канал платформы подается
теплоноситель ЛЗ-ТК-2 с расходом 100
смЗ/сек и температурой 293 К.
В качестве материала, из которого
изготовлены конструктивные элементы
термостабилизированной платформы, а
также кронштейны приборов БОКЗ вы-
бран алюминий АМГ6.
Стационарная гидродинамика теп-
лоносителя в канале описывается систе-
мой уравнений Рейнольдса для вязкой
несжимаемой жидкости [1]:
Эи,
-^- = 0
Эху
(I)
Эх у 7 Эх/ Эх у
( ди. ди у ——т
А —L + — -W/y
I ()Ху UXj J
(2)
где - компонента осредненной по
Рейнольдсу скорости, щ - компонента
пульсации скорости, р - осредненное по
Рейнольдсу давление,
со следующими граничными условиями:
на стенках канала условие прилипания
й|5 =0, (3)
где 5 - поверхность стенок канала теп-
лоносителя;
на входе и выходе канала задан перепад
давлений, соответствующий расходу теп-
лоносителя
₽l.s, -p\s,
0)
105
где S/ и S2 - входное и выходное сечение
канала теплоносителя.
Изменение температурного поля
теплоносителя и платформы во времени
описываются уравнениями температуро-
проводности, с соответствующими гра-
ничными условиями:
для теплоносителя:
дТ э
—+ v • erad Г —и V Т (5)
v men umeny 1men^
Tmen 1— Л) ’
(6)
Тщеп 15 ~ ?пл I
S’
(7)
для платформы:
= a у2/’
un.i y 1ПЛ ’
(8)
(9)
— 2
А'ПЛ
Л17 15 ^men 15
— 2
^пл
- Я ИУС ’ S нус
дп
ътпл ~ Я БОКЗ $ кок1
дп
(10)
(И)
ra.eSpfyC и Ццус - соответственно, по-
верхность посадочного места и тепловы-
деление прибора ИУС, S бокз и Ябокз~
соответственно, поверхность посадочно-
го места и тепловыделение прибора
БОКЗ.
В начальный момент времени
температурное поле всей модели предпо-
лагается однородным и равным номи-
нальному значению температуры 293 К.
По известному полю температуры
можно определить поле смещений: урав-
нение для квазиравновесного состояния
равновесия твёрдого деформированного
тела, имеющего поле температур Т в от-
сутствие объемных сил имеет вид [2]:
(Я + //)graddivu - //rotrotu = KaV Т, (12)
где а - коэффициент объемного расши-
рения, а - коэффициент тепературопро-
водности, X и ц - коэффициенты Ламэ, К
- коэффициент всестороннего сжатия
связанные с модулем Юнга Е и коэффи-
циентом Пуассона о соотношениями:
я =---—-----, it=—-—, к = —-—. О 3)
(1-2<т)(1 + сг) 2(1 + бТ) 3(1-2о-)
В качестве граничного условия ис-
пользуется условие жесткого крепления
кронштейна платформы.
Задача решалась методом конечных
элементов в программном пакете ANSYS.
Результаты расчетов гидродинамики теп-
лоносителя в каналах приведены на рис.
4, распределение температуры платфор-
мы и теплоносителя — на рис. 5-7, рас-
пределения деформаций на платформе
приведены на рис. 8-11.
106
Рис. 5. Поле скоростей (скорость в м/с) теплоносителя в каналах при расходе 100 смЗ/сек
NODAL SOLUTION
293
293.379 2FT.758 294.137 294.516
293.19 293.569 293.948 294.327 294.733
Рис. 6. Распределение температуры (в кельвинах) по всей модели в стационарном состоянии
107
NODAL SOLUTION
AN
STEP=2
SUB =1
TEMP (AVG)
RSYS=O
293 293.174 293.34S 293.522 293.696
293.0S7 293.261 293.435 293.609 293.795
Рис. 7. Распределение температуры (в кельвинах) теплоносителя в канале платформы в стационарном
состоянии
NCDAL SOLUTION
STEP-2
SUB -1
TEMP (AVG)
RSYS-0
SMN «293.97
SMX «294.719
293.97 294.134 294.29S 294.461 294.625
294.052 294.216 294.3S 294.543 294.719
Рис. 8. Распределение температуры (в кельвинах) теплоносителя в каналах кронштейнов в стационарном
состоянии
108
Рис. 9. Распределение суммарных деформаций (в метрах) по всей модели в стационарном состоянии
NCDAL SOLUTION
STEP-1
SUB =1
TIME=1
USUM (AVG)
RSYS=0
DMX =
SMN «
SIOC -
398Е-07 .524Е-06 .101Е-05 .149Е-05 .197Е-05
.282Е-06 .765Е-06 .125Е-05 .173Е-05 .225Е-05
Рис. 10. Распределение суммарных деформаций (в метрах) на платформе в стационарном состоянии (конту-
ром показано недеформированное состояние, для наглядности деформации сильно увеличены)
109
Рис. 11. Распределение суммарных деформаций (в метрах) на центральном кронштейне БОКЗ в
стационарном состоянии (контуром показано недеформированное состояние)
NODAL SOLUTION
STEP-1
SUB -1
TIME-1
USUM (AVG)
RSYS-0
DMX -.500E-05
SMN -.693E-06
SMX -.500E-05
AN
I—
.693E-06 .163E-05 .258E-05 .352E-05 .446E-05
.116E-05 .210E-05 .305E-05 .399E-05 .500E-05
Рис. 12. Распределение суммарных деформаций (в метрах) на левом и правом кронштейнах БОКЗ в
стационарном состоянии (контуром показано недеформированное состояние)
110
Анализируя результаты расчета
влияния условий эксплуатации на ста-
бильность конструктивных элементов
термостабилизированной платформы
чувствительных элементов при тепловых
воздействиях можно сделать ряд выво-
дов. Для обеспечения заданного расхода
теплоносителя при данной конфигурации
каналов, скорость теплоносителя должна
составлять порядка 1 м/с в канале плат-
формы и 0.5 м/с в канале кронштейна (0),
что указывает на турбулентный характер
течения теплоносителя. При этом пере-
пад давления в канале платформы со-
ставляет порядка 2 кПа вследствие его
сложной формы.
При заданном расходе теплоноси-
теля наибольшее значения температуры
достигается на правом кронштейне БОКЗ
— 294.733 К, при этом сама платформа в
локальных точках прогревается до
294.171 К (0). Наибольшее значение тем-
пературы теплоносителя в канале плат-
формы составляет 293.795 К (0), в кана-
лах кронштейнов 294.719 К (0).
При таких температурных полях
максимальные деформации всей кон-
струкции составляют 5 мкм (0), в том
числе на платформе — 2.25 мкм (0), на
центральном кронштейне — 4.46 мкм (0),
на левом и правом кронштейнах — 5 мкм
и 3.5 мкм, соответственно (0). Такие де-
формации соответствуют угловому от-
клонению посадочного места на плат-
форме на 1,7", посадочного места цен-
трального БОКЗ на 1,8", левого - на 1.9"
и правого - 0.96" по сравнению с неде-
формированным состоянием.
В работе проведено исследование
теплового режима платформы чувстви-
тельных элементов космического аппара-
та, предназначенной для астроориента-
ции космического аппарата при воздей-
ствии условий эксплуатации. В результа-
те математического моделирования
найдены стационарное поле скоростей
теплоносителя в каналах платформы,
стационарные поля температур и дефор-
маций конструктивных элементов плат-
формы при заданных внешних тепловых
воздействиях. Показано, что рассчитан-
ные деформации соответствуют угловому
отклонению посадочных мест централь-
ного БОКЗ-а на 1,8", левого - на 1.9" и
правого - 0.96" по сравнению с недефор-
мированным состоянием, что укладыва-
ется в допустимые 3" для ориентации
космического аппарата КА.
Библиографический список:
1. Лойцянский Л.Г. Механика жид-
кости и газа. М.: Наука, 1978. С. 736.
2. Нащокин В.В. Техническая тер-
модинамика и теплопередача. М.: Выс-
шая школа, 1980. с.469.
References:
1. Loycansky L.G. Fluid and gas me-
chanics. Moscow, 1978 (in Russian).
2. Naschokin V.V. Technical thermo-
dynamics and heat transfer. Moscow, 1980
(in Russian).
THERMAL CONTROL OF STAR SENSOR OF SPACECRAFT ATTITUDE CONTROL
SYSTEM BASED ON THE SOLUTION TO THE THERMOELASTIC PROBLEM
©2015 S.V. Tsaplin, S.A. Bolychev
Samara State University, Samara
The paper is devoted to the study of thermal control of the star sensors platform of the spacecraft designed to
spacecraft attitude control under operating conditions. Mathematical modeling of the coolant flow in platform and
the platform temperature field is carried out with ANSYS. The mathematical modeling of platform strained state
under the influence of heat is carried out according to the calculated temperature field. Angular deviations of star
sensors seats is found compared with the undeformed state.
Spacecraft, spacecraft attitude, star sensor, temperature field, strain field, angle deflection
111
Информация об авторах:
Цаплин Сергей Васильевич, кандидат физико-математических наук, доцент ка-
федры физики твердого тела и неравновесных систем, Самарский государственный уни-
верситет. E-mail: tsaplinfesamsu.ru.
Область научных интересов: тепломассообмен, космическое машиностроение.
Колычев Станислав Александрович, ведущий инженер-программист, Самарский
государственный университет.
Область научных интересов: тепломассообмен, математическое моделирование,
космическое машиностроение.
Tsaplin Sergey Vasilevich, candidate of physics and mathematics, associate professor,
department of solid state physics and non-equilibrium systems, Samara State University. E-mail:
tsapl i nfesamsu.ru.
Area of research: heat and mass transfer, space engineering.
Bolychev Stanislav Alexandrovich, lead software engineer, Samara State University.
Area of research: heat and mass transfer, mathematical modeling, space engineering
112
УДК 004.94,629.78
УНИВЕРСАЛЬНЫЙ ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ МОДЕЛИРОВАНИЯ
И ОТЛАДКИ СИСТЕМ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ
©2015 А.В. Лебедев
ОАО «Корпорация «ВНИИЭМ», г. Москва
В докладе рассматривается структура универсального моделирующего программного комплекса,
предназначенного для компьютерной имитации динамики орбитального и углового движения космических
аппаратов (КА) в реальном и ускоренном масштабе времени. Рассматриваются примеры применения данно-
го моделирующего комплекса для создания наземных стендов отладки систем ориентации существующих и
находящихся в разработке КА.
Ключевые слова: космический аппарат, универсальная компьютерная модель, математическое
моделирование
Процесс ориентации космических
аппаратов является крайне важным с точ-
ки зрения их живучести и выполнения
целевых задач. Сложившаяся практика
отработки аппаратуры и программного
обеспечения системы ориентации (СО)
включает этап наземных испытаний [1].
Он, в свою очередь, включает в себя ком-
пьютерное моделирование движения КА
на специальном отладочном стенде в за-
мкнутом контуре с бортовой вычисли-
тельной машиной, на которой выполня-
ются алгоритмы управления ориентаци-
ей. Помимо штатных режимов работы
системы ориентации на данном стенде
моделируются различные нештатные си-
туации, такие как отказ одного или не-
скольких датчиков, или органов управле-
ния, которые должны по возможности
парироваться алгоритмами СО и не
должны приводить к потере космическо-
го аппарата.
Наличие отладочного стенда необ-
ходимо и после введения КА в эксплуа-
тацию. В случае возникновения непред-
виденной на этапе наземной отработки
ситуации, она может быть промоделиро-
вана на отладочном стенде. На основе
результатов данного моделирования при-
нимаются решения о дальнейших коррек-
тировках параметров и алгоритмов ори-
ентации эксплуатируемого КА.
Космические аппараты разного
класса обладают системами ориентации с
различным набором датчиков и органов
управления с разными интерфейсами и
бортовыми вычислительными машинами.
В большинстве случаев, при создании
нового КА, это влечет за собой длитель-
ный процесс разработки программного
обеспечения отладочного стенда, что
обусловлено недостаточным уровнем аб-
стракции моделирующего программного
обеспечения от конфигурации КА и си-
стем ориентации.
В докладе рассматривается разрабо-
танный в ОАО «Корпорация «ВНИИЭМ»
моделирующий программный комплекс,
обладающий универсальной модульной
структурой, что позволяет в сжатые сро-
ки создавать наземные отладочные стен-
ды для систем ориентации новых или уже
существующих КА.
Фактически, структура стенда
определяется с помощью специальных
конфигурационных файлов. Ядро систе-
мы моделирования загружает нужные
модули из уже существующих библиотек
компонент и располагает их согласно
иерархии, определенной в файлах конфи-
гурации [2]. Далее происходит формиро-
вание дифференциальных уравнений
движения КА в форме Коши. После чего,
пользователем может быть запущен про-
цесс интегрирования, который, в зависи-
мости от конфигурации, может происте-
кать в реальном или ускоренном масшта-
бе времени.
В настоящий момент данный ком-
плекс используется для моделирования
динамики и отладки систем ориентации
КА «Ионосфера», «Канопус», «БКА»,
«Ломоносов». В будущем, на базе моде-
лирующего программного комплекса,
113
планируется создать отладочные стенды
для перспективных аппаратов класса
«Канопус».
Библиографический список:
1. Мирошник О.М.,Курилович В.П.,
Айнбиндер В.З., Беленький А.Д. Полуна-
турное моделирование системы управле-
ния ориентацией метеоспутника // Разра-
ботка и исследование электромеханиче-
ских систем космических аппаратов ме-
теорологического и природно-ресурсного
назначения. Труды ВНИИЭМ. - М. НПП
ВНИИЭМ, 1987-Т.83.-С.62-69.
2. Гриневич Д.В., Лебедев А.В.,
Мороз О.В. Разработка универсального
моделирующего программного комплек-
са для создания стендов отладки и под-
держки систем ориентации космических
аппаратов // Вопросы электромеханики.
Труды ВНИИЭМ. Издательство: Научно-
производственная корпорация Космиче-
ские системы мониторинга, информаци-
онно-управляющие и электромеханиче-
ские комплексы им. А.Г. Иосифьяна
(Москва) ISSN: 0205-9428. - 2013. - №4. -
С. 21-30
References:
1. Miroshnik О. М., Kurilovich V. Р.,
Aynbinder V. Z., Belenkiy A. D. Semi natu-
ral simulation of weather satellite attitude
control system // Research and development
of electromechanical systems for weather
and resource satellites. Proceedings of
VNIIEM. - Moscow: NPP VNIIEM, 1987 -
V.83. - P.62-69.
2. Grinevich D.V., Lebedev A.V.,
Moroz O.V. Development of universal mod-
eling software for the creation of stands for
debugging and support of spacecraft attitude
control systems // Questions of electro me-
chanics. Proceedings of VNIIEM. Publish-
ing house of Joint Stock Company ‘Re-
search and Production Corporation ‘Space
Monitoring Systems, Information & Control
and Electromechanical Complexes’ named
after A.G. losifian’ (Moscow) ISSN: 0205-
9428.-2013. - №4,-P. 21-30
UNIVERSAL SOFTWARE COMPLEX FOR MODELING AND DEBUGGING THE
ATTITUDE CONTROL SYSTEMS OF SPACECRAFT
©2015 A.V. Lebedev
JSC “Corporation “VNIIEM”, Moscow
The report describes the structure of the universal modeling software package developed at JSC “Corporation
“VNIIEM” and intended to simulate the orbital and angular dynamics of spacecraft in real-time and accelerated time
scale. The examples of application of this software are presented for the creation of simulation stands targeting ex-
isting and under development spacecraft.
Key words: spacecraft, universal computer model, mathematical modeling
Информация об авторах:
Лебедев Антон Викторович, к.ф.-м.н., старший научный сотрудник ОАО «Корпо-
рация «ВНИИЭМ», 107 078, Россия, г. Москва, Хоромный тупик, д.4., стр. 1, т. 8-495-366-
21 -22, anton.lebedev@mcc.vniiem.ru.
Область научных интересов: компьютерное моделирование сложных систем, опти-
мальное управление движением.
Lebedev Anton Victorovich, candidate of physical and mathematical sciences, senior re-
searcher at JSC “Corporation “VNIIEM”, 107 078, Russia, Moscow, Khoromnyi tupik, 4/1, tel.
+7(495)3662122, anton.lebedev@mcc.vniiem.ru.
Area of research: computer modeling of complex systems, optimal movement control.
114
УДК 629.782
РАЗРАБОТКА МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ДЛЯ ВЫБОРА ОПТИМАЛЬНЫХ
ПРОЕКТНЫХ ХАРАКТЕРИСТИК СИСТЕМЫ ОБЕСПЕЧЕНИЯ ТЕПЛОВОГО
РЕЖИМА КОСМИЧЕСКОГО АППАРАТА
©2015 В.В. Купцов
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
В работе разрабатывается математическая модель построения циклограммы изменения температуры с
течением времени на борту КА. Модель позволяет выбрать оптимальные характеристики системы обеспече-
ния теплового режима.
Ключевые слова: Низкоорбитальная космическая платформа, циклограмма изменения температуры,
электрическая мощность, тепловой режим
Зачастую увеличение точности за-
прашиваемых характеристик КА влечёт к
увеличению массовых, габаритных и
энергетических параметров бортовых
приборов и систем. В условиях постоян-
но возрастающей мощности бортовой ап-
паратуры и необходимости уменьшения
её объема и массы, обеспечение работы
КА возможно только за счёт увеличения
эффективности систем терморегулирова-
ния.
Если провести анализ, то наружная
поверхность КА в околоземном про-
странстве, на освещенной стороне испы-
тывает значительное тепловое воздей-
ствие от Солнца. С другой стороны, КА
сам излучает тепловую энергию в про-
странство и на теневых участках начина-
ет охлаждаться. В результате этого, для
незащищенной поверхности (к примеру,
из стали) температура может колебаться
от минус 150°С до плюс 150°С (рис. 1).
Рис. 1 - Тепловые потоки и
температуры поверхности КА
Рис. 2 - Упрощённая схема СОТР КА
На рис. 1 Qcojui (Qsoln) - мощность
теплового излучения от Солнца, Вт\ QOTp
(Qotr) - мощность теплового потока сол-
нечной энергии, отражённой от Земли,
Вт\ Qnj] (Qpi) - мощность теплового пото-
ка собственного излучения Земли, Вт\
Qka - мощность теплового потока от
внутренних бортовых систем КА, Вт,
Тпов - температура поверхности КА, К.
Поэтому для возможности управ-
ления температурами бортовых систем
КА система обеспечения теплового ре-
жима (СОТР) КА включает следующие
компоненты: термозащитное покрытие
поверхности КА, систему терморегули-
рования внутри КА.
На рис. 2 схематично показано
устройство системы обеспечения тепло-
вого режима КА. Система терморегули-
рования внутри КА создается таким об-
разом, чтобы собирать избыточное тепло
от бортовых приборов и излучать его в
космическое пространство через специ-
альный участок поверхности, который
называется - радиационный теплообмен-
115
ник (РТО) или радиатор охлаждения (рис.
2).
В процессе исследований был раз-
работан алгоритм расчёта изменения
температуры поверхности радиационного
теплообменника за исследуемый интер-
вал времени. Уравнение теплового ба-
ланса КА в околоземном космическом
пространстве, в общем виде, запишется в
виде выражения (1), при решении кото-
рого, можно рассчитать требуемы про-
ектные характеристики элементов систе-
мы обеспечения теплового режима КА.
М 1 = 4-feoin(0 + eoJ0)+CsA-QP№ + tNSt>)-SRTO£™а-Т*то(?)
1=1 V J 1=1
+£\уЩ ' Qim(t) + Sb=i Nj(t) -SpTo • Eyy0 О TpTo(t) (1)
где n - общее количество бортовых
приборов и элементов конструкции КА; i
- номер итого бортового прибора или
элемента конструкции; с; - удельная теп-
лоёмкость i-ro прибора или элемента
конструкции; mi - масса i-ro прибора или
dTz
элемента конструкции; изменение
температуры i-ro прибора или элемента
конструкции в единицу времени; E™sh
защ
Ew - степень черноты термозащитного
покрытия поверхности КА; £*гоЕуу° -
степень черноты поверхности радиаци-
онного теплообменника;
суммарная мощность энергопотребления
бортовых приборов КА в текущий мо-
мент времени t.
В рамках исследовательской работы
было разработано программное обеспе-
чение для расчёта изменения температу-
ры РТО за исследуемый интервал време-
ни.
Осуществляя численное интегриро-
вание дифференциального уравнения (1),
получаем результаты в виде графиков,
отображающих циклограмму зависимо-
сти изменения температуры с течением
времени (рис. 3-5).
Рисунок 3 - Излишняя
площадь РТО
Рисунок 4 - Недостаточная
площадь РТО
Рисунок 5 - Оптимальная
площадь РТО
При анализе построенных цикло-
грамм колебания температуры поверхно-
сти РТО возможен выбор его площади.
Площадь РТО выбирается таким образом,
чтобы на заданном интервале времени
колебания температуры не выходили за
допустимые пределы.
К примеру, если площадь РТО
больше, чем требуется (рис. 3), то излу-
чаемый РТО тепловой поток будет боль-
ше, чем тепловой поток, производимый
бортовыми системами. Следовательно,
температура как РТО, так и бортовых си-
стем начнёт уменьшаться.
На данном этапе исследования ис-
пользуются упрощённые математические
модели, описывающие тепловые процес-
сы на борту КА. В дальнейших исследо-
ваниях планируется усложнение матема-
тических моделей с целью возможности
расчёта распределения температур по
бортовым системам в процессе функцио-
нирования КА.
116
Библиографический список:
1. Голубев И.С. Проектирование
конструкций летательных аппаратов
[текст]: Учебник для студентов втузов /
Голубев И.С., Самарин А.В. - М.: Маши-
ностроение, 1991.-512с.
2. Куренков В.И. Основы устрой-
ства и моделирования целевого функцио-
нирования космических аппаратов
наблюдения [текст]: Учебное пособие /
В.И. Куренков, В.В. Салмин, Б.А. Абра-
мов. - Самара: Изд-во Самар, гос. аэро-
косм. ун-та, 2006. - 296 с.
3. Салмин В.В. Методы решения
вариационных задач механики космиче-
ского полета с малой тягой [текст]: сбор-
ник / В.В.Салмин, С.А.Ишков,
О.Л.Старинова - Самара: Изд-во Самар,
научню центра РАН, 2006. - 267 с.
References:
1. Golubev I.S. Structural design of
aircraft [text]: textbook for students of tech-
nical colleges / IS Golubev, AV Samarin -
M .: Engineering, 1991. - 512 p.
2. Kurenkov V.l. Basics of simulation
devices and target-ing functioning spacecraft
observations [text]: Textbook / VI Kuren-
kov, VV Salmin, BA Abramov. - Samara
Univ Samar, state, aerokosm. University
Press, 2006. - 296 p.
3. Salmin V.V. Methods of solution
of variational problems in the mechanics of
space flight with the low thrust [text]: a col-
lection / V.V.Salmin, S.A.Ishkov,
O.L.Starinova - Samara Univ Samar. Sci-
ence Centre, 2006. - 267 p.
DEVELOPMENT OF MATHEMATICAL MODELS FOR OPTIMAL DESIGN CHAR-
ACTERISTICS OF THE THERMAL CONTROL SYSTEM SPACECRAFT
©2015 V.V. Kuptsov
Samara State Aerospace University, Samara
This article developed a mathematical model of construction sequence diagram of temperature changes over
time on board the spacecraft. The model allows choosing the optimal performance of the thermal control system.
Key words: Low earth orbit space platform, patterns, changes in temperature, electrical power, thermal
regime
Информация об авторе:
Купцов Вячеслав Владимирович, студент четвёртого курса СГАУ, 443086, Россия,
г. Самара, ул. Лукачёва, 46, т. 8-927-765-49-76, slava.kuptcov94femail.ru.
Область научных интересов: математическое моделирование.
Kuptsov Vyacheslav Vladimirovich, fourth-year student SSAU, 443086, Russia, Samara,
Lukachev street, 46, 8-927-765-49-76, slava.kuptcov94femail.ru.
Area of research: mathematical simulation.
117
УКД 629.78
РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДЛЯ ВЫБОРА
ОПТИМАЛЬНЫХ ПРОЕКТНЫХ ХАРАКТЕРИСТИК ЭНЕРГОПИТАНИЯ
КОСМИЧЕСКОГО АППАРАТА
©2015 А. В. Письмаров
Самарский государственный аэрокосмический университет имени
академика С. П. Королёва
(национальный исследовательский университет), Самара
В работе разрабатывается математическая модель построения циклограммы энергопитания на борту
КА. Модель позволяет выбрать оптимальные характеристики системы энергопитания.
Ключевые слова: низкоорбитальная космическая платформа, солнечные батареи, циклограмма элек-
тропитания, электрическая мощность, потребная мощность, математическая модель
На сегодня существует проект низ-
коорбитальной космической с вытянутым
вдоль продольной оси КА корпусом в
форме призмы. В качестве одного из ос-
новных требований - создание ориента-
ции КА в полете таким образом, чтобы
площадь миделева сечения была мини-
мальной. Солнечные батарей КА разме-
щаются на боковых гранях корпуса КА и
силовых аэродинамических поверхностях
(см. рис. 1).
Рис. 1 - Размещение солнечных батарей на КА
Цель работы заключается в разра-
ботке алгоритма построения циклограм-
мы энергопитания и энергопроизводства
электрической энергии на борту КА.
Для выбора оптимальных геометри-
ческих характеристик с учетом требуе-
мой энергии на КА будем рассматривать
следующую расчетную схему, представ-
ленную на рис. 2. Изменяя диаметр попе-
речного сечения и длину КА нужно до-
биться требуемой энергетики при допу-
стимой силе лобового сопротивления, а
также габаритами под обтекателем PH.
Рис. 2 - Расчетная схема КА
118
Для определения среднесуточной
электрической мощности, получаемой от
солнечных батарей, используется выра-
жение
^ср.сут ^уд.СБ ' ^СБ ' (1)
где JVcpcyT - среднесуточная электриче-
ская мощность от солнечных, Вт; Л^удСБ -
удельная электрическая мощность сол-
нечных батарей, Вт/м2; cosacp - средне-
интегральный косинус угла между нор-
малью к панели солнечной батареи и век-
тором, направленным от панели на Солн-
це, рад.
Общая площадь солнечных батарей
для геометрической модели КА на ри-
сунке 2 вычисляется из выражения:
•^СБ 2 ‘ ^пан.бок ^пан.корп 2 ' А ' L ~1~
п R L, (2)
Подставив (2) в (1) получим мате-
матическое выражение вычисления сред-
несуточной электрической мощности для
геометрической модели КА:
^ср.сут 2 ’ А ’ L ’ Ууд.СБ COS££Cpi + тг
R L- Л/уд.СБ • cosacp2, (3)
где cosacpl - среднеинтегральный коси-
нус угла альфа для плоской панели сол-
нечно батареи, расположенной перпен-
дикулярно радиальной оси орбитальной
системы координат; cosacp2 - среднеин-
тегральный косинус угла альфа для сол-
нечной батареи, выполненной в виде
наклеенных на цилиндрический корпус
КА фотоэлектрических преобразовате-
лей.
Для расчета потребляемой электро-
энергии используется выражение
ЛГприб = и (4)
где U(t) - напряжение, потребляе-
мое прибором в текущий момент време-
ни, В; I(t) - сила тока, потребляемая при-
бором, А.
Разбивая весь период обращения
КА по орбите на небольшие участки, -
шаг интегрирования - задаются дискрет-
но значения силы тока и напряжения для
каждого прибора на каждом шаге.
Суммируя полученную потребляе-
мую мощность на каждом интервале вре-
мени, подсчитанную по формуле (4), сто-
ится циклограмма потребляемой энергии.
Для подсчета производимой энер-
гии в окно исходных данных задаются
параметры солнечной батареи: удельная
мощность, площадь солнечной батареи и
дискретно задается среднеинтегральный
косинус угла альфа. Производимая энер-
гия от солнечных батарей подсчитывает-
ся по формуле 3, и строиться циклограм-
ма мощности.
Чтобы убедиться в оптимальном
выборе параметров солнечной батарей,
строится циклограмма разности между
циклограммой производимой энергии от
солнечной батареи и потребляемой энер-
гии приборами. Если она будет уходить в
отрицательную часть, это говорит о том,
что на данном интервале времени элек-
трической энергии не хватает приборам,
и необходимо оперировать характеристи-
ками батареи, до тех пор, пока цикло-
грамма не выйдет из отрицательной зоны.
Библиографический список:
1. Голубев И.С., Проектирование
конструкций летательных аппаратов
[текст]: Учебник для студентов втузов /
Голубев И.С., Самарин А.В. - М.: Маши-
ностроение, 1991. - 512 с.
2. Куренков В.И., Основы устрой-
ства и моделирования целевого функцио-
нирования космических аппаратов
наблюдения [текст]: Учебное пособие /
В.И. Куренков, В.В. Салмин, Б.А. Абра-
мов. - Самара: Изд-во Самар, гос.
аэрокосм, ун-та, 2006. - 296 с
3. Салмин В.В., Методы решения
вариационных задач механики космиче-
ского полета с малой тягой [текст]: сбор-
ник / В.В. Салмин, С.А. Ишков,
О.Л. Старинова - Самара: Изд-во Самар,
научню центра РАН, 2006. - 267 с.
References:
1. Golubev I.S., Structural design of
aircraft [text]: textbook for students of tech-
nical colleges I LS. Golubev, A.V. Samarin -
M .: Engineering, 1991. - 512 p.
2. Kurenkov V.L, Principles and
modeling of the target device operation of
spacecraft observations [text]: Textbook /
V.I. Kurenkov, V.V. Salmin, B.A. Abramov.
- Samara, Samara state aerospace university
Press, 2006. - 296 p.
119
3. Salmin V.V., Methods for solving
variational problems in the mechanics of
space flight with a low-thrust [text]:
V.V. Salmin, S.A. Ishkov, O.L. Starinova -
Samara, Samara Science Centre, 2006. - 267
P-
DEVELOPMENT OF MATHEMATICAL MODELS FOR OPTIMAL DESIGN
CHARACTERISTICS OF POWER SUPPLY SPACECRAFT
© 2015 A.V. Pismarov
Samara State Aerospace University, Samara
This article developed a mathematical model of construction sequence diagram of
power supply on board the spacecraft. The model allows choosing the optimal performance of the accessory power
system.
Key words: low orbi/ space platform, solar panels, eycloyrarn electricity supply, electric power, required
power, mathematical model
Информация об авторах:
Письмаров Андрей Викторович, студент четвёртого курса СГАУ, 443086, Россия,
г. Самара, ул. Лукачёва 46, т. 8-927-772-55-30, andrei pismarovfemail.ru.
Область научных интересов: математическое моделирование.
Pismarov Andrey Viktorovich, fourth-year student SSAU, 443086, Russia, Samara,
Lukachev street, 46, 8-927-772-55-30, andrei pismarovfemail.ru.
Area of research: mathematical simulation.
120
УДК 532.54
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ КОЛЕБАНИЯ ТОПЛИВА В ИЗМЕРИТЕЛЬНОМ
КАНАЛЕ СУРТ
©2015 Н.И. Клюев1, Ю.А. Крюков2
'Самарский Государственный Университет (СамГУ), г.Самара
2АО «РКЦ Прогресс», г.Самара
Рассматривается задача о колебаниях топлива в измерительном цилиндрическом канале СУРТ. По
уровню топлива в измерительном канале, фиксируемом датчиками внутри него, определяют уровень топли-
ва в баке. Известно, что уровень топлива в канале и баке не совпадает.
Построена математическая модель движения топлива в канале на основе параболического уравнения
типа теплопроводности. Приведено численное решение схемой Кранка-Никольсона. Получены результаты,
свидетельствующие о квазипериодических колебаниях топлива в канале. Приведено сравнение результатов
с результатами, полученными в пакете Ansys Fluent. Сопоставление результатов показывает удовлетвори-
тельное совпадение.
Ключевые слова: СУРТ, измерительный канал, датчики уровня, топливный бак, уровень свободной
поверхности
Одним из важных элементов ракеты
носителя является система управления
расходованием жидкого топлива в баках.
От достоверного определение уровня го-
рючего и окислителя в баках зависит их
синхронное опорожнение и гарантиро-
ванный остаток. Для контроля уровня
жидкости в баке применяется следующий
метод: в бак устанавливают вертикаль-
ный цилиндрический канал, внутри кото-
рого помещают датчики уровня (рис.1).
Рис. 1 - Схема топливного бака. 1- бак, 2-топливо, 3-измерительный канал с датчиками, р0 - давле-
ние наддува, £, - уровень топлива в цилиндрическом канале, Н - уровень топлива в баке, g - ускорение
свободного падения.
Верхний срез цилиндрического ка-
нала находится выше уровня топлива в
баке, поэтому перетекание жидкости в
этом месте исключено. Через нижний
срез жидкость свободно сообщается
между баком и каналом. Над свободной
поверхностью жидкости в баке и канале
поддерживается постоянное давление р0
(давление наддува). При опорожнении
топлива из бака по уровню свободной
поверхности жидкости в цилиндрическом
канале, фиксируемом датчиками, опреде-
ляют уровень в баке. Известно, что уро-
вень свободной поверхности в канале
S,(t) и баке H(t) отличаются. Целью
настоящей работы является исследование
121
движения жидкости под действием силы
тяжести в цилиндрическом канале и
определение в нем уровня свободной по-
верхности при падении уровня жидкости
в баке (израсходовании топлива).
На рис. 2 приведена разница уров-
ней свободной поверхности в баке и ка-
нале A(t)=H(t)-!j(t) в первые секун-
ды процесса. На рис. 2 маркерами обо-
значены данные, полученные в Ansys
Fluent, сплошной линией - по предло-
женной модели.
Рис. 2 Разница уровней свободной поверхности в баке и канале
В канале реализуется квазиперио-
дический процесс с уменьшающимися
условными амплитудой и частотой коле-
баниями свободной поверхности.
Результаты, полученные по пред-
ложенной модели близки с результатами,
полученными в пакете Ansys Fluent, что
косвенно подтверждает их адекватность
и отражение физики рассматриваемого
процесса в предложенной модели.
Предложенная модель может быть
использована для оценки колебаний жид-
кого топлива в измерительных каналах
СУРТ, а также может являться основой
для разработки более сложных моделей.
Библиографический список:
1. Н.А. Слезкин Динамика вязкой
несжимаемой жидкости/Н.А. Слезкин.-
М.: Гостехиздат, 1955.-520 с.
2. Л.Г. Лойцянский Механика жид-
кости и газа, «Наука», М., 1970.-904 с.
3. Д.Н. Попов Нестационарные
гидромеханические процессы/Д.Н. По-
пов. - Машиностроение, 1982. - 240 с.
4. В.Н. Талиев Аэродинамика вен-
тиляции, «Стройиздат», М., 1979.- 295 с.
5. Л.Г. Лойцянский Механика жид-
кости и газа, «Дрофа», 1987. -676 с.
6. Д.А. Фокс Гидравлический ана-
лиз неустановившегося течения в трубо-
проводах: Пер. с англ. - М.: Энергоиздат,
1981.-248 с.
7. Н.Н. Калиткин Численные мето-
ды, «Наука», М., 1978.-512 с.
8. А.А. Самарский Теория разност-
ных схем, «Наука», М., 1977.-656 с.
9. ANSYS FLUENT 12.0 Theory
Guide, 2009.
URL:http://orange.engr.ucdavis.edu/Docum
entation 12,0/120/FLUENT/flth.pdf
(дата обращения: 19.01.2015)
122
MATHEMATICAL MODEL OF FUEL OSCILLATIONS IN MEASURING CHANNEL
©2015 N. I. Klyuev1 and Y. A. Kryukov2
’Samara State University, Samara
2JSC «SRC «Progress», Samara
The problem of fuel fluctuation in the measuring channel is considered. The fuel level in the tank is measured
by sensors inside the measuring channel. It is known that the level of fuel in the tank and the channel do not match.
Mathematical models of the fuel flow in the channel are shown. Numerical solutions of the presented model
are given. The results indicate a quasi-periodic oscillation of the fuel in the channel. The solution of the problem by
Ansys Fluent shown for verification. Comparison of results obtained by different methods is satisfactory.
Key words: tank process, fuel fluctuation in the measuring channel, mathematical models, Ansys Fluent
Информация об авторах:
Клюев Николай Ильич, д.т.н., профессор, зав. кафедрой математического модели-
рования в механике СамГУ, 443011, Россия, г. Самара, ул. Акад. Павлова, 1, тел. 334-54-
40, nikolay klyuevfemail.ru.
Область научных интересов: тепло-и массообмен, двухфазные потоки, баковые про-
цессы и тепловые трубы для космической техники
Крюков Юрий Александрович, инж.-констр. II кат. АО «РКЦ «Прогресс», аспи-
рант кафедры математического моделирования в механике СамГУ, тел. 228-94-48,
yurakryukovl985femail.ru.
Область научных интересов: аэрогидродинамика, математическое моделирование
Nikolay I. Klyuev, Doctor of Technical sciences, professor, head of Dept, of Mathemati-
cal Modeling in Mechanics, Samara State University, Samara, 443011, Russia,
nikolay klyuevfemail.ru.
Research field: heat and mass transfer; two-phase flows; tank processes and problems of
heat-pipes for space technology
Yuri A. Kryukov, design engineer of JSC «SRC «Progress»; post-graduate student, Dept,
of Mathematical Modeling in Mechanics, Samara State University, yurakryukov 1985femail.ru.
Research field: aerohydrodynamics, mathematical simulation
123
УДК 539.3
РАЗЛИЧНЫЕ РЕЖИМЫ ЦИКЛИЧЕСКОГО НАГРУЖЕНИЯ КОНСТРУКЦИЙ:
КОНЕЧНО-ЭЛЕМЕНТНЫЙ АНАЛИЗ ДВУХОСНОГО НАГРУЖЕНИЯ
УПРУГОПЛАСТИЧЕСКОЙ ПЛАСТИНЫ С ВЫРЕЗОМ
©2015 В.А. Туркова
АО «РКЦ «Прогресс», г. Самара;
Самарский государственный университет, г. Самара
В докладе обсуждаются инкрементальные и прямые методы определения асимптотического поведе-
ния неупругих элементов конструкций в условиях циклического нагружения. В работе представлены мето-
ды нахождения диапазонов нагрузок, при которых реализуются различные режимы асимптотического пове-
дения конструкции: приспособляемость, знакопеременная пластичность и прогрессирующее пластическое
течение. В конечно-элементном пакете SIMULIA Abaqus выполнено пошаговое циклическое нагружение
образца с концентраторами напряжений (двухосное периодическое нагружение пластины с центральным
отверстием). Определены диапазоны нагрузок, при которых реализуется приспособляемость и знакопере-
менная пластичность.
Ключевые слова: приспособляемость, знакопеременная пластичность, рэтчеттинг, конечно-
элементный анализ, инкрементальный анализ, циклическое нагружение, асимптотическое поведение кон-
струкции, пластические деформации, стабилизированное состояние
В настоящее время элементы кон-
струкций, подверженные действию пери-
одических термомеханических нагрузок,
часто функционируют за их пределом
упругости. Прочностной анализ таких
инженерных сооружений и элементов
конструкций представляет собой важную
задачу, как с инженерной точки зрения,
так и с теоретической точки зрения [1-3].
Примерами элементов конструкций, ра-
ботающих в таких условиях, могут слу-
жить сосуды, находящиеся под действи-
ем внутреннего давления, детали в общем
машиностроении, в авиационно-
космической отрасли. В гражданском
строительстве такие ситуации возникают
при проектировании таких конструкций
как дамбы, морские или океанские плат-
формы, здания и мосты, находящихся в
сейсмически активных зонах.
Полный отклик конструкции, под-
верженной действию сложной системы
термомеханических нагрузок, чрезвы-
чайно сложен и может включать неупру-
гие (пластические) деформации. Причина
сложного описания поведения данной
конструкции заключается в необходимо-
сти выполнения вычислений, включаю-
щих всю историю нагружения конструк-
ции.
Если тело деформируется упруго,
то при переменных нагрузках прочность
определяется усталостными характери-
стиками материала; разрушение наступа-
ет после больше большого числа циклов.
Если же тело испытывает упругопласти-
ческую деформацию, то при нагрузке,
ниже предельной, возможно достижение
опасного состояния при сравнительно
малом числе циклов. При этом следует
различать два случая. 1.Разрушение
наступает вследствие чередования пла-
стических деформаций разного знака
(например, после пластического растя-
жения происходит пластическое сжатие и
т.д.). Это - так называемая знакоперемен-
ная пластичность (пластическая или ма-
лоцикловая усталость). 2. Пластические
деформации не меняют знака, но нарас-
тают с каждым циклом (прогрессирую-
щая деформация - рэтчеттинг). Это при-
водит к недопустимому накоплению пла-
стических деформаций.
В настоящей работе исследование
трех возможных режима асимптотиче-
ского поведения упругопластического
тела под действием переменного нагру-
жения осуществлялось на примере пла-
стины с центральным отверстием. На ос-
новании проведенного вычисли-
124
тельного эксперимента на примере двух-
осного нагружения пластины установле-
ны диапазоны нагрузок, при которых для
конструкции достигается приспособляе-
мость, знакопеременная пластичность и
рэтчеттинг.
Библиографический список:
1. Fuschi Р., Pisno A.A., Weichert D.
Direct methods for limit and shakedown
analysis of structures, Springer, 2015. -
3313 p.
2. Spiliopoulos .K, Weichert D. Direct
methods for limit states in structures and
materials, Springer, 2014. - 278 p.
3. Степанова Л.В. Математические
методы механики разрушения, Самара,
Самарский университет, 2006. - 232с.
References:
1. Fuschi Р, Pisno А.А., Weichert D.
Direct methods for limit and shakedown
analysis of structures, Springer, 2015. -
3313 p.
2. Spiliopoulos .K, Weichert D. Direct
methods for limit states in structures and
materials, Springer, 2014. - 278 p.
3. Stepanova L.V. Mathematical
methods of fracture; - Samara: Samara State
University, 2006 - 232 p.
DIFFERENT TYPES OF ASYMPTOTIC BEHAVIOR: FINITE ELEMENT ANALYSIS
OF THE TWOAXIAL LOADING OF THE ELASTO-PLASTIC PLATE WITH THE
CENTRAL HOLE
©2015 V.A. Turkova
JSC «SRC «Progress», Samara;
Samara State University
Nowadays due to the growth of interest to the knowledge of asymptotic behavior of the structure subjected to
cyclic loading, direct and incremental methods of stabilized state determining begin to develop. The full response of
the structure subjected to a complex system of loads is extremely complicated and can include plastic strain. Neces-
sity of calculations including the whole history of loading makes the description of the structure behavior so diffi-
cult. Results of finite-element (FEM) calculations of the asymptotical behavior of an elastoplastic plate with the cen-
tral hole under the biaxial cyclic loading are presented in the article. Incremental cyclic loading of the sample with
stress raisers is executed in the multifunctional finite-element package SIMULIA Abaqus. The ranges of loads found
for shakedown, cyclic plasticity, ratchetting are presented.
Key words: shakedown, cyclic plasticity, ratchetting, finite element analysis, incremental method, cyclic load-
ing, asymptotic behavior of the structure, plastic strain, stabilized cycle
Информация об авторах:
Туркова Вера Александровна, инженер-программист 2 категории АО «РКЦ
«Прогресс», аспирант кафедры математического моделирования в механике, СамГУ,
443 011, Россия, г.Самара, ул. Академика Павлова, 1, turkovavafesamsu.ru.
Область научных интересов: обратные некорректные задачи в физическом экспери-
менте.
Turkova Vera Aleksandrovna, programmer, JSC «SRC «Progress», post-graduate stu-
dent of chair of mathematical modeling in mechanics of Samara State University,
turkovavafesamsu.ru.
Area of research: inverse tasks, mathematical simulation.
125
УДК 519.711.72
ЗАДАЧА ВЫБОРА ОПТИМАЛЬНОЙ КОНФИГУРАЦИИ БОРТОВЫХ СРЕДСТВ
КОСМИЧЕСКОГО АППАРАТА
©2015 А.Ю. Кулаков
ФГУП "КБ "Арсенал" имени М.В. Фрунзе"
На борту космического аппарата (КА) в процессе его функционирования неизбежно возникают сбои и
отказы бортовых средств (БСр), которые могут приводить к развитию нештатных ситуаций в аварии. Чтобы
бороться с этим явлением требуется переводить КА из неработоспособного структурного состояния в неко-
торое работоспособное. В статье рассмотрена задача выбора рабочей конфигурации бортовых средств КА
для работоспособного структурного состояния. Такая задача формализована в виде многокритериальной
задачи целочисленного программирования. Рассмотрены подходы её решению с помощью "жадного" алго-
ритма и метода случайного направленного поиска.
Ключевые слова: структурная надёжность, реконфигурация системы, структурная динамика,
управление бортовым ресурсом
В процессе функционирования
сложной технической системы (СТС)
непременно возникают случаи, связанные
с реконфигурацией её структуры. Рекон-
фигурация - это один из видов управле-
ния структурной динамикой СТС, кото-
рый включает в себя комплекс операций,
изменяющих структуры СТС и обеспе-
чивающих сохранение или повышение
уровня её целевых и информационно-
технологических возможностей, либо
обеспечивающих наиболее «благоприят-
ный» процесс деградации [1].
Стандартная технология реконфи-
гурации СТС при отказе одного из её
технических средств включает в себя
следующие основные шаги [2]:
Шаг 1. Определение и анализ мо-
мента времени и места отказа ресурса,
снятие с решения задачи, выполняемой
на данном ресурсе, передача задачи на
другой ресурс (с сохранением / без со-
хранения полученных промежуточных
результатов).
Шаг 2. Исключение отказавшего
ресурса из конфигурации СТС, попытка
замены его резервным (однотипным), ли-
бо резервным другого типа, с близкими
функциональными возможностями.
Шаг 3. Исключение связей с отка-
завшим ресурсом, запрет на доступ к
нему, а для самого отказавшего ресурса -
попытка его восстановления.
Данную реконфигурацию в ряде
случаев называют «слепой реконфигура-
цией», так как в ходе её реализации, не
проводятся следующие операции:
• учёт и анализ текущих характе-
ристик решаемых в СТС задач и выпол-
няемых функций;
• анализ и оценивание текущего
состояния СТС в целом;
• оперативный расчёт, оценивание
и анализ целевых и информационно-
технических возможностей СТС для
обоснованного перераспределения функ-
ций СТС между её работоспособными
элементами и подсистемами.
Космический аппарат (КА) как
частный случай сложной технической
системы в процессе эксплуатации так же
может претерпевать структурные изме-
нения (структуры контура управления).
То есть структура контура бортового
управления (КБУ) зависит от изменения
состояний бортовых средств (БСр) КА.
Зачастую такие изменения связаны со
сбоями и отказами БСр (перевод их в не-
работоспособное состояние), приводящих
к неправильной работе КБУ.
В случае возникновения нештатной
ситуации на борту КА текущая структура
КБУ КА оказывается неработоспособной.
126
Тогда необходим синтез новой
структуры, который происходит с помо-
щью "живого" интеллекта, то есть по-
средством анализа человеком телеметри-
ческой информации (ТМИ) на Земле и
принятия управленческих решений о вос-
становлении работоспособности БСр КА
через закладку рабочих программ с тех-
нических средств НКУ. Задачу синтеза
нового структурного состояния можно
разделить на две подзадачи: подзадачу
выбора рабочей конфигурации БСр и
подзадачу выбора режима функциониро-
вания КА.
Рассмотрим задачу выбора конфи-
гурации БСр по заданным критериям. Та-
кую задачу можно формализовать в виде
оптимизационной задачи:
С(х) -> max, (1)
S"=0Xi-*min, (2)
<а,(х) < = 1,2, ...,L, (3)
F(x) > 0, (4)
Xj e {0,1},i = 1,2, ...,n,
где x = {х1л x2,..., xn] - вектор состояния
БСр, для которого:
(1, если i — е БСр необходимо включить
0, если i — е БСр исключить из контура ’
где п - общее число БСр, W'i(x) - функ-
ция, определяющая интенсивность рас-
ходования 1-го ресурса работающими
средствами, - предельно допустимое
значение интенсивности расхода /-го ре-
сурса, 1 = 1,2, ...,L - вид бортового ре-
сурса, С(х) - заданный критерий выбора
рабочей конфигурации БСр, F(x) - оцен-
ка структурной надёжности КБУ для вы-
бранного режима.
Например, для энергопотребления
функция -Mt3(x) будет определяться как
сумма интенсивности энергопотребления
работающих средств <^э(х) = ZF=oxi ’
Wj, где Wj - энергопотребление i-го БСр.
Оценка структурной надёжности
рассчитывается следующим образом [2]:
F(x) = r(P, xvP2x2.P„ xn)|P1=0S =
/о/о’-/о’Г<Р< Х»Р2 Х2.Рп Хп ')dPldP2...dPn '
где г(рг • xt, Р2 • х2,... ,РП-Хп ) - веро-
ятностная функция безотказной работы
КБУ.
Вышеописанная задача является
многокритериальной задачей целочис-
ленного программирования. Для её ре-
шения предлагается использовать "жад-
ный" алгоритм и метод случайного
направленного поиска [3]. Решение осу-
ществляется в два этапа:
1) Нахождение подмножества ДХ
недоминирующих по критерию (2) аль-
тернатив, удовлетворяющих ограничени-
ям (3), (4);
2) Выбор из подмножества ДХ оп-
тимального по критерию (1).
Таким образом, результатом реше-
ния данной оптимизационной задачи бу-
дет являться эффективная рабочая кон-
фигурация БСр. Это поможет формали-
зовать задачу синтеза работоспособного
структурного состояния контура управ-
ления на борту КА. В перспективе по-
добную задачу выбора можно решать с
помощью бортовых вычислителей КА и
использовать результаты для проведения
реконфигурации БСр КА в автоматиче-
ском режиме.
Библиографический список:
1. Охтилев М.Ю., Интеллектуаль-
ные технологии мониторинга и управле-
ние структурной динамикой сложных
технических объектов / М.Ю. Охтилев,
Б.В. Соколов, Р.М. Юсупов. - М.: Наука,
2006.-410 с.
2. Павлов А.Н., Соколов Б.В.
Структурный анализ катастрофоустойчи-
вых информационных систем // Труды
СПИИРАН, 2009, Вып. 8, СПб.: СПИ-
ИРАН, с. 128-151
3. Растригин Л.А., Адаптация
сложных систем / Л.А. Растригин - Рига,
Зинанте, 1981,- 375 с.
References:
1. Ohtilev M.U., Sokolov B.V.,
Usupov R.M., Intelligent technology of
monitoring and control of structural dynam-
ics of complex technical systems; - Mos-
cow: Publishing house "Science", 2006. -
410 p.
2. Pavlov A.N., Sokolov B.V. Struc-
tural analysis of disaster tolerance infor-
mation systems; - Saint-Petersburg: Science
127
Magazine “SPIIRAS proceedings”, 2009, 3. Rastrigin L.A. Adaptation of com-
№8- 128-151 p. plex systems; - Riga:Publishing house "Zi-
nate",1981 -375p.
TASK OF CHOISE OF OPTIMAL CONFIGURATION FOR BOARD DEVICE OF
SPASECRAFT
©2015 A.U. Kulakov
FSUE "DB "Arsenal"
Fault and failures that can lead to the development of abnormal situation in an damage are bound to arise on
board of spacecraft. To combat this phenomenon should be translated spacecraft from inoperable to a usable state. In
this article considered task of choise of optimal configuration for board device of spasecraft for new
structural consist. Task formalized as multi-criteria optimization task of integer programing. The author suggests
approaches to solving of task of choise by "greedy" algorithma and method of random directional search.
Key words: structural reliability, reconfiguration of system, Structural dynamics, control of hoard re-
source
Информация об авторах:
Кулаков Александр Юрьевич, инженер 2 категории ФГУП "КБ "Арсенал", аспи-
рант лаборатории информационных технологий в системном анализе и моделировании,
СПИИРАН, 195 009, Россия, г. Санкт-Петербург, ул. Комсомола, д. 1-3, т. 8-951-675-2354,
russ69tebk.ru.
Область научных интересов: управление структурной динамикой, анализ сложных
технических систем.
Kulakov Alexandr Yuryevich, Engineer, FSUE DB “Arsenal”, post-graduate student,
Lab for information technology in systems analysis and modeling, SPIIRAS, russ69tebk.ru, tel.:
8-951-675-2354. Area of research: control of structural dynamics, analysis of complex technical
systems.
128
УДК 621.396.6.536.248.2.001
ТЕЧЕНИЕ ВЯЗКОЙ ЖИДКОСТИ В ТОНКОМ СЛОЕ НА ПОЛУПЛОСКОСТИ
©2015 Н.И. Клюев1, Е.И. Бакулин2
'Самарский государственный университет, г. Самара
2АО РКЦ «Прогресс», г. Самара
Рассматривается течение жидкой пленки на полуплоскости под действием силы тяжести и внешнего
потока воздуха. Для решения задачи используется метод малого параметра, получено численное решение
нулевого приближения задачи. Результаты представлены в виде зависимости толщины пленки и средней
продольной скорости от длины пластины. Показано, что нулевое приближение дает хорошую точность ре-
шения.
Ключевые слова: Пленка, пограничный слой, трение, нулевое приближение
Течение жидкой пленки под дей-
ствием внешнего потока газа часто
встречается в технических приложениях.
Например, дождевая пленка на поверхно-
сти летательного аппарата уменьшает со-
противление трения и может быть ис-
пользована как элемент управления по-
граничным слоем.
Впервые проблема ламинарных
пленок с гладкой поверхностью была по-
дробно рассмотрена Нуссельтом. Позднее
в работах Киркбрайта и С.С. Кутателадзе
была поставлена проблема турбулентных
пленок. Проблема волнового стекания
ламинарных пленок была поставлена
П.Л. Капицей.
Рассмотрим установившееся тече-
ние плоской пленки переменной толщи-
ны под действием силы тяжести и внеш-
него потока воздуха. Пленка жидкости на
поверхности пластины формируется вы-
давливанием жидкости через пористую
поверхность (рис. 1).
Рис. 1. Схема течения пленки: u, v -компоненты вектора скорости,
Vk - скорость вдува массы, LL - скорость набегающего потока.
Математическая постановка задачи
включает в себя уравнения движения в
приближении пограничного слоя и урав-
нение неразрывности для несжимаемой
жидкости. Решение задачи получено в
пакете прикладных программ Mathcad,
результаты представлены на графиках
рис. 2 и рис. 3 для а=7Т/2 и числа Рей-
нольдса Re=10.
129
Рис. 2. Продольная скорость
1. т=0 2. т=0,015
Рис. 3. Толщина пленки
1. т=0 2. т=0,015
Как и следовало ожидать, спутный
поток воздуха увеличивает среднюю
продольную скорость и уменьшает тол-
щину пленки. На графиках рис. 4 и рис. 5
показано изменение продольной скорости
и толщины пленки при т=0 и Re=10 для
разных углов атаки а=л/4 и а=тт/6.
Рис. 4. Продольная скорость
1. а=~/4 2. а= л/6
Рис. 5. Толщина пленки
1. а=л/4 2. а=л76
Из графиков видно, что увеличение
угла атаки приводит к увеличению про-
дольной скорости и уменьшению толщи-
ны пленки.
Нулевое приближение дает хоро-
шую точность решения и может быть ис-
пользовано при моделировании плоского
течения пленки под действием силы тя-
жести и внешнего потока воздуха.
Библиографический список:
1. Лойцянский Л.Г. Механика жид-
кости и газа; - М.: Изд-во «Наука», 1973.
- 847 с.
2. Кудрявцев Л.Д. Математический
анализ; М.: Изд-во «Высшая школа»,
1973.-470 с.
3. Nikolay I. Klyuev, Asgat G.
Gimadiev, Yuriy A. Kryukov. Two-media
boundary layer on a flat plate./ International
Journal of Engineering and Technology
ISSN: 0975-4024. 2014. Vol. 6. No 5.
Р.2368-2374.
4. Кутателадзе С.С, Стырикович
М.А. Гидродинамика газожидкостных
систем; - М.: Изд-во «Энергия», 1976. -
297 с.
References:
1. Loytsyansky L.G. Fluid mechanics;
- Moscow: “Science”, 1973. - 847 p.
2. Kudryavtsev L.D. Mathematical
analysis; Moscow: “Higher school”, 1973. -
470 p.
3. Nikolay I. Klyuev, Asgat G.
Gimadiev, Yuriy A. Kryukov. Two-media
boundary layer on a flat plate./ International
Journal of Engineering and Technology
ISSN: 0975-4024. 2014. Vol. 6. No 5.
P.2368-2374.
4. Kutateladze S.S., Styrikovich M.A.
Hydrodynamics of gas-liquid systems; -
Moscow: “Energy”, 1976. - 297 p.
130
VISCOUS LIQUID FLOW IN THE THIN LAYER ON THE HALF-PLANE
©2015 N.I. Klyuev1, E.I. Bakulin2
’Samara State University, Samara
2JSC «SRC «Progress», Samara
The liquid film flow on a half-plane under the action of gravity and an external flow of air is considered. The
method of small parameter is used for the problem solution; the numerical solution of zero order approximation of a
problem is received. Results are presented in the form of dependence of film width and average longitudinal velocity
on length of a plate. It is shown that zero order approximation gives a good accuracy of the solution.
Key words: The thin Jilm, boundary layer, friction, zero order approximation
Информация об авторах:
Клюев Николай Ильич, д.т.н., профессор, СамГУ, 443 068, Россия, г. Самара,
Академика Павлова, 1, т. 334-54-40, nikolay klyuevtemail.ru .
Область научных интересов: механика жидкости и газа.
Бакулин Евгений Игоревич, инженер-конструктор 3 категории АО РКЦ
«Прогресс», аспирант кафедры математического моделирования в механике, СамГУ,
443 068, Россия, г.Самара, Академика Павлова, 1, т. 8-927-705-60-67,
bakulin.eugenetegmail.com.
Область научных интересов: механика жидкости и газа.
Klyuev Nikolay Ilyich, professor, doctor of technical sciences, SSU, 443 068, Russia,
Samara, the academician Pavlov’s street, 1, 334-54-40, nikolay klyuevtemail.ru .
Area of research: fluid mechanics.
Bakulin Eugene Igorevich, engineer, JSC SRC «Progress», post graduate student of chair
of mathematical modeling in mechanics of Samara State University, 8-927-705-60-67,
bakulin.eugenetegmail.com.
Area of research: fluid mechanics.
131
УДК 621.01/03:539.4
РАСЧЕТ ДОЛГОВЕЧНОСТИ СИЛЬФОНА
ПО КРИТЕРИЯМ МАЛОЦИКЛОВОЙ ПРОЧНОСТИ
©2015 А.И. Аистов, Ю.В. Скворцов, С.А. Чернякин, С.В. Глушков
Самарский государственный аэрокосмический университет
имени академика С. П. Королёва
(национальный исследовательский университет), Самара
В работе рассмотрена универсальная методика оценки усталостной прочности с использованием мо-
дуля «Fatigue» CAE-системы ANSYS Workbench. Выполнен расчёт напряжённо-деформированного состоя-
ния сильфона в виде гофрированной двухслойной оболочки. По результатам данного расчёта проведена
оценка его долговечности при малоцикловой усталости.
Ключевые слова: малоцикловая усталость, долговечность, метод конечных элементов, петля гисте-
резиса, пластичность, сильфонный компенсатор, гофрированная двухслойная оболочка
Вопросы малоцикловой прочности
элементов конструкций машин на протя-
жении последних десятилетий являлись
предметом самого пристального рассмот-
рения. Расчёт на малоцикловую проч-
ность стал возможен в результате экспе-
риментального изучения закономерно-
стей сопротивления деформированию и
разрушению при циклическом упруго-
пластическом деформировании.
В настоящей работе рассматривает-
ся универсальная методика оценки уста-
лостной прочности элементов конструк-
ций с использованием специализирован-
ного модуля «Fatigue» современной САЕ-
системы ANSYS Workbench. Данный мо-
дуль предназначен для исследования как
многоцикловой, так и малоцикловой
прочности конструкций. При этом в пер-
вом случае долговечность определяется
на основе характеристик цикла напряже-
ний. В качестве исходных данных здесь
используется кривая усталости Вёлера,
описывающая зависимость амплитуды
напряжения от числа циклов до разруше-
ния. Она задаётся набором точек. Во вто-
ром случае применяется деформацион-
ный подход. Деформационная кривая
усталости, представляющая собой зави-
симость амплитуды полной деформации
от числа полуциклов до разрушения, в
отличие от кривой Вёлера задаётся ана-
литически в виде уравнения Басквина-
Мэнсона-Коффина. Анализ усталости в
модуле «Fatigue» основывается на ре-
зультатах расчёта напряжённо-
деформированного состояния конструк-
ции в упругой постановке. При этом в
деформационном подходе для учёта не-
упругого деформирования материала
применяется правило Нейбера и цикли-
ческая диаграмма деформирования
Рамберга-Осгуда. Модуль «Fatigue» поз-
воляет проводить расчёты как при посто-
янной, так и при переменной амплитуде
напряжений или деформаций. При пере-
менной амплитуде схематизация истории
нагружения выполняется методом «па-
дающего дождя», а суммирование повре-
ждений проводится согласно правилу
Пальмгрена-Майнера. Кроме того, в слу-
чае определения долговечности по
напряжениям нагружение может быть не
только пропорциональным, но и непро-
порциональным.
Представлены методика и результа-
ты расчёта сильфонного компенсатора на
малоцикловую прочность. Основным
элементом данной конструкции является
гофрированная двухслойная оболочка,
работающая в крайне тяжёлых условиях
нагружения. При этом имеют место все
возможные виды нелинейностей (и
большие перемещения, и развитые пла-
стические деформации, и контактное вза-
имодействие отдельных гофров). Учиты-
вая, что упрощённая постановка,
132
реализуемая в модуле «Fatigue», не поз-
воляет оценивать долговечность таких
конструкций, моделирование и расчёт
напряжённо-деформированного состоя-
ния сильфона проводится непосредствен-
но в среде ANSYS. Решение данной зада-
чи выполняется пошаговым методом по-
следовательных нагружений. Как пока-
зывают результаты расчётов, наиболее
неблагоприятные условия для накопле-
ния усталостных повреждений здесь воз-
никают на внутренней поверхности
наружного слоя двухслойной оболочки в
местах впадин гофров. Для этих точек
построены диаграммы циклического де-
формирования, которые после несколь-
ких циклов нагружения стабилизируют-
ся. По стабилизированной петле гистере-
зиса наиболее нагруженного гофра и
находится амплитуда полных деформа-
ций. В заключение с использованием
данного значения по деформационной
кривой усталости определяется долго-
вечность рассматриваемого сильфона.
ESTIMATION OF LONGEVITY OF SILPHON
BY LOW-CYCLE LIFE CRITERIA
©2015 A.L Aistov, Y.V. Skvortsov, S.A. Chemyakin, S.V. Glushkov
Samara State Aerospace University, Samara
The universal technique of an estimation of fatigue strength with use of module "Fatigue" of CAE-system
ANSYS Workbench is observed. Evaluation of intense-deformed state of the goffered two-layer pipe was made. By
results of this evaluation the low-cycle life was estimated.
Keywords: low-cycle life, fatigue life, finite element method, hysteresis loop, plasticity, silphon compensator,
goffered two-layer pipe
Информация об авторах:
Аистов Алексей Иванович, аспирант кафедры космического машиностроения
(СГАУ), E-mail: a i aistov(<ziamail.com, 89033031515
Скворцов Юрий Васильевич, кандидат технических наук, доцент кафедры косми-
ческого машиностроения. E-mail: prochfg),ssau.ru.
Чернякин Сергей Алексеевич, м.н.с. НИИ Космического машиностроения,
chernyakin safttjmail.ru, 89372017950
Глушков Сергей Валерьевич, кандидат технических наук, ведущий инженер ка-
федры космического машинострения, testcuperfcr,mail.ru, 89272633759
Alexey Aistov, postgraduate, E-mail: aiaistovfc),gmail.com, 89033031515
Yuri Skvortsov, Candidate of Technics, Associate Professor of Space Engineering De-
partment. E-mail: prochfajssau.ru
Sergey Chernyakin, postgraduate, chernvakin safajmail.ru, 89372017950
Sergey Glushkov, Candidate of Technics, Chief Engineer of Space Engineering Depart-
ment, testcuperfajmail.ru, 89272633759
133
УДК 629.7.015
ПРИВЕДЕНИЕ ОРБИТЫ К ПЛОСКОСТИ ПРИ ДВИЖЕНИИ КОСМИЧЕСКОГО
АППАРАТА С ЭЛЕКТРОРАКЕТНЫМИ ДВИГАТЕЛЯМИ ВБЛИЗИ АСТЕРОИДА
©2015 А.Ю. Шорников, М.К. Файн, Р.М. Хабибуллин
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Представлена математическая модель движения космического аппарата с электрореактивной двига-
тельной установкой в гравитационном поле астероида. Предлагается использовать модель единичных при-
тягивающих центров для моделирования движения космического аппарата в гравитационном поле сложной
конфигурации. Уравнения движения космического аппарата представляют собой уравнения задачи n-тел. В
качестве закона управления предлагается использовать локально-оптимальный закон управления для приве-
дения орбиты космического аппарата к базовой плоскости.
Ключевые слова: Астероид, гравитационный потенциал, электроракетный двигатель, орбита, моде-
лирование траектории движения
Астероидная и кометная опасность
является общепризнанной реальной угро-
зой космического пространства, которая
требует постоянного внимания со сторо-
ны мировой общественности. В настоя-
щий момент остро стоит проблема разра-
ботки методов мониторинга и противо-
действия потенциально опасным объек-
там. В большинстве случаев, моделиро-
вание управляемого движения вблизи
астероидов и комет является сложной за-
дачей, так как часто они имеют сложную
геометрию и распределение масс, что
требует дополнительных гравиметриче-
ских исследований. В данной статье
представлен один из способов решения
этой системной проблемы: моделирова-
ние гравитационного поля сложной кон-
фигурации и моделирование управляемо-
го движения космического аппарата в та-
ком поле. Предлагается использовать
модель единичных притягивающих цен-
тров для моделирования движения кос-
мического аппарата. Схожий подход рас-
смотрен в статье [1]; однако в ней иссле-
дуются вопросы целостности модели
астероида гантелевидной формы образо-
ванного двумя притягивающими центра-
ми.
Таким образом, в рамках данной
работы предлагается приложить задачу
n-тел к моделированию движения вблизи
объектов с гравитационным полем слож-
ной конфигурации. В частности, рас-
смотрен способ стабилизации орбиты
космического аппарата на основании од-
ного из локально-оптимальных законов
управления. В данной статье в качестве
объекта с гравитационным полем слож-
ной конфигурации рассматривается асте-
роид Эрос (433) (рис. 1).
134
Рис. 1 Орбиты астероида Эрос 433
Подобный выбор можно объяснить
формой астероида и положением его ор-
биты в Солнечной системе. Согласно [2],
физические характеристики астероида
Эрос имеют вид: геометрические разме-
ры 34.4x11.2x11.2 км, средний диаметр
= G
16.8 км, масса ~ 6.69 1015 кг, период вра-
щения 5.27 ч.
Рассмотрим модель гравитационно-
го поля, образованная суперпозицией
гравитационных полей двух условных
тел различной массы, вращающихся от-
носительно общего барицентра:
"h
7(х-х,)2 +(у-т2)2 +(z-z2)2
\ ar
где -массы условных притягивающих
центров, х,., j^z, - соответствующие ко-
ординаты притягивающих центров, G-
гравитационная постоянная, со-угловая
скорость вращения системы притягива-
ющих центров, d = a + b- расстояние
между притягивающими центрами.
Предположим, что модель астерои-
да в рассматриваемой задаче представля-
ет собой гравитационное поле двух
условных притягивающих центров с мас-
сами: 4,356 1015 кг, 2,334 1015 кг и вра-
щающихся вокруг барицентра с угловой
скоростью 5,6 10-4 рад/сек. Точные зна-
чения масс были выбраны исходя из гео-
метрии астероида. (Рис. 2)
135
Рис. 3 Силовые линии гравитационного потенциала астероида
На рис. 3 приведены силовые ли-
нии гравитационного потенциала астеро-
ида Эрос, полученные в рамках барицен-
трической модели гравитационного по-
тенциала. Моделирование движения бу-
дем производить в прямоугольной бари-
центрической системе координат при
следующих допущениях: космический
аппарат является материальной точкой,
которая не оказывает никакого влияния
на движения притягивающих центров,
влияние Солнца на движение системы
учитывается (Рис. 4).
Солнце
Астероид
Рис. 4 Силовая схема взаимодействия притягивающих
136
Эрос и космический аппарат лежат
в плоскости BsXY. Ось BsZ является
осью вращения астероида. Пусть в расчё-
тах астероид вращается по часовой
стрелке, а космический аппарат против
часовой стрелки.
Одной из важных задач, относя-
щихся к проблеме управления космиче-
ским аппаратом, является отыскание и
исследование простых схем управления,
позволяющих выполнить тот или иной
маневр. Эти способы управления не обя-
зательно должны быть близкими к опти-
мальным. Основное требование к ним -
простота анализа и реализации (по срав-
нению с оптимальными условиями).
Таким образом, исходное векторное
уравнение примет вид:
d2r /л... (А г. 3 ,
dt г г,)
где L - вектор возмущающих ускорений
двигательной установки космического
аппарата (для наиболее тривиального
случая L = [аг,ау,а:]г).
Соответственно, влияние прочих
сил и моментов на космический аппарат
кроме гравитационных сил притягиваю-
щих центров не рассматривается в рам-
ках данной модели управления. Космиче-
ский аппарат представляет собой матери-
альную точку, которая, как было описано
ранее, не оказывает никакого существен-
ного влияния на движение притягиваю-
щих центров ввиду малости порядка мас-
сы.
В рамках данной главы рассмотрим
простое управление аппаратом, то есть
управление относительно барицентра в
одной плоскости (а. = 0). Система коор-
динат барицентрическая. Плоскость BsXY
лежит в плоскости астероида. Ось BsY
направлена в точку весеннего равноден-
ствия. Введем для этого угол т? - угол
между радиус-вектором аппарата и век-
тором силы тяги. Предполагается, что
двигательная установка работает посто-
янно (Рис. 5).
Рис. 5 Барицентрическая система координат при моделировании движения
Исходя из физического смысла вы-
бранного угла Г] (лежит в плоскости),
определим для него следующие расчет-
ные соотношения:
аух + ауу =—cos ту
т
2^ 2_Р2
®х + й у 2
т
где ax,av - управляющие ускорения, Р -
тяга космического аппарата, m(t) - теку-
щая масса космического аппарата.
Скорости имеют размерность
км/сек, тяга - Н, углы - рад. При расчётах
использовался метод Рунге-Кутты чет-
вертого порядка точности.
Пуст масса космического аппарата
составляет 1200 кг, скорость истечения
двигателей 15 км/секс and шаг интегри-
рования 300 сек. Начальная скорость
движения космического аппарата являет-
ся псевдокруговой (скорость, которую
имел бы космический аппарат если бы
астероид представлял собой один притя-
гивающий центр). Дата старта 30.05.2018
г. Траектория пассивного движения пред-
ставлена на рис. 6: г0 = (0 100 4),
Vo= (0,0021 0 0).
137
Рис. 6 Пассивное движение космического аппарата на орбите 100 км при движении вблизи
Согласно [3], использование ло-
сально-оптимальных законов позволяет
:табилизировать траекторию движения
сосмического аппарата с электрореактив-
юй двигательной установкой. В качестве
;акона управления был выбран закон,
)беспечивающий постоянство параметра
4], скорость истечения 15 км/сек:
7] = л
На рис. 7 представлена траектория
управляемого движения космического
аппарата в плоскости BsXY и в трехмер-
ном пространстве для орбиты в 100 км.
Тяга в данном случае составляет Р = 1
мкН.
Рис. 7 Стабилизация движения космического аппарата на орбите 100 км при движении вблизи
астероида Эрос
138
Рассмотрим графики изменения
наклонения орбиты, долготы восходяще-
го узла и эксцентриситета траектории
движения, рассчитанные в каждый мо-
мент времени. На рис. 8 представлен
график изменения наклонения орбиты
(угол между плоскостью орбиты и плос-
костью отсчета). На рис. 9 представлен
график изменения долготы восходящего
узла орбиты космического аппарата (угол
в базовой плоскости, образуемый между
базовым направлением на нулевую точку
и направлением на точку восходящего
узла орбиты, в которой орбита пересекает
базовую плоскость в направлении с юга
на север). На рис. 10 представлен график
изменения эксцентриситета орбиты (ос-
новная характеристика орбиты, характе-
ризующая ее тип).
Приведение орбиты к плоскости
длилось около 27 суток. На приведение
орбиты к плоскости было затрачено
0,001867 кг топлива.
Oaphc of ОЫ псММюп (I)
0 200000 400000 000000 Ю000 1oW« 12о«00а 14**000 10о«000 1*^000
Птцмс)
Рис. 8 График изменения наклонения орбиты при приведении орбиты к плоскости
Рис. 9 График изменения долготы восходящего узла при приведении орбиты к плоскости
139
Рис. 10 График изменения эксцентриситета орбиты при приведении орбиты к плоскости
Таким образом, используя один из
локально-оптимальных законов управле-
ния, а именно постоянство параметра,
удалось привести орбиту к базовой плос-
кости. При этом, траектория движения
сохранила свою форму, что подтвержда-
ется графиком изменения эксцентрисите-
та. А его уменьшение связано со слож-
ным динамическим распределением гра-
витационного поля в пространстве.
Библиографический список:
1. Beletsky V.V. Generalized restrict-
ed circular three-body problem as a model
for dynamics of binary asteroids. Cosmic
Research 45.5, 2007, pp. 408-416.
2. База данных космических объек-
тов НАСА [Электронный
ресурс] :http://space. frieger.com/asteroids/
3. Ruggiero A. et al. Low-thrust ma-
neuvers for the efficient correction of orbital
elements. Proceedings of the the 32nd Inter-
national electric propulsion conference,
2011.
4. Лебедев B.H. Расчет движения
космического аппарата с малой тягой
[Текст]/В.Н. Лебедев. - М.: Вычисли-
тельный центр РАН СССР, 1968. -
12-40 с.
References:
1. Beletsky V.V. Generalized restrict-
ed circular three-body problem as a model
for dynamics of binary asteroids. Cosmic
Research 45.5, 2007, pp. 408-416.
2. http://space.frieger.com/asteroids/
3. Ruggiero A. et al. Low-thrust ma-
neuvers for the efficient correction of orbital
elements. Proceedings of the the 32nd Inter-
national electric propulsion conference,
2011.
4. Lebedev V.N., “Raschet dvigenia
kosmicheskogo apparata s maloi tiagoi”,
Computation centre of the Russian Academy
of Sciences, Moscow, 1968, pp. 12-40.
BRINGING AN ORBIT TO THE BASIC PLANE FOR A SPACECRAFT WITH AN
ELECTRIC PROPULSION ENGINE FOR A MOVEMENT NEAR AN ASTEROID
©2015 A.U. Shomikov, M.K. Fain, R.M. Habibullin
Samara State Aerospace University, Samara
A mathematical model of the spacecraft with electric propulsion system in the gravitational field of the aster-
oid is represented in the paper. It is proposed to use the model of single gravitate centers for simulation of the space-
craft in the irregular gravitational field. The equations of motion of the spacecraft are the equations of n-body prob-
lem. It is proposed to use a locally optimal control law for bringing the orbit of the spacecraft to the reference plane.
140
Key words: Asteroid, gravitational potential, electric propulsion, electric propulsion engine, space-
craft motion simulation
Информация об авторах:
Шорников Андрей Юрьевич, магистр, ст. лаборант кафедры космического маши-
ностроения, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 8-960-816-10-25,
serandrufemail.ru.
Область научных интересов: задача n-тел, гравитационные поля сложной конфигу-
рации, математическое моделирование, параллельные вычисления.
Файн Максим Кириллович, магистр, ст. лаборант кафедры космического машино-
строения, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 8-903-334-31-63,
grandmashedfemail.ru.
Область научных интересов: баллистическое проектирование, точки либрации, кос-
мические буксиры.
Хабибуллин Роман Маратович, магистр, ст. лаборант кафедры космического ма-
шиностроения, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 8-961-384-20-66,
khabibullin.romanfegmail.com.
Область научных интересов: солнечный парус, спутники дистанционного зондиро-
вания Земли.
Shornikov AndreY Urievich, magister, research technician of the space engineering
department, SSAU, 443 086, Russia, Samara, Moscow highway, 34, 8-960-816-10-25,
serandrufemai 1 .ru.
Area of research: n-body problem, irregular gravitational fields, simulations, parallel com-
puting.
Fain Maksim Kirillovich, magister, research technician of the space engineering depart-
ment, SSAU, 443 086, Russia, Samara, Moscow highway, 34, 8-903-334-31-63,
grandmashedfemail.ru..
Area of research: ballistic design, libration point, space tugs.
Habibullin Roman Maratovich, magister, research technician of the space engineering
department, SSAU, 443 086, Russia, Samara, Moscow highway, 34, 8-961-384-20-66,
khabibullin.romanfegmail.com.
Area of research: solar sail, Earth remote sensing satellites.
141
УДК 629.78
УПРАВЛЕНИЕ ПЛОСКИМИ ПАРАМЕТРАМИ ОРБИТЫ ГЕОСТАЦИОНАРНОГО
СПУТНИКА С ПОМОЩЬЮ ДВИГАТЕЛЯ МАЛОЙ ТЯГИ
©2015 В.В. Салмин, А.С. Четвериков
Самарский государственный аэрокосмический университет имени академика
С. П. Королёва (национальный исследовательский университет), г. Самара
Решена плоская задача терминального управления геостационарным аппаратом в дискретной поста-
новке. Разработан трёхшаговый алгоритм терминального управления периодом, эксцентриситетом и долго-
той стояния с помощью двигателя малой тяги. Получены аналитические выражения оценки затрат характе-
ристической скорости при коррекции орбиты.
Ключевые слова: малая тяга, геостационарная орбита, терминальное управление, коррекция орбиты
Геостационарная орбита (ГСО) яв-
ляется одной из наиболее востребован-
ных орбит для прикладных космических
аппаратов (КА) различного назначения.
Действие различного рода возмущений в
течение продолжительного интервала
времени на движение КА по орбите при-
водит к отклонению параметров орбиты
от требуемых значений. В связи с этим
необходимо постоянно проводить кор-
рекцию орбиты. Применение электроре-
активных двигателей (ЭРД) малой тяги
позволяет существенно снизить расход
рабочего тела при коррекции орбиты и
тем самым увеличить время существова-
ния КА на орбите.
В работе [1] приведены численные
алгоритмы управления КА на ГСО с по-
мощью двигателей малой тяги. Однако
они достаточно сложные и обладают
плохой сходимостью.
В настоящей работе разработан
трёхшаговый алгоритм коррекции плос-
ких параметров орбиты геостационарного
КА с помощью ЭРД малой тяги. Прини-
мается, что корректирующий манёвр реали-
зуется за счёт создания малого трансверсаль-
ного ускорения.
Задача управления плоскими пара-
метрами орбиты геостационарного КА
формулируется как задача оптимального
управления с терминальным критерием в
виде квадратичной формы (задача терми-
нального управления), характеризующей
конечное отклонение по периоду обра-
щения, эксцентриситету и долготе точки
стояния.
Для решения задачи получена дис-
кретная модель плоского движения КА
(при изменении периода обращения, экс-
центриситета орбиты, долготы стояния)
под действием малого трансверсального
ускорения.
Принимается, что структура управ-
ления состоит из трёх активных участков
АВ, CD, ЕО (рис. 1) продолжительностью
То, г/, Т2 соответственно и двух пассивных
участков продолжительностью //// и ///?
соответственно. На участке АВ происхо-
дит уменьшение эксцентриситета до ек =
0, на участке CD эксцентриситет увели-
чивается на некоторое значение е' и за-
тем на участке ЕО это значение снова га-
сится до значения ек = 0. Такая структура
управления позволяет гарантировано
привести КА с ЭРД в заданную точку
ГСО с требуемой точностью по периоду,
долготе и эксцентриситету. Примеры фа-
зовых траекторий приведены на рис. 2.
142
е
Рис. 1 Изменение эксцентриситета при трёхшаговой структуре управления
Рис. 2 Примеры фазовых траекторий при трёхшаговой структуре управления
Если знаки отклонения Д7с пери-
ода обращения в точке С и начального
отклонения периода обращения ДТ}, раз-
личны, то направление трансверсального
ускорения необходимо изменить на про-
тивоположное (рис. 2, б).
Получено приближённо-
оптимальное управление и выражение
для оценки затрат характеристической
скорости в виде функции от начальных
граничных условий (7Ь, во) при коррек-
ции плоских параметров геостационар-
ной орбиты (рис. 3).
|Д7И с
Рис. 3 Затраты характеристической скорости при коррекции ГСО с помощью ЭРД на основе трёхшагового
алгоритма терминального управления: сплошные линии -ДГ0 > 0, пунктирные линии - Д7» < О
143
Библиографический список:
1. Чернявский Г.М. Управление ор-
битой стационарного спутника [Текст] /
Г.М. Чернявский, В.А. Бартенев,
В.А. Малышев. - М.: Машиностроение,
1984,- 144 с.
References:
1. Chemyavsky G.M. Control of the
geostationary satellite orbit [Text] /
G.M. Chemyavsky, V.A. Bartenev,
V.A. Malyshev. - M.: Machinery, 1984. -
144 c.
CONTROL FLAT PARAMETERS GEOSTATIONARY SATELLITE ORBIT
USING LOW-THRUST ENGINE
©2015 V.V. Salmin, A.S. Chetverikov
Samara State Aerospace University, Samara
Is solved plane problem of terminal control geostationary apparatus in a discrete setting. Three-step algo-
rithm developed terminal control period, eccentricity and longitude of standing using the of the low thrust engine.
The analytical expressions costing characteristic velocity for orbit correction.
Key words: low thrust, geostationary orbit, terminal control, correction of the orbit
Сведения об авторах:
Салмин Вадим Викторович, д.т.н., профессор, заместитель заведующего кафедрой
космического машиностроения, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, 267
-46-88, sputnikfessau.ru.
Четвериков Алексей Сергеевич, инженер кафедры космического машиностроения,
СГАУ, 443086, Россия, г. Самара, Московское ш. 34, 8-905-018-49-97,
chctverikov86feyandex.ru.
SalminVadimViktorovich, Doctor of Technical Sciences, professor, deputy head of chair
of Space Engineering of Samara State Aerospace University, SSAU, 443086, Russia, Samara,
Moscow highway, 34, 267 - 46 - 88, e-mail: sputnikfessau.ru.
Chetverikov Alexey Sergeevich, Engineer of chair of Space Engineering of Samara State
Aerospace University, SSAU, 443086, Russia, Samara, Moscow highway, 34, 8-905-018-49-97,
e-mail: chetverikov86feyandex.ru.
144
УДК 629.7.08
ОБЕСПЕЧЕНИЕ КОНТРОЛЯ НАД ЗАДАННОЙ ТОЧНОСТЬЮ
ИЗДЕЛИЙ КОСМИЧЕСКОГО КОМПЛЕКСА НА ЭТАПЕ РАЗРАБОТКИ
КОНСТРУКТОРСКОЙ ДОКУМЕНТАЦИИ
©2015 В.Д. Еленев1, Ю.П. Шупляк2
'Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (национальный исследовательский университет), г. Самара
2АО «РКЦ «Прогресс», г. Самара
Рассматриваются вопросы контроля над заданной точностью изделий космического комплекса на
этапе разработки конструкторской документации.
Точность изделия на этапе разработки конструкторской документации рассматривается как системная
характеристика, охватывающая совокупность единичных требований по точности изделия, заданных на эта-
пе разработки технического задания.
В основу концепции контроля над заданной точностью положено понятие о типовом проектном па-
раметре точности, при помощи которого фиксируется всё множество единичных требований по точности
изделия, определяемых техническим заданием. Все требования по точности изделия, реализуемые на этапе
разработки конструкторской документации, приводятся к заданному в техническом задании исходному
множеству типовых проектных параметров точности с целью подтверждения (или не подтверждения) их
соответствия друг другу.
Ключевые слова: Точность, размерный анализ, расчёт размерных цепей, верификация, электронная
модель изделия, типовой проектный параметр точности, метрическое пространство
Введение
Работа относится к проблематике
обеспечения точности изделий космиче-
ского комплекса (КК) на различных эта-
пах их жизненного цикла существования
(ЖЦС). Под изделиями КК в данном слу-
чае понимаются составные части (СЧ) КК
различного уровня иерархии, для созда-
ния которых разрабатываются отдельные
технические задания (ТЗ).
Точность изделия космического
комплекса (КК) является одной из важ-
нейших характеристик, определяющих
его способность выполнять поставленные
задачи на этапе штатной эксплуатации в
составе КК. Как характеристика, опреде-
ляющая качество изделия, точность явля-
ется его неотъемлемым атрибутом в рам-
ках системы обеспечения качества на
всех этапах жизненного цикла существо-
вания (ЖЦС). Необходимость введения
требований по точности обусловлена не-
возможностью изготовления изделия с
абсолютной точностью.
Современная методология нисхо-
дящего проектирования изделий отлича-
ется высоким уровнем применения ком-
пьютерных технологий на всех этапах их
ЖЦС. Основным достижением последних
лет явилось внедрение концепции парал-
лельной разработки изделия, основанной
на совместном создании и использовании
единой компьютерной трехмерной моде-
ли (ЗО-модели) изделия всеми участни-
ками процесса его создания. В настоящее
время прорабатывается вопрос о возмож-
ности придании такой ЗО-модели изде-
лия статуса подлинника конструкторской
документации и технологической доку-
ментации [1].
Вместе с тем, необходимо отметить,
что, несмотря на достигнутые успехи в
области компьютерных технологий, в
настоящее время имеются проблемные
вопросы, связанные с обеспечением точ-
ности изделий на различных этапах
ЖЦС.
Известно, что точность изделия задаётся
в ТЗ, обеспечивается на этапах разработ-
ки конструкторской документации (КД) и
изготовления и далее контролируется на
всех последующих этапах ЖЦС изделия.
Основным инструментом, при помощи
которого производится контроль точно-
сти изделия на этапе разработки КД, яв-
ляется размерный анализ (РА), опираю-
щийся на математический аппарат теории
размерных цепей (РЦ). При этом процес-
145
сы нисходящего проектирования гаран-
тируют выполнение требований ТЗ, но,
вместе с тем, они не гарантируют реали-
зуемость требований данного ТЗ [2], из-
за чего процессы нисходящего проекти-
рования носят итеративный характер, то
есть предполагают возможность неодно-
кратного чередования процедур синтеза
(структурного и параметрического) и ве-
рификации.
Здесь, в соответствии с [3], следует
понимать:
- под верификацией - подтвержде-
ние (посредством представления объек-
тивных свидетельств) того, что установ-
ленные требования были выполнены;
- под объективным свидетельством
- данные, полученные путём наблюде-
ния, измерения, испытания или другим
способом, подтверждающие наличие или
истинность чего-либо.
В настоящее время процедура ве-
рификации КД на соответствие заданной
в ТЗ точности не имеет формальных ал-
горитмов её проведения и осуществляет-
ся исключительно вручную (с высокой
степенью использования субъективного
фактора).
Данное обстоятельство значительно
затрудняет контроль над точностью изде-
лия в виде аудиторской проверки под-
тверждения точности изделия третьей
независимой стороной и однозначно ис-
ключает процессы обеспечения заданных
в ТЗ требований по точности изделия на
последующих этапах ЖЦС из единого
информационного пространства (ЕИП), в
рамках которого действуют процессы
обеспечения качества изделия.
1 Состояние проблемы контроля
над обеспечением точности изделия на
различных этапах жизненного цикла
существования
При рассмотрении проблемы обес-
печения контроля над заданной точно-
стью изделий на этапе разработки КД в
качестве исходных, не подлежащих об-
суждению и принимаемых в качестве ак-
сиом, принимаются следующие положе-
ния:
1° Проблема обеспечения контроля
над реализацией заданных в ТЗ требова-
ний по точности изделия рассматривается
в рамках процессов нисходящего проек-
тирования, предполагающих разделение
(с известной степенью условности) про-
цесса проектирования изделия на два
взаимосвязанных этапа ЖЦС, выполняе-
мых друг за другом в следующей после-
довательности: этап разработки ТЗ; этап
разработки КД.
2° САПР, используемые при нисхо-
дящем проектировании, должны соответ-
ствовать требованиям нормативной базы,
которая представлена стандартами [4-6].
К числу таких САПР, используемых
на предприятии, можно отнести, напри-
мер:
- среди отечественных систем -
САПР «Компас»;
- среди зарубежных систем - САПР
Creo Parametrik.
3° РА, определяющий требования
по точности изделия на этапах разработ-
ки ТЗ и КД, проведён, его результаты из-
вестны и содержатся в виде аннотаций в
электронных моделях изделия (ЭМИ)
(см. [6]), которые представляют собой:
- проектные ЭМИ (ЭМИП), раз-
рабатываемые проектными подразде-
лениями;
- конструкторские ЭМИ (ЭМИК),
разрабатываемые конструкторскими
подраздел ен ия м и.
При проведении анализа в качестве
основной среды проектирования рас-
сматривалась методика нисходящего
проектирования (МНП), разработанная
компанией РТС (США) на базе систем
Creo Parametrik и Windchill PDM Link [7-
9]. В качестве объективного свидетель-
ства рассматривались два результата РА
изделия на точность на этапах разработки
ТЗ и КД, а верификация КД на соответ-
ствие требованиям ТЗ по точности (далее
по тексту - верификация) рассматрива-
лась как процедура, связанная с контро-
лем соответствия этих результатов РА
друг другу.
Анализ проблемы контроля над
обеспечением точности изделия на раз-
личных этапах ЖЦС показал следующее.
146
Требованиями отраслевого стандар-
та [10], разработанными в дополнение к
основному стандарту [И], определяю-
щему виды и комплектность КД, преду-
сматривается проведение РА изделия на
точность на этапе разработки КД для де-
талей, сборочных единиц, комплексов и
комплектов, однако средства МНП про-
ведение РА не предусматривают.
Известны следующие методики
проведения РА изделия на точность с ис-
пользованием компьютерных техноло-
гий:
«Parametrik Technology corporation
Creo Elements/Pro 5.0 Анализ допуска
Основанный Технологией CETOL», ис-
пользуемая на базе системы Creo Ele-
ments/Pro Tolerance Analysis Extension;
- модуль «Библиотека расчёта раз-
мерных цепей» в КОМ ПАС-3 D.
Данные методики в их сегодняшнем
состоянии рассматривают конкретные
вопросы, связанные с этапами разработки
КД и изготовления, и не предусматрива-
ют сквозного контроля над обеспечением
реализации заданных в ТЗ требований по
точности изделия на этапе разработки
КД. В этом качестве данные методики
просто механизируют процедуру РА в
соответствии с методическими указания-
ми [12].
Адаптация данных методик к про-
цедуре верификации точности потребует
доработки МНП, поскольку последняя не
имеет средств формального описания
точности изделия на уровне электронных
моделей сборочных единиц (ЭМСЕ) [5].
В рамках ЭМИП и ЭМИК обеспе-
чивается параллельная разработка изде-
лия различными исполнителями проект-
ных и конструкторских подразделений, а
так же представителями службы техноло-
гической подготовки производства. В то
же время, и ЭМИП, и ЭМИК позволяют
работать только с номинальной трехмер-
ной геометрией изделия, в которую до-
пуски, обеспечивающие заданную точ-
ность, искусственно вводятся в виде ан-
нотаций. Обменные файлы ЕИП не несут
в себе информацию по допускам и сред-
ствам передачи размерных связей на
уровне сопряжённых элементов деталей
сборок изделия и не обеспечивают точ-
ность изделия с учётом пространствен-
ных РЦ и пространственных допусков.
Отмеченные проблемы не являются
какими-либо новыми проблемами. Они,
например, рассматриваются в работах
[13-17] и в других работах, анализ кото-
рых показывает, что сегодня не суще-
ствует эффективных способов автомати-
зированного проектирования изделий с
учётом обеспечения точности на различ-
ных этапах ЖЦС. Это обусловлено тем,
что, несмотря на успехи, достигнутые в
области трехмерного моделирования,
проблема пространственной размерной
увязки изделия, учитывающей все виды
допустимых отклонений его составных
частей (СЧ) от заданных значений и их
взаимное влияние друг на друга в составе
изделия, по-прежнему остаётся нерешён-
ной. Возможности современных CAD-
систем ограничены проектированием
только номинальной геометрии, а сама
ЗО-модель изделия содержит информа-
цию о допусках только в виде аннотиро-
ванных размеров.
Таким образом, в настоящее время
процедуры проведения РА и верифика-
ции КД на соответствие заданной в ТЗ
точности в рамках МНП не имеют фор-
мальных алгоритмов их проведения и
осуществляются исключительно вруч-
ную.
Кроме того имеют место проблемы,
связанные с тем, что мощности множеств
размеров, определяющих точность изде-
лия в размерных базах ЭМИП и ЭМИК,
имеют различный порядок, в то время как
оба этих множества размеров должны
подтверждать одну и ту же точность из-
делия.
Здесь возникают следующие вопро-
сы:
- что считать точностью изделия на
различных этапах разработки ТЗ и КД;
- что является единицей размерного
анализа точности изделия при проведе-
нии процедуры верификации;
- что является мерой точности изде-
лия.
Известно следующее определение
точности:
147
Определение 1. «Точность геомет-
рического параметра - степень прибли-
жения действительного значения геомет-
рического параметра к его номинальному
значению» [18].
Известны и другие определения
точности, но все они в конечном итоге
сводятся к приведенному выше опреде-
лению, носят частный характер и не при-
вязаны к этапам ЖЦС.
2 Точность изделия. Общие поло-
жения и основное определение
Разделение процесса проектирова-
ния изделия на этапы разработки ТЗ и КД
обусловлено разными целями и задачами,
решаемыми на данных этапах.
Основной целью этапа разработки
ТЗ является создание проекта изделия,
реализующего поставленные задачи на
уровне, соответствующем современному
уровню науки и техники.
Основной целью этапа разработки
КД является создание конструкции изде-
лия, соответствующей всем требованиям
ТЗ с учётом возможности изготовления
изделия на существующей производ-
ственной базе завода-изготовителя.
Основное условие для завершения
разработки КД изделия и перехода к эта-
пу изготовления сформулируем следую-
щим образом:
«Для успешного завершения этапов
проектирования изделия (с учётом обес-
печения заданной точности изделия) и
последующего перехода к этапу изготов-
ления изделия:
- необходимо, чтобы разработанная
КД соответствовала существующей про-
изводственной базе завода-изготовителя;
- достаточно, чтобы разработанная
КД соответствовала требованиям ТЗ».
Чтобы провести РА изделия на лю-
бом этапе проектирования, необходимо
формально описать точность изделия (де-
тали, узла, машины) в виде ограниченно-
го множества размеров (назовём их пара-
метрами точности (ПТ), которые отлича-
ются от прочих размеров, определяющих
размерную базу ЭМИП (ЭМИК), следу-
ющими особенностями:
- каждый ПТ имеет одинаковую
структуру (номинальное значение и до-
пустимые отклонения от номинального
значения);
- значение каждого ПТ выражается
языком чисел (метрических характери-
стик), что позволяет количественно срав-
нивать его с другими размерами точности
на различных этапах ЖЦС посредством
счёта или измерения.
ПТ, представляющие точность из-
делия на этапах разработки ТЗ и КД, от-
личаются друг от друга тем, что принад-
лежит разным моделям. Чтобы отличать
их друг от друга, введём дополнительную
идентификацию: проектные ПТ (ППТ) и
конструктивные ПТ (КПТ).
Любое изделие КК имеет иерархи-
ческую структуру (детали, сборочные
единицы, изделие в целом). Соответ-
ственно точность изделия также должна
иметь иерархическую структуру. В
настоящей работе точность изделия,
представленная в ЭМИП и ЭМИК, рас-
сматривается на трёх уровнях иерархии:
- на нижнем уровне - как точность
множества электронных моделей проект-
ных модулей (ЭМПМ) для ЭМИП и элек-
тронных моделей деталей (ЭМД) для
ЭМИК, в которых каждая ЭМПМ (ЭМД)
описывается в виде множества помо-
дульных (подетальных) ПТ;
- на среднем уровне - как точность
взаимного расположения всех ЭМПМ
(ЭМД) относительно друг друга в составе
ЭМИП (ЭМИК), которая рассматривается
в виде электронной модели сборочной
единицы (ЭМСЕ) (см. [5]);
- на верхнем уровне - как точность
изделия в целом, рассматриваемая в виде
некоторой интегральной характеристики
всех составляющих ППТ (КПТ) нижних
уровней иерархии.
Иерархическое построение даёт
право считать точность изделия систем-
ной характеристикой изделия, которая
имеет следующие особенности:
- не поддаётся непосредственному
наблюдению;
- является характеристикой системы
с иерархической структурой и сама имеет
иерархический характер;
148
- определяется только при помощи
формального описания, которое охваты-
вает все уровни иерархии.
На различных этапах ЖЦС точность
изделия может изменяться, то есть имеет
свойства динамичности. При этом на всех
этапах ЖЦС точность изделия обязатель-
но должна соответствовать заданной в ТЗ
точности в рамках назначенной меры
точности, то есть точность изделия обла-
дает свойствами устойчивости.
Дадим понятию о точности изделия
следующее определение:
Определение 2. «Точность изделия
есть системная характеристика изделия,
имеющая структуру иерархического ти-
па, описываемая на различных этапах
иерархии ограниченным множеством
идентифицированных параметров точно-
сти, имеющих для соответствующего
этапа ЖЦС конкретные количественные
значения, обладающая на различных эта-
пах ЖЦС свойствами динамичности и
устойчивости в рамках заданной меры
точности».
3 Основная концепция метода
контроля над заданной точностью из-
делия
ЭМИП и ЭМИК представляют со-
бой две модели, построенные в рамках
единой (базовой) системы координат
(БСК) и размещённые в метрическом
(Евклидовом) пространстве.
В рамках БСК положение любой
точки в пространстве можно однозначно
описать отдельно и уникально от других,
используя начало отсчёта, оси координат
и расстояния от начала отсчёта до проек-
ций точки на оси. При этом взаимное
расположение двух точек относительно
друг друга в метрическом пространстве
можно определить как совокупность двух
расстояний между проекциями этих то-
чек на соответствующие оси координат
(если задача решается на плоскости). Ис-
ходя из данных условий, любой ППТ
можно представить как соответствующее
номинальное расстояние между проекци-
ями каких-либо двух точек (если задача
решается на плоскости) с учётом допус-
ков.
Поскольку номинальная геометрия
изделия копируется при переходе от
ЭМИП к ЭМИК, номинальное положение
точек, на которые замыкается ППТ, в
пространстве сохраняется, а заданные
значения ППТ обеспечиваются множе-
ством КПТ, каждый из которых имеет
соответствующие значения номинальных
размеров и допусков. В этом случае мож-
но считать, что одно и то же расстояние
между двумя точками, рассматриваемы-
ми в едином метрическом пространстве,
можно обеспечить по двум вариантам, а
процедуру верификации точности изде-
лия можно рассматривать как сравнива-
ние значений обоих вариантов между со-
бой в пределах меры точности, определя-
емой ППТ.
С целью упрощения излагаемых ма-
териалов, здесь и далее по тексту все рас-
суждения будем вести в рамках двухмер-
ной системы координат. Поэтому, в об-
щем случае, точность взаимного распо-
ложения двух точек в пространстве отно-
сительно друг друга может быть пред-
ставлена двумя ППТ.
В настоящей работе процедуру ве-
рификации КД будем рассматривать для
одного ППТ, считая, что все рассуждения
будут справедливы и для других ППТ из
состава ЭМИП.
Будем считать, что любой ПТ (ППТ
или ПКТ) является параметризованным и
представляет собой систему, которая
включает в себя имя ПТ и множество ат-
рибутов, в число которых входят номи-
нальное значение ПТ и допуски.
Имена ПТ могут принадлежать раз-
ным ЭМИ (ЭМИП или ЭМИК) и, соот-
ветственно, иметь различную иерархию
имён (в зависимости от уровня иерархии,
на котором они входят в ЭМИ), а атрибу-
ты ПТ (независимо от их принадлежно-
сти) могут иметь различное значение, но
всегда будут выражаться в рамках единой
метрической системе измерений.
Примечание 1. Все используемые
далее по тексту обозначения имён, зна-
чений и т.д. принимаются условно, толь-
ко с целью пояснения сущности метода.
Для реализации метода на практике
необходимо дополнительно провести
149
процедуру постпараметризации, кото-
рая заключается в присвоении всем пере-
менным, привлекаемым к процедуре ве-
рификации собственных уникальных
имён и значений.
На рис. 1 показана геометрическая
интерпретация параметризованного ППТ
как элемента, задающего в ЭМИП требо-
вания по точности.
На рис. 1а показана некоторая
ЭМПМ Aj, входящая в состав ЭМИП,
построенная в рамках системы координат
xAi 0 yAi, на которой показан параметри-
зованный ППТ (Aj), ± A(A|)p
который определяет точность расстояния
между осями (Hl)Ai и (H2)Ai в таком
виде, в каком он обычно указывается на
модели (ив КД).
Здесь индекс «1» при Aj означает
порядковый номер номинального значе-
ния ППТ в составе ЭМПМ Aj, а значок «
± А » указывает на то, что это допуск на
номинальное значение.
В действительности для любой
ЭМПМ типа Aj все ППТ взаимосвязаны
между собой. Так, например, для ЭМПМ
Aj, показанной на рисунке 1а, к осям
(Hl)Ai и (H2)Ai предъявляются требо-
вания по отклонению от вертикальности
с заданной точностью (в данном примере
эти требования не рассматриваются).
Возникает вопрос, от каких баз
необходимо отсчитывать ППТ
(Aj)! ± A(Aj)] в пространстве, если
указывается расстояние между двумя не-
параллельными линиями.
Введём в ЭМПМ Aj две точки
(Ml)Ai и (M2)Ai на ОСЯХ (Hl)Aj и
(H2)Ai, как это показано на рис. 16, и
спроецируем их на ось xAi . Как видно из
рисунка, ППТ (A j) j ± А (А ( ) । за-
мыкается на проекции этих точек (
((Ml)Ai)xAi и ((M2)Ai)XAi) и при этом
определяется однозначно. В то же время,
ППТ (A j )| ± A (A j)] становится
независимым от осей (Hl)Ai и (H2)Ai.
Назовём введённые таким образом
точки базовыми точками (БТ) и отметим,
что данные БТ представляют собой идеа-
лизированные абстрактные элементы, по-
скольку реально в местах их введения в
ЭМИП изделия могут быть пустые места.
Вместе с тем, введение БТ позволяет бо-
лее точно указывать базы, от которых от-
считываются ППТ, и делает эти ППТ не-
зависимыми друг от друга в пределах
ЭМИП. Главным условием для точного
определения баз здесь является правиль-
ность введения БТ в ЭМИП.
Дадим ППТ, размещённому между
проекциями (((Ml)А;)Хл. и ((M2)Ai)Xu )
точек (Ml)Ai и (M2)Ai на ось xAi , соб-
ственное уникальное имя «(А?)р>, а к
множеству его атрибутов отнесём выра-
жение « (Aj), ± A(Ai)( », которое далее
будем считать значением ППТ (А?)].
Систему
<(Ml)Ai;(A7)1;(Ai)1 ± Д(А,), ;((M2)Ai >,
в которой:
- (Ml)Ai и (M2)Ai - две БТ, на про-
екции которых замыкается ППТ;
- (А^)| - имя ППТ в выбранной си-
стеме обозначений;
- (Aj)! ± А ( A j) । - значение
ППТ(АГ)!
назовём типовым проектным пара-
метром точности (ТППТ) и дадим ему
следующее определение.
Определение 3. «Типовым проект-
ным параметром точности называется
идентифицированный (поименованный)
параметризованный параметр точности,
определяющий взаимное положение двух
идентифицированных точек относитель-
но друг друга, имеющий номинальное
значение и допуски, выраженные в еди-
ной метрической системе измерений».
Введённый таким образом ТППТ
<(Ml)Ai;(А^),;(Aj)| ± A(Aj)i;((M2)Ai>
становится неотъемлемым атрибутом
ЭМИП и сохраняется в ней в неизменном
виде на всех последующих этапах ЖЦС
изделия.
150
Процедуру обеспечения требований
по точности изделия на этапе разработки
КД будем формально рассматривать как
процесс структурного и параметрическо-
го синтеза неизвестного множества эле-
ментов КПТ, реализующих в ЭМИК тре-
бования по точности, заданные ТППТ
<(М1)а1;(а7)1;(А|)1 ± Д(А.)1;((М2)а| >.
Будем считать, что:
- структурный синтез множества
КПТ - это определение множества имён
КПТ, которые в совокупности должны
замыкаться на проекции (((Ml)Ai )Хд. и
((М2)А!)Хм ) БТ (Ml)Ai и (M2)Ai на со-
ответствующую ось (в нашем случае - на
ocbxAi );
- параметрический синтез множе-
ства КПТ - это определение численных
значений всех КПТ, которые были опре-
делены по результатам структурного
синтеза.
Полученное таким образом множе-
ство КПТ автоматически становится
множеством параметризованных КПТ.
Рассмотрим процесс обеспечения
точности изделия на этапе разработки КД
для ТППТ
< (Ml)Ai;(A^)f;(Aj), ± A(Aj), ;((M2)Ai >,
который приведён на рис. 2.
На рис. 2а показана ЭМСЕ Bj, по-
лученная на этапе разработки КД по ис-
ходным данным, заданным с помощью
ЭМПМ Aj и ППТ ( A j ) j ± А ( A j ) ]
, взятых из рис. 1а.
В состав ЭМСЕ Bj входят детали
,(Bj)5 ,<вр6 ,
которые разрабатывались отдельно, а за-
тем компоновались в сборочную единицу
Bj в рамках единого файла. Роль осей
(Hl)Ai и (H2)Ai в сборочной единице
В: выполняют оси (К1)В: и (К2)в , а
J J j
расстояние между которыми представле-
но параметризованным КПТ
(Bj)] ± A(Bj)] . Здесь КПТ
(Bj)] ± A(Bj)] представляет собой сбо-
рочную РЦ, звеньями которой являются
подетальные параметризованные КПТ,
входящие в состав деталей
(Bj)2 ,(Bj)3 ,(Bj)4 и (Bj)6 .
Как следует из рис. 2а, между раз-
мерами (Bj)] ± A(Bj)( и ППТ
(Aj)] ± А (A j ) ] отсутствует пря-
мая связь. Для того, чтобы обеспечить
процедуру верификации необходимо об-
ратиться к ЭМИП и получить из неё дан-
ные по ППТ (Aj), ± А (A j ) ] , вы-
полнив при этом ряд неформализованных
процедур.
На рис. 26 показана ЭМСЕ Bj, по-
лученная на этапе разработки КД по ис-
ходным данным, заданным ЭМПМ Aj и
ТППТ
<(Ml)Aj;(A;)1;(Ai)] ± А(А|),;((M2)Ai >.
Здесь БТ (Ml)Ai и (M2)Ai автома-
тически становятся принадлежностью
ЭМИК, а ТППТ
<(М1)А|;(А;)1;(А|)1 ± А(А,),; ((M2)Ai >,
заключённый между ними, становится
как бы моделью распределения про-
странства для множества КПТ, которые, в
совокупности должны замыкаться на
проекции (((М1)А;)Хл. и ((М2)А;)Хд. )
БТ (Ml)Ai и (M2)Ai на соответствую-
щую ось координат.
Как видно из рис. 2в, между разме-
рами (Bj)j ± A(Bj)| и
(Aj)] ± A (A j)] появляется пря-
мая связь. Однако, чтобы перейти к вы-
полнению процедуры верификации,
необходимо сначала подтвердить, что па-
раметризованный ПКТ (Bj)] ± A(Bj),
действительно соответствует тому значе-
нию, которое указано для него для ЭМСЕ
Bj
Процесс структурного и параметри-
ческого синтеза параметризованных
ПКТ, входящих в качестве звеньев в сбо-
рочную РЦ, образованную ПКТ
(Bj)( ± A(Bj )i , в настоящей работе не
рассматривается. Он представляет собой
ряд неформальных процедур, которые
151
выполняются вручную. Но, при этом,
процесс структурного и параметрическо-
го синтеза звеньев РЦ и их значений про-
исходит в интерактивном режиме на
экране компьютера с прямым доступом к
CAD-информации, заложенной в ЭМСЕ
BJ
На рис. 2в показаны результаты
структурного синтеза множества пара-
метризованных КПТ, которые входят в
состав размерных баз деталей
(Bj)2 ,(Bj)3 ,(Bj)4 и (Bj)6 , и, в сово-
купности, образуют сборочную РЦ
(Bj), ± A(Bj), , представленную пара-
метризованными КПТ (Bj)2, (Врз,
(Bj)’ и (В])'.
На рис. 2г показан параметрический
синтез множества параметризованных
ПКТ, значения которых определяются из
размерной базы соответствующих дета-
лей (Bj)2 ,(Bj)3 ,(Bj)4 и (Bj)6 .
Как следует из рис. 2г, в результате
параметрического синтеза мы получим
следующее множество параметризован-
ных КПТ: ( В j) 2 ± А ( В j) '2 ;
(Bj)i ± A(Bj)i; (Bj)’ ± A(Bj)’;
(Bj)' ± A(Bj)'.
Данное множество КПТ замыкается
на БТ (Ml)Ai и (M2)Ai и образует кор-
теж
< (Ml)Ai;(((Bj)2 ± Д(вр!,) + ((В^ ± Д(врЦ +
+ ((Bj)!, ± A(Bj)') + ((Bj)’ ± A(Bj)’ ));((M2)Ai >•
Значение множества параметризо-
ванных КПТ, включённых в данный кор-
теж, должно соответствовать значению
ПКТ (Bj), ± Д(В|),.
Процедура верификации должна
подтвердить соответствие значений,
представленных кортежами
<(М1)Л, ;(((В;)'2 ± Д(Вj),) + ((Вj), ± A(Bj)1,) +
+ ((Bj)!, ± A(Bj)!,) + ((Bj)J, ± A(Bj)’,));((M2)Ai >
И
<(Ml)Ai;(AJ1;(Ai)1 ± Д(АД ;((M2)Ai >,
ДРУГ другу.
Здесь под соответствием будет по-
ниматься выполнение следующих усло-
вий:
-«(Aj)] » = «(Bj)^ +(Bj)3 +(Bj)!, + (Bj)},»;
<< + A(Aj)] » < «
(+A(Bj)l,) + (+A(Bj)i) + (+A(Bj)!,) + (+ A(B j )J,)»;
« + A(Aj)| » < «
(- A(Bj)^) + (-A(Bj)b + (-A(Bj)!,) + (- A(Bj)!,) »
4 Компьютерная визуализация
метода контроля над точностью изде-
лия
Обращаясь к процедуре верифика-
ции КД на соответствие требованиям ТЗ,
сложно рассчитывать на полноту анализа,
поочерёдно обращаясь непосредственно к
ЭМИП и ЭМИК, поскольку мощность
множества размеров, определяющих точ-
ность изделия в ЭМИП, может иметь
второй и более порядки, а мощность
множества размеров, определяющих точ-
ность изделия в ЭМИК, - третий и более
порядки.
Данные проблемы предлагается
разрешить с помощью создания матрицы
точности, которая представляет собой
таблицу, состоящую из трёх разделов и
ограниченного множества строк.
Левый и правый разделы содержат в
себе информацию по точности изделия на
этапах разработки ТЗ и КД, а средний
раздел содержит информацию о резуль-
татах процедуры верификации КД на со-
ответствие требованиям ТЗ по точности
изделия.
Каждая строка матрицы точности
включает в себя информацию по одному
ТППТ и множеству КПТ, которые распо-
лагаются в ЭМИП и ЭМИК между соот-
ветствующими двумя БТ, являющимися
общими для обеих моделей.
Число столбцов в среднем разделе
может быть разным, в зависимости от
формы представления результатов вери-
фикации. В простейшем случае раздел
может иметь один столбец, в котором ре-
зультат верификации может быть пред-
ставлен качественно в виде оценки типа
«да-нет».
На этапе разработки ТЗ заполняется
левый раздел матрицы точности.
152
Заполнение раздела должно прово-
диться представителями проектного от-
дела, которые являются авторами требо-
ваний по точности изделия. Процедура
заполнения матрицы точности проводит-
ся индивидуально путём введения кон-
кретным исполнителем (коллективом ис-
полнителей) в отдельную строку соответ-
ствующей информации по каждому
ТППТ с последующим подтверждением
завершения операции электронной под-
писью. Число строк в матрице точности
должно соответствовать числу ТППТ,
приведенных в ЭМИП.
Порядок заполнения матрицы мо-
жет быть различным. Важно, чтобы каж-
дый ТППТ, представленный в ЭМИП,
нашёл своё отображение в левом разделе
матрицы точности. Факт полного запол-
нения матрицы точности на этапе ТЗ
также должен обязательно подтверждать-
ся электронной подписью.
Заполнение правого раздела матри-
цы точности может выполняться либо по
мере разработки КД, либо после её за-
вершения. Процесс заполнения матрицы
точности на этапе разработки КД анало-
гичен процессу её заполнения на этапе
разработки ТЗ и также должен обязатель-
но подтверждаться соответствующими
электронными подписями.
Будет считаться, что заданная точ-
ность конструкции изделия на этапе раз-
работки КД обеспечивается, если мера
точности каждой сборочной РЦ из право-
го раздела матрицы точности соответ-
ствует требованиям соответствующего
ТППТ из левого раздела. Если хотя бы
для одного из ТППТ требования по точ-
ности не соответствуют своему заданно-
му значению, то точность изделия не
обеспечивается.
На рис. 4 показан один из возмож-
ных вариантов структуры матрицы точ-
ности и показан пример её заполнения
для ТППТ
<(М1)а!;(аГ)1;(А!), ± A(Aj;((M2)Ai >.
Здесь необходимо отметить, что
при заполнении матрицы точности мож-
но использовать CAD-информацию из
ЭМПМ Aj и ЭМСЕ Bj, выделив инфор-
мацию, представленную на рис. 16 и
рис. 2в, рис. 2г, в виде отдельных слай-
дов.
Выводы и рекомендации
Предлагаемый метод контроля над
точностью изделия на этапе разработки
КД не требует доработки используемых
САПР и не требует адаптации к нему су-
ществующей методологии РА.
При проведении верификации ме-
тод обеспечивает контроль каждого
ТППТ из матрицы точности и может
быть использован на практике при усло-
вии разработки метода постпараметри-
зации (введение БТ и присвоение инди-
видуальных имён для каждого ТППТ),
при помощи которого должна быть обес-
печена подготовка и формализация ин-
формации, связанной с оформлением
матрицы точности.
Матрица точности позволяет про-
водить контроль точности (в том числе -
аудиторский) путем проведения верифи-
кации точности вручную или (при мини-
мальной адаптации аппарата расчёта РЦ)
с использованием компьютерной техни-
ки.
К недостаткам необходимо отнести
тот факт, что метод обеспечивает только
контроль над выполнением требований
по точности изделия на этапе разработки
КД, но в процесс разработки КД не даёт
подсказки в том случае, когда по каким-
либо причинам происходит отступление
от заданных в ТЗ требований по точности
изделия.
Библиографический список:
1 Выписка из протокола заседания
Военно-промышленной комиссии при
Правительстве Российской Федерации
№6 от 31 июля 2013 г. Москва. О разра-
ботке и внедрении информационных тех-
нологий в оборонно-промышленном
комплексе. [Текст].
2. Шехонин, А. А. Методология
проектирования оптических приборов :
учеб, пособие [Текст] / А. А. Шехонин.
В. М. Домненко. О. А. Гаврилина. [Текст]
- СПб. : Изд-во СПбГУ ИТМО, 2006. -
91 с.
3. ГОСТ ISO 9000 - 2011. Системы
менеджмента качества. Основные поло-
153
жения и словарь: Межгосударственный
стандарт [Текст]. - Москва: Стандартан-
форм, 2012.
4. ГОСТ 2.051-2006. Электронные
документы. Общие положения [Текст]. -
Москва: Стандартинформ, 2011.
5. ГОСТ 2.052-2006. Электронная
модель изделия. Общие положения
[Текст]. - Москва: Стандартинформ,
2011.
6. ГОСТ 2.053-2006. Электронная
структура изделия. Общие положения
[Текст]. - Москва: Стандартинформ, 2007
7. Комарова Л.А., Филатов А.Н.
Применение технологии нисходящего
проетирования, основанной на решениях
Windchill PDM Link и САПР
Pro/ENGENEER, для разработки изделий
ракетно-космической техники. [Текст] И
Известия Самарского научного центра
Российской академии наук. 2011, т. 13,
№1 (2), с.297-303.
8. Филатов А.Н., Стерликов К.В.,
Микушкина С.М. Технология нисходя-
щего проетирования изделий РКТ, осно-
ванная на решениях компании РТС.
[Текст] // Автоматизация проектирова-
ния. 2013, №2. с. 46-51.
9. Филатов А.Н., Никашина И.В.,
Комаров В.А. Электронный технический
документооборот конструкторской доку-
ментации как основа единого информа-
ционного пространства предприятия
аэрокосмической отрасли. [Текст] // Из-
вестия Самарского научного центра Рос-
сийской академии наук. т. 15, №6 (4),
2013, с.998-1003.
10. ОСТ 92-0290-73. Номенклатура
таблиц, расчётов, ИЭ и прочих докумен-
тов. [Текст]
11. ГОСТ 2.102-68. Виды и ком-
плектность конструкторских документов
[Текст]. - Москва: Стандартинформ,
2007.
12. РД 50-635-87. Цепи размерные.
Основные понятия. Методы расчёта ли-
нейных и угловых цепей. Методические
указания [Текст] - Москва: Изд-во стан-
дартов, 1987.
13. Шабалин, А.В. Конфигурацион-
ные пространства для оценки собираемо-
сти изделий машиностроения с простран-
ственными допустимыми отклонениями
[Текст] : автореф. дис. ... канд. тех. наук/
А.В. Шабалин. - Иркутск, 2011.
14. Гаер, М.А. Разработка и иссле-
дование геометрических моделей про-
странственных допусков сборок с ис-
пользованием кватернионов [Текст] : ав-
тореф. дис. на соиск. учен. степ, к.т.н.:
спец. 05.02.08 / М.А. Гаер .- Иркутск:
2005,- 18 с
15. Калашников, А.С. Система ав-
томатизированного проектирования и
размерного анализа сборок с простран-
ственными допусками [Текст] : автореф.
дис. ... канд. тех. Наук / А.С. Калашни-
ков. - Иркутск, - 2008
16. Яценко, О.В. Интервальный
анализ собираемости деталей с допуска-
ми при автоматизированном проектиро-
вании [Текст] : автореф. дис. ... канд. тех.
наук / Яценко, О.В. город Иркутск, - 2000
17. Исаев, С.В. Методика оценки
линейной модели пространственной раз-
мерной цепи для обеспечения взаимоза-
меняемости объектов производства при
сборке [Текст] : автореф. дис. ... канд.
тех. наук / С.В. Исаев. - Москва - 2007
18. ГОСТ 21778-81. Система обес-
печения точности геометрических пара-
метров в строительстве. Основные поло-
жения [Текст]. - Москва: Издательство
стандартов, 1989.
154
PROVISION OF MONITORING THE SPECIFIED ACCURACY OF SPACE COMPLEX
PRODUCTS AT THE PHASE OF DESIGN DOCUMENTATION DEVELOPMENT
©2015 V.D. Elenev1, Ju.P. Shuplyak2
'Korolev State Aerospace University of Samara (National Research University), Samara
2JSC SRC Progress, Samara
Abstract: The article deals with the problem of monitoring the specified accuracy of space complex products
at the phase of design documentation development.
Accuracy of the product at the phase of design documentation development is seen as a system characteristic
which covers a set of isolated requirements regarding the product accuracy specified at the phase of statement of
work development.
The concept of specified accuracy monitoring is based on the idea of a standard design accuracy parameter
which is used to fix the entire variety of isolated accuracy requirements specified for a product by the statement of
work. All the product accuracy requirements set and implemented at the phase of design documentation develop-
ment are reduced to an initial set of standard design accuracy parameters specified in the statement of work to con-
firm (or not confirm) that they correspond to each other.
Keywords: Accuracy, dimensional analysis, dimension chain calculation, verification, electronic product
model, standard design accuracy parameter, metric space
Информация об авторах:
Еленев Валерий Дмитриевич, д.т.н., профессор, профессор кафедры ЛА, директор
института авиационной техники, СГАУ, Россия, 443086, г. Самара, Московское шоссе, 34,
т. 267-43-25, E-mail: astra(aissau.ru.
Область научных интересов: автоматизация проектирования ЛА.
Шупляк Юрий Петрович, ведущий инженер-конструктор АО «РКЦ «Прогресс»,
443011, г. Самара, ул. Советской Армии, д. 200А, кв. 79, т. 192-37 (служебный), 926-25-09
(домашний). Область научных интересов: инженерный анализ механического взаимодей-
ствия составных частей космических комплексов.
Elenev, Valerii Dmitrievich, Dr. Sci. Tech., Prof, of aerospace vehicle department, head
of Aircraft Institute, Korolev State aerospace university of Samara, Russia, 443086, Samara,
Moskovskoe shosse, 34, teL. 267-43-25, E-mail: astra6zissau.ru.
Scientific area: automation of aerospace vehicle designing.
Shuplyak, Jurii Petrovich, senior design-engineer, JSC «SRC «Progress», 443011,
Samara, uL Sovetskoi Armii, 200A - 79, tel. 192-37 (office), 926-25-09 (home).
Scientific area: reverse engineering of mechanical interaction of space complex compo-
nents.
155
УДК 004.9
ОСОБЕННОСТИ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ КОНСТРУКТОРСКОЙ
ПОДГОТОВКИ ПРОИЗВОДСТВА В ЕДИНОМ ИНФОРМАЦИОННОМ
ПРОСТРАНСТВЕ ПРЕДПРИЯТИЯ
©2015 И.В. Никашина, Е.В. Головченко, С.М. Микушкина, А.Н. Филатов
АО «РКЦ «Прогресс», г. Самара
Рассмотрены вопросы электронного технического документооборота конструкторской документации,
а также проанализирована возможность предоставления данной документации в виде аннотированных 3D-
моделей. Приведены особенности информационной поддержки конструкторской подготовки производства в
едином информационном пространстве предприятия.
Ключевые слова: Единое информационное пространство (ЕИП), конструкторская подготовка про-
изводства (КПП), жизненный цикл (ЖЦ), электронная структура изделия (ЭСИ), аннотированная 3D-
моделъ, электронный технический документооборот
В современном мире невозможно
представить себе разработку новой ра-
кетно-космической техники без примене-
ния инновационных подходов к проекти-
рованию и современных технических
средств. В соответствии с концепцией
развития информационных технологий в
промышленно-оборонном комплексе на
сегодняшний день перед предприятием
стоят сложные научно-технические и ор-
ганизационные задачи, такие как сокра-
щение сроков проектно-конструкторских
работ, постоянное совершенствование
уровня проектирования и постоянная ин-
формационная поддержка КПП. Целью
применения всех выше перечисленных
мероприятий является выпуск пакета ра-
бочей документации на изготовление из-
делия с минимальным количеством из-
вещений об изменении.
В АО «РКЦ «Прогресс» основопо-
лагающая идея информационной под-
держки изделия РКТ на стадии КПП ос-
нована на решениях таких программных
продуктов, как Windchill PDMLink и
САПР Creo Elements, которая представ-
ляет собой:
• создание электронной конструк-
торской структуры изделия (ЭСИ) нас
основе;
• разработка конструкторской до-
кументации в виде аннотированных 3D
моделей Creo Elements;
• информационное сопровождение
и поддержка всего выше перечисленного;
Основной единицей хранения дан-
ных об изделии является электронная
структура изделия (ЭСИ), которая опре-
деляет совокупность составных частей
изделия и связей между ними, определя-
ющих входимость этих составных частей.
Из общей структуры изделия можно пе-
рейти к каждому конкретному узлу или
агрегату, открыть его графическое пред-
ставление, просмотреть основные атри-
буты и получить полную информацию об
объекте
Структура изделия позволяет:
• Генерировать спецификацию из-
делия;
• Поддерживать актуальность дан-
ных об изделии;
• Отслеживать проводимые изме-
нения;
• Управлять конфигурациями из-
делия.
Из правильно сформированной
структуры изделия (у которой правильно
заданы все атрибуты), спецификация на
изделие формируется нажатием одной
кнопки с помощью генератора специфи-
каций.
Ядром электронного технического
документооборота является электронный
технический документ.
ЭТД - это конструкторский доку-
мент, выполненный в электронной форме
как структурированный набор данных,
создаваем ых программ но-техн ически м
средством. ЭТД состоит из реквизитной и
156
содержательной части. Содержательная
часть документа может быть в виде тек-
стового документа, 2О-чертежа или
ЗО-модели, которая может полноценно
заменить 20-чертеж.
Аннотированная трехмерная модель
ДСЕ содержит в себе всю информацию
об изделии. Такая модель даёт полное и
наглядное представление о геометрии,
размерах, технических требованиях изде-
лия и становится ядром жизненного и
производственного цикла изделия.
Создание аннотированных 3D мо-
делей позволяют уменьшить количество
ошибок при проектировании и конструи-
ровании, сократить время производ-
ственного цикла изделия, улучшить кон-
троль изменений конструкторской и тех-
нологической документации, тем самым
повысить качество и сроки выпуска изде-
лия.
Конечным результатом конструк-
торской интеллектуальной деятельности
является аннотированные ЗО-модели и
ЭСИ, которые после выгрузки на сервер
согласовываются со всеми необходимы-
ми службами предприятия и приобретают
статус «Выпущено». Согласование КД в
электронном виде проводится с помощью
бизнес-процессов.
В данный момент на предприятии
АО РКЦ Прогресс существуют следую-
щие БП:
• Предварительное согласование
КД;
• Предварительная проработка на
технологичность КД;
• Согласование и запуск КД;
• Изменение КД;
• ПИ/ДПИКД;
• Запуск и изменение КД смежни-
ков;
• Листок запуска
Основными и наиболее ожидаемы-
ми положительными результатами от
внедрения электронного документообо-
рота на стадии КПП являются:
• существенное сокращение сро-
ков разработки конструкторской и всей
сопутствующей документации с мини-
мальным количеством извещений об из-
менении (разработка изделия «с первого
захода»);
• коллективная работа проектно-
конструкторских подразделений пред-
приятия над проектами с разграничением
прав доступа к его составным частям;
• надежное хранение и быстрый
поиск информации в электронных архи-
вах;
• максимальное использование в
новых разработках отработанных и про-
веренных технических решений, храня-
щихся в базе данных (БД);
• исключение ошибок за счет
устранения нескольких источников хра-
нения одной и той же информации раз-
ных версий;
• быстрый и качественный выпуск
на рынок изделия, соответствующего
требованиям стандартов;
Исходя из сказанного выше выде-
лим особенности информационной под-
держки КПП в ЕИП предприятия:
• стадийность проработки с воз-
можностью организации параллельной
работы задействованных подразделений
предприятия над изделием;
• возможность осуществления
контроля над потоком информации в
рамках проекта изделия;
• возможность проектирования из-
делия по методике нисходящего проек-
тирования с безбумажным документо-
оборотом.
В заключении следует отметить, что
основными этапами разработки рабочей
документации является проектирование
трёхмерной модели, а также создание ан-
нотированных комбинированных видов,
которые содержат всю необходимую ин-
формацию о модели. Т.о. аннотирован-
ные ЗО-модели совместно с электронным
техническим документооборотом, стано-
вятся ядром жизненного и производ-
ственного цикла изделия.
Библиографический список:
1. Никашина И.В., Филатов А.Н.,
Комаров В.А. автоматизированное
управление конструкторскими данными в
едином информационном пространстве
предприятия // Материалылы междуна-
157
родной научно-технической конференции
ПИТ-2015, Самара, СГАУ, 2015 - т.1,
с.21-29.
2. Никашина И.В., Филатов А.Н.,
Микушкина С.М., Рогова Т.С. Электрон-
ный технический документооборот кон-
структорской документации как основа
единого информационного пространства
ОАО «РКЦ «Прогресс» // Мат-лы XX
Научно-технической конференции моло-
дых ученых и специалистов, г. Москва,
ОАО РКК «Энергия» имени С.П. Короле-
ва, 2014г.-с.627-629.
3. Никашина И.В., Филатов А.Н.,
Микушкина С.М. Электронный техниче-
ский документооборот конструкторской
документации // Мат-лы научно-
технической конференции «Перспектив-
ные информационные технологии 2013»,
Самара, СГАУ, 2013 - с. 132-136.
FEATURES OF PREPRODUCTION ENGINEERING INFORMATION
SUPPORT IN ENTERPRISE COMMON INFORMATION SPACE
©2015 I.V. Nikashina, E.V. Golovchenko, C.M. Mikushkina, A.N. Filatov
JSC «SRC «Progress», Samara
The issues of electronic engineering document management are considered in the paper. Possibility of these
documents distribution in a form of annotated 3D-models is analyzed as well. Information support features of pre-
production engineering in the enterprise common information space are also given in the paper.
Key words: Common information space, preproduction engineering, life cycle, product electronic structure,
annotated 3D-model, electronic engineering document management.
Информация об авторах:
Никашина Ирина Викторовна, инженер-программист 1 категории АО «РКЦ
«Прогресс», аспирант кафедры КиПЛА, СГАУ, Россия, г. Самара, ул. Земеца 18 , т.
276-11 -73, nikashina.irinafemail.ru.
Область научных интересов: информационная поддержка изделия РКТ, электронный
технический документооборот.
Головченко Елена Викторовна, инженер-конструктор 3 категории АО «РКЦ «Про-
гресс», Россия, г. Самара, ул. Земеца 18 , т. 276-11-73.
Область научных интересов: информационная поддержка изделия, ЗС-модели-
рование.
Микушкина Светлана Михайловна, начальник отдела САПР АО «РКЦ
«Прогресс» Россия, г. Самара, ул. Земеца 18, т. 228-96-11.
Область научных интересов: формирование единого информационного пространства
предприятия, методология создания РКТ на основе САПР и PLM.
Филатов Александр Николаевич: начальник управления ИТ АО «РКЦ «Прогресс»,
к.т.н., Россия, г. Самара, ул. Земеца 18, dOO88(kt),samspace.ru.
Область научных интересов: формирование единого информационного пространства
предприятия, методология создания РКТ на основе САПР и PLM.
Irina V. Nikashina, Programming Engineer of JSC SRC Progress, Post-Graduate Student
of Aircraft Engineering Faculty of SSAU, 18 ul. Zemetsa, Samara, Russia, ph. 276-11-73,
nikashina.irina(t/jmail.ru.
Sphere of scientific interest: space-rocket hardware information support, electronic docu-
ment management.
Elena V. Golovchenko, Design Engineer of JSC SRC Progress, 18 ul. Zemetsa, Samara,
Russia, ph. 276-11-73.
Sphere of scientific interest: product information support, 3D modeling.
158
Svetlana M. Mikushkina, Head of CAD Department of JSC SRC Progress, 18 ul.
Zemetsa, Samara, Russia, ph. 228-96-11.
Sphere of scientific interest: company common information space organizing, methodolo-
gy of space-rocket hardware production on the basis of CAD and PLM systems.
Aleksandr N. Filatov, Head of IT Division of JSC SRC Progress, Candidate of Engineer-
ing, 18 ul. Zemetsa, Samara, Russia, dOO88fesamspace.ru.
Sphere of scientific interest: company common information space organizing, methodolo-
gy of space-rocket hardware production on the basis of CAD and PLM systems.
159
УДК 537.86
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВУХЗАХОДНОЙ
КОНИЧЕСКОЙ ЛОГОСПИРАЛЬНОЙ АНТЕННЫ НА ОСНОВЕ
ИНТЕГРАЛЬНЫХ ПРЕДСТАВЛЕНИЙ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ
©2015 Д.П.Табаков1, С.Б. Филиппов2, А.С.Мальцев2
1 Поволжский государственный университет телекоммуникаций и информатики, г.Самара
2АО «РКЦ «Прогресс», г.Самара
Статья посвящена построению математической модели двухзаходной конической логоспиральной ан-
тенны для различных частотных диапазонов радиотехнических систем космических аппаратов. Построение
математической модели осуществляется на основе интегральных представлений электромагнитного поля и
служит для определения электродинамических характеристик антенн с изменяемой геометрией. Рассмотрен
вопрос оптимизации между размерами антенны и необходимой диаграммой направленности в дециметро-
вом и сантиметровом диапазонах волн. Разработан алгоритм программы расчета двухзаходной конической
логоспиральной антенны. Приведены результаты численного моделирования.
Ключевые слова: математическая модель, коническая логоспиральная антенна, интегральное пред-
ставление электромагнитного поля, электродинамические характеристики, диаграмма направленности
Введение
Одной из важных задач при разра-
ботке радиотехнических систем кос-
мических аппаратов (РТС КА) является
построение надежных радио каналов,
обеспечивающих устойчивую связь изде-
лия с наземными станциями, которая за-
висит как от надежности работы аппара-
туры с учетом всех условий сопутству-
ющих полету, так и от диаграмм направ-
ленности антенных устройств, установ-
ленных на КА. Характер диаграмм
направленности (ДН) определяется про-
граммой полета и особенностью кон-
струкций КА. В современных спутнико-
вых системах связи и навигации широко
применяются конические спиральные ан-
тенны. При проектировании конических
спиральных антенн зачастую использует-
ся принцип электродинамического подо-
бия. Этот принцип устанавливает иден-
тичность ДН и входных сопротивлений
двух различных антенн без потерь на ча-
стотах и f2 , если форма этих антенн
одинакова. Такие антенны с одинаковы-
ми размерами в длинах волн называют
электродинамически подобными [1]. Од-
нако использование конических спираль-
ных антенн, устанавливаемых на КА,
определенных частотных диапазонов ча-
сто встречает затруднения, связанные с
различными ограничениями, такими как
размеры и конфигурации самого аппара-
та, зонами полезного груза, компоновкой
научной и целевой аппаратуры, невоз-
можностью применения раскрывающих-
ся устройств и т.д. Например, для диапа-
зона рабочих частот менее 500 МГц габа-
ритные размеры спиральных антенн по-
лучаются значительно большими, что де-
лает невозможным применение их на ма-
лых космических аппаратах, а для рабо-
чих частот выше 7 ГГц габаритные раз-
меры получаются настолько малыми, что
в значительной мере усложняется техно-
логия их изготовления.
Настоящая работа посвящена по-
строению математической модели и раз-
работке алгоритма расчета двухзаходной
конической логоспиральной антенны с
изменяемой геометрией. В рамках моде-
ли можно изменять такие характеристики
антенны как, рабочая частота, размер
экрана, радиус вершины конуса, радиус
основания конуса, высота конуса, высота
подъема конуса над экраном, число вит-
ков спирали, угловую ширину захода
спирали, волновое сопротивление фиде-
ра, тип возбуждения (синфазный либо
противофазный).
Выходными параметрами, опреде-
ляемыми с помощью программы, явля-
ются такие характеристики антенны, как
160
нормированная амплитудная диаграмма
направленности (ДН) в азимутальной
плоскости, нормированная амплитудная
диаграмма направленности в меридиан-
ной плоскости, входное сопротивление
антенны, волновое сопротивление согла-
сующего трансформатора, развертка вит-
ка спирали антенны.
Метод интегрального представления
электромагнитного поля
Интегральное представление элек-
тромагнитного поля связывает поле в
точке наблюдения с токами в заданном
объеме или на поверхности. В случае, ко-
гда точки наблюдения находятся на по-
верхности или в излучающем объеме, ис-
Здесь
— А — р
(Л FsE,H
u ll
(2)
пользуя соответствующие граничные
условия из интегрального представления
поля можно получить интегральное урав-
нение (ИУ) или систему интегральных
уравнений для определения неизвестных
токов.
Среди наиболее ранних работ, ис-
пользующих интегральные уравнения для
электродинамического анализа антенн,
можно отметить [2]. В [3] приводится до-
статочно подробный обзор применения
ИУ к электродинамическому анализу
спиральных антенн.
В основе алгоритма расчета кониче-
ской спиральной антенны лежат дискре-
тизированные представления электро-
магнитного поля [4]:
.7,Fse,h (о
I I /
- поле, создаваемое в точке с радиус маной (рис. 1а), описывающей тонкий
вектором г А;-тым сегментом /-той ло- проводник радиуса G.
а) б)
Рис. 1 - линеаризация образующей тонкопроволочной структуры (а) и
геометрия модели двухзаходной конической спиральной антенны (б).
161
Под сегментом S г- понимается со-
’ I
вокупность параметров: а- радиус сег-
мента; А , - длина сегмента, / Oi- д. -
единичный радиус вектор на сегменте;
. *
I i - полный ток на сегменте; г,-
’ i ’ i
радиус вектор, проведенный в центр сег-
мента; г;- - совокупность узлов лома-
’ i
При постановке граничного условия
/о(е(/п) + е) = О (3)
в центрах каждого сегмента
интегральные представления переходят в
систему линейных алгебраических
уравнений относительно неизвесных
амплитуд I j к :
ной.
j = к j = sj.
(4)
Р аа .
Вид функций К а и Е 1 приве-
i ai
ден в [4]. Поле Е создается генерато-
рами ЭДС, питающими антенну, поле Е
создается токами на антенне.
2. Алгоритм работы программы
Программа расчета реализована в
СКМ wxMaxima 12.04.x.
Для создания геометрии двухзаход-
ной конической спиральной антенны
требуемой конфигурации в программе
необходимо ввести исходные данные со-
держащие настройки параметров расчета
и геометрические параметры антенны.
Настройки параметров расчета
(%ill7)
радиус построения ДН, м */
число точек расчета ДН */
азимут меридианной ДН, град */
частота, МГц */
относит, диэл. проницаемость *
относит, магн. проницаемость *
ЭДС генератора, В */
волновое сопр. фидера, Ом */
rad:300$
ndn:200$
phio:0$
Freq:435$
ep_r:1$
mu_r:1$
Ug:4$
Wf:50$
Рис. 2 - Ввод настроек параметров расчета
162
Геометрические параметры антенны
7 (%1144) / *радиус вершины спирали, мм*/ Rmin:35$
/ *радиус основания спирали, мм*/ Rmax:105$
/ ♦размер рефлектора, мм*/ Dref:300$
/ ♦высота антенны, мм*/ Hant:350$
/ ♦высота подъема спирали, мм*/ hspr:5$
/ ♦угловая ширина ветви, град*/ d:90$
/ ♦число витков спирали*/ Nl:1.0$
/ ♦ширина зазора с генератором, мм*/ dg:30.0$
/ ♦число сегментов спирали*/ Ne:70$
/ ♦п.ч.с. возб.вибратора.*/ Ng: 2$
/ ♦порядок сетки экрана*/ Nw: 6$
/ ♦п.ч.с. проводников экрана*/ Ks:4$
/ ♦п.ч.с. общего проводника*/ Kc:4$
/ ♦число , дополнений к образующей*/ Ns:l$
/ ♦радиус тонких проводников, мм*/ rd:0.2$
Рисунок 3 - Ввод геометрических параметров расчета
Далее выполняется расчет и визу-
альный контроль геометрии конической
спиральной антенны (рис. 4а).
Рис. 4 - геометрия модели спиральной антенны (а) и экспериментальный образец конической
логоспиральной антенны (б).
После проведения контроля геомет-
рии конической спиральной антенны вы-
полняется расчет ДН (рис.5) в азимуталь-
ной и меридиональной плоскостях в ре-
жиме синфазногоили противофазного
возбуждения.
163
VvIRE-SOLVER V.1.0
автор: Табаков Д.П.
число сегментов: ........... 511
расчет матриц: ............. 100 %
сремя расчета матрищ :...... 530.00 мс
Решение СЛАУ: ............. 100 %
время решения СЛАУ: ....... 28130.00 мс
расчет диаграмм направленности
Меридианная ДН: .............. 100 %
Азимутальная ДН: ............. 100 %
• -Ж. . МХХ»*МЖ<ЖЛ.« «ХХХХХХХХХХ.
Входное сопротивление, Ом
Активная часть: ................ 97.18
Реактивная часть: ........... -733.6
общее время расчета: ....... 60.07 с
выполнено
Рис. 5 - расчет ДН в азимутальной и меридиональной плоскостях в режиме синфазного или противофазного
возбуждения
Результат расчета и построения ДН в азимутальной и меридиональной плоскостях пред-
а) б)
Рис. 6 - ДН конической спиральной антенны в азимутальной плоскости (а),
ДН конической спиральной антенны в меридиональной плоскости (б).
Последним этапом работы про-
граммы является расчет и отображение
развертки витка спирали (рис. 7), кото-
рый далее используется при изготовле-
нии экспериментального образца двухза-
ходной конической спиральной антенны
(рис 46).
164
Результаты численного модели-
рования
Геометрия исследуемой модели и
экспериментальный образец конической
логоспиральной антенны представлены
на рис. 4. Исследования проводились на
частоте 435 МГц, при этом антенна имела
следующие параметры:
- Диаметр вершины конуса: 70 мм;
- Диаметр основания конуса: 210
мм;
- Высота конуса: 350 мм;
- Диаметр экрана: 300 мм;
- Количество витков: 1;
- Поляризация: правая круговая;
- Тип запитки: противофазная.
Графическое сравнение расчетной и
экспериментальной ДН в меридианной
плоскости представлено на рис. 8.
конической спиральной антенны. (1-теория, 2-эксперимент)
165
Заключение
Данная модель легла в основу раз-
работки конструкции антенны передаю-
щего канала бортовой системы контроля
и управления малого космического аппа-
рата «Аист-2Д». В целом наблюдается
достаточно хорошее совпадение резуль-
татов эксперимента с результатами рас-
чета.
Из недостатков математической мо-
дели отметим следующее: увеличение
густоты сетки рефлектора приводит к
квадратичному увеличению размерности
матрицы импедансов. При решении
СЛАУ прямыми методами, наиболее
устойчивыми к вычислительной погреш-
ности (использовался метод вращений
Гивенса), крах решения наступает, когда
размер матрицы составляет 700x700 эле-
ментов при условии использования чисел
с плавающей точкой двойной точности.
Уменьшение же густоты сетки рефлекто-
ра приводит к неточному расчету уровня
обратного лепестка нормированной диа-
граммы направленности.
В связи с этим в дальнейшем пла-
нируется переход к сплошной модели
экрана на основе двумерных интеграль-
ных уравнений [5].
Библиографический список:
[1] Жук М.С., Молочков Ю.Б.
Проектирование линзовых, сканирующих,
широкодиапазонных антенн и фидерных
устройств. - М., «Энергия», 1973.
С. 182-188.
[2] Mei К.К. On the integral Equations
of Thin Wire Antennas // IEEE Trans, on Ant.
and Prop. AP-13. - 1965 pp.374-378
[3] Adekola S., Mowete A., Ayorinde A.,
Compact Theory of the Broadband Elliptical
Helical Antenna, European Journal of
Scientific Researsh, ISSN 1450-216X Vol.31
No.3 (2009), pp.446-490.
[4] Неганов B.A., Табаков Д.П.,
Филиппов С.Б., Мальцев А.С.
Теоретическое и экспериментальное
исследование двухзаходной конической
равноугольной логопиральной антенны
малого космического аппарата «Аист-2»,
«Радиотехника», 2015г., №2.
[5] Клюев Д.С. Расчет характеристик
зеркальной антенны с плоским зеркалом
методом двумерных сингулярных
интегральных уравнений - Физика
волновых процессов и радиотехнические
системы - 2010. - Т. 13 - 1 - С.21 -26.
MATHEMATICAL MODEL OF THE CONICAL BIFILAR HELICAL
ANTENNA ON THE BASIS OF INTEGRAL REPRESENTATIONS
OF ELECTROMAGNETIC FIELD
©2015 'D.P.Tabakov, 2S.B. Filippov, 2A.S.Maltcev
2JSC SRC «Progress», Samara
The article is devoted to constructing a mathematical model of double-threaded conical spiral antennas for
different frequency ranges of radio systems of spacecraft. Construct a mathematical model is based on integral rep-
resentation of an electromagnetic field and is used to determine the electromagnetic characteristics of the antennas
with variable geometry. The problem of optimization between the size of the antenna and the necessary radiation
pattern in the decimeter and centimeter wavelengths. The algorithm of calculation programs conical bifilar helical
antenna. The results of numerical modeling.
Keywords: mathematical model, tapered logospiralnaya antenna integral representation of electromagnetic
field, electromagnetic characteristics, the radiation pattern
Информация об авторах:
Табаков Дмитрий Петрович, кандидат физ.-мат. наук, доцент кафедры ОКиТ РТС
ФГОБУ ВПО ПГУТИ. Адрес электронной почты: dimatabakovferamblcr.ru.
Область научных интересов: электродинамика СВЧ и оптического диапазона
166
Филиппов Сергей Борисович, 1963 г.р., в 1988 г. окончил Куйбышевский авиаци-
онный институт, начальник проектно-конструкторской группы антенно-фидерных
устройств АО «РКЦ «Прогресс».
Область научных интересов: радиочастотные линии передач, антенны и устройства
СВЧ.
Мальцев Андрей Сергеевич, 1988 г.р., инженер конструктор 2 категории антенно-
фидерных устройств АО «РКЦ «Прогресс».
Область научных интересов: прикладная электродинамика и техника СВЧ в косми-
ческом приборостроении.
167
УДК 629.7.05:004.942
КОМПЛЕКС МЕТОДИК И ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
ВЕРОЯТНОСТНОГО ПРОЕКТИРОВАНИЯ СУРТ И РКС РАКЕТ-НОСИТЕЛЕЙ
©2015 Л.Н. Бельский, Т.Н. Ложкина, Г.П. Лосев, Е.Н. Маханек,
П.Л. Селезнев, С.В. Слепцова, С.Н. Цуканова, В.Л. Якимов
АО «Научно-производственное объединение автоматики
им. академика Н.А. Семихатова», г. Екатеринбург
Описывается комплекс методик и программного обеспечения вероятностного проектирования си-
стемы управления расходом топлива (СУРТ) и расчета кажущейся скорости (РКС) ракет-носителей (PH).
Рассматриваются методики статистической оценки точности выходных параметров системы управления
(СУ), многопараметрической стохастической оптимизации параметров СУ PH и идентификации параметров
модели объекта по результатам летных испытаний и примеры отработки этих методик на полной математи-
ческой модели (ПММ) СУ PH.
Ключевые слова: статистическая оценка выходных параметров, многопараметрическая стохасти-
ческая оптимизация параметров, идентификация параметров модели объекта
В настоящее время в рамках работ
по вероятностному проектированию
СУРТ и РКС PH типа «Союз-2», «Союз-
СТ», «Союз-2» этапа 1в закончена разра-
ботка цифровых технологий решения 3-х
задач проектирования:
- статистическая оценка выходных
параметров СУ PH;
- многопараметрическая стохасти-
ческая оптимизация параметров СУ PH;
- идентификация параметров моде-
ли объекта по результатам летных испы-
таний.
Алгоритмическое и программное
обеспечение используется при проекти-
ровании СУРТ и РКС PH «Союз-2»,
«Союз-СТ» и «Союз-2» этапа 1в, при
подготовке к пускам, и обработке резуль-
татов летных испытаний (ЛИ). Получен-
ные результаты решения столь сложных
в теоретическом и практическом плане
задач достигнуты благодаря ряду инно-
вационных решений в области проекти-
рования СУ PH.
Во-первых, для стохастических ис-
следований, как наиболее гибкий, точный
и простой метод, пригодный для решения
задач любой сложности, был выбран ме-
тод Монте-Карло. Это метод моделиро-
вания случайных величин с целью вы-
числения характеристик их распределе-
ний, а оценка качества управления про-
водится на основе показателя работоспо-
собности системы с использованием уни-
версального подхода, свободного от вы-
бора весовых коэффициентов, запасов
работоспособности по всем выходным
параметрам системы относительно за-
данных технических требований. Кон-
тролируется 563 выходных параметра
всей системы управления PH.
Во-вторых, использовались вероят-
ностные наихудшие режимы по выход-
ным параметрам системы при параметри-
ческой оптимизации по выбору парамет-
ров СУРТ и РКС, а также критерии и
правила максимизации из всех мини-
мальных запасов работоспособности, в
том числе и при идентификации.
В-третьих, в целях повышения эф-
фективности наземной отработки СУ PH
типа «Союз-2» и отработки методики
идентификации параметров жидкостного
PH, был разработан способ введения в
ПММ дополнительных возмущений, ко-
торый позволил провести исследования
по уточнению лобового сопротивления
Сх с учетом введения дополнительного
возмущения коэффициента изменения
продольной силы ДСх.
В целом комплекс способствует
резкому повышению производительности
труда, повышению экономической эф-
фективности разработок PH в силу его
направленности на уменьшение аварий-
168
ности пусков и увеличению массы выво-
димых полезных нагрузок.
Разработанная цифровая технология
стохастической оптимизации позволит
решать широкий круг задач исследования
и проектирования высокоточных систем
управления движущихся объектов.
Библиографический список:
1. Антушев Г.С. Методы парамет-
рического синтеза сложных технических
систем. М.: Наука, 1989.
2. Лосев Г.П., Ложкина Т.Н.,
Маханек Е.Н. Многопараметрическая оп-
тимизация сложных нелинейных неста-
ционарных стохастических систем // Сб.
тезисов. XX Санкт-Петербургская меж-
дународная конференция по интегриро-
ванным навигационным системам, 27-29
мая, 2013. ЦНИИ Электроприбор, 2013, с.
260...261.
3. Андриенко А.Я, Бельский Л.Н,
Заплатин М.И, Лосев Т.П, Маханек Е.Н,
Чадаев А.И. Цифровая система управле-
ния расходованием топлива ракет-
носителей «Союз-2» и «Союз-СТ» // Про-
блемы управления. 2012. № 5. С. 10... 15.
4. Бельский Л.Н., Лосев Г.П.,
Шалимов Л.Н. Многопараметрическая
оптимизация сложных, нелинейных, не-
стационарных стохастических систем по
критерию максимальной вероятности
выполнения технических требований по
показателям качества. Авиакосмическое
приборостроение, №6, 2014г, с.31-36.
5. НИР «Идентификация парамет-
ров жидкостного PH как объекта управ-
ления СУРТ», ТО №315/1047 от
28.11.2013г.
References:
1. Antushev G.S. Metody para-
metricheckogo sinteza slozhnykh tekhnich-
eskikh sistem [Methods of Parametric Syn-
thesis of Complex Technical Systems], M.:
Nauka, 1989.
2. Losev G.P., Lozhkina T.N.,
Makhanek E.N. Multiparametric Optimiza-
tion of Complex Non-linear Non-stationary
Stochastic Systems // Collection of abstracts
of XX St. Petersburg Conference on Inte-
grated Navigation Systems, May 27-29,
2013. TsNII Electropribor, 2013, 260 ... 261
pp.
3. Andrienko A.Y., Belsky L.N.,
Zaplatin M.I., Losev G.P., Makhanek E.H.
Chadaev A.L Numerical Control Fuel Con-
sumption System of "Soyuz-2" and "Soyuz-
ST" Launch Vehicles // Control issues,
2012. №5. 10... 15 pp.
4. Belsky L.N, Losev G.P.,
Shalimov L.N. Multiparametric Optimiza-
tion of Complex Non-linear Non-stationary
Stochastic Systems According to Maximum
Probability of Meeting Technical Require-
ments in Terms of Quality, Aviakosmich-
eskoe priborostroenie, №6, 2014, 31-36 pp.
5. Research "Identification of Parame-
ters of the Fluid LV as a Control Object of
FMS", MS №315/ 1047, 28.11.2013.
COMPLEX OF TECHNIQUES AND SOFTWARE FOR STOCHASTIC
DEVELOPMENT OF FMS AND CAV OF LAUNCH VEHICLE
©2015 L.N. Belsky, T.N. Lozhkina, G.P. Losev, E.N. Makhanek,
P.L. Seleznev S.V. Sleptsova, S.N. Tsukanova, V.L. Yakimov
JCS «Scientific & Production Association of Automatics
named after the academician N.A. Semikhatov», Yekaterinburg
The article describes a complex of techniques and software for stochastic development of fuel management
system (FMS) and calculation of the apparent velocity (CAV) of launch vehicles (LV). The techniques of statistical
evaluation of the accuracy of the output parameters of the control system (CS), multiparametric stochastic optimiza-
tion parameters of LV CS and identification of the model parameters of the object based on the results of
169
flight tests are examined. The examples of try-out these techniques on complete mathematical model (CMM) of LV
CS are analyzed.
Keywords: statistical evaluation of the output parameters, multiparametric stochastic optimization parameters, the
identification of the model parameters of the object
Информация об авторах:
Бельский Лев Николаевич - заместитель генерального директора ОАО «Научно-
производственное объединение автоматики имени академика Н.А. Семихатова» по ракет-
ной технике (Екатеринбург), e-mail: gvlftfjtpocLru.
Область научных интересов: измерительные средства и системы управления.
Ложкина Татьяна Николаевна - главный специалист отдела ОАО «Научно-
производственное объединение автоматики имени академика Н.А. Семихатова» (Екате-
ринбург), e-mail:, e-mail: aytijnijwcrrif.
Область научных интересов: программирование измерительных средств и систем
управления.
Маханек Елена Николаевна - ведущий инженер отдела ОАО «Научно-
производственное объединение автоматики имени академика Н.А. Семихатова» (Екате-
ринбург), avKtfjtjjogjjii.
Область научных интересов: измерительные средства и системы управления.
Селезнев Платон Львович - начальник сектора отдела ОАО «Научно-
производственное объединение автоматики имени академика Н.А. Семихатова» (Екате-
ринбург), e-mail: avtfcbjtjjocLrii.
Область научных интересов: измерительные средства и системы управления.
Слепцова Светлана Владимировна - ведущий инженер отдела ОАО «Научно-
производственное объединение автоматики имени академика Н.А. Семихатова» (Екате-
ринбург), e-mail: оуКхшдюсгпл.
Область научных интересов: измерительные средства и системы управления.
Цуканова Светлана Николаевна - инженер-конструктор категории отдела ОАО
«Научно-производственное объединение автоматики имени академика Н.А. Семихатова»
(Екатеринбург), e-mail: avtfenpoa.ru.
Область научных интересов: измерительные средства и системы управления.
Якимов Валерий Леонидович - начальник отдела ОАО «Научно-производственное
объединение автоматики имени академика Н.А. Семихатова» (Екатеринбург), e-mail:
дуКсСщюскпл.
Область научных интересов: измерительные средства и системы управления.
Belsky Lev Nikolaevich - the Deputy Director General of JCS “Scientific & Production
Association of Automatics named after the academician N.A. Semikhatov”, (Yekaterinburg) for
space engineering, candidate of technical sciences, a member of the International Academy of
Navigation and Motion Control, e-mail: avtfenpoa.ru.
Field of research: measuring devices and control systems.
Lozhkina Tatiana Nikolaevna - a chief specialist of JCS “Scientific & Production Asso-
ciation of Automatics named after the academician N.A. Semikhatov”, (Yekaterinburg), e-mail:
avtfejnpoa.ru.
Field of research: programming of measuring devices and control systems.
Losev German Petrovich - a senior research engineer of a department of JCS “Scientific &
Production Association of Automatics named after the academician N.A. Semikhatov” (Yekate-
rinburg), candidate of technical sciences, e-mail: avtfenpoa.ru.
Field of research: measuring devices and control systems.
Makhanek Elena Nikolaevna - a senior engineer of a department of JCS “Scientific &
Production Association of Automatics named after the academician N.A. Semikhatov” (Yekate-
rinburg), e-mail: avtfenpoa.ru.
Field of research: measuring devices and control systems.
170
Seleznev Platon Lvovich - a chief of a department of JCS “Scientific & Production Asso-
ciation of Automatics named after the academician N.A. Semikhatov” (Yekaterinburg), e-mail:
avtfenpoa.ru . Field of research: measuring devices and control systems.
Sleptsova Svetlana Vladimirovna - a senior engineer of a department of JCS “Scientific
& Production Association of Automatics named after the academician N.A. Semikhatov” (Yeka-
terinburg), e-mail: avtfenpoa.ru . Field of research: measuring devices and control systems.
Tsukanova Svetlana Nikolaevna - the 1st design engineer of a department of JCS “Scien-
tific & Production Association of Automatics named after the academician N.A. Semikhatov”
(Yekaterinburg), e-mail: avtfenpoa.ru.
Field of research: measuring devices and control systems.
Yakimov Valery Leonidovich - the head of a department of JCS “Scientific & Production
Association of Automatics named after the academician N.A. Semikhatov” (Yekaterinburg),
e-mail: avtfenpoa.ru.
Field of research: measuring devices and control systems.
171
УДК 629.78
МОДЕЛИРОВАНИЕ ПРОЦЕССОВ УПРАВЛЕНИЯ РАЗВЁРТЫВАНИЕМ
ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ С ОГРАНИЧЕНИЯМИ НА
СКОРОСТЬ ВЫПУСКА ТРОСА
©2015 С.А. Ишков, Г.А. Филиппов, Сюй Сяое
Самарский государственный аэрокосмический университет имени
академика С.П. Королёва (Национальный исследовательский университет), г. Самара
В статье рассматривается задача моделирования работы стенда, предназначенного для отработки раз-
вёртывания орбитальной тросовой системы, методами теории автоматического управления Рассматривается
программа управления силой натяжения троса, учитывающая ограничение на скорость выпуска троса. Для
последней решается параметрическая краевая задача. В статье составлена кинематическая схема стенда и, на
её основе, составлена динамическая схема стенда. Моделирование работы стенда выполнено в среде
MapleSim 7.
Ключевые слова: развёртывание орбитальной тросовой системы, управление силой натяжения тро-
са с ограничением на скорость выпуска троса, теория автоматического управления
Впервые орбитальная тросовая си-
стема (далее ОТС) была описана в книге
К.Э. Циолковского «Грёзы о небе» в 1895
году. С тех пор прошло более 100 лет, но
ОТС так и не перешла в разряд эксплуа-
тируемых космических систем. Един-
ственным, относительно удачным экспе-
риментом с ОТС, считается европейский
проект YES2, реализованный в 2007 году.
Спектр задач, которые можно ре-
шить с использованием ОТС - широк.
Одна из этих задач - доставка полезного
груза - спускаемой капсулы (далее СК)
на Землю без применения реактивной тя-
ги.
Необходимо проведение более тща-
тельных теоретических и эксперимен-
тальных исследований динамики ОТС. С
целью выполнения экспериментальных
исследований, в лаборатории космиче-
ских тросовых систем СГАУ проектиру-
ется стенд, предназначенный для отра-
ботки развёртывания ОТС.
Параллельно с разработкой стенда
проводятся и теоретические исследова-
ния в области управления развёртывани-
ем ОТС. В настоящей статье предлагает-
ся следующая математическая модель
развёртывания ОТС [1]:
0 = Ув,
2(ря+й))Уг З гу2 sin0 cos0
г l + ecost?
Л/ V гу2 (з-cos2 0-1)1 Т
(^+<у) +—Л------------ч —’
l + ecosz? тЛ
0 = A1/2p-3/2(l + ecos0)2,
2 esin?7
гу=-2гу2-----------,
1 + е • cos г?
где 0— угол разворота СК в плоскости
орбиты БКА, Vg — скорость изменения
угла разворота СК в плоскости орбиты
БКА, г — длина троса, Vr — скорость вы-
пуска троса, г?-угол истиной аномалии
БКА, со — угловая скорость движения
БКА по его орбите, р, в — фокальный
параметр и эксцентриситет орбиты БКА,
Т — сила натяжения троса, m А — масса
СК, р — гравитационный параметр Зем-
ли.
Общепринято рассматривать управ-
ление развёртывание ОТС в три этапа.
Схематично процесс развёртывания ОТС
показан на рис. 1. В статье рассматрива-
ется только второй (основной) этап раз-
вёртывания ОТС.
172
Рис. 1 - Процесс развёртывания ОТС в три этапа
Ранее была получена оптимальная -
релейная - программа управления раз-
вёртыванием ОТС на втором (основном)
этапе, состоящая из двух участков: уча-
сток развёртывания ОТС с минимальной
силой натяжения троса и участок тормо-
жения. Релейная программа управления
развёртыванием ОТС подробно рассмот-
рена в статье [5]. При реализации этой
программы скорость выпуска троса до-
стигает величин порядка 30 м/с, что явля-
ется неприемлемым.
С целью уменьшения скорости вы-
пуска троса, в статье [2] ранее была со-
ставлена программа управления развёр-
тыванием ОТС, содержащая участок
ограничений на скорость выпуска троса.
Второй этап развёртывания ОТС по
программе, содержащей ограничения на
скорость выпуска троса, состоит из трёх
участков. На первом участке происходит
выпуск троса с некоторой малой силой
натяжения, обусловленной трением троса
об элементы конструкции механизма вы-
пуска троса. Выпуск троса с такой силой
натяжения происходит до тех пор, пока
скорость выпуска троса не достигнет не-
которой заданной величины.
Затем трос будет выпускаться с си-
лой натяжения, обеспечивающей посто-
янство скорости выпуска троса.
На третьем участке происходит
торможение и выпуск троса на всю его
длину. Программа управления силой
натяжения троса имеет вид:
Т’т.пЗфИХ'!
т Гб/ V (О~ (з cos ~ О - 1 )"|
ЛпШ = +----Г------Л ’ ПрИ - '2
|_ 1 + ccostf J
, при t > t2
(2)
где Гтй1-сила натяжения троса на
начальном участке развёртывания ОТС,
определяемая конструкцией механизма
выпуска троса, Ттк1-сила натяжения
173
троса, обеспечивающая постоянную ско-
рость выпуска троса (участок постоянной
скорости выпуска троса), Ттах-сила
натяжения троса на конечном участке
развёртывания ОТС (участок торможе-
ния), /]—время достижения заданной
скорости выпуска троса, t2~время нача-
ла участка торможения.
Для программы управления (2) ре-
шалась параметрическая краевая задача с
граничными условиями вида:
t = ta :г = г0,Уг0 = 0,^° =0,0° =0;
t = tK r = r\VrK = 0,V/ =0,6»° ->max.
Краевая задача решалась модифи-
цированным методом Ньютона. В каче-
стве подбираемых параметров использо-
вались сила натяжения троса на конечном
участке развёртывания ОТС Т тах и вре-
мя начала участка торможения 12.
На рис. 2 показан результаты ре-
шения краевой задачи с ограничением на
скорость выпуска троса Krlim = 13 м/с .
Сила натяжения троса Т, Ньютон
Рис. 2 - Программная зависимость силы натяжения троса и скорости его выпуска от времени
Теперь рассмотрим стенд, позво- лирование развёртывания ОТС. Кинема-
ляющий выполнить имитационное моде- тическая схема стенда показана на рис. 3.
174
Рис. 3 - Кинематическая схема стенда
На рис. 3 цифрами обозначены эле-
менты стенда:
(1) - Двигатель, имитирующий сре-
ду (притяжение Земли);
(2) - Тормозной механизм;
(3) - Датчики, определяющие натя-
жение троса;
(4) - Датчик, определяющий ско-
рость выпуска троса;
(5) - Механизм, демпфирующий
колебания троса;
(6) - Закольцованный трос.
Рассмотрим передаточные функции
элементов стенда. В качестве двигателя,
имитирующего среду используется кол-
лекторный двигатель постоянного тока
независимого возбуждения (от постоян-
ных магнитов). Работа электрического
двигателя описывается дифференциаль-
ным уравнением второго порядка вида:
I (р = , (4)
где Л/^ = Л/дв - Мс - Т • R, где
Л/дв — управляющий момент на валу
электрического двигателя, Мс - момент
сопротивления, Г—сила натяжения троса
после «отработки» тормозного механиз-
ма, R— радиус шкива тормозного меха-
низма.
Электродинамика двигателей тако-
го типа подробно рассмотрена в книге
[3]. Оттуда же заимствована динамиче-
ская схема этого типа двигателя (рис. 4).
м
Рис. 4 - Динамическая схема двигателя постоянного тока независимого возбуждения
175
На рис. 4 обозначено:
«Я —напряжение на обмотке якоря;
Rfl —электрическое сопротивление
цепи якоря;
Т% — постоянная времени двигателя;
КФ —коэффициент усиления по
магнитному потоку;
Ф - магнитный поток внутри кор-
пуса двигателя;
М и Мс — момент на валу двигателя
и момент внешней нагрузки;
J - момент инерции вала двигателя
(вместе с нагрузкой), принят равным
0,002 м2/кг;
со-угловая скорость вращения вала
двигателя;
5 - оператор Лапласа.
Другим важным элементом стенда
является тормозной механизм. Привод
тормозного механизма представляет из
себя шаговый двигатель. На якорь этого
двигателя подаётся импульс напряжения
определённой продолжительности, в ре-
зультате якорь двигателя проворачивает-
ся на определённый угол. Таким образом,
тормозной механизм представляет из се-
бя интегрирующее звено
И'прМ’— (5)
Динамическая схема стенда показа-
на на рисунке 5.
Рис. 5 - Динамическая схема стенда в нотации MapleSim 7
176
На стенд подаётся два управляю-
щих сигнала - программное значение си-
лы натяжения троса и программное зна-
чение скорости выпуска троса. Текущая
скорость выпуска сравнивается с про-
граммной на обратной связи F4. Здесь
формируется ошибка по скорости выпус-
ка троса. Величина этой ошибки подаётся
на привод тормозного механизма.
В зависимости от величины этой
ошибки по модулю на привод тормозного
механизма подаётся большее или мень-
шее напряжение, соответственно тормоз-
ной механизм натягивает или ослабляет
трос, что приводит к увеличению или
уменьшению скорости его выпуска.
Сформированная на тормозном ме-
ханизме сила натяжения троса сравнива-
ется с программной силой натяжения
троса на обратной связи F}. Возникшая
ошибка по силе натяжения троса, умно-
женная на подбираемый коэффициент
усиления по ошибке силы натяжения
троса, подаётся в двигатель имитирую-
щий среду, который стремится натянуть
трос с заданной силой натяжения.
Полученные программы управления
силой натяжения троса и скоростью его
выпуска (рис. 2) положены в основу мо-
делирования работы стенда методами
классической теории автоматического
управления.
На графике зависимости силы
натяжения троса от времени видны два
характерных участка. Первый - скачко-
образное изменение силы натяжения тро-
са {ступенчатое типовое воздействие в
момент времени 2281 секунда, обозначе-
но цифрой 1) и экспоненциальное увели-
чение силы натяжения троса (в про-
межутке времени с 1081 по 2281 секунду,
обозначено цифрой 2).
На графике зависимости скорости
выпуска троса от времени видны два ха-
рактерных участка. Первый - близкое к
линейному увеличение (с 0 по 1081 се-
кунду, обозначено цифрой 3) и уменьше-
ние скорости выпуска троса (с 2281 по
2401 секунду, обозначено цифрой 4) и
участок постоянства скорости выпус-
ка троса (с 1081 по 2281 секунду, обо-
значено цифрой 5).
Результат моделирования покажем
на рисунках. На рисунках 6а, 66 и 6в по-
казан переходный процесс регулирования
силы натяжения троса в начальный мо-
мент времени, в момент времени, соот-
ветствующий экспоненциальному увели-
чению силы натяжения троса и в момент
начала участка торможения (ступенчатое
типовое воздействие). На рисунках 7а, 76
и 7в показан переходный процесс регу-
лирования скорости выпуска троса в
начальный момент времени, в момент
времени начала участка постоянной ско-
рости выпуска троса, и в момент времени
начала участка торможения.
177
0,015
0,5
3
Рис. 6а - Переходный процесс
регулирования силы натяжения
троса на первом участке
Время, секунд
Рис. 66 - Переходный процесс
регулирования силы натяжения
троса на втором участке
Рис. 6в - Переходный процесс
регулирования силы натяжения
троса на третьем участке
Как видно из рис. 6а, 66 и 6в, пере-
ходные процессы в системе апериодиче-
ские, сходящиеся. Продолжительность
регулирования силы натяжения троса в
начальный момент времени первого
участка составляет 4-6 секунд, в момент
начала экспоненциального увеличения
силы натяжения троса составляет 3-4
секунды, в момент начала торможения с
максимальной силой натяжения троса
составляет 5-6 секунд.
Время, секунд
Рис. 76 - Переходный процесс
регулирования скорости выпуска
троса на втором участке
Рис. 7в - Переходный процесс
регулирования скорости выпуска
троса на третьем участке
Рис. 7а - Переходный процесс
регулирования скорости выпуска
троса на первом участке
Как видно из рис. 7а, 76 и 7в, пере-
ходные процессы в системе апериодиче-
ские, сходящиеся. Продолжительность
переходных процессов регулирования
скорости выпуска троса на каждом из
участков практически совпадает с про-
178
должительностью переходных процессов
регулирования силы натяжения троса.
На рис. 8а, пик скорости выпуска
троса на 3 - ей секунде приходятся на
момент «проседания» силы натяжения
троса на той же 3 - ей секунде. Переход-
ного процесса регулирования скорости
выпуска троса в момент начала экспо-
ненциального увеличения силы натяже-
ния троса (рис. 76) как такового нет, ско-
рость выпуска троса увеличивается плав-
но, без рывков и выходит на заданное
значение - 13 м/с.
Переходный процесс регулирования
скорости выпуска троса в начале участка
торможения сперва монотонно уменьша-
ется (2280 - 2282 секунды), затем пере-
ходит в колебательный режим и на 2285
секунде вновь монотонно устремляется к
нулю. Режим регулирования силы натя-
жения троса - аналогичен. На протяже-
нии 2280 - 2282 секунды переходный
процесс регулирования силы натяжения
троса монотонно направлен в сторону
увеличения, затем на 2282 - 2285 секун-
дах сила натяжения троса с некоторой
степенью колебательности продолжает
увеличиваться и с 2285 секунды сила
натяжения троса выходит на заданное
значение около 3 Ньютон (рис. 6а).
Отметим, что коэффициент усиле-
ния по ошибке силы натяжения троса не-
сколько корректировался в процессе мо-
делирования работы стенда (рис. 5). На
первом участке развёртывания ОТС он
принимался равным 1,143, на втором 1,34
и на третьем участке 1,7.
На основании вышеизложенного,
можно сделать вывод, что представлен-
ная динамическая схема стенда позволяет
адекватно выполнить имитационное мо-
делирование работы стенда.
Библиографический список:
1. Белецкий, В.В., Левин Е.М.
Динамика космических тросовых систем
[Текст]/В.В. Белецкий, Е.М. Левин. - М.:
Наука, 1990. -336 с.
2. Ишков, С.А., Сюй Сяое,
Фадеенков, П.В. Моделирование движе-
ния спускаемой капсулы в составе орби-
тальной тросовой системы при ограниче-
нии на скорость выпуска троса
[Текст]/С.А. Ишков, Сюй Сяое, П.В. Фа-
деенков//Управление движением и нави-
гация летательных аппаратов: Сборник
трудов XVII Всероссийского семинара по
управлению движением и навигации ле-
тательных аппаратов: Часть 1. Самара,
18-20 июня 2014г. -2015. С. 78-82.
3. Полковников В.А., Пет-
ров Б.И., Попов Б.Н., Сергеев А.В.,
Сперанский А.Н. Электропривод лета-
тельных аппаратов: Учебник для авиаци-
онных вузов/ В.А. Полковников, Б.И.
Петров, Б.Н. Попов и др.; Под общ. ред.
В.А. Полковникова. - 2-е изд., перераб. и
доп. - М.: Машиностроение, 1990. - 352
с. ил.
4. Бесекерский В.А., По-
пов Е.П. Теория систем автоматического
управления [текст]/В.А. Бесекерский,
Е.П. Попов. - Изд. 4-е, перераб. и доп. -
СПб., Профессия, 2007. - 752 с. - (Серия:
специалист)
5. Ишков С.А., Шейни-
ков И.В. Определение параметров орби-
тальной тросовой системы, предназна-
ченной для спуска малых капсул с орби-
ты [текст]/С.А. Ишков, И.В. Шейни-
ков//Известия Самарского научного цен-
тра Российской академии наук. - 2009. -
т. И.-№5. С. 208-215.
References:
1. Beleckij V.V., Levin Е.М.
Dynamic of the space tether systems/
V.V. Beleckij, E.M. Levin. - Moscow. -
1990.-336 p.
2. Ishkov S.A., Xu Xiaoye,
Fadeenkov P.V. Modeling of the motion of
the payload as part of the orbital tether sys-
tem taking into account the limitation to the
velocity of the deployment of the sys-
tem/S.A. Ishkov, Xu Xiaoye, P.V. Fadeen-
kov//Motion control and navigation of the
flying machines: Abstracts of the XVII All-
Russian seminar on motion control and nav-
igation of the flying machines: Part 1. Sama-
ra, 18 - 20 of June 2014. 2015. pp. 78 - 82.
3. Polkovnikov V.A., Petrov
B.I., Popov B.N., Sergeev A.V., Speranskij
A.N. The electric drive of the aircraft: The
textbook for the aviation institutes/
179
V.A. Polkovnikov, В.I. Petrov, Popov
B.N.//Moscow, - 1990. 352 p.
4. Besecerskij V.A., Popov E.P.
Theory of the dynamic systems/V.A.
Besecerskij, E.P. Popov//Saint-Petersburg, -
2007. 752 p.
5. Ishkov S.A., Sheynikov LV.
Orbital tether system aimed on small cap-
sules deorbiting parameters definition/S.A.
Ishkov, LV. Sheynikov//News of Samara
scientific center of the Russian academy of
science. - Samara. - 2009. - Vol. 11.- Issue
5.-pp. 208-215.
THE MODELING OF THE PROCESS OF THE DEPLOYMENT OF THE ORBITAL
TETHER SYSTEM WITH TAKING INTO ACCOUNT THE LIMITATION OF THE
VELOCITY OF THE DEPLOYMENT OF THE SYSTEM
S.A. Ishkov, G.A. Filippov, Xu Xiaoye
Samara State Aerospace University, Samara
The problem of the modeling of the operation of the special equipment, designed for the imitation modeling
of the deployment of the space tether system, using method of the dynamic systems control is studied. The control
program of the tension of the tether, taking into account the limitation of the velocity of the deployment of the sys-
tem, is studied. The dynamic scheme of the special equipment, design for the imitation modeling of the deployment
of the space tether system, is created and calculated in special program MapleSim 7.
Key words: the deployment of the orbital tether system, the control of the tension of the tether during the
deployment of the orbital tether system, theory of the dynamic systems
Информация об авторах:
Ишков Сергей Алексеевич, д.т.н., профессор кафедры космического машинострое-
ния, СГАУ, 443 086, Россия, г. Самара, Московское шоссе 34, т. 267-43-20, ishkovfessau.ru.
Область научных интересов: управление развёртыванием орбитальными тросовыми
системами.
Филиппов Григорий Александрович, инженер кафедры космического машино-
строения, СГАУ, 443 086, Россия, г. Самара, Московское шоссе 34, т.267-45-09,
ц г i gory ssaufemail.ru.
Область научных интересов: моделирование динамических систем.
Сюй Сяое, аспирант кафедры космического машиностроения, СГАУ, 443 086,
Россия, г. Самара, Московское шоссе 34, т. 267-45-09.
Область научных интересов: управление развёртыванием орбитальными тросовыми
системами.
Ishkov Sergey Alekseevich, professor, doctor of technical science, professor of depart-
ment of spacecraft design, SSAU, 443 086, Russia, Samara, Moscow highway, 34, 267-43-20,
ishkovfessau.ru.
Area of research: the control of the deployment of the orbital tether systems.
Filippov Grigory Aleksandrovich, engineer of department of spacecraft design, SSAU,
443 086, Russia, Samara, Moscow highway, 34, 267-45-09, grigory ssaufemail.ru.
Area of research: modeling of the dynamic systems.
Xu Xiaoye, post - graduate student of department of spacecraft design, SSAU, 443 086,
Russia, Samara, Moscow highway, 34, 267-45-09.
Area of research: the control of the deployment of the orbital tether systems.
180
УДК 629.7.064.3
МЕТОДИКА ОПРЕДЕЛЕНИЯ ЖЁСТКОСТИ РАБОЧЕЙ ЖИДКОСТИ
В ГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ СИСТЕМАХ
©2015 2В.В. Бирюк, 1,2В.М. Бронштейн, |,2А.С. Алчина, 1,2М.Ю. Шатилова,
1,2С.Ф. Ильмурзина
'АО «РКЦ «Прогресс», г. Самара
2Самарский государственный аэрокосмический университет имени
академика С.П. Королёва (Национальный исследовательский университет), г. Самара
Предложена методика определения жёсткости рабочей жидкости в гидравлических следящих
системах. Получена аналитическая оценка допустимого относительного содержания нерастворённого
воздуха к полному объёму жидкости в гидросистеме.
Жёсткость, сжимаемость, растворимость газа в жидкости, деаэрация, объёмный модуль
упругости жидкости
При заполнении гидравлической
системы рабочей жидкостью газ из
окружающей среды (обычно воздух)
может находиться в рабочей жидкости
(РЖ) в растворённом состоянии и в
механической смеси. Растворённый в РЖ
воздух не оказывает существенного
влияния на механические свойства
жидкости. Однако, при возникновении
кавитационных явлений на вибрирующих
смоченных поверхностях, а также
вследствие местных гидродинамических
понижений давления, газы выделяются из
раствора в виде пузырьков, которые
ухудшают свойства жидкости.
Относительное количество газа,
который может раствориться в РЖ прямо
пропорционально давлению на
поверхности раздела, в соответствии с
Законом Генри вычисляется по формуле:
У,=кУжр2/Р1 (1)
где V, - объём растворённого газа, к
- коэффициент растворимости газа в
жидкости, Уж - объём жидкости, pi и р2 -
начальное и конечное давление газа.
Коэффициент растворимости газа в
жидкости зависит от свойств жидкостей и
газов. Воздух может растворяться в
минеральных маслах [1, 2, 3],
применяемых в гидроприводах в объёме
до 10% (к = 0,10) объёма жидкости на 1
атм.
Растворимость кислорода в
жидкостях выше, чем атмосферного
воздуха, ввиду чего растворённый в
жидкости воздух содержит кислорода на
40 - 50 % больше чем атмосферный
воздух, что интенсифицирует окисление
жидкости и разрушение резиновых
деталей гидроагрегатов.
Содержание растворённого воздуха
в РЖ может быть существенно понижено
вакуумированием. Метод
вакуумирования РЖ над её
поверхностью, деаэрацией, особо
эффективен. По данным [1] выделение
воздуха при 20 °C из масла АМГ-10 от
величины вакуума рвак = 720 мм рт. ст.
коэффициент выделения составит 9,1%.
Упругая деформация (сжимаемость)
рабочей жидкости для гидравлических
систем является отрицательным факто-
ром, ухудшает динамические характери-
стики и понижает к.п.д. гидроприводов.
Жёсткость жидкости оценивается
коэффициентом объёмной сжимаемости
Р, который характеризует относительное
изменение объёма жидкости, приходя-
щейся на единицу изменения давления,
определяется формулой:
P = -dV/(Vdp), (1)
где V — это объём рабочей жидко-
сти, р — давление; знак минус указывает
на уменьшение объёма с повышением
давления.
Единицы измерения Р в системе
СИ - 1/Па. Часто Р выражается в см2/кгс.
Величина, обратная р, называется
объёмным модулем упругости жидко-
сти Е:
181
Е = 1/ р = -У dp/ dV. (2)
Единицы измерения Еж те же, что и
давления: в системе СИ - Н/м2 или Па,
часто применяется также кгс/см2.
Дифференциалы dV и dp связаны
между собой уравнением
dV = -Vdp/E. (3)
Интегрируя уравнение (3) в предпо-
ложении, что модуль упругости Е жидко-
сти является постоянной величиной (т.е.
E=const), получаем:
V = Уоехр[-(р-ро)/Е], (4)
где Vo - объём жидкости при
начальном давлении р0.
Выражение для определения теку-
щего значения объёма жидкости приоб-
ретает вид:
V = V0[-(p-p0)/E], (5)
Если принять, что приращение
давления dp = р-ро, а изменение объёма
dV = V-Vo, то
dV=V0(l-pdp), (6)
Среднее значение коэффициента
сжимаемости авиационного масла АМГ-
10 при давлении от 0 до 200 кГ/см2 и
20 °C можно принимать равным 0=7-10’5
см2/кГ.
В соответствии с этим упрощенные
выражения сжимаемости для этого масла
примут вид:
dV = 7-10‘5 V0-dp. (7)
При наличии в РЖ нерастворённого
воздуха нарушается плавность движения
приводимых узлов, приводит к
запаздыванию действия гидравлической
системы и в особенности системы
следящего типа и к потере ею
устойчивости против автоколебаний.
Сжимаемость воздуха (газа)
значительно больше сжимаемости самих
рабочих жидкостей. Наличие в них
воздушных пузырьков понижает
жёсткость гидравлического механизма.
Повышается податливость рабочих
органов гидропривода, характеризуемая
величиной смещения его выходного
звена.
По справочным данным [1] при
давлении 150 кГ/см2 модуль упругости
гидрогазовой смеси, содержащей 1% газа
(приведенного к атмосферному
давлению), почти в 2 раза меньше модуля
однородной жидкости. Даже при
практически неизбежном содержании
воздуха, равном 0,1%, приведенный
модуль упругости масла АМГ-10
снижается при атмосферном давлении с
~14000 кГ/см2 до 1750 кГ/см2. Понижение
модуля упругости не зависит от размеров
пузырьков воздуха и будет тем больше,
чем больше их суммарный объём.
Необходимо принимать меры по
деаэрации жидкости так, чтобы
отношение объёма нерастворенного
воздуха V, к суммарному объёму
жидкости и воздуха Уж + V, не
превышало V, /(Уж + Vr) 0,001.
Выражение (7) сжимаемости масла АМГ-
10 в гидроприводе примет вид:
0,001^-10'5 Уж-(р-р0). (8)
В соответствии с выражением (8)
возможно экспериментально проводить
контроль жёсткости рабочей жидкости
масла АМГ-10 при подготовке к работе в
гидравлической следящей системе.
Заключение
Для обеспечения требуемых
динамических характеристик
гидравлических следящих систем
необходимо проводить вакуумную
деаэрацию заправленной рабочей
жидкости. При тестировании жёсткости
рабочей жидкости относительное
содержание нерастворённого воздуха к
полному объёму жидкости в
гидросистеме не должно превышать
0,1%.
Библиографический список:
1 Башта Т.М. Машиностроительная
гидравлика. М.: Машиностроение, 1971.
- 672 с.
2 Гойдо М.Е. Проектирование
объёмных гидроприводов. М.:
Машиностроение, 2009. - 304 с.: ил. (Б-ка
конструктора).
3 .Кондаков Л.А. Рабочие жидкости
и уплотнения гидравлических систем. -
М.: Машиностроение, -216 с.: ил.
References:
1 Т.М. Bashta Engineering hydraulics.
М.: Mashinostroenie, 1971. - 672 р.
2 M.E.Goydo Designing of fluid
power drives. M. Mashinostroenie, 2009,-
182
304 р.
3 L.A.Kondakov Pressure fluids and
sealing of the hydraulic systems. -M.:
Mashinostroenie, - 216 p.
METHODIC OF PRESSURE FLUID HARDNESS DETERMINE IN
HYDRAULIC SERVO SYSTEMS
© 2015 2V.V. Biryk,12 V.M. Bronshtein, *’2 A.S. Alehina, ’’2 M.Y. Shatilova, *’2 S.F. Ilmurzina
’JSC «SRC «Progress», Samara
2Samara State Aerospace University named after S.P. Korolev
(National Research University), Samara
The article describes methodics of the analysis of the pressure fluid hardness in the servosystems. Analitic
asessment is given to the permissible relative content of the combined air related to the full volume of the fluid in
the servosystem.
Hardness, compressibility, gas solubility in fluid, deaeration, fluid volume modulus of elasticity
Информация об авторах:
Бирюк Владимир Васильевич - доктор технических наук, профессор, заведующий
кафедрой теплотехники и тепловых двигателей, Самарский государственный
аэрокосмический университет. СГАУ, 443086, Россия, г. Самара, Московское ш.34,
т.8-(846)-267-45-66, e-mail: teplotexfessaubk.ru.
Область научных интересов: авиационные и ракетные двигатели, энергетические
установки.
Бронштейн Виталий Михайлович - кандидат технических наук, доцент кафедры
теплотехники и тепловых двигателей, Самарский государственный аэрокосмический
университет. СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 8-(846)-267-45-66,
teplotexfessaubk.ru. Ведущий инженер-конструктор АО «РКЦ «Прогресс».8-(846)-228-90-
43, e-mail:, mailfesamspace.ru.
Область научных интересов: системы управления вектором тяги двигателей.
Алчина Алла Сергеевна - аспирант кафедры теплотехники и тепловых двигателей,
Самарский государственный аэрокосмический университет. СГАУ, 443086, Россия, г.
Самара, Московское ш. 34, т. 8-(846)-267-45-66, Инженер-конструктор 2 категории
АО «РКЦ «Прогресс», т. 8-(846)-228-90-43. e-mail: mailfesamspacc.ru.
Область научных интересов: системы управления вектором тяги двигателей.
Шатилова Мария Юрьевна - аспирант кафедры теплотехники и тепловых
двигателей, Самарский государственный аэрокосмический университет. СГАУ, 443086,
Россия, г. Самара, Московское ш. 34, т. 8-(846)-267-45-66, Инженер-конструктор 3
категории АО «РКЦ «Прогресс», т. 8-(846)-228-90-43. e-mail: mailfesamspace.ru.
Область научных интересов: системы управления вектором тяги двигателей.
Ильмурзина Светлана Фёдоровна - аспирант кафедры теплотехники и тепловых
двигателей, Самарский государственный аэрокосмический университет. СГАУ, 443086,
Россия, г. Самара, Московское ш. 34, т. 8-(846)-267-45-66, Инженер-конструктор 3
категории АО «РКЦ «Прогресс», т. 8-(846)-228-90-43. e-mail: mailfesamspace.ru.
Область научных интересов: системы управления вектором тяги двигателей.
Biryk Vladimir Vasilievich - Doctor of Engineering Science, professor, holder of chair
of the heat engineering and heat engines department. SSAU, 443086, Russia, Samara,
Moskovskoye shosse, 34, tel:8-(846)-267-45-66, e-mail:teplotexfessaubk.ru.
Area of scientific interests:
Bronshtein Vitali Mikhailovich - PhD in Technical Sciences, associate professor of the
heat engineering and heat engines department. SSAU, 443086, Russia, Samara, Moskovskoye
183
shosse, 34, tel:8-(846)-267-45-66, e-mail:teplotexfessaubk.ru. Principal design engineer, JSC
«SRC «Progress», tel: 8-(846)-228-90-43. e-mail: mailfesamspace.ru.
Area of scientific interests: thrust vector control systems.
Alehina Alla Sergeevna - graduate of the heat engineering and heat engines department.
SSAU, 443086, Russia, Samara, Moskovskoye shosse, 34, tel:8-(846)-267-45-66, Design
engineer 2 category, JSC « SRC «Progress», tel: 8-(846)-228-90-43. e-mail: mailfesamspace.ru.
Area of scientific interests: thrust vector control systems.
Shatilova Mariya Yurievna - graduate of the heat engineering and heat engines
department. SSAU, 443086, Russia, Samara, Moskovskoye shosse, 34, tel:8-(846)-267-45-66,
Design engineer 3 category, JSC « SRC «Progress», tel: 8-(846)-228-90-43. e-mail:
mailfesamspace.ru.
Area of scientific interests: thrust vector control systems.
Ilmurzina Svetlana Fedorovna - graduate of the heat engineering and heat engines
department. SSAU, 443086, Russia, Samara, Moskovskoye shosse, 34, tel:8-(846)-267-45-66,
Design engineer 3 category, JSC « SRC «Progress», tel: 8-(846)-228-90-43. e-mail:
mailfesamspace.ru.
Area of scientific interests: thrust vector control systems.
184
УДК 681.7; 531
ИССЛЕДОВАНИЯ ВЛИЯНИЯ ИЗМЕНЕНИЙ КОНСТРУКТИВНЫХ
ПАРАМЕТРОВ ОБЛЕГЧЕННОГО ЗЕРКАЛА НА ЕГО МАССУ И СОХРАННОСТЬ
ФОРМЫ РАБОЧЕЙ ПОВЕРХНОСТИ В ПОЛЕ СИЛ ТЯЖЕСТИ
©2015 С.А. Архипов, М.А. Сальникова, С.А. Морозов
ПАО «Красногорский завод им. С.А. Зверева», г. Красногорск
В данной статье рассмотрен новый подход к применению метода конечных элементов (МКЭ). Мно-
гократное применение МКЭ при разработке облегченного зеркала позволяет определить соотношения меж-
ду его конструктивными и основными параметрами. Полученные зависимости затем аппроксимируются
простыми функциями и используются при проектировании зеркала для получения оптимальной конструк-
ции.
Ключевые слова: облегченное зеркало, метод конечных элементов, деформации поверхности, грави-
тационные деформации
Облегченные зеркала широко при-
меняются в современной оптико-
электронной аппаратуре дистанционного
зондирования Земли. Основная задача
проектирования облегченного зеркала -
выбор оптимальных параметров облег-
ченной структуры, обеспечивающих ее
максимальную жесткость при минималь-
ной массе [1]. Традиционно эта задача
решается с использованием аналитиче-
ских расчетных формул изгиба пластин-
ки.
С помощью метода конечных эле-
ментов (МКЭ) возможно детально рас-
считать напряженно-деформированное
состояние любых сложных простран-
ственных конструкций, в т.ч. и облегчен-
ных зеркал [1, 2]. Однако найденное для
конкретного набора параметров кон-
струкции конечно-элементное решение
не позволяет судить об их взаимосвязи.
В настоящей статье предлагается
для оптимизации облегченной структуры
зеркала многократно использовать МКЭ
и получить множество численных реше-
ний, характеризующих пространство со-
стояний зеркала, которое предлагается
далее аппроксимировать простыми зави-
симостями, например, линейными или
полиномиальными, что позволяет уста-
новить взаимосвязи между конструктив-
ными и основными параметрами зеркала,
такими как масса и изменение формы ра-
бочей поверхности (РП). В предлагаемом
подходе сочетаются преимущества чис-
ленного метода (высокая степень детали-
зации конструкции, минимальная по-
грешность расчета) с преимуществом
аналитического метода (получение реше-
ния, устанавливающего взаимосвязь па-
раметров).
Облегченное зеркало имеет прямо-
угольную форму [3, 4] , как показано на
рис. 1. Основа регулярной облегченной
структуры - шестиугольная ячейка. Ма-
териал зеркала - ситалл СО-1 ISM*1 про-
изводства ОАО ЛЗОС [5].
185
Рис. I - Облегченное зеркало
Зеркало закрепляется с тыльной
стороны в трех местах с помощью вту-
лок, конфигурация которых построена по
принципу байонетного крепления. В оп-
тико-электронном приборе зеркало уста-
навливается вертикально и деформирует-
ся под действием силы тяжести.
Задача проектирования зеркала: при
заданных габаритных размерах зеркала,
требуется выбрать оптимальные пара-
метры облегченной структуры (толщина
лицевой и тыльной пластин, поперечный
размер и глубина ячейки облегчения,
толщина ребер) при которых деформация
зеркала (размах общей ошибки P-V) под
действием силы тяжести не превышает
0,03 мкм.
Толщина лицобои пластины
Рис. 2 - Конструктивные параметры зеркала
Для решения поставленной задачи
проводились следующие исследования с
использованием многократного примене-
ния МКЭ.
1. Исследования влияния толщины
лицевой пластины при фиксированных
параметрах ячеек и ребер на деформации
РП (рис. 3, табл. 1).
2. Исследования влияния попереч-
ных размеров ячеек при фиксированной
толщине лицевой пластины на деформа-
ции РП (табл. 2).
3. Исследование влияния толщины
ребер при фиксированных толщине лице-
вой пластины и размерах ячеек на де-
формации РП (рис. 4, табл. 3).
4. Исследование влияния толщины
тыльной пластины при фиксированных
параметрах ячеек и ребер на деформации
РП (рис. 5, табл. 4).
186
Табл. 1 - Зависимость деформаций РП от толщины лицевой пластины
Толщина лицевой пластины, мм 3 3,5 4 4,5 5
Р-V, мкм 0,020 0,021 0,023 0,024 0,025
ш, кг 1,84 1,89 1,94 1,994 2,0422
Толщина лицевой пластины, мм 5,5 6 6,5 7 7,5
Р-V, мкм 0,026 0,028 0,029 0,030 0,031
ш, кг 2,0905 2,1388 2,1871 2,2354 2,28
Толщина лицевой пластины, мм 8 8,5 9 9,5 10
Р-V, мкм 0,032 0,033 0,034 0,035 0,036
ш, кг 2,332 2,38 2,4286 2,4769 2,5252
Толщина лицевой пластины, мм 10,5 11 11,5 12 -
Р-V, мкм 0,038 0,039 0,040 0,041 -
ш, кг 2,574 2,6218 2,6701 2,7184 -
0,045
0,04
0,035
0,03
0,025
0,02
0,015
0,01
0,005
О
Ряд1
— Линейная (Ряд1)
у = 0,0023х> 0,0136
R1 = 0,9981
Рис. 3 - График зависимости деформаций РП от толщины лицевой пластины
Табл. 2 - Зависимость деформаций РП от поперечного размера ячейки
Количество ячеек по вертикали 3 4
Поперечный размер ячейки, мм 39 28
Р-V, мкм 0,026 0,032
т, кг 2,0905 2,1823
Табл. 3 - Зависимость деформаций РП от толщины ребра
Толщина ребра, мм 3 3,5 4 4,5 5 5,5 6
Р-V, мкм 0,02645 0,02641 0,02640 0,02596 0,02648 0,02676 0,02697
т, кг 1,9569 2,026 2,0905 2,1415 2,2133 2,3264 2,3699
187
0,031
2,5
Рис. 4 - График зависимости деформаций РП от толщины ребра
Табл. 4 - Зависимость деформаций РП от толщины тыльной пластины
Толщина тыльной пластины, мм 0,5 1 1,5 2 2,5 3
P-V, мкм 0,026590 0,025843 0,025340 0,024989 0,024785 0,024748
т, кг 1,787 1,815 1,843 1,87 1,898 1,925
Толщина тыльной пластины, мм 3,5 4 4,5 5 5,5 6
P-V, мкм 0,024938 0,025182 0,025450 0,025733 0,026057 0,026405
ш, кг 1,953 1,98 2,008 2,035 2,063 2,091
Толщина тыльной пластины, мм 6,5 7 7,5 8 8,5 9
P-V, мкм 0,026768 0,027157 0,027566 0,027986 0,028418 0,028869
т, кг 2,118 2,145 2,173 2,2 2,228 2,256
Толщина тыльной пластины, мм 9,5 10 10,5 И 11,5 12
P-V, мкм 0,029311 0,029781 0,030255 0,030733 0,031226 0,031738
ш, кг 2,283 2,311 2,338 2,367 2,393 2,421
0 022
0 02
0123456789 10 11 12
у = IE-Обх4 5Е-О5х’ ♦ О.ОООбх"’ - О,ОО22х ♦ 0.0275
R2 = 0,9995
Рис. 5 - График зависимости деформаций РП от толщины тыльной пластины
Зависимость P-V от толщины лице-
вой пластины (рис. 3) линейная, чем
больше толщина, тем больше Р-V. Для
данного зеркала оно описывается уравне-
нием у=0,0023х + 0,013. Оптимального
значения толщины лицевой пластины при
заданном размере ячейки, которое бы ха-
рактеризовало минимальные значения
деформаций, выявить не удалось. При
окончательном выборе толщины лицевой
188
пластины необходимо руководствоваться
технологическими ограничениями.
При увеличении поперечного раз-
мера ячейки на 11 мм (табл. 2) деформа-
ции РП изменяются на 6 нм, что состав-
ляет примерно 0,0 IX. Таким образом, для
данного зеркала размер ячейки суще-
ственного влияния на деформации не
оказывает.
На графике зависимости деформа-
ций РП от толщины тыльной пластины
(рис. 4) имеется точка минимальных де-
формаций рабочей поверхности. Она
находится в области 4,5 мм. При этом
масса линейно увеличивается с ростом
толщины ребер. Толщина ребра из-за
технологических ограничений должна
составлять не менее 4 мм. Поэтому при
выборе приходится искать компромисс
между технологическими ограничения-
ми, массой зеркала и деформациями ра-
бочей поверхности. В нашем случае, как
следует из графика, оптимально выбрать
толщину ребра 4 мм.
Из рис. 5 видно, что размах общей
ошибки P-V поверхности зеркала вслед-
ствие гравитационных деформаций имеет
нелинейную зависимость от толщины
тыльной пластины с выраженной обла-
стью минимальных значений. К тому же,
она хорошо аппроксимируется полино-
миальной зависимостью 4 степени: у =
10’6х4 - 5-10'5х3 + 0,0006х2 - 0,0022х +
0,0275.
Разница между минимальными и
максимальными значениями деформаций
рабочей поверхности составляет всего
0,007 мкм, т.е. примерно 0,0 IX. Следова-
тельно, наличие или отсутствие тыльной
пластины не вносит существенный вклад
в деформации рабочей поверхности, од-
нако может быть найдено оптимальное
значение толщины тыльной пластины.
Тыльная пластина может предусматри-
ваться в конструкции зеркала для обеспе-
чения требуемых тепловых условий ра-
боты зеркала.
Выводы. 1. В результате много-
кратного применения МКЭ с последую-
щей аппроксимацией взаимосвязи между
параметрами облегченной структуры и
основными параметрами зеркала (масса,
размах общей ошибки) показано, что за-
данное зеркало спроектировано опти-
мально.
2. Продемонстрированный в данной
статье подход, соединяющий преимуще-
ства аналитического и численного мето-
дов, может быть использован для проек-
тирования оптимальных облегченных
зеркал и других сложных пространствен-
ных конструкций.
Библиографический список:
1. Архипов С.А. Проектирование
крупногабаритных высокоточных облег-
ченных зеркал: Аналитический обзор
№5593. М.: НТЦ «Информтехника»,
2004. 106 с.
2. Хечумов Р.А., Кеплер X., Про-
копьев В.И. Применение метода конеч-
ных элементов к расчету конструкций.
М.: Издательство АСВ. 1994. 350 с.
3. Архипов С.А., Морозов С.А.,
Сальникова М.А. Выбор материала и
расчет параметров облегченного зеркала
широкозахватной многоспектральной ап-
паратуры среднего разрешения. // Раз-
мерная стабильность материалов и кон-
струкций оптических и оптико-
электронных приборов: Тезисы докладов.
Красногорск: ОАО «Красногорский завод
им. С.А. Зверева», 2014. С. 59-62.
4. Архипов С.А., Беляев К.С.,
Морозов С.А., Сальникова М.А. Оценка
деформаций облегченного зеркала широ-
козахватной многоспектральной аппара-
туры среднего разрешения под действием
силы тяжести в различных схемах нагру-
жения. // Размерная стабильность мате-
риалов и конструкций оптических и оп-
тико-электронных приборов: Тезисы до-
кладов. Красногорск: ОАО «Красногор-
ский завод им. С.А. Зверева», 2014. С.
63-65.
5. Ситалл СО115М (Астроситалл).
http://lzos.ru/content/view/18/37/.
References:
1. Arkhipov S.A. Proektirovanie
krupnogabaritnykh vysokotochnykh obleg-
chennykh zerkal: Analiticheskiy obzor
189
[Design of large high-precision light-
weight mirrors: an analytical review], Mos-
cow: Science and Technology Center IN-
FORMTEKHNIKA PubL, Moscow, 2004.
106 p.
2. Khechumov R.A., Kepler Kh.,
Prokop'ev V.L Primenenie metoda konech-
nykh elementov к raschetu konstruktsiy [Us-
ing finite element method for structural cal-
culations], Moscow: Publishing house
«ASV», 1994.350 р.
3. Arkhipov S.A., Morozov S.A.,
Sal'nikova M.A. Vybor materiala i raschet
parametrov oblegchennogo zerkala shiroko-
zakhvatnoy mnogospektral'noy apparatury
srednego razresheniya. Razmernaya sta-
bil'nost' materialov i konstruktsiy optich-
eskikh i optiko-elektronnykh priborov: Te-
zisy dokladov. Krasnogorsk: JSC «S.A.
Zverev Krasnogorskiy zavod» PubL, 2014.
P. 56-62 (In Russ.)
4. Arkhipov S.A., Belyaev K.S.,
Morozov S.A., Sal'nikova M.A Otsenka de-
formatsiy oblegchennogo zerkala shiroko-
zakhvatnoy mnogospektral'noy apparatury
srednego razresheniya pod deystviem sily
tyazhesti v razlichnykh skhemakh nagru-
zheniya. Razmernaya stabil'nost' materialov
i konstruktsiy opticheskikh i optiko-
elektronnykh priborov: Tezisy dokladov.
Krasnogorsk: JSC «S.A. Zverev Krasnogor-
skiy zavod» PubL, 2014. P. 63-65 (In Russ.)
5. Sitall CO-115M (Astrositall). [As-
trositall® СО-115М]. Available at
http://lzos.ru/content/view/! 8/37/ (accessed
30.06.2015).
STUDY OF THE INFLUENCE OF LIGHTWEIGHT MIRROR DESIGN
PARAMETERS ON ITS WEIGHT AND MIRROR SURFACE FORM
STABILITY IN THE FIELD OF GRAVITATIONAL FORCE
©2015 S.A. Arkhipov, M.A. Sal'nikova, S.A. Morozov
PJSC «KMZ ZENIT», Krasnogorsk
In this paper the new approach to FEM use is discussed. Multiple FEM utilization in lightweight mirror
structure design allows determining correlations between constructive and basic mirror parameters. The dependen-
cies obtained then approximating by simple functions that helps to design mirror optimally.
Keywords: lightweight mirrors. Finite Element Method, surface deformations, gravitational force
Информация об авторах:
Архипов Сергей Алексеевич, к.т.н., начальник СКБ-1 - главный конструктор кос-
мических и авиационных средств ДЗЗ, ПАО «Красногорский завод им. С.А. Зверева»,
143 403, Россия, Московская область, г. Красногорск, ул. Речная, д. 8, т. 8(495) 562-82-20,
arhipoffezenit-kmz.ru.
Область научных интересов: теплофизика, конечно-элементное моделирование фи-
зических процессов, оптика, дистанционное зондирование Земли.
Сальникова Марина Анатольевна, инженер-исследователь 2 категории тематиче-
ского научно-проектного отдела, ПАО «Красногорский завод им. С.А. Зверева»,
143 403, Россия, Московская область, г. Красногорск, ул. Речная, д.8, т. 8(495) 561-89-67,
m.salnikovafezenit-kmz.ru.
Область научных интересов: расчет оптических систем; расчет, проектирование и
конечно-элементное моделирование оптических узлов и конструкций; дистанционное
зондирование Земли.
Морозов Сергей Александрович, начальник сектора оптотехнических работ, ПАО
«Красногорский завод им. С.А. Зверева», 143 403, Россия, Московская область,
г. Красногорск, ул. Речная, д. 8, т. 8(495) 561-89-67, msafezenit-kmz.ru.
190
Область научных интересов: оптотехника, расчет и проектирование оптических си-
стем, проектирование оптических узлов и конструкций, дистанционное зондирование
Земли.
Arkhipov Sergey Alekseevich, candidate of technical sciences, head of design office -
chief designer of space and airborne remote sensing devices, PJSC «KMZ ZENIT», 143 403,
Russia, Moscow Region, Krasnogorsk, Rechnaya str., 8, phone: 8 (495) 562-82-20,
arhipof^zenit-kmz.ru.
Area of research: thermal physics, finite element modeling of physical processes, optics,
remote sensing of the Earth.
Sal'nikova Marina Anatol'evna, research engineer of thematic research and design
department, PJSC «KMZ ZENIT», 143 403, Russia, Moscow Region, Krasnogorsk, Rechnaya
str., 8, phone: 8 (495) 561-89-67, m.salnikovafezenit-kmz.ru.
Area of research: optical systems design; calculation, design and finite element modeling
of optical components and structures; remote sensing of the Earth.
Morozov Sergey Alexandrovich, head of optical engineering section, PJSC
«KMZ ZENIT», 143 403, Russia, Moscow Region, Krasnogorsk, Rechnaya str., 8, phone:
8 (495) 561-89-67, msa(aizenit-kmz.ru.
Area of research: optical engineering, calculation and design of optical systems, design of
optical components and structures, remote sensing of the Earth.
191
УДК 629.7.064+621.315+621.3.061
АВТОМАТИЗИРОВАННОЕ ПРОЕКТИРОВАНИЕ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ
©2015 В.В. Бирюк1, В.М. Бронштейн1’2, А.Н. Коптев1, Н.А. Надеев1'2, В.Р. Рахмеева1,2
'Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
2 АО «РКЦ «Прогресс», г. Самара
Рассмотрено автоматизированное проектирование электрических сетей (ЭС), включающее в себя эта-
ны проектирования электрической схемы, разработки конструкторской документации на кабели, трассиров-
ки кабелей на электронной модели изделия и получения исходных данных для подготовки производства и
изготовления продукции.
Ключевые слова: кабельная единица, жгут, текстовый файл, автоматизированное проектирование,
трассировка ЭС, раскладка кабеля, скелетная схема кабеля, параметры соединителей, габаритно-
массовые характеристики кабелей, конструкторская документация, производство, скелетная схема кабе-
ля, электрическая схема, единое электронное пространство
Вид ЭС определяется типом ракет-
но-космической техники (РТК), её назна-
чением, особенностями требований к си-
стеме электроснабжения. ЭС классифи-
цируют по назначению, основным элек-
трическим параметрам системы электро-
снабжения, роду тока, напряжению, ча-
стоте, конфигурации сети и т.п.
К ЭС предъявляется ряд специфи-
ческих требований, обеспечивающих:
- Надёжное и бесперебойное снаб-
жение электроэнергией потребителей в
любых условиях эксплуатации. Эта зада-
ча решается совместным построением
конфигурации сети, системы распределе-
ния и защиты. [4]
- Высокое качество электроэнергии,
получаемой потребителями. Это вызвано
тем, что многие потребители критичны к
величине напряжения (особенно сниже-
ния) или частоты.
- Защиты оборудования от помех,
возникающих при работе электрообору-
дования и статического электричества.
Современный уровень программ-
ных и технических средств электронной
вычислительной техники позволяет пе-
рейти от традиционных, ручных методов
конструирования и проектирования ЭС к
новым информационным технологиям с
использованием ЭВМ. В диалоге с ЭВМ
могут быть созданы модели проектируе-
мых изделий, чертежи и схемы, сформи-
рованы библиотеки чертежей деталей,
изображения которых заданы параметри-
чески. [5]
Рассмотрим этапы проектирования
ЭС (рис. 1).
Проектирование ЭС изделий начи-
нается с разработки схемы электрической
принципиальной (ЭЗ), схемы электриче-
ской общей (Э6), схемы соединений (Э4)
по принадлежности.
Схема электрическая принципиаль-
ная выполняется с помощью системы ав-
томатизированного формирования гра-
фики ЭЗ.
Схема электрическая общая разра-
батывается в любом графическом редак-
торе (например, Компас-график, Auto-
CAD и т.д.).
Система для автоматизированного
формирования графики схемы ЭЗ
представляет собой приложение,
работающее в среде графического
редактора AutoCAD, которое
используется для формирования схемы
ЭЗ ЭС, выпуска документации и
преобразования к табличному текстовому
формату для последующей обработки в
системе автоматизированного
проектирования (САПР) ЭС.
Входной информацией для САПР
ЭС являются:
- Кабельные единицы (жгуты). Ин-
формация по кабелям (жгутам) выпуска-
ется на систему изделия (схему).
192
- Перечень соединителей. Перечень
соединителей выпускается на систему
изделия.
Многоитерационный
процесс
Рис. 1 Взаимодействие участников процесса автоматизированного проектирования ЭС
- Схема ЭЗ системы изделия. Вы-
пускается полистно. Создаётся с помо-
щью приложения для AutoCAD «Система
автоматизированного формирования гра-
фики ЭЗ». Результат работы разработчи-
ка электрической схемы представлен на
рис. 2.
Рис. 2 Графическое преставление схемы электрической принципиальной
193
Исходные данные (ИД) на конфигу-
рацию и длины кабелей.
Выходной информацией САПР ЭС
являются:
- Текстовые файлы, содержащие
информацию по габаритно-массовым ха-
рактеристикам кабеля (ГМХК).
- Текстовые файлы, содержащие
информацию о внутренних параметрах
соединителей (ПС).
- Документация на кабели — тек-
стовые таблицы, скелетная схема кабеля
для сборочного чережа (формируется в
AutoCAD).
ЭС на электронной модели изделия
может быть представлена в виде набора
моделей кабелей. Кабель— это два или
больше проводника, которые содержатся
в одном изолирующем кожухе. Кабель
трёхмерен и обладает массово
инерционными характеристиками. [3]
Разработчики кабельных единиц
подготавливают альбом заделок для
использования его при проектировании
кабелей всех изделий и по мере
необходимости дополняют его, проводят
оценку ИД на изделие, схем
электрических принципиальных, общих,
соединений и др. На основании
проводимого анализа разрабатывается
алгоритм конструирования кабелей
изделия или проводится корректировка
существующего алгоритма. Затем
выполняется этап по получению ИД для
монтажника кабелей ЭС. Выходными
данными являются следующие файлы:
- табличный файл с ГМХК (список
связей на кабельную единицу);
- табличный файл с информацией о
параметрах соединителей (список
соединителей на кабельную единицу).
Разработчик кабелей генерирует ИД
в виде текстового файла в специальном
формате, являющегося входным для
модуля электропроводки Cabling (САПР
CreoElements/Pro). Текстовый файл
предназначен для хранения
структурированных данных и обмена
информацией между программами САПР
ЭС и САПР CreoElements/Pro. Этап
конструирования кабелей ЭС: выдача ИД
(входных текстовых файлов) для
монтажника кабелей ЭС.
В результате для каждого кабеля
создаётся текстовый файл.
Кабели имеют большую
протяжённость и буквально пронизывают
летательный аппарат. Это заставляет
выделить их в особую группу
геометрических тел, а их размещение в
изделии в отдельную задачу трассировки.
Эта процедура выполняется после
завершения компоновки, так как
расположение узлов, агрегатов и
элементов конструкции определяет
форму и длину коммуникаций. Задача
трассировки заключается в определении
конфигурации и длин кабеля. Исходными
данными для решения являются:
- компоновка изделия;
- точки выхода и входа кабеля;
- форма и размеры поперечного
сечения кабеля, а также погонная масса
(масса единичного отрезка) кабеля;
конструктивные и
функциональные ограничения (например:
условия и способы закрепления, радиус
изгиба и т.п.).
Цель трассировки — построение
линии трассы, определяющей прокладку
электрических коммуникаций. Этой
линией может быть ось или образующая.
[3]
Монтажник кабелей ЭС, используя
полученные входные текстовые файлы,
производит трассировку кабелей на
электронной модели изделия, после
расстановки приборов и прокладки
трубопроводов, получает модель кабеля в
модуле Cabling (САПР CreoElements/Pro)
(рис. 3) и модель монтажа ЭС в целом.
Основная задача монтажника
заключается в выборе грамотного
компоновочного решения, т.е.
обеспечение корректного прохождения
кабельных трасс по конструкции изделия,
между единицами бортовой аппаратуры
(приборы, датчики) и получение точных
данных о длинах и топологии кабелей.
Выходные данные:
- электронная модель кабельной
единицы;
194
- электронная модель монтажа ЭС
на борту проектируемого изделия.
В связи с конструктивными и
специализированными особенностями
выполнения монтажа ЭС на изделиях
РКТ, а так же выполнения трассировки
кабельных единиц на электронной
модели изделия, возникает
необходимость наложения особых
требований, которые задаются в виде
значений параметров таких как:
- имя участка общей трассы;
- набор элементов;
- требование пластины гаечной;
расположение (размещение)
прибора (датчика);
- имя прибора;
- требование углового корпуса;
- угол выхода кабеля, расположение
ключа;
- условия эксплуатации кабельных
единиц;
диаметр наконечника
металлизации и т.д.
При этом задача монтажника
кабелей ЭС сводится к определению и
наложению специальных требований в
виде определённых значений параметров
для передачи их в конструкторскую
документацию на кабельные единицы, с
последующей реализацией этих
требований в готовой продукции
(изделии).
Следующий этап, которые
выполняет монтажник — это получение
плоского представления кабельных
сборок в модуле Hamess (САПР
CreoElements/Pro) (рис. 4). Плоское
представление создаётся формированием
в трёхмерной проводке плоских
сегментов, с использованием точек
размещения — это позволяет
контролировать плоский контур
разложенной проводки. Процесс
прокладки может проходить как в
автоматизированном, так и в ручном
режимах.
На заключительном этапе
монтажник запускает программу
ReportCabling, которая является
надстройкой модуля Hamess и получает
скелет кабеля для сборочного чертежа
(рис. 5) и выходной текстовый файл,
который соответствует скелетной схеме
кабеля и носит описательный характер,
тем самым формирует ИД на
конфигурации и длины кабелей.
Разработчик кабелей, используя ИД
на конфигурацию и длины кабелей,
получает текстовые файлы на кабели
электрической схемы в формате
кабельной части САПР ЭС. Второй этап
работы: выдача ИД для разработчиков
кабельной сети, после чего, при
необходимости, проводится доработка
кабельной единицы.
Рис. 3. Трёхмерное представление кабеля в модуле
электропроводки Cabling
Рис. 4. Раскладка кабеля на плоскость в модуле
Hamess
195
Гмсрлвр опта по шэдулю *ОЫпд
Рис. 5 Файл скелетной схемы кабеля для сборочного чертежа
Разработчик кабелей на основе
разработанной конструкторской
документации готовит ИД для
производства. ИД содержат в себе
необходимую информацию для
изготовления кабельной единицы,
например:
- данные провода;
- длина провода;
- конструктивное исполнение;
- распайку соединителей и т.д.
Таким образом, с применением
такого подхода, производство получает
все необходимые данные для
изготовления кабельных единиц и
выполнение монтажа ЭС на изделии.
Прокладка кабелей на изделиях
РКТ, разработка электрических схем и их
проверка— это одни из самых сложных
задач. В этот процесс вовлекается
множество специалистов с разным
назначением, но благодаря
автоматизированному проектированию
ЭС появляется возможность создавать
изделия, удовлетворяющие высоким
показателям надёжности. Разработка ЭС
происходит при непосредственном
взаимодействии всех участников
процесса проектирования. Передача
информации осуществляется через
единое электронное пространство и
модульные САПР, что позволяет
осуществлять эффективную передачу
данных и результатов конкретного,
текущего этапа проектирования на все
последующие этапы, так же позволяет
получать не искажённую информацию в
нужном формате на каждом отдельном
этапе проектирования.
В результате применения
автоматизированного проектирования
при создании ЭС значительно
упрощается взаимодействие участников
процесса, появляется чёткая структура
управления информационными
потоками, что повышает качество
выпускаемой конструкторской
документации и готовой продукции,
снижает сроки изготовления изделия.
Библиографический список:
1. Гаршин О.А., Московченко А.В.
«Преимущество нисходящего проектиро-
вания на примере использования
Pro/ENGINEER WILDFIRE»/ Журнал
«САПР и графика» 2004.
№ 11.4С.
2. Михнеев М.А., Прокди Р.Г.
PRO/ENGINER WILDFIRE 2.0/3.0/4.0.
Самоучитель. - СПб.: изд. «Наука и Тех-
ника», 2008. - 352 с.: ил.
3. Гаврилов В.Н. Теоретические ос-
новы геометрического моделирования.
Часть 2. Трёхмерное моделирование.
Учеб, пособие. Самар, гос. аэрокосм, ун-
т. Самара, 2007.
4. Петровичев М.А. Система энер-
госнабжения бортового комплекса кос-
мических аппаратов: учеб. пособие/М.А.
Петровичев, А.С. Гуртов. - Самара: Изд-
196
во Самар, гос. аэрокосм, ун-та, 2007. -
80 с.
5. Чемпинский Л.А. Геометрическое
моделирование в CAD/CAM ADEM
(ПРАКТИКУМ): Учеб, пособие. Самар,
гос. аэрокосм, ун-т. Самара, 2006.
6. Грэхам Г., Стеффен Д.
Pro/ENGINEER® 2001, 3-е издание. - М.:
Изд. «Лори», 2003. - 364с.
7. http://www.ptc.com.
References
1. Garshin О.A., Moskovchenko A.V.
Advantages of the top-down design on the
basis of the Pro/ENGINEER WILDFIRE//
CAD systems and graphics, magazine, 2004,
#11, p.4.
2. Mineev M. A., Progdy R. G.
Pro/ENGINEER WILDFIRE 2.0/3.0/4.0.
Self-instruction manual. - Saint-Petersburg,
Science and Technics, 2008. - 352 p.
3. Gavrilov V.N. Theoretical bases of
geometrical modelling. A part 2. Three-
dimensional modelling. Studies. The grant.
Samaras, гос. аэрокосм, un y. Samara,
2007.
4. Petrovichev M.A. Sistema of power
supply of an onboard complex of space ve-
hicles: studies. M.A. Petrovichev, herd's
grant/m. - Samara: Publishing house Sama-
rarsky state space university, 2007. - 80
with.
5. Chempinskij L.A. Geometricheskoe
modelirovanie v CAD/CAM ADEM
(PRAKTIKUM): Ucheb. pocobie. Samar,
gos. Ajerokosm, un-t. Samara, 2006.
6. Graham G., Steffen D. Inside
Pro/ENGINEER® 2001, third edition. -
Moscow: Lori, 2003. - 364 p.
7. http://www.ptc.com.
COMPUTER-AIDED DESIGN ELECTRICAL NETWORKS
©2015 V.V. Biryk1, V.M. Bronshtein1’2, A.N. Koptev1, N.A. Nadeev1’2, V.R. Rakhmeeva1’2
1 Samara State Aerospace University
2 JSC SRC Progress, Samara
It is analyzed automated designing cable network (harness), including designing of the electrical circuit,
working out of the design documentation on cables, trace cable network system (harness) on electronic model of
a product and obtaining of initial data for preparation jf industrial division and product manufacturing.
Key words: cable, harness, xml-file, computer-aided design, trace cable network system, cable apportion,
the skeletal scheme of a cable, the parameters of connections, the parameters of weight-dimension characteristics
cable, design documentation, manufacture, skeletal scheme of a cable, electroscheme, unified electronic space
Информация об авторах:
Бирюк Владимир Васильевич, доктор технических наук, профессор, зам. заве-
дующего кафедрой теплотехники и тепловых двигателей, СГАУ, 443086, Россия, г. Са-
мара, Московское ш. 34, т. 8-(846)-267-45-66, e-mail: teplotexfessaubk.ru.
Область научных интересов: автоматизированное нисходящее параллельное проек-
тирование изделий.
Бронштейн Виталий Михайлович, кандидат технических наук, доцент кафедры
теплотехники и тепловых двигателей, ведущий инженер-конструктор АО «РКЦ «Про-
гресс», СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 8-(846)-267-45-66,
e-mail: mailfesamspace.ru.
Область научных интересов: автоматизированное нисходящее параллельное проек-
тирование изделий.
Коптев Анатолий Никитович, доктор технических наук, профессор, академик
Российской академии транспорта, заведующий кафедрой эксплуатации авиационной
техники, СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 8-(846)-267-46-13,
e-mail: eatfessau.ru.
197
Область научных интересов: контроль и испытание летательных аппаратов и их
систем.
Надеев Николай Андреевич, инженер конструктор 2 категории АО «РКЦ «Про-
гресс», аспирант кафедры теплотехники и тепловых двигателей, СГАУ, 443086, Россия,
г. Самара, Московское ш. 34, т. 8-(846)-276-11-09, моб. 8-904-748-93-02, e-mail:
nikolaynadeev63fegmail.com.
Область научных интересов: автоматизированное нисходящее параллельное проек-
тирование изделий.
Рахмеева Виктория Рафаэловна, ведущий инженер конструктор АО «РКЦ «Про-
гресс», аспирант кафедры эксплуатации авиационной техники, СГАУ, 443086, Россия, г.
Самара, Московское ш. 34, т. 8-(846)-276-11-09, моб. 8-905-017-11-18, e-mail:
aVis Phoinixfemail.ru.
Область научных интересов: автоматизированное нисходящее параллельное проек-
тирование изделий.
Biryk Vladimir Vasilievich, Doctor of Engineering Science, professor, holder of chair of
the heat engineering and heat engines department, SSAU, 443086, Russia, Samara, Moskovsko-
ye shosse, 34, tel: 8-(846)-267-45-66, teplotexfessaubk.ru.
Area of research: automated downward parallel product design.
Bronshtein Vitali Mikhailovich, PhD in Technical Sciences, associate professor of the
heat engineering and heat engines department, Leading Engineer Designer JSC SRC Progress,
SSAU, 443086, Russia, Samara, Moskovskoye shosse, 34, tel: 8-(846)-267-45-66,
mailfesamspacc.ru.
Area of research: automated downward parallel product design.
Anatoly Nikitovich Koptev, Dr. Sci., professor, academician of Russian Academy of
transport, head of division “Maintenance of Aircraft Engineering”, SSAU, 443086, Russia, Sa-
mara, Moskovskoye shosse, 34, tel: 8-(846)-267-46-13, e-mail: eatfessau.ru.
Area of research: control and test of aircraft and their systems.
Nadeev Nikolai Andreevich, Design Engineer, JSC SRC Progress, graduate of the heat
engineering and heat engines department, SSAU, 443086, Russia, Samara, Moskovskoye
shosse, 34, tel: 8-(846)-276-l 1-09, mob. 8-904-748-93-02, e-mail:
n i ко I a ynadce v63 fegma i I .com.
Area of research: automated downward parallel product design.
Rakhmeeva Viktoriya Rafajelovna, Leading Engineer Designer JSC SRC Progress,
postgraduate of department “Maintenance of Aircraft Engineering”, SSAU, 443086, Russia,
Samara, Moskovskoye shosse, 34, tel: 8-(846)-276-l 1-09, mob. 8-905-017-11-18, e-mail:
a V i s P h о i n i x fe mail.ru.
Area of research: automated downward parallel product design.
198
УДК 539.3, 539.4
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ АСИМПТОТИЧЕСКОГО
РАЗЛОЖЕНИЯ М. УИЛЬЯМСА ПОЛЯ НАПРЯЖЕНИЙ В ОКРЕСТНОСТИ
ВЕРШИН ДВУХ КОЛЛИНЕАРНЫХ ТРЕЩИН ПРИ ОДНООСНОМ
СИММЕТРИЧНОМ РАСТЯЖЕНИИ ПЛАСТИНЫ
©2015 П.С. Росляков
АО «РКЦ «Прогресс», г. Самара
Работа посвящена аналитическому определению коэффициентов асимптотического разложения М.
Уильямса поля напряжений у вершин двух коллинеарных трещин равной длины в бесконечной пластине,
находящейся в условиях одноосного растяжения.
Ключевые слова: Асимптотическое разложение М. Уильямса, поле напряжений в окрестности
вершины трещины, две коллинеарные трещины, растяжение пластины, одноосное растяжение пластины,
многопараметрическое описание поля напряжений
Введение. О построении полного
асимптотического разложения
М. Уильямса.
В настоящее время много работ по-
священо определению коэффициентов
полного асимптотического разложения
М. Уильямса необходимого для получе-
ния наиболее точного решения [1-13].
В [1] решение основано на разло-
жении М. Уильямса, которое является
общим описанием поля напряжений
вблизи вершины трещины. Асимптотиче-
ское разложение М. Уильямса для каждо-
го образца пластины с трещинами содер-
жит последовательность коэффициентов,
зависящих от геометрических параметров
образца (длин трещин и расстояния меж-
ду ними) и величины приложенной
нагрузки. Аналитическое представление
хорошо известно для первых двух слага-
емых полного асимптотического разло-
жения в области кончика трещины (ко-
эффициент интенсивности напряжения,
Т-напряжение), но отсутствует для коэф-
фициентов слагаемых высшего порядка.
На основе поляризационно-
оптического метода (метода
фотоупругости) выполнено экспери-
ментальное исследование напряженно-
деформированного состояния в
окрестности вершины трещины в
образцах с надрезами, находящимися в
условиях смешанного нагружения.
Проведенное экспериментальное
исследование позволило определить
коэффициенты интенсивности
напряжений в асимптотическом
разложении полей напряжений и
перемещений в окрестности вершины
трещины, а также найти коэффициенты
высших приближений в полном
асимптотическом разложении М.
Уильямса [2].
Авторами статьи [3] описана
методика определения коэффициента
интенсивности напряжений и
Т-напряжений для трещины нормального
отрыва на основе измерения локальных
деформационных откликов, вызываемых
малыми приращениями ее длины.
Отклики в форме полей тангенциальных
перемещений регистрируются методом
электронной (цифровой) спекл-
интерферометрии. Интерпретация
экспериментальных данных базируется
на асимптотическом разложении М.
Уильямса. В [3] представлены результаты
демонстрационного эксперимента.
В работе [4] рассмотрены две воз-
можные модели и критериальные урав-
нения механики разрушения тел с выре-
зами, учитывающие несингулярные чле-
ны разложений полей напряжений у вер-
шины выреза (трещины) и основанные на
диаграммах трещиностойкости и мастер
кривой. Приведено критериальное урав-
нение обобщенной диаграммы трещино-
стойкости, одинаково приемлемой для
тела с трещиной и вырезом, и учитыва-
ющей изменение степени стеснения де-
199
формаций у вершины выреза в результате
конечности радиуса скругления его вер-
шины и несингулярной составляющей
напряжений (Т-напряжений). Введено
понятие эффективных Т напряжений,
определяемых посредством осреднения
Т-напряжений перед вершиной выреза в
области предразрушения, характеризуе-
мой эффективным расстоянием. Постро-
ена базовая зависимость вязкости разру-
шения в функции эффективных Т-
напряжений (мастер кривая) трубной
стали для данной геометрии надреза.
В работе [5] показана необходи-
мость учета как сингулярных, так и не-
сингулярных компонентов поля напря-
жений у вершины трещины и разреза в
параметрических и критериальных зада-
чах механики разрушения. Обсуждены
трехмерные и двухмерные модели и кри-
терии, учитывающие несингулярные Т-
напряжения. Их использование показано
на примере решения задач механики раз-
рушения, включающих анализ напряжен-
но-деформированного состояния в
окрестности вершины трещины, экспе-
риментальное определение трещиностой-
кости, мастер-кривой и обобщенной диа-
граммы трещиностойкости тел с трещи-
нами и разрезами, прогнозирование
направлений распространения трещины
смешанного типа.
В рамках работы [6] выполнен тео-
ретический и численный анализ влияния
несингулярных компонентов Т-
напряжений на размеры области пласти-
ческой деформации у вершины трещины
нормального отрыва в связи с изменени-
ем толщины образца. Расчеты проведены
для компактного образца трех толщин. В
[6] установлено, что размер области пла-
стической деформации в срединной по-
верхности образца уменьшается с ростом
его толщины. Для более корректного
определения формы области пластиче-
ской деформации необходим учет угло-
вого распределения несингулярных
Т-напряжений у вершины трещины.
В книге [7] обсуждаются проблемы,
связанные с влиянием накопления по-
вреждений в окрестности как стационар-
ной, так и растущей трещин. Приводится
детальное исследование собственных
значений в разложении по собственным
функциям поля напряжений в окрестно-
сти вершин трещин антиплоского сдвига
и нормального отрыва. Приведен асимп-
тотический анализ полей напряжений в
задаче о трещине антиплоского сдвига в
упругопластическом материале с учетом
высших приближений.
В работе [8] показано, что в полном
асимптотическом представлении полей
напряжений следует удерживать при-
ближения высших порядков, которые
оказываются существенными для опре-
деления амплитуды поля напряжений.
Авторы работы [9] провели анализ
напряженно-деформированного состоя-
ния в малой окрестности вершины тре-
щины - в материале строятся двучленные
асимптотические разложения компонент
тензора напряжений и деформаций, ко-
эффициенты второго члена разложений
находятся численно с помощью конечно-
элементного расчета. В [9] показано, что
необходимо удерживать высшие члены в
асимптотических разложениях механиче-
ских величин в окрестности вершины
трещины.
Результаты асимптотического ана-
лиза [10] показывают, что исключение из
расчета коэффициентов высших поряд-
ков асимптотических разложений может
привести к значительным ошибкам в
оценке параметров разрушения элемен-
тов конструкций.
Опираясь на полное асимптотиче-
ское решение М. Уильямса, в [11] в ре-
зультате обработки экспериментов, про-
веденных методами фотоупругости, были
вычислены коэффициенты интенсивно-
сти напряжений, сопоставленные с ре-
зультатами конечно-элементного реше-
ния. Полученные экспериментальные
данные показали, что высшие приближе-
ния в асимптотических разложениях ме-
ханических величин могут значительно
влиять на коэффициенты интенсивности
напряжений.
Важной и сложной задачей является
определение коэффициентов приближе-
ний высшего порядка (слагаемые третье-
го, четвертого и т.д. порядков) в полном
200
асимптотическом разложении поля
напряжений М. Уильямса. Именно опре-
делению коэффициентов высших при-
ближений полного асимптотического
разложения М. Уильямса поля напряже-
ний в окрестности вершин двух коллине-
арных трещин конечной длины в беско-
нечной пластине, находящейся в услови-
ях одноосного растяжения посвящена
данная работа.
Асимптотические поля у вершины
трещины
Для определения компонент тензо-
ра напряжений в окрестности вершины
трещины используем представление
М. Уильямса [12, 13]:
Оу(г.е)
= £ (1)
к=<х>
где - угловые распределения, опреде-
ляемые в ходе решения краевой задачи; г
- расстояние от кончика трещины;
ак = ak(ff22> а> Ъ} ~ коэффициенты, за-
висящие от геометрии образца с трещи-
ной и приложенной нагрузки, а^2 ~ Н0Р_
мальное напряжение, приложенное на
бесконечности, а и b - определяющие
геометрию вершины трещины.
Угловые распределения напряже-
ний в (1) имеют следующий вид
fl1 = к[(2 + к/2 4- (-l)k )cos(k/2 - 1)0 - (к/2 - l)cos(fc/2 - 3)0]/2,
fl2 = fc[(2 4- к/2 - (-l)k }cos(k/2 - 1)0 4- (к/2 - l)cos(fc/2 - 3)0]/2, (2)
fl2 = к[(к/2 - 1 )sin(k/2 - 3)0 - (к/2 4- (-l)k)sin(fc/2 - 1)0]/2.
радиальные и угловые распределения
компонент тензора напряжений (1), (2) не
содержат геометрические характеристики
образца с трещинами и зависимости от
приложенной нагрузки. Вышеуказанные
характеристики учитываются только ко-
эффициентами ак (амплитудными мно-
жителями).
В большинстве инженерных при-
ложений в (1) удерживается лишь одно
слагаемое или два, последнее из которых
называется Т-напряжением. В последнее
время в механике разрушения сложилось
ясное понимание необходимости учета
высших приближений в асимптотическом
представлении поля напряжений (1).
Приведем анализ высших прибли-
жений в полном асимптотическом разло-
жении М. Уильямса в окрестности вер-
шин двух коллинеарных трещин конеч-
ной длины в бесконечной пластине,
находящейся в условиях одноосного рас-
тяжения. Рассмотрим тонкую пластину с
двумя коллинеарными трещинами под
действием растягивающей нагрузки
(рис. 1). При а = 0 получаем одноосное
симметричное растяжение пластины с
двумя коллинеарными трещинами.
°22
Рис. 1 - Двухосное симметричное растяжение тонкой пластины с двумя коллинеарными трещинами одина-
ковой длины.
201
Комплексное представление поля жения пластины с двумя коллинеарными
напряжений в случае двухосного растя- трещинами имеет вид [7]
0n(z) = 2Re[<p'1(z)] - 2x2Im[<Pi(z)] + С,
<r22(z) = 2T?e[^i(z)] + 2x2/m[<p'1'(z)] - C, (3)
0i2(z) = -2x2Re[<pi (z)], где C = (a - 1) a22/2.
Комплексный потенциал ф^(г) для
пластины с двумя трещинами определя-
ется из формулы (3):
<jPi(z) =
<*22 г2-С2 f .022 _ 2Е(п/2,к)
2 y/(z2 - a2)(z2 - b2) а } 4 ’ 2 F(ir/2,fc)
к
= у/1 - а2/Ь2, (4)
где F(n/2,k) и Е(п/2,к) - полные
нормальные эллиптические интегралы
Лежандра первого и второго рода.
Для случая двухосного симметрич-
ного растяжения тонкой пластины с дву-
мя коллинеарными трещинами выраже-
ния (3) принимают вид
<ГцО) = °22
z2 — С2
.y/(z2 - a2)(z2 - b2).
а — 1
z2 - C2
022(Z) = 022 \Re ,-------------------
I 17 (z2 — a2)(z2 — fc2).
2z
+ x2lm , =
LV(z2 - a2)(z2 - b2)
z(z2 — C2)(2zZ — a1 — b2)
(z2 - a2)3/2(z2 - b2)3'2 ]J’
(5)
2z
a2)(z2 - b2)
012 O) = ~X2022 1 Ее
Определим поле напряжений в слу-
чае двухосного растяжения пластины с
двумя коллинеарными трещинами для
z(z2 — C2)(2z2 — a2 — b2) I
(z2 — a2)2(z2 — b2)2 ]J
точки b (рис. 1). Таким образом, x2 = О,
в = 0, z = b + ге1в.
Имеем
0ц = V2 + a2^ii + аз/^г1/2 + + a3f^r3/2 + arf^r2 + •••
Стоит отметить, что все а2к = О, V Выразим компоненты ак, подстав-
к> 1. ляя из (2)
_ 022 (^2 — Е2)
\p2b\lb2 — а2
022^.а ~ 1)
--------->
ЗЬ4 - 7Ь2а2 + 5Ь2С2 - а2С2
Лз ~Л1 12b(b2 - a2)(b2 - С2) ’
202
а4 = О,
5ft6 - 3464а2 + 4364С2 + 2b2a2C2 - 19Ь2а4 + За2С2
“5 " Я1 160Ь2(Ь2 - а2)2(Ь2 - С2) '
а6 = О,
а7
7Ь8 - 113Ь6а2 + 177й6С2 - 227Ь4а44- 13764а2С2 + 11Ь2а4С2 + 13Ь2а6 - 5а6С2
896b3(62-а2)3(62 - С2)
а8 = О,
а9 = CIJ45610 - 1636Ь8а2 + 2867Ь8С2 - 7170Ь6а4+5732Ь6а2С2 - 132Ь4а6
+ 450Ь4а4С2 - 124Ь2а6С2 - 67Ь2а8 + 35а8С2]
/[18432Ь4(Ь2 - а2)4(Ь2 - С2)]
aio = 0.
На рис. 2 приведены графики рас-
пределения напряжений о’ц/о’гг в
окрестности вершины трещины b для
случая двухосного растяжения пластины
с двумя коллинеарными трещинами при
а = 0, а = 1, b = 2. Рис. 3 содержит
графики распределения напряжений
в диапазоне от 0.15(Ь - а)/а
до 0,22(6 — а)/а от вершины трещины
Ь. На рис. 4 изображены графики распре-
деления напряжений 22/^22 в окрестно-
сти вершины трещины Ь. На рис. 5 при-
ведены графики распределения напряже-
ний 022/ff22 в диапазоне от 0.15(6 —
а)/а до 0,22(6 — а)/а от вершины тре-
щины Ь. Для каждого случая удержива-
ется разное число коэффициентов полно-
го асимптотического разложения поля
напряжений, от 1 до 10.
f
Рис. 2 - Графики распределения напряжений O11/O22 в окрестности вершины трещины b для случая двух-
осного растяжения пластины с двумя коллинеарными трещинами. График красного цвета - график распре-
деления напряжений в окрестности вершины трещины для случая асимптотического разложения поля
напряжений с удержанием одного коэффициента, синий - двух, зеленый - трех, оранжевый - пяти коэффи-
циентов. Графики с удержанием коэффициентов шестого и высших порядков совпадают с графиком оран-
жевого цвета
203
Рис. 3 - Графики распределения напряжений (7цв диапазоне 0.15(Ь — а)/а — 0,24(Ь — а)/а от вер-
шины трещины b для случая двухосного растяжения пластины с двумя коллинеарными трещинами. График
красного цвета - график распределения напряжений в окрестности вершины трещины для случая асимпто-
тического разложения поля напряжений с удержанием одного коэффициента, синий - двух, зеленый - трех,
оранжевый - пяти коэффициентов. Графики с удержанием коэффициентов шестого и высших порядков сов-
падают с графиком оранжевого цвета
Рис. 4 - Графики распределения напряжений а22/а22 в окрестности вершины трещины b для случая двух-
осного растяжения пластины с двумя коллинеарными трещинами. График красного цвета - график распре-
деления напряжений в окрестности вершины трещины для случая асимптотического разложения поля
напряжений с удержанием одного коэффициента, зеленый - трех, черный - пяти коэффициентов. График с
удержанием коэффициента второго порядка совпадает с красным графиком, четырех - с зеленым. Графики с
удержанием коэффициентов шестого и высших порядков совпадают с графиком черного цвета
204
1.6
Рис. 5 - Графики распределения напряжений Огг1агг в диапазоне 0.15(Ь — а)/а — 0,24(Ь — а)/а от вер-
шины трещины b для случая двухосного растяжения пластины с двумя коллинеарными трещинами. График
красного цвета - график распределения напряжений в окрестности вершины трещины для случая асимпто-
тического разложения поля напряжений с удержанием одного коэффициента, зеленый - трех, черный - пя-
ти, сиреневый - шести коэффициентов. График с удержанием коэффициента второго порядка совпадает с
красным графиком, четырех - с зеленым. Графики с удержанием коэффициентов седьмого и высших поряд-
ков совпадают с графиком сиреневого цвета
Как видно из графиков (рис. 2-5),
шестое, седьмое и следующие коэффици-
енты полного асимптотического разложе-
ния поля напряжений не оказывают влия-
ния на общую картину распределения
напряжений в окрестности вершин тре-
щин.
Учитывая полученные результаты
можно утверждать, что для получения
наиболее точных результатов, при реше-
нии поставленных задач, необходимо
удерживать коэффициенты первых пяти
приближений полного асимптотического
разложения М. Уильямса поля напряже-
ний.
С помощью полученных результатов
стало возможным удержать любое наперед
заданное число коэффициентов полного
асимптотического разложения поля
напряжений у вершин двух коллинеарных
трещин при двухосном растяжении пла-
стины. Так же в работе произведен анализ
необходимого порядка коэффициентов
полного асимптотического разложения М.
Уильямса поля напряжений, которые ока-
зывают наибольшее влияние на поле
напряжений.
Библиографический список:
1. Hello G., Tahar М. В., Roeland J. -
М. Analytical determination of coefficients in
crack-tip stress expansions for an finite crack
plane medium, J. International Journal of Sol-
ids and Structures. - 2012. - V. 49. - P. 556-
566.
2. Герасимова T.E., Домаков П.Н.,
Степанова Л.В. Цифровая фотомеханика:
численная обработка результатов опто-
электронных измерений и ее приложение к
задачам механики разрушения // Вестник
Самарского государственного университе-
та. - 2013. - № 9-2(110). - С. 63-73.
3. Писарев В.С., Матвиенко Ю.Г.,
Одинцев И.Н. Определение параметров
механики разрушения при малом прира-
щении длины трещины // Заводская лабо-
ратория. Диагностика материалов. - 2012.
-Т. 78.-№4.-С. 45-51.
205
4. Матвиенко Ю.Г. Два подхода к
учету несингулярных Т-напряжений в кри-
териях механики разрушения тел с выре-
зами // Проблемы машиностроения и
надежности машин. - 2011. - № 5. - С.
104-110.
5. Матвиенко Ю.Г. Несингулярные
Т-напряжения в проблемах двухпарамет-
рической механики разрушения//3аводская
лаборатория. Диагностика материалов. -
2014. - Т. 78. - № 2. - С. 51-58.
6. Матвиенко Ю.Г., Починков Р.А.
Влияние несингулярных компонент Т-
напряжений на зоны пластической дефор-
мации у вершины трещины нормального
отрыва // Деформация и разрушение мате-
риалов.-2012.-№3.-С. 6-14.
7. Степанова Л.В. Математические
методы механики разрушения; - Самара:
Самарский университет, 2009. - 336 с.
8. Niu Z., Cheng С., Ye J., Recho N.
Evaluation of the stress singularities of plane
V-notches in bonded dissimilar materials //
Applied Mathematical Modelling. - 2009. -
V. 33.-P. 1776-1792.
9. Ding P., Wang X. Solutions of the
second elastic-plastic fracture mechanics pa-
rameter in test specimens // Engn. Fracture
Mechanics. - 2010. - V. 77. - P. 3462-3480.
10. Ayatollahi M.R., Dehgany M.,
Nejati M. Fracture analysis of V-notched
components - Effects of first non-singular
stress term // International Journal of Solids
and Structures. - 2011. - V. 48. - P. 332-341.
11. Ayatollahi M.R., Nejati M. Exper-
imental evaluation of stress field around the
sharp notches using photoelasticity // Materi-
als and Design. - 2011. - V. 32. - P. 561 -569
12. Kachanov M., Shafiro B., Tsukrov
I. Handbook of elasticity solution // Springer-
Science+Business Media. - 2003. - 329 p.
13. Williams M.L. On the stress distri-
bution at the base of a stationary crack //
Trans. ASME. Journal of Applied Mechanics.
1957. V. 24. P. 109-114.
References:
1. Hello G., Tahar M. B., Roeland J. -
M. "Analytical determination of coefficients
in crack-tip stress expansions for an finite
crack plane medium," J. International Journal
of Solids and Structures. - 2012. - V. 49. - P.
556-566.
2. Gerasimova T.E., Lomakov P.N.,
Stepanova L.V. Numerical photomechanics:
numerical processing of photoelasticity exper-
iments and its application to the problems of
fracture mechanics problems//Vestnik of Sa-
mara State University. - 2013. - V. 9-2(110).
- P. 63-73.
3. Pisarev V.S., Matvyenko Yu. G.,
Oditsev I.N. Determination of fracture me-
chanics parameters at a small gain of length of
a crack // Factory laboratory. Diagnostics of
materials. - 2012. - V. 78 (4). - P. 45-51.
4. Matvyenko Yu. G. Two approaches
to the account of notsingular T-pressure in
measure of a fracture mechanics of bodies
with cuts // Problems of mechanical engineer-
ing and reliability of cars. - 2011. - V 5. - P.
104-110.
5. Matvyenko Yu. G. Nonsingular T-
Stress in Problems of Two-Parameter Fracture
Mechanics // Factory laboratory. Diagnostics
of materials. - 2014. - V. 78 (2). - P. 51-58.
6. Matvyenko Yu. G., Pochinkov R.A.
Influence not singular components of T-
pressure on field of plastic strain at normal
separation crack tip // Strain and fracture of
materials. -2012. -V. 3. - P. 6-14.
7. Stepanova L.V. Mathematical meth-
ods of fracture mechanics; - Moscow: PHIS-
MALIT, 2009. - 336 p.
8. Niu Z., Cheng C., Ye J., Recho N.
Evaluation of the stress singularities of plane
V-notches in bonded dissimilar materials //
Applied Mathematical Modelling. - 2009. -
V. 33.-P. 1776-1792.
9. Ding P., Wang X. Solutions of the
second elastic-plastic fracture mechanics pa-
rameter in test specimens // Engn. Fracture
Mechanics. - 2010. - V. 77. - P. 3462-3480.
10. Ayatollahi M.R., Dehgany M.,
Nejati M. Fracture analysis of V-notched
components - Effects of first non-singular
stress term // International Journal of Solids
and Structures. - 2011. - V. 48. - P. 332-341.
11. Ayatollahi M.R., Nejati M. Exper-
imental evaluation of stress field around the
sharp notches using photoelasticity // Materi-
als and Design. - 2011. - V. 32. - P. 561-569
12. Kachanov M., Shafiro B., Tsukrov
I. Handbook of elasticity solution // Springer-
Science+Business Media. - 2003. - 329 p.
13. Williams M.L. On the stress distri-
206
bution at the base of a stationary crack //
Trans. ASME. Journal of Applied Mechanics.
1957. V. 24. P. 109-114.
DETERMINATION OF COEFFICIENTS OF THE M.WILLIAMS’S
ASYMPTOTIC EXPANSION OF THE STRESS FIELD IN THE
NEIGHBOURHOOD OF TWO COLLINEAR CRACK TIPS AT THE UNIAXIAL
SYMMETRICAL TENSION OF THE PLATE
© 2015 P.S. Roslyakov
JSC «SRC «Progress», Samara
Paper is devoted analytical determination of coefficients of the M. Williams asymptotic expansion of the
stress field in the neighbourhood of two collinear crack tips in an infinite plate under uniaxial stretching.
Key words: M. Williams's asymptotic expansion, the stress field in the neighbourhood ofcrack tips, two col-
linear crack tips, plate stretching, uniaxial stretching plate, higher order approach
Информация об авторе:
Росляков Павел Сергеевич, инженер-конструктор 2 категории, АО «РКЦ «Прогресс»,
e-mail: rosps89femail.ru.
Область научных интересов: математическое моделирование в механике, асимптотиче-
ские методы и теория возмущений, механика твердых тел, конечно-элементный анализ, нели-
нейная механика разрушения, теория ползучести, численные методы.
Roslyakov Pavel Sergeevich, design engineer, JSC «SRC «Progress», e-mail:
rosps89femail.ru.
Area of interest: mathematical modeling in mechanics, asymptotic methods and perturbation
theory, solid mechanics, finite element analysis, nonlinear fracture mechanics, creep theory, numeri-
cal methods.
207
УДК 681.5: 681.5.01
АНАЛИТИЧЕСКИЙ СИНТЕЗ ЗАКОНА УПРАВЛЕНИЯ
КОСМИЧЕСКИМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ
©2015 Б.К. Чостковский1, В.Ю. Денисов2
'Самарский государственный технический университет, г. Самара
2АО «РКЦ «Прогресс», г. Самара
Рассматривается использование терминального управления применительно к дискретной модели си-
стемы одноосной ориентации и стабилизации космического летательного аппарата (КЛА).
Рассматриваются метод структурно - параметрического синтеза терминального регулятора.
Ключевые слова: система управления, оптимизация терминального регулятора, космический лета-
тельный аппарат, система ориентации и стабилизации
В [1] предложено в системах пози-
ционирования использовать терминаль-
ный регулятор, который позволяет
управлять длительностью переходного
процесса и его формой. Построенный по
такому принципу регулятор, в сочетании
с возможностью тактирования его по
пространственной координате, позволяет
обеспечить попадание объекта в задан-
ную точку фазового пространства в ре-
гламентированный момент времени или
прохождение объекта через заданные
пространственные координаты.
Рассмотрим одноосную систему
ориентации и стабилизации с двигателем
- маховиком, пренебрегая перекрестны-
ми гироскопическими связями. Такая по-
становка вполне оправдана при выполне-
нии плоского поворотного маневра (во-
круг одной оси), а также в некоторых
частных случаях стабилизации [4,5,6].
Система управления одноосной
ориентации и стабилизации КЛА в не-
прерывном виде представлена на рис. 1.
Рис. 1. Структурная схема одноосной системы ориентации КЛА
В схеме, изображенной на рис.1,
введены следующие обозначения: а0 -
задающее воздействие соответствующее
заданному углу поворота, ОС - текущее
значение угла поворота, Мв - внешний
возмущающий момент действующий на
корпус аппарата по оси х, Н(} - началь-
ное значение суммарного момента коли-
чества движения, ]УДв - передаточная
функция вентильного двигателя, -
момент инерции двигателя, Jах - момент
инерции космического аппарата относи-
тельно оси х.
При исследовании использовались
следующие параметры и непрерывные
ПФ системы:
208
Wp{p) = K = \,
87.84
IT (p) =
лв P 0.00234л2 +5 + 64.3
JM =13-10’3кг-л/2,
Jax - 48кг-jw 2,
4=0,
4= о.
(1)
Для построения терминального ре-
гулятора был осуществлен переход к
дискретному аналогу непрерывной си-
стемы, представленной на рис. 1, с шагом
квантования 0,1с..
Получены ПФ модели объекта
управления в дискретном виде. Для этого
ПФ объекта управления (2) преобразова-
на в дискретную ПФ (3), используя из-
вестные методы [3]:
(2)
3-10~5z~'+5.508-10~fez~2-1.221O~loz~3
" Z ~ 1 —z-1 +0.00037z“2 -2.757 -IO’19z’4 ’ (
Далее, для обеспечения терминаль- полнив её передаточную функцию рав-
ного закона управления следует произве- ными нулями и полюсами [2]:
сти изменение вида модели объекта, до-
_ 3 • 10~5z~' +5,508 • 10~6 z~2 -1,22 • 10~'°z~3 • (1 - z,z~')
чГТ/1 -1ч~ 1 -z’1+0.00037z’2 -2.757-10‘19z^-a-z.z’1) ’
Л, 7 1 I I f I - 7 7 1 Х 1 '
где выбранное множество нулей и
полюсов {z,( обуславливает множество
значений управляемой координаты а(к)
(к - номер такта) при регистрации пере-
ходной характеристики.
В качестве нуля и полюса выбрано
устойчивое значение z, =0.9 , следова-
тельно ПФ модели объекта управления
примет вид:
3 • 10~5 z~‘ + 3.251 • 10~6 z~2 + 4.957 • 10~6 z~3 +1,01 • 10~'° z-4
1 — 0.1004z-1 - 0.9z-2 + 0.000338z~3 - 2.757 • 10“l9z“4
ПФ терминального регулятора имеет вид [2]:
209
<7о -Л^ПО-г^’1)
gtep^ =-----> (6)
1-<?0 • адП(1-^-')
д{} найдено из соотношения:
____________________1____________________
Z?j + Z?2 + ^3 + • • • +
= 1.4823-104, (7)
С учетом добавленных нулей и полюсов и найденного значения </() запишем ПФ
терминального регулятора:
G 0.4447z~‘ + 0.437z~2 - 0,375 lz~3-0A409z^ -
TEP{Z) ~ i _ o. 1004z~' - 0.9z"2 + 0.000338z3 + 3.177 • 1 O’7 z’4 -
-0.0658z~5 +2.35-10~5z~6 + 5.07 • 10~7z~7 -3.71 • 10~25z~8
-8.973 • 1 O’8 z’5 + 4.49 1011 z'6 + 8.938 • 10’1 V7 - 6.54 1 O’32 z’8 ’
(8)
Построены переходные процессы с
использованием терминального регуля-
тора и стандартного оптимального циф-
рового ПИ - регулятора, изображенные
на рис. 2, показана эффективность тер-
минального регулятора. При построении
переходных процессов использовался па-
кет Simulink системы научных и инже-
нерных вычислений MATLAB.
Рис. 2. - Сравнение переходных процессов системы управления одноосной ориентации и стабили-
зации КЛА: 1 - оптимально настроенный цифровой ПИ - регулятор; 2 - оптимальный терминальный регуля-
тор
Из семейства характеристик, пред-
ставленных на рис.2 на первый взгляд
можно заметить, что использование циф-
рового ПИ - регулятора (кривая 1) более
эффективно в плане быстродействия, но
ошибка системы будет приближаться к
нулю в бесконечности. Это может приве-
сти к значительным ошибкам при съемки
объектов Земли и определения их место-
нахождения.
Использование терминального ре-
гулятора (кривая 2) позволяет получить
ошибку системы равную нулю на 3-м
такте, обеспечивая тем самым высокую
210
точность, что очень важно непосред-
ственно для КЛА во время, к примеру,
съемки объектов Земли.
При управлении по двум и более
координатам предложенное терминаль-
ное управление может быть распростра-
нено и на многосвязную систему управ-
ления, которая учитывает влияния пере-
крестных гироскопических связей.
Библиографический список:
1 .Синтез цифрового регулятора тер-
минальной системы позиционирования
динамического объекта: Б.К Чостков-
ский, С.А Колпащиков, «Актуальные
проблемы ракетно-космической техники
и её роль в устойчивом социально - эко-
номическом развитии общества» (I Коз-
ловские чтения).2009. с 96-98
2 .Б.К. Чостковский Моделирование и
алгоритмизация процессов управления в
стохастических системах с цифровыми
регуляторами: Учеб, пособ. /2-е изд.,
испр. И доп. - Самар, гос. техн. ун-т. Са-
мара, 2013. 146с.:ил.
3 .Избранные главы теории автомати-
ческого управления с примерами на язы-
ке MATLAB: Б.Р. Андриевский, А.Л.
Фрадков, СПб.: Наука, 2000. - 475с.
4 .Управление космическими аппара-
тами: К.Б. Алексеев, Г.Г. Бебенин, М.:
Машиностроение, 1974. - 340с.
5 .Движение искусственного спутника
земли относительно центра масс: В.В.
Белецкий, Изд. «Наука», 1965. -416с.
б.Оптимальная система стабилизации
космического летательного аппарата с
электромаховичными исполнительными
органами: О.И. Гавриленко, О.В. Резни-
кова, О.А. Лученко, Авиационно-
космическая техника и технология, 2006,
№6 (32)
References:
1. Synthesis digital control of terminal
positioning system of dynamic object: B.
Chostkovsky, S. Kolpashchikov, «Actual
problems of rocket-space technology and its
role in stable socio-economic development
of society» (The first reading of Kozlov).
2009. 96-98 pages.
2. B. Chostkovsky. Modelling and algo-
rithmization management processes in sto-
chastic systems with digital controls: Manu-
al / 2nd edition, revised and augmented. -
Samara State Technical University. Samara,
2013. 146p.: illustration.
3. Selected chapters of automatic con-
trol theory with examples in MATLAB: B.
Andrievsky, A. Fradkov, St.-Peterburg .:
Science, 2000. - 475p.
4. Control spacecraft: K. Alekseev, G.
Biabenin, Moscow .: Engineering, 1974. -
340p.
5. The movement of an artificial satel-
lite of the Earth relative center of mass: V.
Beletsky, Publishing house «Science», 1965.
-416p.
6. The optimum system stabilization of
the spacecraft with elektroflywheel actuator:
O. Gavrilenko, O. Reznikova, O. Luchenko,
Aerospace technique and technology in
2006, №6 (32)
ANALYTIC SYNTHESIS OF CONTROL LAW SPACECRAFT
©2015 B. Chostkovsky1, V. Denisov2
'Samara State Technical University, Samara
JSC «SRC «Progress», Samara
We consider the use of the terminal control for discrete model of the system uniaxial orientation and stabi-
lization of the spacecraft. We consider a method of structural-parametric synthesis of the terminal control.
Keywords: control system, optimization of the terminal control, spacecraft, system of orientation and stabi-
lization
211
Информация об авторах:
Чостковский Борис Константинович, д.т.н., профессор кафедры АУТС, СамГТУ,
443 100, Россия, г. Самара, ул. Молодогвардейская, 244, т. 337-07-00, auts6ajsamgtu.ru.
Область научных интересов: теория автоматического управления, цифровые систе-
мы управления, математическое моделирование.
Денисов Владимир Юрьевич, инженер - программист 2 кат. АО «РКЦ «Прогресс»,
443 009, Россия, г. Самара, ул. Земеца, 18, т. 89379835126, vladenisov63(a;gmail.com.
Область научных интересов: теория автоматического управления, математическое
моделирование, управление космическими летательными аппаратами.
Boris Chostkovsky, Dr.Sci.Tech., professor of sub-faculty AUTS, Samara State Technical
University, 443100, Russia, Samara, Molodogvardiiska st., 244, phone number 337-07-00,
auts(a>samgtu.ru.
Area of research: the theory of automatic control, digital control systems, mathematical
simulation.
Vladimir Denisov, engineer-programmer 2nd category of JSC «SRC «Progress», 443009,
Russia, Samara, Zemetsa st., 18, mobile phone 89379835126, vladenisov63(ajgmail.com.
Area of research: the theory of automatic control, mathematical simulation, control of
spacecraft.
212
УДК 519.6+533.6
АЛГОРИТМ ДИНАМИЧЕСКИ ПЕРЕСТРАИВАЕМОЙ СЕТКИ В ЗАДАЧЕ
ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ ОБТЕКАНИЯ БОКОВЫХ БЛОКОВ
РАКЕТЫ-НОСИТЕЛЯ «СОЮЗ» В ПРОЦЕССЕ ИХ РАЗДЕЛЕНИЯ
©2015 А.А. Костарев
АО «РКЦ «Прогресс», г. Самара
Самарский государственный аэрокосмический университет имени
академика С.П. Королёва (Национальный исследовательский университет), г. Самара
Рассмотрено моделирование аэрогазодинамики начального момента движения ББ в соответствии с
логикой работы системы отделения и маршевой траектории выведения PH, а также начального участка сво-
бодного полета ББ после разрыва связей со второй ступенью, продолжительностью ~ 2 сек. Показаны ре-
зультаты, включающие траекторные параметры движения ББ, а также его аэродинамические характеристики
в процессе отделения. Полученные данные сравнивались с видеоматериалом запуска изделия Sentinel-1 А.
Ключевые слова: ракета-носитель, динамически перестраиваемая сетка, решатель 6DOF, численное
моделирование
Проблемы безударного увода отра-
ботавших ступеней, стабилизации их во
время свободного полета для уменьше-
ния районов падения отделяемых частей
(ОЧ) ракеты-носителей (PH), а также
возможного спасения с учетом многора-
зовое™ их исполнения, требуют ком-
плексного моделирования задач аэроди-
намики, динамики движения, тепловых
нагрузок и прочности сложных по форме
и массово-инерционным характеристи-
кам тел, приближенного к реальной фи-
зической задаче, с учетом современного
развития вычислительных технологий.
Современные пакеты вычислитель-
ной аэрогазодинамики (ANSYS Fluent,
CFD++, GASP, CFD-Fastran,
OVERFLOW, OpenFoam, Logos-Adaptive
и др.) позволяют комплексно моделиро-
вать аэродинамику и динамику движения
на основе модели шести степеней свобо-
ды (6DOF) с применением алгоритмов
динамически-перестраиваемых, адаптив-
ных или сеток типа «Химера» с последу-
ющим переносом полученных данных в
сторонние приложения для определения
прочности конструкции.
Начальный этап движения ОЧ про-
граммируется по логике работы системы
отделения с помощью пользовательских
функций, которые вводятся в решатель
вычислительного пакета. Моделирование
последующего свободного движения ОЧ
осуществляется по параметрам, соответ-
ствующим высоте на которой происходит
разделение. Для однозначности опреде-
ления зон возможного падения ОЧ, а
также для увеличения точности расчетов
предлагается разделять расчетную об-
ласть на составные сеточные объемы с
последующим переносом полученных
параметров движения ОЧ из одной рас-
четной области в другую.
На примере отделения боковых
блоков (ББ) PH «Союз» показано моде-
лирование аэродинамики начального мо-
мента движения в соответствии с логикой
работы системы отделения и маршевой
траектории выведения PH, в том числе
начальный участок свободного полета ББ
первой ступени после разрыва связей со
второй ступенью продолжительностью ~
2 сек.
Расчетная область содержала пол-
ную модель PH «Союз». Моделирование
проводилось для пяти расчетных сеточ-
ных объемов размерностью от 12 млн. до
45 млн. элементов. Получены графики
изменения положения центра тяжести,
скорости центра тяжести, угловой скоро-
сти и углов Эйлера (рысканья, тангажа,
крена) ББ, а также коэффициента про-
дольной силы ББ в зависимости от вре-
мени полета. Результаты моделирования
сравнивались с данными полученными с
видеокамер впервые установленных на 3-
213
й ступени PH «Союз» при запуске изде-
лия Sentinel-1А с космодрома Куру во
Французской Гвиане 3.04.2014 г. 21:02
GMT [1,2]
Использовался пакет ANSYS Fluent
14.5, реализующий алгоритм динамиче-
ски перестраиваемых сеток. Расчеты вы-
полнены с привлечением вычислитель-
ных ресурсов кластера «Сергей Королев»
СКЦ СГАУ (http://hpc.ssau.ru).
Библиографический список:
1. Sentinel-1A rides into space on a
Soyuz. 2014. 04 anp. URL:
http://youtube.com/watch?v=Dwutn7xqEpg
(дата обращения: 01.06.2014).
2. On-board camera provides a unique
perspective on Arianspace’s successful
Flight VS07. 2014. 05 anp. URL:
http://youtube.com/watch?v=rhqclpAa208
(дата обращения 01.06.2014).
DYNAMIC OVERSET MESH ALGORITHM IN THE PROBLEM OF
NUMERICAL FLOW SIMULATION AROUND THE BOOSTERS ‘SOYUZ’
IN SEPARATION PROCESS
©2015 A.A. Kostarev
JSC «SRC «Progress», Samara
Samara State Aerospace University named after academician S.P. Korolyov
(National Research University), Samara
Aerodynamic modeling at the initial moment of movement a boosters В, V, G, D the rocket 'Soyuz’ in ac-
cordance with a logic of separation control system, boost phase trajectory and also the lead of free flight of boosters
after breaking ties with second stage, lasting about 2 sec. is considered. The result including parameters of boosters
movement and also their aerodynamic characteristic in the process of their separation are shown. The obtained data
were compared with captured footage from liftoff to separation by cameras mounted on Soyuz Fregat upper stage
that sent Sentinel-1A into space on 3 April 2014.
Key words: launch vehicle, dynamic overset mesh, 6DOF solver, numerical simulation
Информация об авторах:
Костарев Алексей Александрович, аспирант, Самарский государственный аэро-
космический университет имени академика С.П. Королёва (Национальный исследователь-
ский университет), инженер-конструктор, АО «РКЦ «Прогресс», г. Самара,
alexey.kostarevfehotmail.de, +79276164589. Область научных интересов: вычислительная
аэрогазодинамика, численное моделирование, газодинамика летательных аппаратов, се-
точные модели, САПР.
Kostarev Alexey Alexandrovich, postgraduate, Samara State Aerospace University
named after academician S. P. Korolyov (National Research University), aerodynamic engineer,
JSC «SRC «Progress», Samara, alexey.kostarevfehotmail.de, +79276164589. Area of research:
computational fluid dynamics, numerical simulation, flow dynamic of the launch vehicle, mesh
generation, CAD/CAM.
214
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 7: Информатика и информационно-
управляющие системы. Методы и средства
защиты информации
215
УДК 519.63
О ВОЗМОЖНОСТИ ОРГАНИЗАЦИИ ОБЛАЧНЫХ ВЫЧИСЛЕНИЙ
ДЛЯ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ
ВЫСОКОЙ ИНТЕНСИВНОСТИ НА АЭРОКОСМИЧЕСКОЕ ОБОРУДОВАНИЕ
©2015 Д.Л. Головашкин
Институт систем обработки изображений Российской академии наук, г. Самара
Обсуждается актуальность задачи моделирования воздействия электромагнитных полей высокой ин-
тенсивности на аэрокосмическое оборудование. Описывается состояние исследований в предметной обла-
сти, предлагаются методы и подходы к решению поставленной задачи с помощью облачных вычислений.
Ключевые слова: Воздействие полей высокой интенсивности, FDTD-метод, параллельные
алгоритмы
Современное состояние исследований
в области электромагнитной совме-
стимости
Необходимость изучения воздей-
ствия электромагнитных полей высокой
интенсивности на авиационную и косми-
ческую технику стала очевидна с начала
80-х годов прошлого века после серии
авиационных катастроф: падении пяти
армейских вертолетов Blackhawk, проле-
тавших вблизи радиопередатчиков (1981-
1987, отказ системы управления горизон-
тального хвостового оперения); падение
истребителя Tornado у передатчика ра-
диостанции "Голос Америки" (1983, от-
каз вычислителя системы воздушных
сигналов); падение бомбардировщика F-
111 в Ливии (1986, влияние средств ра-
диоэлектронного противодействия); раз-
рушение в полете пяти гражданских са-
молетов Piper Malibu (1986, отказы авто-
пилотов под воздействием HIRF) и дру-
гих.
В настоящее время обязательным
этапом сертификации авиационной тех-
ники является проведение серии натур-
ных испытаний на полигоне в Турине
(Италия) компании Alenia, включающих
исследование воздействия полей часто-
той от 10 кГц до 40 ГГц на системы рас-
пределения электрической энергии, си-
стемы генерирования электрической
энергии, электронные системы управле-
ния двигателями, электродистанционные
системы управления полетом, системы
экранной индикации пространственного
положения и навигации. Недостатками
этой методики являются: высокая дли-
тельность и стоимость (очередь на испы-
тания два года, аналогичный центр в Ев-
ропе только один), отсутствие отече-
ственных экспериментальных площадок
(центры в Таганроге, Воронеже и Жуков-
ском не обеспечивают всего объема не-
обходимых экспериментов), испытания
проводятся над уже построенным само-
летом (исправление обнаруженных де-
фектов может потребовать проектирова-
ния и изготовления машины заново).
В 2008-2013 годах Европейская ко-
миссия финансировала (26,5 млн EUR)
проект "HIRF Synthetic Environment,
Integrated approach to aircraft
electromagnetic environment", направлен-
ный на решение обсуждаемой проблемы
методом вычислительного эксперимента.
Исследования проводились в 45 вузах и
компаниях ЕС (общий отчет на сайте
http://cordis.europa.eu/result/rcn/140447_еп
.html). Судя по публикациям ведущих
участников (SELEX Galileo, Dassault
Aviation, Eurocopter Group, Evector и др.)
моделирование воздействия HIRF на раз-
личную авионику проводились в основ-
ном с использованием численных мето-
дов FDTD (Finite-Difference Time-
Domain), МоМ (Method of Moments),
FEM (Finite Element Method) и их сов-
местных модификаций. Большая часть
исполнителей пользовалось готовым про-
граммным обеспечением, в частности па-
кетом СЕМ Solutions (Complete
216
Enviroment of Computational
Electromagnetic) компании ESI Group
(Франция, http://www.esi-group.com/
software-services/ virtual-environment/
electromagnetics), реализующим упомя-
нутые методы для решения обсуждаемой
задачи.
Основным недостатком данного
подхода является высокая вычислитель-
ная сложность, связанная с широким
диапазоном как частот HIRF (10 кГц до
40 ГГц), так и линейных размеров изуча-
емых объектов (от планера самолета до
микросхем бортового электронного обо-
рудования). В связи с этим все специали-
зированные программные пакеты: как
упомянутый СЕМ Solutions, так и fdtd-
solvers компании Acceleware
(http://www.acceleware.com/fdtd-solvers) и
др. ориентированы на производство вы-
числений с использованием суперкомпь-
ютеров, в том числе на основе графиче-
ских процессоров (GPU).
Развитие облачных распределенных
вычислений, характеризующихся гибко-
стью, масштабируемостью, дешевизной,
простотой доступа и использования мо-
жет придать новый импульс исследова-
ниям воздействия HIRF на авиационное и
космическое оборудование методом вы-
числительного эксперимента. Действи-
тельно, в первое время научной обще-
ственностью на облачные вычисления
возлагались большие надежды, как на
инструмент математического моделиро-
вания в различных естественнонаучных
областях [1,2]. Однако энтузиазм быстро
сменился разочарованием [3]. Главной
причиной невысокой эффективности вы-
числений указывалась низкая скорость
межпроцессорных взаимодействий в вир-
туальной вычислительной среде.
Повышение производительности
облачных сервисов в последнее время
вернуло былые надежды. Так, в работе
[4] демонстрируется эффективность об-
лачного сервиса Amazon при решении
задач аэро- гидродродинамики. А в не-
давней публикации [5] проводится удач-
ное сравнение ускорения вычислений на
облачном сервисе Amazon ЕС2 cloud-
based НРС cluster и традиционном кла-
стере (четырехядерные процессоры
AMD Shanghai 2.7 GHz по два на узел, 16
узлов) по программе EMA3D 3.3 solver
при исследовании проникновения HIRF в
фюзеляж и кабину пассажирского само-
лёта. Показано, что эффективность обоих
вычислительных систем на рассмотрен-
ном примере отличается незначительно,
позволяя ускорять вычисления до 50 раз.
К сожалению, начиная с 34 ядер ускоре-
ние перестает расти линейно и зависи-
мость принимает логарифмический вид.
Для решения задач нанофотоники
распространяется пакет FDTD Solutions
FDTD Solutions 8.11 компании Lumerical
(https ://www. lumerical .com/tcad-
products/fdtd/), запускаемый в том числе и
на облачном кластере Amazon ЕС2. Ко-
нечно, специфика задач нанофотоники
существенно отличается от тематики
настоящей работы (другие размеры се-
точных областей, модели объектов, элек-
тромагнитные поля), однако исследова-
ния обоих предметных областей основа-
ны на одном численном методе (FDTD) и
автор настоящей статьи (с учетом резуль-
татов работы McDonald Т., Fisher R.,
Rigden G., Perala, R.) полагает, что непре-
одолимых препятствий для организации
облачных вычислений в области воздей-
ствия HIRF на авионику нет.
Предлагаемые методы и подходы ре-
шения задачи электромагнитной сов-
местимости
Традиционным методом изучения
воздействия электромагнитных полей
высокой интенсивности на авионику яв-
ляется натурный эксперимент. Например,
в 1995 году NASA Langley Research
Center были выполнены эксперименталь-
ные полеты самолета Boeing 757, в ходе
которых с помощью датчиков на борту
измерялось воздействие на авиационное
оборудование полей различных передат-
чиков (радиостанции "Голос Америки",
U.S. Naval Surface Warfare Center-
Dahlgren Division и Nasa Atmospheric
Sciences Research Facility). Очевидно, что
подобный подход отличается высокой
себестоимостью и позволяет исследовать
воздействие весьма ограниченного круга
источников.
217
В последнее время в рассматривае-
мой предметной области приобретает
широкое распространение вычислитель-
ный эксперимент, о чем свидетельствуют
как многообразие предлагаемых различ-
ными компаниями программных продук-
тов (СЕМ Solutions, EMA3D solver, fdtd-
solvers и др.), так и отчет
(http://cordis.europa.eu/result/rcn/140447_е
n.html) по проекту "HIRF Synthetic
Environment, Integrated approach to aircraft
electromagnetic environment", профинан-
сированному Европейской комиссией.
Практически все 45 участников упомяну-
того проекта пользовались FDTD-
методом (Finite-Difference Time-Domain)
для моделирования HIRF на самые раз-
личные узлы самолёта: от планера до ка-
белей. Это и определило выбор FDTD-
метода автором настоящей статьи в ка-
честве основного при решении постав-
ленной задачи.
Являющейся по сути разностным
методом решения уравнения Максвелла в
силу общности математической модели
для всех электромагнитных процессов, он
позволяет исследовать все случаи воздей-
ствия различных частот на самолет: низ-
ких частот (10 кГц - 50 МГц), когда пла-
нер становится антенной, принимающей
излучение и индуцирующей токи в элек-
трической проводке; средних частот (30
МГц - 400 МГц) при которых оборудова-
ние подвержено как влиянию индуциро-
ванных токов, так и электромагнитному
облучению и высоких частот (100 МГц -
40 ГГц) - поле проникает через фюзеляж
и непосредственно взаимодействует с
оборудованием и электронными компо-
нентами.
В силу высокой вычислительной
сложности FDTD-метода его реализация
в рассматриваемой предметной области
проводится исключительно на высоко-
производительной вычислительной тех-
нике. При этом, не смотря на известные
достоинства облачных вычислений, при-
меров их организации (за небольшим ис-
ключением, рассмотренном далее в обзо-
ре современного состояния в данной об-
ласти науки) при моделировании воздей-
ствия HIRF на самолет нет. Хотя тот же
метод с успехом реализуется на облачном
кластере Amazon ЕС2 при разработке
элементов нанофотоники. Восполнить
указанный пробел вполне возможно.
Общеизвестным препятствием [3] к
широкому применению облачных вычис-
лений является низкая скорость межпро-
цессорных коммуникаций в виртуальной
облачной среде. Для преодоления влия-
ния этого фактора в настоящей работе
предлагается использовать метод "пира-
мид". Традиционный метод пирамид,
впервые появившейся в работе [6] долгое
время использовался для автоматическо-
го распараллеливания циклических
фрагментов последовательных программ
и предполагал полный отказ от коммуни-
каций между процессорами за счет мно-
гократного дублирования вычислений.
Однако, для большинства случаев из вы-
числительной практики при большом
размере сеточной области упомянутый
размен оказывался невыгодным. Предла-
гаемое авторами [7] усовершенствование
метода, основанное на допущении части
коммуникаций позволит адаптивно вы-
бирать в ходе вычислительного экспери-
мента оптимальную высоту пирамиды,
обеспечивающую наилучшее ускорение.
Второй важной проблемой, сдержи-
вающей применение облачных гетеро-
генных кластеров, содержащих графиче-
ские вычислительные устройства (GPU)
является необходимость увеличения дли-
ны обрабатываемых векторов (особен-
ность производства вычислений на архи-
тектуре SIMD в терминах модели Флина).
Известны [8] два подхода к многократ-
ному увеличению длины операндов в
векторных алгоритмах, хорошо показав-
ших себя при разностном решении урав-
нения теплопроводности и весьма пер-
спективных также и в рассматриваемой
предметной области.
Предостерегая исследователей от
желания писать программный код заново
(что заняло бы слишком много времени)
автор предлагает основываться на из-
вестных открытых пакетах МЕЕР (MIT
Electromagnetic Equation Propagation) и В-
CALM (Belgium California Light Machine),
реализующих FDTD-метод на кластере и
218
GPU, внедрив в них алгоритмы методов
пирамид и "длинных" векторов.
Библиографический список:
1. Hoffa С., Mehta G., Freeman Т.,
Deelman Е., Keahey К., Berriman В. and
Good J. On the use of cloud computing for
scientific workflows in eScience, 2008.
eScience'08. IEEE Fourth International Con-
ference on dec. 2008, pp.640-645
2. Hazelhurst S. Scientiffic computing
using virtual high-performance computing:
a case study using the amazon elastic com-
puting cloud in Proceedings of the 2008 an-
nual research conference.
http://citeseerx.ist.psu.edu/viewdoc/downloa
d?doi= 10.1.1.157.144&rep=repl&type=pdf
3. Marinescu D.C. Cloud Computing:
Theory and Practice// University of Central
Florida, 2013, —416 p.
4. P. Zaspel, M. Griebel (“Massively
parallel fluid simulations on Amazon’s HPC
cloud,” in 2011 First International Symposi-
um on Netowrk Cloud Computing Applica-
tions, IEEE Computer Society, pp.73-78,
2011
5. McDonald T., Fisher R., Rigden G.,
Perala, R. Parallel FDTD Electromagnetic
Effects Simulation using On-Demand Cloud
HPC Resources// Electromagnetic Compati-
bility (EMC), 2013 IEEE International
Symposium p.499-502.
6. Lamport L. The coordinate method
for the parallel execution of DO-loops //
Sagamore Computer Conf, on Parallel Proc.
IEEE, New York, 1973. P. 1-12.
7. Golovashkin D.L., Kochurov A.V.
Pyramid method for GPU-aided finite dif-
ference method// Proceedings of the 13th
International Conference on Computational
and Mathematical Methods in Science and
Engineering, CMMSE 2013 24-27 June,
2013, p. 746-756
8. Vorotnikova D.G., Golovashkin
D.L. CUBLAS-aided Long Vector Algo-
rithms// Journal of Mathematical Modelling
and Algorithms in Operations Research,
V.13,Iss 4,2014, pp 425-431
References:
1. Hoffa C., Mehta G., Freeman T.,
Deelman E., Keahey K., Berriman B. and
Good J. On the use of cloud computing for
scientific workflows in eScience, 2008.
eScience'08. IEEE Fourth International Con-
ference on dec. 2008, pp.640-645
2. Hazelhurst S. Scientiffic computing
using virtual high-performance computing:
a case study using the amazon elastic com-
puting cloud in Proceedings of the 2008 an-
nual research conference.
http://citeseerx.ist.psu.edu/viewdoc/downloa
d?doi= 10.1.1.157.144&rep=rep 1 &type=pdf
3. Marinescu D.C. Cloud Computing:
Theory and Practice// University of Central
Florida, 2013, —416 p.
4. P. Zaspel, M. Griebel (“Massively
parallel fluid simulations on Amazon’s HPC
cloud,” in 2011 First International Symposi-
um on Netowrk Cloud Computing Applica-
tions, IEEE Computer Society, pp.73-78,
2011
5. McDonald T., Fisher R., Rigden G.,
Perala, R. Parallel FDTD Electromagnetic
Effects Simulation using On-Demand Cloud
HPC Resources// Electromagnetic Compati-
bility (EMC), 2013 IEEE International
Symposium p.499-502.
6. Lamport L. The coordinate method
for the parallel execution of DO-loops //
Sagamore Computer Conf, on Parallel Proc.
IEEE, New York, 1973. P. 1-12.
7. Golovashkin D.L., Kochurov A.V.
Pyramid method for GPU-aided finite dif-
ference method// Proceedings of the 13th
International Conference on Computational
and Mathematical Methods in Science and
Engineering, CMMSE 2013 24-27 June,
2013, p. 746-756
8. Vorotnikova D.G., Golovashkin
D.L. CUBLAS-aided Long Vector Algo-
rithms// Journal of Mathematical Modelling
and Algorithms in Operations Research,
V.13, Iss 4, 2014, pp 425-431
219
HIGH INTENSITY RADIATED FIELD EEFFECTS SIMULATION USING
CLOUD HIGH PERFORMANCE COMPUTING RESOURCES
©2015 D.L. Golovashkin
Image processing systems institute of the Russian Academy of Sciences, Samara
Relevance of a problem of modeling of impact of electromagnetic fields of high intensity on the space
equipment is discussed. The condition of researches in subject domain is described, methods and approaches to the
solution of an objective by means of cloud computing are offered.
Key words: High intensity radiated field (HIRF), Finite-Difference Time-Domain (FDTD) .parallel
algorithms
Информация об авторах:
Головашкин Димитрий Львович, доктор физико-математических наук, доцент,
ведущий научный сотрудник Института систем обработки изображений РАН. Область
научных интересов: разностное решение уравнений Максвелла (FDTD-метод), дифракци-
онная оптика, векторные и параллельные матричные вычисления. E-mail:
golovashkin2010@ yandex.ru.
Dimitry Lvovich Golovashkin, Doctor of Physical and Mathematical Sciences, Associate
Professor, Leader Researcher of the Image Processing Systems Institute of the Russian Academy
of Sciences. Scientific interests: FDTD-method, sub wave optics, vector and parallel algorithms
of matrix computation. E-mail: golovashkin2010@yandex.ru.
220
УДК 65.011.56
АВТОМАТИЗИРОВАННАЯ ОБРАБОТКА И АНАЛИЗ ИНФОРМАЦИИ ПРИ
УПРАВЛЕНИИ РИСКАМИ КАЧЕСТВА ПРОДУКЦИИ: МЕТОДОЛОГИЯ И
РЕАЛИЗАЦИЯ КОМПЛЕКСНОГО ПОДХОДА
©2015 О.П. Скоробогатов, А.В. Василевский, Н.С. Кулиш, А.Н. Баутов
ФГУП ЦНИИмаш, г. Королев
В докладе представлен теоретический базис и практические решения по управлению рисками каче-
ства продукции с использованием автоматизированных систем. Предложено использовать комплексный
подход к обработке и анализу информации, а также принятию решений для минимизации рисков и контроля
над ними. Результаты иллюстрированы на примерах автоматизированных систем уровня заказчика продук-
ции (ACCOM ТСН РКТ), предприятия-изготовителя продукции (АСОЭИ) и производственного процесса
(УРКП). Рассмотрены направления интеграции указанных систем.
Ключевые слова: Автоматизация, управление рисками, качество, система, анализ
Обеспечение качества продукции
отечественных предприятий, включая из-
делия, выпускаемые организациями ра-
кетно-космической промышленности
(РКП), является одной из наиболее акту-
альных задач. Сложность изделий ракет-
но-космической техники (РКТ), их высо-
кая стоимость, важность решаемых задач
обуславливают исключительные требо-
вания к качеству и надежности продук-
ции РКП. При этом на всех этапах жиз-
ненного цикла создания, производства и
применения РКТ имеют место разнооб-
разные риски, способные снизить каче-
ство продукции до недопустимых уров-
ней.
Для решения данной проблемы тео-
ретически обоснован и предложен ком-
плексный подход, заключающийся в ав-
томатизации управления рисками на
уровнях заказчика продукции, предприя-
тия-изготовителя продукции и производ-
ственного участка, реализующего техно-
логические процессы. Предложена опти-
мальная интеграция автоматизированных
систем, обеспечивающих управление
рисками качества продукции.
Рассмотрены основные цели, зада-
чи, структуры и функционирование ав-
томатизированных систем: уровня заказ-
чика продукции - на примере АССОИ
ТСН РКТ (автоматизированной системы
сбора и обмена информацией о техниче-
ском состоянии и надежности ракетно-
космической техники), уровня предприя-
тия-изготовителя продукции - на примере
АСОЭИ (автоматизированной системы
анализа и оценки экспертной информа-
ции о рисках) и уровня производственно-
го процесса - на примере УРКП (автома-
тизированной системы управления рис-
ками качества продукции).
С целью координации работ по
управлению рисками качества продукции
предложены направления интеграции ав-
томатизированных систем различных
уровней.
221
AUTOMATED PROCESSING AND ANALYSIS FOR RISK MANAGEMENT
OF PRODUCT QUALITY: METHODOLOGY AND IMPLEMENTATION OF AN
INTEGRATED APPROACH
©2015 O.P. Skorobogatov, A.V. Vasilevsky, N.S. Kulish, A.N. Bautov
Central research Institute, Korolev
The report presents the theoretical basis and practical solutions for risk management of product quality with
the use of automated systems. Proposed to use an integrated approach to the processing and analysis of information
and decision making to minimize risks and control them. The results are illustrated on examples of automated sys-
tems level customer products, the manufacturer of the products and manufacturing site Directions of integration of
the indicated systems are considered.
Keywords: automation, risk management, quality, system, analysis
Информация об авторах:
Скоробогатов Олег Петрович, д.в.н., заместитель генерального директора ФГУП
ЦНИИмаш, Россия, 141070, Московская область, г. Королев, ул. Пионерская, дом 4,
тел. (495) 513-59-51, corp@tsniimash.ru .
Область научных интересов: качество и надежность ракетно-космической техники,
летные испытания пилотируемых космических комплексов.
Area of research: the quality and reliability of rocket and space technology, flight tests of
manned space complexes.
Василевский Анатолий Вячеславович, заместитель начальника научно-
технического центра ФГУП ЦНИИмаш, Россия, 141070, Московская область, г. Королев,
ул. Пионерская, дом 4, тел. (495) 513-50-42.
Область научных интересов: качество, надежность и безопасность ракетно-
космических систем.
Area of research: quality, reliability and safety of rocket-space systems.
Кулиш Николай Семенович, к.т.н., начальник отделения ФГУП ЦНИИмаш, Рос-
сия, 141070, Московская область, г. Королев, ул. Пионерская, дом 4, тел. (495) 513-57-49,
info416@tsniimash.ru .
Область научных интересов: методология обеспечения, оценки и контроля надежно-
сти изделий ракетно-космической техники
Area of research: the methodology for the assessment and control reliability of rocket and
space technology.
Баутов Андрей Николаевич, к.т.н., с.н.с, и. о. начальник отдела ФГУП ЦНИИмаш,
Россия, 141070, Московская область, г. Королев, ул. Пионерская, дом 4, тел. (495)
513-54-16, info416@tsniimash.ru .
Область научных интересов: управление рисками, безопасность космической
деятельности, анализ и моделирование систем.
Area of research: risk management, safety of space activities, analysis and modeling of
systems.
222
УДК629.78,004.4
УСОВЕРШЕНСТВОВАНИЕ ПРОЦЕССА РАЗРАБОТКИ ПРОГРАММНОГО
ОБЕСПЕЧЕНИЯ НПОА НА ПРИМЕРЕ КОМПЛЕКСА ПРОГРАММ
ПРОВЕРОК АППАРАТУРЫ СУ
©2015 Д.О. Пехотин, М.А. Горшков, Н.В. Соловьева
ОАО «Научно-производственное объединение автоматики им. академика
Н.А. Семихатова», г. Екатеринбург
Предложен вариант усовершенствования процесса разработки программного обеспечения Приведе-
ны способы решения проблем совместной разработки.
Ключевые слова: Разработка программного обеспечения, система контроля версий, система ведения
проектов, методология разработки
Методология разработки ПО - это
перечень действий по производству, по-
ставке и сопровождению программных
продуктов, это способ организации труда
разработчиков ПО. В настоящее время
существует великое множество методо-
логий разработки программного обеспе-
чения (ПО). Выбор методологии разра-
ботки ПО во многом зависит от объёма,
сложности, сферы применения про-
граммного проекта, а также от размеров и
внутренней структуры организации.
В целом существующие методоло-
гии разработки ПО можно разделить на
два основных направления - «тяжёлые» и
«лёгкие» (гибкие) методологии. Гибкие
методологии применяются в основном в
небольших динамичных компаниях, в
условиях постоянно меняющихся требо-
ваний при сжатых сроках разработки, от-
личаются малой степенью формализации
процесса разработки и опорой на личные
качества ведущего или группы разработ-
чиков. Такие методологии не применимы
в случае разработки программ повышен-
ной надёжности для объектов ответ-
ственного назначения. В этом случае ис-
пользуются «тяжёлые» методологии про-
ектирования ПО с высокой степенью
формализации процесса создания ПО,
при этом влияние отдельных личностей
на результат работы сводится к миниму-
му [1].
Разработка ПО БАСУ ракетно-
космической техники является ответ-
ственной задачей. В условиях необходи-
мости повышенного качества разрабаты-
ваемого ПО в НПОА на протяжении дол-
гого времени применяется своя одно-
значно «тяжелая» методология разработ-
ки ПО, которая предусматривает боль-
шую степень формализации и контроля.
Разработка ПО в НПОА проводится в со-
ответствии с РД551.04.005-2014 [2].
РД551.04.005-2014 детально описы-
вает все этапы проектирования, разра-
ботки, отработки и подготовки описания
ПО, содержание отчётов по отработке
программ, требования к объёму автоном-
ной отработки ПО и многое другое. Ос-
новные этапы создания ПО следующие:
- определение требований к ПО;
- макетирование и проектирование
ПО;
- программирование компонентов и
их интеграция;
- автономная и комплексная отра-
ботка компонентов ПО на АРМ-П;
- поэтапная отработка ПО на пози-
циях предприятия;
- выпуск и оформление ПД.
В процессе разработки, как прави-
ло, задействовано несколько подразделе-
ний, при совместной разработке прихо-
дится корректировать, объединять разные
версии ПО.
В частности, при совместной разра-
ботке можно выделить следующие про-
блемы:
- ведение истории разработки, обес-
печение целостности программ;
223
- обеспечение вариативности про-
грамм, необходимость хранения несколь-
ких (в том числе «старых») версий про-
грамм;
- необходимость внедрения в код
программы технологических вставок для
отработки каких-либо веток ПО;
- одновременное редактирование и
объединение изменений;
- анализ изменений, внесённых дру-
гими разработчиками.
Также при совместной разработке
существуют проблемы организационного
характера:
- могут присутствовать существен-
ные затраты времени при обмене инфор-
мацией между всеми участниками проек-
та и, как следствие, - нехватка актуаль-
ной информации;
- сложность отслеживания готовно-
сти отдельных частей и всего проекта в
целом и др.
Актуальной задачей является усо-
вершенствование существующего про-
цесса создания ПО путем решения неко-
торых проблем совместной разработки.
Такие проблемы, как правило, решаются
с привлечением дополнительных техни-
ческих средств.Использование этих
средств позволяет упорядочить, форма-
лизовать и автоматизировать процесс
совместной разработки ПО.
В настоящее время в НПОА прово-
дится разработка комплекса проверочных
задач для различных заказов в том числе
«Союз-Восток». В процессе разработки
этих задач был внедрен ряд усовершен-
ствований процесса совместной разра-
ботки ПО.
В частности, в соответствии с реко-
мендациями РД применена система кон-
троля версий.Для применения выбрана
система контроля версий Mercurial, её
внедрение позволило:
- отслеживать историю и прогресс
проекта;
- облегчить взаимодействие между
разработчиками при коллективной разра-
ботке;
- работать одновременно над не-
сколькими версиями проекта;
- поддерживать актуальную версию
проекта на рабочих местах разработчиков
и др.
Для решения проблем организаци-
онного характера внедрена система веде-
ния npoeKTOBRedmine, которая дала воз-
можность:
- формализовать планирование со-
бытий и работ;
- частично автоматизировать расчет
затраченногона каждую задачу или этап
работ времени;
- упорядочить распределение и от-
слеживание ресурсов;
- обеспечить разработчиков акту-
альной информацией.
Внедрение проводилось с макси-
мальной интеграцией средств совместной
разработки в существующуюна предпри-
ятии информационную систему. Сначала
внедрена система контроля версий Mer-
curial, потом добавлена система ведения
проектов Redmine. Проведена интеграция
Redmine с Mercurial и с почтой
MSExchange, используемой во внутрен-
ней сети предприятия. Выработана
наиболее удобная конфигурация и про-
думана идеология для применения
Redmine при разработке ПО.
В настоящее время средства сов-
местной разработки ПО все шире приме-
няются для других видов программ
(наземных, бортовых, технологических)
что позволяет усовершенствовать про-
цесс проектирования ПО НПОА.
Библиографический список:
1. Бобровский С. Технологии Пен-
тагона на службе российских программи-
стов. СПб,: Питер, 2003. - 222 с.
2. Руководящий документ «Систе-
ма качества программно-
математического обеспечения ЦВС. По-
рядок проектирования, разработки, отра-
ботки на АРМ-П, составления описания
ПО, формирования ТД на ПО»
РД551.04.005-2014.
References:
1. Bobrovsky S. Pentagon technology
employ by russian programmers. Saint Pe-
224
tersburg, Publishing house “Piter”, 2003 - 2. Manual document “software quality
222p. system. Planning, design, program docu-
mentation making”.
SOFTWARE DEVELOPMENT PROCESS SPAA IMPROVEMENT AS AN
EXAMPLE CHECK ONBOARD HARDWARE PROGRAMS COMPLEX
©2015 D.O. Pehotin, M.A.Gorshkov, N.V. Soloveva
Scientific production association of automation named after academician
N.A. Semihatov, Ekaterinburg
Offered variation how to improve software development process. Described methods to solve the collective
development problems.
Key words: software development, version control system, project management system
Информация об авторах:
Пехотин Дмитрий Олегович, инженер-программист, ОАО «НПО автоматики им. ака-
демика Н.А. Семихатова», 620075, Екатеринбург, ул. Мамина-Сибиряка, 145, e-mail:
avt@npoa.ru, тел. +7(343) 355-95-94
Область научных интересов: технологии программирования.
Горшков Михаил Александрович, начальник группы, ОАО «НПО автоматики им.
академика Н.А. Семихатова», 620075, Екатеринбург, ул. Мамина-Сибиряка, 145, e-mail:
avt@npoa.ru, тел. +7(343)355-95-94
Область научных интересов: операционные системы реального времени, технологии
программирования.
Соловьёва Наталья Владимировна, к.т.н., доцент, заместитель начальника отдела
ОАО «НПО автоматики имени академика Н.А. Семихатова» Екатеринбург, ул. Мамина-
Сибиряка, 145, раб.тел. 8(343)214-86-36, avt@npoa.ru.
Область научных интересов: структурное проектирование аппаратуры СУ, операцион-
ные системы реального времени, технологии программирования, защита информации в
управляющих системах.
Pehotin Dmitry Olegovich, engineer-programmer, SPA automation, 620075, Ekaterinburg,
Mamina-Sibiriakast. 145, tel. +7(343)355-95-94, e-mail: avt@npoa.ru.
Research interests: software engineering.
GorshkovMihailAlexandrovich, head of group, SPA automation, 620075, Ekaterinburg,
Mamina-Sibiriakast. 145, tel. +7(343)355-95-94, e-mail: avt@npoa.ru.
Research interests: real-time operating systems, software engineering.
Solovieva Natalya Vladimirovna, Ph.D., associate professor, deputy head of department,
SPA automation, 620075, Ekaterinburg, Mamina-Sibiriakast. 145, tel. 8(343)214-86-36, e-mail:
avt@npoa.ru.
Research interests: the structural design of the equipment of control systems, real-time operat-
ing systems, software engineering, information security in control systems.
225
УДК 004.94
СИСТЕМА УПРАВЛЕНИЯ ДАННЫМИ ИНЖЕНЕРНОГО АНАЛИЗА
И ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ
©2015 Д.В. Авдеев
АО «РКЦ «Прогресс», г. Самара
Статья описывает проблематику инженерного анализа и имитационного моделирования, а также
необходимость внедрения системы управления данными моделирования.
Ключевые слова: Имитационное моделирование, инженерный анализ, система управления данными
моделирования
Для улучшения качества, повыше-
ния надежности, уменьшения стоимости
и времени до передачи в эксплуатацию
изделий ракетно-космической техники,
необходимо применять параллельное
проектирование и имитационное модели-
рование (далее моделирование) совмест-
но с высокопроизводительными вычис-
лениями. Поскольку моделирование ста-
новится распространенным явлением и
растет по своим масштабам и сложности,
появляются проблемы по управлению и
хранению данных моделирования. Для
решения данных проблем необходимо
рассматривать внедрение системы управ-
ления данными инженерного анализа и
имитационного моделирования.
С моделированием, становящимся
стандартом практического взаимодей-
ствия, объемом, скоростью и разнообра-
зием технических данных, продолжают
расти уникальные требования к управле-
нию данными и стратегией хранения. Ко-
личество данных моделирования значи-
тельно превосходит данные автоматизи-
рованного проектирования. Что позволя-
ет охватить большее количество про-
блемно-ориентированных инструментов,
процессов и форматов. Данные модели-
рования прежде всего не структурируют-
ся, и часто имеют очень большие разме-
ры.
Наконец, данные моделирования
имеют тесную взаимосвязь с данными
высокопроизводительных ресурсов. Эти
специфические атрибуты делают данные
моделирования более ресурсоемкими и
при традиционных методах управления
создают большие проблемы.
С такими уникальными проблемами
как: эффективное и надежное управление
данными, целостность данных, интегра-
ция и взаимодействие, накопление зна-
ний и многократное применение наилуч-
ших вариантов решения поставленных
задач, столкнулась и наша организация.
Решение данных проблем позволит уве-
личить производительность труда инже-
нера, одновременно инженер получит
единый универсальный интерфейс и со-
временный доступ к данным с улучшен-
ной системой безопасности.
Для реализации внедрения системы
управления данными моделирования
подразделения информационных техно-
логий должны эффективно организовы-
вать людей, процесс и данные по всему
жизненному циклу изделия, уменьшая
трудозатраты конечных пользователей.
Данные моделирования становятся
для производства критическим ресурсом.
Ежегодно на предприятии появляются
более 10 экзабайт новых данных. В
настоящее время количество данных од-
ного проекта может равняться всей ин-
формации полученной до 2000 года. И
постоянно объем обрабатываемых дан-
ных продолжает расти. Например, набора
данных вычислительной гидрогазодина-
мики может достигать сотни гигабайт
информации или даже нескольких пета-
байт, а во время производственного ана-
лиза эти данные могут быстро агрегиро-
ваться в несколько раз.
226
Разработка новых изделий и боль-
шие объемы данных создают необходи-
мость эффективно управлять информаци-
ей и внедрять новые технологии модели-
рования для повышения конкурентоспо-
собности. Этот фактор имеет решающее
значение для внедрения инноваций и по-
вышения производительности.
Сегодня почти каждый процесс раз-
работки изделия должен включать в себя
зависимость от инженерного моделиро-
вания. Хранение и управление данными
моделирования имеет стратегическое
значение для любой организации, так как
данные описывают состав и контекст из-
делия, которое моделируется. Тем не ме-
нее, кроме простого обращения и боль-
ших объемов данных, необходимо управ-
лять этими данными на протяжении всего
жизненного цикла изделия, снижая затра-
ты конечного пользователя. Процесс
управления данными, так же важен, как и
сам процесс моделирования.
Независимо от размера, разные
подразделения находятся на разных
уровнях подготовки по управлению и об-
работки данных моделирования. Некото-
рые - на более низких уровнях - только
начинают освоение, в то время как дру-
гие уже эффективно применяют архитек-
туры информационных технологий, ко-
торые оптимизируют производственный
цикл, эффективно объединяют различные
процессы и данные.
В отличии от проектирования
внешнего вида и геометрии, в которых
применяются относительно однородные
инструменты систем автоматизированно-
го проектирования, моделирование сов-
мещает практику различных областей
науки, и оно должно поддерживать рас-
пределенную работу, применяя различ-
ные инструменты, процессы и форматы.
На рис. 1 изображен типичный по-
ток информации для многих ключевых
рабочих процессов моделирования и раз-
личных типов данных, как правило,
определенных подразделениями инже-
нерного анализа.
PDM
। ЛАНИ ч iEaHHE
ДАННЫЕ
АНАЛИЗ
УПРАВЛЕНИЕ
МОДЕЛИРОВАНИЕ
РЕЗУЛЬТАТ
ЭЛЕКТРОМАГНЕТИЗМ
УСЛОЖНЕНИЕ
КОМПОНОВКА
КОНСТРУКТИВНЫЙ
ГИДРОГАЗОДИНАМИКА
ФИЗИЧЕСКИЙ/МАТЕМАТИЧЕСКИЙ, Ц ИФРОВОЙ
ИНСТРУМЕНТЫ И ФОРМАТЫ
ТЕСТИРОВАНИЕ
ИНФОРМАЦИЯ
ТРЕБОВАНИЯ
СТРУКТУРА ИЗДЕЛИЯ
САЕ HCAD
МОДЕЛИ
КОРРЕЛЯЦИЯ
'ПТиМИ 'Г .ИЯ
МАТЕРИАЛЫ СВОЙСТВА
СВЯЗИ
ИСПЫТАНИЯ ВНЕШНИЕ ДАННЫЕ
Рис. 1 - Процесс управления данными моделирования
Моделирование, как правило, имеет
много зависимостей с другими областями
(внешний вид, материалы, испытания и
т.д.), с несколькими типами данных, по-
ступающих из различных источников.
Входными данными моделирования
являются:
- Данные PDM/ERP/PLM, такие как
трехмерные модели, структура изделия,
материалы, сварные швы, требования к
продукции и эксплуатационные характе-
227
ристики изделия. Дополнительные дан-
ные включают правила, ссылки, графики
ит.д.
- Данные подразделений инженер-
ного анализа, такие как ранее созданные
конечно-элементные модели, научно-
исследовательские данные, граничные
условия, применение материалов, про-
цессов, концептуальных конструкций, а
также отчеты, тесты и т.д.
- Подробная информация о типе
моделирования, задачи моделирования,
спецификации моделирования, техноло-
гического процесса моделирования, про-
граммное обеспечение и т.д.
Выходными данными моделирова-
ния являются большие объемы представ-
ления данных итераций моделирования,
содержащие неструктурированные ре-
зультаты решения и выводы.
Моделирование, как правило вклю-
чает в себя следующие этапы:
- концептуальный: моделирование
на системном уровне для оценки концеп-
ции;
- детализация: уточнение данных
моделирования
- валидация: корреляция моделиро-
вания с физическими испытаниями.
Для решения этих сложностей,
применяется большое количество про-
граммных средств, начиная от коммерче-
ских до приложений собственной разра-
ботки.
Большое количество средств и про-
должающийся рост объема, скорости и
разнообразия данных моделирования со-
здают уникальные проблемы управления:
- решение сложных многомасштаб-
ных, многодисциплинарных и многока-
нальных моделей инженерных задач, ко-
манды моделирования состоят из отдель-
ных экспертов из различных областей,
которые должны эффективно взаимодей-
ствовать. Мониторинг и решение боль-
ших сложных рабочих процессов моде-
лирования, требует развертывания ком-
плексной инфраструктуры информаци-
онных технологий для высокопроизводи-
тельных вычислений, управления данны-
ми и архивацией.
- симуляторы создают терабайты
данных в день, критически важная ин-
формация и результаты часто хранятся в
нескольких файлах или документах. Ин-
женерные пользователи требуют особой
детализации для проникновения в суть,
что зачастую скрыто внутри формата
данных. Это разнообразие данных требу-
ет расширенного управления метаданны-
ми для того, чтобы конечный пользова-
тель смог быстро извлечь часть необхо-
димого набора данных представляющий
для него интерес.
Контекст данных и происхождение
является очень важным для анализа мо-
делирования, но традиционные подходы
к управлению данными, которые хорошо
работают для обычных и конструктор-
ских ситуаций часто являются неадекват-
ными. Аналитики моделирования долж-
ны разбираться в уникально сложных
данных, сгенерированных в огромных
количествах в НРС системах за предела-
ми систем управления жизненным цик-
лом.
Системы управления данными об
изделии имеют возможность хранить
данные моделирования, но данная систе-
ма является слишком громоздким ин-
струментом для решения задач модели-
рования. Вместо данных систем, расчет-
ные подразделения применяют ручной
метод управления данными, которые
хранятся в каталогах пользователей или
размещаются на общих ресурсах. Что за-
частую приводит к потере или недоступ-
ности важной информации.
Моделирование стало стандартной
деловой практикой в большинстве маши-
ностроительных предприятий. С приме-
нением систем управления данными мо-
делирования повышается организацион-
ная сложность, в связи с более широким
применением моделирования.
Инженерные расчеты обычно гене-
рируют данные, которые быстро увели-
чиваются в объеме, достигая тысячи те-
рабайт. Многодисциплинарные исследо-
вания оптимизации конструкции допол-
нительно добавляют объем и сложность.
Эти наборы данных имеют решающее
значение для получения результатов мо-
228
делирования изделия, должны храниться
и быстро извлекаться со всеми взаимо-
связями, которые существуют между ни-
ми. Скорость и эффективность в отобра-
жении, хранении и поиска данных, полу-
ченных от вычислительных эксперимен-
тов значительно повышает требования к
производительности и доступности. По-
нимание и управление большим разнооб-
разием (структурированных и неструкту-
рированных) данных, генерируемых в
моделировании обеспечивает более глу-
бокое понимание для улучшения техно-
логических процессов, которые важны
для наилучшего принятия решений. Если
инженеры могут отслеживать и прове-
рять типы данных, генерируемые во вре-
мя промежуточных этапов процесса мо-
делирования, они могут лучше обеспе-
чить пригодность и обоснованность про-
цессов моделирования.
Приложения инженерного модели-
рования, особенно комплексные системы
оптимизации, генерируют результаты и
промежуточные файлы. Часто эти данные
применяются в качестве входных данных,
которые требуют высокопроизводитель-
ные ресурсы. Перемещение этих файлов
на высокопроизводительных ресурсах
обеспечивается пропускной способно-
стью сети и создает длительные периоды
ожидания и даже большие потери произ-
водительности инженера. Интерактивные
приложения, такие как приложения визу-
ализации, работают лучше всего, если
задержки в сети сведены к минимуму.
Часто важные данные моделирова-
ния не доступны для свободного управ-
ления и хранятся на автономных компь-
ютерах и не являются легкодоступными.
Это плохая практика. Много времени
тратится на такие задачи, как поиск, ко-
пирование, определение правильных вер-
сий или даже хуже, создание процесса
моделирования с нуля, если данные мо-
делирования будут утеряны из-за плохих
методов архивации или несуществующей
политики резервного копирования. Все
это приводит к потере времени и произ-
водительности. Исследования показыва-
ют, что инженеры проводят от 30% до
50% на поиск вручную, проверяя точ-
ность, форматирование и передачу дан-
ных моделирования.
Важное значение имеет защита
данных моделирования и поддержания
целостности данных отношений прове-
рок, соблюдения и организационных по-
литик безопасности.
Управление инженерной базой зна-
ний в структурированном виде требует
высокого уровня подготовки с примене-
нием передовых методов и технологий
управления данными. Чтобы повысить
производительность и внедрить новей-
шие технологии необходимо реализовать
архитектуру системы управления данны-
ми моделирования, которая представляет
гибкую и модульную систему. Реализа-
ция системы управления данными моде-
лирования позволит автоматизировать
процессы обработки, хранения и управ-
ления большими наборами неструктури-
рованных данных.
229
ИНТЕРФЕЙС
ПОЛЬЗОВАТЕЛЯ
ПРИКЛАДНОЕ
ПРОГРАММНОЕ
ОБЕСПЕЧЕНИЕ
ИНТЕГРАТОР ПРИЛОЖЕНИЙ
ПАНЕЛЬ ИНСТРУМЕНТОВ
КОННЕКТОРЫ / ВНЕШНИЕ СВЯЗИ
УПРАВЛЕНИЕ РАБОЧИМ ПРОЦЕССОМ
УПРАВЛЕНИЕ ЗАДАЧАМИ
ЯДРО СИСТЕМЫ УПРАВЛЕНИЯ
I СЕРВЕР
ПРИЛОЖЕНИЙ I
РЕЛЯЦИОННАЯ
БАЗА ДАННЫХ
ХРАНИЛИЩЕ
I ФАЙЛОВАЯ
СИСТЕМА
ХРАНИЛИЩЕ Ц
ДАННЫХ
^СТЕМАУПРАВЛЕНИл ДАННЫМИ Мс ДЕЛИРОВАнИЯ
к. SDM.
ОЧЕРЕДЬ
ЗАЦАЧ
ДАННЫЕ
ВЫЧИСЛИТЕЛЬНЫЙ КЛАСТЕР
НЕС
Рис. 2 - Архитектура системы управления данными моделирования
Пользователи получают доступ к
системе управления данными моделиро-
вания через Web-интерфейс или интегри-
рованное программное обеспечение.
Web-клиент обеспечивает безопасный
интерактивный доступ к моделированию
и обработке данных. Интерактивные
приложения интегрируются с пре- пост-
процессорами, что делает процесс моде-
лирования более легким и более эффек-
тивным, а также позволяет восстанавли-
вать/хранить данные в системе и автома-
тически создавать метаданные.
Панель инструментов предоставля-
ет информацию о системном статусе
процессов, включая отчеты о технологи-
ческих процессах моделирования, актив-
ных рабочих местах и т.д.
Внешние связи облегчают интегра-
цию с внешними системами
(PDM/PLM/ERP/APM) так, чтобы можно
было объединять и управлять процессами
по всему жизненному циклу изделия:
проектирования, конструкторской подго-
товки, анализа, производства и поддерж-
ки при эксплуатации.
Уровень управления рабочими про-
цессами с предопределенными шаблона-
ми позволяет пользователям быстро
определять, создавать, управлять и раз-
вертывать автоматизированные процес-
сы, с целью определения наилучшего ме-
тода. Также этот уровень содержит ин-
струменты обеспечивающие контроль
истории операций, структуры данных,
чтобы отследить стадии, решения и ите-
рации.
Модуль уровня управления задача-
ми интегрируется с высокопроизводи-
тельными ресурсами для оперативного
решения поставленных задач.
Платформа системы управления
данными моделирования находится выше
сервера приложений и включает модель
данных для обработки структуры моде-
лирования. Метаданные хранятся для об-
работки структуры моделирования по
традиционной схеме в реляционной базе
данных, которая интегрируется в плат-
форму системы. На уровне хранилища
данные хранятся в виде файлов.
230
Система хранения и ее компоненты,
например высокопроизводительная отка-
зоустойчивая файловая система, обеспе-
чивает производительность, избыточ-
ность, доступность и защиту данных.
Одной из лидирующих компаний по
автоматизации процессов управления
данными моделирования является Ansys
Inc. Многолетний опыт данной компании
в области разработки программного
обеспечения моделирования позволил
создать систему управления данными
моделирования Ansys ЕКМ, которая ре-
шает множество проблем моделирования
описанных в данной статье.
Библиографический список:
1. Строгалев, В. П. Имитационное
моделирование: учебное пособие / И. О.
Толкачева, В.П. Строгалев; ред.
А. И. Чуприна. — М. : МГТУ им. Н. Э.
Баумана, 2008. — 233 с
2. Oliveira, J.A.A. et al, "Simulation
Data and Process Management (SDM) with
ANSYS Engineering Knowledge Manager
(EKM) at Petrobras, Brazil", Proceedings of
the NAFEMS European Conference "SDM,
Simulation Process&DataManagement",
2011
3. Dr. Thomas Lehnhaeuser "A SPDM
SOLUTION FOR GLOABLLY SHARING
INFORMATION" / Dr. Thomas Frank
(ANSYS Germany, Germany); Mike Wil-
son, David Clifton, Sanjay Angadi, Shanta-
nu Bhide, Chokri Guetari (ANSYS Inc.,
US); Ankit Adhiya (ANSYS India) Dr.
Thomas Lehnhaeuser, Global EKM Support
Manager, 2013
References:
1. Strogalev, VP Simulation: a tutorial
I IO Tolkacheva, VP Strogalev; Ed. Al
Chuprina. - M.: MSTU. Bauman, 2008. -
233 p.
2. Oliveira, J.A.A. et al, "Simulation
Data and Process Management (SDM) with
ANSYS Engineering Knowledge Manager
(EKM) at Petrobras, Brazil", Proceedings of
the NAFEMS European Conference "SDM,
Simulation Process&DataManagement",
2011
3. Dr. Thomas Lehnhaeuser "A SPDM
SOLUTION FOR GLOABLLY SHARING
INFORMATION" I Dr. Thomas Frank
(ANSYS Germany, Germany); Mike Wil-
son, David Clifton, Sanjay Angadi, Shanta-
nu Bhide, Chokri Guetari (ANSYS Inc.,
US); Ankit Adhiya (ANSYS India) Dr.
Thomas Lehnhaeuser, Global EKM Support
Manager, 2013
DATA MANAGEMENT SYSTEMS ENGINEERING ANALYSIS AND SIMULATION
©2015 D.V. Avdeev
JSC «SRC «Progress», Samara
This article describes the problems of engineering analysis and simulation, as well as the need to implement
a data management system modeling.
Key words: Simulation, engineering analysis, simulation data management system
Информация об авторах:
Авдеев Дмитрий Владимирович, начальник сектора АО «РКЦ «Прогресс»»,
Россия, 443009, Самара, ул.Земеца, 18, т. +7-927-906-00-95, dmitr-avdeev@vandex.ru .
Область научных интересов: инженерный анализ, имитационное моделирование.
Avdeev Dmitry Vladimirovich,, head of sector, JSC SRC Progress, 443009, Russia,
Samara, Zemetsa str., 18 tel.: +7-927-906-00-95 dmitr-avdeev@yandcx.ru ,.
Area of research: information technology, engineering analysis, simulation.
231
УДК 65.011.56
НЕОБХОДИМОСТЬ ВНЕДРЕНИЯ НОВОГО ПОДХОДА К ВЫПУСКУ
ЭКСПЛУАТАЦИОННОЙ ДОКУМЕНТАЦИИ НА ПРЕДПРИЯТИЯХ
РАКЕТНО-КОСМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
©2015 Г.С. Канчер, О.В. Космодемьянская
АО «РКЦ «Прогресс», г. Самара
Рассматриваются возможность и необходимость перехода на интерактивную электронную эксплуата-
ционную документацию на ракетно-космические изделия, разрабатываемые в едином информационном
пространстве предприятия.
Ключевые слова: Жизненный цикл изделия, интерактивное электронное техническое руководство,
информационные технологии, эксплуатационная документация
В состав ракетно-космической про-
мышленности(РКП) РФ входят более ста
предприятий и интегрированных структур,
которые характеризуются рядом особенно-
стей, присущих наукоемким высокотехно-
логичным отраслям, а именно:
• высокий уровень затрат на
НИОКР (основной вид деятельности мно-
гих предприятий - проектные и/или опыт-
но-конструкторские работы, а основной
вид готовой продукции - техническая до-
кументация на объекты (изделия) ракетно-
космической техники);
• загрузка производственных мощ-
ностей изготовлением опытных, единич-
ных или мелкосерийных образцов и их по-
стоянной модификацией;
• длительность фаз «разработка -
производство - эксплуатация»;
• сложность продукции - «сверх-
большие» сборки;
• большая номенклатура и широкая
кооперация;
• особенность технологического
цикла производства в виде большого
удельного веса сборочных операций.
Каждая из перечисленных особенно-
стей выдвигает на первый план необходи-
мость прочных связей между участниками
всего жизненного цикла изделия, объеди-
нение их в единый «научно-
производственно-эксплуатирующий ком-
плекс» с момента выявления потребности в
определенной продукции до момента удо-
влетворения этой потребности и утилиза-
ции продукции. Обеспечить такое взаимо-
действие участников жизненного цикла,
когда переход данных с одного этапа жиз-
ненного цикла на другой происходит каче-
ственно и оперативно, возможно только в
среде единого информационного про-
странства.
Основу для построения такого про-
странства на каждом этапе жизненного
цикла продукции на предприятии состав-
ляют свои специализированные автомати-
зированные системы, интегрированные в
единой системе управления жизненным
циклом продукции:разработка ведется в
системах геометрического моделирования
(CAD) и инженерного анализа (САЕ), да-
лее следуют системы автоматизации про-
изводства (САМ), системы планирования
ресурсов (ERP) и т.д.
На АО РКЦ «Прогресс» единое ин-
формационное пространство построено с
помощью PLM-системы Windchill, в кото-
рой происходит управление всеми инже-
нерными данными, поступающими из Сге-
oParametric 2, КОМПАС, Ansys, ЛОГОС,
Лоцман, Вертикаль, АСУП и др.Такое
комплексное использование ИТдолжно
обеспечивать электронный документообо-
рот на всех этапах жизненного цикла изде-
лий. Одна из проблем, которая стоит перед
предприятиями и эксплуатирующими ор-
ганизациями - бумажная форма выпуска
эксплуатационной документации (ЭД): ко-
гда такая документация на изделие состав-
ляет несколько ящиков, а схемы находятся
в отдельных альбомах, то физические и
временные затраты на её использование
232
достаточно высоки, а об удобстве поиска,
доступности и полноте материала и гово-
рить не приходится.
Решение этой проблемы -переход на
ЭД в виде интерактивного электронного
технического руководства
(ИЭТР).Перечень и последовательность
типовых работ по созданию ИЭТР отли-
чаются в зависимости от организационных
вариантов применительно к временной
шкале жизненного цикла изделия, а имен-
но - вариантов параллельного или последо-
вательного их ведения с процессом проек-
тирования изделия.
При «последовательном» варианте
за основу берутся разработанные ранее
комплекты КД, ЭД, технологической и
программной документации. При «парал-
лельном» варианте разработка ЭД ведется
в виде ИЭТР на основе электронной трех-
мерной КД с начального этапа разработки
изделия, используя «единый источник
данных» об изделии.
Первый вариант создания ИЭТР на
АО «РКЦ «Прогресс» возможен для изде-
лий с выпущенной технической докумен-
тацией, второй вариант является един-
ственно приемлемым для новых изделий,
когда процесс разработки ИЭТР будет
встраиваться в ЕИП предприятия с помо-
щью специализированного программного
комплекса Arbortext, интегрированного с
Windchill. Это решение предполагает, что
ЭД будет создаваться в виде XML-
документов с применением предустанов-
ленных шаблонов и возможностью вывода
их в различные форматы, а графическое
наполнение - в системах для создания тех-
нических интерактивных иллюстраций и
анимации (см. Рис.1). Полный отказ от бу-
мажного варианта ЭД в данный момент
невозможен в силу требований военных
заказчиков, но работа по этому вопросу
ведется: осталось получить официальный-
положительный ответ о взаимодействии в
электронной форме с военным представи-
тельством Министерства обороны. В каче-
стве временного решение вышеописанной
проблемы - возможность получения бу-
мажного варианта ЭД с помощью меха-
низма экспорта в предлагаемый формат
(Word - doc или AcrobatReader - pdf) из
основного XML-документа
Создание
Взаимодействие и
управление
* Нормирование
Использование
Arbortext Editor
Наполнение
модулей данных
Arbortext
IsoDraw/Creo
Illustrate
Создание
технических
иллюстраций/
создание
технической
анимации
Arbortext Styler
Создание таблицы
стилей для
публикации
Каталог деталей
Обучающие материалы
Windchill
Обеспечивает
управление
данными и
процессами
Arbortext Publisher
Автоматически
собирает все
компоненты и
публикует
ИЭТР в различные
форматы
Данные для оператора
Эксплуатационные
бюллетени
Интерактивный формат
Отображение
ИЭТР
Creo Parametric 2
Создание 2D и 3D
компонентов
Эксплуатационная
дог ментация
Техническое описание
системы
Бумажно-
ориентированный
формат
Рис. 1 Этапы создания ИЭТР
Если говорить о нормативно-
технической базе, то её достаточно для
начала отраслевого внедрения ИЭТР на
предприятиях РКП.
233
Так, понятие ИЭТР в ГОСТах
ЕСКД используется как ИЭД и вводится
в ГОСТе 2.601-2013: «Интерактивное
электронное техническое руководство -
обобщенное название для взаимосвязан-
ной совокупности эксплуатационных до-
кументов, выполненных в форме интер-
активного электронного документа по
ГОСТ 2.051 и, как правило, содержащих-
ся в одной общей базе данных эксплуата-
ционной документации» [1]. В ГОСТе
2.610-2006 дан раздел «Общие правила
выполнения интерактивных эксплуатаци-
онных документов» и говорится, что все
ЭД могут быть выполнены в виде интер-
активного электронного документа
(ИЭД) по ГОСТ 2.051-2013 [2]. При этом
ГОСТ 2.051-2013 устанавливает общие
требования к выполнению электронных
конструкторских документов изделий
всех отраслей промышленности. Реко-
мендации по содержанию, стилюи
оформлению, логической структуре базы
данных и стадиям жизненного цикла
продукции приводятся в Р50.1.029-2001,
Р50.1.030-2001 и Р50.1.031-2001 соответ-
ственно.
Важно, что в проектах новых стан-
дартов более подробноговорится о разра-
ботке рабочей конструкторской докумен-
тации в виде электронных технических
документов, где ЭД должна быть пред-
ставлена в форме ИЭТР и разрабатывать-
ся головным разработчиком; также в них
прописано, что должны быть продуманы
процедуры утверждения ИЭТР главным
конструктором, согласования ИЭТР с не-
зависимой инспекцией для его оценки,
получения заключения по качеству ИЭТР
у ведущих НИИ по направлению дея-
тельности (при необходимости) и т.д.
В конце данной статьи хотелось бы
предположить, как будет выглядеть тех-
ническая документация в будущем? Воз-
можно, это будет виртуальная реальность
(ВР), новая парадигма взаимодействия
человека и машины с помощью техноло-
гии погружения пользователя в вирту-
альные сцены, сгенерированные компью-
тером. Преимуществами такого подхода
являются высокореалистичное моделиро-
вание трехмерного пространства и дина-
мическое интерактивное взаимодействие
с пользователем.
Важно понимать, что прогресс не
остановить, рано или поздно вся техниче-
ская документация будет представлена в
электронном виде, и для предприятий
жизненно необходимоначать процесс пе-
рехода как можно раньше: это позволит
сократить ресурсы на производство,
улучшить качество продукции и,в ре-
зультате, увеличить прибыль.
Библиографический список:
1. ГОСТ 2.601-2013. Единая систе-
ма конструкторской документации. Экс-
плуатационные документы [Текст]. - М.:
Стандартинформ, 2014. - 36с.
2. ГОСТ 2.610-2006. Единая систе-
ма конструкторской документации. Пра-
вила выполнения эксплуатационных до-
кументов [Текст]. - М.: Стандартинформ,
2006. - 40 с.
References:
1. State Standard 2.601-2013. Uni-
form system of design documentation. Op-
eration and maintenance documentation
[Text]. - M.: Standardinform, 2014. - 36
pages.
2. State Standard 2.610-2006. Uni-
form system of design documentation. Rules
of operation and maintenance documenta-
tion [Text]. - M.: Standardinform, 2014. -
40 pages.
234
THE NECESSITY OF IMPLEMENTATION OF NEW APPROACH TO
OPERATION AND MAINTENANCE DOCUMENTATION PUBLICATIONIN
ENTERPRISESOF SPACE ROCKET INDUSTRY
©2015 G.S. Kancher, O.V. Kosmodemyanskaya
JSC «SRC«Progress», Samara
The possibility and necessity of creating interactive electronic operation and maintenance documentationof
space rocket products using product life cycle management are considered.
Key words: Product life cycle, interactive electronic technical manual, information technologies, operation
and maintenance documentation
Информация об авторах:
Канчер Галина Сергеевна, инженер-программист2 категории АО«РКЦ «Про-
гресс», 443 011, Россия, г. Самара, т. 276-14-20, hotary-s@rambler.ru.
Область научных интересов: визуализация, интерактивная документация, ИТ.
Оксана Владимировна Космодемьянская, инженер-программист 1 категории АО
«РКЦ «Прогресс», 446442, Россия, Самарская обл., т. 8-927-200-3727,
kilokarameli@mail.ru.
Область научных интересов: визуализация, интерактивная документация, ИТ.
Galina SergeevnaKancher,part-programming engineer of JSC «SRC «Progress», 443011,
Russia, Samara, tel. 276-14-20, hotary-s@rambler.ru.
Area of research:visualization, interactive documentation, ГГ.
KosmodemyanskayaOksanaVladimirovna, part-programming engineer of JSC «SRC
«Progress», 446442, Russia, Samara region, t. 8-927-200-3727, kilokarameli@mail.ru.
Area of research:visualization, interactive documentation, ГТ.
235
УДК 004.912
ОПТИМИЗАЦИЯ ПРОЦЕССА РАЗРАБОТКИ И ВЫПУСКА
ЭКСПЛУАТАЦИОННОЙ ДОКУМЕНТАЦИИ
©2015 А.Н. Филатов, С.М. Микушкина, О.В. Космодемьянская, Г.С. Канчер
АО «РКЦ «Прогресс», г. Самара
Приведены методысокращения затрат на разработку эксплуатационной документации (ЭД). Статья
описывает методы оптимизации процесса разработки контента ЭД и публикации в различных целевых фор-
матах. Особое внимание уделено процессу разработки таблицы стилей для публикации ЭД.
Ключевые слова: эксплуатационная документация, ИЭТР, публикация ИЭТР,
таблицы стилей
Одна из проблем, стоящая перед ра-
кетно-космической отраслью РФ, вызва-
на сложностью выпускаемых изделий и
прямопропорциональна необходимому-
объему сопровождающей технической
документации (ТД), которая в бумажном
виде может весить несколько сотен кило-
грамм. Данное обстоятельство влечетзна-
чительные материальные и временные
затраты на её разработку и внесение из-
менений, которые возникают достаточно
часто на этапах проектирования и произ-
водства и коренным образом меняюткон-
струкцию изделия и делают бумажную
форму ТДнеактуальной. В результате
резко снижается эффективность процес-
сов разработки, производства, эксплуата-
.мулътифор.матны е
ции, обслуживания, ремонта сложных
наукоемких изделий.
Все это обуславливает необходи-
мость перехода предприятий ФКА на вы-
пуск документации вэлектронном виде:
часть конструкторской документации,
которая раньше была представлена чер-
тежами, должна разрабатываться в виде
SD-моделей, эксплуатационная докумен-
тация (ЭД) - в виде интерактивных элек-
тронных технических руководств
(ИЭТР), технологическая документация -
в виде интерактивных технологических
процессов и т.д.
На рис. 1 приведена диаграмма, по-
казывающая распределение затрат на
разработку ЭД.
и Формирование
структуры документа
Текст
Графика
и Форматирование и
публикация
Распространиение
Рис. 1 Распределение затрат на разработку эксплуатационной документации
236
Из диаграммы следует, что
наибольший вес в структуре затрат име-
ют:
• разработка графической части;
• разработка текстовой части;
• форматирование и публикация.
В совокупности они составляют
около 80-85 % издержек на создание ЭД.
Следовательно, для сокращения за-
трат на разработку ЭД необходима как
оптимизация процессов формирования
структуры документа, его текстового и
графического контента, так и сокращение
времени, затрачиваемого на форматиро-
вание.
Основными направлениями сокра-
щения трудоемкости разработки содержа-
тельной части документа являются:
• автоматизация процесса создания
структуры документа на основе шаблонов,
сформированных по определенным пра-
вилам;
• использование ПО, позволяюще-
го исключить дублирование фрагментов
текста путем использования системы ссы-
лок;
• применение 3D моделей в каче-
стве исходной информации для создания
иллюстраций, что обеспечивает полное
соответствие графической информации
текущему состоянию изделия и сокращает
затраты на разработку графики за счет ис-
пользования единого источника данных
для разных видов документации.
Традиционно ЭДразрабатывается в
текстовом редакторе MS Word. В связи с
тем, что в MS Word контент документа и
его представление не разделены, форма-
тирование документа происходит непо-
средственно во время написания содержа-
тельной части документа самим разработ-
чиком.
При создании ИЭТР в специализи-
рованном редакторе Arbortext Editor со-
держание документа и описание его
внешнего вида разделяются, а для управ-
ления публикацией и представлением до-
кумента используются таблицы стилей,
создаваемые при помощи модуля
Arbortext Styler. Таблица стилей является
совокупностью спецификаций формати-
рования, применяемых к XML/SGML-
тексту, и позволяет публиковать один
и тот же документ в различных стилях
или форматах вывода, таких, как Web,
HTML, PDF, EPUB и др., а также настраи-
вать отображение документа в окне редак-
тора.
В то время, как в традиционных
процессах подготовки публикаций требу-
ется разработка шаблонов и стилей фор-
матирования для каждого типа выходного
документа, в Arbortext Styler создается
единая таблица стилей для всех форматов
вывода, что сокращает затраты на ее раз-
работку и поддержку.
Рис.2 Этапы создания таблицы стилей.
237
Прежде, чем приступить к разра-
ботке таблицы стилей, необходимо про-
анализировать подлежащие публикации
документы, определить необходимые
форматы публикации и сформировать
для каждого ряд требованийк стилю и
форматированию с учетом общероссий-
ских и отраслевых стандартов (рис. 2):
1. Определить типы документов,
для которого создаётся таблица стилей и
составить список нужных форматов вы-
вода;
2. Составить список главных
структур в документах (как правило, они
соответствуют модулям данных и вклю-
чают титульный лист, оглавление, главы,
индексный указатель, приложения и др.);
3. Определить требования к форма-
тированию по умолчанию (размер стра-
ниц, нумерацию таблиц и иллюстраций,
спецификации шрифтов, “запреты пере-
носа” для заголовков и т.д.);
4. Составить список всех шрифтов,
которые будут использоваться.
5. Составить список языков, кото-
рые поддерживает таблица стилей;
6. Составить список всех формати-
руемых элементов, определить контекст,
в котором они будут форматироваться и
спецификации формата для каждого кон-
текста;
7. Определить элементы, формати-
рование которых меняется на основе зна-
чений атрибутов.
Впоследствии необходимо провести
тестированиеготовой таблицы с помо-
щью комплекта тестовых документов,
созданных специалистом, не участвую-
щим непосредственно в разработке таб-
лицы стилей. Тестовые документы долж-
ны быть доступны в течение всего вре-
мени разработки и поддержки таблиц.
Таким образом, при помощи одно-
кратно создаваемых таблиц стилей ста-
новится возможной оперативная публи-
кация единого XML-источника в различ-
ные целевые форматы без нарушения
структуры и содержания документа.
Кроме того, исключение этапа формати-
рования существенно сокращает время
разработки ЭД.
Библиографический список:
1. Воронцов, А. Способы сокраще-
ния затрат на разработку технической до-
кументации: [Электронный ресурс] URL:
http://www.wiki.itorum.ru/ (Дата обраще-
ния: 05.06.2015)
2. ИспользованиеАгЬог1ех181у1ег
6.0; - Нидхэм: Parametric Technology Cor-
poration, 2011. - 231с.
References:
1. Vorontsov, A. Methods of abbrevi-
ation of expenses for engineering specifica-
tions development: [Internet resource] URL:
http://www.wiki.itorum.ru/ (Inquiry date:
05.06.2015)
2. Using Arbortext Styler 6.0; - Need-
ham: Parametric Technology Corporation,
2011.-231 c.
THE OPTIMIZATION OF OPERATION AND MAINTENANCE
DOCUMENTATION DEVELOPMENT AND PUBLICATION
©2015 A.N.Filatov, S.M.Mikushkina, O.V. Kosmodemianskaya, G.S. Kancher
JSC «SRC«Progress», Samara
The methods of decreasing the outlays spent on operation and maintenance documentation development are
considered. The optimization methods of operation and maintenance documentation content development and publi-
cation in different output formats are described. The development of the operation and maintenance documentation
publication style sheet is emphasized.
Keywords: operation and maintenance documentation J ETP, I ETP output,multiplestylesheets
238
Информация об авторах:
Александр Николаевич Филатов, к.т.н., начальник управления информационных
технологий АО «РКЦ «Прогресс», d0088@samspace.ru;
Светлана Михайловна Микушкина, начальник отдела 2883 АО «РКЦ «Прогресс»,
d883@samspace.ru ;
Оксана Владимировна Космодемьянская, инженер-программист 1 категории
АО«РКЦ «Прогресс», 446442, Россия, Самарская обл.,т. 8-927-200-3727,
kilokarameli@mail.ru.
Область научных интересов: визуализация, интерактивная документация, информа-
ционные технологии.
Галина Сергеевна Канчер, инженер-программист 2 категории АО «РКЦ
«Прогресс», 443 011, Россия, г. Самара, т. 276-14-20, hotary-s@rambler.ru.
Область научных интересов: визуализация, интерактивная документация, информа-
ционные технологии.
Alexander Nikolayevich Filatov, candidate of science, the head of IT of JSC «SRC
«Progress», d0088@samspace.ru;
Svetlana MikhailovnaMikushkina - the division head of 2883 JSC «SRC «Progress»,
d883@samspace.ru ;
Oksana VladimirovnaKosmodemyanskaya, part-programming engineer of JSC «SRC
«Progress», 446442, Russia, Samara region, t. 8-927-200-3727, kilokarameli@mail.ru.
Area of research: visualization, interactive documentation, information technologies.
Galina SergeevnaKancher, part-programming engineer of JSC «SRC «Progress»,
443011, Russia, Samara, tel. 276-14-20, hotary-s@rambler.ru.
Area of research: visualization, interactive documentation, information technologies.
239
УДК 004.056.53+621.376.32
ПЕРЕДАЧА ИНФОРМАЦИИ МЕТОДОМ ЧАСТОТНОЙ МОДУЛЯЦИИ
ХАОТИЧЕСКИХ АВТОКОЛЕБАНИЙ
©2015 Зайцев В.В1., Шилин А.Н.1’2
1 Самарский государственный университет, г. Самара
2 АО «РКЦ «Прогресс», г. Самара
Предлагается использовать частотную модуляцию хаотических автоколебаний в дискретном времени
для защиты информации на цифровых носителях. Детектирование (декодирование) частотно-
модулированного сигнала выполняется с помощью копии хаотических автоколебаний, восстановленной
получателем.
Ключевые слова: дискретное время, хаотические автоколебания, частотная модуляция, детектиро-
вание, защита информации
Одно из направлений скрытной пе-
редачи информации базируется на ис-
пользовании хаотических сигналов [1].
Они могут применяться как для прямой
маскировки информации (chaotic
masking), так и в качестве несущих коле-
баний, модулируемых по амплитуде или
частоте (фазе).
В настоящем сообщении рассмат-
ривается схема передачи дискретных во
времени сигналов (ДВ-сигналов) методом
частотной модуляции автоколебаний ДВ-
осциллятора Ван дер Поля. Эта автоколе-
бательная система, осциллирующая в
дискретном времени, введена в рассмот-
рение в работе [2] и определяется нели-
нейным разностным уравнением движе-
ния (алгоритмом генерации)
х[н] — 2<zcos(2^Q0)x[n — 1] + а2 х[и — 2]= /(1 — х2[п — 1])(х[и — 1] — х[м — 2]) (1)
с константами диссипации
а = ехр(- лЦ, / Q) и глубины положитель-
ной обратной связи у. Параметры урав-
нения Q,, и Q в аналоговом прототипе -
осцилляторе Ван дер Поля - являются
собственной частотой и добротностью
резонатора (Q(1 измеряется в единицах
частоты дискретизации).
Частотную модуляцию в осцилля-
торе (1) можно реализовать следующим
образом:
y[n]- 2acos(2?rQ0(1 + v[n]))y[n -1] + а2у[п - 2]= /(1 - у2[п - 1])у[п -1] - у[и - 2])
где v[n] - информационный сигнал. В приближении низких индексов модуляции
cos (2fl-Q0(l + v[n])) = cos(2^Q0)- 2flQ0 sin(2^Q0 )и[и].
Воспользовавшись этим прибли-
женным равенством, алгоритм генерации
ДВ-сигнала с частотной (точнее, с ча-
у[и] = х[л] — 4лО0 sin(2^ Qo )v[n]x[n -1]
ДВ-осциллятор (1) имеет режимы
генерации широкополосных хаотических
автоколебаний. Например, на рис. 1 не-
прерывной линией показан усредненный
амплитудный спектр автоколебаний х[л]
для значений £20 = 0.2, Q = 20 и
стотно-амплитудной) модуляцией запи-
шем в виде
(2)
у = 0.221. Оценка спектра проведена по
реализации длиной в 65536 отсчетов ме-
тодом Бартлетта с 256-точечным дис-
кретным преобразованием Фурье.
Точки на рис. 1 отображают усред-
ненный амплитудный спектр модулиро-
240
ванного сигнала у[и]. При этом в каче-
стве модулирующего сигнала v[n] вы-
ступали реализации равномерно распре-
деленного случайного процесса в полосе
частот 0 < Q < Qm = 0.025 нулевым сред-
ним и единичной дисперсией. Наблюдае-
мое совпадение спектров несущего (1) и
модулированного (2) колебаний указыва-
ет на высокую степень маскировки пере-
даваемого сообщения.
Детектирование (декодирование)
сигнала у[и] выполняется с помощью ко-
пии хДи] хаотических автоколебаний
х[л], восстановленной получателем при
наличии у него информации о значениях
параметров у, Q(), Q и начальных зна-
чениях х[0] и х[1]. Алгоритм декодирова-
ния имеет вид
|Я[и] + хс [и-1]|
Ил]=J:---------i—1 -1,
|*Д« ~1]|
где
Dr 3 у[л]-х(.[п]
к[и] =---------7-----V •
4М20 sin(2M20)
Успех в декодировании полученно-
го хаотического сигнала у[л] зависит от
точности восстановления копии хДи] и
определяется знанием параметров пер-
вичного хаотического генератора (1). В
работе [3] для режима хаотической мас-
кировки показано, что в генераторе (1)
наиболее значима точность установки
параметров у и Q().
Библиографическийсписок:
1. Дмитриев А.С., Панас А.И. Дина-
мический хаос: Новые носителя инфор-
мации для систем связи. М.: Физматлит,
2002.-251 с.
2. Зайцев В.В., Давыденко С.В., Зай-
цев О.В. Динамика автоколебаний дис-
кретного осциллятора Ван дер Поля //
Физика волновых процессов и радиотех-
нические системы. 2000. Т. 3. №2. С.
64-67
3. Зайцев В.В. Скрытая передача ин-
формации на основе хаотических автоко-
лебаний дискретного осциллятора // Фи-
зика волновых процессов и радиотехни-
ческие системы. 2007. Т. 10. № 1. С.
132-135.
References:
1. Dmitriev A.S., Panas A.I. Dynamic
chaos: New information carries for the con-
nection systems. M.: Physmatlit, 2002. -
251 p.
2. Zaitsev V.V., Davydenko S.V.,
Zaitsev O.V. Self-oscillations dynamics of
the discrete Van der Pole oscillator // Phys-
241
ics of wave processes and radio engineering
systems. 2000. V. 3. №2. P.64-67
3. Zaitsev V.V. Latent information
transfer basing on chaotic self-oscillations of
a discrete oscillator // Physics of wave pro-
cesses and radio engineering systems. 2007.
V. 10.№ l.P. 132-135.
INFORMATION TRANSFER BY MEANS OF FREQUENCY MODULATION OF
CHAOTIC SELF-OSCILLATIONS
©2015 'Zaitsev V.V., 2 Shilin A.N.
'Samara State University, Samara
2 JSC «SRC «Progress», Samara
Frequency modulation of chaotic self-oscillations in discrete time is offered to be used for information secu-
rity on digital carriers. For detecting of FM-signal the copy of realization of the chaotic bearing fluctuation restored
by the recipient is used.
Key words: discrete time, chaotic self-oscillations, frequency modulation, detecting, information security
Информация об авторах:
Зайцев Валерий Васильевич, к.ф.-м..н., профессор кафедры радиофизики, полу-
проводниковой микро и наноэлектроники, СамГУ, 443011, Россия, г. Самара, ул. Акаде-
мика Павлова 1, т. 8-937-174-20-11, zaitsev@samsu.ru.
Область научных интересов: нелинейная динамика.
Шилин Александр Николаевич, инженер-конструктор 1 категории АО «РКЦ
«Прогресс», аспирант кафедры радиофизики, полупроводниковой микро- и наноэлектро-
ники, СамГУ, 443011, Россия, г. Самара, ул. Академика Павлова 1, т. 8-964-986-97-15,
shilax@yandex.ru.
Область научных интересов: цифровая обработка сигналов.
Zaitsev Valeriy Vasilievich, candidate of physical and mathematical sciences, professor
of radio physics department, SSU, 443011, Russia, Samara, Pavlov academician st., 1, tel.
8-937-174-20-11, zaitsev@samsu.ru.
Area of research: nonlinear dynamics.
Shilin Alexander Nikolaievich, Design Engineer, JSC «SRC «Progress», post-graduate
student of radio physics department, SSU, 443011, Russia, Samara, Pavlov academician st., 1,
shilax@vandex.ru , tel.: 8-964-986-97-15.
Area of research: digital signal processing.
242
УДК 519.8, 658.562
ИСПОЛЬЗОВАНИЕ МУЛЬТИАГЕНТНЫХ ТЕХНОЛОГИЙ В УПРАВЛЕНИИ
КАЧЕСТВОМ
©2015 М.Н. Скобленков
Акционерное общество «Ракетно-космический центр «Прогресс»
В статье приведена модель мультиагентной системы менеджмента качества. Описаны преимуще-
ства агентного моделирования. Описаны способности интеллектуального агента.
Ключевые слова: интеллектуальный агент, мультиагентная система, система менеджмента ка-
чества, управление качеством
Современный подход к управлению
качеством требует эффективного созда-
ния продукции на всех этапах ее жизнен-
ного цикла начиная с этапа маркетинго-
вых исследований, научно-
исследовательских работ. Причем дея-
тельность предприятия не может быть
эффективной после того, как продукция
изготовлена. С целью повышения эффек-
тивности процесса управления качеством
на предприятиях разрабатываются, внед-
ряются и сертифицируются системы ме-
неджмента качества (СМК). Особое вни-
мание уделяется не только качеству про-
дукции, но и качеству предоставления
услуг, а именно, сопровождение продук-
ции в эксплуатации и после гарантийное
обслуживание.
Также современный подход к
управлению качеством требует автомати-
зации деятельности предприятия в рам-
ках СМК и распределенного решения
сложных задач (и эффективное решение
распределенных задач). Но традицион-
ные автоматизированные системы управ-
ления не обеспечивают требуемого каче-
ства информационного анализа и необхо-
димой эффективности формирования
управляющих воздействий в условиях
недостаточности априорной информации
о внешней среде функционирования,
большого количества трудно учитывае-
мых факторов нестационарности и субъ-
ективного их характера, изменяемости
целей и критериев качества управления
вследствие деградации или целенаправ-
ленной реконфигурации [1], [2], а слож-
ность современных систем и организаций
достигает такого уровня, что централизо-
ванное управление становится неэффек-
тивным из-за наличия огромных потоков
гетерогенной информации, когда слиш-
ком много времени тратится на ее пере-
дачу в центр [3].
Построение интеллектуальных
моделей управления и поддержки приня-
тия решений позволит снять эти ограни-
чения.
Для решения подобных задач тре-
буются новые подходы. В этой связи и
возникают парадигмы мультиагентных
систем и мультиагентного моделирова-
ния.
Основным компонентом мультиа-
гентной системы выступает автономный
интеллектуальный агент, способный:
а) способный действовать на объ-
екты в некоторой среде, на других аген-
тов, а также на самих себя (действие);
б) способный общаться с другими
агентами (общение);
в) исходящий из некоторых по-
требностей и способные к целеобразова-
нию (потребностно-целевая основа); об-
ладающий набором интенциональных
характеристик (убеждения, желания,
намерения и пр.);
г) несущий определенные обязан-
ности и предоставляющий ряд услуг
(наличие обязательств);
д) обладающий собственными ре-
сурсами, обеспечивающими его автоно-
мию (автономия);
е) способный к восприятию среды
(восприятие с ограниченным разрешени-
ем);
ж) способный строить частичное
представление этой среды на основе ее
243
восприятия, т.е. перцептивных навыков и
умений (локальное представление сре-
ды);
з) способный к обучению, эволю-
ции и адаптации (эволюционный и адап-
тационный потенциал)
и) способный к самоорганизации и
самовоспроизведению (самосохранение)
[4],
снимая тем самым с человека избы-
точную информационную нагрузку.
Агентное моделирование исполь-
зуется для исследований и разработок в
различных областях знания: в искус-
ственном интеллекте, теории сложных
систем, теории игр, теории массового об-
служивания и т.д.
Так для исследования, постоянно-
го мониторинга и проведения системного
анализа деятельности крупного промыш-
ленного предприятия в рамках СМК с
учетом того, что «агентное моделирова-
ние является подходом более универ-
сальным и мощным, так как оно позволя-
ет учесть любые сложные структуры и
поведения», «разработка модели возмож-
на в отсутствии знания о глобальных за-
висимостях» и «агентную модель проще
поддерживать: уточнения обычно дела-
ются на локальном уровне и не требуют
глобальных изменений» [5], СМК осно-
вана на процессном подходе к управле-
нию [6] разработаем мультиагентную
СМК (МАСМК).
МАСМК, с учетом [7], [8], [9],
представляет собой кортеж:
MAQMS =
{Goal, Res, Mean, Agent, R, MSt, Env, Proc}
9
где Goal - множество целей модели
системы, Res - множество ресурсов,
Mean - множество средств, Agent =
{Agents Адent2, ...,Agentn} - множе-
ство агентов, RA - множество отношений
между агентами, MSt = {Stj х St2 х
... х Stn] - множество состояний
МАСМК, Env - среда, Proc - множе-
ство процессов СМК.
Agentn = {AgentGoal,
AgentSolution, St, SI, Act, Ta},
где AgentGoal - множество целей
агентов, AgentSolution - база знаний,
St - множество состояний агента, SI -
множество социальных ограничений, Act
- множество действий агентов, Ta:Stx
Act х SI -» St - функция переходов.
Procn =
{ProcGoal, St, Agent, In, Out, Tp},
где ProcGoal - цели процесса, In и
Out - входы и выходы процесса, соот-
ветственно, Тр - функция переходов.
Формально модель МАСМК мож-
но представить в следующем виде (см.
рис.).
Рис,- Формальная модель МАСМК
244
Архитектура агентов основана на
цикле Деминга с использованием конеч-
ных автоматов. Каждый агент Agentn
самосовершенствуется и делится своими
достижениями с другими агентами. А те
в свою очередь перенимают только то,
что им нужно для достижения своих це-
лей AgentGoal.
При взаимодействии агентов меж-
ду собой они обмениваются информаци-
ей, необходимой им для достижения по-
ставленных целей AgentGoal и
ProcGoal.
Агенты сгруппированы по процес-
сам - у них единая цель AgentGoal
внутри процесса Ргосп.
МАСМК можно использовать как
средство решения задач СМК. Данная
МАСМК представляет собой
имитационную модель СМК
предприятия, реализованную средствами
агентного моделирования. Обеспечение
функционирования СМК и ее
постоянного улучшения осуществляется
путем имитационного моделирования за
счет проигрывания различных сценарий
(ситуаций), возникающих в процессе
деятельности предприятия в рамках
СМК.
Библиографический список:
1. Васильев С. Н., От классических
задач регулирования к интеллектному
управлению. Часть I / Известия
РАН. Теория и системы управления. -
2001. - №1. - С.5-22.
2. Васильев С. Н., От классических
задач регулирования к интеллектному
управлению. Часть П / Известия
РАН. Теория и системы управления. -
2001,-№2.-С.8-21.
3. Варшавский В.А., Поспелов
Д.А. Оркестр играет без дирижера.
Размышления об эволюции некоторых
технических систем и управлении ими. -
М.: Наука, 1984.
4. Тарасов В.Б., Агенты,
многоагентные системы, виртуальные
сообщества: стратегическое направление
в информатике и искусственном
интеллекте //Новости искусственного
интеллекта. - 1998. - №2. - С.5-6.
5. Борщев А.В., Практическое
агентное моделирование и его место в
арсенале аналитика // Exponenta PRO, #3-
4 (7-8) 2004, с. 38-47.
6. ГОСТ ISO 9001-2011.
7. Новицкая Е.Г., Теоретические
основы мультиагентного ситуационного
анализа
http://elibrary.miu.by/iournalsl/item.science-
xxi/issue.2/article. 15.html
8. Паршиков П.А., Мультиагент-
ная система поддержки принятия реше-
ний «Координатор» И Вестник Брянского
государственного технического универ-
ситета. - 2011. - №1(29). - С.71-78.
9. Аксенов К.А., Разработка и
применение метода анализа узких мест на
основе мультиагентного имитационного
моделирования // ИММОД-2013. - 2013.
-с. 19-23.
References:
1. Vasilev S. N., From classical prob-
lems of regulation to intelligence to man-
agement. A part I / News of the Russian
Academy of Sciences. The theory and con-
trol systems. - 2001. - №1. - p. 5-22.
2. Vasilev S.N., From of classical
problems of regulation to intelligence to
management. A part II / News of the Rus-
sian Academy of Sciences. The theory and
control systems. - 2001. - №2. - p. 8-21.
3. Varshavsky V.A., Pospelov D.A.
Orchestra plays without the conductor. Re-
flexions about evolution of some technical
systems and management of them. - M: the
Science, 1984.
4. Tarasov V.B., Agents, multi-agent
systems, virtual communities: a strategic
direction in computer science and artificial
intelligence/Zartificial intelligence News. -
1998. - №2. - C.5-6.
5. Borschev A.V., Practical agent
modeling and its place in an arsenal of an
analystZ/Exponenta PRO, #3-4 (7-8). - 2004,
p. 38-47.
6. GOST ISO 9001-2011.
7. Novitsky E.G., Theoretical of a
basis multi-agent situation analysis
http://elibrarv.miu.by/iournalsl/item.science-
xxi/issue.2/article. 15.html
245
8. Parshikov P. A., Multi-agent sys-
tem of support of decision-making "Coordi-
nator'7/the Bulletin of Bryansk state tech-
nical university. - 2011. - №1 (29). - p. 71-
78.
9. Aksenov K.A., Develop and appli-
cation of a method of the analysis of bottle-
necks on a basis multi-agent imitating mod-
eling//IMMOD-2013. - 2013. - p. 19-23.
USE MULTI-AGENT OF TECHNOLOGIES IN QUALITY MANAGEMENT
©2015 M.N. Skoblenkov
Joint-stock company «Space-rocket center" Progress"
In article the model multi-agent quality management systems is resulted. Advantages agent modeling are
described. Abilities of the intellectual agent are described.
Keywords: the intellectual agent, multi-agent system, quality management system, quality management
Информация об авторе:
Скобленков Максим Николаевич, инженер-конструктор 1 категории АО «РКЦ
«Прогресс», 443 009, Россия, г. Самара, ул. Земеца 19, т. 228-59-57, 8-917-169-33-56,
skoblenkov @ gmail .com
Область научных интересов: мультиагентные системы, агентное моделирование, ис-
кусственный интеллект.
Skoblenkov Maxim Nikolaevich, Design Engineer, Samara Space Center, 443 009, Rus-
sia, Samara, Zemetsa st. 18, tel. 228-59-57, 8-917-169-33-56, skoblenkov@gmail.com
Area of research: multi-agent systems, agent modeling, artificial intelligence.
246
УДК 621.396
ОБНАРУЖЕНИЕ СИГНАЛОВ ПЕРВИЧНЫХ ПОЛЬЗОВАТЕЛЕЙ НА
ЧАСТОТАХ ОВЧ ЧМ РАДИОВЕЩАНИЯ ДЛЯ СИСТЕМЫ
КОГНИТИВНОГО РАДИО
©2015 Е.Д. Струфелев2, С.Н. Елисеев1
’Поволжский университет телекоммуникаций и информатики (ПГУТИ), г. Самара.
Акционерное общество «Ракетно-космический центр «Прогресс»
В условиях интенсивного развития средств беспроводного доступа, мобильной связи и телерадиове-
щания остро проявляется проблема выделения полос частот для внедрения новых радиотехнологий. Одним
из возможных решений данной проблемы является технология когнитивного радио, которая основана на
концепции динамического доступа к спектру. Возможность получения автоматического и автономного до-
ступа к ресурсам РЧС позволяет значительно увеличить эффективность их использования за счёт активного
участия «вторичных» пользователей. Последние занимают полосы частот, выделенные первичным пользо-
вателям (ПП), но временно свободные. В докладе рассмотрен способ динамического доступа вторичных
пользователей к спектру, радиовещания в диапазоне 88-108 МГц.
Ключевые слова: когнитивное радио, диапазон частот ОВЧ ЧМрадиовещания, цифровое радиове-
щание DRM+, мониторинг и зондирование спектра, обнаружение сигналов первичных пользователей
Введение
В июле 2011 г завершён стандарт
беспроводной связи IEEE 802.22, кото-
рый используется для передачи данных
на неиспользуемых участках в телевизи-
онном ОВЧ/УВЧ-диапазоне (54-862
МГц) частот и использует в полной мере
средства когнитивного радио (КР). В
России было принято решение ГКРЧ «О
создании опытной зоны по внедрению
когнитивных систем широкополосного
беспроводного доступа в Российской Фе-
дерации в полосе радиочастот 470- 686
МГц». Рекомендовано активное исследо-
вание технологии когнитивного радио, с
целью разработки предложений по внед-
рению и развитию когнитивных систем
связи в полосах частот 470-686 МГц.
Спецификация IEEE 802.22 WRAN
нацелена на обеспечение жителей сель-
ских и малонаселенных районов широко-
полосным доступом в сеть, но существу-
ют направления, для которых востребо-
вана сама концепция ШЕЕ 802.22 WRAN
с использованием технологии когнитив-
ного радио, но с иными техническими
параметрами.
Исходные данные
Используемый диапазон радиоча-
стотного спектра.
Рассмотрим диапазон ОВЧ ЧМ ра-
диовещания (87.5-108 МГц). Работающие
в ОВЧ-диапазоне технические средства
являются лучшим решением для органи-
зации передачи данных на дальность до
100 км при умеренных требованиях к
скорости передачи данных.
Основной причиной выбора данно-
го диапазона являются уже образовавши-
еся «пробелы» в спектре. Каждый анало-
говый канал в радиовещании занимает
довольно узкую полосу (125... 150 кГц),
но из-за сильного взаимного влияния
сигналов соседних зон их приходится
значительно разносить.
Данные «пробелы» предполагалось
использовать для внедрения сети цифро-
вого радиовещания, но его внедрение
движется крайне медленно. Поэтому
представляется возможным организовать
сеть связи с применением технологии ко-
гнитивного радио (КР). Полагается, что
она будет функционировать между сиг-
налов аналогового радиовещания, при
этом требуется соблюдать защитные ин-
тервалы, во избежание помех системам
аналогового радиовещания.
247
Сигналы аналогового радио
min 400 кГц
сигнал КР
min 150 кГц [ *1
— 1
Рис. 1. Положение сигналов аналогового радио и сигналов когнитивного радио.
Постановка проблемы
Мониторинг или зондирование ра-
диочастотного спектра - одна из важ-
нейших задач системы КР. Зондирование
спектра, как процедура необходимая для
динамического доступа к спектру опре-
деляется как задача нахождения «пробе-
лов» спектра в местах не занятых ПП.
Его эффективность в значительной сте-
пени определяет то, насколько возможно
увеличить эффективность использования
частотного спектра. Алгоритм монито-
ринга спектра для широкого диапазона
отношения сигнал-шум (ОСШ) должен
обеспечивать высокую вероятность пра-
вильного обнаружения сигналов ПП и
низкую вероятность ложного обнаруже-
ния. В тоже время необходимо учитывать
вычислительную сложность и эффектив-
ность этих алгоритмов. Задача анализа-
тора спектра системы КР заключается в
правильном и своевременном детектиро-
вании сигналов ПП - аналогового радио-
вещания (АР), для точной картины заня-
тости спектра, выделения «пробелов»
спектра и цифрового вещания, для ско-
рейшего освобождения частоты ПП.
Анализатор спектра
Принцип действия анализатора
спектра заключается в последовательном
мониторинге всех потенциально возмож-
ных «пробелов» диапазона, и при обна-
/
ружении сигнала АР или DRM+ «выбра-
ковки» этого участка. Алгоритм работы
следующий:
1. На первом шаге сканирования
спектра требуется установить
частоты, занятые аналоговым
вещанием.
2. Далее «пробелы» между стан-
циями АР сканируются на
наличие сигналов DRM+.
Рассмотрим более подробно каж-
дый шаг в канале связи с аддитивным бе-
лым гауссовским шумом (АБГШ). При
этом следует учитывать, что для универ-
сальности системы обнаружения сигна-
лов АР и DRM+, целесообразно исполь-
зовать 256-точечную БПФ, т.к. OFDM
сигнал DRM+ имеет 213 поднесущих, где
43 поднесущие взяты с нулевой энергией.
1. Обнаружение сигнала АР в ка-
нале с АБГШ.
Данный шаг также делится на 2
этапа: «грубое» сканирование методом
БПФ и более точное обнаружение пилот-
тона.
Известно, что спектр сигнала АР
имеет треугольную форму, следователь-
но, на первом этапе требуется, применив
алгоритм БПФ оценить форму сигнала.
Теоретически она должна выглядеть как
на рис. 2
f
Рис. 2. БПФ сигнала АР.
248
Рассмотрим применение 256-
точечного БПФ. На первом этапе анали-
зируемая полоса частот (150 кГц) делится
на 256 отсчетов, обозначим количество
отсчетов - N. N-ый отсчет БПФ обозна-
чим - х(п), где п - номер отсчета во вре-
менной области, где п находится в диапа-
зоне от 1 до N. Далее для получения
спектра применяется сам алгоритм БПФ,
его уравнение:
N
Х(к) = т; У Х(п) • е-/2япк/« к = 1 , N (1)
N £—1
И = 1
где к также находится в диапазоне
от 1 до N, Х(к) - к-ый выход БПФ.
Далее вычисляется спектральная
плотность энергии отсчетов Х(к):
N
E = ^|X(fc)|2 k = l,..,N (2)
И=1
Затем анализатор спектра на основе
спектральной плотности энергии Х(к)
оценивает форму спектра, которая иска-
жается вследствие воздействия АБГШ и
выдается решение о его форме, т.е. долж-
но выполняться условие:
|X(fc)|2
= c°nst l k = 1-N (3)
где I - константа.
Если мы получили картину подоб-
ную рис. 2, то определяется предполага-
емое положение сигнала АР и следует
вынести жесткое решение о наличии сиг-
нала АР на данном участке спектра. Оп-
тимальным путем детектирования сигна-
ла АР является использование особенно-
стей данного сигнала, которые известны
априори. Несущие fc сигнала АР в диапа-
зоне 88-108 МГц стереофонического ра-
диовещания располагаются с интервалом
fc=0,l МГц. На частоте/±19 кГц имеется
пилот-тон (пилот-сигнал), информирую-
щий о стереоканале на частоте 38 кГц.
Обнаружитель пилот-тона строится на
основе высокодобротного полосового
фильтра, который используется в радио-
приемниках. Затем анализатор спектра
комбинирует два признака: форма спек-
тра сигнала и наличие пилот-тона, и вы-
носит решение о наличии или отсутствии
сигнала ПП - АР.
2. Обнаружение сигнала DRM+ в
канале с АБГШ.
На втором шаге мы анализируем
сигнал OFDM, уже прошедшего проце-
дуру БПФ.
Таблица 1.
Параметры сигнала DRM+
Модуляция OFDM
Ширина полосы канала 96 кГц
Разнос между поднесущими 444,444 Гц
Число поднесущих 213
Модуляция поднесущих 16-QAM
Длительность символа 2,5 мс
Обозначим в общем случае сигнал
ПП (DRM+) - S(t), тогда сигнал одной
поднесущей - Sj(t):
N
ад = ^\(0Л = 21з (4)
/=1
Шум в канале - n(t). Сигнал, обна-
руженный анализатором спектра, обозна-
чим: r(t)=h-Si(t)+n(t), где h=l, если сиг-
нал ПП присутствует, h=0, если сигнал
ПП отсутствует.
Обнаружитель строится на основе
набора согласованных с этими поднесу-
щими фильтров. Детектор измеряет спек-
тральную плотность энергии, затем си-
стема обнаружения на основе суммарной
спектральной плотности энергии всех
поднесущих определяет наличие сигнала
ПП.
Главной задачей является нахожде-
ния максимума суммарной спектральной
плотности энергии, когда анализатором
«перекрыты» все 213 поднесущих сигна-
ла ПП.
Исходя из наиболее общего в
DRM+ способа модуляции поднесущей
(16-QAM), и равной вероятности переда-
ваемых символов можно сделать вывод о
249
возможной передачи сигнала с тремя
значениями амплитуды (Aj, А2, A3), фаза
сигнала м.б. определена как случайная
величина равномерно распределённая от
0° до 360°, как это видно из рис.З. Для
Q
удобства введем обозначение: S](t) =
ArS(t), S2(t) = A2-S(t), S3(t) = ArS(t). При-
чем вероятность передачи сигнала
P(Si)=l/4, P(S2)=l/2, Р(5з) =1/4.
Аз
Рис. 3. Возможные амплитуды сигнала 16-QAM
Для решения о наличии сигнала ПП
требуется вычисление спектральной
плотности энергии обнаруженного сиг-
нала:
N
£ = ^|г£(Г)|2 (5)
1=1
r(t)=h-Si(t)+n(t) - сигнал, обнару-
женный анализатором спектра, где i=l ..
213.
r(t)=n(t) - сигнал ПП отсутствует, в
канале только шум.
N N
Е = ^1П(О12 =^Еп (6)
1=1 1=1
r(t)=Sj(t)+n(t) - сигнал ПП присут-
ствует.
N N
г=£|г,(О12=2Ч + £„ (7)
i=l 1=1
Тогда вероятность ошибки при об-
наружении сигнала на поднесущей [3]:
/ М-Е\
Рош « (8)
Где £ - энергия (3), Еп - энергия
АБГШ в полосе одной поднесущей, N -
количество «перекрытых» поднесущих,
М - количество обнаруженных поднесу-
щих с сигналом.
В зависимости от требования к ве-
роятности правильного обнаружения или
из допустимой вероятности ошибки
устанавливается порог обнаружения (Qi).
(h = 0, если Е < Q
V' (h = 1, если Е > Q
(9)
Заключение
В этой статье мы предлагаем ис-
пользование технологии когнитивного
радио в диапазоне ОВЧ ЧМ радиовеща-
ния. Для реализации динамического до-
ступа к спектру предложен способ мони-
торинга спектра и обнаружения сигнала
ПП, проанализирован алгоритм работы
этого метода.
Библиографический список:
1. Haykin S. Cognitive Radio: Brain-
Empowered Wireless Communications. -
IEEE Journal On Selected Areas In Com-
munications, Vol. 23, No. 2, P.P. 201-220,
2005.
2. http://www.drm.org
3. Прокис Дж. Цифровая связь. Пер.
с англ. / Под ред. Д.Д. Кловского. - М.:
Радио и связь. 2000. - 800 с.
References
1. Haykin S. Cognitive Radio: Brain-
Empowered Wireless Communications. -
IEEE Journal On Selected Areas In Com-
munications, Vol. 23, No. 2, P.P. 201-220,
2005.
2. http://www.drm.org.
3. Proakis J.G. Digital communication.
Tr.. from eng. I ed. D.D. Klovskiy. - M.:
Radio and communication. 2000. - 800 c.
250
DETECTION OF SIGNALS OF PRIMARY USERS ON FREQUENCIES VHF FM OF
BROADCASTING FOR COGNITIVE RADIO SYSTEMS.
©2015 E.D. Strufelev2, S.N. Eliseev*
’PSUTI, Samara
2JSC «SRC «Progress», Samara
In the conditions of intensive development of means of wireless access, mobile communication the problem
of selection of frequency bands for implementation of new radio technologies is sharply shown. One of possible
decisions to this problem is the technology cognitive radio which is based on the concept of dynamic access to a
spectrum. Possibility of obtaining of automatic and independent access to resources PSD allows increasing consid-
erably efficiency of their usage at the expense of the active involvement of "secondary" users. Last occupy the fre-
quency bands selected to primary users (PU), but temporarily free. In the report the method of dynamic access of
secondary users to a spectrum, broadcastings in a range of 88-108 MHz is considered.
Keywords: cognitive radio, a range of frequencies VHF FM broadcasting, numeral broadcasting DRM +,
monitoring and spectrum sensing, detection of signals of primary users.
Информация об авторах:
Струфелев Евгений Дмитриевич, аспирант кафедры РРТ, ПГУТИ, т. 8-987-445-46-
76, strufelev@gmail.com .
Область научных интересов: цифровая обработка сигналов.
Елисеев Сергей Николаевич, д.т.н., профессор, зав. кафедрой РРТ, ПГУТИ, 8-902-
371-37-59, eliseev-sn@psuti.ru .
Область научных интересов: цифровая обработка сигналов.
Strufelev Evgeniy Dmitrievich, post-graduate student of PSUTI, tel. 8-987-445-46-76,
strufelev@gmail.com .
Area of research: digital processing of signals.
Eliseev Sergey Nikolaevich, doctor of technical sciences, professor of PSUTI, tel. 8-902-
371-37-59, eliseev-sn@psuti.ru .
Area of research: digital processing of signals.
251
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 8: Перспективные материалы и технологии
в аэрокосмической отрасли
252
УДК 621.9.047
ЭЛЕКТРОХИМИЧЕСКАЯ РЕЗКА ТОНКОСТЕННЫХ ТРУБОК
©2015 В.А. Исаченко, Е.А. Митрюшин, Б.П. Саушкин
Федеральное государственное унитарное предприятие «НПО «Техномаш», г. Москва
Выполнен анализ технологической задачи высококачественной резки тонкостенных труб малого
диаметра. Проведены исследования и технологические испытания процессов электрохимической резки тон-
костенных труб металлическим и алмазным (на медной связке) дисками. Показано, что эти процессы обес-
печивают резку тонкостенных труб без заусенцев и деформации.
Ключевые слова: тонкостенные трубы, электрохимическая резка, комбинированная резка.
Введение
При изготовлении трубчатых теп-
лообменников летательных аппаратов
используются мерные тонкостенные
трубки малого диаметра с толщиной
стенки 0,2...0,5 мм из коррозионно-
стойкой стали 12X18Н1 ОТ . Перед пай-
кой в трубные доски такие трубочки
нарезают в требуемый размер по длине,
используя для этой цели абразивные кру-
ги. При этом из-за высокой пластичности
материала формируется заусенец, кото-
рый удаляют на слесарной операции
вручную. Для снижения объема ручного
труда на ряде предприятий применяют
электроэрозионную резку, исключающую
образование заусенца, однако при этом
повышается трудоемкость изготовления
трубочек из-за низкой скорости электро-
эрозионной резки.
В работе приведены результаты
исследования процесса электрохимиче-
ского резания трубочек металлическим и
алмазным дисками и предложены техно-
логические рекомендации по проектиро-
ванию операции электрохимической рез-
ки.
Рис. 1. Схема резки трубки
Экспериментальные исследования
проводились на базе электрохимического
станка для профильного шлифования мо-
дели ЗЭ70ВФ2. Разрезали трубки диа-
метром 2 мм с толщиной стенки 0,2 мм
из стали 12X18Н1 ОТ алмазным отрезным
кругом диаметром 250 мм шириной 1,6
мм на медной связке с зернистостью ал-
мазных включений 250/200 и металличе-
ским диском диаметром 250 мм, шири-
ной 1,5 мм из низкоуглеродистой стали
(рис. 1). Использовали источник техноло-
гического тока EL-SS4000 фирмы
«Элим». В качестве рабочей среды при-
меняли 12-14% водный раствор азотно-
кислого натрия.
После осуществления поперечной
резки образец разрезали вдоль оси на
электроэрозионном проволочном станке
для последующего измерения радиусов
на оптическом микроскопе «Falcon» QC
300 Series.
Следует отметить, что наличие ра-
диусов на торце теплообменной трубки,
253
автоматически формирующихся при
электрохимической резке, облегчает
сборку с трубной доской и повышает ка-
чество пайки.
Теоретический анализ процесса
резания
Для теоретического анализа процесса ре-
зания паза в условиях идеальной модели
электрохимического формообразования
[1] использовали постановку задачи и
решение, полученное в работе [2].
Рис. 2. Схема формирования профиля реза: вн и в, - соответственно ширина диска
и толщина стенки трубочки
Качественная картина формирова-
ния реза показана на рис. 2. Вращающий-
ся диск-электрод перемещается в направ-
лении заготовки с подачей s. Исходное
положение рабочей поверхности диска -
позиция 0, 1 - положение рабочей по-
верхности при заглублении диска в тело
заготовки, 2 - положение на выходе из
стенки заготовки, 3 - рабочая кромка ин-
струмента вышла из заготовки, 4 - поло-
жение рабочей кромки после перебега
инструмента на достаточно большую
длину. Цифрами Г - 4' отмечены профи-
ли реза, соответствующие перечислен-
ным выше положениям рабочей кромки
инструмента. Кривая, описывающая про-
филь реза на стенке трубочки прибли-
женно описывается тремя сопряженными
окружностями радиусами: наружным R,
внутренним г и радиусом сопряжения г*.
Если ассиметрия наружного и внутренне-
го радиусов в положении 3 выражена до-
статочно заметно, то при наличии пере-
бега их величины выравниваются в тем
большей степени, чем длиннее перебег.
Проведенный анализ подтвержда-
ется фотографией профиля продольного
сечения трубочки, отрезанной электро-
химическим травлением при достаточно
большой величине перебега (рис. 3).
Рис. 3. Профиль продольного сечение торца реза
Как видно, профиль адекватно
представляется дугами трех сопряжен-
ных окружностей. Радиус при входной
кромке (слева), равный на представлен-
ном образце 0,1 мм плавно переходит в
радиус при выходной кромке (справа)
254
равный 0,09 мм. Радиус сопряжения
наружного и внутреннего радиусов со-
ставляет 0,16... 0,17 мм.
В соответствии с обсуждаемой мо-
делью (рис. 2) по окончании процесса
резания в результате анодного растворе-
ния материала заготовки формируется
боковой зазор а, определяющий длину
отрезанной части трубки при работе по
упору.
Обсуждение результатов эксперимента
Предварительные эксперименты
показали, что при электрохимической
резке алмазным и металлическим диска-
ми, основными параметрами режима,
влияющими на профиль реза, являются
напряжение на электродах и подача стола
с заготовкой. Частота вращения инстру-
мента в диапазоне ЗОО-ЗООО об/мин ока-
зывает незначительное влияние, поэтому
приведенные ниже экспериментальные
данные получены при частоте вращения
2000 об/мин.
Величина напряжения на электро-
дах отражает долю электрохимической
составляющей в суммарной скорости ре-
зания. Зависимость радиуса скругления
наружной кромки трубки от напряжения
технологического тока, полученная при
величине рабочей подачи 175 мм/мин,
близкой к среднему значению исследо-
ванного диапазона подач, представлена
на рис. 4.
100 200 300 S’ мм/мин
Рис. 4. Зависимость наружного радиуса скругления от напряжения (7, /') и
величины подачи инструмента (2)
Как видно, формирование радиуса
начинается при некотором начальном
напряжении, в нашем случае 2...2,5 В.
Эта величина близка к сумме электрод-
ных потенциалов, соответствующих
началу анодного растворения стали
12Х18Н10Т. Действительно, принимая
катодный потенциал, равным 1,3 В и по-
тенциал активации данной стали в вод-
ных NaNCh растворах - 0,7 В [2], получа-
ем примерно такую же величину суммы
электродных потенциалов. На получен-
ных кривых можно выделить два участка
с резким переходом между ними. Замет-
ное увеличение радиуса R в диапазоне
напряжений 5... 10 В можно объяснить
тем, что в соответствующей области
анодных потенциалов, наряду с раство-
рением поверхности материала, на по-
следней протекают процессы образова-
ния окислов, влияющих на распределе-
ние электрического поля и скорость фор-
мообразования кромки реза. В этом диа-
пазоне напряжений скорость увеличения
радиуса R при резке металлическим дис-
ком (кривая 7*) выше, чем при резке аб-
разивным диском (кривая 7), что, вероят-
но, связано с интенсификацией роста по-
верхностных образований при образова-
нии ювенильных поверхностей в резуль-
тате микрорезания.
Влияние величины рабочей подачи
инструмента на радиус скругления кром-
ки при напряжении технологического то-
ка 18 В показано на рис. 4, кривая 2. Эта
зависимость мало изменяется при замене
металлического диска на алмазный. Как
видно, величина наружного радиуса
скругления снижается при увеличении
подачи в связи с тем, что при быстрой
255
подаче основная доля машинного време-
ни приходится на перебег инструмента, в
течение которого протекает процесс вы-
равнивания торца реза, описанный выше.
При формировании торца реза сле-
дует учитывать тот факт, что увеличение
подачи инструмента приводит к сниже-
нию рабочего зазора и возрастанию ско-
рости электрохимического растворения
металла заготовки. Однако, при опреде-
ленной критической величине зазора
напряженность электрического поля мо-
жет достигать значений, инициирующих
разрядные явления в межэлектродном
промежутке. Появляются контактные мо-
стики, протекает разогрев локальных
объемов металла.
Таким образом, в общем случае
скорость удаления металла заготовки в
области реза можно представить в виде
суммы трех составляющих
V = Гэх + ГЭр + VM, (1)
где слагаемые правой части представля-
ют собой соответственно скорость элек-
трохимического растворения, скорость
эрозионного разрушения и скорость ме-
ханического разрушения в результате
микрорезания или фрикционного эффек-
та. Очевидно, изменение напряжения на
электродах и подачи инструмента приво-
дят к перераспределению доли отдель-
ных слагаемых в выражении (1) и прева-
лированию того или другого механизма
разрушения металла. Сказанное иллю-
стрируется фотографиями торца и про-
филя реза (рис. 5)
Рис. 5. Торец и профиль поверхности реза при обработке металлическим (верхняя строка) и алмазным (нижняя
строка) инструментами при напряжении на электродах 5 (а), 15 (б) и 20 (в) вольт
При механическом и электрораз-
рядном взаимодействии инструмента и
заготовки разрушение материала заго-
товки сопровождается износом инстру-
мента . Из сказанного выше ясно, что
существует зависимость между скоро-
стью рабочей подачи инструмента и ве-
личиной его износа. При чисто электро-
химической резке износ инструмента не
происходит, а при значениях подачи,
превышающей некоторое критическое
значение, наблюдается явление износа
инструмента. Это означает, что в данных
условиях скорость подачи превышает
скорость электрохимического растворе-
ния, рабочий зазор уменьшается вплоть
до контакта тела инструмента или алмаз-
ных зерен с поверхностью заготовки:
развиваются электроразрядные процессы
и фрикционные явления.
Экспериментальное исследование
износа проводилось по методике, преду-
сматривающей измерение изменения
диаметра инструмента Дб?и при съеме
определенной массы кт заготовки. В ка-
честве меры при оценке износа использо-
вали отношение этих величин q.
При измерениях использовались
микрометр «MITUTOYO» с ценой деле-
ния 0,001 мм и аналитические весы
«OHAUS Pioner» с ценой деления 10"4 г.
Измерения износа проводились
256
при напряжении 18 В и скорости подачи
инструмента 175 мм/мин.
Полученные кривые износа условно
можно разделить на три зоны (рис. 6). В
первой, зоне при скорости подачи, не бо-
лее 50 мм/мин износ практически не
наблюдается, т.е. процесс резки близок к
электрохимическому процессу. При по-
вышении скорости подачи, во второй
зоне, при обработке алмазным кругом, в
работу вступают алмазные зёрна, износ
начинает возрастать, что объясняется
отрезного диска и выпаданием алмазных
зерен.
При резке металлическим диском
износ во второй зоне несколько выше. До
значения скорости подачи 200 мм/мин
фрикционный износ, по-видимому, не-
значителен, но при дальнейшем увеличе-
нии подачи интенсивность износа замет-
но повышается. В условиях малых зазо-
ров или непосредственного периодиче-
ского кониакиа электродов искровой раз-
ряд превращается в искро-дуговой, что
электроэрозионным разрушением связки
повышает интенсивность эрозионного
Рис. 6. Кривые износа при резке металлическим (7) и алмазным (2) дисками
Технологическое применение резуль-
татов исследований
На основании представленных ре-
зультатов исследований разработано и
апробировано в цеховых условиях мно-
гоместное приспособление для мерной
резки тонкостенных трубочек теплооб-
менного устройства на станке
ЗЭ7ОВФ2. Разработана технология резки,
обеспечивающая высокое качество реза.
Установлено, что применение электро-
химической резки позволяет снизить
трудоемкость подготовки комплекта тру-
бок к сборке, повысить качество пайки,
снизить вероятность брака.
Библиографический список:
1. Электрохимическая обработка
изделий авиационно-космической техни-
ки / Под ред. Б.П. Саушкина. - М.: Фо-
рум. 2013.- 480 с.
2. А.Х. Каримов, В.В. Клоков,
В.И. Филатов. Методы расчета электро-
химического формообразования. - Ка-
зань: Издательство КГУ. 1990.- 245 с.
References:
1. Electrochemical machining of the
aerospace technicals I Edited by Prof.
B.Saushkin: Mockow. Forum Publishing
House. 2013,- 480 p.
2. A. Karimov, V.Klokov, V.Filatov
Electrochemical forming calculation meth-
ods. - Kazan: KSTU Publishing House.
1990,- 245 p.
257
ELECTROCHEMICAL CUNNING OF THIN WALL TUBES
©2015 V.A. Isachenko, E.A. Mitruyshin, B.P. Saushkin
The Federal State Enterprise «NPO «Technomash», Moskow
Analyses of technological problem connected with high quality cutting of little diameter thin wall tubes is
carried out. Some investigations and technological tests with using of the metal and diamond (copper foundation)
disk tools are worked out. It is shown that this processes ensure the cutting of thin wall tubes without deformation.
Key words: thin wall tubes, electrochemical cutting, combining cutting.
Сведения об авторах:
Исаченко Вадим Александрович, д.т.н., проф., главный консультант НАЦ ФГУП
«НПО «Техномаш», 127006, г. Москва, ул. Краснопролетарская, 9, тел. 8.916-140-8011
Митрюшин Евгений Алексеевич, к.т.н., начальник лаборатории ФГУП «НПО
«Салют», к.т.н, начальник лаборатории ФГУП «НПО «Техномаш».
Саушкин Борис Петрович, д.т.н., проф., начальник отделения ФГУП «НПО
«Техномаш». Домашний адрес: 109451, Москва, ул. Братиславская, 131. E-mail:
sbp47@mail.ru
Isachenko Vadim Aleksandrovitch. Doctor of science, Professor, the head advicer of
FGUP NPO Technomash. Post address: 127006, Vockow, Krasnoproletarskaya str., 9. Phone
number: 8 916 140 80 11. Sphere of scientific interests: machine building technologies.
Mitrushin Evgeniy Alekseevitch. Doctor of sci., the head of electrochemical laboratory
of FGUP NPO Technomash. Sphere of scientific interests: machine building technologies.
Saushkin Boris Petrovitch. Doctor of science, Professor, the head of department of FGUP
NPO Technomash. Post address: 109451, Moscow, Bratislavskaia str., 13/1.
Phone number: 8 916 705 1857. E-mail: sbp47@mail.ru. Sphere of scientific interests:
machine building technologies.
258
УДК 629.7.058:621.9.048.7
БАЛАНСИРОВКА РОТОРОВ ГИРОСКОПОВ С ЛАЗЕРНОЙ
КОРРЕКТИРОВКОЙ МАСС
©2015 В.С. Кузнецов, А.М. Камалдинов
Федеральное государственное унитарное предприятие
«Научно-производственное объединение «Техномаш»
(ФГУП «НПО «Техномаш»), г. Москва
Рассматривается технология динамической балансировки роторов гироскопов, в которой для выпол-
нения корректировки масс ротора используются лазеры с малой энергией в импульсе и высокой частотой
излучения.
Ключевые слова: динамическая балансировка, корректировка масс, ротор, гироскоп, лазер, лазерная
обработка
Динамическая балансировка рото-
ров гироскопов является одним из основ-
ных средств уменьшения вибраций гиро-
приборов и, как следствие, повышения их
точности, надежности и долговечности.
При балансировке чередуют выполнение
двух операций: определения дисбалансов
ротора и их уменьшения корректировкой
масс [1].
Корректировка масс может произ-
водиться как внесением, так и удалением
материала в плоскостях коррекции рото-
ра. При удалении материала чаще всего
применяют методы механической обра-
ботки (сверление, шлифование и пр.).
Также для этого могут быть использова-
ны перспективные бесконтактные мето-
ды обработки: электронно-лучевая и ла-
зерная [1].
Известны технические решения
[1,2], в которых для удаления материала
из тела вращающегося ротора использу-
ются мощные импульсные лазеры, рабо-
тающие в режимах свободной генерации
и модуляции добротности. При выполне-
нии корректировки масс на подобных
установках дисбалансы ротора стремятся
уменьшить до допустимых значений за
минимальное число импульсов. Как ре-
зультат, за один импульс, энергия кото-
рого может составлять десятки Дж, уда-
ляется объем металла массой до несколь-
ких мг, при этом на ротор оказывается
термическое воздействие, что может
привести к нежелательным изменениям в
структуре материала и к деформации ро-
тора.
В некоторых современных образцах
балансировочной техники применяется
иной подход [3, 4]: при относительно ма-
лых значениях энергии импульсов
(от единиц до нескольких сотен мДж), и
массы металла, удаляемой за импульс
(до нескольких мкг), необходимая произ-
водительность процесса достигается за
счет большей частоты воздействий.
В настоящем докладе излагаются
результаты применения иттербиевого во-
локонного лазера и лазера на алюмо-
иттриевом гранате с неодимом в техноло-
гическом оборудовании для балансиров-
ки роторов гироскопов. Предлагаемое
оборудование обеспечивает выполнение
двухплоскостной динамической баланси-
ровки за одну установку ротора, коррек-
тировки масс на рабочей частоте враще-
ния и создание среды (давления и защит-
ной атмосферы) в рабочем объеме.
Библиографический список:
1. Справочник по балансировке/
М.Е. Левит и др.; Под общ. ред. М.Е. Ле-
вита. - М.: Машиностроение, 1992. - 464
с.
2. LIA Handbook of Laser Materials
Processing. Ed. Ready J.F. Orlando: LIA
Magnolia Publishing Inc., 2001. 715 p.
3. M.Mamczur and J.Gabzdul. High
speed balancing with fiber lasers. Industrial
Laser Solutions, 1, 2012.
4. А.М. Камалдинов, .С. Сурженко,
Е.Г. Аксенов, Е.Э. Чурюмова,
259
В.С. Кузнецов. Полуавтоматический ба-
лансировочный станок // Патент на изоб-
ретение № RU2515102, МПК G01M1/38.
Заявка на изобретение от 15.11.2012 №
2012148421/28(077768). Дата публикации
- 10.05.2014.
GYROSCOPES BALANCING WITH LASER ROTOR MASS CORRECTION
©2015 V.S. Kuznetsov, A.M. Kamaldinov
The Federal State Unitary Enterprise «NPO «Technomash», Moscow
The article deals with the dynamic balancing of gyroscopes technology in witch pulsed lasers with low
pulse energy and high pulse repetition rate are used to provide rotor mass correction.
Key words: dynamic balancing, mass correction, rotor, gyroscope, laser, laser processing
Информация об авторах:
Кузнецов Владимир Сергеевич, аспирант заочного отделения кафедры РК-6
(«Системы автоматизированного проектирования») МГТУ им. Н.Э. Баумана, 105005,
Москва, 2-я Бауманская ул., д. 5, стр. 1, младший научный сотрудник отделения 540,
ФГУП «НПО «Техномаш», 127018, Москва, 3-й проезд Марьиной Рощи, дом 40, тел.:
8-495-689-95-15, e-mail: 260@tmnpo.ru.
Область научных интересов: вибродиагностика, математическое моделирование
механических систем, лазерная обработка.
Камалдинов Альберт Мубаракович, к.т.н., заместитель главного конструктора -
начальник отделения 540, ФГУП «НПО «Техномаш», 127018, Москва, 3-й проезд Марьи-
ной Рощи, дом 40, тел.: 8-495-689-95-67, e-mail: 260@tmnpo.ru.
Область научных интересов: технология производства гироскопов и приборов точ-
ной механики.
Kuznetsov Vladimir Sergeevitch, postgraduate of Bauman MSTU, 105005, Moscow,
2nd Baumanskaya ulica, 5/1, junior research associate of department 540, The Federal State Uni-
tary Enterprise 'NPO 'Technomash', 127018, Moscow, 3rd proezd Marinoy Roshchi, 40,
tel.: +7-495-689-95-15, e-mail: 260@tmnpo.ru.
Area of research: vibration diagnosis, virtual modeling of mechanical systems, laser pro-
cessing.
Kamaldinov Albert Mubarakovich, Ph. D., deputy chief design engineer - head of de-
partment 540, The Federal State Unitary Enterprise «NPO «Technomash», 127018, Moscow,
3rd proezd Marinoy Roshchi, 40, tel.: +7-495-689-95-67, e-mail: 260@lmnpo.ru.
Area of research: Gyroscopes and precision mechanics instruments production technology.
260
УДК 629.7.058.002.51
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ И ОБОРУДОВАНИЯ КОНТРОЛЯ
МОМЕНТНЫХ ХАРАКТЕРИСТИК ДИНАМИЧЕСКИ
НАСТРАИВАЕМЫХ ГИРОСКОПОВ
©2015 Е.Э. Чурюмова, А.М. Камалдинов
Федеральное государственное унитарное предприятие «Научно-производственное
объединение «Техномаш» (ФГУП «НПО «Техномаш»), г. Москва
В докладе рассмотрены существующие технологии контроля моментных характеристик динамически
настраиваемых гироскопов различных типов и приведен ряд их недостатков. Рассмотрены пути совершен-
ствования данных технологий и обоснован выбор технических решений.
Ключевые слова: динамически настраиваемый гироскоп, контроль моментных характеристик, тех-
нологическое оборудование, качество сборки, термокамера
В целях компенсации негативного
влияния изменений температуры окру-
жающей среды, повышения стабильности
выходных параметров и, как следствие,
улучшения точностных характеристик,
гироскопические приборы, в частности,
динамически настраиваемые гироскопы,
работают в условиях термостатирования.
Физические свойства смазочного матери-
ала шарикоподшипниковых опор, газо-
вой среды и материалов конструкции,
линейные размеры деталей и узлов, со-
противления проводников и т.д. зависят
от температурных условий, изменения
которых приводят к появлению так назы-
ваемого «теплового дрейфа» [1-2].
Для обеспечения качества сборки
подобных гироприборов, их испытания
проводят в условиях, приближенных к
эксплуатационным. Контроль параметров
опор приборов, а именно, моментных ха-
рактеристик, на различных этапах сборки
осуществляется с применением термока-
мер, в рабочем объеме которых размеща-
ется чувствительная часть оборудования
для контроля моментных характеристик
и создаются необходимые температурные
условия [3-4].
В докладе рассмотрены существу-
ющие технологии контроля моментных
характеристик динамически настраивае-
мых гироскопов типа КИ05-4 и КИНД05-
081, а также выявлен ряд их недостатков,
связанных с воздействием исполнитель-
ных систем термокамеры
на чувствительную часть оборудования и
объекты контроля. К этим недостаткам
следует отнести: наличие вибраций, со-
здаваемых термокамерой, уровень кото-
рых сопоставим с уровнем полезного
сигнала, уменьшение температурного
градиента путем принудительного венти-
лирования, которое приводит к повыше-
нию загрязненности контролируемого
негерметизированного прибора
на ранних этапах сборки и пр.
Приведены пути совершенствова-
ния технологии и оборудования, обосно-
ван выбор в пользу интеграции специ-
альной системы термостатирования в
стенд контроля моментных характери-
стик. Предложенные технические реше-
ния позволяют устранить существующие
недостатки, в том числе, за счет отсут-
ствия конструктивных элементов, явля-
ющихся источниками вибраций.
Библиографический список:
1. Динамически настраиваемые ги-
роскопы: Теория и конструкция/
Д.С. Пельпор, В.А. Матвеев,
В.Д. Арсеньев. - М.: Машиностроение,
1988.-264 с.: ил.
2. Гироскопические системы, ч. III.
Элементы гироскопических приборов/
Е.А. Никитин, С.А. Шестов,
В.А. Матвеев; под ред. Д. С. Пельпора. -
Учеб, пособие для вузов по специально-
сти «Гироскопические приборы и
устройства». - М.: Высшая школа, 1972.
- 472 с. с илл.
261
3. Прибор КИ05-4. Инструкция по
регулировке КИ4.012.129 ИЗ. Редакция
1-86.
4. Прибор КИНД05-081. Инструк-
ция по проверке функционирования
КИНД.408111.081 И23. Редакция 1-94.
IMPROVEMENT OF TORQUE CHARACTERISTICS MONITORING TECHNIQUE
AND TECHNOLOGY FOR DYNAMICALLY TUNED GYROSCOPES
©2015 E.E. Churyumova, A.M. Kamaldinov
The Federal State Unitary Enterprise «NPO «Technomash», Moscow
In this report we examine existing torque characteristics monitoring techniques and technology for various
types of dynamically tuned gyroscopes and show their significant limitations. Furthermore we discuss several ap-
proaches to improving these technologies and demonstrate validity of engineering solutions.
Key words: dynamically tuned gyroscope, torque characteristics monitoring, technological equipment, as-
sembly quality, heat chamber
Информация об авторах:
Чурюмова Екатерина Эльвковна, аспирант ФГУП «НПО «Техномаш», инженер-
конструктор 2 категории отделения 540, ФГУП «НПО «Техномаш», 127018, Москва,
3-й проезд Марьиной Рощи, дом 40, тел.: 8-495-689-95-15 (доб. 97-64), e-mail:
260@tmnpo.ru.
Область научных интересов: технология производства гироскопов, в частности -
контроль моментных характеристик опор приборов.
Камалдинов Альберт Мубаракович, к.т.н., заместитель главного конструктора -
начальник отделения 540, ФГУП «НПО «Техномаш», 127018, Москва, 3-й проезд Марьи-
ной Рощи, дом 40, тел.: 8-495-689-95-67, e-mail: 260@tmnpo.ru.
Область научных интересов: технология производства гироскопов и приборов точ-
ной механики.
Churyumova Ekaterina Elvkovna, postgraduate, design engineer of department 540, The
Federal State Unitary Enterprise 'NPO 'Technomash', 127018, Moscow, 3rd proezd Marinoy
Roshchi, 40, tel.: +7-495-689-95-15 (*97-64), e-mail: 260@tmnpo.ru.
Area of reaserch: gyroscope production technology and torque characteristics control in
particular.
Kamaldinov Albert Mubarakovich, Ph. D., deputy chief design engineer - head of de-
partment 540, The Federal State Unitary Enterprise 'NPO 'Technomash', 127018, Moscow, 3rd
proezd Marinoy Roshchi, 40, tel.: +7-495-689-95-67, e-mail: 260@tmnpo.ru.
Area of research: Gyroscopes and precision mechanics instruments production technology.
262
УДК 621.791.722
РАЗРАБОТКА ТЕХНОЛОГИИ И ОБОРУДОВАНИЯ
ДЛЯ ЭЛЕКТРОННО-ЛУЧЕВОЙ СВАРКИ КРУПНОГАБАРИТНЫХ СОСТАВНЫХ
ШПАНГОУТОВ ИЗ АЛЮМИНИЕВЫХ СПЛАВОВ
© 2015 В.И. Кулик, Р.В. Машко
Федеральное государственное унитарное предприятие
«Научно-производственное объединение «Техномаш», г. Москва
В работе изложены результаты разработки опытной технологии и оборудования для электронно-
лучевой сварки составных шпангоутов из алюминиевых сплавов, с помощью которой возможно в 2 2,5
раза увеличить коэффициент использования металла, повысить производительность предприятий, задей-
ствованных в производстве ракетно-космической техники, снизить массу заготовок шпангоутов, трудоём-
кость, а так же энергетические затраты на производство крупногабаритных шпангоутов.
Ключевые слова: электронно-лучевая сварка, составные шпангоуты, алюминиевые сплавы, коэффи-
циент полезного использования металла
В России электронно-лучевая свар-
ка (ЭЛС) широко применяется в различ-
ных отраслях, в том числе и в ракетно-
космической отрасли. К сожалению, на
данный момент, в нашей стране наблю-
дается спад в станкостроительной отрас-
ли, что, соответственно, приводит к ряду
проблем.
Имеющееся оборудование для ЭЛС
физически изношено и морально устаре-
ло. В настоящее время крупногабаритные
шпангоуты ракет-носителей (PH) изго-
тавливаются методом контактно-
стыковой сварки (КСС) или методом
многопроходной аргонно-дуговой сварки
(АрДС).
Исходя из многолетнего опыта по
исследованию процесса ЭЛС, можно с
уверенностью утверждать, что процесс
ЭЛС алюминиевых сплавов имеет ряд
существенных преимуществ по сравне-
нию с дуговыми способами сварки.
Как известно, коэффициент прочно-
сти сварных швов после АрДС обычно
составляет 0,5 -? 0,85 временного сопро-
тивления разрыву основного металла.
Для компенсации потери прочности при
этом и обеспечения равнопрочности
сварных соединений с основным метал-
лом стык располагают на участке с утол-
щенными свариваемыми кромками. Это
вызывает увеличение массы сварных
конструкций. В свою очередь, соедине-
ния, выполненные ЭЛС, имеют времен-
ное сопротивление разрыву на 15 4- 25 %
выше, а ширину зоны термического вли-
яния (ЗТВ) в 2 -г 3 раза меньше, чем при
АрДС. Это позволяет значительно
уменьшить массовые характеристики
сварных конструкций [1].
Сварные соединения, полученные в
процессе ЭЛС, имеют максимальную
пластичность и вязкость, а также мини-
мальные сварочные деформации. Одним
из главных преимуществ ЭЛС является
предотвращение отрицательного воздей-
ствия атмосферы, вследствие использо-
вания вакуума. При применении различ-
ных защитных сред в процессе сварки
может происходить окисление жидкого
металла свободным кислородом, содер-
жащимся на поверхностных окислах ме-
талла. Металл шва может насыщаться
водородом вследствие диссоциации ат-
мосферной влаги и влаги, содержащейся
в присадочном материале, если говорить
о АрДС.
За счёт высокой концентрации
энергии луча электронный луч позволяет
получать кинжальную форму проплавле-
ния, что даёт возможность за один про-
ход сваривать металлы толщиной от де-
сятых долей миллиметра до 200 мм. В
результате можно получить швы, в кото-
рых соотношение глубины провара к ши-
рине составляет 20:1 и более.
Если говорить о трудоёмкости про-
цессов ЭЛС и АрДС в серийном произ-
263
водстве, то ЭЛС существенно опережает
АрДС. Это преимущество становится всё
более заметным при увеличении толщи-
ны свариваемых материалов. Кроме того,
из-за более высокого КПД процесса ЭЛС
(0,8 -г 0,9, тогда как максимальный КПД
при АрДС - 0,7) затраты электроэнергии,
даже с учётом затрат на получение ваку-
ума, ниже, чем при АрДС [2].
Разработка новой, современной,
высокоадаптивной технологии и обору-
дования для ЭЛС крупногабаритных
корпусных конструкций PH позволит по-
высить механические свойства сварных
соединений, уменьшить удельные мас-
согабаритные характеристики корпусных
элементов изделий ракетно-космической
техники (РКТ) и снизить энергоёмкость и
себестоимость изготовления крупногаба-
ритных корпусных конструкций PH.
Применяемые технологические
процессы изготовления крупногабарит-
ных шпангоутов из компактных загото-
вок характеризуются недостаточным ко-
эффициентом использования металла
(КИМ). Например, при изготовлении
крупногабаритных шпангоутов с помо-
щью механической обработки профиля
КИМ составляет - 0,3 4- 0,4. Возможные
варианты профилей крупногабаритных
шпангоутов показаны на рис. 1.
Рис. 1 Виды шпангоутов, получаемых с помощью механической
обработки заготовок: Т-образный шпангоут (а);
V-образный шпангоут (б)
При механической обработке
Т-образного и V-образного шпангоутов в
стружку уходит до 70 % металла. Даже
если оптимизировать сечение заготовки,
в стружку будет уходить до 50 %. При-
нимая во внимание тот факт, что новые
высокопрочные алюминиевые сплавы в
несколько раз дороже широко применя-
емых АМгб, 1201 вопросы разработки
энерго- и материалосберегающих техно-
логий становятся всё более актуальными.
Для ухода от неэффективной техно-
логии была проведена работа, в ходе ко-
торой проводилась отработка опытной
технологии ЭЛС составных шпангоутов.
Данная технология обеспечивает высо-
кий КИМ и в качестве заготовок предпо-
лагает применение стандартных плит и
листов.
На рис. 2 представлены различные
варианты сварных соединений заготовок
составных шпангоутов, получаемых при
помощи ЭЛС.
264
Рис. 2 Виды сварных соединений составных шпангоутов,
а) Т-образный шпангоут;
б) V-образный шпангоут (стыковое соединение);
в) V-образный шпангоут (торцевое соединение).
Для сварки образцов-имитаторов
соединений шпангоутов использовалась
установка ЭЛУ-4 с электронно-лучевой
аппаратурой ЭЛТА-60.15 мощностью 15
кВт и вакуумной системой на базе тур-
бомолекулярного насоса фирмы Edwards.
В ходе работы были отработаны
режимы ЭЛС и выбраны оптимальные
значения параметров сварки образцов-
имитаторов Т-образных и V-образных
составных шпангоутов. Оптимальные
режимы сварки приведены в табл. 1.
Табл. 1
Наименование Ускоряющее напряжение UyCK, кВ Ток луча 1л, мА Ток фокусиров- ки 1ф, мА Скорость свар- ки VCB, м/ч
ЭЛС V-образного шпангоу- та: - стыковое соединение - торцевое соединение 60 60 135 160 530 530 60 40
ЭЛС Т-образного шпангоута 60 200 530 30
На рис. 3 представлены фото сваренных Т-образного и V-образного составных
шпангоутов.
Рис. 3 Фото сваренных соединений образцов-имитаторов:
Т-образного шпангоута (а);
V-образного шпангоута, полученного с помощью стыкового соединения (б);
V-образного шпангоута, полученного с помощью торцевого соединения (в).
Исследование качества сварных
швов проводилось следующими метода-
ми:
- разрезкой и металлографическими
исследованиями поперечных макрошли-
фов;
- послойным исследованием попе-
речных макрошлифов при фрезеровании
45 4- 50 слоев металла через 5 мм и кон-
троля поверхности срезов лупой 4-х
кратного увеличения;
- ультразвуковым контролем свар-
ных швов;
- рентгеноконтролем.
На рис. 4 приведены фото макро-
шлифов сварных соединений образцов-
265
имитаторов Т-образных и V-образных
шпангоутов. Дефектов в сварных швах не
обнаружено.
Рис. 4 Фото макрошлифов сварных соединений:
Т-образного шпангоута проваренного с одной стороны (а);
Т-образного шпангоута проваренного с с двух сторон (б);
стыкового сварного соединения V-образного шпангоута (в);
торцевого сварного соединения V-образного шпангоута (г).
Исходя из полученных данных
можно с уверенностью утверждать, что
применение ЭЛС для производства кор-
пусных изделий РКТ позволит снизить
себестоимость сварных конструкций за
счет повышения КИМ и снижения энер-
гозатрат и трудоёмкости по сравнению с
другими способами производства шпан-
гоутов.
После отработки опытной техноло-
гии ЭЛС составных шпангоутов, был
разработан эскизный проект опытного
образца установки для ЭЛС заготовок
шпангоутов и продольных швов обечаек
PH.
В табл. 2 приведены технические
характеристики опытного образца уста-
новки для ЭЛС заготовок шпангоутов и
продольных швов обечаек PH.
Табл. 2.
Параметр Значение
Габариты заготовок шпангоутов, мм: - толщина - диаметр до 140 до 3500
Ускоряющее напряжение, кВ 60
Мощность, кВт 60
Ток луча, мА от 1 до 1000
Скорость сварки, м/ч от 5 до 60
Способ сварки горизонтальным лучом снизу вверх
Остаточное давление в камере, мм. рт.ст. от 1х10'4до 5х10'5
Время откачки камеры, минут не более 35
Ход сварочной пушки, мм - в горизонтальной плоскости - в вертикальной плоскости ±20 2400
Был выбран вариант установки с готовок шпангоутов и обечаек, то есть
кольцевой вакуумной камерой, соответ- локальной кольцевой камерой для коль-
ствующей геометрическим размерам за цевых конструкций. При такой конструк-
ции уменьшается объем камеры и, как
266
следствие, уменьшается время откачки
рабочего вакуума.
Общий вид опытного образца уста-
новки для ЭЛС заготовок шпангоутов и
продольных швов обечаек PH приведены
на рис. 5.
0 45Й7
Кольцебая Гчдроблическии прибод для
бакуумная камера поднятия крышки .
Механизм перемещения ЗЛП по бертикали
б(рибае^ая о^чаака (модуль линейного перемещения [ТМТ с прибодсм СПШ20-# с ПУ)
с приспосодгением
12000
Рис. 5 Общий вид опытного образца установки для ЭЛС
заготовок шпангоутов и продольных швов обечаек PH.
Так как максимальная толщина сва-
риваемых шпангоутов составляет 140 мм,
установка будет укомплектована элек-
тронно-лучевой аппаратурой ЭЛА 60
кВ/60 кВт. Электронно-лучевая аппара-
тура будет оснащена системой визуаль-
ного наблюдения, автоматизированного
слежения электронного луча за стыком,
системой контроля глубины проплавле-
ния. Система видеонаблюдения и иллю-
минаторы будут оснащены защитой от
напыления.
Манипулятор ЭЛП выполнен в виде
прямоугольной колонны, к которой за-
фиксирован модуль линейного переме-
щения с ходом рабочего стола 2400 мм и
приводом с программным управлением.
Пушка имеет возможность установочно
поворачиваться на угол ± 20 ° относи-
тельно горизонтальной оси (в плоскости
стыка) и ± 10 ° относительно горизон-
тальной оси (поперек плоскости стыка).
Вакуумная система установки явля-
ется отдельным модулем, который в ав-
томатизированном режиме производит
откачку камеры до разряжения от 1х10"4
до 1х10'5 мм.рт.ст.
Вакуумную систему предполагается
создать на базе безмаслянных насосов
большой производительности 300-350 л/с
серии MU1203 (Kashiyama, Япония) и
турбомолекулярных насосов TG5500
(Osaka Vacuum, Япония) производитель-
ностью 5500 л/с. Вторым вариантом кон-
струкции вакуумной системы будет ис-
пользование только отечественных насо-
сов.
Опытный образец установки будет
иметь единый пульт управления вакуу-
ми-рованием и сваркой и должен выпол-
нять следующие функции:
- тестирование вакуумной системы,
кинематики перемещения пушки, изде-
лия и ЭЛА;
- автоматизированная откачка каме-
ры при включении одной кнопки «Пуск»,
или откачка камеры в ручном режиме и
выдача информации о готовности рабо-
чего вакуума;
267
- вывод изделия в рабочее положе-
ние;
- вывод пушки в рабочее положение
относительно свариваемого изделия;
- настройка режима ЭЛС для наве-
дения электронного луча на стык и адап-
тивная запись положения стыка в память
системы слежения;
- настройка рабочего режима ЭЛС и
сварка стыка;
- ввод параметров режима ЭЛС из
банка памяти, ФИО сварщика, даты и
времени сварки, при необходимости дру-
гих данных, с возможностью последую-
щего вызова их для ЭЛС данного соеди-
нения;
В настоящее время разрабатывается
конструкторская документация на уста-
новку для ЭЛС заготовок шпангоутов и
продольных швов обечаек PH.
Исходя из данных, полученных в
ходе выполнения работы, можно с уве-
ренностью утверждать, что применение
ЭЛС для производства корпусных изде-
лий РКТ позволит снизить себестоимость
сварных шпангоутов за счет повышения
КИМ, снижения массы конструкции,
трудоёмкости и энергозатрат по сравне-
нию с другими способами производства
шпангоутов. Разработка современных
образцов промышленных установок для
ЭЛС является экономически целесооб-
разной и позволит улучшить экономиче-
ские показатели предприятий, задейство-
ванных в производстве корпусных изде-
лий РКТ.
Библиографический список:
1. Назаренко О.К., Кайдалов А.А.,
Ковбасенко С.Н. Электронно-лучевая
сварка; - Под. ред. Б.Е. Патона. Киев:
Паукова думка, 1987 - 65-66 с.
2. Вихман В.Б, Козлов А.Н.,
Маслов М.А. Преимущества и недостат-
ки электрон-ного луча при сварке по
сравнению с лазером и электрической
дугой. Технологии и оборудование элек-
тронно-лучевой сварки 2014; - Материа-
лы Третьей Санкт-Петербургской меж-
дународной научно-технической конфе-
ренции, СПб: Издательство СПбГТУ,
2014- 12-13 с.
3. Гуревич С.М. Справочник по
сварке цветных металлов; - Киев: Пауко-
ва думка, 1990.
4. Мамутов Е.Л. Электронно-
лучевая сварка деталей большой толщи-
ны; - Москва: Машиностроение, 1992.
References
1. Nazarenko О.К., Kaydalov А.А.,
Kovbasenko S.N. Electron beam welding; -
Kiev: Publishing house Scientific idea, 1987
- 65-66 p.
2. Vihman V.B., Kozlov A.N.,
Maslov M.A. Advantages and shortcomings
of electron beam welding in comparison
with laser beam welding and fusion welding.
Technologies and equipment for electron
beam welding 2014; - Materials of the
Third international scientific and practical
conference in Saint-Petersburg: Publishing
house of St. Petersburg State Technical Uni-
versity 2014 - 12-13 p.
3. Gurevich S.M. Electron beam weld-
ing reference book of nonferrous metal; Ki-
ev: Publishing house Scientific idea, 1990.
4. Mamutov E.L. Electron beam weld-
ing of details with big thickness; - Moscow:
Manufacturing engineering, 1992.
268
DEVELOPMENT OF THE TECHNOLOGY AND EQUIPMENT
FOR ELECTRON BEAM WELDING OF LARGE-DIMENSIONED
CIRCULAR COMPOSITE FRAMES MADE FROM ALUMINUM ALLOYS
© 2015 V.I. Kulik, R.V. Mashko
Federal State Unitary Enterprise «Technomash», Moscow
In this work there are shown the results of the development of empirical technology and equipment for elec-
tron beam welding of circular composite frames made from aluminum alloys, the usage of which, will help to in-
crease the coefficient of useful metal in 2 -? 2.5 times, to raise enterprise productivity, which take part in the produc-
tion of rocket-space engineering, to lower mass of the blank frames, laboriousness and also expenditure of energy to
production of large-dimensioned circular frames.
Keywords: electron-beam welding, circular composite frames, aluminum alloys, coefficient of useful metal
Информация об авторах:
Кулик Виктор Иванович, к.т.н., начальник отделения технологии сварки, ФГУП
«НПО «Техномаш», 127018, Россия, Москва, 3-й проезд Марьиной рощи, 40,
т. +7 (495) 689-24-41.
Область научных интересов: Современные технологии сварки и пайки в ракетостро-
ении.
Машко Ростислав Владимирович, инженер-технолог 2 категории, ФГУП «НПО
«Техномаш», 127018, Россия, Москва, 3-й проезд Марьиной Рощи, 40,
т. +7 (985) 477-16-90, rabadubsky@gmail.com.
Область научных интересов: Электронно-лучевая сварка, фрикционная сварка.
Kulik Viktor Ivanovich, head of department of welding, FSUE «Technomash», 127018,
Russia, Moscow, 3d journey of Maryina Roshcha, 40, t. +7 (495) 689-24-41.
Area of research: Up-to-date technologies of welding and soldering in rocket production.
Mashko Rostislav Vladimirovich, processing engineer, FSUE «Technomash», 127018,
Russia, Moscow, 3d journey of Maryina Roshcha, 40, t. +7 (985) 477-16-90,
rabadubsky@gmail.com.
Area of research: Electron beam welding, friction stir welding.
269
УДК 523,550.3
РАСЧЕТ ТЕОРЕТИЧЕСКОЙ МОДЕЛИ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО
АППАРАТА С ПИТАНИЕМ ОТ СОЛНЕЧНОЙ ЭНЕРГИИ
©2015 И.Н.Васимова1
1 МАТИ-РГТУ им. К.Э. Циолковского, при поддержке АО «НПП «Квант», г. Москва
Приведена теоретическая модель с расчетными данными летательного аппарата оснащенного двига-
телем российского производства на базе солнечных элементов производства «НПП «Квант». В основу рас-
четов положены примеры зарубежных аналогов летательных аппаратов на солнечной энергии со встроен-
ным аккумулятором без применения жидкого топлива. Статья описывает реальные методы проектирования
и результаты математического моделирования прототипа «солнечного самолета» с доказательством воз-
можности создания на существующих российских предприятиях. Актуальность статьи заключается в расче-
том подтверждении возможности бесперебойного полета пилотируемого аппарата не менее 20 часов без
какого-либо загрязнения окружающей среды, с питанием от источника возобновляемой энергии.
Ключевые словам Солнечные батареи, кремний в авиации, малые летательные аппараты, солнечная
энергетика, солнечный самолёт
С момента внедрения солнечной
энергетики в нашу жизнь, многие умы
пытались, и пытаются постоянно приме-
нить такой вид энергии ко всем отраслям,
где необходимо непрерывное экономное
питание. К настоящему времени мировая
наука достигла небывалых высот: то, что
ещё недавно казалось невозможным, с
каждым днём всё плотнее входит в нашу
жизнь. Начав свое развитие самоходных
устройств с создания игрушечных прото-
типов, ученые конструкторы изо-дня в
день всё ближе подходят к созданию са-
молета на солнечных батареях. Этот про-
ект является не только интересной идеей,
но и стратегически необходимой разра-
боткой для решения многих государ-
ственных задач. Наша страна имеет все
необходимые ресурсы для создания по-
добного аппарата. Именно это послужило
основанием для написания данной науч-
ной статьи.
Цель написания статьи:
Цель работы заключалась в состав-
лении расчетной модели летательного
аппарата использующего в качестве ис-
точника энергии кремниевые солнечные
батареи.
Доказательства целесообразности
создания «солнечного» самолета на
территории РФ:
• Стоимость фотоэлектрических
панелей снизилась на 99 процентов за
последние 4 десятилетия, с 74 долларов
за ватт в 1972 году до менее 70 центов за
ватт в 2014. Между 2009 и 2014 годами
цены на солнечные панели снизились на
три четверти, следствием чего стал рост
фотоэлектрических установок на 50 про-
центов в год.
• Двигатель, работающий на сол-
нечном аккумуляторе имеет теоретиче-
ски бесконечный запас хода в расчете на
средний световой день
• Существенная экономия на бес-
платном топливе,
• Полное отсутствие вредных вы-
бросов в атмосферу
• Отсутствие угрозы возгорания от
авиационного топлива,
• Снижение массы летательного
аппарата за счет отсутствия жидкого топ-
лива.
Применение солнечных технологий
позволят значительно снизить стоимость
перелетов.
Выдержки из основной части:
Для полной оценки возможности
осуществления данного проекта на прак-
тике я изучила весь ассортимент солнеч-
ных элементов производимых на терри-
тории Российской Федерации. Для
наглядности приведу краткую классифи-
кацию выпускаемых изделий по макси-
мально-возможному КПД:
270
Кремниевые
Si (кристаллический) 24,7 %
Si (поликристаллический) 20,3 %
Si (тонкопленочная передача) 16,6 %
Si (тонкопленочный субмодуль) 10,4 %
Ш-V арсенид таллиевые
GaAs (кристаллический 25,1 %
GaAs (тонкопленочный) 24,5 %
GaAs (поликристаллический) 18,2 %
пР (кристаллический) 21,9 %
Тонкие пленки халькогенидов
CIGS (фотоэлемент) 19,9 %
CIGS (субмодуль) 16,6 %
CdTe (фотоэлемент) 16,5
Аморфный/Нанокристаллический
кремний
Si (аморфный) 9,5 %
Si (нанокристаллический) 10,1 %
Фотохимические
На базе органических красителей 10,4 %
На базе органических красителей
(субмодуль) 7,9 %
Органические
Органический полимер 5,15%
Многослойные
GalnP/GaAs/Ge 32,0 %
GalnP/GaAs 30,3 %
GaAs/CIS (тонкопленочный) 25,8 %
a-Si/mc-Si (тонкий субмодуль) 11,7 %
По данным, полученным в ходе испы-
таний, проведенных учеными Швейцарии
(при проектировании Solar Impuls) и Ка-
нады (Solar Ship), в условиях полетов в
верхних слоях атмосферы на высоких
скоростях наиболее целесообразно ис-
пользовать кремниевые полупроводни-
ковые солнечные батареи, которые пред-
ставляют собой массив силовых фотоди-
одов, имеющих большую площадь. Для
использования в авиации лучше всего
подходят панели на основе монокристал-
лического кремния ( реальный КПД до
18%). Разработкой и производством дан-
ного типа панелей занимается научно-
производственное предприятие «Квант»,
что говорит о возможности реализации
проекта на территории нашей страны.
Основной массив солнечных фотодиодов
устанавливается на крылья летательного
аппарата, при необходимости добавляют-
ся на верхней части фюзеляжа. В каче-
стве вспомогательной системы необхо-
дима установка двигателя, черпающего
энергию от солнечных панелей. В ходе
написания статьи установлено, что на
данный тип ЛА эффективнее всего уста-
навливать коллекторный электродвига-
тель, с деталями из легких композитных
материалов высокой прочности.
Системы, работающие от солнечных
батарей, могут продолжать работу и в
тёмное время суток, для этого в кон-
струкцию батареи устанавливают накап-
ливающие аккумуляторы. При разработке
летательного аппарата именно разработка
аккумулятора, имеющего сравнительно
небольшой вес и высокую ёмкость, явля-
ется основной сложностью. В статье при-
ведены все расчеты и вычисления, де-
монстрирующие, что для данной цели
единственным возможным на практике
вариантом является установка лёгких ли-
тий-ионных аккумуляторов.
По расчетам, корпус подобного са-
молёта в идеале представляет собой
Т-образный каркас, с основным пропел-
лером в носовой части и дополнительной
планкой для размещения солнечных па-
нелей в хвосте конструкции, весом не бо-
лее 2 тонн. Размах крыльев до 80м, уста-
навливается в ходе построения экспери-
ментальной модели. Основной каркас
изготавливается из сверхлегкого компо-
зитного материала на основе углерода,
химический состав которого (в %) по-
дробно описан в статье. Для достижения
необходимой жесткости каркаса крыльев
на них устанавливаются дополнительные
ребра, выполненные из углеродного во-
локна.
Более подробно с внутренним
устройством аппарата (с указанием марок
и наименований деталей) можно ознако-
миться в приложениях к основному тек-
сту работы.
Как результат написания статьи
получены все необходимые данные и
расчеты для создания экспериментальной
271
модели пилотируемого ЛА с питанием от
солнечной энергии. Результат оправдал
поставленную цель, доказывая, что во-
площение данного проекта на территории
нашей возможно согласно описанному
алгоритму. Продолжая исследование, в
соавторстве с профессиональными инже-
нерами, планируется создание тех. про-
цесса на выпуск пробного изделия.
THEORETICAL MODELING OF THE PILOTED AIRCRAFT FLYING ON SOLAR
ENERGY WITHOUT LIQUID FUEL
LN. Vasimova
1 Moscow State Aviation-Technological University «MATI-RGTU of K.E. Tsiolkovsky»,
JSC «NPP «Kvant», Moscow
Theoretical models with settlement data of the aircraft of the Russian production equipped with the engine on
the basis of solar elements of production "NPP "Kvant" are given. Examples of foreign analogs of aircraft on solar
energy with the built-in accumulator without use of liquid fuel are the basis for calculations. Article describes real
methods of design and results of mathematical modeling of a prototype of "the solar plane” with the proof of possi-
bility of creation at the existing Russian enterprises. Relevance of article consists in calculation confirmation of pos-
sibility of uninterrupted flight of the piloted device not less than 20 hours without any environmental pollution on a
source of renewable energy.
Keywords: Solar batteries, silicon in aircraft, small aircraft, solar power, the solar plane
Информация об авторах:
Васимова Ирина Николаевна, студентка МАТИ-РГТУ им. К.Э. Циолковского, ин-
женер-конструктор «НПП «Квант», 129626, г. Москва, ул. 3-я Мытищинская, д. 16,
т. 8-916-106-46-99, irisha masia@mail.ru
Vasimova Irina Nikolaevna, student of MATI-RGTU of K.E. Tsiolkovsky, engineer
"NPP “Kvant”, 129626, Moscow, 3rd Mytishchinskaya St., 16, t. 8-916-106-46-99,
irisha masia@mail.ru
272
УДК 621.9.047
ПРИМЕНЕНИЕ И ВОЗМОЖНОСТИ ЖИДКОСТЕЙ С ПЕРЕМЕННЫМИ
ХАРАКТЕРИСТИКАМИ В ЭЛЕКТРИЧЕСКИХ МЕТОДАХ ОБРАБОТКИ
©2015 Н.В. Боброва, С.В. Сухоруков.
«Воронежский механический завод» - филиал федерального государственного унитарного
предприятия «Государственный космический научно-производственный центр имени
М.В. Хруничева», г. Москва
В статье описаны свойства жидкостей с переменными характеристиками и возможность их практиче-
ского применения. Благодаря использованию жидкостей с переменными характеристиками в электрических
методах обработки снимаются ограничения по площади обработки заготовок, оптимизируется время рабо-
чего цикла, выравниваются условия анодного растворения, что в свою очередь ведет к расширению техно-
логических возможностей, повышению производительности и точности обработки деталей.
Ключевые слова: электрические методы обработки, рабочая среда, магнитные жидкости, наноча-
стицы
Жидкие намагничивающиеся среды
- ультрадисперсные коллоиды ферро- и
ферримагнетиков, синтезированные в се-
редине 60-х годов и получившие назва-
ние “магнитные жидкости” до настояще-
го времени остаются объектом, привле-
кающим широкий интерес исследовате-
лей явлений, связанных с взаимодействи-
ем электромагнитного поля со средой.
Это объясняется возможностью приме-
нения магнитных жидкостей в машино-
строении, приборостроении и медицине.
Магнитные жидкости используют:
- в качестве рабочего тела в датчи-
ках угла наклона и акселерометрах;
- в магнитных сепараторах для раз-
деления и сепарации материалов с раз-
личной плотностью;
- в качестве магнитоуправляемых
смазок в узлах трения;
- в акустических динамиках радио-
технических и электронных устройств, в
громкоговорителях, в CD и DVD приво-
дах;
- в магнитожидкостных амортиза-
торах и демпферах;
- для очистки водных поверхностей
от нефтепродуктов при аварийных разли-
вах и катастрофах.
Возможность практического при-
менения магнитных жидкостей определя-
ется: во-первых, их стабильностью и со-
вокупностью необходимых технических
характеристик; во-вторых, их способно-
стью выполнять свои функции в кон-
кретных электромеханических и других
устройствах в течение длительного вре-
мени под воздействием высоких и низких
температур, агрессивных сред, магнит-
ных и гравитационных полей.
Свойства магнитных жидкостей.
По [1] магнитные жидкости явля-
ются двухфазными коллоидными систе-
мами твердых частиц ферромагнетиков в
жидкой основе. Для улучшения стойко-
сти этих сред в них добавляют поверх-
ностно-активные вещества.
На частицу в жидкости действуют
гравитационные силы, вызывающие ее
выпадение в осадок. Чем мельче частицы,
тем дольше магнитная жидкость не агре-
гатируется и сохраняет свои реологиче-
ские качества.
Для того, чтобы среда не теряла ра-
ботоспособность, нужно обеспечить ста-
бильное положение частиц за счет тепло-
вого движения [1], т.е. должен выполнят-
ся критерий устойчивости, учитывающий
действие внешних магнитных сил.
/10тН <kT, (1)
где /z0 - магнитная проницаемость
вакуума; т - магнитный момент части-
цы; Н - напряженность магнитного поля;
к - постоянная Больцмана; Т - темпера-
тура среды (кТ - энергия теплового дви-
жения частиц).
273
При введении поверхностно-
активных сред создается отталкивание
сформировавшихся оболочек и раскли-
нивание жидкости между частицами. Из
(1) следует, что с ростом диаметра частиц
энергия их взаимодействия (левая часть
формулы) возрастает, а с увеличением
толщины слоя поверхностно-активного
покрытия - снижается (рис. 1). При этом
уменьшается проводимость частиц и они
приобретают свойства диэлектриков, что
ухудшает их использование при комби-
нированной и, особенно, при электрохи-
мической обработке.
Анализ рисунка 1 показывает, что
диаметр частиц желательно иметь от 6 до
20 нм, хотя в [1] указывается на возмож-
ность ограниченного по времени исполь-
зования жидкостей с частицами до 100 и
более нм. Объемная концентрация частиц
в жидкости без магнитного поля реко-
мендуется до 20%, а в магнитном поле с
напряженностью 20 - 75 кА/м концен-
трация достигает 65 - 70%, после чего
жидкость может потерять текучесть.
Сила (fm), возникающая в магнит-
ном поле и перемещающая частицу, со-
ставляет
fт = fj.Q mMi , (2)
где АН - градиент напряженности
магнитного поля при высоте (L) слоя
магнитной жидкости.
Диаметр
чостиц, нм
' ' ' '/Z7Z7
Рис. 1. Изменение энергии теплового движения (кТ) относительно энергии взаимодействия частиц (U).
Толщина слоя поверхностно-
активного вещества в % к диаметру ча-
стиц: 1 - 10; 2 - 20; 3 - 40; 4 - 80; напря-
женность поля Н = 480 кА/м.
Проводимость магнитной жидкости
(/) без поверхностно активных веществ:
Х = Х\+Хг, (3)
где /] - проводимость основы (в нашем
случае чаще всего воды); %2 - проводи-
мость частиц (или их агрегатов).
Проводимость частиц
к г
где Xi сР ~ средняя проводимость основы;
Кг - коэффициент, учитывающий геомет-
рию частиц и пространства между ними.
По [1] при концентрации исходной жид-
кости более 10%
Kr=(\-CvyK(', (5)
где Су - объемная доля частиц; Кф -
коэффициент, учитывающий форму ча-
стиц. Для сферических частиц /Q>=1,5.
Если магнитное поле создается
электромагнитами, то ток, подаваемый на
них, составляет от 0,1 до 3 А при напря-
жении 8 - 12 В.
Применение магнитных жидкостей.
274
Замена обычной рабочей среды
магнитной жидкостью позволяет расши-
рить границы применимости комбиниро-
ванной обработки, исследовать зависи-
мость проводимости от процентного со-
держания частиц (например, магнетита) в
рабочей среде, появляется возможность
создания границ проводимости локаль-
ным магнитным полем.
К примеру, при электрохимическом
маркировании использование магнито-
реолгической жидкости позволяет рас-
ширить технологические возможности
маркирования на поверхностях сложной
формы и наносить меняющуюся инфор-
мацию одним электродом-инструментом
[2].
Так же магнитореологическую
жидкость применяют в качестве жидкой
токопроводящей рабочей среды при
электрохимической обработке. Длитель-
ностью импульса тока регулируют вяз-
кость рабочей среды, длительность пауз
между импульсами регулируют по вре-
мени восстановления максимального то-
ка в импульсе. Это позволяет увеличить
производительность, повысить точность
обработки и расширить технологические
возможности электрохимических процес-
сов [3]. Применение магнитной жидкости
способствует упрощению и удешевлению
оборудования, повышению его ресурса,
надежности и безопасности. Так как для
осуществления процесса электрохимиче-
ской обработки в пульсирующей магни-
тореологической среде не требуется
сложный, дорогой источник импульсного
тока, сложная система регулирования
межэлектродного зазора, упрощается си-
стема защиты от коротких замыканий.
Снимаются ограничения по площа-
ди обработки заготовок, оптимизируется
время рабочего цикла, выравниваются
условия анодного растворения (за счет
постепенного изменения свойств рабочей
среды), что в свою очередь ведет к рас-
ширению технологических возможностей
электрохимического процесса, повыше-
нию производительности и точности об-
работки деталей. Погрешность формы и
размеров снижается до 1,8 раз; общее
время удаления припуска уменьшается
до 2 раз по сравнению с обработкой по
схеме с непрерывным потоком и невоз-
можно по схеме с импульсно-
циклической обработкой в импульсном
токе [3]. Наблюдение потока на выходе
из зазора показывало равномерности
циклов выхода жидкости по всей ширине
образца.
Существует заявка на патент "Спо-
соб безабразивной доводки сопрягаемых
поверхностей" это изобретение относится
к области машиностроения и может быть
использовано при изготовлении запор-
ных устройств для управления подачи
жидких и газовых сред. Оно направлено
на снижение шероховатости и повыше-
ние точности сопрягаемых поверхностей
при их безабразивной доводке. В начале
доводки между сопрягаемыми поверхно-
стями устанавливают минимальный зазор
по границе начала его пробоя в слабо-
проводящем электролите низковольтным
током, далее увеличивают объемное со-
держание металлического нанонаполни-
теля одновременно повышая межэлек-
тродный зазор до конечной величины с
поддержанием границы его пробоя до
стабилизации величины тока, проходя-
щего через электроды, затем включают
вибрацию сопрягаемых поверхностей в
направлении друг к другу, плавно увели-
чивают относительно конечного зазора
амплитуду вибраций до стабильного по-
лучения пауз тока, продолжают процесс
до получения на одной из сопрягаемых
поверхностей минимальной стабильной
шероховатости, после чего меняют по-
лярность электродов и не изменяя режи-
ма формируют шероховатость на другой
сопрягаемой поверхности.
На рис. 2 показана зависимость из-
менения тока, протекающего в среде сла-
бого электролита в виде промышленной
воды при напряжении между металличе-
скими сопрягаемыми поверхностями,
служащими электродами, 6 В от объем-
ного содержания металлического нано-
наполнителя с размером частиц 8 нм.
275
Рис. 2. Зависимость силы тока от процентного содержания нанонаполнителя.
Рис. 3. Зависимость шероховатости поверхности от времени обработки.
На рис. 3 приведено изменение
шероховатости поверхности от начала
доводки до стабильной достижимой ве-
личины от времени протекания процесса
доводки на режимах, приведенных на
рис. 2.
Наличие в межэлектродном зазоре
металлических наночастиц снижает элек-
трическое сопротивлений электролита, за
счет чего возрастает ток и его плотность,
а наличие вибраций выравнивает условия
протекания процесса доводки, позволяя
при незначительных припусках устра-
нить принудительную прокачку электро-
лита, достигая за счет этого экономии
энергопотребления и упрощения кон-
струкции оборудования. За счет насосно-
го действия вибрации сопрягаемых по-
верхностей наночастицы ускоряют пере-
мещение продуктов обработки от зоны
удаления микронеровностей шероховато-
сти и интенсифицирует процесс доводки.
Перемещение наночастиц в магнитном
поле проходящего тока депассивирует
обрабатываемую поверхность и позволя-
ет снизить высоту микронеровностей от-
носительно электрохимической обработ-
ки в электролитах на базе нейтральных
солей.
276
Библиографический список:
1. Магнитные жидкости в маши-
ностроении / Под ред. Д.В. Орлова, В.В.
Подгоркова. М: Машиностроение, 1993 -
272 с.
2. Пат. 2229966 Российская феде-
рация, МПК7 В 23 Н 9/06. Электрод-
инструмент для электрохимического
маркирования и способ его изготовления
[Текст] / Смоленцев В.П., Смоленцев
Г.П., Левин А.В., Абу Р.Х.; заявитель и
патентообладатель Воронежский госу-
дарственный технический университет. -
№2002120017/022002120017/02; заявл.
22.07.2002; опубл. 10.06.2004, Бюл. №6, -
2с.
3. Пат. 2216437 Российская феде-
рация, МПК7 В 23 Н 3/08. Способ элек-
трохимической обработки [Текст] / Смо-
ленцев В. П., Газизуллин К. М.; заявитель
и патентообладатель Воронежский госу-
дарственный технический университет. -
№ 2001135947/02; заявл. 27.12.2001;
опубл. 20.11.2003, Бюл. №32, - 2 с.
4. Смоленцев В.П. Проектирова-
ние технологических процессов комби-
нированной обработки в реологических
жидкостях / В.П. Смоленцев, А.А. Коз-
лов, Н.В. Пишкова // Вестник ВГТУ Т.9
№2 2013г. С.67-71.
References:
1. Magnetic fluid in engineering I
Ed. D.V. Orlova, V.V. Podgorkova. M: Me-
chanical Engineering, 1993 - 272 p.
2. RU Pat. 2229966 Russian
federation MPK7 V 23 N 9/06. Electrode
tool for the electrochemical marking and
method of its manufacturing [Text] /
Smolentsev V.P. Smolentsev G.P., Levin
A.V., Abu R.H. .; applicant and patentee
Voronezh State Technical University. -
№2002120017 / 022 002 120 017/02; appl.
22.07.2002; publ. 10.06.2004, Bull. №6, -
2c.
3. RU Pat. 2216437 Russian
federation MPK7 V 23 N 3/08. A method of
electrochemical treatment [Text] /
Smolentsev V.P. Gazizullin К. M .;
applicant and patentee Voronezh State
Technical University. - № 2001135947/02;
appl. 27.12.2001; publ. 20.11.2003, Bull.
№32, - 2.
4. Smolentsev V.P. Designing of
technological processes combined
processing in the rheological fluids I V.P.
Smolentsev, A.A. Kozlov, N.V. Pishkova //
Herald VSTU v.9 №2 2013. p.67-71.
APPLICATION AND POSSIBILITIES OF LIQUIDS WITH VARYING
CHARACTERISTICS IN ELECTRICAL PROCESSING METHODS
© 2015 N.V. Bobrova, S.V. Sukhorukov
"Voronezh Mechanical Plant" - a branch of the Federal State Unitary Enterprise "State
Research and Production Space Center of MV Khrunichev ", Moscow
The article describes the properties of liquids with variable characteristics and possibility of their practi-
cal application. Through the use liquids with variable characteristics in electrical processing methods eliminates the
restrictions by area machining, optimizes the working cycle, are aligned conditions of anodic dissolution, which in
turn leads to an expansion of technological opportunities, increased productivity and accuracy of processing parts.
Key words: electrical processing methods, the working environment, the magnetic fluid nanoparticle.
Информация об авторах:
Боброва Наталья Владимировна, инженер по автоматизированным системам
управления производством, отдел информационных технологий, аспирантка кафедры
«Технология машиностроения» Воронежского государственного технического универси-
тета; 394029, Россия, г. Воронеж, ул. Ленинградская, д. 55, кв. 19; тел. 8-951-565-22-69;
Pi.nv@mail.ru.
Область научных интересов: жидкости с переменными характеристиками в электри-
ческих видах обработки
277
Сухоруков Владимир Николаевич, начальник отдела информационных техноло-
гий «Воронежского механического завода» - филиала федерального государственного
унитарного предприятия «Государственный космический научно-производственный
центр имени М.В. Хруничева», 394056, Россия, г. Воронеж, ул. Ворошилова, д. 22.
Область научных интересов: информационные технологии, технологии производ-
ства.
Natalia Bobrova, engineer automated systems of production management, Department of
Information Technology, graduate student of chair "Mechanical Engineering", Voronezh State
Technical University; 394029, Russia, Voronezh, Leningrad, 55-19; tel. 8-9515-65-22-69;
Pi.nv@mail.ru.
Area of scientific interests: fluid with variable characteristics in electric types of treatment
Sukhorukov Vladimir, Head of Information Technology "Voronezh Mechanical Plant" -
a branch of the Federal State Unitary Enterprise "State Research and Production Space Center of
MV Khrunichev, "394056, Russia, Voronezh, Voroshilova str, 22
Area of scientific interests: information technology, manufacturing technology.
278
УДК 621.316
ПРАКТИЧЕСКОЕ ПРИМЕНЕНИЕ МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ В
СОСТАВЕ ЭНЕРГОПРЕОБРАЗУЮЩЕЙ АППАРАТУРЫ СИСТЕМЫ
ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА
©2015 К.Г. Гордеев, К.В. Тараканов, В.В. Лейман, В.О. Нагорный
Акционерное общество «Научно-производственный центр «Полюс», г. Томск
Рассмотрено применение цифровых, в том числе микропроцессорных, устройств в системе управле-
ния комплексов автоматики и стабилизации космических аппаратов.
Ключевые слова: космический аппарат, система электроснабжения, комплекс автоматики и ста-
билизации, микропроцессорное управление
В настоящее время при проектиро-
вании систем электроснабжения (СЭС) к
ним предъявляются требования по по-
вышению выходного напряжения в мощ-
ных (до 15 кВт) системах, размещению
элементов СЭС вне герметичного отсека
космического аппарата (КА), увеличению
срока активного существования систем
КА до 10 - 15 лет, управлению по маги-
стральному каналу обмена, возможности
проверки резерва при минимальных га-
баритах и массе.
Удовлетворение современных тре-
бований к СЭС КА по ресурсу и надеж-
ности невозможно без организации
сложных алгоритмов контроля и управ-
ления режимами работы используемых
источников энергии. Кроме того, разра-
ботчик сталкивается с необходимостью
решения разнообразных задач, связанных
с управлением силовыми преобразовате-
лями по определенному алгоритму. Учи-
тывая, что в схемах управления силовы-
ми преобразующими устройствами, как
правило, используются элементы анало-
говой техники, реализация сложного за-
кона управления требует значительных
аппаратных затрат. Обеспечить функци-
онирование СЭС по заданным алгорит-
мам целесообразно на элементах цифро-
вой техники со встроенными программа-
ми [1]. В последнее время разработчику
электронной аппаратуры стали доступны
самые разнообразные микроконтроллеры
и программируемые интегральные мик-
росхемы, обладающие стойкостью к кос-
мическим излучениям и воздействию тя-
желых заряженных частиц.
Распределенная микропроцессорная
структура управления энергопреобразу-
ющей аппаратурой СЭС КА позволит с
меньшими аппаратными затратами обес-
печивать требуемый алгоритм управле-
ния источниками энергии и контролиро-
вать заданные параметры.
Для исследования применения в
энергопреобразующей аппаратуре мик-
ропроцессорных устройств разработано
устройство управления токораспределе-
нием при заряде и разряде аккумулятор-
ных батарей КА. Устройство токораспре-
деления собирает информацию о теку-
щих значениях токов всех аккумулятор-
ных батарей, определяет режим работы
СЭС (заряд/разряд). Находит среднее
значение токов аккумуляторных батарей
и выдает управляющее воздействие на
соответствующую группу преобразовате-
лей напряжения, для выравнивания токов
аккумуляторных батарей. В качестве
микроконтроллера в составе устройства
токораспределения используется микро-
схема 1887ВЕ1У, выпускаемая ФГУП
НИИЭТ, г. Воронеж.
Полученные результаты демон-
стрируют возможность применения мик-
ропроцессорных устройств в составе
СЭС КА.
Следующим шагом развития СЭС
КА является внедрение цифровых
устройств непосредственно в систему
управления преобразователями напряже-
279
ния и создание распределенной микро-
процессорной системы управления.
Библиографический список:
1. Ибрагимов Ф. Ф. Микропроцес-
сорные средства управления и контроля в
энергопреобразующей аппаратуре СЭС
КА // Электронные и электромеханиче-
ские системы и устройства: сб. науч, тру-
дов «НПЦ «Полюс». Томск, 1997. С.
251 -257.
References:
1. Ibragimov F. F. Microprocessor
controls and monitoring in energy conver-
sion equipment of PS SC // Electronic and
electromechanical systems and devices: st.
scientific, works: «SIC «Polyus». Tomsk,
1997. pp 251-257.
PRACTICAL APPLICATION OF MICROPROCESSOR TECHNOLOGY AS PART OF
ENERGY CONVERSION EQUIPMENT OF POWER SUPPLY OF THE SPACECRAFT
K.G. Gordeev, K.V. Tarakanov, V.V. Leyman, V.O. Nagorniy
Joint-Stock Company «Scientific and industrial center «Polyus», Tomsk
The application of digital devices in the control system of the automation and stabilize complex of the
spacecraft was examined.
Keywords: spacecraft, power supply system, automation and stabilize complex, microprocessor control
Информация об авторах:
Гордеев Константин Георгиевич, к.т.н. заместитель главного конструктора АО
«НПЦ «Полюс», +7 9138888538.
Тараканов Константин Викторович, начальник отдела АО «НПЦ «Полюс»,
+7 9039518994, kvik70@mail.ru.
Лейман Владимир Вольдемарович, начальник лаборатории АО «НПЦ «Полюс»,
+7 9528016128.
Нагорный Василий Олегович, инженер-конструктор 1 категории АО «НПЦ
«Полюс», аспирант кафедры ЭПЭО НИ ТПУ +7 9061984190, gryzun@rbcmail.ru.
Gordeev Konstantin Georgievich, c.t.s. deputy chief designer JSC «SIC «Polyus»,
+7 9138888538.
Tarakanov Konstantin Victorovich, head of department JSC «SIC «Polyus»,
+7 9039518994, kvik70@mail.ru.
Leyman Vladimir Voldemarovich, head of laboratory JSC «SIC «Polyus»,
+7 9528016128.
Nagorniy Vasiliy Olegovich, design engineer 1st category JSC «SIC «Polyus», postgradu-
ate student of EDE TPU +7 9061984190, gryzun@rbcmail.ru.
280
УДК 541.136:519.876.5
ВЫРАВНИВАНИЕ НАПРЯЖЕНИЙ АККУМУЛЯТОРОВ ЛИТИЙ-ИОННОЙ
БАТАРЕИ МЕТОДОМ ИНДИВИДУАЛЬНОГО ДОЗАРЯДА
М.М. Хандорин1, В.Г. Букреев2
1 Акционерное общество «Научно-производственный центр «Полюс», г. Томск
2 Национальный исследовательский Томский политехнический университет
Рассмотрен вариант выравнивания напряжений аккумуляторов литий-ионной батареи при помощи
устройств индивидуального дозаряда. Представлены результаты экспериментальной проверки разработан-
ного устройства, даны рекомендации по его практическому использованию.
Ключевые слова: литий-ионная аккумуляторная батарея, выравнивание напряжений аккумуляторов,
обратноходовой преобразователь
Выравнивание напряжений аккуму-
ляторов в батарее является важной зада-
чей при эксплуатации литий-ионных ак-
кумуляторных батарей, так как аккуму-
ляторы такого типа нельзя разряжать
ниже определенного напряжения (обыч-
но 2,5-2,7 В). При заряде/разряде проис-
ходит их разбаланс, который приводит к
снижению емкости батареи. Существует
несколько способов выравнивания
напряжений аккумуляторов, например
балансировка переключающим конденса-
тором, балансировка на основе индук-
тивных и трансформаторных схем [1].
Если батарея состоит из ячеек с су-
щественно различным внутренним со-
противлением, то подобное выравнива-
ние практически невозможно при под-
ключении нагрузки. Кроме того, равен-
ство напряжений на аккумуляторах не
гарантирует равенства емкостей, что в
конечном итоге необходимо при эксплуа-
тации литий-ионных аккумуляторных
батарей. Данную проблему можно ре-
шить, если напряжения, до которых бу-
дет происходить заряд, определять по ма-
тематической модели, учитывающей из-
менение внутреннего сопротивления яче-
ек, такой как модель Тевенина [2]. При
этом указанные напряжения будут раз-
личными. Для этого можно использовать
устройства индивидуального дозаряда.
Экспериментальные исследования по
проверке дозаряда аккумуляторов прово-
дились по схеме, представленной на
рис. 1.
Рис. 1. Схема дозаряда литий-ионной аккумуляторной батареи
Устройства дозаряда (УДА) состоят
из двух включенных параллельно пони-
жающих обратноходовых преобразовате-
лей, обеспечивают суммарный ток доза-
ряда до 1,2 А. При отказе одного из пре-
образователей ток снижается до 0,6 А
281
Устройство контроля аккумуляторной
батареи (УКАБ) служит для измерения ее
напряжения и температуры. Устройство
управления (УУ) осуществляет выдачу
команд управления УДА.
Проверка схемы дозаряда в режиме
выравнивания напряжений осуществля-
лась на предварительно разбалансиро-
ванных трех аккумуляторах АК1...АКЗ
типа ЛИГП-10 с номинальной емкостью
10 А-ч, изготовленных ОАО «АК «Ри-
гель». Измеряемые дискретные значения
напряжения в зависимости от времени
при включенном режиме баланси-
ровки (рис. 2) показывают, что погреш-
ность выравнивания напряжений на ак-
кумуляторах задается на уровне не более
10 мВ.
Рис. 2. Зависимости напряжения на аккумуляторах от времени дозаряда
У У обеспечивает отключение УДА
при достижении верхнего порогового
значения напряжения, равного 3,90 В, и
включение - при нижнем значении
напряжения на уровне 3,89 В.
Результаты проведенного экспери-
мента показывают, что напряжения ак-
кумуляторов в батарее могут быть вы-
ровнены индивидуальными дозарядом
отдельных ячеек батареи. Разработанное
устройство позволяет достичь точности
дозаряда 10 мВ от значения напряжения,
заданного индивидуально для каждого
аккумулятора.
Библиографический список:
1. Daowd М., Van Den Bossche Р.,
Van Mierlo J. A Review of Passive and Ac-
tive Battery Balancing based on
MATLAB/Simulink // Vehicle Power and
Propulsion Conference (VPPC). Coimbra.
2011. P. 1-7.
2. Хандорин M.M., Букреев В.Г.
Оценка остаточной емкости литий-
ионного аккумулятора в режиме реально-
го времени // Электрохимическая энерге-
тика. 2014. Т. 14, № 2. С. 65 - 69.
References:
1. Daowd М., Van Den Bossche P.,
Van Mierlo J. A Review of Passive and Ac-
tive Battery Balancing based on
MATLAB/Simulink // Vehicle Power and
Propulsion Conference (VPPC). Coimbra.
201 l.P. 1-7.
2. Khandorin M.M., Bukreev V.G.
Ocenka ostatochnoj emkosti litij-ionnogo
akkumuljatora v rezhime real'nogo vremeni
// Jelektrohimicheskaja jenergetika. - 2014.
T. 14, № 2, S. 65 - 69.
282
LITHIUM-ION BATTERY CELL EQUALIZATION METHOD WITH INDIVIDUAL
CELL CHARGE
M.M. Khandorin1, V.G. Bukreev2
’joint Stock Company «Research and Production Center «Polus», Tomsk
2National Research Tomsk Polytechnic University, Tomsk
The method of lithium-ion battery cell equalization using the individual charge devises is shown. The re-
sults of experimental test is presented.
Keywords: lithium-ion battery, cell voltage equalization, state of charge
Информация об авторах:
Хандорин Михаил Михайлович, инженер-конструктор, акционерное общество
«Научно-производственный центр «Полюс», аспирант 2 года обучения кафедры Электро-
привода и электрооборудования Энергетического института Национального исследова-
тельского Томского политехнического университета, т. 8 (382-2) 55-46-94, e-mail:
polus@online.tomsk.net
Букреев Виктор Григорьевич, Национальный исследовательский Томский поли-
технический университет, кафедра «ЭПЭО», профессор, ведущий научный сотрудник,
Акционерное общество «Научно-производственный центр «Полюс», т. +79138542196,
e-mail: bukreev@tpu.ru
Khandorin Mikhail, JSC “SIC “Polus”, engineer-constructor, phone: 8 (382-2) 55-46-94,
e-mail: polus@online.tomsk.net
Bukreev Viktor, National Research Tomsk Polytechnic University, professor, phone:
+79138542196, e-mail: bukreev@tpu.ru.
283
УДК 621.314.1:001.891.573
СХЕМОТЕХНИКА ЗАРЯДНЫХ УСТРОЙСТВ ЭНЕРГОПРЕОБРАЗУЮЩЕЙ
АППАРАТУРЫ РАЗРАБОТКИ АО "НПЦ "ПОЛЮС”
©2015 В. И. Апасов1
'Акционерное общество "Научно-производственный центр "Полюс", г. Томск
Рассмотрена схемотехника модулей зарядных устройств для комплексов автоматики и стабилизации
системы электропитания космических аппаратов, разработанных АО "НПЦ "Полюс" на основе непосред-
ственных преобразователей напряжения. Приведены структурные схемы модулей, показана эффективность
работы устройств, а также надежность их функционирования.
Ключевые слова: система электропитания, зарядное устройство, комбинированный преобразователь,
коэффициент полезного действия
Система электропитания (СЭП) ав-
томатического космического аппарата
(КА) в задаче проектирования рассматри-
вается как обеспечивающая, призванная
генерировать электроэнергию и снабжать
ею бортовую аппаратуру КА в процессе
его функционирования без каких-либо
ограничений в заданных пределах изме-
нения эксплуатационных факторов.
В отечественных и иностранных
разработках используется широкий набор
структурных СЭП, различающихся со-
ставом энергопреобразующей аппарату-
ры, способами регулирования напряже-
ния на источниках и нагрузке, методами
контроля и управления зарядом и разря-
дом аккумуляторной батареи и т. д. [1].
В научно-производственном центре
«Полюс» при проектировании и изготов-
лении СЭП КА используется параллель-
но-последовательная структура как обес-
печивающая наилучшие показатели при
использовании.
Модуль зарядного устройства явля-
ется одним из основных компонентов
комплекса автоматики и стабилизации
СЭП КА. Именно поэтому задача проек-
тирования и изготовления высоконадеж-
ного и в то же время компактного
устройства такого рода, где должны быть
применены современные достижения
науки и техники, весьма актуальна.
Схема модуля зарядного устройства
полностью определяются значением но-
минального напряжения аккумуляторной
батареи. Основой для его построения в
АО «НПЦ «Полюс» выбраны непосред-
ственные преобразователи напряжения.
При общем рассмотрении данные преоб-
разователи выступают в качестве отдель-
ной замкнутой системы автоматического
регулирования.
TV1.1 VD2
Аккумуляторная
батарея
Рис. 1. Структурная схема зарядного устройства первого поколения
Преимущество структурной схемы, стабилизации СЭП КА предыдущего по-
примененной в комплексе автоматики и коления (рис. 1), - возможность получе-
284
ния выходного напряжения как выше, так
и ниже входного одной полярности. Но
такая структура имеет и существенные
недостатки: большие массогабаритные
показатели вследствие применения двух
магнитных элементов - трансформатора
и дросселя, значительные коммутацион-
ные потери, обусловленные наличием
трех транзисторов и трех диодов. Все это
уменьшает КПД устройства, который со-
ставляет от 86 до 91 %.
По причине недостатков данной
схемы на предприятии был осуществлен
переход к следующему поколению за-
рядных устройств (рис. 2), представляю-
щих собой комбинированный понижаю-
ще-повышающий преобразователь. Пре-
имуществами данной схемы являются
улучшенные массогабаритные показате-
ли (за счет уменьшения количества маг-
нитных элементов), а также более низкие
потери на переключение коммутацион-
ных элементов [2].
Система управления для данного
устройства представляет собой двухкон-
турную структуру, имеющую отдельные
контуры управления для ключей пони-
жающего и повышающего преобразова-
теля. КПД составляет от 92 до 95 %.
Система
управления
Рис. 2. Структурная схема зарядного устройства второго поколения
Для дальнейшей модернизации мо-
дуля зарядного устройства вместо диодов
возможно применение ключевых компо-
нентов. Система, построенная по такому
принципу, позволит управлять устрой-
ством с большей гибкостью и в некото-
рых случаях повысить его КПД.
Библиографический список:
1. Системы электропитания косми-
ческих аппаратов / Б. П. Соустии [и др.].
Новосибирск: ВО "Наука". Сибирская из-
дательская фирма, 1994. 318 с.
2. Мелешин В. И. Транзисторная
преобразовательная техника. М.: Техно-
сфера, 2006. 632 с.
References:
1. Souctin В.Р. [etc.] Systemy elektro-
pitaniya kosmicheskih apparatov [Systems
of power supplies of space vehicles]. Novo-
sibirsk, The Siberian book-publishing firm
publ., 1994.318 р.
2. Meleshin V.I. Tranzistomaya
preobrazovatelnaya tehnika [The transistor
converting technics]. Moscow, the Techno-
sphere publ., 2006. 632 p.
285
CIRCUITRY A CHARGE OF THE DEVICES OF POWER REFORMATIVE EQUIP-
MENT OF WORKINGS OUT OF STOCK COMPANY "SCIENTIFIC&INDUSTRIAL
CENTRE"POLYUS”
V. I. Apasov1
’Stock Company "Scientific&Industrial Centre "Polyus", Tomsk
Questions of construction of modules for a charge for a complex of automatics and stabilisation of system of
power supplies of a space vehicle on the basis of direct converters of pressure are considered. Block diagrammes of
modules, an overall performance of devices, and also their reliability of functioning are resulted.
Keywords: power supplies system, the device for a charge, the combined converter, efficiency
Информация об авторах:
Апасов Владимир Иванович, инженер-конструктор 2 категории АО «НПЦ «По-
люс», аспирант каф. ПрЭ факультета электронной техники ФГБОУ ВПО "Томский госу-
дарственный университет систем управления и радиоэлектроники", Россия, 634050,
г. Томск, пр. Кирова, 56В. E-mail: polus@online.tomsk.net.
Область научных интересов: силовая электроника, математическое моделирование.
Apasov Vladimir Ivanovich, Design Engineer of JSC «SIC «Polyus», post-graduate stu-
dent of chair of industrial electronics of "Tomsk state university of control systems and radio
electronics", Russia, 634050, Tomsk, avenue of Kirov, 56V. E-mail: polus@online.tomsk.net.
Area of research: power electronics, mathematical simulation.
286
УДК 621.774.37
ШТАМП ДЛЯ ГИБКИ ЛИСТОВОГО МАТЕРИАЛА
©2015 А.О. Кузин
АО «РКЦ «Прогресс», г. Самара
В данной работе предложена новая схема процесса двухугловой гибки в штампе с упругой планкой.
Смоделирован процесс деформации упругой планки и процесс двухугловой гибки с упругой планкой в про-
граммном комплексе DEFORM - 2D. Проведен анализ результатов полученных в программном комплексе
DEFORM - 2D.
Ключевые слова: Двухугловая гибка, упругие свойства, деформация, напряжение, форма пуансона,
упругая планка, упругое пружинение, ширина планки, моделирование
Как известно, в процессе при
двухугловой гибке возникает упругое
пружинение. Формула для приближённо-
го определения упругого пружинения (П-
образная гибка) [1]:
= 0,375 —(1)
kS Е
где Р - угол пружинения;
k = 1 - х - коэффициент, опреде-
ляющий положение нейтрального слоя в
зависимости от r/S;
= г» + гп +1,255 - плечо гибки,
мм;
ат - предел текучести, МПа;
Е - модуль упругости, МПа.
На кафедре обработки металлов
давлением Самарского Государственного
Аэрокосмического Университета ведется
работа по исследованию упругих свойств
штамповой оснастки, в частности, про-
цесса гибки листового материала[2].
В результате работы была разрабо-
тана модель штампа с упругой планкой,
которая позволяет сделать процесс
двухугловой гибки более технологически
и экономически выгодным. Данный
штамп предназначен для угла гиба 90° и
9О°-0 и не учитывает утонение штампуе-
мой заготовки в зоне гиба. Схема процес-
са представлена на рис. 1.
В начале процесса заготовка 3 фик-
сируется на матрице 5 и выталкивателе 4,
который находятся в верхнем положении.
При движении пуансона 1 вниз выталки-
ватель 4 опускается, упругая планка 2
начинает прижимать вертикальные полки
заготовки 3 к пуансону 1, создавая до-
полнительную нагрузку на заготовку 3.
При обратном ходе выталкиватель 4 вы-
водит заготовку из матрицы 5, при этом
упругая планка 2 на протяжении всего
процесса прижимает заготовку 3 к пуан-
сону 1. После окончания процесса заго-
товку 3 снимают с пуансона 1 пинцетом.
Применение данного способа поз-
волит: использовать упругие свойства
штамповой оснастки, повысить качество
детали, снизить упругое пружинение за
счет формы упругой планки и формы пу-
ансона, исключить из технологического
процесса операции калибровки.
287
Рис. 1 - Схема процесса двухугловой гибки с использованием упругой планки (слева окончание процесса,
справа начало процесса). 1 - пуансон; 2 - упругая планка; 3 - заготовка; 4 - выталкиватель; 5 - матрица; h -
высота планки; b - ширина планки; R - радиус гиба; 5 - толщина заготовки; d - длина заготовки; hj- высота
пуансона; а - ширина пуансона, d] - ширина выталкивателя.
Для определения технологических
параметров процесса был использован
инженерный метод. Также был проведен
анализ напряженно-деформированного
состояния, а именно анализ уравнения
равновесия, уравнения для зоны сжатия и
растяжения. Для определения размеров
планки использована теория чистого из-
гиба. Пользуясь формулами выбранных
теорий, была выведена формула ширины
упругой планки, которая зависит от гео-
метрических размеров заготовки, усилия
гибки и угла пружинения:
, 6-М
Ь-—э------’
h ^max
где М - изгибающий момент, h - высота
планки, б11ШХ - максимальное нормальное
напряжение.
Для подтверждения был смодели-
рован процесс деформации упругой
планки и процесс двухугловой гибки с
использованием упругой планки в про-
граммном комплексе DEFORM-2D. Был
смоделирован процесс деформации пря-
мого и обратного хода для упругой план-
ки, а также для процесса двухугловой
гибки с использованием упругой планки.
Штамповую оснастку целесообраз-
но изготавливать из инструментальных
сталей, предназначенных для штампов
холодной штамповки. Размеры пуансона
и матрицы соответствуют размерам дета-
ли. Пуансон корректируется в зависимо-
сти от геометрических параметров дета-
ли, угла пружинения, минимального ра-
диуса гибки и материала заготовки.
Таким образом при моделирование
процесса были рассчитаны напряжения и
деформации, которые показали, что
упругая планка пластически не деформи-
руется. Разработанная модель штамповой
оснастки с упругой планкой показала
перспективность технологического про-
цесса и рекомендована к внедрению в
производство.
Библиографический список:
1. Романовский В.П. Справочник
по холодной штамповке [Текст] /
В.П.Романовский. - Л.: Машинострое-
ние. Ленингр. Отд-ние, 1979. - 6 изд. -
520 с.
2. Попов И.П., Нестеренко Е.С.,
Кузин А.О. Исследование упругих
свойств штамповой оснастки при опера-
ции двухугловой гибки в штампе с упру-
гой планкой. - М.: Машиностроение,
2012.-С.121-124.
3. Сторожев М.В. Теория обработ-
ки металлов давлением: учебник для ву-
288
зов/ М.В. Сторожев, Е.А. Попов. - 4-е
изд., переработ. и доп. - М.: Машино-
строение, 1977. - 423 с.
4. Писаренко Г.С. Справочник по
сопротивлению материалов [Текст] / Г.С.
Писаренко, А.П. Яковлев, В.В. Матвеев;
Отв. ред. Писаренко Г.С. - Киев: Наукова
думка 1988. - 2-е изд. - 736 с.
References:
1. Romanovsky V.P. Directory on
cold punching [Text] / V.P.Romanovsky. -
L: mechanical engineering; 1979.- 520.
2. Popov I.P., Nesterenko E.S., Kuzin
A.O. Decrease elastic stringiness at two-
angle bending in a die with elastic plate. Izv.
Procuring manufacture, 2013, no. 6, p. 121-
124. (In Russ).
3. Storozhev M.V., E.A. Popov EA
Theory of metal forming. - Moscow: Mash-
inostroenie, 1977.-423.
4. Pisarenko G. S. A directory on re-
sistance of materials [Text] / G.S.Pisarenko,
A.P.Jakovlev, V.V.Matveev. - Kiev, 1988. -
736.
STAMP FOR ARE BENDING A SHEET MATERIAL
A.O. Kuzin
JSC «SRC «Progress», Samara
In the current work the scheme of two-angle bending in a die with elastic plate is proposed, simulation at
two-angle bending in a die with elastic plate in software DEFORM-2D, results of elastic stringiness angle simula-
tion in software DEFORM-2D are analyzed.
Two-angle bending; elastic properties; punch shape; an elastic plate; elastic stringiness; width of plate, sim-
ulation
Информация об авторах:
Кузин Александр Олегович, инженер-конструктор 2 кат. АО «РКЦ «Прогресс»,
аспирант кафедры обработки металлов давлением, СГАУ, 443 122, Россия, г. Самара,
Московское ш. 34, т. 8-927-704-88-99, mrfry@mail.ru. Область научных интересов: холод-
ная листовая штамповка, гибка листового материала, моделирование процессов, разработ-
ка штамповых оснасток.
Kuzin Alexander Olegovich, Design Engineer, JSC «SRC «Progress», post-graduate stu-
dent of the department of processing of metals by pressure, Samara State Aerospace University,
mrfry@mail.ru. Area of research: Sheet punching, simulation processes.
289
УДК 621.9.1
РАЗРАБОТКА СИСТЕМЫ АДАПТИВНОГО УПРАВЛЕНИЯ
МЕХАНООБРАБОТКОЙ НА ОСНОВЕ МОДЕЛЕЙ ТЕХНОЛОГИЧЕСКИХ
РЕЖИМОВ
©2015 А.А. Степанов
АО «РКЦ «Прогресс», г. Самара
Рассмотрена методика разработки адаптивной системы управления режимами механической обработки
на основе моделей конструкторско-технологических параметров инструмента и детали (эквивалентного
напряжения а, максимального касательного напряжения i, смещения р зубьев, коэффициента Ки усадки
стружки, шероховатости Rz, износа h). Представлены схемы управления конструкторско-технологическими
параметрами процессов механической обработки с возможностью
прогнозирования их величин при изменении условий обработки на многоцелевых станках с про-
граммных управлением и марок инструментальных и обрабатываемых материалов. Использование разрабо-
танной методики позволяет назначить рациональные режимы обработки, оптимальную геометрию режущей
кромки инструмента, оценить прочностные параметры инструментов и деталей.
Адаптивное управление, система управления, прогнозирование параметров, напряжённо-
деформированное состояние, режимы резания, режущий инструмент
При механической обработке дета-
лей одним из актуальных вопросов явля-
ется вопрос назначения рациональных
технологических режимов резания и
обеспечения высокой точности обработ-
ки за счет использования адаптивных си-
стем управления, способных компенси-
ровать действие параметрических воз-
мущений [1]. Основными факторами,
снижающими точность механической об-
работки, являются усиленный износ и
поломка режущей кромки, а также по-
вышенная упругая деформация кромки
из-за изменения нагрузки в процессе об-
работки, что приводит к браку вслед-
ствие нарушения геометрии обрабатыва-
емых деталей.
Современные методы компьютер-
ного моделирования технологических
процессов [2,3], позволяют количествен-
но оценить эти факторы, в связи с чем
актуальной является методика разработ-
ки адаптивной системы управления
(АдСУ) процессами механической обра-
ботки с учетом изменяющихся требова-
ний к изделиям, свойств обрабатываемых
материалов, геометрии режущей кромки
инструмента в условиях нестационарно-
сти высокоскоростной обработки. Пред-
варительно моделировался процесс реза-
ния в статическом режиме (строились
нелинейные регрессионные модели оце-
ниваемых параметров, характеризующих
процесс резания), затем рассматривался
динамический режим по линеаризован-
ным статическим моделям.
Для статических моделей исполь-
зовались следующие параметры:
1. Изменяемые (независимые) тех-
нологические параметры: при протягива-
нии - подъём на зуб Sz (при точении
глубина резания t = 2xSz), угол заостре-
ния зуба р, скорость резания V, условный
предел прочности ов и условный предел
текучести т материала протяжки.
2. Оцениваемые (зависимые) пара-
метры: коэффициент запаса прочности по
эквивалентным (средним) напряжениям
(по теории Мизеса), коэффициент запаса
прочности по максимальным касатель-
ным напряжениям (по теории Треска -
Сен-Венана), величина максимального
смещения вершины зуба (режущей лез-
вия) при упругой деформации, величина
износа режущего лезвия, коэффициент
усадки стружки, величина шероховатости
обработанной поверхности. Эквивалент-
ное напряжение рассчитывают в наибо-
лее опасной точке - у основания зуба,
максимальные касательные напряжения -
по передней грани зуба.
Статические регрессионные модели
оцениваемых параметров имеют вид:
290
- для эквивалентных (средних)
напряжений о, Па (по Губеру - Мизесу):
СТ =Сх5Оа7хЛхУСит Н)
экв (J Z к ' ’
где Сп, Cs.n, Сп , Cv- постоянные
О Р (У
величины, Sz - подъем на зуб, мм/зуб
(t= 2xSz -глубина резания); 0 - угол
заострения, 0 (<р - передний угол в
плане, °); V - скорость резания, м/мин;
- для максимальных касательных
напряжений i, Па
т = С. х S Cszi X X VCvi п)
max z z W
где С-, Cszi, Ср., Cvi - постоянные ве-
личины, Sz - подъем на зуб, мм (t= 2xSz -
глубина резания); 0 - угол заострения, 0
(ф - передний угол в плане, °); V - ско-
рость резания, м/мин;
- для статических перемещений р
вершины зуба, мм
/' = С;,х5г'';,’х//Л'хуС‘’' (3)
где Ср , Cs^, СРр , CVp - посто-
янные величины, Sz - подъем на зуб,
мм/зуб (t= 2xSz -глубина резания); 0 -
угол заострения, 0 (ф - передний угол в
плане, °); V - скорость резания, м/мин;
- для коэффициентов усадки
стружки Ки
Ku = Ckux Sz'zk“ х pcfiku х VCvku (4)
где СКи, CszKu, CfiKu, CvKu - посто-
янные величины, Sz - подъем на зуб, мм;
0 -угол заострения, 0 (ф - передний угол в
плане, °); V - скорость резания, м/мин;
- для величины износа h
h = C„xSzszh xpcphxVCvh (5)
где Ch, Cszh, Cph, Cvh - постоянные ве-
личины, Sz - подъем на зуб, мм (t= 2xSz -
глубина резания); 0 - угол заострения, 0
(ф - передний угол в плане, °); V - ско-
рость резания, м/мин;
- для шероховатости обработанной
поверхности Rz
Rz =CRzxSz™ хpCpR: xVCv*- (6)
где CRz, CszRz, CpR , CvR_ - постоянные
величины, Sz - подъем на зуб, мм
(t= 2xSz -глубина резания); 0 - угол за-
острения, (ф - передний угол в плане, °);
V - скорость резания, м/мин;
Уравнение процесса резания с выходным
параметром температура резания О име-
ет вид:
О = Се х VCv₽ х S^Sz xtCte (7)
где Сд, Cvg,Cs ,Cig - постоянные вели-
чины, V - скорость резания, м/мин; Sz -
подъём на зуб, мм/зуб (t= 2xSz - глубина
резания); 0 - угол заострения, 0 (ф - пе-
редний угол в плане, °);
Для структурного моделирования
АдСУ используют замкнутый контур,
состоящий из апериодических звеньев [4].
Для моделирования применялось про-
граммное обеспечение Matlab. Постоян-
ные времени звеньев [5] рассчитаны
применительно к рассматриваемым про-
цессам резания и техническим характе-
ристикам металлообрабатывающего обо-
рудования. Неизвестные коэффициенты,
входящие в модели (1)-(7), получали
экспериментально при точении детали
типа валик из материала 12Х18Н9Т твер-
досплавным резцом ВК8, и при протяги-
вании отверстия в детали зубчатое колесо
из материала 12Х2Н4А-СШ. Значения
коэффициентов приведены в табл. (1)-(6).
291
Табл. 1. Значения коэффициентов эквивалентных напряжений и в модели (1) для про-
тяжек при обработке стали 12Х18Н9Т
Диапазон скоростей резания, м/мин Са СР° с„
14-2 0.000100894 1.60433 1.03702 3.19975
244 65.1657 1.60397 1.34567 1.51151
44-6 4.14165Х1031 1.87467 -1.14171 -11.4678
64-8 870.775 1.74339 1.37184 0.780491
84-10 1.48855x10й 0.840537 2.35353 -4.03046
104-30 11907.7 1.68871 1.22203 0.344572
304-50 8.57587x10'“ 0.775976 -1.07716 6.92799
504-70 44.8547 1.67991 0.73399 1.59887
704-90 2.69275x10’’° 0.181734 -0.839321 9.07961
904-110 46.4121 1.91062 0.178365 2.3193
1104-130 18107.4 1.27246 1.97429 2.76572
1304-150 16816.6 1.60001 0.99847 0.51452
Табл. 2. Значения коэффициентов максимальных касательных напряжений т в модели
(2) для протяжек при обработке стали 12Х18Н9Т
Диапазон скоростей резания, м/мин ст Cszt Срт Суг
14-2 7.63216x10''° 0.329672 -5.9482 12.7437
24-4 0.000325293 0.0552928 -4.09365 9.5875
44-6 1.9377Х1029 1.27426 -3.50428 -7.98395
64-8 27642.4 1.61865 1.18579 0.330037
84-10 1.06987x10” 0.905725 2.37424 -3.99998
10430 4997.43 1.66328 1.28453 0.487438
304-50 2.88044Х10’7 0.792596 -1.11864 6.73304
504-70 27.1798 1.6956 0.651581 1.78314
704-90 0.000101273 1.3988 4.42643 0.982965
904-110 57.9421 1.90727 0.151834 2.30639
1104130 2.48835x10” 0.271166 4.53966 -5.40761
1304-150 6.59216Х105 3.18367 4.77876 8.62324
Табл. 3. Значения коэффициентов статических перемещений р в модели (3) для протя-
жек при обработке стали 12Х18Н9Т
Диапазон скоростей резания, м/мин Ср Csv Срр Сур
14-2 1.59722х10’7 1.66679 0.438783 0.737953
24-4 4.85209x10'° 1.74862 0.956086 1.50882
44-6 2.3661x10” 1.7747 0.796226 1.66223
64-8 2.65478Х10’’5 1.93825 1.86508 2.86489
84-10 1.5834x10’“ 1.63372 0.236909 0.857149
104-30 5.64102x10’” 1.81805 1.37321 2.15893
304-50 7.38097x10’“ 1.67091 0.618037 0.737476
504-70 6.03872x1 О’12 1.78866 1.24568 1.64218
704-90 1.52048x10’’° 2.01531 2.00118 0.084879
904-110 6.99179Х10'6 1.95141 2.09542 2.90408
1104130 1.6634x10’’° 1.64422 0.273483 1.72821
1304-150 2.08393x10’” 1.83535 1.56628 2.16612
292
Табл. 4. Значения коэффициентов для усадки стружки Ku в модели (4) для протяжек
при обработке стали 12Х18Н9Т
Диапазон скоростей резания, м/мин Ски ^SzKu Срки СуКи
14-5 0.00350798 -0.162659 2.10105 0.563075
54-10 0.00181926 -0.155487 2.23083 0.564331
104-30 0.003312 -0.244525 2.07053 -0.590012
304-50 0.00173126 -0.23742 2.1986 -0.591037
504-70 0.0036638 -0.114445 2.11809 -0.548357
704-90 0.00189169 -0.107235 2.24883 -0.549742
904-110 0.00379457 -0.0800966 2.12983 -0.539837
1104-130 0.00390843 -O.O533766 2.13874 -0.530861
1304-150 0.00200724 -0.0461222 2.27064 -0.532402
Табл. 5. Значения коэффициентов износа h в модели (5) для протяжек при обработке
стали 12Х18Н9Т
Диапазон скоростей резания, м/мин ch Cszh Срь Cvh
14-150 3.83598х1О/6 0.0695664 1.88912 264.207
Табл. 6. Значения коэффициентов шероховатости Rz обработанной поверхности в моде-
ли (6) для протяжек при обработке стали 12Х18Н9Т
Диапазон скоростей резания, м/мин cRz CszRz CpRz CvRz
14-150 13.1504 1.09012 -0.124088 1.12066
Характеристики процессов резания
зависят от свойств динамической систе-
мы станка, применяемых режимов реза-
ния, в частности от геометрии и свойств
материала режущего инструмента, обра-
батываемого материала, свойств и спосо-
ба подвода СОТС и др.
Входными координатами, позволя-
ющими эффективно управлять процессом
резания, являются:
- частота вращения шпинделя
- скорость подачи (Vs);
- глубина резания (tn).
Для повышения точности обработки
резанием ее контроль в динамике целесо-
образно осуществлять комплексно по
нескольким выходным координатам,
например:
- термо-ЭДС (Е), характеризует
температуру в <7 зоне резания в).
- эквивалентное напряжение и;
Негативное воздействие на механи-
ческую обработку оказывают возмуще-
ния:
- изменение припуска, следствием
чего является изменение глубины реза-
ния(Лп);
- изменение твердости обрабатывае-
мого материала(ЛНВ);
- изменение подачи (Z1S).
Целью разрабатываемой адаптив-
ной системы управления механической
обработкой является:
- стабилизация температуры в зоне
обработки, эквивалентного и касательно-
го напряжения в резце;
- максимальное качество процесса
при перерегулировании (254-30)%;
- минимальный износ режущей кромки.
В общем случае процесс резания
(ПР) в качестве объекта управления с вы-
ходными координатами, характеризую-
щими резание - а и в, можно предста-
вить следующим образом (рис. 1):
293
Возмущения
4нв
0
Управляющие
воздействия
tn
Процесс
резания
Выходные
координаты
S
о
Рис. 1. Схема процесса резания как объекта управления
Процесс резания описывают урав-
нениями (1) и (7) при номинальных зна-
чениях Sz,p,t и переменных значениях V.
За управляющую координату принимают
скорость резания - V. Система автома-
тического регулирования (САР) регули-
рует выходные координаты (температуру
0 и напряжение о) процесса резания с за-
данной точностью. Процесс резания на
схеме обозначен функциональным бло-
ком ПР, управляющая координата ПР
обозначена V, возмущающее воздействие
f. Функциональная схема приведена на
рисунке 2. Обозначения на рисунке 2: КУ
- корректирующее устройство, УС - уси-
литель, ПЭ - преобразователь электриче-
ской энергии, Д - двигатель, ПУ - пере-
даточное устройство, ПР - процесс реза-
ния, ДУ - измерительная система выход-
ной координаты процесса резания,
например, термопара. В случае превыше-
ния допускаемого механического напря-
жения [о] = 35 МПа, САР стабилизирует
параметры обработки таким образом,
чтобы значение фактического механиче-
ского напряжения о не превышало значе-
ние [о].
Рис. 2. Функциональная схема объекта управления без адаптивного контура
Рис. 3. Структурная схема системы автоматического регулирования
294
Табл. 7. Передаточные функции САУ
Элемент структурной схемы Передаточная функция
Корректирующее устройство w = (1+а25]*п) **’ (l+0.01j*w)
Преобразователь электрической энергии 44 Wn3(p)= (0.103 * p + 1)* (0.28* p + 1)
Передаточное устройство Wny(p)=VH0M/n „ом =150/1000=0.15
Процесс резания Wyc=0.352
с управлением по напряжению Wyc= 1.843
Процесс резания Wyc=0.15438
с управлением по температуре z 4 1.7094 0.096 1.45 ХУдв(р)= (0.0342 * p +1) • 4.05
Усилитель Wo(p)= Uoo/ О = 5/35 = 0.143 В/МПа
Двигатель We(p)= U/ 0, = 5/720 = 0.00694 В/0 С
Измерительная система выходной коорди- наты процесса резания Wos= 19.61936667 МПа/мм
(тензодатчик) W0s=3168° С/мм
Представленная схема обеспечивает
лишь устойчивость системы при отсут-
ствии параметрических возмущений или
при их весьма маленьком воздействии.
На практике с течением времени могут
меняться параметры объекта управления.
Данная система не может обеспечить
требуемое качество переходного процес-
са при значительных возмущениях, по-
этому необходимо синтезировать систему
управления, способную компенсировать
действие параметрических возмущений.
Для того, чтобы исключить влияние из-
менения коэффициента передачи объекта
управления необходимо построить си-
стему, отслеживающую изменение этого
коэффициента и вводящую в основной
контур корректирующий сигнал, обратно
пропорциональный коэффициенту пере-
дачи объекта управления. При этом из-
менится управляющее воздействие при-
вода подачи и скорость вращения двига-
теля, а, следовательно, и подача, причем
ее изменение будет пропорционально из-
менению коэффициента передачи объек-
та управления. Адаптивное регулирова-
ние процесса механической обработки
осуществляют за счёт сравнения с эта-
лонными параметрами процесса резания
по моделям (1) и (7) - контур эталонной
модели, а также контура обратной связи с
датчиком температуры и тензодатчиком.
Схема и график переходных про-
цессов при регулировании эквивалентно-
го напряжения в инструменте с адаптив-
ной системой управления приведены на
рис. 4.
295
a)
SiepRetponM
6)
Рис. 4. а) Структура объекта управления с адаптивной системой управления при регулировании эквивалент-
ного напряжения в инструменте; б) График переходного процесса при регулировании эквивалентного
напряжения в инструменте.
Выводы
С помощью метода планирования
экспериментов [6] получены регрессион-
ные модели оценочных параметров ин-
струмента и детали в процессе протяги-
вания и точения для условий высоко-
производительной обработки. Достовер-
ность моделей составляет 86%. Разрабо-
тан программный комплекс на базе пред-
ложенной методики и полученных моде-
296
лей, предназначенный для оперативного
назначения рациональных режимов про-
цесса протягивания и точения в цеховых
условиях.
Предложена и апробирована методи-
ка, которая позволяет подобрать пара-
метры системы адаптивного управления
значениями эквивалентных и касатель-
ных напряжений, смещения зубьев про-
тяжки под действием сил резания, коэф-
фициента усадки стружки, износа режу-
щей кромки, шероховатости обработан-
ной поверхности в динамическом режиме.
Полученная система устойчива и отраба-
тывает любые теоретически сколь угодно
большие изменения коэффициента пере-
дачи объекта управления. Все элементы
контура адаптации физически реализуе-
мы.
Библиографический список:
1. Зориктуев, В. Ц., Буткин, Н.С.,
Схиртладзе, А.Г. Основы автоматиза-
ции и управления технологическими
процессами в машиностроении [Текст] /
В. Ц. Зориктуев, Н.С. Буткин, А. Г.
Схиртладзе. - Уфа, УГАТУ, 2000 г.
2. Аллик, Р.А., Бородянский, В. И.,
Бурин, А. Г. Системы автоматизирован-
ного проектирования изделий и техноло-
гических процессов в машиностроении
[Текст] / Р.А. Аллик, Бородянский В.И.,
Бурин А.Г и др. Под ред. Р.А. Аллика -
Л.: Машиностроение, 1986.
3. Норенков, И.П. Основы автома-
тизированного проектирования [Текст] /
И.П. Норенков, М.: Изд-во МГТУ им.
Н.Э. Баумана, 2006.
4. Бесекерский, В.А. Теория систем
автоматического управления [Текст] /
В.А. Бесекерский, Санкт-Петербург, Изд-
во Профессия, 4-е издание, 2003.
5. Ануфриев, И.Е., Смирнов, А.Б.,
Смирнова, Е.Н. Matlab 7 [Текст] / Ануф-
риев И.Е., Смирнов А.Б., Смирнова Е.Н.,
Санкт-Петербург, Изд-во «БХВ-
Петербург», 2005.
6. Адлер, Ю.П., Маркова, Е.В.,
Грановский, Ю.В. Планирование экспе-
римента при поиске оптимальных усло-
вий [Текст] / Ю.П. Адлер, Е.В. Маркова,
Ю.В. Грановский - М.: “Наука”, 1976 г.
DEVELOPING OF ADAPTIVE CONTROL SYSTEM OF MACHINING BASED ON
CUTTUNG CONDITION MODELS
©2015 A.A. Stepanov
JSC «SRC «Progress», Samara
The technique of development of adaptive control system of machining conditions based on models of de-
sign-engineering parameters of cutting tool and part (average tension a, maximum tangent tension i, shift p of teeths,
coefficient Ku of chip shrinkage, roughness Rz, wear h) is considered. The control schemes of design-engineering
parameters of machining processes with opportunity of prediction of these parameters values at change of machin-
ing conditions on multi-purpose machine tools with programmed control and marks of cutting tool and part material
are presented. The technique application allows to assign rational modes of machining, optimal geometry of cutting
edge, evaluate strength parameters of cutting tools and parts.
Adaptive control, control system, prediction of parameters, the strained and deformed condition, cutting
modes, cutting tool
Информация об авторах:
Степанов Андрей Александрович, ведущий инженер-программист, АО РКЦ
«Прогресс», г. Самара. E-mail: pochta201002@mail.ru. Область научных интересов: техно-
логия машиностроения, автоматизированное проектирование, информационные техноло-
гии в проектировании.
297
Stepanov Andrey Aleksandrovich, principal software engineer, JSC «SRC «Progress».
E-mail: pochta201002@mail.ru. Area of research: mechanical engineering, computer-aided de-
sign, information technologies in design.
УДК 621.9.1
АВТОМАТИЗИРОВАННАЯ РАЗРАБОТКА ПОСТПРОЦЕССОРОВ
ДЛЯ МНОГОЦЕЛЕВЫХ СТАНКОВ
©2015 А.А. Степанов
АО РКЦ «Прогресс», г.Самара
В статье рассмотрены вопросы автоматизированной разработки постпроцессора для многоцелевого
станка ИР500 с системой ЧПУ Siemens 840D. Выявлены преимущества автоматизированной разработки
постпроцессоров в единой среде CAD/CAM, позволяющей осуществлять непрерывный контроль за процес-
сом разработки и отладки постпроцессора.
Разработка постпроцессора, система ЧПУ, CAD/CAM-систем а, многоцелевые станки, многоосевая
обработка
Постпроцессор для определенной
модели станка предназначен для форми-
рования специальной управляющей про-
граммы (СУП), учитывающей особенно-
сти системы ЧПУ; особенности геомет-
рической компоновки станка; количество
осей, по которым ведется обработка де-
тали. В настоящее время на многих пред-
приятиях внедряется и осваивается мно-
гокоординатное оборудование с количе-
ством обрабатываемых осей до 5. Для
получения СУП необходима универсаль-
ная управляющая программа (УУП),
полученная в результате автоматизиро-
ванного моделирования процесса меха-
нообработки детали в CAM-системе. В
УУП отсутствуют управляющие коман-
ды, разные для различных систем ЧПУ и
контролирующие процесс механообра-
ботки детали на определенной модели
станка.
Во многих CAM-системах (САПА,
GibbsCAM, ProEngineer, CAMWorks,
SurfCAM, MasterCAM, ADEM CAM,
Гемма 3D и др.) СУП генерируется из
УУП автоматически за счет использова-
ния библиотек стандартных постпроцес-
соров. Преимущество генератора пост-
процессоров состоит в возможности
быстрой настройки параметров постпро-
цессора для отдельной модели станка с
минимальной необходимостью ручной
доработки УП после тестирования и от-
ладки постпроцессора. Генератор пост-
процессоров избавляет разработчика от
использования стандартных постпроцес-
соров из библиотек разных САМ-систем.
Алгоритм работы стандартных постпро-
цессоров до конца не ясен разработчику
и всегда приходится дорабатывать УП
вручную. Использование генератора
постпроцессоров позволяет быстро и ка-
чественно разработать УП для станка за
счёт использования проектных процедур,
интуитивно понятных разработчику (тех-
нологу-программисту) .
Постпроцессор упрощает процеду-
ру контроля УП, поскольку осуществляет
сбор информации со всех этапов разра-
ботки УП и после ее адаптации к опреде-
ленной модели станка формирует про-
грамму в G-кодах.При разработке пост-
процессора существует возможность
преобразования УП, разработанной для
одной модели станка, в УП для другого
станка без трудоемких процедур пере-
программирования за счет использования
библиотек постпроцессоров. Схема кон-
троля УП приведена на рис. 1. Разработ-
чик при построении CAD-модели детали
располагает системами САПР, различа-
ющимися по способам построения моде-
лей, обменным форматам файлов (*.iges,
*.prt, *.sat, *. stp и др.), возможностью
298
построения сложных криволинейных по-
верхностей модели. Для сокращения сро-
ков подготовки производства разрабо-
танную модель детали без дополнитель-
ных преобразований передают в
CAM-модуль, где после выбора последо-
вательности технологических операций,
приспособления, назначения режимов
резания, определения стратегии обработ-
ки, формируют УУП в формате CLData
без учета особенностей системы ЧПУ
станка.
Рис. 1. Схема контроля У П
299
При разработке вариантов постпро-
цессоров особенности системы ЧПУ
станка учитывают ручным программиро-
ванием необходимых процедур на языках
высокого уровня (Pascal, C++) или с по-
мощью автоматизированного програм-
мирования в среде генераторов постпро-
цессоров (G-Post, IMS-Post и др.) За счет
наличия постпроцессоров для разных мо-
делей станков существует возможность
быстрого внедрения и освоения применя-
емого на предприятии станочного обору-
дования. Во время контроля УП в систе-
ме Vericut проверяют отсутствие ошибок
в программе для устранения поврежде-
ний детали, столкновений узлов станка с
помощью моделирования до выхода на
станок, сравнивают обработанную заго-
товку с моделью детали из CAD-системы.
Система Vericut позволяет рассчитать
минимальную длину инструмента, опти-
мизировать траекторию инструмента для
снижения времени обработки детали, оп-
тимизировать режимы резания для обра-
ботки разных материалов, загружать мо-
дели режущего инструмента из библио-
тек, моделировать обработку детали за
несколько установов, создавать кинема-
тические схемы станков, настраивать
NC-систему управления для симуляции
обработки различных G-Code слов и
форматов данных, для вывода сообщений
об ошибках. На основе параметров ин-
струментов, кинематических схем стан-
ков, режимов резания, рассчитанных в
системе Vericut разрабатывают элементы
системы контроля для комплекса станок-
УЧПУ. В процессе работы комплекса
станок-УЧПУ выполняют контроль
столкновений при перемещениях рабочих
органов станка и режущих инструментов.
При этом учитывают параметры системы
управления станка, геометрические и ки-
нематические характеристики станка,
режущих инструментов, приспособлений.
Схема разработки постпроцессоров при-
ведена на рис. 2.
Рис. 2. Схема разработки постпроцессоров
300
Для подготовки ТЗ под конкретный
станок для конкретной системы управле-
ния необходимы следующие исходные
данные: тип станка, кинематика и гео-
метрия станка, ЗО-модель станка, пара-
метры системы управления, способ со-
здания постпроцессора (прямое програм-
мирование или автоматизированная раз-
работка на основе библиотек постпроцес-
соров), правила построения УП, доку-
ментация по программированию на стан-
ке с примерами, тестовые УП для дета-
лей. Для подготовки тестовых деталей
конструктор детали изучает ТЗ и разра-
батывает чертеж и 3D-модель детали,
контролирует и дорабатывает постпро-
цессор. Технолог определяет параметры
заготовки, стратегию и порядок и обра-
ботки, выбирает режущий инструмент,
приспособления и оснастку, назначает
режимы обработки. Цеховой конструктор
разрабатывает чертежи и 3D-модели при-
способлений и оснастки. Инструмен-
тальщик разрабатывает или заказывает
режущие или измерительные инструмен-
ты. Полученные чертежи и модели, пара-
метры заготовки, режущие инструменты
отправляют на этап подготовки произ-
водства для организации единой инфор-
мационной среды данных. Получив фай-
лы УП в формате CLData на основе те-
стовых деталей генерируют постпроцес-
сор для станка под конкретный станок и
систему управления. Далее на основе 3D-
моделей детали, инструмента, приспо-
собления контролируют УП в системах
визуализации обработки на наличие
ошибок. Уточненную модель управления
и УП отправляют на этап уточнения тех-
нического задания для разработки пост-
процессора.
Испытания постпроцессора на стан-
ке проводят с отработкой перемещений
исполнительных органов станка в режи-
ме ’’прогона по воздуху” и в режиме об-
работки детали. Схема отработки пост-
процессоров приведена на рисунке 3. При
подготовке данных по станку, ТЗ, моде-
лей деталей, оснастки, инструмента целе-
сообразно использование CAD/CAM-
систем для организации быстрого и каче-
ственного процесса проектирования
постпроцессора. Формирование УП в
формате CLData выполняют в
CAM-системах. Генерация УП в кодах
станка и визуальный контроль УП необ-
ходимы для подготовки заданий-тестов с
учетом выбранных для обработки дета-
лей. Контроль УП в системе Vericut вы-
полняется в несколько циклов до выбора
наиболее подходящего варианта пост-
процессора, согласованного с техниче-
ским заданием. Работа на станке с тесто-
выми деталями и УП позволяет выявить
те фрагменты кода УП, в которых проис-
ходит резкое изменение положение вер-
шины инструмента, совокупности про-
граммных команд, которые некорректно
отрабатываются станком. Контроль дета-
ли на соответствие конструкторской до-
кументации (КД) позволяет связать тех-
нические требования чертежа с парамет-
рами готовой детали. Углубленную отра-
ботку и тестирование ПП выполняют в
среде CADZ САМ с целью сравнения
УУП в формате CLDATA с готовой СУП
в виде конкретных станочных команд для
проверки соответствия отработки команд
файла CD АТ А и полученных станочных
команд. Приёмку постпроцессора в
штатную эксплуатацию проводят после
установления соответствия результатов
работы постпроцессора пунктам ТЗ и
после отработки готовых УП на станке.
Выявленные замечания к работе пост-
процессора учитывают во время техниче-
ского сопровождения после начала штат-
ной эксплуатации постпроцессора. Ве-
дущие специалисты-разработчики вы-
полняют доработку постпроцессора с
учетом замечаний до получения опти-
мального решения и консультируют ста-
ночников по работе с постпроцессором.
301
Рис. 3. Схема отработки постпроцессоров
Выводы
Представленные схемы опробова-
ны при разработке постпроцессора для
многоцелевого станка ИР500 с системой
ЧПУ Siemens 840D. Выявлены преиму-
щества автоматизированной разработки
постпроцессоров в единой среде
CAD/CAM, позволяющей осуществлять
непрерывный контроль за процессом раз-
работки и отладки постпроцессора. Уста-
новлено, что использование генератора
постпроцессоров избавляет разработчика
от трудоёмких этапов проектирования за
счет использования диалоговых окон
настройки параметров компоновки стан-
ка, стандартных подпрограмм, баз дан-
ных параметров станка, инструмента,
приспособлений. Подключение генерато-
ра постпроцессоров к разным САМ-
системам позволяет выполнять интегри-
рованную разработку постпроцессора для
сокращения сроков выполнения и отра-
ботки ТЗ и повышения качества разрабо-
танных СУП.
Библиографический список:
1. Минеев М. A. PRO/Engineer
Wildfire 2.0/3.0/4.0. Самоучитель, Изд-во
«Наука и техника»,352 с, 2009 г.
302
AUTOMATED POSTPROCESSORS DEVELOPMENT FOR MULTI-PURPOSE
MACHING TOOLS
©2015 A.A. Stepanov
JSC «SRC «Progress», Samara
Problems of automated postprocessors development for multi-purpose maching tool IR500 with NC system
Siemens 840D is considered. Advantages of automated postprocessors development in CAD/CAM environment
allowing to execute continuous control for development and debugging postprocessor processes.
Development of postprocessor, NC system, CAD/CAM system, multi-purpose maching tools, multi-axis ma-
chining
Информация об авторах:
Степанов Андрей Александрович, ведущий инженер-программист, АО «РКЦ
«Прогресс», г. Самара. E-mail: Dochta201002@mail.ru. Область научных интересов: техно-
логия машиностроения, автоматизированное проектирование, информационные техноло-
гии в проектировании.
Stepanov Andrey Aleksandrovich, principal software engineer, JSC «SRC «Progress».
E-mail: pochta201002@mail.ru. Area of research: mechanical engineering, computer-aided de-
sign, information technologies in design.
303
УДК 621.01/.03
ИССЛЕДОВАНИЕ ПРОЦЕССА ОБРАЗОВАНИЯ
ВЫСОКОНАГРУЖЕННЫХ СОЕДИНЕНИЙ В ТРЕХСЛОЙНЫХ
КОНСТРУКЦИЯХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
О.Б. Кудрявцев1, А.М. Булаев1, Ю.А. Вашуков2
!АО «РКЦ «Прогресс», г. Самара
2Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Проведен анализ существующих способов соединения трехслойных конструкций с другими эле-
ментами, который показал, что наиболее эффективным способом является постановка втулки путем запрес-
совки. Проведены исследования влияния конструкторско-технологических факторов постановки соедини-
тельных вкладышей на параметры оптимизации. Проведен анализ математической модели, позволяющий
определить исходные геометрические параметры втулки в зависимости от исходных параметров трехслой-
ных панелей. Результаты анализа графически представлены с помощью программ Компас-ЗЭ VI О, 3D Stu-
dio Max, Adobe Photoshop CS3. Составлен алгоритм нахождения оптимальных геометрических параметров
втулки; алгоритм реализован в программах Microsoft Office Excel 2007 и на языке программирования Visual
Basic. Исследовано напряженно-деформированное состояние обшивки и втулки методом конечных элемен-
тов при различных способах нагружения в программе MSC visual NASTRAN for Windows. Рассчитаны весо-
вая и экономическая эффективности разрабатываемого способа постановки втулок.
Ключевые слова: композиционные материалы, трехслойные панели, уравнение регрессии, напря-
женно-деформированное состояние, конечно-элементная модель, метод планирования эксперимента
Применение высокопрочных ста-
лей, титана и его сплавов, армированных
пластиков и композиционных материалов
на основе сверхпрочных непрерывных
волокон в тонкостенных подкрепленных
конструкциях, работающих в условиях
изгиба и сжатия, часто бывает неэффек-
тивным. Это объясняется тем, что по
условию эксплуатации конструкции из
этих материалов должны иметь очень ма-
лую толщину. Но при этом резко снижа-
ется момент инерции сечения пластины
или оболочки, и конструкция, особенно
при невысоких модулях упругости мате-
риала, имеет низкие критические напря-
жения потери устойчивости.
Этого недостатка лишены трех-
слойные панели и оболочки. Трехслойная
конструкция или оболочка состоит из
двух относительно тонких внешних слоев
(называемых несущими) из высокопроч-
ных материалов, связанных слоем запол-
нителя, толщина которого значительно
больше толщины несущих слоев [1].
Клееные сотовые структуры явля-
ются общим видом продукции, исполь-
зующим различные алюминиевые спла-
вы, арамидные бумаги, стеклопластико-
вые материалы на основе различных ви-
дов тканей и связующих. В меньших ко-
личествах для этих целей используются
титановые и стальные листы [2].
Одной из важнейших проблем при
проектировании и производстве кон-
струкций с использованием трехслойных
панелей является их соединение с други-
ми элементами конструкций. Это связано
с тем, что трехслойные панели не выдер-
живают высоких сосредоточенных нагру-
зок, характерных для механических то-
чечных соединений.
С целью повышения производи-
тельности процесса образования соеди-
нений «втулка - трехслойная конструк-
ция» и снижения их массы предложен
ряд способов, заключающихся в осевом
пластическом сжатии устанавливаемого
элемента. Вкладыш запрессовывается в
сотовую панель специальным инстру-
ментом. В процессе запрессовки по
внешнему контуру вкладыша образуется
тороидальная поверхность, с помощью
которой происходит закрепление кре-
пежного элемента между верхней и ниж-
ней обшивками.
304
Степень влияния каждого фактора
на форму тороидальной поверхности раз-
лична и может быть установлена по ре-
зультатам экспериментального исследо-
вания.
Для образования надежного соеди-
нения «вкладыш - трехслойная конструк-
ция» необходимо точно знать размеры
тороидальной поверхности. Это объясня-
ется тем, что если тороидальная поверх-
ность не будет касаться верхней обшив-
ки, то вкладыш не будет закреплен меж-
ду верхней и нижней обшивками [3].
Исследования показывают, что от
соотношения t/p во многом зависит фор-
ма образующейся тороидальной поверх-
ности. Причем для образования этой по-
верхности данное соотношение может
изменяться в пределах от 0,5 до 0,9. От
соотношений t/b и S/So во многом зави-
сит степень пластической деформации, и
её распространение в зоны, прилегающие
к перемычке. Анализ предварительных
исследований показывает, что данные
показатели могут изменяться следующим
образом: t/b- от 0,5 до 0,9 и S/So-ot 0,2 до
0,8. При больших значениях этих пара-
метров на поверхности тороидальной по-
верхности появляются трещины, что рез-
ко снижает несущую способность соеди-
нения [4].
При проведении экспериментов но-
минальный уровень скорости ударника
установлен 5,000 м/сек, а интервал варь-
ирования - 5,000 м/сек.
С целью осуществления процесса
постановки вкладыша была спроектиро-
вана и изготовлена оснастка, состоящая
из подштамповой плиты, направляющей,
ловителя, пустотелого пуансона, ограни-
чителя, и инструментального стакана.
Оснастка была изготовлена по 7 квалите-
ту точности из стали У8А с последующей
закалкой до HRC 52-56.
Несущая способность соединения
«вкладыш-трехслойная конструкция»
оценивалась при статистических и по-
вторно-статистических нагрузках. Испы-
танию подверглись следующие серии об-
разцов:
• с отверстиями и вкладышам, уста-
новленными путем заливки грунтовки;
• с отверстиями и вкладышами,
установленными путем осевого сжатия.
Спроектированное оборудование
состоит из силового каркаса с системой
рельсового продольного движения; рабо-
чей части с поперечным движением по
рельсовым гребенкам, состоящей из ме-
ханизма захвата-передачи втулок, пневмо
приводов и подвижных прессовых голо-
вок. Все движения запитываются от
пневмосистемы, приводы которой уста-
новлены непосредственно на силовом
каркасе и рабочей части станка. Команды
человека управляются пультом СЧПУ.
В настоящее время существуют ме-
тоды расчета трехслойных конструкций,
которые позволяют по величинам нагру-
зок на панель, имеющую конкретные
размеры и характер соединения (вкла-
дыш, шарнир) со смежной частью кон-
струкции, определить необходимые па-
раметры панели (толщину несущих сло-
ев, высоту и плотность заполнителя), от
которых зависит масса сотовой панели
[5].
Библиографический список:
1. Крысин В.Н. Слоистые клеёные
конструкции в самолетостроении. - М.:
Машинотроение, 1980. - 232 с.
2. Комаров Г.В. Способы соедине-
ния деталей из пластических масс. - М.:
Химия, 1986. 356 с.
3. Ендогур А.И. Сотовые конструк-
ции. Выбор параметров и проектирова-
ние. - М.: Машиностроение. 1986. - 199с.
4. Барвинок В.А. , Вашуков Ю.А. ,
Поникарова Н.Ю., Ломовской О.В. Раз-
работка математической модели техноло-
гического процесса постановки резьбово-
го вкладыша в отверстие трехслойной
конструкции.// Сборка в машинострое-
нии, приборостроении. - 2001.- № 3. -
С.26-29.
5. Барвинок В.А., Вашуков Ю.А.,
Поникарова Н.Ю., Ломовской О.В., Ки-
рилинА.Н., Олексийко С.М. Разработка
оборудования с использованием магнит-
но-импульсного привода и материалов с
эффектом памяти формы для сборки
трехслойных конструкций изделий авиа-
космической техники.// Известия Самар-
305
ского научного центра Российской ака-
демии наук. - 2001.-тЗ. № 2. - С. 192-196.
References:
1. Krysin V. N. Stratified клеёные
constructions in aircraft construction. - M:
Машинотроение, 1980. - 232 with.
2. G.V.Sposoby's mosquitoes of joint
of details from plastics. - M: Chemistry,
1986. 356 with.
3. Ендогур A. I. Cellular of a construc-
tion. A choice of parametres and projection.
- M: Machine industry. 1986. - 199c.
4. Barvinok V.A, Vashukov J.A.,
Ponikarova N.J., Lomovsky O.V. Razrabot-
ka of a mathematical sample piece of a mas-
ter schedule of statement of the carving liner
in a hole three-layer конструкции.
//Assembly in machine industry, instrument
making. - 2001. № 3. - C.26-29.
5. Barvinok V.A, Vashukov J.A.,
Ponikarova N.J., Lomovsky Island B,
KirilinA.N., Oleksijko S.M.working of the
equipment with use of a magnetic-pulse
drive gear and materials with a memory ef-
fect of the shape for assembly of three-layer
constructions of articles aerospace
техники .//News of the Samara centre of sci-
ence of the Russian Academy of Sciences. -
2001.43. № 2. -C.192-196.
PROBE OF PROCESS OF FORMATION ВЫСОКОНАГРУЖЕННЫХ
OF JOINTS IN THREE-LAYER CONSTRUCTIONS OF FLYING MACHINES
O.B. Kudryavtsev1, A.M. Bulaev1, J.A. Vashukov2
'JSC «SRC «Progress», Samara
2Samara State Aerospace University, Samara
The assaying of existing modes of joint of three-layer constructions with other elements which has displayed
is carried out that the most effective mode is statement of the sleeve by a press fitting. Probes of influence of design-
engineering factors of statement of connective liners on optimisation parametres are conducted. The assaying of the
mathematical sample piece is carried out, allowing to define initial geometrical parametres of the sleeve depending
on initial parametres of three-layer panels. Results of the assaying are graphically presented by means of programs
Kompas-3D V10, 3D Studio Max, Adobe Photoshop CS3. The algorithm of a finding of optimum geometrical par-
ametres of the sleeve is made; the algorithm is realised in programs Microsoft Office Excel 2007 and in program-
ming language Visual Basic. The is intense-deformed condition of lagging and the sleeve is examined by a finite
element method at various modes of a stressing in program MSC visual NASTRAN for Windows. Are calculated
weight and economic efficiency of a developed mode of statement of sleeves.
Keywords: composite materials, three-layer panels, the regression equation, the is intense-deformed condi-
tion, certainly а-element sample piece, a method of scheduling of experiment
Информация об авторах:
Кудрявцев Олег Борисович: инженер-конструктор; самолето- и вертолетострое-
ние; магистр; ракетные комплексы и космонавтика по направлению инновационные тех-
нологии в производстве летательных аппаратов; АО «РКЦ «Прогресс», 443009, Россия, г.
Самара, ул. Земеца, д.18; тел.8(846)228-99-26, 8(827)655-68-65, эл. почта:
mail@samspace.ru, dartoleg007 @mail.ru.
Область научных интересов: Общее машиностроение
Булаев Антон Михайлович - инженер-конструктор; самолето- и вертолетострое-
ние. АО «РКЦ «Прогресс», 443009, Россия, г. Самара, ул. Земеца, д.18; тел.
8(846)228-94-46, 8(917)148-22-69, эл. почта: mail@samspace.ru, sway-63@mail.ru.
Область научных интересов: Общее машиностроение
Вашуков Юрий Александрович: научный руководитель, канд. техн, наук, доцент,
зам. заведующего кафедрой СГАУ «Производство летательных аппаратов и управление
качеством в машиностроении»; доцент кафедры; обработка композитных материалов.
306
Адрес: г. Самара, ул. Московское шоссе, д. 34, инд. 443086; тел.(846)267-46-36,
334-36-72 эл. почта: vashukov@ssau.ru.
Kudryavtsev Oleg Borisovich: the design engineer; self-summer - and vertoletostroenie;
the master; rocket complexes and astronautics in a direction innovative techniques in manufac-
ture of flying machines; JSC «SRC «Progress», 443009, Russia, Samara, street Zemetsa, д.18;
Ph. 8 (846) 228-99-26, 8(827) 655-68-65, эл. Mail: mail@samspace.ru, dartoleg007@mail.ru
Area of scientific interests: the Common machine industry
Bulaev Anton Mihajlovich - the design engineer; self-summer - and vertoletostroenie.
JSC «SRC «Progress», 443009, Russia, Samara, street Zemetsa, д.18; Ph. 8 (846) 228-94-46,
8(917) 148-22-69, эл. Mail: mail @samspace.ru, sway-63@mail.ru
Area of scientific interests: the Common machine industry
Vashukov Yury Aleksandrovich: the supervisor of studies, Cand.Tech.Sci., the senior
lecturer, the deputy managing chair SGAU «Manufacture of flying machines and quality man-
agement in machine industry»; the senior lecturer of chair; handling of composite materials.
The address: Samara, street the Moscow highway, д. 34, инд. 443086;
Bodies. (846 267-46-36, 334-36-72 эл. Mail: vashukov@ssau.ru
307
УДК 621.385, 678
НАНЕСЕНИЕ ЗАЩИТНОГО ПОЛИМЕРНОГО ПОКРЫТИЯ
НА ПЕЧАТНЫЕ УЗЛЫ
©2015 В.Ю. Маликов, В.Г. Небога
АО «РКЦ «Прогресс», г. Самара
Приведен процесс нанесения защитного полимерного покрытия печатных узлов радиоэлектронной ап-
паратуры. Основой данного процесса является вакуумная пиролитическая полимеризация из газовой фазы.
В статье рассматривается технологический процесс нанесения поли-параксилиленового покрытия, а также
его преимущества перед традиционными методами влагозащиты радиоэлектронной аппаратуры и возмож-
ность его применения в приборах производства АО «РКЦ«Прогресс».
Ключевые слова: Радиоэлектронная аппаратура, полимерные покрытия, поли-параксилилен, влагоза-
щита, вакуумная установка
В современном производстве радио-
электронной аппаратуры космического
направления важную роль в обеспечении
надежности их работы при воздействии
различных вредных факторов принадле-
жит методам влагозащиты. Для элек-
тронных модулей до III поколения РЭА
включительно существующие лаковые
материалы на основе эпоксидных, урета-
новых и силиконовых связующих в ос-
новном соответствовали требованиям
обеспечения влагозащиты. Однако с по-
явлением современной высокоинтегри-
рованной элементной базы, освоением
новых объектов и новых приборов при-
менение традиционных лаков резко со-
кращается, вплоть до полного отказа от
их использования. Увеличение насыщен-
ности радиоэлементами, в том числе бес-
корпусными, применение безвыводных
пассивных и активных компонентов при-
водит к необходимости использовать но-
вые принципы влагозащиты изделий,
эксплуатируемых в особо жестких усло-
виях воздействия космоса.
Уникальным способом обеспечения
надежной защиты электронных
устройств является технология нанесения
полимерных покрытий из газовой фазы в
вакууме. Покрытия, получаемые вакуум-
ным осаждением, имеют существенное
отличие по структуре и свойствам от по-
крытий, получаемых из жидких сред,
наносятся за один цикл (5-10 часов) и ре-
ализуют свои защитные свойства при
толщине 8-12 мкм, в отличие от лаковых
покрытий, когда для обеспечения требу-
емых защитных свойств покрытие осу-
ществляется методом многократного
нанесения материала толщиной 40-80
мкм. Основными их преимуществами яв-
ляются высокие электроизоляционные
свойства, низкая газо- и влагопроницае-
мость, возможность формирования по-
крытия при нормальных температурах,
однородность покрытия по толщине на
изделиях очень сложной конфигурации,
отсутствие токсичности. При нанесении
лака необходим прогрев или выдержка в
течение длительного времени до полного
отверждения. Важной особенностью
ППКП является отсутствие внутренних
напряжений, так как осаждение идет из
газовой фазы, минуя жидкую.
Наиболее хорошо изученными и
нашедшими широкое промышленное
применение являются полипараксилиле-
новые покрытия (ППКП), получаемые
вакуумпиролитической полимеризацией
из цикло-ди-п-ксилиленов, химические
формулы которых приведены на рис. 1.
308
Димеры
Полипраксилены (Парилен)
а
Рис. 1
Рис. 2
ППКП наносятся на специальных ва-
куумных установках. Покрытие толщи-
ной 5-10 мкм не содержит точечных от-
верстий и благодаря низкой паро- и га-
зопроницаемости характеризуется ис-
ключительно высокой влагостойкостью и
устойчивостью к проникновению корро-
зирующих жидкостей и газов. Кроме то-
го, толщина наносимого слоя получается
равномерной, исключается образование
натеков, оголение острых кромок, непо-
крытых мест, например под элементами
сложных электронных схем, в узких ка-
налах (рис. 2).
Нанесение ППКП/ПХПКП на нашем
предприятии производилось на установке
УНБ2-100. Цель работы проверить соот-
ветствие технических характеристик по-
крытия установленным требованиям,
возможность применения поли-
параксилиленового/поли-хлор-
параксилиленового покрытия в приборах
разработки ОА «РКЦ «Прогресс», опре-
деление требований к конструкции ПУ,
подлежащих нанесению ППКП/ПХПКП,
а также полнота отражения в КД техни-
ческих требований, связанных с нанесе-
нием ППКП/ПХПКП. Также отрабатыва-
лись операции защиты поверхностей, не
подлежащих нанесению покрытия
ППКП/ПХПКП, операция удаления за-
щитного покрытия, режима нанесения
ППКП/ПХПКП с получением заданной
толщины покрытия, операция ремонта
ПУ с заменой электронных компонентов.
После установления опытным путем ко-
личества исходного материала был про-
веден ряд испытаний на устойчивость к
воздействию повышенной влажности,
повышенной и пониженной температур,
повышенного и пониженного давления, а
также воздействия циклического измене-
ния температур. Все печатные узлы, а
также образцы прошли данные испыта-
ния, чем подтвердили соответствие
свойств ППК/ПХПК покрытия техниче-
ским условиям и обеспечение надлежа-
щей защиты ПУ. Получено разрешение
на использование данного метода влаго-
защиты бортовой аппаратуры с незначи-
тельными уточнениями технологического
процесса.
Результаты работы позволят форми-
ровать покрытия при нормальных темпе-
ратурах, добиться однородности покры-
тия по толщине на изделиях сложной
конфигурации, добиться отсутствия ток-
сичности и повышения пожаробезопас-
ности, а также повысить стабильность
технологического процесса. Это позволит
сократить затраты, связанные с отбра-
ковкой (доработкой) бортовой аппарату-
ры по результатам наземных испытаний.
Библиографический список:
1. Ширшова В.А. Технология вла-
гозащиты и электроизоляции изделий
РЭА полипараксилиленом. - Компонен-
ты и технологии, 2002, №2.
2. Ткачук Б.В., Колотыркин В.М.
Получение тонких полимерных пленок из
газовой фазы. Л., Химия, 1977, 214 с.
309
3. Бузин А.И., Бартоломе Д.С., Ма-
илян К.А., Пебалк А.В., Чвалун С.Н.
Анализ поверхности тонких пленок поли-
n-ксилилена и его производных И Высо-
комолекулярные соединения, 2004, серия
А, том 46, № 12.
References:
1. Shirshova V.A. Production engi-
neering of damp-proofing and electrical in-
sulation of products radioelectronic equip-
ment. - Components and production engi-
neering, 2002, №2.
2. Tkachyk B.V., Kolotirkin V.M.
Obtaining of thin polymeric films from a gas
phase, L., Chemistry, 1977, 214 s.
3. Byzin A.L, Bartolome D.S.,
Mailyan K.A., Perebalk A.V., Chvalun S.N.
The analysis of a surface of thin films poly-
n-paraxylylene and its derivatives // High-
molecular compounds, 2004, A series, vol-
ume 46, №12.
PROTECTIVE POLYMER COATING DEPOSITION
ON PRINTED BOARD ASSEMBLY
©2015 Vitaly Malikov, Vadim Neboga
JSC «SRC «Progress», Samara
The process of protective polymer coating deposition on radioelectronic printed board assembly is given in the
paper. This process is based on vacuum pyrolytic gas-phase polymerization. The paper focuses on the technological
process of polyparaxylylene coating deposition and its advantages over traditional methods of radioelectronics mois-
ture protection as well as possibility of its use in devices produced by JSC SRC Progress.
Key words: radioelectronic equipment, polymer coatings, polyparaxylylene, moisture protection, vacuum in-
stallation.
Информация об авторах:
Маликов Виталий Юрьевич, заместитель начальника цеха гальванических и лако-
красочных покрытий АО «РКЦ «Прогресс», аспирант кафедры химической технологии
полимеров и композиционных материалов, СамГТУ, 443009, Россия, г. Самара, ул. Земе-
ца, 18, т. 228-62-80, Mr.Malikov.Vito@ya.ru.
Область научных интересов: полимерные и композиционные покрытия (материалы).
Небога Вадим Геннадьевич, к.т.н., начальник производства АО «РКЦ «Прогресс»,
443009, Россия, г. Самара, ул. Земеца, 18, т. 228-60-11, Neboga@samspace.ru.
Область научных интересов: полимерные и композиционные покрытия (материалы).
Vitaly Yu. Malikov, Deputy Head of Electrodeposited & Paint-and-Lacquer Coatings De-
partment of JSC «SRC «Progress», Post-graduate student of Polymer & Compound Chemical
Engineering Faculty of SSTU, 18 ul. Zemetsa, Samara, 443009, ph. 228-62-80,
Mr.Malikov.Vito@ya.ru.
Sphere of scientific interest: polymeric and composition coatings.
Vadim G. Neboga, Candidate of Science (Engineering), Manufacturing Director of JSC
«SRC «Progress», 18 ul. Zemetsa, Samara, 443009, ph. 228-60-11, Neboga@samspace.ru.
Sphere of scientific interest: polymeric and composition coatings.
310
УДК 621.373.826, 629.783, 621.384.3
КОНСТРУКТИВНОЕ РЕШЕНИЕ ДЛЯ УСТРОЙСТВА СБОРА ДАННЫХ
О ПАРАМЕТРАХ ДВИЖЕНИЯ МИКРОМЕТЕОРОИДНЫХ ТЕЛ
©2015 Е.А. Щелоков, А.В. Рузанов
АО «РКЦ «Прогресс», г. Самара
Приведена конструкция детектора для исследования параметров движения микрометеороидов и
космического мусора, смоделированы воздействие линейных ускорений, вибрационные и ударные воздей-
ствия на прибор.
Ключевые слова: микрометеороид, регистратор, модель, вибрационные воздействия, ударные воз-
действия, воздействие линейных ускорений, вектор скорости, оптикоэлектронные системы
Большой интерес в последние годы
проявляется интерес к исследованию фи-
зических процессов и воздействий ино-
родных тел с поверхностью космических
аппаратов (КА). В основном такой инте-
рес связан с необходимостью увеличения
сроков жизни космической аппаратуры и
самих КА в целом.
Одной из последних разработок,
представляющих данные о фактах воз-
действия микрометеороидов с КА, явля-
ется МЕТЕОР, установленный на МКА
«АИСТ».
Однако реализованный метод имеет
ряд недостатков, которые предлагается
устранить с помощью замены чувстви-
тельного элемента (мишени) на «свето-
вые поля», генерируемые устройством,
аналогичным устройству микрометра.
Основными достоинствами предла-
гаемого способа являются: отсутствие
деградации конструкции при регистра-
ции (отсутствие контакта устройства
непосредственно с исследуемым объек-
том), возможность получать данные не
только о фактах пролета и скорости мик-
рометеороидов, но и направлении движе-
ния. Изменение площади покрытия не
будет представлять трудностей для рас-
чета параметров движения и будет зави-
сеть только от расстояния между прием-
ной и передающей частью устройства.
При разработке оптических систем
регистрации требуется высокая точность
и надежность, на основании чего предла-
гается произвести ряд действий по выяв-
лению и устранению возможных недо-
статков, а именно:
1) Разработать конструкцию для
системы регистрации параметров движе-
ния микрометеороидных тел;
2) Произвести гармонический
анализ на поиск резонансных частот
3) Произвести анализ математиче-
ской модели воздействия линейных уско-
рений с амплитудой в 10g;
4) Произвести анализ математиче-
ской модели воздействия ударов с ам-
плитудой в 150g (аналогичных ударным
ускорениям при выведении КА);
5) На основании анализов сделать
выводы о возможности применения раз-
работанной конструкции.
Согласно принятому порядку дей-
ствий, была разработана конструкция
прибора, состоящего из двух блоков, от-
личающихся небольшим смещением ра-
бочих элементов, для возможности рас-
чета векторов скоростей и размеров реги-
стрируемых объектов. Внешний вид од-
ного из блоков приведен на рис. 1.
311
Рис. 1 - Внешний вид одного блока устройства сбора данных о параметрах движения
микрометеороидных тел
На основании требований ко всем
системам, входящим в состав КА, «кон-
струкция прибора должна обеспечивать
отсутствие резонансов в диапазоне ча-
стот до 25 Гц».
Был произведен гармонический
анализ в САПР ANSYS, результаты при-
ведены на рис. 2.
Рис 2 - Результаты гармонического анализа на подтверждение отсутствия резонансных
частот блоков до 25 Гц.
312
Разработанная конструкция под-
тверждает данное требование.
Так же блок должен сохранять ра-
ботоспособность на участке выведения и
при штатной эксплуатации на орбиталь-
ном участке полета, в условиях следую-
щих воздействий:
• Воздействий линейного ускоре-
ния в каждом из трех взаимно-
перпендикулярных направлений с уско-
рением в 0,2g.
• Воздействий линейного ускоре-
ния в направлении продольной оси, с
ускорением в 10g.
Результаты расчета на воздействие
линейных ускорений с наихудшим случа-
ем (воздействием в 10g) представлены на
рис. 3.
l»w Defora«Uon
Т »*: Total Difomution
Unit mm
И M MI5 №41
С.0ПМ14
b M7N75
t M7435
tN-Cllb
0.М44И7
00*337 LB
0.N2247I
ОИШЗЗ
В Mb
Рис. 3 - Результат анализа математической модели воздействия линейного ускорения с амплитудой 10g
Так же необходимо произвести ана-
лиз воздействия механических ударов
при амплитуде удара 150g, аналогичный
возможным воздействиям на этапе выве-
дения КА. Результаты анализа представ-
лены на рис. 4 (представлен результат с
наибольшим смещением, которое наблю-
дается при втором ударе, рис. 5).
Рис. 4 - Результаты анализа математической модели воздействия ударов, аналогичных ударам на этапе вы-
ведения (распределение напряжений)
313
Рис. 5 - Результаты анализа математической модели воздействия ударов, аналогичных ударам на этапе вы-
ведения (смещение относительно оси Y)
Выводы:
В результате проделанной работы
блок, с предложенной конструкцией:
1) Исследован с помощью гармони-
ческого анализа на отсутствие резонанс-
ных частот до 25Гц, представлены ре-
зультаты анализа в виде АЧХ отклика
виброускорений, резонансными частота-
ми являются 612,12 Гц и 1347 Гц.
2) Прошел испытания на воздей-
ствия линейных ускорений, аналогичных
этапу выведения и штатной эксплуатации
блока, в виде математической модели в
САПР ANSYS, при этом максимальное
смещение конструкции, наблюдаемое
при воздействии линейного ускорения с
амплитудой в 10g, не окажет существен-
ного влияния на работу прибора (макси-
мальное смещение конструкции - 0,01
мм).
3) Выдержал испытание на воздей-
ствие механических ударов, аналогичных
ударам на этапе выведения (с амплиту-
дой в 150g). При этом максимальная
нагрузка на блок возникает при втором
ударе. Представлен результат математи-
ческой модели блока после ударных воз-
действий в масштабе смещений 1:1.
На основании результатов прове-
денных анализов можно сказать, что раз-
работанная конструкция удовлетворяет
требованиям условий эксплуатации на
КА и может применятся при разработке
устройства регистрации параметров дви-
жения микрометеороидов.
Библиографический список:
1. Щелоков Е.А., Оптикоэлектрон-
ный детектор параметров микрометео-
роидов [текст] / Е.А. Щелоков, У.В. Бо-
яркина И Конкурс научно-технических
работ и проектов, «Молодежь и будущее
авиации и космонавтики», аннотации ра-
бот, С.236-238, Москва, 2014
2. Телегин А.М., Детектор микро-
метеороидов и частиц космического му-
сора для малого космического аппарата
«АИСТ-2» [текст] / А.М. Телегин,
Н.Д. Семкин // Вестник Самарского госу-
дарственного аэрокосмического универ-
ситета №4 (42), - Самара: СГАУ. - 2014,
-с. 261-263.
3. Оптический микрометр [Элек-
тронный ресурс]: [сайт]. URL:
http://www.prizinasensors.ru/production/lste
п (дата обращения 25.05.15).
314
THE CONSTRUCTIVE DECISION FOR THE DATA GATHERING DEVICE
ABOUT PARAMETERS OF MOVEMENT OF MICROMETEOROIDS
©2015 E.A. Schelokov, A.V. Ruzanov
JSC «SRC «Progress», Samara
This paper presents a design of a sensor for research parameters of movement of micrometeoroids and
space debris with model of vibrating and temperature influences.
Key words: micrometeoroid, sensor, model, vibrating influences, temperature influences, vector of speed,
optic-electronic systems
Информация об авторах:
Щелоков Евгений Алексеевич, инженер-конструктор 2 категории, АО «РКЦ
«Прогресс», E-mail: riddick41666@mail.ru.
Область научных интересов: оптикоэлектронные системы, космическое приборо-
строение, математические модели в САПР
Рузанов Алексей Васильевич, инженер-конструктор, АО «РКЦ «Прогресс»,
E-mail: sun-track@mail.ru.
Область научных интересов: космическое приборостроение, математические моде-
ли в САПР.
Schelokov Evgeny Alekseevich, the desing engineer of the second category, JSC «SRC
«Progress», an E-mail: i iddick41666@mail.ru.
Area of scientific interests: optic-electronic systems, space device engineering, mathe-
matical models in systems of automatic designing.
Ruzanov Alexey Vasilyevich, the desing engineer, JSC «SRC «Progress», an E-mail:
sun-track@mail.ru.
Area of scientific interests: space device engineering, mathematical models in systems of
automatic designing.
315
УДК 621.9.047
РАЗРАБОТКА ПРОМЫШЛЕННОЙ ТЕХНОЛОГИИ И СПЕЦИАЛИЗИРОВАННОЙ
ОСНАСТКИ ДЛЯ ФОРМООБРАЗОВАНИЯ ПОЛУСФЕР, ВХОДЯЩИХ В
КОНСТРУКЦИЮ ВЫСОКОПРОЧНЫХ ШАРОБАЛЛОНОВ ВЫСОКОГО
ДАВЛЕНИЯ (330 кг/см2), ИЗ ПЕРСПЕКТИВНЫХ ТИТАНОВЫХ СПЛАВОВ
©2015 И.Т. Коптев, С.С. Юхневич, Л.Д. Гладкова, Ю.Д. Золотухин, Г.А. Сиделева
«Воронежский механический завод» - филиал федерального государственного унитарного
предприятия «Государственный научно-производственный центр имени М.В. Хруничева»,
(«ВМЗ» - филиал ФГУП «ГКНПЦ им. М.В. Хруничева»), Воронеж
Приведен новый (на уровне изобретений) способ формообразования полусфер из труднодеформируе-
мых перспективных титановых сплавов методом обтяжки нагретой заготовки по холодному пуансону в спе-
циализированной оснастке с определенным углом наклона матричного кольца, со встроенным подогревате-
лем, поддерживающим определенную температуру. Данный способ позволил значительно уменьшить вели-
чину утонения стенки в процессе формообразования вместо 15% до 8% и использовать съемный нагреватель
для формообразования полусфер любой конструкции.
Ключевые слова: Формообразование полусфер, технологический процесс, специализированная
оснастка, температура подогрева оснастки, температура нагрева заготовки
Титановые баллоны высокого дав-
ления объёмом 25 л., 36 л, 130 л. (рис. 1)
для нужд федерального государственного
унитарного предприятия «Государствен-
ный научно-производственный центр
имени М.В. Хруничева» изготавливались
государственным предприятием «Произ-
водственное объединение Южный маши-
ностроительный завод им. А.М. Макаро-
ва» г. Днепропетровск Украина.
Руководством ФГУП «ГКНПЦ им.
М. В. Хруничева» было принято решение
об организации отраслевого специализи-
рованного производства погружных ти-
тановых баллонов на «ВМЗ». В настоя-
щее время ведутся работы по подготовке
производства изготовления опытных об-
разцов титановых баллонов объёмом
25 л., 36 л., 130 л.
Рис. 1 Типовая конструкция, предлагаемых к освоению титановых баллонов
316
Технические характеристики, предлагаемых к освоению титановых баллонов
№ п/п Наименование параметра Ед. изм. 1А1С-6199-0 5А2С-6191-0 (11 С771.00.4302.2270.0000.00.0) 14С43-6312-0 1А1С 6196-0 (11C77U(XU30L2260jOOOOjOOJQ)
1. Геометрия ёмкости Сфера 0377 Сфера 0373 Сфера 428 Сфера 0644
2. Ёмкость л 25 25 36 130
3. Масса кг 9.621 11.545 19.150 37,730
4. Материал Толщина стенки: ВТ6С ВТ6С ВТ14 ВТ6С
5. - в зоне сварного шва мм 5±0.2 5±0.2 8.9 7.7±0.2
- на остальных участках мм 4-0,5 4±0.2 7.1 6±0.2
6. Вид сварки ПКб ПКп ОСТ921313-82 ПКбЛКп ОСТ921313-82 ПКб/ПКп ОСТ921313-82 ПКб/ПКп ОСТ921313 82
7. Характеристики штуцеров: -диаметр отв. проход, сеч. мм 10 20 12 20
8. Основные характеристики:
8.1 рабочее давление кгс/см: 230 230 330 230
8.2 допустимая негерметичность л мкм рт. СТС не более 1-Ю4 не более 5104 1105 не более 5104
8.3 ресурс по циклам нагружения кол. циклов 50 50 50 50
допустимое время
8.4 нахождения под рабочим давлением Применяемость шаробаллонов в составе PH: час 5,5 ч 15 суток Иод 15 суток
PH «Ангара-1.2» 1 3 3 7
9. PH «Ангара-АЗ» шт. 3 3 20
PH «Ангара-А5» 5 5 32
РБ «Бриз-М» КВТК 3 5 1
Начиная работы по подготовке про-
изводства, был проведен анализ техноло-
гии формообразования полусфер на род-
ственных предприятиях. Сопоставление
технологий производства шаробаллонов
высокого давления на предприятиях от-
расли говорит об их отличии в изготов-
лении титановых полусфер. ЗАО «ЗЭМ
РКК «Энергия» и «ЦСКБ-Прогресс» из-
готавливают полусферы из заготовки-
штамповки, которые изготавливает и по-
ставляет ОАО «Корпорация ВСНПО-
АВИСМА» г. Нижняя Салда. ОАО
«Красмаш» изготавливает полусферы из
листовой заготовки с утонением в донной
части до 20%. Существующие техноло-
гии получения полусфер предусматрива-
ют два основных технологических про-
цесса: объёмная штамповка с последую-
щей механической обработкой заготовки
до требуемой толщины и листовая штам-
повка с предварительным нагревом заго-
товки в печи. Листовая штамповка
(рис. 2) - это штамповка нагретой заго-
товки в нескольких штампах или в одном
штампе за несколько переходов с плос-
ким прижимом. При штамповке по из-
вестным схемам утонение в данной части
отштампованной полусферы достигает
более 20% от исходной толщины, что
приводит к необходимости выбора ис-
ходной толщины заготовки, превышаю-
щей толщину детали в 1,5-г2 раза.
317
Рис. 2 Традиционные схемы формообразования полусфер
Формообразование по рис. 2: вы-
тяжка - 2 перехода, продольный обжим,
калибровка, потребовало бы изготовле-
ния 4-х штампов.
При разработке специализирован-
ной оснастки для штамповки и в кон-
струкции штампа на нашем предприятии
была предложена и успешно внедрена
схема штамповки с конусным прижимом
(рис. 3). В случае применения конусного
прижима уменьшается угол охвата заго-
товкой радиуса закругления кромки мат-
рицы, что приводит к снижению мериди-
ональных (растягивающих) напряжений,
уменьшению усилия вытяжки сферы, а
следовательно, к уменьшению величины
утонения центральной зоны полусферы.
Для уменьшения величины утонения,
штамповка осуществляется холодным
пуансоном в нагретой матрице, что также
не позволяет металлу утоняться в зоне
касания пуансона, происходит обтяжка
нагретой заготовки по холодному пуан-
сону.
В отожженном состоянии титано-
вый сплав ВТ6-С является одним из
наиболее трудно деформируемых тита-
новых сплавов. Нагрев до 650°С может
быть использован для отдельных формо-
образующих операций. Одним из наибо-
лее перспективных методов является
окончательное формообразование в соче-
тании с выдержкой в течение 6-10 часов в
пресс-формах, нагретых до температуры
510-640°С. Этот метод более энергоем-
кий, что приведет к увеличению цикла
изготовления деталей.
Учитывая, что микроструктура
сплава ВТ6-С представляет собой пла-
стично-игольчатую a-фазу, разделенную
прослойкой P-фазы (а+р) для получения
оптимальных свойств, деформация
должна быть 25-40%, и выполнена при
завершении процесса в области а+Р, то
температура нагрева заготовки перед
формообразованием должна быть меньше
на 90°С начала превращения структуры
бета в а+р.
Исходя из допустимых коэффици-
ентов вытяжки для титановых сплавов и с
учетом температуры штампуемости, про-
цесс вытяжки осуществляется в 3 пере-
хода в одном штампе сферическим пуан-
соном в сферической матрице с расчет-
ным ограничением хода вытяжной тра-
версы для каждого перехода.
Для уменьшения резкого охлажде-
ния заготовки при установке в матрицу в
конструкции штампа встроен нагрева-
тель, поддерживающий постоянную тем-
318
пературу в процессе формообразования
(рис. 4).
В результате применения данного
способа на нашем предприятии удалось
получить уменьшение толщины при вы-
тяжке титановых сфер с максимальным
утонением 8%, что позволило произво-
дить механическую обработку как с
внутренней поверхности, так и с наруж-
ной.
Предборительные переходы штампобки
Операционный эскиз И 2)
Рис. 3 Предлагаемая схема формообразования полусфер
319
Рис. 4 Специализированная оснастка для формообразования полусфер, внедренная на ВМЗ
Для внедрения данной схемы фор-
мообразования на ВМЗ создан специали-
зированный участок изготовления по-
гружных титановых шаробаллонов с
внедрением технологии, специализиро-
ванной штамповой оснастки для изготов-
ления полусфер методом обтяжки нагре-
той заготовки по холодному пуансону на
базе имеющегося гидравлического пресса
усилием 1600т.с. Изготовление полусфер
по данной технологии дает возможность
отказаться от дорогостоящих покупных
заготовок, существенно повысить КИМ и
сократить трудоемкость на механиче-
скую обработку.
Заключение
Данная технология и специализиро-
ванная оснастка позволяют получить в
процессе формообразования полусферы
из листового материала с максимальным
утонением до 8% и производить проточ-
ку по наружным и внутренним поверх-
320
ностям для обеспечения разнотолщинно-
сти в соответствии с КД, дают возмож-
ность отказаться от дорогостоящих по-
купных заготовок и штампов, существен-
но повысить КИМ и сократить трудоем-
кость на механическую обработку.
При создании отраслевого специа-
лизированного производства по изготов-
лению шаробаллонов, используя предло-
женную технологию и специализирован-
ную оснастку, при освоении новой но-
менклатуры изготавливаются только
матрица и пуансон, которые устанавли-
ваются на уже имеющийся нагреватель.
Библиографический список:
1. Мельников Э.Л., Холодная
штамповка днищ - 2-е изд. перераб. и
доп. - М.: Машиностроение, 1986 - 192с.,
ил.
2. Всесоюзный ордена Ленина НИИ
авиационных материалов. Титановые
сплавы. Руководящие технические мате-
риалы ч. I изд. 2-е, перераб. и доп. - от-
дел научно-технической информации,
1959 г.
3. Ю.П. Давыдов и Г.В. Покров-
ский, Листовая штамповка легированных
сталей и сплавов, Государственное науч-
но-техническое издательство ОБОРОН-
ГИЗ-М.: 1962 г.
4. Романовский В.П., Справочник
по холодной штамповке - 6-е изд., пере-
раб. и доп. _ Л.: Машиностроение, 1979 -
520с., ил.
5. Руководство по аэрокосмическим
конструкционным металлам том II Спла-
вы цветных металлов, второе издание
март 1965, издательство Сиракьюсского
университета, Сиракьюс, Нью-Йорк,
V. Weiss и J.G/ Sessler, редакторы/.
References:
1. E.L. Melnikov, Cold Stamping of
Bottoms - 2nd edition, revised and corrected.
- Moscow: Mechanical Engineering, 1986 -
192 pages.
2. All-Union Order of Lenin Research
Institute of Aircraft Materials. Titanium al-
loys. Technical Guides, part I, 2nd edition,
revised and corrected - Science and Tech-
nical Information Department, 1959.
3. Y.P. Davydov and G.V. Pokrovsky,
Sheet-Metal Forming of Alloy Steel, State
Scientific and Technical Publication OBO-
RONGIZ - Moscow: 1962.
4. V.P. Romanovsky, Cold Stamping
Manual - 6th edition, revised and corrected,
Leningrad: Mechanical Engineering, 1979 -
520 pages.
5. Aerospace structural metals hand-
book volume II Non-ferrous alloys, second
revision march 1965, Syracuse university
press, Syracuse, New York, V.Weiss and
J.G./Sessler, editors/
DEVELOPMENT OF MANUFACTURING TECHNOLOGY AND SPECIAL-PURPOSE
TOOLING FOR HEMISPHERE FORMING, THAT ARE A PART OF CONSTRUC-
TION OF HIGH-STRENGTH SPHERICAL TANKS OF HIGH PRESSURE (330 kg/cm2),
MADE FROM PROGRESSIVE TITANIUM ALLOYS
LT. Koptev, S.S. Yukhnevich, L.D. Gladkova, Y.D. Zolotukhin, G.A. Sideleva
“Voronezh Mechanical Plant” - branch of Federal State Unitary Enterprise “Khrunichev Space
Research and Production Space Center”
(“VMP” - branch of FSUE “Khrunichev SRPSC”), Voronezh
The project describes a new method (at invention level) of hemisphere forming from hard-to-deform progres-
sive titanium alloys by means of stretch forming of hot blank part along a cool force in special-purpose tooling with
specific angle of slope of a matrix ring, with built-in heater maintaining specific temperature. This method allowed
to reduce greatly a wall thinning size during forming to 8% instead of 15% and to use removable heater for forming
of hemispheres of any construction.
Key words: Forming of hemispheres, technological process, special-purpose tooling, tooling heating tem-
perature, blank part heating temperature
321
Информация об авторах:
Коптев Иван Тихонович, к.т.н., доцент, заведующий кафедры «Технология маши-
ностроения» ФГБОУ ВПО «Воронежский государственный технический университет»,
руководитель филиала ФГУП «ГКНПЦ им. М.В. Хруничева» в г. Воронеж - директор
ВМЗ, 394 055, Россия, г. Воронеж, ул. Ворошилова, 22, т. 234-82-32, fgupvmz@mail.ru.
Область научных интересов: электрические методы обработки.
Юхневич Сергей Степанович, аспирант кафедры «Технология машиностроения»
ФГБОУ ВПО «Воронежский государственный технический университет», главный техно-
лог «ВМЗ» - филиала ФГУП «ГКНПЦ им. М.В. Хруничева», 394 055, Россия, г. Воронеж,
ул. Ворошилова, 22, т. 8-908-130-2553, fgupvmz@mail.ru.
Область научных интересов: комбинированная обработка хрупких материалов.
Гладкова Любовь Дмитриевна, заместитель главного технолога «ВМЗ» - филиала
ФГУП «ГКНПЦ им. М.В. Хруничева», 394 055, Россия, г. Воронеж, ул. Ворошилова, 22, т.
8-920-419-4277, fgupvmz@mail.ru.
Золотухин Юрий Дмитриевич, главный специалист отдела главного технолога
«ВМЗ» - филиала ФГУП «ГКНПЦ им. М.В. Хруничева», 394 055, Россия, г. Воронеж, ул.
Ворошилова, 22, т. 234-82-02, fgupvmz@mail.ru.
Сиделева Галина Александровна, начальник технологического бюро листоштам-
повочного цеха «ВМЗ» - филиала ФГУП «ГКНПЦ им. М.В. Хруничева», 394 055, Россия,
г. Воронеж, ул. Ворошилова, 22, т. 8-930-408-5320, fgupvmz@mail.ru.
Ivan Tikhonovich Koptev - Candidate of Engineering Sciences, Associate Professor at
the Department of Manufacturing Engineering of Federal State-Funded Educational Institution
of Higher Professional Education “Voronezh State Technical University”, Head of FSUE
“Khrunichev SRPSC” branch in Voronezh - VMP Diretor, 394055, Russian Federation, Voro-
nezh, 22 Voroshilov Str., tel. 234-82-32, fgupvmz@mail.ru.
Research interests: electrical development techniques.
Sergei Stepanovich Yukhnevich - Postgraduate at the Department of Manufacturing En-
gineering of Federal State-Funded Educational Institution of Higher Professional Education
“Voronezh State Technical University”, Chief Technologist of “VMP” - branch of FSUE
“Khrunichev SRPSC”, 394055, Russian Federation, Voronezh, 22 Voroshilov Str.,
8-908-130-2553, fgupvmz@mail.ru.
Research interests: composite processing of brittle materials.
Lyubov Dmitrievna Gladkova, Deputy Chief Technologist of “VMP” - branch of FSUE
“Khrunichev SRPSC”, 394055, Russian Federation, Voronezh, 22 Voroshilov Str.,
8-920-419-4277, fgupvmz@mail.ru.
Yuri Dmitrievich Zolotukhin, Chief Specialist of Chief Technologist Department of
“VMP” - branch of FSUE “Khrunichev SRPSC”, 394055, Russian Federation, Voronezh,
22 Voroshilov Str., tel. 234-82-02, fgupvmz@mail.ru.
Galina Alexandrovna Sideleva, Head of Production Engineering Bureau of Sheet-Metal
Shop of “VMP” - branch of FSUE “Khrunichev SRPSC”, 394055, Russian Federation, Voro-
nezh, 22 Voroshilov Str., 8-930-408-5320, fgupvmz@mail.ru.
322
УДК 629.78+681.586.5
ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ
С ЗАКРЫТЫМ ОПТИЧЕСКИМ КАНАЛОМ
©2015 Г.И. Леонович1, Н.В. Рясной2, С.В. Ивков2, Н.А. Ливочкина2
'Самарский государственный университет, г. Самара
2 АО "РКЦ "Прогресс", г.Самара
Приведено описание конструкции и принципа работы сетевого гибридного волоконно-оптического
датчика линейного перемещения, построенного на внутриволоконных брэгговских решетках сопряженных с
сенсорно-актюаторными элементами, которые преобразуют изменение постоянного магнитного поля в де-
формацию решетки. Датчик обладает высокой степенью устойчивости к внешним воздействующим факто-
рам.
Ключевые слова: сенсорная сеть, закрытый оптический канал, волоконно-оптический датчик пере-
мещения, внутриволоконная брэгговская решетка, сенсорно-актюаторный элемент, постоянный магнит
В настоящее время серийно изго-
тавливаемые волоконно-оптические дат-
чики перемещения с закрытым оптиче-
ским каналом (ВОДП ЗОК) для изделий
РКТ практически отсутствуют. Предлага-
емые ВОДП, как правило, выполняются с
технологическими разрывами оптическо-
го волокна (ОВ), используемого в каче-
стве чувствительного элемента ампли-
тудного типа, т.е. являются датчиками с
открытым оптическим каналом. Такие
устройства не имеют единой методоло-
гии построения, чувствительны к воз-
действию внешних влияющих факторов
(ВВФ) РКТ, не считаются перспективны-
ми с точки зрения замены традиционным
магнитоэлектрическим, емкостным и
оптоэлектронным датчикам. Также из-
вестные ВОДП не являются сетевыми,
для них не определены принципы ин-
формационной, параметрической и кон-
структивной интеграции в сетевую воло-
конно-оптическую систему передачи ин-
формации. Отсутствие требуемой номен-
клатуры ВОДП ЗОК и недостаточные
темпы их разработок являются сдержи-
вающими факторами в создании и внед-
рении волоконно-оптических сенсорных
сетей (ВОСС), поэтому создание ВОДП
ЗОК с высокими метрологическими и
эксплуатационными характеристиками
является актуальной задачей.
В процессе анализа известных ВОД
выявлено, что с точки зрения защищен-
ности от внешней среды наиболее эффек-
тивным чувствительным элементом во-
локонно-оптических датчиков считается
формируемая в сердцевине оптоволокна
(ОВ) внутриволоконная Брэгговская ре-
шетка (ВБР) [1]. ВБР представляет собой
участок ОВ без технологических разры-
вов длиной Сдс=0,3-3 см, в котором по-
казатель преломления сердцевины п про-
модулирован в продольном направлении
с регулярным пространственным перио-
дом А= 300-600 нм и глубиной модуля-
ции Зп (рис. 1).
Решетка Брэгга
Оболочка Ай(., Сердцевина
Фртр^
Фо</лЧ
ФЫ/Э-Ф^Хдс»
Модуляция п
)))ЙЩ
Рис. 1. Сенсорный участок оптического волокна на основе ВБР
323
Можно создать ВБР с потерями <0,1
дБ, высокой точностью (±0,05 нм) и вы-
соким подавлением помех соседнего ка-
нала (>40дБ). Для света, распространяю-
щегося по оптоволокну в виде низшей
пространственной моды, такая структура
представляет собой спектрально-
селективное зеркало с коэффициентом
отражения Котах на резонансной длине
волны Лвс. удовлетворяющей условию
Брэгга: Авс = 2иА где п- эффективный
показатель преломления сердцевины во-
локна; Л - период решетки. Смещение
ДЛвс, используемое для создания встро-
енных сенсоров, зависит от температуры
световода и от приложенных к нему ме-
ханических растягивающих или сжима-
ющих напряжений [1]:
ЛЛ-BG
= 211Л <1- [Д, - Г(Д1 + Д;)] + СГ +
п dT
(1)
где ДТ - изменение температуры; е -
приложенное механическое напряжение;
Ру - коэффициенты упругооптического
тензора; v - коэффициент Пуассона; а -
коэффициент теплового расширения
кварцевого стекла.
Простые измерительные средства
позволяют определить Хвв и ДХвс с точ-
ностью до долей нм при изменении ALbg
и соответственно Л. К неоспоримым до-
стоинствам сенсорных участков ОВ с
ВБР можно отнести малые размеры и
массу, универсальность, химическую
стойкость, возможность создания на их
основе широкий спектр различных типов
пассивных датчиков: деформации, тем-
пературы, скорости, положения, переме-
щения и др. [2].
ВБР изначально предполагалась ис-
пользовать в качестве элемент квазирас-
пределенной сенсорной системы, предна-
значенной для измерения деформации и
температуры различных физических тел.
В процессе развития научного направле-
ния открылись новые возможности для
расширения номенклатуры физических
величин, связанные с созданием гибрид-
ных датчиков, содержащих сенсорно-
актюаторные элементы (САЭ). Основной
функцией САЭ является преобразование
измеряемой величины в деформацию
сенсорного участка ОВ с ВБР. В частно-
сти, в качестве САЭ для измерения пере-
мещения можно сформировать конструк-
цию ВОДП ЗОК, использующую различ-
ные варианты реализации магнитострик-
ционного эффекта.
На рисунке 2 представлен гибрид-
ный ВОДП ЗОК, построенный по диффе-
ренциальной схеме с применением двух
участков ОВ с ВБР и деформирующими
узлами на основе постоянных магнитов.
Датчик содержит: корпус 1; направляю-
щие линейного перемещения (втулки) 2;
перемещающийся шток 3 с выступами 4
для крепления магнитных вставок 5 из с
центральным отверстием для свободного
перемещения вдоль волоконно-
оптического кабеля (ВОК) 6; неподвиж-
ные фиксаторы 7, 8 ВОК; магниточув-
ствительные или магнитные подвижные
фиксаторы 9 ВОК; 10 участки ВОК с
ВБР; регулирующие упругие элементы
(пружины) 11; ограничители 12 переме-
щения фиксаторов 9 в диапазоне измене-
ния ДЬВв-
324
Рис. 2. Датчик линейного перемещения на основе двух ВБР и постоянных магнитов:
а - конструкция; б - функциональная зависимость смещения длин волн ВБР
от перемещения при разных значениях температуры
Подвижные элементы и направля-
ющие совмещены таким образом, что
магниты и фиксаторы могут испытывать
относительное взаимное перемещение
только вдоль оси штока. Перемещение
вызывает изменение размеров участка
ОВ с ВБР, что приводит к изменениям
длины волны, отражаемой ВБР при под-
ключении датчика к анализатору оптиче-
ских сигналов. В процессе перемещения
х штока участок ОВ с ВБР, к которому
приближается магнитная вставка, испы-
тывает, нарастающее усилие растяжения
за счет притяжения магниточувствитель-
ного или магнитного подвижного фикса-
тора ОВ, а участок ОВ с ВБР, от которого
магнитная вставка удаляется - соответ-
ствующее ослабление растяжения ОВ с
ВБР. Пружины препятствуют попереч-
ному изгибу ОВ, а также сжимают уча-
сток с ВБР при начальной настройке дат-
чика в целях расширения динамического
диапазона деформации ОВ. Максимально
возможное относительное значение диа-
пазона деформации участка кварцевого
ОДНОМОДОВОГО ОВ С ВБР Еп^ДЬвСтах^Вв
составляет в этом случае величину 0,02.
Если большой диапазон не требуются,
вместо пружин и подвижных фиксаторов
могут применяться направляющие пла-
стины из магнитострикционного матери-
ала (£^х=10-6-10-3), к которому ОВ с ВБР
крепится, например, посредством эпок-
сидного клея [3].
В представленном двухканальном
датчике используются две разнонаправ-
ленные зависимости смещения ДЯ.ВС1(Х])
и ДЯВС2(х2) , привязанные к перемеще-
нию х, которые позволяют существенно
повысить чувствительность датчика за
счет использования рабочих участков ха-
рактеристик с большой крутизной.
В каждом канале сила взаимного
притягивания подвижного фиксатора и
вставки в виде постоянного магнита из
магнитотвердого материала цилиндриче-
ской формы с одинаковыми геометриче-
скими параметрами равна (например, в
обозначениях для первого канала) [4]
325
где Во - плотность магнитного потока в
непосредственной близости от полюса,
Тл; S - площадь сечения магнита пер-
пендикулярно вектору перемещения, м2;
h - высота магнита, м; г - радиус магни-
та, м; х - расстояние между магнитами,
м; //о = 410‘7 Гн/м - универсальная маг-
нитная постоянная.
Приложенная к ОВ сила вызывает
осевую деформацию ВБР, в результате
чего происходит смещение брэгговской
длины волны на величину
A^bgi (-^i ) ~ 2иЛ|
\ 2 J J Es
(3)
где Е = 0,56104 кг/мм2 - модуль Юнга
для кварцевого стекла; 5 - площадь сече-
ния ОВ; Fnp - суммарная сила сопротив-
ления пружины, установленной между
корпусом и подвижным фиксатором, и
оболочки ОВ.
В анализаторе спектра определяется
смещение длины волны отраженного от
ВБР оптического сигнала, по значению
которого в блоке обработки данных вы-
числяется цифровой код перемещения
Nx\.
На датчик в процессе эксплуатации
воздействует тепловое воздействие, ко-
торое может вызывать нежелательное
изменения длины волны ВБР, ведущее к
погрешности измерения перемещения.
Для компенсации погрешности исполь-
зуется второй участок оптоволокна с
ВБР, настроенной на ABG2. Оба измери-
тельных канала выполнены на общем
ОВ, поэтому можно считать, что темпе-
ратурные константы кТ]=кТ2 . Все
настройки каналов датчика на заданный
диапазон перемещения X, длины волн
ЯВС1, ABG2 и их взаимосвязь с перемеще-
нием и температурой F(xt,T), F(x2,T)
заложены в памяти блока приема и обра-
ботки оптических сигналов. Тогда ре-
зультат измерения перемещения при
дифференциальной схеме подключения
каналов представляется как [5]
х = РМ(>-к)-Р^г,Т)-С
ki,
где к2х- коэффициент пропорционально-
сти, определяемый при регулировке и ка-
либровке датчика; к и С - постоянные
величины для выбранной конструктив-
ной схемы формирования каналов, кото-
рые определяются по результатам ком-
пьютерной обработки эксперименталь-
ных данных.
Библиографический список:
1. Удд Э. Волоконно-оптические
датчики. М.: Техносфера, 2008. - 520 с.
2. Леонович Г. И., Матюнин С. А.,
Акбаров Р. Р. Ивков С. В., Ливочкина Н.
А. Сетевые цифровые волоконно-
оптические датчики перемещения с за-
крытым оптическим каналом /Вестник
Самарского государственного аэрокос-
мического университета, №7(38), 2012 г.,
с. 9-15.
3. Валенте Л.Г., Бруно А.К.,
Фрейтас Р.М., Брага А.М.Б., Карвало X.
Р., Видал Ж. Л. А. Волоконно-
оптический датчик положения // Патент
РФ 2413178, опубл. 27.02.2011, Бюл. № 6.
4. Vokoun D., Beleggia М., Heller L.
and Sittner P. Magnetostatic interactions and
forces between cylindrical permanent mag-
nets . J. Magn. Magn. Mater. 2009, 321
3758-63.
5. Клаассен К.Б. Основы измере-
ний. Электронные методы приборы в из-
мерительной технике. - М.: Постмаркет,
2000. - 352 с.
References:
1. Udd Е. Fiber-optic sensors. М.:
Technosphera, 2008. - 520 р.
326
2. Leonovich G. I., Matyunin S. A.,
Akbarov R.R., Ivkov S. V., Levochkina N.
A. Network digital fiber-optic displacement
sensors with a closed optical channel
/Vestnik of Samara state aerospace Univer-
sity, No. 7(38), 2012, pp. 9-15.
3. Valente, L. G., Bruno, A., Freitas,
R. M., Braga, A. M. B., Carvalho H. R., Vi-
dal J. L. A. Fiber-optic position sensor // Pa-
tent RF 2413178, publ. 27.02.2011, bull.
No. 6.
4. Vokoun D., Beleggia M., Heller L.
and Sittner P. Magnetostatic interactions and
forces between cylindrical permanent mag-
nets . J. Magn. Magn. Mater. 2009, 321
3758-63.
5. Klaassen, К. B. basis of measure-
ment. Electronic devices in measurement
technology. - M.: Control, 2000. - 352 p.
FIBER-OPTIC LINEAR DISPLACEMENT SENSOR WITH A CLOSED OPTICAL
CHANNEL
©2015 G.I. Leonovich1, N.V.Rasnoy2, S.V. Ivkov2, N.A. Livochkina2
’Samara state University, Samara
2 JSC «SRC «Progress», Samara
Describes the design and principle of operation of hybrid network of fiber-optic linear displacement sensor,
built on fiber Bragg grating associated with the touch-actuating elements, which convert the change of a constant
magnetic field in the deformation of the lattice. The sensor has a high degree of resistance to external influencing
factors.
Keywords: sensor network, indoor optical channel, the optical fiber displacement sensor, fiber Bragg grat-
ing, sensor-actuating element, a permanent magnet
Информация об авторах:
Леонович Георгий Иванович, д.т.н., профессор, начальник Поволжского отделения
Секции прикладных проблем при Президиуме РАН, 443001, г. Самара, пер. Студенческий,
ЗА, (846) 334-48-10, leosil@mail.ru
Область научных интересов: информационно-измерительные системы, целевое пла-
нирование Вооруженных сил.
Рясной Николай Владимирович, главный конструктор АО «РКЦ «Прогресс»,
Область научных интересов: бортовые комплексы
Ивков Сергей Валериевич, инженер АО «РКЦ «Прогресс», область научных инте-
ресов: информационно-измерительные устройства
Ливочкина Наталья Александровна, инженер АО «РКЦ «Прогресс»,
Область научных интересов: технические измерения
Leonovich Georgy Ivanovich, doctor of technical sciences, professor, head of the Volga
Department Section of Applied Problems of the Presidium RAS, 443001, Samara, trans. Stu-
denchesky, ЗА, (846) 334-48-10, leosil@mail.ru.
Research interests: information-measuring system, target planning of the Armed Forces.
Ryasnoy Nikolay Vladimirovich, chief designer of JSC «SRC «Progress», research in-
terests: avionics spacecraft.
Ivkov Sergey Valerievich, engineer of JSC «SRC «Progress» research interests: infor-
mation-measuring devices.
Livochkina Natalia Aleksandrovna, engineer at JSC «SRC «Progress», research inter-
ests: technical measurements.
327
УДК 621.3.082
ТЕСТОПРИГОДНОЕ ПРОЕКТИРОВАНИЕ И ПРОИЗВОДСТВЕННАЯ
ДИАГНОСТИКА ЭЛЕКТРОННЫХ МОДУЛЕЙ РАКЕТНО-КОСМИЧЕСКОЙ
ПРОМЫШЛЕННОСТИ
©2015 В.М. Гречишников, А.А. Курицкий, И.Ю. Мануйлов, А.Д. Бутько
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Приведен алгоритм тестопригодного проектирования и диагностики ЭМ с применением метода
граничного сканирования. Предлагаемого алгоритма разработки, проектирования и диагностики ЭМ заклю-
чается в комплексном использовании метода граничного сканирования на базе аппаратно - программных
средств ProVision в сочетании с функциональным тестированием.
Ключевые слова: тестопригодность, теоретическое покрытие, реальное покрытие, локализация
дефектов, ProVision
На рисунке 1 представлен алгоритм
тестопригодного проектирования и диа-
гностики ЭМ с применением метода гра-
ничного сканирования. Бежевым цветом
выделены этапы, реализуемые с помо-
щью метода граничного сканирования.
Рассмотрим предлагаемый алгоритм бо-
лее подробно.
1. Анализ технического задания на
разработку электронных модулей (ЭМ),
включающего системные требования к
функциональному назначению, кон-
структивной, энергетической и информа-
ционной совместимости, тестопригодно-
сти, средствам производственной диагно-
стики и надежности вновь разрабатывае-
мого изделия. Следует отметить, что
на данном этапе не представляется воз-
можным задать точный процент реаль-
ного тестового покрытия разрабатыва-
емого ЭМ. Это связано с тем, что на
данном этапе неизвестна пока что но-
менклатура применяемых электронных
компонентов и их электрические связи
между собой. Поэтому в ТЗ можно ука-
зать лишь максимальные (минималь-
ные?) требования к тестируемости ли-
ний связи связанных с элементами, со-
держащими JTAG-интерфейс.
2. На втором этапе разрабатывается
функциональная схема изделия, опреде-
ляющая состав входящих в него функци-
ональных блоков и порядок их информа-
ционного взаимодействия.
2-а На этом этапе производится вы-
бор и обоснование используемой эле-
ментной базы с учетом отраслевого огра-
ничительного перечня. При этом обяза-
тельным требованием является макси-
мальное использование цифровых элек-
тронных компонентов, поддерживаю-
щих стандарт IEEE 1149.1.
6. На следующем этапе на основе
функциональной схемы с использовани-
ем САПР PCAD или Altium Desiner раз-
рабатывается электрическая принципи-
альная схема. В ходе разработки принци-
пиальной схемы необходимо реализовать
комплекс схемотехнических и конструк-
тивных приемов, ориентированных на
обеспечение максимально-возможного
тестового покрытия*. Результатами вы-
полнения этапа являются: файл с расши-
рением .sch, net-лист, спецификация.
328
1 .Разработка ТЗ с учетом
требований ГС
2-а. Разработка
функциональной схемы
3 .Выбор элементной базы
4. Разработка
принципиальной схемы
5. Разработка исходных
файлов для Provision
6. Разработка
диагностического проекта в
среде Provision
нет 1
нет 2
Нефункциональный тест
прошел штатно
да
19.Комплексные испытания ПП
нет
20. Функциональный тест
прошел штатно
да
21.Изделие признается годным
22.Регулировка изделия
7.Анализ теоретического
тестового покрытия (ТП)
8.Анализ реального тестового
покрытия (ТП)
9.Визуализация тестового
покрытия на принципиальной
схеме
10. Разработка и реализация
на принципиальной схеме
рекомендаций по
увеличению ТП
I
Н.Разводка печатной платы
i_____________
23.Граничное сканирование
(ГС)
24.Поиск, локализация,
идентификация и
визуализация дефектов
25.Диагностический отчет
да
26 Дефект
устранимый?
нет
12.Визуализация ТП на ПП
27 Изделие бракуется
13.Изготовление и контроль
ПП
14.Сборка (ремонт)
электронного модуля
15.0птическая инспекция
16.Дефектов не выявлено
17.Функциональный тест
Рис. 1 - Общий алгоритм проектирования и диагностики ЭМ с использованием граничного сканирования
*- Здесь курсивом выделены проце-
дуры, реализуемые методом граничного
сканирования.
4. На четвертом этапе в програм-
ме «Provision» разрабатываются файлы
исходной информации, необходимые для
разработки диагностического проекта.
5. Составляется диагностический
проект для проектируемого изделия в
виде набора тестовых приложений.
6. Рассчитывается максимально
возможное теоретическое тестовое
покрытие по устройствам, связям, кон-
тактам.
7. Рассчитывается максимально
возможное реальное тестовое покры-
тие по устройствам, связям, контактам
и с использованием цветовой гаммы осу-
ществляется визуализация покрытия на
принципиальной схеме.
8. Проводится визуализация тесто-
вого покрытия на принципиальной схеме
с использованием цветовой гаммы.
9. Разрабатываются и реализовы-
ваются на принципиальной схеме реко-
мендации по увеличению тестового по-
крытия.
10. Разводка печатной платы, ре-
зультатом которой является psb-файл,
329
отражающий топологию всех электриче-
ских соединений между компонентами
принципиальной схемы на печатной пла-
те изделия.
11. Осуществляется контрольная
визуализация ТП на печатной плате.
12. Изготовление и контроль каче-
ства печатной платы.
13. Сборка (ремонт) электронного
модуля методом поверхностного монта-
жа.
14. Оптическая инспекция собран-
ной печатной платы, в ходе которой
определяется наличие всех элементов на
плате, правильность их установки и
наличие видимых производственных де-
фектов, например короткое замыкание
между контактами микросхем с планар-
ными выводами.
15. При обнаружении дефектов в
ходе оптической инспекции собранная
печатная плата возвращается на участок
сборки для проведения ремонтных работ
и устранения выявленных дефектов.
16. В случае необнаружения дефек-
тов с помощью оптической инспекции
проводится функциональное тестирова-
ние с использованием аппаратно - про-
граммных средств.
17. В случае нештатного выполне-
ния функционального теста изделие пе-
редается в подразделение, в котором, ес-
ли это возможно, проводится поиск, ло-
кализация и устранение выявленных де-
фектов. После этого изделие вновь про-
ходит функциональное тестирование.
18. В случае успешного выполне-
ния функционального теста изделия пе-
редается на комплексные испытания.
19. После комплексных испытаний
изделие вновь проходит функциональное
тестирование.
20. В случае успешного прохожде-
ния функционального теста изделие при-
знается годным к эксплуатации.
Примечание: Некоторые изделия
проверяются функциональными тестами
и методом граничного сканирования во
время воздействия внешних факторов,
что не нашло отражения в алгоритме,
приведено на рис. 1
21. В случае нештатного повторно-
го прохождения функционального теста
после регулировки изделие тестируется
методом граничного сканирования с ис-
пользованием универсального диагно-
стического стенда.
22. В ходе тестирования по методу
ГС осуществляется поиск, локализация,
идентификация и визуализация обнару-
женных дефектов.
23. При обнаружении дефектов про-
грамма формирует диагностический от-
чет с перечнем обнаруженных дефектов.
24. Если обнаруженные дефекты
устранимы, то изделие передается на ре-
монт регулировку.
25. Если дефект признан неустра-
нимым, то изделие бракуется.
Таким образом, отличие предлагае-
мого алгоритма разработки, проектиро-
вания и диагностики ЭМ заключается в
комплексном использовании метода гра-
ничного сканирования на базе аппаратно
- программных средств ProVision в соче-
тании с функциональным тестированием,
что существенно расширяет диагности-
ческое покрытие, облегчает поиск и со-
кращает время, затрачиваемое на и лока-
лизацию и устранение дефектов собран-
ных печатных плат разрабатываемых
электронных модулей.
Библиографический список:
1. Совершенствование методов
разработки, проектирования и диагно-
стики электронных модулей бортовых
систем управления; отчет о НИР/СГАУ;
рус.; руководитель: В.М. Гречишников;
ответственный исполнитель: А.А. Куриц-
кий. - Самара, 2014. - 31с. - Инвентар-
ный № 44/1.
2. Городецкий, A. JTAG тестирова-
ние кластеров.//[текст]/ А. Городецкий//
Компоненты и технологии. 2010. №1 —
С. 38-39.
3. Иванов, А. Два подхода к тести-
рованию кластеров в технологии перифе-
рийного сканирования.//[текст]/ А. Ива-
нов// Компоненты и технологии. 2011.
№10 —С. 203-206.
330
References:
1. Improvement of methods for the
development, design and diagnostics of
electronic modules onboard systems man-
agement; research reports/SSAU; eng.; su-
pervisor: V. M. Grechishnikov; the Execu-
tive: A.A. Kuritzky. - Samara, 2014. - 31C.
- Inventory No. 44/1.
2. Gorodetsky, A. JTAG testing clus-
ters.//[text]/ A. Gorodetsky// Components
and technologies. 2010. No. 1 — Pp. 38-39.
3. Ivanov, A. Two approaches to test-
ing of clusters in the boundary-scan tech-
nology .//[text]/ A. Ivanov// Components and
technologies. 2011. No. 10: Pp. 203 to 206
TESTABLE DESIGN AND DIAGNOSTICS OF ELECTRONIC PRODUCTION OF
MODULES FOR THE AEROSPACE INDUSTRY
©2015 V.M. Grechishnikov, A.A. Kuritzky, I.Y. Manuilov, A.D. Butko,
Samara State Aerospace University, Samara
The algorithm testable design and diagnostics of EM using the method of boundary scan. The proposed al-
gorithm for the development, design and diagnostics of EM lies in the integrated use of the method of boundary
scan-based hardware and software ProVision, in combination with functional testing.
Keywords: testability, theoretical coverage, actual coverage, localization of defects, ProVision
Информация об авторах:
Гречишников Владимир Михайлович, д.т.н., профессор, зав. кафедры электротех-
ники, СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 267-45-56, gv@ssau.ru.
Область научных интересов: электрические методы производственного контроля.
Бутько Алексей Дмитриевич, инженер, аспирант кафедры электротехники, СГАУ,
443 086, Россия, г. Самара, Московское ш. 34, т. 8-927-903-0097, LexAK47@yandex.ru
Область научных интересов: электрические методы производственного контроля.
Курицкий Александр Александрович, к.т.н., доцент кафедры электротехники,
СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 267-45-56, forsale@bk.ru.
Область научных интересов: электрические методы производственного контроля.
Мануйлов Иван Юрьевич, директор НТЦР АО «УКБП», 432071, Россия, г. Улья-
новск, ул. Крымова, д.10 «А»,т. 8(8422) 31-11-06, manuylov@ukbp.ru.
Grechishnikov Vladimir Mikhailovich, doctor of technical Sciences, Professor, head.
Department of electrical engineering, Samara State Aerospace University, 443086, Russia,
Samara, Moskovskoe sh. 34, T. 267-45-56, gv@ssau.ru.
Research interests: electrical methods of production control.
Butko Alexey Dmitrievich, engineer, postgraduate student, Department of electrical engi-
neering, Samara State Aerospace University, 443 086, Russia, Samara, Moskovskoe sh. 34, T.
8-927-903-0097, LexAK47@yandex.ru .
Research interests: electrical methods of production control.
Kurizki Alexander Alexandrovich, Ph. D., associate Professor in the Department of elec-
trical engineering, Samara State Aerospace University, 443086, Russia, Samara, Moskovskoe sh.
34, T. 267-45-56, forsale@bk.ru
Research interests: electrical methods of production control.
Manuilov Ivan Yurievich, superintendent NCCR JSC "UKBP", 432071, Russia, Ulya-
novsk, Krymova str., 10 A, 8(8422) 31-11-06, manuylov@ukbp.ru
331
УДК 004.9
АВТОМАТИЗАЦИЯ РАЗРАБОТКИ КД И 3D МОДЕЛЕЙ МОНТАЖА БКС
И КАБЕЛЕЙ В СРЕДЕ ELEMENTS/PRO «CABLING» НА ИЗДЕЛИЯХ
РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
©2015 О.Б. Кудрявцев
АО «РКЦ «Прогресс», г. Самара
В середине 2010 года на предприятии АО «РКЦ «Прогресс» было начато внедрение автоматизиро-
ванного электронного 3D проектирования и конструирования в среде «Сгео Elements/Рго» (на блоке выведе-
ния «Волга»). В сравнении с «Компас-ЗВ» система «Сгео Elements/Рго» выигрывала в части автоматизации
проектирования и конструирования изделия. Одним из важнейших факторов внедрения являлось ускорение
выпуска конструкторской документации (КД) на кабели и уменьшение трудоемкости по ее сопровождению,
а также в перспективе полный или частичный отказ от бумажных носителей. В последствии применения
приложений Creo Elements/Pro по трехмерному проектирования в корне изменило проектирование и кон-
струирование изделий. Данная возможность Сгео Elements/Pro предоставила возможность конструкторам
полное понимание конструкции в онлайн режиме работы по всему изделию. Т.е. любой исполнитель, рабо-
тающий с конкретной сборочной единицей может контролировать и отслеживать работу и изменения другой
сборочной, единицы которую он задействует в свое работе.
Ключевые слова: проектирование МБКС, среда «Сгео Elements/Pro», макетирование, модель
Рассмотрим алгоритм этапов проек-
тирования и конструирования МБКС в
среде Creo Elements/Pro «Cabling»:
• Также как и в предыдущем пунк-
те, основным этапом в изготовлении лю-
бого изделия является подготовка, и за-
щита эскизного проекта, после чего
наступает этап проектирования изделия с
последующем выпуском ТЗ на бумажном
носителе и модель У СП изделия, в кото-
рые входят основные положения по: тре-
бованиям к изготовлению изделия, его
габаритным размерам, некоторым такти-
ко-техническим характеристик, состав
изделия, условия эксплуатации, устрой-
ство и работа изделия.
• Аналогично после запуска ТЗ и
У СП изделия параллельно в работу всту-
пают ряд подразделений, которые зани-
маются разработкой КД, а точнее разра-
боткой моделей У СК, ПРК на основе
У СП проектного отдела (этап конструи-
рования и выдачи исходных данных в от-
делы смежники).
• На основании выше изложенных
пунктов в работу вступает этап констру-
ирования МБКС в среде Creo Ele-
ments/Pro «Cabling» в который входят
следующие под этапы.
• После проведенной работы по
выдаче исходных данных, отдел по мон-
тажу БКС преступает к выпуску МС,
КМК, МО, ИМК и КД на МБКС с фор-
мированием в автономным режиме спе-
цификации и таблицы подключений (ТБ)
на бумажном носителе. А также после
всех корректировок кабелей соответ-
ствующим отделом, МС кабелей переда-
ется в контекст соответствующего отдела
системы Windchill для дальнейшего за-
пуска с сопроводительной документаци-
ей.
• Завершающим этапом в констру-
ировании кабелей является разработка
КД, которая заключается в следующем.
В заключении необходимо подвести
итог, по которому можно судить рента-
бельность использования, а также пер-
спективы нового метода трехмерного
проектирования и конструирования изде-
лий для АО «РКЦ «Прогресс».
Относительные плюсы Creo Ele-
ments/Pro:
1) достаточно подробная визуали-
зация обстановки изделия;
2) перспектива отказа от макетно-
конструкторских испытаний (МКИ) из-
делия;
3) частичный или полный отказа от
бумажных носителей.
Относительные минусы Creo Ele-
ments/Pro:
332
1) крайне трудоемкое выполнение
большинства операций
2) необходимо достаточно мощные
персональные компьютеры
Что касается производственной со-
ставляющей предприятия, с применением
Сгео/Рго ускорился технологический
процесс сборки изделий и заказа ком-
плектующих. По 3D модели монтажник
может точно определить место положе-
ния кабеля монтируемого на изделии.
Вывод:
1. Разработка КА ведется с ком-
плексным использованием информаци-
онных технологий проектирования и
конструирования в единой информаци-
онной среде. Одним из основных вновь
введенных факторов проектно-
конструкторских работ является форми-
рование единой цифровой модели косми-
ческого аппарат и разработка КД.
2. Ввиду явных преимуществ рабо-
ты данного ПО, основанных на обнов-
ленном инструментарии и интерфейсе.
3. Разработка кабелей по данной
технологии сокращает сроки разработки
изделий нашим предприятием, повышает
качество разрабатываемой конструктор-
ской.
4. Положительный опыт разработки
изделий ракетно космической техники в
условиях комплексного использования
информационных технологий показывает
необходимость использования такого же
подхода в разработке других перспектив-
ных изделий.
5. Применение данных технологий
демонстрирует новые возможности в
сфере управления требованиями как за-
мена или дополнения классических тех-
нических заданий.
Библиографический список:
1. Инструкция 2883-201 2-026 Ме-
тодика Создания габаритных моделей в
САПР Creo Elements\Pro;
2. Методика нисходящего проети-
рования при разработке изделий ЦСКБ-
Прогресс в системе Pro/ENGINEER;
3. Временный регламент №2883-
2013-11. Взаимодействие конструктор-
ских подразделений при сквозном проек-
тировании бортовой кабельной сети по
технологии САПР БКС (схемная часть) -
Cabling (САПР Сгео) - САПР БКС
кабельная часть).
References:
1. The Instruction 2883-201 2-026
Technique of Creation of dimensional sam-
ple pieces in CAD system Creo Ele-
ments\Pro;
2. The Technique descending npoe-
тирования by working out of articles
TSSKB-PROGRESS in system
Pro/ENGINEER;
3. Temporary regulations №2883-
2013-11. Interaction of designer divisions at
open projection of a board cable network on
technique of CAD system БКС (a circuit
part) - Cabling (CAD system Creo) - CAD
system БКС a cable part).
AUTOMATION OF WORKING OUT КД AND 3D SAMPLE PIECES OF MOUNTING
БКС AND CABLES IN THE ENVIRONMENT OF ELEMENTS/PRO «CABLING» ON
ARTICLES OF SPACE-ROCKET ENGINEERING
©2015 О. B. Kudryavtsev
JSC «SRC «Progress», Samara
In the middle of 2010 at the operation of joint-stock company "SRC" Progress »there has been begun intro-
duction automized electronic 3D projection and constructing in the environment Creo Elements/Pro »(on the block
of deducing"Volga"). In comparison with« "system" Creo Elements/Pro »benefited Kompas-3D regarding design
automation and article constructing. One of the major factors of introduction was speedup of issue of the designer
documentation (КД) on cables and labour input reduction on its support, and also in the long term complete or frac-
tional refusal of paper carriers.
In a consequence of application of applications Creo Elements/Pro on three-dimensional projection in a radi-
cal has changed projection and constructing of articles. Given possibility Creo Elements/Pro has given possibility to
333
designers complete understanding of a construction in online a mode of behaviour on all article. I.e. any executor
working with concrete assembly unit can inspect and trace operation and changes of another assembly, which it will
involve units in the to operation.
Keywords: projection МБКС, environment «Creo Elements/Рго», prototyping, a sample piece.
Информация об авторах:
Кудрявцев Олег Борисович: инженер-конструктор; самолете- и вертолетострое-
ние; магистр; ракетные комплексы и космонавтика по направлению инновационные тех-
нологии в производстве летательных аппаратов; АО «РКЦ «Прогресс», 443009, Россия,
г. Самара, ул. Земеца, д.18; тел.8(846)228-99-26, 8(827)655-68-65, эл. почта:
mail@samspace.ru, dartoleg007@mail.ru.
Область научных интересов: Общее машиностроение.
Kudryavtsev Oleg Borisovich: the design engineer; self-summer - and vertoletostroenie;
the master; rocket complexes and astronautics in a direction innovative techniques in manufac-
ture of flying machines; JSC «SRC «Progress», 443009, Russia, Samara, street Zemetsa, д.18;
Ph. 8 (846) 228-99-26, 8(827) 655-68-65, эл. Mail: mail@samspace.ru , dartoleg007@mail.ru.
Area of scientific interests: the Common machine industry.
334
УДК 543.226:541.123.3
ВЫЯВЛЕНИЕ НИЗКОПЛАВКИХ СОСТАВОВ В РЯДУ ЦИКЛОДОДЕКАН -
Н-АЛКАН С ЦЕЛЬЮ СОЗДАНИЯ НОВЫХ ТЕПЛОАККУМУЛИРУЮЩИХ
МАТЕРИАЛОВ ДЛЯ ИЗДЕЛИЙ РКТ
©2015 Е.П. Петров, И.А. Журавлев
АО «РКЦ «Прогресс», г. Самара
Для оптимизации поиска композиций при разработке новых теплоаккумулирующих материалов
предложен алгоритм, базирующийся на уравнении идеальной растворимости твердой фазы. На примере ря-
да циклододекан - н-алкан была выбрана для проведения экспериментальных исследований по поиску низ-
коплавкого состава система циклододекан - н-генэйкозан. Методом низкотемпературного дифференциаль-
ного термического анализа (НДТА) с использованием дифференциального сканирующего калориметра теп-
лового потока построена t-x-диаграмма выбранной системы. Установлено, что система циклододекан - н-
генэйкозан относится к системам эвтектического типа, сплав эвтектического состава плавится при темпера-
туре 29,7 °C.
Ключевые слова: эвтектика, ликвидус, фазовое равновесие, циклододекан, н-генэйкозан, дифференци-
альный термический анализ
Развитие техники требует постоян-
ного поиска и внедрения, новых более
совершенных теплоносителей систем
терморегулирования, обеспечивающих
тепловые режимы теплонагруженных ис-
точников энергии и новых смесей для
низкотемпературных рабочих тел тепло-
вых аккумуляторов, использующих тепло
фазовых переходов. Класс предельных
углеводородов является наиболее изу-
ченным по теплофизическим характери-
стикам. Парафиновые углеводороды
нормального строения устойчивы к
большому числу рабочих циклов, явля-
ются химически стойкими и коррозион-
но-неактивными соединениями, что в
свою очередь делает их перспективными
материалами в качестве рабочих тел теп-
ловых аккумуляторов и систем терморе-
гулирования.
Проведение экспериментальных ис-
следований фазовых равновесий в много-
компонентных системах является про-
цессом трудоёмким. С целью снижения
трудоёмкости при поиске и разработке
новых составов для рабочих тел приме-
няются прогнозирование элементов фа-
зовых диаграмм, отвечающих нонвари-
антными и моновариантным равновесиям
в системе, основанное на термодинами-
ческих, статических и других методах.
Прогнозирование системы С12Н24 - н-
С21Н44 осуществлялось с использованием
уравнения идеальной растворимость
твердой фазы [1].
Методом НДТА [2] первым был
проанализирован эвтектический состав
системы С12Н24 - H-C21H44 рассчитанный
с использованием уравнения идеальной
растворимость твердой фазы (рис.1). По
характеру термограммы было выяснено,
что расчётная эвтектика не отвечает нон-
вариантному равновесному состоянию
системы, поэтому поиск низкоплавкого
состава в системе осуществляли методом
НДТА. Исследования проводили в диапа-
зоне температур от минус 10 до 65 °C.
Для исследования применялись ре-
активы заводского изготовления квали-
фикации «ч» и «чда», с содержанием ос-
новного вещества не менее 99,0 мае. %.
Используя полученные в ходе экспери-
мента данные, была построена фазовая
диаграмма двухкомпонентной системы
С12Н24 - Н-С21Н44, изображённая на рис. 2.
335
65
Рис. 1 t-x диаграмма системы циклододекан -
и-генэйкозан, построенная по расчётным
данным
По характеру диаграммы видно, что
система относиться к эвтектическому ти-
пу, сплав эвтектического состава плавит-
ся при температуре 29,7 °C. Кривая лик-
видуса представлена двумя участками,
для которых можно описать следующие
моновариантные равновесные состояния:
линия ае: Н-С21Н44;
линия eb: н- С12Н24.
Фазовая реакция, отвечающая нон-
вариантному равновесию в системе (точ-
ка е), описывается уравнением:
Ж ^4 C12H24 + H-C21H44.
Сравнение расчетных и экспери-
ментальных данных по системе циклодо-
декан - н-генэйкозан показывает откло-
нение расчетных данных по составу на
4,0% и температуре плавления сплава эв-
тектического состава на 2,4 %. Таким об-
разом, предложенный алгоритм, базиру-
ющегося на уравнении идеальной рас-
творимости твердой фазы, может быть
использован для разработки новых теп-
лоаккумулирующих материалов. Выяв-
Рис. 2 t-x диаграмма системы циклододекан -
и-генэйкозан построенная по экспериментальным
данным
ленный низкоплавкий состав в двухком-
понентной системе С12Н24 - Н-С21Н44 мо-
жет быть использован в изделиях ракет-
но-космической техники в качестве рабо-
чего тела низкотемпературного теплово-
го аккумулятора.
Библиографический список:
[1] Стромберг А.Г., Семченко Д.П.
Физическая химия. - М.: Высш. Шк.,
2006, 527с.
[2] Мощенский Ю.В. Дифференци-
альный сканирующий калориметр ДСК-
500 / Приборы и техника эксперимента,
2003, №6. С. 143-144.
References:
[1] Stromberg A.G., Semchenko D.P.
Physical chemistry. - M: 2006, 527 p. (in
Russian).
[2] Moshchensky Ju.V. Differential
scanning calorimeter DSC-500 / Devices
and technics of experiment, 2003, No 6. P.
143-144 (in Russian).
336
EXAMINATION OF PHASE EQUILIBRIUMS IN BINARY SYSTEMS
CYCLEDODECANE - N-ALKANE FOR THE PURPOSE OF WORKING OUT OF NEW
HEAT-TRANSMITTING AND HEAT-RETAINING MATERIALS.
© 2015 E.P. Petrov, I.A. Zhuravlev
JSC «SRC «Progress», Samara
The method of the low-temperature differential thermal analysis (НДТА) with use of a differential scanning
calorimeter of a heat flux explores system n-genejkozan - cycledodecane. The t-x-diagramme of the studied system
falls into to the eutectic type. The eutectic composition to melt at temperature 29,7 °C.
Keywords: an eutectic, a liquidus, phase equilibrium, cycledodecane, n-genejkozan, a differential thermal
analysis
Информация об авторах:
Петров Евгений Петрович, инженер-технолог 2 категории АО «РКЦ «Прогресс»,
аспирант кафедры общей и неорганической химии, СамГТУ, 443100, Россия, г. Самара,
ул. Молодогвардейская 244, т. (846) 228-93-44, e.p.petrov@yandex.ru.
Журавлёв Иван Анатольевич, инженер-технолог 2 категории, АО «РКЦ
«Прогресс», т. (846) 228-96-79, ivan 9687@mail.ru.
Petrov Evgenie Petrovich, the process engineer of 2 categories of JSC «SRC «Progress»,
the post-graduate student of chair of blanket and inorganic chemistry, SamGTU, 443100, Russia,
Samara, street Molodogvardejsky 244, tel. (846) 228-93-44, e.p.petrov@yandex.ru.
Zhuravlev Ivan Anatolevich, the process engineer of 2 categories of JSC «SRC
«Progress», tel. (846) 228-96-79, ivan 9687@mail.ru.
337
УДК 621.0,621.757
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ СБОРКИ УЗЛОВ С
КОНСТРУКЦИЯМИ ИЗ КОМПОЗИТНЫХ МАТЕРИАЛОВ
©Р.В. Абдуллов1, И.К. Рыльцев2
'АО «РКЦ «Прогресс», г. Самара
2Самарский Государственный Технический Университет, г. Самара
Предлагается методика сборки ответственных узлов и деталей с конструкциями из композитных ма-
териалов, с учетом отклонений положения промежуточных закладных элементов. Отклонения положения
элементов измеряется относительно положения в трехмерной модели сборки на координатно-измерительной
машине.
Ключевые слова: композитные полимерные материалы, процесс сборки, координатно-измерительная
машина, трехмерная модель.
Применение корпусных конструк-
ций выполненных из полимерных компо-
зитных материалов (ПКМ), обусловлено
снижением веса ракетно-космического
изделия. Корпусные конструкции из
ПКМ обеспечивают требуемую проч-
ность и жесткость, при снижении веса
изделия. Сборка ответственных узлов и
агрегатов с корпусными конструкциями
из ПКМ, осуществляется через промежу-
точные закладные элементы (ЗЭ). В связи
с геометрической нестабильностью ПКМ
[2] в настоящий момент точность распо-
ложения сборных ЗЭ в конструкциях до-
стигается методом пригонки с помощью
мехобработки. Этот метод имеет недо-
статок - завышенное машинное время, по
причине сниженных режимов резания и
увеличенного припуска, предназначенно-
го для компенсации погрешности уста-
новки ЗЭ - еу. Предлагается метод экс-
периментального определения погрешно-
сти установки ЗЭ - £ у на координатно-
измерительной машине (КИМ), для
назначения оптимального припуска на
ЗЭ. В этом методе измеряются отклоне-
ния положения эталонных ЗЭ от их по-
ложения в трехмерной модели сборки,
полученные значения используются для
назначения оптимального припуска на
каждый ЗЭ, соответствующий своей по-
зиции.
Описанный метод позволяет
уменьшить количество припуска на за-
кладном элементе, что приводит к сни-
жению времени затрачиваемого на меха-
ническую обработку ЗЭ, при использова-
нии метода сборки пригонкой. Снижение
машинного времени ведет к уменьшению
продолжительности воздействия тепло-
вых полей на конструкцию из ПКМ, воз-
никающих в процессе резания, которые
ведут к нагреву ПКМ и смещению ЗЭ,
следовательно, устанавливаемых на них
узлов и деталей.
Библиографический список:
1. Щербаков В.Т. Проектирование
типовых высоконагруженных конструк-
ций интегрального типа из полимерных
композиционных материалов // Техника,
экономика, информация: Межотр. науч
.техн. сб. М.: Конструкции из компози-
ционных материалов, вып. 2, 1985 - 19 с.
2. Биткина О.В. Разработка метода
расчета напряженно-деформированного
состояния многослойных пластин из во-
локнистых композиционных материалов
с учетом технологических факторов: ав-
тореф. дис. к. техн, наук: 01.02.04 / Бит-
кина О.В - Самара., 2013.- 18 с.
References:
1. Sherbakov V. Т. Designing typical
высоконагруженных designs of integrated
type from polymeric composite materials //
Technics, economy, the information: De-
signs from composite materials. The inter,
sci. tech. coll. Moscow.: Constructions from
composite materials, is. 2, 1985.-19 p.
338
into account technology factors: abstr. of
theses cand. tech. sci. 01.02.04/ Bitkina O.V
- Samara., 2013.-18 p.
2. Bitkina O.V. Working out of a
method of calculation of the is intense-
deformed condition of multilayer plates
from filamentary composite materials taking
PERFECTING TECHNOLOGY OF ASSEMBLY UNITS WITH CONSTRUCTIONS
FROM COMPOSITE MATERIALS
©2015 R.V. Abdullov1,1.K. Riltcev2
1 JSC «SRC «Progress», Samara
2Samara State Technical University, Samara
Method of assemblage of responsible nodes and details with constructions from composite materials taking,
into account aberrations of position of intermediate mortgage elements is offered. Aberrations of position of el-
ements concerning they positions of 3D model of assemblage measured by coordinate measuring machine.
Keywords: polymer composite materials, assembly process, coordinate measuring machine, three-
dimensional model
Информация об авторах:
Абдуллов Рустам Вазыхович, ведущий инженер-программист АО «РКЦ
«Прогресс», аспирант кафедры «Технология машиностроения», СамГТУ, 443100, Россия,
г. Самара, ул. Молодогвардейская, 244, т. 89178108897, abdullov rv@mail.ru.
Область научных интересов: математическое моделирование процессов сборки.
Рыльцев Игорь Константинович, д.т.н. профессор кафедры «Технология машино-
строения», СамГТУ, 443100, Россия, г. Самара, ул. Молодогвардейская, 244, т. 242-41-56.
Область научных интересов: математическое моделирование процессов сборки.
Abdullov Rustam Vazihovich, leading programming engineer JSC «SRC «Progress»,
post-graduate student 3 year of education chair of «Technology of Machine ibdustry» Samara
State Technical University, 443100, Russia, Samara, 244, Molodogvardeyskaya St.,
89178108897, abdullov rv@mail.ru.
Area of research: mathematical simulation of processes of assembly.
Riltcev Igor Constantinivich, professor, doctor of technical sciences chair of «Technolo-
gy of Machine industry», Samara State Technical University, 443100, Russia, Samara, 244,
Molodogvardeyskaya St., tel. 242-41-56.
Area of research: mathematical simulation of processes of assembly.
339
УДК 620.179:621.791.3:621.396.6
ОТРАБОТКА ТЕХНОЛОГИИ ПОВЕРХНОСТНОГО МОНТАЖА
ЭРИ С ПРИМЕНЕНИЕМ КАПЛЕСТРУЙНОГО ПРИНТЕРА MY-500
И АВТОМАТИЗИРОВАННОГО УСТАНОВЩИКА Atoz-PP050
©2015 Иванов А.В., Пахомов А.С.
АО «РКЦ «Прогресс», г. Самара
Отработка технологии поверхностного монтажа SMD - компонентов необходима не только на ста-
диях внедрения ее в производственный процесс, но и на этапах модернизации, когда происходит автомати-
зация ручных операций. В данной работе проведена отработка операций автоматизированного нанесения
паяльной пасты и установки SMD - компонентов на печатную плату. Исследование показало, что паяные
соединения полученные с помощью технологии поверхностного монтажа с применением автоматизирован-
ного нанесения паяльной пасты и установки компонентов на печатную плату удовлетворяют требованиям
по надежности.
Ключевые слова: паяные соединения, печатный узел, плата тестовая, контактная площадка,
рентген анализ, оптический контроль, SMD - компоненты
Технология поверхностного монта-
жа является наиболее распространенным
на сегодняшний день методом конструи-
рования и сборки электронных узлов на
печатных платах. Основным ее отличием
от «традиционной» технологии монтажа
в отверстия является то, что компоненты
монтируются на поверхность печатной
платы, однако преимущества технологии
поверхностного монтажа печатных плат
проявляются благодаря комплексу осо-
бенностей элементной базы, методов
конструирования и технологических при-
емов изготовления печатных узлов.
За последнее десятилетие техноло-
гия поверхностного монтажа развивается
быстрыми темпами и получило широкое
применение в различных областях про-
мышленности (медицина, военная техни-
ка, бытовая техника, научная техника и
т.д.). Главными признаками развития
данной технологии является максималь-
ная автоматизация всего цикла производ-
ственного процесса.
Предприятие АО «РКЦ «Прогресс»,
как и многие передовые предприятия
космической отрасли, не отстают от тем-
пов модернизации технологи поверх-
ностного монтажа. Если еще в 2012 году
на нашем предприятие была освоена, от-
работана и подтверждена технология по-
верхностного монтажа, то уже 2014 году
была произведена модернизация данной
технологии, которая связана с внедрени-
ем в технологический процесс каплест-
руйного принтера MY-500 и автоматизи-
рованного установщика элементов Atoz-
РР050.
Курс на развитие технологии по-
верхностного монтажа на нашем пред-
приятии в части применения выше ука-
занного оборудования обусловлен тем,
что именно операции нанесения паяль-
ной пасты и установки компонентов яв-
лялись наиболее трудоемкими и опреде-
ляющими последующее качество паяных
соединений.
Применяемый способ нанесения па-
яльной пасты на печатную плату с ис-
пользованием трафаретного принтера
имеет ряд недостатков, таких как:
- необходимость заказа трафарета
под каждую разновидность печатной
платы, что сказывается на сроках изго-
товления продукции;
- на переналадку трафаретного
принтера под новую платы затрачивается
много времени;
- невозможность коррекции объема
паяльной пасты под различные компо-
ненты во время процесса нанесения;
- отсутствует максимальная точ-
ность нанесения заданного объема па-
яльной пасты в связи с возможным ее
осаждением в апертуре.
340
Применение каплеструйного прин-
тера MY-500 в технологии поверхностно-
го монтажа решает все указанные недо-
статки и делает процесс нанесения па-
яльной пасты максимально автоматизи-
рованным и уменьшает «человеческий
фактор», что положительно сказывается
на последующее качество паяного соеди-
нения.
Процесс установки элементов на
печатную плату так же относиться к тем
операциям, где влияние «человеческого
фактора» должно быть сведено к нулю.
Применяемые полуавтоматические стан-
ции установки компонентов имеют ряд
следующих недостатков:
- ручное составление программ под
установку компонентов;
- невозможность осуществления
контроля прижатия компонента;
- ручная установка каждого элемен-
та;
- контроль полярности осуществля-
ется оператором.
Внедрение в технологию поверх-
ностного монтажа автоматизированного
установщика элементов обеспечивает,
так же как и каплеструйный принтер,
максимальную автоматизацию процесса
установки компонентов, что позволяет
установить данный процесс с повторяе-
мым качеством.
Каждая модернизация любого тех-
нологического процесса, будь то она свя-
зана с изменением различных режимов
или заменой оборудования, должна быть
подвергнута отработке, для подтвержде-
ния ранее установленных критерий каче-
ства. Так и в нашем случае, технология
поверхностного монтажа с применением
каплеструйного принтера MY-500 и
автоматизированного установщика эле-
ментов Atoz-PP050 была подвергнута от-
работке, с подтверждением выбранных
режимов, которые должны обеспечить
качественное паяное соединение элемен-
тов с целью дальнейшего применения
данной технологии при изготовлении
РКТ.
Задачами исследовательских испы-
таний стали:
- металлографический анализ пая-
ных соединений;
- испытание паяных соединений
ЭРИ ИП на стойкость к воздействию ме-
ханических и климатических факторов;
- оценка безотказности паяных со-
единений ЭРИ ИП с бессвинцовым по-
крытием выводов;
- оценка безотказности паяных со-
единений ЭРИ ИП с бессвинцовым по-
крытием выводов, выполняемых группо-
вым способом оплавления по технологии
поверхностного монтажа с применением
припойной пасты на основе оловянно-
свинцового припоя;
- оценка безотказности паяных со-
единений выводов BGA- компонентов.
Работа по подтверждению техноло-
гии поверхностного монтажа с примене-
нием каплеструйного принтера MY-500 и
автоматизированного установщика эле-
ментов Atoz-PP050 проводилась в не-
сколько этапов:
Этап 1 - Разработка унифицирован-
ного блока для отработки технологии по-
верхностного монтажа;
Этап 2 - Разработка технологиче-
ского процесса нанесения паяльной пас-
ты с применением каплеструйного прин-
тера MY500 и технологического процесса
установки SMD-компонентов примене-
нием автоматизированного установщика
Atoz-PP050;
Этап 3 - Отработка технологии по-
верхностного монтажа SMD-
компонентов с применением каплеструй-
ного принтера MY500 и автоматизиро-
ванного установщика Atoz-PP050;
Этап 4 - Изготовление унифициро-
ванного блока;
Этап 5 - Проведение испытаний
унифицированного блока;
Этап 6 - Определение надежности
паяных соединений (интенсивности отка-
зов паяных соединений).
На первом этапе был разработан
унифицированный блок, состоящий из
24-х тестовых модулей, которые кон-
структивно приближены к печатным уз-
лам применяемые в штатной аппаратуре.
В состав тестовых модулей вошли имита-
торы штатных компонентов, которые
341
имеют различный тип покрытия контакт-
ных площадок - свинцовый и бессвинцо-
вый (табл. 1).
Табл. 1 Перечень имитаторов ЭРИ.
№ Наименование имитатора ЭРИ Покрытие выводов ЭРИ Количество на ЭРИ на 1 тестовом моду- ле, шт
Безвыводные SMD-компоненты
1 SR0402P7A-TIN-ZERO SnlOO 833
2 SR0603P7A-TIN-ZERO SnlOO 416
3 CR0603-J/000ELF SnPb 416
4 SR1206P7A-TIN-ZERO SnlOO 50
5 QFN16M.5-T-DE-D SnlOO 8
6 SD6032E7A-TIN SnlOO 41
SMD-компоненты с гибкими выводами
7 SSOP 28M25T-DE-D SnlOO 22
8 TSSOP64M19.7T-DE-D SnlOO 7
9 LQFP48T19.7T-DE-D Sn 100 20
SMD-компоненты с шариковыми выводами из припоя
10 LBGA48T.8-DC689 SnPb 3
и LBGA144T1.0-DC128 SnPb 6
12 LBGA1225T1.27-DC359 SnPb 1
На втором и третьем этапах была
проведена отработка правильности выбо-
ра технологического процесса для чего
был изготовлен дополнительный тесто-
вый модуль, который был испытан для
металлографического анализа паяных со-
единений.
Монтаж и контроль качества пая-
ных соединений тестового модуля прово-
дился по разработанным техпроцессам в
соответствии с конструкторской доку-
ментацией. Далее, согласно разработан-
ной программе и методике проведения
испытаний (ПМ), тестовый модуль под-
вергся ускоренному температурному ста-
рению путем выдержки в течении 300
часов в климатической камере при тем-
пературе 100 °C.
После испытаний на ускоренное
температурное старение модуль тестовый
подвергся испытаниям на воздействие
медленного изменения температуры
окружающей среды (термоциклирование)
в диапазонах температур от -50 °C до +
70°С 100 циклов. В интервалах между 50-
м, 75-м, 100-м циклом модуль выдержи-
вался 1 час при температуре +25°С.
По окончанию испытаний был про-
веден оптический контроль и рентген-
контроль качества паяных соединений,
замечаний не обнаружено.
Для металлографического анализа
паяных соединений были сделаны образ-
цы микрошлифов компонентов в BGA-
корпусах.
Образец 1 - LBGA144T1.0-DC128.
Образец 2 - LBGA48T.8-DC689.
Рентгенконтроль паяных соедине-
ний микрошлифов производился на обо-
рудование РСВA-ANALYSER. Изготов-
ление микрошлифов и фотографирование
паяных соединений было произведено
также на оборудование нашего предприя-
тия.
Ниже на рис. 1,2 представлены рент-
гене- и фотоснимки образцов 1 и 2.
342
Рис 1. Рентгено- и фотоснимок шлифа LBGA144T1.0-DC128 (образец 1).
Рис 2. Рентгено- и фотоснимок шлифа LBGA48T.8-DC689 (образец 2).
При рентгенанализе паяных соеди-
нений образцов 1,2 видно, что паяные
соединения имеют полное смачивание
припоем контактных площадок ПП и все
паяные соединения имеют ареол (контур
паяного соединения).
При анализе микрошлифов образ-
цов 1,2 трещин не обнаружено, смещение
шариковых выводов с КП ПП отсутству-
ет. Внешний вид данных соединений
имеет правильную «бочкообразную»
форму, что соответствует критерию каче-
ства монтажа паяных соединений м/с в
BGA-корпусах. По всему объему шари-
ковых выводов образцов 1,2 наблюдают-
ся равномерная структура паяного соеди-
нения, что соответствует достаточной
дозе нанесения припойной пасты на пе-
чатную плату каплеструйным принтером
MY500, а также правильности установки
компонентов автоматизированным уста-
новщиком ATOZ РР-О5О.
На четвертом этапе по разработан-
ным техпроцессам и в соответствии с КД
были смонтированы ячейки из состава
унифицированного блока и проведен ви-
зуальный контроль, оптический контроль
и рентгенконтроль качества паяных со-
единений.
При проведении операции оптиче-
ского контроля качества паяных соеди-
нений на ПТ был выявлен массовый де-
фект «надгробный камень» на элементах
SR06033P4A-TIN-ZERO. При проведении
343
исследования причин данного дефекта,
было выявлено, что данный брак являет-
ся результатом некачественного покры-
тия одной контактной площадки данного
элемента. Было принято решение в даль-
нейшем данные элементы не устанавли-
вать в связи с неудовлетворительной
смачиваемостью КП элементов, а кон-
трольные точки Р2:1 и Р2:2 зашунтиро-
вать перемычкой.
Рис. 3. Блок унифицированный
Все изготовленные модули тесто-
вые были собраны в блок унифицирован-
ный (см. рис. 3) для проведения исследо-
вательских испытаний.
Порядок и объем проведения иссле-
довательских испытаний был оговорен в
разработанной программе и методике.
Испытания проводились в два этапа.
Этап1 - Результаты приемо-
сдаточных испытаний (ПСИ).
Приемо-сдаточные испытания про-
водились в следующей последовательно-
сти:
а) Проверка комплектности;
б) Проверка комплектующих и ма-
териалов;
в) Проверка на соответствие черте-
жам;
г) Проверка качества декоративных
и защитных покрытий;
д) Проверка качества маркировки;
е) Проверка электромонтажа;
ж) Проверка на отсутствие посто-
ронних предметов;
и) Проверка сопротивления изоля-
ции;
к) Проверка эл. сопротивления те-
стовых цепей;
л) Испытания на вибропрочность
при воздействии синусоидальной вибра-
ции в диапазоне частот от 20 до 30 Гц с
ускорением 20 м/с2;
м) Испытания на воздействие по-
ниженной температуры окружающей
среды 0°С (с подключенным детектором
событий);
н) Испытания на воздействие по-
вышенной температуры окружающей
среды +70 °C (с подключенным детекто-
ром событий);
о) Проверка массы блока.
Этап 2- Механические и климати-
ческие испытаний.
Испытания на прочность при воз-
действии синусоидальной вибрации про-
водились на вибростенде TIRA с пара-
метрами вибрации представленных в
табл. 5.
344
Табл. 5 - Параметры вибрации.
Диапазон частот, Гц 10-20 20-40 40-80 80-160 160-320 320-640 640-1280 1280-2500
Ускорение^ 2,0 2,0 3-4,5 4,5-6 6-9 9-12 12-7,5 7,5-5
Испытания на прочность при воз- стенде TIRA с параметрами вибрации
действии широкополосной случайной представленных в табл. 6.
вибрации (ШСВ) проводились на вибро-
Табл. 6 - Параметры ШСВ.
Номер режима Поддиапазон частот, Гц Продолжит- ельность действия, с
20 50 100 200 500 1000 2000
Спектральная плотность виброускорения, g2/fu
1 2,16 (0,023) 6,48 (0,068) 8,66 (0,09) 8,66 (0,09) 8,66 (0,09) 3,47 (0,036) 1,3 (0,014) 120
2 1,08 (0,011) 1,08 (0,011) 1,73 (0,018) 2,16 (0,023) 2,16 (0,023) 1,73 (0,018) 1,08 (0,011) 480
Испытания на прочность при воздей-
ствии постоянно действующих линейных
ускорений проводились на Центрифуге
Ml55. Параметры линейных ускорений
при линейных нагрузках приведены в
табл. 7.
Табл. 7 - линейные ускорения при линейных нагрузках.
В направлении продольной оси КА (оси X), м/с2 (g) В двух взаимно перпендикуляр- ных направлениях по осям ±Y; ±Z, перпендикулярным к про- дольной оси КА, м/с2 (g) Время воздействия в каждом направлении, с
Плюс X 70,07 (7,15) Минус X 19,6(2) 19,6 (2) 600
Испытания на прочность при воз-
действии механических ударов много-
кратного действия проводились на удар-
ном стенде STT-800. Испытания при воз-
действии механических ударов много
кратного действия проводились в соот
ветствии с табл. 8.
Табл. 8 - Параметры ударов.
Номер режима Поддиапазон частот, Гц Количество ударных воздействий
50 100 200 500 1000 2000 5000
Значение спектра удара м/с2 (g)
1 98 (Ю) 294 (30) 785 (80) 2450 (250) 4900 (500) 4900 (500) 2940 (300) 2
2 49 (5) 147 (15) 490 (15) 1670 (170) 3430 (350) 3430 (350) I960 (200) 6
Испытания на прочность при воз-
действии одиночных механических уда-
ров проводились на ударном стенде STT-
500. Данные испытания производились в
345
трех взаимно-перпендикулярных направ-
лениях со следующими параметрами
удара: пиковое ускорение 40g и длитель-
ность импульса воздействия 0,5-2 мс.
Общее количество ударов 42 (по 7 ударов
по каждой оси).
После каждого вида испытаний
проводились проверка электрического
сопротивления изоляции и проверка
сопротивления тестовых цепей.
Целостность паяных соединений не
нарушилась.
Перед проведением климатиче-
ских испытаний блок был разобран. Мо-
дули тестовые были закреплены в специ-
альные стойки. Далее модули тестовые
подверглись ускоренному температурно-
му старению путем выдержки в течении
300 часов в климатической камере при
температуре 100 °C (рис. 4).
Рис. 4. Климатические испытания •
После испытаний на ускоренное
температурное старение модули тестовые
подверглись испытаниям на воздействие
медленного изменения температуры
окружающей среды (термоциклирова-
ние):
Режим 1: в диапазонах температур
от 0 °C до + 100°С 1000 циклов с вы-
держкой на каждом значении температу-
ры 15 мин.;
Режим 2: при температуре + 100°С
1 час;
Режим 3: при температуре + 25°С 1
час.
После проведения испытаний
контрольные электрические цепи были
замкнуты. Целостность паяных
соединений не нарушилась.
На этапе определения надежности
паяных соединений (интенсивности отка-
зов паяных соединений) для начала было
рассчитано количество единиц испытан-
ных паяных соединений:
- Расчет количества ПС для ЧИП-
компонентов:
87360 (по СП) - 19968-130-16=67246 ед.
- Расчет количества ПС компо-
нентов с выводами типа «крыло чайки»:
48576 (по СП) - 48-28-28=48472 ед.
- Расчет количества ПС для BGA-
компонентов:
53592 (по СП) - 1225 - 48=52319 ед.
Для прогнозирования уровня безот-
казности ПС выбирается математическая
2
модель на основе % - распределения,
которая позволяет дать количественную
346
оценку безотказности ПС при большом
количестве испытываемых ПС.
. _ йГ2|-«(т)
2NHAt
At - коэффициент ускорения равен 390;
N - количество испытываемых
паяных соединений ;
Н - число часов при испытании на
термоциклирование;
%2 - квадрат квантили распределе-
ния (табличное значение).
Учитывая наш расчет единиц пая-
ных соединений и фактическое значение
времени проведения испытаний на тер-
моциклирование 1667 часов определяем
интенсивность отказов для каждой груп-
пы компонентов:
1. Определение интенсивности
отказа паяных соединений для ЧИП-
компонентов.
За время проведения испытаний на
термоциклирование отказов паяных
соединений не было. Интенсивность
отказа составляет:
Х= 0,2107 / 2 х 67246 х 1667 х 390 = 0,0024х10’9 1/час
2. Определение интенсивности
отказа паяных соединений выводов типа
«крыло чайки».
За время проведения испытаний на
термоциклирование отказов паяных
соединений не было. Интенсивность
отказа составляет:
Х= 0,2107 / 2 х 48472 х 1667 х 390 = 0,0033х10’9 1/час
3. Определение интенсивности За время проведения испытаний на
отказа паяных соединений BGA - термоциклирование отказов паяных
компонентов. соединений не было. Интенсивность
отказа составляет:
Х= 0,2107 / 2 х 52319 х 1667 х390 = 0,003х10’9 1/час
Выводы. На основании результатах
проделанной работы можно сделать сле-
дующие выводы:
1. При металлографического анали-
за паяных соединений трещин не обна-
ружено, смещение шариковых выводов с
КП ПП отсутствует. Внешний вид дан-
ных соединений имеет «бочкообразную»
форму, что соответствует критерию каче-
ства монтажа паяных соединений м/с в
BGA-корпусах. По всему объему шари-
ковых выводов наблюдаются равномер-
ная структура паяного соединения, что
соответствует достаточной дозе нанесе-
ния припойной пасты на печатную плату
на каплеструйном принтере MY500, а
также правильности установи компонен-
тов на автоматизированном установщике
ATOZ РР-050.
2. Полученная интенсивность отка-
зов ПС меньше, чем интенсивность отка-
зов паяных соединений образованных
групповым оплавлением - пайка волной
припоя (в соответствие со «Справочни-
ком надежности электрорадиоизделий»
для пайки ЭРИ волной припоя
0,07* НУ9 1/час.).
3. Результаты проведенных иссле-
довательских работ подтвердили требуе-
мый уровень надежности ПС, получен-
ных в результате поверхностного монта-
жа ЭРИ с использованием каплеструйно-
го принтера MY-500 и автоматизирован-
ного установщика ATOZ РР-050.
Библиографический список:
1. IPC-7095B - Desing and Assembly
Process Implementation for BGAs // March
2008
2. IPC-SM-785 «Руководящие ука-
зания по ускоренным методам испытаний
на надежность паяных соединений тех-
нологии поверхностного монтажа».
347
References:
1. IPC-7095B - Desing and Assembly
Process Implementation for BGAs // March
2008
2. IPC-SM-785 - Guidelines for Ac-
celerated Reliability Testing of Surface
Mount Solder Attachments.
ELECTRONIC COMPONENT SURFACE MOUNTED TECHNOLOGY
DEVELOPMENT USING MY-500 JET PRINTER AND
ATOZ-PP-050 PICK & PLACE MACHINE
©2015 Ivanov A.V., Pakhomov A.S.
JSC «SRC «Progress», Samara
SMD components technology must be developed not only at the stage of commissioning, but also during upgrading
when manual operations are automated. The paper focuses on development of automated solder paste deposition and
SMD component mounting on printed circuit board. The study shows that the soldered joints formed by technique of
automated solder paste deposition and component surface mounting meet reliability requirements.
Key words: soldered joints, printed circuit board assembly, test board, terminal pad, X-ray analysis, optical check-
ing, SMD components.
Информация об авторах:
Пахомов Александр Сергеевич 1982 г.р., АО «РКЦ «Прогресс», Инженер-
технолог, г. Самара, 443009, ул. Земеца, д.18, тел. (846) 228-50-82, (846), домашний адрес:
г. Самара 443105, пр. Юных - Пионеров д. 137, кв.8., сот. 89277326914.
E-mail-zxc 123zxc.0000@Yandex.ru
Область научных интересов: технология приборостроения в области ракетно-
космического производства.
Иванов Андрей Васильевич 1984 г.р., аспирант СГАУ, АО «РКЦ «Прогресс», Зам.
начальника отдела, г. Самара, 443009, ул. Земеца, д.18, тел. (846) 228-50-82, Самарская
обл., инд. 446670., Борский район, село Гвардейцы, ул. Полевая д.9 кв.2.
E-mail-dgaru@mail.ru
Область научных интересов: технология приборостроения в области ракетно-
космического производства.
Aleksandr S. Pakhomov. Date of birth: 1982.
Processing Engineer of JSC SRC Progress; 18, ul. Zemetsa, Samara, 443009; ph. (846)
228-50-82;
Personal address: Ap.8 - 137, pr. Yunykh Pionerov, Samara, 443105; cell ph.
89277326914.
E-mail: zxcl23zxc.OOOO@yandex.ru
Sphere of scientific interest: space instrument engineering technology.
Andrey V. Ivanov. Date of birth: 1984.
Post-graduate student of SSAU; Deputy Head of Department in JSC SRC Progress; 18,
ul. Zemetsa, Samara, 443009; ph. (846) 228-50-82;
Personal address; Ap.2 - 9, ul. Polevaya, s. Gvardeitsy, Borsky Rayon, 446670.
E-mail: dgaru@mail.ru
Sphere of scientific interest: space instrument engineering technology.
348
УДК 621.9.047
КОМБИНИРОВАННАЯ ОБРАБОТКА ТЕПЛОЗАЩИТНЫХ ПОКРЫТИЙ
ТИПА «КЕРМЕТ»
©2015 С.С. Юхневич, Г.А. Сухочев, Д.В. Силаев
Воронежский механический завод, филиал ФГУП «Государственный космический
НПЦ им. М. В. Хруничева», г. Воронеж
Статья посвящена исследованию возможностей комбинированной обработки для технологического
обеспечение качества нанесения защитных покрытий типа Кермет на труднодоступные рабочие поверхно-
сти нагруженных деталей. В работе показана эффективность комбинированного процесса выравнивания
микрогеометрии и упрочнения поверхности пневмодинамической и термомеханической обработкой
Ключевые слова: комбинированная обработка, кермет, упрочнения, защитные покрытия
Технологическое обеспечение каче-
ства нанесения защитных покрытий типа
«кермет» на труднодоступные рабочие
поверхности нагруженных деталей имеет
выделяющиеся из множества научно-
инженерных задач три существенных
проблемы:
- направленное формирование
микрорельефа поверхности под покрытие
с использованием комбинированных воз-
действий различного рода на исходный
материал [1];
- использование методики опти-
мальной динамизации режимов, в част-
ности, с помощью модуляции электриче-
ских параметров при нанесении покры-
тия [2];
- применение методов термомеха-
нического или комбинированного элек-
трохимикомеханического последующего
упрочнения покрытия [1,2].
Для эффективности процессов по-
лучения большинства покрытий, в том
числе методом газотермического напы-
ления и ионно-фазного осаждения, важ-
ное значение имеет структура и свойства
микрорельефа поверхностного слоя ос-
новного материала в исходном состоя-
нии. Основная цель, которая преследует-
ся в настоящее время при подготовке для
нанесения покрытия: придание поверх-
ности заданной шероховатости путем
рифления.
Черновое шлифование абразивным
инструментом проводится на режимах
обдирочного шлифования. Такая подго-
товка вполне может использоваться так-
же для плазменного напыления, в том
числе на прерывистые поверхности; не-
достаток проявляется в том, что шлифо-
вальная пыль остается в порах и тем са-
мым оказывает решающее влияние на
сцепление напыленных покрытий с осно-
вой. Как показывают предварительные
исследования [3], здесь целесообразно
использовать комбинированную зачистку
металлическими не профилированными
щетками, приводимыми в действие пол-
ностью автономными навесными го-
ловками, движущимися по поверхности,
или расположенными периодически по
длине детали с небольшим продольным
перемещением. Электролит не позволяет
оставаться металлической пыли в порах
материала, да и сама обработка становит-
ся более равномерной.
На основании анализа выдвинутых
предположений была предложена ме-
тодология создания регулярного микро-
рельефа поверхности до нанесения по-
крытия и последующего уплотнения его с
помощью комбинированной струйной
обработки с наложением тока низкого
напряжения. Обработка образцов для ис-
следования формирования поверхности в
газожидкостной токопроводящей среде
до и после осаждения покрытия, прово-
дилась на установках эжекторного типа с
использованием имитаторов.
349
При определенной обработке под
покрытия создают сглаженный и активи-
рованный микрорельеф без концентрато-
ров микротрещин и микровыступов, а
микрошарики после покрытия формиру-
ют стабильную, благоприятную для экс-
плуатации покрытия шероховатость, на
создавая напряженного состояния при
повышенной твердости. Традиционно это
обеспечивалось алмазным выглаживани-
ем, что в наших случаях неприемлемо. В
ряде случаев после комбинированной об-
работки и создания пассивирующей
пленки дополнительных покрытий не
требовалось.
Для выполнения исследований по
термомеханическому упрочнению напы-
ленных покрытий на сплошных наруж-
ных поверхностях разработано специаль-
ное приспособление, крепящееся к суп-
порту токарного станка.
Комбинированному термомехани-
ческому упрочнению подвергались по-
крытия, напыленные на установке, пред-
назначенной для нанесения металличе-
ских и тугоплавких металлокерамических
покрытий. На этой же установке произ-
водилось оплавление нанесенного по-
крытия [1]. Для обкатанных покрытий
характерно увеличение длительности ин-
кубационного периода зарождения тре-
щин и числа циклов до появления тре-
щин на поверхности. Повышение трещи-
ностойкости покрытий определяет уве-
личение циклической прочности и долго-
вечности изделия с покрытием. Упроч-
няющая комбинированная термомехани-
ческая обработка покрытия способствует
повышению числа циклов до разрушения
с 9000 до 12000 на образцах. Подобный
эффект можно объяснить тем, что при
упрочняющей обработке покрытия про-
исходит снятие внутренних остаточных
напряжений растяжения и «залечивание»
дефектов покрытия, что позволяет увели-
чить сопротивление усталости у обкатан-
ных покрытий из материала «кермет» в
1,2... 1,3 раза.
В итоге в результате комплекса
наших исследований были найдены пути
и разработаны методы и средства техно-
логического обеспечения требуемых экс-
плуатационных показателей рабочих по-
верхностей и покрытий для целого ряда
ответственных деталей добывающей и
транспортной техники.
Библиографический список:
1. Сухочев Г. А. Поверхностное
упрочнение защитных покрытий
нагруженных деталей / Г. А. Сухочев, А.
М. Кадырметов, К. А. Яковлев //
Нетрадиционные технологии в
машиностроении и приборостроении:
межвузов, сборник научных трудов. -
Воронеж: ВГТУ, 1998. - С. 80-85.
2. Сухочев Г.А. Технологическое
обеспечение качества нанесения защит-
ных покрытий комбинированной
обработкой / Г.А. Сухочев, О.Н.
Кириллов, Д.М. Небольсин, Е.Г.
Смольянникова, А.М. Кадырметов //
Упрочняющие технологии и покрытия. -
2010. - № 8(68). - С. 39^14.
3. Кириллов О.Н. Комбиниро-
ванная высокоскоростная обработка
непрофилированным электродом-
инструментом / О.Н. Кириллов, Г.А.
Сухочев // Упрочняющие технологии и
покрытия. - 2011. - № 12. - С. 41-44.
Refences:
1. Suhochev G.A. Surface hardening
coatings loaded parts-lei / G.A. Suhochev,
A.M. Kadyrmetov, K.A. Yakovlev // Un-
conventional technologies in mechanical
engineering and priborostroenii: Hi. collec-
tion of scientific papers. - Voronezh: Vilnius
Gediminas Technical University, 1998. - P.
80-85.
2. Suhochev G.A. Process Quality As-
surance application zaschitnyh coatings
combined processing I G.A. Suhochev, O.N.
Kirillov, M.D. Nebolsin, E.G. Smolyanni-
kova, A.M. Kadyrmetov // reinforcing and
coating technology. - 2010. - № 8 (68). - S.
39-44.
3. Kirillov O.N. Combined high-speed
processing of non-profiled electrode-tool /
O.N. Kirillov, G.A. Suhochev // reinforcing
and coating technology. - 2011. - № 12. - S.
41-44.
350
COMBINED TREATMENT OF THERMAL BARRIER COATING TYPE CERMET
©2015 S.S. Yukhnevich, G.A. Suhochev, D.V. Silaev
Voronezh Mechanical Plant, a branch of Federal State Unitary Enterprise "State Space SPC them
Khrunichev", Voronezh
The article investigates the possibilities of combined processing technology for ensuring quality protective
coating such as "cermet" on hard-working surface is loaded with details. The paper shows the efficiency of the com-
bined process you microgeometry-leveling and surface hardening pneumodynamic and thermomechanical treatment
Keywords: combined treatment, cermet hardening, protective coatings
Информация об авторах:
Сухочев Геннадий Алексеевич, д.т.н., профессор, профессор кафедры технологии
машиностроения, ВГТУ, 394 026, Россия,г. Воронеж, Московский пр., 14, т. (473) 258-37-
15, 53-09-73, факс - (473) 246-32-77, suhotchev@mail.ru.
Область научных интересов: технологическое обеспечение эксплуатационных пока-
зателей экстремально нагруженных изделий комбинированной отделочно-упрочняющей
обработкой.
Юхневич Сергей Степанович, главный технолог ВМЗ, филиал ФГУП «Государ-
ственный космический НПЦ им. М. В. Хруничева», аспирант кафедры технология маши-
ностроения, ВГТУ, 394055, Россия, г. Воронеж, ул. Ворошилова, 22
Область научных интересов: обработка деталей из хрупких материалов.
Силаев Денис Васильевич, инженер-технолог ВМЗ, филиал ФГУП «Государствен-
ный космический НПЦ им. М. В. Хруничева», аспирант кафедры технология машиностро-
ения, ВГТУ, 394055, Россия, г. Воронеж, ул. Ворошилова, 22, т. 89515633545,
luck ymessages @ yandex.ru.
Область научных интересов: комбинированная обработка узких межлопаточных де-
талей.
Suhochev Gennady Alekseevich, Ph.D., Professor, Department of Mechanical Engineer-
ing, Vilnius Gediminas Technical University, 394026, Russia, g. Voronezh, Moskovsky pr., 14,
ph. (473) 258-37-15, 53-09-73, fax - (473) 246-32-77, suhotchev@mail.ru.
Area of research: technological maintenance of operational indicators of extremely loaded
products combined finishing and strengthening treatment.
Yukhnevich Sergei Stepanovich, Chief Technologist of VMZ, a subsidiary of Federal
State Unitary Enterprise "State Space SPC them. Khrunichev," graduate student of Engineering
Technology, VGTU, 394055, Russia, Voronezh, ul. Voroshilov, 22.
Area of research: machining of brittle materials.
Silaev Denis Vasilevich, process engineer VMZ, a subsidiary of Federal State Unitary En-
terprise "State Space SPC them. Khrunichev," graduate student of Engineering Technology,
VGTU, 394055, Russia, Voronezh, ul. Voroshilov, 22, ph. 89515633545, luckymessag-
es@yandex.ru.
Area of research: combined treatment of narrow inter-blade parts.
351
УДК 621.9.047
ПЕРСПЕКТИВНЫЕ ТЕХНОЛОГИИ КОМБИНИРОВАННОЙ ОБРАБОТКИ
ДЕТАЛЕЙ АЭРОКОСМИЧЕСКОЙ ОТРАСЛИ ^ПРОФИЛИРОВАННЫМ
ЭЛЕКТРОДОМ-ЩЕТКОЙ
©2015 А.Ю. Рязанцев, О.Н. Кириллов
Воронежский государственный технический университет,
Воронежский механический завод, филиал ФГУП «Государственный космический НПЦ
им. М. В. Хруничева», г. Воронеж
В статье рассматриваются возможности комбинированной обработки непрофилированным элек-
тродом-щеткой деталей аэрокосмической отрасли сложного профиля, с целью обеспечения заданного каче-
ства поверхностного слоя.
Ключевые слова: электрод-щетка, комбинированная обработка, упрочнение
Разработчики авиационной и кос-
мической техники нового поколения
предъявляют к качеству изготавливае-
мых деталей все более высокие требова-
ния, возможности традиционных методов
обработки лезвийным инструментом по
дальнейшему повышению качества и
производительности обработки в значи-
тельной степени исчерпаны. Поэтому все
большее распространение получают тех-
нологии электрофизической и электро-
химической обработки. Значительный
интерес представляет способ обработки,
где в качестве инструмента используется
непрофилированный электрод-
проволока. Одной из наиболее интерес-
ных для использования конструкций, яв-
ляется инструмент изготовленный из
консольно закрепленной проволоки:
электрод-щетка [1]. При таком способе
обработки заготовка подвергается ком-
бинированному воздействию эрозионной,
химической и механической составляю-
щих процесса. Их взаимное наложение
позволяет осуществлять обработку с вы-
соким качеством и точностью изделий
произвольной формы и жесткости из вы-
сокопрочных и твердых материалов.
Данная технология позволяет обес-
печить в едином технологическом про-
цессе, без смены и подналадки оборудо-
вания, универсальным проволочным ин-
струментом, интенсивную обработку с
получением заданного распределения
остаточных напряжений в поверхностном
слое и обеспечением качества изделий из
токопроводящих материалов различной
геометрической формы.
С усложнением формы
составляющих элементов современной
наукоемкой продукции машиностроения,
увеличением удельной нагрузки на
конструкцию, под действием
наследственных явлений происходит
изменение формы деталей, возникают
погрешности, способные нарушить
качество всего изделия. Значительное
влияние на точность формы оказывают
остаточные напряжения, их
равномерность, а также наклеп. Для
повышения качества изделий требуется
создание механизма управления
внешними силовыми воздействиями и
проектирование технологических
процессов, обеспечивающих получение
и сохранение заданной геометрической
формы, особенно при обработке
крупногабаритных сложноконтурных
деталей малой жесткости, за счет
низкочастотных импульсных
воздействий. Оптимальным решением
вышеуказанных задач является
технология контактного формирования
поверхностного слоя, в частности
наклепа, на металлических деталях
непрофилированым электродом-щеткой.
Наложение электрического поля
при использовании механических вра-
щающихся щеток качественно изменило
процесс обработки металла и расширило
352
диапазон наклепа с возможностью бес-
контактной обработки участков, не име-
ющих доступа инструмента. Появилась
возможность вести комбинированную
обработку, в которой механический
наклеп можно регулировать не только
свойствами проволоки щетки, но и ло-
кальными воздействиями электроэрози-
онных разрядов, снижающих износ ин-
струмента, повышать качество обрабаты-
ваемой поверхности за счет анодного
растворения неравномерностей обраба-
тываемого профиля. Одновременно про-
исходит увеличение интенсивности
анодного растворения припуска за счет
механической депассивации поверхно-
сти.
Влияние обработки на характер де-
формирования и качество поверхностно-
го слоя оказывают контактные силы, дей-
ствующие на проволоку или пучок про-
волок щетки. В пределах длины контакта,
имеющей большую протяженность, усло-
вия обработки, определяемые, прежде
всего контактными силами, существенно
отличаются друг от друга.
Применение комбинированной об-
работки с наложением электрического
поля следует рассматривать как новое
направление развития технологической
науки. Здесь открывается возможность
адаптивного управления процессом об-
работки, что не всегда возможно при со-
бытиях, протекающих с большой скоро-
стью и при широком диапазоне измене-
ния слабо контролируемых параметров.
Решение вопросов повышения качества
поверхностного слоя касается прежде
всего управления состоянием остаточных
напряжений, наклепа и зависящих от них
эксплуатационных показателей изделий.
Для литых и сварных крупногаба-
ритных деталей сложного профиля с це-
лью стабилизации геометрии целесооб-
разно использовать низкочастотное маг-
нито-импульсное бесконтактное воздей-
ствие, что в ряде случаев позволяет из-
бежать термических операций для стаби-
лизации геометрии заготовок и необхо-
димости в наличии крупногабаритных
печей. Непрофилированный электрод-
инструмент в форме щетки прост в изго-
товлении, универсален, его использова-
ние безвредно для окружающей среды.
Применение контактной комбинирован-
ной обработки этим методом позволяет
получать широкий диапазон наклепа по-
верхности с получением растягивающих
напряжений и малой шероховатостью.
Рассматриваемые технологические
процессы могут использоваться при об-
работке значительнй номенклатуры изде-
лий аэрокосмической отрасли.
Библиографический список:
1. Кириллов О.Н. Технология
комбинированной обработки
непрофилированным электродом.
Воронеж: ВГТУ,2010-254 с.
PERSPECTIVE TECHNOLOGIES OF THE COMBINED PROCESSING OF DETAILS
OF SPACE BRANCH THE ELECTRODE BRUSH
©2015 A.Yu. Ryazantsev , O.N. Kirillov
Voronezh Mechanical Plant, a branch of Federal State Unitary Enterprise "State Space SPC
them Khrunichev", Voronezh
The article considers possibilities of the combined processing by the tool an electrode brush of details of
space branch of a difficult profile, for the purpose of ensuring quality of a blanket.
Keywords: electrode brush, combined treatment, hardening
353
Информация об авторах:
Кириллов Олег Николаевич, д.т.н., доцент, профессор кафедры технологии маши-
ностроения, ВГТУ, 394 026, Россия, г. Воронеж, Московский пр., 14, т. (473) 258-37-15,
253-09-73, факс - (473) 246-32-77, kirillov.olli@yandex.iTi.
Область научных интересов: комбинированные методы обработки непрофилирован-
ным инструментом.
Рязанцев Александр Юрьевич, заместитель главного технолога ВМЗ, филиал
ФГУП «Государственный космический НПЦ им. М. В. Хруничева», аспирант кафедры
технология машиностроения, ВГТУ, 394055, Россия, г. Воронеж, ул. Ворошилова, 22 ,
ryazantsev86@mail.ru.
Область научных интересов: комбинированная обработка нежестких деталей.
354
УДК 621.9.047
РАЗРАБОТКА НОВОГО ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ПАЙКИ
КРУПНОГАБАРИТНОГО СОПЛА КАМЕРЫ СГОРАНИЯ ДВИГАТЕЛЯ РД191
С ПОДГОТОВКОЙ ПОВЕРХНОСТИ БЕЗ ПЕСКОСТРУЙНОЙ
ОБРАБОТКИ И НИКЕЛИРОВАНИЯ ДЕТАЛЕЙ ИЗ СЛОЖНОЛЕГИРОВАННОЙ
СТАЛИ 06Х16Н5МВФ
©2015 А.С. Грибанов, О.Г. Кудашов, Г.И. Козырева, В.А. Мячина, С.Н. Подгорнов
Воронежский механический завод, филиал ФГУП «Государственный космический НПЦ
им. М. В. Хруничева», г. Воронеж
Конструкция и технология ОАО
«НПО Энергомаш» и ОАО «Металлист»
предусматривает изготовление сопла ка-
меры сгорания жидкостного ракетного
двигателя РД191 из двух отдельных бло-
ков. При этом внутренняя и внешняя
стенки блока сопла изготавливаются из
листовых заготовок штамповкой, сваркой
и двухсторонней токарной обработкой
внутренней стенки.
Для обеспечения при сборке под
пайку гарантированных зазоров до 0,2 мм
внешняя оболочка из стали
06Х16Н5МВФ толщиной 0,8 мм и внут-
ренняя из стали 12Х18Н10Т толщиной
4,4 мм проходят совместную термофик-
сацию при определенной температуре -
Тф, обеспечивающей минимальный зазор
между рубашкой и оболочкой. В этих
условиях на поверхности наружной стен-
ки из стали 06Х16Н5МВФ появляются
цвета побежалости от соломенно-жёлтого
до темно-серого цвета с образованием
плотной плёнки, состоящей из окислов
основных легирующих элементов стали.
На поверхность деталей перед сбор-
кой под пайку гальваническим способом
наносится никель:
- на стенку внутреннюю (оболочку)
после механической обработки;
- на стенку наружную (рубашку)
после гидропескоструйной обработки.
Крупногабаритное сопло камеры сго-
рания двигателя РД191, изготавливаемого
на Воронежском механическом заводе,
представляет единый блок и предусматри-
вает следующий способ изготовления.
Наружную оболочку изготавливают из
двух частей штамповкой сварных кониче-
ских заготовок, после чего части оболочки
сваривают технологическим кольцевым
швом. При сварке частей наружной обо-
лочки технологический кольцевой шов
располагается в зоне приварки подколлек-
торного кольца. Внутренняя стенка изго-
тавливается из листовой заготовки толщи-
ной 12 мм (сталь 12Х18Н10Т) методом
многопереходного ротационного выдавли-
вания до номинальной толщины 4,4 мм без
токарной обработки, с последующим фре-
зерованием пазов и нанесением покрытия
под пайку. После сварки подколлекторного
кольца с коллектором с наружной оболоч-
кой осуществляют сборку сопла, сохраняя
угловое взаимоположение оболочек отно-
сительно друг друга, зафиксированное по-
сле штамповки взрывом, после чего осу-
ществляют пайку сопла (RU патент 2 323
363 С1).
Наружная стенка изготавливается
из листа толщиной 0,8 мм из стали
06Х16Н5МВФ (ВИС 16) горячей штам-
повкой двух сваренных конических заго-
товок. Для восстановления пластичности
и снятия остаточных напряжений в связи
с повышенным упрочнением при дефор-
мации требуется дополнительная межо-
перационная термообработка. Входящие
в состав стали легирующие элементы об-
разуют на поверхности металла оксидные
пленки усложняющие очистку поверхно-
сти, так как плёнка окислов на поверхно-
сти хромоникелевых сталей состоит из
оксидов СГ2О3, МоОз, V2O5, V2O4, V2O3,
Nb2O5, NiO, WO3 и Nb©2, с плотностью
от 4,5 до 7,16 г/см3, которая может изме-
няться в зависимости от содержания ле-
гирующих элементов - молибдена, вана-
355
дия, ниобия, вольфрама и температуры. С
переходом низших окислов ниобия, ни-
келя и хрома NiO, NbCb, СГ2О3 в высшие
№26)3, ЬГЬгОз, СгОз плотность соответ-
ственно составляет 4,6; 4,8; 2,6 г/см3,
причем окисел хрома легко растворяется
в щелочном растворе. Это приводит к
увеличению пористости окалины и обес-
печивает более полный доступ к поверх-
ности металла кислоты при последую-
щем травлении. Пористость и рыхлота
обеспечивают полноту удаления окалины
[1].
Была поставлена задача по разра-
ботке и внедрению в производство тех-
нологического процесса подготовки по-
верхности наружной стенки под пайку
без операций термофиксации и гидропес-
коструйной обработки.
Проведена опытная работа по опре-
делению оптимальных режимов предва-
рительного нагрева и последующей
очистки поверхности от окислов химиче-
ским способом перед нанесением гальва-
нического покрытия и электрополирова-
нием.
Разрыхление проводилось в ванне
состава:
Натрий едкий 500-650г/л.
Нитрит натрия 180-250г/л.
Травление проводилось в ванне
травления нержавеющих сталей следую-
щего состава:
Азотная кислота 140-160 г/л.
Фтористоводородная кислота 40-60 г/л.
Необходимое время выполнения
этих операций определялось по состоя-
нию поверхности после их выполнения.
Окисная пленка всегда имеет раз-
личные по величине трещины и поры.
Через эти поры кислота проникает к по-
верхности металла и растворяет ее.
Благодаря тому, что толщина окис-
ной пленки неравномерна, кислота после
местного удаления получает доступ к по-
верхности детали.
Поверхность после травления
должна иметь цвет обрабатываемого ме-
талла и может быть блестящей или мато-
вой, наличие на поверхности остатков
окалины, шлама и растравливания не до-
пускается. Так как в процессе операции
травления наряду с удалением окалины
идёт одновременное снятие поверхност-
ного слоя металла, производилось изме-
рение толщины образцов после травле-
ния. Размеры толщины наружной стенки
после травления должны соответствовать
требованиям чертежа 0,8 ” 0,08 мм.
В результате выполненной работы
были получены следующие результаты:
1. При нагреве по режиму термо-
фиксации при температуре 800°С в тече-
ние 30 минут и последующего травления
20-40-60 минут на поверхности остаётся
не удаленная плотная темно-серая окис-
ная пленка. Увеличение времени предва-
рительного разрыхления до 3 часов и
травления до 3 часов не позволило уда-
лить полностью окисную пленку, по-
верхность остаётся темно-серого цвета,
растравленная. Толщина листа снижается
0,8 мм до 0,68 мм.
2. Термообработка при температуре
850, 900, 950 °C в течение 10 минут с по-
следующим разрыхлением в течение 2
часов и травление в течение 1 часа поз-
воляют получить поверхность от серого
до матового цвета с незначительным по-
темнением. Окисная пленка удалена не
полностью. Увеличение времени травле-
ния до 2 до 3 часов не улучшает внешний
вид поверхности и приводит к местному
растравливанию с утонением от 0,8 до
0,67 мм.
3. При термообработке при темпе-
ратуре 1000-1050°С в течение 10 минут
образующаяся окисная пленка имеет
наибольшую пористость. Легкоплавкая
пятиокись ванадия V2O5 растворяет
окислы других металлов и препятствует
образованию плотных защитных пленок.
Летучая окись молибдена МоОз с темпе-
ратурой плавления 795°С, обладающая
высокой упругостью диссоциации паров
при высоких температурах, возгоняется и
ее пары разрыхляют пленку под слоем
других окислов. Присадка вольфрама
оказывает влияние аналогичное молиб-
дену, способствуя образованию более
рыхлой окалины. После разрыхления в
течение 2х часов и травления в течение 1
часа поверхность имеет светло-серый
цвет основного материала, без окислов и
356
растравливания. Толщина листа изменя-
ется незначительно от 0,8 до 0,77 мм и
остаётся в пределах допуска.
Для определения возможности до-
полнительного удаления окалины образ-
цы прошли электрополировку в ванне
следующего состава:
Кислота ортофосфорная 950-1050г/л
Кислота серная 150-300г/л
Было установлено:
1. Поверхность образцов, термообра-
ботанных при температуре 800-850°С,
улучшается незначительно: цвет матовый,
проявляются места растравливания, пятна и
разводы, имевшие место до электрополи-
ровки.
2. Поверхность образцов, термооб-
работанных при 950°С, улучшается в
большей степени, но сохраняет слабо-
матовый цвет.
3. Поверхность образцов, термообра-
ботанных при 900 и 1000°С, позволяет по-
лучить блестящую поверхность цвета об-
рабатываемого металла без остатков ока-
лины, шлама и растравливания.
По результатам проведённой рабо-
ты был принят следующий технологиче-
ский процесс подготовки поверхности
под пайку:
1. Предварительный нагрев перед
штамповкой
2. Разрыхление окалины в ванне
состава:
Натрий едкий 500-650г/л
Нитрит натрия 180-250г/л
Время от 1 до 2 часов
З. Травление в ванне состава
Азотная кислота 140-160 г/л
Фтористоводородная кислота 40-60 г/л
Время от 1 до 2 час
4. Электрополировка в ванне со-
става
Кислота ортофосфорная 950-1050г/л
Кислота серная 150-300г/л
Время от 0,5 до 1 час
5. Никелирование в ванне состава
Сернокислый никель
Натрий сернокислый
Натрий хлористый
Борная кислота
Таким образом,
полненной работы:
40-200г/л
60-80 г/л
15-20 г/л
25 - 40г/л
в результате вы-
1. Установлена необходимость про-
ведения разрыхления трудноудаляемой
окалины перед травлением. Определены
режимы разрыхления, травления, элек-
трополировки и составы ванн.
2. Определён оптимальный режим
предварительного нагрева перед штам-
повкой внутренней стенки для получения
на поверхности стали 06Х16Н5МВФ
(ВНС16) слоя окислов, легко удаляемого
химическим способом (разрыхлением,
травлением) без последующей пес-
коструйной обработки.
3. Выявлена возможность получе-
ния качественного паяного соединения
при подготовке поверхности методом
электрополирования вместо никелирова-
ния, так как наиболее прочное паяное со-
единение получено при выполнении под-
готовки поверхности наружной и внут-
ренней стенки под пайку электрополи-
ровкой.
4. Разработана и внедрена в произ-
водство технология подготовки поверх-
ности под пайку без проведения опера-
ций термофиксации, пескоструйной об-
работки и никелирования.
Известно, что основным требовани-
ем для получения прочного паяного со-
единения, кроме качественной подготов-
ки поверхности под пайку, является
обеспечение плотного контакта между
соединяемыми деталями не более 0,2 мм.
При изготовлении крупногабарит-
ного блока сопла двигателя РД 191 в
процессе изготовления входящих в него
деталей и последующей сборки под пай-
ку зазоры между наружной и внутренней
стенкой составляют от 0,6 до 2,0 мм.
Устранение этих зазоров только за счёт
технологических процессов механиче-
ской обработки, сварки и последующей
сборки не всегда бывает возможным.
Был выполнен анализ и определена
возможность создания такого контакта, с
использованием изменения физических и
механических свойств материала наруж-
ной стенки блока сопла при повышенной
температуре в процессе нагрева.
Изменение размеров диаметров
наружной и внутренней стенок блока соп-
ла в зависимости от температуры и коэф-
357
фициенты термического линейного расши-
рения может быть определено по форму-
лам (1.1 и 1.2):
DTH = DH(l+aT) (1.1)
DTB = DB(l+aT), (1.2)
где
D н - диаметр наружной стенки при
комнатной температуре
D в - диаметр внутренней стенки
при комнатной температуре
DT н - диаметр наружной стенки
при температуре Т
Dr в - диаметр внутренней стенки
при температуре Т
Т - температура, при которой
определяется размер
a - коэффициент термического
линейного расширения
Коэффициенты термического ли-
нейного расширения для стали
06Х16Н5МВФ (ВНС 16) и стали
12Х18Н10Т в зависимости от температу-
ры приведены в таблице №1.
Таблица 1.
Коэффициенты термического линейного расширения для стали 06Х15ВМБФ (ВНС
16) и стали 12Х18Н10Т.
Сталь a, 106 1/град
Температура °C
20-100 20-200 20-300 20-400 20 -500 20-600
06Х16Н5МВФ 11,3 11,5 11,6 11,8 12,1 12,4
12Х18Н10Т 16,7 17,0 17,4 17,8 18,2 18,6
Таким образом, контакт между
наружной и внутренней оболочкой в
процессе нагрева может произойти за
счёт большего увеличения размеров
внутренней стенки по отношению к
наружной из-за разницы в коэффициен-
тах термического линейного расширения.
Проведённый расчёт изменения размеров
в процессе нагрева показал, что такой
контакт может быть обеспечен за счёт
выдержки при определенной температуре
-Тв.
Дальнейшее равномерное устране-
ние зазоров по всей площади контакта
может быть обеспечено за счёт высоко-
температурной ползучести (динамической
вязкости т|) стали 06Х16Н5МВФ при изо-
термической выдержке с образованием
прогиба между рёбрами внутренней стен-
ки.
Чтобы исключить перераспределение
жидкого припоя в процессе формирования
контакта между соединяемыми деталями с
образованием неспаев и запаев, целесооб-
разно изотермическую выдержку в процес-
се нагрева проводить при температуре ни-
же температуры начала плавления припоя,
т.е. температуры солидуса. При этих усло-
виях была принята температура выдержки
- Тв. Таким образом, деформация внут-
ренней стенки из стали 06Х16Н5МВФ
при выдержке стабилизируется. Исходя
из полученных результатов, было уста-
новлено время выдержки в процессе
нагрева при температуре Тв - 40 минут.
В соответствии с требованиями
технической документации величина
прогиба деталей наружной и внутренней
стенок между рёбрами должна находить-
ся в пределах от 0,15 до 0,5 мм соответ-
ственно (рис. 1).
358
Рис.1. Величина прогиба деталей наружной и внутренней стенок.
Величина прогиба зависит от эле-
ментов конструкции охлаждающих кана-
лов блока сопла внешней нагрузки, тем-
пературы, времени изотермической вы-
держки [1] и может быть определена по
формуле (1.3):
f = Fa 3 т/ 12bh3 Т], (1.3)
где
f - величина прогиба между ребра-
ми
F - величина внешней нагрузки
(давление на соединяемые детали в про-
цессе пайки, кгс/мм2
т- длительность действия при нагруз-
ке (время выдержки при постоянной темпе-
ратуре), в минутах
а - расстояние между опорами (шаг
между рёбрами),,
b - сторона перпендикулярная
направлению действия силы в мм
h - сторона параллельная направле-
нию действия силы(толщина стенки), в
мм
Т) - эффективная динамическая
вязкость материала.
Динамическая вязкость при по-
стоянной температуре может быть опре-
делена по формуле (1.4):
tj = Ft (1 + Д[)/ ?>Д1, (1.4)
где
F - величина внешней нагрузки,
кгс/мм2
т - длительность действия при
нагрузке, в минутах,
I - рабочая длина образца для про-
ведения испытаний на ползучесть, в мм
Д I - увеличение рабочей длины
образца за время приложения нагрузки т,
в мм
Изменение величины прогиба
между ребрами с шагом 4,0 мм в зависи-
мости от температуры и времени вы-
держки представлено на рис.2.
время, мин
Рис. 2. Величина прогиба в зависимости от времени выдержки перед выходом на режим пайки
На основании проведённого ана-
лиза был разработан и внедрён в произ-
водство следующий режим пайки пред-
ставленный на рисунке 3:
359
Т ♦
Рис. 3. Режим пайки
Оборудование: Вакуумно-
компрессионный агрегат ВКА 1000
Блок сопла, прошедший пайку по
разработанному технологическому ре-
жиму, прошёл испытания на прочность
при давлении 550 + 40 кгс/см2 в течение 5
минут и по программе квалификации в
следующем объеме:
Давление 550 кгс/см2 30
раз с выдержкой по 3 мин
Давление 650 кгс/см2 1
раз с выдержкой по 3 мин
Давление 700 кгс/см2 2
раза с выдержкой по 5 мин
Разрушение произошло при давле-
нии 980 кгс/см2 по основному материалу
ребра внутренней стенки (сталь
12Х18Н10Т).
Выводы:
1 Разработан и внедрён в производ-
ство комплексный технологический про-
цесс подготовки поверхности деталей
блока сопла под пайку, исключающий
проведение операции термофиксации и
последующей пескоструйной обработки
(патент RU 2 355 527 С2).
2 Определены температурные вре-
менные параметры технологического
процесса пайки крупногабаритного бло-
ка сопла, обеспечивающие при допусти-
мых зазорах в процессе сборки от 0,3 до
2,5 мм высокую прочность паянного со-
единения (патент № RU 2358845 С2).
Библиографический список
1. Ф.Ф. Жаропрочные стали и
сплава. Металлургия Москва 1969г.
2. Соломин Н.В. Жаростой-
кость материалов и деталей под нагруз-
кой, Москва, 1969.
360
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 9: Малые космические аппараты: проекты,
эксплуатация.
361
УДК 520.6.07
НАУЧНАЯ АППАРАТУРА ДЧ-01
©2015 М.П. Каляев, Д.М. Рязанов, Н.Д. Сёмкин
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (национальный исследовательский университет), г. Самара
Представлено структурное описание, назначение и принцип работы многофункциональной
аппаратуры ДЧ-01, устанавливаемой на малый космический аппарат АИСТ-2.
Ключевые слова: малый космический аппарат, кварцевые микровесы, интегральная микросхема
На КА в полете воздействует
обширный комплекс факторов
космического пространства (ФКП):
потоки электронов и ионов высокой
энергии, холодная и горячая космическая
плазма, солнечное электромагнитное
излучение, метеорная материя, твердые
частицы искусственного происхождения
и другие факторы.
Многофункциональная аппаратура
ДЧ-01, позволяющая контролировать
изменение свойств различных образцов
материалов на борту малого
космического аппарата под воздействием
ФКП, представляет собой моноблок,
который включает в себя три модуля:
ДЧ-ОПТИКА - исследование
воздействия частиц космического мусора
на оптические элементы;
ДЧ-ЭРИ - исследование
воздействия факторов космического
пространства на электронные
компоненты;
ДЧ-КВАРЦ - исследование
воздействия атомарного кислорода на
покрытия.
Блок ДЧ-ОПТИКА содержит
модуль оптических измерений, который
содержит мишень, которая выполнена в
виде диска с отверстиями для оптических
элементов. На фиксированном
расстоянии установлен фотоприёмник,
механически диск соединен с шаговым
двигателем, выход фотоприёмника
соединён с входом блока управления и
обработки информации, с
противоположной стороны диска
установлен полупроводниковый лазер.
В корпусе аппаратуры ДЧ-01
расположена плата с исследуемыми
элементами. В качестве образцов
используются электронные компоненты,
выполненные с различным
технологическим процессом - 0,35 мкм
0,25 мкм и т.д. (FLASH-память,
микроконтроллеры типа AVR,
Контроллерный модуль STM32F3).
Под платой расположен защитный
экран и модуль управления с
микропроцессорным устройством,
предоставляющим различные
интерфейсы обмена данными: spi, i2c,
parallel bus (address/data), а также линии
управления режимами работы
тестируемых микросхем.
Аппаратура позволяет выявить
искажение или потерю данных,
записанных во FLASH память, полный
отказ элементов, превышение
потребления тока отдельными ИМС,
температуру платы с ИМС.
Для контроля уноса массы с
поверхности используется
универсальный частотный метод. В
качестве преобразователя в этом методе
используется кварцевый элемент,
включенный в контур генератора частоты.
Принцип действия кварцевого
преобразователя основан на зависимости
частоты генерируемых сигналов от
изменения массы кварцевого элемента в
процессе осаждения на его поверхность
пыли. С увеличением массы элемента его
резонансная частота падает.
Для минимизации температурных
влияний пара кристаллов с одинаковыми
температурными характеристиками, а
также с практически одинаковыми
частотами установлены на одной основе
на малом расстоянии друг от друга, так
362
что они находятся при одной и той же
температуре.
Аппаратура предназначена для
установки на МКА АИСТ-2, дата
планируемого запуска - конец 2015 года,
срок активного существования - не менее
2 лет. В результате космического
эксперимента будут получены
результаты по изменению оптических
свойств кварцевых стекол марки К-8,
уменьшению массы тонких пленок
различных диэлектриков (например
каптона), отказоустойчивости микросхем
памяти, выполненных с разным
технологическим процессом (0,09-
0,35мкм). Эти данные будут полезны для
уточнения существующих
математических моделей влияния
факторов космического пространства,
производстве микросхем и дальнейшем
изучении как околоземного космического
пространства, так и дальнего космоса.
Библиографический список:
1. Калаев, М.П. Устройство для
контроля толщины покрытий на
поверхности космического аппарата
[Текст]/М.П. Калаев, Д-М.
Рязанов//Физика волновых процессов и
радиотехнические системы. - 2014. - Том
17, №2.
2. Пат. №2011127029 Российская
Федерация, МПК G01T 1/34. Устройство
измерения оптических характеристик
ударносжатых материалов конструкции
космического аппарата [Текст] /
Семкин Н.Д., Калаев М.П.; заявитель и
патентообладатель Самарский
Аэрокосмический Государственный
Университет. - № 2011127029/28. Заявл.
30.06.2011; опубл. 10.01.2013. Бюл. №1. -
4 с.
3. Сёмкин, Н.Д. Определение
параметров кратеров на поверхности
стекла методом малоугловой
индикатрисы [Текст]/ Н.Д. Сёмкин, М.П.
Калаев, К.Е. Воронов//Приборы и
техника эксперимента. - 2011. - №3. - С.
143-148.
References:
1. Kalaev М.Р. A device for control
the coating thickness on the surface of the
space vehicle. - Physics of Wave Processes
and Radio Systems. - 2014. - Vol. 17, №2.
2. Patent №2011127029 Russian
Federation, MPK GO IT 1/34. Device of
measuring optical characteristics of stroke-
compacted transparent materials of
spacecraft construction elements. Semkin
N.D., Kalaev M.P. Proprietor: Samara State
Aerospace University.
3. Semkin N.D., Kalaev M.P.,
Voronov K.E. Determination of parameters
of craters on a glass surface by the smail-
angle-indicatrix method Instruments and
Experimental Techniques. 2011. T. 54. № 3.
C. 425-429.
SCIENTIFIC GEAR DCH-01
©2015 M.P. Kalaev, D.M. Ryazanov, N.D. Syomkin
Samara State Aerospace University, Samara
This article presents structural description, purpose and mode of operation of complex function device
mounted on the miniaturized satellite A1ST-2.
Key words: miniaturized satellite, quartz microbalance, integrated circuit
Сёмкин Николай Данилович - д.т.н, профессор, заведующий кафедрой конструи-
рования и технологии электронных систем и устройств, Самарский государственный
аэрокосмический университет им. академика С.П. Королёва (национальный исследова-
тельский университет).
E-mail: semkin(a;ssau.ru.
363
Область научных интересов: системы управления движением, физика высокоско-
ростного удара, космические исследования.
Каляев Михаил Павлович - к.т.н., старший научный сотрудник Института косми-
ческого приборостроения. 443086, Самара, Московское ш., 34, т.:267-48-50 E-mail:
sgau5feyandex.ru
Область научных интересовжосмическое приборостроение,деградация материалов в
космосе, воздействие микрометеороидов и космического мусора на поверхность.
Рязанов Дмитрий Михайлович - инженер Института космического приборострое-
ния.
443086, Самара, Московское ш., 34, т.267-48-50 drfleardfegmail.com.
Область научных интересов: космическое приборостроение, воздействие факторов
космического пространства на поверхность.
Syomkin Nikolay Danilovich - doctor of technical science, professor, the department of
design and technology of electronic systems and devices, Samara State Aerospace University
named after academician S.P. Korolyov (National Research University). E-mail:
scmkinfessau.ru.
Area of research: high-speed impact, mass spectrometry, space device engineering.
Kalaev Mihail Pavlovich - ph.d, Institute of Space Instruments, Samara State Aerospace
University (National Research University). 443086, Samara, Moskovskoe str, 34. Phone:
267-48-50. E-mail: sgau5feyandex.ru.
Research interests: space equipment-making, space degradation of materials, space debris
and micrometeoroids effect.
Ryazanov Dmitriy Mihaylovich - engineer of Institute of Space Instruments, Samara
State Aerospace University (National Research University). 443086, Samara, Moskovskoe str,
34. Phone: 267-48-50. E-mail: drfleardfegmail.com.
Research interests: space equipment-making, space environment factors effect.
364
УДК 621
РАЗВИТИЕ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ УПРАВЛЕНИЯ
МАЛЫМИ КОСМИЧЕСКИМИ АППАРАТАМИ.
©2015 Р.Н. Ахметов, Д.Е. Готин, Р.Р. Халилов, В.С. Якунин
АО «РКЦ «Прогресс», г. Самара
В докладе представлены предложения по формированию сети станций управления малыми
космическими аппаратами на основе равноприоритетного взаимодействия.
Ключевые слова: малый космический аппарат, центр управления полётом, сеть
Всё большее развитие во всех
отраслях народного хозяйства занимает
применение космических технологий. В
рамках этого при инициативе
федерального космического агентства в
2008 году был создан центр получения и
обработки информации (ЦПОИ)
«Самара». Целью создания центра было
внедрение и развитие услуг на основе
космических технологий. Сейчас ЦПОИ
«Самара» - Поволжский региональный
центр Роскосмоса [1].
Сокращение дистанции между
производством КА и конечным
пользователем привело к необходимости
построения космических систем
обеспечивающих решение поставленных
задач с использованием глубокого
комплексирования имеющихся
технологий. Одним из направлений
такого развития является создание малых
космических аппаратов (МКА).
В настоящее время АО «РКЦ
«Прогресс» совместно со СГАУ
завершил работы по созданию КК
«Аист», предназначенного для решения
образовательных, научно-технических и
экспериментальных задач. На борту КА
«Аист» установлено оборудование для
измерения геомагнитного поля и
компенсации, низкочастотных
микроускорений, а также оборудование
для исследования высокоскоростных
механических частиц естественного и
искусственного происхождения. На
орбите успешно функционируют два
МКА.
Одновременно с управлением МКА
«Аист» АО «РКЦ «Прогресс»
разворачивает проектные работы по
созданию МКА «Аист-2», на борту
которого предполагается разместить
радиолокационное и оптическое
оборудование дистанционного
зондирования Земли (ДЗЗ), научное
оборудование и высокоскоростную
радиолинию передачи информации на
пункт приёма информации.
При создании КК «Аист» были
проведены работы по созданию наземной
инфраструктуры обеспечивающей: связь
и информационный обмен с МКА;
формирование управляющих воздействий
на МКА; обработку телеметрической
информации; решение задач
навигационно-баллистического
обеспечения. Так, на территории
предприятия в дополнение к средствам
приёма и обработки информации ДЗЗ в
структуре ЦПОИ «Самара» был
развёрнут наземный комплекс
управления (НКУ) МКА.
НКУ МКА был создан на базе двух
наземных станций командно-
телеметрического взаимодействия,
основной и резервной, разработанных
НИЛАКТ РОСТО г. Калуга [2]. Станции
управления состоят из комплекта
передающего и приёмного оборудования
работающего в дециметровом и метровом
диапазоне длин волн.
Развитие космических систем на
основе МКА сформировало большое
количество комплексов управления (НКУ
г. Калуга, г. Москва, г. Санкт Петербург,
г. Самара, г. Уфа, г. Омск, г. Красноярск,
г. Благовещенск) [3, 5]. Расположение
пунктов управления позволяет
обеспечить уверенную связь с МКА на
10-12 витках в сутки, что значительно
365
увеличивает возможности по
взаимодействию с МКА. Необходимо
отметить, что оборудование НИЛАКТ
РОСТО является базовым для наземных и
бортовых систем управления МКА
разработки не только АО «РКЦ
«Прогресс», но других российских
предприятий.
НКУ интегрирован в единую
структуру наземных средств управления
приёма и обработки информации ДЗЗ
ЦПОИ «Самара. Совместная работа НКУ
МКА со средствами приёма и обработки
информации обеспечивает замкнутый,
полнофункциональный цикл
дистанционного обслуживания КА.
Наряду с очевидными
преимуществами объединения комплекса
управления и комплекса приёма и
обработки на основе сети Intranet,
построение подобного сегмента
сохраняет возможность для дальнейшего
улучшения наземной инфраструктуры.
Прежде всего, это связано с
требованиями по повышению
пропускной способности систем связи и
обеспечению резервирования.
Одним из направлений развития
предлагается избрать создание сети
станций управления МКА, на основе
равноприоритетного взаимодействия.
При этом взаимодействии необходимо,
чтобы было обеспечено формирование:
- структуры локальных центров
управления обладающих общей системой
информационной безопасности;
- взаимодействия станций сети на
основе различной структуры
информационного обмена наземного
комплекса управления и КА.
Возможной реализацией сети
станций управления будет объединение
станций на основе сети Internet, с
использованием сервера-маршрутизатора
и стандартных протоколов защиты.
Создание сети станций с учётом
представленных выше особенностей
позволит обеспечить:
1. гибкое управление МКА;
2. резервирование станций
управления;
3. экономию средств при создании,
техническом обслуживании и
эксплуатации;
4. расширение технических
возможностей для проведения работ на
МКА и с МКА, а также в случае с КА
ДЗЗ повысить производительность.
Развитие и подходы к построению
наземной инфраструктуры имеют
различную направленность. Существуют
подходы по формированию кластера
МКА и созданию на его основе эффекта
эмерджентности [4]. Необходимо
отметить, что представленные
рассуждения по возможной интеграции
станций не нарушают данного подхода, а
расширяет его технические возможности.
Библиографический список:
1. Ахметов Р.Н. Комплексное
дистанционное обслуживание малых
космических аппаратов / Ткаченко С.И.,
Халилов Р.Р. // Аэрокосмический курьер.
-2012. -Вып. 6,-С. 73.
2. Галаева Е.Ю. Наземный комплекс
управления малыми космическими
аппаратами ГНП РКЦ «ЦСКБ-Прогресс»
/ Галаева Е.Ю., Готин Д.Е., Сивкова И.В.,
Халилов Р.Р., Якунина Т.В. // XIX
, Российская научная конференция
профессорско-преподовательского
состава, научных сотрудников и
аспирантов ПГАТИ: Тез. докл. - Самара,
2012.-С. 8.
3. Грибушкина Е.Н. Создание
распределённой сети пунктов управления
МКА на базе пунктов управления
НИЛАКТ РОСТО / Грибушкина Е.Н.,
Фетисова Е.Ю., Халилов Р.Р. //
Всероссийская научно-техническая
конференция «Актуальные проблемы
ракетно-космической техники и её роль в
устойчивом социально-экономическом
развитии общества», г. Самара, 2009. -
С.213-214.
4 Макриденко Л.А. Структурные
особенности создания группировки
малых КА дистанционного зондирования
Земли / Макриденко Л.А., Минаев И.В. И
II Международная научно-техническая
конференция «Актуальные проблемы
создания космических систем
дистанционного зондирования Земли»,
366
г. Москва, 2014. - С. 4-6.
5. Беневольский С. В. Анализ
телеметрии с космического аппарата
"Юбилейный" [Электронный ресурс.] /
Майорова В. И., Гришко Д. А., Ханеня Н.
Н. // Наука и образование. Режим доступа
к ресурсу:
URL: http://technomag.edu.rU/doc/216675.h
tml свободный (дата обращения
27.05.2015).
References:
1. Ahmetov R. N. Complex remote
operation small space vehicles / Tkachenko
S.L, Khalilov R. R // The Space courier. -
2012.-V. 6.-With. 73.
2. Galaeva E.J. land a control complex
small space vehicles GNP RKTS "TSSKB-
PROGRESS" / Galaeva E.J., Gotin D.E.,
Sivkova LV., Khalilov R. R, Yakunina T.V.
// XIX Russian scientific conference
professorial and teaching composition,
research assistants and post-graduate
students PSUTI: Report theses - Samara,
2012.-With. 8.
3. Gribushkina E.N. Creation of the
arranged web of points of control SSV on
the basis of points of control of NILAKT
ROSTO / Gribushkina E.N., Fetisova E.J.,
Khalilov R. R. // The АН-Russia scientific
and technical conference «Actual problems
of spacerocket engineering and its role in
steady social and economic development
societies», Samara, 2009. - With. 213-214.
4. Makridenko L.A. Structural features
of creation of grouping small KA remote
sounding of the Earth / Makridenko L.A.,
Minaev I.V.//II International scientific and
technical conference «Actual problems of
creation of space systems of remote
sounding of the Earth», Moscow, 2014. -
With. 4-6.
5. Benevolsky S.V. The analysis of
telemetry from space vehicle "Anniversary"
[Electronic resource.] / Majorova V. 1,
Grishko D. A, Hanenja N. N//Science and
education. Access mode to a resource: URL:
http://technomag.edu.ru/doc/216675.html
free (date reference 27.05.2015).
DEVELOPMENT OF THE LAND INFRASTRUCTURE OF MANAGEMENT
SMALL SPACE VEHICLES
©2015 R.N. Akhmetov, D.E. Gotin, R.R. Khalilov, V.S. Yakunin
JSC «SRC «Progress», Samara
In the report offers on formation of a network of stations of management are presented are small space vehicles
on the basis of equally priority interaction.
Keywords: The small space vehicle, control center of flight, network.
Информация об авторах:
Ахметов Равиль Нургалиевич, первый заместитель генерального директора
АО «РКЦ «Прогресс» - генеральный конструктор, д.т.н., профессор, 443009, г. Самара, ул.
Земеца, 18, т. 8(846) 228-67-32, mailfesamspace.ru.
Область научных интересов: геоинформационные и телекоммуникационные
технологии, проектирование и эксплуатация автоматизированных систем управления.
Готин Денис Евгеньевич, начальник группы АО «РКЦ «Прогресс», 443009, г.
Самара, ул. Земеца, 18, т. 8(846)276-10-75., got-in.denferambler.ru.
Область научных интересов: управление КА.
Халилов Ринат Рашидович, к.т.н., заместитель начальника ЦПОИ «Самара» АО
«РКЦ «Прогресс», 443009, г. Самара, ул. Земеца, 18, т. 8(846)228-96-73,
halilovr82femail.ru.
Область научных интересов: наземная инфраструктура дистанционного
обслуживания КА, цифровая обработка сигналов.
367
Якунин Вячеслав Сергеевич, начальник сектора АО «РКЦ «Прогресс», 443009, г.
Самара, ул. Земеца, 18, т. 8(846)955-12-46, svetaslav@bk.ru.
Область научных интересов: наземные станции приёма информации с КА, линии
связи.
Akhmetov Ravil Nurgalievich, First Deputy General Director of JSC «SRC «Progress» -
Chief Designer, Doctor of technical science (PhD), professor, 443009, Samara, street Zemetsa,
18, t. 8(846)228-67-32, mail@samspace.ru.
Area of scientific interests: geographic information and telecommunications technologies,
design and operation of automated control systems.
Gotin Denis Evgenevich, the chief of group JSC «SRC «Progress», 443009, Samara,
street Zemetsa, 18, t. 8(846)276-10-75, got-in.den@rambler.ru.
Area of scientific interests: management SV.
Halilov Rinat Rashidovich, Cand.Tech.Sci., deputy chief TSPOI "Samara" JSC «SRC
«Progress», 443009, Samara, street Zemetsa, 18, t. 8(846)228-96-73, halilovr82@mail.ru.
Area of scientific interests: a land infrastructure of remote service SV, digital processing of
signals.
Yakunin Vyacheslav Sergeevich, the chief of sector JSC «SRC «Progress», 443009,
Samara, street Zemetsa, 18, t. 8(846)955-12-46, svetaslav@bk.ru.
Area of scientific interests: land stations of reception of the information with SV,
communication lines.
368
УДК 621.396
МОНОСТАТИЧЕСКИЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС
Р-ДИАПАЗОНА ДЛЯ ПЕРСПЕКТИВНОГО МКА
©2015 ’О.В. Горячкин, 2Б.Г. Женгуров, 2И.В. Маслов
’Поволжский государственный университет телекоммуникаций и информатики, г. Самара
2АО «РКЦ «Прогресс», г. Самара
В статье описывается проектный облик малого космического аппарата с моностатическим радиоло-
кационным комплексом P-диапазона и возможные тактико-технические характеристики.
Ключевые слова: радилокатор с синтезированной апертурой, P-диапазон, малые космические аппа-
раты
В последние годы обсуждаются
проблемы реализации космических РСА
дистанционного зондирования Земли,
работающих в диапазонах частот, на
данный момент не используемых в
космической радиолокации.
Особенно интересно использование
диапазонов Р и VHF, поскольку РЛИ в
этих диапазонах несет в себе
информацию о распределении
коэффициента отражения в толще
растительности и почвы, при этом
глубина проникновения под поверхность
земли в VHF диапазоне может достигать
нескольких сотен метров, а в Р диапазоне
растительность уже не оказывает
маскирующего действия. Кроме того,
низкочастотных
с высокой
применения
РСА для
растительных
размещение этих
использование
диапазонов связано
эффективностью
поляриметрических
картографирования
покровов.
К сожалению,
систем в космосе сопровождается рядом
сложных технических проблем.
Одной из основных при этом
является потеря когерентности РСА,
вследствие эффектов распространения
радиоволн рассматриваемых диапазонов
через атмосферу Земли. Эти эффекты
приводят к снижению потенциального
пространственного разрешения этих
систем, геометрическим и
поляризационным искажениям. Кроме
этого, с увеличением длины волны
на
космических
РСА. На
опубликовано
растет необходимая площадь апертуры
антенны (>110 м2) при значительной
излучаемой мощности (> 1000Вт).
Осложняет задачу требование наличия
полного поляриметрического базиса.
Прежде всего, данная проблематика
обусловила интерес к изучению влияния
атмосферных эффектов
характеристики
(трансионосферных)
сегодняшний день
достаточно большое количество работ по
данной проблематике (например [1,2]), в
которых показана существенная
деградация разрешающей способности
РСА (до десятков метров в Р диапазоне и
до сотен метров в VHF диапазоне).
Один из возможных путей
преодоления данных трудностей это
использований бистатической схемы
съемки, при которой приемная позиция
размещается под ионосферой на
относительно небольшом расстоянии от
области интереса (10-20 км). Эта идея
использована при разработке БиРЛК на
МКА «АИСТ-2Д» [3,5].
Однако, успешная реализация
БиРЛК на МКА «АИСТ-2Д» открывает
возможности для создания полноценного
космического РСА
сопоставимые с
планами других
объясняется
обстоятел ьствам и:
1) Экспериментальная отработка
радиопередающего устройства (РПУ),
Р
диапазона в сроки
соответству ющи м и
стран [4]. Это
следующими
369
разработанного СОНИИР, г.Самара,
обеспечивающего широкий ансамбль
когерентных сигналов высокой
мощности от 130 до 180 Вт в импульсе;
2) Экспериментальная отработка
наземной антенной решетки из кросс-
поляризованных элементов типа Уда-
Яги, разработанной в ПГУТИ, с
коэффициентом усиления до 20 Дб, в
полосе до 30МГц, на несущей частоте
435МГц;
3) Регистрация сигналов в прямом
канале БиРЛК позволит получить
реализации случайных амплитудных и
фазовых флуктуаций сигнала на трассе
спутник-земля и провести статисти-
ческую идентификацию искажений
сигнала, что необходимо для построения
эффективных алгоритмов синтеза
апертуры в Р диапазоне.
В зарубежных космических
программах основой для создания
низкочастотных космических РСА стало
использования больших
раскладывающихся зеркальных антенн
(диаметр не менее 10-12 м), типа
Astromesh (рис. 1), с облучателем в виде
антенной решетки (4 или 6 элементов).
Особенностями такой антенны является
сложная схема разложения зеркала и
соответственно очень высокая стоимость
космического аппарата.
Рис. 1 BIOMASS P-band SAR (ESA)
В данной статье рассматривается
вариант использования антенной решетки
из четырех приемо-передающих антенн, с
излучателями типа Уда-Яги, с
переключателями поляризации (аналог
наземных антенн НА БиРЛК МКА
«АИСТ-2Д») и соответственно четырех
РПУ РЛК изделия «Аист-2Д» - для
создания моностатического
полнополяриметрического РСА Р-
диапазона космического базирования
(рис. 2) и возможное размещение на МКА
массой до 250 кг.
На рисунке 2 условно показано, что
основные элементы для моностатической
радиолокационной системы проходят
отработку в рамках работ по разработке
РЛК «Аист-2». Так же в ПГУТИ имеется
необходимый технический задел по
созданию и разработке приемной части в
дециметровом и метровом диапазоне
волн.
На рис. 3 показана антенна система,
состоящая из четырех антенн, типа Уда-
Яги, длина каждой антенны 4,4 м (21
элемент), коэффициент усиления 18 дБ.
При расстоянии в стеке между антеннами
1,73 м суммарный коэффициент усиления
достигает 24 дБ, ширина основного луча
диаграммы направленности не более 11
градусов, уровень боковых лепестков
минус 11 дБ. Предварительная масса
антенной системы, при изготовлении из
сплава АМгб, не более 25 кг. Такая
конструкция антенной системы позволяет
использовать её, с минимальными дора-
ботками, практически на любом МКА.
370
Рис. 2 Структурная схема моностатического РСА P-диапазона на основе
передающего модуля РЛК «Аист-2»
Рис. 3Антенная система для моностатического РСА Р-диапазона.
Для расчета основных тактико-
технических характеристик МКА с РСА
P-диапазона были приняты следующие
исходные данные:
1. Масса МКА не более 250 кг.
2. Срок активного существования
не менее 1 года.
3. Использование четырех РПУ
(импульсная мощность каждого не более
180 Вт) из состава БиРЛК для создания
передающей части.
4. Основной режим работы - марш-
рутная съёмка с полной поляризационной
матрицей в полосе захвата не менее 100
км.
В табл. 1 представлены основные
результаты расчета.
371
Табл. 1
Параметр Полоса частот зондирующего сигнала
6 МГц 30 МГц
Высота орбиты (наклонение /=97°) 420 км
Центральная частота 435 МГц
Вид излучаемого сигнала ЛЧМ-импульс, М-последовательность
Частота повторения импульсов 400 Гц 1400 Гц
Разрешение по азимуту 35 м 5-8 м
Разрешение по наклонной дальности 25 м 5 м
Разрешение горизонтальной дальности 30,5-40,6 м 7,9-10,6 м
Минимальный угол падения 28
Максимальный угол падения 39
Полоса захвата не более 130 км
Чувствительность РСА Минус 27 дБ Минус 20 дБ
Длительность импульса 37 мкс 131 мкс
Скважность 19 19
База 1128 790
Период повторения 714 мкс 2,5 мс
Таким образом, основными решае-
мыми задачами данного комплекса будут
являться:
1. Круглосуточный всепогодный
мониторинг Земной поверхности (суши и
моря).
2. Видовая разведка (возможность
обнаружения замаскированной военной
техники).
3. Обнаружение изменений в окру-
жающей обстановке.
4. Подповерхностное (проникающее
под листву) зондирование.
5. Создание цифровых моделей ре-
льефа при интерферометрической сьемке.
6. Обновление топографических
карт.
7. Оценка распределения биомассы
лесов и изменения их годовых запасов.
8. Совместный эксперимент с при-
емным пунктом БиРЛК «Аист-2Д» (ри-
сунок 4).
372
На рис. 5, 6 представлен пример-
ный проектный облик и возможная схема
Рк5п^^кл
Рис-68а—
ННОИ систем,
373
Библиографический список:
1. Горячкин О.В. Методы слепой
обработки сигналов и их приложения в
системах радиотехники и связи. - М.:
Радио и связь, 2003. - 230с.
2. Горячкин О.В. Азимутальное
разрешение для КА с РСА Р,ОВЧ-
диапазона // ИИЭР геофизика и
дистанционное зондирование. - 2004. -
Изд.1.- №4. -с.251-254.
3. Ахметов Р.Н., Белоконов И.В.,
Горячкин О.В., Коваленко А.И., Риман
В.В., Стратилатов Н.Р., Ткаченко С.И.
Околоземная система радолокационного
мониторинга основанная на технологии
микро-спутников // Первый
Специализированный Международный
Симпозиум, Лимассол, Кипр, ноябрь 2-7,
2009, М., А.А.Максимов Научно-
исследовательский Институт
Космических Систем (НИИКС), 2009. -
62 с.
4. Ramongassie S., Valle Р., Orlando
G., Arpesi P.G., Heliere F., Arcioni M. P-
band SAR instrument for BIOMASS//
EUSAR 2014 - p.l 156-1159.
5. Борисенков А.В., Горячкин О.В.,
Дмитренок В.И., Долгополов В.Н.,
Женгуров Б.Г., Журавлев А.А., Курков
И.Г., Хохлов С.М. Бистатический
радиолокатор Р диапазона для МКА
«АИСТ-2» // Научные и технологические
эксперименты на автоматических
космических аппаратах и малых
спутниках: Тезисы докладов третьей
международной конференции " Научные
и технологические эксперименты на
автоматических космических аппаратах и
малых спутниках". Самара, 9-11 сентября
2014 г. - Самара, изд-во СНЦ РАН, 2014,-
С. 167-170.
References:
1. Goriachkin O.V. Methods of blind
processing of signals and their applications
in systems of radio engineering and
communication. - M.: Radio and
communication, 2003. - 230p.
2. Goriachkin O.V. Azimuth
Resolution of Spacebome P,VHF-Band
SAR // IEEE Geoscience and Remote
Sensing Letters. - 2004. - VoLl. - №4. -
P.251-254.
3. Akhmetov R.N., Belokonov LV.,
Goriachkin O.V., Kovalenko A.L, Riemann
V.V., Stratilatov N.R., Tkachenko S.L
Space-based juxtaposition Earth and
Circumterrestrial radar monitoring system
based on micro-satellites technologies // in
Book of abstracts of the First Specialized
International Symposium, Limassol, Cyprus,
November 2-7, 2009, M., A.A.Maximov
Space Systems Research Institute (NIIKS),
2009. - 62 p.
4. Ramongassie S., Valle P., Orlando
G., Arpesi P.G., Heliere F., Arcioni M. P-
band SAR instrument for BIOMASS//
EUSAR 2014-p.l 156-1159.
5. Borisenkov A.V., Goriachkin O.V.,
Dmitrenok V.L, Dolgopolov V.N.,
Zhengurov B.G., Zhuravlev A.A., Kurkov
LG., Hohlov S.M. The bistatic radar P-band
for small satellite «АИСТ-2» // Scientific
and technological experiments on automatic
spacecrafts and small satellites: Theses of
reports of the third international conference
" Scientific and technological experiments
on automatic spacecrafts and small
satellites". Samara, 9-11 September 2014 r. -
Samara, SSC RAS, 2014,- P.l 67-170.
MONOSTATIC RADAR SYSTEM P-BAND FOR PERSPECTIVE
SMALL SATELLITE
©2015 'O.V. Goryachkin, 2B.G. Zhengurov, 2LV. Maslov
'Povolzhskiy State University of Telecommunications and Informatics, Samara
2JSC «SRC «Progress», Samara
The paper describes conceptual design small satellite with monostatic radar system P-band and possible per-
formance characteristics.
Key words: Synthetic aperture radar, P-band, small satellite
374
Информация об авторах:
Горячкин Олег Валериевич, профессор, д.т.н., заведующий кафедрой ТОРС,
ПГУТИ, 443010, Россия, г. Самара, ул. Льва Толстого, д. 23, Тел. (8-846) 228-00-87. Email:
gor@psati.ru.
Область научных интересов: цифровая обработка сигналов в системах радиотехники
и связи, радиофизические методы дистанционного зондирования Земли, радиолокация с
синтезированием апертуры антенны, слепая идентификация систем, прикладная
статистика.
Женгуров Борис Глебович, инженер-конструктор АО «РКЦ» Прогресс», аспирант
кафедры ТОРС, ПГУТИ, 443010, Россия, г. Самара, ул. Льва Толстого, д. 23, Тел.
(8-846) 228-00-72.
E-mail: loir47@rambler.ru.
Область научных интересов: цифровая обработка сигналов, алгоритмы
формирования изображений в МПРСА.
Маслов Иван Владимирович, инженер-конструктор АО «РКЦ» Прогресс»,
аспирант кафедры ТОРС, ПГУТИ, 443010, Россия, г. Самара, ул. Льва Толстого, д. 23, Тел.
(8-846) 228-00-72. E-mail: maclofffemail.ru
Область научных интересов: проектирование малых космических аппаратов,
цифровая обработка сигналов.
Goryachkin Oleg Valerievich, professor, doctor of technical sciences, head of
department, PSUTI, 443010, Russia, Samara, Lev Tolstoy Street, 23, (8-846) 228-00-87, Email:
gorfepsati.ru.
Area of research: digital signal processing in systems of radio engineering and
communication, radio physical methods of remote sensing of Earth, synthetic aperture radar,
blind identification of systems, applied statistics.
Zhengurov Boris Glebovich, Design Engineer, JSC «SRC «Progress», post-graduate
student of PSUTI, loir47ferambler.ru, tel.: (8-846) 228-00-72.
Area of research: digital signal processing, algorithms of formation of images in multistatic
synthetic aperture radar system.
Maslov Ivan Vladimirovich, Design Engineer, JSC «SRC «Progress», post-graduate
student of PSUTI, macloff@mail.ru, teL: (8-846) 228-00-72.
Area of research: design of small spacecrafts, digital signal processing.
375
УДК 520.68
МАЛЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ИССЛЕДОВАНИЯ
МИКРОМЕТЕОРОИДОВ И ЧАСТИЦ КОСМИЧЕСКОГО МУСОРА
©2015 Н.Д.Семкин, А.М. Телегин
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Приведено описание космического аппарата для регистрации космического мусора и
микрометеороидов. Представлена предполагаемая конструкция космического аппарата.
Ключевые слова: микрометеороид, космический аппарат, космический мусор
Для регистрации высокоскоростных
микрочастиц в околоземном космическом
пространстве нами предложен
космический аппарат (рис.1). Питание
данного космического аппарат
производится с помощью солнечных
батарей.
Рис. 1 - Космический аппарат для регистрации микрометеороидов и частиц космического мусора
При выводе на исследуемую орбиту
Земли происходит раскрывание
солнечных батарей и натяжение между
ними пленки металл-диэлектрик-металл,
при этом они образуют мишень для
высокоскоростных микрочастиц. При
ударе высокоскоростной частицы по
мишени происходит образование ионов,
которые регистрируются с помощью
микроканальных пластин. Подробная
методика регистрация изложена в работе
[1].
В качестве системы управления
данным космическим аппаратом
используются один солнечный датчик,
ориентированный на Солнце и пять
датчиков засветки, расположенных на
каждой из граней космического аппарата,
376
за исключением грани, где расположен
датчик Солнце. Ориентацию в
пространстве производится с помощью
магнитной системы ориентации,
состоящей из трех взаимноортоганально
расположенных электромагнита и
магнитометра.
Работа выполнена в рамках темы
16г-Р006-214: «Разработка научно-
технических решений для мониторинга
космического мусора и
микрометеороидов на основе
пленочных датчиков, выполненных в
виде космического аппарата» в целях
реализации федеральной целевой
программы «Исследования и разработки
по приоритетным направлениям
развития научно-технологического
комплекса России на 2014 - 2020 годы»
(соглашение № 14.575.21.0107).
Библиографический список:
[1] Semkin N.D. and etc. Устройство
регистрации параметров микроме-
теороидов и космического мусора.
Патент на изобретение №2 456 639
опубликован 20.07.2012. Приориотет
13.12.2010.
[2] Преобразователи информации в
электронных устройствах бортовых
систем: Учебное пособие / Н.Д. Сёмкин,
А.М. Телегин. Самарский
государственный аэрокос-мический
университет имени академика
С.П. Королева. Самара, 2012, 307 стр.
References:
[1] Semkin N.D. and others. DEVICE
parameter registration micrometeoroids and
space debris. The patent for the invention
№2 456639 published 20.07.2012.
[2] Semkin N.D. Information
converters in electronic devices on-board
systems: Textbook / N.D.Semkin,
A.M.Telegin. Samara State Aerospace
University named after academician S.P.
Korolev. Samara, 2012, 307 pages
THE SMALL SPACECRAFT FOR RESEARCH MICROMETEOROIDS
AND SPACE DEBRIS
©2015 N.D. Semkin, AM Telegin
Samara State Aerospace University, Samara
The description of the spacecraft for the registration of space debris and micrometeoroids. Presented
estimated spacecraft structure.
Key words: micrometeoroids, spacecraft, space debris
Информация об авторах:
Семкин Николай Данилович, д.т.н., профессор, заведующий кафедры
конструирования и технологии электронных систем и устройств, СГАУ, 443 086, Россия,
г. Самара, Московское ш. 34, т. 267-48-39, ikpsgau(fagmail.com.
Область научных интересов: космическое приборостроение.
Телегин Алексей Михайлович, к.ф.-м.н., доцент кафедры конструирования и
технологии электронных систем и устройств, СГАУ, 443 086, Россия, г. Самара,
Московское ш. 34, т. 267-48-50, talex85fajmail.ru.
Область научных интересов: космическое приборостроение.
Semkin Nikolai Danilovich, Ph.D., professor, head of the department of design and
technology of electronic systems and devices, SSAU, 443086, Russia, Samara, Moscow Rd. 34,
t. 267-48-39, ikpsgaufajgmail.com.
Research interests: space instrument.
Telegin Alexey Mihajlovich, Ph.D., assistant professor of design and technology of
electronic systems and devices, SSAU, 443086, Russia, Samara, Moscow Rd. 34, t. 267-48-50,
talex85fajmail.ru.
Research interests: space instrument.
377
УДК 004.942, 519.876.5, 629.78
МЕТОДЫ И АЛГОРИТМЫ НАВИГАЦИОННО-БАЛЛИСТИЧЕСКОГО
ОБЕСПЕЧЕНИЯ МАЛОГО КОСМИЧЕСКОГО АППАРАТА «МАЯК»
©2015 А.А. Недогарок, А.Ю. Шаенко, Р.Э. Аюпов, И.А. Просвирина
Московский Государственный Технический Университет им. Н.Э. Баумана, г. Москва
Разработана математическая модель движения низкоорбитального наноспутника с развёртываемым
крупногабаритным отражателем. Реализованы алгоритмы расчёта параметров вторичной баллистики. На
основе полученной модели реализовано навигацонно-баллистическое программное обеспечение. С помо-
щью разработанных средств произведён прогноз траектории аппарата, оценка времени его баллистического
существования. Определены временные интервалы видимости аппарата и его относительная звёздная вели-
чина для наблюдателя с заданными координатами.
Ключевые слова: математическая модель, навигационно-баллистическое обеспечение, наноспутник,
малый космический аппарат, прогноз траектории, эволюция орбиты
Малый космический аппарат
«Маяк» разрабатывается сообществом
«Твой сектор космоса» и специалистами
МГТУ им. Н.Э. Баумана. В транспортном
положении он имеет конфигурацию
CubeSat 3U, после отделения
развёртывает крупногабаритный
плёночный оптический отражатель в
форме тетраэдра с длиной стороны 3 м.
Для увеличения зоны земной
поверхности, ометаемой отражёнными
лучами, и создания наилучших условий
наблюдения, КА закручен вдоль особым
образом выбранной оси. Таким образом,
особенностями спутника «Маяк»
являются высокий баллистический
коэффициент и наличие интенсивного
углового движения вокруг центра масс.
Для прогноза эволюции орбиты
аппарата, определения срока его
существования, видимой яркости и
расчёта эфемерид для наблюдения
разработано навигационно-
баллистическое программное
обеспечение. Оно состоит из модуля
расчёта движения, а также модуля
расчёта вторичных баллистических
параметров.
Основу модуля расчёта движения
составляет математическая модель
движения аппарата. Движение центра
масс описывается неособенными
равноденственными элементами орбиты.
Специфика динамики аппарата
определяется высоким баллистическим
коэффициентом и большой парусностью,
что делает необходимым учёт множества
возмущающих факторов. Разработанная
модель учитывает следующие
возмущения:
- несферичности гравитационного
поля Земли с точностью до заданного
номера гармоники;
- аэродинамическое торможение;
- воздействие давления солнечного
излучения.
Возмущающие ускорения,
включённые в математическую модель,
могут задаваться как в
детерминированном, так и в
стохастическом виде. Это позволяет
прогнозировать как усреднённое
движение, так и получать отдельные
реализации траекторий под действием
случайных возмущений, и строить трубку
возможных траекторий.
Модуль вторичной баллистики
включает алгоритмы определения
фотометрических параметров аппарата и
небесных координат для заданной точки
наблюдателя. Учитывается градиент
земной тени и несферичность фигуры
Земли.
С помощью разработанного на
основе вышеописанной модели
программного комплекса произведён
прогноз траектории аппарата с
начальными условиями,
соответствующими предполагаемым
условиям выведения при кластерном
378
запуске (высота 550 км, наклонение 65°).
Установлено предполагаемое время
баллистического существования, а также
небесные координаты аппарата для
наблюдателя, находящегося в заданной
точке, и максимальная относительная
звёздная величина аппарата.
На основе разработанного
математического и программного
обеспечения предполагается создание
универсального модуля расчета
движения низкоорбитального ИСЗ и
оценки их вторичных баллистических
параметров.
Библиографический список:
1. Иванов Н.М., Лысенко Л.Н.
Баллистика и навигация космических
аппаратов. - М.: Дрофа, 2004. - 544 с.
2. Curtis H.D. Orbital Mechanics for
Engineering Students. 2 edition. Oxford:
Butterworth-Heinemann, 2013.
3. Xu G., Xu J. Orbits. 2nd Order
Singularity-free Solutions. Berlin: Springer-
Verlag Berlin Heidelberg, 2013.
4. Ярошевский В.А. Вход в
атмосферу космических летательных
аппаратов. - М.: Наука, 1988. - 336 с.
5. Тымкул В.М. Методика расчета
звездной величины международной
космической станции / В.М. Тымкул,
Л.В. Тымкул, Ю.А. Фесько,
К.В. Кудряшов, С.В. Луговских // Изв.
вузов. Приборостроение. - 2013. - Т.56. -
№5.-с. 5-10.
References:
1. Ivanov N.M., Lysenko L.N.
Ballistics and navigation of spacecraft. -
Moscow.: DROFA Publishing House, 2004.
- 544 p.
2. Curtis H.D. Orbital Mechanics for
Engineering Students. 2 edition. Oxford:
Butterworth-Heinemann, 2013.
3. Xu G., Xu J. Orbits. 2nd Order
Singularity-free Solutions. Berlin: Springer-
Verlag Berlin Heidelberg, 2013.
4. Yaroshevsky V.A. Atmosphere
entry of spacecraft. - Moscow.: «Nauka»
Publishing House, 1988. - 336 p.
5. Tymkul V.M. Method for
evaluation of the magnitude of solar
radiation reflected by international space
station / V.M. Tymkul, L.V. Tymkul, F. Y.
A, K.V. Kudryashov, S.V. Lugovskyh //
Izvestiya vysshikh uchebnykh zavedeniy.
Priborostroenie. - 2013. - Vol. 56. - Iss. 5.
- pp. 5-10.
METHODS AND ALGORITHMS OF NANOSATELLITE «MAYAK» NAVIGATIONAL
AND BALLISTIC SUPPORT
©2015 A.A. Nedogarok, A.Y. Shaenko, R.E. Ayupov, LA. Prosvirina
Bauman Moscow State Technical University, Moscow
The mathematical model of LEO nanosatellite motion with large deployable reflector developed. Algorithms
of secondary ballistics parameters determination developed. Navigational software designed based on mentioned
model and algorithms. Using designed software spacecraft trajectory predicted and orbital lifetime estimated.
Satellite observation time intervals and apparent magnitude determined for observer with given coordinates.
Key words: mathematical model, navigational support, nanosatellite, trajectory prediction, orbital evolution
Информация об авторах:
Недогарок Антон Александрович, аспирант кафедры СМ3,
МГТУ им. Н.Э. Баумана, 105 005, Россия, г. Москва, ул. 2-ая Бауманская, д. 5, т.
+7(929)609-04-69, nk260an(a) gmail.com.
Область научных интересов: навигационно-баллистическое обеспечение, внешняя
баллистика, управление летательных аппаратов.
Шаенко Александр Юрьевич, к.т.н., доцент кафедры СМ1 МГТУ
им. Н.Э. Баумана, инженер НИИСМ МГТУ им. Н.Э. Баумана, 105 005, Россия, г. Москва,
ул. 2-ая Бауманская, д. 5, т. +7(926) 177-63-94, ark4110(a),gmail.com.
379
Область научных интересов: крупногабаритные космические конструкции,
композиционные материалы, теплообмен.
Аюпов Родион Эдуардович, студент 5 курса кафедры СМ 1
МГТУ им. Н.Э. Баумана, 105 005, Россия, г. Москва, ул. 2-ая Бауманская, д. 5, т.
+7(968)645-86-11.
Область научных интересов: проектирование космических аппаратов, прочность
конструкций, системы автоматического управления.
Просвирина Ирина Александровна, студентка 5 курса кафедры СМ1 ,
МГТУ им. Н.Э. Баумана, 105 005, Россия, г. Москва, ул. 2-ая Бауманская, д. 5, т.
7(916)208-23-47.
Область научных интересов: проектирование космических аппаратов, прочность
конструкций, системы автоматического управления.
Nedogarok Anton Aleksandrovich, post-graduate student of SM3 department, BMSTU,
105 005, Russia, Moscow, ul. Baumanskaya 2-ya, 5, tel. +7(929)609-04-69,
nk260anfegmail.com.
Area of research: navigation and ballistics support, exterior ballistics, aircraft and
spacecraft control.
Shaenko Aleksandr Yurievich, Ph.D., associate professor of SMI department, Russia,
Moscow, ul. Baumanskaya 2-ya, 5, tel. +7(926)177-63-94, ark4110fegmail.com.
Area of research: large space structures, composite materials, thermal control.
Ayupov Rodion Eduardovich, 5-th year student of SMI department, BMSTU, 105 005,
Russia, Moscow, ul. Baumanskaya 2-ya, 5, tel. +7(968)645-86-11.
Area of research: spacecraft design, structure strength and stiffness, control systems.
Prosvirina Irina Aleksandrovna, 5-th year student of SMI department, BMSTU,
105 005, Russia, Moscow, ul. Baumanskaya 2-ya, 5, tel. +7(916)208-23-47.
Area of research: spacecraft design, structure strength and stiffness, control systems.
380
УДК 629.78
БОРТОВОЙ АЛГОРИТМ ДЛЯ СИСТЕМЫ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ
НАНОСПУТНИКА 8АМ8АТ-218Д
© 2015 А.В. Крамлих1, М.Е. Мельник2
'Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (национальный исследовательский университет), г. Самара
2АО «РКЦ «Прогресс», г. Самара
Рассмотрена система ориентации и стабилизации наноспутника 8ат8а1-218Д. Приведены алгоритмы
определения ориентации и гашения угловых скоростей наноспутника. Проведено численное моделирование
работы алгоритма демпфирования угловой скорости на примере наноспутника 8ат8а1-218Д при различных
режимах работы алгоритма и для различных начальных условий.
Ключевые слова: наноспутник, ориентация, стабилизация углового движения, трёхосный магнито-
метр, датчик угловой скорости, датчик Солнца, магнитная катушка
В настоящее время большое рас-
пространение получили наноспутники
стандарта CubeSat. На базе Самарского
государственного аэрокосмического уни-
верситета ведётся работа по созданию
спутника данного класса, основным
назначением которого является изучение
его динамики движения, отработка алго-
ритмов ориентации и стабилизации дви-
жения, используя встроенные измери-
тельные и исполнительные средства,
входящие в состав бортовых модулей:
трёхосного магнитометра, датчиков
Солнца, датчиков угловой скорости, маг-
нитных катушек. Характеристики изме-
рительных и исполнительных средств
представлены на рис. 1.
Ограничения, накладываемые при-
нятым составом измерительных и испол-
нительных средств, а также характери-
стиками бортового компьютера форми-
руют жёсткие требования на вычисли-
тельную сложность алгоритмов ориента-
ции и стабилизации.
При решении данной задачи ис-
пользуются следующие системы коорди-
нат [1]:
1. орбитальная система координат
(ОСК) OXYZ с центром масс в центре
масс наноспутника: ось OZ направлена
от притягивающего центра, ось OY сов-
падает с направлением вектора произ-
водной истинной аномалии (направление
по бинормали к траектории центра масс),
а ось ОХ дополняет СК до правой.
2. связанная система координат
(ССК) Oxyz с началом в центре масс
спутника. ССК расположена таким обра-
зом, что центробежный момент инерции
спутника =0, а ось Ох - продольная
ось спутника.
Критерии отбраковки измери-
тельной информации, используемой в
алгоритме определения ориентации
наноспутника.
Критерий отбраковки магнитомет-
рических измерений.
Для отбраковки магнитометриче-
ских измерений необходим расчет векто-
ра напряженности магнитного поля Зем-
ли (МПЗ) по выбранной модели. После
расчета модельных значений вектора
напряженности МПЗ отбраковываются
измеренные вектора напряженности.
Н -Н , <k^8H, (1)
ЗН = (ЗН + ЗН ),
где Нит - измеренное значение модуля
вектора напряжённости МПЗ в ССК, Ним
- модельное значение модуля вектора
напряженности МПЗ, в ОСК, 8Н - допу-
стимое отклонение, к* - коэффициент за-
паса (£,>!), ЗН - инструментальная
погрешность, - погрешность моде-
ли МПЗ.
381
Критерий отбраковки токосъёма
Для отбраковки информации о токо-
съёме, воспользуемся критерием анало-
гичным критерию отбраковки магнито-
метрических измерений.
5 -S <kjS, (2)
uni ши) 2 7 X /
ж = (ж + ж ),
\ прио WK) / 7
где Sutii - измеренное значение тока в па-
нелях СБ, модельное значение тока
в панелях СБ, Ж - допустимое отклоне-
ние, к, - коэффициент запаса ( к2 > 1 ),
Ж . - инструментальная погрешность,
8Swh) - погрешность модели токосъёма.
• Два независимых микроконтроллера: NXPLPC4300 и Atmel АТх-
mega
LPC4300:
- Два ядра: CortexM4F и CortexMO
- Тактовая частота: до 204 МГц
- Вычисления с плавающей точкой
- Память: 1 Мб Flash + 64 Мб внешней Flash, 16 Кб EEPROM, 136
Кб SRAM + до 128 Мб внешней SRAM
- Сторожевой таймер
- Часы реального времени
ATxmega
- Тактовая частота: до 32 МГц
- Память: 128 Кб Flash, 2 Кб EEPROM, 8 Кб SRAM
- Сторожевой таймер
- Часы реального времен
• Встроенный модуль управления тремя катушками индуктивности
для стабилизации/ориентации посредством ШИМ
• Два встроенных модуля трехосевых акселерометра, гироскопа и
магнитометра
• Две microSD карты памяти объемом до 32 Гб
• Интерфейсы CAN, I2C х 9, SP1, UART х4
• АЦП 8 входов, порт ввода/вывода общего назначения 10 бит
утер
IX батарей
носпутника
382
Алгоритм определения ориента-
ции наноспутника.
В качестве алгоритма определения
ориентации выбран двухвекторный алго-
ритм определения углового положения
наноспутника [2]. На каждый момент
времени расчета ориентации имеем со-
ставляющие векторов S и Н в ССК и
ОСК. Составляющие единичных векторов
S и Н в ССК и ОСК связаны соотноше-
ниями.
S S\ Н ' Ну \
л V -'х ;
X,.=АХ • Н=АН;
> ’г >х
Xz Xz Н, Н
' /.g. Z А'
(3)
Матрицу перехода от ОСК к ССК представим следующим образом:
coscr sincr sin у -sina cosy
п п / а п 9 а
sin a sine? cose? cosy -cosa sine? siny cose? siny +coscr sine? cosy
n Tn Tn 9 a n Tn 9 a Tn 9 a n Tn 9 a
sina cose? -sine? cosy -cosa cose? siny -sine? siny +cosez cose? cosy
n Tn Tn 9 a n Tn 9 a Tn 9 a n Tn 9 a
(4)
Введем в рассмотрение орты
Р-Н;
HxSxH.
HxS ’
HxS
Г~ HxS
(5)
Матрицы перехода Mi, М2 от вспомогательной системы координат Opqr соответ-
ственно к осям ССК и ОСК имеют вид
НхHxS Я, HxS //zllxS
м’ = X -Я (H,S) X -Я (H,S) Xz-//z(h's);
HxS HyS,.-H,Sr H/SX-HXS/ HxSy-HySx
HftHxS 7/,.HxS H/s HxS
M,' = X -H (H,s) X, -H, (H,S
HXS «,Д. -//.V -W,S
(6)
Используя матрицы Mi и M2,
найдем матрицу перехода от ОСК к ССК.
Получим
А, =М,М'
(7)
Углы схп, у, находятся с помощью
матриц А, и А, по известным тригоно-
метрическим соотношениям.
Модель движения относительно
центра масс наноспутника.
Силы и моменты, действующие на
наноспутник.
При орбитальном полёте наноспут-
ника на заданной орбите основное влия-
ние на него оказывают следующие воз-
мущающие моменты: гравитационный
момент и аэродинамический момент [3].
Гравитационный момент возникает
в результате взаимодействия наноспут-
ника с полем гравитации Земли. Проек-
те. X, -Н S.
X 'х >х Ах
ции гравитационного момента на оси
ССК определяются по формулам [4]:
М =3^(/ -I )с.,с„,
М:
К
(8)
где с ( i - 1,2,3 , j = 1,2,3 ) - элементы
матрицы перехода от ОСК к ССК; R -
расстояние от притягивающего центра до
спутника, р - гравитационный параметр
Земли; /v, / , /. - главные центральные
моменты инерции спутника.
Аэродинамический момент Л/, ,
действующий на наноспутник, имеет вид
[5]
Ма = -т(ап, <рп }qSl
(9)
383
где т(ср, срп) = -С о (ап, срп )Дх sin ап - ко-
эффициент аэродинамического момента
наноспутника, вычисленный относитель-
но центра масс, Са = c„S(ocn,<pn) - коэф-
фициент аэродинамического сопротивле-
ния, с(, - постоянный коэффициент, зави-
сящий от характера взаимодействия мо-
лекул набегающего потока газа с поверх-
ностью наноспутника, S(an,<pn) - пло-
щадь проекции наноспутника на плос-
кость перпендикулярную направлению
вектора скорости центра масс наноспут-
ника, отнесённая к характерной площади
S , q = pV /2 - скоростной напор, V -
величина скорости полёта, р - плотность
воздуха или газа, е. - единичный вектор,
Ах = (хп — х,)// - относительный запас
статической устойчивости, хп и хТ -
смещение центра давления и центра масс
динамически симметричного наноспут-
ника относительно неподвижной точки
о,.
В проекциях на оси ССК аэродина-
мический момент запишется в виде:
Л/.,, =0
М = Ми cos<pn,
Л/ - -Ми sin ср
(Ю)
Уравнения движения наноспутника
Запишем систему уравнений дви-
жения наноспутника в общем виде [1] в
осях ССК
at
(11)
где со - абсолютная угловая скорость,
К„ = 1(0 - вектор кинетического момента,
/ - тензор инерции, Мя - главный мо-
мент внешних сил.
Положим, что оси ССК являются
главными центральными осями инерции
спутника для точки О. Тогда векторное
уравнение (11) в проекциях на данные
оси запишется в виде:
//у + (/. -Iу)со со. =Мх,
/, со +(1Л-1. )<У. сох = М ,
I со. +(/, -Iуо ар -М
(12)
где М, Mr, М, - проекции глав-
ного момента внешних сил на оси ССК;
со, со и со - проекции угловой скорости
СО на оси ССК.
Учитывая, что орбита круговая, до-
полним динамические уравнения тремя
кинематическими уравнениями, связы-
вающими первые производные по време-
ни Эйлеровых углов а , ср. и у, (угол
прецессии - угол скоростного крена ,
угол нутации - пространственного угол
атаки (Хп, угол собственного вращения -
угол аэродинамического крена срп) с про-
екциями вектора угловой скорости на
связанные оси со , со и со :
СО = у COSO,
сог = sin срп sin ап + ап cos ср*,
со = у coscp sin-a sin ср .
z I а Т п п п Г п
(13)
Алгоритм демпфирования угло-
вой скорости наноспутника.
Опишем алгоритм демпфирования
угловой скорости наноспутника. Ди-
польный магнитный момент in форми-
руется по закону [6]
m = -k Н,
(14)
где к - постоянный положительный
коэффициент. Дипольный момент возни-
кает, когда есть //.Таким образом,
М <Л( =-к(НН;-ННг),
Мм =
М:У = -к(ННх -н,ну
(15)
Логика работы алгоритма заклю-
чается в следующем: исходя из инфор-
мации о направлении вращения вектора
напряженности магнитного поля Земли
в ССК, формируется управляющий мо-
мент, вращающий наноспутник в об-
ратном направлении.
Положительный коэффициент к
подбирается из условия того, что при
384
умножении его на производную напря-
женности МПЗ полученный результат
не превышает максимального диполь-
ного момента магнитной катушки
(т = 0.05 А • м).
Проведено моделирование дискрет-
ной и непрерывной работы алгоритма
демпфирования угловой скорости на
примере наноспутника 8ат8а1-218Д. Под
непрерывным режимом работы алгорит-
ма демпфирования угловой скорости
наноспутника понимается режим, при ко-
тором ток на магнитные катушки подает-
ся непрерывно. Под дискретным режи-
мом работы алгоритма демпфирования
угловой скорости наноспутника понима-
ется режим, при котором ток на магнит-
ные катушки подается в течение 3 секунд
с интервалом в 1 секунду для проведения
измерения напряженности МПЗ.
На рис. 2 и рис. 3 представлены
графики гашения угловых скоростей,
приобретаемых наноспутником SamSat-
218Д после отделения при непрерывном
и дискретном режимах работы алгоритма
демпфирования угловых скоростей соот-
ветственно.
385
co , 7c 4
Л* 7
<y., 7c 15
Рис. 2 - Графики гашения угловых скоростей наноспутника SamSat-2184 при непрерывном режиме
работы
386
G) , °/С
V ’
CD
у
4
ч
(Dx , % 15
ч
’ис. 3 - Графики гашения угловых скоростей наноспутника SamSat-218Д при дискретном режиме
работы
Табл. 1 -Время демпфирования при различных начальных условиях отделения наноспутника
SamSat-218Д
Режим работы алго- ритма Начальные условия Время демпфирования, ч
непрерывный 10% 12
50% 60
дискретный 10% 24
50% 120
По результатам моделирования
время демпфирования при непрерывном
режиме работы алгоритма демпфирова-
ния угловой скорости, приобретаемой
наноспутником SamSat-218Д после отде-
ления, в 2 раза меньше чем при дискрет
ном.
387
Исследование выполнено при фи-
нансовой поддержке Министерства обра-
зования и науки Российской Федерации,
в рамках проектной части госзадания
(проект №9.1421.2014/К).
Библиографический список:
1. Попов В.И. Системы ориентации
и стабилизации космических аппаратов; -
2-е изд., перераб. и доп. - М.: Машино-
строение, 1986,- 184 с.
2. Беляев М.Ю. Научные экспери-
менты на космических кораблях и орби-
тальных станциях; - М.: Машинострое-
ние, 1984.-264 с.
3. Коваленко А.П. Магнитные си-
стемы управления космическими лета-
тельными аппаратами; - М.: Машино-
строение, 1975. - 248 с.
4. Белецкий В.В. Движение искус-
ственного спутника относительно центра
масс; - М.: Наука, 1965. -416 с.
5. Belokonov LV., Kramlikh A.V.,
Timbai LA. Low-orbital transformable
nanosatellite: research of the dynamics and
possibilities of navigational and communica-
tion problems solving for passive aerody-
namic stabilization; - Proceedings of 2th
IAA Conference on Dynamics and Control
of Space System, Roma, Italy, 24-26 march
2014, !AA-AAS-DyCoSS2-14-04-10.
6. Chris Whitford, David Forrest. The
CATSAT Attitude Control System. 12th AI-
AA/USU Conference on Small Satellites.
http://digitalcommons.usu.edu/cgi/vicwcont
ent.cgi?article=2252&context=smallsat.
References:
1. Popov V.L Spacecraft systems of
orientation and stabilization; - Moscow:
Machinery, 1986. - 184 p.
2. Belyaev M.Yu. Scientific experi-
ments by spacecrafts and space stations; -
Moscow: Machinery, 1984. - 264 p.
3. Kovalenko A.P. Magnetic control
systems of spacecraft; - Moscow: Machin-
ery, 1975.-248 p.
4. Beletskiy V.V. The artificial satel-
lite motion about the centre of mass; -
Moscow: Science, 1965. -416 c.
5. Belokonov LV., Kramlikh A.V.,
Timbai LA. Low-orbital transformable
nanosatellite: research of the dynamics and
possibilities of navigational and communica-
tion problems solving for passive aerody-
namic stabilization; - Proceedings of 2th
IAA Conference on Dynamics and Control
of Space System, Roma, Italy, 24-26 march
2014, IAA-AAS-DyCoSS2-14-04-10.
6. Chris Whitford, David Forrest. The
CATSAT Attitude Control System. 12th AI-
AA/USU Conference on Small Satellites.
http://digitalcommons.usu.cdu/c^i/vicwcont
ent.cgi?article=2252&context=smallsat.
ON-BOARD ALGORITHM FOR SAMSAT-218D NANOSATELLITE ORIENTATION
AND STABILIZATION SYSTEM
©2015 A.V. Kramlikh', M.E. Melnik2
1 Samara State Aerospace University, Samara
2JSC “SRC “Progress”, Samara
The nanosatellite SamSat-218D attitude and angular motion control system is considered. The nanosatellite
attitude and angular motion control algorithms are given. The numerical simulation of the angular motion control
algorithm on the nanosatellite SamSat-218D is made in the various algorithm operation modes and for the various
initial conditions.
Keywords: Nanosatellite, attitude, angular motion stabilization, three-axes magnetometer, angular rate
sensor, Sun sensor, magnetic coil
388
Информация об авторах:
Крамлих Андрей Васильевич, к.т.н., доцент, доцент кафедры космического маши-
ностроения СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 267-44-44,
kramlikhfajrnail.ru.
Область научных интересов: навигация, ориентация и управление космическими ап-
паратами, комплексирование и обработка информации.
Мельник Мария Евгеньевна, инженер-конструктор 2 категории АО «РКЦ
«Прогресс», аспирант межвузовской кафедры космических исследований, СГАУ,443 086,
Россия, г. Самара, Московское ш. 34, т. 8-927-704-7594, mashagrigoreva(g)gmail.com.
Область научных интересов: алгоритмы ориентации космических аппаратов, ком-
плексирование и обработка информации, алгоритмы управления угловым движением
космического аппарата.
Kramlikh Andrey Vasilyevich, candidate of engineering science, associate professor, the
department of space mechanical engineering, Samara State Aerospace University, 443 086, Rus-
sia, Samara, Moscow highway, 34, tel. 267-44-44, kramlikh^mail.ru.
Area of research: spacecraft navigation, orientation and control, information integrating
and processing.
Melnik Maria Evgenyevna, Design Engineer, JSC “SRC “Progress”, Samara, post-
graduate student of the crossuniversity space research chair of Samara State Aerospace Universi-
ty, 443 086, Russia, Samara, Moscow highway, 34, tel. 8-927-704-7594,
mashagrigorevafo) gmail.com.
Area of research: spacecraft attitude algorithms, information complexing and processing,
spacecraft angular motion control algorithms.
389
УДК 629.7.05
ОСОБЕННОСТИ РЕАЛИЗАЦИИ ПАРИРОВАНИЯ СБОЕВ И ВОССТАНОВЛЕНИЯ
ВЫЧИСЛИТЕЛЬНОГО ПРОЦЕССА СИСТЕМЫ УПРАВЛЕНИЯ
МАЛОГАБАРИТНЫМ КОСМИЧЕСКИМ АППАРАТОМ
©2015 Н.В. Соловьева, А.Б. Уманский, А.В. Леонтьев, А.В. Есиновский
ОАО «НПО автоматики им. академика Н.А. Семихатова», г. Екатеринбург
Рассматривается структура управляющего вычислителя для системы управления малогабаритным
космическим аппаратом. Представлен ряд аппаратных и программных решений для обеспечения парирова-
ния сбоев, вызванных фактором космического пространства, с последующим восстановлением вычисли-
тельного процесса.
Ключевые слова: бортовой цифровой вычислитель, малый космический аппарат, парирование сбоев,
восстановление вычислительного процесса
В рамках опытно-конструкторской
работы в ОАО «НПО автоматики» про-
водится разработка системы управления
(СУ) для малого космического аппарата
(МКА), предназначенного для проведе-
ния фундаментальных исследований.
Ключевой особенностью данной разра-
ботки является необходимость обеспече-
ния работоспособности МКА при жёст-
ких требованиях к массогабаритным ха-
рактеристикам. Помимо этого, при разра-
ботке аппаратуры, алгоритмов и про-
граммного обеспечения (ПО) для МКА
необходимо учитывать влияние факторов
космического пространства (ФКП).
Ионизирующие излучения и тяжелые за-
ряженные частицы вызывают сбои и ка-
тастрофические отказы в работе аппарат-
ного обеспечения СУ, которые приводят
к выводу из строя электроники СУ. С
учетом этих ограничений требуется обес-
печить достаточную степень резервиро-
вания узлов СУ для гарантированного
парирования сбоев и последующего вос-
становления.
Архитектура бортового цифрового
вычислителя (БЦВ), обеспечивающего
функционирование СУ МКА во всех ре-
жимах работы, представлена на рис. 1.
БЦВ представляет собой трёхка-
нальную вычислительную систему. Каж-
дый канал содержит в себе процессор,
постоянное запоминающее устройство
(ПЗУ), оперативное запоминающее
устройство (ОЗУ), интерфейсную ПЛИС.
390
Каналы связаны друг с другом последо-
вательным интерфейсом SpaceWire.
С учетом условий воздействия ФКП
была поставлена задача парирования пе-
риодических сбоев с последующим вос-
становлением вычислительного процесса
(ВП). Основой аппаратно-программной
реализации парирования сбоев и восста-
новления является распределенный меж-
ду тремя каналами модуль принятия ре-
шений об исправности БЦВ. Все три ка-
нала решают одну и ту же задачу, фор-
мируя в характерные моменты времени
одну и ту же обменную информацию для
внешних абонентов (ВА). Перед выдачей
информации в ВА каналы обмениваются
между собой этой информацией по меж-
канальному интерфейсу. Далее произво-
дится сравнение в каждом канале инфор-
мации со всех трёх каналов по принципу
«два из трёх». При успешном сравнении
канал, физически подключенный к або-
ненту, осуществляет взаимодействие с
ним. По факту успешного завершения
обмена принятая информация транслиру-
ется в соседние каналы. В случае сбоя
при обмене парирование осуществляется
повтором информации по основной и по
резервной линиям связи (ЛС). При
устойчивом нарушении взаимодействия
по обеим ЛС бракуется канал, подклю-
ченный к данной линии связи. Также при
расхождении информации для выдачи в
ВА одного из каналов с данными двух
других каналов проводится бракование
канала, выдавшего недостоверную ин-
формацию, и его восстановление путём
полной перезагрузки этого канала и по-
следующей передачей оперативной ин-
формации из соседнего канала по межка-
нальному интерфейсу. При этом для пе-
резагрузки канала необходимым услови-
ем является сигнал снятия питания, вы-
ставленный с обоих соседей. После сня-
тия питания процессор проходит инициа-
лизацию, затем квитирует соседние про-
цессоры об успешном запуске. При от-
сутствии квитанции в течение опреде-
лённого времени соседний процессор ме-
няет вектор сброса для восстанавливае-
мого процессора и заново перезапускает
его.
Возможность смены вектора сброса
в канале обеспечивается соответствую-
щей структурой ПЗУ. ПЗУ вычислитель-
ного канала условно разделено на два
банка с возможностью переключения ис-
пользуемого в данный момент банка со-
седим или собственным каналом вычис-
лителя. Для противодействия поврежде-
ниям памяти в обоих банках ПЗУ хранят-
ся одинаковые программы [1].
Для удобства восстановления опе-
ративной информации после перезагруз-
ки канала используется специальная зона
ОЗУ, где хранятся все необходимые для
восстановления ВП данные (признаки
прохождения характерных участков про-
граммы, входные/выходные массивы
данных, часть глобальных переменных).
Поскольку все три канала функциониру-
ют по одинаковой временной диаграмме,
запоминая при прохождении определён-
ных участков необходимые признаки, то
это позволяет любому каналу после пере-
загрузки вернуться в актуальное состоя-
ние.
Программное обеспечение БЦВ ре-
ализовано с использованием компактной
ОС РВ собственной разработки НПОА,
кастомизированной под нужды данной
разработки. В каждом канале БЦВ функ-
ционирует несколько потоков управле-
ния, в том числе и фоновый поток скани-
рования ПЗУ на наличие сбоев, с после-
дующим восстановлением сбойных
участков независимо от штатных алго-
ритмов.
Заложенный комплекс аппаратно-
программных средств контроля, париро-
вания сбоев и восстановления позволяет
обеспечить работоспособность системы в
условиях возникновения кратковремен-
ных разовых сбоев. Это позволяет управ-
ляющему вычислителю не только реализо-
вать выполнение всей совокупности задач,
решаемых МКА в реальном масштабе вре-
мени, но и с большой долей вероятности
обеспечить живучесть СУ в условиях воз-
действия ФКП.
Библиографический список:
1. Есиновский А.В. Вычислитель-
ный модуль повышенной надежности для
391
систем управления космическими аппа-
ратами / А.В. Есиновский, А.В. Леонтьев,
А.Б. Уманский // Вопросы электромеха-
ники. Труды ВНИИЭМ. 2014. С.67-72
References:
1. Esinovskii A.V. Computing module
of improved reliability for spacecraft control
systems; - Electromechanics questions. Pro-
ceedings VNHEM, 2014. - 67-72 p.
FAILURES PARRYING AND COMPUTATIONAL PROCESS RECOVERY
IMPLEMENTATION DETAILS FOR SPACECRAFT CONTROL SYSTEMS
©2015 N.V. Solovieva ’, A.B. Umanskii ', A.V. Leontiev ', A.V. Esinovskii1
1 SPA of Automatics, Yekaterinburg
The article presents a computational structure for miniaturized satellite control system. Parrying failures
caused by outer space factor with further process recovery hardware and software methodic are described.
Key words: on-hoard evaluator, miniaturized satellite, parrying failures, control system, computing process
recovery
Информация об авторах:
Соловьёва Наталья Владимировна, к.т.н., доцент, заместитель начальника отдела
ОАО «НПО автоматики имени академика Н.А. Семихатова» Екатеринбург, ул. Мамина-
Сибиряка, 145, раб. тел. +7(343)214-86-36, avt@npoa.ru.
Область научных интересов: структурное проектирование аппаратуры СУ, операци-
онные системы реального времени, технологии программирования, защита информации в
управляющих системах.
Уманский Алексей Борисович, к.т.н., начальник сектора, ОАО «НПО автоматики
имени академика Н.А. Семихатова», 620075, Екатеринбург, ул. Мамина-Сибиряка, 145,
тел. +7(343)263-76-89, e-mail: pdwn 1982@yandex.ru.
Область научных интересов: разработка бортовых систем управления реального
времени и программно-математических средств, обеспечивающих их функционирование
при воздействии неблагоприятных условий.
Леонтьев Алексей Викторович, инженер-программист, ОАО «НПО автоматики
имени академика Н.А. Семихатова», 620075, Екатеринбург, ул. Мамина-Сибиряка, 145,
тел. +7(343)263-76-89, e-mail: avt@npoa.ru.
Область научных интересов: программирование систем управления реального вре-
мени.
Есиновский Александр Валентинович, инженер-конструктор, ОАО «НПО автома-
тики имени академика Н.А. Семихатова», 620075, Екатеринбург, ул. Мамина-Сибиряка,
145, тел. +7(343)263-76-89, e-mail: avt@npoa.ru.
Область научных интересов: проектирование бортовых систем управления.
Solovieva Natalya Vladimirovna, Ph.D., associate professor, deputy head of department,
SPA automatics, 620075, Yekaterinburg, Mamina- Sibiryaka st. 145, tel. 8(343)214-86-36, e-
mail: avt@npoa.ru.
Research interests: the structural design of the equipment of control systems, real-time op-
erating systems, software engineering, information security in control systems.
Umanskii Aleksey Borisovich, Ph.D., head of the sector. SPA automatics, 620075, Yeka-
terinburg, Mamina- Sibiryaka st., 145, tel. +7(343)263-76-89, e-mail: pdwn 1982@yandex.ru.
392
Research interests: the development of real-time on-board control systems and software
and mathematical tools to ensure the reliability of their operation when exposed to adverse con-
ditions.
Leontiev Aleksey Viktorovich, Programmer Engineer, SPA automatics, 620075, Yekate-
rinburg, Mamina- Sibiryaka st. 145, tel. 8(343)214-86-36, e-mail: avtfenpoa.ru.
Research interests: real-time control system programming
Esinovskii Alexandr Valentinovich, Design Engineer, SPA automatics, 620075, Yekate-
rinburg, Mamina- Sibiryaka st. 145, tel. 8(343)214-86-36, e-mail: avtfenpoa.ru.
Research interests: developing on-board control systems
393
УДК 629.78:528.8
РАЗРАБОТКА ОПЫТНО-ТЕХНОЛОГИЧЕСКОГО
МАЛОГО КОСМИЧЕСКОГО АППАРАТА «АИСТ-2Д»
©2015 Р.Н. Ахметов, Н.Р. Стратилатов, В.И. Абрашкин, А.В. Никитин
АО «РКЦ «Прогресс», г. Самара
Представлены материалы по опытно-технологическому малому космическому аппарату «Аист-2Д»,
предназначенному для отработки и сертификации целевой аппаратуры дистанционного зондирования Зем-
ли, научной аппаратуры, обеспечивающих систем и их программного обеспечения для дальнейшего исполь-
зования в перспективных разработках.
Ключевые слова: малый космический аппарат, дистанционное зондирование Земли
Предприятие АО «РКЦ «Прогресс»
в кооперации с ведущими университета-
ми города Самары создаёт опытно-
технологический малый космический ап-
парат «Аист-2Д». Данные работы прово-
дятся в рамках реализации комплексного
проекта создания высокотехнологичного
производства по договору
№02.036.31.0001 между АО «РКЦ «Про-
гресс» и «Минобрнауки России», заклю-
станционного зондирования Земли, науч-
ной аппаратуры, обеспечивающих систем
и их программного обеспечения для
дальнейшего использования в перспек-
тивных разработках АО «РКЦ «Про-
гресс».
Запуск ОТ МКА «Аист-2Д» запла-
нирован в конце 2015 года с космодрома
«Восточный» совместно с КА «Ломоно-
сов» (ОАО «Корпорация «ВНИИЭМ», г.
ченным по итогам открытого конкурса в
Москва) и AM НТА «Контакт-
соответствии с постановлением Прави-
тельства РФ от 09.04.2010 г. №218.
Опытно-технологический МКА
«Аист-2Д» предназначен для отработки и
сертификации целевой аппаратуры ди-
Характеристики ОТ МКА «Аист-2Д»:
Параметры рабочей орбиты
- тип орбиты
- околокруговая со средней высотой, км
Разрешение (проекция пикселя) для Н =
Наноспутник» (СГАУ, г. Самара) с ис-
пользованием ракеты-носителя «Союз-2»
этапа 1а и блока выведения «Волга» (раз-
работчик и изготовитель - АО «РКЦ
«Прогресс», г. Самара).
ССО
490
D км, м
- в панхроматическом диапазоне - в мультиспектральном диапазоне - в инфракрасном диапазоне не хуже 1,5 не хуже 4,5 не хуже 122,5
Полоса захвата для аппаратуры видимого диапазона, км не менее 40
Полоса захвата для аппаратуры ИК-диапазона, км не менее 47
Скорость передачи целевой информации на наземный пункт приема, Мбит/с от 64 до 175
Среднесуточное электропотребление БА, Вт 285
Срок активного существования, лет не менее 3-х
Масса МКА, кг 550
Масса специальной аппаратуры, кг 150
394
В состав обеспечивающих систем
МКА входят: бортовая система контроля
и управления, система управления дви-
жением, система электропитания и си-
стема обеспечения теплового режима.
В состав системы управления дви-
жением МКА входят: комплекс исполни-
тельных и чувствительных элементов,
управляющие двигатели-маховики, опти-
ческие солнечные датчики, электромаг-
ниты, приборы ориентации по Земле и
звездный датчик.
Выведение ОТ МКА «Аист-2Д» на
рабочую орбиту обеспечивается с ис-
пользованием ракеты-носителя «Союз-2»
этапа 1а и блока выведения «Волга».
Библиографический список:
1. Козлов, Д.И. Конструирование
автоматических космических аппаратов
[Текст] / Д.И. Козлов — М.: Машино-
строение, 1996. — 448 с.
2. Кирилин, А.Н. Ракеты-носители и
космические аппараты ГНП РКЦ "ЦСКБ-
Прогресс" [Текст] / А.Н. Кирилин,
Р.Н. Ахметов И Общероссийский научно-
технический журнал «Полет» . -2007 . -
№8 . - С. 45-52.
References:
1. Kozlov, D.I. Designing of an auto-
matic space vehicles [The text] / D.I. Kozlov
— M.: Machine industry, 1996. — 448 p.
2. Kirilin, A.N. Rocket-carriers and
space vehicles of SRPSC «TsSKB-
Progress» [The text] / A.N. Kirilin, R.N.
Ahmetov // Russian scientific and technical
journal «Полет» . -2007. - №8. - p. 45-52.
WORKING OUT OF THE SKILLED-TECHNOLOGICAL
SMALL SPACE VEHICLE «AIST-2D»
©2015 R.N. Ahmetov, N.R. Stratilatov, V.I. Abrashkin, A.V. Nikitin
JSC «SRC «Progress», Samara
Hereby presented the materials on the skilled-technological small space vehicle «Аист-2Д», intended for
working off and certification of targeted equipment for remote sensing of the Earth observation, scientific equip-
ment, providing systems and their software for the further use in perspective workings out.
Keywords: The small space vehicle, Remote sensing of the Earth observation
Информация об авторах:
Ахметов Равиль Нургалиевич, д.т.н., первый заместитель генерального директора
- генеральный конструктор АО «РКЦ «Прогресс».
Стратилатов Николай Ремирович, к.т.н., главный конструктор - начальник отде-
ления проектных и научно-исследовательских разработок КК и КА АО «РКЦ «Прогресс».
Абрашкин Валерий Иванович, к.т.н., начальник головного проектно-
конструкторского отдела по космическим системам и комплексам АО «РКЦ «Прогресс».
Никитин Александр Викторович, инженер-конструктор 1 категории АО «РКЦ
«Прогресс», т. 8-927-724-05-22
Ahmetov Ravil Nurgalievich, doctor of technical sciences, the first deputy of the general
director - general designer.
Stratilatov Nikolay Remirovich, candidate of technical sciences, chief designer - head of
space systems and satellites design and research division, JSC «SRC «Progress»
Abrashkin Valerii Ivanovich, Candidate of the technical sciences (Cand. tech, sci.), the
chief of head design department on space systems and complexes of JSC «SRC «Progress».
Nikitin Alexander Viktorovich, The design engineer of 1 category of JSC «SRC
«Progress», t. 8-927-724-05-22
395
УДК 629.78
ВЫБОР ПРОЕКТНЫХ ПАРАМЕТРОВ АЭРОДИНАМИЧЕСКИ
СТАБИЛИЗИРОВАННОГО НАНОСПУТНИКА
©2015 И.В. Белоконов, И.А. Тимбай
Самарский государственный аэрокосмический университет имени
академика С.П. Королёва (национальный исследовательский университет), г. Самара
Получены формулы для выбора проектных параметров (запаса статической устойчивости, длины,
продольного момента инерции) аэродинамически стабилизированного наноспутника, обеспечивающих при
движении на низких орбитах отклонение продольной оси наноспутника от вектора скорости центра масс
меньше допустимого с заданной вероятностью на заданной высоте при заданных погрешностях угловой
скорости от системы отделения. На основании расчётов построены номограммы, которые позволяют просто
и наглядно выбрать основные проектные параметры наноспутника стандарта CubeSat.
Ключевые слова: Наноспутник, аэродинамический момент, угол атаки, функция распределения, про-
ектные параметры
Введение
Для обеспечения требуемой ориен-
тации спутников часто используются
пассивные или комбинированные (пас-
сивные в сочетании с активными) систе-
мы стабилизации, которые не требуют
или требуют незначительного расхода
рабочего тела и энергии, запасённых на
борту. Поскольку большинство нано-
спутников запускается на низкие около-
земные орбиты, целесообразно для ста-
билизации углового положения исполь-
зовать аэродинамические силы. Следует
отметить, что величина углового ускоре-
ния, обусловленного аэродинамическим
моментом, наноспутника на один-два по-
рядка выше, чем у спутников с большими
размерами и массой (при одинаковом
значении относительного запаса статиче-
ской устойчивости). Это расширяет диа-
пазон высот, на которых аэродинамиче-
ский момент, действующий на наноспут-
ник, является преобладающим и его
можно использовать для ориентации
наноспутника по набегающему потоку.
В известных работах задача обеспе-
чения аэродинамической стабилизации
наноспутника решается в детерминиро-
ванной постановке, так, например, в ра-
боте [1] рассматривается задача обеспе-
чения аэродинамической стабилизации
наноспутника класса CubeSat путём раз-
вёртывания солнечных панелей под
определённым углом к его продольной
оси после отделения от адаптера. В дан-
ной работе задача обеспечения аэроди-
намической стабилизации наноспутника
рассматривается в вероятностной поста-
новке применительно к угловому движе-
нию наноспутника после отделения от
носителя. При отделении наноспутника
от носителя со случайной начальной уг-
ловой скоростью реализация величины
максимального угла атаки также носит
случайный характер.
В работе [2] получены аналитиче-
ские функции распределения максималь-
ного угла атаки наноспутника для Рэле-
евского и равномерного распределений
величины начальной поперечной угловой
скорости для плоского углового движе-
ния наноспутника по круговой орбите
под действием гравитационного и аэро-
динамического моментов. Показано, что
при отделении наноспутника по вектору
скорости центра масс (начальное значе-
ние угла атаки мало) и при незначитель-
ной закрутке относительно продольной
оси, можно с достаточной точностью ис-
пользовать аналитические функции рас-
пределения максимального угла атаки,
полученные для случая плоского углово-
го движения, и в случае пространствен-
ного движения. В данной работе указан-
ные аналитические функции положены в
основу вывода формул для выбора про-
ектных параметров наноспутника.
396
Выбор проектных параметров аэроди-
намически стабилизированного осе-
симметричного наноспутника
Полагая, что обтекание динамиче-
ски симметричного наноспутника являет-
ся свободномолекулярным и удар моле-
кул газа абсолютно неупругий, аппрок-
симируя аэродинамический момент сину-
соидальной зависимостью от угла атаки
а , угловое движение наноспутника в
плоскости круговой орбиты относительно
траекторной системы координат под дей-
ствием гравитационного момента и аэро-
динамического восстанавливающего мо-
мента, можно описать уравнением вида
[3]:
a-a(//)sina-c(//)sin la = 0, (1)
где а(Н) = a0Slq(H)/ Jп - коэффициент,
обусловленный аэродинамическим вос-
станавливающим моментом; а0 - коэф-
фициент аппроксимации коэффициента
аэродинамического восстанавливающего
момента синусоидальной зависимостью
от угла атаки; 5 - характерная площадь
наноспутника; / - характерная длина
наноспутника; Jп - поперечный момент
инерции наноспутника;
q(H) = V2 р(Н}/2 - скоростной напор; V
- скорость полёта; Н - высота полёта,
р(Н) - плотность атмосферы;
C(/7) = 3(J„-Jv)(ty(/7))2 /(2J„) - коэф-
фициент, обусловленный действием гра-
витационного момента; <7Г - продольный
момент инерции наноспутника;
со(Н) = p/(R3+H)2 - угловая скорость
движения центра масс наноспутника по
орбите; 7?3 - радиус Земли; р - гравита-
ционный параметр Земли.
При отделении наноспутника от
адаптера реализация величины макси-
мального угла атаки носит случайный
характер. Максимальное значение угла
атаки наноспутника, помимо величин
аэродинамического и гравитационного
моментов, определяется начальным зна-
чением угла атаки а0 и начальным зна-
чением угловой скорости а0 . Полагая,
что из указанных величин наибольший
разброс значений имеет величина угло-
вой скорости а() , и пренебрегая разбро-
сами других величин, для модели движе-
ния (1) в работе [2] получены функции
распределения величины максимального
угла атаки crmax на момент отделения от
носителя. Если модуль величины а0 рас-
пределен по Рэлеевскому закону, то
функция распределения максимального
угла атаки определяется по формуле:
/7(«таЭ = 1-
ехр
-«(cosamax
- cos а0) - c(cos2 атах - cos2 а0)
(2)
где <7 > 0 масштабный параметр распре-
деления.
Если модуль величины а0 распре-
зоне [O,crOmax], то функция распределе-
ния максимального угла атаки определя-
ется по формуле:
делен по равномерному закону в диапа-
2«(cosamax -cosa0) + 2c(cos2 amax -cos2 a0)
? (amax ) -
^4) max
(3)
Задавая p - вероятность реализа-
ции допустимого значения максимально-
го угла атаки а*тт, разрешая (2), (3) от-
носительно коэффициента а , обуслов-
ленного аэродинамическим восстанавли-
вающим моментом, получим:
в случае распределения начальной угло
вой скорости а0 по Рэлеевскому закону
<721п(1 - р*) + c(cos2 <ах - cos2 а0)
cos<ax -cosa0
(4)
397
в случае распределения начальной угло- вой скорости а0 по равномерному закону
(«Отах Р* У “ MCOS2 «max - COS2 «0)
а - \ PJ
2\cos«max -cosa0I
Поскольку принято, что обтекание
наноспутника является свободномолеку-
лярным и удар молекул газа абсолютно
неупругий, то аэродинамическая сила со-
противления определяется площадью
проекции наноспутника на плоскость,
перпендикулярную вектору скорости
набегающего потока [3], и для осесим-
метричного наноспутника коэффициент
восстанавливающего аэродинамического
момента, вычисленный относительно
центра масс, определяется по формуле:
та (а) - -с05 (а)Ах sin(«),
где со = 2,2 - коэффициент лобового со-
противления; Дх = Дх// - относительный
запас статической устойчивости, Дх -
запас статической устойчивости (рассто-
яние, отсчитываемое от цента масс до
геометрического центра наноспутника),
S{a) - площадь проекции наноспутника
на плоскость перпендикулярную вектору
скорости набегающего потока, отнесён-
ная к характерной площади наноспутни-
ка.
С целью разрешения уравнений (4)
и (5) относительно проектных парамет-
ров наноспутника, коэффициент аппрок-
симации синусоидальной зависимостью
по углу атаки коэффициента восстанав-
ливающего аэродинамического момента,
вычисленного относительно центра масс,
можно приближённо вычислить следую-
щим образом:
а0 ~ та(я/2) = -с{)Ах5(я/2) . (6)
Подставляя выражение для коэф-
фициента а , обусловленного аэродина-
мическим восстанавливающим моментом
в (4), (5), учитывая (6), разрешая (4), (5)
относительно проектных параметров,
объединенных в конструктивный пара-
метр, получим требование к его вели-
чине. Для того чтобы максимальный угол
атаки наноспутника «тах был меньше
допустимого значения с вероятностью не
меньшей чем р*, необходимо выполне-
ние следующего условия для конструк-
тивного параметра наноспутника:
в случае распределения начальной угло-
вой скорости по Рэлеевскому закону
, = > = <72ln(l-p*) + c(cos2<ax -cosa0)
'/2 rl c0(cos<ax-cosa0^(tf)
в случае распределения начальной угло-
вой скорости по равномерному закону
d = te s ,>d = ^Omaxp')2-2c(cos2-cos2a<))
Jn л'2 H 2c0(cosa0-cos<ax)<7(/7)
(7)
(8)
где 5^/2 - площадь проекции наноспут-
ника на плоскость перпендикулярную
вектору скорости набегающего потока
при угле атаки а = я/ 2.
Следует отметить, что необходимо
и выполнение следующего условия:
аэродинамический момент должен пре-
восходить гравитационный и определять
характер движения, т.е. необходимо, что-
бы выполнялось условие | а |> 21 с | [3].
Данное условие, учитывая выражения
для коэффициентов а и с, можно запи-
сать в виде требования к конструктивно-
му параметру:
(9)
Следует отметить, что требование
(9) намного слабее требований (7) и (8) в
широкой области проектных параметров.
В выражения (7), (8), (9) входит ко-
эффициент с, обусловленный действием
гравитационного момента, который не-
значительно меняется от высоты по срав-
нению с коэффициентом а, обусловлен-
ным аэродинамическим моментом. По-
398
этому, вычисляя значение коэффициента
с на высоте Я=150км, учитывая также,
что при условии Jп > Jv отношение раз-
ности поперечного и продольного мо-
ментов инерции к поперечному моменту
инерции не может превышать единицы,
получим предельное значение коэффици-
ента с = 2.2-10-6 рад/ с1. Данное значе-
вано для верхней оценки требуемого зна-
чения конструктивного параметра.
На высотах где аэродинамический
момент значительно превосходит грави-
тационный коэффициентом с можно
пренебречь. Тогда выражения для кон-
структивного параметра (7), (8) прини-
мают вид:
ние коэффициента может быть использо-
d = ^S >d = <72ln(l-/?*)
Л Л'2 '' c0(cos<ax-cosa^H)’
(Ю)
S >d = («Отах/Н2
Л */2 Н 2с0 (cos tf0-cos <ах)?(//)
Выбор проектных параметров аэроди-
намически стабилизированного
наноспутника стандарта CubeSat
Наноспутник стандарта CubeSat
имеет форму прямоугольного параллеле-
пипеда с равными сторонами основания.
Коэффициент восстанавливающего аэро-
динамического момента наноспутника
стандарта CubeSat, вычисленный относи-
тельно центра масс, зависит от простран-
ственного угла атаки а (угла между про-
дольной осью наноспутника и вектором
скорости центра масс) и угла (р - угла
собственного вращения (угла между
плоскостью угла атаки и поперечной
осью, перпендикулярной боковой сто-
роне):
та(а,(р) = -с05(<7,^)/1г sin(tt'). (12)
Площадь проекции наноспутника
класса CubeSat на плоскость перпендику-
лярную вектору скорости набегающего
потока, отнесённая к характерной площа-
ди наноспутника, определяется по фор-
муле:
5 (а, <р) =| cos(a) | +к | sin(cr) | -(| sin(^>) | +1 cos(#>) |),
(13)
где к - отношение площади одной из бо-
ковых поверхностей к характерной пло-
щади.
Для проведения анализа углового
щения близка к равномерной, коэффици-
ент восстанавливающего аэродинамиче-
ского момента (12), учитывая (13), можно
усреднить по углу собственного враще-
движения наноспутника, для случая, ко- ния:
гда угловая скорость собственного вра-
та(а) = -с()Дх sin
| cos(«) | Ч-1 sin(«) |
(14)
Для проведения приближенного
анализа параметров движения, зависи-
мость коэффициента восстанавливающе-
го аэродинамического момента, вычис-
ленного относительно центра масс
та(сх) ’ усреднённую по углу собствен-
ного вращения (р (14), с достаточной
точностью можно аппроксимировать си-
нусоидальной зависимостью по углу ата-
ки:
тп(а) = а0 sin(«).
С целью разрешения уравнений (4)
и (5) относительно проектных парамет-
ров наноспутника, коэффициент аппрок-
симации синусоидальной зависимостью
по углу атаки коэффициента восстанав-
ливающего аэродинамического момента,
вычисленного относительно центра масс,
можно приближённо вычислить следую-
щим образом:
4А-
ао ~та(л/2) = -с0Дх —. (13)
л
Так, например, для наноспутника
CubeSat 2U с размерами 0,1><0,1 ><0.,2 м3
коэффициент я0, вычисленный методом
наименьших квадратов, равен а0 = -1,14,
399
а по формуле (6) aQ =-1,12, для нано-
спутника CubeSat 3U с размерами
0,1 х0,1 х0,3 м3 коэффициент а0, опреде-
лённый методом наименьших квадратов,
равен а{} = -1,68, а по формуле (6) а0 = -
1,61, что достаточно близко и не изменя-
ет результат исследования.
Подставляя выражение для коэф-
фициента а , обусловленного аэродина-
мическим восстанавливающим моментом
в (4), (5), учитывая (13), разрешая (4), (5)
относительно проектных параметров,
объединенных в конструктивный пара-
метр, получим требование к его вели-
чине. Для того чтобы максимальный угол
атаки наноспутника стандарта CubSat
czmax был меньше допустимого значения с
вероятностью не меньшей чем /?*, необ-
ходимо выполнение следующего условия
для конструктивного параметра нано-
спутника:
в случае распределения начальной угло-
вой скорости по Рэлеевскому закону
d =—lb>dri =
ln(l-p*) + c(cos2< -cosa0))
4c0(cos<ax - cos a0)?(//)
(14)
в случае распределения начальной угло-
вой скорости по равномерному закону
d = ^Lib>d Fornax/)2 ~2c(cos2 < -COS2 g0)),
Л Н 8c0(cosa0-cos<ax)^(H)
(15)
где b сторона основания прямоугольного
параллелепипеда.
Выражение (9) применительно к
наноспутнику стандарта CubeSat прини-
мает вид
d = —lb>d2=—^—
j, 4с.,Ч(Н)
(16)
На высотах где аэродинамический
момент значительно превосходит грави-
тационный коэффициентом с можно
пренебречь. Тогда выражения (14), (15)
принимают вид:
—ш и , - ^21п(1-/) (17)
Л '' 4c0(cos<ax -cosa0)?(//)’
d = ^lb>d„=- J (18)
Jn 8c0 (coscz0 - cos czmax #(H)
Для малых значений aQ (отделение наноспутника по вектору скорости) мож- но принять coscz() = 1. В этом случае, вы- ражения (17), (18) принимают вид:
Ar жт21п(1-/)
d = —lb > d. -7-----—i-т2--,
J. 4<-,,(cos<x-lM«)
d = ±lb>d„ = - .
(19)
(20)
Используя, полученные выражения
(14)-(20), можно построить номограммы
для оценки возможности обеспечения
требуемого значения конструктивного
параметра. Так, например, на рис. 1,2
справа приведены зависимости требуемо-
го конструктивного параметра наноспут-
ника от высоты орбиты Н и от величины
параметра ст (начальная поперечная уг-
ловая скорость распределена по Рэлеев-
скому закону) для значений максимально
угла атаки czirax = 20 град (рис. 1),
атах = 30 град (рис. 2), вероятности
р* = 0.95 и начального угла атаки = 0
400
, слева приведены значения конструктив-
ного параметра наноспутника CubeSat 3U
(0,1х0,1х0,Зм3) с различными значения-
ми поперечного момента инерции в зави-
симости от запаса статической устойчи-
вости Аг и конструктивный параметр
аэродинамически стабилизируемого
наноспутника трансформируемой кон-
струкции SamSat-QB50, разрабатываемо-
го в Самарском государственном аэро-
космическом университете в рамках
международного проекта QB50 [4]. Рас-
чёты проводились для стандартной плот-
ности атмосферы в соответствии с ГОСТ
4401-81 [5]. Наноспутник трансформиру-
емой конструкции SamSat-QB50 - нано-
спутник массой 2 кг, имеющий исходную
форму CubeSat 2U с размерами
0,1x0,1x0,2 м3 и первоначальное расстоя-
ние между центром давления и центром
масс Ах = 0,02 м. После отделения от
адаптера наноспутник трансформируется
в форму CubeSat 3U с размерами
0,1x0,1x0,3 м3, за счет чего значительно
увеличивается расстояние между цен-
тром давления и центром масс (до
Ах = 0,055 м), а следовательно, и увели-
чивается величина аэродинамического
момента [4].
Рис. 1. Номограмма для выбора конструктивного параметра наноспутника в зависимости от высоты полёта
Н и значения параметра (J при С(*тт = 20 град, р = 0,95, СИ0 = 0
Рис. 2. Номограмма для выбора конструктивного параметра наноспутника в зависимости от высоты полёта
Н и значения параметра (У при = 30 град, р = 0,95, СХа = 0
401
На рис. 3, 4 справа приведены зави-
симости требуемого конструктивного па-
раметра наноспутника от высоты орбиты
Н и от значения правой границы
начальной поперечной угловой скорости
«()тах (начальная поперечная угловая
скорость распределена по равномерному
закону) для значений максимально угла
атаки а*тм = 20 град (рис. 3),
а^ах = 30 град (рис. 4), вероятности
р* = 0,95 и начального угла атаки = 0
Рис. 3. - Номограмма для выбора конструктивного параметра наноспутника
в зависимости от высоты полёта Н и значения правой границы начальной
поперечной угловой скорости <20тах при С(*,ах — 20 град, р =0,95, СИ0 =0
Рис. 4. Номограмма для выбора конструктивного параметра наноспутника
в зависимости от высоты полёта Н и значения правой границы начальной
поперечной угловой скорости 6ZOmax при 6Z^ax =30 град, р =0,95, СХ0 =0
На рисунках 5, 6 справа приведены
зависимости требуемого конструктивно-
го параметра наноспутника от высоты
орбиты Н и от величины заданной веро-
ятности р* для значений максимально
угла атаки атм = 20 град , начального
угла атаки <2() = 0 , для параметра
402
О = 0.05 град/с (рис. 5) и величины
«Отах =015 град/с (рис. 6).
Jn,KT-M2
0.013
0.016
0.019
0.022
0.025
Рис. 5. Номограмма для выбора конструктивного параметра наноспутника
в зависимости от высоты полёта Н и значения заданной вероятности /7*
при ~ 20 град, (Хц = 0, сг = 0,05 град/с
Дх.м 0.06 0.045 0.03 0.015 0 200 250 300 350 Н,км
Рис. 6. Номограмма для выбора конструктивного параметра наноспутника
в зависимости от высоты полёта Н и значения заданной вероятности р
ПРИ «max =2® град, «0=0, «Отах =0,15град/с
Номограммы можно использовать
как для выбора проектных параметров
параметра наноспутника, так и для зада-
ния требований к погрешностям системы
отделения существующего наноспутника.
Так, например, на рис. 1 показан пример
выбора конструктивного параметра нано-
спутника для высоты орбиты Н= 380 км
(планируемая высота полета группировки
спутников в международном проекте
QB50) при заданных величинах
«max = 20 град , р” = 0,95 , а0 = 0 ,
а = 0,05 град/с. Как видно, значение
конструктивного параметра наноспутни-
ка для обеспечения заданного движения
должно быть d > 0,13 м/кг. На рис. 2 по-
казан пример задания требований к вели-
чинам начальной поперечной угловой
скорости для наноспутника SamSat-QB50
при заданных величинах Н = 380 км,
403
a* х = 30 град , р* = 0,95 , а() = 0 . Как
Шал * 7 л 7 7 v
видно, для того чтобы наноспутник
SamSat-QB50 совершал заданное движе-
ние необходимо, чтобы выполнялось тре-
бование: а < 0,05 град/с.
Выводы
Таким образом, получены формулы
для выбора проектных параметров (запа-
са статической устойчивости, длины,
продольного момента инерции) аэроди-
намически стабилизированного нано-
спутника, обеспечивающих при движе-
нии на низких орбитах отклонение про-
дольной оси наноспутника от вектора
скорости центра масс меньше допустимо-
го с заданной вероятностью на заданной
высоте при заданных погрешностях угло-
вой скорости от системы отделения. По-
строены номограммы, которые позволя-
ют просто и наглядно выбрать основные
проектные параметры наноспутника
стандарта CubeSat.
Исследование выполнено при фи-
нансовой поддержке Министерства обра-
зования и науки Российской федерации в
рамках научного проекта
№ 9.1421.2014/К.
Библиографический список:
1. Samir A. Rawashdeh and James Е.
Lumpp, Jr., Aerodynamic Stability for Cu-
beSats at ISS Orbit / Rawashdeh, S., et al.
(2013): JoSS, Vol. 2, No. 1, pp. 85-104.
2. LV. Belokonov, A.V Kramlikh, LA.
Timbai, Low-orbital transformable nanosat-
ellite: research of the dynamics and possibil-
ities of navigational and communication
problems solving for passive aerodynamic
stabilization, Proceedings of 2th IAA Con-
ference on Dynamics and Control of Space
System, Roma, Italy, 24-26 march 2014,
I AA-AAS-DyCoSS2-14-04-10.
3. Белецкий В.В. Движение искус-
ственного спутника относительно центра
масс [Текст] / В.В. Белецкий - М.: Наука,
1965.
4.1. Belokonov, L. Gluhova,
D. Ivanov, A. Kramlikh, M. Ovchinikov,
I. Timbai and E. Ustugov, Selection of De-
sign Parameters of Aerodynamically Stabi-
lized Nanosatellite for Thermosphere Re-
search within the QB50 Project, 5th Europe-
an CubeSat Symposium, 3-5 June 2013,
Ecole Royale Militaire, Brussels, Book of
Abstracts, p. 50.
5. ГОСТ 4401-81 Атмосфера стан-
дартная. Параметры.
References:
I. Samir A. Rawashdeh and James E.
Lumpp, Jr., Aerodynamic Stability for Cu-
beSats at ISS Orbit / Rawashdeh, S., et aL
(2013): JoSS, Vol. 2, No. 1, pp. 85-104
2. LV. Belokonov, A.V Kramlikh, LA.
Timbai, Low-orbital transformable nanosat-
ellite: research of the dynamics and possibil-
ities of navigational and communication
problems solving for passive aerodynamic
stabilization, Proceedings of 2th IAA Con-
ference on Dynamics and Control of Space
System, Roma, Italy, 24-26 march 2014,
IAA-AAS-DyCoSS2-14-04-10.
3. V.V. Beletsky, The motion of the
artificial satellite about its center of mass [in
Russian], Nauka, Moscow, 1965.
4.1. Belokonov, L. Gluhova,
D. Ivanov, A. Kramlikh, M. Ovchinikov,
I. Timbai and E. Ustugov, Selection of De-
sign Parameters of Aerodynamically Stabi-
lized Nanosatellite for Thermosphere Re-
search within the QB50 Project, 5th Europe-
an CubeSat Symposium, 3-5 June 2013,
Ecole Royale Militaire, Brussels, Book of
Abstracts, p. 50.
5. GOST 4401-81 Standard atmos-
phere. Parameters, Moscow, 1981.
404
THE SELECTION OF THE DESIGN PARAMETERS OF THE AERODYNAMICALLY
STABILIZED NANOSATELLITE
©2015 I.V. Belokonov, I.A. Timbai
Samara State Aerospace University named after academician S.P. Korolyov
(National Research University), Samara
The formulas for selecting the design parameters (static stability factor, length, longitudinal moment of iner-
tia) of the aerodynamically stabilized nanosatellite are obtained. At the low circular orbits the design parameters
provides deviation of the longitudinal axis of the nanosatellite from the center of mass velocity vector that is less
than acceptable with a given probability on a given height at the known errors of angular velocity for separation
system. By means of numerical calculations nomograms, which allow simple select nanosatellite of the CubeSat
standard design parameters were done.
Key words: Nanosatellite, aerodynamic moment, angle of attack, cumulative distribution function: design pa-
rameter
Информация об авторах:
Белоконов Игорь Витальевич, доктор технических наук, профессор, заведующий
межвузовской кафедрой космических исследований Самарского государственного аэро-
космического университета имени академика С.П. Королёва (национальный исследова-
тельский университет), E-mail: acad@ssau.ru.
Область научных интересов: динамика полёта, баллистика, навигация в космосе.
Тимбай Иван Александрович, доктор технических наук, профессор, профессор ка-
федры высшей математики Самарского государственного аэрокосмического университета
имени академика С.П. Королёва (национальный исследовательский университет), E-mail:
timbai@ssau.ru.
Область научных интересов: механика космического полёта.
Belokonov Igor Vitalievich, doctor of engineering science, professor, head of space re-
searches department at Samara State Aerospace University named after academician S.P.
Korolyov (National Research University). E-mail: acad@ssau.ru.
Area of research: flight dynamics, ballistics and space navigation.
Timbai Ivan Alexsandrovich, doctor of engineering science, professor at higher mathe-
matics department, Samara State Aerospace University named after academician S. P. Korolyov
(National Research University). E-mail: timbai@ssau.ru.
Area of research: mechanics of outer-space flight.
405
УДК 629.78
ВЫБОР ПАРАМЕТРОВ ПРОГРАММЫ ОТДЕЛЕНИЯ ГРУППИРОВКИ НАНО-
СПУТНИКОВ ПРИ КЛАСТЕРНОМ ЗАПУСКЕ ИЗ ПЕРЕХОДНОГО ОТСЕКА
ОРБИТАЛЬНОЙ СТУПЕНИ PH «СОЮЗ»
©2015 М.С. Щербаков, Д.П. Аваряскин
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Сформулирована и решена задача выбора параметров отделения наноспутников от орбитальной сту-
пени ракеты-носителя, исключающих возникновение опасного сближения с ней и друг с другом при после-
дующем движении, а также обеспечивающих заданное расстояние между наноспутниками. Разработана ме-
тодика выбора программы отделения группировки наноспутников с учётом обеспечения заданной началь-
ной формации из условия безопасности движения на заданном интервале времени.
Ключевые слова: орбитальная ступень, неориентированный полёт, группировка наноспутников, про-
грамма отделения, стохастический анализ, моделирование движения
В настоящее время популярность
кластерных запусков растёт вместе с воз-
растающей тенденцией использования
космических аппаратов малых размеров,
в том числе формата наноспутников
(НС). Анализ существующих проектов
показал, что выведение большинства НС
на орбиту осуществляется с ориентиро-
ванных платформ при заранее опреде-
лённых параметрах отделения.
В данной работе рассматривается
проблема отделения группировки НС от
платформы, которая осуществляет неори-
ентированное движение вокруг своего
центра масс, а, следовательно, направле-
ние отделения нельзя предсказать зара-
нее. В качестве такой платформы предла-
гается использовать орбитальную сту-
пень (ОС) ракеты-носителя (PH) «Союз»,
в переходном отсеке которой имеются
резервы по выводимой на орбиту массе и
объёму. После отделения основной по-
лезной нагрузки ОС PH «Союз» соверша-
ет неконтролируемое движение относи-
тельно центра масс. Вследствие того, что
отделение НС от ОС происходит в слу-
чайном направлении, а тормозящее влия-
ние атмосферы на НС и ОС сильно отли-
чаются друг от друга, возможно появле-
ние таких случаи, при которых может
произойти опасное сближение как с ОС,
так и друг с другом. Это является след-
ствием того, что движение происходит на
низкой орбите, где атмосфера имеет су-
щественное влияние, а рассматриваемые
объекты имеют разные баллистические
коэффициенты.
Также для проведения некоторых
экспериментов требуется поддержание
расстояния между НС в группировке не
больше заданного, при этом НС не обла-
дают большими запасами энергетики для
поддержания заданного расстояния отно-
сительно друг друга, что требует подбор
определённых параметров отделения.
Поэтому задачу исследования и выбора
параметров отделения наноспутников от
орбитальной ступени ракеты-носителя
следует считать актуальной.
Сформулирована задача отделения
НС из переходного отсека орбитальной
ступени ракеты-носителя «Союз» в каче-
стве попутного груза. Считается, что ОС
после отделения основной полезной
нагрузки приобретает начальную угло-
вую скорость и совершает неориентиро-
ванный полёт. Для численных расчётов
принимались следующие модели началь-
ных угловых скоростей в осях связанной
системы координат, которые приобретает
орбитальная ступень PH «Союз» после
отделения основной полезной нагрузки
<ох = - (2,5 ± 0,3) %,
(оу = (0,0 ± 2,5) 7с,
wz = (0,0 ± 2,5) 7с.
406
X'
Рис. 1 Положение ОС во время отделения группировки НС
Наноспутники отделяются в слу-
ступени, проходящая через центр масс,
чайном направлении, которое обусловле-
но неконтролируемым полётом ОС во-
круг своего центра масс. Рассмотрено
движение орбитальной ступени относи-
тельно центра масс без учёта действия
внешних сил, при этом кинетическая
энергия вращения ОС существенно
больше работы внешних сил. Тогда после
отделения основной полезной нагрузки
ступень совершает вращательное движе-
ние, представляющее собой регулярную
прецессию, при которой продольная ось
описывает круговой конус относительно
неизменного в пространстве направления
вектора кинетического момента К. (угол
полураствора конуса а*). Движение оси
симметрии вокруг вектора кинетического
момента К. происходит с постоянной
угловой скоростью прецессии . Одно-
временно ступень вращается с постоян-
ной угловой скоростью собственного
вращения ф вокруг оси симметрии.
Рис. 2 Начальные условия углового движения ОС
Через определённое время (задерж-
ка At) отделяется НС, при этом угол ата-
ки ао (угол между продольной осью сту-
пени и вектором скорости) в момент от-
деления НС можно определить по фор-
муле [1]:
ао = arccos(cos2(а^+ sin2(aJ cosfyo))-
В работе [2] получено выражение
для плотности распределения угла ао, из
которого выведены выражения плотности
распределения проекции скорости отде-
ления наноспутника в орбитальной си-
стемы координат:
f,., . arccos(V / V).
f (Vx) =--------- — exp
, , V2
<T’At V. 1--^-
V V2
f 1
2<т2ДГ J ’
-V 2 )
у
2<r2At2
ехр
f(Vv) =----------=
у CT-At-V-J2>r
f(Vz) =
exp
-V/
2a2At2
cr-At-Vjlir
407
где о - среднеквадратическое отклонение
компонентов поперечной угловой скоро-
сти.
Получены математические ожида
ния mvxi, rnvyi, mvzi и дисперсии Dvxi
DVyi, Dvzi для проекций скорости отделе
ния наноспутника Vxi, Vyi, Vzi
mVxi = V + V exp -71" 2<r2At J -KVxl, DVxl =V2 + V2-exp [ -я2 Y2Atd -m Vx2“K D Vx2
mvzl = °’ Dvzl ‘V
где слагаемые Kyx, KDx, KDy, KDz являют-
ся интегралами от функций, от которых
невозможно получить первообразную
аналитически. Значения этих слагаемых
рассчитываются численно.
Получены аналитические выраже-
ния для математического ожидания mxi,
(4 \ з
fHx] - т\\\ I —sin(69T)-3r 1ч—^-(1 -COS(69T))- — Рх I",
(2 2 / Y 2Р f 5Н1(бУГЙ
т х =/иг.|----cos(69r) +—- t--------,
\СО СО ) СО \ СО )
/и_, - о,
гпУ1, mZ| и дисперсии Dxi, Dyi, Dzi коорди-
нат положения НС в предположении
движения ОС по круговой орбите в цен-
тральном поле притяжения на протяже-
нии двух витков полёта
<4 V (2 2}2
Drl = DVxX • —sin {cot) - 3 / +Dri- —cos(69/)-,
\CO J \co co)
<2 2 Y (I Y
£> = DVxX -----cos(69Z) + Dv । • — sin(69/) .
\co co ) \co )
o
co
гдет = t + Дт интервал времени между от-
делением наноспутников.
На рисунке 3 изображены области
параметров отделения НС, с учётом вы-
полнения условия безопасности движе-
ния НС и ОС для случаев отделения пер-
вого НС через 5 с и 10 с после отделения
основной ПН.
а) время отделения НСЬ At|= 5 б) время отделения НС,, Д1]= 10 с
Рис.З Области параметров отделения, исключающих возможность столкновения между НС и ОС, а так же с
учётом разлёта НС на 10 км относительно друг друга в течение двух витков
Таким образом, в данной работе
найдена область допустимых параметров
отделения наноспутников, исключающих
возможность опасного сближения двух
НС как с ОС, так и друг с другом, а также
исключающих их разлёт друг относи-
тельно друга на расстояние более 10 км
на протяжении двух витков полёта.
Сформированы рекомендации по выбору
начальных условий отделения НС: ско-
рость отделения от 0,5 м/с до 3 м/с, за-
держка отделения от 5 с до 30 с.
Библиографический список:
1. Belokonov, LV. Radionavigation of
low orbital CubeSat after separation from
Soyuz upper stage [Текст]/ I.V. Belokonov,
A.V. Kramlikh, LA. Timbai - 7th Interna-
tional Workshop on Satellite Constellation
408
and formation Flying, Lisbon, Portugal, 13-
15 march 2013, IWSCFF-2013-08-04.
2. Аваряскин, Д.П. Statistical re-
search of the nanosatellite relative motion
after separation from the rocket carrier upper
stage [Текст] / Д.П. Аваряскин, И.В.
Белоконов // 64th International astronauti-
cal congress / IAC-13-C1.2.2. - Beijing,
China, 2013
3. Аваряскин, Д.П. Выбор условий
отделения наноспутников от подвижной
платформы [Текст]/ Сборник тезисов до-
кладов Молодёжной научной школы-
конференции при 40-й Ассамблее CO-
SPAR, 2-10 августа 2014 г. - Москва, Ти-
пография МГУ, 2014.
References:
1. Belokonov, LV. Radionavigation of
low orbital CubeSat after separation from
Soyuz upper stage [Текст]/ LV. Belokonov,
A.V. Kramlikh, LA. Timbai - 7th Interna-
tional Workshop on Satellite Constellation
and formation Flying, Lisbon, Portugal, 13-
15 march 2013, IWSCFF-2013-08-04.
2. Avaryskin, D.P. Statistical research
of the nanosatellite relative motion after
separation from the rocket carrier upper
stage / D.P. Avaryskin, LV. Belokonov //
64th International astronautical congress /
IAC-13-C 1.2.2. - Beijing, China, 2013
3. Avaryskin, D.P. The Choice of Pa-
rameters for Nanosatellite Separation from a
Non-Oriented Upper Stage / Thesis of the he
40th COSPAR Scientific Assembly, August,
2-10, 2014 r. - Moscow, Press of MSU,
2014.
THE SELECTION OF A NANOSATELLITE GROUP SEPARATION PARAMETERS
FOR CLUSTER LAUNCH FROM THE TRANSFER COMPARTMENT OF THE
ROCKET ’’SOYUZ” ORBITAL STAGE
©2015 M.S. Shcherbakov, D.P. Avaryaskin
Samara State Aerospace University, Samara
It was formulated and solved the problem of selection the parameters of nanosatellites separation from the
launch vehicle orbital stage. The parameters eliminate the risk of a dangerous approchement of nanosatellites with
orbital stage and with each, as well as providing a predetermined distance between nanosatellites. It was designed
the method for selecting a separation program of a nanosatellite group to ensure the formation from the specified
initial conditions of safety at a predetermined time interval.
Key words: orbital stage, non-oriented flight, nanosatellite group, separation program, stochastic analysis,
motion simulation
Информация об авторах:
Аваряскин Денис Петрович, аспирант Межвузовской кафедры космических иссле-
дований, СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т.8-937-067-87-57,
avaryaskindfagmail.corn.
Область научных интересов: динамика полета, наноспутники, относительное движе-
ние.
Щербаков Михаил Сергеевич, аспирант Межвузовской кафедры космических ис-
следований, СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 8-917-140-11-57,
sherbakov.nTsfamail.ru.
Область научных интересов: динамика полета, наноспутники, относительное движе-
ние.
Avaryaskin Denis Petrovich, post-graduate student of Space Research Department at
Samara State Aerospace University named after academician S.P. Korolyov (National Research
University). E-mail: avaryaskindfafgmail.ru.
409
Area of research: flight dynamics, nanosatellites, relative motion.
Shcherbakov Mikhail Sergeyevich post-graduate student of Space Research Department
at Samara State Aerospace University named after academician S.P. Korolyov (National Re-
search University). E-mail: sherbakov.m.s@mail.ru.
Area of research: flight dynamics, nanosatellites, relative motion.
410
УДК 621.396.6
ПОВЫШЕНИЕ ХАРАКТЕРИСТИК СИМПЛЕКСНЫХ ВЫСОКОСКОРОСТНЫХ
РАДИОЛИНИЙ ПЕРЕДАЧИ ИНФОРМАЦИИ С МАЛЫХ НИЗКООРБИТАЛЬНЫХ
КОСМИЧЕСКИХ АППАРАТОВ НА ЗЕМНЫЕ СТАНЦИИ
©2015 В.М. Колосов, А.П. Кирпичева, А.А. Котяхов
ЗАО «Меркурий», г. Москва.
Приведены предложения по повышению характеристик симплексных высокоскоростных радиолиний
передачи информации с малых низкоорбитальных космических аппаратов на земные станции.
Ключевые слова: высокоскоростная радиолиния, малые космические аппараты, дистанционное зон-
дирование земли
В настоящее время ЗАО
«Меркурий» выполняет ОКР по
созданию бортовой аппаратуры
высокоскоростной радиолинии (БА-ВРЛ)
для применения в КА ДЗЗ различного
назначения.
Основанием для проведения работ
является тенденция повышения
характеристик целевой аппаратуры
космических аппаратов ДЗЗ в части
объема формируемой целевой
информации.
Цели выполнения работ:
- повышение скорости передачи
информации в симплексном радиоканале
космический аппарат / земная станция;
- обеспечение возможности
использования бортовой аппаратуры
высокоскоростной радиолинии в малых
космических аппаратах (МКА).
Аппаратура существующих ЗС в
сочетании с доступным частотным
ресурсом
8025-8400 МГц позволяет достичь
информационную скорость в радиоканале
более 1 Гбит/с.
Для достижения указанных целей
выполнить следующие задачи:
- определение структуры сигналов
обеспечивающей скорость передачи
информации более 1 Гбит/с;
- обеспечение необходимой
энергетики радиолинии;
- обеспечения малых значений
массы, габаритов и электропотребления
БА-ВРЛ для применения МКА.
Структуру радиосигналов
предлагается формировать на основе
системы рекомендованных стандартов
Международного Консультативного
Комитета по космическим системам
передачи данных (CCSDS),
разработанных с участием специалистов
Федерального космического агентства.
Требуемую энергетику радиолинии
при постоянных характеристиках ЗС
предлагается обеспечивать высоким
коэффициентом усиления антенной
системы.
В БА-ВРЛ требуемая ЭИ ИМ
обеспечивается использованием
64-элементной активной фазированной
антенной решетки, при этом выходная
мощность каждого канала составляет от
20 до 150 мВт в зависимости от высоты
орбиты и параметров ЗС.
Использование современных
диэлектрических материалов позволяет
создать плоский печатный излучатель
элемента АФАР с площадью 1 кв. см.
По результатам проведенных
исследований в настоящее время
изготавливается макет БА-ВРЛ
позволяющий достичь скорости 1 Гбит/с
при массе менее 7 кг и
электропотреблении менее 50 Вт.
411
ENHANCEMENT OF SIMPLEX HIGH-SPEED COMMUNICATION RADIO LINES
FROM LOW-ORBIT SPACECRAFT TO GROUND UNITS
©2015 V.M. Kolosov, A.P. Kirpicheva, A.A. Kotyakhov
"Mercury ZAO" (Close Joint-stock Company), Moscow
Suggestions for enhancement of simplex high-speed communication radio lines from
low-orbit spacecraft to ground units.
Key words: high-speed radio line, small spacecraft, earth remote sensing
Информация об авторах:
Колосов Валерий Михайлович. Начальник комплексного отдела ЗАО «Меркурий».
127015, г. Москва, ул. Большая Новодмитровская д. 14, стр. 1, тел. +7 (495) 748-01-94,
+7 (916) 755-19-51, v.kolosovfemrcur.ru
Область интересов: антенные системы и область передачи информации.
Кирпичёва Анастасия Павловна. Ведущий инженер-конструктор
ЗАО «Меркурий». 127015, г. Москва, ул. Большая Новодмитровская д.14, стр. 1, тел.
+7 (495) 748-01-94, +7(925) 533-50-90, a.kirpichevaftrmrcur.ru
Область интересов: конструирование радиоэлектронной аппаратуры космических
аппаратов.
Котяхов Андрей Александрович. Инженер ЗАО «Меркурий». 127015, г. Москва,
ул.Большая Новодмитровская д.14, стр. 1, тел. +7 (495) 748-01-94, +7 (917)544-64-81,
a.kotyahovfcrmrcur.ru
Область интересов: информационный обмен, системы обеспечения тепловых
режимов.
Kolosov Valerii Mikhailovich. Chief of complex department, "Mercury ZAO". 14c 1,
Bolshaya Novodmitrovskaya St., Moscow, Russia. Zip-Code: 127015. tel.+7 (495) 748-01-94,
+7 (916) 755-19-51, v.kolosovfemrcur.ru
Area of research: antenna systems, information communication.
Kirpicheva Anastasia Pavlovna. Design Engineer, "Mercury ZAO". 14cl, Bolshaya
Novodmitrovskaya St., Moscow, Russia. Zip-Code: 127015, tel. 7 (495) 748-01-94, +7 (925)
533-50-90, a.kirpicheva(amrcur.ru
Area of research: design of spacecraft radio equipment.
Kotyakhov Andrey Aleksandrovich. Engineer, "Mercury ZAO". 14cl, Bolshaya
Novodmitrovskaya St., Moscow, Russia. Zip-Code: 127015, tel. +7 (495) 748-01-94, +7
(917)544-64-81, a.kotyahov(a;mrcur.ru
Area of research: information exchange, thermal control systems.
412
УДК 629.78
МАГНИТО-ИМПУЛЬСНОЕ УСТРОЙСТВО ОТДЕЛЕНИЯ
НАНОСПУТНИКОВ: АНАЛИЗ ВОЗМОЖНЫХ ТЕХНИЧЕСКИХ
РЕШЕНИЙ
©2015 О.В. Филонин, З.И. Гимранов
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Рассмотрены методы исследования и математического моделирования расчёта основных параметров
малогабаритных магнитоиндукционных эжекторов для вывода на орбиту нано - и микроспутников, приве-
дены примеры некоторых технических решений.
Ключевые слова: Магнитоиндукционные эжекторы, системы запуска нано- и микроспутников, элек-
тромагнитные толкатели
Появление нано- и микроспутников
поставило перед исследователями
множество задач. Одной из главных задач
такого рода, является эффективный
вывод нано - или микроспутника на
заданную траекторию. Первоначально
эти задачи решались с помощью
пружинных устройств [1,8, 9].
Однако по мере роста объёма
исследований, проводимых с помощью
малых спутников стали возникать такие
задачи, как точный вывод на заданную
орбиту, с определённой начальной
скоростью, сохранение ориентации
микроспутника при его движении по
траектории [2J и т.д. Всё это потребовало
разработки новых, высокоэффективных
устройств выведения.
Для того чтобы реализовать в такой
системе эффект эжекции достаточно в
половинках броневого сердечника
расположить обмотки с
противоположенными направлениями
намотки (правую и левую). В этом случае
магнитные поля в каждой половинке
сердечника будут направлены навстречу
друг другу и при подаче импульса тока,
обмотки будут стремиться, оттолкнутся
друг от друга. Изменение импульса
dP = Fdt будет определяться
напряженностью сформированного
магнитного поля, скоростью его
изменения, массами. Таким образом, если
одну половинку такого
магнитоиндукционного эжектора связать
с платформой носителя, а другую,
которая становиться подвижной
относительно системы доставки на
орбиту, с наноспутником (НС), то
последний также приобретёт
соответствующее изменение импульса
dPn и сможет отделиться от платформы.
Расчёт такой электромеханической
системы запуска можно свести к
следующим положениям [5]. Величину
силы, определяющей изменение
импульса отделяемого объекта можно
найти из условия баланса - изменение
энергии системы равно работе сил поля:
dWY = Fdz = dWc-dWu,
здесь dWY - изменение энергии системы,
dz - приращение расстояния между
инжектором и объектом, dWc -
изменение энергии конденсатора, dW^ -
изменение энергии магнитного поля
катушек.
Изменениями энергии тепловых
потерь в данном случае можно
пренебречь. Энергия магнитного поля
двух индуктивно связанных катушек:
0Z _ А*1 | ^2*2 _ A^Z1Z2 _ ^f2fl
" 2 2 2 2
Индуктивности Л] и Л2 не зависят
от расстояния z между катушками, это
расстояние влияет лишь на величину
взаимной индукции М . Следовательно,
изменение энергии магнитного поля
катушек при изменении расстояния
413
между ними на величину dz можно
оценить из соотношения:
dWH =i2dM
При этом конденсатор должен
выработать дополнительную энергию
dW( , обусловленную тем, что
необходимо создать дополнительное
напряжение для компенсации ЭДС,
возникающих в контурах при их
перемещении. Это дополнительное
напряжение dU равно сумме
производных по времени
потокосцеплении взаимоиндукции обеих
катушек:
dU = 2d(Mi)/dt =2idM /dt, i-const,
. -Г •/ \ dM ,, , xdF
dU = 2
\ Clt clt J
Уравнение энергетического баланса
можно записать в виде:
Fdz = dWc - dWH = 2i2dM - i2dM = i2dM.
Таким образом, сила действующая
на отделяемый аппарат, в данный момент
времени может быть оценена из простого
соотношения:
F(t) = i1dM/dz
Для расчета «электромагнитной
силы» необходимо знать зависимость
взаимной индуктивности катушек М от
расстояния z между ними. Если
принять, что катушки индукторов имеют
одинаковое число витков N , то М (z)
можно оценить с помощью эмпирически
получаемого соотношения:
М =W^N2Refff (к}
у
здесь Reff - эффективный радиус
катушки эжектора Re(f =/?,+—( R2 -Rt) ,
методика определения вида /'(Л)
подробно изложена во многих работах
[6|.
В заключении отметим, что
габариты данной системы эжекции
составляют порядка 1 дм3, масса порядка
1,5 кг. Для долговременного
использования данной системы на орбите
целесообразно корпус выполнить в виде
вакуумированной колбы, и
направляющую, связанную с подвижной
катушкой и посадочным местом спутника
также выполнить в виде
вакуумированной колбы, а внутри
корпуса - 1 поместить инфракрасный
подогреватель для надёжной работы
электронных элементов управления. Для
того чтобы производить запуски под
различными углами по отношению к
плоскости платформы г? и в различных
направлениях - (р , данную систему
целесообразно снабдить простейшей
электромеханической устройством для
выбора заданных углов &,<р.
Библиографический список:
1. M.Yu. Ovchinnikov, Russian
Launch Opportunities for Small Satellites,
Acta Astronauti-ca, March 1998, V.43, Issue
11-12, pp.623-629.
2. М.Ю. Овчинников, В.Д.
Шаргородский, В.И. Пеньков, С.А.
Мирер, А.Д. Герман, Р.Б. Немучинский.
Наноспутник REFLECTOR. Выбор
параметров системы ориен-тации.
Космические исследования, 2007, т.45, N
1,-с. 67-84.
3. Селиванов А.С., Тучин Ю.М.,
Урличич Ю.М., Вишняков В.М.
Предварительные результаты летных
испытаний технологического
наноспутника ТНС-0. Доклад на 10-ой
международной конференции
«Системный анализ управления и
навигации». Крым, Евпатория, 3-10 июня
2005.
4. Глущенков В.А. (RU),
Юсупов Р.Ю. (RU), Белоконов И.В. (RU),
Гимранов З.И. (RU), Способ запуска
наноспутников в качестве попутной
полезной нагрузки и устройство для его
осуществления, патент РФ, 2472679(13)
С1.
5. Кучинский Г.С., Шкуропат П.И.,
Шнеерсон Г. А. Генераторы больших
импульсных токов // Физика и техника
мощных импульсных систем: Сб. статей /
Под ред. Е.П. Велихова.
Энергоатомиздат, 1987,- С. 127-164.
6. Калантаров П.Л., Цейтлин Л.А.,
Расчет индуктивностей, 3 изд., Л., 1986, -
с 456.
414
7. Ландау Л.Д., Лифшиц Е.М.
Теоретическая физика. В 10-ти т. Т. VIII.
Электроди-намика сплошных сред: Учеб,
пособие. — 4-е изд., испр. и доп. — М.;
Наука. Гл. ред. физ.-мат. лит., 1987, - с.
452.
8. Селиванов А.С., Урличич Ю.М.,
Попов Г.А., Лукьященко В.И. О создании
экспе-риментального малого
космического аппарата для отработки
микротехнологий. Труды семинара
«Проблемы развития и использования
микротехнологий в авиации и
космонавтике». С. Петербург, 2002 г.
9. Бандель Д., Овчинников М.Ю.,
Тайль Ш., Хромов О.Е., Селиванов А.С.
Наноспут-ник GREASAT. Общее
описание. Препринт ИПМ РАН им. М.В.
Келдыша, №21,2009, Москва, стр.34.
References:
1. M.Yu. Ovchinnikov, Russian
Launch Opportunities for Small Satellites,
Acta Astronautica, March 1998, V.43, Issue
11-12, pp.623-629.
2. M.Yu. Ovchinnikov, V.D.
Shargorodskiy, V.L Penkov, S.A. Mirer,
A.D. German, R.B. Nemuchinskiy.
Nanosputnik REFLECTOR. Vyibor
parametrov sistemyi orien-tatsii.
Kosmicheskie issledovaniya, 2007, t.45, N
1,-s. 67-84.
3. Selivanov A.S., Tuchin Yu.M.,
Urlichich Yu.M., Vishnyakov V.M.
Predvaritelnyie rezultatyi letnyih ispyitaniy
tehnologicheskogo nanosputnika TNS-0.
Doklad na 10-oy mezhdunarodnoy
konferentsii «Sistemnyiy analiz upravleniya
i navigatsii». Kryirn, Evpatoriya, 3-10
iyunya 2005.
4. Gluschenkov V. A. (RU), Yusupov
R. Yu. (RU), Belokonov I. V. (RU),
Gimranov Z. I. (RU), Sposob zapuska
nanosputnikov v kachestve poputnoy
poleznoy nagruzki i ustroystvo dlya ego
osuschestvleniya, patent RF, 2472679(13)
Cl.
5. Kuchinskiy G.S., Shkuropat P.L,
Shneerson G.A. Generatoryi bolshih
impulsnyih tokov // Fizika i tehnika
moschnyih impulsnyih sistem: Sb. statey /
Pod red. E.P. Velihova. - Energoatomizdat,
1987,- S. 127-164.
6. Kalantarov P.L., Tseytlin L.A.,
Raschet induktivnostey, 3 izd., L., 1986, -s
456.
7. Landau L.D., Lifshits E.M.
Teoreticheskaya fizika. V 10-ti t. T. VIII.
Elektrodi-namika sploshnyih sred: Ucheb.
posobie. — 4-e izd., ispr. i dop. — M.;
Nauka. Gl. red. fiz.-mat. lit., 1987, - s. 452.
8. Selivanov A.S., Urlichich Yu.M.,
Popov G.A., Lukyaschenko V.L О sozdanii
ekspe-rimentalnogo malogo kosmicheskogo
apparata dlya otrabotki mikrotehnologiy.
Trudyi seminara «Problemyi razvitiya i
ispolzovaniya mikrotehnologiy v aviatsii i
kosmonavtike». S. Peterburg, 2002 g.
9. Bandel D., Ovchinnikov M.Yu.,
Tayl Sh., Hromov O.E., Selivanov A.S.
Nanosput-nik GREASAT. Obschee
opisanie. Preprint IPM RAN im. M.V.
Keldyisha, #21, 2009, Moskva, str.34.
BIT PROCESSES IN CAPACITIVE ENERGY STORAGE MAGNETIC
INDUCTION EJECTORS
©2015 O.V. Phylonin, Z.I. Gimranov
Samara State Aerospace University, Samara
The methods of research and mathematical modeling method of calculating the basic parameters of small
magneto ejectors to launch nano-and micro-satellites are shown as examples of some of the technical solutions.
Key words. Magnetic Induction ejectors systems run micro and small satellites, electromagnetic lifters
415
Информация об авторах:
Филонин Олег Васильевич, д.т.н., профессор, профессор кафедры физики, СГАУ,
443 086, Россия, г. Самара, Московское ш. 34, т. 241-53-61, phynistf^mail.ru.
Область научных интересов: обратные некорректные задачи в физическом экспери-
менте.
Гимранов Зафар Ильясович, аспирант межвузовской кафедры космических иссле-
дований, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 8-927-706-01-91,
zafargimranov86(ft)gmail.com.
Область научных интересов: Магнито-импульсное устройство отделения наноспут-
ников.
Phylonin Oleg Vasilievich, professor, doctor of technical sciences, professor of chair of
physics, SSAU, 443 086, Russia, Samara, Moscow highway, 34, 241-53-61, phynistfojmail.ru.
Area of research: inverse and incorrect tasks in the physical experiment.
Gimranov Zafar Ilyasovich, post-graduate student of space research department of
Samara State Aerospace University, zafargimranov86(q)gmail.com, tel.: 8-927-706-01-91. Area
of research: magnetic-impulse device for launch nanosatellite.
416
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 10: Вопросы экономики аэрокосмической
отрасли. Повышение качества
подготовки специалистов
для аэрокосмической отрасли.
417
УДК 338.5:629.78
ФОРМИРОВАНИЕ БЮДЖЕТА РАСХОДОВ И ДОХОДОВ В УСЛОВИЯХ
КОНКУРЕНТНОГО ВЗАИМОДЕЙСТВИЯ МЕЖДУ ПРЕДПРИЯТИЯМИ
ПО ПРОИЗВОДСТВУ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
©2015 Г.М. Гришанов1, С.А. Кирилина2
'Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
2АО «РКЦ «Прогресс», г. Самара
Рассмотрено поведение предприятия в условиях как ценовой конкуренции, так и конкуренции по
надежности изделий. Определены условия, при выполнении которых рынок функционирует устойчиво и
обеспечивает исключение конкурентного вытеснения одного субъекта рынка изделий ракетно-космической
техники другим.
Ключевые слова: ценовая конкуренция, надежность изделия, дуопольный рынок, функция спроса, рав-
новесие Курно
Рассмотрим проблему формирова-
ния бюджета доходов и расходов путем
выбора конкурентных стратегий между
двумя участниками рынка по производ-
ству РКТ в условиях ценовой конкурен-
ции по надежности изделий, как наиболее
важному параметру для заказчика.
Пусть участникам рынка РКТ, вы-
пускающим неоднородные изделия, из-
вестны функции спроса у1(Ц(ш)) и
у2(Ц(щ)) на выпускаемые изделия. Через
равные промежутки бюджетного периода
предприятия планируют изменение цен
Ц1 и Цг продаж своего изделия и его
надежности а>1 и ш2, измеряемые вероят-
ностью отказа РКТ. Бюджет доходов и
расходов каждого предприятия есть про-
изведение цены на объем продаж (доход)
минус затраты, уровень которых характе-
ризует величину прибыли:
ВП, (Ц(щ)) = (Mj - <д(ад))у;(Ц(ш)),1,; = 1,2, i *j,
Естественными ограничениями яв-
ляются требования неотрицательности
объемов выпуска (уг > 0,у2 > 0 ), а так-
же цен (Цг > 0, Ц2 > 0).
Найти оптимальные значения цен
Ц° и Ц2 и надежности 04 и а>2 из условия
независимой максимизации прибыли
каждого предприятия.
В модели неоднотипной дуополии
управляемыми параметрами являются
цены и уровень надежности изделия каж-
дой фирмы, выбираемые менеджерами на
основе тех или иных стратегий.
Каждая фирма, управляя ценой и
уровнем надежности на выпускаемое из-
делие, стремится максимизировать свою
прибыль, исходя из необходимых усло-
вий существования максимума
дВП,(Ц(ш)Ц(ш)) _ дВП,(Ц(ш)) _ . _
дЩ ’ do)i
(1)
На функции спроса yj(U(w)), i =
1,2 наложим следующие требования:
для любых значений Цги Ц2 функ-
ция спроса У[((д, Ц), i = 1,2 убывает по
Цр i = 1,2 и возрастает по Цу,у = 1,2, i Ф
;,то есть < 0; > 0; i,j = 1,2, i Ф j;
В соответствии с введенным предполо-
жением, чем выше цена предприятия, тем
меньше спрос на его продукцию, и чем
выше цена конкурента, тем этот спрос
выше.
Простейшей моделью поставленной
задачи неоднотипной (дифференциро-
ванной) дуополии являются линейные
418
модели функций спроса, которые опреде-
ляются следующими уравнениями:
У/(М(^)) = Уо “ ^Mi + Ь?М7, Ч = 1.2, i * j,
где уд - емкость рынка ракетно-
космической техники, >0,i = 1,2,
- коэффициенты чувствительности функ-
ции спроса к изменению цен Ц1, Ц2.
(2)
Из практики использования ракет-
но-космической техники на соотношение
между коэффициентами функции спроса
наложены следующее ограничение:
Это неравенство означает, что на
величину спроса изменение собственной
цены оказывает большее влияние, чем
изменение цены конкурента.
Каждое из уравнений (2) удовле-
творяет наложенным требованиям на
функцию спроса:
1>Ц > 0, i,j = 1,2, i Ф j.
Получение оптимального решения
задачи неоднотипной дуополии с выбо-
ром цены сводится к вычислению част-
ных производных системы (2) и после-
дующему решению этой системы относи-
тельно цен изделия предприятий.
Пусть удельная себестоимость из-
готовления изделия для каждого пред-
приятия определяется в соответствии с
уравнениями:
Q(yi(w)) = cfyt(to, Ц), i,j = 1,2,
где с? — удельные затраты. следующей функциональной зависимо-
Предположим также, что цена из- стью:
делия и его уровень надежности связаны
Ui(wi) = Mio + ywz,i = 1,2,
где у > 0 - скорость увеличения С учетом (3) и (4) представим
цены. уравнение для прибыли в следующем ви-
де:
ВПг(ш) = уо(Mio + У ^i) - a,(Mzo + У wz)2 + Z>i(Myo + У ’ "y)(Mio + У’^t)
- сГ[Уо - Gi(Mio + У 1 Wf) + bi(M7o + У • "у)] —> max, i.j = 1,2, i
O)i
Необходимые условия существо-
вания максимума в соответствии с (1)
определяются из равенства
Уо - 2azMio + Myo + «icf ~ 2а7ушг - Ь7ущу = 0
Из уравнения (6) следует, что уро- предприятия в условиях конкуренции
вень надежности изделия для каждого определяется из системы уравнений:
1 ,
= 2уа- ^Уо ~ 2Я/Ц/0 + biU,j0 + aiC* ' + 2а *’7' = 1'2'1 * 7‘ (7)
Обозначим первую составляющую уравнения (7), через At, т.е.:
А = Уо - 2tZiMio + Myo “ i,7 = 1.2, i * j,
419
С учетом введенных обозначений
систему уравнений (7) запишем в следу-
Ai
/Г — - -4- />°
<^1 — о------Г Ч--Ш2
2уаг 2аг
л
— Ч------Ь э--
2уа2 2а2
ющем виде:
(8)
Геометрическое решение системы (8) представлено на рис. 1.
Рис. 1. Геометрическое решение задачи определения равновесных значений уровней надежности изделия
На рисунке 1 представлена линия
реакции а>^ = 4- — а>2 первого
предприятия и линия реакции а>2 =
Л? . О
второго предприятия.
Решая систему (8), получим, что
равновесные значения уровней надежно-
сти изделия первого и второго предприя-
тия составят величину:
0>2
2а1А1 4- btA2
Y^ata2 - b1b2)’
2ax42 “F
y(4a!a2 - M2)’
(9)
Точка пересечения линий реакции
на рис.1 представляет собой точку равно-
весия Курно. Из рисунка следует, что
(Дё < 2yai,i = 1,2)Л(Л < 2уЬь1 = 1,2)Л(2а, >bhi = 1,2)^ > 0,i = 1,2)
При выполнении этих неравенств
рынок РКТ не становится монопольным и
единственным положением в точке рав-
новесия, координаты которой удовлетво-
точка равновесия существует, если одно
временно выполняются следующие нера-
венства:
(10)
ряют приведенной системе линейных
уравнений (9). При этом равновесие ди-
намически устойчиво в том смысле, что
из любого начального состояния рынок с
420
течением времени переходит в равновес-
ное состояние. Иными словами, если вы-
полняется (10), то, несмотря на суще-
ствование конкурентных отношений,
обеспечиваются условия, необходимые
для нормального функционирования
обоих участников на рынке ракетно-
космической техники.
Из рис. 1 следует, что снижение
уровня надежности одного из изделий
приведет к выполнению требований вза-
имосвязанных неравенств (10). Это озна-
чает, что выпуск этого изделия, как не
конкурентоспособного, предприятием
прекращается, и в этой связи встает зада-
ча или его модернизации, или разработки
и выпуска нового изделия. Из сказанного
следует, что конкуренция на рынке ра-
кетно-космической техники между пред-
приятиями по их изготовлению является
положительным фактором, поскольку
стимулирует развитие ракетно-
комической техники.
При определенных равновесных
значениях уровня надежности изделий
coj, а>2 легко определить равновесные
значения цен, объемов выпуска каждого
изделия и равновесную величину дохода
и затрат, получаемую каждым предприя-
тием.
Ц*(ш;) = Ц,о + = 1,2.
у*(Ц(ш)) = у0 - + Ь£цЦ*, i.j = 1,2
ВП*(w) = yo(Uio + У • wj - at(Uio + У ‘ "i)2 + bi(Ц;0 + У ‘ W/)(4io + У • <»i)
- сГ[Уо - ai(Uio + У • Wj) + bi(Ц;0 + У • СО;)] —> max, i,j = 1,2, i
*7-
С практической точки зрения ры-
ночная ситуация является предпочти-
тельной, поскольку препятствует моно-
полизации экономики и приводит в ко-
нечном итоге к разнообразию ракетно-
космических услуг. Под устойчивостью
рынка изделий ракетно-космической тех-
ники понимается его способность функ-
ционировать без вытеснения слабых кон-
курентов более сильными, что формально
выражается в существовании решения
системы статических уравнений в точке
равновесия с уровнем надежности каждо-
го из изделий, удовлетворяющих системе
взаимосвязанных неравенств (10), при
реализации которых каждое предприятие
обеспечивает получение максимальной
величины прибыли.
Библиографический список:
1. Гришанов Д.Г., Гришанов Г.М.,
Кирилина С.А., Щелоков Д.А., Внутри-
фирменные механизмы бюджетного
управления крупным промышленным
комплексом по производству ресурсоем-
ких изделий: монография - Самара,
2009.-180 с.
References:
1. Grishanov D.G., Grishanov G.M,
Kirilina S.A., D.A. Schelokov D.A. Intra
firm mechanisms of the budgetary manage-
ment of a large industrial complex on pro-
duction of resource-intensive products:
monograph - Samara, 2009. - 180 pages.
421
FORMATION OF THE BUDGET INCOME AND EXPENSES IN THE COMPETITIVE
INTERACTION BETWEEN THE ENTERPRISES MANUFACTURING ROCKET
AND SPACE TECHNOLOGY
©2015 G.M. Grishanov, S.A. Kirilina
1 Samara State Aerospace University, Samara
2 JSC «SRC «Progress», Samara
The behavior of the company in the conditions of both price competition and competition on the reliability
of the products. The conditions under which the market operates is stable and provides an exception competitive
displacement of market entity rocket and space technology to others.
Keywords: price competition, product reliability, duopolny market demand function, Cournot equilibrium
Информация об авторах:
Гришанов Геннадий Михайлович, доктор технических наук, профессор кафедры
экономики ФГАОУ ВО «Самарский Государственный аэрокосмический университет име-
ни академика С.П. Королева» (Национальный исследовательский университет).
Область научных интересов: моделирование механизмов взаимодействия в органи-
зационно-экономических системах.
Кирилина Светлана Александровна, доктор экономических наук, начальник
управления финансов и ВЭД АО «РКЦ «Прогресс»
Область научных интересов: методы и инструменты бюджетно-инвестиционное
управление предприятием.
Gennady М. Grishanov, Doctor of Engineering, Professor of Economics in Samara State
Aerospace University.
Sphere of scientific interest: interaction mechanisms modeling in economic organizing sys-
tems.
Svetlana A. Kirilina, Doctor of Economics, Head of Finance & Foreign Economic Activi-
ty Office in JSC «SRC «Progress».
Sphere of scientific interest: methods and tools of company budgetary and investment
management.
422
УДК 658+338.5:629.78
ОЦЕНКА ФИНАНСОВОЙ УСТОЙЧИВОСТИ ПРЕДПРИЯТИЯ
ПО ПРОИЗВОДСТВУ РКТ
©2015 С.А. Кирилина
АО «РКЦ «Прогресс», г. Самара
Проведена оценка финансовой устойчивости предприятия, осуществляющего производство ресурсо-
емких изделий, в зависимости от рыночных параметров в частности от цен на изделия, материалы, энерге-
тические, трудовые, денежные ресурсы, значения которых формируются в зависимости от предложения и
спроса, складывающихся на денежном, товарном, сырьевом рынках, а также рынке труда.
Ключевые слова: ценовая конкуренция, надежность изделия, дуопольный рынок, функция спроса, рав-
новесие Курно
Изменение параметров конъюнкту-
ры на сырьевом, денежном рынке, рынке
продукции порождает проблему оценки
финансовой устойчивости предприятия и
обоснование выбора стратегии поведения
в изменяющихся рыночных условиях. В
связи с этим проведем оценку финансо-
вой устойчивости и эластичности прибы-
ли предприятий [1].
Доход, получаемый предприятием
от инвестирования капитала в какое-то
направление производственной деятель-
ности, должен быть достаточным, чтобы
по крайней мере покрыть его стоимость,
Если доходность капиталовложений
больше их стоимости, то можно считать,
что предприятие работает эффективно. В
связи с этим обобщающим критерием,
характеризующим финансовую устойчи-
вость организации, является получаемая
в результате ее функционирования вели-
чина прибыли в виде операционного до-
хода, чистого операционного дохода, не-
распределенной прибыли. Каждый из ви-
дов прибыли позволяет оценить окупае-
мость определенной структуры затрат и
определить "запас финансовой прочно-
сти" организации в условиях сложившей-
ся конъюнктуры на товарно-сырьевом
рынке [1].
Так, операционный доход представ-
ляет собой налогооблагаемую прибыль и
позволяет оценить окупаемость перемен-
ных и постоянных затрат, а прибыль,
освобожденная от налоговых платежей и
остающаяся в организации, является чи-
стым операционным доходом. Важным
показателем в оценке эффективности ор-
ганизации является также чистая продук-
ция, называемая в литературе еще добав-
ленной стоимостью, позволяющей рас-
считать "вклад" предприятия в новую
стоимость выпускаемой продукции и
безубыточность. Таким образом, каждая
из видов прибыли позволяет сделать вы-
воды об окупаемости отдельных затрат, и
совокупность всех затрат.
Рассмотрим задачу определения
финансовой устойчивости предприятия,
осуществляющего производство ресурсо-
емких изделий. Для этого вначале приве-
дем уравнение, позволяющее рассчитать
величину операционного дохода, получа-
емого от реализации продукции
OD = у (Ц-m - з) - ПЗ = R - М - ЗП - ПЗ, (1)
где OD - операционный доход;
у - объем выпускаемых изделий;
Ц - цена одного изделия ;
m - затраты ресурсов на одно изделие;
з - заработная плата рабочих на одно из-
делие;
ПЗ - постоянные затраты.
В приведенном уравнении величина
R = у • Ц представляет собой планируе-
мую стоимость продукции, М = у • m -
материальные затраты, связанные с про-
изводством и зависящие от объема у вы-
пускаемых изделий, ЗП=у-з - величина
заработной платы, находящаяся в про-
порциональной зависимости от объема
выпускаемых изделий.
423
В уравнении (1) материальные за-
траты m на одно изделие определяются
как сумма произведения норматива рас-
хода ресурса на стоимость и равны,
m = XmiUi (2>
i
где mi - норма расхода i-ro ресурса на
одно изделие;
Hi - цена единицы i-ro ресурса.
Из (1.) можно получить норму
’’вклада” компании в новую стоимость
равную
Ц-Ут.ц, (3)
у(Ц-т) R-М Ц-т Т ' v ’
У U R Ц Ц Г
где у; =JzL - относительное значения
Ц
цены i-ro ресурса.
В этом уравнении величина ЧПр =
y(L(-m)=R-M представляет собой объем
чистой продукции (добавленной стоимо-
сти). Из (3) следует, что норма "вклада"
определяется как отношение цены еди-
ницы чистой продукции (Ц-m) к цене од-
ного изделия.
В качестве постоянных затрат вы-
делим уплату компанией процентов за
кредит ПК, определяемый по формуле
ПК = аА, (4)
где а - процентная ставка кредита;
А - сумма кредита.
С учетом (4) прибыль до уплаты налога
ОП определяется из уравнения
ОП = у (Ц - m - з) - ПЗ - ПК, (5)
где ОП - облагаемая налогом при-
быль.
Если ставка налога равна Н, то чи-
стую прибыль, остающуюся в распоря-
жении компании, можно рассчитать по
формуле
ЧП - OII(l -Н) [у (Ц т-з)-(ПЗ + ПК)]( 1 - Н). (6)
Полученная чистая прибыль рас-
ходуется на уплату основного долга по
кредитам, а оставшаяся часть распреде-
ляется предприятием на развитие произ-
водства, выплату дивидендов акционерам
и другое.
С учетом сказанного нераспреде-
ленная прибыль равна
НП=[у (Ц - m - з) - (ПЗ + ПК)]( 1 - Н)-А=
= [у (Ц - m - з) - П3](1 - Н)- [1+а(1 -
Н)]А. (7)
Если величина нераспределенной
прибыли больше нуля (НП > 0), то это
означает, что инвестированный предпри-
ятием в производство продукции капи-
тал, включая и заемные средства в объе-
ме А, окупается в полной мере.
Величина каждого из рассмотрен-
ных критериев эффективности (ЧПр, OD,
ЧП, НП) зависят от рыночных парамет-
ров и в частности от цен на изделия, ма-
териалы, энергетические, трудовые, де-
нежные ресурсы, значения которых фор-
мируются в зависимости от предложения
и спроса, складывающихся на денежном,
товарном, сырьевом рынках, а также
рынке труда. В связи с этим в зависимо-
сти от складывающейся конъюнктуры на
рынках могут возникать ситуации, в ко-
торых эффективность функционирования
предприятия снижается до критического
состояния с точки зрения ее финансовой
надежности. Определим критические
значения параметров, при которых с по-
зиции рассмотренных критериев запас
финансовой устойчивости равен нулю.
При этом вначале решим эту задачу для
операционного дохода, определяемого в
соответствии с уравнением (1). Из (1)
следует, что при заданном объеме заказа
на выпуск изделий и заданных ценах на
материальные и трудовые ресурсы кри-
тическая цена одного изделия определит-
ся из уравнения:
I I ПЗ , /ох
Ц = m + з н---= m + з + d ’ (8)
У
где d = ПЗ/у - постоянные затраты, при-
ходящиеся на одно изделие.
При цене Ц = Цкр операционный
доход равен нулю, а это означает, что
предприятие окупает текущие затраты и
постоянные затраты в сумме ПЗ, но при
этом не получает прибыли. При сложив-
шейся конъюнктуре на рынке значение
критической цены одного изделия пред-
ставляет собой нижнее предельное зна-
чение, при которой окупаются перемен-
ные затраты в объеме у (т + з) и посто-
янные затраты в объеме ПЗ.
Критические значения объемов
материальных и трудовых затрат с пози-
ции критерия операционного дохода
424
можно определить из следующих урав-
нений:
m«p =SaXP = H-3-d,
Зкр=Ц-т-а. (9)
При сложившейся конъюнктуре
относительно цен на изделия и цен на
трудовые ресурсы критические объемы
материальных и трудовых затрат на одно
изделие характеризуют верхние их гра-
ницы, выше которых затраты не должны
подниматься, так как они уже не будут
окупаться.
Критические значения уровня по-
стоянных затрат ПЗ можно определить из
уравнения
ПЗкр = у (ц - m - з). (10)
Это значение постоянных затрат
характеризует их верхнюю границу, при
которой обеспечивается окупаемость.
Определив критические значения
параметров по формулам (8 - 10), при
которых с позиции критерия операцион-
ного дохода достигается безубыточность
функционирования предприятия, можно
рассчитать разности между фактически-
ми значениями цены изделия, затратами
материальных и трудовых ресурсов, по-
стоянными затратами и соответ-
ствующими им критическими величина-
ми. Полученные таким образом разности
соответствуют запасам финансовой
прочности по различным параметрам, ха-
рактеризующим конъюнктурную рыноч-
ную ситуацию. Так, запас финансовой
прочности по цене изделия равен:
ДЦ = Ц-Цкр
- или в процентах ДЦ% = (| ^кр)юо; (И)
по материальным, трудовым, по-
стоянным затратам
Дт = ткр - т, ДЗ = Зкр - 3, ДПЗ = ПЗкр - ПЗ (12)
или в процентах
Дт%
100
дз% =
-^--1 юо%;
3
дпз% =
пзкр
ПЗ
100.
Если фактическая цена изделия
больше критической, а фактические за-
траты материальных, трудовых ресурсов
и постоянных затрат меньше критиче-
ских, т.е. ДЦ > 0, Дт > 0, ДЗ > 0, ДПЗ > 0,
то предприятие после возмещения всех
затрат имеет прибыль и тем большую,
чем больше запас финансовой прочности.
Определим запас финансовой
прочности предприятия с позиции крите-
рия нераспределенной прибыли (НП),
рассчитываемой в соответствии с уравне-
нием (7). Для этого найдем вначале кри-
тические значения параметров, при кото-
рых запас финансовой прочности равен
нулю. Из уравнения (7) следует, что кри-
тическая цена одного изделия равна
Ц =т + з + —+ [1 + а(1-Н)]—-—
Р У У(1-Н)
При этой цене нераспределенная
прибыль равна нулю (НП=0), а это озна-
чает, что предприятие окупает все затра-
ты, включая и заемные средства с про-
центами, но средств на выплату дивиден-
дов и развитие компании не остается.
Подставляя значения критической
цены, определяемое по уравнению (13), в
формулу (11), можно рассчитать запас
финансовой прочности предприятия по
цене изделия с позиции критерия нерас-
пределенной прибыли.
Сравнивая критические значения
цен, найденных по уравнениям (8) и (13),
можно заключить, что критическая цена,
определяемая с позиции критерия нерас-
пределенной прибыли больше критиче-
ской цены, определяемой с позиции кри-
терия операционного дохода, на величи-
ну
[1+а(1-Н)] А .
у(1-Н)
Следовательно, запас финансовой
прочности по цене, определяемый по
критерию нераспределенной прибыли,
при всех равных других условиях всегда
будут меньше запаса финансовой проч-
ности по цене, определяемой по крите-
рию операционного дохода, на величину
425
[1 +а(1 -И)] А .
у(1-Н)
Аналогичным образом можно
оценить запас финансовой прочности и
по другим параметрам. В частности по
объему финансовых средств запас фи-
нансовой прочности равен:
ДА%=( )Ю0, (14)
где А = —(1~Н) [у(Ц - m - з) - ПЗ] •
кр 1 + а(1-Н)
Учитывая, что величина нераспре-
деленной прибыли представляет собой
конечный результат деятельности пред-
приятия, а все остальные критерии -
промежуточные, то оценка запаса финан-
совой прочности с позиции критерия не-
распределенной прибыли является
наиболее надежной. Поэтому критерий
нераспределенной прибыли позволяет
оценить одновременно и запас финансо-
вой устойчивости, и эффективность ин-
вестирования средств предприятия в
производство изделия.
Библиографический список:
1. Гришанов Д.Г., Гришанов Г.М.,
Кирилина С.А., Щелоков Д.А., Внутри-
фирменные механизмы бюджетного
управления крупным промышленным
комплексом по производству ресурсоем-
ких изделий: монография - Самара,
2009.-180 с.
References:
1. Grishanov D.G., Grishanov G.M,
Kirilina S.A., D.A. Schelokov D.A. Intra
firm mechanisms of the budgetary manage-
ment of a large industrial complex on pro-
duction of resource-intensive products:
monograph - Samara, 2009. - 180 pages.
ASSESSMENT OF FINANCIAL STABILITY OF MANUFACTURING
ENTERPRISE CT
©2015 S.A. Kirilina
JSC «SRC «Progress», Samara
The evaluation of the financial stability of the enterprise conducting production-intensive products, depend-
ing on market variables such as the price of products, materials, energy, labor, financial resources, whose values are
formed depending on supply and demand prevailing in the money, commodity, commodity markets and the labor
market.
Keywords: price competition, product reliability, duopolny market demand function, Cournot equilibrium
Информация об авторах:
Кирилина Светлана Александровна, доктор экономических наук, начальник
управления финансов и ВЭД АО «РКЦ «Прогресс».
Svetlana A. Kirilina, Doctor of Economics, Head of Finance & Foreign Economic Activi-
ty Office in JSC «SRC «Progress».
426
УДК 366.6
ФИНАНСОВЫЕ РЕСУРСЫ ПРЕДПРИЯТИЙ РАКЕТНО-КОСМИЧЕСКИЙ
ПРОМЫШЛЕННОСТИ В УСЛОВИЯХ ИЗМЕНЕНИЯ
ОРГАНИЗАЦИОННО-ПРАВОВОЙ ФОРМЫ
© 2015 И.В. Зиновьева
АО «РКЦ «Прогресс», г. Самара
В работе рассмотрены финансовые ресурсы, характерные для федеральных государственных унитар-
ных предприятий и акционерных обществ, сто процентов акций которых находится в федеральной соб-
ственности.
Финансовые ресурсы, федеральное государственное унитарное предприятие, акционерное общество,
акции которого находятся в федеральной собственности, предприятие ракетно-космической промышлен-
ности.
Принципы функционирования кор-
поративных финансов едины для всех
видов и форм предпринимательских
структур. Однако организация финансов
хозяйствующих субъектов происходит
по-разному и зависит от структуры ис-
точников финансовых ресурсов, от по-
рядка распределения и использования
полученной прибыли, от порядка взаимо-
расчётов с бюджетом. Эти различия свя-
заны с формой собственности, видом де-
ятельности, технологическими особенно-
стями процесса производства.
Всю совокупность финансовых ре-
сурсов предприятия можно разделить на
три группы: собственные, заёмные и при-
влечённые средства.
Собственные ресурсы предприятия
- это средства, принадлежащие предпри-
ятию на правах собственности и гаранти-
рующие интересы его кредиторов, часть
совокупного капитала предприятия.
Собственные средства формируют-
ся за счёт инвестированной части (внеш-
ний источник), представляющей собой
вложения собственников в предприятие,
и за счёт накопленной части (внутренний
источник), образующейся в процессе хо-
зяйственной деятельности предприятия.
Инвестированные ресурсы образу-
ются уставным капиталом и эмиссион-
ным доходом, включаемым в состав до-
бавочного капитала.
Накопленные ресурсы возникают в
результате распределения чистой прибы-
ли на отчисления в резервный капитал и
за счёт нераспределенной прибыли про-
шлых лет.
Уставный капитал представляет со-
бой минимально необходимое имущество
предприятия, выступающее гарантией
исполнения обязательств перед его кре-
диторами. Добавочный капитал пред-
ставляет собой собственный капитал
предприятия, который формируется за
счёт эмиссионного дохода, прироста сто-
имости имущества в результате пере-
оценки, за счёт стоимости имущества,
полученного организацией безвозмездно.
Порядок использования добавочно-
го капитала, который может быть
направлен на увеличение уставного капи-
тала, погашение балансового убытка за
отчетный год, а также распределен между
учредителями организации и на другие
цели, определяется собственниками в со-
ответствии с учредительными докумен-
тами при рассмотрении результатов от-
чётного года.
Резервный капитал - это совокуп-
ность резервных фондов, созданных с це-
лью обеспечения экономической ста-
бильности предприятия и формируемых
им за счёт резервов, образованных в со-
ответствии с законодательством и учре-
дительными документами, за счёт оце-
ночных резервов, резервов предстоящих
расходов и резервов по условным фактам
хозяйственной деятельности.
427
Действующее российское законода-
тельство предусматривает возможность
формирования резервного фонда пред-
приятия на покрытие убытков. Для пред-
приятий других организационно-
правовых форм за исключением акцио-
нерных обществ создание резервного
фонда не является обязательным, вопрос
о его формировании и использовании
определяется учредительными докумен-
тами.
Среди резервов, создаваемых в со-
ответствии с учредительными докумен-
тами, учётной политикой выделяются
следующие виды добровольных резерв-
ных фондов:
а)накопления;
б)потребления;
в) социальной сферы.
В фонд накопления входит нерас-
пределенная прибыль, являющаяся ре-
зервом для финансового обеспечения
развития производственной системы
предприятия.
В фонде потребления учитывается
нераспределенная прибыль, направляе-
мая, согласно учредительным докумен-
там или решению учредителей, на осу-
ществление мероприятий по материаль-
ному поощрению работников предприя-
тия и развитию социальной сферы (за ис-
ключением капитальных вложений), а
также прочих подобных мероприятий,
приводящих к приумножению имущества
предприятия.
В фонд социальной сферы входит
нераспределенная прибыль, являющаяся
резервом для финансового обеспечения
развития социальной сферы (капиталь-
ных вложений).
Оценочные резервы (резерв по со-
мнительным долгам, резерв под обесце-
нение финансовых вложений, резерв под
снижение стоимости материальных цен-
ностей) предназначены для уточнения
балансовой оценки отдельных объектов
бухгалтерского учёта.
В целях равномерного включения
расходов в издержки производства и об-
ращения создаются резервы предстоящих
расходов на ремонт основных средств, на
гарантийный ремонт, на оплату отпусков,
на выплату ежегодного вознаграждения
за выслугу лет, на выплату вознагражде-
ний по итогам работы за год, на гаран-
тийное обслуживание и на иные цели.
Резервы по условным фактам хо-
зяйственной деятельности формируются
с целью отразить расход по удовлетворе-
нию обязательства, которое пока не воз-
никло, но может возникнуть с достаточно
высокой степенью вероятности.
Самыми надежными являются соб-
ственные источники финансирования,
поскольку гарантирует стабильное фи-
нансовое состояние. Основным собствен-
ным источником финансирования в лю-
бой коммерческой организации высту-
пают чистая прибыль.
В рамках бюджетного финансиро-
вания распределение средств осуществ-
ляется в соответствии с уровнем приня-
тия решений: на федеральном уровне фи-
нансируются федеральные программы и
объекты, находящиеся в федеральной
собственности; на региональном - регио-
нальные программы и объекты, находя-
щиеся в собственности отдельных кон-
кретных территорий.
Заёмный капитал предприятия -
часть совокупного капитала предприятия,
сформированного за счёт долгосрочных и
(или) краткосрочные финансовых обяза-
тельств, включает денежные средства или
другие имущественные ценности, при-
влекаемые на возвратной основе для фи-
нансирования развития деятельности
предприятия.
В своей финансово-хозяйственной
практике предприятия используют как
банковские кредиты, так и коммерческие
и товарные кредиты (кредиты, получен-
ные от других предприятий).
Кредиторская задолженность как
источник привлечённых средств исполь-
зуется предприятиями и организациями
всех отраслей российской экономики и
включает в себя:
а) переходящую задолженность по
заработной плате;
б) переходящую задолженность по
отчислениям во внебюджетные фонды;
в) задолженность по резервам пред-
стоящих платежей и расходов;
428
г) минимальную задолженность пе-
ред бюджетом по налогам.
Образование данных ресурсов вы-
звано тем, что между моментом поступ-
ления денежных средств, предназначен-
ных для вышеперечисленных выплат, и
фиксированным (либо договором, либо
законом) днём выплаты имеется опреде-
ленное время (временной лаг), в течение
которого указанные средства уже нахо-
дятся в обороте, но не расходуются по
своему назначению.
Образование данных ресурсов вы-
звано тем, что между моментом поступ-
ления денежных средств, предназначен-
ных для вышеперечисленных выплат, и
фиксированным (либо договором, либо
законом) днём выплаты имеется опреде-
ленное время (временной лаг), в течение
которого указанные средства уже нахо-
дятся в обороте, но не расходуются по
своему назначению.
Структура источников финансовых
ресурсов предприятия имеет важное зна-
чение, поскольку показывает соотноше-
ние собственных и заёмных средств в ак-
тиве предприятия. Деятельность пред-
приятия, осуществляемая в большей сте-
пени на внутренние финансы, свидетель-
ствует о его финансовой надёжности и
ликвидности баланса. Напротив, привле-
чение внешних источников финансиро-
вания не всегда может быть оправдан-
ным, поскольку предполагает выплату
процентов за пользование чужими де-
нежными средствами и тем самым не-
оправданно отягощает ликвидный баланс
предприятия.
Таким образом, финансовые ресур-
сы, необходимые промышленным пред-
приятиям для осуществления финансово-
хозяйственной деятельности, могут быть
получены разными способами.
На предприятиях государственной
формы собственности при их создании
используются бюджетные средства. Гос-
ударство является собственником этих
ресурсов, и только оно временно переда-
ёт право владения и распоряжения ими
руководству предприятия, с которым за-
ключается соответствующий контракт.
Государственные предприятия как ис-
точник финансовых ресурсов могут ис-
пользовать банковский кредит, государ-
ственные дотации. Прибыль, полученная
в результате хозяйственной деятельно-
сти, является собственностью государ-
ства и используется в соответствии с дей-
ствующим законодательством.
Предприятие вследствие недостатка
собственных оборотных средств привле-
кает большие объёмы кредитных средств.
В данных условиях основным фактором
привлечения кредитных ресурсов высту-
пает несовпадение во времени процесса
изготовления продукции, выполнения
работ и оказания услуг с оплатой за них.
Как правило, процесс производства отно-
сится к отчётному году, а оплата произ-
водится в следующем году, что преду-
сматривается условиями заключённых
контрактов с государственным заказчи-
ком и необходимостью создания задела
на продукцию с длительным сроком из-
готовления.
Создание унитарных предприятий
сопровождается формированием уставно-
го фонда, привлечением бюджетных ис-
точников финансирования и заёмного ка-
питала.
Размер уставного фонда унитарного
предприятия, образованного за счёт за-
креплённых за ним внеоборотных (ос-
новных) и оборотных активов, отражает-
ся в балансе предприятия на дату утвер-
ждения устава. Уставный фонд унитарно-
го предприятия выполняет те же функ-
ции, что и уставный капитал в других
коммерческих организациях. Дополни-
тельно уставный фонд, будучи основой
осуществления унитарным предприятием
хозяйственной деятельности в матери-
альном плане, выступает индикатором
эффективности его функционирования.
В соответствии с законодатель-
ством собственником государственного
предприятия принимается решение о его
ликвидации в том случае, если по итогам
финансового года показатель стоимости
чистых активов унитарного предприятия
будет меньше минимального размера
уставного фонда, установленного на дату
государственной регистрации этого
предприятия, и в течение трёх месяцев их
429
стоимость не будет доведена до уровня
минимального размера уставного фонда.
Прибыль, формируемая в том же
порядке, что и в других коммерческих
организациях, также является не менее
важным источником формирования фи-
нансовых ресурсов унитарного предприя-
тия. Однако Бюджетный кодекс РФ отно-
сит прибыль унитарных предприятий к
неналоговым доходам бюджета. Ежегод-
но государственные унитарные предпри-
ятия обязаны перечислять в государ-
ственный бюджет часть прибыли, кото-
рая остается после уплаты налогов и
иных обязательных платежей у предпри-
ятия. Сроки, размеры и порядок перечис-
ления обязательных сумм определяет
Правительство Российской Федерации.
В унитарном предприятии процесс
распределения прибыли прописан в его
уставе, в соответствии с которым при-
быль после уплаты налогов и иных обя-
зательных платежей отчисляется в фонд
социальных мероприятий, фонд матери-
ального поощрения и иные стимулирую-
щие фонды.
Собственник унитарного предприя-
тия вправе принять решение об увеличе-
нии уставного фонда за счёт чистой при-
были, оставшейся в распоряжении пред-
приятия.
Отличительной чертой, характери-
зующей финансы унитарных предприя-
тий, является возможность использова-
ния ими целевых бюджетных средств в
качестве источников финансирования.
Ассигнования из бюджетов различных
уровней (федерального, регионального,
местного) предоставляются для целей
осуществления отдельных программ и
мероприятий социального характера и
имеют формы субсидий, субвенций, до-
таций.
Субсидии - это средства бюджета
того или иного уровня, которые выдают-
ся для реализации различных проектов и
программ, а также для развития и осу-
ществления уставной деятельности и
предоставляемые на условиях долевого
финансирования расходов.
Субвенции - это средства бюджета
того или иного уровня, имеющие безвоз-
мездный характер. Грант является разно-
видностью субвенций, имеет денежную
или материальную вещественную форму,
т.е. предоставляется в виде имущества на
праве собственности или в пользование.
Дотации представляют собой сред-
ства, полученные государственным уни-
тарным предприятием либо от государ-
ственного органа, либо от органа местно-
го самоуправления для покрытия убыт-
ков предприятия. Дотационные средства
не входят в налогооблагаемую базу и вы-
ступают в качестве одной из форм госу-
дарственной помощи, выделяемой из
бюджета для финансирования текущих
расходов и капитальных вложений пред-
приятия.
Унитарные предприятия имеют
особенности, связанные с привлечением
заёмных средств. Использование в каче-
стве источников финансовых ресурсов
заёмных средств представляется доста-
точно проблематичным для унитарного
предприятия, поскольку оно не является
собственником имущества, имеющегося
у него для ведения хозяйственной дея-
тельности. Без согласия собственника
имущества унитарного предприятия не-
возможно в качестве залога предоставить
недвижимое имущество кредитной орга-
низации для обеспечения займа. Поэтому
унитарное предприятие находится в не-
равных условиях с другими участниками
делового оборота ввиду особенностей
организационно-правовой формы и
вследствие ограниченности источников
финансовых ресурсов.
Принимая во внимание обстоятель-
ства, указанные выше, а также в соответ-
ствии со ст. 6 Бюджетного кодекса РФ
собственник унитарного предприятия,
которое испытывает дефицит финансо-
вых ресурсов, может предоставить ему в
пользование бюджетные кредиты на
условиях возвратности и платности.
Проценты по бюджетному кредиту
относятся на себестоимость. А проценты
по кредитам, используемым на конверси-
онные мероприятия и инвестиции, в со-
ответствии с Положением по бухгалтер-
скому учету 6/01 «Учёт основных
средств» идут на увеличение балансовой
430
стоимости инвестиций. Основанием для
предоставления бюджетного кредита яв-
ляется также поставка товаров, работ,
услуг для нужд собственника унитарного
предприятия. Здесь собственник унитар-
ного предприятия выступает одновре-
менно в двух качествах: заказчика и кре-
дитора.
Такого рода предприятия, как пра-
вило, не нацелены на коммерческий ин-
терес, а в основном решают стратегиче-
ские, политические, социальные задачи
государства, прибыль, получаемая после
продажи изделия, составляет небольшую
величину. В этой связи финансирование
затрат заёмными средствами имеет риск
образования дебиторской задолженности
у предприятия.
Основной частью собственного ка-
питала и основным источником соб-
ственных финансовых ресурсов унитар-
ного предприятия является уставный
фонд, формируемый собственником и
представляющий собой минимальный
размер его имущества, гарантирующего
интересы кредиторов. За счёт средств
уставного фонда финансируется приоб-
ретение основных средств и оборотных
активов предприятий, которые переходят
в затраты соответственно через аморти-
зационные отчисления и материальные
затраты.
Уставный фонд унитарного пред-
приятия может быть увеличен по реше-
нию собственника посредством передачи
им дополнительного имущества, либо за
счёт прибыли, заработанной предприяти-
ем в процессе финансово-хозяйственной
деятельности.
Собственным источником средств
является также добавочный капитал,
складывающийся из прироста стоимости
имущества по переоценке, однако на
данный момент переоценка стоимости
основных средств не предусмотрена, но
поскольку ранее она существовала, по
тем объектам, по которым ранее перево-
дилась переоценка, она продолжает про-
водиться.
В ст. 16 Федерального закона «О
государственных и муниципальных уни-
тарных предприятиях» сказано о том, что
у унитарного предприятия резервный
фонд на покрытие убытков образуется за
счёт чистой прибыли, а его размеры и
порядок создания прописаны в уставе
унитарного предприятия.
Прибыль - это важный источник
осуществления затрат, основой получе-
ния которого в ходе коммерческой дея-
тельности является государственная соб-
ственность, принадлежащая предприятию
РКП на праве хозяйственного ведения.
В соответствии со сложившейся
коммерческой практикой использования
прибыли хозяйствующего субъекта она
может быть полностью или частично пе-
редана в соответствующий бюджет или в
полном объёме остаться в распоряжении
предприятия. Передача части прибыли
унитарных предприятий в бюджет в Рос-
сии производится путем обложения до-
ходов, уменьшенных на величину расхо-
дов, налогом на прибыль и установления
нормативными законодательными актами
размера обязательных ежегодных отчис-
лений с величины прибыли в соответ-
ствующий бюджет.
Таким образом, прибыль унитарно-
го предприятия делится на три части:
а) на прибыль, распределяемую в
бюджет через обложение её налогами и
платежами, предусмотренными законо-
дательством;
б) на прибыль, направляемую соб-
ственнику имущества унитарного пред-
приятия в бюджет;
в) на прибыль, которая остаётся у
предприятия.
Основной объём прибыли получа-
ется за счёт основной деятельности - раз-
работки и изготовления РКТ.
Размер прибыли, перечисляемой в
федеральный бюджет, рассчитывается
как разница между чистой прибылью
предприятия, полученной за прошедший
год, и утвержденной программой дея-
тельности унитарного предприятия на
будущий год суммой расходов, направля-
емых на реализацию мероприятия по раз-
витию предприятия.
Если утвержденная программа дея-
тельности предприятия отсутствует, то
размер прибыли, перечисляемой в феде-
431
ральный бюджет, рассчитывается как
разница между чистой прибылью пред-
приятия, полученной за прошедший год,
и суммой обязательных отчислений в
фонды предприятий, образованные в со-
ответствии с уставом.
Предприятие располагает также
средствами целевого финансирования
(государственной поддержки) в виде гос-
ударственной помощи, полученными из
бюджетов различных уровней (федераль-
ного, регионального, местного), а также
из внебюджетных целевых фондов на
безвозмездной основе по договорам на
поставку товаров, работ и услуг.
Главным образом, унитарное пред-
приятие, находясь в федеральной госу-
дарственной собственности, является по-
лучателем финансирования из федераль-
ного бюджета.
Указанные средства используются
только в рамках задач, для реализации
которых были получены, поступают че-
рез открытый счёт казначейства при
наличии бюджетной росписи и уведом-
ления о бюджетных ассигнованиях.
Ресурсы в виде уставного фонда,
целевого финансирования, прибыли, ис-
пользуемые на бессрочной и бесплатной
основе, с юридической точки зрения не
являются собственными для предприя-
тия, но способ их формирования и ис-
пользования даёт возможность отнести
их к собственным средствам.
Таким образом, уставный фонд и
собственные финансовые ресурсы, кото-
рые возникают в процессе хозяйственной
деятельности предприятия (добавочный,
резервный капитал, прибыль, целевое
финансирование), образуют его соб-
ственный капитал, за счёт которого по-
крываются как текущие, так и капиталь-
ные затраты.
У предприятия, которое выпускает
продукцию с высокими затратами на её
производство и низким уровнем доход-
ности, нет возможности финансировать
все расходы за счёт собственных источ-
ников средств, что обусловливает необ-
ходимость использования дополнитель-
ных финансовых ресурсов, формируемых
за счёт привлечённых и заёмных средств.
Заёмные финансовые ресурсы пред-
ставлены кредитами банка долго- и крат-
косрочного характера, а также иными
финансовыми обязательствами, которые
связаны с размещением облигаций и вы-
дачей векселей, а также с лизинговым
финансированием.
Основным фактором привлечения
кредитных ресурсов банков является по-
требность в оборотных средствах для
финансирования процесса изготовления
продукции, выполнения работ и оказания
услуг в отчетном году с оплатой их в мо-
мент реализации в следующем году, что
предусматривается условиями заключен-
ных государственных контрактов с госза-
казчиками и необходимостью создания
задела для производства изделий с дли-
тельным сроком изготовления.
Основными целями привлечения
кредитных средств выступают пополне-
ние оборотных средств, выплата заработ-
ной платы, покупка финансовых вложе-
ний, покупка основных средств или ма-
териально-производственных запасов.
Таким образом, при достаточном
объёме финансовых ресурсов, их рацио-
нальном использовании предприятие мо-
жет рассчитывать на стабильное финан-
совое положение, характеризующееся его
хорошей платежеспособностью, финан-
совой устойчивостью и высокой ликвид-
ностью, поэтому перед предприятием
стоит задача максимизации доли соб-
ственных финансовых ресурсов, увели-
чения эффективности их использования
для укрепления финансового состояния
субъекта хозяйствования в целом.
В связи с принятием Правитель-
ством РФ Концепции управления госу-
дарственным имуществом и приватиза-
ции в РФ, а также Федерального закона
«О приватизации государственного и му-
ниципального имущества» имеет место
акционирование федеральных унитарных
унитарных предприятий с сохранением
100 % акций в государственной соб-
ственности. В данном случае применяет-
ся такой способ приватизации государ-
ственного имущества, как преобразова-
ние унитарного предприятия в акционер-
ное общество.
432
При этом особенностями финансо-
вых ресурсов акционерного общества яв-
ляется следующие.
Законом установлен минимальный
размеры уставного капитала для акцио-
нерных обществ.
Размер уставного капитала акцио-
нерного общества, создаваемого посред-
ством приватизации имущественного
комплекса унитарного предприятия,
определяется с учетом следующих пра-
вил (п. п. 19, 20 Письма Минимущества
России от 06.06.2002 N АБ-2/10099):
- если БА >= 100 000 руб. (мини-
мальный размер уставного капитала для
АО), то приватизация имущественного
комплекса унитарного предприятия про-
водится посредством его преобразования
в АО с размером уставного капитала,
равным балансовой стоимости активов.
Кроме этого, определяются количество и
номинальная стоимость именных обык-
новенных бездокументарных акций, со-
ставляющих уставный капитал создавае-
мого АО. Номинальная стоимость акции,
как правило, принимается равной 10 или
100 руб.;
- если БА < 100 000 руб., то преоб-
разование предприятия в АО в принципе
невозможно, так как общество с разме-
ром уставного капитала ниже установ-
ленного минимального предела не реги-
стрируется.
При кредитовании (принятии обес-
печения) предприятий, находящихся в
федеральной собственности, следует учи-
тывать требования Федерального закона
от 30.11.2001 № 178-ФЗ «О приватизации
государственного и муниципального
имущества». В соответствии с указанным
Законом при кредитовании (принятии
имущества) предприятий, находящихся в
государственной и муниципальной соб-
ственности, недопустимы выдача креди-
тов указанным предприятиям и принятие
от них обеспечение кредитов имущества
при отсутствии соответствующего согла-
сия собственника.
При заключении договоров залога
имущества, находящегося в государ-
ственной собственности, необходимо
учитывать также положения Постановле-
ния Правительства РФ от 03.07.1998 №
696 «Об организации учета федерального
имущества и ведения реестра федераль-
ного имущества». Согласно п. 13 указан-
ного Постановления федеральное имуще-
ство, не внесенное в реестр, если оно яв-
ляется объектом учета реестра, не может
быть отчуждено или обременено. Таким
образом, такое имущество не может вы-
ступать предметом залога.
Таким образом, можно сделать вы-
вод, что акционерное общество обладает
преимуществом перед федеральным уни-
тарным предприятием, поскольку распо-
лагает наибольшим спектром доступных
источников финансирования своей дея-
тельности.
Библиографический список:
1. Грибов, В.Д. Экономика орга-
низации (предприятия) [Текст]: учебник /
В.Д. Грибов, В.П. Грузинов, В.А. Кузь-
менко. - 6-е изд., перераб. - М.: КНО-
РУС, 2012.-416 с.
2. Денисова, М.О. Преобразование
унитарного предприятия. Заключитель-
ная и вступительная отчетность [Текст] //
Жилищно-коммунальное хозяйство: бух-
галтерский учет и налогообложение. -
2008.-№ 11.
3. Денисова, М.О. Приватизация:
вчера, сегодня, завтра [Текст] // Жилищ-
но-коммунальное хозяйство: бухгалтер-
ский учет и налогообложение. - 2006. -
№8.
4. Косорукова, И.В. Оценка стои-
мости ценных бумаг и бизнеса [Текст] :
учебное пособие / С.А. Секачев, М.А.
Шуклина под ред. И.В. Косоруковой. -
М.: Московская финансово-
промышленная академия, 2011. - 672 с.
5. Михеева, Н. Государство как
акционер [Текст] / Н. Михеева // ЭЖ-
Юрист. - 2004. - № 44.
6. Новашина, Т.С. Экономика и
финансы предприятия [Текст] : учебник /
В.И. Карпунин, В.А. Леднев под ред. Т.С.
Новашиной. - 2-е изд., перераб. и доп. -
М. : Московский финансово-
промышленный университет «Синергия»,
2014.-352 с.
433
7. О государственных и муници-
пальных унитарных предприятиях
[Текст] : федер. закон от 14.11.2002 №
161-ФЗ : [ред. от 04 ноя. 2014] // Россий-
ская газета. - 2002. - № 229.
8. Об акционерных обществах
[Текст] : федер. закон от 26.12.1995 №
208-ФЗ : [ред. от 29 июн. 2015] // Россий-
ская газета. - 1995. - № 248.
9. Рогуленко, Т.М. Учет капитала
организации [Текст] // Бухучет в строи-
тельных организациях. - 2012. - № 5. - С.
16-21.
10. Самсонова, А.Е. Правовые ос-
новы кредитования юридических лиц
[Текст] // Юридическая работа в кредит-
ной организации. - 2008. - № 3.
References:
1. Gribov, V.D. Ekonomika of the
organisation (enterprise) [Text]: the text-
book / V.D. Gribov, V.P. Gruzinov,
V.A. Kuzmenko. - 6 edition, reprocessed
and added. - M : KNORUS, 2012. - 416 P.
2. Denisov, M.O. Transformation of
the unitary enterprise. The final and intro-
ductory reporting [Text] // Housing and
communal services: accounting and the
taxation. - 2008. - № 11.
3. Denisov, M.O. Privatization: yes-
terday, today, tomorrow [Text] // Housing
and communal services: accounting and the
taxation. - 2006. - № 8.
4. Kosorukova, LV. Estimation of
securities and business [Text]: the manual /
S.A. Sekachev, M.A. Shuklina under the
editorship of I.V. Kosorukovoj. - M: The
Moscow Financial and Industrial Academy,
2011.-672 P.
5. Mikheyev, N. Goverment is as the
shareholder [Text] / N. Mikheyev // the
EZH-LAWYER. - 2004. - № 44.
6. Novashina, T.S. Economy and the
finance of the enterprises [Text]: the text-
book / V.I. Karpunin, V.A. Lednev under
the editorship of T.S. Novashinoj. - 2 edi-
tion, reprocessed and added. - M: The Mos-
cow financial and industrial university
«Synergy», 2014.-352 P.
7. About the state and municipal uni-
tary enterprises [Text]: federal law from
14.11.2002 № 161-FZ: [edition from 04
nov. 2014] // The Russian Newspaper. -
2002.-№229.
8. About joint-stock companies
[Text]: federal law from 26.12.1995 № 208-
FZ : [edition from 29 jun. 2015] // The Rus-
sian Newspaper. - 1995. - № 248.
9. Rogulenko, T.M. Account of the
capital the organisations [Text] // Account-
ing in the building organisations. - 2012. -
№5.-p. 16-21.
10. Samsonov, A.E. Legal of a basis
of crediting legal bodies [Text] // Legal
work in the credit organisation. - 2008. -
№3.
ROCKET SPACE PRODUCTION ENTERPRISES FINANCIAL RESOURCES IN
CONDITIONS OF ORGANISATIONAL LAW FORM CHANGE
© 2015 LV. Zinoveva
JSC «SRC «Progress», Samara
The federal state unitary enterprise and federal property shares stock-company financial resources are con-
sidered in the article.
Financial resources, the federal state unitary enterprise, federal property shares stock-company, rocket
space production enterprise
Информация об авторах:
Зиновьева Ирина Владимировна, экономист 1 категории, Акционерное общество
«Ракетно-космический центр «Прогресс», e-mail: iren429@yandex.ru; область научных ин-
тересов: оптимизация затрат, формирование себестоимости, планирование.
434
Zinoveva Irina Vladimirovna, first category economist, Samara Space Center, e-mail:
iren429@yandex.ru; science interest’s area: costs optimization, cost price forming, planning.
435
УДК 331:629.78
МОДЕЛИ МОТИВАЦИИ И СТИМУЛИРОВАНИЯ РАБОТНИКОВ ПРЕДПРИЯТИЯ
ПО ПРОИЗВОДСТВУ РКТ
©2015 Д.А. Щелоков
АО «РКЦ «Прогресс», г. Самара
Рассмотрена проблема мотивации персонала, предложены модели принятия решений центром и ра-
ботником в задаче стимулирования.
Ключевые слова: центр, агент, мотивация, уровень квалификации
Эффективная деятельность пред-
приятия требует квалифицированных со-
трудников и поэтому одним из важней-
ших аспектов развития предприятия яв-
ляется развитие персонала. В этой связи
рассмотрим проблему мотивации сотруд-
ников как одного из действенного управ-
ляющего параметра персонала.
Рассмотрим задачу стимулирова-
ния. Для этого предположим, что целевая
функция управляющего органа (центра)
представляет собой разность между до-
ходом Н(у), зависящим от действий аген-
та у е Y и величины стимулирования
6(У):
Ф(6(у), у) = Н(у) - 6(у) ->• max6(y) (1)
Целевая функция агента ровна раз-
ности между величиной стимулирования,
получаемой от центра, и затратами агента
С(у):
f(6(y),y) = 6(у) - С(у)-> таху (2)
Оптимальным решением задачи (1)
является следующая система стимулиро-
вания:
6(х,у) = fC(x)"C(y),y (3)
7 ( 0 у Ф х v
где х - плановое задание, определя-
емое с позиции интересов центра
Н(у) - С(у) -> maXy.
С точки зрения развития персонала
цель стимулирования и мотивации за-
ключается в побуждении агентов к разви-
тию. Поэтому рассмотрим модель моти-
вации, которая отражает характеристику
агента, влияющею на эффективность его
действий. Обозначим г Е R уровень ква-
лификации агента и предположим, что от
него зависят затраты, то есть если
С=С(у,г). Будем считать, что с повыше-
нием квалификации, затраты уменьша-
ются, или повышается качество выпуска-
емой продукции. В соответствии с (3) за-
траты С(х,г) зависят как от планового за-
дания, так и от уровня квалификации.
В работе показано, что традицион-
ная система стимулирования, направлен-
ная на компенсацию затрат агента, не по-
буждает агента к развитию. Получены
условия, при выполнении которых, раз-
витие агента, выгодное центру, оказыва-
ется выгодным и для агента.
Отметим также, что полученная за-
висимость целевых функций центра и
агента от уровня квалификации, позволя-
ет ставить и решать задачи управления
обучением, которое заключается в пред-
ставлении возможности агенту повышать
свою квалификацию. Однако обучение
требует и ресурсов, и времени, которые
следует учитывать в модели мотивации.
Библиографический список:
1. Гришанов Д.Г., Гришанов Г.М.,
Кирилина С.А., Щелоков Д.А., Внутри-
фирменные механизмы бюджетного
управления крупным промышленным
комплексом по производству ресурсоем-
ких изделий: монография - Самара,
2009.- 180 с.
References:
1. Grishanov D.G., Grishanov G.M,
Kirilina S.A., D.A. Schelokov D.A. Intra
firm mechanisms of the budgetary manage-
ment of a large industrial complex on pro-
duction of resource-intensive products:
monograph - Samara, 2009. - 180 pages.
436
MODEL OF MOTIVATION AND INCENTIVE MANUFACTURING
ENTERPRISE CT
©2015 D.A. Schelokov
JSC «SRC «Progress», Samara
The problem of motivation of staff, offered a model of decision-making center and an employee in the prob-
lem of incentives.
Keywords: center, agent motivation, skill level
Информация об авторах:
Щелоков Дмитрий Александрович, кандидат экономических наук, доцент,
начальник отдела подготовки кадров АО «РКЦ «Прогресс».
Dmitry A. Schelokov, Candidate of Economics, Associate Professor, Head of Personnel
Training Department in JSC «SRC «Progress».
437
УДК 658:629.78
ОРГАНИЗАЦИЯ ВЗАИМОДЕЙСТВИЯ В ПРОИЗВОДСТВЕННОЙ СИСТЕМЕ
ПРИ КОМПЛЕКТНОМ ВЫПУСКЕ ПРОДУКЦИИ РКТ
©2015 К.А.Пекина1, М.Г. Сорокина2
'АО «РКЦ «Прогресс», г. Самара
2Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Исследован процесс синхронизации материальных потоков между цехами в производственной систе-
ме в решении задачи комплектной поставки.
Ключевые слова: цех-поставщик, цех-потребитель, механизм взаимодействия, применяемость, ком-
плектность
Эффективность функционирования
предприятия, выпускающего сложные,
наукоемкие изделия и состоящего из со-
вокупности технологических взаимосвя-
занных производственных, научных, кон-
структорских подразделений, во многом
определяется механизмом внутрифир-
менного взаимодействия. Это объясняет-
ся тем, что конечные результаты произ-
водственной системы зависят от четкого
взаимодействия между всеми структур-
ными подразделениями предприятия.
Всякое нарушение в согласованной рабо-
те, например, относительно качества,
сроков, номенклатуры, ритмичности,
комплектности между производственны-
ми цехами, участками, приводит к увели-
чению затрат ресурсов и снижению эф-
фективности в производственной системе.
В изменяющихся рыночных условиях
механизм управления должен обеспечи-
вать не только высокий уровень качества
техники, материалов, но и качественно
новый уровень производственных взаи-
модействий.
Проблема согласованной работы в
производственной системе сводится, та-
ким образом, к проблеме синхронизации
материальных и информационных пото-
ков между всеми его субъектами, которая,
в свою очередь, выступает как задача ор-
ганизации механизма формирования и
реализации внутрифирменных стратегий
управления, ориентированных на реали-
зацию заказа по объему выпуска, ценам
выпускаемой продукции.
Исследуем процесс синхронизации
материальных потоков между цехом-
потребителем и цехом-поставщиком в
решении задачи комплектной поставки
по всей технологической цепочке. Нару-
шение ритмичности, комплектности в
такой производственной системе могут
возникать потому, сто цех-потребитель, с
позиции своего критерии предъявляет
одни требования к ассортименту, объе-
мам поставки деталей и узлов, а цех-цех-
поставщик с позиции уже своего крите-
рия, учитывая технологические особен-
ности производства, имеет другое пред-
ставление о выгодном для себя ассорти-
менте и объемах выпуска комплектую-
щих.
Будем считать, что механизм взаи-
модействия в производственной системе
обеспечивает сбалансированность мате-
риальных потоков, если каждое струк-
турное подразделение, действуя в
направлении реализации заказа по объе-
мам, номенклатуре, срокам, реализует
одновременно плановое задание всей
производственной системы.
Определим требования, предъявля-
емые к механизму взаимодействия в ре-
шении задачи выпуска деталей, узлов в
заданном планом количестве. Предполо-
жим, что цех-поставщик стремится мак-
симизировать прибыль, остающуюся в
его распоряжении, при выпуске “п” видов
деталей или узлов, определяемую урав-
нением
438
fityi) = £j(U,ji - тя)ул - cb
(1)
„ ц
где Ц77 = — tji - плановая цена выпуска j-
й детали l-м цехом; тпд - переменные за-
траты, связанные с выпуском единицыу-й
детали l-м цеха; сг - постоянные затраты;
yi - фактический выпуск деталей у-й де-
тали l-м цехом в плановом периоде про-
должительностью Г; Tj = tji ~ трудо-
емкость изготовления у-й детали по всем
цехам; tjt - трудоемкость изготовления j-
й детали в l-м цехе; Ц - цена конечного
изделия.
Рассмотрим функционирование
производственной системы, в которой
взаимодействуют два цеха, один из кото-
рых является цехом-поставщиком, вы-
пускающий “п” видов деталей, узлов и
один цех-потребитель, осуществляющих
сборку и выпуск одного сборочного узла
или изделия.
Пусть ajj = 1,п - производитель-
ность по выпуску у-й детали в единицу
времени. Тогда задача выбора цехом-
поставщиком объема выпуска деталей
каждого наименова-
ния обеспечивающего максимум его це-
левой функции, имеет вид
/(у) = Sy=i (Цу - mj) max
Vn — т1
а;'
(2)
Пусть для обеспечения ритмичной
работы производственного комплекса,
выпускающего конечное изделие, задает-
ся цеху-поставщику плановое задание по
поставкам каждой детали в объеме
Xj,j = 1,п за период времени, равный Т.
В этом случае стратегия выбора це
хом-поставщиком значений объемов по
ставок продукции при условии выполне
ния планового задания описывается еле
дующей моделью:
/(У) = Х"=1(Ц/ “ га,) yj-c = Ху=1 dj yj
'Lrj=1^ = T,yj =xjJ = U
(3)
Цех-поставщик, поставленный в турного задания, определяет следующую
условия точного выполнения номенкла- стратегию по выпуску продукции:
У] = xj,j = 1,71. (4)
Определим значение целевой ное решение (2) в целевую функцию (1),
функции цех-поставщика при стратегиях получим
(3) и (4). Для этого, подставив оптималь-
/”(У) = <(ЛТ-С = Е7_Л^-С. (5)
aj
Подставляя (3.5) в (1) получим следующее значение целевой функции цех-
поставщика
/О) = S”=i djXj - с. (6)
Сравним величины операционного вычитая/(%) из/°(у), определим вели-
дохода (5) и (6) между собой. Для этого, чину разности
Д/(х) = /“(у) - Дх) = =
/ ' \ (7)
= E7=I V
\uj /
Если Д/(х) > 0, то это означает ,
что в системе имеет место противоречие,
поскольку цех-поставщик , реализуя пла-
новое задание и обеспечивая тем самым
ритмичность и эффективность работы
производственного комплекса в целом,
439
несет потери , так как его операционный вого задания цех-поставщика является
доход за период Т уменьшается на вели- выполнение следующего неравенства:
чину Условием реализации плано-
/(х) > /°(у). (8)
Реализовать практически условие
(8) можно или выбором функции стиму-
лирования цеха-поставщика, или выбо-
ром параметров, например цен на про-
дукцию, от которых зависит величина
операционного дохода. Выполнение
условия (8) осуществим изменением цен
Цу,7 = 1,п . В этом случае для цеха-
поставщика следует иметь две цены. Бо-
лее высокая цена используется для опре-
деления дохода в случае выполнения
планового задания по всей номенклатуре.
При невыполнении плана, хотя бы по
одному виду продукции, доход опреде-
ляется по более низким ценам.
Реализация неравенства (8) позво-
ляет цеху-поставщику получить допол-
нительный эффект не меньший потерь
Д/(х), что создает экономическую заин-
тересованность цех-поставщика в вы-
полнении планового задания. Но при
этом решается проблема настройки ин-
тересов только одного цех-поставщика
на интересы всей производственной си-
стемы и не учитываются интересы цеха-
потребителя.
Производственный комплекс мо-
жет не иметь финансовой возможности в
реализации условия (8), так как величи-
на общего эффекта, получаемого в си-
стеме от согласованного взаимодействия,
может быть меньше величины дополни-
тельного эффекта, направляемого для
стимулирования цех-поставщика при ре-
ализации условия (8). Поэтому опреде-
лим верхнюю границу изменения цен,
при которых выгодно “выгодно” делить-
ся с цехом-поставщиком частью своего
эффекта, получаемого от согласованного
взаимодействия. Для этого рассмотрим
следующую модель процедуры планиро-
вания выпуска продукции и комплекту-
ющих:
F(x) =
(Цо ~ ™о) miny - Xy=i
уп *7 _ т
LJ=1а<~
ЦуХу — с0 -> max
(9)
где Цо - рыночная цена готовой продук-
ции, т0 - переменные затраты цеха-
потребителя на единицу готовой продук-
ции, Ху - плановое задание по выпуску
детали j-го наименования, bj - применяе-
мость j-й детали в готовом изделии, со -
постоянные затраты.
Оптимальное плановое задание це-
ха-потребителя, получаемое в результате
решения модели (9), равно
xf = bj-^J = 1,п.
Li=^aj
(10)
В этом уравнении величина Ey=i^
представляет собой затраты времени на
выпуск цехом-поставщиком одного ком-
т
плекта, а отношение----характеризует
уП J
количество готовой продукции (комплек-
тов), которое может выпустить цех-
потребитель.
Таким образом, цех-потребитель,
выбирая величины изменения, создает
такие условия в которых цех-поставщик
экономически заинтересован в комплект-
ной поставке своей продукции, а цеху-
потребителю “выгодно” стимулировать
цеха-поставщика за комплектный выпуск
продукции путем установления более вы-
соких цен. Существование диапазонов
изменения цен выступает как требование
к механизму управления, реализовать ко-
торое можно, изменяя параметры моде-
лей принятия решений цехом-
поставщиком (2) на этапе реализации
плановых заданий и модели принятий
440
решений цеха-потребителя на этапе пла-
нирования выпуска продукции цехом-
поставщиком.
Библиографический список:
1 Гришанов Д.Г., Гришанов Г.М.,
Кирилина С.А., Щелоков Д.А., Внутри-
фирменные механизмы бюджетного
управления крупным промышленным
комплексом по производству ресурсоем-
ких изделий: монография - Самара,
2009.- 180 с.
References:
1 Grishanov D.G., Grishanov G.M,
Kirilina S.A., D.A. Schelokov D.A. Intra
firm mechanisms of the budgetary manage-
ment of a large industrial complex on pro-
duction of resource-intensive products:
monograph - Samara, 2009. - 180 pages.
ORGANIZATION OF INTERACTION IN PRODUCTION SYSTEM WITH
COMPLETE IN OUTPUT CT
K.A.Pekina1, M.G. Sorokina2
'JSC «SRC «Progress», Samara
2Samara State Aerospace University, Samara
The process of synchronization of material flows between shops in the pro-duction system in the task of
complete delivery.
Keywords: shop, supplier, shop-consumer interaction mechanism, applicability, completeness
Информация об авторах:
Пекина Ксения Александровна, начальник бюро АО «РКЦ «Прогресс» аспирант
кафедры физики, СГАУ, 443 086, Россия, г. Самара, Московское ш. 34.
Kseniya A. Pekina, Head of Bureau in JSC «SRC «Progress», Postgraduate student of
Physics Department in SSAU, 34 ul. Moskovskoe sh., Samara, Russia, 443 086.
Сорокина Марина Геннадьевна, доктор экономических наук, профессор ФГАОУ
ВО «Самарский Государственный аэрокосмический университет имени академика
С.П. Королева» (Национальный исследовательский университет).
Marina G. Sorokina, Doctor of Economics, Professor in Samara State Aerospace Univer-
sity.
441
УДК 339.13
ПЕРСПЕКТИВЫ РАЗВИТИЯ СРЕДСТВ ВЫВЕДЕНИЯ СВЕРХЛЕГКОГО КЛАССА
©2015 Е.В. Кирилина
АО «РКЦ «Прогресс», г. Самара
Приведены тенденции развития мирового космического рынка в части создания средств выведения
сверхлёгкого класса и оказания пусковых услуг, анализ текущего состояния и прогноз развития мирового
рынка малых космических аппаратов, анализ экономической целесообразности создания ракеты-носителя
сверхлёгкого класса; рассмотрены существующие и перспективные ракеты-носители сверхлёгкого класса и
их основные характеристики.
Ключевые слова: мировой космический рынок, средства выведения, малый космический аппарат,
тенденции развития, экономическая целесообразность
В последнее десятилетие на миро-
вом космическом рынке наблюдается
резкое увеличение числа запусков малых
космических аппаратов (МКА).
За рубежом под МКА подразумева-
ется аппарат, масса которого позволяет
выводить его на орбиту с помощью по-
путного выведения с основной полезной
нагрузкой (ПН); кластерным запуском на
ракетах-носителях (PH) среднего и лёгко-
го классов; целевым запуском как един-
ственной ПН на PH сверхлёгкого класса,
а также с борта МКС. Обычно к ним от-
носят КА, масса, которых не превышает
500 кг.
Рассмотрим перспективы развития
PH сверхлёгкого класса в качестве сред-
ства выведения МКА.
В настоящее время основными
предпосылками к развитию мирового
космического рынка средств выведения
сверхлёгкого класса являются:
- уменьшение массы космических
аппаратов и быстрое развитие мирового
рынка МКА;
- формирование многоспутниковых
орбитальных группировок на базе МКА;
- предоставление компаниям - за-
казчикам возможности запуска МКА по
запросу;
- максимальное упрощение назем-
ных служб (автономная навигация, циф-
ровые системы управления, уменьшение
численности стартовых расчетов);
- необходимость уменьшения стои-
мости PH сверхлёгкого класса и, как
следствие, снижение удельной стоимости
выведения полезной нагрузки на орбиту;
- прогнозируемый рост мирового
рынка МКА - в натуральном выражении
к 2020 году будут запускаться до 200
аппаратов ежегодно.
В свою очередь, ключевыми факто-
рами, благотворно влияющими на разви-
тие рынка МКА, являются:
- активное развитие технологий,
микроэлектроники, создание новых мате-
риалов, программного обеспечения и т.д.;
- активное привлечение венчурных
инвестиций в отрасль (Skybox, PlanetLabs
и др.);
- появление и развитие концепции
коммерческой электроники, что позволя-
ет снижать стоимость МКА;
- увеличение предложения СВ МКА
- в частности, лёгких PH, сверхлёгких,
авиатехники;
- рост количества крупных про-
грамм с участием МКА (QB50 (ЕС),
SeeMe (DARPA, США), Colony 1 и II
(NRO, США);
- увеличение рынка космических
услуг более чем в 2 раза.
Основным барьером для увеличения
количества запускаемых МКА ежегодно
является угроза значительного
увеличения космического мусора. Вторая
проблема МКА - низкий срок активного
существования, который, с одной
стороны, способствует увеличению
частоты запуков КА, но, с другой
стороны, снижает эксплуатационные
442
характеристики аппарата и ограничивает
количество заказчиков.
По мнению некоторых экспертов
создание PH сверхлёгкого класса
является экономически нецелесообразно
по следующим причинам:
стоимость запуска PH
сверхлёгкого класса существенно ниже
запуска тяжёлой, но удельная стоимость
1 кг выводимой полезной нагрузки с
уменьшением общей грузоподъемности
PH возрастает. Таким образом, выгоднее
запускать МКА традиционным попутным
запуском на существующих PH лёгкого и
среднего классов, чем на PH
сверхлёгкого класса;
- более тяжёлая PH имеет большую
массовую эффективность по сравнению с
более лёгкой, т.е. на выведение 1 кг ПН
на орбиту с использованием более лёгкой
ракеты затрачивается больше
материалов, топлива, энергии и т.д.
В свою очередь, сторонники PH
сверхлёгкого класса приводят следующие
аргументы в пользу использования PH
СЛК:
- коммерческая цена попутного
запуска определяется конкретным
поставщиком пусковых услуг и может
достигать нескольких десятков тысяч
долл, за 1 кг и быть необоснованно
завышеной;
- предоставление пусковой услуги
заказчику «по требованию»;
нет необходимости
подстраиваться под параметры орбиты
«основной» миссии;
- не нужно выполнять жесткие
требования , предъявляемые со стороны
основной ПН, с целью ненанесения ей
вреда.
Следует отметить, что наиболее
востребованы PH сверхлёгкого класса
для запуска тех МКА, которые в силу
своей специфики требуют экзотических
орбит выведения со вполне
определенными параметрами, либо для
запуска КА решающих специфические
оборонные задачи, требующих
оперативного запуска.
Библиографический список:
1. Прокопьев В.Ю., Кусь О.Н.,
Оссовский А.В., Малые космические
аппараты стандарта Cubesat. Современ-
ные средства выведения. - Новосибирск:
Вестник науки Сибири, №2 (12), 2014. -
71-80 с.
2. Соболев И., Всегда ли нам надо
«нано»? - URL: http://
sk.ru/news/b/articles/archive/2015/05/01/vse
gda-li-nam-nado-nano_3 fOO.aspx. (дата
обращения: 16.06.2015г.).
3. Новости космонавти-
ки/Новостная лента. - URL: http://novosti-
kosmonavtiki.ru/news. (дата обращения:
17.06.2015г.).
References:
1. Prokopyev V.Ju., Kus O.N.,
Ossovskij A.V., Small space vehicles of
standard Cubesat. Modem means of the as-
cent. - Novosibirsk: the Bulletin of a science
of Siberia, №2 (12), 2014. - 71-80 with.
2. Sobolev И, whether Always it is
necessary to us «нано»? - URL: http://
sk.ru/news/b/articles/archive/2015/05/01/vse
gda-li-nam-nado-nano_3f00_.aspx. (Refer-
ence date: 16.06.2015r.).
3. Astronautics/news line News. -
URL: http://novosti-kosmonavtiki.ru/news.
(Reference date: 17.06.2015r.).
443
PROSPECTS OF DEVELOPMENT OF THE LAUNCH VEHICLE
OF THE EXTRALIGHT CLASS
©2015 E.V. Kirilina
JSC «RSC «Progress», Samara
Tendencies of development of the world space market regarding creation of means of the ascent of an ex-
tralight class and rendering of firing services, the analysis of a current condition and the forecast of development of
the world market of small space vehicles, the analysis of economic feasibility of creation of the launch vehicle of an
extralight class are resulted; existing and perspective launch vehicles of an extralight class and their basic perfor-
mances are considered.
Keywords: the world space market, ascent means, the small space vehicles, development tendencies, eco-
nomic feasibility
Информация об авторе:
Кирилина Елена Викторовна, к.э.н., ведущий инженер АО «РКЦ «Прогресс»,
443009, Россия, г. Самара, ул. Земеца 18, т. 228-96-68, Kirilina elena83@mail.ru.
Область научных интересов: конкурентоспособность промышленных предприятий,
изучение мирового космического рынка.
Kirilina Elena Viktorovna, candidate of economic science, the leading engineer of joint-
stock company «Space-rocket centre «Progress», 443009, Russia, Samara, street Zemetsa 18,
t. 228-96-68, Kirilina elena83@mail.ru.
Area of research: competitiveness of the industrial enterprises, studying of the world space
market.
444
УДК 005.94
человеческий капитал как основной фактор производства
В СОВРЕМЕННОМ МИРЕ
©2015 Н.И. Верховых, М.Ю. Давыдова
ОАО «Научно-производственное объединение автоматики
им. академика Н.А. Семихатова», г. Екатеринбург
Проводится анализ трудовых ресурсов предприятия. Описывается возможная методика расчета стои-
мости человеческого капитала.
Ключевые слова: рыночная стоимость фондов предприятия, Гудвилл кадрового потенциала, оценка
уровня образования.
Традиционно выделяют четыре ос-
новных ресурсных фактора, необходи-
мых для производства товаров и услуг.
Это Труд, Капитал, Земля и Спо-
собность к предпринимательству.
В России для большинства произ-
водственных предприятий нашей отрасли
доминирующим фактором, конечно, яв-
ляется капитал.
Материальный капитал воплощен в
зданиях, оборудовании, сырье и иных
производственных фондах, которые пря-
мо или косвенно способствуют осу-
ществлению процесса производства.
Информационный капитал наиболее
важен именно в настоящее время в усло-
виях крайней неопределенности и дина-
мики внешней среды. Посредством ры-
ночной информации организация получа-
ет данные об изменениях спросовых ха-
рактеристик, что позволяет вовремя под-
строить производство и восстановить
равновесие.
Человеческий капитал - это все зна-
ния, профессиональные навыки и умения,
профессиональный опыт, которым может
обладать работник предприятия
Существует множество различных
методик по оценке человеческого капи-
тала, в основном зарубежных. Большин-
ство экономистов формируют структуру
человеческого капитала по затратному
принципу, на основании различных видов
инвестиций в человеческий капитал[1].
Универсальной методики на сего-
дняшний день нет. Одна из часто исполь-
зуемых методик основана на использова-
нии коэффициента - Гудвилл (англ,
goodwill) кадрового потенциала и отоб-
ражает реальную, рыночную, индивиду-
альную стоимость работника как кон-
кретного человека умеющего выполнять
определенные функции, решать те или
иные задачи.
Нами предлагается в основу мето-
дики расчета стоимости человеческого
капитала предприятия положить методи-
ку эксперта по инвестиционным проек-
там, директора оценочно-консалтинговой
компании В.В. Аллавердяна, включив в
оценочную стоимость сотрудника инве-
стиции в человеческий капитал и изме-
нив порядок расчета гудвилла человече-
ского капитала.
ОАО «НПО автоматики» приобрело
статус акционерного общества в июле
2014 года. По результатам анализа и ди-
намики изменения за последние три года
характеристик персонала (среднегодовая
численность сотрудников, их возраст и
уровень образования, текучесть кадров)
можно судить о высокой квалификации
работников и стабильности работы пред-
приятия.
С учетом этих показателей возмож-
но определить Бобщ - стоимость челове-
ческого капитала всех работников пред-
приятия.
Бобщ = ЗП * Гчк + И * t (1)
где ЗП - фонд заработной платы,
руб.; Гчк - коэффициент (гудвилл чело-
веческого капитала работника); И - инве-
стиции за один год; t - период.
Гудвилл человеческого капитала
работника (Гчк) - коэффициент, кото-
рый отображает рыночную, индивиду-
альную стоимость работника.
445
Гчк можно представить, как сумму
коэффициентов (индексов), учитываю-
щих прибыль предприятия, общие затра-
ты на персонал и профессиональный уро-
вень сотрудников:
Г чк = Ипр + Ист+ Кпп (2)
где И||р - индекс прибыли человеческого
капитала, отражающий изменение за год
соотношения прибыли предприятия и
номинального фонда рабочего времени
работника; Ист - индекс стоимости чело-
веческого капитала, отражающий изме-
нение за год соотношения общих расхо-
дов предприятия на персонал и номи-
нального фонда рабочего времени работ-
ника; Кпп - коэффициент профессио-
нальной перспективности работника.
Таким образом, исследованием ве-
личины гудвилла человеческого капитала
можно оценивать такую важную характе-
ристику кадров, как их конкурентоспо-
собность. В целом для предприятия ха-
рактеристика уровня конкурентоспособ-
ности работников необходима для оценки
перспективы успешной деятельности,
определения уровня и направленности
инвестирования в трудовые ресурсы.
Предприятия, не способные осуществ-
лять инвестиции в человеческий капитал,
не могут рассчитывать на достижение
таких темпов роста, которые наблюдают-
ся у других, даже если они имеют доступ
к той же технологии, поскольку у них от-
сутствуют знания для того, чтобы эффек-
тивно использовать такую технологию.
[2]
Для современного этапа мирового
научно-технического и социально-
экономического развития характерно ко-
ренное изменение роли и значения чело-
веческого фактора в экономике и обще-
стве. Человеческий фактор превращается
в ведущую производительную силу об-
щественного развития: именно он спо-
собствует совершенствованию и опти-
мальному использованию всех других
факторов производства.
Библиографический список:
1. Фитц-енц Я. Рентабельность ин-
вестиций в персонал: измерение эконо-
мической ценности персонала / Пер. с
англ.; под общ. ред. В.И. Ярных. М.:
Вершина, 2006.
2. Ларионов И.К. Экономическая
теория. - М.: Дашков и К, 2008 - 366с.
References:
1. Fietz-enz J. The Roi of Human Cap-
ital: Measuring the Economic Value of Em-
ployee Performance / Translated from Eng-
lish; under the general editorship of V.I.
Yamykh. M.: Vershina, 2006.
2. Larionov l.K. Economics. - M.:
Dashkov i K, 2008 - 366pp.
HUMAN CAPITAL AS THE MAIN FACTOR OF PRODUCTION IN THE MODERN
WORLD
©2015 N.I. Verkhovykh, M.Y. Davydova
JCS «Scientific & Production Association of Automatics
named after the academician N.A. Semikhatov», Yekaterinburg
The analysis of the enterprise workforce is given. The article describes design procedure of human capital
value.
Key words: the market value of enterprise funds, goodwill of staff capacity, assessment of the educational at-
tainment
446
Информация об авторах:
Верховых Наталья Ивановна - ведущий инженер-конструктор ОАО «Научно-
производственное объединение автоматики имени академика Н.А. Семихатова» 620075,
г. Екатеринбург, ул. Мамина-Сибиряка, 145, (343) 355-95-25, дуКау^юату.
Область научных интересов: оценка человеческого капитала.
Давыдова Марина Юрьевна - инженер 1 категории ОАО «Научно-
производственное объединение автоматики имени академика Н.А. Семихатова» 620075,
г. Екатеринбург, ул. Мамина-Сибиряка, 145, (343) 355-95-25, ду^упдюскуи.
Область научных интересов: экономика и планирование, оценка человеческого ка-
питала.
Verkhovykh Natalya Ivanovna - a senior design engineer of JCS “Scientific & Produc-
tion Association of Automatics named after the academician N.A. Semikhatov” (Yekaterinburg),
e-mail: avtfenpoa.ru.
Field of research: assessment of human capital.
Davydova Marina Yurievna - the 1st rank Engineer of JCS “Scientific & Production As-
sociation of Automatics named after the academician N.A. Semikhatov” (Yekaterinburg), e-mail:
avtfajnpoa.ru.
Field of research: economy and planning, assessment of human capital.
447
УДК 378.147
ПСИХОЛОГИЧЕСКАЯ ПОДГОТОВКА СПЕЦИАЛИСТОВ ПО
ОРГАНИЗАЦИИ И УПРАВЛЕНИЮ ПЕРЕВОЗКАМИ НА ТРАНСПОРТЕ
©2015 Ю.В. Гатен
Самарский государственный аэрокосмический университет имени академика
С.П. Королева (Национальный исследовательский университет), г. Самара
Автор рассматривает основные социально-психологические знания, умения и навыки необходимые
для формирования профессиональной компетентности специалистов по организации перевозок и управле-
ния на транспорте. Излагает цели, задачи и содержание учебной дисциплины «Транспортная психология»,
обосновывает необходимость применения инновационных методов обучения.
Ключевые слова: транспортная психология, социально-психологическая компетенция, интерактив-
ные методы обучения
В целях углубления социально-
психологических знаний, умений и навы-
ков, необходимых при решении профес-
сиональных задач, для студентов Инсти-
тута авиационной техники, обучающихся
по специальности 190701.65 «Организа-
ция перевозок и управление на транспор-
те», на кафедре философии и истории
СГАУ разработан учебно-методический
комплекс по дисциплине «Транспортная
психология».
Задачами освоения дисциплины яв-
ляются: 1) формирование у студентов
представлений об основных понятиях
общей психологии, социальной психоло-
гии, психологии труда, инженерной пси-
хологии, психологии делового общения;
2) развитие социально-психологической
компетентности; 3) совершенствование
умений и навыков по использованию
психологических приемов в профессио-
нальной деятельности.
В результате обучения студент
должен:
знать: общие теоретические катего-
рии фундаментальной и прикладной пси-
хологии; основные индивидуально-
психологические и личностные особен-
ности людей, стили; основные законо-
мерности динамических процессов в со-
циальных группах; психологические осо-
бенности деятельности в нестандартных
и чрезвычайных ситуациях на транспор-
те; психологические аспекты обслужива-
ния пассажиров на внутренних и между-
народных воздушных линиях; психоло-
гические факторы надежности транс-
портного процесса;
уметь: использовать в практиче-
ской деятельности основные закономер-
ности транспортной психологии; состав-
лять психологическую характеристику
личности клиента; определять собствен-
ное психическое состояние и пользо-
ваться приемами эмоциональной саморе-
гуляции; оценивать межличностные от-
ношения и разрешать конфликтные ситу-
ации между участниками транспортного
процесса; использовать в практической
деятельности основные психофизиоло-
гические особенности управления транс-
портными средствами и системами;
владеть: методами психологических
исследований состояния и динамики по-
казателей качества системы организации
перевозок грузов и пассажиров на транс-
порте; навыками делового общения в
сфере транспортного обслуживания; ме-
тодами предотвращения массовой пани-
ки; технологиями профайлинга в сфере
обеспечения транспортной безопасности.
В учебном процессе активно ис-
пользуются разнообразные образователь-
ные технологии, в том числе - интерак-
тивные методы обучения: творческие за-
дания, работа в малых группах, деловые
игры, кейс-метод (анализ конкретных си-
туаций, решение ситуационных задач),
презентации, метод проектов, дискуссии,
«круглые столы», тренинги, интерактив-
448
ные лекции. По сравнению с традицион-
ными методами ведения занятий в интер-
активном обучении познавательная дея-
тельность осуществляется в форме сов-
местной работы студентов, когда все
участники взаимодействия обмениваются
информацией, сообща решают проблемы
на основе анализа социально-
психологических факторов, моделируют
профессиональные ситуации, оценивают
действия других и свое собственное по-
ведение, погружаются в реальную атмо-
сферу делового сотрудничества. Приме-
нение подобных инновационных методов
обучения повышают активность студен-
тов, их мотивацию к учебно-
профессиональной деятельности, позво-
ляют перейти от пассивного усвоения
знаний студентами к их активному при-
менению в моделируемых или реальных
ситуациях профессиональной деятельно-
сти, что, безусловно, повышает качество
подготовки будущих специалистов по
организации и управлению перевозками
на транспорте.
PSYCHOLOGICAL TRAINING ON THE ORGANIZATION AND
MANAGEMENT OF TRANSPORTATION TRANSPORT
©2015 Y.V. Gaten
Samara State Aerospace University, Samara
The author considers the main socio-psychological knowledge and skills necessary for the formation of
professional competence of experts on the organization of traffic and transport management. Sets out the goals, ob-
jectives and contents of the discipline "Transport Psychology", justifies the need for the use of innovative teaching
methods.
Key words: traffic psychology, psycho-social competence, interactive teaching methods
Информация об авторах:
Гатен Юлия Владимировна, к.пед. наук, доцент кафедры философии и истории,
СГАУ, 443 086, Россия, г. Самара, Московское ш. 34, т. 2674787, malusik 1 (2fnarod.ru.
Область научных интересов: психология и педагогика высшей школы, инженерная
педагогика и психология.
Gaten Yulia Vladimirovna, candidate of pedagogical Sciences, associate professor of
Philosophy and History Chair, SSAU, 443 086, Russia, Samara, Moscow highway, 34,
t. 2674787, malusik 1 (2f narod.ru.
Area of research: psychology and pedagogy of higher education, engineering pedagogy
and psychology.
449
УДК 621.3.082
ОБРАЗОВАТЕЛЬНАЯ ПРОГРАММА ДОПОЛНИТЕЛЬНОГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ (ПОВЫШЕНИЯ КВАЛИФИКАЦИИ)
ПО ТЕМЕ: «ТЕСТОПРИГОДНОЕ ПРОЕКТИРОВАНИЕ И ПРОИЗВОДСТВЕННАЯ
ДИАГНОСТИКА ВЫСОКОИНТЕГРИРОВАННЫХ ЭЛЕКТРОННЫХ МОДУЛЕЙ»
В.М. Гречишников, А.А. Курицкий, А.Д. Бутько
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
Образовательная программа дополнительного профессионального образования «Тестопригодное про-
ектирование и производственная диагностика высокоинтегрированных электронных модулей» предназна-
чена для повышения квалификации разработчиков инновационной цифровой электронной техники пред-
приятий аэрокосмического кластера Самарской области.(АО «Прогресс», АО «»НИИ Экран»и др.)
Ключевые слова: тестопригодность проектируемых изделий, цифровой диагностический проект,
Pro Vision
Цель подготовки по программе:
формирование профессиональных компе-
тенций в области тестопригодного проек-
тирования (DFT) и производственной ав-
томатизированной диагностики высоко
интегрированных электронных модулей
на основе метода граничного сканирова-
ния (JTAG-интерфейса).
Образовательная программа допол-
нительного профессионального образо-
вания «Тестопригодное проектирование и
производственная диагностика высоко-
интегрированных электронных модулей»
предназначена для повышения квалифи-
кации разработчиков инновационной
цифровой электронной техники пред-
приятий аэрокосмического кластера Са-
марской области (АО «РКЦ «Прогресс»,
О «НИИ Экран»и др. )
Несмотря на значительную потреб-
ность предприятий в специалистах, вла-
деющих методами тестопригодного про-
ектирования и производственной диагно-
стики подготовку или переподготовку
специалистов в указанной области не
проводит ни один ВУЗ Самарской обла-
сти.
Срок обучения: 72 часа
Компетенции, подлежащие форми-
рованию по итогам обучения (образова-
тельные результаты по программе)
Обучение по программе предпола-
гает освоение или совершенствование в
рамках модулей соответствующих про-
фессиональных компетенций:
Категория ра- ботника Вид профессио- нальной деятель- ности (ВПД) Профессиональные компетенции (ПК) / готовность к выполнению трудовых действий в разрезе ви- дов профессиональной деятель- ности (образовательный резуль- тат) Профессиональный модуль
Специалист- проектировщик (схемотехник) Тестопригодное проектирование цифровых высоко интегрированных модулей, комплек- сов, систем. Способен оценивать на этапе проектирования тестовое покры- тие изделия, формулировать си- стему требований для улучше- ния тестопри годности проекти- руемого устройства. Способен создавать проекты ав- томатизированного тестирова- Тестопригодное проек- тирование и производ- ственная диагностика высоко интегрирован- ных электронных модулей.
450
ния сложных цифровых систем с использованием передового про- граммного обеспечения. Способен применять визуализа- цию диагностируемых дефектов с целью их локализации и анали- за причин возникновения.
С целью овладения указанными
профессиональными компетенциями
обучающийся в ходе освоения програм-
мы должен:
освоить практический опыт (при-
обрести навыки выполнения трудовых
действий):
• анализа тестопригодности проек-
тируемых изделий с использованием про-
граммного пакета ProVision фирмы
JT AG-T echnologies;
• выполнения диагностических
проектов цифровых систем любой степе-
ни сложности в программной среде
ProVision фирмы JTAG-Technologies
приобрести умения:
• оптимального выбора элемент-
ной базы проектируемого изделия с уче-
том соотношения стоимостных затрат и
степени тестового покрытия;
• подготовки исходных данных
проекта: конвертации файлов, поиск и
редактирования моделей, кластеризации
схемы;
• интерпретации результатов диа-
гностики изделия по полю векторов
и репортам программного пакета
ProVision фирмы JTAG-Technologies;
• выполнения визуализации де-
фектов на принципиальной схеме и на
топологическом образе (плате) проекти-
руемого изделия;
получить знания:
• по современным методам кон-
троля электронных систем;
• по принципу построения и функ-
ционирования JTAG-интерфейса;
• по аппаратному обеспечению ре-
ализации метода граничного сканирова-
ния с использованием JTAG-интерфейса;
• по функциональным возможно-
стям и особенностям использования про-
граммного пакета ProVision фирмы
JT AG-T echnologies.
К итоговой аттестации допускаются
лица успешно прошедшие промежуточ-
ный контроль.
Форма итоговой аттестации по про-
грамме - защита выпускной работы
Вариант выпускной работы - Со-
здание проекта и диагностика модуля
JT2153 с выявлением привнесенных де-
фектов с их визуализацией на принципи-
альной схеме и печатной плате.
Защита выпускной работы оценива-
ется «положительно» если слушатель:
Освоил - методы тестопригодного
проектирования высокоинтегрированных
электронных модулей
приобрел -навыки составления диа-
гностических проектов
практически реализовал - разработ-
ку диагностического проекта и произ-
водственную диагностики референсной
платы.
Библиографический список:
1. Внутрисхемный контроль пара-
метров элементов РЭА и интегральных
микросхем: учебно-методическое посо-
бие. В.М. Гречишников, А.А. Курицкий -
Самара: Изд-во Самар.гос. аэрокосм, ун-
та - 9 с. : ил.
2. Функциональный контроль циф-
ровых интегральных микросхем: учебно-
методическое пособие. В.М. Гречишни-
ков, А.А. Курицкий - Самара: Изд-во Са-
мар. гос. аэрокосм, ун-та - 16 с.: ил.
3. Современные технологии диа-
гностирования многослойных печатных
плат с использованием JTAG-
интерфейса. Гречишников В.М., Куриц-
кий А.А. УИП Самар, гос. аэрокосм, ун-
та, Самара, 2013 г.
4. Testing and Programming PCBA’s
during Design and in Production. JTAG-
Technologies. 2013.
5. Периферийное сканирование в
жизненном цикле изделий. А. Иванов.
451
Производство электроники: технологии,
оборудование. Материалы. №2 2010 г.
References:
1. In-circuit testing of parameters of
elements of electronics and integrated cir-
cuits.: the training guide. V. M. Grechishni-
kov, A. A. Kuritzky - Samara: Publishing of
SSAU-9 p.: ill.
2. Functional test for digital integrated
circuits.: the training guide. V. M. Grechish-
nikov, A. A. Kuritzky - Samara: Publishing
of SSAU - 16 p.: ill.
3. Modem technologies of diagnostics
of multilayer printed circuit boards using
JTAG interface. Grechishnikov V. M., Ku-
ritzky A. A. WHIP SSAU, Samara, 2013
4. Testing and Programming PCBA's
during Design and in Production. JTAG
Technologies. 2013.
5. Boundary-scan testing in the life
cycle of products. A. Ivanov. Electronics
manufacturing: technology, equipment. Ma-
terials. No. 2, 2010.
THE EDUCATIONAL PROGRAM OF ADDITIONAL PROFESSIONAL
EDUCATION (TRAINING) ON THE TOPIC: "TESTABLE DESIGN
AND PRODUCTION DIAGNOSIS OF HIGHLY INTEGRATED ELECTRONIC
MODULES".
V.M. Grechishnikov, A.A. Kurizki, A.D. Butko
1 Samara State Aerospace University, Samara
The educational program of additional professional education "Testable design and production diagnosis of
highly integrated electronic modules intended to enhance the skills of developers of innovative digital electronic
equipment of the enterprises of the aerospace cluster of Samara region.
Keywords: testability design products, digital diagnostic project Pro Vision
Информация об авторах:
Гречишников Владимир Михайлович, д.т.н., профессор, зав. кафедры электротех-
ники, СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 267-45-56, gv@ssau.ru.
Область научных интересов: электрические методы производственного контроля.
Бутько Алексей Дмитриевич, инженер, аспирант кафедры электротехники, СГАУ,
443 086, Россия, г. Самара, Московское ш. 34, т. 8-927-903-0097, LexAK47@yandex.ru.
Область научных интересов: электрические методы производственного контроля.
Курицкий Александр Александрович, к.т.н., доцент кафедры электротехники,
СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 267-45-56, forsale@bk.ru.
Область научных интересов: электрические методы производственного контроля.
Grechishnikov Vladimir Mikhailovich, doctor of technical Sciences, Professor, head.
Department of electrical engineering, Samara State Aerospace University, 443086, Russia, Sa-
mara, Moskovskoe sh. 34, T. 267-45-56, gv@ssau.ru.
Research interests: electrical methods of production control.
Butko Alexey Dmitrievich, engineer, postgraduate student, Department of electrical engi-
neering, Samara State Aerospace University, 443 086, Russia, Samara, Moskovskoe sh. 34,
T. 8-927-903-0097, LexAK47@yandex.ru .
Research interests: electrical methods of production control.
Kurizki Alexander Alexandrovich, Ph. D., associate Professor in the Department of elec-
trical engineering, Samara State Aerospace University, 443086, Russia, Samara, Moskovskoe sh.
34, T. 267-45-56, forsale@bk.ru.
Research interests: electrical methods of production control.
452
УДК 331:629.78
ВЗАИМОДЕЙСТВИЕ МЕЖДУ ПРЕДПРИЯТИЕМ ПО ПРОИЗВОДСТВУ
РКТ И РАБОТНИКАМИ НА РЫНКЕ ТРУДА
©2015 Д.А. Щелоков
АО «РКЦ «Прогресс», г. Самара
Определены значимые факторы производственной системы влияющий на рынок груда и его равно-
весные состояния. Определены условия оптимального спроса на труд предприятием и предложение труда
каждого работника.
Ключевые слова: дополнительный спрос и предложение, предельный продукт труда, предельная по-
лезность досуга
Взаимодействие на рынке труда
между его участниками определяются
входящими потоками рабочей силы,
формирующие дополнительные и выхо-
дящими с рынка труда потоками рабочей
силы формирующие дополнительный
спрос. В этой связи целью функциониро-
вания рынка труда являются достижение
равенства между дополнительным спро-
сом и дополнительным предложением в
плановом периоде. При этом наиболее
значимыми факторами системы, влияю-
щий на рынок труда являются плановые
темпы прироста продукции, плановые
инвестиции, динамика производительно-
сти труда, изменение среднегодовой чис-
ленности работников, убыль кадров по
естественно - возрастным причинам. На
основании факторов производственно -
экономической системы предприятием
осуществляется прогнозирование в еже-
годной дополнительной потребности в
кадрах для всех профессионально - ква-
лификационных укрупненных групп спе-
циальностей. Полученный прогноз ра-
ботников по видам деятельности необхо-
димо разделить по уровням профессио-
нального образования: высшее, среднее и
начальное образование.
Важным результатом, который поз-
воляет получить предлагаемая методика
прогнозирования, является нахождение
равновесного состояния рынка труда
между ежегодным дополнительным
спросом и ежегодным дополнительным
предложением по видам деятельности и
уровням профессионального образова-
ния. На основе прогноза выпуска специа-
листов с профессиональным образовани-
ем из образовательных организаций по-
требности предприятия в специалистов с
различным уровнем профессионального
образования составляются балансы меж-
ду спросом и предложением. Положи-
тельные или отрицательные значения ба-
ланса свидетельствует об избыточном
или недостаточном выпуске специали-
стов по определенной группе специаль-
ностей для покрытия потребности пред-
приятия.
Спрос на труд предприятием опре-
деляется равенством предельного про-
дукта труда в стоимостном выражении
MR Pi и уровнем заработной платы со:
MRPt = со
Предложение труда у каждого ра-
ботника характеризуется отношением к
труду и досугу, при этом сумма времени
и досуга определены L = 24 — I, где L
число часов труда, I.
При этом работник решает следу-
ющую задачу:
U (С, Г) -» max
PC < (24 - /)ш + Уо,
где U - функция полезности работ-
ника, С - объем потребления товаров и
услуг, Р - потребительские цены, Yo - не-
трудовой доход.
В результате решения задачи полу-
чены следующее соотношение:
MU, _ со
М(Ц~~Р
453
где MU, - предельная полезность досуга,
MUC - предельная полезность материаль-
ных благ.
Из полученного уравнения следует,
что отношение предельной полезности
досуга к предельной полезности благ
равно реальной заработной плате
Из модели принятия решений также
следует, что каждый работник решает
проблему выбора между трудом и досу-
гом и определяется индивидуальными
предпочтениями. В одном случае работ-
ник предпочитает работать больше, в
другом меньше, выбор зависит от уровня
зарплаты и от нетрудового дохода, инди-
видуальных предпочтений.
Библиографический список:
1. Гришанов Д.Г., Гришанов Г.М.,
Кирилина С.А., Щелоков Д.А., Внутри-
фирменные механизмы бюджетного
управления крупным промышленным
комплексом по производству ресурсоем-
ких изделий: монография - Самара,
2009.- 180 с.
References:
1. Grishanov D.G., Grishanov G.M,
Kirilina S.A., D.A. Schelokov D.A. Intra
firm mechanisms of the budgetary manage-
ment of a large industrial complex on pro-
duction of resource-intensive products:
monograph - Samara, 2009. - 180 pages.
INTERACTION BETWEEN NOW AND MANUFACTURING CT
IN THE LABOR MARKET
©2015 D.A. Schelokov
JSC «SRC «Progress», Samara
Identified significant factors influencing the production system to the labor market and its equilibrium state.
The conditions for optimal labor demand and labor supply now each employee.
Keywords: additional supply and demand, the marginal product of labor, the marginal utility of leisure
Информация об авторах:
Щелоков Дмитрий Александрович, кандидат экономических наук, доцент,
начальник отдела подготовки кадров АО «РКЦ «Прогресс».
Dmitry A. Schelokov, Candidate of Economics, Associate Professor, Head of Personnel
Training Department in JSC «SRC «Progress».
454
УДК 330.1:629.78
ОЦЕНКА ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ ПРОВЕДЕНИЯ
ФУНДАМЕНТАЛЬНЫХ КОСМИЧЕСКИХ ИССЛЕДОВАНИЙ В УСЛОВИЯХ
ОГРАНИЧЕННОГО ФИНАНСИРОВАНИЯ (НА ПРИМЕРЕ КОСМИЧЕСКИХ
ЭКСПЕРИМЕНТОВ «КОНУС А» И «НУКЛОН»)
©2015 П.А. Карасев, А.С. Карасев, Е.Ю. Морозова
ФГУП «КБ «Арсенал», г. Санкт-Петербург
Аннотация: В статье дана оценка проблеме финансирования фундаментальных космических исследо-
ваний в рамках Федеральной космической программы, рассматривается возможность использования резер-
вов серийных космических аппаратов для установки дополнительной научной аппаратуры и приводится
расчет экономической эффективности применения данного метода на практике.
Ключевые слова: фундаментальные научные исследования, космический эксперимент, ракетно-
космическая промышленность, НИОКР, логистический подход, экономическая эффективность, инновации
Потенциал отечественной фунда-
ментальной науки выявляется и практи-
чески реализуется посредством органи-
зации и проведения ориентированных
фундаментальных, прогнозных и поис-
ковых исследований, предшествующих
начальным стадиям жизненного цикла
технических средств и технологий -
прикладным научно-исследовательским
и опытно-конструкторским работам
(НИОКР).
Согласно «Стратегии развития
космической деятельности России до
2030 года и на дальнейшую перспекти-
ву» [1], целью развития отечественных
фундаментальных космических иссле-
дований является выход российской
науки на ведущие позиции в ключевых
направлениях наук о космосе, а в долго-
срочной перспективе - завоевание и
удержание позиций одного из мировых
лидеров в основных научных дисци-
плинах о космосе.
Согласно этому документу [1]
важнейшими, равнозначными в отно-
шении приоритетов, направлениями
отечественных фундаментальных кос-
мических исследований на долгосроч-
ную перспективу в дальнем космосе
приняты: исследование планет и малых
тел Солнечной системы, поиск путей
предотвращения возможных угроз Зем-
ле и ее биосфере, детальное изучение
Луны с помощью автоматических кос-
мических аппаратов и робототехниче-
ских систем, развертывание на ее по-
верхности астрономических обсервато-
рий, пунктов мониторинга Солнца и
станций наблюдения за Землей; астро-
физические исследования, включая фи-
зику космических лучей; изучение
Солнца и солнечно-земных связей; изу-
чение влияния факторов космического
полета и космического пространства на
живые системы, в том числе в интере-
сах осуществления пилотируемых поле-
тов за пределами магнитосферы Земли,
поиск внеземной жизни. Очевидно, что
реализация положений данной страте-
гии потребует выделения огромных
средств из бюджета страны.
На сегодняшний день в ракетно-
космической промышленности Россий-
ской Федерации разработаны и осу-
ществляются 7 федеральных целевых
программ, а непосредственно фунда-
ментальные научные исследования в
космосе проводятся в рамках «Феде-
ральной космической программы Рос-
сии на 2006-2015 годы» (ФКП-2015, в
настоящее время в стадии разработки
находится Федеральная космическая
программа России на 2016-2025 годы).
В работе [2] отмечается, что в по-
следние годы наблюдалась положитель-
ная динамика финансирования ФКП-
2015 (табл.1)
455
Табл.1
Динамика финанси рования ФГ ,П «Федеральная космическая программа «2006-2015»
Год 2007 2008 2009 2010 2011 2012 2013
Сумма, млрд 24,4 30,67 58,22 67,03 75,29 104,48 128,33
В то же время, ряд НИОКР, про-
водимых в рамках указанных ФЦП, в
ближайшее время может быть значи-
тельно сокращен в целях экономии
бюджетных средств. В частности, про-
ект Федеральной космической про-
граммы на 2016-2025 годы подвергнет-
ся секвестру на 10% (изначально бюд-
жет программы составлял 2,4 трлн руб.)
[3].
Научно-исследовательские и
опытно-конструкторские работы, кото-
рые проводятся в российской ракетно-
космической промышленности, состоят
из последовательных этапов, включаю-
щих в себя множество процессов. Пре-
рывистое прохождение этапов вслед-
ствие сбоя выполнения процессов при-
водит к ощутимым потерям. В сфере
НИОКР возникающие потери во многом
предопределяются недостатками управ-
ления информационными потоками.
Информационный поток в виде научно-
технической информации является од-
ним из самых важных ресурсов, исполь-
зуемых в сфере НИОКР. Правильное и
сбалансированное управление потоком
научно-технической информации долж-
но приводить к решению поставленных
в ходе выполнения НИОКР задач.
Так как ракетно-космическая про-
мышленность должна использовать вы-
сокоэффективные технологии и высо-
копроизводительное оборудование с
переоснащением производства при пе-
реходе изготовления от одного образца
ракетно-космической техники (РКТ) к
следующему, это приводит к тому, что
на сегодняшний день потенциальные
ресурсы экономии производственных
затрат в ходе проведения НИОКР себя
практически полностью исчерпали. При
этом в ракетно-космической отрасли
четко выделяются две тенденции, тре-
бующие совершенно разных логистиче-
ских подходов. Для ракетной тематики
характерно серийное производство с
устоявшейся цепочкой кооперации и
стабильной технологией и применяе-
мым оборудованием. Для космических
аппаратов в настоящее время обычным
является штучное изготовление, а пере-
ход к изготовлению нового КА зача-
стую приводит к существенной замене
парка оборудования и применяемых
технологий. Поэтому одним из немно-
гих резервов экономии издержек в про-
цессе товародвижения в ракетно-
космической отрасли является принятие
логистических решений по оптимиза-
ции и рационализации всех производ-
ственных процессов. В этом случае це-
лесообразно использовать методику ин-
новационной логистики, научный ин-
струментарий которой нацелен на по-
вышение уровня управления за счет
применения различного рода иннова-
ций, направленных на улучшение каче-
ства обслуживания потребителей, рост
эффективности потоковых процессов и
снижение совокупных издержек на их
реализацию [4].
Модель управления всеми видами
потоков в системе НИОКР ракетно-
космического назначения может быть
структурирована в соответствии с ос-
новными функциональными подсисте-
мами научно-промышленной организа-
ции: управление НИОКР, управление
проектами, управление снабжением и
сбытом, управление технологической
подготовкой производства, оперативное
управление основным производством,
управление финансами и др.
Предприятия отечественной ра-
кетно-космической промышленности
456
при проведении НИОКР сталкиваются с
рядом специфических проблем и огра-
ничений. Основными из них являются
следующие: длительный цикл изготов-
ления изделий, широкая номенклатура
потребляемых ресурсов, уникальность
потребляемых ресурсов, длительный
цикл изготовления ресурсов, моральное
и физическое устаревание ресурсов,
планирование в условиях неопределен-
ности, все возрастающая зависимость от
применения импортных комплектую-
щих, прежде всего электронной компо-
нентной базы и, при этом, очень слабо
развивающееся импортозамещение [4].
Для оптимизации расходов на
НИОКР в РКП предлагаются различные
подходы. В частности, рассматривается
возможность использования резервов
космических аппаратов для размещения
дополнительной полезной нагрузки и
резервов ракет-носителей для кластер-
ного выведения КА на орбиту.
Так, согласно Федеральной косми-
ческой программе России [5], для реа-
лизации программы фундаментальных
космических исследований, в период до
2025 года необходимо обеспечить по-
требности академических институтов в
научных данных для проведения фун-
даментальных исследований.
По мнению некоторых специали-
стов [6], на данный момент приоритет-
ными для исследования являются сле-
дующие фундаментальные исследова-
ния - в частности, направления физики
космоса, - по которым реализуются
полномасштабные космические проекты
и создаются комплексы научной аппа-
ратуры:
1. Внеатмосферная астрофизика -
получение научных данных о проис-
хождении и эволюции Вселенной.
2. Планетология - исследование
планет и малых тел Солнечной системы.
3. Изучение Солнца, космической
плазмы и солнечно - земных связей.
Исследования в области внеатмо-
сферной астрофизики позволяют полу-
чить уникальные данные об очень отда-
ленных космологических объектах, и о
событиях происшедших в период за-
рождения звезд и галактик. Это, свою
очередь, предоставляет возможность
осуществить глубокий прорыв в иссле-
довании фундаментальных свойств ма-
терии, и получить новую информацию в
области ядерной и квантовой физики,
теории относительности, проблем про-
странства - времени [6].
Обычно, проведение такого рода
космических экспериментов требует со-
здания отдельного космического аппа-
рата научного назначения, со всеми вы-
текающими финансовыми затратами.
Например, в работе [7] приведена мето-
дика определения стоимости специали-
зированного космического комплекса, в
соответствии с которой при оценке
полных затрат на создание отдельного
научного КА учитываются следующие
составляющие: затраты на проведение
ОКР для разработки специализирован-
ного КА; затраты на производство КА;
затраты на подготовку и проведение за-
пуска КА в заданную точку космиче-
ского пространства; затраты на летную
эксплуатацию КА; и так называемые
«штрафные» затраты - стоимость от-
чужденной земли, потери, иные допол-
нительные расходы. Кроме того извест-
но, что условия космического простран-
ства предъявляют очень жёсткие требо-
вания ко всем составным частям КА в
плане высочайшей надёжности, стойко-
сти и живучести. Соответственно, име-
ли место случаи, когда долго и с боль-
шой затратой ресурсов создаваемый
научный КА не выполнял свои задачи
как из-за отказов научной аппаратуры,
так и по причине неисправных обеспе-
чивающих систем из состава космиче-
ского аппарата. Кроме того, космиче-
ский аппарат - это комплекс сложней-
ших систем: электропитания, терморе-
гулирования, управления движением,
телеметрии, передачи командно-
программной информации и т.д. И не-
редко стоимость обеспечивающих си-
стем КА многократно превышала стои-
мость выводимой полезной нагрузки
[8].
Для того, чтобы повысить эффек-
тивность фундаментальных научных
457
исследований, проводимых в космосе, и
существенно снизить затраты на них,
существует следующее решение: не со-
здавать отдельную космическую плат-
форму для размещения научной аппара-
туры, а разместить её в качестве допол-
нительной полезной нагрузки на хоро-
шо отработанный серийный КА, реша-
ющий в качестве основной задачи про-
ведение дистанционного зондирования
Земли (ДЗЗ), обеспечение связи, нави-
гации или выполнение метеорологиче-
ских задач.
Именно такой инновационный
подход к проведению НИОКР был
впервые предложен ФГУП «КБ «Арсе-
нал» для осуществления космического
эксперимента «Конус-А» на серийных
космических аппаратах серии «Кос-
мос».
Проведенный анализ показал, что
орбитальные характеристики серийно
выпускавшихся КА серии «Космос»
приемлемы для работы научной аппара-
туры «Конус-А», разработанной и изго-
товленной ФТИ РАН. Дальнейшая про-
работка подтвердила правильность воз-
никшей идеи об установке научной ап-
паратуры в качестве дополнительной
полезной нагрузки КА. Так, расчеты
показали, что на КА серии «Космос»
имеются достаточные ресурсы по энер-
госнабжению дополнительной научной
аппаратуры, обеспечению ее теплового
режима. Кроме того, результаты работы
КБ «Арсенал» показали наличие сво-
бодного пространства на КА для раз-
мещения дополнительной научной ап-
паратуры и приемлемость ее массогаба-
ритных характеристик.
Учитывая, что всё жизнеобеспече-
ние научной аппаратуры проводилось за
счёт ресурсов основной бортовой аппа-
ратуры КА, доработкам (и, соответ-
ственно, дополнительному финансиро-
ванию) подлежали только вопросы сты-
ковки систем энергопитания, терморе-
гулирования, телеметрии КА с научной
аппаратурой и изготовления дополни-
тельных конструктивных элементов,
бортовой кабельной сети (БКС) и до-
полнительной системы телеметрическо-
го контроля (ДСТК) в обеспечение
функционирования научной аппаратуры
«Конус-А».
Интересные научные результаты,
полученные при функционировании
первого комплекта научной аппаратуры
«Конус-А», установленной на КА
«Космос-2326», позволили продолжить
дальнейшие работы по этому экспери-
менту. Всего на орбиту были выведены
три комплекта научной аппаратуры
«Конус-А», причём каждый из после-
дующих был существенно переработан
и модернизирован по сравнению с
предыдущим, что позволило наращи-
вать объем выполняемых научных задач
на каждом из последующих КА.
Размещение на серийных КА до-
полнительной бортовой аппаратуры,
разработанной КБ «Арсенал» для обес-
печения функционирования научной
аппаратуры «Конус-А», производилось
одновременно с изготовлением КА. Для
управления работой научной аппарату-
ры были использованы резервы системы
управления КА. Все эти работы выпол-
нялись в кооперации с предприятиями-
разработчиками и поставщиками выше-
названных систем.
Для обеспечения требуемого
уровня качества и надёжности функци-
онирования дополнительной полезной
нагрузки КБ «Арсенал» и ФТИ РАН
разработали и выполнили с положи-
тельными результатами комплексные
программы наземной эксперименталь-
ной отработки (КПЭО) дополнительной
бортовой аппаратуры, разработанной
КБ «Арсенал», и научной аппаратуры
«Конус-А», соответственно.
Таким образом, подготовка к про-
ведению каждого из научных экспери-
ментов на борту серийных КА разра-
ботки КБ «Арсенал» требовала времен-
ных затрат в среднем около 3-х лет на
один КА, привлечения обширной ко-
операции и в сумме потребовала финан-
сирования 157,75 млн. руб. (в ценах
2010 г. без учета стоимости самой
научной аппаратуры «Конус-А»), Учи-
тывая, что стоимость изготовления од-
ного КА серии «Космос» как минимум
458
на порядок превышает вышеуказанные
средства, а затраты на обеспечение пус-
ка и эксплуатации КА в течение срока
активного существования также изме-
ряются сотнями млн. рублей, понятно,
что выбранный вариант использования
серийного КА в качестве платформы
для установки дополнительной научной
аппаратуры позволяет наиболее эффек-
тивно использовать финансы, выделяе-
мые на фундаментальные научные ис-
следования [8].
Затраченные КБ «Арсенал» сред-
ства можно сгруппировать по следую-
щим основным позициям:
- затраты на выполнение КПЭО
вновь вводимых в КА серии «Космос»
конструктивных элементов, обеспечи-
вающих установку научной аппаратуры
«Конус-А». Если взять данные по фи-
нансированию ОКР «Конус-А» на по-
следнем из КА «Космос-2421», то за-
траты на эти цели составили 60,88 млн.
руб. (в ценах 2010 г.). Очевидно, что эти
затраты несоизмеримы с КПЭО КА в
целом;
- затраты на изготовление (в том
числе технологическая подготовка про-
изводства на заводе-изготовителе КА)
элементов конструкции, БКС, агрегатов
автоматики, приборов управления,
устанавливаемых на КА для обеспече-
ния размещения научной аппаратуры
«Конус-А» и её комфортного функцио-
нирования в условиях космического
пространства;
- затраты на приобретение аппа-
ратуры, систем, приборов у предприя-
тий кооперации (в том числе, проведе-
ние необходимых доработок серийной
матчасти), используемых для размеще-
ния и функционирования научной аппа-
ратуры «Конус-А» (например, ДСТК
Ижевского радиозавода). Общие затра-
ты на вышеназванные работы, отнесён-
ные к завершающему КА «Космос-
2421», составили 33,6 млн. руб. (в ценах
2010 г.). Соответственно, затраты на
остальную бортовую аппаратуру, обес-
печивающую функционирование науч-
ной аппаратуры «Конус-А», входили в
себестоимость КА и не отразились на
цене ОКР «Конус-А»;
- затраты на установку научной
аппаратуры «Конус-А» в процессе
сборки КА и проведение дополнитель-
ных электрорадиотехнических испыта-
ний в части научной аппаратуры;
- затраты на доставку на космо-
дром Байконур дополнительного назем-
ного испытательного оборудования для
обеспечения проверок функционирова-
ния научной аппаратуры «Конус-А» при
подготовке КА к запуску;
- затраты на обеспечение получе-
ния научной информации по каналам
ТМИ, её первичной обработки и до-
ставки в ФТИ РАН. Для последнего
эксперимента с научной аппаратурой
«Конус-А» это составило 14,06 млн.
руб. (в ценах 2010 г.) [8].
Успешное проведение космиче-
ского эксперимента «Конус-А» на трех
КА серии «Космос» позволило говорить
о начале инновационного экономиче-
ского подхода к реализации фундамен-
тальных научных исследований в кос-
мосе. Так, другим примером установки
дополнительной научной аппаратуры на
космический аппарат является КА «Ре-
сурс-ДК1», разработанный АО «РКЦ
«Прогресс» и выведенный на орбиту
15.07.2006 г. Наряду с основной целе-
вой задачей (дистанционное зондирова-
ние Земли), КА выполняет функции ор-
битальной платформы-носителя ин-
струментальных средств для проведе-
ния фундаментальных научных иссле-
дований в рамках международного
научного эксперимента «Рим-Памела».
На КА «Ресурс-ДК1» установлена до-
полнительная научная аппаратура «Па-
мела», предназначенная для поиска и
исследования античастиц ядерного и
электронно-позитронного состава пер-
вичных космических лучей в околозем-
ном пространстве с целью решения
фундаментальных проблем в области
космологии, а также научная аппарату-
ра «Арина», созданная в Национальном
исследовательском ядерном универси-
тете «МИФИ». Научная аппаратура
«Арина» предназначена для регистра-
ции высокоэнергичных электронов и
459
протонов, их идентификации, выделе-
ния всплесков высокоэнергичных ча-
стиц - предвестников землетрясений
[8].
Свое продолжение данный подход
к проведению фундаментальных науч-
ных космических исследований полу-
чил при запуске КА «Ресурс-П» №2
26.12.2014 г. На данном КА установлена
научная аппаратура «Нуклон», разрабо-
танная НИИЯФ МГУ в кооперации с
российскими предприятиями. Научная
аппаратура «Нуклон» предназначена
для исследования нашей галактики, ее
объектов, поисков странной и темной
материи путем регистрации и изучения
галактических космических лучей.
К слову, в отличие от работ по те-
ме «Конус-А», реализация космическо-
го эксперимента «Нуклон» столкнулась
с рядом сложностей и неоднократно
возникала ситуация по принятию реше-
ния о переносе сроков установки ком-
плекса научной аппаратуры на серий-
ный КА. Несмотря на то, что организа-
ционная и финансово-экономическая
выгода от использования серийного КА
в качестве носителя дополнительной
полезной нагрузки (ДПН) очевидна (о
чем уже говорилось выше), всегда су-
ществует необходимость согласования
установки дополнительной научной ап-
паратуры с основным заказчиком кос-
мического аппарата. Эта проблема все-
гда имеет вероятностный результат, т.к.
имеются достаточно справедливые опа-
сения у потребителя результатов функ-
ционирования серийного КА в том, что
ДПН может оказать негативное влияние
на основной результат работы КА. Так,
при подготовке к проведению космиче-
ского эксперимента «Нуклон» в процес-
се согласования установки ДПН на борт
серийного КА разработки ФГУП «КБ
«Арсенал» так и не удалось получить
разрешение на размещение комплекса
дополнительной научной аппаратуры.
Ввиду вышеперечисленных про-
блем Федеральным космическим
агентством было рассмотрено несколь-
ко вариантов продолжения работ по те-
ме «Нуклон»:
- использовать в качестве носителя
научной аппаратуры «Нуклон» специ-
альный малый КА (с проведением всего
комплекса НИОКР по созданию такого
КА). Тщательная проработка этой идеи
показала, что простая переустановка
дополнительной научной аппаратуры с
одного типа КА на другой без длитель-
ной и дорогостоящей отработки невоз-
можна и, как уже было сказано выше,
применение новой и не имеющей опыта
эксплуатации космической платформы
потребует больших временных и фи-
нансовых затрат;
- использовать в качестве носителя
научной аппаратуры «Нуклон» серий-
ный КА, изготавливаемый в рамках Фе-
деральной космической программы.
Проведенные исследования пока-
зали, что КА типа «Ресурс» разработки
АО «РКЦ «Прогресс» наиболее опти-
мальным образом пригоден для реали-
зации космического эксперимента
«Нуклон». Как уже было сказано выше,
на КА «Ресурс-ДК1» был установлен
прибор «Рим-Памела», его функциони-
рование во время эксплуатации данного
КА было признано чрезвычайно успеш-
ным. Соответственно, массово-
габаритные характеристики, потребно-
сти в энергопотреблении и командно-
программная информация ДПН «Нук-
лон» укладывались в возможности,
предоставляемые КА «Ресурс-П».
После оформления всех необхо-
димых технико-распорядительных до-
кументов ФГУП «КБ «Арсенал» в соот-
ветствии с вновь заключенным контрак-
том провело составную часть ОКР
«Нуклон» в части обеспечения разме-
щения научной аппаратуры и управле-
ния ею на КА «Ресурс-П» №2. При этом
был использован задел, наработанный
при проведении предыдущего ОКР
(установка научной аппаратуры «Нук-
лон» на КА разработки ФГУП «КБ «Ар-
сенал»). Необходимо было выполнить
оставшийся комплекс работ по наземно-
экспериментальной отработке комплек-
са научной аппаратуры, изготовлению
штатного комплекта научной аппарату-
ры, проведению необходимых испыта-
460
ний. Эта работа выполнялась тремя эта-
пами, цена которых была соответствен-
но 40 530 тыс.руб., 10 000 тыс. руб., 300
тыс. руб. (в ценах 2012г.).
Как уже было отмечено, КА «Ре-
сурс-П» №2 был успешно выведен на
орбиту и сейчас функционирует по сво-
ему назначению и, соответственно, с
его помощью обеспечивается проведе-
ние космического эксперимента «Нук-
лон». В процессе летной эксплуатации
КА подтвердилось, что наземная экспе-
риментальная отработка комплекса
научной аппаратуры была проведена
полноценно и взаимного отрицательно-
го влияния ДПН «Нуклон» и бортовой
аппаратуры КА не оказывается.
Необходимо подчеркнуть, что как
и в случае с проектами «Конус-А» и
«Рим-Памела» затраты на проведение
космического эксперимента «Нуклон»
являются несопоставимо малыми по от-
ношению к затратам, необходимым для
создания специализированного КА
научного назначения.
Несмотря на скромные используе-
мые ресурсы, такие как масса, геомет-
рические размеры, энергетика и т.п.,
эксперимент «Нуклон» увеличит обще-
мировую статистику, собранную за
предыдущие 50 лет исследования, как
минимум в 2 раза. Причем речь идет о
качественно новом материале - впервые
будет исследован беспрецедентно ши-
рокий энергетический диапазон косми-
ческих лучей в четыре порядка единой
методикой в ходе долговременного, не
менее 5 лет, орбитального эксперимен-
та.
В заключение можно сказать, что
при проведении научных экспериментов
«Конус-А», «Рим-Памела» и «Нуклон»
на серийных КА не потребовалось вы-
деления финансирования на такие ре-
сурсоемкие этапы, как разработка и из-
готовление специализированного КА
под установку на него научной аппара-
туры, затраты на технологическую под-
готовку предприятия-изготовителя КА
(обычно сопоставимых со стоимостью
КА), на закупку ракеты-носителя, на
проведение на космодроме работ по
подготовке и запуску КА. Все это гово-
рит в пользу использования резервов
серийных КА для установки дополни-
тельной научной аппаратуры для про-
ведения фундаментальных научных ис-
следований.
Библиографический список:
1. Стратегия развития космиче-
ской деятельности России до 2030 года
и на дальнейшую перспективу (проект)
// Офиц. сайт «Координационного науч-
но-технического совета Федерального
космического агентства по программам
научно-прикладных исследований на
пилотируемых космических комплек-
сах» [Электронный ресурс]. URL:
http://knts.tsniimash.ru/ru/src/Centcrlnl~Re
5/Стратегия%20развития%20космическо
й%20деятельности%20России%20до%2
02030%20года.рб1~ (Дата обращения
04.06.2015).
2. Ерыгина Л.В. Состояние рос-
сийской ракетно-космической промыш-
ленности и тенденции ее развития /
Л.В. Ерыгина, Р.С. Сердюк // Вестник
Сибирского государственного аэрокос-
мического университета им. академика
М.Ф. Решетнева. - 2014. - № 1 (53). - С.
207-211.
3. Информационное агентство
ВПК.пате офиц. сайт [Электронный ре-
сурс]. URL: http://vpk.namc/ncws/
128978 proekt federalnoi kosmicheskoi
programmyi па 20162025 godyi urezhut
na 10.html (Дата обращения
27.03.2015).
4. Карасев П.А. Внедрение логи-
стического подхода при проведении
НИОКР в российской ракетно-
космической промышленности /
П.А. Карасев, А.С. Карасев // Логисти-
ческие системы в глобальной экономике
[Электронный ресурс] : материалы V
Междунар. науч.-практ. конф. (2-3 апр.
2015 г., Красноярск) : электрон, сб. /
Сиб. гос. аэрокосмич. ун-т. - Красно-
ярск, 2015. - Режим доступа:
http://www.sibsau.ru/ i mages/document/
2015/2015_04_02_sbornik_logisticheskie_
sistemy_v_globalnoy_ekonomike.pdf
свободный. - Загл. с экрана. С.220-224.
461
5. Постановление Правительства
РФ от 22 октября 2005 года № 635-дсп
«О Федеральной космической програм-
ме России на 2006-2015 гг.» //
Офиц.сайт Федерального космического
агентства. [Электронный ресурс]. URL
http://www.federalspace.ru/115 (дата об-
ращения 17.05.2015).
6. Вальмиспильд В.Н., Колбасина
И.В., Сорокин А.В. Перспективы разви-
тия физики космоса на фоне достиже-
ний в космической технике и техноло-
гий // Актуальные проблемы авиации и
космонавтики. - 2012. - Т. 2. - № 8. - С.
447-448.
7. Кислицкий, М.И. Двойное ис-
пользование космических аппаратов:
концепция, технические и экономиче-
ские аспекты / М.И. Кислицкий. - СПб.:
Политехника-сервис, 2012. - 198 с.
8. Карасев, А.С. Анализ экономи-
ческой целесообразности проведения
научных экспериментов с помощью до-
полнительной полезной нагрузки на се-
рийных КА / А.С. Карасев, П.А. Карасев
// Материалы II Всероссийской научно-
технической конференции «Актуальные
проблемы ракетно-космической техни-
ки» (II Козловские чтения); под общ.
ред. А.Н. Кирилина / СамНЦ РАН - Са-
мара, 2011. - 667 с. - С.637-638.
References:
1. Strategy for the development of
space activity of Russia up to 2030 and
beyond (project) // official site "Coordinat-
ing scientific and technical council of the
Federal Space Agency of the program of
scientific and applied research on manned
space complexes". Available at:
http://vpk.name/news/128978 proektfede
ral-
noi kosmicheskoi programmyi na 20162
025 godyi urezhut na 10.html (In Russ.).
2. Erygina L.V., Serdjuk R.S. Sos-
tojanie rossijskoj raketno-kosmicheskoj
promyshlennosti i tendencii ее razvitija
[Growth trends of Russian space industry].
Vestnik SibGAU, 2014, № 1 (53), pp. 207-
211. (In Russ.).
3. Information Agency VPK.name
official site. Available at:
http://vpk.name/news/128978 proekt fede
ralnoikosmicheskoi programmyi na
20162025 godyi urezhut na 10.html (In
Russ.).
4. Karasev P, Karasev A. Implemen-
tation of logistics method in R&D in the
russian space industry, Logistic systems in
global economics. Available at:
http://www.sibsau.ru/images/document/20
15/2015_04_02_sbornik_logisticheskie_sis
temy_v_globalnoy_ekonomike.pdf (In
Russ.).
5. Resolution of the Government of
Russian Federation dated October 22,
2005 № 635-dsp "About Russian Federal
Space Program (for 2006-2015)." 11 offi-
cial site of Federal Space Agency. Availa-
ble at: http://www.federalspace.ru/115 (In
Russ.).
6. Valmispild V.N., Kolbasina LV.,
Sorokin A.V. Perspektivy razvitija fiziki
kosmosa na fone dostizhenij v kosmich-
eskoj tehnike i tehnologij. Aktual'nye
problemy aviacii i kosmonavtiki, 2012, i.2,
№ 8, pp. 447-448. (In Russ.).
7. Kislickij M.I. Dvojnoe
ispol'zovanie kosmicheskih apparatov:
koncepcija, tehnicheskie i jekonomiches-
kie aspekty, SPb., Politehnika-servis,
2012.-198 p. (In Russ.).
8. Karasev A.S., Karasev P.A. Ana-
liz jekonomicheskoj celesoobraznosti
provedenija nauchnyh jeksperimentov s
pomoshh'ju dopolnitel'noj poleznoj
nagruzki na serijnyh KA, Materialy II Vse-
rossijskoj nauchno-tehnicheskoj konfer-
encii «Aktual'nye problemy raketno-
kosmicheskoj tehniki» (II Kozlovskie cht-
enija); SamNC RAN - Samara, 2011. -
667 p. - pp.637-638. (In Russ.).
462
THE EVALUATION OF ECONOMIC EFFICIENCY OF BASIC RESEARCH IN SPACE
IN CASE OF LIMITED FUNDING (ON THE EXAMPLE OF THE CONE-A AND
NUCLEON SPACE EXPERIMENTS)
©2015 P.A. Karasev, A.S. Karasev, E.Ju. Morozova
FSUE «КВ «Arsenal», St. Petersburg
The article is about of basic space research under the Federal Space Program. The possibility of the use of re-
serves in serial spacecraft for extra scientific equipment is analyzed. Here the calculation of the cost-effectiveness of
this method in practice.
Keywords: basic research, space experiment, aerospace industry, R & D, logistics approach, economic effi-
ciency, innovation
Информация об авторах:
Карасев Петр Александрович: начальник группы, ФГУП «КБ «Арсенал», 195009,
г. Санкт-Петербург, ул. Комсомола 1-3, т. (812) 292-47-38, petrkarfamail.ru.
Область научных интересов: Оптимизация цикла проведения НИОКР, экономиче-
ские аспекты НИОКР в оборонно-промышленном комплексе.
Карасев Александр Сергеевич: к.т.н., заместитель генерального конструктора по
договорной работе, ФГУП «КБ «Арсенал», 195009, г. Санкт-Петербург, ул. Комсомола
1-3, т. (812) 292-47-38, alskarfamail.ru.
Область научных интересов: вопросы достоверности контроля технических пара-
метров сложных систем.
Морозова Елена Юрьевна: заместитель генерального директора - директор по
экономике и финансам, ФГУП «КБ «Арсенал», 195009, г. Санкт-Петербург, ул. Комсомо-
ла 1-3, т. (812) 292-47-38, kbarsenalfakbarsenal.ru.
Область научных интересов: Вопросы ценообразования при проведении НИОКР в
ракетно-космической промышленности.
Karasev Petr Aleksandrovich: head of the group, FSUE "KB" Arsenal ", 195009, c, ul.
Komsomola, 1-3, (812) 292-47-38, petrkarfajmail.ru.
Area of research: optimization of R&D cycle, the economic aspects of research and devel-
opment in the military-industrial complex.
Karasev Alexander Sergeevich: Ph.D., Deputy general designer of contract work, FSUE
"KB" Arsenal ", 195009, St. Petersburg, ul. Komsomola, 1-3, (812) 292-47-38, alskarfamail.ru.
Area of research: issues of technical reliability of the control parameters of complex sys-
tems.
Morozova Elena Jur’evna: Deputy general director - Director for economics and finance,
FSUE "KB" Arsenal ", 195009, St. Petersburg, ul. Komsomola, 1-3. (812) 292-47-38,
kbarsenalfakbarsenal.ru.
Area of research: issues of pricing in the R&D in the aerospace industry.
463
IV Всероссийская научно-техническая конференция
«Актуальные проблемы ракетно-космической техники»
(IV Козловские чтения)
Секция 11: История ракетно-космической техники и
космонавтики
464
УДК 94(47)
ПОДГОТОВКА К ЛЁТНЫМ ИСПЫТАНИЯМ РАКЕТЫ Р-5 В 1952 ГОДУ
©2015 Л.П. Вершинина
Федеральное государственное унитарное предприятие
«Центральный научно-исследовательский институт машиностроения»,
г. Королёв, Московская обл.
В докладе рассматривается процесс подготовки и согласования программы испытаний баллистиче-
ской ракеты Р-5, а также анализируются причины их срыва в 1952 году.
Ключевые слова: ракета Р-5, летные испытания, С.П. Королев, НИИ-88
Конструктивная схема ракеты Р-5
вытекает из работ над предыдущими из-
делиями Р-2 и Р-3: использование несу-
щего кислородного бака предполагалось
осуществить ещё в 1949 г. в конечном
варианте «двойки», а бесстабилизаторная
аэродинамическая схема прорабатыва-
лась в эскизном проекте ракеты Р-3, за-
щищённом на Пленарном заседании НТС
НИИ-88 в декабре 1949 г.
Отработка конструктивных реше-
ний по Р-3 проводилась на эксперимен-
тальной ракете Р-ЗА, в результате чего
выявилась возможность быстрого созда-
ния боевой ракеты на дальность 1200 км.
В докладной записке, направленной 20
октября 1951 г. в Министерство воору-
жения, С.П. Королёв предложил «прин-
ципиально одобрить направление работ и
основные характеристики ракеты с даль-
ностью 1200 км, присвоив ей наименова-
ние Р-5». Лабораторную и стендовую от-
работку ракеты предполагалось начать
уже в декабре 1951 г., а лётные испыта-
ния провести в 2 этапа в течение 1952 г.
В действительности, как свидетель-
ствуют новые архивные данные, работа
над ракетой Р-5 шла гораздо труднее, чем
виделось первоначально. Испытания в
1952 г. так и не были проведены, хотя
осенью шла активная подготовка к ним.
PREPARATION FOR ROCKET R-5 FLIGHT TESTS IN 1952
©2015 L.P. Vershinina
The federal state unitary enterprise
“The central scientific research institute of engineering”,
Korolev, the Moscow region
In the report process of preparation and the coordination of the program of tests of ballistic rocket R-5 is con-
sidered, and also the reasons of their failure in 1952 are analysed.
Keywords: rocket R-5, flight tests, S.P. Korolev, SRI-88.
Информация об авторе:
Вершинина Любовь Павловна, историк-архивист, инженер I категории, ФГУП
ЦНИИмаш, 141070, РФ, Московская область, г. Королев, ул. Пионерская, д. 70,
vegal00@mail.ru
Область научных интересов: история ракетно-космической техники, история Совета
главных конструкторов.
465
Vershinina Lubov Pavlovna, historian-archivist, the engineer of I category, The federal
state unitary enterprise “The central scientific research institute of engineering”, 141070, Russia,
the Moscow region, Korolev, Pioneerskaya street, 70 vegal00@mail.ru.
Research interests: history of space rocket technology, history of Council of chief design-
ers.
УДК 94(47)
ИСТОРИЯ ЧЕРЕЗ ЛИЧНОСТЬ: ПРОБЛЕМЫ РЕКОНСТРУКЦИИ БИОГРАФИИ
ЛИДЕРОВ РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА СССР
©2015 В.Н. Парамонов
Самарский государственный университет, г. Самара
Аннотация: Под реконструкцией биографии понимается изучение и восстановление жизненной
судьбы персоны в конкретно-историческом контексте. На качество реконструкции биографии ученых, кон-
структоров, организаторов ракетно-космического комплекса ССС влияют секретность в отношении данной
сферы деятельности, рассредоточение документов, относящихся к конкретной личности, в разных архива,
слабая работа исследователей с неопубликованными материалами персон, избранных в качестве объекта
изучения.
Ключевые слова: историческая биография, реконструкция биографии, ракетно-космический ком-
плекс, ученые, конструкторы, организаторы, исторический источник
Актуальность темы связана с воз-
растанием интереса научного сообщества
к биографиям ученых, конструкторов как
носителей научно-культурного, техниче-
ского знания. В современной прессе, ли-
тературе наблюдается увеличение общего
числа биографических текстов и их не-
равномерное распределение по разным
типам печатных изданий. На рынке пери-
одической печати появились специализи-
рованные издания, посвященные биогра-
фической тематике («биографические»
журналы), героями которых становятся
люди, известные широкой аудитории.
Современные журнальные издания руко-
водствуются в основном коммерческими
интересами. В газетах (особенно еже-
дневных) полноценные портретные очер-
ки встречаются редко.
Историческая биография, под кото-
рой понимают исследование и описание
жизни исторических личностей, является
популярным жанром исторических ис-
следований. В подобных исследованиях
через призму исторической личности по-
казывается история во всех ее проявле-
ниях, т.к. жизнеописание отдельного че-
ловека идет через раскрытие его частной
и внутренней жизни. Как отмечает Л.П.
Репина, «...Биографии известных людей
прошлых эпох — идеализирующие или
„раздевающие”, в форме морального
наставления или каталога подвигов, ад-
вокатской речи или обвинительного при-
говора, наградного листа или заключения
психиатра, помимо прочего, всегда слу-
жат своеобразным зеркалом (вопрос о
степени его „кривизны" без устали деба-
тируется), глядя в которое читатель мо-
жет многое узнать и о себе» [18. С. 5-6].
Автором статьи под «научной» био-
графией понимается историческое ис-
следование, в котором указаны актуаль-
ность, степень изученности, библиогра-
фия, признанные научным сообществом
принципы и методы работы в рамках
данного жанра. Главные черты биогра-
фии сводятся к следующим: ориентация
на строгую объективность как самого ис-
следовательского инструментария, так и
способа изложения; наиболее значитель-
ное исследовательское усилие автора
должно быть направлено на обобщение,
типизацию материала, т.е. процедуру, га-
рантирующую максимальное приближе-
ние к истинности получаемого знания. В
466
биографии, безусловно, присутствие
мыслей, чувств, особенностей характера,
привычек главного персонажа при абсо-
лютном авторском нейтралитете самого
биографа, который должен сохранить
умение обобщать, адекватно описывать
жизненные ситуации интересующей его
личности. Чтобы изобразить характер,
внутренний мир личности, нужно пока-
зать поступки героя и события, произо-
шедшие с ним, которые являются важной
частью жизни человека, а, следовательно,
и частью его биографии. При этом иссле-
дователю важно учитывать собственную
субъективность, критически относиться к
своей точке зрения и реалиям своей эпо-
хи. Ученым секретарем научно-
биографической серии АН СССР З.К.
Соколовской были сформулированы кри-
терии научной биографии: объективность
изложения, критический анализ истори-
ческих источников, квалифицированное
изучение жизни и деятельности героя
биографического описания, недопусти-
мость художественного вымысла [24. С.
70].
Под реконструкцией биографии по-
нимается изучение и восстановление
жизненной судьбы персоны в конкретно-
историческом контексте, характеризую-
щем данную эпоху, в неразрывной связи
с жизнедеятельностью персоны (лично-
сти).
Нам близка точка зрения И.Ф. Пет-
ровской о выборе героев для биографи-
ческой реконструкции: «Задача биогра-
фики - не показывать, “делать жизнь с
кого”, не являть примеры для подража-
ния и объекты восхищения..., а раскрыть
многообразие людей и сложность каждо-
го из них. Точнее - не выявление особо
выдающихся деятелей какой-то элиты, а,
в конечном счете, создание группового
портрета общества, состоящего из непо-
вторимых индивидуальностей, где каж-
дый самоценен и значим, в каждом есть
что-то достойное внимания, изучения»
[15. С. 20].
Инновационный процесс, как пока-
зывает исторический опыт, инициирует-
ся наиболее активными деятелями той
или иной сферы деятельности. Нередко
содержание, методы осуществления, ре-
зультаты новых внедрений носят отпеча-
ток тех креативных личностей, которые
добивались их претворения в жизнь. В
этой связи особенно важным представля-
ется реконструкция биографий лиц,
ставших участниками или свидетелями
переломных моментов в жизни страны.
Особый интерес в этой связи вызывает
реконструкция биографий ученых, кон-
структоров, организаторов производства
ракетно-космической техники.
Следует учитывать, что данная
группа людей специфична. Как правило,
долгое время они остаются засекречен-
ными, еще больший срок секретности от-
носится к их разработкам, изобретениям.
Поэтому сведения о жизни такого персо-
нажа ограничены, а реконструкция био-
графии носит частичный характер. Как
писала дочь С.П. Королева Н.С. Королева,
«эта завеса (секретности - В.П.) была
настолько мощной, что даже в институте,
где я работала, почти никто не знал, чем
занимается мой отец. Когда я позвонила
туда и сказал, что не приду на работу,
потому что у меня умер отец, сослужив-
цы не ассоциировали это с сообщением о
смерти Главного конструктора. В доме на
Октябрьской, где почти сорок лет жила
бабушка и десять лет прожил отец, люди
были потрясена тем, что они не имели
понятия, чья мать живет по соседству. На
вопросы соседей бабушка всегда уклон-
чиво отвечала, что работа сына связана с
авиацией, и они думали, что он лётчик»
[7. С.112-113].
Начиная с 1960-х годов, вышло
большое количество изданий по истории
развития РКК в СССР, включая биогра-
фические данные об отдельных разработ-
чиках РКТ [1; 4; 12; 17; 22; 23; 25]. Крат-
кие биографические данные о лидерах
РКК были помещены в энциклопедиче-
ских изданиях [2; 8; 9; 10; 11; 21].
Например, в издании «Космонавтика.
Маленькая энциклопедия» (1968) были
отражены основные события в области
космонавтики, происшедшие до сентября
1967 г. Особое внимание уделялось кос-
мическим жидкостным ракетам и двига-
телям, впервые предложенным К. Э.
467
Циолковским. Материал энциклопедии
охватывал такие разделы, как космонав-
тика, космические летательные аппараты,
космические ракетные двигатели, ракет-
ное топливо, управление движением и
космическая навигация, динамика косми-
ческого полета, космическая связь, кос-
модромы, космическая медицина и био-
логия, жизнеобеспечение, геофизика,
астрономия, космическое право, биогра-
фии ученых и космонавтов. В энцикло-
педии "Космонавтика" (1985) , включа-
ющей около 2000 статей, освещалась ис-
тория и современные для того времени
проблемы ракетостроения и космонавти-
ки, приводились биографии пионеров
космонавтики, советских и зарубежных
космонавтов, ученых и конструкторов -
создателей космической техники. Следу-
ет отметить увеличение числа персон,
чьи биографии приводились в справоч-
ных изданиях. Но статьи о персоналиях
ограничивались перечислением дат жиз-
ни, основных карьерных этапов, заслуг и
наград.
К основным разновидностям био-
графии относятся собственно биографи-
ческие труды, биографические эпизоды в
рамках других жанров (очерка, речи и
др.), статьи некрологического характера,
юбилейные статьи, а также персональные
энциклопедические статьи, различающи-
еся между собой, первую очередь, полно-
той, принципом отбора и способом пода-
чи материала, концепцией автора, а так-
же степенью его субъективности.
Кроме развлекательной и познава-
тельной функций биографические очерки
выполняют также и функцию ценностно-
ориентирующую. Поэтому требования к
этической стороне подачи биографиче-
ской информации в историческом иссле-
довании должны быть достаточно высоки.
Научная биография обрела статус
междисциплинарного жанра, произведе-
ния которого создаются с очевидной
опорой на свойства отличных друг от
друга дисциплин. При создании биогра-
фии представителей ракетно-
космического комплекса важно учиты-
вать наличие в исследовательской прак-
тике естественнонаучных открытий, вы-
числительных техник, графиков, формул,
т.е. того, что составляет уже иную об-
ласть познания, не требующую столь не-
обходимого отвлечения в сферу искус-
ства, стиля, даже, возможно, словесной
игры, характерных для биографий писа-
телей, художников и др.
Критический анализ источников о
представителях РКК включает в себя
установление подлинности и достоверно-
сти содержания имевшихся документов,
поиск ответов на такие вопросы, как: ка-
ково социальное происхождение персо-
нажа; в каких условиях проходила его
социализация (влияние на нее системы
образования; общественных событий и
пр.); какие личные качества были ему
присущи; какие нравственные ценности
являлись для него приоритетными; каким
было влияние на его биографию опыта
старшего поколения (родителей, дедушек
и бабушек); каков был «круг общения»
изучаемого персонажа; какие события
(люди и пр.) вызвали в свое время у него
самые сильные переживания и т.д.? Се-
рьезной проблемой в изучении биогра-
фий ученых, конструкторов ракетно-
космической техники являются ограни-
чения, согласно закону о защите персо-
нальных данных. Это не позволяет в пол-
ной мере отразить различные стороны
жизнедеятельности личности.
Анализ биографических изданий
позволяет выделить три группы биогра-
фов.
1) Ученики-последователи [14]. Для
их работ характерным является макси-
мально позитивная обрисовка личности
ученого, конструктора, высокая оценка
его вклада в развитие авиации. Следует
отметить также, что особое внимание ав-
торов по вполне понятным причинам
уделено тем сферам деятельности упо-
минаемых, исследуемых персон, которые
оказались в центре их собственных про-
фессиональных интересов.
2) Коллеги [12; 27 28; 29]. Их рабо-
ты отличаются от прочих биографиче-
ских обзоров глубиной рассмотрения
профессиональной деятельности героя,
но, одновременно, анализ работ позволя-
ет говорить также о наличии некоторой
468
конкуренции между научными деятелями,
фирмах, так как именно в данной группе
биографий мы находим отражение отри-
цательных черт характера героя и крити-
ку процесса его деятельности. Опублико-
ванные воспоминания руководителей
конструкторских бюро, участников собы-
тий того или иного времени, интервью с
ними раскрывают многие черты стиля
управления той или иной персоны. Так,
Б.Е. Черток в своей книге «Ракеты и лю-
ди» рассказал о непростых взаимоотно-
шениях генеральных и главных кон-
структоров той эпохи (например, Коро-
лева и Глушко, Глушко и Мишина), о
решениях по началу или завершению тех
или иных работ, о смелости или отсут-
ствии таковой при отстаивании различ-
ных точек зрения. О натянутых, далеко
не партнерских отношениях после смер-
ти С.П. Королева между Центрального
конструкторского бюро эксперименталь-
ного машиностроения и его филиалом в
г. Куйбышеве написал В. Чаркин. На
развитие КБ в Самаре ЦКБЭМ выделяло
явно заниженные трудовые и финансо-
вые ресурсы. Д.И. Козлов не мог сми-
риться с таким положением, он приложил
титанические усилия по созданию на базе
филиала самостоятельного головного КБ,
и в июле 1974 года было создано Цен-
тральное специализированное конструк-
торское бюро[27]. В воспоминаниях о
Д.И. Козлове отмечаются такие черты
его характера, как требовательность и
справедливость [16; 27].
3) Личные знакомые. Публикации
личных знакомых С.П. Королева, Д.И.
Козлова, М.К. Тихонравова, Б.Е. Чертока
и других характеризуются осторожно-
стью авторской оценки достижений уче-
ного, конструктора, организатора и
стремлением выделить ту сторону его
труда, которая была наиболее близка их
собственным профессиональным интере-
сам.
Главной проблемой при работе с
любыми источниками является то, что ни
один из них не содержит полной инфор-
мации о человеке, а имеющиеся в них
факты далеко не всегда бывают досто-
верными. Перед биографом стоит в этой
связи задача: по разрозненным источни-
кам восстановить в текстовой форме
жизненный путь человека. Архивные
данные представляют только сырой ма-
териал для биографии, даже если речь
идет не о развернутом литературном
жизнеописании, а о простой биографиче-
ской справке - «персоналии». Для ее со-
ставления требуется собрать и обобщить
биографические факты, под которым по-
нимается «высказывание..., являющееся
ответом на вопросы типа кто?, что?, ко-
гда?»^].
Серьезной проблемой в изучении
темы является рассредоточение докумен-
тов, относящихся к конкретному персо-
нажу, в разных архивах. Заявки на изоб-
ретения сосредоточены в РГАНТД, а о
том, каким было внедрение, эффектив-
ность - в других архивах. Такого рода
разбросанность затрудняет получение
целостной исторической картины о дея-
тельности личности ученого и конструк-
тора.
Для этого, прежде всего, необходи-
мо восстановить как можно больше био-
графических фактов: поступков или пе-
реживаний героя, мнений о нем совре-
менников, внешних событий, отразив-
шихся на его жизни. На помощь исследо-
вателю приходят всевозможные источни-
ки: научная литература, справочные из-
дания, периодическая печать, научные и
публицистические работы интересующе-
го нас лица, эпистолярное наследие, ме-
муары, личные дела из архивов организа-
ций, с которыми был связан человек. Все
они в совокупности формируют единое
историографическое и источниковедче-
ское поле для реконструкции биографии.
В качестве информационных ис-
точников важны личные дела, автобио-
графии, дающие сжатую, но в то же вре-
мя целостную картину прожитой данным
персонажем жизни, анкеты, выписки из
различных документов (постановлений
партийных и государственных органов),
выступления, воспоминания, дневники,
переписка. Так, в Самарском государ-
ственном архиве социально-
политической истории хранятся ориги-
налы автобиографии и личного листка по
469
учету кадров Д.И. Козлова от 21 ноября
1961 г., в которых отражены важнейшие
жизненные вехи его биографии.
Для реконструкции мировоззрения
ученого важны первичные тексты, напи-
санные им самим, не по заданным кано-
нам, «не для печати», а личные, искрен-
ние. Ими являются, как правило, мемуа-
ры. Если они недоступны, то рекон-
струкция будет носить частичный харак-
тер, использование отдельных отрывков,
источников не спасет ситуацию, а может
сформировать лишь гипотезу. Использо-
вание только опубликованных работ
означает однобокость источниковой базы.
Для анализа творческого пути интересен
генезис мысли ученого, путь идеи от
черновика через отредактированные вер-
сии к чистовику. Можно говорить о
несоответствии между значительным
вкладом Д.И. Козлова в развитие отече-
ственного РКЦ, с одной стороны, и не-
достаточной изученностью его научного
наследия, с другой. Научные стороны
биографии Д.И. Козлова оказалась со-
вершенно не исследованной. Понятно,
это может быть связано и с засекречен-
ностью ряда материалов. Но в перспекти-
ве изучение рукописных неопублико-
ванных материалов позволит более по-
дробно представить различные аспекты
его профессиональной деятельности в
динамике, а также выявить внутренние и
внешние факторы развития научного
мышления, что поспособствует более
глубокому пониманию научного насле-
дия в целом.
Не стоит забывать, что любой уче-
ный проходит через творческие муки,
научный поиск, сложность выражения
найденных соответствий, доказательство
гипотез - все это благодатная почва для
образности и эмоциональности.
Патентная документация помогает
разгадать, что хотел сказать автор изоб-
ретения. Важно патент рассматривать и
как определенный этап в жизни того или
иного человека и учитывать конкретную
мотивацию. Так, при защите диссертации
на соискание степени в области техниче-
ских наук, считается признаком хороше-
го тона, если среди публикаций соиска-
теля есть заявка о выдаче патента или па-
тент на изобретение. Тогда считается, что
есть документальное подтверждение но-
визны работы, представленной на защиту.
Нередко над изобретением работают не-
сколько человек, а для обеспечения за-
щиты диссертации авторство отдают од-
ному. Но по патентам и заявочным мате-
риалам по близкой тематике можно это
выявить.
Патентные документы позволяют
раскрыть, чем отличился герой, какими
путями он шел к достижениям, узнать не
только о конечных результатах творче-
ской работы, но о движении мысли героя
в процессе изобретения, а также о чув-
ствах, которые владели в это время чело-
веком, что именно помогло ему и может
помочь другому достичь успеха, что сле-
дует у него заимствовать, перенять.
Представляют интерес заявочные мате-
риалы В.П. Глушко относящиеся к 1930-
м годам и хранящиеся в Самарском фи-
лиале РГАНТД [19. Ф. Р-1. Оп. 3-5. Д.
6524, 6578; Оп. 47-5. Д. 830,909, 929, 943,
986, 1066, 1439; 1894; Оп.48-5. Д.1106].
Материалы помогают исследовать
начальный этап творчества ученого, кон-
структора.
Следует также отметить, что за-
явочные материалы дают возможность
получить информацию о возрасте, месте
жительства, партийности изобретателя на
момент изобретения и подачи заявки ,
насколько человек был настойчив, над
чем работал, как менялась его концепция
и в целом видение проблемы, работал ли
он индивидуально или в коллективе (в
команде), с какими трудностями встре-
чался. Также возможно проследить неко-
торые элементы творчества, мировоззре-
ния, стиль и тип мышления, логику твор-
чества, насколько изобретатель был ин-
формирован о достижениях в своей обла-
сти, особенности взаимоотношений с
коллегами (по переписке).
В коротких интервью-
воспоминаниях опрашиваемые зачастую
выделяют самое существенное в биогра-
фии героя. Т.П. Аншаков -, 1-ый заме-
ститель Генерального директора ЦСКБ
«Прогресс» (1979 — 2006 г.г.), член-
470
корреспондент РАН: «Это был человек
безгранично преданный делу, очень ор-
ганизованный, с высоким чувством от-
ветственности и, в то же время, очень
простой. Кстати, обладал прекрасной ин-
туицией: с первого взгляда давал верную
оценку человеку... Он был очень прин-
ципиальным человеком. Помню, как мы
начинали внедрять на производство пер-
вые разработки космических аппаратов.
Тогда стоял вопрос, как их строить. Коз-
лов предлагал развивать цифровые си-
стемы управления, он считал, что за та-
кими аппаратами будущее. Приехала ко-
миссия из Москвы во главе с начальни-
ком Главка, и заняла жесткую неприми-
римую позицию. Помню, нас тогда
назвали «самарскими радиолюбителями».
Дмитрий Ильич тогда не уступил, и в ко-
нечном итоге комиссия сдалась. Это по-
коление космических аппаратов живет до
сих пор — Козлов был абсолютно прав».
Н.В. Свешников - министр промышлен-
ности и энергетики Самарской области
(2002 — 2007), характеризуя Д.И. Козло-
ва, подчеркнул следующее: «Он был ве-
ликий конструктор и ученый, и вместе с
тем, у него всегда было уважительное
отношение к молодым специалистам... И
еще хочу сказать: самое ценное его каче-
ство — постоянство, верность принципам
и идеалам. Его никто не сломал, не пере-
делал. Вы знаете, что он не вышел из
КПСС? Он даже от наград отказывался в
знак протеста, когда Ельцин ему их да-
вал». В.А. Сойфер - член-корреспондент
РАН, Президент СГАУ: «Проницатель-
ный взгляд его помню до сих пор, под
ним можно было только правду говорить.
Его прозорливость распространялась и на
человеческие и на профессиональные от-
ношения. В начале 60-х годов он взял
курс на технологию дистанционного зон-
дирования земли с помощью спутников-
разведчиков, тогда это направление не
было в приоритете, люди вообще не по-
нимали, зачем это надо. А скоро выясни-
лось, что эта тематика чрезвычайно акту-
альна, и до сих пор актуальность все по-
вышается» [6].
Анализ источников показывает, что
многие лидеры ракетно-космической от-
расли сочетали в себе качества и ученого,
и конструктора, и организатора-
инноватора.
Труды человека, чью биографию
мы реконструируем, играют не послед-
нюю роль в этом процессе. В них мы
находим ценную информацию о научных
пристрастиях и приоритетах, условиях и
методах работы, помощниках интересу-
ющего нас лица.
При этом важно учитывать, что
творчество многих представителей ра-
кетно-космической отрасли не ограничи-
валось только научно-технической сфе-
рой. К.Э. Циолковский написал ряд
научно-фантастических произведений
[26]. М.К. Тихонравов занимался живо-
писью, коллекционированием марок,
считая, что марки помогали ему снимать
напряжение [ 5. С. 194-195].
Интересны личные фонды предста-
вителей РКК, хранящиеся в архивах.
Например, в РГАНТД в г. Москве хра-
нятся личные фонды Б.Е. Чертока (1912-
1911) - ученого в области систем управ-
ления РКТ, соратника Королева С.П. (с
1945), Героя Социалистического Труда
(1961), лауреата Ленинской (1957) и Гос-
ударственной (1976) премий; А.И. Оста-
шева (1925—1998) — инженера-
механика, специалиста в области испы-
таний ракетной техники, лауреата Ленин-
ской (1960) и Государственной (1978)
премий, одного из ведущих испытателей
ракет и ракетно-космических комплексов
ОКБ-1, начиная с ракеты Р-1, соратника
Королева С.П ; А.В. Палло (1912— 2001)
— инженера-механика, специалиста по
двигателям аэрокосмической техники,
лауреата Ленинской премии (1966), рабо-
тавшего в РНИИ, НИИ-1, ОКБ-1, НПО
«Энергия» [13. С. 38, 39-40, 56].
Например, в фонде А.В. Палло
представлены различные документы,
раскрывающие различные стороны его
биографии. Во-первых, документы твор-
ческой деятельности: воспоминания о
встречах с конструкторами РКТ (Короле-
вым С.П., Бушуевым К.Д., Чертоком Б.Е.,
Семеновым Ю.П.) и космонавтами (Гага-
риным Ю.А., Леоновым А.А., Шатало-
вым В.А., Елисеевым А.С.), об организа-
471
ции поиска и эвакуации космических ап-
паратов (1940-1993). Во вторых, доку-
менты служебной и научной деятельно-
сти: акты, протоколы, отчеты испытаний
ОРД-2 в ГИРДе, подписанные Короле-
вым С.П., Цандером Ф.А. (1933), техни-
ческая документация НИИ-3, разрабо-
танная на крылатую ракету дальнего дей-
ствия, реактивную установку на самолете
ПЕ-2, подписанные Королевым С.П.,
Раушенбахом Б.В. (1933—1944); копии с
рабочих чертежей, выполненные на каль-
ке, в том числе на первый, второй, третий
искусственные спутники Земли, косми-
ческие корабли-спутники для транспор-
тировки животных и других научных ис-
следований, автоматические межпланет-
ные станции «Венера-1», «Марс-1» и не-
которые другие (1957 — 1962); докумен-
ты, справки, письма и пр., относящиеся к
периоду работы Палло А.В. в НИИ-1,
Лаборатории двигателей АН СССР, ОКБ-
23, ОКБ-1; чертежи, схемы, рисунки кос-
мических аппаратов и модулей «Союз»,
«Спектр», «Природа», «Квант», «Полюс»,
ОС «Мир» и др. (1970-1995). В- третьих,
переписка. В-четвертых, документы к
биографии: анкета кандидата в члены
КПСС (1955), анкета, автобиография и
личный листок по учету кадров в АН
СССР (1960), копия удостоверения №
2204 о присуждении Палло А.В. Ленин-
ской премии (1966) и др. В-пятых, доку-
менты других лиц: документы брата Пал-
ло А.В. - В.В. Палло (1923—1994) —
Главного конструктора НПЦ им. М.В.
Хруничева, лауреата Ленинской премии.
В-шестых, фотодокументы.
К ценнейшим источникам принад-
лежит периодика. В ней содержится не
только информация о том или ином пе-
риоде и важнейших событиях, но и не-
редко публиковались под псевдонимами
героев статьи о развитии ракетно-
космической техники. Так, С.П. Королев
опубликовал под псевдонимом «Профес-
сор К. Сергеев» статьи в газете "Правда":
«Творчество, воодушевлённое Октябрём»
- 10 ноября 1960 г.; «Советская Земля
стала берегом Вселенной!» - 31 декабря
1961 г.; «С Новым космическим годом!» -
1 января 1964 г.; «Космические дали» -
1 января 1965; «Шаги в будущее» - 1 ян-
варя 1966 г.
Соратник и заместитель Главного
конструктора С.П. Королева, впослед-
ствии возглавлявший НПО им. С.А. Ла-
вочкина, крупный разработчик-проектант
ракет и космических аппаратов С.С.
Крюков (1918-2005) использовал для
публикаций в академических и популяр-
ных изданиях псевдоним «С.С. Соколов»
[22; 23].
В газетах и журналах, вышедших
после смерти наших героев, особый ин-
терес представляют объявления о смерти
и похоронах и некрологи. Уже сам факт
их появления в прессе говорит о значи-
мости данного лица. Так, население
СССР узнало имя главного конструктора
космических кораблей С.П. Королева
только после публикации некролога о
нем в центральных газетах 16 января
1966 г.
В целом, изучение жизненного пу-
ти ученых, конструкторов, организаторов
ракетно-космического комплекса, векто-
ра их научных исследований, мировоз-
зрения и умонастроений, служебных, се-
мейных и дружеских связей позволяет
глубже заглянуть в определенный исто-
рический период, персонифицировать
истори-ческие события, обогатить их
фактами.
Библиографический список:
1. Академик С.П. Королёв. Уче-
ный. Инженер. Человек. Творческий
портрет по воспоминаниям современни-
ков: Сб. статей/ Редкол.: А.Ю. Ишлин-
ский (предс.), Б. В. Раушенбах (зам.
предс.). В.П. Бармин и др. М.: Наука.
1986. -514 с.
2. Большая советская энцикло-
педия. 3-изд. Т.1-30. М.АСоветская эн-
циклопедия, 1969-1978.
3. Валевский В. Л. Биографика
как дисциплина гуманитарного цикла //
Лица: биографический альманах. СПб.:
Феникс, 1995. Вып. 6. - С. 33-68.
4. Голованов Я. Королев: факты и
мифы. М.: «Наука», 1994. - 800 с.
472
5. Кантемиров Б.Н. Михаил Клав-
диевич Тихонравов (1900-1974). М.:
Наука, 2014.-216 с.
6. Кнор А. Человек высшего раз-
решения. Дмитрий Козлов в воспомина-
ниях друзей и коллег/
http://drugoigorod.ru/kozlov/ Дата обраще-
ния - 10 июня 2015 г.
7. Королева Н.С. С.П. Королев.
Отец. К 100-летию со дня рождения: В 3-
хкн. Кн.З. 1957-1966. М.: Наука, 2007. -
253 с.
8. Космонавтика. Маленькая эн-
циклопедия/ ред. Беркович Л.М. М.: Со-
ветская энциклопедия, 1968. - 534 с.
9. Космонавтика. Маленькая эн-
циклопедия/ Гл. ред. акад. В. П. Глушко.
М. Советская энциклопедия, 1970. -
592 с.
10. Космонавтика СССР / Сост.
Гильберг Л. А., Еременко А. А. М.: Изд-
во «Машиностроение», «Планета», 1987.
— 496 с.
11. Космонавтика. Энциклопедия/
Главный редактор В.П. Глушко. М.: Со-
ветская энциклопедия, 1985 - 528 с.
12. Крюков С.С. Избранные работы.
Из личного архива // С.С. Крюков. - М.:
Изд-во МГТУ им. Н.Э. Баумана, 2010. -
191 с.
13. Личные фонды и коллекции
РГАНТД. Путеводитель. 2003. - 176 с.
14. А. И. Осташев. Сергей Павло-
вич Королёв — гений XX века. Прижиз-
ненные личные воспоминания об акаде-
мике С. П. Королёве. М., ГОУ ВПО
МГУЛ, 2010.
15. Петровская И.Ф. Биографика:
Введение в науку и обозрение источни-
ков биографических сведений о деятелях
России 1801-1917 годов. СПб. : Логос,
2003.-490 с.
16. Рахнович А.Г., Хмельницкий
Ю.А. Жизнь под грифом «секретно». Са-
мара, 2014.
17. Ребров М. Ф. Сергей Павлович
Королёв. Жизнь и необыкновенная судь-
ба. М.: ОЛМА-ПРЕСС, 2002. - 383 с.
18. Репина Л.П. Личность и обще-
ство, или История в биографиях (вместо
предисловия) // История через личность:
историческая биография сегодня / Под
ред. Л.П. Репиной. М., “Круги”, 2005.
720 с.
19. Российский государственный
архив научно-технической документации.
Филиал в г. Самаре.
20. Советская космическая инициа-
тива в государственных документах.
1946-1964 гг./ под ред. Ю.М. Батурина.
М.: «РТ Софт», 2008. - 416 с.
21. Советский энциклопедический
словарь. Изд 1-3. М.: Советская энцикло-
педия, 1979-1985.
22. Соколов С.С. Новое поколение
«Венер» изучает планету»// Современные
достижения космонавтики (Знание. 1976.
№ 12. Серия «Космонавтика, астроно-
мия»).
23. Соколов С. С. Советские авто-
матические межпланетные станции ис-
следуют Марс// Вестник АН СССР. 1974.
№ 10.
24. Соколовская З.К. 400 биогра-
фий ученых. М.: Наука, 1988.- 514 С.
25. С.П. Королев и его дело. Свет и
тени в истории космонавтики. М.: Наука,
1998. - 716 с.
26. Циолковский К.Э. Грёзы о Зем-
ле и небе (сборник). Тула: Приокское кн.
изд-во, 1986. - 448 с.
27. Чаркин В. Всемирный миро-
творец был особо засекречен / Правда.
2011. 11 марта.
28. Чаркин В. Космическая миссия
Дмитрия Козлова/ Самарские известия.
2011. 12 апреля.
29. Черток Б.Е. Ракеты и люди. Кн.
1-4. М.: Машиностроение, 2002.
References:
1. Akademik S.P. Korolov. Uchenyy.
Inzhener. Chelovek. Tvorcheskiy portret po
vospominaniyam sovremennikov: Sb. stat-
ey/ Redkol.: A.YU. Ishlinskiy (preds.), В. V.
Raushenbakh (zam. preds.). V.P. Barmin i
dr. M.: Nauka. 1986.-514 s.
2. Bol'shaya sovetskaya entsiklopediya.
3-izd. T.l-30. M.: Sovetskaya entsiklopedi-
ya, 1969-1978.
3. Valevskiy V.L. Biografika kak
distsiplina gumanitamogo tsikla // Litsa: bi-
ograficheskiy al'manakh. SPb.: Feniks, 1995.
Vyp. 6. - S. 33-68.
473
4. Golovanov YA. Korolev: fakty i
mify. M.: «Nauka», 1994. - 800 s.
5. Kantemirov B.N. Mikhail Klav-
diyevich Tikhonravov (1900-1974). M.:
Nauka, 2014.-216 s.
6. Knor A. Chelovek vysshego raz-
resheniya. Dmitriy Kozlov v vospominani-
yakh druzey i kolleg/
http://drugoigorod.ru/kozlov/ Data obrash-
cheniya - 10 iyunya 2015 g.
7. Koroleva N.S. S.P. Korolev. Otets.
К 100-letiyu so dnya rozhdeniya: V 3-khkn.
Kn.3. 1957-1966. M.: Nauka, 2007. - 253 s.
8. Kosmonavtika. Malen'kaya entsi-
klopediya/ red. Berkovich L.M. M.: So-
vetskaya entsiklopediya, 1968. - 534 s.
9. Kosmonavtika. Malen'kaya entsi-
klopediya/ Gl. red. akad. V. P. Glushko. M.
Sovetskaya entsiklopediya, 1970. - 592 s.
10. Kosmonavtika SSSR / Sost.
Gil'berg L. A., Yeremenko A. A. M.: Izd-vo
«Mashinostroyeniye», «Planeta», 1987. —
496 s.
11. Kosmonavtika. Entsiklopediya/
Glavnyy redaktor V.P. Glushko. M.: So-
vetskaya entsiklopediya, 1985 - 528 s.
12. Kryukov S.S. Izbrannyye raboty.
Iz lichnogo arkhiva // S.S. Kryukov. - M.:
Izd-vo MGTU im. N.E. Baumana, 2010. -
191 s.
13. Lichnyye fondy i kollektsii
RGANTD. Putevoditel'. 2003. - 176 s.
14. A. I. Ostashev. Sergey Pavlovich
Korolov — geniy XX veka. Prizhiznennyye
lichnyye vospominaniya ob akademike S. P.
Korolove. M., GOU VPO MGUL, 2010.
15. Petrovskaya I.F. Biografika :
Vvedeniye v nauku i obozreniye istochnikov
biograficheskikh svedeniy о deyatelyakh
Rossii 1801-1917 godov. SPb. : Logos,
2003. - 490 s.
16. Rakhnovich A.G., Khmel'nitskiy
YU.A. Zhizn' pod grifom «sekretno». Sama-
ra, 2014.
17. Rebrov M. F. Sergey Pavlovich
Korolov. Zhizn' i neobyknovennaya sud'ba.
M.: OLMA-PRESS, 2002. - 383 s.
18. Repina L.P. Lichnost' i ob-
shchestvo, ili Istoriya v biografiyakh (vmes-
to predisloviya) // Istoriya cherez lichnost':
istoricheskaya biografiya segodnya / Pod red.
L.P. Repinoy. M„ “Krug"”, 2005. 720 s.
19. Rossiyskiy gosudarstvennyy
arkhiv nauchno-tekhnicheskoy dokumen-
tatsii. Filial v g. Samare.
20. Sovetskaya kosmicheskaya init-
siativa v gosudarstvennykh dokumentakh.
1946-1964 gg./ pod red. YU.M. Baturina.
M.: «RT Soft», 2008. - 416 s.
21. Sovetskiy entsiklopedicheskiy
slovar'. Izd 1-3. M.: Sovetskaya entsiklope-
diya, 1979-1985.
22. Sokolov S.S. Novoye pokoleniye
«Vener» izuchayet planetu»// Sovremen-
nyye dostizheniya kosmonavtiki (Znaniye.
1976. № 12. Seriya «Kosmonavtika, as-
tronomiya»).
23. Sokolov S. S. Sovetskiye avto-
maticheskiye mezhplanetnyye stantsii is-
sleduyut Mars// Vestnik AN SSSR. 1974. №
10.
24. Sokolovskaya Z.K. 400 biografiy
uchenykh. M.: Nauka, 1988.- 514 S.
25. S.P. Korolev i yego delo. Svet i
teni v istorii kosmonavtiki. M.: Nauka, 1998.
-716 s.
26. Tsiolkovskiy K.E. Grozy о Zemle
i nebe (sbomik). Tula: Priokskoye kn. izd-
vo, 1986.-448 s.
27. Charkin V. Vsemirnyy mirotvorets
byl osobo zasekrechen / Pravda. 2011. 11
marta.
28. Charkin V. Kosmicheskaya missi-
ya Dmitriya Kozlova/ Samarskiye izvestiya.
2011. 12aprelya.
29. Chertok B.Ye. Rakety i lyudi. Kn.
1-4. M.: Mashinostroyeniye, 2002.
474
HISTORY THROUGH THE PERSONALITY: PROBLEMS WITH
RECONSTRUCTION OF THE USSR ROCKET AND SPACE COMPLEX LEADERS
BIOGRAPHY
©2015 V.N. Paramonov
Samara State University, Samara
Abstract: The reconstruction of the biography means to study and recover the vitality of fate a person in a
concrete historical context. The quality of the USSR rocket-space complex scientists, designers, organizers biog-
raphies reconstruction is dependent on privacy in the scope of activity, distribution of documents relating to a par-
ticular individual in different archives, poor work of researchers with unpublished papers of persons elected as ob-
jects of study.
Keywords: historical biography, reconstruction of the biography, rocket and space complex, scientists, de-
signers, organizers, historical source
Информация об авторах:
Парамонов Вячеслав Николаевич - доктор исторических наук, профессор, про-
фессор кафедры истории и философии науки Самарского государственного университета,
Почетный работник высшего профессионального образования Российской Федерации,
443011 г. Самара, ул. Академика Павлова, 1, Самарский государственный университет,
тел. (846)3345451, факс: (846)3345417, e-mail: parvja@mail.ru.
Область научных интересов: история России XX века, история науки и техники, ис-
тория защиты информации.
Vyacheslav Paramonov - Doctor of History, Professor, Department of History and Phi-
losophy of Science, Samara State University, Honored Worker of Higher Professional Education
of the Russian Federation, 443011, Samara, ul. Pavlov, 1, Samara State University, tel.
(846) 3345451, Fax: (846) 3345417, e-mail: parvja@mail.ru.
Research interests: history of Russia of the twentieth century, the history of science and
technology, the history of the protection of information.
475
УДК 629.78; ББК О 6 д (2)
ЖИЗНЬ И ТВОРЧЕСТВО ПИОНЕРА КОСМОНАВТИКИ
А.А. ШТЕРНФЕЛЬДА
(К 110-ЛЕТИЮ СО ДНЯ РОЖДЕНИЯ)
©2015 С. Г. Морозова
Политехнический музей, г. Москва
В статье описаны основные этапы творческого пути пионера космонавтики А.А.Штернфельда (1905—
1980), представлен его выдающийся вклад в развитие и популяризацию космонавтики. Дана характеристика
материалов личного документального фонда ученого, который хранится в Политехническом музее.
Ключевые слова: история ракетной и космической техники, траектории межпланетных перелетов,
первоисточники по истории космонавтики, научная популяризация
Ари Абрамович Штернфельд (1905-
1980), один из пионеров космонавтики,
ученый, заложивший основы современ-
ной науки о космической навигации,
прожил яркую, трудную, полную порой
драматических событий жизнь, раздвигая
границы времени и пространства. Он ро-
дился в Польше, сформировался как уче-
ный во Франции, но большую часть жиз-
ни и научного творчества отдал нашей
стране. В его жизни уместилась вся исто-
рия становления космонавтики - от пер-
вых идей по преодолению околоземного
пространства до систематических поле-
тов пилотируемых кораблей.
Штернфельд родился 1 (14) мая
1905 г. в старинном польском городе Се-
радзе в купеческой семье. После оконча-
ния в 1923 г. еврейской гуманитарной
гимназии в Лодзи Штернфельд продол-
жил обучение в Кракове на философском
(физико-математическом) факультете
Ягеллонского университета. Но через год,
стремясь к овладению техническими
науками, он поступает в Институт элек-
тротехники и прикладной механики Нан-
сийского университета (Франция). В1927
г. после окончания университета с ди-
пломом инженера-механика Штернфельд
приступает к систематическим исследо-
ваниям по космонавтике - теме, которая
волновала его еще с гимназической поры.
Он решает писать докторскую диссерта-
цию и поступает в Сорбонну. В течение
трех лет (1928-1930 гг.) он собирает ма-
териалы, строит концепции развития ра-
кетной техники и освоения космического
пространства, регулярно встречается со
своими научными руководителями из
Сорбонны. Но вскоре случилось неожи-
данное: научные руководители предло-
жили сменить тему на что-то менее фан-
тастическое, апробированное практикой,
т.к. не могли отвечать за научность темы
о межпланетных полетах. Штернфельд
отказался, покинул в середине 1932 г.
Париж, вернулся к родителям в Лодзь,
где спустя полтора года довел до конца
начатую во Франции рукопись «Введение
в космонавтику». Он представил свой
труд на обсуждение польских ученых, и в
декабре 1933 г. выступил на научном со-
брании Астрономической обсерватории
Варшавского университета. Его доклад
приняли довольно холодно, «считая тему
космических рейсов слишком фантасти-
ческой» [1, с. 11]. Решив, что дальнейшее
пребывание в Польше стало «бессмыс-
ленным», Штернфельд выехал в Париж.
Французские ученые проявили
большой интерес к его исследованиям в
области космической навигации, которые
указывали на возможности выбора опти-
мальных маршрутов межпланетных ко-
раблей. Особое внимание привлекли рас-
считанные Штернфельдом траектории
межпланетных перелетов, которые вели к
цели - другому небесному телу - не по
прямой, а в обход и, тем не менее, пред-
ставлялись более выгодными, так как
позволяли значительно экономить и топ-
ливо, и время пребывания в пути. По ма-
териалам монографии Штернфельд пред-
ставил в начале 1934 г. Французской
476
Академии наук две научные работы, ко-
торые были опубликованы в Докладах
Академии. В мае 1934 г. Штернфельд вы-
ступил в Сорбонне с докладом, где изло-
жил основные идеи и расчеты своих тео-
рий. Он получил положительные отзывы
авторитетных ученых и специалистов Р.
Эсно-Пельтри, Ж.Перрена, Г. Оберта, П.
Ланжевена, В. Гомана и др. Его труды по
космонавтике, наконец, нашли офици-
альное признание во Франции. В июне
1934 г. работа «Введение в космонавти-
ку» (Initiation a la cosmonautique) была
удостоена Международной премии по
астронавтике, которую Комитет астро-
навтики Астрономического общества
Франции присуждал с 1928 по 1939 гг.
авторам работ, в наибольшей степени
способствовавших практическому реше-
нию задачи межпланетных сообщений.
Летом 1935 г. Штернфельд пере-
ехал на постоянное жительство в СССР.
Еще в сентябре 1930 г. в статье, опубли-
кованной в парижской газете «Юманите»,
он утверждал: «Только социалистическое
общество откроет путь к освоению кос-
мического пространства» [2]. Штерн-
фельд был зачислен старшим инженером
в штат Ракетного научно-
исследовательского института (РНИИ),
где работали Г.Э.Лангемак, В.П.Глушко,
С.П.Королев, М.К.Тихонравов. Он стал
заниматься разработкой конструкций по-
роховых крылатых ракет. За два года ра-
боты в институте он получил несколько
авторских свидетельств на изобретения,
опубликовал 3 статьи в сборнике РНИИ
«Ракетная техника». В конце 1937 г. ру-
копись «Введение в космонавтику», су-
щественно дополненная результатами
новых исследований в РНИИ, была опуб-
ликована. В книге А.Штернфельда впер-
вые были представлены новые, более вы-
годные траектории полета межпланетно-
го корабля, устроенного по принципу ра-
кеты, дана теория составной ракеты, рас-
считаны пути к ближайшим звездам [3].
Книга стала известной в научных кругах,
она экспонировалась в павильоне СССР
на Всемирной выставке 1937 г. в Нью-
Йорке. Радость от успеха книги омрача-
лась тем, что в 1937 г. по институту про-
катилась волна репрессий; руководство и
ведущие сотрудники были арестованы,
некоторые из них - впоследствии рас-
стреляны. Летом 1937 г. Штернфельд
взял временный отпуск и приступил к
разработке робота своей системы («ан-
дроида») в ЦНИИМАШ НКТП. Но в
конце 1937 г. он без объяснения причин
был сокращен из РНИИ, а в апреле 1938
г.- отчислен из ЦНИИМАШ. На протя-
жении двух последующих десятилетий
Штернфельд неоднократно предприни-
мал попытки продолжить работы по тео-
рии космонавтики в научно-
исследовательских институтах или в си-
стеме АН СССР, но все они оказались
безуспешными.
Лишенный возможности работать в
«официальной науке», Штернфельд реа-
лизует себя как блестящий популяриза-
тор науки, размещая публикации в жур-
налах «Знание - сила», «Наука и жизнь»,
Техника - молодежи». Его статьи печа-
тают массовые журналы «Огонек»,
«Смена», «Школа и производство»,
«Жизнь глухих», а также газеты «Труд» и
«Красная звезда». В 1949 г. вышла в свет
книга «Полет в мировое пространство»,
которая являлась научно-популярным
вариантом монографии «Введение в кос-
монавтику», в 1956 г. - новый научный
труд «Искусственные спутники Земли».
Штернфельд выступает с лекциями в
МГУ, Московском планетарии, Политех-
ническом музее, на заседаниях Секции
астронавтики при Центральном аэроклу-
бе СССР им. В.П.Чкалова, в создании ко-
торой он принимал самое живое участие.
С успехами практической космонавтики
к Штернфельду пришло мировое офици-
альное признание. В 1962 г. он стал лау-
реатом Международной премии Галабера
по астронавтике, в 1964 г. принял участие
в работе XV международного астро-
навтического конгресса в Польше.
Штернфельд был удостоен званий почет-
ного доктора наук Академии наук СССР,
Университета г. Нанси и Национального
политехнического института Лотарингии
(Франция). Книги ученого выдержали 85
изданий на 36 языках в 33 странах пяти
континентов.
477
Основным хранителем наследия
Штернфельда в России является Поли-
технический музей. Личный докумен-
тальный фонд ученого представляет со-
бой обширное собрание замечательных
по своей исторической ценности пись-
менных и изобразительных источников,
освещающих сферу научных интересов
ученого, а также материалов биографиче-
ского характера, раскрывающих много-
гранность его личности. Материалы фон-
да позволяют проследить развитие твор-
ческой мысли ученого, его научные по-
иски и инженерные изобретения, оценить
его вклад в развитие мировой космонав-
тики, очертить круг научного сообще-
ства, с которым ученый установил тес-
ные связи. Значительную часть фонда
составляют источники, представляющие
образ выдающегося ученого-
популяризатора [4]. Фонд включает более
2500 единиц хранения. На его основе в
Политехническом музее неоднократно
проводились публичные чтения, готови-
лись публикации, была оформлена ста-
ционарная экспозиция. Но информаци-
онный потенциал массива первоисточни-
ков не исчерпан, и кажется, что исследо-
вателей творческого наследия Штерн-
фельда еще ждут новые находки и от-
крытия в области истории космонавтики.
Библиографический список:
1. Штернфельд А.А. Введение в кос-
монавтику. М., 1974.
2. Фонд письменных источников
Политехнического музея (ФПИ ПМ). Ф.
24. Оп.1. Ед.хр. 25520/120.
3. Тихонравов М.В. Отзыв на книгу:
А. Штернфельд. «Введение в космонав-
тику». М., 1937// Вестник инженеров и
техников. 1938. № 7.С. 443-445.
4. Штернфельд М.А. Пропаганда
идей космонавтики в творчестве
А.А.Штернфельда: просветительство и
популяризация//Штернфельд А.А. Меня
считали неизлечимым фантастом... М.,
2005. С. 145-150.
References:
1. Shternfeld A. A. An Introduction to
cosmonautics. М., 1974
2. The Written resources Fund of the
Polytechnic Museum (WRF PM). F. 24.
Inv.l. Stor. Un. 25520/120.
3. Tikhonravov, M. V. a Review on the
book: A. Shternfeld. «Introduction to cos-
monautics». M., 1937// Bulletin of engineers
and technicians. 1938. № 7. P. 443-445.
4. Shternfeld, M. A., Promotion of the
ideas of space in works of A. A. Shternfeld:
enlightenment and popularization//A. A.
Shternfeld I was considered incurable fan-
tast... M., 2005. P. 145-150.
THE LIFE AND WORK OF PIONEER ASTRONAUTICS A. A. STERNFELD
(TO THE 110TH ANNIVERSARY OF THE BIRTHDAY)
©2015 S.G. Morozova
The Polytechnic Museum, Moscow
The article describes the main stages of the creative ways the pioneer of cosmonautics A. A. Stemfeld
(1905-1980), presented his outstanding contribution to the development and promotion of space exploration. The
feature of materials of a personal documentary Fund of the scientist, which is stored in the Polytechnical Museum, is
made.
Keywords: history of rocket and space technology, the trajectories of interplanetary missions, the primary
sources for historical the primary sources on the history of space exploration, scientific popularization
Информация об авторе:
Морозова Стелла Гургеновна, зам. руководителя Дирекции научных и дизайн- ис-
следований, ученый секретарь Политехнического музея. 101000, Москва, Новая площадь,
3/ 4. Тел. +7 916 008 12 27 sgmorozova@polymus.ru
478
Область научных интересов: история науки и техники, музееведение, история Поли-
технического музея, введение в научный оборот письменных источников из собрания По-
литехнического музея.
Morozova Stella Gurgenovna, Deputy Head of the Directorate for science and design re-
search, Scientific Secretary of the Polytechnic Museum. 101000, 3/ 4 Novaya square, Moscow,
Russia tel.:+7 916 008 12 27 , E-mail: sgmorozova@polymus.ru
Research interests: history of science and technology, museology, history of the Museum,
the introduction of written sources from the collection of the Museum.
479
УДК 523,550.3
ОБЗОР ФОНДОВ ФИЛИАЛА РГАНТД ПО ИСТОРИИ СОЗДАНИЯ И РАЗВИТИЯ
ОТЕЧЕСТВЕННОЙ КОСМОНАВТИКИ ЗА 1928-1996 ГГ.
©2015 Л.Е. Антонова
Филиал федерального казенного учреждения «Российский государственный архив
научно-технической документации» (филиал РГАНТД), г. Самара
Представлены документы, имеющиеся на постоянном хранении в филиале РГАНТД, касающиеся со-
здания, развития, испытания и использования отечественной космической техники в период 1928-1996 гг.
Ключевые слова: Заявочные материалы на изобретения, основоположники космонавтики, научно-
исследовательские институты, научно-технические отчеты, испытания ракетной техники, космонавты-
изобретатели, самарские ученые-изобретатели
Филиал федерального казенного
учреждения «Российский государствен-
ный архив научно-технической докумен-
тации» (филиал РГАНТД) - крупнейший
центр хранения технической документа-
ции Российской Федерации. На постоян-
ном хранении в архиве в настоящее вре-
мя находится более 2 млн дел по 21 от-
расли экономики, в том числе по станов-
лению и развитию ракетостроения и кос-
монавтики в СССР, а после 1992 г. - в
России.
Основная часть документов содер-
жится в 11 фондах архива, среди кото-
рых: коллекция «Заявочные материалы
на изобретения (из фондов Комитета РФ
по патентам и товарным знакам и его
предшественников)» 1, Всесоюзный ин-
ститут авиационных материалов (ВИАМ)
2, Центральный аэрогидродинамический
институт имени Н.Е. Жуковского (ЦАГИ)
3, Летно-исследовательский институт
имени М.М. Громова (ЛИИ) 4, Научно-
исследовательский институт техническо-
го стекла (НИТС) 5, Всесоюзный научно-
исследовательский институт электроме-
ханики (ВНИИЭМ) 6 и другие. В составе
фондов заявочные материалы на изобре-
тения, научно-исследовательские отчеты
по испытаниям, переписка руководства ин-
ститутов с вышестоящими организациями,
приказы директоров по основной деятельно-
сти и другие документы.
Интерес отечественных ученых и
инженеров к ракетной технике появился
еще в конце XIX в., когда в 1884 г Н.И.
Тихомиров занялся проблемой создания
ракетных снарядов - «самодвижущихся
мин реактивного действия», а в 1921 г. в
Газодинамической лаборатории (ГДЛ),
созданной по его инициативе, конструк-
торами В.В. Артемьевым, Г.Э. Лангема-
ком, В.П. Глушко и другими было сдела-
но несколько серьезных изобретений в
области создания ракет на бездымном
порохе.
Золотым фондом филиала РГАНТД
являются заявочные материалы на изоб-
ретения первооткрывателей космоса К.Э
Циолковского («Металлический дири-
жабль» 7, 1928 г., «Полуреактивный дви-
гатель» 8, 1929 г.); М.К. Тихонравова
(«Реактивный двигатель» 9, 1930 г.); В.П.
Глушко («Реактивный двигатель» 10,
1931 г., «Реактивный двигатель с пере-
менной камерой сгорания» 11, 1931 г.,
«Реактивный летательный аппарат» 12,
1931 г. и другие); Б.С. Лангемака («Реак-
тивный двигатель» 13, 1931 г.); В.И.
Дудакова («Ракетная установка на само-
лете» 14, 1932 г., «Реактивный двигатель
прямоточного типа» 15, 1939 г.), С.А. Ко-
сберга («Многоплунжерный топливный
насос для двигателя внутреннего сгора-
ния» 16, 1937 г.), Б.В. Раушенбаха («Пла-
нирующая ракетная бомба с автоматиче-
ским и телемеханическим управлением»
17, 1941 г.) и другие. Эти документы по-
стоянно находятся в научном обороте,
используются историками для написания
монографий, статей, диссертаций, экспо-
нируются на выставках.
Пионерами космической отрасли
были сделаны в основном теоретические
480
расчеты конструкций и траекторий поле-
та космических кораблей. Практические
разработки, на основании которых в по-
следствии были созданы космические
аппараты, принадлежат сотрудникам
Особого конструкторского бюро (ОКБ-1)
под руководством С.П. Королева. В по-
следствии многие из них стали руководи-
телями крупных научных институтов и
центров, внесших весомый вклад в раз-
витие ракетно-космической отрасли. Не-
оценимый вклад в рождение практиче-
ской космонавтики внесли такие крупные
ученые, как Б.Н. Петров, А.Ф. Богомолов,
В.М. Кавтуненко и другие.
В филиале РГАНТД имеются за-
явочные материалы на изобретения Г.Е.
Лозино-Лозинского («Реактивный двига-
тель» 18, 1944 г., «Радиатор для охла-
ждения газожидкостных систем лета-
тельных аппаратов»19, 1967 г.), С.М.
Алексеева («Скафандр для космонавтов»
20, 1966 г.), В.М. Барышева («Стенд для
испытания солнечного источника энер-
гопитания космического аппарата» 21,
1970 г.), Г.И. Северина («Система поки-
дания летательного аппарата членами
экипажа» 22, 1970 г.), В.П. Мишина
(«Способ сближения космических объек-
тов» 23, 1975 г.), В.М. Кавтуненко («Ра-
кетный летательный аппарат и ракетный
двигатель» 24, 1995 г.), В.Н. Соловьева
(«Способ предстартовой подготовки и
пуска ракеты-носителя» 25, 1995 г.) и
другие.
После принятия исторического по-
становления № 1017-419 от 13 мая 1946 г.
о создании в стране ракетной техники
сотрудники ЦАГИ, созданного еще в
1918г., бросили все силы на создание но-
вых установок, обеспечивающих гипер-
звуковые скорости потока и моделирую-
щих такие сложнейшие процессы, как
аэродинамический нагрев при входе ле-
тательного аппарата в атмосферу, рас-
пространение ударных волн и многое
другое.
В документах архива имеются
научно-технические отчеты об испыта-
нии первых ракет, созданных советскими
конструкторами и прошедшими испыта-
ния в аэродинамических трубах Т-101,
Т-104, Т-106 и др. Например, «Испыта-
ние модели дальней ракеты Р-1 в аэроди-
намической трубе Т-106» 26, 1947 г.,
«Испытание ракеты Р-101 в аэродинами-
ческой трубе Т-104» 27, 1949 г., «Иссле-
дование аэродинамических характери-
стик дальней ракеты Р-2 при дозвуковых
и сверхзвуковых скоростях» 28, 1950 г.,
«Испытание дальней ракеты ЗРА в аэро-
динамической трубе Т-108» 29, 1951 г.
После 1946 г. ЛИИ стали прово-
диться летные и наземные испытания не
только авиационной, но и космической
техники. В научных отчетах имеются
сведения об исследовании управления
ракетой Р-101 с Х-образным расположе-
нием крыльев 30(1949 г.), определении
коэффициента внешнего минимального
лобового сопротивления модели объекта
«Буран» с потоком воздуха 31 (1956 г.),
исследовании электростатических харак-
теристик ракет и снарядов 32 (1959 г.),
исследовании читаемости приборов си-
стемы индикации и ручного управления
космического корабля «Восток» 33
(1962 г.), стабилизации объекта «Спи-
раль» на участке космического полета 34
(1965 г.). Отчеты снабжены графиками,
схемами, фотографиями и позволяют
полно проследить за научной деятельно-
стью ученых в плане изучения всех сто-
рон деятельности космической техники,
которая разрабатывалась и производи-
лась в нашей стране. Многие из этих до-
кументов снабжены грифом «совершенно
секретно» и лишь недавно пущены в
научный оборот.
В период активной научной работы,
связанной с освоением космического
пространства, ВИАМ, как и многие дру-
гие научные организации страны, актив-
но занимался вопросами развития косми-
ческой отрасли. В сфере его деятельности
были разработка и испытание новых ма-
териалов, способных выдержать высокие
температуры и большие перегрузки. Так,
в 1959-1963 гг. институт разработал и ис-
следовал различные виды стеклотексто-
литов с повышенной термостойкостью,
стекловолокнистого пластика на основе
крупногабаритных изделий для самоле-
тов и ракет 35, антенных обтекателей для
481
самолетов и ракет 36, высокотермостой-
ких пеноматериалов для нужд ракетной
техники 37, технологии изготовления го-
ловной части ракет из пластмасс 38. В
последующие годы в связи с разработкой
и внедрением в производство новых ви-
дов синтетических материалов институ-
том испытывались светофильтры для
скафандров космонавтов 39 (1966 г.),
элементы лунного скафандра 40 (1968 г.),
нейтронопоглощающие материалы для
защиты жизненно важных объектов лета-
тельный аппаратов 41 (1972 г.)
С первых лет космической эры, ко-
гда страна осваивала первые шаги в осво-
ении космоса и создавала ракетно-
ядерный щит, ВНИИЭМ, как головная
организация, активно участвовал в разра-
ботке электротехнического оборудования
ракетоносителей, в частности Р-7, с по-
мощью которой был выведен на орбиту
первый искусственный спутник Земли, а
затем и первый пилотируемый корабль
«Восток». В составе фонда переписка ди-
ректора института А.Г. Иосифьяна с вы-
шестоящими организациями по вопросам
электроснабжения стартовых и бортовых
комплексов ракет и космических аппара-
тов 42, протоколы заседаний научно-
технического совета 43, а также описание
и фотографии изделий, разработанных
коллективом института для ракетной
техники в 1947-1957 гг. 44
Проблемами создания новых типов
стекол, способность выдерживать высо-
кую нагрузку, температуру, натиск ме-
теоритных дождей занимался Научно-
исследовательский институт техническо-
го стекла и его Обнинский филиал. Кро-
ме остекления кабин космических кораб-
лей и спускаемых аппаратов ГСПКБ за-
нимался разработкой полимерных склеи-
вающих материалов для шлемов и ска-
фандров летчиков и космонавтов; без-
осколочных изделий; остекления косми-
ческого комплекса «Союз»; эксперимен-
тального пилотируемого орбитального
самолета «Спираль»; космических аппа-
ратов «Космос-186», «Космос-188»;
остекления скафандра космонавта для
выхода на поверхность Луны. 45
Целый комплекс исследований был
связан с разработкой и установкой на
борту космических кораблей специаль-
ной аппаратуры для изучения и контроля
состояния космонавтов, специальной
одежды, питания, средств спасения. В
филиале РГАНТД имеются заявочные
материалы на изобретения выдающихся
ученых-биологов и медиков, которые
участвовали в подготовке первого отряда
космонавтов, а в дальнейшем разрабаты-
вали методы и способы адаптации чело-
века к условиям космоса (С.А. Бугров)
46, реабилитации организма человека по-
сле длительной обездвиженности, про-
филактики гиподинамических нарушений
и влияние невесомости на организм че-
ловека (О.Г. Газенко) 47, биотехнические
системы жизнеобеспечения для автоном-
ных объектов (В.И. Яздовский) 48.
Одним из создателей систем конди-
ционирования воздуха в космических ап-
паратах Г.И. Ворониным в 1968 г. были
разработаны и запатентованы системы
кислородного питания экипажа, автома-
тического регулирования давления в ав-
тономных герметических кабинах 49.
Ю.Е. Синяк предложил окислительно-
каталитический метод регенерации воды
из мочи и других влагосодержащих отхо-
дов жизнедеятельности человека, метод
получения азотной кислоты и аммиачной
воды из отходов с целью создания за-
мкнутой системы жизнеобеспечения на
космическом корабле, способ и устрой-
ство для очистки воздуха от вредных
примесей в герметичном замкнутом по-
мещении 50. Е.Б. Рухлиным сконструи-
рованы устройства для проведения фи-
зиологических исследований в космо-
се51, В.А. Савичевым и М.М. Газетдино-
вым - специальные скафандры для выхо-
да человека в космическое простран-
ство52.
Исследование космоса требует
больших знаний не только ученых,
участвующих в разработке конструкций
тех или иных приборов, находящихся в
отсеке космических аппаратов, способов
и методов их управления. В условиях
космического полета заниматься эксплу-
атацией всей сложной системой космиче-
482
ского корабля приходится непосред-
ственными участниками полета - космо-
навтам, которые должны обладать для
этого значительными научными и прак-
тическими знаниями.
В отряде космонавтов многие име-
ют степени кандидатов и докторов наук,
являются авторами научных трудов и
изобретений, которые внедрены как на
космических кораблях, так и использу-
ются на Земле при разработке новых
космических систем, подготовке космо-
навтов для полетов в космос. Среди них
В.В. Лебедев - автор 152 публикаций и
26 изобретений, внедренных в системах
«Салют» и «Союз» 53. Им впервые вы-
полнен обобщенный анализ работы чело-
века в сложной технической системе, ко-
торой является орбитальная станция, вы-
явлены особенности жизнедеятельности
человека в космическом полете и его
роль в проведении научно-технических
исследований.
А.А. Леонов за годы научно-
практической работы и во время косми-
ческих полетов выполнил целый ряд
сложных исследований и экспериментов:
исследование световых и цветовых ха-
рактеристик зрения после полета в кос-
мос, влияние факторов космического по-
лета на остроту зрения пилота комплекса
«Буран», создание скафандра для работы
в гидросфере. А.А. Леоновым разработан
комплекс средств для тренировки космо-
навтов в условиях невесомости; тренажер
ручной ориентации, стыковки космиче-
ских кораблей и тренировки вестибуляр-
ного аппарата космонавта 54.
Е.В. Хрунов защитил диссертацию
по теме «Биомеханика работы человека в
условиях космического пространства»,
разработал и получил авторские свиде-
тельства на систему и устройство для
аварийного спасения космонавтов в
условиях космического полета 55.
Представляя космонавтов-
изобретателей нельзя не назвать имена
В.М. Севастьянова, имеющего более 200
научных публикаций и 6-ти изобрете-
ний56; Л.И. Попова, среди заявок которо-
го «Аварийный люк спасательного аппа-
рата», «Багажник транспортного лета-
тельного аппарата» 57, А.Г. Николаева и
разработанный им «Способ тренировки
невесомости» 58, Г.Т. Берегового и его
изобретение «Способ моделирования
гравитационных условий космического
полета» 59. В содружестве с теоретиче-
ской и практической космонавтикой рос-
сийская наука добилась лидирующего
положения в мире в освоении космиче-
ского пространства в XX веке.
Создание и производство ракетно-
космической техники и развитие космо-
навтики в стране неразрывно связано с
самарской землей. Своим статусом «не-
официальной столицы космонавтики»
Самара обязана С.П. Королеву, по ини-
циативе которого в 1950 г. было положе-
но начало специализированному косми-
ческому центру - ЦСКБ. За более чем
полвека своего существования на основе
базового пакета ракеты Р-7, ЦСКБ под
руководством его бессменного руководи-
теля Д.И. Козлова разработано около де-
сятка ракетоносителей среднего класса,
запущено более 1900 спутников и аппа-
ратов различного назначения. Это было
бы невозможно без самоотверженного
труда инженеров и конструкторов, изоб-
ретателей ракетно-космического центра
ЦСКБ «Прогресс» на счету которых бо-
лее 2000 авторских свидетельств и патен-
тов на изобретения. Среди них Г.П. Ан-
шаков 60, А.А. Сочивко 61, А.В. Чечин
62 и др.
Развитие двигателестроения в
стране нельзя представить без разработок
СНТК имени Н.Д. Кузнецова 63 и его со-
трудников, таких как В.С. Анисимов -
заслуженный конструктор РФ, автор
множества трудов в области создания
двигателей 64.
Большую роль в подготовке кадров
для предприятий ракетно-космической
отрасли сыграл Самарский государствен-
ный аэрокосмический университет имени
С.П. Королева. Созданный еще в годы
Великой Отечественной войны, он по-
стоянно расширял номенклатуру специ-
альностей, в т.ч. по проектированию,
конструированию и технологии произ-
водства космической техники. Среди ос-
нователей и преподавателей университе-
483
та известные деятели науки и техники,
ученые-изобретатели А.М. Сойфер 65-
первый исполняющий обязанности ди-
ректора Куйбышевского авиационного
института; В.П. Лукачев 66 - первый рек-
тор Куйбышевского авиационного инсти-
тута, профессор, доктор технических
наук; В.М. Дорофеев 67 - первый заве-
дующий кафедрой теплотехники и тепло-
вых двигателей, профессор и др.
Особое место среди документов
филиала РГАНТД занимают личные
фонды представителей науки Самарской
области, которые архивисты с гордостью
хранят для будущих поколений. Личные
фонды содержат неоценимые с точки
зрения науки разработки ученых, изобре-
тателей, внесших вклад в развитие не
только отечественной, но и мировой кос-
мической науки, фотографии, наградные
листы, записи. Среди них документы
Н.Д. Кузнецова68- генерального кон-
структора авиационных и ракетных дви-
гателей, некоторые из которых до сих
пор остаются непревзойденными по тех-
ническим и экономическим показателям;
А.В. Чечина69 - первого заместителя ге-
нерального конструктора ЦСКБ «Про-
гресс», кандидата технических наук, лау-
реата Государственной премии и др.
Использование документов филиала
РГАНТД при изучении истории ракетно-
космической отрасли нашей страны су-
щественно расширяют источниковедче-
скую базу исследований и позволяют со-
здать более объективную картину слож-
нейшего пути развития космонавтики не
только в СССР, но и во всем мире. Доку-
менты филиала РГАНТД ждут своих ис-
следователей, историков, инженеров,
всех, кто неравнодушен к своей истории,
к космической науке, ее первооткрывате-
лям и последователям.
BRANCH RGANTD FUNDS OVERVIEW ON ISTRIA ESTABLISHMENT
AND DEVELOPMENT OF NATIONAL COSMONAUTICS FOR 1928-1996 GG.
©2015 L.E. Antonova
Federal State institution Branch "Russian State archive of scientific and technical
documentation” (RGANTD Branch), Samara
Presented documents available on permanent storage in branch RGANTD relating to the creation, develop-
ment, testing and use of domestic space technology between 1928-1996 g.
Keywords: application materials for invention, pioneers of space science, scientific institutions, scientific and
technical reports, the missile test, the astronauts-inventors, Samara scientists-inventors
Информация об авторе:
Антонова Людмила Евгеньевна, главный специалист Филиала федерального ка-
зенного учреждения «Российский государственный архив научно-технической докумен-
тации» (филиал РГАНТД), 443096, г. Самара, ул. Мичурина, д.58, т.336-24-51, antono-
va iopad@mail.ru
Lyudmila Е. Antonova, Chief specialist of the branch of the Federal State institution "the
Russian State archive of scientific and technical documentation (RGANTD Branch), 443096,
Samara, UL. Michurin, d., 58, t. 336-24-51. antonova iopad@mail.ru
1 Филиал РГАНТД. Ф.Р-1
2 Там же. Ф.Р-124
3 Там же. Ф.Р-217
4 Там же. Ф.Р-220
5 Там же. Ф.Р-286
6 Там же. Ф.Р-480
7 Там же. Ф.Р-1. Оп. 1-5. Д. 13157
8 Там же. Д.31522
484
9 Там же. Оп.47-5. Д.891
10 Там же. Д.929
11 Там же. Д.986
12 Там же. Оп.3-5. Д.6524
13 Там же. Оп.47-5. Д.977
14 Там же. Д.1170
15 Там же. Оп.49-5. Д.291
16 Там же. Оп.23-5. Д.667
17 Там же. Оп.50-5. Д.1665
18 Там же. Оп.51-5. Д.930
19 Там же. Оп.313-5. Д. 1582
20 Там же. Оп.240-5. Д.15, 17
21 Там же. Оп.375-5. Д.1535
22 Там же. Оп.372-5. Д.1471
23 Там же. Оп.309-5. Д.821
24 Там же. Оп.436-5. Д.19
25 Там же. Оп.436-5. Д.922
26 Там же. Ф.Р-217. Оп.2-1. Д.5
27 Там же. Д.64
28 Там же. Д.313
29 Там же. Д.517
30 Там же. Ф.Р-220. Оп.4-1. Д.95
31 Там же. Д.571
32 Там же. Д.958
33 Там же. Оп.5-1. Д.262
34 Там же. Д.944
35 Там же. Ф.Р-124. Оп.2-1. Д.1519
36 Там же. Д.1529
37 Там же. Д.1572
38 Там же. Д.1874
39 Там же. Д.2374
40 Там же. Д.2530
41 Там же. Д.3143
42 Там же. Ф.Р-480. Оп.3-6. Д.182
43 Там же. Там же. JX.TTI, 307
44 Там же. Оп.4-1. Д. 17
45 Там же. Там же. Ф.Р-286. Оп.5-1. Д. 73, 79, 94, 95, 198, 205
46 Там же. Ф.Р-1. Оп.530-5. Д.933
47 Там же. Оп.307-5. Д.363; Оп.ЗЮ-5. Д.1657; Оп.348-5.Д.980
48 Там же. Оп.447-5. Д.198
49 Там же. Оп.339-5. Д.250; Оп.353-5. Д.339
50 Там же. Оп.319-5. Д.87; Оп.437-5. Д.841
51 Там же. Оп346-5. Д.1402
52 Там же. Оп.369-5. Д.1657;Оп.360-5. Д.1087
53 Там же. Оп.343-5. Д.1993
54 Там же. Оп.241-5. Д.248; Оп.299-5. Д.297
55 Там же. Оп.483-5. Д.729, 1381
56 Там же. Оп.484-5. Д.1924
57 Там же. Оп.386-5. Д.726; Оп.482-5. Д.1584
58 Там же. Оп.385-5. Д.1384
59 Там же. Оп.404-5. Д.155 60 Там же. Оп.332-5. Д.479
61 Там же. Д.1722
62 Там же. Оп.424-5. Д.472; Оп.307-5. Д.574; Оп.309-5. Д.345
63 Там же. Ф.Р-187. Оп.5-2. Д. 1-244; 39, 245, 248-289
64 Там же. Ф.Р-1. Оп.295-5. Д.1322
65 Там же. Оп. 189-5. Д.953
66 Там же. Оп. 195-5. Д.88О; 224-5. Д.84; Оп.342-5. Д.1656; 345-5. Д.702; Оп.480-5. Д.211; Оп.482-5.
Д.315; Оп.512-5. Д.1556; Оп.560-5. Д.1938; Оп.561-5. Д.1621; Оп.567-5. Д.246; Оп.580-5. Д.1464; Оп.582-5.
Д.1332; Оп.584-5. Д.1442, 1496; Оп.593-5. Д.1О38, 1528; Оп.596-5. Д.1824; Оп. 605-5. Д.1099
67 Там же. Оп. 193-5. Д.409; Оп.208-5. Д.1802
68 Ф.Р-876
69 Ф.Р-932
485
УДК 9, 62, 35.074
ВОЗДУШНО-КОСМИЧЕСКИЙ САМОЛЁТ - ДИПЛОМНЫЙ ПРОЕКТ
КОСМОНАВТОВ 1-ГО НАБОРА
©2015 В.В. Лебедев
Санкт-Петербургский филиал Института истории естествознания и
Техники им. С.И. Вавилова РАН, г. Санкт-Петербург
Рассказывается о дипломной работе космонавтов и кандидатов в космонавты первых наборов по
окончании учёбы в ВВИА им. Н.Е. Жуковского. В статье обобщены разрозненные данные по учёбе космо-
навтов и приведено много малоизвестных фактов, позволяющих по-новому посмотреть на историю отече-
ственной космонавтики.
Ключевые слова: Воздушно-космический самолёт, диплом Гагарина, Ю.А. Гагарин, ГС. Титов, С.П.
Королёв, решётчатые крылья, несущий корпус
После успешного полёта 12 апреля
1961 г. в космос Юрию Алексеевичу
Гагарину была уготована стезя -
наставника будущих космонавтов и
руководителя космической отрасли.
Поэтому уже 1 сентября 1961 г. он и
другие будущие космонавты стали
слушателями Военно-Воздушной
Инженерной Академии им. проф. Н.Е.
Жуковского (ВВИА).
Деятельность Ю.А. Гагарина после
полёта, трудовые будни, семь лет учёбы,
и наконец, - диплом, лишний раз
подтвердили правильность выбора
кандидатуры Г агарина, как первого
космонавта, умного и авторитетного
специалиста.
Одной из сфер многогранной
деятельности С.П. Королёва был - отряд
космонавтов. Это не без его инициативы
пошли они учится в Академию. Он
оказывал влияние на содержание
учебных планов и программ, которые
лично корректировал.
В середине 1965 г. зам. начальника
ВВИА им. Н.Е. Жуковского по учебной и
научной работе назначили С.М.
Белоцерковского. Среди первоочередных
задач которого встал ряд вопросов,
связанных с завершением космонавтами
инженерного образования.
Сама необычность потока
слушателей - космонавтов в авиационной
академии и новизна проблем, которые
предстояло решать в будущем
космонавтам, наложила отпечаток на
тематику дипломов. А точнее - диплома.
После многочисленных прений и
консультаций пришли к выводу, что это
должна быть комплексная работа
космонавтов, как одного
конструкторского бюро, и тема должна
быть близкой как для авиационников, так
и для космиков, а также быть
перспективной и актуальной. И такой
темой стал - многоразовый воздушно-
космический самолёт. На это решение
наложило отпечаток также и время:
начало космической эры ещё только
начиналось, поэтому любая дорога была
непроторенной, и полёт фантазии и
конструкторской мысли ещё не был
положен в “прокрустово ложе”
экономико-политического
консерватизма. Хотя было много
попыток превратить дипломные работы в
поверхностные военно-тактические
рефераты о роли космоса в военном деле.
Предполагалось, что уже в бли-
жайшем будущем, будут летать в космос
не только на одноразовых ракетах. А
возвращаться не в капсуле по
баллистической траектории, испытывая
огромные перегрузки, а на аппаратах с
повышенным аэродинамическом
качеством, т.е. на космических
самолётах.
Сложность задачи подразумевало
комплексность решения этого вопроса,
поэтому довольно быстро был решён
вопрос о едином дипломе для
486
космонавтов. Каждый из космонавтов
при этом получал свой солидный
самостоятельный раздел, который
тщательно увязывался со всеми
остальными. Такой подход позволял
осуществить глубокую проработку
проблемы, а также учил космонавтов
коллективному творчеству. А как у
любого творческого коллектива должен
быть руководитель, как-то незаметно для
всех и в тоже время естественно
неформальным лидером
“новоиспечённого КБ” стал - Ю.А.
Гагарин.
Руководителем дипломного проекта
Ю.А. Гагарина стал С.М.
Белоцерковский.
После получения поддержки
задуманного от С.П. Королёва,
остановились на том, что это будет -
одноместный гиперзвуковой
космический самолёт. Впоследствии, в
конце 1980-х годов, его назовут “Буран-
68”, по имени первого полетевшего
отечественного челнока “Буран” в
космос.
Всего было выполнено 15
дипломных работ (11 их авторов
побывали в космосе). Каждый из
слушателей был автором конкретного
раздела. Кому чем заниматься, выбирали
они сами.
Вся работа проводилась в тесном
контакте дипломников между собой, что
позволяло каждому учитывать в своих
исследованиях требования, выходящие за
рамки того, что он делал сам. Так
претворялась в жизнь идея С.П.
Королёва, что каждый космонавт должен
прочувствовать “шкуру” главного
конструктора на себе.
Ю.А. Гагарин, например, отвечал за
общую методологию использования
космического аппарата, выбор
аэродинамических форм и размеров
несущих элементов для обеспечения
посадки и способов посадки по
самолётному. Ему предстояло выбрать
аэродинамическую компоновку ВКС,
изучить особенности пилотирования
аппарата лётчиком и выработать
предложения по возможности улучшения
посадки.
Уже в середине 1966 г. была
выбрана аэродинамическая схема КА и
определены основные геометрические
параметры. Фюзеляж был выбран типа
“несущий корпус” и представлял собой
короткое крыло большой толщины с
аэродинамическим качеством не более
4,5.
Перед посадкой и в процессе
приземления требовалось увеличить
аэродинамическое качество аппарата, т.е.
увеличить площадь крыла. А при входе в
плотные слои атмосферы, для плавного
обтекания фюзеляжа при гиперзвуковом
полёте, консоли крыльев должны быть в
“тени” фюзеляжа. Поэтому крылья
сделали поворотными. Они
разворачивались из положения от 20° и
до 80° от вертикали.
Такую компоновку необходимо
было подтвердить практическими
доводами и Ю.А. Гагарин
незамедлительно приступил к
аэродинамическим исследованиям в
дозвуковой трубе. Для чего на заводе и в
мастерских академии была изготовлена
деревянная модель КА, которая шла под
кодовым названием “Модель ЮГ”
(Модель Юрий Гагарин).
Ю.А. Гагарин конструировал и
“облётывал” свой аппарат широко
используя вычислительную технику.
Основные расчёты он вёл на ЭВМ
БЭСМ-2М, в чём были определённые
сложности, т.к. тогда ещё не умели
моделировать на ЭВМ обтекание
самолёта при больших углах атаки, что
было важно для изучения режимов
сваливания и входа в штопор.
Был собран электронный
моделирующий комплекс, включающий в
себя аналоговую ЭВМ МН-8, кресло
лётчика с органами управления, приборы.
Пилот имел возможность во время
посадки следить на экране электронного
дисплея за динамикой процесса. Это был
один из первых тренажёров по
пилотированию орбитальных самолётов.
Пилотом же был сам Ю.А. Гагарин.
487
2 января 1968 г. начался
заключительный этап дипломного
проектирования. Каждая дипломная
работа представляла собой целый
научно-технический трактат, плюс 8-10
чертежей и графиков. И даже при этом по
объёму дипломная работа Ю.А. Гагарина
превосходила дипломы других в 2...2,5
раза. Видимо из-за этого, а также
загруженности Гагарина, вынужденного
выполнять “обязанности Космонавта №
1”, он не смог выйти первым на защиту.
Первая группа космонавтов
защищала свои работы в январе 1968 г. в
Звёздном городке.
Гагарин защищается 15 февраля
1968 г. на “отлично”, а 17 февраля
Государственная экзаменационная
комиссия выдала Ю.А. Гагарину
инженерный диплом с отличием,
отметила его научные способности, и его
единственного из, защищавшихся
космонавтов, рекомендовала в заочную
адъюнктуру академии. Он и здесь был
первым.
Библиографический список:
1. Белоцерковский С.М. “Диплом
Гагарина”. - М.: Молодая гвардия, 1986;
2. Белоцерковский С.М. “Гибель
Гагарина: Факты и домыслы”. - М.: Ма-
шиностроение, 1992;
3. Белоцерковский С.М. “ЭВМ в
науке, авиации, жизни”. - М.: Машино-
строение, 1993;
4. Бюшгенс Г.С., Бедржицкий Е.Л.
“ЦАГИ - центр авиационной науки”. -
М.: Наука, 1993;
5. Каманин Н.П. “Скрытый кос-
мос”. Кн. 14-3. - М.: Инфортекст, 1995,
1997; Новости космонавтики, 1999;
6. “Лётчики-космонавты СССР -
выпускники академии” // Сост.: В.А. Ши-
тов. Под ред. С.М. Белоцерковского. -
М.: ВВИА, 1977.
7. “Научные школы ВВИА им. Н.Е.
Жуковского”. - М.: Академия авиации,
2000;
8. Пономарёва В.Л. “Женское лицо
космоса”. - М.: Гелиос, 2002;
9. Ребров М.Ф. “Космический ра-
курс “Жуковки” И Г-та “Красная звезда”,
18 февраля 1993 г.;
10. “Решётчатые крылья в ракето-
строении, космонавтике, авиации” / Под
ред. С.М. Белоцерковского, В.П. Фроло-
ва, В.А. Подобедова, В.П. Плаунова. -
М.: Новый Центр, 2007;
11. Черток Б.Е. “Ракеты и люди”,
т.З “Горячие дни холодной войны”. - М.:
РТСофт, 2007.
12. Шитов В. “Встречи с Ю.А. Га-
гариным” // Г-та “Труд”, 27 марта 1989 г.;
13. Шитов В. “Он был великим оп-
тимистом” // Ж-л “Гражданская авиация”,
№ 4, 1996 г.;
14. Stache Р. “Sowjetische Raketen:
Im Dienst von Wissenschaft und Vertei-
digung”. - Berlin: Militarverlag der DDR,
1987.
References:
1. Belocerkovsky S.M. “Gagarin's di-
ploma”. - M.: Molodaya guardya, 1986;
2. Belocerkovsky S.M. “Gagarin's
death: Facts and conjectures”. - M.: Mashi-
nostroenie, 1992;
3. Belocerkovsky S.M. “The Comput-
er in science, aircraft, lives”. - M.: Mashi-
nostroenie, 1993;
4. Biyshgens G.S., Bedrzhicky E.L.
“ZAGI - center of aviation science”. - M.:
Nauka, 1993;
5. Kamanin N.P. “Hidden space”.
Books 14-3. - M.: Infortekst, 1995, 1997;
Novosti kosmonavtiki, 1999;
6. “Space pilots of the USSR - gradu-
ates of academy” // Originator V.A. Shitov.
Under S.M. Belocerkovsky's edition. - M.:
VVIA, 1977.
7. “ Schools of sciences of VVIA of a
name of N.E. Zhukovsky”. - M.: Academya
aviacii, 2000;
8. Ponomaryova V.L. “Woman's face
of space”. - M.: Helios, 2002;
9. Rebrov M.F. “Space foreshorten-
ing of “Zhukovka” // Newspaper “Krasnaya
zvezda”, 18.02.1993;
10. “Trellised wings in rocket produc-
tion, astronautics, aircraft” / Under S.M.
Belocerkovsky's edition, etc.. - M.: Novyi
Zentr, 2007;
488
11. ChertoK B.E. “Rockets and peo-
ple”, vol. 3 “Hot days of cold war”. - M.:
RTSoft, 2007.
12. Shitov V. “Meetings with Yu.A.
Gagarin” // Newspaper “Trud”, 27.03.1989;
13. Shitov V. “He was the great opti-
mist” // Magazine “Grazhdanskaya aviacia”,
Vol. 4, 1996;
14. Stache P. “Sowjetische Raketen:
Im Dienst von Wissenschaft und Vertei-
digung”. - Berlin: Militarverlag der DDR,
1987.
THE AEROSPACE PLANE - THE DEGREE PROJECT OF ASTRONAUTS
OF THE 1st SET
©2015 V.V. Lebedev
The St.-Petersburg branch of Institute of history of natural sciences and equipment
of S.I. Vavilov of the Russian Academy of Sciences, St.-Petersburg
It is told about the thesis of astronauts and candidates for astronauts of the first sets after the end of study in
VVIA of N. E. of Zhukovsky. In article data on study of astronauts are generalized and is given many little-known
facts allowing to look in a new way at history of domestic astronautics.
Key words: Aerospace plane, Gagarin’s diploma, Yu.A. Gagarin, G.S. Titov, S.P. Korolyov, trellised wings,
lifting body
Информация об авторе:
Лебедев Виталий Владиславович, Председатель Секции истории авиации и космо-
навтики СПбФ ИНЕТ РАН, Руководитель Комиссии воздухоплавания РГО, 197 372, Рос-
сия, г. Санкт-Петербург, Долгоозёрная ул., 11-36, моб.т. +7-911-220-06-52,
lebed2000@mail.ru.
Область научных интересов: История воздухоплавания, авиации и космонавтики.
Lebedev Vitaly Vladislavovich, Chairman Section of history of aviation and astronautics
of the St.-Petersburg branch of Institute of history of natural sciences and equipment of the Rus-
sian Academy of Sciences, Head of Commission of aeronautics of the Russian Geographical so-
ciety, 197 372, Russia, Saint-Petersburg, Dolgoozernaya street, 11-36, mob.tel.
+7-911-220-06-52, lebed2000@mail.ru.
Area of research: History of aeronautics, aviation and astronautics.
489
УДК 94(47)
«КОЗЛОВУ Д.И. ПРЕДОСТАВЛЯЕТСЯ ПРАВО ОКОНЧАТЕЛЬНОГО
РЕШЕНИЯ ВОПРОСОВ...»: О ПОЛНОМОЧИЯХ РУКОВОДИТЕЛЯ
ФИЛИАЛА № 3 ОКБ-1 В 1960-61 ГГ.
©2015 С.В. Семенов
АО «РКЦ «Прогресс», г. Самара
В докладе рассматривается вопрос о полномочиях и статусе заместителя Главного конструктора
ОКБ-1 Д.И. Козлова в первые годы пребывания в Куйбышеве. Показано, что расширение полномочий руко-
водителя филиала № 3 в 1960-1961 гг. имело большое влияние на формирование нового самостоятельного
конструкторского Центра - ЦСКБ.
Ключевые слова: С.П. Королев, Д.И. Козлов, филиал № 3 ОКБ-1, Государственный авиационный
завод № 1
Вопрос полномочий, предоставлен-
ных заместителю главного конструктора
ОКБ-1 Дмитрию Ильичу Козлову в 1960-
1961 гг. никогда не был темой отдельного
исследования. Чаще всего в литературе
можно встретить упоминание об особых
полномочиях, которые были предостав-
лены Д.И. Козлову в связи с его переез-
дом в Куйбышев для организации произ-
водства ракет Р-7. Между тем, именно в
1960-1961 гг. Козлову и возглавляемому
им коллективу Главным конструктором
С.П. Королевым было предоставлено
право самостоятельного решения многих
технических вопросов по производству
баллистических ракет и ракет-носителей
для космических полетов. Это стало
большим шагом к будущим самостоя-
тельным разработкам филиала № 3 ОКБ-
1, вершиной которых стало создание са-
мой надежной ракеты-носителя «Союз».
Чтобы понять особенность и важность
этих полномочий следует сначала обра-
титься ко времени назначения
Д.И. Козлова заместителем Главного
конструктора.
2 января 1958 года вышло Поста-
новление ЦК КПСС и Совета Министров
СССР «Об организации серийного про-
изводства изделия 8К71 на Государ-
ственном авиационном заводе № 1 имени
И.В. Сталина Куйбышевского Совета
народного хозяйства». Во исполнение
этого Постановления в феврале того же
года председатель Государственного ко-
митета СССР по оборонной технике
К.Н. Руднев издал приказ об оказании
технической помощи заводу № 1. Вы-
полнение этой задачи возлагалось на
коллективы ОКБ-1, завод №88 и НИИ-
88. А так как ведущим конструктором
изделия 8К71 являлся начальник отдела
ОКБ-1 Д.И. Козлов, то в приказе именно
он был назван в качестве ответственного
за перепрофилирование завода № 1. Не-
задолго до отлета Козлова в Куйбышев
С.П. Королев назначил его своим заме-
стителем. Дмитрий Ильич так вспоминал
об этом назначении: «В январе 1958 года
меня пригласил к себе С.П. Королев и
сообщил, что я назначен его заместите-
лем. После этого Сергей Павлович ска-
зал, что при личном одобрении Хрущева
я направляюсь в Куйбышев, где буду ра-
ботать на одном из предприятий в каче-
стве ответственного представителя Глав-
ного конструктора ОКБ-1 для организа-
ции на нем серийного производства раке-
ты Р-7».
История приезда Д.И. Козлова в
Куйбышев и масштабной реконструкции
авиационного производства завода под
выпуск ракет при всемерной поддержке
директора В.Я. Литвинова неоднократно
описана в литературе и стала уже хре-
стоматийной. В это время (1958-1959 гг.)
вопрос о полномочиях Дмитрия Ильича
сводился фактически к статусу «второго
директора» предприятия. Действительно,
сразу после приезда Козлова в Куйбышев
В.Я. Литвинов издал приказ, в котором
подчеркивалось, что все указания и рас-
490
поряжения заместителя Главного кон-
структора Д.И. Козлова приравниваются
к распоряжениям самого директора. По-
этому эти указания являются обязатель-
ными для руководителей всех подразде-
лений завода № 1 и подлежат немедлен-
ному исполнению в установленные сро-
ки. Благодаря такому приказу, Дмитрий
Ильич мог набирать себе помощников из
числа сотрудников предприятия.
В 1959 году встает вопрос о нала-
живании на заводе № 1 серийного произ-
водства усовершенствованной ракеты Р-
7А (8К74). Поэтому 23 июля 1959 года
создается отдел №25 ОКБ-1, который
осуществляет конструкторское сопро-
вождение серийного производства уже
двух типов межконтинентальных балли-
стических ракет: Р-7 и Р-7 А. Кроме того,
вскоре завод № 1 начинает изготавливать
ракеты-носители на базе Р-7 для запуска
беспилотных кораблей-спутников. На
мой взгляд, с этого времени можно гово-
рить об острой необходимости наделения
Д.И. Козлова полномочиями другого ро-
да. Дело в том, что в процессе освоения
производства изделий неизбежно возни-
кают ситуации, когда необходимо внести
изменения в техническую документацию.
Эти изменения должен был утверждать
главный конструктор изделий -
С.П. Королев. В целях оптимизации се-
рийного производства ракет в Куйбыше-
ве Сергей Павлович письмом от
20.06.1960 г. передает кальки-
подлинники технической документации
на изделия 8К71 и 8К72 на ответственное
хранение и дальнейшее ведение серийно-
конструкторскому отделу Авиационного
завода № 1. А заместителю Козлову он
делегирует часть своих полномочий:
«Все изменения в техническую докумен-
тацию... утверждаются моим заместите-
лем тов. Козловым Д.И.». И далее: «То-
варищу Козлову Д.И. предоставляется
право окончательного решения вопросов
по всем изменениям...». Через три
дня - 23 июня 1960 г. - на базе отдела
№ 25 был создан филиал № 3 ОКБ-1, ко-
торый возглавил Д.И. Козлов. Таким об-
разом, вместе с полномочиями на утвер-
ждение технических изменений Дмитрий
Ильич получил должность руководителя
филиала ОКБ-1, имевшем большую са-
мостоятельность, чем отдел головной ор-
ганизации.
К началу 1961 года можно уже го-
ворить о полномочиях филиала № 3 ОКБ-
1, а не отдельного человека в лице его
руководителя. Так в письме Д.И. Козлова
от 15.03.1961 г. мы находим сведения о
праве принятия самостоятельных реше-
ний в рамках подготовки первого полета
человека в космос. Говоря об изготовле-
нии ракет-носителей для пилотируемых
полетов, Дмитрий Ильич доводит до све-
дения адресатов, что «объем и порядок
проведения необходимых на этих изде-
лиях доработок определяется филиалом
№ЗОКБ-1».
Как руководитель филиала ОКБ-1
Д.И. Козлов заботится о большей эффек-
тивности военной приемки (письмо гене-
рал-майору Н.К. Смирницкому от
15.07.1961 г.) и требует от смежников
исполнения сроков и повышения каче-
ства продукции (письмо С.А. Косбергу от
24.08.1961 г.). В то же время, Дмитрий
Ильич не потерял статуса «второго ди-
ректора». Так, когда в конце 1961 года
В.Я. Литвинов перешел на работу в Куй-
бышевский Совет Народного Хозяйства
(КСНХ), а назначение нового директора
еще не состоялось, Козлов берет на себя
ответственность по подготовке завода
«Прогресс» к производству «лунной ра-
кеты» Н-1. В своем письме от
30.11.1961 г. он, обращаясь к
С.П. Королеву и председателю КСНХ
В.И. Смирнову, требует освободить завод
от несвойственной (авиационной) ему
продукции и «в самой резкой форме по-
ставить этот вопрос перед вышестоящи-
ми планирующими организациями». Как
известно, уже в 1962 году на предприя-
тии в основном было свернуто производ-
ство агрегатов и запчастей для авиацион-
ной промышленности, что позволило
освободить мощности под масштабный
проект Н1-ЛЗ и выдержать сроки изго-
товления ракет-носителей для запуска
спутников и пилотируемых кораблей.
Таким образом, именно 1960-
1961 гг., на мой взгляд, стали тем рубе-
491
жом, когда расширение полномочий ру-
ководителя филиала № 3 Д.И. Козлова
оказало большое влияние на формирова-
ние нового самостоятельного конструк-
торского Центра - ЦСКБ.
Библиографический список:
1. Ерофеев В.В., Чубачкин Е.А.
Конструктор космической верфи - Сама-
ра: ООО «Офорт», 2009. - 308 с.
2. Кирилин А.Н., Ахметов Р.Н.,
Тюлевин С.В., Ткаченко С.И., Сторож
А.Д., Капитонов В.А., Фомин Г.Е., Нови-
ков В.Н., Семенов С.В. Самарские ступе-
ни «семерки» - Самара: Издательский
дом «Агни», 2011. - 256 с.
3. Письмо С.П. Королева № 2587 от
20.06.1960 г. (оригинал) / Архив истории
предприятия АО «РКЦ «Прогресс».
4. Письмо Д.И. Козлова № 01878 от
15.03.1961 г. (оригинал) / Архив истории
предприятия АО «РКЦ «Прогресс».
5. Письмо Д.И. Козлова № 05696 от
24.08.1961 г. (оригинал) / Архив истории
предприятия АО «РКЦ «Прогресс».
"KOZLOV D.I. GRANTED THE RIGHT TO THE FINAL DECISION ...":
ON THE FULL POWERS OF THE HEAD BRANCH № 3 EDB-1 IN 1960-61.
©2015 S.V. Semenov
JSC «SRC «Progress», Samara
The report examines the status and full powers of deputy chief designer of EDB-1 D.I. Kozlov in the first
years of stay in Kuibyshev. It is shown that the expansion of full powers of the head of the branch № 3 in 1960-1961
had a great influence on the formation of a new independent design center - CSDB.
Key words: S.P. Korolev, D.I. Kozlov, branch № 3 EDB-1, State Aviation Plant № 1
Информация об авторе:
Семенов Сергей Вячеславович, историк, корреспондент пресс-службы АО «РКЦ
«Прогресс», 443009, РФ, г. Самара, ул. Земеца, д. 18. Тел. 228-55-27.
Область научных интересов: история АО «РКЦ «Прогресс», история отечественной
авиационной и ракетно-космической промышленности.
Semenov Sergey Vyacheslavovich, historian, correspondent the press service, JSC «SRC
«Progress», 443009, Russia, Samara, Zemetsa, 18, 228-55-27.
Research interests: history of JSC SRC Progress, history of domestic aviation and rocket
and space industry.
492
УДК 94(47)
ПЕРВЫЕ ЛАУРЕАТЫ ЛЕНИНСКОЙ ПРЕМИИ ЗА РАЗРАБОТКУ РАКЕТНО-
КОСМИЧЕСКОЙ ТЕХНИКИ
©2015 В.И. Ивкин
Военная академия РВСН им. Петра Великого, г. Москва
Рассказывается о первых лауреатах Ленинской премии за разработку ракетно-космической техники.
Ключевые слова. История ракетостроения, космонавтики, архивы, источники, документы ЦК
КПСС и Совета Министров СССР, Ленинские, Сталинские, Государственные премии.
В своём выступлении на XXXIX
Королевских чтениях (январь 2015 г.)
«Лауреаты Сталинской премии за работы
в области ракетостроения и космонавти-
ки» автор изложил результаты исследо-
ваний и привёл списки лауреатов Ста-
линской премии, составленные по ре-
зультатам раскрытия так называемых
«завуалированных формулировок» - за
разработку новой аппаратуры, новых ме-
тодов исследований, за работу в области
техники и т.д.
Кроме того научному сообществу
были впервые продемонстрированы вы-
явленные архивные документы с пред-
ставлениями к присуждению Сталинской
премии от 27.02.1951 г. за создание ракет
Р-1 три премии 1-й степени и две премии
2-й степени (руководители авторских
коллективов: Королев С.П., Глушко В.П.,
Пилюгин Н.А., Бармин В.П., Котельни-
ков В.А.), а так же постановление Прези-
диума Комитета по Сталинским премиям
в области науки и изобретательства при
Совете Министров СССР от 14 апреля
1954 года о присуждении премий за со-
здание ракет Р-1 и Р-2 трём авторским
коллективам первой степени (Коро-
лев С.П., Глушко В.П., Пилюгин Н.А.),
семи коллективам второй степени (руко-
водители: Бармин В.П., Кузнецов В.И.,
Котельников В.А., Рахматуллин Х.А.,
Ананьев С.Л., Решетов К.А., Соко-
лов А.И.) и двум коллективам третьей
степени (руководители Буров Л.П. и Сте-
панов Л.Г.).
Анализируя причины не присужде-
ния Сталинских премий ракетостроите-
лям во главе с С.П. Королевым, автор
пришел к выводу, что после смерти
И.В. Сталина его соратники принялись
активно модернизировать премию имени
вождя и в конце концов отменили её. Во-
прос отмены Сталинских премий по-
дробно изложен автором в публикации
документов ЦК КПСС и Совета мини-
стров СССР за 1953 - 1967 гг. в журнале
«Исторический архив», 2013, № 6, с.3-49.
Постановлением ЦК КПСС и Сове-
та Министров СССР от 15 августа
1956 года № 1127 «О Ленинских премиях
за наиболее выдающиеся работы в обла-
сти науки, техники, литературы и искус-
ства» были признаны утратившими силу
постановления СПК СССР об учрежде-
нии премий имени Сталина и одновре-
менно учреждены Ленинские премии в
размере 75 тысяч рублей (к слову это го-
раздо меньше денежной части Сталин-
ских премий 1-й степени, которые со-
ставляли по науке - 200 тысяч, по изоб-
ретательству - 150 тысяч, по литературе
и искусству - 100 тысяч). Всего было
учреждено 12 премий - за научные труды;
30 премий - за архитектурные и техниче-
ские сооружения, изобретения, конструк-
ции машин, новые материалы, усовер-
шенствования методов производства; а
так же 8 премий - за произведения лите-
ратуры и искусства. Не допускалось
многократное присуждение Ленинской
премии.
Этим постановлением присуждение
премий было возложено на Комитет по
Ленинским премиям в области науки и
техники и Комитет по Ленинским пре-
миям в области литературы и искусства,
которые должны были ежегодно их при-
суждать ко дню рождения В.И. Ленина
(22 апреля) своими решениями и публи-
493
ковать их в центральной печати. Тогда же
появилась традиция в ежегодниках
«Большой Советской Энциклопедии»
публиковать краткие биографические
справки лауреатов Ленинской премии,
которая существовала до 1991 года.
Постановлением ЦК КПСС и Сове-
та Министров СССР от 9 сентября 1966 г.
№ 739 «О Ленинских и Государственных
премиях СССР в области науки и техни-
ки, литературы и искусства» были внесе-
ны изменения в положение и статус Ле-
нинской премии. Размер премии был
увеличен до 10 тысяч рублей (не забудем
о денежной реформе с 1.1.1961 г. с дено-
минацией 1:10), а их количество умень-
шено до 25 премий по науке и технике и
5 премий по литературе, искусству и ар-
хитектуре. Премии присуждались один
раз в два года (по чётным годам) ко дню
рождения В.И. Ленина. При этом реше-
ния Комитетов о присуждении Ленин-
ских премий не являлись окончательны-
ми, как это было по положению
1956 года, а подлежали утверждению ЦК
КПСС и Советом Министров СССР с
публикацией соответствующего совмест-
ного постановления в центральной печа-
ти.
Присуждение Ленинских премий за
работы, по укреплению обороны страны,
осуществлялось Президиумом (а не Пле-
нумом) Комитета по Ленинским премиям
в области науки и техники и естественно
не публиковалось в печати.
Первое присуждение Ленинской
премии состоялось 7 сентября 1956 года
(то есть через 23 дня после её учрежде-
ния). Весьма интересно, что постановле-
ние об учреждении Ленинской премии
опубликовано в изложении в газете
«Правда» 8 сентября 1956 года. Знак Ла-
уреата Ленинской премии № 1 был вру-
чен И.В. Курчатову, № 2 -
Я.Б. Зельдовичу, № 3 - А.Д. Сахарову,
№ 4 - Ю.Б. Харитону. Они удостоились
звания лауреата Ленинской премии по-
становлением Совета Министров СССР
№ 1253-634 от 7.9.1956 за создание на
новом физическом принципе изделия
РДС-37 (первой советской двухступенча-
той термоядерной бомбы). Важно заме-
тить, что присуждение премии решением
правительства не предусматривалось По-
ложением о Ленинских премиях.
После успешного запуска первого
искусственного спутника Земли Прези-
диум ЦК КПСС 10 октября 1957 г. (про-
токол № 116, пункт VIII)1 принял реше-
ние о максимальном поощрении создате-
лей советского чуда, давшего прочный
фундамент идеологическим обосновани-
ям преимуществ социализма перед капи-
тализмом, обеспечившим рост политиче-
ского авторитета страны. Указами Пре-
зидиума Верховного Совета СССР от
21 декабря 1957 года большая группа
конструкторов, научных и инженерно-
технических работников, военнослужа-
щих, рабочих и служащих была удостое-
на государственных наград. Звание Героя
Социалистического Труда было присвое-
но 13 специалистам; орденом Ленина
награждены 102 человека; орденом Тру-
дового Красного Знамени — 463 челове-
ка; орденом Красной Звезды — 132 чело-
века; орденом «Знак Почета» — 1042 че-
ловека; медалью «За трудовую доблесть»
— 709 человек; медалью «За трудовое
отличие» — 634 человека. Орденами бы-
ли награждены предприятия, конструк-
торские бюро и научно-
исследовательские институты, прини-
мавшие участие в создании первого в ми-
ре искусственного спутника Земли, в том
числе ОКБ № 1 (Королева) орденом Ле-
нина. Высшей аттестационной комиссии
разрешалось присвоить ученые степени
кандидата и доктора технических наук
наиболее активным участникам создания
спутника без защиты ими диссертаций.
Постановлением Совета Министров
СССР №1418-657 от 18 декабря
1957 года за разработку и запуск первого
искусственного спутника Земли было
присвоено девять Ленинских премий 60
конструкторам, научным и инженерно-
техническим работникам, военнослужа-
щим. В числе этих первых лауреатов Ле-
нинской премии за создание ракетно-
космической техники был и Д.И. Козлов,
именем которого названы проходящая
научно-техническая конференция.
494
С целью ликвидации «белых пятен»
истории отечественной космонавтики и
ракетостроения я хочу назвать поименно
всех лауреатов в той последовательности,
как они указаны в постановлении прави-
тельства. Каждому лауреату был вручен
знак лауреата Ленинской премии от
№118 у С.П. Королева до №178 у
Г.А. Тюлина.
Королев Сергей Павлович (1907 -
1966) главный конструктор ОКБ-1
Глушко Валентин Петрович (1908
- 1989) главный конструктор ОКБ-456
Рязанский Михаил Сергеевич
(1909 - 1987) главный конструктор НИИ-
885 Министерства радиотехнической
промышленности СССР.
Пилюгин Николай Алексеевич
(1908 - 1982) главный конструктор НИИ-
885 Министерства радиотехнической
промышленности СССР.
Бармин Владимир Павлович
(1909 - 1993) начальник и главный кон-
структор ГСКБ Спецмаш.
Кузнецов Виктор Иванович (1913
- 1991) главный конструктор НИИ-10
Министерства судостроительной про-
мышленности
Мишин Василий Павлович (1917
- 2001) первый заместитель генерального
конструктора ОКБ-1
Вольцифер Анатолий Николае-
вич (1918 - 1996) начальник отдела ОКБ-
1 ГКОТ, г. Калининград Московской обл.
Крюков Сергей Сергеевич (1918 -
2005) начальник проектного отдела ОКБ-
1 ГКОТ, г. Калининград Московской обл.
Козлов Дмитрий Ильич (1919 -
2009) ведущий конструктор ОКБ-1 ГКОТ,
г. Калининград Московской обл.
Корженевский Эдуард Иванович
(1909 - 2003) начальник отдела ОКБ-1
ГКОТ, г. Калининград Московской обл.
Лавров Святослав Сергеевич
(1923 - 2004) заместитель начальника от-
дела ОКБ-1 ГКОТ, г. Калининград Мос-
ковской обл.
Райков Иван Иосифович (1918 -
1999) заместитель начальника отдела
ОКБ-1
Тихонравов Михаил Клавдиевич
(1900 - 1974) начальник отдела ОКБ-1
Чертой Борис Евсеевич (1912 -
2011) начальник отдела ОКБ-1
Юрасов Игорь Евгеньевич (1922
- 1985) начальник отдела ОКБ-1
Агафонов Сергей Петрович (1918
- 1993) начальник конструкторской бри-
гады ОКБ-456 Госкомитета СМ СССР по
оборонной технике.
Абрамов Алексей Сергеевич (1911
- 2000) главный конструктор ОКБ-12
Госкомитета СМ СССР по авиационной
технике.
Ваничев Александр Павлович
(1916 - 1994) начальник лаборатории
НИИ-1 МАП (ФГУП «Центр Келдыша»),
Желтухин Николай Алексеевич
(1915 - 1994) начальник отдела техниче-
ских расчетов ОКБ-456 Госкомитета СМ
СССР по оборонной технике.
Кременецкий Владимир Яковле-
вич (1910 - 1995) ведущий конструктор
ОКБ-456 Госкомитета СМ СССР по обо-
ронной технике.
Лист Григорий Николаевич (1901
- 1993) начальник конструкторской бри-
гады ОКБ-456 Госкомитета СМ СССР по
оборонной технике.
Поляков Константин Михайло-
вич (1912 - 1995) главный металлург за-
вода ОКБ-456
Соловьев Юрий Дмитриевич
(1917 - 1984) ведущий конструктор ОКБ-
456 Госкомитета СМ СССР по оборонной
технике.
Шабранский Виталий Леонидо-
вич (1917 - 1992) начальник испытатель-
ной станции ОКБ-456
Белоусов Анатолий Владимиро-
вич (1922 - 1996) заместитель начальни-
ка отдела НИИ-885 (ныне ФГУП «РНИИ
КП» г. Москва).
Гальперин Исаак Цалиевич (1922
- 2007) начальник лаборатории НИИ-885
(ныне ФГУП «РНИИ КП» г. Москва).
Жуков Яков Степанович (1899 -
1976) заместитель главного конструктора
НИИ-885 (ныне ФГУП «РНИИ КП» г.
Москва).
Катков Георгий Федорович (1919
- 1989) главный инженер завода №699
Министерства электротехнической про-
мышленности и одновременно главный
495
конструктор бортового электрооборудо-
вания ракет СКБ-699
Манукян Эдуард Мигранович
(1913 - 2010) заместитель главного кон-
структора НИИ-885 (ныне ФГУП «РНИИ
КП» г. Москва).
Маркичев Николай Васильевич
(1918 - 1972) начальник отдела - заме-
ститель главного конструктора НИИ-944
Радкевич Дмитрий Кириллович
(1910 - 2000) заместитель главного кон-
структора НИИ-944 Госкомитета по су-
достроению
Стариков Александр Васильевич
(1906 - ?) начальник отдела - заместитель
главного конструктора НИИ-885 Мини-
стерства радиотехнической промышлен-
ности
Сергеев Владимир Григорьевич
(1914 - 2009) заместитель начальника от-
дела НИИ-885 Министерства радиотех-
нической промышленности СССР
Хитрик Моисей Самуилович
(1922 - 1994) начальник лаборатории
НИИ-885 Министерства радиотехниче-
ской промышленности СССР
Цециор Зиновий Моисеевич (1914
- 1990) начальник лаборатории - заме-
ститель главного конструктора НИИ-944
Осташев Евгений Ильич (1924 -
1960) заместитель начальника отдела
комплексных испытаний ракет НИИП
№ 5 Министерства обороны СССР
Бахтюков Михаил Иванович
(1909 - ?) заместитель начальника отдела
ГСКБ Спецмаш. Министерства машино-
строения ССС
Веремьев Мефодий Николаевич
(1914 - 1993) главный конструктор
Уральского КБ машиностроения
Гольцман Александр Моисеевич
(Михайлович) (1912 - 1980) начальник и
главный конструктор ОКБ-686 (Москов-
ского прожекторного завода)
Жданов Борис Сергеевич, глав-
ный конструктор СКБ ВНИИКИМАШа
Министерства машиностроения СССР
Лейкин Николай Сергеевич (1902
1979) главный конструктор ЦКБ на заво-
де «Подъёмник» Министерства транс-
портного машиностроения СССР
Сидоров Михаил Михайлович
(1910 - 1994) ведущий конструктор -
начальник отдела ГСКБ Спецмаш. Мини-
стерства машиностроения СССР
Троицкий Ювеналий Леонидович
(1914 - 1985) заместитель начальника и
главного конструктора ГСКБ Спецмаш
Келдыш Мстислав Всеволодович
(1911 - 1978) директор Института при-
кладной математики АН СССР
Бажинов Игорь Константинович
(род. 1928) старший научный сотрудник
НИИ-4 Министерства обороны СССР.
Брыков Анатолий Викторович
(1921 - 2007) научный сотрудник НИИ-4
Министерства обороны СССР.
Нариманов Георгий Степанович
(1922 - 1983) начальник отдела НИИ-4
Министерства обороны СССР.
Охоцимский Дмитрий Евгенье-
вич (1921 - 2005) заведующий отделом
Института прикладной математики АН
СССР.
Щукин Александр Николаевич
(1900 - 1990) заместитель Председателя
Специального комитета по реактивной
технике при Совете Министров СССР
Эльясберг Павел Ефимович (1914
- 1988) начальник лаборатории НИИ-4
Министерства обороны СССР.
Энеев Тимур Магометович (род
1924) научный сотрудник Отделения
прикладной математики Математическо-
го института Академии Наук СССР.
Яцунский Игорь Мариамович
(1916 - 1983) старший научный сотруд-
ник лаборатории НИИ-4 Министерства
обороны СССР.
Агаджанов Павел Артемьевич
(1923 - 2001) заместитель начальника
Командно-измерительного комплекса по
измерениям и научной части.
Бегун Николай Андреевич (1911 -
1986) начальник отделения - главный
конструктор НИИ-195 Министерства ра-
диотехнической промышленности (ныне
Российский институт радионавигации и
времени» (Санкт-Петербург)
Васильев Анатолий Алексеевич
(1921 - 1973) заместитель начальника
НИИП-5 по измерениям и научно-
исследовательской работе.
496
Губенко Евгений Степанович
(1911 - 1959) начальник - главный кон-
структор СКБ-567 Министерства про-
мышленности средств связи.
Мозжорин Юрий Александрович
(1920 - 1998) заместитель начальника
НИИ-4 Министерства обороны СССР
Морозов Константин Константи-
нович (1921 - 1989) старший инженер
Московского энергетического института
Соболев Федор Евгеньевич (1912
- 1970) начальник КБ-4 по созданию ки-
нотеодолитов, фотограмметрических
приборов и киноаппаратуры Красногор-
ского завода № 393.
Тюлин Георгий Александрович
(1914 - 1990) заместитель начальника
НИИ-4 Министерства обороны СССР по
научно-исследовательской работе.
Как видно из представленного
списка случайных людей среди лауреатов
не было, все они являлись и являются ко-
рифеями нашей отечественной ракетно-
космической науки и техники. Автору
пока не известны биографии первых лау-
реатов Ленинской премии за работы по
ракетно-космической технике
М.И. Бахтюкова, Б.С. Жданова и
А.В. Старикова. Но думаю, что при по-
мощи кадровых органов предприятий и
организаций Роскосмоса эти лакуны
можно весьма оперативно закрыть.
Весьма символично, что последним
(именно последним, а не крайним как
любят говорить пиарщики) лауреатом
Ленинской премии, получивший знак ла-
уреата № 3847, за разработку, отработку
и освоение серийного производства по-
движного железнодорожного стартового
комплекса 15П261 модульной структуры
с ракетой РТ-23УТТХ является замести-
тель министра общего машиностроения
СССР Усенков Артур Владимирович,
удостоенный этого звания Указом Пре-
зидента СССР от 3 декабря 1991 года.
Думаю, что при поддержке Роскос-
моса можно было бы подготовить книгу
«Лауреаты Ленинской премии за созда-
ние ракетно-космической техники», ко-
торая способствовала патриотическому
воспитанию населения нашей страны,
пропаганде славной истории отечествен-
ного ракетостроения.
THE FIRST WINNERS OF THE LENIN AWARD FOR WORKING OUT OF
SPACE-ROCKET ENGINEERING
©2015 V.I. Ivkin
Military academy of rocket strategic forces of Peter the Great, Moscow
It is told about the first winners of the Lenin award for working out of space-rocket engineering.
Keywords: History of rocket manufacturing, astronautics, archives, sources, documents of the Central Com-
mittee of the CPSU and Ministerial council of the USSR, Lenin, Stalin, State awards
Информация об авторе:
Ивкин Владимир Иванович, член-корреспондент РАРАН, кандидат исторических
наук
Старший научный сотрудник Военной академии РВСН им. Петра Великого,
ivkin-v@mail.ru.
Область научных интересов: история ракетно-космической техники.
Ivkin Vladimir Ivanovich, corresponding member RARAS, candidate of historical sci-
ences, the senior research assistant of Military academy of rocket strategic forces of Peter the
Great, ivkin-v@mail.ru.
Research interests: history of space rocket technology.
497
УДК 629.78(09)
К 55-ЛЕТИЮ НАЧАЛА ЗАПУСКОВ РАКЕТЫ-НОСИТЕЛЯ 8К78 «МОЛНИЯ»:
САМАРСКИЕ РАКЕТЫ-НОСИТЕЛИ В ПРОГРАММАХ
ИССЛЕДОВАНИЙ ЛУНЫ, ВЕНЕРЫ И МАРСА
©2015 Н.В. Богданова
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (Национальный исследовательский университет), г. Самара
В статье описываются этапы реализации программ исследования Луны и планет солнечной системы
автоматическими космическими аппаратами, запуски которых осуществлялись ракетами - носителями «Во-
сток-Л», «Молния», «Молния -М».
Ключевые слова: Ракета-носитель, межпланетные полеты, изучение планет Солнечной системы,
автоматические межпланетные станции
После запуска первых искусствен-
ных спутников Земли начался новый этап
в развитии ракетно-космической техники
— осуществление межпланетных поле-
тов. Полеты к ближайшим от Земли
небесным телам — Луне и планетам
Солнечной системы Венере и Марсу тре-
буют значительных энергетических за-
трат и продолжительных сроков полета.
В ходе их реализации необходимо вы-
полнение таких операций, как выведение
космического аппарата (КА) на орбиту
искусственного спутника исследуемой
планеты, торможение для посадки на ее
поверхность, разгон для обратного воз-
вращения на Землю. Для осуществления
межпланетного перелета космического
аппарата необходимо было решить также
проблемы выбора оптимальных траекто-
рий полета, создания высокоточных си-
стем управления и ориентации, разработ-
ки надежных средств радиосвязи и мно-
гие другие. Для запуска КА к Луне на ба-
зе МБР Р-7 была создана трехступенчатая
ракета-носитель (PH) 8К72Л («Восток-
Л», «Луна»). Первые две ступени были
аналогами ступеней Р-7. Третья ступень
(блок «Е»), оснащалась жидкостным ра-
кетным двигателем (ЖРД) 8Д714
(РД0105) ОКБ-154 главного конструкто-
ра С. А. Косберга. Блок «Е» впервые в
мире позволял достичь второй космиче-
ской скорости, что обеспечивало воз-
можность осуществления межпланетных
полетов. С помощью PH 8К72Л 2 января
1959 года в СССР был осуществлен пер-
вый запуск автоматической межпланет-
ной станции (АМС) в сторону Луны.
Всего было выполнено шесть запусков
PH 8К72Л с АМС серии «Луна», три из
которых были успешными. Блок «Е» ра-
кеты-носителя имел серьезные недостат-
ки: двигатель не мог запускаться в неве-
сомости и имел недостаточный удельный
импульс (ЖРД 8Д714 был выполнен по
открытой схеме).
Постановлением Правительства от
4 июня 1960 года «О планах освоения
космического пространства» предписы-
валось создать четырехступенчатую ра-
кету-носитель для запуска АМС к Марсу
и Венере. Четырехступенчатая PH 8К78,
получившая в дальнейшем наименование
«Молния», была разработана ОКБ-1 на
базе двухступенчатой МБР Р-7А(8К74).
На первой и второй ступенях использо-
вались модернизированные двигатели
8Д74К и 8Д75К. В качестве третьей сту-
пени (блока «И») использовалась дорабо-
танная вторая ступень МБР Р-9 (8К75) с
новым двигателем 8Д715К (РД0107) ОКБ
С.А. Косберга. Четвертая ступень (блок
«Л»), был разработан ОКБ-1. В его со-
ставе впервые был применен ЖРД 11ДЗЗ
замкнутой схемы, также разработанный
ОКБ-1.
Запуск двигательной установки
блока «Л» должен был происходить в
условиях невесомости через полтора часа
полета по орбите вокруг Земли, а не сра-
зу после окончания работы третьей сту-
пени, поэтому на блоке «Л» требовалось
498
установить систему стабилизации и ори-
ентации на время паузы и блок обеспече-
ния запуска двигателя в невесомости. На
блоке «Л» также устанавливалась систе-
ма управления блоками «И» и «Л», раз-
работки НИИ-885 главного конструктора
Н.А. Пилюгина. Производство первых
трех ступеней PH 8К78 в 1960 году ОКБ-
1 передало филиалу №3 (ЦСКБ) и заводу
№1, а производство четвертой ступени в
1965 году было передано в ОКБ им. С.А.
Лавочкина.
Первый пуск PH 8К78 с АМС се-
рии « Марс» 10 октября 1960 года окон-
чился неудачей их-за аварии третьей сту-
пени PH. Удачным стал третий старт PH
Молния с АМС «Венера -1», который со-
стоялся 12 февраля 1961 года. «Венера -
1» стала первым исследовательским ап-
паратом, направленным людьми к другой
планете Солнечной системы. Первый
успешный запуск АМС в сторону Марса
был осуществлен 1 ноября 1962 года.
Всего в 1960-1965 гг. были выпол-
нено 28 запусков PH 8К78 с АМС к Луне,
Венере и Марсу. 17 из них закончились
неудачей, в том числе 8 - из-за аварий
ракет-носителей. Основной причиной от-
казов был незапуск двигателя блока
«Л». Анализ аварий позволил выявить
причину неудач. Была допущена проект-
но-конструкторская ошибка, в результате
которой двигатель четвертой ступени
(блок «Л») не запускался ( разгонный
блок «Л» PH «Молния» обладал только
одноразовым запуском двигателя на про-
межуточной орбите). Создание PH «Мол-
ния» положило начало планомерному
изучению Солнечной системы. Однако
высокая аварийность PH 8К78 вызвала
необходимость ее модернизации.
В 1961 году в Куйбышевском фили-
але №3 ОКБ-1 начались работы по созда-
нию ракеты-носителя 11А57 с повышен-
ными энергетическими характеристика-
ми для вывода многоместных пилотиру-
емых кораблей и спутников детального
фотонаблюдения. PH 11А57 «Восход»
стала первой полностью самостоятельной
разработкой Куйбышевских специали-
стов.
Конструкторский задел и опыт, по-
лученный при создании PH «Восход»,
нашел применение в работах по модерни-
зации PH 8К78. Новый вариант носителя
получил индекс 8К78М. В составе пер-
вой и второй ступеней применялись мо-
дернизированные двигатели 8Д727 и
8Д728 ОКБ -456 В. П. Глушко, на блоке
третьей ступени - двигатель 11Д55
КБХА
С. А. Косберга. Система управления
PH также была глубоко модернизирова-
на. В ОКБ им. С. А. Лавочкина были про-
ведены работы по повышению основных
тактико-технических характеристик и
надежности разгонного блока «Л». 4 ок-
тября 1965 года начались летные испыта-
ния PH 8К78М. 31 января 1966 года со-
стоялся запуск PH «Молния-М» с АМС
станцией «Луна-9», которая впервые в
мире осуществила мягкую посадку на
Луну. Всего в 1966 -1972 гг. было произ-
ведено 16 запусков PH 8К78М с АМС к
Луне и Венере, 4 из которых окончились
неудачей - один из-за аварии PH, три -
из-за отказа систем АМС. Запуски АМС
к Луне и Венере, осуществленные PH
«Молния» и «Молния-1» стали важней-
шим этапом в развитии исследований
космоса. Ученые получили уникальные
данные о ближайших к Земле небесных
телах, о межпланетном пространстве,
солнечном излучении и т.д. Наиболее
успешными стали исследования Венеры,
которая получила наименование «Рус-
ской планеты».
Спустя десятилетия Самарская ра-
кета-носитель снова проложила дорогу к
«Русской планете» европейскому косми-
ческому зонду: 9 ноября 2995 года с кос-
модрома Байконур ракетой-носителем
«Союз-ФГ» с разгонным блоком «Фре-
гат» осуществлен запуск космического
аппарата «Венера-Экспресс», предназна-
ченного для дистанционного исследова-
ния Венеры.
Библиографический список:
1. Самарские ступени «семёрки» /
А.Н. Кирилин, Р.Н. Ахметов, С.В. Тю-
левин, С.И. Ткаченко и др. Под ред.
499
А.Н. Кирилина. - Самара: Издательский
дом «Агни», 2011. - 256 с.: ил.
2. В.С. Авдуевский, В.П. Сенкевич.
Автоматические межпланетные станции
для исследования Луны, Марса, Венеры и
межпланетного пространства, созданные
в СССР до 1982 г. Из истории ракетно-
космической науки и техники. Вып. 3.,
М.: ИИЕТ РАН, 1999.
3. Исследования солнечной систе-
мы. Космические вехи. Четвёртый Меж-
дународный симпозиум по исследованию
Солнечной системы. ИКИ РАН, Москва,
14-18 октября 2013. Под ред. А.В. Заха-
рова; М.: ИКИ РАН, 2013. - 512 с.
4. http://nssdc.gsfc.nasa.gov/
References:
1. Samara stage Seven I A.N. Kirilin,
R.N. Akhmetov, S.V. Tyulevin,
S.I. Tkachenko et al., Ed. A.N. Kirilin. -
Samara Publishing House «Agni», 2011. -
256 p.: ill.
2. V.S. Avduevskii, V.P. Senkewich.
Automatic interplanetary station exploration
of the Moon, Mars, Venus and interplane-
tary space by the Soviet Union until 1982.
From the history of the missile and space
science and technology. Vol. 3, M .: IHST
Academy of Sciences, 1999.
3. Studies of the solar system. Space
milestones, fourth International Symposium
on the Exploration of the Solar System. ISA,
Moscow, October 14-18, 2013. Ed. A.V.
Zakharov; M .: ISA, 2013. - 512 p.
4. http://nssdc.gsfc.nasa.gov/
BY THE 55-TH ANNIVERSARY OF THE LAUNCH 8K78 ’’LIGHTNING"
LAUNCH VEHICLES: SAMARA LAUNCH VEHICLES IN RESEARCH PROGRAM
MOON, VENUS AND MARS
©2015 N.V. Bogdanova
Samara State Aerospace University, Samara
This article describes the stages of the lunar exploration program and the planets of the solar system with au-
tomatic spacecraft, launched from launch vehicles of the "East-L", "Lightning", "Lightning-M."
Key words: vehicle, interplanetary missions, the study of the planets of the solar system, automatic inter-
planetary station
Информация об авторах:
Богданова Надежда Викторовна, директор музея авиации и космонавтики имени
С. П. Королёва, СГАУ, 443086, Россия, г. Самара, Московское ш. 34, т. 267-43-75,
hogdanadin@mail.ru
Область научных интересов: история ракетно-космической техники, этапы развития
космонавтики в Самаре.
Bogdanova Nadezhda Victorovna, director of the Museum of Aviation and Astronautics
named after S.P. Korolev, SSAU, 443086, Russia, Samara, Moscow highway, 34, 267-43-75,
hogdanadin@mail.ru.
Research interests: history of space rocket technology, the stages of development of astro-
nautics in Samara.
500
УДК: 629.13.
Н.Н. ПОЛИКАРПОВ И РАКЕТНАЯ ТЕХНИКА СССР В ГОДЫ ВЕЛИКОИ
ОТЕЧЕСТВЕННОЙ ВОЙНЫ
©2015 В.П. Иванов
Федеральное государственное бюджетное учреждение науки «Санкт-Петербургский
институт информатики и автоматизации РАН» (СПИИРАН), г. Санкт-Петербург
Статья посвящена вкладу Н.Н.Поликарпова в развитие ракетной техники СССР в годы Великой Оте-
чественной войны. Показано, как благодаря его усилиям в стране создавался прототип первой боевой кры-
латой ракеты 10Х, наземные испытания которой начались летом 1944 г. Роль Поликарпова в подготовке
кадров для ракетно-космической промышленности СССР также велика. Практику работы в его КБ прошли
такие выдающиеся конструкторы, как М.К.Янгель, В.Н.Челомей, А.В.Потопалов, ДЛ.Томашевич,
М.Р.Бисноват, М.К.Тихонравов.
Ключевые слова: история ракетно-космической техники, ракета, крылатая ракета
Выдающийся конструктор Н.Н. По-
ликарпов за свою яркую творческую
жизнь, работая главным конструктором
заводов «Дуке», №1, №25, №39, №156,
№21, №84, №51, спроектировал ряд са-
молетов, многие из которых в течение
долгих лет находились на вооружении
ВВС СССР. Достаточно назвать в их чис-
ле истребители И-3, И-5, И-15, И-15бис,
И-153, И-16, разведчики Р-1, Р-5, знаме-
нитый учебный самолет У-2. Они участ-
вовали во всех войнах 30-х - 40-х годов
двадцатого века [1].
Однако по ряду причин его вклад в
развитие ракетной техники СССР долгое
время оставался неизвестным.
Отметим, что по своей первой спе-
циальности Н.Н.Поликарпов был двига-
телистом, поэтому обще теоретические
проблемы создания ракетных двигателей
ему были хорошо понятны. К тридцатым
годам относится достаточно интенсивное
его сотрудничество с РНИИ, разрабаты-
вавшего для самолетов И-15, И-16 ракет-
ное вооружение, катапульту для безаэро-
дромного старта истребителя И-15 и др.
Непосредственному подключению
КБ Поликарпова к проектированию ракет
способствовали многие предшествующие
события.
Германская фирма «Аргус» с 1938 г.
проводила разработки пульсирующего
воздушно-реактивного двигателя, кото-
рые в итоге завершились созданием
сравнительно надежного двигателя AS
109-014. 19 июня 1942 г. фирма «Физ-
лер», имевшая некоторый опыт по созда-
нию беспилотных мишеней, приступила
к проектированию самолета-снаряда, или,
как тогда говорили, летающей бомбы Fi-
103. Для секретности использовалось
следующее обозначение машины: «ми-
шень для зенитной артиллерии
(Flakzielgerat) -76», сокращенно FZG-76.
Уже после начала массированного при-
менения геббельсовская пропаганда стала
называть «оружием возмездия
(Vergeltugwaffe) -1» или V-1. Кроме дви-
гателя и планера, необходимо было со-
здать сложную по тем временам систему
автоматического управления на базе ав-
топилота «Аскания», включавшую в себя
в качестве подсистем магнитный коррек-
тор (компасное устройство), мембранный
бародатчик высоты, аэролаг (двухло-
пастная вертушка со счетчиком для опре-
деления пути), пневматические исполни-
тельные устройства. В декабре 1942 г.
начались летные испытания Fi-103. В це-
лом они развивались успешно, летом
1943 г. самолет-снаряд был рекомендован
к серийному производству, а в июле
1943 г. Германия приступила к формиро-
ванию первой боевой части, вооружен-
ной самолетами-снарядами, обучению
личного состава, разработке основ боево-
го применения.
Также успешно продолжалась раз-
работка противником дальней жидкост-
501
ной ракеты А-4, более известной как V-2
(«V ergeltugwaffe-2 »).
Наша разведка оперативно извеща-
ла Правительство об усилиях противника
по созданию нового оружия. Необходимо
было готовить ответные меры.
Внезапно приобрели особую значи-
мость первые шаги в этой области,
начавшиеся еще до войны: разработка
ракетных двигателей в ГДЛ, ракет раз-
личной конструкции в РНИИ, турбореак-
тивного двигателя А.О. Люлька и др. Это
в полной мере относилось и к исследова-
ниям В.Н. Челомея по созданию пульси-
рующих воздушно-реактивных двигате-
лей.
Нарком Авиапрома А.Н. Шахурин
вспоминал: «Однажды ночью [в конце
1942 г.] в одном из районов Москвы, где
располагался ЦИАМ, началась сильная
«стрельба», длившаяся несколько десят-
ков секунд. Стали выяснять ее причину.
Оказалось, что это известил о своем рож-
дении пульсирующий двигатель
В.Н. Челомея. Двигатель делал ни много
ни мало, а 50 «выстрелов» в секунду...
Когда разобрались, в чем дело, я и ко-
мандующий ВВС генерал А. А. Новиков
поехали в ЦИАМ. Прошли в бокс, где
был установлен новый двигатель и нахо-
дился сам Челомей. Конечно, нам захоте-
лось увидеть его детище в работе. Вла-
димир Николаевич предложил уйти из
бокса при его запуске, но мы с Новико-
вым сказали, что будем находиться здесь,
чтобы посмотреть все от начала до конца.
Грохотал двигатель действительно
невероятно... Что мог дать этот «пуль-
сар»? Выяснилось, что на базе такого
двигателя можно построить снаряды типа
самолетов-снарядов и подвешивать их
под тяжелые бомбардировщики. Не доле-
тая до цели несколько сот километров,
летчики могли отправить эти снаряды в
дальнейший полет. Самолеты в данном
случае не входили бы даже в зону проти-
вовоздушной обороны противника. За-
манчивая идея.
В.Н. Челомею было сказано:
— Продолжайте совершенствовать
двигатели, а мы подумаем, как развер-
нуть эту работу» [2].
Летом 1943 года И.В. Сталин дал
указание наркому авиапрома А.Н. Ша-
хурину и его заместителю А.С. Яковлеву
разработать программу ускоренного раз-
вития реактивной авиации и ракетной
техники в СССР. Представленные ими
вскоре материалы Программой назвать
было трудно, так как все пункты содер-
жали лишь пожелания, а не конкретные
предложения. Тогда Сталин дал указание
Л.П. Берии взять на себя ее разработку.
Тот блестяще справился с поручением. В
его документе четко были расписаны це-
ли, задачи, перечислены переводимые в
новую отрасль предприятия, определена
кооперация, финансирование, ответ-
ственность. Именно программа Берии
было положена в основу правительствен-
ного документа, принятого в октябре
1943 года.
В октябре 1943 г. в правительстве
обсуждался вопрос о конкретных шагах
по реализации Программы. В частности,
18-й главк Наркомата авиационной про-
мышленности, ранее занимавшийся обо-
рудованием, становился головным по ре-
активной авиации и ракетной техники.
Всем конструкторским бюро, особенно
свободным от обслуживания серийного
производства, было предписано заняться
проектированием самолетов с реактив-
ными и ракетными двигателями. КБ
Н.Н. Поликарпова приступило к разра-
ботке ракетного перехватчика «Малют-
ка», учебного самолета с ракетным дви-
гателем [1]. Кроме того, наркомат должен
был выделить КБ для проектирования
ракетной техники. Выбор пал на КБ По-
ликарпова. Николай Николаевич пытался
протестовать, но безуспешно. Ему выда-
ли задание на разработку крылатой раке-
ты (самолета-снаряда) по типу немецкого
Fi-103 (V-1). Отсюда следует, что какие-
то описания конструкции и чертежи уже
были добыты нашей разведкой.
В. Н. Челомей должен был создать пуль-
сирующий двигатель на базе немецкого
фирмы Аргус. Соответствующие органи-
зации подключались для производства
бортового оборудования.
Для ускорения работ группу
В.Н. Челомея перевели на изолирован-
502
ную территорию бывшего ОТБ ЦИАМ и
подчинили Поликарпову.
По-видимому, в Правительстве
учитывался богатый опыт Поликарпова
по проектированию отечественных авиа-
ционных конструкций на базе импортных.
Николай Николаевич выделил
группу инженеров, которые работали над
заданием изолированно, в отдельном по-
мещении на территории бывшего ОТБ
ЦИАМ. В итоге интенсивной работы к
маю 1944 г. формирование облика кры-
латой ракеты, получившей обозначение
10Х, было завершено, и чертежи начали
передаваться в производство.
Отметим, что в конце 1943 г., бу-
дучи в командировке в Москве, Дмитрий
Людвигович Томашевич, работавший то-
гда в Казани в конструкторском бюро
В.М. Мясищева, посетил
Н.Н. Поликарпова на его опытном заводе
№51. Поликарпов предложил Томаше-
вичу перейти к нему заместителем, на
что Дмитрий Людвигович ответил согла-
сием. Поликарпов написал в наркомат
письмо с просьбой назначить Томашеви-
ча на эту должность, но бюрократическая
машина на просьбы Поликарпова реаги-
ровала крайне медленно.
Полноразмерный макет 10Х был
построен в июле 1944 г. Комплект при-
боров находился тогда в разработке, но с
августа макет стал применяться в каче-
стве стенда для отработки конструкции
двигателя В.П. Челомея. В качестве вен-
тилятора для имитации скоростного
напора использовался истребитель ИТП
Н.Н. Поликарпова.
Тяжелые условия военной обста-
новки, сильные стрессы, обусловленные
арестом, событиями и особенно послед-
них лет, подорвали здоровье Николая
Николаевича. Первые признаки недомо-
гания он почувствовал в конце 1943 г.
Зимой 1943/44 г. Поликарпов перенес
тяжелую болезнь без точного диагноза,
сопровождавшуюся высокой температу-
рой. Д.Н. Кургузов вспоминал, как одна-
жды в начале 1944 г. он встретил
Н.Н. Поликарпова: «...Он пожаловался
тогда на свое здоровье, и я еще подумал:
«Раз он жалуется, значит, действительно
худо...». Диагноз выявил причину болез-
ни: рак. Операция, проведенная в июне
1944 г., помочь не смогла.
В июле 1944 г. Поликарпов напра-
вил письмо в наркомат с просьбой назна-
чить Д.Л. Томашевича главным кон-
структором завода №51.
30 июля 1944 г. в 12 часов дня
Н.Н. Поликарпова не стало.
1 августа 1944 г. Д.Л. Томашевич
вступил в должность заместителя главно-
го конструктора завода №51. Несмотря
на личную просьбу Н.Н. Поликарпова,
главным его так и не назначили.
После начала массированного об-
стрела территории Англии ракетами V-1
и V-2 было дано указание ускорить раз-
работку отечественного аналога самоле-
та-снаряда V-1 и двигателя Челомея к
нему Д-З.
Отметим, что в начале августа
1944 г. в наркомате Челомей еще рас-
сматривался только как разработчик
пульсирующего двигателя. Предполага-
лось выдать аналогичные задания Мику-
лину и Стечкину. Главным конструкто-
ром хотели назначить В. П. Горбунова,
потом П.О. Сухого. В. П. Четвериков
должен был проектировать стартовые
устройства. Однако и Горбунов, и Сухой,
и Четвериков под разными предлогами
уклонялись от проведения этих работ.
Как рассказывал И.В. Четвериков автору
этих строк, ракетная техника казалась
ему делом далекого будущего, а потому
на то время не очень перспективным.
В середине сентября 1944 г. было
принято решение об организации на за-
воде № 51 специализированного КБ по
разработке пульсирующих воздушно-
реактивных двигателей и самолетов-
снарядов с ними. 19 октября
В.Н. Челомей был назначен главным
конструктором завода. Д.Л. Томашевич
курировал авиационную тематику КБ. В
конце октября на завод доставили посту-
пивший из Англии некомплектный обра-
зец V-1. Недостающие узлы и агрегаты
удалось разыскать на бывшем немецком
полигоне в Польше.
С конца 1944 г. начались заводские
испытания сначала основных элементов,
503
а затем и всего изделия. Такие высокие
темпы говорят о том, что на заводе № 51
и группой В.Н. Челомея в ЦИАМ уже
была проведена большая предваритель-
ная проработка снаряда.
Постановлением ГКО № 7350 от 18
января 1945 г. наркомату авиапромыш-
ленности поручалось спроектировать,
построить и совместно с ЛИИ в феврале-
марте испытать самолет-снаряд по
типуУ-1. Для летных испытаний изделия
предусматривалась постройка опытной
серии из 100 штук 10Х. В дальнейшем
предполагалось довести суточное произ-
водство до 15 ракет. Летные испытания
начались 20 марта 1945 г.
Согласно постановлению
министерства, к середине 1945 года
доводка уже построенных самолетов на
заводе №51 прекращалась, равно как и
создание новых. Предприятие
ориентировалось на создание крылатых
ракет.
Первый этап летных испытаний КР
10Х начался с весны 1945 г. Испытания
проводились в Голодной степи между
Ташкентом и рекой Сыр-Дарья. До конца
августа с трех переоборудованных
самолетов-носителей Пе-8 было
произведено 63 пуска 10Х, лишь 30%
которых по совокупности показателей
были признаны удовлетворительными.
Во многом неудачи первого этапа были
связаны с плохой работой автомата
регулятора подачи горючего.
Для анализа причин на завод №51
прибыли три генерала:
В.Ф. Болховитинов, С.А. Лавочкин и
бывший заместитель Н.Н. Поликарпова
Н.А. Жемчужин.
По результатам 1-го этапа
испытаний в чертежи 10Х были внесены
необходимые изменения, в 1946 году
построена новая партия из 180
модернизированных ракет. Начались
повторные испытания.
Следует отметить одно
обстоятельство, существенно
осложнявшие проектирование: ни ВВС,
ни Сухопутные войска не имели ясного
представления о назначении этого
оружия, способного попасть только в
крупный город, а также о тактике боевого
применения.
Большого конструкторского опыта
у В.Н. Челомея тогда еще не было, что не
всегда искупалось напористостью,
энергией. Заместитель директора завода
№51 Д.Л. Томашевич пытался оказать
посильную помощь, но наталкивался на
непонимание: В.Н. Челомей отвергал все
то, что ему казалось вторжением в его
прерогативы. Напряженные отношения,
возникшие между В.Н. Челомеем и
Томашевичем, накалялись. Постепенно в
них в той или иной степени оказалась
вовлеченной большая часть
конструкторского коллектива. Нелегко
пришлось А.В. Потопалову, избранному
парторгом ОКБ. Должность обязывала
его придерживаться хотя бы видимого
нейтралитета.
Дмитрий Людвигович подал
«наверх» докладную записку, в которой
обвинял В.Н. Челомея в техническом
авантюризме. После чего ему пришлось
оставить завод.
С большим трудом доработка 10Х
все же завершилась и было рекомендова-
но принять 10Х на вооружение.
Затем вышли на испытания ее мо-
дификации - крылатые ракеты 14Х, 16Х
и другие.
19 февраля 1953 г. постановлением
правительства все работы над ракетами
10Х сворачивались, ОКБ и завод №51
передавались в ОКБ-155 (А. И. Микояна)
и становились его филиалом. Сокращен-
ная группа В.Н. Челомея переводилась на
другое предприятие.
В 1959 г. организация, которой ру-
ководил В. Н. Челомей, резко сменила
тематику и стала заниматься созданием
баллистических ракет и космической
техники. К числу известных разработок
этого периода относятся ракета-носитель
«Протон», космические станции типа
«Салют».
Создание ракеты 10Х являлось
определенным этапом в развитии проек-
тирования и производства новых систем,
в подготовке кадров отечественной про-
мышленности. Практику работы в кон-
структорском бюро Н. Н. Поликарпова
504
прошли многие генеральные и главные
конструкторы, видные деятели науки и
техники. В их числе М.Р. Бисноват,
А.Г. Брунов, М.И. Гуревич,
А.В. Потопалов, М.К. Тихонравов,
Д.Л. Томашевич, М.К. Янгель.
Отмечая их вклад в развитие ракет-
но-космической техники, мы не должны
забывать и ту роль, которую сыграл в
этом деле Н.Н. Поликарпов.
Библиографический список:
1. Иванов В.П. Неизвестный Поли-
карпов. - М.: «ЯУЗА», «ЭКСМО», 2009.
- 864 с.
2. Шахурин А.И. Крылья Победы. -
М.: Политиздат, 1983. - 240 с.
N.N.POLIKARPOV AND THE ROCKET ENGINEERING OF THE USSR IN
YEARS OF THE GREAT PATRIOTIC WAR
©2015 V.P. Ivanov
Federal state budgetary establishment of a science the St.-Petersburg institute of computer
science and automation of the Russian Academy of Sciences, St.-Petersburg
The article is devoted N.N.Polikarpov's contribution to development of rocket engineering of the USSR in
years of the Great Patriotic War. It is shown, as thanking its efforts in the country there was a prototype of the first
battle cruise missile 10X which ground tests began summer of 1944. Polikarpov's Role in a professional training for
the space-rocket industry of the USSR also is great. Activity practice in its KB there passed such outstanding de-
signers, as M.K.Jangel, V.N.Chelomey, A.V.Potopalov. D.L.Tomashevich, M.R.Bisnovat, M.K.Tihonravov.
Keywords: history of space-rocket engineering, the rocket, the winged rocket.
Информация об авторе:
Иванов Владимир Петрович, кандидат технических наук, доцент, Федеральное
государственное бюджетное учреждение науки Санкт-Петербургский институт информа-
тики и автоматизации РАН, 199178, РФ, Санкт-Петербург, 14 линия, дом 39, т. (812)328-
19-19. spiiran@iias.spb.su.
Область научных интересов: история авиационной и ракетной техники, жизнь и дея-
тельность Н.Н. Поликарпова.
Ivanov Vladimir Petrovich, candidate technical sciences, the senior lecturer, Federal state
budgetary establishment of a science the St.-Petersburg institute of computer science and auto-
mation of the Russian Academy of Sciences, 199178, Russia, St.-Petersburg, 14 line, 39,
(812)328-19-19 spiiran@iias.spb.su.
Research interests: history of aviation and rocket engineering, N.N. Polikarpov's life and
activity.
505
УДК 629.76(470+571 )(091)
АРТЕМЬЕВ ВЛАДИМИР АНДРЕЕВИЧ:
У ИСТОКОВ СОВЕТСКОГО РАКЕТОСТРОЕНИЯ
©2015 Р.Н. Парамонова
Самарский государственный аэрокосмический университет имени академика
С.П. Королёва (национальный исследовательский университет), г. Самара
Статья посвящена актуальной проблеме защиты авторских прав В.А. Артемьева - одного из создате-
лей реактивных снарядов для «катюш» и других систем залпового огня.
Ключевые слова: защита авторских прав, патент на изобретение, ракеты на твёрдом топливе,
Реактивный научно-исследовательский институт, Сталинская премия
До недавнего времени не подвергал-
ся сомнению тот факт, что одним из родо-
начальников современной ракеты на твер-
дом топливе является изобретатель-
пиротехник Владимир Андреевич Арте-
мьев. Имя В.А. Артемьева стало упоми-
наться в открытой печати с 1964 г., когда
обнародовали имена создателей легендар-
ной «катюши» [1]. Тогда же был отмечен
вклад Владимира Андреевича в общее де-
ло сначала в «Лаборатории для разработ-
ки изобретения инженера Н.И. Тихомиро-
ва», затем продолженное в Газодинамиче-
ской лаборатории, реорганизованной в
1934 г. в Реактивный научно-
исследовательский институт (РНИИ). Так,
в 1967 г. были опубликованы отрывки из
записок В.А. Артемьева: «3 марта 1928
года я произвел на Главном артполигоне
пуск сконструированной нами ракетной
мины с половинным ракетным зарядом из
бездымного пороха. Пуск ракетной мины
осуществлялся совмещением стрельбой
его из миномета Ван-Дерена. Ракета поле-
тела на дистанцию 1300 метров. Это была
первая ракета на бездымном порохе, осу-
ществленная впервые не только в СССР,
но и, пожалуй, во всем мире... В июне
1928 года... штат лаборатории состоял
уже из десяти человек... В 1930 году ла-
боратория приступила к разработке ра-
кетных снарядов, основанных только на
одном реактивном принципе, откинув
совмещение пуска ракеты со стрельбой
миномета... Коллективными силами...
была... создана «катюша». В окончатель-
ной разработке снарядов к ней я также
участвовал непосредственно». Комменти-
руя записки, Н. Мельников отмечал, что
начатый еще в 1920 г. двумя пионерами-
энтузиастами Артемьевым и Тихомиро-
вым и продолженный ими вместе с боль-
шим коллективом ракетчиков-
конструкторов первый этап создания бу-
дущей «катюши» завершился созданием в
1938 г. её основной части - реактивного
снаряда. Подчеркивалось, что В.А. Арте-
мьев поскромничал и ничего не рассказал
о том, что именно им в 1933 г. было
найдено решение проблемы устойчивости
полёта реактивного снаряда - его опере-
ние [2] должно выходить за габариты сна-
ряда. В 1941 г. за создание нового ракет-
ного оружия В.А. Артемьев в составе
группы ведущих специалистов РНИИ был
удостоен Сталинской премии. Скупые
строчки биографии «засекреченного» В.А.
Артемьева длительное время не пополня-
лись, так и вошли в энциклопедические
издания [3].
Первый скандал вокруг «Катюши»,
разразившийся в 1988 г., когда Я. Голова-
нов стал отстаивать право соавторства
инженера И.И. Гвая на изобретение самой
знаменитой реактивной установки времен
войны [4], имя Артемьева практически не
затрагивал.
Второй скандал был связан с публи-
кацией Г.В. Смирновым 16 декабря 1997 г.
статьи о М.Н. Тухачевском в газете «Ду-
эль» (в 2009 г. газета была закрыта по ре-
шению суда). В ней нелестным образом
были представлены «друзья Н. И. Тихо-
миров и В.А. Артемьев», которые якобы в
«маломощной организации, существо-
вавшей лишь на бумаге» вели работы над
506
снарядами, похожими на ракетные снаря-
ды, запатентованные в 1926 г. И.П. Граве.
Возмущение же последнего стоило ему в
1930 г. свободы. Эта крайне неэтичная
версия не выдерживает критики, если об-
ратиться к архивным материалам. Ведь
И.П. Граве был прекрасно осведомлён о
работе В.А. Артемьева и даже давал по-
ложительные отзывы в качестве эксперта.
Так, 13 апреля 1930 г. В.А. Артемьев и
Г.Э. Лангемак подали заявку №
68258/3676 на изобретение: «Механиче-
ский способ бронирования пороховых зе-
рен» на 18 листах. Работа ими была вы-
полнена в порядке службы в качестве по-
стоянных сотрудников. Назначением дан-
ного способа являлось: получить увеличе-
ние геометрической прогрессивности по-
рохового зерна данной формы. Предло-
женный способ был пригоден в отноше-
нии порохов, способных гореть парал-
лельными слоями, причем, зерно должно
было быть цилиндрической формы, длина
(высота) которого не меньше диаметра
(т.е. «пороховая шашка»). Описание ме-
ханического способа бронирования поро-
ховых зерен занимает 3 листа. В отзыве от
25 октября 1930 г. эксперт И.П. Граве
утверждал: «предложение помещать по-
рох в целях изоляции его наружной по-
верхности в металлическую оболочку яв-
ляется лишь частным случаем уже извест-
ного предложения помещать порох вооб-
ще в твердые оболочки (см. доклад проф.
И.П. Граве в Косартоне «К вопросу о
наивыгоднейшей форме пороха, стр.33,
изд. Косартона, 1920 г.)». Поэтому «но-
визну предложения» он усматривал лишь
«в предлагаемом заявителями способе по-
лучения порохового зерна в металличе-
ской оболочке с изолирующей бумажной
прокладкой и помещенного внутри метал-
лической оболочки порохового зерна», на
что и был выдан не подлежащий опубли-
кованию патент [5]. В Самарском филиале
Российского государственного архива
научно-технической документации (Фи-
лиал РГАНТД) хранятся и другие заявоч-
ные материалы на получение патента на
изобретения, поданные В.А. Артемьевым
в 1930-1941 гг., в том числе и на получе-
ние патента на «пороховую ракету» (10
апреля 1933 г.) [6].
Не так давно, в январе 2011 г., со-
здателям «катюши» вновь потребовалась
«защита» от нападок некомпетентных
учёных и писателей. Эту защиту блестяще
осуществил профессор В. Фоменко [7].
Библиографический список:
1. См.: Из истории авиации и космо-
навтики. М., 1964; Пойда Ф. Шквал огня -
вот что такое ракетная артиллерия: Из ис-
тории отечественной ракетной техники //
Техника - молодёжи. 1965. № 5; Колод-
ный Л.Е. Повесть о «Катюше». М., 1968 и
др.
2. Мельников Н. Как стартовали ра-
кеты И Красная звезда. 1967. 13 сентября.
В настоящее время специалистами первый
период в истории ракетной техники так и
называется - периодом оперённых реак-
тивных снарядов СССР и Германии (1930-
1945 гг.). - Воротников О.С. Развитие ра-
кет полевых реактивных систем залпового
огня в XX веке: Автореф. дисс. на соиска-
ние уч. степ. канд. технических наук. М.,
2007. С. 6.
3. См.: Большая Советская энцикло-
педия: В 30 тт. Том 30. М., 1978. С. 576;
Великая Отечественная война. 1941-1945:
Энциклопедия. М., 1985; Оружие Победы.
1941-1945: Сб. М., 1985; Космонавтика
СССР. М., 1987; Широкорад А.Б. Энцик-
лопедия отечественной артиллерии.
Минск, 2000; Большой российский энцик-
лопедический словарь. М., 2003.
4. Голованов Я. Лжеотец «Катюши»:
Легенда Костикова И Огонек. 1988. № 50.
5. Филиал РГАНТД. Ф. Р-1. Оп. 47-5.
Д. 693. Лл. 1-4,16об-17об, 18-18об.
6. Подр. см.: Парамонова Р.П. Арте-
мьев Владимир Андреевич // Люди пыт-
ливой мысли (по архивным документам):
Историко-технический альманах. Самара:
Изд-во «НТЦ», 2006. С. 41-50; Парамоно-
ва Р.Н. Инженер-пиротехник Владимир
Андреевич Артемьев И Управление дви-
жением и навигации летательных аппара-
тов: Сб. трудов ХШ Всероссийского НТ
семинара по управлению движением и
навигации летательных аппаратов: Часть
П. Самара: СГАУ, 2007. С. 208-213.
507
7. См.: Фоменко В. «Катюша» -
правда и мифы о создателях грозного
оружия.
http://www.elektron2000.com/node/698. Да-
та обращения: 13.06.2015.
References:
1. Sm.: Iz istorii aviatsii i kosmonavtiki.
M., 1964; Poyda F. Shkval ognya - vot chto
takoye raketnaya artilleriya: Iz istorii otech-
estvennoy raketnoy tekhniki I I Tekhnika -
molodozhi. 1965. №5; Kolodnyy L.Ye.
Povest' о «Katyushe». M., 1968 i dr.
2. Mel'nikov N. Kak startovali rakety //
Krasnaya zvezda. 1967. 13 sentyabrya. V
nastoyashcheye vremya spetsialistami pervyy
period v istorii raketnoy tekhniki tak i
nazyvayetsya - periodom operonnykh reak-
tivnykh snaryadov SSSR i Germanii (1930-
1945 gg.). - Vorotnikov O.S. Razvitiye raket
polevykh reaktivnykh sistem zalpovogo
ognya v XX veke: Avtoref. diss, na soiskani-
ye uch. step. kand. tekhnicheskikh nauk. M.,
2007. p. 6.
3. Sm.: Bol'shaya Sovetskaya entsi-
klopediya: V 30 tt. Tom 30. M., 1978. S. 576;
Velikaya Otechestvennaya voyna. 1941-1945:
Entsiklopediya. M., 1985; Oruzhiye Pobedy.
1941-1945: Sb. M., 1985; Kosmonavtika
SSSR. M., 1987; Shirokorad A.B. Entsi-
klopediya otechestvennoy artillerii. Minsk,
2000; Bol'shoy rossiyskiy entsiklope-
dicheskiy slovar'. M., 2003.
4. Golovanov YA. Lzheotets «Katyu-
shi»: Legenda Kostikova // Ogonek. 1988. №
50.
5. Filial RGANTD. F. R-l. Op. 47-5. D.
693. LI. 1-4, 16ob-17ob, 18-18ob.
6. Podr. sm.: Paramonova R.N. Arte-
m'yev Vladimir Andreyevich // Lyudi pytli-
voy mysli (po arkhivnym dokumentam): Is-
toriko-tekhnicheskiy al'manakh. Samara: Izd-
vo «NTTS», 2006. p. 41-50; Paramonova
R.N. Inzhener-pirotekhnik Vladimir Andre-
yevich Artem'yev // Upravleniye dvizheni-
yem i navigatsii letatel'nykh apparatov: Sb.
trudov ХШ Vserossiyskogo NT seminara po
upravleniyu dvizheniyem i navigatsii le-
tatel'nykh apparatov: Chast' II. Samara:
SGAU, 2007. p. 208-213.
7. Sm.: Fomenko V. «Katyusha» -
pravda i mify о sozdatelyakh groznogo oru-
zhiya.
http://www.elektron2000.com/node/698.
Date of circulation: 13.06.2015.
VLADIMIR A. ARTEMIEV: AT THE ORIGINS OF THE SOVIET ROCKET AND MIS-
SILE ENGINEERING
©2015 R.N. Paramonova
Samara State Aerospace University, Samara
The article is devoted to the actual problem of Vladimir Artemyev copyright protection - one of the founders
of rockets for the "Katyusha" and other multiple launch rocket systems.
Keywords: copyright protection, patent, solid fuel rockets, Jet Research Institute, the Stalin Prize
Информация об авторе:
Парамонова Римма Николаевна - доцент, кандидат исторических наук, доцент ка-
федры философии и истории Самарского государственного аэрокосмического универси-
тета имени академика С.П. Королёва (национального исследовательского университета),
Московское шоссе,34, (846) 267 47 87, rimmanic@list.ru
Область научных интересов: история отечественной науки и техники XX века.
Paramonova Rimma Nickolaevna - Cand. Sc. {History}, assistant professor of philoso-
phy and history , department in Samara State Aerospace University (National Research Universi-
ty), Moscow highway, 34, (846) 267 47 87, rimmanic@list.ru
Research interests: history of national science and technology of the XX century.
508
УДК 629.7.054:629.78
ИЗ ИСТОРИИ СОЗДАНИЯ ПЕРВОГО ОТЕЧЕСТВЕННОГО КА ДЗЗ «ЯНТАРБ-2К»
С БАЗОВОЙ ЦИФРОВОЙ СУД И НЕКОТОРЫЕ ПЕРСПЕКТИВНЫЕ
НАПРАВЛЕНИЯ ЕЁ ДАЛЬНЕЙШЕГО РАЗВИТИЯ
©2015 Ю.В. Белов1, Т.А. Тимонина2
'Самарский государственный аэрокосмический университет имени академика
С.П. Королева (Национальный исследовательский университет), г. Самара
2АО «РКЦ «Прогресс», г. Самара
Изложен ряд научно-технических и практических результатов исследований и разработок коллектива
специалистов в области проектирования цифровых систем управления движением (СУД) космических аппа-
ратов (КА) дистанционного зондирования Земли (ДЗЗ), созданных за 55-летний период с момента образова-
ния ЦСКБ в 1959г.
Ключевые слова: Опорная система координат, гиросиловой способ управления КА, автономная нави-
гация, интегрированная система управления, волоконно-оптический гироскоп
В силу ряда обстоятельств и лич-
ных качеств нашего руководителя Д.И.
Козлова в период 1964-?1970 гг. неболь-
шой сплоченный коллектив молодых ра-
ботников филиала № 3 ОКБ-1 заложил в
своих разработках целый ряд принципи-
ально новых технических решений, поз-
воливших совершить качественный ска-
чок в развитии целого направления в оте-
чественной космической технике (пере-
ход от аналоговых к цифровым СУД).
Это дало возможность нашему ЦСКБ в
острой конкурентной борьбе с другими
предприятиями отрасли состояться как
конструкторскому бюро с собственными
проектными разработками.
В книге /1/, посвященной 55-летию
ЦСКБ и 50-летию отдела 1404, подробно
описан этот фрагмент искусства косми-
ческого аппаратостроения в истории оте-
чественной космонавтики.
Начало этого большого пути было
трудным, но захватывающим и даже по-
рой казалось авантюрным - ведь мы бра-
лись за необычное дело, подобных кото-
рому сделать до нас не довелось еще ни
одному предприятию отрасли.
Конечно, нам помогли опыт, знания
и практические навыки, полученные в
ОКБ-1, где мы проходили стажировку.
Однако нам была поручена вполне само-
стоятельная работа, ответственность за
сроки и качество выполнения которой
целиком ложилась на нас. Таким образом,
работать и учиться пришлось одновре-
менно.
С.П. Королёв говорил: « Кто хочет
работать - ищет средства, кто не хочет -
причины». Итак, нам пришлось начинать
с «нуля».
Существенным отличием новой
СУД являлось то, что по нашей инициа-
тиве впервые в отечественной космиче-
ской практике ставилась навигационная
задача автономного определения на бор-
ту КА параметров движения центра масс
КА. Это открывало путь к реализации так
называемого координатно-временного
метода управления целевой аппаратурой
(ЦА), обеспечивающего большие точ-
ность, экономичность и оперативность
решения целевой задачи. Реализация его
обеспечила снижение расходов фото-
пленки примерно на 30% в течение срока
вплоть до 2003 года.
Необходимо заметить, что в составе
СУД КА «Янтарь-2К» был впервые в
отечественной космической технике реа-
лизован режим автономной навигации.
Однако решение этой проблемы
было совершенно немыслимо без БЦВМ.
Но тогда на предприятии никто не заду-
мывался о практическом ее использова-
нии для решения конкретных задач на
борту КА. Поэтому первое ТЗ в НИИ
микроприборов на БЦВМ с требуемыми
характеристиками пришлось писать нам.
509
Предпринятые попытки «завязать-
ся» с другими фирмами не изменили сде-
ланного нами выбора по причине ориен-
тации смежника на элементную базу в
бескорпусном исполнении. В результате
50 лет тому назад, может быть, несколько
неуверенно, было выдано первое ТЗ на
изделие «Салют-3». Выдавал его отдел 4
(начальник отдела А.В. Соллогуб), в ко-
тором в то время концентрировались си-
лы, привлекаемые к проектированию
бортового комплекса управления (БКУ).
Для поиска наилучших вариантов
построения приборов приходилось орга-
низовывать конкурсную работу несколь-
ких предприятий. Затем в процессе дело-
вых контактов, многочисленных техни-
ческих споров и обсуждений результатов
исследований, испытаний лабораторных
макетов и опытных образцов альтерна-
тивных вариантов мы должны были сде-
лать безошибочный выбор одного из них.
Однако при этом мы не всегда учитывали
очень важный критерий - стоимость.
У нас не было большого опыта и
того авторитета, который зарабатывается
годами, поэтому нас не всегда восприни-
мали с нашими новшествами. Однако
наши идеи, поначалу не всегда подкреп-
ленные глубокими научно-техническими
проработками, неуклонно пробивали себе
дорогу в жизнь благодаря настойчивости,
проявленной при их всестороннем обос-
новании.
Приведу один пример. Известный
главный конструктор и ученый в области
гироскопических устройств В.И. Кузне-
цов не поддержал идею использования
исполнительных органов нового типа -
силовых гироскопических комплексов
(СГК) для высокоточной ориентации КА.
Этот известный в теоретической механи-
ке принцип применялся в то время для
устранения боковой качки морских судов.
Тем не менее, благодаря нашей активной
работе, впервые примененные в отече-
ственной космической технике устрой-
ства подобного типа дали существенный
экономический эффект, увеличив срок
активного существования КА.
Позднее наша «спарка» трехстепен-
ных гиросиловых стабилизаторов (ГСС)
(рис.1) была увековечена в известной
классической монографии «Управление
ориентацией космических аппаратов»,
выпущенной издательством «Наука» /2/,
и вошла в историю развития систем
управления КА.
Рис.1
Было найдено также оригинальное
и достаточно смелое по тем временам
техническое решение проблемы «раз-
грузки» СГК в условиях длительного
воздействия на КА постоянного возму-
щающего момента. Базируется оно на
принципе многофункционального ис-
пользования аппаратуры и элементов
конструкции КА (панелей солнечной ба-
тареи (ПСБ), т.е. интегрирования их в
единый бортовой комплекс.
Одной из актуальных проблем было
создание радиовертикали-высотомера и
астровизирующего устройства (АВУ) с
широким полем обзора для одновремен-
ного решения на борту КА задач навига-
510
ции и высокоточной ориентации (астро-
коррекции комплекса командных прибо-
ров (ККП) по принципу его многофунк-
ционального использования.
Результаты проведенной с ВНИИ
ЭМ АН СССР НИР, доложенные нами в
Миноборонпроме, убедили главного кон-
структора ЦКБ «Геофизика» - монополи-
ста в создании оптических датчиков СУД
- В.А. Хрусталева в обоснованности
наших доводов в пользу АВУ на новом
принципе телевизионной развертки изоб-
ражения. Затем наше ТЗ было принято в
работу, а интерес к данной разработке
проявили многие предприятия, в том
числе НПО «Энергия».
Можно привести пример, когда в
результате, в том числе и нашей настой-
чивости в составе Минобщемаша было
создано новое предприятие - НИИ ко-
мандных приборов с дополнительной
специализацией по разработке гиропри-
боров СУД наших и других космических
объектов включая СГК, для чего группа
специалистов ЦНИИ «Электроприбор»
Минсудпрома во главе с В.П. Арефьевым
была переведена в Минобщемаш. Так мы
преодолевали ведомственные барьеры.
ЦНИИ ЭП мы получили «в наслед-
ство» от ОКБ-1, которое вело с ним рабо-
ты по перспективным двухроторным ги-
роорбитам (рис.2) - прототипам нашего
ККП. Главным их преимуществом, по
сравнению с применявшейся на объектах
серии «Зенит» однороторной гироорби-
той, является использование гироскопов,
работающих в наиболее естественной для
них инерциальной системе отсчета (не
прецессирующих гироскопов). Это спо-
собствует увеличению точности построе-
ния опорной системы координат. Специ-
ально по этому важному вопросу была
организована встреча Д.И. Козлова с
Б.В. Раушенбахом на нашем предприятии.
НИ - напран leiiue но icia
Рис.2
Были скептики и среди руководите-
лей нашей отрасли промышленности. Не
хочется даже думать, что могла не сло-
житься судьба, как управленцев, у мно-
гих из нас. Руководство нашего 3-го
главка Минобщемаша в лице К.А. Кери-
мова сильно сомневалось в способностях
немногочисленного молодого коллектива
«радиолюбителей из Куйбышева».
Но, несмотря ни на что, мы боро-
лись за право быть самостоятельными и
претворить в жизнь свои идеи и замыслы.
Мне, молодому тогда начальнику
сектора, пришлось присутствовать и вы-
ступать на весьма представительном со-
вещании в МОМ, где решалась наша
судьба.
Конечно, была большая поддержка
главного конструктора Д.И. Козлова, ко-
торый, пожалуй, один из немногих верил
в нас, что придавало уверенности и оп-
тимизма. В самый критический момент
нас поддержал Б.Е. Черток, после чего за
нами была окончательно закреплена те-
матика по разработке систем управления
(СУ), так как в силу органической связи и
взаимодействия СУ и КА в целом со все-
ми другими его системами, тот, кто со-
511
здает КА, проектирует и СУ для него, по-
другому нельзя - это, как показала в
дальнейшем практика, - самый эффек-
тивный путь.
В отделе в то время была сосредо-
точена обширная тематика, мы испыты-
вали острый недостаток в кадрах, поэто-
му в нашем секторе был принят такой
принцип проектирования системы, когда
все основные вопросы, связанные с раз-
работкой и исследованием характеристик
отдельного канала управления, поруча-
лись одному инженеру.
Не испугались мы трудоемкой, не
соответствующей квалификации наших
специалистов, работы по программиро-
ванию и отладке бортового программное
обеспечения (БПО). Она и сейчас отни-
мает много времени, не позволяет нашим
инженерам-механикам в полной мере за-
ниматься структурным синтезом и выбо-
ром квазиоптимальных параметров бор-
товых систем (БС) КА из условия макси-
мума их эффективности при ограничен-
ных ресурсах.
Многое в то время в нашем отделе
делалось впервые. Как уникальную сле-
дует отметить большую работу по созда-
нию трехстепенного динамического
стенда на воздушной опоре.
Трудно давалась организация испы-
таний системы на заводе и техническом
комплексе. Автоматизация испытаний
потребовала разработки целой серии ис-
пытательных алгоритмов и программ.
Но, прежде чем «научить» назем-
ную вычислительную машину проверять
работоспособность нашей системы, при-
шлось самим переработать огромный
объем телеметрической информации,
чтобы убедиться в том, что машина «не
ошибается» и ей можно доверить оконча-
тельную проверку системы перед отправ-
кой КА в полет.
Была проведена также большая ра-
бота по разработке спецматобеспечения,
предназначенного для планирования и
анализа качества работы СУД на назем-
ном комплексе управления, внедрению
его на вычислительных средствах в Цен-
тре управления полетом (ЦУП). Это по-
требовало проведения серьезных трени-
ровок в составе боевых расчетов по
штатному технологическому графику,
без чего невозможна была бы четкая,
слаженная работа многочисленного кол-
лектива в ходе натурных испытаний и
совместной эксплуатации КА на началь-
ном этапе.
Не умаляя роли руководителей, я с
глубокой признательностью вспоминаю
совместную работу с нашим Московским
филиалом, ЦУП, 1584 ПЗ, представите-
лями смежных отделов и предприятий, с
кем проводили бессонные ночи, ведя по-
рой мучительные поиски причин неодно-
кратных нештатных ситуаций, чтобы вы-
работать мероприятия по выходу их них.
И нам не раз удавалось продлить работу
дорогого (в прямом и переносном смыс-
лах) объекта в штатном варианте, или
одном из резервных. Мы даже научились
успешно завершать работу изделия в без-
выходных, казалось бы, ситуациях - при
отказах жизненно важных ее элементов.
На конечном этапе этого большого прой-
денного нами пути было убедительно до-
казано, что наша система обладает боль-
шой живучестью за счет заложенной при
ее проектировании гибкой логики и
функциональной избыточности. Так
осуществлялась интеллектуальная под-
держка надежности СУ в связи с практи-
ческой невозможностью полной автома-
тизации процессов идентификации не-
предусмотренных эксплуатационно-
технической документацие отказов и
восстановления работоспособности КА
на начальной стадии его эксплуатации.
В дальнейшем СУД КА «Янтарь-
2К» была принята в качестве базовой для
его последующих модификаций.
С использованием накопленного
опыта и созданного задела обучалось не
одно поколение молодых специалистов,
которым в течение более десяти лет чи-
тались специальные курсы лекций на ка-
федре динамики полета и систем управ-
ления летательных аппаратов СГАУ име-
ни С.П. Королева.
Характерной чертой развития со-
временных космических систем ДЗЗ яв-
ляется усложнение КА, что обусловлено
все возрастающими требованиями к та-
512
ким основным критериям их эффектив-
ности, как качество получаемой инфор-
мации, оперативность ее доставки потре-
бителю и производительность. Отмечен-
ная особенность приводит к возрастанию
массо-энергетических показателей (МЭП)
аппаратуры зондирования и бортовых
обеспечивающих систем, а в сочетании с
требованием повышения их экономиче-
ской эффективности - к увеличению сро-
ков активного функционирования КА и
запасов расходуемых ресурсов. Особенно
актуальна проблема минимизации массы
при создании малых КА.
Ее решение системными средства-
ми ведется в двух направлениях /3/. Пер-
вое основано на упрощении и улучшении
МЭП модернизируемой и новой аппара-
туры за счет усложнения логики управ-
ления последней, реализуемой в БЦВМ.
Примерами являются переход к со-
зданию бескарданных систем ориентации,
в которых гироплатформа с громоздкими
устройствами подвеса со следящими
приводами «заменяется» интегрировани-
ем кинематических уравнений, а также
применение в последних разработках
ЦСКБ двухстепенных ГСС (рис. 3) с
лучшими МЭП вместо более сложных
конструктивно, но простых в управлении
«спаренных» гироскопов.
Двигатель
Датчик углового
положения
Рис.З
Вторым важным направлением ми-
нимизации массо-энергетических и стои-
мостных показателей бортовой аппарату-
ры (БА) и сокращения запасов топлива
является более полная реализация потен-
циальных возможностей последних за
счет использования их в нескольких бор-
товых системах. Успешному развитию
этого направления в настоящее время
способствует тот фактор, что во многих
случаях приборы и методы, реализующие
близкие функции в различных бортовых
и наземных системах, построены на од-
них и тех же физических принципах.
Эти поистине неисчерпаемые ре-
зервы объясняются исторически сло-
жившейся и существующей до сих пор
специализацией предприятий отрасли и
подразделений-кураторов аппаратуры (на
предприятиях-разработчиках КА и их
БКУ) не по физическим принципам рабо-
ты последней, а по ее функциональному
назначению. Причем целесообразность
такой специализации не всегда вытекает
из структурной декомпозиции БС, став-
шей почти стандартной, и поэтому не
всегда оправдана.
Есть одно емкое слово - интеграция.
Интеграция - это не тенденция, а прин-
цип наилучшего, в смысле получаемого
эффекта, использования имеющихся ре-
сурсов и его игнорирование зачастую
приводит к отрицательным последствиям.
По этому принципу, естественно,
должно идти и развитие техники.
Наглядные примеры: использование ПСБ
в системах электроснабжения (СЭС) и
СУД, бортового синхронизирующего ко-
ординатно-временного устройства в ре-
шении задач пространственной ориента-
ции, автономной навигации, синхрониза-
ции работы бортовой аппаратуры и фор-
мирования бортовой шкалы времени;
единой астрогироскопической системы
для определения и обеспечения ориента-
ции визирных осей ЦА; совместного
513
(одновременного) управления траектор-
ным и угловым («разгрузка» СГК) дви-
жениями за счет расхода единого запаса
рабочего тела двигательной установки
через одни и те же управляющие ракет-
ные двигатели малой тяги; базовой архи-
тектуры интегрированной СУ КА ДЗЗ с
различной ЦА на основе унифицирован-
ных рядов однородных многофункцио-
нальных приборных и программных мо-
дулей; моноблока электронных приборов
в бескорпусном исполнении в виде плат,
образующих функционально закончен-
ные модули, размещенные на единой ра-
ме с едиными средствами жизнеобеспе-
чения и т.д.
Применяемый на картографических
КА датчик инерциальной информации
(волоконно-оптические гироскопы и
кварцевые акселерометры) ИУС ВОА
(рис. 4) является идеальным, удовлетво-
ряющим принципу интеграции БА в еди-
ный бортовой комплекс и после полного
цикла наземной и летной отработки мо-
жет быть успешно использован в составе
перспективной универсальной высокоди-
намичной СУД, удовлетворяющей прин-
ципу многофункционального использо-
вания БА с целью минимизации ее МЭП,
а также широкому диапазону требований,
предъявляемых к СУД КА ДЗЗ на совре-
менном этапе.
Рис. 4
Библиографический список:
1. Ю.В. Белов, Р.Г. Залялова, Н.А.
Куроедов, В.А. Погодин, Ю.С. Симанов-
ский, Д.М. Суринский, И.В. Тихомиров.
Проблемы создания систем управления
движением космических аппаратов раз-
работки АО «РКЦ «Прогресс». Воспоми-
нания о будущем. АО «РКЦ «Прогресс»,
2015г.
2. Б.В. Раушенбах, Е.П. Токарь.
Управление ориентацией космических
аппаратов. Наука, 1974 г.
3. Ю.В. Белов. Интеграция как важ-
ный фактор совершенствования КА зон-
дирования Земли. - Сборник научных
трудов, вып. 3, ГНПРКЦ «ЦСКБ-
Прогресс», 2004 г.
References:
1. Belov Ju.V., Zalyalova R.G., Ku-
roedov N.A., Pogodin V.A., Sima-
novskii Ju.S., Surinskii D.M., Tikho-
mirov I.V., Problemy cozdaniya system up-
ravleniya dvizheniem kosmicheskikh appa-
ratov razrabotki JSC «SRC «Progress».
Vospominaniya о budushchem. (Problems
Associated with Creating Motion Control
Systems for Spacecraft Developed by JSC
SRC Progress. Memories of the future, Sa-
mara, JSC SRC Progress, 2015
2. Raushenbakh B.V., Tokar’ E.N.,
Upravlenie orientatsiei kosmicheskikh appa-
ratov (Spacecraft attitude control), Moscow,
Nauka, 1974.
3. Belov Ju.V., Integratsiya kak va-
zhnyi factor sovershenstvovaniya KA
zondirivaniya Zemli (Integration as an im-
portant factor of Earth sensing satellites im-
provement), Sbornik nauchnykh trudov, is-
sue 3, Samara, GNPRKTs TsSKB-Progress,
2004.
514
FACTS FROM THE HISTORY OF CREATING THE FIRST HOME YANTAR EARTH
REMOTE SENSING SATELLITE WITH A BASIC DIGITAL MOTION CONTROL
SYSTEM AND SEVERAL PROMISING LINES OF ITS FURTHER DEVELOPMENT
©2015 Ju.V. Belov1, T.A. Timonina2
1 Korolev State Aerospace University of Samara
(National Research University), Samara
2 JSC «SRC «Progress», Samara
The article deals with a number of scientific and technical and practical results obtained by a group of de-
signers in the coarse of their research and development work in the field of designing digital motion control systems
for earth remote sensing satellites built over 55 years starting from the foundation of the TsSKB design bureau in
1959.
Keywords: reference system, gyro-force method of satellite control, autonomous navigation, integrated
control system, fiber-optic gyroscope
Информация об авторах:
Белов Юрий Вячеславович, к.т.н., доцент, 443086, Россия, г. Самара, СГАУ, Мос-
ковское шоссе 34, тел.: 263-34-71.
Область научных интересов: системы управления КА.
Тимонина Татьяна Александровна, инженер-конструктор, 443009, Россия, г. Са-
мара, АО «РКЦ «Прогресс», ул. Земеца 18, тел.: 228-96-69, timonina@samspace.ru
Область научных интересов: системы управления КА.
Authors:
Belov, Jurii Vyacheslavovich, Cand. Sci. Tech., Assoc. Prof., SSAU, 443086, RF, Sama-
ra, Moskovskoe shosse 34, tel.: 263-34-71.
Scientific area: spacecraft control systems.
Timonina, Tat’yana Aleksandrovna, design-engineer, RF, 443009, Samara, JSC «SRC
«Progress», ul. Zemetsa 18, tel.: 228-96-69, timonina@samspace.ru
Scientific area: spacecraft control systems.
515
УДК 629.78(09)
АЭРОСТАТНЫЙ КОМПЛЕКС ПРОЕКТА АМС «ВЕГА»
В ФОНДАХ ПОЛИТЕХНИЧЕМКОГО МУЗЕЯ
©2015 В.Г. Иванов
Федеральное государственное бюджетное учреждение культуры
«Политехнический музей», г. Москва
В статье описывается эксперимент по изучению атмосферы планеты Венера с помощью автономного
аэростатного зонда, входившего в состав автоматической межпланетной станции «Вега».
Ключевые слова: Проект «Вега», аэростатный зонд, изучение атмосферы планеты Венера.
В фондах Политехнического музея
хранится уникальный экспонат, подоб-
ный которому есть только в музее пред-
приятия-разработчика комплекса - НПО
им. Лавочкина и в музее Института кос-
мических исследований. Речь идёт об
аэростатном зонде, созданном в рамках
проекта «Автоматическая межпланетная
станция Вега».
15 декабря 1984 г. ракета «Протон»
вывела на опорную орбиту головной блок,
с которой АМС «Вега» стартовала к Ве-
нере.
9 июня 1985 года, за двое суток до
входа в атмосферу планеты Венера, от
станции отделился спускаемый аппарат, а
сама АМС включением двигательной
установки была переведена на пролётную
траекторию к комете Галлея. На высоте
65 км по команде от спускаемого аппара-
та отделился аэростатный зонд, который
в автономном полёте в течение 45 час. 30
мин. передавал научно-измерительным
пунктам на Земле научную информацию
об атмосфере Венеры. За дрейфом следи-
ли радио обсерватории семи стран мира
на всех континентах. По завершении
проекта «Вега» габаритно-массовый ма-
кет аэростатного зонда был передан По-
литехническому музею. Зонд состоит из
грузового контейнера тороидальной
формы, внутри которого был уложен
аэростат и приборная гондола с научной
аппаратурой, радиокомплексом с антен-
но-фидерным устройством и блоком ав-
тономного электропитания. На наружной
поверхности контейнера закреплены
шар-баллоны газа наддува аэростата и
приборный контейнер автоматики. Масса
зонда при дрейфе - 21 кг. Масса прибор-
ной гондолы 6.7 кг.
Весь приведённый в сообщении
фактологический материал взят из статей
руководителя разработки проекта Д.Т.Н.
Владимира Геннадьевича Перминова,
опубликованных им в журналах «Ново-
сти космонавтики».
Библиографический список:
1. В. Перминов. Аэростаты в небе
Венеры. К 20-летию полёта АМС «Вега».
Новости космонавтики, том 15 №8(271)
2005 с. 61 -63
2. В. Перминов. Встреча с кометой
Галлея. К 20-летию полёта АМС «Вега».
Новости космонавтики, том 16 №5 (280)
2006 с. 68 - 72
Bibliographic list:
1. V. Perminov. Balloons in the sky of
Venus. On the 20th anniversary of flight
AMC "Vega". Space News, Volume 15, №8
(271)2005.61-63
2. V. Perminov. Meeting with Hal-
ley's comet. On the 20th anniversary of
flight AMC "Vega". Space News, Volume
16, №5 (280) 2006 c. 68 - 72
516
BALLOON PROJECT COMPLEX AMC ’’VEGA”
FUNDS POLITECHNIC MUSEUM
©2015 V.G. Ivanov
Federal State Institution of Culture "Polytechnic Museum", Moscow
The article describes an experiment to study the atmosphere of Venus using autonomous balloon probe, part
of the automatic interplanetary station "Vega".
Keywords: project "Vega", balloon probes, study the atmosphere of Venus.
Информация об авторе:
Иванов Валентин Георгиевич, научный сотрудник, куратор фонда «Космонавти-
ка» Политехнического музея, Россия, 101000, Москва, Новая площадь, %
т. 8(495) 730 54 38, vgivanov@polymus.ru.
Область научных интересов: история ракетно-космической техники, музейное дело.
Valentin G. Ivanov, researcher, curator of the Foundation "Space" Polytechnical Museum,
Russia, 101000, Moscow, New Square, % t. 8 (495) 730 54 38 vgivanov@polymus.ru.
Research interests: history of space rocket technology, museum.
517
УДК 629.7 + 608 (091)
КРАТКИЙ ОБЗОР НАУЧНОГО НАСЛЕДИЯ УЧЁНЫХ САМГТУ С УЧЁТОМ ЕГО
ВАЖНОСТИ ДЛЯ РАЗВИТИЯ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ
©2015 А.А. Барсова
Самарский государственный технический университет, г.Самара
Дан обзор научно-исследовательских работ, выполненных по заказу ЦСКБ научными сотрудниками
структурных подразделений вуза за период с 70-х годов до 2014 года.
Ключевые слова: СамГТУ, учёный, наследие, ЦСКБ, разработка, космическая техника
Самарский государственный техни-
ческий университет, в прошлом Политех-
нический институт, на всём протяжении
своего становления и развития осуществ-
лял тесное сотрудничество с промышлен-
ными предприятиями, расположенными
не только в Самаре, но и во многих регио-
нах России.
С появлением в нашем городе фили-
ала №3 ОКБ-1 при заводе «Прогресс», ор-
ганизатором и бессменным руководите-
лем которого был Дмитрий Ильич Козлов,
вуз одним из первых приступил к реше-
нию многих проблем, стоявших перед ра-
кетно-космической отраслью.
С середины 70-х годов несколько
факультетов Куйбышевского политехни-
ческого института развивали научные
направления и имели хозяйственные до-
говоры с подразделениями преобразован-
ного к тому времени филиала №3 ОКБ-1 в
самостоятельное предприятие - цен-
трального специализированного кон-
структорского бюро (ЦСКБ).
На кафедре информационно-
измерительной техники факультета авто-
матики и измерительной техники в 1975
году под руководством д.т.н., профессора
Е.М. Карпова начались исследования по
созданию средств определения ориента-
ции и силы лобового аэродинамического
сопротивления низкоорбитальных косми-
ческих аппаратов (КА), использующих в
качестве источника информации набега-
ющий на КА поток частиц ионосферной
плазмы. Непосредственным разработчи-
ком темы был руководитель группы В.В.
Сбродов. Вместе с ним работали Ю. Лаза-
рев, В. Чепурнов, М. Алексеев. За четы-
рёхлетний период времени сотрудники
кафедры НИТ смогли создать информа-
ционно-измерительные системы, включа-
ющие в себя ионный датчик углов курса и
тангажа «Альфа», молекулярный датчик
ориентации «Нейтрино-1», датчик ско-
ростного напора «Нейтрино-2». Все эти
приборы прошли полный цикл экспери-
ментальной отработки в ионосферных и
вакуумных аэродинамических трубах.
Приборы «Нейтрино-1» и «Нейтрино-2»
были внедрены в ЦАГИ и ЦСКБ с общим
экономическим эффектом в 450 тыс. руб-
лей. Коллективом было получено более 20
авторских свидетельств на изобретения, а
руководитель группы В. В. Сбродов защи-
тил кандидатскую диссертацию. В 1979
году, уже являясь доцентом кафедры ин-
тегральных роботов, В.В. Сбродов сосре-
доточил своё внимание на проблеме ис-
кусственного интеллекта. Первоочеред-
ными были исследования, направленные
на решение задач распознавания образов
(изображений) и ситуационного анализа
наблюдаемых сцен. Вместе с ним над
этими проблемами работали И.В. Тихо-
миров, Б.С. Власов, В.П. Свиридов, М.Н.
Ульянкин, К.Н. Ульянкин, Н.А. Соколов,
Е.Д. Васильев.
Одной из первых работ по созданию
оптико-электронных средств обработки и
анализа изображений стала созданная
учеными-политехниками система измере-
ния скорости движения изображения в
фокальной плоскости оптической системы.
В течение 1980-1987 годов были разрабо-
таны также два макетных и один экспери-
ментальный образец корреляционной си-
стемы измерения, предназначенные для
использования на различных подвижных
аппаратах. В качестве примера можно
518
привести экспериментальный образец си-
стемы «Трек», который прошёл отработку
в составе комбинированной системы
управления движением КА на динамиче-
ском стенде «Вектор» в ЦСКБ, модели-
рующем орбитальное движение КА и
управление ориентацией КА с помощью
штатной системы управления движением.
В 1986-1987 годах тот же коллектив
разработал комплект оборудования для
оснащения самолёта-лаборатории. Были
проведены успешные лётные испытания
корреляционной системы измерения ско-
рости движения изображения. В результа-
те, разработчики темы получили более 15
авторских свидетельств на изобретения, и
было защищено 3 диссертации на соиска-
ние учёной степени кандидата техниче-
ских наук.
В то же время на кафедре «Инте-
гральные роботы», организованной в 1979
г. профессором Е.М. Карповым, парал-
лельно проводились исследования в обла-
сти разработки методов распознавания и
создания бортовых средств распознавания
опорных наземных ориентиров, а также
стационарных и мобильных объектов раз-
личных классов.
В 1988 году за разработку и внедре-
ние образцов новой техники доцент ка-
федры интегральных роботов В.В. Сбро-
дов был награждён медалью «За трудовую
доблесть».
Помимо решения научно-
технических задач, стоящих перед ракет-
но-космической отраслью политехниче-
ский институт занимался также пробле-
мой подготовки кадров для ЦСКБ. Кафед-
ра интегральных роботов в 1982 году
начала целевую подготовку инженеров-
электромехаников по специальности 0654
«Робототехнические системы» для ЦСКБ.
При этом следует отметить, что выпуск-
ники ФАИТа получали путёвки молодых
специалистов для работы в ЦСКБ, начи-
ная с 1961 года. А в 1989 году кафедра
робототехнических систем начала целе-
вую подготовку инженеров-
системотехников для предприятий маши-
ностроительного, автостроительного и
ракетно-космического профилей.
В 70-е годы прошлого столетия дру-
гая группа исследователей кафедры ИИТ
работала в соответствии с одним из науч-
ных направлений Д.И. Козлова по созда-
нию прецизионных систем ориентации и
астронавигации КА, а также систем
управления на базе бортовых цифровых
вычислительных машин. В одной из
хоздоговорных работ с ЦСКБ была по-
ставлена задача по определению способов
комплексирования систем ориентации с
целью повышения надёжности и точности
орбитальных измерений. В группу иссле-
дователей входили научные сотрудники
И.И. Волков, В.И. Бутырев, Е.П. Черкас-
ский и другие.В результате были разрабо-
таны конкретные практические рекомен-
дации по созданию информационно-
измерительных систем. Группа в составе
Б.К. Брюханова, Б.К. Григоровского и Е.П.
Курочкина разрабатывала информацион-
но-измерительную систему для определе-
ния объёма жидкостей в закрытых резер-
вуарах в условиях невесомости. В то вре-
мя решение этой проблемы вызывало
большие сложности. В результате прове-
дённых научных исследований были раз-
работаны методы и средства измерений,
позволяющие с приемлемой точностью
определять объёмы жидкостей.
НИИ Проблем надёжности механи-
ческих систем (НИИ ПНМС), организо-
ванный в 1994 году по инициативе ректо-
ра СамГТУ д.т.н., профессора Ю.П. Сама-
рина, в течение последних 15 лет выпол-
нил хоздоговорных работ по заданию
ЦСКБ на сумму более 200 млн. рублей.
Исследования учёных НИИ ПНМС
проводились по таким основным научным
направлениям, как:
- разработка методов и программно-
го обеспечения систем управления движе-
нием и анализа динамики космических
аппаратов (КА) дистанционного зондиро-
вания Земли (ДЗЗ);
- разработка методов и программно-
го обеспечения обработки видео данных,
получаемых КА ДЗЗ;
- проектирование, изготовление, по-
ставка «под ключ» систем электроснаб-
жения объектов наземной инфраструкту-
ры космических комплексов.
519
К числу работ, выполненных по пе-
речисленным направлениям, следует от-
нести:
1. Проектирование, изготовление,
поставка, ввод в строй в 2004 году и га-
рантийное обслуживание в течение 12 лет
системы гарантированного электроснаб-
жения (система 14Э129) монтажно-
испытательного корпуса (МИК 14П83)
ракеты «Союз-2» на космодроме «Пле-
сецк». Данный МИК является единствен-
ным в России , который обеспечивает
подготовку к запуску ракеты «Союз-2».
2. Участие в проектировании систе-
мы гарантированного электроснабжения
МИК ракеты «Союз-2» на космодроме
«Куру» (Французская Гвиана) в 2010-2012
годах.
3. Разработку методов и программ-
ного обеспечения (2010 г.) реконструкции
космических снимков, искажённых дви-
жением. Данное ПО позволило продлить
срок активного существования КА ДЗЗ
«Ресурс-ДК» на 5 лет с сохранением целе-
вых функций до настоящего времени.
4. Разработку методов и программ-
ного обеспечения (2013 г.) высокоточного
определения ориентации КА по снимкам
подстилающей поверхности. Данное ПО
существенно ускоряет лётно-космические
испытания и ввод в строй новейших КА.
5. Организацию работ по выполне-
нию проекта «Многоуровневая система
дистанционного гиперспектрального зон-
дирования Земли» в составе Аэрокосми-
ческого кластера Самарской области. В
результате выполнения последнего проек-
та в 2014 году положено начало созданию
уникальной для России базы гиперспек-
тральных данных, комплексирующей
данные, получаемые бортовыми система-
ми наблюдения КА типа «Ресурс-П», а
также авиа-лабораториями, и данные о
химическом составе почв и вод Самар-
ской области, получаемые при наземном
мониторинге. База данных имеет огром-
ные возможности применения в экономи-
ке России.
Учёные инженерно-
технологического факультета нашего
университета внесли свою лепту в освое-
ние космоса. По заказу АО «РКЦ «Про-
гресс» был выполнен ряд научно-
исследовательских работ:
- Разработка ускорителей для разго-
на сферических тел диаметром 3-6 мм
(1974 г.);
- Исследование процессов, протека-
ющих при высокоскоростном взаимодей-
ствии структурных тел с КА, и возможно-
сти создания систем защиты (1988 г.);
- Разработка модельных тел для изу-
чения процессов высокоскоростного вза-
имодействия (1990 г.);
- Разработка лазерной виброакусти-
ческой диагностики дефектов крупнога-
баритных конструкций, выполненных из
полимерных композиционных материалов
(2009 г.);
- Проведение работ по оценке запаса
стойкости пиротехнических изделий при
воздействии вторичных факторов молние-
вых разрядов (2009 г.);
- Разработка соединительного моду-
ля для элементов ракетно-космической
деятельности (2007 г.). По этой теме была
выполнена и успешно защищена диссер-
тация на получение учёной степени кан-
дидата технических наук. Были разрабо-
таны «Устройство продольного разделе-
ния оболочки детонационным разделите-
лем» (Лаптев Н.И., Мордасов В.И., Са-
зонников Н.А.) и «Устройство разделения
створок головного обтекателя» (Дукин
А.Д., Лаптев Н.И., Мордасов В.И., Ткач
В.Е. с получением патентов в 2008 г. и в
2009 г.
Созданная 1972 году научно-
исследовательская лаборатория «Приводы
спецмеханизмов» при кафедре деталей
машин, ас 1976 года - при кафедре при-
кладной механики должна была решить
проблему создания малогабаритного при-
вода весом не более 9.6 кг. Заказчиком от
ЦСКБ был А. В. Чечин. Руководил лабо-
раторией доцент В.А. Комаров. В течение
6 лет была разработана технология и изго-
товлен уникальный электропривод для
520
ориентации панелей солнечных батарей
КА на солнце. Экономический эффект в
1978 году составил около 4 млн. рублей.
Более 25 лет работа электроприводов,
установленных на различных КА, была
безотказной. Научно-исследовательской
лабораторией совместно с ЦСКБ были
выполнены и защищены 7 кандидатских
диссертаций, внедрены в производство
семь стандартов конструкций электропри-
водов различного назначения для КА и
получено 11 авторских свидетельств на
изобретения.
Грандиозность программы по созда-
нию ракет-носителей, спутников, косми-
ческих кораблей и космических аппаратов
научного назначения не позволяет в пол-
ной мере представить в одном докладе все
научные исследования, выполненные учё-
ными СамГТУ. Остается только поблаго-
дарить всех за их неоценимый вклад в
освоение космического пространства.
В настоящее время продолжается
укрепление деловых контактов между
Самарским государственным техническим
университетом и АО «РКЦ «Прогресс».
Это сотрудничество поможет и в будущем
сохранить приоритет Российской ракетно-
космической техники.
Библиографический список:
1. Выдающиеся деятели науки и
техники Самарской области / Под общ.
ред. А.В. Киселева. - Самара: Самарский
областной Дом науки и техники, 2001. -
244 с.
References:
1. Prominent persons of science and
engineering of Samara region / Ed. A.V.
Kiselev. - Samara: Samara regional science
and engineering Centre, 2001. - 244 p.
OVERVIEW OF SSTU SCIENTISTS’ HERITAGE IN VIEW OF ITS IMPORTANCE
FOR DEVELOPMENT OF ROCKET AND SPACE TECHNOLOGY.
©2015 A.A. Barsova
Samara State Technical University, Samara
The paper contains a review of scientific research , commissioned on CAaDEB’s order by academic staff of
the different structural units of SSTU for the period from the 70s to 2014 .
Key words: Samara State Technical University, scientist, heritage, central assembly and design engineering
bereau, development, space technology
Информация об авторах:
Барсова Алла Анатольевна, директор музея СамГТУ., 443100, Россия, г. Самара,
ул. Молодогвардейская, 244, т. 278-43-73, samgtu-museum @ yandex.ru.
Область научных интересов: история СамГТУ.
Barsova Alla Anatolyevna, director of the Museum of SSTU. 244 Molodogvardeiskaya
Str., 443100, Samara, Russia, 278-43-73, samgtu-museum@yandex.ru.
521
УДК 658.5 + 621.454
КОСМИЧЕСКАЯ БЕЗЫМЯНКА: ОТ ЗАВОДА №24 ДО ОАО «КУЗНЕЦОВ»
©2015 Н.Н. Аладьева
ОАО «Кузнецов», г. Самара
Рассказана история организации и развития производства жидкостных ракетных двигателей типа
РД-107 и РД-108 на предприятии.
Вскоре после запуска нашей стра-
ной искусственного спутника Земли, в
Куйбышев, на заводы авиационного «ку-
ста» приехала правительственная комис-
сия. Целью их визита являлось выявление
возможностей серийного производства
ракеты Р-7 и двигателей к этой ракете.
Обследовав заводы авиационной Безы-
мянки, комиссией было решено ракету
собирать на заводе №1 (ныне АО «РКЦ
«Прогресс»), а ракетные двигатели - на
заводе №24 (ныне ОАО «Кузнецов»).
28 мая 1958 г. коллектив завода по-
лучил от Правительства страны ответ-
ственное задание. Постановление пред-
писывало начать освоение, подготовку и
организацию серийного производства
жидкостных ракетных двигателей РД-107
и РД-108.
25 июля 1958 этого же года, прика-
зом № 101 главного конструктора ОКБ-
456 Валентина Глушко на заводе имени
М.В.Фрунзе был образован филиал ОКБ
для конструкторского обеспечения начи-
нающегося серийного производства на
заводе жидкостных ракетных двигателей.
ОКБ-456 передал заводу более 10
ООО наименований технологической до-
кументации.
За ходом работ осуществлялся по-
стоянный контроль со стороны Прави-
тельства.
В канун нового, 1959 года, 29 де-
кабря, первое изделие, изготовленное и
собранное на заводе, без замечаний про-
шло огневое испытание на полный ре-
сурс на стенде разработчика ЖРД.
В 1959 году начались пуски ракет с
двигателями серийного производства.
Первое летное испытание произошло 12
сентября 1959 года и завершилось выво-
дом автоматической станции «Луна-2» на
заданную траекторию вокруг Луны. За-
воду №24 имени М. В. Фрунзе было раз-
решено серийное производство двигате-
лей для ракет.
29 июня 1960 года Президиум Вер-
ховного Совета СССР своим указом
наградил завод №24 имени М. В. Фрунзе
орденом Трудового Красного Знамени
«за успешное выполнение Государствен-
ных заданий по освоению в производстве
специальных изделий».
12 апреля 1961 года ракетой - носи-
телем с двигателями производства завода
№24 им. М.В.Фрунзе был запущен одно-
местный космический корабль «Восток»
весом 4730 кг с первым космонавтом на
борту - гражданином нашей Родины
Юрием Алексеевичем Гагариным. Так
началась эра пилотируемых космических
полетов.
Химзавод.
Распоряжением Совета Министров
СССР от 22 апреля 1958 года в связи с
организацией производства жидкостных
ракетных двигателей на заводе №24 име-
ни М.В.Фрунзе было разрешено строи-
тельство испытательного комплекса ЖРД.
Первое огневое испытание на стен-
де №1 испытательной базы было произ-
ведено 31 августа 1961 года.
В 1962 году успешно прошли испы-
тания модификации ЖРД РД-107ММ и
РД-108ММ с улучшенными энергетиче-
скими характеристиками. Эти двигатели
находились в эксплуатации до 2011 года
в составе ракеты-носителя «Молния-М»,
обеспечивая вывод спутников связи на
высокоэллиптические орбиты.
Десятилетие с 1967 по 1976 годы.
На орбиту были выведены космические
корабли нового поколения типа «Союз».
Успешный вывод на орбиту осуществ-
522
лялся ракетой- носителем с помощью
двигателей повышенной надежности РД-
117иРД-118.
Десятилетие с 1979 по 1989 годы
предприятие серийно производило ЖРД,
обеспечивающие вывод на орбиту трех-
местных кораблей «Союз - Т». В эти же
годы ОКБ и предприятие провели работы
по дальнейшему форсированию двигате-
лей РД-118 и РД-117, что обеспечило
запуск ракетой - носителем кораблей
«Союз - ТМ» и грузовых кораблей «Про-
гресс - М».
В 1995 году были начаты работы по
теме «Русь»: освоение экологически чи-
стого двигателя. Для решения этой зада-
чи были отработаны новые модификации
двигателей для первой и второй ступени
РД-107А и РД-108А. В 1999 году были
успешно завершены испытания по этой
теме. По результатам изготовления и ис-
пытаний Межведомственная комиссия
разрешила серийное производство этих
двигателей.
Всего с помощью двигателей типа
РД-107 и РД-1О8 было произведено более
2000 пусков, из них с космодрома Байко-
нур - 1942.
Роль завода им. М.В. Фрунзе в выполне-
нии советских космических программ
была неоценима, и эту эстафетную па-
лочку куйбышевский завод передал сво-
ему приемнику - ОАО «Кузнецов». Се-
годня здесь, как и много лет назад, одним
из главных и ключевых направлений яв-
ляется космическое...
Библиографический список:
1. Моторостроители. К 80-летию
Самарского моторостроительного произ-
водственного объединения имени
М.В.Фрунзе. 1912 - 1992/Сост.
Н.Н.Аладьева. - Самара, 1992. - 128 с.
2. Под знаменем НК. От завода
№24 им. М.В.Фрунзе до ОАО «Кузне-
цов» /Сост. Н.Н.Аладьева. - М.:ОО
«ЦРТ «Золотое крыло», 2012.-256 с., ил.
SPACE BEZYMYANKA: FROM THE PLANT N 24 TO JSC KUZNETSOV
©2015 N.N. Aladieva
Joint Stock Company Kuznetsov (JSC Kuznetsov), Samara
The story of rocket engines RD-107 and RD-108 production at the plant.
Информация об авторе:
Аладьева Наталия Николаевна, начальник Центра истории и техники ОАО «Куз-
нецов»,443009, Россия, Самара, Заводское шоссе, 29, т. 227-33-42, 8-917-116-03-42,
n.aladieva@mail.ru.
Aladieva Natalia, the Head of the History & Mechanism Center of JSC Kuznetsov, 29,
Zavodskoye shosse, Samara, Russia, 443009, tel.: +7 846 227-33-42, +7-917-116-03-42, e-mail:
n.aladieva@mail.ru.
523
УДК 94(47)
МКС - ИСТОРИЯ В ПОЛЕТАХ КОСМИЧЕСКИХ КОРАБЛЕЙ.
ПРАВДА, ВЫМЫСЛЫ, ФАКТЫ
©2015 Г.Е. Фомин
АО «РКЦ «Прогресс», г. Самара
Доклад-презентация “МКС - исто-
рия в полетах космических кораблей.
Правда, вымыслы, факты” освещает о
творцах ракетно-космического строи-
тельства: С. П. Королев, Max Faget, Ка-
рел Боссарт, Glenn L. Martin, Вернер фон
Браун, В. Н. Челомей; Ван Юнчжи о кос-
монавтах, астронавтах; о ракета-
носителях и космических кораблях.
Творцы ракетно-космического
строительства, космонавты и астронавты
каждый из них прошел первую ступень
космонавтики. Каждый из них вошел в
историю как конструктор, который пер-
вый создавал новую оригинальную тех-
нику, а космонавты и астронавты сделали
первый шаг в деятельности космонавтики.
Космонавт Ю. А. Гагарин - первый
гражданин СССР, Мира и Вселенной.
Алан Шепард - первый астронавт США,
суборбитальный. Г. С. Титов - первый
человек, пробывший в космосе более 1
суток. Джон Гленн - первый орбиталь-
ный астронавт США. В. В. Терешкова -
первая женщина космонавт. В. М. Кома-
ров, К. П. Феоктистов, Б. Б. Егоров -
космонавты первого многоместного ко-
рабля. П. А. Беляев, А. А. Леонов - впер-
вые вышли в открытый космос (А. А.
Леонов). В. Гриссом, Д. Янг впервые
проводили маневр на двуместном косми-
ческом корабле. Д. Макдивитт, Э. Уайт
проводили маневр сближения со ступе-
нью “Аджена”. Ф. Борман с Д. Лоелл и У.
Ширра с Т. Стаффорд провели маневр,
сближение и полет в три витка на двух
двуместных кораблях. Ч. Конрад, Р. Гор-
дон произвели маневр, сближение и сты-
ковку со ступенью “Аджена”, привязав
трос на ступень, вращательными движе-
ниями создавая искусственную силу тя-
жести. В. М. Комаров испытывал новую
технику, погиб при отказе парашюта. Д.
Айзли, У. Ширра, У. Каннингем были
испытателями новой лунной техники на
околоземной орбите. Г. Т. Береговой -
первый произвел маневр сближение на
новой технике. Ф. Борман, Д. Ловелл, У.
Андерс произвели первый облет Луны. В.
Шаталов, Б. Большое, А. Алисеев, Е.
Хрунов произвели маневр, сближение,
стыковку первой в мире орбитальной
станции. Юджин Сернан, Томас Стаф-
форд, Джон Янг произвели облет Луны и
стыковку командного модуля с лунным
модулем. Нил Армстронг, Майкл Кол-
линз, Эдвин Олдрин - первые жители на
Луне. Майкл Коллинз на орбите Луны. В.
А. Шаталов, А. С. Елисеев, Н. Н. Рука-
вишников - первые космонавты ДОС
“Салют”. Г. Т. Добровольский, В. Н.
Волков, В. И. Пацаев - второй экипаж
ДОС “Салют”, погибли про посадке. Три
экспедиции астронавтов сделали амери-
канскую ЛОС “Скайлэб”. Астронавты
Слейтон, Стаффорд, Бранд и космонавты
Леонов и Кубасов - первая международ-
ная космическая станция Союз-Аполлон.
Советские космические корабли
были одноместный “Восток” и трехмест-
ный “Восход-1” и двуместные с выхода в
космос “Восход-2”. В США - одномест-
ный КК “Меркурий” и двуместный КК
“Джемини”.
Советские ракеты-носители “Во-
сток” (8К72-К), “Восход” (11А57). Аме-
риканские ракеты были “Рэдстоун”, “Ат-
лас-D”, “Титан-IIGLV”.
Далее в советском союзе была сде-
лана новая ракета-носитель “Союз”
(11А511)и новый маневренный космиче-
ский корабль “Союз”.
В США создали новые PH “Сатурн-
1Б”, “Сатурн-5” и новый корабль “Апол-
лон-7” для посещения Луны.
524
Лунная эпопея в СССР предусмат-
ривала три этапа: PH “Союз/КК “7К, 9К,
ПК”, PH “Протон/КК “7К-Л1”, PH “Н-
1/КК “Л-3”.
ДОС “Салют-Протон” создана но-
вая техника в составе самой орбитальной
станции и тяжелым PH “Протон”.
США создали ЛОС “Скайлэб” на
базе PH “Сатурн-5”, PH “Сатурн-1 Б”, КК
“Аполлон”.
Советская и американская орби-
тальная станция “Союз-Аполлон” созда-
ны на базе PH “Союз” (11А511-У), КК
“Союз”, американской ракеты “Сатурн-
IE” и КК “Аполлон”.
Далее в нашей презентации пода-
ются Спейс Шаттл (США), Мир (СССР-
Россия), МКС (Международная), Китай.
Далее в нашей презентации прило-
жена перспектива полетная программа
России и США. Имеются КА “ПТК НП”
(Россия), КА “Драгон-У2” (США).
INTERNATIONAL SPACE STATION - HISTORY IN THE FLIGHT
OF THE SPACECRAFT. TRUE, FICTIONS, FACTS
©2015 G.E. Fomin
JSC «SRC «Progress», Samara
Информация об авторе:
Фомин Георгий Евгеньевич, кандидат технических наук, почетный работник
“ЦСКБ-Прогресс”. Самара, ул. Алексея Толстого 26, квартира 24, тел. 89276876435,
geofomin@mail.ru.
Fomin Georgy Evgenievich, Candidate of technical science, honorary worker of «TsSKB-
Progress». Samara, Alexey Tolstoy str., 26- 24, tel. 89276876435, geofomin@mail.ru
525
АЛФАВИТНЫЙ УКАЗАТЕЛЬ
JN® п/п Ф.и.о. Стр.
1 Абдуллов Р.В. 338
2 Абрашкин В.И. 394
3 Аваряскин Д.П. 406
4 Авдеев Д.В. 226
5 Аистов А.И. 74,132
6 Аладьева Н.Н. 521
7 Алтунин В.А. 21
8 Алтунин К.В. 21
9 Алчина А.С. 181
10 Антонова Л.Е. 479
И Апасов В.И. 284
12 Архипов С.А. 185
13 Ахметов Р.Н. 365, 394
14 Аюпов Р.Э. 378
15 Бакулин Е.И. 129
16 Барсова А.А. 517
17 Баутов А.Н. 221
18 Белов Е.В. 46,51
19 Белов Ю.В. 508
20 Белоконов И.В. 396
21 Бельский Л.Н. 168
22 Бирюк В.В. 27, 181, 192
23 Боброва Н.В. 273
24 Богданова Н.В. 497
25 Богданович В.И. 40
26 Болотов М.А. 36
27 Болычев С.А. 102
28 Бочков С.В. 77
29 Бронштейн В.М. 181, 192
30 Бубненков Д.И. 90
31 Букреев В.Г. 281
32 Булаев А.М. 304
33 Буренина Е.А. 99
34 Бутько А.Д. 328, 449
35 Василевский А.В. 221
36 Васимова И.Н. 270
37 Великанов А.А. 17
38 Верховых Н.И. 444
39 Вершинина Л.П. 464
40 Вобликов Д.Н. 66
41 Гатен Ю.В. 447
42 Гераськин А.М. 96
43 Гимранов З.И. 413
44 Гиорбелидзе М.Г. 40
45 Гладкова Л.Д. 316
46 Головашкин Д.Л. 216
47 Головненко Е.В. 156
48 Гордеев К.Г. 279
49 Горшков М.А. 223
50 Горюнов А.А. 43
51 Горюнова Н.Р. 43
526
52 Горячкин О.В. 369
53 Готин Д.Е.
54 Гошин Е.В.
55 Гребнев Д.Н. 74
56 Гречишников В.М. 328, 349
57 Грибанов А.С. 355
58 Гринько А.П.
59 Гришанов Г.М. 418
60 Гришанцева Л. А. 90
61 Давыдова М.Ю. 444
62 Данилов В.А.
63 Дедус Ф.Ф. 96
64 Дементьев А.С. 99
65 Демиденко В.П. 21
66 Денисов П.В. 208
67 Досколович Л.Л.
68 Дуплихин В.К. 74
69 Дюльдин Р.С.
70 Егоров А.М.
71 Егоров А.С.
72 Егошкин Н.А.
73 Еленев В.Д. 145
74 Елисеев С.Н. 247
75 Емельянов А.А. 90
76 Емельянов К.С. 90
77 Еремеев В.В.
78 Есиновский А.В. 390
79 Жевако В.В.
80 Железнов Ю.Е.
81 Женгуров Б.Г. 369
82 Журавель Ю.Н.
83 Журавлев И.А. 335
84 Забиякин А.С.
85 Зайцев В.В. 240
86 Зарецкий Д.С. 93
87 Згонникова М.О.
88 Зиновьева И.В. 427
89 Золотухин Ю.Д. 316
90 Зуперман Я.А. 74
91 Иванов А.В. 340
92 Иванов В.Г. 515
93 Иванов В.П. 500
94 Ивкин В.И. 492
95 Ивков С.В. 323
96 Ильин А.М.
97 Ильмурзина С.Ф. 181
98 Илюхина Е.А.
99 Исаченко В.А. 253
100 Ишков С.А. 172
101 Калаев М.П. 362
102 Камалдинов А.М. 259,261
103 Канчер Г.С. 232, 236
104 Карасев А.С. 454
105 Карасев П.А. 454
106 Кирилина Е.В. 441
527
107 Кирилина С.А. 418,423
108 Кириллов О.Н. 352
109 Кирпичева А.П. 411
ПО Кирсанов А.А. 93
111 Китаев А.И. 27
112 Клюев Н.И. 121, 129
113 Козырева Г.И. 355
114 Колосов В.М. 411
115 Коптев А.Н. 192
116 Коптев И.Т. 316
117 Космодемьянская О.В. 232, 236
118 Космодемьянский Е.В. 93
119 Костарев А.А. 213
120 Коханова С.Я. 21
121 Крамлих А.В. 381
122 Крюков Ю.А. 121
123 Кудашов О.Г. 355
124 Кудрявцев О.Б. 304, 332
125 Кузин А.О. 287
126 Кузнецов В.С. 259
127 Кукушкин В.Е. 74
128 Кулаков А.Ю. 126
129 Кулик В.И. 263
130 Кулиш Н.С. 221
131 Купцов В.В. 115
132 Курицкий А.А. 328, 449
133 Лебедев А.В. 113
134 Лебедев В.В. 485
135 Лейман В.В. 279
136 Леонович Г.И. 323
137 Леонтьев А.В. 390
138 Ливочкина Н.А. 323
139 Ложкина Т.Н. 168
140 Лосев Т.П. 168
141 Лукс А.Л. 27
142 Лысенко С.А. 87
143 Маликов В.Ю. 308
144 Мальцев А.С. 160
145 Мануйлов И.Ю. 328
146 Маслов И.В. 369
147 Матвеев А.Г. 27
148 Маханек Е.Н. 168
149 Машко Р.В. 263
150 Мельник М.Е. 381
151 Микушкина С.М. 156,236
152 Митрюшин Е.А. 253
153 Морозова Е.Ю. 454
154 Морозов С.А. 185
155 Морозова С.Г. 475
156 Муштакова И.В. 69
157 Мячина В.А. 355
158 Нагорный В.О. 279
159 Надеев Н.А. 192
160 Небога В.Г. 308
161 Недогарок А.А. 378
528
162 Никашина И.В. 156
163 Никитин А.В. 394
164 Николаев В.А. 17
165 Нонин А.С. 66
166 Обухова Л.А. 21
167 Осипов А.В. 24
168 Парамонов В.П. 465
169 Парамонова Р.Н. 505
170 Пастухова С.С. 96
171 Пахомов А.С. 340
172 Пекина К.А. 437
173 Петров Е.П. 335
174 Пехотин Д.О. 223
175 Печении В.А. 36
176 Письмаров А.В. 118
177 Платонов Е.Н. 21
178 Подгорнов С.Н. 355
179 Порядин А.В. 27
180 Привалова А.М. 99
181 Просвирина Н.А. 378
182 Рахмеева В.Р. 192
183 Романов А.М. 93
184 Росляков П.С. 199
185 Рузанов А.В. 311
186 Рузанов Н.В. 36
187 Рыльцев И.К. 51,338
188 Рязанов Д.М. 362
189 Рязанцев А.Ю. 352
190 Рясной Н.В. 323
191 Сазонникова Н.А. 66
192 Салмин В.В. 142
193 Сальникова М.А. 185
194 Саушкин Б.П. 253
195 Селезнев П.Л. 168
196 Семенов С.В. 489
197 Семкин Н.Д. 362, 376
198 Сивов М.Е. 93
199 Сиделева Г.А. 316
200 Силаев Д.В. 349
201 Скворцов Ю.В. 132
202 Скобленков М.Н. 243
203 Скоробогатов О.П. 221
204 Слепцова С.В. 168
205 Соболев В.В. 17
206 Соловьева Н.В. 223, 390
207 Сорокина М.Г. 437
208 Степаненко И.С. 36
209 Степанов А.А. 290, 298
210 Стратилатов Н.Р. 394
211 Струфелев Е.Д. 247
212 Сухоруков С.В. 273
213 Сухочев Г.А. 349
214 Сюй Сяое 172
215 Табаков Д.П. 160
216 Тараканов К.В. 279
529
217 Телегин А.М. 376
218 Терентьев А.А. 21
219 Тимбай И.А. 396
220 Тимонина Т.А. 508
221 Ткаченко А.С. 66
222 Трусов М.Г. 93
223 Туркова В.А. 124
224 Уманский А.Б. 390
225 Файн М.К. 134
226 Федотов А.Л. 90
227 Филатов А.Н. 156,236
228 Филиппов Т.А. 172
229 Филиппов С.Б. 160
230 Филонин О.В. 413
231 Фомин Т.Е. 523
232 Хабибуллин Р.М. 134
233 Халилов Р.Р. 365
234 Хандорин М.М. 281
235 Цаплин С.В. 102
236 Цуканова С.Н. 168
237 Чайка Д.Ю. 78,81
238 Черная М.М. 24
239 Чернякин С.А. 132
240 Четвериков А.С. 142
241 Чостковский Б.К. 208
242 Чурилин Е.В. 99
243 Чурюмова Е.Э. 261
244 Шаенко А.Ю. 378
245 Шайкина Д.Ю 61
246 Шатилова М.Ю. 181
247 Шилин А.Н. 240
248 Шиняков Ю.А. 24
249 Шорников А.Ю. 134
250 Шупляк Ю.П. 145
251 Щелоков Д.А. 435, 452
252 Щелоков Е.А. 311
253 Щербаков М.С. 406
254 Юдинцев В.В. 93
255 Юхневич С.С. 316, 349
256 Якунин В.С. 365
257 Яновская М.Л. 21
258 Якимов В.А. 168
530