






































































































Author: Пашков Е.В. Осинский Ю.А Четверкин А.А
Tags: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика техника технические науки электропневмоавтоматика пневмопривод
ISBN: 966-7473-37-6
Year: 2003



Пашков Е.В.
Осинский Ю.А.
Четверкин А.А.
лектр .'in
автомат
в производственных
процессах
%
v
Пашков Е.В., Осинский Ю.А., Четверкин
А.А.
ЭЛЕКТРОПНЕВМОАВТОМАТИКА
В ПРОИЗВОДСТВЕННЫХ
ПРОЦЕССАХ
Издание второе, переработанное и дополненное
Под общей редакцией
заслуженного деятеля науки и техники Украины,
д-ра техн. наук, проф. Е.В. ПАШКОВА
Рекомендовано Министерством образования и науки Украины
в качестве учебного пособия для студентов
машиноприборостроительных специальностей
Севастополь
2003
Ььк 3-5-05
1122
> IK" f»$ 1. 58o : CkS 1,587.357
Рецензенты:
нне. СевНгГ >P ^ "**"' ПрйфеСС°Р' ЛЯВ' ^Ч"»' «Прнборострое-
B_V. Ганский, i-p техн. наук, cr. научи, сотрудник, зав. отделом я»
тамаимащш океано|рафнчески\ исследований МГЦ НЛН Украины.
Научный редактор В.К. Марию юв i-p техн. наук профессор.
Л. 1^2-551 оН803 оГИНЫ ° ПрИСВОеНШ1 1Т,1*а учсбного "ос°б"я
Пашков Е.В.
П22 Электропневмоавтоматнка в производственных процессах: Учеб. пособие
/ Е.В. Пашков. Ю.А. Осинекнн, А.А. Четверкнн: Под ред. Е.В. Пашкова.
• — --е изд.. перераб. и доп. — Севастополь: Изд-во СевНТУ, 2003. —
496 с, нл.
ISBN 966-7473-37-6
Приведены терминология, основные понятия, графическое обозначение
элементов электропневмоавтоматнки. рассматриваются конструкция, принцип
действия и методика расчета электрических преобразователей сигналов и датчиков
сигналов. Описаны конструкции и даны характеристики электропневмораспределите-
лей. свободно программируемых контроллеров и исполнительных устройств
систем электропневмоавтоматики. Изложены рекомендации по выбору, расчету и
проектированию электропневматическнх систем управления технологическим
оборудованием. Даны численные примеры расчета основных элементов.
Для студентов технических вузов машиностроительных и
приборостроительных специатьностен. а также слушателей отделений переподготовки и повышения
квалификации в области автоматизации техпроцессов и производств.
Приведена термшолопя, ochobhi" поняття, граф1чне позначення елемент1в
електропневмоавтомагнкн, розглядаються конструкция, принцип дм та методика
розрахунку електричних перетворювашв сигнагив. Опнсаш конструкцп i даш
характеристики електропневморозподкпьннмв, вкпьно програмусмнх контролерш i
виконавчих пристроТв систем електропневмоавтоматнки. Внкладеш рекомендацн
по вибору, розрахунку i проектуванню електропневмоавтоматнчних систем керу-
вання технолопчним обладнанням. Приведен! чиеельш приклади розрахунку ос-
новннх елементтв.
Для студента техтчних вуз1в машннобуд1вннх i приладобудшннк спешаль-
ностей, а також слухач1В вйццлень перепиготовки та пивищення кванф.кацп у
галуз! автоматнзацп техпроцеав i виробннцтв.
ББК 3-5-05
i
Л Ш»-__ -.-^„^ .ГОП
LSBN 966-7473-37-6
i
© Издательство «СевНТУ», 2003
ПРВДНСЛОВШ.
Годы, прошедшие со времени первого издания учебного пособия
«Электропневмоавтоматнка в производственных процессах» (1997 г.), характеризуются
значительными достижениями в различных технических отраслях современного про-
изводства. r K
Несмотря на большое внимание, уделяемое развитию и применению средств
автоматизации, наличию работ в данном направлении, вопросы создания
высокоэффективных систем электронневмоавтоматикн не получили достаточного
отражения в литературных источниках.
Появление в промышленности новых высокопроизводительных и
высокоточных технологических процессов требует постоянного внимания к созданию и
применению адекватных средств автоматизации.
Основной задачей авторов второго издания была переработка и дополнение
первого издания материалами, являющимися результатами обобщения
практического опыта, накопленного в последние годы фирмой «Festo» (Германия), которое
может быть использовано студентами вузов технических специальностей при
выполнении расчетно-графнческих заданий, курсовых и дипломных проектов,
выпускных работ.
В предлагаемой вниманию читателей книге авторы использовали разработки
фирмы «Festo». имеющей свои представительства в 52 странах и заводы по
производству техники автоматизации в 10 странах, специалисты которой успешно
решают задачи автоматизации в таких известных компаниях и фирмах как
Фольксваген. Даймлер-Крайслер, Филипс и др. с комплексным применением
электропневмоавтоматнки. контроллеров, сенсорики и других средств. Одновременно в
книге обобщены и отражены опыт предприятий приборостроительной,
машиностроительной и других отраслей промышленности, данные отечественных и
иностранных литературных источников а также личный многолетний опыт работы
авторов в данной области.
Книга написана в соответствии с учебными планами таких направлений
обучения в СевНТУ. как 0902 — Инженерная механика, 0909 — Приборы. 0914 —
Компьютеризированные системы автоматики и управления. 0925 —
Автоматизация и компьютерно-интегрированные технологии. 0922 — Электромеханика,
специальностей, отражающих вопросы автоматизации прошводства. а также
программами обучения учебных центрах «Фесто-Украина» и «Фесто-РФ». Во многом
она ориентирована на обучение по программам С-МВА (Менеджмент в области
инженерии), в которых сочетаются как тренинги по методам управления,
имеющие практическую направленность, так и новая информация о последних
достижениях в области автоматизации и информационных технологий. Книга также
может быть использована в процессе обучения мехатроннке. являющейся
синтезом механики н электроники, и рассматривающей вопросы планирования
производственных систем, монтажа, программирования, ввода в эксплуатацию,
обслуживания и поиска неисправностей.
Цель учебного пособия:
— обобщить обширную информацию в обтасти разработки и применения
средств электропневмоавтоматики:
— описать наиболее характерные конструкции элементов электропневмоав-
гоматикн, нх параметры, характеристики, особенности исполнения:
— изложить методику рационального проектирования основных элементов
электропневмоавтоматнки. квазиоптнмальных по совершаемой работе, н
предложить инженерные методы их расчета:
»«а»л, на «тометмк примерах вмчомости мемсито» " систем •«««-
^Z^Tnr«« „'«ершено—, »Ы„о„и,смь,с фу„к-
иии. позитивные и негативные аспекты.
Учебное посооие состоит из восьми глав.
Кроме общих вопросов электропневмоавтоматики в нем последовательно
рассматриваются вопросы расчета н конструирования преобразователей
информации, конструктивные и эксплуатационные особенности датчиков сигналов на их
основе. констр\кции и эксплуатационные характеристики пневморасиределителеи,
свободно программируемых контроллеров, элементов электропневматических
систем и манипуыторов промышленных роботов с пневмоприводом, элементов
вакуумной техники, а также вопросы разработки систем управления
технологическим ооорудованием для конкретных техпроцессов.
Список использованной литературы приведен в конце книги. Предисловие
написано Пашковым Е.В. и Осинским Ю.А. Главы 1,11, Ш. VII и VIII — Е.В.
Пашковым, п. IV. разделы 1.7.2.5,3 6Л — Ю.А. Осинским, гл. V — А.А. Четверкиным
и Е.В Пашковым.
По просьбе авторов разделы 2.6.2,2.6.3 и 2.6 4 написаны Ю.К. Сопнным;
глава VI — канд. техн. наук ЮД Волковым.
Авторы выражают глубокую признательность докт. техн. наук, проф.
В К Маригодову, инженерам В.Д. Сорокиной и Е.Н. Абрамовой за помощь, ока-
шш>ю при подготовке учебного пособия к изданию.
В процессе работы над рукописью этого издания с благодарностью учтены
замечания отмеченные в рецензиях докт. техн. наук. В.А. Гайского и докт. техн
наук. проф. В.Я. Коппа.
СТРУКТУРА И НАЗНАЧЕНИЕ СИСТЕМ АВТОМАТИКИ
™«v 1™" а Т И К а ~ ОТраСЛЬ наУки и Te™«. охватывающая теорию и прак-
SfJZL СИСТСМ уПраВЛеНИЯ те*"И"ескими процессами, осуществляемыми
Оез непосредственного участия человека.
Пневмоавтоматика- раздел автоматики, охватывающий теорию и
практику построения систем управления техническими системами на базе
пневматических устройств.
Аналогичным образом можно классифицировать электроавтоматику как
раздел автоматики.
Электропневмоавтоматика— раздел автоматики, охватывающий
теорию и практику построения систем управления техническими системами на
базе комбинированных устройств, осуществляющих преобразование различных
неэлектрических, физических величин (перемещение, давление, механические
напряжения, температура и др.) в физические величины электрического напряжения
тока, частоты и др.
В соответствии с общими принципами управления технологическими
процессами автоматическое управление осуществляется на основе информации,
получаемой с помощью комплекса технических средств автоматики {4].
Системы автоматики в зависимости от выполняемых функций делятся на
автоматические системы контроля, управления и регулирования [53].
Технические средства автоматики, включающие различные автоматические
устройства, служат для получения, передачи, преобразования и хранения
контрольной информации, формирования и передачи командной информации,
использования ее для воздействия на управляемый процесс.
Интеграция электрических и пневматических устройств автоматики играет
важную роль в решении множества задач автоматизации производства.
Необходимость в дешевых и эффективных производственных системах
требует минимизации времени цикла работы технологического оборудования.
Электропневматические средства автоматики обладают рядом преимуществ. В
системах управления, где сигналы передаются на большие расстояния, с целью
сокращения времени передачи в качестве рабочей среды используется электричество. В
системах, где ожидается расширение и частое изменение номенклатуры
выпускаемой продукции, использование пневмоклапанов с электромагнитным
управлением дает возможность внедрять в них свободно программируемые контроллеры
что позволяет быстро изменять цикл работы систем.
Электрические устройства выполняют в системах управления
функции генерации и обработки сигналов.
Пневматические устройства решают различные задачи,
связанные с поступательным или вращательным перемещением нагрузки, а именно,
зажим, перемещения, позиционирование, ориентация.
Сигналы о наличии или состоянии объекта генерируются (вырабатываются)
разлнчнымии датчиками 1 (рисунок 1.1) и передаются на логико-вычислительные
устройства (процессоры) 2. в качестве которых, например, могут быть
использованы электромагнитные реле, контроллеры и др. Процессор обрабатывает
получаемые сигналы и посылает их к интерфейсным устройствам 3. предназначенным для
связи различных по виду энергии (рабочего тела) элементов, например, пиевмо-
распределителям с электромагнитным управлением, подающих сжатый воздух в
одну из рабочих полостей пневмоцилнндра 4. перемещение штока которого
контролируется датчиками положения 5. образующими обратную связь.
Программирование процессора (контроллера) осуществляется либо с помощью специальных
пультов, либо с помощью ПЭВМ, в которых хранится пакет программного обеспе-
чения. например. VinPlSA.
Структура и назначение систем автоматики
Пневмоавтоматика
Электроавтоматика
Сопла
Цилиндры
Моторы
Индикаторы
Пневыодвигателл
Распределители
Исполнительные устройства
I
7~1_
оиства!—
Электромоторы
Электромагниты
Лилейные двигатели
Управляющие элементы
Распределители (триггеры)
Обратные клапаны
Клапаны давления
Логические элементы
I
ггы |_
Мощные контакторы
Мощные транзисторы
Полупроводники
Процессорные элементы
Переключатели
Кнопки
Концевые выключатели
Генераторы программ
Сигнализаторы приближения
Датчики
{
I
D?
Контакторы
Реле
Электронные элементы
(контроллеры)
Входные элементы
т т т т т т '.
Сигналы
Переключатели
Кнопки
Концевые выключатели
Генераторыпрограмм
Сигнализаторыпрнб *
Индикаторы
Датчики
Рисунок 1.2
1
Таким образом, в процессе разработки систему управления можно
рассматривать как совокупность трех отдельных частей или блоков. Они включают в себя
выходные устройства, элементы, обрабатывающие сигналы, и входные элементы,
обеспечивающие ввод сигналов и обратную связь. В терминах аппаратного
обеспечения это означает, что для передачи сигналов должны существовать входные,
процессорные, управляющие и исполнительные устройства [26].
На рисунке 1.2 показано расположение устройств и элементов по
направлению потоков сигналов, характерных для электроавтоматики и пневмоавтоматики,
и выполняющих сходные функции в системах управления.
Для проектировщиков и наладчиков электропневматических систем очень
важно уметь различать уровни расположения элементов внутри системы, так как
на каждом уровне решается определенная задача прохождения или обработки сигнала.
Основываясь на данной схеме можно заключить, что для большинства
случаев системы электропневмоавтоматики, являясь комбинированными, представляют
собой сочетание электрических и пневматических устройств, соответственно
расположенных на двух первых и двух последних уровнях, выделенных на рису
штриховыми линиями.
Распределители с электромагнитным управлением и реле могут выполнять
как функции обработки сигналов, так и функции управления исполнительными
устройствами. Например, если распределитель используется для управления
цилиндром, он относится к управляющим элементам. Если же он служит для
обработки сигналов, он относится к процессорным элементам.
Особое место в электропневматических системах занимают источники
энергии, энергоносителями в которых являются сжатый воздух или электричество.
1 . " гналы информации
Носителем информации является сигнал. Под сигналом понимают
материальное воплощение сообщения, которое может быть использовано в
информационных системах при передаче, переработке и хранении информации.
Глава I
«ишяа
ypowoc
«5 апиалы moivt 1^ыть разделены на непрерывные и дис-
ie. Непрерывным называется сигнал, воспроизводящий все мгновенные
фюической величины. Дискретный сигнал образуется из непрерывного
.„. нием по времени, по уровню или одновременно по времени и
то
В системах управления в качестве сигналов обычно используют
электрические и механические величины (постоянный ток. амплитуду, напряжение,
давление сжатого газа или жидкости, усилия и т.п.), так как они позволяют легко
осуществлять передачу на расстояние, преобразование, сравнение и хранение
информации В одних сл>чаях сигналы возникают как непосредственное следствие
протекающих при управлении процессов (изменение тока, напряжения, температуры,
давления, положения исполнительных (выходных) элементов механических
устройств и т.п.). в других случаях они обеспечиваются чувствительными элементами
(преобразователями') или датчиками.
1.2. Элементы автоматики
С : .енно операциям, производимым с сигналами информации в
автоматических устройствах могут быть выделены функциональные ячейки —
элементы.
Элемент — простейшая в функциональном отношении ячейка
(устройство, схема), предназначенная для выполнения одной из следующих основных
операций с сигналом:
1) преобразования контролируемой величины в сигнал, однозначно
связанный с информацией об этой величине (чувствительные элементы, датчики);
2) преобразования сигнала одного рода энергии в сигнал другого рода
энергии: электрический в неэлектрический, неэлектрический в электрический, неэлек-
грический в неэлектрический (электромеханические, термоэлектрические,
электропневматические, пневмоэлектрические, фотоэлектрические,
пневмомеханические и др.);
3) преобразования сигнала по величине энергии (усилители);
4) преобразования сигнала по виду, т.е. непрерывного в дискретный и
наоборот (аналого-цифровые, цифро-аналоговые и др.);
5) преобразования сигнала по форме, т.е. сигнала постоянного тока в сигнал
переменного тока и наоборот (модуляторы, демодуляторы);
6) функционального преобразования сигналов (счетно-решающие элементы,
функциональные элементы);
7) сравнения сигналов и создания командно-управляющего сигнала
(элементы сравнения, нуль-органы);
8) выполнения логических операций с сигналами (логические элементы);
9) распределения сигналов по различным цепям (распределители,
коммутаторы, реле, контакторы, магнитные пускатели)-
10) хранения сигналов (элементы памяти, накопители);
illI создания программных сигналов (программные элементы);
полнит1Гм,ГГВаННЯ СИГНаЛ°В ДЛЯ в°ЗДе»ствия на управляемый процесс
(исполнительные элементы, двигатели, электромагнитные муфты).
В общем виде элемент представ-
«11Э ляет собой преобразователь (рисунок
13), на вход которого подается
сигнал «х» , а на выходе получается
сигнал «у».
»> 6) Элементы (Э) подразделяются на
Рисунок 13 пассивные, активные и с
обратной связью.
Структура и назначение систем автомятц„„
В пассивных элементах (рисунок 1.3,а) выходной сигнал «у» получается за
счет входного сигнала «х» и, как правило, в результате потерь меньше последнего
(*<>')•
В активных элементах (рисунок J .3.6), характеризующихся наличием
вспомогательного источника энергии (ВИЭ), входной сигнал <а» лишь управляет
передачей энергии от ВИЭ выходному сигналу, который может быть больше входного.
Если входной сигнал не зависит от выходного, то элемент принято называть
разомкнутым.
Величины «х» и «у» могут быть как электрическими (ток, напряжение,
сопротивление), так и неэлектрическими (давление, скорость, температура,
перемещение и др.).
Различают элементы реверсивные и нереверсивные.
Нереверсивные элементы сохраняют знак выходной величины постоянным независимо от
изменения знака входной величины. Реверсивные — изменяют знак (полярность
постоянного напряжения, тока; фазу переменного напряжения, тока; направление
перемещения).
По форме представления входного и выходного сигналов различают элементы
непрерывного, дискретного ирелейного действия.
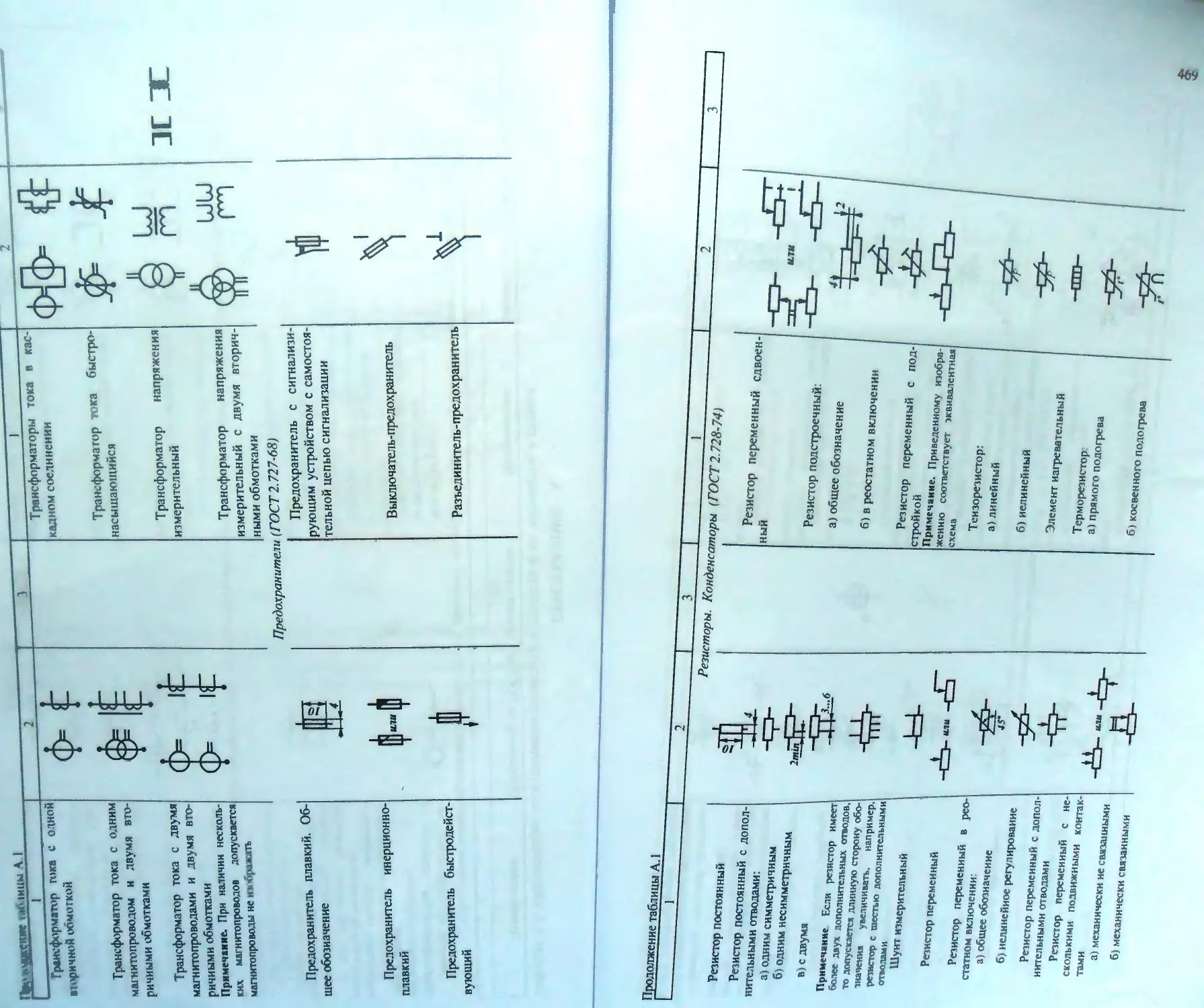
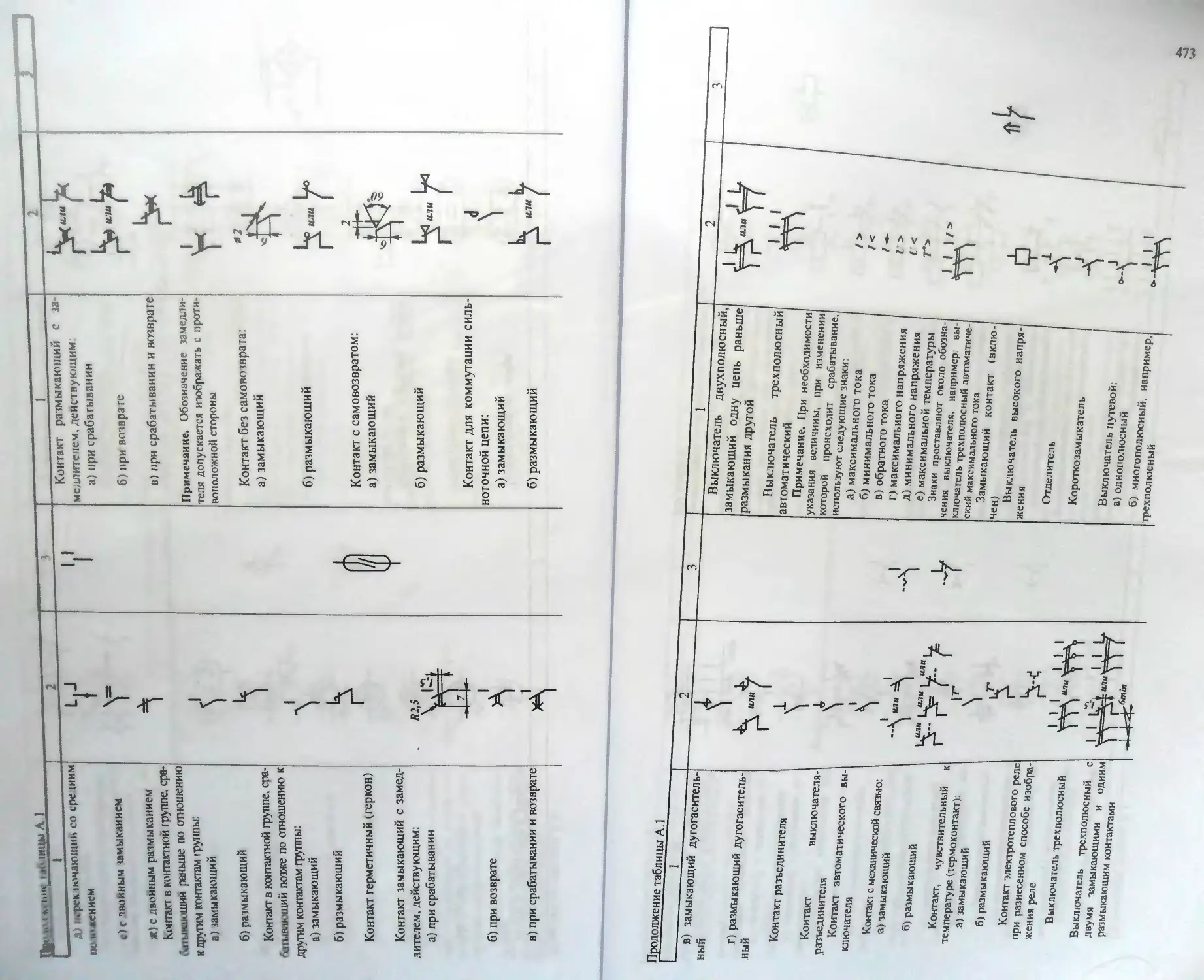
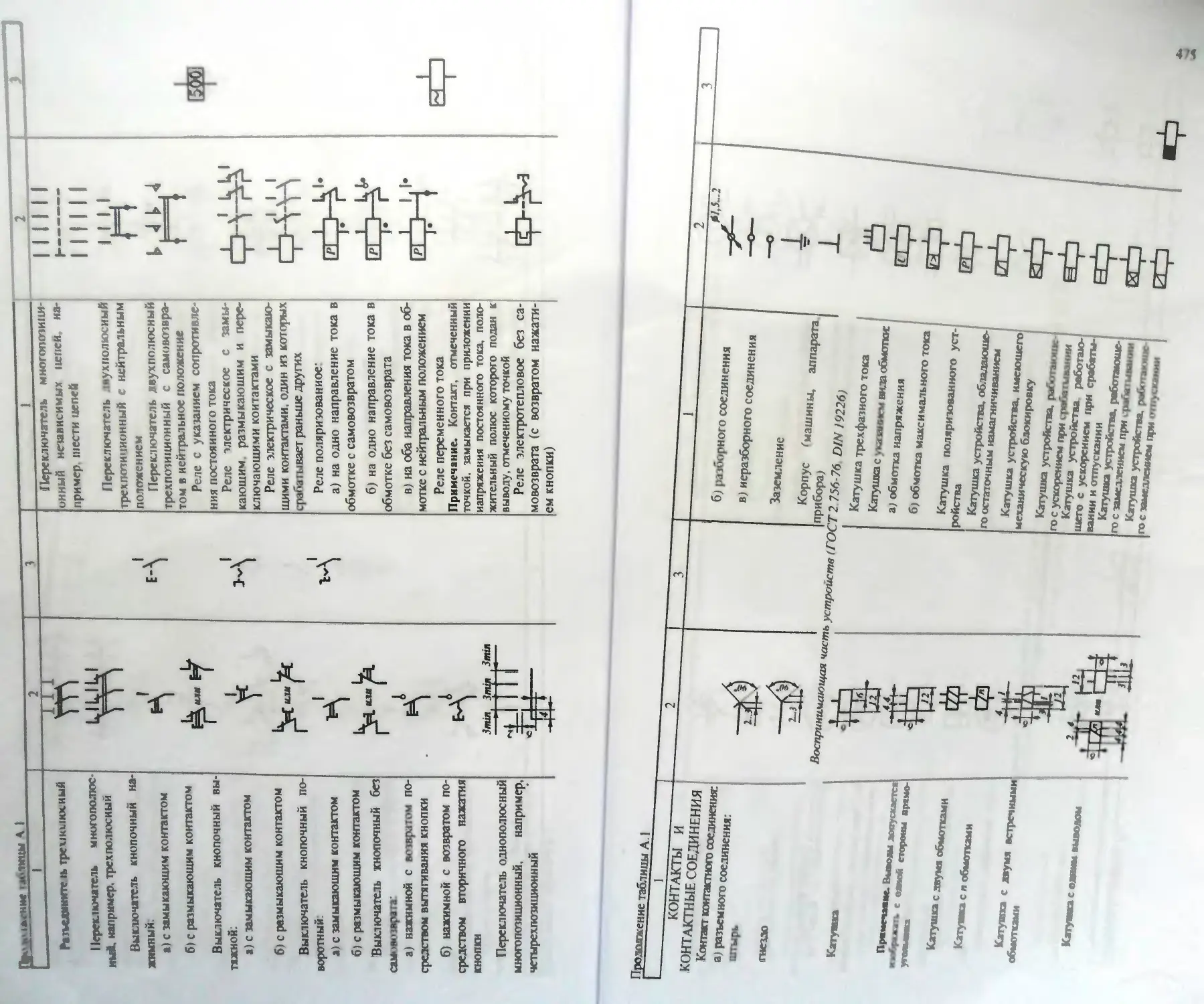
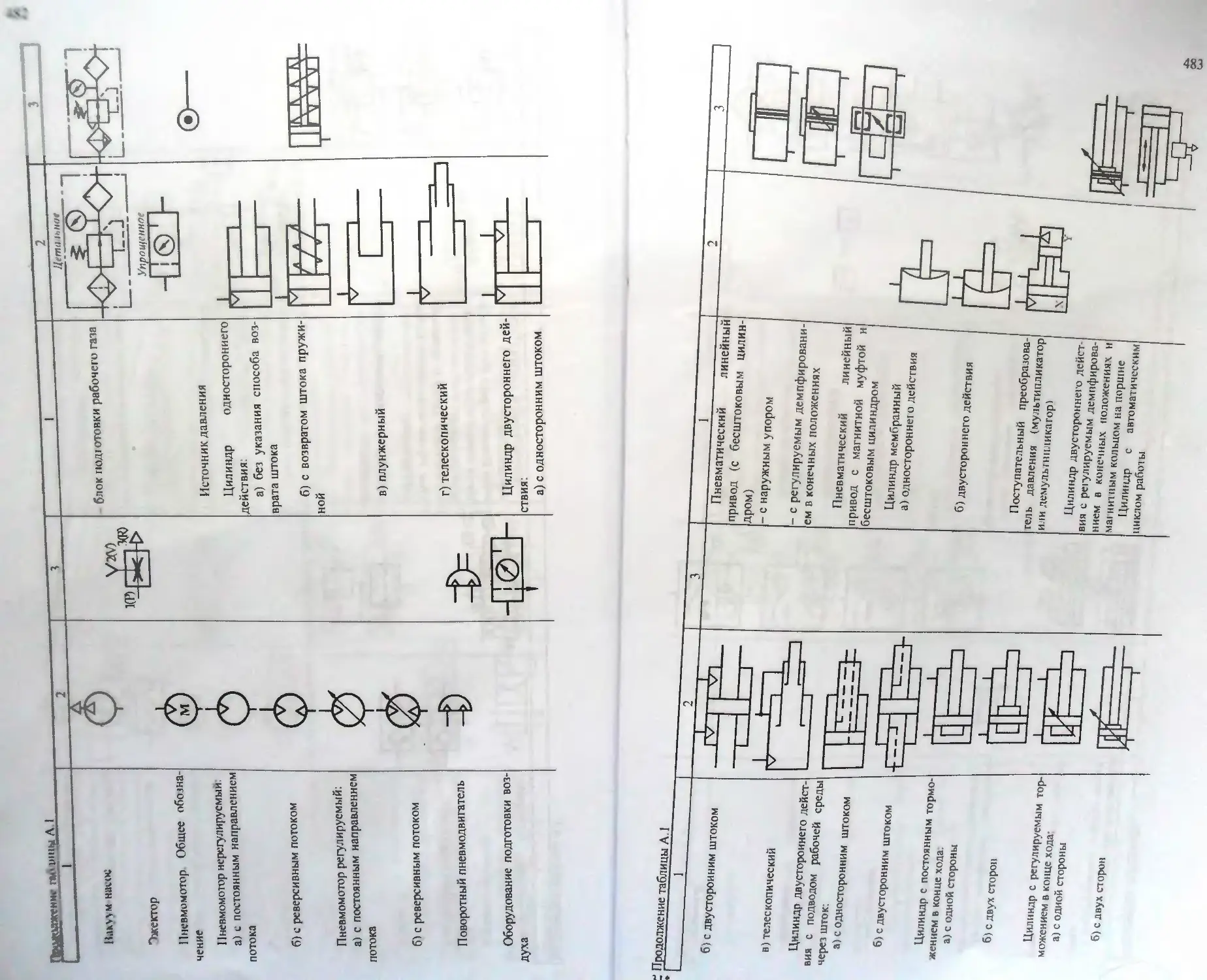
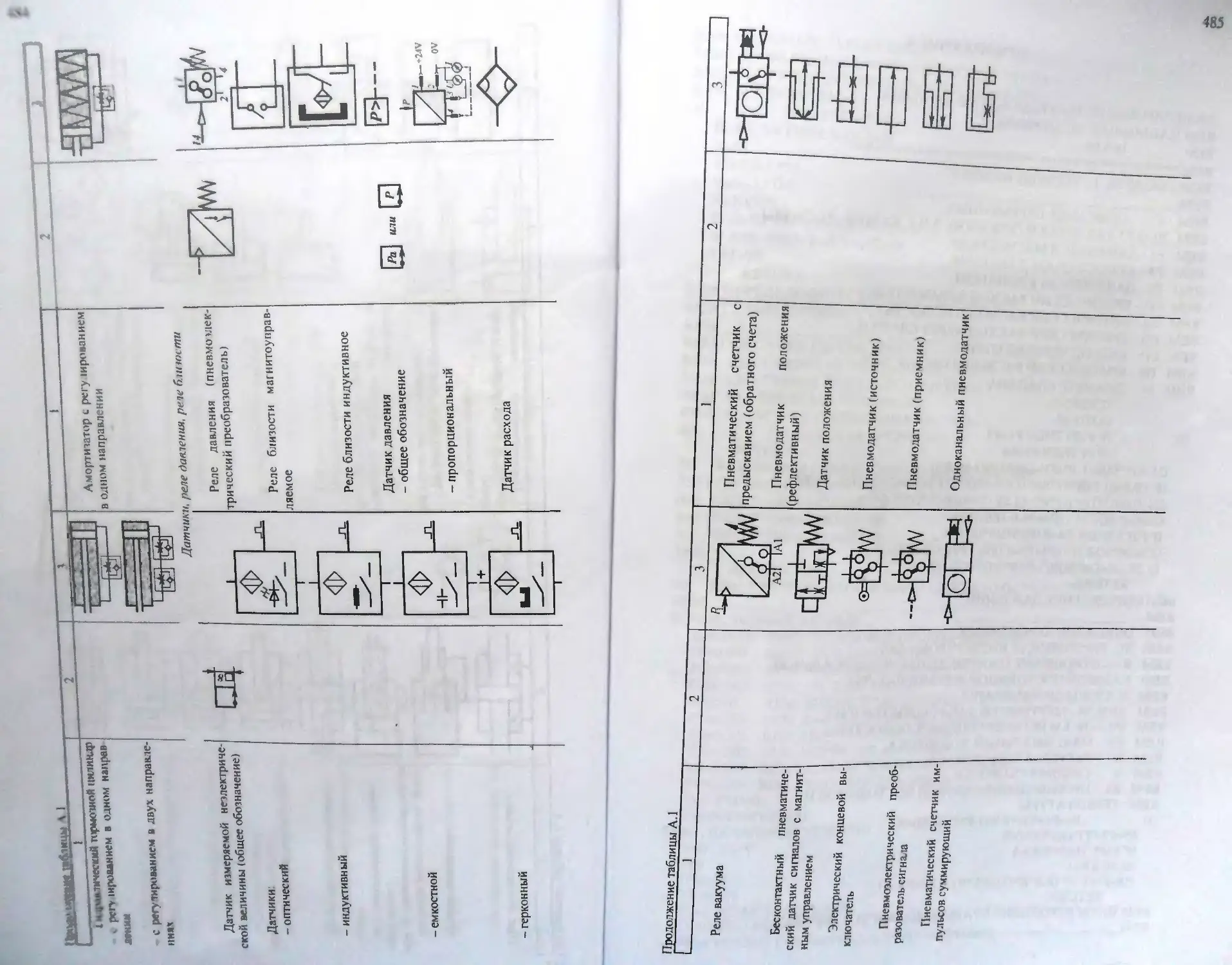
В приложении А приведены условные графические обозначения ряда
элементов автоматики по ГОСТам, стандартам DIN и Festo — обозначения (по DIN и по
Festo приведены обозначения элементов, отличающиеся от обозначений по
ГОСТам). При схемном или схемно-конструктивном соединении нескольких
элементов получаются основные функциональные автоматические устройства,
которые в определенных сочетаниях образуют системы автоматического управления.
1.3. Характеристики управления элементов
Основной характеристикой элемента в установившемся режиме работы
является характеристика управления, определяющая функциональную связь между
входным <сс» и выходным «у» сигналами в статике (статическая
характеристика)
У=Ах). (|.|)
Характеристики управления бывают линейными, недннейн ырл и,
релейными.
В общем случае характеристика управления у = fix) представляет собой
непрерывную кривую или кривую, имеющую разрывы непрерывности.
На рисунке 1.4 приведены основные типичные характеристики управления
элементов [4].
Характеристика, представленная на рисунке 1.4,а, является линейной, с
постоянной крутизной, характеризующейся углом
а = arctg y/v (1.2)
и пропорциональной зависимостью между входной «х» и выходной «у»
величинами. Характеристика, представленная на рисунке 1.4,6, изображает непрерывную
функциональную связь, когда непрерывному изменению входной величины «л>
У
7
■У
+ V
■/
/.
V
Г1П
л -v
а)
б)
в)
Рисунок 1.4
г)
Д)
Глава I
««««.«№-« •""« »—« Bb,MV,H°B ВеЛ"""НЬ' ^ "Р" ЭТОМ
ни Интервал изменения входной величины от - «л,» До + «,» зона
«♦ччиствитетьностн (порогчувствительности).
Ш' Cmlol^l^c^cZy =№ в которой только при некоторых опре-
«2£ значениях непрерывно „меняющейся входной величины,™^~
•тчина изменяется скачком, называется релейной характеристикой
Релейная характеристика с зоной нечувствительности изображена на рисунке 1.4,г.
При входной ветичине х = ± .г, происходит скачок выходной величины до посте-
янного значения iw-
Характеристики ряда элементов имеют неоднозначную зависимость между
физическими величинами, характеризующими состояние элемента (например,
намагниченность^ от физических величин, характеризующих внешние воздействия
(например, магнитного поля), т.е. имеет место гистерезис (отставание, запаздыва-
нис> в форме петли (рисунок 1.4л).
В электромагнитных реле гистерезис имеет прямоугольную форму.
1.4. Основные параметры элементов
Свойства элементов определяются рядом параметров, к числу которых
относятся коэффициент преобразования, чувствительность, коэффициент усиления,
порог чувствительности и погрешность [53].
Различают три вида коэффициента преобразования: статический,
динамический иотносительный.
Статический коэффициент преобразования (коэффициент
передачи) Ко, есть отношение выходного сигнала элемента v к его входному сигналу .г:
Ксп = у/х. (1.3)
Динамический коэффициент преобразования Кдии показывает, во
сколько раз приращение выходного сигнала {&у; dy) больше или меньше
приращения входного сигнала (Дх; dx):
Kba.^bylAx^dy/dx. (1.4)
Коэффициенты К„ и К^ будут равны, если v изменяется пропорционально .г.
Относительный коэффициент преобразования К^ есть
отношение динамического коэффициента преобразования к статическому, т.е.
пп« хх к«», = Кдш1/Ксп. (1.5)
Для датчиков коэффициент преобразования называется чувствитель-
пЬПп;аЯЛЯУСИ-1ИТеЛеЙ~КОЭффициенто« Усиления.
homvчн^Гн,!? Ч>вствительности называют наименьшее (по абсолют-
ному^чению) знамение входного сигнала, необходимое для появления выходно-
помом '"'истерезиса, вызванного, например, остаточным магне-
^^«^^ возникающее в ре-
Усзовий его работы. р£1ичают аГсоТю7^.Г ИЗМеиения внешни*
■риведеииую погрешности У* отиос"тельную и
Абсолютной nornemiinfTLu, a
»* выхопн^^ Av называ»от разность между факти-
выходиого сигнала* „ его расчетным значением у„-
v.-vp = Ay. (1.6)
Структура и назначение систем
Относительная погрешность f
погрешности д, к расчетному значению выходного сигн^"6 абС°ЛЮТН°Й
Приведенная n.rpJ^V^^'^ M
нести Д, к максимальному i*^^^^^^^ «Л»
диапазон его изменения: сигнала у™, , определяющему
S = А>' 'У™ (Av / v^J-100%.
(1.8)
1.5. Обратные связи
—-ф-
-r-vi I 1 У
э— э -
1—|_^jJ
г—
ОС
Phcvhok 1.5
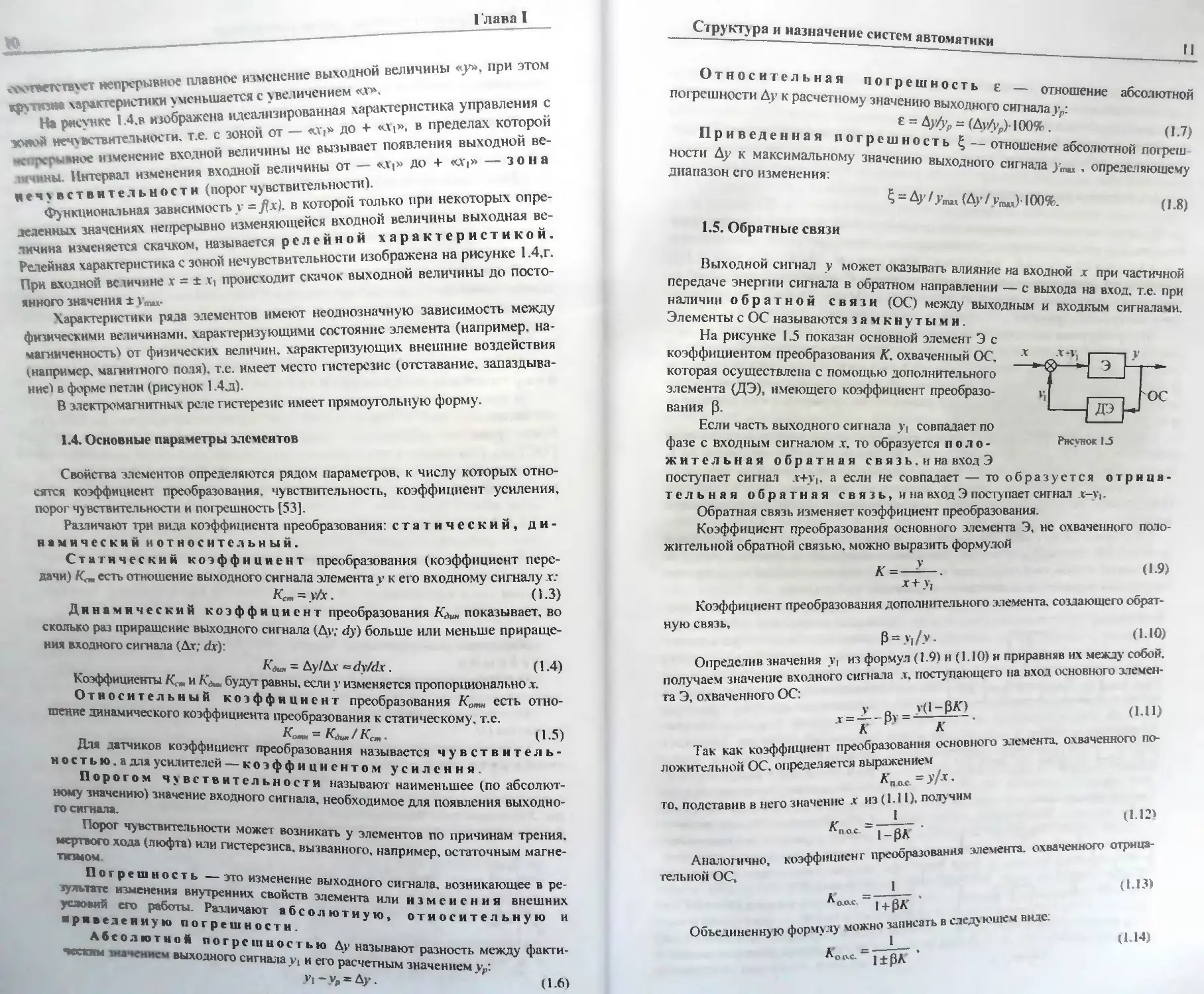
Выходной сигнал у может оказывать влияние на входной х при частичной
передаче энергии сигнала в обратном направлении - с выхода на вход, те при
наличии обратной связи (ОС) между выходным и входным сигналами,
элементы с ОС называются замкнутыми.
На рисунке 1.5 показан основной элемент Э с
коэффициентом преобразования К. охваченный ОС.
которая осуществлена с помощью дополнительного
элемента (ДЭ), имеющего коэффициент
преобразования (3.
Если часть выходного сигнала у, совпадает по
фазе с входным сигналом .г, то образуется
положительная обратная связь, и на вход Э
поступает сигнал .v+v,. а если не совпадает — то образуется
отрицательная обратная связь, и на вход Э поступает сигнал л-vv
Обратная связь изменяет коэффициент преобразования.
Коэффициент преобразования основного элемента Э, не охваченного
положительной обратной связью, можно выразить формулой
К = —^—. (1-9)
Х+ V,
Коэффициент преобразования дополнительного элемента, создающего
обратную связь,
Р = У,/у. П.Ю)
Определив значения v, из формул (1.9) и (1.10) и приравняв их между собой.
получаем значение входного сигнала .г. поступающего на вход основного
элемента Э, охваченного ОС:
r=i_Bv=*!zfi*>. (lid
i A'
Так как коэффициент преобразования основного элемента, охваченного
положительной ОС. определяется выражением
А'по.с=>7-Г-
то. подставив в него значение х из (1.11). получим
1
(1.12>
Аналогично,
тельной ОС,
ко»
ффициенг преобразования элемента, охваченного отрица-
(1.13)
1
Обьединенную формулу можно записан, в следуюшем виде:
Аом-~7±рГ'
(114)
VI
Глава I
*+» стаослггся к отрицательной ОС. а знак «-» — к положительной.
Пояожительная ОС увеличивает коэффициент нреооразовашш, но уменьшает
стабильность работы элемента.
Отрицательная ОС уменьшает коэффициент нреоораювания. по увеличивает
СпйБильность работы элемента
на ав-
1.6. Ф\икиии систем автоматики
Системы автоматики, в зависимости от выполняемых функции, делятся
тематические системы контроля, управления и регулирования [4.531.
\вюматическая система контроля (АСК) (рисунок 1.6,а)
осушествляет сравнение контролируемой величины с заданным (эталонным) ее
лначенисм и фиксирование результатов сравнения в форме, удобной для
наблюдения и длительного хранения
Контролируемая величина с контролируемого объекта (КО) поступает на дат
чик (Д). в котором преобразуется в сигнал, удобный для измерения. С выхода Д
преобразованный сигнал передается на сравнивающее устройство
(СУ), в котором осуществляется сравнение преобразованного сигнала
контролируемой величины с сигналом эталонной величины, постунаемым сзадающего
устройства (ЗУ).
После-шее может быть программным, т.е. последовательно выдающим
различные значения эталонной величины. ЗУ может отсутствовать, если АСК
предназначена для измерения абсолютного значения контролируемой величины.
Порченный результат сравнения подается на воспроизводящее устройство
ЧВУ), которое указывает, сигнализирует или записывает значение контролируемой
величины
Автоматическая система управления (АСУ), являющаяся
разомкнутой системой, служит для выполнения операций, задаваемых внешним
источником воздействий (задающим устройством) на входе этой системы, причем
сам процесс управления не зависит от его конечного результата
Контроль
Управление
ЗУ
УУ
ИУ
УО
в)
Регулирование
Рисунок 16
Выход
Структурная схема АСУ
приведена на рисунке 1.6,6.
Поступающий на вход
управляющего устройства (У У)
управляющий сигнал оценивается
(измеряется) и преобразуется в
физическую величину, удобную
для передачи. С выхода УУ
преобразованный сигнал поступает
на исполнительное
устройство (ИУ), которое
воздействует соответствующим образом
^Управляемый объект
(УО). Примером такой сиегемы
может служить автомагическая
система компенсации,
поддерживающая постоянство выходной
•«личины УО.
емг. Автоматическая
«»» (АСР) Р"»л"РО —
пг»»п. ' (Рисунок |.6.в)
зЕГГе,Ш Ш* "держания с
заданной точностью постоянства
значений одной или нескольких физических величин (регулируемых величин)
I МТ 1С I ТТ"" 3"аЧС,ШЯ уКВМ,,ных Ве'"'ЧИ" по 3«™У
'«копу. АСР предиавляег собой систему с замкнутой цепью воздейспнш. в которой
управляющие воздействия вырабатываются в результате сравнения
действительного значения управляемой величины, контролируемой датчиком обратной свяш
Д. с предписанным (>.алойным) жачением. Если значения этих величин не равны,
то на выходе СУ возникает сигнал рассмласовшшя. который воздействует на
систему посредством ИУ таким образом, что в дальнейшем это рассо.ласование
автоматически сводится к очень малому значению (теоретически к нулю).
1.7. Энерюснабжение элементов электропневмоавтоматики
1.7.1. Ис1 очники электрического питания
Наиболее распространенным
напряжением электропитания элементов
электропиевмоавтоматики (датчиков,
распределителен, контроллеров и др.) является
постоянное напряжение 24 В,
обеспечиваемое специальными блоками питания.
На рисунке 1.7 показан общий вид Nw^
источника электропитания типа D.AS- tj ^
NETZG 24V/5A, имеющий следующие '
характеристики (37,50]: входное напря- ^F
жен не — 220 В, частота — 50 Гц, пере- ^
менный ток; выходное напряжение — ^^
24 В (ПОСТОЯННЫЙ ТОК С максимальной Рисунок 1.7
величиной в 5 А). Габаритные размеры:
150x100x225 мм; вес — 3,3 кг. Источник питания обладает защитой от
перенапряжений, устойчив к перегрузкам и при коротком замыкании.
Широкое внедрение электронных средств автоматизации — устройств
программ но-ложческого управления (программируемых контроллеров) - привело к
появлению специальных источников электропитания, к числу которых следует
отнести разработанную фирмой BECK, входящей в группу «Fes.o», модель PSE 3
Zcv^oK I 8.а) с входн! напряжением I80...264 В (переменный ток), входной
^^^^^Z> lZ^ZJrJTo 2000 мнад =
морТ) - от^С до +7(ГСР С^Ч^А^^^^
часов. Выходное напряжение - 24 В/ U А (ткпя л^ _ ^^„^
напряжения й±\%\ выходная мощность -к . промышленных
Источник питания PSE 3 предназначен дляпплпняюду к Р
компьютеров IPC. размещаемых на ^е^альных шасси ™ , дб р7.50].
Схема сгьГковкн источника питания ~^^» ,РС формируем
Напряжение питания логики в шасс, Дл ^ ^ ^^ ттшя J]0|,,M,
либо от интегрированного "СТ0Ч,,"К" " „тегрированы часы реального времени
модели PS IPS IMPS IPS М. в ™wPblt |ИП1'РТ0 36 В постоянного тока: вы-
Rea/Гппе. Напряжение пн.а.и.я '™ ^ ^ длямодуля PSIPS10 „ 5 В/6 0 А
ходпое напряжение — 5 B/4.Uл l ps. ps, | Стандартный формат мотулен IPC,
(постоянный ток) для модуля модели г. ■ подробное описание
п .ом числе н источника питания. .Юкатан »•» риеуике
ирпнедсмо в главе VI.
14
Слана I
Нейтраль
+24 (постоянный ток)
от+1» В до 26 В
(постоянный ток)
Источник
шпаши
Шасси
Ш1.3
IIIi 4
Шт 6
IIIi 5
-220 Н®-
50Гц в_
III. 2(-)
ILh 1(+)
, Источник питания PSI-3
Шт 6 (от +10 до 36 В постоянный юк)
Шт 5
Шт 5 (+5 В kciiomoi атсльный
пропил питания)
Шт 3 -общий провод (минус)
Шасси для модулей IPC
б)
Рисунок 1.8
Для получения постоянного напряжения пигания 24 В может быгь использо-
ртсуГеТ!н"ИаЛЬНаЯ ЭЛеКТрИЧеская схема «сточпика пи.ания, представленная на
но^ЛТпГ^7' 1Н"аТПП2-5-127/220-50 рассчитан на номинальную мощ-
ноГоб^е'203 иГЫ?Г "а ПСРВНЧН0Й °бМ°ТКе 127 ИЛИ 22° В <™ в"<*»"*-
или 1,|э а, соответственно). Трансформатор содержит четыре
ВториЧ1|,'1Х обмотки. Из „их используются две обмотки с
номерами выводов 11-12 и 23-24, которые рассчитаны на
напряжение 14 В при максимальном токе нагрузки 5 А.
иомотки включены последовательно, что дает
возможность получить на выходе трансформатора переменное
напряжение 28 В, „р„ максимальном токе ншрузки до
5 А На диодах VD1 - VD4 собран мостовой выпрями-
Ст?б.,™ НСЭТОР С1 Я1ШЮ1СЯ конденсатором фильтра,
exit пГ|°Р ВЫХОДИО«° напряжения собран па микро-
ЙГи^Г ,LM2574-ADJ- «тч« представляет со-
Ьой интегральный ключевой стабили,атор с
регулируемо
Рисунок 1.9
Оруктура и назначен!
220 В «О Гц <<
или
127 В 60 Гц <4
2 Ti 24 V0J.VM
Г 12
«-24 В
Рисунок 1.10
мым выходным напряжением, с защитой от перегрузки и от короткого замыкания
по выходу. Эта микросхема имеет следующие параметры: максимальное входное
напряжение до 45 В; выходное напряжение от 1,23 до 37 В; максимальный ток
нагрузки до 3 А
Для своего функционирования микросхема требует всего четыре внешних
элемента: конденсатор на входе (его роль выполняет конденсатор фильтра С1); на
выходе обращенный диод с барьером Шоттки (VD5); накопительный дроссель^LI
и конденсатор фильтра С2. На резисторах Rl - R2 собран управляемый делитель
наГяГниТко^ьпТподает часть выходного напряжения на вход обратной связи
Гн^ГнГстабилизатора. С помощью ^^^ГТЛ"^
лировать выходное «Ъ^^^
дополнительный фильтр нижних часто! дл« <-
го напряжения стабилизатора.
1.7.2. Системы подготовки сжатого воздуха
™™чч потребляет примерно 10% энергии, вырабаты-
Производство сжатого воздуха потрсоляет \>
ваемой для промышленных ч^"; промышленных площадок.
Воздух используется на большинстве промы
Основные секторы потребления:
производство стекла — 20%;
машиностроение - ,2*: ков _ 9%;
производство продуктов питания и н
производство резины и пластмасс- 10*.
производство химикатов — «%•
I
Глава I
Обязательным критерием надежного функционирования электропневматиче-
ски\ систем (ЭПС) является качество очистки сжатого воздуха от загрязнений,
которые, оказывая физическое, химическое и электролитическое воздействие на
элементы электропневмоавтоматики, снижают их долговечность в несколько раз.
По данным «Tacis» (EUK 9701/M/12/4), производство сжатого воздуха
является неэффективным и дорогостоящим процессом, поскольку только 10% полезной
энергии расходуется на получение воздуха (остальные 90% преобразуются в
тепло), а его цена в 15 раз превышает цену на электричество.
К тому моменту, когда сжатый воздух достигнет конечного потребителя,
общие затраты на количество эффективной работы могут стать еще выше из-за
потерь на трение, утечки и затрат впустую.
Сжатый воздух содержит пять основных видов загрязнений: вода — в жидком
и арообразном виде, капли масла, масляный туман, твердые частицы.
Загрязнения в сжатом воздухе содержатся в виде аэрозолей, т.е. дисперсных
образований, состоящих из твердых или жидких частиц, взвешенных в воздушной
среде.
Содержащаяся в сжатом воздухе вода вызывает коррозию деталей ЭПС.
Водяные пары, содержащиеся в сжатом воздухе, в случае их конденсации, также
приводят к появлению коррозии.
Масло, поступающее в магистраль после компрессора, в результате
необратимых изменений, происходящих с ним под воздействием высоких температур во
время сжатия воздуха, теряет свои смазывающие свойства. Выделяющиеся из
масла смолистые вещества, забивая зазоры и тонкие отверстия
электропневмоавтоматов, приводят к выходу из строя последних. Твердые частицы засоряют каналы
ЭПС и их элементов, вызывают повреждения сопряженных поверхностей в опорах
направляющих и подшипниках.
Пыль, вода, масло создают на поверхностях пневмоопор пленку, которая
может препятствовать нормальному запуску ЭПС и т.д.
В связи с тем, что воздухоочистные устройства рассчитаны на работу в
определенном технологическом режиме и их оптимальные параметры лежат в
довольно узком диапазоне, для обеспечения эффективной очистки сжатого воздуха
необходимо в каждом конкретном случае произвести подготовку подлежащего очистке
сжатого воздуха таким образом, чтобы его технологические параметры
соответствовали оптимальным характеристикам воздухоочистных стройств, в которых он
будет подвергаться очистке.
Чем чище должен быть сжатый воздух, тем больше будут расходы. Это
должно приниматься во внимание при проектировании систем сжатого воздуха.
ГОСТ 17433-80 «Промышленная чистота. Сжатый воздух. Классы
загрязненности» регламентирует 15 классов загрязненности сжатого воздуха. Четные
классы, допуская определенное содержание воды в жидком виде, регламентируют
размер и концентрацию твердых частиц в сжатом воздухе. Нечетные классы, помимо
размера и концентрации твердых частиц, регламентируют и содержание паров в
сжатом воздухе. Температура точки росы сжатого воздуха для классов 0, 1, 3, 5, 7.
9,11 и 13 — ниже минимальной рабочей температуры не менее чем на 10 К (10°С)-
Качество сжатого воздуха по DIN ISO 8573-1 выражается в классах качества
(таблица 1.1). Этот стандарт устанавливает, какие загрязнения допустимы в соот-
• классах сжатого воздуха. Данные о классах качества содержат
следующую информацию в заданной последовательности:
1. Класс качества для твердых загрязнений.
2. Класс качества для содержания воды.
3. Класс качества для общего содержания масла (капельки, аэрозоль и пары)-
Структура и назначениесистемаВТпмятмП|
17
Таблица 1.1- Классы качества по DIN ISO 8573-1
Виды за
грязне
чний
Класс
качества
1
1. Содержание твердых
веществ
max. размер
частиц
мкм
0,1
1
15
40
max.
плотность частиц
мг/м3
2. Содержание
воды
0,1
1
10
max. точка росы
(°С)
-70
3. Содержание
масла
"max.
концентрация масла
мг/м3
-40
-20
+3
+7
+10
не определена
0,01
0,1
25
С экономической точки зрения, воздух высокого качества должен использоваться
только там, где он действительно нужен. Общие рекомендации по соотв- ствию
класса качества области применения сжатого воздуха даны в таблице 1.2 [37].
Таблица 1.2. Рекомендации по применению сжатого воздуха
^~"~^^Виды загрязнений
Область^^^^^^
применения ^""-"--^^
Горное дело
Чистка
Сварочные машины
Станки
Пневмоцилиндры
Пневмоаппараты
Упаковка
Прецизионные
регуляторы давления
Метрологические пнев-
моустройства
Пневматические опоры
Датчики
Продукты питания
Фотооб.аботка
Твердые вещества
Класс
5
5
5
5
5
3...5
5
3
2
2
2
2
1
мкм ""
40
40
40
40
40
5...40
40
5
1
Точка росы
воды
Класс
7
6
6
4
■ 4
4
4
4
4
3
"~о "2 Г
(°С)
-
+10
+10
+3
+3
+3
+3
+3
+3
?0
_ЛЛ _9Г)
1 1 '-—> |—™— —'■
" i 4 +3
0,01-0,1 2 -40
Содег
Класс
5
4
5
5
5
5
3
3
3
3
2
1
1
жание масла
мг/м3
■- 25
5
25
■■ 25
25
25
|ЩЩ ^
1
1
1
0,1
0 01
0,01
„vewa паспределения сжатого воздуха с раз-
На рисунке 1.11 представлена "^„ресиверы обычно устанавлива-
ветвленным трубопроводом. Воздухосборники^ у ^ ^ СГЛаживания пульса-
Ются в линии нагнетания за компрессором^ создаНия запаса сжатого воз-
Ций потока воздуха, поступающего из кОМ"^ико^ расходов в пневмосистеме, а
ДУха для использования при возникновени ения конденсата воды и масла, со-
также для охлаждения сжатого воздуха, отд ^ компрессора. Воздухосборники
Держащихся в сжатом воздухе, поступаЮмпресс0ров, у которых выходной поток
особенно необходимы для поршневых K0^J!^eccopH^x станциях между компрес-
имеет большую пульсацию. На крупных к £онцевые охладители и влагоотдели-
СоР°м и воздухосборником УстанавЛИВа1°М)НденСата. Так, например, для компрес-
тели, что позволяет избавиться ^^TL размер воздухосборника в литрах дол-
сора, создающего давление около 0.7 Мi . »*" атмосферного воздуха в ком-
*ен быть приблизительно в 30 раз больше под
li»
Глава I
Система распределения воздуха
Регулятор давления
Фильтр и влагоотделитель
К потребителю
Блок питания
J _____
Осушитель
воздуха
ДО
Вход атмосферы
воздуха
\
Промежуточный
охладитель
Дренажный
патрубок
(ДП)
компрессор
Дренажный
патрубок
(ДП)
Воздухосборник
в клапан
о датчик
в отстойник
. предохранительный
клапан
Рисунок 1.11
прессор, то есть для компрессора, потребляющего 50-10"3 м3/с атмосферного воз
ГУХОсбОРНИК еМКОСТКЮ пкппп ISOn тть.-т,чП М.,3_1П3 „..3_ 1ППГ
сор, то есть для компрессора, потребляющего 5010" м7с атмосферного
воздуха, требуется воздухосборник емкостью около 1500 литров (1м3= 103 дм3= 1000
литров).
Поскольку дальнейшее охлаждение воздуха может происходить в самих
распределительных воздухопроводах, их следует монтировать с наклоном в направ-
Г^ноГГГ°ЗДУХа (УКЛ°Н 1-2%)' ЧТОбы СИЛа тяжес™ и поток воздуха могли
гшГе™Т? К_кДренажным отрубкам, расположенным через соответствующие
Г^апаГм" иС"абжеННЫМч ^матическими конденсатоотводчиками (дренажны-
В р^елелит? }"" ПРедОТВРа^ния их переполнения,
зу JZ^ZJ^T^0^0^^ СЛСдует избегать расположенных вни-
^y^2^:izz:::z7^OMHo-в нижней точке байпасов сле-
Исключая дренажные патрубки все Tn..u „ к
ДУХопроводов должны быть рГпоГожены Г- - Ра-И3 РаспРеДелительных воз-
попадания конденсата в линии отб1а 1 РХНСИ ЧаС™ ДЛЯ предотвращения
ответвления для отбора воздуха ппт_-„Г I РаспРеДелительные воздухопроводы и
тить чрезмерные потери давлениТГ, ЫТЬ °ДН°Г° Р*31^- чт°бы предотвра-
потока в трубопроводах Трубные' (В°ЗНИкающие ПРИ прохождении воздушного
Из-за возможности охлаждения возп ДИНения также вызывают потери давления,
тельным воздухопроводам прелпочт* В° ВРСМЯ СГ° пРохо>ВДения по распредели-
сжатого воздуха как можно ближе к еЛЬНее Устанавливать блоки подготовки
ныи блок, примыкающий к возл^пг-к °ТУ ИСпольз°вания воздуха, чем один мощ-
Для гашения колебаний ы^Т"^
обеспечения одинаковой величины пТ В распРеДелительных трубопроводах и
шего сжатый воздух, .«аюли^*^^™ ДЛЯ ВССГО °боРудования, потребляю-
6ите™- У СЯ ПР°ме*Уточные ресиверы и ресиверы потре-
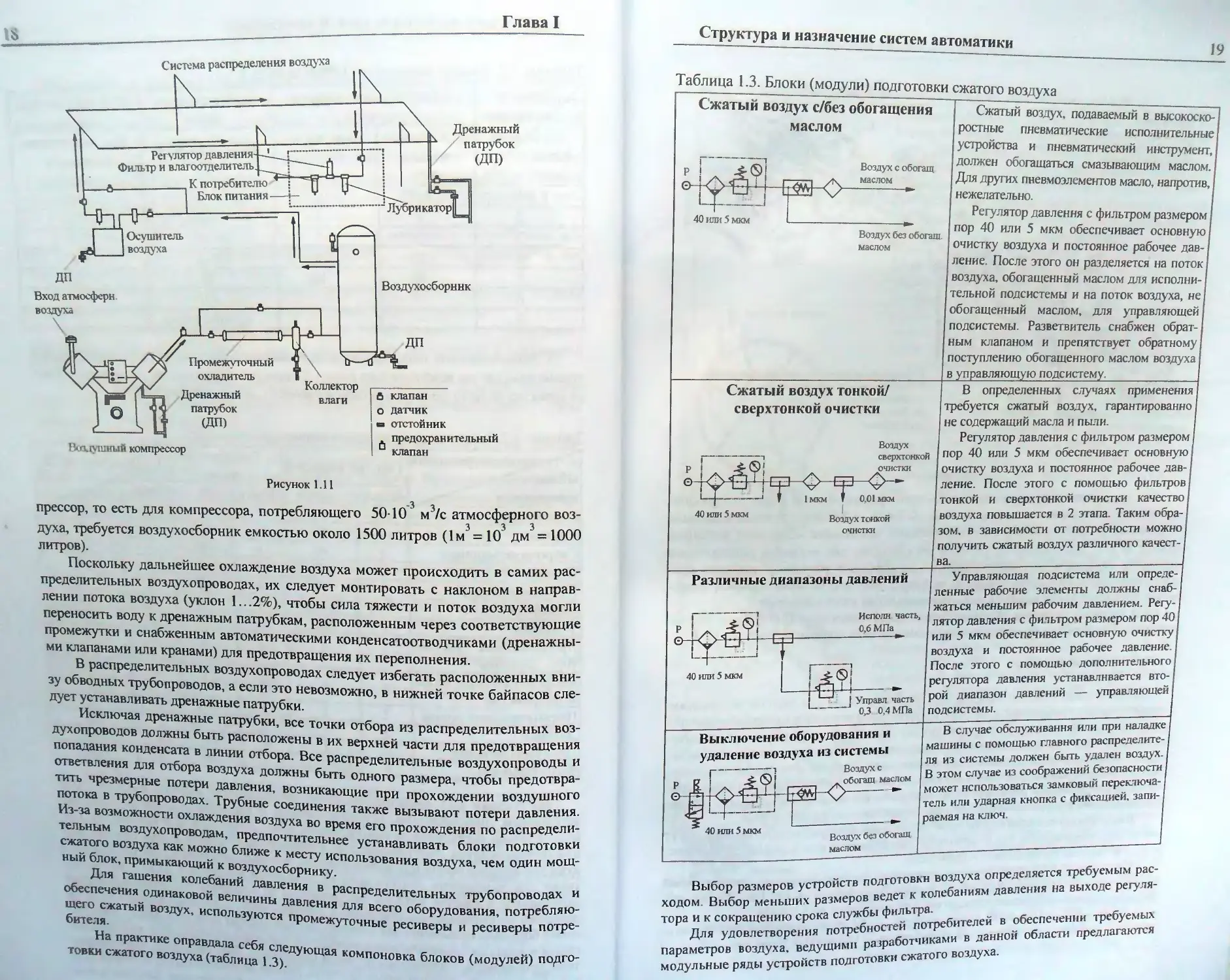
На практике оправдала себя г„„
товки сжатого воздуха (таблица 1.3)к°мпоновка блоков (модулей) подго-
Структура и назначение систем автоматики
Таблица 1.3. Блоки (модули) подготовки сжатого воздуха
I — z
19
Сжатый воздух с/без обогащения
маслом
4$
4*
■Ш-О
Воздух с обогащ
маслом
40 или 5 мкм
Воздух без обогаш.
маслом
Сжатый воздух, подаваемый в высокоско-|
ростные пневматические исполнительные/
устройства и пневматический инструмент,/
должен обогащаться смазывающим маслом.
Для других пневмоэлементов масло, напротив, j
нежелательно.
Регулятор давления с фильтром размером
пор 40 или 5 мкм обеспечивает основную)
очистку воздуха и постоянное рабочее
давление. После этого он разделяется на поток]
воздуха, обогащенный маслом для
исполнительной подсистемы и на поток воздуха, не|
обогащенный маслом, для управляющей!
подсистемы. Разветвитель снабжен
обратным клапаном и препятствует обратному
поступлению обогащенного маслом воздуха
в управляющую подсистему.
Сжатый воздух тонкой/
сверхтонкой очистки
Воздух
сверхтонкой
очистки
1мкм
.01 мкм
40или5мкм
Воздух тонкой
очистки
В определенных случаях применения!
требуется сжатый воздух, гарантированно!
не содержащий масла и пыли. I
Регулятор давления с фильтром размером |
пор 40 или 5 мкм обеспечивает основную/
очистку воздуха и постоянное рабочее дав-1
ление. После этого с помощью фильтров!
тонкой и сверхтонкой очистки качество!
воздуха повышается в 2 этапа. Таким
образом, в зависимости от потребности можно)
получить сжатый воздух различного
качества.
Различные диапазоны давлений
т
-га-
Исполн часть,
0,6 МПа
40или5мкм
т
! Управл часть
J 0,3 0,4 МПа
Выключение оборудования и
удаление воздуха из системы
Воздухе
маслом
<■ (S! . обогащ к
&Ц-то—
40 или 5 мкм
Воздух без обогащ
маслом
. Управляющая подсистема или
определенные рабочие элементы должны снаб-1
I жаться меньшим рабочим давлением. Регу-1
I лятор давления с фиаьтроч размером пор 40)
I или 5 мкм обеспечивает основную очистку |
(воздуха и постоянное рабочее давление.
IПосле этого с помощью дополнительного!
[регулятора давления устанавливается
второй диапазон давлений — управляющей I
I подсистемы.
В случае обслуживания или при наладке I
машины с помощью главного
распределителя из системы должен быть удален воздух. I
В этом случае из соображений безопасности |
может использоваться замковый переключа-1
тель или ударная кнопка с фиксацией, запи-1
раемая на ключ.
~ „тготовкн воздуха определяется требуемым рас-
Выбор размеров устройств "Ы™0™^^ давле„„я на выходе регуля-
ходом. Выбор меньших размеров ведет к колеи
тора и к сокращению срока службы фи*Ь^атоебителей в обеспечении требуемых
Для удовлетворения потребностей j ^^ предлагаются
параметров воздуха, ведушимп Р^^бот»п»
модульные ряды устройств подготовки ежа
Глннн I
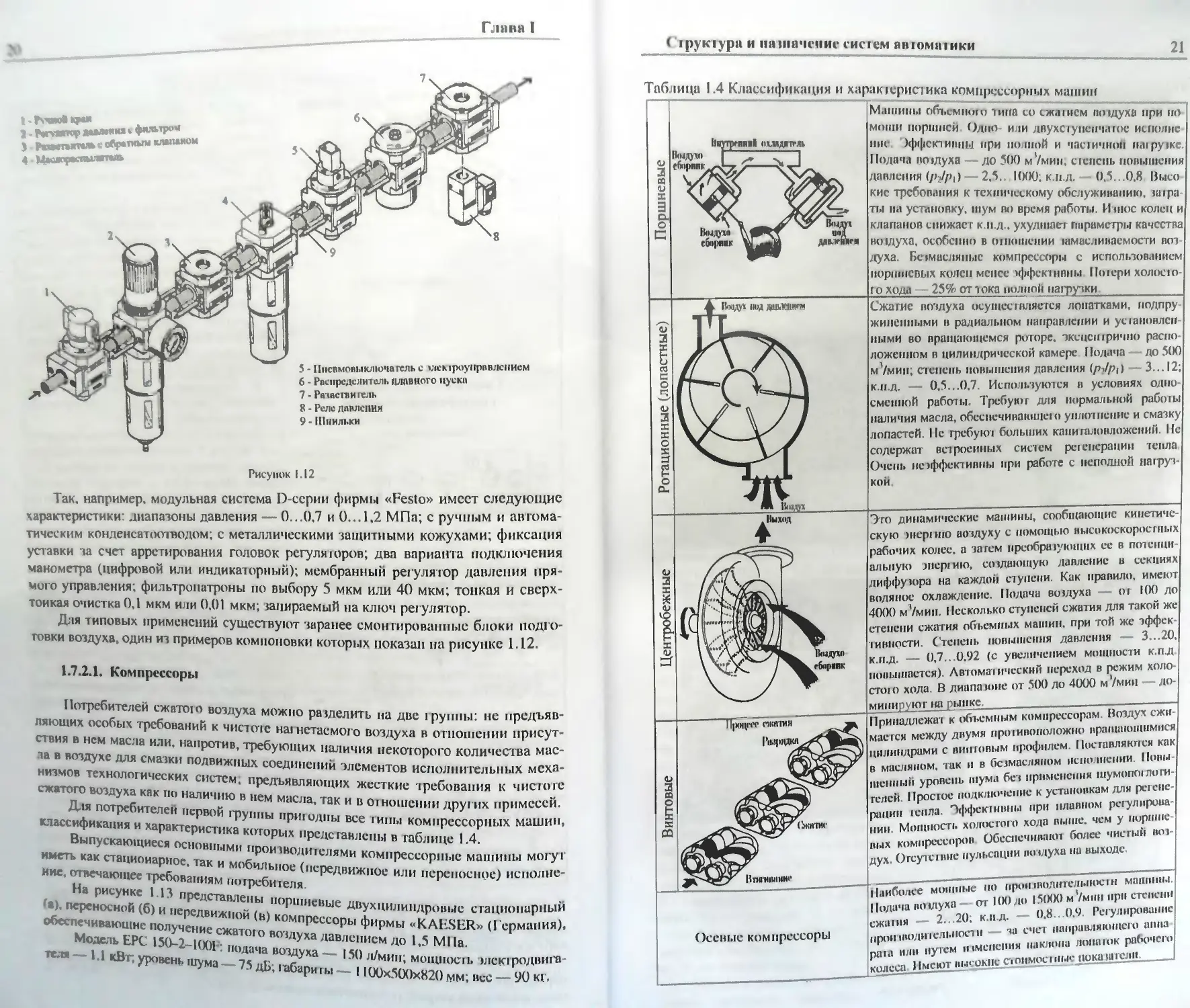
4 ЫЬекткпылатшь
5 -I IiicnMow.iключа гель с ълемроунрпвлснием
6 - Распределитель плавного пуска
7-Рачвсгпигель
8 - Реле лаплснин
9 - Шпильки
Рисунок 1.12
Так, например, модульная система D-ссрии фирмы «Festo» имеет следующие
характеристики: диапазоны давления — 0...0.7 и 0...1.2 МПа; с ручным и
автоматическим конденсатоотводом; с металлическими защитными кожухами; фиксация
уставки за счет арретированил головок рсгуляюров; два варианта подключения
манометра (цифровой или индикаторный); мембранный регулятор давления
прямою управления; фильтропатроны по выбору 5 мкм или 40 мкм; тонкая и
сверхтонкая очистка 0,1 мкм или 0.01 мкм; запираемый на ключ регулятор.
Для типовых применений существуют заранее смонтированные блоки
подготовки воздуха, один из примеров компоновки которых показан на рисунке 1.12.
1.7.2.1. Компрессоры
ляЮши^ГЛеЙГаТО,°,В03ДуХа М°Ж"° ра,делить »а Д»е ipymibi: не „редъяв-
ствиГв нем м„г ^ К ЧИС1Ше На,НС™мо'-° воздуха в отношении нрисут-
™ZZlZ^cZ' На"РОТИВ' ^У™"* '««ичия некоторого количества мае-
^^zz:zz:°:^:rсоедиис,,ий мтов ——,.,x МСха-
сж^тов^здухаГГ а^ чТГ:вГмГаГаТХ П° ^™ШЯ " ЧЖ™
Для потребителе,, . г а'Так и в 0Iношении других примесей.
■««Ф^Й^^^ ВСС '"'"" —Р-орпых машин,
ВыпускаюишесяГсГвт "и г "*с*с™>"»" в таблице 1.4.
иметь как стаВДоиаРиоеГГм27ШО?1,СЛЯМИ ком''Ре^Р»ь" машины могут
ние. отвечающее требов;„„я^^ГфебиТел^|"СреЛВИЖ"0е HJ1" переносное) иснолне-
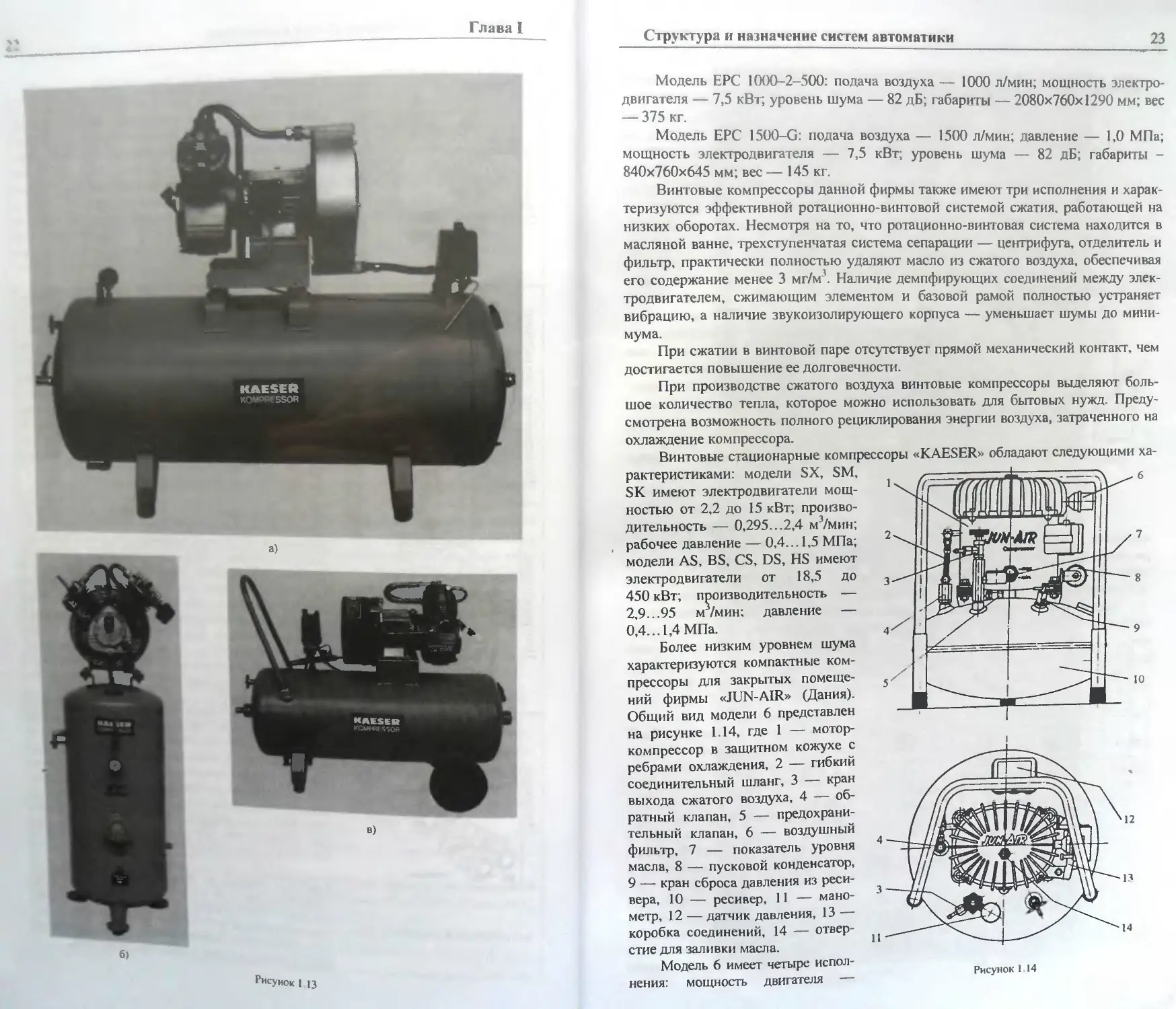
г«».переносиоГ(б)и"пеП,!е^
обеспечиваюшне получше ежа™? К0МПрСССоРь. фирмы «KABSER» (Германия).
Модель ЕРС №l-?m™™Z У™ ДаВЛС,,исм *' '-5 МПа.
тел" — 1.1 кВт. уровень шума __ 7s „г'*ПДуха ~~ '5() ^мин; мощное, ь wicki родви.-а-
/-•> ДЬ. i абари „.,- 1100x500x820 мм; вес - 90 кг.
ipyKiypa и нишачение сис1ем атомщики
Таблица 1.4 Классификация и харакиристика компрессорных машин
I—I ' г
Машины o(ti.i.mhiiiu Типа со ежа i нем по (духа при но
мон.и поршней Одно- или двухаупенчаюе исполне
inn )ф|||СК1иш1Ы при полной и часги'шои гьнруже.
Подачи во (Духа —до 5(H) мУмин, степень попышения
давления (pjlpt) — 2,5.. 1000; к.н.л. — 0,5...0.8 Высо
кис требования к техническому обслуживанию, шра-
|ты на установку, шум по время работы. И tnoc колец и
клапанов снижает к.н.л.. ухудшает параметры качества
ио1духа, особенно в опннпении ымасливаемости воэ-
|духа. Бе (масляные компрессоры с использованием
поршневых колен менее тффеюивиы Ио.ери холост-
|f о хода — 25% оттока полной нагрузки
. ■ .—■ *
(Сжатие воздуха осуществляется лопатками,
подпружиненными и радиальном направлении и
усыновленными во вращающемся роторе, зксцсшрично
расположенном п цилиндрической камере Подача — до 500
м'/мин; степень повышения давления ip-Jp\) — 3... 12;
к.н.д. — 0,5...0,7. Используются п условиях
односменной работы. Требуют для нормальной paCoibi
наличия масла, обеспечивающею уплотнение и смазку
лопастей. Не гребукп больших капиталовложений. Не
.содержат встроенных систем регенерации тепла
[Очень неэффективны при работе с неполной
нагрузкой
Это динамические машины, сообщающие
кинетическую Miepnno воздуху с помощью высокоскоростных
рабочих колее, а затем нреобра)укшшх ее в потснци-1
альпую jiiepiHio, создающую давление в секциях
диффуюра на каждой ступени. Как правило, имеют
водяное охлаждение. Подача вомуха — or КЮ до
4000 м'/мин. Несколько ступеней сжатия для такой же
степени сжатия объемных машин, при той же
эффективности. Степень повышения давления — 3...20.
к.н.д. — 0,7...0,92 (с увеличением мощности к.п.д
повышается). Автоматический переход в режим
холостою хода. В диапаюне от 500 до 4000 м'/мин — до-
миннруюг на рынке, I
Принадлежат к объемным компрессорам. Воздух
сжимается между двумя прожвоположно вращающимися,
ншшдрами с нипгопым профилем. Поставляются как
масляном, так и в бстмасляпом исполнении.
Повышенный уровень шума без применения шумопгмлоги-
гелей. Простое подключение к установкам для
регенерации 1спла. Эффект ними при плавном регул
пронации. Мощность холостого хода выше, чем у пиршне-
пых компрессоров Обеспечивают более чистый boi-
дух. Огсутс.пне пульсации тмдуха на выходе.
,1аигчмн.е мощные но нриншолитслыюсгн мшннш.1.|
Подача во «духа— от КИ) до 15(КХ) м'/мнн при степени
ежашя — 2...20: к.н.д. — 0.8...0,4. Регулирование
нроншоднтслыюетн — за счет направляющего апна
para или путем щмепепия наклона лопаюк рабочею
колеса 11меют иы-окне d оимос i иы*- показатели. |
V
*u
*•* *
6)
KAESER
K» ■• SSOR
a)
Глава I
"J
*t
Tiia
KAESER
KCUWFSSOfl
B)
Рисуиок 1 13
Структура и назначение систем автоматики
23
Модель ЕРС 1000-2-500: подача воздуха — 1000 л/мин; мощность
электродвигателя — 7,5 кВт; уровень шума — 82 дБ; габариты — 2080x760x1290 мм; вес
— 375 кг.
Модель ЕРС 1500-G: подача воздуха — 1500 л/мин; давление — 1,0 МПа;
мощность электродвигателя — 7,5 кВт; уровень шума — 82 дБ; габариты -
840x760x645 мм; вес — 145 кг.
Винтовые компрессоры данной фирмы также имеют три исполнения и
характеризуются эффективной ротационно-винтовой системой сжатия, работающей на
низких оборотах. Несмотря на то, что ротационно-винтовая система находится в
масляной ванне, трехступенчатая система сепарации — центрифуга, отделитель и
фильтр, практически полностью удаляют масло из сжатого воздуха, обеспечивая
его содержание менее 3 мг/м . Наличие демпфирующих соединений между
электродвигателем, сжимающим элементом и базовой рамой полностью устраняет
вибрацию, а наличие звукоизолирующего корпуса — уменьшает шумы до
минимума.
При сжатии в винтовой паре отсутствует прямой механический контакт, чем
достигается повышение ее долговечности.
При производстве сжатого воздуха винтовые компрессоры выделяют
большое количество тепла, которое можно использовать для бытовых нужд.
Предусмотрена возможность полного рециклирования энергии воздуха, затраченного на
охлаждение компрессора.
Винтовые стационарные компрессоры «KAESER» обладают следующими
характеристиками: модели SX, SM,
SK имеют электродвигатели
мощностью от 2,2 до 15 кВт;
производительность — 0,295...2,4 м3/мин;
рабочее давление — 0,4... 1,5 МПа;
модели AS, BS, CS, DS, HS имеют
электродвигатели от 18,5 до
450 кВт; производительность —
2,9...95 м/мин; давление —
0,4... 1,4 МПа.
Более низким уровнем шума
характеризуются компактные
компрессоры для закрытых
помещений фирмы «JUN-AIR» (Дания).
Общий вид модели 6 представлен
на рисунке 1.14, где 1 — мотор-
компрессор в защитном кожухе с
ребрами охлаждения, 2 — гибкий
соединительный шланг, 3 — кран
выхода сжатого воздуха, 4 —
обратный клапан, 5 —
предохранительный клапан, 6 — воздушный
фильтр, 7 — показатель уровня
масла, 8 — пусковой конденсатор,
9 — кран сброса давления из
ресивера, 10 — ресивер, 11 —
манометр, 12 — датчик давления, 13 —
коробка соединений, 14 —
отверстие для заливки масла.
Модель 6 имеет четыре
исполнения: мощность двигателя —
Рисунок 1 14
Глава I
синий черный голубой белый коричневый желто/зеленый
Рисунок 1.15
0,34 кВт; производительность
— 50 л/мин; создаваемое
давление — 0,8 МПа; объем
ресивера—4, 10, 15 и 25 л;
напряжение питания — 220 В
потребляемый ток — 2,65 А
вес — 20, 22,5, 27,5 и 30,5 кг:
уровень шума — 45 дБ.
Монтажная схема
электропитания показана на
рисунке 1.15, где 1 — реле
пуска, 2 — пусковой
конденсатор, 3 — тепловая защита
мотора, 4 — контрольная
лампа, 5 — соединительная
коробка, 6 — датчик
давления. Для удобства монтажа
провода имеют разный цвет.
Ограничения в
отношении длительности
непрерывной работы
компрессора иллюстрируются
графиками на рисунке 1.16.
Кривая 1 показывает
время непрерывной работы
компрессора при различных
давлениях, до его отключения по команде теплового реле при достижении
температуры около 115°. Эта величина рассчитана с момента включения компрессора при
температуре двигателя 20°С. Например, компрессор может обеспечивать давление
0,55 МПа в течение 128 минут, после чего произойдет его автоматическое отключение.
Кривая 2 показывает рекомендуемое время работы компрессора в течение
одного часа при обеспечении различных давлений. Так, например, при обеспечении
давления 0,45 МПа рекомендуемое
время непрерывной работы
составляет 70% от часа, что соответствует
42 мин. Оставшиеся 18 минут
компрессор отключен.
На рисунке 17 показан общий
вид (а) и схема устройства
винтового компрессора (б) компании
«Летнее» (Украина), включающая в
себя: 1 — воздушный фильтр, 2
клапан всасывающий, 3 — винтовая
пара, 4 — клапан минимального
давления, 5 — масляный фильтр, 6
— фильтр-сепаратор масло/воздух,
7 — радиатор масляный, 8 — Ра"
диатор воздушный, 9 — ременная
передача, 10 — электродвигатель,
11 — осушитель воздуха
холодильного типа, 12 — воздушный ресивер, 13
— блок фильтров очистки сжатого
воздуха.
03 0,4 0^
Рисунок 1.16
0,8 МПа
Структура и назначение систем автоматики
25
Ь *
ЛЕТ
7 В
а)
Рисунок 1.17
б)
ь
Глава I
Замкнутая система охлаждения, циркуляции и очистки масла обеспечивает
хамкгеристику процесса сжатия воздуха максимально приближенную к изотерме.
В Оттаве компрессора имеются информационно-сигнализирующие устройства,
обеспечивающие контроль температуры, учет рабочего времени, выдачу на
матричный индикатор текстовых сообщений о режимах работы компрессора и
необходимости проведения техобслуживания, включающие аварийную сигнализацию
при неисправности электровентилятора системы охлаждения, приводного
электродвигателя и при превышении допустимой температуры работы компрессора.
Входящий в состав компрессора электронный блок управления обеспечивает
контроль и поддержание нормального давления, энергосберегающий режим
холостого хода, оптимальной температуры работы и аварийную остановку компрессора.
Компания выпускает ряд компрессоров различных моделей от ВК 10-10,
имеющего производительность — 1000 л/мин, мощность двигателя — 75 кВт,
напряжение питания — 380 В при частоте тока в 50 Гц, вес — 270 кг, габариты —
0,9x0,7x1 м и обеспечивающего давление 1,0 МПа, до модели ВК 15-15-500 Д,
имеющего ресивер на 500 л, производительность — 1130 л/мин, мощность
двигателя — 11 кВт, напряжение питания — 380 В при частоте в 50 Гц, вес — 450 кг,
габариты — 2x0,7x1,6 м и обеспечивающего давление 1,5 МПа.
1.7.2.2. Вакуумные насосы
Создание вакуума обеспечивается либо с помощью эжекторов, либо с
помощью вакуум-насосов. Последние обеспечивают более высокую
производительность и имеют те же конструктивные решения, что и компрессоры.
В последнее время все большее распространение получают лопастные,
винтовые и кулачковые вакуум-насосы, среди которых можно отметить пластинчато-
роторные маслоуплотненные и абсолютно сухие насосы, а также сухие ротацион-
но-кулачковые насосы фирмы «BUSCH» (Германия), винтовые фирмы «KAESER»
(I ермания).
На рисунке 1.18 представлен общий вид (а) и разрез (б) пластинчато-
роторного (лопастного) маслоуплотняемого вакуумного насоса модели RA 0063 Е
фирмы «BTJSCH», имеющего в своем составе следующие узлы и детали: 1 — отсек
улавливания масляных паров, 2 - всасывающий фланец, 3 — смотровое окно
уровня масла, 4 - сливная пробка, 5 - заливная пробка, 6 выхлопной клапан,
ноТЙнГ , Г™ (Л°Па"Ь)' 8 ~ Р°Т0Р' 9 - «ыхлопной фильтр, 10 - выхлоп-
SZTJir ,ТЛЯТ ФИЛИР> 12 ~ п°™™тель масляного тумана, 13 -
обеспечивают™JI ~ ^"^ ПаНСЛИ обслУживания. Насосы данной модели
fSSZSrSr* ПреДельного вакУУма от -0,09995 МПа до -0,098 МПа.
K^SSSiSSS^?^ электроприводом от 0,1 до 30 кВт
Средний срок службы - б^'е 2ШОО *"' С0СТаШШет 0Т 3 *> 150° м /час'
фильтров — кажлие яп/w «wT часов; замена выхлопных и масляных
(2 литр; масла? 500(Р6000 "асов работы; смена масла - через 10000 часов
енные газоба.адаст^ыГк^па'н'ы" а"4 " Пар0газовых смесей предусмотрены встро-
имеется специальный блок (рисунок 1Р8б)"РКУЛЯЦИИ " ВНутренней очистки масла
Ю25 С фирмы "^ИСН^(шсунпТ°1Рт°РНЫе вакУУмнь'е насосы серии SECO SV
ДО 250 м3/час и имеют соответгтп обеспечивают производительность от 2
£Д»222 кг. Развиваемый ^м"-or TlE^T °Т °'18 Д° 7'5 кВт' ВСС ~ °Т
обеспечивается за счет исполкяп Д0 ~°'085 МПа- Работа этих насосов
материалов, из которых изготоалГ^™"/Н™ФрИКЦИОННЫХ самосмазывающихся
лопатки, изготовленные из твевпых рабочие л°патки 2 (рисунок 1.19,6). Такие
V углегРаФитных или менее твердых смольно-
Глава I
^ н^сТвХ.тсчизает.я фитьтром всасывания I фильтром выхлопа (версия
компрессора) 4 и клапаном-глушителем выхлопа 5.
Хкл работы насоса без всякого обслуживания составляет 6000...7000 часов,
после чего требуется замена рабочих лопаток. Такие насосы уступают маслоуп-
лотнпошим мочелям лишь тем, что ограничены в области создания вакуума в
пределах -0095 -0,085 МПа но причине одноступенчатого исполнения. Создание
двух- и трехступенчатых насосов, способных обеспечить получение более высоких
значении вакуума, во многом зависит от достижений в области пар сухого трения.
Вакуум-насосы этой же фирмы серии Mink Ml 1252 BV (рисунок 1.20,а)
характеризуется тем, что элементы механизма откачки представляют собой
ротационные з>бья-кулачки 2 (роторы Рутса или когтеобразные роторы),
смонтированные в корпусе 1, образую! камеру сжатия 3 (рисунок 1.20,6). Эти кулачки
расположены на двух синхронно вращающихся валах, с зацеплением вне зоны откачки.
При вращении они не соприкасаются друг с другом, равно как и с расточками
корпуса Являясь сухим и экологически чистым оборудованием, они имеют низкое
энертпотребтение, малые габариты, высокую надежность в работе (около 24000
часов без обслуживания)
Модели Mink могут быть исполнены с возможностью управления скоростью
и процессом откачки, благодаря использованию современного электропривода с
регулируемой частотой вращения приводного вала. Такие модели удобно
вписываются в современные производственно-технологические системы с ЧПУ с общим
управлением от ПЭВМ или свободно программируемых контроллеров.
Производительность насосов — 65...500 мУчас, при наличии соответственно
электропривода мощностью от 1,5 до 9,2 кВт и весе насоса от 105 до 310 кг
Развиваемый вакуум: -0,097; -0,09 или -0,08 МПа.
1.7.2.3. Фильтры-влагоотделители и осушители
и 6е]оГ^ногпТаКСЖаТОГО В°ЗДуХа'Как южного, многосторонне применяемого
l^r^yZ^Z™*™ ЛИШЬ ТО'Да' ™ °н 'феД-авляется шдр*
^J^Z^^LZ^^^ "*«»P«h"W" —ый воздух
крупные тверГеТааицьГи ме Г "аРЫ ^ ИПЛИ ШСЛа; мас"янь'й ^ман;
ржавчины. Эти загтопне.и.,, и» к*^ твердые частицы, являющиеся отложениями
««п. « ^:™:^~::г™ и"и ,асгач"° удш",ть в мв"-
разные проблемы- у ' как их присутствие может вызвать
~ выход из стрс!я прибо ов ° ""еВМ0"Ривад;
— преждевременный износ ^ГГ™," и,меРИте"ьных инструментов;
* *Р И,Н0С Убиении (разгерметизацию) „невмоэлементов
»фжки производства0"' "0ВЫШаюгся Расходы на техническое обслуживание и из-
Рассматривая поочередно каж,,,,:.
«елует делать выводы в относи 'Г Ш*Я™»»» и способы «о устранения.
••иду основное нажаче„иеис"о1ГДа,,1,ОСТИ ТРебУемых Затрат, имея при
bJyeMoro сжатою воздуха.
Структура и назначение систем авюмагики
29
Вода
В любой системе ежаioiо воздуха вода изначально присутствует на выходе из
компрессора в виде паров, а далее, ко. да воздух охлаждается, она присутствует и в
жидкой и в .азообрашой фамх, и, поскольку стоимость удаления воды в жидком
состоянии относительно меньше, рассмотрим сначала этот вид загряшения.
Воздух, содержащий водяные пары, называется влажным воздухом
и характеризуется абсолютной и относительной влажностью Отношение
абсолютной влажности к максимальному количеству воды в виде пара, которое могло
бы содержаться в единице объема воздуха при тех же температуре и давлении,
называется относительной влажностью.
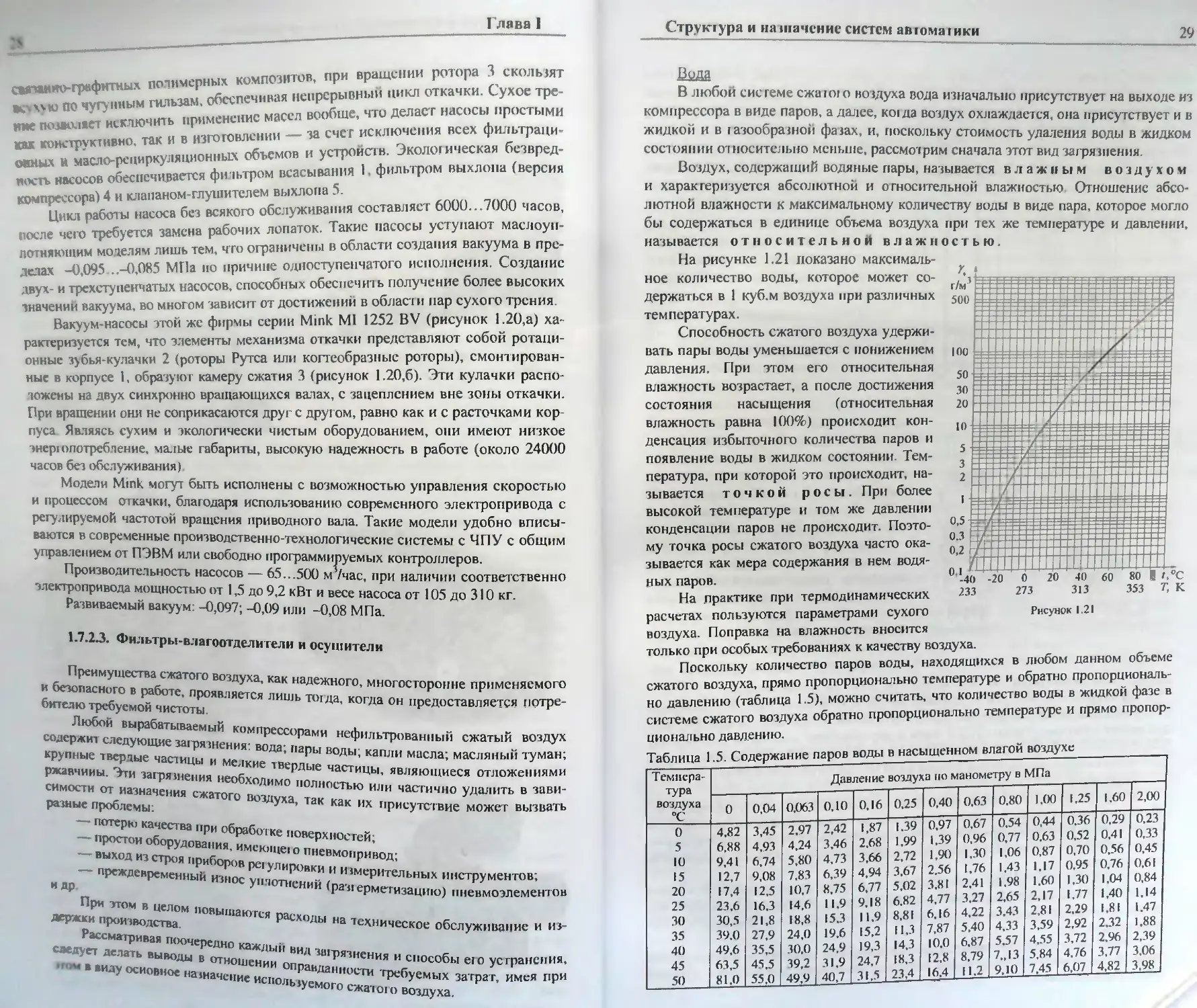
На рисунке 1.21 показано
максимальное количество воды, которое может
содержаться в 1 куб.м воздуха при различных
температурах.
Способность сжатого воздуха
удерживать пары воды уменьшается с понижением
давления. При этом его относительная
влажность возрастает, а после достижения
состояния насыщения (относительная
влажность равна 100%) происходит
конденсация избыточного количества паров и
появление воды в жидком состоянии.
Температура, при которой это происходит,
называется точкой росы. При более
высокой температуре и том же давлении
конденсации паров не происходит.
Поэтому точка росы сжатого воздуха часто
оказывается как мера содержания в нем
водяных паров.
На практике при термодинамических
расчетах пользуются параметрами сухого
воздуха. Поправка на влажность вносится
только при особых требованиях к качеству воздуха.
Поскольку количество паров воды, находящихся в любом данном объеме
сжатого воздуха, прямо пропорционально температуре и обратно
пропорционально давлению (таблица 1.5), можно считать, что количество воды в жидкой фазе в
системе сжатого воздуха обратно пропорционально температуре и прямо
пропорционально давлению.
Таблица 1.5. Содержание паров воды в насыщенном влагой воздухе
Давление воздуха по манометру в МПа
Рисунок 1.21
Температура
воздуха
°С
о
5
10
15
20
25
30
35
40
45
50
0
4,82
6,88
9,41
12,7
17,4
23,6
30,5
39.0
49,6
63,5
81,0
0,04
3,45
4,93
6,74
9,08
12.5
16,3
21.8
27.9
35,5
45,5
55.0
0,063
2.97
4.24
5.80
7,83
10,7
14,6
18,8
24,0
30.0
39,2
49,9
0.10
2.42
3.46
4,73
6,39
8,75
11.9
15.3
19.6
24.9
31,9
40,7
0,16
1,87
2.68
3.66
4.94
6.77
9,18
11.9
15.2
19,3
24.7
31.5
0.25
1.39
1,99
2,72
3.67
5,02
6.82
8.81
11,3
14,3
18.3
23,4
0.40
0,97
1.39
1,90
2.56
3,81
4,77
6.16
7,87
10.0
12.8
16.4
0,63
0.67
0,96
1.30
1.76
2.41
3,27
4,22
5,40
6.87
8.79
11.2
0,80
0.54
0,77
1,06
1.43
1.98
2.65
3.43
4.33
5.57
7..I3
9,10
1.00
0.44
0.63
0,87
1,17
1.60
2.17
2.81
3,59
4.55
5,84
7.45
1,25
0.36
0.52
0.70
0.95
1,30
1.77
2.29
2,92
3,72
4.76
6,07
1.60
0,29
0,41
0,56
0,76
1.04
1,40
1.81
2.32
2.%
3.77
4,82
2,00
0,23 |
0,33
0,45
0,61
0,84
1,14
1.47
1.88
2.39
3.06
3.98,
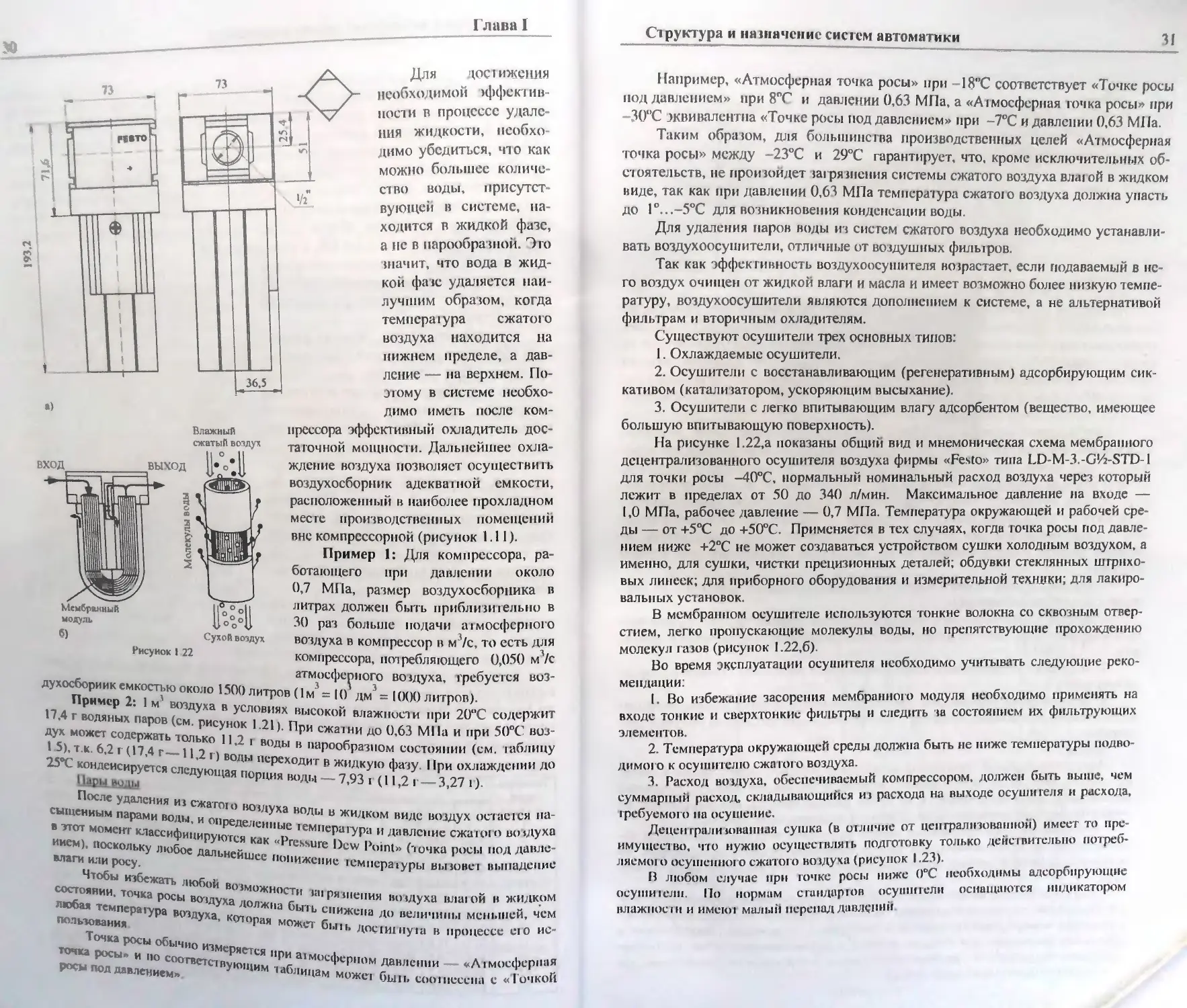
Влажный
сжатый воздух
ВХОД
ВЫХОД
Мембранный
модуль
6)
Рисунок I 22
т
Сухой воздух
Глава I
Для чос! ижеиня
необходимой зффектии-
1ЮС1И в процессе
удаления жидкости,
необходимо убедиться, что как
можно большее
количество воды,
присутствующей в системе,
находится в жидкой фазе,
а не в парообразной. Эю
значит, что вода в
жидкой фаю удаляется
наилучшим обра юм, когда
темпера 1 ура сжатого
воздуха находится на
нижнем пределе, а
давление — на верхнем.
Полому в системе
необходимо иметь после
компрессора эффективный охладитель
достаточной мощности. Дальнейшее
охлаждение воздуха позволяет осуществить
воздухосборник адеквашой емкости,
расположенный в наиболее прохладном
месте производственных помещений
вне компрессорной (рисунок 1.11).
Пример 1: Для компрессора,
работающего при давлении около
0,7 MI la, размер воздухосборника в
литрах должен быть приблизительно в
30 раз больше подачи ашосферпого
воздуха в компрессор в м3/с, то есть для
компрессора, потребляющего 0,050 м^/с
лухосЛм™.,.,.. атмосферного воздуха, требуется виз-
^::::ь^1тю ,50° »«*»"»* ><> д-з=i«» л^ро»,.
П.4 г водяных паров (смТсунГГ7пХпЬ,СОКОЙ влаж"^и "Р" 20"С содержит
ДУХ может содержать только 112 Р" СЖа'НИ д0 °'63 М|1а и "Ри 50°С вш"
* 5), т.к. 6.2 г (17 4 г— 11 ? п « ' ' В°ДЫ В 1,аРообРазном состоянии (см. тблицу
25Т конденсируется вдюшая™ "Среходит в ЖИДКУ'<> фазу. При охлаждении до
щ ^ н/ едукиодя порция вод... — 7,93 i (11,2, 3,27 i).
После удаления из сжатою во
СЫЩСМИЫМ парами воды и онпеле, ** В°ЛЬ1 И жи;'Ком виде воздух остас1СЯ па-
" *"" моме»т ^ассиф„и„рУ1о.г^е"11Ь;е ,ем,,еРагУра и давление сжа.от «„духа
иием). поскольку любое дкльнейш1 ^ DcW l>oint» ^чка росы под даиле-
«-«иросу. дальнеишее понижение ,еМ11Сра1уры BJ0^ „„шадсние
Чтобы иэбежать любой в
^вик точка росы во^ТолжнаТ и"РЯ1"е"ия ">«ДУхв »...ой » жидком
^ГиГ,ура Вотд^ «С^ сГГГдо вели"" м< <й-чсм
Точка росы обычное "У'а " """"^ И° ""
^^е^^ ~ .А-мосферная
ниеМй чцам Мож<-ч был, соотесспа с «Точкой
Структура и назначение систем автоматики
31
Например, «Атмосферная точка росы» при -18"С соответствует «Точке росы
под давлением» при 8°Г и давлении 0,63 МПа, а «Агмосферпая точка росы» при
-30"С эквивалентна «Точке росы иод давлением» при -7°С и давлении 0,63 МПа.
Таким образом, для большинства производственных целей «Атмосферная
точка росы» между -23°С и 29°С гарантирует, что. кроме исключительных
обстоятельств, не произойдет загрязнения системы сжатого воздуха влагой в жидком
виде, так как при давлении 0,63 МПа температура сжатою воздуха должна упасть
до Г...-5°С для возникновения конденсации воды.
Для удаления паров воды из систем сжатого воздуха необходимо
устанавливать воздухоосушители, отличные от воздушных филыров.
Так как эффективность воздухоосушителя возрастает, если подаваемый в
него воздух очищен от жидкой влаги и масла и имеет возможно более низкую
температуру, воздухоосушители являются дополнением к системе, а не альтернативой
фильтрам и вторичным охладителям.
Существуют осушители трех основных типов:
1. Охлаждаемые осушители.
2. Осушители с восстанавливающим (регенеративным) адсорбирующим
сиккативом (катализатором, ускоряющим высыхание).
3. Осушители с легко впитывающим влагу адсорбентом (вещество, имеющее
большую впитывающую поверхность).
На рисунке 1.22,а показаны общий вид и мнемоническая схема мембранного
децентрализованного осушителя воздуха фирмы «Festo» типа LD-M-3.-C/2-STD-1
для точки росы -40°С, нормальный номинальный расход воздуха через который
лежит в пределах от 50 до 340 л/мин. Максимальное давление на входе —
1,0 МПа, рабочее давление — 0,7 МПа. Температура окружающей и рабочей
среды — от +5°С до +50°С. Применяется в тех случаях, когда точка росы под
давлением ниже +2°С не может создаваться устройством сушки холодным воздухом, а
именно, для сушки, чистки прецизионных деталей; обдувки стеклянных
штриховых линеек; для приборного оборудования и измерительной техники; для
лакировальных установок.
В мембранном осушителе используются тонкие волокна со сквозным
отверстием, легко пропускающие молекулы воды, но препятствующие прохождению
молекул газов (рисунок 1.22,6).
Во время эксплуатации осушителя необходимо учитывать следующие
рекомендации:
1. Во избежание засорения мембранного модуля необходимо применять на
входе тонкие и сверхтонкие фильтры и следить за состоянием их фильтрующих
элементов.
2. Температура окружающей среды должна быть не ниже температуры
подводимого к осушителю сжатого воздуха.
3. Расход воздуха, обеспечиваемый компрессором, должен быть выше, чем
суммарный расход, складывающийся из расхода на выходе осушителя и расхода,
требуемого па осушение.
Децентрализованная сушка (в оишчие от централизованной) имеет то
преимущество, что нужно осуществляв подготовку только действительно
потребляемою осушенного сжатого воздуха (рисунок 1.23).
П любом случае при точке росы ниже 0°С необходимы адсорбирующие
осуши 1елп. По нормам стандарта осушители оснащаются индикатором
влажное!и и имею! малый перепад давлений
Глава I
Компрессор М
Охладитель
Масюотделитель
Фильтр
предварительной очистки
^(центральный)^ J
Ресивер высокого
Давления
Компрессорная
Входной фильтр
Осушитель
i
Блок подготовки
воздуха
Выходной фильтр
Рисунок 1.23
Потребитель
Потребитель
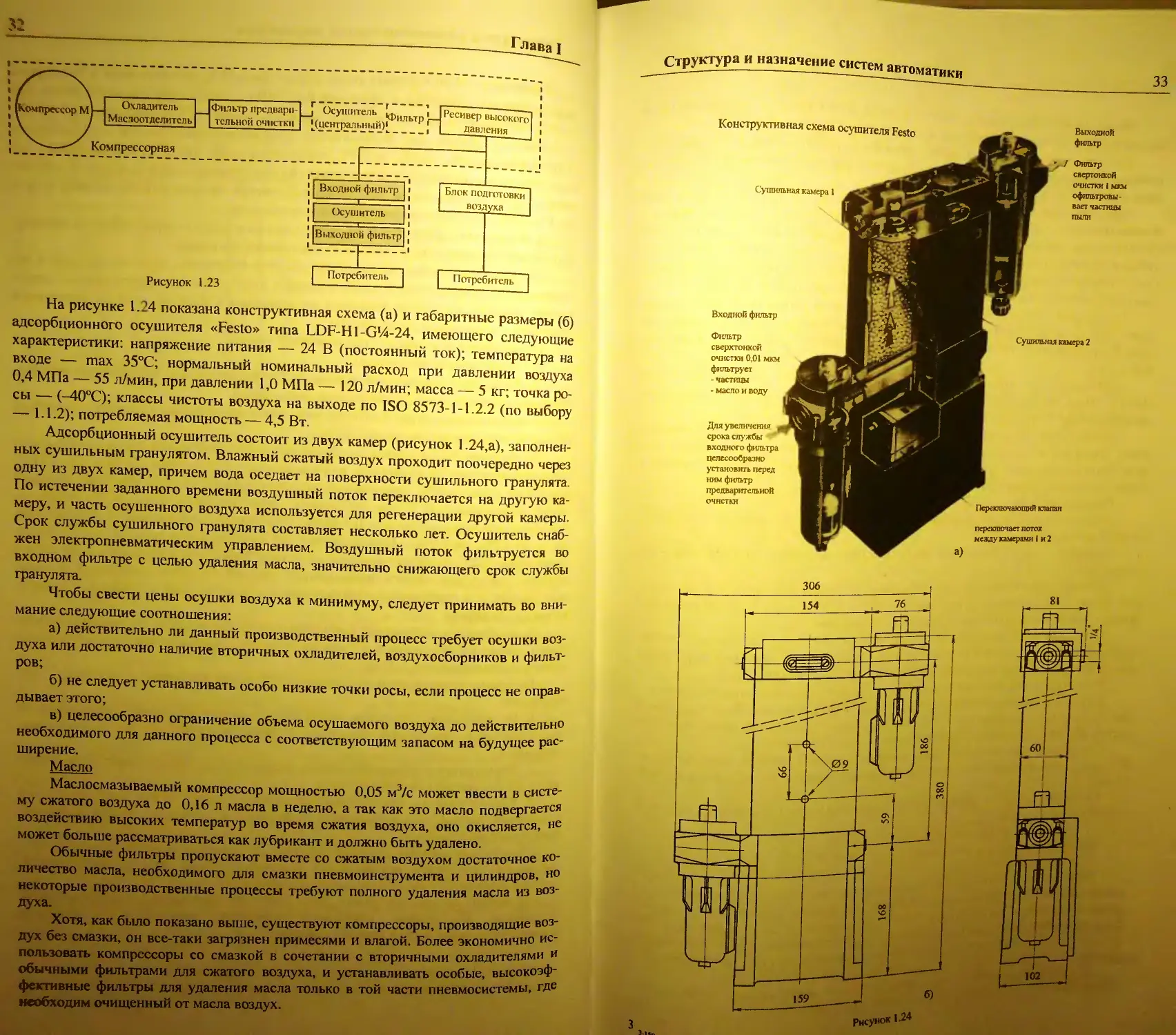
На рисунке 1. 4 показана конструктивная схема (а) и габаритные размеры (б)
адсорбционного осушителя «Festo» типа LDF-H1-GV4-24, имеющего следующие
характеристики: напряжение питания — 24 В (постоянный ток); температура на
входе — max 35°C; нормальный номинальный расход при давлении воздуха
0,4 МПа — 55 л/мин, при давлении 1,0 МПа — 120 л/мин; масса — 5 кг; точка
росы — (-40°С); классы чистоты воздуха на выходе по ISO 8573-1-1.2.2 (по выбору
— 1.1.2); потребляемая мощность — 4,5 Вт.
Адсорбционный осушитель состоит из двух камер (рисунок 1 -24,а),
заполненных сушильным гранулятом. Влажный сжатый воздух проходит поочередно через
одну из двух камер, причем вода оседает на поверхности сушильного гранулята.
По истечении заданного времени воздушный поток переключается на другую
камеру, и часть осушенного воздуха используется для регенерации другой камеры.
Срок службы сушильного гранулята составляет несколько лет. Осушитель
снабжен электропневматическим управлением. Воздушный поток фильтруется во
входном фильтре с целью удаления масла, значительно снижающего срок службы
гранулята.
Чтобы свести цены осушки воздуха к минимуму, следует принимать во
внимание следующие соотношения:
а) действительно ли данный производственный процесс требует осушки
воздуха или достаточно наличие вторичных охладителей, воздухосборников и
фильтров;
б) не следует устанавливать особо низкие точки росы, если процесс не
оправдывает этого;
в) целесообразно ограничение объема осушаемого воздуха до действительно
необходимого для данного процесса с соответствующим запасом на будущее
расширение.
Масло
Маслосмазываемый компрессор мощностью 0,05 м3/с может ввести в
систему сжатого воздуха до 0,16 л масла в неделю, а так как это масло подвергается
воздействию высоких температур во время сжатия воздуха, оно окисляется, н
может больше рассматриваться как лубрикант и должно быть удалено.
Обычные фильтры пропускают вместе со сжатым воздухом достаточное ко
личество масла, необходимого для смазки пневмоинструмента и цилиндров,
некоторые производственные процессы требуют полного удаления масла из во
Духа. з-
Хотя, как было показано выше, существуют компрессоры, производящие ^
дух без смазки, он все-таки загрязнен примесями и влагой. Более экономично ^
пользовать компрессоры со смазкой в сочетании с вторичными охладителям
обычными фильтрами для сжатого воздуха, и устанавливать особые, высок у
фективные фильтры для удаления масла только в той части пневмосистемы,
необходим очищенный от масла воздух.
и
Глава I
Масло может находиться в сжатом воздухе в трех видах - водно-масляная
** Z\TZZrP^Z^^y^ — б»ть удалена с
w« сытного Дыр-, но Для удаления аэрозоли и паров масла необхо-
^Г^Г^зГ^т размеры капель в диапазоне от 0 01 до 1 микрона
и да^ б^ше нГнаиболее причиняющие беспокойство (около 90%) находятся в
обученном диапазоне размеров. Из-за их малых размеров и массы на них
практически не влияют центробежные силы, создаваемые потоком воздуха в
большинстве стандартных воздушных фильтров и их удаление возможно только с
помощью специальных слипающих (связывающих мелкие частицы) фильтров.
В условиях нормальной эксплуатации длительная скорость потока воздуха
через фильтр не должно превышать 75% максимальной расчетной пропускной
способности фильтра, так как возникает риск повторного заноса масла в
воздушный поток.
Счипаюший фильтр, пропускающий при стандартных испытаниях менее
0.001% масла, обеспечивает получение сжатого воздуха с остаточным
содержанием масла менее 1 мг/м3 (по весу 1 часть в 1 миллионе).
Для большинства процессов удаление паров масла не является
необходимостью, кроме тех случаев, когда их запах недопустим. Это касается, в первую
очередь, производственных процессов в фар\ . кологии и пищевой промышленности, а
также различных дыхательных аппаратов.
Твердые частицы
Твердые частицы присутствуют в любой системе сжатого воздуха независимо
от типа компрессора.
Во-первых, это атмосферная пыль, всасываемая через входные отверстия
компрессора.
Во-вторых, это продукты коррозии, возникающей под действием воды и
слабых кислот, образующихся в результате взаимодействия воды и газов, таких,
например, как двуокись серы, всасываемой компрессором
т^ЗТ*' ^ С°единения У™еР°Да, образующиеся под действием темпера-
^ZlZr:™:?^™ °Т °б"ЧН0ГО "»» У-родных поршневых
фГи^киТГ В НеКОТ°РЫХ ™ПаХ ^ляных компрессоров.
Кр'пн^е ч^ГиГ^ЦЫ ИМеют довольно широкий диапазон размеров.
любой^емы с™ в^аТГ" б°Лее 5° МШ И Д0Л™ бЫТЬ ~ »
Достаточноудалитьлишьча^
Стандартные фильтры для сжатпт о™
50 мкм. а практически большие"ГиГниГ, 'Т* 4aC™UU Pa3MCP°M ^
40 мкм. 1ВО из них способны удалить частицы около
Мелкими считаются частит., ™,
очередь на три группы: Р^ром менее 25 мкм, подразделяемые
в свою
1) с размерами от 10 до 25 мкм-
2 с размерами от 1 до Ш мкм-'
3) менее 1 мкм.
Если воздух используется л ™ и»к
инструментов или в приборах р^пГ™ ВЫСОКОСК°Р°стных пневматических
Г™ ло Ра3меР°в частиц мен;;';« " ВаНИЯ техпроцессов, рекомендуется фильт-
£тГ>ЩИХ ЭЛемеНТОВ с со^^Р0»' « ™ достигается путем установки
Ф^-^я .жатого воздух, су;ГВ^ТаМкиеГМеРаМИ ™Р ° «i-P™
^S- -Душных no^nHHKOB И£ ЭЛСМеНТЫ С Р-МераМИ "0Р Д° 5
НЫХ «"«"оших фильТровМн'еН0Иб;Юрнь,х пневм™°торов и особо высоко-
ДИМа Фильтрация до 5 микрон и даже
Структура и назначение систем
автоматики
Подготовка сжагого воздуха
холодильным сушильным аппаратом
(точка росы +3°С)
Установка при сильно
колеблющемся расходе
сжатого воздуха
Ш Молочный завод,
пивоваренный завод
Пищевые продукты,
пневматические опоры,
химические установки
ШБольнины,
воздух для дыхания
Фармакология
фотолаборатории,
ткацкие станки
JTv Гэ] Упаковочная техника,
\)^ UZJ покраска
Производственный воздух,
тонкая пескоструйная
очистка
Для незащищенных от мороза сетей сжатого воздуха:
подготовка сжатого воздуха с адсорбционным
осушителем (до - 70°)
Установка при сильно
колеблющемся расходе
сжатого воздуха
^ w 1ез| Фильтр Ресивер
ZK FX д-т"
Дробеструйная грубая
очистка
Системы отвода сточных
вод
а)
Фармакология, молочные
и пивоваренные заводы
Пищевая промышленность,
производство оптики
Воздух для дыхательных
аппаратов
Фотолаборатории,
фармакология
Холодильники,
пневчоопоры, распылители,
прецизионные регуляторы
Степень фильтрации:
Ш Остаточное содержание масла < 0,003 мг/м,
очищен от частиц > 0,01 мкм,
стерильный, без запаха и вкуса.
Остаточное содержание масла < 0,003 мг/м,
очищен от частиц > 0,01 мкм, мкм.
стерильный, без запаха и вкуса.
I о I Остаточное содержание масла < 0,01 мг/м,
L=2J очищен от частиц > 0,01 мкм
Ml Остаточное содержание масла < 1 мг/м,
££J очищен от частиц > 1 мкм.
Остаточное содержание масла < 5 мг/м,
очищен от частиц >3мкм и на 100°ооталагн.
^ Не подготовлен.
Сжатый воздух •
посторонние примеси
Пыль
о
Масло (иефть)
Микробы
Вода - конденсат
Сухой воздух
б)
Рисунок 1.25
меньше и есть возможность поставить в стандартные фильтры для сжатого
воздуха специальные элементы размерами пор.
Для особо тонкой фильтрации и удаления бактерий из воздуха необходима
фильтрация частиц до I микрона, и стандартные фильтры для сжатого воздуха не
Глава [
™ .г г IV41CB коша они «сиолыуннХя как нрс шири
^««ьй фильтры для зашиты u т ула.ш.ва.ш крупные загряз-
и^юшиса для У и^ния особо малых ти.щ, j
мютнечастицы „.„-;,„,„-^я в процентах загрязнении, за
^Ж " 99 99999% (фирмы «Кае
^'нТ.крвый вз.чяд выбор между филыр-мп. имеющими >ффекнпз.,ое,.,
t« о» оо о!о и 99 999' имеет неоольшое н.аченпс. Однако, если выразить эти
^лпг, 72. - .„„„к,,,,.,,, mm гостаня! О 1'Ж и 0,001% и становится
цифры как процент проницаемое ш. они состапя! u.i/c
ясно, что первый фильтр пропускает в 10 ра« больше загрязняющих веществ, чем
второй, и в 100 раз больше, чем третий.
Фильтры для сжатого воздуха, задерживающие час.ицы до 50 микрон, счи
гаются филы-рами 1Рубой очистки, фильтры с щапазоном от 5 до 50 микрон —
средней очистки, от 1 до 5 — высокоэффеюнвпые фильтры, а фильтры, имеющие
процент проницаемости менее 0.003% и днаиазои часгнц от 0,01 до 2-х микрон —
сверчвыеокоэффектнвные фильтры.
Однако, как бы ни была чороша конструкция фильтра, для сохранения )ф-
фективности он требует регулярною .ечпнческого обслуживания, что озиачае.
регулярную чистку всеч деталей, включая фильтрующим элемент. Вследствие
глубины фильтрующего слоя спеченные элементы особенно трудно очищать даже
обратным воздушным потоком, и они требуют периодической замены.
Слипающие высокоэффективные элементы нельзя очистить, их следует заменять до того,
как они полностью забьются загрязнителями.
Экономичность и надежность в производственных условиях системы
подготовки сжатого воздуха в большой степени зависит от о.пималыюсти и правильно
сти подбора входящих в нее устройетв.
На рисунке 1.25 показан рекомендуемый фирмой «KAESER» состав систем
подготовки для различных технологических процессов с использованием холо-
дитьного сушильного аппарата с точкой росы +3°С (а) и состав сис.емы, не защи-
щеинои от мороза с адсорбционным осушителем (до -701') (б), а также
соответствующие им степени фильтрации.
Обозначения фильтров на схемах:
FV - предфилыр, для осаждения частиц тнердых .ел £ 3 мкм;
гл_микгк,фиЛьтр. для осаждения масляных аэрозолей и частиц твердых
тел £0.01 мкм;
FA~ Р^вЛмТслаГИВИР0ВаН"Ь,М УП,СМ ;U14 0С№'™ масляного тумана („а-
FXA-комбинация микрофилыров из FX и
PATHS ^^.Гый^м Ю1Я СЖа1°'° BOWyXa' c'-°^«hv or микробов;
«ен^^Ги Р H,TKa^BO,° M-'Ka- *» очие.ки сильно за. ряз-
ZK - циклонный сепапа гш Г™ - ИСаС,'шасМ01« «' мосфериога но «духа;
сата; F С10И|1ИЮ. ЛДЯ осаждении полученною копдеп
Т——
+2т^лы,ыи суишльиыи аппарат для сжа.ою воздуха (.очка росы до
AT— адсорбционный ocvum.«.„. .
серия К - с ре.сне ° И0,дУха:
с Регенерацией те.птП" Х0"од,,ым ™ «духом (Ди -70" ); серии W —
АК- адсорберсZrZ" щухш ('ю^^О-
Уи.ем идя удаления паров масла
£ФУУ'УР« и назначение сие им am ,та, |1КИ
Рисунок 1.26
На рпсуикс 1.26 изображены условное обо-
Тпаче.ин (а) и коперукция (б) епшдар.иого
фидыра-нлаюо.дели.еля. Попадая и филыр
по1дух завихряется, «по достн.ас.ся
расположенном о.верс.ин. направляющих «о но юшпель-
ноп к сепке нрофачиши с писана 2. Под псйсг
пнем цещробежных сил капельки воды п масла
попадаю, па с.епкп сIакала и смекаю, вши к
сливной пробке 1, коюрая для удаления плат
вкручиваемся нпуфь с.акапа Необходимо
следить, ч.обы уровень жидкое п. рмульсип) ш
поднялся выше филыра 3, выполняемою н
спрессованных лагу >ч шариков или hi мсал-
локерампкп н предназначается для задержания
твердых чаепщ (ныли, ржавчины, окалины) По
мере загрязнения рекомендуется промывам,
фнлыр уапг-еппрнюм во нзиежанне уменынення
расхода воздуча.
Для удобена обслуживания фильтры сдаб
жаюгея атомаiнческнмп коиденса нклвоцами,
условное обозначение (а) и одно щ конеруктив-
ных решений (б) которых представлены па ри
супке 1.27. ICoiщенса гоои«од моитпрусея вместо
сливной пробки в пижш» i час. и с i а капа 1.
При подпиши уровня коиденса та до опреде
ленной отметки, поплавок 4 исплыплс. преодо
левая усилие (апираппя клапана 3, создаваемое iciiciкующим па нею давлением
сжатого воздуха, находящегося и полости 2 стакана 1. Клапан J открывается н
сжатый воздух, нисупоя по к.шалу 5 и шюкчлтую полость цнлшпра конденсат
о i иода, перемещает поршень 11 со шюком 7 mi рано, сжимая пружину 12 и о i
кривая клапан 8. Находящиеся в стакане 1 конденсат под денспнем давления воздуха
удаляется из полосш 2 но каналу 6 н через елшшос ошереше У. Мри юкрышп
клапана 3 после падения уровня конденсата в сыкане, норшеш. 11 под дейевпем
пружины 12 медленно но транше гея и исходное положение блаюдари медленному
перетеканию воздуха из ш.окопоп по
лости и беенпоковую, чю дочитается
la счет малого радиального за юра
между поршнем н сопками цилиндра 13
При )том воздух окоиой полосн
пычодщ в атмосферу черсм omepeme
10.
Ручном сброс конденсат пропс
лодщ при пажашн на пиок 7.
Фплыры тпкоп ичпс.кп н сверх
тпкин очискн ежаiот iiouiyxa eooi
вс с i пенно на * У.УУУ* и УУ.УУ"°Г.
снабжены сменным фнлыри-ык-'ментм
2 in ооросплнкашою си-кловолокпа,
шфференцнальпым м.шомером I для
измерения перепада давления и перо
еппым аншмишческнм мименсапнм
подом J (рисунок 1.28) При нрокчш
ппн ежлою воздуха через волокнп
Глава I
стую ткань крупные частицы (> 3 мкм) не
проходят через фильтрующий слой, задерживаясь
внем под действием сил инерции или при
столкновении с волокнами. Отделение мелких
и мельчайших частиц масляного пара и
твердых загрязнений до 0,01 мкм обеспечивается
пористостью фильтровальной ткани.
Мельчайшие частицы влаги собираются волокнами
и образуют на них более крупные капли (коа-
лесцентный эффект), которые затем стекают
под действием собственного веса на дно
стакана.
Для предотвращения собирания масляно-
водяной эмульсии в пену, которая может
захватываться сжатым воздухом, не следует
превышать рекомендованный для фильтра
расход сжатого воздуха.
Для использования фильтров тонкой и
сверхтонкой очистки сжатый воздух должен
быть предварительно очищен фильтрами с
тонкостью фильтрации соответственно 5 мкм
или 1 мкм.
Замена патронов у фильтров тонкой
очистки фирмы «Festo», типа LFM осуществляется
при перепаде давления (падении давления)
0,07 МПа; для фильтров сверхтонкой очистки
типа LFMA — 0,035 МПа.
1.7.2.4. Маслораспылители
Обычно пневмоаппаратура фирмы «Фес-
то» может использоваться без
маслораспылителя, так как при сборке в нее вводится
консистентная смазка на весь срок службы. Но если
приводы используются в экстремальных
условиях, например, при медленных движениях
штоков цилиндров, при точных подачах и в тех случаях, когда шток цилиндра
подвержен большой радиальной нагрузке, необходимо применять воздух с
наличием масла.
На рисунке 1.29,а показано условное обозначение маслораспылителя, а на
рисунке 1.29,6 — конструкция маслораспылителя с двойным распылением масла. Он
обеспечивает получение частиц масла размерами от 0,1 до 0,003 мм.
В маслораспылитель воздух из магистрали подводится к отверстию Б.
Проходя через маслораспылитель, основной поток разделяется: одна часть его (основная
часть) направляется к выходному отверстию Ж через щели К, а другая через
каналы В, Г и Е. Когда дроссель 4 полностью открыт, каплепадения не происходит.
Ири дросселировании давление в полости А становится меньше, чем в резервуаре,
вследствие чего масло поднимается по трубке 7, отжимает шарик 8 от седла
втулки У и через канал, имеющийся в корпусе 3, попадает в трубку 11. Так как в зоне Д
ргспылителя (после кольцевой щели) происходит местное понижение давления, то
Г^Г,ГИВаеТСЯ И3 ^^ 1 *' пР°х°Дит через отверстие малого диаметра рас-
^ду^а РеСС08аНН0Г° В отвеРстии пР°бки 2. и распыляется в потоке сжато-
Структура и назначение систем автоматики
39
6)
Рисунок 1.29
Частицы масла, вследствие местного понижения давления в зоне И (после
щелей К), вместе с потоком воздуха проходят к выходному отверстию Ж через
отверстие Е в корпусе, а остальные оседают в резервуаре на основной поверхности
масла. Попадая в основной поток воздуха, масло подвергается вторичному
распылению и, таким образом, в пневмосистему поступают мельчайшие его частицы.
Дозировка расхода масла осуществляется дросселем 4. При полностью
закрытом дросселе разность давлений в стакане и в полости А будет наибольшей и, сле-
в<-
Ри<-унок I
Глава I
^™ также будет наибольшим. Увеличение расхода сжатого
^1^^^^шп^ создает большую радость даЮ*
^~ZZTl что вызывает увеличение расхода масла при том же
""ХГГпр^ствует понижению уровня масла в трубках 7 и И при
отсутствии расхода "Грез масл'ораспылитель. Поэтому, каплевыпадение начинается сра-
ЗУТт;ГГсВо°«нный с корпусом 3 кольцом 5, заполняется маслом через
пробку 10 до уровня, обозначенного на стакане. Наличие прозрачного колпачка 12
позволяет вести наблюдение за каплепадением с любой стороны маслораспылите-
тя Количество масла измеряется в каплях в минуту.
Конструкция пропорционального маслораспылителя с дисперсным
распылением масла с помощью сопла Вентури показана на рисунке 1.30. Маслораспыли-
тель обеспечивает подачу масла пропорционально расходу воздуха. Проходя через
сопло, воздушный поток разделяется: одна его часть отжимает подпружиненный
клапан 9. проходит через образующийся кольцевой зазор к выходному отверстию,
а другая, пройдя через отверстие 6, отжимает от седла подпружиненный шарик 5 и
через отверстие 4 попадает внутрь стакана 1 с маслом 2. В результате увеличения
давления в стакане 1 масло поднимается по трубке 3, отжимает шарик 15 от седла
штуцера и через дроссель 14 попадает в трубку-капельницу 12, размещенную под
прозрачным колпачком 11. Параллельно, в результате местного падения давления
в зоне сопла Вентури за клапаном 9, происходит отсос воздуха из полости под
колпачком 11 и вытягивания масла из трубки-капельницы 12, которое, пройдя
через жиклер 10 и трубку 8, тонко распыляется в турбулентном потоке воздуха
выходного отверстия. Чем больше расход воздуха через сопло Вентури, тем больше
величина кольцевого зазора клапана 9, большее падение давления за ним и,
следовательно, более интенсивное истечение масла из трубки-капельницы 12.
Конструкция маслораспылителя допускает его дозаправку маслом во время
работы через отверстие, закрываемое пробкой 7.
Для заливки в маслораспылитель рекомендуются следующие марки масел:
специальное масло Festo OFSW-32 с вязкостью 32 мм2/с при 40°С; Esso Nuto H32;
Mobil DTE 24 с вязкостью 24 мм2/с; Shell Hydrol DO 32 с вязкостью 32 мм2/с.
Количество капель масла устанавливается с помощью дросселя 14. Как
правило, достаточно 1 ...12 капель на 1000 литров воздуха.
fi ПРимеР- Система в среднем потребляет 100 л/мин. На 1000 литров должно
ма1ГнпГ° КаПСЛЬ МаСЛа- Соответс™енно, в этом случае 1 капля масла в виде
масляного тумана должна подаваться каждые 2 минуты.
1.7.2.5. Регуляторы давления
*°y£™7C^Z™ZZTeHbl ^ У—ния Давления в магистрали
те*. атакже для^абГ,Г П0Требляющих элементов электропневматических сис-
показано на рисунке 1 31Г" ШШ1ения- Услов»ое обозначение регулятора давления
на обратная связь по давлениТЛ""6 П0Дается СНИЗУ- пунктирной линией обозначе-
Основным элементом Л " РеВДоРа"
ся измерительная чембоана д^™1*' "Редставленного на рисунке 1.31,6, являет-
ны пружиной 2 связан с одной™Ц*ППенная в коРпУсе 5. Жесткий центр 3 мембра-
роны штоком о, подпружиненной ' ° рег^лиРовочным винтом 1, а с другой
стона мембрану „ тарельчатый клГа™рельч™ ™апан°м 7. Пружина 2 воздействует
ю«т сжатый воздух к потребитеrl т°Т°РЫИ' пРиподнимаясь над седлом,
пропуске-^да^мое давлением ад™ ^ ^^ °ТКрыТ до тех поР- "ока
воздуха на мембрану, не превысит усилие пружины.
Структура и назначение систем автоматики
41
После этого тарельчатый клапан
опускается на седло, закрывая
отверстие, и накопление давления
прекращается
Использование сжатою
воздуха приводит к уменьшению
давления и, следовательно,
уменьшению усилия на мембрану со
стороны потребителя. Пружина 2
приподнимает тарельчатый клапан 7 и
обеспечивает приток сжатого
воздуха в полость мембраны 4.
Настройка регулятора на
определенный уровень давления
осуществляется вращением регулировочного
винта 1, изменяющего величину
сжатия пружины 2, передающей
усилие на мембрану.
При компрессии со стороны
потребителя или при уменьшении с
помощью регулировочного винта
уровня давления, усилие на
мембрану со стороны воздуха превышает усилие пружины. Мембрана прогибается,
сжимая пружину, и излишки сжатого воздуха через отверстие в жестком центре 3
(рисунок 1.31,в) выпускаются в атмосферу.
Рисунок 1.31
^
Р1=0.7МПа
!
б)
, 100 200
Объемный расход (Норм.л/мин)
Объемный расход 20 Нормлмю^
0.3 0.4 0 5 6.6 0.7 0.8 0.9
Давление на вчоде (МПа)
в)
Глава I
Основным элементом миниатюрного регулятора типа ARJ 210-М5 компании
^ЯгГия" полного на рисунке 1.32а является латунный поршень 5, ус-
^ГыГе шестигранном латунном корпусе 9. снабженном деаэрационным
"^ПрТ^во^'вании регулировочного винта 1 в крышку 2 происходит сжатие
пглткины 3 и перемещение поршня 5. открывающего клапан 6 и сжимающего
пг/ужинл 7 давая тем самым возможность сжатому воздуху поступать к
потребителю Одновременно сжатый воздух поступает через отверстие 8 к поршню 5.
Клапан открыт до тех пор. пока усилие, создаваемое давлением воздуха на
поршень, не превысит усилие пружины 3. Поршень, поднимаясь, дает возможность
клапану 6 закрыться под действием усилия, создаваемого пружиной 7, прекращая
тем самым рост давления на выходе.
Использование потребителем сжатого воздуха приводит к уменьшению
давления на поршень, который снова под действием усилия, развиваемого пружиной
3, перемещается вниз, открывая клапан 6.
При резком возрастании давления в выходном канале, сжатый воздух, пройдя
через отверстие 8 к поршню, поднимает его, отрывая от штока клапана, в
результате чего давление через центральное отверстие в поршне и деаэрационное
отверстие 4 сбрасывается в атмосферу.
На рисунке 1.32,6 представлены расходные характеристики распределителя
при давлении на входе р{ =0,7 МПа, а на рисунке 1.32,в — характеристика
давления при объемном расходе 20 л/мин. Максимальное давление на входе
распределителя — 0.8 МПа. Диапазон давлений на выходе — 0,2...0,7 МПа. Диапазон
рабочих температур — 5...60°С. Вес — 0,28 кг. Возможна установка манометра
вместо заглушки в выходном канале.
Повышение быстродействия, точности и надежности регулирования
достигается применением редукционного клапана, представленного на рисунке 1.33.
Принцип действия редукционного пневмоклапана основан на автоматическом
изменении проходного сечения между дросселем и седлом при изменении
давления и расхода сжатого воздуха на входе, что обеспечивает постоянное давление на
выходе пневмоклапана.
В гайке 1 корпуса 2
вмонтирован* дроссельный
клапан 3, прижимаемый к
седлу пружиной 16. На
толкателе 4 клапана, имеющем
сквозное осевое отверстие,
закреплен мембранный узел
14, состоящий из двух
алюминиевых дисков, между
которыми расположена
мембрана 15, имеющий в своем
составе обратный
лепестковый клапан 13. На крышке 5
мембрана установлен стакан
7 с регулировочным узлом 1,
состоящим из винта 8 с
маховичком 9, шайбы 10,
пружины 6, настроечного
клапана Ц и резинового
кольца 12.
Через входную полость
А сжатый воздух, отжимая
Рисунок 1.33
Структура и назначение систем автоматики
43
Рисунок 1.34
дроссельный клапан 3 от
седла, поступает в выходную
полость Б, а также через
радиальное отверстие во втулке
дроссельного клапана 3 и
отверстие в толкателе 4 в
полость В мембранной камеры,
закрывая лепестковый клапан
13. Через отверстие d
полость Б соединена с полостью
Г. Если давление в полости Г
превышает давление в
полости В, то сжатый воздух
поступает через открытый
обратный клапан 13 в полость В и
через отверстие в
настроечном клапане 11 сбрасывается в атмосферу.
При вращении регулировочного винта 9 и сжатии пружины 6, прижимающей
настроечный клапан 11 к кольцу 12, давление в полости В увеличивается.
Мембранный узел 14, перемещаясь вниз, открывает дроссельный клапан 3,
увеличивая расход воздуха и давление до заданной величины. Давление в
полостях Г и В уравновешивается.
Если давление на выходе превышает давление настройки, мембранный узел
14 перемещается вверх, клапан 3 закрывается и сжатый воздух, преодолевая
давление пружины 6, открывает клапан 11 и сбрасывается в атмосферу. Давление в
полости Б редукционного клапана снижается до величины, определяемой
настроечным клапаном.
На рисунке 1.34 приведена схема редукционного клапана, которая
использовалась при моделировании. В математической модели давление р\ задавалось
величиной диаметра D2 отверстия, через которое стравливался сжатый воздух с
расходом G8. Рассматривался процесс наполнения сжатым воздухом объема V0.
При этом открывался клапан диаметром D и сжатый воздух поступал в камеру Г
и объем V0. Процесс считался законченным, когда клапан закрывался, т.е.
значение зазора л становилось равным нулю. В приложении Б дана программа
математической модели, написанная на языке TURBO BASIC. При моделировании
оценивалось значение ошибки Д, равной разнице давления pt и давления в объеме
V0 при различных отношениях диаметра D4 мембраны и диаметра D клапана.
При диаметре мембраны, превышающей диаметр клапана в восемь раз, значение
ошибки задания давления достигает минимума и составляет 0,2% (рисунок 1.35). а
из рисунка 1.36 видно, что с увеличением диаметра клапана практически линейно
уменьшается время моделируемого процесса.
о 5<Ь
ю
5
i
0,5-
6 8 10 12 16 D4/D
Рисунок 1.35
'.с
0.3
0.2
0.1 +
6 8 10 12 16 D,/D
Phcvhok I.36
44
Глава 1
1.7.2.6. Стандартный блок подготовки воздуха
Блоки подготовки воздуха (БПВ) упрощают подачу очищенного и
обогащением воздуха потребителю, в непосредственной близости к которому они
устанавливаются. ,
" Обычно в состав стандартного блока подготовки воздуха входит фильтр-
вдагоотделитель, регулятор давления со стрелочным манометром или цифровым
манометром-преобразователем и маслораспылитель.
На рисунке 1.37.а приведено условное обозначение стандартного БПВ. и
показан общий вид БПВ фирмы Festo, D-серин типа FRC с габаритными и
присоединительными размерами (б).
Полиамидные стаканы фильтра-маслоотделителя 1 и маслораспылителя 2
закрыты защитными кожухами. Ручка 3 регулятора давления с манометром
снабжена блокировочным устройством. Винт 4 служит для удаления воздуха из
масляного резервуара, а винт 5 — для регулирования подачн масла в пневмосистему.
Крепление блока на технологическом оборудовании осуществляется с помощью
специального кронштейна 6.
| Рисунок 1.37
Входящие в состав D-сепии п л,
«*есЯ модульным принципомТпо^ устройств,
характеризующее^ эксплуатации БПВ оГн ЗГмеппГЛЯЮТ С°ЗДаВаТЬ <0™етствующ„е
Блоки подготовки типа FRC n ™ ^^ ПрИВеден на РисУНКе ' -12.
Структурам назначение систем автоматики
45
мальный расход воздуха 125 л/мин. Нормальный номинальный расход при
диаметре входного отверстия 1/8" составляет 700 л/мин для типоразмера «MINI».
Диапазон функционирования маслораспылителя — с 3 л/мин. Масса — 0,7 кг.
Диапазон температур окружающей среды — от -10° до +60°С
1.7.2.7. Пневмовыключатели и распределители плавного пуска
Кроме рассмотренных в предыдущих параграфах исполнительных устройств,
блоки подготовки воздуха могут оснащаться пневмовыключателями с
электроуправлением, предназначенным для подачи и удаления воздуха из пневмосети. а
также распредедитетями плавного пуска, предназначенными дл ■ ограничения ско-
оости роста давления в пневмосети. „,„*—,_
Р Они используются в качестве устройств защиты как сбривающего
персонала так и технологического оборудования. Наличие пневмовыключатыа воою-
нала, так те. пневмоснстему сжатого воздух в момент ее обслужива-
распределителя плавного пуска обеспечивает медленный рост дав-
чает случайную подачу
ния, а наличие
•2
S
?
Ц'
64
5
4 -еЩЗм
JBL
39.4
а)
_ЕШЯ_
Ф
I
1 г^=УГ)»] '
1 *■* —
38 _
б>
Рисунок 1.39
*)
Глава I
l-"f GP; 7
б)
с
яг
Щ
UL-J
368
е
40
в)
22^
6-ы
п§.
Q СП
84 5
^ 64.5
38
в
>
-+-Г-
10.5
Для кабеля
Вспомогательный
гГ
ручной рычаг
J
i j, -. , -■■ ,i ^
RT, 29,!
1
уШтеккер
с 1* • к i
ЧМ4
Давление срабатывания
(закрыто - открыто) для поршня 5
„- 0.5,
| 0.4
£302
J^
0.1
ч " 0.2 0.4 0.6 0.8
д) Давлениев .. контуре (МПа)
Хар-ка расхода, с дросселированием
(через игольчатый клапан)
o500f
е)
12 3 4
Число оборотов ипш
*— При ™м включенные ^^^
^J^T™ техно-^коГо^л:ГМ ПНеВМО-™ндры и исполни-
*|JS2?5^«^полный рш*^""70» "-«Роенного рабочего
**»Р*пв*»т и присоед^ J™Hoe обозначение, а не рисунке 1 4R к к -
Структура и назначение систем автоматики
47
Таблица 1.6. Рабочие условия функционирования УППВ типа EAV (SMC) [261
Рабочие
условия
ее
О
ее
О
и
О
сз
о
Св
т
ее
§
<и
s
i
а
СО
о
с
S
с:
v
о
о
о
с
S
I
сз
со
о
О.
S
с;
<и
о
о
о
о.
ее т
О VD
о Р
С-
I
з:
сз
о.
г^
сз
S
ыэ
X се
О се
I
<и
т
2
СП
X
<и
зг
о
5
са
о
ГС
Условия
по
лениям
о,
С!
v
<
а.
а.
Л1
<
<
О.
Функционирование
(см. рис 1.40,в)
При включении пилотного
клапана (управляющего
пневмораспредечителя) 4
(электрическом включении
или от ручного
вспомогательного рычага)
вспомогательный воздух отжимает
поршень 3 вниз и главный
клапан 1 открывается. При
этом закрывается переход к
отверстию выхода R. Поток
сжатого воздуха поступает
через игольчатый клапан 7
от Р к А.
Пример соединения
целиндра с
пневмодросселеми
Когда Рл > 1 /2 Рр,
открывается поршень 5. В
результате этого РА. немедленно
возрастает до значения РР.
Поршень 5 остается
открытым, скорость хода поршня
цилиндра определяется
только пневмодросселем
При отключении пилотного
клапана 4 поршень 3 и
главный клапан 1 поджимаются
вверх пружиной 2. переход к
отверстию выхлопа R
открывается. Одновременно
прерывается поток сжатого
воздуха от входа Р. В
результате разницы давлений
на обратном клапане 6 этот
клапан отжимается вниз и
происходит деаэрация
повышенного давления
вторичного контура через пере-
ход R.
I ЛИВН I
— 2 < Вт. напр
, „„.„„„ _0" LftMIUuM-cci —".IHftRi. Погреочясмая
Г,т,ан,я - 413(мос.ояш.ос). I Ш и2\) В (нср^и-
n v. и нос оооада вис pecnpe ie in
re 1Я Ii ювнот nvck.1 с ограничением pocia
(at оощик bju («)) paciipt ic inic 1Я
«Fesio» П серии, мим I Mil -MINI e
,м^мГ^снн'нГ-6,25 . 1.6 МП.., массой - 0.182 к. представлен
На Гис»нке 1.40 даны оиши вид (а), мнемоническая схема (б), габаритные
рпмеры (в! и коистрчкцня (П устройства и ювиом подачи ноиуха (УНИИ) шпа
FW 2(4*1 компании SML (Япония) (241, имеющею следующие харакгхриешкн:
встгъгтетьное давление — 1.5 МИа, раиочес чапюнне 0.2... 1.0 МПа; дпапаюп
температур — 0 Л0\; жвнвалеипюе сечение — 21 мм ; нормальны»
номинальный расход— 1150 л/чин. вес — 0.37 кг; напряженно пшапня — 24 В
(постоянное! и 220 В шерсчеимое). потребляемая мощность при носюинном шке — 1,8
Вт, степень тащиты — IP о*»
Рабочие > словил и после товательнисть функционирования У1ШВ отражены в
таблице 1.6. а на рнечпке 1.40л и е покашны его характеристики. PeiyjinpoBKa
игольчатою клапана (троссеи) 7 оеуществпяеюя с помощью огвергкн: при
вращении по часовой стрепке расхид уменьшаемся, пропт часовой — повышается.
В б юкс ИОД10ШВКИ вот \уха устройс i но мои трус гея после рогуля гора данле-
НИ1
1.8. Типы «ащигы элементов элсктропневмоавгома i ики
Стандарты D1N 41Ю50 предписывают мщиту элементов автоматики с >лек-
троуправлевием от прикосновений и от нроннкновепня инородных тел и воды.
от прикосновений и проникновения инородных тел
_^ Виды защиты
Таблица 1.7. Степень «щиты
Пояснение
«" преднамеренною доступа к ™Г "а"Р"М1Ср- ™кЫ'- "° "ст '•'"»"...
™3^ахи,!»ред11МХт,л J™ " Э1™ л<™ям- З...ц,па от прикосновения
"ли «нутг^иним |ХвиСжн!!1м?1',и1МИ " 1,ахо«Я11»,м" "ОН напряжением
[T^J^-x тел аиаГрГс^ТГмм Ш,ГВ " "^""™~ «I»"*
^Щитшогг
|«МКИХ И1Ю
[Родных тел
Змцит» от
[крупных
| инородных
тел
Unnrraoi
«-редних
Sf^f^^^ р-..к11Ш1е11|1Я 1всрдых
пГ..1""ВС"Ие ,,ы 'и ие пк,1о.„п„....:"а '" "Ред * о.ложепни пыли
Sf^**^^™*.CZ?? "°'""""'«• ■« '"■» с м„«е.
^У —„Ым дсталяГ 1,, iaaX"j;,,WM- '"'^=ГИ
——_____ " "Р'чткновсния пыли
{ ipvkivpa и на течение сипом автмашки
4v
1ипы 1ащты опноынаююя с помощью бг»р виатуры. коц)рая loliomi из
диух неншеппых букв IP и двух, индексов для степени инциы. например, iP 54.
Нсрпын индекс 5 Оаолица 1.7) покашваел степень lanmiu oi прикосновения и
проникновения инородных юл и прсчуомттрппаст полную ташиту oi прикосновс
пня к нахо 1ящимся под напряжением и внутренним подвижным дсатям; мщиту
oi вредных отложений пыли; проникновение пыли иотностью не предогвращаег-
ся, но пыль не может проникать в таких Количествах, которые нарушат режим ра-
Г)оп>1.
Втрой индекс 4 Оаблица 1.8) предуемафивает защиту Oi воды брылаюшеи
на оиирудованно со всех направлений, которая не должна наносить никакою вреда.
Таблица 1.8. Степень чащи па от воды
Второй
индекс
I laiiMcnona-
ннс
ВИДЫ ТЯЩИТЫ
Пояснение
о
Нет защиты
Нет специальной шщиты
Защита от
вертикально
падающих
капель воды
Капли воды, падающие вертикально, не должны наносить никакого вреда
Защита oi
наклонно
падающих
капель воды
Капли воды, падающие под любым углом до IV к вертикали, ие должны
наносить никакого вреда
Защита от
распыленной
воды
Капли воды, падающие пот любым углом до 60° к вертикали, не должны
наносить никакою вреда
Защита от
бры иающеи
воды
Вода, брызгающая на оборудование со всех направлений, не должна
наносить никакого вреда
Защита от
струи воды
Струя воды ит сопла, которая направлена на оборудование с любой сто-
роиы. ие должна иметь никакого вредною во действия
Защити при
наводнении
)'"■■"'■ —.- ,
При наводнении, например, in бушующего моря, воза не должна
проникать во вредных количествах в оборудование
Защита при
окунании в
воду
Вода не должна про,™ в оборудование в количествах, превышающих
допусгимое шачепне при погружении в воду на определенное время и
ирн определенном давлении
Защита при
шинельном
hoi ружеиии
в воду
^—не^^ои^еть в оборудование в количествах, превышающих
допустимое значение при погружении в воду на неопределенное время и
при определенном давлении
1.9. Специфические .ребования к элементам „скфоииевмоавтоматики
..«....-канляю! специфические требования к апемен-
Отдельные виды производств п^<n-M«ot , I ^ аттяшщт
там )лекгтроиневмоава>ма1ики, исполыуюшнхеи i t
нмх rexiiiuu.1 нческих процессов. ^.-^„„„-лучевых |рубок (ЭЛТ) (Cathode Ray
Так. например, при 'Ф0»™^^^^,;.^ компоненгов автт.ма.ин.ро-
Tuhcs) ш..решено применение BC^' хара(сгсри «уюшихся такими исобенноетями.
ванных ciicivM, веществ и магерн-и i • ' именно, меди, нефлоиа, силикона.
коюрые приводя, к повын.енному npt»a«Axy орак ,
полиинпилхлорнда. може. бым. деталишрован следующим
Запрет на неполыоиапне inix nemeciL
oGp.i u)M
1 IVi
tWvK!** молекул меди приводит к тому, что ТОчка растра на .кране трубки
lSSS^Sa наносит вред цветовой гамме изображения.
'taTi^S ^ментов электроиневмоавтомагики, работающие с нагрузкой
ж ^П^к подшипники скольжения, шарниры, золотники, ходовые винт.
^^Гк^кты и ф., не должны принципиально содержать медь, а также
легирующие металлы
Детали работающие без износа, такие как корпуса, резьбовые соединения и др.,
поверженные иислючителкно статической иагрузке и содержащие медные или
легирующие трбавки. толжны снабжаться эффективной защитной поверхностью. При
нашими легирующих и метных добавок до 1% не требуется какая-либо защита
поверхности корпуса, изготовленные способом литья под давлением, с содержимым меди от
3 до 5*. должны снабжаться соответствующим покрытием (химическим, никелевым,
цинковым).
Все без исключения галогеносодержащие вещества, в том числе тефлон,
уменьшают эмиссию испускающих электроны катодов и приводят к значительному
сокращению срока службы ЭЛТ. Содержащие тефлон вещества запрещается
принципиально использовать при производстве ЭЛТ как в чистом виде, так и в качестве добавок
или присадок.
Содержащие силикон вещества наносят вред флюоресцирующему слою ЭЛТ.
Силикон с трудом удаляется и дегазируется. В результате этого наносится ущерб
вакуумной среде ЭЛТ. Не должны применяться и смазочные вещества, силиконовая
резина, а также силиконовые шланги и силиконосодержащие средства в качестве дезо-
юрантов.
Отсутствие поливинилхлоридов (ПХВ) уменьшает возможность значительных
пеперь при возникновении пожаров, снижает вредность производства при изготовле-
НИИ jj 11.
марк^яТна^ гт """^ ^^ УКа3аННЫе матЯ™ (СТ - материалы),
маркируется знаком «СТ» и занесена в специальный каталог.
1.10.Пневмоглушители и фильтры пневмоглушителя
пускеПГйГГГИТеЛИ ШП nP™Ha4e»b' Для снижения уровня шума при
выпуске (выхлопе) сжатого воздуха из пневматических устройств
с-ГмГГа^ скорости воздуха- ™б*а-
полнительныхпневмГ^ На СК0Р0СТИ перемещения ис-
На писунке I Ai . » Устройств, например, штоков пневмоцилиндров.
пневмог^^ей4 оГаГ ш"с (ХГ Т^дГ* W " ™*»»£« ™
соединением и типов ANaTaNBH,m л" ™) ™Па AN ,03Л I0 C Рябовым при-
«. а также характеристики рГсхола/Г М0НТЭЖа В ^троразъемных соединени-
они характеризуются компа™СТЬ1о1п ДИЙГраммы УР0ВН™ шума (е) [24]. Все
шума и низким уровнем протГо™ИСП0™ения> >ью>кой степенью понижения
помещениях при выхлопе сжатого ПЛЯ' РИ "Х исполь-ювании уровень шума в
Максимальное давление У™ "" ПРе™ет 85 дБ(А).
температур _ т .у Д£) ^ ШДУХа ™ ВХОДе ПГ ~ ^ МПа. Диапазон рабочих
Эксплуатационные и весогяК^.,
^а№нно: Уменьшение уровня шуГГ^Г^Г™ ПГ ™"d AN ^3/110, соот-
35мм-^-1и20грамм Шума,1а25и21%;эквнвален1ноесечение- № и
Структура и наитачение систем автоматики
О
а)
шиЯ материал "^
Knpnyi
m пслнацетиля
Присоединит
резьба
011
б)
013
f4j
■шипи!! ^~
фосфористая
•и»
Mffrtmn-
ti сплав на основе
в)
JJ
порошка
ПООмкхроя)
с
г
материм
Корпу< / Крыша
Г)
■щ
ицшишш -]
05
02
01
I 0 02
I 001
С 0005
0002
0
Д)
50
*//
ш$
/
//
//
7,
200
К*/
fWw
и
/
т /
1000
5000
"/
Z
/
|_Г '
20000 1
100000
■J с пиевмогтушнтелем -
~ 130 |-| | без пневмоглушителя-
100
500 2000 10000 50000
Объемный расход (л/wm)
е)
AN500
ANW0
Условия: Давление на входе 0 5 МПа
Расстояние от пневмопгушнтеоя
AN200-W0>l v
ANe00>2v
Рисунок 1.41
Эксплуатационные и весогабаритные показатели ПГ типа ANA1-C08:
снижение уровня шума на 40 дБ(А); для установки в быстроразъемном соединении
0 8 мм- эквивалентное сечение — 11 мм; вес — 5 грамм. Их не рекомендуется
использовать на открытом воздухе и подвергать контакту с растворителями и
коррозионными газами.
Фильтры-пневмоглушители (ФПГ) предназначены для удаления паров масла,
присутствующих в пневмосистеме, при выпуске сжатого воздуха из
пневматических устройств и „невмосистем, а также для снижения уровня шума при выходе
сжатого воздуха из выхлопных отверстий. ФПГ рекомендуется устанавливать в
пневмосистемах, где используются маслораспылители. ._
На рисунке 1.42 показаны мнемоническая схема (а) общий вид (бХгабарит-
ные размеры (в) и конструкция (г)ФПГ компании SMC (Япония) типа АМС 510
[24]. Максимальное давление на входе - 1 МПа; максимальный объемный расход
- 3000 л/мин; сепень маслоотделения - 99,9%; уменьшение уровня шума -
более 30 дБ; диапазон рабочих температур - от -10 до +60 С: вес и./кг.
Воздух (рисунок 1 42 г) через отверстие 2 присоединительного штуцера 1 по-
^n^Z^VZvyl^o элемента 5 и. пройдя через него, ос-обожда«^
масла, которое стекает па дно чашки 6 из поликарбоната. С^нещ^р-
выходе воздуха в атмосферу обеспечивается звукопоглощающим материалом 3. За
4*
Глава I
-GTZ}
»)
б)
мена фильтрующего элемента
обеспечивается свинчиванием штуцера 1 со
стяжной шпильки 4, удерживающей детали
фильтра в собранном виде.
Вывинчиванием запорной иглы 8 из втулки 9
открывается игольчатый клапан и осуществляется
слив масла из чашки 6, которое выходит
наружу через радиальные отверстия 7
и центральное отверстие 10 в запорной
игле 8.
ФПГ типа АМС имеют 5
модификаций, отличающихся максимальным
объемным расходом — от 300 до 10000 л/мин.
С помощью диаграммы (рисунок 1.43)
можно осуществить выбор ФПГ для пнев-
моцилиндров с различным диаметром
поршня и скоростью его перемещения. Так,
например, при диаметре поршня 150 мм и
скорости перемещения 300 мм/с объемный
е05МП»
300
100 мо
Рисунок 143
500
Рисунок 1.42
расход составляет около 1900 л/мин, что
соответствует ФПГ типа АМС 610.
Противодавление, создаваемое
фильтрующими элементами, может быть
определено с помощью диаграмм на рисунке 1.44,а.
Диаграммы на рисунке 1.44,6
показывают зависимость уровня шума,
создаваемого сжатым воздухом при выходе в
атмосферу, от объемного расхода пневмоуст-
роиств без фильтра-пневмоглушителя,
(кривые 1) и с пневмоглушителем (кривые
2), а диаграммы на рисунке 1.44,в и г
показывают их шумовые характеристики с
использованием и без фильтров-пневмо-
глущителей.
Структура и нашачеиие систем автоматики
200 300 1000 2000
Объемный расход (л 'иин>
5000 10000
2000 4000 6000 8000
. i i расход (пАот)
1 - без фильтра пневмоглушителя; 2-е фильтром < *'
10000
1 1 1 1
Шумовые характеристики АМС 810-910
225 450 900 1800 ЗоОО ">200 14400
Диапазон частот (Гц)
1 - без фильтра пневмоглушителя; 2- кривая предельно допустимого уровни шума,
3-е фильтром пневмоглушителя
ПО
г i .
Шумовые характеристики АМС 810/910
« 1 1
8. 70
S-
60
диапазон частот (Гц)
I - бет фильтра пневмоглушителя; t арида ■»—
3-е фильтром пневмоглушител»
Рисунок 1.44
Глава I
«rro применение физмров iihcbmoi lyiiirtTctvii дает (чпможночь нс-
tv иегкмнитс тьиые пневмочетройства с напаюном звуковых час го i от О
144П0 Гц бет превышения предельно допустимого уровня шума.
1.11. > СН.1И1С1И давления
\vT
Гтлпггел Чономвтры
<5)
^PeiMinop
давления
\
Првовм
it
Л-
г
-4ВЯМ
Уатюми
Б
'I
М к'
l*i гмг-
I
^сили-
"пдьнм
nuept A
Поршень Б
г»1 «I .'
ГМ МО
ОбрсгкыЯ
Выход
В)
Усилители давления нречназначе-
ны для повышения давления в пневма-
шческич магистралях без дополни
тельных затрат электроэнергии.
На рисунке 1.45 представлены
мнемоническая схема (а), общий вид (б),
принципиальная схема (в) и габаритные
размеры (г) усилителя компании SMC
(Япония), тина EVBA 111J с
присоединительными отверстиями 1/4", для
рабочей среды с содержанием примесей
5 мкм. очищенной от масла, имеющего
следующие характеристики: диапазон
давлений на входе — 0.1... 1.0 МПа;
диапазон давлении на выходе —
0,2...2,0 МПа; рабочая температура —
5...50°С; номинальный расход воздуха
при давлений на входе, равном
давлению на выходе 0,5 МПа — 60 л/мин;
отношение давлений (вход/выход) —
max 4:1; вес — 0,98 кг [24J. Работает
усилитель следующим образом (рисунок
1.45,в). Из выходной магистрали сжатый
Рисунок I 45
<труктура и назначение chcicm авгомашки
35
ОвммкыЯрмвдГ
§1 06
104
- 102
£ 10
а<т
о«в
о од
о «2
о«
о
ш
1111
Ш
.< гвртомя точкш
во мух поступает через оорагные к шпаны К1
и К2 в усилительные камеры А и Ь. а штем
через регучяюр давления и пневмораенрече
дитсль с прямым механическим управлением в
приводную камеру Б В результате увеличения
давления в лих камерах сдвоенный поршень,
преодолевая давление в усилительной камере
Б. перемещается влево, в peiyjrbiarc чего
происходит дополнительное сжаше
находящегося в этой камере воздуха, который через
обратный клапан КЗ поступает на выход к
потребителю, а воздух щ приводной камеры А
сбрасывается по каналу F в атмосферу.
Когда сдвоенный поршень достигает
своей мертвой точки, он переключает пневморас-
пределитель таким обраюм, что начинается
заполнение через регулятор приводной
камеры А и деаэрация приводной камеры Б. Под
действием давления воздуха в приводной
камере А и усилительной камере Б, сдвоенный
поршень перемещается влево, вызывая
дополнительное сжатие воздуха, находящегося в
усилительной камере А и его поступление
через обратный клапан К4 на выход.
При достижении сдвоенным поршнем
второй мертвой точки вновь происходит
переключение пневмораенределителя и цикл
повторяется.
Характеристика расхода усилителя типа
EVBA 1111 приведена на рисунке 1.46.а. Так, например, при /»i=0.75 МПа и
р2= 1,0 МПа, объемный расход составляет 75 л/мин.
02 04 06 0*
Дшиине каким* PI (МП»)
Р1-0оМ11«.ПЧММП«.
оОммныЯ ркхо) » 10 л'ыпн
10
:ч
"10
20 Ю
Отношение мыший P2/PI
е)
12 3-4
Объем резервуара (л)
1'исмюк 1.46
Глава I
XMtpro» «юен» рисунок 1.46.6). печенная дл* ооъемжт^схо-
Ю ^^к*«ывает. что при ,=0,6 МПа тавление на выходе Р-1.0 МПа,
те viewweaeTCJi в 166 раза
да того, чтобы ограничить тльсацию давления на выходе, рекомендуется
^танмиюатъ дополнительный резервуар (ресивер) со стороны вторичного
контура (рвсмюк 1.46,г). объем которого может быть выбран с помощью диаграммы на
донке 14б.е Так. например, чтобы ограничить пульсацию давления до
0.02 МП требуется допатнительный резерву ар объемом 1.3 л.
Бремя, необходимое для достижения давления в резервуаре, например от
р i= 1.0 МПа до р 2=13 МПа при давлении на входе 0.5 МПа. определяется с
помощью анаграммы на рисунке 1.46,в (ятя усилителя EVBA 1111) следующим
образом-
р, 05 ~ р, 0.5
чри во ни давления с соотношения 2 до 3 время достижения указанного
- г= 170-60= 110 с на каждые Юл объема.
Время подачи повышенного давления в резервуар может быть сокращено
путем параллельного включения обратного клапана tрисунок 1.46л). При этом
усилитель начнет функционировать лишь тогда, когда давление в резервуаре будет
соо . давлению р, в пневмосети, что иллюстрнр\ется диаграммами на
рисунке 1 46дк.
Г.18ВЯ II
ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКИХ ДАТЧИКОВ
В автоматике очень часто контроль, регулирование и передачу физических
величин осуществляют при помощи электрических сигналов, так как они наиболее
удобны для построения различных автоматических устройств, обеспечивая
высокую скорость передачи, дистанцнонность совместимость и дальнейшую
обработку ^усиление).
В этом случае неэлектрическне величины (скорость, ускорение, пшенное и
угловое перемещение, давление и разряжение, температура световой поток,
уровень и др.) преобразуются в электрические величины (напряжение, ток.
сопротивление, мощность, частота, индуктивность, емкость. ЭДС и др.).
Для этой цели широко используются первичные преобразователи
информации — электрические датчики.
2.1. Классификация электрических датчиков
Датчик — устройство, функционально преобразующее контролируемую
(входную) величину в выходной сигнал, удобный для дальнейшей обработки и
дистанционной передачи.
В общем виде датчик Д (рисунок 2.1) предста&зяет собой чувствительный
элемент (ЧЭ) и преобразователь (П). I
Чувствительный элемент выполняет функ- л | . »
ции «органов чувств» н предназначен для преоо- } I i n I 1 |
разования контролируемой величины д в такой ' _ _1 i
biu сигнала .м. который удобен для дальнейшее) РнонокЛ!
использования в преобразователе П. в котором
неэзектрнческин сигнал .г| преобразуется в электрический снгнат у.
Электрические датчики делятся на параметрические и генераторные.
Параметрические датчики полу чают электрнческу ю энергию от
вспомогательного источника энергии. К ним относятся контактные, погенцномет-
рические, тензо- и терморезнсторные фотоэлектрические индуктивные,
емкостные датчики, датчики Холза.
Генераторные датчики не требу ют постоянного источника
энергии, гак как являются источниками ЭДС.
К ним относятся термоэлектрические, пьезохчектрнческне. тахометрнческне.
индукционные датчики.
К датчикам предъявляются следующие общие требования f53J:
1) непрерывная и линейная зависимость выхотнон ветчины у от входной с
2) высокая динамическая (лифференциальная) чувствительность;
3) малая инерционность:
4) наименьшее влияние датчика на измеряемый или ретллирлемый параметр:
5) надежность в работе;
6) совместимость с используемой измерительной аппаратурой и источниками
питания:
7) минимальные масса и габариты:
8) низкая себестоимость.
При выборе датчиков неооходнмо также учитывать особенности
технического процесса: периодичность и максимачьную частоту воздействии, наличие
вибрации, параметры окружающей среды (температуру, влажность* нашчне токсичных
и воспламеняющихся компонентов и др.)
Глава II
U. Э,.И1-к.«—«»^б'>"ММ™" W4"K0B
. ™Лжомгеш датчиков служат для преобразования ме-
••SSSSSSSSS^. ор-на кхнкческого устройства (текко-
"^^ГГ:;ТГ«То^Г»асГсоед.,„е„Ис двух „т_
*лектриче1л Ы„«1У ними [541. Контакты бывают открытые и
и», позволяющее проводить ток между ними и*\
^^^ГеТонтактов в запаянном стеклянном баллоне, заполненном
„тертным газом (чистым азотом или азотом с небольшой добавкой водорода,
давлением (0 4 0 6) 105 Па) предохраняет их от окисления и загрязнения. Для
улучшения контактирования поверхности касания (контакты) покрываются тонким
слоем (2 .50 мкм) золота, родия, палладия, рения, серебра и др. Такие
герметизированные контакты получили название герконы.В связи с тем, что контакты в
геркоие управляются магнитным полем, герконы называют магнитоуправ-
яемычи контактами.
22.1. Разновидности герконов
Характерные разновидности обычных герконов изображены на рисунке 2.2
[46]. на котором «а» и «г» — замыкающие герконы, «б» — переключающий гер-
кон. «в» — переключающий с помощью металлического шарика М (срабатывает при
изменении наклона геркона или перемещении шарика с помощью магнитного поля).
ЖМ
WftJJJ,
R Рис\нок2.2
^ярнъГсил'ы у^рживаГ-™"3 (~РИСУН0К 2'2'д) на поверхности контактов моле-
-ни, силы нажатГв кГ^^лГ^ ЖМ (РТуТЬ ~ Н^ Чт° Не ^ет ""'
ромагнитного материала выполнен " Качество контакта. Плунжер 1 из фер-
Держателем через сюй жидкого мДЛп^п6 ТРУбКИ' контак™рующей с контакто-
перемещается влево и контакты " 1 ^Д Действием магнитного поля плунжер
перемещает плунжер в исходное сюТ™™' Пр" Снятии-тока возвратный элемент
мыкает контакты 1—г^^к^^^Г*?"'^ "P" сРабать,ва»ии замыкает или раз-
°бмоткс Управления to Магиитни" 3 в завнсимости от направления тока в
<и пластине 2. в зазорах 1-2 и Г."°ТОК 0т нее- проходящий по магнитопровоДУ
** Частей геР*оиа. В одной чягТ"1РаЗДеЛЯется на два потока — верхней и ни*-
С"^ываетс« с потоком от to в ^ МагНИТНЫЙ "оток от постоянного магнита
«™*и складываются в верхней часГ"! ~~ °"И «"читаются друг из друга. Если
«t*V™L КШ «^Рюом. изменен^ ^"^тся контакты 1^2, если в нижней
X^^^^^S9'^тока в обмотке * (и потока оТ
МЯТЫ° И^ЛК^ ™^и^Я^^пдайствия геркона с магнитной па-
. СОппл^г
n neov/rib'
Преобразователи мектрнческих датчиков
59
тате чего замыкаются контакты геркона После снятия импутьса тока «жтагш
остаются в замкнутом состоянии за счет потока от намагниченного сердечника
N-S. Для размыкания контактов в обмотку подается импульс противоположно*
полярности, создающий поток противоположного направления
Вместо постоянного магнита N-S можно применять реманентиые материа-
ты (сплавы кобальта н хрома 35КХ12. 35КХ15. 40КНБ). характеризующиеся пря-
моугольностью петли гистерезиса, достаточно высокой остаточной индукцией и
большой магнитной энергией В опнчие от магнитотвердых ставов,
используемых для изготовления постоянных магнитов, реманентные материалы обладают
очень малым временем перемагничивания, находящимся в пределах 10..50 чкс.
Общее время срабатывания герконов с магнитной памятью — I. .5 мс.
2.2.2. Управление герконами с помощью постоянных магнитов
На рисунке 2.3 представлены схемы управления герконами. входящими в
состав путевых датчиков (выключателей).
■-Е1КФ1
СР~-
СР
отп~-~отп
а)
Рмс>нок2.3
В схеме (рисунок 2.3.а) на перемещающейся со скоростью v детали 5
устройства устанавливается постоянный магнит N-S. При подходе к геркону 3 поток Ф от
постоянного магнита замыкается через ферромагнитные пластины 1 и 4. в резузь-
тате чего замыкаются контакты 2 геркона за счет магнитного притяжения Когда
постоянный магнит отходит от геркона, магнитный поток исчезает, и контакты 2
расходятся под действием упругих сил плоских контактных пружин 1 и 4.
На рисунке 2.4 представлены тяговые РА$) и противодействующая Р^Ь)
характеристики геркона [54].
Состояние геркона изменяется при приближении или удалении от него
постоянного магнита. При приближении постоянного магнита на расстояние л, (рисунок
2.4) его магнитный поток начинает замыкаться через контактные п тетины. Под
действием усилия, создаваемого этим потоком, контакты сблизятся, и зазор между
ними уменьшится от 8„ до 8| (точка А).
При дальнейшем
уменьшении л усилие,
создаваемое постоянным магнитом,
увеличивается, и
характеристика Р, поднимается. При
*2=*./» контакты замыкаются
(точка Б). Зазор Ь\
называется зазором срыва 6^,.
Контакты переходят в конечное
положение, определяемое
зазором 84 = 6,, который оп-
Рис>нок 2 4
Глава П
„МКПЫ1ИЯ и неровноегями контактом иоверх-
^^ утиной -^"^'^l^n'ara Л берется меньше v, Ми-
пост* г» обеспечения запаса no yui шю kuuF
ое контактное нажатие при х2"^ ^ ~ координаты v до значения
^^- « ™- Т^^Г £"случае
мни. Gn .ет паралле1ьна оси геркона (шния Л—Л) (.рисунок
ZZ»^v« « тангенциальную составлякниую индукции I», поля аостоян-
X :^рис>нок 2 5.а, Изменение В, при перемещении магни »«»»«
том же рисунке Срабатывание геркона наступает в точках В, = ВС/, Таким
образом, при т—и магнита в направлении, указанном стрелкой, возможно
трехкратное срабатывание (точки СР, ... СР,) и отпускание (точки 0777, ... 0777,).
Первое срабатывание происходит в точке СРу.
Рис\нок2.5
^бГСтоп°СнЬ НаМаГНИЧИвания ма™™ перпендикулярна оси геркона (рисунок
^кратнЛа^ГГИ МЗГНИТа В УКа,аНН°М СТРеЛК0Й направлении происходит
^Г^ГоГпГякона'который реагирует на но<—*юс—-
«в.1я^сЯя-ГеРК°Н0В' УПравляемых постоянным магнитом, основными параметрами
И координата срабатывания
и герконом в момент срабатывания ределяющая Расстояние между магнитом
2) координата отпускания v n
герконом при отпускании; '"""" определяюЩая расстояние между магнитом и
3) дифференциал хода ,/ п™
<*=^-уС|>; "> представляющий собой разность координат
4) зона вьюченного состпЯНиа
4)30на ^'юченного состояния л,
ояния Л>- составляющая
Перечисленные выше xJ^~yomH+y,p~2ytP + d-
ГврКОИ 1 сР^тывает, а в roZTl^Z" m*C"»™» Р^унком 2.6. В точке А
„ /7) "впускает при реверсивном перемещении по-
" ^У "энного магнита N (рисунок 2.6,а) и
при отсутствии реверса (рисунок 2 6,6).
Величины <1и дув большинстве
случаев должны быгь минимальны, т.к.
«ольшая величина d увеличивает зону
иЗпГИТеЛЬН0С™ конгрольно-
"чмерительной аппаратуры.
Рисунок 2 6
Преобрязова 1сли электрически»
циников
61
ynpaBjiciine юрколами может осуществляться за счет перемещения ферро
магнишого жрана (мапшгною шунта). На рисунке 2.3.6 1еркон срабатывает при
удалении жрана Э, ранее туширующею машнтный поток, от постоянною мат-
ннга. т.к. Mai нитный ногок Ф| становится меньше магнитного потока Ф2.
На рисунке 2 3,в ie-ркон срабатывает при приближении к постоянным
магнитам жрана вследствие возрастания мат ни гною потока Ф, который замыкается не
через воздух, магнитная проводимость которою меньше маптитной проводимости
металла, а через феррома! нитный экран.
На рисунке 2.3,г геркон срабатывает при удалении жрана из зазора между
герконом и постоянным магнитом вследствие того, что весь магнитный поток,
создаваемый постоянным магнитом, будет замыкаться через контактные пластины
геркона, создавая соответствующее усилие срабатывания
При большом количестве герконов они могут быть установлены по окружно-
сти (рисунок 2.7,а).
Постоянный магнит
1 укреплен на
вращающемся рычаге и
поочередно
замыкает герконы 3, 2, 4.
Для уменьшения
зоны включенного
состояния Лат
герконы помещены в
магнитные экраны 5.
Влияние толщины
экрана Л на работу
геркона показано на рисунке 2.7,6.
\а:. град
Рисунок 2.7
2.2.3. Схемы включения герконов
В таблице 2.1 приведены технические данные герконов отечественного
производства. При уменьшении коммутируемого тока значение допустимого
напряжения увеличивается (U=PmaJl), но не должно превышать значения U^,
определяемого электрической прочностью рабочего зазора. При уменьшении
напряжения коммутируемый ток увеличивается, но не должен быть больше значения /„,„.
Таблица 2.1. Основные технические данные герконов
Параметр
2 I 2
ы I ы
2 S
i
S
й I ы
5 S
Общая длина, мм
Длина баллона, мм
Диаметр баллона, мм
Максимальная
коммутируемая мощность. Вт
Максимальный
коммутируемый ток, А
Максимальное
коммутируемое напряжение. В
Максимальное время
срабатывания, мс
Максимальное время
отпускания, мс
замыкающие
79
50
5,4
30
1,0
250
3
2
переключающие
2
о.
замыкающий
64 I 45 I 45 ( 41 I 30 I 40 I 48 I 54 I 65
37 28 20 I 20 16 I 10 23 18 44
4,2 ( 3,6 (.3,1 J 3 J 2.6 | 2,3 14,41 4 | 8
12
0.15
220
12
0,35
127
2 2,3
0,8 0,5 0.5
7,5
0.25
80
1,5
0,3
9
0,25
180
1,0
0,3
0 3
0,01
30
0,6 6,0
0,03 0,2
36
1.0 0.8
36
7.5 200
0,25 I 2
180
1,0 1,5
0,5 0.3 - 2,0
100
10
8
67.5
43
8
80
3
20
4
3
Глава II
*■»
~u._, ппя чисто активной нагрузки.
"" ^^Г^=Г„1С^ь герко„а ухудшав „
. сче аой нагрузке RL коммутационн значения постоянной
■ ^"-ГГеГ^Гр^ыГГяля активной нагрузки
!Гк™герконаслеОТТироЮТьце= Harpy31ta R„
*°" ' ' Lh шунтирована резистором Rw. При
размыкании контакта геркона ток протекает
через резистор Rw и вся электромагнитная
энергия переходит в тепловую,
выделяемую в сопротивлении нагрузки RH и
резисторе /?ш.
Наличие резистора Яш увеличивает
токовую нагрузку контактов, что является
недостатком схемы. От этого недостатка
свободна схема на рисунке 2.8,6 В этой
схеме контакты нагружаются только током
UIRH и обратным током диода VD. При
включении цепи через диод VD протекает
только небольшой обратный ток. При
отключении поток в магнитной цепи нагруз-
Рисунок2.8 ки начинает спадать и на ней появляется
ЭДС самоиндукции с полярностью, обозначенной в скобках. Для этой
полярности диод VD открыт и закорачивает нагрузку. Вся электромагнитная энергия
нагрузки выделяется в сопротивлении RH и прямом сопротивлении диода.
В схеме рисунок 2.8,в контактный промежуток шунтируется резистором
Ru, что облегчает гашение дуги и уменьшает износ контактов. В этой схеме для
полного отключения цепи необходим дополнительный контакт К2, который
разрывает цепь после отключения контакта К1. Чем меньше сопротивление
резистора Rw, тем быстрее гаснет дуга. Однако при этом контакт К2 нагружается
больше током.
В схеме (рисунок 2.8,г) контакт шунтирован цепочкой RjC. Положим
вначале, что Кш-0. Наличие конденсатора С уменьшает ток, текущий через контакт-
^тЗГТ™' "Г™' С ТЗКЖе Снимает СК°Р°СТЬ нарастания напряжения на
контактах. Все это облегчает процесс отключения """"
конденРсатГаЫКпГИ Ш™ ВЮМ°ЖНа СИЛЬНая электР™ская эрозия за счет разряда
конденсатора. Для ограничения тока разряда служит резистор Я
^ннегГф^ГЛ^) ГГо™веоНеРа (ДВУХ ™^™° ™" «Диего двусто-
лельно кат^ш1 позволяют исп1ЛОЖНЫМИ П0ЛЮсами' включенными парал-
пктания зТпазды1ТпрТвыГГ°ВаТЬ ПОСТОЯННое и временное напряжения
ше 150ВследУетГ1юча?ьпо™ СНИИ уС1?анимо' «Д^ко при напряжении свы-
Весьма ^Тшы^Т ^^ "еск™ъ™ диодов-
фисунок2.8,е), ток утечки котппкГ^НИЯ пеРенапРяже»"я являются варисторы
«ого напряжения. Они пригодны В03растаег лишь при превышении номиналь-
тен пригодны для схем с постоянным и переменным напряже.
tfan^^t^^^!^ "финалы некоторых элементов ис-
**«* осуществляв, помо Z ' ^ ЬЬ5ТО (^Рмания),
запитывание ко-
***™*« <см. 5 3.3). ЩЬЮ эле«^оконтактных датчиков с магнитным воз-
Габли
и,
В
<48
48-
240
ца 2.2. Элементы искрогашения для электромагнитных катушек FESTO
^^^Тип катушки
Элемент^*^^^
искрогашения ^"""-^^
Сопротивление R (Ом)
Емкость С(цФ)
Диод Зенера
Варистор
Сопротивление R (Ом)
Емкость С(цФ)
Диод Зенера
Варистор
Постоянное напряжение
MSFG
1
0,1
2xBZY
97 С 75
125SDL
480/6
1
0,1
2xBZY
97 С 75
125 SDL
1КУ6
MSG
1
0.1
2xBZY
97 С 75
175SDL
480/6
1
0,1
2xBZY
97 С 75
175 SDL
1К/6
MSXG
1
0,1
2xBZY
97 С 75
175 SDL
480/6
1
0,1
2xBZY
97 С 75
175SDL
1К/6
Переменное напряжение
MSFW
220
0.1
4xBZY
97 С 2000
125 SDL
480/6
470
0,047
4xBZY
97 С 2000
125 SDL
1К/6
MSW
220
0,1
4xBZY
97 С 2000
175 SDL
480/6
470
0,1
4xBZY
97 С 2000
175SDL
1К/6 1
MSXW
220
0.1
4xBZY
97 С 2000
175SDL
480/6
470
0,1
4xBZY
97 С 2000
175SDL
1К/6 1
Выбор параметров шунтирующей ЛС-цепочки производится с помощью
номограммы на рисунке 2.9 [47]. По току / и напряжению на нагрузке U„ опреде-
0,01
0,008
0,006
0,004
0,003
Рисунок 1-9
I лава II
„^ . „пснсггора , Для че. о .ipono ш.ея прямая через
„и «ост* шумтигУ™*™ па оси к указы лет u.npi.i ивленис
*rt»c Т тии'и' J
ре пастора
м напряжет* на натр зке (/,« 200 В
HepTZ через .очки с коорчинатами /. и V. на номо.рамме рисунок 2.9
пря-уюдо пересечения с вертикальной шкалой еонрогивлении «.
Потуч м К= Ом. С=4мкФ.
2Л.4. Преим -щеста и иенилатки |срконов
Герконы обладают стетующими преимуществами-
1) герметичность, потво тяюшая их использовать в условиях повышенной
влажности, запыленности, н .аро- и взрывоопасное!и и кн. при
низком перехошом сопротивлении в замклгутом положении
(001 .0.001 Ом) и чалом падении напряжения на кош акт ах;
2) простота конструкции, малые масса и табариты, ню позволяет
автоматизировать их нрои!водство и спиши, стоимость иноговления;
3) высокое быстродействие (время срабатывания и отпускания 1...3 мс),
что позвотяет испотьзовать герконы при частоте коммутации до 1000 в
секунду,
4j отсутствие трущихся деталей и сложных кинематических пар
обеспечивает надежную работу терконов в течение 106 ... 108 циклов;
5) высокая злектрическая прочность междуконтакннно промежутка;
6) гальваническая развяжа цепей управления и коммутируемых цепей;
' ' ' управления как -ысктроматнишым полем, так и нолем носто-
янного магнита, что расширяет функциональные возможное!и i еркотюн;
Qi "*iJ2^1Xrrb раб0ГГЬ1 В ,Ш11К)КОМ Дишююие температур („г -60" до +120" С);
НедостаткиТ кыш'™™ * С°ВрСМе,,,,ЬШИ изделиями микро >лск тропики.
l^Z'^Z!™ ЧУВСТВИТС ,ьнос,ь'» м<" «инюму килю управления,
ZZZZZ*»к внс,шшм ма,иижым пол™- ч»°^^ c«°w-
нмх мер по защите от их воздействия-
™'^ZZZбa'L,<,,,a• ЧУВС1ВИ,С ,ЬШКЛ" к У^™ и вибрациям,
4) значите тьиое впеJ«*ЧТгМЧ> "° ач,0Р1И,аЧ"и места установки герконов;
—- •^zz^zz:;^''«""-»'* <>■* * -""
1К«ш,и„ич)с%ге11111гэГ|етг1юп«-' «Ч.к ...рое может cociukiihii. ДО
токах, Р°и«во1ьжио ратмыкания коша и при больших
7) шачительиый техт
Х""" ИткииР^роспарамсФон
2.2.5.<г,кры.Ые мектически* ^
|"|ескиеко_,па1С1Ы
f * крытые коит акты в Гк
■• «.«mo «***шч^кон, х„^Й J™*"*, нем закрытые „еркопы,. подвержены
И Ц^*"* «"виричеш.!» ишоеа и, ,ю тому, менее
«- ^И" ГЦГт "'^"ncidl" ж"* ,ГеЛ' °Г,УС ■--•иваю.пси характер сопри
"""""^'рисунок 2 If), ,1ж' Ра«'|ичаку| „ .It.„.Uc, линейные и
. - неких датчиков
1очечнме контакты Гри унч 2 Ю,а>,
обеспечивающие соприкосновение рабочих поверхно
сгей контакте в точке, выполняются в виде конуса, по
лусферы и Плоскости, двух ткнусфер и применяются в
пенях с небольшими кждми (не выше 2 Ч А)
Линейные контакты, обеспечивают!*
соприкосновение по линии (рисунок 2 10,6), применяются в
цепях с токами порядка единиц и десятков ампер
Плоскостные контакты (рисунок 2 Ющ
используются в цепях повышенной и большой мощности
с юками порядка десятков и сотен ампер
Контакты, прелнашаченные для рабо)ы при не
больших токах, выполняются ит блаюродпых метаыов
С
б)
в)
1'исуиок2 10
(серебра, платины, иыога, палладия) и их спгавов, а при сравнительно б лылих
тиках — из во тьфрама и ею сплавов с мо жбденом, нлатитю иридия и других ме
таллов.
Для обеспечения надежною контактною соединения контактное уси ihc не
должно быть менее 10 ' Н для золша, (5. 15; 10 Н для серебра и 0,7 11 тля
вольфрама [4|
Для надежной работы контактов необходимо, чтобы при номинальном токе
/,,„„ падение напряжения на переходном сопротивлении К было меньше падения
напряжения в ючке ратмят чения материалов UK\ (таблица 2 5;.
/,,„„*» = (0.5.. 0,8)1/,, (2.1)
Неличина контактною нажатия /■„, для номинально и тока определяется с
помощью выражения |54j
FKII=p2noJ(4K2).
о„
Jk
Ом
(2 2)
,лс р _ удельное сопротивление материала контактов (таблица 2.5); О „ — вре
меиное сопротивление на смяже материала контактов (таблица 2.5).
Для упрощения расчетов может быть иснолмована эмпирическая формула
[45,54|
/W="VW
(2 3)
где kt - ко *рфицис.гт для одтнночечных котгтатпов, выбираемый ит .абоицы 2.1 [54J.
1аблица 2.3. Значения Ц —- *■ лля одноточечных коп„ктов
И
Материал контактов
Медь
Серебро
Олово
-Латунь
'таль
Алюминии
/тля слаГнпОчпых
контактов
Дли силытигочных
контактов
0,0)4. .0.0175
0.(К>6
...кги нпи копотком «мыкании (Kl) iaipya-
Аналитическии расчет ^^V,u, ноль а.ься он. ыми данными, нспо-
пе.г. по ,ому при расчетах нелесооорлии» пол
1 ' ' vili.lllllll ИЮ
I нот о привариваюшет о юка (ударный ок).
(2.4)
1Ш1
срСДстисппос1.я...1ва..,.иими ,ок сиари...п.ия и к« ^
*")мннричсс
||кфмула гшя минимшты
Лы-.-,шяко,ффи..иснш к приведены в.
■блине 2 4,
Глава II
[
Материал
Тип контакта
I Щеточный
Пальисвыт* несамоустанаативаюшийся
Медь— татунь
Медь — медь
Латунь —медь
Латунь —сталь
Латунь — латунь
Медь — латунь
Ь. А/Н
тт
950... 1270
1300
1200
1520
1600
1820
| Пальцевый самоустанавливающийся
Приваривающий ток возрастает с увеличением силы нажатия в контактах F„.
Минимальный приваривающий ток является ударным и равен [45]
где fc, _ ударный коэффициент (для низковольтных контактов А.4« 1,3); /„ — ток
короткого замыкания.
Пример.
Определить необходимую силу нажатия в серебряных одноточечных
контактах. Номинальный ток 1я-2 А. Ток короткого замыкания /„=20 А.
Решение.
1. Из условия надежной работы точечных контактов (2.1) величина
переходного сопротивления
К = 0,5 UJIH.
Из таблицы 2.5 находим для серебра падения напряжения в точках размягче-
i и плавления матепиала:
ния и плавления материала:
£/., = 0,09 В;
Таблица 2.5. Материалы контактов
£/*2 = 0.37В.
Материал
Платина
Золото
Серебро
Вольфрам
Медь
Алюминий
Молибден
Олово
Железо
Иридий
р. Омм
11 10
2,3-10"8
1.65-10"8
5,5-10"8
1,75-10*
2,91 10"8
5,8-Ю"8
12 10*
1010'*
5,5 10'
МН/м
780
530
340
1800
520
150
1690
45
350
После подстановки
получаем:
Температура. °С
Размягч.
7",
540
100
180
1000
190
150
900
100
500
—
Плавлен.
Т,
1773
1063
960
3390
1083
658
2620
232
1540
2450
Напряжение U. В
Размягч.
vki
0,25
0.08
0,09
0.4
0.12
0.1
0,25
0,21
—
Плавлен.
ик2
0,65
0,43
0,37
1,1
0.43
0.3
0,75
——
0.6
—
2- С помощью выраже„1=(°25,?,09/2=0'0225 °М"
™я) F. ^яноминГно" J3;3) °"Р«™ «
'номинальноготока-' "1'*"АСЛ>1СТСЯ контактное усилие (усилие
Из таблицы 2.3 для сег**™ *""= ^'"^
Таким образом СеребРЯнь'* слаботочных контакту А, =0.006 н"2 Ом.
* 1^^(25,. J^°j^25,Ja007 H.
/"-=*»^'„ = l.3V2-20 = 36.77 Л.
на-
Преобразователи мектричеекц датчиков
4 С помощью (2 ) находим F„ « тога itoprnwro «шыгаи
как иПхГ^ "1° ^Т ЖПРИ"Р"""" *м «ребртных контактов таю*
как и для медных, так как физические параметры материале, достаточно (шаги.
таотицы 2 4 для пальцевого несамоустанаа.1иваю.цегося контакта *> = 1ЧЮ А/Н
Окончательно пату чаем.
F„ = 36.77г/1300: = 1352 (169 10*) =0,0* Н
5. Поскольку контактное нажатие по номинальному tokv />*0.07 Н г"
KOHTajcTHoro нажатия, определяемого no tokv КЗ Fe» 0.0008 Н то прнн на
жатие^„ = 0.07Н.
2.3. Потенцномегрнческне преобразователи датчиков
Потенциометрические (реостатные) преобразователи служат для преооразо-
вания угловых или чинейных механических перемещений в соответствующие
изменения сопротивления А. напряжения V щи тока /.
Конструктивно потенцномегрический преобразователь (потенциометр)
представляет собой переменный резистор (реостат), включенный по схеме детителя
напряжения, подвижный контакт которого перемещается под воздействием
механического усилия.
Широкое применение в устройствах автоматки получили проволочные
потенциометрические преобразователи непрерывной намотки. Они состоят hi
каркаса, обмотки и подвижного контакта (ползуна)
Каркас выполняется из изоляционного материала (текстолита, стск.югсм.тт>
лита. пластмассы) или металла (алюминиевого сплава), покрытого слоем
изоляции По форме каркасы бывают плоскими, индии 1рнческммн и кольцевыми.
Для обмоточного провода негюльзмогся сплавы с высоким > тельным сопро-
гивлением: манганин, константан. нихром. Д|я преобразователей с матым > тельным
давлением и повышенной износоустойчивостью применяют сагавы из благородных
металлов: платины с иридием, платины с палладием н \р. Лнлметр оомогочного
провода в зависимости or необхо шмой пучности и ветчины сонрогааюиия
составляет 0.03...0.1 мм для преобразователен высокого класса точности и 0.3...0.4мм для
преобразователей низкого класса точности |4|. В габнше 2.6 нриве 1ены основны.
cbohcibu материалов, используемых тля шготовлеши иогсшшометров (54]
Габ-щца 2.6. Млгсржиы ногенцномстрнчеекнх игкччуазова гелей
~~ I \ дельное ) юкгриче I Мак», имальиач
Нздшеиованне и сосив материала СКОе сопротнменне [ рабочая
(сплава)
Манганин МНцЗ-12 (Си. Mn. Ni+Co)
Konciaman MIIMu 40-1.5 (Си. Ni+CoMnJ
Hciiiiuibocp MHn 15-20 (Си. 7а. Ni+Co>
Нихром X151100 (l:c. Ni. Cr)
Фехраль 0\2 М05 (Fe. Cr. .41)
I bin i ими-иридии il'i. lr)
Серебро-палладии (Ag. 1M)
Вольфрам (W)
npii20"C р.Омм
4.3 10
5 IP'
3.3 ю-1
1.12 Ю*
1.3-10*
I0UV*
3.8 10*
5.5 10*
rcMiicpaiypa.y
60
.MX)
2(X)
IKX)
1200
540
150
1000
1 Ю ж колпак шолпяюг в ни v ,u „ч. пара. ,e <--»;~(™
„лас них ще.ок „, сплаио» .. .а.ш» ирии.и. а ы.и-л fcT'-« '«"■•* "££;
фосфорнсюи upon но и 'ip. Д1н млцжнои гмин- -
OOMOIKC С КО !1.1,М1Ш \CII IIICM (0.5... IM 10 II
5*
68
Если по всей длине каркас имеет одинаковые высоту и ширину, а обмоточнь"
провод — одинаковые диаметр и удельное электрическое сопротивление, то тако"
преобразователь обеспечивает линейный закон распределения сопротивления.
2.3.1. Электрические схемы потенциометрических преобразователей
Потенциометрические преобразователи делятся на однотактные и двухтактные
Однотактный (непрерывный) преобразователь (рисунок 2.11,а) дает
возможность измерять перемещение х ползуна только одного знака и имеет
статическую характеристику управления при работе в режиме холостого хода, пред-
б)
ставляющую собой линейную завиГиГ^''
перемещением ползуна х (риСу2 2 1Ш ""^ ВЫХ0ДНЫМ "ряжением ивых и
РУющие на знак перемещГнГползу™ "Ре°бра30вате™ (РИСУН0К 2'2>а), реаги-
СТаВ73"^мНаарИСУНке2-12,б У ' ИМ£ЮТ ХаРа^Ристику управления,
преданием *ч!£Ц^^ с максимальным сопротив-
СОПр---Потенци^^^^ U. ПРиРзтоМ
г D R*=Rf(x) Щеткой Щ изменяется по закону
гдеях — сопротивление участка г- я ^ л. (2-6)
мещения движка потенциометра. ' ~ ФУНКЦИЯ линейного или углового пере-
Выходное напряже-
ние ивых снимается с
резистора Rx и,
следовательно, зависит от
перемещения движка. Таким
образом осуществляется
преобразование входной
величины (перемещение)
в выходную величину
(напряжение).
При смещении
движка вправо от точки
Н на величину х
выходное напряжение
потенциометра в режиме
холостого хода (Ян = оо):
Преобразователи электр»ЧСС|,11г
— -:^-^-^!^_Д№шко^^
U**=IRX=RXU/R, ^_R_
или с учетом (2.6) для любой заданной функции «Т'В ^
„ U**-Uf{x).
При линейном законе распределена
где0=х//-относительноеперемещениедвижка / „ (Z7)
Характеристика управления такого ncn™ln ™M0™f по каРкасУ-
линейна (рисунок 2.11,6) и прямая I соответ™! Т* " РСЖИМе хотс™™ хода
личии нагрузки №,*„) хараиииггппГ"ZL - Ф°РМуЛе (27)' Однак0
при на-
боте потенциометра появляются пофешно'сГ^ НеЛШеЙН0Й ^ив"е 2) и в ра-
Максимальное сопротивление обмотки линейного потенциометра
Л = 4р/(о/(^2) = 4р/сЛ/(^з)> -L__I__J1_^
СИ|0^Г0м^Г^Г^' (18)
где р — удельное сопротивление материала пговопя- /
витка намотки; ^со,, - ДЛИНа намотки "у 7^1ГоТТГГ,
в™ТмГ;.провода'соответс^
нии (2.вТравен: ° С°ПР°ТИВЛеНИе R ™^™метра, то диаметр провода на основа-
d=№lq>Lo/WR)-
Допустимая мощность рассеяния Р в обмотке при нагреве ее током должна
Удовлетворять условию
Р < ССТ Sox3 At, — jb. J^ L. П дч
СИ|Вт Вт/м'трад м град
где ctj коэффициент теплоотдачи; Sal7 — площадь поверхности охлаждения обмот-
и, Ar=t~tomax — допустимое превышение температуры обмотки при нагреве ее
током, / верхний предел температуры нагрева обмотки при максимальной
температуре окружающей среды; ?01ШХ — максимальная температура окружающей среды.
Это условие может быть выражено в другом виде:
4plcpI2/(nd2)<ar£,n!cpdAt.
Отсюда
I<Idon=ylaT^2d3At/4p,
где I — Ток в 0бмотке; £ — коэффициент, учитывающий, что часть поверхности
пРовода соприкасается не с окружающей средой, а с каркасом.
Для обмотки в воздухе а, = (0,1...1,4)-10" Вт/(см2-град) =
= 0.0...14) Вт/(см2-град), значение £ лежит в пределах 0.5<£< 1.
Допустимая плотность тока в обмотке зависит от материала провода и усло-
Вий его охлаждения. Обмоточный провод из манганина и константана допускает
плотность тока: при пластмассовом каркасе до 10 А/мм2; при металлическом кар-
Касе до 25...30 А/мм2. При этом температура не должна превышать 40...500 С.
Обмоточный провод из благородных металлов при металлическом каркасе
Пускает плотность тока порядка 40...50 А/мм2 и температуру 70...80°С.
2-3.2. Погрешности потенциометрических преобразователей
4v Основными источниками погрешностей потенциометров являются: зона не-
ЧУвствительности, технологические погрешности (непостоянство диаметра прово-
Глава II
Рвсужж213
д* шага намотки и др.), люфты, ^™^"с™£
«ш^ные факторы (влияние температуры, меха-
^Га^^ельнос™ ^словлена
дискретны* изменением сопротивления при переме-
^Гшетки с витка на виток. В пределах зоны
нХвствите.тьности перемещение шетки не
вызывает изменения выходного сигнала, поэтом}
сигнал изменяется скачкообразно или ступенями [33].
Олкнчатая характеристика линейного
потенциометра представлена на рисунке 2.13; ширина
ступеньки равна шагу L намотки провода, а высота —
сопротивлению R, витка.
Если для линейного потенциометра за идеальную характеристику принять
прямою, проходящую через середины ступенек, то зона нечувствительности или
Гбсолютная погрешность в единицах сопротивления составит:
ДЯ =хК/2ш. С2-10)
R — максимальное сопротивление потенциометра: to — полное число витков.
Относительная погрешность
bc=TARJR=±ll2vi. (2-Й)
Выходное напряжение нагруженного потенциометра зависит от характера и
— - * нагрузки R„ (рисунок 2.11л). В случае чисто активной нагрузки
(/„=/. К., IH=UJ(R,+RH),
где J. — величина тока в нагрузке: R, — внутреннее сопротивление схемы:
R^iR-RjRJR^l -с,) G;R.
Следовательно, с учетом (2.7)
Una=GIUaJ[oAi-ox) + aH], (2.12)
где <x.=RJR — коэффициент нагрузки; CX=RJR .
Характеристики потенциометра, соответствующие выражению (2.12),
нанесены на рисунке 2.11,6 пунктиром. Таким образом, при чисто активной нагрузке
• • дополнительная нелинейность характеристики управления.
Для уменьшения погрешности потенциометра от нагрузки целесообразно
иметь коэффициент нагрузки достаточно большим (o,> 10) или выполнять
потенциометр с нелинейным распределением сопротивления вдоль каркаса,
обеспечивающим при заданной нагрузке линейную характеристику управления (фУнкцио-
нальныи потенциометр).
^Для измерения переменных величин потенциометрические преобразователи
могут оыть использованы если частота не превышает 5 Гц.
Пример.
витК0^^Г,а6С°ЛЮ1?УЮ погРешность линейного потенциометра с числом
витков провода с эмалевой изоляцией rn-i*nn \a~*
диаметр005 мм Спе-ш„а иэоляц«еи со- 1600. Материал провода — константан-
^ениГ ОДНОГ° ВИТКа НаМОТКИ - 25 мм-
ст^^Г^о^:°ПРеАе'1ЯеМ УДеЛЬНОе электРИческое сопротивление кон-
где
величины!
ие
р = 5-107Ом-м.
2. Используя выражение (2.8), вычисляем максимальное сопротивлен
мотки линейного потенциометра.
»=4pto/(x<f)=4-5 10"7 0.025 1600/3.14(510'5)2 = 80010"7/7,85109=1,02Ом
3 Абсолютная погрешность на основании (2.10) равна:
ДЯ =±СЯ/2со)=±(1,02/2-1600)=±0,03 Ом.
об-
2*4. 1 еязопреобраэователв
В основе ... , уовт^ .
тензоэффекта, за* , , „ я в ™*V. > '**» "
__„„_ „ „ и -" активного ►•..!!« ,, , ,
[М49] па1упро1ЮДНтаовь" • ™ т нх ......;
По способу закрепления на , . элементах , ,. , делятся
на наклеиваемые н ненакленваемые.оо ..: . ... «„£
нению — на проволочные, фольговые патупроводниковые.
2.4.1. Наклеиваемые тензопреобразователи
П рово.точные тензопреобразователи (рисунок 2 14,а)
руктивно представляют собой отрезок тонкой • •. • токи 1 (• ■ ■ ппУ п1
которая зигзагообразно наклеена на тонкую бумажную i
ГПОХТОЖКУ! 2 f RPTTVV пппвгптгя тяшгй -Mimi^r-» 'mmm"
(подложку) 2. Сверху проволока также закрыта тонкой бумагой или .
или п.
КОВСТ-
<Ш2_005мм),
• I. t ОСНОВУ
Ркуаог2!4
пленкой 3, или фетром Для включения в измерительную схему к концам
ки припаиваются медные выводы 4. Такая плоская конструкция . -. * обычно
лучше, чем наматываемая на бумажный каркас 5 (рисунок 2.14.6), т.к. ближе
располагается к поверхности деформируемой детали, на которую нак. - тенэо-
преобразователь. Это приводит к более высокой стабильности (меньше
и ползучесть вследствие релаксации клеевого стоя) и дает более точные
результаты на тонких деталях (например, мембраны датчиков давления).
Измерительной базой преобразователя является длина петель решетки А,
величина которой лежит в пределах 13-100 мм Ширина решетки В P-^...10 мм.
НоминальноГсопротив.тение - 10. •1Ш^ТО^а^™1~^Ш)елстав.
Фотьговые тензопреобразователи (рисунок 2.15) представ
ляют со^йдальнейшее развитие проволочных. В них вместо решеток из ... то-
ки применяется решетка из фоль-
ги толщиной 0,004 ...0.012 мм.
Рисунок решетки выбирают
таким, чтобы можно было снизить
погрешность из-за поперечной
деформации, которая в
фольговых тензопреобразователях
практически сводится к нулю. На
рисунке 2.15,3 представлена
типовая форма фольгового тензопре-
образователя. на рисунке 2.15,6
- короткобазовый пр^Г^ва^ ембран>
теть, на рисунке 2.15,в -дл*"*"" могут пропускать больший ток, чем прово-
Фотыовые ^"Р^Р^^ „опе^ечного'сечения проводника при тех же
.точные, благодаря большей плошадн nui.cj^
Ржмкж 2-15
Глава II
~S*"~* " "~ пучшаюшей теплообмен, вследствие
„^«-ч решетки и большей теплоотдаче,^улу (ч вСТВИТеЛьному элемен-
СЕ~^^кд**^^ тока до
02A ^^^^f^^S^J^ и фольговых тензопреобразова-
В качестве материала решеток пр в таблице 2.7.
ю* применяются материалы и сплавы, приведеннь
TafriHua^TJ^a^ —
Материал
Химический состав
Серебро
Птатина
Медь
Константаи
Нихром
Манганин
Никель
Хромель
Платино-иридий
Платино-родий
100%Ag
lOOftPt
lOO^rCu
60%Cu+40%Ni
80%Ni+20«K:r
84f7rCu+12%Mn+46%Ni
99,5%Ni
65%Ni+25%Fe+10%Cr
809fcPt+20%Ir
90%Pt+10%Rh
Удельное
сопротивле-
нне р, Омм
1,6510°
HlO'8
1,7510"8
5210"8
НОЮ"8
45-10"8
810"8
ПОЮ"8
36-Ю"8
23-10"8
Коэффициент
тензочувстви-
тельности
2,4...2,°-
4,1...6,1
2,2...2,6
1.9...2Д
2,1.,.2,3
1,9
-12,6
2,5
6,0
4,8
Наибольшее удлинение тензопреобразователя не должно превышать преде-
юв упругой деформации. Обычно относительное удлинение составляет около 1%.
Температурный диапазон работоспособности от -40 до +70° С.
Основными достоинствами проволочных и фольговых тензопреобразователей
являются: практически полное отсутствие их влияния на деформацию детали;
линейность характеристики (рисунок 2.14,в); низкая стоимость.
Полупроводниковые тензопреобразователи отличаются от
проволочных и фольговых большим (до 50%) изменением сопротивления при
деформации и более высоким пределом чувствительности к температуре (в 10...20 раз).
Их преимущества заключаются в более высоком (в 60 раз) коэффициенте тен-
зочувствительности. малых размерах (длина базы А = З...Ю мм), больших
значениях выходного сигнала.
Наиболее сильно тензоэффект выражен в таких полупроводниковых
материалах, как германий (Ge). кремний (Si), антимонид индия (InSb), фосфид индия (1пР),
арсенид галлия (GaAs), антимонид галлия (GaSb) [lg].
Для тензопреобразователей чаще применяют германий и кремний в виде
пластан толщиной 0.03...0.2 мм, шириной 0,5... 1 мм и длиной (базой) 3...15 мм.
Существует несколько способов изготовления полупроводниковых тетонре-
^™™™£И: ВЫрезание из полупроводникового монокристалла; выращивание
S3^JTCPWn,0M К°НДеНСации паР°в- "несение „а некоторые виды
^способом Ш,еН°К С° СВ0ЙСТвами "«"«кристаллов; получение диффузион-
•одн^ГГтип°аб?пГЦИе ЭЛеКТРОННОЙ проводимостью, называются полупро-
SZtЖданные неГ"^ ДЬ'Р°ЧНОЙ "Р^Димостъю - „-™,va. Основные
-ДСныТ^иГ" 1 РЫХ ООЛУпРов°Д"иковых тензопреобразователей „p.i-
^ЛКг^^Г" "Р^ователей от -160 д*
40,1
при относительных деформациях ДО
-fe^^^
73
Таблица 2.8. Матепналы полупппипт,.,^
П^oiнiлTн^
Материал
Германий
(Ge) л-тнпа
Германий
(Ge) /?-типа
Кремний (Si)
н-типа
Кремний (Si)
р-тнпа
Номинальное
сопротивление,
__ Ом
200... 1500
50.. 500
100
30...300
Коэффициент тен-
зочувствительно-
стиприг=25°Г
-100...-150
55
-102
100. .120
Размеры пластин:
длина х ширина х
х толщина, мм
5...14х0.5...0,7х
х 0.1.„0,2
5,..10х1.0...0.5х
х 0,1...0,2
7х 0.4 х 0.05
7.,.9хО.4..Д5х0,О4
Максимальное удлинение
при разрыве
0,12.. .0.15
0,1
0.31
0.3
Основными недостатками полупроводниковых тензопреобразователей
являются: малая гибкость, небольшая механическая прочность, нелинейность
характеристики, большой разброс характеристик однотипных преобразователей,
нестабильность параметров.
Закрепление тензопреобразователей на деформируемых деталях
осуществляется с помощью целлюлозноацетоновых. нитроцеллюлозных. кремнннгрифтале-
вых, карбинольных. бакелитофенольных (БФ) и других клеев. Применяются также
керамические цементы и различные лаки.
Электрическое сопротивление одиночного длинного провода
R = pl/S. (2.13)
где р — удельное электрическое сопротивление: / — длина провода; S —
площадь поперечного сечения провода [30].
Если по всей длине провода к нему приложено равномерное напряжение с
изменение сопротивления составляет:
dR__<Hpl/S)^=pdl^_pldS_ + Jdp_ {2Л4)
do do Sdo s*do
или отнесенное к исходному сопротивлению:
1до
Sdc
R'dc
sdc рдс
(2.15)
Выражения (2.14) и (2.15) показывают, чго при конечном изменении
напряжения сопротивление вызывается:
а) изменением длины Ш1=е = о/Е. где Е — модуль упр\ гости:
б) ^ZZZorWW сечения S или диаметра проволоки d (поперечная
деформация):
AS/S=2Ad/d;
в) изменением удельного ™Р™™?4^ 0ТН0ШСН1|е
При коэффициенте Пуассона (J (u-U.^...w.fA i t у
поперечной деформации к продольно».
ц=-(Д<//</)/(Д//Л,
уравнение (2.15) принимает вид: ., |р)
ЛЯ/Я = 1Л/(1+2и)1//+Др/р-
Уравнение (2,6) д^ув'т^ьпоегь к деформациям, т.е. теизоч, е-
ст.н гель-ость ///) = m/?//?)/a=l+2M-H(^PV(^\ <2J7)
к=-(АК/Ю/{Ы/п к металлической проволоки
Значение ко.ффицнен гов ™^^^^ „р„Ведсны в глолнце 2.7.
и фольги, полупроводников кругло шнк п м^1даи состаюжт м=()д
Так как коэффициент Пуассона для оипыш
УРавНеи„е(2.17),феобразуеКядв,шу^д^)/(Д//о
Глава II
2ЛХ Невакжямечые тензопреобразователи
1 из константана или другого ма-
ВТЯХ ТаКОГО типа iiliv>ov-'v"- * "J "*"
1ИСу-
• ш такого типа проволока 1 из константана или другого
о. на. .1 на изоляторы 2. закрепляется на взаимоперемешающихся
3 и 4» находящихся под действием сил F или крутящего момента A/ (pi
нок2Л61 [1]
«риала, ва
таляЗи
Рисунок 2.16
Усилие, требуемое хтя растяжения пучка из п проволок длиной / на
величину Д/, равно:
где Е — модуль упругости материала
ков ^^^^^гЙГ*^ СИСТСМЫ' ^^ И3 ДВУХ ПУЧ'
клеив^ыхп^^Ге1ейя™РИТе-1ЬНЬ,М НЭТЯГОМ- ^имуществом нен»-
"ocm.HH^SSSS^^T" ОТСУГСТБИе ПОПеРечной ™зочувствитель-
2-4 J. Измерительные схемы тензопреобразователей
Уравновешеннь^м^^^ широко используются
званный изменением сопрот^иТ" "^ ' К°Т°РЫХ Р^аланс моста, вы-
«сгным изменением соп£^^,^,Ре0*,,^те,М- каптируется из-
Преимушеством такого MeZal^Sn "^ "" ^«гается равновесие,
^«^иениях сопротивления ^ Т°ЧН0СТЬ и применимость прЯ
«■pur случаев становится неопГвданно сГ°ЛЬЗ°ВаНИе УРав"°вешенного мое
Рвение получается при использоТнииеугГГ" " «^садкиы. Более простое
=и величины шн по швипшнв ТГГ ГперГеН„ГвМОСТа' ~ "»" °ПР*
Блок-схема апРяжения в измерительной диа-
— пяти ™™^Z^~r* Н3 РИСУНК£ 2'17- О» -сто-
ительного) элемента датч„ка 1. тензопреобра-
Преобразовггелн элеугричептит
Датчиков
75
зователя 2, мостовой схемы ч (в *™.«..
теля 4 и показываХе^сывГа^Г„:ГЧеН «""»«*~"™>' »»~
"*« и, ^исывающего или передающего устройства 5 f 7j
F i iA/
I
R
I
4
5
Рисунок 2 17
Звенья измерительного устройства соединены последовательно. Ко входу
упругого элемента 1 прикладывается сила F (давление, момент). С выхода этого
звена деформация £ = М/ передается тензопреобразователю 2. вследствие чего
изменяется его относительное сопротиыение А/?//?, вызывающее разбалансировку
моста 3, на выходе которого появляется ток i, усиливаемый в усилителе 4 до
величины I; и регистрируемый устройством 5.
Передаточный коэффициент упругого элемента I
*, =e/f:
тензопреобразователя (тензочувствительность) (таблица 2.7)
k2 = (AR/RV(Al/0:
мостовой схемы
kj = i/(AR/Ry,
усилителя
Передаточный коэффициент (чувствительность) всей системы
ношению координаты выхода i2 к координате измеряемой величины F, т.е.
(2.19)
12.20)
(2.21)
равен от-
Jtv=/V/r,
\222)
откуда следует, что
kz=k,k2k3kt. 12.23)
т.е. передаточный коэффициент всей измерительнон системы равен произведению
передаточных коэффициентов отдельных звеньев. Чем больше передаточный
коэффициент, тем чувствительнее измерительная система.
Передаточный коэффициент it, зависит от конструкции и размерных
параметров упругого элемента датчика (плоской пружины, мембраны и т.п.) н может
быть в каждом отдельном сл>чае получен путем расчета. Наибольшее атиянне
оказывает толщина упр>гого элемента. Чем тоньше упругий элемент, тем больше
значение коэффициента А|.
Случай 1 Упругий элемент — консольная балка (пластина) шириной Ъ и
толщиной А (рисунок 2.18.а). Относительное удлинение волокон расположенных
PiB.-\iioik2.l8
б)
- ,iu я также относительное сжатие волокон,
распалена нижней поверхности оалки. а ™к F определяется с помощью
женных на верхней поверхности, от действия t-
закона Гукв: E=mE={M„.hV(EJ). (2-34)
»и..« по плошали поперечного сечения балки (пласти-
где а — нормальные напряжения по _ ИЗП1бающ|1П момент в сеЧе_
ны); А — плошадь поперечного сечения vw
Глава II
^ ■ 1 - hhl 12 — момент инерции прямоуголь-
. сфкнйж бмги
Изгибающий момент М равен.
kJ -Fil-гЛ
пятчпнцп'- .—
, -Расстояние от ме^ётки балки ДО середины тензопреобразователя (Т).
Подавляя значения J и Мя в уравнение (2.24), получаем:
E = U2F(J-x4/(EWi). Д,*^
Таким образом, передаточный коэффициент упругого элемента с учетом (2.19)
*, = [12(/-х)1/(Ш.). (2-26)
Если входной величиной (рисунок 2.17) является не сила F, а перемещение
стрета прогиба балки), т.е. конструируется датчик перемещения, то передаточный
коэффициент получается подстановкой в уравнение (2.25) выражения,
связывающего величину стрелы прогиба с действующей силой F, т.е.
6=(F/3)/(3£7). (2-27)
Отсюда
F=(35EJ)//3 = (35Ш13)/( 12/3).
Подставляя значение F в уравнение (2.25), после преобразований получаем:
e = [36/i(/-.*)]//\
а передаточный коэффициент
k[ = [ih(l-x)]/l3. (2.28)
Случаи 2. Упругий элемент — крупая мембрана радиусом RM и толщиной
h, защемтенная по краям, нагружена давлением р (рисунок 2.18,6).
Тенэопреобразователь наклеен в центре мембраны.
Растягивающее напряжение и прогиб в центре мембраны определяются с
помощью выражений [6]
о = (0,488р4)/й2; (2.29)
о = (0,1706/<)/(ЕЙ2); (2.30)
Относительное удлинение (сжатие) волокон на поверхностях мембраны
е = о/£ = (0,488р^)/(ЕА2). (2.31)
Передаточный коэффициент равен-
*,=е/р = (0.488/&)/(£й2). (232)
е = (2,865/г)//?2,
а передаточный коэффициент с учетом (2.19) (
Механические напияжени,. ^ (2.34)
РУ. «ен„отся вдоль радиуса и мот бТГ™ МембРаны> заделанной по конту-
- опредетены с помощью выражений П] МССТаХ НаКЛейки тензопреобразовате-
- Для радиальных напряжений
-^та„генц„,1ьных напряжений ^ ' ^
^Формул (2 35, и (2 36) в -^н)]]^ . (2.36)
*" ' Х'« = R«f^^4T0™ 0Пределе»»ь.х расстояниях от центра
°» и Or меняюгзнак " "* '^ ~"Л«ч/о~+Ц)(1 + Зц)
21Р^>^а^ов£1ели_2ле1арических
датчиков
77
Для получения максимальной чувствие,,.,
ной погрешности тензонреобразовате ™Т И минимальн™ температур
должны быть наклеены на мембранГв ее'„Р """^ ' С0СВДНИХ П-1ечах моста-
обласгях, где напряжения имеют равные з1Т5гГ """к " "" ПерИферИИ' ТЛ" "
зопреобразователи, имеющие форм'у, n^J^^^ °—T TCH"
-15=LЖ ™" Д«Г^ — и
Таблица 2.9. Материалы ^^^^^^
Коэффициент
Материал, марка
Бериллиевая бронза Бр Б2
Марганцевый мельхиор
МНМ 19-20-20
Сплав Н41ХТ (инвар)
Сплав ЭИ-702
Предел
прочности.
Н/мм~
1250
1200
1260
1220
Модуль
упругости, Н/мм2
Т
1,310
1,8-105
1,410s
2.1I05
Пуассона ц
0,35
0,33
0,33
0,28
Величина передаточного коэффициента мостовой схемы зависит от способа
включения тензопреобразователя в схему. В мост можно включить один, два или
четыре преобразователя (рисунок 2.19) [7,33].
Если наклеен один преобразователь, то он может быть включен в любое пле-
а) Rt+AR
в) R,+\R.
чо моста (рисунок 2.19,а).
Остальными плечами моста являются
балластные сопротивления R2, /?з и
/?4- Если на упругий элемент
наклеены два преобразователя, и оба
они работают на растяжение, то
они включаются в мост так, как
показано на рисунке 2.19,6. Если
наклеены два преобразователя,
один из которых работает на
сжатие, а другой на растяжение, то они
включаются по схеме на рисунке
2.19,в. Наконец, при наличии
четырех преобразователей их включение
осуществляется по схеме,
приведенной на рисунке 2.19,г.
Сила тока, протекающего че-
при разбалансе моста (рисунок 2.1У,а),
Рисунок 2.19
рез измерительную диагональ i
Un(R',^~R2R4)
(2.37)
входное сопро-
где R[ = Rl±AR>— сопротивление тензопреобразователя; Rv - вх
усилителя- £/0 —напряжение источника питания.
, ™Г=/?, = /?4. то после некоторых преобразовании уравнение (2.37)
тивление
Если
приводится к виду
t/„(AW
(2.38)
i =
[*, 2RV/[R,
у^ТдЛ/№2(й ДА/'*. ) + (2 + Л*/*,))
„ичя-га I связана с входной AR/R, нелинейной за-
Видно, что выходная ^Г^иГв действите.пьности, A/?//?,«l, и,
висимостью. Однако нелинейность невелик д/?//? tq
следовательно, ДК//?,»2. Поэтому, если «те i
ГлаваЦ
уравнение (2.38) принимает вид:
; = (t/0M/K,)/[K1-4(^/K1+i)]. (2з9
При принятом допущении зависимость i =/(Д/?/Л,) линейна.
Передаточный коэффициент моста с одним тензопреобразователем получ
ся равным: т'
к3 = */(ДВД) = U0/[4Rl{Ry/Rl +1)].
Из данного выражения видно, что к3 зависит от напряжения питания м
[/о, сопротивления тензопреобразователя Я, и сопротивления входа усилителя /?Э
Чем больше эти величины, тем больше передаточный коэффициент. у'
При включении в мост двух тензопреобразователей (рисунок 2.19 б и в) имеем
/ = tt/0/K,){(M/K,)/[2(/y Я, +1)]} ' (2 4]
(2.41)
и
k3=U0l{2Rx{Ry]Rx+m. (2.42)
При включении в мост четырех тензопреобразователей (рисунок 2.19,г)
i = (£/0//?,)[(ДВД)/( Яу/Ч +1)3 (2.43)
и
к =U0/[Ri{Ry/Ri+l)]. (2.44)
2.4.4. Прил еры расчета
Пример 1.
На плоский консольный упругий элемент (рисунок 2.18) с размерами
/=30 мм, £»=10мм, И = 1,0 мм наклеен на расстоянии х= 15 мм от места заделки
консоли фольговый тензопреобразователь с тензочувствительностью кг = 2.
Материал упругого элемента — бериллиевая бронза Бр.Б2. Напряжение источника
питания моста U0=6 В, сопротивление тензопр образователя /?i = 50 Ом.
Минимальное усилие нагрузки упругого элемента F=50 H. Требуемое изменение тока в
диагонали моста от нуля до максимума i2 = 50 мкА. Сопротивление усилителя
Я,,=5000 Ом. Опреде; ить коэффициент усиления усилителя.
Решение.
1. Находим передаточный коэффициент измерительное сист-мы, используя
(2.22):
кг=i2/F =5 • 10"5/50 = 10"6 А/Н.
2. Из таблицы 2.9 находим модуль упругости для бериллиевой бронз
£=1,3-Ю5 Н/мм2.
3. Передаточный коэффициент упругого элемента определяем по форму
(2.26)
*, = 12(/-jc)/(£Wi2) = 12 (30-15)/(1,3105101,02) = 180/13105 = 1,410" 1/Н.
4. Определяем передаточный коэффициент моста с одним тензопреобраз°в
телем, используя (2.40):
fc3=t/0/[4jR,(/?>/jR,+l)]=6/[4-50(5000/50 + l)] = 6/2104 В/Ом-310"4 А.
5. Коэффициент усиления усилителя получается равным:
fc4=*z/(*i к2к3) = 10"6/(1,4 10 4-2 3-10 4) = 10"6/8,410"8= 12.
Пример 2. м>
На мембрану из бериллиевой бронзы (рисунок 2.18,6) с размерами Rms* ^c
толщиной А=0,5 мм наклеен фольговый тензопреобразователь (рисунок 2-1->>
» . стельностью к2=2. Напряжение источника питания моста Vo= ^
сопротивление тензопреобразователя Я, = 100 Ом. Давление, действуют66
, р=0,2 МПа=210 Па. Требуемое изменение тока в диагонали
Преобразователи электрическикпат.,ш<.пп
79
;, = 50мкА. Сопротивление усилителя Я„=5 кОм n™o„»„ ^
г,„™„„ у ^м- ипределить коэффициент
усиления усилителя. r w ^ }
Решение.
1. Передаточный коэффициент измерительной системы на основании (2.22):
fe=«p = 5.10 /210 =2,5.10,0A.M2/H = 2,5.10-4 Амм2/Н.
2. Передаточный коэффициент мембраны определяется с помощью (2.32):
*, =(0,488 R2M )/ЕИ =0,48818 /1,3-Ю5-0,52= 158,1/0,32510^5-Ю-3 мм2/Н .
3. Передаточный коэффициент моста определяется с помощью (2.42), так как
тензопреобразователь состоит из двух частей — внутренней и внешней,
подверженных одна растяжению, другая сжатию, и включенных в мост по схеме на
рисунке 2.19,6, т.е.
к3 = Uo/[2Rt (Д/Я, +1 )] = 6/[2-100 (5000/100 +1)] - 6-10"4 А.
4. Коэффициент усиления усилителя равен:
К=Шкх к2 къ)=2,5-10**/(5-10"3-2-6-10"4)« 40.
2.5. Емкостные преобразователи
Принцип действия емкостных преобразователей основан на изменении
емкости конденсатора под воздействием преобразуемой неэлектрической величины.
Емкость конденсатора зависит от таких параметров как расстояние между
пластинами (обкладками), площади пластин, диэлектрической постоянной между
пластинами.
Емкостные преобразователи служат для измерения перемещений, размеров
деталей, уровней жидкости, сил давления, ус орения, температуры, состава
физических смесей и т.п.
Основным достоинством емкостных преобразователей является: высокая
чувствительность (до 500 В/мм); отсутствие подвижных трущихся деталей; простота
конструкции; малые размеры и масса; малая инфционность; малый собственный момент.
К недостаткам следует отнести: большое внутреннее сопротивление; влияние
на работу преобразователя паразитных емкостей (требуется экранировка);
необходимость усиления снимаемого сигнала; потребность источника напряжения
высокой частоты; сильное влияние изменения температуры, влажности и
загрязненности окружающей среды; для достижения максимальной чувствительности монтаж
следует производить короткими проводами, что не всегда удобно.
Для исключения погрешностей, вызванных изменением температуры, а также
Для устранения влияния влажности преобразователи выполняют из сплавов с
малым температурным коэффициентом линеГного расширения (например, инвара) и
герметизируют.
2.5.1. Принцип действия и расчет емкостных преобразователей
Наибольшее применение в системах автоматики получили
плоскопараллельные и цилиндрические преобразователи, построенные по одинарной или
дифференциальной схеме [4,49,56].
Дифференциальный преобразователь позволяет улучшить линейность
преобразования и увеличить чувствительность.
На рисунке 2 20 схематически изображено устройство емкостных преобразо-
f-гелей и приведены графики изменения их емкости: при изменении длины зазора
8 между пластинами (обкладками) конденсатора, причем одной из пластин может
быть поверхность объекта (детали), не входящего в состав преобразователя; при
Мнении площади 5 перекрытия пластин в результате их относительного смеще-
Ния: при изменении диэлектрической проницаемости материала ем.
Глава 11
Рисунок 2.20
В первом случае емкость изменяется по гиперболическому закону, во втором
и третьем — линейно.
В емкостных преобразователях измеряемая неэлектрическая величина
функционально связана с параметрами конденсатора. Изменением величины 8 и
площади S обычно измеряют линейные и угловые перемещения, а изменением
величины е — уровни непроводящих жидкостей, размеры диэлектрика.
Характеристика управления емкостного плоскопараллельного преобразовате-
: изменяющимся воздушным зазором 8 определяется выражением [27]
С е 8 S
(2.45)
ЛЯС1
C6 = eS/8,
где
СИ| Ф ф/м м м2 '
.«- 8 — расстояние между обкладками; е — абсолютная диэлектрическая
проницаемость среды между обкладками; S —площадь обкладок; е=е„£„; е<>=8 85-10 <Ш
^т!ТЧССКаЯ П°СТ0янная; е«=1 -относительная диэлектрическая проницае-
мость для воздуха и вакуума.
величин6*1? Тае беСКОНечно малое изменение емкости вследствие изменения
величин о, S и е можно выразить в виде [56]
dC=(ЭС/Эе) de + (dCldS) dS + (дСШ d8
о/о)АЕ + (е'/8")М+ЬХ)/(80 + Д8)2]д8
где € S иЯ> ЛС/Со = Л£/е' + М/Хо-А8А[1 + (Д8/8())]280} , (2>)
'Де е,л„иоо — соответственно няия
иой, площади и длины воздушного *' Ные значе»ия диэлектрической постояИ'
■ходиой величины; С0 - начальнаТ°Ра преобРа™вателя, когда нет воадейсгви'
Так как емкостное соТрГиВле." "РеобР™^еля.
-^анапряженияпуания)=ы^
откуда, переходя к конечным'»™!^ + ^'^dS + {дх'™>db .
"™ чувствительностей: *,p>™—M Д5. д* и Де> „^^ ^ ^^ ^
Прсобрашватсли ментричм-ь-иу
югчнков
(247
- к ншенемшю зазора (при f=const. 5=согы)
*8=(Д1,/1,<))/(Дб/Д8!1)=|:
- к и шененню илоща ш (при f=conxt, б = сопм)
*, = (Av.A.<>)/( AS/So)=-1/[ 1 + (AS/Sn)]2; (2 4X)
- к ишенению ш иекгрпческой проницаемоеги (при б«слмЫ. 5=согы>
*г=(ДгЛ<()/(ДгУе')=-|/[| +(лГ/р',]2. (2 40;
В 01 и\ формулах через xli} обошлчено начальное значение емкостного сонро-
тивлення. Следовательно, о гное иге иное вменение реактивного сопротивления
преобразователя является линейной функинсн шмсисния за юра Дб и лс шнсГшии
функцией изменения площади и дп >лектрнческой постоянной. В свяш с ггим ша-
чения относительных изменений AS/S„ н ie/c' обычно -юпускают не бо юе 0 2 —
для одинарных преобразова iеле» и 04 — для щфференцнальных
При заданном абсолютном значении перемещения Дб шаченне абсоношого
изменения электрического сопротивления Дг, преобразовагстя растете
уменьшением 8п. Это, в свою очередь, приводит, при прочих равных условиях, к росту
выходного напряжения измерительной цепи, в которую включен нреобрлювлель.
Поэтому стремятся значение бц сделать по возможности ма1ым.
Чувствительность емкостного преобразователя зависит от конструкции и
размеров его пластин (обкладок).
При испольювании емкостных
преобразователей в составе датчиков давления одна из
пластин выполняется в виде защемленной
между держателями 3 мембраны 2 (рисунок 2.21)
весьма малой толщины h по сравнению с ее
диаметром 2R. прогибающейся пот действием
давления р в направлении неподвижной об-
K^ Ветчина прогиба Дб гля любого радиуса г мембраны опре .еляегся е по
мощью уравнения . . ,
дб^з/и-м^-^А16"'*' l20J
,„ ..„..мЯтны- ц—комЬфнииет Пуассона.
где £-модуль угфугости материи мсморан.М «
Для узкой кольцеобразной зоны-а фцх -^ ^^ ^^
начально располагавшейся на расстоянии Ъ
W
°<п;
Стл мок 2 21
HMiipoiuTi. 1/(&,-Дб) кал
ны), приращение емкости
1 дС=е2л/-'//-/(б.>-До)-
л-.—- jsIS^SST -р.' ^,«.
( i, ш вспхнос.н склоняемой дпафра.мы при начал.,
а полная емкость сферической по i следовательно, равна,
ной емкое. Со плюс приращение емкой и ДГ. след
,1ШЯ Г 50). ляя м.шы°х о.клонснип почучлем ,.р..ра
Подс.авлня До m уравнсннЖ-ЛЧ.
щение емкости , W(|6/-$JA!). (152)
a oi постельное и «мспепне емкости 2 ^д|о/»,»/**) • (2'S3)
ДС/Г„ - /'С -М ■ J ,^lb СМКОС..Ю..1 нреобра «....не .*
Hi уравнения (2.53) ннч"0. "«> ЧУ* „„„ мсмбра„... при малых «еформациях
С ПОДВИЖНОЙ llJIilCIIIIIOII В ВИДЬ .01О|1 ПС-НС'»11
пропорциональна давлению " ченкр
piVOiyca мембраны, обра 1 но про
n
Гл
laeajj
порциональна кубу толщины мембраны h, отношению £/(1 -д2) и
ному зазору 6о между мембраной и неподвижной пластиной. а
В случае, когда подвижной обкладкой конденсатора является порще
щадью, эквивалентной мембране, а его перемещение предположим пяк, °
~ а с_ ..-—- v&mb\M Нч
'Чаль,
пло.
симальному прогибу мембраны в центре
2. _4.
A6max=3/>(i-^)R/(i6£/0
и
(2.54)
(2.55)
(2.56)
С0 = Я£/?/6о,
полная емкость преобразователя для перемещения Д8тах будет
C0 + AC=[mR\l +A5max/6o)]/6o ,
ледовательно
АС = Зте(1 -ii2)pR6/(\6Eh3bl).
Относительное изменение емкости
AC/Q = 3(l-[i2)pR4/(\6Eh\),
т.е. чувствительность такого преобразователя в 3 раза выше чувствительности
преобразователя с мембраной.
На самом деле для преобразователя с поршнем изменение емкости на
основании (2.54)
ДС = теЛ2Д5пт/б2!) (2.57)
а чувствительность
АС/С0=Д5тах/50. (2.58)
2.5.2. Измерительные схемы емкостных преобразователей
Существует большое разнообразие схем включения емкостных
преобразователей, однако в подавляющем большинстве случаев используют
неуравновешенные мосты переменного тока [4,56] и, в частности, четырехплечные мосты (рису-
нок 2.22).
В целях уменьшения влияния емкостей
соединительных проводов практикуется
размещение всех элементов моста в
непосредственной близости от преобразователя или
конструктивно вместе с преобразователем.
Так как выходная мощность
преобразователей обычно весьма мала (микровольтамперы).
то их применяют в сочетании с электронным11
усилителями У, включаемыми в измерительную
сопротивления пп™к„,™ Диагональ моста. Для уменьшения выходного
пол^Ги^оТники п ЛЯ И' соотв^ве„но, увеличения его мощности, ис-
На рисунке 2 22 п" "" ВЫС°К°Й Част0™ С* Десятков мегагерц),
образователем С 'rs -г™"* ИЗмеРительная цепь с одинарным емкостным пр«
моста по активной ,пгР°ТИВЛениЯ ги R необходимы для уравновешивай*
^-пореа^Гной. ЯЮЩСЙ' а "^нный (подстроечный) конденс^Р
экрана шунтирует^еобп0 еМК0СТЬ С' соединительного провода АБ относительна
связи с этим подобные ,ГиОВадЛЬ И Тем самым Уменьшает чувствительность
невелика и, следователе ПрименяЮтся лишь в том случае, когда длина ка^
™ьной цепи являегсГво1^КОСТЬ С' МаЛа' Преимуществом подобной измФ
ля, что упрощает его конст7ТЬ 3а3еМления п°Дви*ной части преобразо*8
Рисунок 2.22
Преобразователи электри^и*^»^.,,,,^
83
Напряжение холостого хода при токе нагшпт, / п
ния нагрузки й,-» оо оке нагРУЗки /„=0 и полного сопротивле-
иеь* = U„[xc/(xai + хс) - (/+ fi)/(2fi + г)], (2.59)
где .*с=Со + С, -емкостное сопротивление преобразователя С0 и шунтирующей
емкости С,; / - сопротивление левой части переменного резистора г.
2.5.3. Примеры расчета емкостных преобразователей
Пример 1.
Определить величину приращения емкости преобразователя датчика давления
с мембранои из бериллиевой бронзы. Диаметр мембраны 2Я=20 мм, толщина
h=0,5 мм, начальный зазор между мембраной и электродом (неподвижной
обкладкой) 8о=0,3 мм. Диапазон изменения контролируемого давленияр=0. .0,5 МПа
Решение.
1. По таблице 2.9 определяем для бериллиевой бронзы E=l,31o" Н/м2,
ц = 0,35.
2. Диэлектрическая проницаемость среды между мембраной и электродом
,-12
е = е0е„. Для воздуха е„ = 1. Электрическая постоянная Ео=8,85-10" Ф/м.
Так как средой является воздух Ео=8,85-10 • 1 = 8,85-10 Ф/м.
3. Используя выражение (2.52), определяем приращение емкости:
АС = ле(1-ц2)/>Д6 /(16Е82Л3) =
= 3,14-8,85-10_|2(1 -0,352)-5-105 -0,016/(16-1,3-Юм -О.ОООЗ2 -0,00053) =
= 0,52 10~12 Ф = 0,52 пФ.
Пример 2.
Для того же преобразователя определить чувствительность и начальную
емкость преобразователя Q.
Решение.
1. Используя выражение (2.53), получаем относительное изменение емкости
(чувствительности):
ДС/С0 = /7(1-ц2)/г4/(16£-80Л3) =
= 5-105(1-0,352)-0,014/(16 1,3- 0" ■ 0,0003 0,00053) =
= 4,4-10_3/7,8-10-2 =0,06.
2. Начальная емкость преобразователя
С0=ДС/0,06=0,52/0,06 = 8,7 Ф-
Пример 3. -„ ОГ1
Емкостной преобразователь с диаметром неподвижного электрода 2/?=20 мм
используется в составе датчика наличия объекта производства в рабочей зоне
технологического оборудования. Начальная емкость преобразователя, на которую
Рассчитана измерительная цепь, С0=0,ЗпФ. Рабочая среда - воздух. Определить
максимальное расстояние от электрода до объекта производства, при котором бу-
Дет происходить срабатывание датчика.
Решение.
Используя выражение (2.45), получаем: . ,
6mM = Ke/2/Co=3,l4.8.85-lO-,f0.012/30-10 =9.3-10 м=9,3 мм.
Оделить выходное напряжение измерительной.цеп*,Ь^ емкостного
преобразователя в режиме холостого хода (рисунок 2.22) при "«-24 В, Со-30 пФ,
6*
84
Глава Ц
С| = 1 пФ, R= 1000 Ом, г=200 Ом, /=10 Ом, CN=30 пФ. Частота пи
(0=1000 Гц. ^Ни«
Решение.
Используя выражение (2.59), с учетом хс= 1/шС, получаем:
t/«x=t/«[jfc/(-^+%)-('-' + ^)/(2* + r)] =
= 24{ [1/1000(30 +1)]/[1/1000 ■ 30 +1/1000(30 +1)] -[(10 + 1000)/(2 -1000 + 200)]} -
= 0,76 В.
.6. Индуктивные преобразователи
Индуктивный преобразователь представляет собой катушку индуктивности
(взаимной индуктивности), параметры которой изменяются под воздействием
входной величины (перемещение, магнитное поле).
В таблице 2.10 приведены схемы шести типов таких преобразователей (графы
1...6). Простейшим и наиболее распространенным типом является
преобразователь с изменяющимся воздушным зазором [56]. Ферромагнитный сердечник 1
(графа 1), снабженный катушкой 2, вместе с подвижным якорем 3 и воздушными
зазорами 6 составляют магнитную цепь преобразователя. При перемещении якоря
3 под воздействием входной величины Хех изменяется 6 и, следовательно,
изменяется магнитное сопротивление этого зазора и всей магнитной цепи в целом. Таким
образом происходит изменение индуктивности и полного электрического
сопротивления преобразователя.
Таблица 2.10. Схемы индуктивных преобразователей
С
изменяющейся длиной
воздушного
зазора
С
изменяющейся
площадью
воздушного
зазора
С магнитным
насыщением
магнитопро-
вода
С потерями
на
вихревые токи
С
подвижным
сердечником
С
распределенными
параметрами
85
Любой преобразователь с изменяющей
ся в преобразователь с изменяющейся взаим^ ~НДуктивностью легко превращает-
ный сердечник поместить вторую (измеоитГ" ИНДуктивностью> если на магнит-
возникает э.д.с, увеличение или уменьшен "^ °.бмотку 4- В ^ обмотке
какого-либо параметра магнитной цепи Та"6 КОТОрОЙ обУсл°влено изменением
Тель может выполняться одинарнь1м ^^::iZ:Z7Z^^^:
ми системами, изменяющими свои параметры в разных направлениях
Индуктивность катушки можно изменить также путем измГения площади
воздушного зазора графа 2) изменением магнитного н^щен~РомаГГ-
го магнитопровода (графа 3). Преобразователи последнего типа имТют замкнутую
ферромагнитную цепь и основаны на том, что при воздействии магнитным полем
перемещающегося постоянного магнита 1 на участок 2 магнитопроводящей цепи
происходит его насыщение и падение вследствие этого магнитной проницаемости.
В результате индуктивное сопротивл-ние обмотки также падает, а ток в рабочей
цепи возрастает.
Преобразователи с изменяющимися потерями на вихревые токи (графа 4)
основаны на том, что при помещении проводящего тела 1 в переменное магнитное
поле преобразователя (катушка 2) в этом теле возникают вихревые токи,
создающие магнитное поле, направленное навстречу основному. В результате этого
параметры катушки (индуктивность и активное сопротивление) изменяются и,
следовательно, между перемещением проводящего тела и параметрами катушки
возникает функциональная зависимость. Как правило, такого рода преобразователи
работают удовлетворительно только при высокой частоте источника питания (до
нескольких мегагерц включительно) и называются токовихревыми
преобразователями.
Для измерения больших перемещений (более 1 мм) получили применение
преобразователи с подвижным ферромагнитным сердечником (графа 5),
называемые с о л е н о и д н ы м и. И, наконец, для измерения еще больших перемещении
(более 10 мм) применяются преобразователи с распределенными параметрами
(графа 6). В этих преобразователях конфигурацию магнитной системы делают та-
\.v ' F F , ^„„й varviiiKH в воздушном зазоре изменялся
кои, чтобы при перемещении ^"«Той катушкой (в случае коротко-
магнитный поток, ^^юштсяС^^^в^6),шиюыстжЯпоп-
замкнутого подвижного ВИТ«Э^^^^^^^ (графа 12).
ныи поток, сцепляющийся с подвижной катушко р ^ „
Вследствие этого э.д.с, возникающая в катушке, иуд
мещения. „ „„пппняются как наборными, (шихто-
Магнитопроводы преобразователей в "^^ ^ а£мшм ферро.
ванными) из листовой стали, так и цельнi • снижающий чувст-
магнитных сердечниках наблюдается поверхностный ФФ
вительность. - диаметром 3 мм и меньше широко
Для малогабаритных пРеобРаз0ваТеЛпесобные работать при повышенных час-
применяются магнитомягкие ферриты, спо ления в них оверхностного
тотах источников питания (сотни килогерц) оез ^
эффекта и заметных потерь. „ктивных преобразователей является воз-
Одним из основных достоинств инДУ" i 5 Вт) [49]> .„о позволяет во мно-
можность получения большой моЩН^ ^Д нОГ0 сигнала.
гих случаях обходиться без усилителей ""*"« ых преобразователей исполь-
Для повышения чувствительности мадо^^ десятков мегагерц. Харак-
3Уется напряжение питания с частот°"]1образователей являются:
теРными областями применения таких прс f-
Глава II
~ нота сигнала от измерите ibiwi о устройства с подвижной
~ ,* чеш^равляюший жран в ви« алюминиевого флажка укреидяега,
с^ уоройстм., ^ мехЙНИЧеско.о контакта с поверхностью изделия;
' резного сигнала при приб жжении к нреооразователю любой метал-
.чсо* массы датчики бшзостн).
Недостатками простейших счем индуктивных очинариых преобразователей
аграфы 1 и 2) являются
— нелинейность характеристик, снижающая диапазон измерения;
— отсутствие н> тевого значения выхо иного сигнала;
— »йствие на якорь одностороннего усилия притяжения.
Приведенные недостатки устраняются испочьзованнем дифференциальных
«<i «вателей ^
2.6.1.Характеристики н расчет индуктивных преобразователей
Пренебрегая активным сопротивлением катушки и магнитным
сопротивлением стальных участков магнитной цепи, индуктивность преобразователя [1,49,56]
£ = ^M=VVUoS/6. rill- DL ,А W 7* ^. (2-60)
СИ|1н = В-с/А - В-с/(А-м) м2 м
где Wk — число витков катушки; Л8=6/ио5 — магнитное сопротивление
воздушного зазора; § - длина воздушного зазора; Uo= 1,257-10"* Гн/м — магнитная
постоянная; S — эффективная площадь воздушного зазора
ння 1дя ^сопГЖеНИЯ М0ЖН° П°ПУЧИТЬ пР,1ближенное Уравнение преобразова-
«via *Ц — WUUM.
Полный дифференциал L
dL={dUdS) dS + (ЭШ8) db.
IKl fTTMjrr^oitirt...-^— . А Г- • «>
<lL={dLldS)dS + (dMb)db
Переходя к конечным приращениям AS и Дб, получим уравнение преобразования:
где 5„и &. ^"^^^-(XVoS^Afib + AS)2.
VJr НаЧа"1ЬНЫе ЗНаЧСНИЯ S и 8 "Ри А.-0
Чувствительность преобразоватепа i
реооразователя къ к изменению длины зазора при 5=const
■ чувствительность *s к измениf^"^*»" + (Л&/80)П , (2.61)
! из^ме»ению площади при 8 = const
о=6о и S=So. индуктивности преобразователя при
При сделанных допущение ™
«вателя будет равно его индуктивн17сГп^ГеГю Ст°еПР°ТИВЛеНИе Z ПРе°бра'
2 = o)L = cuW2n с/к
где ы - >Гловая частота питай, ' ' (263)
«=.(Д7/Гw Г Р" юме"«"™ зазора
«ж*)фуню,иГГ Ф>ик«ией площади "™ о "ротивление преобразовате-
nSSST АЛИНЫ За,°ра 6- Иначе гоГРа * И "Шейной (гиперболиче-
-^ Чуас^ГеГ0153 НС »-о»нн иВ^ВиЧсУВСТВ^ьность преобразователя
» "* »«ст оТ1 НОСТЬ Же к '"менениЛГ0^ °Т 0Тн°шения Д8/5о (уравне-
Ш т **»- изменения дГ ПЛ°Щади ^Равнение 2.62) постоянная
Преобраювятели
г,С,а,и^!21ия1чиков
В
ДУШНО!
свяад с изложенным, для преобп
душною зазора максимальное значение а?/?™1" С ИШеиян»«™я Длиной воз-
преобраювателей и 0.4 для дифференте "" Прев°«"д"Т °-2 лля одинарных
ность преобразования, не превышают™"Тъ " Пшволяет Отучить нелиней-
Ток в цепи обмотки может быт,. Z
жет бытьрассчитан_с_помо,цью выражения-
/ = f//V(/?H + /?)4fMz.)2.
где Я„ — активное сопротивление
нагрузки; R ~ активное сопротивление
обмотки
Зависимость индуктивности
обмотки L одинарного преобразователя и
протекающего по ней тока / от длины
зазора 8 и площади зазора S представлены,
соответственно, на рисунке 2.23, а и б.
Зависимость тока в нагрузке /„ от
зазора для дифференциального (индуктивного) преобра
зователя (графа 1) представлена на рисунке 2.24.
По сравнению с рисунком 2.23.а возрастает
крутизна этой зависимости и она становится более линейной.
Токи в обмотках Wx и И/2 (см. графу \)
соответственно равны:
/, =^e/V(^+i?)2+co2(£fc + ^)2;
■U<
J^K
+ R)-+(iT(LH+L,Y
индуктивность обмо-
где LH — индуктивное сопротивление нагрузки; Z-i и L2
ток Wji и Wk2 преобразователя.
Для взаимонндуктивных (трансформаторных) преобразователей
чувствительность к изменению зазора при 5=const
kST = АЕ/АЬ = -Eo/{Soll + (А8 80)J2], (2.65)
а чувствительность к изменению площади при 5=const
ksT=AE/AS=Eo/S0. (2.66)
где E0 = (WklWi2lhSo(OL)/80 — начальное значение индуктированной в
измерительной обмотке" Э.Д.С. при Х„ = 0; Щ\ и Wa — соответственно число витков
первичной (возбуждения) и вторичной (измерительной) обмоток (графа 7).
Сравнивая выражения (2.65) и (2.66) с выражениями (2.61) и (2.62) видим, что
чувствительности трансформаторного преобразователя при неизменных / и W
отличаются от таковых одинарного лишь постоянным множителем (Z<, и £У.
Вместе с этим, с учетом выражения для Еи видно, что чувствительности ksr и к,т
Растут с ростом частоты источника питания и тока в обмотке возбуждения.
2.6.2. Измерительные схемы индуктивных преобразователей
Широкое распространение получили измерительные схемы (ИС) релейного
типа, основанные на использовании резонансных ^-™!^S 1ЮЛОЖения ме.
-^ «„топот!, бесконтактный контроль положения мс-
Эги схемы позволяют ™У^С™™™^^„^ (сталь). так и немагнитных
таллических изделии, выполненных как из магнитных ^i
(алюминии, латунь) материалов. паоа1Лельно1 о колебательного контура,
Резпнянгнк.р ИГ гтпоятся на основе параллель.^ Jt
Резонансные ИС строятся ---- цемента, охваченного „оложитель-
вюпоченного в выходную цепь У*»4"™*™^ баляиса фаз „ амплитуд в «-«г^
ной обратной связью. При выполненииусловино Ф
с обратной связью возникают ав
в системе
колебания, частота которых соответствует резо-
Глава П
«м* костельного контура. Вокр>г индуктивности переднего обра-
> „его* ^^"^р^^щееся напряженностью индукцией, магнит-
% ^^"Гным^тнвлснием среды и т.п Наличие в ,оне чувстви-
KtJSTSnpH^p. вбпизи индуктивности LC-енератора) металлической дета-
^^ Тс^й изменение конфигурации замкнутых линии напряженности
Jm^o noia. а также его интукции и величины магнитного потока, пронизь,-
мюпего ооъект контре 1я.
Подобные изменения характеристических параметров генерируемого
магнитного пол» могут происходить за счет увеличения магнитной проницаемости среды
хпри контроле стальных деталей), а также вследствие возникновения в
контролируемом объекте вихревых токов и наведенных магнитных потоков. Указанные
явления обусловливают нарушение баланса фаз и амплитуд в схеме LC-генератора
и срыв автоколебаний.
Характеристические параметры магнитного поля при необходимости можно
преобразовать в информационные (электрические, звуковые, световые и т.п.)
сигналы, свидетельствующие о наличии (либо отсутствии) металлического объекта в
контролируемой зоне. Этим сигналам обычно присваивается определенное
логическое состояние- наличию объекта — логическая единица, а его отсутствию —
логический ну зь. Данные логические состояния могут быть и инверсными.
Технические характеристики ИС (точность, чувствительность, дальность
действия и т.д.) определяются параметрами колебательного контура LC-генератора, а
также особенностями схемотехники последних.
Рассмотрим базовые измерительные схемы на основе резонансных LC-
генераторов.
На рисунке 2.25 показана ИС на основе
генератора Амстронга [32]. В качестве усилительного
элемента используется биполярный транзистор
V71, включенный по схеме с общим эмиттером.
Незистивный делитель R\, R2 обеспечивает
положительное напряжение между базой и эмиттером.
Параллельный колебательный контур L1, СЗ
включен в коллекторную цепь транзистора V71.
Ьлокировочный конденсатор С\ «заземляет» по
переменному току шину коллекторного напряжения
базу транзистора VT1 напряжение ^ЗДелительный конденсатор С2 передает на
•«тушки L2. индуктивносвязанмп^. "ТеЛЬН0Й кратной связи, снимаемое с
Схема работает стеду^^6бат^ьным контуром L1, СЗ.
пряжения +£4 положительный „1?' П°СЛе ^ючения коллекторного на-
ныи режим транзистора VT1 пос^кГ "* резистоРе *2 обеспечивает актив-
«олкнт включения питания) к колГктОП"РИ разРяженн°м конденсаторе СЗ (в
ложительное напряжение. оллек™РУ относительно эмиттера приложено по-
Конденсатор СЗ заряжает*.
STST Ш ИСТ°ЧНИКа "ап"яжеени°яПТВЛеНИе ко—op-эмиттер открь,-
«r;;KLiB г0гвьтате раэря- Сенясат+0^асТем разряжается через индук;
Рисунок 2.25
индуктивности о КОЛЛект°Р"ого тока ;пя ИЯ
•«.транзистора ^ че^ "a"№HHe самои^кции "^^ ™ обУсловлИт
**™*» KOMncHCHnvU ^ К0Нденсатор С2 э"ДУКЦИи- поступающее в базовую
СИрУеТСЯ УменЬшение а;^3а с*^ Усилительных свойств траи-
УДЬ! автоколебаний в коллекторном
Преобразоватслиэ^рн.^,.,, я
контуре U, СЗ. в котором через 2 l „
синусоидальные колебания. ' рИода Устанавливаются непрерывные
Выходное напряжение V снимав
транзистора V71, практически рТвно напГженТ К°НДе"СатоР С4 < вектора
ратора, поскольку на переменном токе потенГГ "* КОЛебате1ьном к<»"Уре гене-
го напряжения соответствуют потен.,™™ Г JMHT~epa и шины копекторно-
ко— o„pe„ n^^rrSirZ^Vrr * —
тывается по формуле Томпсона [32J: lcJ,bHOf о контура П. СЗ и рассчи-
/0=i/(2kVl1 СЗ), f L с
На рисунке 2.26 показана ИС на основе генера- ■ ,
тора Хартли, отличающаяся высокой стабильностью I I , *
частоты автоколебаний [45]. В данной схеме
резисторы Rl, R2, Ю создают активный режим
транзистора VT1 на постоянном токе. С помощью
резистора /?3 в транзисторе образуется отрицательная
обратная связь по току эмиттера, за счет которой
повышается стабильность частоты автоколебаний и
обеспечивается температурная стабилизация
параметров схемы в целом.
На переменном токе транзистор VTI включен
по схеме с общей базой, которая реализуется с по- Phcvhok2.26
мощью блокировочного конденсатора С\. Коллекторной нагрузкой транзистора
является колебательный контур L\, C2. С части индуктивности П
(индуктивность L') снимается сигнал положительной обратной связи, поступающий в цепь
эмиттера транзистора через разделительный конденсатор СЗ. Выходное
напряжение ивых снимается с коллектора транзистора, а конденсатор С4 разделяет
постоянную и переменную составляющие выходного сигнала. Частота f0
автоколебаний определяется параметрами колебательного контура:
/0 = l/(2rcVZlC2). (2-68)
Для получения высокой стабильности частоты автоколебаний используются
кварцевые резонаторы, которые включаются в цепь положительной ооратнои
связи (рисунок 2 27,а). Кристалл кварца является пьзоэлектриком, поэтому упругие
колебания в нем возникают, если к граням кристалла приложено электрическое
напряжение. В свою очередь, механические^^^^^oZZT^
сталла электрическое напряжение. Амплитуда этих ко . опоеделя-
„„ ,0„„иг1й частоте кристалла, величина которой определи
мального значения на резонансной частше ^
ется его геометрией. ,- _„
Таким образом, кристалл кварца ведет себя как
электромеханический резонатор, ™е^те™*™™
замещения которого эквивалентна ™«*™™£
контуру (рисунок 2.27,6). Данный контур имеет две
резонансные частоты: последовательного и паралле;
ного резонанса. Последовательный колебательны., кон
тур образован индуктивностью U ем^ческ*я ем_
тинным сопротивлением п кваР^кварцедержателя.
кость СЬ. сосгояшая из емкостей кв рцД Р ^ ^
выводов и пьеюэлемента в целом, сов- батель_
ментами Ц, Ск, п образует параллельный i^_ ^ ^
ный конгур. Наличие двух резонансны ^ обутов_ ^ "^
чающихся друг от друга не более чел нропус- гисиюкг 27
лнвает высокую добро.кость и узкую
Глава II
.—п«. а также резкое изменение его импеданса в данной по-
резоиатора, а также Р*"*- печонатора позволяют реализовать
чктег > «эаиимс особенности кварцевого резонатора
«вето ► ■»». * eLC-генератор . ^ схеме с генератором
МГ на базе кварцевого резонатора подоона lxcmc v v
L Глм^тичие этих схем состоит в замене емкости О в цепи
, обт^юй свази кварцевым резонатором с импедансом Z2. Пере-
СостаМ,^1ходногосигна.та 1/« снимается через конденсатор СЗ с
.^^ VT1. что оспабляетв-тияние нагрузки генератора на частоту
■ -гчдч автоколебаний
В ««смотренных схемах кварцевых LC-генераторов колебательный контур
шсттюеГна частоп последовательного резонанса кварца. В этих условиях импе-
. пвралзельиого колебательного контура и кварцевого резонатора имеют ак-
пиный характер, за счет чего в схеме с обшей базой усилительного элемента ба-
,. фаз и амплитуд реализхется только в полосе пропускания резонатора.
Измерительные схемы, построенные на основе кварцевых LC-генераторов. в
салу изложенных особенностей последних, обладают высокой чувствительностью и
чалым гистерезисом. Узкий частотный диапазон генерации обеспечивает
формирование выходного сигнала соответствующего логического уровня с крутым фронтом,
что в конечном счете повышает точность позиционирования объекта контроля.
2.6J. Электрический расчет резонансных измерительных схем
Расчет начинается с выбора частоты автоколебаний. В системах автоматиза-
юш индуктивные преобразователи обычно работают на звуковых частотах, т.е.
1.0.16.0 КГЦ. В ЛаННОМ ЧаГТтИПМ ТИЯП^Пие irweuLItioinrxn roR^.rrn .,,,„,,!-
Пр1^рязовят1л2^^
= 1.0.16.0 кГц. В данном частотном диапазоне уменьшаются габариты
индуктивности колебательного контура LC-генератора, что повышает разрешающую
• • • • датчика в целом.
После выбора рабочей частоты рассчитываются параметры колебательного
юнтурв LC-генератора. Данный расчет начинают с выбора транзистора
соответствующей проводимости (в зависимости от используемого источника питания).
Ьслн для питания ИС используется источник напряжения, в котором заземлен
о^тел^ыи вывод то в Схеме LC-генератора используют п-р-п транзистор (на-
Ч**ер. КГ 315; КТ 815.817,819), а в противном случае -р-пр транзистор
Для исключения влияния емкости тт,Р™п f ijAwmiup.
яастот> ttnwn-.A.urf Г емкос™ коллекторного перехода транзистора на
^авт^отебании емкость колебательного контура (СЗ, С1 в схемах на ри-
^телы^> к^ТвТхе ДИаПа3°Не °Л-100 НФ" Величина индуктивности
обр^«ого контура (в схемах „а рисунках 2.25-2.27) определяется следую-
- *£Я££^ Q отельного контура
"ор»п. следующим условиям [211: Гь Эти параметры должны удовле-
____ С = Ю...500; г, =0 1 inn»
Нашесть контур. определяв ^формуле
гяв р. = ^щск = щ, =,/( г (2.69)
*т «тура. «,-2* _ Т* ~ °*°* (^рактеристическое) сопротивле-
^'v^r^^^^^y^^l^^nZ^ КОЛебате-ноГо контура:
Ио^вя из «данных значений параметрТиТГ^0"
'"■■"■" Р.=бгь а ад™, задавшись вечии! - отделяют волновое сопро-
*» .. „ф, расечн™,^ н^бхо^ГГ- ^^ ««дельного контура
<* - V(4nV0^) НДУКГИВН°СТЬ L< по Формуле (2.687
После расчета колебатетьной системы oov
ределяющих режим транзистора LГ гр^по,тсущесгаляетс* выбор резисторов, оп-
Для конкретного транзистора вы^Т ™ ПОСТояино* ™*-
коэффициент усиления тока базы R < характеристические параметры:
/J ^мина^ое J^^J^TTT^'0'^^ Р обозначается
предельно допустимое значение ZZetT™"™ ™ ^^^ '—
f/bm« [43]. напряжения между кохтектором и эмиттером
Затем определяется сопротивление кохтекторной нагрузки транзистора.
Данным сопротивлением является резонансное сопротивление колебагаьиого
контура Z^, величина которого рассчитывается по форму те [21]
\=vllrL=Q2rL=Qvt. (2.70)
Если в схеме LC-генератора отсутствует отрицательная обратная связь по
току эмиттера, т.е. когда эмиттер транзистора заземлен (рисунок 2.25). то
коллекторный ток транзистора lk определяется параметрами Ек и 2^ и рассчитывается по
закону Ома:
h = EkIZkQ.
При наличии сопротивления Ry в цепи эмиттера транзистора (сопроти&тение
КЗ в схемах на рисунках 2.26, 2.27) падение напряжения U„ созданное током
эмиттера /э на данном сопротивлении, создает в схеме отрицательную обратную
связь по току, которая обеспечивает температурную стабитизацию режима
транзистора. Практика показала, что для обеспечения высокой температурной
стабильности режима, необходимо выполнить условие [52]
£/,=/,/?,=0,9... 1.1 В.
Зная параметры /*, Р(Ь,3) транзистора, можно определить ток эмиттера /, и
сопротивление R3 по формулам
/,=(Р+1)/*/Р=(Н+1>/*/Р-
Если токи коллек^Гэми^ера в схеме с эмитгерным резистором
неизвестны, то расчет ^^^^^^Ф- ** ™ **™ ^™ **
,27).1шРЯжение^^^
Ek=hZo+Ub+U3.
где £/ь - напряжение между ^^^Хпюшсння
Следовательно, ток коллектора опредсляегс (, ?3)
" - „,« таанзнстора в активный режим напряже-
Для обеспечения "плавного вы*°^напряженИя Uocr в режиме насыше-
ние иь должно быть больше остаточного напря ^ ^ Q5 u B
ния. Наряжение Vocr У ^^.^Л^ДОВ: ^=0.9...1.1 В.
[43]. Поэтому, с учетом ^^^""ГноГпи^н.и Ь Датжно быть меньше допус-
Номина.тьное напряжение ^^S^o напряжения выбирается из у.зови.^
тимого напряжения 1/„ ^^^^^„„^.„^„ш.
Дальнейший расчет параметров^ ^J^ „ ^„ме генерации и значе-
формулам. Затем определяется п.
ния резисторов R1. Я2. формуле (2 75)
Ток базы U V^^^Xb,, ^базы ^ относительно земли ие-
До, обеспечения стаби пьноспи, .к-нии. ^«^^"^
обходимо, чтобы ток делителя напряже с др>рои стороны. потенции ов
2.27) был больше тока базы в •*•-
(2.71)
(2.72)
Глава II
. «tiirmin шипсрною перехода ф. Для герма-
больше потенциала oiкрытою шипч
«мписгоров Ф «0.3 . 0,4 В 11Я кремниевых - <|>,«0.6.. "-» » 1-^-Ь
tpMnwrropoB ? '• L«wm.hhijm эмипером (рисунок 2.25)
С учел*, нажженного, в схеме с закмюжыч эми. Р \ ,
» .«схемах с 1миттерным резистором (рисунки 2.26, 2.27) ^-(У. + ф,. la
р^^ыба'тжЛештеля R\,R1 рассчитываю.ся в следующей
- тельностм.
Выбирается ток базового тетитетя /,,:
/л=(3..5)/. (2/76)
Определяется общее сопротивление базового делителя Rd:
Rt=EJh=R\+R2. (2-77)
Рассчитываются сопротивления R\ и К2:
К2 = 1У/,,, К1=(Е*-1/пУ/а- (2-78)
Значения резисторов К1,Я2.ЯЗ уточняются по ГОСТ 140].
Мощности, развиваемые резисторами Я1, К2, /?3, соответственно равны:
Р,=/*ЯГ A = /d2K2; P3 = 12,R3. (2.79)
В данные формулы подставляются уточненные значения резисторов.
Посте расчета режима по постоянному току определяется выходное
сопротивление каска та. Для схем с заземленным эмиттером (рисунок 2.25) входное
сопротивление R определяется сопротивлением базы r6~UJl,. В общем случае,
при наличии резистора в цепи эмиттера (рисунки 2.26, 2.27) сопротивление /?„
представляет собой параллельное соединение резисторов базового делителя /?1,
R1 и сопротивления ге
Гаки-м образом, для схемы с заземленным эмиттером
а для схем с эмиттерным резистором Я, сопротивление Ям определяется через
проводимости [52]: F
l/R«,= l/tfl + l/K2 + l/r„, /28П
где l/re=l/pj?,= 1/^3 = 1/^,^3.
Величина раздельного конденсатора С„ определяется по формуле
^ В^ГГоГзГ НЙГРУЗКИ' НЙ КОТ°РОе Han™ конденсатор С,
(«^н^^Т^Г^Г^ 26 ВЫХ0Де ™ С Оператором
иа рисунке 2.27, выбираются по формуй (2 82) „с ",Ю,дансатоР С3 ~ в схемах
сопротивления R„„ следующего каскада «7 ** Ю ЧаСТ°ТЫ /() И BXO«»oro
■-гае такого каскада может "гГьзГ'ьСЯ ГгГ" "^^ Ге"ераТ°Р- В Ка"
' • юватеть уровня, усилитель тока „ т ■' , римеР« ам»литудный детектор.
аой линией). Следовательно R =/? 1"а РисУН1<е 2.25 показано штрихо-
•сечктывается по формуле 25) блокировочный конденсагор
С\ рассчитывается по формуле
С1>1/(2п/„гМЦ1[),
где г, ь"«"-
гГ,«1.ВЫХ01НОе сопР°™»ление Сочника ко, (283)
. »«"Ч"м сопротивления г ,щГ КОЛлек™Р"Ого питания Ек
Чяжсиия источника F л ж ""' опРеделяется при r,,r^q
ичника ft« по формуле р выОоре номинального на-
^те^стмТвТа'1ЬНЫЙ Т°К "а™ источника * <2'84)
^К"1 »"бранио,об ,ока питания оГ, " нзвес™ый и, технических
CI ^ геНерет°Р°м Хартли (рисункиТ^ :*Г '* ,'°-2-« Ом.
«"ределяются с 1едую„1ИЧ, обраюм: " °' 227) блокировоч мыс конденса-
CUl/(2n/fj/U.
(2.85)
П еоб а^2^ели_эле!прИ.1еск.Ич
Датчиков
На шключительном )гацс зл
,ы иоложигельнон обрапнж связиСК1РИ,'еСК01 ° РасЧСТа ИС "'-ределяюгея элемен
Конденса юры в ИС с генетт™ » л
по формуле ,СШраТ°Р™ Амстрони (рисунок 2 25, расгчи.ыааюгся
10ко„™ГеСТВЛЯеГСЯРаСЧСТ''— " -^с..-*^'
наетс"^^ <■ — * Р—
откуда
^=\ЙЛАй#Л1. (2 87)
Здесь /к, 5, — длина и площадь поперечного сечения катушки (соленой за)
колебательного контура; и0=4я-107 Гн/м — магнитная постоянная; п.
—относительная магнитная проницаемость среды, заполняющей окно каркаса соленойш
(для пермаллоя ц, = 50000; для меди — ц, =0,999; для никеля — р. =300; для
твердой стали — \i( = 200; для эбонита — ц, = 1,0).
Для схем с генераторами Амстронга и Хартли LK=Ll.
Из теории автоколебаний известно, что для обеспечения в системе с
положительной обратной связью баланса амплитуд необходимо выполнить условие
7Р=1,
где у—коэффициент положительной обратной связи; $=h2\,-
Для генератора Амстронга коэффициент у соответствует коэффициенту
трансформации трансформатора, образованного индуктивностями L\ и L2.
Следовательно, параметр у определяется из выражения
у= ПТ= HWl = 1/Р = ,/Л215 . (2 88>
где ИЛ, W2 — соответственно число витков в индуктивностях L\ и L2.
' и/ w v, папамето У= 1/3. можно определить необходи-
Зная число витков Wt=W, и napaMeip r чу,
мое число витков W2 обмотки обратной связи, т.е.
и/2=уи/, = иур. (289)
, Уяптии Гиисунок 2.26) ко}ффициент у рассчить/вается
В схеме с генератором Хартли (рисунии т-г
1'0 формуле [21J f _ (2.90)
y=L,Llк пишется напряжение положительной обрат-
где U — индуктивность, с которой снимается нш Р
НОЙ СВЯЗИ. - I* и /'•
Отсюда находится значение индуктивностеи
L' = L1/P; L ■■ , соответственно, онреде-
Числовигков^'и < индуктивностеи
^.яется с помощью ""^^^^^^ Hi -itf (2.91,
^* V ' , ,'.. L* соответешенно.
'Де /', /'-длины намогок и"ЛУ^"В^Иоб;агной связи (рисунок 2.26) опрело»
Рмкосгь С? в пени положительной ^
п« по формуле 152, п^+^^^^аеПЧ^^п^''
* ^ = 2я.^7,Р+ 0--,ход^;:=„^тнои свя<и в схеме С квар11евым
Расчет элементов цени поле обенностн.
оператором (рисунок 2.27) имее. свои
Глава II
.«бия traMWiot при активном характере импеданса ZI
T^TtSZo™ Impa г, Данное условие реализуете,
'»^!?г=^=й^^^ет^ -«отводом
L' и L*. вхотящих в состав обшей индуктивности L1.
Gffinooeme между индуктивностями L' и Г определяется из выражения [39]
21*ДЛ - П = 2л f0 L' = (Z^3)/(Z^ + Я 3) + г,, (2.93)
где L «Ll/B L'=M-L'; Zwe=2jl/nL7(p+l); r» - активное сопротивление кварца.
Пользуясь этими формулами, можно рассчитать соотношение между числом
■ПК* Ък и Wt* индмсгивностей L' и I* соответственно.
Постюлыо, w; = V^SSA>- w; = VL'/7<HoHA), соотношение числа
«ган» определяется стедующим образом:
WJW^jL'l'KLr); Wk=yWk; w; = Wk-W[,
гае t /L"= 1/1рЧ 1 - L'lLX)] =7/0 - L7L1); у — коэффициент включения резонатора.
2,6.4. Определение дальности действия магнитного поля индуктивных
преобразователей
Расчет дальности действия заключается в определении максимального
расстояния бяв,. на котором обеспечивается изменение логического уровня
выходного сигнала преобразователя под действием металлических контролируемых
объектов
Примеиитезьно к преобразователю резонансного типа необходимо
определи, о»», на котором в LC-генераторе измерительной схемы срываются либо воз-
оуждаотся автоколебания
Полагаем, что надежный срыв автоколебаний
происходит, если металлический объект площадью S0 расположен
перпендикулярно оси симметрии сердечника катушки (соле-
т^ДИаМе1Р°М D° = 2*° ИДЛИН0Й 1° сзаз°Р™ § между
ZZ* ССрдечника и дивным, пронизываемым магнитным
полем участком поверхности объекта (рисунок 2.28)
поля научит*"5™™ ЛИНИЙ напР™енности магнитного
прудит к и^Мет1ЛИЧеСК0Г° 0бъекта вблизи соленоида
з^^го ХТеНИЮ ЛИНИЙ магни™ потока, прони-
Чае^гТьС^атГмВЛеЧет * СОбОЙ "Ра—вание" излу-
РМеавние точки («фокуса»), в «попоив Матитного П°™ и затрудняет оп-
- « ' ■ ^JmZ^ZZWr ВЗаимодей™ие излучаемого и
****шо можно считать, что XkZ "cL ' С Д0статоч"ой для практики
• В^-мссиств ШГНИТН0ГО "0ЛЯ ВВСДеМ НеКОТ°РЬ,е Д°'
Г**^^^^ "Роисходит в
1 гж^ "иную оЬмотку с числом витков
"И-err произвольной геомегоии (Л.
•"■•едой**паде-l? ^Ф^Усировано» в мент™ „
поле — в центре соленоида ^ окружности радиу
2 11
В рамках принятых допушеш •
схвия магнитного поля "реобразов^ТГ **
ляет собой расстояние от цента- Т "Редстав-
верхности объекта пп0и„™^ Соле"оида до
полем (рисунок 2.28):' РШ'ИЗЫваемог° магнитным по-
п Л = 0,5/„ + 6.
Вывод уравнения дальности осуществляется на
основании закона Био-Савара-Лапласа f22] Z Ги
менения которого соленоид с числом виткГ Тн
током / заменяется одним витком диаметром
L>a-2Rlh по которому течет ток /,,=Л7/2. Очевидно
что данный виток является средним витком
соленоида преобразователя (рисунок 2.29).
Согласно закону Био-Савара-Лапласа.
напряженность dH магнитного поля, созданная
элементом тока /0 длиной dl' в точке А, расположенной в
«центре» эквивалентной окружности радиусом R3 на расстоянии р от элемента
тока, определяется выражением [22]
dH=I0dhmO/(Anp), (2M)
угол между радиус-вектором р и элементом dl (рисунок 2.29).
fr\ пи/л; r>w 1ППМ/-ПШ1Л /О С\А \ nnnn -~.™ «л. —. ... _ . _ _
95
Рисунок 2.29
где 0
J - — — -v-^y l_>»^Bij<w UVIWUJJVI4 у *i jJi^m^rmjiu tat \yjn\,yn\JI\ 4..&У}.
Поскольку выражение (2.94) является векторным произведением векторов р
и dl, 0 = 90°, sin© = 1,0, после преобразований получаем [22J:
dH=I0dlsinp/(4np2), (2.95)
где р — угол между векторами р и И.
Интегрируя выражение (2.95) по длине витка le=2nR() (рисунок 2.29),
получаем суммарную напряженность магнитного поля Нл в центре окружности
радиусом R3:
i.
НА = /0sinP fdl/(4np2) = J0Rosinp/(2p2). (2.96)
о
Поскольку p2=h2+R£, sinP=J?o/p, после преобразования выражения (2.06)
получаем: , , ,
/Г 2 2 3Л] Н R0 N I И
'/[4h2 + Rl)4 си|^
- А м
(2.97)
HA=RiNl/(4pi) = RlNI
Магнитный поток Ф* пронизывающий объект (контролируемую деталь)
магнитный поток v,>, "F - оппелеляется следующим образом
площадью 5Л с учетом принятых допущении определив иу к
[22,271: w с
<^_____^" »* н s
0o=p.op.cHASd, СИ|вб = Вс Вс/(А-м) - А/м м
(2.98)
- А/м
.. __ относительная магнитная проницаемость
где ц,, _ магнитная постоянная; и„ °тн
материала объекта (детали). создает между торцами объекта (детали)
, Переменный магнитный поток •> кцт £)(/)> величина которой опре-
1 и 2' разность потенциалов — JM*- "
делается выражением wl.
где / — текущее время. потоку Ф>С) деталь эквивалентна замкну-
В данном случае по отношению к^ Kfyr(tpo^y проТскает вихревой ток /,(/).
тому витку проводника радиусом «<• справедливо выражение
Потому, с учетом выражения (2.98) для ЭДС спр ^
Глава II
П-ем*Л1иМЬН..мтокесо1СН01<И«1*»'1
„атФ>»-. ,>.11ш1=/и,,1И. ,2.юо,
w f ..икпичсская часюта гока соленоида,
«^ужа^аго тока. w=2tf. /- иим'^1,11111ПОВа,жя п0 времени получаем:
Поасшша (2 ИКП в (2.ЭД). после шфферснцирования по вр
U)=-£«co40f,
^Гно^виТ;^; tokv Ш. можно определить величину последнего по
ТГСпри расчет* вихревого тока, наведенного в объекте необходимо учи-
тыыгЯ «..ение поверхностного эффекта, поскольку переменный ток высокой
частоты протекает по поверхности проводника, а глубина его проникновения в тело
о&ьскта зависит от частоты / Следовательно, метрическое сопротивление ооъ-
tm вихревому току (е«о импеданс) значительно больше сопротивления детали
постоянному току.
При >чете поверхностною эффекта импеданс объекта для вихревого тока Z()
опрелеляется выражением 129)
^ = ^^72. (2-101)
гае р„ — удельное электрическое сопротивление материала объекта.
Тогда, с учетом закона Ома. для вихревого тока /„(f) справедливо выражение
/«U)=-/™cosow, (2.102)
vntl^LJ =Alm, A^NaSX/U^ + Rtf12}; a = j2[iai)v/pd ,
Для нахождения напряженности Н,м магнитного поля, наведенного в центре
соленоида О вихревым током / (f), вновь воспользуемся законом Био-Савара-
Лапласа
По аналогии с предыдущими рассуждениями, согласно (2.94), дифференциал
аН определяется выражением
М-о. = 7„</Г sin вг/147Цр')2 ], (2.i03)
с1н'т^«7МеНТ """Г0"0 Т0Ка'' Р' ~ РадиУс-ве^ор, соединяющий элемент dl'
с центром соленоида (точка "О"); в'-угол между векторами р' и dV
ш^^^^^^Г0^(2ЛОЗ) по т,ериметру ,1Л0'
и--*;/./Ь(а2+л?)^]. }
^Нааедеиныи в ^ соленой. магнитный 110гок ф- М|ад|яа^
г* Ц. S. - сооггветственн^ГтшситеГьная м (2-"°5)
шкшнм и площади поперечного се 1 "" «Роницасмость сердечник
При отсутствии объекта <д чени" ,10сл*-'Дне1 о. F
^--напряженностьw^^T™^^ *«У«™.иоГО ир*
определяв
"«—«. »"-.e»^;S- ,2.1*"
Преобразователи .лею ,и.,секи* ,„
"неких птчиков
У7
И j ичложенно1 о следует что в
объекта действуют два 'фотив(,положнг?)ня^,еН0И1а "Р" ,Шичии металлическою
Ф. (Рисунок 2.2Q, Следовательно, IZZ^T "Ч™""" m™ ~ * «
леноида определяется pa иноегью: У Р"Ь"! Mdl """"-и поток Фг в центре со-
В С001ВСТС1ВИИ с законом тлскпкшяп.ы™ • (210Н)
Е па концах соленоида опрвд^^^?^ Ж ~^кции
E.=-Nd0Jdr=-L(dll)/dr,
где L - индуктивность соленоида при отсутствии объекта
Интегрируя обе части данного соотношения, получаем''
N0o = Ljo,
откуда
L =N0 // L N Ф i
Из выражений (2.IU8), (2.109) следует, что взаимодействие излучаемого и
наведенного в объекте магнитных полей приводит к изменению индуктивности
соленоида AZ,, равному:
ALc=NA0/ln=N0z/Io.
В соответствии с формулой Томпсона [27J, изменение индуктивности AL*
колебательного контура LC-генератора индуктивного преобразователя приводит к
изменению частоты автоколебаний
Af = \/{2n^AL(Ck),
где Ск — емкость колебательного контура LC-генератора с резонансной частотой
/0 = 1/(2тц/4О~).
Следовательно, относительное изменение частоты автоколебаний a=Aflf0
определяется следующим образом:
a=ALJL =АФ/Ф0 = Ф1/Ф0=(Фо-Ф,«УФо= 1-0J0* 0-1Ш)
Таким образом, наличие металлического объекта (детали) вблизи соленоида
индуктивного преобразователя приводит к нестабильности частоты а
автоколебании. Если изменение частоты Af=af0 превышает полосу пропускания
резонансной системы LC-генератора, то происходит срыв автоколебании, а при а*0
(отсутствие объекта) Д/=0, т.е. автоколебания восстанавливаются. Следовательно,
параметр а определяетЧувствительность индуктивного преооразователя в целом,
сфамстр а определяет У действия магнитного поля преобраювателя осу-
Для определения дальналvu№ ^„^ 0J<^
Щсствим преобразование уравнения i-..mw. «
ТОГДС"™м (2.102). (2.I04J. (2Л07) для параметра у справедливо следуюа.ее
выражение: , Я ,2 r.2\V-l
".висит от величины вихревого тока /„.максимальное
Поскольку параметр У .ювиь „..стабильности частоты LC-генератора
значение Y„„„ соответствует максимально!
«*--1-У«. где flNlJ****1)"}-
Y„,ax ~ л; " « соопюшеши (2.102). для парамет-
I ^образован данное выражение у
Ушах
Нвсдсм следукиниеобошачсиня: г-!/^2*^)'V + *f)V2J.
I I VI
с учетом которых выражение (2.111) приобретает вид:
Ут№ = В-С=1-Оа1Ю1.
Таким образом, для параметра А определяющего дальность действия Маг
нкгного поля индуктивного преобразователя, справедливо выражение
D = (Л2 + /?о2)3/2(Л2 + R'f2 = С-1 = В/О -атах). {2Щ
При фиксированных параметрах /?0, Яэ, Pd. Ц«ь w, Sd, /0 для конкретной схемы
LC-генератора с известным значением нестабильности частоты а^ можно
определить параметры В и Я зная которые не трудно рассчитать параметры h и
6=Л-0,5/0.
Проведенный анализ показывает, что в общем случае дальность действия
магнитного поля индуктивного преобразователя Л зависит от соотношения
параметров /?0 и R}, /?0 и Л, /?, и И. Поскольку параметр D связан с варьируемыми
параметрами Ro, R,vih законом трех вторых, получить общее выражение для
дальности достаточно сложно. Поэтому целесообразно упростить выражение (2.112),
рассмотрев некоторые частные случа i соотношения характеристических
параметров преобразователя и объекта.
Практический интерес представляют следующие частные случаи.
Случай 1.
й»/?о. Данное неравенство соответствует условию, при котором
эффективное расстояние от контролируемого объекта до преобразователя (дальность
действия) значительно больше размеров соленоида.
При этом интерес представляют два частных случая:
а) дальность действия превышает эффективный размер детали R, (h »/У —
дальняя зона;
б) дальность действия значительно меньше размеров контролируемого
объекта (Л<зс/?э)— ближняя зона.
Случай 2.
Л«/?0; А»/?э. В этом случае дальность действия значительно меньше
размеров соленоида, но превышает эффективные размеры объекта (для контролируемых
объектов малых размеров).
Случай 3.
h =■ Rq . Дальность действия соизмерима с эффективным размером (радиусом)
соленоида. При этом имеют место два частных случая: дальность действия
превышает эффективный размер детали (h»R3), либо значительно меньше
последнего (А «/?,).
Случай 4.
А=/?э. Дальность действия соизмерима с эффективным размером детали- Прй
этом интерес представляют два частных случая:
а) дальность действия превышает размеры соленоида (А » R0) — дальняя зона;
б) дальность действия значительно меньше эффективного размера (радиУс
соленоида (А «Д0) — ближняя зона.
Случай 5.
h~R0~R3. Дальность действия соизмерима с эффективными размерами
леноида (R0) и (R3) детали.
Аналитические выражения дальности действия магнитного поля индук™^.
го •-••». 1вателя для приведенных случаев могут быть получены путем ал
раических преобразований уравнения (2.212) с учетом выбранной системы иер
венств:
Преобразователи электрических
Датчиков
99
2. Л»Л0;Л«/?з;
з.л«л0;л»/гз;
4-*=*o; а)Ло»/?э; б)^,«Я,;
или
h^Rf,; a)h»Rj; б)А«/?з;
5-A = tf3; a)R0»Rj- 6)R0«Rj-
(2.113)
или
h = R3; а)А»/?3; б)А«/?3;
Результаты преобразований сведены в таблицу 2.11.
Таблица 2.11. Формулы для расчета параметров индуктивных датчиков
Соотношение
характеристических параметров
датчика и детали
А»Я0
h<KR0
h~R0
h~R3
h = R0
h»R3
А«/?э
A»/?3
А»ЯЭ
А«/?э
A»tf0
A«/?0
Ro~R,
Формулы для расчета дальности h и зазора 8
й-де/а-а^И^мМмм]
/^'[Я/а-а^АмШм]
ft = *o'W-a™)]^M.[MM]
A = 2-V4[£/(l-ara„)JV6[M],[MM]
А = 2~V2R;l[B/(l -а^И^мИмм]
А^-'^Я/а-а^ЛМмм]
h =, 2-12R^[B/(\-amia, И^мМмм]
A = 2-V2[B/(l-affllx)JV6[Mj,[MM]
1
|8=A-0,5/0 [м],[мм];
R3=Jsd/n;
в=к,ф4э=к2&Ы6Ъ
K^SnaiM'1];
K2=Q,5a/n [m\
a={Avf0\i0\idlpd)ll2[u']
Примечание. 1.
Характеристические параметры преобразователя
и детали, а также искомые
параметры А и 6 выражаются в сне-
теме СИ.
2. Расчет параметров А и 6
можно проводить в [мм] с учетом
с :ующих
коэффициентов. 1
Анализ полученных формул показывает, что дальность действия определяет-
«uihj «ил^чсиимл чу у J „„„амршпв соленоида и объекта контроля, а
ся соотношением характеристических параметров соленоид ^JlI n
тя1^«. ^пнцрпгпго сопротивления материала объекта р*
также зависит от удельного электрического сопри. то™„ятппя t „ „„
em ..о - ,, п^пнансной частоты LC-генератора /0 н ее
его магнитной проницаемости fi* РезонанСН° действия h не зависит от
максимальной нестабильности cw При ^ ^"Гн^ной проницаемости сер-
тока в катушке соленоида, числа витков N в ней, м
«"Ника цс и площади Sc попере -ного сечения соленоида.
Пример 1. магнитного поля индуктивного преобразова-
Определить дальность действия магнш я наличия в рабочей зоне тех-
теля, используемого в составе датчика для к £ эффекти:н.й площадью
неловкого оборудования -ГГ^ГэГктричГким сопротивлением
поперечно го сечения Sd=5-W «>J^^Z™«<b™ и,= 1(г\Па-
Рд=13.107Ом.м и относительной магнитной про^ £ А,=4-1()2м,
Раметры соленоида преобразователя: внешний « /о=ш<Гц.
^наобмотки /0=210-2м,резонанснаячастогаЬСгенеРатор
1 лава II
Km™* гпт-унки 2 25 -2.27), исходя и * которой
1 ъЛиркч схему LT гснсра.ора (рису.ки . стандарт-
,\ м^симальн^нсстаби.ьнос.ь^ a,m<,0%,a
»» схем 1Г rcvicpaiopoB с нск«аРцо»а.шои р . ^ гсрмоста,„рования
«рикварцсвоис ,B.iH«u.iM4acio.i—CW-.lu
, рцтиорсюна.ираН юнсра.ора CW- ■ е иЭМСрИтеЛьной
Таким ооразом. при иою-.ыо«....... в W^ 0 * ш Q
vxcmhIC 1CHCP-.0P-с кварцевым рсю.ш1оромм«^^
применения обычных схем авто.снерлюров пардмир находи
121Я2Л». -жОо определился ^^^Ге^ГГс-гснерагора с кварцевой стабили-
Дальнсйшин расчет ировс ich Д 1я схемы LA. i снера ч i
тайней частоты, нотагая «^« = 0. «.«.приярм
2 llcxow щ активной .пощади конгролируемого объекта S» определяем
эффективный радиус R :
Rt = JsJn = j5\Q~JiftM=Q№b и.
3 Опрос .ясм параметры 'а. К, (либо К2\ В, используя формулы таблицы
2.U:
« = ,/4пц,^/0/р()=>/4-М4-4-314Ш-7-103 104/иКГ7 -34853
К, « 0.5тш=0.5 • 3,14 • 34854=54747 м"1;
А.«0*а/я = Я48^3/3 14-2=5547 м"1;
В = А1^=М747(2Ю-2)1 (12,6-КГ3)4 =1.1-Ю-8 м*;
Я = K,F&bl = 5547(2- 10~2)3 (5-Ю^)2 = 1.1 • 1(Г8 м*.
4Лравниваемхарлк1сристнческие параметры Яп и /?/.
R«=0.5Д,=0.5 • 4 -10"2 = 0,02 м;
Я,=0,0126м.
Таким образом. Rn>R,.
5. И» табтцы 2.11 выбираем формулу для расчета дальности h из
следующих изображении.
В процессе проектирования конструкции датчика для конкретного
применение известны ожидаемые величины зазоров между соленоидом преобразователя и
объектом. Зная лишу соленоида /„. порядок величины зазора 5, можно оценить
чю парадку ветчины) ожидаемую дальность действия й = 0.5/„ + 5. сравнив ее С
хар^геристическими параметрами R0 „ R,. В результате такого сравнения
выбирается раоочая формула для расчета дальности действия
h a ^r,nLTCXH010r"4CCW,X соо6Ражсн»й можно задать требуемую дальность
им^13ГтЛС 1"ВеС"ПШМ'1 '«Раметрами R0 и R„ выбрать по табли*
формут> для расчета h, уточнив реальное значение дальности
аейс^ияГоГмЗмТс'Г СЛУЧа" "РННИМаСМ hmF* Te- °*ндаемвя дальность
Пр-мер2. 0.5/0-0.04-0.5 0,02=0,03 м = 30,
ШЛМ0^^^^^^^^УЯ " ^Ъекта контроля определяв
LC-генератора /0= Ю0 Гц. и обыж«>м для частоты автокоде'
101
Решение.
I - Определяем параметры а, К, В:
Кх - 0,5лл = 0,5 • 3,14 • 3485,3 =5475 м';
Л = ед^=5475Г2.10-2)'-(12,б.|(ГУ = ,.,.,о-»м«
2. Определяем дальность действия и зазор-
h *ЧВ№ = ^F/^0,027 м = 27 мм ;
8 = Л-0.5/о = 0 027-0,01 =0.017 м= 17 мм
Пример 3
Определить дальность действия датчика и зазор для объектов из алюминия
(Ц„- 1.0) при частоте /„= 100 Гц и при неизменных остальных параметрах
преобразователя и объекта, принятых в примере 1.
Решение.
« = V4^oMrJ/o /pd = л/4 ■ 3,14 • 4 - 3,14 -10-7-102 - l/l,3 -10~7 = 110.2 м1;
К} =0,5тш =0,5 -3,14 110,2 = 173,1 м"1;
В = ^,ЛоХ4 = 173 1(2-10"2)3 (12,6-10"3)4 = 3,49-ИГ11 мб;
h - у/Ъ/л/2 = ^3.49-10""/^" = 0,0152 м = 15 мм;
5 = // - 0,5/0=0,0152 - 0,5 - 0.02=0.0052 м=5,2 мм.
Пример 4.
Определить действительную дальность действия, полагая, что ожидаемая
дальность действия соизмерима с эффективным радиусом объекта и с радиусом
соленоида R0 (R0~h) при тех же параметрах преобразователя и объекта, что и в
примере 3.
Решение. _ „
1. В соответствии с пунктом 4 примера 1 параметры R0 и Л, имеют один
порядок i *„= 20 мм; *,= 12,6 мм). Следовательно, в первом приближении с
некоторой погрешностью £к можно принять Rq= #, ■
2. Оценим погрешность £«. , лшлп-17%
р -Г</?„-/?,ИОО%)//?о = (20-12.6)-1001/20-37%.
""L J'rru является допустимой, определяем дальность и за-
3. Если такая погрешность »™»™Л I к^в,а . соответствующем
зор с учетом ранее полученных значении v у
по условию примере 3- _пьность рассчитывается с помощью формулы из
Для случая h-Ro-Ry •naj
таблицы 2.11. имеющей bhz£____
/j~^/VJ = ^9^T/VI = 0.0128m^3 мм;
п« пГР) = 000''8и=3.0мм.
8 = А-О,5/о=(а0128-О.5-ил^ • м дальност„ действия для принятого
4. Оценим погрешность £* опрд дальност11 А= 15.2 мм. из при-
Допущення ЛЬ= Л,. Принимая за точное
мера 3 получаем ->_i->8) 100/15.2=16%.
еЛ=(/Ъ-Л)100*А>-^-- " чт0 „вдетельствует о допустимости
Таким образом, погрешность е„ «
принятого приближения
102
2.7. Фотоэлектрические преобразователи
Фотоэлектрическими преобразователями называются устройства,
преобразующие световой поток в этектрический сигнал [4.16,23].
Они разделяются на прямые и обратные.
В прямых преобразователях (приемники света) происходит
преобразование видимых инфракрасных или ультрафиолетовых излучении в
изменение этектрнческой энергии на выходе.
В обратных преобразователях происходит преобразование
электрической энергии в электромагнитные излучения, т.е они являются
источниками излучения.
Испотьзование прямых и обратных преобразователи в совокупности (оптро-
ны) позволяет в значительной мере расширить диапазон применения
фотоэлектрических преобразователи. Особая ценность такой совокупности заключается в том,
что связь между источником и приемником осуществляется с помощью фотонов
(оптическая связь). Это позволяет получить полную этектрическую развязку
между ними (сопротиатение до 1016 Ом. емкость менее 10 пФ) и, следовательно,
сравнитетьно просто осуществлять согласование различных цепей, отличающихся
напряжением частотой, сопротивлением и другими этектрическими параметрами
Кроме того, они малогабаритны, имеют высокое быстродействие и
чувствительность, однонаправленность передачи и широкую полосу пропускания сигнала
Погрешности фотоэлектрических преобразователей связаны в основном с
нестабильностью характеристик источников света и фотоэлементов. Величина
светового потока может меняться в зависимости от нестабильности напряжения
питания, изменения характеристик источника света со временем и возможного
загрязнения.
На стабильность выходного сигнала фотоэтемента оказывает влияние
нестабильность его характеристик, обусловленная изменением температуры, старением,
нестабильностью течнового тока и напряжения питания, утомляемостью и т.д
В наибольшей степени влиянию температуры подвержены
полупроводниковые фотоэтементы. Утомляемость связана с уменьшением чувствительности при
непрерывном освещении, которая уменьшается в несколько раз в первые 100..
150 часов работы и восстанавливается посте прекращения освещения
2.7.1. Прямые фотоэлектрические преобразователи
Различают три вида прямых преобразователей: с внешним фотоэффектом, с
внутренним фотоэффектом и вентильные (или с р-п переходом)
Первый вид устройств обычно называют фотоэлементами, второй
вид — фоторезнсторамн.
__ В устройствах третьего вида под действием излучения либо возникает ЭДС,
лиоо меняется сопротивление р-п перехода. Первые из них называются вей-
Tuii.nL.4nrf.„T„ г-~~~ -~у^ъ. „j „ИА называются В<
™™£Л фотоэ'1емента«»*аДРУГиевзавнсимосги от числа р-п
реходов фотодиодами, фототраизнсторами, фототиристорами.
пе-
2.7.1.1. Фотоэлементы
газоне=^;Г^^^ «*- 7"™ "~
на внутреннюю стенку стеклянного бахтон^вТюХ^Г" ' НаНеССННЫЙ
вием „опадающего на него излучения шл^^^Г^' '"* ""*
аноду под воздействием этектрического поля НяГ^Т помещающиеся к
сурьмяно-иезиевые.кислородно-цезиевыеивисмуго^!? ШИР°К° пРименяются
муго-серебряно-цеэиевые катоды-
Преобразователи ^^оичес^^}:}1^^^а
103
Напряжение питания составляет обычно Ш> ™ „
вышают 0,1 мкА [59J Балтон газонапо-щенноггwL ' темиовые токи не лре-
ным газом при низком давлении, что приводи фОТОЭ1емекта заполняется инерт-
5—7 раз, благодаря ионизации газа фотоэлек^ "ОВЫШению чувствитетьности в
гораздо более инерционны, чем вакуумные чт^Х)Намн °Днако эти фотоэлементы
Основной недостаток вакуумных ф^ °3аТ^дняегихпРименениев схемах
ность (единицы ити десятки мкА/лм) при небТ*1"0* ~~ "* НтКМ чУвствите;'ь-
Допустимые выходные токи ие превышают 10-^20°" BJ"yipeHHeM сопротивлении
чувствитетьиых электронных усилителей [231 "ГГ° Тре6ует пР"*енения
Увеличение чувствитетьности ботее чРи „
гокаскадные фотоумножителГ 1ЬК°™ЯЧра3дают мво"
На рисунке 2.30 представтены vrmnBr™„
фотоэтементов, а также^свегов^п^^; J»«™»«- схема включения
некоторых фотоэлементов [4,12,55] «"ьт-амперные х .. .исгики
s-щ—|
so
60
49
20
гт-гггтп
rj
V
мкА
80
60
40
?0
0
3 /
/ 2
/А- -^
•
1
^- —
0.1 0 2 0.3 0 4
г)
200
600
в)
1000
V
ыхЛ
60
I
40
20
/
Й
30
100
150 СЗ
Ристаок 2.30
Фотоэлемент типа Ф-1 (рисунок 2.30л). имеющий интеградыпю чувстви-
тельность > 70 мкА/лм, напряжение питания 100 В, течновой ток <I 10 А (при
(/=100 В), дотговечность 400 часов, габариты — длина 103 мм. диаметр 40 мм.
выполнен в виде цилиндрического баллона Б, в торны которого впаяны выводы
анода А и непрозрачного фотокатода К, используется для точных .. • « ^^^
ских измерений слабых или медленно изменяющихся • потоков. Чтобы
баллон не поглощал ихтучение в уяь • " области спектра (а-0.2 .0.4
мкм), он снабжается окном О из • *>го *-™ увиолевого стекла. Для
исключения из выходного сигната токов утечки межд) выводами катода и анода в баллон
вварено охранное кольцо ОК. наппзки R. в
Если такой элемент включить тЖКяЮ^1кч^в'2 ,QA то при пра-
иепь источника напряжения "~ ™ ™ '^^^^^Щъ ж*^
вильном выборе параметров схемы можно •ЮЯУ4™^ , J^ в ю а
между мощностью поступающего на ■ • • £ ^ „^„д^о ^гл-в ь
следовательно, и выходным напряжением и ma- llv
KM
*то рвхшчные тины фоткато шн имею! неодинаковую чувечвшелыюсть к иглу
ченичм ра тон длины волны, i e pa «личную специальную ч у в с i в и.
Зависим^ть^ув^внгельности фи.юлемешл от (липы полны плдлющио на
него изучения шмываетея спектральной характерис! икои.
Спектральная чувиннтельнооь определяется выражением 14|
w,M- cm a/1 a I" (2Л14)
где 1ф — фоготок. Фх — световой поток с длиной волны А..
Спектральные характеристики для некоторых фотошемепшв приведены па
рисунке 2 Ч\в. 1де но оси ордина! оиюжсна спектральная чувствительность и относительных
единицах (в процентах от максимального ншчепня): I — сурьмяно-це шепот; 2 —
кремниевого.3 - кислородно-серсоряио-цел1СВ01Х); 4—германиевого.
Митральная чувствительность 5„„ характеризует реакцию
фотоэлемента на свет полнот спектрально!о сосчлвл, пока«ынлс1 ирирлщеиие фо-
тоюка при ишененнн светового ноюка Ф на 1 лм (люмен) и определяется с
помощью выражения
Sm = dl,,Jc№. (2.115)
Световым потоком нашваеiся произведение силы света / на
величину te'iecHoi о yum со, т.е.
Ф I со
Ф = /со, . (2.116)
СИ | лм кд ср
Обычно для вакуумных фотоэлементов SWI не превышает 100 мкА/лм
(лм = кд • ср; кд — кан ^елла; ср — стсрадиап; /,.,, = 65,6° Kpyronoi о конуса).
Так как фототек зависит не только от величины падающего свеювого потока,
ио и от приложенного напряжения иф, фотоэлементы часто характеризуются
удельной и н 1 е i р а л Ы1 о и чувствительностью, отнесенной к
I В при юженного напряжения:
5,,> = У(ФЦ,,). (2. II7)
Световая характеристика представляет собой зависимость
выходною тока 1ф оi световою потока Ф, падающею на чувствительный орган
фото-» |емен гл.
Световые харапернстики вакуумных фотоэлементов отличаился
линейностью в достаточно широких пределах освещенности фогокатода (рисунок 2.30,г):
I — вакуумного с кислородно-цезиевым катодом; 2 — вакуумного с сурьмяно-
цезиевым катодом; 3 — газонаполненного с сурьмяно-цсшевым катодом
Освещенностью £ называется отношение светового потока Ф к
площадке Ь„ освещаемой поверхности.
При перпендикулярном падении:
E*tP/S„,
При наклонном падении
Е ф S
СИ| лк лм м2- (2П8)
£=/cosa/r2, I r
СИ|'лк кд м' (2-1,9>
вещаемой поверхностью. Расстояние между источником света и ос-
Вольт-ампериая характеристика ,.„
симость фототека 1ф от напряжения U, 1.рилоЖе,,н«т??С1аВ'1ЯЙ °И ЗЙВИ"
нмиых величинах световою потока Ф РИЛ°Же1,ИШо к Фотоэлементу, при ра»
Преобра «жат ели шскт ничего», „..„
)05
Мл рисунке 2.30,д предеиилено «мейс!
х и i л «он «полненных фого>лемснтои I т, "° '"КИХ хи1М1СТсристик для вакуум-
i о. *"" ~~ вакУУМных; 4 — 1 а юпанолненно
I — све.овой поюк 0 01 лм; 2 — 0.05 лм. 3-0,1
лм
2.7.1.2. Фоюрезисгорм
потока. Р * и,МС|«ется мод действием лучистою
Принцип устройства и схема включения <Ь,попе«*-.,»« „
На подложку 3 и, слюды или cr^'^^'ZT^^1^^"1-
пиковый слой 2 с «„пактами I по коаям МТГ ' "аностся «°лу«Р»иод-
чаются в мааллический или пл^Еов-TZ^Г**™"* -орые эаклю-
зрачиою для излучений рабочею ^ГЦ^^^^^^Г^
тропроводпость ко.орых «,„,„, мепЯе1ся под действием свет а. ^ носятсГ'селен
теллур, германии, кремний, сульфиды висму.а. свинца, теллура, кадмия иФШи
роко используются на практике серннсо-свипцовые, сернисто-висмутовые, сер
иисю-кадмиевыс и селенисто-кадмиевые фоторезисторы. Сернистый свинец чув-
2 3
Ф
U=comt
а
У
\
^
'\
0,4 1.0 1.5 2,0 2,5 Я.мкм
»)
—у
^>
-~=г
ф}
_а
Ъ
ЖМг
\ +
к>.
4
3
2
I
о
20 40 60 80 100t/, В
г)
ствителен к инфракрасным,
а сернистый кадмий — к
видимым лучам.
Схема включения
фоторезистора показана на
рисунке 2.31,6. Если
облучения нет, то фоторезистор
Имеет некоторое большое
сопротивление Rr,
называемое темновым. Оно
является одним из парамет- „ („m,„A„m
н „И т70м Соответствующий ток I через фото-
ров фоторезисгора и составляет 10 ...IV и • „wyieiii* с достаточ-
резистоп называю г темновым током.i Ф" до
ч*>-П
*
Глава II
тершей фотонов в полупроводниковом слое происходит генерация пар
подметных носителей заряда (электронов и дырок), и его сопротивление уменьшается.
Переменный выходной сшнал определяется изменением напряжения на
сопротивлении нагрузки RK при изменении сопротивления фотослоя Иф. Ьсли
V, — напряжение питания, то при изменении Яф на АЯФ сигнал изменится на
U При Щ^Иф [59]
Аи^и^нАНфК^ + Иф) ■ (2-!20)
При оптимальном согласовании, т.е. при RH = Rф
Аи=(Щ4)№ф/Кф). _ <2-121)
Далее сигнал усиливается и передается на измерительное устройство.
Фоторезисторы характеризуются удельной чувствительностью, т.е.
интегральной чувствительностью, отнесенной к 1 В приложенного напряжения:
S Ф U 1ф П1та
5» = 1фЦФи\ сИ|А/вТл^м-В-А- (2,22)
Фоторезисторы из сернистого свинца (тип ФС-А) имеют чувствительность
порядка 500 мкА/В-лм; из сернистого кадмия (тип ФС-К) — порядка
(1000...6000) мкА/В-лм.
Спектральные характеристики двух разных типов фоторезисторов приведены
на рисунке 2.31,в: 1 — сернисто-свинцового; 2 — сернисто-висмутового. Вольт-
амперные характеристики при различных величинах светового потока показаны на
рисунке 2.31,г.
Частотная характеристика определяет зависимость выходного
сопротивления фоторезистора от частоты /м модуляции светового потока. У
фоторезисторов частота /„ превышает обычно 2 кГц, а у некоторых типов она много
меньше (например, у фоторезистора типа ФС-КМ2 — 1 Гц, типа ФС-А1 — 10 Гц,
типа ФС-К1 — 100 Гц).
Достоинства фоторезисторов заключаются в следующем: более низкое, чем у
фотоэлементов напряжение питания; широкий спектральный диапазон (от 0,4 до
40 мкм): высокая интегральная чувствительность; малые размеры и масса. Однако
им присущи и недостатки: инерционность, зависимость параметров от
окружающей температуры, малый диапазон линйности евтовой характеристики,
зависимость Иф от Ф (фоновая зависимость).
Фоторезисторы эффективно применяются для аналогового управления элек-
тропневмораспределителями и позволяют с помощью маломощного аналогового
сигнала (например, постоянного тока) управлять величиной давления воздуха,
поступающего в пневмосистему. Электрическая схема управляемого делителя
напряжения на основе фоторезистора для ре лирования давления показана на
рисунке 2.31 ,д.
Светоизлучающий диод фоторезисторного преобразователя (ФРП) включен в
цепь котлектора транзистора VT1, подключенного к источнику постоянного тока
напряжением £, = + 5 В. Резисторы Rl, R2, R3, RA задают режим работы
транзистора VT1 на постоянном токе (этими резисторами обеспечивается необходимый
ток покоя транзистора при отсутствии управляющего сигнала U ,„ ).
При (/„^=0 ток покоя /tt транзистора VT1 может быть в"ыбран таким, что
светодиод ФРП светиться не будет. В результате сопротивление фоторезистора
будет иметь величину темнового сопротивления RT. Обмотка управления
пропорционального электропневмоклапана (ЭПК) включена последовательно с сопротив-
•ением фоторезистора и балластным (ограничивающим) сопротивлением /?6 в
цель постоянного тока напряжением Vm (этим напряжением запитывается вто-
цепь управления — обмотка управления ЭПК)
П^^=1ВеЛИТаТТОВОГОСОПр°ТИВЛения Rr настолько велика, что
в рели обмотки ие будет. В результате давление воздуха на выходе ЭПК от-
постепенно обрывается, ею
сутствует. При увеличении [/,„„ транзистор уг\
сопротивление коллектор-эмиттер уменьшает мостсг'еино обрывается, ек
неином режиме), а прямой ток / светодиол (фан,ИС10Р ^ работает в ли-
тивление фоторезистора уменьшаегся, ток пи УВеЛИЧИвастСя- В реулыатс сопро-
чет за собой увеличение выходного давления ТаНИЯ !ят 1Ш B°3PacTdeT- чт" вле-
Изменяя величину балластного резисторГТ^
лирования (изменения) давления на выходе ЭП|Л' задавать Диапазон регу-
образом, аналоговый сигнал U лей™,,.. • устном случае ЯЙ=0). Таким
pa VT1, обеспечивает аналоговZmZeZT" ™ ^ У»*"«™т> транзисто-
ФРП также можно использовав Z ™"* ВЫХ°Де ЭПК-
2.31,е). При действии на входе инвертора птТ™™ У"равЛения ЭПК <Р*Ун«
тодиод ФРП излучает световой nZ и с^0™аУГВЛеНИЯ ^^ СВе"
величины Rce (минимальное значение)' В Гба Ф°Т°реЗИСТОРа *ос™
сяток /6=£2/Ясв, где Е2 - „апряжениf„7 ^"^ ™ формирует-
2 с«, д иг напряжение питания вторичной цепи ФРП Этот ток
усиливается транзистором VT1 в R раз. Коллекторный ток \ ДГоксгГиГая
насыщение транзистора VT1, обусловливает включение ЭПК При у -(/> Г
гическии нуль) светодиод закрывается, а сопротивление фоторезисп^нчи^
ется, достигая величины RT. Ток в цепи базы прекращается (/Д транзистор
V7T закрывается (/4«0). Электромагнит ЭПК переходит в противоположное, на
пример, в первоначальное состояние, а исполнительный орган, управляемый ЭПК
возвращается в исходное положение.
2.7.1.3. Фотодиоды
Фотодиодами называются полупроводниковые приборы, основанные на
внутреннем фотоэффекте, использующие одностороннюю проводимость р-n перехода,
при освещении которых появляется ЭДС (фотогальванический режим) или (при на-
j чии питания) изменяется величина обратного тока (фотодиодный режим).
При фотодиодном режиме под воздействием света на электронно-
дырочный переход и прилегающую к нему область происходит генерация пар
носителей заряда, проводимость диода возрастает, и обратный ток увеличивается.
При фотогальваническом или вентильном режиме электроны из
освещенного вещества перемещаются в другое вещество, отделенное от него
тонким запирающим слоем, в результате чего возникает ЭДС определенной
напряженности между слоями полупроводника и чистого металла, разделенными
промежуточным запирающим слоем, обладающим односторонней проводимостью.
Принцип устройства и схемы включения фотодиода в фотодиодном (б) и
фотогальваническом (в) режимах показаны на рисунке 2.32.
При изготовлении фотодиодов для получения р-n перехода используется
либо метод вплавления примесей, либо метод диффузии. При этом глубина р-л
перехода относительно освещаемой поверхности делается меньше длины диффузии_
Материалом для фотодиодов служат монокристаллы германия илнчряшияЗ,
„, к * , о 19 ^ н которые вплавляется материал 4, оора
образующие л-область (рисунок 232*), в которые монокристалла По-
зующий /7-областъ. Обращенная к световому потоку Ф ™Р°™* J !
~ - о „„„/vtq кпнтактирующеи с контактным кмьцом 1.
крыта полупрозрачной пленкой 2 золота, контаклиру^щ служат се-
w , „ „ойптяюших в вентильном режиме, служат се
Материалом для фотодиодов, Раб°таЮ*"* ые на металлический электрод.
лен, сернистый таллий, сернистое сереоро, нанос Темновой ток не
Рабочее напряжение у Фо™адов^Н^ кремниевых,
превышает 20 мкА для германиевых и / мк/- * 9 г
туда
ышает ау) мкл для гермамисвшл .. ~ - 9
Постоянная времени обычно не превышает • критическая частота (ампли-
Для фотогальванического (вентильного) ре* оставляет i „2 мГи, а вфотоди-
падает на 30%) фотодиода с р-n структуре)
Глава II
I
ф ч
.
■>
—
' V
п
з
п-р
9 )
4
с,
с
ф
^
■)
6}
Ьг
ф
1Н
в)
80
60
40
20
0
г) 0,4
^
У\
4V 2
3^,
u\
ч\
ь
\
6 \
0.6 0,8 1,0 1,2 1,4 1,6 1,8 Л,мкм
е) u,z.j \j,j и, /Э I,U Ф, ЛМ
Рисунок 2.32
одном режиме — до 200 мГц при приложенном обратном напряжении порядка 150 В
[12] Интегральная чувствительность фотодиодов составляет 3...20 мА/лм, а
пороговый поток 10 ... 10 мА/лм. Ток при освещении составляет сотни микроампер.
Интегральная чувствительность селеновых вентильных фотодиодов
составляет 300...750 мкА/лм, сернисто-серебряных — 3500...8000мкА/лм, сернисто-
таллиевых 5000... 10000 мкА/лм (Ян=0). Недостатки: в процессе эксплуатации
«стареют», т.е. теряют постепенно чувствительность; высокая инерционность,
объясняющаяся большой емкостью.
На рисунке 2.32,г представлены спектральные характеристики различных
фотодиодов: 1 — селенового; 2 — медно-закисного; 3 — кремниевого; 4 — сернисто-
галлиевого; 5 — сернисто-серебряного; 6 — германиевого.
Вольт-амперные характеристики /=/([/) при Ф=const для фотодиодов,
работающих в фотодиодном режиме (рисунок 2.32,д), показывают, что если
светового потока нет (Ф=0), то через фотодиод протекает обычный начальный обратный
ток /0 (темновой). Под действием светового потока ток возрастает, и
характеристика располагается тем выше, чем больше Ф. Повышение обратного напряжения
незначительно увеличивает ток. Но при некотором напряжении U возникает
электрический пробой (штриховые участки характеристики)
Световая характеристика вентильного, например, селенового фотодиода
зависит от величины нагрузки (рисунок 2.32,е). При малых нагрузках характеристи-
юн носят тинеиныи характер.
Сила тока, получаемого от а " " "
Формулой [34]: °Т Фонола, т.е. ф^
Фотою*. выражается следующей
/P=en'o/(*v), / г, р .
СИ|7 L— -—JL е
где е - элементарный электрический « ~ * 1^Г~^~^ ' (2Л23>
-■И- - ~-^==~
2.7.1.4. Фототранзисторы
переходов (общ"^)0^^
ные свойства транзистора. В °ебе СВОиства фотодиода и усилитель-
По конструктивному исполнению ™,
вые, МДП - фототранз^рыТ^ составные, поле-
переходные фототранзисторы [16]. Д*ЦИрованным (инверсным) каналом и одно-
Биполярный фототранзистор
представляет собой обыч
но в его корпусе сделано прозрачное окно чёпГ 0°ЫЧНЬ,Й ^"^ор,
воздействовать на область базы C-rnwn,' К0™Р°е световой поток может
приведена на рисунке 2 33 а ' РУ^ра такого Фототранзистора типа р-п-р
Ф
Рисунок 2.33
Фотоны вызывают на базе генерацию пар носителей заряда — электронов и
дырок. Они диффундируют к коллекторному переходу, в котором происходит их
разделение так же, как и в фотодиоде. Дырки под действием поля коллекторного
перехода идут из базы в коллектор и увеличивают ток коллектора. Электроны
остаются на базе и повышают прямое напряжение эмиттерного перехода, ч^о
усиливает инжекцию дырок в этом переходе. За счет этого дополнительно
увеличивается ток коллектора. В транзисторе типа п-р-п все происходит аналогично.
Включение фототранзисторов в измерительную схему может осуществляться
по схемам со свободным коллектором, эмиттером или базой [59].
Триодное включение фототранзисторов ничем не отличается от обычных
схем включения плоскостных транзисторов. Наиболее распространено включение
по схеме с общим эмиттером (рисунок 2.33,в), отличающееся наибольшим
коэффициентом усиления по мощности. Схема включения со свободной базой (рисунок
2.33,6) аналогична схеме включения фотодиода в фотодиодном режиме.
Интегральная чувствительность фототранзисторов в десятки раз больше, чем
У фотодиодов, и может достигатьсотен миллиампер, „алюмен. ^^
Выходные характеристики фототранзистора ^воОод ^
Рисунке 2 33 г Различные коивые соответствуют различным ж*
н^унке z.jj.r. различные кривые использовании схемы с общим
потока Ф, но не тока базы, что имеет место при ии и
110
Глава И
жтттером. Характеристики показывают, что при повышенном напряжении U
возникает электрический пробой (штриховые учаоки)
Основные параметры фототраншеторов — шпаральиая чувештелыюегь,
рабочее напряжение (10 I« В), темновой ток (до сотен микроампер), рабочий юк
(до десятков миллиампер), максимальная допустимая рассеиваемая мощность (до
десятков милливатт) граничная частота Фото i ран зис юры, изготовленные
сплавным методом, имеют граничные частоты до нескольких кижнерц, а и «готовленные
диффузионным методом (пленарные) MOiyi работать на час ютах до нескольких
Merai ерц
Недостаток фототранзисторов — сравнительно высокий уровень собственных
шумов
2.7.1.5. Фототиристоры
Фототиристоры представляют собой триодный тиристор, но управляемый не
напряжением, подаваемым на один из эмиттерных переходов, а световым потоком.
На рисунке 2.34 представлена четырехслойная структура р-п-р-п
фототиристора [16].
+ + ■"
*
+
+ _ +
it
П,
П,
п.
Я.
+
а)
Рисунок 2.34
При действии света на область базы рх в ней генерируются электроны и
дырки, которые диффундируют к п-р переходам. Электроны, попадая в область
перехода /72, находящегося под обратным напряжением, уменьшают его
сопротивление, за счет чего происходит перераспределение напряжения, приложенного
к тиристору: напряжение на Пг уменьшается, а напряжение на переходах 77, и /73
увеличивается, что приводит к усилению инжекции в переходах 77, и /73. К
переходу П2 приходят инжектированные потоки, его сопротивление снова
уменьшается и происходит дополнительное перераспределение напряжения. Инжекция в
переходах /7, и /7, усиливается, ток нарастает лавинообразно, т.е. фототиристор
отпирается.
Чем больше световой поток Ф, действующий на фототиристор, тем при
меньшем напряжении он включается, что наглядно показывают вольтамперные
характеристики на рисунке 2.34,6.
Фототиристоры могут успешно применяться в различных автоматических
устройствах в качестве бесконтактных ключей для включения значительных
напряжений и мощностей. Достоинства: малое потребление мощности во
включенном состоянии, малые габариты, отсутствие искрения, малое (доли секунды) время
включения.
11реобра1оватсли электр»^,^
.Датчиков
III
2.7.2. Обратные Ф« мпле,сгр„Ческие
с»рсо0ра1Ова|СЛ11
В качестве обратных преобразуя „•„,-
ются различные видь, ламп - шкалив!?"" ис,0чи««» изучения „римеия
ДР.. а также твердые >лектрол,омипес7е„Гь '■ Т^*™^ л™и„есцГтГи
Наибольшее распространение полуГли с » ЛИ°ДЫ)-
прямом "агфяжении)харак,ери1уЮМ1ИСсУЯм^10СйВие:°ДИоДы, работающие „р„
стью излучения. мал°и инерционностью и некогерентно-
Принцип работы светодиода заключается в с,
жении в полупроводниковом диоде происхо1тС''едуЮщем- ПР" прямом напря
элементарной области в область базы. Н^Гер е^ГкГ '
^копцентраЦИяДЫрокв ,-области, ,е.
элементарной области в область базы Han™"" ИНЖекция носителей заряда ,
л-области больше, чем концентрация дпоок Т^ Т" К0Нцен'1Раиия электронов
дит инжекция электронов из «-области в п-обНаУ^™' ^ Пп>>Р"> т0 "Роисх°-
рекомбинируют с основными носителями ^„ „ :ИнжектиРомнные электроны
ками р -обласи. Рекомбини^ю^^г^06™- В ~M СЛ*Чае сW
тических уровней зоны проводимости блГГ Т™ - ^ ВЫС°КИХ ЭНеРге'
кие уровни, расположенные вблизи Be"He« ™ """*" **"""*• ™ б°ЛСе "*""
2.35). При этом выделяется фотон "***" ^^ ВалеНтН0Й 30™ (рисунок
Для современных фотодиодов
применяются главным образом
фосфид галлия GaP и карбид кремния
SiC, а также некоторые тройные
соединения, состоящие из галлия,
алюминия и мышьяка (GaAlAs) и др.
Германий и кремний непригодны.
Помимо светодиодов, дающих
видимое свечение, имеют место све-
тодиоды инфракрасного
излучения, изготовляемые
преимущественно из арсенида галлия
I Зона
[проводимости
Запрещенная
зона
Валентная
юна
Количество движения
Рисунок 2.35
GaAs. Они применяются в фотореле, различных датчиках и входят в состав
некоторых оптронов.
Вольт-амперная характеристика светодиодов такая же, как у обычного
выпрямительного диода. Яркость и сила света с повышением температуры
уменьшается. Быстродействие высокое и составляет 10" с после подачи на диод импульса
прямого тока.
Основные фотометрические величины, характеризующие источники
светового излучения:
сила света — отношение светового потока Ф к телесному углу со, в
котором распространяется световой поток:
/ ф й
/,=**/*,, си|^Гл7-с;; (1|24)
световая яркость- отношение светового потока в телесном угле к
, расположенной под углом <р к направлению
размеру излучающей поверхности
наблюдения:
Ьф = d20/(dAud(uco}np),
ф А
со
Ф
СИ|
—. (2.125)
кд/м2 лм м' ср град
я составляет (2 .3) В. Максималь-
Величина постоянного прямого нэпРяжен"Яияпаз0Н теМператур окружающей
но допустимый ток - десятки миллиампер Диапазон "темп р л
Глава П
Преобразователи ^ектрическит^у.,,,,.^
световая эффективность (светоотдача) — есть отношение
светового вотога к . ксветодиод\ мощности.те
ц Ф Р
п -ФР • (2 126)
1\ф-<РРтт СИ|лм/Вт ЛМ Вт
Констрмстивно светодноды выполняются в металлических корпусах с линзой,
обеспеч й направленное излучение Масса диода составляет доли грамма.
2,7.3. Оптрояы
О в т р о в — это полупроводниковый прибор, в котором конструктивно
объединены источник и приемник излучения, имеющие между собой оптическую
связь. Если отрои имеет только один излучатель и один приемник, то его
называют оптопаров
К важнейшим достоинствам оптронов можно отнести:
— отсутствие электрической связи между входом и выходом и обратной
связи между фотоприемником и излучателем;
— широкая паюса частот пропускаемых колебаний, возможность передачи
i i с частотой от н> тя до 10 Гц;
— возможность управления выходными сигналами путем воздействия на
оптическую связь.
— возможность совмещения с другими полупроводниковыми и мнкроэлек-
трическимн приборами
Недостатки заключаются в относительно большой потребляемой мощности из-
за i «"" t « u t I. : • энергии, сравнительно высоком уровне шумов,
ухудшении • • в с течением времени, невысокой температурной стабильности.
Констрчктнвно в оптронах излучатель 1 и приемник 3 излучения помещаются
в одном корпусе и заливаются оптически прозрачным клеем 2 (рисунок 2.36 а).
1
113
12
т~~гТ
1 1
-в*
6)
в)
<Ш> <Щ) <Ц£> (Щ)
<©£> _Щ) ]И$ <Щ)
л)
Рисунок 2.36
Особую конструкцию имеют оптопары с открытым оптическим каналом
между излучателем 1 и фотоприемником 2 в виде воздушного зазора (рисунок
2 36.6). в котором может перемещаться светонепроницаемая преграда, например,
ооьект контроля или закрепленный на исполнительном органе технологического
ооору ♦ ► флажок (экран).
В другом исполнении оптопары с открытым каналом световой поток
излучателя 1 попадает в фотоприемиик 2, . . .сь от какого-либо объекта 3, находяще-
^напрнмер. на непрерывно перемещающейся ленте транспортера (рисунок
В г . - излучателя оптопар наиболее широкое распространение получили
еветодиоды с видимым или инфракрасным ихлучением п .Г^ получили
т*~ у- ™i изучением, в качестве приемников —
• • . «• • • • нзисторы, фототиристоры.
На рисунке 2.36.Г схематически изобпаженя ~~,
выходная цепь питается от источника noc™„Z^T°P"™ °тоПар^ У котоР°й
имеет нагрузку /?„. Напряжение £А „одаГе^ZтИ Пе^метого напряжения и
в нагрузке. Цепь управления (цепГизлу^теляТи"3 '^^^ >ПраМЯСТ ТОКОМ
который может быть включен в цепь от^с^ьноЭОЯИромна ОТ ^P^cropa
мер. 220 В. относительно высокого напряжения, напри-
Резисторные оптопары применяются хт„ автоматического
регулирования усилия, связи между каскадами, управления бесконтактными делителями
напряжения, модуляции сигналов, формирования различных сигналов и тд
Диодные оптопары (рисунок 2.36д) имеют обычно кремниевый
фотодиод и инфракрасный арсенидо-гахлиевый светодиод Фотодиод может работать
в фотогенераторном режиме, создавая фото-ЭДС £*=0,6...0.8 В, или в
фотодиодном режиме. Для повышения быстродействия применяют фотодиоды типа p-i-n
Применение диодных оптопар разнообразно. Это, например, импульсные
трансформаторы, не имеющие обмоток; передающие элементы в блоках сложной
радиоэлектронной аппаратуры; чувствительные элементы датчиков обнаружения,
контроля, положения. В качестве приемника может быть использован варикап
(рисунок 2.36,е).
Транзисторные оптопары (рисунок 2.36 ж) имеют обычно в
качестве приемника излучения биполярный кремниевый и • >-. истор типа п-р-п
Оптопары этого типа работают главным образом в ключевом режиме и применяются в
коммутаторных схемах, устройствах связи различных датчиков с измерительными
блоками, в качестве реле и др. случаях. Приемниками могут быть составные транзисторы
(з), фотодиод с транзистором (и), однопереходный (к) и палевой (л) транзисторы.
Тиристорные оптопары (рисунок 2.36.м) имеют в качестве
фотоприемника кремниевый фототранзистор и применяются в ключевых режимах
Область применения — формирование мощных импульсов, управление мощными
тиристорами, управление и коммутация различных устройств с мощными натру • ми.
2.7.4. Волоконно-оптические преобразователи
Волоконно-оптические преобразователи (ВОП) по
характеру использования оптического волокна делятся на два типа: 1) в которых воюк-
но служит только для передачи сигналов; 2) в которых волокно является
собственно преобразователем [8.17,34]. Первые являются преобразователями с
внешней модуляцией, вторые- с внутренней мод>лЯНиеи свето-
вого потока.
Оптическое волокно (световод) обычно бывает двух типов: од-
н о м о д о в о е. в котором распространяется только одна мода (тип Распределения
передаваемого электромагнитного поля), и многомодовое - с передачей
МНОЖеСТВа (ОКОЛО СОТНИ) МОД. ^„^~ ъ-кл-чи Rpn-
Модой называется распределение ^^^^^ пош^^^ь
тикальной оси световода в виде стоячей волны, многократно повторяющееся вдаль
горизонтальной оси с периодом, ««=^^2^ световоды различаются
Конструктивно одномодовые (а) и многомило
только диаметром сердечника —
световедущей части, внутри
которой коэффициент преломления «i
чуть выше, чем в периферийной
части — оболочке, т.е. n2</»i (Ри~
сунок2.37). а)Ъ&^* "' I
Конструкция волоконного Сердечкнх<П|) О&яочка^
кабеля диаметром 0,9 мм, пред- phcvw»2.?7
Покрытие
.1 / >V '
в)
н.
Глава II
стмлеяяая на рютнке 2 З7.в. созданная на основе данных световодов (поз. 3,4,5),
кяючает в себя второе покрытие 1 из найлона и амортизирующий слой 2.
V одномодовых световодов (рисунок 2 38,а) диаметр сердечника не
превышает Юмкм По сравнению с многомодовыми они обладают меньшей дисперсией, но
соединение их друг с другом вызывает значительное затруднение. Применяются
для высокоскоростных линий передач сигналов. Многомодовые волокна (рисунок
2 38 б) имеют больший (окото 50 мкм) диаметр сердечника, что облегчает их
соединение друг с другом. Но поскольку групповая скорость света для каждой моды
различна, то при передаче узкого светового импульса происходит его расширение
(увеличение дисперсии). Основное применение они находят в составе
преобразователей датчиков для измерения характеристик эффектов, при которых изменяется
интенсивность света (сенсорная оптоэлектроника). В качестве материала для
волокон используется кварц; многокомпонентное стекло на основе S1O2 с включением
Na:0, GeCb, LiO, MgO, CaO, тастмасса — полиметилметакрилат с оболочкой из
фторполимера; фтористое (инфракрасное) стекло и др.
,Д=0,3°о
Оботочка
Достоинства оптических волокон заключаются в следующем:
— широкополосность (до десятков терагерц); малые потери (минимальные
0,154 дБ/км); малый диаметр (около 125 мкм согласно стандарту CCITT);
— малая масса (30 г/км);
— эластичность (минимальный радиус изгиба 2 мм);
— механическая прочность (нагрузка на разрыв до 7 кг);
— отсутствие взаимной интерференции (перекрестные помехи);
— безиндукционность;
— взрьгеобезопасность;
— электроизоляционная прочность (волокно длиной 200 мм выдерживает
напряжение до 10000 В);
-высокая коррозионная стойкость.
С помощью оптических волокон можно измерять: давление, температуру,
расстояние, положение в пространстве, скорость вращения, скорость линейного
перемещения, ускорение, колебания, массу, звуковые волны, уровень
электрического поля, электрический гок, магнитное поле, концентрацию газа, дозу
радиоактивного излучения и др. параметры.
2.7А1. Структура оптического волокна
Оптическое волокно, как уже отмечалось выше, состоит из сердечника, по
которому распространяется свет, и оболочки, заключенных в оплетку, являющуюся
-ИЮ0ГГИОЙ оболочкой. Коэффициент преломления света л, сердечника лишь
незначительно превышает коэффициент преломления „ *
введенный в сердечник с торца волокна по оболочки, поэтому свет,
дечника и оболочки, как бы запирается в сегГе«„ 0Тражается
ог границы
серией (рисунок 2.38). РДечнике и распространяется только в
Для полного внутреннего отражения светя п™.
в, необходимо, чтобы выполнялось условие Вх0дящег0 в во™«»о под углом
„ v 1 и Чти- (2 127)
Поскольку разница между коэффициентами mv>™., .
лочке не превышает 0,01, величину 0 можно Г Л * СеРДечнике « об°'
JL-^tx М0ЖН0 представить следующим образом:
©max-V"!2-^. (2.128)
Это максимально возможный угол, под которым свет может проходить в
оптическое волокно, т.е. приниматься им. Называется такой угол 'числовой
апертурой и обозначается ЛИ (Numerical Aperture)
При рассмотрении оптических волокон вместо разности щ и я, чаще всего
используется величина, называемая относительной разностью
коэффициентов преломления
Д = (и,2 - п\ )/2и2 = (и, - п2 )/п2. (2.129)
Если воспользоваться значением Д, то зависимость между NA и Д может
быть представлена в виде:
М4 = и,л/2Д. (2 130)
Относительная разность коэффициентов преломления Д обычно выражается
в процентах. Так, например, при /i| = l,47 и Д=1% значения
ЛИ = 0,21 и 0гаах=12°.
Одним из важных параметров волокон является нормированная
частота, определяемая по формуле
v = (2nrNA)/l = (2nrnlyf2A)/\, (2.131)
где г — радиус сердечника.
Для оптических волокон со ступенчатым изменением коэффициента
преломления (рисунок 2.38,а,б) значение v=vc=2,405 является граничным (v, —
нормированная частота среза), т.е., если действительное значение v волокна хотя бы
немного меньше, распространяется одна мода (рисунок 2.38,а), если больше —
распространяется множество мод (рисунок 2.38,6). Величина vf определяет
условие существования в оптическом волокне одной моды, или условие границы среза
мод более высоких порядков.
Величина
К=ъ**ШК (2-,32)
называется длиной волны среза; «^^^
ной волны, большей К, работают в »»£%£>~ ГГвГкГ
волокнах разность во времени Р""***^^
рядка, которая может распространяться, и модой сами! ^
критического угла 4>с = cos"V^ выражается формулой ^ ^
5Т«щШс, „_.1СТОанения света в вакууме,
где L — длина волокна, с — скорость рас "1*»^ ¥XftapiA можно передать п.
Следовательно, частотная полоса в •
многомодовому вол.кну, определяется из выражен (2 ,34)
ВЬ=иЪ^сКпА)- ^ тополучается В =20МГцкм.
Если предположить, что А = ' /о' п'" ' '
8*
Глава II
2JA2.
но-опгические преобразователи с внешней модуляцией
Преобразователь такого вида может быть выпоанен в виде двух световодов
(«яткчмых оптических волокон или жгутов волокон) и промежутка между ними.
Поток излучения от источника вводится в передающий световод I (рисунок 2.39).
На выходе передающего световода в зоне измерений формируется поток
излучение, заключенный в конусе апертуры световода. Часть излучения падает на вход
световода 2. выводится из зоны измерения к фотоприемнику и преобразуется в
пропорциональный электрический сигнал [17].
Излучатель
Зона |
измерений |
^
\
Приемник
^
Рисунок 2.39
Физическую основу работы таких преобразователей составляет изменение
(под действием измеряемого параметра) интенсивности излучения, проходящего с
выхода передающего на вход приемного световода в соответствии с диаграммой
направленности, светоиспусканием источника света (светодиода) и способами
модуляции. С учетом того, что модуляция потока излучения осуществляется в
промежутке между двумя световодами, эти устройства получили название В О П с
внешней модуляцией.
Наряду с достоинствами оптронов с открытым каналом они имеют такие
преимущества, как слабая зависимость результатов измерений от температуры,
электромагнитных полей большой интенсивности и вибраций в зоне измерений,
стойкость к агрессивным средам и химическая инертность, высокая локальность
измерений и др.
Для таких ВОП характерны два способа получения измерительной
информации — рефлекго метрический, основанный на отражении потока
излучения от контролируемого объекта, и прямоходовой, когда поток излучения
не меняет своего направления при распространении между торцами световодов.
Для рефлектометрических ВОП используются следующие основные способы
получения измерительной информации (рисунок 2.40): модуляция потока при
аксиальном движении отражающей поверхности (бесконтактные преобразователи
перемещений, толщины, расстояний) (а); модуляция потока при угловых
перемещениях плоской отражающей поверхности (преобразователи давлений, усилий,
ускорений, расстояний) (б); модуляция потока за счет ортогонального
перемещения грани поверхностей с различными отражающими свойствами (преобразовате-
ударных воздействий, акселерометры, преобразователи перемещений, числа
абортов) (в,г): наличия и пространственного расположения (в,г); модуляция по-
* при изменении поглощающих и рассеивающих свойств неподвижных
поверхностей (д).
Для ВОП прямоходового типа характерными являются следующие способы
. ляцли (рисунок 2.40): ортогональное перемещение торцов (гидрофоны, пре-
еди силы, ускорений, скорости потоков жидкости и газа) (е); аксиальное
торцов (преобразователи перемещений) (ж); перекрытие проходяще-
-. •.- .ватели линейных размеров, давления, температуры) и погло-
(
^^иЛДатчиков
Рисунок 2.41
Рисунок 2.40
щение или рассеяние проходящего потока
(преобразователи уровней жидкости,
запыленности, температуры) (з).
Рассмотренные схемы
преобразователей не позволяют установить zo>3...5mm.
Для обеспечения большей дальности
действия в структуру преобразователя вводится
специальная оптическая насадка, т.е.
реализуется гибридный ВОП (рисунок 2.41).
Поток излучения от излучателя 1 попадает в световод 2 и далее, сформированный
насадкой 5, на объект измерения 6. отразившись от которого вновь попадает на
насадку и далее через световод 3 на приемник 4. На практике использование
насадок позволяет увеличить рабочее расстояние до 0,1...0,2 м.
2.7.4.3. Волоконно-оптические преобразователи с внутренней модуляцией
Принцип работы ВОП данного вица основан на изменении.<W»™ £
локна под влиянием внешнего давления, температуры, магнитного и
электрического полей, радиоактивного излучения его ождении внутрн
Поскольку модуляция потока «Ф>*™»*^ элемента и преобразователя,
световода, выполняющего функции чувствиic ^ внутренней модуля-
такие устройства могут именоваться как В U
иней.
11
Глава II
I
Рисчнок 2.42
Выполнены они могут быть в
виде световода 1 (рисунок 2.42) с
излучателем 2 и приемником света
3 на концах, помещаемого в зону
измерения, изменение параметров
которой вызывает изменение фазы
распространяющегося по волокну
света.
При небольшой относительной
разнице коэффициентов
преломления в волокне фаза света
Ч» = р7«Лп/. (2.135)
где р — постоянная распространения волны вдоль оси волокна; / — участок
волокна, подверженный влиянию внешнего воздействия; к=2к1Х\ п — коэффициент
преломления сердечника; X — длина поляризованной волны в вакууме.
Относительное изменение фазы под влиянием зоны измерения —
чувствительность преобразователя
ДЧУУ=МП+Л/i/n . (2.136)
Кроме изменения фазы, распространяющейся по оптическому волокну волны,
можно использовать для измерения изменения поляризации, угла вращения
плоскости поляризации, потерь, явление рассеяния света.
2.7.5. Блоки оптронной развязки
Обобщенная структура блока оптронной развязки (БОР) представлена на
рисунке 2.43. Блок управления фотоизлучателем вырабатывает электрический сиг-
| -^ j
I
В\од1
Бток
управления
излучателем
irzr
Оптопара
Буферное
устройство
Нагрузка
J
Рисунок 2.43
нал, обеспечивающий излучение светового потока в определенном диапазоне
электромагнитных волн. Этот поток воспринимается фотоприемником, на выходе
которого возникает электрический сигнал в виде тока или напряжения,
поступающий на буферное устройство, которое обеспечивает согласование выходной цепи
БОР с нагрузкой как по уровню, так и по мощности. Буферным устройством БОР
может служить компаратор напряжения, преобразователь уровня, логические
элементы «И», «ИЛИ», «НЕ», а также их совокупность. По аналогичной структуре
строится и блок управления фотоизлучателем оптопары.
Для увеличения нагрузочной способности БОР в буферном устройстве ис-
потьзуют усилитель мощности. При этом БОР может управлять мощными
нагрузками (например, обмоткой электропневмораспределителя).
2.7,5.1. Блок оптронной развязки на основе диодной оптопары в
генераторном режиме
Схема такого БОР представлена на рисунке 2.44. Усилитель мощности БОР
реализован на базе неинвертирующего операционного усилителя (ОУ) [25]. Выво-
фотодиода оптопары подключены к неинвертирующему входу ОУ
относительно общего провода земли. Коэффициент усиления ОУ кОУ= 1 +R2IRX может из-
я с помощью переменного резистора R2. В результате усиления фото-ЭДС
Т
Рисунок 2.44
на выходе ОУ образуется напряжение £/выг=£,(1+Я2Ш), приложенное между
базой и эмиттером составного транзистора на элементах VT1 и VT2 Этим
наложением транзисторы V71 и VT2 открываются, входя в режим насыщения.
Потенциал объединенного коллектора становится близким потенциалу земли (в режиме
насыщения напряжение между коллектором и эмиттером не превышает величины
0,3 В, что соответствует логическому нулю). В результате прохождения
коллекторного тока 1К составного транзистора по обмотке управления электропневмо-
клапана (ЭПК) на ней образуется напряжение £ и электромагнит ЭПК
срабатывает, обеспечивая поступление сжатого воздуха к исполнительным элементам
технологического оборудования.
2.7 5.2. Блок оптронной развязки на основе транзисторной оптопары
Принципиальная электрическая схема такого БОР изображена на рисунке
2.45. Усилитель мощности выполнен на основе комплементарных транзисторов
типа р-п-р и п-р-п.
/*" создает на
Рисунок 2.45
(I *0) коллекторный ток последнего
При облучении базы фототранзистора </в Поскольку эмит-
создает на резисторе /?2 падение напряжения Щ-1К* •
создает на резжлирс v-jmR7 база отрицательна
с о потенциал базы — £ - ** *
тер V71 имеет потенциал +Ь,а поге ц зистор VT\ насыщается; кол-
относительно эмиттера. В результате при /« JP торам RX RA, создает на
лекторный ток /,, этого транзистора, проте ^ ^ напряжение больше
резисторе RA падение напряжения 4
I*
Глава II
1 О а транзистор VT2 заходит в насыщение и коммутирует обмотку управления
>ПК При /„«О световой поток излучателя отсутствует, фототраншетор закрьи,
*0. трашистиры VTI и VT2 закрыты, обмотка управления ЭПК обесточена
2-7J5.3. Схемотехнические методы управления тлуча1слсм онюнары
Для создания номинального входною тка излучателя /„ применяются
специальные схемы управления излучателем оптппары. которые строятся на основе
транзисторного уситителя тока 1ибо на основе ioi ическою элемеша 119|.
+F*>
С выхода
триггере
+£,>
С выхода
григтера
nauirrH
Тратисторныс усилители гока могут
быть реализованы по схеме с общим
коллектором (эмитгерный повторитель)
(рисунок 2.46,6) или по схеме с общим эмиттс-
ром (рисунок 2 46,а).
Сишал ло!Ической единицы с выхода
трип ера блока памяти системы управления
технологическим оборудованием (робота,
станка с ЧПУ и др.) поступает на базу
транзистора VTI, выполняющего функцию
усилителя тока логической единицы на выходе
блока цифровой обработки (БЦО),
реализующего заданный алгоритм
функционирования исполнительных opiaHOB
технологическою оборудования. В схемах на рисунке
2.46 Офаничиваюгций резистор R\
обеспечивает номинальный ток питания излучателя /вх и предотвращает выгорание р-п-
переходов изтучателя (светодиода). Резистор R2 предогвращает имитирование
напряжения югической етиницы на выходе ipmiepa памяти, обусловленное
низким входным сопротивлением транзистора VT1.
На рисунке 2 47 представлены схемы управления излучателем, построенные
на базе югических элементов-инверторов. В схеме (рисунок 2.47,а) используется
инвертор на интегральной микросхеме; на рисунке 2.47,6 — инверюр реализован
на базе тогического этемента 2И-НЕ; на рисунке 2.47,в — на базе ло1Ического
элемента ЗИЛИ-НЕ, а в схеме (рисунок 2.47,г) роль инвертора выполняет
внутренний инвертор три! гера блока памяти.
Во всех приведенных схемах резистор R) ограничивает входной юк излуча-
тетя, а напряжением F, (обычно Е, = 5 В) питается аиод фотоизлучателя оптопа-
ры При наличии на входе инвертора сигнала логической «1» на выходе инвертора
Е\ Е
Рисунок 2 47
.Преобразовали "mSggLJS^
обра.уется пи.кий ло.ическии уровень ,„
излуча.еля Под действием п(п,ряжспияТ^Г "У"*' "Р"**-""*- к катоду
жмок, г,оскольку через Р „ псреход ;^™™»* «ачинае, излучать ецпо Л
шли процесс происходит на инверсном в .ТолГ/Л^ ЮОДН0И 7<>К '- Ана-™-
трштсравошикаетешнал логической U 7DJ фИ"сРа <" Когда на .S-входс
скои «I по выходу Q и в состояние югичеса п. "СРеХ°ЛИТ в «**»»»«« логичс
"Ри вошикновении сигнала ло.ическоГп'^'^^^^ё
бо сиг нала ло, ичеекой , I „а входе R /« ™„r "*, ВХ°ДС и,,вс1т>Р»" ^б,в), ли-
цесс, на выходе инвертора образуется высокий »Р"исхо .ит обратный нро-
мый к кашду излучателя Последний запипае, '0ГИЧеСКИЙ УР»иень, прикладывас-
анолом и катодом стаиовигея равной nV1K R ' С рт,,ость потенциалов между
™>™.ус, и » „оде „р„ем,„ h-^STJ^SSlr
2.7.6. Примерь, расчета „ „ро^^»,,,,,, , ,„„,„ „„^ ^^
Пример 1
напряжение пи гания (/„=24 В |20|. "штмь /„- iz вт,
Решение.
1. Определяем номинальный ток )ПК
h = PJU.= 12/24 = 0,5 А.
2. Принимаем £=(/„ = 24 В.
3. Используя [ 14|, выбираем схему иеинвертирукмшяо операциониою уенли
геля (ОУ), обеснечиваюшего усиление фого-ЭДС фотодиода (нат.ример, типа
К140УД14 А,Б,В). Данная схема обеспечивает режим холостого хода фотодиода,
поскольку она имеет большое входное сопротивление (R„= 10* ..К)13 им).
4. Для обеспечения насыщения составною грашистора (VTI, VT2) принимаем
(/вы, = (1,5...3)В.
5. По рекомендациям [25] принимаем #1 = 10 кОм.
6. Используя |19], выбираем тил оптопары и определяем собходимый
коэффициент усиления ОУ, полагая Еф=0,75 В:
коу= (1 + R2IR1) = ивш/Еф = 3,0/0,75=4,0 ;
R1IRI = (коу-1)=4 -1 = 3,0;
Я2 = ЗД1 =3-10 = 30 кОм.
Тип оптопары — АОД 101 Б.
Технические характеристики:
и„„в
1,8
/„, мА
10
к,.%
1,5
U.
обр.зит
,в
100
'ибр.
,,мА
8,0
7. Определяем ток обратной связи через резисторы RI и Д2:
IVL = UeJ(R\ +K2)=3- Ю /(10+30)=75- Ю А.
8. Определяем мощность резисторов Я1 nR2:
/>=/,^Л1 = 5,6 10-5Вт;
/>=/^./?2 = 1,69 10-4Вт.
9. Выбираем резисторы R\ и*2, используя [401_
У?1_ОМЛТ-0,125-ЮК±5%,
Л2-ОМЛТ-0,125-3(Ж±5%.
Глава II
Ш. Определяем необходимый коэффициент усиления тока Ро составного
k пора на элементах V71 и VT2 Принимаем выходной ток ОУ К140УД14
ттжХ0 **А, руково1Ств\ясь [14].
Коэффициент ро определяем по формуле
Ро = /«/С=05 310-, = 166,6.
11 Выбираем тип транзисторов VTI и V7Z исходя из следующих
соображений Реальный коэффициент усиления pr=pi Р;, где Pi и р2 — коэффициенты
усиления тока базы транзисторов VTI и V72. При выборе необходимо выполнять
условие Рр^Ро- учитывая, что мощные транзисторы имеют высокий коэффициент
Р» 1 (р = 70...100), но малое допустимое значение коллекторного тока [43]. С
другой стороны, мощные транзисторы могут иметь коэффициент Р= 10...20, а
коллекторный ток может достигать для некоторых типов, например, КТ 819, нескольких
ампер. Поэтому в составном транзисторе целесообразно первый (входной)
транзистор брать меньшей мощности, а конечный (выходной) — большей. Кроме того,
максимально допустимая мощность, рассеиваемая на коллекторе выбранного
транзистора Р^вах* должна быть больше мощности нагрузки БОР (в рассматриваемом
примере должно выполняться условие: />кЛпах>(1,5...2,0);Рн). Максимально
допустимое напряжение коллектор-эмиттер должно быть больше напряжения Е, т.е. С/ю > Е.
С учетом изложенного, используя [43], выбираем транзисторы:
VT1— КТ315Г: р, =20—150;
/мшл=Ю0мА;
t/„ = 30B.
VT2 — КТ819Г: р2 = 10...20:
*ктах = 7,0 А;
(/„=40 В.
Принимаем для дальнейших расчетов:
pi=20 (минимальное значение);
р2=10 (минимальное значение).
12. Определяем реальное значение коэффициента усиления:
р/) = р1 -р2 = 20- 10 = 200>р0= 166,6.
Следовательно, транзисторы VT1 и VT2 выбраны правильно.
Пример 2.
Рассчитать элементы БОР на основе транзисторной оптопары (рисунок
2.45,а), предназначенного для управления ЭПК с электрическими параметрами:
(/.= 24 В; Ри=12Вт; /„=0,5 А [43].
Решение.
1. Выбираем транзисторную оптопару, используя [19], например, АОТ123
А.Б.В. электрические параметры которой приведены ниже:
(/„,В
2,0
/„, мА
20
'виллах» МА
10...20
Увни, В
30...50
0,3
Используя табличные значения параметров оптопары, определяем выходной
ток фототранзистора 1вых=1™ при (/Ю=Е:
'*« = С = 0,75/^ = 0,75 ■ 20 • 10~3 = 15 мА.
Полученное значение коллекторного тока лежит в середине диапазона
изменения выходного тока фототранзистора (Imx.nax= 10...20 мА).
3 Определяем суммарное значение сопротивления резисторов (Rl +R2), по-
Е— U„~ 2A В:
(/П+К2)=£//т„=24/15-10"3=1,6 кОм.
4. Принимая напряжение t/,= . s d ' —
на для насыщения транзистора VTn « (ДЗННая ве™чина на,™,
- Определи -^'S^'»».^.^
З-й'.и-Т"?,"00-03484
Выбираем, используя [40]?" ° 5 ' ° V • 100 = 22,5 мВт.
£2I™f-'--U5K±5%;
6- Определяем ™**mj£*^^ ■
7- Полагая коэфф„циенты усилен Э '° ~33-3-
одинаковыми, определяем максимальное з^2^Г * ^"^ М0ЩН0С™
Р.^=7Щ»5Г ФФициентаусиления:
Принимаем В, = В,= ю 1г,г„„
Р, = Р- • Рз = Ю2= 100>Ро. ' РСаЛЬНОе ЗНЗЧеНИе -эффициента усиления
8. На основании проведенного расчета выбипя™
мощности, руководствуясь [43]- выбираем транзисторы для усилителя
V12 —КТ819Г: ртш=Ю, U„=3QB /-7ЛД
9. Определяем коллекторный ток транзистора V7i:
'*.=Р,С = Ю-1510-3 = 150 мА.
10. Определяем суммарное сопротивление резистаюв ГЯЗ + »<п ™
транзистор V7I насыщается: ие резисторов (КЗ+Я4), при котором
., _ <ЛЗ+R4)=Е/1« = 24/0,15 = 160 Ом.
ров /?4 и3^?ВаЯСЬ напРя^"ием UA=IKX -R4= .,5 В, определяем величину резисто-
R4=UA/Ild = l,5/0,15=\0 Ом; '
/?3 = 160- 10= 150 Ом= 1,5 кОм.
12. Определяем мощность резисторов R3 и R4:
Р3 = (/,., )2 • R3 = (0,15)2 • 150 = 3,4 Вт;
Р4 = (IKlf ■ R4 = (0,15)2-10 = 0,225 Вт.
13. На основании проведенного расчета мощность резистора Ю должна быть
не менее 4 Вт, а мощность резистора R4 ие менее 0,5 Вт. Поэтому, в качестве
резистора R3 выбираем два резистора мощностью 2 Вт, величиной 300 Ом. Для того
чтобы расчетная величина резистора Я3 = 150 Ом осталась прежней, соединяем
их параллельно. В результате получаем резистор R3 мощностью 4 Вт, а величина
резистора R3 = 150 Ом, т.е. совпадает с расчетным значением.
В качестве резистора R4 выбир м резистор ОМЛТ-0,5-Ю±5%, а в качестве
ЯЗ — ОМЛТ-2 — 300 ±5%, соединенных параллельно.
14. Определяем коллекторный ток фанзистора V72:
Д2 = РГД,=0,1510=1,5 А.
Полученное значение тока значительно превышает номинальный ток обмотки
Управления ЭПК, что обеспечивает надежную коммутацию нагрузки с помощью
электронного ключа VT2.
15. На основании проведенных электрического и ^TTZS
схему БОР необходимо скорректировать. После корректировки она принимает
вид, показанный на рисунке 2.45,6, с резисторами.
IM
Глава 11
Rl __oM 1T-I-1,5±5*; R3.R4-OVU1T-2 — ЧХ)±5*-
R2 — ОМЛТ-0.125-100 ± 5%- R5 — ОМЛТ-0,5 — 10 ± 5%.
Пример 3
Расчитать элементы схемы управления излучателем с транзисторным
усилителем тока фиехнок 2.46.а). Напряжение питания излучателя £, = 5 0 В (для ТТЛ-
сигналов, КМОП — £| = 5 ..20 В).
Решение
I Выбираем тип диодной оптопары АОД 101Б Принимаем входной ток
измерителя /„=10 мА
2. Определяем величину ограничивающего резистора RV
R1 = £,//» = 5/10 10 Ч = 0.5 кОм.
Принимаем по таблицам /?1=510 Ом.
3. Определяем мощность Р\ резистора R\-
/> = 4 /?1=0,012-510 = 510-Ю"4 =51 мВт.
Выбираем R1 — ОМЛТ-0.125 — 510± 5%.
4. Для расчета ограничивающего резистора R2 необходимо знать параметры
ТТЛ-сигнала управления в частности, ток l'Q и напряжение U'Q логической
единицы сигнала на выходе триггера памяти. При использовании в качестве
последнего, например, микросхемы К155ТМ2, принимаем U'Q =4,5 В; l'Q=1.0 мА [431.
Тогда величина резистора /?2 определяется по формуле
R2 = Uq/Iq = 4,5/l О"3 - 4,5 кОм.
Принимаем #2 = 4.7 кОм.
5. Определяем мощность Р2 резистора R2:
Р2 = (l'Q)2R2 = l-10"6 • 4.7 • 103 = 4,7 мВт.
Выбираем R2 — ОМЛТ-0,125 — 4,7К± 5%.
6. Выбираем тип транзистора VT1, обеспечивающего необходимый входной
ток излучателя /«=10 мА. Данный транзистор должен иметь коэффициент
усиления по току Р=/А//б. удовлетворяющий условию
При выбранных параметрах VT1 — КТ 315(А...Г), |} = 30...60 [43]. Поскольку
P>p\mn. транзистор VTI выбран правильно.
Примечание: по аналогичной методике рассчитывается схема управления
излучателем на основе эмиттерного повторителя (рисунок 2.46,6).
Пример 4. '
Рассчитать элементы схемы управления излучателем на основе логического
инвертора ТТЛ-структуры (рисунок 2.47, а...г). Напряжение питания £,=5 В,
/««»= Ю мА (для оптопары АОД 101 Б).
Решение.
Расчет сводится к выбору микросхемы инвертора и определению параметров
ограничивающего резистора R1 по формуле
Я1 =fi//«on = 5/1010"1 = 0,5 кОм = 500 Ом.
По справочнику выбираем ближайшее значение сопротивления /?1= 510 Ом
и тип сопротивления:
R1 — ОМЛТ-0,125 — 510 ± 5%.
Пример 5.
^Рассчитатьи спроектировать фоторезисторный преобразователь на основе
фошрезистора ФСК-П1 с рабочим напряжением (/„ = 50 В, используемый в соста-
■е устройства для управления ЭПК (теми™ ■) ч i «л „ *
, ,Л£. „,„„ „„„, к vim фисунок Z.3l,e) с током срабатывания
/ *1),5 А, напряжением питания £2 = 24 В
Решение
Проектир
а) выбор т„„„ ф.,го„^1;:,™^Г »
арактерист иками 11Qi- четными
125
Проектирование ФРИ можно развит. н
ai BKifinn п.»,. л. F 'делить на два лапа-
ми характеристиками 119|; " " —«ыми эпсктрическими и снектральны-
б) расчет характеристически* ,.,
фрп . г„, "«« -Р-п» Ф„ТО1К,„„ора, ^тут „
ФСК-Ш: ',ПМ°ЩЬЮ '281 «Ч»*"»- -„„нсск,,;
Рабочее иапряжсние^мя;;;:н7^^ч
Темповой Максимальное значение
ток Среднее значение
тельности
Наименьшее темновое сопротивление
Наименьшее значение кратности
Интегральная чувствительность
ТТ -
Н-дл
Допустимая мощность рассеивания
■ffm.tmn. MOM
^и») А/лм.
Рта МВт
1000
4.8
Примечание
Фоторезист оры: ФСК-
П1а, ФСК-
П1б (для
видимой части
спектра
тромагнитных волн)
100
2. По вольт-амнериой характеристике фоторезистора ФСК-П1 P8I / -т/,
при постоянной освещенности F r.n„»r,„ и^лший| '.-.-/((/,,)
П-чп п «.вещенностн t„ определяется величина светового тока / • пт.
U„-50 В световой ток /„=700 мкА. освещенность £о=200 ж " Р
3. Величина светового сопротивления
Я„ = ВД.=50/700-10 "=71.43 кОм
4. По величине кратности у (см. таблицу) определяем величина темнового
сопротивления
Вт=yRc*=l0Ч-71,43 = 71.43 мОм.
5. Величина темнового тока
L = Up/Rm=50/71,43-106=0,7 мкА.
6. Величина фототока
^=/.4,-/« = 700-0,7=oQ9.3 мкА.
7. По величине удельной чувствительности £„> с помощью (2.122)
определяется необходимый световой поток
Ф=/Д5и)-£/,Л=699,3/(8000-50) = 1.748-10"* им.
8. По люкс-амперной (световой) характеристике фоторезистора
!<* =/(Еф)\и [28J определяется необходимая величина освещенности Еф,
обеспечивающая световой ток /„ = 700 мкА. Для данных значений Up и /„
ЕФ= 138,88 лк. Для дальнейших расчетов принимается £^= 139 лк.
В тех случаях, когда световая харак герметика не задана, можно воснолыо-
ваться величиной стандартной освещенности £„, при которой снималась вольт-
амперная характеристика фоторезистора /„ = /(^ф\шюал •
Поскольку необходимая величина освещенносп. £#=139 лк найдена т
люкс-амперной (световой) характеристики, дальнейший расчег ведегся исходя из
Данной величины F,.
о о J ф' ± .,г= .:•> гпектпальной характеристикой, совпа-
9. Выбирается тип фотоизлучателя to спьктршьн ' Amnnciiiciona
Дающей (по максимуму излучения) с аналог нон характерна„кон фиорыисюря
120
I 1ЙПЙ II
ЛШ _ ««тпчшюш* тивд v HWpwticHiiwM .мо-чепнем типа АД 10 ЬМ
114 Пр« прямом w« Лг«Ю *-4 «*• » ^ч tfMO,xl UK 'ОМ "U * " Г,,.
П* Оперной ч.р*1пхТ,к,нко н xouuv* пртмое шисиие напряжения на
{ «2,0 В
10 Прямое сопротивление мх чагетя ^
r-«o,«2/m ю а: ком» w ом
11 fixo woe напряжение IV «ест ющее на вхо ю ФР11 •• питающее фол*
тцчата». принимаем равным *0 В Дэииос напряженно ооично нсиолыусич
формирования цифровых еж налов управления ГТЛ-ч ровня.
12 Определяется величина ограничивающего ре тс горл Я, в цепи фотонну-
чатепяФРП 1\и мою мконл Ома тук I* онре ie weive ечммои iiMiponiMCiiint
г.кК а также величиной 1/«,
/*-tVt»V+K>.
откуда
t'.-M^ + f W,.»v +!„./?,.
К *(«/„-/»W/^=(5-0.01 '•QOJ/OOI-.W Ом.
IV Мощность ограничивающего ре шегора R
'•■'i ^■U>.0n' 300 = 310* Bi.
В со1>твегствин с ГОСТ принимается i ип:
ОМЛТ-0.125-300±5%.
14 Используя (2.119) определяется он шмальпое расстояние г„ между фого
нзлучатсгсм и фотоприемннком (фогорезнсгором). па котором обеспечивается
освещенность £"=139 лк. Так как в проектируемом ФРП неполмусгеи cuCTO ШОД
направленного нпччення (с фокчепрчющен лининО. угол между направлением
распространения света и нормалью к освещаемой поверхности (Х=0 н costx= 1.
Сила света /определяется но ша.рамме направленное гн конкретного фогоншччи
теля 1191 Для АЛ102БМ сила света 1==104кд.
Таким ооразом,
r„ s J(Icost)/E ш ^КГМ/ш - 8.482• 10 4 м 0.84S мм.
Примечание в тел случаях, koi ia волы-амперном характеристика фогорешего-
ра задана, а номинальная освещенность Е„ н люкс-амперная (спешная') характернсгн-
ки не и «весты, roi \а для опенки освещенности Е используется выражение (2.118)
\ктивная площадь S„ освещснно11 поверхности ишесгна щя конкретных фо-
торезисторов Так. в часi нос i и. для ФСК!11 а площадь S„ = 6x6 а 36 м' 1281. Тогда
F=1.748 10 '/36-10*-48.555 лк.
Данная величина освещенности получена с учетом рассейпания света, т.е ко
гда сош<1(). Поско шку для расемафнваемого случая cos«=l,0
г„ * JljF - JO I • НГ748.555 - 1.435 • 10"3 м - 1.435 мм.
Очемпно, что на чанном расстоянии г„ свег и тучи геля будет более'риссеян,
чем на расстоянии £„=0.848 мм. Tio ошачаст. чго расчет освещенное... по
величине активной поверхнос.н Sn фоторечнегора является веема нриГинпкенпым и
должен применяться в крайнем случае, когда огсутс.вукм снеговые характерней
вгй фоторе шетора.
IV Ко>ффицнсн1 прсобраюшшняФРМ
,* , * *4.«Vye-^9,3/5= П9.8(, мкЛ/И.
lf> (ля обеспечения тока 1.раСа.ывання ' И Ik / -м< а . i
пм \ГГЛ «л т. *, А„,. / |«"а1ыимния 1|Ц\ /,^a»(J,5 А, КО Н НИЩПСН I уСНЛС
ияя V71 оо Тику базы (рисунок 2.31.е)
(* = /,// «/..Д,, |де / «£//>
Посте подстановки и преобразования
П >еоб 1я ншигелн мекцтческнч
1Н1411 КОН
127
>кннцо
г K»4.vRjhi (0.5 71.43 IoVm-USS
Iukhm оораюм. ipannurop \Tl ипж.,„ . "'">•♦«■ H8H
олы №iamm 1 1SS H кичесве .р.ипнс,хт. гТ0"' К°,фф,щис"1 UH"a,,,H ll'Ka
пои .pan uicixtp. например, типа КГ 827 v L» м"жс» оы,ь иеночыоваи ^осгав
1 ,,в*Лукоп,Р^о р..750.. 18ОО0|47|.
2.К. Иреобрншвнюлн \«ui.im
И преоораювалчях \очла. ои.оеящнхея к га.и.т.,«. .
тсадм. непользчехя нтричныи кЬфекг вошик^" ,КЫМ ,,|W,"wllM*
j , ..тш и|ц|ккг. вощикающпп к проио тиках или но iv
проводках с юком up,. в,нкпепчш на „их мт.н.и.ого ,ul |«1 « £|
Эффгк. Чел л. ^н..чие^в,,оя.№„ии,чс.меЛт;;к1н>
ачщнд п.нымц при отсу .х шин ма. питого ноля
Преоора,ов;.ТО,ь Чо^ма нреЧст..МЙ,т тнж „о.ырехпо „осинк фнеч.ок
2 4S.a). вьик непнын в „п (с гопкон .и.аси.нь, ,„ ,нпхпр.ЧвдИ1ЬЦШИЧ, M.„VpluuJ
Дна нывоча (1 „ .)-юковые. сужа, для .ю «ипочеим ..реоораю.и1адя к вне...
иемч ис.очннк) .ока. а два дру.их (3 и 4) - |ю№и.1.шы1ыс. мс^гу ко.орымн воч
ппкасг ».д.с
Эффект \ол .л 11<|И1ос1рнрч1. |сч на рнечнкс 2.48.0.
При oivyiVTBUH ма.пптного по .я ноюк «тек.ропоп не .икажаеая (схема 1).
1-слн материал о.поро veil, ю поюк >1ек.р<Ч1ов нчее. о шлаковую нчо.нооь При
наличии Mainnnioixi поля, вектор магии гнои нидукнин коюро.х» В направлен пер
пендпкллярно плоскости прсоораиншгеля. с.пы Лоренца 01кюняю1 >1ек.р<ч.ы и
искривляю! нх фиск горни (схема \\\ ^.о напраменпе .раектрпн нрнноцц к но
явлс!1нн> о.ринагсльпых шрячов на право.*. сю|юне пчасшны (схема Ш) Такое
накопление шря'юв прочочжаск'я. пока возникающая между иыво ими нонереч
пая VUC называемая J.Ji.c. Холл п. не скомпенсируе. с.пы. со цапаемые
магпнгным нолем.
1<\ 4« /,м
0,1 0.4 О.Л 0.8 Й.Тд
О
,00 0.4 O.S U /М«П
с)
»N Глава II
jW'4111 I II «III i'i " "—
• i для режима заданного тока имеет вид:
* IBFX и.Я)чпа/Л, ——— — -^-r-—,(2.13/)
" v ^ ^ СИ | mB im mA Тл mm mm mm град м /В с
гае — постоянная Xo.ua. зависящая от свойств полупроводника, /, a, h —
соответственно тина, ширина и толщина пластины но 1упроводника; и —
подвижность носителей тока. / — ток в преобразователе, F(//</,U.#) — поправочная
чнкция. а — угол между вектором В и п юскостью преобраювателя.
Эффект Холла сильно проявляется в материалах с только электронной или
только дырочной проводимостью, и он тем сильнее, чем меньше концентрация
носителей тока и чем больше их подвижность
Различают кристаллические и пленочные преобразователи. Первые
выполняются в виде тонких пластин (Л =0,1 0,5 мм), вырезанных из монокристаллов Ge,
Si или из кристаллов химических соединений InAs, InSb, HgSe, HgTe, и др.;
вторые образуются испарением в вакууме исходного вещества, которое осаждается
тонким слоем (Л= 1 20 мкм) иа изоляционной подложке, например^ из слюды, и
их рабочая площадь может иметь очень малые размеры (0,01 х0,01 мм").
Так как потенциальные выводы не удается укрепить точно в
эквипотенциальных точках, то между этими выводами при В=0 возникает некоторое напряжение
{/„ив этом отношении преобразователь характеризуется коэффициентом
неэквивалентности
k„=UJU. (2.138)
где U— входное напряжение.
Так как выходная величина преобразователя зависит от двух входных
величии I и В (2.137), то его чувствительность — гальваномагнитная
ч > вствительность определяется выражением
S№=EJW = RJh, (2.139)
полагая функцию F= I и а=90°.
При /=const имеем чувствительность к магнитной индукции; при 5 = const
— чувствительность к току.
На рисунке 2.48,в,г приведены характеристики Exn=J{B) и Ex_n=f(J)
преобразователей, изготовленных из различных материалов, а на рисунке 2.48,д показана
зависимость чувствительности к току 5/ от индукции В для преобразователей
разных размеров
В постоянном магнитном поле и при питании постоянным током э.д.с. тоже
постоянна. Если же одна из входных величин переменная, то на выходе
преобразователя возникает переменная э.д.с. той же частоты, что и частота входной вели-
нны Если ток изменяется с частотой со,, а магнитная индукция с частотой со2, то
э.д.с состоит из суммы двух составляющих, одна из которых изменяется с
частотой (со, -оь). а фугая (со, +iih). В частном случае, когда ток и магнитная индукция
имеют одну и ту же частоту, но сдвинуты по фазе на угол ф, э.д.с. имеет
постоянную составляющую и переменную двойной частоты:
£»=/?x,fl/[costp - cos(2cor + cp)]//j. (2.140)
В постоянном магнитном поле и при питании переменным током э.д.с. не
изменяется при изменении частоты тока в широком диапазоне — до десятков мегагерц.
В переменном магнитном поле в преобразователе возникают вихревые токи, с
«ягорыми связано увеличение э.д.с, что особенно заметно, если преобразователь
находится в среде с большой магнитной проницаемостью (например, в узком зазо-
ре магнитопровода) r J
На рисунке 2.48,е приведена частотная характеристика преобразователя из
fciA*. находящегося в узком зазоре ферритового сердечника: по оси ординат отло-
отношеяие э д с. Е , при частоте / к э.д.с. £oj0 при /= 0
Погрешности преобразователя обусловлены, в основном, температурой.
У лучших типов преобразователей п„ ' ~~
|емпературот-4()до+то°с И 0на составляет О 02 п \<г пп
Напряжение нежвипотенциальноси „ ' '"""**"*
зависимость, которая может достига. Л "" В Ценности е,о темп,™
вает порог чувствительности и лочн^ь , ГВ Ми^ольт .^"Г^
На рисунке 2.49 показана фе°браэова™я. °граничи-
зависимость от температуры Т
постоянной Холла R„ при раз.
личных значениях конценграции
носителей тока п. Как видно из
рисунка, чем меньше и, т.е. чем
больше чувствительность, тем
сильнее зависят параметры
преобразователя от температуры.
Следует учитывать
нелинейное гь уравнения
преобразования (2.137). Для различных
типов преобразователей в
диапазоне fi = 0v.l Тл нелинейность
составляет 0,5.. .4,0%, а в
диапазоне 0...2 Тл она может
достигать 10%.
Преобразователи Холла
находят применение для измерения
больших постоянных токов,
ем-УКл!
220
260
380 т°К
300 340
Рисунок 2.49
мощности, фазы, а также для умножения частоты, анализа формы кривой,
модуляции и демодуляции малых сигналов. Кроме этого, они могут использоваться в
приборах для измерения неэлектрических величин: линейных и угловых
перемещений, вибраций, крутящих моментов с
предварительным преобразованием измеряемых
величин в изменение магнитной индукции
или тока.
На рисунке 2.50 показана схема датчика
давления (а), действие которого основано на
смещении постоянного магнита 2,
закрепленного в центре мембраны 3, относительно хол-
ловского датчика 1, и его характеристика
ивых = (р(р), показывающая изменение
выходного сигнала в зависимости от давления/? (б).
Рисунок 2.50
2.9. Пьезоэлектрические преобразователи
Пьезоэлектрические преобразователи относятся к электростатическим, т.е. к
преобразователям, в которых носителем выходной измерительной информации
является электрический заряд.
Их принцип действия основан на том, что, если к пластине, определенным
образом вырезанной из некоторых кристаллов, приложить механическое усилие,
то на ее гранях возникают электрические заряды. Наоборот, внешнее
электрическое поле, действуя на эти же грани, вызывает механическую деформацию
кристалла. Первое из указанных явлений на ывается прямым
пьезоэлектрическим эффектом, авторое—обратным [56].
Веществами с такими свойствами, называемыми п ь е з о э л е к т р и к а м и,
«вляются кварц (двуокись кремния) с ненарушенной кристаллической решеткой, а
14
Глава II
же пгганат бария (BaTiCM, цнрконат-титанат свинца (Pb(Zr()s<iTio4s)00 (кера-
• ЦТОидр
Если из кристалла кварца (рисунок 2.51 ,а) вырезать параллелепипед так,
чтобы его грани были параллезьны главным осям (так называемый А-среэ), то под
|ействием сипы Fx в направлении оси X на гранях, параллельных механической
^нейтральной) оси У. появится электрический заряд qx (рисунок 2.51,6):
qx=duFx. (2.14I)
где d\\ — пьезоэтектрическая постоянная (пьезоэлектрический модуль по толщи-
-12
не), зависящая от свойств материала (например, у кварца </м =2,1 • 10 Кч/Н, ти-
таната бария rf„ =(67,..l 15)10 П Кл/Н).
Индексы соответствуют направлениям осей или плоскостей, при этом цифрам 1,
2 и 3 соответствуют направления осей A', Y и Z. цифрам 4, 5 и 6 — плоскости ZY, ZX и
YV Первый индекс характеризует приложенное воздействие, второй — полученный
рез>льтат. Так, у пьезомодуля dM индекс 1 означает, что пластина деформируется
вдоль оси X и напряженность поля измеряется тоже вдоль этой оси.
Ест сила Fv направлена вдоль оси Y, то наблюдается поперечный пьезоэф-
фект, а заряд
?,=-<Ьг1у/*Уч. (2.142)
где v и у — размеры пьезоэлемента в направлении осей X и Y. При действии по
оси Z пьезоэффект не наблюдается.
Z\
+о-
F
* * * + + + +
пит
f + 4- + +
в)
Z*
Y
Г
XS*
2
6)
r)
Рислнок 2.51
Пьезоэффект, наблюдаемый при действии Fx, носит название
продольного. Знак заряда изменяется с изменением знака Fx. У титаната бария пьезо-
модуль примерно в 50 раз больше, чем у кварца, у ЦТС в два раза больше, чем у
титаната бария, а у ЦТБС — в два раза больше, чем у ЦТС.
В связи с тем, что выходное (внутреннее) сопротивление преобразователя
велико, а развиваемая им мощность чрезвычайно мала, выходное напряжение
требует усиления для чего применяются усилители с большим входным
сопротивлением (10 ...10 Ом).
С четью получения заряда большей величины (например, в датчиках
давления) пьезоэлектрические элементы механически соединяются последовательно, а
электрические — параллельно (рисунок 2.51,в). Суммарный заряд в этом случае
определяется по формуле
4z=nq, (2.143)
где л — число пьезоэлементов в виде шайб, дисков или пластин
При использовании пьезоэлектрических датчиков обычно измеряют не заряд,
а напряжение на емкости, образуемой обкладками пьезоэлементов, которое нахо-
ся по формуле
u=qzlc=nqJc = nduFJc, (2.144)
~^r-iLJ^L£a!4»iKOB
где с — собственная емкость пьезой ~ *~~~
Широкое применение в качест„реКТРИЧеСКого «"ика
Монокристалл ™"ZT "'"*ОЖе "°™*ш727£ ЭЛСет1>°«Р"™°™ы-
"паническим воздействиям
Для использования в качестве П№ * Действиям
всего в направлении оси Z (р„сунок f об^ВЗТелей "«ку поляризуют чаще
направлением. Направление осей X и f p СнГ Т™ "Ре™~еннТм
оси Z вызывает деформацию (сжатие) м0ГГ" Т™ F' "Раженное по
Дах 2 напряжения Uz, определяемого J^S^^^^^^^
Uz=d
33'
t
Ы
",
v.t (2.145)
где Г - толщина пластины вдоль оси Z в м; Ь и / - ширина и длина пластины в
м; Fz — сила, приложенная по оси Z в Н; п - число пластин, образующих
составной преобразователь (рисунок 2.51,в).
Обратным пьезоэффектом можно воспользоваться для построения обратного
преобразователя перемещения. При приложении электрического поля
напряженностью Е вдоль оси X, относительная деформация в направлении этой оси
AX/x=dn Ех. (2.146)
Учитывая, что Ех = Uxlx, где Ux — приложенное к пьезоэлементу
напряжение, имеем
AX=d,,-Ux. (2.147)
Так как величина деформаций очень мала (доли микрометра), пьезоэлементы
широко применяются для возбуждения ультразвуковых колебаний или для
измерения очень малых перемещений (например, в нано.ехнологиях).
Одной из наиболее перспективных конструкций пьезоэлектрических
преобразователей, предназначенных для датчиков сигналов, является биморфный
пьезоэлектрический преобразователь (БПЭ), образованный пластинками ПЭ 2,
электродами 1 и соединительным швом 3, используемый как преобразователь
электрической величины в механическую (обратный пьезоэлемент) (рисунок 2.52,а).
Ук '
Рисунок
Глава II
№гмб Л, БПЭ можно рассматривать каь результат действия поперечных сил
и t , мггорые появляются в составляющих его пьезоэлементах пх и п2 за счет
Продольных сит Fop. направленных в противоположные стороны. Это достигается
тем. что вектор F^ напряженности попя. индуцируемого преобразуемым
напряжением в одном ПЭ. совпадает по направлению с вектором поляризации Е,„
а в другом — сдвинут относительно него на 180°.
На рисунке 2 52.6 изображен пьезоэлектрический обратный преобразователь
на базе такого бнморфного пьезоэлемента. применяемый для измерения давления
весьма малых величин (доли Паскаля) [15]
БПЭ выполнен в виде крупой мембраны 1 с напыленными на нее полосками
2 из полупроводникового материала PbS. закрепленной на упругой подвеске из
фотьги 3. выполняющей функции центрального электрода БПЭ.
Полупроводниковые потоски (тенки) нанесены по две на каждую сторону мембраны и являются
составными элементами измерительной схемы в виде тензометрического моста
(RI — R4) (рисунок 2.52,в). В общем случае в схеме может быть использован
согласующий элемент (СЭ), которым является усилитель постоянного тока с
модуляцией переменным напряжением сигнала постоянного тока.
При отсутствии сигнала (давления) тензометрический мост находится в
состоянии равновесия и выходное напряжение его равно нулю. Наличие давления
приводит к разбаланснровке моста вследствие различных знаков деформации тен-
зосопротивлений, размещенных на противоположных поверхностях мембраны.
Возникающий сигнал (напряжение) подается с выхода моста через СЭ на
мембрану в полярности, которая соответствует отрицательной обратной связи. Под
воздействием этого напряжения мембрана изгибается в сторону, противоположную
направлению приложенного давления, что приводит к уравновешиванию моста.
В ряде случаев можно обойтись без согласующего элемента — усилителя.
Если, например, тензосопротивление из PbS с размерами (15x5)10 м и
толщиной (5...10)10 м имеет активное сопротивление около 300 кОм, то при
коэффициенте тензочувствительности K=(AR/R)/(MI)=10 , относительном
изменении сопротивления Др/р = 10% и напряжении питания моста £/„ = 300 В выходное
напряжение тензометрического моста будет U0=±27 В, т.е. вполне достаточное
для воздействия на мембрану.
Диапазон давлений, измеряемых с помощью датчика на базе данного
преобразователя, с мембраной из ЦТС-19 диаметром d=4\ ■ 10~3 м толщиной 7-10"4 м,
находится в пределах (0 ..500) Н/м\ На рисунке 2.52,г приведены результаты
экспериментального исследования преобразователя с тензорезисторами из PbS,
сопротивление которых равно 20-Ю3 Ом. Толщина пластин БПЭ — 0,35 мм.
Характеристики 1, 2 и 3 соответствуют диаметрам БПЭ, равным 41 мм, 35 мм и 6,5 мм.
Постоянная времени преобразователя составляет (1...3)-10"3 с- погрешность —
0,5.-1.5%. ' V
Пьезоэлектрические тензометры данного типа обладают большой мощностью
при работе в резонансном режиме, поэтому их можно нагружать на катушки
индуктивности, светодиоды, электрооптические преобразователи (жидкие
кристаллы, элементы Кэрра).
КОНСТРУКТИВНА0»'''
осоБЕнности^^оГ,ННЫЕ
Как было отмечено в § ~> \ в об
ство содержащее механический чув^еГ' Д~ТЧИК "К™**, собой усгрой
преобразователь (П). ^„тельный элемент (ЧЭ) и электрики
В ряде конструктивных исполнений „ят
чувствительных элементов, являются ToTlH* ПрадУс^Р"вается наличие
сигналом информации и электричекn"Z'™*1тиш* элементами между
ления или преобразования сигнала в Z^lfl™'^ И сл™им для уТ„-
ческом преобразователе. В этих случа^иГ^™ Г "спользования в электри-
воздеиствие на этот преобразователь, собствеГп ИНф°рШции <™ваЮТ прямое
нок 3.1). сооственно и являющийся датчиком (р„Су-
Сигналы информации v2 в виде
изменения магнитного сопротивления R / / *""**-»
относительной магнитной проницаемо- /' X,tf^7^?~4\ '''
сти ц, относительной диэлектрической / /Г~Т|~ (/~Г~~
проницаемости е, потока излучения ф /
(магнитного, светового), действующие в / —~ /
зоне измерения, как правило, не требу- " '~ -'
ют наличия в конструкциях соответст- Р«<*нок3 1
эВлУеЮм1ИтХоГИКОВ (ИНД>™НЫХ- —- Фотоэлектрических) чувствительных
Наряду с этим, сигналы информации v„ в виде перемещения 5. усилия F дав
лен„я р, температуры , в большинстве случаев требуют наличия ч/вствГтельнь х
элементов, выполняющих функцию усиления сигналов. ительных
3.1. Чувствительные элементы датчиков
Чувствительные элементы могут быть выполнены жесткими или упругими. В
качестве простейшего жесткого ЧЭ используются штоки Ш, штанги и т.п.,
размещаемые в направляющих трения скольжения или качения с передаточным
отношением, равным или меньше единицы (рисунок 3.2,а). Чувствительность таких
элементов, а, следовательно, и погрешность позиционирования, зависит от
величины зазоров в направляющих и износа.
Большей чувствительностью и меньшей погрешностью обладают рычажные
элементы РЭ (рисунок 3.2,6), используемые, например, в составе
электроконтактных датчиков перемещения. Обозначив величиной А)' погрешность, возникающую
в контактах К датчика, и приведя ее к линии измерения, т.е. к линии действия
усилия F, нетрудно заметить, что она будет составлять А>ЛИ , где ки = L/a —
передаточное отношение ЧЭ датчика. Таким образом, возникающая в контактах
преобразователя погрешность Av, обусловливает в к раз меньшую величину изменения
положения ЧЭ, т.е. в к раз меньшую погрешность срабатывания преобразователя.
Однако следует иметь в виду, что значительное увеличение передаточного
отношения (к > 25) приводит к повышению инерционности ЧЭ и датчика в целом, а
также вызывает увеличение входного сигнала (усилия F). пп ,
В к,ЧесТ.еУу„Руп,х ЧЭ „р~я—^SSSS. ГМ
сУнок 3.2,в), круглые плоские М (рисунок 3.2,е) или гофрири
(Рисунок 3.2,д). электроконтактного преобразовате-
На рисунке 3.2,е показан пружинный Ч J э ^^^ обусл0вленная
ля. Достоинствами которого являются высокая чу
Глава III
14 i!
ППч -
j
в)
К
РЭ
6)
X. MN 1
J ш-
пс
FWIAAj
п т
ЬЛЛПАЛ
И
ж)
т
з)
^3'
и)
Рисунок 3.2
к)
отсутствием кинематических пар с внешним трением и гарантированных зазоров,
надежность в работе и возможность получения больших передаточных отношений
при небольших габаритных размерах.
ЧЭ состоит из неподвижной 1 и подвижной 2 колодок, соединенных между
собой двумя плоскими пружинами 3 (пружинный параллелограмм). К колодкам
прикреплены две плоские вертикально расположенные пружины 4, в месте
соединения концов которых установлен подвижный контакт К.
Если не учитывать прогиб пружин, то передаточное отношение км - 1/Ъ
(рисунок 3.2,е). Так как треугольники ABC и FDE подобны, можно записать, что
ku~L/a. Поскольку толщина пружины весьма мала (примерно 0,06...0,1 мм), то и
размер а можно выдержать небольшим. При а = 1 мм передаточное отношение
kM = L[U].
Кроме мембран для преобразования давления р в перемещение упругих ЧЭ,
взаимодействующих с электрическими преобразователями П датчиков, широко
используются сильфоны С (рисунок 3.2,ж) и плоские трубки Т, изогнутые по дуге
(рисунок 3.2,з) или по спирали (рисунок 3.2,и). В этом случае ЧЭ, как правило,
допотняются пневматическими соплами ПС, предназначенными вызывать
изменение действующего на ЧЭ давления воздуха в зависимости от изменения
контролируемых неэлектрических величин (величины перемещения, размера и др.)
(рисунок 3.2,к), которые могут быть классифицированы тоже как ЧЭ. При этом имеет
место двойное преобразование и усиление контролируемой величины, например,
перемещения, сначала в изменение давления, а затем снова в перемещение, но уже
ЧЭ в виде мембраны или сильфона. Следует отметить, что в системах
пневмоавтоматики пневматические сопла выполняют функции преобразователей
механических величин в давление рабочей среды или непосредственно датчиков.
3.2. Электроконтактные датчики с механическим воздействием
Электроконтактные датчики с механическим воздействием применяются в
системах последовательного управления, когда команда на работу последующего
яена автоматизированного оборудования дается либо в середине, либо в конце
работы (перемещения) предыдущего звена, например штока пневмоцилиндра. В
силу этого, такие датчики
получают название
путевых датчиков или
конечных
выключателей.
Они могут быть
подразделены на кнопочные
или рычажные. Для
позиционирования рабочих
органов с точностью
(0,3...0,7)10"- м
применяются моментные конечные
выключатели
(микропереключатели), работающие в
режиме переключателя,
конструкция которых пред
Рисунок 3.3
д.
-г-„ « ииунок .».J
ставлена на рисунок 3.3,а. Неподвижные контакты 2иЬ
вом корпусе 4 с отверстиями для закпепл укреплены в пластмассо-
расположенными друг от друГа на расстоянии £ мГлоГ^™ °6WaH™'
плен на конце распорной пружины'состоящей из п^оскойуТГ """^ * ^
При воздействии рабочего органа на ,im*i тос«°" ' и фигурной 6 частей,
изменяется направле ие сиГдейств^, ПР°ИСХОДИТ формация пружины и
чего контакт 5 пе- ™™У*>"** на распорную пружину, в результате
ребрасывается в
нижнее положение за
время 0,01...0,02 с,
обеспечивая тем
самым надежную
коммутацию
электрических цепей.
Ход штока 1
составляет десятые
доли миллиметра.
Микровыключатели
типа ВМК-ВЗГ,
например, отключают
ток 2,5 А при
постоянном напряжении 220 В и переменном 380 В.
Конструкция рычажного путевого датчика с
ломающимся рычагом показана на рисунке 3.3,6.
При перемещении рабочего органа справа
налево его воздействие на ролик 1 приводит к повороту
рычага 2 против часовой стрелки вокруг оси О, в
результате чего подпружиненный ролик 11
переместится по полке 10 качающегося рычага с подвижными
контактами 7 и 8 и изменит направление действия г
силы, создаваемой пружиной 12, по отношению к оси
качания рычага. Поворот рычага с подвижными
контактами вокруг оси О произойдет лишь после того,
как приводной рычаг 2 переместится на несколько
большую величину и отведет собачку 5 от полки 10
качающегося рычага.
в) I-
Рнс)ж>к 3 4
136
Глава III
Освободившийся рычаг под действием пружины 12 быстро повернется,
разомкнет контакты 6 и 7 и замкнет контакты 8 и 9, а также зафиксируется другой
сооачкой. После снятия усилия, приложенного к ролику 1, рычаг 2 иод действием
пружины 4 возвращается в исходное положение и происходит обратное
перемещение контактов.
Кольцевые пружины 3. введенные в состав рычага 2, обеспечивают
компенсацию перебега рабочего органа, воздействующего на ролик 1, а при движении
рабочего органа слева направо обеспечивают «ломку» рычага, способствующую
свободному его перемещению (возврату) без срабатывания датчика.
На рисунке 3 4.а, б представлены путевые датчики фирмы «Festo» с
роликовым рычагом РР (а), срабатывающим при движении рабочего органа как в прямом,
так и в обратном направлениях, и с ломающимся рычагом ЛР(б), срабатывающим
только при движении рабочего органа в одном направлении. Основой данных
конструкций путевых датчиков является микропереключатель 1, закрепленный в
корпусе 3 (рисунок 3.4.в). Связь приводного штока микропереключателя с РР или ЛР
осуществляется через шток 2, имеющем в своем составе компенсационную
пружину сжатия, предохраняющую микропереключатель от поломки при чрезмерных
угловых перемещениях рычагов.
3.3. Электроконтактные датчики с магнитным воздействием
Датчики данного типа применяются в электропневматических системах
последовательного управления в тех случаях, когда необходимо избежать прямого
механического воздействия исполнительных органов технологического
оборудования на их чувствительные элементы. Они могут выполнять функции как
путевых датчиков, так и конечных выключателей.
На рисунке 3.5,а представлен внешний вид электроконтактного датчика 1
типа SME-1-LED-24 с узлом крепления на технологическом оборудовании в виде
планки 3 с винтом 2, посредством которого датчик фиксируется, например, на
цилиндрическом стержне 4 диаметром 6 мм.
Датчик состоит из разъемного корпуса 2 (рисунок 3.5,6), внутри которого
размещены геркон 4 и плата 1 с индикатором срабатывания (включения) в виде
желтого светодиода 3, залитые искусственной смолой.
Примером
практического использования таких
электроконтактных
датчиков в качестве концевых
выключателей может
служить их установка на
стяжных шпильках или
ребрах жесткости пневмо-
цилиндра одностороннего
действия (рисунок 3.6),
поршень которого снабжен
постоянным кольцевым
магнитом.
При приближении
поршня 1 с магнитом 2 к
центру геркона 3 магнитное
поле замыкает его контакты
(рисунок 3.7).
Минимальный ход поршня 5mm между
двумя переключениями
определяется с помощью
выражения [37]
где Ятах — максимальная
величина гистерезиса
(рисунок 3.8), определяемая
из таблицы 3.1.
Максимальная
скорость Vmax зависит от пути
срабатывания
перемещения Sep соответствующих
типов пневмоцилиндров, а
'также от времени
срабатывания подключенных к
датчику элементов,
например, распределителей
воздуха в полости пневмо-
цилиндра.
Так, например, для
пневмоцилиндра типа
DNNZ диаметром 80 мм с
датчиками типа SME-1-
LED-24, имеющими путь
срабатывания Scp=l0 мм,
подключенными к пнев-
мораспределителю типа
JMTH-5-1/4 с временем
срабатывания tcp= 16 мс,
скорость срабатывания
^тах=5ср/Г=10/16=0,625 М/С.
Пневмоцилиндры,
снабженные
электроконтактными датчиками с
•аолица 3
0 цил.,
мм
10
12
16
20
25
32
40
50
63
80
100
125
160
200
250
320
р^ЕЭНеЕистики^^^
Тип
Цилиндра
UNbsFT""
ESNI)SN|
ESN DSN
esnHn
ESRDSN
ESNbSN
DGS
ESW.DSW
DN.DNZ
DNNZ
ESW.DSW
DN.DNZ
DNNZ
ESW.DSW
DN.DNZ
DNNZ
ESW.DSW
DN.DNZ
DNNZ
DN.DNZ
DNNZ
DN.DNZ
DNNZ
DN.DNZ
DN.DNZ
DN.DNZ
DN.DNZ
DN.DNZ
Гистерезис,
Дшх. MM
SME
2
2
2
2
2
1.5
2
2
2,5
9 S
2
2,5
2,5
2
3
3
2
3
3
3
3
4
4
4
4
5
4
5
SMP
1,5
1,5
2
2
2.5
2
1,5
4
4
2
4,5
4,5
2
5
5
2
5
5
5
5
7
7
5
6
7
7
7,5
Путь
срабат.,
1ШП" MM
SME
7
5
8
6
7
6
7
10
7
7
9,5
8
8
10,5
8
8
11
9
9
10
10
10
10
11
11
10
11
11
SMP
9
9
11
9
9
17
10
12
15
15
12
15
15
12
17
17
13
18
18
19
19
20
20
15
16
16
16
16
Рис\иок З 7
<иИк
Глава III
М81НИТМЫМ вопейсгви
ем, нелыя рамещать в
jL j V* местах действия силь-
Ц —^ J.J иых магнитных полей,
например, в сварочных
машинах.
™ Минимальное рас-
Ркуяок3 8 стояние между двумя пневмоцилинтрами, снабженными такими
датчиками, при отсутствии защитного экрана должно составлять
60 мм (рисунок 3.9)
Рисунок 3 9
3.4. Индуктивные датчики
L1T
подтверждение
выполнения перемещения
:В составе жестких
|уг т>ов оборудования
ft
Индуктивные датчики сигналов (команд) позволяют бесконтактно
регистрировать функциональные движения исполнительных органов технологического
оборудования изи объектов производства, выполненных из электропроводящих
материалов. Процесс коммутации электрических сигналов, вырабатываемых
преобразователем датчика, также осуществляются бесконтактно.
Области применения индуктивных датчиков показаны на рисунке 3.10. С их
помощью можно осуществлять: контроль отработки перемещений
исполнительных органов технологического оборудования, например, защитных кожухов, сеток
станков и подъемных устройств, дверей, экранов и др. (поз. 1); контроль отработки
перемещений револьверных головок, пинолей, инструментальных кареток
станков, выполняемых с высокой точностью, гарантируемой жесткими упорами
(поз.2), переключение с высокой скоростью сортировочных устройств для
объектов производства, перемещаемых с помощью ленточных и других транспортеров
щоз.З); определение частоты вращения и обнаружения простоев (поз.4);
сортировку в зависимости от материалов
объектов производства (поз.5); точное
позиционирование объектов
производства в зажимных приспособлениях
станков (поз.6); направление
перемещения объектов производства в
транспортных потоках (поз.7); направление
вращения при прямых и обратных
ходах (поз.8).
На рисунке 3.11 представлены
внешние виды и конструктивные
параметры некоторых типов
индуктивных датчиков: тип SIE-4S-PS-S-LED
со штеккерным разъемом Ш,
предназначенный для установки в гладких
отверстиях малого диаметра,
имеющий диаметр рабочей поверхности 1,
равный 4 мм, снабженный
подтверждающим срабатывание светодиодом
2, с рабочей частотой /= 5000 Гц и
током нагрузки/= 75 мА при рабочем
напряжении (/ = 24 В и температуре
' = 25°С, весом т - 0,005 кг (а); тип
SIE-M8S-PS-S-LED, /= 2000 Гц;
£/ = 24В;/= 125мА;т = 0,015кг(б);
SIES-M12xl-PS-K-LED с при-
распознавание
материалов
позиционирование
*С
определение направ-
"* " иш
Рнсувок 3 10
ТИП
^^VES^^^^^n,»^^ fl
Рисунок 3.11
соединительным кабелем К и светодиодом 2, предназначенный для контроля
угловых положений секторов и других исполнительных органов технологического
оборудования, совершающих качательные движения, /= 800 Гц; т =0,135 кг (в);
тип SIE-V3-PS-K-LED,/= 250Гц; m=0,I2 кг; tcp= 1,2 мс, со светодиодом 2,
предназначенный для пакетного монтажа, т.е. образования линейки (блока) датчиков (г).
Датчики с переключателями'типа PNP снабжены присоединительным
кабелем серого цвета, а типа NPN — черного.
Устройство датчика, выполненного в резьбовомкорпусе и снабженного
присоединительным кабелем, показано ^ _ _ |g- -f^— - [^J^^ ~п
на рисунке 3.12. Датчик сконструи- ( НИР-о-' (3Mj^Z ^_5
Рован по принципу трех проводного ,.-
переключателя постоянного напря- ^
Жения с отдельным контуром для
Спряжения питания.
Глава III
зо
—^ч-л^^г
2(Н
10
^ч/ЧЛч/4
-«ЧЛч/Чг^:
—31.2 В
~^-+24В
-8.8 В
С
^UtJ
"гпи»——I—
^ытщ-г-
г\
Sn+H
РислнонЗ.13
Переменное магнитное поле 1 создается катушкой 2 с ферритовым
полусферическим сердечником, установленной в резьбовом металлическом корпусе 6 с
помощью защитного экрана 3 с оттиском фирмы «Festo» на рабочей поверхности.
Преобразователь 5 выполнен по гибридной схеме и изолирован от корпуса капто-
новой пленкой 4. Световой индикатор срабатывания (светодиод) 8 и
присоединительный кабель 9 установлены в крышке 7. Для герметизации полость датчика
заполнена специачьным компаундом.
Кривые срабатывания датчика (рисунок
ЗЛЗ.а) расположены кругами над активной
(рабочей) поверхностью датчика в зоне действия
высокочастотного переменного магнитного поля
3, создаваемого катушкой 2, размещенной в
корпусе 1 датчика. Они состоят из кривых
включения 4 и выключения 5, разность между
которыми есть гистерезис, отнесенный к
входному сигналу датчика. Срабатывание
происходит при введении в активное пространство
объекта измерения (контроля) 6.
Постоянное напряжение для работы
датчиков Uв может выбираться в пределах от +10 В до
+ 30 В. Эти предельные значения не должны ни
занижаться, ни превышаться, так как это
отрицательно отражается на эксплуатационной
надежности датчика. Напряжение пульсации Uw не
должно превышать 2,4 В (рисунок 3.13,6) и его
следует учитывать при определении предельных
значений.
На рисунке 3.14 показаны коммутационные
расстояния индуктивного датчика, определяющие дальность его действия.
Коммутационным расстоянием называется расстояние, на
котором измерительная пластина из стали ST37 (аналог — сталь 35),
приближающаяся к рабочей поверхности датчика диаметром d, вызывает изменение
выходного сигнала.
Номинальное коммутационное
расстояние 5„ — это параметр, при котором не принимаются во внимание ни
технологические допуски, ни отклонения вследствие изменения тем .ературы или
>• жения
Реальное коммутационное пяггтпаи..« с ~ ~»
j Mnvnnue расстояние ог определяется при
«ильном напряжении и температуре окружающе" среды 293°К (=20°С). Оно
егт иметь максимальное отклонение +Ш% г>т ч™«.„.,„
wiiuiuhchhc +iu/o от номинального коммутационного
^>
Рабочая
поверхность
-(-Датчик
Рисунок 3.14
"^™^^^ особе.
141
Полезное коммутацией.
пределах установленных диапазонов ™ ° * Р а с с г ° я н и е S п,,™^
максимальное
отклонение ±10% от пеап^' " г 'н-лсмии.
Р а б о ч е е к о м м у т а ц и 0 ^Т^Т^^^ расстояния.
эго расстояние,
при котором датчик работает в предел** п г "
находится между рабочей поверхностью и^^ УСаомЛ эксплуатации. Оно
Воспроизводимость Гпп«™ алымзначениемS.
«ведения (повторения) следуюшихТр'ТдГ^ * "^^ ™^сл, воспро-
■■»""" ^ ..о^^с г.г,„ ™^„„„, ~ л^у1 за Другом двух ftkivrm., F
* д ух выходных сигналов и те-
имеющих максимальное
чении 8 часов при постоянной температуре'£^Г'~
отклонение от номинального ±5% напряжении,
Петля гистерезиса дат
включения при приближении измерительной!*" P33H°CTb ХОДа междУ т°чкой
ее удалении. Показывается в процентаТотТ "Ы И
Измерительная стальная
пластина имеет форму квадрата
со стороной пг, равной диаметру
d рабочей поверхности датчика.
Толщина пластины — 1 мм.
На рисунке 3.15
представлены типичнее кривые изменения
пускового момента и петли
гистерезиса переключательных
элементов датчика (пунктиром —
выключенное состояние, т.е. дат-
точкой выключения при
S„(mm)
87654 3 21 12345678
Рисунок 3.15
Рисунок 3.16
чик не заглушён; сплошной линией — включенное состояние, т.е. датчик заглушён).
Индуктивные датчики могут быть установлены в металлических держателях
или деталях технологического оборудования, как это показано на рисунке 3.16,а,
что никак не отражается на их характеристиках. При последовательном монтаж-
между ними следует соблюдать расстояние, равное диаметру d
датчика.
При монтаже в полости металлического держателя или
детали технологического оборудования следует выдерживать
расстояния от рабочей поверхности датчика до этих элементов,
показанные на рисунке 3.16,6. Размер свободной зоны должен
быть выдержан в пределах 3X5.S,,.
При выполнении измерительной пластины из цветных
металлов Sn уменьшается (рисунок 3.17). Рабочие
коммутационные расстояния Sa датчиков при взаимодействии с
измерительной пластиной (объектом измерения), выполненной из
материала, отличающегося от стали St37, даны в таблице 3.2.
ИЗ
-.71-
-d-
Датчик
Phcvhok 3 17
Глава III
Т«&яица 3 2. Коммутационные расстояния Sa датчиков
i
Материал объектов контроля
Сталь St 37 ^аналог — сталь 35)
Хромоникетевая сталь
1ат\нь
\люмнний
Медь
Sa
1,0 xS„
0,9 х S„
0,5 х S„
0,5 x 5„
0,4 x S„
Пример.
Номинальное коммутационное расстояние — S„ =4 мм.
Материал объекта татунь.
Опредетить рабочее коммутационное расстояние Sa.
Решение.
Из таблицы 3.2 для латуни Sa = 0,5х 5„ = 0,5x4 = 2 мм.
Описанные конструкции индуктивных датчиков обладают следующими
преимуществами"
— отсутствие механического износа;
— отсутствие отказов из-за загрязненных, обгоревших или сварившихся
контактов,
— отсутствие вибрации контактов;
— высокая скорость переключения (около 5000 Гц);
— большой срок службы, не зависящий от числа циклов срабатывания;
— невосприимчивость к вибрациям, ударам;
— любое положение при монтаже;
— полная герметизация, создающая высокий класс защиты.
3.5. Оптоэлектронные датчики
Оптоэлектронные датчики фирмы «Festo» состоят из двух основных узлов:
передатчика и приемника. В зависимости от исполнения и области применения
дополнительно используются рефлекторы (отражатели) и световоды.
Передатчик и приемник помещаются либо в один корпус (отражающие зонды
и отражающие световые затворы) или они размещаются в отдельных корпусах
(односторонние световые затворы).
Основные типы оптоэлектронных датчиков представлены на рисунке 3.18.
$:
4
в)
Рисунок 3.18
Датчик, функционирующий на п™
светового луча, имеющего имл^°* ^«аемого от объе^
Олн»ст„р„„„ий CBCTni> . 1ЬНЫХ °4«™ей (реф.
-Г " —• --==~
Использование световодов в составе пят
измерения (рабочей зоны) (рисунок 3?8 г, ГГ™ "^^ Выне<™ их из зоны
тов с малыми габаритными размерамиI и с«Т °СУЩес™™ контроль об1ек
На рисунке 3.19 представлена констпГ Ф°РМЫ-
конструкция отражающего зонда, состоящая из
Рисунок 3 19
-П.
1
I '2 'з
3 ШШ&ЬШ2Ь№
' ТШ|/ [± тГ
4 5 6 7 '8
Рисунок 3.20
а)
Кг-^- +
Рисунок 3.21
а)
Рисунок 3.22
Глава III
mm 10
0 5
Рисунок 3 23
К)
латунного корпуса 5 с наружной
резьбой, внутри которою
размещены фотоэлектронный узел 7, смон-
1нрованный в прозрачной крышке 1,
электронной njiaibi 6, охваченной
защитным жраном 2, и поюнцио-
мегра 3. Закрепление
присоединительного кабеля 4 в корпусе датчика
обеспечивает его разфузку от
натяжения В блок-схему зонда (рисунок
3.20) ВХОДЯ1 ИСТОЧНИК ПОСТОЯННОГО
напряжения 9 величиной К)...30 В,
осциллятор I, передатчик 2 и
приемник 3 излучения, предусилитель
4, сумматор 5, импульсно-
уровневый преобразователь 6,
индикаторный светодиод 7 и выходной
элемент 8 с защитной проводкой.
Выходной элемент может выполнять функции замыкающего контакта (элемент
«II»), размыкающего («НЕ») или переключающего («ИЛИ»), что определяется
входящими в его состав транзисторами.
На рисунке 3.21,а показана схема выходного элемента, выполняющего
фикцию замыкающего контакта с транзистором p-n-р перехода; на рисунке 3.21,6 - п-
р-n перехода.
На рисунке 3.22,а дана схема, реализующая функцию переключающего
контакта на транзисторах с р-п-р переходом, а на рисунке 3.22,6 — с п-р-п переходом.
Во всех случаях транзисторы защищены от токов короткого замыкания и пиков
напряжения.
Функция замыкающего контакта реализуется при попадании света на
приемник, что приводит к срабатыванию выходного реле, являющегося нагрузкой. На-
тичие р-п-р перехода обеспечивает переключение положительного потенциала на
нагрузку К.
Наличие п-р-п перехода вызывает переключение отрицательного потенциала
на нагрузку К. При попадании света на приемник в схеме, представленной на
рисунке 3.22,а, нагрузка К на выходе А последовательно переключается на
положительное напряжение, а выход А блокируется. В случае схемы (рисунок 3.22,6)
нагрузка переключается на отрицательное напряжение, а выход X блокируется, т.е.
устанавтивается на положительное напряжение.
На рисунке 3.23 приведены типичные кривые пуска и выключения с учетом
гистерезиса для датчиков тина RT и RT-Q. В оптоэлектрических датчиках «Festo»
гистерезис находится на осевом пусковом направлении ниже на 20% номинальной
дальности включения SN . Сплошные линии соответствуют состоянию включения
датчика, пунктирные — выключению.
Оптоэлектронные датчики могут быть выполнены е цилиндрическими или
прямоугольными корпусами и иметь кабельное или штеккерное подключение.
При цилиндрическом исполнении (рисунок 3.24) источник излучения и
приемник размещаю гея в диаметральной плоскости на рабочей поверхности 2. Они
снабжены потенциометрами 1 и желтыми индикаторными светодиодами 5, трех-
жизьным кабелем 4 или штеккерным разъемом 6.
У датчиков с р-п-р переходом оболочка 3 присоединительного кабеля и
поясок 3 на корпусе при шгеккерном исполнении имеют серый цвет, а у датчиков с
пр-п переходом — черный
Конструктивные и жеплуатят,»,,,,
^^^£!11!2£]21Да:гч„ков
145
Tim SOF-RT/L-MI8-PS-K-LED
45
И hi
Гнп SOK-RT/L-MI8-NS-K-1 ED
TiinSOC-LA-Ml8
26
Тип SOE-LK.-RT-1000-4
Я.
Рисунок 3.26
Тип SOE-LK-RTS-2000-M5
Тип SOE-LK-SE-1000-2
-1000
Si б)
Тип SOE-LO-RT-500-M5
„ 500 -
Тип SOE-LG-SE-500-M5
г)
Под ключ 8ым
±ЕЙч <£&ш*
Рисунок 3-27
Глава III
Цм подключения к датчикам световодов предназначена специальная насадка
1рис\нок 3 2>\ закрепляемая на корпусе датчика с помощью гайки 2 В корпусе 4,
кмеющсч сквозные осевые отверстия, размещены два резьбовых штуцера 3 под
резьбовые концы светодиодов Угловая фиксация насадки относительно
приемника и излучателя света датчика обеспечивается
1~ ■->■ —I 1 штифтом 1
*f- f—f При использовании корпусов прямоугольной
формы также возможно кабельное (рисунок
3.26,а) и штекерное (рисунок 3.26,6) подключение
датчиков. Приемник и излучатель 5 размещаются
в рабочем окне 2 (а), которое для присоединения
световодов снабжается специальными резьбовыми
сунок элементами 6 (б). Срабатывание датчиков
визуально подтверждается индикаторными светодиодами 4, а настройка
осуществляется с помощью потенциометров 3. Присоединительный кабель 1 датчика типа SOE-
RS-Q-PS/0-K-LED с р-п-р переходом имеет серый цвет и длину 2,5 м, а датчика
TimSOE-RFS-20
л
Тип SOE-RFS-80
Л
г)
Рисунок 3.29
типа SOE-RS-Q-NS/0-K-LED —
черный. У датчиков со штеккерным
подсоединением типа SOE-RS-Q-PS/0-S-
LED с р-п-р переходом штеккер 7
имеет серый цвет, а у типа SOE-RS-Q-
NS/0-S-LED с п-р-п переходом —
черный. Кроме того, штеккер датчика,
выполняющего функции приемника
излучения, снабжен дополнительным
индикатором 8 зеленого цвета.
Типы световодов «Festo»,
используемых для подключения датчиков,
удаленных от зоны контроля,
представлены на рисунке 3.27.
Двухканальный (а) и одноканаль-
ный (б) световоды имеют штеккерное
подключение к датчикам, а световоды
(г) и (д) имеют защитную металлическую оплетку и снабжены резьбовыми
присоединительными элементами. Двухканальный световод (в) выполнен в виде
спирали, что улучшает условия его размещения на технологическом оборудовании.
Для мерной резки световодов с обеспечением прямоугольного среза, что весьма
важно при сопряжении с датчиками или другими световодами, рекомендуется
использовать специальный резак «Festo» (рисунок 3.28) с отверстиями 1 для резки
световодов с защитной оболочкой 0,2 мм и отверстиями 2 _ для световодов без
оболочки 01,0 мм.
Для уменьшения рассеивания отраженного светового потока при
использовании датчиков типа отражающий зонд и отражающий световой затвор
предназначены специальные отражатели (рефлекторы), представленные на рисунке 3.29.
Отражатели (а) и (в) имеют поверхности 1, предназначенные для наклеивания на
хГ^ГниТч\Тгп™ЧеСКОГО 0б°Р*Д0Вания; -Р—ель (б) снабжен отверстием 2
SS^ST КРСПЛеНИЯ; °^аж™ W выполнены в виде самоклеющихся
При кодировании типов датчиков, световодов и отражателей в ctdvktvdv кола
закладывается основная информация о и, и*,„ фажателеи в структуру кода
^^ Формация о их назначении и ко .структивных особен-
Пример кодирования датчик»»-
TunSOE — RT — 1Ч|Жов.
С индикацией
рабочего состояния
ч
Присоединение:
К — кабельное;
штекерное.
S —
ц
_ Схема преобразования:
- р-п-р — замыкающий контакт;
РО = "РП~~3aMbIKaiou»H" контакт';
р-п-р — размыкающий контакт;
"~Р'п — Размыкающий контакт.
Конструктивное исполнение:
М12 — круглый, диаметром 12 мм;
Q — прямоугольный;
V3 — прямоугольный, компактный.
Назначение:
RT — отражающий зонд;
RS — отражающий световой затвор;
Е — приемник;
S — передатчик;
L — с присоединением световодов.
Пример кодирования отражателей:
Тип SOE — RFS20
RFS 20 — отражающий световой затвор, 0 20 мм;
RFF-10I/20 — отражающая фолия с размерами
100 x20 мм.
Пример кодирования световодов:
ThhSOE —LG —RT —500 —М5
Исполнение:
М5 — интовое присоединение;
2 — текерное 0 2 мм;
4 — текерное 0 4мм.
ч
Габарит по длине, мм.
Назначение:
RT — отражающий зонд;
SE — передатчик / приемник;
RTS — отражающий зонд, спираль.
Материал световода:
LG — стекловолокно;
LK — полимерное волокно.
Глава III
Ч5.Д Области и особенности применения оптоэлектронных
1*ТЧВК0В
в)
Prcvhok 310
. большой д&тьности действия и гибкости встраивания в
технологическое обор\дование. что во многом юстигается сочетанием оптоэлектронных
датчиков со световодами,
обеспечивается широкий спектр
областей их применения.
Как отражающие зонды они
широко применяются в бумажной
и гекстильной промышленности,
для контроля, например, качества
рулонного материала (рисунок
З.ЗО.а). а как отражающие
световые затворы для контроля
диаметров рулонов, бухт провода,
полосового материала и др.
(рисунок 3.30,6). В качестве
отражающих световых затворов они
успешно применяются при
штабелировании и стопировании
плоских объектов производства
(рисунок З.ЗО.в) для контроля
высоты штабеля или стопы.
В качестве односторонних
световых затворов весьма
эффективным является применение
оптоэлектронных датчиков для
контроля и счета объектов
производства (рисунок 3.31,а), для
контроля и сортировки (рисунок 3.31,6) в
процессе транспортирования на ленточных транспортерах; для контроля
положения каретки роботов-штабелеров (рисунок 3.31,в), используемых в
автоматизированных складах, а также для контроля положения манипуляторов портальных
роботов- для управления открытием и закрытием различных дверей и створок,
подводом и отводом кожухов, защитных
экранов, заграждений и т.п. (рисунок
3.31,г), посредством создания стро-
бирующих импульсов излучения.
В сочетании со световодами
датчики применяются: для
опознавания объектов малой величины,
например, контроля наличия
радиоэлементов, поступающих в ленте на
сборку (рисунок 3.32,а); для
распознавания специфических
конструктивных особенностей объектов,
например, наличия резьбы по всей
длине стержневой части болтов
(рисунок 3.32,6), что связано с
рассеянием светового потока неровностями
резьбы и его отражением при
гладкой поверхности стержня (следует
РнегнокЗЗ!
Рисунок 3.32
принимать во внимание неточность
расположения объекта и изменение при
этом отраженного потока света); для
контроля за уровнем жидкости через
пеленгаторное окно в резервуаре на
основе использования законов
преломления светового потока, проходящего
через жидкость (рисунок 3.32,в); для
контроля за уровнем жидкости на основе
использования отраженного от ее
поверхности луча, попадающего на
приемник, при достижении уровнем
определенного значения (высоты) (рисунок
3.32,г); для позиционирования объектов
производства при обработке или на
сборочной позиции (рисунок 3.32,д), что
достигается перекрытием всех световых
потоков, создаваемых расположенными
определенным образом концами
световодов датчиков, только при требуечюм
расположении объекта (точность
0,1 мм); для идентификации
(распознавания) объектов производства (рисунок
3.32,е), имеющих специфические
признаки: после срабатывания S1/E1
опрашивается S2/E2, и если есть
срабатывание, объект А соответствует заданному,
если нет — то на позиции
распознавания находится объект В.
При использовании
оптоэлектронных датчиков следует принимать во
внимание помехи, возникающие в
процессе контроля.
На точность контроля могут
оказывать влияние отражающие
поверхности окружающей среды (рисунок
3.33,а), устранить которые можно с
помощью специальных диафрагм,
перекрывающих отраженный поток. Кроме
этого можно изменить положение
оптической оси или уменьшить чувствительность приемника и^™и"' нчлучения
Взаимное воздействие нескольких передатчиков и приему£^™"
(рисунок 3.33,6) устраняется изменением их расположения относительно друг
ДРуГа- „ия изучения (рисунок З.ЗЗ.в) следует
При воздействии постороннего источника излуч«и WJ^ даафрашу
изменить угловое положение оптической оси датчик
(обтюратор). й ды или объектов контроле
В случае сильного загрязнения окруЖаЮ1^атИческ>ю очистку рабочих по
следует предусматривать периодическую а*т0™
верхностей датчиков или объектов (рисунок 3.J , )•
а)
-•,
ttCz:
Phcvhok3.33
г)
ЛЯ
Глава III
АДкНне». ©электрические датчики
Датчики данного типа обладают высокой точностью, позволяют осуществ-
днстанционные (бесконтактные) измерения, малогабаритны,
нечувствительны к изменению температуры, к магнитным и электрическим полям, к уровню
освещенности, задымтенности и запыленности, не требуют специальной смазки,
пожар» и взрывобезопасны С их^омощью можно производить измерения в
относительно труднодоступных местах и создавать простые конструкции многомерных
устройств для контроля практически любых линейных параметров объектов
производства, а также параметров рабочего тела, каким является сжатый воздух.
Для их работы необходима воздушная сеть с определенным давлением
воздуха подготовка которого в ряде случаев требует особого внимания.
Такие датчики обладают значительной инерционностью, снижающей их
производительность. Однако данный недостаток может являться положительным
качеством датчика, так как создает нечувствительность его к вибрациям.
Пневмоэлектрические датчики могут быть разделены на две группы: датчики
давления и вакуума, предназначенные для контроля за давлением сжатого воздуха,
и датчики размеров (перемещений).
3.6.1. Датчики давления и вакуума
Датчики давления и вакуума предназначены для регистрации или измерения
давления воздуха в пределах своего диапазона.
Они подразделяются на аналоговые и цифровые (дискретные).
Аналоговые датчики давления (непрерывного действия)
фирмы «Festo» (тип SDE) основаны на использовании пьезоэлектрических
преобразователей, сопротивление которых изменяется под воздействием давления.
Основой датчика являются кремниевые диски 1 и 2 (пластины) (рисунок
3.34,а), один из которых имеет в центре утончение 3, играющее роль мембраны, а
другой — отверстие для подвода воздуха. На утонченной части диска методом
диффузии нанесены тензосопротивления 4 с выводами 5, являющиеся составными
элементами тензометрического моста.
г)
Рисунок 3.34
Конструктивные и ткгпгсуятщщ
Рисунок 3.35
mm. 115
Конструктивное оформление
датчиков давления показано на ри
сунке 3.34,6. Датчик состоит из
корпуса 1 с отверстием для подвода
воздуха к мембранному узлу 2. Полость
между мембранным узлом и
преобразовал елем 5, закрепленным на
круглой площадке 4, заполнена
жидким кварцевым наполнителем 3
Электронная часть датчика
выполнена на плате 6. Разъем 7 служит для
подключения к датчику
соединительных проводов.
Схемы подключения датчиков
при работе в режиме напряжения и
токовом режиме работы показаны на
рисунке 3.34,в, г, соответственно.
На рисунке 3.35 показано
устройство аналогового датчика
давления типа РТХ 500/600 компании
DRUCK LIMITED (Англия). Он
состоит из сборного корпуса 1, внутри
которого размещены схемная плата 2
С высокопробными Капсулирован- Рисунок 3 36
ными (полностью герметизированными) элементами и модуль давления 3
(преобразователь) из очищенной стали с изолирующей прокладкой Хастеллоя и
кварцевым жидким наполнителем. Элементы измерительной схемы диффундированы в
общий кварцевый кристалл 4.
Габаритные и присоединительные
размеры датчика давления типа SDE-10-
10В/20мА («Festo») показаны на рисунке
3.36. Он имеет присоединительную штек-
керную розетку ПР типа SIE-WD-TR и
предназначен для измерения давлений в
диапазоне от 0 до 10 бар (0...1 МПа).
Максимальное давление на входе — 1,4 МПа.
Выходное напряжение — 0... 10 В, ток —
0...20 мА. Нелинейность лежит в
пределах 0,5%, частота — 100 Гц, л са — 0,12
—£[
Phcvhok 3.37
—чА |0-20мА
—• (1_1(1R
0-10В
кг, температурный диапазон — 0...+85сС.
Датчик имеет встроенную защиту от
короткого замыкания, переполюсования и
перегрузки до 50 В постоянного тока.
На рисунке 3.37 показаны типовые Т1шЖЕ.ю-10в/20м.л
элементы закрепления датчика на техно- t £/.в
логическом оборудовании: монтажная
4*-
Рисунок 3.38
й зажим 2 «--■
планка 4, кронштейн 3, клеммный ^
в отверстии которого размещав! ся корпус 2
Датчика 1.
При использовании аналогового
датчика давления I в системах
автоматического регулирования (рисунок 3.38) его
X
/.мА
:Ж
*.i^«W иМ7ша
Рисунок 3.39
152
Глава III
подключение осуществляется с помощью аналого-цифрового преобразователя 2 с
блоком питания 3 и регулятора давления 4.
Графики зависимости напряжения U и тока / от давления р для датчиков типа
SDE-10-10B/20MA представлены на рисунке 3.39.
Цифровые датчики давления (дискретного действия) основаны
на использовании электроконтактных преобразователей. При возникновении
давления приводится в действие мембрана, взаимодействующая с
микропереключателем.
В зависимости от конструкции датчика входной сигнал может находиться в
вакуумном диапазоне давлений, в диапазонах низкого и нормального давлений В
некоторых конструкциях (типы PEN и PEV) требуемый пьезометрический напор
(высота давления) может регулироваться бесступенчато.
В датчиках типа PEN в качестве входного сигнала может использоваться
перепад давления.
На рисунке 3.40,а показан внешний вид, габаритные и монтажные размеры
датчика давления типа РЕ-РК-4 со шланговым (штуцерным) присоединением к пневмосе-
ти, предназначенного для контроля давления воздуха от 0 до 0,025 МПа. Минимальная
величина давления срабатывания — 0,008 МПа, отключения — 0,001 МПа,
температурный режим работы — от—10 до +60СС. Датчик предназначен для запитывания как
постоянным напряжением 24 В, так и переменным 250 В. При этом токи нагрузки
составляют 6А и 2А, соответственно. Масса датчика — 0,62 кг.
Датчик данного типа состоит из разъемного корпуса 4 (рисунок 3.40.6) с
присоединительным штуцером 1 и фиксирующей гайкой 2, внутри которого смоити-
Рисупок 3.40
153
■ ~ ш J"«4JP 1 i
рованы мембрана 3 со штоком 5 взаим - " =
ключателя 6. Датчик может рабо^тГМ°ДеИствУ«Щим с толкателем м
замыкания (г) и размыкания <1^ В режиме переклей ? микропере-
провода различных цветов Ч^ "^^ ** wSSTSl? (РИСУНМС ***>*
мые к контактам mhZSJLT ЧСРНЫЙ' Г ~~ ^убъГС " ~ ИСПОЛЬзуются
Для контроля дГен^,~
ние, показанное на рисунке 3 4п! °'15 до 0.8 МПа лат™ „
Типре.ук-5] с исполнение датчиков
I fsQ^H
^c-[Qw^
-60
Тип PE-VK 5 I
б)
45-
Рисунок3 4|
При контроле низкого давления от 0.00005 до 0,025 МПа используются дат-
ики типа PE-VK-5.1 с усилителем давления или типа РЕ-1000 без усилителя, га-
аритные и монтажные размеры которых, а также их мнемоническое обозначение
на схемах показаны на рисунке 3.41. Датчик без усилителя имеет один вход
низкого давления X (рисунок 3.41,6). Датчик с усилителем (рисунок 3.41,а) имеет два
выходных пневматических каната: канал Р для давления воздуха от 0.01 до
•025 МПа и канал X низкого давления для сигнала, несущего информацию о
контролируемом параметре. При постутеини на вход X сигнала мембрана 3 (рисунок
f-41,в), смонтированная в корпусе усилителя 2. прогибается и пере сопло 4.
Истекающий до этого в атмосферу через отверстие 5 (на схеме R) воздух
давлением р поступает через отверстие, показанное ьчнктиром. в полость корпуса I над
мембраной 6, вызывая ее прогиб и срабатывание микропереключателя 7. Возврат
Мембран в исходное положение обеспечиваете* за счет их упр> гости.
Глава Ш
-
** .
* «ктропктание датчиков
Тк«ето«и»е«е
напряжение
е.в
15
X»
11>
\ 230
'**
1>
•>
04
02
'* *
6
1
0.03
оо:
Переменное
напряжение
L.B
ПО
230
!
L
'я>л
10
5
h*
5
5
Допускаемые электрическая
нагрузка сопротивления 1К и индуктивная
нагрузка /t для датчиков, запитываемых
постоянным и переменным напряжением,
приведены в таблице 3.3.
Рассмотренным конструкциям
датчиков давления свойственен один
недостаток — при резких колебаниях
завления нарушается стабильность
срабатывания и уменьшается срок службы из-за износа контактов и мембраны.
• > i i это проявляется прн стендовых испытаниях на герметичность элементов
. « тематики Представленный на рисунке 3.42.а датчик давления
«• « » действия имеет улучшенные динамические характеристики за счет
в его конструкцию демпфирующего элемента с изменяющимся
моментом II [2] При контроле герметичности подмембранную полость 2 и
объем i ой емкости (на риоллсе не показана) соединяют с источником
сжатого воздуха, а затем отключают от него. Мембрана 3. защемленная между
* и «~ 1 и корпусом 19, прогибается, сжимая пружину 4. перемещает
вггос ~ ва величину S =0,1-0,5 мм что приводит к размыканию контактов 13. 14
и свидетельствует о достижении
требуемого давления. Дальнейшее перемещение
центра мембраны и штока 7 вызывает
перемещение втулки 8, установленной
относительно штока 7 с гарантированным
зазором Скорость переУ1ещения втулки 8
гасится за счет сил трения, создаваеунлх
кольцевым полым уплотнениеУ! 10.
состоящим из двух кольцевых манжетов,
установленных в выточке центральной части
корпуса 19 с помощью запорной шайбы 16,
причем полость уплотнения связана через
обратный клапан 9. дроссель 15 каналами 5
и 17 с похмембранной полостью 2, что
способствует увеличению сил трения за счет
подводимого в уплотнение сжатого воздуха.
Настройка датчика на требуемое
давление осуществляется с помощью
нажимной гайки 6. для вращения которой в
корпусе выполнены окна 18. Для устранения
относительного углового смещения штока
7 и втулки 8 предусмотрен штифт 11.
Полость датчика с электрическими
контактами закрыта крышкой 12.
При резком падении давления в
похмембранной полости 2 давление
в полости уплотнения 10 падает
мехленнее за счет истечения воздуха
через дроссель 15, что обеспечивает
мехленное уменьшение силы
трения, и, следовательно, замехленный
возврат втулки 8 и штока 7 в
исходное состояние.
При моделировании процесса
1
•*
It E,
гх
ф
Ряс*вок3 42
в)
155
работы сигнализатора дааления учитываю™. „™
противления, создаваемые уалотнениями \7° авижУшие УС1™Я " У™-™я со-
уравнениями наполнения мембранной 1юто^^£!!" T**aa»™4Ba«»*
Задачей динамического моделнрованГ яа^ет П^Г^ *°
сигнализатора давления, которые обеспечаТп^ выбоР ™*« параметров
позволят увеличить срок службы ^^ СГ° Р*60™ и те* ««"
Расчетные схемы сигнализатора дааления предстаатены на рисунках 3 42 б в
При подаче дааления в мембранную полость на мембрану денс^ет активе
силз
где р, - даатение в мембранной потослт,; Л - площадь мембраны (все парапет-
ры имеют размерность с системе СИ).
В данном случае усилие, развиваемое ,,,",,, , какхляпнеа-
моцилиндра поскольку максимальное перемещение жесткого центра ... весь-
уй мало (Х9=0.004 м). Одновременно на мембрану действует пассивная сила
nc = FT1, + Fnp + Foaa + %. (32
где FTP — сила трения, определяемая с помощью выражения
Ftp = Kjp p2 -D5 Н fjp, (3 3)
в котором Kjp — коэффициент, учитывающий напраатение силы трения, у* —
давление в полости упрааления. D5 — внутренний диаметр уплотнения. Н—
эффективная высота уплотнения:/гр — коэффициент трения материала уплотнения; 0 —
коэффициент вязкого трения; V— скорость подвижных частей.
Сила создаваемая пружиной определяется выражением
FBP = F6 = c х (3-4)
где F6 — у силение первоначального поджима; с — коэффициент упругости, .г —
текущая координата.
Сила даатения. действующая на мембрану со стороны штока,
F^=P,FL (33
где р4 — атмосферное дааление.
Сжимаемостью воздуха со стороны штока можно пренебречь, поскольку
страаливанне воздуха из этой полости происходит через сравнительно большое
отверстие.
Тогда ньютоновское уравнение хля сигнализатора дааления имеет
следующий вид: , £л
где А - у скорение. с которым движутся подвижные части сигнализатора даа ения
массой /я. ..«-гих процессов используется одна из
При моделировании термодинам веских прицел
форм уравнения Дарси-Вейсбаха (41):
~-~- п — большее даатение: р, — меньлее
где G — массовый расход в полость р,-\
дааление; Д — проходное сечение в полость.
Соотношение хля приращения дааления в полостях имеет вид
( А, (тс Л
' л (RTG, \
-«b+-4 " > (3.8)
dt
dp2=^-RTG2
vo
где dt - постоянная интегрирования. . = • 0.0001 с: * - уннверсатьная газовая
постоянная; Т~ температурГв градусах Кельвина, х, - высота мемораннои
полости; V0 - обьем поло^гьлотнения: С <h - ««»ые расходы в меморан-
ную полость и полость уплотнения. • • : • иио-
с
Начало
Ввод исходных данных:
диаметры \слоеных
проходов давления
Определение критических
расходов
G3.G5
площадей проходных
сечений
-4 '
Определение расходов
в полости:
мембранную и v плотнеиия]
G2=G5\(1-P2/P,)
Определение тек> щих
давлений
Р, =Р| +ДР1
Р2 =Рг +APz
I
i-6
Определение активной
составляющей силы - А,
r-S
Коэф. трения
равен трению покоя
-10-
—11
Определение сил
сопротивления - Пс
г-13-
Ускорение
равно нулю
Рисунок 3.43
Конструктивные н эксплуатя....т
Значение
скорости, ускорения!
равны иутю
А=0 В=0
Интегрирование
уравнения второго порядка
B=S1
S1=SI+A Tl
V=S1-A Tl/2
x=x+V • Tl
T=T+T1
Печать
Конец
Продолжение рисунка 3 43
Совместное решение вышеприведенных уравнений 3.1, 3.2, 3.5, 3.6. 3.7, 3.8
методом Рунге-Кутта второго порядка [41] реализовано алгоритмом,
представленным на рисунке 3.43, который учитывает нелинейный характер силы трения и
процесс движения мембраны со штоком до упора.
Результаты моделирования показывают, что для эффективной работы
сигнализатора высота манжетного уплотнения должна быть не менее 6 мм для диаметра
мембраны 40 мм. Моделирование проводилось для случая отсутствия тормозящего
уплотнения, для случая кольцевого уплотнения вокруг штока (рисунок 3.42,6) и
Цм/с
0.10 г-
0,05 Ь
0,00
J 1—1 1 J .4
200 fx 3-10 с
Рисунок
3 44
V
Глава Ш
случая активного торможения давлением подаваемым в полость уплотнения
счнок3 42.в)
Зависимость скорости подвижных частей сигнализатора давления от времени
представлена для этих трех an чаев на рисунке 3.44. соответственно. Полное
время проиесса измеряюсь от начата подачи давления в мембранную полость до
перемещения подвижных частей до упора. \натиз графиков позволяет еде тать
вывод, что использование активного торможения тавленнем подвижных частей
сигнализатора чменьшает максимальную скорость в 3 раза по сравнению со случаем
без торможения ив 1.22 раза по сравнению со случаем без активного торможения.
Такое уменьшение скорости позволит увеличить срок службы мембраны и
контактных элементов. Колебательный характер движения подвижных частей
сигнализатора да&ления без торможения (рисунок 3.44) , кривая 1, объясняется
отсутствием вязкого трения.
5—
4-
J J
2
А
ksl
-4.-—w \l f
1 Б1 1
ия
3—Еу
1
- JQ-~
»)
Рисунок 3 45
Для контроля герметичности
пневмоаппаратуры при высоких
скоростях изменения давления питания и
с учетом изменения направления его
действия предназначен аналоговый
датчик, изображенный на рисунке
3.45 [3]. Камеры А и Б в корпусе 1
(рисунок 3.45.а) датчика соединяются
с рабочими полостями
испытываемого пневмоаппарата и с источником
сжатого воздуха, который после достижения в камерах заданного даатения
отключается. При понижении даатения. т.е. при появлении утечки, например, в камере
Б, упругий чувствительный пьезокерамический элемент 3. с нанесенными на нем
диффузионным способом тензорезнсторамн 4, образующими тензометрическнй
мост, прогибается в сторону камеры Б. Вырабатываемый преобразователем 4
сигнал фиксируется регистрирующим устройством 10.
В случае резкого перепада давлений, например, в начале заполнения камер и
полостей испытываемого пневмоаппарата или при неожиданной разгерметизации
какого-либо канала или полости, может произойти разрушение чувствительного
элемента или его деформация на недопустимую величину. Высокая скорость
нарастания электрического сигнала вырабатываемого преобразователем 4
воспринимается дифференцирующим устройством 7, преобразуется в выходной сигнал
положительной или отрицательной направленности, соответствующий
направлению прогиба. Эти сигналы поступают на измерительные входы компараторов 6 и
9. предназначенных для сравнения электрических сигналов от
дифференцирующего устройства с эталонными значениями источника опорного напряжения 8,
уровни срабатывания которых соответствуют допустимой скорости изменения
давления. При превышении скорости на выходе компараторов появляется управляющий
сигнал, поступающий на соответствующие вставки 2
и 5. представляющие собой пакеты пьезокерамиче-
ских колец (преобразователей) диаметром d с
электродами, реализующих обратный пьезоэлектрический
эффект, причем пакеты набраны так, что одни кольца
увеличиваются в диаметре на величину А (рисунок
3.45,6), а другие уменьшаются. Таким образом,
вставки приобретают зубчатую форму, при которой
значительно возрастает газодинамическое сопротивление
каналов D подачи воздуха в камеры А и Б за счет
уменьшения площади проходного сечения и из-за
Рисунок 3.46
159
возникновения дополнительных туп* ^™ . ,»
ВСтаВ0К- ^Рбулентных, встречных „
В отличие от датчиков давления ' "^
крепленных в корпусе s .„ ,ения- Датчик вакуумя ,г.
Держит пружинуТжатия Г4^™»**. бТмембп ^ ^ "0МИМ0 M"
мосистеме^л^ охве^И ^"^«ый винт 2 ST" ° Т°ЛКателе" 4- «-
сжимая пружГу" вГь'Гтем ^Г ™ №£ К ™еВ-
изЛшре„иТкаГдаале„ия "№aB™ **ш ™Па Pen ^Сраоатыва«ия датчика.
При функционировании в режиме „*,
полненный в корпусе 1. что "pZZ^I^T^* »«*. -
Тип ре.Ч-кь аТИК> сильфона 5. пружины 4 и выводу
Рис^ок 3 4"»
Глава III
vnopa Ь «.ильфона из активной зоны преобразователя 8. Происходящее при этом
срабатывание датчика подтверждается свечением светодиода 7. Диапазон
давления от 0.025 до 0,8 МПа.
При контроле вакуума используется канал р2. Падение давления внутри
снлъфона приводит к его сжатию и также выводу упора 6 из активной зоны преоб-
■ is 8 Диапазон вак>ума — от -0,02 до -0.08 МПа.
Для контроля перепада давлении используются оба канала, при этом давление
в канале р\, должно быть больше давления р2. Настройка датчика производится с
помощью винта 2 и подвижной в осевом направлении шайбы 3, сжимающей
пружину 4.
Пепя гистерезиса переключающего элемента датчика составляет 0,025 МПа
при ненагруженнои пружине 4. Таким образом, если в канале р2 имеется давление
0.2 МПа. то срабатывание преобразователя произойдет при давлении в канале р\
равном 0,225 МПа. Если в канале р\ действует давление 0,2 МПа, а в канале р2, оно
падает до 0,175 МПа, то тоже происходит срабатывание датчика. Диапазон
давлений при дифференциальном режиме — от -0,095 до 0,8 МПа.
На рисунке 3.47 даны графики
зависимости величины гистерезиса (в процентах) от
давления включения (в, г, е) и от перепада
давлений (д). Кроме того, график (е)
показывает повторяемость точек переключения
датчика при различных давлениях на входе.
Датчик запитывается постоянным
напряжением 24 В, ток на выходе при наличии
преобразователя с р-п-р переходом — 400 мА.
Минимальное сопротивление нагрузки —
470 Ом, частота питающего напряжения —
70 Гц, масса датчика — 0,24 кг.
Регулируемое реле давления типа PEV-
1/4-В, представленное на рисунке 3.48,
срабатывает, когда давление в подводящем
канале достигает заданной величины. Точка
переключения регулируется бесступенчато
от 0,1 до 1,2 МПа, для чего служит маховичок 9, вращением которого вызывается
осевое перемещение упора 7, зафиксированного от вращения планкой 4, и сжатие
Рисунок 3.48
пружины 5.
т
4о^
а)
6)
Рисунок 3 49
в)
Поворотом регулировочного винта по часовой стрелке можно
увеличить верхнее и нижнее значения давления
переключения (один оборот = 0,13 МПа).
При достижении заданной величины
давления мембрана 2 прогибается,
перемещает шток 3 с упором 11,
взаимодействующим с микропереключателем 10. На
рисунке 3.49 показаны варианты
подключения реле, работающего в режиме
переключателя (а), замыкающего (б) и
размыкающего (в) контактов. Гистерезис реле Н
изменяется поворотом втулки 8 с
шестигранной головкой, расположенной под
защитным колпачком 9 (рисунок 3.48).
При этом нижняя точка переключения не
изменяется (давление р,„ прямая 1), а
изменяется верхняя точка переключения
(давление рф ломаная линия 2) (рисунок
0.6 0.8
Рисунок 3 50
^^^^^^^
рассчитано на
3.50). Реле усчитано на питающее пе~
напряжение 250 В и ток 6 А МакгГ! Переменн°е
переключения - 3 3 Гц ЛияпГ ИМЗЛЬная частота
ратур — от -20 до +80°С, масса
Датчиков
161
0,22 кГ.
Настраиваемое реле вакуума типа VPEV-1/8
(рисунок 3.51,а) по конструктивному исполнению в
основном, аналогично описанному ранее реле
давления типа PEV-I/4-B. Отличие заключается в
наличии дополнительного отверстия подключения
вакуума 12 и заглушки 13 с каналом связи нижней
мембранной полости с атмосферой. Вакуумная
точка переключения 1 (рисунок 3.51,6) и гистерезис
(минимальный 2 и максимальный 3) могут
регулироваться независимо друг от друга. Одним
оборотом регулировочного винта 6 по часовой стрелке
(рисунок 3.48) можно уменьшить давление
переключения на 0,018 МПа. Гистерезис изменяется
поворотом регулировочной втулки 8 без изменения
точки переключения.
Диапазон устанавливаемого
вакуума от -0,02 до -0,095
МПа; повторяемость ±0,003 МПа;
максимальная частота
переключения — 3,3 Гц; максимальное
напряжение питания — 250 В
(переменный ток); электрическая
нагрузка (активная) — 5А;
температура окружающей среды —
от -20 до +80°С; масса — 0,24 кг.
Для выполнения функции
цифрового манометра в составе
устройств подготовки воздуха
предназначены измерительные
пьезорезистивные
преобразователи давления типа PENV-A-
PS/O-K-LCD и VPENV-A-PS/O-
K-LCD (для вакуума), позволяю-
щие осуществлять регулировку давления переключения и гистерезиса по
цифровой шкале, имеющие по два аналоговых выхода и ™*™^™И™К™™"2~
тор (LCD). Установка давления переключения и ^^резиса, выоорнорма^ьно-
заГнутого и нормально-разомкнутого режимов осуществлятся в диалоговом ре
^Пример монтажа преобразователя »^ "
рисунке 3.52, а габаритные и присоединительные^^ ф^/ции:
Преобразователи данного типа могут »*^^*«и» параметров давления
- индикация минимальных и максимальных значени р*
и вакуума;
установка задержки срабатывания;
сравнение значений; .
- выбор единиц измерения: bar, psi, k™' ний давлеНия (вакуума) и дав-
- одновременная индикация текуш»*i ималЬной величин;
ления переключения или минимальной
пароль для защиты данных.
И _
■0,02 -0,04 -0,06 -0,08
- Верхняя точка переключения, МПа
б)
Рисучок3 51
-0.1
I
Глава III
«
Ч
г
\
\
I
%
% \
Рисунок 3.52
32.5
1
Р
Z>
' t
Jr
CSTOl
□
.i m .
ki3
it41
т—-
щ
25,7
35,5
1 - 6-жяльный кабель 2,5 м,
3 - пневматические разъемы:
ВМ
YE
2 - LCD-дисплей;
4 - адаптер PENV-A-SH
Рисунок 3 53
0 +
GN
WH
^*т м%
Рисунок 3 54
Рисунок 3.55
Схема выводов измерительных
преобразователей даагения и вакуума показана на рисунке
3 54, где BN (коричневый) — плюс; ВК (черный)
— выход I; WH (белый — выход 2; BU (синий)
— нуль: GN (зеленый) — аналоговый выход UA;
YE (желтый) — аналоговый выход IA; Rl —
нагрузка на коммутативном выходе; Rv— нагрузка
на выходе сигналов по напряжению; R| —
нагрузка на выходе сигналов по току.
Параметры преобразователя давления:
диапазон давлений — от 0 до 1,2 МПа;
настраиваемый диапазон давления — от 0,02 до
1,2 МПа; настраиваемый гистерезис — от 0,002
до 0,9 МПа; максимальный ток нагрузки
одновременно на двух выходах — 150 мА;
максимальное падение напряжения на выходе — 1,2 В;
напряжение питания — 24 В (постоянное);
аналоговые выходы: давление от 0 до 1,0 МПа
соответствует 0...10 В или 4...20 мА; точность
— 2,5%; температура окружающей среды —
0.. ,50°С; масса — 0,18 кг.
Параметры преобразователя
для вакуума: диапазон давления —
от 0 до -0,1 МПа; настраиваемый
диапазон вакуума — от -0,002 до -
0,1 МПа; гистерезис — от -0,0002
до -0,09 МПа; аналоговые выходы:
давление от 0 до -0,1 МПа.
соответствует 0...10 В или 4...20 мА;
остальные параметры идентичны
параметрам преобразователя
давления.
На рисунке 3.55 представлена
конструкция малогабаритного
датчика давления, действие которого
основано на преобразовании
давления, приложенного к мембране, в изменение
емкости. Мембрана 1, воспринимающая
давление, является подвижным электродом
емкостного чувствительного элемента, выполненного
заодно с корпусом из стали с малым
температурным коэффициентом линейного
расширения. Неподвижный латунный электрод 2
заделан с помощью бакелитового лака в
изоляционную текстолитовую шайбу
3, имеющую отверстия 4 для подвода
противодавления. Диапазон изменения
давления — 0,05...0,07 МПа. Рабочее
изменение емкости — 3...3.5 пФ;
начальная емкость — 15...20 пФ.
Частота собственных колебаний датчика —
6 кГц.
3.6.2. Бесконтактные даТЧ„ки положения
Датчики положения предназначен
ственного положения исполнительньЛр^"0"^"0™ К0НТР<™ простран-
обьектов производства, а также определеГ^""10™^^ оборудования и
последних от заданных. Р ДСЛения отклонений размерных параметров
В качестве чувствительных элементов ™
па сопла, в сочетании с усилителями пневматГГ ПрИМеняютс* различного ти-
них- Ревматического сигнала (давления) или без
Условно сопла могут быть раздел
в сочетании с механическими жесткимГупопГ ^""^ УП°РНЫе' «-зуемые
раженный воздушный поток («отражающий^ ? К0ЛЬцевые' использующие от-
пересечении воздушного потока объектом п пневм°затворы, основанные на
ментом технологического оборудования J°mmacrBa ИЛИ ИСПо™ительным эле-
3-56) [37]. оорудования («пневматический барьер») (рисунок
Типы пневматических сопел "FESTO"
SD-2 SD-3 SD-3-N
Упорные
RFL-4 RMI-5 RFL-15
RML-4,8-S
Котыдевые
SML-40S SH-100S SFL-6
SD-3 SFL-100F
Пневмозатворы
Р.
Рабочий зазор S, мм
РЕ-1000
РЕ-РК-4
PE-PK-4-2N
PE-PK-4-SW
PE-PK-4-2N-SW
PE-VK-5.I
Р- К-100.1
-H5V -4SV ( ^fe'
Рисунок 3.56
IW
Глава III
Тип SD-2
_^5
Тип Y-PK-3-D
Рисунок 3.58
Рисунок 3 57
Их сочетание с различными типами датчиков давления на базе
электроконтактных преобразователей и позволяет получить датчики положения,
реагирующие на изменение режима истечения сжатого воздуха из сопел вследствие
изменений, происходящих в окружающем их близлежащем пространстве.
Датчики, управляемые подпором воздуха
(датчики избыточного давления торможения)
основаны на сочетании упорных сопел типа SD-2,
SD-3 с жесткими упорами типа SDA-12xI-B. Таким
р/ / \ \ Я образом, они являются конечными выключателями
р ^//^sJU^\ и могут успешно использоваться для контроля
положения объектов производства и исполнительных
органов технологического оборудования с высокой
степенью точности. Небольшие размеры и малое
усилие срабатывания позволяет использовать их в
труднодоступных местах при различных
температурных условиях окружающей среды и сильном ее загрязнении.
Датчик с соплом типа SD-2 (рисунок 3.57) используется с раздельным
дросселированием приточного воздуха, для чего применяется дроссельное соединение
типа Y-PK-3-D (рисунок 3.58), в котором вход Р снабжен дросселем с проходным
сечением 0,4 мм.
При перекрытии сопла истечение воздуха в
атмосферу уменьшается и в канале А дроссельного
соединения появляется давление рА , вызывающеее
срабатывание подключенного датчика давления, например, типа
РЕ-РК-4 (рисунок 3.40).
Датчик с соплом типа SD-3 (рисунок 3.57,6),
снабжаемый сжатым воздухом через вход Р, также
срабатывает при перекрытии сопла и появлении в выходном
канале А давления выхода рА. Это давление (сигнал)
существует до тех пор, пока сопло перекрыто, и оно
должно соответствовать давлению срабатывания,
подключенного к соплу датчика давления. Давление
питания/? = 0...0,8 МПа.
Для разгрузки сопла от действия перемещающихся исполнительных
элементов технологического оборудования (например, суппортов, бабок, кареток) и
повышения точности их позиционирования сопла датчиков размещают в
специальных жестких упорах (рисунок 3.59).
На рисунке 3.60 показаны графики зависимости давления на выходе сопла рл
(канал А) от рабочего зазора (соплового расстояния) s для датчиков с соплами SD-
2 а) и SD-3 (б и в). Из графика (в) видно, что при значениях j £ 0,15 мм и
давлении
Рисунок 3 59
J^E№iS^^
!£TJI5aT4HKOB
0.1 0.2 0,3 0.4 0.5 0,6 0',7рМШ
О." 0 2 0,3 04 0.5/ШПа
Рисунок 3 60
о" 00"мПаИЯч^ °'6 МПЗ' В КЗНаЛе А В°ЗНИКаеТ Ва^м' Достигающий величины -
0,003 МПа, что позволяет использовать датчики типа VPE ве™чины -
I рафики на рисунке 3.60,г,д показыва- TlfflSD, N '
ют зависимость расхода воздуха от давления
питания р.
Рабочий температурный диапазон
сопел: -4О...+ 10О°С. Масса сопел - 0,007 и
0,02 кг, соответственно. Масса дроссельного
соединения — 0,005 кг. Масса упора — 0,12кг.
На базе сопел SD-3 с помощью
специальных насадок созданы сопла SD-3-N,
предназначенные для датчиков регистрации
уровней жидкостей (рисунок 3.6!).
Предпочтительное давление питания
Р = 0,01. ..0,015 МПа. При отсутствии
жидкости воздух, подаваемый в канал Р,
свободно истекает в атмосферу. При
перекрытии жидкостью отверстия погруженной
трубы (ПТ) на выходе возникает сигнал (давление), величина которого
пропорциональна высоте жидкости над отверстием ПТ (рисунок 3.62).
Условные проходы трубо- и ,.
шлангопроводов, находящихся Т^^^ЗАПараметры трубопроводов
между жидкостью (зеркалом по- L>^eHHOClb'M
верхности) и соплом скоростного
напора SD-3-N, приведены в
таблице 3.4.
Так как ПТ соприкасается с
Жидкостью, которая может быть по
Рисунок 3.61
0,50
Условный проход, мм
1.00
2,50
5,00
2,5
с*
Глава III
I 6.015МП» К насосу
Рис\нок3.62
Тип RML48-S
Рисунок 3.63
Максимальное!
сопловое
расстояние
4 8 5.1мм
своему химическому составу афессив-
ной. необходимо иснолыовать лпн-
коррозионнмй материал. Следует учи-
1ывать и температурные условия.
При контроле уровнен жидкоеiей с
но 1.ВИЖПММИ поверхностями преду-
сматрнваегся демпфирование,
заключающееся в снабжении ПТ но всей
длине кожухом, имеющим в основании
очно или несколько отверстий малого
диаметра, что позволяет получить
внутри кожуха и ПТ спокойное «зеркало». В
сильно пенящихся жидкостях пневмо-
щупы имеют особое преимущество
перед электронными дискретными,
которые могут срабатывать на пену.
Наличие последней не отражается на
точности контроля, так как смена давления
возникает только при достижении
поверхностью жидкости соответствующей
удельной плотности.
На рисунке 3.62,а показана
система контроля за уровнем жидкости. При
достижении заданного значения датчик
срабатывает и отключает насос,
подающий жидкость в резервуар.
Система, показанная на рисунке 3.62,6, по-
Мбхо.75 зволяет
контролировать максимальное и
минимальное значение
уровня.
Сопла кольцевого
излучения
(«отражающий глаз»)
используются в составе
бесконтактных датчиков
сигналов. Область
применения — ощупывание
стрелочных
измерительных инструментов,
контроль пресс-форм и
листовых штампов
(толщина деталей,
разрывы в полосах, за-
Точность
контроля
0,05 мм
Минимальные размеры и форма
контролируемых объектов
Рисунок 3 64
J552£ms^^^
167
/ixJO4. 40
Р. VI!!и
Р, MI In
S, MM
а,мм
Рисунок 3.65
липание плоских деталей положрныр ™^.„
талей, счет, измерение ШЛ°ЖеНИе КР°МКИ <™<*ы или листа, высота стопы де-
дежность работы таких датчиков. д Hd на
Мнемоническая схема, общий вид и разрез кольцевого сопла типа RML-4 8-8
показаны на рисунке 3.63. Через штуцер Р, запрессованный в корпус 4 сопло
снабжается профильтрованным, не содержащим масла воздухом, который
истекает в атмосферу через кольцевой зазор, образованный наружной резьбовой втупкой
J и трубчатой вставкой 1. Закрепление сопла на технологическом оборудовании
осуществляется с помощью гаек 2. Тип RML.5
При перекрытии выхода сопла
воздух поступает в отверстие вставки
1. и на выходе А появляется
сигнал давлением > 0,05-10"3 МПа,
который в дальнейшем может быть
усилен до требуемого значения.
На рисунке 3.64 приведены
параметры, характеризующие
возможности датчиков с данным типом
кольцевого сопла. Давление питания
—- от 0,0075 до 0,025 МПа.
Максимальное давление, подаваемое на
вход — 0,05 МПа. Температурный
диапазон работы — от 10 до + 60СС,
масса сопла — 0,011 кг.
На рисунке 3.65 приведены
графики зависимости давления на
выходе рА от величины
аксиального зазора S (осевая
чувствительность) при различных величинах
Давления р на входе (а) и
зависимость рА от величины бокового
Рисунок 3.66
N
Глава III
Рисунок 3 68
р< , Х07^-
«10 0'
МПа 9_ 1
7С
~
4
ie
i
|
I
И-,
/ ] V
I /
л
' 1 '
1
1 '
v 4FL
' j _E
! /
. ; /1 i
i ! / i
.
1
1-
1
• '?
i i i
I *
| j
!
■
t
1
1
|
\
I !
1
T
-4
-1
-1-
! ; i
t-i'-
lMM±
■ flMM
1=1.5mm
Рисунок 3.69
10 12 14 16 18 20S,MM
Рисунок 3 70
u u
Рисунок 3 67
смещения а (латеральная зависимость) также при
различных р на входе (б).
Кольцевые сопла типа RML-5, RFL-4 и RFL-
15 (рисунок 3.66) способны обнаружить изменение
положения объекта на величину от 0,1 до 0,3 мм
(рисунок 3.72). Сопла RML-15 и RFL-4
предназначены для работы с давлением входа от 0,01 до
0,02 МПа, а сопло RFL-15 — от 0,02 до 0,03 МПа.
Устройство сопла типа RFL-4 показано на
рисунке 3.67. Воздух давлением р, поступая в
полость сопла, образованную конической втулкой 1
и дюзой 2, и истекая в атмосферу через кольцевой
зазор между ними, вызывает падение давления
(вакуум) в канале А, связанном с
соответствующим электроконтактным преобразователем,
которое может регулироваться с помощью дроссельной
иглы 5, размещенной во внутренней части корпуса
4. При перекрытии кольцевого зазора в канале А
возникает давление >0,510~3 МПа, способное
вызвать срабатывание усилителя (показано
пунктирной линией на графиках рисунков 3.68 и 3.69).
Наружная часть корпуса 3 выполняет защитные
функции и снабжена резьбой для монтажа с
помощью гаек 6 на технологическом оборудовании.
Зависимость давления выходного сигнала рл
от соплового аксиального S и латерального
расстояния а при р = 0,015 МПа для сопел типа PML-
5 и RFL-4 приведены на рисунках 3.68 и 3.69,
соответственно, а для сопла типа RFL-15, на рисунке
3.70, где кривая 1 — при давлении р = 0,015 МПа,
2 — при р = 0,02 МПа, 3 — при р = 0,03 МПа, 4 —
область рассеяния при/? = 0,02 МПа.
Графики на рисунке 3.71 иллюстрируют
зависимости расхода воздуха от давления питания р
сопел типа REL-4, RML-5 (а) и RFL-15 (б).
На рисунке 3.73 показана мнемоническая
схема (а), внешний вид (б) и разрез (в)
передающего сопла, которое может быть использовано в
сочетании с соплом типа SD-3 для образования
пневматического затвора или в сочетании с
дроссельным соединением типа Y-PK-3-D вместо
сопла SD-2. Оно производит тонкую стабильную
струю воздуха, способную вызвать появление
'b^^™^J^SSlssS!SiSSSSmm
датчиков
169
выходного
сигнала в приемном
сопле,
расположенном от него
на расстоянии
20...40 мм. при
давлении
питания сопла — от
0,01 до 0,04 МПа.
Воздушные
струи обоих
рМПа
Рисунок 3 71
0.05/1 МПа
Тип
RML-5
RFL-4
RFL-15
Диаметр
дюзы.
d,
мм
—
2,25
—
Максимальное
сопловое
расстояние , мм
5.5
4.5
15.5
Точность
контроля
мм
0.2
■o.i
0.3
Минимальные
размеры н форма
контролируемых объектов
т-
fcx/;.MM
3x10
3x20
-
b*h,\ia
8x10
8x20
-
€»
л 5
л
20
Рисунок 3.73
Рисунок 3.72
СОПеЛ ДОЛЖНЫ бЫТЬ Согласованы (рас- TimSML-40-S
положены на одной оси) так, чтобы
точка наибольшего напора
(критическая точка) находилась перед
выходным отверстием приемного сопла. При
удалении сопел друг от друга более,
чем на 50 мм, энергия потока воздуха
приемного сопла должна быть
уменьшена с помощью входного дросселя
(ВД). В противном случае энергии
потока передающего сопла будет
недостаточно, чтобы преодолеть энергию
потока воздуха приемного сопла и
вызвать появление давления на его выходе А.
Диаграмма на рисунке 3.74 позволяет осуществить выбор проходного сечения ВД
в зависимости от соплового расстояния s и требуемой величины выходного
давления рА, где кривая 1 — без ВД, кривая 2 —
ВД диаметром 0,5 мм, 3 — диаметром 0,4
мм, 4 — ВД диаметром 0,3 мм, 5 —
давление р перекрыто.
На рисунке 3.75 показаны
мнемонические схемы и общие виды передающего и
приемного сопел, образующих
пневматический затвор (рисунок 3.76),
применяющийся в составе датчиков для контроля
объектов сложного профиля или регистрации
объектов, находящихся в неопределенном
положении. Сопла запиты ваются
AG I8J
МПа
дав-
50 70
Рисунок 3.74
1
Глава III
TleiSFLlWKi
t
rS
ж
— &
\
it
vOTFr
fou
7,>
mi
\j
Ш
5
58
A
TenSFL-IOtVF
SFL-IOO-S
Рисунок 3.75
SFL-100-F
p „ .>*11 ■ ^
PurvHiu 4 1(\
Tim SFL-6
ленном 0.001...0.002
MI 1л. Выходной
сигнал pi может
изменяться от 0.0002 Ml la
до давления пшания.
Сопла М01 ут
располагаться друг от
друга на расстоянии до
100 мм. При
отсутствии между сопла
контролируемого
объекта струя воздуха,
истекающего из
передающего сопла (SFL-
100-S) препятствует
свободному выходу
струи воздуха из
приемного сопла
(SFL-100-F). Возникающий подпор
воздуха создает на выходе А давление
рл > 0,05-10~" МПа, которое может быть
усилено и передано к датчику давления.
При перекрытии струи давление
л. . п
0.04 0,08 0 12 0 16 />Л1Па
Рисунок 3 78
Рисунок 3.77
Рл = 0. Сопла нормально функционируют при температуре
окружающей среды в пределах от -40 до +Ю0°С. Масса
сопел — 0.05 кг. Максимальное давление в питающем
сопле — 0,4 МПа, в приемном — 0,05 МПа.
Сопло воздушного затвора вилочного типа показано
на рисунке 3.77. Оно применяется в составе датчиков для
контроля объектов производства или положения
исполнительных органов технологического оборудования (дисков,
флажков и т.п.), толщиной до 5 мм. Давление питания - от
0 до 0,8 МПа. При давлении р > 0,3 МПа целесообразно
встраивать дроссель, способствующий уменьшению
расхода воздуха. Рекомендуемый рабочий диапазон давления
— от 0,01 до 0,1 МПа. Давление выходного сигнала
должно соответствовать допустимому рабочему давлению
подключаемого усилителя. При свободном вилочном проходе
на выходе А имеется сигнал в виде давления рА. При
перекрытии струи воздуха в проходе давление на выходе
пропадает. г
График ЗаВИСИМОСТИ ВЫХОДНОГО пая пенно rs ™. „
3 78 a nacxn,™ „»„w« ~г идного Давления рА от входного р показан на рисунке
л /» а расхода воздуха от р — на рисунке 3.79.
9М 0.08 0 12 0 16 /ШПа
Рисунок 3 79
171
3.6.3. Пневматические измеригелы,»»
Давление и расход воздуха в элеюп.,
измеряется с помощью манометров и ротам '™аТИЧеских ^темах в основном
ма.ические измерительные схемы деля гея 1 ?Г ' ЭависиМ0С1« от ««> все пнев-
I • М а н о м е т р и ч е с к и е - Пе,,1 ОСнов"ые . ругшы [ 11):
2. Р о т а м е т р и ч е с к и е - EZ^T""* "* изме« Давления.
но' ° потока. РеагируЮЩме на изменение скорости воздуш-
В устройствах электропневмоавтоматик» к
матические схемы манометрического типа С Ш"Р°К° пРименяются ннев-
На рисунке 3.80.а представлена простейша. ™
■ростсишая схема манометрического типа.
Рисунок 3.80
Для косвенного определения расхода воздуха через сопло 4 с площадью
проходного сечения f2, путем измерения давления устанавливается дополнительный
постоянный дроссель 1 с площадью канала/h который носит название входного
сопла.
Сжатый воздух под постоянным давлением/) через сопло 1 поступает в
измерительную камеру 3 и далее через кольцевой зазор, образованный торцом
измерительного сопла 4 и поверхностью контролируемого объекта 5, истекает в
атмосферу. В зависимости от величины зазора s в камере 3 устанавливается определенное
измерительное давление р..,, которое при постоянном рабочем давлении р и тоща-
ди входного сопла /) является мерой расхода воздуха через измерительное сопло,
следовательно, и мерой контролируемой линейной величины s.
Для визуальной оценки величины давления р., используются жидкостные или
пружинные манометры 2, шкала которых градуируется в линейных величинах.
Управляющие сигналы вырабатываются датчиком давления 6, например,
электроконтактным, мембранного типа РЕ-РК-4 (рисунок 3.40).
Строгое определение зависимости р4 =jfa) представляет значительную
сложность, поэтому для целей практического анализа пневматических измерительных
схем эта зависимость определяется приближенно.
Используя уравнение неразрывности потока
/lpl(Ol=/.p2(02. (39>
гДе р,со, и р2со2 плотность воздуха н скорость потоков, проходящих через
входное и измерительное сопло, соответственно, а также приняв допущение о
несжимаемости воздуха р, = р2 = р , тогда
(b^fiiF^vp-. «,W2#n'p. <3-,0>
г<* МЦ2- коэффициенты истечения через соответствукнцне сопла, можно
"олучить приближенную зависимость измерительного давления от зазора:
„.sn/fl+rGb/MiX/i'/iN")-
Глава III
,»»/,*/ . /2=n</,S. t/, и d2 —диаметры входного и измерительного сопел.
Приняв Ц-. /Ц| *= 1 получаем окончательно
PA = r'[\+(f2tfir\- О-")
Графически данная зависимость представлена на рисунке 3.75,6. Эту кривую
ооычно называют характеристикой пневматической
измерительной системы. Ее крутизна (тангенс угла наклона) характеризует пере-
аточное отношение пневматической схемы [38]:
ks=dpA/ds = -3,2pS(d;/dt)/[\ + l6S2(di/d*)]. (3.I2)
Знак минус перед правой частью означает, что с увеличением d2 или s
величина измерительного давления рА уменьшается.
Наибольшее передаточное отношение получается при 4d2s/d{ =0,58 и
Pi = 0,75р:
kSim~26p(d2/df). (3.13)
Таким образом, изменение передаточного отношения пневматической
системы манометрического типа легко достигается путем подбора диаметров сопел,
зазоров и величины рабочего давления, что придает универсальность этим
системам.
Как правило, для работы измерительных схем используется прямолинейный
участок характеристики, ограниченный точками 1—2, на котором передаточное
отношение максимально и практически постоянное.
Отрезок As = smax — smin определяет предел измерений схемы.
Более совершенной является дифференциальная схема (рисунок 3.81),
состоящая из двух ветвей, каждая из которых соответствует обычной схеме (рисунок
3 80 а).
В одной ветви, состоящей из входного
сопла /, и измерительного сопла /2
воспринимающего изменение положения объекта
измерения 1, расход определяется измерительным
давлением рм. Другая ветвь, образованная
входным соплом /|' и соплом /т с
предварительно установленным зазором sconsl, имеет
постоянный расход, определяемый давлением
РА2 — const. Эта ветвь обычно называется
ветвью противодавления.
Дифференциальная схема, для которой
характерно сравнение двух давлений рм и рА2,
менее чувствительна к колебаниям рабочего
давления р. В качестве измерителя давления 2,
включаемого в диагональ пневматического
неуравновешенного моста, может быть
использован, например, датчик типа REN-M5
(рисунок 3.47), предназначенный для получения
нииальных сигналов давления.
В дифференциальных пневматических системах сопла обеих ветвей системы
могут иметь различную величину и форму проходных сечений. Если оба зазора
валяются переменными, система определяет алгебраическую сумму двух
размеров В этом случае обе ветви системы — измерительные и для каждой из них су-
иествуют следующие зависимости:
аРл = рл1-ра2 ; as = s,-s2.
ДИ'ч»
датчиков
173
(3.14;
Передаточное отношение Дифференциальной системы ^^
Kd=dApAfdbS.
При работе с постоянным противодавлением передаточное отношение систе
мы определяется параметрами измерительной ветви, так каГ^Л"Га следов"
тел ьно и рА2 = const. J2 ">nsi, л следова-
Если система работает по схеме дифференциальных измерений, то
необходимо, чтобы каждому значению As соответствовало одно и то же значение АРл nZ-
висимо от величины зазоров .v, и s2. Тогда в общем случае
Ра\ = Рм ~АрАн dpM ldsx = dpA2 /ds2 . (3.15)
Таким образом, для обеспечения однозначной зависимости между As и АрА
необходимо чтобы передаточные отношения измерительной ветви и ветви
противодавления были равны в каждой точке рабочих участков их характеристик Это
условие осуществимо лишь при использовании прямолинейных участков с
одинаковым передаточным отношением характеристик каждой ветви. Для выполнения
этого условия на практике диаметры входных и измерительных сопел необходимо
делать соответственно равными.
В дифференциальных
измерительных схемах широкое применение в ка- ~ "
честве чувствительных элементов
получили сильфоны.
На рисунке 3.82 приведена
дифференциальная схема, основанная на
использовании дифференциального
манометра.
Сжатый воздух из пневмосети,
пройдя через блок фильтра и
стабилизатора, под постоянным давлением
поступает через входные сопла 1 и Г в
полости сильфонов. Из левого сильфона
воздух через кольцевой зазор s
образованный торцом измерительного сопла 2 и поверхностью объекта контроля,
истекает в атмосферу. В этом сильфоне не создается измерительное давление рп
величина которого зависит от размера объекта контроля.
Из правого сильфона воздух истекает в атмосферу через узел
противодавления 9, а в полости сильфона создается постоянное давление д» С»^»™*К™™
сильфонов жестко связаны стяжкой 3, которая подвешена на плоских пружину 8
Положение подвижной системы определяется разностью давлении Рм н рА2. Пере
мещение стяжки измеряется с ^^ZZ^Z^^^ электрические
На стяжке с помощью плоских "Р^/^нс целью обеспечения необхо-
контакты. Для предварительного натяжяшя w^ ^ г помошью винтов 7 осуще-
\Pconsr
Рисунок 3.82
димого усилия замыкания контактов служат упоры 6. С помощью
ствляется настройка сраба
контролируемого объекта, ири ишши»»^- — .
1фференциальных счльфонных приборов не превышает
^^ * с ,rvrur,iirpHHe такой измерительной
1НИЯ кончалivd wv j ,
ствляется настройка срабатывания электрических контактов при заданном размере
v - .. D.ifinne параметров схемы и упругих
^lujinvibn naviJJUMKa wpavaii«««-"
контролируемого объекта. При правильном выборе параметров
элементов погрешность дифференциальных счльфонных "Р1*1*
~ Ас „„ г,^г»Рпятпчное отношение такой измерительной
десятых долей микрометра. Общее передаточное иш ш
системы сх \сл
к0 - KsKmHL '
™u«-iri->H измерительной системы, оора-
где к, - передаточное отношение пнев"^шени^ меха„„зма передачи от
зеванной соплами 1 и 2; *,„ - передаточное 0TH0^.0H0B.
сильфона на стрелку; кс — передаточное отношени v ^ ^^
kc=A,U.
Глава III
Конструктивные и экс^луяТЯ1,,,0||1
4 — "Эффективная тощадь си 1ьфонов; j — жесткость твух сильфонов и их
\кииной подвески (есчи она имеется), приведенная к оси упругого перемеще-
снльфонов.
Передаточное отношение для электрических контактов кс / к, снльфонных
приборов обычно принимается равным 20...50. Уменьшение передаточного
отношения на контакты ведет к уменьшению точности настройки. Таким образом,
передаточное отношение сильфонов с учетом (3.17) составляет:
kL ={20...50)/k^AJj. (3.18)
С учетом механического и эрозионного износа контактов после заданного
чиста срабатываний, передаточное отношение сильфонов должно удовлетворять
WTOBHK)
ДИ,/(М,)<Д«. (3-19)
где Л,,, — механический и эрозионный износ контактов, определяемый из
таблицы 3.5: Д> — допускаемая погрешность измерения.
С целью уменьшения погрешности показаний до заданной величины Д5
необходимо увеличивать эффективную площадь сильфонов так, чтобы усилие FL,
развиваемое сильфонами при изменении измерительного зазора на величину
допустимой погрешности Д,, было равно или больше суммарного дополнительного
усилия те.
F^>Fk+Fv, (3.20)
где
FL=nF+ 0,5^11,,
(3.21)
здесь F — усилие предварительного прижима пруж .ы к ограничительным
планкам, обеспечивающим надежное замыкание контактов (выбирается из таблицы 3.5);
п — чисто контактов (п = 1...8); /, — величина перемещения контакта в замкнутом
состоянии;), — жесткость /-ой пружины, несущей конт. и (/,- = 0,02 Н/мм).
Таблица 3.5. Параметры контактов измерительных систем
Материал контактов
Вольфрам В4
Серебро Ср.99,9
Платина Пл П-1
Вотьфраморениевый сплав ВР-20
Палладий с ишдием П1,И-18
Износ после
25000 срабатываний,
мкм
1...2
5...7
5...7
0,5... 1
4...6
Рекомендуемое
усилие замыкания,
Н
0,1...0,15
0,05...0,08
0,03...0,05
0,1.-0,15
0,07...0,1
Усилие Fc, развиваемое сильфонами при изменении измерительного зазора на
величину погрешности измерения As, составляет:
Fc = AJ<As. (3-22)
На основании (3.20) и (3.22) определяется эффективная площадь сильфонов:
A,>(Fk+Fj/(k,As).
Жесткость сильфонов и пружинной подвески
j = (0,02...0,05) A3ks.
В существующих приборах жесткость подвески составляет 10...20% от об-
жесткости подвижной системы.
Передаточное отношение механизма передачи от сильфонов к стрелочному
указателю определяется из выражения (3.16):
где а - заданный или выбранный интервал п. ' Ш3)
деления шкалы устройства. н Деления шкалы; i — заданная цена
Существующие измерительные пневма
инствами имеют малые пределы измеоеНИо ™ЧеСКИе системы наряду с их
достояния. Мерения' чт° ограничивает область их приме-
Максимальный зазор s, при котором т
ределяется условием еоретически возможны измерения, оп-
откуда
ЩМ>ти1,5
При
s<d2f4.
s>d2l4 площадь истечения кольцевого зазора практически
(3.24)
не зависит
от зазора s. Отсюда следует что олним „, « Т
является увеличение диаИЛZZП "^«ения предела измерения
увеличение диаметра измерительного сопла. Однако
чительно увеличивает
расход воздуха и
практически оказывается
неприемлемым.
Увеличение
пределов измерений
достигается с помощью
измерительных систем
с кольцевыми (эжек-
торными) соплами [11].
такое решение зна-
Phcvhok 3.83
Принципиальная схема такой системы представлена на рисунке 3.83,а.
Воздух под постоянным избыточным давлением истекает из входного селла 1
непосредственно в измерительное сопло 2 и далее через кольцевой зазор ь
атмосферу.
Давление рА в измерительной камере 4 отсчитывается по показывающему
прибору (манометру) 5 и служит мерой изменения размера контролируемого
объекта (КО). Зависимость рА(.ч) является характеристикой пневматической
измерительной системы с кольцевым соплом.
Параллельно с манометром к измерительной камере 4 может подключаться
датчик давления 3, выдающий автоматический сигнал, свидетельствующий о
достижении объектом заданного размера или положения, например, PE-VK-5.1.
Особенности такой системы заключаются в том, что прямолинейчый участок ее
характеристики pA{s) значительно больше, чем у обычной пневматической
измерительной системы при тех же передаточных отношениях. Это иллюстрируется
графиком на рисунке 3.83,6. Отрезок ab кривой 1 соответствует прямолинейному
участку характеристики обычной пневматической системы и определяет ее предел
измерения. При больших значениях измерительгого зазора кривизна характеристики
резко увеличивается. В схеме с кольцевым соплом при больших зазорах
увеличивается количество воздуха, эжектируемого из ^Т^^Г^ж^поЛ^т'ь
„ гтопярт пплее резко и может дос1И1<иь
Дит к тому, что измерительное давление рА ли f^£P прям0линеЙному
отрицательных значений. Отрезок ас W™»J™^^*m эжекторной
Участку характеристики и определяет увеличенный предел г
системы при том же передаточном ^™ошенИ"пими „оплами уводится на основе
Расчет пневматической системы с кольцевым* ^^ ,__, и 2__2 (рису-
Уравнения сохранения количества движения между
Но*3.84,а): ,^„„. (3.25)
G,(0,
(G, + G2 )co2 = /, (д, - РК) + № - Ргр •
Глава III
б) n)
Рисч цок 3 84
1де СУi и Cf2 — массовый расход воздуха,
иаекающего из входною Щ и ш2 измерительною сопел,
cooircicihciiiio; to, и (02 — скороеiи ноiока воз-
духа, истекающею из входною и измерительною
сопел, coot ветст вепио. />„ — ат мосферпое давление;
P»~Pi + Р„ —* абсолюшое измерительное
давление; ДЯ - дополнительная сила давления на
входную кромку ишершелыюго сопла; ртр— сила
трения между сечениями I—1 и 2—2 (ввиду се
малости в дальнейших расчетах принимается Ртг = 0).
Левая час1ь уравнения (3.25) определяет
изменение количества движения между
рассматриваемыми сечениями, а правая — импульс
гидродинамических сил.
С целью упрощения расчета принимается Д/? = 0. Кроме того, при глухой
измерительной камере для установившегося режима С2 = 0.
Тогда, после некоторых преобразований уравнения (3.25), получается
выражение для определения измерительного давления:
Рд={2р[(/2//1)-е1}/{2[(/2//1)-е1-(Л//|)}, (3.26)
где р — рабочее давление; е= />|//>2; Р\ — плотность воздуха, истекающего из
входного сопла; р2 — плотность воздуха, истекающего из измерительного сопла.
Формула (3.26) выражает статическую зависимость измерительного давления
от зазора. При контроле линейных размеров
/2 = lid2s '
где d2 — диаметр измерительного сопла (для кольцевых сопел рекомендуется
принимать равным 2 мм). Из анализа расчетных зависимостей и экспериментальных
данных установлено, что величина зависит не от абсолютных геометрических
размеров сопел, а от отношения сечения сопел и величины рабочего давления,
которое рекомендуется устанавливать:р = (I ■ 105...2 • I05) Н/м2= (I • 105...2 • 10") Па.
Эмпирическая формула зависимости е(/2 / /() имеет следующий вид:
при рабочем избыточном давлении р = 2 • К)5 Па
при рабочем избыточном давлении р = 1,5 • 105 11а
при рабочем избыточном давлении р = I • К)5 Па
Но '+£
Передаточное отношение пневматической системы с кольцевым соплом
*,=фд/^«{8/7(/2//1)и/2/г/12)1(/2//|-2е)|}/{2[(/2//|)-е|-(/2//,)2}2.(3.30)
Оптимальная длина / проходного сечения измерительного сопла (рисунок
3 84.в) подсчитывается по эмпирической формуле
/=[ВД</,2/</2)]-1,5£/2. (3.31)
Расстояние 12 между входным и измерительным соплами определяется из
оедующего условия: конечное сечение свободной струи, вытекающей из
входного сопла диаметром </,, должно быть равно или меньше (у входа в измерительное
сопло) площади проходного сечения измерительною qoiuia. Это условие выполня-
(3.27)
(3.28)
(3.29)
ется при
/2-1.59W2-f/,),
(3.32)
Конструктивные и экеппуя,аци.,,„,
Для целей пракшческою расчета ^
величины Ф = /2//|, преобразуется к ви^* (U6) с Помо'™« безразмерной
М = [2(ф-е)/,|/,2(ф_еь 2.
Для измерения линейных размеров
Зависимость „д(ф) Г1ри рабочем
показана на рисунке 3.85. Экспериментальна
что прямолинейные участки характерTnJ??™™0'
ной пары сопел практически одинаковь^, рХеТ"
л«ч рекомендуемых рабочих давлений %.$ 2,5^
Анализ кривой на рисунке 3.80 показывает, что для оа
боты пневматической системы на прямолинейном уТстке
cTZrZ: й "РИ ИЗМерИТе« зазоре ,mn, LrZ
ствующем нижней границе лредела измерения вепичина
Bv,oBzacb л а "?и измеритель»ом ^Snm;c^z::
вующем верхней границе предела измерения,
ф -■ ' ,о-
Предел измерения Ад- = л1ШХ - Smm.
Согласно формуле (3.34) имеем:
<Pmin=0,5 = 4f/2S
откуда диапазон измерения
Рис\нок3.85
*mmld\
а диаметр входного сопла
dx = \,1Ъ^Ш
А1,ли устранения скачков давления (точки
торцах измерительного сопла, необходимо выпо
(D-d2)/2<0,5
As = 0,325(d~/d2),
(3.35)
И 36)
Для устранения скачков давления (точки А на рисунке 3.79,6) при ачоских
ах ишрпитришлгп c-nntio иопКуплиил выполнение пояска, ширимой
'""мм. (3.17)
3.6.4. Примеры применения пневмоэлектрических датчиков
Области применения пневмоэлектрических датчиков весы\-а разнообразны
(рисунок 3.86). В машино- и приборостроении они успешно применяются при
расфасовке и дозировке сыпучих и жидких наполнителей. Предназначенные для
них емкости, например, в форме колпачков нли чашек должны соответствующим
образом располагаться на транспортере, т.е. донышком вниз. При расположении
донышком вверх (а) по сигналу от датчика с кольцевым соплом они удаляются
(сдуваются) с транспортера.
С помощью датчиков с соплами, образующими „невмозатвор
(пневматический барьер), легко осуществляется счет изделий, перемещающихся по транснор-
ТСРУ г- „,„ г^шеетвлять унраатение циклом работы
Сопла вилочного типа позволяет оц^тм% *Рпортеров „ т.д. Так. на-
техиологического оборудования: прессов, станк.. . у HJUTCMM второй Явля-
иример. может осуществляться ™ты™ше "^еппетше иа боковой стороне
ется кулачок (в) или специальные флажки, закреплен..
транспортной ленты (г). ^ гоунпы или расфасовке датчики с со-
При сортировке изделий на размерные р* же(||Ш засЛ0нкн. выполняющей
плами подпора могут выдавать информацию о
функцию делителя потока (д).
Конструктивные и эксплуатационно л^й
179
использованы на конечной операции контлп-м « «^ соплами могут оыть
определяются как отктонения Ц^^^Г™*" W ° ИХ П°М0ШЬЮ
отверстий, пазов, и т.п ^ Н НаЛИЧИе вып^нениых на заготовке
При автоматической загрузке обрабатывающего и сборочного оборудования
датчики на базе пневмозатвора применяются для контроля наличия деталей
прошедших ориентацию в бункерном загрузочном устройстве, а также для отключи
ния бункера в случае перепотнения отводного тотка ити буферного магазина (ж)
На производствах, связанных с изготоатением бумажного и текстильного
полотна, датчики с кольцевыми соплами и пневмозатворачи успешно применяются
для управления положением полотна относитетьно барабанов (з), а также хтя
контроля относительного расположения двух и более позос при получении
многослойного полотна (и).
При использовании различных стрелочных измерительных устройств (весов,
манометров, индикаторов и т.д.) сопла позволяют осуществить бесконтактное
распознавание положения стрелки, являющейся тегкодеформируемым этементом (к,
л, м). Таким образом, можно без больших затрат автоматизировать процессы
взвешивания как сыпучих, так и жидких продуктов, а также химически активных и
вредных веществ.
Широкое применение пневмоэлектроконтактные датчики потучили в
системах высокоточного автоматического контроля в процессе обработки.
Получение сопряжений с допуском на зазор или натяг в несколько
микрометров при обеспечении полной взаимозаменяемости экономически не всегда
выгодно, так как изготовление деталей с допуском 1...2 мкм является весьма сложной
технологической задачей. Для получения таки\ сопряжений в основном
пользуются индивидуальной пригонкой сопрягаемой пары, а в массовом про родстве —
селективной сборкой.
Индивидуальная подгонка — операция трудоемкая и дорогостоящая, при
селективной сборке имеет место незавершенное производство.
Указанные недостатки могут быть исключены при применении спосооа
сопряженной обработки, основанного на том, что одна из деталей, чаще втулка,
изготавливается по сравнительно широким допускам, а загем к каждой втулке
автоматически при обработке на станке пригоняется ваз.
1гН|вЬ
4 5 4 6 7
I
II
Рисунок
3.87
I
Глава III
На рисунке 3 87 приведена принципиальная схема пневмо>лекгричеекого
устройства активного коигроля, построенная но недифференцнальной схеме
измерения с применением сильфонного пневмоэлектрического датчика 10 типа
BB-H974U1-8)[ll]
На измерительную позицию 1 устанавливается втулка с отверстием Dx
которая центрируется пробкой 2, в вырезах которой расположены измерительные
иноки 1 и 3, почвешенные на плоских пружинах 4 и 6. несущие сопло 9 и плоскую
заслонку 8. Измерительное усилие создается пружинами 5 и 7,
Позиция II представляет собой двухконтактную скобу, установленную на
столе шлифов&пьного станка. С помощью пневмоцилиндра 11 скоба подается на
деталь и ее измерительные твердосплавные наконечники 15 и 16 располагаются в
диаметральной плоскости детали, что обеспечивается упором 12. Скоба содержит
измерительное сопло 14 и плоскую заслонку 13.
Давление в правом сильфоне рА2 зависит от суммы зазоров (Si + s2). Давление
в левом сильфоне рц устанавливается в зависимости от величины зазора s3, в узле
противодавления, который служит для насгройки системы.
По мере снятия припуска с обрабатываемой детали зазор s2 уменьшается,
расход воздуха из правого енльфона также уменьшается, что приводит к росту
давления рл2 смещению подвижной части сильфонного датчика вправо и
размыканию контактов К, в результате чего появляется управляющий сигнал на
прекращение обработки.
Пневмоэлектрические датчики успешно применяются в измерительных
устройствах контрольных автоматов.
На рисунке 3.88 показана схема измерительной позиции, предназначенной
для контроля высоты и параллельности торцов и бурта подшипникового кольца с
помощью сильфонных пневмоэлектроконтактных датчиков [11].
Шпиндель 1 с магнитным столом 2, снабженный центрирующим пояском,
принимает деталь с транспортирующей системы и перемещает ее в вертикальном
направлении с помощью кулачка 15, вводя в зону измерительной позиции и
придавая вращение от зубчатой передачи 16.
Рисун к 3 R«
"^^^™"!^^ m
Каретка 5, подвешенная ца " ~~—
тельный наконечник 12 из твердого У*"* "РуЖи,ы* 6 и 8 Iiet~, „ *
тролi непараллельное™ торцов. ЬЦ"' а '""««оишй конт.кг 9 1„ля ко»"
Кон фоль высоты и riai»u,iw.nt
14, несущей на себе сопло 17 гпТл ™ бурта K0Jlbua осуществив
только бурта, по и ^^**£™ '^«St^
ЧУ осуществляется пружиной 13. Сопло ПГтеркносп' "оджим каретки к кол!
="п. '* — ~ ~ ЖйГ^Й"?
Глава IV
ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛИ
4.1. Назначение и классификация
Этектропневмораспределители (ЭПР) предназначены для управления
потоками сжатого воздуха в системах электропневмоавтоматики. Они используются
ия пуска, остановки и изменения направления потока воздуха от источника
питания в конкретную пневмолинию и выпуска отработанного воздуха в атмосферу
через выхлопные каналы.
ЭПР могут иметь различное число отверстий (линий) для подвода или отвода
воздуха и число рабочих позиций, а также разные схемы управления.
От конструкции ЭПР зависит долговечность его работы, необходимое для
переключения усилие, время переключения, способ управления и габариты.
Количество подводов и отводов (исключая каналы управления) определяет
линейность пневмораспределителя. Применяют в основном двух-, трех-, четырех-
и пятилинейные пневмораспределители [24,37].
По количеству фиксированных положений распределительного элемента
(например, золотника) различают двух-, трех- и многопозиционные
пневмораспределители. Наибольшее применение в промышленности получили двухпозици-
онные пневмораспределители, распределительный элемент которых под
действием управляющего сигнала может занимать одно из двух крайних положений.
Распределительный элемент трехпозиционного пневмораспределителя также имеет
два крайних положения и при отсутствии сигнала управления занимает третье
среднее положение.
Для описания пневмораспределителей применяются условные обозначения в
виде дроби, например, пневмораспределитель 2/2, пневмораспределитель 3/2, пнев-
мораспределитель 5/2. Первая цифра определяет линейность пневмораспределителя,
а вторая цифра относится к количеству позиций его переключения:
пневмораспределитель 3/2 — трехлинейный двухпозиционный пневмораспределитель;
пневмораспределитель 5/3 — пятилинейный трехпозиционный пневмораспределитель.
На практике используются две системы обозначений присоединительных
отверстий пневмораспределителей — буквенное и цифровое. Эти системы
приведены в таблице 4,1. В настоящее время предпочтение отдается цифровой системе.
Таблица 4.1. Наиболее часто встречающиеся обозначения присоединительных
отверстий ЭПР [37]
Наименование отверстия
Отверстие питания
Рабочие отверстия
Отверстия выхлопа
Линия управления, выключающая выходной сигнал
Линии управления
Присоединения вспомогательных потоков
управления
Отверстия выхлопа из линий управления
Буквенное
обозначение
Р
А,В
R,S
Z
X.Y
Обозначение
по ISO 5599Я1
1
2,4
3,5
10
12,14
81,91
82,84
Для быстрого определения характеристик пневмораспределителей
используются диаграммы (рисунок 4.1), связывающие давление на входе и выходе пневмо-
рэспределителя с объемным расходом воздуха и именуемые как «P/Q-диаграммы».
-5^!H!IH£bjvhh2^
183
Кроме этой характеристики для оп
используется коэффициент расхода Потоп °^° «Определителя часто
пропускную способность конкр,™^;^';- "« " диаграмма, отраГет
По горизонтальной оси диаграмм»? ^сунок 4.2).
воздуха, выраженный в нормальнГли^ГвТ *° °ТЛ°Жен 0&b« расход
жено давление, выраженное в МПа. оХтиТ"^ П° веР™ьной оси отло
изкоторых соответствует определенному «Г "* "^ КрИВЫе' к™
теля. Кривая показывает связь между Z^ZJn "^ пне™°Распредели-
пневмораспределителя. Так, расход равеТнГо У** " ДЗВЛеНИеМ на ™*™
входному (точка пересечения кривой с вепЗ, ™ ВЫХОДНое Давление равно
связано со снижением выходного давления ^Г™ ""^ Увеличе™е расхода
из графика. Таким образом, каждая toZmZ*™3™™™ ВХ°ДНОм)' что ™°
ное давление (одно и то же для всей созывает три величины: вход-
... __ „„.w /.t^in OVCJ
кривой), выходное давление (коорди
ната точки по вертикальной оси) и
расход (координата по
горизонтальной оси). Для удобства определения
характеристик
пневмораспределителей при различных входных
давлениях на P/Q-диаграмме строится
семейство кривых, соответствующих
разным давлениям.
Помимо своей наглядности, P/Q-
диаграмма имеет еще и то
преимущество перед табличными или
расчетными методами, что она позволяет
быстро и надежно определить
взаимосвязь между давлениями и
расходом без необходимости выполнять
какие-либо расчеты.
На практике главным образом
встречаются три основных вопроса:
а) Какое давление остается на
выходе пневмораспределителя при
указанных значениях давления на
входе и объемного расхода сжатого
воздуха через него?
б) Какой объемный расход
может обеспечить
пневмораспределитель при указанных значениях
давления на входе и выходе?
в) До какого уровня давления
должен быть отрегулирован
редукционный клапан перед
соответствующим распределителем при указанном
расходе и рабочем давлении?
Приведенные ниже примеры
показывают, как можно ответить на эти
вопросы с помощью P/Q-диаграмм. _
Пример 1. Требуемый объемный
Расход составляет 1300 л/мин, а
давление на входе 0,7 МПа. Определить
Давление на выходе.
Пример I
Объемный расчод (л/мин)
Пример 2
IUVU mv~t\j i.v««
Объемный расход (л/мнн)
Пример 3
0.65
0,45
1450 2000 в)
Щ foOO I45U iwv
Объемный расход (л/мии)
Рисунок 4.1
Глава1\
—m^Mrmi^m—»i in ■ i —•— ,—«—
На Диаграмме (а) от значения 1300 л/мин проведена пунктирная линия верти-
вверх до точки, в которой она пересекает кривую, начинающуюся на оси
давления от отметки 0.7 МПа Горизонтальная штриховая линия, проведенная от
точки пересечения до оси давлений, указывает на выходное давление 0,58 МПа.
^ho м есть уровень давления на выходе распределителя.
Пример 2 Давление на входе распределителя составляет 0.7 МПа, а
давление на выходе требуется не менее 0,45 МПа. Определить объемный расход
сжатого воздуха через распределитель.
В этом случае от значения 0,45 МПа на оси давления проводят
горизонтальную линию (см диаграмму б) до пересечения ее с кривой, начинающейся на
отметке 0,7 МПа По вертикали под точкой пересечения находится значение
объемного расхода, равное 1650 л/мин.
Пример 3. Наименьшее давление, требуемое на выходе, составляет
0.45 МПа, объемный расход составляет 1450 л/мин. Необходимо определить
давление на входе.
Получают точку пересечения вспомогательных линий, начинающихся на
отметках требуемых значений давления на выходе 0,45 МПа и объемного расхода
1450 л/мин (диаграмма в). Давление на входе получают, проведя из точки
пересечения линию в направлении шкалы давления параллельно двум смежным кривым.
В нашем случае это значение составляет 0,65 МПа.
Под прямой, которая на диаграммах поднимается вправо из точки
пересечения кривой 0,1 МПа с горизонтальной осью, все кривые уходят вертикально вниз.
В этой области скорость потока воздуха в пневмораспределителе достигает уровня
скорости звука и больше не растет, как бы ни увеличивался перепад давлений. Это
явление наступаег при критическом перепаде входного и выходного давлений,
который для воздуха равен 1,89. Это значит, что если давление на выходе пневмо-
распределителя ниже, чем половина входного давления, расход воздуха не зависит
от выходного давления и определяется только давлением на входе
(сверхкритический перепад давлений). В случае, когда давление на выходе выше, чем половина
входного, имеет место докритический перепад давлений. При сверхкритическом
перепаде, если давление на входе постоянно, расход имеет максимальное значение.
Режим течения определяется из условий:
/>i+0.1013> 1,89(р2+0,1013) — сверхкритический перепад;
рх +0,1013 < 1,89 (р2+ 0,1013)— докритический перепад,
где pi и р2 — давления соответственно на входе и на выходе пневмораспредели-
геля (МПа).
При выборе размеров пневмораспределителей обычно избегают
сверхкритических перепадов давлений и звуковых скоростей течения воздуха, так как работа
в таком режиме сопровождается
высокими гидравлическими потерями,
непреодолимыми ограничениями по
расходу и низким уровнем давления в
исполнительных устройствах.
В международной практике
используются различные величины,
характеризующие пропускную
способность пневмоэлементов.
На рисунке 4.2 сопоставлены
рассмотренные показатели пропускной
способности пневмоэлементов и
приведены числовые коэффициенты для
перевода данных параметров из одной
системы измерения в другую [24].
Рисунок 4 2
еделители
J 85
Эквивалентное сечение S (мм2).
Данная величина равна пл
самое соотношение между лавл^„°£^в ДиаФРа™е. создающего то же
мент. Эквивалентное сечение измеряется пГпп ^ " ИссладУемь'й пневмоэле-
зовать пропускную способность как отдел, нот B°W*a И Может «Р-сгери-
темы элементов. отдельного пневмоэлемента, так и целой сис-
Нормальный объемный расход Q„ (ил/мин)
Эта величина равна объемному LLv Г
условии, что давление на входе составляетЙш^ Чере3 пнев™емент при
ем воздуха рассчитывается при стандаотн. TJ1 * "* ВЫХ°Ле ~ °'5 МПа' 0бъ"
лении 760 мм ртутного столба, „ли 0 ,£'Х^ ТеМПера^е °°С и >**■
Следует отметить в отношении рп„.„.
чем . атм или 1 кгс/см2, а в™„а 0 ЮШМтТ"*' ^ ' ^ М 2% б°ЛЬше'
при перепаде давлений 0,1 МПа и температуре воды 20Т ™
Коэффициенте (н м3/мин).
Такой же параметр, что и *у, только имеющий размерность (нм3/час)
Коэффициент CV (ам.галлон/мии).
_ Аналогичен параметрам Ь и Kv, однако основан на применении
американской системы мер. Равен 1 при пропускной способности 1 американский галлон
воды в минуту при перепаде давления в 1 фунт/кв.дюйм (1 psi=0,007 МПа) и при
температуре воды 60°F.
Коэффициент/
То же, что и коэффициент CV, однако имеющий размерность вместо амери
канских галлонов английские галлоны в минуту.
Основным требованием, которое предъявляется к распределителям,
управляющим исполнительными устройствами (цилиндрами и моторами), является
обеспечение быстрого срабатывания исполнительного устройства после
получения управляющего сигнала. Поэтому распределитель следует располагать как
можно ближе к исполнительному
устройству или непосредственно на нем
(рисунок 4.3,а). Это сокращает длину
линий коммуникаций и,
следовательно, время переключения, а также дает
дополнительные преимущества за
счет сокращения числа соединений,
трубопроводов и времени монтажа.
Пневмораспределители с
электромагнитным управлением могут
рассматриваться как
электропневматические преобразователи. Они имеют
пневматический клапан для выдачи
сигнала и электрическую
управляющую часть, называемую
электромагнитом (соленоидом) (рисунок 4.3.6).
Электрический ток, поступая на
обмотку электромагнита, генерирует
электромагнитную движущую силу,
которая перемещает якорь, связанный
с Топорными элементами. Для случаев
Цилиндр
Датчики
а)
Стоп
Распределитель
Контакты
Катушка
Корпус
Пружина
Направлявшая
") Рисунок 4 3
Сердечник
(якорь)
it*
Глава IV
погери "иектропитання имеется ручное дублирование.
Внутренние детали соленоида, взаимодействующие с рабочей средой,
выполняются из немагнитной нержавеющей стали. Для устранения вибраций сер-
»ечника в соленоидах переменного тока используется экранирующее кольцо,
размещаемое в кольцевом пазу на торцовой, обращенной к сердечнику части стопа,
которое выполняется медным, за исключением распределителей с корпусами из
нержавеющей стали, где используется серебро. Экранирующие кольца не
используются в соленоидах постоянного тока. Тонкостенная трубчатая направляющая
сердечника выполняется из нержавеющей стали, подверженной глубокому отпуску.
Конструктивно, ЭПР могут иметь нормально-закрытые (НЗ) или нормально-
открытые (НО) клапаны. Первые закрыты при отсутствии напряжения на катушке
соленоида и открыты при ее запитывании. Вторые, наоборот, закрыты при подаче
напряжения на катушку и открыты при отсутствии напряжения питания.
Пневматические клапаны могут быть прямого и непрямого действия.
В клапанах прямого действия (рисунок 4.4, а,д,е,ж) сердечник соленоида 1
механически соединен с запорным элементом (уплотнением) 2 и непосредственно
открывает или закрывает проходное отверстие 3 при включении или выключении
соленоида. Работа клапана не зависит от давления в трубопроводе или скорости
потока воздуха, т.е. его открытие и закрытие может осуществляться при любом
давлении в пределах рабочего диапазона.
В клапанах непрямого действия (рисунок 4.4, б,в,г,з,и), снабженных
пилотным (управляющим) 4 и перепускным 5 отверстиями, используется для работы
давление в трубопроводе.
Когда на соленоид подано напряжение, сердечник (якорь) 1 втягивается,
пилотное отверстие 4 открывается и давление над поршнем 6 или мембраной 7
сбрасывается на выход клапана. При этом давление рабочей среды начинает отжимать
поршень или мембрану от седла 8 клапана, открывая его.
Когда соленоид отключен от питания, пилотное отверстие закрыто запорным
элементом с помощью пружины 9, и все давление в трубопроводе прикладывается
к поршню или мембране, обеспечивая таким образом герметическое закрытие. В
клапанах с мембранным усилителем роль запорного элемента (уплотнения)
выполняет сама мембрана из эластичного материала, например, тефлона, фторэла-
стомера-витона, этилена-пропилена, хлоропрена-неопрена [51].
Существуют два типа конструкции клапанов непрямого действия:
1. С плавающей мембраной или поршнем, которым необходим минимальный
перепад давления, чтобы оставаться в открытом положении (рисунок 4.4, б,г).
2. С мембраной или поршнем принудительного подъема, которые
удерживаются в открытом положении сердечником 1 через посредство, например, пружины
10, и работают на перепаде давления от нуля до максимума (рисунок 4.4, в).
Минимальный рабочий перепад давления — это давление, необходимое для
открытия клапана и удержания его в открытом состоянии. Клапан двухходовой
2/2-распределителя с плавающим поршнем или мембраной начнет закрываться
при достижении давления меньшего, чем минимальное рабочее давление. Для
трехходовых и четырехходовых распределителей непрямого действия
минимальное рабочее давление определяется между портами (каналами) подачи давления и
портом сброса и должно поддерживаться в течение всего цикла, чтобы обеспечить
полный переход клапана из одного положения в другое. Клапаны непрямого
действия с мембраной или поршнем принудительного подъема не требуют
минимального рабочего давления.
Максимальный рабочий перепад давления _ это максимальный перепад
давления между входом и выходом распределителя, при котором соленоид может
безопасно работать. Если давление на выходе не извесгно, консервативный
подход требует считать данной величиной подаваемое давление
Электропневмораспределитрп^
в | С мембранным усилителем принудительно
го подъема
Рисунок 4.4
Глава IV
клапаны тчнжерного типа (рисунок 4.4, а) имеют несложную конструкцию
с небольшим числом быстро изнашивающихся деталей, поэтому долговечны в
раооте. прочны и нечувствительны к пыли. Однако для их переключения, как
правило, необходимо значительное усилие, чтобы преодолеть усилие возвратной
пружины и противодавление. При равных с другими конструкциями габаритах,
потенциально они способны обеспечить больший расход воздуха, благодаря
большей площади проходного сечения.
Меньших приводных усилий требуют шиберные, шарнирные и рычажные
клапаны.
В конструкции шиберного клапана (рисунок 4.4. д), ход шибера 1!,
связанного с сердечником 1 соленоида, зависит от диаметра проходного отверстия 3 седла
8. Уплотнение обеспечивается подпружиненной втулкой 12. Недостаток —
повышенный износ седла и втулки, входящих в контакт с шибером.
Конструктивные решения шарнирного (рисунок 4.4, е) и рычажного (рисунок
4.4, ж) клапанов позволяют уменьшать приводные усилия, развиваемые соленоидами,
с помощью рычагов 13, однако габариты возрастают, а долговечность снижается.
Тарельчатые клапаны (рисунок 4.4, з) выгодно отличаются относительно
коротким ходом штока с запорными элементами 14 при переключении и
незначительным износом.
Уплотнение между каналами в золотниковых клапанах обеспечивается за
счет очень малых зазоров между самим золотником 15 (рисунок 4.4, и,к) и
корпусом, либо за счет установки на золотнике уплотнительных колец круглого сечения
или манжет.
Поскольку воздух в корпуса распределителей с золотниками подается под
прямым углом к золотнику, его сопротивление переключению минимально, и
такие ЭПР имеют лучшие характеристики переключения.
Тарельчатые и золотниковые клапаны обычно характеризуются наличием
пилотного управления, т.е. являются клапанами непрямого действия.
Одним из основных признаков, по которым можно классифицировать
распределители, является наличие или отсутствие у них свойств памяти. В
зависимости от этого они делятся на моностабильные и бистабильные.
Моностабильными в электропневмоавтоматике называются ЭПР с
односторонним электромагнитным управлением и пружинным возвратом в исходное
положение. Они не обладают свойством памяти, а это значит, что при отключении
сигнала на электромагнит они возвращаются в исходное положение.
Бистабильные ЭПР обладают свойством памяти. Обычно это 4/2, 5/2-
распределители с двусторонним управлением. Они имеют следующие
характеристики:
1) для переключения в новое положение необходимо наличие сигнала только
на одном электромагните;
2) последнее положение при переключении запоминается; распределитель
переключается коротким электрическим импульсом —Ю...25мс;
3) текущее положение сохраняется до появления противоположного сигнала.
Бистабильные ЭПР называются также распределителями с памятью (триггеры).
4.2. Распределители для индивидуального монтажа
4.2.1.2/2-распределители с электромагнитным управлением
Изображенный на рисунке 4.5 распределитель с электромагнитным
управлением имеет два канала (линии): входной 1 (рисунок 4.5,а,в,г) и выходной 2, а
также две позиции переключения: исходную (рисунок 4.5,6) и включенную (рисунок
4 5, в). Когда якорь 5 с уплотнительным
элементом 3, находящийся под действием
пружины 4, перекрывает седло „„
Рисунок 4 5
При подаче питания на электрический разъем 9 и далее на катушку 6.
смонтированную в корпусе 8, возникающий магнитный поток притягивает якорь к ст ►-
пу 7, открывая тем самым проход воздуха из входного канала в выходной
(полости, заполненные воздухом, зачернены), т.е. в атмосферу (рисунок 4.5,в). С
помощью эксцентрика 2 возможно ручное управление распределителем: при его
повороте с помощью отвертки на 180° происходит поднятие якоря.
Такой тип ЭПР применяется в основном в качестве отсечного клапана,
например, при запитывании сопел сдува объектов производства или отходов с
рабочей позиции технологического оборудования.
На рисунках 4.5,а и 4.5,г представлены мнемоническая схема и общий вид
распределителя, соответственно.
Производимый фирмой «ФЕСТО» 2/2-распределитель типа MFH-2-M5
обладает следующими характеристиками: ход якоря — 1,5 мм; расход воздуха —
58 л/мин; рабочее давление — от 0 до 0.8 МПа: быстродействие при 0,6 МПа —
10 мс; диапазон рабочих температур — от -10 до +60°С; масса — 0,11 кг;
напряжение питания - 12, 24, 42, 110, 220 В / 50 Гц или 12, 24,42.48 В - постоянного
тока; потребляемая мощность — 4,5 Вт. _
На рисунке 4.6 представлена мнемоническая схема (а), общий вид с
габаритными размерами (б) и конструкция (в) нормально-открытого 2/2-распРеделителя
прямого действия тепа SC Е030 А070 ASCO (Англия) для сред под низким давле-
прямого действия типа гл. CUJ" диаметром 3/8", проходным сечением
нием, с присоединительными отверстиями диаметр
п ~ - „,л J/wac или 23,3 л/мин, рассчитанного на пере-
9 мм, пропускной спосооностью 1,4 м /час или -->, г „ „
0,3 МПа. Время
Вес — 0,7 кг.
пад давления 0...0.1 МПа. Максимально ^^ТодГ^С. Вес - 0.7 кг
срабатывания —5...40 мс. Диапазон температур 230 В / 50 Гц (перемен
Напряжение питания - 24 В (постоянный ток^г% -,
ный ток). Защита катушки — исполнение if
иг
Глава IV
Рисунок 4.6
Распределитель имеет латунный корпус 1 с седлом 2 и двумя
присоединительными резьбовыми отверстиями (вход/выход) (рисунок 4.6,в). При подаче
питания на катушку соленоида 11, установленную на тонкостенную трубчатую
направляющую 12, создаваемый ею магнитный поток вызывает перемещение
сердечника 10 с продольным пазом на наружной образующей для перетекания
воздуха к стопу 8, в кольцевом пазу торцовой поверхности которого размещено медное
кольцо 13, способствующее устранению вибрации сердечника при использовании
переменного тока. Посредством штока 9, проходящего через центральное
отверстие стопа, сердечник перемещает толкатель 6, который, в свою очередь,
посредством пружины 4 перемещает держатель 5 с запорным элементом 3 из нитрилбу-
напрена (NBR), перекрывая проходное отверстие седла 2. Возврат в исходное
положение обеспечивается пружиной 7.
Выполнение оси проходного отверстия седла не под прямым углом к оси
присоединительных отверстий способствует улучшению расходных
характеристик распределителя за счет уменьшения местных сопротивлений.
На рисунке 4.7 приведены мнемоническая схема (а), общий вид с
габаритными размерами (б) и конструктивное исполнение нормально закрытого 2/2-
нз ПуП
В*од Выход
Рисунок 4.7
-ЭлеетР0пнев^дРд£пр^делители
распределителя непрямого действия г ~~~ ' '
лия), для работы в тяжелых условиях и Гг^™ П°РШНем Ф»Рмы ASCO (Аш
ГвГн ~Г470Та0 мс" НМаЛЬН° ^^Е^ЕГ^ ~ *
24, 1.5 и 23f В;50 Г^ВесГа^™6 "^ "^Z^^* сраба-
способность с пРисоЦед^
сечением 28 мм - ,2,8 м%ас или 467 ХГГ ^^ ' '/4" и "Р™ым
пазон рабочей температуры - от -20 д^Zr * "с™™™ ~ * 65 ^
При запитывании катушки соленоидам ~
стопу, открывает пилотное отверстие Воз^"™* *' Пе?ем«ь вверх к
сбрасывается через отверстие 4 на выхолпГ Нах0ДЯЩийс» под поршнем 5
мещает поршень 5 влево (рисунок" в) о"^™^ Рабочее ^влен'ие пере
ходное отверстие в нем. При отключении сгГ ** °Т ССДЛа 7 и откРыва« "po-
стие перекрывается запорным aJ^SSS " "^ *"""" °"£
трубопроводе через канал 4 прикладываетек пГ " ГГение в по«ем
ное закрытие клапана. Пружина 6 о6Ъсп^пя " РШНЮ 5' обеспечивая герметич-
в седле 7 при отсутствии^ Tnl~^IT^ "^
Вход
а)
Выход Вход
Рисунок 4.8
Вытод
б)
2/2-распределитель с нормально закрытым клапаном, непрямого действия с
плавающей мембраной ASCO модели SC E210 D070 (рисунок 4.8, 6)
характеризуется следующими параметрами: минимальный перепад давления — 0,035 МПа;
максимально допустимое давление — 2,0 МПа; время срабатывания — 15...60 мс;
Диапазон температур — от -20 до 85СС; вес — 0,9 кг; напряжение питания — 24 В
постоянного тока; диаметр присоединительных отверстий — ЗА".
При срабатывании элеюромагнита (рисунок 4 8,а) сердечник 1 открывает
пилотное отверстие 2, в результате чего воздух, поступающий под давлением через
отверстие 6 в надмембранную полость, сбрасывается по каналу 3 и далее через
отверстие 2 в выходной канал распределителя. Усилие, создаваемое давлением на
входе (под мембраной), действующим на мембрану со сторонп запорного
элемента 5, преодолевая усилие создаваемое пружиной 4, отрывает запорный элемент от
седла, открывая проходное сечение в нем. При перекрытии пилотного отверстия 2
Давление на входе (над мембраной) и усилие, развиваемое пружиной 4, надежно
прижимают запорный элемент к седлу.
В конструкции 2/2-распределигеля ASCO с нормально закрытым клапаном
непрямого действия (рисунок 4.9, а) мембрана 4 принудительно> "ЗГПпГ
перемещении сердечника 1 открывающего пилотное отверстие 2 в штоке 6
запорного элеменга 5. ™ SSiLJic- посредством пружины 3, закрепленной опит
к°нцом на сердечнике, а другим - на штоке с помощью тарелок.
i«:
ii'-'Ha lv
Вход
Выход
Вход
а)
Вы.ход
б)
Рисунок 4.9
Внешний вид и габаритные размеры распределителя типа SCE210D089
представлены на рисунке 4.9. б. Характеристики данного распределителя:
максимально допустимое давление — 1.8 МПа; время срабатывания — 15... 120 мс;
перепад давления — 0.9 МПа; пропускная способность при диаметре
присоединительных отверстий в 1" — 9,6 м3/час или 160 л/мин: вес — 2,5 кг; диапазон
температур — от -20 до +85°С; исполнение защиты катушки — IP 65; материал корпуса
с седлом — латунь или нержавеющая сталь; материал трубки сердечника, стопа и
сердечника, пружин — нержавеющая сталь; материал уплотнений, мембраны и
запорного элемента — нитрил-бунапрен (NBR) [51].
Представленный на рисунке 4.106 ноомал
прямого действия JOUCOMATIC (Франция) [5 lW3aKpbITbrfi 2/2-распределитель
в жестких атмосферных условиях и характериз^НаЗНачен тя использования
конструкции. При выполнении функции НО (ноом " ПОвышенной прочностью
... снабжается резьбовым отверстием 1 Руч^Н°~°ТКРЫть>й клапан) стоп
ся с помощью маховичка 2, а закрепление на технп? Управление обеспечивает-
. ..... отверстия 4 с резьбой М5. Кабельный вводT^46^0" оборудовании с
нкгельные элементы, а клемма провода заземления acS**1 СПеЧиальные Уплот-
.. . . взрывонепроницаемого кожуха соленоида (рису^*0"0*0*6*" внутри за-
У 1скч роннсвчорасирсчели ic ли
КС
^ Принцип рабо, ы апало, „чем „р„„ЦН11у работы ^„^^ ^ ^
XapaKiepnciiiKii распредели геля: максимально тп,„т
*• м---- — ^ «-■- - >о...» « <-Z™:~—
0 6 МПа): диапазон внешних температур — от -ЮТ по +дп°г пиления
11ИЯ: „осюян.юс - 24 В; переменное - 24 115 и 230 В МП г, НЯПряЖения пита-
" г £ЫЫ 50 1 ц; уровень защиты —-
IP 65; пропускная способность при проходном сечении 1,5 мм — 008 м3/час и,и
1.3 л/мин; присоединительные отверстия -' Труб. 1/4"; вгс
— 0.81 кг; уплотнение - фторэластомер/витон (FPM).
Высокой компактностью монтажа обладают 2/2-
распределнтелн «Festo» типов МЕВН МОЕВН MVH
MOVN, MDH, MODH. снабженные цанговыми'QS -
* разъемами для быстрого подключения.
На рисунке 4.11 представлены общий вид (а) и кон-
сгруктивные параметры (б) 2/2-распределителя типов
MVH/MOVH-2-1J-QS-4 с проходным сечением 1,7 мм,
имеющих прямое управление, т.е. переключающиеся
Рисунок 4.11
1TIfV тпеноида. Уплотнения из пербунана; нор-
при подаче напряжения на КЯ1^<^2ти. MOVH - 60 л/мин; диапазон
мальный номинальный расход. Mvn fi ' при 24 В постоянного тока
Давлений - от -0,09 до +0.8 МП* ^^^ПУс. монтажная ширина -
— 9 мс; температура окружающей cPeV, i2 и 24 В (постоянный ток); 24, 110
36 мм; масса - 0,245 кг; напряжение питания ^
и 220 В/50 Гц (переменный ток). Тип защиты
„„„ с односторонним электромагнитным
4.2.2. 3/2-распределителисоднос v
управлением
и имеют три канала (линии) и две позиции пере-
Такого типа распределител мально закрытые, нормально открытые,
ключения. Они подразделяются й ^ клапатыц распределитель (рисунок
Нормально закр" екшчен 2/2 -распределителю. Отличие заключа-
4-12,6) по своей конструкции ид^ ^ осевым каналом и снабжении якоря 5 вто-
ется в выполнении на стопе ^ подпружинены в осевом направлении (на ри-
Рым уплотнением. Оба У№^щМ износа. В исходном положении, т.е. при обесто-
сунке не показано) для ^"^уплотнением 3 поджат пружиной 4 к нижнему седлу в
ченной катушке 6, якорь 5 с у
I**
Глава 1\
««fwvcc 1 При тиаче напряжения на катушкч вощиклс! ЭМ1\ отрывающая
жор*, от нижнего седла (риехнок 4 12.в) Сжлын на» i\\ urkhhcm p прочо on ш
■лааиого оперстня 1 к выходномч 2. а вых юинос отверстие 3 о юкирчется верх-
хплотнением (штвором) на якоре, те якорь перемещается прошв сичы деп-
СПМа пружины 4 После снятия питания якорь прижимается к нижнему седлу и
•оздхх ю канава 2 сбрасывается в атмосферу мере» вычлопнос о1веретие 3
Ручное управление осуществляется эксцентриком 2. Такие распределители с тужат
управления пневмоцнлиндрами одностороннего действия, непрямою управ-
синя ЭПР другого типа, а также для но iami и oik почення сжатого воздуха.
ъ:л
8
&*
а)
,Л.Н
* 1
nil *r
-
к
, i
i |
-#1;
Ж:
"R
: i'l
; 1;
1
— т )
Р(1)-е.
-0.-Ч2)
в)
А у)
Рнс\нок4.12
Мнемоническая схема ЭПР и общий вид с присоединительными размерами
представлены, соответственно, на рисунке 4.12,а,г.
Представителем данного типа ЭПР, выпускаемым фирмой *ФЕСТО»,
является 3/2 — распределитель типа MFN-3-M5, обладающий следующими
характеристиками, рабочим ход якоря — 1,3 мм; расход — 50 л/мин: рабочее давление —
0...0,8 МПа; быстродействие при 0.6 МПа — 10 ме: масса — 0,095 кг; напряжение
питания — 12. 24. 42. 110, 220В/50 Гц или 12. 24. 42. 48 В — постоянного тока:
потребляемая мощность — 4.5Вт.
Представленный на рисунке 4.13.6 нормально открытый 3/2-
распредетитель, по конструкции идентичен нормально закрытому. Однако его
каналы (отверстия) подключены таким образом, что в исходном положении
клапан открыт. Канал питания Р(1) проходит вдоль якоря 6. поджатого к седлу 2 в
корпусе 1 пружиной 4. Уплотнения 3 и 8 якоря находятся под действием усилий.
отдаваемых пружинами 5 и 7 соответственно, что снижает их износ при вхожде-
• контакт с седлами. Для подвода питания (давления р) на резьбовом конце
v 10 установлена ганка 11 с резьбовым отверстием иод штуцер. Катушка 9.
■ в корпусе 12 подключена к сети питания с помощью ра тьема 13.
адово
л ! г)
Рис\нок4 И
При подаче питания якорь поднимается, преоюгсвая давление воздуха и за
крывая верчнее седло. В то же время открывается нижнее седю и возд\> из
выходного отверстия 2 проходит через отверстие 3 в атмосферч (рисунок 4.»„i,b).
Нормально открытые ЭПР используются гам. где необхонтмо иметь
пневматический сигнал при отсутствии электрического или где шток цнлн.ира в
исходном положении должен быть втянут. Такие ЭПР представляют логическую фчнк-
цню *НЕ». Если сигнал на ^дектромагнит не поступает (логический 0). на выхо ie
возникает пневматический сигнал (логическая П. Нормально открытый ЭПР
называют еще инвертором нтш отрицателем.
Мнемоническая схема НО ЭПР дана на рисунке 4.13.а. а на рисунке 4 13,г
приставлен общий вид с присоединительными размерами ЭПР типа МОС 1Mb.
имеющего характеристики: ход якоря - 2.5 мм: расход возду ха - IW л/мнн. Р*«е
явление - 0...0.7 МПа: бысцюдействне при 0.6 МПа: срабатыванпе - м, отлчека-
ние - 13 ме: масса - 0.34 кг: напряжение питания - 12 . -4 . 4_ ПО. -0ш. ц
или ,2.24,42.48 В - постоянного ^*^^^ш ^утнруемыл
Повышение быстродействия «j?^^,™,, мощности, может
Дамении. а также снижение потребляво«^^ыипии. „Сраженного на
быть достигнуто применением 3/2 — дл«.м^.«
рисунке 4.14 1*361. , ,стаНовлена ппьза 10 с упором icro-
В корпусе I с каналами А. с н ^ * ч - • кч)нечнике когорого выполнено
пом) 8. снабженным каналом В. на полюсном (^м |( нз немагнитного маге-
седло 7 и кольцевой nai с размещенным в нем цаК1Щ1|М магингное «залнпа-
Риала (латуни, нержавеющей стали и др). "Р^| й „ямашнченностн малш-
I,,..... 1 « .. .„.жжении «з-да iK' » ,„п»1.гмп,1г.
«me» якоря 4 в притяну том положении из-за i -•■^ ^ ^ ft н сокржиг )|1ЛОТ.
1е„ с обеих сторон »Р> „ р, „.„ового скрж-
ж подвижною «^^нк^нными вту
ня. армированного по наружиои оора«>
топровода. Якорь подпружинен с обеих сГО^н0^направяснин решнового стерж-
"чтельный элемент 5 в виде подвижною в i ^ ^„^отснными втулками, раз-
t^
Гтавв \\
Рисунок 4 14
чсчснными цичшшрнческим
б\ргом в центра 1ЬНой част
стержня, с |ужащим утошс
пнем На ипмс 10 установ-
юнл кйтушкл 9. закрытая
снар\жи кож\хом !2. на
котором закреплен элсктро-
разъем 15. Внутри посчечне-
го ра «мощено устройство
регулирования характеристик
элемромагни га. содержащее
транзисторный ключ 14. маг-
инто) правляемый
герметичный контакт 16 (геркон).
резисторы 13 и 17. диоды 18.19.
Этектропневмокладан работает следующим образом. При поктче напряжения
Uta на устройство регу шрования транзистор 14 н&хочится первоначально в
проводящем состоянии, так как через резистор 17 и переход база — эмиттер протекает
ток Этот ток обеспечивает форсированное срабатывание электромагнита и
перемещение якоря 4 с > плотнительным эчементом 5 к седлу 7. Если давление питания
перетается по канал\ С к седлу 2. то при перемещении у илотнительиого элемента
5 к седлу 7 чавление воздуха создает допотнительное усилие его прижатия к
этому седлу, т.е. перекрытие канала В. Воздух из канала С поступает в канал А.
Пружина 3 позволяет добиться герметичности но седлу 7 при малых давлениях и при
подаче воздуха к седлу 7.
В тот момент, когда якорь 4 притянется к упору 8, величина рабочего
магнитного зазора между ними и, следовательно, величина магнитного
сопротивления зазора существенно уменьшится, что приведет к скачкообразному
увеличению магнитного потока рассеяния с внешней стороны кожуха (магнитопровода)
12. замыканию контактов геркона 16, включенного параллельно переходу
эмиттер-база и закрытию транзисторного ключа 14. После закрытия транзистора,
накопленная в катушке электрическая энергия разряжается через резистор 13 и диод
19; при этом разрядный ток. протекающий по обмотке, создает убывающий во
времени магнитный поток, удерживающий геркон 16 в замкнутом состоянии, а
якорь в притянутом к упору 8 положении.
Так как магнитный поток, при котором происходит размыкание герконов,
выбран большим, чем магнитный поток отпускания якоря, то через определенное
время после закрытия транзистора произойдет размыкание контактов геркона,
транзистор откроется и по обмотке катушки вновь потечет увеличивающийся во
временя ток, создающий соответствующий магнитный поток.
Таким образом, схема управления автоматически переходит в режим широт-
но-импу чьсного регулирования, причем функции генератора импульсов
регулируемой скважности выполняются транзисторным ключем 14 совместно с герко-
ном 16. катушкой 9 и разрядным резистором 19.
При снятии напряжения якорь 4 под действием пружины б перемещается к
седлу 2 Если сжатый воздух подавался по каналу С, а верхнее седло 7 каналом В
соединено с атмосферой, то при перемещении уплотнительного элемента 5
происходит его отрыв от седла 7 и перекрытие канала 2. Канал В соединяется с каналом
А продольными пазами 20. выполненными на наружной образующей якоря и
одновременно служащими для устранения вихревых токов, вызывающих появление
ч зитных магнитных полей и «залипание» якоря.
При испотьзовании пилотного управления (непрямого управления
С -«усилением) размеры электромагнитов могут быть минимальными. С
>лсктропневмораспрспслит.. ,„
электрической точки фения при
иком управлении имеются чва
преимущества уменьшается
расход щерит и выделение
iciuia. С точки зрения
пневматики преимущество заключается
в том, что переключение
распре (ели геля является НОИ1ТИВ
ним. Электрический сигнал
посту нает на мюктромагннг,
который переключает якорь-затвор
пилотного клапана. Сигнал с
пилотного клапана воздействует
на главный распре (слшель
Представленный на
рисунке 4.15 3/2 -распределитель с
пилотным управлением
функционирует следующим образом.
В исходном положении
(рисунок 4.15.6) давление
питания р действует на нижнюю
часть (клапан) 2 главного
затвора, прижимая его к седлу в
корпусе I и не позволяя воздуху
проходить к выходному
отверстию. При этом выхочное
отверстие связано с атмосферой
через центральное и боковые
отверстия в штоке приводного
поршня 3. При подаче
электрического сигнала на
электромагнит 5 его якорь 4, поднимаясь,
открывает нижнее сопло
пилотного клапана, и сжатый воздух
от отверстия ! (рисунок 4.I5.B)
через канал К в корпусе и
открытое сопло поступает в
полость над приводным поршнем,
площадь которого больше, чем
площадь уплотнения главного
затвора. Поэтому поршень с
затвором, сжимая пружину,
опускается вниз и открывает а
проход воздуха от отверстия I к
выходному отверстию 2. В то
же время боковые отверстия в
штоке приводного поршня,
попадая в зону уплотнения в
корпусе, перекрываются, отсекая
тем самым выходное отверстие
2 от выхлопного отверстия 3.
г.е. от атмосферы.
Глава IV
Ручное \правление осуществляется с помощью винта 7, конический конец
которого, нри заворачивании, перемещает штифт 6, взаимодействующий с якорем
^магнита
Мнемоническая схема распредечителя дана на рисунке 4.15,а, а общий вид с
присоединительными размерами на рисунке 4.15,г.
3/2- распредетитепь типа МСН-3-1/4 имеет следующие характеристики: ход
■коря — 6.5 мм; расход воздуха — 600 л/мин; рабочее давление — 0,1 ...0,8 МПа;
время открытия — 16 мс, закрытия — 23 мс; масса — 0,73кг; температурный
диапазон — от -10 до +60°С; напряжение питания — 12, 24, 42, 110, 220 В/50 Гц
М12)
R(3)
'"(12) jff>
Z(10)
S^
в П4-
a
«
&0,l-
>>
*u
ж
§0,095 0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
ffl
£3 Рабочее давление, МПа
б)
94.5
Тип MFH-3-3/4
MOFH-3-3/4
MFH-3-3A-S
I Эяежгрмш-жткую катушку можно повернуть на 360"
J • ручное управление
J Пыимвомуж»» линию упрюлення для тип» MFH-3-3/4-S
о подернуть на 180*
Рисунок 4.16
199
Электропневмораспределители
или 12, 24, 42, 48 В — постоянного тока- пп™ к
На рисунке 4.16,а представлена консХц'Гз/? М°ЩН0СТЬ- ,2 *■
рии «Tiger Classic» типа MFH-3/4-S с доп ^-распределителя «Festo»
селения, нормально закрытого, непрямого ^3™™™™ П0ДВ0Д0М B0Wxa управ-
теристики: условный проход — 19 Mu J!l * имеЮ1«его следующие харак
^А(2),
мм; нормальный номинальный расход
*~У ■ Т1ТЛН----
К-
6)
-107,5
т
Ж
ш
в)
f
д)
Z(14)R(3)A(2)P(1) г)
60
Mggg
е)
Рисунок
4 17
лчч
Глава IV
">00 л/мин, шапаздн рабочего давления от -0,0Q5 до 1,0 МПа; время срабатывания
при 0.6 МПа. вкл. — 50 мс, выкл. — 60 мс; температура окружающей среды от -10 до
+60°С: вес — 1,26 кг. напряжение питания постоянного тока— 12,24 В. переменного
тога— 24.42. 110,230 В/50...60 Гц. Данный тип распределителя пригоден для работы
с вакуумом (прнсоещнение для вакуума I). Зависимость минимального давления
управления от рабочего давления показана на рисунке 4.16,6, а общий вид с
габаритными и присоединительными размерами приведен на рисунке 4.16,в, где Z(10) —
1Ю1ВОД воздуха в линию управления, выключающую выходной сигнал.
При подаче напряжения на соленоид сердечник 1 с уплотнителем 2,
втягиваясь внутрь катушки, открывает пилотное отверстие, чавая возможность сжатому
воздуху поступать из отверстия питания Р(1) по каналу 9 в полость над поршнем
4, который перемещает шток 5 вниз, сжимая пружину 8, перекрывает
уплотнением 6 проходное отверстие, связывающее выхлопное отверстие с рабочим
отверстием А(2), и открывает проход воздуха из отверстия Р(1) в отверстие А(2). При
снятии питания с соленоида давление над поршнем 4 сбрасывается в атмосферу
через канал Y(12) и пружина 8 возвращает шток 5 в исходное положение,
перекрывая уплотнением 7 доступ воздуха из отверстия Р(1) к отверстию А(2). Пово-
Рабочее давление рх, МПа
Рисунок 4.18
Электропневмораспредслителм
201
ротом кулачка 3,
взаимодействующего с торцом
сердечника 1,
осуществляется ручное управление
распределителем.
Малыми
габаритными размерами
характеризуются 3/2-распределители
«Festo» серии «Midi-
Pneumatic», имеющие три
исполнения: для
индивидуального монтажа с
резьбовым присоединением 1/8";
стыкового присоединения к
плитам для
индивидуального монтажа и для блочного
монтажа на специальных
плитах.
Мнемоническая схема
3/2-распределителя типа
МЕН-3/2-5,0 для стыкового
соединения (а), общий вид
(б), габаритные и
присоединительные размеры (в),
конструкция (г), общий вид
платы для индивидуального
монтажа (д) и ее
габаритные и присоединительные
размеры (е) даны на
рисунке 4.17.
При втягивании
сердечника 1 в катушку
соленоида открывается
пилотный клапан 3 и воздух из
отверстия питания Р(1) по
каналу 6 поступает к
поршню 5 золотника 7,
перемещает его вправо, сжимая
пружину 8 и открывая
проход воздуха из отверстия
Р(1) к отверстию А(2). При
снятии питания с
соленоидной катушки золотник
под действием пружины 8
возвращается в исходное
положение, соединяя
рабочее отверстие А(2) с
отверстием выхлопа R(3).
Выхлоп из системы
управления осуществляется по
каналу 2 через отверстие.
Z(14) в атмосферу.
U-Л—J
^ Ручное управление
(не блокируется)
100
10О 300 400
О^ммнСш расход (л мин) в)
Рисунок 4.19
\X1
«I I I
Глннн 1\
Поскольку плата дтя ннднвнтлальнои> монтажа (рисунок 4 17.е) является
\нмверсалычой н можт?1 быть нспотьювана дтя 5/2 распределигечсй laiiiiou серии.
при монтаже 3/2-распредепнге1сн от вере шя 4.5 не нснодымогся.
Распределитеть характерна ется ни.кой iioipco тяемой мощностью (1.5 Вт) н
пригоден для прямого чек тройною \ прав темня. Условный нрохо i — 5 мм
Нормальный номинальный расход — 5*»0 л/мин. диапазон тавленпн — 0.2.. 0.8
МПа; время сраоатывання — 10 мс. время вык ночеинм — 19 мс; 1емнераг>ра
окружающей среды — от -4 то 50° С. напряжение питания — 24 В постоянного
тока, вес — 0.17 кг.
Минимальной монтажной шириной характеризуются распределители «Festo»
серии «Compact-Performance» т,СР) Они имеют малую потребляемую мощность
(1 Вт) при высоких значениях расхода (до 3000 л/мни), что позволяет их
использовать при прямом эчектронном управлении.
На рисунке 4.18 представлены мнемоническая схема (а), общий вид (б) и
размеры (в) моностабитьного 3/2-распределителя серии СР типа СРЕ10-М1Н-
3GLS-M7 без штекерной розегкн со вспомогательным ручным управлением, с
резьбой М7 в отверстиях питания P(l), A(2), R(3). Проходное сечение
распределителя — 4 мм. номинальный расход — 430 л/мин. температура окружающей среды
— от -10 до +50° С. напряжение питания — 24 В постоянного тока. Зависимость
давления управления от рабочего давления для данного типа распределителя дана
на рисунке 4.ISji.
При подключении давления поршень 2 с золотником 1 находятся всегда в
левом положении (рисунок 4.18.г). При запитываннн приводного электромагнита 3.
его сердечник 4 открывает пилотное отверстие 5 и воздух из входного отверстия
Р( 1) по каналам 7 и 8 проходит к поршню 2. Поскольку площадь рабочей
поверхности поршня со стороны канала 7 больше, чем со стороны штока 1, последний
перемещается вправо, перекрывает проход воздуха к отверст шо R(3) и соединяет
своей проточкой отверстия Р(1) и А(2). После снятия питания и перекрытия пи-
ютного отверстия бесштоковая полость соединяется с атмосферой и поршень,
находящийся под давлением в отверстии Р( I). возвращает шток (золотник) в
исходное положение, обеспечивая соединение отверстий R(3) и А(2). Ручное
управление осуществляется с помощью кнопки 6.
Представленный на рисунке 4. !9,а.б многофункциональный 3/2-
распределитель компании SMC (Япония) [24] с прямым электромагнитным
управлением типа EVT307, характеризуется компактностью конструкции и
возможностью использования для вакуума Диапазон рабочих давлений — 0...0.9 МПа;
время срабатывания — менее 20 мс: максимальная частота срабатывания — 10 Гц;
напряжение — 24 В постоянного и 220 В переменного тока; потребляемая
мощность при постоянном напряжении — 4,8 Вт. Характеристики расхода
представлены на рисунке 4.19,в. Номинальный расход— 196 л/мин. Вес — 0,150 кг.
Запнтыванием катушки электромагнита 2 обеспечивается притяжение
сердечника 1 к стопу 3 и перемещение посредством подпружиненного штока 4 золотника 6 с
уплотнением в центральной части, открывающего доступ воздуха из питающего
отверстия Р(1) к рабочему отверстию А(2), выполненных в алюминиевом корпусе 5.
При отключении питания катушки золотник 6 возвращается в исходное
положение пружиной 7, обеспечивая соединение отверстия А(2) с выхлопным
отверстием R(3) (показано в виде окружности).
4.2.3. 4/2-ряспределитсли с электромагнитным пилотным управлением
Для управления цилиндрами двустороннего действия необходимо, чтобы
распределитель имел два выходных отверстия. 4/2-раснределитель с односторон-
электромагнитным пилотным управлением и с дисковыми клапанами
(рисунок 4.20.6) иочиж на комоннац11Ю двух у, п
гого н нормально-закрытого В исходном c^ГГИ,e,,c,,~ ,Шрмал"»° ™Ф'-
шомше затворы 2 и 7 обоих клапанных блокГ ЛЮаатеР «'««ует "шзу на
положении, а затвор 1 перекрывает выход во ."v! "Р"'"" 4 " 6 »™пк* в верхнем
Выходное отверстие А(2) сообщается \ " агмосФсРУ-
отверстие В(4) _ с выхлопом R(3) чепе, поп.™^"™ ,,Нта,,,1я Р(,)- « ""халнос
электромагнита но нптмается якорь-затвор 5 ШТ°К "°Р Я 6' ПРИ «мючении
пропуская воздух в полости над обоимиР ' "ИЛОТИого клапана (рисунок 4.20.в),
метцают клапанные блоки вниз Затвор 2 т • ,В°ЛНЫм" "«РЧ'нямн. которые иере-
шток поршня 6 перемещает вниз иад,1ЗД,|^^,,^^И^«»н« седло I. a
Теперь воздух через открытое седло з-m™, т<
выходу В(4). а выход А(2) через открытое гГ ПР0Ч^ИТ ™ отверстия Р(1) к
сферой (отверстие R(3) Проход воэл\П ЛС№Г° бл°Ка сооб>^егся с атмо-
отверстию 3 через полый иттокГр, Г рТвоХГ ПИТа""Я *»* ~™»~V
у право, о блока перекрыт нижним затвором.
Рисунок 4.20
4/2-рпспределигель тепа МСН-4-1/4. шоюиическая схема которого н«>ра.
жена на рисунке 4.20а имеет следующие хчяпеписпи»: «а «»ч» - " «"•
раоод ££. - «0 ** Р-*« ~^Ж?2££
:^г ^пг« .Та^ж^"^ ж - -—™*
потребляемая мощность — 12 Вт. .ппР,еп1ГгеМ эчекгромапшг нереклю-
В рассмотренной конструкцт.н ™ф№^*"^ w> при отсут.
чает распределитель в одном направлении. 1^ ^ hCXlVllloe положение.
ствнн электропитания распредели гель возвр "_ |НИГНЫМ правлением воз-
В ^-распределителе с двусторон.шм *' ^ и ||р|| отсутсгвИи эдек.ро-
вратная пружина заменяется вторым witfinpi И1С,1Я непр0|1зоПдег
питания никаких изменений в положении Р"с"^ " ,,.,,„ГСЛя с плоским зо-
На рисуттке 4.21,0.6 представлены схема - .
•потником и его конструкция, соогиегаиеино.
Iлавя 1\
..шЭДЩ!*
I
m
О
о
7лШ
* * t
HI)
Phcyhc* 4 21
t * 4
VJJ Rl» Bt-1»
При ОТСУТСТВИИ
\ нравдяющего сш
нала на электромш нн-
гах V I и V2
приводной поршни 3.6 с
плоским золотником
2 находятся в
положении последнего
перек 1ЮЧСМИЯ.
например, в правом.
Поджатие золотника
к направляющей I с
выходными и
выхлопным о1верстия-
ми осуществляется пружиной 5. Для устранения у тарных нагрузок на поршень в
конце перемещения с тужат демпферы 4 в виде дросселей. При гаком положении
входное отверстие Р(1) связано с выходным 2 (рисунок 4.21,6), а второе выходное
(рабочее) отверстие В(4) — с выхлопом R(3).
При подаче хаектропитания на правый электромагнит Y2 его якорь,
втягиваясь открывает нижний затвор, давление питания р поступает к правому
приводному поршню 6 и перемещает его вместе с золотником влево, обеспечивая проход
воздуха от отверстия Р(1) к отверстию В(4) и сообщение отверстий А(2) и R(3)
(рисунок.4 21»в)
4Л.4.5А2-риспределнтсли с э юктромагнитным пилот
ныл управлением
5/2-раснределители выпопняют те же функции, что и 4/2-распределителн.
Главное отличие между ними заключается в том, что первые имеют два
выхлопных отверстия а вторые — одно.
я 'з
\ I
*> 3 2 4
Рис>иок 4.22
З^-распределитель с односторонним электромагнитным пилотным
управлением (рисунок 4 22.6). содержит шток 3. смонтированный в корпусе на
эююриых упругих элементах 2 и 5 с возможностью осевого перемещения под тей-
J^}Srpmm^wpac»J^:::^iii
205
с гвисм усилия, создаваемое мечи™ "" "~
^" (г) к выхлопному Rm\ г> Р(|Нр!1сунок4.22б в) и
т ор прижимается к его правому ce«oK i 0днов^„но. двусторонний L
Р к выхо-о В(4). Левое седло огкрь^о^Гп^ "^ °Т 0ТВ^™ "mi,™
Р( I) к выходному огверегиш А(2). ^вГ, Г? " СЖ8ТЫЙ В0^ " перстня
отверсч не В(4) с выхлопным S(5) Р °Т0ДвинУт от седла, сообщая выходное
При включении электромагнит ^
сунок 4.22.В). через кото»Г давлен „^.Г* ""^ ™™ **
мемораны. которая, прогибаясь, перемен^ГГ W " П0Л0СТЬ пРнво™«
возвратной пружины. Диск двустороннего^ °' "Речевая действие
затвор закрывается, а левый открГаетсГ ГпТ ^"^ "* ЛеВОе «*»■ ^«"й
сообщается с атмосферой через отверстие r/J Г™^' ВЫУадНОе 0ТвеР™ A(2)
ру ется. сжатый воздух проходТгг отГ^я mнТ"0* °Перете *5) бло^
Такой распре житель имеет н^льшой о)BUWwo^ 0™*>™™ В(4>.
тельные силы трения н благодаря пи™ * Р" ПСРекточе"»"- "«начн-
неболыиого элоорГмагнит! TrTJ У **"*"*• УЧ*"*"» с помощью
может служи Л1;Г^лп^Гы^ ТяТоГ"
характеристиками: ход umL _'J' r^01в^«Г^Т™
,„„„,„„„ n^ni по».п ,- р^ход воздуха—130 л/мин; рабочее
мс ассГ О ю Д° Пв: 6,JC^dlCTB»e: открытие- Ю мс, закрытие_ 22
7л о ,« Г ' КТ: на,,Ряжсн,,с питания - 12. 24. 42. ПО. 220 В/50 Гц или 12
-4. 4-. 48 В — постоянного тока; потреб-иемая мощность — 4.5 Вт.
Мнемоническая схема распределителя дана на рисунке 4 22,а. а общий вид с
присоединительными размерами — на рисунке 4.22,г.
5/2-распределнтель с двусторонним электромагнитным пилотным
управлением (рисунок 4.23) отличается от 5/2-распределителя с отпоет, ронним
управлением наличием в его конструкции второго .электромагнита вмело
пружины возврата и второй приводной мембраны.
Frnu м,л^„.»г,,....-: ....„,— ., „......„ л.,, „01ан на электромагнит YI, то после
Если последний
й сигнал управления был noj
\14
п_^4>|1
ыВДЩШ
*****
3 2 14 5
рисхвок''^
44i
Глава IV
«to сижтм Двусторонний дисковый затвор останется неподвижным, отверстие
витаю» Р{\) б>лет сообщено с выходным отверстием А(2) (рисунок 4.23 б), а
выходное отверстие В(4) — с выхлопным S(5)
При подаче сигнала на электромагнит Y2 распределитель переключается,
поток воздуха пойдет от отверстия Р(1) к отверстию В(4) (рисунок 4.23,в), а
отверстие А(2) сообщается с атмосферой через отверстие R(3).
Такой тип распределителя обладает свойством памяти, так как сохраняет
положение. соответств> ющее последнему сигналу управления. В
электропневматических системах их использование дает определенные преимущества. Так, для их
переключения нужны сигналы длительностью всего 10...25 мс. Соответственно
снижаются требования к мощности источника питания. В системах со сложной
последовательностью выполнения операций рабочие цилиндры можно
удерживать в требуемом положении долгое время без помощи сложных переключающих
устройств и лишнего расхода электроэнергии.
2 3 4 5 6
95,5
53
ш
Квооочное ручное
уяраялсинс
г)
Рисунок 4 24
Электропневмораспределитр „„
207
5/2-распределитель типа JMFH-5-PK 3
имеет следующие характеристики: рабочий "рад"авле||иый иа рисунке 4.23,г,
105л/мин, рабочее давление от 0 2 до 0 8 МП е? 2'5 ММ; расход в°ЗДухя —
мс; диапазон температур — от 0 до +60°С ЬыстРодействие при 0,6 МПа— 13
- 12, 24, 42, 110, 220 В/ 50 Гц переменно, о ™ 72 "utlZ "Г™* ""^
тока; потребляемая мощность 4 5 Вт П ,вь~ постоянною
щью штуцеров на нижней поверхности монтажТпй?^™ 0Сушествляется с "омо-
ления на технологическом оборудован! "ЛИ™ ° отвеР™" для креп-
Я/9 пНтТУНКе 424 "РеДСГаВЛен 5/2-™МА-Распредел„тель «Festo» типа MN2H-
5/2-D-02 с односторонним непрямым электроупраалением, пневмагиче™
возвратом, вспомогательным ручным управлением кнопочного типа,
^Гаченный как для индивидуального монтажа на специальной плите (б), гак и для
батарейного монтажа. При индивидуальном монтаже распределитель размещается на
установленной поверхности плиты с продольными отверстиями, совмещаемыми с
отверстием питания Р(1), рабочими отверстиями А(4) и В(2), отверстиями
выхлопа R(3) и S(5), а также отверстиями управления Х(12) и Y(14) (рисунок 4 24 в)
Отверстия, обозначенные арабскими цифрами (б) соответствуют линиям питания
на мнемонической схеме (рисунок 4.24,а). Габаритные и присоединительные
размеры даны на рисунке 4.24,г.
При отсутствии электропитания на катушке приводного электромагнита 2
сжатый воздух из отверстия питания А(1) по (внутреннему) каналу, показанному
пунктирной линией (рисунок 4.24,в) поступает в канал 5 плунжерного клапана н в
канал 7, чем обеспечивается левое положение плунжера 8 и соединение
питающего отверстия Р( 1) с рабочим отверстием В(2).
При запитывании электромагнита, якорь 3, втягиваясь внутрь катушки,
открывает клапан, в результате чего, воздух из отверстия Р( 1) по каналам 5 и 6
поступает к поршню 1 золотника 8, перемещая его вправо, так как D2 > D,.
Поступление воздуха к отверстию В(2) прекращается и оно соединяется с выхлопным
отверстием S(3), а рабочее отверстие А(4) соединяется с Р(1). Отверсти 10
предназначены для связи штоковых полостей с атмосферой.
Данный тип распределителя имеет следующие характеристики: условный проход
- 6 мм; нормальный номинальный расход - 500 л/мин.; диапазон рабочего давления
- 0,2...1,0 МПа; время срабатывания (вкл/выкл.) - 22Я8 мс; температура
окружающей среды - от -5 до + 50Т; вес - 0,16 кг; рабочее напряжение - 24 J постоянный
ток и 110/230 В, 50.. .60 Гц—переменный ток; тип защиты - IP65 (по DLN *****
5/2-180-распределитель фирмы «Festo» (ISO - ^^ZZZ»?*
по стандартизации), мнемоническая ^^^^^^
габаритные и присоединительные Р^Г"**™ V Тигельным кольцам 11
4.25, отличается высокой долговечностью благодаря ао пневш.
специальной конструкции. Он имеет ™»°™^J^L>™ вингы да
тический возврат, вспомогатель-«П^Д общий вид которой. габаритные и
индивидуального закрепления на монтажниц ш , Характеристика распределителя:
присоединительные размеры даны на рисунке . ■ _ j 200 л/мин.; диапазон
условный проход- 8 мм; нормальный »°»т™*™"?*т _ (вкл/выкл) - 23/32 мс;
рабочего давления — 0,2...1,0 МПа: вРе"я5Ра°^_о45 кг; напряжениепостоянно-
температура рабочей среды--от-10ДО+5^-«^ ^ потреблЯемая мощность -
го тока — 24В; переменного — ,Ш .^,^40050)
2,5 Вт (постоянный ток); тип защиты - IP» V-' $ приводного электромагни-
При отсутствии сигнала управления на кату ю питаиия P(i). иосту-
та, клапан 9 перекрыт, и давление, подведен**• ^^ ^ „ полость |3 воз-
пая по внутреннему каналу, показанному W™^ «лунжера 3 и соединение
Действует на поршень 12, обеспечивая лев
P(l)cB(2),aA(4)cR(5).
\x?
Глава IV
чВДЯ
UF»
I
R(5) A(4) P(l) B(2) S(3) Y(I2)
54 6_. , _
в)
•—.
it
t
■■*,■'
1 ♦
117.4
87.6
43,8
P
1
P-f-^
i 1 .
<?> , 9
>
С
llfll
1
/i V
7 «
» !
u u
ЛиМ5
M 28 J
42
J
J
ОС
г»}
o>
Ручное
ynptiaieiuic
r)
Рисунок 4 25
>лгктропнсрморисиречел и i с. i ц
209
При заингыванни
катушки 5. сердечник (якорь)
6 электрочкннитл втяшва-
ется, открывая клапан 9 и
давая возможность сжагом>
воздуху, подведенном) к
Р(1). пронгн по каналам 10,
4 к поршню 2. бочьшсго.
чем у поршня 12 диаметра,
что обеспечивает
перемещение плунжера 3 вправо.
В резучьтате. воздух из Р( 1)
поступает в А(4). а второе
рабочее отверстие В(2) со-
е пните гея с выхлопным
отверстием S(3).
При наличии lonojitiiiтельного подводе воздуха >иравления в канат \(12).
такого же типа распре телнгели могут быть использованы для низкого раоочего
давления или инертного газа.
Распределитель снабжен поворотным приспособлением 1ля фиксации кнопки
7 ручного управления. Удержание кнопки, находящейся под тействнеч уен :ня.
создаваемого пружиной 8. обеспечивается седлом клапана, выступающая часть
которою размещена в пазу нижней части кнопки. __
На рисунке 4.27 представлены мнемоническая схема (а), осшнн biu ф) и
размеры (г) 5/2-распределитедя «Festo», серии «T.ger-2(XXK с односторонним
электроуправлением, пружинным возвратом н вспомогательным ручн-.м
управленцем, без штеккернон розетки, с тарельчатыми клапанами.
Рисунок 4.26
В исходном положен»,., шток 2 под действием »»»«""'"*^^"
беспечнвается перекрытие кольцевым уыктне^«3 про
седла 14 н соединение питающего
отверстия седла 15. У—к .4 - u*»J" - q ^
я Р(1) с рабочим отверстием Ь(~), «"'Ч11 *
нем положении, чем ооес
ХОДНОГО
отверстия Р(1) с рабочим
выхлопным отверстием R(5). «четпомагнига 10 пронехо-
При подаче напряжения на кагушку приводи - -^ ^
чнваегся проход
цит отрыв сердечника 9 с уплотнением от седла о.
сжатого воздуха из пнтающе,
ме
упло
от
оо^тия Р(П но каналам 12. 7 к поршню 6. пере-
о отверч™ к ^„с уплогненнем 5 сетла 13.
лценне штока 2 вниз, сжатие пружины ■. ^ J^.^ tf,' в результате питающее
иютненисм 4 седла 15 и отрыв уплогнени*i.^ i ^ р^чее отверстие В<2)
•верстпе Р(1) соединяется с рабочим отверг ' м.равдения Z(14)
.... en. Отводимый воздух "■»
— с BbixjtonHbiM отверстием ар». V"D
поступает к отверстию 84 но каналу 1' • Tiser-'WOO» с двусторонним злектро-
5/2-золотниковын распределись ccpi" . - ^ (в) коНСф>КЦ|1Я < а) и раз-
управлением и .кпомогагельнымуп^шленисм.^ -^ 1ВаиСпа1Ие11„я:бездонаиш-
меры (е) котрого представлены ш Р^^'^Г./.^ым „одводом воздуха управления
тельного подвода JMVH-5-3/8-B н с ^'^'^.«д содаяепкнжД Отвочимый
JMVH-5-3/8-S-B по линиям 12 и 14 (Р»"--
Глава1\
О
г
б)
t
■ ,.М5
44
воздух и! линии
управления поступает
к отверешям 82 и 84.
Зависимость давления
управления от
рабочего 'деления показана
на рисунке 4.28.Г.
Данная
конструкция
распределителя характеризуется
следующими
параметрами: условный
проход - 14 мм;
нормальный
номинальный расход — 2000
л/мин; диапазон
рабочего давления —
0,2... 1,0 МПа (для
первого типа) и от
-0,09 до 1,0 МПа (для
второго типа); время
срабатывания при
0,6 МПа—17 мс;
темпера гура
окружающей среды — от -
5 до +50"С; вес — 0,9
кг; напряжение
питания — 24 В
постоянного тока;
потребляемая мощность 25 В г.
Распределигель
переключается
посредством
попеременной подачи
напряжения на
электромагнитные катушки 3,11 и
остается в
переключенном состоянии
после снятия сиiнала до
тех пор, пока будет
подан сигнал на
противоположную
катушку.
При запитыва-
нии катушки 11
открывается клапан 12
и воздух, поступая из
питающего отверстия
Р(1) по каналам 13 и
10 в полость 9,
вызывает перемещение
г. ика 6 влево, в результате чего перекрываются отверстия 8, связывающие
Р» I > с Ш2) и открываются от версгия 7, связывающие Р( 1) с А(4) Одновременно
16
=*?=нфр:
48
Груб 1/4
153.6
Рисунок 4 27
Элекчропневмораспределн гели
v
■«Е
2 П(УН-5-Т/8-В
а)
К4-> 5*1*Т*82
G
12
те
141 1 5*l*?j
2 JMVH-5-T8-S-B
V12)
б) 84 '
82
** *
1=0.5-
в)
§0 4-
§0.V
ffi
§■02-
>,
s oi-
х
а
а
«
1—г
R -0 I 0 0.1 0.2 0,1 0.4 0.5 0.6 0.7 0.8 0 9 1.0
г)
Рабочее давление МШ
82 R(5) ^ P(0 \ S(J) 84
1 П
\ Щ4)
12 Д)
JMVH-5-3/8-B
JMVH-5-J/8-S-B
f^f4--t
в
JMVH-<-*«-SB
(■ircviluK
4'Ч
:t
Глава IV
раоочсе отверстие В(2) еоетиияе1СЯ с выхлопным отверстием S(3), а отверстие
К(51отеекаегея oi А(4).
Распредетитель второго исполнения при наличии дополнительною подвода
воздуха >правления по линиям 12 и 14 может быть использован для ншкого
давания ити инертного газа.
Миниатюрные 5/2-распрсдслители «Midi-Pneumatic» обеспечивают высокую
плотность монтажа, благодаря малой монтажной ширине 18 мм, и
характеризуются высокой пропускной способностью (до 500 л/мин). Они имеют три
конструктивных решения: распределители резьбового присоединения с резьбой 1/8" для
индивидуального монтажа; распределители резьбовою присоединения для
монтажа на платах индивидуального монтажа и на PRS-платах для блочного монтажа;
распределители стыковою присоединения для индивидуального и батарейного
монтажа.
На рисунке 4.29 показана мнемоническая схема (а), общий вид
распределителя с монтажной платой (б), конструкция (в) и габаритные размеры (г)
моностабильного 5/2-распределителя с односторонним электроуправлением и
вспомогательным ручным управлением без штепсельной розетки типа МЕН-5/2-
1/8-В. Для индивидуального монтажа служит плата типа AU-ME-1/8, общий вид и
размеры которой даны на рисунке 4.29,д. Два отверстия 04,5 мм предназначены
для монтажа на технологическом оборудовании.
При обесточенной катушке приводного электромагнита 4 отверстие питания Р( 1)
соединено с рабочим отверстием В(2), так как золотник 8 под действием усилий, соз-
таваемых пружиной 10 и давлением воздуха, действующего на поршень 9 находится в
левом положении. Второе рабочее отверстие А(4) соединено с отверстием выхлопа
R(5). Выхлоп воздуха из линии управления Z(14) (поз. 3 на рисунке) осуществляется
через отверстие 84.
При запитывании электромагнита якорь 5, втягиваясь внутрь катушки,
закрывает проход воздуха по каналу 3 к отверстию 84 и открывает проход сжатого
воздуха от Р(1) через каналы 7 и 2 к поршню 1 золотника, диаметр которого
больше, чем диаметр поршня 9. В результате золотник 8 перемещается вправо,
обеспечивая соединение Р( 1) с А(4), а В(2) с S(3).
Ручное управление обеспечивается кнопкой 6, нажатием которой осуществ-
чяется перемещение сердечника (якоря) 5 и открытие пилотного клапана.
Эксплуатационные характеристики распределителя: условный проход — 5
мм; диапазон давлений — 0.2...0,8 МПа; время срабатывания при 0,6 МПа —
вкл/выкл. — 10/19 м/с; вес — 0,19 кг; потребляемая мощность— 1,5 Вт;
напряжение питания — 24 В постоянного тока; тип защиты — IP65.
Представленный на рисунке 4.30, в 5/2-раепределитель с двусторонним
электроуправлением (бистабильный) серии «Compact-Performance» фирмы «Festo»
характеризуется минимальной монтажной шириной и малой потребляемой
мощностью при высоких значениях расхода, что позволяет использовать прямое
электронное управление.
Он имеет два основных исполнения (рисунок 4.30): без дополнительного
подвода воздуха управления (а) и с дополнительным подводом воздуха
управления (б) по линиям 12 и 14. Габаритные и присоединительные размеры
распределителя типа CPE10-M1H-5J-M7 (с резьбой М7 в присоединительных отверстиях)
даны на (д). Эксплуатационное характеристики: условный проход — 4 мм;
нормальный номинальный расход — 350 л/мин; диапазон рабочего давления — 0,25...0,8 МПа
(без дополнительного подвода воздуха) и от -0,09 до + 1,0 МПа (с
дополнительным подводом воздуха); диапазон давления управления — 0,3...0,8 МПа; время
переключения — 8 мс; температура окружающей среды от -10 до + 50°С;
напряжение питания — 24 В постоянного тока; потребляемая мощность — 1Вт; тип
u
Глава IV
84* Л Li 82
Г
JVIV3V82
1
<0
ШЙ2Ш
Jj &Ц hi
84 ' 82
б)
Бистрора гьсмнос
QS - соединение '
V
в)
5 6 7
\ \ 84 \ Z(I4) A(4) B(2) Y(12) 82
3
М7
2 I
|£ЭЕ
R(5) P(l) S(3)
10
23
C-S-J
23
^d
аФв- в
1.5
70.6
Вф-В г >£
Ml
г103_
Ручное
Г,
Пневмоглушнтель
.._» управление
©
-*,6-3L
28.5
16.5
13
1®
M7
Д)
«
«5 '
•^ 0 6-
<s
0, U.J
§ 0 4-
•j
9 u->
тлен
—
t=t -0,1 0 0,2 0.4 0,6 0,8 1,0
e)
Рабочее давление PI, MI la
Рисунок 4 30
При запишвании приводного электромагнита 1
внутрь, открывает проход сжатого воздуха от сердечник 4, втаиваясь
лам 7 и 6 к поршню 2 золо.ника 1 котопьГ ПИТаЮЩе,° огверстия РП) гю кана-
динение Р(1) с А(4) и В(2) с SO), перекрывая ЪлъТ* ^^ осуществляет сое"
рой, правый электромагнит, золотник 1 воз "ОДаче напряжения на вто-
4.30,г положение, связывая Р(1) с В(2) и А^^шГ0* В показанное на рисунке
ся. Отверстия 82 и 84 предназначены для выхлопе' ^Р™6 S(3> перекрывает-
Y( 12) и Z( 14) - для подвода воздухаГраГн" ЕГ" " """"* уПраВ"' а
ния от давления питания показана на (е) 3авис™ость давления управле-
Ручное управление осуществляется с помощью вилочных кнопок 5 утапли
вающих подпружиненные сердечники 4 внутрь соленоидов. С помоГью Гхот"
верстии в корпусе 0 3,5 мм распределитель может монтироватьсяЗсреТ^ен"
но на технологическом оборудовании. непиередствен-
4.2.5. 5/3-распределители с электромагнитным пилотным управлением
В отличие от двухпозици-
онных распределителей трехпо-
зиционные характеризуются
следующими возможностями:
— в нейтральном
положении, когда все линии перекрыты,
может быть осуществлена
кратковременная остановка поршня
цилиндра двустороннего действия в
промежуточном положении;
— в нейтральном
положении, когда все выходы сообщены
с выхлопом, поршень цилиндра
двустороннего действия может
перемещаться без
сопротивления, создаваемого давлением
сжатого воздуха;
— в нейтральном положе-
Функлия. %
В нейтральном положении все линнн перекрыты
MN2H-5/3G-D-01 MN2H-5/3G-D-0I-S
14
4^2
AIItttIA
ш
12
Ш
12
В нейтральном положеннн выходы сообщены с выхлопом
MN2H-5/3E-D-01 MN2H-5/3E-D-01-S
14
ш
at
2 12
I
П
i
В нейтральном положеннн выходы сообщены с питанием
MN2H-5/3B-D-01 MN2H-5/3B-D-OI-S
14 4, ,2 12 14 4, ,2 12
/ /
2 I
z(i4> т т р"> т
Рисую* 4-3'
Глава IV
M4
f
\ Л
I 19 I
I H— —I
1 26,2
I I I
Труб 14"
Рисунок 4.11
Рисунок 4.32
нии, когда все выходы сообщены с
питанием, поршень цилиндра
двустороннего действия находится
под противодавлением.
При наличии
дополнительного подвода воздуха управления
они могут быть использованы для
низкого рабочего давления или
инертных газов.
На рисунке 4.31,а показаны
мнемонические схемы всех
модификаций 5/3 — распределителя
«Festo» серии VDMA, типа
MN1H-5/3...-D-01 и типа MN1H-
5/3...-D-01-S с дополнительным
подводом воздуха управления
(линия 14). Эксплуатационные
характеристики распределителей:
условный проход — 8 мм;
нормальный номинальный расход —
1000 л/мин; диапазон рабочего
давления — 0,3... 1,0 МПа;
диапазон давления управления (для S-
типов) — 0,3... 1,0 МПа; время
срабатывания при 0,6 МПа (вкл/выкл)
— 23/52 мс; температура рабочей
среды от -10 до +60°С; вес —
Электропневмораспределщ ел и
0,34 кг; напряжение питания — ->4 В п
го; потребляемая мощность при 24 В J??nT? г°КЗ " '10/23U B ~ переменио-
размеры приведены на рисунке 4 32 ' абаРи™ые и присоединительные
Распределители устанавливаются на плитах и„п
ковым расположением резьбовых отвепстий инДивиДУального монтажа с бо-
(рисунок 4.33), типа NAS-1/4-0I-VDMA с °ДВ0Д? иотв°Да сжатого воздуха
26 мм. из анодированного алюминия весом^^nlГ*"0" повеРхностьк> шириной
При отсутствии питания на приемных '■* -.«И
4.31,6), с помощью пружины 9 обеспечиГ^ и'7,ромапип« 4 и 5 (рисунок
золотника 10 и перекрытие всех линий. иеитРальное (среднее) положение
При подаче напряжения, напримеи нч n,»nL.-
доступ сжатого воздуха из питаюГеГо" Ти^Г"""",4 ^^^
поршнем 1, в результате чего золотник , ™СрСТИЯ Р(1) по каналУ 3 в полость 2 с
соединяя питающее отверстиеТрХ м Гв^ГемТГ ГГ "^^ 9 "
В(2) с выходным отверстием Функция°ТВерСГИем А^> а Раб°чее отверстие
4+4тт
S(3).
При отключении
электромагнита 4 золотник возвращается
в нейтральное положение.
При запитывании
электромагнита 5 воздух по каналу 6
поступает в полость 8 с поршнем
7, обеспечивая перемещение
золотника 10 влево, сжатие
пружины 9 и соединение Р(1) с В(2), а
А(4) с R(5).
Отверстия Y(12) и Z(14)
предназначены для подвода
воздуха управления. В этом случае
воздух из питающего отверстия
Р(1) не подается в каналы 3 и 6.
Представленный на рисунке
4.34,6 5/3-180-распределитель,
MFIH-53G-D-I-S-C
4, ,2
Wf
ЖЧ
Щ\2
14
12
В нейтральном положении выходы сообщены с выклопоч
MF1H-5 3G-D-1-C MF1II-5 3G-D-I-S-C
14
■ж
жМ
MF1II-5 3G-D-I-S-C
4. ,2
"Ш
5*3
I
Ж
14
В нейтральном положении выходы сообщены с
MFIH-5 3G-D-I-C MF1H-5 3G-D-
4, ,2
12
пиганием
I-S-C
14
К
т»
■«$
?#Р
м
12
а)
X Z(\4) R(5)
Й*^Гад" sw м12)
Рисунок 4.34
I
I "ihum IV
£
1
M3W Ч
,1-
I
1
M5
2»
J2
ON
vnpHH'ieiinc
Рисунок 4.35
прочна ш.пен для выполнении auaiiuiпчных функций, присущих описанной выше
консфукцни, 'мо отображено на рисунке 4.34.а.
Нейтральное (среднее) положение юлогннка 8, перекрывающею нее линии,
обеспечиваемся с помощью двух подпружиненных упоров 3, осуществляющих
функции чемнферо».
При по чаче шпация на приводной мекгрома! пит 4. вочдух or шнающего
отверстия Р(1) ци показанному пуню ирной линией каналу 7 и каналам 5,6 iioeiyiiacr
в пошеть 2, где воздействуя на поршень J. перемещает юлошик 8 вправо,
обеспечивая сое |инс11ис Р(1) с А(4), а В(2) с S(3). После сияi им питания золотник
возвращается в исходное (центральное^ положение правой пружиной
При ляншыпании jjieKipOMai ища 9, нщдух, носчуман в полость К),
обеспечивает перемещение ншпника 8 влево, соединение 1'(1) с рабочим ошерстисм
В(2). а рабочего о (вере 1ия А(4) с выхлопным R(5).
Характерно икн распределителя: условный проход — 8 мм; нормальный
поминальный расход — 1200 л/мин; рабочее давление — 0,3... 1,0 МПа. а для
S модификации от «.09 до + 1,6 МПа; время срабатывания при 0.6 МПа
(вкл/выкл) — 14/41 мс; iCMiicparypa рабочей среды от -10 до +50"С; вес — 0.65 ki ;
напряжение питания — 24 М (постоянною тока) и 110/230 В/50...60 Гц (перемен
Hot о тока). 1ип тащшы IP65
Распре 1елитсль снабжен попоротым приспособлением для фиксации кнопки
ручного управления.
Размерные параметры раенределтеля приведены на рисунке 4.35.
Установка распредели 1еля осущесшлястся на плите индивидуальною моп-
та , покачанной на рисунке 4 36, с нижним расположением присоедини 1слыюй
рпьбы тип NAU 1/4-ID 150).
>!ll'KI|IOIIIIl>UMO|ia 11|><-Ц(Ч||| ИМ,,,
!*/
I (I') «итцннис мигания
4.2 (Л И) pufb'iitc или омодпиые
о терния
1.3 (R.S) - отсрымм иыллопл
12,14 (IV) - 01нс|к i ия подвода вшдуха
управления
Рисунок 4 То
5/3-«Compacl PeiГоппапсс» распредели гели <*1гч|о.» с двусторонним milk
фомагпн 'м управлением (биешбщи.ные) (рисунок 4 37,6;. Хараккрнгующнеся
минимальной монтажной шириной и малин пофсоляемоп мощносм.ю при пысо
кил лмчениях расхода, hmcioi ряд модификации (а) Imihi одари икон нофсблие
мои мощное in (I Mi) они hmcioi прямое )лекфнческос укрепление. При условном
проходе 4 мм нормальный номинальный расход составляй 350 л/мнп. Диана юн
комму шруемых давлении (рабочих и управления) лсжш н пределах 0J. .0,8 МПа,
время сраба1ывапня (икл/выкл)— 15/25 м/с. Напряжение нимпия для данных ш
нов — 24 М иосюяипого юка. Габаритные н нрнсоелнншельныершмеры pacnpi
делтеля иша CIM'IO MIII-5/36-M7 даны на 0). Подсоединен и< к исполни юн
иым органам гсхноло! нчеекою оборудования осуществляется с помощью пнСВМа
тических рнчьемои с резьбой М7.
При 01сутстиии )лекфони|иния па приводных шжфомниппах распредели
юля тина CTI IO-MHI-5/3G (рисунок4.*7.в) и расположении юлошикл I в пен
фалыюм положении, обеепечииаемом пружиной 8, «се линии перекрыт.
При иодачс ни.ипня. например, па левый wick грома, пит 3. якорь (сердечник)
4 втягиваясь внутрь кшушки. о.крывает проход воздуха и» канала 6. свяшнною с
I'd), через пило й клапан и канал 7 к пор о 2 ая смешение или».ига
I вправо, соединение Р(1) с А(4). П(2) с выхлопом SO) и сжа.пе пружины 8 По
еле аштия „.папин с .лек.ромшпи.а пружина 8 вотвршцае. юлопн.к " "«'Ф™
„, линий управления 7 выбрасывается .«^«J
"ос положение, а во «дух
нанпи дополни 1елыюго подвода во муха
"bixjioiiiioe отеретие 84. При испольюва „М1т„|П,г,»|„
"срез о.версие Z( 14) в управляющий капал 6, иосл,днпй .полируется о. рабочею
Давления, поступающею ь распределили, черст Р( )• 11cpcmcihbci«i в левое
»Р" ■" -ванин правого ^f^^'^i^^Sy
"оложеппе. сжимая пружину 8. и соединяем Р )<- "<-• 5 утапливаю-
Ручное управление рсалн.уе.ся с помощью вило
«'"'х сердечники 4 вну .рь ка.у.нек. (<tFesU)s) ХаРактсри.уюгся малыми
Распределители серии «Micio-I ntuin»i ^ h|CJ|||I0 ВЫСОкпн пропускной ено
'"барщами (мотажпып mai — W мм), '»''"«- бе „„щсншл ыо жемлунпщннбла-
с"бн0<-,ио(до 80 л/мин), малым иссом (20-'J "^^„j, ттимпыо (05 ВО. Они
'"Ларя встроенной схеме чишшы, мало» "» W |Л)|||№„р^н-дипенне
имсю, две модификации: стыковое присоединен I
Глава IV
iNnCPHO-MIIMW
Высйф пллож в«
'Пнин перекрыты
гНт
ГипСР! 10-МПМ Л .
В ией гр полож все
шнии псрекрып.1
4, ,2
1ипСРЫ0-М1Н-5/ЗВ
Внейгр полож все
линии перекрыты
4, ,2
"«ИШЬ'' чйЯри» "«И»
5W 5Wl sWl
_ ' 1 1
Рашределители с донолн подвочом вошха \ правления
4' >2 4| |2 ' 4, ,2
12
14
Wf
84
5*1*3 :*82 84*! 5VIV3 1*82 84*1 5*1*3 1*8:
2
82
14
12
14
12
a)
5 6
84 /7(14) \(4)
7
14
U(2) ^(12)
12
8
/
82
Тип CPEI0-MIH-5/3...-M7
M7
a^-ifo <»-o-t i ,^-g
©I
-115
Ручное
управление мз
ajs^SBfT
г)
Рисунок 4.37
Распределители
могут быть смонтированы
индивидуально или на
плате для блочного
монтажа.
На рисунке 4.38,а
показан общий вид 5/3 —
распределителя непрямого
управления типа MZH-
5/3G-M3-L-LED,
снабженный LED-индикатором и
резьбовыми отверстиями
МЗ в линиях питания, с
пневмовозвратом в
исходное положение, стыкового
исполнения. Условный
проход — 1,5 мм;
нормальный номинальный
расход — 45 л/мин,
диапазон давлений — 0,2...0,7
МПа; время срабатывания
при 0,6 МПа (вкл/выкл) —
12/30 мс; температура
окружающей (рабочей)
среды — 5...50°С; вес - 0,05
кг; напряжение питания —
24В (постоянный ток); тип
защиты — IP40.
Распределитель
монтируется на плите
индивидуального монтажа типа
ЭлсктропнсвмораспределнтРп.,
221
/"
* «
а)
99.5
45
fiL.
ъ-
M2H-5/3G-I.5-L-K
M2H-5/3E-l,5-L-K
50,5
ГГ
03,2
Л
II
-44-
ft
-Т
10
28
8,5
б)
82
8
о
1
4.2
5
82,84
(Р)
(А.В)
(R+S)
- отверстие питания
- рабочие или
выходные
отверстия
- отверстия выхлопа
- отверстия выхлопа
ID ЛИНИИ
управления
в)
Рисунок 4.38
AS-MZ-5-M5 (рисунок 4.38,6), размеры которой, а также габаритные размеры
распределителя, приведены на рисунке 4.38,в. Вес плиты — 0,015 кг, материал —
алюминий. Диаметр рабочих отверстий — М5, отверстий выхлопа из линий
управления — МЗ.
4.2.6.5/4-распределитель с двусторонним электромагнитным пилотным
управлением
Рассмотренные конструкции распределителей имеют две позиции
переключения, что необходимо учитывать при проектировании систем управления
<-,. J , ., л1й„\ ниляется пятилинеиным (пятиканаль-
5/4-распределитель (рисунок 4.39^«^^^ элементом. Наличие
ным), четырехпозиционным ™™™бть™У"?™*^возможности построения
третьей и четвертой позиции создает дополнительные возмож ^
систем управления. электромагнита, которые управля-
Клапанныи распределитель содеРЖ"™иненн J четырех клапанных блоков.
Jot подачей воздуха к поршням попарно соет"™™ 4 39,б) все четыре выход-
При отключенном питании электромагнитов ф *^^ у, фИсунок 4.39,в) дав-
ных канала перекрыты. При включении эле^ (И клапанных блоков, что
ление р из входного отверстия 1 подае™* *ПОСтугпению воздуха по каналу 4
приводит к открытию их запорных элементов и
Глава IV
Vt2
u лШУИ1 AIMII/
czdAiWililiA:
Ф
Мм,
3ZJI2
в одну из рабочих полостей цилиндра
двустороннего действия. Вторая рабочая полость каналом 2
соединяется с выхлопным отверстием 3. При
отключении Y1 и включении Y2 (рисунок 4.39,д) запиты-
в)
?!(/) д) tl(P)
Рисунок 4.39
вается вторая рабочая полость цилиндра по каналу 2, а первая каналом 4
соединяется с выхлопным отверстием 5.
Включением одновременно двух электромагнитов Y1 и Y2 (рисунок 4.39,г)
(3-я позиция), достигается соединение полостей цилиндров с атмосферой при
отключенном давлении, что дает возможность осуществить их продувку, и
проверить при включенном давлении настройку системы управления (датчиков) путем
перемещения вручную штока цилиндра.
При аварийном отключении электрического питания эти распределители
фиксируют штоки цилиндров в достигнутом положении.
4.3. Батарейный монтаж распределителей
При батарейном монтаже обеспечивается централизованное питание и
централизованный выхлоп, а благодаря малым габаритным размерам
распределителей (монтажная ширина — 10...36 мм) — высокая компактность монтажа.
Наличие централизованного выхлопа позволяет применять эффективные
глушители шума, удовлетворяющие требованиям экологичности.
Для батарейного монтажа ведущими фирмами мира, в т.ч. фирмой «Festo»,
разработаны конструкции компактных нормально открытых и нормально
закрытых распределителей с электромагнитным управлением.
На рисунке 4.40,а показан общий вид нормально закрытого 3/2-
распредечителя «Festo» для батарейного монтажа с прямым управлением типа
MVH-3-1J-AW-QS-4, эксплуатационные характеристики и размерные параметры
которого такие же, как у описанного в предыдущем разделе 2/2-раснределителя
типа MVH/MOVH с проходным сечением 1,7 мм и предназначенного для
индивидуального монтажа.
.-* I
а)
%
_ Монтажная И-шина
**'
б)
10' 9'
Рисунок 4.40
На Н-шине по DIN EN 50022 (DIN -немецкий ™™^™™™*™™1
он может монтироваться в паре с распределителем типа MOVH(H4««^№
крытый), имеющим те же габаритные и присоединительные размеру На г^сунке
4.40,6, показан пример размещения ~%^£2£5££^
типов, а на рисунке 4.40,в приведены Р^*^^^eJ^e»cmb-
MVH-3-1J-AW-QS-4 и пример Ф^У^^^-З-К с отверстиями для
зованием шины 1 и концевых плит 8 типа сг-^ ^^^
централизованного подвода 5 и выхлопа 7 сжа™™ исполнительных пневмати-
Огверстия 6 предназначены для подеосда*яи*
ческих устройств (пневмоцилиндров, пневм01^контактами под штеккерные розет-
Электромагнитные катушки 3 с "™??СИ^а)КДЬ1Й из распределителей снабжен
ки имеют возможность поворота на 1»и • 05.разъемом 10 для пневмошлангов
Держателями 9 для информационных ™че „азначеио для стяжного винта
Диаметром 4 мм. Сквозное отверстие ^JJP^ №ПКИ ц, фиксация которых в
(шпильки) М4. Для ручного управления и
м
I лава IV
mГpГZки",0ЧeИ0/BЬ,KЛ'0Чa,0 °С^е— - с «омошью специальной сьем-
lu* т^ТГН0Г° М°НТаЖа """«V»1"* lSO-распредели.елеи фирмы «besto
^юГшТичя! } ИСГЮЛЬЗУКУГСЯ <™«V»"e наборы модулей пли, четырех .ипора,-
^зГ1ТЯ дааМ^ами "Рисоединительных отверстии, один из кагоры" (3
типоразмер с резьбовыми отверстиями 1/2"), представлен „а рисунке 4 41 ,а. Пример,,
«паренного монтажа ISO-раснределигелей даны на рисунке 441,6 и 4.42. Пример
•£MnfWT«*4*b«nn*T УГЛОЮЯМОКТЮОвяти™
TtviNEV
.с'
ТипМАУУУ
Тип NZV-
плиты
I
Плата-заглушка
TwiNDV
Монтажная плип
TwiNEV
Угловая присоад плита
Тип NAW-
Плата с регулятором давления
ДляКО 1.2иЗ
для ISO-
яплвта
12иЗ
W'
»»
* »
Разделительная шайба
ТилКвС-
V
1 -Левая т. • •■ плита
2 - Модуль плиты для баг • • • монтажа NAV
3 - Плата-заглушка NDV
4 - • т" • ■ плита
5 - Монтажная плита с • • •
выходными • • NAW
в no DIN ISO 5599/1 *|
7 - Модуль плиты для • • о монтажа
с ... 1
8-
литвпьная шайба NSC
отверстиями
=■ "14
1 (В) - отверстие питания
4 2 (А.В) - рабочие или
выходные отверстия
5 3 (R S) - отверстия выхлопа
12 14 (Y.Z) - отверстия подвода
воздуха управления
225
2^Ф«^!е*ч!Н2а£пре
мне оярусного багареиного монтажа пп„ ' " "
выхлопных отверстиях R и S, 2 --ТоииУ" № РИсУнке 443 где |
управлением (без электоомяги», °"Цевая "лига, 3 — sn J' ~~ "'У»"™
типа LR-ZP- 5 - К?™ "Ш И ',ил<™ь« клапано^"^^ ш С ""евм°-
нымн катушки, f Г~ь fa ^ГГ^?^ —
лектромап.пи.микатуп^Г^^ ° *~ 'КГ"1
строра гъемные соединения "Р°м««Уточная „лита с дросселям^ Гбы"
1-Леваят.. .. „„„а
2 "МодУль ПЛить< Для батарейного
монтажа типоразмера 3
3 - Промежуточная плита NZV
4' МодУль п"иты для батарейного
монтажа типоразмера 1 или 2
П* .. » _
плита
Рисунок 4.43
Промежуточная плита типа GRO-ZP-3-150-B с подключенными к
присоединениям R (5) и S (3) дросселями Д регулирования выхлопа для распределителей
но DIN ISO 5599/1 (рисунок 4 44), выполненная из анодированного алюминия
устанавливается между распределителем и плитой с регулятором давления. Вес —
0,85 кг (типоразмер 3).
При многоярусном монтаже с использованием ISO-распределителей с пнев-
моуправлением, промежуточная плита с регулятором давления (рисунок 4.45,а)
Для регулирования давления в пределах 0.-1,2 МПа в соответствующих входах и
выходах (в) монтируется между промежуточной плитой с дросселями и
промежуточной плитой с электромагнитами и пилотными клапанами, управляющими
подачей воздуха к распределителю (б). Использование промежуточных плит с элек-
трома.нитами позволяет уменьшить высоту многоярусной батареи. Нормальный
номинальный расход регулятора давления типоразмера 3 (рисунок4А5,г) составляет
1600 л/мин (тип LR-ZP-P-D-3); вес — 1,22 кг
Пои батапейнпм монтаже VDMA-распределителеи (рисунок 4 46а) исполь-
при оатареином монтаже уьч ^ ^ г & |/4„и 1/8„^ ш стыко.
зуются монтажные ^^^^^Z^Z«« типоразмера 0. (резь-
вой поверхностью но VDMA-24563. Пример и«-»«'
ба 1/4") приведен на рисунке 4.46,в. качестве соединительного эле-
Промежуточна* плита NZV используйся в 3меров 01 „ 02 и
мспта между модулями плит для батарейного мои
имеет монтажную ширину 32 мм.
ч
:»
Глава IV
Ч'
а)
Регулятор давления для линии 1
*?¥
«5 « 1 2312
Регулятор давления для линии 2
<1
б)
-И4-Я
пиша
£ rte
ISO-распределитель
. Плита дросселей
„ Плита с регулятором
давления
Промежуточная
плита с
электромагнитами для
ISO-распределителя
- Плита для батарейного
монтажа со стыковой ЛЧ
поверхностью по
DIN ISO 5599/2
Разделительная шайба
Регулятор давления для линии 4
К5* 1 2312
Регуляторы давлений для линий 2 и 4
V5 * 1 2 312
[^ Щ |
72,5 . . 72.5 . |
119
1 - отверстие для
присоединения
манометра труб 1/8"
2 - регулировочный
винт
3 - присоединительная
стыковая поверх-
-1 Ll ность по DIN
5599/1
4 - винт с
цилиндрической головкой
невыпадающий
г)
Рисунок 4.45
Электропневмораспределители
Монтажная плита
Тип NAW-...-VDMA
227
Комплект концевых плит
Тип NEW-. -VDMA
7
•*
♦ ^
Промежуточные плиты
Тип NZV- ..-VDMA
Заглушки для пустых мест
Тип NDV- .-VDMA
NSC- -VDMA
а)
б)
1 - набор торцовых плит NEV
2 - модуль плиты для батарейного
монтажа NAW
3 - модуль плиты для батарейного
монтажа NAW-VL
4 - плата заглушки NDV
5 - монтажная шина тип NRH-35-2000
1 (Р) - отверстие питания
4.2 (А,В) - рабочие или выходные
отверстия
5.3 (R.S) - отверстия выхлопа
12,14 (YZ) - отверстия подвода
воздуха управления
,,, Z1 | * »s^-4— Рисунок4.46
епекоытия общих линий 1.3,5 мевду тор-
Заглушки NSC применяются Д™ п«^* монтажа или между двумя пли-
Цевой плитой и модулем плиты для батаре ных рабочих давлениях,
тами для батарейного монтажа, напримерMP <<Midi.pneurnat,c>> <«ft*w>)
При батарейном монтаже P-^«f^ (б), пример единения которых
(Рисунок 4.47,а), используется к0М"^нГм шестигра.»шком, внутренний „а-
пок4н на (в). Стяжной болт 4 с «^^ „ля соединения двух любых со
РУжной резьбой одного диаметра, пре
Глава IV
Электропневмораспределители
А
Штеккерные розетки с LED-индика- Тип AW-ME-Ve Тип AW-VL-1/e,
цией вкл /выкл.
Односторонний
5/3 - распределитель
Двусторонний
Заглушка
>>,
а
&
Стяжной Х"*
болт
5/3 - распределитель
TotZP-ME-Vb-..
i«1
ц
i
ТипЕР-ME-Vb
Концевая плита у^
/с резьбовыми отв.
Заглушка
Тип PRMEB-5
Ф*
Заглушка
Тип СРЕ10 10-PRSB
Тип СРЕ10 10-PRSE-1
TnnCPE1010-PRSE-2
Г
TMnCPE1010-PRSG-2
229
Концевая плита с отверстием4
под стяжной болт (глухая)
а)
б)
Переходник (штуцер)
Тип СРЕ10 10-PRS-EP/ZP
1 - набор торцовых плит типЕР-МЕ-1/8
2 - плита основная тип AW-ME 1/8
3 - заглушка, тел PRMEB-5
4 - винт для соединения основных плит
с торцовыми плитами
5 - плита промежуточная тип2Р-МЕ-1лЭ
6 - дополнительное отверстие питания 1
может быть выполнено в этом глухом
отверстии
7 - направление для отдельной зоны
давления для типа ZP-ME-1/8-Z
8 плита основная naiAWVL-lrtl для
распределителей с пневмоуправлением £
21,75
Рисунок 4.47
При нормированном монтаже плит типов AW-ME-l/8 и AW-VL-l/8 (для
распределителей с пневмоуправлением) должна быть выдержана следующая
последовательность монтажа:
1. Торцовая плита с подводом питания.
2. Плита основная для монтажа распределителей с электроуправлением.
3. Плита основная для монтажа распределителей с пневмоуправлением.
4. Торцовая плита со стяжным винтом.
Элементы крепления
(защелки)
б)
рисунок 4.48
^Ч Глава IV
-•м * ШтШЫ i ■»■—■* ■■*■ .»■■ - ... I,- и,, — —
Промежуточная плита типа ZP-ME-1/8-P снабжена дополнительным
отверстием ия по 1вода воздуха (Р-присоединение) и устанавливается для увеличения
расхода Промежуточная плита типа ZP-ME-1/8-Z с отдельным Р-присоединением
•устанавливается для питания различных зон давления. Отдельная зона давления
показана на (в) позицией 7
Батарейный монтаж «Сотрас1-Регпэгтапсе»-распределителей (рисунок
4.48.а) осуществляется с помощью набора плит, переходников (штуцеров) и
элементов крепления (защелок), входящих в комплект поставки (б). Пример
возможной комбинации распределителей, монтажных плит и вспомогательных элементов
приведен на (в). Размерные параметры элементов монтажа для распределителей
типа СРЕЮ-М1Н-... даны на рисунке 4.49.
1 Ппит» для г . - . . елей и присоединения 4 Торцовая плита типа CPE10-PRS-EP/ZP 8 Зажимной винт для монтажной шины
питания типа CPE10-PRSG-2 5 Крепежное отверстие е 3.3 mm 9 Место для таблички, iBS 6x10
2 Плита пли \ распределителя типа CPE1WRSE-1 6 Крышиа-мглушкатипаСРЕЮ-PRSB 10 Элемент крепления
3 Плита для 2 -- • пей 7 Монтажная шина для крепления по DIN 11 Задвижка
типа CPE1WRSE-2 en S0022 12 Повители
Рисунок 4.49
Для установки распределителей с резьбой М7, в отверстия R(5) и S(3)
предварительно ввинчиваются переходники (штуцеры) с внутренним шестигранником
под ключ, имеющие специальную кольцевую канавку под задвижку 11 вилочного
типа, удерживающую распределитель от выпадания. Центральное отверстие
распределителя Р(1) используется для его центрирования относительно
цилиндрического полого ловителя 12 на каждом модуле платы для батарейного монтажа.
При больших длинах батареи распределителей, с целью придания ей большей
жесткости, используется монтажная Н-шина по DIN EN50022, закрепление
батареи на которой осуществляется с помощью винтов 8. При небольших размерах
батареи закрепление на технологическом оборудовании производится с помощью
специальных лапок с отверстиями 5.
4.4. Блочный монтаж распределителей
В отличие от батарейного монтажа на одной плите блочного монтажа в
зависимости от исполнения можно устанавливать от 2 до 10 распределителей (рисунок
.50,а). Плиты имеют общее отверстие питания Р(1) и общие отверстия выхлопа
каналов R(5) и S(3), а также общие отверстия выхлопа из линий управления, что
Электропневмораспределитрпи
231
позволяет, в первую очередь, значительн
коммуникаций. ° УМеньшить длины пневматических
Для миниатюрных распределитепей
пользуются плиты пяти типоразмеров (ри™ ^I^atic. («Fes*»>
недруга количеством устанавливаемых ^^L^J^TT^ W °T
поставки которых входят заглушки (в, л ™ „J, елеи (от 2 Д° 10). в комплект
на рисунке 4.50,г. Ш"" яля «"много монтажа даны
Типы PRS-ME-1/8-2
PRS-ME-1/8-»
PRS-ME-l/8-в
PRS-WE-1/8-8
PRS-ME-1/8-10
Тип PRB
а)
>J5
el В)
:zz
^-*:
h&=4*=&
¥-■*-—-.►-■•- •
L..1-X..X-
тф-Ф~ф-
£ | ~1 Т"
Тип
PRS-ME-V,-2
PRS-ME-V,-4
PRS-ME-Va-в
PRS-ME-'/,-8
PRS-ME-V.-10
L,.MM
56
S2
126
164
200
U.mm
46
82
116
154
190
S3£%* "»ЙД5м «M****»
MEH-ME'rP *££%.,£>*
Рисунок 4 50
П1ЬТпип
- В ояда серии «Tiger 2000» исполь-
Для блочного монтажа распредели^* i> ^ плиты (рисунок 4 5Ш
зуютсТр-планка с общим питанием (Р*^ к'оторые ^ет уст—ться в
При использовании Р-планок ™"*?£m„5/3 V^^^^Z^Z'-
зависимости от модификации от 2 до 1^ ^^ поставки для каждого при
Ра которых приведена на рисунке .
:,c
Глава IV
Тип
PAL-l/4- 2-B
PAL-l/4- 4-В
PAL-l/4- 6-B
PAL-l/4- 8-B
PAL 1/4-10-B
и.
мм
73
!39
205
271
337
и.
мм
10!
167
233
299
365
L,. I
187
253
119
385
в)
Рисунок 4.51
MFH-5/3E-I/4-B
MFH-5/3B-I/4-B
MVH-5/3G-I/4-B
MVH-5/3E-I/4-B
MVH-5/3B-I/4-B
JMFH-5-I/4-B
JMVH-5-I/4-B
I 4 Птоехоп-чй HHi^^pqp— ■ .
соединения (распределителя) входят- ниппелТТ^
глушка с уплотнительным кольцом; крышка Уплотнительным кольцом; за-
При использовании плит типа PRS наДЛЯ "ерекрытия свободного места,
до 10 5/2 или 5/3-распределителей, номёнкла°Т°РЫе М°ЖеТ Устанавли»аться от 2
4_52,в, в комплект поставки входит крышка (^Р& КОТОрых приведена на рисунке
го места. Плита имеет общее отверстие питани^Т^ W* пеРекРытия свободно-
щие отверстия выхлопа из линий управления П ИС 0твеРс™я выхлопа и об-
двух сторон. • иРИсоединение к ним возможно с
ft r*firvuv rnvuaaY парппйпл
ДВуХ СТОрОН. - -^i.vnnc к НИМ ВОЗМОЖНи v
В обоих случаях распределители привинчияя
гами М5х75. Благодаря этому возможна nrw~? °Я К планке и плите двумя
о иииил ^.учо*л распределители привинчу
винтами М5х75. Благодаря этому возможна nDo Ся к планке и плите двумя
телей. Для предотвращения утечек воздуха в выТ** " бЫстрая смена распредели-
выхлопа укладываются фасонные уплотнения °ЧКИ В0КРУГ отверстий питания и
Плита
Л
--*■
%
р*
* 1
9-
J
' И
4 -; к'I
л . '
Распределители
Заглушка
Рисунок 4.52 П^сГ^Ре^Тмогут быть блочно смонтиро-
Распределители серии «Туег Uas отверстием питания (рисунок
ваны либо на PAL-монтажных™™£ монтажа с общим отверстием питания и
4 53 либо на PRS-плитах Додаете к которым возможно с обеих сторон
обшим отверстием выхлопа, присоед может быть устан0влено от 2
оощим отверг 1" и а Планках, и и распреде-
(торцов) (рисунок 4.54). J^ дИНИтельнои резьбой 1/8 или 1/4 . .эти Р* £**
до 6 распределителей с при*"» ^.ми болтами (рисунки 4.53, 4.54,6, в).
ZtlT^a^^^l^Z закрыты на PAL-планках колпачковыми
Свободнее места (болты) м^ (ками) Через ^ьбовые присоеди-
гаТкГи а на PRS-плитах^ ^" ^лям подавать другое давление или среду
ненГможно к агдв^Йииицшв-о™ из анодированного алюминия,
(инертный газ). Планка и
чч
Глава IV
\
1 Тип
PAL-5-V4-2
PAL-5-V4-4
| PAL-5-V4-6
Li,mm
72
136
200
L2,mm
100
164
228
l-3,MM
120
184
248
Ц.мм
94
158
222
На эти планки можно монтировать следующие типы распределителей "FESTO" :
MFH-3-V4 MFH-5-V4 JH-5-V4 JMFDH-5-V4
MFH-3-V4-S MFH-5-V4-S JDH-5-V4
VUO-3-1/4 VL-5-V4 JMFH-5-V4
Рисунок 4.53
Для миниатюрных 3/2-распределителей серии «Micro-Pneumatic» («Festo»)
используются плиты блочного монтажа типа PRMZ-3-M3-... (рисунок 4.55,а,б) на
которых в зависимости от исполнения можно установить от 2 до 10
распределителей. Плиты имеют общее отверстие питания и общее отверстие выхлопа. Размеры
плит приведены на (в). Диаметр отверстия питания Р(1) — МЗ, отверстия выхлопа
— М5, отверстия выхлопа из линии управления — М5.
Для монтажа 3/2, 5/2 и 5/3-распределителей этой же серии предназначены
монтажные плиты общий вид которых (б) и размеры (в) приведены на рисунке
4.56. Как и в предыдущей конструкции, плиты имеют отверстие выхлопа каналов
R(5) и S(3), а также общие отверстия выхлопа из линии управления (82 и 84).
Выходные отверстия МЗ находятся на распределителях. Свободные места
перекрываются заглушками 1 THnaPRMZB-5. Материал плит — алюминий.
Электропневмораспределители
235
PRS-плита
Линия
питания ж
Глушители
в линиях выхлопа
:•;•'••
а)
• 1,
б)
1 Пустоте/ъл винт
тип VT-'A-PRS
2 возможен монтаж
следующих типов
MFH-5-V»
VL-5-Vj
JH-5-V4
JDH-5-V»
JMFH-5-V4
JMFDH-5-V.
з Крышей распределителей
можно повернуть нв 180"
Тип
PRS-V4-2
PRS-V*-4
Li мм
90
152.5
PRS-V4-2 |215.5
1-2.мм|гЗес,кг
75,е
1зе.б
0,59
0.9
201.4 j 1.23
Рисунок 4.54
а)
%
\ - I
б)
J Тип ^
PRMZ-3-HW
PRMZ-J-M3-4
PRM2-3-M3-6
PRM2-3-M3-8
PRMZ-3-M3-10
Lt.MM
32.5
53,5
74.5
Lj.mm
27.5
48.5
69,5 ]
95.5 90.5 j
116,5
111,5 |
Bec«r
002
003
0045
006
0.0751
1 Тип MZH-3-0.4-K
» Тип MZH-3-0.4-LED
з Заглушка
1 (Р) - отверстие питания
2 (А) - рабочее или выходное •
3 (R) - отверстие выхлопа
Рисунок 4.5!>
в)
I Щ*а 1\
:*
6>
* Ui l^a iA
*>J Kk ^k! ^k ! '
4.5. Распределители с пропорциональным управлением
Необходимость использования в системах электропневмоавтоматнкн распре-
тителей с пропорциональным управлением (РПУ) вызвана требованиями
повышения качества и точности реализуемых техпроцессов, гибкости технологических
сметем, надежности, уровня автоматизации. Использование в составе систем
управления персональных ЭВМ и свободно программируемых контроллеров
<СПК) вызывает необходимость расширения функциональных возможностей
элементов хтектропневмоавтоматики. т.е. повышение их «интеллектуальности».
Интенсификация работы технологического оборудования приводит к увели-
• силовых нагрузок и вибрациям его элементов. Благодаря регулированию
уменьшается износ, так как оптимизируются механические нагрузки.
На рису икс 4.57 представлены общ,1Й BHJ , яу „
ные размеры (в) 2/2 — пропорционального г*гГ включения ф) и габарнт-
6-010-В. имеющего следующие характере™ ,Я1Ч>ра лаа1ен»« типа МРРЕ-3 Щ-
0...0.6 \1Па. давление пшшиа — 08 МПа диал!ион входных давлении —
(постоянное); потребляемая Мощность — ' "а^рвЖение питания — 24 В + 25%
сигнала — 0... 10 В (постоянное) или 4 -*\ s 3адаваемое значение входного
0...60Т; вес — 0.65 кг. тип защиты - IPM Rr ТСМЛерапРа Р860^» СР™* -
на возможность подключения внешнего датчиТ^™"" дагчика "Р^^^тре-
неудоатетворнте.ьном качестве регут„ров^„яТ^Г^" ^ '"*" т
Зависимость давления на выходе (канят ->\ ™ ™„,
казана на рису нке 4.57,. расходныеТаГ^ГТн^Г" ^"^^ "*
Подключение PHV к элементам утфавления осуществляется с помощью
задающего шести секционного цифро-аналогового преобразующего модуля (п^н
4.57.е.ж) типа MPZ-.-24 (SGH-6SW). спос™„оГО1^^^
мых аналоговых значении управляющих напряжений для РПУ типов МРРЕ- и
MPYE-5-1/8. Модуль подает на выход заданные значения напряжения от 0 до
10 В. Напряжение на шести выходах (SP1-SP6). снабженных индикаторами
рабочего состояния 5. настраиваются отдельно для каждого выхода десяти
оборотными потенциометрами 3 н активизируются соответствующими дискретными
управляющими сигналами.
} етанавлнвлечые значения напряжения иа выходах являются
последовательно приоритетными: значение первой линии имеет высший приоритет, значение
шестой — низший. Если о ал гствуюг сигналы активизации линий 1—б то на
выход подается сигнал от внешнего задатчика. Ятя установки значения внешнего
сигнала должен быть подключен потенциометр 2.5 кОм < R < 10 кОм
Задающий модуль имеет следующие характеристики: рабочее напряжение —
20...30 В постоянного тока: напряжение на выходе — 0...I0 В. ток выхода — 5
м \; потребляемая мощность — 1.5 Вт при 24 В рабочего яжения; выход для
питания от задатчика — 10 В ± 3%. 6 чА: сигнал от внешнего задатчика — 0...I0
В: входное сопротивление внешних задающих входов -- < 100 кОм: входное
сопротивление линии управления - < 3 кОм: температура окружающей спелы -
0.. .60Т: вес — 0.14 кг: степень защиты — 1Р20 (D1N 400.4))
Модуль может монтироваться на n и G-шннах (поз.1. 2). Состояние включе-
ння показывает индикатор 4. __ д.
На рисунке 4.58 представлены общий в,и (а), мнемонич*:кая схема^ оО и
используемого в составе сервопневмати^"^» Д^ с
теряющегося простотой управления. ^Н0М,^Х^" Свободному рпче-
механическнм приводом. ^^ ^^^ ^ш^^Р п сшг,^ т^
шенню его составляющих, таких как инеи. помощью которого органи-
рення перемещений (датчик линейных перемчт
зуется обратная связь). «Ьильгрованный сжатый воздух обо-
Распределнтель использует 5 мкм ог?> *^ чправление н встреченный
гащенный или без обогащения маслом. н"^*д_6 мм: расход — ТОО л^ин ±
регулятор положения золотника: условныйinpv w|r, „,„»„,« — 24 В ± 2>
* Ю*: допуспгмое входное давление — »» «^ , Вт в среднем положении золотим
постоянного тока: потребляемая мотнуть " величин: напряжение —
ка при U„=5 В (рисунок 4.58.D: ^^^«^иие- Д» Ом (упра*-
0...I0 В. постоянноеГток -4...20 м* »*%££ 20. *>* « при максимаь-
лен„е током): предельная частота при ™*£ _4>: ыС- „«креме -Л«*~'
ном итленнн -120 Гц: время l**»»*^- рабочее «»"-fГ *
при максимальном ходе золотника: тема <**• . ^ дШтЫ _ иъ.
пускается конпеншпня жидкое™1, D
Глава IV
М16х0.75,
•X.
9
I ! I
■в I
2Л
U/
18,8
60,2
ш
J
4,5
h i -A-
I v^
1
.
129,1
F
Труб. 1/8"
И
62
В)
О
й__I 2 3 4 5 6 тТТГ0
' '- ,в—-
Д)
200 400 600 800 1000 1200
- Расход, л/мин _
T~r^NW~in
Чг^мш^п
Рисунок 4.57
ж)
■Электропневмораспределители
Л
а)
И
чщтен
5VIV3
1
та<*^
б)
Uw
Ф
1 700
600
1 500
I 400
I 300
а 200
100
ч
—
!/
Кошроллер
позиционирования
24 V
0 1 23456789 10
Напряжение управления, V **
г)
24
Пвевыопилиндр 1
MPYE-5-1/B
Система измерения
перемещений
Рисунок 4.58
Д>
С помощью пропорционального распределителя может быть осуществлено
бесступенчатое регулирование скорости штока пневмоцилиндра. Совместно с
контроллером позиционирования (например, SPC 200) реализуется точная пнев-
матическая система позиционирования. ,Яг1/1[1Ц> Г941 _па
Электпппнеяматический преобразователь компании SMC (Япония) [24]. типа
ITV iS^lZZZmT^Z), имеющий шесть модификаций, состоит из рабо-
V 2000—3000 (рисунок «v. п распределителей 4изс электро-
тающих в паре ™-™^££^ с камерой управления 7, в которой рас-
магнитным управлением (б), соедини ^^ f ^^ посредсгаом штока с
положена мембрана 3, связанн^ и ^„аном выхлопа 2. Выходной рабочий
клапаном 1 подачи Давления пит ^ ^ ^^ соединен с камерой> расп0ло-
канал регулятора В (2) п0 *а"ат^иком давления 6, сигнал с которого поступает в
женной под мембраной 5, и с д ^.^^ напряжение питания, электрический
блок управления. На него ж иск^тый СИГнал. Блок управления снабжен дис-
управляющий анал0Г0ВЫИп,е^на выходе преобразователя,
плеем, показывающим давл^ приведена на рисунке 4.59,в.
Блок-схема преобразо ^^^ сигнал увеличивается, впускной распредели-
Когда входной УправЛ*ой 5 — выключается. Давление питания через впуск-
тель 4 включается, а выпус* ет в камеру управления 7 и действует на мембрану 3
ной распределитель 4 пос^ через канал обратной связи на мембрану действует
сверху. Одновременно сн, ователя В (2). Под действием возрастающего давле-
давление на выходе пр мембрана з перемещает шток вниз, открьшает клапан 1
ния управления свеР 1ВВЯ пропорциональное увеличение давления на выходе
подачи давления, вы каналу обратной связи поступает в камеру под мем-
В (2). Выходное Дввлени
МО Глава IV
Указатель давления
Напряжение питания
Входной сигнал
X
Выходной электрический
сигнал
»1п.
i*
а)
Входной
управляет»** -
сигнал
Давление питания
I
Блок управления
Of
Впускной клапан
Выпускной клапан —'
' *-*■ Мембрана
Главный клапан
Датчик давления ■*■
Выходное
давление
в)
Рисунок 4.59
браной и к датчику давления 6. После преобразования этот сигнал проходит в
блок управления, где сравнивается с входным электрическим сигналом.
Таким образом, перемещение мембраны 3 вниз, а вместе с этим и увеличение
выходного давления, будет происходить до тех пор, пока мембрана не
уравновесится под действием на нее давления сверху и снизу, и сигнал рассогласования в
блоке управления между входным управляющим сигналом и сигналом обратной
связи не станет равным нулю.
При уменьшении входного управляющего электрического сигнала
происходит включение распределителя 5 и выключение 4. В результате камера
управления 7 через выпускной клапан 5 соединяется с атмосферой и давление в ней
падает. Под действием пружины 8 клапан 1 закрывается, а клапан 2 открывается,
соединяя рабочий канал В (2) преобразователя с выхлопом S(3), в результате чего
давление на выходе уменьшается пропорционально уменьшению входного
управляющего сигнала.
На рисунке 4.60,а даны габаритные и присоединительные размеры
преобразователя, а на (б) — рабочие характеристики.
Электропневмораспределитр г.ч
М12Х1
Линейность
И6
f 0,5
I"
/
/
/
/
г
3 25 50 75 100
Входной сигнал
от полного диапазона регулированы)!
Характеристика давления
?1,0
0.5
0
,з,
|-1.о;
Давление не выходе 0.2 ЬПа ^
Стартовая
точия
I
'0.2 0,4 0.6 0,8
Дшлеяяс ва входе (МП«)
б)
Рисунок 4.60
Г iana IV
Технические характеристики ITV 2010 рабочая среда — 5 мкм отфильтро-
мяный сжатый воздух с содержанием Macia не более 1 мг/м\ диапаюн
регулирования — 0,005 0,5 МЛа, номинальный расход воздуха — 1150 л/мин;
минимальное рабочее давление на выходе — 0,1 МПа, максимальное рабочее давление —
1.0 МП* напряжение питания — 24 В ± 10% постоянною тока, входной сигнал
аналоговое управление по току — 0 20 мА, по напряжению — 0 10 В,
дискретное управление — 4 точки, выходной сигнал аналоговый выход — 1.. 5 В,
гистерезис — S 0,5 % от потного диапазона регулирования, чувствительность — й 0,2
* от потного диапазона регулирования, вес — 0,35 кг, степень зашиты — IP65.
Наличие в известных конструкциях пропорциональных распределителей
(клапанов) упругих элементов (пружин; снижает их быстродействие, ухудшает
линейность рабочей характеристики и приводит к увеличению габаритов.
Представленный на рисунке 4 61
малогабаритный пропорциональный
электродинамический клапан характеризуется
отсутствием упругих элементов Он состоит из корпуса
4 с центральной втулкой 3, служащей
направляющей для полого тонкостенного штока
2, образующих золотниковую пару с ради-
альным зазором 0,003 мм, превращающуюся
в аэростатическую опору при поступлении
сжатого воздуха в радиальный зазор.
К одному концу штока с помощью планки 5
прикреплена катушка 6, охваченная магнитопро-
водом 7, 8, внутри которого размещен постоян-
в^-пп. л 6i ныи магнит большой мощности 9, а другой
свободный конец выходит в полость крышки 1 с
отверстием R для выхлопа воздуха в атмосферу.
За счет разиости диаметров D\ и D2 направляющих поясков <Dt > Dt) масса
штока с катушкой уравновешивается усилием, создаваемым давлением воздуха,
поступающим в позость В втул и 3.
Подача напряжения на катушку 6 приводит к втягиванию штока внутрь
втулки и открытию доступа сжатого воздуха из каната Р к каналу А, связанному с
исполнительным механизмом технологического оборудования.
Увеличение давления на выходе А приводит к возрастанию усилия,
действующего из верхний коней штока диаметром Д, выбывая тем самым его подъем и
перекрытие нижним концом диаметром D2 прохода воздуха от канала Р к каналу А.
Уменьшение давления вызывает опускание штока под действием усилия, создаваемого ллек-
•« . > ическим приводом, • • • ным постоянным магнитом и катушкой.
Точность поддержания заданной величины давления на выходе
обеспечивается отсутствием трения в паре шток — втулка, а также линейным характером
зависимости усилия ■> гектродинамического привода от подаваемого напряжения.
4,6 Ня вмоостроьа
Писаиоостркв — по многофункциональное перепрограммируемое мо-
ьиое управляющее устройство, представляющее собой совокупность
элементов пневмоавтоматики и электроники, имеющее встроенные коммутационные
пяе тические и э гастрические многоканальные соединения, предназначенное
решения задач автоматизации
ни* интеллектуальной пневмоавтоматики предусматривает включение в
(гоемоостровоя встраиваемых свободно программируемых конгроллеров
(CJI ) < чиы фирм в том числе Ferto и Siemens.
Тра ишиоииое сое гниение ш гангов как „^
соединения имеют так достаточно бо гышТ »«"«er ««or места,
тетральной техники, к которой относятся пн вРе%М' Пр°Х Лени сигнала у ии-
прохож гения сигнала существенно меньшеT^JP0M ****»**»**»» Ч*"
резких перегибов (изломов; в местах соединеий "^ °Н,Иб°К *0М Уиикаш*
ног о отсоединения ш гаш в, так как все км.^ " *Гй'ОЖиости самопроизволь-
моитажиые агаты, имеюнгие общий пои™^ZOU™™Т™"™"* "***»» в
Послезнее обегояте гьство позвог^ет иЗьзо^ IL^^ Имии "*"»
ные выхлопные пневмсфи.гьтрГ^поГшаГГ **ш"ми« "ntjwn»«.
wYr,.,0,HMt что повышает экологичностъ venmum Ил «п.
не», опасность несанкционированного вмешательства в c^cSSS
Ииевмооегрова характеризуются мнстовариантносп^Гпо^е^Г
Так, например, пневмоострова Festo имеют следующие исполнения
1 Пневмоострова с однополюсным электрическим разъемом Грисунок 462,
работающие независимо от типа контро ьтера и подключающиеся с гюмошью cnL
циальиог о кабеля Благодаря этому реализуется зашита от переполюсовки
CPV-fwee-oocrpo. тип Ю СР рое т С О . ,и1)
ч .
*
\*
^
Рисунок 4 62
2. Пневмоострова с многопотюсиым электрическим разъемом {рисунок 4 63;
к которым управ гяюшие сигналы от контроглера передаются по многожильному
кабелю, что сокращает расходы при монта/ке.
СРУпиевиоостров тип » СРА-лиевмоостро» г в ирммевиооетров
7.
Мп-пневноостров
и^Касимамоострм г* 03
#///
,»V
.'/ #'
*\ Л'*
T<ger гмввмоостров гио 02 вез
электрических входов
Т,мг лкеыюоетро* тж 02 с зпш-
рХккмм tun»****0!*"
, , . тип МЛ
W»
Рясутю*
463
Я4
Глава IV
3, Инеамоосгрова с разъемами для \8-ннтерфенса (рисунок 4.64),
особенностью которого является одновременная пере \ача данных н питания но
2 *c»ubHov\ каоспо. Благодаря оиретеченноп форме мое 1я исключается
возможность перено посовки Носко 1ьк\ в аварийной сшулцин распределители дотжнм
ооесточнты.я, они имею! специальный вход иииння чтя кабеля. На каждый
остров в АЬ-ннтсрфеисе выдешегся 4 адреса. Потому одни пневмоосфов может
сотержать 4 моностаон 1ьны\ 5/2-раепре \е нпеля и ш 2 любых распределителя с 2
кагхшкалш каждый.
CPV пнеамоострое тщ » GPA пнеамоострое тип 12 kWMaxt-пневмоостров тип 03
• »'
Рисунок Л.Ы
4. Пневмооетрова с разъемами Feldbus (.рисунок 4.65), предназначенные для
потключения к узлам Feldbus и к блокам управления, позволяющие осуществлять
децентрализованное подключение модулей ввода/вывода. Может быть
подключено четыре блока с 16 входами и 16 выходами каждый. Кабель сети осуществляет
передачу данных и напряжения питания.
CPV-пиевмоостров тип Ю СРА-пневмооетров тип 12 МкУМахнпнввмоостров тип 03
'-' : I
Tioet-пиввмоостров тип 02 без
электрических входов
Тюег-пневмоостров тип 02 с
электрическими входами/выходами
ISO-пневмоостров тип 04В
т*
к
Ml
а
Рисунок 4.65
5. Пневмооетрова со встроенным контроллером (рисунок 4.66).
предназначенные для самостоятельного решения задач по замкнутому цикловому или
гибкому управлению модулями Минимальное число модулей входов и
электрических выходов не должно превышать 12.
МоУМщ-пнммоостров тип 03 Гкму-пневиоостров тип 02 с элект- ISO-пневмоостров тип 04В
рическими входами! выходами
I
J1 ti*£ji&
— «Г
№*
Рисунок 4.66
4.6.1. Пневмооетрова е однополоеным присоединением
К данному нсио шению относятся пмрп».л
4.б7а.б. 4.68). отнимающиеся J^^Z?**0" ТИПа ,а 12 " 14 «Р"™ж
„а распретстителей) ^ "^ равным 10- «2 "ли 14 мы (шири-
Пневмоосгрова типа .0 (рисунок 4.67. а) оттичак™ повышенным
номинальным расходом по отношению к его габаритам Количество ^делите.^
ГРУ m vTITm,4'^ ПР"ВеДеНЫ ГабарКГНЫС РаЗМСрЫ ""^оосгрова модификации
CPV10-VI-4 (М.сго). в составе которого могут быть нею «домны Compact Per-
Гогтапсе-распред^ители 3 типов с условным проходом 4 мм. рабочим давлением
0.2...0.8 МПа и номинальным расходом 400 л/мин- 3/2-распределитети типа
CPV10-MIH-3: 5/2-раепредечители моностабитьные типа CPV10-MIH-5L; V2-
распределители бнстаб»пьные типа CPV10-M1H-5J; ^-распределители бнета-
бильные с монтажной шириной 18 мм.
Создание различных зон давления обеспечивается путем итановки
разделительных плит (рисунок 4.67.6). Резервирование свободных позиций
осуществляется плитами-заглушками, вместо которых могут быть установлены распределители,
реле или разделительная плита. Все распределители имеют вспомогательное
фиксируемое или нефикенруемое ручное управление. Распределители используют
давление управления, сжатый воздух для которого подается либо из чинии
питания, либо отдельно. Подача давления осуществляется через дев\ю. правую или
при необходимости через две торцовые плиты. Также может использоваться
многоканальный пневморазъем, но в этом случае число распределителей должно быть
четным. В случае внутреннего давления управления торцовые плиты не содержат
дополнительных разъемов. Подача внешнего сжатого воздуха необходима прн
давлении питания меньше 0.3 МПа.
Пневмооетрова данного типа могут содержать многообразные сочетания
различных пневмораспределителей и электрических реле.
Простота монтажа и обслуживания достигается благодаря съемным ннфоры*
ционным табличкам и светонндикаиии состояния распределителей и рае
Кроме однополюсных электрических разъемов передача УЧ»"»^
сигналов к катушкам электромагнитов распределителей возможна с пюоыо мн*.о-
полюсных разъемов, разъемов Feldbus и AS-интерфеиса (рисунок4.6^
плита
t
1S
Плита
Плита реле
в
PHvyw**6*
24t>
Глава IV
'-Пазы для крепления
- • • • тзбличех
-. разъем
з Панель для информационных
табличек
' Правая • •: • плита
Рисунок 4.68
5 Левая торцовая плита
1- Однополюсный разъем
2 - Многополюсный разъем
3 - Разъем Feldbus
4 - Разъем для AS-интерфейса
5-Т« • •;. - плита
6 - Пакет распределителей
7 - Многоканальный пневматический
разъем
8 - Одноканальный пневматический
разъем типа QS 2
У
*г^ ^
^■6
Рисунок 4.69
Электропневмораспределитр пч
4.6.2. Пневмоострова с многополюснк.м „
,юсным соединением
К данному исполнению пневмп™-™„
сунке 4.63. пневмоостровов относятся типы, приведенные на ри-
В качестве примера, на рисунке 4 70 к
СРА-10 на базе Compact Performance оасп "РеДСТавлен пневмоостров типа 12
тажным шагом 10 или 14 мм и номиняткЛ, Н™" Различных типов с мон-
ветственно. Пневмоостров можГсоГрж^ Т"*" *° ^ 65° ^ ^
имеющих ручное дублирование пилотное Распределителей (от 2 до 22),
сти от типа право/концевой ^^^Ж У"РМ "' В ~
подвод воздуха управления. Если давление пита1яГ^п^ННИИ "ЛИ ШеШШй
ет 0,3...0,8 МПа, то его можно испГзоватГлГСРА-ПНевмоостР°ва««геи-
управления. Если давление питани^^^^^^
обходим дополнительный подвод воздуха управления.
93+(п х 10.5)
Рясунож4 70
зон давления, которые фор-
Пневмоостров может иметь несколько различных зон давления, которые
формируются с помощью монтажных плат с заглушками. Это тяоя^^^
Различные усилия на штоках пневмоцилиндров, «W«"™^
Давления и вакуума, возможность Д™»~££3 ^Гь^ТесГ
сжатого воздуха, возможность деаэрации (отвода воздух
(Рисунок 4.71). _ „™„ествляется плитами-заглушками.
Резервирование свободных позиции °^\ пониженного давления от
СРА-острова могут работать в режиме вакуума или по
-°.09 до +0,3 МПа в следующих случаях:
1 • Давление питания подается раздельно.
или
^.w до +и,л МПа в следующих случала
1 • Давление питания подается раЗДМЬ"°стабильные 5/2-распределители
2. Используются моностабильные и о
^-распределители. многополюсными разъемами анало-
Пневматическая часть пневмоостровов с
"^чна варианту с индивидуальными разъемам . ^^ концевой плите (рисунок
. Электрическая часть отличается тем,jno енне которого с распре-
4-70,а)
закреплен Multipol-разъем (мг-
Глава IV
помол» еоздай-
Приняв использования «ели • овном пшюте
ттвмораспраделвтелей действуют дм
Пример использования ясли только един
гтиеямораспределитель работает на другом
давлении
Пример использования, если требуется
выпустить воздух в двух разных местах
Дополнительная секция
/деаэрации (отеода еоздуха)
Леем
сторона
1
■Т-т—1
лг=з—
_
rf-
..
_
»ш
Ji£p
J
Правая
сторона
секция деаэрации
Пример использования, если дополнительно
требуется выпустить воздух только из одного
пнеяморэспределителя
Рисунок 4.71
Перемычка
ь^У.
Распределитель
Блок . ..
тельных «онтактоа
I
разъемов
Рисунок 4 72
делителями
осуществляется последовательными
электрическими
контактами и перемычками.
В состав перемычек
входят световые
индикаторы, приспособления
для ручного
дублирования, разъемы катушек
распределителей и
зажимы для маркировочных
табличек (рисунок 4.72).
ISO-пневмоостров
(исполнение 3) на базе
распределителей 5 с
монтажными плитами 3 для
батарейного монтажа,
представленный на
рисунке 4.72, может
содержать максимально
14 распределителей 1, 2 и
3 типоразмеров с
электроуправлением.
^!£1Р£П!1?511£Р5£пр^?делители
Разделительная
шайба (заглушеа)
Рисунок 4.73
управлением. Электрические контакты электромагнитов,
размещенных в промежуточных плитах, соединены внутри с
многополюсным разъемом 1 через промежуточную плиту для
подвода воздуха 2.
Для использования вспомогательного давления питания
необходимо переставить две перемычки на промежуточной
плите 4. Источником давления управления может служить как
основная линия питания, так и внешнее вспомогательное
давление, которое также необходимо использовать, если основное давление питания
меньше 0,3 МПа или больше 0,8 МПа.
Создание зон различного давления на одном пневмоострове возможно,
благодаря установке разделительной шайбы между двумя монтажными плитами
(рисунок 4 73 б) которая вставляется в отверстие питания с правой стороны. Подача
и отвод воздуха в этом случае осуществляются слева через промежуточную плиту
(адаптер) 2, расположенную между монтажной плитой и узлом многополюсного
разъема 1. а также через правую торцовую плиту 9. В ряде случаев
разделительные шайбы используются для разделения каналов отвода воздуха 3 и 5 (рисунок
4'71Плита дросселей 6 предназначена для регулирования выхлопа в каналах 5(R)
и 3(S) плита 7с регулятором давления - для регулирования дарения в каналах
4(a? o,m AfZ? I; канале 2(B) и в канале 1(Р). Свободные (резервные)
чуА) и 2(B), в канале 4(A), в канале £\и,
монтажные плиты закрываются заглушками 8.
i Глава IV
ч. .._t t i . . t _ — '" ' -
Данное исполнение не позволяет использовать отдельные электрические
входы Тип защиты — IP65 Монтажный шаг распределителей — 43, 58,7 и 72 мм.
Тшш распределителей, на базе которых может состоять пневмоостров: моно —
или бистабнльные 5/2 5/3-распредетители с расходом 1200, 2300,4500 л/мин
4.6.3. Пневчоострова с AS-интерфейсом
Протокол AS-интерфейс (AS-Interface) предназначен для экономичного
объединения цифровых датчиков и исполнительных устройств на сетевом уровне с
минимумом затрат.
Основные преимущества AS-интерфейса (ASI):
— только один кабель для передачи сигналов и питания;
— быстрый монтаж с использованием прокалывания специального плоского
двужильного кабеля, сечение которого не допускает переполюсовки;
— отсутствие лишних разъемов, клеммных коробок; нет необходимости в
разделке кабелей;
— нет необходимости в модулях ввода/вывода контроллера;
— минимальная длина пневматических линий с высоким быстродействием;
— минимальные затраты для монтажа отдельных распределителей и
небольших групп распределителей;
— возможность значительного удаления управляемых распределителей и
датчиков;
— соответствие общепризнанному международному стандарту AS-
International (Association);
— стандартизованный протокол передачи;
— отсутствие необходимости в специальном программном обеспечении;
— быстрый обмен данных с временем опроса менее 5 мс.
Структура сети ASI представлена на рисунке 4.74,а. Ведущий модуль ASI (б)
устанавливается наряду с модулями ввода/вывода на Midi/Maxi — и ISO-
пневмоостровах типов 04 и 05(в). Он обеспечивает связь между сетью ASI и
пневмоостровами и является начальной точкой.
К ведущему (Master) модулю может быть подключено до 124 периферийных
(ведомых) устройств (модулей) (рисунок 4.74, в):
1. Сетевые разъемы, обеспечивающие подключение отдельных
распределителей к ASI. К ним также подключаются датчики с помощью специальных кабелей.
2. Модули ввода/вывода (Е/А — модули) типа ASI-4E-B, предназначенные
для непосредственного подключения и электроснабжения датчиков, имеющие
следующие характеристики: 4 входа для плоского кабеля; напряжение питания —
26.5 ..31,6 В; потребляемый ток — max 200 мА; максимальный ток нагрузки для
каждого выхода — 200 мА; напряжение дополнительного питания — 24 В ± 10 %;
напряжение питания датчиков — 20...30 В, ток — 100 мА; устойчивость к
коротким замыканиям; тип защиты IP67; вес — 0,3 кг.
3. СР-острова с разъемом ASI (рисунок 4.69), в состав которых могут
входить 2 или 4 распределителя.
4. Модульные острова типа 03 с Midi/Maxi-распределителями и разъемом
ASI (максимально 4 катушки электромагнитов). Характеристика ASI-разъема:
напряжение питания — 26.5...31,6 В; потребляемый ток — max 17 мА; диапазон
температур — 5 ..50 С; напряжение дополнительного питания — 24 В ± Ю %; ток
дополнительного питания — max 360 мА в зависимости от типа распределителя;
тип защиты — IP65
5 Блок питания, предназначенный для электроснабжения сети ASI. Питание
исполнительных устройств осуществляется по отдельной линии, что позволяет в
аварийных случаях их отключать без нарушения работы ASI.
ч
Глава IV
Ьдок питания имеет встроенную схему защиты от продолжительного
короткого замыкания и перегрузок, а также индикацию напряжения.
Используемый для питания сети блок Festo типа ASI-CNT-115/230 ВАС
(переменный ток) имеет спедующие параметры: вход (напряжение питания) —
И5/230 В. 47.. 63 Гц; температура от — 10 до +55°С; к.п.д. — 87 % при
номинальном напряжении питания: время срабатывания — менее 2 мс; задержка —
более 10 мс: тип защиты — IP20; вес — 1,2 кг.
На рисунке 4.75 представлен внешний вид, габаритные и присоединительные
размеры пневмоострова типа 03 с разъемом ASI, выполненным заодно с левой
торцовой плитой 1, основу которого составляют Midi и Maxi — распределители 2 и 7, соот-
; : нно, с внешним вспомогательным давлением управления (5/2 и 5/3-
распределители), которое подается через адаптерную 5 или правую торцовую плиту 8.
В обоих случаях максимальное значение вспомогательного давления составляет 0,5
МПа. Для его поддержки предназначены специальные регуляторы давления 3,
которые вместе с глушителями 4 в линиях выхлопа устанавливаются на адаптерной или
правой торцовой плите. Для Maxi-распределителей установка регулятора давления
осуществляется только на платах-адаптерах. Монтаж распределителей
осуществляется только попарно на соответствующих плитах 6 для блочного монтажа. В составе
пневмоострова могут быть максимально 4 катушки электромагнитов, т.е. 2 биста-
бильных или 4 моностабильных распределителя.
Торцов» плита ■, (Р) - Канал питания
' * * ' ' Т76 4 2 (А.В) - Рабочие (выходные) каналы
д. 3 5 (R S) - Каналы выхлопе
|~ us "" 14 12 - Каналы вспомогательного управления
' } as 84 82 - Каналы выхлопа потока управления
1 J75J
К} 1- «4i.3t.in5H.Zli
Рисунок 4.75
4.6.4. Пневмоострова с разъечом Feldbus
^mt7ZZ^Z°^2Tm 10 оп с умами Feldbus <p**"«" 4.64.
как можноближекnZZuZZTT' Р*СПр*™™™*>™ находиться
линии пневматической части системы\ "^^ П°ЛуЧИТЬ ОСОбенно К0Р<>™е
шлангам, уменьшить потери, и паГ^, "^ ВРСМЯ П°ДВ°Да И 0твода "°ЧУ» по
расходе. ^cne^'S^S^SS^^ ^ Т°М * H°M™°M
ет сэкономить время при монтаже РаССТ°ЯНИЯ Д° Датчиков сложения позволя-
К одному узлу Feldbus типа CP-FB-...-E могут подключаться, в зависимости
от протокола, до четырех линий (рисунок 4.76,а). Датчики, концевые выключатели
или малые потребители электроэнергии (сигнальные лампы, распад"Г™
т.д.) подключаются к специальным блокам (модулям) ввода uLZTZpL
НИеМ ПИТЯНИО ?d R тл^л.. ПСА - ^ паирже
нием питания 24 В, током 0,5 А и защитой от короткого замыкания
— модули ввода, имеющие 16 входов и разъемы 8 х Ml2;
— модули ввода, имеющие 16 входов и разъемы 16 х М8:
— модули ввода, имеющие 8 входов и разъемы 8 х Ml2.
Общий вид с габаритными размерами узла Feldbus типов CP-FB-. .-Е показан
на рисунке 4.76,6.
На рисунке 4.77 показан пневмоостров типа 03 на базе Midi- и Maxi- 5/2 и
5/3-распределителей с цилиндрическим золотником. Он может иметь до 26
моностабильных распределителей. Возможны исполнения, при которых могут быть
зарезервированы свободные посадочные места для распределите тей. закрываемые
заглушками 9.
Плиты для батарейного монтажа имеют общие для всех распределителей
каналы питания и выхлопа, а также линию выхлопа для давления управления. Линии
выхлопа могут подключаться к торцовой или промежуточной плите. Состояние
распределителей индицируется светодиодами. Напряжение питания
распределителей — 24 В постоянного тока: тип защиты — IP65: потребляемая мощность: для
Midi — 1,5 Вт, для Maxi — 2,2 Br, условный проход: Midi — 4 мм. Maxi — 7 мм;
номинальный расход: Midi — 500 л/мин, Maxi — 1250 л/мин; рабочее давление: Midi —
0,4.. 0,8 МПа и от — 0,09 до + 1.0 МПа — для вспомогательного даатения: Maxi —
0 4 1 МПа и от — 0 009 до + 1.0 МПа — для вспомогательного; управляющее
давление - 0.4.. .0,5 МПа; время вклУвыкл.: для Midi - 10.. .20 мс. Maxi - 18.. .55 мс
Максимальное число модулей входов/выходов 8 (не должно превышать 12).
Переход от условного прохода 4,0 мм (Midi) к условному проходу 7.0 мм
ысрелид ид у „„„„,.„ ятаптегм 2 Пневмоостров может содержать не
(Мах ) осуществляется с помощью адаптера z. im /"_,.„ пяг „тягаться
более одного адаптера. При этом Midi-распределители 7 должны располагаться
ьолее одного адаптера р располагаются Maxi-распределители 4.
ряТР7о^^^
межд/узлом Feldbus и mo"=^toh ^™^™^m c ода
В основном в составе пневм^^ющего давления из канала питания илн
ной подачей вспомогательного упр ^^ т адаптере 2 или на
отдельно, которое не должно "^^^ятор дарения 3.
правой торцовой плите 5 устанавлив н^ависимой от электрической. Монтаж-
Пневматическая часть выполне на плитах батарейного монтажа 6. В
распределителей осуществляется по р ^ да типа плит Я1Я батарейного
зависимости от условного пР°ХОДпа * ^ей (1 катушка). 2 адреса; для биста-
монтажа: для моностабильныч Р«"Р™ ' Если 0дии из двух распределите-
бильных распределителей (2 катушки* ^ бистзбильныч распределителей.
лей бистабильный. то н плита '^йикклабмьный. один адрес остается немс-
Если при этом второй Распределите^ ходит автоматически.
пользованным. Распределение адр
Глава IV
Ito/tym идем
• (ммнтчкпм (ммиоостром)
- митричким
п
Модули мод»
- 1»-х|н«ло» |8iMtf)
- »ииалм (»iMJ)
• *\^
-V
J
Met;» two» .
Иаилм (toMfi) 4
;',".Н=^-
"U ^=*
. /лг.о -«
ж
о«
о»
огаа owe. ц
r-^L. Об %)
я%
я %
Я'-
л
Типы CP-FB05-E
CP-FB06-E
СР FB09-E
CP-FB11-E
CP-FB13-E
CP-FB14-E
а)
Рисунок 4 76
Элсктропневмораснрсдели«
Рисунок 4.77
Монтажная схема лневмоострова со стороны конечной правой плиты 5
изображена на рисунке 4.78,6. Создание зон различного давления для Midi-
распределителей, в том числе и для вакуума, осуществляется с помошью
промежуточной плиты (рисунок 4.79). Блоки с более низким давлением должны рас-
Рисужмс 4 78
•156
Глава IV
Рисунок 4.79
полагаться ближе к электрической части пнемоострова. Создание различных зон
давления для Maxi-распределителей осуществляется с помощью разделительной
шайбы (заглушки), которая устанавливается в монтажную плиту для батарейного
монтажа справа (рисунок 4.80). Подача давления осуществляется через адаптер 2
и правую торцовую плиту. При создании более двух зон давления используется
промежуточная плита 10 (рисунок 4.77) и разделительная шайба (заглушка).
Монтаж пневмоостровов 3 на технологическом оборудовании, например, на
столах сборных модулей автоматической линии 1 (рисунок 4.78,а), производится с
помощью крепежных элементов 2. Управление работой островов может осущест-
Ъ f
Макси-распределитель
Олектроразъем
Заглушка
Рисунок 4.80
вляться от одного ведущего (Master) пнев-
моострова со встроенным контроллером.
В состав представленного на рис. 4.81
пневмоострова типа 11FB-02 с разъемом
Feldbus, светоидикатором, схемой защиты и
разъемами для ввода/вывода могут входить
4... 14 распределителей с
электроуправлением. Резервные позиции закрываются
заглушками или заменяются плитами с реле. Плита
для блочного монтажа имеет общие для всех
распределителей каналы питания и выхлопа,
а также линию выхлопа для пневматического
каскада предварительного усиления. Линии
Электропневмораспги^тгщ,
IIIF8-02- V4 -6
Тип
UF8-02- V4 -4
IIFB-02-1<4 -6
IIFB-02- 1/4 -10
tlFS-02- 1/4 -12
■ lll-B-02- 1/4 -14
I IIFB-02- 1/4 -16
Li мм
237
303
435
501
587
633
Lj,mm
222
288
354
420
486
552
16181
1 - Узел Feslo Feldbus
2 - Сетевой раэьем
3- Основной предохранитель
4 - Панель и табличек
5 - - • . • - ручное управление
7 - Распределитель с электроуправлением
6 - Бистабильный распределитель
с ЭУ или 5/3-распределитель
9- Плита реле
10 - Плита-заглушка
1 (Р} - Канал питания
4 2 (AJ3) - Рабочие (выходные) каналы
3,5 (R,S) - Каналы выхлопа
14.12 - Каналы . • управления
(только тип S)
84.82 Каналы выхлопа потока управления
11 - Болт пустотелый
Рисунок 4.81
выхлопа могут подключаться с двух сторон. Каждому распределителю bj аелено 2
разъема для подключения датчиков положения. Возможно различное
распределение разъемов между распределителями и независимое обращение „ каждому из
разъемов. Пневмоострова имеют две независимые линии питания. 11ри аварийном
отключении напряжение питания датчиков не изменяется.
4.6.5. Пневмоострова со встроенными контроллерами
Пневмоострова этого типа могут работать как самостоятельно, решая
,»„,„„. ..„„ ,«„„. ^пипй яптоматической единицы оборудования.
задачи
Пневмоострова этого типа могут работать как самое «ииашии.
Управления циклом работы одной автоматической единицы оборудования так и в
режиме ведущего (Master) для группы программируемых °^т^^р-
мый). Максимальное числ'о модулей -«^^^S^KS £.
число распределителей - 26. ВозможнаУС^и^З Siemens и разъемом
использовании блока управления с к^ГклСие налоговых модулей вво-
Peldbus помимо цифровых возможно подключение
Да/вывода и модуля AS-интерфейса. многофункционального Midi/Maxi-
На рисунке 4.82 приведен состав ^„ и ^^„qecKHx выходов
пневмоострова типа 03. Состояние распредс ы„ mQKS отрабатывает сигна-
°пределяется встроенным SPS-контроллером. у_интерфейса можно осушеств-
ль« обратной связи от датчиков. С помощью teiao .
лять управление и энергоснабжение.
17
Глава IV
patnp. типоразмера 1Ю тал
1ЛЖ ЛЛ2Н
раслрад. ''«юразаара Мал
I ти 1ПК ЛТН
дополнительны»
подвой вому» ■
встроенный
гяуаипель
вардаатая кявта с типоразмера Md
■а Уаас ратуиатвром
тага с регулятором
вдоеиая
пата дросселей с обр. клапанам
■оду» входова
модуль выыдоа
■ода)» пропори
концевая плата (различные
Элнтрачаскак часть
- 1 _ 12 ВА-модуль
- Выходы поеыи. мощности
- Аналоговый Е/А-модуль
- Многоголосный разъем
- АБнитерфекс
- РеИнв-подключение
- Контроллер
Рисунок 4.82
На рисунке 4.83 изображен пневмоостров типа VIFB-03-...-SF3 со
встроенным в управляющий блок типа SF3 контроллером Festo, имеющим следующие
\
f
О-
Модули
ввода/вывода
О-
Управляющее блок
Плита для Плита для
блочного блочного
монтажа МТ2Н монтажа
JMT2H (MlDt) MT2H, JMT2H
(MAXI)
Рисунок 4 83
данные: номинальное напряжение питания
24 В, постоянное, допустимый диапазон „а
пряжении питания - I8...30 В; время аварий-"
ной рокировки 20мс; рабочая память Zi
и EEPROM-128KB для программ, модулей
сообщении, драйверов (I команда = 4 20
байт); время обработки 1024 команд - около
1 мс; меркеры (внутренние переменные — 512
(все постоянные); таймеры - 32 (все
постоянные); временной диапазон — от 0 01 до
655,35 с; счетчики — 32
(постоянные);'диапазон отсчета — 0...65535; регистры - 128 из
которых 100 — постоянные- программируемые
входы/выходы — цифровые и аналоговые- то-
кальные — 128(64) входов /128(64) выходов
цифровых; ASM 24 входа /124 выхода, циф-
#7. л,'~ ^«T^fO
'Г '
г ft " •
.-<>"5
в ' * '
ш
z
т-%
•/ -7 *
0 0 0 0 0 0 !
I ан« айн ани >V:m *-ш гн»~
о^и в-Ц ft«U *«W i-U t-L, '■*
i у-п у-р ~т *-т *-т гч»
I о-» „и ^ ^w ^ ^ -
/2т^ Х^ ^НЬ ^*W rf^ .^aW
, -. п .-■-■ ^-ТП —PI pi-. t"P
ф ф ф 0 0 0
Г-—Т 1 аЧ« oUW aUM а~»
^ЙМ-А ' J_!_i
1 - Сетевой рвзъеи 24 В
2-
з- •••' • используете
вых выхода 0 5 А)
каналов ввода/вывода и дэтчи-
* (2
цифровых входа)
используемые
5- ■ датч«ов:
2 разъедена • - •
можны различное ■
. - < и -
к каждому входу
входы (2 цифро-
дли входных скгнвлоа Ваз-
• между рас-
* '• • ■ обращение
6-i • • разъем
. ... интерфейсЧ.24 RS232или
токовая петля
7- Ратъем Fakftxjs
V.24/RS 485 или S№C L2- OP
Рисунок 4.84
36 входов /12 выходов; Feldbu*-1048JnOjl28x2 каналовна
ровые; аналоговые - м .,««« ;cnftware) _ Festo FST 200; диагностика с
станцию); средство программирования (Software) гемо го
помощью FST 200 или ^^^ZZyZ^oocrpoB со встроен-
Изображенный на Р^У^^^^^Л» ™па nFB-02-..,SF3,
ными контроллером Festo (или Siemens, и F-—"■ пнеВмоосгровов. В составе
предназначен для работы с группой "Р^Ха^делителейГэлектроуправ-
пневмоострова может быть от 4 до 16 ^ ^ ят „„„»«. с реле. Исполь-
лением. Резервные позиции занимаются за у ^^ управляющего блока н
3Уемый интерфейс Feldbus(RS485jnpe4Ha3Ha^^ FeIdbus передают сигналы к
Децентрализованных пневмоостровов. Узя размерные параметры такие же. как
отдельным катушкам электромагнитов и !*" • (рисунок 4.81)
" У пневмоострова типа 11FB-02 с разъемом Feldbus (р су
Глав» IV
4.7. Рвсче* и проектирование мемромяшитов с втяжным якорем
4. Л. Конар>кния »лск1Ромя. ни.ов с втяжным якорем
В «льготе кончтпктнвных элементов ЭИР в качестве приводных злек.рома.-
ютж i JM) получи, и применение ЭМ е втяжным якорем и плоским стопом
(рисунок 4S*) При т>м якорь и стоп снабжаюica запорными элементами
(уплотеми), перекрытия вхотных н выходных сопел подачи ежаiого воздуха (на
DHvVHKc н« показаны) Эта особенность консгрукшвного исполнения приводит к
откачу от использования конических стонов, которые в ряде случаев более
предпочтительны, чем плоские стопы, так как обеспечивают при одних и тех же
габаритах ЭМ большие по величине яговые усилия.
>М с втяжным якорем состоят из неподвижной части магнитопровода (корпуса,
1. стона), подвижной (якоря), катушки, каркаса и направляющей якоря.
Корпчсы выполняются цельными или составными. На рисунке 4.85,а,
представлена конструкция привотного ЭМ фирмы «ФЕСТО», включающая в себя
цельный штампованный корпус 4 в виде чашки, внутри которой размещены
обмотка 5 с каркасом 7, стоп (сертечник) 6 с ферромагнитным шунтом (ФМШ) в
вите воротничка высотой /;„, направляющая I с якорем 3 и пружиной возврата 2.
Ш\нт способствует увеличению тягового усилия в начале хода якоря. После уста-
t>,
1*П£-Ц
б)
Рисунок 4.85
новки внутрь корпуса, катушка
заливается специальным
компаундом. Направляющая 1 и стоп 6
выполнены в виде одной детали,
но из разных материалов: первая
— из немагнитного, второй — из
магнитного. В качестве
соединения используется
мелкомодульное резьбовое соединение с
последующей механической
обработкой. Якорь снабжен по концам
запорными элементами.
Другое исполнение ЭМ (рисунок 4.85,6) предусматривает наличие точеного
корпуса 3, выполненного совместно со стопом, и фланца 2. Внутри корпуса
размещена с радиальным зазором А катушка 4 с каркасом 5, который является
направляющей для якоря 1. г
Детали Mai нитонровода изготавливаются в большинстве случаев из низкоуг-
2^Гп1Эст'] 1азРб°7еХН"ЧесКИХ сталей марок: 10864; 20864; ,0880; 20880; 11895:
R п,^1Я увеличения быстР°действия используется кремнистая сталь марки Э310.
о ряде случаев применяются железоникелевые сплавы (пермаллои) с высокой
ыатитнон проницаемостью марок 45Н. 79НМ, 80НХС и др.
MHornoZI^T ВЫполняются каркасными и бескаркасными, однообмоточными и
миог^бметочными^ Наибольшее распространение получили провода марок ПЭВ-
стойкплч."^ ..~ ' 1ВР- В электромагнитах с высокой и повышенной гепло-
il^S^^^S^^ полиамидной изоляцией марок ПЭТимид
пн^^^гГ™™™™ т иеметаллических материалов - текстолита, ге-
тел**и т ™1Т на"0лИамиД"°й или кремний-органической основе с
наполнимте» -~fin^ ИЛИ *T°P°nj,acTa. а также из металлических немагнитных
материк» оронзы, латуни, алюминиевых сплавов, нержавеющей стали и др.
-2:2£™!"^^^
Направляющей якоря яв.им
-■■» с,№. „„„,._:...- «~. «-..„«, „, бр„„1ы
кя Следующие
,г)Сре1сяоб,(1Чно(| , .
~r - UJ •Ы5Кгдс^/~диа
ржавеющей сади. Наиболее час»'„Г""''
метр якопя. цпи ,.u*S. 1,н,рлн"я,о"№йбеРсся
метр якоря. При любо^ мё ашГ1,,СЙбСре,СЯ
*:::::^ ^ ~,0 ;;;л
-сышен^l". Р"ШШВ ^«ию.„ - сии
-.отсяпропицаемосьиш; ™^Г™^™"»™^-
Д« носепиговления магнитных СВ2Г',ИЯ' УВДи™««' коЧрци.и, L
подвергают термической обриГ^'^8^ *™" ^иЦ
или реже в атмосфере водорода ВЫсок™'*ратурному 0,жи,у в вис
си ia.
1СНИЯ
вакууме
или реже в атмосфере водорода.
4.7.2. Магматический (аналитический) метол расчета ллектромапжюв
При наличии в качестве исходных данных hT— тятвой силы в начале ходя
якоря, Ь„ — хода якоря, U— расчетного напряжения питания и 6rfan —
допустимого превышения температуры при продолжительном включении, проектный расчет
втяжного ЭМ с плоским стопом сводится к определению следующих параметров |20j.
1. Конструктивный фактор
If г-1 /г /х ~"1" (4.1)
кН°-\м.
(4.2)
КФ = \Л0Г3^1ЪЯ
Для втяжною ЭМ с плоским стопом должно выполняться условие
ft.5... 11.0 <АФ< 31.3. .47
для ЭМ с коническим стопом
0,15... 1,5 <КФ< 6,5...II.
Рациональная форма стопа ЭМ с втяжным якорем зависит от КФ и усеченно-
сти конуса г) (рисунок 4.86). ■ ■
2. Диаметр якоря
</ = 1,79-10-у ^/^,«1,(4.3)
где Въ = 0,7... 1,1 Тл —
магнитная индукция в рабочем зазоре,
принимаемая в указанных
пределах с целью одновременного
обеспечения минимальных
габаритных размеров, объема,
массы и потерь МДС.
3. Наружный диаметр ЭМ
4. Длина ЭМ
0.02 004 ОМ 01 0J 0,4 0.< I 1
Рисунок 4 86
D = 2d. м.
4 < 10 20 40 (0 |М Гр.шМ"3!*
зазор;
(4.4)
(4.5)
где 5 = 5„ + 5„„ — рабочий ,,.
б„„. = (0,05...0,1) 5„ — толщина немагнитной
прокладки из латуни, нержавеющей стали и
Других материалов, помещаемой между
якорем и стопом для предотвращения «залипа-
ния» якоря в приподнятом положении из-за
остаточного магнетизма; 8„=>0,15...0,5 мм о «^ м о.« о.» . и ■.
нерабочий (паразитный) зазор между якорем Рисунок4 87
и направляющей. Удельное сопротивление
»амоточного провода р для конкретного превышения температурь, 6(k.„
рассчитывается с помощью выражения
0,2 0,4 0,4 0< I U 1.4 И !• 2 ЛТ>
Глава IV
*С
р = р0(1+а0е).Омм, (4.6)
^ I 7S id* Ом м - У кпьное сопрогивленис медного провода при 20°С;
г р»* i 1э ш ■ - _ ^ ^с^ — температурный коэффициент
Т
| Я W * ■« «*» О*
Рисунок 4 88
•«» *"«
ме 1ного провода.
Для удобства расчетов можно пользоваться
рисунком 4 89.
Удельная мощность рассеяния л11Й и
превышение температуры 6 электромагнита при
продолжительном режиме работы взаимосвязаны
(рисунок 4.88). По заданному 6 и условиям
теплопередачи (кривая 1 — плохие; кривая 2 —
средние; кривая 3 — хорошие) можно найти Пу*
5. Определяется отношение UD, которое
должно находиться в пределах:
Z7D = 0.7...1,8. (4.7)
6. Максимальная магнитная индукция
В = В^/ф. Тл, (4.8)
где ф — пог равочный коэффициент, учитывающий потери МДС, зависящий от
агнитной индукции н имеющий максимальные значения (минимальные потери
МДС) при индукциях в рабочем зазоре 0,3...0,8 Тл (кривая 1) (рисунок 4.87) и
максимальной индукции 0.35...0,95 Тл (кривая 2) для наиболее распространенных
электрических сталей.
7. Вн>тренний диаметр магнитопровода
D, = 0.87 D , м . (4.9)
8. Толщина фланца (торцовой части корпуса)
C=0,12D,M. (4.10)
9. Средний диаметр катушки
Dtp = [(D, - 2А) + (d + 2b))/2 , м , (4.11)
гд А = п).025...0,2) 10 — зазор между катушкой и корпусом, м; Ъ = (0,05...0,25) 10
— толщина цилиндрической части каркаса, м.
10 Высота катушки
hk = l(D, - 2А) - (d + 2b)]/2), м
11. Длина катушки
_2 h=L-2(bx + C),u,
reb, = (0 0.2)10 —толщина щеки каркаса, м.
12. Длина стопа
U = (0,3...0,55)4,M.
(4.12)
(4.13)
(4.14)
13. Диаметр провода
d„p = 1,78 • 103 JpDcpB(8 + 8„) / U , м .
(4.15)
После расчета полученное значение округляется в сторону ближайшего
стандартного диаметра по таблице проводов [5]. Здесь же находятся сечение провода q
диаметр провода в изоляции d„.
14. Число витков катушкн
<о = 0,865/Л/<£.
15. Длина обмоточного провода
L„p =TtDcp - со . м .
1 . Сопротивление катушки
/?о = npl}Dcp()Hq = 1 ■ lQ-*Dcpio I dlp,Ом
(4.16)
(4 17)
(4.18)
шке
ряется
Погрешность расчет основных „ " ~~~
ся с -— —--'sssz z гг-——
263
по данной мето-
Р _ 2 2 1 """"".Усилия:
где Fu = опт т ~^оФ /=> I (6+5 \2 и
C/(AmJ~ ^гнитная постоянная.
сечение якоря (стопа);
4.7.3. Пример расчета втяжного ЭМ с плоским стопом
Задача.
Определить основные размеры и параметры втяжного ЭМ с плоским стопом,
создающего тяговую силу FT = 60 Н при напряжении питания катушки U = 24 В,
допустимом превышении температуры 6^ = 50°С, средних условиях теплоотдачи
и имеющего ход якоря 6Я = 1,5 ■ 10~3 м.
Решение.
1. Определяем конструктивный фактор ЭМ, используя (4.1):
КФ = 1-10-3J'Ъ/8Я =110-УбО/1,510-3 =0,2кН°-5/м.
Пользуясь рисунком 4.86, для КФ - 0,2 кН^/м определяем, что ЭМ
должен иметь ФМШ или коническую форму стопа с углом а = 30°. Поскольку форма
стопа задана (плоская), в конструкции ЭМ необходимо иметь ФМШ (рисунок
4.85,а).
2. На основании (4.3) рассчитываем диаметр якоря:
d„=l79W'3^FT/B6 ,м
Принимая В5 = 1,0 Тл, получаем
d = 1,79-КГ3 = V60/1.0 = 13.87-10"3, м.
1
еи>*Оил
Принимаем d = 14 ■ 10 м.
3. Наружный диаметр ЭМ на основании (4.4) равен
D = 2d = 2 14 = 28- 10~3м.
4. Длина электромагнита с учетом
(4.5) равна:
L = 8,7 • 103(5 + 5л)д//у ■ p/(D' • ПуЛ), м.
Ход якоря 5„= 1,5 ■ 10 3 м; величину ,(
паразитного зазора 5„ берем равной 0,2 мм. '■»
Используя зависимость на рисунке 4.89, ■'*;,, и иияи „. „„.„.«„.,*
НахОДИМ р ДЛЯ Заданного превышения Рисунок 4 89
температуры 0 = 50°С:
р = 2,1 • 10 Омм.
Используя графики на рисунке 4.88, находим я„, для 6 = 50°С и средних ус
ловий теплопередачи: я,^ = 500 Вт/м'.
Тогда
L = 8,7103(1.5-IO-3+0.210-3)v/f60-2,110-8)/[(2810-3)3-500] =
= 8,71,7А/П.-'5Ш^=50,28610-3 м.
-з
Принимаем L = 50 • 10 м.
. '_ г/г» которое в соответствии с рекомендациями
ч 1 Я
L = 50- 10~ м.
5. Определяем отношение L/D, i
(4.7 олжно быть в пределах от 0,7 до 1.8.
Глава IV
UD = 50/28 =1.786,
что соответствует рекомендациям.
6 С помощью (4.8) находим максимальную магнитную индукцию:
В = В6Лр Тл.
Поправочный коэффициент ф определяем с помощью графика на рисунке
4.87.
Для #6 = 1,0 Тл, используя кривую 1. получаем ф = 0 85.
Тогда
В= 1.0/0,85 = 1Л8Тл.
7. Внутренний диаметр магнитопровода
D, = 0.87 D = 0,87 • 28 -Ю'^ 24.36- 10 м.
8. При наличии фланца фисунок 4.85) его толщина определяется
соотношением (4.10):
С = 0.12 D = 0.12-28- Ю-1 = 3,36 10~ м.
9. Параметры катушки рассчитываются с помощью выражений (4.11—4.13).
Средний диаметр катушки:
DCP = [(D, - 2А) + (d + 2d)]/2, м.
-2 -2
Принимая Л = 0,1 • 10 м и fc = 0,2 • 10 м, получаем:
D„ = [(24.36 • 10~3 - 2 • 1 ■ 10"3) + (14 ■ К)"4 + 2 ■ 2 ■ Ю~3)]/2 =
. = <22.36 • 10"3 + 18 ■ 10_3)/2 = 20,18 • Ю"' м.
Высота катушки
Л, = [(</, - 2А) - (d + 2b)]/2 = [(24,36 ■ 10~3 - 2 • 1 ■ Ю-3) -
- (14 • 10"3 + 2 - 2 • 10_3)]/2 = (22,36 - 10~3 - 18 • 10_3)/2 = 2,18 • 10~3 м.
Длина катушки
/K = Z.-2(fc1 + 0.
Принимая толщину щеки каркаса Ь\ = 0,1 • 10 " м, получаем:
1К = 50 ■ 10~3 - 2(1 • 10"3 + 3,36 • 10~3) = 41,28 • Ю"3 м.
10 С помощью соотношения (4.14) находим длину стопа:
1сг = 0,4 ■ /« = 0.4 • 41,28 ■ 10~3 =16,5 10~3 м.
11. Используя (4.15), рассчитываем диаметр намоточного провода:
d = 1.78• 1 0^р-DcpB(b+8„)/U =
= 1,78 103V2,lIO-8-20,1810-3l,18(l,5-10-3 + 0,210-3)/24 =
= 0.335■ 10-3м = 0,335 мм.
Выбираем в качестве ближайшего стандартного диаметра по таблице
проводов [5] провод марки ПЭВ-1 диаметром d„p = 0,33 мм, сечением q = 0,11 мм2 =
= 1.1-10 м2. Диаметр провода в изоляции dm = 0,37 мм.
12. Используя выражение (4.16), находим число витков катушки:
ю = 0,865/Л / <£, = 0,865• Ю-3 - 41,28-ИГ3 - 2,18• 10"1 / (0,37-10~3)2 *568.
13. С помощью (4.17) рассчитываем длину обмоточного провода:
L^p = 1фсры =3,14 20,18-10_3 -568 = 36 м.
14. Сопротивление катушки определяется с помощью выражения (4.18):
/?o = 7-10-8D(o/9 = 7-10-8-20,18-10-3-568/1,1-10-7=7,30 0m.
15. Производится поверочный расчет, заключающийся в определении
тягового усилия, создаваемого ЭМ с рассчитанными параметрами, с использованием
выражения (4.19):
^-=Иоф2^/2(6+б„)2.
Площадь сечения якоря:
5 = ^/2/4 = 3,14 (14103)2/4«154,0-Ш-6м2.
Полная магнитодвижущая сила (МДС) катушки:
FM = (uU/Rf, = 568 ■ 24 /7,3 • 1867 А.
Подстановка полученных значений S и FM дает следующее значение Ff.
Fr=U57-10-*-a85218672J5410-6/2(U-IO-3+0,2lO-3)2 =
= 487,5 Ш"6/5,78-Ш-6 = 84,ЗН,
т.е. ЭМ с рассчитанными параметрами позволяет получить требуемое тяговое
,mefr = 60H.
mi£BM\llf4FCKHE ИСПОЛНШТЛЬНЫК УСТРОЙСТВА
Пневматические исполнительные устройства преднашачены для
преобразования знергии сжатого воздуха в механическое линейное перемещение или
вращение. Они используются для приведения в движение рабочих opianoe машин,
выполнения различных основных и вспомогательных операций. Линейное
перемещение обеспечивается пневмоцилиндрами, поворотное движение —
исполнительными устройствами, имеющими в качестве рабочего opiana лопасть или шестерню
с рейкой.
В пневмоцилиндрах одностороннего действия давление сжатого воздуха
действует на поршень только в одном направлении, в обратную сторону поршень со
штоком перемещается под действием пружины или внешних сил. Пневмоцилинд-
ры с пружинным возвратом используют для выполнения небольших перемещений
и с небольшими развиваемыми усилиями, так как встроенная пружина, сжимаясь,
значительно снижает усилие, развиваемое поршнем.
В пневмоцилиндрах двустороннего действия перемещение поршня со штоком
под действием сжатого воздуха происходит в прямом и обратном направлениях.
Поворотные пневмодвигатели могут быть поршневыми и лопастными.
Кроме названных выше типов, в промышленности используются также пнев-
моустройства специального назначения. К ним относятся бесштоковые цилиндры,
позиционные цилиндры, пневмокаретки, цилиндры с полым штоком, с тормозом и
шевмозахваты.
В процессе монтажа, наладки и эксплуатации пневматических
исполнительных устройств необходимо предусматривать ряд конструктивных мер
безопасности [37].
Чтобы свести к минимуму риск нанесения травм персоналу, рекомендуется
применять защитные ограждения.
При высокой скорости движения рабочего органа устройства или в случае
больших инерционных нагрузок, собственный демпфер пневмодвигателя может
оказаться недостаточным для смягчения удара. Для снижения скорости рабочего
органа до включения собственного демпфера рекомендуется использовать схемы
замедления или устанавливать наружные демпферы, ослабляющие удар. В
последнем случае конструкция должна обладать достаточной жесткостью.
Во избежание травм персонала, повреждения оборудования и объектов
производства, необходимо предусматривать конструктивные меры, обеспечивающие
собтюдение безопасности при падении давления. Такие меры особенно
необходимы в системах с подвешенными грузами и в подъемно-транспортных механизмах.
Если пневмопривод управляется с помощью трехпозиционных пневморас-
пределителей, у которых в нейтральном положении все выходы сообщены с
выхлопом, или возобновляет работу после того, как давление в пневмосистеме было
сброшено, возможен резкий рывок рабочего органа с места и затем его движение с
чрезмерно высокой скоростью. Это обусловлено тем, что в одну полость цилиндра
подано высокое давление, в то время как в другой полости давление отсутствует, и
нет никакого противодействия движению поршня, которое обычно бывает при
вытеснении воздуха из полости пневмоцилиндра. В лих случаях необходимо
предусматривать меры против резких рывков, например, применяя устройства
плавной подачи воздуха.
Все виды нагрузок на шток поршня должны быть приложены только в осевом
направлении. Неизбежные боковые наФузки, приложенные к концу штока, не
должны превышать значения, допустимые для каждого тина пневмоцилиндра.
Не рекомендуется использовать гшевмоцилиндр как амортизатор.
™ап. только
если
длина хода поршня определяйся ZkZ г? У 'С'° "оложс"и«- И°™"У. -
ходимоубеди,,,,, ^^пф^Г^^^^ГГ^^ Н^
демпфером. НерекомендуетеT^SZZ^ZT СНабЖС"НЬ'Й "е™"°вь'м
регулировочным винтом демпфера Тк как о ГжГ,' 1-ви"ченным д0 У"°?а
уплотнения цилиндра. Р ° М°ЖСТ ,фИВесТИ к "««Рождению
ви, "РеЖДе Ч£М "шя,ивать резьбовое соединение на конце штока требуется
привести его в полностью утопленное положение. При затяжке шток не должен вра-
иДы I bL-Я •
При техническом обслуживании оборудования необходимо прежде всего
убедиться, что в результате отключения питания не произойдет падение
транспортируемых объектов или узлов оборудования, находящихся в поднятом или
неустойчивом положении. Только после этого можно отключать электрическое и
пневмагическое питание, обязательно удостоверившись в том, что давление в
системе полностью сброшено.
5.1. Свойства воздуха
Рабочим телом для исполнительных устройств электропневмоавтоматики
служит сжатый воздух, представляющий собой смесь из азота и кислорода (по
объему примерно 78% и 21%, соответственно) и других газов, содержащихся в
небольших количествах (аргон, углекислый газ и др.), а также водяного пара.
Основными и наиболее распространенными параметрами сжатого воздуха
являются температура, давление и удельный объем (или плотность).
Давление представляет собой силу, действующую по нормали к
поверхности тела и отнесенную к единице площади этой поверхности.
Атмосфера Земли на ее поверхности развивает давление в одну физическую
атмосферу (ра). Давление, отсчитываемое сверх величины атмосферного
давления, называется избыточным или м а и о м е т р и ч с! с к и м (ри) и
указывается в технических характеристиках пневматических устройств.
Полное давление равно сумме избыточного и атмосферного
давления [13,27]: (51)
Полное давление газа= пропорционально его абсолютной температуре Г и
концентрации молекул п, когорую можно определить как отношение.
n=MV, _ V ' '
где N- число молекул, находящихся в сосуде; V- объем сосуда.
Давление р газа равно: _
" р " * - (5.3)
р = кпТ. СИ|Па = н/м2 l/м2 Дж/К К'
л№пгтчвляет собой постоянную Больц-
Коэффициент пропорциональности представляет
мана, равную: ji п ..,,
** '•3806t 1 масса - заключенного в нем воздуха. В
Чаще известен объем V сосуда и м ^^ (отсутствует межмолеку-
чредиоложении. что воздух являегся ид ^ ^^ 6ып 011рвделен0 „о
лярное взаимодействие), давление Р вну v
Формуле К/адейрона: m R TV (54)
p = mKT/V. си|]|а кг Дж/кг-К К -1'
mv
I 'III till \
г R — универсалы»** i uuwu irotnwtttun 11 >я no • ivx.i /?■ -87 Дж/м К), киц.рня
равно внешней ре я* еовершасмон при uociOMiiuOM Minim мчим кнширнм
чом «о-мул» "Ри twi-pceaiiiirt сю «a I ip» ivc Г— icmh -puiyp.1 n ip;uwniv Кельни
и* (абсолютная темпера rv pa)
Нулевая температура но Цельсию п фишм*
О' штЛ^К,
Lcim концииткшня iaia в сосуде раина ну пи. iu и»ш «v. Диичсине и шном со
суде тоже рвано H>.-ik> Можно счн..иь. чю на поперчиосш 1емлн сосуд оОлащкч
некогорум поющналыюн першей тк ык "сеь окружающий сю пощух налощи
ся not атмосферным ынленнем и. а.чодя и со*.Уд. моЖч соверши il риишу.
Так работки miioi не вакуумные уе.ронсми. например, iiaKyyMiii.ic ирпноды,
вакуумные npiicouui И 1 il Кчюрят. ч.о пи ycipoiicnta раоо.аюг на рп пожени .
Сосуд бу ^ei также оолачам. потенциальной iiepuieit, соли диилспис iaia iiiivipu
нет буд i больше .имосферною (i.e. /'„>(>). Ччееь ми ыкже можег соперниць
раиогу, но уже при вычи С hi еосуца и ашосферу, i .с. принесщ и дейстне ycipou
ства. pjoor кмчие па nai псиппс
Поскольку бочыпннемш ycipoiicni промышленной псыроннсимо.пиомшнкн
рабоиет на n.ii пекшие, а M.n.icipani.iioe данленпс сущее i пенно больше агмое(|)ер
ною, при рпечете yciuiuit удиипо ноль иишьси н оыючпым данленисм. li icpivio
динамических рцечеш.х полыукнеи полным даилением.
В системе СП е-цннщен щмерснин даалепнм служи г и не киль (На) Пис
каль равен панлепшо, пьпыпаемому силой и I II (иыоюп). рииномерпо раенред*
ленной 1ш нормальной к пен нонерчпое in площадью I м2 (I Mail М/м*).
Cooi ношении между единицами давления приисдеиы и 1аолнце5.1 11 *.37|.
Таблица 5. \ Cooi iiuuieiuie между единицами давлении
1 К1 С/СМ
Гднпицы
т
I Бар
I Па
1 рм
(фуи |-сила/кв.Д1нйм)
I мм pi ст
I мм под.ст
кГ'с/см
j«
1
1,02
1.02-10
0,07
1,36 Ю
К)
1>ап
0.УК
10
0,07
п.угю
9.81 К)
Г
Па
9,81-Й)
10
6.9-10
133,3
0.К1
>ы
14.22
!4.5
1,45-10
I
19,34 10
,42-10
мм pi.ci.
735,6
750,3
7.5-Ю
51.71
I
7.30-10
Г
5.2, Основные К'рмодшшшчсскик инсонм
Во мшчих случи» ураипепии сос.ояция идеальных .аюн н „пенмонп.омам.
КС Можно истин.юниц» с доспмочион ючпо
пью и для реальшах ппон.
Ьоилсм и U»62 I. вЛшлии. и лием не in
иисимо oi нею Марши Юм » I 76 i uo «Ь|шп
Пии было ус.а..пилено, чю если пп иншмнл
пскошрми нераопачальный оПьем V() и имел
давление />„, ю после сж.мни до обьемн V|
Сю данленпс />,, при условии, ч.о iCMiiepaiy
pa i a i.i in и iMciuie iсм (И J о i к p м и ч с •
с к и й процесс), иомыси 1сн до ие шчипы.
при к»чор и проишедеппе начальною ио сми
и д.ш 1СНИН »удс1 раппо проп шедепню конеч
Ли 001.СМИ и данления (рисунок 5.1,н).
/*.V„-/».V, . (5.5)
I'livynoK VI
-" "»" """ mimnnn
Ч»9
иранцу юиш ученым Ж Ш "" """" """
.=^;:;:;:;;г ;,и <м«- ^-Ж;г» - - « -
'""■bit с ,„ с , '«''Чкпур,, „и,, m v ,; !" """ ^шчешш .,„„ ум „
piliypu <p,„.VIIOK y^ t) VNlllbUilllCM 111М11„р„1111|1ил|#|||1
О ПСу ц
Рц/I'q i*\II\ прц Veconsl. (5L^
/'i Vi./i//». ,,7v
При iichimciihom laiuieimn in 0Л1 nj ..
.помете пернопачил,.,,,, , , " , ,Zn, .Г""в"ы,"'-ИВШ* "JI" «
т... v».....,........ . . чртю'Ш). ui.m nciiieiiiio. к uoipiiciaiiino
Ксльннпа .фопорц,.о„,11Ы1о ,„ме„иш,о .емперц.уры „ ,PW, ,
V|//'| У.//^ при /вины, ^5Kj
10 (4.111,1 yiiuiioH'ieuo Ж. I Cii JIioiviiu >M 11 IWP юду.
I Ipn u д 11 a ft a , 11« м „р,)|(1Чч-е hci .е..л«.обМе1ш между c,u „мои и оьру
жшшце i .редо... При мижешю можно ечп.мп. аднаиашым проц^с и iicicimhhiki
niipuiiiiiiiioii chcicmo. ecu on осущестляеим , очь гч.и-.ро. ч„_. .енлооомсп мощу
uicieMoii п окружающей ере (он ирамичесм! не уеиснаег происходи п. Дди oui
111.111 nponicc онисыааекя уршшепнем
*/
/>V и-сонм . (5.9)
где к — noKaiaiein. адл ошы. pnitiii.iii Vi юшеппю к'плосм&исш una при huliomii
■ЮМ/щвлеппн /> к iciiJiocMhinui ила при noiioHiiiioM оиьеме V.
Пммсрмцчсскин. нюоарпып, щочорнмп п илншшшып прощаем яя'шкием
частыми случаями иолщрппмою ироцессЩО! ijk-ч wnv< ту/ цып) ' им
процесс оптыиаегся уравнением
1>\ шеоим , (5. lui
|Д( н-— пока шгель пол iфоны при // к — процесс нолшрониын; при //«О —
Процесс нюбпрныи; при пт I — iiioicpMinecMin. при пт оо— н очориыИ
5.J. Иек'ченне ежнюю bwiyxa че|мч и i перс те
оспоапыми 001 ношениями, необходимыми для оннешшм pnooii.i шкимиш
ЧССКПЧ уСфО ICIU, ЯНЛЯЮ1СЯ СООПКННСННЯ. ШШСЫШИОЩПС 1ИМИ1Ы ДННЖ'СЯШ! U0 (\
mi. Принимаемся, чю ао1дуч являоея ндеилыюн жидкое i i.in,'i.c. шкоП
жидкое 1 ыо. н шпорой чнепщы перемемщшк'я «'(ни ошостелыю друюп и- ipe
Пня. Предположим. 4i0 движение усшпошнинссси н снойепт Ж|Г(косш в данном
сечеппп осшнч -я поиояппымп. 1.0. данлепне н icMiiopaiypa т. л мшинлся. ОСю
шмчпм ч*-ре i г. /». *• р. г. eooiaeicMie.n.o, смцнк\ь днтмгшы жилист, д.пшеш.,,
ускорение силы .яжес.н. плошос... жнимк-ш и i..-«uy над пло -косью о.ече.а.
Ураапеппс |;с|)пулли п днффере.щнЦЛЫЮЙ ^цтс. аырижшо.цес uim.ii еочранеш
«icpi ни. шппсышнлеч в виде 11 Ц'.
+«,/,>>'</ 0. №11)
2 р
llnieipiijioiunnie моюураапеш.н ,ае. .....ржете ...кона чн.^енач «, и с.п.
2ц ■'.vp
.. ,„.,,,„ „„к-иифоиа.ши. iipemiii.i'niei co(.,.,t под ими
lli-iiiiiiiiini //—• ||<н I'flllllll ими') 1 '
Mi /...чипа n — но* «.„.iMieiMo < >» l»"»1'" сумме (ннюр >u ChO к. ч
•i а и о р, рц пиша 'мы . дин КУ"^'"1 я )МММ '
»
Глава V
ного
fi пьезометрического \^- и геометрического г. Учитывая низкую
плотность воздуха, величиной с обычно пренебрегают. Поэтому,
2« JSP
(5.13)
Для идеальной жидкости запас энергии в каждом сечении потока остается
неизменным У реальных жидкостей, имеющих трение, запас энергии от сечения к
сечению по направлению потока убывает. Уравнение для реальной жидкости меж-
IV двумя произвочьными сечениями потока имеет вид:
с;-с,
Pi
J
dp
+ Н
2g ' gQ
Pi
12
= 0,
(5.14)
где
Я|2 = //,-#2 — потери энергии. (5.15)
Обычно гидравлические потери Я12 принимают пропорциональными
изменению кинетической энергии, т.е.
Hn = ^c2l2g, (5.16)
где величина ^ называется коэффициентом гидравлических потерь; с — средняя
скорость в сечении потока.
В случае истечения воздуха из резервуара с достаточно большими размерами
(рисунок 5.2) скоростью воздуха перед отверстием можно пренебречь и тогда
1
с-
Рг
J
!
tdp_
^Iflр ■
Величина
л/Гч
(5.17)
: ф называется к о э ф ф и -
1
Рисунок 5.2
циентом скорости.
В каналах пневматических сопротивлений
скорость течения воздуха сравнительно велика, и
поэтому, с достаточной степенью точности можно считать,
что теплообмен между протекающим воздухом и
стенками канала отсутствует и, следовательно,
истечение происходит по адиабатическому закону.
Поэтому, можно записать:
P*~pf
Р =
_ Pi
Pi
i/k
,V*
(5.18)
где к показатель адиабаты; р, р, — плотности воздуха в различных сечениях.
С учетом (5.18) уравнение (5.17) приобретает вид:
С = ф
2RTk
к-\
к-\
Р\
Массовый расход воздуха
Gm = Fcp2,
где F—площадь сечения А-А; р2 — плотность
Подставив (5.19) в (5.20), получаем-
(5.19)
(5.20)
воздуха в сечении А-А.
Gm=4>Fp, ■ (5.20
В полученном выражении за плотность воздуха в сечении отверстия
площадью F принята плотность в среде, куда происходит истечение.
На самом деле плотность воздуха в этом сечении иная. Выравнивание
плотности воздуха в струе с плотностью воздуха окружающей среды происходит в
сечении Б-Б, расположенном на некотором расстоянии от отверстия. При этом
площадь сечения Б-Б меньше площади отверстия F. Отношение сжатого сечения к
расчетному называют коэффициентом сжатия струи. Произведение
коэффициента сжатия на коэффициент скорости называют коэффициентом
расхода ]±. Таким образом, для уточнения в
формулу для определения расхода Gm вместо ф следует
ввести р..
На практике приходится рассчитывать расход
воздуха не для отверстия с тонкими стенками, а для
различных видов дросселирующих сопротивлений, 0,4
имеющих более сложную конфигурацию. В этих
случаях коэффициент расхода определяют
экспериментально, и он является поправочным коэффициентом,
учитывающим геометрию дросселя.
Расход (рисунок 5.3) имеет максимальное
значение при
Показатель адиабаты к для воздуха равен 1,4, следовательно, GKp = 0,528.
Момент равенства с=скр соответствует в канале дросселирующего
сопротивления скорости течения воздуха, равной скорости звука. Экспериментально
показано что если в дальнейшем понижать давление р2, то расход Gm не увеличится, а
останется постоянным. Поэтому, в случае докритического течения (с>акр),
пользуются формулой
0,8
0,6
0,2
о
0 2 0.4 0,6 0,8
Рисунок 5.3
(5.22)
Gm=HFP]
а в случае надкритического течения (g<gk/>) — формулой
(5.23)
Gm = VFP\:
RT, k
к Г 2 \7-
+ llk + lj
(5.24)
Для расчета расхода воздуха часто пользуются более простой формулой
G = GmJi^o. (5.25)
J«P
где G=p,/pl.l, pj — давление в полости до подводящего отверстия; /?,.,
—давление в полости за подводящим отверстием; G^ — критическое значение массового
Расхода, определяемое по формуле
C,/,= 1,5I0"V/71, (5.26)
где d — диаметр подводящего отверстия.
Максимальная погрешность при таком определении расхода равна 3,4%.
Глава V
5A Пневматические цилиндры и пневмокамеры
5.4.1. Определение расхода
Типоразмер чпраадяющей и регулирующей аппаратуры, а также
трубопроводов зависит от потребляемого приводом воздуха при нормальном номинальном
расходе, для определения которого может быть использована номограмма, построенная
без учета тепловых потерь (рисунок 5.4) [24,37]. Для учета влияния тепловых потерь
рекомендуется увеличить полученное значение расхода на коэффициент 1,4.
Пример.
Пэршень цилиндра диаметром 63 мм перемещается со средней скоростью
500 мм/с
Требуется определить эффективное потребление воздуха, находящегося под
давлением 0.6 МПа.
Решение.
1. Определяется точка пересечения 1 для значения рабочего давления
0.6 МПа и средней скорости поршня — 500 мм/с.
т < шкоты! расход воздуха 2. Из точки пересечения 1
проводится вертикальная
линия до пересечения с линией
диаметра цилиндра 63 мм.
Получается точка
пересечения 2.
3. Из точки пересечения
2 проводится горизонтальная
линия до шкалы пикового
расхода воздуха,
приближенное значение которого
Q = 620 л/мин.
4. Полученный
теоретический расход умножается на
коэффициент 1,4:
6 = 620x1,4 = 868 л/мин.
Определение
нормального номинального расхода
сжатого воздуха в приводе при
его циклической работе
необходимо для установления
производительности
компрессора и затрат энергии. С этой
целью используются
номограммы, построенные без
учета тепловых потерь (рисунки
5.5, 5.6). Для их учета
необходимо умножить полученное
значение на 1,4. При
количестве циклов большем, чем
один в минуту, полученное
значение потребления необхо-
Рабочее давление (МПаГ^г"''' I ДИМ° УМН0ЖИТЬ Н3 И*
1 '-' i количество в течение одной
минуты.
Рисунок 5.4
Пневматические исполнительные'
Теоретический расход воздуха
в трубопроводах сжатого воздуха
273
^^;;^-ГодВоздухв
Рисунок 5.5
Рис}нок5 6
Пример.
гота циГо? ТП ЦИЛИВДРа ~ 5° ММ' ХОД "°РШНЯ С° ШТОКОМ - 600 мм, час-
rnvlT ~ МИНУТУ' ДИаМСТр ™даОД*Щего трубопровода - 6 мм длина
трубопровода между цилиндром и распределителем-2 м
0,5 МПРа.бУеТСЯ °ПреДеЛИТЬ раСХОД ВОЗД*ха- "водящегося под рабочим давлением
Решение.
I. С помощью номограммы на рисунке 5.6 определяется точка пересечения 1
Уровней рабочего давления 0,5 МПа и средней скорости 600 мм/с.
2. Из точки пересечения I проводится вертикальная линия до пересечения с
наклонной линией, соответствующей диаметру поршня 50 мм, для получения точ-
кн 2.
3. Из точки пересечения 2 проводится горизонтальная линия до пересечения
со шкалой пикового расхода воздуха, приближенное значение которого
6=13,5 л/мин.
4. Полученное значение умножается на 1,4 и количество циклов в минуту:
Q, = 13,5-1,4 -5=94,5 л/мин.
5. С помощью номограмм на рисунке 5.5 определяется точка пересечения I
Для значений рабочего давления 0,5 МПа и длины трубопровода 2 м.
Глава V
№
«к lb точки 1 проводится вертикальная пиния до пересечения с наклонной
прямой, соответствующей внутреннему диаметру трубопровода 6 мм, для получе-
имя точки 2
7. Из точки пересечения 2 проводится горизонталь до пересечения со шкалой
расхода воздуха.
8. Полученное значение, соответствующее вепичине С = 0,56 л/мин,
умножается на коэффициент 1.4 и количество циклов в минуту:
Q, = 0,56 • 1,4 • 5 = 3.92 л/мин.
9. Сложением £), и Q2 определяется полный расход воздуха в цилиндре и
трубопроводе:
Ci + Ог=94»5 + 3,92=98,42 л/мин.
5.4.2. Стандартные пневмоцилиндры
Цилиндры и комбинации современных цилиндров при использовании в
соответствии с нормативами пригодны для работы без обслуживания, и могут
приводиться в действие осушенным сжатым воздухом как с обогащением, так и без
обогащения маслом [24.37].
Работа без обогащения маслом обеспечивается благодаря выбору
применяемых материалов и пар материалов, геометрическому расположению динамических
уплотнений, а также базовой смазке, нанесенной на заводе-производителе.
Работа без обогащения маслом невозможна при следующих условиях
эксплуатации:
если цилиндры один раз приводились в движение сжатым воздухом с
обогащением маслом, то следует обязательно учесть, что для дальнейшей эксплуатации
всегда требуется сжатый воздух, обогащенный маслом, так как дополнительная
смазка жидким распыленным маслом вымывает базовую смазку;
если цилиндры приводятся в действие сильно осушенным сжатым воздухом
(точка росы под давлением ниже -20°С) и при высоких скоростях (свыше 1 м/с),
рекомендуется использовать сжатый воздух, обогащенный маслом.
При выборе размеров цилиндров и распределителей следует учитывать
рекомендации, отраженные в таблице 5.2, поскольку их выполнение позволяет
получить скорости движения поршней, достаточные для практического использования
137].
Таблица 5.2. Соотношение параметров пневмоцилиндров и распределителей
.. 1 n^„._„„u„TOrnLUUlu | VrnnRHKiK I Номинальный расход,
Цилиндр с
поршнем 0 мм
До 12
> 12...25
25...50
50...100
Присоединительный
размер распределителя
МЗ
М5
1/8'
Условный
проход, мм
1,5
2,5
3,5
1/4'
150...200
200... 320
1/2';
3/4", 1"
7,0
Номинальный расход,
л/мин
80
До 200
До 500
12,0
18,7
До 1140
До 3000
До 6000
Время срабатывания пневмоцилиндров во многом зависит от длины пнев-
мошлангов. соединяющих их с распределителями. Конструктивное решение стан-
юртных цилиндров 2 по ISO 6431 позволяет устанавливать распределители 1 и
дроссели 3 непосредственно на них, способствуя максимальному уменьшению
длины пневмошлангов (рисунок 5.7,а), причем допускается несколько комбинаций
их размещения (рисунок 5.7,6), где позиции 1,2,3 соответствуют размещению
распределителей справа по ходу движения штока, а 4,5 и 6 — слева: комбинация 1 и 4
моностабильный распределитель смонтирован справа или слева, шток втянут;
""^^^^
275
комбинация 2 и 5 Мо * -————£11
слева, шток выдвинут- "°СТабильный расппе™
Рисунок 5.7
НаРтиГт&
__ и ходом К. 20Jo мм ^Де * ^ ° тЖ1рШИ П°РШНЯ 32-125 ™
1 монтажная деталь для последовательного соединения двух цилиндров отнпгп
2 - СежГ№ П°ЛУЧеНИЯ 3 -«^«онногоцилиндраиеГГин™0
3 — Jf Пежные лапы Для передней и задней крышек;
^ фланцевое крепление для передней или задней крышки;
цапфа для передней или задней крышки;
в ~ ?П°РЫ для ЧапФы 4 и промежуточной цапфы 15;
о фланец с осью для задней крышки;
опорная стойка со сферическим подшипником для 6;
опорная стойка под сварку, со встроенным сферическим подшипником;
Фланец с проушиной для задней крышки:
О опорная стойка для фланца 9 или головки 16;
фланец с проушиной, задняя крышка;
'2 фланец с осью для фланца 11 или для задней крышки;
13 — опорная стойка для фланца 12;
J 4 опорная стойка со сферическим подшипником для фланца 12;
5 цапфа для промежуточной крышки на гильзе цилиндра;
головка со сферическим подшипником;
опора поперечная для головки 16;
8 головка с наружной резьбой для головки 16:
19 — соединительная деталь для компенсации радиальных отклонений;
20 — головка, коррозионно-кислотостойкого исполнения;
Id*
276 Глава V
21 — головка для компенсации радиальных и угловых отклонений;
22 — направляющая для предотвращения проворота при больших моментах;
23 — крепление для датчиков 25 при работе цилиндров с направляющей 22;
24 — профильная упругая вставка для профильных пазов с целью защиты кабеля
датчиков и собственно самих профильных пазов от загрязнения;
25 — датчики типа SME/SMT-8 (герконные) для бесконтактного опроса,
монтируемые непосредственно в профильные пазы цилиндра;
26 — дроссели для регулирования скорости штока цилиндра;
27 — быстроразъемные цанговые соединения типа QS.
Рисунок 5.8
Конструктивные решения по „ "~~ ~
поРШ„я„т8 63мМиходомпо-о™ 5омз2с
, Виды крепления цилиндров " "риведены на рисунке 5.9.
Монтаж основных Цилиндров без кп.
Резьбовое крещение КЪепл ^^^^^
-ред„ вд« Sg"-»*»*. Поворотекрепление
F7L г^, _ сзади
Крепление спереди Крепление
сзади
Варианты монтажа и дополнительные крепежные детали
Крепление на лапах Югеммное крепление с
Крепление при помощи
фланца
последующ, юстировкой
Поворотное крепление
на фланце
Поворотный фланец Опорная стойка Поворотный фланец
с опорной стойкой
-^^^^ H§££3fJ «а^ЗЭ^
Сферическая опора
Поворотный фланец
с кронштейном
Резьбовой палец
Рисунок 5.9
Для установки на цилиндрах датчиков положения с матитным
(бесконтактным) управлением предназначены либо специальные монтажные комплекты, либо
конструктивные решения профиля корпусов цилиндров (рисунок 5.10).
Закрепление датчиков на круглых цилиндрах может осуществляться с
помощью: планки специального профиля, закрепленной по концам корпуса
параллельно его оси и прижима (а,з); хомутов из коррозионно- и кислотостойкого
материала для датчиков круглого профиля (г) и прямоугольного профиля (д,е) с
резьбовыми вставками из нержавеющей стали или стальных хомутов (и).
Закрепление на цилиндрах, имеющих стяжные шпильки (б,ж) или приливы на
корпусе (в) производится с помощью прижимов различной конструкции из
нержавеющей стали.
Закрепление на корпусах, имеющих Т-образные профильные канавки, может
производиться, например распорными усилиями, создаваемыми с помощью винта
(к) или с помощью упругих монтажных скоб (л).
Пример применения стандартных
ISO 6432 в составе установки для наполнениТГЫХ nHeBM0™H"P°B no DIN
наполнения бутылок приведен на пиг„»,■«, «t 11
приведен на рисунке 5.1 ]
Рисунок 5.11
5.4.2.1. Цилиндры одностороннего действия
Цилиндры одностороннего действия применяются в тех случаях, когда
необходимо производить работу с приложением силы в одном направлении. Возврат
поршня цилиндра в исходное положение осуществляется встроенной пружиной.
Так как для размещения пружины необходимо пространство, цилиндры
одностороннего действия выпускаются обычно с ходом до 150 мм.
Развиваемое ими усилие определяется по формуле
F = p
kD1
D
— FTp — F,
TP
Я/>>
СИ|Н МПа = 106Н/м2 мм = 103м
(5.27)
где р — давление воздуха в магистрали; D - диаметр цилиндра; FTP - сила
трения в уплотнениях (обычно берется в пределах 10% от развиваемого усилия); FnP-
усилие, создаваемое пружиной (в конце хода составляет 10% развиваемого усилия).
j , a a^.iv^ipj „„„инлпов используется табличный метод
Часто при определении размеров цилиндров ииюль^
(таблица 5.3). тнгттЖиия (б) и размеры цилиндра односторон-
Мнемоническая схема (а), констРУ^ ^„птой хода 50 мм типа ESNU-20-
него действия (в) с диаметром поршня 20 мм и длиной д
50-Р-А (Р — демпфирование в конце хода, А — опрос с по
заны на рисунке 5.12. {2 ^„„„„евые крышки соеди-
В данной конструкции °^^^щей стали путем завальцовки. В со-
нены с тонкостенной гильзой 7 из нержаве кольцевой магнИт 9, магнитное
ставе поршня 10 цилиндра имеется п№Т0Я™0М (герк0ном), закрепленным на
поле которого управляет бесконтактным д стяжной болт). Датчиков может
гильзе с помощью монтажного комплекта (хо^производить контроль заданных
быть установлено несколько, и они позволя ^ демпфир0вание которого осуще-
конечных и промежуточных положенИИнПОрШвл^ющая втулка 3 штока 1 выполне-
ствляется с помощью упругих колец 6. Напра ^ дополнительного обслу-
на из самосмазывающейся металлокерамики и н • у
:so
Глава V
жнвания. Для исключения проворота штока в процессе затягивания гайки на нем
выполнена двусторонняя лыска 2 под соответствующий размер ключа (для
цилиндра с диаметром поршня 20 мм — ключ 7 мм). „,„„,,
1 2 3 4 5 б 7 8 5> W) 1.1 I*
13
Таблица 5.3. Теоретическое усилие цилиндров одностороннего действия
г
0
порш- 1
1Я (ММ)
2,5
4
f.
1П
, 16
1 20
25
32
40
0
хггока
(мм)
1
2
3
4
5
8
10
12
14
Направление
действия
Выдвиж.
Втягивай.
Выдвиж.
Втягивай.
Выдвиж.
Втягивай.
Выдвиж.
Втягивай.
Выдвиж.
Полезная
площадь
поршня (мм2)
4,9
-
12,6
■*""-""в—
28,3
-
78,5
-
201
Втягивай. | _
Выдвиж.
Втягивай.
Выдвиж.
Втягивай
Выдвиж.
Втягивай
Выдвиж.
Втягивай
314
-
491
-
804
-
1260
-
Давление (МПа)
0,2
-
0,3
0,34
0,4
083
0,5
1,32
0,6
1,81
0,7
2,30
0,8
—
0,9
—
1,0
-
0,64
-
0,74 2,00
3,26 4,52
5,78 -
-
-
1,47
1,94 4,77
7,60 10,4
13,3
16,1
_ _
—
1,77
8,84 16,7 24,5 32,4 40,2 48,1 -
_
3,53
26,0 46,1 66,2 86,3 106,4 126,5 -
—
6,86
23,8 55,2 87 118 148 181 212 244
275
" 7,8
51,2 100 149 199 248 297 346 395
444
14
94 174 255 335 415 | 496 576 657 737
15
176 | 302 428 554 680 806 934 1054 1184
■ ^ 1 1 1 1 1 1
24
Крепление цилиндра может осуществляться либо с помощью резьбы задней
крышки 12, либо отверстия 13, либо гайки 4. Выдвижение штока происходит при
подаче сжатого воздуха в отверстие 11, возврат — под действием пружины 8.
Данный тип цилиндра соответствует нормам ISO 432 и СЕТОР RP 52P
(Европейский комитет по гидравлике и пневматике) и может иметь размеры: диаметр
.поршня — 8...25 мм; ход— 10, 25, 50 мм. Рабочее давление — max 1,0 МПа;
диапазон температур — от -20 до +80°С; вес — 0,235 кг; сила возврагной пружины
для хода 50 мм, min/max — 13,5/19,5 Н; усилие на шгоке при давлении питания 0,6
МПа — 150 Н. Материал уплотнения — полиуретан.
— . » г»пу I и
5.4.2.2. Ц»™»ДРЫд.устор„„„сгода.(ггв111|
В пневмошшиндри двустоцп,,,,,..
FBr = p
rt>- nd
-/;— v
4 ''^—гтг, ^—£___£__£_
где D — диаметр поршня- d — ли СИ'Н МПа мм мм'
трения(10% от развиваемого усилия!?^ ^-^^е воздуха; F„.
Таблипа5 4 т.™-,. ЛИЯ*Н'™бо определена с помощью таблиТ.
■ дс и — диаметр поршня- d ли м
трения (10% от развиваемогоУсилия^лТ^яТ^™6 ***** ^-си
Таблица 5.4. Теоретическое L„„ опР«,а с помощью таблицы 5.4
| порш- (штока лише площадь I „" ~ '
дейст- поршня
вия I (мм')
(5.28)
сила
|ня (мм)
^————* ' ' ; -■
Для цилиндров специального исполнен.* характеризующихся проходным
Штоком (исполнение S2) (рисунок 5.13.в). усилие при выдвижении FBbmB-FBT, так
1г-ъш, ..,.„ — . „„„mi м<"-и. ;iv СОООЙ.
Штоком (исполнение S2) (рисунок 5.13.в). усилие при выдвижении FBmB:
как площади поршня с обснч сторон равны между сооои.
*»y»
Глава V
На оисунке S 13 показаны мнемоническая схема (а), конструкция (б) и общий
вид Ж^. « пневмоцилиндра типа DSNU-20-50-PPV-A, имеющего диа-
м^р п^шня 20 мм. ход - 50 мм, и рассчитанного на максимальное рабочее дав
лтие 10 МПа. Максимальная длина хода цилиндров данного типа - 320 мм. Они
могут выпускаться как с круглым штоком, так и с квадратным (тип DSNUL), с ре-
™емым демпфированием и без него, т.е. с упругими демпфирующими
кольцами Минимальный путь торможения- 17 мм. Максимальный крутящий момент
на штоке для пневмоцилиндров типа DSNUL — 0,2 Н • м.
1 1 34567 8У
> ' \ \ \ \ \ Тиб. I j
в)
6)
II2+50 (ход)
Специальное исполнение S2
116+50 (ход)
92+50+50
Рисунок 5.13
В отличие от пневмоцилиндров одностороннего действия, и в передней 2 и в
задней 9 крышках, соединенных с гильзой путем завальцовки, выполнены
отверстия 3 и 8 для подвода сжатого воздуха. Демпфирование осуществляется в конце
хода штока 1 за счет перекрытия выходных отверстий в крышках с уплотнениями
4 цилиндрическими консолями 5 поршня 6, и вытеснения воздуха через отверстия
10 регулируемых дросселей.
На гильзе снаружи могут быть закреплены один или несколько датчиков с
помощью соответствующих монтажных наборов (рисунок 5.13,в), срабатывающих
при воздействии на них магнитного поля кольцевого постоянного магнита 7.
Скорость перемещения штоков цилиндров с поршнями от 12 до 25 мм при
давлении воздуха 0,6 МПа, дросселировании выхлопа, горизонтальном положении
и без нагрузки: Vmm= 10 мм/с, Vnax= 100 мм/с.
Пневмоцилиндры типа DSNU выпускаются с диаметрами поршня от 8 до
25 мм, а длиной хода — от 10 до 500 мм.
На рисунке 5.14 приведены условное обозначение (а), общий вид (б),
конструкция (в) и размеры круглого пневмоцилиндра типа DSW-32-100-P-A-B (г)с
упругими демпфирующими кольцами 6 в конечных положениях. Как и в ранее
описанных конструкциях передняя 2 и задняя 10 крышки из алюминия с отверстиями
5 и 11 для подвода воздуха соединены с гильзой 7 из нержавеющей стали путем
завальцовки. В передней крышке размещены уплотнение 2 и направляющая
самосмазывающаяся втулка 3 для штока 1. Управление датчиками осуществляется с
i!25BJ^H2^!21£i!cnaaHHTe.
^£У£ГРойства
283
помощью постоянного котьпеп
лот™ - ->*■». «or;:;:™ 11™~° -««8 с „
'»" МПа, вес — 0,45 кг
-V *М,-
«_
Рисунок 5.14
ход -Г^ТзоГ' ДаНН°Г° ™"3 ИМСЮТ ДйаМе1рЫ П°рШНеЙ 0Т 32 *> « мм,
ход от 25 до 300 мм; тормозной путь - от 19 до 27 мм, соответственно
Толкающая сила при р = 0,6 МПа — от 482 до 1870 Н.
Представленный на рисунке 5.15 пневмоцилиндр двустороннего действия
(а,в; может иметь два исполнения (б): тип DNGU — с круглым штоком и
регулированием демпфирования в конечных положениях: тип DNGUL — с квадратным
не проворачивающимся штоком. Гильза 5 цилиндра из анодированного алюминия
(в) имеет специальный профиль (д) и соединяется с передней 2 и задней 10
алюминиевыми крышками с помощью винтов с внутренним шестигранником и
внутренней резьбой (г), используемой для крепления цилиндра. Поршень,
состоящий из двух частей 6 и 8, между которыми размещен постоянный магнит,
закреплен на штоке 1 из нержавеющей стали с помощью гайки 11.
Демпфирование поршня со штоком, например, в левом положении
происходит следующим образом. При подаче воздуха в питающее отверстие 9, поршень
быстро перемещается до вхождения втулки его левой части 6 в контакт с юбочным
уплотнением 4, после чего наступает уменьшение скорости его движения, так как
воздух из штоковой полости начинает поступать к отверстию выхлопа 3 не через
кольцевой зазор 14 с большим проходным сечением, а через канал 12 и дроссель
13 с меньшим регулируемым проходным сечением.
В начале обратного хода воздух поступает непосредственно к поршню через
кольцевой зазор 14 и юбочное уплотнение 4, выполняющее функции обратного
клапана.
На продольных ребрах профильной гильзы (д) могут быть закреплены один
или несколько датчиков (например, герконных), позволяющих контролировать
конечные и промежуточные положения поршня, управление которыми
осуществляется с помощью магнитного поля постоянного кольцевого магнита 7.
На рисунке 5.15,г приведены конструктивные параметры пневмоцилиндра
типа DNGU-32-50-PPV-A с диаметром поршня 32 мм, ^^1^сч^
ного на рабочее давление 1,2 МПа, температуру - от -20 до +80 С, весом - 0483
кг. Тормозной путь — 19 мм.
Глава V
2 * 4
' V I
5 6 7 8 9 10
/ / f \JL'
CNGUL
1 - Винт с внутренним шестигранником и
внутренней резьбой
2 — Винт для регутировкн демпфирования
г)
Тип DNGUL-32
4
- 037 '
1 - Монтажный набор для датчиков
2 - Бесконтактный датчик
Д)
е)
-I !■ I "1 ' I ' ' ' " ' МММ l'l'1'ПМ
10 20 28 40 60 100 150200 400 600 1000
Ход, мм —— »-
300 шах
Рисунок 5.15
VDmV^STT™ ° DIN 1S° М31 <Немеикий институт по стандартизации),
4FE490m (0бЩество немецких машиностроительных предприятий) и
**» (.стандарт Франции), цилиндры данного типа выпускаются с диамет-
JISS!!^^^^
24*
рами поршня от 32 до J2S " "
■0...600 „м (лля DN0UL) ~, длиной хода „ 10 до 20Qg
Графики зависимости nnn IWSGU) и
типа DNGUL с диаметром поршнЛ? СИЛЫ F" ОТх°Да и плеча S пп
Ход поршня равен 150 мм
Допустимая поперечная сила ^=95Н „
Пример 2. п ^ н' Допустимое плечо S= 84 мм
Поперечная сила Fn=40 H
Допустимый ход поршня о».
Примерз. Р28мм'допУс™мое плечо 5=20 мм
РеГнГНЯСОСТаВЛЯеТ'50мМ'--Рь-га 5-ЮОмм.
1. Определяется реальная поперечная ™пя *г
чины крутящего момента для данного типопя? ' С учетом максимальной
великого типоразмера цилиндра Мкр=800 Н-мм.
р — кр 800
3 Таккака™<7Я ' ^ ™ ^™--перечная сила Fn=9,5H
тажнь;й)ГеПмОЛНеННЫЙ "* ^ ИШП™ "Р0*™- ™зволяетумен Ш^Т0Н-
пшменеи^ сРавнению с традиционными стандартными цилиндрами за счет
применения более простых конструктивных решений по установке датчиков
контроля положения поршня, основанных на использовании продольных
профильных пазов, поперечное сечение которых аналогично поперечному сечению
размещаемых в них датчиков (г).
Постоянной составной частью конструкции пневмоцилиндров с
регулируемым демпфированием в конце хода являются демпфирующие диски 4 (в),
благодаря которым энергия поршня, которая не полностью поглотилась пневматическими
демпферами, без остатка рассеивается при контакте с ними, что позволяет достичь
высоких скоростей и высоких частот машинного цикла.
Перемещения сборного поршня 14 с магнитом 6 и штоком 1 демпфируются
при вхождении втулок 8 в контакт с соответствующей юбочной манжетой 7,
вследствие перетекания воздуха из рабочей полости через каналы 13 и дроссели 12
в полости 11 или 15 и далее в соответствующее отверстие впуска/выхлопа 3 или 9.
На рисунке 5.16,г приведены конструктивные параметры пневмоцилиндра
типоразмера DNC-32-100-PPV-A с диаметром поршня 32 мм, ходом — 100 мм, с
бесконтактным опросом положения поршня (PPV) и регулируемым
демпфированием в конечных положениях (А). Рабочее давление— 1,0 МПа, путь торможения
■— 29 мм, вес — 1,29 кг.
Цилиндры данного типа производятся с диаметрами поршня 32... 125 мм,
Длиной хода — от 1 до 2000 мм. Минимальный ход для опроса положения поршня
Датчиками для диаметра 32 мм — 17 мм; для диаметра 125 мм — 27 мм.
Стандартный ряд ходов поршня - 25, 40, 50, 80, 100, 125, 160, 200, 250, 320,400 и 500 мм.
Зависимости поперечной силы F„ от алины хода для различных
типоразмеров цилиндров приведены на рисунке 5.16,д.
Для предотвращения проворачивания штоков стандартных пневмоцилиндров
типа DNG и DNGU при больших моментах предназначены направляющие
(модули) типа FENG с подшипниками скольжения и типа ^NG- -KF с^одшнпни-
ками качения, котопые могут быть использованы в составе манипуляторов про-
"►
Глава V
ez^
»)
15
8 14
13 12 И
6)
120+100 (ход)
Рис>иок5.16
мышленных Р°бот°в с пневмоприводом г
^ Данного типа даны на (в) и (г)
-KF шариковая направляющая
X - расстояние до центра
масс полезной нагрузки
центр масс полезной нагрузки
Тип FENG-... направляющая скольжения
-I ' I М I | I | I | ' I ' I ' I М I
50 100 150 200 250 300 350 400 450 500 0
В)
• Вылет А+Х мм
г)
J I ' I ' I ' М И I ' I ' I ' Н I ' I
50 100 150 200250300350400450500550600
Вылет А+Х мы »-
Рисунок 5.17
рисунок j- i'
Направляющие имеют стандартный ряд ходов: 50. 100. 160. 200. 250. 320, 400
и 500 мм; диапазон рабочих температур - от -20 до +80°С. Направляющая плита
выполнена из алюминия, подшипники скольжения - из спеченной бронзы р-
правляющие штанги — из стали. Вес направляющей скольжения FENG-32 — 1,
кг, FENG-32-...-KF— 1,3 кг.
на-
,46
Глава V
SA2A инсимоцилинчры с прецизионным стопором
Пневмошпиндры с прецизионным стопором (фиксатором) используются в
«х ^х^гда водима точная остановка штока в нескольких позициях,
иаппимео в штабелеукладчиках, при подаче заютовок.
Арийства пневмоцилиндров с фиксаторами заключаются в следующем.
Во-первых обеспечивается автоматическая фиксация штока, а следовательно,
и перемещаемого с его помощью груза, при аварийном отключении питания.
Во-вторых фиксация и удерживание штока в заданном положении
длительное гремя без дополнительных затрат энергии, в том числе при переменных
нагрузках, колебаниях рабочего давления или негерметичности.
Условное обозначение (а), внешний вид (б) и конструкция фиксатора (в)
пневмошпиндра двойного действия, с регулируемым демпфированием и
бесконтактным опросом положения поршня типа DKE-...-PPV-A «Festo» приведены на
рисунке 5 18. а прнсоединитетьные и размерные параметры пневмоцилиндра
типоразмера DEE-40-200-PPV-A с диаметром поршня 40 мм. ходом 200 мм — на
рисунке 5.18,г.
х=гг
"т3^
,1
Механизм фиксатора размещен в цилиндрическом корпусе 4, установленном
между крышками 3 и 13, через которые проходит шток 1 основного цилиндра 14.
В крышку 13 ввинчена направляющая 12 поршня 11, имеющего в своем составе
коническую втулку 10, взаимодействующую с шариками 9, помещенными в
клиновидном зазоре, образованном коническими торцовыми поверхностями направ-
гающей 12 и втулки 8.
На шток 1 между втулкой 8 и резьбовой втулкой 2 с армирующим
закаленным кочьцом 5 помещено упругое разрезное профильное кольцо 6 (цанга).
При отсутствии давления поршень 11 с нажимной втулкой 10 за счет усилия,
создаваемого пружиной 7, находится в правом положении, т.е. у крышки 13
основного цилиндра При этом коническая поверхность нажимной втулки, взаимо-
де*ствуя с шариками 9, перемещает их в радиальном направлении, вызывая осевое
перемещение втулки 8, что приводит к кольцевой деформации (сжатию) упругого
• • кольца 6. фиксирующего шток 1.
Пневматические »™™™^™»у^^
При подаче давления через питающее отвеос™ к „
перемещаясь влево, сжимает пружину 7 и oCRnfW ™ршню 11, последний,
на них давления со стороны втулки 10 В свою ШрИт 9 °Т «"«веемого
освобожденное от оказываемо^ на пегy^'Г"' У"РУ,°е Pa*C3H"e K™° 6'
освобождая шток 1. У ""* °° СТОроны ВТУ,ки 8- разжимается.
Данный тип цилиндров выполняется с диаметрами поршней от 40 до 100 мм
и длиной хода от 10 до 2000 мм. Сила фиксации - от 13Ш до 8ШН рабочее
давление питания цилиндра — 0 38 10 МПа р»к„ , раоочее
линдра - 1,0 МПа. Ш' Раб°Чее Давление основного ци-
Приведенная сила фиксации соответствует остаточной нагрузке. При ее
превышении может происходить проскальзывание штока
Фиксатор может быть отключен только топа, когда обе полости основного
цилиндра находятся под давлением, подаваемым через 5/3-распределитеть иначе
резкое перемещение штока может привести к аварийной ситуации.
Для обеспечения надежного функционирования клнноплунжерного
механизма фиксатора необходимо обращать внимание на правильный выбор углов
конических подвижных соединений с целью исключения из самозаклинивания.
Пример конструкции фиксатора на базе клинорычажного механизма показан
на рисунке 5.19,а. Он использован в составе пневмоцилиндра типа C92LA
компании SMC (Япония) с диаметрами поршней от 10 до 100 мм, длиной хода —
25...500 мм, максимальной рабочей скоростью 500 мм/с, при диапазоне рабочих
давлений от 0,08 до 1,0 МПа. Точность остановки — до ± 0.2 мм.
К передней крышке 9 стандартного основного пневмоцилиндра (рисунок
5.19, а), включающего в себя гильзу 10, шток с поршнем 12. снабженным
магнитным кольцом 11 для управления датчиками, устанавливаемыми на шпильках 15,
соединяющих переднюю крышку с задней 13, прикреплен с помощью винтов 23
корпус 2 фиксатора, механизм которого выполнен на базе двуплечих рычагов 22,
установленных с возможностью поворота в держателях 4.
Левые концы рычагов взаимодействуют со сферическими поверхностями
держателя 21 в виде упругого разрезного кольца, размещенного в наружной
кольцевой проточке зажимного кольца (цанги) 3, имеющего П-образное поперечное
сечение, а правые, несущие установленные с помощью осей 20 ролики 19. с
клиновыми поверхностями на внутренней поверхности поршня 7, имеющего палец
6, размещаемый в направляющей 5, предохраняющей поршень от проворота.
При отсутствии давления поршень 7, смещаясь влево под действием пружины
18 (или от давления воздуха) и взаимодействуя с роликами рычагов 22,
осуществляет их поворот в держателях 4 и сжатие зажимного кольца 3, блокирующего шток
1 (рисунок 5.19, б). ™и подаЧе вспомогательного воздуха в
Разблокировка штока осуществляется при пил"
левое питающее отверстие корпуса фиксатора 2. „„_„_„ г ппмош. ю
Регулировка скорости поршня при демпфировании производится с помощью
игольчатых дросселей 14 и 16 с '^Р^^тственно зависимости удержнваю-
На рисунке 5.19,г,в представлены соответствен» ^
щего усилия от рабочего давления при "™™™™™Z на шток в различных
МПа и зависимость максимальной Д™™"^™^ поршня.
рабочих положениях цилиндра от скорости пер^ин в с пружннным фиксатором
Максимальная удерживающая сила для «"^^ давлении 0,4 МПа составляет
и диаметром поршня от 40 до 100 мм при Р сложением величины
соответственно 2300... 13000 Н. Эти вел^ам^ом 40 мм - 800 Н), и значе-
усилия, развиваемого пружиной (для порШН* помощью номограмм на рисунке (г),
ния удерживающего усилия, определяемого
Глава V
1,4 5678910
\\l r*J/
а)
\ 1 * \
2-i2J 21 20 19 18 17 16
Блокировка
t *
Разблокировка
* t
в 3000
1,2000'
.? |000|
0.1 0,2 0,3
Давление р (МПа)
> держивающее усилие при
макс давлении блокировки 0.2S МПа
в)
0 50 100 200 300
Скорость поршня (мм/с)
400
г)
Рисунок 5.19
5.4.2.4. Пневмоцилиндры двойного действия с защитой от проворота
Цилиндры двойного действия (рисунок 5.20,а) обеспечивают получение
двойного усилия при выдвижении штока. Они характеризуются наличием штока
большого диаметра, снабженного механизмом защиты от проворота.
Схематично принцип работы такого цилиндра показан на рисунке Э.лх, . р
подаче сжатого воздуха в питающее отверстие А обеспечивается двойное уем
на штоке, выполняющем функции поршня, так как воздух действует на торц
поверхности 1 и 2; при подаче воздуха в отверстие В происходит втягивание
ка усилием, развиваемым только одной поверхностью 3.
По сравнению со стандартным тандем-цилиндром (в) пневмоцилиндр д
ного действия имеет осевой габаритный размер меньше на 30%, а ширину н^
меньше, чем у цилиндра с двойными направляющими (г), создающего то ж у
лие (рисунок 5.17). ja-
Механизм фиксации от проворота (рисунок 5.20,г) выполнен в виде «">
крепленных на штоке-поршне планок с антифрикционными накладками,
туюших с пазами корпуса две направляющих скольжения.
Датчик
^v
Вьцвижение поршня
ДУХ' П0™паюЩ„„ в А, дайсгаует иа]и2
1 2 А В
а)
Втяптанн* поршня ■—=— .
б) BoWX. поступающий в В, действует на 3
Направляющая
скольжения
Шгок-поршеш.
Пресс
Манипулятор
робота
Подъем
Рис\ нок 5.20
„-.„ чействня типа MGZ компании SMC
Габаритные размеры цилиндра, дво^о™ действ.. ^ ^ ^ ^^
(Япония) с диаметром поршня 40 мм и ходом .л
5'20"5; „„.We давление 1.0 МПа. минимальное рабо-
Он рассчитан на максимальное раооче " наличии датчиков
чее давление — 0,08 МПа. Температура окружаюше р^. к ^ фи_
положения поршня - от -10 до + 60°С; скорость поршня ~ • эжментов.
Рование в конце перемещения осуществляется с помощью упру
19*
29:
Глава V
Стандартные размеры поршней пневмоцилиндров двойного действия — 4п
50 и 63 мм.
Примеры применения пневмоцилиндров показаны на рисунке 5.20,е.
5.4.3. Компа ные и короткоходовые цилиндры
Наиболее широкое применение компактные и короткоходовые цилиндры
нашли в зажимных приспособлениях, что обусловлено быстрым срабатыванием и
возможностью получения больших усилий зажима при малых габаритных размерах
Различают следующие конструктивные исполнения цилиндров:
— одно- или двустороннего действия;
— с тянущим или толкающим штоком;
— с круглым или квадратным штоком;
— с наружной или внутренней присоединительной резьбой на штоке;
— с дополнительными направляющими для штока.
Тип AEVULQ-... Тип AEVUZ-... Тип ADVU-...
В)
<J$S^*SS«S»5S8S
т
мшш*
Тип ADVU-32-15-P-A
.т.
на
Рисунок 5.21
д) е)
Цилиндры данного типа могут закрепляться на
технологическом оборудовании как с помощью
разнообразных принадлежностей, так и без них.
Демпфирование поршня в конечных
положениях осуществляется по причине малых габаритов в
основном с помощью упорных колец, часто
выполняемых заодно с уплотнительными элементами
поршня.
Внешние виды компактных пневмоцилиндр°в
одностороннего действия с толкающим квадратным
током (а), одностороннего действия с круглы*
тянущим штоком (б) и двустороннего действия (в)
схеммЗВЛеНЫ "а рисУнке 5-21> * их мнемонические
веннп ня КОНС,РУ,сп«ное исполнение - соответст-
вен но на г, д и е.
тинных^"0 У!ИДеть' что в основу всех констрУ*;
основных^ТНИЙ П°ЛОЖен "PHHiin унификации
B^Ha^™^ И узло° пневмоцилиндров-
ми шГп * К°РПУС 3 с "Рофильными пазз-
тЯ МалогабаРитных герконных датчиков испол-
->
TwnADVUL-32-1S-P-A
нения SME-8-... или SMT-8-... (Festo) и крышками 2 и 8 с отвепстиями „„
да Шиотвода И ^-™^иивд^^^
нержавеющей стали, соорныи поршень 7 с постоянным кольцевым магнитом б и
уплотнителем 5, выполненным заодно с демпфирующими кольцами. Возврат
штока в исходное положение у цилиндров одностороннего действия обеспечивается с
помощью пружины 4. Задняя крышка 8 снабжена центрирующим отверстием 9
облегчающим установку пневмоцилиндра на оборудовании и стыковку двух таких
цилиндров при создании многопозиционного привода.
Габаритные и присоединительные размеры толкающего пневмоцилиндра
типа ADVU-32-15-P-A (Festo) с диаметром поршня 32 мм и ходом 15 мм, с опросом
положения поршня и демпфированием в конце хода приведены на рисунке 5.21 ,ж.
Внешний вид пневмоцилиндра типа ADVUL-32-15-P-A
с такими же размерами и ходом поршня, но с защитой по- ADVUL-...
следнего от проворота с помощью двух направляющих
штанг, связанных платформой 4, показан на рисунке 5.22.
Закрепление крышек на корпусе цилиндра реализуется с
помощью четырех пар специальных резьбовых втулок 5 и 6, из
которых две пары втулок 3 и 2
(по диагонали) имеют
исполнение, дающее возможность их
использовать в качестве
направляющих для штанг за счет
удлинения втулки 3. При
последовательном соединении 2, 3
или 4 короткоходовых
цилиндров с одинаковым диаметром
поршня, а также одинаковым
ходом (рисунок 5.23,а) может
быть получен многосекционный
цилиндр двустороннего
действия. Его внешний вид и
конструктивное исполнение показаны
на рисунке 5.23,б,в.
Такое исполнение
позволяет увеличить вдвое, втрое либо
вчетверо толкающее усилие ю рпсунок5.22
штоке, по сравнению с оььгч-
ным пневмоцилиндром,
например, типа ADVU. „„линдра благодаря внутренним распределительным
Для многосекционного цилДР-а ^^ ^^^^^ 6 и 7, чтобы
подканалам 4 и 8 (в) необходимы^п тдров^ Тянущая сила на выходном штоке
вести сжатый воздух в попоет 2 с п0Ст0ЯННЫМ кольцевым магнитом 3.
1 равна силе, создаваемой.^J^ магниты. Отверстие выхода воздуха в
Остальные поршни "е C№P g & ааерта подвода воздуха к промежуточ-
левой крышке заглуш*»J _ резьбовыми пробками 5.
ньш (межсекционным) крЫекционного пневмоцилиндра ТИпа ADVUT-
Габаритные Р^п " „Г 25 мм, с демпфированием в конце хода (буква Р)
25x4-. .-Р-А с да^^шня (буква А) приведены на рисунке 5.23, г. Ход поршня
и onDOCOM п°ложе"^ точек в обозначении типа.
проставляется -**£££ с диаметром поршня 25 мм на крышках выполняются
Р Для nHeBTMOUH«PaOraKoM ^ ^^^ т вн£шнег0 торца как и отверСТИЯ
только отверст
Зи5.
*21
Глава V
Tw»ADWUT- -P-A
б)
в) 9
ADVUT-25X4- -Р-А
,10 . 4
нс >ot_fjili
г)
1 - Канавка для датчиков положения типа SME/SMT-8-.
2 - Штоки всех поршней выдвигаются, для поршня 025 мм
3 - Штоки всех поршней выдвигаются, для поршней 040... 100 мм
4 - Штоки всех поршней втягиваются, для поршия 025 мм
5 ' Штоки всех поршней втягиваются для поршней 040 100 мм
++ - прибавить 2 длины хода
+++ - прибавить 3 длины хода
++++ - прибавить 4 длины хода
Рисунок 5.23
Представленные на рисунке 5.24,а компактные короткоходовые пневмоци-
линдры одностороннего действия типа EMM (Festo) характеризуются блочной
конструкцией и малой массой. При диаметре поршня от 10 до 32 мм стандартные
длины ходов составляют 5, 10 и 15 мм. Зависимость минимальной силы
возвратной пружины от хода показана на рисунке 5.24, в. Максимальное рабочее давление —
0.6 МПа (до 1,0 МПа при внешнем ограничении хода или уменьшении
дополнительной массы). Максимальный допустимый крутящий момент на штоке нневмо-
цилиндра типа ЕМ ML (с направляющей штангой) с поршнем, диаметром от 10 до
32 мм, не превышает 0,02 Нм. Варианты крепления цилиндров без
дополнительных элементов на технологическом оборудовании показаны на (г).
Корпус 5 цилиндра с продольными канавками (рисунок 5.24,6) для установки
датчиков опроса положения поршня 7 с кольцевым мшнигом 8 и штоком 1, закрыт
с ооеих сторон крышками 2 и 10 с демпфирующими упругими кольцами 3.
Фиксация крышек в корпусе осуществляется упругими разрезными кольцами 11.
Сжатый воздух подводится в бесштоковую полость через питающее отверстие 9, а воз-
лух из штоковои полости отводится в атмосферу через огверстие 4, закрытое
сетчатым фильтром-заглушкой. Возврат поршня со штоком в исходное положение
осущеслпяется пружиной 6.
иаппГ3631'"™"6 И присоединительные рашеры толкающих нневмоцилиндров 6ei
направляющей и с направляющей для шгока показаны соответс1венно на (д) и (е).
1/)МП ИНЛРЫ ДВуст°Р°ннего Действия рассчитаны на рабочее давление до
и vma, имеют такие же рашерные параметры и отличаются от аилиндров одно-
il!^™12^^^
^1£фойства
295
х°Да поршня:
стороннего действия длиной
■мм. для поршней диаметром от 16
ЕММ-...
I-EMMZ-I0
2-EMMZ-I6
3-ЕММ7-20
_, 4-EMMZ-2J
5 Ю 15 5-EMMZ-J2
Ход мм ——
18 J
Рисунок 5.24
Глава \
Примеры применения компактных и короткоходовых пневмоцнлинлров при-
•еаены т рисунке *>.25 « ■ ие клеевых соединений (а), (б); деление потока
астме* с тчснением уровня транспортирования (в): гибка (г) с приченениеч
< > * них цилиндров
Рисунок 5.25
5.4.4, Ввертные пневчопилиидры
Ввертные цилиндры предназначены для установки в резьбовых отверстиях
инструктивных элементов технотогического оборудования и оснастки небольших
размеров
Ути цилиндры пригодны для выполнения операций зажима, фиксации, стопо-
рения. позиционирования Конечное положение выдвинутого штока может быть
изменено в зависимости от глубины вворачивания цилиндра.
Конструктивно ввертный цилиндр представляет собой резьбовой корте 4 в
виде стакана(рисунок 5 26. а) с двумя лыскамн под ключ, в донной части которого
имеется резьбовое питающее отверстие 9. Направляющей штока 1 служит
резьбовая передняя крышка 2. Ятя диаметров цнтнндра 6 мм поршень 6 выполняется
Целиком из полиуретана, а х.я цилиндров диаметром 10 и 16 мм — из
нержавеющей стали с воротничковым манжетным уптотнениеч. Упорная шайба 7.
содержащая центральное дросселирующее отверстие 10. предотвращает перемещение
поршня за пределы зеркала цилиндра, т.е. в зонч проточки для выхода
шлифовального круга. Возврат штока с поршнем в исходное потоженне осуществляется с
помощью пружины 5. Гайки 3 служат для установки цилиндра на технологическом
ооорудо. с помощью монтажных элементов, показанных на рисхнке 5.26.В
ч
с
Ржтнок 5 26
>плотнительное кольцо круглого сечения 8 угтраняег .течки в,™* т v_
новке.цилиндров без использования монтажны^ГнтоГ ^ '*" >"*
с диам^Т 5 26о"Ривелены "баритные размеры цилиндра пи» EGZ-I0-I0
с ^"аметроч поршня 10 мм и ходом 10 мм. Допустимое рабочее давление -
£« лп la: диапазон температур - от -20 до +«0Т. толкающая сила ори 0.6 МПа -
- и. сила пружинного возврата при ходе 10 мм — 3.5 Н Допустимая раляаяыш
весовая нагру зка на полностью выдвинутый шток для данного цилиндре не
должна превышать 15 гр. ^^ "^
Стандартные значения хода поршня дтя цилиндров с . 06.10 и 16 мм
5- Ю и 15 мм.
2.4.5. Стопорные цилиндры
Стопорные цилиндры предназначены для использования в составе
транспортеров. С их помощью осуществляется надежная остановка таких объектов
транспортирования, как поддоны н коробки, кассеты и галеты.
Констру ктнвно онн могут быть снабжены цилиндрическим \тюром. роляхо-
ВЬА| упором и ломающимся роликовым упором
На рисунке 5.27.а показан внешний вид стопорного цилиндр* с
цилиндрическим у пором фирмы Fexto» типа STA с диаметром поршня от 20 ло S0 мм и хо-
Jom от 15 до 40 мм. с у пру i ими демпфнру юшимн кольцами в конечных
положениям а на (б) приведены габаритные и присоединительные размеры цилиндра типа
STA-32-20-P-A с поршнем диаметром J2 мм. ходом 20 мм с опросом поюжеяия
Поршня (Р) и демпфированием в конце хода ( -v
Глава V
1^Ш\ * I I Ш
5 10 15 20 25 30
Сюрость соударения, v (ч/мин)
35 40
Ригутю*5Г7
Моитжжмое потоженне стопорных цилиндров с цилиндрическим и ролико-
i упором может быть любое, а цилиндров с ломающимся ротиковым упором —-
> вертикальное
Варианты установки стопорных цилиндров могут быть следующие: на резьбе
• <*). на резьбе в цилиндре (г) и с помощью фтанца (д).
Стопорный цилиндр представляет собой цилиндр одностороннего действия,
я он может быть использован н как цилиндр двустороннего действия, если из
Для отвода воздуха из бесштоковон полости вывинтить ниппель для
тр* и подвести к нему сжатый воздух.
Пневматические нсполннта,,,^ ycrpo|fCTM
При подаче воздуха в штоковvkj mnr™™
сунок 5.27л) поршень 3 со штоком 6 втм^^Т^™ ^ *™lK 4 <*>«'
жику 2. При снятии даазения шток Л2^' Г4* "*">" '* **""** т'
ние, фиксируя следующий объект т^Ц^"^Ш * ""^ "^
воспринимаются направляющей вткой^ Опальные усилия на штос
срабатывающими при воздействии на них чагнитного поЛицСВ^гоГни4
Стопорный цилиндр с рожковым упором типа STA-^-20-P-A-R ZS. R
обозначает тип упора) показан на рисунке 5.27. е В оттичие от цилиндра с
цилиндрическим упором, не нуждающимся в угзовой фиксации, угловая фиксация
штока данного типа цилиндра, несущего ролик, необходима и ссушествляется с
помощью фигурной шайбы закрепленной с помощью двух винтов на торцовой части
фланца.
Для стопорных цилиндров не рекомендуется превышение допустимой
кинетической энергии столкновения объекта транспортирования со штоком-упором, та*
как это может привести к механическому повреждению элементов их креатения.
Диаграммы нагрузки для стопорных цилиндров с цилиндрическим или
роликовым упором даны на (ж). При их построении предполагалась установка на
останавливаемом объекте (поддоне, кассете) упругого буфера с ходом деформации I мм
Принцип действия стопорных цилиндров показан на рисунке 5.28137].
Стопорный цилиндр с цилиндрическим упором (а):
I - ударное торможение (остановка) объекта транспортирования с помощью
штока поршня:
II - втягивание штока и освобождение объекта;
III - шток остается втянутым до тех пор. пока объект не пройдет над ним.
после чего шток выдвшается под действием пружины или сжатого
воздуха, подаваемого в бесштоковую полость, и готов к остановке нового
объекта.
Стопорный цилиндр с роликовым упором (б):
I- ударное торможение (остановка.) объекта транспортирования:
II- втягивание штока при подаче сжатого воздуха и освобождение объекта
транспортирования:
fii „„ ., „it™- пт тействием пружины выдвигается ло
Ш-даатение снимается, и шток под деисшпс-и HJ
упора ролика в дно объекта, который продотжает двигаться;
уииуа уилилл о^ отлиигается в конечное положение и
IV - после прохождения ооъекта шток выдвигается
готов к остановке нового объекта.
Стопорный цилиндр с ломающимся ^^"XTwSap» гидравлическо-
I - безударное мягкое ^^^^61рЖун^ 5.28, г);
му амортизатору (демпферу) в ^^ * 5 блокируется, объ-
II - в выдвинутом положении штока ло^^^ор<м.
ект не отталкивается обратно уПОр(^де1Ите1Я 2 шток начинает втяги-
III- при подаче сжатого воздуха от-pat ре . • ломающегося
ваться. объект освобождается, "^^/упором 7 на фтанце 3:
рычага при вхождении сооачки 6 вl*™ejujt в na3V 8 корпуса I. от-
- срабатывает датчик положения, у ^ ^^ ^ ^ действие„ пружины
ключается подача сжатого воздух . траясПОрт„рования приводит к
выдвигается, контакт ролика с ооъ
ломке рычага: аи1„1ийся рычаг под действием спираль-
после прохождения объекта ломакшi^ ^ исходное положение и
поной пружины распрямляется возвраш
тов к остановке следуюшего объекта
IV
Глава V
Стопорный цилиндр с цилиндрическим упором
I Ч
■ I J \ U U U1
tl
Направление
транспортировки
Стопорный цилиндр с роликовым упором
I 11 1И
j§l щ й
А
б)
п
Направление
транспортировки
1
ТИТЛ
•&
Стопорный цилиндр с ломающимся роликовым упором
— и in rv
а и
в)
и и и1 и и1 и и и V1 и я Ji и
т
Направление
транспортировки
S
4
зии-
|_
з-?оо-
8
га
Q
о. 100
со ■ ****
1 :
о
50-STA
о--~1-
:-5О-30-Р-А
F-32-20-P-/
"* STAF-вб-ЗО-Р-А-К.
L STAF-80-40-P-A-K
Xi
3
X
3
V
\
s
S
V
\
k
1!с!Г^.ЫЙ.?!^.!Ю-НУаЖа" \ ^У"анты схем присоединения pacnoeTieTv^nir
соову или с фронтальной МЕКДО-а ri I ».^.-./..„ . .Г
5 10 15 20 25 30 35 40
-Скорость соударения, v (м/мин) —
Рисунок 5.28
\
-^^^^^^
Устройства
J0J
Увеличение скорости срабатывания стопорных цичнндров с фланцевым
креплением достигается непосредственной установкой на них распределителей, что
сокращает длину коммуникаций. Возможные варианты установки показаны на
рисунке 5.28, е. Диаграммы нагрузки для различных типов стопорных ци7индров с
ломающимся рычагом приведены на (д).
Максимальное рабочее давление для стопорных цитиндров рассмотренных
типов — 1,0 МПа; диапазон рабочих температур — 5.. 60°С.
5.4.6. Плоские цилиндры
Характерной особенностью плоских цилиндров с прямоугольным сечением
поршня является то, что в них удачно сочетаются функции привода и
прямолинейной направляющей. Отсутствие возможности проворачивания поршня вокруг
своей оси позволяет применять такие цилиндры для выполнения технологических
операций, требующих, при применении цилиндров с круглым поршнем,
оснащения их дополнительными направляющими, что приводит к увеличению габаритов.
Малый размер поперечного сечения плоских цилиндров позволяет на 40%
сократить межцентровое расстояние между рядом расположенными цилиндрами по
сравнению с межцентровым расстоянием рядом распотоженных цилиндров с
круглым поршнем (рисунок 5.29,г). Так, например, шгашадь прямоугольного
поршня с размерами 5x20 мм эквивалентна площади круглого поршня
стандартного цилиндра диаметром 12 мм.
6 7
в)
Рисунок S.29
На рисунке 5.29 показано условное обозначение, внешний вид (а),
конструкция (б) и размерные параметры плоского цилиндра одиостороннего действия типа
EZH-10/40-40-A (Festo) с прямоугольным поршнем /0x40 мм, ходом 40 мм. с
опросом положения поршня датчиками, монтируемыми в специачьном пазу корпуса 1.
Поршень 4 рамной конструкции снабжен уплотнителем 2. постоянным магнитом 3
и Двумя направляющими стержнями 5 для пружин его возврата в исходное
положение, расположенных в отверстиях вкладыша 6.
сГн..,,-,.... ™„о •> vnnnvce осушесга!яется с помощью тонко-
ч^иксация элементов цилиндра в корпусе wv^iu
единой втулки 7. запрессованной в его боковые стенки и во вкладыш 6.
испольной также для крепления цилиндра на технологическом ооорудовании.
*£
Глава V
корт с ци титра выношячся m алюминия; поршень — ш пластмассы, ар
ммрованнои углеродным воюкном; уплотнения — из псрбунана. Масса покшан
«ото н* (в) ци шндра— 0,22 ki; диапазон рабочих чавленнн 0,28... 0.6 МПа; дна на
зон раоочих температур — от 20 до +80Т. Рашиваемос усилие при 0,6 МПа —
1£5 Н. \силие возвратной пружины, min/max — 18/28 Н.
П юс-кий цн шндр двустороннего действия (рисунок 5.4) а) типа DZF с
демпфированием в конечных по юженнях имеет компактный корпус .* из алюмнписно-
ю профнш с гладкой внешней формой и с канавками для ра «метения дамшков
потожения (б). Передняя и задняя крышки, снабженные соответственно
отверстиями 2 и 6 для цодвоча сжатого воздуха, привинчены двумя ним тми каждая
I
щ& -— ГпрЕН
\
»Ь.свМЯ,ическ„е„сп«л„„1с,1|1||ь
'и °ис1ва
никк-релсмвсшо к корпусу. Ц|10к , -
- 295 И. ,ямущая __ 24? н ^-«ВДг сила ,фи „авлс„т( «"«Ч"
максимальный угол 1Юво Ш^^Н^".щий момент „а шго£__ 0 112
гипа DZF-25...-A-P-A-S20Pc пР™ ЫТ1' "еШИЛЫЮе ™« «па
ные размеры когорого приведены „ T^ZZT^ """""^ ~« - «С
составе вакуумных захватов (Ч) исюУ^Г °СУЩеСГВЛя7ь С1"'фимененис в
-и, что особенно важно, н^^^^ "<— -руг св^и
шгамна или при сборке. Р Р >CTdHOBfce "лоской детали в матриггу
l{gfl i 8"
i - Полтс uiiyipeiuiiiM пкепн-рпиниюм и Biivir«iHcfl Ре,ьбоП-
i - Винт дм pci улпроппиия демпфпров«1и« » юистих положению.
3 - Дптчнк положения nun SMI -У. SM Г-8
['IICvhokS-'I
Глава V
Успямение пропорота оттока с поршнем может быть обеспечено с помощью
яяоашх шиапиров типа DZH с овальным поршнем (рисунок 5.31,а), обеспечи-
мющих ъчтнжение высокой тотности монтажа (в». Корпус 2 таких цилиндров
я путем мерной резки алюминиевого цельнотянутого поршня,
шюши(| канавки для установки датчиков Передняя и задняя крышки снабжены
соспветственно отверстиями питания 1. 5 и регулируемыми дросселями 6, 7.
Сборный поршень овальной формы имеет поли>ретановое уплотнение и
встроенный стержневой постоянный мягкий 4
Размерные параметры цитиндра с регулируемым демпфированием типа
DZH-20- -PPV-A с овальным поршнем, площадь которого эквивалентна
круглому поршню диаметром 20 мм. приведены на (г). Стандартные длины хода: 25, 40,
80. 100, V> 160, 200, 250, 320 мм; сила толкающая min/max — 128/158 Н; путь
торможения— 17 мм, максимальное рабочее давление — 1,0 МПа.
4 4 7, Бесштоковые пневмоцилиндры
Прн необходимости обеспечения больших рабочих ходов используются
бесштоковые пневмоцилиндры. так как по сравнению со стандартными они имеют
выигрыш в габаритных размерах на длине примерно вдвое при тех же рабочих
ходах, что объясняется отсутствием штоков.
Одной из разновидностей таких пневмоцилиндров являются пневмоцилиндры
с магнитной связью, длина рабочих ходов которых может достигать четырех
метров [371.
На рисунке 5.32 показаны условные обозначения таких приводов с
демпфирующими кольцами и регулируемым демпфированием (а), внешний вид (б),
конструкция (в), а также приведены размерные параметры привода типа DGO-12-...-
Р-А-В фирмы '«Festo» (г) с диаметром поршня 12 мм. Максимальное рабочее
давление — 0,7 МПа: диапазон температур — от -20 до +60°С; масса на 10 мм хода —
0,002 и; ход — 10... 1200 мм; полезное усилие — 58 Н при давлении сжатого
воздуха 0,6 МПа; сила разъема магнитной муфты — 100 Н; уплотнение — пербунан;
цилиндр — из хромистой стали.
Пневмоцилиндр состоит из тонкостенной немагнитной гильзы 15 (рисунок
5.32 в), закрытой с двух сторон пробками 1 и 17 с отверстиями для подвода
сжатого воздуха, внутри которой помещен сборный поршень, включающий в себя два
стянутых шпилькой 8 тунжера 10, между которыми помещены кольцевые
постоянные магниты 9. разделенные между собой шайбами из немагнитного материала.
Плунжеры снабжены мшгжетными уплотнениями 12, демпфирующими кольцами 13
и тонкостенными втулками 5, выполняющими функции подшипников скольжения.
Выступающие части 14 плунжеров и уплотнения 16 используются в составе бес-
штоковых пневмоцишндров с регулируемым демпфированием, имеющих поршни
лиаметром от 16 до 40 мм.
С наружной стороны гнлыы 15, напротив постоянных кольцевых магнитов 9,
размещены постоянные кольцевые магниты 7, установленные в бегунке 11,
снабженном двумя парами направляющих втулок 4, и удерживаемые от выпадения из
него втулкой 3 и разрезным пружинным кольцом 2. Между магнитами 7 и втулкой 3
помешен постоянный кольцевой магнит 6, магнитное поле которого вызывает
срабатывание датчиков опроса положения поршня.
Перемещение наружного бегунка осуществляется за счет силового взаимо-
• ия постоянных магнитов, расположенных в нем и на перемещаемом с по-
' сжатого воздуха поршне.
^Ведомые устройства объекты перемещения и другие приспособления можно
"еиосрелственно крепить на бегунке с помощью выполненных в нем резьбовых
или штифтов (мальцев), установленных в них.
I \?/7/67?Г^2'3}4}516'7
б)
i
I - Ход; - _
■, • й -> - Отверстие для смажи
I - Магнит для управления бесконтактным датчиком. 6 - Бесконтактный датчик положения
i - Возможность поворота бегунка в пределах 360°; + - прибавить длину хода
4 - Конечные положения бегунка: г)
ЁЕЕ§
А)
0 ' 500 1000 1500 2000 250О 3<.О0 W *О0 4500
Длина хода, мм "-
е)
10 20 50 ИМ 200 500 ЮОО
Плечо А, мм —
I ц
ж)
и—-—V,n* I 2468I0W 40 60100
°-' °Л 0-,0'6Це1яФ«Р>™а"ЫаССв'КГ "
Рне\ по*
5.3Z
Глава V
Поскольку поршень не имеет непосредственной механической свя ш с бегун-
- . рабочие полости цилинтра герметичны, что исключает утечки.
При монтаже его стедует распотагать горизонтально для исключения смеще-
бегунка с нагрузкой относительно поршня под действием собственно» о веса.
Зависимость поперечной силы, F, от длины хода для цилиндров ра «личных
i «. меров приведена на рисунке 5.32л; зависимость допустимой осевой силы
F от плеча А — на (е); зависимость максимальной скорости поршня от
движущейся демпфируемой массы — на (ж).
Пневмоиилиндры с магнитной связью выпускаются неразъемными и в
поршень вводится смазка на весь срок службы.
Усилие развиваемое на бегунке, вычисляется по формуле
F =
kD*
-P-F,
D
тр»
(5.29;
4 ' ,н' СИ|Н МПа мм
где D — диаметр поршня; р — тавление в маг истрали; F^ — усилие трения.
Пневмоцилиндры выпускаются с диаметром поршня до 40 мм, поскольку для
бозьших "шаметров необходимы большие и дорогие магниты из редкоземельных
металлов.
На рисунке 5.33 представлены мнемонические схемы и общий вид (а),
конструкция (б) бесштокового пневмоцилиндра с механической связью между поршнем
1 &4 '
»>
I -1 (рпсоединенис обеих воздушных mhi ис-гралей к одной
Торцоя.>й крышке с 3-х сторон но выбору
2-1 (рофильная канавка для датчиков ноли спим
3 -1 lai для закладных крепежных деталей
4 - Винт для pei улировкн демпфирования в конце хода
5 - Устаиоаочиое отверстие для монтажных лап
6 Ложемент для унлот и и тельной ленты
Нисунед $33
Ш.евма.ические "^ши^ьн^,^^
ибе1унком гипа 1XJP фирмы «Fesio» Bu,wcw
80 мм, ходом — от К) до 3000 мм га,'Шга ЛШ с жам«Р»ч "<>ршня oi И до
нисОЛМПа,дВД,И,,нтем|Кр41ур.^
Блаюдаря нигицевой форме алюмтт..,.,.' .
нойсвя1Ью С шрцов корпус акпытГ, ^еот~о.щлиндрасма,нИ1
порпмпо ю "оверхностяТXnZ; :гг::лиме,ошими на о(5р",иа,,,ых к
1 ■ л дымшнирующис ко н,ца 5 и плунжеры 6 пег улитгсмпт
дросселя 3, входящие в конце хода поршня в отвертя с мартам7на еТто
цовых поверхностях. Бегунок 9 жестко связан с поршнем 10 подпружш, иными
шжфгами I. Уплотнение рабочих „олосгеи осуществляйся с помощью специ
влыюи профильной ленты 8 из нержавеющей стали, для размещения которой в
зоне продольного прореза корпуса предусмогрен специальный ложемент. Лента
закреплена на корпусе с помощью механизмов натяжения 4 и пропущена через
поршень сквозь щелевые отверстия 12. Для защиты поршня от попадания июне
пыли и грязи предназначена металлическая лента 7, пропущенная через щель,
образованную бегунком (кареткой) 9 и верхней частью поршня 10, снабженной
ленточными разделителями 13 из твердого сплава или закаленной стали, которые
для уменьшения износа лент и уменьшения трения имеют высокий класс
чистоты поверхности. В поршень встроены постоянные Mai питы для управления дл-
чиками положения герконною гина, размещаемыми в профильных канавках
корпуса.
Размерные параметры пневмоцилиндра типа DGP-32-...-PPV-A-B е диаметром
поршня 32 мм, регулируемым демпфированием и опросом приведены на (в). Полезное
усилие, создаваемое поршнем при рабочем давлении 0,6 МПа — 483 Н; основная
масса — 1,55 кг; масса на J0 мм хода — 0,041 кг; путь торможения — 20 мм.
Зависимость допустимой назрузки F на безуиок от расстояния между
опорами L для всех типоразмеров показана на рисунке 5.34. а; зависимость
максимально допустимой скорости поршня от перемещаемой массы приведена на (б).
Эти данные справедливы для случаев горизонтального расположения пнев-
моцилиндров и нагрузки сверху при:
г1Пах = 20 мм для цилиндров с диаметром поршня or 8 до ПI^мм;
rZ-50 мм для цилиндров с диамегром поршня от 25 до 80 мм.
,,-г ■,* ппрпшамн допустимой области, следует
Вели условия ^^^^ZZr^Z « « ближе К *™
создан, дополнительную опору (амор| и заторы, упоры;
масс. . гхтР-Т2 (рисунок 5.34,в)
Характеристики натру жи для пневмоцилиндра ™'^аш|маи;ь11ЫЙ |1рололь„ын
следующие: максимальная нормальная сила - ' ^ 2 н максимальный
момент А/, =40 М-м; максимальный поперечный момсн. г
«РУ1ЯЩИЙ момент Л/, = 5 Н-м. ,IU„.„,„n нескольких натру <»к (силы, мо-
Мри одновременном воздеис.нии .ы 1«и«й[37|:
мен i а) необходимо выполнение следуюши у ^
- + 0.4—*'
г.
"%max Mi max
л. ""*., SMC (Яшшия) ныиускакпея четы-
Ьсснпоконые ле.мочные цилиндр'-' Ф"Р• {f> до |00
Рсх .„„„размеров и имени диаметры пор.'"*„„„„ жесткости корпуса ход
*>(><) мм (016 мм имее. oipai.H-ie ■'" ,,v3a
"°P я — JO00 мм) |Ч7.50|.
20*
Глава V
осп> допустимой
mrpvsm F от расстояния
между опорами I
И00000
= 10000
I
1000
L
1000 1400 1800 2200 2600 3000
—Допустимо* расстояше между опорами, L (мм) —
\
10000
1000
»
2500 3000°
500 1000 1500 2000
—Допустимое расстояние между опорами, L (мм) —«-
TwiDGP-. -В
Масса
-С
F?
«й
_$И
б)
1 о..
din ода'он» w одцзоз i 2 з 5 ею 2озо508оюо2оо sooeoo
Движущаяся масса (кг) *•
Рисунок 5.34
Общий вид цилиндра типа MY1 показан на рисунке 5.35,а; конструкция и
габаритные размеры цилиндра с диаметром поршня 32 мм даны соответственно на
(б) И (В)
В общем, конструктивно он аналогичен бесштоковому пневмоцилиндру типа
DGP Отличие заключается в выполнении уплотнительных элементов, в частности,
уплотнитезьная лента выпотнена профильной из специальной пластмассы.
с-с
л)
8-1
_1
Ьаии
-£=ф* *--
A-t e
c-t
J,
-. to^muwcwi-wM*
J '«nwcra».»»,),.,,,
«« r«nn «mfe /кипам
"OHIxwcni обклммх
"• 4P»w )»*OT«f*v»>* newt,
Мушт \
6)
Jfe«<ae_\
• ' '»» "о>м^ таща
4"
£ 14 \ Tp^6J/j6
"""' чаглушка
IPi6_'/r.
f... 52 .j 2otb I
V. U i-f I)
Труб. I/|6" io £
заглушка
в)
Рисунок 5.35
5.4.8. Вращающиеся пневмоиилиндры
Для приводов патронов и приспособлений, осуществляющих зажим изделий
на токарных и токар^револьверных станках, применяются вращающиеся пнев-
цилиндры. iRvcTODOHHero действия со сплош-
Вращающийся сдвоенный ^^^Х^^оЛш имеет возду-
нь.м штоком, выполненный по типу тандемцилиндр л& * качения на коп-
хоПР„»„л„У10 иуФч,. устан<)МС„„уЮ с«.»-—:„70™"re:Hs.
"Усе 2 с отверстиями для закрепления на врашающи. 1
гического оборудования. й |Во;,иое усилие зажимному меха-
Для ггрисоединения гяги, передан токарного трехкулачкового патрона,
чизму станочного приспособления, наприм f^ e штока 4. Сжатый воздух
послужит резьбовое отверстие Hd выступающем ^
7 в по. сти А и В, вызывая
дается через штуцер 6 и цен гровое отверегис _
to
I i п. V
псремешсни поршне.
3 i. < и cm яая на
шп t 4 гянушую си-iy.
Черп мгтумер 5 воздух
«шластся я полость
вы ы ви сние
п >ршнсй 3 вправо, т е
создание то
СИ 1Ы, B/IBOC МСНЫНСЙ
j яму шей В процессе
вр шения корпуса
муфта с и мяо шпими
ш lain ами оетает н
по и 1 .
5.4.9. VI ранние ми 1ин ipu
Яых
ния
UN.
< i iicuocraiком является уменьшение силы «акреп
да 1ШО -. Но пому их рекомендуется применяп, при
■»—
V) пне цилиндры находят при енсни в конструкциях здхваг
• • промымхюнных роботов и авюонераторов, а ичиы присп» i ie-
стаи тормотимх устройств и др.
на объект крепления и ж i/сремсш-ния мо ет осушсынлжься
мембрвнои или через посредеь нажимною /емсн/а Онiока, башмака,
) • • иа м бьпь выпо гнена Kpyi i< и, плис и или ырельчатои, а
иметь прямо отьную форму сп циальною профиля
Преимуществом мембранных иижндров перед стандартными поршневыми
• и одностороннею ейынияяим |ся то, м i они работ аил нрак1ичсски
трения и степень фяшенности и иг i»ihc aroio во шуха сушей венно не
ия п или работосш
ния и» мере у i .чеиия
небольших ходах
Представлен
ныи на рисунке 5.17
пи шндр имеет
pyi |ую ырельча-
тую мембрану 2,
•ашемлепнук» по
край» в ратьемном
корпусе 1 и снаб
жеиную опорным
диском (нем i ром) 3,
_ соединенным со
.„• иноком 4 Выдии
17 «ани нпока проис*
Х«11И1 при ВоУГСЙс -
иа мем рану, a m,ntpat — код действием пружины или а
и м мбраим
■Ф
.11
I i
1-й. и
, уп
М
ни
I I
ИМ
и
|ьими ход hijока — 50 7 при oihochicjimio >о п.ших диамет-
я опре » ния вс 1ичин юи инока и мнисимоыи т KoiicipyKiHB
и мембран ш на рис н е 5 38 а— шя шрельчаюи мембраны.
Ни
м iически
'"«•'"•П 1Ы,
«F
П
о J
'«-'О 5 0 3 f
о — 1я пя€ , рстижя
мембраны в —
иы. Рекомен1Уются следу щ^
I f К 200, 250, 320 и 400 мм f ш , "* ' ° «*««ра • ы / J25
Нару ный диаметр опорной ша *ы ыч -,-«,
«ярсииггкаисвы м браи *™
улам
<*«0,7 /
мрешновыхм бран '530)
</ /-^-2i-(2 4i
где — го инина мембраны " 5 30
Уси тс, ра юиваемое мембраной рисунок 5.3*),
,„ с ~ *' И,Н ^ МПа* ^
'Ле л, — эффективная площадь мембраны;/>-давлениесжатого вол™ *■
Усн ше пружины 10% от ма симальногГразви o^l^T ^ " '
^-jfc2 + 'i 5 + 'г2). 5 33>
где г, — наружный радиус мембраны. 2—радиус жесткого центра
Для быстрого - ма деталей, чувствительных к деформациям, с нетяачн-
гс п.ным искривлением поверхностей зажима и малой шерох» . .,
применяемся мембранные пи жндры бет специального зажимного элемента,
мнемоническая схема которых (а), обшни вид (6i и конструкция (в) даиы на рисунке 5.39 '37J
Конструкция мембранного цилиндра включает в себя корпус J
прямоугольной или крутдо формы, в полости которого с помошью зажимной планки 2 закре-
нлена фшурная мембрана 3 соответствующей формы, имеющая Т-образные ие-
скво-шые отверстия 4 ,ыя установки прижимной металлической пластины с
рифленой рабочей поверхностью 1на рисунке не показана), предохраняющей мембра-
"У, выполненную ит полиуретана, от повреждения Так как цилиндр имеет
большую скорость, а в конструкции не предусмотрен ограничитель хода мембраны,
Давление в ею рабочую полость можно подавать во избежание разрывов мембра-
"ы, то,п. о после установки зажимаемого объекта.
Усилие воJHpaia обеспечивается w счет энергии упругих деформации,
накопленных в мембране.
На рисунке 5.39. i приведены размерные параметры мембранного цилиндра
'ина hV 10/10 3 с рабочими размерами мембраны- шири^длина - 10/30 мм и
-одом - 3 мм; масса - 0,02 к,. рабочее давние - W МП£ Р?^ГГ^
Р* — от 20 до +40°С 'эффективная сила зажима при 0.6 МПа при ходе в J мм -
* И. а холе 3 ^м -80 Н часть усилия "P^^Z^^JZZv
Убраны, Данному мембранному шлииду эквива-зентеи стандартный шетиндр
'^...ос,„Ро„не,„дейспжясдиаметгюм»орш^ ^шдра ^ ^-П-Ъ с
На рисунке 5.19.Д даны параметрымнем F^ ^j ю^, рассчитзнного
■"«?>Meiром мембраны 12 мм. ходом 3 мм. имеюш
зк
Глава V
•)
2
С -
«■ПЯ1
с*
б)
иг
■)
«а
*"Цж
1 -1
з _4
V г
■л
.-ПЗЬ""*™^
.011 - эй
1 iii I i ,
ш " » » » '-ш
Tfe 1
1 -Ход до упор*
2 - Отверстие питания по выбору,
оттек перестановки wiyuilm
3 Нажимная поверхность
4 Стгурная мембрана г)
Рисунок 5.49
на рабочее давление 0,6 Ml 1а и температуру от -10 до +40"С. Эффективная сила
зажима при 1 мм хода — 55 Н, при 3 мм хода — 56 Н
Варианты монтажа (а) и примеры применения (б) прямоугольных
мембранных цилиндров и кру! шх мембранных цилиндров (в) показаны на рисунке 5.40.
Обьегт крив**- /~ ^
линеАн й формы / ^
%*Ч
I w пеит я
■егт )«жима
Ofiwrt ижима
г
Ни*, иох 40
«;
В)
Пневматические исполин' 1Ы1ые
Р«иства
5.4.10. Баллонные и |Ин |рЫ
Ь шины пилиндры ирщ1ашчаш
not»и. в качесгве мониторов, успокоите-. ""* "РИМ Н и' в часг'
роиств Ьй.омря гибкости конструкции craw ГЮЛЬСМНи* » имиых уст
мажческои свя ш с другими звеньями <ш 'тв*гся н?л**Яни и пемеигы кине-
Они налрвд «клея напиллндрыс «^ГТ"^?"НарИСунке54U
Г В, мембраной с одним и. и двумя играми ^и кТ/^ " м1ю,имы«* <тио
>i и цилиндры о. ны все! и оаПотати /"*-,-4|»°J
иметь граничите 1ьные упоры т к сшиТ? С "P0""0""!*""* или в конце хода
32...53кН,.Ходт тшп1^1ГтТПа^М№^У" °»
«)
EBS
ЕВ
_ I
•т
Е
•а
о
1
UlTor /T
I
4 —
[£50±0£
J80
'efe
l !
11руб. *
MVM5
I \
*й-
#U5_
1 - Крепежная речьба M8x IО 3 - Требуемое пространство
2 - Подвод вогауха 4 - Исходное состояние
в)
|£
у _«*#*• »fj««sn«.4—•*—
э
-»«.'
GD
''Ребуемый диаметр при Mi-нтаже
Л)
б'алтоиною мижнлра с чулочной мем-
Конарукция и размерные параметры » J4| B диаметр мембраны в ис-
ПР-иои типа HiS-80 110 приведены Hf pHL* *иакЛОиа - 15°. Максимальное
х"Диом состоянии — Н» мм. ход - ' I» мы- |() мМ (р„суиок 5.41л) Требуемый
Смс|цснис оси в радиальном накрав. о"""
u
. рабочего щпкфанстго d* 100 мм Гаоочсе давлен и — 0,8 Ml la, раЬочая
гечиерагуря — ог ^40 о +71 I* вив смая сила при выдвижении ни ока при
0.6 МПа— 1.4 ЛИ,у1И1ис сжатия до мипимилыюн выесчы— 50 П.
■» передачи усилия д < t и пользогться вся площадь верхних и нижних
металлических наки ок. Перед установкой цилни ipu ю! ны и а и виииждены
от ч<»
Цин ндр на рисунке ^ 41.i пшаЬМ 14VM) имеет чнампр юромдадьной мем
>раны в нехо том состоянии 14^ мм и ход — 60 мм. Развиваемая сила
выдвижения при 0.6 МПа mm/max — 1.V5.5 к11, усилие сжшня до минимальной hmcom.i —
' »Н. 'яуст го наклона — 0" Рв(юч с лявлсин —0,8 МПа.
Баллонные цилни фы с юроидалыюи меморанои можно нснолыошш» для
раГк по дуге (рисунок 5.41 ,е), однако при ном женлун.ация должна осущесгв-
В1фед lax опустимизоутлана шна и при соблюдении минимальной //„„„
и максимад ной / m высоте |50].
1я нилин ipoa типа ГП 14*5 60 минимальная высота /1т„ж^{) мм, макси
мальная //ян*" 110 мч
5.5. Mhoi (милиционные пненмоцилиндры
Ммоюни ннионные цилиндры Moiyr быть пира «шипы пугем жесткого или
н жеегкоги соединения двух и более цилиндров с одинаковой или разной длиной
хода фисунок 5 42.й)
эме
•}
«)
ЕЩ
ф-.
-Ф
,? ч- 120+\о
Пр«к пшкп
rn
ИЗ
■ 2 3
А Н( Д
'!i 'li-
12 4 4
А Не д
=ряр;
■^игглщ—1
и
"1
3 2 1
I Т L_C
д)
*Э
fl^ar
я =м
г——г
5 6 ? 8 9 Ю
\ ' ' '
* И -'.11 ' I
II
I
% »
12
ь
I'ik viiuk 5 42
ж)
\ llpt>l|lll 1ЫП.1Г КЯПЛПК11
(ЛМ (tll'IIIKUH
ДЛЯ ЖСС1КО.О СОСДИЦСПИЯ ,,„„
Реализация **п.„и,,и„„„„101 У
лнпдрои с одИ11 Конои Ы1|Ш1(| х();(а (Рр ^кВ0^-;'.' '«уем соединения дву* ци
нулем соединения двух цилинтроп с г*шад л " Х "° И"ио'''«"<> ««РИЬиДа
Следует «.мcIи,^ч,„ecЛикo,ДГwiГГ,W(P,Л,y,,0к5■42•,'
лен, ю будем передни,.„ься кор,|ус тт11" Ж*м»" п«™м«|««л,ш/фи. „креп
осущес, вля ,ь под „од ежа ,„,„ во «духас i^"V ?*НШип * "**W">cn,
..невмомилипдров 1И1ЮВ DNG и DNCJU с „ ' pe',"s,J,w,|C""M«" Д>'я соединения
выполняю 1ся и.{ Ш1МИНИЯ. ""<»ме.рами норншен „, 32 До 100 мм,
блакщаря последова.ельному Z^ZT ЛеИСТВИЯ МОЖеТ бшь ""V™
одинаковыми диаметрами поршня и пи.™ К,,роткох("твь«* цилиндров с
Л.ж)Л1 пп,ИЦ1ш , m.LhohcJhT вжм Z Г /У'ИНаМИ Х°Ла (РИСУЖЖ 542'
жу.очпук, позицию 2. По пр, '"Г" -Не"(Крадстисш,° или "^ "роме
-ее, да больше, чем'предьX Z П^Г, ^ '^^ (Х2) ™'™< »ь„ь
дагь давление в правый иилишт »к. У'фавлсния. г.е. сначала надо по-
Кписфукиия miioioiiojwwohhoio цилиндра тина ADVUP- -РА с ,.*» и
-ока м,.а па рисунке 5.42.е. Он состоит из двух корпусов 3 и 8. двух торцах 2 „
0 спТкепТм7ЖУГОЧЖ,Й КРЫШКИ ^ ШГ°КИ ' И 9 С "^"'"ЯМИ ----™ 5 и
камп t кольцевыми постоянными ма.нигами 12. управляющими Чагчи
ками. жсегко не связаны между собой. При подаче вотдуха в нишкицес отверстие
«Р'."нки 11 поршень 10, перемещаясь влево, вызывает перемещение в гом же
направлении поршня 5 со тюком 1 на величину XI. равную ею ходу. При нодаче
оздуха в верхнее ии1аюн(ее отверстие промежуточной крышки 6, поршень 5
отрывается or конца пиока 9 и перемещается самоеюягсльно на величину (Х2—XI).
«дачей воздуха в полости 4 и 7 через соответственно витающее 01верстие левой
рьпнки 2 и нижнее питающее (мверстис в нромежуточной крышке, оба поршня
""«вращаются в исходное положение. При нодаче во«чуха в верхнее питающее
верстне нромежуточной крышки обеспечивается перемещение только поршня 5
«' in током 1 на величину Х2.
Цилиндры данною типа выпускаются с поршнями диаметра 25, 40. 63 и
00 мм, ходом от I до 500 мм шя диаметра 25 мм, и от I до 2000 мм — утя ос-
•альных диаметров. Максимальное рабочее давление — 1.0 МПа
Схема MifOioiiojHUHOMiio/o ниевмоцилнндра, образованною с помощью
нечеткою соединения штоков нескольких нилин'фон с различной длиной чопа,
•юладшощечо зпачтелыю большим числом позиций, представлена на рисунке
д-43,а|41|.
Впугри сборпою корпуса I размещены нор и 2.4,5. снабженные упорами 3.
и "ыхочпой шi-ок 6. Количество конечных положений равно 2 в степени числа со
^•«не-нных цилиндров. Например, при двух соединенных цилиндрах: 2 =4 конеч-
"Ьi,^ положения. Для получения удобных коортишп позиционирования ход после-
^■"Шспо цилиндра берут в два раза больше хота предыдущего (цифровые пнев-
м°Чил||нлры). Н таких конструкциях необходимо подавав прозиволавление
,0Г> но полипину рабочею) в .шоковую нолоаь гшеледнего самою длиш.охоад-
'"'<> Инлиндра.
. 11а рисунке 5.43.6 показана конерукния цифровою .шенмоцн шн Фа. со тер
^"«ая ..певмоцплтщдр пропшцдавления У и „ненмоц.опшчр рабочих «мн..1 (мо
lyj,c'') 3. в «„„ром ра.мешены нзанмосвя.аиные между собой пор. 1.2.5.10
316
Глава V
1312 111
13 12 б)
Phcvhok 5.43
Поршень 1 неподвижный. Оба пневмоцилиндра с помощью фланцев 6 и 8
крепятся к кронштейну 7. В конструкции используются резинофторопластовые
уплотнения, образуемые резиновыми кольцами 13 и Г-образными фторопластовыми
манжетами 12.
5.6. Поворотные пневмодвнгателн
Для реализации вращательного движения предназначены поворотные пнев-
модвигатели, в которых усилие передается выходному валу либо непосредственно
от поворотной лопасти на нем установленной, либо от поршней с рейками вместо
штоков, совершающих возвратно-поступательное движение, зубчатому колесу,
закрепленному на выходном валу.
На рисунке 5.44 изображены условное обозначение (а), общий вид (б),
конструкция (в) и приведены размерные параметры (г) поворотного двигателя типа
DSPL-32-180-P-FW (Festo) с двусторонним демпфированием в конечных
положениях с помощью упругих демпфирующих пластин, с полым фланцевым валом
(FW), имеющего поршень диаметром (шириной) 32 мм, угол поворота лопасти —
от0до180°. J F
Развиваемый крутящий момент при 0,6 МПа — 10 Н-м. Максимально
допустимое рабочее давление — 0,8 МПа; максимальная частота реверсирования — 3
1 ц; диапазон температур — от -10 до +60°С; масса — 1,39 кг; допустимая
радиальная сила на валу - 200 Н; допустимая аксиальная сила на валу — 75 Н;
допустимый момент инерцнн масс на валу — 1,4x1а4 кг-м2; потребление воздуха при
угле поворота 180° и 0,6 МПа -454-10"6 м3 (454-103 дм3 или 0,454 литра).
Поворотный привод (в) включает в себя корпус 8 с разделителем полостей Ю
н подшипниками 9, в которых установлен вращающийся полый фланцевый вал 2
со шлицами на которых смонтирована поворотная лопасть (поршень) 6 с
уплотнениями 7. На противоположном фланцу конце вала 2 установлен диск 1
регулируемой упорной системы, в прорезях которого с помощью винтов 3 закреплены
-Г^Ни^е^^
1>НРойства
i 5
4
а)
:\ г* ^
1 - Угловая шкала
2 - Положение метки при 0°по
угловой шкале
3 - Подводы воздуха
4 - Сквозное отверстие
Рисунок 5.44
переналаживаемые кулачки 4. взаимодействующие с датчиками конечных и
промежуточных положений (рисунок 5.45.а). Полый фланцевый вал позволяет
пропускать через него электрические провода, эластичные трубопроводы для жидких
или газообразных сред. Для облегчения установки утла поворота на крышке 5
имеется шкала углов.
Крутящий момент, развиваемый лопастным поворотным двигателем, опреде-
Ляется с помощью выражения [13]. _
JL—E *_* (5.34)
M^^pSRn. СИ|Н-м МПа *м" ы
„ „—..с плошадь лопасти- R — средний
где р _ давление в питающей магистрали. Ь гсюшиь
Радиус лопасти; п = 0.8...0,9-КПД двигате-m^ зхчапьи обеспечивающие
На рисунке 5.45. б показаны консгрук ^^ вшоч -, и ВЬАОДНЫМ „.
м°нтаж поворотных двигателей с Ф-паиЦевЫ" п топастей. 3 — крепежные лапы;
лом со шпонкой 1, а также контроль У1^"св0^°6 _1 „уфта свободного хода, обеспе-
4 —- фланцевое крепление; 5 — выходной Ч"3"*' 5 ^j^, только правое вращение;
чнвающая либо только левое врашение флан ^ ^ ^ бризгозашншенные конечные
, 8 — электрические конечные выключатели.
MS
Глава V
\
^
a)
Тип
DSR-32
DSRL-32
в)
l,0 1,2 1,4
Время поворота, t
Рисунок 5.45
ки-ТГТГ;1^ П ~ пневматические выключатели; 12, 13 — индуктивные
датчики, 14^ ib, 16 _ кронштейны для крепления датчиков.
на.™ п»нРЛТКе 5'45' В ПОказана зависимость момента инерции масс на выходном
BDeL^Z^0T ВРеМСНИ пов°Р°та ' « Угла поворота. Указанное на диаграмме
время поворота достигается только дросселированием
СрисунокТ^бТ ЦИЛИНДР ^У^Р0»"^0 Действия типа DCM-... - 270-P-FW
упорной сИст^,ГГЛИЧаеТСЯ ОТ пРедыДУЩего типа конструкцией регулируемой
SSTS им7Д ,1И В°!МОЖНОСТью обеспечения большего угла поворота - до
котором выптн2>РНЫИ К°РПУС l ° Ра^е™телем полостей 2 (рисунок 5.46,6), в
ТУ 37стано*-,Єà КЭНаЛЫ тЯ подв°Да Давления. На фланцевом шлицевом ва-
«шиУ^Гми i^" Л°ПасТЬ (п°Ршень) 4 и флажок 6, взаимодействующий с жест-
Викгами9 с ко^ТГГ"1™" В "^Р33"™ пазУ 5 корпуса с помощью винтов 7.
иий вала 3. фагаикам* осуществляется точная настройка угловых положе-
Пневматические исполни^ ||L|^,
T™DSM-....m.p.FW
1 - Положение призматической шпонки при (f
2 - Присоединение сжатого оздуха
3 - Установочшй винт для присоединения
упора
4 - Ручное управление (внутренний шеетнгранншс)
5 - Регулирование конечных положения
6 - Контргайка регулнрованм конечных положений
7 - Непрерывно регулируемые упоры
Рисунок 5.46
Для ручного поворота вала 3 в процессе настройки в нем со стороны флажка
6 имеется шестигранное отверстие под ключ.
Цилиндры данного типа выпускаются с диаметрами ("Ч^1"^ £
16, 25, 32 и 40 мм; рабочее давление - 1,0 МПа; диапазон температут--ох -Ю»
+(VY>n. - п а мпя — 1 25 ..20 Н-м, допустимая частота сраоа-
+60 С; крутящий момент при 0,6 МПа 1 ,л ■ на валу - 45.. .350 Н,
тывания _ 2 Гц; максимально допустимая Р^™^3 Jacc на ^ при
осевая -, 18...120 Н; максимально допустимьжмом.н^и^^ ^^^^ _
наличии внешних упоров и демпферов — ('• ■• >
°"Л 5°" ^гпукпия и размерные параметры поворот-
На рисунке 5.46, в приведены констру (шириной) поршня
(лопало цилиндра DSM-16-270-P (без фланца) с диаметром
СТн) • 6 мм и углом поворота 270°. становки амортизаторов на приводы
На рисунке 5.47, а показаны варианты У^ ^ ^^ DSM.]6.270-P угол
™па DSM. При установке одного амортиза у ^ ^ ^ ^ показан пример уста-
УМеньшается до 254°, двух — до 238° (рисуно . << g полностьЮ закрывают-
н°вки датчиков, которые при монтаже на жестк
320
Глав;
ay
Базовое исполнение, Вариант CL Вариант CR Вариант СО
Жесткий упор с обеих Амортизатор слева, Амортизатор справа, Амортиза
сторон жесткий упор справа жесткий упор слева сторон T°^blc°6eirx
~вре«. «Л*/*
JlHeBMaTHnecKHejicnoj^^
32J
Зависимость момента инерции масс от «п.
DSM-16-270-Р... показана на рисунке 5 47 г а на ГлГ "^^ " *" П0В0Р™ Д»
сы, происходящие в цилиндре без амортизатор 1 ПОКазаны переходные процес-
Двусторонние поворотные цилин "РИ ИХ НалИчии'
(рисунок 5.48,а), имеющие три исполн^мТ!^111 (фИрШ SMC' Я™»™)
полнения с фиксированными углами поворота
4. т ^-*
а)
Угол поворота 90° Угол поворота 180° Угол поворота 270°
Подюд воза м 'А'/ Подюд воздуха'В'
Пневмоподвод Пневмоподвод
0 0.1 0,2 0,3 0.4 0,5 0,6 0,7 0,8
Рабочее давление (МПа) —
Д)
-!-МоМе^и„еРШШ(кг^^'
е)
Подшипник
Нагрузка
Рнсуиок 5.48
Глава V
"ч* XfKf и ~4W и сквозной вал с лысками на обоих концах и характеризуются
компактностью конструкций, высокой надежностью и длительностью срока службы.
Они могут монтироваться в любом положении. Конструкция цилиндра показана на
ртнлнке 5.48,6. В корпусе 8, состоящем из двух частей с разъемом в
диаметральной тоскости. скретенных винтами 1, на подшипниках 6 смонтирован лопастной
вал 5 из нержавеющей стали. Вкладыш 7 разделяет внутреннюю полость корпуса
на тве камеры, имеющие отверстия А и В для подвода воздуха (в). Герметизация
камер (полостей) осуществляется кольцевыми манжетными уплотнителями 3,
закрепленными в обеих частях корпуса с помощью стопорных колец 4. На лопасти
смонтирован внутренний эластичный демпфер 2 (только для типоразмеров
CRB1BW20 и CRB1BW30). Для устранения перетечек воздуха из одной камеры в
другую лопасть и вал в зоне кольцевых уплотнителей 3 армированы полиуретаном
или пербунаном 9. Уплотнение 11. установленное в разделителе 7, устраняет
перетечки воздуха из камеры в камеру в зоне центральной части вала — лопасти 5.
Габаритные и присоединительные размеры цилиндра типа CRB1BW20 даны
на (г). Диапазон рабочих давлений — 0,15...0,7 МПа; внутренний объем при углах
поворота 90, 180 и 270° равен соответственно 4,8-10"6, 6,1-Ю"6 и 7,9-10"6 м3;
максимальное число циклов в секунду для тех же углов поворота соответственно — 4, 3
и 2; допустимое время поворота на угол 90° — 0,03. ..0,3 с; масса — 0,106 кг.
Зависимость крутящего момента от рабочего давления для данного привода
показана на (д), а на (е) показана зависимость времени поворота от .момента
инерции масс на валу.
Статическая допустимая радиальная нагрузка на вал — 25 Н; аксиальная — 20 Н.
При динамических нагрузках на вал рекомендуются варианты подключения
поворотного цилиндра, показанные на (ж), характеризующиеся применением
дополнительных опорных подшипников.
5.7. Вращающие цилиндры
Принцип работы вращающих цилиндров основан на преобразовании
поступательного движения поршня во вращательное посредством зубчато-реечной
передачи.
Конструктивно, такие цилиндры могут иметь однореечное и двуреечное
исполнение.
На рисунке 5.49 показаны общий вид (а), конструкция (б) и размеры однореечно-
го вращающего привода типа DRQ-32-180-PPVJ-A фирмы «Festo», с двусторонним
регулированием торможения в конце хода и регулированием конечных положений
при настройке угла поворота. Он имеет поршень 032 мм, угол поворота — 180°;
диапазон рабочего давления — 0,25... 1,0 МПа; диапазон температур — от
-10 до +60°С; развиваемый крутящий момент при 0,6 МПа — 5 Н-м; длина пути
торможения — 13,5 мм; допустимая нагрузка на вал, аксиальная/радиальная — 120/120 Н;
допустимый момент инерции масс — 0,002 кг-м2; максимальная частота при
максимальном моменте инерции для замкнутого цикла 0°... 180°.. .0° — 1,6 Гц.
Цилиндры данного типа выпускаются серийно с диаметрами поршня 16, 20,
25, 32.40, 50,63, 80 и 200 мм.
Корпусом 3 вращающего цилиндра (рисунок 5.49, б) является мерно порезанный
профильный алюминиевый прокат, анодированный снаружи, имеющий продольные
профильные (Т-образные) канавки для установки датчиков опроса положения
поршней 10 с постоянными кольцевыми магнитами 12 и пербунановыми манжетами И
Между поршнями, с помощью винтов 16, установлена зубчатая рейка 13, входящая в
зацепление с выходным валом шестерней 1. Устранение зазора в зацеплении
осуществляется с помощью башмака 14, воздействующего на рейку усилием, создаваемым
пружиной 15. Запитывание рабочих полостей цилиндра производится через питающие
J^npoiiCTBa
отверстия 8 и 17. Торможение поршня «
ния начинается тогда, когда выступают! * "Ч***"»-
часгь соответствующей резьбовой п Л ГШВДрнчеаа«
хое отверстие поршня. В результате ВХ0ДИТ в ГлУ'
сферу из полости внутри поршня череГка!^3 " а™°-
проточку 4 и отверстия 8 т^т^^Т^
ется из полости в атмосферу по каналу \ TgJT**
5 6 7 яо Сре3 ^т-
5 6
I I
а)
/
4 3 2
Tim DRQ-32-180-PPVJ-A
-Ш
Ы$М~- ' |. I .0J7H7 Г И'рМНЦ I
L. 129.5 ' °~
25,
10
п
30
1 -Бесконтактный датчик типа SME-8
2 - Винт для регулирования торможения
поршня в конце \ода
Регулирование конечных положений
2 3 * s 6 7
Крутяшнй момент. Н-м —
•7
Рисунок 5.49 аи„иивают перемещение пробок 6 в
РУемый дроссель 7. Стопорные кольца 5 0Г^™еличенИя угла поворота.
0севом направлении при выворачивании с це у рабочего давления для
Зависимость крутящего момента на выходном^ валу Р
Цш1индра с диаметром поршня 32 мм приведе' ^ вращаюшего цилиндра типа
_ Пример выполнения двуреечного ком ндры данног0 типа
выпускало (SMC, Япония) показан на рисунке э J ■ ^ регулнруемымн демпферами
*°Тс» с размерами поршней 10. 15. 20. 3V иi ■ ,5 мм цИЛИндрь. с диаметрами
Снабжены цилиндры с диаметрами поршняJ^ ц элементам„ „3 гюлиуре- ф
П°РШня ю „ 15 мм снабжены демпфируем* у РУ
Глава V
тана.
™ Диапазон рабочих давлений: пя цичиндров с поршнями диаметром 10 и
15 мм - 0Л5...0Л МПа; для остальных - ОЛ-.Л 0 МПа: угол поворота — 90 и
180°±5°; температура окружающей среды —
- 5...оО°С. Они имеют сквозной выходной вал-
J' шестерню, снабженный лысками по концам.
? ^ На рисунке 5.50,6 даны размерные парамет-
* . * ры вращающего цилиндра типа CDRQ-15-90,
*'" имеющего поршень 015 мм и угол поворота 90°.
«)
J014,
Г lC6g8
-SJU
Датчик
6 7 Н^ 8 9 10
\ \(%тп/ /
t 2 13
1
£ 0.8
о*
s о.б
S
s
>£ 0,4
a
£o,2
с
Ы
1
6)
r)
0,1 0,2 03 0,4 0.5 0,6 0,7
— Рабочее давление (МПа) —
Рисунок 5.50
Л1."
Ъ
?0.8
ее
go.6
о. 0.5
§0.4
о
Й0.2
о
с
Ш
Д)
-Момент инерции (krefxlO)—
J!=-^^^
325
Цилиндр (в) имеет двуреечное
ходном валу-шестерне 2 kdvt«.„u- ИСП01н<*ие. позвоадюш^ «*,
даваемый однорее^м ц~ ГЕ1 В ™ ** "£~^£
еТСя одновременной подачей возТха ^Г'?**0™ « *"»**■. Z Я2ж
логичным образом связаны две д^, ^" А и Б- «язанные^ал^ ?Пн1
лен в корпусе 6 с помощью полш^^г^?^ Ва>шестерня устС-
Перемещение поршней I с упл ,3акрытых крышкой 13
управление кoтoPы^mcюyщecтa^Яeтcя^итГl,, """""Ч*™* Датчиками 8.
Регулировка хода производится с гюмшГ "0ЗДМИ П0СГОян«ьгх магнитов 7.
ложение которых фиксируется гайками S УП0а 3 ° утотетя^ * по-
6 закрыты крышкой 14 с уплотнением' л,Г °ТВерстия под ПоРшН" в корпусе
реек реализуется с помощью полиупетаноТГГ^Т "Ч*™"*»"* поршней-
Двуреечные (двучпоршневые) вращающие цилиндры типа DRQD модульного
исполнения, показанные на рисунке 5.51. выпускаются с диаметрами поршГГ
rnn:RQD-..-PP\J-A-AR-Z\V-... „ Д
Шестерня '
4*V-
I'm: KQl}-„..> SRJ.A-AR-FW-...
* \
Ц|И*МДР*«Ч«С1М)
Задняя крышш
РтЛИОК *S'
РтЛИОК ^>
«n 90° ISO" » W. Они имеют реглтл-
20. 25 и 32 мм и обеспечивают углы noBOfHvra^ ^ ^^^^ (П(„ nRQn....-
РУемые пневматические (шп PRQD-j-J 1ЫХ „о-южгнпй.
VSRJ) демпферы и мехами «мы насгроикн конечных
Юо
Глава V
Линейное (встречное) перемещение поршней-реек преобразуется во вп
ное движение выходного вала-шестерни с компенсацией зазора в зацеплении*1}^1''
ствие этого цилиндр не имеет люфтов при реверсировании направления движен Д~
Благодаря конструктивному исполнению цилиндра возможна переда "*
того воздуха через полый вал-шестерню исполнительным устройствам ч^ °Жа"
мым на нем и вращаемым, ' акРепляе-
На рисунке 5.52 приведены размерные параметры цилиндров типа DRnn ■*-> ,о
PPVJ-A-AL-FW-SD и DRQD-32-18(VYSRJ-A-AL-FW-SD, имеющих: поршеГ01Л
- угол поворота 180° - настраиваемое пневматическое и гидравлическое демпЛ„
вание - бесконтактный опрос положения поршней - присоединение воздуха 1Г
-полый фланцевый вал плиту передачи воздуха через пневмошлангДоСГГ
ЕПЖГ " С ™амдат*Ч-« 0/1'° МПа, с гкдродемп^Г"
0,2/1.0 МПа, точность повторения угла поворота — >0 01°- оязнинярмчй
ГГеГ 25 мГ ?^Г" ^ - -=^еГГ
I—&L ,
Тип DRQD-32-180-YSRJ-..
ТиубЛ/8"_, , 2
Тип DRQD-32-180-YSRJ--
39 59,4-70,1
1 - : для датчиков положения, тип SME-8 SMP я
2 - Самоустанавливающиеся амортизаторы для демХ?,Г
3 - Втулка для настройки конечных положений п™ ~Фч£вания конечна
4 - Вигг с внутренним шест„гра„„нкоМ™д^а™Поа£^^..-У5Ю П0~нй
со .. . регулировочным винтом ira демпЛппТ" К0Нечнь« поло»™,,«
5 - Исполиение PPVJ - оба присоединения воздухаЛ адия конечного^Т
по «ыбору с продольной или торцовой стороны 4№mte- пол°«<жня
6-Исп. - YSRJ-оба присоединения воздуха иакч,.^
только с продольной стороны аЧ>Ь1Шке,
7 - Плата передачи воздуха (для шланга с виешним04 мы)
• " *' ' ' ■ крепления для ласточкина хвоста
'"п обозначенного центрирующего отверстия при О"
Рисунок 5.52
Максимально допустимая осевая сила
«««/динамическая FKl = 1200/200 Н; растягивздц.^^ на«имающая статиче-
статическая/динамическая
Fx2 =
ни пневматических демпферов J=40-10 кг- 2 г ^ на валУ при на-
На рисунке 5.53,а показана зависимость Томен
поворота, а на (б) — схемы нагружения и зависимое ИНСрЦИИ масс от Ч^ени
силы, действующей на вал, от расстояния 7ЛМ " машшальной радиальной
ших бланцевый и иилинппи<™й „. .™~ ДЛЯ цили«ДР°в типа DRQD-32, имею-
JFuia, а па Kv> — ихемы нагружения и зависимпгт времен,
силы, действующей на вал, от расстояния 7 л™ максимальной радиально!
фланцевый и цилиндрический вьГдше вГ?" """ DRQD"32' ™™
типа DRQD-16-...-FW при Z= 15 мм согласно Z ' "^"^ ДЛЯ ПР™
к и мм согласно диаграмме на nucwnc s « л .
симально допустимая радиальная сила F =450 Н рисунк 5.53,6 мак-
1 2000
I 1500
TnnDRQD-32-...-YSRJ
Макс, допустимый момент инерции масс 15U0x10"Vm2
h I I 1 1 1 1-й—i , ,
a)
l.o
• Время поворота (с) ■
Фланцевый вал
Z=15mm
Цилиндрический вал
Статические нагрузки
Fy=fl;Z) для фланцевого и цилиндрического валов
Динамические нагрузки
Fy =f[Z) для фланцевого и цилиндрического валов
320п
0 10 Z ,7(мм)фла«1евоговалаТ
Расстояние Z (мм; w . ] \ \ \
I I I ' 54 64 74 84 94 104
0 4 14 24 34 1 „п^гь-ого вала-*-
|| I I I
" Гг^шшинлри-ескоговала-
-Расстояние i
0 10 20 30 40 50 60 70 80 90 100
—Расстояние Z (мм) фланцевого вала——
I I I I I I I I I I I I
0 4 14 24 34 44 54 64 74 84 94 104
Расстояние Z (мм) цилиндрического вала—
б)
Рисуио • 5.53
расчета моментов инерции вращаемых масс различной фор-
Выражениядл><р
= таблице 5.э.
мы даны bi«u момент может, в зависимости от момента инерции и величины уг-
Крутяид вызвать высокую конечную скорость. Полученная при этом ки-
лового ускор 'я вращения может нанести вред поворотному приводу при рез-
нетическая ^ Поэтому не должно превышаться допустимое значение кинети-
ком тормо ^^ величина которой рассчитывается с помощью выражения [27]
ческой энер
Глава V
Едоп=0,53со2,Нм, (5.35)
где J — момент инерции, кг-м2 (см. таблицу 5.5); (0=26/г — угловая скорость с"1; 6
— угол поворота, рад (180°=3,14 рад); t — время поворота, с.
Таолица 5.5. Расчет моментов инерции вращаемых масс
) 1) Тоия* пруток
с опорой м по центру
2) Тонкий пруток
с опорой по центру
J = m«rnr
12
3) Тонкая пластина
с опором по центру
(вертикально)
J = m'TT
4) Тонкая пластина
с опорой не по центру
(горизонтально)
, 4а 2+b2 4a*+b2
j = m.» j. + пу °> *"
12
12
5) Тонкая пластина
с опорой по центру
(горизонтально)
6) Тонкая шайба
с опорой по центру
(горизонтально)
8) Тонкая шайба
с опорой по центру
(вертикально)
Сначала рассчатаЯта ымякт юарц»
Ч«чатого колка В (случав 6). а аатам
J=(aft)Mb + J,
Рашеры аУЬ/r в (м)
Число зуб!
В таблице 5.6 указаны максимально допустимая кинетическая энергия и
диапазон времен поворота. Если время поворота меньше, может возникнуть
прерывистое вращение выходного вала.
Таблица 5.6. Допустимые значения кинетической энергии
Диаметр
поршня, мм
10
20
30
Допустимая кинетическая энергия
Едоп, Him
t 50
Без амортизатора
0,007
0,025
0.048
0,081
С амортизатором
0,039
0,116
0,116
0,294
Диапазон времени поворота
(с/90°)
Без амортизатора
0,2... 1
С амортизатором!
0,2...0,7
329
5.8. Демпфирующие устройства ~~
Демпфирующие устройства (я
Гк™Г!^^^^^ «—я
_ие ^SS5S сГГИИ Г^-ГчеГГ
энергию за счет сжатия и вытеснения озГа^Г ПНевма™—е, поглоЩ«е
различение, поглощающие энергию за Z "^Р0****^ °»Ч™* ™
закрытой полости в другуючерез д^ели^ТГ"™0™ (Ю) из «
Наиболее широкое применение в «^Sf Г4™'
шли гидравлические демпферы, благолаоямГ ЭЛе"ентов пневмоавтоматики на-
фирмы «Festo» типа ^^Ц^^™"*(а) И °бщий »"* №) демпфера
12, 16, 20, 25 и 32 мм и ходоГршно^лоТо"* ^^ "°РШНЯ 5'■ *■
жущейся массы не должна превышав 3 Lu ^ СК°Р°СТЬ пеРе1«ия дви-
Демпфера при 50% нагрузке л^Гв^х 1ST """"*" ^ " '™
^
^ *
^ **
б)
10 Ключ 36 мм
а)
7 8 9 0 II 12
/ ' П_ I
г) Б
Рисунок 5.54
Размерные параметры и конструкция одного из типоразмеров YSR-25-40-C
приведены на (в) и (г) соответственно.
Демпфеп данного типоразмера имеет поршень 025 мм, ход которого состав-
демпфер данного типорсимьн гнябжен упорным колпачком из
полижет 40 мм. Индекс «С» означает, что шток снабжен упор
Уретана. уол/час 160/150000 Н-м; остаточная энер-
Максимальная работа торможения, м «** ^ ^^ н ^^ возврата _
«J* - 0,80 Н-м; максимальная У^ "SSL температура-от-Шло+5(ГС.
и>^ с; сила возврата — 25 Н; масса — о,jo •" - v , м на базе цилиндрического тон-
Конструктивно демпфер выполнен неР^ резьбой М22х1,5, внутри которого
^стенного корпуса 3 с наружной монтажн VJ^Kno корпуса на две полос-
Установлена втулка 7, разделяющая внутрен ^ штоком 2, а во второй — вспо-
Ти А и В. В первой размешен основной пор^набжеННЫЙ возвратной пружиной 4.
м°гательный с центрированием по штоку н
>эо
Глава V
При воздействии перемещающейся массы на упорный колпачок 1 шток утап-
.ивается внутрь корпуса и поршень 9, оказывая давление на масло, находящееся в
полости А, вытесняет его через центральное коническое отверстие 11 дросселя и
отверстие во втулке 7 в полость Б. Масло, поступая в полость Б, вызывает
перемещение влево поршня 5 и сжатие пружины 4. При вхождении конического штыря
12 дросселя в отверстие 11, уменьшается его проходное сечение. Давление масла в
полости А возрастает, что приводит к отжиму клапана 8 в виде пакета тарельчатых
пружин от поршня 9. открытию сквозных каналов 10 в поршне и более
интенсивному вытеснению масла в полость Б. Срабатывание клапана происходит и при
ударных нагрузках на шток.
При снятии нагрузки со штока 2 масло, находящееся в полости Б,
вытесняется из нее подпружиненным поршнем 5 в полость А как через центральное
отверстие 11, так и через отверстия 10, проход через которые масло получило в
результате снятия нагрузки с тарельчатых пружин и уменьшения их наружного диаметра.
Закрепление демпфера на оборудовании осуществляется с помощью гаек 6.
Выбор демпфера может быть рассмотрен на следующих примерах.
Пример 1.
Пневмоцилиндр, развивающий усилие на штоке F4=190 H (рисунок 5.55,а),
имеет присоединенную массу т = 50 кг, перемещаемую по наклонной плоскости
вниз со скоростью V=l,5 м/с. Угол наклона а=45°. Шток цилиндра совершает
1800 двойных ходов в час.
Необходимо произвести выбор демпфера, обеспечивающего безударную
остановку перемещаемой массы в конце хода.
Решение.
1. Определяют суммарную силу, действующую на шток демпфера с учетом
присоединенной массы т:
F = F4+Gcosa = F4+mgcosa = 190+50-9,81 0,525 = 190 + 257,5 = 447,5 Н.
2. Используя номограмму на рисунке 5.55,в, выбирают подходящий для
рассмотрения амортизатор. Определяющим при выборе амортизатора по данной
номограмме является график для силы F, расположенный первым справа от точки
пересечения значения приведенной массы т = 50 кг и скорости соударения
V=l,5 м/с. Для каждого типоразмера амортизатора построены три графика сил.
Промежуточные значения следует рассчитывать аппроксимацией. Нанесенные
стрелки относятся к рассматриваемым примерам.
Как следует из номограммы, к рассмотрению следует принять амортизатор
типоразмера YSR-25-40-C, так как соответствующий ему график № 7 находится
правее графика № 6 для типоразмера YSR-20-25-C.
3. Проверяется отсутствие превышения допустимой работы демпфирования
W^ и работы демпфирования в час Whmax. Для демпферов данного типоразмера
Wm«= 160 H-M;Whmax= 150000 Нм; ход S=40 мм = 0,04 м.
Определяется реальная суммарная работа демпфирования за один ход штока
цилиндра:
W=-mV2 + Fs = --50 1,52+447,5 0,04 = 56,2+ 17,9 = 74,1 Н-м.
^ 2
С учетом того, что за один час шток цилиндра совершает 1800 ходов, часовая
работа демпфирования
Wft=W-1800 = 74,l-1800 = 133380 Н-м.
Производится сравнение реальных значений энергии демпфирования с
максимальными, характеризующими выбранный типоразмер демпфера:
W = 74,l Н-м < Wmax=160H-M;
Wh =133380 Н-м < Whm№= 150000Н-м,
nHeBMaTH4ecKHejicnnji».^rjl
Неустройства
Нилннтщ
Диафаммад^вьЮорасамоусганавлнвак.шихсяаморти^оровтипайк-
н m m -
Ш YSR-5-5-C
Ш VSR 1-U:
QJ VSR-8-8^:
GDVSR-I2-I2-C
£S YSR-I6-20C
Ш YSR-20-2*C
Ш YSR-25-40-C
IS YSR-32-60-C
45|7| .
6 8 10 20
— Приведенная масса (кг)-
Для каждого типа амортизатора нанесены три графика сил.
Промежуточные значения следует рассчитывать аппроксимацией.
Нанесенные стрелки относятся к рассмотренным примерам.
в)
Рисунок 5 55
показывают, что данный типоразмер подходит для рас-
массу,
'часа производится 900 двойных ходов
Результаты сравнения i
смотренного случая.
Пример 2. кутящий момент Л/= 20 Н-м, перемеща-
Поворотный цилиндр, развивающий щ>у ^ , ^^ момент инерции ко-
ет по радиусу /? = 0,5 м и с угловой скоростью^ ^
торой равен У=2 кг-м2. В течение одного
'Рисунок 5.55, б). чивающего полное поглощение энергии
Произвести выбор демпфера, обеспе
и безударную остановку в конце хода.
Решение. перемещаемого груза:
1. Определяется приведенная мач.
x>:
Глава V
2. Определяется динсйная скорость перемещения:
V=wK = 4 0.5 = 2 м/с.
\ Оире ьлчяется действующая на демпфер сипа:
F = M/K = 20/0,5 = 40 Н.
■* Исполы\я номограмму на рисунке 5.55.В. определяют шпора мер
соответствующего демпфера типа \SR (аналогично описанной в предыдущем примере
процедуре выбора1». Это \SR-l6-20-C. имеющий следующие характеристики:
поршень диаметром 16 мм: хох — 20 мм; максимальная работа торможения, за
ход/час — 30/64000 Н-м. время возврата — 0,2 с: сила возврата — 13 Н; масса —
0.21 кг; лдарная максимальная нагрузка — 2000 Н,
5. Определяется реальная суммарная раоота демпфера за один ход и за 900
ходов в чае.
W =05mv\2-t-F-i = 0.5-8 -2*+400,02 = 16 + 0.8»168 Н-м;
\\ = ц -9(Ю = 1Ъ.ЬО00 = 15120 Н-м.
b Производится сравнение реальных значении энергии демпфирования с
максимальными, характеризующими выбранный типоразмер демпфера:
И = 16.8 Н-м < \Vm;tt=30H м:
\U = 15120 Н-м < И,
= 64000 Н • м
откуда следует, что выбранный типоразмер удовлетворяет условиям поставленной
задачи.
Демпферы типа RBQ фирмы SMC (Япония) фису нок 5.56.а). имеющие пять
RBO типоразмеров с наружным» диаметрами корпуса 16. 20, 25, 30 и 32 мм
и ходом штока от 4 до 13 мм характеризуются малыми осевыми разме-
« . рами. Допустимая скорость столкновения — 0.05...3 м/с; рабочая
температура — от-Юдо+80°С.
■^ Нафузка, приложенная к концу поршневого штока 2. снабженного
i полиуретановым буфером 1. вызывает его перемещение вправо (рису-
а) нок 5.56. б) и вытеснение масла из полости стакана 6 через отверстия
123456 789
1 '
-as
ТЭ^с?
Бе» упорного колпачкя
RBQ1O07
б)
С\порным колпачком
RBQC 2007
_Под \nopiibifi ji
колпачок """V "" *"
Phcvhok 5 56
- a,K'm"4Km,^!SSS^SlSi*n.
в его стенке, в результате чего обтерт™ ™
вуюша» на,ру,ке „ ,»„«, уменьшав™ ЗГГ"" '"""■ "Т"0^"'
и стаканом 6. Фиксация стакана 6 и крышки 1 * ,ппп,Т корпусом У
цовкои. После перекрытия всех отвеет ГшспопоГГ °СущеСТВЛена 3авМЬ"
шюка. его движение прекращаете? ^ Рас"<«нных по ходу перемещения
После снятия нагрузки поршневой шток 2 под действием пружины 10
выдвигается наружу, создавая разряжение, открывающее шариковый обратный клапан 8
для быстрого поступления масла через прорези в донышке стакана 6 в его полость
Двонное уплотнение из воротннчковых манжет 4 5 надежно препятствует утечкам
масла, что гарантирует большой срок службы.
Демпферы могут оснащаться упорными колпачками из полиуретана,
армированные стальными втулками. Размерные параметры демпфера типоразмера
RB02007 (без упорного колпачка) и RBQC 2007 (с упорным колпачком)
представлены на (в). Он имеет следующие характеристики: допустимое поглощение
энергии 1Уза один ход — 12 Н-м; длина хода 5= 7 мм; число допустимых двойных
ходов в мин. — 60; максимально допустимое приводное усилие — 500 Н; сила
возврата — 12.75 Н: масса — 0.6 кг.
Общий вид (а) демпферов типов RB н RBC (с колпачком) фирмы SMC их
конструкция (б) и размерные параметры (в) показаны на рисунке 5.57.
Воспринимаемая штоком 1 с поршнем 10 нагрузка вызывает их перемещение
внутрь стакана 9, вытеснение находящегося в нем масла через отверстия 18 и
продольный паз 17 в его стенке в аккумулирующие полости 8 и сжатие возвратной
пружины 13, центрирование которой осуществляется напраачяюшей тарелкой 11,
закрепленной на штоке 1 с помощью пружинного стопорного кольца 12. При этом
поршень, имеющий возможность осевого смещения между тарелкой 11 и упорной
поверхностью штока 1. поджимается силами трения к последней, выполняя
функции тарельчатого клапана. Часть масла поступает в штоковую ™тьгакана 14
через отверстие 20 в его стенке. После снятия нагрузки поршень со штоком под
epej uibepcint ^u ь tin ч«-п ,,-vnnnne патожение. а вытесненное масло
действием пружины 13 »™Р™*™»В^*™™з отверстия 18. радиатьные
возвращается в бесштоковую полость стакана и чср« и t
пазы 19 и 21 и радиальный зазор между ™Рш"5ем. 'J "J10^ ,, ,, ,з м is i<s
RB RBC IlLIJmggdm
a)
T"n RBI007
* ч r-r-i t 3S
, ЗУ
■46,7
53.7
Pik-wiok :> -■>
V4
Гш на V
\м воропшчкивых млнж ы 3 и 5. >i ыноиленпые и рн vicjiiiicju.tiuii тулке 4
К ! пиитике cmo'imkciiiu б шнжп I cooibcicibchiiu. надежно к-рмечиmpyioi
»нчгрсннис полости игмнферл
Кори\с 9 демпфера выпошен перл торным, имеет по неси унии, наружную
рыьб . снашмн упорной ыулкон 2 и вниговои ии душкой 1о с запорным шариком
15, черс! которую нрои шогится заливка масла.
Размерные иарлмсгры демпфера типоразмера RB1007 проведены на (в).
Характеристики демпфера, ход штока — 7 мм; допустимое поглощение >nepi ни W —
бНм. скорость столкновения, max/inui — 5/0,05 м/с; допустимое число двойных хо
ов — 70 хоюв в минуту; усилие на ежа гон пружине — 9,611; масса — 25 грамм.
В процессе моныжа слечует учшывагь. что угол 6| между осью демпфера и
направлением речу »ыир>ющего усилия F (рисунок 5.58,а) не должен превышав
5° Для тина RBQ и 3° для типа RB.
В сл\'чае вращательной нафу«кн (рисунок 5.58,6) демпфер должен быть
установлен но касательной к дуге окружности радиуса R. Угол юрможеиня 62 не
должен превышать для тех же типов темпферов. соответственно, 5° и 3°.
Длина хода амортизатора может быть уменьшена с помощью упорной гайки
(рисунок 5.58,в). При расчете параметров демпфирования следует вместо S
оперировать значением S„.
I , . > ННЧСИПИ
ходи
■)
6)
Ж^
4.R
Рисунок 5.58
Вид
удара
И
8 &
и е-
а
s
V
"W1
W2
W
m
Цилиндр с
массой в
горизонт,
плоскости
и
V
m-V2
2
F S
W1+W2
2W
V2
Цилиндр с
массой,
вниз
5|v
V
m-V2
2
F-S + mgS
W1+W2
2W
V2
Цилиндр с
массой,
вверх
Btv
V
m-V2
2
F • S - mgS
W1+W2
2W
V2
Свободный
горизонтальный удар
14]
V
V
m-V.2
2
—
Wl
.
Падающая
масса
15]
2g-h
m-g-h
m-g-S
WI+W2
2W
V2
Качающаяся
масса с
поворотным
приводом
if"
coR
mV2 Jo)2
2 2
MS/R
W1+W2
2W
V2
Процедура выбора требуемого типоразмера демпфера может быть
рассмотрена на следующих примерах.
Пример 1.
Пневмоцилиндр с диаметром поршня d=50 мм, запитываемый сжатым
воздухом давлением р=0,5 МПа, совершающий и = 30 ходов в минуту, перемещает
объект массой т= 10 кг в горизонтальном направлении (схема 1, таблица. 5.7) со
11.|е..Ма.ич1скииг„оЛ|1И1
,и,,''«Ь|'Кгрпйс,вя
Мыораи, п.,, демпфер» и vera,,,..
I**""""- ИП СОотв^-.Вие его пяп
Решение ° "аР',МС1Р«ь условиям
I. С помощь,,, номо, раммы А (риСу„0К 5 w,
пи. tf,. При я.Ц)чн т/=1м/с Су,,0К5^0'фелсляс,сякин(ггическаяшер-
2. I1рои людная предвариrejnиый
аблицеО определяйся Pa6o,aV2 ^'^"Ч»^ .«naRB-1412.
icpoM поршня </=50мм. Рин°Д"ои силы, со «даваемой цилиндром с
^1=511^.
'ДИ1СЯ 1ф
шределяс
днамефом поршня d=t
3. Определяется эффектная масса т Дл„ jmm
мариая энергии " /у,я ,гшо "«ачала определяется сум-
Поэтому жачепию для скорости V-l „/
фекжвная масса ет, = 35 ki ~ "° номогРамме А находится эф-
вы0р11Г™ФТрГр^
ту «-45 Ч10 больше, чем это требуется по условиям задачи («=30 дв хол/мЗ
Таким образом подходящим демпфером является RB-1412 ''
Пример 2.
Рассматривается схема нагружения 2 по таблице 5.6. Заданные параметры по
аналогии с примером I: т = 5 кг; />=0,5 МПа; V=3 м/с; «=20 дв. ход./мин;
а - 50 мм. Поставленные вопросы для решения те же.
Решение.
1. Определяется с помощью номограммы А кинетическая энергия
^1 = 22,5 Н.м.
2. Определяется работа приводной силы тяжести W2. Предварительно
выбирается RB 2015. По таблице В при d=50 мм получают F*=14J Н-м. По
номограмме С при /и = 5 кг для RB 2015 работа силы тяжести mgs=0,l Н-м. Таким
образом W2 = F's + mgs = 14,7 + 0,7 = 15,4 Н-м.
3. Суммарная энергия составляет W= Wt + W2 = 22,5 +15,4 = 37,9 Н-м По
этому значению с помощью номограммы А находится эффективная масса те=8,3 кг.
4. С помощью D проверяется предварительно выбранный тип демпфера. При
>пс = 8,3 кг и V=3 м/с, точка пересечения лежит под линией RB 2015,
допускающего /; = 25 дв.ход./мин. Таким образом демпфер данного типа является подходящим
Для удовлетворения условий поставленной задачи.
Пример 3. ,
Схема нагружения 3 в таблице 5.7. Заданные значения параметров: т=5 кг;
Р = 0,5 МПа; V=3 м/с; « = 20 дв. ходУмин: </=50мм.
Поставленные для решения вопросы те же.
Решение.
1. С помощью А определяется Wt =^H^6 0 RB 20I5. По В находят
уделяется™
г"■*= 14,7 Н-м, а по С при w=5 кг для no ~i
Разом ....
14 7-07=14 Н-м.
W2 = F'S~wlw ^25 + 14=36.5 Н-м. и V=3 м/с по
3. При суммарной энергии W-W, + ^2
диаграмме А находят т, = 8,1 кг. „пмогоаммы D проверяется RB20J5.
4. При т.. = 8.1 кг и V=3 м/с с помощью н" Г. ,я лежиТ под линией,
Спускающий « = 25дв.ход./мин. Так как точка пер
"VMS
Глава V
В
Кинетическая энергия W1 или W (Нм)
0.1 0.15CU 0.5Ц7 1 2 3 5 7
Скорость столкновения V (м/с)
Работа усилия на цилиндре W2=FxS
при 0,6 МПа* (Нм)
Тип
Ход
торможения
S (мм)
Диаметр поршня d (мм)
6
10
15
20
25
30
40
50
63
80
100
125
140
160
180
200
250
300
RB-
0806
6
0,085
0,236
0,530
0,942
1,47
2,12
3,77
5,89
9,35
15,1
23,6
36,8
46,2
60,3
76,3
94,2
147
212
RB-
1007
7
0,099
0,274
0,619
1,10
1,72
2,47
4,40
6,87
10,9
17,6
27,5
43,0
53,9
70,4
89,1
110
172
247
RB-
1412
12
0,170
0,471
1,06
1,88
2,95
4,24
7,54
11,8
18,7
30,2
47,1
73,6
92,4
121
153
188
295
424
RB-
2015
15
0,212
0,589
1,33
2,36
3,68
5.30
9,42
14,7
23,4
37,7
58,9
92,0
115
151
191
236
368
530
RB-
2725
25
0,353
0,982
2,21
3,93
6,14
8,84
15,7
24,5
39,0
62,8
98,2
153
192
251
318
393
614
884
* При рабочем давлении, отличном от 0,5 МПа,
умножайте на поправочный коэффициент
Поправочный коэффициент
на различные рабочие давления
Рабочее давл (МПа
Поправочный
коэффициент
0,1
0,2
0,2
0,4
0,3
0,6
0,4
0,8
0.5
1Р
0j6
1.2
0,7
1.4
0,8
1.6
05
1,8
Работа сипы тяжести W2=m«g«s (Нм)
1000г
Скорость столкновения,
эффективная масса те
Ю 100
Масса т (кг)
Рисунок 5.59
0.1 02 0,3 0,40.5 5 1 2 3 45
Скорость столкновения V (м/с)
-^'^^^
337
соответствующей этому типу демпЛ
допустимого, демпфер выбоан JL РЭ' а ^нное число по -.
Пример 4. Р "Равильно. ЧИсло Д**ных ходов меньше
Схема нагружения 4 в т»к
2. С помощью номограммы П о к
Схема нагружения 5 в таблиие 5 7 ч„„
М= 10 Н-м; со = , с»; -10 дв.ходГин /? о^Г ^ч" ™'™«P°* «=3 кг;
Решение. ' ' "
гия W, =0,38 Н-м. ~ ~ Для а"=3 кг кинетическая энер-
2. Предварительно выбирается демпЛеп RRnsrv.., „
водной силы: Демпфер RB0806 и определяется работа про-
W2=M-s/R = 10-0,006/0,5 = 0,12 Н ■ м.
3. Суммарная энергия
W=W, + 1У2=0,38+0,12=0,5 Н-м.
По этому значению при V=0,5 м/с с помощью номограммы А находят
эффективную массу те = 4 кг. Щ
4. Проверяется с помощью D соответствие вибрационного типа демпфера
условиям задачи. Точка пересечения лежит по линии RB0806, для которого
допустимое число двойных ходов « = 80. Таким образом подтверждается соответствие
выбранного демпфера заданным условиям.
5.9. Дроссельные устройства
Регулирование скорости движения штоков пневмоцилнндров осуществляется
посредством изменения количества подаваемого в единицу времени воздуха в
полости пневмоцилиндра. Обычно применяются дроссели с обратным клапаном
(рисунок 5.60,а), которые дросселируют воздух только в одном направлении.
Обратный клапан 3 (рисунок 5.60.6) закрывает проход воздуха в этом направлении, н
воздух проходит через регулируемое винтом I сечение во втулке 2 и отверстия 4
В обратном направлении воздух имеет свободный проход через открывающийся
обратный клапан 3 (рисунок 5.60,в).
Возможны два вида дросселирования: дросселирование в напорной линии и
Дросселирование в линии выхлопа.
Рисунок
5.60
22
зм
Глава V
Рисунок 5.61
В первом случае (рисунок 5.61,а) дроссель с обратным клапаном
устанавливается таким образом, что в пневмоцилиндр попадает дросселированный воздух, а
истечение воздуха происходит через обратный клапан, установленный в линии
выхлопа. При таком виде
дросселирования, даже при малых
изменениях нагрузки на штоке,
например, при срабатывании концевого
выключателя, возникают
значительные изменения скорости
перемещения поршня. Снижение
нагрузки в подвижных частях,
например, нагрузки от возвратной
пружины пневмоцилиндра
одностороннего действия, вызывает
ускорение хода штока. Поэтому
дросселирование в напорной
линии применяется при управлении
пневмоцилиндрами
одностороннего действия и малых объемов.
При дросселировании в
линии выхлопа воздух свободно проходит в полость через обратный клапан (рисунок
5.61,6), а вытекает из полости через дроссели, создающие сопротивление
протекающему воздуху. В данном случае поршень находится между двумя подушками
сжатого воздуха. Первая формируется за счет сжатого воздуха, втекающего в одну
из полостей под давлением, а вторая — за счет ограничения расхода воздуха,
вытекающего из другой полости в атмосферу. При таком регулировании скорость
поршня менее восприимчива к изменениям нагрузки по ходу движения:
используется при управлении пневмоцилиндрами двустороннего действия.
На рисунке 5.62 изображен общий вид с мнемосхемой (а), конструкция (б) и
приведены размерные параметры (в) дросселя с обратным клапаном типа GR-3/8-B
(Festo), имеющего следующие характеристики: условный проход
дросселя/обратного клапана — 2/3 мм; нормальный номинальный расход через
дроссель/обратный клапан — 0... 127/247 л/мин; диапазон давлений — 0,05...0,1 МПа;
диапазон температур — от -20 до +75°С; масса — 0,035 кг.
Проходное отверстие дросселя в виде кольцевой щели образовано
поверхностью конического конца 4 регулировочного винта с мелким шагом резьбы и
скошенной кромкой поршия 3, поджимаемого пружиной 5 к корпусу 1, имеющего
каналы для прохода воздуха. Проходное отверстие обратного клапана также имеет
форму кольцевой щели, образованной боковой поверхностью поршня и седлом
обратного клапана 2 из пербунана.
Полное вывинчивание регулировочного винта 4 из резьбовой втулки 6
предотвращается стопорным кольцом 8. а его фиксация в заданном положении
обеспечивается стопорной гайкой 7.
Закрепление дроссельного устройства на технологическом оборудовании
может осуществляться либо с помощью отверстий в корпусе, либо с помошью
контргайки, как это показано на (в).
Зависимость расхода воздуха от числа оборотов регулировочного винта
приведена на (г).
Пневматт^скиеисполните,,ьН1
^Я^Ройства
1 - Защитный колпачок
2 - Контргайка
2 А полировочного винта-—
_ Число оборотов рсгулиров
г) Р11Суиок5.62 я дроссель„0го устройства
Представленная на рисунке 5.63, *Л> kohcw ного монтажа на пнев-
типа GRLZ- -В (Festo) предназначена для непР ^ ^ поворотнын приС0е-
^оцилиндры с'помошыо резьбовой чая» Д^й может быть повернут
волнительный штуцер I с внутренне*,Р ^ ^
"РУГ оси корпуса 2 на любой угол» ^„„ом ^ТтГконТ В обратном на-
В направлении дросселирования. ^ ^^ 6 и атулкон J.
колы№вую щель 5 между регулиро"
22*
Глава V
правлении воздух движется через кольцевой зазор между втулкой и корпусом, от-
вовнутрь воротничок кольцевой манжеты 4 из пербунана.
жимая
Тип GRLZ- ..-В
а)
0123456789 10
v —Число оборотов регулировочного винта—
Рисунок 5.63
Дроссельное устройство данного типа имеет 18 типоразмеров.
Изображенный на (в) типоразмер GRLZ-1/8-B имеет следующие
характеристики: условный проход — 4 мм; номинальный расход через открытый дроссель
— 0...380 л/мин; номинальный расход в направлении свободного потока при
открытом/закрытом дросселе — 380/160 л/мин; диапазон давлений — 0,02... 1,0
МПа; диапазон температур — от -10 до +60°С; масса — 0,03 кг.
Зависимость расхода воздуха от числа оборотов регулировочного винта для
дросселей с присоединительными отверстиями 1/8" приведена на (г).
Для установки в выхлопных отверстиях R или S 5/3-распределителей
предназначены дроссели типа GRE, мнемоническая схема (а) и общий вид (б) которых
показаны на рисунке 5.64. Они обеспечивают возможность управления скоростью
поршня цилиндра посредством регулирования расхода воздуха при выхлопе в
атмосферу.
Дроссели имеют четыре типоразмера, отличающиеся размерами резьбового
присоединения (от 1/8" до 1/2") и проходного сечения (5,3; 5; 7 и 10 мм);
соответствующий им расход воздуха при 0,6 МПа — 0...520; 0...Ю00; 0...2000 и
0...3980 л/мин и уровень шума, измеренный на расстоянии 1м — 85 дБ(А).
80 дБ(А), 87 дБ(А) и 90 дБ(А); диапазон рабочих температур — от -10 до +70°С ;
масса — 0,015.. .0,075 кг. Диапазон давлений — 0... 1,0 МПа.
Скорость потока воздуха на выходе регулируется с помощью дроссельного
винта 2, размещенного в резьбовом отверстии корпуса 1. Воздух выходит в
атмосферу через глушитель 3, выполненный из пористой спеченной бронзы, что
понижает шум при выхлопе.
_-J*™?™™^
СТонства
Тип GRE-.
4 5 6 7 8 9 10 II 12 13 14
Число оборотов _
регулировочного винта
Рисунок 5.64
Размерные параметры выхлопных дросселей всех четырех типоразмеров
приведены на рис. 5.64 (г), а зависимость расхода воздуха от числа оборотов
регулировочного винта — на рис. 5.64 (д).
5.10. Запорные устройства
„йпятные клапаны и клапаны быстрого
К запорным устройствам относятся обрттные^клал
выхлопа. У обратных клапанов ceeci^m^ciCM^Bm^^ ^ ^ и
направлении и полное перекрытие прохода в лру^ ^ привеДен т рисунке
Условное обозначение обратного клапана ™™ м в ^ отличающихся друг
5-65,а. Клапаны данного типа имеют шесть тип р ^ ^ ^ условным прохо.
от ДРУга размерами присоединительной резь' J расходом (от 115 л/мин До
4°м (от 2,2 мм до 16 мм) и нормальным>»°^MaccaL0.015...0,425 кг.
6650 л/мин). Рабочее давление — 0,04... 1~ т,'ь 3 с уплотнением 2 из пербу-
Запорным элементом клапана является п ^ ополданом потоку воздуха.
на*а, подпружиненный в осевом направлениеР |жнмяега1 от седла на корпу-
Прн подаче воздуха на вход клапана, порше ^ упора „ к1)ЫШку 5.
£ 1 и смещается в Управлении потока сживая ^^ радиальные отвер-
£рохоЖД воздуха к выход„омУ отвер
^«я 4 в юбке поршня. в0зврашает поршень в исходи
При снятии давления пружина е
"Ри котоп™ ^„„„„и входное отверс™
*;
Глава \
ТипН-Ш-Н
2 3 4
вход
выход
Размер к
"под ключ *
б)
Г>
Е
L£ —.
—U
Тип
Н-М5
Н-1/8 аЛ
H-I/4-B
Н-ЗЯ-В
Н-1/2-В
Н-3 4-В
А. мм
20
2S.5
50
54
70
77
В. мм
4
7.5
32
32
44
50
С. мм
7
0.5
9
11
13
13.5
D
М5
Тр\ 6.1/8"
Труб. 1/4"
Труб 3/8"
Трчб.1/2"
Tpv6 3/4"
К. мм
II
14
Т)
->■»
27
32
в)
Рне\нок>.65
Для увеличения скорости перемещения поршня используют клапан быстрого
выхлопа (рисунок 5.66,а). Это сокращает время обратного хода штока, что
особенно важно для цилиндров одностороннего действия. За счет снижения
сопротивления пневмолннин. в которой установлен клапан быстрого выхлопа, поршень
цилиндра движется с макснматьной скоростью. При этом воздух сбрасывается в
атмосферу через относительно большое выхлопное отверстие. Если давление
подается на аход Р фисунок 5.66.6). то подвижный запорный элемент закрывает
выхлопной канат R. Сжатый воздух поступает на выход А. Если даатенне в канате Р
снято (рисунок 5.66.B1. то возду х. вытекающий из цилиндра, перемещает запорный
элемент в сторону каната Р. закрывает его и минуя распределитель, по
кратчайшему ттн свободно выходит в атмосфер\.
ч '
Elf jXlVW
Phcvhok 5.66
ПневматическИ£испп,»ЧтС1|_
343
от
Клапан быстрого выхлопа устаНЯЙ
пневмоцнлиндра. На рисунке S L , аднваеТСя в непоспе^
ряет обратный ход иилнщ™ п7 Примснен«е ^панГо^""™ близосги 01
читается скорость пгГГ^ °ДностоРоннего действГ ^°Г° 8ЫХЛопа >бы"-
чнвается скорость прямого хода цилиндра JBV™ ' а на РИс>н*е 5.66д уве™
Конструкция клапана быстрого вш™УСТОроннего^йствня. ^^^
шителем показана на рисунке 5.67.а Эти к^нГ* S№ (Festo) co встроенным гту-
15 мм и рассчитаны ^V^^^^^^«ош^^^
хлопе при рабочем ,аааени„ 0 6 МПа н нГп^™ •°,МПа- ^«ь шума на вы-
Диапазон рабочих температур — От-->0 т1С?адН ' М не 4*wumct 86 дБГА)
Нормальный номинальный расход от р?^"0-065-0'320^ "
4560 л/мин: от А к R - 390...4020л/мин Клвп ****** 5Ш) ~ от 300 *>
■4-7 Д^~- ■* ■■-
те
•Ч"1
а)
Р - отверстие питания
А - выходное отверстие
R - отверстие выхлопа
Pjh.-ihok5.67
Сжатый воздух поступает от Р^^^^,^^^
А (Рисунок 5.67.б).В это же время выгонное ^«к^М^ ^^
элементом 1 из пербунана. Если входное оперепкг 0г А к R через
^ь с атмосферой воздух из полости цилиндра идет на вьалоп у»
ВстРоенный глушитель 2 из спеченной бронзы. ? прНведены на (в).
Размерные параметры клапаны типоразмера м*
5Л1. Быстроразъечные соединения с цанговым зяжямо*
для полимерных пневмошлянгов
/КГ) щлючвюшие в сеоя оолее
„ Быстроразьемные «Quick Star) ^^„„й. ^^^юкяи^^
J* 1000 стандартных и фУнкциона.ьныхсоед. ияХ ^исоед«ннтельной
^высокой нежность, и не ««— « > _ИН|_
^элементы, „меюшне присоелин-^ J^u*"-"*^^ or W »
°°P-4jOTMmi4*pHK, предназна:еннуюл^в f наружны^;^
1У2. .Широкий набор соединении для ^выч)образ)етсгандаР
(конических и цилиндрических лю
U4
Глава V
Таблица 5.8. Quick Star — соединения с цанговым зажимом
Qwck Star - мини ряд
T*nOSM-_
TwQSMF-.
Тип QSM- -I
Тип OSMP-
Тип QSM-
Тип QSM-.
TWOSMC» Тип QSC
Тип OSMS-..
Тип OSML-
HS
TunQSM.
Тип QSMT
Тип QSMLL-
Тип QSML-
Тип OSMTL-
Тип OSMT-.
Тип OSMY- .
Тип OSMX-.
Quick Star - стандартный ряд
. Функциональные ввертные соединения с QS-bci
|Тип QSK-
Тип OSK
^ *?
Тип OSKL-
вставными присоединениями
Тип QSH-.
Тип OSRL-
Кроме того существуют специальные
высокотемпературные, огнестойкие-
^ ,u...».v оон-илигсмпературные, огнестойки1-
воррозионно- и кислотостойкие, антистатические (токопроводящие) соединен^
--^££!Р£иства
предназначенные для использо** " " — —Jf?
щевой, машиностроительной я в Различны* ^
К ФункцИ0„1„ZZ^"""^^ "" Ч»——«т („„_
ся соединения. Послелни^ ,, нениям относятся ■»«.
конструкция бьТс;и o::z4am^^Z2:rи *-^»
мере углового БС (р„^Гк^Г° С°е^"ияS Г**^^
никелированной латуни в en™' УСТанаМиваемого с? РаССМОТРена "а при-
моэлементов (распре* Г°TBeTCTB»e резьбовые от °ЩЫ0 Ш7*цеРа 6 из
1 2 3 7еИ'ПНеВМОЦИЛИНДР08Идп.) ЯК°РПУСОВ
пнев-
I I / "*'
/ Тефлон
мат»1^х
-}
а)
б)
Рисунок 5.68
Надежная герметизация без использования уплотнительного кольца
(просадки) обеспечивается слоем тефлона, нанесенного на резьбу. Монтаж соедине-
"и* производится путем завинчивания рукой с последующей затяжкой ключом
У** двух оборотов Подобные резьбовые соединения можно повторно монтнро-
лВать До пяти раз. Момент затяжки резьбовых соединений да.различных типов резьб
^ИТ в следующих пределах: МЗ - 0,7 Н-м; М5 - 1.5... 1,0 Н-м; 1/8 - 7...9 Н-м;
^п12-14Н-М;3/8"-22-4Н-М;^"™^ГполняюТся из синтетической
^олы?ПУСа ' быстроразъемных «*W«™ ■^п0 рисоадинитель.
Ного1^ОЛНбуттете^ТаЛаТа) И Т^Годавается облегчение (гибкость)
монт УцеРа 6 на 360° (®- Таким обр
Tffа в стесненных условиях. иамида или полиуретана,
осуществляет нтаж шланга 4, изготовленного из пол а удержание — с помощью
Мц0гСЯ ПростЬ1М вставлением в монтажное °JBp ^ счет расклинивающего эф-
монтажное отар ^ ^ разевающего эф-
ержавеюшеи el ^ Уплотнительное
, ДефоРмааЦИ^т^уРт абсолют»)
Me*,,v~ " из пербунана (нитрикаучука)' гаран ^^ прОИЗВоя
ТИЯ вУ Флангом и корпусом БС. °свобожде полнацеталя.
В 0севом направлении на кольио-толкатель
Фект Пестков°й нанги 3 из "еРжавеЮШ^иСматери"ала"шлкнга. Уплотнительное
к0л?,а И ^значительной упругой пФР"аи""™ /ет абсолютную герметичность
*S? 2 Из пербунана (штршгу^^^гг производится путем
нажата УУ Шланга, u' »«, КС. Освобождение M8.
$*
Глава V
БС рассчитаны на рабочее давление 0,085... 1,0 МПа, диапазон температур —
О...60°С и имеют следующие исполнения: прямое (штыковое); угловое; тройник;
крестообразное.
На рисунке 5 6*) представлены БС прямого исполнения с наружным (а) и
внутренним (б) шестигранником под ключ. Первые (тип QS) имеют 11
типоразмеров с конической резьбой от 1/8 " до 1/2 "; проходные отверстия от 3 до 13 мм;
размер Dy под шланг — 4...16 мм; Н — 21...41,5 мм; Н| — 8...15 мм; Нг —
17, .33 5 мм; размер под ключ SW — 10.. .24 мм; масса — от 0,009 до 0,068 кг.
Jk_
н_
в)
1
Рисунок 5.69
Вторые (тип QS-...-1) имеют 10 типоразмеров с конической резьбой от 1/8"
до 1/2"; условный проход — 2,6...8,5 мм, размер D, под шланг — 4... 12 мм;
D: —9.5...21 мм;Н —21..34мм;Н, —8...15мм;Н,— 17 —26mm;SW —2,5...8
мм. Условный проход меньший, чем у первого исполнения, лимитируется
размером под ключ внутреннего шестигранника.
Функциональное БС типа QSR-MO на (в) имеет встроенный
шарикоподшипник, обеспечивающий возможность вращения корпуса относительно резьбового
штуцера. Они выпускаются как с метрической резьбой М4 и М5, так и с
конической 1/8"...1/2"; условный проход — 1,9...9,5 мм; D| — 4...12 мм; частота
вращения — 500...200 об/мин (большим типоразмерам соответствует меньшая частота
вращения из-за возможности закручивания шлангов вследствие инерционности
вращающихся масс); D2— 10,5...21 мм- Н — 33...62,5 мм;Н| — 3,5... 15 мм; Н2 —
29,5...54,5 мм; SW — 12...24 мм.
Быстроразъемные соединения типов QST и QSTL в виде тройников (а, б) и
угловые типов QSL и QSLL (в), показанные на рисунке 5.70, также имеют
несколько исполнений, что обеспечивает удобство монтажа, рациональное
размещение, а, следовательно, экономию шлангов и уменьшение объемов подводящих
магистралей сжатого воздуха. Они характеризуются условным проходом от 1,2 до
4 мм и сконструированы под шланги (размер D,) от 3 до 6 мм; размеры под ключ
— 5,5...10 мм.
В качестве примеров на рисунке 5.70. бив приведены размерные параметры
БС с присоединительной конической резьбой 1/8" и отверстиями D, под шланги
1иаметром 6 мм.
<;
\ \
♦■
.0
$ '
о-.
Тип QST-1/8-6
Ршлнок
t5.70
„,„ полимерных пневчошлангов
5Л2. Ниппельно-резьбовые соединения для полн. р
рпжание пневчошлангов в ниппельно-
В отличие от цанговых БС надежное у Jep щью наК11ЛНых гаек 4 (рис>-
^зьбовых соединениях (НРС) обеспечивается _ ^^ наВорачнваемых на
УК 5-71.а). с конической внутренней тоР"0*™ „пель 5 шланга соответсгвл
Р^ьбовук, часть 3 штуцера 1 после ««евання н ШТУЦеров осуществляете)
ч
Глава V
юл» комбинированные уплотнительные кольца из нержавеющей стали с пербуна-
ном или алюминия, выдерживающие температуру от -3U до + ши ^.
\
6)
1 - Накидная гайка
2 - Колпачок
в)
TnnVT-l/8-З-РК-З
_3JLS н13мм
Тип LK
Тип VT
Тип TK
V*
Л
г)
1 - Пустотелый вннт типа VT-...
2 - Кольцевая деталь типа LK-...
3 - Кольцевая деталь типа TK-...
Рисунок 5.71
НРС имеют два исполнения: с наружной резьбой (тип СК) (а) и внутренней
(тип АСК) (б), и предназначены для шлангов с внутренним диаметром от 3 до 13 мм.
Дюймовая цилиндрическая присоединительная резьба, которой снабжены НРС,
имеет размеры от 1/8" до 1/2". Кроме того, имеются два типоразмера с резьбами
М5.
Временно неиспользуемые НРС могут быть заглушены с помощью
специальных колпачков из полиуретана (в).
Для повышения компактности монтажа пневмомагистралей применяются
разводные многосекционные коллекторы (рисунок 5.71,г). Они имеют один общий
подвод воздуха через пустотелый присоединительный винт типа VT с радиальными
отверстиями, на который одеваются 2...3 кольцевых НРС типа LK или ТК,
обеспечивающие от 2 до 6 выходов для подсоединения пневмошлангов. Винты
выполняются из оцинкованной стали, а кольцевые соединения — из алюминия. Диаметры
ниппелей имеют размеры под шланги с проходным сечением Dy=3.. .6 мм.
Размерные параметры коллектора типа VT-1/8-3-PK-3 с присоединительной
цилиндрической резьбой 1/8", в составе которого имеются два кольцевых
соединителя тила ТК и одно типа LK (всего 3) под шланги диаметром 3 мм, приведены
на (д>-
Для повышения компактности соединительных магистралей,
характеризующихся наличием пневмошлангов с различными проходными сечениями,
применяются многоканальные разъемные соединения (рисунок 5.72,а), состоящие из
розетки типа KSV и многоканального штекера типа KDVF, которые могут быть ос-
нашены штекерами 6 и втулками с ниппелями 2 для эластичных трубопроводов с
D7 1,5, 2; 3 и 4 мм, количество которых может быть от 5 до 32 (рисунок 5.72,6)-
Соединение корпусов розетки 1 и штекера 7, выполненных из пластмассы,
осуществляется накидной гайкой 5 из алюминия. Места расположения штекеров и втУ'
лок пронумерованы, и при соединении друг с другом не меняются, благодаря
направляющему выступу 4, входящему в паз 3 на розетде.
Пневматические исполии^,^
Многоканальный илисер
ч
KDVF
К.: г
0
KSV
а)
Г т /'
2 3 4
Рисунок 5.72 Ь)
Штекер имеет чашеобразную форму для крепления защитного рукава 8 с
внутренней спиралью из пружинной стали, обеспечивающей его упругость и со-
хранение формы поперечного сечения.
Диапазон рабочих давлений — 0,...0,8 МПа; диапазон температур — от -10
до +60°С; масса — 0,123.. .0,353 кг в зависимости от типоразмера.
В одинаковых конструктивных элементах можно расположить штекеры и
втулки с различными условными проходами и диапазонами давлений. Так,
например, при числе одноканальных разъемов 5, 8, 16 и 32 они могут иметь диаметры
условного прохода 2, 3 и 4 мм, что позволяет обеспечить их оптимальное
расположение с целью удобства присоединения шлангов; при числе разъемов 7, 12 и
22 — диаметр условного прохода шланга 6 мм.
Глава VI
СВОБОДНО ПРОГРАММИРУЕМЫЕ КОНТРОЛЛЕРЫ
Во второй половине 20-го века достижения в области техники автоматизации
с применением пневматики прогрессировали более или менее параллельно
подобным достижениям в области электроники. В 60-е годы, когда электромеханические
системы со сложными релейными и контакторными контроллерами становились
все более негибкими, шла жесткая борьба за превосходство между электронными
и пневматическими контроллерами, которая закончилась чистой победой
электронных контроллеров. Со стороны пневматики программируемые системы
автоматизации были разработаны до уровня пневматических машин, управляемых с
помощью программ, записанных на перфоленту. Со стороны электроники
использование элементов булевой алгебры первоначально было популярно в Европе, т.е.
в системах управления использовались непосредственно элементы логики И, ИЛИ
и НЕ, соединяемые между собой проводами.
Однако, программируемый логический контроллер (ПЛК), а в англоязычной
литературе PLC, впервые разработанный в США в 1968 году, скоро убедил всех,
что процесс программирования может выполняться более просто с помощью
устройства программирования (программатора) с электронной памятью, чем
плоскогубцами и отверткой. ПЛК быстро заменил все другие подходы в технологии
автоматизации поскольку это было относительно небольшое, относительно
недорогое и значительно более гибкое средство.
Одновременно, в технике управления технологическими процессами
устанавливались новые стандарты. Для программирования ПЛК, кроме специальных
программирующих устройств (программаторов) и специальных языков
программирования, стали применять появившиеся персональные компьютеры (ПК) и широко
распространенные универсальные языки программирования. ПЛК даже стали
называть свободно программируемыми контроллерами (СПК). Как и в других
областях электроники, с течением времени уменьшались размеры программируемых
систем автоматизации. PLC-технология стала более компактной, были
разработаны мини- и микро- ПЛК, а компьютеры для управления технологическими
процессами вышли на уровень микро-ЭВМ. ПЛК и персональные компьютеры сделали
возможным реализовывать сложные системы управления, контроля и
тестирования, информационные системы, в том числе иерархические.
В течение последних 25 лет программируемый логический контроллер
доминировал в области технологии автоматизации механических систем и в системах
управления технологическими процессами. Персональный компьютер в основном
применялся для автоматизации офисов. Концепция развития и конструкция ПК
сделали его классической универсальной машиной в компьютерной технологии.
Тем самым было доказано, что ПК — это подходящее средство для использования
далеко за пределами офиса. Взаимодействие между машинным миром в
производстве и компьютерным миром в офисе стало все более необходимым не только
для крупномасштабных проектов. Потребовалось создание компьютерных сетей,
которые бы включали как ПК, так и ПЛК.
В результате около 20 лет назад появилась идея создания ПК, подходящего
Для использования в промышленности, то есть промышленного ПК (Industrial PC
или IPC). На рисунке 6.1 показано, что разработка промышленного ПК имеет два
источника, технология автоматизации в промышленности и технология
производства компьютеров
^вободнюгфогра^ишптуемые
Н™1£оллерЬ1
Системы управления.
- релейные,
- пневматические,
- на электронных
логических
элементах
35 J
Промышленный""
ПК (IPC)
Миии/Микро ПЛК
(PLC)
Микрокомпьютер
Развитие
компьютеров
Рисунок 6.1
Миниатюрные ПЛК обеспечивают так™ * ^
динозавры 15-20 летней давности а стот/Г Эффективность. как гигантские
Персональные компьютеры предлагаюте* ' ** "* ,00° ДОЛЛаРов USD-
сальные ЭВМ, а стоят ^nJS^^^S^ ™ " ^ yH^
-ПвхоКды; ЖН° ВЫДеЛИТЬ ЧСТЫРе °СН0ВНЫХ К°МПОНеНТа (Рис^нок "*
— выходы;
— память, в которой сохраняются инструкции программы пользователя и
данные;
— процессор, который читает входные данные и управляет выходами в
соответствии с инструкциями программы пользователя.
Терминал программирования - инструмент, используемый для:
— создания и пересылки программы пользователя в память ПЛК;
— отладки программы пользователя и запуска системы управления;
— выполнения диагностики установки.
Автоматизация в офисе и на производстве ведут к усиление связей этих двух
областей. С технической точки зрения идея полностью компьютеризированного
производства (Computer Integrated Manufacturing) привела к работе с сетями между
Уровнем планирования производства (проект, подготовка работы, статистика и
т.д.) и промышленным уровнем (управление технологическими процессами и
аппаратами, контроллеры, датчики, приводы и т.д.). Это означает, что конторские
компьютеры и промышленные компьютеры связываются друг с другом. Кроме
того, это означает, что различные типы аппаратных средств должны быть
согласован... „„ л/ „nif что универсальная машина, в то время как
вань, друг с другом. Конторская ПК - это универ Конторская ПК может
ПЛК - это ориентируемая поставленной ****™™^ „ т0Рвремя как тя
относительно легко адаптироваться к Р«™ ТнТПромышленный ПК был
ПЛК - это практически невозможно. ^f^^L^ промышленного
Рожден с идеей легкой адаптации конторской ПК л требования р
производства. „„ппавления свободно программируемых
В настоящее время развиваются два налра* ышяенные ПК (IPC). Оба
Контроллеров (СПК): классические ПЛК (гь J шкОВ и противников. Клас-
имеют свои преимущества и недостатки, CBOH^ многих задач автоматизации,
веские ПЛК лучше приспособлены для реш логаЧеские процессы. IPC
Скольку ориентированы на вполне конкретны ^ избытоЧными, но имеют
Явл*Ются более универсальными и, след0,5уЛмеюШИХ программировать для ПК и
'°Раздо более широкую базу пользователей, у
Помощью ПК .нным ПК нижнего уровня (plant-floor).
т Эта глава посвящена ПЛК и "Р^^^нно в производстве, располага-
_е- системам, которые используются н ниЮ.
ЯСь очень близко к технологическому оборуд
Глава VI
VP
§орчяЯг1В*1
FTX 417ЛТ 2000
FTX117
\У
■ыкаючател.
Датчик
Контактор
Соленоидный
клапан
Индикаторная
лампа
.Аналоговый
клапан
плк
Рисунок 6.2
6.1. Структура контроллера
Главное преимушество ПЛК — замена жесткой аппаратной логики,
например, релейной, на программируемую по заданному алгоритму логику. При
использовании жесткой логики система управления обычно строится на основе жестких
соединений Например, при достижении узлами станка определенных положении
датчики формируют сигналы, которые управляют соответствующими
исполнительными механизмами. Если возникает необходимость использовать эти же
датчики для управления другими исполнительными механизмами, необходимо
физически изменить конфигурацию оборудования, т.е. соединения между датчиками и
исполнительными механизмами. На простых станках это не занимает много вре-
чеки, а чаше всего в этом просто нет необходимости. Но как только количество
t и исполнительных механизмов достигает нескольких десятков, их связи
и • > взаимодействия настолько усложняются, что изменение коммутации
вручную становится трудоемкой и долговременной задачей, а часто и просто н^
> 1 • Для часто перестраиваемого технологического оборудования, на'
пример, станки с числовым программным управлением (ЧПУ), обеспечение »|Х
лыеовой • • • без ПЛК просто невозможно
^^вободнопрогт^амлш^^
Для реализации процесса управления
числе пневматическим, требуются средства, °Логнчес,(И* оборудованием, в том
разных типов и принципов действия кнопки"**3 ИСХ0ДН0Й ""Формации (датчики
тел и, панели оператора и т. п.) и средства v К°НЫевые ВЫКЛ1<>чатели. переключа-
чачи (реле разных типов и принципов дейстИРаа:,еНИЯ испалните1ЬНЫ*и «еханиз-
пределители, регуляторы и т п) Пои -ж»' К0нтакгоРы- пневматические рас-
для управления может быть как дисктэетГт Т™** ^P*2"** и информация
тура, давление;. Дискретная информация вводктся в контроатер и выводится из
него в виде уровней напряжения, е.. = - лтоишх cnrmJZ^ выволну »
„-„.^„.^„ч / п \ и ующих состояниям «включено» («1»)
и «выключено, («0»). Непрерывная информация вводится в контротлер и
выводится из него в виде тока или напряжения, которые меняются в определенных
пределах (например. 0-20 мА. 0-10 В). Дискретная информация принимается и
выдается контроллером в виде отдельных дискретных сигналов, импульсов, кодов.
Непрерывная информация — как аналоговые сигнаты (ток или напряжение).
При использовании ПЛК датчики и испатнительные механизмы соединяются
между собой не напрямую а через модули ввода-вывода подключаются к
контроллеру (рисунок 6.3). Порядок соединения датчиков и исполнительных
механизмов с входами и выходами контроллера не играет рати. Связи входных
сигналов с выходными задаются программой, которая записана в память контроллера и
под управлением которой процессор реализует необходимый алгоритм
управления. Программа представляет собой последовательность инструкций — команд
процессора. Каждая команда содержит сведения об исходной информации и
методе ее обработки — операции. Такими операциями являются опрос модулей ввода-
вывода, запись или чтение данных из памяти, логические, арифметические,
проверки и изменения порядка выполнения операций в зависимости от выполнения
различных условий и т. п. Процессор выполняет операции последовательно в
соответствии с шагами алгоритма утгравления^ листва (ГОЛ или в
Память ПЛК состоит го постоянного зал ■ ' 1^^1ячкиия)и
„„. . г> л rt.K \f.»mr«-V П&ЧЯТЬ ТОЛЬКО ДЛЯ Ч1СМИЯ/ и
англоязычной .литературе ROM (Read Only Memory J^^ ^^^ ^
оперативного запоминающего устройства iu-э #. } ПЗу позволяет сохра-
(Random Access Memory — память с произвольным -*- шу ^ сохраняет
нить гфограмму даже посте выключения шпания_ к^ ^^ значення перемен.
программу в текущем ее состоянии в пР°цеа^ГшЫ ^^^ содержимое ОЗУ не
»ых и накапливаемых данных. После выклк ^ т1ерах ИСпользуют мато-
сохраняется. Для того чтобы это не пРоЮОШЛ°тпанягь содержимое ОЗУ при от-
габаритные литиевые батареи, позволяющиен^езависнч>ю память EPROM
■«юченном питании до нескольких лет. или
I Модул!
с
t
ПЗУ-ROM
03y-RAM
I
Датчики
Рисуя**
<U
354
Глава VI
Для запуска, останова, изменения, удаления, загрузки программ в контроллер
и отображения его состояния используются как встроенные в него, так и
автономные (в программаторе) клавиатура и дисплей — простейший индикатор. Кроме
того, существует вариант использования персонального компьютера в качестве
программатора. В таком случае контроллер соединяется с ПК кабелем, обычно
через последовательный порт RS232. В ПК предварительно должен быть
установлен специальный пакет программ для программирования контроллеров.
6.2. Конструкции контроллеров
Выпускаемые многими фирмами контроллеры разных конструкций и с
разными функциональными возможностями, можно условно разбить на две группы:
— компактные однокорпусные контроллеры, имеющие ограниченное количество
входов-выходов и предназначенные для решения простых задач управления;
— модульные контроллеры, конфигурация которых и состав включаемых
модулей может меняться в значительных пределах.
Типичный представитель первой группы
контроллеров изображен на рисунке 6.4. Это
компактный контроллер Mitsubishi FX0. На рисунке 6.5
представлен модульный контроллер Siemens S7-
300.
Кроме того, имеется ряд различных
конструкций контроллеров, которые учитывают требования
индивидуальных приложений. Обычно различают
следующие конструкции СПК:
— переносной контроллер;
— контроллер в виде съемной платы (слота);
— контроллер, встроенный в монитор;
— контроллер в 19" корпусе;
— нижнеуровневый или «рельсовый» контроллер.
В
Рисунок 6.4
...r.i:
I
Рисунок 6 5
Переносной контроллер представляет собой идеальную систему как для сбора
измеряемых данных для мобильных измерительных систем, так и для
программирования и отладки приборов в устройствах, функционирующих в экстремальных
условиях.
Слоговый контроллер устанавливается в систему как съемная плата и
напрямую сообщается с другим электронным оборудованием системы управления.
Контроллер в мониторе является полностью интегрированной системой обр^'
ботки и визуализации данных. Это по сути автоматизированный полностью
интегрированный человеко-машинный интерфейс.
Контроллер в 19" корпусе (обычно модульный) представляет собой промыв'
ленную систему, ориентированную на максимальное быстродействие, например-
для пультов управления и центральных компьютерных систем.
Нижнеуровневый (plant-floor) или «рельсовый» контроллер — это компактны
или модульный СПК, который может быть установлен на направляющую (реЛьС'
Свободно nporpajHjvu^M,^
прямо в шкафу управления. Такие системы ofk
ствие, определяющееся тактовой частотой имеют невысокое быстродей-
как стало возможным применять их, как ком™"™ ПроцессоРа- Однако, с тех пор,
ках и для работы в сетях, как типичные ПК "аКТНЫе УстРойст^ в небольших бло-
низкоуровневых систем, для локальной обоагъГ "^^ использоваться в качестве
ции (качественно немного ниже чем < ви данных и локальной их индика-
данных и как межсетевой переход между v^1™^' локального накопления
го уровня. У УР°ВНем Машин и компьютерами верхне-
6.3. Концепция промышленных ПК (IPC)
Термин «Промышленный ПК» тпосвептгнип ,*«.,„„„«,
тг,Л п - "посредственно указывает два корня
концепции IPC. «Промышленный» означает специальные требования для окружающих
промышленных условии. Они определены в стандартах для программируемых
логических контроллеров и теперь также применяются при производстве IPC.
Специальные требования включают:
— увеличенный диапазон рабочей температуры (обычно 0 — 55° С вместо
диапазона 5 — 35° С для офисов);
— повышенное сопротивление вибрации;
— повышенное сопротивление ударным нагрузкам;
— усиленная электромагнитная (ЕМС) защита.
«ПК» означает происхождение из класса персональных компьютеров. В этом
контексте обычно понимается, что IPC:
— базируется на технологии процессоров для персональных компьютеров;
— работает под управлением операционной системы (MS-DOS и другие).
В результате IPC объединяет гибкость и универсальность ПК с
устойчивостью к ошибкам и надежностью PLC. На рисунке 6.6 представлен типичный
представитель однокорпусного промышленного ПК фирмы Festo FEC FC640.
В противоположность ПК,
производительность PLC не
характеризуется количеством ^
операций с плавающей запятой в ш
секунду, например, а обычно ? Щ,
указывается время цикла из 1000 > Д*
бинарных выражений, или какая i ЧЬ
либо подобная характеристика. ' S; \
ПК отличается от классического ' ; М, \
PLC, прежде всего, процессором ^ j }K „
и операционной системой. J P»
Операционная система PLC
обязательно должна
поддерживать логические операции с Рисунок 6 6
Двоичными переменными и
"озволять использовать о
"Рограммирующие и контрольные У^Г^ор используется в PLC. Поэтому
3Ующих PLC ч1. «сего не важно, какой процессор^ ^^ ^ та приклад„ая
для реальных приложений, исполь-
г—™пгающисикин1р">"»^-' „ „„„pccod используется в PLC. Поэтому
^Ующих PLC, чаще всего не важно, какой проц* v нм та ПрИКЛад„ая
ровное различие между ПК и PLC - ^Г^^сгшы. Для того, чтобы ПК
"Рофамма, которая определяет область применения
^ PLC он лолжен: ^ оПТ11Мизированиые для выполнения
ыполнения операций и ис-
L<~ он должен:
6yj] ~"~ понимать языки программир
СВЬ,Х операций; стельностью а
**ь^. П°ЗВОЛЯТЬ УПРаВЛЯ7Ъ П°СЛГГе действия:
'ьзовать таймеры и вычислительные деи
x.
Глава VI
— позволять подключать средства программирования и диагностики
непосредственно во время работы;
— обшатъс* с программирующим и диагностическим оборудованием.
Если IPC переналаживается под PLC. то в IPC нужно ввести программу,
которая удовлетворяет всем перечисленным требованиям. Есть два различных пути
"ия достижения этой цели.
Можно написать программу, которая делает поведение IPC таким же, как у
PLC Программа приложения содержится в отдельном файле, интерпретируемом
как «PLC-система». Это классический способ для PLC: операционная система и
функциональность PLC определяется производителем PLC. Программа пишется с
использованием синтаксиса в каждом отдельном случае для любого специального
приложения, затем она выполняется PLC. Пакет программ FST работает в
соответствии с этим принципом.
Альтернативой является разработка программы, которая была написана на
языке PLC, (языке высокого уровня) понятном ПК. Программа, написанная на
языке высокого уровня компилируется соответствующим компилятором, и PLC
функции, такие как работа с программатором интегрируются в эту программу.
Файл программы, полученный таким образом, содержит и PLC —
функциональность, и специальное приложение.
Стандарт IEC 1131-1 определяет программируемый логический контроллер
(PLC) следующим образом: «Цифровая электронная система, предназначенная для
использования в промышленном оборудовании с программируемой внутренней
памятью, определяемыми пользователем операторами для реализации
специальных функций, таких как логическое управление, управление последовательностью,
временные и вычисштельные функции и арифметические функции для
управления разными типами машин или процессов посредством цифровых и аналоговых
входных и выходных сигналов. Программируемый логический контроллер и
соответствующие периферийные устройства (PLC-система) спроектированы таким
образом, чтобы их можно было легко интегрировать в любую производственную
систему управления и чтобы она была проста в эксплуатации».
С PLC тесно связан программатор. Он применяется для работы без
компьютера. В настоящее время ПК оснащены специальным программным обеспечением
пя программирования PLC.
Средства программирования и отладки в стандарте IEC 1131-1 определены
так:
«Периферийное устройство из стандартного списка продукции, которое
облегчает процессы программирования, тестирования, ввода в эксплуатацию и
поиска неисправностей в приложениях PLC-систем удовлетворяет тем же требованиям,
что и документация к программе. Оно может использоваться, как человеко-
машинный интерфейс. Средства программирования и отладки называются
«сменными», если они могут быть установлены в соответствующий интерфейс, или если
разъем может быть отсоединен в любое время без риска для приложения
пользователя. В других случаях про средства программирования и отладки говорят, что они
«присоединены постоянно».
Примечательно, что этот международный стандарт упоминает большинство
важных задач PLC, а именно логическое управление, управление
последовательностью, временные и вычислительные функции наряду с арифметическими
функции Практическим следствием этого является то, что программируемые
логические контроллеры сегодня характеризуются рядом свойств:
аппаратные средства, позволяющие подключать бинарные датчики и ис-
.ктетьные механизмы;
Свободно программируемые контроллеры
- аппаратные средства соответствуют „
температуроустойчивости. вибростойкост7и Прои^01Шат^ требованиям по
(ЕМС) воздействиям; К0СТИ и Устойчивости к электромагнитным
оптимальную под-
— операционная система (всгооенняо» ^
держку булевых операций для бинарныхГн^4"^3*
— встроенное программное обеспечение
граммирования и отладки, которые позвотяют П0ДаерживаК)шее средства про-
ным входам и выходам, так и к пямоти п ' ИЧСТЬ ПРЯМ0Й Доступ как к бинар-
счетчиков и т. д.). ^ пеР«ь.х (фтагов. регистров, таймеров,
Это описание PLC похоже на опигяии« юг
производственных условиях. ^ "** ПерЮГ0 ПК "Ранимого в
Компьютер является «пригодным в производственных условиях, если его
аппаратное обеспечение удовлетворяет требованиям, аналогичным требоГиям™
PLC, а именно, соответствующая температуроустойчивость, вибростойкость и
устойчивость к электромагнитным (ЕМС) воздействиям.
Другими словами, IPC это вычислительная система, пригодная для
использования в условиях производства и построенная на основе процессорной технологии
Intel 80x86.
PLC также является вычислительной системой, но она может быть построена
на основе любого микропроцессора. Естественно, что рыночные PLC также могут
иметь центральные процессорные устройства, используюшие процессоры
семейства Intel 80x86 Однако такие PLC нельзя перестроить на IPC. поскольку и\
программное обеспечение разработано для специальных задач PLC: операционная
система PLC установлена без возможности изменения и оптимизирована для
выполнения булевых операций (И. ИЛИ, НЕ и т. д.). К тому же, операционная
система PLC предназначена для взаимодействия с PLC-программатором для выбора
тестируемых функций и прямого доступа к входным и выходным данным.
Операционная система промышленного ПК, напротив, считывается каждый
раз, когда ПК загружается, как и у любого другого ПК. 3*о означает, что
операционная система имеет достаточную гибкость. Кроме того, все операционные
системы ПК разработаны прежде всего, для обработки файлов (DOS - дисковая one-
FaoFauuianbi, пр^яча ж,пг„„ выполнять задачи автоматизации,
рационная система) и для того, чтобы °™«™^£ ^амм. ^ „ИКоим
они должны быть обеспечены соответствующим пакетом-^ир
образом не устанавливает грань между ПК и программатором, даже если такое
Разграничение возможно.
6.4. Совместимость IPC с ПК
- с ПК. В этом смысле описание аппарат-
IPC является системой,
совместимой с . .*. может имт „„„дар™ пк в
"ых средств (АС) и программного c6ecne4^LauK программного обеспечения IPC
ячестве отправной точки. Обобщенное оп ы>> те п0 слоям,
может быть построено на основе «пРинц™Шач1С input Output System) - базо-
Первый слой содержит программу Bit» l ся „ энергонезависимои
вУю систему управления вводом-выводом ко Р^^ ашаратного окруже-
"амяти „ разработана производ***^^^
ния. Второй слой это
операционная сие ™ • 0перациониая система л^-*»-
» зависимости от приложения как обычно в ^ обеснечение^, ПК ^в
бь-ть естественным образом совместима с^ J ^ Прижщение запускается
r адвисимостн от назиа
-о,,ь естественным ооразом w--
Мо*но, с MS-DOS, в зависимости
°Перацнонной системы.
Глава VI
fcj! Электропитание IPC
Промышленные ПК испотьз\ютея в >сповиях производства. Нижнеуровне-
аые ПК и. в особенности, «ретьсовые*, устанавливаются прямо в шкафу
управления технологического оборудования. Основное напряжение, используемое на се-
годкятний день в таких шкафах, составляет 24 В (постоянное). Однако, кроме
использования непосредственно в рабочих машинах. IPC также часто
используются в переносных системах измерения и сбора данных. «Автомобильное
напряжение» 12 В постоянного тока часто встречается в таких мобильных системах.
Все IPC-системки например, фирмы Festo оснащены преобразователем
напряжения, который может обеспечивать на выходе напряжение в интервале от 10
до 36 В Блок питания логического уровня обеспечивает систему
стабилизированным напряжением 5 В. Все периферийные платы, которые требуют этот уровень
управляющего напряжения, питаются непосредственно от этого источника.
Обычному ПК необходима батарея для резервного хранения установочных
данных и работы таймера реального времени. Современные устанавливаемые в ПК
батарейки имеют срок годности несколько лет, поэтому интервал
техобслуживания может изменяться от 1,5 до 10 лет. IPC фирмы Festo разработаны так, что
могут функционировать полностью без технического обслуживания. Это возможно
благодаря следующим особенностям: установки BIOS хранятся в EEPROM —
тектронно-перепрограммируемой постоянной памяти и потому сохраняются при
отключении питания, а таймер реального времени перенесен в блок источника
питания, где его питание дублируется конденсатором в позолоченном корпусе,
который гарантирует работу таймера не менее 5 дней. Это позволяет оставлять
гакие IPC без всякого ухода на выходные дни. Необходимо применение батарей,
если система отключается от основного источника питания на более длительный
период времени.
6.6. \ппаратные интерфейсы IPC
Открытость системной шины является одной из наиболее важных черт, опре-
ктяющих широкое распространение ПК. Действительно, ISA — шина, которая
применяется в ПК для плат расширения, остается пока одной из самых
популярных. Несмотря иа то. что такие системные шины, как MCA, EISA или PCI
предлагают бопьшие возможности во многих отношениях, широкое распространение
шины ISA привело к появлению большого количества экономичных плат
расширения. Таким образом, достоинство шины ISA не столько в ее пропускной
способности, скотько в наличии большо! о количества дешевых плат расширения. Шина
ISA используется в своей первоначальной форме (8-битовые данные) для
подключения тат расширения в IPC фирмы Festo. Отличия от стандартной шины ISA как
правило не вызывают трудностей. Так, большинство плат расширения,
разработанных для 8-битовой шины ISA, без проблем выполняют свои функции при
прямом подключении к шине IPC. Платы с напряжением питания 12 В могут работать
в IPC-системах, которые также работают с напряжением 12 В.
Шина ISA имеет два серьезных недостатка, препятствующих ее
использованию в производстве:
— во-первых, только лишь небольшое число плат может быть подсоединен0
к ней ио 20 модулей),
— во-вторых, мультипроцессорность невозможна, т. е. нелыя использоват"
центральных процессорных устройства (ЦПУ) в одной системной шине.
Для устранения этих недостатков ISA шина была расширена в 12С — ишнУ
я IPC-систем Сделаны доступными два ранее не использовавшиеся вывода, не'
аимые для шины 1С. Достоинство 12С шины, раизаботанной, например. Ф»*Р
мой Philips, в том, что к ней может п "~" ~~ " "
5 м (это расстояние может Г^т №4aTbcMo256unnv,«,-
простоте и высокой пРо^ ~с ^^^Ж^!
является синхронной «master-slave! " * Небольц|<" конфигурациях SL
представляет собой надстройку н7ши~ « (НВВИ № ~зацZ
ниями IPC - систем и соединяется с внешние^№нь^ монтажными реше
I С существенно расширяет возможности1гс^5Еы° "^^ Р*™тВ- ^та
6.7. Память программ и память да„ных
Развитие IPC всегда сталкивается с в
Память с произвольной выборкой (RAM? T^ "амяти ^ пРогРамм и данных,
основной памяти. Такая память должна »J~ ПраШж "пользуется в качестве
пространные накопительные устроТсва"оГТыГпУТ* ' "У* **
жесткие диски, представляют, тем не менееТ™ ' Ие КаК' флоппи и
сти, вибрации и экстремальны^™ УФ У *" ЖивУчес™ ,рС. В частно-
шительными тя^^^^^,^"^ ^^ ^^ Р^
■or*. ™*.л«щпчс.1.ких движущихся частей и вращающихся поияочпп
Жесткие диски, которые удовлетворяют требованиям работы в^ло ИЯХ произ
vTb мипеНрГСС°ЯЩее ВРШЯ °ЧеНЬ Д0Р0ГИ- НаПр0ТИВ' <»"*» EPR0M
—'живуч в мире PLC. но не свойственен обычным офисным ПК, где EPROM
используется лишь для хранения BIOS. Тем не менее, использование EPROM в качестве
памяти программ стало практическим стандартом. EPROM является
энергонезависимой памятью, одновременно очень устойчивой и очень дешевой. Применение
EPROM является очевидным решением, когда требуется стабильная работа
программ — приложений, например, после этапа ввода в эксплуатацию. К тому же.
энергонезависимая память, содержимое которой может изменяться, обычно
является необходимой при функционировании IPC, например, для опроса состояния
машины перед началом продолжения работы после останова, вызванного
отключением питания. RAM-модули со встроенной батареей со временем эксплуатации
До 10 лет имеют себе альтернативу — не требующую обслуживания флэш-память
(flash), которую можно рассматривать практически как жесткий диск.
IPC-системы, также используют именно эти типы памяти. ЦПУ с 0.5 Мбайт
Флэш-памяти может быть использовано, если нужно создать систему, не требую-
Щую технического обслуживания. 2>га память уже встроена в ЦПУ и поэтому не
требует отдельного слота на шине ISA. п»- „„,™ m„. „
Устройства стандартных накопителей, известные в ПК. в IPC доступны в
Форме сменных модулей:
- контроллер с Фл0П"и-ДИт^н7жМет-,к магнитных дисках различных обь-
— промышленные накопители на жесткил ™«
емов;
— флэш-память разных объемов; PCMCIA — карт;
- PCMCIA-модули с интерфейсом ^,д«„„ш сетей и применяе-
^ сетевые карты с интерфейсом дая внутр ч> у
МЬ1е в локальных сетях. файлов и затем запускаются для
ПК загружается чтением из BIOS с""^рхЕСВАТ в ПК устаноачено, что
^«полнения файлы CONFIG.SYS и АШ^ " если там ничего не найдено.
Jr°S сначала ищет системные файлы на диске А и.
на Диске С:. „UHVK1 систему, это означает, что
ЕРР>" "-ять EPROM содержит опег,ЦИО"^Ус g 1рс,системе вши
,R°M должна симулировать диск А:, или дис обозначение диска С: заре-
^'онез'^аякГм симулируют флоппи-ДИ -Ценного модуля памяти (же-
2>°Вано Для фл эш-памяти или дополнитель .
ГКИИЛИГ"\
Глава VI
Т • распределение памяти в ЦПУ выгтядит следующим образом:
Основная 1 Мбайт, из которых 640 Кбайт зарезервировано для операцион-
память ной системы и приюжения:
BIOS Занимает первые 128 Кбайт EPROM;
Диск А Оставшиеся 384 Кбайт из О S Мбайт EPROM и добавочно
12S Кбайт или 0.5 Мбайт энергонезависимой RAM или EPROM;
Диск С 0.5 Мбайт флэш-памяти встроенной в ЦПУ;
Диск D Флэш или приводы жестких дисков подключенные как модули к
шине ISA. или сетевые устройства.
Эта конфигурация доказала свою практичность и легкость в применении.
Однако, она имеет большое неудобство для дальнейших изменений. При любых из-
-неннях программы притожения необходимо удалять модуль EPROM, стирать и
перезаписывать программу, даже, если это только ради ее тестирования. Эта
процедура весьма трудоемка, в особенности при тестировании новых версий
программ. Поэтому, BIOS IPC-систем спроектирован так. что во время загрузки
автоматически распознает дополнительно подключенный реальный дисковод. При
условии, что в Setup не сделано иных установок, подключенный дисковод со встав-
енным диском автоматически распознается как диск А:, т.е., как первый
загрузочный привод Тогда EPROM/RAM в ЦПУ автоматически становится диском В:.
Если флоппи-диска нет в дисководе, или контроллер флоппи-дисковода не
установлен, то EPROM / R\M автоматически распознается как диск А:.
Этот принцип дает стедуюшие возможности:
— работа с приводами для флоппи- и жестких дисков, как в стандартном ПК;
— работа памятью приложений в очень надежной и дешевой EPROM;
— работа с комбинированной EPROM/RAM: EPROM — для программ
приложения, и i » ременная RAM — для данных;
— • «« с комбинированной EPROM/RAM и дополнительно с
энергонезависимой и не требуюшей обслуживания флэш-памятью.
В зависимости от требований могут иметь место различные комбинации этих
• ■ » Для использования возможностей памяти специфичных для IPC,
особенно для EPROM с интегрированной BIOS, существуют практичные средства.
Наиболее важными средствами для IPC-систем являются следующие:
— • ♦ • ROMKIT.EXE подготовки данных для записи в EPROM в
бинарном EPROM-файле:
— мощный программатор EPROM с возможностью питания от батарей для
местных задач программирования Обноатение программ делает легким также
внесение обновлений в BIOS.
— .... платная программа PKJLITE.EXE позволяет сжимать
исполняемые файлы (ЕХЕ и СОМ файлы) с последующим их восстановлением во время
выполнения программы. Это значит, что программа требует меньше дисковой
памяти без ущерба та ее • • • > й
&&. Запуск в дистанционное управление IPC
Персональный компьютер, эквивалентный IPC, всегда имеет интерфейсы Д-1Я
клавиатуры и не менее одного последовательного интерфейса (СОМ!)
борту», т.е. они включены в него как стандарт. Эта особенность является оД-
•о " - промышленного ПК над классическим PLC. Последователь-
• _ видео-порт, порт клавиатуры для PLC относительно сложны "
Это конечно, не является определяющим фактором интеграцию промьиЛ'
ПК в машины и помещения возле него монитппя пЛшсипт шля Гчело»8'
Свободно программируй,, ,г „
—- 361
xeibHO, необходимы дисплеи и ад
Оборудование IPC ф„рмы Fest0 И ""
ГУР^- ' "РИМеРУ- "ВДст — следующую конфи-
VGA-совместимый видео порт PS? ,„
интерфейс (RS232Q. Промышленного станТ'"™^ "0рт "««иатурь, и COMI
виатуры и т.д. доступны в различных комб„^„ГЕ ™ ~ ЭКРаНЫ' *-
стандарта также доступны в этом случае -mv Устройства промышленного
При широком разнообразии мониторов и клявия™
та остается много приложений, где нет ни м ^р пРомьшпенною стандар-
для постоянного присутствия возле машин^т?^' "" клавиатУРы< "оиодяших
возможность подключения дистея и ™ZJz "Р™?™* Такого типа есть
средственно во время работы системы Чст7™ ™ **" 0бсл*ж" ™»
управления одним компьютером и друшГнГпимТ""^ испмь^ ™
г™- -,„ ~к„ тт другого, например, из портативного PC и in
IPC в целях обслуживания. Для этих целей разработай большой набор программ
помогающих осуществлять удаленное управление компьютером. Доступное в
настоящее время ПО позволяет осуществлять удаленный контроль через
последовательный порт или так же легко через телефонный модем или сеть. Принципа
удаленного управления может быть проиллюстрирован условно бесплатной
программой FemTerm, включенной во все ЦПУ IPC фирмы Festo.
FernTerm — это программа, предназначенная для удаленного управления
компьютером. Требуется два компьютера для того, чтобы один из них был
удаленно управляемым, а второй управляющим, который работает, как терминал по
отношению к первому. Все программное обеспечение удаленного контроля,
следовательно, содержит два компонента. В случае FernTerm эти два компонента
следующие:
— FERN.COM для удаленно управляемого компьютера;
— TERM.COM для управляющего компьютера, работающего как термина,.
FERN.COM установлена на IPC как резидентная (находящаяся постоянно в
оперативной памяти) программа. TERM.COM может использоваться для доступа к
'К Г=„ РИ «— Т=Г -»=^,, ,рс.
— высоконадежная, тщательно к™*™™' *° „певшаяся программа
FERN.COM ничего не предпринимает, если щ>у
завершит свою ра-
возьмет на себя контроль портом CUMi. ™ - установи корректной
боту, СОМ1 может быть использован FernTerm вновь *
Скорости передачи СОМ1 порта; «яедачи данных, включающий
— широкий диапазон возможных «"Р"^ ^^ ^^ и большие ско-
"изкие скорости для длинных кабелей с вь'ибо1ЬШНХ файлов;
Р°сти для коротких кабелей и быстрой перед даи кабель:
-возм™стьудаленногоуправл ниячере передаЧу кодов
~ опцию контроля кода опроса ^В^авиш и комо'инааии «славиш,
Вс« специальных клавиш. Ф^^вотСОМ! доСО^ 2 „ ,
-возможность использования пор одемиыи каоель '
FemTerm требует подключения «^ ^^„й в комплект
сс^ине„ы,, имеющий 9 штырьковый рагье
Истемы фирмы Festo.
Глава \ I
(к9 lid ее программного обеспечения FST
FST — программное обеспечение, разработанное для Festo IPC, содержит два
элемента одна программа превращает IPC в PLC. (ругая делает любой ПК
программатором
Использование FST включает в себя работу с обеими сторонами PLC-
сястсмы
— программа Kernel (FSTPCR2l.EXE) зап>скается в ЦПУ IPC автоматически.
Это можно слетать также. использ\я монитор и клавиатуру. Как только
программа FSTPCR21 Е\Е запущена, IPC «трансформируется» в PLC. Методы работы и
синтаксис этого PLC следуют стандарту, разработанному фирмой FESTO для
FESTO PLC контроллеров классического типа (FPC):
— программа FSTIPC ЕХЕ запускается на ПК (это может быть любой ПК).
что • данный компьютер в программатор. В этом случае методы работы
и синтаксис также основаны на FESTO FPC.
Центральный управляющий блок PLC и программатор сообщаются друг с
другом через последовательный интерфейс посредством нуль модемного кабеля. В
IPC это обычно СОМ1 интерфейс, встроенный в ЦПУ. На программаторе может
использоваться нобой из двух портов СОМ I или COM2. Как только прикладная
программа управления (проект) полностью готова в блоке программатора, она
записывается в PLC Эта процедура включает передачу файла, имеющего такое же
ямя, как и у проекта, но с расширением «.RUN» из программатора в PLC.
Программа стартует автоматически, если противное не установлено специально. Если
есть программа PLC-приложения, запускаемая на IPC. программа FSTPCR21.EXE
может быть запущена с именем программы PLC-приложения (например.
FSTPCR21.EXE TEST1») как с параметром. Это приложение тогда автоматически
стартует в то же самое время.
PLC — это всегда PLC в отличие от PC. который может быть игровой
приставкой, автоматической системой бухгалтерского учета, текстовым процессором
или тем же PLC. Тем не менее, IPC, однажды преобразованный в PLC посредством
Пч .. мы FSTPCR21.EXE. остается PLC. Только введением команды «QUIT»,
которую можно ввести через клавиатуру, подключенную к IPC (т.е. уже к PLC),
можно вернутся назад в режим PC.
6.10. Однокорпусные контроллеры ГРС серий FEC Compact и
FEC Standard
Контроллеры FEC (Front End Controller;, выпускаемые фирмой «Festo» — это
семейство однокорпусных
^ промышленных программи-
fc ""> руемых логических мини-
« . ' " • ^ - * i контроллеров, включающее
серии контроллеров FEC
Compact (рисунок 6.7) и FEC
Standard (рисунок 6.6).
Основные модификации
• » 0Ж> ^^ контроллеров серии FEC
Compact представлены в
таблице 6.1. Эти контроллеры
_ разработаны как недорогая
универсальная
промышленная система управления, к°"
Рисунок &7 торая может быстро и легко
» •
i
J^25lHS!1^:^
устанавливаться и эксптуати """ 363
ты с программируемыми кон0831^" 1Ю:1ьми имею
управления мнтеФнрованы „ *^« Все фу^^*"* °ПШ ^
стандартных релейных шкафах" Р"Усе ^ССогпо*. He6ouui°" системы
В пластмассовом корпусе установлены следующие основные составляющие
контроллера:
— процессор AMD 186/ 20 МГц:
— память оперативная 256/512 Кб и перезаписываемая (Flash) 256 Кб:
— каналы ввода транзисторные, вывола релейные (электромеханические
реле, коммутирующие в рабочем режиме переменный ток ло 5 А при напряжении до
250 В или постоянный ток до 5 А при напряжении до 36 В. частота переключений
40 25 Гц), семисторные (Solid SR-реле) или транзисторные:
— последовательные интерфейсы для программирования (COM, RS232) и
Расширения (ЕХТ),
— сетевой интерфейс Ethernet lOBaseT:
— преобразователь питания 220 В / 24 В постоянного тока в тех
модификациях контроллеров в которых просмотрено питание от сети переменного тока.
f tp.o,inuiiFD h . t , тать ВНИМание на окружающие
При установке контроллеров ««^^^L, Нельзя устанавли-
Условия. при которых они будут ^^™££?£ь. «асляный пман.
°"ь контроллеры в местах, где "^^J^Z^u™- ««- ™"-
^копроводящая пыль или газ. вызывают..* ^^^ непосредственно
Ратура, прямые солнечные лучи, повышенная * ^^ кон7роллеры непо-
в°лизи высоковольтного оборудования. Н<-.ь ^^ нагревателя, трансфор-
сРедственно над устройством, выделяющим гея ^ ^ ^^ 55Т ^^
**ат°Ра или мощного резистора. Если ™Р>"оП) охлажДения.
ходимо установить вентилягордля принудите. ^^^ ^^ (DIN< шир„на
. Контроллер может быть установлен н стаИ0ВКи необходимо voe-
35 Мм) или непосредственно на винты М4. b p ^ „^ „ванна с высоким на-
Литься, что модуль установлен как можно л
"Ряжением и большой мощности Np 1И NPN типа разделены на две
wu.iDiuv Compact у'у „ греется гальваническая
12 входов контроллеров FEC ч н 4 вх0 ,а. Имеепя
*>Ппы. „ервая группа 8 вхо.ов. вторая rj' сиг„алов (34 В. 7 мА) через
Связка (опгоэлектронная пара) и индикар
Глава VI
светодиоды (после гальванической развязки).
Время задержки приема сигнала — 5 мс.
Максимальное напряжение включения — 15 В,
выключения — 5 В. Два входа второй группы
могут также использоваться как счетчики с
максимальной частотой 2 кГц. Провода для
входных сигналов подключаются 14 винтами (12
сигнальных и 2 общих провода). На каждый
винт можно присоединить 2 провода сечением
до 0,75 мм'.
' Контроллеры серии FEC Standard
разработаны на базе 1РС@СН1Р (рисунок 6.8), который
Рисунок 6 8 содержит в себе все основные элементы
контроллера (рисунок 6.9): процессор, память,
последовательные порты, Ethernet, Watchdog.
Основные модификации контроллеров серии FEC Standard, поставляемых
Фесто, представлены в таблице 6.2, а разъемы для подключения входных,
выходных сигналов и электропитания представлены в таблице 6.3.
186 CPU
FLASH
RAM
Ethernet
CORE Logic
Interrupt control
DMA control
Date/Digital I/O
Clock control
Feature functions
$=$>
2 Serial ports
Watchdod
Рисунок 6.9
Таблица 6.2. Серия контроллеров фирмы Фесто FEC Standard с
программированием в пакете FST
Тип контроллера
FC400-FST
FC440-FST
FC600-FST
FC640-FST
FC620-FST
FC660-FST
Характеристики
16 входов / 8 выходов дискретных
16 входов / 8 выходов дискретных, Ethernet
32 входа / 16 выходов дискретных
32 входа/ 16 выходов дискретных, Ethernet
32 входа / 16 выходов дискретных, 3 входа /1 выход
аналоговых (0...20 мА)
32 входа / 16 выходов дискретных, 3 входа /I выход
аналоговых (О.. .20 мА), Ethernet
^Свободно "Р^ам^ир^ем^ек^^
Таблица 6.3. Разъемы для FEC Standard
Тип
PS1ZC13-S
PS1 ZC13-Z
PS1 SAC10
PS1SAC11
PS1 SAC30,.
PS1SAC3J
Контроллеры серии FEC Standard помещаются в плоском алюминиевом
корпусе и питаются от источника постоянного тока напряжением 24 В. Каналы ввода-
вывода транзисторные.
Программирование контроллеров серии FEC Compact и FEC Standard
осуществляется с помощью пакета программ FST (таблица 6.4), который реализован в
двух вариантах: как приложение DOS и приложение Windows. On может
устанавливаться на персональных компьютерах с операционными системами DOS или
Windows 95/ 98/ 2000/ NT. Контроллеры FEC Standard программируются только в
варианте пакета под Windiws (PS1-FST2-CD-WIN).
Таблица 6.4. Программное обеспечение для FEC Compact и Standard
Тип
Характеристики
PS1-FST1-CD
PS1-FST2-CD-WIN
ю-
Пакет программирования FST (версия 3.21) с
руководством пользователя, примерами и обучающими про-1
граммами; технические описания и руководства для I
контроллеров '
IWJI1 1 LJXJJ и Ш'щг^г-^ш,
Пакет программирования FST (версия 4) с
руководством пользователя, примерами и обучающими
программами; технические описания и руководства для I
контроллеров I
6.11, Модульные контроллеры IPC PS1
6.11, Модульные контроллеры № глж
,<.„«,« PS1 (рисунок 6.9) имеют широкий
Промышленные ПК фирмы Фесто серии ^шя совмешающих в себе
спектр различных модулей пРомЬ,шлеН „ ~ а'„ персонажного компьютера.
Функции модулей программируемого K0^°^a4K„. За счет небольших габари-
При этом размер модулей не больше ^тнои ^ ^^ п0 причине
тов такие промышленные ПК можно 1^^^^m^f^Z
ограниченности пространства использование прс^^.дальныхш^
именно, например, в шкафах и пультах УП^^работаны таким «*£»£ ™£
солях оператора. Модули промь-шлеии*™т?м £*- ^^^2^Г
"е требуются ни вентиляторы, ни »" ыШленного ПК но™
Финском обслуживании^нс^аи; Р **£%£?. шк,
«Улей такова, что позволяет быстро:ый ПК можиоу с на.
°ить на объекте все устройство. Про-^^ ^ этого -J^ Модули
*ах, пультах или щитах У»Равле"'*' нный монтаж с помо и
Являющую стандарта DIN, либо "^^ двух устану »ы льн0 п0 f'C
П* крепятся к монтажному блоку с «* ,SA рс шине и^" ^^ __ преоб.
°бмен„ва,отся информацией по стандар ^^ с0 встроен^ ^ посадочных мес.
'Ци«е данных. Электропитание на '"""^жного блока на;зова„„я моитаЖного
р^ователя (в случае использования^ ^ („ &гу.,ае нспо,
Та) и с отдельных модулен-пре°°Р'
V*
Глава VI
I
\\
г
\
I «
\
»
Рисунок 6 9
блока на 8 или 12+2
посадочных места). В случае
использования монтажного
блока на 5 и более
посадочных мест в него
встраивается дополнительный I С
шинный таймер.
Преобразователи питаются от
источника постоянного тока
напряжением 10...36 В.
Шина данных,
смонтированная в монтажном блоке,
обладает высокой
помехозащищенностью и защитой
от появления ошибок при
передаче. Дополнительно
имеется подложка IPC-ZM10 для монтажного блока, служащая для обеспечения
этектрической изоляции монтажного блока от поверхности, к которой он
крепится Не занятые посадочные места на монтажном блоке закрываются специальными
заглушками IPC-ZM11.
Набор модулей
центрального процессора (ЦП;
для промышленного ПК
позволяет реализовывать
многопроцессорные
распределенные и
централизованные системы
управления. Модули центрального
процессора не нуждаются в
проведении
профилактических работ. Модули ЦП
модификаций НС01 и НС02
предназначены для
решения простых задач
управления. Более мошиые модули
модификации НС20-40 и
выше предназначены для
решения более сложных
задач, требующих
подключения дополнительной
вычислите 1ЬНОЙ МОЩНОСТИ
(процессоры 486 или 586)-
На рисунке 6.10
представлены модули центрального
процессора Pentium с
оперативной памятью 64 Мб-
Все процессорные модули явтяются PC/XT или PC/AT совместимыми и работаю*
со всеми операционными системами, подходящими для их класса мощности (MS
DOS, OS/2. Windows и др ) Процессорные моду ж модификации НС1Х снабжены
зарегистрированной промыш генной базовой системой ввода/вывода (BIOS),
которая оптимально соответствует требованиям, предъявляемым производством
В зависимости от конкретных требований к системам автоматизации модули
ЦП для промышленных ПК IPC) через модули связи могут сопрягаться с разлив
о
I
I
t
т
Рисунок 6 10
^Свободно "Р0Т>*ммирури;:;;^||
ныМи интерфейсами (AS, Fieldbus Ртпк „
ЦП серии НС2Х и выше шинный' Г8 Ш$ И DP. CAN И лп i л™
ц к ^ шинный интерфейс m»~- ар) Я1* мощных
сочетаться с необходимой вычиС1ите1ьно„^ ВС1роениым Ra.sh диском может
ОЗУ. Шинный интерфейс обеспечивает связь С ЬЮ И тРебуемыи объемом
жидкокристаллический) и последоватеиными гт!ИЭТуР°Й* М0НИ™Р°м 'VGA или
ЦП промышленного ПК может ZyZ ^1"°*"™
объекта управления и унравтять процессом с ^,pMam,° «посредственно от
дискретных и аналоговых сигналов Широкий "ШОШЬЮ мадУлеи ввода/вывода
зволяет для каждого конкретного стучал п«-.«к "СКТР моду1еи ввода/вывода по-
промыш тенного ПК подооратъ необходимую конфигурацию
Все функции связи и ввода-вывода м<г*и« ,^,
прикладных программ. Они в основГ SZ^ZZ^S^Z
ляюшего ЦП. Существуют также дополнительные функции безопасност>,JZ2
гарантируют, что при сбоях в упраатяющем ЦП дискретные выходы принимТет
определенное состояние, а ошибки, возникающие в процессе работы, могут быть
обнаружены прикладными программами
Для программирования модульных промышленных ПК серии PSI можно
использовать любой из общепринятых языков высокого уровня (Pascal, C++) или
широко применяемые для программирования контрогтеров язык релейно-
контактных схем (LD — Ladder diagram) или язык списков инструкций (IL —
Instruction list), которые реализованы в пакете программирования FST (таблица 6 4).
6,12. Контроллер позиционирования SPC200
Контроллер мягкого позиционирования SPC-200 (рис. 6.11; является
специализированным контроллером и предназначен для управления пневматическими
линейными приводами Он выпускается в нескольких вариантах и реализует
регулирование положения и управление позиционированием (до 4 координат). SPC-
200 имеет модульное исполнение и состоит из основного бтока двух типоразмеров
с широким набором функций в зависимости от установки в ием 4 или 6,вгавных
плат. Возможно^/и управление ^^^^^^^^
Динатой SPC-200 соединяется через "**^^ 1Геиия и пропор-
«Ующеи пневматической координаты, напР"мс£, " может быть подключен к
«иональным распределителем. Кон^-™^ *^гтера. реагировать на коман-
"андартным входам-выходам вышестоящего к°^. /^гные сигналы через
Ды вышестоящего контроллера через входы и выдав-
выходы. Модуль ввода-вывода имеет
10 входов и 8 выходов, причем 7 вхо-
Дов и 6 выходов являются свободно
"Рограммируемыми.
Программирование соответствует стандарту для ЧПУ
ID,N 66025). Для программирования
^пользуется пакет программ
^INPISA, поддерживающий
конфигурирование, ввод в действие и
пробирование контроллера SPC200 , #
Ни °CH0B"bie возможности и фУ»к' | *
и ваРиантов контроллера1
ем "~"УпРавление позиционировани-
говь?'Я Г1Невматических приводов, ша-
Ых Двигателей и их комбинации;
.,„-"-Оптимальность тля 1 "J Рису***"
ВМатических координат с аналого-
ч$
Глава VI
тчиком почожения, возможность расширения до 4 координат;
— включение функций ввода-вывода для одновременного управления
захватами, толкающими цилиндрами, поворотными приводами;
— мод>1ьное исполнение (цифровые входы-выходы в разных
количественных вариантах, интерфейс Feldbus для Profibus или Interbus);
— мощная самонастраивающаяся техника регулирования для пневматических
координат,
— простое обслуживание через поле диагностики и обслуживания;
— простое программирование с помощью пакета программ WinPISA.
Основные технические характеристики контроллера:
— напряжение питания 24 В постоянного тока -10% / +25%;
— максимальный потребляемый ток 5,4 А;
— количество цифровых входов 10, выходов 8;
— количество аналоговых (0... 10 В) входов для задания положения — 2;
— интерфейс для программирования через ПК RS-232;
— диапазон температур при работе от-5 до +50° С;
— исполнение (тип защиты) IP20.
6.13. Однокорпусные контроллеры TSX Nano
Дискретные входы-выходы (I/O) ПЛК TSX Nano, фирмы «Schneider»
(Франция) доступны в четырех конфигурациях, в зависимости от требуемого
расширения (рисунок 6.12):
— «базовый ПЛК» — не расширяемые ПЛК (14 и 20 I/O);
— «базовый ПЛК» — не расширяемые ПЛК с 1 интегрированным
аналоговым входом (10.16 и 24 I/O);
10 I/O (6 входов + 4 выходов)
14 I/O (8 входов + 6 выходов)
16 I/O (9 входов + 7 выходов)
16 I/O (9 входов + 7 выходов) ПЛК с 115 VAC
входами
201/0(12 входов + 8 выходов)
24 I/O (14 входов + 10 выходов)
Рисунок 6.12
.Свободно "Pggj^yg^e
Зо9
— «расширение I/O» (16 „ & i/o
-«базовый ПЛКилирасширение 1/0» Пя
Базовый расширяемый ПЛК может й,Г РаСШиРяемые ПЛК (10 16 и 24 I/O»
расширяемым ПЛК, c^y^ZtZ^ ™ Р-жре^ГЮ„.1и
Кроме того, максимум тр„ подчиненных SТ™* Г'°
рированные как подчиненные ПЛК) могут бит РаСШИряемь,е Плк- сконфигу-
ряемому ПЛК с поддержанием связи чеоез г™? П°ДКЛЮчены к «быовому. расши-
По^Г °бМеНа (рисУН0К 6.13).
Базовый ПЛК Расширение УО "одм"н#нн*"* Подмииенныа „
(ЕЕ—Э ЕЕ» «ш^™^ плкз "■"""«—
Рисунок 6.13
Дискретные I/O ПЛК TSX Nano программируются на языках PL7-07PC
(Лестничных диаграмм или Списка инструкций).
Эти ПЛК программируются:
— программатором FTX 117 (рисунок 6.2);
— FTX 417 или PC совместимым терминалом (Лестничных диаграмм или
Списка инструкций).
При создании прикладной программы, программное обеспечение PL7-07
использует четыре редактора — List/Ladder editor, Date editor, Configuration editor и
Symbol editor.
Редакторы языков List и Ladder используются для разработки основной
программы — главной части прикладной программы. Разработка основной
программы включает:
— назначение адресов входам и выходам, используемых в программе;
— выбор предопределенных значений переменных, которые нужно использо-
взть в программе-
~ определение порядка, в ^^J^^^^Z^ -с
Язык Ladder (лестничная диаграмма) - схем ^
пользуются и графические элементы, и текст. Каждый сео«н
gram представляет собой цепь. ,-й текСГ логических инст-
Язык List (список инструкций) - представляет собой
РУкций. I 2
На этих языках
записывайся логика выполнения
программы, необходимая для
Убавления машиной или
пропсом. Возможно автоматиче-
^Кое преобразование инструк-
^И11 языка Ladder в инструкцию
"эыка List.
обес,Ги"07 - программное
Дей ие РС имеет четыре
СтвУющих режима:
'• Инициализации (Initial).
;?• Автономный (Offline).
(Ом-*' ^"теракгнвный
""пе).
• Мониторинга.
570
Глава VI
Общий вид ПЛК TSX Nano показан на рисунке 6.14, где:
1 — подключение питания ПЛК;
2-питвние датчиков для моделей с питанием 100/240 VAC: питание
24\ DC/150mA; это питание не используется для моделей с 115VAC входами;
3 —дисплей состояния входов: максимально может отображаться 16
внутренних бит (%S69=1);
4 — подключение входов;
5 — удаляемая крышка для защиты клемм;
6 —селекторный переключатель для кодирования функций ПЛК
(расширяемые ПЛК): хг
0 — базовый ПЛК; 1 — расширение I/O; 5 — подчиненный ПЛК № 2;
6 _ подчиненный ПЛК № 3; 7 — подчиненный ПЛК № 4;
7 — потенциометр: 1 — на ПЛК с 10,14 или 20 I/O; 2 — на ПЛК с 16 или 24 I/O;
8 _ порт для подключения ASCII или UNI-TELWAY устройств
(расширяемые ПЛК): ASCII, RS485 UNI-TELWAY — протоколы ведущий или ведомый;
9 — закрывающаяся крышка для доступа к 8,7 и 6;
Ю — подключение расширения: расширение I/O; подчиненный ПЛК;
подчиненный Moldus (V3); аналоговый ^входной канал;
11 — подключение выходов;
12 — дисплей состояния выходов: максимально может отображаться 16
внутренних бит (%S69=1);
13 — дисплей состояния ПЛК: RUN, ERR, COM, I/O
Габаритные размеры ПЛК— 105... 165x85x60 мм.
По умолчанию, все I/O сконфигурированы как дискретные. Однако
отдельные I/O могут быть в процессе конфигурирования приданы некоторым
специфическим функциям (вход RUN/STOP, защеливающиеся входы, I/O быстрых 10 кГц
или реверсивных 1 кГц счетчиков, выход состояния ПЛК (SECURITY),
импульсные выходы, выход широтно-импульсной модуляции).
ПЛК TSX Nano программируются на обратимых языках PL7 (Instruction List
или Ladder), которые дают возможность использовать функции: блоки плана
\RTC), таймеры, реверсивные счетчики, LIFO/FIFO регистры, сдвиговые регистры,
трам контроллеры, шаговые счетчики.
Основные функции ПЛК TSX Nano:
— режим выполнения: нормальный (циклический) или периодический
(2 до150мс);
— время цикла: менее 1 мс для 1000 элементарных инструкций; менее 0,6 мс
для 100 элементарных инструкций;
— время выполнения: от 0,2 до 2 мке для одиночной логической инструкции;
— емкость памяти: данные — 256 внутренних слов, 64 слов констант, 128
внутренних бит (64 из них сохраняются); программа — 1000 инструкций
(защищенная RAM и EEPROM);
— резервирование: RAM ПЛК — батарейкой; время сохранения — 30 дней;
— язык, обратимый PL7: Instruction List или Ladder;
— терминальный порт: RS 485 связь, UN1-TE протокол, 9600 бит/с/
19200 бит/с; максимальное расстояние: FTX 117 — 10м; UNI-TE 50 м;
— расширение I/O: 1 на ПЛК; максимальное расстояние между базовым ПЛК
и расширением — 200 м;
— подчиненные ПЛК: три — подключаются к «базовому,, расширяемому
ПЛК и связываются через слова обмена; максимальное расстояние между базовым
ПЛК и последним подчиненным ПЛК — 200 м;
— связь по Modbus- неизолированный RS485 — до 200 м (режим ASCII «Л»
-^^^Роллеры
371
— функциональные блоки- б
времени: 1 мс (для первых двух)'ИГ "ЛаНа (RTc> - 16 та-
9999; реверсивный счетчик-- \f МС' 10° *с 1с 1 ми!' РЫ ~ 32' бата
регистры на 16-слов; адвИгак«1?,,^от0^9^-1^ЖвадМ ОТОдо
шагов, 16 управляемых бит Г РеГИС7ры ~" * 16 Ьит 1° рСГИСТры~4
- потенциомГ " ,ИТ' Т™* С1*тчики -4:256^ «°»№р - 4: 8
-аналоговый канал: фут^
_- отображение внутри би(^ZIT "" НеК°Т°РЫХ МОДелей'
чиненных ПЛК ГраошДые ШК ^Т^Г^'"3 ^^ "" П№
к „ сконфигурированные как подчиненные) воз-
(TSX Nano с 24 I/O) на передней панели;
— программируемый входной фильтр: на базовом или подчиненном ПЛК
возможно изменить время фильтра во время конфигурирования; нет фильтрации /
с фильтрацией — 3 мс / 12 мс; I/O конфигурируются по группам;
— специальные I/O: возможно назначение специфических функций в
процессе конфигурирования:
вход RUN/STOP — 1 из первых 6 входов базового или подчиненного ПЛК (от
%10,0 до %ГО,5); защелкивающиеся входы — первые 6 входов базового или
подчиненного ПЛК (от %Ю,0 до %Ю,5); вход аналогового модуля — подключается к
входу % 10,0, сконфигурированного как частотомер; быстрый счетчик — 10 кГц;
частотомер — 10 кГц; быстрый реверсивный счетчик — 1 кГц;
выход состояния ПЛК (SECURITY) — 1 из первых 4 выходов на базовом или
подчиненном (от %Q0,0 до %Q0,3); выход PULSE — последовательность
импульсов (4,9 кГц макс); выход PWM — широтно-имп. модуляция (4,9 кГц макс);
аналоговый выходной модуль - подключается к ЭДО, сконфигурированный как
PWM; пороговые выходы - 2 (%Q0,1 и 9cQ0.2), «смовд™ с острым
счетом, модифицируются без ожидания конца цикла. PULSE и PWM-™™<££
использования ПЛК с р^ми выходами если ^£«fc«
чем время переключения реле (приблизительно аО Гц). Еслии* у
максимальный ресурс срабатывания реле может^ьгт1достигнуг
Сле
«„„„ jjcuypu ираиатываини рель i
едовательно, рекомендуется использо-
ать эти выходы главным образом для ПЛК
с транзисторными выходами.
Нормальный режим работы ПЛК вы
0лняется циклически (рисунок 6.15).
Внутренняя обработка (системная):
!• Управление ПЛК:
Ul — проверка возможности выполне
Ния программы;
ф — управление по времени; моди-
КаЧия текущего блока плана (RTC):
I/O г^ ~~ Управление индикаторами: RUN,
U'ERR,COM;
k.(jN/ — обнаружение переключения
ми Пап ~~ Управление другими сисгемны-
•Фаметрами.
гРаМм °бРаботка запросов из порта про-
иРования и порта расширения.
^Тен"е входов:
8 с0От ~^ входы памяти модифицируй
в"°С(УСТВИи с состоянием физических
2<J» °h
Внутренняя обработка I
рисуно*61-
Глава VI
Выполнение
программы
Время
IP
%Q
%I
»«Q
IP
Время цикла 1ц
Время циклаДц^!
IP- ысутренняя • <
41 - чтение входов
Рисунок 6 16
"oQ - модификация выходов
Начало периода
Чтение входов
(%1)
Выполнение программы.
выполняется программа, написанная пользователем.
Модификация выходов:
— состояние физических выходов (%Q) модифицируется в соответствии с
выходами памяти.
Рабочие режимы:
— ПЛК в режиме выполнения: процессор управляет системой, читает
входы, выполняет программу и модифицирует выходы.
— ПЛК остановлен: в этом случае процессор управляет системой, читает
входы и модифицирует таблицу изображения выходов.
Время цикла программы пользователя проверяется сторожевым таймером
ПЛК и не должно превышать 150 мс. В
противном случае возникает ошибка,
вызывающая немедленную остановку ПЛК
(индикаторы RUN и ERR мигают).
Возможные варианты:
1. Время цикла меньше времени
сторожевого таймера (150 мс): нормальный режим,
начинается следующий цикл.
2. Время цикла больше времени
сторожевого таймера: ПЛК останавливается,
индикаторы RUN и ERR LEDs мигают и
системный бит %S11=1.
Схема циклического режима показана
на рисунке 6.16.
Реализация периодического режима
показана на рисунке 6.17.
В этом случае, чтение входов, обработка
программы и модернизация выходов
выполняется периодически, в соответствии со
временем, определенным пользователем при
конфигурировании (от 2 до 150 мс).
В начале цикла ПЛК, таймер
программного обеспечения устанавливается в
значение, заданное при конфигурировании. Цикл
ПЛК должен закончиться прежде, чем
истечет время периода. Следующий цикл
начнется, когда время периода закончится.
Когда время цикла превышает заданно6
значение, системный бит %S19 устанавлива-
fncywx6 |7 ется в '• Состояние этого бита может про»е'
Модификация выходов
(%Q)
Внутренняя обработка
Конец периода
__^|ФЫ
ряться и сбрасыва.ься пользователем и ^^
Как и в случае нормального п и™ "Рограчмой ПП1
рожевым таймером ° рсжи^, время .Г™ "°1ЬЗователЯ
R™.,^....„_..„ "икла "Рограмм „г
"ИкЛЗ "^^'проверяется сто-
рожевым таймером.
Возможные варианты:
1. Время цикла меньше за тан
цикл начинается после nwn„ ro вРемени- нг>пиа,
режима показана на Р„сунке 6 jg.
Выполнение
программы
IP.
%1
Выполнение
программы
«oQ
°oI
V?
I.P.
Период
IP
Период
IP. - внутренняя обработка,
"oQ - модификация выходов
°о1 - чтение входов.
Рисунок 6.18
ПЛК TSX Nano могут быть смонтированы либо на монтажной панели
(платине) с помощью двух винтов МЗ, либо на монтажной DIN — рейке шириной
мм. Клеммы подключения ПЛК защищены съемной крышкой. К каждой клемме
ожет подключаться два провода сечением 1 мм2, снабженные открытым или
закрытым оконцевателем. Момент затяжки винтов клемм — 0,5 Нм.
Встроенные средства защиты входов/выходов предохраняют ПЛК от
индустриальных помех, а возможность выполнения процедуры самотестирования
обеспечивает непрерывный контроль его состояния
Гла ва VII
МАНИПУЛЯТОРЫ С ПНЕВМОПРИВОДОМ
Создание гибких производственных систем (ГПС), характеризующихся
кой мобильностью, выдвигает дополнительные требования к входящим в их со °
манипуляторам промышленных роботов (ПР). Необходимы агрегаты и элеме *
манипуляторов, которые могут быстро, гибко и выгодно с точки зрения цень Ы
ответствовать гибким производственным процессам с большим многообраз
типов, количества и вариантов изделий.
Применение агрегатно-модульного принципа позволяет создавать различнь
по функциональному назначению и компоновке ПР без избыточности функций и
оптимальными характери тиками для решения с высокой эффективностью
конкретной технологической задачи.
Данный принцип имеет следующие преимущества [30]:
— сокращение времени и трудоемкости проектирования специальных ПР
поскольку они создаются на базе унифицированных узлов, номенклатура которых
может пополняться;
— повышение надежности вследствие отработанности и производственной
апробации входящих в ПР унифицированных узлов и отсутствие избыточности;
_ — удешевление производства ПР из-за ограниченности номенклатуры
деталей и узлов и, следовательно, повышение серийности выпуска;
— улучшение условий эксплуатации и ремонта роботов, обусловленное
уменьшением разнообразия конструкций узлов и деталей;
— сокращение сроков подготовки обслуживающего персонала
Однако агрегатно-модульный принцип имеет определенные недостатки:
— отказ в некоторых случаях от более выгодных конструктивных решении в
пользу менее выгодных, но соответствующих принципу агрегатного построения"
— увеличение габаритных размеров и массы конструкции-
— ухудшение динамических и точностных характеристик-'
,^^Zb^rZ7XZ ST"по™роботов - м0*
модулей, включающих в себя вс-noZnT ^ ™ *** ФУн^ионаЛЬН^
ратной связи, демпферы, эHeP^S^^MeXaHИЗMЬ,• ПрИВОДЫ' ДЗТЧИКИ 1
ходимые для работы модуля информационные коммуникации, необ-
Модульный принцип имеет недостатк-ы «я
латуры деталей и узлов за счет включенГ' °буСЛОВЛенные увеличением номенк-
связи и демпферов, сложностью kohctdvk. М°ДУЛЬ привода Датчиков обратной
функций модуля, сложностью функодонипов И В РЯДС случаев избыточностью
нологическом оборудовании при различных с3"™ М0Дулей на обслуживаемом тех-
стемах УпРавления.
. 7.1. Манипуляторы на базе функиит.» ™
функциональных линейных модулей
На рисунке 7.1 показан манипулятор в оснп
рого использованы функциональные линейные МОдУльной конструкции кото
ризующиеся рядом особых признаков [37,50]- М°дули типа НМР (Festo), характе-
— высокая жесткость на всем диапазоне Harov
— компактность и высокий технический рузок;
— высокая скорость перемещения; ИЗаин;
— плавная (бесступенчатая) регулировка х^
щью встроенного механизма; Рда *** нуля до максимума с поМ0'
Манипуляторы с пневмппр»^Л0П|
375
• л
J
I
Рисунок 7.1
— отсутствие необходимости переустанавливать демпферы и датчики
положения при изменении длины хода, изменении нагоузки-
ятможность регулировки демпферов при изменении нагрузки.
— возможгш^ f ц-^линдр воздухопровод, исключающим наличие пневмо-
шлангов внутри модуля. ^ специальных унифицированных комплектов монтаж-
Широкое приме 611, 12, 13 и 19 позволяет легко осуществлять со-
ных элементов (адаптер HHgjjHbIX приводов 7 и 10 с несущими элементами 16
единения функциоиаль • ^спользование унифицированных элементов для ком-
и схватами 2 (РиСУ"°,4 ' j5 обеспечивает надежное, наглядное и компактное раз-
муникаций 4, 5. 8. 9, кабелей и пиевмошлангов. В пазах несущих элементов
мещение электрическ 0ННЬ1Н- блок 18 для датчика 1. встроенного в захват-
удобно закрепляются.
ный разъем 17 для CPE-распределителей, позволяющий
ный орган 2, многоп икИ ПОложения. а также пневмоостров на основе батарей-
подключать та!$?р.ра^пределителей (на рисунке не показан).
ного монтажа С *\ ыва10шне отверстия для головок крепежных винтов, улуч-
Крышки 20, и и предотвращают попадание грязи в эти отверстия,
шают дизайн конструкци
Глава VII
Рисунок 7.2
Линейный функциональный модуль типа НМР (Festo) имеет легкий сборный
корпус 7, на котором осуществляется закрепление привода и других
исполнительных элементов с помощью различных адаптеров и переходников (рисунок 7.3,а).
Приводом служит пневмоцилиндр двустороннего действия, шгок 11 которого
с помощью втулки 12 связан с задней торцовой крышкой 13 корпуса 7 модуля, а
корпус 2 цилиндра, выполненный из шлифованного круглого стального профиля,
выполняет роль направляющей скольжения, удерживаемой от поворота вокру'
своей оси четырьмя опорами качения 6.
Закрепленный на цилиндре упор 5 предназначен для взаимодействия с регу-
шруемыми упорными шайбами 8, установленными на резьбовой шганге 9, с
поносимо которых могут задаваться промежуточные точки позиционирования.
Резьбовая штанга 9 связана с демпферами 4, которые работают в конечных и
промежуточных положениях цилиндра 2 с упором 5. Срабатывание демпферов
контролируется датчиками положения 10, размещенными в пазах их корпусов. Для конфО'
я промежуточных положений предусмотрена линейка датчиков, на которой paJ'
ся до пяти герконных датчиков (показана на рисунке 7.3,6).
Маиипуляюры cjwgun.. ^
(ОМ
14
I/
ГО 'I
и.
12
13
\
," Ч
tl
aj
&
i&
4*Р
0
S
<\»
<0Г
**\
Jp
Р,клнок7.. ККОТорой..епосрсдствен-
, На переднем конце цилиндра 2 закреплена ^ ^ схваты ие
"° «ли с помощью монтажных элементов или ^ Р^ ^ от 0 д0 ШГ в0-
,. тлп1,тл может поворачив- поворачиваться
па переднем конце цилиндр* * -"•" 1лапгеров крепятся ьл»..» « ««■ ■■-
''° «ли с помощью монтажных элементов или№ ^ да у,ол от 0 д0 W во-
"с"°л„итель„ые элементы. Плита может "^ 7.3.б) плита поворачиваться
J* своей оси. При наличии узла Ф»«Т"^2М« (рисунок 7.1.) "редна-
С *°жег. Пневматический У«Ф*^Ы" ^£* в .«бом ^^Z^JZ
''^ен дл„ удержания штока I. ****"*°^ быть снята вручную- Фиксирую
СтВУет ,.-„ ,- .„„и которая MO»ci ouaUX пружиной / рычаы л.
«"жег. Пневматический унр^'"--' „„„той. в iiwi.™. Ли1.,.нпую-
***н дл„ удержания штока I. святого п^ быть снята вручную- Фиксирую
СтйУет ,.-„ ,- .„„и которая MO»ci ouaUX пружиной / рычат л,
и,„й I КЗК ЭЛеме,,Т бЛ0К,ф°ВК ' Гжш ДИ РаСКЛИ" штока I происходи! при
«и патрон 3 узла фиксации сол^Р* « Д0свобожде..ие штока ^ д
'кивающих шток ! от перемещения^ '^«У^^..Lb 6 под
? !,а,'е -оздуха давлением /» к порш.ж*• » „^ снЯ„,и давлен пор
е,,°Дит их дру, к дру. у. сжимая .ФУ«""> -
Глава VII
йсгвнсм пружины 4 возвращается в исходное положение, освобождает рычаги 5,
которые снова заклинивают шток 1. В задней части модуля размещен общий
электрический и пневматический разъем 14, обеспечивающий подключение 6 датчиков
ж тожения.
Модули типа НМР имеют четыре типоразмера, отличающиеся диаметрами
поршней : 16,20,75 и 32 мм: рабочее давление — 0,4.. .0,8 МПа; диапазон температур
— 0. .60°С; уровень шума не превышает 68 дБ (А); точность позиционирования —
<0,01 мм; толкающее усилие при 0,6 МПа — от 121 до 483 Н; тянущее усилие — от
104 до 415 Н; скорость выдвижения — 0.8...1,1 м/с; основная масса — от 2,85 до 6,82
кг; масса на каждые 10 мм хода — от 0,06 до 0,28
кг; длина хода — от 50 до 400 мм в зависимости от
диаметра цилиндра.
Представленный на рисунке 7.4,а
функциональный линейный модуль типа HMPL (Festo),
выполненный на базе спаренных цилиндров
379
^Манипуляторы с "невмопрЦт,Лоа|
с двусторонними штоками, концы котппых
имеет три TiiuopaiMcpa с диаметрами поршней \°?Я""еш ПопеРечными плитами.
равна 30.. .200 мм в зависимое™ от TnnopaiMe 20 мм'дли>ш х°ж которых
Благодаря четырем впрессованным в ^
(рисунок 7.4, б) и двум штокам обеспечивает?»"^ '' шариковым направляющим
зииионирования Встроенные амортизаторы (демпГоы пГ™ " ^"^ П°'
егкими упорами, объединяющие в себе <bv~ P металшческими же-
ва„„я и задания длины хода в сочетании! жеГим^Г рСГулИровКИ демп*иР°-
LnpuB пешшчапии опнот п»™,™ жестким корпусом позволяют получить
время реализации одного двойною хода менее, чем за 0,5 с. В случае
необходимости внутренний упор может быть вынесен на™™ г»„, ie> неооходимо-
,n n "ынсин наружу (поз 18) и закреплен на задней
крышке 10. С помощью упоров можно точнп г.™-™,™.™ задней
F ОГ1 J у """ожии точно откорректировать конечные
положения в диапазоне 20 мм.
На передней плите 21 с помощью центрирующих втулок и отверстий 20
можно точно осуществлять с помощью адаптеров 2. 25. 26 и котировочных элементов
23 установку и закрепление различных исполнительных элементов: поворотных
приводов 24, схватов 1, 27 н др. Также на передней ллите монтируется штанга
фиксирующего устройства 19. блокирующего ее перемещение в случае
пропадания воздуха.
С помощью дополнительного пчоского цитиндра и упора 7 может быть
установлено любое положение передней и задней плит между двумя крайними. Его
можно задавать как со стороны начального, так и со стороны конечного
положений. После останова возможно продолжение движения в том же направлении.
Дополнительно, Для задания промежуточных позиций, могут быть
использованы элементы 3, размещаемые на плате жесткости 6. которая добавляется к
модулю для повышения его устойчивости особенно в многокоордннатных системах
манипулирования Ее крепление осуществляется на передней и задней плитах.
Дополнительные функции достигаются путем использования профиля в виде
ласточкиного хвое га на ее наружной поверхности.
Для размещения электрических и пневматических коммуникаций ~зУ-
ются ппевморукава с переходниками 5. устанавливаемые на э»нгах модуля с
помощью ™,хуголков22: =
Упорные резьбовые шпильки в позволяю! р^ у
нив хода плаг. ралемам. Для удлине-
Кожух 12 закрывает Heca..K-пионированныи^юсгу^ ^^ ^ ^^ ^
ния электрических проводов от дагчнков »Р^ „ ' ашний с индикаторов датчн-
с прозрачными окнам.. 16 для визуального сняти ^^ ^^
к°в 14, служи г для защиты о г загря женин вн^ма11НПуГ,ятора или era соединение
Закрепление модуля на несущих лкмента ^„терных шип с ласточкиным
с ДРУГ им„ компоненгамн реали .уется с помощью ада
ХВосТОм 17. пм сое1И1,сния модулей типов НМР и
и На р|1су11ке 7.4.в. показаны "Р"^\ 1Ю,иц.кжирования по оси Z при
RMPL е образованием промежуточных н*"" ^ 0О(. что достигается -с-
а^с„еч„„а,ощсм перемещение но оси ци . { ограж.|Сг концеи
Мо, ^«сема несущих элеме..н>в 0Ч"*«*Я> J^i несущих *•*"'? «*"*
^■•по.о „одхода Благодаря сочетанию от. 11Ши„„ „еоохотимои
5?*" "Ракти^и neo.pi,nKMC -мож,и t|MvB „„1Ь
Ре J'PWcuiiii маннпуля.ора. Набор мои*J» мр11В01амИ (модулями), та.
,ул,Фуемые соединения как меЖДУ "''*«
Глава VII
> i 1 и нссушими элементами из анодированного алюминия (рисунок
X имеющими специальный профиль.
Применение уготков-адлптеров 1 позволяет использовать в конструкции ма-
птудятора профили различных фирм, например, профили 5 и 8 (Festo), прнмы-
♦ » к полке 9 угопка, и профи чь 12 (Bosch), примыкающий к полке 10.
Увеличение жесткости вертикальных и горизонтальных несущих элементов
жкгтигается парным соединением планками 6 соответствующих профилей (8 и 5),
торцы которых закрываются заглушками 3 и 4. Угловые заглушки 2
предназначены закрытия отверстий под винты в полках соединительных уголков и
уголке • 'I ров. закрепляемых на профилях с помощью закладных элементов 7
(вкладышей) с внутренней резьбой, размещаемых в Т-образных продольных пазах
профитей. Уготки 11 служат \ля закрепления манипулятора на основании.
Рисунок 7.5
-МаНИПуЛЯ1^ь^^
Si
На рисунке 7.6 приведены ко " ~~"~
„ых Для закрепления модулей muZZZL^^^ "а<к>^- прешажачен
ментов манипулягоров между собой ^Т?™ И **"« «ело ,„.£ ,ь„Г .
2 - центрирующая втулка; 3 - n^Z'nT ^"^ ГДе ' ~ »™ышн.
стом; 4 - соединительные планки с L^~reP> ' "™"™ ™
Tim HMAV-DI ..
Тип
HAVB-1
I HAVB-2
1 HAVB-3
1 HAVB-4
1 HAVB-5
| Длины, мм J
20 1
40 1
60 I
60
100 1
Tun HAVB-6...9
Pik'vllOK 7.6
1Ta модулей гип.1 НМР от массы
Зависимости прогибов f выдвижного ъ t ^ ^ ртунке 7.7. а на ри-
m объекта манипулирования и длины вылс .^ i ог,гой массы
сУнке 7.8л _ зависимости времен вычвижения/вг
Глава MI
,*V'
нмр-it-. i I I I
> ' 1 >
75«r
Г i u1.!//
I u-l
—iv v——^* i I
t-
tw
2«0
-Burr lm-
-Выжгг 4 мм-
100 200 300
Вылет L mm-
Рисунок 7.7
Зависимости допустимой поперечной силы Fd и допустимого крутящего
момента V от пины хода (вылета) /, приведены на рисунке 7.8, бив.
соответственно.
При использовании элементов крепления в форме ласточкиного хвоста на
плите выдвижного элемента линейного модуля важно выполнение рекомендаций.
обусловленных смешением центра тяжести объекта манипулирования
относительно оси модуля В качестве примера на рисунке 7.9 показаны допустимые смешения
для модулей типа НМР-20, которые должны находиться в пределах поверхности.
ограниченной ломаной линией, соответствующей определенной массе объекта
мвинпу тирования.
При выполнении этих рекомендаций манипулирование происходит без
колебании
Размерные параметры модуля типа HV1P-25 с диаметром поршня 25 мм при'
ведены на рисунке 7.10д. Два фигурных паза 1 на плите, закрепленной с помошь"0
■житов 4 на цилиндре, предназначены для размещения закладных деталей, исполь-
эуемых монтажа захватных устройств. Плита может поворачиваться на люб0»
утм ■ пределах 360". Четыре фигурных паза 2 под такие же закладные
^'"""-"raPJiiJgeBMonp
"КОЗОм
' 1 —(——I ' 1-1 . 1——I .
* Г0в 200 300
Длина хсда (мм
6)
в)
■ 1ш1-
Рнстжж'Я
£ 0
5
! 1
1 .
-200 -ISO -I00 -50
— Ц«пр яжгетмдм*»»
ж
Глава VII
i 1 1 У
-=-ч
н—
i
Тр-
IwHt
1
н--*-
О О
1
Манипуляторы с^шевмппг^р^,^^
385
детали (см. рисунки 7.5 и 7.6) Предна
элеменгах и закрепления на боковойТоТепхГ^"0^ МОД*Ля на несУ'*«*
„невмоцилиндра. Эти „азы образуют нрофиТь 3 в R Д°Г,0лнительного плоского
Резьба и центрирующая расточкеИГигJ В Виде Ласт°™иного хвоста,
линейных перемещений (минисуппортов с^Т'1уЮкя Ш У™™*™ приводов
рующих втулок соответствующего размера ,Х МОДулей>с помощью центри-
Резьбовые отверстия 6 и 7 в задней части мо
воздуха, обеспечивающего соответствие УЛЯ пРедна™ачены для подвода
Ус™» фиксатора, ^mZ^'ZZZZ™""'Ш™^
отключении воздуха, показана на (6) -, »», J, Цилиндра при аварийном
дннения пневмошлангов дано на /в) р°"^у,ГГИВНОе исполнение узла присое-
крышки приведены на (г). газмерные параметры задней торцовой
Толкающая сила, создаваемая модулем при давлении п* мп
295 Н а тянупган — 947 и rv™ Р Давлении 0,6 МПа, достигает
Гйл ? ™НУЩЗЯ „247 Н- Ск°Рость выдвижения/втягивания - 1,1 м/с Масса -
5,84 кг (без торцовой крышки). Ход поршня - 100,150,200, 250 320 и 400 мм
Для торможения в конечных положениях встроены гидравлические
амортизаторы, не требующие регулировки и обеспечивающие поглощение энергии 10 Нм
7.2. Манипуляторы на базе модулей со стандартными н спарениьгмн
цилиндрами
Линейные модули предназначены для перемещения и позиционирования
объектов производства, инструмента и технологической оснастки, в частности, для
зажимных устройств. Их конструктивное исполнение обеспечивает высокую
точность отработки траектории перемещения, защиту от проворота и увеличение
полезной нагрузки на привод.
Комбинируя линейные модули, можно получать многокоординатные
приводы, что и предопределяет эффективность их использования в составе
манипуляторов промышленных роботов для различных технологических процессов. При этом
Для каждого координатного перемещения обеспечивается контроль потожения и
торможение (демпфирование) в конце хода.
Модули линейного перемещения, имеющие в своем составе стандартные
цилиндры, могут быть следующего исполнения (рисунок 7.11).
SLE SLZ- .«„гшвгкаоеткой Комбинация модуля с кареткой
Комбинация модуля с Комбинация модуля "Ч"™0" бктокошяо „шшндра
направляющими и стандартного н стандартного цилиндра
Цилиндра 6V
5.
-' Рисунок 7.11
" г 2 соединенных по концам поперечиы-
а) комбинация двух подвижных шта"£с (траверсой 1) соединен шток 3
*« траверсами (плитами) 1 и 6, с одной ,« котог^ JpenJ]eHHOro „а олоке шарн-
Стандартного цилиндра двустороннего Д попепеч-
*ых ня„пЯИпИ™,.Л ,„танг 2, связанных по концам попереч
.одвижных штанг Д закреплен цилиндр
траверсами (планками).
СТ
—г...^го цилиндра дву^^г^— „ппрпрч-
**-х направляющих^; штанГ 2, связанных по -= попереч
б) комбинация двух неподвижных ш^^ (траверсе б) закрепле
Иь,ми траверсами (планками), в о днои ^—
25
Э-13!)
Глава VII
iBvcropoHHero действия 5, шток которого соединен с кареткой 7, установленной
на штангах с шариковыми направляющими;
в) комбинация двух неподвижных штанг 2, связанных по концам
поперечными траверсами (планками), в которых закреплен бесштоковый цилиндр 8,
подвижной муфтой которого является снабженная шариковыми направляющими каретка
7. установленная на штангах.
В представленном на рисунке 7.12,а модуле линейного перемещения типа
SLE-10, имеющем первое исполнение, используются пневмоцилиндры 7 типа DSN
и DSNU с чиаметром поршня 10 мм. Демпфирование перемещения штанг с
траверсами осуществляется либо с помощью двух самоустанавливающихся
амортизаторов 1, размещенных в передней части блока направляющих и в задней траверсе,
TimSLE-lO..
Нагрузки для линейного модуля типа SLE (динамические)
. X
d
И.
цы
S - точка приложения
полезной нагрузки;
Х = 25мм;
F - полезная нагрузка;
М- крутящий момент
Рисунок 7.12
^анипуляторЬ|^1нсвмдИр
^одом
387
лИбо с помощью одного самоустанав "
го амортизатора 2, устанавливаемое аЮЩегося амортизатг,п, .
ки перемещений осуществляется 1^° * Задней C^L^"^
имеющих PNP/NPN-выходь, Z Датчикам" 3, наприм^" ТР°ЯЬ <пра6от-
новленных спереди и сзад, б^Т* """Ч*""* «^Ту^Г*"™ "'"*'
предназначен для -"оД^^^
Компенсация радиальных и осевых Р™3аТОра '■
цилиндра 7 в отверстии передней траверсьГо^ГесГ *» ШНТШе №а ш™
ной муфты 5. Отверстия 6 предназначены для заТпГ ^ С mM0Ulhl° <*«-
гшит (адаптеров) или для его закрепления ТтЗ" "* МОДуле "родных
образования многокоординатной системы ^аверсах дРУ™х модулей, с целью
Кроме данного типоразмера фирмой F
метрами поршней цилиндров 16 20 25 32 40 «Г ВЫПуск'аются модули с диа-
ходов от 50 до 250 мм. Для типоразмеров SF F m ^ °° стандаР™ыми Длинами
ление 1,0 МПа, а для SLE 32 и 50 - I 7 мп п" ИСПользУе™ рабочее дав-
до + 80°С. ' m la- ^иапазоны температур — от -20
повер^ГьГ^ КРеПИТЬСЯ НЙ °ПОРаХ — — « - боковой
На рисунке 7.12,6 приведена зависимость допустимой полезной нагрузки от
длины хода для различных типоразмеров SLE, а на (.) - зависимость дог^иГ
го крутящего момента на траверсе от дайны хода.
Представленный на рисунке 7.13,а модуль линейного перемещения второго
исполнения типа SLZ-20 снабжен стандартным цилиндром 6 двустороннего
действия типа DSNU-20. Состав амортизаторов I, 2 и датчиков 3, а также их
размещение на конструктивных элементах модуля такой же, как и у модуля типа SLE.
итверстия 5 с резьбой служат для крепления. Фигурные пазы 7 на каретке
предназначены для размещения закладных крепежных деталей, а монтажные шины 8 —
Для установки датчиков положения герконного типа (SME/SMT-8).
Муфта для компенсации радиальных и осевых отклонений монтируется на
конце штока цилиндра в месте его соединения с кареткой.
Модуль данного типа снабжается стандартными цилиндрами с длиной хода
min/max — 90.. .320 мм. Рабочее давление — 1,0 МПа.
На рисунке 7.13,6 показана схема действующих на модуль нагрузок, а на (в) и
(г) приведены соответственно зависимости допустимой полезной нагрузки F и
допустимого крутящего момента Мд011 на каретке от длины хода для различных ти-
ПоРазмеров модуля
к ■* „.„„„„ линейного перемещения типа
SLM с бР'ТЬеМУ ИСП0ЛНеНИЮ mm^r,Zum^m, входящими в со-
Ста« УстаноШТОКОВЫМИ ЦИШШДРаТпе^ ТиГидрь. имеют диаметры поршней
Установленных на штангах кареток, цилиндр min/max —
\1' ,6' 20, 25, 32 и 40 мм и соответсгвующие длины ходов mm/max
ri, мм- т„п- el M-40 снабжен цилиндром
б с Представленный на рисунке 7.J4 модуль типа ^ ^^ _ 50 m m
200 Д9ИаМетР°м поршня 40 мм со стандартными,д ^ рабочих темпера-
Тур' ' 320 и 400 мм. Рабочее давление — ^ ^ ПопИНОе усилие при 0,6
Щ\ ~~ °Т ~20°С Д° +60°С; движущаяся масса j H Состав амортн-заторов
I. 2 Г~ 754 Н^ сила разрыва магнитной "УФ™ предыдущич типов модулей.
Карликов 3 и упоров 4 такой же. как иi у ДЧ*^ ? „ центр„рующими
"С"3 снабжена крепежными резьбовыми отверс
3**
Глава VII
TWiSLZ-20-..
Мдоп^МкрйМпр^Мп
F - нагрузка;
Мкр- крутящий момент;
Мпр - продольный момент;
Мп - поперечный момент
Рисунок 7.13
^Манипуляторы списим»^
Тип SI М-40-...
Тип SLM-40 с упорной плитой
Тип SLM-4U с коммутационной пневмоплатой
и полон направляющей штаигой
—(-wliinin /
.ппавляюших модуля. Для соединения
Ниппель 8 предназначен для смазки нш F ннатной системы, исполь-
с ДРУгимн модулями, с целью образования мн0Г ^^ датчиков положения
33"°тся пазы 9 для закладных деталей, а для р
с"Ужат монтажные шины 10. крыШКам бесштокового цилиндра 6
„ Л» Удобства подвода воздуха к обеим РЫсвязываюЩНе отверстия в крыш-
"спользУЮтся коммутационные пневмоплать. . подвадНТСЯ питание
*" < отверстиями ^ в полых ш™^^^
КЯп е помощью упорных плит и «« перемещении, в эт ' ' штоки деМп-
£Репси внутри максимального диапазона пер ^ ^ взаИМОде„ствукгг
танавлнваются на упорных плитах. „„„„тазаторы от скоро-
а ' ■ иеских нагрузок на <^J№ модулей
СТи Зависимости допустимых J^^Z*** т разлитых
вхождения в контакт с под
Ставлены на рисунке 7.15.
*>u
Г лава VII
leovrrmuu нагрузка при юриэонталыном
растюаожгнии тинейного модутя
Ij^,- нагрузка иа амортизатор;
т„ - движущаяся масса (собственная), кг,
шс - масса нагрузки,
g = 9,81м/с2
кг;
0.5
КО 1,5
-Скорость, м/с
1,0 1,5 2,0
Скорость, м/с -
3,0
Допустимая нагрутка при вертикальном
распотожении линейного модутя
tiea^JmB+mJxg
1,0 1,5 2,0
-Скорость м/с -
3,0
600
400
300
200
3? 100
с
I
С
с
ь.
z
«
«
ь
а
X
80
60
40
30
20
IU-
8
6
4-
3
2
1
Рисунок 7 15
v. s^
*х^^
""^
0 0,5
1,0 1,5 2,0 2,5 3,0
-Скорость, м/с *"
На рисунке 7 16 покаюны примеры использовании модулей линейных
перемещений типов SLE, SLZ и SLM при посгроении миоткоординагных манннуля-
шюниых систем, которые могут быть использованы для реалтаг ии различных
технолог ических процессов.
Двухкоординатный привод иа бате
SLZ.SLE вд
Д»ухкоор,
«J» SLE
;йй«иый привод ш Ьжк
■ *
»1
Трехкоординатныи приводна 6aje
SLN3, SLE, SLfc
Трешюрдннатаыи привод на базе
SLZ.SLE.SLE
Г
Рисунок 7.16
рисунок 7 I7
„йзинлрами двустороннего
10 с0 спареииыми "^ ^0 сравненню с мо-
,,. Модули линейного перемещения двойноеj«* g п0 ВЫСоте.
Сй-ння грнсуиок 7.17) позволяют создав 0М тот ж
?.yj,»MH „а базе стандартных иняинЯД.
"и также имеют несколько исполиени
Глава VII
а) блок 3 спаренных цизиндров с шариковыми или направляющими
скольжения для непроходных штоков 2, соединенных поперечной траверсой 1, выполнен
неподвижным и снабжен пазами для установки датчиков положения;
б) блок 3 спаренных цилиндров двустороннего действия с шариковыми или
направляющими скольжения для проходных штоков 4, соединенных по концам
твумя поперечными траверсами 1 и 5, выполнен неподвишшм и снабжен пазами
для установки датчиков положения;
* в) блок спаренных цилиндров с шариковыми или направляющими
скольжения для полых проходных штоков, соединенных по концам двумя поперечными
неподвижными траверсами, выполнен в виде подвижной каретки 6, а для
установки датчиков потожения предусмотрена линейка 7, закрепленная на траверсах.
На обоих поршнях находятся постоянные кольцевые магниты, магнитные
поля которых управляют датчиками положения.
Jki
мпфер
ш
ш
-§.^ш
Эластичные
демпфирующие
элементы
Винте
контргайкой
б)
Рисунок 7.18
Сглаживание ударных нагрузок в конце перемещения подвижных элементов
модулей осуществляется либо с помощью винтовых регулируемых упоров,
входящих в контакт с эластичными демпфирующими элементами на траверсах
(рисунок 7.18, б), либо с помощью демпферов с самовозвратом, входящих в контакт с
упорами, размещаемыми на неподвижном блоке или каретках (рис. 7.18, а).
На рисунке 7.19, а в качестве примера приведена конструкция модуля
линейных перемещений типа DPZ-10 (Festo), имеющего поршни диаметром 10 мм и
стандартные длины ходов 10, 25, 40 и 50 мм. Развиваемое толкающее/тянущее
усилие при давлении 0,6 МПа — 94/60 Н.
Максимальное давление питания — 1,0 МПа ; рабочая температура — от -20
до +80°С с учетом датчиков положения.
Модули типоразмеров DPZ и DPZJ производятся с диаметрами поршней 10,
16, 20, 25 и 32 мм и ходом 10, 25, 40, 50, 80 и 100 мм. Установка и закрепление
модулей, имеющих ход поршней меньше 30 мм, осуществляется с помощью
комбинированных отверстий 1 и 2; от 30 до 70 мм — используются отверстия 1 и 6;
больше 70 мм — отверстия 1 и 7. Подвод воздуха производится через резьбовые
отверстия 5 на боковой стороне блока цилиндров. С помощью упорного болта 4
осуществляется точная установка длины хода с регулированием в пределах 10 мм.
Продольные канавки 3 допускают размещение одного или нескольких герконныХ
датчиков конечных или промежуточных положений типа SME-8.
На рисунках 7.19,б,в показаны соответственно зависимости допустимой
нагрузки F и допустимого крутящего момента М на траверсе от длины хода для
различных типоразмеров модулей DPZ и DPZJ.
Манипуляторь1спиеВМ0
Поводом
Тип DP7-10-..
■9—_ц
оЩЗР
ъРЩЕ
0 10 20 30 40 50 60 70 80 90 100 0 10 20 30 40 50 60 70 80 90 J0O
Длина хода мм Л™«а *ода> мм '
б)
в)
Phcvhok7.19
Конструкция и размерные параметры ^^^ZZ^ZZ
Репными цилиндрами диаметром 20 ^^^^„^„^«рису^
кольцами в конечных положениях и датчика •~|СТИКИ как и у ранее рас-
7-20,а. Он имеет такие же эксплуатационные харv
трубопроводов произво-
сМотренной конструкции. Присоединение п^оложеннЫХ в торца.х штоков. Для
дится по выбору с помощью отверстии '• Р укрепленная на траверсах. На-
м°нтажа датчиков положения служит лине'* ых оров з, вместо которых, при
СтРойка хода производится с помошыо Резь авливаюшиеся амортизаторы
Не°бхоДнмостн, могут быть установлены самоу
типа YSR. _, u пОПуСп.мого крутящего момента М на
Зависимость допустимой "aW3K" \ " ДраЗМеров модуля приведены, соответ-
КаРетке от длины хода для нескольких т. ^ ^ ^
^венно, на рисунке 7.20, б, в.
**t
Глава VII
TfcnSPZ-20- -PA
178,6+ход.
О 10 20 30 40 50 60 70 80 90 100
Длина хода, мм —
Г
?
Н 8-
3
?. С1
lilt
Е
и. ,
Ь5 2~
I 0-
SP2
4SPZ-32
ч
-25
^
SPZ-20
Г"
SPZ-16
SPZ-10"
1
"Ч
I
I
1 \
ltd
\Ju
HI
б)
Рисунок 7.20
О 10 20 30 40 50 60 70 80 90 100
Длина хода, мм —"
в)
Варианты сочетания модулей линейных перемещений типов DPZ/SPZ для
создания многокоординатных манипуляционных систем, а также используемые
для этого соединительные и крепежные элементы, приведены на рисунке 7.21. В
качестве последних применяются адаптерные плиты 2, центрирующие штифты 1 и
втулки 3
Примеры использования таких систем на операциях перекладки с
переориентацией объектов производства (а), а также на операциях набивки кассет
изделиями, поступающими к манипулятору по шаговому транспортеру (б), показаны на
рисунке 7.22. Перемещение кассеты по двум координатам, а также подъем и
опускание, обеспечивается координатным столом на базе бесштоковых пневмоцнлинД-
ров со встроенными датчиками положения и короткоходовых стандартных
цилиндров с бесконтактным опросом положения поршней.
Манипуляторы с п
^^РЛводом
5Р2-Л)Р/-координага
395
Рисунок 7.21
Рисунок I—
3%
Глава VII
7Л Манипуляторы на базе бесштоковых модулей позиционирования
Бесштоковые модули позиционирования (сервопневматические позиционеры)
на баТе которых могут быть образованы многокоординатные манипуляционные
механизмГхаракгеризуются наличием в составе линейного привода либо
внешней (навесной), либо внутренней (встроенной) измерительной системы
Для создания таких модулей применяются пневматические линейные
приводы с бесштоковыми цилиндрами типа DGP, DGPL и DGPL- - HD (рисунок
7 23) и аналоговые (а) или цифровые (б) измерительные системы (рисунок 7.24).
DGP
DGPL
DGPL-..-HD
Рисунок 7.23
а)
/*"
б)
Рисунок 7.24
Бесштоковые цилиндры типа DGPL и DGPL-...- HD отличаются от базового
цилиндра типа DGP дополнительными шариковыми накладными направляющими
и усиленной кареткой (бегунком), обеспечивающими скорость перемещения
Vnax = 3 м/с и ускорение Атах = 50 м/с .
На рисунке 7.25,а приведен пример конструктивного решения одного из т -
поразмеров модуля, созданного на базе линейного привода 1 типа DGPL с шаР
ковой направляющей для бегунка (каретки) 6, связанного скобой 5 с бегунко
Гползушкон) 4 аналогового потенциометрнческого датчика линейных перемещ
ний 3 типа MLO-POT-TLF. Прикрепление датчика к приводу осуществляется
помощью кронштейнов 2.
Подключение модуля к элементам управления показана на рисунке 7.23, .
Данная система позволяет уменьшить время отработки одного цикла на
за счет управления демпфированием, что избавляет о г необходимости нсполь ^
ння амортизаторов. Значительно снижаются вибрации технологического оборуд
вания за счет «мягкого» демпфирования. и
При сохранении параметров процесса во}можно увеличение перемешае
массы на 30%. Оптимизация параметров функционирования производится са
системой, благодаря ее адаптивным свойствам.
^^^l^^^^v
iJBOAOM
397
12 3 4
Осевой контроллер ___Модуль
SPC200 персмёЩошя
\
У
Пропорцпональньш
/э/£ртспределнтсль
*'
Интерфейс
модуля
б)
Рисунок 7.25
Клеймо
Таблички
i с на-
Датчик
Г1невмоинлиндр
тлпа EMMLZ
^^, Рисунок 7.26
.тления на базе линейного модуля t и«-
На рисунке 7.26 показам пример шстро манипуляТОра для клеймения
■есной измерительной системой «^внОГ0 решения портального ма-
таблнчек, а на рисунке 7.27 - прим? ^Уяющей, представляющей собой ли-
"ипулягора с использованием осевой " fВ ,м), т,. лишенный поршня^ н
*й„нй 11ривод со свободной ^^^^Г^я^^г
1а*наи w,„Ha осевой .иич-идаюш^»^, паршшельно модаю У „
го приводного модуля. Она У^'^ твуюЩ„й на «™^°%оватя. Фут-
*>»Усп,мый поперечный моменг. ^^ „ объекта манипул Р
Массамн функционального модуля
>^>
Глава VII
цноналъный модуль, оснащенный захватным устройством, крепится на приводном
модуле и осевой направляющей с помощью двух адаптерных плат.
Линейный
бесштоковын
модуль
Осевая
направляющая
Адаптер
Рисунок 7.27
Линейные пневмоприводы со встроенной измерительной системой (рисунок
7.28, а,б) типов DGPI и DGPIL отличаются -друг от друга наличием у второго
типа шариковой направляющей и усиленного бегунка. Переход к встроенной
системе датчика перемещений способствует уменьшению габаритов модуля, что
позитивно отражается на весо-габаритных параметрах манипулятора, в составе
которого они применяются, а также на его динамических характеристиках.
На рисунке 7.28,в приведены размерные параметры линейного модуля типа
DGPI-25, имеющего поршень диаметром 25 мм и регулируемые демпферы в
конечных положениях. Рабочее давление — 0,8 МПа; диапазон температур — от — 10
до +60°С. Полезная сила при давлении питания 0,6 МПа — 295 Н; тормозной путь
18 мм. Стандартные длины рабочих ходов выбираются в пределах от 180 до
1600 мм.
Модуль оснащен бесконтактной магнитострикционной измерительной
системой, работающей с абсолютным^ значениями перемещений. Тип защиты — IP65;
нелинейность — <±0,05% величины перемещения или минимальная — ±0,005
мм; воспроизводимость — <± (0,001% измеряемого расстояния + 0,02 мм);
гистерезис — <0,09 мм; напряжение питания — 14,5...26,5 В постоянного тока;
потребляемый ток— 30 мА; остаточная пульсация — <0,5 В-с.
MaHHnyJIgIgPH£iIHeBMonp
"водом
имГЛТ
1
Тип DGPI-...B.
399
Тип GPIL-....KF-B-...
I .
301+ход
-194.
| | Труб.1/У
Б)
Корпус
Рисунок 7.28
1-т ™„о ттлптяпьного типа с использованием ли-
Пример компоновки манипулятора портального 1"
нейных и функциональных модулей приведен на рисунке /.-», , д •
1 — захватное устройство;
2 — адаптерная круглая пластина; _
3 - поворотный привод захватного устройства,
4 — элемент связи (переходник);
6 Z £=™™ «- —— ™«»
7 — адаптерная плата;
8 — присоединительный эл„еМ^ теПа НМР;
9 — функциональный линейный модул
10—осевая направляющая; йкой; _
11 — соединительный узел с кон f -
12 -адаптерная т*™™™<™СТ°^тпаМЬО-РОТ-...-Ы
13, 17 - аналоговый датчик перемеш
400
Глава VII
Л ииенный модуль
для подачи радиоэлементов
в зону сборки
направляюща"
Рисунок 7.29
14 — КООНШтейн !«,„ " " z2L
[4-кронштейн креплениядатчика.
15,16 — линейный бесштоко -
18 -РУкав для коммуникаций"'11 ПРИВ°ДТиПа DGpL;
19-соединительная коробка;'
20, 27-соединительныеУголки.
11 — электрический модуль их™/»
22 - нневмоостров типа СРуГ Х°Д ™па CP"E;
23 — контроллер типа SPC-20O
?б' ^ 7 бГКИ °СеВ0Г0 ИнтеРфейса типа SPC AIP
26 —профильтипа HMBS; n"aiFL-AIF;
27 — крепежный уголок.
Пример создания сборочного центоа ня я
и модулей со спаренными цилиндрами для наГиГ™"* бесштоковь<х модулей
диоэлементами показан на рисунке 7 29 б V напРимер, печатных плат
раной портальной системы реализуется с помГГГ™ "риводами манипуляцион-
v шдуется с помощью контроллера типа SPC-200.
7.4. Механические захватные устройства с пневмоприводом дтя
манипуляторов "»Н"ьодом для
ботов3тВрТНЫе УСТР°ЙСТВа (ЗУ)' ИЛИ схва™< манипуляторов промышленных
роботов (ПР) предназначены для захвата и удержания объектов производства в
процессе перемещения (манипулирования).
Весьма широкое распространение получили механические ЗУ с
пневматическим приводом, способствующим уменьшению массы ЗУ, а следовательно,
улучшению динамических характеристик манипуляторов.
Вид схвата определяется формой, размерами, массой и физическими
свойствами объекта манипулирования, а также специфическими требованиями
технологического процесса.
К захватным устройствам предъявляются следующие основные требования:
надежность захватывания и удержания объекта манипулирования на стадии
перемещения, и особенно на стадиях разгона и торможения, когда на захваченный
объект оказывают влияние инерционные нагрузки; недопустимость повреждения или
Разрушения объектов захвата; прочность и жесткость при малых габаритных
размерах и массах.
Особое внимание должно быть обращено на проверку допустимых для
конкретного ЗУ сил, моментов, нагрузок, действующих на места крепления.
Важное требование - возможность захвата деталей с до^точно шфоким
Диапазоном р^меров и масс. ^Г1~:^1^=-
выполнить сложно, идут по пути лиоо выполнения гуои
"ения сменным всего ЗУ. ия механИческие схваты под-
По типу механизмов передачи привод но у^ ые; п0 В11Л> захватных
Разделяются на безрычажные, рычажные, к. j юбками)- по виду движения
элементов — с плоскими и фигурными к-ула* . п0 числу кулачков — двухку-
Кулачков — с линейным и угловым перемете - 7 30 а) условные обо-
лачковые, трехкулачковые и многокулачковы ф ^ ^ 7.30в — возможности
качения ЗУ по «Festo» показаны на рис. '• • ' ых залватов.
Укрепления сменных губок на кулачках сганд р 1ен„я технологическим
Для оптимизации процессов автомат'.чес ^ ^^ вашшм m
об°РУДованием. в составе которого "^Хвя31, выдающими информацию об
кование оснащения ЗУ датчиками °°Г^н^ с зажимом/разжимом ооъек-
0тРаботке приводом губок перемешенш.
°в Манипулирования.
26
402
Глава VII
Трвхточеч. схват HGO
Параллельный схват HGP
т
Поворотный схват HGR
: • •• < • закрепления
сменных губок
1 - Стандартные
схваты ^
2-Губки IF
(изгот закаэч)
3 - Крепежные болты
4-Центрир штифты
Трахточ. схват HGD
HGD-16
Схват параллельный HGP Поворотный схват HGR Угловой схват
HGP-6 HGR-10 HGW-10
1 - Стандартные схваты
2-Датчики SMH-S1
3-Датчики SME/SMT-8
4 - Электронный блок
для датчиков SMH-AEk
HG0-32J-5C
MHS3-160(2001-250
HGP-10|-161-251-35
MHZ2-10M 61-201-25
MHL2-10/-16f-20f 25/-32/-40
HGR-16/-25/-32/-40
MHY2-10/-16/-20/-25
HGW-16I-25/-32I-40
г)
Рисунок 7.30
Манипуляторыс^Шп
риводом
403
В схватах фирмы «Festo» и SMr "" ~
опрос состояния приводных элем. Позв°ляющие ocvu,
В качестве «т^^^^^^^Г^ ^^
удержания захваченных ойт.р^г ' Используемых r 4v
* наиболее широко при^™» ™ «-»ix ^Х^Г'Г"
жерные, реечно-рычажныр „, рычажнь1е, рычажно-nnvu^ „
руЮЩие механизме, №' ^-^ажные „ .и^Ге^аГГ^
7.4.1. Кулачковые захватные устройства
Трехкулачковые ЗУ могут быть исп
наружного захватывания объектов произХстГпГ ^ вн^еннег°. так „ для
ность позиционирования объектов ппоизвоп^' °беСпечиваемая такими ЗУ точ-
в пределах 0,01 мм. производства (точность центрирования) лежит
Представленный на рисунке 7 31 я ™ВЯт „,
вающий при раскрытии/за™, t паР^льного типа, т.е. обеспечи-
V V крытии/закрытии сохранение параллельности губок своей оси,
- Канавка для датчиков положения.
- Отверстие для сжатого воздуха:
3 «ват закрыт
Г/Версгие Для сжатого воздуха:
4 схват открыт
g ввРпениедля установочного штифта
~ Центрирующая расточка
Тип
HGD-32-A
HGD-5Q-A|
Тип
HQD-32-A
HGD-50-A
404
Глава VII
юнеет рычажно-плунжерный зажимной, центрирующий механизм, в котором роль
атчнжеров выполняют кулачки 9 с резьбовыми отверстиями 8 для закрепления
г\б«ж различной формы и размеров.
Привод кулачков выполнен на основе пневмоцилиндра двустороннего действия.
При подаче воздуха, например, в бесштоковую полость, поршень 5,
перемещаясь, вызывает при посредстве штока поворот по часовой стрелке трех двуплечих
рычагов 10 вокруг осей 11 и разведение кулачков 9 в радиальном направлении.
Попадание инородных тел в центрирующий механизм предотвращается с
помощью защитного кожуха 7. Установка и центрирование ЗУ на манипуляторе ПР
обеспечивается центрирующим отверстием 2 в крышке 1. Для установки датчиков
положения в корпусе 3 захвата выполнены Т-образные продольные пазы 4.
Управление датчиками осуществляется с помощью магнитного поля, создаваемого
кольцевым магнитом 6 на поршне.
Размерные параметры ЗУ типа HGD -...-A (Festo) приведены на рис. 7.31,6.
Схема нагрузки на кулачках и допустимые силы и моменты, действующие на
них. приведены в таблице 7.1. При этом речь идет о дополнительных статических
нагрузках от веса объекта манипулирования или губок, закрепленных на кулачках,
а также о силах, возникающих во время манипулирования (силы ускорения,
инерции и т.д.).
Таблица 7.1. Параметры допустимой нагрузки на губках
1
к
С*- й
1
V .А
t
^=
9
iv
Нагрузка
F Статическая
F Динамическая
Мх Статическая
Мх Динамическая
My Статическая
My Динамическая
Mz Статическая
Mz Динамическая
Н
Н
Н-м
Н-м
Н-м
Н-м
Н-м
Н-м
HGD-32-A
90
9
1.6
0,16
2,8
0,28
1,9
0,19
HGD-50-A
173
17,3
4,7
0,47
8,1
0,81
5,3
0,53
Динамические значения касаются сил и моментов, которые возникают на
кулачках ЗУ при закреплении дополнительных губок. При расчете моментов следует
учитывать положение оси 0-0.
Применение дополнительных губок увеличивает движущуюся массу. Это
означает, что одновременно увеличивается кинетическая энергия, которая
определяется движущейся массой и скоростью. Очевидно, что при изменении движущейся
массы время открытия или время закрытия схвата должно настраиваться с
помощью дросселей в линиях питания приводного механизма.
Схваты типа HGD-...-A имеют два типоразмера, отличающиеся друг от
друга диаметрами поршней: HGD-32-A и HGD-50-A, с поршнями диаметром 32
и 50 мм. соответственно, рабочее-давление — 0,2...0,8 МПа; ход открытия
каждого кулачка соответственно 3.9 и 6 мм; время открытия и закрытия при
0,6 МПа — 0.01 с; точность воспроизведения (повторяемость) — 0,02 мм;
рабочая частота — 4 Гц (240 дв.ход/мин); диапазон температур — 5...60°С; масса
— 0.3 и 0.985 кг, соответственно.
Зависимости сил захвата F3 от плеча /. на котором они действуют (рисунок
7.32.а). для двух рассматриваемых типоразмеров, приведены на рис. 7.32,в.
Величина усилия захвата для конструктивных решений, отличных от рас'
счатриваемых. может быть рассчитана с помощью выражения, полученного н»
основании схемы (б):
.l^-fl
F ч F,
«р
(7.D
ЗА СИ|Н - Н мм мм'
где Tj—КПД механизма схвата; Fv—усилие на приводе, Н; а и в—плечи рычагов, М*1-
^11НУ^орь.спневмо
ДЕЛводом
Внешнее захватывание
Тип HGD-32-A
^Внеш^ахватьшанне (ЗШфыть)
Внутреннее захватывание (открь
160-т—.
0 20 40 60 80 100
Плечо силы /, мм —
Тип HGD-50-A
Внешнее захватывание (закрыть)
j 400
0 20 40 60 80 100
Плечо силы / мм
Внутреннее захватывание (открыть)
400т ''II
"» 40 «Г 80 10»
■ Плечо омы I, мм "
Плечо силы
в)
РИСУНОК
7 32
4w
Глина VII
С другой стороны, силы за\ва1ывзния, которые фебуюгся для удержания
объекта манипулирования, moi ут быть рассчи iaiiH на осиованн^пыражения 130]
(7.2)
Fj'ki-Ki^k^-mg.
т
СИ I м
8
F К, К,
м/с2 И - - -
где m — масса объекта манипулирования; q — ускорение свободного падения; А',
— коэффициент безопасности, значения которого завися! or условия применения
ПР и расположения других элементов обслуживаемого роботом технологического
оборудования: К, = 1,2...2.0: к2 — коэффициент, зависящий от максимального
ускорения а. с которым ПР перемещает объект: Л2= 1 +alg (a = g — для
пневматических ПР; а«(3...4)# — для гидравлических; a = 2g — для электромеханических);
кз — коэффициент, зависящий от конструкции схвата и расположения в нем
объекта манипулирования (таблица 7.2).
Таблица 7.2. Значения коэффициента А3
Губки захватного
устройства - призмы. Круглое
сечение детали
~2
Губки захватного
устройства - плоские. Прямо-
угольное сечение детали
tgG/2 + fl/(2/>)
т
Ш
2
vug
1/(2ц)
sin в/(2ц)
l/(2ii)
twig
sin 6/(2|i)
1/(2Ю
il/h
Ш£3
(
il/h
m
ju - коэффициент трения между объектом манипулирования и губками ЗУ: для иечакалси
них губок без насечки и = 0,12...0,15; для закаленных с насечкой и =0,3...0,35;
в-угол перемещения губки от нейтрального положения, характеризующегося параллель
[ностью расположения губок у|довых ЗУ. ____—
Приравняв (7.1) и (7.2), можно получить выражение для расчета
приведенного усилия fnp, необходимого для создания требуемого усилия зажима:
" K2Ki'"g-b (7.3)
F =Hl
'up
Г|Я
^"""y^^gi^Jae^nj,,^^
407
Принимая во внимание вцпа """"" " " ~~
моцилнндра двустороннего дейггпТ'"16 (5-28) т* Расчета vru
диамет ра: Деиствия- можно получит! Г У "" На ",токе ""ев-
. УТЪВыРажс"ие для расчета его
ZJ = 3,46I0 \l*lJxJ&mgb о т g ь
ВЫХ СХВятп» ,.С-. Ш ШМ
В отличие от трехкулачковыхехг^топ f " " МПа = 1°6Н/мг .' (74)
тоиншплунжерные зажимные механизмы с двусГпп П°ЛОб"Ые СХВаты SMC им™<
Кулачки I (б), размещенные в 1Шах 1 Клином (РИС>'»0К 7.33. а)
корпуса 4, снабжены клиновидными
7
S 10 15 ,?0 И
Плечо iiiMinrii 1 . мм — -"•
s I» ' „' | мм—~
IWUIOK?.'-'
I лава VII
, •> « в шдепление с клиновитными выступами на конце штока 11
имеющего кольцевой магнит 10 для управления ,атчиками положения,
в на^жных Т-образных пазах корпуса (в) Поршень со ш.оком
«*.инен"с помощью викта 8 с уплотнением, предотвращающим перетечку возду-
ГшТ^Тпо^, подача воздуха в которые осуществляется через питаю-
^о^сттГя 1 и 5 Крышка 6 пневмоцилиндра зафиксирована в корпусе с помо-
Гю^н^ого разрезного котьца 7. Отверстия 12 и пазы .3 в кулачках 1 пред-
^^Тсоответ^но для центрирования и закрептения сменных губок.
^^,симос™ удерживающего усилия F, от плеча захвата L показаны на ри-
сунке 7 33л-
-Г
Г
.И , .7.
1
L
йК\
'пима «эдп* опрмпм опта
51
ч.
, пен» кщи эафьлш сюта
0WA,n^t 1.5
2от »3 4 |ы6джа 6 5 X пу»иа SC
Крелбюые очерстия
RA
MHS2-25D
1*«««0 »
»j 12 , Ю! «ИМ 34|10[14|125|п 13 2SJ4 1С
гвоГм
и 1 м! i3' м! «a j i21 и
14 5
t»«2M)! 4» j IT j 42! tij 42 t 41 I 14120117 j 14 S j S I it JS 1I4| в 112!6« i«.l » ImSxObUI
1 *1
13
27
5 12
KlHAi ИВ |0 I P 10
8 5W
ю lew
JffiL
jjH
25
«3*05
MS>0S
i«0
240
» » » w* « a
-en» s ж г им liJOiii 2
я cQ im iil ) 2«иаУ|зк 'Ml
Рис>ыок 7.34
Маиииулякфцс^л^,^^ м
Трехкулачковые схваты SMr ^~ " ^
На рисунке 734 „ривс,ю„ы то„с2^Гт6("»<'«"'1»-« '
Сбррва
<Л
ft.
Рисунок 735
Примеры применения трехкулачковых ЗУ на операциях загрузки/выгрузки
обраоатываемых на токарном станке деталей, на операциях сборки с
использованием кассет и на операциях перегрузки и транспортирования приведены иа
рисунке 7.35.
7.4.2. Двухкулачковые параллельные захватные устройства
Особенностью параллельных ЗУ является параллельное расположение
поверхностей кулачков, предназначенных для монтажа сменных губок, во всем
диапазоне их перемещений.
Выполнение кулачков самоцентрирующимися обеспечивает высокую
точность повторяемости отрабатываемых перемещений
Представленная на рисунке 7.36,а конструкция ЗУ имеет два поршня 3 со
штоками 4, на концах которых установлены по два миниатюрных
шарикоподшипника 5, взаимодействующих с двумя подвижными кулисами 6 и б.№yi».6 нахо-
v- ™ .„, ви-шя! ильная их горизонтальные пере-
лится сзади кулисы 6 и на рисунке ие вилна^в™™ J ами> внут.
мещения в противоположных «аира"» Кулисы с«* £ «£
ренние и наружные боковые по-тхнося 9 «f^ т жртт преду.
ными при их перемещении. Дм закрепле• . ю 8 под центрирующий
смотрены по два резьбовых 7 и одному гладкому от ^
шгифт. „„Аиииые канавки для установки датчиков
На корпусе 1 схвата выполнены цроф ^ магнитньши полями постоян-
"оложения, срабатывание которых ооеспе
"ь.х магнитов 2, закрепленных иа каждом П0Р с<шается ПрИВодное усилие
Прн подаче сжатого воздуха к ж™**. г36.б> При этом шток правого
F»P и происходит разведение ^^^^".ошего усилия F^ создаваемого
поршня утапливается "°* *ейСТВИе"2^
контактирующими с подшипниками ^^ия сведение губок к центру схвата
Подача давления к правому П°РШ" „жжения
и Усиливание левого штока с ПЧ*1** рассчитана с помощью выражения
Величина усилия захвата м°жет
,^,Й впадины кулисы ^к^ с кулачками.
'* a - половина угла клиновидной в^ ^ постояниом коята
В обоих случаях подшипники ^.-
4W
Глава VII
TKnHGP- -A
в)
1 -Профильная канаека для датчика положения, тип
SME-8/SIWT-8
2 - Присоединение сжатого воздуха схват закрыт
3- Присоединение сжатого воздуха, схоат открыт
4-Закрыто
5-Открыто
6-Центрирующая втулка
Рисунок 7.36
Тип
HGP-10-A
HGP-16-A
HGP-25-A
HGP-35-A
Тип
HGP-10-A
HGP-16-A
HGP-25-A
HGP-35-A
В,
32
47
68.2
88
н3
16
21.7
32
44.!
в*
S
о
+)
16
25
29
33
Вз
16
17,8
21
31
н,
Ю
о
о"
1
7,5
7.5
17.5
17.5
н5
7
7
16.!
16.!
в4
30
43.8
65
65
н«
4
4
> 8
5 8.5
в5
35.8
53.8
80
110
н7
8
11
16
17
вв
СО
О
о
1
7
13
22
27
н,
4
5.5
8
8.5
D,
мз
мз
Ti/в
Т'/в
Не
7.6
10.5
15
16
D2
МЗ
М4
Мб
М8
L,
15.5
22
37
45
о3
не
h7
0
5
7
S
12
L*
4,2
5.7
10.5
10.5
is +0,1 р\
2.5
3.3
5.1
6.4
La
СО
О
о
1
7
10
15
20
D5
МЗ
М4
М5
Мб
т,
о
+
1.2
1,6
2.1
2.6
ъ
7
7
15
те
не
0
2
3
4
5
т3
+
6
8
15
16
н,
66
80
121
142
Т„
to
о
+
3.5
3.5
6,5
6.5
н2
15
20
30
32
т5
1.2
1,4
1,0
2,4
Значения допустимых статических и динамических нагрузок, действующих
на схват, приведены в таблице 7.3, а зависимости силы захвата F3 от плеча / ее
приложения к захватываемому объекту показаны на рисунке 7.37.
Таблица 7.3. Параметры допустимой нагрузки на губки
HGP-10-A
0.02
0,02
0,02
HGP-16-A
64
6.4
1.2
0.12
0,7
0.07
0.8
0.08
HGP-25-A
174
17,4
5,7
0,57
2.9
0,29
3,7
0,37
HGP-35-A
230
23
7,5
0.75
5.2
0,52
5.3
0.53
рами пор™нейПа|0СР|ЛРе?? ИМеЮТ четЬ|Ре типоразмера, отличающиеся диамет-
0.2 О 8 мп, ' '- и 35 мм (рисунок 7.36,в). Рабочее давление -"
у ; 7 п1 пТмп Х°Д КуЛаЧКОВ - 5' 8; ,0: 15 и 25 мм- соответствующая сил*
";„ "~ 7" J? в кажл°м цилиндре схвата — 27, 60, 190 и 390 Н; время ера;
при 0,6 МПа - от 0.01 до 0,06 с; точность позиционирования — ±0.02
-^™Н««рь« с пне
мм; рабочая частота — л г —-—_
зон рабочих температур Ц ™° ^оа./Ши, —^
до'.2/ кг;диапа-
ш 40 60 80 100 120 140 160 180 200
Плечо силы /, мм —
■ I I I I I I I I I
20 40 60 80 100 120 140 160 ISO 200
— Птсчо силы /, мм
Рисунок 7.37
0fi кПо ^Рафикам на писунке 738 можно получить величину силы захвата при
'ь МГЬ „ рисунке 1.э° m минимальной допустимой величн-
НЫ ^е1Вн3аВГИМ°СТИ °Т эксцен^'СИТТ ZZZТипоразмеров схватов.
сц<ения / точки приложения силы F3 дляразиыл
411
Глава VII
г*Ф«Н
-+-
юо
Тип HGP-10-A
Недопустимо» область
oU-
| g. Тип HGP-16-A
Недопустимая область —\
50 < х-1)* шхпнтп при
(1.6 МП» (II)
60 )кс||гиг]1нсн1«те(мм)
310 ('или ia\nuT« при
(1,6 МП» (II)
100 Аииситцигитег t (им)
1'нсунок 7 38
Так, например, для ЗУ типа HGP-10-A при <? = 30 мм, сила захвата
Г»=24,25 Н. а плечо ее приложения / должно находиться в пределах 25 мм.
Двусторонний параллельный самоцентрирующий схваг гипа MHZ2 компании
SMC (Япония), изображенный на рисунке 7.39,а, основанный на использовании «Г
лисно-рычажиого механизма, обеспечивает точность пошциопированни ±0.01 мМ-
Рабочий диапазон давлений — 0,2...0,7 MI la; максимальная частота срабатывания —
30 с . Схваты имеют четыре модификации с диаметрами поршни 10, 16,20 и 25 мм.
Повышение точности позиционирования объектов манипулирования
обеспечивается применением направляющих качения 7 с шариками 9 для кулачков 8.
сниженных резьбовыми отверстиями для закрепления сменных i-убок (рисунок 7.39. б).
Перемещение поршня 12 со ппоком, на конце коюрого рашещеи штиф'' 1"
входящий в пазы двуплечих рычат» 10, вызывает понорог последних вокруг с*#
5 и перемещение кулачков 8. Выполненное из нолиурегина демпфирующее кол';'1'
3 снимает ударные нагрузки в конце хода нор я. У|ечки по муха hi иноков''1'
оссштоковой полостей предо!вращаю 1ея с помощью уплотнений 11 и 14. устои""
Тип MHZ2
10
F,- *.
а)
Объект
захвата
ч
'.' У И 14 15
LLI i /
б)
Iliu для датчиков
Губки
Захват снаружи
Удерживающее усилие Удерживающее усилие
при захвате снаружи при захвате изнутри
MHZ2-10D MH22-10D
Н | | | | \i*T
Объект Т= ~ФФ\
захвата 1F3
.Л.
3«»ят снаружи
0 10 20 30 40 50 0 10 20 J0 40 50
„ ~. i ;.<ui » —Плечо рычага,!, (мы)—
—Плечо рычага. Ц№) f
При захвате снаружи
-1 MHZ2-10D
i60r
При захвата изнутри
MHZ2-1QD
«
Захват
изнутри
»I Иг****? Z
русмиж 7-W
'£ib JO J0 40 SO
ЭКЯНПТвСаТГТ. KUtl}—
Глава VII
кнных соответственно в выгочкс корпуса 4 и крышки 1, которая зафиксирована в
корпусе с помощью п юского разрезного пружинного кольца 15. Управление
датчиками поюжсиня. размещенными в пазах корпуса, осуществляется магнитным
uoiev кольцевою мамшп 2, установиенного на поршне. Центрирование
шариковых направлякмцих 7 кулачков 8 опюснтелыш корпуса обеспечивается штифтами
17, а упоры lb предотвращают выпадение шариков 9 из направляющих.
Зависимость удерживающего усишя /•? оi плеча L |убок для типоразмера MHZ2-10D
при захвате снаружи и изнутри приведены на рис. 7.39,в, а на рис. 7.39,г
приведены зависимости допустимой длины плеча L от величины чкецситриситега е.
Рскоменгнется выбираж схват так, чюбы удерживающее усилие было в
10.. 20 раз больше веса делали 124].
Данный гин ЗУ имеет конструктивные исполнения поршня и крышки, позво-
лякчдис прсиоразовать двусторонний схват в односторонний постоянно раскрытый
или постоянно закрытый, что достигается размещением соответственно в бесипоко-
вон или штокпвой полости пружины сжатия (на рисунке не показана).
На рисунке 7 40 даны конструктивные параметры ЗУ тина MHZ2-I0 с
диаметром поршня 10 мм, длиной хода на раскрытие 4 мм, усилием удержания при
4/5
0.5 Ml 1а равном 17 Ц г,пи „.
Масса сх„ага-55 грамм" У7РСН"ем **«* и 98 Н -
Лшчшелыю большая mtlm ' "т шРУж«ом захвате
дельными схватами ,„1И МТ"'\ Хо*а -а РаскрыТИе ,y6oif .
I7 " П и" ?/•?? «П »ФФе«сгив„ое уДер-
9
Тип MHL2
41
Глава VII
жямкчпее >си, не на один кузачок при 0,5 МПа — 14 45, 74. 131, 228 и 396 Н
Обеспечиваемая точность позиционирования — 0,1 мм; рабочее давление — 0,1...
0.6 МПа: рабочая температура — от -10 до +60°С.
Гхбки схвата 18. выполненные из алюминия (рисунок 7.41, б), имеют по паре
цилиндрических направляющих, подшипники скольжения 13 которых размешены
в крышках 9 и в корпусе 2 из анодированного алюминия, снабженного
Т-образными канавками для размещения датчиков положения. Фиксация крышек в
корпусе ос>ществляется с помощью стопорных разрезных колец 10.
Нижние две направляющие 11 являются штоками иневмоцилиндров на
которых зафиксированы пружинными тоскими кольцами 3 поршни 4 с
уплотнениями 5 и магнитами 7. Верхние две направляющие 17 выполнены в виде
зубчатых реек, связанных между собой синхронизирующей паразитной шестерней 14,
установленной в корпусе с помощью оси 15 и крышки 16.
Одни концы направляющих 11 и 17 выполнены резьбовыми для соединения с
губками 18 с помощью гаек 19, а другие — падкими под соосные отверстия в
противоположных губках, в которых они размещаются при их сведении.
Уплотнения 12 штоков выполнены из пербунана. Демпфирование поршней в
конце перемещения обеспечивается упругими кольцами 8.
В качестве примера на рис. 7.40.B приведены размерные параметры одной из
модификаций схвата — MHL2-20D с диаметром поршней 20 мм и длиной хода
губок — 40 мм.
При выборе или конструировании ЗУ подобного исполнения необходимо
убедиться, что точка приложения усилия захвата, характеризующаяся размером R
(рисунок 7.41, г), лежит в допустимых пределах, определяемых рабочим
давлением. В противном случае действующая на губки и кулачки нагрузка из-за
несбалансированности может привести к поломкам этих элементов.
7.4.3. Поворотные захватные устройства
В основе конструкции поворотных схватов лежит реечно-рычажный
механизм, обеспечивающий постоянство момента на кулачках с губками по всему углу
раскрытия и закрытия.
Представленный на рисунке 7.42.а схват типа HGR фирмы «Festo» имеет
четыре модификации с диаметрами поршней 16, 25, 32 и 40 мм, рассчитанных на
рабочее давление 0,2...0.8 МПа. Угол раскрытия кулачков, а следовательно, и
закрепленных на них губок, равен 180°. Время открытия/закрытия при 0,6 МПа —
0,01...0,04 с. Рабочая частота — 4 Гц (240 дв.ход./мин). Момент захвата при
0.6 МПа — от 0,25 Нм для схвата с диаметром поршня 16 мм, до 3,0 Нм — для
схватов с поршнем 0 40 мм. Масса — 0,11.. .0,71 кг.
Привод ЗУ представляет собой пневмоцилиндр двустороннего действия с
поршнем 4 и штоком 5, на конце которого выполнены с одинаковым шагом три
кольцевые канавки 7 под зубья в виде круглых цитиндров (цевок) 8 колес 10, на
осях которых закреплены кулачки 9 с отверстиями для установки сменных губок.
Шток 5 и колеса 10 образуют цевочный механизм, являющийся разновидностью
зубчатого механизма, предназначенный для передачи незначительных усилий.
Подача воздуха в бесштоковую полость вызывает перемещение поршня со
штоком и раскрытие кулачков 9, в штоковую — закрытие (сведение ) кулачков
ограничение величины сведения губок и предотвращение выхода цевок из
зацепления с канавками штока 5 обеспечивается штифтами 6, упирающимися в тореи
иггока при его втягивании внутрь корпуса схвата 1, а штифт 12 ограничивает хоД
поршня при выдвижении. Для устранения ударов поршня о крышку корпуса в коние
перемещения при выдвижении предусмотрено демпфирующее упругое кольцо 11 •
-M^l^'HlPP^il^MOn
Ёиводоч
Рисунок 7 42
Перетечки воздуха из полости в патость устраняются с помощью манжетного
уплотнения 2 из пербунана. а управление датчиками положения, размещаемыми в
пазах корпуса 1, осуществляется магнитными полями кольцевых постоянных
магнитов 3.
Общий вид схвата и размерные параметры четырех модификаций схвата типа
HGR приведены на рис. 7.42,6, а в таблице 7.4 даны параметры доп)стимой нагрузки
на губки схватов этих модификаций. В таблице 15 даны величины моментов захвата в
зависимости от давления питания и от схемы захвата (рисунок 7.43, а).
J^wuaJA. ПараметрыдопустимоЙ1нагрузки1та1^ки^ ^ОЛПА,
" нагрузка ^-ЛнШб^ТН0Я-25-А HGfl-32-A, НСЯ-40-А'
-чица 7.5. Момент захвата в зав»<симост»^т^авления
4Г
Глава VII
Внешнее
захватывание
Вт треннее
захватывание
Ч1р
32
Ш
б)
F,
Тип HGR-I6-A
Внешнее захватывание (закрыть)
Внутреннее захватывание (открыть)
30 40 50
Плечо силы г, мм
20 30 40
Плечо силы г, мм •
Тип HGR-25-A
Внешнее захватывание (закрыть)
Внутреннее захватывание (открыть)
-, 1 1 1 ^
10 20 30 40 50 60 70 80
Плечо силы г, мм —
в)
10 20 30 40 50 60 70
Плечо силы г, мм •
Рисунок 7.43
^''"""y^J^jcjHWBMonp:
иводом
TnnlIGR-32-\
Именшссзахипгы|,111шс(
419
0 6 Ml fa
•40 60 80
Плечо силы г, мм
Тип HGR-40-A
Внешнее захватывание (закрыть)
150-. ■
Внутреннее мхватьшаиис (открыть)
20 40 60 80 100
Плечо силы г, мм
20 40 60 80 100 120
111СЧО СИЛЫ Г. ММ »
Тин HGR-I6-A
Тип HGR05-A
О 0,1 0.2 0.3 0.4 0.5 0.6 0.7 0,8
- Время полорота, с —
? °1ГТГ!оалГо* °-5 "■* °-7 °*
Время поворот с-
Тип IIOR-40- I
т" 04 W—\ | 1 (Г-^ГТ7 °.*
П 0.1 0.2 0.3 0,4 0.5 0.6U^__
•Врсмяно11оро1а.с
[>цС\ I»*
♦20
Глава VII
Установка на кулачки обок увеличивает пишущуюся массу, г.е.
увеличивает кинетическую »НСр1ИЮ.
Диаграммы на рис. 7.43.В и i показывают зависимоеi и сил захн-iia Ff 01
рабочего давления и плеча г, а чшнраммы на рис. 7.43,д — зависимости времени
открытия и закрытия губок от момента инерции и\ масс.
Теоретический расчс1 уенчия зажима может был» выполнен с помощью
выражения, полученного на основании схемы, приведенной на рисунке 7.43, б:
b*F.
пр
4г
Kpd du
d d..
СIII H na = H/Mz м м м
(7.6;
где Fv — приводное усилие; р — давление воздуха: d — диаметр приводного
цилиндра; dm — диаметр зубчатых колес; г — плечо силы закрепления F3 .
7.4.4. > гловые захватные устройства
Угловые схваты являются разновидностью поворотных схватов и
характеризуются наличием рычажного приводного механизма, который может быть отнесен
к кулисно-рычажным механизмам.
Угол раскрытия кулачков таких схватов значительно меньше, чем у
поворотных. Так. например, у счватов тина HGW (Fcsto) (рисунок 7.44, а) он составляет
20°.
Эти схваты имеют четыре модификации, отличающиеся диаметрами
поршней: 16, 25, 32 и 40 мм (рисунок 7.44, б).
Подача воздуха в бесштоковую полость вызывает перемещение поршня 2 со
штоком 3 с кольцевой канавкой, в которой размещены концы рычагов-кулачков 5,
установленных с возможностью поворота на осях 4. Происходит разведение
кулачков и установленных на них сменных губок под конкретный объект
манипулирования.
Штифты 6 ограничивают угловую величину сведения кулачков, а штифт 7 —
перемещение поршня для раскрытия кулачков.
Кольцевые магниты 8 на поршне управляют датчиками положения,
размещаемыми в пазах корпуса схвата 1, выполненного из алюминия.
Рабочее давление схватов — 0,2...0,8 МПа; время открытия/закрытия —
0,01...0.02 с; точность воспроизведения перемещений — ± 0,02 мм; рабочая
частота — 4 Гц (240 дв.ход./мин); диапазон рабочих температур — 5...60°С; масса —
0,1.. 0,72 кг в зависимости от типоразмера.
Параметры допустимой нагрузки на кулачки в соответствии со схемой на-
гружения приведены в таблице 7.6.
Таблица 7.6. Параметры допустимой нагрузки на кулачки
[Нагрузка
F Статическая Н
Мж Статическая Н-М
My Статическая Н-м
Mz Статическая Н-м
HGW-16-A
31
0.9
0,3
0,5
HGW-25-A
54
1,7
0,6
1.1
HGW-32-A
74
3
1
1,8
HGW-40-A
124
5,7
2,2
3,6
Man
^^^iiiilllCBMo.,
HUliOflOM
3 - Отверстие для сжатого воздум
схват открыт °"ЗДУ»а
4 - Центрирующие втулки (2 штуки)
Piicmiok 7 44
Величины моментов захвата при внутреннем и внешнем закреплении обьек-
в манипулирования (рисунок 7.45. а) в зависимости от давления приведены в
таолице 7.7.
аолица 7.7. Момент захвата в зависимости от давления
Диаграммы, показывающие зависимость силы захвата от давления сжатого
B0^yxa и плеча Ь приложения силы /> для случаев внутреннего и внешнего за-
*ватывания ппннелены на пис 7.45,в и рис. 7.45.T.
■«*. приведены на put. /•*»-.« к „асенпана с помощью схемы на
Величина усилия захвата F, можег бьпь pact
РИсУнке 7.45.6- . h
F n dab
F
р _ "/'
(7.7)
где f
n,.
„. —7Г~- СН|Н Па = Н/м
Н 1ШСЧ„ры.11.п>В^-Л"амС1Р,,0РШНЯ,,р"-
„ v приводное усилие, аап — ш"-
д"«го цилиндра; и —давление воздуха- ^ открь1Т1)я/«.Крытия схва-
ТОй Диаграммы па (д) „оказывают *»«с"^Цт*^ "* ^ уЖМ"""
1)а° <>• момсигов инерции масс ку.ачко J•
П,0««-х кнцстнческу о Jncpr.no „сремешен"" ку.
Глава VII
Внешнее Внутреннее
захватывание захватывание
TimHG\\-16-\
Внешнее захватывание (закрыть)
Внутреннее захватывание (открыть)
I 80
40 50 60
0 10 20 30
Плечо силы Ь, мм
Тип HGW-25-A
Внешнее захватывание (закрыть)
80
70
К 60
ЬГ
« 50
н
а
2 40
Г)
я 30
С 20
10
о
0.6
1
\
X
V
V
>
0,2 М
МПа
,4МГ
W
Па—,.
а
10 20 30 40 50
— Плечо силы Ь, мм
60
Внутреннее захватывание (открыть)
0 «0 20 зо 40 50 60 70 80
Плечо силы Ь, мм
в)
Рисунок 7.45
0 10 20 30 40 50 60 70 80
Плечо силы Ь, мм —"~
Тип HGW-32-A
360 Внсшнсс зачватыв
ЗбО^^ахватыва
300
РЫТЬ)
- Плечо силы Ъ, мм
Тип HGW-40-A *
— Плечо силы Ъ, мм -
550
40 60 80 100 120
- Плечо силы Ъ, мм -
20 40 60 80 100 120
— Плечо силы Ь, мч —
Тип HGW-I6-A
Тип HGW-25-A
tT^—^ 1 ' 1 ' |_То i п' 0 1 0' 0.3 0 4 0.5 0,6 0,7 0.8
0 0,1 0.2 0,3 0.4 0.5 0.6 0,7 0.8 I °_^_°^ш поворота, с
~~ Время поворота, с —-
Тип HGW-32-A
- Время поворота, с -
TnnHGW-40-A
0 0,1 0.2 0.3 0,4 0.5 0.6 0,7 0.8
~~ Время поворота, с ■ " д>
°_JlL Время поворота, с ■
Глава VII
7.5, Вакх \ мные захватные устройсл ва
7.5.1. Вак\ мные системы и обору юванис
Вакуумные системы и оборудование преднашачепы для создания рафсжен-
иого воздуха, распределения ею потока и использования в качестве природной
срезы по анало! ии со сжатым возтухам 124].
Такого типа системы эффективно применяются в автомашшроианных
сборочных линиях для перемещения хрупких изделий раушчных табаритв — от
малых но размеру электронных компонентов до аеклянных пластин или траис-
. ровкн и удержания в опре везенном положении например, кинескопов
телевизоров
Кроме rroio, вакуумные системы находят широкое применение при
автоматизации хочо ими листовой штамповки, для удержания и транспортировки неже-
ч \ издеит. а также в дерсвоибрабаилвающей промышленности для гранспор-
ровкн плит из дрсвесно-сфужсчных материалов.
В терминах пневматической icxhojioiни под вакуумом понимакл об-
тасть, свободную от окружающей атмосферы (давление в которой ниже
атмосферного, равною р„=0,1033 МНа).
Под идеальным вакуумом в вакуумной технике понимается
состояние объема, в котором нет материи. Устройство для создания вакуума фирмы
Fcmo» позвозяст но |учить технический вакуум до 85% (- 0,085 МПа).
Существуют два основных меюда получения вакуума: посредством
вакуумного насоса, который откачивае1 во$дух т резервуара (см. 1.7.2.2) или используя
чжекторы. которые со маки вакуум блаюдаря кинетической жергии сжатого
воздуха Хотя соз иние вакуума с помощью вакуумного насоса объемного типа
относите 1ыю iopoio, jfcrr спосоо все же иснользуе1Ся для содаиия глубокого вакуума
в оозьших объемах. Но в большинстве случаев вакуум создается при помощи
тжетегоров, так как )тот способ более дешевый.
Типовые схемы вакуумной системы с ншапием от -эжектора (а) и вакуум-
насоса (б) нретставлены на рисунке 7.46.
Пяевмораспрсделитель Бвкуумраснрслсшп ель
2и , _В_
Оё
Эжектор
£jE}-cz>
еь-1
О]-
"акуум-насос
Н Ь
А
I lpucoura
Присоски
Ичлелиг
^
111ЛСЛ11С
" 6)
Г№уник 7.46
При ис,ц,.ь«,ва.1„и .жскюра или вакуумной, насоса в .ехнолоическом нро-
Тп.™? ^ВаГа И,ЛС ШЯ "соГ,хо"им<>- '«"*" нродолжи.слы.ос, со.данпя (сбр»-
рвиии мх " УРОВ"Я СаМО!° Ра,Псжсния в '«.-«е-пие всей icxhojioi ической о«.е-
юясия т'ё^иМ* В СШ"ВС1с1вии с харакчериешкамн пикуумнрояолон и ihiioM
evronvn^^'r ИОС и011*' ■ымваиис вакуумной сиешмы может Оып. досИ"
ПгГг^^г1' ,Х"Л",1,1,° «ВДмншо ..Гюрудпвшшя.
•ыбооЗсГ Я Вакуум|,ого "б"РУЛ0Ы11ия сос.ои, .„ двух очювпых >■*
«•мм и мсч^Т* nuupUt ,aKJIlu,|aeiCH в определении георешческин полы*1"
Р*чет тк>л ЛИИМС|ра "Риенскн; выбор вакуумной аннара.уры. включаю
. '***,,,жи,е1ы«1сги °,ка,"<и. определение величины утечкл. »'-'Ги'Р
«*УУМ распреде шгеля
1_1„..я-_
425
I— >тик
Наибольшее паемп
"ФУгаой формы. ft,„0апя'Г"е"Ие В ва^м„Ыл
иио.овле я. «**■ *»* постой i^^ "°"№« ~
В -аблице 7.8 „ривелсна бработк" "Ресс-форм Л1Я их
I Плоская I -— и^РШгщщ ~~~^
Плоская
с ребрами
жесткости
Глубокая
Используется при работе с плоскими,
не шероховатыми поверхностями g усломт
отсутствия деформации изделия
Применяется при работе с поверхностями
когда возможна их деформация или смятие
под действием вакуума (виниловые
бумажные, картонные листы и др J
Используется при работе с криволинейными
поверхностями
Сильфонная
Элипсо-
образная
Используется для захвата изделий
I с наклонной поверхностью и в условиях
' ограниченного пространства
Вращающаяся
! Для захвата изделий с небольшой
поверхностью захвата или для точно
расположенных удлиненных изделий
' Для работы с изделиями, имеющими
не горизонтальную поверхность присасывания
Для изделий имеющих неровную поверхность
или если изделие нуждается в демпфировании
при базировании
Большого
Диаметра
[Для работы с тяжелыми изделиями
Эпекп
ропроводная
i Для предо ; • • ■ • накапливания статического
электричества Резиновый материал с пониженным j
I электрическим сопротивлением используется как '
I ОДно из средств электростатической защиты
л .„ ,.,„™-я hi расчета величины потьемиой си-
Диаметр круглой присоски oiipwM* тся Р „ п _
*-■ Расчетное „шченне должно быть «**»""£ „рт,*^ подоио.» усн-
^•ио. в случае необходимое... ^k*P,,Mt^** ^.крхносгей ихва.а. их имас
^'я Необходимо уч1П...на.ь вес тделня, KJIt^^ в np(U(CCCC чвиження (в момеиг
^^"Hocib, а также силы, действующие ,ы '^|H||4CHlMi „бусломенные техникой
(.°АЬема. переноса, оаановьн н 'Ф-) " "',,„,,,. ,С1яемые в каждом конкретном
Си"<аеносг.|. Дополни.слы.ые oi|»л"«с,,и ;u0CIII „снолыовання да.олннтельио-
7Чае "'Делы.о. MOiyi иривссш к '<«,Гт'" ' ктс1Ш на .п .с В таашце
» колнмес.ва присосок н указания их ^ -£ сМЫ в мвис..«осп. от лиамет-
^"'"'«адепы „„чеши ,а.рсп.ческон.ю.ьс
"Риеоскн и уровня рлрежеиия.
>
Глявя VII
7 ♦* Теоретическая иодьсмная си m (Н)
Джметр
присоски (мм!
Пдоаидьпри-
lOCKH (ММ )
4V085
3.1
0.264
-0,080 10.248
0ЛУ*5
-0.070
-0.06*
-0.060
0.233
12.П
^8.3
50 3
10
78.5
1.07 2.41 14,28
1.01 2.26 4.02
0,9451 2.12
0.217
0.202
-0.055
0.050
-0.045
0.186
0.171
0.882 1 «8
0.819 1.84
0.756 1.70
3.77
3.52
3.27
6.67
И
133
11.3
16
201
6.28 10.6
5.8° 9.98
5.50 I 9.31
5.10
0.693 1.5<>
0.155 0.630
0.040
0.140
0.124
10.567
,0.504
1.42
1.27
1.13
3.02
2.77
.52
.26
2.01
4.71
4.з:
8,65
7.48
17.1
314
26.7
16.1
15.1
14.1
13.1
3.93
3.5*
3.14
7.33
6.65
5.49
5.32
12.1
11.1
25.1
25
W1
41.7
23.6
22.0
20.4
18.8
10.1
9.05
8.04
17.3
15.7
39,3
36.8
32
40
804
68.3
64.3
60,3
34.4
31.9
29.5
27.0
14.1
12.6
24.6
22.1
19.6
56.3
52.3
48.2
44.2
126
107
101
94,5
88.2
81,9
50
196
167
157
147
137
127
75.6
40.2
36.2
32.2
69.3
63.0
56.7
50.4
118
108
98.0
88.2
78.4
По гьемная сита присоски может быть наадена путем расчета усилия ее отры
ва от плоской поверхности.
F p st
Вакуумная
присоска4^
F = ps/t
t
t*4
t
внимание, что s
соски
I С " (7 8)
СИ|Н МПа = Ю6Н/м2 мм2 -'
t^8 где р — уровень разрежения; .v — эффективная
площадь присоски; t — коэффициент
безопасности: при работе горизонтально
расположенной присоски (рисунок 7.47). т.е. при работе на
отрыв — г>4; при работе вертикально
расположенной присоски, т.е. при работе на сдвиг
Рис\нок7.47 —f>8.
Используя выражение (7.8) и принимая во
можно получить выражение для расчета диаметра при-
I Изделие I 1
= nD2/4.
D = 2 10
Ft
D F
ь
pn
СИ|м Н МПа = 10бН/м2
(7.9)
где п — количество присосок, используемых для поднятия изделия.
Если один эжектор 1 соединен с более, чем одной присоской (рисунок 7.48.а).
необходимо учитывать, что при разгерметизации хотя бы одного соединения
присоски с изделием уровень вакуума иадает, приводя к разгерметизации других
присосок. Для предотвращения этого необходима установка вакуумных клапанов 3
между присосками 4 и разводящим коллектором 2.
При манипулировании изделиями, имеющими несколько параллельных
плоских поверхностей захвата, рекомендуется использовать компенсаторы длины 5.
телескопической конструкции (рисунок 7 48, б).
>f«£-
к>
•1
i£ inozirlnF
„ б)
Рисунок 7.48
^=^^^^
ti(w..™K„ll№ „„ — —«2.
i
i
»)
Тип VAS-8-M5-PUR
б)
Тип VAS-100-1/4-SI
Тип VASB-100-1/4-NBR
jfce 1/4-
1 - Ниппель для пневмошланга
D,= Я мм
в)
-Впку)м./М0':МТ1п---
с)
0 I 2 3
ж)
Plli-Wli»
_Иак\\м./чИ1"*АИ1в-—
•)
7 4«
.,ь и.юк.ианы облает ннхчрн-
., матерная" l,pwXK *r -20 V +Ы"С.
. В таблице 7.10 приведены «^ cpWbI - от
биения. Диана юн гемнераОР01****
Глава VII
Таолица 7.10. Области применения материалов вакуумных присосок
Витон
Бм амчмс не пригодно, • пригодно,
• хорошо подсолят ••• очень хорош подходит
Конструкции трех типгт
(PUR _ полиуретан; SI - силикон^"! ПР"С°СОК из Различного материала
(вдчд), а зависимости теооетичегк-пй 1„„ пеРбунан) показаны соответственно на
Из^ластич^ости^исосок "ГмГ"?" ^ ОТ В^ма ~ на ^ ж' 3>"
ПГГ1 ntn' МБре Удаления воздуха, захваченная деталь
поднимается на высоту S (рисунок
1 -Щ, определяемую соотношением
вакуума и веса детали. Это
перемещение может использоваться как
короткий рабочий ход с плавным подъемом
Детали. В то же время его необходимо
Учитывать при задании траектории
перемещения детали относительно
Установленных элементов
технологической оснастки.
7.5.3. Выбор и конструкция эжекторов
Выбор эжектора начинается с определен
ельности откачки, т.е. времени, необходим Приближе»ного значения продол-
установившегося уровня разрежения требуем *" достижения под присоской
чения/выключення распределителя. Это воем *"* пРИСасывания после вклю-
диаграмм или расчетным путем. может быть получено с помошыо
Pi сунок 7.50
жительности
времени, необходимо н"илиженн°го зш
разрежения, требуемого *" ДОСТИЖения под присоской
целителя. Это впемя ДЛЯ пРИСасывания после вклю-
диаграмм или расчетным путем. может быть получено с помошыо
Переходный процесс изменения уровня вя
чеиии вакуум-распределителя показан на рисун™5 "°Д Присоской ПРИ переклю-
^анипулятор^щп^шп^од^
Рис\ иск 7.51
Время Т, (с), необходимое для достижения 63% уровня вакуума от
установившегося значения, может быть получено с помощью выражения
Тх =60V/Q, (7.10)
где V — емкость вакуумпровода на участке от эжектора до присоски, л; Q —
уровень среднего расхода воздуха, л/мин.
Время, необходимое для достижения 95% уровня вакуума от усгановнвше-
гося значения ,7П.
7* =3 Т l'-П)
При размещении присоски'на поверхности объекта захвата могут возникнуть
условия, что воздух все же просачивается в ,
ее полость, как это показано на Ри^.52 I « I _
в результате чего требуемый №-«£*£ ,-£=) -^
жени!, необходимый дляJ-"^ ^V C2^
МОЖеТ бЫТЬ ДОСТИГНУТ. К Л _ эжеКТОр И Пористое «да* шероямга.равочипсюрхносл
ХОДИМО ВЫбираТЬ П0^Х0,"Я 0бесПеЧИТЬ тре- Рисунок 7.52
распределитель, способ"^енИЯ, чтобы ком-
буемые параметры разр ,Декгивную рабочую поверхность £ (мм2)
пенсировать утечку. н) через эффективную р
Уровень утечек^ }
определяется по фоРмЯ^= {м.
„нРГ0 расхода
Величина среднего Р ^
а
т,
-+&■
(7.13)
г0 расхода определяется по формуле
я максим^"0 %..3)-&„ •
Величина мак Q -С-
(7.14)
- (2- ■ ■-»^ср • Л
^ «пиом не менее величины £W
г- ортся с Р Трется исходя из значения эт т
Эжектор вь,биРп>гель '"^ бшьше- чем у оборудования, входя-
Syrt-SSS ^соСрассчитываемой с помошью выражения
ди проходного^до ПР-
шеговЦеПь° 5=s--
щах.
1U
ММ
(7.15)
' еделитель в линии питания нормально откры-
^.вЫб^^,? обладает фуикци й «самоневыключения», пк
РекомеН<0й, ^апРя^»ии в сет
того типа "чае**"
контрмер3
4.
Глава VII
На рисунке 7.53 показаны примеры управления распределением давления
%жатого воздуха, испо 1Ьзуемого для создания вакуума, основанные на использо-
мнмн 2/2 и 3/2-распределителей. а также схема организации совместного выхлопа
сжатого воздуха в многоместных вакуумных схватах.
улрмпвмм
У треление
самим 3/2
в линии вакуума
Совместный выхлоп воздуха
П
■is
и
Кг~
И
о
L». Выхлоп
Рисунок 7 53
Скорость нарастания давления в линии вакуума при отсоединении объекта
захвата регулируется дросселем Д. а с помощью реле вакуума РВ задается
диапазон разрежения для удержания захваченного объекта. Защита эжектора от
попадания жидких и твердых частиц, находящихся на объекте захвата, осуществляется с
помощью вакуумного фильтра Ф1, а защита реле РВ — с помощью фильтра Ф2
(рисунок 7.53,а).
Использование общей линии выхлопа (г) позволяет применять более
эффективные фильтры и глушители, устанавливаемые с обоих концов выхлопного
коллектора К для уменьшения сопротивления выхлопу. Если же выхлоп должен
осуществляться через трубопровод, необходимо убедиться, что его диаметр достаточ-
но большой и создаваемое в нем давление не будет влиять на нормальное функ-
ц1 [ | ~1 I I Г~~] ! :—| ционирование эжекторов.
К 5 j -67— — i Уровень разрежения
изменяется в соответствии с
уровнем утечек, как это
показано на диаграммах
(рисунок 7.54).
Если уровень утечек
составляет, например.
30 нл/мин, то уровень
разрежения для эжекторов с
высоким уровнем вакуума
составляет 20 кПа (0,02 МПа), а для
эжекторов с высоким
уровнем расхода — 33 кПа.
Если же уровень утечек
вен», пя mp^u..., „ составляет 5 нл/мин, то уро-
SSho i. ПеРВЫХ СОСтав™ет 80 «Па, а Д^ второго типа - 47 кПа.
холимо при yp^Ty'eHeKSbST"^ НЗибоЛЬШего У*™"» Ряжения необ-
п* т.е. с высоким уровнем пасхоГ f "" использовать эжекторы второго ти-
•УР-ншм^а с высоким уровне-расход
Phcn мок 7.54
СГИКИ
С ВЫСОКИМ ■"""'"" •n-iiiwibJUHciib :>жск1иры mupuiu »«
m-mum. ^P°BHeM расхода- а пРи меньших значениях утечек целесообраз-
Таким ог^азоме,ГГОРЫ "Т*™ ™Па' ^ С ВЫСОКИМ УРовнем вак>'Ума"
и и выбпати -»*l!!P^_B!!!^pe следУет рассматривать обе расходные характери-
i и выбпат ^лслус! рассма
Д*. захвата и^ожГи"6^ г,ОДХОДЯщей для конкретного случая.
■осп*) использукггг "ЗДелии с гладкой и воздухонепроницаемой поверх-
>"утся как эжекторы, так и эжекторные головки.
-Мн2Щ2=2^^
В эжекторе, мнемоничео». ~~~~ ——-Л1
го показаны на рисунке 7 « Я СХеМа (а) ofii.,u-
сжатого воздуха' *££* ^м созда^^ ^утия (в)
Далее к выхлопному cSj^?™^ oTBep ^fT»4*** энергии^
»аля), сжатый воздух увеГии ^ ПР°*°Д* Сз е' "^ С°П1° ' ^опл^Г
зультате чего из m££~ c^ a^px^gST В ^ ' (С°<^а
создается разрежение "л^МНОго отверстия \П\ ,тл...ВаеТСЯ в Сошю 2, в ре-
создастся разрежете ""И"™»» «тарег», одГ*""ПЯ " гошю 2- » W-
„„._ J npo«orm огсос веду» и
-га*.
а)
TiuiV\D-i/8
Рисунок 7.55
динитрГКТ°Р VAD"'/8 (РИСУН°К 755'Г)- имекмций "»юминиевый корпус с присое-
015 ТГмп" °ТВеРС™ЯМИ *"*П>о« '/8", рассчитан „а питающее давление
и.о... 1,0 МПа и температуру от -20 до +80°С. Масса - 0,039 кг. Диаметры
питающего / приемного сопла — 0.8 / 2,1 мм.
Эжекторная головка типа VAK-J/4, мнемоническая схема (а), общий вид (б),
конструкция (в) которой приведены на рисунке 7.56, создает вакуум по такому же
ViK.
ТипЛЧК-1/4
с импульсом сброса - ц
-СШЗ)
чш;>\
, Поисоединениедля г-Присогинятиди
1. Присчед"" лопотшггслгьных
DBXV
vm» по выбору лопотшп^-гьны,
объемов
рис%нок
г)
7-56
*a
Глава VII
*ra> Однако одновременно с созданием разрежения в полости вакуумного
V(2). притягивающего клапан быстрого выхлопа 3 к седлу, через канал 5
цхмклоднт вакотение сжатого воздуха в полости (ресивере) 4. При отключении
тения питания Р накопленный сжатый воздух, находящийся в полости под кла-
ом \ соединенной с основной полостью 4 кольцевым зазором 6, отжимает кла-
гаии от седла и в виде импульса, проходя через отверстие вакуума V(2), надежно
отталкивает удерживаемое изделие от ваку\мной присоски.
Конструкция вак>умной головки допускает увеличение объема полости
(ресивера) 4 путем присоединения дополнительной полости (ресивера) к отверстию в
корт се
Уровень шума, создаваемый соплом при продувке, понижается за счет
встроенного в канал R(3) глушителя.
Готовка типа VAK-1/4 (рисунок 7.56,г) с присоединительными отверстиями
диаметром 1/4" имеет диаметры сопел питающего / приемного — 1,1 /2,8 мм;
объем встроенного ресивера — 320 мм\ масса — 0,263 кг.
На рисунке 7.57 показаны основные характеристики эжекторов и эжекторных
готовок типов VAD и VAK разных типоразмеров.
0 0.1 0,2 0.3 0А 0 5 0.6 0.7 0Л 0,9 1.0
Рабочее давление. МПа -
. , -, > . 1 1 1 1 1
0 1 0.2 03 0 4 0.5 0.6 0 7 0.8 0.9 1.0
Рабочее давление МПа —
-0,9
-0,8
я -0,7
_2 .0,6-
'о
•; -0.5
1-0.4-1
£0 .0,3-
-0.2
-0.1
I 0-I
70п
60-I
-Й50Н
:.40
'30
20
10
0
2
1>
3
I
i
i»
М
1 - VAD-3/8
, VAD-1/4
*~ VAK-1/4
3 - VAD-1/8
4 - VAD-M5
В
Г 1
1
9 1
0
-Давление р, МПа-
-—.
J-
J.
v/.
-3
4
■■**
-2
"Ч
-*>
-~т
"ч
>
1
2
-VAD-3/8
VAD-1/4
3-VAD-1/8
4 - VAD-M5
v:
Л
s!
^«*
I
v,
^
ч.
*v
£
-0,2 -0,4 -О.е -0.8
-Вакуум xlo'Mlla
Рисунок 7 57
-^=^^^
С целью экономии сжатою воздуха Рг
Vin-U
VAD-IIU
VAD-И-
-Давление p. МПа»
Ш Ш
VAMtYB-t» VAD-ME-1/8
VAD-MYB-M» VAD-ME-f-1/8
VAD-ME-1M
VAD-ME-MM
VAD-ME-3/8
VAD-ME-l-3/8 .
Рисунок 7.58
■m -до -цн -«м
-Вагуум Ар. МПа—
BJVAO-ME-
HJVAO-MYB-,..
Д)
В отличие от ранее рассмотренных конструкций эжекторов, они имеют
встроенные 2/2-распределители (рисунок 7.58.а,б): тип VAD-M - один
распределитель; тип VAD-M-I — два распределителя.
При подаче напряжения на распределитель 8 (рисунок 7.58,в). установленный
на алюминиевом корпусе 1, открывается подача сжатого воздуха от питаюшего
~ ^„г.г.А и vhpih4hb за счет сужения в нем свою
сопла Р(1) к соплу 2, пройдя через которое<У»е™™в™ *тверстие выхл0-
скорость, воздух сбрасывается в приемное "™£^„^« присоски 3, свя-
па R(3) в ресивер 4. Создаваемое при этом Р^Р«чиваетусловиеЛ1я надеж-
занной с вакуумным отверстием в К0Р^„ * ';вачеииого изделия (иа рисунке не
ного поджима к ней атмосферным давлением захвачен
показано). распределителя процесс создания разре-
При снятии напряжения с катушки у
ряжения прекращается. „ пячпежеиие по такому же принципу.
Эжектор типа VAD-M-I. создающий^ ^^.^ п0дачи даВления в
имеет второй распределитель 7 для о ваченной детали,
полость присоски 3 и надежного °™™""e™"0Z>T иа давлении сжатого воздуха
Оба рассмотренных типа эжекторов работа ^ ^ от тип0раме-
ОЛ ...0,8 МРП, Размеры с« *^£. ^"Tt^Z-
Ра; время срабатывания — 1О мс. пи у ^ температура v. ■
от 1,4/1.4 Вт до 1.5/2,5 Вт; тип защиты
0.032.. .0,28 кг. „я от давления питания "Рив^э *КТОрОВ от
Зависимость ^^^^Х^^^^^^^ "
"ых типоразмеров эжекторов на (П.^ атМ0Сферным давани
вакуума (перепада давлений АРJV „=о.6 МПа. различные типы
«олоеги присоски) при давлении п"^ Р ^ с^в„ » P-
КПД является критерием, »° ^шьк, выражения f50j
Лекторов, и может быть рассчи
28
3-| Si,
4M
Глава VII
n(AP) = - «Ар>-<?
(7.16)
1 +
60 \
гж f _ врем» вамчмирования- Q - расход воздуха; V - вакуумнруемын объем.
Эжекторы тина VADM и V ADMI (рисунок 7.59.а) имеют встроенные в линию
«и^ум. фильтры, предохраняющие сопла от засорения частичками масла пыли и
!р2ГнБШШЮ на поверхностях захватываемых объектов (рисунок 7.59, б).
VADM
Тип VADM-..
VADM ч VADMK..-LS-P
а)
TMnVAD*- Тип VA0M-...-W-N Тип VADMk.-P/-N
с импульсом сброс» со встроенным вакуум-реле со встроенным вакуум-реле
и и индикатором
и индикатором
Тип VADMI-95-P/N
\' Tpvl
55 y-W
\6 1/8",
c^=ffi=3S
мя.
it
JtJ
78.8
1 - 11рнсослннснне сжатого воздуха
2 - Вакуумное присоединение
* - Ручное управление
4 - Крепежная рсчьоа
5 Крепежное отверстие
6 7 - Присоединения для розеток
Рисунок 7.59
эжекторов типа VADMI прелусмогрена линия импульсного сброса,
состояли второго распре «лителя и регулируемого дросселя в канале 2 вакуумной
присоски, имеющего та выхода В линии вакуума встроен обрагиый клапаи,
обеспечивший сохранение разрежения в полости присоски после отключения
распределите» питающего сопло Лаваля (рисунок 7.59. б).
^^^ типа эжекторов имеют исполнения, характери гующисся наличием реле вз-
*7У*а. помощью которого контро шруется давление разрежения в линии вакуума
-i!HS=£!s^^
415
Эжектор типа VADMl i с D ~ ———__
PNP-выходом, которое блат Г Имест Ре.е с Ж,
навливать область вакуу„а ^ ПяИНПо'«У* п^Г* Э№*»«» ""гуха и
позволяет исключить ^ ',^^того ^ ^^ов. по.воляетуста-
чения распределителей с„е Г Р°Грамм«Рование „Г ^ захвага- Это
Для индикации ошибок^ЭИ*~'« ^СТЛ™™""" ' в™
Габаритные „ ирисовТ™'СНИЗИть ^т12^Мтмн^ ««„ал
казаны на (в). Он имеет ' ' Ра3меРы ™ш1 ЫС С™А"»С»»*-
0,95 мм; тонкость ф^шГ^ *»*Ч» ™Z„Г VADMM'-»N ио-
- 0.1..Д8 МПа; ^%£2 ВС'Ф°еННОго Ф"льтра -^ С0ПЯа ЛаВ*'я ~
реле - 254/240 rpZ^Tj^™^ dZ - (f ^Г™* "™
мощность эжектора с одним Г * "* *"****** п^Ъ Г" ° Г***
7,0 ^™ "™ « VAOM . VAOM, приведены н
"РИьеДены на рисунках
0.4 0.5 0.6
-Рабочее давление р.
0,7 ОЛ?
МПа —-
0+ . . . .
0,3 0.4 0.5 «д.
Рабочее давление p. MI fa -
0.6 0.7 0.8
(U <U 'о.'Я 0.4 0.5 0.6
Рабочее давление р. МПа
-""TWHDM-4S 4 VADM-140
' " VAOMI-4S " VADMI-I40I
, VADM-70 с VADM-200
_' " VADMI-70 э " VADMI-200]
, VADM-95 a VADM-MOl
J'VADMl-9S° VAOMI-ЗОО)
0.5 0.6 0.7 0.8
...... г, lllln —
-0.02 -0.04
—-Никуум, МНа-
P|k-MloK 7.60
Vs
Глава VII
-0,09-
-U.Uo-
-0.07
-0.06
-г-« 05
s
be -u.ihj
-0.03-
-0.02
-0 01
n
VAOM-...
VADMI-..
« at Ql2 03 0.4 0.5 0.6 0.7 0.8
— Рабочее ювленне p. МП»-—
-0.02
-0.04 -0.06
Вахлум. МПа-
-0.08
Рисунок 7.61
Повышение вакуумного расхода может быть достигнуто использованием
двух- и трехступенчатых эжекторов фис\нок 7.62).
Двчхступенчатый эжектор (а) (24] обеспечивает повышение вакуумного
расхода на 40%, а трехсту пенчатый — на 250%.
Для запитывания рекомендуется применять сжатый воздух без содержания
часла.
При включении распределителя вакуумирования 2 сжатый воздух подается на
вход эжекторов 3. обеспечивая отсос воздуха в линии вакуума через фильтр 5.
4 ровень вакуу ма контролируется с помощью реле 6.
l_^lv^
а)
Ц>-^,у
э
Рисунок 7.62
40%
Помшемп икууиного рарцща
Ввчгумнмй ркиод
J^HffiS^^
437
При выключении тсппл ~~ _ 4
поступает в линию вакуум"^1^ 2 воздух т я
Однако для быстрого „ НЦ еКТа °т ^соски €беепеч^» Рост лавле-
смотрен распределитель сб2?,* Г° ^^к'ш,»
с- в линию вакуума. СкорХ^" ""«^и ^ГСГ°ТО <**«" преду-
Аналогично функции Нарастани« Давления пегГГ ТЫИ воз^х ™ьает-
нения на базе одноГи СТГ ^^нчатый ^Г ЛРОССе1еч 7"
Обратные клапаны в 1ИНИи , ^ ^ П°«—
ют попадание воздуха и^ ят. Г К7ума ВТ0Р°й и тоетой
А1ЕСТР1ШНЕВМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ
Существуют два основных метода разработки принципиальных схем управ-
.ни* [261
1) интуитивный метод, часто называемый методом проб и ошибок;
2) методическое (систематическое) проектирование, основанное на
выполнении соответствующих правил и инструкций.
В первом случае проектировщику необходимы большой опыт и интуиция, кроме
того этот метод требует больших затрат времени когда дело касается сложных схем.
При проектировании по второму методу достаточно знаний основ теории и
методики последовательного проектирования.
Независимо от используемого метода, конечной целью проектирования
является разработка правильно и надежно работающей системы. Если раньше больше
времени обращали на создание системы, минимизированной по числу элементов,
то сейчас акцент переместился в сторону надежности в работе и удобства в
обслуживании. Это достигается в ходе методического проектирования, в результате
которого постедоватетьность работы системы находит ясное отражение в
легкочитаемых схемах и технической документации.
В этом случае система управления проектируется в соответствии с
определенной процедурой, при использовании которой роль человеческого фактора
уменьшается. Однако во многих случаях при методическом проектировании в системе
используется большее число элементов, чем при интуитивном проектировании.
Разработка обычных схем электропневматических систем проходит
следующие этапы:
1) описание работы схемы;
2) разработка диаграммы «перемещение-шаг» (циклограммы) для данного
рабочего процесса;
3) изображение на принципиальной схеме пневматических элементов;
4) изображение на принципиальной схеме электрических элементов;
5) составление документации по обслуживанию;
6) составление списка запасных частей и технических данных.
1.0
1.01
1
2.0
В
"&Ш
JZZJ"
2.01 !
ш
01
HJ0'-1
При разработке
пневматических схем
придерживаются
следующих
рекомендаций (рисунок 8.1):
а) расположение
элементов на схеме
должно быть таким,
чтобы поток сигналов
шел в направлении
снизу вверх;
б) цилиндры и
распределители
располагаются на схеме
горизонтально, штоки
цилиндров
выдвигаются слева направо.
Рис\нок8.1
Система цифрового обозначения элементов пневматической схемы долж»3
соответствовать следующим критериям:
1Д 2.0 итд
. 1
-01,02 нт.д.
элементом
+24 \
Рие>нок 8.2
б) схемы систем с промежуточным
или релейным управлением могут ^
разделены на логическую и yn£B°^
ЩУю части. На последней упр^тяюг^
элементы (электромагниты'пуске!
реле) исполнительных устройств рас!
полагаются слева направо в
соответствии с последовательностью работы
системы. К разработке таких схем следует
подходить творчески, поскольку четкое
разделение и строгое соответствие
шаговой диаграмме (циклограмме)
практически невозможно.
стПН„ЭГМеНТЫ ЭЛек^ической схемы обозначаются буквами и цифрами в
соответствии с направлением потока сигналов слева направо. Обозначение
переключателей, выполняющих ключевые функции, такие, как пуск или останов, производится
по выбору разработчика. Электрические элементы на схеме изображаются в
исходном положении. В случае изображения нормально открытых переключателей в
исходном положении включенными (активированными) стева от них наносится
стрелка (рисунок 8.2,6). т.е. в исходном положении через этот переключатель
проходит ток.
8.1. Прямое и непрямое управление пневматическим цилиндром
При выборе метода управления в электрической части системы (прямое или
непрямое) следует руководствоваться следующим:
1. Усилием переключения распределителя.
2. Размерами электромагнита и величиной напряжения.
3. Сложностью схемы. „ ,_„_-,„.. „<„,„„„»„„„
Если в пневмосистеме нет необходимости в ^^^^rZ^Zl
поршня цилиндра, то управляющий цилиндром распылитель имеет небольшие
Размеры, а усилие для его переключения и^^вле н и с. Примером, иллю-
В этом случае применяется прЯМ" "ня может быть задача закрепления
стрирующим использование прямого упра ^^ (рисунок 8j.a).
объектов производства в прнспосоолен!м_ ^^ поршНя 25 мм при нажатии
Цилиндр 1.0 одностороннего деистви_тпщена1ДетаЛь освобождается,
"а кнопку должен зажать деталь. Если KHoiiero деГ,Ствия применяется 3/2-
Для управления цилиндром одн^Уданн0М случае размер цилиндра не-
распределитель(рисунок а.л
б>- П°СГ: Учительный расход воздуха Операци-
большой. для его управления ^^ЛтГпере^ючателем с кнопкой, который
а можно непосредственно управлять ,*^ ^ ^
кото-
—Щ1Л1. для ci о у iijjaDj. w...— . .„„-ялять пер**-"* „. -
е« зажима можно непосредственно -Целителя (рисунок 8.3Л
«одает ток на обмотку ^*£^£S- ^^^^^
При нажатии на кнопку SI тоь ^^ вюдуч поИдет чере* v
Рый переключает распредели гель 1- •
Глава VIII
в)
Рис\нок8.3
« ,х него отверстия I к выходному 2 и заставит поршень двигаться, выдвигая
.ток н сжимая нрчжинч. Если кнопку S1 отпустить, ток на электромагнит
перестает поступать и распределитель под действием своей пружины вернется в
исходное положение. Шток цилиндра втянется, поскольку воздух из его рабочей
1бесшго«овой) попости выйдет в атмосферу через выхлопное отверстие 3 распре-
делителя.
При
использовании 5/2-распределителя
(рисунок 8.3,в) схема
функционирует
следующим образом.
Нажатием кнопки S1
включается
распределитель 1.1. Сжатый
воздух от отверстия I
проходит к выходу 4,
перемещая поршень и
выдвигая шток. При
отпускании кнопки
распределитель
возвращается в исходное
положение, воздух от 1
через 2 поступает в
штоковую полость,
шток втягивается, а воздух из бесштоковой полости выходит в атмосферу через
отверстие 5.
Недостатки такой схемы управления заключаются в следующем.
Ести переключатель нажать на короткое время, шток выдвинется не
полностью и затем втянется. Это происходит из-за того, что электромагнит выключится
и позволит возвратной пружине вернуть распределитель в исходное положение.
Поэтому возможно, что шток вообще никогда не выдвинется полностью, т.к. он
непосредственно реагирует на срабатывание S1.
Ести для включения электромагнита потребуется большой ток, контакты
переключателя могут сгореть или оплавиться. В последнем случае контакты
замкнутся, и шток будет удерживаться в выдвинутом положении.
Если цилиндр имеет большой диаметр и ход поршня, то следует использовать
распределитель с увеличенной площадью проходного сечения, для переключения
которого требуются мощные электромагниты. Такую нагрузку контакты
переключателя пропустить не могут, и в этом случае необходимо применять непрямое
управление.
Непрямое управление применяется и в случае дистанционного управления
системой.
Как правило, при непрямом управлении контакты переключателей
разгружаются за счет использования реле.
В качестве примера рассматривается управление цилиндром одностороннего
действия розикового пресса для листового материала, шток которого должен
выдвигаться при нажатии на переключатель, а при отпускании втягиваться (рисунок
8 4,а). Цилиндр имеет диаметр 250 мм, и для управления им необходим большой
расход воздуха
Схема управления показана на рисунке 8.4,г. При нажатии на кнопку S1 ток
подается иа обмотку реле К1, контакты которого К1, замыкаясь, пропускают ток
яа1 обмотку электромагнита Y1. 3/2-распределитель 1.1 переключается (рисуио*
4 ). на его выхозе 2 появляется давление воздуха, заставляющее шток цилинДР3
1.0 выдвигаться. Отпускай»
-опки S1 приводи/Га^Т
врату распределителя в^"
ходнее положение, ра(к)£я
полость через отверстие 2
соединяется с выхлопом 1 „
шток с поршнем под деист
вием своей пружины также
возвращается в „СХ0дн^
положение.
На рисунке 8.4,в
показано использование Для De
шения этой задачи 5/2-
распределителя с одним
электромагнитом, для Под.
ключения которого
используется электрическая схема
на рисунке 8.4,г.
5 13 г)
Рисунок 8.4
8.2. Реализация основных логических функций
пользуютРс0яМпЫШЛеННЫХ СКСТШаХ W"™ ™<™ переключателей н Ре,е ис
к^^ОнТРеШаГоЛИЧНЫХ К°Мбина№ КотаРь'е «W ™« выделяются каГб!
бовани! Г определенные задачи, такие как: обеспечение блокировок по тре-
^ аниям техники безопасности, блокировок ручных устройств ввода сигнатов
ДДержания реле и индикаторов во включенном или выключенном состоянии.
Блоки могут быть разбиты на три большие группы [26J:
1. Логические блоки
2. Блоки памяти.
3. Блоки переключения.
8.2.1. Логические блоки
С функциональной точки зрения логический блок может состоять из одной
«НЛП»
*1
Или нескольких контактных пар. <([,м
Элементарные логические V| ,—
Функции, формирующие блоки: И, д; ) &
ИЛИ, НЕ. Их графическое
изображение дано на рисунке 8.5. Каньк*мш« ^_^
Эти логические функции могут _/ у_ ~J~^}~
Ыть реализованы как на пневмати- —(—J -~ZS
Ческих, так и на электрических эле-
Ментах.
Для реализации функции «И»
Д°СТаТ0ЧН0 nr>r-ri/.nrvnaTpnhHO ПОД
Ф-
Дизъюнкция
ф-
«НЕ»
Отрицание
Ф-
Рисунок 8 5
к — последовательно
За"°чить контакты (рисунок 8.6л>. та „а выходе, т к. контакт S2
^ь,кание конгакта SI не обеспечит пояш.енн „ ме понведет к появле.
"гае1Ся ПТ.П....... т,^Р и замыкание только^
н»^ - откРытым. Также и замыл...-- одНОВр(
ННИЮ "ь,ходно, о сигнала. Он появится только P
Контактов S1 и S2.
,еменном замыкании обо-
1 лава VIII
1 о
1.1 4
^§ШШм
ч1-
г) 5 О 3
1
+24 V 1
J—7
si «A ki\
S2E-\
кц
OV
Yl
Pi
Д)
Рисунок 8.6
На практике логическая функция может иметь гораздо больше входов. На
рисунке 8.6,6 представлена реализация функции «И» на три входа с помощью трех
последоватетьно подключенных контактов. Для получения сигнала на выходе
необходимо одновременно замкнуть все три контакта SI, S2 и S3.
Практическая реализация функции «И» может быть рассмотрена на примере
штамповки Пуансон пресса опускается только при закрытом ограждении, что
достигается нажатием на кнопки S1 и S2 (рисунок 8.6,в). Если одно из этих условий
нарушается, пуансон немедленно поднимается и блокируется в верхнем
положении Приводной пневмоцилиндр 1.0 управляется 5/2-распределителем с
односторонним электромагнитным управлением и пружинным возвратом (рисунок 8.6,г).
Электрическая схема, реализующая заданный алгоритм управления, показана
иа рисунке 8.6.д.
Пока выключатели S1 и S2 не активированы, цепочки 1 и 2 разомкнуты. При
нажатии только на один из выключателей цепочки остаются разомкнутыми. Если
же ограждение закрыто (опущено, S1 нажат), и оператор включил кнопку S2, ток
поступает иа обмотку реле К1. Контакт К1 замыкается, включается электромагнит
Y1, переключая распределитель 1.1. Теперь сжатый воздух проходит от входа 1 на
выход 4 распределителя и шток цилиндра 1.0 выдвигается. Из штоковой полости
ьилиидра воздух выходит в атмосферу через отверстие 3. Если отпустить S1 и S2.
контакт К1 разомкнётся, электромагнит отключится. Пружина возвращает
распределитель в исходное положение, при котором сжатый воздух подается на выход 2.
^^втягивается, а воздух из бесштоковой полости выходит в атмосферу через
ыключатели S1 и S2 подключены последовательно, но они не выполняю1-
•-тыо функции устройства безопасной работы, когда обе руки оператора за-
^^> ны хзя включения пресса и не могут оказаться в опасной зоне, т.е. в зоне
^ITii "V^™™ такое подключение не должно быть использовано для эти*
** Ц<тесообразней использовать i
* — от рук (рисунок 8 6,6).
включение на три входа: одно — от огра*Де'
BxoflSl\ Вход Si
Рисунок 8 7
ЛРуЛсСк 383Та, tTT <<ИЛИ>> ^^ П°ДКЛЮЧа'ОТ ПаР—ь„о друг
стоиТзам^Г ^ 0бЭ К°Н1а™ Р330™^. на выходе сигнала иет. Но
стоит замкнуть хотя бы один из них (S1 или S2), и иа выходе появится сигнал
реализация функции показывается на примере сталкивают картонных
короток с одной ветки транспортера на другую (рисунок 8.7.6), который упраатяется с
помощью кнопок SI или S2 с обеих сторон подающей ветки конвейера. При
нажатии на кнопку Si или S2 цилиндр 1.0 сталкивает коробку. Если обе кнопки
отпущены, шток цилиндра возвращается в исходное нотожение, Цилиндр управляется
5/2-распределителем с одним электромагнитом (рисунок 8.7,в).
Пока кнопки S1 и S2 не нажаты, ток на обмотку реле К1 не поступает
(рисунок 8.7,г). Если нажать на кнопку SI, ток пройдет на обмотку К1 по цепочке 1, а
если нажать на S2, то — по цепочке 2.
Нажатие на кнопку SI или S2 приводит к замыканию контакта KI, и ток по
цепочке 3 пойдет на электромагнит YI. который переключает распределитель 1.1.
Сжатый воздух от источника питания поступает на вход 1 и далее на выход 4: шток
Цилиндра выдвигается. При этом воздух из штоковой полости оудет выходить в
атмосферу через отверстие 3. Если обе кнопки отпустить, контакт KI разомкнётся.
■»„<. oieepciHc j. ^ ^UTtxn. „еонется в исходное положение, при
электромагнит выключится, распределитель вернетг етянется а
втором сжатый воздух от входа no^naCT4i^BBb^epy через отверстие 5.
воздух из бесштоковой полости будет выходи
Если переключатель акти-
Функция «НЕ» реализуется следующим оир ,
при его отключении
«ирован (рисунок 8.8,а) на выходе есть сигнал, и н
сигнал исчезает. жет быть контроль за положением
Примером практической реализации
цилиндра одностороннего действия
Штока цилиндра. При нажатой кнопке штс. ^^ КОН7ролируется коице-
вь.двигается (рисунок 8.8,6). Исходное полож ^ служитл1Я индикации вы-
вь<м выключателем с роликовым Р"чаг0^т чТ0 шток не находится в исход-
мнения цилиндром работы и <*^$£***»*к™ с ОДНОСГОронним
*°м положении. Управляется цилиндр -v
-ектромагн итом(Рисунок8.^^
8*Л"о?Го^^^
*°^акт разомкнут. Нажатие на кнопку
Глава vm
10 S2
гШ^
+24 \ l
SIE-Ч S2rM
Иылот.
\m i«P*
О
Bmi.SlE-
6)
Phc\hok8.8
\ 1 и выдвижению штока, освобождающего концевой выключатель S2. Теперь его
контакт замыкается, и ток поступает на лампу L1. которая, загораясь, показывает,
что шток не находится в пехотном положении.
8.2.2. Блоки памяти
Контакты переключателей и реле могут использоваться для удержания
электромагнитов клапанов (распределителей), реле и ламп во включенном состоянии
продотжительное время без использования дополнительных сигналов. Например,
в системе с двумя цилиндрами один из них (зажимной) должен оставаться с вы-
изинутым штоком до тех пор, пока продолжается операция
обработки (сверления, расточки и др.), обеспечиваемая дру-
1им цилиндром. Этого можно достичь, используя элемент
памяти, который поддерживает необходимое состояние
технологической системы.
Простейшим элементом памяти является реле с блок-
контактом (с «самоподхватом»). При кратковременном
срабатывании кнопочного иереключателя S1 включается реле
К1 (рисунок 8.9) и его контакт К1, подключенный
параллельно переключателю, замыкаясь, удерживает реле постоянно включенным.
Недостаток такой схемы в том, что реле остается включенным на протяжении
времени, в течение которого оно подключено к источнику питания. Однако этого
можно избежать, установив дополнительный переключатель для размыкания
контакта К1 и выключения реле. Этот переключатель можно подключить двумя
способами, кажаьгй из которых имеет свои преимущества и недостатки. Получаем
схемы с доминирующим включением или выключением.
Доминирующее включение
При срабатывании переключателя S1 (рисунок 8.1(),а) ток подается на
обмотку реле К1. контакт которого К1 замыкается. После отключения S1 ток пойдет на
обмотку по параллельной ветви чере» замкнутый контакт К1 и нормально
закрытый контакт пока не включенного переключателя S2. Реле остается включенным.
Срабатывание переключателя S2 приведет к размыканию ветви с конiактом KI. "
ТОК "СреСТансТ постУ"ать на обмотку реле. Если одновременно включиib и удержи-
"тьишжатьгми кнопки переключателей S1 и S2, реле будет оставаться включенным-
Пттому такая схема и называется схемой с доминирующим включением, и ее реа-
■ может быть рассмотрена на примере запорно! о клапана (рисунок 8.10.6)
Рисунок 8 9
°пч*пьЕД ЧакрьпьЕ
Рис\нок8.10
Запорный клапан открывается и закрывается цилиндром двустороннего
действия 1.0. При нажатии на кнопку «Открыть» (рисунок 8./0,г) шток цилиндра
выдвигается и остается в выдвинутом положении до тех пор. пока не будет нажата
кнопка «Закрыть». Кнопка, подающая команду на открытие клапана, должна
доминировать над кнопкой, закрывающей его. Упраазение цилиндром
осуществляется 5/2-распределителем с одним электромагнитом (рисунок 8. Ю.в).
При нажатии на кнопку «Открыть» реле KI с помощью контакта К 1.2
самоблокируется (т.е. получает питание по параллельной цепочке). Даже если кнопку
«Открыть» отпустить, ток на обмотку реле К! будет поступать по цепочке 2 через
нормально закрытый контакт кнопки «Закрыть» и К/.2. Другой контакт KI.1.
замыкаясь, подает ток на обмотку электромагнита YI. Шток цилиндра выдвигается
и открывает запорный клапан. При нажатнн на кнопку «Закрыть» цепочка 2
разрывается, реле К! обесточивается, его контакты размыкаются, что приводит к
выключению электромагнита. Шток цилиндра втягивается, закрыв*.жирныйi
клапан. Если обе кишки нажать одновременно, ток на обмотку р ле К1 будет
поступать по цепочке 1. и запорный клапан ^^^к'^гого. схема с са-
В этой схеме «Открыть».Доминируетнад ^^J^ ^ритым кон.
моблокировкой обладает свойством памяти *>
такта К 1.2 после отпускания кнопки «Открыть».
Доминир^ше^вьн.л^ ^^^ (р„сужж
В этой схеме переключатели s " - МСННом и>; срабатывании цепь
8-. 1). При этом S2 Доминирует "ал^^^
подачи тока на обмотку реле М ока* 'усмотрена
Реализация такой схемы может быть рас
на следующем примере. ^ ^ с поШивком
Магнит, установленный на Ры и ког1а жит
(Рисунок 8.12,а). воздействует па rt-P^ 'уровНЯ. При
к«сть в баке достигнет установлен « ый 0,,оК,
и шгл. ,ш<ч.1."— j аварийны" -j -
срабатывании геркона включам ^ огкЛючеп
который звучит до тех пор. |,ок" Н^.||Я.'Гуд™ не ОРЯ-
"«мощью новорожою "^""^^чатель включен.
'Кен срабатывать, если этот пер<*
КП
т
Включить
Выключить
РионоьЯ II
I JIIIIIH \ lit
1
l'tii-\ii«KRI2 Л}
Ptuiciuu, шин 'ш ipc став i iio в шщ ткфцческпи схемы на рисуике
12.6
ПрИ НО ИСНС1 ИНН 11.1 ICpKOII 111, llKJHOM.ICllH |H\UC Kl, ОДИН ill KOIIiilKIOII КОМ)
рою Kl 1 с 1>жнт n« самотн.ил. чруш" К1.2 — для нюлочешш |удка 1 удок
Mo I бЫТЬ UI 1WH.1I l ИОМиЩЫО IIOMOpOIllUlO UUIKJIIO'IUIOIH SI, KOIopi.III ИИЛИС1СИ
доминирующим если он раюмкис! спои копим, при сраПапананнн геркона гудок
1« ВКЛЮЧИ 1СЯ
Для счучая аиюмтическщО уироилиши урииисм ладача и ее решение hmcioi
следующий ипд.
Л
II IMIITP
«Я Konnrnoli
in,ixjuu'iair и.
13L.
Рыч»г по„таиы.ч Рыча! с цошКШКиМ
При ипиженин шдан
шло уронни жидкое in it
Паке i«oi;ieiieii«yci па
копненон ublKJUU'ld ель
е роликовым рычш ом
(рисунок К.13,.1)- Cm-
itiiji с последнею но
сlyiiaci на клапан, ко
■ орый иифьшалсь,
снижает уронеш. жид
кос in и бакс. Даже п
случае наличия сшнаиа
С КОНЦеНОЮ III.IKJHCI'i.l
(сля онераiop должен
имен, пошожноеи. С
ПОМОЩЬЮ KMUUKI1 UIMC
UH1 uhiii жидкие i и.
Решение данной
ладами снодшея к елс
дующему.
Кшда уронеш»
ЖИДКОС III II (MIKC ДОС
niiiiei шданною нш
чения, pi.i'iai e поил.in
ком нажимао на кон
испои 111.1юно'1<пел1> М
'Icpei сю котик i и
I'm и» ei H) нормально iiiKpi.ii мп
«««„ikw . , кон oik i кнопки S2 IUK
"остутлет „« Ыпмпшу ^ |е К) K(n<ipoe с,М|1<вдикирус1|:я Ku||IllKIIlM км и шММ
«У по мчи ...ка на ымырим.,,,,,, Yl ,»mi , кошак.а К1.2 (риеуно
,М',иМ,Ш,"Л""Ич,,. и.,.и<.
«-•■"«ыж,., i м ,,""•'»'"..,,.„„„
»«*» ,ь..кнопкам„мск ';■*'• *..*, ,;i(;;7s"' "■«.."•
'«..«..«„.„и "• "-—.к „,, 1П1;((:^мп""мм«*"•«•««^.
■ьиру|к..ч « цеп,, как « .„„,OM ,?' "ФМ """<"«.„,*, ,иШ11
""■•У к..|1.«к„ж KI.2 М( ' У'"" "" *-»..*.;„ "™12 "''"«""<"'•<
к • "-<—у-«„е(1;::г:,,,нии -* * „WI1W
«-2Л. Ьлоки переключении
Ьлокн no ipviffif i M,„
Iuk на помшку puie. KMtmon. пипример. ,,.,K1,„.,„„„, ,„, , „ Ли
-Molir:;,;™:™^;—« « «и „^ ., m n
iimc ,,., копык,^ 23 У"' J,,",", CKy'° """**«'««* a •!....
"•' PUCyiJKC «.14 IIONIMII IICpCMNi
■'•■""mini кишакг. KoinpMii служи! для ^V ;
жТшпГ'" "" ,,"C'KV,H 'ПУХ J",M"' mP « ~ " « \ M -V M 2
ЖШищих еос.оянпе |N.;ie Kl. До пуска ' ) Kl 2
сис1смы юрт слепая лампа I » »»слс Kl
"Meet один ипрмалыимнкр ш kihii:iki "ч. •ши.чЛ
J^1' и и;|ии нереключаюшннея — Kl 2. ■ ^
>елс Kl, коюр(1с oeiaciCH no пключенннм икпмнии с пимшкын ммкиушигпки
: (Kin KJ.J (лаже после шпускания М). n cm к.мпим К/ 2 неремнпчяс! т» мчу
окл на лампу I 2. коюрня iiukjimuJci. ■ и> сиисмя им ничсня Ирн тключетш
еле с номо.нмо нс|жк; июля S'2 nioiu J ««ряски лнм.ш I I. iah кпк Kl 2 ш»
/м> и 1ЖШИМ пуеконон кнопки М юк при
х" ш на лампу I | через ком мм KI.2.
tdinpiiMci., она сшиалшнруе! о нреликр Г|и»и.*яп
11ЧЮМ cocioiHiiii chcicmu. При л -ини на кинику S/ шк пншеи-я iu .»(|Мщку
Реле KI, коюр(1с ос пился но пключенннм шччишт с пимшкын ммкиушигпкк
к
'OKI!
Реле
"Panjaeioi n нехо (пое положение
N..1. 1.ис11!би1Ы!Ые ,лск11»«11..(имн.ичсеки«сиспм1..|.п««я1 ш
И предыдущих нрнмерич я ос.н.у фу «^' "^ М1(|11Я „ 11ЫХ(,;1111,М у,,
"''йене, чш диеиншшсь нрнмедаиисм ^ " (|lf/,|f,lll{lllt.(J Ilipuil
"««'Пхолнми для споем, и коюрмх и ",м,ю ' M(11„K.(i,f„i №цыми ш-мгигами
"Им 1лсЦфомаи1Н|11Ммун/м1Ю1е1111см. я*ля«"« 1|1ря(И1И Uni ju. "('Сшсчинпи,
()"» ocinioi я шелник-инмми rojH.Ki» я случи»
"««'■■•подпчу ока и» их 1ЛСК1 роман»" применении 0и« ,Фн чмых pmiip I
Лл1.1Чшц,,ш,„,срИ11С1111< WKJlBi'Mf* I (|i|j| („,,„„„.,, >|ф (1 1ЯЮШИ
'"■"ЛсИ. „„„„ щщ,,» eiioiieim^ ,-,"""М''' .,,.„, ,„.„ж1..е>.м....м1. по ..,. ме-.м
';"'"м„ р.^предешме^м". м«»У '' '.„„'„,„„« чш^-ом гк.р..мш.„т.н. « .
1 *ем« у|фп, Ч1т (iJiyl|11.1СЯ прите
ч
Глава VIII
.ыЯ распре к-штен, имеет но два электромагнита. Такие схемы предпочти-
. • там где в случае потери электропитания может возникнуть аварийная си-
глция. Бистабмльные распределители остаются в текущем положении даже при
отключении питания, что особенно важно для зажимных устройств.
В качестве примера использования бистабильных распределителей
рассмотрим сетующую задачу. Шток цилиндра двустороннего действия должен
выдвигаться при кратковременном нажатии на кнопку электропереключателя. В
полностью выдвинутом положении он должен оставаться до тех пор, пока не будет
нажата кнопка другого
+24 V J
SI E-\
ML
S2E-X
]-^ Y2CD-$
6)
Piicvhok8.1S
переключателя при
отпущенной первой
кнопке. После этого шток
цилиндра втягивается,
оставаясь в исходном
положении до нового
нажатия первой кнопки.
Скорость движения
поршня цилиндра
должна регулироваться
независимо от
направления его движения.
Решение этой задачи представтяется в следующем виде.
Включаясь, при кратковременном нажатии, переключатель S1 (рисунок
8.15,6) подает напряжение непосредственно на электромагнит Y1 распределителя
1.1. который переключается и подает пневмосигнал через отверстие 4 в бесштоко-
вую полость цилиндра 1.0, заставляя его шток выдвигаться. Даже если сигнал на
YI исчезает, распределитель остается в данной позиции, а поршень со штоком
продолжает движение до тех пор, пока не будет нажата кнопка переключателя S2.
Если при этом кнопка S1 останется нажатой, то включение S2 не окажет на
систему никакого воздействия. При отсутствии же сигнала на Y1 сигнал с S2 на
электромагнит Y2 переключит распределитель 1.1 в исходное положение, при котором
воздух через отверстие 2 поступает в штоковую полость цилиндра, заставляя шток
втягиваться. Шток остается в этом положении до нового появления сигнала с S1.
Если из-за одновременного нажатия обеих кнопок включаются оба
электромагнита Y1 и Y2, распредетитель не переключается, а остается в том же
положении, куда его переключил последний одиночный сигнал. В этом и заключается
бистабильность распределителя и свойство памяти.
Предпочтительнее применять непрямое управление электромагнитами через
контакты реле, т.к. в этом случае контакты переключателей чрезмерно не
нагружаются и уменьшается риск образования электрической дуги.
Для регулирования скорости в схеме использованы дроссели с обратными
клапанами. В полости цилиндра 1.0 воздух без сопротивления проходи г через
обратные клапаны. Дроссель 1.01 управляет скоростью втягивания штока, а дроссель
02 скоростью выдвижения. Это называется дросселированием на
выжоде. Они имеют независимую настройку, что позволяет обеспечить
требуемые скорости перемещения поршня в обоих направлениях.
^^В качестве второю примера может быть рассмотрен процесс подачи на
конвейер коробок с помощью цилиндра двустороннего действия (рисунок 8.16,а). При
срабатывании переключателя шток цилиндра 1.0 полностью выдвигается. Он дол-
достичь крайнего положения прежде, чем оператор с помощью второго нерс-
тяподаст сигнал на втягивание штока. Подтверждение крайнего выдвину-
пояожения штока обеспечивает концевой выключатель S2 с роликовым рыча-
Ш*м дотжеи продолжать вьщвшаться даже при условии отпускания первого
Эле1пропнсвм£Г1|»ус,С||[
ЭН^Орад,
Н "Ф4
Рисунок 8.16
переключателя. Скорости движения поршня в обоих направлениях должны иметь
независимую регулировку. Панель управления удалена от цилиндра, поэтому
следует использовать непрямое управление.
При нажатии кнопки SI включается реле К1, его контакты замыкаются,
обеспечивая подачу тока на электромагнит Y1 (рисунок 8.I6.B). Распределитель II
переключается в положение, в котором сжатый воздух поступает на выхадI 4■<&.
Шток цилиндра выдвигается даже если кнопка SI отпушена, т.к.J^™™
ч ,тп/фа « а тоК полностью выдвинется, сраоатывает
обладает свойством памяти. Как только «™* * включится реле К2.
концевой выключатель S2. Если теперь "*™™™™°YJ который верНет распре-
его контакты, замкнувшись, обеспечат тдi ^ поступать т вХода 1 к
выделитель в исходное положение. Воздух uw
ходу 2, шгок цилиндра втянется. предыдущем примере, регули-
Скорости выдвижения и втягивания, как Р
руются дросселями 1.0! и 1.02. нажатой. выдвижение штока пройдет
Если кнопку S\ постоянно УДеРживаТ у2 распределитель не переключится,
нормально, но при попытке подать сигнал ^ ^ ^ шншов д0М„„„Рует тот.
т.к. на Y1 уже есть ™™^^тт*пь.
который первым поступил на распу м
„ вт„гивания штока пневмоцилиндра
8.4. Подтверждение выдвижения
можетбытьрассмогренонаследуюшемпримсре.
Решение данной задачи можс дейст.
Задача. ью вТЯ11угом ш«« ,1НЛ"ТтГдХ "«ью
Подтверждение о полностью втя У ^^^^ ц,тока. Ш^ долж и ^
вия и нажатие на кнопку пр"*^^ другую кнопку заставит его
выдвинуться, прежде чем нажат
I лини VIII
tUWM* IKOfeHIWUblO ОК1СМЫ ЯНЛЯС1СЯ T». «ПО ШЮК ЛОЛЖСИ ВЫДШНП1М-Я
ч* но, а в имться быстро ад сч i исиоиыовани* клаи.им оис ipni о выхлопа.
к*Г"иП1НС пи пшдра 1.0 Bimiyi (рисунок 8 17.n). па*:и концевой иыключ
■№» ^ и его норм 1ыю опертый котакт umkmvi u.okhi ю чрелкои. рисунок
176) В мт*м случ е выключатель S"* няшшиш «нормально шкрышм. включен
S3 S4
ьл\
\2
Ф-? ФЛ
Г», пик 8 17
б)
При мажаiии на кнопку S1 ток нооунаст на обмочу реле К1. и лсктроми!-
НиГ Y1 эапитывасчея 5/2 распределитель 1 1 нереключае1ся, жндух начинает
притекать через отверстие 4 в бсеппоконую поноси, цилиндра. При гаком направле
иии поюка воздуха Клапан бысфо!о выхлопа 1.01 не oKaii.iitaci никакою «ффекга,
и поршень ни hhi ipa медленно, блаюдлря наличию дросселя с обратным клапаном
1 02. твшаегся вправо, вылитая шюк. Как юлько шшк начинат движение, коп
цсвии выключатся S^ освобождаемся и cm кошак!, рашыкаясь, обесючинаег
i «мотки ре 1С К1, а еле ива.слыю. и глскфомаиппа Y1. Ьлатдаря 6nci.i6itjii.noii
характериешке, распределиiель 1.1 остается в ношции, eooiнеiciнующеи выдни-
снию штока. Поршень цилиндра продолжас! медленно двшап.ся, пока нпок в
крайнем положении ис нажмет на концевой выключали» S4. Шток ochicich и
ттом ношжиши Ло тех пор. пока не буде1 мажаiа кнопка S2. последовательно
соединенная с S4. -ни приводит к включению реле К2 и uieKipoMUiimia Y2. Распре
делитель возвращается в исходное положение, во «дух проходи! черсч отпершие 2
и обратный клапан, вы роенный параллельно дросселю 1 02, в цжжоиуи» полос п>
ни тычра. поршень коюрою бысмро перемещаемся в обрашую ciupuiiy. г.к. boi
Л>х и ч бес ш токовой полосiи выходи 1 в а1мосферу мере» клапан бысфою иыхлоиа
1 01, имеющий большое прохпдг ow сечение 1аким обраюм шюк мин шикмея iu
ратдо быстрее, чем выдвш деки
Необходимо обратить внимание на момеш подачи ока mi о во|духа a chcic
My, когдараенреде 1И1 ель 1.1 шпимасм неопределенное положение Чтбыоп вшил
правильное исходное но южение, и шюк цилиндра после подачи пищуха ока шлея
втянутым, еле iyci иаж.иь на кнопку ручною дублирования Y2. 1 ели пни не еде
дагь, ю Hiia пенрлви'п.ною исходною положения рас предел тел я ппиК миЖС!
несанкционированно выдвинуться до нмешщсльсмиа онер.иор»
Н качестве в юрою примера может бы п. nuini ia;i.i4.i перемещения i,ipi.i с ид
кого конвейер* и чрумщ (рисунок К.1Н,в) Опсрнюр нажимаем кнопку, чюбы не
реляинугь пере ш ючную станцию к конвейеру 1. Она ос пился ни мои пошипи до
гюр пока ппер.пф ис нажмел на ipyiyio кнопку, после чею сыпнпя нереме
и. К к» нвенеру 2 Кнопки не чонжпы прнноииь сишщно в дннженнс, если
прявонюн) ни шндра находи к я ие в крайнем полож-нип, чю цодшерждв
И уст новлеиными ни корпусе цилиндра
гтсяг
"""""'—«.еие,
»■* «нив
4 а.
"1(Г' i „ »*м»
!,rPUu ((1Я V
П2
v ' "нишя \ "'
''ihviiok» 18
« -""uir zz^s^z,a ,,к ■—»
«a*»" . к.,, у si „клЮ.ысГс IL7,.; 1 • й0 к жш ,амк">,ы "р»
тдра о выдвшае.ся. Ко,да ш.шс нолносыо „, стся. .„и сея ■срк,,..
л. bum кнопка S2 пажа,.-,. „к, 1МКЯ рсж. К2 „ следом ^ктромш ни, Y2. кию
I »н нереключас! распределиicvn, !.! п исходное положение ('*«,..„( момух ,„,
ciyiiaei па выход 2. -по приводит к игялнишню штока. 1 ермж til. yi ihhowichumh
H.I Корпусе ЦПлППЦр.!. ВК.Л10ЧЛС1СЯ MUIIIIIIIIMM IICUICM Н1Ч.ЮЯ111КМ0 Mu.l.Htl.UlO Mlf
"l,,!l Jia "opmiie. Kin да imoh полностью шяну.. I'cjiii он вклшчен n момею. koi iu
CHcicMa 1Ы\од1пся в исходном положении, h.i схеме > и циллып.^ся стрс'ш ч!
слева отобошачення (срмны.
lleiiojibjOBaiiiie копневых пмклш'ицслсн и оноих кришшх положениях ппоьа
ионюляет исключиil 1ш1М0жшн;1ь нцишременнин подачи сипьишн на Owi jjick
•ром н lima раснре;»ели1еля
Ь.5. Унрннленне но давлении»
и . „ ., .,„„„„■■•■(••кон операции м«жс| оьнь пеущее»
'♦ ряде случаев выполнение кчноло! и itLBi'" i i
■M-e-m при мро.0Сределенном паченни чаиленич еж..юм, m..,v«. пньимемою
* .'сполин.сльным .лемен.ам •«'^^^^««■^ "I* »Р- Г"
Опера.нн, ме.Ш,.ооГ,р..о„1к1.. к:,к ..p« « ^ ^ „ иж11м ч
'•«.ином обеспечен.... .ри-уемо... усилия «^^'^J , „ ;[||я ,„„„ n UIChlpi,
"рнснособиенняч — ннеимошем^. ннепмшы«f * |(|||t llIllvCK 0,„,,,v цчишнм
"'■омоск-юму ..с.р..п.п„мся реле 'ЬИ.лемня. lj <
ДО чое.нження м.с<|ш. I шда.м«"'*"'» ,,н WRk
Чид.Н1.1 I. .„.моты" i.\i"B"«".i. "/,"»1" «,,М,1М1 " <в"
Плне.мвс-а с ЧС.али ивгнмя.ся с ц ш 11С1К^Ш^» н №'-""« "Р"
*ен,№ ,,,^,„„„„,N1 дмусоропнею *''hl' ^|4L4.lllcIII|(.e наедине ин.* »»
".,>,„.„„ hlHlIIKII Условия. ^*"i;;7№w.^^*,"WW'" ",,>M",
"•'■■дра в>.» ч 11О1НВЧП.10 и-" «|,,l,,v'' '
452
Глав;
аУЩ
дасткчь Дуемого значения. Для подтверждения прихода штока в Крайнее
^^Толожение используется геркон, установленный на корпусе ц„л
Оп^к»р должен иметь возможность настройки значения давления.
Решение.
При нажатии на кнопку S1 (рисунок 8.19,6) ток поступает на обмотки Реле Kl
н электромагнита Y1 5/2-распределителя с двусторонним управлением (РисУн0к
8 19 а) который переключается, заставляя шток цилиндра выдвигаться. Давление
из бесштоковой полости цилиндра поступает на реле давления В1. Когда шток
достигнет крайнего положения, включается геркон В2, а затем — реле В1.
Контакты В1 и В2, включенные последовательно, замыкаются, пропуская ток на обмотку
реле К2, которое замыкает цепь подачи тока на Y2, после чего распределитель
возвращается в исходное положение, а шток втягивается.
+24V, 2 3
S1E-X
К!
Г
В2
В1
I
ЕЧ
К2
0V
К1\
Y1
К2\
I
Я
Y2
И
Рисунок 8.19
б)
Сигналы на электромагниты Y1 и Y2 могут быть очень непродолжительны.
Для их включения достаточно короткого импульса. Если давление, поступающее
на реле, не достигает значения, настраиваемого регулировочной пружиной, или
шток цилиндра на своем пути встречает препятствие, мешающее ему полностью
выдвинуться, поршень не втянется. Реле К2 и, следовательно, Y2 включаются
только тогда, когда оба контакта — В1 и В2 будут замкнуты.
Для удобства настройки реле рекомендуется установить манометр.
Пресс штампует металлическую пластину (рисунок 8.20,а). Выдвижение
штока приводного цилиндра должно начинаться только после достижения
заданного значения давления в магистрали питания, которое устанавливается на реле
нс^тьН^пИ°ДНОВРеМеНН0Г0 НаЖЭТИЯ На две кнопки. Необходимо иметь возмо*-
SSS2STскорот движения п°ршня «™ра в обоих "а»равленй
Р«,№Иоо " втягиваться при отпускании любой из кнопок.
котоДшо^ГчГяГ" НаЖЗТИИ КНОПОК S1 и S2 включается реле К1, конта^
которого ооеспечивают подачу токяня vi „„ , , , .„^К20,бд>-
Расптелели^пг. п-~» Y1 Распределителя 1.1 (рисунок Ъ.ш > -
-j2SKj2SSSTn"a - -оде 4 появляется ш—^
пение питания в системе Г™ ПК™Нт тя Распределителя 1.2. КоГД
а его контакты о^^ваГпсГ УСТаНОВЛенно- качения, включается Р^.
*»отцепьподачи^кЛ^э^Г*^ На обмоткУ Реле ^ KaK№^J^°
• • ■ ■ "^522^° Л' ВКЛЮЧаетс«' подавая сжатый **&^
S1 я». S2, Меггро^Г^Г^КОТ0Р0Г° вь*™™- Если отпусти^ ,.2
«■_ .^Пш^Г^ГЛСЯ'«одача питания к распреДе^0сф-
ЙГ бужг выходить че~Гвклю^^ : °ЗДУХ И3 бесштоковой полости в а ^
•Я™*** в исходяоТполоТ™ Разделитель 1.2 и отверстия 4 и е
• снстеме упадет "^™е Разделителя 1.1. Аналогично, если Д^^т
НИЖС Уловленного „а В1 значения, В1 »***
^ле!Сгропневматт1ескиРгитп[и
Управления
Пуансон
Матрица
Деталь
+24 V | 2
»ЧОО
BI
SIE-
S2E-
К1
Р>
\
К2
К.\
YI
К2\
0V
Я
Y2
>$
Рисунок 8.20
подачу тока на Y2, распределитель 1.2 вернется в исходное положение, позволяя
штоку втянуться.
Таким образом, в данном случае логическая функция «И» реализована и на
электпических и на пневматических атементах.
В схТму на рисунке 8.20,в можно включить концевые выключатели: в цепоч-
d схему на рич-^п ,^ цепочку 4 — втягивание. Их уста-
ку 3 - контакт, разрешающий «W«J цеп°ч * достигнуто одно
новка заблокирует движение штока до тех пор, пока не уд
крайних положений.
8.6. Сортировка деталей
„й Объектов производства) из различных материалов,
При сортировке деталей (ооъе ^^ различного типа датчики, на-
например, из пластмассы и метал; , ^unvaoamaK объектов и индуктивные —
пример, такие как емкостные дл ется на конвейере с помощью стрелки
Для металлических. Сортировка °Ч™ двустороннего действия с демпфиро-
(рисунок 8.21,а), перемещаемой цилиндре
ванием в конце хода
(рисунок »•"•";• схемы, представленной на рисунке
Решение задачи возможно
8 21 в объекта например, пластмассовой тары, сра-
При попадании в зону ^^^ К2Р контакты которого К2 комму-
батывГ ёмкс^ный датчик ^^^П-рьспр^™™- Последний
перетируют цепь 4 питания электромагнита ^^ воздуха от вхада , к вы.
клюСгся в положение, обеспечивающее под у^^ , Q ввдвигается и
ключается в по бесштоковую пол иия с одной Из отводящих
ходу 4 питания и далее » ннЫИ угол до совмещ
стрелка поворачивается иа задан
ветвей транспортера.
Глава \ III
в) »
Рнсмюк8.21
При ирох» - тары из металла срабатывают оба датчика, однако питание
востувает только на электромагнит Y1, т. к. запитывание реле К1 приводит к за-
- • « 3 с контактом К 1.1 и разрыв) цепочки 4 за счет размыкания
нормально закрытого контакта К1 2 реле К1. Поэтому замыкание контактов К2 не
запитывание электромагнита Y2.
В результате стретка возвращается в исходное положение.
8.7. Склеивание деталей
Специфичность операций склеивания заключается в обеспечении временной
выдержки под нагрузкой соединяемых деталей необходимой для образования
надежного клеевого соединения.
Отстал задача склеивания деталей формулируется следующим образом: вы-
- - поршня цилиндра двустороннего действия происходит после нажатия
ручной кнопки, посте жктижения конечного положения шток в течение 5 секунд
детали и затем возвращается в исходное положение.
Летали с нанесенным на склеиваемые поверхности клеевым составом разме-
шявотся между прижимом и упором (рисунок 8.22.а), а поршень со штоком цилин-
ID находится во втянутом положении, о чем свидетельствует лампа L1. вклю-
геряоном S1 При нажатии на кнопку S3 (рисунок 8.22.В) запитывается реле
К1. ноятакт К1 которого замыкает иепь 3 подачи тока на этектромагнит Y1 5/2-
■ делителя I 1 (рисунок 8 22.6) Распреде тигель переключается в положение.
•вгонят вход 1 соединяется с выходом 4 и сжатый воздух поступает в бес-
волость, выдвигая шток с прижимом. При достижении поршнем край-
срабатывает геркон S2. чем обеспечивается подача тока на
катушку К2 реле с пятисекундиой задержкой по переднему фронту (с замедлением сра-
Г1о истечении плтисекундиой выдержки замыкается контакт К2. запи-
■юрой электромагнит Y2. переводящий распреде титель в исходное
котором веток втянут. С1 • . вание S2 дублируется загоранием
&*м>
^i^nPl^HB
Рнс\иок 8 22
Данная задача может быть решена с помощью моностабнльного 5/2-
распределителя (рисунок 8.23.а). Дтя этого параллельно геркону S1 и п>скателю
S3 размещается блокирующий контакт К1.1 реле Kl, а последовательно еч> в цепь
1 вводится контакт К2 с замедлением (рнс>нок 8 23.6
+2-4 V
Yl£0
а)
„™и во втянутом положении обеспечивает
Когда поршень с кольиевым «^ s3 запитывается реле Kl. самобло-
замкнутое состояние SU начатием на кнопк) 7кт1Ь переключается.
кирующеГя контактом КМ- Ток «оФ%£ ^рабол, идентичен вышеопн-
шток выдвигается то срабатывай - ^ ^ ^ ^
санном>. генные задержки м0^т °~"17ЬНЫХ элементов, разре-
Более тигельные временн ^ ^ допол^нь^
шью реле времени, лиоо вВ^а при повторном нажатии п>
ших йыпотнение HoeorQ "
шью реле времени"^ г0 инкла при i
шающих выполнение hoboi ч
Глава VIII
8.S. > правление открытием и закрытием дверей
В автоматизированном производстве довольно часто приходится решать за-
чи. связанные с открытием и закрытием различных дверей, створок, ворот, с
перемещением ограждений, защитных экранов и кожухов технологического
оборудования и т.п.
В качестве примера может быть рассмотрена задача автоматического
открыто» створок ворот автоматизированного склада для одностороннего проезда робо-
кара или других транспортных средств (рисунок 8.24,а). Створки ворот должны
открываться при проходе транспортного средства без ударных нагрузок в конце
перемещения и с возможностью регулирования скорости их перемещения, а также
оставаться открытыми после прохода транспортного средства в течение 5 секунд.
Открытие створок дотжно доминировать над закрытием.
\ Е%А К1.2\ *^-<-\ S4En
Yl
К1.3
Y2
Н иН
Рис>нок8.24
Решение задачи может быть осуществлено на основе оптических датчиков,
цилиндров двустороннего действия 1.0 и 2.0, демпфируемых в конце хода,
регулируемых дросселей с обратными клапанами и одного бистабильного 4/2-
распределителя (рисунок 8.24,6).
При пересечении транспортным средством светового луча от излучателя S к
приемнику Е оптоэлектронного датчика В1 (рисунок 8.24,в), последний,
срабатывая, включает подачу тока на катушку реле К1, контакт К 1.1 которого разрывает
цепь 2, а К 1.2 коммутирует цепь 4 электромагнита Y1 распределителя 1.1.
Переключение распределителя приводит к запитыванию бесштоковых полостей обоих
цилиндров сжатым воздухом. Штоки выдвигаются до срабатывания двух
последовательно подсоединенных концевых переключателей S1 и S2, коммутирующих
иепь 2 питания катушки реле К2 с замедленным срабатыванием, контакт которого
KZ управляет подачей тока на электромагнит Y2 распределителя. Однако запиты-
-^^Ж112£^?т«Ческие
:1!:^---^^истемь,
Л!£?вления
457
вание реле К2 произойдет ли '
действия датчика т "°«e вы
срабатывав ^ ^ **■«—*,, %£°*ш* срелс» „ та1ш
""К, распределите,,, , ^£*»Ш Сраь2Е#*Г"" -.»«£
Если в м„„ент Мкры™ТГ та™"';" «Р-С с™У""" к "Ч«»«
батываиие реле Ki .. ""У Датчика в 1 ЮСГВ0Р»к.
закрытого Sa^Trr °~""U^Г™™* —. сра-
„aJ„::„r* ^^x^zzr~°>- •
нажатия можно ocvmecTnu-r^ И54с возвратом пп™,
ворот, соответствеиГ П"П »"« Я—. 4Г„Т~ ££
"ок 8.25л) служив L п^Ге„™ГГШеИ ™T"""*,"> ^»™»Р™Ра <Р«у.
таким образом, чтобы их^Г™Г2, ""'Т™ "Р"""*™»*" пластин
параллельно боковым ГраЩ даШМ *""■ "" О™»
^^
а)
+24 V i
д^'лЦд1
К1
0
0У
Г
л*
в)
Рисунок 8.25
vnoDa в тот момент, когда к нему подходит
Задача сводится к выдвижению у v исключенИ10 выдвижения упора, если
неправильно ориентированная пластин ерж11вается в выдвинутом состоя-
деталь занимает правильное положение.
нии 3 секунды. пиТСЯ к использованию цилиндра односто-
Один из вариантов решения сводите лт и с здома, нитиьш
роннего действия 1.0. управляемогоЗД Р^^оэле.оропреобразователем BI
управлением, и пневматического д
правильном положении, устанаш
Глава VIII
now сопла. Это же расстояние, но до четали, имеющей требуемое положение,
чятетьно превосходит сопловое.
Поэтом на выходе coma пневматический сигнал появляется лишь в случае
^хождения неправильно ориентированных деталей. Этот сигнал усиливается и
срабатывание реле давления В1. замыкание контактов которого приво-
t к запитыванию катушки реле К1 с замедленным отключением (рисунок
8 2*>&) Контакт К 1.2 данного реле включает цепь 3 подачи тока на электромагнит
YI распределителя, который, переключаясь, соединяет вход 1 с выходом 2,
обеспечивая подачу воздуха в бесштоковую полость и выдвижение штока-упора.
Задержка срабатывания по заднему фронту реле К1 обеспечивает упору
выдвинутое состояние в течение требуемых 3 секунд, по истечении которых
электромагнит обесточивается и шток с поршнем под действием возвратной пружины
втягивается внутрь цилиндра. Контакт 1.1 служит для самоблокировки реле К1.
8.10. Пошаговое перемещение с контролем наличия деталей
В процессе манипулирования объектами производства, как правило,
необходимо иметь подтверждение о их наличии в соответствующей зоне манипуляцион-
ного пространства. Это достигается применением различных датчиков, выдающих
сигналы о расположении объекта, его форме, размерах, материале и др.
параметрах, влияющих на ход технологического процесса.
Представленный на рисунке 8.26,а элеваторный подъемник выполняет
функции магазина и кантователя: первая функция выражается в расположении на его
полках определенного количества объектов производства, а вторая — в перевороте
объектов на 180°, т.е. если на подающем транспортере объекты коробчатой формы
поступают на полки подъемника днищем вверх, то с подъемника они поступают на
отводящий транспортер днищем вниз.
Задача, решаемая при управлении работой подъемника, заключается в
обеспечении заполнения всех полок (без пропусков) объектами производства с
дальнейшим пошаговым перемещением их снизу вверх и выдачей на отводящий
транспортер. В качестве механизма пошагового перемещения используется храпо-
вый механизм с приводом от пневмоцилиндра двустороннего действия с
регулируемой скоростью. Контроль наличия деталей осуществляется пневматическими
соплами (пневматический барьер), подключенными к общей воздушной
магистрали (рисунок 8.26,6). Управление работой цилиндра, снабженного герконами S1 и
S2, осуществляется моностабильным 5/2-распределителем. Скорость перемещения
поршня со штоком в обоих направлениях регулируется дросселями 1.01 и 1.02.
Ятя преобразования пневматического сигнала от сопла в электрический
используется датчик давления с пневмоусилителем В1. Подготовка воздуха для сопел и
датчика давления осуществляется с помощью отдельного блока 0.1.
При отсутствии объекта на загружаемой полке подъемника шток цилиндра
1.0 втянут, геркон S1 замкнут и включена подача тока на катушку реле К1
(рисунок 8.26,в), управляющего работой отсекателя, установленного на подающем
транспортере (на рисунке не показан). Срабатывая, отсекатель пропускает к
подъемнику один объект, который, попадая на полку, перекрывает воздушный поток от
питающего сопла к принимающему. Датчик давления В1 срабатывает, катушка
реле К2 запитывается током, самоблокируется контактом К2.1, а второй контакт
К2 2 коммутирует цепь 4 питания током электромагнита Y1 распределителя 1.1.
Последний срабатывает, вход 1 соединяется через выход 4 с беенггоковой
полостью, что приводит к выдвижению штока, соединенного с рычагом (водилом) хра-
о механизма. При срабатывании S2 реле КЗ с нормально юкрытым контак-
КЗ разрывает цепь питания электромагнита Y1, в результате чего
распределите» «отвращается в исходное положение, вход 1 соединяется через выход 2 со
□ F1<F=3
+24 V,
Рисунок 8.26
штоковой полостью, шток цилиндра 1.0 втягивается до срабатывания SI. Цикл
повторяется.
8.11. Координированное перемещение
Разработка систем с несколькими цилиндрами требует четкого понимания ja-
Дачи управления. Последовагеяыюоь срабатывания исполнительных устройств
задается графически с .юмощью дишраммы «перемещенне-шаг». Четко должны
быть определены и дополнительные условия: подтверждение тот. что исполни
определены и допили „„OIIlinM п.гюженн1Ь а также начальных >сювий.
Процесс проектирования и Р0^'0 м СШИроким применением рае-
сложности будущей системы. Ha,,p"Mtp; „нтиым у„раВжнием общей нроб.емои
пределителси с двусторонним электром.^ ^^ |01ШТельности срабатывания
появляется то, что при реялнчянн" заданно ^^ надолго «запирающие» один
"олнтельных усгронечв Moiyr П(,ЯВЛЯ'ЬСЯ^С( 1ре,е.;игелю вовремя нерек'ночшь-
ил июкгромапшгов. подавая во»можностнр«, ^штотинык ре.„е и концевых
<*. Это влечет за собой включение в <lhx^ ^ ^ ^ 1К.„олыова..ню свобоц.о
переключателей. Другим решением я*
"Рофаммируемых копт роллеров.
Глава VIII
Иллюстрацией к тому, как решается задача проектирования системы с
несколькими цилиндрами, является следующий пример.
Задача.
Для перемещения деталей из магазина в лоток используются два цилиндра.
При нажатии на кнопку выдвигается шток цилиндра 1.0 (рисунок 8.27,а),
выталкивая деталь из магазина на промежуточную позицию, откуда она затем сталкивается
в лоток цилиндром 2.0. Как только деталь попадает в лоток, штоки сначала
первого, а затем второго цилиндра втягиваются. Скорость движения поршней обоих
цилиндров должна регулироваться в обоих направлениях. Требуется обеспечить
подтверждение всех конечных положений.
Решение.
Управление последовательностью действия цилиндров в задаче основано на
использовании герконов. Условиями старта процесса являются возвращение штока
цилиндра 2.0 в исходное положение и нажатие кнопки S3. Последовательность
выдвижения и втягивания штоков цилиндра показана на диаграмме (рисунок
8.27,6).
12 3 4 5=1
S1 , . S2
S3 2.0 S4
□ Q "О
_ov
1 1 J
г)
Рисунок 8.27
Чтобы определить место „ ' ~ ' —~
Управляет последовательи^1РаС!!ОЛо^ния Левого „
- текущее состояниГ^"8^ "^оу^Т™*' «*»*
~ желаемую Реакц„ю МТЬ:
Для данной задачи Сможет б
Состояние ЫТЬ Предста«™0 так (рнсунок „ ,7 в
20 втянут Реакция
53 нажата S3 Вкл»°чается
S2 включен In вы^игается
54 включен f« ВЫдвигае™
SI включен ,? втягим^ся
^•и втягивается
8.12. Чеканка линеек
Задача.
На пластмассовых шнейках необходимо чеканить надпись с помощью
цилиндра двустороннего действия 1.0 (рнсунок 8.28.а). Выдвижение штока цилиндра
происходит лишь в том случае, если нажата кнопка пуска и активен оптический
датчик, фиксирующий н&яичие линейки в рабочей зоне пресса.
Обратный ход цилиндра происходит после достижения в бесштоковой
полости цилиндра заданного давления, причем шток должен находиться в конечном
положении
*а№
+24 V J la
{Чц-vhok
Глава VIII
Решение.
В исходном положении шток с поршнем находится во втянутом положении,
геркон S1 замкнут при помощи магнитного потока, создаваемого кольцевым
магнитом на поршне, о чем свидетельствует загорание лампы L1. Катушка реле К1
впитывается током, что приводит к замыканию контактов К 1.1 и К1.2 в цепях 1а
и 3. При поступлении линейки на рабочую позицию оптический датчик S3
коммутирует цепь 2 питания реле К2, что приводит к замыканию его контактов К2.1 и
К2.2 в цепях 3 и 7. Загорание лампы L3 подтверждает наличие линейки в рабочей
зоне. При нажатии на кнопку S4 запитывается реле КЗ, один из контактов
которого К3.1 в цепи 4 служит для самоблокировки реле, а другой К3.2 в цепи 6 для
подачи тока на электромагнит Y1 моностабильного 5/2-распределителя 1.1 (рисунок
8.28,6). Распределитель переключается в положение, при котором вход 1
соединяется с выходом 4, и сжатый воздух поступает в бесштоковую полость цилиндра,
вызывая выдвижение поршня со штоком: S1 размыкается, a S2 замыкается, о чем
свидетельствует загорание лампочки L2 в цепи 5. Включенное в цепь 5 реле К4
запитается током лишь тогда, когда давление в бесштоковой полости достигнет
требуемой величины, способной вызвать срабатывание датчика давления В1 и
замыкание его контакта.
Срабатывание реле К4 приводит к размыканию его нормально закрытого
контакта К4 в цепи 3. Катушка реле КЗ обесточивается, контакты К3.1 и К3.2
размыкаются, и распределитель возвращается в исходное положение, при котором
соединяются вход 1 и выход 2, чем обеспечивается втягивание поршня со штоком,
размыкание S2 с последующим замыканием S1.
Лампа L1 вновь загорается, что свидетельствует о готовности оборудования к
реализации нового цикла.
Скорость перемещения штока в обоих направлениях регулируется с помощью
дросселей 1.01 и 1.02.
8.13. Штамповка с механизированной подачей деталей в рабочую зону
Задача.
Пластмассовые детали укладываются вручную на штамповочную подушку.
Пневматический цилиндр 1.0 двустороннего действия перемещает штамповочную
подушку под пуансон, приводимый в действие цилиндром 2.0 (рисунок 8.29,а). С
помощью этого цилиндра штампуются названия на пластмассовых деталях. После
произведенной штамповки цилиндр 2.0 возвращается в исходное положение и
только тогда цилиндр 1.0 делает обратный ход.
Решение.
При наличии нескольких цилиндров строится диаграмма «перемещение-шаг»,
указывающая последовательность перемещения исполнительных устройств (рисунок
8.29,6). Каждое перемещение изображается в пределах текущего шага. Сравнивая
диаграммы в пределах шага, можно определить положение штоков цилиндров.
В данном случае имеется два цилиндра: 1.0 и 2.0. На шаге 1 шток цилиндра
1 0 выдвигается, цилиндр 2.0 остается неподвижным. На шаге 2 выдвигается шток
цилиндра 2.0, который втягивается на шаге 3. Наконец, на шаге 4 втягивается шток
цилиндра 1.0. Шаг 5 эквивалентен шагу 1.
В начальном состоянии штоки обоих цилиндров втянуты. Геркон S3 замкнут,
о чем свидетельствует световой индикатор L2, и запитана катушка реле КЗ,
контакт которого КЗ коммутирует цепь 10 питания электромагнита Y2 бистабильного
5/2-распределителя 1.1, чем обеспечивается нахождение штока цилиндра 1.0 во
втянутом положении и замыкание нормально открытого контакта переключателя S1.
Посте загрузки на подушку детали и нажатия на кнопку S5 запитывается реле
I. контакты которого в цепях 2, 6 и 9 соответственно размыкаются и замыкаются.
„ —-^=и!Фавления
Замыкание контакта К| 3 ч ^ ___^
распределителя 1 l „ s Цеп" 9 ппИпл " —
1 » выходу 4 и д^ееТГ'"' "^ZlTj "»« ™« «а ^
гаясь, освобожп, бесштоковую п«!' обеспе,'иааеГ ™ ЭЛе,С1Р0магнит VJ
благодаря,^^ ^^Г^ ЩГ*"""""
обесточивает реле Ки^*ПНПн» Реле «. 2ГКГ П * *■** *
вает электромагниты VI „ ?з а ^Т0реле Шз ■ W Т*™ К2 * «епи ,
Делитель 2.1 возвращается^-2 В Цепи6- **££, ^Т"^ 0&сго*
штоковую полость цилиндра 2 П ^ П°№н^ п^У^ ^ Расп^
положение и *««^ввп*>^^Д "»*» •
i 5=i
И 4 2
У|Г^Зт\Л)/гТ<ТГ2 У31$ЛЩП$У4
5 IJ
5 13
+24 V , 2 А
S5 Е-\ К1.|\ S4
Глава VIII
1.0 SI S
Рисунок 8.31
Сравнивая обе схемы, легко можно убедиться в преимуществах, получаемых
при использовании контроллера, позволяющего значительно упростить
монтажную схему за счет исключения реле и уменьшения числа монтажных проводов и
соединений. Последнее обстоятельство способствует повышению надежности
работы схемы.
467
30*
1ииы К I
I
Грансформатор гока с одной
вт кричной обмогкой
Трансформатор тока с одним
машитопроводом и двумя
вторичными обмотками
Трансформатор тока с двумя
магнитопроводами и двумя
вторичными обмотками
Прямечмие. При наличии
нескольких магнитопроводов допускается
магнитопроводы не • • ть
Предохранитель плавкий.
Общее обозначение
Предохранитель инерционно-
плавкий
Предохранитель
быстродействующий
JCU-
щф
[]
i
Трансформаторы тока в
каскадном соединении
Трансформатор тока быстро-
насыщаюшийся
Трансформатор напряжения
измерительный
Трансформатор напряжения
измерительный с двумя
вторичными обмотками
Предохранители (ГОСТ2.727-68)
Предохранитель с сигнализи
рующим устройством с
самостоятельной цепью сигнализации
Выключатель-предохранитель
Разъединитель-предохранитель
Резистор постоянный
-52Е£Г,С —
родним симметричным
б> «Дням несимметрн^м
в) с двумя
Примечание Если п~
^ВД-Рс^"^ например,
«««одами ткгп,ю "волнительными
Шунт «мерительный
Ре5ИСТ°Р переменный
а> общее обозначение
б,ИеЛИНеЙИОе^лироваиие
тами "одвижиыми КОнтак.
а> механически несвяза1Шыми
б^еханнческИсвязанными
сторы.
-Ы-
-tV
Конденсаторы (ГОСТ2.728-74)
„^зистор переменный сдвоен
ный
Резистор подстроенный:
а) общее обозначение
б> в реостатном
включении
Peak
crpSTP ПереМенный с под
"еТГ'^^Р^енному нзобра-
схема "етствует эквивалентная
Теизорезистор:
а>линейный
б) нелинейный
Элемент нагревав
Терморезистор
а) прямого
'ЛЬНЫЙ
подогрева
б> косвенно
го подогрева
• постоянной емко-
Диод. Общее обозначение
Туннельный диод
Обращенный диод
Стабилитрон:
•) односторонний
б) двусторонний
Варикап
Тиристор диодный (динистор)
Тиристор диодный
симметричный
Тиристор триодный иеэаиирас-
мый с управлением по катоду
(тиристор с инжектирующим
управляющим электродом р-типа)
Тиристор триодный нсчаннрас-
мый с управлением но аноду (лири-
crop с инжектирующим уигшвляю
\дам -мекгролом п<ти\ш)
•sfr-
Кондеисптор неременной ем
кости
тлеет ролигиче
60'
Я
~5Ь
-Wh-
Кондеисатор
с кий
" • ' Тиристор фиодиый шпирае
мый с управлением но аноду
Тирисгор триодный чонирае-
М1.1Й с управлением iui катоду
Тирисгор триодный
симметричный исгапираемый
Примечание. Для упрощения доиус
кие гея выполнять уьлон с фнфичс
скис обошнчения тиристоров в itp
KiiJii.KOM июбрижеиин
Трпнчиетор imm/»-/(-/>
т-
■-СИ
-PC
-*
"Ф
1)
А
а
12
о
2.S
14
II
V5
Транше юр пша "7J-" c K0J1
леюором. jJicKipii'iCLKii
соединенным с корпусом
Нолевой транше юр с каналом
«-пша
/)
и
h
12
2,5
Л
14
1.?
4
Продолжение таблицы А. I
I
I
Полевой транзистор с каналом
/Р-ТНПВ
Фоторезистор
Фотодиод
Фототиристор диодный
Фототраизистор типа р-п-р
СвсгоизлучающиЙ диод
(R«5 или 6 мм)
4?
*
Диодная оптопвра
Тирнсгориая он 1 онара
I'cthc горная он сонара
Однотипная моеюиая
выпрями гелышя cm'm.i
упрощенное и юбражеши.
1рс\ф||цц1я моссония ныпря-
МПГСЛЫ1.1Я 1ХСМИ
I: a
21 21
*—<Qy-j
71 71 71
КМмушжииые уепюйеш JmtWm,m'"""' ™'4><m-m«a „ «о (,„„„ы • ^Ьтс„,ш („о ПН I 2.71US7 и П1МК;г»
схемах должны итовражнтод! в ио-1
ложеини. принятом за начальное ! \_l | |
Контакт коммутационного \5П „.,« \ в.,и V
устройства, Общее обозначение. J Ми> I I
в) ммыквющий
б) рвтмыквюишй
71 21 21
Л«« 7imiJ\
в) переключающий
li переключающий 6ci гчимм»
каким цени
^ гФО
* 1
щцы А 1
д) рек почаюшни со tpe жим
№. еиием
)с звоиным «мыканием
I
ж) с двойным размыканием
Контакт в контактной группе, сра-
" . . щии раныие по отношению
к другим контактам 1рупны:
в) замыкающий
б) размыкающий
Контакт в контактной группе, ера-
•. ■ • щий позже по отношению к|
другим контактам группы:
а) замыкающий
б) размыкающий
Контакт герметичный ^геркон)
Контакт замыкающий с
замедлителем, действующим:
а) при срабатывании
б) при возврате
в) при срабатывании и возврате
LiJ
Г
и
i
Контакт размыкающий с »■
медлителем, действующим-
а) при срабатывании
б) при возврате
в) при срабатывании и возврат
Примечание. Обозначение
замедлителя допускается изображать с
противоположной стороны
Контакт без самовозврата:
а) замыкающий
б) размыкающий
Контакт с самовозвратом:
а) замыкающий
б) размыкающий
Контакт для коммутации
сильноточной цепи:
а) замыкающий
б) размыкающий
J5*-j*
~*Р или Т°
*2
W
\
L L
~\ или f
Продолжение таблицы А.
НЫЙ
в) замыкающий дугогаситель-
ныи
г) размыкающий дугогаситель-
и
Контакт разъединителя
выключателя-
Контакт
разъединителя
Контакт автоматического вы
ключателя
Котакт с механической связью:
а) замыкающий
б) размыкающий
Контакт, чувствительный
температуре (термоконтакт):
а) замыкающий
б) размыкающий i
Контакт электротеплового реле
при разнесенном способе изобра-!
жения реле
Выключатель трехполюсиый
Выключатель трехполюсиый с
двумя замыкающими и одним
размыкающим контактами
J L_^6«b ' I I
-I
1
Выключатель двухполюсный,
замыкающий одну цепь раньше
размыкания другой
Выключатель трехполюсиый
автоматический
Примечание. При необходимости
указания величины, при изменении
которой происходит срабатывание,
используют следующие знаки:
а) максимального тока
б) минимального тока
в) обратного тока
г) максимального напряжения
д) минимального напряжения
е) максимальной температуры
Знаки проставляют около обозна-
!чения выключателя, например:
выключатель трехполюсиый
автоматический максимального тока
Замыкающий контакт (вклю-
Выключатель высокого иапря-i
жения
Отделитель
Короткозамыкатель
Выключатель путевой:
а) однополюсный
I б) миогополюсиый, например,]
трехполюсиый
i.i.i
IT)
/>
/<
/«■
*-<
г*
IT
Ф
Л'
tj.
Ifc—L-
i* нш тицы * 1
J
Ратьедмните ib трехполюсиыи
11ереключатель многополюс-
ный. например, трехполюсиыи
Выключатель кнопочный
нажимный.
а) с замыкающим контактом
б) с размыкающим контактом
Выключатель кнопочный вы
тхжной:
а) с замыкающим контактом
б) с размыкающим контактом
Выключатель кнопочный
поворотный.
а) с замыкающим контактом
б) с размыкающим контактом
Выключатель кнопочный без
сам». • : i
а) нажимной с ■ ■ ■ %<
посредством вытягивания кнопки
б) нажимной с возвратом
посредством вторичного нажатия
кнопки
Переключатель однополюсный
многопозиционный, например,
четырехлозишюнный
■4
Зяип
ь
Зтгя Звал
т
■s
ч
1Л
i
^Переключатель
многопозиционный независимых пепси,
например шести цепей
Переключатель ухполюсиый
трехпотииионный с нейтральным
положением
Переключатель лвухполюсныЙ!
трехпозипионный с
самовозвратом в нейтральное положение
Реле с указанием
сопротивления постоянного тока
Реле электрическое с замы
каюшим размыкающим и пере-|
ключающими контактами
Реле электрическое с
замыкающими контактами, один из которых
• • вает раньше других
Реле поляризованное'
а) на одно направление тока в|
обмотке с самовозвратом
б) на одно направление тока в
обмотке без самовозврата
в) на оба направления тока в
обмотке с нейтральным положением
Реле переменного тока
Примечание. Контакт, отмеченный
точкой, замыкается при приложении
напряжения постоянного тока,
положительный полюс которого подан к
выводу, отмеченному точкой
Реле электротепловое без
самовозврата (с возвратом
нажатием кнопки)
IIIIII
шТП
Гт
Ф4г*'
ф-тт,
ЕЛ
W
*тН'-
Фъ-г-
№10
Е
Пс
)ДОЖкение таблицы А I
КОНТАКТЫ И
КОНТАКТНЫЕ СОЕДИНЕНИЯ
Контакт контактного соединения:
а) разъемного соединения
|Гнездо
Катуяша
Првмечяме. Выаояы яоауаежгсш]
с одной стороны врхмо-
Катушка с двумя обмотками
Катушка с я обмотками
Катушка с ааумя встречными
обмотками
Катуяша,
•ыводом
2-3
б) >-■ «1 iHoro соединения
в) иеразборного соединения
Заземление
I Корпус ''машины, аппарата J
-*— | |прибора>
Воспринимающая часть устройств (ГОСТ 2 756-76 DIN 19226)
] | * I I ' Катушка трехфазного тока ,
Катушкас -■ ■ < - видаобмотки: j
а; обмотка напряжения
б) обмотка максимального тока
Катушка поляризованного уст-!
[ройства
I Катушка устройства, обладаюше-
Iro остаточным иамагиичиваиием
Катушка устройства, имеющего
механическую блокировку
Катушка устройства, • -■ •
го с ускорением при »• и
Катушка устройства работаю-]
щего с ускорением при
срабатывании и отпускании
Катушка устройства, работающе-]
го с замедлением при ., ,-. |
Катушка устройства, • .. .
го с замедлением при •
^,,2
1
±
аф
■ф
[ьчм. i .»i тя-A
Воспринимающая часть
адектрогепливш о реле
I
Электромагнит с одной
активной обмоткой
Электромагни г управляющий
пневмоклапаном
/
Вольтметр с цифровым
отсчетом
Вольтметр с непрерывной ре-
гис фацией
Амперметр
Осциллограф
Мультиметр с указанием
измеряемых величин: напряжение, ток
и сопротивление
Вольтметр с измерительной
шкалой в милливольтах
Электрический звонок
Зуммер
Электрическая сирена
1риборь
i звуковой си
\№i)
ш
©
0
(vito)
©
ft
W
it
Электрой верительные приборы (Г ОСТ 2.729-М)
„,, ^ „, ,.ветт)и (игнашшцш (ГОСТ2.7J2-6H)
•начиэации(ГОСТ2.741'- 6Н). с
Гудок, сигнальный рожок
Свисток
Ревун
Лампа накаливания
Электролюминесцентный
прибор индикации некоммутируемый
Лампа накаливания с
инфракрасным излучением
Термометр
Термометр электроконтактный
В
333
на-
IR
Ф
Ф
фк
Продолжение таблицы А.
Обозначения условные графически
Аккумулятор пневматический
(ресивер, баллон,
воздухосборнике
ник)
Фильтр для воздуха
Влаго- или маслоотделитель:
а) с ручным спуском конденсата
б) с автоматическим
конденсата
спуском
Фильтр- влагоотделитель:
а) с ручным спуском конденсата
1
б) с автоматическим спуском
конденсата
Маслораспылитель
Охладитель воздуха
Клапаи обратный
без пружины
с пружиной
Клапан быстрого выхлопа
воздуха в атмосферу
-о-
-о-
Обозначения распределительной и
:ие элементов пневматических сетей (ГОСТ2.780-96, DIN ISO 1219)
I
Нагреватель воздуха
Глушитель
Заборник воздуха из атмосфе-
-СИ>
ры
Манометр
Воздухоосушитель
Расходомер
Место удаления воздуха
Выхлопное отверстие
без присоединения для уст-,
ройств отвода
с резьбой на присоединении
,тт и регулирующей аппаратуры (ГОСТ 2.7HJ-68. DIN ISO 55W)
АППАРАТУРА РЕГУЛИРУЮЩАЯ
Клапан соотиошен
ия давлений
Mill
I
К шпан peimK 1И чашеинй
Peiyjwrop пиления ннсвмаж-
ческмй
Pei-у.шруемый дроссель
Дроссель с обратным клапаном
Обозначения споабов
управления распределителями
Кнопка (рукоятка) с фиксатором
Педаль
Возвратная пружина
Ролик (кулачок)
Прямое писвмоуправление
Одностороннее электрома! нит-
иое управление (с двумя
противодействующими обмотками)
пленник шрмшной
/(НЦфрШМОНЫИ KJHHIUH
Запорный клапан
Пикуумный клапан
АППАРАТУРА РАП1Р1,Д1 ЛИ П'ЛЬНАЯ
Одпое тройное эдею ромаг-
питое управление (с одной об
МОI КОЙ)
С
«с
">лекгрома1 пи i not. управление
с ручным дублированием
Пилотное управление
(непрямое управление)
Управление специальное,
например, постоянным Mai ми юм
Электропновмагнческое
непрямое управление
(комбинированной управление)
тж
-схь
3>£
Продолжение таблицы А, I
Обозначения отверстий (линий)
распределителей
Г—Число рабочих отверстий (линий)
Г ЧИСЛО ГКПНЦИЙ
2/2-распрсделитель (отсечной
клапан)
3/2-раснределитель,
га крытый
нормально!
^-распредели,ель,
скрытый
нормально
^■Распредели
гель
5/2-распределитель
3/Э-распределИгел , ,__
ими ,^_ ' 'Тсхлиней
""и грехпчпивдонный)
4n'pecsrrcj,b ——
иеиный грехпепини,
(примеры!
ионный)!
ЕЙ
Eft
ЕЙ
Л .2
5/3-расиределн гель (пя гили-
|нейиый фехношпионпыи)
5/4-распределигель (пятили
иейный четырехно шционный)
Ч/б-раснределшель (трехлн
иеиный шесмигюшцнонный) т
Примечание, Отверстия или лн
иии обоншчикпеи по DIN IS'* 5*"У*>
Следующим оПриюм
Цмфроиое Буквенное
11олвод дпвлении I P
Пыхлом 1 К ( V2)
Пыхлоп V K.S(V2)
Выход 1иишш 3,4 В.А
Обо1начепия puc•llpeдt•llи■reлeй■
|Ооотношепие ра(мерных пирамег-
рон схемных обочиичс-ннн распре
делителей JJ4
Ап1Ш|Ш1Ъ1 с двумя или более харак- >.,
герпымн рабочими пошцмями и с
бесчисленным множеством кроме
жуточпых позиций t изменяемом
степенью лросселиронанич
2/2-рнспродсли itvib
шнорный двухлинеиныи
двухпошциоппый с мускульным
управлением
с 1лекгроми1пин1ым унривлени
ем и пружинным вошриюм
АЛ
1
- с одной линией управления,
совмещенной с камерой
кольцевой поверхности, с другой линий
управления, сообщенной с
камерой дифференциальной
поверхности, пружинный возврат
5/2-распределнтель
нормально закрытый
- с односторонним кнопочным
или электромагнитным
управлением и пружинным возвратом
3/2-распределитель |
нормально открытый
- с односторонним электромаг
нитным управлением и
пружинным возвратом
- с односторонним кнопочным
или электромагнитным
управлением и пружинным возвратом
- с односторонним
электромагнитным пилотным (непрямым)
управлением и пружинным
возвратом
- с переходом через
промежуточную позицию, управлением
электромагнитом и возвратной
пружиной
4/2-распределитель
- с односторонним электромаг
нитным пилотным (непрямым)
управлением и мускульным воз
действием
С£*П-~
Eow
^Е
ER
WV
23
М
Jx-tI-A Ьп
Е
5№
№
t
vw
г з
!
- с односторонним управлением
от электромагнита и пружинным
возвратом
- с ручным управлением и
фиксацией рукоятки
4/3-распределитель
- с ручным управлением и
фиксацией рукоятки
пилотный, с пружинным
центрированием, управлением двумя
противоположными
электромагнитами, с мускульным дублиро
ванием
- с двусторонним электромагнит
ным управлением и пружинным
возвратом
5/2-распределитель
- с односторонним
электромагнитным пилотным (непрямым)
управлением или двусторонним
кнопочным и пружинным
возвратом
- с двусторонним
электромагнитным пилотным (непрямым)
управлением
- с двусторонним
электромагнитным управлением и пружинным
возвратом
- управление давлением в двух
направлениях
щ
гшЦ
tt
tt
X
I
Л*-
ffL^g
ил/
t№
WZ]
Ц^2Н
-Ш-
SSMmS
~ Продолжение таблицы А. 1
Г Г j
1
Распределитель
пропорциональный
м
Клапаи ИЛИ
Клапан И
(перекидной) — ^) 1 N
_^t^_
Клапан последовательности
""Л
Редукционный клапан (Регуля
тор давления)
- без клапана сброса (без
возможности сброса избыточного
выходного давления)
с клапаном сброса (с
возможностью сброса избыточного
выходного давления)
Клапан регулирования
перепада давления
rjwv
Обозначения условные насосов,
Компрессор
Насос (компрессор) ручной
Насос (компрессор)
шестеренный
Насос (компрессор) винтовой
Насос (компрессор)
пластинчатый
Насос (компрессор) радиалыю
поршневой
-Ln_/-\j~>
компрессоров и двигателей пневматических (ГОСТ 2.782-96,
Насос (компрессор) радиально
поршневой
Насос (компрессор)
кривошипный
Насос (компрессор) лопастной
центробежный
Насос струйный
- общее обозначение
- с газовым внешним потоком
Вентилятор
- центробежный
- осевой
DIN ISO 1219)
00
шии.'кшихемохнв о dmiMiTHti
aumdou eh иопяиод nniilhh ibiv
и хкинзжоиоп xishwho* 0 wan и
-ваос1иф11Идс W4W3/<dmrX.i3d л вив:
-xoH3tf aisHHodaioXotr dfHuirnJi
IdoxeMmrumsifKw) иннзи-oeir чга
кивюиэгг OJ3nnodoiDXatr (g
виахзцэгг о laHHodoxocmrro (в
ywHHBdgwaw dEUmrHfr
ModtTHHirHTi имаояохтээд
w hohihhjbw d tfoaHdu
(ЖМЭЭЬНХВМаЭНЦ
иохф/Си
ИННИЭНИ1Г
ХВННЭЖ01Г01/ хиньэно* a иэ
HHBaod^uwatf wnwa/CdHuvQad о -
wodou/C иинжМвн:
-нии-иП игчаомо!гпээ9 э) iroaHdu
ипщэнии ииюзьихвияэнц
^х
ы
^
^Л.
етй =9
ы
w
к>
■®J
toHitilnodUA
*гЧ
Г <
woaoxm WHHHodoiooHiro э (в
:ки81э
иэ)7 ojaHHodojoXatr dtrHHUitfi
ИИМЭЭЬИ1ЮЮЭ1ГЭХ (J
юн11 пш>1!
ипнйэжн^1Ш (а
ион
■ижАйи вжит woXEdatoa э (д
вхохт Bxsda
-Lou вдоэоиэ кинвевмА tag (в
:киахэиэС
oj3HHod(uooHtfo dCHMi/Hfl
ВИНЭ1ГЯВ1Г НИНЬОХЗЦ
blbj o.ishoged имыохо itrou жжд
+
=4=
ODIUM
(л)е
ГЬкик кайми wfo
CZ__1
i тическкй тормозной цилиндр
• регу шрошнием в одном напрев
мним
■» с регулированием в двух
направлениях
Датчик измеряемой неэлектриче
ской величины (общее обозначение)
Датчики'
- оптический
- индуктивный
- емкостной
■ герконныи
Амортизатор с регу жрованием
в одном направлении
Датчики, реле давления, репе бчпос
ти
Реле давления (пневмо
электрический преобразователь)
Реле близости магнитоуправ-
ляемое
Реле близости индуктивное
Датчик давления
- общее обозначение
- пропорциональный
Датчик расхода
-->
ш
0 — И
М£
2* U
НЕ
0—
±l
+24V
0V
ГТЫ
Продолжение таблицы А.1
Реле вакуума
Бесконтактный
пневматический датчик сигналов с
магнитным управлением
Электрический концевой
ключатель
Пневмоэлектрический
преобразователь сигнала
Пневматический счетчик
импульсов суммирующий
Пневматический счетчик с
предысканием (обратного счета)
Пневмодатчик положения
(рефлективный)
Датчик положения
Пневмодатчик(источник)
Пневмодатчик (приемник)
Одноканальный пневмодатчик
3
t
-в
8
ПРИЛОЖИ!"! I.
mm шитлши pi дукциошкл >кллилн_л'
Kl\1 МАШИННЫЙ КС Ml IMIMI III
RIM 1(.')V4
£1 ^ ••**♦•***••*•**•**•»*♦**♦*****♦****•**+*******
MM МОДУЛЬ 1 ПРМпДИПАМИКА"
Kl M „
KtM ОНИ Mllll III PI Ml I It t I.I X
RIM IM ИР2ДЛНЛ1ППЯМЮПО< 1ЯХНИ1, 11102 РЛ ХОДМ
Ki VI P). ПАНИКИН НМА1ИС1РЛЛИ,
KIM PI AIMO<Ф1 IMIOI ДАИП1 Hill ,
RIM РЧ-ДЛИ'И IIHI .ЛКЧАПЛИОМ
RIM СЛ КРИ1НЧИ KMltPAf ХОД И ПОЛОС lb H.
KIM (.1.КРИ1ИЧК КИИ РАСХОД M IЮЛ01 II.I,
KIM OS КРИ1ИЧИ КИИ РАСХОД HLI'LIKJLMIAII.
KIM Г,7 РАСХОД 41 PI , КЛАНАМ.
kIM <.6.КРИ1ИЧККИПРЛ(ХОДИПК>ЛО ШИ
RIM I) -ДИАМПР КЛАПАНА
Sf Kl I N 7
(iOKHjO
10 II IMIM till N14 IM
II I'l I HI MM 14
i.i iVSORd IM/|M)C,r,»SgK(l 1'4/Pl)
11 \0000l HllNC* 0 00H*4*I)*X*|4:Ci7 (J5*SOR(l 1'5/lM)'.
Ci4 ,><XilS*I»4*|>\*|»5 I I Sl_ СJ4 .H>015*U3*I)3*P4\_
d* M*SOR(l .(I'J+Mllll'fti/Kj
II P2PMHINC4 )<И>Н*1Д*ГЛ*Р4'_
G2i 04*SOR (I -iP44l'5 0.11 6)/P2>: 7«Ci7+(i2
1 (J H4*SgR(l Р2/Р1):Г!7 .17Г.2
Rl HIRN
kf iOiipi Д1 jii ти- Даши mil'
RIM
Kl M OIIIK ЛПИ1 HI PI MI-IIIIMX
KIM Tl IIO< 10Я11МЛЯ ИНН 1РИРОИЛПИЯ
KIM К -OIIKHIIMIHI IIPOH'IHI Д1 ПИЯУПИИ11Ч ЛЛЫЮИ
KIM lAtOltOll HOC 10ЯПИОЙ И II Mill РА1УР1.1
Kl M К ПЛОЩАДИ Ml MbPAIIM
KIM Х0ИХ4 Ml Р1Ш.И OI, 1-MI.I ПОЛОСНИ НИ I.
KIM V0 -Ol, I M ИСПОЛНИ ИЛЬНЫХ ПОЛОС I Ы1_
KIM ХУ -МАКСИМАЛЬНЫЙ ХОД IIIIOK/
RIM X • ПКУ1ЦАЯКООРДИ11Л1
KIM V ( PI ДПЯЯ КОНИ'III
KIM Rl •ПРОИШ1ДКШ1 1ЛЮНОЦ1Ю 10ЯИНОЙИ
M 11 Mill PA IУ I'M
1М*Р1+11*(К*(Я PI*V)/(X0fX;
P l'VM*fRI*<i7)/V0
0 P2P*TIU NKR- I
IIS! KR I
P2 +Г I *(KK»K,'02fl'2*V}/(X4+Xy X)
Kl KIRN
FMHllflll'UPOHAIIHI УРЛНП1 1Ц U|ope ЮН» РЯДКА»
К1'Моми( лит iii ... »,.
к "--£ "=Ь ■
RI'M Л .УСКОР1ЦИ1 JIM,,,,HLfK0WK 1И
JU " X MIINA 0
"*>* Ш1ЛЛ0 II
Н SI
■SI Sl+A*l|
V SlA*ll/2
X-X+V*'J I
";X>X9ni|lNX-XyVosmi
II- X <0 IIJl-'N X 0:V OS! о
т«.т+п
RirWRN
rimЬпжлии» пш-мгнных ~~
КИМ АО СУММА АКТИВНЫХ СИЛ
KIM КО СУММА СИЛ СОПРОГИВЛН1ИЯ
RhM FI - ПЛОЩАДЬ МГМЬРЛИЫ
кг:м м - масса подвижных частьй
40 Л«(ЛО-КО) /М ; PRINT "A-" А
KhTIJRN
45 RIM МЫНОД I РЛФИЧК КОГО ШОЬРАЖМИЯ
PSI-. Г fT* 1000+1, ARS (X) *90(ХИ))
rem PShT(T*IOOO+I.P2/l4(H)-70)
rem РЯГТ(Г*1О00+|,Р5/14О0-70)
rem PSIiT(T*IO00+I.Pl/1400 70)
1-0
KM'UKN
60 RIM ******* TUIO СНОШ'ОП ПРОГРАММЫ ******
RI'M __
KI-.M ИСХОД'"'"' ДЛИН'»""
U-OOI25 RIM УСЛОВНЫЙ ПРОХОД КЛАПАНА'
Dl-0.(K)l RIM' УСЛ. ПРОХОД В II!
1)2-0.001 RI'M* УСЛ. ПРОХОДИТ 1С
(П 0.(Ю2 KIM' УСЛ. ПРОХОД В Г
04 0 04 RliM ДНАМ1 IP Ml МЫ'АПЫ
P'i-ОШ. KI-'M ДЛ1Ш1 Mil'МАГИСТРАЛИ
X0-0.00I RIM Ml 1MB OI» IM CBI 1'ХУ
X4-o.oo2 rim Mi-ргн.ок ''М"1^,,, ,,„-,,
VO 0.002 К.'МОЫМ ИСПОЛНИ УПИНК III
Р4-0.1Г6 KJiM Л1МОСФ1РДА1Ш IIHI
1-0: II ( 0
PI»P4:P P4:P>PI
REM ПАЧЛЛЫ1Ы1- УСЛ' Ш1Я
V 0:Si V
I 0
M-0.IM
ASM) HOI
и-гк.мсплАП'.ш |||>n|
^^сп;,п1Хдна"!нг""^->.,Ш^.ма
ПРИЛОЖЕНИЕ Б
МОЛНИРОВАНИЕ РЕДУКЦИОННОГО КЛАПАНА'
REM МАШИННЫЙ ЭКСПЕРИМЕНТ
REM 16.9.95
RE_^ **********************************************
REM МОДУЛЬ 1 "ТЕРМОДИНАМИКА"
REM
REM ОПИСАНИЕ ПЕРЕМЕННЫХ
REM PI И Р2 ДАВЛЕНИЯ В ПОЛОСТЯХ В И Г, G1 И G2- РАСХОДЫ
REM РЗ - ДАВЛЕНИЕ В МАГИСТРАЛИ,
REM P4 - АТМОСФЕРНОЕ ДАВЛЕНИЕ,
REM P5 - ДАВЛЕНИЕ ЗА КЛАПАНОМ,
REM G3 - КРИТИЧЕСКИЙ РАСХОД В ПОЛОСТЬ В,
REM G4 - КРИТИЧЕСКИЙ РАСХОД В ПОЛОСТЬ Г,
REM G5 - КРИТИЧЕСКИЙ РАСХОД ЧЕРЕЗ КЛАПАН,
REM G7 - РАСХОД ЧЕРЕЗ КЛАПАН,
REM G6 - КРИТИЧЕСКИЙ РАСХОД ИЗ ПОЛОСТИ В
REM D - ДИАМЕТР КЛАПАНА
SCREEN 7
GOTO 60
10 IFP1P3THENP1=P3
IF PI THEN P1=P4
G1=G3*SQR(1-P1/P3)-G6*SQR(1-P4/P1)
IFX0.0001 THEN G5=0.0015*4*D*X*P3:G7=G5*SQR(1-P5fl>3):_
G4=0.0015*D3*D3*P5: ELSE G4=0.0015*D3*D3*P4:_
G2=G4*SQR (1 - (P4+P5-0.1E6) /P2)
IF P2P5 THEN G4=0.0015*D3*D3*P4:_
G2=G4*SQR (1 - (P4+P5-0.1E6) / P2) :G7=G7+G2_
ELSE G2=G4*SQR(1-P2/P5):G7=G7-G2
RETURN
REM ОПРЕДЕЛЕНИЕ ДАВЛЕНИЙ.
REM
REM ОПИСАНИЕ ПЕРЕМЕННЫХ.
REM Tl - ПОСТОЯННАЯ ИНТЕГРИРОВАНИЯ.
REM R -ОТНОШЕНИЕ ПРОИЗВЕДЕНИЯ УНИВЕРСАЛЬНОЙ
REM ГАЗОВОЙ ПОСТОЯННОЙ И ТЕМПЕРАТУРЫ.
REM К ПЛОЩАДИ МЕМБРАНЫ.
REM Х0 И Х4 - МЕРТВЫЕ ОБ.ЕМЫ ПОЛОСТЕЙ ВИГ
REM V0 - ОБ.ЕМ ИСПОЛНИТЕЛЬНЫХ ПОЛОСТЕЙ
REM X9 - МАКСИМАЛЬНЫЙ ХОД ШТОКА.
REM X -ТЕКУЩАЯКООРДИНАТА.
REM V - СРЕДНЯЯ СКОРОСТЬ.
REM R1 -ПРОИЗВЕДЕНИЕ ГАЗОВОЙ ПОСТОЯННОЙ И
REM ТЕМПЕРАТУРЫ
20 P1=P1+T1*(R*G1-P1*V)/(X0+X)
Р5=Р5+Т1 *{R1 *G7)/V0
IFP2P5THENKR=-1
ELSEKR=1
P2=P2+T 1 * (KR*R*G2+P2*V) / (X4+X9-X)
RETURN
REM ИНТЕГРИРОВАНИЕ УРАВНЕНИЕ ВТОРОГО ПОРЯДКА _
REM ОПИСАНИЕ ПЕРЕМЕННЫХ
REM SI - ЗНАЧЕНИЕ СКОРОСТИ В КОНЦЕ ЭТАПА
reM В - ПРЕДЫДУЩЕЕ ЗНАЧЕНИЕ СКОРОСТИ
REM A - УСКОРЕНИЕ
30 IF X<THEN A=0
IF X > Х9 THEN A=0 : В=0
B=S1
S1=S1+A*T1
V=Sl-A*Tl/2
X=X+V*T1
IF X>X9 THEN X=X9:V=0:S1=0
IF X <0 THEN X=0:V=0:S1=0
T=T+T1
RETURN
REM ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ ДЛЯ СЛУЧАЯ
REM СУХОГО ТРЕНИ ■
REM
REM ОПИСАНИЕ ПЕРЕМЕННЫХ
REM АО - СУММА АКТИВНЫХ СИЛ
REM КО - СУММА СИЛ СОПРОТИВЛЕНИЯ
REM F1 - ПЛОЩАДЬ МЕМБРАНЫ
REM M - МАССА ПОДВИЖНЫХ ЧАСТЕЙ
40 А=(АО-КО) /М : PRINT "A=" A
RETURN
45 REM ВЫВОД ГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ
PSET (Т* 1000+1, ABS (X) *90000)
rem PSET(T*1000+l,P2/1400-70)
rem PSET(T*1000+l,P5/1400-70)
rem PSET(T*1000+l,Pl/1400-70)
1=0
RETURN
60 REM ******* ТЕЛО ОСНОВНОЙ ПРОГРАММЫ ************
REM
КЕМ~ИСХОДНЫЕ ДАННЫЕ ~
D=0.0125 REM' УСЛОВНЫЙ ПРОХОД КЛАПАНА'
DbO.OOl REM' УСЛ. ПРОХОД В В '
D2=0.001 REM' УСЛ. ПРОХОД ИЗ В *
03=0.002 REM' УСЛ. ПРОХОД В Г'
04=0.05 REM ДИАМЕТР МЕМБРАНЫ
РЗ=0.6Е6 REM ДАВЛЕНИЕ МАГИСТРАЛИ
Х0=0.001 REM МЕРТВ . ОБ.ЕМ СВЕРХУ
Х4=0.002 REM МЕРТВ . ОБ.ЕМ СНИЗУ
V0=0.002 REM ОБ.ЕМ ИСПОЛНИТ.УСТРОЙСТВ
Р4=0.1Е6 REM АТМОСФЕР ДАВЛЕНИЕ
Т=0: FLG=0
Р1=Р4:Р2=Р4:Р5=Р1
КЕМ НАЧАЛЬНЫЕ УСЛОВИЯ
V=0:S1=V
1=0
М=0.03
Х9=0.003
F5=2 REM СИЛА ТРЕНИЯ
С=30: F6=3 REM ЖЕСТКОСТЬ ПРУЖИНЫ И
REM УСИЛИЕ ПРЕДВАРИТЕЛЬНОГО ПОДЖИМА
Л Jtaf*» аМ Теория эдектромагнигного поля и основы распространения радиоволн /
М Л^^^ В 3 кн. / Под ред. К.В. Фролова,
ЕЖТ^^Ф Ин^укГя по' п'рограммированию на языке управления FWL: Пер. с
/ф Микуск*.- Б.м.: Fe<to Electronic, 1987. - 150с
32 М,ндд М. 200 избранных схем электроники / М. Мэндл. - М.. Мир, 1987. - 350 с,
33 Нуберт Г П. Измерительные преобразователи неэлектрических величин /1 .П. Ну-
Gecrt — Л Энергия. 1970. — 360 с
34. Окоси Т. Воюконно-оптические датчики: Пер. с япон. / Т. Окоси. — Л.: Энерго-
ктомяздат. 1990. — 256 с.
Я5. Осипович Л А Датчики физических величин / Л.А, Осипович. - М.:
Машиностроение. 1979.—159с.
36 Пат. 20038520 РФ. Электропневмоклапан / Б.В. Суханов, И.Д. Путинцев, Ю.А.
Осинский // Открытия, изобретения. — 1995. — № 18.
37. Пневматические средства автоматизации: Каталог 1998/1999. — Эсслинген (ФРГ):
Festo AG & CO. 2000.
38. Рабинович А.Н. Приборы и системы автоматического контроля размеров деталей
машин / А Н. Рабинович. — К.: Техтка, 1970. — 396 с.
39. Радиотехнические схемы на транзисторах и туннельных диодах (теория и расчет) /
Под ред Р.А Валитова. — М.: Связь. 1972. — 464 с.
40. Резисторы С •• = • / Под ред. Н.И. Четверикова.—М.: Радио и связь, 1987. — 352 с.
41 Робототехнические системы в сборочном производстве / Под ред. Е.В. Пашкова. —
К. Вишв шк., 1987. — 272 с.
42. Свободни программируемые контроллеры. — М.: МВТУ Фесто-Дидактик, 1988. — 34 с.
43 Справочник по полупроводниковым диодам, транзисторам и интегральным
схемам / Под ред. Н.Н. Горюнова. — М.: Энергия, 1972. — 568 с.
44. Справочник по средствам автоматики / Под ред. В Э- Низэ и В.И. Анина. — М.:
Энсргоатомиздат, 1983. — 504 с.
45 Таев И.С. Электрические аппараты. Общая теория / И.С. Таев. — М.: Энергия,
197 —272 с.
46. Таев И.С. Электрические аппараты управления: Учебник для вузов / И.С. Таев. —
М Высш.шк. 1984— 247с.
47 Терешук Р М. Полупроводниковые приемно-усилительные устройства. Т. 1. / P.M.
Терешук, К М. Терешук, С.А. Седов. — К.: Наук, думка, 1989. — 800 с.
48. Терешук P.M. Справочник радиолюбителя. T.l. / P.M. Терешук. — К.: Техника,
1970. —694 с.
49 Туринин А.М. Электрические измерения неэлектрических величин / А.М Тури-
нин. — М.: Энергия. 1966. — 690 с.
50. Фесто. Программа поставок: Каталог. — К.: ДП «Фесто», 2000.
51. Ходовые отсечные электромагнитные клапаны Каталог. — Б.м.: ASCO / Jonco-
matic, 1999.
52. Хоровиц П. Искусство схемотехники. Т. 1. / П. Хоровиц, У. Хилл. — М.: Мир,
1984 —598 с.
v о ??'Чекваскин АН- Основы автоматики: Учеб. пособие / А.Н. Чекваскин, В.Н. Семин,
К Я. Стародуб — М.- Энергия. 1977. — 448 с.
54 Чунихин А.А. Электрические аппараты. Общий курс: Учебник для вузов. /
А.А. Чунихин. — М.: Энергоатомиздат, 1988. — 720 с.
55. Щепина Н.С. Основы светотехники / Н.С. Щепина. — М.: Энергоатомиздат,
1985. — 344 с
56 Электрические измерения / Под ред. Е.Г. Шрамкова. — М.: Высш. шк., 1972. — 502 с
-»57' Электротехнический справочник Т.1. / Под обш. ред. П.Г. Грудинского. — 1.-
•Лкргия, 1975. —776 с.
ли I* Эяементы и устройства пневмоавтоматики высокого давления: Каталог / Под ред.
А И Кудрявцева. — М.-. ВНИИТЭМП, 1990. — 183 с.
^-Я*Ушсиков Ю Г °сновы оптико-электронного приборостроения. / Ю.Г. Якушен-
— М Сов радио, 1977. —272 с.
AG A6Co!5S)St_^20XamPlS °f PnCUmatic APP1,Cdtions 'St- Hesse. - Esslingen (FRG): Festo
СОДЕРЖАНИЕ
ПРЕДИСЛОВИЕ
3
Глава I
СТРУКТУРА И НАЗНАЧЕНИЕ СИСТЕМ АВТОМАТИКИ 5
1.1. Сигналы информации
1.2. Элементы автоматики ~
1.3. Характеристики управления элементов .........1...Z....... 9
1.4. Основные параметры элементов .....""' ,0
1.5. Обратные связи ,
1.6. Функции систем автоматики 12
1.7. Энергоснабжение элементов электропневмоавтоматики 13
1.7.1. Источники электрического питания 13
1.7.2. Системы подготовки сжатого воздуха 15
1.7.2.1. Компрессоры 20
1.7.2.2. Вакуумные насосы 26
1.7.2.3. Фильтры-влагоотделители и осушители 28
1.7.2.4. Маслораспылители 38
1.7.2.5. Регуляторы давления 40
1.7.2.6. Стандартный блок подготовки воздуха 44
1.7.2.7. Пневмовыключатели и распределители плавного
пуска 45
1.8. Типы защиты элементов электропневмоавтоматики 48
1.9. Специфические требования к элементам электропневмоавтоматики 49
1.10. Пневмоглушители и фильтры пневмоглушителя 50
1.11. Усилители давления 54
Глава II
ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКИХ ДАТЧИКОВ 57
2.1. Классификация элекгрических датчиков 57
2.2. Электроконтактные преобразователи датчиков 58
2.2.1. Разновидности герконов - £
2.2.2. Управление герконами с помощью постоянных магнитов ЭУ
2.2.3. Схемы включения герконов
2.2.4. Преимущества и недостатки герконов
2 2 5 Открытые электрические контакты
2.3. Потенциометрические преобразователи датчиков _._ »
2.3.1. Электрические схемы потенциометрических пРе°бРаз™а 68
2.3.2. Поф'шн^ипо^'нци •"«
2-4-ТеН30Г,ре0бр^Вате^ 71
2.4. L Наклеиваемые тензопреобразователи..
и ■ ■ *■
74
24 2' нёнаклеиваемыетензопреобразователи 74
2.4.3.' Измерительные схемы тензопреобразователеи ^
2 4 4 Примеры расчета 79
Емкостные преобразователи ^££Z£^*£^
2.5.1. Принцип действия и расчетемк^ mmnf£nmKumu...
2.5. Емкостные преобразователи преобразователей 79
2 5 3.- ПрГерГрасчет, емкосных преобразователей __ О
2.6. Индуктивные npeo^J^"^—™ преобра3ователен 86
2.6.1. Характеристики и рас 'етДУых ователей 87
2.6.2. Измерительные схемы инду*
2 *■ ^метрический расчет рсюнансных измерительных схем 90
2 Ъ.4 Опрсде гсние ьиъносги действия магнитного поля нндук-
тмвных преобразователен •
Фотохтск^ичсские преобразователи "2
2.7 I Прямые фотоэлектрические прсооразоватеш 102
2 7 1.1. Фотоэлементы 102
2.7 1.2 Фоторезисторы ,05
2.7.1.3. Фотодиоды 107
2.7.1.4 Фототранзисторы *^9
27 1 5. Фототиристоры НО
2 7.2. Обратные фотоэлектрические преобразователи 111
2 7 3. Отттроны '' -
2.7 4. Волоконно-оптические преобразователи 113
2Л4 1. Структура оптического волокна 114
2.7 4.2. Волоконно-оптические преобразователи с внешней
модуляцией Но
2.7.4.3 Волоконно-оптические преобразователи с
внутренней модуляцией 117
2 7.5. Блоки оптронной развязки 118
2.7 5.1. Блок оптронной развязки на основе диодной оптопа-
ры в генераторном режиме 118
2.7 S.2. Блок оптронной развязки на основе транзисторной
оптопары 119
2 7.5 3 Схемотехнические методы управления излучателем
оптопары 120
2.7.6. Примеры расчета и проектирования блоков оптронной
развязки , 121
2.8 Преобразовагети Холла 127
29. Пьезоэлектрические преобразователи 129
ГэамП!
KOHCTP>KTllBHblF И ЭКСПЛУАТАЦИОННЫЕ
ОСОБЕННОСТИ ДАТЧИКОВ 133
3.1. Чувствительные элементы датчиков 133
3.2. Электроконтактные датчики с механическим воздействием 134
3 3 Этектроконтактные датчики с магнитным воздействием 136
34 Индуктивные датчики 138
35. Оптоэлектронные датчики 142
3.5 1. Области и особенности применения оптоэдектронных
датчиков , 148
3 6, Пневмоэлектрические датчики 150
3.6.1 Датчики давления и вакуума 150
3 6.2 Бесконтактные датчики положения 163
36 3. Пневматические измерительные схемы
электропневматических систем и их расчет 171
3 64 Примеры применения пневмоэлектрических датчиков 177
Г IV
) 11КТРОПНЕВМОРАСПРЕДЕЛИТЕЛИ 182
41 Назначение и классификация 182
* 2. Распределители для индивидуального монтажа 188
4 21 2/2-распредеяители с этектромагнитным управлением „ 188
493
4-2-3- 'tp™^!!!....:...r:^™= =■' ,м
4.2.4.5/2-раслрадлит™ с мещюмагштн™ ™о'™ч ^
управлением
4.2.5. 5/3-распределители с алектромагнитным пилотным Ш
управленим _.,
4.2 6 5/4-распределитель с двусторонним электромагнтным
пилотным управлением 2^1
4.3. Батарейный монтаж распределителей """ 222
4.4. Блочный монтаж распределителей 230
4.5. Распределители с пропорциональным управлением 236
4.6. Пневмоострова 242
4.6.1. Пневмоострова с однополосным присоединением 245
4.6.2. Пневмоострова с многополюсным соединением 247
4.6.3. Пневмоострова с AS-интерфейсом 250
4.6.4. Пневмоострова с разъемом Feldbus 253
4.6.5. Пневмоострова со встроенными контроллерами 257
4.7. Расчет и проектирование электромагнитов с втяжным якорем 260
4.7.1. Конструкция электромагнитов с втяжным якорем 260
4.7.2. Математический (аналитический) метод расчета
электромагнитов 261
4.7.3. Пример расчета втяжного ЭМ с плоским стопом 263
Ггтяня »^
ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА 266
5.1. Свойства воздуха ~
5.2. Основные термодинамические законы ^8
5.3. Истечение сжатого воздуха через отверстие ^
5.4. Пневматические цилиндры и пневмокамеры Ц-
5.4.1. Определение расхода ~ ~
5.4.2. Стандартные пневмоцилиндры ~'
5.4.2.1. Цилиндры одностороннего действия -
5 4 2 2. Цилиндры двустороннего действия -
5 4^3 Пневмоцилиндры с прецизионным стопором..... -™
5Л~2Л. Пневмоцилиндры двойного действия с защитой от ^
проворота " ->9т
5.4.3. Компактные и короткоходовые цилиндры 1~296
5.4.4. Ввертные пневмоцилиндры ".".'.""." 297
5.4.5. Стопорные цилиндры ["."".'."".'."-' 301
5 4 6 Плоские цилиндры 304
5 4 7 Бесштоковые пневмоцилиндры ,09
54*8' Вращающиеся пневмоцилиндры • 310
5 4.9. Мембранные цилиндры 313
Ч 4 10. Баллонные цилиндры ••-•-- 314
5.5. Многопозиционные пневмоцилиндры _ 316
5.6. Поворотные пневмодвигатели •■••■ 3
5.7. Вращаюшне цилиндры 3-У
5.8. Демпфирующие устройства ■■ . J/
5.9. Дроссельные устройства • •
5.10. Запорные устройства
511. Быстроразъемные соединения с цанговым зажимом для
полимерных пневмошлангов 343
5 12. Ниппельно-резьбовые соединения для полимерных пневмо-
шлангов. 347
Глава \ I
СВОБОДНО ПРОГРАММИРУЕМЫЕ КОНТРОЛЛЕРЫ 350
6.1. Структура контроллера 352
6.2. Конструкции контроллеров 354
6.3. Концепция промышленных ПК (IPC) 355
6.4. Совместимость IPC с ПК 357
6.5. Электропитание IPC 358
6.6. Аппаратные интерфейсы IPC 358
6.7. Память программ и память данных 359
6.8. Запуск и дистанционное управление IPC 360
6.9. Исполыование программного обеспечения FST 362
6.10. Однокорпусные контроллеры IPC серий FEC Compact и FEC
Standard 362
6.11. Модульные контроллеры IPC PS1 365
6.12. Контроллер позиционирования SPC200 367
6.13. Однокорпусные контроллеры TSX Nano 368
•
Глава VU
МАНИПУЛЯТОРЫ С ПНЕВМОПРИВОДОМ 374
7.1. Манипуляторы на базе функциональных линейных модулей 374
7.2. Манипуляторы на базе модулей со стандартными и
спаренными цилиндрами 385
7.3. Манипуляторы на базе бесштоковых модулей
позиционирования 396
7.4. Механические захватные устройства с пневмоприводом для
нип\ляторов 401
7.4.1. Кулачковые захватные устройства 403
7.4.2. Двухкулачковые параллельные захватные устройства 409
7.4.3. Поворотные захватные устройства 416
7.4.4. Угловые захватные устройства 420
7.5. Вакуумные захватные устройства 424
7.5.1. Вакуумные системы и оборудование 424
7.5.2. Выбор и конструкция присосок 425
7.5.3. Выбор и конструкция эжекторов 428
Глава \П1
РАЗРАБОТКА ЭЛЕКТРОПНЕВМАТИЧЕСКИХ СИСТЕМ
УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ 438
8.1. Прямое и непрямое управление пневматическим цилиндром 439
8.2. Реализация основных логических функций 441
8.2.1. Логические блоки 441
8.2.2. Блоки памяти 444
8.2.3. Блоки переключения 447
8.3. Бистабильные электропневматические системы с памятью 447
8 4. Подтверждение выдвижения и втягивания штока пневмоци-
яиндра 449
5. Управление по давлению 451
6 Сортировка деталей 453
8.7. Склеивание деталей
8.8. Управление открытием и закрытиём'дверей 454
8.9. Управление выдвижными упорами 456
8.10. Пошаговое перемещение с кпн-mn™.! 457
8.11. Координированное пеРё«Т!.4" *""* 458
8.12. Чеканка линеек 459
8.13. Штамповка с "^^^ы^^-^~ 461
8.14. Перемещение пакетов по конвейерам ZZZZZZ 464
ПРИЛОЖЕНИЕ А
ПРИЛОЖЕНИЕ Б ZZZZZZZZZ. 486
Библиографический список 4g9
НАВЧАЛЬНИЙ П0С1БНИК
Учебное пособие
ПАШКОВ Свген Валентинович
ОСШСЬКИЙ Юрш Олександрович
ЧЕТВЬОРКШ Олександр Олексшович
ПАШКОВ Евгений Валентинович
ОСИНСКИЙ Юрий Александрович
ЧЕТВЕРКИН Александр Алексеевич
ЕЛЕКТРОПНЕВМОАВТОМАТИКА
У ВИРОБНИЧ1Х ПРОЦЕСАХ
ЭЛЕКТРОПНЕВМОАВТОМАТИКА
В ПРОИЗВОДСТВЕННЫХ ПРОЦЕССАХ
Коректор O.K. Андреева
Нормоконтролер Г.М. ПерЫдсъков
Комп'ютерний Ha6ip O.M. Абрамова
В.Д. Сорокина
Здано в Ha6ip 06.01.2003. Пщп. до друку 30.05.2003. ДК № 1272 от 17.03.2003
формат 70x1081/16. Пашр офс. Гарнггура «Тайме». Друк офс. Ум. друк.арк. 43,4.
Обя,-вид. арк. 54,2. Тираж 1000 прим. Зам № 3-159
Видавництво СсвНТУ. Севастополь, Стршецька балка, Студм1стечко НМ11
тел, 23-52-10 *
E-mail; root *>sevgtu.sebastopol.ua
AT«КНИГА»
МСП 04655, Кшв-53, вул Арт м 25
ПАШКОВ Евгений Валентинович - первый проректор,
проректор по научной работе Севастопольского национального
технического университета, автор более 190 научных
публикаций в области а: оматизации производственных
процессов, в том числе пяти учебных пособий,
97 изобретений и патентов
ОСИНС ИЙ Юрий Александрович - генеральный директор
ДП «ФЕСТО», автор более 20 работ и публикаций в области
автоматизации производственных процессов,
в том числе трех уче» ых пособий, 25 изобретений и патентов
ЧЕТВЕРКИН Александр Алексеевич - менеджер технической
поддержки ДП «ФЕСТО» автор более 20 научных публикаций
в области автоматизации технологических процессов,
в том числе двух учебных пособий 10 изобретений и патентов
v