







































































































































































































































































































































































































































































































































































Автор: Харазов В.Г.
Теги: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика системы управления
ISBN: 978-5-93913-176-6
Год: 2009




Харазов В. Г
ИНТЕГРИРОВАННЫЕ
СИСТЕМЫ
УПРАВЛЕНИЯ
ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Распределенные системы
управления(РСУ)
Техническое обеспечение РСУ
Программное обеспечение РСУ
Промышленные сети
С .° с
О
системы управления
180-летию Санкт-Петербургского
государственного технологического института
(технического университета) посвящается
В. Г. Харазов
Интегрированные системы
управления технологическими
процессами
Рекомендовано учебно-методическим объединением вузов Российской Федерации
по образованию в области радиотехники, электроники, биомедицинской техники и
автоматизации в качестве учебного пособия для студентов высших учебных заведе-
ний, обучающихся по специальности 220201 «Управление и информатика в техниче-
ских системах»
Саню Петербург
2009
УДК 681.5
ББК: 32.965
Х20
Все права защищены. Никакая часть данной книги не может быть воспроизведена
в какой бы то ни было форме без письменного разрешения владельцев авторских прав.
Текст публикуется в авторской редакции.
Рецензенты:
Зав. кафедрой информационно-измерительных технологий и систем управления Санкт-
Петербургского государственного технологического университета растительных полимеров,
профессор, д.т.н. Кондрашкова Г.А.
Профессор кафедры автоматики и процессов управления Санкт-Петербургского государ-
ственного электротехнического университета «ЛЭТИ», д.т.н. Душин С.Е.
Х20 Харазов В.Г.
Интегрированные системы управления технологическими процессами — СПб.:
Профессия, 2009. — 592 с. ил., табл., сх.
ISBN 978-5-93913-176-6
Во втором издании учебного-справочного пособия добавлены новые сведения и
учтены пожелания специалистов по автоматизации и преподавателей.
В книге подробно рассмотрены интеллектуальные приборы контроля техноло-
гических параметров. Также описан широкий спектр программируемых логических
контроллеров, приводится описание инструментальных систем программирования
контроллеров. Даны сведения о новых SCADA-системах, современных базах данных и
СУБД, в том числе модели баз данных, архитектура доступа к данным, серверы баз дан-
ных и пр.
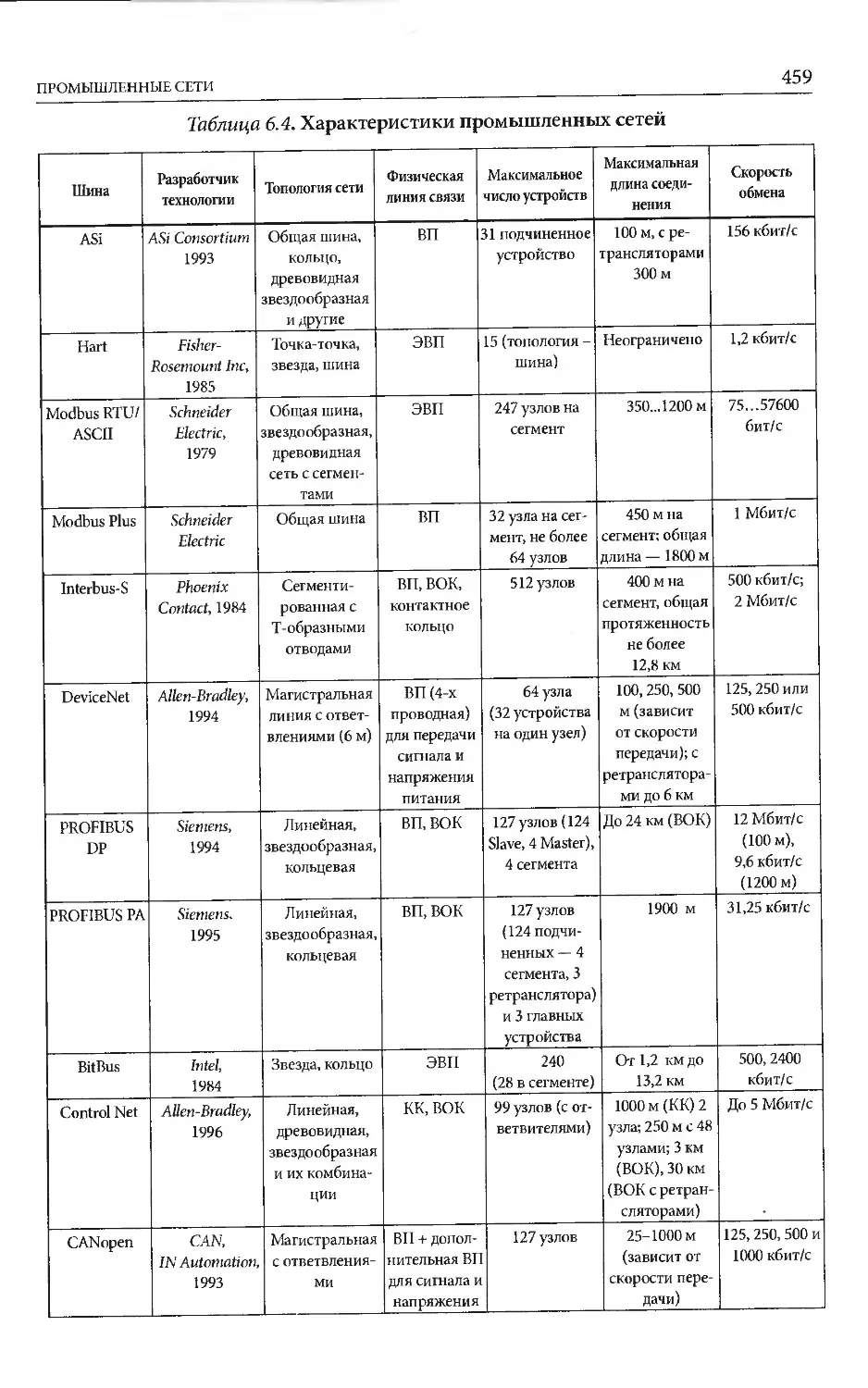
В обновленном разделе, посвященном сетевому оборудованию, приводятся харак-
теристики промышленных сетей, в том числе Industrial Ethernet, топология и методы до-
ступа, описание активного оборудования. В завершающем разделе книги представлены
системы верхнего уровня: ERP- и MES-системы, информационные системы и системы
проектирования.
Издание предназначено для сотрудников отделов автоматизации, инженеров, спе-
циалистов предприятий, занимающихся разработкой и внедрением АСУТП, сотрудни-
ков проектных организаций и НИИ, а также для студентов, обучающихся по специаль-
ностям 210100 «Управление и информатика в технических системах» и 210200 «Автома-
тизация технологических процессов и производств».
УДК 681.5
ББК: 32.965
ISBN 978-5-93913-176-6
© Харазов В. Е, 2009
© Издательство «Профессия», 2009
Оглавление
Введение..............................................................4
Раздел I
Техническое обеспечение
распределенных систем управления
Глава 1. Приборы контроля и управления технологическими процессами....9
Глава 2. Программируемые логические контроллеры (ПЛК).................168
Глава 3. Оборудование и компоненты распределенных систем управления.269
Раздел II
Программное обеспечение
распределенных АСУ ТП
Глава 4. Программное обеспечение ПЛ К.................................352
Глава 5. Программное обеспечение рабочих станций......................380
Раздел III
Промышленные сети
распределенных систем управления
Глава 6. Промышленные сети: архитектура, оборудование, характеристики.418
Раздел IV
Распределенные системы управления (РСУ)
Глава 7. Алгоритмическое обеспечение РСУ..............................461
Глава 8. Распределенные системы управления (РСУ)....................481
Раздел V
Интегрированные системы управления
Глава 9. Принципы и основы интеграции систем управления.............535
Глава 10. ERP- и MES-системы верхнего уровня РСУ....................538
Литература..........................................................554
Глоссарий...........................................................570
Приложение. Схемы подключения ПЛК...................................581
ВВЕДЕНИЕ
В начале XXI века в промышленной автоматизации сформировалась устойчивая
тенденция перехода от автономных распределенных систем управления к интегрирован-
ным1 системам управления промышленным производством в целом в масштабах пред-
приятия, холдинга или объединения. Современные аппаратно-программные средства
предоставляют возможность объединения в единую структуру всех уровней иерархии
системы управления предприятием любого профиля.
Крупные зарубежные и отечественные компании стремятся представить на рынок
промышленной автоматизации всю необходимую линейку средств автоматизации — от
первичных преобразователей, станций ввода/вывода, контроллеров, рабочих станций и
серверов до промышленных сетей и программного обеспечения для построения интегри-
рованной системы управления. Жесткая конкуренция ведущих фирм-производителей
интеллектуальных средств и систем на рынке промышленной автоматизации направле-
на на выпуск широкой номенклатуры приборов и средств измерения, отличительными
чертами которых являются повышенная надежность в жестких условиях эксплуатации,
высокая точность измерения и преобразования данных, упрощенные приемы обслужи-
вания как со стороны аппаратной части, так и со стороны программирования.
Под интегрированной системой управления будем понимать такую систему, в кото-
рой объединены вычислительные, сетевые, аппаратные и иные ресурсы, необходимые
для достижения многокритериальной цели управления предприятием. Интегрированная
система управления, таким образом, объединяет все уровни иерархии системы управ-
ления — нижний (полевой) уровень, контроллерный, диспетчерский и бизнес-уровень.
Для этого используются соответствующие протоколы, интерфейсы, физические кана-
лы обмена данными, серверы, преобразователи, программное обеспечение и пр., соот-
ветствующие международным стандартам. Соответствие международным стандартам
компонентов систем автоматизации делает их открытыми для программно-аппаратных
средств различных производителей средств автоматизации.
Открытость систем контроля и управления для средств автоматизации различных
производителей, придерживающихся этих стандартов, стало ответом на компромисс
между программно-аппаратными средствами различных фирм-производителей. Стан-
дартизация охватывает не только системы программирования, протоколы, интерфей-
сы, локальные сети, но и конструктивы, способы защиты аппаратуры, условия экс-
плуатации и т. п.
Открытость технического и программного обеспечения систем автоматизации яв-
ляется одной из важных тенденций современной автоматизации. К примерам интегри-
1 Интеграция (integration) — это процесс объединения в одно целое, а под термином integrity подразумева-
ется целостность, полнота, структурная завершенность.
ВВЕДЕНИЕ
5
рованных пакетов для автоматизации производства в масштабах предприятия мож-
но отнести пакеты PCS7 фирмы Siemens, Proficy Historian компании GE Fanuc, Factory
Suite ArchestrA корпорации Invensys и др.
Ряд тенденций связан с дальнейшим развитием микроэлектроники,- микропро-
цессоров и микропроцессорных устройств на их основе, что сопровождается наряду
с расширением их технических характеристик, снижением цен, увеличением тиража
и применимости этих устройств.
Среди промышленных компьютеров наблюдается рост сверхкомпактных без-
вентиляторных компьютеров со встроенными операционными системами реального
времени (ОСРВ) Windows Embedded и Windows СЕ.
Среди программируемых логических контроллеров (ПЛК) помимо моноблочных
(компактных) и модульных ПЛК все ведущие фирмы расширяют объем выпуска PC-
based (PC-совместимых) контроллеров с MS Windows совместимой операционной
системой. PC-based контроллеры, обладая достоинствами обычных ПЛК, исполь-
зуют мощное программное обеспечение, стандартные языки программирования
высокого уровня и способны реализовать сложные алгоритмы управления. Кроме
этого, наблюдается расширение выпуска различных модификаций контроллеров для
расширенного применения, а с учетом их использования для определенного класса
процессов контроллеры характеризуются объектно-ориентированной компоновкой
(проектно-компонуемые контроллеры).
В области сетевых технологий безусловной тенденцией развития является широ-
кое применение в проводных сетях протокола и сетей Ethernet и Industrial Ethernet,
в том числе применение гигабитных Ethernet-сетей передачи данных — Ethernet 100
Гбит/с (100 GE) с дальностью передачи до 10 км для одномодового волокна. В области
активного сетевого оборудования наблюдается развитие магистральных промышлен-
ных коммутаторов, обеспечивающих работу интегрированных сетей управления про-
изводством с поддержкой сетей Ethernet 10 Гбит/с (10 GE). Развитие сетей Ethernet по-
буждает разработку программно-аппаратных средств перехода от последовательных
интерфейсов к сетям Ethernet. С другой стороны, заметной тенденцией, направленной
на уменьшение числа проводников на печатной плате, является переход с параллель-
ной на последовательную передачу данных в технологии Gigabit Ethernet.
Другой тенденцией развития сетевых технологий является быстрое развитие
беспроводных сетей передачи данных с использованием протоколов GSM, GPRS,
Bluetooth и др. Развитие беспроводных технологий привело к созданию беспровод-
ных измерительных приборов. В качестве примера приведем беспроводный датчик
температуры Rosemount 648, беспроводный датчик давления Rosemount 305IS, кото-
рые питаются от модуля питания в искробезопасном исполнении. Сбор информации
от беспроводных измерительных приборов осуществляет беспроводный шлюз 1420.
Система беспроводных приборов может устанавливаться во взрывоопасных зонах
технологического процесса.
В ближайшие годы среди баз данных преимущественное применение найдут реля-
ционные базы данных и клиент-серверная архитектура доступа к данным. Среди сер-
веров баз данных реального времени (БДРВ) находят применение blade-серверы, обе-
спечивающие обработку больших массивов информации от различных источников.
Среди программного обеспечения диспетчерских рабочих станций (SCADA-
систем) наблюдается снижение числа новых SCADA-систем, расширение функций из-
вестных SCADA-систем и их унификация. Безусловным лидером среди SCADA-систем
б
ВВЕДЕНИЕ
является фирма Wonderware концерна Invensys (в 2006 г. выпущена версия InTouch
10.0). Общее число внедрений на объектах этого ПО составило более 450 тысяч.
Программное обеспечение контроллеров, как правило, включает ОРС-сервер,
Web-сервер, программы ПИД-регуляторов с автонастройкой параметров регулятора,
а также программы регуляторов с прогнозирующей моделью, адаптивных и нейроре-
гуляторов.
Среди систем программирования контроллеров лидируют интегрированные си-
стемы программирования на языках по стандарту IEC 61131-3 — пакеты ISaGRAF,
CoDeSys, Unity Pro и др.
К тенденциям развития распределенных систем управления можно отнести
системный подход к построению системы с учетом стандартизации и унификации
оборудования и программного обеспечения, единого подхода к многоуровневой
структуре систем управления. Для ряда систем характерно появление в их составе
программно-аппаратных средств удаленной технической диагностики и удаленного
технического обслуживания, применение станций управления и визуализации, вы-
полненных в едином конструктиве, четырехкратное резервирование процессорных
модулей станций управления, широкое использование распределенЗЗно-модульных
систем, станций удаленного ввода/вывода и др. В целом, все это направлено на улуч-
шение качества управления — повышение точности, быстродействия, технической и
экономической эффективности систем управления.
В книге сделана попытка рассмотреть структуру системы управления техноло-
гическим процессом как интегрированную систему управления технологическим
процессом, начиная от формирования заказа, закупки комплектующих, непосред-
ственного производства по технологическому регламенту и вплоть до сбыта гото-
вой продукции. Такой подход к настоящему времени практикуется в большинстве
стран-производителей. При этом анализу и синтезу таких систем предшествует фор-
мирование многоцелевой задачи и критериев управления, подробный экономиче-
ский анализ эффективности процесса, грамотный выбор аппаратно-программных
средств для всего комплекса интегрированной системы и т. п.
Таким образом, проектирование или модернизация современных распределенных
систем правления (РСУ) должны выполняться с учетом максимального удовлетворе-
ния требований на разработку системы управления, в том числе функциональных, тех-
нических, экологических, требований надежности, безопасности и др.; использования
программно-аппаратных средств, отвечающих всем международным стандартам, га-
рантирующим соблюдение принципа открытости систем; экономической эффективно-
сти системы управления с учетом всего жизненного цикла системы и др. требования,
определяемые спецификой и характером технологического процесса.
Материал книги включает пять разделов, каждый из которых отражает совре-
менное состояние средств автоматизации в рамках интегрированной системы управ-
ления технологическим процессом.
Раздел 1 «Техническое обеспечение распределенных систем управления» содер-
жит главы, посвященные описанию в основном интеллектуальных приборов для из-
мерения технологических параметров, программируемых логических контроллеров,
оборудования и компонентов распределенных систем управления.
Глава 1 «Приборы контроля и управления технологическими процессами» содер-
жит сведения о приборах измерения температуры, расхода, давления, уровня, анали-
заторах газа и жидкости, весоизмерительной технике, бесконтактных выключателях
ВВЕДЕНИЕ
7
(сенсорах), показывающих и регистрирующих приборах, функциональных устрой-
ствах, исполнительных механизмах, приборах учета энергоносителей.
Глава 2 «Программируемые логические контроллеры (ПЛК)» посвящена описа-
нию современных ПЛК (компактных, модульных, PC-совместимых) основных за-
рубежных и отечественных производителей ПЛК, описанию встраиваемых систем и
компонентов ПЛК.
Глава 3 «Оборудование и компоненты распределенных систем управления» вклю-
чает щитовое оборудование, промышленные компьютеры (рабочие станции), панели
оператора, источники бесперебойного питания, локальные микропроцессорные ре-
гуляторы, основы проектирования РСУ.
Раздел 2 «Программное обеспечение распределенных систем управления» вклю-
чает главы, посвященные программному обеспечению ПЛК и рабочих станций.
Глава 4 «Программное обеспечение ПЛК» описывает языки программирования
по стандарту IEC 61131-3, а также примеры программирования на этих языках. От-
дельный раздел посвящен инструментальным системам программирования ISaGRAF,
CoDeSys, Unity Pro, STEP7 и др.
Глава 5 «Программное обеспечение рабочих станций» включает описание совре-
менных SCADA-систем, ОРС-стандарта взаимодействия SCADA-систем и ПЛК, баз
данных (БД) и систем управления базами данных (СУБД).
Раздел 3 «Промышленные сети распределенных систем управления» содержит
сведения о промышленных сетях всех уровней иерархии систем управления, актив-
ном оборудовании промышленных сетей. Отдельный раздел посвящен беспровод-
ным сетям управления по стандартам GSM, GPRS, Bluetooth и др.
Раздел 4 « Распределенные системы управления (РСУ)» включает главы, посвя-
щенные алгоритмическому обеспечению систем управления и описанию современ-
ных систем управления.
Глава 7 «Алгоритмическое обеспечение РСУ» содержит описание видов обеспе-
чений, алгоритмов управления адаптивных, робастных, ситуационных, нечетких и
нейро-нечетких систем управления, а также описание искусственных нейронных
сетей.
Глава 8 «Современные РСУ» посвящена рассмотрению структуры, состава и ком-
понентов зарубежных и отечественных распределенных систем управления компа-
ний Honeywell, Valmet Automation, Metso Automation, Foxboro, Yokogawa, ABB, Fisher
Rosemount Systems, АО «Импульс», ГК «Текон» и др.
Раздел 5 «Интегрированные системы управления» содержит главы, в которых
рассматриваются вопросы интеграции систем управления, ERP- и MES-системы.
Глава 9 «Принципы и основы интеграции систем управления» содержит сведения
об интегрированных системах управления предприятием и принципах интеграции
систем управления технологическим процессом. Также в этой главе рассматривается
иерархия современных систем управления.
Глава 10 «ERP- и MES-системы интегрированной системы управления» посвяще-
на рассмотрению систем планирования ресурсов предприятия (ERP-систем) и систем
управления производством (MES-систем).
В Приложениях приведен список сокращений, глоссарий терминов, используе-
мых в книге, стандарты интерфейсов, конструктивов и степеней защиты оборудова-
ния.
Библиографический указатель содержит 356 источников.
8 ВВЕДЕНИЕ
Пособие предназначено для студентов, обучающихся по специальностям
210100 — «Управление и информатика в технических системах», 220301 — «Авто-
матизация технологических процессов и производств», 230101 — «Вычислительные
машины, комплексы, системы и сети», 230102 — «Автоматизированные системы об-
работки информации и управления», а также может быть полезна студентам специ-
альностей 230104, 240301, 240401, 240501, аспирантам, специалистам цехов КИПиА,
отделов АСУ ТП и инженерам по автоматизации технологических процессов.
Автор считает своим долгом поблагодарить заведующего кафедрой информаци-
онно-измерительных технологий и систем управления Санкт-Петербургского госу-
дарственного технологического университета растительных полимеров профессора,
докт. техн, наук Кондрашкову Г. А. и профессора кафедры автоматики и процессов
управления Санкт-Петербургского государственного электротехнического универ-
ситета «ЛЭТИ», докт. техн, наук Душина С. Е. за ценные замечания и предложения по
содержанию учебного пособия.
_________________________РАЗДЕЛ I_____________________________________
ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
ГЛАВА 1. ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ
ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
1.1. Приборы для измерения температуры
Температура является одним из важнейших параметров большинства технологиче-
ских процессов. Необходимость точного измерения температуры в широком диапазоне
определила разработку и применение различных методов и средств измерения темпера-
туры. Для суждения о температуре любого тела (газообразного, жидкого, твердого или
плазмы) используют зависимость температуры от изменения какого-либо физического
свойства вещества, — объемного расширения жидкости или газа, электрического со-
противления, эффекта возникновения фототока или электрического потенциала и др.
Вопросам измерения температуры в различных областях науки и техники посвящено
много работ, среди которых выделим работы [1.1,1.3,1.5-1.8,1.13,1.14,1.15]*.
В данном учебно-справочном пособии в основном рассмотрены лишь те методы
и средства измерения температур, которые имеют унифицированный выходной сиг-
нал или могут быть отнесены к интеллектуальным средствам измерения, снабженных
микропроцессорным устройством для обработки и преобразования аналогового вы-
ходного сигнала датчика в цифровой. Такие первичные преобразователи, получившие в
последние годы широкое распространение, могут быть легко интегрированы в систему
управления процессом.
В зависимости от принципа действия приборы для измерения температуры принято
подразделять на следующие группы:
• термометры расширения;
• манометрические термометры;
• термоэлектрические термометры (термопары);
1 Тепловое расширение воздуха от температуры впервые было использовано в 1597 г. Галилеем. Высота столба
жидкости в стеклянной трубке, верхний конец которой оканчивался стеклянным шаром, а открытый нижний
конец был погружен в сосуд с водой, изменялась в зависимости от температуры. В 1655 г. Гюйгенс предложил
в качестве опорных точек шкалы термометра использовать точку таяния льда (0°) и кипения воды (100°).
В 1742 г. Цельсием предложена температурная шкала, в которой расстояние между точками таяния льда и
кипения воды разделено на 100 равных частей. В 1714 г. Фаренгейт изготовил ртутный стеклянный термометр.
Первый манометрический газовый термометр появился в 1879 г., жидкостный — в 1882 г. Открытый в 1821 г.
Зеебеком эффект термоэлектричества был использован в 1887 г. для изготовления первых термоэлектрических
термометров (термопар). В 1871 г. Сименсом найдена зависимость сопротивления платиновой проволоки от
температуры, приведшая в 1886 г. к созданию первого платинового термометра сопротивления. Первые пи-
рометры излучения появились в 1892 г. В 1852 г. Кельвиным предложена термодинамическая температурная
шкала, а в 1968 г. принята Международная практическая температурная шкала МПТШ-68. В области положи-
тельных температур приняты опорные точки шкалы: кипения воды (100 °C), затвердевания цинка (419,58 °C),
затвердевания серебра (961,93 °C) и затвердевания золота (964,43 °C).
10
ГЛАВА 1
• термометры сопротивления;
• пирометры излучения.
") Первые четыре группы приборов основаны на контактных методах измерения,
когда чувствительный элемент находится в непосредственном контакте с измеряе-
мой средой. Пирометры излучения основаны на неконтактных методах измерения,
когда пирометр отнесен от измеряемого объекта на некоторое расстояние и не ока-
зывает влияния на температурное поле объекта измерения^
1.1.1 Контактные датчики (термопары и термометры сопротивления
с унифицированным выходным сигналом)
Термометры расширения используют эффект теплового расширения специаль-
ной термометрической жидкости — ртуть, спирт или органические жидкости в сме-
си с красящим веществом.
В зависимости от свойств стекол диапазон измерений термометров расширения
в основном составляет от -90 до +600 °C, однако, в отдельных случаях нижний пре-
дел может быть от -200 °C, а верхний до +800 °C.
На принципе различия коэффициентов линейного расширения твердых тел
основаны дилатометрические и биметаллические термометры. Диапазон их измере-
ния составляет от -150 до +700 °C. Для общепромышленного применения выпуска-
ются стеклянные термометры с сигнализирующим контактным устройством.
Манометрические термометры основаны на использовании зависимости дав-
ления жидкости (ртуть, спирт и др.), газа (азот) или парожидкостной смеси, нахо-
дящихся в замкнутом объеме, от температуры. Конструктивно манометрический
термометр состоит из термобаллона, находящегося в измеряемой среде, гибкой
капиллярной трубки и манометра. При изменении температуры среды изменяется
давление внутри замкнутого объема термосистемы, что приводит к перемещению
свободного конца манометрической трубчатой пружины и показывающей стрелки
или пера самопишущего устройства. Выпускаются манометрические термометры по-
казывающие, самопишущие, электроконтактные, с выходным пневматическим сиг-
налом, а также с унифицированным токовым сигналом. Диапазон измерения жид-
костных манометрических термометров составляет от -50 до +500 °C (в отдельных
случаях до +600 °C), газовых от -200 до +700 °C. К достоинствам манометрических
термометров следует отнести простоту конструкции и эксплуатации, взрыво- и по-
жаробезопасность. К недостаткам— невысокую точность (1...2%), инерционность
(особенно у жидкостных манометрических термометров) и необходимость контроля
герметичности термосистемы.
В табл. 1.1 приведены технические характеристики манометрических термоме-
тров фирмы WIKA (Германия).
Таблица 1.1. Характеристики манометрических термометров фирмы WIKA
Мо- дель Тип Диаметр шкалы, мм Класс точности Диапазон из- мерений, °C Давление среды, МПа Материал термобаллона Исполнение Дополнительные устройства
71 Газовый 100,160 1 От-30...+50 до 0...+200 2.5 Сталь Со съемной защитной насадкой Электро- контактное устройство
73 Газовый 100,160 1 От-200...+50 до 0...+700 2.5 Хромо- никелевая сталь С наклоном и поворотом корпуса Электро- контактное устройство
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ 11
Термоэлектрические термометры (термопары). Измерение температуры с помо-
щью термопары основано на эффекте немецкого физика Т. Зеебека, открытом в 1821 г.,
согласно которому в цепи, составленной из двух разнородных проводников А и В, места
соединений которых находятся при разных температурах t и 10, возникает электриче-
ский ток.[Проводники, образующие термопару, называют термоэлектродами, место их
соединения, помещенное в среду с измеряемой температурой 1, рабочим (горячим) спа-
ем, а спай с постоянной и известной температурой t0 — свободным (холодным) cnaexcj
|Термоэлектродвижущая сила (термоЭДС) термопары, спаи которой находятся
при температурах t и t0, равна: ЕАВ (t, t0) = eAB(f) - е АВ (t0) и может быть рассчитана
на основе эффектов Пельтье и Томпсона. Поддерживая температуру свободного спая
постоянной, т. е. t0 = const, получим: ЕАВ (t, t0) = еАВ (t) - const. Таким образом, ЕАВ
(t, t0) =/(t). При экспериментально найденной зависимости термоЭДС термопары
от температуры, измерение неизвестной температуры сводится к измерению термо-
ЭДС. Зависимость термоЭДС термопары от температуры при постоянно заданной
температуре свободного конца термопары называется номинальной статической ха-
рактеристикой (НСХ), которая определяется ГОСТом. Государственный стандарт РФ
(ГОСТ Р8.585-2001) определяет типы термопар (при температуре свободных концов
0 °C), приведенных в табл. 1.2 [1.17,1.18].Д
Таблица 1.2. Характеристики термопар по ГОСТ Р8.585-2001
Тип Обозначение термопреобразователя НСХ Материал термоэлектродов Диапазон измерения, °C ТермоЭДС, мВ
Положительный Отрицательный
R ТПП Pt+13%Rh/Pt пп ПР-13(87%Р1+ 13% Rh) ПлТ (Pt) -50... 1768 -0,226... 21,101
S ТПП Pt+10%Rh / Pt пп ПР-10 (90% Pt+ 10% Rh) ПлТ (Pt) -50... 1768 -0,236... 18,693
В ТПР Pt+30%Rh / Pt+6%Rh ПР ПР-30 (70% Pt+ 30% Rh) ПР-6 (94 % Pt+ 6%Rh) 0...1820 0... 13,820
J ТЖК [Fe/Cu+Ni] (железо/константан) жк Fe 55%Cu+ 45%Ni,Mn, Fe -210...1200 -8,095... 69,553
т тмк [Cu/Cu+Ni] (медь/константан) мк Ml (Cu) 55%Cu+ 45% Ni,Mn, Fe -270...400 -6,258... 20,872
Е ТХКн [Ni+Сг/ Cu+Ni] (хромель/константан) хк THX 9,5(90,5% Ni+ 9,5% Cr) 55%Cu+ 45% Ni,Mn, Fe -270...1000 -9,835... 76,373
К ТХА [Ni+Cr/Ni+Al] (хромель/алюмель) ХА THX 9,5 (90,5% Ni+ 9,5% Cr) НМцАК2-2-1 94,5% Ni+ 5,5% Al,Si,Mn -270...1372 -6,458... 54,886
N тип [Ni+Cr+Si/Ni+Si] (нихросил/нисил) НН 84,2% Ni+ 14,2%Cr+l,5%Si 95%Ni+4,5%Si -270...1300 -4,345... 47,513
L тхк [Ni+Cr/Cu+Ni] (хромель/копель) хк THX 9,5 (90,5% Ni+ 9,5% Cr) МНМЦ 43-05 56%Cu+ 44% Ni -200...800 -9,488... 66,466
М тмк [Cu/Cu+Ni] (медь/копель) мк Ml (Cu) МНМЦ 43-05 56%Cu+ 44% Ni -200...100 -6,154... 4,722
А (А-1, А-2, А-3) ТВР [W+Re/W+Re] ВР BP-5 95%W+5%Re BP-20 80% W+ 20% Re А-1: 0...2500 А-2:0...1800 А-3:0...1800 0... 33,015 0... 27,232 0... 26,773
Конструкция термопары включает термоэлектроды, изоляционные бусы и за-
щитную арматуру, в том числе защитный чехол. Диаметр термоэлектродов из благо-
родных металлов находится в пределах от 0,07 до 0,5 мм, из неблагородных метал-
Т2
ГЛАВА 1
лов — от 0,1 до 3,2 мм. Длина монтажной, погружаемой и наружной частей термо-
пары выбирается из ряда 10,16,20,25,32,40,50,60,80,100,120,160,200,250, 320,400,
500, 630, 800,1000,1250,1600, 2000, 2500 и 3150 мм.
[ В зависимости от материала термоэлектродов термопары классифицируют по
следующим группам:
• термопары из благородных металлов;
• термопары из неблагородных металлов;
• термопары из тугоплавких металлов;
• металлокерамические термопары.
Помимо термопар, указанных в табл. 1.2, в научно-исследовательской практике
известны термопары, материал термоэлектродов которых включает иридий, руте-
ний, молибден, тантал, ниобий и др. металлы. Также известны вольфрам-рениевые
термопары группы С (W5%Re) и группы D (W3%Re) на диапазон температур
0...2300 °C. 1
Гругига металлокерамических термопар была разработана для измерения высоких
температур в углеродсодержащей, восстановительной, нейтральной среде и вакууме. К
ним относятся термопары с термоэлектродами из силицидов молибдена и вольфрама
(MoSi2 / WSi2), графит/борид циркония (C/ZrB2) и графит/карбид титана (C/TiC). Под-
робные данные о термопарах этой группы приведены в работе [1.6, 1.10].
В последние годы находят применение термоэлектрические преобразователи из
термопарного кабеля (кабельные термопары). Такая термопара представляет собой
гибкую металлическую трубку с наружным диаметром от 1 до 6 мм с размещенными
внутри нее одной или двумя парами термоэлектродов диаметром от 0,2 до 1,08 мм.
Пространство между термоэлектродами заполнено мелкодисперсной изоляционной
массой [1.15]. К таким термопарам относятся КТМС-ХА и КТМС-ХК. К достоин-
ствам кабельных термопар относятся: более высокая стабильность показаний, воз-
можность изгибов и монтажа в труднодоступных местах, малая инерционность, ра-
бота в условиях больших рабочих давлений. \
[ Поскольку градуировочные таблицы термопар составлены с учетом температу-
ры свободных концов термопары, равной 0°С, которая должна быть постоянной в
течение всего цикла измерения, используют компенсационные провода, назначение
которых — отнести от рабочей зоны с высокой и меняющейся температурой свобод-
ные концы термопары. Компенсационные провода соответствуют ГОСТ 1790-77 и
ГОСТ 10821-75. ]
Для термопар из неблагородных металлов в основном используются компенса-
ционные провода из аналогичных сплавов, а для термопар из благородных металлов
используют специальные сплавы, в основном медно-никелевые. При температурах
до 100 °C эти сплавы должны давать такую же термоЭДС, как и соответствующая тер-
мопара, а каждый из удлинительных (компенсационных) проводов не образовывал
термоЭДС со своим термоэлектродом^
Температура окружающей среды" в местах присоединения к термопаре для раз-
личных компенсационных проводов может колебаться от -40 до 100 °C и более в за-
висимости от изоляции жилы и оболочки провода. Сечение компенсационных про-
водов составляет величину 0,5; 0,75; 1,0; 1,5; 2,5 мм2. Технические характеристики
компенсационных проводов приведены в табл. 1.3.
Помимо марок ПТВ и ПТВО используются провода марок ПТВВ, ПТВВЭ, ПТВВТ,
ПТВВГ ПТФФ и др., указанные в табл. 1.4.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
13
При более высоких температурах в местах соединения с термопарой используют-
ся специальные высокотемпературные компенсационные провода (табл.1.5).
Таблица 1.3. Характеристики компенсационных проводов
Тип термопары Марка компенса- ционных проводов Сечение провода, ммI 2 Материал токопроводящих жил Изоляция жилы
тмк птв-мк 1x0,75+1x1,0; 1х1,0+1х2,5 Медь-копель Поливиниловая
тмк ПТВО-МК 1х1,0+1х2,5 Медь-копель Поливинилхлоридная
тхк ПТВ-ХК 2x0,5; 2x1,0; 2x1,5; 2x2,5 Хромель-копель Поливиниловая
тхк ПТВО-ХК 2x2,5 Хромель-копель Поливинилхлоридная
ТХА ПТВ-ХА 2x0,5; 2x1,0; 2x1,5; 2x2,5 Хромель-алюмель Поливиниловая
ТХА ПТВО-ХА 2x2,5 Хромель-алюмель Поливинилхлоридная
ТХА ПТВ-М 1x0,75+1x1,0; 1x1,0+1x2,5; 2x2,5 Медь-константан Поливиниловая
ТХА птво-м 1x1,0+1x2,5; 2x2,5 Медь-константан Поливинилхлоридная
Таблица 1.4. Характеристики проводов ПТВВ, ПТВВЭ, ПТВВТ, ПТВВГ ПТФФ
Марка провода Характеристика провода термоэлектродного Число жил Изоляция жилы Сечение провода, мм2 Рабочая темпера- тура,°C
ПТВВ — 2 Поливинил- хлоридная 0,2; 0,75; 1,0; 1,5; 2,5 -40...+80
ПТВВЭ Экранированный 2 -40...+80
ПТВВТ Теплостойкий 2 -40...+105
ПТВВГ Гибкий 2 0,75; 1,0; 1,5; 2,5 -40...+80
птввгэ Гибкий экраниров. 2 -40...+80
птввтг Теплостойкий гибкий 2 -40...+105
птвтг Гибкий 1 1,5 -40...+80
ПТФФ-120 Теплостойкий гибкий 2 Фторопласт 0,2; 0,35; 0,5; 0,75; 1,0; 1,5; 2,5 -60...+120
ПТФФ-200 2 -60...+200
ПТФФЭ-120 Теплостойкий гибкий экранированный 2 -60...+120
ПТФФЭ-200 2 -60...+200
Таблица 1.5. Характеристики высокотемпературных компенсационных проводов
Тип термопары Марка ком- пенсационных проводов Диапазон темпе- ратур, °C Сечение провода, мм2 (диаметр, мм) Материал изоляции жил Материал оболочки
ТХА, ТХК, ТЖК ктм сэ 0...+400 2x0,5 (4) Стеклоткань Экран из нерж, стали
ТХА, ТХК КТМФЭ -50...+220 2x0,5 (3,5) Фторопласт Фторопласт
ТХА, ТХК КТСФЭ -50...+220 2x0,5 (3,5) Стеклоткань Фторопласт
ТХА, ТЖК кмст -50...+180 2x0,2 (3,5) 2x0,5 (4,5) Стеклоткань Силиконовая резина
ТПП,ТПР,ТВР ККМ ФЭ -50...+200 2x0,5 (3,5) Фторопласт Фторопласт
I Цвет изоляции проводов: материал жилы медь — красный, константан — ко-
ричневый, медно-никелевый сплав ТП (для термопар ТПП) — зеленый, хромель —
фиолетовый или черный, алюмель — натуральный или белый, копель — желтый или
оранжевый^]
Для автоматической компенсации изменения температуры свободных концов
термопары используют мостовые схемы с терморезистором в одном из плеч моста.
При отклонении температуры свободных концов от градуировочного значения воз-
14
ГЛАВА 1
никает разность потенциалов, численно равная по величине и обратная по знаку из-
менению термоЭДС термопары при изменении температуры свободных концов.
Для получения нормированного выходного аналогового или цифрового сигнала,
повышения точности и снижения габаритов применяются измерительные (нормирую-
щие} преобразователи, встраиваемые в клеммную головку термопары. В качестве вы-
ходных сигналов используются токовые (0...5 мА, 0...20 мА, 4...20 мА) или 0...10 В,
HART-протокол, Profibus и др. В измерительных преобразователях сигнал термопары
усиливается входным каскадом усилителя и с помощью АЦП преобразуется в цифро-
вой сигнал. Микропроцессор пересчитывает (ставит в соответствие) цифровой сигнал
со значениями температуры в соответствии с градуировочной таблицей, осуществля-
ет функции компенсации температуры свободных концов термопары, линеаризации,
демпфирования, контроля обрыва цепи и др., и далее через ЦАП преобразует его в
аналоговый выходной сигнал в диапазоне 0/4.. .20 мА или 0... 10 В. При этом источник
питания преобразователя находится во внешней цепи (цепи нагрузки), j
В табл. 1.6 приведены данные отечественных и зарубежных термопар с унифи-
цированным выходным сигналом. Напряжение питания преобразователей 18...36
VDCA Питание преобразователей с маркировкой Ех осуществляется от барьеров ис-
кробезопасности. Зависимость выходного сигнала термопребразователей от темпе-
ратуры линейная.)
Таблица 1.6. Характеристики термопар с унифицированным выходным сигналом
Тип термопары НСХ Тип нормирующего преобразователя Выходной сигнал Диапазон измерения,°C Класс точно- сти Изготовитель
ТХАУ Метран-271 К — 4...20 мА 0...600,0...800,0...900, 400...900,0...1000 0,5; 1,0 ГК «Метран», г. Челябинск
ТХАУ Метран-271-Exia К — 4...20 мА 0...600,0...800 0,5; 1,0
Метран 281 К Электронный модуль HART -40...300, -40... 1000 0,2; 1,5
Метран 281-Exia К
ТХКУ-205 L ПТ-205 4...20 мА 0...400,0...500,0...600 1,0; 1,5 НПП «Элемер», Московск. обл.
ТХКУ-205 Exia L ПТ-205 4...20 мА 0...400,0...500,0...600 1,0; 1,5
ТХАУ-205 К ПТ-205 4...20 мА 0...600,0...900 0.5; 1,0
ТХАУ-205 Exia К ПТ-205 4...20 мА 0...600,0...900 0.5; 1,0
ИТ-1.2-Ех К НПТ-1-Ех 4...20 мА 0...200,0...400,0.. .600, 0...800 0,5 НПП «Автоматика», г. Владимир
ИТ-ЕЗ-Ех L НПТ-1-Ех 4...20 мА 0...150,0...200,0...400, 0...600 0,5
ТС-201,-301,-401,-501 В, Е, I, К, L.N, R.S, Т Т20.10 4...20 мА Диапазон и тип термо- пары программируется по цепи 4.. .20 мА с помощью спец. ПО 0,5 WIKA, Германия
Т12.10ЕХ 4...20 мА 0,25
Т32.10Ех 4...20 мА, HART 0,12
Т42.10 Profibus РА 0,08
В качестве вторичных приборов для термопар применяются электронные по-
тенциометры и милливольтметры. Общий вид термопары ТХКУ (ТХАУ) ООО НПП
«Элемер» приведен на рис. 1.1СДля снижения погрешностей измерения термопары
выработаны рекомендации по их использованию:
• В зоне измерения должен находиться не только рабочий спай, но и термоэлектро-
ды термопары на определенной длине для уменьшения теплоотвода от спая.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
15
• При подключении нескольких термопар к измеритель-
ному прибору переключение термопар должно быть
двухполюсным для уменьшения погрешностей из-за
возможно слабой изоляции при высокой температуре и
некачественного заземления.
• Соединение термоэлектродов с компенсационными про-
водами в клеммной головке термопары должно быть за-
щищено от воздействия окружающей среды (отсутствие
влаги, пыли и пр.).
• Для защиты от высокочастотных помех, возникающих в
Рис. 1.1
цепях при работе дуговых систем розжига газа, мощных
контакторов и пр. используются экранирование прово-
дов и схемы заземления с фильтрами^ более подробные
сведения об уменьшении помех в измерительных цепях
термопар приведены в работе [1.10].
| На погрешность измерения оказывают влияние также другие факторы, а именно
конструкция термопары с защитным чехлом, способ ее монтажа на объекте (в стака-
не, кармане, с выступающей частью чехла и пр.), теплопередача через защитный че-
хол и др.]Так, тепловой поток от фланца можно уменьшить с помощью изолирующих
(асбестовых) прокладок. Длина защитного чехла, погруженного в зону измерения,
должна обеспечить устойчивую теплопередачу излучением и конвекцией.
Термометры сопротивления. В термометрах сопротивления используется зави-
симость сопротивления металлов или полупроводников от температуры измеряе-
мой среды. При увеличении температуры сопротивление чистых металлов (платина,
медь, никель и др.) увеличивается, а полупроводников (окислы металлов) уменьша-
ется и наоборот! Показателем изменения сопротивления термометра от температуры
служит температурный коэффициент сопротивления (ТКС) а, который должен быть,
как и удельное электросопротивление, возможно большим и постоянным. ТКС при-
нято определять в небольшом диапазоне температур 0... 100 °C:
ao;ioo = С^юо ~ ' 100-
Для платины aPt = 3,9 • 10~3 град’, для меди aCu = 4,26 • 10~3 град1, для никеля
высокой чистоты aNi = 6,17 10-3 град-1. Зависимость сопротивления термометра от
температуры характеризуется номинальной статической характеристикой (НСХ).
НСХ термометров сопротивления представлены в виде таблиц по ГОСТ 6651-94.
Тип НСХ определяется двумя параметрами — Ro (сопротивление термометра при
0 °C) и отношением R100/R0.
Термометры сопротивления платиновые (ТСП) имеют высокую точность изме-
рения и используются для диапазона температур -200. ..+850°C. Нелинейность ста-
тической характеристики ТСП в интервале температур 0...500°C не превышает 5%.
Для ТСП определены следующие НСХ: 50П, 100П и PtlOO (Ro равно 50 и 100 Ом соот-
ветственно). Для диапазона температур -200...+850°C известны также градуировки
(НСХ) Pt50, Pt200, Pt500 и PtlOOO.
Изменение сопротивления платины в диапазоне температур 0.. .+650°C выража-
ется зависимостью: Rt = R() (1 + A t + Bt2 ); А = 3,9685 • 10-3 К *; В = -5,847 • 10-7 К-1 .
Термометры сопротивления медные (ТСМ) используются в диапазоне темпе-
ратур -50...+180°C. Для ТСМ определены следующие НСХ: 50М и 100М (Ro равно
16
ГЛАВА 1
50 и 100 Ом соответственно). Зависимость сопротивления от температуры у ТСМ
линейная.
Изменение сопротивления меди в диапазоне температур -50. ..+180 °C выража-
етсядависимостью: R, = Ro (1 + At); А = 4,26 • 10 3 К1.
I В качестве вторичных приборов для термометров сопротивления обычно ис-
пользуются уравновешенные мосты и логометры.
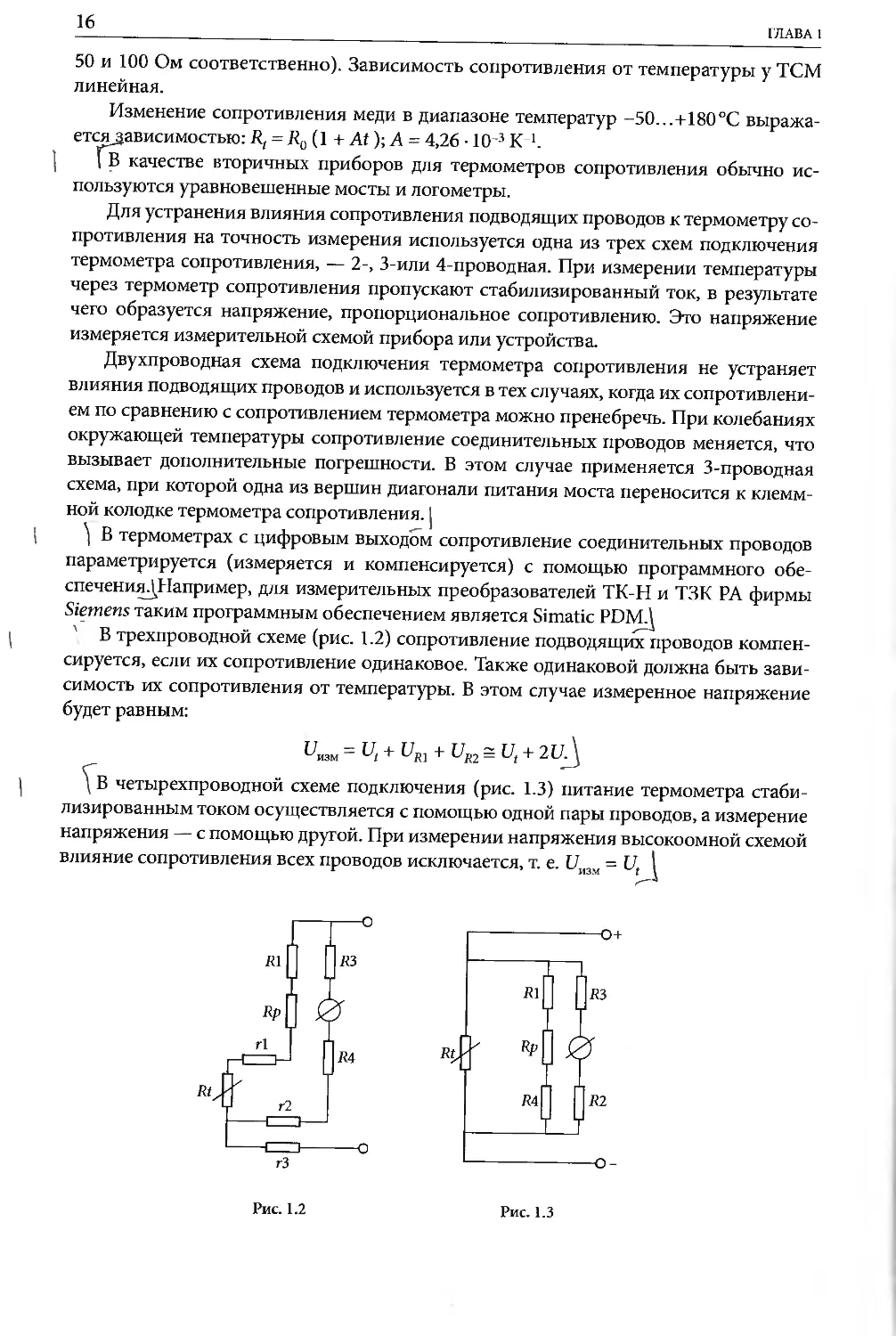
Для устранения влияния сопротивления подводящих проводов к термометру со-
противления на точность измерения используется одна из трех схем подключения
термометра сопротивления, — 2-, 3-или 4-проводная. При измерении температуры
через термометр сопротивления пропускают стабилизированный ток, в результате
чего образуется напряжение, пропорциональное сопротивлению. Это напряжение
измеряется измерительной схемой прибора или устройства.
Двухпроводная схема подключения термометра сопротивления не устраняет
влияния подводящих проводов и используется в тех случаях, когда их сопротивлени-
ем по сравнению с сопротивлением термометра можно пренебречь. При колебаниях
окружающей температуры сопротивление соединительных проводов меняется, что
вызывает дополнительные погрешности. В этом случае применяется 3-проводная
схема, при которой одна из вершин диагонали питания моста переносится к клемм-
ной колодке термометра сопротивления. |
В термометрах с цифровым выходом сопротивление соединительных проводов
параметрируется (измеряется и компенсируется) с помощью программного обе-
спеченияДНапример, для измерительных преобразователей ТК-Н и ТЗК РА фирмы
Siemens таким программным обеспечением является Simatic Р1)МД
' В трехпроводной схеме (рис. 1.2) сопротивление подводящих проводов компен-
сируется, если их сопротивление одинаковое. Также одинаковой должна быть зави-
симость их сопротивления от температуры. В этом случае измеренное напряжение
будет равным:
И = Ц + + Ur2 =U. + \
УВ четырехпроводной схеме подключения (рис. 1.3) питание термометра стаби-
лизированным током осуществляется с помощью одной пары проводов, а измерение
напряжения — с помощью другой. При измерении напряжения высокоомной схемой
влияние сопротивления всех проводов исключается, т. е. Пизм = Ц I
Рис. 1.2
Рис. 1.3
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
17
Для существенного снижения погрешности из-за влияния соединительных про-
водов измерительная мостовая схема размещается в непосредственной близости от
чувствительного элемента термометра, а именно в клеммной головке термометра со-
противления. Выходной сигнал измерительной схемы такого нормирующего преобра-
зователя, как правило, токовый (0...5 мА, 4. ..20 мА).
Термопреобразователи ТСМУ-Ех, ТСПУ-Ех, а также ТХАУ-Ex, выполнены в соот-
ветствии с требованиями на взрывозащищенное электрооборудование группы II по
ГОСТ Р 51330.0 99 (МЭК 60079.0-98) и ГОСТ 22782.0 и 22782.5. Взрывозащищенные
термопреобразователи могут использоваться во взрывоопасных зонах, где возможно
образование взрывоопасных смесей категорий ПА, ПВ и ПС и групп взрывоопасности
Т1...Т6 (в зависимости от температуры их воспламенения). Группа Т1 — температу-
ра 450°C, Т2 — 300°C...Тб — 85°C. Электрическая цепь уровня «ia» (особовзрыво-
безопасная) или «ib» (взрывобезопасная) для взрывоопасных смесей категории ПС
должна соответствовать параметрам: напряжение холостого хода Схх< 24 В, а ток
короткого замыкания 1к 3 < 120 мА.
Технические характеристики термометров сопротивления с унифицированным
выходным сигналом приведены табл. 1.7.
Таблица 1.7. Характеристики термометров сопротивления
с унифицированным выходным сигналом
Тип термометра сопротивления НСХ Тип нормирующего преобразователя Выходной сигнал, мА Диапазон измеряемых температур, °C Класс точно- сти Изготовитель
ТСМУ Метран-274 100М — 0...5,4... 20 -50...50,0...50, 0...100,0...150,0...180 0,25; 0,5 ГК «Метран», г. Челябинск
ТСМУ Метран-274- Ех юом — 4...20
ТСПУ Метран-276 юоп — 0...5.4...20 -50...50,0...100, 0...200,0...400,0... 500
ТСПУ Метран-276- Ех 100П — 4...20
Метран-286 юоп — HART -40...200 -40...500 0,4
Метран-286-Exia PtlOO —
ТСМУ-055 ТСМУ-205 ТСМУ-205-Ех юом ПТ-205 4...20 -50...50,0...50, 0...Ю0,0...150,0...180 0,25; 0,5 НПП «Элемер», Московская обл.
ТСПУ-055 ТСПУ-205 ТСПУ-205-Ех юоп ПТ-205 0...5, 4...20. 4...20 -50...50,0...Ю0, 0...200,0...300,0...500
HT-l.l-Ex 50М, юом НПТ-1Г-ЕХ 4...20 50...50, -50... 150, -50...200,0...100, 0...200 0,5 НПП «Автоматика», г. Владимир
ИТ-1.4-ЕХ 50П, юоп PtlOO НПТ-1Г-ЕХ 4...20 -50...50, 0...100,0...200, 0...400,0...500
TR-201,-301,-401, -501 PtlOO Т12.Ю Т21.Ю Т31.Ю 4...20 -200...850 0,5 IV/KA, Германия
Т32.Ю HART -200...850 0,1
ГПогрешности измерения температуры термометрами сопротивления в основном
определяются схемой подключения, конструкцией термометра, изменением сопро-
тивления линии от температуры окружающей среды, соблюдением правил эксплуа-
тации и рядом др. факторов, зависящих от конкретных условий измерения^
18
ГЛАВА 1
\ Некоторые рекомендации по уменьшению погрешностей измерения:
• необходимо обеспечить хорошую электрическую изоляцию соединения термо-
метра и соединительных проводов (10 МОм и более);
• места соединения термометра и соединительных проводов в клеммной головке
'термометра должны быть изолированы от окружающей среды;
• прокладка соединительных проводов должна производиться отдельно от линий
питания для снижения наводок и др. ]
1.1.2 Неконтактные датчики температуры (пирометры излучения)
Потребность в точных бесконтактных измерениях высоких температур (до
3000 °C) в ходе технологического процесса возникает во многих отраслях промыш-
ленности — в металлургии, химической, стекольной и др.
В одних случаях это связано с перемещением материала, температуру которо-
го необходимо измерять, например, при прокатке листов, профиля или труб в ме-
таллургии, или с измерением температуры слитков, слябов, расплава металла или
стекломассы, т.е. тогда, когда контакт с поверхностью материала невозможен или
недопустим. В других случаях, например при измерении температуры в вакуумных
камерах, в печах закалки или обжига керамики, в активной или защитной среде, при-
менение контактных датчиков ограничено по диапазону измерения или по условиям
рабочей среды. Актуально применение бесконтактных методов измерения темпера-
туры в процессах высокочастотной сварки или индукционного нагрева при высоком
уровне электромагнитного излучения. Есть много и др. случаев, когда бесконтактное
измерение является единственно возможным способом контроля температуры.
Основы бесконтактной термометрии (пирометрии) достаточно полно освещены
во многих работах, среди которых отметим [1.3,1.5,1.7,1.8,1.16]. В данной книге так-
же рассмотрены вопросы практического применения пирометров излучения в про-
мышленности, а также рекомендациям по снижению погрешностей измерения.
Как известно, зависимость интенсивности теплового излучения черного тела во
всем диапазоне длин волн от его температуры определяется уравнением М. Планка:
T0(X,T) = Ci;r5(eQ/>’7 -I)’1,
где С] = 2nc2h — первая постоянная излучения; С2 = ch/к — вторая постоянная из-
лучения; h — постоянная Планка; к — постоянная Больцмана; с — скорость света в
вакууме; Т — абсолютная температура, К.
Закон излучения Планка характеризует взаимосвязь абсолютной температуры Т
и спектральной интенсивности (плотности) излучения черного тела.
При малых значениях XT получаем формулу Вина:
Е0(Х,Т) = С1Х“5еС2/хг.
При XT < 3000 мкм • град погрешность отклонения от закона Планка не превыша-
ет ЗК. Проинтегрировав уравнение Планка по длинам волн X от 0 до бесконечности
получим уравнение Стефана-Больцмана:
Е(Х,Т) = |е0(Х,ТМХ = оТ4 ,
о
где о = 5,67 1012Вт см-2 град-4 — постоянная Стефана-Больцмана.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
19
Максимум распределения интенсивности излучения черного тела по длине вол-
ны X определяется законом смещения Вина:
Хтах • Т = 2896 мкм • град.
Согласно этому закону с повышением температуры Т максимум кривой спек-
тральной плотности излучения смещается в сторону коротких длин волн.
Любое физическое тело отличается от абсолютно черного тела (а.ч.т.) тем, что
часть тепловой энергии этого тела отражается или пропускается. Поэтому интенсив-
ность излучения любого физического тела £(Х, Т) будет меньше интенсивности из-
лучения а.ч.т. £0(Х, Т):
£(Х, Т)=е-£0(Х, Т),
где 0< £ < 1 — излучательная способность (степень черноты) тела.
Излучательная способность зависит как от температуры тела, так и от состояния
поверхности (шероховатость, наличие пленки окислов и пр.) и угла визирования. При
угле визирования меньше 40° от нормали погрешность измерения несущественна.
В табл. 1.8 приведена излучательная способность высокотемпературных мате-
риалов в зависимости от эффективной длины волны (еа).
Таблица 1.8. Излучательная способность ^высокотемпературных материалов
Материал Х = 1 мкм X = 5,1 мкм Материал Х = 1 мкм X = 5,1 мкм
Графит 0,8 (2000 °C) 0,82 (2500 °C) 0,78...0,88 Сталь листовая 0,35 0,55...0,7
Молибден 0,22 (2000 °C) 0,25 (2500 °C) 0,08... 0,15 Сталь холодного проката 0,78...0,9 0,8...0,9
Вольфрам 0,28 (2000 °C) 0,32 (2500 °C) 0,05...0,25 Окись алюминия 0,3...0,4 0,45
Тантал 0,25 (2000 °C) 0,28 (2500 °C) 0,12...0,15 Стекло силикатное 0,65 0,94
Платина 0,27 0,9 Керамика 0,5 0,8... 0,85
В технике бесконтактного измерения высоких температур получили широкое при-
менение яркостные (оптические) пирометры, пирометры суммарного и частичного из-
лучения и пирометры спектрального отношения. В качестве приемников излучения
могут применяться фотосопротивления, фотодиоды, болометры, пироэлектрические
приемники, фотоэлементы, работающие как в видимой, так и в инфракрасной области.
При монохроматическом излучении, т. е. излучении в очень узком конечном участке
спектра длин волн, температура тела определяется величиной его спектральной ярко-
сти. Яркостной температурой реального тела называется такая температура а.ч.т., при
которой их энергетические яркости на одной и той же длине волны X равны между
собой. Соотношение между яркостной температурой, измеренной яркостным пироме-
тром, и действительной температурой определяется соотношением
1/Т-1/Тя=—1пе(Х,Т),
где £ (X, Т) — монохроматический коэффициент черноты тела.
Погрешность яркостного пирометра тем меньше, чем меньше X и ниже темпе-
ратура. При повышении температуры эффективная длина волны уменьшается, по-
скольку максимум энергии излучения смещается в сторону коротких волн. Для изме-
20
ГЛАВА 1
рения яркостных температур используется одна из длин волн в диапазоне 0,6...1,5 мкм
(в яркостных пирометрах с исчезающей нитью обычно 0,65 мкм).
Пирометры суммарного излучения (радиационные пирометры) используют
закон Стефана-Больцмана для а.ч.т. Для реального тела радиационной температу-
рой Тр называется температура а.ч.т., интенсивность теплового излучения которого
во всем диапазоне длин волн такая же, как и у реального тела. С учетом того, что
е • оТ4 = оТр4, получим —
где Т — действительная температура реального тела; е — степень черноты тела.
Радиационная температура Тр, измеренная по интенсивности суммарного излу-
чения нечерного тела, всегда меньше действительной (истинной) температуры Т.
Поскольку степень черноты е не зависит от длины волны лишь для «серых» тел,
вышеприведенная зависимость соблюдается достаточно хорошо только для зеркаль-
ной оптики. Применение линзовой оптики приводит к ограничению спектрального
диапазона, что превращает пирометры суммарного излучения, строго говоря, в пи-
рометры частичного излучения, и в этом случае показания пирометра могут не соот-
ветствовать общепринятой зависимости, выраженной законом Стефана-Больцмана.
Для любого пирометра частичного излучения для каждого конкретного материала
можно подобрать показатель корня в вышеприведенной формуле так, что в некото-
ром диапазоне температур можно будет зависимость радиационной и действитель-
ной температур выразить соотношением
Т = Т гщ'
где n=f(T) для конкретного материала линзы пирометра (например, для Т=2000К и
линзы из кварцевого стекла л = 4,3); £ф — фактическая степень черноты тела в огра-
ниченном спектральном диапазоне пирометра.
При этом реально используемый спектральный диапазон определяется не только ма-
териалом фильтров и линз, но и спектральной характеристикой приемника излучения.
Температурой частичного излучения называется температура а.ч.т., при которой
интенсивность его теплового излучения в интервале длин волн Х1...Х2 формирует вы-
ходной сигнал пирометра такой же величины, как и реальный объект при его дей-
ствительной температуре. Влияние степени черноты тела на показания пирометра
при уменьшении температуры снижается. В пирометрах частичного излучения, как
правило, используются средняя или ближняя инфракрасная области спектра.
Зависимость распределения спектральной энергетической яркости от темпера-
туры используется в пирометрах спектрального отношения. Температура спектраль-
ного отношения (цветовая температура) — это температура а.ч.т., при которой отно-
шение интенсивностей излучения в участке спектра с эффективными длинами волн
X, и Х2 такое же, как и у реального тела. Таким образом, цветовая температура Тц
связана с действительной температурой реального тела Т соотношением
£О(ХР Тц )/£0(Х2, Тц ) = £(ХР Т)/Е(Х2, Г).
После замены Е и Ео их значениями по формуле Вина и логарифмирования полу-
ченного выражения зависимость между действительной и температурой спектраль-
ного отношения примет вид:
1/Т- 1/Тц = In [е (Хр П/е (Х2, Т)] • [l/C2(Xf> - Х2~1)].
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
21
Для серых излучателей, спектральная излучательная способность которых в
какой-либо области спектра постоянна, правая часть выражения обращается в ноль.
Таким образом, измеренная пирометром спектрального отношения цветовая
температура для серого излучателя равна действительной.
Примером серого излучателя с некоторым приближением может служить графит,
у которого в диапазоне температур от 1700 до 2000 °C степень черноты ех изменяется
от 0,78 до 0,79. Поскольку степень черноты у графита и др. неметаллических материа-
лов медленно растет с ростом длины волны, измеренная цветовая температура будет
меньше действительной и наоборот, т.е.:
если е (Хр 70 < е(Х2, Т), то Тц < Т,
а прие (Хр Т) > е(Х2, Г), Тц> Т.
Наименьшей селективностью обладают твердые тела с шероховатой поверхно-
стью. Независимость показаний пирометров спектрального отношения от степени
черноты при измерении температуры «серых» излучателей и значительно меньшие
по сравнению с др. классами пирометров погрешности при измерении температуры
большой группы нечерных тел, степень черноты которых лежит в диапазоне 0,6.. .0,9,
определили преимущественное использование пирометров этого класса. К другим
преимуществам пирометров спектрального отношения относятся независимость
показаний от расстояния до излучающей поверхности, ее размеров и возможность
производить измерения в более широком диапазоне углов визирования.
Принципиальная схема пирометра спектрального отношения, реализующая ме-
тод измерения отношения двух потоков излучения на длинах волн Xj и Х2 , включает
два пирометра (два фотоприемника с одноканальными схемами усиления) и схему
обработки 2-х сигналов для вычисления значений температуры по величине отноше-
ния сигналов. Чувствительность пирометра тем выше, чем больше расстояние между
областями спектральной чувствительности, т. е. чем меньше X, и больше Х2. Однако
этот интервал не должен быть слишком велик, чтобы не стала сказываться неравно-
мерность спектра излучательной способности.
У большинства пирометров спектрального отношения ширина спектрального
диапазона составляет около 0,2 мкм (0,45...0,65 мкм, 0,65...0,88 мкм, 0,88...1,03 мкм
и др.). Наведение на объект измерения осуществляется с помощью оптического при-
цела, специального осветителя (фонарика) или лазерного луча.
Из ведущих зарубежных фирм, выпускающих пирометры излучения, можно
назвать Land Instruments International Ltd. (Англия), Mikron (США), Raytek (США-
Германия), Siemens (Германия), Impac (Германия), Heitronics (Германия), InfraPoint
(Германия), Eurotron (Италия), ОРТЕХ (Япония) и др. Каждая из фирм выпускает, как
правило, пирометры компактные (переносные) и стационарные, частичного излуче-
ния и спектрального отношения.
Для примера перечислим некоторые из выпускаемых типов зарубежных пиро-
метров. Так, фирма Land выпускает пирометры Minolta /Land Система 4 типа Ml, R1,
LandFLTSA типов FG (оптоволоконные), JRG, DTT и VDT на диапазон 4,8...5,2 мкм.
Фирма Mikron производит пирометры М67, М-90, М-120. Фирма Siemens выпускает
известные пирометры серий ARDOPORT, ARDOCELL, ARDOMETER и ARDOCOL.
Фирма Impac — пирометры спектрального отношения IS/GA, ISQ5...IS10 и IN5-Ex
для взрывоопасных производств. Из пирометров фирмы Heitronics отметим серии
KT-81R, -81S, КТ-19, КТХ (каждая серия включает от 6 до 19 моделей). Среди ста-
22
ГЛАВА 1
Рис. 1.4
ционарных пирометров фирмы Eurotron выделим
пирометры IRtec Rayomatic -10, -20, -40, -60, -100.
Среди пирометров спектрального отношения фир-
мы ОРТЕХ отметим серию VF-3000.
Одной из известных зарубежных фирм, выпу-
скающих большую линейку пирометров, является
фирма Raytek (США-Германия). В табл. 1.9 приведе-
ны технические характеристики стационарных пирометров частичного излучения и
спектрального отношения фирмы Raytek, а на рис. 1.4 приведен общий вид пироме-
тра спектрального отношения серии MR1S.
Таблица 1.9. Характеристики пирометров фирмы Raytek
Тип пирометра Модель Спектральный диапазон, мкм Диапазон измере- ния, °C Точ- ность, % Время уста- новления показаний, с Показатель визирования, d = //s Выходной интерфейс
Спектрального отношения Серия MR1S 1,0 600...3000 0,5 0,01 44:1/130:1 4 - 20мА, RS-485/RS-232
Спектрального отношения FR1 1,0 450...2500 0,3 0,01 20:1/65:1 4 - 20мА, RS-485/RS-232
Частичного излучения Серия TX/SX 2,2; 3,9; 4,24; 4,47:4,61; 5,0; 7,0; 7-14 -18...2000 1 0,02....0,15 15:1/60:1 4 - 20мА, HART Protocol, RS-485/RS-232
Частичного излучения MID/MIC 3,9; 5,0; 8-14 -40... 1200 1 0,15 2:1/10:1 0/4 - 20мА, 0-5В, К, J, RS-485/RS-232
Частичного излучения MA1/2S • 1,0; 1,6 250...3000 0,3 0,001 80:1/ 300:1 0/4 - 20мА, RS- 485/RS-232
Частичного излучения FA1/2 1,0; 1,6 250... 3000 0,3 0,01 22:1/44:1 /100:1 0/4 - 20мА. RS-485/RS-232
К числу известных производителей большой линейки стационарных и перенос-
ных пирометров относится фирма Siemens. В табл. 1.10 приведены основные техни-
ческие характеристики пирометров серий ARDOCELL, ARDOCOL, ARDOMETER,
ARDOPORT и ARDOPTIX фирмы Siemens. Пирометры имеют прочный металличе-
ский корпус (нержавеющая сталь или алюминий), класс защиты IP65, высокую элек-
тромагнитную помехоустойчивость, а также высокую точность измерения за счет
многоточечной линеаризации сигнала. Отдельные серии пирометров имеют от 40 до
50 различных типов. Фирма выпускает пирометры с передачей излучения от нагрето-
го тела по световоду (ARDOCELL PS36 и др.).
Таблица 1.10. Характеристики пирометров фирмы Siemens
Тип пирометра Диапазон измерения, °C Показатель визирования Выход
Пирометры частичного излучения
ARDOCELL PS IX 30...1000 1:20 0/4...20 мА, RS-232, RS-422/RS-485
ARDOCELL PS 2X/3X 180...3000 1:20
ARDOCELL PS 11 0...400 1:20
ARDOCELL PS 21 300... 900 1:100
ARDOCELL PS 31 700... 1400 1:100
ARDOCELL PS 32 100...2500 1:30
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
23
Окончание табл. 1,10
Тип пирометра Диапазон измерения, °C Показатель визирования Выход
ARDOPORT (портативный) -30...1999 1:20 RS-232
ARDOPTIX (портативный) 200...2500 1:20 RS-232
Пирометры спектрального отношения
ARDOCELL PZ10 0...1000 1:38 0/4...20 мА, RS-232, RS-422/RS-485
ARDOCELL PZ30 700...2500 1:240
ARDOCELL PZ41 1000...3000 1:120
ARDOMETER MPZ, PZ10 0...1000 1:40
ARDOMETER MPZ, PZ20 250...2000 1:150
ARDOMETER MPZ, PZ30 700...2500 1:175
ARDOCOL MPZ, PZ40 900...2400 1:150
ARDOCOL MPZ, PZ50 500...1400 1:150
Большой арматурный набор для защиты пирометров включает водоохлаждае-
мые корпуса, диффузоры, защитные трубы и др. В пирометрах используется оптика с
просветными визирами, фокусируемая оптика и сменная оптика.
В табл. 1.11 приведены технические характеристики пирометров фирмы
«MIKRON» (США).
Таблица 1.11. Характеристики пирометров фирмы MIKRON (США).
Тип модели Спектральный диапазон, мкм Диапазон температур, °C Назначение
Пирометры частичного излучения
М50 (компактный) 6,5... 14 -20... 300 Многоцелевое назначение
М500 (компактный) 7...14 0...500 Широкий спектр применения
М67А 7...20 -40...100 Низкотемпературные процессы
М67В 8...14 0...1000 Общего назначения
М67Е 4,8...5,2 100...1300 Производство стекла и керамики
М67Н 0,78... 1,06 500... 3000 Горячие и расплавленные металлы
М67Р 2...2,6 250... 1650 Черные и цветные металлы
М68, M68L (световодный) 0,78... 1,06; 1...1.6 500...3000; 350... 1100 Производство стекла, индукционный нагрев
Пирометры спектрального отношения
М77 2 узких диапазона 350.. 3500 Металлы, литейное производство, индукционный нагрев
M77LS 2 узких диапазона 300...3000 Лабораторная модель пирометра
M190R1, M190R2 0,78...1,06 250...3000 Черные и цветные металлы
М770, М780 2 узких диапазона 300... 3000 Металлургия
М78, М780 (световодные) 2 узких диапазона 350...3500 Металлургия
Пирометры М68 и M68L работают при окружающих температурах до 300 °C без
охлаждения и до 500 °C с охлаждением, длина волоконно-оптического кабеля до
24
ГЛАВА 1
12 м. Пирометры М770/780 имеют аналоговый выход 4...20 мА, интерфейс RS-485,
цифровой дисплей и возможность наведения на объект размером 2 мм. Пирометр
М600 «Infracouple» (диапазон измерения 300...3000°C) имеет на выходе такие же
сигналы, как и термопары типа К, R, S, В и W. Одним из высокотемпературных све-
товодных пирометров является пирометр серии М668 (250...4000°C), а также пи-
рометр М680 (150...3600°C) для процессов индукционного нагрева, плазменного
производства, плавки металлов. Каждый из типов пирометров имеет от 3-х до 7
моделей.
Фирма HEITRONICS (Германия) выпускает инфракрасные пирометры серий КТ.
К ним относятся пирометры КТ11 иКТ12 для низких температур (-30...400 °C, выход
0/4...20 мА), КТ15 (19 моделей) на диапазон температур -50°C...3000°C (выход RS-
232), КТ19 (19 моделей) на диапазон температур -50...3000°С (ЖК дисплей, выход
RS-232, показатель визирования 1:200), КТ81 на диапазон температур 500...3000°С
(пирометр спектрального отношения, выход RS-232, показатель визирования 1:400),
КТ150 на диапазон температур -50...2500°C (выход RS-232, 0...1В, 0...10В, 0/4...20
мА), КТХ (5 моделей) на диапазон температур 0°C...2000°C (выход 0/4...20 мА). Пи-
рометры серий КТ12 и КТХ наиболее устойчивы к электромагнитным помехам.
Фирма EUROTRON (Италия) производит высокотемпературные пирометры IRtec
Rayomatic 20 на диапазон температур -25.. .2000 °C (выход 4.. .20 мА), IRtec Rayomatic 40
на диапазон температур -25.. .2000°C (HART), IRtec Rayomatic 60 на диапазон темпера-
тур 300... 1600 °C (4.. .20 мА), IRtec Rayomatic 100 на диапазон температур 300.. .2700 °C
(4...20 мА). Фирма производит также портативные пирометры IRtec Р на диапазон
температур -30...2000 °C. Показатель визирования от 1:60 до 1:200.
Фирма ОРТЕХ (Япония) выпускает пирометры серии РТ на диапазон температур
от -40 до 500 °C, также высокотемпературные пирометры частичного излучения VF-
3000 на диапазон температур 400...3000°C и спектрального излучения на диапазон
температур 600...2000°C. Показатель визирования пирометров 1:200, устройство на-
ведения — лазерный целеуказатель.
Пирометры фирмы IMPAC Infrared GmbH (Германия), входящей в Micron Group,
рассчитаны на измерение температуры вплоть до 3300 °C в различных отраслях про-
мышленности. Так, для диапазона температур 250...3000 °C выпускаются стационар-
ные пирометры Serie 5 (IGA5), Serie 12 (IGA12), Serie 140 (IGA140), Serie 200 (IGA200)
и Serie 300 (IGA300). В табл. 1.12 представлены характеристики пирометров серии
IS300/ IGA 300.
Таблица 1.12. Характеристики пирометров фирмы IMPAC
Модель Диапазон измерения, °C Спектральный диапазон, мкм Погрешность, % Показатель визирования
IS300/MB13 650... 1300 0,8...1,1 ± 1,5 1:70,1:75, 1:80
IS300/MB18 650... 1800 0,8...1,1 ± 1,5 1:70,1:75,1:80
IS300/MB25 1100...2500 0,8...1,1 ±1,5 1:70, 1:75, 1:80
IGA300/MB8 300...800 1,45... 1,8 + 1,5 1:40,1:60
IGA300/MB12 400... 1200 1,45... 1,8 ±1,5 1:40,1:60
IGA300/MB13L 300... 1300 1,45...1,8 + 1,5 1:40,1:60
На диапазон температур 550...3300°С выпускаются соответственно Serie 5
(IS5), Serie 12 (IS12), Serie 140 (IS140), Serie 200 (IS200) и Serie 300 (IS300). Для диа-
пазона температур 200... 1600°C выпускается пирометр Kleiber290, а для диапазона
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
25
160...2300°C пирометр Kleiber274. К пере-
носным пирометрам относятся модели IG А
8plus и IGA 15plus (250...3000°C) и IS 8plus
(550...3300°C). На рис. 1.5 представлен пи-
рометр IGA 200 Serie 200 (а) и серии 300 (6)
фирмы IMPAC Infrared GmbH (Германия).
В табл. 1.13 приведены данные пиро-
метров фирмы MAURER GmbH (Германия).
Рис. 1.5
Основная относительная погрешность из-
мерения пирометров ±1,0%, выходной сигнал 0/4.. .20 мА и 0... 10 VDC.
Таблица 1.13. Характеристики пирометров фирмы Maurer GmbH
Модель Диапазон измерения Спектральный диапазон, мкм Быстродействие, мс Область применения
OKTR 1485 600... 3300 0,85... 1,1 20...200 Металлургия
KTR 1485 550... 4000 0,85...1,1 10... 100 Металлургия
KTR2100-G 200...2500 5,1...5,6 5...500 Стекло
KTR 1475 250...1700 1,45...1,7 10...100 Металлургия
Фирма LAND Instruments International (Англия) производит пирометры для из-
мерения температуры стекла, керамики, металла и др. материалов. К пирометрам
фирмы Land относятся модели Ml 600/1600 CL (диапазон температур 600... 1600°C,
спектральный диапазон 1 мкм), Ml 800/2600 CL (800... 2600 °C, 1 мкм), R1 600/1600 CL
(600.. .1600 °C, 0,85... 1 мкм), R11000/2600 CL (1000.. .2600 °C, 0,85... 1 мкм). Фирма про-
изводит большую гамму пирометров для стекольной промышленности, в том числе
для измерения температуры поверхности стекла Land FLT5A (250 °C... 1100 °C, 3,9 мкм,
показатель визирования 1:50, выход 4...20 мА), температуры стекломассы FG 10/14С
(1000... 1400°C, 1:50,0,7... 1 мкм), FG 12/16,5С (1200... 1650 °C, 1:50,0,7... 1 мкм) и VDT
(1000...2500 °C, 1:100,4,8... 5,2 мкм).
Среди отечественных пирометров отметим пирометры фирм «Инфратест» (г. Ека-
теринбург), КБ «Диполь» (Москва) и «ТЕХНО-АС» (г. Коломна, Московская обл.).
В табл. 1.14 представлены пирометры серии «Термоскоп» (фирма «Инфратест»).
Пирометры широко применяются для измерения температуры в производстве ме-
таллов, керамики, стекла и пр.
На рис. 1.6 представлен пирометр «Термоскоп-004» фирмы «Инфратест».
Рис. 1.6
26
ГЛАВА 1
Таблица 1.14. Характеристики пирометров фирмы «Инфратест»
Тип пирометра Диапазон измерения, °C Показатель визи- рования Погрешность, % Выход Целеуказатель
Пирометры частичного излучения
Термоскоп-004 (стационарный) 300...2000 От 1:50 до 1:500 ±0,5 RS-485, 0/4...20 мА Лазерный или оптический
Термоскоп-100 (ручной) -20...2000 От 1:60 до 1:300 ±1,0 — Лазерный
Термоскоп-100- Logo(ручной) -20...2000 От 1:60 до 1:300 ±1,0 RS-232 Лазерный
Термоскоп-300-1С (ручной) 300...2000 1:240 ±0,5 RS-232 Оптический
Термоскоп-200 (стационарный) -20...2000 От 1:30 до 1:75 ±1,0 4...20 мА Оптический или лазерный
Термоскоп-600- 1С 300...2000 Ос 1:160 до 1:280 ±0,5 RS-485, 4...20 мА Оптоволокно
Термоскоп-800-1С 300...2000 1:300 ±0,5 RS-4856 0/4...20 мА Оптический
Пирометры спектрального отношения
Термоскоп-300-2С (ручной) 700...2000 1:100 ±0,75 RS-232 Оптический
Термоскоп-600-2С 700...2000 1000...2000 1:100 ±0,75 RS-485, 0/4...20 мА Оптоволокно
Термоскоп-800-2С 700...2000 1:100 ±0,75 RS-485, 0/4...20 мА Оптический
Инфракрасные термометры (пирометры) серии КЕЛЬВИН, выпускаемые КБ
«Диполь» (Россия), охватывают область температур от -30 до 2300 °C.
Модель «Кельвин ЛЦМ» (показатель визирования 1:90, 1:120, 1:150, 1:180, 1:200,
1:250, 1:300) рассчитана на диапазоны температур -30... 100°C, -30...200°C, -30...
400°С, -18...600°С, 100...1000°С, 200...1300°С, 500...1600°С, 700...1800°С. Абсолют-
ная погрешность определяется выражением: 1 оС+0,01хТизмоС. Модель «Кельвин- У1»
(показатель визирования 1:120 и 1:180, спектральный диапазон 1,0... 2,6 мкм) измеря-
ет температуру в диапазоне 300.. .2300 °C.
Модель «Кельвин-У2» (1:100, 3,86 мкм) имеет диапазон измерения 500...2300°C.
Модель «Кельвин-УЗ» (1:100, 4,8...5,2 мкм) имеет диапазон измерения 300...2300°C.
Пирометры выполнены в переносном (ручном) исполнении, однако легко перестраи-
ваются в стационарное исполнение. По заказу выход пирометра может быть 0.. .5 мА,
4. ..20 мА, 1 мВ/I град или RS-232.
Инфракрасные пирометры фирмы «ТЕХНО-АС» (Россия) применяются в те-
плоэнергетике, металлургии, стройиндустрии, химической и пищевой промыш-
ленности. К низкотемпературным пирометрам относятся пирометры С-НО «Фа-
кел» (-20...200°C, показатель визирования 1:100, погрешность ± 1,5%), С-210 «
Салют» (-20...600°C, показатель визирования 1:100, погрешность ± 1,5%), С-300
«Фаворит» (-20. ..600 °C, показатель визирования 1:100, погрешность ± 1,5%). К вы-
сокотемпературным пирометрам ООО «ТЕХНО-АС» относятся пирометры С-500
«Самоцвет» (400... 1600°C, показатель визирования 1:100, погрешность ± 1,0%),
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ 27
С-600 «Хрусталь» (700...1900°C и 800. ..1200°C, показатель визирования 1:180, по-
грешность ± 1,0%) и С-3000 «Сталь» (1300... 1800°C, показатель визирования 1:50,
погрешность ± 1,0%).
ННТП «Термоконт» (Москва) выпускает пирометры ДИЭЛТЕСТ серий TH, ТВ,
ТЦ. Модельный ряд пирометров ДИЭЛТЕСТ включает до 90 стандартных моделей
на начало 2005 г., из которых 60 моделей — стационарные приборы. Погрешность
измерений составляет для различных моделей ±1, ±0,5 и ±0,3% при одинаковых
или близких остальных характеристиках. Пирометры ДИЭЛТЕСТ являются мало-
чувствительными к электромагнитным полям, что позволяет использовать их на
металлургических и машиностроительных предприятиях, оснащенных мощными
индукционными нагревательными и плавильными печами. Для этого ни в одной
из модификаций приборов не используются моточные элементы (трансформато-
ры, дроссели, дроссельные и трансформаторные преобразователи напряжения),
подверженные влиянию сильных магнитных полей. Необходимо отметить, что
стационарные модификации пирометров ДИЭЛТЕСТ выпускаются в прочном ме-
таллическом корпусе, что повышает их механическую прочность и надежность.
Большинство модификаций пирометров может комплектоваться пыле- брызгоза-
щитными кожухами со степенью защиты IP65. Питание стационарных пирометров
составляет 24 VDC, а переносных — от аккумуляторов. Линейка стационарных
пирометров ДИЭЛТЕСТ состоит из 12 серий, каждая из которых различается по
принципу действия (частичного излучения или спектрального отношения), диапа-
зону измеряемых температур, спектральному диапазону, погрешности измерений и
по конструктивному исполнению.
Внутри серии пирометры подразделяются на следующие модификации:
• базовая с выходным сигналом 0.. .20 мА;
• базовая с выходным сигналом 4.. .20 мА;
• базовая с выходным интерфейсом RS-232.
Кроме того, каждая из модификаций может иметь дополнительно выходные ре-
лейные контакты (мин. и макс.). Эти модификации отличаются тем, что можно за-
дать значение температуры, по достижении которой сработает находящееся в при-
боре реле замыкающее контакты. Контакты изолированы от корпуса пирометра и от
имеющихся внутри его потенциалов («сухие контакты»).
Система визирования всех стационарных пирометров — квазибеспараллакс-
ная, с двумя лазерными целеуказателями, при этом центр измеряемой области на-
ходится точно посередине между лазерными пучками. Оптические системы пиро-
метров сфокусированы на расстояние примерно 1 м (стандартная оптика). На этом
расстоянии от объектива пирометра находится плоскость визирования, размер
которой минимален. Необходимость фокусировки на др. расстояния оговаривает-
ся при заказе пирометра. Все модели пирометров ДИЭЛТЕСТ (более 150) делят в
зависимости от точности на 3 группы: пирометры широкого применения (погреш-
ность ± 1,0%), повышенной точности (погрешность ± 0,5%) и прецизионные (по-
грешность ± 0,3%). К пирометрам 1-й группы относятся пирометры ТНЗ (4,5,6) П и
ТНЗ (4,5,6) С, к пирометрам 2-й группы — ТВ2 (3) П, ТЦ2 (3) П и ТВ2 (3) С, ТЦ2 (3)
С, к пирометрам 3-й группы — ТВ4 (5) П, ТЦ4 (5) П и ТВ4 (5) С, ТЦ4 (5) G Буква
«П» в типе пирометра означает «переносной», буква «С» — «стационарный»).
В табл. 1.15 приведены основные технические характеристики некоторых пиро-
метров ННТП «Термоконт».
28
ГЛАВА 1
Рис. 1.7
Таблица 1.15. Характеристики пирометров фирмы ННТП «Термоконт»
Тип пирометра Диапазон измерения, °C Спектральный диапазон, мкм Показатель визирования Погреш- ность, % Выход Целеуказатель
ТН4П (част, излучения) 200... 1200 0,8...4,0 1:50 + 1,0 — Оптический
ТВ6С (част, излучения) 500... 1800 0,9...1,1 1:100 + 1,0 0...20мА Лазерный
ТВ2П (част, излучения) 500... 1800 или 700...3000 0,9...1,1 1:125 ±0,5 — Оптический, дисплей
ТЦ2С (спектр, отношен.) 600... 1800 0,6...0,9/ 0,9...1,1 1:80 ±0,5 0...20мА Лазерный
ТЦ-4П (спектр, отношения) 600... 1800 0,6...0,9/ 0,9...1,1 1:80 ±0,3 — Оптический
На рис. 1.7 представлены пирометры ТВ2П (а), ТЦ2С (б) и ТВ6С (в).
Следует сказать, что переносные пирометры находят широкое применение в раз-
личных отраслях промышленности благодаря целому ряду преимуществ:
• отображению на дисплее текущего значения, максимальной, минимальной и
средней температуры, а также разницы температур;
• компенсации влияния фона на точность измерений;
• сигнализации выхода параметра за пределы измерения;
• сохранению в памяти прибора до 100 и более точек измерения;
• наличию лазерного или оптического прицела;
• малым габаритам и др.
В табл. 1.16 приведены характеристики переносных пирометров фирмы Raytek
(Германия).
Таблица 1.16. Характеристики переносных пирометров фирмы Raytek
Тип пирометра Диапазон измерения, °C Спектральный диапазон, мкм Погрешность, % Целеуказатель Габариты
MiniTemp4 (Raytek) -18...275 7...18 ±2,0 Лазерный 150x100x38
Raynger MX (Raytek) -30...900 8...14 ±0,75 Лазерный 200x170x50
Raynger 3i (Raytek) 10...800 200... 1800 150... 1800 600...3000 7,9 (фторопласт); 1,6 (металл, керамика); 5,0 (стекло); 1,0 (металл, керамика) ±1,0 Лазерный или оптический 15x101x38
На рис. 1.8 показан общий вид портативных пирометров MiniTemp и Raynger 3i.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
29
Применительно к различным объектам
измерений и условиям рабочей среды могут
быть сделаны некоторые практические ре-
комендации по использованию пирометров
в конкретных условиях производства.
При измерении температуры тел, у
которых еА мала, а также для исключения
влияния засветки пирометра рекомендует-
ся использование визирной трубки, глухой
конец которой находится в зоне измеряемой
температуры. Если отношение внутреннего
Рис. 1.8
диаметра трубки к ее длине составляет 1/15 или менее, то можно рассматривать вну-
треннюю поверхность дна трубки как а.ч.т.
Известно также, что при погружении защитной трубки в ванну расплава на глу-
бину, превышающую ее диаметр в 5 раз, коэффициент ех = 0,99 11.3]. Для графитовой
трубки длиной 120 мм с внутренним диаметром 6 мм. коэффициент ех = 0,995 [1.10].
Иногда создание искусственной полости черного тела достигается высверливанием в
объекте цилиндрического канала с соотношением диаметра к длине не более 1/5.
При высоком уровне электромагнитных помех или высокой окружающей темпе-
ратуре, а также при наличии дыма, конденсата, пыли или присутствия посторонних
предметов в зоне измерения используется волоконная оптика. Гибкий волоконно-
оптический кабель (ВОК) переносит поток излучения от объекта непосредственно к
приемнику пирометра. Различная форма приемной площадки ВОК (прямоугольная,
цилиндрическая, конусная) позволяет собрать излучение с различной площади излу-
чателя. Помимо гибких свет оводов могут использоваться и жесткие световоды. В рабо-
те [1.10] рассмотрен пирометр полного излучения для измерения высоких температур
(до 1800 °C) в углеродсодержащей среде с помощью свет овода из лейкосапфира.
Наличие паров воды, дыма, пыли и пр. могут увеличить погрешность измерения
температуры. При выборе пирометра с конкретным спектральным диапазоном сле-
дует учитывать зависимость коэффициентов пропускания и поглощения от длины
волны. Так, пыль и конденсат приводят к ослаблению потока излучения. Полосы по-
глощения паров воды оказывают сильное влияние на длинах волн 2,2...3 мкм. Со-
держащиеся в печных газах СО с полосами поглощения на длинах волн 4,8.. .5 мкм и
СО2 с полосами поглощения на участках спектра 2,8.. .3 мкм и 4,1.. .4,3 мкм не оказы-
вают влияния на погрешности измерения пирометров с кремниевыми фотодиодами,
спектральная чувствительность которых находится в диапазо-
не 0,8... 1,2 мкм [1.5].
В ряде пирометров производи! ели предусматривают не-
обходимость учета рассеянного излучения и плохого контакта
(диапазон регулирования изменения излучательной способно-
сти в приборах устанавливается от 0,10 до 1,15 и даже до 1,50 с
шагом 0,01). Влияние зеркального отражения убирается либо
выбором места установки прибора, либо установкой защит-
ных экранов (штор).
При измерении температуры ряда материалов пироме-
трами излучения необходимо учитывать их специфические
свойства. Особенности измерения температуры поверхности
Рис. 1.9
30
ГЛАВА 1
слитков, слябов связаны с наличием окалины, дыма и пр. При измерении темпера-
туры стекла необходимо учитывать, что коэффициенты излучательной способно-
сти ех стекла в видимой и ближней ИК-области спектра малы и достигают значений
0,82...0,98 в области длин волн 4,5...8 мкм (максимум около 0,98 при длине волны
5 мкм). В диапазоне длин волн 8... 12 мкм излучение снижается из-за роста коэф-
фициента отражения (рх), вызванного резонансом группы SiO2 в стекле. Таким об-
разом, в диапазоне 4,5...8 мкм стекло по излучательной способности приближается к
а.ч.т. Характеристики стекол, охватывющих ИК-область спектра, и приемников I4K-
излучения приведены в работах [1.4,1.7,1.11,1.12].
Рассмотрим другие системы неконтактного измерения температур — тепловизо-
ры и сканирующие термометры.
Тепловизор — устройство, фиксирующее тепловое поле удаленного объекта из-
мерения. Тепловизор имеет память на 100 и более термограмм, которые могут быть
перенесены на персональный компьютер для обработки и архивации. На экране ото-
бражается термограмма в выбранной палитре с цифровым значением температу-
ры в центральной точке термограммы. Тепловизор ThermoView Til30 фирмы Raytek
(рис. 1.9) имеет болометрическую матрицу 160x120, диапазон измерения температуры
-10.. .250 °C в спектральном диапазоне 7... 14 мкм. Погрешность измерения температу-
ры +2 °C, показатель визирования 1:10 при минимальном пятне визирования 7 мм.
Прибор позволяет анализировать термограммы, накапливать архив и создавать
отчеты. В тепловизоре используется лазерный прицел. Для связи с компьютером
имеется порт USB. Прилагаемое ПО InsideIR помимо обработки термограмм создает
БД по техническому обслуживанию и диагностике оборудования.
В табл. 1.17 приведены характеристики тепловизоров различных фирм.
Таблица 1.17. Технические характеристики тепловизоров
Модель Диапазон измерения,°C Погрешность, % Память Масса, кг
TH 9100 («NEC») -4... 500 ±2 1Гб 0,7
TermoView ТОО (Raytek) -10...250 ±2 100 термограмм 1.0
Flexcam (Infrared Solutions Inc.) -10...600 ±2 1 Гб 1,9
IRI1011 (Infrared Integrated Systems Ltd) -10...300 ±2 1000 термограмм 0,6
M9100 Provision (Mikron) 600...4000 +1,5 Запись на НЖМД 30 кадров/с 0,8
Сканирующий термометр (инфракрасный сканер)
применяется для точного измерения и визуализации тем-
пературы протяженных объектов (лента, полоса).
Линейно-сканирующий термометр МР-50 фирмы
Raytek (рис. 1.10) включает бесколлекторный электродвига-
тель, устройство сканирования (зеркало, линзы, реперное
черное тело калибратор), инфракрасный детектор, микро-
процессор, устройства аналоговых и цифровых входов-
выходов. Сканирующий термометр МР-50 имеет высокую
Рис. 1.10
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
31
скорость сканирования (до 48 линий в секунду), формирует цветные термопрофили
в режиме реального времени, вычисляет параметры термограмм.
Обработка данных осуществляется с помощью ПО DataTemp. Частота сканирова-
ния— 48 Гц, угол сканирования — 90°, оптическое разрешение — 100:1. Прибор имеет
прочный водоохлаждаемый корпус с воздухообдувом входного окна прибора. Размеры
прибора: 200x180x190 мм.
В табл. 1.18 приведены технические характеристики сканирующего термометра
МР-50 (оптическое разрешение 100:1).
Таблица 1.18. Характеристики сканирующего термометра МР-50
Тип Спектральный диапазон» мкм Диапазон измерения, °C Оптическое разрешение
MR50 LT 3...5 20...300 100:1
MR50 МТ 3,9 100...800 100:1
MR50 G50 5 100...600 100:1
MR50 G51 5 200...950 100:1
MR50 1М 1 600...1200 100:1
MR50 2М 1,6 400... 950 100:1
В последнем десятилетии появилось 2 новых класса неконтактных термометров —
многодиапазонные (многоспектральные) пирометры и пирометры, совмещенные с
телевизионными системами наблюдения. Укажем на одно важное обстоятельство,
имеющее отношение к многоспектральным пирометрам. Приборы данного класса
обеспечивают приемлемую точность измерений температур поверхности различных
материалов при условии их специальной калибровки в определенном, достаточно
узком, температурном диапазоне, характерном для каждого конкретного материала.
1.1.3 Регуляторы температуры прямого действия
Регуляторы температуры основаны на поддержании температуры регулируемой
среды путем изменения расхода с помощью регулирующего клапана. Регуляторы пря-
мого действия относятся к устройствам, работающим без использования посторон-
него источника энергии. Конструктивно регулятор представляет собой термобаллон
с термочувствительным жидким или твердым наполнителем, капиллярную трубку и
регулирующий орган (клапан или сильфон) (рис. 1.11), представляющий собой двух-
ходовой нормально открытый (НО) или нормально закрытый (НЗ) клапан. Материал
клапана и термобаллона — в основном нержавеющая сталь марки 12Х18Н10Т.
При изменении температуры регулируемой среды изменяется давление рабоче-
го вещества, что приводит к перемещению клапана на величину, пропорциональную
изменению объема наполнителя замкнутой термосистемы.
Рис. 1.11
32
ГЛАВА 1
Постоянная времени регуляторов температуры прямого действия может состав-
лять от 60 до 199 с.
Регуляторы температуры прямого действия используются для поддержания тем-
пературы жидких и газообразных сред.
• Технические характеристики регуляторов ОАО «Теплоконтроль» (г. Сафоново) и
компании Samson (Германия) приведены в табл. 1.19.
Регуляторы температуры с использованием внешних источников питания работа-
ют в комплекте с первичными преобразователями с унифицированным выходным сиг-
налом или с первичными и нормирующими преобразователями, унифицированный
выходной сигнал которых обрабатывается микропроцессорной схемой регулятора.
В табл. 1.19 приведены характеристики регуляторов температуры прямого дей-
ствия.
Таблица 1.19. Характеристики регуляторов температуры прямого действия
Тип Ду, мм Условная пропускная способность м’/ ч Предел настройки температуры, °C Температура среды,°C Давление среды, МПа Длина ка- пилляра, м
PT-ДО (ДБ) («Теплоконтроль») 15 25 40 50 80 2,5 6,3 16 25 60 0-40,20-60,40-80, 60-100,80-120, 100-140,120-160, 140-180 -15...+ 225 0,4; 0,6 1,6; 2,5; 4,0; 6,0; 10,0
РТС-ДО(ДЗ) («Теплоконтроль») 15 20 25 32 40 50 65 80 100 125 150 2,5 4,0 6,3 10 16 25 40 63 100 160 250 0-100; 100-200 0...+225 1,0; 1,6 1,6; 2,5; 4,0; 6.0; 10.0
РТПД («Теплоконтроль») 65 80 100 125 150 40 100 160 250 400 35-60; 60-85; 85-110 0...+225 1,0 2,5; 4,0; 6.0; 10,0
РТ-ТС («Теплоконтроль») 25 40 50 80 6,3 12,5 25 60 Фиксировано: 35,45,50, 55,60, 65, 70,75,80,85, 90, 95 ±2 °C 120 1,0 —
РТЦГВ («Теплоконтроль») 20 25 32 4,0 6,0 10 Фиксировано: 50,60, 75 130 1,0 —
2РТ-04 («Теплоконтроль») 15 32 2,5 10 0-15; 15-30; 30-45 Вода — до 100; пар — до 200 1,6 4,0; 6,0; 10,0
РТР («Теплоконтроль») 15 20 1,8 2,2 10-30 120 1,0 —
Тип 4 (НО) Тип 4 (НЗ) «Samson» 15...50, 15...250 — Установка на задатчике термостата 350 1,6; 4,0 3,0
Тип 43 «Samson» 15... 250 4-500 0-35, 5-70, 40-100, 50-120, 70-150 200 2,5 5
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
33
1.2. Приборы для измерения расхода
Измерение расхода и учет жидких, газообразных, а также сыпучих сред всегда
являлось актуальной задачей применительно к различным сферам деятельности
человека2. В последние годы актуальной задачей стало точное измерение расхода
в нефтехимической, нефтеперерабатывающей, газовой и др. отраслях промыш-
ленности.
Расходом вещества принято называть количество вещества, прошедшее через
определенное сечение (трубопровод) в единицу времени. Объемный расход измеря-
ют в м3/с (м3/ч, л/ч), массовый в кг/с (кг/ч). Приборы, измеряющие расход, называ-
ются расходомерами.
В последние годы наибольшее применение в промышленности находят массовые
расходомеры, учитывающие температуру и плотность, а при измерении расхода газа
плотность и влагосодержание газа.
Из методов и средств измерения расхода получили распространение следующие
типы расходомеров:
• электромагнитные;
• ультразвуковые;
• кориолисовые;
• вихревые;
• переменного перепада давления на сужающем устройстве (диафрагма, сопло,
труба Вентури);
• тепловые;
• скоростного напора.
Методы и приборы для измерения расхода жидких и газообразных сред приведе-
ны в работах [1.19-1.39]. Основное внимание уделено методам и приборам с унифи-
цированным выходным аналоговым или цифровым сигналами.
В настоящее время большое применение в технике точного измерения расхода
находят бесконтактные расходомеры, т. е. расходомеры, чувствительные элементы
которых (сенсоры) не контактируют напрямую с измеряемой средой, а также рас-
ходомеры, обеспечивающие высокую точность измерений расхода, стабильность и
воспроизводимость показаний.
Помимо краткого рассмотрения основных методов и приборов для измерения
расхода основное внимание уделено бесконтактным и относительно новым типам
расходомеров (ультразвуковым, кориолисовым, вихревым и др.), которые имеют
унифицированный аналоговый или цифровой выходной сигнал.
2 Впервые зависимость динамического давления (напора) от скорости потока (расхода) использовал в
1732 г. французский инженер А. Пито. В середине XVIII века Д. Бернулли разработал законы механики
жидких и газообразных тел. В 1883 г. английский физик О. Рейнольдс, исследуя течение вязкой жидко-
сти, установил так называемое число Рейнольдса (Re), зависящее от плотности (р), вязкости (р), скорости
вещества (г) и размеров сечения трубопровода^: Re = pvl I р. При Re < 2000...2200 имеем ламинарное
течение, при больших значениях — турбулентное. В 1831 г. английским физиком М. Фарадеем открыта
электромагнитная индукция, основные законы которой получены английским физиком Д. К. Максвеллом
в 1873 г. и в дальнейшем легли в основу теории электромагнигных расходомеров. Французским ученым
Г. Кориолисом открыт эффект, согласно которому во вращающейся системе отсчета материальная точ-
ка, движущаяся не параллельно оси вращения, отклоняется в направлении, перпендикулярном ее отно-
сительной скорости. Произведение массы точки на кориолисовое ускорение определяет кориолиса силу,
направленную противоположно этому ускорению. Кориолиса сила и ускорение (поворотное ускорение)
используются в кориолисовых расходомерах.
2 Зак. 3801
34
ГЛАВА 1
1.2.1 Электромагнитные (магнитно-индукционные) расходомеры
Электромагнитный расходомер (рис. 1.12) основан на использовании закона
электромагнитной индукции Фарадея, согласно которому в проводнике, движущем-
ся в магнитном поле, наводится ЭДС (£), пропорциональная скорости потока.
Рис. 1.12
Е = К В • v • d,
где К — коэффициент пропорциональности (постоянная сенсора); В — магнитная
индукция между полюсами катушек; v — скорость потока жидкости; d — внутрен-
ний диаметр трубопровода.
Роль проводника в данном случае играет электропроводящая жидкость. Конструк-
тивно расходомер состоит из специальных катушек, расположенных с разных сторон
измерительного участка трубы, и минимум двух электродов, установленных внутри или
вне измерительного участка трубы. Напряжение, на-
водимое движущейся в магнитном поле электропро-
водящей жидкостью, воспринимается измерительны-
ми электродами и преобразуется электронной схемой
с большим входным сопротивлением в выходной сиг-
нал для отображения значения расхода на дисплее и
(или) передачи к контроллеру (компьютеру).
За счет создания пульсирующего электромагнит-
ного поля снижаются погрешности от амплитудных
факторов, состава вещества, низкой электропровод-
ности жидкости. К достоинствам электромагнитных
расходомеров также относятся высокое быстродействие и независимость показаний
от характера потока жидкости (ламинарный, турбулентный).
Внутренняя поверхность трубы (или специальная вставка) выполняется из не-
проводящего материала, в качестве которого используются фторопласт, керамика,
полиуретан. Измерительные электроды изготавливаются из нержавеющей стали, ти-
тана, тантала или платины.
Электромагнитные расходомеры используются для измерения расходов воды, кис-
лот, щелочей, суспензий, сточных вод с электропроводностью более 1 мкСм/см. По-
грешность измерения электромагнитных расходомеров составляет от ±0,5 до ±1%.
Преимущества электромагнитных расходомеров:
• работа в широком диапазоне температур, вязкости, плотности, давления и элек-
тропроводимости;
• отсутствие контакта с измеряемой средой без потери давления;
• возможность измерения без помех жидкости со взвешенными частицами или
пузырьками газов;
• большой диапазон диаметров трубопроводов (от 2 до 2600 мм);
• большой динамический диапазон измерений и линейность показаний;
• высокая точность, надежность и простота эксплуатации.
Ряд электромагнитных расходомеров имеют дополнительные функции:
• представление результатов в различных единицах на 2.. .4-строчном дисплее;
• самодиагностика и электрическая самоочистка электродов;
• возможность сохранения результатов измерения, калибровки в ПЗУ и др.
В табл. 1.20 представлены технические характеристики электромагнитных рас
ходомеров.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ 35
Таблица 1.20. Технические характеристики электромагнитных расходомеров.
Тип Исполнение Д>»мм Расход, м3/ч Миним. прово- димость среды, мкСм/см Давление среды, МПа Температура среды, °C Выход
Взлет ЭР (ЗАО «Взлет») ЭРСВ-410 -510 10 20 32 40 50 65 80 100 150 200 0.028... 3,4 0,113... 13,58 0.290...34,78 0,453...54,34 0,708...84,9 1,196... 143,5 1,811...217,3 2,83 ...339,6 6,37...764,1 11,32... 1358 5 2,5 150 4...20 мА, RS-232
Proiine Promag (Endress +Hauser GmbH) Датчики: Promag W Promag U Promag H Promag S Преобр-ли: Promag 10 Promag 23 Promag 35S Promag 50/53 25...2000 15...600 2... 100 15...600 0,005...113000 0,005...10200 0,005...2000 0,005...10200 5 5; 50 5; 50 1 4 4 4; 1,6 4 80 180 180 130 4... 20 мА, HART, Profibus РА/DR FF
ADMAG (Yokogawa) ADMAG -CA -AXF 15... 100 2,5...400 Скорость пото- ка до 10 м/с 0,01; >1,0 4 -40...+180 4...20 мА, HART
SITRANS FM (Siemens) Датчики: -711/A; -711/E; 911/E 15...2000 15...2000 15...600 Скорость потока 0,25... 12 м/с 3 3 (пост, поле); 0,01 (перем, поле) 1,0; 1,6; 2,5; 4,0 по заказу 60 4...20 мА, HART Profibus PA
Преобр-ль: • Transmag;
• Intermag2
ПРЭМ (ЗАО «Тепло- ком») Мод. 3 15 20 25 32 40 50 80 100 150 0,007...6,7 0,012... 12 0,018...18 0,03... 30 0,045 ...45 0,07... 72 0,18... 180 0,28 ... 288 0,63... 630 1 1,6 150 4...20 мА, RS-485
1.2.2 Ультразвуковые расходомеры
Принцип действия ультразвукового расходомера (рис. 1.13) основан на зависи-
мости разности времени прохождения сигналов ультразвуковой частоты (20 кГц.
и более), направленных одновременно (или попеременно) в направлении потока и
против него, от скорости потока, т. е. от объемного расхода.
Скорость распространения ультразвуковых колебаний в измеряемой среде (V)
связана со скоростью измеряемого потока (vcp) равенством:
36
ГЛАВА 1
Рис. 1.13
v=Qi + %
где Со — скорость звука в данной среде (для жидкости
Со = 800...2000 м/с, для газа и пара от 150 до 1000 м/с, для
твердых тел от 2000 до 6000 м/с).
Время прохождения колебаний по потоку (/J и про-
тив потока (12) равны:
G = L / (Со + vcp); t2 = LI (Co - vCp),
где L — длина участка между датчиком и приемником уль-
тразвуковых колебаний. Приравняв скорость звука в этих
уравнениях найдем скорость потока г'ср:
% = L • (/2 - /J/ 2 t2.
Датчики расходомера могут быть накладные, врезные, устанавливаемые относи-
тельно оси трубопровода по диаметру или хорде, в контакте или без контакта с из-
меряемой средой. Расходомер имеет одну пару датчиков, устанавливаемых под углом,
или две пары датчиков, устанавливаемых одна по направлению потока, а другая -
против потока. Измерительный участок расходомера представляет собой врезку,
монтируемую на трубопроводе, или устанавливаемую на байпасе. Измерительный
преобразователь может находиться на расстоянии от 30 до 250 м от датчика (в за-
висимости от типа расходомера). В качестве материала датчиков (пьезоэлементов)
используется титанат бария.
В табл. 1.21 приведены технические характеристики ультразвуковых расходоме-
ров.
Таблица 1.21. Характеристики ультразвуковых расходомеров
Тип Исполнение Число каналов измерения ДУ.ММ Скорость потока, м/с Давление среды, МПа Температура среды, °C Выход
Взлет-МР УРСВ-510 1 10...5000 0,1...20 2,5 160 4...20 мА,
(ЗАО «Взлет») -520 2 10...5000 0.1...20 RS-232 /
-530 3 10...5000 0,1...20 RS-485
-540 4 10...5000 0,1...20
УРСВ-110 1 10...4200 0,1...12
Proline Prosonic Prosonic Flow — 4...20 мА,
Flow W 1 50...4000 0...15 80 ОК
(Endress+ Hauser P 1 50...4000 0...15 170
GmbH) u 1 15...100 0...10 80
c 1 300...2000 0...10 60
SITRANS — м3/ч: —
FUS 1 25 17 180 4...20 мА;
(Siemens) 50 70 HART;
80 180 ProfibusPA;
100 300 ОК; СК
ULTRAHEAT 2WR Исполнение 5 1 0,6...60 м«ч: 16; 25 150 Импульсный
(LANDIS&GYR) 6 3,5/6/10
7
UFM 005 ПП14 1 20... 1600 3,6...36 200 1,6; 2,5 150 RS-232
(«Теплоприбор») ПП15 1 35... 36 200
ПП18М 1 15...90
пшои 1 24... 36 200
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
37
К достоинствам ультразвуковых расходомеров относятся:
• неконтактность измерения сред, в том числе агрессивных или находящихся под
высоким давлением;
• независимость результатов измерения от температуры, давления, вязкости, элек-
тропроводимости;
• большой диапазон диаметров трубопроводов (от 15 до 4000 мм и более);
• надежность, точность, минимальные затраты на обслуживание и ремонт.
1.2.3 Кориолисовые расходомеры
Кориолисовые расходомеры относятся к расходомерам массового расхода (с од-
новременным измерением объемного расхода, плотности и температуры). Принцип
действия кориолисового расходомера основан на измерении силы Кориолиса, воз-
никающей при движении измеряемой среды в трубках первичного преобразователя,
колеблющихся в противофазе с резонансной частотой, пропорциональной массе и
скорости потока (рис. 1.14). Частота колебаний трубки первичного преобразовате-
ля зависит от формы, материала и массы
трубки, которая складывается из массы
самой трубки и массы вещества, расход
которого измеряется. Масса вещества
равна произведению объема трубки на
плотность вещества. При постоянстве
объема трубки частота колебаний опре-
деляется плотностью вещества с учетом
его температуры, измеряемой термодат-
чиком. К краям одной трубки расходо-
мера прикреплены катушки-соленоиды,
к краям другой — постоянные магниты.
За счет колебаний трубок относительно
друг друга в противоположных направле-
ниях под действием задающей катушки,
в катушках-соленоидах (движущихся в
магнитном поле) генерируются синусои-
дальные колебания (рис. 1.14, а, б).
Когда расход вещества отсутствует,
сигналы от двух катушек-соленоидов со-
впадают по фазе. При наличии расхода в
результате эффекта Кориолиса различные
участки трубки изгибаются относительно
друг друга, что приводит к фазовому сдви-
гу колебаний по длине трубки. Временной
промежуток фазового сдвига, измеряемый
микросекундами, прямо пропорционален
массовому расходу. Сенсор преобразует
этот сигнал в аналоговый или частотно-
импульсный выходной сигнал.
Измерение плотности в кориолисо-
вом расходомере производится на осно-
потока
Рис. 1.14
38
ГЛАВА 1
вании соотношения массы и частоты колебаний трубки. При увеличении массы
трубок с измеряемой средой собственная частота колебаний трубок уменьшается и
наоборот. Измеряя период колебаний, который обратно пропорционален частоте, су-
дят о плотности вещества.
На рис. 1.14, в показан общий вид расходомера. В табл. 1.22 представлены техни-
ческие характеристики кориолисовых расходомеров.
Таблица 1.22. Характеристики кориолисовых расходомеров
Тип Модель Ду. мм Массовый расход жидкости, т/ч Давление среды, МПа Температура среды, °C Выход
Proline Датчики:
Promass 80,83 Promass 8x F 8,15,25,40, 50, 800 10 -50...+200 4...20 мА,
(Endress+ 80,100,150 HART, ОК,
Hauser GmbH) Promass 8x M 8,15,25,40,50, 180 35 50...+150 Profibus РА 4...20 мА,
80; HART, ОК,
Promass 8x I 8,15,25,40,50; 70 10 -50...+150 Profibus РА или
Promass 8x H 8,15, 25,40,50; 45 4 -50...+200 FF
Promass 8x E 8,15, 25,40,50;
Promass 8x A 1,2, 4; 450 кг/ч 40 -50...+200
Преобразователи:
Promass 80 Promass 83
Proline Датчик: Кг/ч:
Promass 40E Promas E 8 0...2000 10 -40...+125
(Endress+ 15 0...6500
Hauser GmbH) 25 0... 18 000
40 0...45000
50 0... 70 000
Преобразователь; 4. ..20 мА, HART,
Promass 40 ОК
Метран-360 Кг/ч: 30 -40...+150
(Emerson 1700 15 3...1360 4...20 мА
Process 8...2450
Management и 2700 25 33... 16 325 4...20 мА
ГК «Метран») 1FT 9703 50 33..11161 87...43 550 4...20 мА,
87...31980 HART
Micro Motion Датчик: Мод. 2000:
(Emerson ELITE (CMF) 3...150 28... 108654 15 -40...+200 2х(4...20мА)
Process F 6...75 378... 12 300 10 -50...+180 HART, OK, RS-
Management, H 6...75 177...7611 10 -50...+180 485, Profibus, FF.
США) л/ч: Мод. 1000:
T 6...50 680...87 000 10 2х(4. ..20 мА)
D 3...150 680...680 400 15; 40 HART. RS-485
DT 6...40 8160...38 100 60 -50...+420 Мод. 3000:
Преобразователь: 2х(4...20мА)
2000 HART, RS-485,
1000 OK
3000
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
39
1.2.4 Вихревые (вихреакустические) расходомеры
Принцип действия вихревого расходомера (рис. 1.15) основан на измерении па-
раметров вихревой дорожки Кармана, образующейся в виде завихрений потока при
обтекании средой вихревого тела (призмы трапецеидальной формы или др. типа). На
гранях вихревого тела обтекания чередующиеся вихри создают перепады давления
на его поверхности. Число перепадов давления в единицу времени и частота завих-
рений прямо пропорциональны скорости потока, т. е. объемному расходу. Частота
импульсов преобразуется емкостным или ультразвуковым преобразователем в вы-
ходной сигнал. При наличии температурного датчика измеряется также массовый
расход.
Измерительная система расходомеров Prowirl состоит из проточной камеры, в
которую помещен завихряющий барьер со встроенным в него язычковым сенсором.
Одним концом сенсор прикреплен к емкостному или пьезоэлектрическому датчику.
Поток рабочего вещества, огибая завихряющий барьер, создает вихревые вибрации
язычкового сенсора. Частота этих вибраций F прямо пропорциональна скорости по-
тока V, ширине барьера d рабочего вещества:
F=St-v/d,
где St — число Страуда.
Данное уравнение справедливо для измерения расхода газов, пара, низко-
вязких жидкостей (число Рейнольдса Re > 4000). Микропроцессорный модуль
расходомера измеряет частоту вихревых вибраций и вычисляет объемный расход
вещества.
К основным достоинствам вихревых расходомеров относятся:
• возможность измерения расхода жидкостей, пара и газов;
• независимость измерений от колебаний температуры, давления, вязкости
среды;
• возможность измерений при высоких температурах среды (до +400 °C);
• высокая стабильность и простота эксплуатации;
• высокая надежность, в том числе при наличии вибраций.
В табл. 1.23 приведены основные технические характеристики вихревых расходо-
меров.
Однолучевой
преобразователь
Ду 25-200 мм
А-А
а
Рис. 1.15
40
ГЛАВА 1
Таблица 1.23 Характеристики вихревых расходомеров
Тип Ду, мм Расход, м3/ч Давление среды, МПа Темпе- ратура среды,°C Погреш- ность, % Выход
Воздух Пар Вода
8800 (ГК «Метран» и Emerson Process Management} 15 25 40 50 80 100 150 200 От 1,4...769 до 39,4... 8853 Кг/ч: от 6,7...4094 до 54,6... 157453 От 0,41...27 до 5,38...885 3,5 -40... +230 ±0,65 — жидк.; +1,35 — пар,газ 4...20 мА, HART, 0... 10 кГц
Метран-ЗООПР (ГК «Метран» и Emerson Process Management) 25 32 50 80 100 150 200 250 300 0,18...9 0,25...20 0,4...50 1...120 1,5...200 5...400 6...700 12...1400 18...2000 1,6 0... +150 +1,0 4... 20 мА, RS-485, СК
Proline Prowirl (Endress+ Hauser GmbH) Prowirl F 15...300 Prowirl W 15...150 Prowirl H 15...150 До 75 м/с До 75 м/с До 9 м/с 25 -120... +400 ±0,75 - ЖИДК.; ±1,0- пар, газ 4...20 мА, HART, Profibus РА
V-BAR мод. 600: мод. 700: (EMCO, США) 76... 500 75...2000 Да Да Да Да Да 0,9 130 -40...200 -10...260 1%- жидк.; 1,5%— пар, вода 4...20 мА, 0... 10 кГц, ЖКИ
1.2.5 Расходомеры на принципе перепада давлений
Расходомеры данного типа, получившие наибольшее распространение, основа-
ны на зависимости перепада давлений до и после сужающего устройства, установ-
ленного в трубопроводе (рис. 1.16).
Как известно, согласно уравнению Бернулли энергия движущейся среды вклю-
чает статическую энергию (давление) и кинетическую (энергию движения). При су-
жении трубопровода скорость потока увеличивается, а
статическое давление в суженом потоке уменьшается.
Перепад давлений (высокого до сужения и низкого по-
сле) является мерой расхода.
Из сужающих устройств наибольшее применение
находят диафрагмы и сопла. Стандартная диафрагма
представляет собой тонкий металлический диск с кони-
ческим отверстием, острая кромка которого направле
на навстречу потоку (для измерения расхода потоков с
разных сторон трубопровода используются диафрагмы
с цилиндрическим отверстием). Диафрагмы применя-
ются для диаметров трубопроводов D >50 при 0,05 < т
Рис. 1.16 < о,7, где т — модуль сужающего устройства, равный
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
41
отношению площади поперечного сечения диафрагмы с диаметром отверстия d к
площади поперечного сечения трубопровода с диаметром D(m = d2/D2) и при числах
Рейнольдса примерно от 104 до 106 . Толщина диафрагмы b относительно внутренне-
го диаметра трубопровода D составляет величину: b < 0.1D. Как правило, диафраг-
мы устанавливаются в трубопроводы с внутренним диаметром не менее 50 мм. По
конструкции диафрагмы бывают камерными и бескамерными. Камерные диафрагмы
позволяют повысить точность измерения перепада давлений и несколько сократить
длину прямых участков трубопровода до и после диафрагмы. Материал диафрагмы
должен быть химически- и износостойким. В практике для этих целей используется
нержавеющая сталь марки 12Х18Н9Т и др. К достоинствам диафрагмы относят ма-
лые габариты, простоту замены, низкую стоимость, к недостаткам — потерю давле-
ния, изнашиваемость и засоряемость.
Стандартное сопло применяется для трубопроводов D > 50 мм при 0,05 < т <
< 0,65. Сопло имеет со стороны входа профильное конусообразное отверстие, пе-
реходящее на выходе в цилиндрическую форму с острой выходной кромкой. Наи
большее применение нормальное сопло находит при измерении расхода газов и пара
при диаметрах трубопровода примерно до 200 мм. К достоинствам сопла относят
меньшую потерю напора и меньшую засоряемость по сравнению с диафрагмой. Не-
достаток — сложность изготовления, ограничение диаметров трубопровода и более
высокая стоимость.
Сопло (труба) Вентури представляет собой устройство, в котором поперечное се-
чение сопла постепенно сужается, а затем плавно увеличивается до первоначального
диаметра. Угол конусности трубы Вентури а составляет величину 10 °< а <30 °. Труба
Вентури применяется для измерения расхода агрессивных жидкостей и суспензий,
например, пульпы (смесь воды с песком). Достоинства трубы Вентури: малые поте-
ря давления и износ, достаточно высокая точность; недостатки — большие размеры,
трудность монтажа, более высокая стоимость.
Перепад давлений на сужающем устройстве преобразуется в унифицированный
выходной сигнал с помощью измерительных преобразователей различного типа.
В качестве чувствительных элементов преобразователей используются мембрана,
сильфон. В последние годы наибольшее применение получили тензорезистивные и
емкостные чувствительные элементы (сенсоры), как имеющие более высокие точ-
ностные характеристики.
Принцип действия тензорезистивного (пьезорезистивного) сенсора заключает-
ся в том, что под действием разности давлений происходит микроизгиб пластинки
(мембраны) с пьезорезисторами, включенными в мостовую схему.
В результате тензорезистивного эффекта изменяется сопротивление пьезорези-
сторов. Изменение сопротивления, пропорциональное перепаду давления, преобра-
зуется электронной схемой в выходной токовый сигнал 4...20 мА или в цифровой
сигнал (HART, RS-485). Пьезорезистивные преобразователи рассмотрены в п. 1.3.
Принцип действия емкостного датчика состоит в том, что давление от раздели-
тельных мембран, установленных со стороны высокого и низкого давлений, пере-
дается через разделительную жидкость на мембрану, отклонение которой вызывает
изменение емкостного сопротивления сенсора.
На рис. 1.16 представлен измерительный преобразователь перепада давлений
Deltatop DPO12 фирмы Endress+Hauser. В табл. 1.24 приведены технические характе-
ристики преобразователей перепада давлений.
42
ГЛАВА!
Таблица 1.24. Характеристики преобразователей перепада давлений
Тип Модель Диапазон перепада давлений, кПа Давление среды, МПа Температура среды, °C Погреш- ность, % Выход
3051С (ГК-«Метран») CD 0,025...13800 25 -40...+120 +0,075 4...20 мА, HART, FF
Метран-100-ДД (ГК «Метран») 1410 1430 1450 1496 0,04; 0,063; 0,1; 0,16; 0,25; 0,4. 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63. 0,1; 0,16; 0,25; 0,4; 0,63; 1,0; 1,6 МПа. 25; 40; 63; 100; 160; 250; 400; 630. 0,1 25 25 16 -40...+120 +0,1 4...20 мА, HART, RS-485
Метран-43Ф-ДД- 3494 (ГК «Метран») — 0,4; 0,63; 1,0; 1,6; 2,5; 4; 6,3; 4 -40...+120 +0,5 0...5, 0/4...20 мА
SITRANSP серия DSIII (Siemens) 7MF 4433 0,0145...0,29 0,0145...0,87 0,036...3,63 0,087...8,7 0,23...23,3 0,73...72,5 4,35...435 3,2 16 16 16 16 16 16 -40...+100 ±0,2 HART, Profibus РА
DeltabarS (Endress+ Hauser GmbH) PMD75 От 0... 100 Па до 0.. .4 МПа 4 -40...+120 +0,2 4...20 мА
1.2.6 Расходомеры постоянного перепада давлений
К расходомерам постоянного перепада давлений относят ротаметры и поплавко-
вые расходомеры.
Рис. 1.17
Ротаметр (рис. 1.17) состоит из стеклянной ко-
нической трубки (в основном из боросиликатного
стекла), плавно расширяющейся к верхней части,
поплавка из алюминия, нержавеющей стали или
фторопласта, защитной арматуры с фланцами для
присоединения к трубопроводу (строго вертикаль-
но). Поплавок, свободно перемещающийся внутри
трубки, имеет в верхней части канавки, расположен-
ные под углом, для придания поплавку вращатель-
ного движения и самоцентрирования его в трубке.
Поплавок находится в равновесии на различной высоте при соблюдении равенства
сил, действующих сверху и снизу поплавка. Сверху вниз действует сила тяжести по-
плавка Gn, а снизу вверх — сила гидродинамического напора F:
Gn = p-g-V-, F=P-S,
где р — плотность материала поплавка; g — ускорение свободного падения; V —
объем поплавка; Р — давление на нижнюю плоскость поплавка; S — площадь по-
перечного сечения поплавка.
При равенстве G = F поплавок устанавливается на разной высоте (при разной
величине площади кольцевого сечения между поплавком и стенкой трубки). Для гра-
дуировки ротаметров применяются вода и воздух. Измеряемый расход Q равен:
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
43
Q = а • \ - К,
где а — коэффициент расхода (определяется экспериментально); SK — площадь коль-
цевого сечения; К — постоянный коэффициент, определяющий объем и площадь по-
перечного сечения поплавка, плотность среды и др. факторы.
Ротаметры применяются для визуального местного контроля расхода газа или
жидкости. Также имеются ротаметры с магнитным поплавком, у которых на разной
высоте могут располагаться контакты (НО или НЗ).
Диапазон измерений ротаметрами для жидкости составляет от 0,1 л/ч до 25 м3/ч,
для газов от 1,6 л/ч до 400 м3/ч.
Рис. 1.19
Поплавковые расходомеры, использующие тот же принцип измерения, снабже-
ны устройствами электрической или пневматической дистанционной передачи по-
казаний. В первом случае поплавок жестко связан с плунжером дифференциально-
трансформаторной катушки, во втором случае — перемещение поплавка с помощью
магнитной муфты передается на элемент сопло-заслонка пневмопреобразователя.
Выходное давление пневмопреобразователя в диапазоне 0,02....0,1 МПа поступает к
измерительному преобразователю.
На рис. 1.18 представлены ротаметры с дис-
танционной передачей показаний типа РЭ (пыле-
брызгозащищенное исполнение по ГОСТ 13045-
81) и РЭВ (взрывозащищенное исполнение по “
ГОСТ 12.2.020). На рис. 1.19 показан ротаметр с
пневматической передачей и местной шкалой по-
казаний типа РП, РПФ, РПО по ГОСТ 13045. j
В табл. 1.25 приведены основные технические
характеристики расходомеров постоянного перепада давлений.
Рис. 1.18
Таблица 1.25. Характеристики расходомеров постоянного перепада давлений
Тип Верхи, предел измерений, м3/ч Д,.> мм Давление среды, МПа Температура среды, °C Погрешность, %
Жидкость Газ
Арзамасский приборостроительный завод
РМ-0.16ЖУЗ 0,16 — 15 0,6; 1,6; 6,4 +5...+50 ±2,5
РМ-1,6 ЖУЗ 1,6 — 40
РМ-6,3 ГУЗ 1,6 — 40
РМ-40ГУЗ — 6,3 15
РМФ-1,6ЖУЗ — 40 40 -30...+100
РМФ-40 ГУЗ — 40 40
РЭ-0.063ЖУЗ 0,063 — 10 -40...+70 +2,5
РЭ(РЭВ)-0,4ЖУЗ 0,4 — 15
РЭ(РЭВ)-4ЖУЗ 4 — 40
РЭ (РЭВ)-16 ЖУЗ 16 — 100
Шатковский приборостроительный завод
РП-0,63 ЖУЗ 0,63 — 25 6,4 -10...+50 ±2,5
РП-2,5 ЖУЗ 2,5 — 40
РП-ЮЖУЗ 10 — 70
РП-25 ЖУЗ 25 — 100
РП-63ЖУЗ 63 — 150
Sitrans F VA Trogflux 12,5 л/ч... 200 л/ч... 20; 32; 63 1,0 -10...+60 ±2,5
(Sieznens) 25 м’/ч 430 м3/ч
44
ГЛАВА 1
1.2.7 Тепловые расходомеры
Принцип действия тепловых (калориметрических) расходомеров основан на за
висимости разности температур двух термодатчиков, одного — опорного, измеряю-
щего температуру среды, второго — подогреваемого и поддерживающего эту раз-
ность температур постоянной, от расхода. Чем больше расход, тем больше охлажде-
ние подогреваемого термодатчика и тем больше энергии требуется для поддержания
заданной разности температур. Таким образом, ток в цепи подогрева термодатчика
является функцией расхода, а сама величина расхода обратно пропорциональна раз-
ности температур
Q = VS>
где Q — величина расхода, Уср — средняя скорость потока, S — площадь поперечного
сечения канала (внутренний диаметр трубопровода).
По классификации, изложенной в работе [1.26], данный тип измерительного пре-
образователя может быть отнесен к стержневому типу. Известны неконтактные тер
моконвективные тепловые преобразователи трубчатого типа, в которых термодатчи-
ки располагаются снаружи трубопровода [1.25].
Зависимость массового расхода QM от разности температур двух термодатчиков
At определяется зависимостью
QM=0,24PR/k-cp- At,
где 0,24 PR — теплота электронагрева; ср — удельная теплоемкость среды; к — по-
правочный коэффициент.
Если R, ср и At = const, то QM =f(P). В то же время если поддерживается постоян
ной мощность, подводимая к подогреваемому термодатчику, т. е. если Р R = const, то
QM=/(A0.
Термодатчики (используются платиновые термометры сопротивления) включа-
ются в два плеча мостовой схемы. Двумя другими плечами мостовой схемы являются
постоянные (подстроечные) резисторы.
В табл. 1.26 приведены технические характеристики тепловых расходомеров.
Таблица 1.26. Характеристики тепловых расходомеров
Тип Модификация Ду, мм Диапазон расходов, м/с Температура среды, °C Погрешность, % Выход
ST50 ST75 ST98 (Fluid Components Inti.) Погружной Проточный Погружной и проточный 50 6...50 65 0,25...150 0,1... 1500 0,2...210 120 +2 4...20 мА
260 ±1
t-mass AT70 t-mass AT70F t-mass AT70W (Endress+Hauser GmbH) Погружной Проточный Проточный 80... 1000 15...150 25...100 0...70 0...70 -10...+100
ИРГ-10 -100 -1000 (ОАО «Цвет») Проточный — 10; 100; 1000 мл/мин 100 ±2,5 Дисплей
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
45
К достоинствам тепловых расходомеров относят:
• высокую точность измерения массового расхода
(±0,5...1%);
• большой динамический диапазон измерения (100:1);
• возможность измерения малых расходов;
• большой диапазон диаметров труб (от 40 до 2000 мм);
• высокую надежность, простоту эксплуатации.
Преимущественное применение тепловые расходомеры нахо-
дят для измерения расхода газов. На рис. 1.20 показан общий вид
теплового расходомера t-mass АТ 70 F фирмы Endress+Hauser.
Рис. 1.20
1.2.8 Скоростные (турбинные) расходомеры
Принцип действия скоростных расходомеров основан на зависимости частоты
вращения турбины (ротора), установленной в потоке жидкости, от объемного рас-
хода. В табл. 1.27 приведены технические характеристики скоростных расходомеров.
Таблица 1.27. Характеристики скоростных расходомеров
Тип Модель Ду, MM Диапазон расходов, м3/ч Давление среды, МПа Температура среды, "С Максим, частота, Гц
7000 (Barton Instruments Systems) 71xx 8 10 20 40 80 100 200 300 0.057...0,681 0,114.-1,363 0,341-7,95 1,136.-36,34 4,542.-198,3 11,36-354,31 43,15-1533 97,66-3407 69 -200...+230 2040 1550 1500 823 816 625 333 320
73xx 80 100 200 300 400 500 600 6,360.-198,73 14,31-353,63 54,1-1533,1 122,4- 3406,9 207...5451 334...8346,8 477... 12038 34,5 277 495 1030 955 720 1165 1290
PCT с пребразователем ТПР (ОАО «Арзамасский приборостр. з-д») — 4; 6; 10; 12; 15; 20; 25...100 0,003.-60 л/с 20; 40 -200...+200 6...250; 20... 500
ПРМТ («Теплоком») — 32; 50; 100 1-100 1,6 +4...+150 —
ЛГ-80, -100,-150, -200 («Промприбор») — 80; 100; 150; 200 16... 1600 (газ) 10 0...+100 —
8035 («Burkert Easy Control Systems») — 15...600 0,1... 10 м/с 2,5 0...+100 —
При прохождении каждой лопаткой турбины мимо индукционного датчика фор-
мируется импульс синусоидальной формы с частотой, пропорциональной расходу.
Объемный расход Q пропорционален частоте вращения ротора/и площади по-
перечного сечения потока S:
46
ГЛАВА 1
где / — частота вращения ротора, пропорциональная сред-
ней скорости потока vcp; /= к vcp; к — коэффициент про-
________________порциональности, учитывающий гидромеханические свой-
( /я ства датчика.
На рис. 1.21 показан общий вид счетчика холодной (го-
рячей) воды «Метран-Бетар».
Основные требования, предъявляемые к конструкции
расходомера, касаются высокого качества подшипников,
Рис. 1.21 £
конструкции и выбора материала ротора, химической стой-
кости к различным средам и др. Для стабилизации потока
жидкости перед ротором устанавливаются струевыпрямители (пластины) и диффу-
зоры, а участки трубопровода длиной от 10D до 5D должны быть прямыми.
По характеру расположения лопаток турбины расходомеры подразделяются на
винтовые и крыльчатые. Лопасти винтовой турбины, укрепленной на горизонталь-
ной оси, изогнуты по винтовой линии, а лопатки крыльчатой турбины расположены
под углом к направлению потока. Угол наклона лопаток может быть изменен в зависи-
мости от диапазона расходов и диаметра трубопровода. Для предохранения расходо-
мера от посторонних примесей перед ним устанавливаются фильтры. Электронный
блок, служащий для пересчета частоты импульсов в значение расхода, может рас-
полагаться как непосредственно на датчике (допустимая температура -4О...+7О°С),
так и на расстоянии от датчика (до 200 м). Максимальная точность измерения рас-
хода скоростными расходомерами составляет ± 0,1.. .0,5%.
Преобразователи типа ТПР Арзамасского приборостроительного завода вы-
пускаются с магнито-индукционным генератором (МИГ) для преобразования
частоты вращения турбинки в частотный сигнал синусоидальной формы или с
усилителем-формирователем (УФ) для преобразования вращения турбинки в сиг-
нал прямоугольной формы. Погрешность преобразования ±1%.
1.2.9 Датчики контроля расхода (потока)
Датчики контроля потока или датчики протока предназначены для контроля на-
личия потока жидких и газообразных веществ. Примером использования датчиков
протока может служить контроль наличия воды охлаждения в технологических уста-
новках или контроль воздушного потока в воздухопроводах и т. п.
Принцип действия датчиков контроля потока основан на калориметрическом
методе отвода тепла контролируемой средой. Устройство включает два терморези-
стора, включенных в измерительный мост. Один из терморезисторов находится в
термическом контакте со встроенным нагревателем, т. е. является подогреваемым
терморезистором. Второй терморезистор измеряет температуру среды. Движущийся
поток отводит тепло от подогреваемого терморезистора и выходное напряжение из-
мерительного моста изменяется пропорционально изменению скорости потока, вос-
станавливая равновесие моста.
Конструктивно датчики делят на проточные и погружные, устанавливаемые на
горизонтальных или вертикальных участках трубы. Погружные датчики устанавли-
ваются, как правило, на трубопроводах большого диаметра. Выбор датчика контроля
потока зависит от расхода (л/мин или м3/ч) или скорости потока (м/с) и внутренне-
го диаметра трубопровода. Так, при расходе воды в диапазоне от 0,01 до 30 л/мин
для трубопроводов диаметром от 6 до 25 мм скорость потока составит 0,01...1 м/с,
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
47
а при расходе от 0,1 до 5000 м3/ч для трубопроводов диаметром от 25 до 500 мм ско-
рость потока составит 0,01. ..1,5 м/с. Для воздуха скорость потока при тех же рас-
ходах составит для трубопроводов от 6 до 25 мм от 2 до 20 м/с, а для трубопроводов
25... 500 мм от 0,5 до 30 м/с.
Датчик контроля потока используется в комплекте с оценочным модулем, кото-
рый устанавливается на расстоянии от датчика или может располагаться в общем
корпусе. С помощью потенциометров модуля осуществляется настройка на рабочий
диапазон датчика, теплопроводность контролируемой среды и точку переключения
(граничное значение скорости потока). Состояния выходов отображаются с помо-
щью светодиодов.
1.2.10 Расходомеры и дозаторы сыпучих материалов
Классификация и описание принципа действия расходомеров сыпучих веществ
приведены в работах [1.20,1.40-1.46].
Сыпучие материалы различаются размерами и формой частиц, а также грану-
лометрическим составом, т. е. содержанием в сыпучем материале частиц различной
крупности. Также сыпучие материалы характеризуются показателями пористости и
влажности. Пористость материала определяется процентным отношением объема
пор и свободного пространства между частицами к общему объему сыпучего мате-
риала. Заполнение этих пространств влагой характеризует влажность сыпучего ма-
териала. Процентное содержание влаги в сыпучем материале может достигать до 20
и более процентов.
Известны следующие методы измерения расхода сыпучих веществ: весовой,
динамически-весовой, силовой, тахометрический, радиоизотопный, электромаг-
нитный и др. [1.20]. Наибольшее применение находят весовые методы измерения
расхода.
Динамически-весовой метод основан на зависимости величины давления потока
сыпучего материала на подвижный лоток от расхода. Последний под действием пото-
ка сыпучего материала смещается, преодолевая сопротивление пружины. Величина
смещения лотка является функцией расхода.
Силовой метод измерения основан на придании потоку сыпучего материала
кориолисового ускорения. Поток сыпучего материала направляется на радиальные
лопатки диска, который вращается электродвигателем. Момент на валу двигателя яв-
ляется функцией массового расхода.
Тахометрический метод основан на зависимости скорости вращения турбинки,
крыльчатки или др. тела, вращающегося под действием потока материала, от расхода.
Ось крыльчатки может совпадать с направлением потока (крыльчатка винтовой фор-
мы) или быть перпендикулярна направлению потока (крыльчатка лопастного или
ковшового типа). Как правило, турбинные расходомеры с крыльчаткой устанавлива-
ются на вертикальных трубопроводах диаметром порядка 250 мм.
Ионизационный метод основан назависимости степени поглощения у-излучения,
прошедшего через слой сыпучего материала, от расхода. При изменении расхода сы-
пучего материала, движущегося по наклонному трубопроводу, изменяется толщина
просвечиваемого слоя, что приводит к изменению поглощения у-излучения.‘
Принцип действия электромагнитных расходомеров основан на взаимодействии
высокочастотного электромагнитного поля с частицами материала, сигнал от кото-
рых отражается и измеряется его частота и амплитуда. В зависимости от модифика-
48
ГЛАВА 1
ции прибора возможно измерение расхода сыпучего материала с размером частиц от
десятых долей миллиметра до 200 мм и более.
На весовом методе измерения основаны автоматические весы периодического
или непрерывного действия. К автоматическим весам периодического действия от-
носятся ковшовые весы, а к автоматическим весам непрерывного действия — кон-
вейерные (ленточные) весы.
Ковшовые автоматические весы работают на принципе периодического запол-
нения и опорожнения. Конструктивно эти весы представляют собой опрокидываю-
щийся или поворотный ковш, а также ковш с откидным дном. Более подробные све-
дения об этих весам можно найти в работе [1.40].
Конвейерные весы находят широкое применение в горнодобывающей, металлур-
гической, химической промышленности, строительной индустрии и в др. отраслях
промышленности и сельского хозяйства. Конвейерные весы используются для про-
ведения учетных и технологических операций при приеме, дозировании и отпуске
продукции различного назначения. К учетным операциям относят взвешивание и
дозирование, а к технологическим — прием, транспортировку и отгрузку материа-
лов. В большинстве применений используются автоматические конвейерные весы
непрерывного действия, совмещающие операции взвешивания, дозирования и опе-
рации приема, перемещения и отгрузки материала. Конвейерные весы состоят из
рамы грузоприемного устройства с роликоопорами, которые опираются на тензодат-
чики. Рама с роликоопорами подвешена с помощью соединительных узлов и кон-
вейер может иметь угол наклона до ± 20 °. Выпускаются конвейерные весы с одной
или двумя роликоопорами. Прием материала из бункера осуществляется ленточным,
пластинчатым, тарельчатым или шнековым питателем, вибропитателем или шлюзо-
вым затвором.
Конвейерные автоматические весы определяют расход, как массу материала на
участке длины ленты, прошедшего в единицу времени. Роликоопоры, установлен-
ные под транспортной лентой, передают нагрузку на весоизмерительное устрой-
ство динамометрического или тензометрического типа. При этом участком взве-
шивания является суммарное расстояние между роликами весовой платформы
и полусуммы расстояний между роликами весовой платформы и неподвижными
роликоопорами конвейера. Как правило, могут использоваться роликоопоры су-
ществующего конвейера или новые роликоопоры устанавливаются на конвейер
взамен существующих.
К характеристикам конвейерных весов относят ширину и скорость ленты, ли-
нейную плотность транспортируемого материала (кг/м), дискретность отсчетного
устройства, класс точности, диапазон рабочих температур, программное обеспече-
ние и др.
Тензометрическое устройство весов имеет индикатор, который фиксирует мгно-
венное значение нагрузки на весоизмерительный датчик, расход в конкретный мо-
мент времени, производительность конвейера (суммарный расход), скорость дви-
жения ленты конвейера, время взвешивания, линейная плотность материала. Также
тензометрический прибор помимо индикатора имеет клавиатуру для параметриро-
вания прибора и интерфейс для связи с компьютером (RS-232).
Известны устройства, преобразующие нагрузку на ролики в угол поворота ры-
чажного механизма. Дальнейшее преобразование сигнала с учетом скорости движе-
ния конвейера осуществляется с помощью микропроцессорного устройства. Ско-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
49
рость движения ленты определяется с помощью тахометрического датчика, связан-
ного с вращением натяжного барабана конвейера. Погрешность конвейерных весов
составляет порядка ±1%.
В промышленности нашли большое применение устройства для непрерывного
дозирования сыпучих веществ. Под процессом дозирования понимают процесс вы-
дачи заданных количеств веществ. Устройства для непрерывного дозирования назы-
ваются дозаторами непрерывного действия. Вопросы дозирования жидких веществ
подробно рассмотрены в работе [1.46]. Дозированию сыпучих веществ посвящены
работы [1.43-1.45]. Погрешность дозирования сыпучих веществ зависит от плотно-
сти и вязкости, что обусловлено изменением температуры, давления, химического и
гранулометрического составов сыпучих веществ.
Производительность дозатора определяется сечением потока материала при по-
стоянной скорости движения материала, а при неизменном проходном сечении —
скоростью движения материала. Регулирование расхода сыпучего материала осу-
ществляется с помощью регулирующего органа дозатора (электрического или пнев-
матического типа), снабженного датчиком контроля проходного сечения и скорости
движения материала.
Рабочими органами дозаторов сыпучих материалов служат питатели, в том
числе шнековые, ленточные, секторные, пластинчатые, тарельчатые, лотковые
и др. Как правило, эти питатели располагаются у выходного отверстия бункера.
Производительность шнековых питателей, применяемых для дозирования мелко-
зернистых материалов, зависит от скорости вращения шнека. Производительность
лотковых питателей определяется частотой и амплитудой колебаний, создаваемых
виброприводом. Производительность тарельчатых питателей — скоростью вра-
щения тарели и изменением сечения потока при перемещении клинообразного
затвора и т. д. [1.43].
По принципу действия дозаторы сыпучих материалов подразделяются на объем-
ные и весовые. Объемные дозаторы измеряют массу материала по его объему (G = V-у,
где G — масса материала, кг; V — объем, м3 ; у — насыпная плотность материала,
кг/м3). Весовые дозаторы используют более точные весоизмерительные устройства.
Широкое применение нашли ленточные весовые дозаторы.
В качестве весоизмерительных датчиков широко используются тензометриче-
ские приборы [1.40]. Электротензометрические методы взвешивания основаны на
тензоэффекте, заключающемся в изменении электрического сопротивления тензо-
резистора при его деформации под действием приложенной силы. Для этого тензо-
резисторы наклеивают на упругие элементы, обладающие линейной зависимостью
деформации от нагрузки.
Характеристикой тензорезистора является коэффициент тензочувствительности
К, который равен отношению AR/R А1, где А/? — изменение сопротивления тензоре-
зистора, R — начальное сопротивление, А/ — относительное удлинение. Разновид-
ности тензодатчиков приведены в разделе 1.6.2.
1.3. Приборы для измерения давления
Согласно Международной системе единиц СИ в качестве производной единицы для
измерения давления принят Паскаль (Па) — давление силой 1 Н на площадь 1 м2 (Ша= 1
Н/м2). К числу внесистемных единиц, встречающихся на практике, относятся кг/см2,
мм рт. ст., мм вод. ст, атм, бар и др. В табл. 1.28 приведено соотношение этих величин.
50
ГЛАВА 1
Таблица 1.28. Единицы измерения давления
кПа МПа кгс/см2 мм рт. ст. м вод. ст. бар
1 кПа 1 0,001 0,0102 7,501 0,102 0,01
1 МПа 1000 1 10,2 7501 102 10
1 кгс/см2 (1 атм) 98,07 0,09807 1 735,6 10 0,9807
1 мм рт. ст. 0,13332 0,0001333 0,001359 1 0,01359 0,001333
1 мм вод. ст. 9,807 0,009807 0,1 73,56 1 0,09807
1 бар 100 0,1 1,02 750,1 10,2 1
Известны различные уровни давления, используемые в приборах для измерения
давления. К ним относятся абсолютное (или полное), избыточное (или относительное),
атмосферное (или барометрическое) и остаточное (или вакуум). Избыточное давление
(Ри) равно разности абсолютного давления (Ра) и атмосферного давления (Ратм):
Р =Р-Р .
и а атм‘
Если абсолютное давление ниже атмосферного, т. е Ра < Ратм , то имеет место ва-
куум. Приборы для измерения давления классифицируют по виду измеряемого дав-
ления и по принципу действия3.
По виду измеряемого давления приборы делят на:
• манометры — приборы для измерения избыточного и абсолютного давления;
• барометры — приборы для измерения атмосферного давления;
• вакуумметры — приборы для измерения разрежения или вакуума;
• мановакууметры — приборы для измерения избыточного давления и разрежения;
• напоромеры — приборы для измерения малого избыточного давления (до 40 кПа)
• тягомеры — приборы для измерения малого разрежения (до - 40 кПа);
• тягонапоромеры — приборы для измерения малых избыточного давления и раз-
режения;
• дифференциальные манометры — приборы для измерения разности двух дав-
лений.
По принципу действия приборы для измерения давления делят на:
• жидкостные (или гидравлические), основанные на уравновешивании измеряе-
мого давления давлением столба жидкости;
• пружинные (или деформационные), основанные на уравновешивании измеряе-
мого давления силой упругой деформации чувствительного элемента;
• грузопоршневые, в которых измеряемое давление уравновешивается силой, соз-
даваемой массой поршня и грузами, действующими на поршень, или создавае-
мым давлением жидкости; используются в качестве образцовых при поверке и
градуировке манометров; диапазон измерения от 0,1 до 250 МПа;
3 История развития приборов для измерения давления связана с именами Архимеда (ок. 287-212
до н. э.), Б. Паскаля, Д. Бернулли, Р. Бойля, Э. Мариотта и др. Согласно закону Архимеда, на тело, по-
груженное в жидкость или газ, действует выталкивающая сила, направленная вверх и равная весу вы-
тесненной им жидкости. Б. Паскаль (1623-1662 гг.) установил, что давление на жидкость в сосуде переда-
ется одинаково и без изменения величины по всем направлениям внутренней поверхности сосуда. Закон
Бойля—Мариотта (открыт независимо друг от друга в 1662 г. английским физиком и химиком Р. Бойлем
и в 1676 г. французским физиком Э. Мариоттом) гласит, что при постоянной температуре объем данной
массы газа обратно пропорционален давлению. Закон строго применим для идеальных и сильно разре-
женных газов. Д. Бернулли (1700-1782 гг.) установил зависимость скорости течения жидкости или газа от
давления: при увеличении скорости течения давление уменьшается, и наоборот, при снижении скорости
течения жидкости или газа давление возрастает.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
51
Рис. 1.22
Рис. 1.23
• Электрические манометры и вакуумметры, основанные на преобразовании из-
меряемой величины в электрическую (напряжение, ток) или в изменение сопро-
тивления чувствительного элемента.
Жидкостные манометры подразделяют на 17-образные манометры, чашечные ма-
нометры (с вертикальной и наклонной трубкой), а также жидкостно-механические при-
боры, к которым относят кольцевые весы, поплавковые и колокольные манометры.
Пружинные манометры в зависимости от упругого чувствительного элемента де-
лят на приборы с трубчатой или пластинчатой пружиной, мембраной или мембран-
ной коробкой и сильфоном.
Более подробно устройство, принцип действия, правила эксплуатации и поверки
жидкостных и пружинных манометров приведены в литературе [1.47-1.53].
Электрические манометры, вакуумметры и мановакууметры, характеризую-
щиеся наличием выходного сигнала, подразделяют на манометры (вакуумметры) со-
противления, тепловые манометры, пьезоэлектрические манометры (вакуумметры),
ионизационные и радиоизотопные вакуумметры.
Манометры сопротивления основаны на зависимости изменения сопротивле-
ния проводника (манганина) или полупроводника от давления в области высоких
давлений. Использование в качестве проводника манганина объясняется его низким
ТКЭС. Для большинства проводников электрическое сопротивление с ростом давле-
ния уменьшается. Манометры сопротивления применяются для измерения высоких
давлений вплоть до 1000 МПа.
Теплопроводные (термопарные) манометры основаны на зависимости теплопро-
водности газов от давления в области низких давлений. Изменение теплопроводно-
сти газов приводит к изменению температуры нагревателя и изменению термоЭДС
связанной с ним термопары (или сопротивления термометра сопротивления). Термо-
парные манометры применяются для измерения давления (вакуума) в диапазоне от
0,0133 до 1333 Па.
Пьезоэлектрические манометры. Чувствительным элементом пьезоэлектриче-
ского манометра (рис. 1.22) служат кварцевые пластины. Изменение давления, пере-
даваемого через мембрану на пластины, вызывает изменение разности потенциалов
на пластинах. Напряжение на входе усилителя преобразователя формирует унифи-
цированный выходной сигнал прибора. Пьезоэлектрические манометры применя-
ются для измерения давлений до 100 МПа.
В табл. 1.29 приведены технические характеристики преобразователей давления
зарубежных и отечественных производителей.
52
DIABA 1
Таблица 1.29. Технические характеристики преобразователей давления
Тип Принцип измерения (сенсор) Диапазон измерения Погреш- ность изме- рения, % Параметры рабочей среды Выходной сигнал Индикатор
1 2 3 4 5 6 7
SITRANS Р (Siemens)
Серия МК И Пьезо- резистивный 0,23... 160 бар +0,25 -ЗО...+11О°С 4...20 мА Аналоговый
Серия MS 0,03...400 бар ±0,25 -40...+100°C ЖК-дисплей
Серия DS III 0,01...400 бар ±0,1 -40...+100 °C ЖК-дисплей
Серия Z 0...25 бар ±0,5 -25...+85 °C —
Серия MPS 0...20 мм.вод.ст ±0,3 -10...+80 °C —
Cerebar S» (Endress +Hauser GmbH)
PMC 731 Емкостной 0...40 бар ±0,1 -40...+100 °C 4...20 мА
PMC 635 0,16... 6,0 бар ±0,2 -40...+100 °C
T PMC 131 0,1...40 бар +0,5 -40...+100 °C
TPMP131 Пьезо- резистивный 1...400 бар ±0,5 -25...+70°C
MPMC 41/45 0,01...400 бар +0,2 -40...+125 °C
dTRANSpO2 (JUMO)
404382 Пьезо- резистивный 0,06.-.25 бар ±0,1 -40...+100°C 4...20 мА HART ЖК-дисплей
404385 0,1...600 бар ±0,1 -30...+120°C ЖК-дисплей
404327 0,05... 10 бар ±0,2 -20...+80 °C —
404353/404354 0,25...700 бар ±0,6 -30...+120 °C —
BD Sensor
DMP331/3332> Тензо- резистивный 0,06...60 МПа ±0,25 -40...+125 °C 0/4...20 мА —
LD301 125Па...25МПа ±0,1 -25...+125 °C 4...20 мА, HART ЖК-дисплей
LMK 35/331 Емкостной 0,006...6 МПа ±0,5 -25...+125 °C 0...10В —
WIKA
HP-1 Пьезо- резистивный 0...8000 бар +0,5 -20...+80°C 0/4...20 мА —
D-10/D-11 0... 1000 бар ±0,1 -20...+80 °C RS-232
S-10/S-11 0...1000 бар +0,1 -20...+80 °C 0/4...20 мА
ГК «МЕТРАН»
3051 S» Емкостной (изб. и диф.); терморезистив- ный (абс.) Верх. пред. изм. -0,0138 кПа... 69 МПа (200:1,100:1)3 ±0,055 -40...+150°С 4...20 мА, HART, FF, Profibus ЖК дисплей
3051C Емкостной (абс., изб., дифф.) 0,012 кПа... 27,58 МПа +0,1 -40...+150 °C 4...20 мА, HART, FF
3051T Пьезо- резистивный 2,07 кПа... 68,9 МПа ±0,075 -40...+150°С 4...20 мА, HART, FF
3051 H 0,62 кПа... 13,8 МПа -40...+190 °C
1151» 6,22...6895 кПа (абс); 0,18... 41369 кПа (изб.); 0,18... 6895 кПа (диф.) (50:1)3> -40...+120°C 4...20 мА, HART, 1...5B, 10...50 мА
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
53
Окончание табл. 1.29
1 2 3 4 5 6 7
2088 Пьезо- резистивный 10,34... 27580 кПа (20:1) ±0,1 -40...+120 “С 4...20 мА, HART, 1...5 В, ЖК дисплей
Метран-1001! (-ДИ.-ДА, -ДИВ,-ДД) Пьезо- резистивный 0,04 кПа... 100 МПа (25:1) ±0,1 -40...+70 °C (окружающая) 4...20 мА, HART, RS-485 ЖК дисплей
Метран-491' (-ДИ, -ДВ, -ДД, -ДИВ) Пьезо- резистивный 4 кПа... 100 МПа ±0,15 -40...+70 °C (окружающая) 0/4... 20 мА, О...5мА ЖК дисплей
Метран 55 (-ДИ.-ДА, -ДИВ.-ДД) Тензо- резистивный 0,06...100 МПа (10:1) ±0,15 -4О...+7О°С (окружающая) 0/4...20 мА, 0...5 мА —
ЗАО «Манометр»
Сапфир 22МТ Тензо- резистивный 4 кПа.. .2,5 МПа; (абс.) 0,16 кПа... 100 МПа (изб.); 0,16кПа...16МПа (диф.) ±0,2 0/4...20 мА ЖК дисплей
ПГ «МИДА»
-ПИ-51, 52 Пьезо- резистивный 0...160 МПа 0,1; 0,25 -40...+80 °C 0/4...20 мА
-ПИ-61 0...5000 psi 0.1; 0.2 -65...+150 °C
-ПИ-62 -40...+80 °C 0,25; 0,5 -40...+300 °C
-ПИ-62 0...200 МПа 0,1 -40...+200 °C
-ПА-51 0...10 МПа 0,1;0,2 -40...+80 °C
-ПА-61 0... 1500 psi 0,1; 0,2 -65...+150 °C
ОАО «Манотомь»
МС2000 (Ех) Преобразователь давления 0...25; 40; 63; 100; 160; 250 кПа ±0,2; ±0,5 -50...+60 °C О...5мА; 4...20 мА Стрелочный
ДМ5007А (ДМ5007АЕх) 0...0.06; 0,1; 0,16; 2,5; 0,4; 0,6; 1; 1,6; 2,5; 4; 6; 10; 16; 25; 40; 60; 00; 60; 250 МПа ±0,5 О...5мА; 4...20 мА
ДМ2005Сг1Ех Преобразователь давления сигна- лизирующий 0... 160 МПА +1,5 Контакты: 1А (220 VDC, 380VAC)
«СТЭНЛИ»
Корунд- ДИ-001 Пьезорезистив- ный 0,06... 160 МПа ±0,5; -60...+130 °C 0...5 мА, 0/4...20 мА —
1 Модели для измерения давления во взрывозашишенном исполнении.
2 Преобразователи для измерения избыточного, абсолютного и дифференциального давления.
3 Диапазон перенастроек пределов измерения.
Манометры (вакуумметры) с пьезорезистивными (тензорезистивными) пре-
образователями. Пьезорезистивный преобразователь представляет собой тонкую
монокристаллическую пленку кремния, выращенную на поверхности монокристал-
лической пластины (подложки) из искусственного сапфира. Измеряемое давление
через кремнийорганическую жидкость передается к мембране, вызывая изменение
электрического сопротивления кремниевых пьезорезисторов, включенных в мосто-
54
ГЛАВА 1
вую измерительную схему. Сигнал разбаланса мостовой схемы поступает к усили-
телю и далее преобразуется в унифицированный (в основном токовый) выходной
сигнал. Достоинствами пьезорезистивных преобразователей являются линейность
сигнала, малая инерционность, небольшая погрешность. Схема пьезорезистивного
измерительного преобразователя (сенсора) приведена на рис. 1.23.
Ионизационные вакуумметры используют эффект термоэлектронной эмиссии
(испускание электронов нагретыми телами в вакууме) при ионизации газа под дей-
ствием электрического поля. Приборы применяются для измерения вакуума в диа-
пазоне от 133,3-10*3 до 133,3-10 10 Па.
Радиоактивные (радиоизотопные) вакуумметры основаны на зависимости тока,
протекающего через ионизационную камеру от давления газа в камере с радиоактив-
ным источником. В приборах используется a-излучение, обладающее наибольшей
ионизирующей способностью на единицу длины пробега частиц. Эти вакуумметры
применяются для измерения вакуума в диапазоне от 1,333 Па до 1,333 кПа.
На рис. 1.24, а показан преобразователь 891.x3.4xx фирмы WIKA, на рис. 1.24, б —
преобразователь 2088 ГК «Метран», на рис. 1.24, в — преобразователь Метран 55 ГК
«Метран».
Рис. 1.24
Коррозионностойкие преобразователи давления Метран-49 предназначены для
измерения давления сред с высоким содержанием сероводорода, как в измеряемой,
так и в окружающей среде, а также других агрессивных сред.
Преобразователь Метран-55 рекомендуется для технологических процессов, не
требующих высокой точности измерений. Преобразователь Метран-55 отличается
простотой конструкции, невысокой стоимостью, надежностью и малыми габаритами.
Преобразователи модели 3051S являются результатом совместного производства
ГК «Метран» с компанией Fisher-Rosemount.
На рис. 1.25 показан общий вид вакуумметров 13BT3-003 (й), ВИЦБ-2/7-007 (6) и
вакуумметра сигнализирующего ДВ 2005 Сг (в).
Рис. 1.25
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
55
В табл. 1.30 приведены краткие характеристики отечественных вакууметров
(преобразователи вакууметрического давления).
Таблица 1.30. Характеристики преобразователей вакууметрического давления
Тип Наименование Тип и число преобразо- вателей Диапазон из- мерения, Па Погреш- ность, % Выходной сигнал Габаритные размеры, мм
ФГУП «Курский завод «МАЯК»
ВМБ14 Вакуумметр магнитный блокировочный ПММ-32-1 (1 шт) 1-10Л..1 +80...-0 2 канала блокировки 467x80x158
ВИЦБ-2/7-007 Вакуумметр иониза- ционный цифровой блокировочный ПМИ-51 (5 шт) 1-Ю-5... 10 ±3 1 канал блокировки 470x240x158
ЗАО «БУКОН»
13BT3-OO3 Вакуумметр теплоэлек- трический блокировоч- ный ПМТ-6-ЗМ (3 шт.) 0,1...1-Ю-5 +110... -60 2 канала блокировки 212x100x158
«Уралтеплоприбор» (Сапфир-22ДВ-Вн)
2210 Преобразователь давления 25; 40; 60; 100; 160 кгс/м2 ±0,25; 0,5 0...5 мА 212x100x158
2220 250; 400; 600; 1000 ±0,5 4...20 мА 112x189x262
2230 600; 1000; 1600; 2500; 4000 +0,25; 0,5
2240 40,60,100 кПа ±0,25; 0,5
«Уралтеплоприбор» (Сапфир-22ДИВ-Вн)
2310 Преобразователь давления 1,25; 2; 3; 5; 8 МПа ±0,25; 0,5 О...5мА; 4...20 мА 125x225x265
2320 12,5; 20; 30; 50 МПа ±0,5 112x189x262
2330 30; 50; 80; 125; 200 МПа ±0,25; 0,5
2350 0,3; 0,5; 0,9; 1,5; 2,4 МПа ±0,5
ОАО «Манотомь»
ДВ2005Сг Вакуумметр сигнализи- рующий -1...0 кгс/см2 +1,5 1А; 20 VDC; 380 VAC 160x170x147
Разделительные устройства для передачи давления
Для работы с агрессивными, коррозионными, вязкими и токсичными среда-
ми для защиты чувствительных элементов манометров применяются мембранные,
трубчатые и язычковые устройства передачи давления.
Мембранные разделители. Мембранные разделители применяются для защиты
чувствительных элементов приборов при измерении давления загрязненных, вязких
или химически агрессивных сред. Также применение мембранных разделителей обо-
сновано при наличии пульсаций давления или резких колебаниях температуры среды.
Давление среды передается через мембрану на чувствительный элемент датчика
через манометрическую жидкость (масло), заполняющую пространство между мем-
браной и манометром.
С целью снижения погрешности измерения рекомендуется использовать мано-
метрическую трубку (капилляр) возможно меньшей длины и больший диаметр мем-
браны. Длина капилляра достигает 1...3 м, допустимая температура среды составля-
ет -90...+400 °C.
Соединение разделителя с измерительным устройством осуществляется непо-
средственно или через соединительный рукав (длина около 2,5 м и более), поставляе-
мый по требованию заказчика. Давление среды может достигать 160 МПа и более.
56
ГЛАВА 1
а^,. Трубчатые разделители. Используются пре-
Я^' имущественно для измерения давления вязких сред.
Трубчатое устройство передачи давления крепится
ф|гЬ В» непосредственно в трубопроводе между двумя флан-
цами. Максимальные давления при использовании
о g трубчатых разделителей составляют до 40 МПа.
Рис ! 26 Язычковые устройства передачи давления.
Устройство состоит из овальной трубки, закрытой с
одной стороны и погруженной непосредственно в измеряемую среду, и соединитель-
ной части. Максимальное измеряемое давление — до 160 МПа, температура среды-
до 400°C. Применяется для измерения давления текучих, гетерогенных сред.
Материал деталей устройств для передачи давления, соприкасающихся с изме-
ряемой средой: хромоникелевая сталь, никель, тантал, титан, тефлон и ряд др. спе-
циальных материалов. Передача давления к чувствительному элементу манометра
осуществляется через наполнительную жидкость, в качестве которой применяются
силиконовые масла, глицерин, растительное масло и др.
В табл. 1.31 приведены технические характеристики разделительных устройств.
На рис 1.26 показан общий вид мембранного разделителя РМ-5319 (а) и трубчатого
устройства 981.18 (б).
Таблица 1.31. Характеристики разделительных устройств.
Модель Тип устройства Диапазон давлений, МПа Температура среды, °C Контактируемый материал
СКВ «Приборы и системы»
РМ-5319, -5320, -5497 Мембранное 2,5 -З0...+60°С 36НХТЮ
РМ-5321, -5322 60
WIKA
990.10 Мембранное 25 -30...+70 °C Хромоникелевая сталь
990.27 40
981.10 Трубчатое 40
981.18 4
970.10 Язычковое 160
1.4. Приборы для измерения уровня
Измерение уровня необходимо для контроля количества вещества в емкостях
(бункеры, реакторы и пр.) и его расходе (изменении количества вещества во време-
ни). Приборы для измерения уровня называются уровнемерами, а для сигнализации
предельных значений уровня (минимального или максимального) — сигнализатора-
ми уровня.
В зависимости от метода преобразования значений уровня в измеряемый элек-
трический или пневматический сигналы уровнемеры делят на следующие группы:
• поплавковые уровнемеры;
• гидростатические уровнемеры;
• ультразвуковые уровнемеры;
• радарные уровнемеры;
• емкостные уровнемеры.
Сигнализаторы уровня подразделяют на ультразвуковые, емкостные, вибраци-
онные, радиоизотопные и электромеханические [1.63-1.68].
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
57
1.4.1 Поплавковые уровнемеры
Принцип действия поплавкового уровнемера основан на перемещении поплав-
ка, находящегося на поверхности жидкости, уровень которой измеряется, и преобра-
зовании этого перемещения в нормированный электрический или пневматический
выходной сигнал. Вес поплавка G уравновешивается выталкивающей силой, пропор-
циональной площади S и глубине погружной части поплавка й:
G = pgSh.
В качестве преобразователей перемещения поплавка применяются диф-
ференциально-трансформаторная или ферродинамическая схемы, потенциометри-
ческое устройство или элемент сопло-заслонка для преобразования в пневматиче-
ский выходной сигнал.
Буйковый уровнемер фирмы Dresser (рис. 1.27, й) имеет поплавок в виде длинно-
го цилиндра (буйка), частично погруженного в жидкость, вес которого уравновеши-
вается пружиной. Таким образом, буйковый уровнемер имеет поплавок переменного
погружения. Перемещение буйка h равно высоте столба жидкости (уровню) Н и об
ратно пропорционально силе, создаваемой пружиной (жесткости пружины) Fnp:
F = H-(F1/F2),
где Ft = pgS — выталкивающая сила, действующая на погруженную часть буйка; р —
плотность среды; S — площадь буйка; F2 = F, + Fnp.
Чем больше Fnp, тем меньше перемещение буйка и наоборот. Далее перемещение
буйка преобразуется в выходной сигнал так же, как и в поплавковых уровнемерах.
В качестве выходного сигнала в современных буйковых уровнемерах используется
HART-иротокол или токовый сигнал 4...20 мА. На рис. 1.27, б показана конструкция
преобразователя, где 1 — буек; 2 — буйковая камера; 3 — рычаг; 4 — торсионная
трубка; 5 — камера торсионной трубки; 6 — стержень; 7 — магниты; 8 — датчик Хол-
ла. Перемещение буйка в этих уровнемерах приводит к повороту торсионной трубки
с дальнейшим преобразованием с помощью контроллера угла поворота в токовый
сигнал 4...20 мА. При использовании датчика Холла поворот трубки изменяет маг-
нитное поле датчика Холла, что приводит к изменению тока, преобразуемого с помо
щью встроенного микропроцессора в цифровой сигнал с HART-протоколом.
Рис. 1.27
58
ГЛАВА 1
В табл. 1.32 приведены технические характеристики поплавковых и буйковых
уровнемеров.
Таблица 1.32. Технические характеристики поплавковых и буйковых уровнемеров
Тип Диапазон измерения (верхний предел), м Температура среды, °C Давление среды, МПа Погрешность измерения, % Выходной сигнал
ДУЖЭ-200М «Старорусприбор» 0,1...3 -55...+70 10; 16; 20 СК
ВМ25, ВМ26 (KROHNE, Германия) 0,3...6 -200... +400 4 СК, 0/4...20 мА, HART, Profibus
Серия 249 (Emerson Process Management, США) — -30...+590 40 + 0,25 4...20 мА, HART
Серия 12300 (ЦДУ-01) (Dresser, Германия) 0,35; 0,8; 1.2; 1,5; 1,8; 2,1; 2,4; 3 -200...+450 1,6...40 + 0,5 4...20 мА, HART
1.4.2 Гидростатические уровнемеры
Принцип действия гидростатического уровнемера основан на зависимости уров-
ня жидкости Н постоянной плотности от давления Р столба жидкости:
Р = pgH.
Технические характеристики гидростатических уровнемеров приведены в
табл. 1.33
Таблица 1.33. Характеристики гидростатических уровнемеров
Тип Диапазон измерения (верхний предел), м Температура среды, °C Давление среды, МПа Погрешность измерения, % Выходной сигнал
Зонд УГЦ -1 (Россия) Зонд УГЦ - 2 (Россия) 1; 1,6; 2; 2,5; 4; 6; 8; 10; 12; 16; 0...1; 0...60 -40...+125 -40...+85 0,07 ±0,5 ±1 0...5 мА, 4...20 мА, СК
Зонд Метран-55- ЛМП- 308(Россия) 0...4.5 кПа; 0...2,5 МПа 0...+70 — ±0,25 0...20 мА, 4...20 мА, 0...10 В
Зонд Метран-55- ЛМК-858 (Россия) 0...4 кПа; 0... 1 МПа 0...+70 — ±0,35 4...20 мА
Sitrans Р (серия DS III) 7MF4633 (Siemens) 0,36...72,5 Па 40...+100 40 ±0,15 4...20 мА
Зонд 7MF1570 (Siemens) 0...2; 0...4; 0...6; 0...10; 0...20 -10...+80 0,14; 0,14; 0,3; 0.3; 0,6 ±0,3 4...20 мА
Зонд LMP 307 (BD Sensor) 0,6... 160 -10...+70 — ±0,25 4...20 мА, 0...10В
Deltapilot FMX 160 (Endress+Hauser) 250 (тросовый) -10...+100 0,2 ±0,1 4...20 мА, HART, Profibus РА, СК
УГЦ-Lx НПП «Автоматика» 3; 12; 16; 60 -40...+125 (УГЦ-1.1/1.2); -25...+80 (УГЦ-1.3/ 1.4/1.5/1.6 ) 0,1 ±0,5; ±1,0 4...20 мА, СК
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
59
Измерение давления жидкости в нижней части ре-
зервуара может производиться через разделительную
мембрану с помощью измерительного преобразователя,
шкала которого проградуирована в единицах уровня.
В качестве чувствительного элемента (сенсора) преоб-
разователя используется измерительная ячейка с пьезо-
сопротивлениями (тензорезисторами), включенными в
мостовую схему. Давление столба жидкости через разде-
лительную мембрану и кремнийорганическую жидкость
передается на пластину с тензорезисторами, вызывая
разбаланс мостовой схемы. Выходное напряжение мо-
стовой схемы, пропорциональное уровню, преобразует-
ся в токовый выходной сигнал (рис. 1.28).
Рис. 1.28
Разновидностью гидростатического уровнемера является погружной зонд, ис-
пользуемый для измерения уровня в резервуарах, колодцах, скважинах, глубоковод-
ных каналах и пр. Давление столба жидкости, пропорциональное глубине погруже-
ния, воздействует через разделительную мембрану на тензорезистивный датчик. Это
давление сравнивается с атмосферным, которое передается через вентиляционную
трубку, находящуюся в соединительном кабеле. Выходной сигнал напряжения мо-
стовой схемы датчика преобразуется в токовый сигнал.
При использовании дифманометров для измерения давления столба жидкости
одна полость чувствительного элемента дифманометра соединяется с уравнитель-
ным сосудом, заполненным жидкостью той же плотности, что и жидкость, уровень
которой измеряется. Другая часть дифманометра воспринимает переменное давле-
ние столба жидкости в зависимости от ее уровня. Измеренный перепад давлений в
дифманометре является функцией уровня.
Отдельную группу представляют пьезометрические уровнемеры, принцип дей-
ствия которых основан на продувании воздуха или газа через слой жидкости и изме-
рении давления, являющегося функцией уровня. Обязательным условием при этом
является равенство давления воздуха (газа) и давления столба жидкости, что харак-
теризуется видимым выходом отдельных пузырьков воздуха из трубки в жидкость.
1.4.3 Ультразвуковые уровнемеры
Принцип действия ультразвукового уровнемера (рис.
1.29) основан на зависимости времени прохождения ультра-
звуковых колебаний (40...70 кГц) от границы раздела двух
сред с различной плотностью или диэлектрической прони-
цаемостью. По классификации уровнемеров, приведенной в
работе [1.9], к группе ультразвуковых уровнемеров относят
уровнемеры, в которых используется принцип отражения
колебаний со стороны жидкости (датчик устанавливается в
днище резервуара на предельной глубине). В случае распро-
странения ультразвуковых колебаний в воздухе до границы
раздела с жидкостью или твердым веществом уровнемер от-
носят к группе акустических уровнемеров.
Ультразвуковой уровнемер состоит из ультразвукового
излучателя (сенсора) и преобразователя, включающего ге-
Рис. 1.29
60
ГЛАВА 1
нератор ультразвуковых колебаний, усилитель, фазовый детектор, микропроцессор.
Уровень жидкости определяется по временному промежутку At исходя из соотноше-
ния высоты столба жидкости h и скорости распространения звука в среде с:
At = 2h/c,
где At — интервал времени, определяемый разностью фаз передающего и приемного
сигналов.
При нахождении излучателя над поверхностью раздела фаз на высоте Н интервал
времени At = 2(H-h)/c. В зависимости от диапазона измерений выбирается мощность
излучателя и частота ультразвуковых колебаний.
Технические характеристики ультразвуковых уровнемеров представлены в
табл. 1.34
Таблица 1.34. Характеристики ультразвуковых уровнемеров
Тип Диапазон измерения (верхний предел), м Температура среды, °C Давление среды, МПа Погрешность измерения, % Выходной сигнал
ЭХО-5 (Россия) 0,4... 10 (АП31); 10; 16; 20; 30; (АП); 1; 1,6; 2,5; 4; 6 (АП6В) -40...+120 — ±1,5 0...5 мА, 0/4...20 мА, СК
ВЗЛЕТ УР (Россия) 0...8 -20...+50 — ±0,2 0...5 мА, 0/4...20 мА, СК, RS-232, RS-485
PROBE (Siemens) 0,25...8 -40...+60 — ±0,25 4...20 мА, СК
ST-H (Siemens Milltronics) 0,3...10 -20...+60 — ±0,25 43 кГц
Echomax XRS-5 Echomax XLS/XLT (Siemens Milltronics) 0,3... 10 0,9...30; 1,8...60 -20...+60 -40...+150 — ±0,25 43 кГц 13; 22 кГц
Prosonic T FMU/FTU Prosonic FDU (Endress+Hauser) 0,25...5; 0,4...8; 0,6...15 0,3...2; 0,5...5; 0,8...10; 1...15; 0,8...45; 1,6...70 (сыпучие) 0,3...5; 0,5... 10; 0,8...20; 1...25 (жидк.) -40...+80 0,3 ±2 4.. .20 мА, HART, СК, Profibus
Prosonic M FMU40 FMU41 (Endress+Hauser) 0,25...5 (жидк.); 0,25...2 (сыпуч.); 0,4...8 (жидк.); 0,4...3,5 (сыпуч.) -40...+80 0,3 ±2 4...20 мА, HART, FF, Profibus РА
Чем больше диапазон измерения, тем больше должна быть мощность излучателя
(большая излучающая поверхность мембраны) и тем ниже частота излучений.
На точность ультразвукового уровнемера оказывают влияние ряд факторов, сре-
ди которых степень поглощения колебаний в жидкой (твердой) среде, плотность и
температура воздушного (газового) слоя, наличие пыли, дыма и пр.
Для снижения дополнительной погрешности от изменения температуры среды в
сенсор устанавливается датчик температуры. Для акустических уровнемеров, кроме
того, на точность измерения оказывает влияние форма поверхности (конусность при
измерении уровня твердого или сыпучего вещества) или наличие пены и волнисто-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
61
сти поверхности для жидких сред. По местонахождению сенсора различают бескон-
тактные и контактные сенсоры.
Контактный сенсор представляет собой погружной элемент (трос или штырь),
вдоль которого распространяются ультразвуковые колебания. К достоинствам кон-
тактного уровнемера относят большой диапазон измерения, независимость от со-
стояния поверхности (пена, волнение поверхности), измерение уровня сред с малой
диэлектрической проницаемостью. Недостатки — механическое воздействие на кон-
тактный сенсор, особенно твердой фазы, коррозия, налипание на поверхности сен-
сора и др.
Бесконтактный сенсор имеет ряд преимуществ, среди которых высокая надеж-
ность измерения (в том числе агрессивных сред), простота эксплуатации и ремонта.
1.4.4 Радарные (микроволновые) уровнемеры
В радарных уровнемерах (рис. 1.30) используются микроволновые импульсы
высокой частоты (от 6 до 26 ГГц), поступающие через стержневую (штыревую), ру-
порную или волноводную антенну в измеряемую среду. Диапазон измерения уров-
ня до 20 м и более, погрешность до ±0,15%. На показания уровнемера не оказывают
влияния состав, температура и давление среды, а в отдельных случаях и диэлектриче-
ская проницаемость материала. Диапазон измерений зависит от частоты колебаний,
размеров антенны, состояния поверхности и диэлектрической постоянной среды
(е). Чем выше е, тем больше величина отраженного импульса. Поскольку при высо-
кой частоте скорость распространения электромагнитных колебаний в различных
газах и воздухе отличается незначительно, точность измерений уровня радарным
уровнемером не зависит от содержания пара или дыма. Кроме того, за счет малой
длины волны излучения, радарные уровнемеры характеризуются более высокой раз-
решающей способностью измерения, а уровнемеры с рупорной антенной — малыми
габаритами. При сравнении радарных уровнемеров с частотой излучения 6 и 24 ГГц
следует учитывать, что низкочастотные радары имеют большие габариты, но менее
чувствительны к наличию на поверхности пены или волнистости поверхности, а так-
же наличию конденсата на антенне.
Метод частотно-модулиров энного непрерывного излучения, используемый
в радарных уровнемерах, получил название метода FMCW (Frequency Modulated
Continuous Wave).
К числу контактных радарных уровнемеров с частотой
излучения 0,2... 1,5 ГГц относят уровнемеры, у которых из-
лучатель крепится на конце удлинителя (троса), что позво-
ляет при установке сенсора вблизи дна резервуара измерять
уровень независимо от состояния поверхности. Помимо тро-
совой антенны в таких уровнемерах используется штыревая
или коаксиальная антенна.
В последние годы появилась новая серия радарных уров-
немеров — радарные волноводные уровнемеры, относящие-
ся к классу контактных уровнемеров. Принцип измерения
уровня основан на том, что импульсы микроволновой часто-
ты малой мощности направляются по зонду-волноводу, по-
груженному на всю глубину измеряемого слоя. При достиже-
нии импульсом среды с другим коэффициентом диэлектри-
Рис. 1.30
62
ГЛАВА 1
ческой проницаемости (например, раздела фаз газ-жидкость) происходит отражение
сигнала. Интервал времени между передачей зондирующего сигнала и приемом отра-
женного сигнала пропорционален расстоянию от излучателя до поверхности среды.
Поскольку импульсы направляются строго по зонду-волноводу возможно измере-
ние уровня в узких резервуарах. Также эти уровнемеры используются для контроля
уровня раздела жидкостей с различной диэлектрической проницаемостью (напри-
мер, уровня раздела воды и нефти). Измерение уровня волноводным уровнемером
осуществляется по технологии рефлектометрии с временным разрешением (TDR —
Time Domain Reflectometry).
Все радарные уровнемеры имеют преобразователи сигнала, укрепленные в голов-
ке сенсора. Электронный и дисплейный модули могут быть сняты для замены (ре-
монта) без демонтажа антенны.
Технические характеристики радарных уровнемеров приведены в табл. 1.35.
Таблица 1.35. Характеристики радарных уровнемеров
Тип Диапазон измерения (верхний предел), м Температура среды, °C Давление среды, МПа Погрешность измерения, % Выходной сигнал
Радарные бесконтактные уровнемеры
Sitrans LR300 (Siemens') 0...20 -40...+200 1 ±0,15 4...20 мА, RS-485
Sitrans LR400 (Siemens) 0...45 -40...+140 (+250) 1 ±0,15 4...20 мА, HART, Profibus РА
Rosemount- 5400 (Fisher Rosemount) 3...20 -40...+150 1 ±10 мм 4...20 мА, HART Profibus РА
Rosemount- 5600 (Fisher Rosemount) 2...50 -40...+150 1 ±10 мм 4...20 мА, HART Profibus РА
BM70A, BM70P BM700, BM702 (KROHNE) 0,5...40 До +250 40 ±1...10 мм 4...20 мА, HART Profibus РА, FF, RS-485
Micropilot M: FMR 230 FMR231 FMR 240 Micropilot S: FMR 530 FMR 533 0...20 (рупорн.) 0...20 (стержн.) 0...20 (рупорн.) 0...25 (рупорн.) 0...40 (парабол.) -60...+400 -40...+150 -40...+150 -40...+200 -40...+200 16 4 4 4 1,6 ±10 мм.(бГГц) ±10 мм.(бГГц) ±3 мм.(26ГГц) ±1 мм ±1 мм 4...20 мА, HART Profibus РА, FF, RS-485
Радарные контактные уровнемеры
Levelflex M FMP40 (Endress+Hauser) 4 (стержневой); 4 (коаксиальн.); 35 (тросовый) -40...+150 4 ±3 мм (до 10 м) ±0,03% (больше 10 м) 4...20 мА, HART Profibus PA, FF
Серия 3300 (Fisher Rosemount) 0,4...6 (коаксиальн.) 0,6..3 (стержнев.) 1...23 (гибкий) -40...+150 4 ±0,1% 4...20 mA, HART
1.4.5 Емкостные уровнемеры
Принцип действия емкостного уровнемера основан на зависимости емкостно-
го сопротивления датчика, включенного в одно из плеч моста переменного тока, от
уровня.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
63
Емкостной преобразователь представляет собой кон-
денсатор с пластинами, пространство между которыми
заполнено жидкостью, уровень которой измеряется. Та-
ким образом, емкость преобразователя Спр равна сумме
двух емкостей, одна из которых представляет конденса-
тор, погруженный в жидкость с диэлектрической прони-
цаемостью Еж (например, £воды = 80), а другая находится
над уровнем в среде с диэлектрической проницаемостью
£ср (например, £возд = 1). Конструкция датчика может быть
трубчатой (концентрично расположенные труба в трубе) или пластинчатой (параллель-
но расположенные пластины). Так, для пластинчатого датчика емкость преобразователя
равна:
С = Ь/l (в • h + е • й),
' Ж Ж В В' '
где b — ширина пластины; I — расстояние между пластинами (обкладками конденса-
тора); йж — высота столба жидкости (уровень); hB — высота пластины над измеряе-
мым уровнем.
Чаще используются емкостные датчики круглого сечения различной длины и
диаметра. Конструктивно емкостной уровнемер представляет емкостной датчик
уровня и электронный преобразователь (рис. 1.31). Микропроцессор преобразовате-
ля воспринимает аналоговый или частотный сигнал, пропорциональный уровню, и
преобразует его в унифицированный токовый сигнал. Технические характеристики
емкостных уровнемеров приведены в табл. 1.36
Таблица 1.36. Характеристики емкостных уровнемеров
Тип Диапазон измерения (верхний предел), м Температура среды, °C Давление среды, МПа Погрешность измерения, % Выходной сигнал
ДУЕ-1 (Россия) 0,2;0,4;0,6;1;1,6;2,5;4;6; 10;16;20;25 Первичн. преобразователь: КНД, ТНТ. ПСФ, ПТФ, ПОФ, СФ Измерит, преобразователь: ПИ-6 -60...+100; +5...+250 2,5; 10 ±0,5; ±1; ±1,5 0...5 мА. 0/4...20 мА, СК
РОС-101 (Россия) 0,1;0,25;0,6;1;1,6;2;3; 4...20 (через 0,5 м) -100...+250 2,5 ±1,5 СК
SITRANS LC300 (Siemens) 0,3... 5 (стержневой); 0,5...25 (кабель) -40...+200 3,5 ±0,25 4...20 мА
SITRANS LC500 (Siemens) 0...3.5 (стержневой); 0...35 (кабель) -200...+200 (+400) 20; 50 ±0,25 4...20 мА, HART
VEGACAP (VEGA) Перв. преобр ль: EL 0...4 (стержневой, EL2x); 0...25 (кабель, EL42). Промежут. преобр-ль: VEGAMET, VEGALOG -50...+400 6,3 ±5 мм 4...20 мА
.Multicap DC 11 .Multicap DC21 i Endress+Hauser) 0...4 0,1...4 -80...+200 10 5 ±1 4...20 мА
1.4.6 Сигнализаторы уровня
В качестве сигнализаторов уровня используются различные физические свой-
ства газов и жидкостей, значительно отличающиеся друг от друга, такие как плот-
ность, диэлектрическая проницаемость, теплопроводность и др.
64
ГЛАВА 1
В зависимости от этого получили применение емкостные, ультразвуковые, ви-
брационные, радиоизотопные и электромеханические сигнализаторы уровня. При
достижении уровнем одного из предельных значений (максимального или мини-
мального) сигнализатор формирует дискретные или аналоговые выходные сигналы
(типа «сухой контакт» — СК или «открытый коллектор» — ОК). Погрешность сраба-
тывания устройства сигнализации выражается в абсолютных единицах и составляет
от +1 до ±5 мм.
Емкостные сигнализаторы уровня (рис. 1.32) применяются для контроля уров-
ня жидких и сыпучих веществ в широком диапазоне температур и давлений. Они
могут устанавливаться как на боковой стенке резервуара, так и на верхней крышке.
Защитные чехлы, устойчивые к химическому воздействию (тефлон и др. материалы),
позволяют использовать их в агрессивной среде (табл. 1.37).
Ультразвуковые сигнализаторы уровня (рис. 1.33) осуществляют бесконтактный
контроль предельных значений уровня жидкостей, взвесей и твердых веществ. При
этом на сенсоре не образуются отложения и конденсат. К другим достоинствам уль-
тразвуковых сигнализаторов относят простоту монтажа и обслуживания. Недоста-
ток — погрешности при контроле предельного уровня жидкости, в которой присут-
ствуют пузырьки газов или пена.
Вибрационные сигнализаторы уровня имеют ряд достоинств, к числу которых от-
носятся высокая механическая прочность, наличие функции самоочищения лопаток
резонатора, работоспособность в широком диапазоне температур, давлений, элек-
тропроводности и вязкости среды, длительный срок службы.
Принцип действия вибрационного датчика (рис. 1.34) основан на зависимости
частоты колебаний механического резонатора (камертона) от изменения плотно-
сти среды, окружающей резонатор. Конструктивно вибрационный датчик включа-
ет две симметричные пластины камертона, закрепленные на жесткой мембране, от
которой к пластинам в противофазе передаются колебания на резонансной частоте
0,4. ..15 кГц. Резонансная частота колебаний связана с плотностью измеряемой среды.
Вибрационные датчики применяются также для определения границы раздела двух
жидкостей, например воды и бензина.
Принцип действия радиоизотопного сигнализатора уровня (гамма-реле) основан
на зависимости степени поглощения у-излучения при прохождении через слой жид-
кости или твердого вещества от уровня.
Интенсивность у-излучения после прохождения через слой вещества выражает-
ся зависимостью:
Рис. 1.32
Рис. 1.33
Рис. 1.34
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
65
где I — интенсивность у-излучения после прохождения
слоя вещества толщиной В; 10 — начальная интенсивность
излучения; р — коэффициент ослабления у-излучения для
конкретного материала.
В качестве источников у-излучения применяются
изотопы Со60 и Cs137, мощность которых рассчитывает-
ся в соответствии с конкретными условиями (параметры
контролируемого вещества, материал стенок, изоляции и
др.). В качестве приемников у-излучения используются
ионизационные камеры, газоразрядные и сцинтилляци-
онные счетчики, полупроводниковые детекторы. Энергия
ионизирующего излучения в детекторах преобразуется
в электрический сигнал. При этом ионизационные камеры выдают сигнал анало-
говой формы, остальные типы детекторов — дискретной формы. Сигнал, усилен-
ный детектором, поступает в электронно-релейный блок, формирующий выходной
сигнал.
Конструктивно у-реле представляет собой толстостенный контейнер или блок
источника с находящимся внутри источником у-излучения (рис. 1.35). Источник
у-излучения помещен в дюралевый колпачек, который навинчен на т орец штока ре-
гулировочного механизма 1, служащего для быстрой и надежной установки источ-
ника у-излучения в рабочее или нерабочее положение. Регулировочный механизм
защищен стальным колпачком 10, навинчивающимся на втулку 3. Чугунная оболоч-
ка 5, залитая свинцом 7 обеспечивает надежную биологическую защиту персонала.
Оболочка снабжена трубкой 8, внутри которой передвигается шток регулировочного
механизма с источником у-излучения. Перпендикулярно оси передвижения штока
расположено коллимационное отверстие для выхода потока у-излучения. В период
транспортировки или хранения это отверстие закрыто свинцовой пробкой 6. Спе-
циальная заслонка переводит прибор в положения «луч закрыт» или «луч открыт».
Электронная схема приемника у-излучения, находящегося на противоположной сто-
роне слоя вещества, формирует два выходных сигнала «уровень больше» или «уро-
вень меньше». К основным преимуществам радиоизотопных сигнализаторов уровня
относят высокую надежность, возможность работы в условиях запыленности, высо-
кой температуры, давления и вязкости и др.
Электромеханические сигнализаторы уровня. К их числу относятся электрокон-
тактные сигнализаторы и сигнализаторы с поворотной лопастью.
Принцип действия электроконтактных сигнализаторов заключается в том, что
чувствительный элемент (поплавок) при достижении предельного уровня (макси-
мального или минимального) замыкает группу контактов, с помощью которых выда-
ется выходной сигнал. На рис. 1.36 приведен общий вид поплавкового сигнализатора
уровня типа ВМ 26 фирмы KROHNE.
Принцип действия сигнализаторов с поворотной лопастью (лопастной сигнали-
затор) заключается в том, что лопасть приводится во вращение синхронным двига-
телем с редуктором и приостанавливается при соприкосновении с контролируемым
веществом, что приводит в действие релейную схему прибора. При освобождении от
нагрузки вращение возобновляется и реле приходит в исходное состояние. Сигна-
лизатор находит применение при контроле предельных уровней жидких и сыпучих
материалов.
3 Зак. 3801
66
ГЛАВА 1
Рис. 1.36 Рис. 1.37
На рис. 1.37 представлен общий вид
сигнализатора с поворотной лопастью типа
SITRANS LPS200/Pointek PLS 200. Сигнали-
затор оборудован складной лопастью и по-
зволяет контролировать уровень материалов
с низкой плотностью (до 35 г/л).
Технология с использованием вращаю-
щейся лопасти позволяет определять состоя-
ния «полный», «пустой» или другой заданный
уровень в емкостях с такими материалами,
как цемент, пластик в гранулах и др. Лопаст-
ной сигнализатор SITRANS LPS200 применя-
ется как для сыпучих веществ с небольшой
плотностью 35 г/л с использованием дополнительной шарнирной лопасти, так и для
веществ с плотностью 100 г/л с использованием стандартной измерительной лопасти.
Чувствительность лопасти может настраиваться для различных характеристик мате-
риала, например, для исключения влияния образования отложений материала. Техни-
ческие характеристики сигнализаторов уровня приведены в табл. 1.37.
Таблица 1.37. Характеристики сигнализаторов уровня
I Тип Диапазон измере- ния, м Температура среды, °C Давление среды, МПа Погрешность,% Выходной сигнал
1 2 3 4 5 8
Емкостные сигнализаторы уровня
СУС-РМ (Россия) 0,l;0,25;0,6;l;l,6; 2...22 (через 0,5 м) -100...+250 0,1;2,5 ±4 мм СК
РИС-101 (Россия) 1...22 -100...+250 2,5 ±2,5 СК
ЭСУ-1 (Россия) 3 контрольных уровня до +200 — ±10 мм СК
Minicap FTC 260/262 (Endress+Hauser) 0...0Д4 (стержневой); 0...6 (тросовый) -40...+130 2,5 ±3 мм СК, ок
Pointek CLS 100 Pointek CLS 300 Pointek CLS 500 (Siemens) 0,1 (стержн.); 0,35 (стержн); 0,5...25 (кабель) -40...+110; -40...+85; -200...+200 1; 3.5; 50 ±2 мм 4...20мА,ОК; СК, ОК; 4...20 мА, HART
LS 200 (KROHNE) 0...6 -20...+80 1 ±1 мм СК
Ультразвуковые сигнализаторы уровня
Pointek ULS 200 (Siemens) 0,25...3 (сыпучие); 0,25...5 (жидкие) -20...+80 1 ±3 мм СК, ОК
Вибрационные сигнализаторы уровня
Pointek VLS 200 (Siemens) 0,3...4 (с удлини- телем) -25...+80 1 ±3 мм СК
Liquiphant T Liquiphant M FTL 5x, 7x Liquiphant FTL20 (Endress+Hauser) 3 (с удлинителем); 3 (с удлинителем); длина ЧЭ — 38 мм -40...+150; -40...+150; -40...+100 4; 6,4; 4 ±2 мм СК, ок
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
67
Окончание табл. 1.37
1 2 з 4 5 6
Радиоизотопные уровнемеры
РРП - 1Т (Россия) — -30...+50 — ±2 СК
Gammapilot FT6 470Z (Endress+Hauser) 1,5 Не ограничено ±1 СК
DG 57 (Endress+Hauser) 0,1...2 ±1...2 СК
LB 323 (Berthold) 10 ±2 СК, 0/4...20 мА
Электромеханические сигнализаторы уровня
Pointek PLS 200 (Siemens) 10 (с удлините- лем ); длина поворотной лопасти — 250 мм. -20...+80 0,05 ±1 СК
Лопастные сигнализаторы уровня
Pointek PLS200 (Siemens) 0,25; 10 (с кабель- удлинителем) -20...+80 0,05 СК ±1
1.4.7 Измерение уровня раздела фаз
Для измерения уровня раздела фаз (разделительного слоя) жидких сред и твердых
веществ используются различные методы измерения: ультразвуковой, емкостной, ги-
дростатический и др. Измерение границы раздела двух жидких сред с различной плот-
ностью применяется при контроле разделительного слоя нефтепродуктов, сжиженных
газов, водных растворов в химической, нефтеперерабатывающей, горной промышлен-
ности, при переработке минерального сырья, в промышленности сточных вод (кон-
троль уровня отстойников) и в других отраслях промышленности [1.65-1.68].
При контроле разделительного слоя двух жидких сред по разности плотностей
необходимо, чтобы разность плотностей составляла не менее 10%. Так, в системе
многоканального измерения уровня и раздела жидких сред РУПТ-МН-РС64 [1.67]
диапазон плотности измеряемой жидкости составляет 0,5... 1,1 г/см3, а разность
плотностей верхней и нижней фаз должна быть не менее 0,1 г/см3.
При контроле разделительного слоя по разности диэлектрических проницаемо-
стей (электропроводности) двух жидких сред эта разность должна быть не менее по-
рога чувствительности прибора и также не менее 10%.
Магнитострикционный метод высокоточ-
ного измерения уровня и уровня раздела фаз
основан на магнитострикционном эффекте
[1.68]. Поплавок, положение которого зависит "
от разности плотностей жидких сред, пере- 2
мещается по трубке, внутри которой натянут
провод 1 из магнитострикционного материала //Си
(рис. 1.38). Внутри поплавка находится магнит. j V/ С
При перемещении поплавка с магнитом вокруг 5 х-------------
провода создается магнитное поле 3. С помо- 5
шью короткого импульса по всей длине про-
вода генерируется кратковременное магнитное
68
ГЛАВА 1
поле. Магнитное поле провода 4 взаимодействует с проводом, в результате чего на
конце провода образуется механическая волна 5, которая преобразуется пьезоэлек-
трическим преобразователем 2 в электрический сигнал. Положение поплавка (уро-
вень раздела фаз) определяется временем пробега волны. Разность плотностей двух
фаз должна быть не менее 50 кг/м3, плотность 400 кг/м3 и более.
В табл. 1.38 приведены технические характеристики приборов для измерения
разделительного слоя жидких сред.
Таблица 1.38 Характеристики приборов для измерения разделительного слоя
Тип Метод изме- рения Диапазон измерения Температура и давление среды Выходной сигнал Питание Область приме- нения
Inter Ranger DPS 300 (Siemens') Ультра- звуковой 30 м 20 °C, 0,1 МПа 2х (4... 20 мА); 4 реле 220 VAC Сточные воды, горная промышленность
Pointek CLS 300 (Siemens) Емкостной 1м — стержень, 25 м — кабель -40...+200 °C 3,5 МПа СК, р-п-р 220 VAC Нефтехимия, проводящие материалы.
Sitrans LC 500 (Siemens) Емкостной 5,5 м — стержень, 35 м — кабель -200...+200 °C 5 МПа 4...20 мА, р-п-р 24 VDC Нефтехимия, газ, петрохимия
KSR (KSR KUEBLER) Магнито- стрикцион- ный Зибм -200...+200 °C до 10 МПа 4...20 мА 10...30 VDC Нефтехимия, газовая, энергетика
РУПТ-МН-РС64 (СКВ «Приборы и системы») Гидростати- ческий (плот- ность) 0,5...1,1 г/см3 -50...+50 °C 2,5 МПа СК 220 VAC Нефтепродукты, сжиженный газ в резервуарах
1.5. Анализаторы состава и свойств веществ
Качество продуктов, получаемых в ходе технологических процессов, определя-
ется его физико-химическими свойствами. Контроль этих свойств в ходе процесса
позволяет повысить эффективность процесса и качество продукта. Анализ состава
веществ предполагает определение таких свойств, как концентрация, вязкость, плот-
ность, электропроводность и др.4 * * * В
Приборы, предназначенные для анализа состава веществ, называются анализато-
рами. В основном это анализаторы газов и жидкостей. Методы анализа определены
4 В 1785 г. русский химик Т.Е. Ловиц открыл явление адсорбции — процесса поглощения веществ из
раствора или газа твердыми веществами или жидкостью. В 1903 г. русский биохимик М. С. Цвет создал
метод хроматографического адсорбционного анализа. В 1895 г. французский физик П. Ланжевен разра-
ботал электронную теорию парамагнетизма, послужившую основой термомагнитных газоанализаторов.
В области развития спектроскопии отметим И. Ньютона, который впервые в 1666 г. разложил световое
излучение в спектр. В 1802 г. Волластон ив 1814 г. Фраунгофер обнаружили дискретные спектры поглоще-
ния и испускания. В 1860 г. Д. Максвелл создает электромагнитную теорию света, за которой последовало
открытие рентгеновских и гамма-лучей. В 1896 г. голландский физик Зееман открыл эффект расщепле-
ния спектральных линий в магнитном поле. В 1905 г. А. Эйнштейн определил кванты, как частицы света
(фотоны), а в 1911 г. М. Планк выдвинул гипотезу квантов излучения. В 1911 г. Э. Резерфорд сформулиро-
вал модель атома, состоящего из ядра и электронов. В 1919 г. английским физиком Ф. Астоном изобретен
масс-спектрометр. Квантовые представления в спектроскопию внес Нильс Бор в 1913 г., объяснив спектр
атома водорода. В 1924 г. создаются основы квантовой механики. В 1944 г. Завойским открыто явление
парамагнитного резонанса.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
69
ГОСТ и для газов подразделяются в зависимости от прямого измерения или с пред-
варительным преобразованием пробы на две группы. Первая группа (прямого изме-
рения) включает абсорбционно-оптические, термокондуктометрические, термомаг-
нитные, пневматические методы. В состав второй группы входят электрохимические,
термохимические, фотоколориметрические, пламенно-ионизационные, хроматогра-
фические и масс-спектрометрические методы. Методы анализа жидкостей также ре-
гламентированы и по вышеприведенной классификации подразделяются на методы
прямого измерения — кондуктометрические, потенциометрические, диэлькометриче-
ские, полярографические, оптические, радиоизотопные, механические и кинетические.
К методу с предварительным преобразованием пробы относится титрометрический
метод. Описание методов анализа приведено в работах [1.73,1.74,1.79].
В данной книге основное внимание уделено приборам контроля состава и свойств
веществ, используемых в составе систем контроля и регулирования АСУ ТП, приме-
нительно к которым кратко рассматриваются методы анализа и принцип действия
анализаторов.
1.5.1 Газоанализаторы
Существует большое число газоанализаторов для контроля процентного содер-
жания различных газов, в том числе токсичных (СО2, СО, SO2, Cl2, NH3, H2S и др.),
взрывоопасных (Н2, СН4, С3Н8) газов, а также О2 [1.69,1.72, 1.78].
В табл. 1.39. приведены физико-химические свойства некоторых газов.
Таблица 1.39. Физико-химические свойства газов
Газ Молярный вес, г/моль Ippm (перевод в мг/м3) 1% об. (перевод в г/м3) ПДК рабочей зоны
Кислород О2 32 1,249 12,49 —
Углекислый газ СО2 44 2,054 20,54 0,44 об.%
Угарный газ СО 28 1,250 12,50 20
Сероводород H2S 34 1,518 15,18 10
Хлор С12 71 3,170 31,70 1
Аммиак NH3 17 0,759 7,59 20
Окись азота NO 30 1,339 13,39 5
Двуокись азота NO2 46 2,054 20,54 2
Сернистый газ SO2 64 2,857 28,57 10
Водород Н2 2 0,089 0,89 —
Метан СН4 16 0,714 7,14 300
Озон О3 48 2,143 21,43 0,1
Хлористый водород НО 36,5 1,629 16,29 5
Примечание. 1% об. = 10 000 ppm (part per million)-, 1%НКПР по метану — 0,0528% об. или 369 мг/м3.
Для токсичных и взрывоопасных газов введено понятие предельно допустимой
концентрации (ПДК) в рабочей зоне. Выпускаются сигнализаторы довзрывных кон-
центраций (ДВК). Сигнализаторы ДВК и газоанализаторы ПДК при содержании го-
рючих паров 5...50% от нижнего предела воспламенения (НПВ) должны включать
световую и звуковую сигнализацию для оповещения персонала о наличии опасных
концентраций взрывоопасных и вредных веществ. Одной из основных технических
характеристик газоанализатора или сигнализатора является диапазон измерения по
поверочному компоненту в процентах от концентраций, соответствующих нижнему
70
ГЛАВА 1
концентрационному пределу распространения пламени (%НКПР). В качестве пове-
рочного компонента может быть, например, метан. Единицы измерения концентра-
ции газа: г/м3, мг/м3, % по объему.
В табл. 1.40 приведены основные горючие газы и пары нефтепродуктов.
Таблица 1.40. Горючие газы и пары нефткпродуктов
Ацетилен С2Н2 Гексан с6н14 Пропан С3Н8
Бензин с6н14 Гептан С7Н14 Стирол с,н6
Бензол с6н6 Ксилол ^8^18 Толуол ед
Бутан С4Н10 Метан сн4 Этан с2н6
Бутадиен ^Hf, Метанол СН3ОН Этилен с2н4
Бутилен С4Н8 Октан ^8^18
1.5.1.1 Термокондуктометрические газоанализаторы
Принцип действия термокондуктометрического газоанализатора основан на за-
висимости сопротивления терморезистора, находящегося в рабочей камере с ана-
лизируемой газовой смесью и нагретого до температуры примерно 200 °C, от тепло-
проводности окружающей терморезистор смеси. Теплопроводность анализируемого
газа должна значительно отличаться от теплопроводности др. компонентов смеси.
Принципиальная схема термокондуктометрического газоанализатора пред-
ставляет собой неуравновешенный мост, в противоположных плечах которого (для
повышения чувствительности) находятся рабочие камеры с терморезисторами, а в
двух других — камеры со сравнительным газом (воздух) и терморезисторами. Те-
плопроводность анализируемого газа, отличная от теплопроводности воздуха, вы-
зывает изменение сопротивлений терморезисторов рабочих камер по отношению
терморезисторов сравнительных камер. Сигнал рассогласования мостовой схемы
(ток в диагонали моста) является функцией процентного содержания анализируе-
мого газа в газовой смеси {1.76].
В табл. 1.41 приведены значения коэффициентов теплопроводности (Хг) некото-
рых газов при 0 °C и атмосферном давлении, а также величина отношения Хг и коэф-
фициента теплопроводности воздуха Хв, являющегося сравнительным газом в схеме
газоанализатора.
Таблица 1.41. Значения коэффициентов теплопроводности (Хг) некоторых газов
Газ Хг, мВт/(м ° С) ХА Газ Хг, мВт/ (м ° С) ха
Азот 23,72 0,996 Окись углерода 22,94 0,965
Аммиак 21,33 0,879 Сернистый ангидрид 8,17 0,344
Водород 169,60 7,130 Сероводород 12,79 0,538
Воздух 23,78 1,000 Углекислый газ 14,59 0,614
Двуокись азота 42,71 1,796 Хлор 7,65 0,322
Кислород 24,16 1,016 Водяной пар (100 °C) 23,15 0,973
Метан 31,38 1,320
Коэффициентом теплопроводности (X) называется величина, численно равная
количеству теплоты (Q), прошедшему в единицу времени (t) через слой единичной
толщины (А/) при разности температур поверхностей слоя (АТ) в 1 °C, если площадь
слоя (S) равна единице.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
71
Л = О(Д//Д Г) S t, Вт/м • град
Погрешности термокондуктометрических газоанализаторов связаны с измене-
нием окружающей терморезисторы температурой, колебаниями расхода анализиру-
емого газа и напряжения питания. Газоанализаторы используются для определения
содержания водорода (Н2), гелия (Не), углекислого газа (СО2), сернистого газа (SO2),
аммиака (NH3), аргона (Аг), хлора (С12) и хлористого водорода (НС1).
Технические характеристики термокондуктометрических газоанализаторов при-
ведены в табл. 1.42
Таблица 1.42. Технические характеристики газоанализаторов
Тип Принцип работы Анализируемый газ Диапазон измерения, % об. Погрешность, % Выходной сигнал
1 2 3 4 5 6
АКВТ-01 Электро- химический о2 0,1. ..2; 0,1. ..5; 0,1. ..10 0,1...0,4 0...5,4...20 мА
АНКАТ 7631М lExsibIICT6 (переносной) Электро- химический СО, NH3 H2S, SO2 Cl2 no2 о2 0...200 мг/м3 0...20 мг/м3 0,3...25 мг/м3 0... 10 мг/м3 0...30 ± 5 мг/м3 ± 2,5 мг/м3 ± 0,5 мг/м3 ± 0,5 мг/м3 ± 3 0...5, 4...20 мА
АНКАТ 7621М lExsibIICT6 (стационарный) Электро- химический со so, H2S Cl2 0... 50 мг/м3 0...20 мг/м3 0...20 мг/м3 0...5,0...50 мг/м3 ± 1 мг/м3 ± 1 мг/м3 ± 0,75 мг/м3 ± 0,25 мг/м3 4...20 мА, СК
АНКАТ 7654 (стационарный) Электро- химический со so2 H2S no2 0...50 мг/м3 0...20 мг/м3 0...20 мг/м3 0...10 мг/м3 ± 5 мг/м3 ± 2,5 мг/м3 ± 0,75 мг/м3 ± 0,5 мг/м3 0...1 В
Палладий 3 (стационарный) Электро- химический co 0...50 мг/м3 ±(0,75...5) мг/м3 0...5,4...20 мА
Оптима 3 (стационарный) Электро- химический (О2) Термокаталитиче- ский (СО) O2 co 0,2...21 0... 1000 ppm ± 10 0...5, 4...20 мА, СК, RS-232
ГЛ-5108 (стационарный) Электрохимиче- ский o2 (микро- концентрации) 0...5-Ю-4,0...1-10-’ 0...5-103,0...0.01, 0...0.05 + 10 Встроенный самописец
СТГ-2 (стационарный) Электрохимиче- ский Cl2 0...1 мг/м3 0.. 20 мг/м3 + 25 СК
ЭССА (стационарный) Электрохимиче- ский NHj Cl2 co NO H2S o3 CH4 o2 0...200,0...600 мг/м3 0...5,0... 50 мг/м3; 0... 100 мг/м3; 0...30 мг/м3; 0...30 мг/м3; 0...1 мг/м3; 0...25; 0...30 + 10 RS-232, СК
Хоббит -Т 1 ExibIIBT6 (стационарный) Электрохимиче- ский NH, H2S SO2 CH4 HF 20...500 мг/м3; 5...30 мг/м3; 10... 100 мг/м3; О...5О%, НКПР; 0,5; 2,5 мг/м3 (1 и 5 ПДК) + 25 0...5,4...20мА, СК, RS-232
72
ГЛАВА 1
Продолжение табл. 1.42
1 2 3 4 5 6
КАСКАД-Н 312/512/52/62 Электро- химический со NO no2 H2S so2 о2 0...20 г/м3 0...3 г/м3 0...200 мг/м3 0...0.1 г/м3 0...5г/м3 0...25%о6. ± 0,05 мг/м3 ± 0,05 мг/м3 ± 30 мг/м3 ± 5 мг/м3 ± 0,05 мг/м3 ± 2.5% RS-232, ЖК-индикатор
ГОЗОН (стационарный) Электро- химический (8 каналов) Оз 0...1 мг/м3 ±25 СК
Колион 1В ExiblIBT4 (стационарный) Фотоионизаци- онный СО; H2S; NO2; NH3,CH3 0...2000 мг/м3 ± 15 ЖК- индика- тор
ИВА-lBxx Электрохимиче- ский Н2, Ar SO2 CO2 NH3 0...100%; 0...20%; О...1ОО%; 0...15%,0...20%, 30...90% ±5 4...20 мА
СТМ-10 lExdIICT4 (стационарный) Термохимический (1...10 каналов) H2>CH CH4,C3H8 0...50%, НКПР ± 5%, НКПР измерение; ±10%, НКПР сигнализация 0...1В.СК
СТМ-30 lExdibIICT6 (стационарный) Термохимический (1...16 каналов) CH, CH4 C3Hf,H2 О...5О%, НКПР ± 5%. НКПР- измерение; ± 2,5%, НКПР сигнализация 4...20 мА, СК, RS-232, RS-485
СГГ-20 lExibdsIICT6 Термохимический CH, CH4, C3H8 0...50%, НКПР (горю- чие газы и пары) ±5 СК
ГИАМ-29 (переносной) Оптико- абсорбционный co XCH 0...5,0...10; 0...1000,0...5000 ppm ±5 СК, RS-232
ГИАМ-315 lExibdIIBT6 (переносной) Оптико- абсорбционный co 1CH 0...3000 мг/м3 + 75 мг/м3 (0...300); ± 25 (300...3000) СК
Оптогаз-500.7 Оптогаз-500.8 Оптико- абсорбционный co co2 0...1000,1000...2000 ppm (ХСН); 0...5000 ррш (СО) ± 3,5% (СО), ± 5% (ХСН) СК
ГТВ-1101 вз lExdIICT6 (стационарный) Термокондукто- метрический ДО 0...1,0...2,0...3; 0...1,0...2,0...3, 50... 100, 70... 100 ±5 ±5 СК
ГАУ-Д-М1 (стационарный) Термоконд-й; Оптико- абсорбционный H2 co co2 0...20; 0...50; 0...30 ±2 0...5.МА; 4...20 мА, 0...10В
ГТМ-5101 ВЗ lExdIICT6 (стационарный) Термомагнитный O2 0...2,0...5,0...10, 0...30,0...50 ±2,5; ± 4 0...5;4...20 мА, СК
ГАММА-100 (стационарный) Термокондукто- метрический co2,h2,n2 СО2: 0...50,40...100 Н2:0...1,0...5,0...10, 0...50, 0...100, 50..100 80... 100, 90... 100; N2: 0...20, 0...60, 60... 100, 80... 100; ± (2...10) 0...5,4...20 мА, СК, RS-232, RS-485
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
73
Окончание табл. 1.42
1 2 3 4 5 6
ГАММА-100 (стационарный) Термомагнитный О2 0-1,0—2,0...5,0...10, 0...50,0.-100,80...100, 95...100 ± (2...I0) 0...5,4...20 mA, CK, RS-232, RS-485
Оптико- абсорбционный СО, СО2, сн4, so2 CO: 0...1,0...2,0...5, 0—10,0...50,0...100; CO2:0—1,0...2,0...5. 0—10,0—50,0—100, 40-100,90—100; CH4: 0...1,0...2, 0...5, 0...10,0-50,0.-100; SO2:0...2,0...5,0...10, 0-20, 0...60 ± (2... 10) 0...5,4...20 mA, CK, RS-232, RS-485
КЕДР Оптико- акустический со, со2, сн„, С2Н2, NH3, SO2, NO, N2O ОтО... 0,005%об. до 0-.100%об. (CO,CO2, SO2, N2O, CH4); ОтО...0,05%об. до 0...100%об. (NH3, C2H2); ОтО—0,01%об. до 0—100%об. (NO) CH4, CO, CO2, N2O: ± (4...10); NH3, SO2, NO: ±6; N2O:±(4...10) 0...5 mA
ТМО2-ТС (GE Panametrics) Термокондукто- метрический H2, CO2, He, so2 0...1,0...2,0...5.0...10, 0...25,0—50,0-100, 80-100,90.-100 ±2 4...20 mA
ULTRAMAT 6 (Siemens) Оптико- абсорбционный (2...9 мкм) co,co2,no, NH3, CH4, УСН ОтО... 5%об. до 0...100%об. ±0,5 Profibus DP/ PA, RS-485, 4..20 mA
ULTRAMAT 23 (Siemens') Оптико- абсорбционный CO, CO2, NO, O, 0...300 ppm (NO, SO2) 0...2000 ppm (CO), 0—20%o6. (CO2), 0...25%o6. (O2) ±(4-15) Profibus DP/ PA, 4...20 mA, CK
OXYMAT 6 (Siemens) Термомагнитный o2 От 0-0,5% до 0.-100% ± 1,5 Profibus DP/PA
FIDAMAT (Siemens) Пламенно- ионизационный XCH ОтО... 10 ppm до 0...999999 ppm ±2,5 RS-485,4...20 mA
Binos 100 (Emerson Process Management) Оптико- абсорбционный, электро- химический O2, CO2, CO, CH„, (2 канала) 0.-21% O2 + 2 RS-232, 4...20 mA
Oxymitter 4000 (Emerson Process Management) Сенсор на основе оксида циркония O2 0-21% O2 ±2 HART
1.5.1.2 Термомагнитные газоанализаторы
Принцип действия термомагнитного газоанализатора основан на зависимости
объемной магнитной восприимчивости парамагнитного газа (кислород, азот, воз-
дух, а также NO и NO2), от температуры при прохождении газовой смеси в магнит-
ном поле, от его концентрации в исследуемой газовой смеси [1.77].
Способностью к намагничиванию в направлении приложенного магнитного
поля обладают парамагнитные газы, к числу которых относится, прежде всего, кис-
лород. Магнитные моменты атомов или молекул парамагнитного газа стремятся рас-
74
ГЛАВА 1
положиться по направлению, т. е. вдоль магнитного поля. Парамагнитная восприим-
чивость у этих газов уменьшается с увеличением температуры.
Как известно, намагниченность (/) пропорциональна напряженности Н магнит-
ного поля: J = х • Н, где \ — магнитная восприимчивость. Вещества, для которых у> О,
называются парамагнетиками, вещества, для которых у < О, называются диамагнети-
ками. Из всех газов наибольшей магнитной восприимчивостью обладает кислород,
магнитная восприимчивость которого на 2-3 порядка выше, чем у других газов. Это
позволяет выделить процентное содержание кислорода в смеси с другими газами.
Метод, основанный на использовании парамагнитных свойств газа, находящегося в
магнитном поле при его нагреве, называется термомагнитным методом.
Термомагнитный газоанализатор представляет собой мостовую схему, двумя
смежными плечами которой являются платиновые нагреватели, навитые на стеклян-
ную трубчатую перемычку кольцевой камеры, при этом одно из плеч находится в
постоянном магнитном поле. Двумя другими плечами моста служат постоянные
резисторы. Анализируемая смесь поступает в кольцевую камеру, где часть потока
ответвляется, втягиваясь в трубчатую перемычку и нагреваясь в магнитном поле.
При этом объемная магнитная восприимчивость газа уменьшается. В результате на-
гретая газовая смесь вытесняется более холодной, образуя вдоль перемычки поток
термомагнитной конвекции. Этот направленный поток вызывает по ходу движения
охлаждение одного платинового терморезистора и нагрев другого, в результате чего
изменяется их сопротивление и мост выходит из равновесия. Сигнал разбаланса мо-
ста является функцией процентного содержания кислорода в смеси.
Источниками погрешности термомагнитного газоанализатора являются коле-
бания температуры, расхода анализируемой смеси и напряженности магнитного
поля. Технические характеристики термомагнитных газоанализаторов приведены
в табл. 1.42.
1.5.1.3 Термохимические газоанализаторы
Принцип действия термохимического газоанализатора основан на тепловом
эффекте реакции каталитического окисления анализируемого газа. Окисление (го-
рение) происходит на каталитически активной платиновой нити, являющейся тер-
мосопротивлением мостовой схемы, или в слое катализатора, температура реакции
которого измеряется датчиком температуры [1.74].
В приборах первой группы анализ газа основан на повышении температуры нити
при сгорании анализируемого компонента. Температура нити Т = f(q, а, и), где q—
удельная теплота горения; а — коэффициент, характеризующий полноту реакции;
и — число молей прореагировавшего вещества.
Схема газоанализатора представляет собой мостовую схему, в одном из плеч
которой находится проточная рабочая камера. В другом плече мостовой схемы —
сравнительная камера, заполненная воздухом. Двумя другими плечами моста служат
постоянные резисторы. При сгорании анализируемого компонента в рабочей камере
повышается температура, что приводит к повышению сопротивления платиновой
нити и разбалансу мостовой схемы. Ток в диагонали моста является функцией со-
держания анализируемого компонента в газовой смеси.
Термохимические газоанализаторы, у которых реакция окисления осуществля-
ется в слое насыпного катализатора, включают два термометра сопротивления, один
из которых (рабочий) измеряет температуру реакции в слое катализатора, а другой
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
75
Рис. 1.39
(сравнительный) — в слое инертной массы. Термодатчики
включены в смежные плечи мостовой схемы. Анализируе-
мый газ последовательно проходит через сравнительную
и рабочую камеры. При нахождении в газовой смеси ана-
лизируемого компонента в рабочей камере со слоем ката-
лизатора возникает экзотермическая реакция с выделени-
ем тепла, в результате чего увеличивается сопротивление
рабочего термодатчика и происходит разбаланс моста с
появлением в диагонали тока, пропорционального содер-
жанию измеряемого компонента.
На рис. 1.39 показан термохимический газоанализатор СТМ-10. Погрешности
термохимических газоанализаторов зависят от колебаний температуры окружающей
среды, расхода анализируемого газа, активности катализатора. Термохимический ме-
тод используется для определения концентрации большого числа газов (СО, О2, H2S,
SO2, NO2, СН4 и др. горючих тазов), паров органических соединений (спиртов, эфи-
ров и кислот).
Технические характеристики термохимических газоанализаторов приведены в
табл. 1.42.
1.5.1.4 Электрохимические газоанализаторы
Электрохимические газоанализаторы широко применяются для непрерывного
контроля микроконцентраций токсичных газов (СО, H2S, SO2, С12 и др.) на уровне
ПДК рабочей зоны, а также микроконцентраций одних газов (например, кислорода)
в других (например, водороде, аргоне, гелии, этилене и др.) [1.82].
Принцип действия газоанализаторов основан на измерении электропроводности
растворов, абсорбирующих анализируемый компонент газовой смеси. Анализируе-
мый газ принудительно поступает через капилляр в рабочую емкость и измерительную
ячейку, в которых находится поглотительный раствор. Анализируемый компонент аб-
сорбируется раствором, подаваемым в систему с постоянным расходом, и проходящим
последовательно через участок со сравнительными электродами и затем через измери-
тельную ячейку с рабочими электродами. Разность значений проводимости раствора
до и после абсорбции является функцией концентрации анализируемого компонента.
Газоанализаторы, основанные на этом методе, называются кондуктометрически-
ми газоанализаторами. Другой разновидностью электрохимического метода является
кулонометрический метод, основанный на измерении силы тока при электролизе рас-
твора, содержащего измеряемый компонент (газ), при контролируемом потенциале
измерительного электрода. Измерительный электрод находится в камере с раствором
электролита, через который барботируется газовая смесь. Анализируемый компонент
взаимодействует с реагентом, который окисляется на измерительном электроде. Напри-
мер, при измерении концентрации SO2 в качестве реагента используется йод, а электро-
литом служит 5%-ный раствор серной кислоты [1.82]. Потенциал подводится к измери-
тельному и к вспомогательному электроду, который отделен от раствора ионообменной
мембраной. При постоянном расходе газовой смеси ток электролиза является функцией
содержания анализируемого газа. В других схемах электрохимических газоанализато-
ров могут использоваться твердоэлектролитные измерительные электроды.
Возможность измерения микроконцентраций газов с высокой точностью явля-
ется одним из главных преимуществ электрохимических газоанализаторов.
76
ГЛАВА 1
К числу анализируемых компонентов помимо токсичных газов относится микро-
концентрация кислорода в газовой среде. Технические характеристики электрохими-
ческих газоанализаторов приведены в табл. 1.42.
1.5.1.5 Оптико-абсорбционные газоанализаторы
Принцип действия оптико-абсорбционного (оптико-акустического) газоана-
лизатора основан на зависимости избирательного поглощения электромагнитного
излучения, проходящего через камеры (кюветы), заполненные измеряемым компо-
нентом (анализируемым газом), от концентрации. Для газового анализа в настоящее
время используются два участка спектра, — ультрафиолетовый (0,2...0,4 мкм) и ин-
фракрасный (2... 10 мкм). Зависимость степени поглощения излучения от концентра-
ции измеряемого компонента определяется законом Бугера-Ламберта-Бера:
фщф0/‘С'.
где Ф0А и ФА — монохроматические потоки излучения до и после кюветы шириной I
с анализируемым газом; ех — коэффициент поглощения излучения анализируемым
газом; С — концентрация газа.
Поток излучения Фх, поглощенный анализируемым газом, равен:
ФА(С) = 1-е^\
где Da = £ I • С — оптическая плотность анализируемого компонента на длине волны X.
Принципиальная схема оптико-абсорбционного газоанализатора представляет
собой один или два канала, включающие осветитель, селективный фильтр (моно-
хроматор), рабочую камеру с анализируемым газом (при 2-канальной схеме также
сравнительную камеру с чистым газом, не поглощающим излучение в данном спек-
тре длин волн), фотоприемник(и), микропроцессорную схему обработки сигнала, а
также показывающее и сигнализирующее устройства [1.70,1.71-1.75].
Особенностью схем оптико-абсорбционных газоанализаторов является тщатель-
ный выбор всего оптического тракта — спектральной характеристики фильтра, гаран-
тирующего максимум поглощения излучения измеряемым компонентом в выделенной
фильтром области спектра; габаритов кюветы, определяющих оптическую плотность
компонента на данной длине волны; наличие абтюратора потока излучения для усиле-
ния по переменному току и снижения погрешности от амплитудных факторов.
Газоанализаторы ультрафиолетового поглощения используются для измерения
концентрации СО, СО2, СН4, SO2, NO, NO2, С12 и паров ртути. В качестве компен-
саторов светового потока в двухканальных схемах газоанализатора используются
оптический клин, заслонка или реохорд, включенный в вершину измерительной диа-
гонали мостовой схемы, двумя плечами которой служат фотоприемники излучений,
прошедших через рабочую и сравнительную кюветы. В качестве источников ультра-
фиолетового излучения используются ртутные лампы, а в качестве приемников из-
лучения — фотодиоды и фоторезисторы.
В газоанализаторах инфракрасного излучения в качестве приемников ИК-
излучения используются оптико-акустические преобразователи, преобразующие
тепловое воздействие ПК-лучей в давление газа, находящегося в постоянном зам-
кнутом объеме. При прерывистом за счет абтюратора потоке излучения в преобразо-
вателе изменяется давление с частотой прерывания излучения (5...6 Гц). Пульсация
давлений между рабочей и сравнительной камерами при компенсационной схеме из-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
77
Рис. 1.40 Рис. 1.41
мерения воспринимается мембраной, которая является одной из обкладок конденса-
торного микрофона. Амплитуда колебаний, зависящая от разности давлений в двух
камерах, является функцией концентрации анализируемого компонента. Усиленный
от конденсаторного микрофона сигнал поступает на вход электронного преобразо-
вателя, формирующего унифицированный выходной сигнал.
В качестве источника ИК-излучения используется нагретая примерно до 800°C
хромоникелевая проволока. ИК-излучение проходит через окна, изготовленные из
материалов, пропускающих ИК-излучение. К таким материалам относится, напри-
мер, флюорит. На рис. 1.40 представлен общий вид газоанализатора ULTRAMAT6
фирмы Siemens. На рис. 1.41 приведен общий вид газоанализатора кислорода «Oxymat
6» фирмы Siemens. Погрешность измерения оптико-абсорбционных газоанализато-
ров составляет ±4...5%. Характеристики оптико-абсорбционных газоанализаторов
приведены в табл. 1.42.
1.5.1.6 Пламенно-ионизационные газоанализаторы
Принцип действия газоанализаторов основан на ионизации молекул органиче-
ских веществ в водородном пламени с последующим измерением ионизационного
тока как функции процентного содержания анализируемого газа.
Пламенно-ионизационные газоанализаторы применяются для определения до-
взрывных концентраций бензола, стирола, дихлорэтана, хлорвинила и др. Газоанализа-
тор представляет собой горелку, куда поступает водород и анализируемый газ. Горелка
представляет собой один из электродов под напряжением 200.. .300 В. Вторым электро-
дом является цилиндрическая насадка (коллектор) из платины или титана, к которой
подведен второй (положительный) потенциал. Горелка с насадкой находятся внутри
ионизационной камеры, в которую для поддержания горения подается воздух.
При отсутствии в анализируемом газе органических компонентов электропро-
водность водородного пламени низкая. При повышении концентрации анализируе-
мого компонента проводимость пламени повышается и в цепи коллектор-горелка
возникает ионизационный ток, создающий на входе высокоомного усилителя напря-
жение, величина которого пропорциональна концентрации анализируемого газа.
Технические характеристики пламенно-ионизационных газоанализаторов при-
ведены в табл. 1.42.
Известны также фотоколориметрические и денсиметрические газоанализаторы.
Фотоколориметрические газоанализаторы основаны на изменении цвета опре-
деленных веществ при их реакции с анализируемым компонентом газовой смеси.
78
ГЛАВА 1
Изменение оптической плотности раствора является функцией концентрации. Эти
газоанализаторы применяются для измерения микроконцентраций токсичных при-
месей в газовых смесях — сероводорода, окислов азота и некоторых др.
Денсиметрические газоанализаторы основаны на измерении плотности газовой
смеси. Применяются для определения содержания углекислого газа, плотность кото-
рого в 1,5 раза больше плотности воздуха.
1.5.1.7 Хроматографы
В хроматографах используется хроматографический метод определения каче-
ственных и количественных характеристик газообразных и жидких смесей. Этот ме-
тод основан на разделении анализируемой смеси на составляющие ее компоненты за
счет их адсорбции при движении смеси вдоль слоя сорбента. Поглощение веществ из
потока жидкости или газа, перемещающегося по слою сорбента (неподвижная фаза
в виде твердых или жидких поглотителей), происходит с различной скоростью, что
определяется временной зависимостью сигнала детектора. Величина сигнала детекто-
ра (мВ • см3/мг) пропорциональна содержанию анализируемого компонента. При на-
личии в смеси нескольких компонентов входной сигнал детектора представляет собой
хроматограмму, каждый пик которой определяет компоненту анализируемой смеси, а
площадь пика — процентное объемное содержание этого компонента в смеси.
В зависимости от фазового состояния анализируемой смеси хроматографы раз-
деляют на газовые и жидкостные.
Газовые хроматографы применяются для качественного и количественного анали-
за веществ в широком интервале температур (до 400 °C) и давлений (до 60 МПа). Проба
анализируемого газа (от 0,1 до 10 мл) вводится в хроматографическую колонку в поток
газа-носителя с помощью дозатора. В качестве газа-носителя используются азот, гелий,
аргон, воздух, водород; в качестве сорбента — твердое порошкообразное вещество
(твердый адсорбент). В качестве адсорбентов применяются угли, пористые полимеры,
окись алюминия и другие материалы, устойчивые к высокой температуре.
Хроматографическая колонка пред-
ставляет собой трубку из стекла или ме-
талла прямой, U-образной или спиральной
формы. Длина колонки может быть от не-
скольких сантиметров до нескольких ме-
тров, внутренний диаметр трубки от 0,5 до
3 мм. Чем длиннее трубка, тем более четкое
разделение компонентов смеси. Для под-
держания постоянства температуры сор-
бента, влияющей на качественные харак-
теристики анализа, хроматографическая
Рис. 1.42 Рис. 1.43
колонка устанавливается в термостат.
На рис. 1.42 представлен общий вид газового хроматографа MicroSAM, а на
рис. 1.43 — газового хроматографа PGG Р302 (модель II) фирмы Siemens.
В качестве детекторов хроматографов используются термокондуктометрические,
пламенно-ионизационные, фотометрические и др. детекторы.
Принцип действия термокондуктометрических и пламенно-ионизационных де-
текторов такой же, как у газоанализаторов, рассмотренных выше. При этом чувстви-
тельность последних выше, чем у термокондуктометрических детекторов.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
79
Принцип действия фотометрического детектора основан на измерении излуче-
ния анализируемого газа в водородном пламени. Так, интенсивность излучения S2
при разложении серосодержащих соединений проявляется в диапазоне длин волн
от 0,35 до 0,45 мкм. Поток излучения измеряется фотоприемником и преобразуется
далее в выходной унифицированный сигнал.
Жидкостные хроматографы используются для анализа большого числа смесей при
более низких температурах, не вызывающих их разрушения. К таким компонентам от-
носятся аминокислоты, жиры, углеводы, пестициды, гербициды, лекарственные пре-
параты. В табл. 1.43 представлены технические характеристики хроматографов.
Таблица 1.43. Характеристики хроматографов
Тип Детектор Число каналов, газ-носитель Диапазон измерения Диапазон темпе- ратур термостата колонок, °C Выходной сигнал
1 ТХМ-2000М ДТП, ПИД, ТИД, ТХД, ФИД, ЭЗД Одновремен- ное измерение до 3-х параме- тров Пропан: 4 Ю-10 г/мл. Бензол: 2 • 1012 г/см3- Водород: 8 • 10 10 г/см3- Объем дозы: 0,5; 1; 2 см3 50...400 RS-232
Газохром-2000-01 ДТП.ДТХ Газ-носитель: гелий, азот Н2: 1 10 3 %об. СО: 3 • 10 3 %об. СН„: 1 103 %об. СО2:5 - 102 %об. О2:6,5 • 10 4 %рб 50...200 RS-232
Газохром-2000-02 ПИД Газ-носитель: азот Пропан: 2 • 1(?5 %об. 50...200 RS-232, USB
ПОТОК-2000 IExdIIAT4 Микрокатаро- метр 4 канала Пропан: 2 10~7 г/см3; сг..с6, со,со2 30...200 RS-232
Микрохром 1121-4/5/6 [ExdesIIBT4/H2X ДТП Газ-носитель: гелий Мод. 4: жидкость: (310~7г/см3). Мод. 5: газ (пропан: 2 10~7% об.). Мод. 6: содерж. О2 и N2 50...200 RS-232
Интерхром-2003 lExdemIIBT4 процессы не- । фтепереработки, газодобычи) ДТП Пропан: 2 10-7 г/см3 Октан: 3 10 'т г/см3 Объем дозы: 0,12...4 см3 (газ) 2 • 10"3 см3 (жидкость) 50...200 RS-232
MicroSAM (Siemens) WLD (ДТП) 1 Предел детектирования 0,5 • 10-9 г/мл -40...200 Ethernet
Maxum edition II (Siemens) FID (ПИД), WLD (ДТП), HID (ФИД), ECD (ЭЗД), PFD Газ-носитель: N2, Не, Н2 50...200 Ethernet
RGC 202 mod. II (Siemens) FID (ПИД), WLD (ДТП), ECD (ЭЗД), PFD (ПФД) Газ-носитель: сжатый воздух 5...400 Ethernet
RGC 302 mod. II (Siemens) 5...260 Ethernet
GC 1000 Mark II (Yokogawa) TCD, FID, PFD Газ, жидкость. Число по- токов— 31; Число компо- нентов — 255 N2, Не, Ar, Н2 (1 или 2), 0...300 мл/мин; TCD: 10 ppm... 100%; FID: 1 ppm... 100%; FPD: 1 ppm...0,1% 0...450 4...20mA,CK, RS-232, RS422 ЖК- индикагор
ДТП — детектор по теплопроводности; ПИД — пламенно-ионизационный детектор; ФИД — фотоио-
низационный детектор; ЭЗД — электронно-захватный детектор; ТИД — термоионный детектор; ТХД —
термохимический детектор.
80
ГЛАВА 1
1.5.1.8 Влагомеры (гигрометры)
Влагомеры применяются для измерения абсолютной или относительной влаж-
ности газов, а также твердых веществ. Абсолютная влажность газа (г/м3, кг/м3) равна
массе водяного пара, содержащегося в единице объема парогазовой смеси. Относи-
тельная влажность газа (%) — это отношение фактической влажности к предельной
влажности для анализируемого газа при данной температуре.
Принцип действия гигрометров газов основан на одном из 3-х методов: психро-
метрическом, методе точки росы и сорбционном (поглотительном).
Психрометрический метод основан на зависимости степени охлаждения поверх-
ности увлажненного тела от влажности газа. Чем меньше влажность газа, тем больше
интенсивность испарения и тем ниже температура увлажненного тела. При измере-
нии этим методом гигрометр имеет два термометра, один из которых («мокрый») по-
стоянно соприкасается с увлажненным гигроскопическим телом, получающим влагу
из кюветы. При испарении влаги с увлажненного тела его температура понижается.
Разность температур «сухого» и «мокрого» термометров определяет относительную
влажность газа. Для повышения точности и быстродействия «мокрый» термометр
постоянно обдувается газовым потоком (воздухом) со скоростью 3...4 м/с. При низ-
ких температурах примерно от -10 до +5 °C в качестве смачивающего раствора ис-
пользуется 3%-ный водный раствор формальдегида.
Преимущество психрометрического метода — точность и быстродействие, недо-
статки — увеличение погрешности при низких температурах, необходимость стаби-
лизации расхода и давления газа при обдуве.
Метод точки росы основан на охлаждении газа до состояния насыщения (точки
росы) и измерении температуры насыщения. Для нахождения точки росы исполь-
зуют зеркальную поверхность охлаждаемого металлического зеркала, появление
конденсата на поверхности которого ослабляет отражаемый этой поверхностью све-
товой поток. Фотоэлемент фиксирует наличие конденсата на поверхности зеркала,
температура которого в этот момент пропорциональна влажности газа.
Среди сорбционных (поглотительных) методов получили применение пьезо-
сорбционные, кулонометрические и емкостной методы.
Принцип действия пьезосорбционных гигрометров основан на зависимости
частоты колебаний пьезосорбционного чувствительного элемента, покрытого сло-
ем сорбента, от относительной влажности газовой смеси. В результате сорбции
или десорбции водяных паров пленкой сорбента изменяется масса покрытия и, как
следствие, частота колебаний пьезосорбционного чувствительного элемента. К до-
стоинствам пьезосорбционного гигрометра относятся высокая чувствительность и
быстродействие. К недостаткам — необходимость индивидуальной градуировки на
газовых смесях заданной влажности.
В кулонометрических гигрометрах используется явление поглощения влаги из
анализируемого газового потока пленкой гидрофильного вещества (фосфорного ан-
гидрида или пятиокиси фосфора) с одновременным разложением поглощенной воды
под действием приложенного напряжения на водород и кислород. В установившемся
режиме сила тока электролиза является функцией влажности анализируемого газа.
Гигрометр представляет собой трубку с двумя электродами в виде спирали, между
витками которых нанесена пленка пятиокиси фосфора. Внутрь трубки продувается
анализируемый газ (расход 100... 150 л/ч). Продукты электролиза воды (водород и
кислород) уносятся потоком газа.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
81
Преимущество кулонометричексих гигрометров — независимость показаний от
состава газа и отсутствие требований в индивидуальной градуировке. Недостаток —
требование ограничения в анализируемом газе щелочных компонентов.
Емкостной метод основан на изменении электрической емкости чувствительного
элемента и преобразовании этого изменения в электрический сигнал с учетом вели-
чины компенсации температурной зависимости. Емкостной датчик представляет со-
бой плоский конденсатор с электродами из пористой платины с полимерным запол-
нением межэлектродного пространства. Под действием влаги полимер расширяется,
что приводит к изменению емкости конденсатора. Наличие пыли в окружающей сре-
де измерения увеличивает погрешность датчика. Достоинством емкостного датчика
является малое время установления показаний (от 10 до 30 с), широкий диапазон
измерения по температуре (от -40 °C до +85 °C).
Принцип действия датчиков фирмы Mela (Германия) основан на емкостном мето-
де. Влагозависимый конденсатор состоит из слоев, включающих в себя основу — кера
мический субстрат, систему электродов и слой золота, проницаемый для паров воды, а
также влагочувствительный полимер. Емкость такого конденсатора пропорциональна
относительной влажности окружающей среды. К преимуществам чувствительного эле-
мента относятся практически линейное изменение характеристик, хорошие динамиче-
ские характеристики, гигростабильность и большой диапазон измерения. 0... 100% RH
(Relative Humidity — относительная влажность). Гигростабильность чувствительного
элемента обеспечивает устойчивость его к росе, так как конденсирующаяся на поверх-
ности вода не вызывает каких-либо повреждений. Однако, правильные показания
можно получать только после того, как вода с поверхности будет полностью удалена.
Чувствительные элементы могут использоваться вплоть до уровня абсолютной влаж-
ности, соответствующего температуре точке росы 60 °C. В течение непродолжительно-
го времени эти элементы можно использовать до температур точки росы порядка 90°C.
При использовании вместе с защитной рамкой влагочувствительные элементы могут
эксплуатироваться при температурах от -40 до 110 °C.
Фирма Mela производит датчики относительной влажности и температуры типов
RC и PC стержневого типа (выходной сигнал 4...20 мА, 0... 10 В, погрешность ±2%),
датчики влажности и температуры KL, WL, PL (выходной сигнал 4...20 мА, 0... 10В,
погрешность ±3%), датчики влажности и температуры VRX.D (выходной сигнал
4...20 мА, 0...10 В, давление до 2,5 МПа, температура - 40...+80°С) и др. Диапазон
измерения относительной влажности 0...100%. Изме-
рение температуры осуществляется платиновым тер-
мометром сопротивления, погрешность ± 0,2 °C. На-
пряжение питания датчиков 15...24 VDCили 24 VAC.
В датчике влажности фирмы JUMO измеритель-
ный полимерный элемент состоит из множества нитей,
в каждой из которых содержится до 90 волокон диа-
метром 0,003 мм. Под действием влаги волокна приоб-
ретают гигроскопические свойства, заключающиеся в
том, что с абсорбцией влаги волокна удлиняются, что
служит мерой относительной влажности. С помощью
точной механики это удлинение преобразуется в изме-
нение состояния коммутационного элемента (микро-
выключатель).
82
ГЛАВА )
В анализаторах влажности газов фирмы GE Parametrics используются тонкопле-
ночные чувствительные элементы на основе оксида алюминия (анализаторы влаж-
ности MIS1, MIS2, MMS3 и др.).
На рис. 1.44, а представлен измерительный преобразователь влажности РОСА-10
НПП «Элемер», а на рис. 1.44, б— датчики влажности RC и PC фирмы Mela (Германия).
Измерение влажности твердых тел в промышленности осуществляется косвен-
ными методами, к которым относятся кондуктометрический, диэлькометрический,
СВЧ-метод, метод ядерного магнитного резонанса и ряд др.
Технические характеристики влагомеров газов приведены в табл. 1.44
Таблица 1.44. Характеристики влагомеров газов
Тип (Фирма) Измеряемая величина Диапазон измерения Погрешность Выходной сигнал Габариты, мм
Роса-10 (НПП «Элемер») Абсолютная влажность Относит, влажность 0...18 г/м3 О...1ОО% + 2% 4...20 мА; дисплей Длина: 100... 1000
ИПТВ056 (НПП «Элемер») Относительная влажность 0...100% ± 1; дополн. погреш. при изменении т-ры газа на 10 °C +1,5 0...5 мА (4...20 мА) Длина: 100... 1000
Термодат-38СН1 («Системы контроля») Относительная влажность О...1ОО% ±2% Релейный-4 —
ИВТМ-7 МК-с («ИРЭТ») Относительная влажность О...99% + 2% 0...5 мА, RS-232 20x15x210
ЭЛИРОС22 (НПО «ОВЕН») Абсолютная и относит, влажность, температура 0. ..100%; -40...+120 °C; -200...+800 °C + 5% USB 2.0 93x28x260
RC.PC («МЕМ») Относительная влажность, температура О...1ОО%, -40...+80 °C ±2% 4...20 мА; 0...10В Длина: RC:182; PC: 145
Symaro QFA66 (Siemens) Относительная влаж- ность, температура О...1ОО% + 2% 0...10 VDC —
TESTO 615/625 (TESTOAG) Относительная влаж- ность, температура 5...95% + 3% 9VDC 190x57x42
Moisture Image Series 1 (2) (GE Panametrics) Точка росы, темпера- тура и давление газов и жидкостей (от 1 до 6 каналов каждый параметр) От -ПО до + 60 °C; 1 Па...34 МПа; -30...+70 °C ±2 °C; + 0,5%; + 0,5% 4...20 мА; 0...2В; RS-232; дисплей Исполнение: настольное, щитовое, стоечное
1.5.2 Анализаторы жидкости
Анализ состава и свойств жидкостей осуществляется различными методами, в том
числе кондуктометрическими, потенциометрическими, диэлькометрическими и др.
1.5.2.1 Кондуктометры
При растворении электролитов процесс диссоциации характеризуется степенью
диссоциации а, которая равна отношению числа распавшихся на ионы молекул к
общему числу молекул, существовавших до распада. При а~1 раствор является силь-
ным электролитом, а при а» 0 — неэлектролитом. Слабые электролиты характеризу-
ются величиной 0<а« 1.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
83
Способность вещества проводить электрический ток определяется величиной
удельной электрической проводимости у0 (См/см). Если у есть величина, обратная
электрическому сопротивлению раствора, то удельная электрическая проводимость
у0 есть величина, обратная удельному электрическому сопротивлению:
Хо = 1 /р = UR -lls = \- Us, ом"1 • см”1-
Величина l/s (см-1) называется постоянной электролитической ячейки с площа-
дью электродов s (см2) и расстоянием между электродами / (см).
Проводимость слоя электролита шириной I см, помещенного между электрода-
ми, при объеме слоя, содержащего 1 моль растворенного вещества, называется экви-
валентной электрической проводимостью X. Эквивалентная и удельная электриче-
ские проводимости связаны между собой зависимостью:
Х = Хо/С,
где С — концентрация электролита, моль/мл.
Таким образом, концентрация раствора может быть определена по его удельной
электропроводности: Хо = X • С.
При кондуктометрических измерениях применяются двух- , трех- и четырех-
электродные измерительные ячейки. При протекании тока (постоянного или пере-
менного) через электроды двухэлектродной ячейки потенциал электродов изменя-
ется. Процесс изменения потенциала электрода при прохождении тока называется
поляризацией. Для снижения поляризационных явлений, приводящих к увели-
чению погрешности измерения, используют четырехэлектродные измеритель-
ные ячейки, в которых два крайних электрода служат для подвода питания, а два
средних (измерительных) — для снятия потенциала раствора. При трехэлектрод-
ной ячейке крайние электроды соединяются между собой и вместе с внутренним
электродом образуют две параллельно включенные двухэлектродные ячейки. Такая
схема обеспечивает снижение наводок на измерительные цепи кондуктометра.
По наличию или отсутствию гальванического контакта электродов с анализируе-
мым раствором различают контактные и бесконтактные кондуктометры.
Схема контактного кондуктометра представляет собой мостовую схему, в одно
из плеч которой включена кондуктометрическая ячейка. При изменении концен-
трации раствора изменяется сопротивление Rx измерительной ячейки, мост вы-
ходит из равновесия и сигнал разбаланса моста пропорционален величине изме-
нения концентрации раствора. Поскольку электрическая проводимость раствора
существенно зависит от его температуры, исследуемый раствор необходимо тер-
мостатировать или вводить температурную компенсацию, измеряя температуру
раствора.
Помимо контактной кондуктометрии для измерения концентрации растворов
используется бесконтактная низкочастотная и высокочастотная кондуктометрия.
В бесконтактной низкочастотной кондуктометрии используется промышленная или
повышенная частота и трансформаторная схема измерения силы тока, наведенного в
растворе электролита, представляющего собой вторичную обмотку трансформатора.
Сила тока, зависящая от наведенной в растворе ЭДС и сопротивления раствора, про-
порциональна концентрации раствора.
В бесконтактной высокочастотной кондуктометрии используется высокочастот-
ное электромагнитное поле, взаимодействующее с раствором, находящимся в ем-
84
ГЛАВА 1
костной или индуктивной ячейке. В результате этого взаимодействия изменяется ак-
тивное и реактивное сопротивление цепи. В практике нашли применение проточные
емкостные измерительные ячейки. Концентрация раствора определяется по сумме
активной и реактивной составляющих проводимости.
•Индуктивные измерительные ячейки (проточные и погружные) представляют
собой индуктор, электромагнитное поле которого наводит ЭДС в растворе, нахо-
дящемся внутри индуктора в трубе (емкости) из диэлектрика. При изменении элек-
трической проводимости раствора изменяется величина потерь и импеданс (полное
сопротивление) индуктора. Активная составляющая импеданса, пропорциональная
концентрации раствора, определяется также параметрами индуктора (радиус и чис-
ло витков индуктора), индуктивностью и емкостью измерительной ячейки и часто-
той высокочастотного поля индуктора.
Поскольку на проводимость раствора оказывает влияние температура, необ-
ходимо термостатировать измерительную ячейку, либо компенсировать изменение
температуры с помощью корректирующих цепей.
На кондуктометрическом методе анализа основаны, помимо концентратомеров,
также солемеры и сигнализаторы электрической проводимости растворов.
В табл. 1.45 представлены технические характеристики кондуктометрических
анализаторов жидкости.
Таблица 1.45. Характеристики кондуктометрических анализаторов жидкости
Наименование Тип Диапазон измерения, мкСм/см Температу- ра среды, °C Давление среды, МПа Погреш- ность, % Выходной сигнал
Датчик электро- проводности (Endress+Hauser) CLS12 CLS13 CLS15 CLS21 CLS50 CLS52 0,04...20; 0,1...200 0,04...20; 0,1...200 0,04...20;!...200 10...20000 5...2000 0...2000 160 250 130 160 180 125 4,0 4,0 1,2 1,6 1,6 1,6 ±5; ±10 мкСм/см
Преобразователь (Endress+Hauser) МуРго CLM431/CLD 431 0...2000 250 — ±0,5 HART, 4...20 мА
Преобразователь (Endress+Hauser) SmartecS CLD132 10... 2000 140 1,6 ±0,5 СК, HART, Profibus РА
Преобразователь проводимости и сопротивления (Endress+Hauser) Mycom СРМ152/ CLM152 Ex 5... 2000; 0,2 кОм см 20 МОм см — — ±0,5 2х(4...2О) мА, HART, Profibus РА
Преобразователь проводимости и сопротивления (Endress+Hauser) Liquisys S CLM 223/253 0... 2000; 0...86 МОм-см — — ±0,5 СК, 4...20 мА, HART, Profibus РА
Измеритель проводимости и концентрации (Yokogawa) SC 150; SC 202/402 0,1 мкСм/см ...1,0 См/см -20...250; 0...105 1,0 ±1 СК, 4...20 мА, HART
Концентратомер AKK-201 1 10-5...1 См/м 10... 100 0,5 ±0,5 0... 100 мВ
Концентратомер КНЧ-1М 1... 100 См/м 30...85 1,0 ±1; ±2,5 0...5 мА
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
85
Принцип устройства датчика электропроводности рассмотрим на примере ин-
дуктивной измерительной ячейки проводимости CLS 50, представляющей собой
стержень с кольцеобразным сенсором на конце (диаметр отверстия 15 мм). Катушка
излучения сенсора генерирует переменное магнитное поле, которое индуцирует элек-
трический потенциал в жидкости. Присутствующие в жидкости ионы образуют ток,
величина которого пропорциональна концентрации ионов раствора. Концентрация
ионов непосредственно связана с электропроводностью раствора. Ток, возникающий
в жидкости, генерирует переменное магнитное поле в приемной катушке сенсора,
который измеряется с помощью трансмиттера Mycom CLM 152, Liquisys CLM 223/253
и др. Сенсор устанавливается в тройниках на трубы диаметром не менее 70 мм, так
как расстояние сенсора от стенки трубы не должно быть менее 30 мм. Диапазон из-
мерения CLS 50 от 5 мкСм/см до 2000 мСм/см, постоянная ячейки — 2 см1. Одно-
временно с измерением электропроводности с помощью термометра сопротивления
PtlOO осуществляется контроль температуры раствора.
1.5.2.2 pH-метры
Для измерения активности ионов водорода, характеризующей кислотные или
щелочные свойства раствора, используется потенциометрический метод измерения
разности потенциалов двух электродов, помещенных в анализируемый раствор.
Вещество, растворимое в воде, диссоциирует под воздействием воды, которая в
свою очередь диссоциирует на ионы водорода и гидроксила:
Н2О <-> [ Н+] + [ он-]
Процессы электролитической диссоциации и воссоединения из ионов молекул
воды протекают с определенной скоростью. Константа диссоциации воды
К = К [Н2О] = [Н+] • [ОН-] = 1014.
Так как количество водородных и гидроксильных ионов при диссоциации мо-
лекул воды одинаково, концентрация каждого из них равна 10-7. Водный раствор,
в котором число водородных ионов [Н+] равно числу гидроксильных ионов [ОН-]
называется нейтральным.
Для более удобного выражения концентрации водородных ионов датский химик
Зеренсен ввел понятие водородного потенциала pH, как десятичного логарифма кон-
центрации ионов водорода, взятого с обратным знаком: pH = -lg|H+] (в соответствии
с определением Зеренсена «р» — начальная буква датского словаpotenz или «степень»,
а Н — химический символ водорода).
Активность водородных ионов для нейтральных водных растворов (при темпе-
ратуре 22°C) pH = - 1g (IO-7) = 7, для кислотных растворов pH < 7, для щелочных рас-
творов pH > 7. С увеличением температуры раствора pH уменьшается и наоборот.
Электродный потенциал образуется в цепи измерительный электрод-раствор-
вспомогательный электрод (электрод сравнения). Потенциал последнего должен
быть постоянным. В качестве измерительного электрода используется стеклянный
или пластиковый электрод, не подверженный окислению или коррозии, а в качестве
вспомогательного электрода — хлорсеребряный или каломельный. Сопротивление
измерительного электрода может достигать до 1000 МОм, что требует применения
высокоомных усилителей.
В табл. 1.46 приведены технические характеристики pH-метров и мутномеров.
86
ГЛАВА 1
Таблица 1.46. Характеристики pH-метров и мутномеров
Тип Предел измерения, pH (редокс потенциала, мВ) Погружная длина, мм Температура среды, °C Давление среды, МПа Погреш- ность, % Выходной сигнал
Электроды: TopHit HCPS 401 Orbisint CPS11/12/13 Ceraliquid CPS 41/42 (Endress+Hauser) 0...14 120; 225; 360 -15...+135 -15...+130 -15...+130 1,0 0,6 0,8 ±0.5 ЭДС
Преобразователь Liquisys S CPM 23/253 (Endress+Hauser) -2...+16 (-1500...+1500) — -20...+150 — +0,5 СК, 4...20 мА, HART, Profibus РА
Преобразователь MyPro CPM 431 (Endress+Hauser) -2... 16 (-1500...+1500) — -20...+150 — ±0,5 4...20 мА
Преобразователь Mycom CPM 152 (Endress+Hauser) -2...+16 — -20...+150 — ±1,0 Profibus РА
Преобразователь pH-150; pH-202 (Yokogawa) -2... 16; -2...15 — -20...250; -5... 105 0,5 +0,02 pH СК, 4...20 мА, HART
Преобразователь dTRANSpHOl (JUMO) -1...+14 (-1999...+1999) — -50...250 — +0,25 2хСК, 4...20 мА, RS-485
Мутномер Mycom CUM 121 (Endress+Hauser) 0...300 г/л 1630 -20...+150 — ±1 RS-232, RS-485
Датчик мутности GUSHI с преобразова- телем Liqusys M Cum 223/253 0...300 г/л — -20...+150 — +0,5 СК, Profibus РА или HART
Датчики промышленных pH-метров подразделяются на проточные (магистраль-
ные) и погружные. Проточные датчики используются для измерения pH растворов,
протекающих по трубопроводам, а погружные — для измерения pH в емкостях, от-
стойниках, резервуарах. Помимо датчика, в комплект pH-метра входит преобразова-
тель ЭДС измерительной ячейки в выходной сигнал, выполненный по компенсаци-
онной схеме.
Для компенсации влияния температуры раствора на ЭДС электродной систе-
мы pH-метра применяется схема ручной или автоматической температурной ком-
пенсации. Зависимость ЭДС электродной системы от pH и температуры раствора
представляет собой ряд прямых, пересекающихся в изопотенциальной точке, т. е в
точке, в которой потенциал электродной системы при определенной величине pH
не зависит от температуры раствора. Положение изопотенциальной точки в системе
координат Е = f (pH) различно для разных электродных систем. Для компенсации
изменения температуры раствора используется мостовая схема с термометром со-
противления, включенным в одно из плеч моста. Выходной сигнал мостовой схемы
в виде напряжения разбаланса моста включен встречно с ЭДС электродной систе-
мы pH-метра. В последние годы получил применение комбинированный электрод
со встроенным датчиком температуры, соединенный с помощью разъема (степень
защиты IP68) кабелем с преобразователем.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
87
Для повышения надежности и достоверности измерений pH растворов применя-
ются различные способы ручной и автоматической очистки электродов. Так, одним
из способов очистки является промывка датчика в промывной ячейке при перекры-
тии анализируемого раствора и подаче очищающей жидкости по сигналу реле, тай-
мера или контроллера. Также используются и др. способы очистки: ультразвуковой,
очистка струей сжатого воздуха, механический и др. Возможна очистка электродов
без остановки процесса измерений. Фирмой Endress+Hauser выпускаются датчики с
самоочисткой серии СРС 20, CPC 20Z, СРС 200/210, CYR 10/10Z.
1.5.2.3 Измерение мутности растворов. Нефелометры
При измерении мутности растворов со взвесью твердых частиц или суспензий
используется нефелометрический метод измерения, основанный на измерении ин-
тенсивности светового потока, рассеянного твердыми частицами раствора. Зависи-
мость интенсивности светового потока J, прошедшего через раствор расстояние /, от
первоначальной интенсивности Jo имеет вид:
/ = /о-1О£',
где £ — показатель рассеяния.
Показатель рассеяния определяется соотношением размеров и числом частиц, а
также длиной волны светового потока. При длине волны X меньше, чем размер части-
цы, часть светового потока преломляется на границе раздела твердой и жидкой фаз,
а часть отражается частицами. Если длина волны светового потока больше размера
частиц, возникает дифракция световой волны, т. е. огибание световой волной пре-
грады в виде твердых частиц.
Таким образом, интенсивность рассеянного излучения, измеряемого в направлении
перпендикулярном направлению основного светового потока, характеризует концен-
трацию взвешенных частиц, т. е. мутность раствора. Векторная диаграмма рассеянного
света в различных направлениях (индикатриса рассеяния) позволяет судить о размере и
форме частиц. Формула Релея связывает интенсивность рассеянного излучения ]р с ин-
тенсивностью падающего излучения /, объемом и плотностью частицы, концентрацией
частиц, длиной волны и показателями преломления твердых частиц и раствора. Учиты-
вая, что все величины, кроме концентрации, являются постоянными, можно судить о
концентрации взвешенных частиц по интенсивности рассеянного излучения.
Одна из схем нефелометра представляет собой источник излучения, световой
поток которого проходит через окна измерительной камеры и попадает на полупро-
зрачное зеркало, на которое падает также рассеянный световой поток, выходящий
под прямым углом через боковое окно камеры.
Предварительно оба световых потока поочеред-
но прерываются с помощью абтюратора. Ком-
пенсационная заслонка (или оптический клин)
служит для выравнивания (компенсации) све-
товых потоков. Ее положение определяется
величиной сигнала фотоприемника и фазочув-
ствительного усилителя. На рис. 1.45 показаны
мутномер CUM121 для щитового монтажа (рис.
1.45, а) и мутномер CUM151 для установки по
месту (рис. 1.45, б).
88
ГЛАВА 1
Нефелометрические анализаторы-мутномеры применяются для контроля сточных
вод в отстойниках и открытых водоемах. Толщина просвечиваемого слоя составляет от
5 до 50 мм и более. Первичный преобразователь может быть проточный или погруж-
ной. Глубина погружения первичного преобразователя примерно до 15...20 м.
1.5.2.4 Плотномеры жидких сред
Плотность р (кг/м3) есть отношение массы вещества т (кг) к его объему V (м3):
р = m/V.
Измерение плотности производится для определения качественных характери-
стик вещества (состав, концентрация, однородность и др.). Плотность жидкости за-
висит от температуры.
В промышленности наибольшее применение нашли весовые, поплавковые, ги-
дростатические и вибрационные плотномеры.
Весовой плотномер представляет собой U-образную горизонтальную трубку по-
стоянного объема, по которой протекает (при полном заполнении объема трубки)
жидкость анализируемой плотности. Трубка уравновешена при заполнении ее жид-
костью заданной плотности. При отклонении плотности от заданного значения изме-
няется масса трубки, что приводит к ее повороту в вертикальной плоскости. Величи-
на поворота преобразуется с помощью пневмопреобразователя, дифференциально-
трансформаторной, ферродинамической или другой схемы измерения в выходной
унифицированный сигнал.
Поплавковый плотномер представляет собой частично или полностью погру-
женный в жидкость поплавок и схему преобразования сигнала. Принцип действия
плотномера с частично погруженным поплавком основан на уравновешивании веса
поплавка G и выталкивающей силы F, равной:
F=pgSH,
где S — площадь сечения поплавка; Н — глубина погружения поплавка.
При неизменной плотности жидкости и воздушной (газовой) среде над поплав-
ком выталкивающая силы равна весу поплавка. Изменение плотности жидкости при-
водит к изменению глубины погружения поплавка. Линейное перемещение поплав-
ка (буйка) при изменении плотности жидкости преобразуется в выходной сигнал.
Плотномер представляет собой измерительный сосуд постоянного объема с частич-
но погруженным поплавком. Жидкость поступает в сосуд снизу и сливается сверху
сосуда. При этом сохраняются постоянный уровень и объем жидкости.
В плотномерах с полностью погруженным поплавком перемещение поплавка
воспринимается упругим элементом (пружина, сильфон), сила сжатия-растяжения
которого преобразуется в выходной сигнал. Уровень жидкости также поддерживает-
ся постоянным. В рассмотренных весовых плотномерах используется схема темпера-
турной компенсации изменения температуры жидкости.
Гидростатические плотномеры используют зависимость давления Р столба жид-
кости высотой Н от плотности р:
P=pgH,
где g — ускорение свободного падения.
При Н - const плотность жидкости р определяется давлением столба жидкости
Р, которое может быть измерено манометрическим прибором. В пьезометрических
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
89
плотномерах давление столба жидкости определяется при продувании через слой
жидкости воздуха или инертного газа. Давление столба измеряется преобразовате-
лем давления с разделительной мембраной.
Вибрационный плотномер представляет собой трубчатый камертонный резо-
натор, через который протекает анализируемая жидкость. Частота колебаний ка-
мертонного резонатора определяется размерами трубки камертона (наружный и
внутренний диаметры), частотой колебаний, плотностью материала трубки (титан,
сталь) и плотностью жидкости. В зависимости от плотности и температуры жидко-
сти изменяется частота колебаний камертона. Измеряя частоту колебаний и вводя
температурную компенсацию можно судить о плотности жидкости.
Известны также радиоизотопные плотномеры, основанные на ослаблении пото-
ка у-излучения после прохождения среды с определенной плотностью.
1.5.2.5 Вискозиметры
Вязкостью называется свойство жидкостей или газов, характеризующее сопро-
тивление сдвигу или скольжению при перемещении смежных слоев потока относи-
тельно друг друга. Согласно формуле Ньютона сила сдвига F равна:
F = pS-(dV/dH),
где р — динамическая вязкость; S — площадь внутреннего сдвига; V — скорость те-
чения одного слоя относительно другого; п — толщина движущего слоя (dV/dn —
градиент скорости).
Жидкости, вязкость которых не зависит от сдвигающих напряжений, называют-
ся ньютоновскими жидкостями. Вязкость многих материалов (синтетические смолы,
смазочные материалы, расплавы стекла и пр.) зависит от напряжений сдвига. Такие
жидкости называются неньютоновскими.
Отношение динамической вязкости к плотности вещества называется кинема-
тической вязкостью. Динамическая вязкость измеряется в Па-с, а кинематическая
вязкость в м2/с.
В промышленности для измерения вязкости нашли применение ротационные и
вибрационные вискозиметры.
Ротационные вискозиметры основаны на зависимости реактивного сопротивления
перемещению твердого тела от динамической вязкости жидкости. Крутящий момент
создается вращением твердого тела (диск, шар, цилиндр, лопатки и пр.) в жидкости.
В установившемся режиме динамическая вязкость |1 равна:
В = Мкр/кы,
где Мкр — крутящий момент; о> — угловая скорость вращающегося тела; к — посто-
янная прибора.
При о> = const вязкость |1 определяется крутящим моментом Мкр. При вращении
тела с помощью электродвигателя крутящий момент на валу электродвигателя М = к1Ф,
где I — ток в цепи электродвигателя; Ф — магнитный поток; к — постоянная. Измеряя
потребляемый электродвигателем ток судят о вязкости анализируемой жидкости.
Известны вискозиметры, основанные на зависимости угла поворота чувстви-
тельного элемента от вязкости среды и ряд др. схем ротационных вискозиметров.
Вибрационные вискозиметры основаны на поглощении звуковых (ультразвуко-
вых) колебаний при прохождении через среду от ее вязкости.
90
ГЛАВА 1
Интенсивность электромагнитных колебаний J при прохождении расстояния I
убывает по экспоненциальному закону;
где а — коэффициент поглощения, зависящий от вязкости среды.
Измеряя интенсивность колебаний J судят о вязкости вещества.
Вибрационные вискозиметры обычно используются для измерения вязкости
ньютоновских жидкостей.
В промышленности также используются ультразвуковые вискозиметры с магни-
тострикционным эффектом. В таких вискозиметрах измеряется затухание свобод-
ных колебаний пластины из магнитострикционного материала, находящейся в из-
меряемой среде.
1.5.3 Спектроскопия. Промышленные спектрометры
1.5.3.1 Спектроскопия
Спектроскопия — раздел физики, изучающий оптические спектры атомов и
молекул. Спектроскопия представляет совокупность оптических методов исследо-
вания спектров электромагнитного излучения. Спектроскопия электромагнитно-
го излучения базируется на квантовой теории. Задача спектроскопии — изучение
строения атомов и молекул на основе изучения спектров, уровней энергии атомных
систем и характеристик переходов с излучением между уровнями энергии. Основы
атомной и молекулярной спектроскопии, теория и методы измерений приведены
в работах [1.80, 1.81, 1.84-1.86]. Спектр может быть непрерывный (сплошной) или
дискретный. В соответствии с законом сохранения энергии переход атомной си-
стемы из одного состояния в другое сопровождается излучением или поглощением
квантов. В спектроскопии при рассмотрении диаграммы уровней энергии пользу-
ются волновыми числами (см-1) 1/Х, где X — длина волны. Поскольку 1/X = v/C, где
v — частота, а С — скорость света, в спектроскопии принято обозначать частоту
и волновые числа как v [1.79]. Каждому переходу между дискретными уровнями
энергии соответствует определенная спектральная линия, характеризуемая вол-
новым числом монохроматического излучения v. Для сложных атомов характер-
ны дискретные спектры, состоящие из отдельных спектральных линий. Поскольку
атомы характеризуются четкими линейчатыми спектрами, для всех известных эле-
ментов, а также их изотопов, составлены атласы этих спектров, позволяющие их
быстрое распознавание. Спектры молекул, особенно сложных, представляют собой
сплошные спектры. Таким образом, каждый атом или молекула определенного ве-
щества имеет свой характеристический спектр.
Оптические спектры делят на спектры испускания, поглощения, люминесценции
и рассеяния.
Спектр поглощения образуется при переходе с нижних энергетических уровней
на верхние (увеличение энергии и поглощение фотона). Соответственно спектр испу-
скания образуется при переходе с верхних уровней на нижние (уменьшение энергии
атомной системы и испускание фотона). Спектры поглощения изучают в условиях
термодинамического равновесия при определенной температуре, а спектры испуска-
ния — в неравновесных условиях с использованием оптических и электрических спо-
собов возбуждения.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
91
Оптическое возбуждение представляет собой монохроматическое излучение
определенного спектра с передачей атомной системе порции энергии hv. После пре-
кращения излучения исследуется длительность и форма затухания. На этом основа-
ны методы люминесцентного анализа [1.79-1.81,1.84,1.85].
В зависимости от длины волны электромагнитного излучения различают гамма-,
рентгеновскую, оптическую и радиоспектроскопию.
В зависимости от состава и строения атомных систем спектроскопию подраз-
деляют на ядерную, атомную, молекулярную и спектроскопию конденсированных
систем [1.84].
Ядерная спектроскопия изучает уровни энергии атомных ядер и переходы между
уровнями и подразделяется на гамма-, альфа- и бета-спектроскопию.
Атомная спектроскопия изучает электронные уровни энергии атомов и переходы
между ними. Электронные уровни энергии — это уровни, связанные с движением
электронов относительно ядер.
Молекулярная спектроскопия изучает электронные, колебательные и вращатель-
ные уровни молекул и переходы между ними. Колебательные уровни молекул — это
уровни, связанные с колебательными движениями ядер в молекулах около некото-
рых равновесных состояний. Вращательные уровни молекул — это уровни, связан-
ные с вращательным движением самой молекулы. Основные методы изучения мо-
лекулярной спектроскопии — спектроскопия испускания, пропускания, отражения,
рассеяния.
Спектроскопия конденсированных систем (кристаллов, аморфных тел и жидко-
стей) также изучает уровни энергии этих систем и переходы между ними.
Существуют и другие уровни энергии атомов и молекул, энергия которых очень
мала и составляет тысячные и миллионные доли эВ.
К числу методов молекулярной спектроскопии при исследовании сложных моле-
кул относятся методы люминесценции. В зависимости от способа возбуждения лю-
минесценции (от латинского liminis — свет) известны различные методы люминес-
ценции: фотолюминесценция (возбуждение световыми квантами), катодолюминес-
ценция (поток электронов от катода), рентгенолюминесценция (возбуждение рентге-
новскими лучами), сцинтилляции (ионизирующее излучение), хемилюминесценция
(энергия химических процессов, в основном окислительных) и др [1.83,1.84,1.87].
Появлению люминесценции предшествует поглощение энергии возбуждения,
сообщаемой веществу тем или иным способом. Люминесценцию иногда называют
«холодным свечением», так как температура люминесцирующих веществ чаще всего
не столь высока, чтобы наблюдаемое свечение можно было объяснить равновесным
для этой температуры светоиспусканием.
Фотолюминесценцию в зависимости от продолжительности свечения после пре-
кращения возбуждения светом делят на флуоресценцию (кратковременное свечение
порядка 10“9...10"7 с) и фосфоресценцию (более продолжительное свечение от 10~4 до
1СН с). В зависимости от механизма свечения различают спонтанную и вынужден-
ную люминесценцию.
Спонтанная люминесценция характеризуется самопроизвольным переходом из
возбужденного состояния в нижележащее основное состояние. При равенстве энер-
гий квантов испускания и поглощения наблюдают резонансную люминесценцию.
Вынужденная люминесценция возникает из-за внешнего воздействия, например,
при повышении температуры раствора или изменении его концентрации. Повыше-
92
ГЛАВА 1
ние температуры раствора сопровождается снижением квантового выхода люминес-
ценции («температурное тушение люминесценции»), что обусловлено увеличением
колебательной энергии молекулы при повышении температуры. Вынужденная лю-
минесценция применяется при исследовании сложных органических молекул в рас-
творах при низкой температуре. Спектральные характеристики фотолюминесценции
включают спектр люминесценции и спектр возбуждения люминесценции. Спектр
люминесценции представляет собой распределение интенсивности люминесценции
по длинам волн (X) и частотам (v) излучаемого свечения. Для измерения фотолюми-
несценции используются флуориметры (приборы для измерения интегральной ин-
тенсивности флуоресценции), спектрофосфориметры и др.
Помимо фотолюминесценции на практике используется люминесценция ато-
мов, возбуждаемая рентгеновскими лучами — рентгенофлуоресценция. Рентгеноф-
луоресцентный анализ (РФА) основан на вторичной эмиссии рентгеновских фотонов
при переходе электронов с более высоких энергетических уровней.
Хемилюминесценция возникает за счет экзотермических химических процес-
сов при тепловых эффектах порядка 40...70 ккал/моль в видимой и УФ областях
спектра [1.83].
Широкое применение получила ИК-спектроскопия. Традиционные ИК-спектро-
метры бывают двух типов: дисперсионные и интерференционные.
Дисперсионный спектрометр имеет источник ИК-излучения, щелевые диафраг-
мы, диспергирующий элемент (призму или дифракционную решетку), кювету с об-
разцом и приемник излучения. В двухлучевой ИК-спектроскопии используется до-
полнительно модулятор, направляющий попеременно световые потоки на кювету с
образцом и на кювету сравнения (последняя может отсутствовать). Далее световые
потоки направляются к приемнику ИК-излучения. Сравнение образца с эталоном
осуществляется нулевым методом или по величине соотношения двух сигналов. До-
стоинство метода: высокое разрешение, быстродействие и большое отношение сиг-
нал/шум.
Интерференционный спектрометр (Фурье-спектрометр) использует больший
световой поток по сравнению с дисперсионным в средней и длинноволновой ИК-
областях спектра. Ж. Фурье показал, что флуктуации электромагнитного поля мо-
гут быть представлены в виде синусоидальных и косинусоидальных волн различной
частоты. Таким образом, спектр может быть представлен Фурье-преобразованием
электромагнитного поля. В интерференционном спектрометре из входного потока
излучения формируются когерентные волны (обладающие одинаковой частотой и
разностью фаз), в результате наложения которых образуется интерференция. Из-
вестен классический 2-лучевой интерферометр Майкельсона (Фурье-спектрометр),
который в 1962 г. Г. Гебби был усовершенствован для применения в длинноволновой
области спектра.
1.5.3.2 Спектрометры
Спектрометром называется прибор для получения, измерения и исследования
спектров электромагнитного излучения. Спектрометр состоит из источника излуче-
ния, спектрального анализатора и приемника излучения.
В качестве источника излучения в последние годы широко используются пере-
страиваемые по частоте лазеры (в диапазоне 0,2...50 мкм). К основным характери-
стикам перестраиваемых лазеров относят спектральное и временное разрешение,
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ 93
чувствительность, избирательность и др. Используются лазеры на красителях с им-
пульсной накачкой и с накачкой на парах меди.
Лазеры позволяют осуществлять плавную перестройку частоты (длины волны)
возбуждаемого светового излучения в широком спектральном диапазоне.
В качестве приемников излучения чаще других используются высокочувстви-
тельные фотоумножители, сигнал с выхода которых поступает на усилители и далее
на ЭВМ или измерительные и регистрирующие приборы. В лазерной аналитической
спектроскопии применяются лазерные атомно-флуоресцентные спектрометры, ла-
зерные атомно-фотоионизационные спектрометры, лазерные инфракрасные абсорб-
ционные спектрометры и др.
Большинство спектрометров построены по двухканальной схеме измерения (из-
мерительный канал и канал сравнения). Двухканальная схема измерения, основан-
ная на нулевом методе, применена в инфракрасном спектрофотометре (рис. 1.46).
Световой поток от источника излучения 1 направляется с помощью зеркал 2-5
по двум каналам: в измерительном канале I помещается исследуемый образец б, в
канале сравнения II — фотометрический клин 7 и образец сравнения 8. С помощью
прерывателя 9 пучки света из каналов I и II попеременно проходят через монохрома-
тор 10 (призма), после которого световые потоки разлагаются в спектр и поступают
на ИК-приемник излучения 11 (болометр). Материал призмы должен быть прозрачен
в ИК-диапазоне (LiF, NaCl и др.). Когда интенсивность излучения в обоих каналах
одинакова, на болометр поступает постоянное излучение и сигнал на входе усили-
теля отсутствует. При наличии поглощения в образце на болометр поступают лучи
разной интенсивности и на выходе болометра возникает переменный сигнал. Этот
сигнал после усиления приводит в действие фотометрический клин, который сводит
к нулю разность двух потоков. Фотометрический клин связан с указателем величины
поглощения в функции длины волны.
К методам лазерной спектроскопии атомов и молекул относят методы лазерно-
го возбуждения флуоресценции, многоступенчатой резонансной ионизации, ПК аб-
сорбционной спектроскопии, многофотонной ионизации молекул [1.80,1.81].
Приведем краткие сведения принципа работы лазеров, используемых в лазерной
спектроскопии. Рассмотрим изображенную на рис. 1.47 произвольную двухуровне-
вую атомарную или молекулярную структуру (на практике лазеры работают на трех
и более уровнях).
По закону Больцмана при равновесии отношение числа частиц N2 на уровне 2 к
числу частиц на уровне 1 определяется отношением N2/Nl = ехр(-АЕ1кТ). Если на
систему падает световой поток с частотой, отвечающей энергии ДЕ(йу]2), то энергия
поглощается и частицы переводятся с уровня 1 на уровень 2 со скоростью гпога, кото-
рая определяется числом частиц Np интенсивностью излучения р и коэффициентом
индуцированного поглощения Эйнштейна (В):
Рис. 1.46
Рис. 1.47
94
ГЛАВА 1
Чюги = В^Р-
Частицы из состояния 2 могут релаксировать в состояние 1 под действием ра-
диационных процессов. Скорость спонтанного перехода с уровня 2 на уровень 1, а
следовательно, интенсивность спонтанного излучения, пропорциональна AN2, где
А — -коэффициент спонтанного излучения Эйнштейна. Фотоны с энергией &E(hv12)
вынуждают частицы с уровня 2 эммитировать излучение с энергией ДЕ со скоростью
вынужденного излучения кизл = B'N2p, где В'— коэффициент Эйнштейна для вы-
нужденного излучения.
Лазерное действие зависит от усиления света за счет вынужденного излучения
при условии N2>Nj («инверсная заселенность»). Основными характеристиками ла-
зера являются: монохроматичность и высокая интенсив-
ность излучения, малая расходимость луча, когерентность
и др.
Получили применение He-Ne и СО2 газовые лазеры,
твердотельные рубиновые лазеры на органических кра-
сителях. Основное достоинство лазера на красителях —
возможность перестройки частоты выходного излучения.
Лазеры на красителях могут быть импульсными и непре-
рывными. Накачка осуществляется другим лазером. Пере-
стройка частоты излучения в широкой ультрафиолетовой
и видимой областях спектра осуществляется изменением добротности резонатора,
Рис. 1.48
заменой красителя, изменением концентрации и др. На рис. 1.48 показана схема энер-
гетических уровней лазера на красителях.
С верхнего уровня S2 происходит быстрая безызлучательная релаксация частиц
на нижний колебательный уровень состояния S, с дальнейшим переходом на нижнее
состояние Т1 либо безызлучательная релаксация на уровень $0, сопровождающаяся
флуоресценцией.
Метод флуоресценции основан на регистрации поглощенной энергии лазерного
луча по возникающей флуоресценции возбужденных в образце частиц. На рис. 1.49
приведена схема лазерного атомно-флуоресцентного спектрометра.
Лазерный атомно-фотоионизационный спектрометр основан на методе много-
ступенчатого резонансного возбуждения лазером уровней атомов и молекул с после-
дующей их ионизацией. Процесс атомизации осуществляется в графитовых тиглях
1 — лазер накачки; 2 — лазер на красителе. 3 —
формирователь пучка; 4 — атомизатор (электро-
термический или плазменный); 5 — фильтр; 6 —
фотоэлектронный умножитель (ФЭУ); 7 — син-
хронизатор (стробинтегратор); 8 — регистратор;
9 — блок питания
Рис. 1.50
Рис. 1.49
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
95
(кюветах), нагреваемых в вакууме до 3000 °C. Используется также импульсное лазер
ное испарение и ионное распыление, а также пламенная атомизация.
В состав спектрометра, использующего метод инфракрасной абсорбционной
спектроскопии, входят: криогенная система для охлаждения диода полупрово-
дникового инжекционного лазера (60...80 К), блок перестройки лазера за счет
изменения температуры (до 100 К), блок питания, интерферометр Фабри-Перо,
дифракционный монохроматор, кюветы с исследуемым и реперным газами, мо-
дулятор, детектор ИК-излучения с усилителем, регистратор с приемником ИК-
излучения.
На рис. 1.50 представлен общий вид лазерного спектрометра.
1.5.3.3 Масс-спектрометры
Масс-спектрометрический анализ является наиболее совершенным и универ-
сальным методом, поскольку использует основную характеристику вещества — мас-
су молекулы или атома. Это дает возможность определять состав вещества вне за-
висимости от его физических или химических свойств [1.88-1.91]. Согласно ГОСТ
12862-81 масс-спектрометры подразделяются на масс-спектрометры для анализа хи-
мического и изотопного составов.
Масс-спектрометрический анализ химического состава газов, а также жидкостей
и твердых веществ, способных переходить в газообразное состояние при их нагреве,
позволяет определять содержание большого числа компонентов сложных смесей.
Масс-спектрометры анализа изотопного состава газов и твердых веществ позво-
ляют осуществлять дискретный анализ практически любого элемента периодической
системы элементов.
Принцип действия масс-спектрометра основан на использовании различия тра-
екторий положительных ионов анализируемого вещества, движущихся в однородном
поперечном магнитном поле и отличающихся отношением массы к заряду (m/q).
При глубоком вакууме, создаваемом в ионизационной камере, молекулы анали-
зируемого вещества под действием пучка электронов ионизируются с образованием
положительных ионов.
Под действием ускоряющих электродов электронной пушки положительные
ионы, имеющие одинаковый заряд (q), но различную массу (т), в зависимости от
состава вещества, получают ускорение. Далее пучки ионов попадают в камеру ана-
гизатора с однородным поперечным магнитным полем напряженностью Н. В зави-
симости от величины Н, ускоряющего напряжения Е и отношения m/q, траектории
ионов будут различными. Ионы, имеющие большую массу, отклоняются меньше
и наоборот. Далее ионные пучки различных траекторий попадают на многокол-
лекторный приемник ионов. Ионный ток создает на нагрузочном сопротивлении
коллектора напряжение, соответствующее определенной массе, т. е. определенному
компоненту вещества.
Изменяя напряженность поля Н или ускоряющее напряжение Е получают масс-
спектрограмму с пиками, соответствующими определенному компоненту, а высота
пиков характеризует величину концентрации компонента в смеси. Способность масс-
спектрометра разделять ионы характеризуется разрешающей способностью R, кото-
рая равна: R=m/Mn, где т — масса иона, а Ат — разность между двумя близлежащи-
ми различимыми пиками масс-спектрограммы. Значения R для масс-спектрометров
составляет от 100 до 500000.
96
ГЛАВА 1
К основным характеристикам масс-спектрометра относят значение ускоряюще-
го напряжения £ (6. ..10 кВ), диапазон массовых чисел (например, 150. ..800), расход
пробы (мг/ч), относительную погрешность измерения, скорость сканирования и др.
Конструктивно масс-спектрометр состоит из нескольких блоков (стоек): источ-
ника ионов, электронной пушки, масс-анализатора, приемника ионов и управляю-
щей ЭВМ на базе персонального компьютера. Наибольшее применение получили
масс-спектрометры для анализа состава газов.
В зависимости от принципа действия и составляющих компонентов известны
различные типы масс-спектрометров: секторные магнитные и (или) электрические;
квадрупольные; с ионной ловушкой; время-пролетные; с Фурье-преобразованием
сигнала и др. [1.89-1.91].
Принципиальная схема секторного масс-спектрометра с одноканальным (а) или
многоканальным (б) детектором приведена на рис. 1.51.
Магнитное или
электрическое
Пластина
коллектора
Выходная щель
Магнитное или
электрическое
поле
Пучок ионов
£ Входная щель
К Источник ионов
Многоканальный
детектор
Пучок ионов
Входная щель
' Источник ионов
Рис. 1.51
В сканирующем анализаторе масс (я) изменяют силу электрического или маг-
нитного поля, при этом регистрируется только одна масса. В несканирующем ана-
лизаторе (б) все массы регистрируются одновременно с помощью многоканального
детектора.
В квадрупольном масс-спектрометре пучок ионов с помощью электрического
поля ускоряется и проходит сквозь квадруполный анализатор масс, состоящий из
четырех стержней, к которым приложено напряжение постоянного или переменного
тока. В результате этого сквозь анализатор в каждый момент времени проходят ионы
с одним отношением массы к заряду (m/q). Изменяя напряженность поля определя-
ют различные значения m/q. Известны масс-спектрометры с двумерной и трехмер-
ной квадрупольными ловушками. На рис. 1.52 показан гибридный масс-спектрометр
с линейной квадрупольной ловушкой фирмы Thermo Electron Corp.
Рис. 1.52
Масс-спектрометр с ионной ловушкой основан на улав-
ливании положительных ионов в полости между кольцевыми
электродами и концевыми заглушками, к которым приложе-
но электрическое напряжение. Затем ионы последовательно
испускаются из этой полости соответственно величине m/q.
Времяпролетный масс-спектрометр основан на одно-
временном старте выбитых с помощью лазера (или импульса
высокого напряжения) ионов с плоской поверхности образ-
ца. Ионы с большим значением m/q движутся к детектору
относительно медленно, в то время как ионы с малым значе-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
97
нием mlq движутся быстро. Время пролета при длине пути, например, 0,1 м может
составить 72 мкс. При этом разрешение должно составлять несколько наносекунд.
Хотя время-пролетные масс-спектрометры регистрируют массы всех ионов без ска-
нирования, они имеют меньшую разрешающую способность и меньший диапазон
массовых чисел по сравнению с масс-спектрометрами с Фурье-преобразованием.
Принцип действия масс-спектрометра с преобразованием Фурье основан на
том, что ионы с помощью дозатора инжектируются (впрыскиваются) в ячейку ана-
лизатора и под действием магнитного поля раскручиваются и вращаются на низких
орбитах с радиусом, пропорциональным mlq. Затем при приложении высокочастот-
ного импульсного сигнала ионы резонансно ускоряются и переходят на более высо-
кие орбиты. Высокочастотный сигнал, образующийся под действием вращающихся
ионов, измеряется и подвергается преобразованию Фурье. Достоинством этих масс-
спектрометров является высокое разрешение (более 100000).
Получили применение многоколлекторные масс-спектрометры с ионизацией в
индуктивно-связанной плазме и в тлеющем разряде.
На рис. 1.53 представлен многоколлекторный масс-спектрометр для изотопно-
го анализа с плазменным источником серии FINNIGAN TRITON Т1 фирмы Thermo
Electron Corp., а на рис. 1.54 показан общий вид масс спектрометра МТИ-350Г Ураль-
ского электрохимического комбината.
Рис. 1.54
Рис. 1.53
1.6. Весоизмерительная техника
1.6.1 Весоизмерительное и дозирующее оборудование
Весоизмерительное промышленное оборудование классифицируют по различ-
ным признакам: по назначению, по статической (динамической) нагрузке, по типам
весоизмерительных (чувствительных) датчиков, по грузоподъемности, по точности и
др. признакам [1.93-1.95].
По назначению промышленное весоизмерительное оборудование (лабораторные
и др. не промышленные весы далее не рассматриваются) делят на конвейерные, бун
керные, крановые, платформенные, монорельсовые, паллетные и вагонеточные весы.
Отдельную группу весоизмерительных устройств составляют дозирующие устрой-
ства (дозаторы) непрерывного и дискретного действия, шнековые весы и специаль-
ные тензометрические весоизмерительные устройства.
В зависимости от того, осуществляется взвешивание в статике или в динамике,
весы делят на статические и динамические. К динамическим весам относятся кон-
4 Зак 3801
98
ГЛАВА 1
вейерные весы, а также весы для взвешивания, например, вагонеток в движении;
к статическим — платформенные, бункерные, крановые, паллетные и другие весы
при взвешивании в статике. Конвейерные или ленточные весы рассмотрены в раз-
деле расходомеров сыпучих материалов (раздел 1.2.9).
Чувствительными датчиками весов являются силогидравлические преобразовате-
ли, тензодатчики, динамометрические датчики и др. Наибольшее применение нашли
тензодатчики в комплекте с программируемыми измерительными преобразователями.
Диапазон измерения веса современных весоизмерительных устройств составля-
ет от нескольких грамм до 200 тонн. При этом весоизмерительные датчики имеют
различную конструкцию и работают как на сжатие, так и на растяжение.
Среди отечественных производителей весоизмерительной техники отметим
фирмы «Балтийские весы и системы», «Веста», «Метра», «Тензо-М», «ПетВес», «Пе-
тровес», «Топау», «Эталон Прибор», «Сибтензоприбор», «Промавтоматика», «Союз-
цветметавтоматика» и др. Крупные призводители весоизмерительной техники вхо-
дят в Российскую Ассоциацию производителей весоизмерительной техники. Из за-
рубежных производителей весоизмерительной техники на Российском рынке отме-
тим Mettler-Toledo GmbH, Caston.
В табл. 1.47 приведены краткие технические характеристики отечественных ве-
соизмерительных и дозирующих устройств. В качестве первичного преобразователя
используется, как правило, тензометрический преобразователь.
Таблица 1.47. Характеристики весоизмерительных и дозирующих устройств
Тип Произво- дительность, т/ч Ширина (мм) и скорость (м/с) транспортерной ленты Параметры материала Погреш- ность Число ролико- опор Выходной сигнал Габариты, мм
1 2 3 4 5 6 7 8
Конвейерные весы
ВК-2 1...1000 400...2400 мм; 0,5...4 м/с Насыпная плотность > 0,8 т/м3 ±1..2% 1 0/4...20 мА; RS-232/RS-485 1560x1145x1065
ВКТ-3 0,8... 100 650; 800 мм Насыпная плотность > 0,8 т/м3 ±1% 1 0...5 мА 1560x1145x1065
ВКТ-4 5; 10; 25; 50; 100; 250 650; 800 мм; 0,4 м/с Линейная плотность1) 10.. .450 кг/м ±0,5..1% 1 0/4...20 мА; 0...5 мА; RS-485 1650x300x690
ВКТ-5 0,8...8000 650; 800 мм; 0,125...2,5 м/с Линейная плотность 16...800 кг/м ±1% 1; 2 0/4...20 мА; 0...5мА; RS-485 1560x1145х 1065
BE 7371 990 1400 мм; 2,1 м/с Линейная плотность 25... 125 кг/м ±0,5% 2 0...5 мА, 0...10В 1600x1820x400
BE 7240 10000 500... 1600 мм; 0,5...6,3 м/с Линейная плотность 25...400 кг/м ±0,5% 2 0...5 мА, 0...20 мА, ИРПС 1485 х (760...2050) х Х410
MUS 2000 1800 мм; до 3 м/с Линейная плотность 2...350 кг/м ±0,5..1% 1 4...20мА;СК 2092x242x468
MIS 5000 500... 1800; до 4 м/с Линейная плотность 10...415 кг/м ±0,5% 1 4...20мА;СК (740...2340)х х(241...3О5)
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
99
Продолжение табл. 1.47
1 2 3 4 5 6 7 8
М8400 НПВ 320...12000 кг 500...2000; Линейная плотность 5... 1000 кг/м ±0,5% 2 4... 20 мА; RS-485 1290xl815xxl65 (при ширине ленты 800 мм)
Платформенные весы
СВП-6-3 Пределы измерения: 3 кг; 6 кг — — ±2,5% — RS-232 300x300
СВП-30-3 15 кг; 30 кг
ВНТ-4501- 80-1600 1...80 кг — — ±2,0% — RS-232, Centronics 600x600
ВНТ-4501- 100-2000 1...100 кг — — ±2,0% — RS-232, Centronics 600x800
4580П 0,4-.-20 т; 6...300 т — — ±0,25% — 14РПС 4000x1800; 8000x2100
Серия ВТ-60; ВТ-150; ВТ-300; ВТМ-300; ВТМ-600 60 кг; 150 кг; 300 кг; 300 кг; 600 кг Дискретность отсчета, г: 20; 50; 100; 100; 200 ±2 дис- крета — Цифровая индикация 550x400x125; 550x400x125; 550x400x125; 815x620x140; 815x620x140;
«Классик» -500 -600; -1000; -1500; -2000; -3000 500 кг 600 кг; 1000 кг; 1500 кг; 2000 кг; 30000 кг Дискретность отсчета, г: 100; 200; 200; 500; 500; 1000 ±2 дис- крета RS-232, RS-485 1200x1200; 1200x1200; 1200x1200; 1200x1200; 1500x1200; 1500x1200;
СВ- -150ПА; -300П; -1000П; -ЗОООП; -5000Г1; -1000011; 150 кг; 300 кг; 1 т; Зт; 5 г Ют Дискретность отсчета, г: 50; 100; 200; 1 кг; 1 кг; 2кг ±2 дис- крета RS-232 1000x800; 1000x800; 1250x1000; 1250x1000; 2000x1500; 2000x1500;
! Бункерные весы
ВВС-10; ВБС-150 1..,200т — — ±100 кг (до 100 т); ±200 кг (до200т) — O...5mA, 0/4...20 mA, RS-485 800х800х х(1300...2500)
Крановые весы
ВА-05061 0,1...5т — — ±0,5% — Цифровая индикация 487x266x395
СВК -2000; -5000; -10000; -20000; 2000 кг; 5000 кг; 10000 кг; 20 000 кг, Дискретность отсчета, кг: 1; 1; 2; 10; ±2 кг; ±2 кг; ±4 кг; ±20 кг; RS-232 Высота 700 мм
100
ГЛАВА 1
Продолжение табл. 1.47
1 2 3 4 5 6 7 8
СВК-ДЗ)- -5000; -10000; -20000; 5000; 10000; 20000; Дискретность отсчета, кг: 1; 2; 10 ±2 кг; ±4 кг; ±20 кг; RS-232 Высота 700 мм
Паллетные (П-образные) весы
М8100- 0.6СК9С 4...600 кг — — ±1,5% — RS-485 1200x800x80
М8100- 1.5СК9С 10...1500 кг — — ±1,5% — RS-485 1300x1220x100
ВТС-600П 600; 1500 кг — — ±2,0% RS-232/ RS-485 800x1185x70
Шнековые весы
ВАШ-1 0,4...50т/ч — Насыпная плотность > 0,8 т/м1 ±1,0% — 0...5 мА 2000x1000x800
Дозирующие устройства (дозаторы)
ВД1.6 0,16... 16 т/ч — Влажность < 1% ±1,0% — ИРПС 1025x1104x1840
АД-400-БН2) 80...400 кг; 32 т/ч —' Дозирование порциями ±1,0% — RS-232/RS-485 2710x1220x3070
АД-600-БЦ2) 200...600кг; 48 т/ч 2710x1220x3270
4273 ДН исп. 0 (Ех) 1...400 т/ч — Насыпной вес 0,5...3 т/м3, влаж- ность <15% ±1,0% — 0...5 mA, 0...10B 4130x1500x1100
4273 ДН исп. 2 (Ех) 16...400 т/ч — 1 (асыпной вес 0,5...3 т/м3, влаж- ность <12% ±1,0% — 4130x1500x1890
4488 ДН исп. 0 (Ех) 1...100 т/ч 800; 1000; 1200 Насыпной вес 0,2...0,9 т/м3, влаж- ность <17% ±0,5% — 3350xl400x x(1600,1800)
ДНД-16 2... 16 т/ч — Дозирование изменением скорости шнека ±1,0% — 4...20 mA 2400x1900x1900
Устройства тензометрические
Опора тензо- метрическая Нагрузка: 500; 1000; 2000 кгс — — ±1,0% — 4...20 mA 168x150x232
Подвеска тензо- метрическая 1 {агрузка: 0,5; 1 тс — — ±0,1% — 4...20 mA 210x51x44
ТВУ-4 200... 10000 кг — — ±0,5% — 0...5 mA, 4...20 mA, RS-232, CK —
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
101
Окончание табл. 1.47
1 2 3 4 5 6 7 8
Вагонеточные весы
ВТВ-СД 100 т (статика); 200 т (в движении) Скорость движения вагоне- ток не более 10 км/ч ±0,25% — Цифровая индикация 15150x2500x695
*) Линейная плотность (кг/м) является погонной нагрузкой транспортера.
2> Цементный дозатор со шнековым питателем. Используется рычажно-тензометрическая весоизме-
рительная система.
Дистанционная передача значений взвешенной массы (при большой высоте подъема груза).
Для крановых весов используется беспроводной радиоканал передачи данных по
протоколу Bluetooth с дальностью передачи до 100 м. Для считывания и запоминания
данных применяется переносной карманный компьютер с ЖК-дисплеем.
Платформенные весы серии Wildcat (WS-15...300VIR), серии SS Wilcat (WS-30...
300VIR) и серии Т (Т4606, Т4615, Т6830, Т6860) с интерфейсом RS-232 производит фир-
ма Mettler Toledo GmbH. Платформенные весы на пределы измерения от 1 до 3 т серии
PF (PF01, PF02, PF03), а также серии BW-II (6.. .500 кг) выпускает фирма «ВЕСТА». Кон-
вейерные весы НПП «МЕТРА» показаны на рис. 1.55, платформенные весы серии WS
фирмы Mettler Toledo GmbH — на рис. 1.56, крановые весы Caston II — на рис. 1.57.
Для сравнения в табл. 1.48 приведены характеристики весоизмерительных си-
стем SIWAREX фирмы Siemens.
Таблица 1.48. Характеристики весоизмерительных систем SIWAREX (Siemens)
Тип модуля Связь с ПЛК Аналоговый выход Дискретный вход/выход Интер- фейс Напряжение питания Удаление датчика веса,м Погреш- ность, %
SIWAREX U с S7300 — напрямую; с др. через ЕТ-200М — — RS-232 10 VDC 1000 0,05
SIWAREX М с S7300 — напрямую; с S5 по RS-232; с др. через ЕТ-200М 0/4...20 мА 3x24 VDCI 4x24 VDC RS-232 10 VDC 1000 0,01
SIWAREX А с S7300 — напрямую; с S7400 через ЕТ-200М 0/4...20 мА 3x24 VDCI 4x24 VDC RS-232 10 VDC 1000 0,01
SIWAREX Р через ET-200U 0/4...20 мА /2х (СК) TTY1) 10 VDC 500 0,01
D тру — последовательный интерфейс, 20 мА, скорость передачи 9600 бод, пассивный, беспотенци-
альный. Возможно подключение до 4-х дистанционных цифровых индикаторов.
2> SIWAREX U и SIWAREX М являются функциональными модулями ПЛК Simatic S7300.
Рис. 1.55
Рис. 1.56
Рис. 1.57
102
ГЛАВА 1
Системы взвешивания SIWAREX соответствуют идеологии Totally Integrated
Automation и полностью интегрированы с системами Simatic S5 и S7, а также с систе-
мой управления производственным процессом Simatic PCS7. В качестве программно-
го обеспечения используется пакет STEP 5/7, а также ПО параметрирования Windows
SIWATOOL.
1.6.2 Тензометрические датчики веса (тензодатчики)
Тензодатчики используются в качестве силоизмерительных элементов в конвей-
ерных, бункерных, платформенных, крановых весах и в весовых дозаторах.
Тензодатчики весоизмерительных устройств отличаются высокой точностью,
линейностью характеристик, малой инерционностью, небольшими габаритами
и широким выбором возможностей их установки на различных элементах кон-
струкций.
В зависимости от конструктивных особенностей, связанных с направлением
приложения нагрузки, тензодатчики делят на датчики консольного типа (на нагруз-
ку от нескольких килограмм до 5... 10 т) и датчики сжатия-растяжения (S-образные,
цилиндрические и др.).
В табл. 1.49 приведены сравнительные характеристики тензодатчиков фирмы
SCAIME (Франция), Siemens (Германия), ООО «Уралвес» и ОАО «Петвес», а на рис.
1.58 показаны тензодатчики консольного типа Мерадат-К (а), тензодатчики фирмы
«Тензо-М» (б), тензодатчик МВ 150 (в) фирмы «Тензо-М», на рис. 1.59 — установка
тензодатчиков на бункере, на рис. 1.60 — общий вид монорельсовых весов.
Измерительной схемой тензодатчика является мостовая схема с дальнейшим
преобразованием сигнала с помощью измерительного преобразователя в норми-
рованный выходной сигнал. Измерительный преобразователь помимо цифровой
индикации имеет выходной интерфейс (RS-232 или RS-485), аналоговые и/или дис-
кретные выходы и позволяет подключать до 4...8 параллельно соединенных
тензодатчиков.
Помимо измерительных преобразователей весоизмерительных систем исполь-
зуются программируемые весовые терминалы (контроллеры с программным обе-
спечением, позволяющие осуществлять выбор различных типов тензодатчиков,
пределов измерения, характеристик выходных сигналов и др. параметров конфи-
гурации системы).
Рис. 1.58
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
103
Таблица 1.49. Характеристики тензодатчиков
SCAIME (Франция), Siemens (Германия), ООО «Уралвес» и ОАО «Петвес»
Тип модели Конструкция Предел измерения Погрешность измерения, % Материал Степень защиты
Тензодатчики фирмы SCAIME
AQ Консольного типа 5; 10; 15; 20; 30; 35 кг ±0,02 Алюминий IP65
АН 30; 50; 100; 200 кг Алюминий IP65
АК 6; 12; 30; 60; 120; 300 кг Нержавеющая сталь IP68
SK30X 300; 500; 1000; 2000 кг Нержавеющая сталь IP68
ZF Сжатия - растяжения (S-типа) 25; 50; 100; 200; 500 кг; 1;2;5т ±0,05 Сталь с никелевым покрытием IP65
SD25X 0,5; 1;2;4;6т ±0,02 Нержавеющая сталь IP65
R10X Сжатия 2,5; 5; 10; 15; 30 т ±0,05 Нержавеющая сталь IP68
СА40Х 100; 200 т ±0,02 Нержавеющая сталь IP68
Весоизмерительные ячейки SIWAREX R фирмы Siemens
ВВ Сжатия 10; 20; 50; 100; 200 кг ±0,02 Нержавеющая сталь 1Р66/ IP68
СС Сжатия 10; 24; 40; 60; 100 т ±0,02 Нержавеющая сталь 1Р66/ IP68
К Сжатия 2,8; 6; 13; 28; 60; 130; 280 т ±0,1 Нержавеющая сталь IP65
SB Консольного типа 0,5; 1; 2; 5 т ±0,02 Нержавеющая сталь 1Р66/ IP68
RN Сжатия 0,06; 0,13; 0,28; 0,5; 1; 2; 3,5; 5; 10; 13; 28; 60 т ±0,02 Нержавеющая сталь 1Р66/ IP68
Тензодатчики ООО «Уралвес»
Мерадат-К» 1 Консольного типа Мод. А: 6; 8; 15; 30; 50; 100 кг; Мод. В: 50; 100; 150; 300; 500; 1000; 1200 кг Класс точности по ГОСТ 30129 «сз» Алюминиевый сплав IP67
Мод. М: 150; 250; 500; 1000; 2000 кг; Мод. С: 50; 100; 150; 200; 250; 500; 750 кг; 1; 2 т Легированная сталь IP67
Мерадат-К12 Мод. А: 0,5; 1; 2;3; 5;10;15;20; 25 т; Мод. Б: 0,5;1;2;10; 20 т Легированная сталь IP68
Мерадат-К14 Горизонталь- ные датчики Мод. А: 5...500 кг; Мод. В: 200 кг; Мод. С: 250 кг; Мод. Д: 100 кг Рабочий ко- эффициент передачи 2±0,2мВ/В Легированная сталь IP68
Мерадат-К16 S- образные датчики Мод.А/Б: 20...200; 250; 300; 500 кг; 0,7; 1; 1,2; 1,5; 2;3т.; Мод.Р: 1;3;5; 7,5; 15 т Легированная/ Не- ржавеющая сталь IP67
Мерадат-К18 Цилиндриче- ские датчики Мод. А: 500; 1000 кц Мод. Д: 10; 20; 25; 30; 40; 50 т; Мод. 3: 10; 15; 22; 33; 47; 68; 100 т Легированная сталь IP67; IP68; IP68
Мерадат-К20 Сжатия- растяжения Мод. Г: 2; 3;5; 10; 15; 20; 30 т; Мод. М: 40 т Легированная сталь IP67
Тензодатчики ОАО «ПетВес»
ДОУ-3, ДОС-3 Сжатия 0,1...2000 кН Дискрет: 0,0001...0,5 Легированная сталь IP 67
*) Тензодатчики МЕРАДАТ включают большое число моделей на различные пределы измерения
www.uralves.ru).
104
ГЛАВА 1
Рис. 1.59
Рис. 1.60
Среди весовых терминалов фир-
мы SCAIME отметим программируе-
мый весовой терминал IPC 50, по-
зволяющий подключить до 8 парал-
лельно соединенных тензодатчиков.
Терминал имеет 6-разрядный ЖК-
дисплей, интерфейс RS-232, RS-485,
дискретный ввод/вывод, степень за-
щиты IP65.
Среди весовых терминалов ООО
«Уралвес» — Мерадат КСК-20, КСК-21,
КСК-22.
1.7. Бесконтактные выключатели (сенсоры)
Бесконтактные выключатели, называемые также датчиками положения, датчика-
ми приближения, бесконтактными конечными выключателями, сенсорами, находят
широкое применение в промышленности [1.96,1.97].
Бесконтактные выключатели используются для контроля положения изделий
из металлов и диэлектриков, бесконтактного контроля заполнения (опорожнения)
резервуаров с жидкостью, контроля потока жидких и газообразных сред, измере-
ния линейных перемещений и расстояний до объекта, контроля положения венти-
лей, заслонок, клапанов, поршней в пневмоцилиндрах, контроля частоты враще-
ния механизмов (транспортеров, элеваторов, электродвигателей) и углов поворота
механизмов с использованием в качестве управляющих объектов зубьев шестерен,
лопастей крыльчаток и пр. Также бесконтактные выключатели используются для
создания световых барьеров, определения цвета и контраста объектов и в ряде др.
применений.
К достоинствам бесконтактных выключателей, выпускаемых также во взрывобе-
зопасном исполнении, относят независимость от влажности, пыли, перепада темпе-
ратур, вибрационных и ударных нагрузок.
Бесконтактные выключатели классифицируются по принципу действия (индук-
тивные, емкостные, магниточувствительные, оптические, ультразвуковые), по кон-
структивному исполнению (форма и материал корпуса, способ подключения), по
коммутационной способности («открытый коллектор», «сухой контакт», род напря-
жения питания) и др.
Основные определения бесконтактных выключателей в зависимости от принци-
па действия по IEC 60947-5-2 следующие:
• Бесконтактный выключатель: позиционный выключатель, осуществляющий
коммутационную операцию при определенном взаимном положении объекта
воздействия и чувствительного элемента выключателя без механического кон-
такта выключателя с объектом воздействия.
• Индуктивный бесконтактный выключатель: бесконтактный выключатель, соз-
дающий электромагнитное поле в зоне чувствительности и имеющий полупро-
водниковый коммутирующий элемент.
• Емкостной бесконтактный выключатель: бесконтактный выключатель, создаю-
щий электрическое поле в зоне чувствительности и имеющий полупроводнико-
вый коммутирующий элемент.
ТРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
105
• Оптический бесконтактный выключатель: бесконтактный выключатель, обна-
руживающий объекты, прерывающие или отражающие видимое или невидимое
оптическое излучение и имеющий полупроводниковый коммутирующий эле-
мент.
• Магниточувствительный бесконтактный выключатель: бесконтактный выклю-
чатель, обнаруживающий изменение напряженности постоянного магнитного
поля, имеющий полупроводниковый коммутирующий элемент и не содержащий
подвижных частей в чувствительном элементе.
При установке на объекте бесконтактного выключателя необходимо учитывать
расстояние срабатывания (s), которое зависит от размера активной поверхности вы-
ключателя, формы и материала воздействующего объекта. Расстояние срабатывания
(s) — это расстояние, при котором объект воздействия, приближаясь к активной по-
верхности выключателя, изменяет коммутационное состояние (выходной сигнал)
выключателя.
Номинальное расстояние срабатывания (s„) — условное значение расстояния
срабатывания, которое не учитывает допуски при изготовлении и отклонения, обу-
словленные внешними факторами, — изменением напряжения питания и темпера-
туры окружающей среды.
Реальное расстояние срабатывания (sr) — расстояние срабатывания конкретного
бесконтактного выключателя, измеренное при номинальном напряжении питания и
температуре окружающей среды (23±5) °C. Для индуктивных и емкостных выключа-
телей 0,9 sn<sr< 1,1 sn.
Используемое (полезное) расстояние срабатывания (su) — расстояние срабатыва-
ния конкретного выключателя, измеренное во всех рабочих диапазонах напряжений
питания и температур окружающей среды. Для индуктивных и емкостных выключа-
телей 0,81 s„ < su < 1,21 sn.
Гарантированное расстояние (интервал) срабатывания (sa) — интервал, начинаю-
щийся от активной поверхности, внутри которого гарантируется надежная работа вы-
ключателя в условиях эксплуатации, указанных изготовителем. Для индуктивных вы-
ключателей 0<sfl<0,81s„; для емкостных — 0<хй<0,72хи. К другим характеристикам бес-
контактных выключателей относятся воспроизводимость, гистерезис, номинальное на-
пряжение, максимальные ток нагрузки и частота срабатывания, способ монтажа и др.
Воспроизводимость — точность повторений любых двух измерений реальных рас-
стояний срабатывания в течение 8 ч при окружающей температуре (23+5) °C и неиз-
менном значении напряжения питания.
Гистерезис (Н) — разность расстояний между точкой включения при приближе-
нии объекта воздействия к активной поверхности выключателя и точкой выключе-
ния при удалении от активной поверхности (0,03sn<H< 0,2sn).
Максимальный ток нагрузки (Imax) — ток, протекающий через выключатель при
длительной работе без выхода из строя последнего. В качестве нагрузки используют-
ся обмотки реле, контактора или вход контроллера.
Максимальная частота срабатывания (/) — максимально возможная частота пе-
рехода выключателя из неактивного состояния в активное, и наоборот, при которой
выходной каскад выдает определенную последовательность сигналов.
Способы монтажа:
• утопленный — устанавливаемый заподлицо в металл;
• неутепленный — с наличием вокруг чувствительного элемента свободной зоны.
106
ГЛАВА 1
При утопленном монтаже минимальное расстояние между соседними выключа-
телями 1 >2d, где d — диаметр выключателя. При неутепленном монтаже 1 > 6s.
1.7.1 Индуктивные бесконтактные выключатели
Принцип действия индуктивного бесконтактного выключателя основан на из-
менении амплитуды колебаний высокочастотного генератора, формирующего в зоне
активной поверхности (торца) выключателя с помощью катушки колебательного
контура электромагнитное поле. Внесение в это поле металлического объекта приво-
дит к возникновению вихревых токов, снижается добротность контура и амплитуда
колебаний генератора. В результате вырабатывается аналоговый сигнал, пропорцио-
нальный расстоянию между выключателем и объектом. Пороговое значение аналого-
вого сигнала приводит к срабатыванию триггера и переключению коммутационного
элемента.
Схема индуктивного выключателя приведена на рис. 1.61.
Генератор Демодулятор Триггер Коммутационный
элемент
Рис. 1.61
Индуктивные выключатели широко применяются в качестве конечных выключа-
телей в автоматических линиях, станках с ЧПУ, в прокатном производстве и др.
В соответствии со стандартом расстояние срабатывания приводится для норми-
рованной квадратной пластины из стали Ст40 толщиной 1 мм и шириной, равной
диаметру активной поверхности выключателя. При контроле др. материалов рассто-
яние срабатывания должно быть скорректировано на поправочный коэффициент К:
Материал К Материал к
Сталь40 1 Нерж, сталь 0,6... 1,0
Медь 0,25...0,45 Нихром 0,82...0,9
Латунь 0,35...0,5 Никель 0,65...0,75
Алюминий 0,35...0,45 Чугун 0,93...1,05
При размере объекта приближения меньше нормированного, расстояние сраба-
тывания определяется графиком зависимости s/sn от отношения площади реального
объекта к площади нормированного (стандартного) объекта (рис. 1.62).
В табл. 1.50 приведены основные характеристики индуктивных бесконтактных
выключателей.
Зависимость расстояния срабатывания
от площади используемого объекта воздействия
Рис. 1.62
Рис. 1.63
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ 107
Таблица 1.50. Характеристики индуктивных бесконтактных выключателей.
Тип выключателя, производитель Расстояние срабатывания, sn, мм Материал корпуса Диаметр корпуса, мм Напряжение питания Выходной сигнал
ВБ2.08М 1,5 Латунь 8 10...30 VDC ок
ВБ2.12М 2 12 10...30 VDC OK
2 12 35...250 VAC CK
ВБ2.18М 5 18 10...30 VDC OK
5 18 35...250 VAC CK
ВБ2.30М 10 30 10...30 VDC OK
10 30 35...250 VAC CK
ВБ2.36М 12 36 10...30 VDC OK
12 36 35...250 VAC CK
ДБ2.30М 1,6. .14 30 12...30 VDC 1,5...20 mA
ЗАО «МЕГА-К», Россия
ВБИ-М12 2; 4 Латунь 12 10...30 VDC OK
ВБИ-М18 5; 8 Латунь 18
ВБИ-МЗО 10; 15 Нерж, сталь 30
ВБИ-М47 20 Нерж, сталь 47
ВБИ-Щ06 6 (ширина Полиамид -
(щелевой) щели)
ЗАО «Сенсор», Россия
1,5; 2; 5; 10; 18 Нерж, сталь М8;М12; 10...40 VDC CK;OK;
E2G М18; М30 200 mA
OMRON, Япония
IF 0005 2 Латунь 12 20...250 VAC! CK
IA 0032 10 20 VDC
IG0011 5 18
IB 0016 20 34
IGM 200 8 Нерж, сталь 18 10...36 VDC OK
ИМ 209 22 30
Ifm-electronic, Германия
IH04 0,8 Нерж, сталь 4 10..30 VDC OK
IM 05 0,8 Нерж, сталь 4
IM 08 1,5; 2,5;3 Медь 8
IM 18 5; 8; 12 Медь 18
IM 30 10; 15; 22 Медь 30
SICK AG,
Германия
Индуктивные выключатели имеют выходной сигнал типа ОК (рпр или прп) или
СК (релейный), напряжение питания постоянное (10...30 VDC) или переменное
(35...250 VAC), расстояние срабатывания от 1,5 до 150 мм, степень защиты корпуса
IP67, диапазон температур от -25 до +70 °C.
Индуктивные выключатели переменного тока, в которых коммутирующим эле-
ментом служит тиристор, могут применяться вместо механических концевых выклю-
чателей для управления катушками магнитных пускателей без промежуточных реле в
цепях переменного тока. При управлении катушками реле ток отпускания должен быть
больше остаточного тока выключателя. При использовании в качестве коммутирую-
щего элемента транзистора управление катушками магнитного пускателя осуществля-
ется без промежуточных реле в цепях постоянного и переменного тока. Выключатели
постоянного тока имеют более высокое быстродействие по сравнению с выключателя-
ми переменного тока. Выпускаются индуктивные выключатели во взрывобезопасном
исполнении. На рис. 1.63 показан индуктивный датчик E2G фирмы Omron.
108
ГЛАВА 1
Известны индуктивные выключатели пороговой частоты, содержащие в одном
корпусе индуктивный выключатель и встроенное микропроцессорное устройство,
настраиваемое потенциометром на определенную частоту срабатывания. При из-
менении частоты вращения, например, электродвигателя транспортера, на выходе
выключателя появляется сигнал, используемый для выключения двигателя или др.
операций. Также в промышленности используются индуктивные выключатели с вы-
ходным аналоговым сигналом (например, 0...20 мА). Эти датчики используются для
измерения расстояния, ширины и толщины материала, волнистости ленты и др.
1.7.2 Емкостные бесконтактные выключатели
Основной особенностью емкостных выключателей по сравнению с индуктивны-
ми является то, что они реагируют не только на металлы, но и на неметаллические
предметы, что обусловило их применение в химической, деревообрабатывающей, бу-
мажной, стекольной промышленности, в процессах переработки пластмасс и др.
Принцип действия емкостного выключателя основан на изменении емкости
датчика при приближении объекта (металл или диэлектрик) к активной (торцевой)
поверхности выключателя. Активная поверхность выключателя образована пласти-
нами «развернутого» конденсатора (рис. 1.64), включенного в цепь обратной связи
высокочастотного генератора. При отсутствии объекта вблизи активной поверхно-
сти датчика колебания генератора отсутствуют.
Генератор Демодулятор Триггер Коммутационный
элемент
Рис. 1.64
Приближение объекта к активной поверхности датчика вызывает удлинение
электрического поля перед активной поверхностью датчика, увеличение емкости
между электродами и амплитуды высокочастотных колебаний генератора, что при-
водит к формированию выходного сигнала выключателя. Чем больше величина
диэлектрической постоянной е материала, тем больше расстояние срабатывания.
Величина диэлектрической постоянной е для различных материалов приведена в
табл. 1.51, а на рис. 1.65 представлен график зависимости расстояния срабатывания
(sr, %) от диэлектрической постоянной е материала.
Таблица 1.51. Величина диэлектрической постоянной е для различных материалов
Материал £ Материал Е Материал £
Аммиак 16 Керосин 2,2 Спирт этиловый 26
Бумага 2,3 Каучук 2,8 Стекло 5
Бензол 2,3 Мрамор 8,3 Текстолит 7,5
Вода 80 Нефть 2,2 Толуол 2,4
Воздух 1 Полиамид 5 Трансформ, масло 2,3
Гетинакс 4,5 Полипропилен 2,3 Фарфор 4,4
Дерево 2...7 Полистирол 3 Фторопласт 2
Кварц, стекло 3,7 Полиэтилен 2,3 Цемент 2
Кварц, песок 4,5 Резина 2,6 Эбонит 4
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
109
Зависимость реального расстояния
забатывания Sr от диэлектрической проницаемости
Рис. 1.65
Емкостные выключатели применяются для контроля уровня жидких или сыпу-
чих материалов, сигнализации провисания или обрыва ленты, позиционирования и
счета объектов и др.
В табл. 1.52 приведены технические характеристики емкостных выключателей.
Таблица 1.52. Характеристики емкостных выключателей
Тип выключателя, производитель Расстояние срабатывания, $п, мм Материал корпуса Диаметр корпуса, мм Напряжение питания Частота срабатывания Выходной сигнал
ВБ1.18М ВБ1.30М ЗАО«МЕГА-К», Россия 10 20 Латунь 18 10...30 VDC 100 Гц ок
ВБЕ-Ц18 5 Полипропилен 18 10...30 VDC 10 Гц ок
ВБЕ-ЦЗО 20 Полиамид 30 10...30 VDCI ок
90...250 VAC СК
ВБЕ-Ф60 40 Полиамид 60 10...30 VDCI ок
ЗАО «Сенсор», 90...250 VAC СК
Россия
KG0001 8 Латунь 18 20...250 VAC 50 Гц ок
KG 5003 8 18 10...36 VDC 50 Гц
KG0025 20 34 20...250 VAC 40 Гц
KG5004 20 34 10...36 VDC 40 Гц
Ifm-electronic,
Германия
СМ 18 8; 12 Пластик 18 10..40 VDC 10/С...30/С ок
СМ 30 16; 25 30 10...40 VDC/
SICKAG, Германия 20...265 VAC
1.7.3 Магниточувствительные бесконтактные выключатели
Магниточувствительные датчики по сравнению с индуктивными имеют большее
расстояние срабатывания (до 85 мм) при высокой частоте переключений (до 20 кГц).
Недостаток — необходимость внешнего постоянного магнита или магнитной метки
на объекте.
Принцип работы магниточувствительного бесконтактного выключателя осно-
ван на изменении характеристики чувствительного элемента на основе геркона или
на эффекте Холла при воздействии внешнего магнитного поля (рис. 1.66).
по
ГЛАВА 1
управляющий объект
Рис. 1.66
При приближении объекта с магнитом к вы-
ключателю происходит увеличение напряженно-
сти магнитного поля, что вызывает срабатывание
триггера и изменение выходного сигнала датчи-
ка. В случае появления в зоне между датчиком и
внешним магнитом ферромагнитного материала
напряженность магнитного поля уменьшает-
ся, срабатывает триггер и изменяется выходной
сигнал датчика. При удалении объекта в первом
случае и ферромагнитного материала во втором
случае происходит обратный процесс и выключа-
тель возвращается в исходное состояние.
К преимуществам магниточувствительных
выключателей с герконом относятся возмож-
ность работы при постоянном или переменном напряжении, простота конструк-
ции. Достоинство выключателей на эффекте Холла — большая частота коммута-
ции (до 20 кГц). Технические характеристики магниточувствительных бесконтакт-
ных выключателей приведены в табл. 1.53
Таблица 1.53. Характеристики магниточувствительных
бесконтактных выключателей
Тип выключателя, произ- водитель Расстояние срабатыва- ния, sn> мм Материал корпуса Диаметр корпуса, мм Напряжение питания Частота срабатывания Выходной сигнал
ВБ5.12М ВБ5.12М ЗАО «МЕГА-К», Россия 10 10 Латунь 12 12 10...30 VDC 400 Гц 20 кГц Геркон; ОК
ME 5002 MF 5001 Ifm-electronic, Германия 60 60 Латунь 8 12 10...30 VDC 5 кГц ОК
BIM-EG08-Y1X BIM-M12E-Y1X (0ExiaIICT6X) SICK AC, Германия 78 90 Латунь 8 12 +8,2 VDC 1 кГц 2,2 мА<1< 1 мА
1.7.4 Оптические бесконтактные выключатели
Оптический выключатель имеет собственный излучатель и приемник излучения,
размещенные раздельно или в одном корпусе. Для повышения эффективности рабо-
ты выключателя осуществляется модуляция светового потока, что устраняет влия-
ние посторонних засветок и др. помех.
Принцип работы оптических выключателей основан на прерывании потока из-
лучения, направленного от излучателя к приемнику, посторонним непрозрачным
объектом. Такой тип выключателя называется барьерным (рис. 1.67).
К преимуществам такого выключателя относится большое расстояние от излу-
чателя до приемника (десятки метров), высокая помехозащищенность. Недостаток —
наличие двух частей изделия (излучателя и приемника) с необходимостью точной
настройки.
Принцип действия оптического выключателя, излучатель и приемник излучения
которого находятся в одном корпусе (рис. 1.68 и 1.69), основан на эффекте диффузно-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
111
Рис. 1.67
го или зеркального отражения светового потока от объекта. Такой тип выключателя
называется диффузным. Достоинством выключателя является простота настройки и
экономия питания. Недостаток — возможность ложных срабатываний от объектов с
большой отражательной способностью.
В качестве излучателя в оптических выключателях используется диод, а в каче-
стве приемника излучения — фотоприемник (фотодиод, фототранзистор). Поток из-
лучения формируется в ИК-диапазоне или в красном участке спектра. Для доступа
луча в труднодоступные зоны используются гибкие световоды.
К числу оптических бесконтактных выключателей относятся лазерные датчики. Их
основное назначение — контроль мелких объектов. Поток лазерного излучения позво-
ляет контролировать объекты на расстоянии до 60 м, а четко видимая лазерная точка
облегчает настройку системы. К недостаткам лазерных датчиков относят меньший срок
службы, более высокую стоимость и чувствительность к вибрациям. Характеристики
лазерных датчиков приведены в табл. 1.54. Также к оптическим бесконтактным выклю-
чателям относят оптические (фотоэлектрические) защитные барьеры, формирующие в
одной плоскости параллельные лучи с шагом примерно 20 мм.
Максимальная высота барьера — до 1 м, ширина — до 16 м. Минимальный раз-
мер обнаруживаемого объекта — 25 мм. При наличии в зоне барьера дыма или пыли,
могущих повлиять на прием ИК-излучения, датчики защитных барьеров имеют регу-
лировку чувствительности.
Защитные барьеры применяются там, где необходим запрет или ограничение до-
ступа в контролируемые зоны посторонних непрозрачных объектов, в том числе рук
человека.
Рис. 1.68
Рис. 1.69
112
ГЛАВА 1
В табл. 1.54 приведены технические характеристики оптических бесконтактных
выключателей.
Таблица 1.54. Характеристики оптических бесконтактных выключателей.
Тип выключателя, производитель Расстояние срабатывания, ММ Материал корпуса Диаметр корпуса, мм Напряжение питания Частота срабатывания, Гц Выходной сигнал
Оптические бесконтактные выключатели
ВБ3.12М.70.Т12000 0... 12 000 Латунь 12 10...30 VDC 100 ок
(барьерный)
ВБ3.18М.65.Т16000 0... 16 000 Латунь 18 10...30 VDC 100 ок
(барьерный) BE3.12M.70.TR400 5...400 Латунь 12 10...30 VDC 400 ок
(диффузный) BB3.18M.65.TR400 0...400 Латунь 18 10...30 VDC 400 ок
(диффузный) ПКФ «Страус»,
Россия
ВБО-Э20-200Р 0... 16000 Алюминий 23x65 10...30 VDC 250 ок
(барьерный) ВБО-М18 76К (диффузный) ЗАО «Сенсор», 100 Латунь 18 10...30 VDC 250 ок
Россия
OF 5018 (барьерный) 0...4000 Латунь 12 10...36 VDC 400 ок
ОБ 5010 1...400 Латунь 12 10...36 VDC 400 ок
(диффузный) Ifm-electronic,
Германия
Лазерные бесконтактные выключатели
ОБ 5018 (барьерный) 2000...6000 Латунь 18 10...30 VDC 500 ок
ОС, 5056 1...I50 Латунь 18 10...30 VDC 500 ок
(диффузный) Ifrn-electronic,
Германия
Люминесцентные датчики
LUTl B/U 50... 150 Металл 23x70x60 10...30VDC 600... ок,
SICK 6 кГц 0... 10 VDC
(Германия)
LUT 3-6/3 10/20/50/90 Металл 27x88x85 12...30 VDC 1500 ок,
SICK (Германия) 0,5...10 мА
Видеодатчики
ICS 101/111 70 Металл 47x47x140 24 VDC 400 ок
SICK (RS-232)
(Германия)
AGD/DC1 330 Металл 47x47x140 24 VDC 400 ОК
SICK
(Германия)
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
113
1.7.5 Ультразвуковые бесконтактные датчики
Принцип действия ультразвуковых датчиков основан на зависимости времени
прохождения ультразвуковых колебаний от излучателя до границы раздела сред и
обратно от расстояния до объекта. Основной характеристикой ультразвукового дат-
чика является дальность действия. Нижней границей дальности является величина
«мертвой зоны», определяемой временем затухания датчика, по прохождении кото-
рого датчик будет способен вновь принимать отражаемые сигналы. Угол распростра-
нения ультразвуковых колебаний датчика составляет примерно 5 °.
Имеется два режима работы ультразвуковых датчиков: по отражению (режим
отражения сигнала от объекта) и режим ультразвукового фотореле. Ультразвуко-
вое фотореле однонаправленного действия состоит из излучателя и установленно-
го напротив него приемника излучений. При нахождении объекта между излучате-
лем и приемником происходит изменение состояния коммутационного выхода. На
рис. 1.70 показаны схема работы (а) и общий вид ультразвукового датчика М18 фир-
мы Siemens (б).
Клинообразный УЗ-луч
Объект
Sonar-BERO
а
"Мертвая"
•“ зона
Настроенная коммута
-ционная или аналоге
пая зона (горит диод)
руемое)
—Дальность действия--------*
Рис. 1.70
Угол распрост-
ранения УЗ ок. 5е
Рис. 1.71
1.7.6 Люминесцентные датчики
Люминесцентные датчики для автоматизации производственных процессов
определяют объекты, содержащие невидимую УФ люминесцентную метку, которая
не может быть обнаружена невооруженным глазом.
Работа датчика построена на способности некоторых материалов
флуоресцировать — излучать в видимом диапазоне при поглощении
ультрафиолетового света. Активный элемент датчика излучает ультра-
фиолетовый сигнал, а детектор распознает видимое вторичное излучение
и подтверждает наличие объекта. Помимо поверхностного нанесения
невидимых меток, в промышленности применяется метод добавки лю-
минесцентных порошков и жидкостей в краску, масло, чернила и дру-
гие жидкие объекты. Расстояние считывания может быть изменено по-
средством использования сменных линз. Датчики также поставляются с
оптоволоконными кабелями.
На рис. 1.71 представлен общий вид люминесцентных датчиков LUT1 B/U и LUT
3-6/3-8/3-9. Характеристики датчиков приведены в табл. 1.54.
1.7.7 Видеодатчики
Видеокамера позволяет с высокой точностью распознавать объекты; имеет вы-
сокую скорость «захвата» изображения и короткое время срабатывания (2,5 мс). Ка-
114
ГЛАВА 1
Рис. 1.72
мера имеет функцию распознавания до 4 и более раз-
личных объектов, включая объекты с высокой отра-
жающей способностью. Память видеокамеры может
хранить данные о 16 объектах.
Характеристики видеодатчиков приведены в
табл. 1.54.
На рис. 1.72, а показан общий вид обучаемого ви-
деодатчика ICS 101/111,ана рис. 1.72, б показан цвет-
ной видеодатчик AGD/DC1.
На рис. 1.73 показаны примеры применения бесконтактных датчиков на произ-
водстве.
в
Рис. 1.73
1.8. Показывающие и регистрирующие приборы
1.8.1 Показывающие аналоговые и цифровые приборы
В аналоговых измерительных приборах используются электромеханические из-
мерительные преобразователи, преобразующие электрическую величину (ток, на-
пряжение) в угловое или линейное перемещение указателя.
Электромагнитные приборы для измерения переменного тока и напряжения
основаны на взаимодействии магнитного поля измеряемого тока, проходящего че-
рез катушку, с одним или несколькими сердечниками из магнитомягкого материала.
В приборах используется неподвижная катушка и подвижный сердечник со стрел-
кой. Подвижный сердечник может быть выполнен с плоской или круглой катушкой.
Приборы электромагнитной системы позволяют измерять действующее значение
тока и напряжения в цепях с искаженной формой сигнала.
Помимо электромагнитной системы в приборах для измерения переменного
тока и напряжения используется магнитоэлектрическая система с выпрямителем.
Измерительный механизм с внутрирайонным магнитом имеет опоры на кернах или
растяжках и выпрямитель в измерительной цепи.
Основным элементом магнитоэлектрических приборов, предназначенных для
измерения постоянного тока и напряжения, являются постоянный магнит и катушка
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
115
Рис. 1.74 Рис. 1.75 Рис. 1.76 Рис. 1.77
(рамка). Приборы выполнены с подвижной катушкой или с подвижным магнитом.
В первом случае магнит по отношению к катушке является внешним. В воздушном
зазоре между магнитопроводом и полюсными наконечниками магнита находится
цилиндрический сердечник с катушкой и стрелкой. Магнитоэлектрические приборы
используются для измерения токов от 10 мкА до 20 А и напряжений от 25 мВ до 750 В
при прямом включении. Для измерения в большем диапазоне применяются внешние
шунты и добавочные сопротивления.
В электродинамической системе электроизмерительных приборов использует-
ся подвижная катушка со стрелкой и неподвижная катушка. Основное применение
электродинамическая система нашла в переносных приборах переменного тока.
В ферродинамических измерительных приборах для создания магнитного потока
в рабочем зазоре используется электромагнит, состоящий из неподвижной катушки,
магнитопровода и ферромагнитного сердечника. Подвижной частью является бес-
каркасная рамка со стрелкой. Ферродинамические приборы в основном используют-
ся для измерения мощности.
Шкалы приборов могут быть квадратными (отклонение стрелки по шкале
равно 90°) или круглыми (отклонение стрелки по шкале равно 240°) (рис. 1.74).
На рис. 1.75 представлен вольтметр типа IQ 72 фирмы АВВ с установкой на DIN-
рейку.
Индукционные измерительные устройства используются в электросчетчиках
энергии переменного тока. Прибор состоит из электромагнитов с обмотками, пи-
таемыми переменным током. В зазорах магнитопроводов располагается подвижный
алюминиевый диск, в котором индуктируются токи, взаимодействие которых с маг-
нитными потоками создает вращающий момент.
Для расширения пределов измерения приборов постоянного тока применяют до-
бавочные сопротивления, включаемые последовательно с прибором, и шунты, вклю-
чаемые параллельно (рис. 1.76).
За счет шунтов расширяются пределы измерения по току, за счет добавочных
сопротивлений — по напряжению. Добавочные сопротивления и шунты могут быть
внутренними (в корпусе прибора) или наружными. Внутренние шунты применяют
для токов примерно до 30... 50 А.
Для уменьшения погрешности измерений напряжения или тока сопротивление
вольтметра должно быть достаточно велико (вольтметр должен иметь малое потре-
бление), а сопротивление амперметра по тем же соображениям должно быть мало.
Для преобразования значений токов или напряжений в стандартный (унифи-
цированный) вид используются измерительные трансформаторы тока и напряже-
ния (рис. 1.77). Стандартными величинами тока и напряжения принято считать для
тока— 5 А (иногда 1 А), для напряжения — 100 В.
116
ГЛАВА 1
Рис. 1.78
Первичная обмотка трансформатора тока включается в
линию последовательно. Во вторичную обмотку трансформа-
тора тока включается амперметр и последовательные цепи др.
измерительных приборов. Первичная обмотка трансформато-
ра напряжения включается в линию параллельно, а к зажимам
вторичной обмотки трансформатора напряжения подключа
ется вольтметр.
Коэффициент трансформации измерительных трансфор-
маторов указывается в паспортных данных измерительных
трансформаторов.
Крепление электроизмерительных приборов осуществля-
ется на лицевой панели щита или пульта управления (щито-
вые или панельные приборы) и на DIN-рейку.
На щитовые приборы распространяется стандарт МЭК 51. Щитовые приборы
могут эксплуатироваться при температуре -25...+50°С.
По представлению результатов измерения электроизмерительные приборы де-
лятся на аналоговые (стрелочные) и цифровые измерительные приборы. В цифро-
вых приборах осуществляется автоматическое преобразование аналоговой величи-
ны в дискретную с выдачей результатов измерения в виде числа на шкале прибора
(рис. 1.78). Цифровые приборы имеют меньшую погрешность измерения, высокое
быстродействие и хорошую помехоустойчивость.
В табл. 1.55 приведены технические характеристики некоторых показывающих
аналоговых и цифровых приборов основных производителей.
Более подробная информация о приборах и методах измерения электрических
величин дана в работах 11.98-1.106].
Таблица 1.55. Характеристики показывающих аналоговых и цифровых приборов
Тип (фирма) Система из- мерения Предел измерения (мА, А. В) Способ подключения Класс точности Габаритные размеры, мм
1 2 3 4 5 6
Аналоговые электроизмерительные приборы
Амперметры постоянного тока
М381 (АООТ «Краснодар- ский ЗИП») Магнито- электрическая 0,5... 500 мА, 1...30А, 30...750 А, 1...7,5кА Непосредственное Наружный шунт 1,5 120x120x60
М42300 (ОАО «Электропри- бор», Чебоксары) Магнитоэлек- трическая 0,5...600 мА, 1...750 А, 0,075...3 кВ 1...15А, 2.. 150 В: непо- средственное; 20.. .750 А — шунт 75 мВ 1,5 40x40x48
М1830М1 (ЗАО «Электроточ- прибор», Омск) Магнитоэлек- трическая 100 мкА... 5 А: 10...500А Непосредственное Наружный шунт 0,5 240x30x300 (со световым указателем)
CQ72 (АВВ) Магнитоэлек- трическая 100 мкА...25 А; Непосредственное 1,5 72x72
Амперметры переменного тока
Е350 (АООТ «Краснодар- ский ЗИП») Электромаг- нитная 5...750 мА, 1...300А, 1...800А, 1...4кА Непосредственное; через трансформатор тока со втор, током 1 или 5 А 1.5 96x96x107
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
117
Продолжение табл. 1.55
1 2 3 4 5 6
ЭА0700 (ОАО «Электропри- бор», Чебоксары) Электромаг- нитная 1А...5 кА 1...10 А: непосредственное; 20 А...5 кА —через трансф-ор тока 1,5 80x80x50
Э4203 (ОАО «Электропри- бор», Чебоксары) Электромаг- нитная 20...50 А Непосредственное 1,5 120x120x50
Ц1730 (АООТ «Вибратор», С.-Петербург) Магнитоэлек- трическая 5А...10 кА Через трансформатор тока со втор, током 1 или 5 А 1,5 160x30x276
IQ72 (АВВ) Электромаг- нитная 250 мА...60 А, 10...3000 А Непосредственное Через трансформатор тока со втор, током 5 А 1,5 72x72
Вольтметры постоянного тока
М381 (АООТ «Краснодар- ский ЗИП») Магнитоэлек- трическая 1...150 мВ, 3...750 В, 1...15 кВ Неп осредственное; с наружным добавочным сопротивлением 1,5 120x120x60
ЭВ 0607 (ОАО «Электропри- бор», Чебоксары) Магнитоэлек- трическая 2...3000 В Непосредственное 1,5 96x96x50
М1738 (АООТ «Вибратор», С.Петербург) Магнитоэлек- трическая 10 мВ...600 В Неп ©средств енное 1,0 160x30x276
CQ72 (АВВ) Магнитоэлек- трическая 60 мВ...600 В Непосредственное 1,5 72x72
Вольтметры переменного тока
Е349 (АООТ «Краснодар- ский ЗИП») Электромаг- нитная 6 ..500 В, 450...750В, 3,5...600 кВ Непосредственное Через трансформатор напряжения с вторичным напряжением 100 В 1,5 72x72x55
Э4203 (ОАО «Электропри- бор», Чебоксары) Электромаг- нитная 10...750 В Непосредственное 1,5 120x120x50
Ц1730 (АООТ «Вибратор», СПетербург) Магнитоэлек- трическая 30...450 В Непосредственное 1,5 160x30x76
IQ 72 (АВВ) Электромаг- нитная 6...800 В, 3,3...44 кВ Непосредственное Через трансформатор напряжения с вторичным напряжением НОВ 1,5 72x72
Ваттметры
Д390 (АООТ «Краснодар- ский ЗИП») Ферродинами- ческая 1 кВт (кВар)... 30 ГВт (ГВар) (номин. ток 5 А, номин. напряже- ние 127,220,380 В) Непосредственное и через трансформаторы тока и напряжения 1,5 160x30x272,5
Цифровые приборы
Амперметры
Ф295 (ЗАО «ПО Электро- точприбор», Омск) — 5...500 мА — 0,1 80x160x250
118
ГЛАВА 1
Окончание табл. 1.55
1 2 3 4 5 6
Вольтметры
Ф296 (ЗАО «ПО Электро- точприбор», Омск) — 500 мВ...5 В, 10 В... 1000 В — 0,1 80x160x250
N17Z (LUMEL, Польша) — 1...500В, 0,01...40 А, 20...200 Гц Непосредственное; с шунтом; неп осредственное 0,1 52,5x90x64,5 DIN
1.8.2 Регистрирующие приборы
Одноканальные и многоканальные регистрирующие приборы с записью измеря-
емых величин на диаграммной ленте и имеющие на пишущем узле указатель являют-
ся одновременно и показывающими приборами. В ряде регистрирующих приборов в
верхней или нижней частях лицевой панели располагается ЖК-дисплей или цифро-
вой указатель номера канала и значения параметра в момент измерения.
К основным достоинствам регистрирующих приборов относятся наглядность,
наличие документирования данных в каждый момент времени, дешевизна. К недо-
статкам относятся затраты на обслуживание прибора — замену ленты, чернил, чист-
ку лентопротяжного механизма и др. Эти недостатки сокращаются за счет примене-
ния качественных пишущих узлов плоттерного (фломастерного) типа и улучшения
конструкции лентопротяжного механизма. Дальнейшее улучшение функциональных
характеристик приборов связано с наличием интерфейсов связи с компьютером RS-
232 и RS-485, многоцветной печати данных, функций самодиагностики с регистраци-
ей результатов на диаграммной ленте, защитой от несанкционированного доступа,
повышенной защитой от пыли и влаги вплоть до IP65, контролем обрыва или корот-
кого замыкания датчиков, наличием встроенных преобразователей входных сигна-
лов в унифицированные токовые и др.
Основными характеристиками регистрирующих приборов являются:
• число каналов измерения;
• основная погрешность, %;
• ширина диаграммной ленты, мм;
• скорость перемещения диаграммной ленты, мм/ч;
• характеристики входных сигналов;
• регистрация параметра: аналоговая или цифровая;
• дополнительные устройства: сигнализаторы, регуляторы;
• преобразователи;
• выходной интерфейс (RS-232, RS-485 и др.);
Рис. 1.80
Рис. 1.79
Рис. 1.81
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
119
• напряжение питания;
• габаритные размеры, мм.
На рис. 1.79 и 1.80 представлены регистраторы Альфалог-100 и Технограф, а на
рис. 1.81 — Variograph фирмы Siemens.
В табл. 1.56 приведены сравнительные характеристики некоторых регистрирую-
щих приборов.
Таблица 1.56. Характеристики некоторых регистрирующих приборов
Модель (фирма) Число каналов измерения Входные сигналы Ширина диаграмммной ленты, мм Скорость перемещения диагр. ленты, м/ч Погреш- ность % Выходной интерфейс
Альфалог-100 (ГК «Метран») 1,2,3 или 6 ТП: L,B,S,T,R,N,K,J; ТС: 50П,100П, 50М, 100М, PtlOO, PtlOOO; -20...20, -100... 100, -200...200 мВ; 0...10, -5...5, -10... 10В, 0/4...20 мА 100 5, 10,20,60,120, 240, 300,600 ±0,25 4хСК; RS-485
Технограф (ГК «Метран») 12 ТП: К, L.S, В; ТС: 50П, 100П, 50М, 100М; 0...10,0...20,0...50,0...100 мВ; 0...5В, 0...5,0/4 ..20 мА 160 5, 10,20,40, 60, 120,240,480, 1200,2400 ±0,25 24хСК, RS-232, RS-485
PMT-39D -49D (ГК «Метран») 6; 1 или 3 ТП: К, L.S, А-1; ТС: 50П, 100П, 50М, 100М, PtlOO 0...10,0...20,0...75,0...100 мВ; 0...5,0/4...20 мА 100 10, 20, 60,120, 240; ±0,25 4хСК, RS-232
Variograph (Siemens) 12 AI: 3,6,12 DI/DD: 6/8 100; 200 — ±0,15 RS-232, RS-485
KE-8 (LUM EL) 1,3,6 Универсальные 100 — ±0,5 RS-232, RS-485, RO
1.8.3 Безбумажные самописцы
Безбумажные (экранные, дисплейные) самописцы имеют целый ряд преимуществ
по сравнению с регистрирующими приборами с диаграммной лентой. Безбумажный
самописец является цифровым регистратором данных на цветном экране дисплея.
Данные отображаются в виде трендов (аналог диаграммной ленты), гистограмм или
буквенно-цифровой информации.
Входными сигналами являются сигналы от термопар, термометров сопротивле-
ния, а также от датчиков давления, уровня и др. неэлектрических величин, преоб-
разованных в аналоговые сигналы постоянного тока, активное сопротивление или в
дискретные сигналы. Число гальванически изолированных каналов составляет для
различных модификаций от 3 до 32 каналов. К числу универсальных каналов .отно-
сятся входной ток 0...5,0/4...20 мА, напряжение 0... 10 В, +1 В, +10 В, ± 10 мВ.
К числу достоинств безбумажных самописцев относятся: отсутствие бумаги и
пишущих узлов, сохранение в энергонезависимой памяти (от 32 до 64 Мбайт) резуль-
татов измерения текущего времени, состояния дискретных входов и выходов. Даль-
120
ГЛАВА 1
Рис. 1.82 Рис. 1.83
нейшее сохранение данных осуществляется на дискете или в памяти компьютера.
Глубина архива, определяемая пользователем, составляет до 20 суток и более, диапа-
зон времени для одного экрана — от одной до 250 мин. Диапазон времени измерения
по всем каналам составляет от 0,2 до 1 секунды, скорость графопостроения — от 1
до 12000 мм/ч. Размер ЖК-дисплея составляет для большинства приборов от 5,5"
(320x240 точек) до 12,1" (800x600 точек). На рис. 1.82, а показан цифровой дисплей-
ный самописец SIREC DS, на рис. 1.82, б — SIREC DH фирмы Siemens. На рис. 1.83
показан многоканальный регистратор РМТ 69 Ех НПП «Элемер».
Конфигурация параметров прибора осуществляется потребителем с помощью
кнопочной клавиатуры прибора или с компьютера по интерфейсу RS-232 или RS-485.
Помимо кнопок на панели прибора могут располагаться светодиодные индикаторы
состояния релейных выходов и состояние «авария».
К другим функциональным особенностям приборов относятся диагностика об-
рыва датчиков, усреднение показаний, извлечение квадратного корня, математи-
ческие функции (сложение, вычитание, умножение, деление, возведение в квадрат,
логарифмирование, экспоненциальное сглаживание и др.). Для аналоговых входных
каналов может быть введено математическое выражение (до 200 знаков на канал).
За счет наличия дискретных входов возможно управление такими функциями,
как «старт», «стоп», «сброс», «суммирование» и др. Дискретные выходы позволяют
подключать исполнительные реле с коммутацией токовой нагрузки до 5 А при напря-
жении переменного тока 220 В при выходе любого параметра за пределы уставок.
В табл. 1.57 приведены технические характеристики безбумажных самописцев
отечественных и зарубежных производителей.
Таблица 1.57. Характеристики безбумажных самописцев
Модель (производи- тель) Число каналов Объем внутренней памяти, Мб Размер дисплея Погреш- ность, % Выходной сигнал Напряжение питания Габаритные размеры, мм
1 2 3 4 5 6 7 8
РМТ 69Ех (НПП «Элемер») Входные: 6 — универсальные; 16 — дискретные Выходные: 16 — релейные 8...64 5,7" цветной ±0,25 RS-232, RS-485 220 VAC 227x145x260
М660.1 (ООО «Юри- мов») 8: 0,1...500 мА; 1 А — пост, ток; 10...250 В — пост, напряжение 8...64 240x128 точек, ч/б ±0,25 2xRS-485 220 VAC 160x160x215
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
121
Окончание табл. 1.57
1 2 3 4 5 6 7 8
Ш 9329А НПФ «Сенсорика» Входные: 16 — универсальные; 11 — дискретные Выходные релейные — 2,16, 32 Флэш 16 Мбайт 5,7" цветной ±0,1 RS-232, RS-485 220 VAC 200x144x360
REGIGRAF «Вибратор» Входные: 16 — универсальные; 8 — дискретные; Выходные: 4 — аналоговые, 16 — релейные Флэш 16 Мбайт 10,4" цветной ±0,25 RS-232, RS- 485, Ethernet (no заказу) 220 VAC 255x205x165
ЭР-6 (НПП «Авто- матика») Входные: 6 — универсальные; Выходные: 6 — дискретные, 2 — аналоговые 4...32 5,7" цветной ±0,25 (± 0,5 для тер- мопар) RS-232, RS-485 85...265 VAC, 90...300 VDC 144x185x115
СЛЕД (ООО Сев,- зап. прибор- ный парк) Входные: 12 — универсальные; 7 — дискретные Выходные: 5 — релейные Флэш 128 Мбайт 5,7" цветной ±0,25 RS-232, RS- 485, Profibus DP 220 VAC 138x138x225
SIRECDM (Siemens) Входные: 8,12,16 — универ- сальные; 16 — дис- кретные Выходные: 4 — релейные, 2 — аналоговые 4...8 5,7" цветной ±0,04 RS-232, RS- 485. TCP/IP 90...240 VAC, 24 VDC 144x144
SIRECDH (Siemens) Входные: 24,32 — универсаль- ные; 32 — дискрет- ные Выходные: 8 — релейные 4 — аналоговые 4...8 12,1" цветной ±0,1 RS-232, RS- 485, TCP/IP 90...240 VAC, 24 VDC 300x300
LOGOSCREEN 500 (JUMO) Входные: 6,12 — универсаль- ные, 4 — дискретные Выходные: 3 — релейные Флэш 1 Мбайт 5" цветной + 0,15 RS-232. RS-485 110...240 VAC, 20...53 VDC 144x144x214
KD3 (LUMEL) Входные: 3,6,12 — универ- сальные; Выходные: 6 — релейные 1,44 5" цветной ±0,5 RS-232, RS-485 93...253 VAC, 20...53 VDC 220x144x250
1.9. Функциональные устройства систем автоматизации
1.9.1 Нормирующие преобразователи
Нормирующие преобразователи неунифицированных входных сигналов в нор-
мированные выходные сигналы широко используются в системах автоматизации.
122
ГЛАВА 1
Входными сигналами нормирующих преобразователей являются сигналы термо-
пар, термометров сопротивления, дифференциально-трансформаторных и ферроди-
намических датчиков, датчиков давления, расхода и др.
Выходными сигналами измерительных (нормирующих) преобразователей явля-
ются сигналы постоянного тока 0...5 мА, 0/4...20 мА, а также сигналы напряжения
0...5 В, 0...10 В, -5...+5 В или -10...+10 В.
По числу преобразуемых входных или выходных сигналов преобразователи делят-
ся на одноканальные и многоканальные, а по условиям эксплуатации на преобразо-
ватели в общепромышленном и взрывозащищенном исполнении. Используемый вид
взрывозащиты — «искробезопасная электрическая цепь» уровня «ia» в соответствии с
ГОСТ Р 51330.0-99. По зависимости выходного сигнала от входного преобразователи
могут быть с линейной или нелинейной зависимостью, а по связи между входными
и выходными цепями — с гальванической связью или без нее. Ряд преобразователей
имеют ЖК-дисплей для индикации значений преобразуемого параметра.
В табл. 1.58 приведены технические характеристики некоторых нормирующих
преобразователей отечественного производства.
Таблица 1.58. Технические характеристики некоторых
нормирующих преобразователей
Модель Тип первичного преобразователя Число кана- лов преоб- разования Погрешность преобразова- ния, % Выходной сигнал Напряжение питания, В Габаритные размеры, мм
ИПМ 0104Ех НПП «Элемер» ТС: 50МД00М, 50П, 100П, PtlOO; ТП: L, К 2 ±0,5% 0...5 мА, 4...20 мА 24 VDC 78,5x22,5x60,5
НП-02 ГП «Метран» ТС: 50МД00М, 50П, 100П; ТП: L, К, S, В 1 +0,5% 0...5 мА, 4...20 мА 220 VAC 72x144x180
Ш9322А-2 ГП «Метран» ТП: L, К, S, В, А-1, А-2, А-3 2 +0,5% 0...5 мА, 4...20 мА 220 VAC 60x160x350
ИПМ 0196/MI ГК «Метран» ТС: 50МД00М, 50П, 1 ООП, PtlOO; ТП: L, К, А 2 ±0,5% 0...5 мА, 4...20 мА U VDC 23x75x125
ИП-Т10 ОАО «ЗЭиМ» ТП: L, К, S, В, А-1, А-2, А-3; ТС: 50МД00М, 10П, 50П, 100П; 1 ±0,5% 0...5 мА, 0...20 мА, 4...20 мА, 0...10В 24 VDC; 220 VAC 40x172x162
НП-ШО ОАО «ЗЭиМ» О...1О,-1О...О...1О мГн 1 +1,0% О...5мА, 0...20 мА, 4...20 мА 220 VAC 80x170x162
НП-Н10 ОАО «ЗЭиМ» 0,1...10 кОм 1 +0,5% 24 VDC через БП24 40x172x162
НП-Р10 ОАО «ЗЭиМ» До 150 мВ 1 ±0,5% 24 VDC через БП24
Преобразователи имеют возможность перестройки диапазона измерения пара-
метра, а также типа НСХ (например, 50М на 100М, 50П на Ю0П или PtlOO). Крепление
нормирующих преобразователей в основном осуществляется на DIN-рейку.
1.9.2 Функциональные блоки
Функциональные блоки служат для выполнения определенных математических и
др. функций с входными и выходными сигналами — сложение, умножение, деление,
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
123
возведение в квадрат, извлечение квадратного корня, сравнение с заданием, интегри-
рование и др. К функциональным блокам относят также блоки питания. Некоторые
блоки питания имеют функцию корнеизвлечения.
Входными сигналами функциональных блоков являются сигналы постоянного
тока 0...5, 0...20, 4...20 мА, 0...10В, сигналы от термопар, термометров сопротивле-
ния и дифференциально-трансформаторных датчиков.
В табл. 1.59 представлены технические характеристики функциональных
устройств.
Таблица 1.59. Технические характеристики функциональных устройств.
Тип Основная функция
Блок интегрирующего задатчика БЗИ (ОАО «ЗЭиМ») Преобразование интеграла в унифицированный сигнал постоянного тока; ограничение выходного сигнала и сигнализация при достижении
Блок динамической связи БДС (ОАО «ЗЭиМ») Алгебраическое суммирование до 4-х унифицированных сигналов, демпфи- рование и динамическое преобразование выходного сигнала
Блок суммирования и сигнали- зации БСС (ОАО «ЗЭиМ») Алгебраическое суммирование до 3-х унифицированных сигналов постоян- ного тока, введение сигнала от задатчика, демпфирование выходного сигна- ла и формирование выходного релейного сигнала
Блок суммирования и демпфи- рования БСД ОАО «ЗЭиМ» Алгебраическое суммирование до 4-х унифицированных сигналов постоян- ного тока, сравнение их с сигналом задания, демпфирование суммы
Блок нелинейных преобразова- ний БНП-2 (ОАО «ЗЭиМ») Демпфирование и нелинейное преобразование входного аналогового сигна- ла, аппроксимированного кусочно-линейным методом
Блок селектирования БСЛ-2 ОАО «ЗЭиМ» Прием до 4-х унифицированных сигналов с гальваническим разделением и выходом, масштабирование, демпфирование и выделение наибольшего или наименьшего сигнала
Блок вычислительных операций БВО2 (ОАО «ЗЭиМ») Алгебраическое суммирование по каждому входу унифицированных сиг- налов с масштабированием, гальваническим разделением; демпфирование результирующего сигнала; проведение между результирующими сигналами одной из операций: сложение, умножение, деление, возведение в квадрат, из- влечение квадратного корня
Блок питания и корнеизвлечения МЕТРАН-611 (ГП «Метран») Питание стабилизированным напряжением 24 и 36 VDC датчиков с унифи- цированным токовым выходным сигналом и функционального преобразо- вания этого сигнала с корнеизвлекающей зависимостью (число каналов-1)
Блок питания БП КАРАТ-22 (ГП «Метран») Преобразование напряжения 220 VAC в стабилизированное напряжение 24 или 36 VDC (1, 2, 4 или 8 каналов)
Блок питания БПД-40-Ех (ГП «Метран») Питание стабилизированным напряжением датчиков с унифицированным выходным токовым сигналом 4...20 мА и с видом взрывозащиты «искробе- зопасная электрическая цепь» (число каналов 1 или 2)
Блок питания БП96 (ГП «Метран») Питание стабилизированным напряжением 24 или 36 VDC датчиков с уни- фицированным выходным токовым сигналом 4...20 мА (число каналов от 1 до 4-х)
Блоки питания с видом взрывозащиты «искробезопасная электрическая цепь»
имеют встроенные барьеры искрозащиты. Питание функциональных блоков 220 VAC,
габаритные размеры 80x160x537 мм. Корпуса приборов предназначены для щитово-
го монтажа.
1.9.3 Барьеры искрозащиты
Барьеры искрозащиты служат для обеспечения искробезопасности электриче-
ских цепей датчиков температуры, давления и др. измерительных преобразователей
в системах измерения, сигнализации и регулирования, находящихся во взрыво- и
124
ГЛАВА 1
пожароопасных зонах производств различных отраслей промышленности (химиче-
ской, нефтехимической, нефтегазовой и др.).
Барьеры искрозащиты в зависимости от типа имеют входные или выходные ис-
кробезопасные электрические цепи, выполненные с уровнем взрывозащиты по ГОСТ
Р 51330.10-99 «ib» — взрывозащищенный или «ia» — особовзрывозащищенный. Все
барьеры устанавливаются вне взрывоопасной зоны и относятся к неразборным из-
делиям.
В «Правилах устройств электроустановок» (ПУЭ) взрывоопасная зона — это по-
мещение или ограниченное пространство в помещении, в которых имеются или мо-
гут образоваться взрывоопасные смеси.
Вид взрывозащиты основан на ограничении энергии искрообразования. Допу-
стимые параметры цепи: максимальное напряжение разомкнутой цепи до ЗОВ, ток
к.з. до 100 мА, допустимая мощность до 0,45 Вт.
Барьеры искрозащиты могут быть активными и пассивными. Активные барьеры
обеспечивают искробезопасность и питание датчиков с унифицированными выход-
ными сигналами, электропневматических преобразователей и др. устройств. Напря-
жение питания активных барьеров составляет величину 36+3,6 VDC или 24+0,5 VDC.
Погрешность преобразования активных барьеров ±(0,1.. .0,2)%.
Пассивные барьеры обеспечивают искробезопасность датчиков и др. измери-
тельных преобразователей, не имеющих собственных источников питания (напри-
мер, электропневматических преобразователей, позиционеров, термопар и термоме-
тров сопротивления в обычном исполнении).
В блоках искрозащиты на стабилитронах (БИС) применяются защищенные плав-
кими предохранителями стабилитроны для ограничения напряжения шунтировани-
ем аварийного тока на землю. Барьеры состоят из шунтирующих стабилитронов и
последовательно включенных резисторов или резисторов и сменных предохраните-
лей. Искрозащитные элементы обеспечивают искробезопасность электрических це-
пей посредством ограничения энергии. В нормальном режиме напряжение пробоя
стабилитронов не превышает определенного значения и стабилитрон не пропускает
ток. При превышении напряжения пробоя в случае аварии стабилитрон переходит в
режим стабилизации с увеличением протекающего через него тока. При дальнейшем
увеличении тока срабатывает предохранитель, предотвращая передачу критической
электрической мощности во взрывоопасную зону.
На рис. 1.84 показана электрическая схема барьера искрозащиты на стабилитро-
нах [1.108], а на рис. 1.85 принципиальная схема соединений 2-канального барьера
искрозащиты БИЗ 9712 фирмы «Сенсорика».
Рис. 1.84
Рис. 1.85
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
125
В активных барьерах искрозащиты с
гальванической развязкой источник сигна-
ла передается или принимается из взрыво-
опасной зоны через изолированный тракт
(чаще оптрон). Так, в активных барьерах
серии Корунд-М500 гальваническое раз-
деление сигнальных цепей входа и выхода
происходит благодаря преобразованию
1вых
входного сигнала постоянного тока в ча-
Рис. 1.86
стоту следования импульсов и передачи их
через оптрон с последующим восстановлением уровня постоянного тока. На рис. 1.86
приведена принципиальная электрическая схема активного барьера искрозащиты
КОРУНД-М5Ю.
Это допускает возможность заземления первичного преобразователя. Для умень-
шения вероятности возникновения взрывоопасной ситуации при заземлении необ-
ходимо следить, чтобы только одна точка цепи была заземлена, а другая должна быть
изолирована от земли (напряжение пробоя не менее 500 В.).
Заземление барьера искрозащиты достигается установкой его на DIN-рельс. Кро-
ме того, обычно имеется одна клемма для заземления проводом. Устройства, уста-
новленные во взрывоопасной зоне (измерительные преобразователи, клапаны и др.)
должны быть изолированы от земли. Если необходимо их заземление, то использу-
ются барьеры искрозащиты с гальванической изоляцией.
В табл. 1.60 приведены технические характеристики барьеров искрозащиты оте-
чественных производителей.
Таблица 1.60. Технические характеристики барьеров искрозащиты
Тип Назначение Напряжение питания, VDC Габаритные размеры, мм
1 2 3 4
НПФ «Сенсорика»
БИЗ-9712-А1 БИЗ-9712-А2 Активный одноканальный барьер для питания 2-про- водных датчиков с выходным сигналом 4...20 мА 24; 36 120x75x19
БИЗ-9712-АЗ БИЗ-9712-А5 Активный одноканальный барьер для управления электропневматическим клапаном Активный одноканальный барьер для управления электроконтактными датчиками
ГК «Метран»
РИФ-А1 РИФ-А2 РИФ-АЗ РИФ-А4 РИФ-А5 РИФ-А6 Активный одноканальный барьер для питания 2-прово- дных датчиков с выходным сигналом 4.. .20 мА Активный одноканальный барьер для управления электропневматическими преобразователями и электро- пневмопозиционерами во взрывоопасных зонах Активный одноканальный барьер для обеспечения искро- безопасности цепей систем сигнализации и управления с электроконтактными датчиками во взрывоопасных зонах 24 36 36 36 24 24 105x73x20
РИФ-А7 Активный одноканальный барьер для питания потенцио- метрических и реостатных датчиков во взрывоопасных зонах и преобразования их выходного сигнала в сигнал 0...5,0/4...20 мА 36 105x73x20
126
ГЛАВА 1
Окончание табл. 1.60
1 J 2 _ 1 з 4
«СТЭНЛИ»
Корунд-М1 Корунд-М11 Корунд-МЗ Кору нд-М’DIN Корунд-М510 Корунд-М560 Активный одноканальный барьер для питания 2-х прово- дных датчиков с выходным сигналом 4.. .20 мА Активный одноканальный барьер для питания понижен- ным напряжением (до 12 В) 2-проводных датчиков с вы- ходным сигналом 4...20 мА и тензопреобразователей Пассивный 2-канальный барьер для обеспечения искробе- зопасности датчиков, не содержащих собственных источ- ников электропитания (электропневматические преобра- зователи, позиционеры, термопары и др.) Барьеры искрозащиты в корпусах для установки на DIN- рельс со сменными предохранителями Активный одноканальный барьер с гальванической изоля- цией для подключения датчиков, не содержащих собствен- ных источников электропитания (электропневматические преобразователи, позиционеры и др.) с входным сигналом 4.. .20 мА, подключаемых по 2-проводной схеме Активный одноканальный барьер с гальванической изо- ляцией для питания и искрозащиты датчиков с выходным сигналом 4.. .20 мА, подключаемых по 2-проводной схеме. Выходной сигнал барьера по стандарту RS-485 24 12 12,8 24 24 VDC 105x73x20
ООО «Ленпромавтоматика»
БИ-001 БИ-002 БИ-003 БИ-005 БИА-101 Пассивный одноканальный барьер искрозащиты цепей термопар и 3-проводного подключения терморезисторов Активный одноканальный барьер для питания 2-прово- дных датчиков с выходным сигналом 4.. .20 мА Пассивный одноканальный барьер искрозащиты цепей термопар и 4-проводного подключения терморезисторо Активный одноканальный барьер для обеспечения искро- безопасное™ цепей систем сигнализации и управления с дискретными датчиками во взрывоопасных зонах Активный одноканальный барьер с гальванической изо- ляцией для обеспечения искробезопасности и питания датчиков с выходным сигналом 0/4.. .20 мА, преобразова- ния в выходной сигнал 0/1...5 В 1 36 1 12 24 114x99x17
НПО «ОВЕН»
ИСКРА-ТС.01 ИСКРА-АТ.01 ИСКРА-ТП.01 Пассивный одноканальный барьер искрозащиты для под- ключения терморезисторов типа ТСМ/ТСП; Пассивный одноканальный барьер искрозащиты для под- ключения датчиков с выходным сигналом 0...5 мА, 0/4...20 мА; Пассивный одноканальный барьер искрозащиты для подключения термопар и датчиков с выходным сигналом -1...+1В; 9 30 6 98x82x22
На рис. 1.87 представлен общий вид барьера искрозащиты Искра ТС.01 про-
изводства НПО «Овен».
Барьеры искрозащиты выпускаются рядом зарубежных фирм, среди которых,
прежде всего, следует отметить фирму Eicon Instruments (Италия), входящую с 2001 г.
в состав группы компаний Pepperl+Fuchs (Германия). Фирма выпускает барьеры ис-
крозащиты с гальванической развязкой серии К, серий HiD 2000 и HiD 3000, барьеры
искрозащиты на стабилитронах серии Z.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
127
В табл. 1.61 приведены характеристики барьеров искрозащиты с гальванической
изоляцией серии 400 фирмы Eicon Instruments, а на рис. 1.88 показан общий вид ба-
рьеров искрозащиты Eicon pZ600.
Таблица 1.61. Характеристики барьеров искрозащиты с гальванической
изоляцией серии 400 фирмы Eicon Instruments
Тип модуля Число каналов Входной сигнал во взрывобезопасной зоне Выходной сигнал во взрывоопасной зоне Питание Общие характеристики
J1D411 1 «СК» Релейный выход 24 VDC (25 mA) Рабочая температура О...6О°С; изоляция 2500 V (для серии 400);
р[)412 2 «СК» Релейный выход 24 VDC (25 mA)
J1D431/432 1/2 «СК» Релейный выход, 2А 24 VDC (15 mA)
pD441/442 1/2 «СК» 2 оптотранзистора 24 VDC (20 mA) Подключение «под винт»; габариты: 16,4х 112x92 мм.
pD471/472 1/2 20...30 VDC 2 оптотранзистора (40 mA при 24 VDC, 10 mA при 12 VDQ, нагрузка 300 Ом 20...30 VDC
Рабочий режим модуля конфигурируется пользователем: вход — контакт или
проксимитор; входной контакт — нормально разомкнут или нормально замкнут;
выходной транзистор нормально закрыт или нормально открыт; сигнализация обна-
ружения повреждения линии.
К другим барьерам искробезопасности с гальванической развязкой относятся
4-канальные модули дискретного ввода-вывода HiD серии 2000. Модули имеют све-
тодиодные индикаторы статуса сигнала и аварии, малую потребляемую мощность,
монтируются на объединительной плате.
Модули HiD серии 3000 объединяются по шине Fieldbus. Задание и контроль па-
раметров с управляющего персонального компьютера осуществляются через шину
Profibus.
Группой компаний Pepperl+Fuchs выпускается искробезопасная система ин-
терфейсов дистанционного процесса IS-RPI (Remote Process Interface). Искробезо-
Рис. 1.87
Рис 1.88
128
ГЛАВА 1
пасные блоки ввода-вывода могут устанавливаться прямо во взрывоопасной зоне,
что значительно сокращает стоимость электропроводки. Каждый функциональ-
ный модуль соединяет 16-канальные блоки ввода-вывода. Межсетевой интерфейс
питает до 8 функциональных модулей и соединяет их с внешней полевой шиной
(Profibus, ControlNet, Modbus, Foundation Fieldbus). Таким образом, один межсете-
вой интерфейс обеспечивает питание и сопряжение до 128 входов-выходов с по-
левой шиной.
В табл. 1.62 представлены функциональные модули искробезопасной системы IS-
RPI.
Таблица 1.62. Функциональные модули искробезопасной системы IS-RPI
Тип модуля Функция Число каналов Общие характеристики
RSD-BI-Exl6 Двоичный вход 16 HART- совместимость; искробезопасное питание во взрывобезопасном корпусе; «горячая» замена модулей
RSD-BO-Ex4 Двоичный вход 4
RSD-CI-Ex8 Аналоговый вход 8
RSD-CI-Ex8.H Аналоговый вход с протоколом HART 8
RSD-CO-Ex8 Аналоговый вход 8
RSD-CO-Ex8.H Аналоговый выход с протоколом HART 8 Возможность передачи сигналов из взрывоопасной зоны световодными линиями связи
RSD-TI-Ex8 Аналоговый температурный преобразователь (термопары и термометы сопротивления) 8
RSD-CT1-Ex2 Счетчик 2
1.9.4 Блоки питания
Блоки питания предназначены для преобразования сетевого напряжения 220 В
переменного тока в стабилизированное напряжение 24 или 36 В постоянного тока.
Большинство контроллеров, сенсорных датчиков и датчиков с унифицированным
выходным токовым сигналом требуют питающего напряжения 24 В постоянного
тока. Ряд датчиков и измерительных преобразователей давления (разрежения), пере-
пада давлений и др. питаются напряжением 36 В постоянного тока.
По числу выходных каналов есть блоки питания с числом выходных каналов от
одного до восьми. Одними из важнейших характеристик блоков питания являются
поканальная гальваническая развязка, защита от перегрузки и короткого замыкания
и др. Ряд блоков питания имеют светодиодную индикацию включения и перегрузки
по каждому каналу, совмещение функций блока питания, преобразования, корнеиз-
влечения и др.
Большинство блоков питания характеризуются коэффициентом пульсации вы-
ходного напряжения (+0,1% при колебании питающего напряжения +10%). Отдель-
ные модификации блоков питания имеют взрывозащищенное исполнение.
В табл. 1.63 представлены модификации блоков питания отечественного произ-
водства.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
129
Таблица 1.63. Блоки питания отечественного производства
Тип Выходное на- пряжение, В Число выход- ных каналов Максимальный ток на- грузки на канал, мА Вид монтажа Потребляемая мощность, Вт Габариты (ШхВ), мм
Метран-602 24 2 120 Щитовой 10 72x160
Метран-604 24 4 80 DIN-рельс 17 70x75
Карат-22 24 (36) 1...8 50... 100 Щитовой 15...60 76x170
БПД-40ЁХ 24 1; 2 < 100 Щитовой 6; 9 72x144
БП96/24-4 24 4 80 щитовой 15 48x96
БП96/36-4 (ГК «Метран») 36 4 80 DIN-рельс 25 70x75
БП-99/24 24 2 300 Щитовой 30 70x125
БП-99/36 36 2 200 Щитовой 30 70x125
БП 2036А/36-4 36 4 45 Щитовой 20 80x160
БП2036А/36-8 36 8 25 Щитовой 20 80x160
БПИ 24-1/1 (НПП «Элемер») 24 1 1000 DIN 30 30x78
SITOP Smart 24В/10 А (Siemens) 24 1 10А DIN 200 70x125
SITOP Модульный 24В/40А 24 1 40А Щитовой 720 240x125
1.9.5 Измерительные преобразователи тока и напряжения
Преобразователи однофазного и трехфазного тока и напряжения применяют-
ся в качестве датчиков переменного тока для электроизмерительных приборов и
систем, счетчиков, анализаторов количества и качества энергии, АСКУЭ, защиты
электродвигателей и др. потребителей электроэнергии. Преобразование тока и на-
пряжения до уровня 1 (5) А и 100 В осуществляются с помощью трансформаторов
тока и напряжения, которые выпускаются многими отечественными и зарубежны-
ми фирмами [1.110].
1.9.5.1 Трансформаторы тока
Трансформатор тока предназначен для измерения и контроля больших токов с
использованием стандартных измерительных приборов и устройств автоматическо-
го управления и контроля. Одновременно трансформаторы тока служат для изоля-
ции аппаратуры от потенциала сети, в которой производится измерение.
Трансформаторы тока Т-0,66 и ТШ-0,66 предназначены для передачи сигнала из-
мерительной информации измерительным приборам в установках переменного тока
частоты 50 Гц с номинальным напряжением до 0,66 кВ включительно. Трансформа-
тор тока Т-0,66 является катушечным, а трансформатор ТШ-0,66 — шинным.
Трансформаторы класса точности 0,2S; 0,2; 0,5S; 0,5 применяются в схемах энер-
гоучета для расчета с потребителями, класса точности 1 — в схемах измерения.
Трансформаторы предназначены для эксплуатации в климатическом исполнении
V категории размещения 3 по ГОСТ 15150.
Для трансформатора ТШ-0,66 первичной обмоткой служит шина распредели-
тельного устройства, пропускаемая через окно трансформатора. Выводы вторичной
обмотки расположены на корпусе трансформатора и закрываются защитной крыш-
5 Зак 3801
130
ГЛАВА 1
кой, что исключает несанкционированный доступ к трансформатору в процессе экс-
плуатации.
Трансформаторы выполнены в пластмассовом корпусе. По специальному за-
казу возможна поставка трансформаторов в корпусе из самозатухающих пластмасс.
Трансформаторы крепятся к заземленным конструкциям с помощью фланцев или
лап (усиленный вариант на токи 20-400 А).
Трансформаторы ремонту не подлежат. Номинальный класс точности трансфор-
маторов Т-0,66 — 0,2; 0,5S; 0,5; 1,0. Номинальные первичные токи — 10, 15, 20, 30,40,
50, 75,100, 150, 200, 300,400, 600, 800,1000 А.
Номинальный вторичный ток — 5 А. Коэффициент трансформации 2; 3; 4; 6; 8;
10; 15; 20; 30; 40; 50; 60; 80; 100; 120; 160; 200. Номинальное напряжение — 0,66 кВ.
Средняя наработка на отказ порядка 200000 ч.
В табл. 1.64 приведены характеристики трансформаторов тока Т-066.
Таблица 1.64. Характеристики трансформаторов тока Т-066
Номинальный первичный ток, А Номинальная вторичная нагрузка, ВА Класс точности
54-75,100,150 5 0,5
204-75,100,150,200 10
100 5 1
150 0,5
150 1
200 0,5
250 0,5
300,400 0.2S; 0,2; 0,5S; 0,5
Условия эксплуатации трансформаторов: температура от -45 °C до + 40 °C, габа-
ритные размеры 87x125x93 мм, масса не более 1,3 кг.
На рис. 1.89 показан общий вид трансформаторов Т-0,66 (а) и ТШ-0,66 (б).
Шинные трансформаторы тока ТНШЛ-0,66. Трансформаторы предназначе-
ны для встраивания в комплектные распределительные устройства (КРУ) и служат
для передачи сигнала измерительной информации измерительным приборам или
устройствам защиты и управления в установках переменного тока частоты 50 или 60
Гц с номинальным напряжением до 0,66 кВ включительно (рис. 1.90).
Опорные трансформаторы тока ТОП-0,66 предназначены для работы в следую-
щих условиях: высота над уровнем моря не более 1000 м; температура окружающей
среды при эксплуатации от -45 до +50 °C, при транспортировании и хранении от -50
до +50 °C; окружающая среда невзрывоопасная, не содержащая пыли, химически ак-
Рис. 1.89
Рис. 1.90
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
131
Рис. 1.91 Рис. 1.92
тивных газов и паров в концентрациях, разрушающих покрытия металлов и изоля-
цию; рабочее положение — любое.
Измерительные трансформаторы тока серии ТТ компании LEM. Компания LEM,
ведущий разработчик решений в области измерения электрических параметров,
представляет высокоэффективный трансформатор тока с разрезным сердечником
Split-core для мониторинга активной мощности (рис. 1.91).
Отличительные особенности:
• измерение переменного тока первичной обмотки от 0 до 100 А;
• высокие точность, линейность и незначительный сдвиг фаз между первичной и
вторичной обмотками;
• сердечник трансформаторов ТТ выполнен из нового типа феррита с улучшен-
ной магнитной проницаемостью, что позволяет осуществлять точные измерения
сигналов переменного тока в расширенном диапазоне частот 50/60 Гц.
Трансформаторы серии ТТ отличаются высокой точностью, имеют лучший по-
казатель при меньших значениях тока первичной обмотки. Ферритовый материал
обеспечивает линейность 0,1% и низкий сдвиг фаз между измеряемым напряжени-
ем и током. В отличие от использующихся многослойных материалов FeSi или FeNi,
новый плотный материал характеризуется незначительными воздушными зазорами,
благодаря чему трансформаторы нечувствительны к старению и температурным из-
менениям.
Технические параметры трансформаторов тока TT50-SDh TT100-SD:
• два диапазона измерения тока первичной обмотки: 50А и 100А;
• габариты TT50-SD: 36,5x43x31,5 мм с диаметром отверстия 8 мм; TT100-SD:
36,5x43x31,5 мм с диаметром отверстия 16 мм;
• выходной ток TT50-SD до 16 мА, TT100-SD — 33 мА;
• коэффициент трансформации 3000:1.
Трансфюрматоры тока ASR компании MBS Sulzbach Messwandler GmbH (рис. 1.92).
Измерительные трансформаторы с круглым отверстием под кабель или втулку серии
ASR, встраиваются в соединения шин или в место подключения кабеля к шине. Втул-
ки из высококачественной меди обеспечивают прочное соединение.
Отличительные особенности:
• первичные токи 30...1000 А;
• вторичный ток 1 или 5 А;
• классы точности 1.0, 0,5, 0,2, 0,5s, 0,2s;
• диаметр отверстия под втулку 21, 22,5,42мм;
• толщина трансформаторов 44, 48,5, 49,5, 60мм.
132
ГЛАВА 1
Рис. 1.93
Рис. 1.94
Трансформаторы тока ASK (рис. 1.93). Измерительные трансформаторы серии
ASK, имеют универсальное или прямоугольное отверстие с фиксаторами.
Отличительные особенности:
• первичные токи 30...7500 А, вторичный ток 1или 5 А;
• классы точности 1,0, 0,5, 0,2, 0,5s, 0,2s;
• универсальное и прямоугольное окно для шин от 20x5 до 130x130 мм.
• универсальное окно также для кабеля/ втулки/шпильки диаметром от 17,5 до
90 мм.
Трансформаторы тока KBU (рис. 1.94). Измерительные трансформаторы тока с
разъемным сердечником серии KBU обеспечивают легкую замену при изменении на-
грузки на шине в случае модернизации объекта. Регулируемые фиксаторы обеспечи-
вают надежное закрепление трансформатора в любом положении на шинах меньше
размера окна. Вторичный ток 1 или 5 А. Класс точности 1,0 и 0,5.
Трансформаторы тока с преобразователем 4...20 мА фирмы CIRCUTER (Испа-
ния). Трансформаторы тока серий TI-420, TP-420, ТСМ-420, ТСВ-420 представляют
собой трансформаторы тока и измерительные преобразователи в одном устройстве.
Применяются в системах измерений и автоматики, требующих стандартные входные
сигналы постоянного тока 4...20 мА.
Для питания преобразователей необходим либо источник постоянного тока
10...28В или 7,5...36 В (TI-420, TP-420, ТС-420), либо 220...230 В переменного тока
(ТСМ-420, ТСВ-420). Для преобразователя ТС 020 дополнительного питания не тре-
буется.
При монтаже трансформаторы тока закрепляются на шине или на любой несу-
щей поверхности. Модель ТСМ-420 монтируется на DIN-рейку. Трансформаторы
тока ТР-420 с разъемным сердечником применяются для монтажа на существующих
Рис. 1.95
Рис. 1.96
Рис. 1.97
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
133
сетях. Их конструкция позволяет вести монтаж без отсоединения шин и без отклю-
чения напряжения.
Серия трансформаторов тока TI-420-35 (-70, -105) различается отношением то-
ков входа/выхода, равным 2,5; 5; 10; 20; 50; 100; 250; 500; 750; 1000 и 1500.
Трансформаторы тока применяются в диапазоне температур -10...+50°С, про-
должительная перегрузка до 1,5 /ном.
При необходимости установки трансформаторов тока и напряжения во взры-
воопасной среде выбирается взрывобезопасное исполнение, либо трансформаторы
помещаются в специальные корпуса для использования во взрывоопасных средах.
Например, корпуса типа Cubo ХРСР фирмы Ensto Control Оу (Финляндия) с катего-
рией взрывозащиты Exe IIU или др.
Материал корпусов поликарбонат или металл.
На рис 1.95 и 1.96 показаны трансформаторы тока фирмы CIRCUTOR с разъем-
ным магнитопроводом и с креплением на DIN-рейку.
Основные технические характеристики трансформаторов токов фирмы
CIRCUTOR приведены в табл. 1.65
Таблица 1.65. Технические характеристики трансформаторов токов
фирмы CIRCUTOR
Тип/ TI-420 ТР-420 ТСМ-420 ТСВ-420 ТС-420 ТС-020
серия 35 70 23 58 88 25 35 70 ТС5 ТС6 ТС8 ТС5 ТС6 ТС8
Диам. под кабель, мм 35 70 — — — 25 35 70 20 28 44 20 28 44
Размер под шину, мм 20x30 50x80 80x80 70 25x5 40x10 60x12 25x5 40x10 60x10
2,5 А X X
5А X X X X X
10 А X X X X X X
20 А X X X X X X
50 А X X X X X X
100 А X X X X X X X X X X
200 А X X X X X
250 А X X X X X X
300 А X X X
500 А X X X X X X X
750 А X X X X
1000 А X X X
1.9.5.2 Трансформаторы напряжения
Трансформаторы напряжения предназначены для преобразования высокого на-
пряжения до стандартного значения 100 В и для гальванической изоляции цепей вы-
сокого напряжения от измерительных цепей и цепей релейной защиты. Вторичную
обмотку трансформатора рекомендуется заземлять (рис. 1.97).
Среди большого числа трансформаторов напряжения, выпускаемых различны-
ми фирмами, освоены в производстве трансформаторы малой мощности со встро-
енными защитными предохранительными устройствами, трансформаторы класса
точности 0,05; 0,1 и 0,2.
134
ГЛАВА 1
Известны понижающие трансформаторы типов ОСО, ОСОБ, ТБС2, ОСМ1 и др.
Понижающие трансформаторы серии ОСО-0,25 выпускаются на напряжения
127/12, 127/36; 220/12 (24, 36, 42,110); 380/12, 380/220. Понижающие трансформа-
торы серии ОСОВ-0,25 выпускаются на напряжения 127/12; 220/12 (24, 36, 42, 127);
380/36 (42, 127). Трансформаторы ТБС2-0.1 УЗ выпускаются на напряжения 220/36-
12, 220/24-12, 380/15-22.
ГОСТ на трансформаторы напряжения измерительные лабораторные 23625-2001
устанавливает номинальную мощность трансформаторов из ряда 5; 10; 15; 25 В-А.
1.10. Исполнительные механизмы
Исполнительные механизмы (электрические, пневматические, гидравлические)
предназначены для перемещения (поворотного или поступательного) регулирующего
органа в системах управления технологическими процессами. В качестве регулирую-
щих органов в АСУ ТП используются запорные и регулирующие односедельные и двух-
седельные клапана, клапаны типа «баттерфляй», шаровые запорные и регулирующие
краны, пробковые краны, заслонки (шибера), поворотные дисковые затворы и др.
1.10.1 Электрические исполнительные механизмы
Электрические исполнительные механизмы (Э14М) по принципу действия делят
на электромагнитные (соленоидные) и моторные. Электромагнитные ЭИМ представ-
ляют собой электромагнит с плунжером, связанным с регулирующим органом (РО).
При подаче командного импульса на электромагнит плунжер втягивается внутрь
электромагнита, перемещая РО. При снятии сигнала плунжер под действием воз-
вратной пружины устанавливается в начальное положение. В зависимости от кон-
струкции РО электромагнитные ЭИМ имеют исполнение НО («нормально открыт»)
или НЗ («нормально закрыт»). Ввиду того, что РО может занимать одно из двух край-
них положений («закрыто» или «открыто») электромагнитные ЭИМ применяются в
схемах двухпозиционного регулирования, а также в схемах аварийной защиты и бло-
кировки. ЭИМ имеют ряд преимуществ перед пневматическими и гидравлическими
ИМ. Подвод питания осуществляется по проводам, монтаж и эксплуатация которых
значительно проще, чем монтаж импульсных линий. Недостатком ЭИМ является не-
который выбег сервомотора и люфты редуктора.
Управление электрическим исполнительным механизмом (ЭИМ) осуществляет-
ся контактным способом (с помощью контактов реле или магнитного пускателя) или
бесконтактным способом (с помощью бесконтактных ключей пускателей, тиристор-
ных или симисторных ключей).
Для контроля положения вала ЭИМ и регулирующего органа ЭИМ комплектует-
ся контактным блоком сигнализации положения (блок концевых выключателей) или
бесконтактным (индуктивный, реостатный или токовый). Блок концевых выключа-
телей (БКВ) обеспечивает сигнализацию при нахождении вала ЭИМ в крайних по-
ложениях и прерывание перемещения вала в соответствующем направлении.
Концевые выключатели могут быть смещены (раздвинуты или сдвинуты) в пре-
делах сектора угла поворота вала ЭИМ. Поворот вала ЭИМ составляет для большин-
ства однооборотных ЭИМ 0,25 оборота (90°) или 0,63 оборота (225°).
Одним из крупнейших российских производителей ЭИМ является ОАО «Завод
Электроники и Механики (ЗЭиМ)» (г. Чебоксары) [1.111]. Предприятие выпускает
блоки сигнализации положения индуктивные БСПИ (диапазон 0... 10 мГн), блоки сиг-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
135
нализации положения реостатные БСПР (диапазон 0...120 кОм), блоки сигнализации
положения токовые БСПТ (диапазон 0...5, 0...20 или 4...20 мА). Также для сигнали-
зации положения регулирующего органа ЭИМ может комплектоваться механизмом
сигнализации положения МСП-1. Выходной сигнал МСП-1 токовый (0...5 мА при со-
противлении нагрузки 2,5 кОм и 0.. .20 мА, 4.. .20 мА при сопротивлении нагрузки до
1 кОм). Питание блока МСП-1 составляет 220 В, 50 Гц. Для взрывозащищенного ис-
полнения выпускаются блоки сигнализации положения соответственно БСПР-ПВТ6,
БСПТ-ПВТ6 и блоки концевых выключателей БСП-ПВТ6. Некоторые МЭО имеют руч-
ной маховик для поворота вала редуктора без помощи электродвигателя.
В зависимости от климатических условий работы ЭИМ по ГОСТ 15150 имеют
различное климатическое исполнение: У2 (-30...+50°C, относительная влажность
до 100% без конденсата), УЗ (-10...+50°C, относительная влажность до 95% без
конденсата), Т2 (-10...+50°С, относительная влажность до 100% без конденсата),
ТЗ(+5...+50°С, относительная влажность до 100% без конденсата) и ряд др.
В табл. 1.66 приведены характеристики ЭИМ ОАО «ЗЭиМ».
Таблица 1.66. Характеристики ЭИМ ОАО «ЗЭиМ»
Тип Потребляемая мощность, Вт Тип электродвигателя Тип командного устройства Габаритные размеры, мм
МЭО-6,3/10-0,25-01 46 ДСОР-68-0,25-150'1 ПБР-2М 230x200x185
МЭО-16/63-0,25-01 46 ДСОР-68-0,25-150 ПБР-2М 230x200x185
МЭО-40/10-0.63-99К 95 ДСТР-110-0,6-1362> ПБР-ЗА 235x200x185
МЭО-100/63-0,63-99К 170 ЗДСТР-135-1,6-150" ПБР-ЗА 440x315x305
МЭО-250/63-0.63-99К 250 ЗДСТР-135-4,0-150 ПБР-ЗА 440x315x305
МЭО-630/63-0.63-92КБ 200 АИР-56А4 ПБР-ЗА 445x452x402
МЭО-10/Ю-0,25-ПВТ4-00 ПО ДСТР-116-0,6-136-ПВТ4 ПБР-2М 410x265x305
МЭО-16/Ю-0,25-ПВТ4-00 НО ДСТР-116-1,6-136-ПВТ4 ПБР-2М 410x265x305
МЭО-40/25-0.25-ПВТ4-00 170 ДСТР-116-1,6-136 IIBT4 ПБР-2М 410x265x305
МЭОФ-6,3/10-0,25-02 46 ДСОР-68-0,25-136 ПБР-2М1 245x200x185
МЭОФ-16/63-0,25-02 36 ДСОР-68-0,25-136 ПБР-2М1 245x200x185
МЭОФ-40/160-0,63-02 46 ДСОР-68-0,25-136 ПБР-2М1 245x200x185
МЭОФ-6,3/ 12,5-0,25-ИВТ5-03 60 ДСТР-116-1,0-136 IIBT4 ПБР-ЗА 320x150x210
МЭМ-6,3/63-10-96 6,3 АИР 56В4 ПБР-ЗА 255x150x285
МЭМ-16/63-10-96 16 ПБР-ЗА 255x150x285
МЭМ-63/63-10-ПВТ4-98 6,3 ПБР-ЗА 152x280x500
МЭП-25000/100-50-99 200 Номин. усилие на штоке: 25000 Н; ход штока-50 мм ПБР-2М1 325x330x720
МЭП-20000/240-120-00 200 Номин. усилие на штоке: 20000 Н; ход штока 120 мм ПБР-ЗА 325x330x840
ПЭОЗ-13-1,5-02К+ 100 ДСТР-110-0,6-136 ПБР-ЗА —
ПЭОЗ-21-1.5-ПВТ4-02 НО ДСТР 116-0,6-ПВТ4 ПБР-ЗА 375x265x305
ПЭОМ-8/80-0,25-02 10 АИР 63 А6 ПБР-2М —
ПЭМ-А7 180 Асинхронный. Настройка номин. крутящего момента 25...70 Н-м; число оборотов 10...45 ПБР-2М 373x332x559
11ДСОР-68 — малогабаритный синхронный двигатель с числом оборотов вала 150 об/мин.
2> ДСТР-110 — малогабаритный синхронный двигатель с числом оборотов вала 136 об/мин.
3> ЗДСТР-135 — малогабаритный синхронный двигатель с числом оборотов вала 150 об/мин.
4> ПЭОЗ-13-1,5-02К: 13 — номинальный крутящий момент, 13Н; 1,5 — скорость вращения вала, 1,5 об/мин.
136
ГЛАВА 1
Рис. 1.98
Рис. 1.99
Рис. 1.100
Рис. 1.101
Пример обозначения электрического исполнительного механизма ЗЭиМ:
МЭО-16/10-0.25И-11ВТ4-00-КБ-У2
МЭО — механизм электрический однооборотный;
16 — номинальный крутящий момент на выходном валу, 16 Н-м;
10 — номинальное время полного хода выходного вала, 10 с;
0,25 — номинальный полный ход выходного вала, 0,25 об. (90°);
И — индуктивный блок сигнализации положения выходного вала;
ПВ — категория взрывоопасности смеси;
Т4 — температура воспламенения смеси от 135 до 200 °C;
00 — год разработки, 2000 г.;
К — трехфазное напряжение питания;
Б — токовый датчик и встроенный блок питания;
У2 — климатическое исполнение.
Помимо однооборотных механизмов типа МЭО ОАО «ЗЭиМ» выпускает ме-
ханизмы однооборотные фланцевые — МЭОФ, многооборотные — МЭМ, прямо-
Рис. 1.102
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
137
ходные — МЭП и МЭПК, приводы однооборотные запорные — ПЭОЗ, приводы
однооборотные малой мощности — ПЭОМ, приводы многооборотные — ПЭМ. Ме-
ханизмы МЭО объединяются с регулирующим органом посредством рычагов и тяг.
Механизмы МЭОФ, МЭМ, МЭП и приводы ПЭОЗ, ПЭОМ и ПЭМ устанавливаются
непосредственно на трубопроводную арматуру.
На рис. 1.98 представлен механизм типа МЭО-6,3, на рис. 1.99 — МЭО-630, на
рис. 1.100 — МЭОФ-250/ 63-0.25-ПВТ4-01. На рис. 1.101 показан привод однообо-
ротный запорный ПЭОЗ-ОЗК.
Помимо ОАО «ЗЭиМ» электрические исполнительные механизмы выпускают-
ся рядом предприятий РФ, среди которых МЗТА, ОАО «Тулаэлектропривод», ЗАО
«НПП «Автоматика» (г. Владимир), ОАО НПП «Эра» (г. Пенза), ЗАО «Армагус» (г.
Гусь-Хрустальный), а также «Днепродзержинский завод электрических исполнитель-
ных механизмов» (Украина), «Термо-К» (Беларусь) и др.
На рис. 1.102 приведена схема дистанционного управления электропривода
ПЭОЗ-ОЗК.
1.10.2 Электропривод с преобразователем частоты
Необходимость регулирования скорости вращения механизмов возникает
во многих производственных процессах. Это насосы, вентиляторы, конвейеры,
подъемно-транспортное оборудование, станки, вытяжные машины, центрифуги,
мельницы, экструдеры, буровые механизмы и др.
Наибольшее применение в промышленности нашли преобразователи частоты с
асинхронными двигателями с короткозамкнутым ротором. Регулирование скорости
вращения вала двигателя осуществляется путем изменения частоты и напряжения пи-
тания двигателя. Преимуществом такого электропривода является его простота и на-
дежность, вызванная отсутствием трущихся частей (коллектора и щеток, характерных
для электропривода постоянного тока), механических узлов (характерных для механи-
ческих вариаторов скорости) или гидросистем (для гидравлического двигателя).
Основными достоинствами регулирования скорости двигателя с помощью пре-
образователя частоты являются:
• высокая точность поддержания заданной скорости;
• мягкий пуск без механических и электрических перегрузок;
• регулируемое время ускорения и замедления вращения;
• возможность дистанционного управления приводом, в том числе по локаль-
ной сети;
• экономия электроэнергии (режим энергосбережения);
• возможность работы двигателя во взрывоопасной зоне;
• увеличение срока службы привода;
• снижение эксплутационных затрат и др.
Преобразователь частоты состоит из стандартного выпрямителя однофазного
или трехфазного напряжения питания, звена постоянного тока (фильтра) и инверто-
ра с реализацией алгоритмов скалярного или векторного управления для разомкну-
той или замкнутой систем. Как правило, инвертор выполнен на базе силовых тран-
зисторных ключей IGBT (Insulated Gate Bipolar Transistor — биполярный транзистор
с изолированным затвором), способных работать при высоких токе и напряжении
и высокой частоте коммутации (рис. 1.103). Новые силовые модули IPM (Intelligent
Power Modules) в ближайшие годы могут заменить IGBT.
138
ГЛАВА 1
ВЫПРЯМИТЕЛЬ ФИЛЬТР ИНВЕРТОР
Рис. 1.103
Принцип работы и устройство преобразователей частоты рассмотрены в работах
[1.112-1.117]. К основным техническим характеристикам различных типов частотно-
регулируемых электроприводов относятся:
• максимальные выходная мощность и ток преобразователя частоты и максималь-
ная мощность электродвигателя;
• вольт-частотный и (или) векторный способы управления скоростью;
• перегрузочная способность преобразователя частоты;
• диапазон регулирования частоты (скорости) при управлении с датчиком или без
датчика обратной связи;
• функция автоматического энергосбережения при работе с насосами и вентиля-
торами;
• защитные функции преобразователя (защита от короткого замыкания, перегре-
ва, холостого хода, обрыва фаз, бросков напряжения и др.);
• автоматический рестарт после пропадания сетевого напряжения с возможно-
стью «подхвата» частоты вращения;
• работа по циклограмме;
• способы торможения двигателя (торможение постоянным током с внутренним
или внешним тормозным резистором, комбинированное, рекуперативное и
скольжением);
• наличие встроенных ПИ-, ПИД-регуляторов, последовательных интерфейсов;
• характеристики и число входных и выходных сигналов;
• программное обеспечение работы электропривода;
• многофункциональная панель управления (пульт оператора);
• возможность синхронного управления несколькими приводами от одного пре-
образователя и ряд др.
Как правило, мощность частотного преобразователя выбирается равной (или
чуть больше) мощности электродвигателя. Это правило распространяется на
электродвигатели с номинальным числом 1500 и 3000 об/мин. При использова-
нии др. электродвигателей или в некоторых особых случаях выбор частотного
преобразователя должен соответствовать условию, при котором номинальный
выходной ток преобразователя должен быть не меньше номинального тока элек-
тродвигателя.
Для повышения надежности работы преобразователя в его схеме предусмотрены
сетевые (входной и выходной) дроссели, фильтры электромагнитной совместимости
(ЭМС-фильтры), соответствующие нормам излучения EN 55011 класса А и В, радио-
частотные фильтры и др. аксессуары.
Входной дроссель применяется для компенсации высших гармоник из сети в пре-
образователь и обратно, а также для защиты конденсаторов промежуточного конту-
ра, диодов и тиристоров выпрямителя при бросках тока в сети и нагрузке.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
139
Выходной дроссель используется при длине кабеля между преобразователем и
электродвигателем более 50... 100 м. Назначение дросселя— подавление высокоча-
стотных гармоник в токе двигателя, вызывающих его дополнительный нагрев. Пре-
образователь формирует ток в обмотках двигателя методом широтно-импульсной
модуляции (ШИМ) по синусоидальному закону. Высокая частота ШИМ гарантирует
бесшумную работу электродвигателя. К другим функциям выходного дросселя от-
носятся ограничение амплитуды тока короткого замыкания за счет индуктивности
дросселя, компенсация емкостного тока в случае длинного кабеля, сглаживание бро-
сков напряжения на обмотках двигателя и др. Выбор дросселя зависит от напряже-
ния сети, диапазона рабочих частот и максимального тока электродвигателя.
Радиочастотные фильтры используются для снижения радиочастотных помех,
излучаемых преобразователем в питающую сеть. ЭМС-фильтры снижают излуче-
ние силовой части аппаратуры привода до пределов, необходимых в соответствии со
стандартом EN 55011 класс А и В. Класс А — длина экранированного силового кабеля
до 100 м, класс В — длина кабеля до 20 м. При установке ЭМС-фильтра контролиру-
ется ток заземления (утечки), величина которого для преобразователя со встроен-
ным или внешним ЭМС-фильтром не должна превышать порядка 30 мА.
Выбор преобразователя частоты со скалярным или векторным способом управ-
ления определяется требуемой мощностью преобразователя, видом нагрузки и др.
требованиями. Традиционно преобразователи частоты со скалярным способом
управления применяются для управления электродвигателями небольшой мощно-
сти. В большинстве преобразователей частоты предусмотрены как скалярный, так и
векторный алгоритмы управления.
Принцип скалярного способа управления состоит в том, что скорость вращения
магнитного поля статора пропорциональна частоте источника питания f При вольт -
частотном способе управления, когда U = F(f), электромагнитный момент зависит от
частоты и напряжения питания. В зависимости от вида нагрузки используются раз-
личные формы взаимосвязанного управления напряжением и частотой:
• при постоянном моменте нагрузки: UJfs = const;
• при постоянной мощности: (у /J/= const-
В случае вентиляторной нагрузки, когда нагрузка зависит от скорости, - имеем
квадратичную зависимость: const.
Для реализации принципа скалярного управления следует согласованно управ-
лять напряжением (током) статора эдектродвигателя при изменении частоты пита-
ния. В режиме скалярного управления используются схемы с датчиком скорост и или
без него. Для улучшения качества выходных характеристик в алгоритм скалярного
управления без датчика обратной связи введена функция компенсации скольжения,
при которой частота тока статора определяется алгебраической суммой заданной и
текущей частоты вращения ротора. Также известен алгоритм скалярного управления
с контролем потокосцепления ротора (FCC — Flux Current Control), которое поддер-
живается постоянным. В переходных режимах, однако, величина потокосцепления
не является постоянной, что ухудшает динамические характеристики электроприво-
да. Этот недостаток устраняется в электроприводе с системой векторного управле-
ния. Системы векторного управления называют также системами с ориентировани-
ем поля электродвигателя [1.115].
При использовании режима векторного управления возможно управление с
постоянным крутящим моментом на валу (СТ — Constant Torque) или переменным
140
ГЛАВА 1
крутящим моментом (VT — Variable Torque). Управление переходными процессами
электродвигателя переменного тока основано на следующих переменных состояния:
вектор тока статора Is, вектор тока ротора 1Г, потокосцепление статора потокос-
цепление ротора Преобразование сигналов, пропорциональных переменным со-
стояния, осуществляется с помощью преобразователя координат.
Векторное управление при разомкнутой системе (без датчика обратной связи по
скорости) обеспечивает поддержание скорости с точностью порядка + 0,5% и диапа-
зон скоростей 1:100. В этом режиме скорость вращения вала может быть рассчитана
путем точного измерения формы сигнала и обратной связи по трем выходным фа-
зам привода. Векторное управление в замкнутом контуре (с импульсным датчиком
скорости) обеспечивает более высокое быстродействие и повышенную точность по
скорости (от ± 0,02 до ± 0,001%), а также широкий диапазон скоростей 1:1000. В ка-
честве датчика обратной связи используется энкодер, с помощью которого произво-
дится расчет и управление углом поворота и скоростью вращения вала электродви-
гателя. В случае потери связи с энкодером, привод автоматически переходит в режим
векторного управления с разомкнутым контуром. Известны алгоритмы векторного
управления с помощью вектора тока (CFC — Current Flux Control) и вектора напря-
жения (VFC — Voltage Flux Control). Теоретические основы алгоритмов векторного
управления и системы электропривода с векторным управлением приведены в рабо-
тах [1.114- 1.117].
Преобразователь частоты имеет функцию энергосбережения, позволяющую
экономить от 5 до 60% электроэнергии путем поддержания оптимального КПД. Пре-
образователь автоматически отслеживает потребление тока, рассчитывает нагрузки
и при необходимости снижает выходное напряжение. При этом снижаются потери
на обмотках двигателя и повышается КПД.
Функции торможения основаны на подачах в одну
из фаз двигателя напряжения постоянного тока (рис.
1.104). Взаимодействие магнитного поля в этой фазе
с магнитным полем ротора приводит к быстрой оста-
новке двигателя. Существует также режим генератор-
ного торможения с подключением внутреннего тор-
Рис. 1.104 мозного резистора (до мощности примерно 7,5 кВт)
или внешнего (при больших мощностях).
На рис. 1.105 приведена схема подключения силовых цепей и цепей управления
преобразователя частоты Micromaster 420 фирмы Siemens.
Имеется ряд других функций, а именно:
• функция встроенного ПИД-регулятора и разнообразных модулей расширения
позволяет организовать контроль и управление технологическими параметрами,
интегрируя преобразователь частоты в существующие и проектируемые системы
управления;
• функция многоступенчатого регулирования скорости с переключением электро-
привода на ряд фиксированных скоростей;
• функция предотвращения опрокидывания ротора или функция ограничения мо-
мента при разгоне, торможении и в процессе работы; при разгоне и торможении
в случае задания большого ускорения и недостатка мощности двигателя увели-
чивается время разгона (торможения); при перегрузке — снижается скорость
вращения двигателя;
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
141
1, ОТ 200 В до 240 В от 200 В до 240 В
L----------л---------- /х/З, от 380 В до 480 В
L1
1 о
I Внешний
I источник
I питания
Внешний
источник
питания
L3
PF.
Аналоговый вход
Входное напряжение
от 0 Б до + 10 В
DIN2
0В
Я
: §
10
DIN3
Рис, 1.105
1+ 10 &
0В
I Rvar L
I >=4,7 кОм | AIN+^
AIN-
DINI
max 33 В, max 5 mA
08
+24 В(тах 100 mA)
RL1-B
RL.1-C
Выходные контакты реле
Xz 250 В, max 2 A
(индуктивная нагрузка)
= 30B,max5A
(омическая нагрузка)
AOUT+
AOUT-
Аналоговый выход
0 мА- 20 мА
Последова-
тельный
интерфейс
RS 485 (RS 232
/'+ N-
• функция «подхвата» скорости (частоты) работающего двигателя; в случае пуска
преобразователя при вращающейся нагрузке для предотвращения опрокидыва-
ния используется функция поиска скорости (функция подхвата работающего
двигателя); после определения скорости вращения нагрузки привод начинает ре-
гулирование с текущей скорости;
• защитные функции электропривода: токовая защита двигателя от перегрузки по
току; защита двигателя от перегрева; защита от короткого замыкания; -защита
от перенапряжения в звене постоянного тока; защита от замыкания выходных
фаз, в том числе на землю; защита от обрыва сетевых фаз; защита от колебаний
напряжения (до ± 15%); защита от перегрева выходных каскадов; защита от про-
142
ГЛАВА 1
Рис. 1.106
Рис. 1.107
пуска резонансных частот, могущих привести
к механическому резонансу.
Интерфейс пользователя преобразователя
частоты основан на принципах HMI и реали-
зуется с помощью встроенной панели управле-
ния, программного обеспечения, сетевых плат
и открытых стандартов на промышленные
сети. С помощью коммуникационных модулей
преобразователь частоты может быть подклю-
чен к различным открытым промышленным
сетям: Modbus RTU, Modbus Plus, Profibus DP,
Device Net, Interbus, Ethernet и др.
Пульт управления преобразователя служит для выполнения следующих функций:
• настройки параметров преобразователя;
• управления включением-отключением, изменения направления вращения;
• отображение основных параметров и состояния преобразователя (скорость, ча-
стота, величина тока, выходное напряжение, потребляемая мощность и др.);
• вывод сообщения об ошибках и диагностических сообщений и др.
Для отображения параметров используется встроенный черно-белый или цвет-
ной жидкокристаллический дисплей. Имеется возможность подключения выносной
ЖК-панели для управления и настройки параметров.
Программное обеспечение большинства преобразователей частоты работает под
управлением ОС Windows и позволяет выполнить настройку, конфигурирование,
диагностику, визуализацию, тестирование и архивирование параметров.
Большинство преобразователей имеют степень защиты IP20, однако известны
модели со степенью защиты IP54 и IP65.
К настоящему времени известно свыше 50 крупных фирм, производящих раз-
личные типы преобразователей частоты. В табл. 1.67 приведены основные техниче-
ские характеристики преобразователей частоты. На рис. 1.106 приведен общий вид
преобразователей частоты Micromaster 440 фирмы Siemens, а на рис. 1.107 преобразо-
ватель типа FR-F 700 (до 630 кВт) фирмы Mitsubishi Electric.
Помимо перечисленных в табл. 1.67 преобразователи частоты производят фир-
мы Yaskawa Electric (Япония), Delta Electronics Inc. (Тайвань), Emetron AB (Швеция), LG
Industrial System Co. (Корея), Matsushita Automation Controls (Япония) и др.
Таким образом, высокие технические характеристики, простота управления,
компактные размеры и низкая стоимость определили широкое применение частотно-
регулируемого электропривода в промышленности.
1.10.3 Сервопривод
Сервоприводом или сервомеханизмом (от латинского слова servus — слуга) на-
зывается устройство с обратной связью, осуществляющее за счет вспомогательного
источника механическое перемещение регулирующего органа системы управления
в соответствии с сигналами управления [1.118-1.1201- Таким образом, сервосистема
воспроизводит на выходе с требуемой точностью входные сигналы (осуществляет
высокоточное позиционирование).
Отличие сервомеханизма как следящей системы, от классической системы с обрат-
ной связью, заключается в том, что сервосистемы обладают свойством усиления мощ-
Таблица 1.67 Технические характеристики преобразователей частоты
№ п/п Тип (фирма) Напряжение (В), мощность (кВт) Режим управления двигателем Диапазон выходной частоты, Гц Входы Выходы Способ торможе- ния Перегрузочная способность, % Интерфейс Программное обе- спечение
1 ACS-800- 01/02 (АВВ) 3~ (380- 415) 1,5..ЛЮ 3~ (380-500) НО... 500 Прямое регули- рование момента (DTC) 0...300 AI —3 DI-7 АО —2 RO —3 (СК) Торможение по- стоянным током 150 ProfibusDP, Interbus, DeviceNet, CANopen Modbus +, Modbus RTU, Ethernet DriveSize, Drive OPC, DriveAP, Drive Windows 2.0
2 FR-D700 (Mitsubishi Electric) 1- (230) 0,1 - 2,2 кВт 3~ (400) 0,4 - 7,5 кВт Векторное управление 0,5.-400 AJ —2 DI - 5 АО - 1 DO —2 Торможение по- стоянным током 200 RS-485, Modbus RTU VFD Setup
3 FR-A700 (Mitsubishi Electric) 3 -(380-480) 0,4... 630 Векторное управление 0,2.-400 AI —3 DI —12 АО-2 DO —6 Торможение по- стоянным током 120-200 RS-485, Modbus RTU VFD Setup
4 Altivar 31 (Schneider Electric) 1~ (200-240) 0,18...2,2 3- (200-240) 0,18.-15 Вольт-частотное, векторное управ- ление 0...500 AI —3 DI — 6 RO —1 DO —1 (OK) Торможение по- стоянным током 200 ProfibusDP, Modbus RTU, Modbus+, Fipio, Ethernet PowerSuite
5 Altivar 71 (Schneider Electric) 3~(200-240) 0,35...75 3~ (380-500) 0,75.-500 Вольт-частотное и векторное управ- ление 0 ...1000 AI — 4 DI — 20 АО-3 DO —8 RO —4 Торможение по- стоянным током 150 CANopen, Modbus RTU, Modbus Plus, Fipio, ProfibusDP,Ethernet, DeviceNet, Interbus PowerSuite
6 Micromaster 420 (Siemens) 1- (200-240) 0,12..,3 3- (380-480) 0,37.-11 Вольт-частотное и управление с кон- тролем потокосце- пления (FCC) 0...650 AI-1 DI —4 AO —1 RO —1 (CK) Торможение по- стоянным током и комбинированное торможение 150 ProfibusDP, DeviceNet, CANopen, RS-232 Starter, Drive Monitor
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
Продолжение табл. 1.67
№ п/п Тип (фирма) Напряжение (В), мощность (кВт) Режим управления двигателем Диапазон выходной частоты, Гц Входы Выхода Способ торможе- ния Перегрузочная способность, % Интерфейс Программное обе- спечение
7 Micromaster 440 (Siemens) 1- (200-240) 0.12...3 3~ (380-480) 0,37...200 Вольт-частотное, векторное и управ- ление потокосце- плением (FCC) 0...650 AI —2 DI —6 АО —2 RO-3 (СК) Торможение по- стоянным током, комбинирован- ное, генераторное 150...200 RS-485, ProfibusDP, DeviceNet, CANopen, RS232 Drive Monitor
8 NXS (Vacon Оу) 3- (208-240) 0,37...30 3~ (380-500) 0.75-200 3-(525-690) 2,2...200 Скалярное и век- торное управление 0...7200 AI —2 DI-6 (базовая плата ОРТ—А8) АО-1 DO — 1 (базовая плата ОРТ-А8) Внешний или встроенный тор- мозной резисторы 200 RS232, RS-485, Profibus DP, CANopen, DeviceNet, Ethernet NC1131-3 Engineering, NCLoad, NCDrive
9 F5 General (KEB) 3~ (180-280) 0,37...75 3- (305-500) 0,37...315 Векторное управ- ление 0...1600 AI-2 DI —8 АО —2 RO —2 (СК) DO (ОК)—2 Торможение по- стоянным током 150 ProfibusDP, Interbus, CAN, DeviceNet, KEB- HSP5 COMBIVIS 5
10 VAT2000 (GE Power Controls) 3~ (200-230) 0,4...37 3~ (400-460) 1,7...75 3~ (400-460) 100...450 Вольт-частотное, векторное управ- ление 0...440 (вольт- частотное), 0...120 (вектор- ное) DI —8 R1-2 АО —2 RO — 2 (СК) DO-3 (ОК) Торможение по- стоянным током 120...150 ProfibusDP, RS232/ RS-485 Power DriveAid-1
11 Movidrive MDV (SEW Eurodrive GmbH) 3- (380-500) 1,5...90 Векторное управ- ление 0...400 AI-1 DI —6 RO — 1 (СК) DO —2 (ОК) Торможение по- стоянным током 50 Profibus DP, Interbus, CAN, CANopen, DeviceNet, RS-485 MOVI Tool
ГЛАВА 1
£
Окончание табл. 1.67
№ п/п Тип (фирма) Напряжение (В), мощность (кВт) Режим управления двигателем Диапазон выходной частоты, Гц Входы Выхода Способ торможе- ния Перегрузочная способность, % Интерфейс Программное обе- спечение
12 VLT 5000 (Danfoss) 3- (200-240) 0,75...37 3~ (380-500) 0,75...400 Вольт-частотное, векторное управ- ление 0...1000 AI-3 DI-8 АО-2 DO-2 (ОК) RO-2 (СК) Торможение по- стоянным током 150 RS-485, ProfibusDP, Interbus, DeviceNet, Modbus +, Modbus RTU, LonWorks VLT Motion Control Tool (MCT 10)
13 Commander SX (Control Techniques) 1~ (200 -240) 0,25...2,2 3- (200-240) 0,75...7,5 3- (380-480) 0,75...37 Вольт-частотное, векторное управ- ление 0...1000 AI —2(3) DI — 4(6) АО-1 RO - 1 (СК) DO- 1(2) (ОК) Торможение по стоянным током 150 RS-485, ProfibusDP, Interbus, DeviceNet, CANopen CT Soft
14 VFD-V (Delta Electronics Inc.) 3~ 380 (0,75...75) Вольт-частотное, векторное 0...600 AI —3 DI —8 АО —1 DO —2 RO-2 Торможение по- стоянным током 150...200 RS-485 VFD Com- munication Program
15 Varispeed F7 (Yaskawa Electric Corp.) 3- (380-400) (0,4... 160) Вольт-частотное, векторное 0...400 AI-1 DI-7 АО - I RO-3 Торможение по- стоянным током 150 RS-485, ProfibusDP, Interbus, DeviceNet, CANopen Custom Application Software Environment (CASE)
16 Starvert iH (LG Industrial Systems) 3- (220-230) 30... 55 3- (380-460) 30...220 Вольт-частотное, векторное управ- ление 0,5...400 A/D —6 (програм- мируют- ся) АО-1 DI —3, RO-2 Торможение по- стоянным током 150 RS-485, DeviceNet, F-Net. Profibus DP, Modbus-RTU Driveview 2.0
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
СП
146
ГЛАВА 1
ности за счет использования энергии вспомогательного источника. В состав сервопри-
вода входят сервоусилитель, серводвигатель и датчик обратной связи. Таким образом,
сервомеханизм представляет собой звенья замкнутой динамической системы автома-
тического регулирования с обратной связью. Сервопривод осуществляет высокоточ-
ное отслеживание входного сигнала в зависимости от изменения которого происходит
перемещение регулирующего органа системы управления. В качестве задающего сиг-
нала может быть, например, угол поворота командного вала, угловая скорость команд-
ного вала или напряжение потенциометра. Сигнал рассогласования в этих случаях уси-
ливается и прилагается к одной из обмоток возбуждения серводвигателя, управляемый
вал которого поворачивается до положения, когда рассогласование не станет равным
нулю. При этом за счет инерционности и запаздывания может наблюдаться колеба-
тельный процесс установления выходной величины. Поэтому оптимальная настройка
выходного параметра достигается за счет настройки таких величин, как коэффициент
усиления, чувствительность, запаздывание, демпфирование и др.
В качестве силового привода сервосистемы используются обычно электродвига-
тели переменного (постоянного) тока, гидро- или пневмосистемы.
Динамические характеристики сервопривода в составе следящей системы долж-
ны согласовываться с динамическими характеристиками других звеньев системы.
Основные требования, предъявляемые к сервоприводу, призваны обеспечить не-
обходимые показатели качества и прежде всего быстродействие и точность позицио-
нирования. Поскольку сервопривод должен воспроизводить управляющие сигналы с
высокой точностью без искажений, особое внимание при проектировании или выбо-
ре сервопривода уделяется не только статическим и динамическим характеристикам
сервопривода, но и характеристикам объекта управления и промежуточных звеньев
системы.
Помимо быстродействия и точности к характеристикам сервопривода относят
мощность серводвигателя, номинальный крутящий момент, скорость вращения и
момент инерции.
Быстродействием сервопривода называется время перехода сервопривода из
одного установившегося состояния в другое при подаче на вход системы единичного
ступенчатого воздействия.
Точность сервопривода определяется ошибкой установления сервоприводом но-
вого состояния равновесия. На показатель точности влияют автоколебания в систе-
ме, наличие люфтов, трения и пр.
Таблица 1.68. Характеристики сервоприводов фирмы Mitsubishi Electric
Тип сервопривода Тип серводвигателя Мощность сервод- вигателя, кВт Номинальный вращаю- щий момент, Н’М Скорость вращения, об/мин
MR-J3 Mitsubishi Electric HF-SP HF-KP 0,5...7 0,05...0,75 2,4...33,4 0,16...24 2000/3000 3000/6000
MR-J3 Mitsubishi Electric HC-SFS HF-RFS HC-KFS 0,5...7 1,0...5 0,05...0,75 2,4...33,4 3,18... 15,9 0,16...2,4 2000/2500 3000/4500 3000/4500
Мощность серводвигателя — это предельная выходная мощность, развиваемая
сервоприводом, находящимся под номинальной нагрузкой. Под номинальной на-
грузкой понимается момент (усилие), развиваемое сервоприводом, работающим с
максимальной полезной мощностью.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
147
Коэффициент полезного действия сер-
вопривода есть отношение максимальной
полезной мощности, развиваемой на выходе
серводвигателя, к потребляемой мощности
от сети.
Помимо этих основных характеристик
при исследовании сервопривода использу-
ются и ряд др. характеристик, свойственных
замкнутым системам автоматического ре-
гулирования. К ним относятся постоянная
времени сервопривода, время запаздывания,
время установления номинальной скорости
и др., а также конструктивные характеристи-
ки, определяемые габаритами и массой сер-
Рис. 1.108
вопривода.
В табл. 1.68 приведены технические характеристики сервоприводов фирмы
Mitsubishi Electric. Сервоприводы применяются для точного позиционирования за-
датчиков систем управления, в следящих системах, системах перемещения исполни-
тельных устройств в станках ЧПУ и в др. устройствах. На рис. 1.108 приведен общий
вид сервоприводов MELSERVO MR-J2S фирмы Mitsubishi Electric.
1.10.4 Шаговые двигатели и устройства управления
Шаговые двигатели (ШД) широко используются для управления станками с ЧПХ
в качестве маломощных приводов роботов и манипуляторов, для приборов управле-
ния позиционированием, в приборах телемеханики и вычислительной техники.
Шаговые двигатели работают в комплекте с контроллерами, выполняющими
функции логических устройств и электронных коммутаторов. Функциональная схе-
ма ШД приведена на рис. 1.109.
Формирователь импульсов (ФИ) преобразует входные импульсы произволь-
ной формы в прямоугольные импульсы определенной длительности. Электронный
коммутатор (ЭК) преобразует импульсы в напряжение, подаваемое через усилитель
мощности (УМ) на обмотки статора ШД.
Шаговый двигатель состоит из зубчатых статора и ротора, сердечники которых
выполнены из магнитомягкой стали. При возбуждении соответствующей фазы ШД
постоянным током его ротор поворачивается на фиксированный угол, называемый
углом шага или шагом. Величина шага различна для различных моделей ШД. Таким
образом, в ШД цифровой сигнал преобразуется в механическое перемещение ротора
ШД [1.121].
Шаговые двигатели имеют ряд достоинств, а именно:
• отсутствует обратная связь, необходимая для управления положением вала в
электроприводах;
• удобство управления с помощью цифровых систем управления;
• высокая точность частоты вращения (положения вала ротора).
Рис. 1.109
148
ГЛАВА I
За каждый импульс ШД поворачивается на фиксированный угол. Чем меньше
шаг, тем больше частота вращения. Число шагов за один оборот вала называется ша-
говым числом. Шаговое число S=360/a, где а — угол шага двигателя.
Применяются 3- и 4-фазные двигатели с величиной шага 1,8°; 2°; 2,5°; 5°; 7,5°;
15 °. Известны ШД с шаговым углом 0,72 °. Обычно 4-фазные ШД имеют шаговое чис-
ло 200. Кроме того, используются ШД с постоянными магнитами. Частота вращения
ШД (шаговая частота вращения) задается числом шагов в секунду и может обозна-
чаться в Гц.
Различают однополярное управление, при котором напряжение на каждой фазе
изменяется от 0 до + U и двухполярное управление — напряжение изменяется от -U
до +U. Кроме того, управление ШД называется импульсным, когда напряжение на
фазу или группу фаз подается в момент поступления сигнала, а по истечении опреде-
ленного времени фаза обесточивается. Зубцы ротора такого ШД устанавливаются по
оси зубцов статора за счет реактивного момента. Другой способ управления назы-
вается потенциальным управлением, при котором напряжение на фазе (группе фаз)
сохраняется неизменным вплоть до прихода управляющего импульса. Положение
ротора при этом фиксируется магнитным полем фазы, находящейся под напряже-
нием [1.120].
Напряжение, приложенное к фазе ШД, определяется уравнением
17ф = гф.Гф + <ДКф/Л,
где гф и /ф — активное сопротивление и ток фазы; 'Рф — потокосцепление фазы (за-
висит от конструкции ШД и способа коммутации обмоток статора).
Режимы работы ШД подразделяют на статический, квазистатический, резонанс-
ный и установившийся режимы.
В статическом режиме (/имп = 0) по статорным обмоткам протекает постоянный
ток, создающий неподвижное поле статора, при котором ротор ШД неподвижен.
В квазистатическом режиме при низких частотах (/"имп <f0) ШД работает в режиме
отработки единичных импульсов. Переходные процессы, характеризующиеся перио-
дом собственных колебаний ротора при отсутствии нагрузки на валу Т0=1//0=2л/а>0,
где/, — частота собственных колебаний ротора, угловая частота которых ш0 зависит
от момента инерции ротора, числа пар полюсов и статического момента. Все пере-
ходные процессы затухают к началу каждого следующего шага, а положение ротора
устойчивое.
Резонансный режим (/имп =/0) является неустойчивым. Для снижения колебаний
ротора в области резонансных частот применяется его торможение за счет встречной
коммутации фаз ШД.
Установившийся режим > Jo) характеризуется установившейся средней ча-
стотой вращения ротора. Помимо этих режимов работа ШД характеризуется пере-
ходными режимами (пуск, торможение, реверс).
Для каждого типа ШД существует предельная частота коммутации или часто-
та приемистости (fnp), которая для современных ШД находится в пределах от 100 до
1000 Гц.
Согласно классификации ШД делятся на реактивные, с постоянными магнитами
и гибридные [1.121].
Реактивные ШД. Принцип работы ШД приведен на рис. 1.110. Статор этого трех-
фазного ШД имеет 6 зубцов. Каждые два противоположных зубца, отстоящие друг
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
149
от друга на 180 °, образуют фазу. Катуш-
ки каждой фазы могут быть соединены
последовательно или параллельно. Когда
фаза возбуждена (замкнут один из пере-
ключателей S2 или 83), в зубцах фазы
возникает вращающий момент, приводя-
щий к тому, что зубцы ротора (в данном
случае их 4) устанавливаются на одной
прямой с возбужденными зубцами ста-
тора. Это положение называется положе-
нием равновесия, когда магнитное сопро-
тивление является минимальным. При
этом зубцы I, II и III в возбужденном со-
стоянии представляют северный полюс,
а Г, 1Г и ПГ — южный. Если отключить
фазу I и возбудить фазу II, то возникнет
магнитный поток, создающий «натяже-
Рис. 1.110
ние» магнитных силовых линий. В резуль-
тате этого магнитное сопротивление увеличивается и под действием возникшего
вращающего момента ротор повернется на угол 30 °. После выполнения ротором трех
шагов он вернется в исходное положение.
Помимо величины шага в градусах к основным параметрам ШД относятся:
• Максимальный статический (удерживающий) момент в Н-м. Это момент, кото-
рый может быть приложен к валу возбужденного ШД без последующего его вра-
щения.
• Фиксирующий момент — максимальный статический момент, приложенный к
валу невозбужденного ШД без его последующего вращения (Н-м) для ШД с по-
стоянными магнитами.
• Точность позиционирования (погрешностьуглового шага) в градусахили процент от
полного оборота (ошибка для реактивного ШД с шагом 15° составляет около ±0,1 °).
• Отношение крутящего момента (г-см) к моменту инерции ротора (кг-м2); это от-
ношение должно быть большим, чтобы при подаче входного импульса ротор ШД
смог повернуться с максимальным ускорением, а при прекращении последова-
тельности импульсов — остановиться в положении, определяемым последним
импульсом.
• Шаговая частота вращения (число шагов в секунду) и частота импульсов, выра-
женные в Гц. Для перехода к частоте вращения п в об/мин используется формула:
n = 60fl S, где f— шаговая частота вращения, 8 — число шагов.
• Ток фазы (А), сопротивление фазы (Ом), индуктивность фазы (мГн), напряжение
питания (В). Эти данные определяются типом ШД и приводятся в характеристи-
ках ШД.
Для реактивных ШД в целях увеличения крутящего момента, высокой точности
позиционирования и уменьшения габаритов воздушный зазор между статором и ро-
тором должен быть минимальным (обычно он находится в пределах 30... 100 мкм).
Также желательно иметь малый угол шага, что достигается увеличением числа зубцов
статора и ротора. Известны четырехфазные ШД с числом зубцов ротора равным 50
и числом шагов 200.
150
ГЛАВА 1
Фаза 4
ФазаЗ
Рис. 1.111
Число шагов S в зависимости от числа фаз т и числа зубцов ротора Np определя-
ется формулой: S = m-Np. Число шагов S при известном угловом шаге Qs определяется
значением: S = 360 / Q5.
Помимо рассмотренных однопакетных реактивных ШД, в которых фазы выпол-
нены з виде одного слоя (пакета), применяются многопакетные реактивные ШД.
Шаговые двигатели с постоянными магнитами. В этих
I—I ШД ротор представляет собой цилиндрический постоянный
+ £ / \ Фаза2 магнит, а статор имеет 4 зубца с обмотками — фазы 1...4 (рис.
1.111). При возбуждении фаз в последовательности 1 -2-3-4 ро-
тор будет поворачиваться по часовой стрелке с угловым шагом
90°. При удвоении числа зубцов статора угол шага будет 45°.
Поскольку намагниченность постоянных магнитов невы-
сокая, крутящий момент ШД с постоянными магнитами огра-
ничен.
Гибридные ШД. В ЩД этого типа используются принципы как реактивного, так
и ШД с постоянными магнитами. В 4-фазном гибридном ШД на полюсе статора рас-
полагаются не одна обмотка фазы, а две обмотки двух различных фаз, намотанных по
бифилярной схеме. При возбуждении катушки создают магнитные потоки различ-
ной полярности. Ротор представляет собой цилиндрический постоянный магнит, на
каждый из полюсов которого надет сердечник ротора с зубцами. Крутящий момент
создается за счет взаимодействия магнитных полей катушек и постоянного магни-
та ротора. Гибридные ШД применяются там, где требуется малый угловой шаг. Наи-
большее применение находят 4-фазные гибридные ШД с числом шагов 200 и углом
шага 1,8°. В работе [1-121] приведены примеры др. типов гибридных ШД — гибрид-
ные ШД с постоянным магнитом в статоре, ШД с внешним ротором и др. Основные
характеристики шаговых двигателей приведены в табл. 1.69.
Таблица 1.69. Характеристики шаговых двигателей
Тип Рабочий ток (фаза), А Сопротивление (фаза), Ом Индуктивность (фаза), мГн Крутящий момент, кгссм
Гибридные шаговые двигатели с угловым шагом 1,8°
FL20STH30 0,6 6,5 1,7 0,18
FL39ST20 0,5 13 7,5 0,8
FL57STH41 2,8 0,7 1,4 5,5
FL110STH201 8 0,5 11 300
ДШР60-0,1-1,8 2 0,66 1,3 0,3...16Н'М
Шаговые двигатели с постоянными магнитами с угловым шагом 7,5°
РМ 2515-01 0,5 10 2,7 0,11
РМ 3522-01 0,5 60 77,5 0,55
РМ4222-02 1,27 15 49,8 1,1
1.10.5 Энкодеры
Энкодером называется устройство для преобразования углового или линей-
ного перемещения в цифровой код (двоичный, код Грея и др.). Принцип действия
энкодеров заключается в фотоэлектронном сканировании оптических кодов.
Для контроля угловых перемещений в датчиках скорости вращения, ускорения,
положения, углов и пр. используются угловые или поворотные кодирующие устрой-
ства, для контроля перемещений — линейные.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
151
По способу преобразования энкодеры делятся на инкрементные и абсолютные
энкодеры. Инкрементные энкодеры (энкодеры приращений) определяют прираще-
ние относительно начального фиксированного (базового) положения. Абсолютные
энкодеры формируют выходной сигнал, определяющий абсолютную величину угло-
вого или линейного перемещения.
Как инкрементные, так и абсолютные энкодеры могут быть одно- или многообо-
ротными.
Принцип действия инкрементного энкодера заключается в формировании с по-
мощью источника света (инфракрасных светодиодов) световых потоков, проходя-
щих через защитную диафрагму и поступающих на фотодиодную матрицу и далее к
микропроцессору (рис. 1.112). В зависимости от угла поворота на выходе формирует-
ся код, соответствующий определенной позиции вала энкодера. Число импульсов за
один оборот вала для различных типов энкодеров достигает от 2048 до 10000. Число
импульсов, соответствующих углу поворота вала, подсчитывается счетчиком. Точ-
ность измерения угла поворота составляет несколько тысячных градуса, а при из-
мерении линейных смещений — доли миллиметра.
Абсолютные энкодеры формируют уникальный код для каждой позиции вала.
При этом счетчик импульсов не требуется, так как угол поворота вала определен в
каждый момент времени. Диск абсолютного энкодера имеет несколько концентриче-
ских дорожек, каждая из которых формирует уникальный цифровой код для каждой
позиции вала. Абсолютный энкодер сохраняет значение сигнала при потере питания,
устойчив к вибрациям и практически не подвержен помехам.
Однооборотный (single-turn) энкодер выдает абсолютное значение параметра в
пределах одного оборота. После каждого оборота значение кода возобновляется с его
начального значения.
Многооборотный (multi-tum) энкодер (рис. 1.113) имеет встроенный переда-
точный механизм (редуктор) из нескольких кодовых оптических дисков и способен
фиксировать не только угол поворота, но и число оборотов вала. Многооборотные
энкодеры способны фиксировать до 4096 оборотов вала.
Для определения направления вращения вала энкодера по часовой стрелке (CW)
или против часовой стрелки (CCW) используются два выходных канала (А и В).
Для определения точностных характеристик энкодера рассматривается разреше-
ние энкодера — число выходных импульсов за оборот вала и количество двоичных
слов за оборот вала (для абсолютных энкодеров).
Рис. 1.112
Рис. 1.113
152
ГЛАВА 1
Для линейных перемещений используются энкодеры на диапазон измерений от
30.. .40 мм до 1700 мм и более. Разрешение при этом составляет 0,1 мм и менее. В ка-
честве выходных интерфейсов широко используются RS-422, Profibus и CANopen. У
большинства энкодеров степень защиты не хуже 1Р65 и IP67.
Энкодеры выпускаются многими фирмами, среди которых Omron, SICK, Siemens,
Lenie&Linde, Fagor и др.
В табл. 1.70 приведены характеристики энкодеров фирмы Lenie&Linde (Швеция).
Таблица 1.70. Характеристики энкодеров фирмы Lenie&Linde (Швеция)
Тип энкодера1 Кол-во имп./об Диапазон частоты, кГц Тип выхода Питание, VDC Потребляемый ток (максим.), мА Диаметр корпуса, мм
RS310 25...1200 0...200 TTL 5/9...30 70 30
RS510 1...2500 0...100 TTL 5/9...35 55 58
RS560 1...5000 0...200 TTL, RS422 5/9... 30 45 68
DUO 525 5000 0...200 TTL, 2XRS422 5/9...30 90 68
ХН860 2048 0...100 HTL 5/9...30 60 100
TACHO 10 бит на 360° - 4...20 мА 9...36 60 89
1 Степень защиты по IEC 529 для RS 310 составляет IP67, для остальных — IP65. Допустимая вибрация
<100 м/с2 (50...2000 Гц), ударопрочность <1000 м/с2, температура окружающей среды -25...+75°С.
Новая линейка энкодеров фирмы Lenie&Linde имеет расширенный температур-
ный диапазон до +100 °C (RSI504, RHI504), рабочая температура энкодеров серии 500
Рис. 1.114
составляет -40...+70°C, вибрации до 300 м/с2. Энко-
деры фирмы Lenie&Linde Profibus DP и CANopen по-
вышенной точности (8192 дискрета) способны кон-
тролировать до 4096 оборотов. Серия энкодеров 800
предназначена для эксплуатации в тяжелых условиях
производства. На рис. 1.114 приведен общий вид эн-
кодеров фирмы Lenie&Linde.
1.10.6 Пневматические исполнительные механизмы
Пневматические исполнительные механизмы (ПИМ) наиболее эффективно ра-
ботают в пожаро- и взрывоопасных производствах, в условиях агрессивных сред,
характеризующихся наличием повышенной температуры, радиации, вибрации, маг-
нитных полей и пр. Пневматические устройства просты по конструкции, надежны
в эксплуатации и обслуживании. Как правило, пневматические системы дешевле
электрических и гидравлических систем, а по сравнению с последними не требуют
замкнутого цикла использования рабочей среды.
Наряду с перечисленными достоинствами пневматические системы имеют и ряд
недостатков, обусловленных самой рабочей средой. Это прежде всего сжимаемость
воздуха, которая подчас исключает плавность движения рабочих органов исполни-
тельных устройств, а также необходимость очистки воздуха во избежание появления
конденсата. Кроме того, пневматические устройства, по сравнению с электрически-
ми, имеют меньшую скорость срабатывания, а по сравнению с гидравлическими ис-
полнительными механизмами развивают значительно меньшие усилия.
Существуют определенные ограничения на длину трассы от регулятора до ПИМ
во избежание больших запаздываний (примерно до 300 м).
Устройства пневмоавтоматики можно классифицировать по функциональному
назначению (системы подготовки и транспортирования воздуха, датчики, преобра-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
153
зователи, измерительные и регистрирующие приборы, регуляторы, функциональ-
ные блоки, исполнительные устройства) и по давлению питания (системы низкого,
нормального и повышенного давления). К исполнительным устройствам относятся
пневмоцилиндры, поворотные однооборотные и многооборотные двигатели, мем-
бранные, шланговые и сильфонные исполнительные механизмы [1.122-1.132].
Системы с повышенным давлением питания представляют собой пневмопривод
и предназначены для силового воздействия на рабочие органы машин. В качестве
управляющих устройств в таких системах в основном применяются клапанные или
золотниковые распределители, а в качестве двигателей — пневмоцилиндры поступа-
тельного действия, поворотные и многоборотные двигатели.
В зависимости от типа привода ПИМ делят на мембранные и поршневые ис-
полнительные механизмы. Мембранный исполнительный механизм в качестве пре-
образователя давления сжатого воздуха в перемещение штока и связанного с ним
РО использует герметичную мембранную камеру с мембраной из резинотканевого
материала. На мембрану действуют сила давления от командного прибора, с одной
стороны, и сила противодействия возвратной пружины, с другой стороны. Условие
равновесия этих сил выражается равенством
ДР-Рэф = с5,
где: ДР — разность давлений на мембране; Рэф — эффективная площадь мембраны;
с — жесткость пружины; S — величина хода мембраны.
Мембранные исполнительные механизмы представляют собой механизмы пря-
мого действия (движение штока вниз) и обратного действия. При этом в зависимости
от конструкции РО обеспечивается исполнение механизма НО (нормально открыт)
или НЗ (нормально закрыт).
Статические характеристики мембранных исполнительных механизмов близ-
ки к линейным, однако они обладают зоной гистерезиса, составляющей до 10. ..15%
от наибольшего значения командного сигнала. Для уменьшения зоны гистерезиса
мембранные исполнительные механизмы комплектуются позиционером, который
представляет собой усилитель с обратной связью по положению штока. Управляю-
щий сигнал поступает в область мембраны позиционера, перемещение которой че-
рез золотник регулирует расход и давление воздуха, поступающего к мембранной
камере мембранного исполнительного механизма. Перемещение основной мембра-
ны ИМ через толкатель и пружину отрицательной обратной связи уравновешивают
силу, действующую на мембрану позиционера. Позиционер обеспечивает точность
позиционирования около 0,5% от диапазона регулирования. Для надежной работы
позиционера необходимо стабилизировать давление воздуха, поступающего к пози-
ционеру, и обеспечить его фильтрацию.
Поршневые исполнительные механизмы применяются в тех случаях, когда от
ИМ необходимо получить перемещение РО на значительное расстояние. Поршне-
вые исполнительные механизмы имеют зону нечувствительности не более 1%. Си-
ловая часть пневмопривода содержит пневмоцилиндр, шток которого соединен с
РО. При цикловом управлении приводом происходит перемещение исполнительно-
го механизма из одной крайней точки в другую. Для контроля положения поршня
пневмоцилиндра в настоящее время вместо концевых выключателей используется
магнитный датчик, устанавливаемый непосредственно на корпусе пневмоцилиндра,
и магнит, устанавленный в поршне [1.133,1.134].
154
ГЛАВА 1
^^1 В настоящее время ряд зарубежных фирм, таких как FESTO
(Германия), SMS (Япония), ENOTS (Англия), SAMSON (Герма-
ЩЯ ния), HI-FLEX (Финляндия), ASCO/Joucoma—Tic (Нидерланды),
1 I PARKER, CAMOZZI и др., имеющие свои представительства во
многих развитых странах, сосредоточили в своих руках разра-
ф ботку и выпуск оборудования пневмоприводов, управляемых от
! " ПЭВМ и контроллеров. В этих фирмах налажен массовый выпуск
основных компонентов силовых пневмосистем, в состав которых
входят технические средства подготовки сжатого воздуха, пневмо-
Чг распределители, пневмоцилиндры и контрольно-измерительная
аппаратура.
Фирма SAMSON выпускает большую серию регулирующих
клапанов (проходных, трехходовых, угловых), пневматические и
электропневматические позиционеры, электропневматические и пневмоэлектри-
ческие преобразователи, датчики положения, концевые выключатели и пр. К числу
выпускаемых цифровых позиционеров относятся HART-позиционер, PROFIBUS-PA-
позиционер и FOUNDATION Fieldbus-позиционер. На рис. 1.115 представлен общий
вид клапана с электропневматическим позиционером 3730-2 фирмы Samson. Среди
отечественных производителей отметим ПНФ «ЛГ автоматика», которая выпускает
отсечные (запорные), регулирующе-отсечные и клеточные регулирующие клапаны с
Ду от 10 до 200 мм и условной пропускной способностью от 0,06 до 630 м3/ч на услов-
ное давление от 1,6 до 16 МПа (марки КМР, КМО, КМРО), футерованные клапаны
для агрессивных сред (УИФ, МИУФ), клапаны высокого давления до 40 МПа (КВДР,
КВДО), виброустойчивые угловые клапаны, регулирующие клапаны для малых рас-
ходов (ПОУ-7М, -8М, - 9М) и др.
Для взрывоопасных производств клапаны комплектуются позиционерами
SIPART PS2 фирмы Siemens. На рис. 1.116 показан клапан ПОУ-8М с позиционером
SIPART PS2.
Характеристики пневмоприводов находятся в пределах: диаметр поршня
0,008...0,5 м, величина перемещения штока с поршнем до 3 м, давление питания в
пределах 0,4... 1,0 МПа (в отдельных случаях до 10 МПа), скорость перемещения до
3 м/с, число циклов доходит до 10 млн.
В настоящее время ввиду достижения высоких показателей надежности и безо-
пасности исполнительные устройства пневмоавтоматики находят широкое приме-
нение при создании промышленных роботов, управляемых программируемыми ло-
гическими контроллерами с помощью электропневматических
преобразователей.
Как в России, так и за рубежом ряд фирм США, Франции,
Японии, Италии, Швеции и др. стран выпускают гамму ро-
ботов с пневмоприводом для обрабатывающих и сборочных
производств. Это роботы РМ-12 фирмы KIKA, MNU 500 фир-
мы BOSH (Германия), UNIMATE фирмы KAWASAKI (Япония),
Е-401 фирмы VERSATRAN (Япония), AUTOPLACE фирмы
AUTO-PLACE (США), MECMAN (Франция) и др. Современные
сборочные роботы имеют цифровой пневмопривод и систему
управления, обеспечивающую связь рабочего цикла сборочно-
го робота с циклом работы обслуживаемого технологического
Рис. 1.116
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
155
оборудования. Такие роботы успешно применяются в гибких производственных си-
стемах (ГПС) сборочных машиностроительных производств [1.128-1.132] и наряду
с другим оборудованием входят в интегрированные производственные системы,
управляемые с помощью ЭВМ. Это основное направление, в котором совместно с
электро- и гидроприводом будут совершенствоваться и применяться пневматиче-
ские системы управления.
1.10.7 Гидравлические исполнительные механизмы
Гидравлические исполнительные механизмы или гидропривод имеют перед пнев-
матическими исполнительными механизмами ряд преимуществ, к которым следует
отнести более высокую мощность и быстродействие, малую удельную массу (масса
гидропривода, отнесенная к передаваемой мощности, кг/кВт), защиту от перегрузок
и большую надежность. Основным недостатком гидроприводов является их пожа-
роопасность, большие затраты на рабочую жидкость (масло), чувствительность к за-
грязнению рабочей жидкости и снижение КПД по мере износа движущихся частей.
Поэтому гидроприводы не используются в пожаро- и взрывоопасных производствах, в
частности в химической и нефтеперерабатывающей промышленности [1.135-1.142].
Гидроприводом называют совокупность гидромашин, гидроаппаратуры, трубо-
проводов и вспомогательных устройств, предназначенных для передачи энергии и
преобразования движения посредством жидкости.
К числу гидромашин относятся насосы (в данной работе не рассматриваются) и
гидродвигатели. Гидродвигатели подразделяются на гидродвигатели поступатель-
ного движения на базе поршневых устройств (гидроцилиндров), гидродвигатели
ограниченного поворота выходного звена (применяются в промышленных робо-
тах) и гидромоторы или гидродвигатели с непрерывным вращением выходного зве-
на (применяются в подъемных и поворотных устройствах). Поршневые исполни-
тельные механизмы подразделяются на механизмы одностороннего и двусторонне-
го действия (рис. 1.117).
Рис. 1.117
В гидроцилиндрах одностороннего действия жидкость под давлением от насоса
поступает к цилиндру 1 с одной стороны поршня 2 со штоком 3, а в гидроцилиндрах
двустороннего действия — с двух сторон. При анализе гидравлических САР приня-
то рассматривать гидравлический исполнительный механизм как единую систему,
включающую управляющие устройства и соединительные трубопроводы. В качестве
управляющих устройств используются золотниковые преобразователи, преобразо-
ватели типа «сопло-заслонка» и др. При этом входной величиной системы является
перемещение подвижных элементов управляющего устройства (плунжера золотника
или заслонки), а выходной — перемещение штока исполнительного механизма.
Характеристики гидроцилиндров: диаметр поршня составляет 80, 120 и 150 мм,
максимальный ход поршня 250...300 мм, время перемещения поршня до 25 с.
156
ГЛАВА 1
Гидроаппаратура — это дроссели, клапаны и гидрораспределители, служащие
для управления гидроприводом. Дросселем называется устройство, регулирующее
расход рабочей жидкости в зависимости от перепада давления до и после дроссе-
ля. Клапаны представляют собой устройства, изменяющие под действием потока
рабочей жидкости проходное сечение клапана. По назначению клапаны делятся на
напорные и редукционные (для стабилизации давления рабочей жидкости неза-
висимо от расхода), проходные (для сбрасывания излишнего давления жидкости),
обратные (для движения жидкости только в одном направлении).
Гидрораспределители служат для изменения направления движения потоков ра-
бочей жидкости. В основном применяются золотниковые гидрораспределители.
К вспомогательным устройствам относятся устройства, служащие для фильтра-
ции и нагрева/охлаждения рабочей жидкости. Также к вспомогательным устрой-
ствам относятся гидробаки.
В промышленности получил применение регулируемый гидропривод, в котором
скорость выходного звена может изменяться по заданному закону. Для этого исполь-
зуются два вида регулирования — дроссельное и объемное. При дроссельном регу-
лировании скорость выходного звена изменяется дросселированием потока рабочей
жидкости с отводом части потока через дроссель или клапан, минуя гидродвигатель.
При объемном регулировании скорость выходного звена изменяется за счет измене-
ния рабочего объема гидродвигателя.
Принцип наиболее часто используемого дроссельного регулирования заклю-
чается в том, что часть жидкости от насоса отводится через дроссель или клапан
на слив, минуя гидродвигатель. Схемы гидроприводов с дроссельным управлени-
ем приведены на рис. 1.118 [1.141]. На рисунке обозначены гидродвигатель 1, ги-
дрораспределитель 2, дроссель 3, переливной клапан 4, нерегулируемый насос 5.
Дроссель может быть установлен на входе в гидродвигатель (рис. 1.118, а), на вы-
ходе (рис. 1.118, б) или одновременно на входе и выходе (рис. 1.118, в). При пол-
ном открытии дросселя скорость поршня гидроцилиндра максимальная. По мере
уменьшения открытия дросселя давление перед ним повышается, клапан 4 приот-
крывается и часть жидкости от нерегулируемого насоса 5 идет на слив. При полном
закрытии дросселя скорость поршня становится равной нулю, а вся жидкость от
насоса идет через клапан на слив в бак.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
157
Связующим звеном между электронной схемой управления, получившей наи-
большее применение ввиду более высокой точности, быстродействия, многоканаль-
ное™, и гидродвигателями являются электрогидравлические усилители (преобразо-
ватели). К их числу относятся:
• электромеханические преобразователи (с перемещающейся катушкой или пере-
мещающимся якорем) электромагнитного типа. Принцип действия основан на
взаимодействии магнитного поля, создаваемого током управления, с подвижным
якорем, помещенным в магнитное поле.
• однокаскадные усилители мощности, к которым относятся усилитель мощности
типа сопло-заслонка, струйная трубка, клапанного типа (шариковые, конусные и
тарельчатые клапана) и золотникового типа (2-, 3- и многопозиционные золотни-
ки с числом каналов управления от 2 до 5).
• двухкаскадные усилители мощности. В качестве 1 -го каскада обычно использу-
ется сопло-заслонка, а в качестве 2-го каскада — золотниковый усилитель мощ-
ности. Выпускаются также усилители без обратной связи, с обратной связью по
положению, с обратной связью по расходу и с обратной связью по давлению.
• пропорциональные усилители мощности — используются в гидромашинах со
сложными циклограммами движений.
Гидролинии, используемые в гидроприводах, делят на всасывающие (рабочая
жидкость движется к насосу), напорные (рабочая жидкость под давлением движется
от насоса), сливные (рабочая жидкость движется в сливной гидробак). Среди гидро-
баков используются в основном гидробаки открытого типа.
В качестве рабочей жидкости в гидроприводах используется рабочая жидкость
минерального происхождения: трансформаторное, веретенное или индустриаль-
ное масло с вязкостью 10...40 сСт при температуре до 50°C. При более высоких
температурах используются синтетические жидкости на кремни йорганической
основе.
1.11. Приборы учета энергоносителей
К приборам учета энергоносителей относят средства учета тепловой энергии
(тепловычислители и теплосчетчики), электрической энергии и мощности (электро-
счетчики и сумматоры энергии), расхода технических газов и газовых конденсатов,
счетчики воды [1.143-1.149].
1.11.1 Теплосчетчики
Теплосчетчики предназначены для измерения и регулирования параметров те-
пловой энергии и теплоносителя в закры тых и открытых (водяных и паровых) систе-
мах теплоснабжения. Теплосчетчики применяются для коммерческого учета тепло-
вой энергии и массы теплоносителя при расчетах между потребителем и теплоснаб-
жающей организацией.
Принцип работы теплосчетчика состоит в измерении расхода, температуры и
давления теплоносителя (воды или пара) в системах теплоснабжения с последующим
расчетом по этим параметрам тепловой энергии и массы теплоносителя.
Теплосчетчики способны обеспечивать измерение и регистрацию параметров
теплоносителя по 1...8 трубопроводам, а также передачу данных о текущих или
усредненных среднечасовых, среднесуточных и других параметрах по интерфейсам
RS-232, RS-485, CAN.
158
ГЛАВА 1
Расчет основных параметров энергоносителя осуществляется с помощью тепло-
вычислителей, являющихся составной частью теплосчетчиков. Тепловычислители
рассчитаны на прием сигналов от датчиков расхода, давления, перепада давлений,
температуры, градиента температур. Входными сигналами датчиков могут быть то-
ковые сигналы (0...5 мА, 0/4...20 мА), сигналы напряжения (0,4...2 В.), частотные
сигналы (0... 1000 Гц), изменение сопротивления термометров сопротивления с НСХ
50М, 50П, 100М, 100П, 500П, PtlOO, Pt500.
В состав теплосчетчиков, выпускаемых фирмами РФ, входят отечественные
преобразователи расхода серии ВЗЛЕТ, ПРЭМ, СУР, ВСТ и др., преобразовате-
ли температуры ТСПУ-205, Метран-205, КТСПР, КТПТР и др., преобразовате-
ли давления Сапфир-22, Метран-55 и др., а также зарубежные преобразователи
с унифицированными выходными сигналами фирм Dcmfoss, JUMO, Ргетех и др.
В составе теплосчетчиков вместо преобразователей расхода с аналоговым или
частотным выходным сигналом могут использоваться счетчики горячей воды
крыльчатые (Ду<50 мм) или турбинные (Ду>50 мм) с дискретным выходным сиг-
налом [1.147-1.149].
Принцип работы теплосчетчика основан на измерении сигналов от преобразо-
вателей расхода, температуры и давления в подающем и обратном трубопроводах и
вычислении потребления количества тепла Q с использованием значений массового
расхода G и разности энтальпий (теплосодержания) в подающем и обратном трубо-
проводах (й[ и h2 соответственно) по формулам:
Г.
Q = - G2h2; Q = J G(ht - h2 )dT.
r,
Единицы измерения параметров теплосчетчиков:
• количество теплоты: ГДж, Гкал;
• объемный расход теплоносителя: м3/ч;
• массовый расход теплоносителя: т/ч;
• объем теплоносителя: м3;
• температура теплоносителя: °C;
• избыточное давление в трубопроводах: МПа.
Помимо функций измерения и регистрации теплосчетчики осуществляют регу-
лирование (поддержание) теплового режима и параметров теплоносителя в системах
тепло- и водоснабжения. С помощью теплосчетчиков может быть задан темпера-
турный график отопления в зависимости от температуры наружного воздуха с дис-
танционным (или автоматическим) переводом системы отопления в режим с повы-
шенным или пониженным теплопотреблением (ночной режим). При этом поддержи-
вается определенная температура в контурах отопления и горячего водоснабжения.
Уравнения измерения тепловой энергии и количества теплоносителя соответствуют
МИ 2451-98.
На рис. 1.119, а приведен общий вид тепловычислителя СПТ961М «НПФ Логи-
ка», на рис. 1.119, б— теплосчетчика-регистратора «Взлет ТСР-М» ЗАО «ВЗЛЕТ», на
рис. 1.119, в — тепловычислителя ВКТ-7 ЗАО «НПФ Теплоком» и на рис. 1.119, г —
электромагнитного теплосчетчика КМ-5 «ТБН Энергосервис».
В табл. 1.71 приведены технические характеристики отечественных теплосчет-
чиков.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
159
Таблица 1.71. Характеристики отечественных теплосчетчиков
Тип теплосчетчика Тип тепловы- числителя Диапазон и тип преобразователя Погреш- ность, % Выходной сигнал Степень защиты
расход темпе- ратура, °C Давление, МПа
Логика 961К (ЗАО «НПФ Логика») СПТ 961 0...105 м3/ч; ВЗ ЛЕТ-ЭР 0...160; КТПТР, КТСПР 0...1.6 ±2 RS-232, RS-485 IP54
Взлет ТСР-М (ТСР-031) (ЗАО «ВЗЛЕТ») — Зх(О,О1...136О) м3/ч, ВЗЛЕТ - ЭР420Л Зх(О...18О), «Взлет ТПС» 0...2.5 ±2 RS-232, RS-485 IP54
ВКТ-7 ЗАО «НПФ Теплоком» ТСК-7 Вых. сигнал: 0... 10 (1000) Гц 0...175; НСХ: ЮОМ, ЮОП, 500П, PtlOO, Pt500 Вых. сигнал: 4.. .20 мА +0,25 RS-232, RS-485 IP54
ТЭРМ-02 («Эталон», г. Владимир) ИП-02С 5...220 (Ду 15... 100 мм); ПРЭ-0114 0...150; КТСПР (НСХ 100П) 0...1.6; 4...20 мА +1,5 RS-232, RS-485 1P54
СТЭ-0115 («Эталон», г. Владимир) 0...160; КТСПР (НСХ PtlOO) 4...20 мА ±3 RS-232, RS-485 1P54
КМ-5 (ТБН «Энергосервис», Москва) — 2,5...2500 (Ду 15...300 мм); РМ-5 0...150; КТПТР КРТ-1-1,0; 4...20 мА ±4 RS-232, RS-485 IP54
КМ-5-Б (ТБН «Энергосервис», Москва) — 2,5...2500 (Ду 15...300 мм); РМ-5-Б ИД; 0... 1,6 МПа +2; ±5 RS-485 IP54
Учет расхода природного и др. технических газов (азот, аргон, аммиак, водород,
кислород, ацетилен и др.) осуществляется с помощью вычислителей количества га-
зов по выходным сигналам преобразователей температуры, давления и объема газов
и определения значений расхода и объема газа, приведенных к нормальным условиям.
Вычислители количества газов входят в состав измерительных комплексов, обе-
спечивающих индикацию и регистрацию измеряемых и вычисляемых параметров, а
160
ГЛАВА 1
Рис. 1.120
также среднечасовых и среднесуточных значений. Возможно
создание часовых, суточных, декадных и месячных архивов
данных.
Уравнения вычислений расхода газов соответствуют
ГОСТ 8.563.1-97, ГОСТ 8.563.2-97, ГОСТ 8.563.3-97, ГОСТ
30319.2, ГОСТ 8.563.
На рис. 1.120 показан общий вид корректора газов «Взлет
КГ-411» ЗАО «ВЗЛЕТ».
В табл. 1.72 приведены технические характеристики вы-
числителей количества газов.
Таблица 1.72. Характеристики вычислителей количества газов
Тип Число преобразователей; выходные сигналы Погреш- носгь, % Выходной сигнал Степень защиты Напряжение питания
Температура Давление Расход
СПГ741 ЗАО «НПФ Логика» 5х(4...2ОмА); 2х (0... 18/500 Гц); 2хТС (НСХ 50П, 100П, 50М, 100М) ±0,2 RS-232, Centronics 1P54 9...24 VDC
СПГ761 ЗАО «НПФ Логика» 8х(0...5,0/4...20 мА); Зх(О...1ООО Гц); ЗхТС (НСХ 50П, 100П, 50М, 100М) ±0,15 RS-485, Centronics IP54 220 VAC
ВКГ-2 ЗАО «НПФ Теплоком» ЗхТС (50М, 50П, 100М, 100П, 500М. 500П 8х(0...5 мА, 0/4...20 мА) Зх(4...2О мА) ±0,15 RS-232, RS-485, Centronics IP54 220 VAC
ВКГ-ЗТ ЗАО «НПФ Теплоком» 100П, 500П. PtlOO, Pt500 4...20 мА 1000 Гц +0,2 RS-232, RS-485 IP54 9...24 VDC
Взлет КГ-411 ЗАО «ВЗЛЕТ» -50...+180 °C 0...15 МПа 0...1106 м3/ч ±0,2 RS-232, RS-485 IP54 36 VDC
1.11.2 Электросчетчики
Рис. 1.121
Учет потребляемой электроэнергии осуществляется с помощью электросчетчи-
ков и сумматоров электрической энергии.
Счетчики электрической энергии подразделяют на одно- и трехфазные, элек-
тронные и индукционные, одно- и многотарифные.
Счетчики по вариантам исполнения де-
лят на счетчики непосредственного включе-
ния и трансформаторного включения. Счет-
чики используются для измерения активной
и реактивной электрической энергии в одно-
фазных двухпроводных, трехфазных трех-
проводных и четырехпроводных цепях пере-
менного тока.
К числу основных технических характе-
ристик электросчетчиков относят класс точ-
ности, номинальный ток и номинальное на-
пряжение, число тарифов, выходной сигнал,
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ 161
габариты, массу, устойчивость к температурным и механическим воздействиям и др.
К числу характеристик электросчетчика относят также встроенную защиту от само-
хода (отсутствие сигнала при отсутствии тока в токовых цепях электросчетчика), на-
личие ЖК-дисплея или счетного механизма и др [1.150,1.151.
На дисплей помимо электрических параметров выводится текущее время (часы,
минуты), т екущая дата (день, месяц, год), текущее значение средней мощности, энер-
гия потребления по тарифным зонам и др.
Ниже рассмотрены основные функции и технические характеристики электрон-
ных электросчетчиков с выходным сигналом.
А. Учет и индикация параметров:
• количество потребленной и отпущенной активной и реактивной электроэнергии
раздельно, нарастающим итогом, суммарно и раздельно;
• по нескольким тарифам (число тарифов от одного до восьми);
• количество потребленной и отпущенной активной и реактивной электроэнергии
раздельно по тарифам за прошедшие дни и месяцы;
• вывод графиков усредненной на заданном интервале времени потребляемой ак-
тивной мощности;
• измерение и регистрация потребляемой электроэнергии после перерыва пита-
ния;
• регистрация ежесуточных максимумов и минимумов получасовых мощностей с
фиксацией даты и времени;
• фиксация отключения силовой цепи на время более чем на заданную длитель-
ность (до нескольких минут);
• фиксация даты обмена информацией с внешними устройствами, а также попы-
ток несанкционированного доступа к данным;
• автоматическое изменение сезонного времени (летнее/зимнее), ведение календаря.
Б. Параметры, задаваемые по интерфейсу (RS-232, RS-485, CAN):
• коэффициенты тока и напряжения;
• текущее время и дата;
• величина суточной коррекции хода часов;
• разрешение (запрет) перехода на летнее/зимнее время;
• задание тарифного расписания;
• пароли для доступа и редактирования параметров;
• скорость обмена по интерфейсу;
Электросчетчики соответствуют ГОСТ 30206-94, ГОСТ 30207-94, ГОСТ Р 52320-
2005, ГОСТ Р 52323-2005, ГОСТ Р 52425-2005.
На рис. 1.121, а показан общий вид электросчетчика Ф669М, на рис. 1.121, б —
ЦЭ2726 ОАО «ЛЭМЗ».
В табл. 1.73 приведены основные технические характеристики отечественных
электронных электросчетчиков.
В случае большого числа электросчетчиков и необходимости решения задач
диспетчеризации интегрированной системы учета и распределения электрической
энергии применяются сумматоры. Сумматор рассчитан на работу с электросчет-
чиками, имеющими выходной электрический сигнал (числоимпульсный или ана-
логовый).
Сумматоры обеспечивают комплексное решение задач многотарифного учета
потребления и отпуска электрической энергии и мощности, многозонного контроля
6 Зак. 3801
162 ГЛАВА 1
максимумов энергопотребления, управление нагрузками и организации систем дис-
петчеризации распределения электрической энергии.
Таблица 1.73. Характеристики отечественных электронных электросчетчиков
Тип Варианты подклю- чения Число тарифов Класс точности Номинальные значения Выходной сигнал
Ток, А Напряжение, VAC
Однофазные электросчетчики
СЭА11-2 (ОАО «Сигнал», г. Ставрополь) Непосредственное1) 2 2 5(65) 220 Импульсный
СОЛО (ОАО «лэмз», С.-Петербург) Трансформаторное 1 1; 2 5(60) 220 Импульсный
ЦЭ-2726 (ОАО «ЛЭМЗ», С.-Петербург) Непосредственное 4 1 5(50) 220 RS-485
СОЭТ-1(ОАО«МЭТЗ», г. Мытищи) Непосредственное 4 2 5(60) 220 Импульсный
СЭТ1-2К5 («ГРПЗ», г. Рязань) Непосредственное 2 1 5(50) 220 Импульсный
СЭБ-2А.07 («НЗиФ», г. Н. Новгород) Непосредственное 4 2 5(50) 220 RS-485
Трехфазные электросчетчики
ОАО «Сигнал», г. Ставрополь
СЭАЗ-1 Непосредственное 1 2 5(55) 3x220 Импульсный
СЭАЗ-2 Трансформаторное 2 2 1(8) 3x220 Импульсный
СЭА32 Трансформаторное 8 1 5(50) 3x220/380 RS-232, RS- 485
СЭ 3000 Непосредственное 4 0,5 0,025(7,5) 3x220 RS-232, RS- 485, CAN
«МЗЭП», Москва
СТЭ-561/П5 СТЭ-561/П50 СТЭ-561/П100 Непосредственное Трансформаторное Трансформаторное 4 1 5(7,5) 5(50) 10(100) 3x220/380 RS-485
«МЭТЗ», г. Мытищи
СЭТ4-1/1 СЭТ4-1М СЭТ4-1/2М Непосредственное 1 1 5(7,5) 5(60) 10 (100) 3x220/380 Импульсный
«ИНКОТЕКС», Москва
Меркурий-230АКТ-03 Непосредственное 4 1 5 (7,5) 3x220/380 GSM
ОАО «ЛЭМЗ», С.Петербург
ЦЭ-2727 Непосредственное 8 1 3x220/380 RS-232, RS-485
ТРИО Непосредственное 1 1; 2 1(2); 5(10); 5(50); 10(100) Зх(76...264) Импульсный
Ф669М Непосредственное 8 0,5 5(10) 3x230/400 RS-232, RS-485
Альфа «АВБ ВЭИ Метроника» Трансформаторное 4 0,5 5 3x220/380 RS-485, ИРПС
О При величине тока до 5 А применяется прямое подключение, при токе >5 А — подключение через
измерительные трансформаторы тока.
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
163
Так, сумматор СПЕ 542 «НПФ Логика» имеет 16 универсальных числоимпульсных
входов и 4 дискретных управляющих выхода. Система учета, построенная на базе сум-
матора СПЕ 542, может объединить 32 учетные группы с общим числом измеритель-
ных каналов до 128 каналов. Для увеличения числа обслуживаемых каналов к сумма-
тору можно подключить от одного до семи расширителей, каждый из которых имеет до
16 входов (итого, 8x16 до 128 каналов). Основные параметры энергопотребления зано-
сятся в архивы, которые размещаются в энергонезависимой памяти. Там же находится
массив параметров настройки (база данных). Управление базой данных производится
с клавиатуры сумматора или с помощью компьютера. Сумматор имеет интерфейсы
RS-232 (для связи с компьютером или для подключения модема), RS-485 и оптический
интерфейс по стандарту IEC 1107 (для связи с переносным компьютером).
1.11.3 Автоматизированные системы контроля и учета энергоресурсов (АСКУЭ)
Первоначальное название автоматизированной системы коммерческого учета
электроэнергии (АСКУЭ) к настоящему времени претерпело изменение. Это связано
с интеграцией средств учета электроэнергии и технического учета потребления тепло-
вой энергии. Таким образом, речь идет о системе контроля и учета энергоресурсов.
Системы АСКУЭ предполагают объединение в единую систему всех приборов
и средств контроля параметров энергоносителей (давление, расход, температу-
ра, активная и реактивная электрическая мощность) на базе единого программно-
технического комплекса. Этим добиваются сокращения времени и финансовых ре-
сурсов на оптимальный выбор технических средств, их монтаж и эксплуатацию на
объектах тепло- и электроэнергетики.
Вопросам учета и управления энергоресурсами посвящено много работ [1.143-
1.146]. По принятой терминологии АСКУЭ подразделяются на системы коммерче-
ского и технического учета.
Коммерческий учет подразумевает учет выработанной или отпущенной потре-
бителю энергии для денежного (финансового) расчета с поставщиком. Техническим
учетом называется учет при контроле потребления энергии внутри предприятия его
подразделениями (цехами, отделами и т. п.).
АСКУЭ по классификации могут быть централизованными или децентрализо-
ванными, двух- или трехуровневыми, с аналоговыми, дискретными или смешанны-
ми измерительными каналами, одно- или многопоточными и др.
Основные требования, предъявляемые к АСКУЭ:
• коммерческий учет тепловой и электрической энергии, газа, воды и т. п. на вводе
в предприятие;
• коммерческий учет энергоресурсов, отпускаемых потребителям;
• технический учет энергоресурсов по подразделениям предприятия;
• контроль энергопотребления в заданных временных интервалах (минуты, часы,
смена, сутки и т. д.);
• фиксация отклонений контролируемых параметров энергоучета и их сигнализация;
• автоматическое управление энергопотреблением по заданным критериям;
• внутренний расчет потребления энергоресурсов подразделениями предприятия.
На практике получили применение трехуровневые АСКУЭ.
Нижний уровень представлен первичными преобразователями параметров
энергоносителей (температура, давление, расход, электрическая мощность) с унифи-
цированным выходным сигналом (аналоговым и/или дискретным).
164
ГЛАВА I
Средний уровень представляют специализированные измерительные и вычис-
лительные устройства или программно-технические комплексы, осуществляющие
сбор, обработку, хранение и передачу сигналов на верхний уровень (теплосчетчики,
сумматоры, ИИС, контроллеры и т. п.).
Верхний уровень представляют рабочие станции на базе персональных компью-
теров, в задачу которых входят сбор информации, поступающей со среднего уровня,
обработка информации по отдельным абонентам и группам, ее отображение и доку-
ментирование (печать) для анализа и принятия решений службами главного энерге-
тика, главного метролога и др. службами предприятия.
Основные функции систем среднего и верхнего уровней АСКУЭ:
• создание нормативно-справочной базы предприятия по каждой точке и группе с
учетом тарифов, зон и временных интервалов энергоучета;
• создание базы данных параметров АСКУЭ по каждой точке энергоучета с задан-
ным интервалом дискретизации (большинство АСКУЭ работает с реляционны-
ми базами данных);
• обработка данных энергоучета в соответствии с действующими тарифами и ото-
бражение информации в виде графиков, таблиц и рапортов с возможностью пе-
чати;
• сигнализация о выходе параметров энергоучета за пределы нормального функ-
ционирования, диагностика неисправностей и др.
В целом уровень энергопотребления предприятия обусловлен энергоемкостью
используемого технологического оборудования и режимами его эксплуатации.
Снижение энергопотребления может быть достигнуто заменой устаревшего
малоэффективного оборудования (или его модернизации) и выбором оптимального
режима энергопотребления. Последнее достигается изменением режима работы обо-
рудования во времени и по величине энергопотребления в течение суток (в пиковых
зонах) для минимизации затрат в рамках многотарифной системы платежей.
Примерами комплексных информационно- измерительных систем являются:
• измерительно-вычислительный комплекс (ИВК) «СПРУТ» ЗАО «ОВ», предна-
значенный для автоматизированного учета и контроля за потреблением основ-
ных энергоносителей (вода, пар, газы, тепло, электроэнергия);
• комплекс технических средств «ИСТОК» НПЦ «Спецсистема», предназначенный
для учета потребления (выработки) природного газа, пара, воды, сжатого воз-
духа;
• информационно-измерительная система «ЛОГИКА» НПФ «ЛОГИКА», предна-
значенная для технического и коммерческого учета тепловой энергии теплоно-
сителя (вода, пар, природный и др. технические газы), электрической энергии и
мощности;
• система учета и регулирования энергии «Энергоучет» НПО «Системотехника»,
предназначенная для учета теплоносителей (вода, пар) и многотарифного учета
электроэнергии;
• комплекс технических средств ОАО «Энергомера» («КТС Энергомера») предна-
значенный для автоматизации контроля коммерческого и технического учета
электроэнергии и мощности на энергетических объектах промышленных пред-
приятий.
Не рассматривая в целом зарубежные АСКУЭ, приведем в качестве примера
АСКУЭ типа Teleperm фирмы Siemens, работающую в структуре PCS7. Система по-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
165
строена на базе контроллеров Simatic, станции распределенного ввода-вывода Simatic
ЕТ200, SCADA-системы WinCC и другого серверного и сетевого оборудования.
Основные характеристики отечественных систем представлены в табл. 1.74.
Таблица 1.74. Характеристики информационно-измерительных систем
Тип Средства контроля параметров Число каналов Интерфейс
Давление Расход Температура Электроэнергия
ИВК «СПРУТ» (ЗАО «ОВ») Входные сигналы: канал 1: токовый импульсный; канал 2: 0...5 мА, 0/4...20 мА; канал 3: ТС; канал 4: «СК» Электросчетчики: Евро Альфа; ЦЭ6823; СЭТ- 4ТМ; СТС5605 16 RS-232, RS-485
«ИСТОК» (НПЦ «Спецси- стема») 0...10 МПа; PC-28, PR-28 (Aplisens, Польша) Диапазон 1:10; Prowirl 72 (Endress+Hauser)-, Метран-300 (ГК Метран); UFM-001 (ЗЭиМ) -50...+450 °C ТС (НСХ 50П, ЮОП) 4 GSM, Centronics
ИИС «Логика» (ЗАО НПФ «Ло- гика») Теплосчетчики СПТ941, СПТ961. Корректоры СПГ741» СПГ761, СПГ762, СПГ763 Сумматор СПЕ542 4; 8 RS-232, RS-485, IEC 1107
«Энергоучет» (НПО «Системо- техника») Теплосчетчик HC-200W 32х(МГУ-32) 4 RS-232, RS-485, УКВ- радиоканал
4х(Сапфир 22МДИ, Метран 43, МИДА-ДИ, МТ-100) 4x(UFM-001, ВЗЛЕТ-PC, УРСВ, ПРЭМ, Метрэн- 300ПР и др.) 4х(ТС НСХ ЮОМ, ЮОП), КТПТР-01, КТСПР-001 и др.
«КТС Энер- гомера» ОАО «Энергомера» — — — Электросчетчики ЦЭ6805, ЦЭ6811, ЦЭ6850;УСПД- 164-01 16... 256 RS-485, CAN, GSM
Дальнейшей интеграцией средств и систем учета тепловой энергии является
создание автономных тепловых пунктов на заданную мощность теплоносителя.
Примером такого теплопункта является автоматизированный тепловой пункт
«ВЗЛЕТ АТП» фирмы «Взлет», включающий в себя датчики температуры, давления,
узел учета расхода тепловой энергии и теплоносителя, регулирующие клапаны и насо-
сы. Общий вид теплопункта приведен на рис. 1.122, а
его структура — на рис. 1.123.
Теплопункт «Взлет АТП» обеспечивает постоян-
ную подачу тепла в систему отопления в соответствии
с заданным расписанием и с учетом температуры на-
ружного воздуха, а также постоянство температуры
воды в системе горячего водоснабжения (ГВС).
Помимо этого теплопункт обеспечивает постоян-
ство напора теплоносителя, регулирование темпера-
туры воды, возвращаемой в теплосеть, сигнализацию
при возникновении нештатных ситуаций. Насосы
теплового пункта работают с 50%-ным резервирова-
нием. В автоматическом режиме через определенные
промежутки времени, задаваемой пользователем,
Рис. 1.122
166
ГЛАВА 1
ВЗЛЕТ ДТП
Рис. 1.123
один из насосов останавливается на короткое время для промывки его фильтра дру-
гим насосом.
АТП могут использоваться в индивидуальных тепловых пунктах (ИТП), цен-
тральных тепловых пунктах (ЦТП), локальных автоматизированных котельных или
в индивидуальных котельных частных зданий.
Важной особенностью модификаций «Взлет АТП» модульного исполнения явля-
ется то, что это универсальное средство регулирования измерения, коммерческого
учета и регистрации управления и контроля (щит электроуправления с регулятором
отопления и возможностью управления по модему), собранное в единое модульное
устройство, позволяет осуществить полную автоматизацию системы теплопотре-
бления. АТП подключается по входу к тепловой сети централизованного теплоснаб-
жения и/или городскому водопроводу, а по выходу — к системам отопления, ГВС
ит. д.
Информация выводится на жидкокристаллический индикатор регулятора ото-
пления «Взлет-РО» с помощью интерфейса RS-232.
Основные технические характеристики АТП:
• давление в подающем трубопроводе 1,6 МПа;
• давление в обратном трубопроводе 0,8 МПа;
• температура теплоносителя в подающем труби ipoeoде 5... 150 °C;
• температура теплоносителя в обратном трубопроводе 5...95°C;
• температура окружающей среды 5... 50 °C;
• напряжение питания 3x380 VAC;
• потребляемая мощность 0,44 кВА.
В работе [1.145] приведен пример АСКУЭ на базе программно-технического ком-
плекса ЭКОМ. Типовая структура ПТК ЭКОМ приведена на рис. 1.124. Компонента-
ми ПТК являются: Энергокомпьютер ЭКОМ-ЗООО, MS SQL-сервер (могут использо-
ваться базы данных Oracle, Dbase, Paradox) и программное обеспечение.
ЭКОМ-ЗООО представляет собой проектно-компонуемый модульный РС-сов-
местимый промышленный компьютер (на шине ISA) с модулями аналогового, дис-
кретного и числоимпульсного (частотного) ввода и дискретного вывода («СК»). В
структуре ЭКОМ-ЗООО также используются измерительные преобразователи, счетчи-
ПРИБОРЫ КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ 167
ки и модули ввода-вывода с интерфейсами RS-232, RS-485,14РПС. В качестве графи-
ческого редактора используется MS Visio 2000. ПТК ЭКОМ применяется в электро-
энергетике, металлургии и других отраслях промышленности.
Промышленный
ПК
сервер опроса
Рис. 1.124
V
ГЛАВА 2. ПРОГРАММИРУЕМЫЕ
ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ (ПЛК)
2.1. Общее описание и классификация ПЛК
Контроллеры могут быть классифицированы по различным признакам: функ-
циональным, конструктивным, объему вычислительных ресурсов, числу каналов
ввода/вывода и др.
Вопросам выбора различных микропроцессорных устройств, и, прежде всего
контроллеров, их характеристикам и особенностям применения в АСУ ТП посвя-
щены работы [2.1-2.9]. В работе [2.9] предложено все контроллеры в зависимости
от функциональных возможностей, вычислительной мощности и конструктива (по
критерию цена/производительность) разделить на моноблочные (компактные), мо-
дульные, PC-совместимые (PC-based) и встраиваемые (Embedded Controller). Следу-
ет отметить, что эта классификация носит условный характер, поскольку моноблоч-
ные или модульные контроллеры могут быть PC-совместимыми, а РС-совместимые
контроллеры могут иметь модульную или моноблочную конфигурацию. Однако для
проектирования АСУ ТП малой, средней или большой информационной мощности
предварительный выбор аппаратно-программного обеспечения системы определя-
ется выбором того или иного типа контроллера по вышеприведенной классифика-
ции, прежде всего с учетом функциональных особенностей, производительности и
числа каналов ввода/вывода. В последние годы наметился также класс мезонинных
контроллеров.
Моноблочный контроллер представляет собой микропроцессорное устройство,
в едином конструктиве которого располагаются источник питания (не обязательно),
центральный процессор (сопроцессоры), память, включающая память программ и
память переменных (как правило, энергонезависимая), встроенный порт(ы) для вы-
хода в сеть, фиксированное число встроенных каналов аналогового и/или дискрет-
ного ввода/вывода, встроенный ПИД-регулятор с автонастройкой (не обязательно),
слот расширения для подключения дополнительных модулей, ЖК-дисплей (не обя-
зательно), индикаторы состояния контроллера. Так, новый моноблочный контрол-
лер Twido фирмы Schneider Electric имеет 24 входа/выхода с расширением до 88 кана-
лов, моноблочный контроллер FPO фирмы Matsushita имеет 16 дискретных входов
и 16 дискретных выходов, моноблочный контроллер Unitronics М90 Micro фирмы
Industrial Automation Systems имеет аналоговый вход и 16 дискретных входов/выхо-
дов и т.д.
Увеличение вычислительной мощности моноблочных контроллеров достигается
с помощью блоков расширения, объединенных цифровыми линиями связи, и мезо
нинных модулей.
Модульные контроллеры представляют собой крейт (корзину) с модулем пита-
ния, процессорным модулем и различным числом модулей ввода/вывода, коммуни-
кационных и специальных модулей. Число модулей в корзине доходит до 16 и более.
Число модулей может быть увеличено за счет плат расширения и добавления новых
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
169
корзин. При выборе коммуникационных модулей промышленных сетей следует
иметь ввиду скорость и дальность передачи данных в сети, число узловых станций,
наличие питания по шине, топологию сети. Следует отметить, что наблюдается рас-
ширение применимости Ethernet-сетей, Internet-технологий и GSM-телемеханики
(на базе сотового телефона, модема и SIM-карты) и ряда др.
PC-based или PC-совместимые контроллеры составляют отдельный класс
программируемых контроллеров, значение и роль которых с развитием Internet-
технологий существенно возрастает. PC-based контроллеры характеризуются нали-
чием встроенной PC-совместимой операционной системы (Windows 9x/2000/NT/
ХР/СЕ, QNX, MS DOS, Linux, MiniOS7, OS-9 и др.), использованием стандартных
системных шин (PC-104, VME, АТ96 и др.), возможностью использования стан-
дартного программного обеспечения (ISaGraph, Си, Турбо-Си, Си++, Паскаль,
Assembler, SCADA-систем Trace Mode, InTouch, Citect и др., а также баз данных),
коммуникационных стандартов, наличием ОРС-сервера и др. PC-based контрол-
леры, таким образом, могут использовать богатое программное обеспечение не-
зависимых производителей, имеют значительно больший объем памяти, чем
традиционные ПЛК, возможности расширения и модернизации, а также лучшие
возможности диагностирования. PC-based контроллеры на базе промышленных
ПК позволяют сосредоточить функции управления и визуализации в одном месте,
используя встраиваемые системы — платы УСО, памяти, коммуникационные мо-
дули и др., а SCADA-системы, требующие больших объемов памяти и недоступные
ПЛК, легко реализуются на ПК. Промышленные компьютеры, выпускаемые рядом
фирм (Advantech, Axiom, Portwell и др.), удовлетворяют самым жестким условиям
эксплуатации, — степень защиты лицевой панели IP65, диапазон рабочих темпе-
ратур от 0 до 50 °C. Стандартные операционные системы позволяют использовать
инструментальные средства разработки прикладного программного обеспечения
(ПО) различных фирм. Наличие коммуникационных портов ввода/вывода, меха-
низма взаимодействия ОРС позволяют ПК взаимодействовать с любым оборудо-
ванием — от ПЛК до любых рабочих станций. Однако эти контроллеры зачастую
обладают избыточностью вычислительных ресурсов и функций ввиду их универ-
сальности, возможностью зависания с длительным временем рестарта, понижен-
ной надежностью за счет множества компонентов (приложений) на платформе PC.
Для большинства практических применений влияние этих недостатков может быть
устранено или снижено.
Встраиваемые ПЛК (Embedded Controller) представляют собой полнофункцио-
нальные системы, выполненные в форматах PCI, CompactPCI, ISA, РС/104, MicroPC и
др., устанавливаемые в слот компьютера или объединительной платы, входящей в со-
став оборудования. При этом встраиваемый ПЛК использует внешнее питание, степень
защиты базовой системы, имеет малые габариты, легкость замены и ряд других досто-
инств. Среди производителей встраиваемых систем фирмы Advantech, Fastwel, Octagon
Systems и др. Примерами встраиваемых контроллеров служат RTU188 и CPU188-5 фир-
мы Fastwel, модель 5070 фирмы Octagon Systems и др. Новым направлением встраивае-
мых систем является применение SOM-модулей, представляющих собой компактные
высокоинтегрированные компьютеры, устанавливаемые на базовую плату.
В работе [2.8] предложена классификация микропроцессорных программно-
технических комплексов, включающих контроллеры и промышленные компьютеры
в зависимости от выполняемых функций (специальных, функций контроля и управ-
170
ГЛАВА 2
ления, оптимизации, диспетчеризации и планирования). Так, PS-based контроллерам
отведены специальные функции управления в медицине, научных исследованиях и
для управления небольшими объектами в промышленности. Следующий класс ло-
кальных контроллеров включает контроллеры, встраиваемые в оборудование, и
автономные контроллеры для управления небольшими объектами. По вышеприве-
денной классификации это моноблочные и встраиваемые контроллеры. Наконец,
сетевой класс контроллеров (PLC Network) с числом входов/выходов сотни и тысячи
каналов представляют модульные контроллеры.
Следует отметить, что программируемые логические контроллеры по сетевым
возможностям приближаются к ПК, их память Флэш-memory обладает доста-
точной емкостью для размещения небольших SCADA-систем. Примером может
служить SCADA-система Trace Mode, размещенная в виде SoftPLC в памяти кон-
троллеров «Лагуна», Ломиконт, Теконик, АДЭМ и др. ПЛК обладают повышенной
надежностью, высоким быстродействием (0,9 мкс и менее на базовую команду),
малыми габаритами, возможностью «горячей замены модулей» (замена модулей
без выключения питания) и др. К дополнительным возможностям относятся на-
личие сторожевого таймера, самодиагностика, режим автонастройки параметров
регулятора.
Программирование контроллеров осуществляется в зависимости от задачи и
типа контроллера на различных языках программирования по стандарту IEC 61131-3.
Широко применяется программный пакет ISaGRAF как интегрированный пакет раз-
работки и отладки приложений для ПЛК и связи с ПО верхнего уровня. Таким обра-
зом, отмечается сближение технических характеристик ПК и ПЛК, удовлетворяющих
требованиям единого стандарта IEC 1131, и имеющим общий механизм взаимодей-
ствия программных средств в виде ОРС-сервера (OLE for Process Control), что по-
зволяет на их базе создавать оптимальные структуры РСУ
Как правило, контроллеры устанавливаются на DIN-рейку, а соединения с други-
ми модулями, например с модулем питания, модулем аналогового ввода и др. осущест-
вляются с помощью разъемов, жгутов или проводников с наконечниками «под винт».
В разделе 2.2 приведены технические характеристики большинства контролле-
ров, используемых на российском рынке промышленной автоматизации. Для удоб-
ства анализа и полноты описания все контроллеры рассматриваются по фирмам-
производителям. Это позволяет проследить изменения в существующих контролле-
рах и появление новых контроллеров фирмы-производителя.
В последние годы получили развитие станции удаленного ввода/вывода, вклю-
чающие в состав модули УСО, процессорный модуль обработки входных сигналов,
блок питания и коммуникационный модуль для связи с базовым контроллером.
При этом станции ввода/вывода располагаются вблизи объекта управления и об-
мениваются данными по сети с контроллером, находящимся в операторском по-
мещении (в шкафу или универсальной стойке). Этим достигается существенная
экономия кабельных трасс, а базовый контроллер освобождается от функций обра-
ботки сигналов (фильтрация, масштабирование, усреднение и др.). Станции управ-
ления представляют собой каркас со встроенными модулями (устройства I/O) или
отдельные модули, объединенные цифровым каналом приема/передачи данных и
устанавливаемые, как правило, на DIN-рейке. Модули могут быть распределены
территориально или располагаться в непосредственной близости друг от друга на
общей DIN-рейке.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
171
В табл. 2.1-2.5 представлены контроллеры различных фирм-производителей.
Таблица 2.1. Моноблочные контроллеры
№ н/п Наименование контроллера Фирма-производитель
1 FPO, FP1 Matsushita, Япония
2 Direct Logic DL05, DL105, DL06 Koyo Electronics, Япония
3 Modicon TSX Twido, TSX Zelio Schneider Electric, Франция
4 Alpha, Alpha XL, FX1S, FX1N Mitsubishi Electric, Япония
5 Sysmac CPM 1A/2A Omron, Япония
6 Simatic S7-200, S7-300C, C7-620, LOGO Siemens, Германия
7 VIPA System 100V VIPA GmbH, Германия
8 VersaMax Nano, VersaMax Micro General Electric Fanuc, США—Япония
9 Unitronics M90/M91 Micro, Visio 230 Industrial Automation Systems, Израиль
10 MicroLogix, PICO Rockwell Automation, США
11 ROC 306, ROC 312 Fisher, США
12 TeleSafe, SmartWire, SCADAPack Control Microsystems, Канада
13 DVP Delta Electronics Inc.,
14 Comat BoX Turck GmbH, Германия
15 Facon Fatec Automation Corp., Тайвань
16 Easy 500,600,700,800, MFD Titan, PS4 Moller GmbH, Германия
17 FATEK Fatek Automation PLC, Тайвань
18 Decont - 182 «ДЭП», Россия
19 MC8 МЗТА, Россия.
20 TKM-410 Группа компаний «Текон», Россия
21 ПЛК 100, ПЛК 150 «ОВЕН», Россия
22 NE-1600 «ИКОС», Россия
Таблица 2.2. Модульные контроллеры
№п/п Наименование контроллера Фирма-производитель
1 FP2 Matsushita, Япония
2 DL205, DL405 Koyo Electronics, Япония
3 Modicon TSX 37 Micro, TSX 57 Premium, TSX Quantum Schneider Electric, Франция
4 FX 2N, FX 3N, MELSEC AnSH, QnAS, QnA Mitsubishi Electric, Япония
5 CS1, CQM1H, CJ1 Omron, Япония
6 Simatic S7-300, S7-400 Siemens, Германия
7 VIPA System 200V, System 300V VIPA GmbH, Германия
8 GE Fanuc Series 90-30, Series 90-70, VersaMax, PACSystems General Electric Fanuc, США—Япония
9 MicroLogix SLC500, CompactLogix, FlexLogix, ControlLogix Rockwell Automation, США
10 PS-416, XC100, XC200, XC600 Moller GmbH, Германия
11 B&R SYSTEM 2000 Bernecker&Rainer, Австрия
12 BX 3100 Beckhoff, Германия
13 ADAM-8000 Advantech, Тайвань
14 TKM 700 ГК «Текон», Россия
15 P-130 ПО «Промприбор», Россия
16 КОНТРАСТ КР-300Ш (ИШ), KP-500 ЗАО «ВОЛМАГ», Россия
17 ЭК-2000 ЗАО «Эмикон», Россия
18 СОНЕТ, КП-ПР ФГУП «ЭЗАН», Россия
172
ГЛАВА 2
Таблица 2.3. PC-based контроллеры
№ л/п Наименование контроллера Фирма производитель CPU ОС no
1 Direct Logic 470 Koyo Electronics, Япония Pentium MMX 200 МГц Windows СЕ Think&Do
2 WinPLC Koyo Electronics, Япония Hitachi SH3,40, 100 МГц Windows СЕ Think&Do
3 ROC 809, ROC 812 Fisher-Rosemount (США) PowerPC Многозадачная ОСРВ ROCLink 800
4 i-7188, i-8000 TCP DAS (Тайвань) AMD 80188, 40МГц MS DOS, Mini OS7 ISaGRAF, Си, Па скаль, Ассемблер
5 ADAM 4500, 5510/ 5511 Advantech, Тайвань i80186, 40 МГц DataLight ROM- DOS С, C++, Ассем- блер, UltraLogik, Paradum-31
6 ADAM 6500 Advantech, Тайвань StrongArm 206 МГц Windows CE. Net 4.1 C++, VBasic
7 WAGO серия 758 WAGO, Германия SC 1200 266 МГц RT-Linux WAGO-I/O-PRO CAA
8 RTU188 Fastwel Inc., Россия Aml88ES, 40 МГц MS-DOS 6.22 C, C++, Паскаль, Qbasic, Ассемблер
9 TREI-5B TREI GmbH, Россия i80486DX4, 80 МГц Windows ISaGRAF
10 МФК АО «Текон», Россия i80586, 133 МГц ОС PB под DOS 6.x, ОС Linux ISaGRAF, Си++, Trace Mode
11 TKM52 АО «Текон», Россия AMD DX5, 133 МГц DOS, СПО на базе ОС Linux ISaGRAF, Trace Mode Tecon CX
12 КРОСС ОАО «ЗЭиМ», Россия МС68302/ 68360 20 МГц OS-9000 ISaGRAF, Trace Mode
13 P-130 ISa ОАО «ЗЭиМ», Россия PC- совместимый процессор RTOS-32 ISaGRAF
14 NZ-6000 «Ниешанц-Автоматика», Россия 180386SX, 40 МГц MS DOS, Linux ISaGRAF PRO
15 УК-753 УНИКОНТ НПО «Квантор», Украина i80C186EC, 20 МГц MS DOS, ОС PB CI4, ТурбоСИ, Паскаль, КварцТ
16 Ломиконт TM ОАО «Электроприбор», Россия i80486DX4, 80 МГц Windows ISaGRAF, Trace Mode
17 Микроконт-Р2 НПО «Системотехника», Россия I80486DX4, 133 МГц MS DOS, QNX, Windows 95/NT LD, FBD, Ассем- блер
18 ПТКУМИКОН (КТСМикКОН) ЗАО «Инкоммет», Россия i80386 Windows SFC, FBD
19 пкэм-з «Электромеханика», Россия МС68302, 20 МГц OS-9 ISaGRAF
20 МИКСМ9107 ООО «Электронмаш- Систем», Россия StrongArm, i80386 MS DOS, Linux Ассемблер
Таблица 2.4. Встраиваемые контроллеры
№п/п Наименование контроллера Фирма - производитель
I HiCO486, HiCOSH4, HiCOGEODE Hitex Automation, Германия
2 Модули 6010,6020,6030,6040,6050 Octagon Systems, США
3 Модуль CPU 188-5 Fastwel Inc., Россия
4 ICPCon7000/8000 ICP DAS, Тайвань
5 RT National Instruments, США
6 KMn-20 МСКУ2М АО «Импульс», Украина
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
173
Таблица 2.5. Системы распределенного ввода/вывода и управления
№п/п Наименование системы Фирма-производитель
1 ADAM 4000, ADAM 6000 Advantech, Тайвань
2 i-7000, М-7000 ICP DAS, Тайвань
3 Bus Terminal Beckhoff, Германия
4 I/O Phoenix Contact Phoenix Contact, Япония
5 MELSEC ST Mitsubishi Electric, Япония
6 Simatic ET 200M/200S/200iS/200X/200R Siemens, Германия
7 Momentum MIE (связь no Ethernet) Schneider Electric, Франция
8 SmartSlices Omron, Япония
9 Genius GE-Fanuc, США—Япония
10 FieldControl GE-Fanuc, США—Япония
11 Terminator I/O Koyo Electronics, Япония
12 Flex Integra I/O (1793 Rockwell Automation, США
13 Flex I/O (1794) Rockwell Automation, США
14 Flex Logix Rockwell Automation, CHIA
15 SEX 200 Rockwell Automation, CHIA
16 Think I/O Kontron, Германия
17 WAGO I/O System WAGO, Германия
18 I/O System XI/ON Moller GmbH, Германия
19 I/O System Bl. 67 Turck GmbH, Германия
20 Excom Turck GmbH, Германия
21 ioLogik4000 MOXA, Тайвань
22 NI CompactDAQ National Instruments, США
23 Fastwel I/O Fastwel Inc, Россия
24 X67 System B&R, Австрия
25 IS-RPI Pepperl+Fuchs, Германия
26 Jet I/O 6500 Korenix, Германия
27 RIO Allen-Bradley, США
28 IS1 ETC Electronics, Германия
29 I/A Series RTU20 Foxboro, США
30 LB Cooper Crouse-Hinds/CEAG, США
31 TREI5B-05 TREI GmbH, Германия
32 Деконт, Деконт-Ех «ДЭП», Россия
33 КРОСС-500 «ЗЭиМ», Россия
34 ТРАССА-500 «ЗЭиМ», Россия
35 MIRageN «Модульные системы Торнадо», Россия
36 DCS-2000 «Эмикон», Россия
37 Smart-RTU «РТСофт», Россия
2.2. Программируемые контроллеры зарубежного производства
Ниже приводится описание, состав и технические характеристики контролле-
ров, систем распределенного ввода/вывода и управления ряда фирм-производителей,
представленных на Российском рынке промышленной автоматизации. С учетом того,
что многие фирмы выпускают целый ряд контроллеров разного класса (моноблоч
ные, модульные, PC-совместимые и т. д.), перечень аппаратно-программных средств
дан применительно к различным фирмам. Тем самым легче следить за постоянно об-
новляющейся номенклатурой контроллеров, модулей ввода/вывода, программным
обеспечением и т. п. В большинстве случаев (по заверениям производителей), новые
модификации контроллеров и версии программного обеспечения поддерживают
предыдущие модификации и версии.
174
ГЛАВА 2
2.2.1 Контроллеры компании Advantech, Тайвань
Фирма Advantech производит контроллеры различных классов — компактные,
модульные, PC-совместимые и встраиваемые. К компактным контроллерам можно
отнести управляющие модули ADAM-4500 и ADAM 6500/6501. Семейство модуль-
ных контроллеров представлено серией ADAM-8000. К PC-based контроллерам от-
носятся контроллеры серии ADAM-5000 и промышленные компьютеры MIC-3000 с
модулями ввода/вывода на шине CompactPCI.
Контроллер ADAM-4500 (рис. 2.1) в компактном корпусе представляет собой
IBM PC-совместимый управляющий модуль с процессором 80188 и ОС ROM-DOS.
Память ОЗУ — 256 кбайт, флэш-ПЗУ — 256 кбайт. Коммуникационные порты: СОМ1
— RS-232/RS-485, COM2 — RS-485, COM3 — RS-232. Скорость обмена — до 115,2
кбит/с, длина линии связи — до 1200 м. Напряжение питания: 10.. .30 VDC.
Контроллер ADAM-6500/6501 с набором модулей аналогового и дискретного
ввода/вывода в аналогичных корпусах предназначен для построения систем сбора
данных и управления на основе интерфейса Ethernet. Для этого в каждый модуль сбо-
ра данных встроен Web-сервер. Для взаимодействия со SCADA-системой в модулях
реализована поддержка протокола Modbus TCP/IP и обмен данными осуществляется
с помощью ОРС-сервера. Контроллер ADAM-6500/6501 со встроенной ОС Windows
СЕ снабжен процессором Intel StrongArm 206 МГц (ADAM-6500) или Intel XScale 400
МГц (ADAM-6501). Память ОЗУ — 64 Мб, флэш-ПЗУ — 16 Мб (ADAM-6500) и 32 Мб
(ADAM-6501). Интерфейс Ethernet: lOBaseT (ADAM-6500) и 10/100 BaseT (ADAM-
6501). Последовательные интерфейсы ADAM-6500: 3xRS-232 и 2xRS-485. Интерфей-
сы ADAM-6501: lxRS-232,1XRS-232/RS-485.
В состав серии ADAM-6000 входят 8-канальный модуль аналогового ввода
ADAM-6017 и 8-канальный модуль для подключения термопар, 16-канальный мо-
дуль дискретного ввода/вывода ADAM-6051, конверторы Ethernet в оптический ин-
терфейс 100 BaseFX и USB в RS-232/RS-422/RS-485 и др.
Модульный контроллер распределенной системы сбора данных и управления
ADAM-8000 (рис. 2.2) программно совместим с контроллерами серии Simatic S7-300
фирмы Siemens. Программирование контроллера возможно как с помощью пакета
STEP7, так и с помощью пакетов ADAM-WinPLC7 и ADAM-WinNCS. Контролле-
ры серии ADAM-8000 могут объединяться в сетях Profibus DP, Modbus TCP и CAN.
Контроллер имеет сменные процессорные модули и модули ввода/вывода. В табл. 2.6
приведены основные характеристики процессорных модулей.
Таблица 2.6. Характеристики процессорных модулей ADAM-8000
Тип модуля/CPU Память ОЗУ/ программ, кбайт Число таймеров/ счетчиков Время исполнения бита/слова, мкс Интерфейс
ADAM-8214-1B/ CPU214 32/40 128/256 018/0,78 RS-232
ADAM-8214-2B/ CPU214 32/40 128/256 018/0,78 RS-232, Profibus DP
ADAM-8215-1B/ CPU215 64/80 128/256 018/0,78 RS-232
ADAM-8215-2B/ CPU215 64/80 128/256 018/0,78 RS-232, Profibus DP
ADAM-8216-2B/ CPU216 128/192 128/256 018/0,78 RS-232, Profibus DP
Для всех моделей контроллера допускается объединение до 32 модулей ввода/вы-
вода по MPI-интерфейсу. При наличии интерфейса Profibus DP (скорость обмена дан-
ными от 9600 бит/с до 12 Мбит/с) число ведомых устройств — до 125 (до 32 без повто-
рителя). В состав серии ADAM-8000 входят коммуникационные модули Profibus DP
Master и Profibus DP Slave, CANopen Master и CANopen Slave, а также DeviceNet Slave.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
175
Рис. 2.1 Рис. 2.2 Рис. 2.3
Модули аналогового ввода — 4- и 8-канальные (ADAM8231-1BD52 и ADAM8231-
1BF00), аналогового вывода — 4-канальные ADAM8232-1BD50, модули дискретного
ввода и вывода — 8-, 16- и 32-канальные. Помимо этих модулей в состав ADAM-8000
входят модуль интерфейса Modbus, модуль счетчика и др.
Модульные контроллеры серии ADAM-5000 включают IBM РС-совместимые
контроллеры: ADAM-5510/5510M/5510E, различающиеся объемом памяти и чис-
лом последовательных портов; ADAM-5511 — с поддержкой Modbus; ADAM-5000/
TCP, ADAM-5510/TCP, ADAM-5510Е/ТСР и ADAM-5510EKW/TCP — с поддержкой
Ethernet; ADAM-5550 с ОС Windows CE 5.0; ADAM-5000/485 на базе интерфейса RS-
485; ADAM-5000/TCP с 32-разрядным RISC-процессором Strong ARM фирмы Intel.
Контроллеры ADAM-5000 состоят из процессорного модуля, кросс-платы с бло-
ком питания и модулей ввода/вывода (от 4 до 8). Питание контроллера — 10...30
VDC, диапазон рабочих температур от -10 до +70°С. Для примера рассмотрим кон-
троллер ADAM-5550.
Контроллер ADAM-5550 с ОС Windows СЕ (рис. 2.3) снабжен процессором
AMD Geode GX533, объем ОЗУ — 128 Мбайт, флэш-ПЗУ — 1,5 Мбайт. Контроллер
имеет встроенные Web-сервер и FTP-сервер. Шасси рассчитано на установку 8 моду-
лей ввода/вывода. Коммуникационные порты: 2xRS-232/RS-485, lxRS-485, lxRS-232,
2xUSB 1.1,2xEthernet 10/100 BaseT. Программирование контроллера осуществляется
с помощью пакета KW MULTIPROG.
В табл. 2.7 представлены характеристики некоторых других моделей контролле-
ров серии ADAM-5000.
Таблица 2.7. Технические характеристики контроллеров серии ADAM-5000.
Тип контроллера Тип процессора ОС Объем памяти ОЗУ/ПЗУ Интерфейсы Сетевой протокол no
ADAM-5510M 16-разряд - ный микро- процессор 80188 ROM-DOS 640 кбайт/ 1,5 Мбайт 2xRS-232, lxRS-485, lxRS-232/ RS-485 Modbus/ RTU UltraLogik
ADAM-5511 256 кбайт/ 512 кбайт 2xRS-232, lxRS-485 UltraLogik, SCADA ADAMView
ADAM-5510/ТСР 640 кбайт/ 1,5 Мбайт 2xRS-232, lxRS-485, lxRS-232/RS-485, Ethernet 10/100 BaseT Ethernet TCP/IP Turbo C++
Новые модели ADAM-5510/HC и ADAM-5510/HCGco встроенной SCADA-системой
Trace Mode поддерживают новые функции, в том числе возможность программирова-
ния в единой среде контроллера и операторской станции, функции автопостроения
проекта, использование единой базы данных и др. Также имеется возможность приема
и передачи данных в формате SMS по GSM-каналу. Со встроенной системой Trace Mode
ADAM-5510 поддерживают до 128 точек ввода/вывода и до 32 FBD-программ.
176
ГЛАВА 2
Среди модулей ввода/вывода для контроллеров серии ADAM-5000 отметим 8-ка-
нальные модули аналогового ввода (ADAM-5017 и ADAM-5017H), 4-канальный мо-
дуль аналогового вывода ADAM-5024, 8- и 16-канальные модули дискретного ввода
и вывода, модули релейного вывода и др.
Максимальное число встроенных каналов ввода/вывода достигается при исполь-
зовании контроллера ADAM-5000/TCP, позволяющего установку 8 модулей на 128
каналов ввода/вывода. Контроллер имеет 32-разрядный RISC-процессор Strong ARM
фирмы Intel, встроенные порты Ethernet 10/100 BaseT и RS-485. Использование про-
токола Ethernet Modbus/TCP позволяет интегрировать ADAM-5000/TCP со SCADA-
Рис. 2.4
системой и другими пользовательскими
приложениями.
Промышленный компьютер серии
MIC3000 (рис. 2.4) базируется на системной
шине CompactPCI и имеет конструктивное
исполнение по стандарту Евромеханика вы-
сотой 3U и 6U. Исполнение 3U применяется
в системах промышленной автоматизации,
исполнение 6U — в телекоммуникационных
системах. В табл. 2.8 приведены основные
технические характеристики процессорных
модулей MIC-3000.
Таблица 2.8. Характеристики процессорных модулей MIC-3000
Тип модуля Тип процессора Объем ОЗУ Интерфейс шины Периферийные интерфейсы Сетевой интерфейс
М1С-3316 Intel Celeron 650 МГц До 384 Мбайт PICMG 32 бит/33 МГц 4XRS-232/422/485, IxUSB 1.1 Ethernet 10/100 BaseT
MIC-3318 Intel Pentium 4 1,2/1,7 ГГц До 512 Мбайт PICMG 32 бит/33 МГц 2xRS-232/422/485, 2xUSB 2.0 2x Ethernet 10/100 BaseT
MIC-3351 Intel Pentium MMX 266 МГц До 256 Мбайт PICMG 32 бит/33 МГц 2xRS-232,2xUSB 1.1, IxFDD, IxParallel Ethernet 10/100 BaseT
Исполнение процессорных модулей — безвентиляторное. Также на платах уста-
новлены контроллер VGA (С&Т 69000 с разрешением 1280x1024) и контроллер IDE
(UDMA/33). Имеется возможность установки жесткого диска формата 2,5" и твердо-
тельного накопителя СотращФлэш.
Для увеличения числа портов последовательной передачи (RS-232/422/485) пред-
назначены 4-портовая плата MIC-3612 и 8-портовая плата MIC-3620.
В табл. 2.9 приведены характеристики модулей ввода/вывода MIC-3000.
Таблица 2.9. Характеристики модулей ввода/вывода MIC-3000
Тип модуля Число аналоговых входов Число аналоговых выходов Число дискретных входов Число дискретных выходов Частота опроса
MIC-3714 4x12 бит — — — 30 МГц
MIC-3716 16x16 бит 2x16 бит 16 каналов ввода/вывода + 1 счетчик 250 кГц
MIC-3753 — — 96 TTL-каналов ввода/вывода + 1 счетчик 1,6 МГц
MIC-3756 — — 32 изолированных 24 VDC 40 кГц
MIC-3761 — — 8 изолированных 24 VDC 4 реле типа А и 4 реле типа В 40 кГц
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
177
2.2.2 Контроллеры компании Beckhoff (Германия)
Контроллеры делятся на 3 класса: контролеры промышленной шины серии
ВС и ВХ, серия Embedded-PC СХ1000 и промышленные PC.
Контроллеры относятся к классу контроллеров, программируемых по стандарту
МЭК 61131-3. Концепция компьютерного управления компании Beckhoff базируется
на модульном принципе построения контроллеров и систем ввода/вывода, встраи-
ваемых компьютерах, программном обеспечении TwinCAT, высокоскоростной сети
EtherCAT, сети Lightbus на основе оптоволокна и др.
Модульные PC-based контроллеры включают контроллеры серии СХ — СХ1000,
СХ1020 и СХ9000 различных модификаций в зависимости от типа процессора, объе-
ма памяти, системных интерфейсов и пр.
Контроллер СХ1000 (рис. 2.5) относится к кон-
троллерам средней производительности. Все мо-
дули контроллера устанавливаются на DIN-рейке.
Контроллер СХ1000 может работать в автономном
режиме, без монитора и клавиатуры (в этом случае
соответствующие компоненты не требуются). Если
управляющая система не имеет средств визуали-
зации, существует возможность ее обслуживания
через встроенный Ethernet или интерфейс RS-232.
Рис. 2.5
При необходимости визуализация подключение осуществляется через DVI/USB мо-
дуль (DVI-Digital Video Interface — цифровой видеоинтерфейс) к любой управляющей
панели Beckhoff. Контроллеры серии СХ1000 представляют собой систему, модули ко-
торой соединяются между собой с помощью стандартной системной шины РС/104.
Отдельные компоненты системы представляют собой модули одинарной (19 мм) или
двойной (38) ширины. Базовый блок состоит из одного модуля CPU (СХЮОх-Оххх), по-
ставляемого в различных модификациях, и одного модуля питания (СХПОО-ОООх).
Различие модификаций процессорных модулей касается объема памяти (16 МВ
Флэш/32 MB RAM или 64 МВ Флэш/128 MB RAM). Последний вариант является обя-
зательным условием для работы системы в среде Windows ХР Embedded. Также мо-
дули отличаются наличием различных интерфейсов (Ethernet, RS-232, USB), встроен-
ной операционной системой (Windows CE.NET или Windows ХР Embedded). Общи-
ми для контроллеров серии СХ являются: системная шина РС/104 Standard или ISA,
блок питания на 24 VDC. Все варианты блоков питания оборудуются двустрочным
(по 16 знаков в каждой строке) ЖК-дисплеем с подсветкой для вывода сообщений о
статусе. Пользовательские программы могут использовать дисплей также для вывода
специальных текстовых сообщений.
Среди модулей серии СХ1000 имеются модули с интерфейса-
ми промышленных шин Profibus, CANopen, DeviceNet, SERCOS
Interface и Lightbus как в исполнении Master, так и в исполнении
Slave.
Для программирования контроллеров используется програм-
мное обеспечение TwinCAT. Сочетание модульной аппаратной ча-
сти и мощного программного обеспечения позволяет позициони-
ровать СХ1000 как контроллер для универсального применения.
Контроллер СХ9000 (рис. 2.6) включает процессорный мо-
дуль, блок питания, интерфейсы ввода/вывода, EtherCAT-модули
Рис. 2.6
178
ГЛАВА 2
или K-bus модули. Операционная система — Microsoft Windows СЕ, оперативная па-
мять 64 Мбайт с расширением до 128 Мбайт., интерфейс — 2xEthernet. Программное
обеспечение контроллера — TwinCAT СЕ PLC или СЕ NC РТР runtime.
Модульная система ввода/вывода Bus Terminal. Станция ввода/вывода представ-
ляет.собой сетевой контроллер ВС (Bus Coupler), обеспечивающий связь модулей вво-
да/вывода с промышленной шиной. Контроллер станции ввода/вывода может также
выполнять самостоятельные функции по управлению процессом, диагностике и др. В
систему ввода/вывода входят более 150 типов модулей, в том числе модули Bus Terminal
с интерфейсами RS-232, RS-485, Ethernet для связи с различными интеллектуальными
устройствами (подключение к сети Ethernet только для контроллера ВС9000). Дискрет-
ные модули выполнены в виде 2-, 4-и 8-канальных устройств. Стандартные аналоговые
входы сигналов ±10 В, 0 ... 10 В, 0/4 ... 20 мА выполнены в 1-, 2-, 4- и 8-канальном вари-
анте. В стандартном корпусе модуля шириной всего 12 мм компактно сосредоточены
входы и выходы аналоговых сигналов. Благодаря этому достигается высокая плотность
системы, позволяющая экономично использовать занимаемое пространство. На рис.
2.7 показан контроллер ВС9000 из серии ВС.
Управление каналами ввода/вывода осуществляется по промышленной шине
через интерфейсный модуль Bus coupler, который выбирается по типу шины, в соот-
ветствии с необходимыми требованиями.
Модуль расширения K-bus позволяет подключать до 255 модулей ввода/вывода к
одному контроллеру. Контроллеры промышленных шин Beckhoff поддерживают про-
токолы Lightbus, Profibus DP/FMS, Interbus, CANopen, DeviceNet, ControlNet, Modbus,
Fipio, SERCOS Interface, RS-232, RS-485, Ethernet TCP/IP и USB.
Модуль ввода/вывода может быть мастер-устройством промышленной шины.
Как правило, это целесообразно для интегрирования подсистем в систему более вы-
сокого уровня. Мастер-устройства доступны для следующих шин: AS-Interface, EIB,
LON, DALI, LIN и EnOcean
Различные типы Bus Terminal контроллеров (рис. 2.8) используют различные
сети. Сеть Lightbus поддерживает ПЛК типа ВС2000; Profibus — ВС31хх; Interbus —
ВС4000; CANopen — ВС51хх; DeviceNet — ВС52хх; Modbus — 7300; RS-485 — ВС8000,
ВХ8000; RS-232 — BC81xx; Ethernet TCP/IP — BC90xx, BX9000, BC91xx.
В зависимости от типа шины интерфейсные модули BUS Coupler подразделяют-
ся на следующие типы: EtherCAT — ВК1120, ВК1250; Lightbus — ВК20хх; Profibus —
ВКЗОхх, В КЗ Ixx, ВК35хх; Interbus — ВК4500; CANopen — ВК5 Ixx, LC5 Ixx; DeviceNet —
BK52xx, LC5200; ControlNet — BK7000; CC-Link— BK7150; Modbus — BK73xx; Fipio —
Рис. 2.7
Рис. 2.8
Рис. 2.9
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
179
£1
Н
г
и
Рис. 2.10
ВК7420; Sercos Interface — ВК75хх, RS-485 — ВК8000; RS-232 — ВК8100; Ethernet TCP/
IP— BK90xx, 9100; ASi— KL/KS62xl, LON— KL/KS6401; MP-bus— KL/KS6771.
Серия контроллеров BX (BX3100, BX5120, BX5200, BX8000 и ВХ9000) отличается
от серии ВС большим объемом памяти (ОЗУ-512 кбайт, флэш ПЗУ — 1 Мбайт), а
также наличием дополнительного интерфейса RS-485, ЖК-дисплея и часов реально-
го времени. Кроме того, контроллеры серии ВХ поддерживают промышленную сеть
CANopen. На рис. 2.9 показан общий вид контроллера ВХ9100.
Промышленные ПК (рис. 2.10) базируются
на процессоре Intel Pentium от 266 МГц до 2 ГГц,
объем ОЗУ — от 64 Мбайт до 1 Гбайт. Возможно
оснащение промышленного ПК встроенным ЖК-
дисплеем или удаленным на расстояние до 100 м.
Новая серия промышленного ПК С6300 обладает
малыми габаритами, высокой производительно-
стью, большим набором интерфейсов промыш-
ленных шин. ПО промышленного компьютера —
TwinCAT под Windows NT/2000/XP.
2.2.3 Контроллеры компании Bernecker & Rainer Industrial
Elektronik GmbH, Австрия
Компания B&R выпускает серию промышленных контроллеров B&R System2003,
System2005 и System2010, серию контроллеров и модулей ввода/вывода Х20/Х67. Но-
вой продукцией является PC-совместимый контроллер, встроенный в операторскую
панель РР100/РР200.
Модульный контроллеры B&R System2003 (рис. 2.11) представляют серию про-
мышленных контроллеров и модулей для систем управления при решении задач ма-
лой и средней автоматизации. Процессорные модули серии построены на процессо-
рах Intel Pentium или Motorola, имеют среднюю наработку на отказ (MTBF) больше
1 000 000 ч. Контроллер способен обрабатывать до 10 000 дискретных и до 5000 ана-
логовых сигналов. Время выполнения типовой инструкции — 0,5 мкс. Интерфейсы
связи контроллера: RS-232, RS-422, RS-485, CAN, Ethernet TCP/IP, Ethernet PowerLink,
TTY, USB, Profibus DP и др). Для конфигурирования контроллера используется пакет
Automation Studio™.
Операционная система контроллера — мультизадачная, реального времени. Мак-
симальное количество входов/выходов — 272 дискретных и 80 аналоговых. Модули
центрального процессора (СР 430/470/474/476/770/774): память SRAM — 750 кбайт,
Флэш PROM — 1,5 Мбайт. Процессорный модуль СР 570 на базе х86 процессора
имеет встроенные интерфейсы Ethernet 10/100 BaseT и USB.
Конструкция крейта позволяет устанавли-
вать 2, 3, 4, 5,6, 8 или 10 модулей. При исполь-
зовании удаленных входов/выходов общее
число станций достигает 31. Система удален-
ного ввода/вывода (RIO) B&R применяется
для приложений с большей производитель-
ностью. Она обеспечивает скорость передачи
данных до 2 Мбит/с. Время отклика RIO (счи-
тывания цифрового входа и установки цифро-
180
ГЛАВА 2
вого выхода) менее 3 мс. Общая ширина крейта в зависимости от числа модулей N
составляет от 161,5 до 773,5 мм (76,5xN + 8,5 мм). Размеры модулей в металлическом
корпусе: 77x115x70 мм. Модули устанавливаются на базовой плате, выполненной
из алюминия, и крепятся винтами. Модули дискретного ввода/вывода рассчитаны
на 2, 4, 8, 16 или 32 канала. Выходные элементы дискретного выхода — транзистор,
реле, семистор. Модули аналогового ввода/вывода с числом каналов от 1 до 4-х рас-
считаны на сигналы ± 10 VDC, 0.. .20 мА. Помимо этих модулей имеются температур-
ные модули, модули ЧПУ и позиционирования, смешанные модули и интерфейсные
модули. Напряжение питания контроллера: 18. ..30 VDC или 190...220 VAC. Рабочая
температура— от 0 до 60 °C.
Модульный контроллеры B&R System2005 (рис. 2.12) применяется для созда-
ния средних и больших систем автоматизации. Процессорные модули контроллера
построены на процессорах Pentium III, время цикла типовой инструкции — 0,012
мкс. Модульная концепция и масштабируемость, полный спектр модулей для любых
типов задач, поддержка всех основных промышленных интерфейсов и полевых шин
расширяют применение данного типа контроллеров. Основные характеристики кон-
троллера: операционная система — мультизадачная, реального времени с квантова-
нием по времени; минимальное время цикла— 0,2 мс; минимальное время обработ-
ки команды — 0,012 мкс; напряжение питания: 18.. .30 VDC или 190...220 VAC.
Модули B&R System 2005 имеют пластмассовые корпуса и крепятся к модулю базо-
вой платы, который присоединяется к монтажному основанию. На базовой плате мо-
жет быть установлено до 15 модулей. Если необходимо большее число модулей систему
легко увеличить, используя сегменты расширения. Основной сегмент содержит CPU
и модуль питания, расположенный в левом конце сегмента. Центральный процессор,
расположенный на основной базовой плате справа от модуля питания, занимает два
места. CPU отличаются друг от друга производительностью, возможностью работы с
параллельным процессором и быстродействием. Модули CPU (СР260/340/360/380/382)
имеют интерфейсы RS-232, CAN, Ethernet PowerLink, USB; память — SRAM 512 кбайт,
DRAM - 64 Мбайт, флэш-память 1 Гбайт. В модулях СР360, СР380 и СР382 (рис. 2.13)
в качестве процессора используется Pentium 266 МГц , SRAM 512 кбайт, DRAM 32
Мбайт (СР360) и Pentium III 500
МГц, SRAM 512 кбайт, DRAM 64
Мбайт (СР380 и СР382).
Модули дискретного ввода/
вывода рассчитаны на 16 и 32
канала (дискретный ввод) и на 8,
16 и 32 канала (дискретный вы-
вод). Модули аналогового ввода/
вывода — на 8 каналов (сигналы:
± 10 VDC, 0...20 мА). Помимо
этих модулей имеются темпера-
турные модули, модули ЧПУ и
позиционирования, смешанные
модули, интерфейсные модули,
модули дополнительной памяти,
модули расширения и модули
параллельных процессоров.
Рис. 2.13
Рис. 2.12
Рис. 2.14
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
181
Рис 2.15
ООО
ООО
Ъ&ы О©©
» *
• о©®
Модульный контроллеры B&R System 2010 (рис. 2.14) имеет базовую плату с
системной шиной на 8 модулей и разъемом для установки на DIN-рейке до 20 моду-
лей ввода/вывода. Поддерживаются интерфейсы RS-232, Ethernet 10/100 BaseT, CAN,
Profibus DP. Модуль питания — с напряжением питания 24 VDC или 90...270 VAC.
Модули дискретного ввода/вывода рассчитаны на 32 канала с входным/выход-
ным напряжением 24 VDC или 120/130 VAC. Модули аналогового ввода рассчитаны
на 8 или 16 каналов, входные/выходные сигналы — ток или напряжение.
Система удаленного ввода/вывода (Remote I/O) объединяет до 31 slave-станции
без повторителя и до 126 slave-станций с повторителем.
Панели оператора со встроенным контроллером PowerPanel (рис. 2.15) объеди-
няют панель оператора и полнофункциональный контроллер в одном корпусе. В пане-
ли оператора Panel Ware (PW) используются текстовый дисплей на 4x20 символов или
графический дисплей с матрицами TFT, EL, LCD и сен-
сорным экраном с подсветкой. Панель имеет до 47 функ-
циональных или программируемых кнопок, устройство
управления курсором. Панели PW поддерживают различ-
ные промышленные интерфейсы связи и полевые шины
(RS-232/422/485, Profibus FMS, CAN, NET2000 и др.).
Панели Power Panel разделяются на серию РР15/
РР21/РР35/РР41, основанных на процессорах Motorola,
и панелей серии РР100/200 на базе Intel-совместимого
центрального процессора (DRAM — 128 Мбайт, слот
для Сотрас1Флэш-карты, интерфейс Ethernet 100 Мбит/с, 2х USB, lxRS-232. Панели
РР100 и РР200 поставляются в исполнении с предустановленной операционной систе-
мой Windows СЕ и с выбранными модулями ввода/вывода представляют собой РС-
совместимый контроллер (промышленный компьютер).
Панели Power Panel (РР21 и РР41) оборудованы слотами для установки дискрет-
ных и аналоговых модулей ввода/вывода, быстродействующих модулей ввода/вывода
(применяются для подсчета событий, управления пусковыми механизмами, шаговы-
ми двигателями и проведения частотных измерений), а также модулей связи интер-
фейсов RS-232, RS-422, RS-485, TTY, CAN, Profibus и Ethernet. Модули ввода/вывода
РР21и PP41: 10DI/8DO. Модули ввода/вывода РР15 и РР35: 8DI/8DO/4AI/4AO.
Программирование панелей управления Power Panel, как и другой продукции B&R,
осуществляется с использованием единого инструментального программного обе-
спечения Automation Studio”. Панели оператора со встроенным контроллером, как и
другое оборудование B&R, обладают широким выбором драйверов для работы с PLC
других производителей. Наличие общей аппаратной платформы, единого программ-
ного обеспечения для программирования любого компонента, полноценный набор ап-
паратных и сетевых средств фирмы Bernecker&.Rainer, упрощает процесс разработки и
сопровождения систем промышленной автоматизации любого уровня.
2.2.4 Контроллеры компании Control Microsystems, Канада
Контроллеры и модули ввода/вывода фирмы Control Microsystems являются обо-
рудованием для жестких условий эксплуатации и предназначены для работы в необ-
служиваемых условиях в температурном диапазоне от -40 до +70 °C.
Фирма Control Microsystems выпускает контроллеры марки TeleSAFE, SCADAPack
и SmartWIRE.
182
ГЛАВА 2
Контроллер TeleSAFE Microl6 (рис. 2.16) имеет процессор М37702 с частотой
14,7 МГц, объем ОЗУ — 1 Мбайт, флэш-ПЗУ — 2 Мбайт. Программирование осу-
ществляется на «С», языке релейной логики или на других языках ТЕС 61131-3. Связь
с внешними устройствами через последовательные порты RS-232 или RS-485. Увели-
чение-каналов ввода/вывода достигается при помощи модулей ввода/вывода серии
5000. Контроллер имеет встроенные сторожевой таймер и часы-календарь. Пита-
ние контроллера — от источника постоянного или переменного тока напряжением
12..,28В.
Контроллеры SCADAPack предназначены для создания распределенных систем
телемеханики и управления. Контроллер монтируется в 19-дюймовую стойку и име-
ет каркасно-модульную структуру. В шасси контроллера кроме процессора и блока
питания могут быть установлены до 12 модулей ввода/вывода аналоговых или дис-
кретных сигналов с возможностью «горячей» замены. Архитектура контроллеров
позволяет создать систему управления различной конфигурации — от устройства
удаленного ввода/вывода нескольких сигналов до системы управления, обрабаты-
вающей более 400 каналов ввода/вывода.
Контроллеры программируются на стандартных языках МЭК 61131-3, а также на
«С». Прикладная программа хранится во Флэш-памяти. Диагностику контроллера,
программирование и отладку программ можно проводить в удаленном режиме — по
телефонной или радиолинии. Контроллеры поддерживают коммуникационный про-
токол ModBus RTU и ASCII.
Контроллеры и модули расширения имеют групповую или индивидуальную
гальваническую изоляцию каналов, минимальное энергопотребление, возможность
перехода в спящий режим и встроенный источник бесперебойного питания. Напря-
жение питания контроллеров 24 VDC.
Контроллер SCADAPack32 (рис. 2.17) является наиболее мощным контролле-
ром, предлагаемым фирмой Control Microsystems. Он имеет 32-разрядный 120 МГц
RISC-процессор, 8 Мбайт DRAM, 4 Мбайт Флэш, 1 Мбайт SRAM. Программирование
осуществляется на языке релейной логики, языках стандарта IEC 61131-3 (ISaGRAF),
языке С и C++.
Контроллер SCADAPackER (рис. 2.18) в исполнении Rack-mount имеет интер-
фейс Ethernet lOOBaseT (скорость обмена данными 100 Мбит/с).
Контроллер SCADAPack Wireless (рис. 2.19) со встроенным радиомодемом пред-
назначен для организации беспроводной связи на частотах 900 МГц или 2 ГГц. Ско-
рость передачи — 115 кбит/с.
Контроллер SCADAPack2 имеет 32-разрядный процессор и поддерживает про-
токолы Modbus RTU, Modbus ASCII, Modbus/TCP. Помимо модуля расширения 5606
к контроллеру может быть подключен модуль беспроводной связи на частоте 900
МГц или 2,4 ГГц.
Контроллер SCADAPackES оснащен процессором AMD Elan™ SC520. Среда
программирования ISaGRAF соответствует стандарту IEC 61131-3. Для увеличения
числа каналов ввода/вывода используются внешние модули, подключаемые к портам
RS-485 или Ethernet.
Новый модуль ввода/вывода 5606 (рис. 2.20) имеет 32 дискретных входов, 16
дискретных выходов, 8 программно конфигурируемых аналоговых входов и 2 ана-
логовых выхода. Данный модуль устанавливается на промышленном контроллере
SCADAPack32 и указывается в коде его заказа. Среди других модулей расширения от-
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
183
'Й мш -ли» > И>» чцлиллмг.
НИИ *
Рис. 2.18
Рис. 2.19 Рис. 2.20 Рис. 2.21
метим следующие: 5402 (16 DI/DO, рис. 2.21), 5404 (16 DI), 5405 (32 DI), 5406 (16 RO),
5409 (8 DO), 5411 (32DO), 5502 (для термометров сопротивления), 5504 (термопары
J, К, Т, Е и ± 80 мВ), 5506 (AI0/4...20 мА, 0...5 VDC) и др. К коммуникационным мо-
дулям относятся: 5901 (Dual-Up модем), 5902 (радиомодем), 5904 (HART-интерфейс),
5908 (беспроводный интерфейс 900 МГц и 2,4 ГГц), 5910 (Ethernet-интерфейс).
Технические характеристики различных моделей контроллеров SCADAPack при-
ведены в табл. 2.10.
Таблица 2.10. Технические характеристики контроллеров SCADAPack
Тип контрол- лера Память ОЗУ/ПЗУ Число встроен. аналог, каналов ввода/вывода Число встроен, дискрет, каналов ввода/вывода Интерфейс Модули расшире- ния
SCADAPack Память программ 12 Келов 8/2 20/12 (RO); 3 счетных входа 2xRS-232, lxRS-232/ RS-485 Серия 5000
SCADAPack32 ОЗУ — 8 Мбайт, флэш-ПЗУ — 4 Мбайт 8/2 20/12 (RO) 3 счетных входа 3XRS-232, lxRS-232/ RS-485, IxEthernet 10/100BaseT Серия 5000
SCADAPack32P — — 3xRS-232/RS-485, IxEthernet Серия 5000
SCADAPack 100 ОЗУ - 256 кбайт, флэш-ПЗУ — 512 кбайт 3/1 6 DI/DO lxRS-232, lxRS-232/ RS-485 —
SCADAPack Light Память программ 12 кслов 5/- -/2RO 3 счетных входа 3xRS-232 Серия 5000
SCADAPack Plus 13/2 16/14 RO 3 четных входа 4xRS-232 Серия 5000
SCADAPack LP ОЗУ 1 Мбайт, флэш-ПЗУ — 512 кбайт 6/2 8DI/DO 3 счетных входа 2XRS-232, lxRS-232/ RS-485 Серия 5000
SCADAPack 350/370 ОЗУ — 8 Мбайт, флэш-ПЗУ — 4 Мбайт 8/2 20/12 (RO) lxRS-232, lxRS-232/ RS-485, lxRS-485, IxEthernet 10/100 BaseT, 2xUSB 2.0 Модуль 5606
SCADAPack2 ОЗУ — 4 Мбайт, флэш-ПЗУ —16 Мбайт 5/2 8 (конфигуриру- емые пользова- телем) 2xRS-232, RS-485, Ethernet 10/100 BaseT
SCADAPackES ОЗУ-2 Мбайт, флэш-ПЗУ — 32 Мбайт, SDRAM —128 Мбайт 12/4 32/16 (RO) 3xRS-232,2xRS- 232/RS-422/RS-485, 2xEthemet —
184
ГЛАВА 2
Коммуникационные контроллеры, поддерживающие последовательный обмен
данными по интерфейсам RS-232 и RS-485: 5201 RS-485 (поддерживает 64 AI, 32 АО,
64 DI, 64 DO); 5202 RS-232 (поддерживает 64 AI, 32 АО, 64 DI, 64 DO).
Для программирования контроллеров серий TeleSAFE Micro 16 и SCADAPack,
отладки и документирования программ контроля и управления используется пакет
TelePACE. Пакет программирования TelePACE содержит редактор программ релей-
ной логики — TelePACE Ladder Logic и набор инструментов для работы на языке С —
TelePACE С Tools.
Для связи контроллеров TeleSAFE Micro 16 и SCADAPack со SCADA-системами
предназначен ОРС-сервер, который поддерживает до четырех последовательных
соединений. Каждое из них может быть отдельным устройством или несколькими
устройствами в зависимости от способа соединения (без управления передачей дан-
ных, с использованием сигналов RTS/CTS или с набором номера по коммутируемым
телефонным линиям).
2.2.5 Контроллеры компании Delta Electronics Inc., Тайвань
Контроллеры компании серии DVP (рис. 2.22) представляют собой моноблочные
контроллеры с модулями расширения дискретных и аналоговых каналов ввода/вы-
вода и встроенными интерфейсами RS-232 и RS-485. Для контроллеров серии DVP-
Рис. 2.22
SS/SA/SX/SC имеются коммуникационные модули
расширения Profibus DP и DeviceNet. Пакет програм-
мирования под ОС Windows WPLSoft использует три
технологических языка программирования — LD, IL
и SFC. Для программирования под ОС DOS имеется
пакет DPLSoft. Память программ составляет от 4 до
16 кслов для различных типов контроллеров. Число
базовых и прикладных инструкций — 127.
Серия DVP объединяет в своем составе 6 типов
базовых процессорных модулей (DVP-SS/SA/SX/ES/
ЕХ/ЕН), различающихся объемом памяти, быстродействием, числом встроенных ка-
налов ввода/вывода, набором встроенных функций и др. Все модули выпускаются в
пластмассовых корпусах. Монтаж осуществляется на стандартную DIN-рейку или на
плоскую поверхность. Соединения между модулями выполняются плоскими кабеля-
ми или встроенными разъемами.
Контроллеры серии DVP-SS имеют в своем составе базовый модуль DVP- 14SS и
модули расширения DVP-04AD и DVP-02DA. Встроенные каналы дискретного вво-
да/вывода: 8DI и 6DO. Память программ (EEPROM) составляет 4 кслов. Максималь-
ное число каналов с модулями расширения — 128. Встроенные интерфейсы — RS-232
(связь с ПК, программатором НРР или с операторской панелью), RS-485 (связь с ПЛК
по протоколу Modbus в сети master/slave и с преобразователями частоты DELTA
VFD-B/M/S и др.).
Контроллер DVP-SA имеет встроенные каналы дискретного ввода/вывода: 8DI
и 4DO. Память программ составляет 8 кслов. Модули расширения общие с контрол-
лерами серии DVP-SS.
Контроллер DVP-SX имеет встроенные каналы дискретного и аналогового вво-
да/вывода: 4DI, 2DO, 2AI и 2АО. Память программ составляет 8 кслов. Модули рас-
ширения общие с контроллерами серии DVP-SS.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
185
Контроллер DVP-ES имеет встроенные каналы дискретного ввода/вывода на 14,
24, 32 и 64 точки. Память программ составляет 8 кслов. Модули расширения на 8,
16, 32 и 64 канала ввода/вывода. Тип дискретных входов 24 VDC PNP или NPN, вы-
ходов— релейный (СК) и транзисторный (ОК). Питание контроллера 24 VDC или
100...240 VAC.
Контроллер DVP-EX имеет встроенные каналы дискретного ввода/вывода
на 14 точек (8DI и 6DO) и аналогового ввода/вывода на 6 точек (4AI и 2АО). Мо-
дули расширения на 8, 16, 24 и 32 канала ввода/вывода. Тип дискретных входов:
24 VDC PNP или NPN, выходов — релейный (СК) и транзисторный (ОК). Тип
аналогового входа и выхода: 0...20 мА, ± 10 VDC. Питание контроллера 24 VDC
или 100...240 VAC.
Контроллер DVP-EH имеет процессорный модуль на 16, 20, 32, 48, 64 и 80 кана-
лов дискретного ввода/вывода. Модули расширения на 8, 16, 32 и 48 каналов ввода/
вывода. Память программ составляет 16 кслов, память данных — 10000 регистров.
Время выполнения базовой инструкции — 0,24 мкс. Число высокоскоростных счет-
чиков до 200 кГц — 4, число импульсных выходов (до 200 кГц) — 2. Максимальное
число каналов ввода/вывода с модулями расширения — 512.
Новая серия модульных контроллеров DVP-SV имеет характеристики аналогич-
ные контроллерам серии DVP-EH, но отличается компактным модульным исполне-
нием (корпус Slim).
2.2.6 Контроллеры компании FATEK Automation Corp., Тайвань
Компания FATEK Automation выпускает моноблочные контроллеры серии FBe
и FBs (рис. 2.23), модули расширения, коммуникационные модули и программное
обеспечение контроллеров WinProLadder. Контроллеры имеют встроенные каналы
аналогового и дискретного ввода/вывода, скоростной счетчик, таймер, встроенные
интерфейсы RS-232, RS-485, HMOS. Для вычислений используется 16-разрядный
процессор Z8 из серии Z180. Коммуникационные драйверы FACON PLC поддержи-
ваются большинством производителей SCADA-систем. Компания FATEC предлагает
также ОРС-сервер, ActiveX, DDE-сервер.
Встроенные каналы дискретного ввода/вывода: 12DI/8DO, 24 VDC (FBs-20MC),
I6DI/12DO, 24 VDC (FBs-28MC), 24DI/16DO, 24 VDC (FBs-40MC).
Увеличение числа каналов достигается с помощью модулей расширения, харак-
теристики некоторых из которых приведены ниже (табл. 2.11).
На рис. 2.24 представлен общий вид модуля расширения FBs-4DA/2DA.
Рис. 2.23
Рис. 2.24
186
ГЛАВА 2
Таблица 2.11. Характеристики модулей расширения контроллеров FATEK
Тип модуля Аналоговые входы Аналоговые выходы Дискретные входы Дискретные выходы
Дискретные и аналоговые модули ввода/вывода
FBS.-2O МА — — 12 D1, 24 VDC 8RO, 2AAC/DC
FBS-14MAS — — 8DI, 24 VDC 6 тиристорных выходов, 1А АС
FBS-32MAT — — 20 DI, 24 VDC 12 транзисторных выходов, 24 VDC
FBs-40MC — — 24 DI, 24 VDC 16RO, 2AAC/DC
FBs-40 MCS — — 24 DI, 24 VDC 16 тиристорных выходов, 1А АС
FBs-бОМСТ — — 36 DI, 24 VDC 24 транзисторных выходов, 24 VDC
FBs-6AD 6 А1,+ 5/10 VDC, + 10/20 мА или 0...5/10 VDC, 0... 10/20 мА __ — —
FBs-B2AlD 2 AI, 0... 10 VDC, 0...20 мА 1 АО, 0...10 VDC, 0...20мА — —
FBS-4A2D 4 AI, ± 5/10 VDC, ± 10/20 мА или 0...5/10 VDC, 0... 10/20 мА 2 АО,-5/10...+5/10 VDC, -10/20...+10/20 мАили 0...5/10 VDC.0... 10/20 мА — —
FBS-2DA — 2 АО, -5/10...+5/10 VDC, -0/20.. .+10/20 мА или 0...5/10 VDC.0... 10/20 мА — —
FBS-4DA — 4 АО, -5/10...+5/10 VDC, -0/20.. .+10/20 мА или 0...5/10 VDC.0...10/20 мА —
FBS-B2DA — 2 АО, 0... 10 VDQ 0...20мА — —
Коммуникационные модули
FBS-CM22 2 порта RS-232 с индикаторами
FBS-CM55 2 порта RS-485 с индикаторами
FBS-CM25E lxRS-232, lxRS-485 с Ethernet-интерфейсом, с индикаторами
FBS-CM25C Конвертер RS-232/RS-485 с индикаторами
FBS-CM5R Репитер RS-485 с индикаторами
FBs-CBE (Ethernet) Ethernet-интерфейс плата с индикаторами
Специальные модули
FBS-TC2 Модуль для термопар, подключение 2 термопар
FBs-ТСб Модуль для термопар, подключение 6 термопар
FBS-RTD6 Модуль для терморезисторов, подключение 2 терморезисторов
FBS-TC16 Модуль для термопар, подключение 16 термопар
FBS-RTD16 Модуль для терморезисторов, подключение 16 терморезисторов
FBS-2ARTD4 2 аналоговых входа и 4 входа для термопар
FBS-2ATC4 2 аналоговых входа и 4 входа для терморезисторов
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
187
2.2.7 Контроллеры компании GE Fanuc (США—Япония)
В состав линейки VersaMax Nano контроллеров компании GE-Fanuc входят мо-
ноблочные контроллеры VersaMax Nano и VersaMax Micro, модульные контроллеры
VersaMax, Series 90-30, Series 90-70 и новый модульный контроллер с открытой архи-
тектурой и повышенной функциональностью PACSystem RX7i.
Контроллер VersaMax Nano (рис. 2.25) имеет 10 каналов дискретного ввода/вы-
вода, а в новых моделях VersaMax Micro (рис. 2.26) число каналов ввода/вывода до-
ходит до 84-х с подключением до 4-х модулей расширения. Базовый VersaMax Micro
выпускается в 3-х модификациях: 14, 23 и 28 каналов ввода/вывода. Контроллеры
применяются для решения задач локальной автоматизации.
Модульный контроллер VersaMax (рис. 2.27) используется в качестве устрой-
ства распределенного управления с числом каналов ввода/вывода до 1500. К одному
модулю CPU можно подключить до 8 шасси ввода/вывода. К числу модулей ввода/
вывода относятся до 31 типа модулей дискретного ввода/вывода и 19 типов моду-
лей аналогового ввода/вывода. Процессор с объемом памяти 64 кбайт осуществляет
обмен данными по 2048 каналам ввода/вывода. К числу сетевых интерфейсов кон-
троллера относятся: Genius Bus, Profibus DP, DeviceNet и Ethernet. Программирование
контроллеров осуществляется па языках LD и IL при помощи программного пакета
VersaPro. Кроме того, в ассортименте продукции компании GE Fanuc имеется единое
программное обеспечение (SIMPLICITY Machine Edition для программирования, ви-
зуализации и управления.
Рис. 2.25
Рис. 2.26
Модульные контроллеры Series 90-30 (рис. 2.28) относятся по производительно-
сти к контроллерам среднего класса и включают 11 модулей CPU, более 100 различ-
ных типов модулей ввода/вывода, интеллектуальных и коммуникационных модулей.
Программирование контроллеров Series 90-30 реализуются с помощью пакета Ladder
Logic, графического языка «SFC» и «С». Контроллер снабжен интерфейсом Ethernet
TCP/IP. Удаленная система ввода/вывода базируется на сетях Genius Bus, Profibus DP,
Interbus-S или DeviceNet.
Модульные контроллеры Series 90-70 (рис. 2.29) предназначены для больших си-
стем, а также для применений, требующих повышенной надежности — дублирование
или тройное резервирование модулей (TMR). Контроллеры совместимы с другими
ПЛК Series 90. В контроллерах Series 90-70 использована новейшая технология, а от-
крытая архитектура VMEbus представляет собой платформу для эффективного выпол-
нения работы разного объема. Семейство Series 90-70 имеет в своем составе шйрокую
номенклатуру аналоговых, дискретных, коммуникационных и специальных модулей,
а также модуль сопроцессора PC с загрузкой Windows или др. операционных систем.
Для программирования контроллера Series 90-70 используются языки «LD» и «С».
188
ГЛАВА 2
Рис. 2.29 Рис. 2.30 Рис. 2.31
Станция оперативного управления типа OCS/OCS 100/OCS 200/OCS 250 (рис.
2.30) включает контроллер, операторскую панель и систему ввода/вывода. Контроллер
может быть как моноблочным, так и модульным, содержащим до 4-х модулей ввода/
вывода SmartStack. Объем памяти для программ — 64... 128 кбайт в зависимости от
типа, время цикла — 0,7 мс. Встроенные интерфейсы: CsCAN, DeviceNet, RS-232/RS-485.
Программирование контроллеров осуществляется с персонального компьютера.
Модульный контроллер с открытой архитектурой и повышенной функцио-
нальностью PACSystem RX7i (рис. 2.31) выполнен на базе шины VME64 с поддерж-
кой плат различных производителей, в том числе Ethernet и GENIUS. В качестве
процессора используется Pentium III CPU, 300MHz или 700MHz. Объем памяти —
10 Мбайт. Контроллер имеет встроенный Ethernet 10/100 и построен на базе кон-
троллера Series 90-70.
Основной полевой шиной для связи контроллеров GE Fanuc с полевым уровнем
и между собой является Genies. Физической средой шины Genies является экрани-
рованная витая пара или оптоволокно. Помимо шины Genies контроллеры GE Fanuc
поддерживают шину Profibus DP. Помимо модулей ввода/вывода, устанавливаемых в
базовый конструктив контроллеров GE Fanuc, выпускаются системы ввода/вывода
Field Control, включающие несколько модулей, среди которых должен быть модуль
интерфейса сети Genies, Profibus DP и Ethernet.
Инструментальные средства программирования контроллеров интегрированы в
пакете Proficy Machine Edition (ME), который включает также программы управле-
ния на базе PC и систему построения HMI Cimplicity ME View. Программирование
контроллеров осуществляется с помощью инструментальной среды CIMPLICITY
Logic Developer.
2.2.8 Контроллеры компании ICP DAS, Тайвань
PC-совместимые контроллеры (SoftPLC) компании ICP DAS отличаются от клас-
сических ПЛК тем, что многие функции реализуются на программном уровне, а на-
личие мощного программного обеспечения промышленного компьютера расширяет
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
189
возможности PC-совместимых контроллеров. К основным преимуществам контрол-
леров относятся:
• использование открытых протоколов, что позволяет интегрировать в одну систе-
му устройства широкого спектра производителей;
• простота программирования и доступность широкого спектра программного
обеспечения, что минимизирует затраты времени и средств на создание систе-
мы;
• интеграция с системами верхнего уровня, что позволяет обеспечить доступ к
данным технологического процесса со стороны операторских станций верхнего
уровня системы управления предприятием.
Контроллеры и модули распределенного ввода/вывода серии 1-7000 и 1-8000
компании ICP DAS, распространяемые компанией IPC2U Group, предназначены для
управления технологическими процессами, встраивания в технологическое оборудо-
вание, сбора данных и пр.
Линейка контроллеров и модулей серии 1-7000 включает процессорные модули
(контроллеры серии 1-7188), коммуникационные модули, модули аналогового вво-
да и вывода, модули дискретного ввода/вывода, таймеры/счетчики. Каждый модуль
представляет функционально законченное устройство, размещенное в пластиковом
корпусе из негорючей пластмассы ABS. На корпусе расположены необходимые разъ-
емы и клеммные соединители для винтовой фиксации внешних входных и выходных
цепей. Установка модулей не требует специальных объединительных плат и может
осуществляться как на стандартную несущую 35-мм DIN-рейку, так и на любую пло-
скую панель или стену. К числу основных достоинств модульной системы относятся:
сокращение затрат на кабельную продукцию, повышение живучести системы за счет
снижения затрат на эксплуатацию, замену и модернизацию системы.
PC-совместимые контроллеры 1-7188 (рис. 2.32) представляют собой функци-
онально законченные устройства, размещенные в компактных пластиковых корпу-
сах. В контроллер установлен процессор AMD188-40 МГц, объем памяти 128...512
кбайт SRAM, электронный Флэш-накопитель объемом 256...512 кбайт, часы ре-
ального времени, порт Ethernet и последовательные порты RS-232 и RS-485. Мо-
дификации I-7188X позволяют устанавливать в корпус специальные мезонинные
модули с цепями ввода/вывода сигналов. Такое решение позволяет в ряде случаев
обходиться без внешних модулей ввода/вывода. Ряд контроллеров 1-7188 имеют
встроенную систему программирования ISaGRAF (1-7188 EG/EGD/XGD), ОС —
Mini OS7 или ROM DOS.
Контроллеры 1-7188 и модули ввода/вывода серии 1-7000 поддерживаются
SCADA-системой Micro TRACE MODE 6. В этом случае программипование контрол-
леров осуществляется на 5-ти языках программирования по
стандарту МЭК 61131-3. Контроллер, запрограммированный в
Micro TRACE MODE 6, может быть подключен к операторскому
ПК на базе SCADA TRACE MODE 6 через сеть Ethernet lOBaseT
по протоколу I-NET TCP/IR При этом программирование кон-
троллеров и SCADA ПК осуществляется в единой инструмен-
тальной системе, а все настроечные параметры вводятся один
раз и многократно используются на любых физических устрой-
ствах проекта (в контроллерах и на ПК). Настройка параметров
сети 1-7000 также автоматизирована процедурой автопострое- Рис 2-32
190
ГЛАВА 2
ния. Предусмотрена облегченная настройка на УСО ICP/DAS серии 1-7000 с помо-
щью процедуры автопостроения.
Среди новых моделей микроконтроллеров серии 1-7000 отметим контролле-
ры 1-7188EF-016 и I-7188XDB-CAN. Модель I-7188EF-016 содержит порты Ethernet
lOBaseT, RS-485, RS-232 и изолированный FRnet. Данное устройство предназначено
для подключения модулей ввода/вывода, работающих в сети FRnet, к персональному
компьютеру через порт Ethernet по протоколу Modbus или DCON. Каждый контрол-
лер I-7188EF-016 способен объединить до 16-ти модулей по 16-ти каналам ввода/вы-
вода в каждом модуле. Таким образом, I-7188EF-016 поддерживает до 256-ти каналов
ввода/вывода.
Контроллер I-7188XDB-CAN — программируемый микроконтроллер на базе
процессора 80188-40 МГц, ОЗУ — 512 кбайт, флэш-ПЗУ — 512 кбайт, ОС — MmiOS7.
Устройство имеет интерфейсы RS-232, RS-485 и порт CAN bus. Программирование
осуществляется на языке C/C++.
PC-совместимые контроллеры серии 1-8000 (рис. 2.33) имеют улучшенные тех-
нические характеристики и более широкий диапазон рабочих температур. Конструк-
тивно контроллер серии 1-8000 выполнен в виде отдельного блока, содержащего цен-
тральный процессор, источник питания, панель
управления, коммуникационные порты и от 4 до
8 слотов расширения. В качестве операционной
системы используется MiniOS7.
Модули ввода/вывода серии 1-8000 (более
50 моделей) устанавливаются непосредственно
в корзину контроллера (от 4-х до 8-ми слотов).
Для расширения системы можно использовать
специальные корзины расширения, подключаемые по шине RS-485, или отдельные
модули ввода/вывода серии 1-7000.
Модули расширения серии 1-8000 делятся на два типа: параллельные и после-
довательные. Модули параллельного типа — высокоскоростные устройства вво-
да/вывода, которые могут быть установлены только в контроллеры серии 1-8000/
WinCon-8000. Модули последовательного типа обладают более низкой скоростью
обмена и могут устанавливаться как в слоты расширения контроллеров, так и в
слоты корзин расширения 87к4, 87к5,87к8, 87к9, обеспечивая, таким образом, рас-
ширение контроллеров или работая в качестве станции удаленного ввода/вывода с
интерфейсом RS-485.
Среди модификаций контроллеров серии 1-8000 отметим контроллеры со встро-
енной системой программирования ISaGRAF, системой моделирования MatLab, ин-
терфейсами Ethernet lOBaseT.
Встроенную систему программирования ISaGRAF имеют контроллеры 1-8417 (40
МГц, ОЗУ — 128 кбайт, флэш-ПЗУ — 256 кбайт, lxRS-232, lxRS-485, lxRS-232/RS-
485, 4 слота), 1-8417 (ОЗУ — 512 кбайт, флэш-ПЗУ — 512 кбайт, 4 слота), 1-8437 (до-
бавлен порт Ethernet 10 BaseT), 1-8817 (8 слотов), 1-8837-80 (80 МГц, Ethernet 10 BaseT,
8 слотов). С системой MatLab применяется контроллер 1-8438-80 (80 МГц, ОЗУ —
512 кбайт, флэш-ПЗУ — 512 кбайт, Ethernet 10 BaseT, 4 слота) и 1-8831-ModbusTCP
(Ethernet 10 BaseT, 8 слотов).
PC-совместимый контроллер серии WinCon-8000 (рис. 2.34) является даль-
нейшим развитием серии 1-8000 и представляет собой полноценный компьютер.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
191
Он разработан на базе процессора Intel
Strong ARM 206 МГц, имеет встроенный
видеоконтроллер с портом VGA, разъемы
USB, PS/2 для манипулятора и клавиату-
ры, а также возможность подключения
накопителей стандарта Compact Флэш.
Все это дает возможность использовать
Рис. 2.34
этот контроллер как полноценный про-
мышленный компьютер. В то же время
WinCon сохраняет аппаратную преемственность и полностью совместим со всеми
модулями ввода/вывода серии 1-8000. Операционная система реального времени
Windows CE.NET позволяет программировать WinCon-8000, используя Visual Basic.
NET, Visual C, Embedded Visual C++, а также современные SCADA-системы.
Среди 18 моделей контроллеров WinCon-8000 имеются контроллеры с поддерж-
кой системы ISaGRAF. К ним относятся: W-8337-G (ОЗУ — 64 Мбайт, флэш-ПЗУ — 32
Мбайт, интерфейсы lxRS-232, lxRS-485, 2xEthernet, WinCE.Net, 3 слота); W-8737-G
(7 слотов), W-8037-G (без слотов расширения). В контроллерах L-8731/8741-G (7 сло-
тов), L-8331/8341-G (3 слота) установлена ОС Linux, добавлены порты USB.
Новые контроллеры ГСР DAS серии KinCon-8045/8345/8745 построены на про-
цессоре Intel StrongARM и работают под управлением ОС Windows СЕ. Контролле-
ры могут программироваться с помощью программного обеспечения KW, Microsoft
EVC++ или VS.NET. Программное обеспечение KW позволяет вносить изменения в
программу без выключения контроллера и в короткие сроки создавать многозадач-
ные системы управления реального времени. Контроллеры серии KinCon поддержи-
вает систему визуализации ProVisIT, с помощью которой можно создавать иерархи-
ческую структуру экранов. Вместе с сенсорной панелью (GA-700YY-UOM/USB) это
полностью готовая система автоматизации с человеко-машинным интерфейсом.
2.2.9 Контроллеры компании Koyo Electronics, Япония
Контроллеры Direct Logic от компании Koyo Electronics подразделяются на моно-
блочные, модульные и PC-совместимые. К моноблочным ПЛК относятся DL05, DL06
и DL105. К модульным ПЛК — DL205, DL305 и DL405. PC-совместимый контроллер
DL470 представляет собой промышленный компьютер с процессором Pentium 200
МГц ММХ. Контроллер DirectLogic DL205 с процессорным PC-совместимым моду-
лем WinPLC и ОС Windows СЕ относится к классу как модульных, так и PC-based
контроллеров.
Моноблочный контроллер DL05 (рис. 2.35) имеет слот расширения, поддержи-
вающий дополнительные модули аналогового и дискретного ввода/вывода с питани-
ем 95...240 VACu 12...24 VDC (8 типов), модуль памяти и часов-календаря реального
времени или модуль подключения к сети DeviceNet, встроенный высокоскоростной
Рис. 2.35
Рис. 2.36
Рис. 2.37
192 ГЛАВА 2
счетчик 5 кГц, импульсный выход, два порта RS-232, протокол Modbus RTU, 4 конту-
ра ПИД-регулирования с автонастройкой параметров регулятора и др. возможности.
Контроллер имеет быстросъемные клеммники и устанавливается на DIN-рейку.
Моноблочный контроллер DL-06 (рис. 2.36) имеет 4 слота для установки до-
полнительных модулей аналогового и дискретного ввода/вывода (до 24 аналоговых
или до 64 дискретных каналов ввода/вывода) с питанием 95...240 VAC и 12...24
VDC. Число типов дополнительных модулей — 9. Контроллер имеет встроенный вы-
сокоскоростной счетчик, импульсный выход, связь по интерфейсам RS-232/RS-422/
RS-485 и протоколам Modbus RTU или ASCII, 8 контуров ПИД-регулирования и др.
Программирование контроллеров DL-05 и DL-06 осуществляется на языке релей-
ной логики.
Моноблочный контроллер DL-105 (рис. 2.37) представлен в виде 8 моделей с
питанием от сети переменного или постоянного тока. Контроллер имеет один порт
RS-232 (скорость обмена 9600 бод), осуществляет обмен по протоколу Modbus RTU
или ASC II. Некоторые модели контроллера имеют высокоскоростные входы (5 кГц)
или импульсные выходы (5.. .30 VDC, 7 кГц макс.). Язык программирования контрол-
лера — RLL, число команд — 91, число таймеров/счетчиков — 64/64. Пакет програм-
мирования DirectSO/T для программирования только DL-105 в ОС Windows — РС-
PGM-105. Для программирования помимо контроллера DL-105 других контроллеров
семейства DirectLOG/C (DL-205, DL-305, DL-405) используется пакет PC-PGMSW.
ПО DirectSOFT используется с ОС Windows 95/98/NT4 и выше.
Модульный контроллер DL205 (рис. 2.38) имеет каркасы на 3, 6 или 9 слотов.
Число каналов дискретного ввода/вывода в модуле 4, 8, 12, 16 или 32, аналогового
ввода/вывода — 2, 4 или 8. К специальным модулям относятся РС-совместимый
модуль WinPLC, модуль Ethernet, DeviceNet, имитатор 8-канального ввода, Бейсик-
сопроцессор. Время выполнения булевой операции в зависимости от типа процессо-
ра и объема памяти составляет 3,3 мкс. (ПРЦ D2-230), 1,4 мкс. (ПРЦ D2-240) и 0,61
мкс. (ПРЦ D2-250). Число контуров ПИД-регулирования — 4 (для D2-250), встроен-
ных портов — 1 (для D2-230) или 2 (для D2-240 и D2-250).
Контроллер осуществляет обмен данными по протоколам Modbus RTU, ASC II,
скорость обмена 9600 бод (D2-230), 19,2 Кбод (D2-240) и 38,4 кбод (D2-250). Контрол-
леры DL-205 могут быть объединены в сеть DirectNet с общим числом абонентов до
90 (последовательный протокол по принципу ведущий/ведомый). При этом DL-250
(с ПРЦ D2-250) может выступать в качестве ведущего и ведомого, a DL-240 (с ПРЦ
DL-240) — в качестве ведомого. Модели DL-250 и DL-240 имеют порты с передачей
данных по протоколу Ethernet TCP/IP (для DL-250 - физический канал - витая пара,
тип среды — lOBaseT, для DL-240 — оптоволокно, lOBaseFL).
Контроллеры DL-205 поддерживают как локальный, так и удаленный ввод/вы-
вод. При локальном вводе/выводе применяется один каркас с 3. 4. 6 или 9 слотами и
Рис. 2.38
Рис. 2.39
Рис. 2.40
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
193
набором необходимых модулей. Для удаленного ввода/вывода удаленный ведущий
модуль размещается в локальном каркасе и соединяется витой парой с удаленными
ведомыми модулями. Число удаленных каркасов от 7 (по протоколу RM-NET — «уда-
ленный ведущий») до 31 (по протоколу SM-NET — «секционный ведущий»). Ско-
рость передачи по протоколу RM-NET фиксированная и составляет 38,4 бод, по про-
токолу SM-NET — от 38,4 бод при длине 1,2 км до 614,4 бод при длине 100 м.
Программирование контроллера осуществляется на языке RLL (релейной логи-
ки), программное обеспечение в среде Windows — пакет DirectSOFT.
Модульный контроллер DL-305 (рис. 2.39) имеет сменные процессорные модули
и до 9 модулей расширения. Контроллер имеет каркасы на 5, 8 и 10 слотов. Число ти-
пов модулей расширения — более 40, модули имеют 8 и 16 каналов ввода/вывода. Бы-
стродействие контроллера (время выполнения булевой операции) составляет 1,4 мкс.
Контроллер имеет два встроенных порта: Modbus RTU и K-siquence DirectNet, а также
встроенный ПИД-регулятор с автонастройкой параметров регулятора. Программиро-
вание контроллера осуществляется на языке RLL, число базовых команд— 165.
Модульный контроллер DL-405 (рис.2.40) имеет каркасы на 4, 6 или 8 слотов.
Для питания используются сети 110/220 VAC и 125 VAC, а также сеть постоянного
тока 24 VDC. Аналогично контроллеру DL205 система ввода/вывода контроллера
DL405 включает модули удаленного ввода/вывода ведущие и ведомые, а также ведо-
мые модули секционного ввода/вывода. Число каналов дискретного ввода/вывода
в модуле 8, 16, 32 и 64, аналогового ввода/вывода — 2, 4, 8 и 16. К специальным мо-
дулям относятся модуль Ethernet, 8-канальный модуль для индуктивных датчиков,
модуль ПИД-регулятора на 16 контуров, 4-контурный регулятор температуры, ими-
татор 8/16-канального входа, высокоскоростной счетчик 100 кГц. К коммуникацион-
ным модулям относятся Modbus RTU, Ethernet, модуль сетевого интерфейса TIWAY,
модем, модуль SDS (Smart Distributed System) и др. Помимо Modbus RTU и Ethernet
доступен протокол DirectNet ведущий/ведомый. Время выполнения булевой опера-
ции в зависимости от типа процессора и объема памяти составляет 3,0 мкс (ПРЦ
D4-430); 0,33 мкс (ПРЦ D4-440) и 0,96 мкс (ПРЦ D4-450). Число команд от 113 до 210,
число таймеров/счетчиков 128... 256/128...256.
Система ввода/вывода поддерживает пять типов конфигурации системы: ло-
кальный ввод/вывод, расширенный ввод/вывод (за счет увеличения числа каркасов
локального ввода/вывода с модулем расширения D4-EX), удаленный ввод/вывод (до
7 удаленных каркасов), секционированный ввод/вывод (аналогично DL-205) и рас-
пределенная система ввода/вывода SDS (взаимодействие с локальной системой через
модуль интерфейса SDS). Для удаленного ввода/вывода используется удаленный ве-
дущий (модуль D4-RM), размещенный в локальном каркасе. Процессор локального
каркаса обновляет информацию в модуле D4-RM, который управляет обменом дан-
ных между удаленными ведомыми модулями (D4-RS), установленными во всех уда-
ленных каркасах. Вместо модуля D4-RM непосредственное взаимодействие с ведо-
мыми модулями может осуществлять процессор локального каркаса ввода/вывода.
При секционированном вводе/выводе используется секционированный ведо-
мый модуль D4-SS-xxx, представляющий собой моноблочное устройство, содержа-
щее блок питания, блок ввода/вывода и коммуникационный порт.
Система ввода/вывода SDS предусматривает наличие интерфейсного модуля
ввода/вывода SDS в локальном каркасе. Все периферийные модули подключаются к
интерфейсному модулю с помощью 4-проводного коммуникационного кабеля. Мак-
" Зак. 3801
194
ГЛАВА 2
симальное число модулей в одной системе — 8, число периферийных устройств на
один модуль SDS — 64; максимальное число периферийных устройств, таким обра-
зом, составляет 512 устройств.
Программирование контроллера осуществляется с помощью пакета DirectSOFT
(PC-PGMSW) в режимах on-line и off-line.
В табл. 2.12 приведены краткие технические характеристики контроллеров ком-
пании Koyo Electronics.
Таблица 2.12. Характеристики контроллеров компании Koyo Electronics.
Тип ПЛК Число входов/ выходов Макс, число каналов ввода/вывода Объем памяти программ Объем памяти данных Интерфейс Питание
DL05 8/6 встроенные 30 2 кслов 4 кслов DeviceNet, Profibus, Modbus RTU, DirectNet 12/24 VDC, 220 VAC
DL06 20/16 встроенные 100 7,5 кслов 7,3 кслов DeviceNet, Profibus, Modbus RTU, DirectNet, Ethernet
DL105 10/8 встроенные 18 2 кслов 384 слов DeviceNet 24 VDC, 110/220 VAC
DL205 до 256 256...16384 (2...15,8) кслов 256... 14,6 кслов DeviceNet, Profibus, Modbus RTU, DirectNet, Ethernet 12/24 VDC, 110/220 VAC
DL305 до 368 1152 7,7 кслов 7,1 кслов DeviceNet, Modbus RTU, SDS, Ethernet 12/24 VDC, 110/220 VAC
DL405 640...2048 1152...16384 (3,5...15,5) кслов (3...15,3) кслов DeviceNet, Profibus, Modbus RTU, DirectNet, Ethernet 24/125 VDC, 110/220 VAC
DL470 Промышл. компьютер проц. Р200 Слоты расшир. IxPCI/ISA, 2xPCI, IxISA НЖМД 2,1 Гбайт, ОЗУ 64 Мбайт — 2xRS-232,2xUSB, Ethernrt 10 BaseT 220 VAC
Рис. 2.41
PC-совместимый контроллер на базе модуля WinPLC в соста-
ве DL-205. Модуль WinPLC (рис. 2.41) представляет собой процес-
сор со встроенной операционной системой WindowsCE, управляю-
щий модулями ввода/вывода контроллера DL205. В состав контрол-
лера входят высокоскоростной порт Ethernet lOBaseT и последова-
тельный порт RS-232 для подключения периферийных устройств.
Более 30 модулей, разработанных для контроллера DL205, могут
использоваться с WinPLC. В качестве программного обеспечения
используется среда выполнения Think&Do, поставляемая вместе с
контроллером. Основой программы среде Think&Do являются соз-
даваемые пользователем блок-схемы, поддерживающие большой набор математиче-
ских операций для переменных таких типов, как целые, так и с плавающей точкой.
Объем памяти WinPLC: ОЗУ — 2 Мбайт, флэш-память — 4 Мбайт, ОЗУ с питанием
от аккумулятора — 64 кбайт. Таким образом, WinPLC объединяет достоинства про-
мышленного компьютера с богатым программным обеспечением и программируе-
мого контроллера с развитой системой ввода/вывода данных.
2.2.10 Контроллеры фирмы Matsushita Electric Works (Япония)
В состав контроллеров серии FP входят моноблочные контроллеры FPO и FP Sig-
ma, моноблочный контроллер FP1 и модульный контроллер FP2. Для контроллеров
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
195
Рис. 2.42
серии FP выпущен FP-OPC сервер по стандарту ОРС DA (vl-v3). Подробные све-
дения о контроллерах FPO и FP2 приведены в работе [2.9]. Ниже рассматриваются
характеристики и области применения моноблочных контроллеров FP Sigma (FPS)
и FP1. На рис. 2.42 представлена линейка контроллеров фирмы Matsushita — FPO (а),
FPS (б), FP1 С40(в) и FP2 (г).
Контроллер FP1 по техническим характеристикам несколько превосходит кон-
троллер FP0. К числу базовых модулей контроллера FPS относятся модуль FPG-C32T
на 16DI/16DO, модуль FPG-C32T2 на 16DI/16DO, модуль FPG-C24R2 на 16DI/8RO.
С использованием модулей расширения контроллера FP0 можно увеличить
число каналов ввода/вывода до 128 (для модулей FPG-C32T и FPG-C32T2) и до 120
для модуля FPG-C24R2. С использованием модулей расширения FPG-XY64D2T на
32DI/32DO контроллера FPS число каналов ввода/вывода возможно увеличить до
288 и 280 соответственно.
Контроллер FP1 представляет собой набор высокопроизводительных базовых
модулей с числом входов/выходов от 14 до 152. За счет модулей расширения возмож-
но наращивание входов/выходов до 256. К базовому модулю допускается подключе-
ние до 2-х модулей расширения.
Данные входов контроллера FP1:
• входное напряжение — 12...24 VDC;
• входное напряжение/ток «1» — 10 В/ЗмА; «0»: 2.5В/1 мА;
• входное сопротивление — 3 кОм;
• индикация — светодиоды.
Данные релейных выходов:
• тип контакта — НО
• нагрузка контакта — 2А (250 VAC), 2А (30 VDC);
• механический ресурс — 100000 срабатываний при полной нагрузке.
Данные транзисторных выходов:
• тип выхода — ОК;
• коммутируемое напряжение — 5...24 VDC;
• защита от перенапряжений — стабилитроны.
Основные технические характеристики контроллеров FP1 приведены в табл. 2.13
196
ГЛАВА 2
Таблица 2.13. Технические характеристики контроллеров FPI
Тип FP1-C14 FP1-C16 FP1-C24(C) FP1-C4O(C) FP1-C56 (С) FP1-C72(C)
Число встроенных входов/выходов 8/6 8/8 16/8 24/16 32/24 40/32
Максимальное число входов/вы- ходов 54 (14+40) 56 (16+40) 104 (24+40+40) 120 (40+40+40) 136 (56+40+40) 152 (72+40+40)
Быстродействие 1,6 мкс на логическую команду
Память программ (шагов/кбайт) 900/1,8 2720/5,4 5000/10
Число базовых/рас- ширенных команд 41/85 80/111 81/111
Память данных, слов (DT) 256 1660 6144
Последовательный интерфейс (СОМ- порт) Нет RS-232 (все модели FPl-CxxC)
Габаритные раз- меры (ШхВхГ) 120x81x45/74 (DC/AC) 190x96x45/74 (DC/AC) 260x96x45/74 (DC/AC) 260x120x45/74 (DC/AC) 300x120x45/74 (DC/AC)
Для увеличения числа входов/выходов до 152/256 применяются модули расшире-
ния FP1-E8 (4 D1 + 4 DO, 8 DI + 8 DO), FP1-E16 (8 DI + 8 DO, 16 DI + 16 DO), FP1-E24
(16 DI + 8 DO) и FP1-E40 (24 DI + 16 DO). К базовому модулю можно подключить до
двух модулей расширения, а через шину удаленной периферии MEWNET-TR могут
подключаться модули аналогового ввода/вывода типа FP1 4 А/D и FP1 2 D/A.
Для обмена данными контроллер FP1 имеет интерфейсы RS422, RS-232C
(COM-порт у контроллеров, начиная с С24С), GSM-интерфейс. Кроме того, кон-
троллеры могут обмениваться данными по шинам C-NET и Profibus DP (интер-
фейс RS-485). Сеть фирмы Matsushita MEWNET-F позволяет использовать в каче-
стве ведущих контроллеры FP2, а в качестве ведомых — FPO, FP1, операторские
панели и др. (до 32 ведомых устройств подключаются по витой паре на расстоя-
нии до 700 м).
Программирование контроллеров FP1 осуществляется с помощью единого
для контроллеров серии FP универсального пакета NAIS Control 1131, соответ-
ствующего стандарту МЭК 61131-3. С 2006 г. прекращен выпуск контроллеров
серии FPI, FP3 и FP10.
Модульные контроллеры FP2, технические характеристики которых приведе-
ны в работе [2.9], имеют максимальное число входов/выходов — до 2048 с использо-
ванием удаленной периферии по шинам S-LINK и MEWNET-F. Модуль расширения
S-LINK имеет два порта, к каждому из которых могут подключаться до 128 каналов
ввода/вывода (используется 4-проводной кабель). Шина MEWNET-F обеспечивает
подключение по двухпроводному кабелю длиной 800 м.
2.2.11 Контроллеры фирмы Mitsubishi Electric, Япония
К моноблочным контроллерам относятся контроллеры типа FX1S (рис. 2.43),
FX1N (рис. 2.44), FX3U (рис. 2.45) и контроллеры серии ALPHA. К модульным кон-
троллерам относятся контроллеры MELSEC System Q.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
197
Рис. 2.43
Рис. 2.44
Рис. 2.45
Контроллер FX1S имеет от 10 до 30 входов/выходов в зависимости от модели,
память программ — 2К. Контроллер FX1N имеет от 14 до 60 входов/выходов, кон-
троллеры FX3U — от 8 до 64 входов/выходов. Для увеличения числа входов/выходов
контроллеров FX1S, FX1N и FX3U к базовым модулям подключаются модули расши-
рения (аналогового и дискретного ввода/вывода) и компактные блоки расширения
(дискретного ввода/вывода). При этом общее число входов/выходов достигает 132
для FX1N и 256 для FX3U. Контроллеры снабжены съемным дисплейным модулем,
имеют встроенные порт RS-422, два аналоговых потенциометра, встроенные часы
реального времени, переключатель RUN/STOP. Быстродействие — до 0,065 мкс на
одну логическую команду. Контроллеры имеют высокоскоростные счетные входы и
импульсные выходы. Характеристики контроллеров FX1S, FX1N, FX3U приведены в
табл. 2.14. Также имеются коммуникационные модули для подключения контролле-
ров к полевым шинам Profibus DP, Device Net, ASI, CC-Link и Ethernet.
Таблица 2.14. Характеристики контроллеров FX1S, FX1N, FX3U
Тип модуля FX1S FX1N FX3U
Число встроенных входов/выходов базового блока 10/14/20/30 14/24/40/60 8/16/24/32/40/64
Память программ, шагов 2000 8000 64000
Быстродействие, мкс на логическую команду 0,55 0,065
Набор команд 114 125
Регистры данных 256 8000
Число таймеров/счетчиков 64/32 256/235
Максимальное число входов/выходов 30 128 256
Поддерживаемые сети Computer Link, Peer to Peer, Parallel Link, ASi Computer Link, Peer to Peer, Parallel Link, I/O Link, Open Fieldbus Profibus DP, ASi, I/O Link, CC-Link, DeviceNet, CANopen, Ethernet
Программное обеспечение IEC 1131.3 и MELSEC-Software
Напряжение питания 12-24 VDC, 240 VAC
Новое поколение моноблочных контроллеров компании — ПЛК FX3U. В за-
висимости от модели число встроенных каналов дискретного ввода/вывода от 16
до 128. Дополнительные модули могут быть подключены к ЦПУ по внутренней
высокоскоростной шине (до 256 каналов). С модулями удаленного ввода/вывода
максимальное число каналов — до 384. Отличительной особенностью контроллера
является наличие второй шины расширения для подключения до 10 дополнитель-
ных модулей-адаптеров FX3U ADP, увеличенная память программ (64 кшагов), вы-
сокое быстродействие (0,065 мкс на базовую инструкцию). Коммуникационные мо-
дули контроллера поддерживают сети Ethernet 10/100 BaseT, Profibus DP, DeviceNet,
198
ГЛАВА 2
Рис. 2.46
CANopen, ASi, а также последовательные интерфейсы
USB, RS-232/RS-422/RS-485. Для отладки программ и
диагностики работы контроллера предлагается дис-
плейный модуль FX3U-7M, который позволяет вы-
водить коды ошибок программы, отображать и изме-
нять состояние регистров памяти и настраивать часы
РВ. Технические характеристики контроллера FX-3U
приведены в табл. 2.15
Таблица 2.15. Характеристики контроллеров FX-3U
Тип FX3U-16MR/ ES FX3U-32MR/ ES FX3U-48MR/ ES FX3U-64MR/ ES FX3U-80MR/ ES FX3U-128MR/ ES
Число встроенных ВХОДОВ 8 16 24 32 40 64
Число встроенных выходов 8 16 24 32 40 64
Тип выхода Релейный/транзисторный
Питание 24 VDC/100-240 VAC
Габариты, мм (ШхВхГ) 130x90x86 150x90x86 182x90x86 220x90x86 285x90x86 350x90x86
К моноблочным контроллерам фирмы Mitsubishi относится серия контролле-
ров ALPHA. Контроллер (рис. 2.46) имеет ЖК-дисплей и 8 функциональных кла
виш для программирования, ввода данных, создания и воспроизведения текстовых
сообщений, память программ — 1500 бит, функцию часы/календарь, число входов/
выходов от 6 до 20 в зависимости от модели. Программное обеспечение контролле-
ра (AL-PCS/WIN-EU) совместимо с ОС Windows. Настройка программы возможна,
как в режиме online с подсоединенным контроллером, так и в режиме offline без
контроллера. Кроме программирования на базе контроллера, возможно также про-
граммирование с помощью функциональных клавиш и дисплея, без использования
дополнительного оборудования. Характеристики контроллеров серии ALPHA при-
ведены в табл. 2.16.
Таблица 2.16. Характеристики контроллеров серии ALPHA
Тип модуля AL2-10MR-A AL2-10MR-D AE2-14MR-D AL2-20MR-A AE2-20MR-D AL2-24MR-A
Число Входов/выходов 10 (100-240) ГАС.' 10 24 VDC 14 (расшир. ДО 18) 24 VDC 20 (100-240) VAC 20 24 VDC 24 (расшир. ДО 28) 24 VDC
Число цифровых входов с обработ- кой аналог, сигналов — 6 8 — 8 —
Число дискретных входов 4 (100-240 VAC) 6 (100-240 VAC) 14 (24 VDC) 12 (100-240 VAC) 12 (24 VDC) 15 (100-240 VAC)
Число дискретных выходов 2 (8А, реле) 4 (1А/24 VDC транзистор) 6 (8A, реле) 8 (8A, реле) 8 (8A, реле) 9 (4X8A/5X2A)
Питание 100-240 VAC 24 VDC 24 VDC 100-240 VAC 24 VDC 100-240 VAC
Габаритные размеры, мм 71x90x55 71x90x55 124,6x90x52 124,6x90x55 124,6x90x55 124,6x90x55
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
199
К модульным контроллерам относятся контроллеры MELSEC System Q, MELSEC
AnSH, QnAS и QnA
Контроллер MELSEC System Q (рис. 2.47) представляет собой мощный модуль-
ный контроллер с возможностью контроля до 4096 локальных и до 8192 удаленных
точек ввода/вывода. Встроенная память до 252 тыс. шагов, эквивалентная 1 Мбайт
оперативной памяти, может быть расширена до 32 Мбайт установкой карты расши-
рения памяти. В зависимости от требуемых задач в контроллере применяются одно-
процессорные или многопроцессорные CPU. В табл. 2.17 приведены технические
характеристики модулей CPU контроллера.
Таблица 2.17. Характеристики модулей CPU контроллера MELSEC System Q
Тип CPU QOOJ CPU Q00 CPU Q01 CPU Q02 CPU Q02H CPU Q06H CPU Q12H CPU Q25H CPU
Память программ, тыс. шагов 8 (32 кбайт) 14 (56 кбайт) 28 (112 кбайт) 60 (240 кбайт) 124 (496 кбайт) 252 (1008 кбайт)
Число входов/выходов 256/2048 1024/2048 4096/8192
Быстродействие, мкс 0,2 0,16 0,1 0,079 0,034
Таймеры/ счетчики 512/512 2048/1024
Максимальное число вставляемых модулей 16 24 64
Габариты (ШхВхГ), мм 245х98х х98* 27,4x98x89,3
* Габариты базового блока с модулем CPU, пятью посадочными местами и блоком питания.
Базовые шасси контроллера рассчитаны на 3 модуля (Q33B-E), 5 модулей (Q35B-E),
8 модулей (Q38B-E) или 12 модулей (Q312B-E). Модули в базовом шасси автоматически
адресуются. К базовому шасси может быть присоединено до 7 шасси расширения с 64 мо-
дулями. В зависимости от числа модулей определяется мощность блока питания. Мощ-
ность блоков питания составляет 45,105 или 160 ВА в зависимости от модификации.
В базовое шасси может быть установлен модуль РРС, представляющий собой
компактный персональный компьютер, способный решать задачи программирова-
ния контроллера на языках высокого уровня (C++, Visual Basic), визуализации, ве-
дения баз данных и др. задач, свойственных PC. В безвентиляторном модуле РРС
используется ПРЦ фирмы Intel (400 МГц, память 128 Мбайт), поддерживаются ОС
Windows 2000/NT. Модуль имеет следующие интерфейсы: 2xRS-232, 2xUSB, IxEth-
ernet (100 BaseTX/10 BaseT), lxPS/2. Контроллер MELSEC System Q поддерживает
открытые сети Ethernet TCP/IP, Profibus DP/FMS, DeviceNet, ASi и сети MELSEC (CC-
Link, MelsecNet/B/10/Н и др.).
Программирование MELSEC System Q осуществляется с помощью пакетов про-
граммирования контроллеров GX IEC Developer по стандарту IEC 1131-3, GX Devel-
oper, конфигуратора сети GX Configurator DP и пакета визуализации MX4 SCADA.
Модульные контроллеры серии MELSEC AnSH (рис. 2.48) применяются для ре-
шения широкого спектра задач управления на базе 7 процессорных модулей, диффе-
ренцированных по уровням, и 60 модулей различных приложений.
Несмотря на небольшие размеры, контроллер AnSH обладает памятью ЗОК про-
граммных шагов, время выполнения логической инструкции составляет 0,25 мкс.
200
ГЛАВА 2
Рис. 2.47 Рис-248
Контроллер поддерживает сети Profibus и Ethernet, а также сети фирмы
Mitsubishi — MelsecNet/B и MelsecNet/10.
Характеристики контроллера MELSEC AnSH представлены в табл. 2.18
Таблица 2.18. Характеристики контроллера MELSEC AnSH
Наименование Характеристика
Число входов/выходов 1024
Число аналоговых сигналов До 256, макс, разрешение 14 бит
Память 8192 регистров, ЗОК шагов
Время выполнения инструкции Обработка бита: 0,25 мкс, обработка слова: 9,0 мкс
Позиционирование Макс. 96 шаговых двигателей, макс. 32 серводвигателей, макс 64 высокоскоростных счетчика
Источник питания 115/230 VAC, 12/24 VDC
Размеры, мм (ШхВхГ) (220...430)х130х94
Контроллер MELSEC QnAS представляет собой модификацию контроллера
MELSEC AnSH со значительно увеличенной производительностью процессора. Си-
стема может быть расширена до 1024 локальных и 8192 удаленных сигналов ввода/
вывода. Процессор выполняет арифметические операции в 10 раз быстрее, а бито-
вые — за 0,075 мкс. QnAS имеет объем памяти 60К шагов, а со слотом PCMCIA объем
памяти может быть увеличен до 2 Мбайт.
2.2.12 Контроллеры компании Moller GmbH, Германия
Компания Moller GmbH выпускает семейство моноблочных (компактных) и мо-
дульных контроллеров, а также несколько типов управляющих реле EASY.
Управляющее реле EASY (рис. 2.49) предназначено для логического управле-
ния освещением, водоснабжением, вентиляцией, температурным режимом, управ-
ления транспортерами, смесителями и пр. В зависимости от модели имеется до 12
дискретных входов и 8 транзисторных или релейных выходов, до двух аналоговых
входов (0...10 VDC), 8 таймеров, 8 счетчиков и 8 аналоговых компараторов. EASY
снабжен текстовым ЖК- дисплеем на 4 строки по 12 символов и 8 кнопками для вво-
да программы и параметров процесса. С помощью COM-порта осуществляется под-
Рис. 2.49
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
201
ключение EASY к компьютеру для программирования с помощью пакета EASY-Soft.
Возможна связь EASY с контроллерами по интерфейсу Profibus DP или ASi. Питание
контроллера 24 VDC/115 VAC!220 VAC.
К моноблочным контроллерам относится семейство контроллеров PS4 (PS4-
100, PS4-150, PS4-200 и PS4-300), к модульным — контроллеры типа PS 416.
Моноблочные (компактные) контроллеры серии PS4. Контроллеры этой се-
рии включают компактные контроллеры PS4-101/111, PS4-141/151 (рис. 2.50, a), PS4-
201/271 (рис. 2.50, 6), PS4-341 (рис. 2.50, в). В качестве модулей расширения к этим
контроллерам применяются различные модули I/O (ЕМ4-101/201/204 и LE4-116-
DX1, LE4-116/206/622/633 и др). Для передачи данных используются полевые сети
ProfiBus DP, InterBus и SucoNet. Физический канал — экранированная витая пара.
При использовании сети SucoNet допустимая длина сегмента без использования по-
вторителей — 600 м при скорости обмена 187,5 кбод.
В табл. 2.19 приведены краткие технические характеристики контроллеров PS4.
Таблица 2.19. Технические характеристики контроллеров серии PS4
Тип контроллера Количество DI/DO Количество AI/AO Интерфейс Питание Модули расширения
PS4-141 16DI/14DO 2AI/1AO RS-232/RS-485, Ethernet 24 VDC —
PS4-151 16DI/8RO 120/240 VAC —
PS4-201 8D1/6DO 24 VDC + до 6 модулей LE
PS4-271 12DI/8RO 4AI/4AO RS-485 120/240 VAC + до 5 модулей LE
PS4-341 16DI/14DO 2AI/1AO RS-232/RS-485 24 VDC
Скорость обмена по интерфейсу RS-485 от 187,5 кбит/с до 375 кбит/с, длина сег-
мента без повторителя — 600 м при скорости обмена 187,5 кбит/с и 300 м при скоро-
сти обмена 375 кбит/с. Время выполнения 1К инструкций — 5 мс. Объем внутренней
памяти PS4-201 32 Кб, для PS4-341 — 512 кбайт. Расширение памяти достигается с
помощью внешних модулей памяти.
Моноблочный контроллер PS-416 (рис. 2.51) предназначен для решения задач
управление сложными процессами с задачами от регистрации данных до расчета
сложных алгоритмов управления. Контроллер PS-416 состоит из крейта (корзины)
202
ГЛАВА 2
BGT-400, блока питания, процессорного модуля
CPU-400, сетевых карт NET-400 и карт входов/
выходов INP-400, OUT-400. Процессорный мо-
дуль CPU-400 имеет объем основной памяти — 1
Мбайт, дополнительной памяти (флэш-память)
— от 512 кбайт до 4 Мбайт. Тип процессора —
Рис. 2.51 16-разрядный процессор с RISC-архитектурой.
Время обработки 1К инструкций — 0,5 мс. Ин-
терфейс — RS-485. Крейт контроллера PS-416 имеет несколько модификаций с раз-
ным количеством посадочных мест: 9,13 и 19. Питание контроллера — 220 VAC.
Характеристики сетевой карты контроллера: скорость передачи по сети — 187,5
кбит/с при длине сегмента 600 м, размер данных при посылке/приеме — 120 байт/120
байт, число подключаемых станций — 30.
Модуль дискретных входных сигналов INP-400 имеет 16 каналов (24 VDC), мо-
дуль выходных сигналов OUT-400 имеет 16 каналов (24 VDC). На лицевые панели
модулей выведены 16 индикаторов состояния модуля.
В качестве программного обеспечения контроллера PS-416 используется система
SUCOSOFT-S40, которая функционирует в среде WINDOWS и имеет стандарт соот-
ветствия IEC 1131. Языки программирования соответствуют стандарту IEC 61131-3
и включают IL, LD и FBD.
Модули расширения I/O ЕМ4 (удаленные) и LE4 (локального расширения).
Модуль расширения EM4-201-DX2 обеспечивает удаленный ввод/вывод данных и
передачу информации по промышленной сети контроллеру-мастеру, который произ-
водит обработку этих данных. Дискретный модуль EM4-201-DX2 имеет 16 дискрет-
ных входов (24 VDC). Модуль имеет два разъема SUCONET К/К1, предназначенные
для соединения модуля с другими устройствами системы. В модуле расположен разъ-
ем для подключения модулей локального расширения LE4-116-DX1, LE4-116-XD1 и
LE4-116-DD1. Расширяемый дискретный модуль EM4-204-DX1 аналогичен моду-
лю EM4-201-DX2, но работает в сети Profibus-DP. Аналоговый модуль расширения
ЕМ4-101-АА2 имеет 8 аналоговых входов и 4 аналоговых выхода, а также два разъема
SUCONET К/К1. С помощью специального переключателя S3 устанавливается коли-
чество и тип используемых аналоговых входов.
Модуль локального расширения LE4-116-DX1 имеет 16 дискретных входов
(24 VDC). Модуль имеет разъем для подключения к модулю EM4-201-DX2 или к дру-
гим модулям LE4-116-DX1. Модуль LE4-116-DD1 имеет 8 DI и 8 DO, питание 24 VDC.
Модуль LE4-116-XD1 имеет 16DO, питание 24 VDC. Модуль LE4-108-XR1 имеет 8RO,
питание 24 VDC/230 VAC. Модуль LE4-308-HX1 имеет 8DI, питание 120/240 VAC.
Модуль LE4-104-XP1 имеет пневматический выходной сигнал. К модулям аналого-
вого ввода/вывода относятся модули LE4-206-AA1 (4 AI+2 АО, ±10 VDC) и LE4-206-
АА2 (4 AI+ 2 АО, 0/4...20 мА). Модули управления
энкодерами: LE4-622-CX1 (инкрементные энкоде-
ы) и LE4-6343-CX1 (абсолютные энкодеры).
Группа коммуникационных модулей включает
модули LE4-504-BS1 (Profibus DP Master), LE4-504-
ВТ1 (Profibus DP Slave), LE4-503-BS1 (Profibus FMS),
LE4-509-BS1 (LON), LE4-505-BS1 (ASi), LE4-501-BS1
(SucoNet K).
Рис. 2.52
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
203
Станции распределенного ввода/вывода WinBLOCK и System XI/ON показаны
на рис. 2.52. Станция ввода/вывода WinBLOCK используется с сетями Profibus DP,
CANopen, DeviceNet и InterBus. Модули станции имеют 8,16 и 32 канала ввода/вывода.
Станция ввода/вывода XI/ON с модулями ECO на 8 и 16 каналов при ширине модуля
12,5 мм используется в сети Profibus DP в качестве Slave-узла. В качестве программного
обеспечения применяется пакет I/O Assistant.
К новым модульным контроллерам компании Moeller относятся контроллеры
ХС10 для задач малой и средней сложности и ХС200 для более сложных задач. Кон-
троллеры имеют встроенные каналы дискретного ввода/вывода (8 DI 6 DO). К кон-
троллеру могут быть подключены до 15 модулей расширения XIOC (495 каналов вво-
да/вывода). Контроллер ХС200 имеет 32-разрядный RISC-процессор и встроенный
порт Ethernet. Объем памяти программ — 256 кбайт, памяти данных — 512 кбайт.
Для программирования контроллеров используется пакет XSoft Pro (CoDeSys).
Для связи контроллеров с верхним уровнем придается ОРС и Web-серверы.
2.2.13 Контроллеры компании National Instruments, США
PXI (PCI extension for Instrumentation) — контроллер представляет собой ком-
пьютерную платформу, которая базируется на системной шине PCI (спецификация
CompactPCI), ОС Windows и стандартных компьютерных технологиях с использова-
нием стандартных интерфейсов и локальных сетей, в том числе сетей Ethernet.
Открытый стандарт PXI предложен альянсом PXISA (PXI Systems Alliance), куда
вошли более 60 компаний. PXI представляет собой модульную систему сбора и об-
работки измерительной информации, состоящую из шасси с различным числом сло-
тов для модулей ввода/вывода (рис. 2.53). Шасси допускает установку РХ1-слотов,
гибридных слотов и PXI Express-слотов.
Высокоскоростная масштабируемая последовательная шина PXI Express поддер-
живает пропускную способность 2 Гбайт/с на каждый слот. Данная шина допускает
использование как модулей PXI Express, так и CompactPCI Express. Выпускаются шас-
си с 4,6, 8,14 и 18 слотами.
Управление PXJ-системой может осуществляться с удаленного ПК, в который уста-
навливается плата PXI Express. Эта плата соединяется с помощью медного или оптоволо-
конного кабеля с PXI-модулем, который устанавливается в первый слот PXI-шасси. Мак-
симальная длина линии связи составляет 7 м для медного и 200 м для оптоволоконного
кабеля (модели PXI — РС1е 8361/8362, PXI — PCI 8331/8336 и др.).
Одним из классов PXI-контроллеров является класс встраиваемых в стойку кон-
троллеров, которые поставляются с предустановленными ОС Windows, процессором,
RAM, HDD, интерфейсами и драйверами (мо-
дели PXI/PXIe-8351, PXI/PXIe-8106 и др.).
Компания National Instruments выпускает
большое число плат для PXI-систем: цифро-
вые осциллографы, генераторы сигналов, пла-
ты для виброакустических измерений, анали-
заторы сигналов, цифровые мультиметры,
реле, мультиплексоры, платы видеозахвата
сигнала и программируемые источники пита-
ния. Диапазон анализируемых сигналов — от постоянного напряжения до радиоча-
стот (диапазон частот плат ВЧ-диапазона составляет от 9,7 кГц до 6,6 ГГц).
204
ГЛАВА 2
Программирование и графическая разработка систем моделирования, изме-
рения, тестирования и управления осуществляются с помощью среды разработки
Lab VIEW (см. параграф 4.3.5).
2.2.14 Контроллеры компании Omron Corp., Япония
Моноблочные контроллеры. К числу моноблочных контроллеров относятся
SYSMAC СРМ1А/2А и SYSMAC СРМ2С, рассмотренные в работе [2.9]. Контрол-
леры имеют до 100... 140 дискретных входов/выходов и позволяют подключать до
3...5 блоков расширения, в том числе для аналоговых сигналов входа/выхода и дат-
чиков температуры.
Модульные контроллеры. К модульным контроллерам относятся контроллеры
SYSMAC CQM1H, CS1 иС[1 [2.9]. Контролер SYSMAC CQM1H (рис. 2.54) имеет сетевой
модуль Controller Link (скорость передачи в сети до 2 Мбайт/с), а также поддерживает
сети DeviceNet, ProfibusDP, CompoBus/S, ASi. Число модулей ввода/вывода составляет
16, число дискретных входов/выходов до 256/256. Время выполнения базовой инструк-
ции 0,375... 1,125 мкс, память программ до 15,2 кслов, память данных до 12 кслов.
Контроллер CS1 (рис. 2.55) обладает высокой производительностью со временем
выполнения базовой инструкции в зависимости от одного из 9 модулей ЦПУ от 0,04
до 0,08 мкс. Более 100 типов модулей, в том числе модули Ethernet, Profibus DP, Devi-
ceNet, Controller Link и др. позволяют обрабатывать до 5000 точек ввода/вывода.
Семейство модульных контроллеров SYSMAC CJ1 включает контроллеры се-
рии CJ1H, CJ1G, CJ1M. Контроллеры CJ1 имеют малые габариты (90x65 мм), поддер-
живают сети DeviceNet, Profibus DP, CompoBus/S, Controller Link и Ethernet. Протокол
MACRO для RS-232C/RS-485 позволяет подключить к каждому последовательному
порту до 32 устройств.
На рис. 2.56 показан контроллер SYSMAC CJ1. В табл. 2.20 приведены характери-
стики базовых модулей контроллера CJ1.
Таблица 2.20. Характеристики модулей контроллера CJ1
Модель Число входов/ выходов Время выполнения базовой инструкции, нс Объем памяти, шагов Карта памяти
CJ1H 2560 20 60...120К Compact флэш memory
CJ1G 960... 1280 40 10...60К
CJ1M-CPU 12/13 360...640 100 10...60К
CJ1M-CPU 22/23 360...640 100 10...20К
Общее число входов/выходов зависит от числа блоков расширения. Так, для
контроллеров CJ1Н число блоков расширения (expansion rack) — до трех, для CJ1G от
двух до трех, для CJ1M-CPU13 и -CPU23 — только один блок расширения.
Новые контроллеры CJ1M (рис. 2.57) имеют память данных 32 Кслов, порт
RS-232C. Модули CPU22 и CPU23 имеют 10/6 дискретных входов/выходов, число мо-
Рис. 2.55
Рис. 2.54
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
205
Рис. 2.56
Рис. 2.57
дулей расширения — 10. Базовые модули ввода/вывода серии CJIWxx рассчитаны
на 8, 16, 32 и 64 канала, специальные модули аналогового ввода/вывода рассчитаны
на 2,4 и 8 каналов. К числу специальных модулей также относятся модули позицио-
нирования, высокоскоростных счетчиков и др. Сетевые модули CJ1W-SCU21 имеют
2 порта RS-232, CJ1W-SCU41 один порт RS-232 и один порт RS-232/RS-485, CJ1W-
ETN11 — порт Ethernet, CJ1W-CLK21 — Control Link и CJ1W-DRM21 — DeviceNet.
Программирование контроллеров семейства CJ1 осуществляется с помощью па-
кета программ СХ-Automation Suite. Установка контроллеров и модулей расширения
осуществляется на DIN-рельс. Питание контроллера 10,2...26,4 VDC.
Модульная система удаленного ввода/вывода Omron SmartSlice (рис. 2.58). Систе-
ма предназначена для сбора данных и удаленного управления и соединяется с контрол-
лером по сети Profibus DP (скорость обмена до 12 Мбайт/с на расстояние до 1200 м на
сегмент) или по сети DeviceNet. Система СХ-One служит
для настройки, программирования и контроля работы
системы. В модулях системы SmartSlice производится
первичная обработка сигналов. Например, в модулях |
аналогового ввода/вывода реализуются функции мас -
штабирования, линеаризации, суммирования, диффе-
ренцирования, аварийной сигнализации и др.
Технические характеристики системы SmartSlice
Рис. 2.58
приведены в табл. 2.21.
Таблица 2.21. Технические характеристики системы SmartSlice
Модули ввода/вывода Тип сигнала Число каналов Модули ввода/вывода Тип сигнала Число каналов
GRT1 ID4 Вход пост, тока, прп, 24 VDC 4 GRT-AD2 Аналоговый вход 0...20 мА, 4...20 мА, ±10В, 0...5В, 0...10 В 2
GRT1 ID4-1 Вход пост, тока, рпр, 24 VDC 4 GRT-DA2 Аналоговый выход ±10 В, 0...5В, 0...10 В 2
GRT1-OD4 Транзисторный выход, прп, 24 VDC 4 GRT1-DA2C Аналоговый выход 0...20 мА,4...20 мА 2
GRT1-OD4-1 Транзисторный выход, рпр, 24 VDC 4 GRT1-CP1 1 (модуль позиционирования) 24 VDC от инкрементного энкодера 2
GRTI-ROS2 Релейный выход 1хНО, 24 VDC/250 VAC 2 — — —
2.2.15 Контроллеры компании Rockwell Automation
Идеология системы автоматизации на базе контроллеров компании основана на
интегрированной архитектуре Integrated Architecture Rockwell Automation, позволяю-
206
ГЛАВА 2
Рис. 2.59 Рис. 2.60 Рис. 2.61
щей синтезировать масштабируемую систему с использованием контроллеров раз-
личной производительности, систем визуализации, управления перемещением и пр.
Концепция Integrated Architecture стала возможной благодаря сочетанию высокоэф-
фективных технологий, таких как платформа управления Logix'", открытая сетевая
архитектура NetLinx”, технологии визуализации ViewAnyWare™ и оболочка разра-
ботки программного обеспечения FactoryTalk.
В состав семейства контроллеров входят моноблочные контроллеры PICO,
MicroLogix 1000, MicroLogix 1200 и MicroLogix 1500, модульные контроллеры SLC-500 и
PLC-5, платформы CompactLogix, FlexLogix, ControlLogix и ProcessLogix. Контроллеры
MicroLogix 1200 и MicroLogix 1500 имеют возможность локального расширения за счет
подключения с помощью шлейфа модулей ввода/вывода. К контроллеру MicroLogix 1200
дополнительные каналы ввода/вывода устанавливаются путем подключения до 6 цифро-
вых или аналоговых модулей ввода/вывода. К контроллеру MicroLogix 1500 может быть
подключено до 8 модулей цифрового или аналогового ввода/вывода Compact I/O.
Большую группу изделий составляют распределенные системы ввода/вывода:
семейство FLEX I/O, семейство POINT I/O, 1769 Compact I/O, 1791 Block I/O, шасси
ввода/вывода 1756 I/O, 1746 I/O, 1771 I/O и др.
Моноблочный контроллер PICO (рис. 2.59) предназначен для применения там,
где требуется работа с минимальным числом дискретных и аналоговых входов/вы-
ходов. Контроллер исполняет основные функции типа логики, счета и согласования
по времени. Для программирования контроллера используются программное обе-
спечение PicoSoft, встроенные ЖК-дисплей и мини-клавиатура.
Контроллеры MicroLogix 1000 (рис. 2.60) используется в приложениях, которые тре-
буют небольшое число точек ввода/вывода (до 32). Все аналоговые модели MicroLogix
1000 имеют 16 цифровых каналов и 5 аналоговых (4 входа и 1 выход). Среди аналоговых
входов — 2 входа по напряжению и 2 входа по току. Разрешение всех входов 16 бит. Ана-
логовый выход имеет настраиваемый диапазон по напряжению или по току, разрешение
15 бит. Все входы и выходы подключены к внутренней шине контроллера и размещены в
едином конструктиве с процессорным блоком. Это позволяет добиться высокой скоро-
сти ввода/вывода. Программировать и отлаживать программы контроллера MicroLogix
1000 можно как на PC, так и с помощью ручного программатора MicroLogix ПНР.
Контроллеры MicroLogix 1200 (рис. 2.61) имеют процессорный блок с 24 или 40
каналами ввода/вывода. Дополнительные каналы ввода/вывода устанавливаются пу-
Рис. 2.62
Рис. 2.63
Рис. 2.64
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
207
тем подключения модулей сбора данных: до 6 цифровых
или аналоговых модулей ввода/вывода.
Контроллеры MicroLogix 1500 (рис. 2.62) состоят из
базового блока, на котором расположены пассивная шина
и модули на 24 или 28 цифровых входов/выходов, и про-
цессорного блока. В серии 1500 расширены коммуникаци-
онные возможности контроллера — добавлена поддержка
протокола Modbus RTU и обмена с ASCII-устройствами,
увеличен объем памяти и число дополнительных модулей
Рис. 2.65
ввода/вывода. Подключение модулей ввода/вывода осуществляется непосредственно к
корпусу контроллера или может быть удалено на расстояние до 1 м при помощи кабеля.
Контроллер Compact!,ogix (рис. 2.63) — небольшой контроллер высокой про-
изводительности для семейства ввода/вывода Compact I/O. Имеет строенный порт
для сетей ControlNet, Ethernet/IP и DeviceNet. Для всех контроллеров CompactLogix,
FlexLogix, ControlLogix и ProcessLogix используется единое программное обеспече-
ние RSLogix 5000.
Контроллер FlexLogix (рис. 2.64) сочетает в себе преимущества механизма управ-
ления Logix с компактной системой ввода/вывода Flex I/O без уменьшения вычисли-
тельной мощности и возможностей программирования. FlexLogix предназначен как
для использования в приложениях распределенного управления со всеми возмож-
ностями Netlinx коммуникаций, так и для автономных применений.
Контроллер ControlLogix (рис. 2.65) является контроллером универсального приме-
нения. Задняя шина ControlLogix функционирует как сверхскоростная сеть ControlNet.
Допускается любая комбинация процессоров, модулей ввода/вывода и коммуникаци-
онных модулей. Контроллеры имеют возможности резервирования и сертифицирова-
ны на использование в приложениях, соответствующих SIL 2, SIL 3.
В табл. 2.22 приведены краткие технические характеристики контроллеров ком-
пании Rockwell Automation.
Таблица 2.22. Технические характеристики контроллеров
компании Rockwell Automation
Тип контроллера Память (макс.) Число каналов ввода/ вывода Тип модуля расширения Сеть резервирования Программное обеспечение Языки про- граммирования
PICO 0,5 кин- струкций До 38 (релейные) — — PICO Soft LD
MicroLogix 1000 1 кслов До 32 — — RSLogix 500 LD
MicroLogix 1200 4 кслов До 128 — — —
MicroLogix 1500 14 кслов До 256 Модули для DeviceNet — —
SLC 500 64 кслов 4096 1790,1791, 1792,1794, 1797,1798, 1799 RIO/DH+ LD
PLC 500 100 кслов 3072 RIO/DH+ или ControlNet RSLogix 5 LD, SFC, ST
Compact Logix 256 кбайт До 30 модулей Compact I/O — RSLogix 5000 LD, FBD, SFC, ST
FlexLogix 512 кбайт 128 аналог, или 512 цифр. 1794,1797 —
Control Logix 7,5 Мбайт 3800 аналог, или 128000 цифр. 1790,1791, 1792,1794, 1797, 1798,799 ControlNet
Process Logix 7,5 Мбайт 64 модуля ввода/вывода 1756,1794, 1797 ControlNet Control Builder FBD
208
ГЛАВА 2
Контроллеры имеют порты RS-232, DH485, DeviceNet, ControlNet и Ethernet TCP/
IP. Питание 24 VDC/240 VAC.
Распределенные системы ввода/вывода предназначены для увеличения каналов
ввода/вывода, экономии кабельной продукции, повышения быстродействия и надеж-
ности сбора и обработки данных. Помимо основных функций сбора данных и управ-
ления эти системы имеют встроенную диагностику и обработку данных, а также допу-
скают «горячую» замену модулей и др. Связь с базовым контроллером осуществляется
с помощью сетевых коммуникаций Ethernet TCP/IP, ControlNet, DeviceNet, RIO.
Сеть Ethernet TCP/IP: скорость передачи 10/100 Мбит/с, поддерживается органи-
зациями Industrial Ethernet Assotiation, IAONA, ODVA и др.; сеть ControlNet — скорость
передачи 5 Мбит/с; сеть DeviceNet — скорость передачи до 500 кбит/с; удаленный
ввод/вывод (RIO) — скорости передачи 57,6 кбит/с, 115,2 и 230,4 кбит/с; Data Highway
Plus (DH+) — связывает до 64 станций на скоростях 57,6 и 230,4 кбит/с; DH485 — свя-
зывает до 32 станций на скорости до 19,2 кбит/с.
В табл. 2.23 приведены основные технические характеристики распределенных
систем ввода/вывода.
Таблица 2.23. Характеристики распределенных систем ввода/вывода
компании Rockwell Automation
Тип системы ввода/вывода Тип каналов ввода/вывода Отличительные особенности Коммуникации Монтаж Область применения
FLEX I/O (1793,1794) D I/O, A I/O, счетчик, реле, температурный 48 VDC Remote I/O, ControlNet, DeviceNet и др. DIN-рейка, панель Общего назначения
POINT I/O (1734,1734D) D I/O, A I/O» счет- чик, реле, датчик положения Встроенная диагностика DeviceNet
1769 Compact I/O D I/O, A I/O, реле, температурный 24 VDC
1798 FLEX Armor I/O 24 VDC 1Р65/IP67 Встраиваемый
1791 Block I/O D I/O, A I/O Шасси Remote I/O DIN-рейка, панель Пульт оператора
1797 FLEX Ex I/O D I/O, A I/O, частотный, температурный Искро- безопасность ControlNet DIN-рейка В агрессивных средах
2.2.16 Контроллеры фирмы Schneider Electric, Франция
К моноблочным (компактным) контроллерам относятся контроллеры серии
TWIDO (мод. TWDLCAA10DRF, TWDLCAA16DRF, TWDLCAA24DRF).
Моноблочный контроллер TWIDO (рис. 2.68, а) предназначен для создания
простых автономных систем. Контроллер имеет встроенный блок питания датчиков
напряжением 24 VDC, слот для карты памяти 32 кбайт, процессор и блок дискретно-
го ввода/вывода.
К компактному контроллеру можно подключить до четырех модулей расшире-
ния аналогового и дискретного ввода/вывода. Время цикла составляет 1 мс для вы-
полнения 1000 логических инструкций. На лицевую панель контроллера возможна
установка 2-строчного по 8 символов дисплея (TWD ХСР ODC). Напряжение пита-
ния контроллеров 100...240 VAC.
К модульным контроллерам относятся контроллеры TWIDO, TSX Micro, TSX
Premium, TSX Quantum.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
209
б
Рис. 2.66
Рис. 2.67
в
Модульные контроллеры TWIDO (рис. 2.66, б) в зависимости от числа входов/
выходов и производительности процессора имеют 5 модификаций. Напряжение пи-
тания модульных контроллеров TWIDO всех модификаций составляет 24 VDC. К
контроллеру можно подключить от 4 до 7 модулей расширения, карты памяти и ча-
сов реального времени. Модульный контроллер помимо дискретных входов/выходов
оснащен одним аналоговым входом напряжения (0...10 VDC), одним потенциоме-
тром (диапазон 0...1023), последовательным портом RS-485 (дополнительно порт
RS-232/RS-485). Характеристики модульных контроллеров приведены в табл. 2.24.
Таблица 2.24. Характеристики модульных контроллеров TWIDO
Модель TWIDO Число входов/ выходов Число входов Число выходов Число модулей расширения Дополнительный картридж
TWD LMDA20DTK 20 12 8 (ОК) 4 2 слота: часы реального времени и память
TWD 1.MDA20DUK 20 12 8 (ОК) 4
TWD LMDA20DRT 20 12 2 (ОК), 6 (RO) 7
TWD LMDA40DTK 40 24 16 (ОК) 7
TWD LMDA40DUK 40 24 16 (ОК) 7
Программирование контроллеров TWIDO осуществляется при помощи про-
граммного обеспечения TwidoSoft на языках LD и IL с ОС Windows 98(SE)/2000.
TwidoSoft обеспечивает функции редактирования, мониторинга, копирования и
вставки, анимации в режиме РВ, диагностику работы ПЛК и др.
Программирование контроллера осуществляется с помощью инструментальной
системы UnityPro на любом из пяти языков по стандарту IEC 1131-3.
Модульный контроллер Modicon М340 (рис. 2.67) имеет шасси на 4, 6, 8 или
12 платомест с функцией горячей замены модулей. Высокоплотные модули (до 64
каналов) имеют толщину 32 мм. Высота контроллера — 100 мм, глубина — 93 мм.
М340 снабжен коммуникационными портами USB, Modbus, Ethernet или CanOpen.
Библиотека функций контроллера включает следующие функции:
• ПИ- и ПИД-регулирование;
• автонастройка регуляторов;
• 2-, 3-позиционный и каскадный регулятор;
• генератор функций изменения алгоритма управления;
• масштабирование и др.
Программирование ведется в среде UnityPro на языке FBD. С ПК, подключенного к
сети Ethernet, имеется возможность получения данных при помощи FTP сервера. М340
имеет встроенный Web-сервер для системной диагностики и параметрирования кон-
троллера. Технические характеристики контроллеров М340 приведены в табл. 2.25
210
ГЛАВА 2
Таблица 2.25. Характеристики контроллеров М340
Характеристики Тип процессора контроллера Modicon М340
ВМХР341000 ВМХР342010 ВМХР342020 ВМХР34 20300
Время выполнения двоичной -инструкции, мкс 0,18 0,12 0,12 0,12
Объем RAM, кбайт 2048 4096 4096 4096
Объем памяти программ, К инструкций 35 70 70 70
Объем карты памяти SD, МБ 8 16 16 16
Встроенные порты: USB/CANOpen/Modbus Ethernet TCP/IP 1/-/1 1/1/1 1/-/1 1 1/1/- 1
Модульный контроллер Modicon TSX 37 Micro (рис. 2.68) используется для соз-
дания АСУ ТП с числом каналов ввода/вывода порядка 200-300. Базовая конфигура-
ция контроллера включает блок центрального процессора с памятью, мини-дисплей,
коммуникационные порты и платы. Имеется 5 модификаций контроллера для раз-
личных уровней интеграции, а также более 40 различных модулей, как полнофор-
матных (в размер слота), так и полуформатных (половина слота) на 8, 16, 32 и 64
точки. Время выполнения одной логической команды контроллера составляет 0,15
мкс. Максимальное число дискретных сигналов ввода/вывода одного контроллера —
248. Контроллер имеет удобную индикацию, встроенный коммуникационный порт
RS-485, слот для карты памяти PCMCIA (до 64 кслов), а также слот для коммуника
ционной карты PCMCIA. Отдельные входы контроллера можно использовать в каче-
стве входов прерывания выполняемой программы пользователя и в качестве входов
быстрого счета на 500 Гц или 10 КГц.
Сетевые возможности контроллера определяются наличием встроенных комму-
никационных портов или коммуникационных карт типа PCMCIA (ASCII, Modbus,
Fip и др.). С помощью модуля ETZ 510 (модуль Ethernet с флэш-памятью 8 Мб) обе-
спечивается связь по сети Ethernet.
Модульный контроллер TSX Premium (рис. 2.69) относится к контроллерам
среднего класса, расширяющим возможности TSX Micro.
Помимо базовой конфигурации контроллер включает до 64 специализирован-
ных модулей, среди которых 4 модуля Ethernet и 8 модулей связи ASi.
Контроллер TSX Premium обладает повышенной надежностью. Повышение на-
дежности достигается дублированием интерфейсов ввода/вывода, безударным пере-
ключением управления исполнительными механизмами, мощными диагностическими
функциями (системная диагностика каждого модуля и канала ввода/вывода, диагно-
стика приложений и системы визуализации при переходе с основного процессора на
резервный). Подключение резервных модулей ввода/вывода осуществляется с помо-
Рис. 2.68
Рис. 2.69
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
211
щью системы быстрого монтажа TeleFast. В контроллере реализована технология «те-
плого резервирования», позволяющая передать управление на резервный контроллер
при отказе ведущего за несколько секунд (в отличие от «горячего резервирования»,
где передача функций управления происходит немедленно). Паке т программ UnityPro
контроллера позволяет программирование на языках стандарта IEC 1131-3.
В табл. 2.26 приведены основные технические характеристики односетевых (TSX
Р57 104М/204М/254М) и многосетевых (TSX Р57 304М/454М/554М) контроллеров.
Таблица 2.26. Технические характеристики контроллеров TSX Premium
Модель TSX Р57 104М 204М 254М 304М 454М 554М
Число дискретных входов/выходов 512 (модули на 8,16, 32,64 канала) 1024 (модули на 8,16,32,64 канала) 2040 (модули на 8, 16, 32,64 канала)
Число аналоговых входов/выходов 24 (модули на 4, 8,16 кана- лов) 80 (модули на 4,8,16 каналов) 128 (модули на 4, 8,16 каналов) 256 (модули на 4,8, 16 каналов) 512 (модули на 4,8, 16 каналов)
Сеть/число моду- лей сети ASi/2 ASi / 4; (Interbus или Profibus DP) /1 ASi/8; (Interbus, Profibus DP) /2
Объем памяти ОЗУ/ расширение, кбайт 96/256 160/768 192/768 192/1792 320/2048 640/4096
Время выполне- ния инструкции, мкс 0,27 0,19 0,12 0,06 0,04
Число каналов регулирования — 10 (по 3 контура на канал) 15 (по 3 контура на канал) 20 (по 3 конту- ра на канал) 30(по 3 конту- ра на канал)
Число сетей, тип и число шин 1 сеть, 1 ASi, 1 CANopen 1 сеть, 4 ASi, 1 CANopen, 1 шина друго- го типа 1 сеть, 4 ASi, 1 CANopen, 1 Fipio, 1 шина другого типа 3 сети, 8 ASi, 1 CAN-open, 2 шины друго- го типа 4 сети, 8 ASi, 1 CAN-open, 1 Fipio, 2 шины другого типа 5 сетей, 8 ASi, 1 CAN-open, 1 Fipio, 2 шины другого типа
Рис. 2.70
Модульный контроллер Modicon TSX Quantum (рис. 2.70) является одним из
самых мощных контроллеров, совместимых с младшими сериями контроллеров —
Compact и Momentum. Имеется свыше 40 типов модулей ввода/вывода и модулей
специального назначения, устанавливаемых на монтажных панелях серии Quantum.
Модули ввода/вывода соответствуют стандартам МЭК на
взрывобезопасность (Ex ia, Ex ib зоны 2 группы ПА-С). Моде-
ли контроллеров TSX Quantum определяются одним из четы-
рех типов процессоров (табл. 2.27).
Старшая модель контроллера имеет ОЗУ 2 Мбайт и обе-
спечивает сканирование одной тысячи булевских команд за 0,1
мс. Модули ввода/вывода ПЛК Quantum используются в трех
вариантах: локальный (местный) ввод/вывод, удаленный ввод/
вывод и распределенный ввод/вывод. Любой модуль устанав-
ливается в любой слот шасси. Выпускаются шасси на 2, 3, 4, 6,
10 и 16 слотов. При выборе максимальной конфигурации (блок
питании, процессор и 14 модулей ввода/вывода) имеем ПЛК на 2048 каналов дискрет-
ного ввода/вывода. Максимальное число аналоговых каналов ввода/вывода на шасси
локального ввода/вывода составляет 84 канала (56 входных и 28 выходных каналов).
212
ГЛАВА 2
Распределенный ввод/вывод поддерживает 3 сети: поддержка одной встроена в
ЦПУ, поддержка двух других обеспечивается установкой специальных модулей сете-
вого интерфейса. Для обеспечения коммуникаций поставляются следующие модули:
модули Mudbus и Modbus +, Ethernet TCP/IP, SY/МАХ, MMS Ethernet; модули уда-
ленного ввода/вывода; модули горячего резерва; модули управления перемещением;
модули Lonworks, Profibus DP; модули шины ASi-Bus.
Программирование контроллера осуществляется в режиме online с использо-
ванием инструментальных систем ConCept и UnityPro. Пакеты ConCept и UnityPro
устанавливается под управлением MS Windows и позволяет использовать все пять
специализированных языков по стандарту IEC 1131-3. Отличительной чертой паке-
тов является наличие программы, моделирующей контроллер со всеми его модулями
(симулятор аппаратных средств). Это дает возможность выполнять большую часть
работы по отладке приложения в автономном режиме без подключения к контролле-
ру. Оба пакета имеют большой набор библиотек стандартных функциональных бло-
ков. Кроме того, имеется возможность создания пользователем нестандартных функ-
циональных блоков на языке Си. Более подробные данные по контроллерам фирмы
Schneider Electric приведены в работе [2.9].
Таблица 2.27. Характеристики процессоров контроллера Modicon TSX Quantum
Характеристика Процессор
140CPU11302 140CPU11303 140CPU43412A 140CPU53414A
Процессор / тактовая частота 186 / 20 МГц 186 / 20 МГц 486 DX / 80 МЩ 586/ 133 МГц
Объем памяти Флэш / SRAM 256 кбайт / 256 кбайт 256 кбайт / 512 кбайт 1 Мбайт / 2 Мбайт 1 Мбайт / 4 Мбайт
Число регистров 9 999 9 999 57 К 57 К
Число бит 8 192 8192 65 535 65 535
Макс, размер программы 109 кбайт 368 кбайт 896 кбайт 2,5 Мбайт
Порт Modbus г + + + +
Порт Modbus 1 1 2 2
Кол-во дополнитель- ных сетевых модулей 2 2 6 6
2.2.17 Контроллеры компании Siemens, Германия
К контроллерам компании Siemens относятся моноблочные контроллеры
Simatic S7-200, Simatic S7-300C и Simatic S7-620, модульные контроллеры Simatic S7-
300/300F, SIPLUS S7-300, Simatic S7-400 (Simatic S7 400H/400F/400FH), PC-based кон-
троллер Simatic WinAC (ПК).
Контроллер Simatic S7-200 (рис. 2.71) предназначены для решения задач управ-
ления и регулирования в небольших системах автоматизации. При этом Simatic
S7-200 позволяют создавать как автономные системы управления, так и системы
управления, работающие в промышленных сетях. Область применения контролле-
ров Simatic S7-200 простирается от простейших задач автоматизации (управление
лифтами, подъемниками и пр.) до управления станками и конвейерными линиями.
Программирование контроллеров осуществляется с помощью пакета STEP7 Micro/
Win V3.2 для ОС Windows 95/98/NT/2000. Пакет включает языки программирования
по стандарту IEC 61131-3 и языки высокого уровня С, C++.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
213
Рис. 2.71
Рис. 2.72
Рис. 2.73
Моноблочный контроллер Simatic S7-300C объединяет в одном корпусе цен-
тральный процессор и встроенные аналоговые и дискретные входы/выходы для под-
ключения датчиков и исполнительных механизмов. Контроллер имеет увеличенный
объем памяти и более высокую скорость выполнения команд. В контроллерах S7-
300С использована новая концепция загрузки и сохранения данных с использовани-
ем новых микрокарт памяти, встроенный интерфейс Profibus-DP или PPI (Point-to-
Point Interface). Вс троенные функции контроллера поддерживают работу скоростных
счетчиков, импульсных выходов, ПИД-регуляторов, измерителей частоты.
Модульный контроллер S7-300 (рис. 2.72) представляет собой универсальный
программируемый контроллер для построения систем автоматизации низкой и сред-
ней производительности. Имеет широкий спектр модулей для максимальной адапта-
ции к требованиям любой задачи. Высокая плотность монтажа модулей ввода/выво-
да и возможность расширения системы до 32 модулей позволяют строить системы
управления с большим числом каналов ввода/вывода. Программное обеспечение
контроллеров реализуется с помощью пакета STEP7/ STEP7-Lite (IEC 1131-3) с язы-
ками программирования STL, LD и FBD.
Модульный контроллер Simatic S7-300F представляет собой программируе-
мый контроллер для построения систем автоматики безопасности и противоава-
рийной защиты и базируется на функциональных возможностях программируемого
контроллера Simatic S7-300. Контроллер используется в системах распределенного
ввода/вывода на основе Profibus DP со станциями ЕТ 200М с F-модулями, ЕТ 200S
PROFIsafe, ЕТ 200pro PROFIsafe и ЕТ 200есо PROFlsafe с использованием для обмена
данными профиля PROFIsafe.
Контроллер SIPLUS S7-300 представляет собой универсальный контроллер для
эксплуатации в тяжелых промышленных условиях, базирующийся на функциональ-
ных возможностях контроллеров Simatic S7-300. Имеет расширенный диапазон рабо-
чих температур (-25 ... +60 °C), более высокую стойкость к вибрационным и ударным
нагрузкам, работает в средах, содержащих агрессивные примеси и газы.
Контроллер Simatic С7-620 (рис. 2.73) представляет собой устройство, соче-
тающее в одном корпусе программируемый контроллер и панель визуализации и
управления с ЖК-дисплеем. Блоки управления Simatic С7 полностью совместимы
с программируемыми контроллерами Simatic S7-300. Помимо панели управле-
ния в состав контроллера входят модули аналогового и дискретного ввода/выво-
да. Возможно расширение числа входов/выходов с помощью модулей контроллера
Simatic S7-300. Число дополнительных модулей — 24, по 8 модулей на трех носите-
214
ГЛАВА 2
лях. Встроенный контроллер имеет высокое быстродействие (время выполнения
логической команды не превышает 0,1...0.3 мкс), что существенно расширяет до-
пустимые области применения систем автоматизации на базе контроллеров Simatic
С7. Контроллер поддерживает математические операции с плавающей запятой и
функции связи с устройствами человеко-машинного интерфейса. Это исключа-
ет необходимость программирования функций обмена данными между панелью
оператора и контроллером. Панель оператора и контроллер используют единую
базу данных проекта STEP 7. Контроллер Simatic С7-620 обменивается данными с
контроллерами S7-300, S7-400 и др. устройствами по интерфейсу MPI (MultiPoint
Interface), а также по сети Profibus DP. Поддерживаются также диагностические
функции и парольная защита контроллера.
Встроенная панель оператора осуществляет управление выводом и обработкой
сообщений об ошибках и текущих значениях параметров и вывод изображений (в
Simatic С7 с графической панелью оператора), а также текстовых сообщений.
Имеется 6 модификаций контроллера С7-620. Программирование осуществляет-
ся с помощью программных пакетов S7-SCL, S7-Graph, S7- HiGraph, а также программ-
ного обеспечения RunTime. Программирование панелей оператора осуществляется с
помощью пакетов ProTool и ProTool/Pro, работающих под ОС Windows NT/2000. Для
конфигурирования системы автоматизации и встроенного контроллера применяет-
ся STEP 7 или STEP 7 Lite.
Модульный контроллер Simatic S7-400 (рис. 2.74) предназначен для построения
систем автоматизации средней и высокой степени сложности. Контроллер отлича-
ется высоким быстродействием, возможностью применения структур локального и
распределенного ввода/вывода, широкими коммуникационными возможностями,
функциональностью, удобс твом эксплуатации и обслуживания. Эффективному при-
менению контроллеров способствует возможность использования нескольких типов
центральных процессоров различной производительности, наличие широкой гаммы
модулей ввода/вывода дискретных и аналоговых сигналов, функциональных модулей
и коммуникационных процессоров. Simatic S7-400 отвечает самым жестким требова-
ниям промышленных стандартов, обладает высокой степенью электромагнитной со-
вместимости, высокой стойкостью к ударным и вибрационным нагрузкам. Установка и
замена модулей контроллера может производиться без отключения питания («горячая
замена»). Контроллер может комплектоваться широким спектром модулей, устанав-
ливаемых в монтажных стойках в любом порядке. Процессорные модули оснащены
встроенными интерфейсами Profibus DP. При необходимости, в базовом блоке кон
троллера может быть использовано до 4 центральных процессоров. К числу модулей
относятся модули ввода/вывода дискретных и аналоговых сигналов, коммуникаци-
Рис. 2.74
онные модули для организации последовательной
передачи данных по РР-интерфейсу, функциональные
модули для решения специальных задач управления
(счет, позиционирование, автоматическое регулиро-
вание и т. д.), интерфейсные модули для связи базо-
вого блока контроллера со стойками расширения. К
одному базовому блоку контроллера Simatic S7-400
может подключаться до 21 стойки расширения. Мо-
дули устанавливаются в свободные разъемы монтаж-
ных стоек в произвольном порядке и фиксируются в
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
215
рабочих положениях винтами. Фиксированные места занимают только блоки питания,
первый центральный процессор и некоторые интерфейсные модули.
В качестве программного обеспечения контроллеров используется программный
пакет STEP7. Основными областями применения Simatic S7-400 являются технологи-
ческие установки, машиност роение, химическая промышленность и др.
Контроллер Simatic S7-400H применяется в областях, предъявляющих повы-
шенные требования к надежности функционирования системы управления. Кон-
троллер имеет резервированную структуру — резервирование основных функций
и конфигураций систем ввода/вывода, резервирование сетей Profibus DP контролле-
ра, горячее резервирование модулей и автоматическое безударное переключение на
резервный блок в случае отказа ведущего блока. Для гарантированного безударно-
го включения резерва между базовыми блоками контроллера необходима надежная
скоростная связь. Эта связь поддерживается по оптоволоконным кабелям, соединяю-
щим два центральных процессора. В этих целях оба базовых блока контроллера вы-
полняют одну и ту же программу, работают с одними и те ми же блоками данных, с
одними и теми же внутренними данными (битами памяти, таймерами, счетчиками
и т. д.). При отсутствии ошибок и отказов оба базовых блока находятся в активном
состоянии. Сигнал от каждого датчика (или двух резервированных датчиков) по-
ступает на входы резервированной пары модулей ввода, считывается в оба базовых
блока и проверяется на идентичность, после чего используется программой. Каждое
формируемое программой управляющее воздействие выводится на исполнительное
устройство через выходы двух модулей вывода. При отказе одного из двух резерви-
рованных модулей программа контроллера выполняет его идентификацию и прекра-
щает обращение к этому модулю, продолжая работать с исправным модулем. После
ремонта или замены неисправного модуля и его установки в систему программа воз-
обновляет обращение к обоим модулям.
Безударное переключение может быть обеспечено только при синхронной ра-
боте двух базовых блоков контроллера. Функции синхронизации выполняются ав-
томатически операционной системой контроллера и не требуют программирования
со стороны пользователя. Этим обеспечивается возможность быстрого перевода
функций управления на любой базовый блок контроллера в любой момент време-
ни. Контроллер Simatic S7-400H способен поддерживать обмен данными с другими
контроллерами S7-400H, стандартными системами автоматизации S7-400 и компью-
терами. Для организации обмена данными с компьютерами через резервированные
каналы связи дополнительно необходим пакет программ S7-REDCONNECT. В зави-
симости от круга решаемых задач для организации обмена данными могут использо-
ваться различные сетевые конфигурации: резервированная или не резервированная
магистральная структура и кольцевая топология с одиночным или дублированным
кольцом. Программирование контроллеров S7-400H не отличается от программиро-
вания стандартных моделей S7-400. Для этого могут быть использованы все функции
пакета STEP 7 от V5.0 или выше. Конфигурирование резервированных систем ввода/
вывода контроллера S7-400H выполняется с помощью опционального пакета S7H,
интегрируемого в STEP 7.
Контроллер S7-400F/FH предназначен для построения систем противоаварий-
ной защиты (ПАЗ). Базируется на использовании компонентов S7-400H и станций
распределенного ввода/вывода ЕТ 200М с модулями систем безопасного управления
(F-модулями), станций ЕТ 200S PROFISafe и ЕТ 200есо PROFISafe. Контроллер обе-
216
ГЛАВА 2
спечивает одновременную поддержку функций противоаварийной автоматики и
функций стандартного управления.
PC-based контроллер Simatic WinAC (промышленный компьютер) поддержива-
ет связь с процессом через систему распределенного ввода/вывода на основе Profibus-
DP. С этой целью WinAC Slot PLC оснащен встроенным интерфейсом Profibus-DP.
Системы WinAC Software PLC подключаются к сети Profibus через коммуникаци-
онные процессоры. Для решения технологических задач Simatic WinAC использует
программное обеспечение RunTime спектра Simatic, включающее программное обе-
спечение (например, Standard PID Control, Easy Motion Control и т. д.) с библиотеками
и стандартными функциональными блоками, интегрируемыми в программы Simatic
WinAC. К этим модулям относятся функциональные и технологические модули, уста-
навливаемые в станции распределенного ввода/вывода Simatic ЕТ 200 и подключае-
мые к Simatic WinAC через сеть Profibus-DP. Simatic WinAC, пакет программирования
STEP 7 и программное обеспечение визуализации могут устанавливаться на одном
компьютере или связываться между собой через сети MPI, Profibus DP или Ethernet.
В соответствии с концепцией Totally Integrated Automation для подавляющего
большинства приборов оперативного управления и мониторинга семейства Simatic
HMI, а также систем Simatic ProTool/Pro и Simatic WinCC обеспечивается полный
доступ к данным и функциям Simatic WinAC. Для организации обмена данными
с системами визуализации других производителей Simatic WinAC снабжен ОРС-
сервером. Интегрированный в Simatic WinAC ОРС сервер с Data Access Interface 2.0
(интерфейс доступа к данным) обеспечивает открытый доступ к данным WinAC со
стороны приложений, выполняющих функции ОРС клиентов. Программирование и
конфигурирование систем автоматизации WinAC выполняется с помощью STEP 7, а
также инструментальных средств проектирования Simatic. Это позволяет использо-
вать для программирования Simatic WinAC все языки программирования, отвечаю-
щие требованиям международного стандарта IEC 61131-3. Simatic WinAC работает
на стандартном PC под управлением Windows 2000 или Windows ХР Professional, про-
граммно совместим с Simatic S7 и оптимизирован для задач сбора и обработки дан-
ных, визуализации и управления.
2.2.18 Контроллеры SMART2 компании PEP Modular Computers GmbH, Германия
Контроллер SMART2 (рис. 2.75) продолжает развитие концепции SMART I/O и
базируется на технологии открытой шины VME. Может использоваться в жестких
условиях промышленного производства. Контроллер используется для создания не-
больших систем примерно до 100 каналов ввода/вывода. Однако интерфейс локаль-
ной сети Profibus позволяет создавать распределенные системы, объединяющие кон-
троллеры различной мощности других производителей, интеллектуальные датчики
и исполнительные устройства с интерфейсом Profibus. Все
блоки и модули контроллера устанавливаются на стан-
дартном DIN-рельсе.
Предшествующая модель — контроллер SMART I/O,
программно совместим с системами VME9000 и IUC9000.
В качестве операционной системы используется много-
задачная многопользовательская ОС реального времени
OS-9. В качестве средств программирования используют-
Рис. 2.75 ся ассемблер, компилятор Ultra-C (стандарт ANSI-C, C++),
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
217
интегрированная среда FasTrak для Windows,
а также система ISaGRAF.
Контроллер SMART I/O состоит из базо-
вого блока SMART-BASE с тремя разъемами
для сменных модулей ввода/вывода SM-xxx
и дополнительных блоков SMART-EXT, каж-
дый из которых имеет по 2 разъема для смен-
ных модулей ввода/вывода. К одному модулю
SMART-BASE можно подключать до 4 блоков
SMART-EXT. Широкая номенклатура модулей
ввода/вывода позволяет оптимизировать кон-
фигурацию распределенных систем управ ле-
Рис. 2.76
ния под конкретную задачу.
Контроллер SMART2 отличается от контроллера SMART I/O тем, что наряду с
модульной конструкцией он компонуется из блоков, которые монтируются на DIN-
рельсе. В каждом из блоков может располагаться до трех функциональных модулей.
Максимально возможное число блоков — 5; следовательно, максимальное количе-
ство модулей в контроллере — 15. Несколько контроллеров SMART2 могут быть
связаны между собой и с другими контроллерами с помощью промышленных сетей
Profibus, Modbus или CAN.
Процессорный блок SM2-CPU (рис. 2.76, я) базируется на микропроцессо-
ре MC68LC302 20 МГц (DRAM 512 кбайт/1 Мбайт, SRAM 25 6кбайт, Флэш 1
Мбайт/2 Мбайт). Интерфейсы контроллера — RS-232, RS-485, Profibus DP (модуль
SM2-DP), CAN (модуль SM2-CAN) или Ethernet (модуль SM2-ETH).
Типы и характеристики модулей дискретного ввода/вывода: SM-DW1 (8DI, 24
VDC); SM-DOUT1 (8DO, 24 VDC); SM-DIO (8DI/2DO); SM-ACI1 (8DI, 80...240 VAC);
SM-ACO1 (6DO, 80...240 VAC); SM-REL1 (6RO, 250 VDC 220 VAC).
Типы и характеристики модулей аналогового ввода/вывода: SM-ADC1 (6А1, 0.. .5
мА, 0...20 мА, 0..10 VDC, ± 5 мА, ± 10 VDC); SM-ADC12 (6/12 AI, 0...5 мА, 0...20 мА,
± 5 мА); SM-ADC32 (16/32 AI); SM-DACl(2/6 АО, 0...10 VDC, ± 10 VDC, 0...20 мА);
SM-DAD1 (4AI/2AO, ± 10 VDC, 0...10 VDC); SM-TERM (4 канала для термопар); SM-
РТ100 (4 канала для термометров сопротивления).
Типы и характеристики интерфейсных модулей: SM-RS-232 (интерфейс RS-232);
SM-RS422I (интерфейс RS-422); SM-RS-485I (интерфейс RS-485). Помимо этих мо-
дулей в составе SCADA2 применяются модули счетчиков, модули питания, кросс-
модули многоканальные, блоки мультиплексора и др. На рис. 2.76, 6 представлен об-
щий вид модуля АЦП типа SM-ADC1.
В качестве операционной системы используется ОС РВ типа OS-9, которая обеспе-
чивает 32-разрядный режим адресации, осуществляет динамическое распределение па-
мяти, использует средства межзадачного взаимодейс твия (семафоры, сигналы, события,
алармы, программные каналы и др.). Контроллер поддерживает сетевые протоколы:
• Modbus, организующий обмен данными по принципу Master-Slave (1 Master и до
247 Slave). Поддержка протокола реализована через интерфейс RS-232.
• Profibus DP — стандартный протокол, работающий по принципу маркерной асин-
хронной шины. По протоколу Profibus DP допускается максимальное число узлов
сети — 122, из которых 32 могут быть в роли Master. Скорость передачи данных от
9,6 до 12 Мбод. Поддержка протокола реализована через интерфейс RS-485.
218
ГЛАВА 2
• CANbus — стандартный протокол, основанный на принципах децентрализован-
ного контроля за доступом CSMA/CM, В контроллере SMART2 поддерживается
протокол CANopen Master/Slave, скорость передачи — до 1 Мбод.
Средства разработки прикладного программного обеспечения:
• Среда OS-9. Среда разработки приложений включает компилятор UltraC/C++,
отладчик системного уровня и уровня исходного текста, текстовый редактор,
поддержку промышленных сетей.
• FasTrak для Windows — полная кросс-среда (пакет для Windows) разработки и
отладки прикладного ПО для OS-9. Включает кросс-компилятор UltraC/ C++,
кросс-Ассемблер, графический отладчик исходного текста, редактор исходного
текста, некоторые утилиты и пр.
• ISaGRAF — инструментальный пакет для описания логики работы контролле-
ра на основе языков программирования по стандарту IEC 61131-3. Пользователь
также может программировать дополнительные функции на языке С.
2.2.19 Контроллеры компании TURCK, Германия
Контроллер Comat ВохХ (рис. 2.77) имеет максимальное число входов до 3600,
выходов — до 2040. Память программ — 64 кбайт, число функциональных блоков —
127. Различные типы контроллеров имеют встроенные дискретные каналы — до 12,
аналоговые — до 12, выходные дискретные — до 8,
аналоговые — до 4. Контроллер с питанием 24 VDC
может обрабатывать аналоговые сигналы 0...10 VDC
с разрешением 0,1 V. При этом входы контроллера
можно конфигурировать как аналоговые или дискрет-
ные. Контроллер снабжен ЖК-дисплеем, речевым мо-
дулем на 16 минут, интерфейсами RS-232 и Ethernet.
Питание контроллера — 24 VDCили 110...230 VAC.
Программирование и конфигурирование контроллера осуществляется с помо-
щью ПК или съемного ЖК-дисплея с клавиатурой. Программирование контроллера
производится с помощью пакета QUICK II на базе ОС Windows. С помощью симуля-
тора программа может быть проверена перед запуском.
Контроллер AF-10MR-A имеет 6 DI, 4 RO; модель AF-20MR-A имеет 12 DI, 8 RO;
AF- 10MR-D — 6 конфигурируемых дискретных/аналоговых входа 0... 10 VDC и 4 RO;
AF-20MR-D — 12 конфигурируемых дискретных/аналоговых входа 0...10 VDC и 8
RO; AF-10MT-GD — 4 PNP выхода 24 VDC; AF-20MT-GD — 8 PNP выхода 24 VDC.
С помощью модуля расширения AF-MUL можно управлять контроллером по теле-
фонному кабелю (после ввода пароля). После набора телефонного номера предваритель-
но записанный текст будет воспроизведен через встроенный или внешний динамик.
К другим модулям контроллера относятся модуль интерфейса RS-232 — AF-M232,
модуль интерфейса RS-485 — AF-C485, конвертор RS-232/RS-485 — AF-P485.
Визуализация и опрос состояния параметров процесса управления осуществляется
с помощью SCADA 2.2. Допускается работа в сети до 256 контроллеров Comat ВохХ.
2.2.20 Контроллеры компании Unitronics, Израиль
К контроллерам фирмы относятся моноблочные контроллеры М90/М91
(рис. 2.78), V120 (рис. 2.79), V230 (рис. 2.80), V260 (рис. 2.81), V280 (рис. 2.82) и Jazz
Micro-OPLC (рис. 2.83).
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
219
Контроллеры имеют полнофункциональную панель индикации и управления.
Панель управления контроллера М90/М91 содержит одно- или двустрочный ЖК-
дисплей на 16 символов с подсветкой, 15 клавиш. Клавиатура обеспечивает настрой-
ку системы и изменение значений внутренних переменных. В зависимости от типа
модели контроллер имеет встроенные дискретные и аналоговые входы/выходы,
коммуникационные порты RS-232 и (или) CANbus, а также порт расширения, позво-
ляющий подключать до 8 модулей (из 18 типов) на 64 входа/выхода (максимально),
включая сигналы от термометров сопротивления, термопар и пр. Характеристики
модулей расширения представлены в табл. 2.28. Модули расширения подключаются
к контроллерам с помощью адаптера ЕХ-Al. К числу новых модулей расширения от-
носятся также модули измерения веса/деформации типа IO-LC1, IO-LC3.
Функция промышленной шины позволяет соединение до 63 контроллеров М90/
М91 в локальную децентрализованную сеть CANbus, работающую в режиме multi-
master. Сеть управляется PC через интерфейс RS-232. Также возможно подключение
удаленных модулей М90/М91 с помощью пакета GSM Control через сеть мобильной
связи GSM. После подключения контроллера к GSM-модему возможна передача
SMS-сообщений. GSM-Control работает шлюзом между средой GSM с одной стороны
(отсылая и получая SMS-сообщения) и средой MS Windows (используя интерфейсы
DDE, ОРС или SQL-запросы при работе с БД).
В качестве программного обеспечения для программирования контроллера и
создания HMI используется пакет U90 Ladder, состоящий из редактора многозвен-
ных схем, редактора HMI и редактора переменных. Загрузка создаваемой программы
производится с PC, а обмен данными — через DDE-сервер. ПО работает под Windows
95/98/NT4.0 на языке LD. ПО позволяет создать до 80 дисплеев. Кроме того, при под-
ключении контроллера (DDE-сервера) к компьютеру через DDE-порт с использова-
нием протокола DDE осуществляется связь со SC ADA-системой InTouch, являющей-
ся DDE-клиентом.
Для всех моделей дискретные входы — транзисторные (рпр), 24 В. пост, тока,
а дискретные выходы — релейные (для моделей Т1 и ТА2- транзисторные, рпр).
Аналоговые входы включают сигналы 0-5 В, 0-10 В, 0-20 мА и 4-20 мА (для моде
Рис. 2.81
Рис. 2.82
Рис. 2.83
220
ГЛАВА 2
лей R2 0-5В и 0-10В, для модели ТА2 0-10В). Время выполнения логической опе-
рации — 12 мкс
Таблица 2.28. Характеристики модулей расширения контроллера М90
Ъш модуля I0-D18- Т08 10- R08 10- D18-R04 ю- R016 10- DI16 10- ТО16 10- А14-А02 10- А06Х I0-PT4 10- АТС8 EX90-D 18- R08
Число дискретн. входов 8 — 8 16 — — — — — 8
Число дискретн. выходов 8 (рпр) 8 (реле) 4 (реле) 16 (реле) — 16 (рпр) — — — — 8 (ре- лейн.)
Число аналогов, входов — — — — — 4 — 4 РТ100 8 (0...10В, 4...20 мА) —
Число аналогов, выходов — — — — — 2 (+/- 10 В) 6 (0...10 В) — — —
Контроллеры серии Vision V120 и V230/260/280 снабжены графическим диспле-
ем, позволяющим выводить 8 строк по 20 символов или графику размером 128x64
пиксел (V230) и 320x240 пике. (V280), не требуя затрат на PLC-HMI коммуникации.
На панели контроллера располагаются 24 клавиши для программирования и управ-
ления. Контроллер имеет встроенные: до 16 дискретных входов (рпр, 24 VDC), 4 дис-
кретных выхода транзисторных (рпр/прп, 24 VDC), 10 релейных и 3 аналоговых вхо-
да (0-10 VDC, 0-20 мА).
Характеристики контроллера: память программ — 16 кслов, время выполнения
одной логической команды — 0,8 мкс, число таймеров — 128, число портов RS-232 —
2, CANbus — 1, поддержка протокола Modbus, master/slave, возможность подключе-
ния к сети GSM и формирования SMS-сообщений, защита передней панели по IP65,
габариты 184x155x60,5 мм. В табл. 2.29 приведены технические характеристики мо-
делей контроллера Visio 230.
Таблица 2.29. Технические характеристики контроллера Visio 230
Тип модуля VI20-12-R1 V120-12-R2C V120-12-UN2
Число дискретных входов 10 рпр/прп, 12/24 VDC 10 рпр/прп, 12/24 VDC 12 рпр/прп, 12/24 VDC
Высокоскоростные счетчики 3(10 кГц максимум) 3 (10 кГц максимум) 2(10 кГц максимум)
Число дискретных выходов 6 релейных выходов 6 релейных выходов 12 транзисторных вы- ходов, 12/24 VDC
Число аналоговых входов 1 (0-10 В, 0-20 мА, 4-20 мА) 2 (0-10 В, 0-20 мА, 4-20 мА) 2 (0-10 В, 0-20 мА, 4-20 мА)
Число входов термопар/тер- мометров РТ100 — — 2
Число высокоскоростных вы- ходов (HSO) — — 2 (2 кГц максимум)
Число входов/выходов рас- ширения До 128
Число модулей расширения — 8. Всего в сегменте может быть до 63 модулей
Vision 230 и Unitronics М90/М91.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
221
Контроллеры V120, V230, V260 и V280 с модулями расширения позволяют по-
лучить до 160 входов/выходов, обеспечивают поддержку Modbus, CANbus, Ethernet,
SMS/GSM data/GPRS. Единое программное обеспечение (Windows-based program)
VisioLogic Ladder Software используется для программирования контроллеров и соз-
дания операторского интерфейса
Новый контроллер Jazz Micro-OPLC имеет встроенные цифровые и аналоговые
входы, релейные и транзисторные выходы (в зависимости от модели), двухстрочный
16-символьный ЖК-дисплей, возможность отправки/получения SMS-сообщений
(программа GSM-Control), поддерживает протоколы Modbus RTU или ОРС-сервер
для обмена данными со SCADA-системами, а также имеет возможность считывать/
записывать данные из/в ПЛК используя Excel, Access или др. Windows-приложения.
Контроллер Jazz Micro-OPLC имеет 16-ти клавишную настраиваемую клавиатуру и
по своим функциональным возможностям превосходит известные интеллектуаль-
ные реле. Программное обеспечение контроллера — пакет JZ-PRG. В табл. 2.30 при-
ведены технические характеристики контроллера Jazz Micro-OPLC.
Таблица 2.30. Технические характеристики контроллера Jazz Micro-OPLC.
Тип контроллера JZ10 11-R10 JZ10-11-T10 JZ10-11-R16 JZ10-11-T17
Число дискретных входов 6 pnp/npn 6 pnp/npn 8 pnp/npn 8 pnp/npn
Число дискретных выходов 4 релейных 4pnp 6 релейных 7pnp
Число аналоговых входов нет нет 2х(0...10В)и 2x(4...2O мА) 2x(0...10B) и 2x(4...2O mA)
Память программ 24 К
Коммуникации RS-232, Modbus RTU master-slave, GSM-порт
Питание 24 VDC
Степень защиты IP65
2.2.21 Контроллеры фирмы VIPA, Германия
Серия контроллеров VIPA, полностью совместимых с контроллерами Simatic
S7-300, включает семейство контроллеров малого класса (до 160 входов/выходов)
типа VIPA System 100V, контроллеры VIPA System 200V для систем с числом входов/
выходов до 1024, семейство контроллеров System 300V и 300S, обладающих высокой
надежностью, быстродействием и функциональностью. Расширение систем дости-
гается с помощью широкой номенклатуры модулей ввода/вывода. РС-совместимой
встраиваемой системой высокого быстродействия является VIPA System 500S. Про-
граммирование контроллеров VIPA осуществляется с помощью пакета STEP7 фир-
мы Siemens или собственного ПО WinPLC7. Модули VIPA используются в качестве
ведомых (для младшего класса ПЛК) или ведущих в
сети Profibus DP.
Компактный контроллер VIPA System 100V
(рис. 2.84) применяется для управления малыми
системами с числом дискретных входов/выходов
до 160 или аналоговых входов/выходов — до 24.
Объем памяти 32 кбайт, объем расширяемой памя-
ти модулями ММС до 64 Мбайт. Время обработки
слова — 1,2 мкс. Контроллер полностью совместим
222
ГЛАВА 2
по системе команд с ПЛК Simatic S7-300. Модули аналогового и дискретного ввода/
вывода с питанием 24VDC, устанавливаются, как и процессорный модуль, на DIN-
рейку. Скорость передачи данных по сети Profibus DP составляет от 9,6 кбод до 12
Мбод. Характеристики модулей CPU и ввода/вывода приведены в табл. 2.31.
Таблица 2.31. Характеристики модулей CPU и ввода/вывода
Модель Тип CPU Число входов/выходов Тип модуля ввода/вывода Число входов/выходов
VIPA 114-6BJ00 CPU 114 DI 16 (20), DO 8 (4) — —
VIPA 114-6BJ10 To же + часы реального времени — —
VIPA 114-6BJ50 DI 16, DO 8 (релейные) — —
VIPA 114-6BJ60 To же + часы реального времени — —
VIPA 115-6BL00 CPU 115 DI16 (20), DO 16 124) — —
VIPA 115-6BL10 То же + 2 последовательных порта — —
VIPA 115-6BL20 DP—Slave интерфейс — —
VIPA 121-4BH00 — — SM 121 DI х 16
VIPA 121-6BLOO — — SM 121 DI х 32
VIPA 122-4BHOO — — SM122 DOx 16
VIPA 122-6BL00 — — SM 122 DO х 32
VIPA 123-6BL00 — — SM 123 DI X 16,DOx 16
VIPA 136-4BD70 — — SM136 AI x 4, АО x 2, DIO x 8
VIPA 136-4BD60 — — SM 136 Al X 4, DIO x 8
Контроллеры VIPA System 200 (рис. 2.85) имеют до 1024 дискретных и до 128
аналоговых входов/выходов. Объем памяти от 16 до 512 кбайт, расширяемой памяти
на карте ММС — до 64 Мбайт. Время обработки слова — 0,78 мкс. Помимо традици-
онных модулей расширения в состав контроллера входит PC-совместимый процес-
сорный модуль CPU 288, представляющий компактный IBM PC-совместимый кон-
троллер. Несомненный интерес представляют процессорные модули CPU 21xNET со
встроенным интерфейсом IndustrialEthernet с поддержкой протокола TCP/IP.
Отличительной особенностью линейки System 200V является отсутствие кросс-
платы. Системная шина реализована в виде наборного соединителя, устанавливае-
мого в углубление DIN-рейки. На одной системной шине допускается установка до
32 модулей. Процессорные модули контроллера оснащены интерфейсом MP2I, ко-
торый объединяет два интерфейса — RS-232 и MPI (MPI — многоточечный интер-
фейс на базе стандарта EIA RS-485; для подключения ПК к контроллеру с помощью
MPI требуется специальный адаптер). Модули контроллера объединяются по сети
Profibus DP и CANopen в качестве ведущих и ведомых, по сети DeviceNet и Interbus
Рис. 2.86
Рис. 2.85
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
223
в качестве ведомых. В табл. 2.32 приведены характеристики некоторых модулей рас-
ширения System 200.
Таблица 2.32. Характеристики модулей расширения контроллера VIPA System 200V
Модель Тил CPU Объем памяти, Кб Тип модуля ввода/вывода Число входов/выходов
VIPA 211-1ВА01 CPU-211, -212, -213 16,-128, -512 — —
VIPA 214-1BA01 CPU-214,-215, -216 16,-128, -512 — —
VIPA 241-1BA01 CPU-241,-242, -243 16, -128, -512 — —
VIPA 2XX-2BP01 CPU DP Встроенный Profibus DP — —
VIPA 2xx-2BT01 CPU NET Встроен TCP/IP —
VIPA 2xx-2BS01 CPU SER 2XRS-485 — —
— — — SM221 DI х 8/16/32
— — — SM222 DO х 8/16/32
— — — SM231 AI х 4
— — — SM232 АО х 4
— — — SM234 AI х 2, АО х 2
— — — СР 240 RS-232/RS-485
— — — IM253 Profibus/CANopen, Interbus
Контроллеры VIPA System 300V (рис. 2.86) имеют до 1024 дискретных и до 256 ана-
логовых входов/выходов. Объем памяти контроллеров составляет от 32 до 512 кбайт,
расширяемая с картой ММС до 64 Мбайт. Время обработки бита составляет 0,18 мкс.
Контроллеры полностью совместимы аппаратно и по системе команд с контрол-
лерами Simatic S7-300. Модули расширения System 300 взаимозаменяемы с однотип
ными модулями Siemens. Характеристики модулей CPU и модулей ввода/вывода при-
ведены в табл. 2.33.
Таблица 2.33. Характеристики модулей CPU и модулей ввода/вывода VIPA System 300V
Модель Тип CPU Объем памяти, Кб Тип модуля ввода/вывода Число входов/выходов
VIPA 314- 1ST CPU-314, -315, -316,-317 32, -32,-256,-512 — —
VIPA 314- 2DP00 CPU-314DP Master/Slave — —
VIPA 314- 3SL00 CPU-314 Net Master/Slave TCP/IP — —
VIPA 314- 4SL00 CPU-314 Web Master/Slave TCP/IP Webmaster — —
— — — SM321 DI х 16/32
— — — SM322 DO х 16/32
— — — SM331 AI x 2/8
— — — SM332 АО x 2/4
— — — СР 340 R232/RS-485
— — — IM 353 Profibus/CANopen, Interbus, DeviceNet
Контроллер System 300S, выполненный по технологии SPEED7, имеет высокое бы-
стродействие, объем рабочей памяти может быть расширен до 8 Мбайт с помощью кон-
фигурационной карты MemoryConfiguratorCard (МСС). Процессорные модули System
300S снабжены портом Ethernet для организации обмена данными по сети Ethernet. Для
установки высокоскоростных модулей и коммуникационых процессоров предназначена
шина расширения SpeedBus. К процессорному модулю возможно подключение до 32 мо-
дулей расширения. Среди встроенных интерфейсов — MPI, Profibus DP, Ethernet.
224
ГЛАВА 2
Рис. 2.87
Контроллер VIPA System 500S (рис. 2.87) представляет со-
бой Slot-PLC — карту в формате PCI, устанавливаемую в корпус
IBM PC-совместимого компьютера и оснащенную интерфей-
сом Profibus-DP. Обмен данными между CPU и прикладными
программами осуществляется с помощью ОРС-сервера, входя-
щего в комплект поставки.
Модули расширения подключаются по сети Profibus DP.
Каждое устройство System 500S имеет контроллер Ethernet с
поддержкой функций связи PG/OP. Среди встроенных интер-
фейсов — MPI, Profibus DP, Ethernet.
2.2.22 Контроллеры компании WAGO (Германия)
Компания WAGO, известная как мировой производитель пружинных зажимов
(клемм) и различных соединителей, выпускает модульные системы ввода/вывода,
включающие базовые и сетевые контроллеры. В модульной системе WAGO-1/O-Sys-
tem 750 используются базовые контроллеры узла сетей Lightbus, Profibus DP, Interbus,
DeviceNet, CANopen, CAL. Помимо серии 750 компания выпускает компактную се-
рию WAGO-1/O-System 752, серию WAGO-1/O-System 755 со степенью защиты IP 67,
серию WAGO 758 (компактный промышленный компьютер).
Модульная система ввода/вывода WAGO-1/O-System 750 (рис. 2.88). Система
WAGO-1/O-System 750-ххх имеет в составе базовый сетевой контроллер, устанавли-
ваемый на DIN-рейку с зажимом CAGE CLAMP (заземляющий контакт, автомати-
ческая фиксация, 2-, 3- и 4-проводные клеммы), модули ввода/вывода. Для примера
приведем характеристики базовых контроллеров для сетей Lightbus (750-300), Profi-
bus DP (750-343) и Interbus (750-804).
Характеристики базового сетевого контроллера WAGO-1/O-System 750-300: сеть
Lightbus, скорость 2,5 Мбит/с, время передачи — I мс на 640 каналов ввода/вывода,
максимальное число каналов ввода/вывода — 16192, максимальное число сетевых
узлов — 254, максимальная длина сегмента сети — 300 м (HCS), физическая среда —
волоконно-оптический кабель. Максимальное число модулей ввода/вывода в одной
станции — до 64, питание — 24 VDC, степень защиты — IP20.
Характеристики базового сетевого контроллера WAGO-1/O-System 750-343
(рис. 2.89): сеть Profibus DP/V1, скорость передачи 12 Мбит/с, максимальное чис-
ло сетевых узлов (с репитером) — 125, максимальное число каналов ввода/вы-
вода — 6000, физический канал — витая пара по EN 50170, максимальная длина
Рис. 2.88
Рис. 2.89
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
225
сегмента в зависимости от скорости пе-
редачи и физического канала — от 100
м до 1200 м, скорость передачи — от 9,6
кбит/с до 12 Мбит/с, питание — 24 VDC,
степень защиты — IP20.
Характеристики базового сетевого
контроллера WAGO-1/O-System 750-804
(рис. 2.90): сеть Interbus, скорость пере-
дачи 500 кбит/с, максимальное число
сетевых узлов— 256, максимальное чис-
ло каналов ввода/вывода — 4096, макси-
мальное число модулей ввода/вывода —
64, физический канал — витая пара, мак-
симальная длина сегмента сети — 400 м,
Ошибка AI1
Ошибка AI3
All
Общий
(земля)
AI3
Общий
(земля)
—Шина разводки
потенциала питания
Рис. 2.90
время передачи — 1,4 мс на 320 каналов ввода/вывода, программирование контрол-
лера по МЭК 61131-3, пакет программирования — WAGO-I/O-PRO32, питание — 24
VDC, степень защиты — IP20.
В других модификациях системы используются сети Profibus DP (базовый ведо-
мый контроллер 750-301, скорость передачи 1,5 Мбит/с и 750-303 со скоростью пере-
дачи 12 Мбит/с), Interbus (базовый контроллер 750-344, скорость передачи 500 кбит/с
и 750-345 со скоростью передачи 2 Мбит/с), DeviceNet (базовый ведомый контроллер
750-346, скорость передачи 125-500 кбит/с) и CANopen (базовый контроллер 750-347,
скорость передачи Юкбит/c...l Мбит/с). Габариты модулей системы: высота—65 мм,
ширина — 51 мм, глубина — 100 мм.
Серия WAGO-1/OSystem 755 имеет степень защиты IP67 и может использовать-
ся в жестких условиях эксплуатации. Контроллер используется в качестве ведомого
устройства в сети Profibus DP с числом дискретных входов/выходов 16DI, 8DI/4DO,
8DO; в сети DeviceNet в качестве ведомого устройства с числом дискретных входов/
выходов 16DI, 8DO; в сети Interbus в качестве ведомого устройства с числом дискрет-
ных входов/выходов 8DI, 8DO.
PC-контроллер WAGO I/O IPC (серия 758). Контроллер WAGO I/O-IPC
типа 758-870 (рис. 2.91) на базе процессора Geode SC1100/1200, 266 МГц, ОЗУ —
32 Мбайт, операционная система— RT-Linux, интерфейсы RS-232, 2x10 Base-
Т/100 Base-TX, USB-порт, сетевые интерфейсы — Profibus DP, CANopen и Devi-
ceNet. Максимальное число модулей в узле — 64. Программирование осуществля-
ется с помощью пакета WAGO-I/O-PRO-CAA с
использованием языков программирования по
стандарту МЭК 61131-3. Питание контролле-
ра — 24 VDC, степень защиты — IP20. Габариты
устройства — 172x65x100 мм.
Программное обеспечение контроллеров
компании WAGO. Программное обеспечение
включает пакеты WAGO-I/O-CHECK2, WAGO
ОРС Server для Modbus TCP и WAGO I/O-PRO
(инструмент для программирования и визуали-
зации). Поддерживается ОС Windows 98/2000/NT
4.0, ОЗУ не менее 32 Мбайт. Рис- 2-91
8 Зак. 3801
226
ГЛАВА 2
2.3. Контроллеры, производимые предприятиями РФ
К числу производителей отечественных контроллеров относятся: ГК «ТЕКОН»,
ЗЭиМ, ЗАО «Волмаг», ЭзАН, МЗТА, ЗАО «Эмикон», НПФ «КРУГ», компания ДЭП,
НПО «Системотехника», ЭлеСи, ОВЕН, ЗАО «Альбатрос» и некоторые др.
К достоинствам отечественных контроллеров относятся, помимо естественной
подробной русификации всех компонентов системы, максимальный учет специфики
российского производства, легкость адаптации к условиям эксплуатации, обучения
и обслуживания, совместимость с отечественным оборудованием. Немаловажными
обстоятельствами являются более низкая цена, возможность получения быстрой
консультации в период эксплуатации и ремонта и др.
Ниже приводятся краткие сведения об отечественных контроллерах, выпускае-
мых российскими компаниями. Более подробные сведения можно найти на сайтах
компаний, в отечественных журналах (прежде всего в журнале «Промышленные
АСУ и контроллеры» и др.), в материалах семинаров и выставок по автоматизации и
управлению.
2.3.1 Контроллеры ЗАО «Волмаг»
Контроллеры ЗАО «Волмаг» серии КОНТРАСТ предназначены для построения
систем автоматизации различной архитектуры. Современные скоростные интер-
фейсы, открытый протокол связи, каналы подключения полевых сетей, фирменные
программные продукты обеспечивают работу контроллеров в составе сложных
многоуровневых систем автоматизации. Контроллеры имеют блочно-модульную
конструкцию, высокую надежность и «живучесть» за счет использования техноло-
гии поверхностного монтажа на базе электронных компонентов производства Intel,
AMD, Atmel, Altera, Analog Devices, Bourns и других ведущих зарубежных фирм. Кон-
троллеры серии КОНТРАСТ изготавливаются в двух исполнениях: навесное испол-
нение (КР-300ИШ, КР-ЗООШ) — для встраивания в шкаф с односторонним доступом
и приборное исполнение (КР-300И, КР-300М, PK-131/300M) — для встраивания в
щит. Время цикла контроллеров серии КОНТРАСТ — от 10 до 400 мс.
Серия КОНТРАСТ включает контроллеры КР-500, КР-300Ш, КР-300ИШ, КР-
300ИП, КР-300М, РК-131/300М.
Контроллер КР-500 (рис. 2.92) предназначен для построения распределен-
ных систем автоматического управления. Модули УСО подключаются к централь-
ному процессорному блоку по интерфейсу RS-485 и могут быть удалены от блока
центрального процессора на расстоянии до 1,2 км. Каждый модуль УСО выполнен
в отдельном корпусе и построен на базе микропроцессора, который выполняет сле-
дующие функции:
• информационный обмен с центральным про-
цессором;
• ввод/вывод аналоговых и дискретных сигналов;
• диагностика входных/выходных сигналов (контроль
лини связи с датчиками сигналов, защита от КЗ, кон-
троль включения);
• линеаризация сигналов термодатчиков;
• точный подсчет импульсов на дискретных входах
(до 500 Гц);
• непрерывная диагностика модулей.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ 227
В состав контроллера входят блок контроллера
БК-500 и модули УСО, которые подключаются к кон-
троллеру с помощью шлюзового микроконтроллера.
ШМК имеет 3 порта RS-485. К одному ШМК можно
подключить 16 модулей УСО-Д.
В состав блока БК-500 входят: модуль процессора
ПРЦ-500 с зашитой резидентной программой, модуль
МИК-Д с разъемами для подключения пульта на-
стройки ПК-302 и клеммами для подключения поле-
вых сетей, модуль МП-Д, включающий в себя схему
стабилизации напряжения. Рис. 2.93
Модули УСО-Д контроллера (21 модификация) со
встроенным микропроцессором (рис. 2.93) выполнены в компактных пластмассовых
корпусах и содержат одну или две (в сдвоенном корпусе) печатные платы с габарит-
ными размерами 100x80 мм, на которых размещены электронные компоненты. На
передней панели модуля имеются клеммы для подключения цепей входных и выход-
ных сигналов (12 или 24 клеммы) и разъем для подключения пульта контроллера ПК-
302. Каждый модуль УСО-Д имеет два канала связи с интерфейсом RS-485. Один из
каналов при установке модуля подключается к шине интерфейса связи с контролле-
ром. Ко второму каналу подключается пульт контроллера ПК-302 или компьютер для
настройки и диагностики модуля. Модули УСО могут подключаться к устройствам
других производителей по протоколу Modbus RTU. Число контуров регулирования,
поддерживаемых контроллером, — 32.
Контроллеры объединяются в локальную сеть МАГИСТР (до 31 устройства),
что позволяет им обмениваться оперативными данными в процессе работы. Поло-
жительным свойством сети МАГИСТР является то, что можно обратиться с верх-
него уровня ко всем контроллерам сети, подключившись к любому из них. Каждый
контроллер оснащен шлюзовым каналом для связи с верхним уровнем. Связь осу-
ществляется по последовательному интерфейсу RS-232 или RS-485 (оговаривается
при заказе). Скорость связи — 1,2...115,2 кбит/с. Скорость передачи по шлюзовому
каналу аналоговых/дискретных сигналов составляет 5000/80000 сигналов в секун-
ду. Также для связи с верхним уровнем предусмотрен интерфейс Ethernet. Общее
число аналоговых/ дискретных каналов сети МАГИСТР составляет 5890/9424.
Скорость связи по сети — до 500 кбит/с. Топология сети МАГИСТР— моноканал,
интерфейс связи— RS-485 (4 канала нерезервированной или 2 канала резервиро-
ванной полевой сети).
Программное обеспечение контроллеров включает резидентную программу,
поставляемую в составе контроллера, систему программирования и настройки
контроллеров КОНТРАСТ для IBM PC в ОС Windows или ИСТОК (DOS), а также
ОРС-сервер связи со SCADA-системами. Технологические языки программирования
контроллеров — ФАБЛ (язык класса FBD, до 999 функциональных блоков) и ПРО-
ТЕКСТ (язык класса ST, до 64000 переменных).
Контроллеры предусматривают их резервирование в целом, резервирование
процессорных модулей или модулей УСО.
Контроллер КР-300М состоит из блока контроллера БК-М (БК) с процессором
и тремя модулями УСО, блока БУСО-М. Число модулей в блоке УСО-М — 4, число
блоков БУСО — 4. Таким образом, общее число модулей УСО — 19, а число анало-
228
ГЛАВА 2
говых входов/выходов контроллера — до 190, дискретных — до 304. Для подклю-
чения к блоку контроллера БК-М двух, трех или четырех блоков БУСО-М предна-
значен блок расширения БР. В качестве дополнительного оборудования для работы
с контроллером применяются блоки усилителя мощности БУМ-20М/30 (усиление
мощности дискретных выходных сигналов с помощью реле), блоки усилителей
сигналов для термопар БУТ-10И/30 (преобразователи термоЭДС в токовый сигнал
0/4...20 мА, 0...5 мА 2- и 4-канальные) и блоки усилителя сигналов для термосо-
противлений БУС-10И/30 (преобразователи сигналов терморезисторов в токовые
сигналы).
В состав блока БК-М входят системная плата с четырьмя разъемами для установ-
ки процессорной платы и трех модулей УСО, модуль процессора ПРЦ-301 (процессор
Intel 386ЕХ) с резидентной программой, модули УСО, лицевая панель со встроенным
пультом управления (или без него), модуль стабилизатора напряжения и межблоч-
ный соединитель (МБС) с блоком питания БП-ШМ (220 VAC/24 VDC). Тип модулей
УСО: МАС (8 AI, 2 АО), МДА (8AI, 4 DO), МСД-00 (16 DO), МСД-01 (4 DI, 12 DO),
МСД-02 (8 DI, 8 DO), МСД-03 (12 DI, 4 DO), МСД-04 (16 DI), МАВ (8 АО).
Объем программы ФАБЛ аналогичен КР-500 и составляет 999 алгоблоков. Коли-
чество контуров регулирования — 32. Одновременно с программой ФАБЛ контрол-
лер способен выполнять программу, написанную на структурном языке ПРОТЕКСТ.
Применение этого языка облегчает программирование контроллера для решения за-
дач дискретного управления.
Контроллер КР-300Ш аналогичен контроллеру КР-300М, но выполнен в на-
весном исполнении. Это дает следующие преимущества: конструктив позволяет
применять модули повышенной канальности (максимальное число дискретных
входов/выходов контроллера КР-300Ш составляет 608 каналов). Контроллер в на-
весном исполнении удобно размещать в шкафах с односторонним доступом. Отли-
чия от контроллера КР-300М: контроллер состоит не из блоков, а из секций (одна
секция БК-Ш и до четырех секций БУСО-Ш); процессорная плата и модули УСО
аналогичны модулям приборного исполнения; питание контроллера осуществля-
ется от блока ББП-24 или БГ-24.
В состав блока контроллера БК-Ш входят системная плата с пятью разъема-
ми для установки процессорной платы и трех модулей УСО, модуль процессора
ПРЦ-301Ш с резидентной программой, модуль МПИ, модули УСО. К одному бло-
ку БК-Ш можно подключить до четырех блоков БУСО-Ш, каждый из которых со-
держит до 4-х модулей УСО. Тип модулей УСО: МАС-ЗШ (8 AI, 2 АО), МДА-ЗШ
(8 AI, 4 DO), МСД-Ш.00 (16 DO), МСД-Ш.01 (4 DI, 12 DO), МСД-Ш.02 (8 DI, 8 DO),
МСД-Ш.03 (12 DI, 4 DO), МСД-Ш.04 (16 DI), МАВ-Ш-Х (8 АО), МСД-2Ш.01 (32 DI),
МСД-2Ш.03 (16 DI, 16 DO).
Таким образом, максимальное число аналоговых/дискретных входов/выходов
блока контроллера — 30/96, блока БУСО — 40/128 (число блоков БУСО — до 4). Таким
образом, максимальное число аналоговых/дискретных входов/выходов контроллера
в целом составляет 190/608.
Контроллер КР-300ИП (рис. 2.94) является дальнейшим развитием контролле-
ров КР-300М и включает интеллектуальные модули УСО. Каждый модуль УСО име-
ет встроенный микропроцессор, отвечающий за функции, аналогичные контрол-
леру КР-500. Максимальное число аналоговых/дискретных входов/выходов блока
контроллера — 3048, блока БУСО — 40/64 (число блоков БУСО — до 4), одного
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
229
Рис. 2.94
блока БУСО-1 до 128 (только дискретные). Таким
образом, максимальное число аналоговых/дис-
кретных входов/выходов контроллера в целом
(без блока БУСО-1) составляет 190/816.
С помощью модуля интерфейсных каналов
МИК можно организовать до трех полевых сетей.
Если к каждому каналу этого модуля подключить,
например, по два блока БУСО с модулями дис-
кретного ввода, то общая канальность контрол-
лера возрастет на 768 каналов дискретного ввода.
Каждый канал полевой сети — универсальный и может быть запрограммирован по
желанию пользователя на работу с различными устройствами, имеющими интер-
фейс RS-485. Реализованы драйверы связи по протоколам: Modbus RTU ведущий/
ведомый. Кроме каналов полевой сети модуль МИК имеет высокоскоростной допол-
нительный шлюзовой канал для связи с верхним уровнем и канал горячего резерви-
рования контроллеров.
Контроллер КР-300ИП1 (рис. 2.95) аналогичен контроллеру КР-300ИП, но вы-
полнен в навесном исполнении. Благодаря новым модулям аналогового ввода повы-
шенной канальности (2 группы до 12 каналов) с возможностью выбора типа вход-
ного сигнала пользователь имеет возможность индивидуально настроить каждый
канал первой группы на любой из сигналов: 0...5,0...20,4...20 мА. Аналогично, каналы
второй группы индивидуально настраиваются на любой из предло-
женных диапазонов сигнала от термопары.
Обновлен ряд модулей дискретного ввода повышенной ка-
нальности. Модуль МСД-1-16/8 (16 входов, 8 выходов) по желанию
пользователя способен работать в режиме многоканального ввода
дискретных сигналов. Все восемь выходов используются как управ-
ляющие сигналы на блок коммутации и расширения (блок БКР),
который поочередно коммутирует группы по 16 сигналов на входы
модуля. Таким образом, один модуль воспринимает до 128 дискрет-
ных сигналов.
В состав блока контроллера БК-ИШ входят системная плата с пятью разъема-
ми для установки процессорной платы и трех модулей УСО, модуль процессора
ПРЦ-300ИШ с резидентной программой, модуль МПИ, модули УСО, межблочный
соединитель МБС-Ш. К одному блоку БК-Ш можно подключить до четырех блоков
БУСО-Ш, каждый из которых содержит до четырех модулей УСО. Блок БУСО-ИШ
подключается к контроллеру через канал полевой сети. На один канал допускается
подключать до 24 блоков БУСО-ИШ.
Тип модулей УСО: МАС-1Ш (8 AI, 2 АО), МДА-1Ш (8AI, 4 DO), МСД-1Ш.00 (16
DO), МСД-1Ш.02 (8 DI, 8 DO), МСД-1Ш.04 (16 DI), МСД-1Ш.06 (16 DI, 8 DO), MAB-
1Ш (8 АО), МАС-2Ш (8 AI, 2 АО), МДА-2Ш (8 AI, 4 DO), МСД-2Ш.00 (32 DI), МСД-
2Ш.02 (16 DI, 16 DO), МАС-5Ш (24 AI), МТС-Ш (23 входа для термопар). МРС-Ш
(8 каналов для подключения термометров сопротивления), МИК-Ш (3 канала по-
левой сети RS-485).
Таким образом, максимальное число аналоговых/дискретных входов/выходов
блока контроллера — 72/96, блока БУСО — 96/128 (число блоков БУСО до 4), одного
блока БУСО-1 — 96/128. Следовательно, максимальное число аналоговых/дискрет-
Рис. 2.95
230
ГЛАВА 2
ных входов/выходов контроллера в целом (без
блока БУСО-1) составляет 456/608.
Контроллер РК-131/ ЗООМ (рис. 2.96) со-
стоит из блока БК-1М с процессором Intel 386ЕХ,
блока БУСО-М и имеет возможность наращи-
вания числа модулей УСО до шести модулей. К
другим отличительным особенностям контрол-
лера относятся: объем ФАБЛ-программы — до
399 алгоблоков; 16 контуров регулирования; два
варианта лицевой панели (регулирующая и логи-
ческая); 9 независимых программ логического управления.
Максимальное число аналоговых/дискретных входов/выходов блока контролле-
ра — 20/32, блока БУСО — 40/64 (число блоков БУСО — 1). Таким образом, макси-
мальное число аналоговых/дискретных входов/выходов контроллера в целом состав-
ляет 60/96.
Особенностью контроллера является аппаратная совместимость с контроллером
Ремиконт Р-130. Таким образом, заменив в Р-130 процессорную плату и блок пита-
ния на аналогичные от РК-131/300М, можно получить контроллер с более мощными
программными и интерфейсными возможностями.
2.3.2 Контроллеры ГК «ТЕКОН»
В группу компаний «ТЕКОН» входят ЗАО «ТЕКОН», ЗАО «ПК Промконтрол-
лер», ЗАО «ТеконГруп». Группа компаний «Текон» производит контроллеры МФК
3000, МФК, ТКМ 52, ТКМ 410.
Контроллер МФК (рис. 2.97) представляет собой PC-совместимый контроллер,
состоящий из базовой части, процессорного модуля и модулей ввода/вывода. Базо-
вая часть представляет собой крейт Евромеханика 19" размером 6U. В крейт устанав-
ливается процессорный модуль и до 16 модулей ввода/вывода формата ЕЗ в произ-
вольном сочетании и 4 места для модулей формата РС/104. Для наращивания инфор-
мационной мощности применяются модули ввода/вывода ТЕКОНИК.
Контроллер МФК является проектно-компонуемым изделием и выпускается в раз-
ных вариантах базовой части. Основное базовое исполнение контроллера МФК-02 вклю-
чает процессорный модуль БЦП2 с СПО TeNIX и поддержкой программирования на
ISaGRAF PRO. Помимо процессорного модуля типа БЦП-2 на базе процессора Pentium
300 МГц, 586/133 МГц, применяется процессорный модуль microPC. Объем ОЗУ — от 8
до 16 Мбайт, ПЗУ — от 2 до 64 Мбайт. Интерфейс — RS-232 (СОМ1) и RS-232 (COM2)
для V04/V03, Ethernet 10/100 BaseT. Контроллер интегрируется в локальных сетях Bitbus,
CAN, Ethernet, ArcNet и др. Системное ПО имеет многозадачную ОСРВ под DOS 6.Х.
Общее число каналов ввода аналоговых сиг-
налов — 256, аналоговых выходов — 128, дискрет-
ных входов — 768, дискретных выходов — 640.
Среди модулей ввода/вывода — модули вво-
да дискретных сигналов D48 (6 групп по 8 кана-
лов), модули вывода дискретных сигналов D40
и Р40 (40 каналов), модуль ввода/вывода дис-
кретных сигналов D32 (32 канала, 16 DI/16 DO),
Рис. 2.97 модуль ввода/вывода аналоговых сигналов А16/2
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
231
(16 AI и 2 АО), модуль вывода аналоговых сигналов
АО8 (8 АО), модули ввода сигналов термопар и тер-
мометров сопротивления L16 и L16i.
Контроллер МФКЗООО (рис. 2.98) используется
для контроля и управления технологическими про-
цессами объектов с повышенными требованиями к
надежности. МФКЗООО включает до трех крейтов с
общим числом модулей ввода/вывода (15 типов мо-
Рис. 2.98
дулей) до 61 (каждый крейт рассчитан на подключе-
ние 21 модуля). Максимальное число аналоговых вводов/выводов — 976, дискретных
вводов/выводов — 2928.
Среди модулей — модули ввода напряжения постоянного и переменного тока
DI48 (24 VDC), DI32 (220 VAC), DI16 (220 VAC); модули вывода напряжения постоян-
ного и переменного тока DO32 (24 VDC), DO16r (24 VDC/220 VAC) D)16s (220 VAC);
модули аналогового ввода AI16 (0/4...20 мА, 0...5 мА, 0...10 В) и LI16 (16 каналов
RTD3, RTD4 или 15 каналов ТС с каналом компенсации холодного спая).
Другие преимущества по сравнению с контроллером МФК: высокопроизводи-
тельный PC-совместимый процессорный модуль, мощная среда программирования
ISaGRAF PRO, дублированный интерфейс Ethernet 100 Base-T, резервирование (ду-
блирование или троирование) помимо модулей ввода/вывода также модулей ЦП,
100% горячее резервирование контроллеров. PC-совместимый ЦП Geode 300 МГц
имеет следующие интерфейсы: 2xEthernet 100 Base-T, 2хСОМ-порта, 2xUSB-порта,
LPT-порт. Для АСУ ТП с взрывоопасным производством используется групповой
8-канальный барьер искрозащиты ТСС_Ех8А. Все модули ввода/вывода имеют воз-
можность горячей замены.
Программное обеспечение МФКЗООО использует языки технологического про-
граммирования по стандарту IEC 61131-3. Базовой системой программирования
для всех контроллеров является система ISaGRAF PRO. Эта система состоит из сре-
ды разработки ISaGRAF PRO Workbench и среды исполнения. Библиотека ISaGRAF
PRO содержит более ста функций и функциональных блоков. Загрузка прикладных
программ осуществляется по сети Ethernet (протокол TCP/IP). Базовым ПО кон-
троллеров является СПО TeNIX, включающее ядро многозадачной ОС Linux. Для
доступа со стороны SCADA-систем к данным контроллеров используется ТесопОРС
Server. В качестве SCADA-систем используются любые открытые SCADA-системы, в
том числе КРУГ-2000, TraceMode, MasterSCADA и др.
Контроллер ТКМ700 (рис. 2.99) имеет распределенную архитектуру и модульный
принцип построения. Максимальное число модулей ввода/вывода — 51 из 16 раз-
личных типов модулей. Расширение контроллера достигается компоновкой четырех
крейтов. Максимальное число каналов аналогового ввода/вывода - 408/408, дискрет-
ного ввода/вывода — 3264/3264. Основные преиму-
щества ТКМ700: непрерывная самодиагностика
процессорного модуля и модулей ввода/вывода,
пониженное энергопотребление, автоматическое
конфигурирование модулей ввода/вывода, резер-
вирование электропитания и др.
Крейт ТКМ700 имеет 8 или 15 платомест на
объединительной панели. В зависимости от зада- Рис. 2.99
232
ГЛАВА 2
Рис. 2.100
чи может быть выбран определенный тип процессорного модуля. Старшая модель
СР-7010 имеет 32-разрядный RISC-процессор Intel XScale 400 МГц. В качестве панели
оператора используется графическая панель оператора V04M. Программирование
ТКМ700 также производится с помощью системы ISaGRAF PRO. Остальные параме
тры аналогичны контроллеру МФК3000.
Контроллер ТКМ52 (рис. 2.100) представляет собой РС-
совместимый моноблочный контроллер в виде четырехмодуль-
«ого блока. Отличие от контроллера ТКМ51 заключается в ис-
пользовании в ТКМ52 PC-совместимого процессорного моду-
ля. Контроллер применяется для сбора, обработки параметров,
.реализации функций регулирования и противоаварийной за-
щиты. Контроллер ТКМ52 состоит из базового модуля с блоком
клавиатуры и индикации V03, блока питания и процессорного
модуля с процессором 586-100/133 МГц, а также модулей вво-
да/вывода (от 1 до 4, устанавливаемых в любом сочетании (12
типов модулей с групповой и индивидуальной гальванической
изоляцией). Объем ОЗУ — 16 Мбайт, флэш-ПЗУ — 16 Мбайт,
энергонезависимая память — 512 кбайт.
В зависимости от количества секций для модулей ввода/вывода различаются
следующие модификации базового исполнения контроллера: ТКМ52.2 на 2 модуля
ввода/вывода (3 секции) и ТКМ52.3 на 3 модуля ввода/вывода (4 секции). В качестве
дополнительных опций предусмотрены возможность местного подключения клавиа-
туры и монитора (VGA) и энергонезависимой памяти для организации архивов и
сохранения состояний входов/выходов и промежуточных переменных при переза-
грузке (512 кбайт).
Максимальное число каналов аналогового ввода/вывода — 64/32, дискретного
ввода/вывода — 192/160. Интерфейсы: Ethernet 10Base-T, RS-232 (COMI), RS-232/RS-
485 (COM2), VGA, LPT1. Горячая замена модулей не предусмотрена.
Контроллер ТКМ410 (рис. 2.101) представляет собой моноблочный контроллер
средней информационной емкости. Основное назначение контроллера — автома-
тизация теплопунктов, котлов, горелок, а также систем защиты и блокировок. Кон-
троллер входит в состав ПТК «Теплоник» и рассчитан на работу при температуре
-4О...+7О°С.
Контроллер ТКМ410 содержит 32-разрядный RISC-процессор фирмы ATMEL
33 МГц. Флэш-память — 2 Мбайт, ОЗУ — 2 Мбайт, энергонезависимое статическое
ОЗУ — 512 кбайт с питанием от литиевой батарейки.
Число каналов аналогового ввода/вывода — 16AI, 2АО, дискретного ввода/вы-
вода — 36 DI (24 VDC), 24 DO (24 VDC). Основные интерфейсы: Ethernet lOBaseT,
3xRS-232, lxRS-232/RS-485, lxRS-485.
Через порт RS-232 возможна передача сообщений по GSM/GPRS каналу с по-
мощью модема TELECON 100. Для применения в системах АСУ ТП модем имеет
дополнительную функцию удаленного включения/выключения питания. Выпуска-
ются ТРИ модификации модема, отличающиеся устанав-
1 ливаемыми GSM/GPRS терминалами фирмы Wavecom и
«встроенными функциями (TELECON 100-01, TELECON
®^=^=И^^В100 02 и TELECON 100-03). Скорость передачи данных для
Рис. 2.101 устройств класса 2 (1 канал на прием, 1 канал на передачу)
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
233
составляет 9,6 или 14,4 кбит/с, для устройств класса 10— 56,7 кбит/с. Отличитель-
ной характеристикой GSM/GPRS модема TELECON 100 является наличие встроен-
ного стека протоколов TCP/IP, что значительно упрощает передачу данных в режиме
GPRS, передачу файлов и работу с электронной почтой.
Программирование контроллера ТКМ-410 осуществляется с использовани-
ем системы ISaGRAF PRO. Питание контроллера — 220 VAC. Габаритные размеры:
425x160x71 мм.
Распределенная система ввода/вывода ТЕКОНИК (рис. 2.102) предназначена
для построения распределенных систем управления. С процессорными модулями
Р06 и Р06 DIO, ТЕКОНИК применяется в системах телемеханики, системах учета
энергоресурсов и диспетчеризации.
Процессорный модуль Р06 (рис. 2.103) имеет встроенные каналы ввода/вывода и
может применяться в качестве автономного высокопроизводительного контроллера с
широкими коммуникационными возможностями. Процессорный модуль Р06 на базе
технологии t-mezon имеет несколько исполнений, отличающихся друг от друга про-
изводительностью процессора, объемом памяти, рабочим диапазоном температур и
наличием дополнительных коммуникационных интерфейсов. В модуле использует-
ся процессор Intel XScale 266/533 МГц. Объем памяти: флэш-память — 16/32 Мбайт,
ОЗУ— 32/64 Мбайт, энергонезависимая память — 1 Мбайт. Исполнения Р06 DIO
имеют встроенные 32 канала дискретного ввода и 16 каналов дискретного вывода.
Все исполнения Р06 имеют два интерфейса Ethernet IEEE 802.3 10/100 Мбит/с. Испол-
нения Р06 СОММ и МАХ содержат шесть интерфейсов RS-232/RS-485.
Рис. 2.102
Рис. 2.103
PC-совместимый процессорный модуль Р04 Т7101 имеет несколько исполне-
ний, которые отличаются наличием дополнительных COM-портов, интерфейса для
местного подключения клавиатуры и монитора. В модуле используется процессор
486DX4-100. Объем памяти: флэш-память — 16 Мбайт, ОЗУ — 16 Мбайт, энергоне-
зависимая память — 512 кбайт. Общее число дискретных входов — до 480, дискрет-
ных выходов — до 480, аналоговых входов — до 240, аналоговых выходов — до 120
для одного сегмента RS-485. Интерфейсы модуля Р04: Ethernet lOBaseT; 2xRS-232 или
4xRS-232, LPT1, VGA (опция).
Система ТЕКОНИК является проектно-компонуемым изделием и поставляется
в соответствии с заказной конфигурацией. Система может содержать один процес-
сорный модуль Р06, Р06 DIO или Р04, коммуникационный модуль или преобразова-
тель интерфейсов (конвертор) RS-232/485 ТСС485А, панель оператора V04/V04M и
до 250 модулей ввода/вывода в произвольной конфигурации. Модули ввода/вывода
ТЕКОНИК имеют коммуникационный интерфейс RS-485 с максимальной скоростью
115 кбит/с (ASCII-протокол Т4000). В составе системы ТЕКОНИК могут применять-
234
ГЛАВА 2
ся интеллектуальный датчик температуры ТСТ11, датчик давления МЕТРАН-100 и
другие интеллектуальные устройства.
Модули ввода/вывода системы ТЕКОНИК: Т3702 (16DI, 24 VDC), Т3703 (8DI, 220
VAC), Т3603 (16DO, 48 VAC/24 VDC), Т3602 (8DO, 220 VAC), Т3101 (8AI, 0/4...20 мА),
Т3501 (4АО, 0/4. ..20 мА), Т3204 (8 каналов напряжения 0...+50/+100/+500/+1000 мВ,
сигналов термопар), Т3205 (8 каналов для термометров сопротивления).
В качестве дополнительного оборудования применяются: панель оператора V04/
V04M, GSM/GPRS модем TELECON 100, клеммные соединители серии ТСС, умощни-
тели дискретных сигналов серии ТСВ и конвертор RS-232/RS-485 типа ТСС485А.
2.3.3 Контроллеры компании «ЗЭиМ»
ОАО «Завод Электроники и Механики» выпускает семейство системно и про-
граммно совместимых контроллеров нового поколения: КРОСС-500, ТРАССА-500
и Ремиконт Р-130 ISa. Контроллеры ориентированы на автоматизацию технологиче-
ских объектов в различных отраслях — теплоэнергетика, нефтегазовая промышлен-
ность, цементная, стекольная, пищевая промышленность, агропромышленный ком-
плекс и др. Максимальное число каналов аналогового (дискретного) ввода/вывода
для контроллера Кросс-500 — 256 (512), для контроллера Трасса-500 — 3840 (3840),
для Ремиконт Р-130 ISa — 20 (32).
В контроллерах применены PC-совместимые центральные процессоры, опе-
рационная многозадачная система реального времени RTOS-32, соответствующая
стандарту POSIX, технологические и процедурные языки программирования (шесть
технологических языков системы ISaGRAF), расширенная библиотека алгоритмов
контроллера Р-130. В качестве интерфейсов используются RS-232, RS-485, сетевые
интерфейсы Ethernet и Modbus. Для связи со SCAD А-системами Citect, InTouch, Trac-
eMode, MasterSCADA и др. поставляется ОРС-сервер.
Контроллер КРОСС-500 (рис. 2.104) включает центральный процессор, интел-
лектуальные модули ввода/вывода, программируемые модули автономного управле-
ния (микроконтроллеры) и четыре последовательные высокоскоростные внутренние
шины, объединяющие модули. Все элементы контроллера работают параллельно и
автономно. Блок центрального процессора БЦП управляет работой контроллера,
имеет резидентное программное обеспечение (РПО) и предназначен для ввода и вы-
полнения прикладной программы пользователя. Основой базового программного
обеспечения контроллера служит многозадачная операционная система реального
времени OS-9, обеспечивающая, помимо многозадачности, развитую сетевую под-
держку по стандарту POSIX. Для удобства программирования на языках стандарта
Рис. 2.104
МЭК 61131-3 в состав программного обеспе-
чения контроллера введено ядро системы ISa-
GRAF. Базовый монтажный блок контроллера
SMART2-BASE объединяет модуль центрально-
го процессора SM2-CPU-1,5 производства фир-
мы Kontron, субмодуль SM2-ETH (контроллер
Ethernet с поддержкой стандарта Ethernet IEEE
802.3 и 802.Зх), модуль питания. В качестве про-
цессора используется Motorola 68LC302 с так-
товой частотой 20 МГц, объем памяти DRAM
— 1,5 Мбайт, SRAM — 256 кбайт, флэш-память
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
235
для хранения программ и констант пользователя, а также служебных программ —
1 Мбайт. Для подключения модулей УСО (до 32 модулей на сегмент) предназначен
расширитель интерфейса SP1 (модуль ИСК1). В состав ВЦП встроены каналы с ин-
терфейсами RS-232, Ethernet, до четырех мезонинных ячеек с интерфейсом SP1 или
RS-485.
Модули ввода/вывода имеют встроенный микропроцессор, выполняющий не-
зависимо от центрального процессора различные функции по обработке сигналов
и диагностике оборудования (фильтрация, линеаризация, калибровка и др.). Поми-
мо собственных модулей возможно подключение модулей ввода/вывода фирмы РЕР
Modular Computers из состава SMART2.
Многоканальные модули ввода/вывода постоянного состава включают сле-
дующие типы модулей: АП-8 — 8 каналов аналогового ввода (0/4...20 мА, 0...5 мА,
0...10 В); AIO1-8/4 — 8 каналов аналогового ввода (0/4...20 мА, 0...5 мА, 0...10 В) и
4 канала аналогового вывода (0/4...20 мА, 0...5 мА); AI01-0/4 — 4 канала аналого-
вого вывода (0/4...20 мА, 0...5 мА); ТС1-7 — 7 каналов ввода сигналов от термопар
(ТВР, ТПР, ТПП, ТХА, ТХК, ТМК, ТЖК); TR1-8 — 8 каналов ввода сигналов от тер-
мометров сопротивления (ТСМ50, ТСМ100, ТСП50, ТСП100); DI1-16 — 16 каналов
дискретного ввода; DO1-16 — 16 каналов дискретного вывода; DI01-8/8 — 8 каналов
дискретного ввода и 8 каналов дискретного вывода. Также в состав модулей УСО
входят модули контроля и управления исполнительными механизмами (МКУ-ЗА,
МКУ-ЭК, МКУ-ЭП), программируемый микроконтроллер аналоговый МК-А (язык
FBD, библиотека алгоритмов Р-130, каналы ввода/вывода 8А1,4 АО, 8 DI, 8 DO/IO) и
программируемый микроконтроллер импульсный МК-И (отсутствуют каналы 4 АО,
остальные характеристики аналогичны МК-А).
Для наладки, настройки и конфигурирования модулей, а также контроля и изме-
нения параметров (коэффициентов) блока центрального процессора ВЦП и микро-
контроллеров в автономном режиме предназначен пульт настройки PN1.
Все модули и терминальные блоки контроллера, кроме блока переключения БПР-
10, выполнены для монтажа на DIN-рейку. Размеры модулей: высота 130 мм, длина
(глубина) 100 мм, ширина (30, 45, 60) мм в зависимости от типа модуля. Каждый мо-
дуль имеет три разъема — для подключения внешних сигналов, магистрали SPI и пуль-
та настройки. Питание контроллера в зависимости от заказа — 220 VAC или 24 VDC.
Контроллер ТРАССА-500 (рис. 2.105) имеет децентрализованную архитектуру
и по принципу построения и функционирования является полным аналогом кон-
троллера КРОСС-500 и обладает всеми отличительными особенностями последнего.
Различия между контроллерами ТРАССА-500 и КРОСС-500 следующие:
• наличие в полевых модулях последовательных портов, работающих в режиме
«ведомый», с одинаковыми или разными приоритетами команд управления вы-
ходами модуля (вместо шины SPI) для дублирования линий связи полевой сети
или работы с двумя ведущими;
• плата INT-232 с интерфейсом RS-232 для сопряжения с модемами;
• плата INT-485 с гальванически изолированным интерфейсом RS-485 для сопря-
жения блоков ТРАССА-500 с полевой сетью RS-485;
• плата INT-485-1 с интерфейсом RS-485 (без гальванической развязки) для сопря-
жения блоков ТРАССА-500 или других устройств по интерфейсу RS-485;
• плата SP1 для подключения устройств КРОСС-500 по интерфейсу SP1;
• сокращенная номенклатура полевых модулей, использование только проектно-
236
ГЛАВА 2
Рис. 2.105
компонуемых модулей с переменным составом раз-
нородных каналов.
д -'С Контроллер полевой ТРАССА-500 компону-
•►••ется из блоков, модулей и других изделий. В кон-
троллере ТРАССА-500 применяется ВЦП на базе
—PC-совместимого модуля Wafer 482, который со-
держит процессор i486DX4-100 с встроенным со-
процессором. В состав ТРАССА-500 входят также
блок переключения Б ПР-10 и пульт настройки PN1,
входящие в состав контроллера КРОСС-500 и име-
ющие аналогичные функции. Блок переключения БПР-10 предназначен для контакт-
ного переключения до 8 аналоговых или дискретных сигналов и может применяться
в схемах резервирования. Блок содержит 8 реле с переключающими контактами, вы-
ходные контакты каждого реле гальванически изолированы от остальных цепей.
В состав контроллеров, кроме традиционных средств (блока центрального про-
цессора ВЦП (ВЦП) и блоков ввода/вывода), введены блок программируемого микро-
контроллера Т-МК1 (блок Т-МК1) и процессоры ввода/вывода (ПВВ), функциони-
рующие автономно, параллельно и асинхронно по отношению к ВЦП. Максимальное
число аналоговых и дискретных входов/выходов контроллера — 7648. Каналы ввода/
вывода размещаются в ячейках блоков T-ADIO1 и T-DIO1, а также блоков микро-
контроллера Т-МК1. Конструкция блоков ввода/вывода T-ADIO1, T-DIO1 унифици-
рована и содержит платформу, на которой расположена клеммная колодка и соответ-
ствующие модули. Модули T-ADIO1, T-DIO1 имеют две платы — плату процессора
с мезонинами интерфейсных плат и плату ввода/вывода, на которой установлены до
8 ячеек, выбранных заказчиком. Каждая ячейка имеет гальваническое разделение от
других ячеек и от внутренней цифровой шины. Все ячейки, кроме ячейки ТС1, могут
быть установлены на любое место (от 1 до 8); ячейка ТС1 может быть установлена
на места от 2 до 8. Блоки имеют проектно-компонуемый состав — до 8 аналоговых и
дискретных ячеек по заказу.
Блоки Т-МК1 имеют встроенные собственные каналы ввода/вывода аналоговых
и дискретных сигналов, и кроме функций ввода/вывода, первичной обработки сиг-
налов и передачи их БЦП, свойственных всем блокам, выполняют различные управ-
ляющие функции. Параметры блоков T-ADIO1, Т-МК1 приведены в табл. 2.34.
Таблица 2.34. Ячейки проектно-компонуемых блоков T-ADIO1, Т-МК1
Тип ячейки Параметры ячейки
АП 1 канал ввода сигналов 0... 10 В, ± (0...10) В,± (0/4...20) мА, 0...5/20 мА
AI2 1 канал ввода сигналов 0...10 В, ± (0/4...20) мА, 0...5 мА
АВ 4 канала ввода сигналов ± (0/4.. .20) мА, ± (0... 5) мА
АО1 1 канала вывода сигналов 0/4...20 мА, 0...5 мА
АО2 2 канала вывода сигналов 0/4.. .20 мА, 0... 5 мА
ТС1 1 канал ввода сигналов напряжения ± (0...25/70/140/280/560/1120/2240) мВ
TR1 1 канал ввода сигналов сопротивления 0...50/100/200/400 Ом, трехпроводная схема
TR2 1 канал ввода сигналов сопротивления 0...50/100/200/400 Ом, четырехпроводная схема
TR3 2 канала ввода сигналов сопротивления 0.. .50/100/200/400 Ом и сигналов от термометров сопротивления 0... 100/200/400 Ом, четырехпроводная схема подключения
DI2 4 канала ввода дискретных сигналов
DO2 4 канала вывода дискретных сигналов
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ 237
Т-МК1 может использоваться для построения небольших систем автоматиза-
ции без применения центрального процессора и имеет систему ввода/вывода бло-
ка T-ADIO1. Один из последовательных портов Т-МК1 может использоваться для
подключения блоков T-ADIOl, T-DIO1 и Т-МК1 с целью увеличения числа входов/
выходов. В этом случае Т-МК1 является «ведущим» в сети. Для программирования
Т-МК1 разработан язык FST («функционально ориентированный структурирован-
ный текст») на базе любого текстового редактора.
Резидентное программное обеспечение микроконтроллера включает операцион-
ную систему реального времени RTOS-32 и исполнительную систему ISaGRAF Target.
Программирование Т-МК1 осуществляется на любом из шести языков системы
ISaGRAF с некоторыми ограничениями на максимальное число переменных.
Дискретные ячейки входных сигналов блока T-DIO1: DI1 (2 канала, 24 VDC),
DI3 (1 канал, 220 VAC), DI4 (1 канал, 24 VDC). Напряжение гальванической изо-
ляции — 1500 В.
Все блоки контроллера имеют интерфейс RS-232 и могут настраиваться как в со-
ставе контроллера дистанционно через контроллерную сеть и ВЦП, так и автономно,
при подключении блока к ПК или пульту настройки PN1 (в лаборатории, на объекте),
что значительно упрощает и удешевляет процедуры настройки блоков.
Пульт настройки PN1 служит для просмотра и изменения настроек блоков,
ячеек, каналов; просмотра состояния входов и выходов; изменения состояния вы-
ходов; оперативного контроля и установки значений переменных (коэффициентов)
технологических программ ВЦП и блоков Т-МК1; тестирования блоков и вывода на
индикатор сообщений об обнаруженных ошибках, выдаваемых блоками в случае
их отказа и т. п.
Интерфейс контроллера с технологом-оператором осуществляется с помощью
пульта, встраиваемого в шкаф управления. Пульт технолога-оператора предназначен
для визуализации и управления переменными. Пульт содержит ЖКИ-индикатор,
клавиатуру и канал для подключения к ВЦП. В качестве пульта может использо-
ваться любая операторская панель с интерфейсом RS-232/485 и протоколом обмена
Modbus (например, серия EZ фирмы EZ-TOUCH и др.). В состав контроллера пульт
технолога-оператора не входит.
Функции пульта технолога-оператора программируются пользователем с по-
мощью пакета КОНФИГУРАТОР ПУЛЬТА в процессе разработки программы.
Средства технологического программирования ВЦП и микроконтроллера исполь-
зуют систему разработки IsaGRAF Workbench в соответствии со стандартом МЭК
61131-3, расширенную новыми алгоритмами, в том числе из библиотеки контрол-
лера Р-130.
Контроллер имеет следующие встроенные интерфейсы: 4xRS-485, 2xRS-232.
IxEthernet. Каналы с интерфейсом RS-232 применяются для связи контроллера с
модулями ввода/вывода, инженерной станцией, для подключения пульта технолога-
оператора и резервирования ВЦП.
Для повышения надежности систем автоматизации на базе контроллеров пред-
усмотрены различные способы резервирования аппаратуры этих контроллеров. К
ним относятся: резервирование ВЦП, резервирование контроллеров, резервирова-
ние модулей ввода/вывода, резервирование полевых сетей.
Различные способы резервирования реализуются либо встроенными
программно-аппаратными средствами контроллера, либо проектными средствами с
238
ГЛАВА 2
управлением процедурами резервирования со стороны технологической программы
пользователя (ТПП).
Резервирование контроллеров и ВЦП поддерживается системными средствами.
Потребителю необходимо соединить дискретные выходы контроллеров, подключить
аналоговые выходы к блоку переключения резерва и соединить ВЦП специальным
жгутом. Все остальные виды резервирования осуществляются проектным путем.
Контроллер Р-130 ISa (рис. 2.106) представляет новое поколение российских
контроллеров Р-130. Контроллер имеет расширенные функциональные возможно-
сти, более высокую производительность обработки и передачи данных, а также более
Рис. 2.106
развитую систему программирования.
В состав контроллера входит PC-совместимый про-
цессор на базе микропроцессора I386SX40, содержащий
флэш-память для хранения резидентного программного
обеспечения и технологических программ пользователя,
оперативную энергонезависимую память для хранения
базы данных технологической программы, динамиче-
скую память для исполнения программ, флэш-диск (по
дополнительному заказу), сторожевой таймер и таймер-
календарь. Также имеются два системных канала для
подключения к сетям Ethernet и Modbus, канал с интерфейсом RS-232 для организации
резервирования контроллеров, резидентное программное обеспечение — операцион-
ная система реального времени RTOS-32 и исполнительная система ISaGRAF Target. В
состав контроллера Р-130 ISa входят 7 типов модулей УСО (МАС, МДА, МСД), блоки
усилителей сигналов термопар БУТ-10, усилителей сигналов термометров сопротивле-
ния БУС-10, блоки усилителей мощности БУМ-10, блоки питания БП-1, БП-4.
Основной микропроцессорный блок контроллера Р-130 ISa выполнен в прибор-
ном конструктиве контроллера Р-130, в который устанавливаются модуль процес-
сора, 1...2 модуля ввода/вывода, лицевая панель и преобразователь 24 VDC/5 VDC.
Габаритные размеры конструктива — 80x160x365 мм. Установка контроллера рассчи-
тана на утопленный монтаж на вертикальной панели щита или пульта управления. Все
остальные блоки рассчитаны на навесной монтаж.
Программное обеспечение контроллера Р-130 ISa — система технологического
программирования ISaGRAF. Система разработки технологических программ поль-
зователя контроллеров ISaGRAF Workbench включает шесть типов технологических
языков: SFC, FC, FBD (расширен библиотекой алгоритмов Р-130), LD, ST и IL. Си-
стема обеспечивает возможность расширения поставляемых библиотек функций и
алгоритмов силами пользователя на языке Си. Для связи с верхним уровнем (сопря-
жение со SCADA-системами) используется ОРС-сервер. Все программные продукты
функционируют на ПК в среде Windows.
2.3.4 Контроллеры ОАО «МЗТА»
ОАО «Московский Завод Тепловой Автоматики» производит контроллеры МС8,
МС5 и релейные модули MR4 и MR8, входящие в ПТК «КОНТАР». В состав КОНТАР
входят также инструментальные программы КОНГРАФ, КОНТАР-АРМ, КОНТАР-
SCADA.
Контроллеры измерительные МС8 (рис. 2.107) предназначены для сбора инфор-
мации и реализации разнообразных алгоритмов автоматизированного управления
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
239
технологическими процессами. Контроллеры МС8
являются основным (базовым) элементом комплек-
са КОНТА Р. Система КОНТА Р — это распределен-
ная система управления, основанная на Интернет-
технологии. Для передачи и приема информации
используется глобальная сеть Интернет. Для обра-
щения к глобальному серверу пользователю необ-
ходим только Web-браузер. Таким образом, доступ к
глобальному серверу осуществляется с любого кли-
ентского компьютера, подключенного к Интернет.
Поскольку контроллеры имеют непосредственный
Рис. 2.107
выход в Интернет, отпадает необходимость в наличии компьютеров (рабочих стан-
ций) на каждом объекте. Особенно это актуально при управлении удаленными объ-
ектами без участия оператора на объекте.
Идеология построения МС8 позволяет использовать контроллер в качестве авто-
номного контроллера или объединять контроллеры в локальные сети с помощью кана-
лов связи, в том числе сети Интернет. Связь между контроллерами и другими модулями
осуществляется по интерфейсу RS-485. Связь с модулем расширения МЕ4 или другим
контроллером МС8 осуществляется через интерфейс RS-232C (на базовом модуле).
В состав программного обеспечения контроллеров входят: ОС, обеспечивающая
связь с другими контроллерами внутри сети, между контроллерами и оборудованием
(датчики, исполнительные органы и т. д.), между мастер-контроллером и верхним
уровнем. Кроме того, ОС выполняет функцию самодиагностики. В состав программ-
ного обеспечения также входят: программа для наладки, мониторинга и управления
контроллерами типа КОНСОЛЬ, инструментальная система программирования ал-
горитмов КОНГРАФ (имеет встроенный симулятор), система локальной диспетче-
ризации КОНТАР-АРМ (создание мнемосхем, графиков), KOHTAP-SCADA, ОРС-
сервер для связи с другими SCADA.
Контроллеры выпускаются в исполнениях, отличающихся друг от друга харак-
теристиками базового модуля и составом дополнительных узлов, объединенных в
едином корпусе, а также типом клеммников.
Контроллер МС-8 имеет встроенные каналы дискретного ввода (4 DI, СК), дис-
кретные выходы (8 DO, ОК для МС-8.1 или «сухой» симисторный ключ для МС-8.2),
аналоговые входы (8 AI, 0.. .2500 мВ, 0/4.. .20 мА, термометры сопротивления, термо-
пары), аналогового вывода (2 АО, 0/4...20 мА, 0...5 мА, 0...10 В).
При необходимости подключения к контроллеру персонального компьютера
применяется исполнение контроллера с одним из встроенных субмодулей:
• интерфейсный субмодуль RS-232C — используется для подключения к компью-
теру с целью контроля работы, настройки параметров и загрузки функциональ-
ных алгоритмов;
• интерфейсный субмодуль WebLinker ЕМ — универсальный коммуникационный
модуль, содержащий интерфейсы Ethernet и RS-232C. Используется для переда-
чи информации в локальных и глобальных сетях по протоколам TCP/IP и UDP/
IP; модуль имеет функции защиты данных: шифрование и ограничение доступа
(Firewall), а также выполняет все функции интерфейсного субмодуля RS-232C.
• интерфейсный субмодуль WebLinker USB — аналог WebLinker ЕМ, но вместо ин-
терфейса RS-232C используется интерфейс USB.
240
ГЛАВА 2
• интерфейсный субмодуль WebLinker Modem — коммуникационный модуль, со-
держащий интерфейс RS-232C; используется для подключения GPRS/CDMA мо-
дема, обеспечивающего выход в Интернет, а также выполняет все функции ин-
терфейсного субмодуля RS-232C.
Для индикации и управления используется пульт управления MD8.1. Пульт позво-
ляет выводить на дисплей значения параметров, производить их настройку, наблюдать
по светодиодам за состоянием дискретных выходов контроллера. Выполняет все функ-
ции интерфейсного субмодуля RS-232C (содержит встроенный интерфейс RS-232C).
Питание контроллера: 220 VAC или 24 VDC, потребляемая мощность 6 ВА. Габа
ритные размеры — 157x86x58.5мм (с винтовыми клеммниками) и 157x114x58,5мм (с
разъемно-винтовыми клеммниками). Монтаж — на DIN-рейку по стандарту DIN EN
50 022 (шириной 35мм). Степень защиты контроллера — 1Р20.
Контроллер МС5, входящий в комплекс КОНТАР, отличается от МС8 количе-
ством встроенных каналов аналогового ввода: в МС5 их 5, аналоговых выходов — 1,
дискретных выходов — 5. Число дискретных входов, как у МС8 — 4. Число сими-
сторных выходов для МС5.1хх — 2. Характеристики каналов ввода/вывода аналогич-
ны МС8. Кроме того, объем постоянной памяти (для загрузки алгоритмов) 9,5 кбайт
(у МС8 — 60 кбайт). Основной интерфейс (на базовом модуле) — RS-485, дополни-
тельный — RS-232 (Ethernet отсутствует). В исполнении МС5.101 имеется субмодуль
RS-232C (интерфейс RS-232), а в исполнении МС5.111 прилагается пульт MD8.1 со
встроенным интерфейсом RS-232 и часами-календарем.
Питание контроллера 220 VAC (для МС5.1), 24 VDC (для МС5.2), потребляемая
мощность 6 ВА. Габаритные размеры 157x86x58,5. Монтаж контроллера на DIN-
рейку, степень защиты — IP20.
Контроллеры МС5 предназначены для автоматизации небольших объектов, на-
пример, тепловых объектов, приточных установок и т. п.
Модуль релейный MR8 (рис. 2.108) входит в состав комплекса КОНТАР и со-
держит реле и силовые ключи (симисторы). Модули предназначены для применения
в автоматизированных системах управления технологическими процессами, а также
в системах сбора и передачи информации по интерфейсной сети RS-485. Модуль реа-
лизует различные алгоритмы управления с дискретными выходными сигналами, в
том числе управление электрическими исполнительными механизмами, пусковыми
устройствами насосов, вентиляторов и другого оборудования, переключение режи-
мов управления и ручное управление электрическими исполнительным механизмами
и пусковыми устройствами с помощью механических переключателей (тумблеров).
Модуль MR8 выпускается в различных исполнениях, отличающихся наличием
или отсутствием блока ручного управления, типом и количеством выходных силовых
элементов, а также типом клеммников. Для примера, исполнение модуля MR8.1221
имеет 4 выходных ключа на электромагнитных реле, с панелью ручного управления
выходными ключами.
Встроенное число каналов ввода/вывода базовой модели: дискретные входы —
8, дискретные входы управления (непосредственное управление выходными ключа-
ми) — 4, дискретные выходы — 4 (на электромагнитных реле для MR8 1121/1221), — 4
(2 — симисторные ключи и 2 — электромагнитные реле для MR8 1131/1141/1231/1241),
4 (симисторные ключи для MR8 1151/1161/1251/1261).
Напряжение питания модуля — 220 VAC, потребляемая мощность — 6 В А, монтаж—
на DIN-рейку. Степень защиты модуля — IP20. Габаритные размеры 139x89x63 мм.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
241
Рис. 2.108 Рис. 2.109 Рис. 2.110
Модуль релейный MR4 (рис. 2.109) входит в состав комплекса КОНТАР. Основное
назначение модуля: фазоимпульсное управление активной нагрузкой, например, на-
гревателями или осветительными приборами, а также управление внешними симисто-
рами или тиристорами. Модуль может быть использован в двух основных режимах:
• Управление выходной мощностью в соответствии с предварительно запрограм-
мированным алгоритмом; воздействие на алгоритм осуществляется через дис-
кретные входы прибора.
• Управление выходной мощностью в соответствии с сигналами, передаваемыми
по интерфейсному каналу RS-485.
Основные функции модуля MR4: управление электрической мощностью актив-
ной нагрузки в режиме фазоимпульсной модуляции; выполнение алгоритмов функ-
ционирования, необходимых для управления конкретным технологическим процес-
сом; использование информации о состоянии входных дискретных сигналов модуля
для работы функционального алгоритма и передачи по каналу RS-485 на верхний
уровень управления; обмен информацией с контроллерами в сети по интерфейсу RS-
485; прием дискретных сигналов от контроллеров МС8 или других устройств для не-
посредственного (прямого) управления выходными силовыми ключами.
Пульт управления выносной MD8.3 (рис. .2.110) входит в состав комплекса
КОНТАР и предназначен для работы в комплекте с контроллерами МС8 и МС5, име-
ющими дополнительный интерфейс RS-232C. Пульт управления предназначен для:
вывода на дисплей информации о входных/выходных сигналах и параметрах функ-
ционального алгоритма контроллера; вывода на светодиодные индикаторы инфор-
мации о состоянии и режимах работы дискретных выходов контроллера; настрой-
ки параметров функционального алгоритма контроллера; переключения режимов
управления автомат/ручное и ручного управления выходами контроллера; поддерж-
ки индикации текущего времени и календарной даты с помощью энергонезависи-
мых часов/календаря (в том числе при работе с контроллерами МС5). Тип дисплея —
ЖК-дисплей с подсветкой. Количество символов — 2 строки по 16 символов. Число
двухцветных светодиодных индикаторов — 8, количество клавиш — 4.
2.3.5 Контроллеры ФГУП «ЭЗАН».
Программируемые логические контроллеры серии «Сонет» (рис. 2.111) производ-
ства ФГУП «Экспериментальный завод научного приборостроения с СКВ» относятся
к модульным контроллерам. Контроллеры СОНЕТ являются проектно компонуемыми
изделиями и в зависимости от компоновки способны выполнять функции управляю-
щих контроллеров, контроллеров удаленного ввода/вывода или удаленных програм-
мируемых контроллеров и могут использоваться как автономно, так и в составе рас-
пределенных систем управления. Контроллер состоит из крейта на 5 или 8 модулей
ввода/вывода, процессорного модуля, блока питания и модулей ввода/вывода. К до-
полнительному оборудованию относятся блок переключения резерва БПР-1, фильтр
242
ГЛАВА 2
Рис. 2.111 Рис. 2.112
электропитания ФП-220-1 и интерфейсные модули МИ-АВВ-8, МИ-АВВ-4, МИ-АВ-4.
В зависимости от числа модулей (5 или 8) число каналов дискретного ввода/вывода
от 80 до 128, аналогового ввода — от 40 до 64, аналогового вывода — от 20 до 32 соот-
ветственно. Процессорный модуль контроллера построен на базе микроконтроллера
ATmega 128-16 с тактовой частотой 16 МГц. Объем ОЗУ — 36 Кб, ПЗУ — 128 КБ, флэш-
память — 1 Мб. Число встроенных интерфейсов: lxRS-232,2xRS-485 (Modbus RTU).
Характеристики процессорных модулей приведены в табл. 2.35
а
б
в
Таблица 2.35. Характеристики процессорных модулей ПЛК «Сонет»
Тип модуля Тип МП Объем памяти Интерфейсы Назначение
СН-МП-1 ATmega 64 - lxRS-485 Удаленный ввод/вывод на базе протокола Modbus
СН-МП-1-3-Р ATmega 128 - 2xRS-485 Удаленный ввод/вывод на базе протокола Modbus, поддержка горячего резервирования
СН-МП- РС104-2 NS Geode GX1,300 МГц ОЗУ—64 Мбайт, ПЗУ—128 Мбайт 2xRS-485, 2xEthernet ПК х86 с контроллерами VGA, Ethernet и Modbus, поддержка горячего резервирования
СН-МП- ПЛК-3 ATmega 128 ОЗУ—36 кбайт, флэш —2 Мбайт RS-232, 2XRS-485 Процессорный модуль ПЛК «Сонет», програм- мирование в стандартеIEC 61131-3
На рис. 2.112 представлены процессорные модули СН-МП-1 (а) и СР-МП-1-
3-Р (б). Широкая номенклатура модулей ввода/вывода (СН-АВ-хх, СН-АВВ-хх,
СН-ДВ-хх и СН-ДВВ-хх) предусматривает аналоговый ввод по 4, 6 или 8 каналам
сигналов 0/4...20 мА, 0...5 мА, 0...10В, 0...100 мВ, сигналов термопар и терморези-
сторов. Модули аналогового вывода — 4-канальные, дискретного ввода/вывода —
8- и 16-канальные на 220 VAC и 24 VDC. На рис. 2.114, в показан общий вид модуля
СН-АВВ-4 для входного тока 0...5 мА.
Для работы в составе сети Modbus был разработан контроллер СОНЕТ-МАСТЕР.
Открытая архитектура РС/104 контроллера и стандартная периферия позволяют ис-
пользовать управляющее ядро любой системы, реализованной на платформе Intel х86.
Для программирования контроллеров «Сонет» применяется программное обе-
спечение PLC Designer, соответствующее стандарту МЭК 61131-3. Для разработки
прикладных программ на языках SFC, FBD, LD и IL используется эмулятор контрол-
лера, позволяющий выполнять отладку программы без аппаратных средств.
Для построения многоканальных, высокопроизводительных программируемых
контроллеров ЭЗАН производит модули ввода/вывода в стандартах VME и Сот-
pactPCI формата 3U и 6U, а также платы-мезонины, устанавливаемые на модули-
носители VME 98100 и CompactPCI 4100.
2.3.6 Контроллеры ЗАО «ЭМИКОН»
ЗАО «Эмикон» производит модульные контроллеры ЭК-2000 и DCS-2001, а так-
же широкую номенклатуру модулей серии ЭК-2000 и DCS-2000 для распределенных
систем управления.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
243
Контроллер ЭК-2000 (рис. 2.113) представляет каркасно-модульную систему и
предназначен для использования в системах управления, где предъявляются повы-
шенные требования к надежности, защите систем управления от воздействия пыли,
брызг, агрессивных сред, к работоспособности в широком диапазоне температур и
воздействии вибраций. Конструктивно контролеры серии ЭК-2000 состоят из блока
вычислительного и блока кроссового. В состав вычислительного блока входят каркас
с объединительным модулем, центральный модуль, модули связи с объектом (МСО)
и модуль питания. Внутри модуля может быть установлен барьер искрозащиты.
В состав кроссового блока входят панели монтажные и блок питания. Варианты
исполнения контроллера: бескорпусной, однокорпусной и двухкорпусной. В бескор-
пусном исполнении пользователю поставляется перечисленный состав блоков, кото-
рые размещаются в шкафах пользователя, либо непосредственно в корпусах техноло-
гического оборудования. Двухкорпусное исполнение необходимо использовать в тех
случаях, когда контроллеры непосредственно устанавливаются в производственных
помещениях, где возможно воздействие пыли или влаги, как при эксплуатации, так и
при проведении ремонтных или профилактических работ. В помещениях с обычными
условиями эксплуатации целесообразно использовать более дешевый однокорпусной
вариант исполнения.
В качестве средства отображения в контроллерах применяются панели опера-
тора серии UniOP. Панель оператора может быть установлена непосредственно в
кожух блока вычислительного (при автономной установке контроллера), на двери
электрошкафа или в пульте управления пользователя (в слу-
чае встраивания контроллера в пользовательское оборудо-
вание). Панель оператора может поставляться в виде пере-
носного терминала. Максимальное расстояние от панели до
контроллера — 1200 м.
Необходимое количество каналов ввода/вывода может
быть реализовано при подключении контроллеров в локаль-
ную сеть. Максимальное количество узлов в сети — 256. При
использовании последовательного интерфейса, расположен-
ного на центральном модуле, или сетевых модулей С-02А и
С-05А скорость передачи информации — до 2,5 Мбит/с. Физический уровень локаль-
ной сети — RS-485. Канальный уровень — Modbus или SDLC.
К числу модулей контроллера относятся процессорные модули CPU-03A, CPU-03B
и CPU-20A, сетевые модули С-02А, С-20А, интерфейсные модули CIM-485I (связь по
интерфейсу RS-485) и CIM-232NI (связь по интерфейсу RS-232). Модули аналогового
ввода/вывода (AI-03A, AI-04A, AI-20, АО-01А, АО-03 и др.) используют 12-разрядные
АЦП и ЦАП и служат для преобразования однополярных и двуполярных сигналов,
а также сигналов термопар и терморезисторов, в цифровой код и преобразования
12-разрядного кода в токовые сигналы 0.. .5 и 0/4.. .20 мА. В модулях дискретного вво-
да/вывода (DI-01 A, DI-03A, DI-04A, DI-07-Ех, DO-01A, DO-03A, DO-O4A, DIO-04A и
др.) питание осуществляется от внешнего или внутреннего источника.
В качестве ОС используется ОС РВ ОС-188. Язык программирования — CONT
со средой программирования в ОС Windows CONT-Designer, включающей текстовый
редактор, транслятор и отладчик.
Контроллер DCS-2001 (рис. 2.П4) является малоканальным модульным кон-
троллером. В состав контроллера входят модуль центрального процессора CPU-12А,
244
ГЛАВА 2
модули ввода аналоговых сигналов AI-14 (токовые сигналы) и AI15 (сигналы термо-
резисторов), модуль вывода аналоговых сигналов АО12 (2 канала, 0...20 мА), модуль
ввода дискретных сигналов DI-12 (12 каналов, СК), модуль ввода/вывода дискрет-
ных сигналов DIO-12 (8 DI, 4 DO, СК). Все модули контроллера выполнены в виде
многослойных печатных плат размером 77x85 мм, установленных в пластмассовых
корпусах для крепления на стандартный DIN-рельс. Контроллер допускает установ-
ку помимо процессорного модуля до 4-х модулей связи с объектом (УСО). В отличие
от семейства DCS-2000 модули УСО серии DCS-2001 не имеют собственного процес-
сора и последовательного интерфейса и работают исключительно под управлением
модуля CPU-12A. Обмен данными между CPU-12A и любым из 4 модулей УСО осу-
ществляется посредством параллельного интерфейса, включающего в себя сигналы
мультиплексированной 4-разрядной шины адреса и шины данных, сигналов управ-
ления, а также линий питания 5/24 VDC. Модули соединяются посредством плоских
кабелей и конструктивно объединяются в единый наборный пластмассовый корпус,
предназначенный для установки на стандартный DIN-рельс.
Питание контроллера осуществляется от источника питания 24 VDC. Контрол-
лер эксплуатируется в диапазоне температур 25... +60°C.
Семейство модулей ввода/вывода DCS-2000 (рис. 2.115) предназначено для ис-
пользования в распределенных системах управления. Все модули ввода аналоговых и
дискретных сигналов имеют входные цепи искрозащищенного исполнения ExibllC и
встроенные блоки питания первичных приборов, что позволяет подключать датчи-
ки, находящиеся во взрывоопасных зонах, непосредственно к модулям.
В состав модулей входят: модули центрального процессора CPU15 и CPU-17В
(2xRS-232, 4xRS-485); модули ввода/вывода аналоговых сигналов AI-10 (4 канала для
подключения термопар ТХК и ТХК, 1 канал для подключения терморезисторов), Al-11
(4 канала для подключения терморезисторов), AI-12 (4 канала сигналов тока или на-
пряжения), АО-11 (2 канала 0...20 мА или 0...10 В); модули ввода/вывода дискретных
сигналов Dill (8DI, СК), DO-11 (8DO,MOSFEToutput),DIO-U (4 DI, СК и 4 DO).
Для контроллеров ЭК-2000, DCS-2001 и системы распределенного ввода/вывода
DCS-2000 помимо вышеперечисленных модулей предназначены следующие модули об-
щего применения и блоки: модуль контроля фаз АСС-01А, блоки грозозащиты BZ-11 и
BZ-12, модуль повторителя интерфейса RS-485 (3xRS-485), модули конверторов IR-04A
(преобразование 220 VAC в DO, OK), IR-04D (преобразование 24 VDC в DO, OK), OR-04A
(4 канала, преобразование 24 VDC в DO, СК), OR-06 (6 каналов, преобразование 24 VDC
в DO, СК), модули питания с выходным напряжением 24 VDC типа PU-12/13/14/15 и вы-
ходным напряжением 5,7... 6,3 В (PU-17A)h 11,4... 12,6 В (PU-17 В); блок бесперебойного
питания UPS-10 и блоки сетевого питания SU-6, SU-8 и SU-10 (220 VAC/24 VDC).
Рис. 2.115
Рис. 2.114
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
245
Конструкция модулей серии DCS-2000 предусматривает их установку на стан-
дартную DIN-рейку. На эту же рейку устанавливаются клеммники для подключения
внешних кабелей. Поскольку клеммники размещаются в непосредственной близости
от модулей микропроцессорной системы, это существенно упрощает наладку и об-
служивание системы.
Блоки одной подсистемы связаны по локальной сети и обмениваются данны-
ми по запросу ведущего устройства, поэтому они могут располагаться как в одном
электрошкафу, так и в разных электрошкафах, в том числе в разных помещениях. Все
модули имеют два независимых канала для обмена по сети RS-485.
Рабочий температурный диапазон модулей: -20...+70 °C. Питание модулей осу-
ществляется от блоков стабилизированного напряжения 24 VDC.
В табл. 2.36 приведены технические характеристики некоторых отечественных
контроллеров различных фирм, предназначенных для работы в составе как локаль-
ных систем автоматизации, так и вместе с модулями расширения в составе распреде-
ленных систем управления.
Таблица 2.36. Технические характеристики отечественных контроллеров
Тип ПЛК, производитель ПРЦ/Объем памяти Кол-во AI Кол-во АО Кол-во DI Кол-во DO Интерфейс no
ОВЕН ПЛК 100 Компания «ОВЕН» RISC-200 МГц/ 360 байт или неограничен — — 8 6 СК/ 12 ОК 2xRS-232, RS-485, Ethernet 10/100 BaseT Среда про- граммирова- ния CoDeSys 2.3
ОВЕН ПЛК 150 Компания «ОВЕН» 4 2 (4...20 мА/ 0...10 В) 6 4 СК RS-232, RS-485, Ethernet 10/100 BaseT
Decont-182, Компания «ДЭП» Zilog 80182-30 МГц/ОЗУ 1Мбайт, флэш-ПЗУ 1 Мбайт 6 универсальных каналов ввода/вывода (AI, DI, DO); устанавливаются в гнезда «С» и «D» RS-232, 2XRS-485, 2хИРПС DeSystem, DeModule, WinDecont, WDeveloper
рС-1010, «НЕВА- БИЗНЕС» 80С188ЕВ/ память данных 64 кбайт 8 4 (4...20 мА) 10 (СК) 10 (ОК) RS-485, Ethernet C/C++
Микроконт-Р2/ 33, НПО «Си- стемотехника» DS80C320-20 МГц/ 1586; 16 кбайт/64 Мбайт Модуливвода/вывода: AI (4...20), АО (2), DI (16, 32), DO (16,32) RS-485, RS-232/ RS-485, Ethernet Монитор RTM320, ТУРБО-РКС
МикКОН, ЗАО «ИНКОМ- МЕТ» I386SX-40 МГц/ 1486-300 МГц; ОЗУ: 4... 128 Мбайт, флэш-ПЗУ: 32 Мбайт Модули и мезонины ввода/вывода: AI (4...32), АО (2,8, с мезонином — 16), DI (8,16,32, с мезонином — 64,64, с мезонином — 128), DO (16, с мезони- ном — 32,32, с мезонином — 64) RS-232, RS 485, 14РПС МикСИС
ЭЛСИ-ТМ, ЗАО «ЭлеСи» Pentium-100/300, ОЗУ-32 Мбайт, флэш ПЗУ-16/64 Мбайт 4,24 канала в модуле — 4 (встрое- ны); 32 (в модуле) 16,32 (в модуле) Ethernet lOBaseT OpenPCS no МЭК 61131-3
ЭЛСИ-2000, ЗАО «ЭлеСи» C167CR/ОЗУ-512 кбайт, флэш- ПЗУ-512 кбайт До 8 модулей ввода/вывода: AI (8), АО (4), DI (8), DO (8) RS-232, RS-485, CAN
2.4. Встраиваемые системы
Встраиваемые системы в целом и встраиваемые контроллеры в частности выде-
лены в отдельный класс ввиду ряда отличий и специфических свойств этих систем.
246
ГЛАВА 2
Под встраиваемыми системами понимают класс компонентов программно-
аппаратных средств, встраиваемых (устанавливаемых) в какое-либо оборудование
(станок, пресс, компьютер и пр.), и выполняющих строго определенные функции.
В этом смысле встраиваемая система выступает как часть целого и не может рассма-
триваться в виде самостоятельного элемента.
Достоинствами встраиваемых систем являются компактность, функциональ-
ность, относительно низкая стоимость, хорошие эксплуатационные характеристики
и ряд других. К встраиваемым (embedded) системам относятся одноплатные компью-
теры Embedded Computing Platform), контроллеры (Embedded PLC), модули ввода/
вывода, процессорные, коммуникационные и мезонинные модули, платы памяти,
встраиваемые Интернет-устройства, встраиваемое программное обеспечение (опе-
рационные системы РВ, -QNX, VxWorks, OS-9, Linux RT, RTX, Windows XP Embedded,
Windows СЕ и др.), встраиваемые системы программирования (ISaGRAF, CoDeSys и
др.), системы визуализации (SCADA-системы TraceMode, MasterSCADA) и др.
Каждая из вышеперечисленных встраиваемых систем имеет свои особенности.
Так, встраиваемые одноплатные компьютеры базируются на системных шинах VME,
PCI, CompactPCI, РС/104, PMC. Встраиваемые операционные системы устанавлива-
ются на CompactFlash. Хотя встраиваемые аппаратные системы представляют собой,
как правило, бескорпусные компоненты, для защиты которых используется корпус
самого оборудования, для тяжелых условий эксплуатации появились «встраиваемые
системы в корпусе». Примером может служить, например, встраиваемый промыш-
ленный компьютер BOXER компании AAEON (Тайвань), работающий в широком
диапазоне температур и влажности. Ниже рассматриваются встраиваемые програм-
мируемые логические контроллеры.
2.4.1 Контроллеры в стандарте РС/104 Н1СО486/ HiCOSH4/ HiCOGEODE
фирмы Hitex Automation, Германия
Контроллеры HiCO по своим техническим параметрам полностью соответству-
ют стандарту РС/104 и обладают хорошими эксплуатационными характеристиками,
высокой производительностью и малыми габаритами. Поддерживается аварийное
батарейное питание для SRAM.
Встраиваемый контроллер Н1СО486 (рис. 2.118) имеет следующие характери-
стики:
• процессор: AMD Elan SC410- 66/100 МГц;
• ОС — Windows СЕ или DOS;
. ОЗУ DRAM —4...32 Мбайт;
• флэш-ПЗУ — 16... 144 Мбайт;
• коммуникационные порты: LPT1, СОМ1, COM2, COM3, IRDA;
• габариты 96x90x16 мм (формат РС/104);
• потребляемая мощность: 3 Вт;
• диапазон температур:-10...+70°C.
Встраиваемый РС с процессором Hitachi SuperH 8Н4-167МГц (рис. 2.117) имеет
следующие характеристики: ОС — RTOS, системная шина — ISA, ОЗУ — 16 Мбайт,
Флэш ПЗУ — 8 Мбайт, интерфейсы Ethernet, USB, порт PS/2 для клавиатуры и мыши.
Расширение возможностей процессорного модуля достигается с помощью дополни-
тельных плат HiCO-SH4-base с интерфейсом РС/104, разъемами для Compact-Флэш
и LCD. Дополнительно контроллеры HiCO486 и HiCOSH4 могут комплектоваться
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
247
Рис. 2.118
Рис. 2.119
адаптером для подключения ЖК-дисплея, Флэш-дисками от 2 Мбайт до 144 Мбайт и
компактной флэш-картой емкостью от 4 до 48 Мбайт.
Встраиваемый контроллер HiCOGEODE с 64-разрядным процессором фирмы
National Geode CPU 6x86-200 МГц имеет следующие характеристики: SDRAM от 32 до
128 Мбайт, Compact-Флэш до 96 Мбайт, коммуникационные порты Ethernet 10/100
BaseT, 2xUSB, IxLPT, 2xCOM.
Для расширения возможностей контроллеров HiCO фирма производит следую-
щие периферийные модули:
• HiCO-PCMCIA для подключения карт памяти, сетевых, модемных карт PCMCIA;
• HiCOCAN-104 с CAN-шиной и интерфейсом РС/104 (процессор МС68332-20
МГц, SRAM 128 кбайт, Флэш-память 512 кбайт);
• HiCOCAN-ISA с CAN-шиной и интерфейсом ISA;
• HiCOCAN-PCI с CAN-шиной и интерфейсом PCI;
• HiCO-DIO- модуль цифрового ввода/вывода (16 DI, 8 DO, диапазон напряжений
10-30 VDC, выход «ОК», нагрузочная способность до 1,5 А на канал).
Среди встраиваемых PC-совместимых систем на отечественном рынке замет-
ное место занимает продукция фирм Octagon Systems (США), Advantech (Тайвань) и
Fastwel Inc. (Россия) в формате MicroPC и РС/104. Форматы MicroPC и РС/104 явля-
ются одними из наиболее устойчивых форматов для жестких условий эксплуатации
(температура -40...+85°C, вибрации до 5 g и удары до 20 g и более).
К этим изделиям относятся встраиваемые одноплатные промышленные компью-
теры с расширенным температурным диапазоном (-40...+70°C), контроллеры, про-
цессорные модули и модули ввода/вывода, монтажные каркасы и источники пита-
ния. Высокая надежность модулей формата MicroPC объясняется рядом фактором,
а именно: небольшие габариты плат (114,3x124,5 мм) с шиной ISA имеют 4-точечное
крепление, исключающее перемещение и воздействие вибрации или ударов. Благо-
даря 100%-му применению в изделиях элементной базы по технологии КМОП энер-
гопотребление снижено до уровня, при котором не требуется какое-либо охлаждение
плат, могущих работать в герметичных корпусах. Напряжение питания всех плат —
одного номинала, а именно 5 VDC. Удобство эксплуатации обеспечивается тем, что
в системное ПЗУ процессорного модуля помещена автоматически загружаемая опе-
рационная система ROM-DOS, совместимая с MS-DOS 6.22, и базовая система ввода/
вывода BIOS. Однако, возможно использование любого другого программного обе-
спечения и средств разработки, совместимых с технологией PC (например, Windows
95/98/NT, QNX, Linux и др.). Далее рассматриваются встраиваемые компьютеры фир-
мы Advantech (Тайвань), встраиваемые микроконтроллеры фирмы Octagon Systems
(США), встраиваемые процессорные платы и промышленные компьютеры фирмы
Fastwel Inc. (Россия), широко используемые в промышленности.
248
ГЛАВА 2
2.4.2 Встраиваемые микроконтроллеры фирмы Advantech, Тайвань
Компания Advantech выпускает встраиваемые промышленные компьютеры серии
ARK (ПРЦ Intel Celeron М — 1,4 ГГц, ОЗУ DDR до 1 Гбайт, порты RS-232/422/485, Eth-
ernet Ю/lOOBaseT, ОС — Windows 2000/ХР/ХР Embedded), UNO (ПРЦ Celeron 400/600
МГц; ОЗУ — 64/128 Мбайт, порты RS-232/422/485, Ethernet 10/100BaseT, ОС — предуста-
новленная Windows ХР Embedded или Windows СЕ). Некоторые модели компьютеров
серий ARK и UNO имеют слоты расширения PCI (ARK-7480, UNO-3062 и UNO-3072)
и встроенные каналы дискретного ввода/вывода (UNO-3072 и UNO-2050). Также ком-
пания Advantech производит встраиваемые процессорные модули в форматах РС/104+
(РСМ-3353/3370) и РС/104 (РСМ-3341/3375/3380). Отдельную группу продукции Ad-
vantech занимают одноплатные встраиваемые компьютеры формата 3,5" (серия Biscuit
PC 3,5") с размером стандартного НЖМД IBM PC и формата 5,25" и ЕВХ (серия Biscuit
PC 5,25") с размером стандартного НГМД IBM PC. Дальнейшее сокращение размеров
модулей встраиваемых систем привело к появлению серии вычислительных платформ
SOM (System On Module — система на модуле). Каждый модуль SOM является высо-
коинтегрированным одноплатным компьютером, устанавливаемым на базовой плате.
Основные модификации модулей SOM: SOM-144 с процессором AMD Geode Castle и
SOM-ETX с процессором Pentium. Модули SOM-144 (68x100 мм) поддерживают Win-
dows СЕ и поставляются с предустановленными ПРЦ и ОЗУ Модули SOM-ETX (раз-
мер 144x100 мм) поддерживают Windows СЕ и поставляются с предустановленным
ПРЦ (ОЗУ устанавливается дополнительно).
2.4.3 Встраиваемые микроконтроллеры фирмы Octagon Systems, США
Фирма Octagon System производит микроконтроллеры серии 6000, процессорные
платы формата РС/104 (50хх и 6225, 2133, 2050 и 2060), платы стандарта EPIC (РС-
510/600/680/770).
К достоинствам микроконтроллеров серии 6000 относятся IBM РС-совместимая
архитектура, реализованная на базе процессора 1803868Х-25МГц, а также АТ-
совместимой BIOS с промышленными расширениями. Контроллер способен функцио-
нировать как автономно, так и совместно с модулями ввода/вывода, объединенными
8-ми разрядной магистралью ISA. Микроконтроллеры серии 6000 могут устанавли-
ваться в конструктивы Octagon, а также в пассивные объединительные платы с шиной
ISA. В стандартном исполнении микроконтроллеры имеют встроенную ОС DOS 6.22,
однако пользователю предоставляется возможность установки во флэш-ПЗУ любой
операционной системы (Windows СЕ, Windows ХР Embedded, Linux и др.).
Контроллеры серии 6000 поддерживают интерфейсы RS-232, RS-485, LPT-1,
РС/104. Скорость обмена по последовательным интерфейсам (СОМ1-СОМ4) состав-
ляет от 300 до 115,2 кбит/с.
Высокопроизводительные встраиваемые процессорные платы формата РС/104
типа 5066, 5070 и 5090 оснащены процессорами AMD 5x86 (133 МГц), ZF Micro 5x86
(128 МГц) и VIA Eden 400/733 МГц соответственно, имеют встроенные каналы ввода/
вывода, единое питание +5 В. Процессорные платы формата РС/104 моделей 2133,
2050 и 2060 отличаются объемом ОЗУ (до 32, 64 и 256 Мбайт), наличием разъема
DiscOnChip или СотрасГФлэш для увеличения объема ПЗУ
Модели РС-510/600/680/770 имеют объем ОЗУ от 48 до 512 Мбайт, до 4 портов
RS-232, RS-422/485, число каналов дискретного ввода/вывода от 24 до 64, размеры
плат 146x203 мм.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
249
Сравнительные характеристики микроконтроллеров серии 60x0 приведены в
табл. 2.37.
Таблица 2.37. Сравнительные характеристики микроконтроллеров серии 60x0
Тип модуля 6010 6020 6030 6040 6050
Процессор 386SX
Наличие последовательных портов COMI и COM2 Да
Наличие последовательных портов COM3 и COM4 — — Да — —
Возможность установки преобразователя RS-232/485 типа NIM — Да Да Да Да
Параллельный портЬТР! Да
Порт EIDE НЖМД Да — — — —
Шина расширения РС/104 Да — — — —
Объем ОЗУ, Мбайт 4 2
Объем флэш-ПЗУ, Мбайт 1
Объем статического ОЗУ, кбайт 128
Объем динамического ОЗУ Мбайт 2
Число каналов дискретного ввода/вывода 17 48 + 17 17 24 + 17 24+17
Число каналов дискретного вывода — — — — 8
Число каналов аналогового ввода/вывода — — — 8/2 (0...5В, 0...10В) —
Напряжение питания, В 5VDC
Потребляемый ток, мА 475 490 440 590 435
Диапазон рабочих тем ператур -40...+85 °C
Компания Fastwell Inc. выпускает встраиваемые одноплатные компьютеры с под-
держкой стандартов MicroPC и РС/104 типа СРС106 и с поддержкой 2 портов Gigabit
Ethernet, портами расширения РС/104 и РС/104+ типа СРС1600/1700. В формате Mi-
croPC компания Fastwel выпускает модуль микроконтроллера CPU188-5. Модуль пред-
назначен для использования в системах сбора данных и управления. По своим функ-
циональным возможностям аналогичен микроконтроллеру 6040 Octagon Systems.
Благодаря своей компактности, малому энергопотреблению и большой функ-
циональности модуль CPU188-5 может использоваться для широкого диапазо-
на встраиваемых приложений. Характеристики модуля CPU188-5: процессор
Aml88ES-40 МГц, ОС, совместимая с MS-DOS 6.22; системная шина — ISA, стати-
ческое ОЗУ (SRAM) до 1024 кбайт, флэш-ПЗУ до 2048 кбайт. Модуль имеет 48 кана-
лов дискретного ввода/вывода, 8 каналов аналогового ввода, 2 канала аналогового
вывода, интерфейсы RS-232/422/485.
Модуль CPU] 88-5 выпускается в трех модификациях в зависимости от объема
памяти, числа каналов ввода/вывода и др. (табл. 2.38).
К встраиваемым системам относятся также платы ввода/вывода аналоговых и
дискретных сигналов. Эти платы, выпускаемые многими российскими предприятия-
ми (ЗАО «Руднев-Шиляев», «L-CARD» и др), рассчитаны на различные системные
шины и интерфейсы (ISA, PCI, PC-104, Ethernet, USB). Вместе с платами предоставля-
ется пакет программного обеспечения для настройки плат.
250
ГЛАВА 2
Таблица 2.38. Характеристики модулей CPU188-5
Тип модели CPU188-5LC CPU188-5BS CPU188-5MX
SRAM 512 кбайт 1024 кбайт
Флэш 1024 кбайт
' СОМ1 RS-232 (неизолированный)
COM2 RS-232 (неизолированный); RS-422/485 (изолированный), скорость обмена 200/2500 кбит/с
AI/AO — — 8./2 (изолированный) 0...5В, 0...10 В, +/-5В
Габаритные размеры, мм 124,5x114,3
Выбор платы на примере выбора платы АЦП осуществляется в следующей после-
довательности: выбор частоты дискретизации (кГц, МГц); выбор разрядности АЦП,
числа каналов, диапазона входного сигнала (в вольтах); наличие на плате ЦАП и его
разрядность, число каналов ввода/вывода; коэффициент усиления и необходимый
интерфейс платы.
2.5. Компоненты ПЛК
К компонентам ПЛК относятся процессорные модули, модули ввода/вывода
аналоговых и дискретных сигналов, сетевые коммуникационные модули и модули
специального назначения [2.10-2.12].
Модульные ПЛК конфигурируются на базе шасси или корзины. Отличие шас-
си от корзины состоит в конструктиве и методе крепления модулей. Шасси пред-
ставляют собой плоскую панель, крепящуюся в шкафу управления или на щите с
защелками для модулей и разъемами, через которые осуществляется обмен инфор-
мацией между модулями. Число модулей, устанавливаемых на шасси: 4, 6, 8 или
12. С внутренней стороны шасси содержит шину обмена данных между модулями
ПЛК. Корзина отличается от шасси наличием боковых стенок и перегородок меж-
ду модулями. Некоторые ПЛК не имеют корзины или шасси и конфигурируются
соединением модулей между собой при помощи разъемов и защелок на боковых
поверхностях.
Модуль центрального процессора (CPU) является основной интеллектуальной
составляющей ПЛК, обеспечивающей обработку и хранение информации. Обычно
CPU совмещены с модулем источника питания, служащим для преобразования се-
тевого напряжения переменного тока в ряд напряжений, служащих для питания мо-
дуля центрального процессора и модулей ввода/вывода. Выбор источника питания
определяется совокупной потребляемой мощностью подключенных к ПЛК модулей
ввода/вывода. Кроме того, модуль источника питания содержит литиевую батарею,
обеспечивающую питание оперативной памяти ПЛК, в которой хранится рабочая
программа и текущие данные, сохраняемые при отключении сетевого питания.
Модули ввода/вывода аналоговых и дискретных сигналов представляют со-
бой устройства связи с объектом (УСО) и служат для приема, аналого-цифрового и
дискретно-цифрового преобразования входных сигналов, а также для формирования
выходных сигналов с помощью цифро-аналоговых и цифро-дискретных преобразо-
вателей. Помимо этого, модули или платы УСО могут представлять собой отдель-
ные устройства сбора и обработки сигналов, а также формирования управляющих
воздействий по заданному алгоритму на базе установленного на плате сопроцессора,
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
251
разгружая тем самым основной процессор. Такие УСО, находящие широкое приме-
нение при создании распределенных систем с удаленным вводом/выводом информа-
ции, являются интеллектуальными терминалами и могут быть как выносными, так и
встраиваемыми. В выносном варианте связь с ПЛК осуществляется по каналам RS-
232 или RS-422/RS-485.
Широкое применение находят встраиваемые платы УСО, устанавливаемые в ПК.
При этом обеспечивается прямой доступ к памяти и выполнение требуемых функ-
ций линеаризации и масштабирования сигналов, компенсации температуры холод-
ных спаев термопар, ввод сигналов высокого и низкого уровней, формирование ал-
горитмов управления и др. К основным требованиям, предъявляемым к УСО, отно-
сятся точность преобразования, физический уровень сигнала, постоянная времени,
разрешающая способность, напряжение питания и др.
2.5.1 Процессорные модули ПЛК
Процессорный модуль контроллера определяет основное функциональное на-
значение и технические характеристики контроллера.
К основным техническим характеристикам процессорного модуля относят:
• способ выполнения программы;
• тип и тактовая частота микропроцессора;
• объем памяти программ и памяти данных;
• скорость выполнения логической операции (команды, инструкции);
• встроенные функции (счетчики, ШИМ, ПИД-регулятор, позиционирование
и др.);
• число встроенных каналов аналогового и дискретного ввода/вывода;
• энергонезависимые часы/календарь;
• тип и число последовательных портов (RS-232, RS-422, RS-485, USB);
• интерфейсы промышленных сетей (Ethernet, Profibus, CANbus и др.);
• напряжение питания и габариты.
Для процессорных модулей PC-based контроллеров к числу основных характери-
стик дополнительно относятся:
• тип шины расширения;
• тип встроенной PC-совместимой ОС;
• наличие и тип встроенной SCADA-системы;
• возможность подключения гибких и жестких дисков, дисплея, клавиатуры и пр.;
• возможность подключения жидкокристаллической или электролюминесцент-
ной панели.
Процессорный модуль ПЛК выполняет следующие функции: обеспечение рабо-
ты операционной системы реального времени (ОС РВ), организация коммуникаций
между модулями внутри ПЛК, хранение и выполнение программы управления тех-
нологическим процессом, хранение информации, обусловленной программой управ-
ления, осуществление связи с ПК или программатором.
Операционная система реального времени (ОС РВ) предназначена для выполнения
программ, записанных в контроллере, и обеспечения непрерывности процесса обра-
ботки данных, поступающих от модулей ввода/вывода, сетевых модулей и устройств.
Основные отличия процессорных модулей ПЛК различных производителей ха-
рактеризуются производительностью процессора, объемом памяти программ и дан-
ных и максимальным числом обрабатываемых дискретных и аналоговых каналов.
252
ГЛАВА 2
В качестве базовых процессоров в процессорных модулях контроллеров широко
применяются процессоры фирм Intel (i80C186EC, i80188, i80386EX(SX), i80486DX4,
i80386, Pentium MMX и др.), Motorola (MC68302, MC68360 и др.), Zilog (80182), Hi-
tachi, Atmel и др.
Для сбора и обработки данных используются вспомогательные процессо-
ры (сопроцессоры) типа i80C188, i80C51(31), PIC16C73A и другие, а также RISC-
сопроцессоры. Более подробные данные о микропроцессорах этих и других типов
приведены в работах [2.5,2.10-2.12].
В большинстве случаев выбор ПЛК зависит от информационной емкости техно-
логического процесса, т. е. от количества дискретных и аналоговых сигналов, необхо-
димых для контроля и управления. Чем больше информационная емкость процесса,
тем мощнее требуется процессорный модуль.
При выборе процессорного модуля для контроллера руководствуются следую-
щими соображениями:
• оценивается информационная емкость процесса, определяется число дискрет-
ных и аналоговых сигналов, которые будут обрабатываться в ПЛК.
• определяется объем требуемой памяти, который может потребоваться для решения
поставленной задачи управления; объем памяти складывается из памяти для реше-
ния задач ПЛК (связь модулей, конфигурация и т. д.), памяти для обработки анало-
говых и дискретных точек ввода/вывода, память для организации сетевого обмена.
Рассматривается необходимость решения задач управления, таких как ПИД-
регулирование, адаптивного управления, алгоритмов нечеткой логики, нейросете-
вых алгоритмов управления и др.
Процессорные модули снабжены индикаторами, которые предназначены для
отображения состояния процессорного модуля, состояния контроллера, режима ра-
боты модуля, ошибок ввода/вывода и программных ошибок.
В работе [2.9] приведены основные характеристики процессорных модулей.
2.5.2 Модули ввода/вывода дискретных сигналов
Дискретными входными сигналами в распределенных системах управления яв-
ляются сигналы коммутации кнопок, конечных выключателей, контактов реле и пр.,
а в качестве дискретных выходных сигналов служат сигналы управления магнитны-
ми пускателями, реле, сигнальными лампами, исполнительными механизмами.
Устройства дискретного ввода/вывода представляют собой устройства преобра-
зования двоичных сигналов логических уровней 1 и 0. Этим уровням соответствует
напряжение на замкнутом или разомкнутом ключах. Величина напряжения может
быть различной, но чаще используется напряжение 12,24, 36,48,125 или 250 В. Вели-
чина тока канала дискретного вывода обычно составляет 100 или 200 мА.
Основными характеристиками каналов дискретного ввода/вывода являются:
• число каналов дискретного ввода/вывода, расположенных на плате или в модуле;
• характеристика канала дискретного вывода: релейный («сухой контакт» — СК)
или транзисторный вывод («открытый коллектор» — ОК);
• уровень сигнала (TTL-совместимые или нет);
• напряжение гальванической изоляции (500,1500, 2500 В и др.);
• напряжение канала дискретного ввода/вывода;
• выходной ток канала дискретного вывода;
• индикация состояния канала.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
253
Широкий диапазон модулей дискретного ввода/вывода определяется напряже-
нием питания (переменного или постоянного тока), полярностью сигнала (положи-
тельной или отрицательной), подключением через винтовые клеммные колодки или
специальные соединители.
Модули ввода/вывода подразделяются на следующие типоразмеры:
• модули стандартного формата смешанных входов/выходов (I/O): 28 I/O (161 + 120),
64 I/O (321 + 320);
• входные и выходные модули стандартного формата: например, 32 входа или 32
выхода (в ряде ПЛК встречаются модули высокой плотности на 64 входа или
выхода);
• полуформатные (смешанные) модули ввода/вывода, которые имеют различное
количество каналов, что позволяет лучше адаптировать аппаратную часть к за-
дачам прикладной программы (например, 8 1/4 О или 32 1/16 О).
Дискретные входы могут быть сконфигурированы как:
• нормальные дискретные входы (заданная по умолчанию конфигурация);
• запирающиеся входы;
• вызванные событием входы;
• входы прямого, обратного или реверсивного счетчика;
• вход Run/Stop;
• управляющий вход для передачи данных из RAM во флэш-память.
На уровне входов используется текущий контроль напряжения датчика. Все вход-
ные модули обычно включают средства для текущего контроля напряжения датчика.
Эти средства следят за тем, чтобы напряжение питания датчиков, подключенных к
модулю, находилось на уровне, достаточном для нормальной работы входных кана-
лов модуля. Если напряжение питания датчика ниже определенного предела, об этом
сигнализируется включением индикаторной лампы на модуле, бита ошибки канала
или бита ошибки в слове состояния модуля.
На уровне выходов реализуются следующие функции:
• текущий контроль напряжения питания исполнительных устройств;
• защита от коротких замыканий и перегрузок. При возникновении подобной си-
туации питание с соответствующего канала снимается, что индицируется рас-
смотренным выше способом;
• защита ошибки полярности сигнала;
• защита против скачков напряжения;
• защита контактов выходных реле;
• реактивация выходов;
• переход на аварийный режим.
Схемы дискретного ввода и дискретного вывода типа «открытый коллектор»
(«ОК») и дискретного вывода типа «сухой контакт» («СК») компании ICP DAS пред-
ставлены на рис. 2.118, а, би 2.119 соответственно.
Платы ввода/вывода, встраиваемые в слоты материнской платы IBM PC, ис-
пользуют шины PCI, Compact PCI, РС/104, Micro PC, ISA и VME. Число каналов
дискретного ввода/вывода на плате, как правило, составляет 8, 16, 32, 48 или 96.
Помимо этого платы (модули) дискретного ввода/вывода имеют гальваническую
изоляцию каналов с напряжением изоляции 500,1000,2500 или 3000 В постоянного
тока, сторожевой таймер и счетчик/таймер. Диапазон рабочих температур модулей
ввода/вывода составляет от 0...+70°C до значений -40...+85°C. Среди других ха-
254
ГЛАВА 2
Рис. 2.118
рактеристик модулей дискретного ввода/вывода отметим среднее время наработки
на отказ (не менее 100 тыс. часов), ресурс реле модулей релейного вывода (от 500
тыс. до 100 млн. срабатываний), частота входных сигналов (от 10 до 40 кГц. и более)
с измерением частоты по любому каналу, самотестирование, подавление дребезжа-
ния контактов и др.
В модулях УСО удаленного сбора
данных и управления (например, серии
ADAM, 1-7000 и др.) при программирова-
нии устанавливается величина входного
или выходного сигнала, скорость переда-
чи данных (от 1200 бит/с до 115,2 кбит/с)
и другие параметры. Объединение моду-
лей в асинхронную полудуплексную двух-
проводную сеть по стандарту RS-485 при
длине сегмента до 1200 м и числе модулей
в сегменте до 256 позволяет создавать
распределенную систему сбора данных и
управления большой информационной
емкости.
2.5.3 Модули ввода/вывода аналоговых сигналов
Модули ввода/вывода аналоговых сигналов выполняют следующие функции:
• аналого-цифровое преобразование сигнала и выдача результата на внутреннюю
шину контроллера;
• цифро-аналоговое преобразование сигнала, полученного от процессорного мо-
дуля по внутренней шине;
• фильтрация, масштабирование и линеаризация входного сигнала;
• сигнализация выхода значений измеряемого параметра за допустимые пределы;
• самодиагностика и др.
Модули ввода/вывода аналоговых сигналов используются как встроенные не-
посредственно в контроллер, так и в качестве удаленных станций ввода/вывода.
В случае построения распределенной системы процессорный модуль находится на
основной стойке, а соединение с системой ввода/вывода и управление происходит
с помощью сетевых технологий. Для этого в стойку станции ввода/вывода встраи-
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
255
вается специальный сетевой модуль. Процессорный модуль главной стойки должен
поддерживать управление удаленными станциями по сетевому стандарту.
Основные характеристики модуля ввода/вывода аналоговых сигналов:
• разрядность;
• количество каналов ввода/вывода;
• диапазон входных и выходных сигналов модуля;
• быстродействие;
• точность преобразования;
• обнаружение обрыва датчика;
• возможность подключения датчиков, имеющих нестандартный выход;
• гальваническая развязка сигналов;
• подавление помех на входе/выходе;
• напряжение питания;
• потребляемая мощность;
• габариты.
Количество каналов ввода/вывода варьируется от 2 до 14 в зависимости от класса
контроллера. Для моноблочных (компактных) ПЛК количество каналов обычно со-
ставляет 2 или 4, для PC-based и модульных 8,16 или 32.
Наиболее распространенными стандартными сигналами являются сигналы на-
пряжения: 0...5 В, 0... 10 В , 1...5 В, ±5 В, ±10 В и сигналы тока: 0...5 мА, 0/4...20 мА.
Основным компонентом модуля аналогового ввода является аналого-цифровой
преобразователь (АЦП). В зависимости от временной последовательности опера-
ции преобразования аналоговой величины в цифровой код АЦП подразделяют на
следующие типы: последовательный АЦП со ступенчатым пилообразным напря-
жением (состоит из компаратора, счетчика и ЦАП); АЦП с двоично-взвешенным
приближением (поразрядного уравновешивания или поразрядного кодирования);
параллельные АЦП (с одновременным квантованием сигнала с помощью набора
компараторов, включенных параллельно источнику сигнала); последовательно-
параллельные АЦП.
В настоящее время широко используются интегральные, функционально закон-
ченные АЦП, в одном корпусе которых находятся все необходимые компоненты для
работы АЦП (за исключением источника питания). К таким компонентам относятся
устройство компенсации температуры холодных спаев термопары, сигнализация об-
рыва термопары и др. Примером таких АЦП могут служить АЦП AD595, AD571 и
AD7550 фирмы Analog Devices, ADC0800 фирмы National Semiconductors и др.
В многоканальных модулях аналогового ввода используются многоканальные
АЦП с коммутацией (мультиплексированием) входных аналоговых сигналов на
входе АЦП.
Важной функциональной характеристикой модуля является наличие гальвани-
ческой развязки сигналов. Точность преобразования аналогового сигнала в цифро-
вой код зависит от разрядности АЦП. Наиболее часто встречаются модули с разряд-
ностью преобразования от 8 до 16 бит. Естественно, чем выше разрядность, тем ниже
быстродействие АЦП.
Модули аналогового ввода/вывода обычно питаются от блока питания кон-
троллера напряжением 12 VDC или 24 VDC, или 110/220 VAC. Потребляемая мо-
дулем мощность обычно составляет около 2 Вт. Некоторые модули обеспечивают
питание токовой петли.
256
ГЛАВА 2
Входные аналоговые сигналы подаются на модуль через клеммную колодку,
проходят через гальваническую развязку, мультиплексируются и преобразуются в
цифровой код с помощью АЦП. Далее, после соответствующей обработки, сигнал
поступает на внутреннюю шину контроллера и обрабатывается процессором по за-
ложенной программе.
Модуль аналогового вывода работает в обратной последовательности. Основным
компонентом модуля аналогового вывода является цифро-аналоговый преобразова-
тель (ЦАП). Существуют ЦАП, основанные на методе параллельного суммирования
токов или напряжений, пропорциональных весам разрядов преобразуемого цифро-
вого кода. Эталонные токи или напряжения получают с помощью весовых резистор-
ных сеток или резисторных делителей.
2.5.4 Коммуникационные модули
Коммуникационные модули предназначены для обмена данными между кон-
троллером и внешними устройствами по вычислительным сетям передачи данных.
Среди коммуникационных модулей находят применение коммуникационные мо-
дули локальных сетей CAN, DeviceNet, Profibus DP, Ethernet, сети GSM/GPRS и др.,
коммуникационные модули интерфейсов RS-232, RS-422/485.
Характеристиками коммуникационных модулей являются допустимая скорость
обмена (бит/с), число обслуживаемых устройств обмена данными, количество пор-
тов ввода/вывода, напряжение гальванической изоляции, напряжение питания, диа-
пазон рабочих температур и ряд других.
С целью недопущения снижения вычислительных ресурсов базового процессо-
ра, отвечающего за ввод/вывод, обработку информации и работу системы в целом,
используется сетевой коммуникационный контроллер. В качестве коммуникацион-
ных контроллеров широко используются контроллеры фирмы Motorola МС68302,
МС68360, МРС8хх/82хх [2.10-2.13].
В состав коммуникационного контроллера фирмы Motorola входят модуль цен-
трального процессора CPU (Central Processor Unit), модуль системной интеграции
SIM (System Integration Module) и модуль коммуникационного процессора (СРМ —
Communication Processor Module). В коммуникационных контроллерах серии
МС68302, куда входят контроллеры MC68LC302/302V, MC68EN302 и др., использу-
ются 16-разрядные процессоры 68ЕС000, которые обладают малым энергопотребле-
нием и невысокой стоимостью. Контроллеры серии МС68360 являются дальнейшим
развитием серии МС68302 и обладают более высокой производительностью и расши-
ренными функциональными возможностями. Контроллер имеет 32-разрядную шину
данных и 32-разрядную шину адреса. В состав коммуникационного контроллера се-
рии МС68360 входит 32-разрядный процессор CPU32+ (33 МГц). Модуль системной
интеграции SIM60 реализует интерфейс с системной шиной. В состав модуля входят
генератор тактовых импульсов, контроллер динамического ОЗУ, блок тестирования
и отладки и др., а также сторожевой таймер (watch-dog timer) и таймер прерываний.
В состав модуля СРМ входят RISC-процессор, двухпортовое ОЗУ и большой набор
периферийных устройств.
В коммуникационных контроллерах МРС8хх/82хх в качестве процессора ис-
пользуется 32-разрядный RISC-процессор Power PC со встроенными блоками кэш-
памяти команд и данных. Коммуникационный процессор СРМ и блок SIM этих
контроллеров обеспечивают повышенную скорость обмена данными (до 100 Мбит/с
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
257
по протоколу Fast Ethernet) и более высокую производительность. Тактовая частота
процессора — 80 МГц.
Серия МРС82хх является следующим поколением коммуникационных контрол-
леров на базе RISC-процессора Power PC, тактовая частота которых повышена до
200 МГц, увеличено число последовательных каналов в блоке СРМ, введен контрол-
лер шины PCI.
Коммуникационные контроллеры MC68EN360/EN360V имеют интерфейсы RS-
232, RS-485, Ethernet, флэш-память до 4 Мбайт, SRAM и др.
Корпус коммуникационного модуля выполнен из пластмассы или металла и
крепится к стойке с помощью винтовых разъемов или специальной системы сое-
динения, как правило, аналогичной системе крепления других модулей на стойку
контроллера. Модуль также имеет разъем для подключения на внутреннюю шину
контроллера.
Коммуникационный контроллер выполняет все необходимые операции по фор-
мированию прерываний, обмену данными по сети и по внутренней шине контролле-
ра. Некоторые модули предназначены для соединения различных сетей; в этом слу-
чае контроллер выполняет операции по преобразованию протоколов.
Конфигурирование и программирование коммуникаций контроллера осущест-
вляется с помощью специального программного обеспечения, обычно поставляемо-
го фирмой-производителем вместе с контроллером.
2.5.5 Модули специального назначения
К числу специальных (функциональных) модулей относятся модули позициони-
рования, счетчики, модули взвешивания, модули часов реального времени и памяти,
вычислительные, логические и диагностические модули, модули энкодера, техниче-
ского зрения, одно- и многоканальные модули барьеров искробезопасности, модули
мезонинных плат, модули питания и др.
Модуль позиционирования используется при автоматизации процессов переме-
щения изделий в различных отраслях промышленности, будь то упаковка изделий,
производство автомобилей, робототехника, складское хранение или движение то-
варов от начальной до конечной позиции. При увеличении степени автоматизации
предприятий критической становится возможность координации работы различных
перемещающих устройств, дистанционное изменение программ движения и получе-
ние информации о состоянии продукции. Оборудование для управления перемеще-
нием должно обеспечивать гибкость и высокую точность, что возможно только при
использовании цифровых сервоустройств. Для обеспечения быстроты и простоты
связи, настройки и эксплуатации необходима интеграция устройств перемещения с
контроллерами. В целом устройства для управления серводвижением включают кон-
троллеры, приводы, двигатели и различную арматуру.
Модули позиционирования работают в следующих режимах:
• установка скорости движения и торможения;
• абсолютный пошаговый режим: координаты точек позиционирования задаются
в виде абсолютных координат, сохраняемых в памяти в табличной форме;
• относительный пошаговый режим: перемещение определяется пройденным
путем;
• режим контрольных точек: выполнение операций синхронизации при прохожде-
нии контрольных точек.
9 Зак. 3801
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
259
Модуль энкодера имеет один или несколько входов для приема сигналов от ин-
крементного энкодера (шифратора приращений) или от абсолютного энкодера. В
качестве дополнительных функций модуля энкодера используются: измерение дли-
тельности и частоты импульсов, счет на базе счетчиков сигналов с дифференциаль-
ными или TTL-уровнями сигналов, измерение скорости и пр. Одной из важных ха-
рактеристик модуля энкодера является максимально допустимая частота следования
входных импульсов.
Модули технического зрения служат для обработки входных сигналов от теле-
визионных датчиков различного назначения. Это могут быть телевизионные каме-
ры видеонаблюдения и охраны, контроля размеров изделий, телекамеры роботизи-
рованных технологических комплексов (РТК), телекамеры видеоконтроля качества
продукции, ее маркировки и упаковки на линиях упаковки и сортировки продук-
ции и др.
Модули барьеров искробезопасности (искрозащиты) предназначены для гальвани-
ческой развязки электротехнического оборудования, находящегося во взрывоопасной
зоне, и электротехнических устройств, находящихся во взрывобезопасной зоне.
Модули мезонинных плат служат для повышения функциональных возможно-
стей базовой платы и устанавливаются на базовой плате, используя ее источники
питания. Мезонинные модули позволяют за счет компактности размещения достиг-
нуть экономии габаритов модуля.
К модулям специального назначения также относятся модули компараторов, мо-
дули имитации для тестирования программ, модули декодирования и др.
2.6. Системы распределенного ввода/вывода и управления
Выбор распределенных систем ввода/вывода и управления обусловлен следую-
щими соображениями:
• Необходимость территориальной удаленности средств автоматизации из зон с
высоким уровнем температуры, электромагнитного излучения и механических
нагрузок.
• Удаленность базового ПЛК от станции ввода/вывода при их связи по сети зна-
чительно сокращает затраты на кабельную продукцию, особенно в случае при-
менения оптоволокна.
• Процессор станции ввода/вывода, занятый преобразованием и обработкой вход-
ной информации, разгружает от этих функций центральный процессор, который
сможет реализовать более сложные алгоритмы управления.
• Модульность системы управления облегчает проектирование, монтаж, замену
модулей и их эксплуатацию.
• Модульность системы расширяет возможности масштабирования и модерни-
зации системы ввода/вывода и управления, позволяет вводить в строй систему
поэтапно.
• Повышение надежности системы достигается за счет резервирования аппарат-
ного обеспечения и приближения сигналов управления к объекту.
• Быстрое интегрирование модульных систем ввода/вывода в общую информаци-
онную систему предприятия.
В табл. 2.39 представлены характеристики систем распределенного ввода/вывода
и управления.
Таблица 2.39 Распределенные системы ввода/вывода и управления
№ Наименование Число модулей в сегменте (корзине) Число кана- лов в модуле Интерфейсы Степень защиты Температу- ра, °C Отличительные особенности
1 ADAM серий 40хх, 41хх, 45хх, ADAM 6000, Advantech (Тайвань) 32 4,8,16 RS-485, Ethernet (ADAM 45хх, 6000) IP20 -25...+75 ADAM 41хх — для жестких условий эксплуатации (-40...+85 °C)
2 i-7000, М-7000, ICP DAS (Тайвань) 256 (без репитера) 8,16 RS-485 IP20 -25...+75 Двойной сторожевой таймер, i-7188EGD с поддержкой ISa-GRAF, Х-серия мезонинных модулей
3 Bus Terminal, Beckhoff (Германия) 64 (через K-bus ДО 255) 2,4,8 Profibus DP, Interbus, CANopen DeviceNet, ControlNet, Modbus, RS-232, RS-485, Ethernet TCP/IP OP20 0...+60 Ширина модуля 12,5 мм
4 I/O Phoenix Contact, Phoenix Contact (Япония) 63 (127 с повторите- лями) 8,16,32 Profibus, Ethernet, Interbus, ASi; IP65/67 0...+60 Bluetooth (2,4 ГГц)
5 MELSEC ST, Mitsubishi Electric, Япония 32,64,128 и 256 4 Profibus DP, CC-Link, ASi, Melsec Net, RS-485 IP67 0...+55 Ширина модуля 12,5 мм. Скорость обмена 3... 12 Мбод
6 Simatic ET 200S/ 200iS/ 200Х/ 200eco, Siemens (Германия) 64/32/7/8 2,4/2,4/2, 4/8,16 Profibus DP IP20/30/67/67 0...+55 ET200iS — для взрывоопасных зон
7 Momentum MIE (связь no Ethernet), Schneider Electric (Франция) 8192/ 8192 каналов ввода/вывода 4, 8,16,32 TCP/IP и Interbus-S; ModbuRTU (RS-485) IP20 0...+60 Встроенные Web-страницы (5) ПО: Unity Pro и ProWORX 984 Ladder Logic по стандарту IEC 61131-3
8 SmartSlices, Omron (Япония) 1024 I/O DeviceNet, Profibus DP, CompoBus/S IP20 «Горячая» замена модулей; ПО: CX-Integrator ПЛК: CS1/CJ1
9 Genius 32 8,16 Genius, Profibus DP, Interbus-S, RS-485 IP20 0...+60 Ударная нагрузка до 15 g. Составной модуль
10 FieldControl, GE Fanuc (CHIA, Япония) 8 8,16 (всего 128 каналов) Genius, Profibus DP, Interbus-S IP20 0...+60 Единое ПО VersaPro
11 Terminator I/O, Koyo Electronics (Япония) 6 (корзина) 8,16 Ethernet lOBaseT, Device NET, Modbus, Profibus DP IP20 0...+60 Рекомендуемый базовый контроллер — DL205
ГЛАВА 2
Продолжение табл. 2.39
12 Flex Integra I/O (1793) 8 3,4 Ethernet, ControlNet, RS- 232/422/485 и Remote I/O IP20 — Работают с модулями Flex I/Ои модулями 1793
13 Flex I/O (1794) 8 узлов/адаптер 2,4,8,16 ControlNet, DeviceNet, Remote I/O, Ethernet IP20 -20...+75 5 g при 10.. .500 Гц и ударным нагрузкам (30 g при 11 мс.) ПО: RSLogix 5000, RSView32-SPC, -Messenger, -Trend из SCADA-пакета RSView32
14 FLEX Logix 9 адаптеров по 8 модулей 4,16 Ethernet, DeviceNet, ControlNet, RS-232/RS-485 IP20 -20...+75 Модуль GPS глобальной сети GPS
15 SLX 200, Rockwell Automation (CHIA) 60 каналам А1/ АО и 128 каналам DI/DO 8,16 RS-232, RS-485 Ethernet Время наработки на отказ - 500000 часов, поканальная изоляция
16 Think I/O, Kontron (1ёрмания) модули ввода/ вывода WAGO 750/ 753 2,4,8 Profibus DP, CAN open, Modbus RS-232, Ethernet lOBaseT/ lOOBaseTX IP20 0...+60 ПО: CoDeSys (стандарт IEC 61131-3), пакет SOPH. ТА
17 WAGO I/O System, WAGO (Германия) Число узлов в сети Profibus DP —96; Interbus — 256; CAN — 110,64 модуля на узел 2,4,8 Ethernet TCP/IP, ProfibusDP, Interbus, DeviceNet, CANopen, CC-Link, RS-232/ RS-485 IP20 0...50 ПО: WAGO-I/O-PRO по стандарту IEC 61131-3
18 I/O System XI/ON, Moller GmbH (Тёрмания) 72 8,16 Profibus-DP, CAN- open, DeviceNet, INTERBUS IP20 ПО: XSoft Professional
19 20 I/O System BL 67 Excom, Turck GmbH (1ёрмания) 32 станции на 16 модулей 2,4,8,16 2,4,8 Profibus DP, DeviceNet, ModbusTCP, Profinet IO, EtherNet/IP, CANopen Profibus DP/PA IP67 IP20 -25...+85 -20...+60 ПО: I/O Assistant Связь с ПЛК по Profibus через ис- кровзрывозащитный барьер
21 ioLogik 4000, MOXA, Тайвань 32 2,4,8,16 Ethernet, RS-232/RS-485 IP20 -20...+60 ПО: ioAdmin
22 NI CompactDAQ, National Instruments, США 8-слотовое шасси (256 каналов) 4,8,16, 32 USB 2.0 IP20 -40...+70 Гальваноизоляция 2300 VDC. ПО: DAQ Assistant
23 Fastwel I/O, Fastwel Inc. (Россия) 63 8,16 RS-232, FBUS IP20 -40...+85 ПО: CoDeSys
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
Окончание табл. 2.39
№ Наименование Число модулей в сегменте (корзине) Число кана- лов в модуле Интерфейсы Степень защиты Температу- ра, °C Отличительные особенности
24 Х67 System BeJR (США) 253 2,4,6,8 RS-232, RS422/485, CANopen, DeviceNet, Ethernet, Profibus DP IP67 0...+60 Монтаж на DIN-рейку, топология — шина
25 IS-RP1, Pepperl + Fuchs (Германия) 8 на сегмент 16 Profibus DP/PA, Modbus, ControlNet IP20 -20...+70 Число сегментов:10 — FF, 31 — Profibus, Modbus.
26 Jet UO 6500, Korenix (Германия) — 4, 8,14 Ethernet IP31 — Монтаж на DIN-рейку
27 RIO, Allen-Bradley (США) До 32 шасси к одному master — Ethernet, ControlNet, RS-232/422 Ш320 — —
28 IS1, ITC Electronics (Германия) — — Modbus TCP — -20...+70 —
29 I/A Series RTU20, Foxboro, (США) 63 2,4,8,16, 32 Modbus RTU IP20 -25...+70 Резервирование ПРЦ, АЦП, модулей
30 LB COOPER Crouse-Hinds/CEAG (США) 192 канала ввода/ вывода 4,8 Modbus RTU, Profibus DP, HART IP20 Работа во взрывоопасных зонах
31 TRE1 5B-05 TREI GmbH (Германия) 255 (поддержка 6000 каналов) 2,4,8 Ethernet 10/100, Bluetooth, RS-232, RS-485 IP20 0...+60 Наработка на отказ 150000 часов, монтаж на DIN-рейку
32 Деконт, Деконт-Ех «ДЭП» (Россия) — 4,6,8,16,64 RS-232, 2xRS-485,4xSSI IP20 -40...+70 Взрывозащищенная серия Деконт- Ех (2,4,8 каналов)
33 34 КРОСС500 ТРАССА500, ЗЭиМ (Россия) 32 32 4,8,16 1,2,4 RS-232, RS-485, Ethernet 4xRS-485, 2x RS-232, lx Ethernet IP20 IP20 0...+50 0...+50 ОСРВ: OS-9 ОСРВ. RTOS 32, ПО — ISaGRAF
35 MIRageN, «Модульные системы Торнадо» (Россия) 32 шасси I/O 8,16,24,32 3xRS-485 IP20 0...+70 Монтаж на DIN-рейку
36 DCS-2000, ЗАО «Эмикон» (Россия) 32 10,12,14 RS-485 IP30 -20...+70 Питание 24 VDC
37 Smart-RTU, «РТСофт» (Россия) — 4,8,16 Ethernet, CAN, RS-232 IP20 0...+50 ОС: Wind. NT Embedded; синхрони- зация от GPS
ГЛАВА 2
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
263
2.7. Методика выбора ПЛК
Выбор контроллеров для распределенной системы управления обусловлен боль-
шим числом разнородных факторов, зависящих прежде всего от того, является ли
система вновь проектируемой или решаются задачи модернизации существующей
системы. В последнем случае имеют значение факторы преемственности программ-
но- аппаратных средств, квалификация обслуживающего персонала и службы ремон-
та, наличие сопроводительной документации и ее освоение, запас комплектующих,
выявленные показатели надежности (наработка на отказ, срок службы, ремонтопри-
годность и др.).
При выборе контроллера для РСУ основной задачей является, естественно, наибо-
лее полное удовлетворение технических требований на разработку РСУ (требования к
информационным, управляющим и вспомогательным функциям, а также требования
к техническому, программному, метрологическому и организационному обеспечению,
требования к диагностике и техническому обслуживанию системы и др.).
Основные требования при выборе контроллера с учетом специфики производ-
ства и решаемых задач следующие:
• Характеристики контроллера, соответствующие требованиям проекта или усло-
виям существующего производства.
• Выбор класса контроллера (моноблочный, модульный, PC-based, встраиваемый).
• Соответствие контроллера международным стандартам (открытость ПЛК).
• Наличие необходимых интерфейсов связи уровней иерархии системы.
• Возможность визуализации данных (связь со SCADA-системами).
• Наличие стандартных систем программирования и алгоритмов настройки пара-
метров контроллера.
• Показатели надежности контроллера (время наработки на отказ, возможности
резервирования, «горячей замены», ремонтопригодность и др.).
• Экономические показатели
2.7.1 Характеристики контроллера, соответствующие требованиям проекта
или условиям существующего производства
К наиболее важным характеристикам относятся параметры процессорного мо-
дуля (тип и быстродействие процессора, объем памяти и др.), наличие сопроцессора,
время выполнения логической команды (инструкции), наличие сторожевого тайме-
ра, часов реального времени, число встроенных и наращиваемых входов/выходов,
наличие в контроллере необходимого числа модулей ввода/вывода, специальных
и коммуникационных модулей, среда программирования контроллера (удобство и
простота программирования). Важным показателем контроллера является возмож-
ность резервирования контроллера, модулей и плат, диагностика состояния кон-
троллера и другие факторы (светодиодная индикация каналов и режимов работы,
наличие панели визуализации и клавиатуры, гальваническая изоляция по входам и
выходам, степень защиты контроллера и др.).
2.7.2 Выбор класса контроллера (моноблочный, модульный, PC-based,
встраиваемый)
После расчета аналоговых и дискретных каналов ввода/вывода следует сделать
выбор класса контроллера — моноблочный, модульный, PC-based или встраиваемый
264
ГЛАВА 2
контроллер. Моноблочный контроллер, имеющий, как правило, небольшое число
встроенных дискретных и аналоговых каналов ввода/вывода, может использоваться
автономно или с модулями расширения в малых и средних по сложности системах
управления. При выборе модульного контроллера обеспечивается большее число
каналов ввода/вывода, повышается функциональность контроллера за счет допол-
нительных функций, упрощается обслуживание контроллера, допускающее в ряде
случаев «горячую» замену модулей и др. Модульность контроллера с использованием
мезонинных модулей ввода/вывода по стандартам Industry Раск и ModPack и специ-
альных модулей различного назначения является одной из тенденций развития кон-
троллеров. При выборе PC-based контроллера значительно повышается многофунк-
циональность контроллера за счет возможностей ПО, удобства программирования,
снижается его стоимость. В случае модернизации существующей системы управле-
ния может быть рекомендована замена существующего контроллера на его новые
модификации, которые, как правило, бывают полностью совместимы.
Выбор встраиваемого контроллера определяется IBM PC-совместимой архитек-
турой используемой рабочей станции с ОСРВ, а также необходимостью в достаточ-
ном обеспечении для решения сложных алгоритмов управления.
2.7.3 Соответствие контроллера Международным стандартам
Выбор контроллера, соответствующего Международным стандартам (откры-
тость контроллера), означает соответствие стандарту качества ISO 9001, стандартам
шинной архитектуры контроллера (VME, PCI, CompactPCI, РС/104 и др.), стандарт-
ным протоколам связи промышленных сетей (Profibus, Modbus, Interbus, CAN, Bit-
bus и др.), стандартам связи с полевыми приборами (HART-протокол, AS-интерфейс,
Fieldbus Foundation, RS-485 и др.), стандартам на ОСРВ (QNX, OS 9000, VxWorks и
др.), стандартам на программное обеспечение контроллеров (IEC 1131-3), стандартам
на степень защиты корпуса (1ЕС 529), на габаритные размеры (1ЕС 297 — ^"-кон-
структивы, Евромеханика и 1ЕС 917 — метрические конструктивы), на ударо- и ви-
бропрочность (IEC 68-2) и др. В ряде случаев допускается соответствие отдельных
показателей (например, габаритных размеров, показателей электропитания и др.) от-
раслевым стандартам (ТУ ГОСТ). В случае использования разработок на территории
России необходимы сертификаты соответствия Госстандарта России на соответствие
требованиям ГОСТ и разрешение Госгортехнадзора на применение в составе систем
автоматизации на поднадзорных объектах.
- ч
2.7.4 Наличие необходимых интерфейсов связи уровней иерархии системы
В интегрированной системе управления информация о работе систем управле-
ния на полевом и контроллерном уровнях должна быть доступна на диспетчерском
и административном уровнях иерархии системы. Эту связь обеспечивают различные
интерфейсы связи, среди которых получают наибольшее распространение интерфей-
сы Ethernet и Industrial Ethernet. Интерфейс Ethernet обеспечивает высокую скорость
передачи данных, низкую стоимость и поддерживается подавляющим большинством
производителей программного и аппаратного обеспечения. Через сеть Ethernet серве-
ры и операторские станции верхнего уровня управления предприятием получают не-
посредственный доступ к данным параметров технологического процесса. При нали-
чии SCADA-системы, установленной на операторской станции, используется клиент-
серверная архитектура связи, при которой SCADA-клиент получает прямой доступ к
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
265
данным процесса с помощью ОРС-сервера. Использование протокола Ethernet Modbus/
TCP позволяет легко интегрировать контроллеры со SCADA-системами, поддержи-
вающими протокол Modbus (без необходимости дополнительного драйвера для кон-
троллера). Дальнейшим развитием связи контроллеров с удаленными операторскими
станциями является использование сети Internet и GSM-технологии.
2.7.5 Возможность визуализации данных (связь со SCADA-системами)
Практически любая современная система контроля (мониторинга) и управления
требует визуализации данных о процессе в режиме реального времени. Представле-
ние данных о ходе технологического процесса в виде таблиц, графиков и мнемосхем,
а также сигнализация отклонений параметров от заданных значений осуществляется
с помощью SCADA-систем с ОРС-сервером. Наличие у ряда PC-based контроллеров
встроенной SCADA-системы (например, Trace Mode и MasterSCADA) позволяет зна-
чительно ускорить процесс настройки проекта и повысить эффективность представ-
ления информации, снизить затраты на приобретение SCADA-системы и коммуни-
кационных интерфейсов. К таким контроллерам относятся российские контроллеры
Р130 ТМ, Ломиконт ТМ, Лагуна, Теконик и др. В случае применения контроллеров др.
марок следует сформулировать условия выбора той или иной SCADA-системы, о чем
будет сказано в гл. 2 раздела 2.
2.7.6 Наличие стандартных систем программирования и алгоритмов настройки
параметров контроллера
Наличие стандартных систем программирования контроллера, таких как ISa-
GRAF, STEP7, CoDeSys, FP Win и др., позволяют ускорить процесс ввода в эксплуата-
цию систем регулирования и упростить процесс обслуживания системы, особенно в
случае автоматизации малоизученных объектов управления. Крайне важно наличие
у контроллера режима автонастройки параметров ПИД-регулятора — коэффициен-
та усиления и постоянной времени интегрирования Т(. (постоянная времени диффе-
ренцирования Td, как правило, устанавливается программно в соотношении с полу-
ченным значением времени интегрирования Td = Т /4,5). Известен ряд методик опре-
деления параметров настройки ПИД регулятора от классических до оригинальных,
некоторые из которых рассмотрены в гл. 3 раздела 1. Известны режимы настройки
параметров адаптивных регуляторов и др. алгоритмов управления, реализуемых, как
правило, на программном уровне.
2.7.7 Показатели надежности контроллера (время наработки на отказ,
возможности резервирования, «горячей замены», ремонтопригодность и др.)
К показателям надежности относятся время наработки на отказ (желательно
иметь 100 тыс. часов и более), срок службы (10 лет и более), ремонтопригодность
(возможность легкой замены модулей, блоков). Повышение надежности и точности
достигается за счет средств диагностики, прогнозирования отказов, режимов без-
ударного переключения, «горячего» резервирования, гальванической развязки, ду-
блирования и троирования аппаратных средств, рестарта ПО и другими методами.
2.7.8 Экономические показатели
К экономическим показателям при выборе контроллера относятся цена контрол-
лера и программного обеспечения, стоимость сопровождения в течение жизненно-
266
ГЛАВА 2
го цикла контроллера, затраты на обучение и обслуживание и др. Экономические
затраты складываются из стоимости контроллера, затрат на кабельную продукцию,
а в случае беспроводной связи с контроллером — стоимости приемо-передающих
устройств и программного обеспечения. Следует учитывать затраты на обучение,
модернизацию и сопровождение в течение всего жизненного цикла контроллера.
При проектировании распределенных систем управления с большим числом ка-
налов ввода/вывода применяется методика тендерных торгов для оптимального вы-
бора аппаратных средств и программного обеспечения.
Рядом фирм предлагается упрощенная методика выбора контроллеров. В качестве
примера ниже рассматривается методика выбора контроллера фирмы Allen-Bradley.
Для системы распределенного управления фирма Allen-Bradley производит кон-
троллеры FlexLogix. В состав системы, помимо контроллера, входят модули ввода/вы-
вода FLEX I/O, коммуникационная плата 1788 для связи с сетью ControlNet (устанав-
ливается непосредственно в контроллер) и программное обеспечение RSLogix5000.
Выбор модели контроллера и модулей ввода/вывода осуществляется в несколько
шагов (этапов).
Шаг 1. Определение числа каналов ввода/вывода и выбор модуля
Ниже приведена табл. 2.40 характеристик выбранных устройств ввода/вывода.
Таблица 2.40. Характеристики устройств ввода/вывода
Тип сигнала Параметры сигнала Количество точек ввода/вывода Количество точек вво- да/ вывода на модуль Количество модулей Тип модуля
Дискретный вход 24 VDC 43 16 3 1794-IB16
Дискретный вход 120 VAC 48 8 6 1794-IA8
Дискретный выход 24 VDC 15 16 1 1794-ОВ16
Дискретный выход «СК» 5 8 1 1794-OW8
Дискретный выход 129 VAC 25 8 4 1794-ОА8
Аналоговый вход 4...20 мА 6 4 2 1794-IF41
Аналоговый вход 0...10В 2 4 0 1794-IF1
Аналоговый выход 4...20 мА 4 4 1 1794- OF41
Шаг 2. Компоновка системы (определение конфигурации системы)
На этом этапе выбирается расположение контроллера (по месту, в щите и т. д.),
использование центрального контроллера или системы удаленного ввода/вывода.
Контроллер FlexLogix поддерживает 8 локальных модулей ввода/вывода (на локаль-
ной DIN-рейке), 8 модулей ввода/вывода в локальном расширении (на DIN-рейке ло-
кального расширения) и 16 удаленных модулей ввода/вывода по сети ControlNet.
Для локального расширения требуется адаптер локального расширения 1794-
FLA, для удаленного ввода/вывода по сети ControlNet — адаптер сети ControlNet
(1794-ACN15 или -ACNR15 в зависимости от типа модулей ввода/вывода).
Шаг 3. Определение объема памяти контроллера
Расчет объема памяти производится исходя из числа точек ввода/вывода и вре-
мени, необходимого на обработку одного сигнала. Объем памяти для дискретной
точки ввода/вывода — 400 байт, аналоговой — 2600 байт, одного коммуникацион-
ного модуля — 5000, для выполнения одной задачи — 4000 байт. Итого в примере —
12000 байт.
Определим число дискретных точек ввода/вывода: 43 + 48 + 25 + 15 + 5 = 136; чис-
ло аналоговых точек ввода/вывода: 6 + 2 + 4 = 12; число коммуникационных плат —
одна плата 1788 — CNC.
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ
267
Таким образом, необходимая величина памяти контроллера равна:
• задачи контроллера: 2x4000 = 8000 байт;
• дискретные точки ввода/вывода: 136x400 = 54400 байт;
• аналоговые точки ввода/вывода: 12x2600 = 31200 байт;
• коммуникационные модули: 2x5000 - 10000.
Всего — 103 600 байт (101,17 кбайт). Фирмой Allen Bradley выпускаются контрол-
леры 1794-L33 с объемом памяти 64 кбайт и 1794-L34 с объемом памяти 512 кбайт. С
учетом требуемого объема памяти выбран контроллер 1794-L34.
Шаг 4. Выбор необходимого числа DIN-реек
Общее число модулей (см. шаг 1) составляет 18. На локальной рейке (вместе с
контроллером) можно разместить 8 модулей и до 8 модулей — на рейке локального
расширения. При этом можно разделить 8 модулей ввода/вывода, находящихся на
одной рейке, на две части, соединив их кабелем 1794-СЕ1 или 1794-СЕЗ. В нашем при-
мере потребуется одна локальная DIN-рейка для 8 модулей и две DIN-рейки локаль-
ного расширения на 6 и 4 модуля. Для связи контроллера, находящегося на локаль-
ной рейке, с адаптером 1794-FLA, находящимся на рейке локального расширения,
также используется кабель 1794-СЕ1 или 1794-СЕЗ.
Шаг 5. Выбор источника питания.
Для выбора источника питания необходимо вычислить общую потребляемую
мощность контроллера и модулей ввода/вывода. Для примера рассчитаем потребля-
емую мощность контроллера и модулей ввода/вывода, размещенных на локальной
рейке. На этой рейке разместим контроллер, четыре модуля дискретного ввода 1794-
IA8 и четыре модуля дискретного вывода 1794-ОА8 (табл. 2.41).
Таблица 2.41. Расчет потребляемой мощности
Тип устройства Номинальный ток, мА Потребляемая мощность, Вт Количество устройств Общая потребляемая мощность, Вт
ПЛК 17944.34 640 21,1 1 21,1
Модуль 17944А8 7,1 4,5 4 18,0
Модуль 1794-ОА8 2,25 4,1 4 16,4
Общая потребляемая мощность — 55,5 Вт
Выпускаемый фирмой Allen-Bradley источник питания для контроллеров FLEX
типа 1794-PS13 рассчитан на максимальную мощность 36 Вт. Поэтому выбираем два
источника 1794-PS13.
Шаг 6. Проверка связей контроллера с модулями ввода/вывода (определение числа
соединений).
Определим число соединений с учетом следующих нормативов: число соедине-
ний локальной рейки (соединение типа Рэк) — 1; число соединений рейки локального
расширения — 1; модуль ввода/вывода — 1. Если модули 1794-IA8 (4 шт.) и 1794-ОА8
(4 шт.) находятся вместе с ПЛК 1794-L34 на локальной рейке, то используется одно
соединение. Для рейки локального расширения с адаптером 1794-FLA и модулями
1794-IA8 (2 шт.), 1794-IB16 (3 шт.), 1794-ОВ16 (1 шт.) используется одно соединение.
Для удаленной рейки по сети ControlNet с адаптером 1794-ACN15 (1 шт.), включаю-
щей модуль 1794-OW8 (1 шт.), 1794-IF41 (2 шт.) и 1794-OF41 (1 шт.) число соединений
равно 5, т.к. каждый удаленный модуль и адаптер требуют одного соединения. Таким
образом, общее число соединений примера — 10.
268
ГЛАВА 2
Для передачи и приема данных (тегов) необходимы следующие соединения: про-
изводимый тег (тег, передаваемый одним контроллером другим контроллерам) для
одного потребителя — 1 соединение; при п потребителей и т тегов число соединений
равно т п. Кроме того, учитывается число соединений, равное числу сообщений.
Предположим, что на передачу данных требуется 22 соединения (6 — производимые
теги, 4 — потребляемые теги, 12 — сообщения). Тогда общее число соединений со-
ставит 22 + 10 = 32 соединения.
Шаг 7. Выбор программного обеспечения
Выбор ПО определяется выбором контроллера, коммуникационных плат, рабо-
чей станции и панели оператора. Выбранное ПО сведено в табл. 2.42
Таблица 2.42. Программное обеспечение.
Тип устройства Программное обеспечение Тип, серия для заказа Примечание
Контроллер FlexLogix 1794 RSLogix 5000 Серия 9324 Работает под управление Windows NT
Коммуникационная плата ControlNet 1788-CNC, -CNCR RSNetWorx для ControlNet (поставляется с RSLogix 5000) 9324-RLD300 NXENE
Коммуникационная плата в рабочей станции RSLinx (поставляется с RSLogix 5000) 9324 —
Рабочая станция RSView32 9301 —
Панель оператора Panelview Пакет программирования PanelBuilder 9301 2711-ND3 или -ND1 —
ГЛАВА 3. ОБОРУДОВАНИЕ И КОМПОНЕНТЫ
РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
3.1. Основы проектирования распределенных систем управления
Состав, содержание и объем проектной документации определяется ГОСТ 21.408-93
«Система проектной документации для строительства. Правила выполнения рабочей
документации автоматизации технологических процессов». ГОСТ введен в действие
с 1 декабря 1994 г. в качестве государственного стандарта Российской Федерации поста-
новлением Госстроя России от 5 апреля 1994 г. № 18-26.
При разработке проектной документации также руководствуются требованиями ГОСТ
21.101 и других взаимосвязанных стандартов Системы проектной документации для строи-
тельства (СПДС), Единой системы конструкторской документации (ЕСКД), строительными
нормами и правилами (СНиП) и отраслевыми стандартами (ОСТ) [3.6-3.15].
Разработке проекта автоматизации предшествуют научно-исследовательские и
опытно-конструкторские работы (НИР и ОКР), оценка сметной стоимости и технико-
экономической эффективности работы, противопожарные, экологические, санитарные
и другие требования. При большом объеме проекта выполняется предпроектное обсле-
дование объекта автоматизации.
Основанием для проектирования является техническое задание (ТЗ), которое со-
ставляется Исполнителем-проектировщиком с участием Заказчика.
Проект автоматизации выполняют в одну стадию (рабочий проект) или в две стадии
(первая стадия — технический проект, вторая — рабочий проект).
В техническом задании указываются объекты автоматизации (цеха, установки, про-
изводства), условия эксплуатации (пожаро- и взрывоопасность среды, агрессивность,
запыленность, задымленность и пр.), стадийность проекта, уровень капитальных затрат,
предложения по структуре системы управления, уровню автоматизации, выбору средств
автоматизации, размещению щитов и пультов управления, а также особые условия.
В качестве исходных данных Заказчик предоставляет Исполнителю:
1. Технологические схемы с расположением и характеристиками оборудования, тру-
бопроводами и линиями электроснабжения, перечень контролируемых, сигнализируе-
мых и регулируемых параметров с указанием предельных и номинальных значений до-
пустимого диапазона их изменения, метрологические характеристики и т. д.
2. План расположения оборудования с указанием рекомендуемых мест установки
щитов и пультов управления.
3. Схемы электро-, газо-, водо- и воздухоснабжения, характеристики имеющегося
электрооборудования, насосов, компрессоров и пр.
4. Необходимые данные для расчета сужающих устройств, выбора датчиков, регули-
рующих клапанов и других исполнительных механизмов.
5. Требования надежности, быстродействия и эффективности АСУ ТП.
270
ГЛАВА 3
6. Требования к алгоритмическому и программному обеспечению.
7. Дополнительные исходные данные по типовым проектным решениям.
В состав рабочего проекта систем автоматизации включают:
• исходные данные для расчета сужающих устройств и регулирующих органов;
• структурные схемы;
• схемы автоматизации;
• схемы принципиальные управления, регулирования, сигнализации (электриче-
ские, пневматические);
• схемы питания;
• схемы (таблицы) соединений и подключения внешних проводок;
• чертежи расположения оборудования и внешних проводок;
• чертежи установок средств автоматизации;
• эскизные чертежи общих видов нетиповых средств автоматизации;
• спецификацию щитов и пультов, оборудования, изделий и материалов (далее —
спецификация оборудования).
В состав проекта также входит техническая документация на изготовление и по-
ставку технических средств автоматизации, в том числе:
• опросные листы на приборы;
• карты заказа на электроаппараты;
• таблицы соединений и подключения проводок в щитах и пультах (по требованию
заказчика);
• документация для заказа комплексов средств централизованного контроля и ре-
гулирования, телемеханики, вычислительной техники, программно-технических
комплексов, микропроцессорных средств и контроллеров, систем и установок
пневмоавтоматики и др. (по требованию Заказчика).
В процессе проектирования составляется задание разработчикам смежных ком-
плектов рабочей документации на размещение элементов автоматизации на техно-
логическом (инженерном) оборудовании и коммуникациях, обеспечение энергоно-
сителями (электроэнергией, сжатым воздухом и др.), проектирование специальных
помещений и сооружений для средств автоматизации, на связь и сигнализацию (при
необходимости), обогрев, теплоизоляцию трубных проводок в наружных установ-
ках, заполненных замерзающими жидкостями и пр.
Основы проектирования автоматизированных систем приведены в работах
[3.1-3.15].
3.1.1 Структурные схемы
При разработке проекта автоматизации сложного производства (цеха, завода и
пр.) рекомендуется в состав проекта включить структурные схемы, охватывающие
конструктивную, функциональную и алгоритмическую структуры. Под структу-
рой управления понимается совокупность и взаимосвязь основных частей системы
управления. Графическое изображение структуры управления называется структур-
ной схемой. Основные исходные данные для выбора структуры управления, в том
числе ее иерархии, как правило, задаются Заказчиком при выдаче задания на про-
ектирование. При разработке структурных схем должны быть определены основные
виды обеспечений АСУ ТП: организационное, информационное, алгоритмическое,
техническое, метрологическое и лингвинистическое. Правильность выбора структу-
ры управления определяет ее эффективность, надежность, стоимость и т. д.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
271
3.1.2 Схемы автоматизации
При разработке схем автоматизации решаются следующие задачи:
• получение достоверной и точной информации о параметрах, характеризующих
состояние технологического оборудования;
• формирование управляющих воздействий на технологический процесс с целью
регулирования, сигнализации или блокировки, в том числе с целью стабилиза-
ции процесса;
• регистрация (архивация) технологических параметров.
Наиболее важным этапом разработки схем автоматизации является выбор основ-
ных технических средств, в том числе средств вычислительной техники (контрол-
леров, рабочих станций, сетевого оборудования, программного обеспечения и пр.),
исполнительных механизмов (регулирующих и запорных клапанов, электропривода
и т. д.). Выбор технических средств контроля или регулирования технологического
параметра определяет контур контроля, регулирования и управления — совокуп-
ность отдельных функционально связанных приборов, выполняющих определенную
задачу по контролю, регулированию, сигнализации, управлению и т. п.
При выполнении схем автоматизации решаются задачи выбора щитов и пультов,
размещения технических средств автоматизации на щитах и пультах, технологиче-
ском оборудовании и на трубопроводах.
При выборе технических средств автоматизации следует руководствоваться
международными стандартами (принцип открытости систем), возможностью модер-
низации и наращивания (масштабирования) систем управления. Выбор технических
средств должен производиться исходя из требований пожаро- и взрывобезопасно-
сти среды, требований точности, быстродействия и др.
Технологическое оборудование (печи, реакторы, теплообменники, насосы и пр.),
а также связывающие их коммуникации (трубопроводы) на схемах автоматизации
изображаются упрощенно. Вспомогательное оборудование и трубопроводы, которые
не оснащаются техническими средствами автоматизации и не влияют на работу си-
стем автоматизации, не показывают на схемах автоматизации.
Технологическое оборудование изображают по ГОСТ 2.780, ГОСТ 2.782, ГОСТ
2.788, ГОСТ 2.789, ГОСТ 2.790, ГОСТ 2.791, ГОСТ 2.792, ГОСТ 2.793, ГОСТ 2.794 и
ГОСТ 2.795.
Коммуникации в зависимости от транспортируемых сред изображают в соответ-
ствии с приложением 3 ГОСТ 14202.
Трубопроводную запорную арматуру, используемую в системах автоматизации
(не регулирующую) — по ГОСТ 2.785.
Условные графические и буквенные обозначения приборов и контуров контро-
ля и управления изображают по ГОСТ 21.404. Буквенные обозначения измеряемых
величин и функциональных признаков приборов указывают в верхней части окруж-
ности (овала). Номер контура и буквенное обозначение приборов (прописная буква
русского алфавита) указывают в нижней части окружности (овала).
Линии связи между приборами и контурами контроля и управления изображают
на схемах сплошной тонкой линией независимо от вида сигналов и количества про-
водов и труб.
Схемы автоматизации выполняют двумя способами:
1) развернутый, при котором на схеме изображают состав и место расположения
технических средств автоматизации каждого контура контроля и управления;
272
ГЛАВА 3
2) упрощенный, при котором на схеме изображают основные функции конту-
ров контроля и управления (без выделения входящих в них отдельных технических
средств автоматизации и указания места расположения).
3.1.2.1 Развернутый способ выполнения схем автоматизации
При развернутом способе в верхней части чертежа изображается технологиче-
ская схема, представляющая собой автоматизируемое оборудование и линии связи
(трубопроводы).
Все приборы, регуляторы, исполнительные механизмы и низковольтная аппара-
тура располагается на чертеже в одной из 4 зон.
• В разрыве трубопроводов изображаются сужающие устройства, ротаметры, ре-
гулирующие органы и др. встраиваемые в технологические коммуникации при-
боры (датчики концентратомеров, плотномеров, pH и др.).
• Приборы, устанавливаемые непосредственно на технологическом оборудовании,
изображаются в виде окружности в конце линии от места отбора параметра до
датчика.
• Внещитовые приборы и технические средства автоматизации, конструктивно не
связанные с технологическим оборудованием, показывают условными графиче-
скими обозначениями в прямоугольнике, расположенном в нижней части черте-
жа под технологической схемой с заголовком «Приборы местные».
• В нижнем прямоугольнике с заголовком «Приборы на щите» или «Приборы на
пульте управления» располагаются приборы и технические средства автоматиза-
ции, размещаемые на лицевой панели щита, в щите или на боковой стенке щита.
Все приборы и электроаппаратура в этом прямоугольнике изображаются в виде
окружностей (овалов), разделенных горизонтальной линией на две части.
В верхней части окружности указываются последовательно измеряемая величи-
на, уточнение измеряемой величины и функциональное назначение прибора (обо-
значение в виде заглавной буквы английского слова, обозначающего параметр или
назначение прибора).
Измеряемые величины: Т — температура; Р — давление, разрежение; L — уро-
вень; F — расход; S — скорость, частота; Н — ручное воздействие; G — размер, по-
ложение, перемещение; К — время, временная программа; Е — любая электрическая
величина; М — влажность; Q — состав, качество; R — радиоактивность; V — вяз-
кость; D — плотность.
Уточнение измеряемых величин в виде дополнительных обозначений: D — раз-
ность, перепад; F — соотношение, доля; J — автоматическое переключение; Q — ин-
тегрирование, суммирование; Е — чувствительный элемент; Т — дистанционная си-
стема передач; К — станция управления; У — вычислительные функции.
Функциональное назначение прибора: А — сигнализация; С—регулирование, управ-
ление; I — показание; R —регистрация; S — включение, отключение, переключение.
Дополнительные обозначения, отражающие функциональные признаки преоб-
разования сигналов: Е — электрический сигнал; Р — пневматический сигнал; G —
гидравлический сигнал; А — аналоговый сигнал; D — дискретный сигнал. Знаками
математических операций обозначается выполнение соответствующих функций.
При обозначениях приборов следует указывать не все функциональные призна-
ки прибора, а лишь те, которые используются в данной схеме. Например, при обо-
значении показывающего и самопишущего прибора температуры, если функция
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
273
«показание» не используется, следует писать TR вместо TIR. Сигнализатор уровня,
снабженный контактным устройством или встроенными сигнальными лампами, мо-
жет обозначаться в зависимости от используемых функций: LS, LA, LSA, LC.
В нижней части окружности указывается цифровое обозначение соответствую-
щего контура и буквенное обозначение (прописными буквами русского алфавита)
каждого прибора или датчика, входящего в контур (в зависимости от последователь-
ности прохождения сигнала от датчика до исполнительного механизма).
При большом количестве приборов допускается применять обозначения, в кото-
рых первый знак соответствует условному обозначению измеряемой величины, по-
следующие знаки — порядковому номеру контура в пределах измеряемой величины.
Электроаппаратура, входящая в систему автоматизации (звонки, сирены, сиг-
нальные лампы, табло, электродвигатели и др.) показывают на схеме графическими
условными обозначениями по ГОСТ 2.722, ГОСТ 2.732, ГОСТ 2.741 и присваивают
им буквенно-цифровые обозначения по ГОСТ 2.710.
Обозначения буквенно-цифровые в электрических схемах по ГОСТ 2.710-81
(буквенные и двухбуквенные коды наиболее распространенных видов элементов)
приведены ниже.
Буквенные коды: В — преобразователи; Е — осветительные устройства, нагре-
ватели; F — предохранитель; G — источники питания; Н — устройства световой и
звуковой сигнализации; К — реле, контакторы, магнитные пускатели; М — двигате-
ли; Q — автоматические выключатели; R — резисторы; S — выключатели, переклю-
чатели; Т — трансформаторы, автотрансформаторы; U — преобразователи частоты,
выпрямители; V — диоды, тиристоры, транзисторы.
Двухбуквенные коды: ВА — громкоговоритель; BV — датчик скорости; ВР — дат-
чик давления; ЕК — нагревательный элемент; EL — лампа осветительная; FU — пре-
дохранитель плавкий; НА — прибор звуковой сигнализации; HL — прибор световой
сигнализации; КК — реле электротепловое; КМ — контактор магнитный; КТ — реле
времени; QF — выключатель автоматический; RK — терморезистор; RP — потенцио-
метр; S А — выключатель, переключатель; SB — выключатель кнопочный; ТА — транс-
форматор тока; TV — трансформатор напряжения; UZ — преобразователь частоты,
выпрямитель; VD — диод, стабилитрон; VT — транзистор; VS — тиристор.
Линии связи между приборами изображаются с разрывом при большой протя-
женности и/или при сложном их расположении. Места разрывов линий связи ну-
меруют арабскими цифрами в порядке их расположения слева направо над прямоу-
гольником с заголовком «Приборы местные». Допускается пересечение линий связи
с изображениями технологического оборудования.
На линиях разрыва связи у прямоугольника «Приборы местные» указывают пре-
дельные (максимальные или минимальные) значения измеряемых (регулируемых) ве-
личин по ГОСТ 8.417 или в единицах шкалы выбранного прибора. Для обозначения
разрежения (вакуума) ставят знак «минус». Для приборов, встраиваемых непосред-
ственно в технологическое оборудование и не имеющих линий связи с другими при-
борами, предельные значения величин указывают рядом с обозначением приборов.
3.1.2.2 Упрощенный способ выполнения схем автоматизации
При упрощенном способе выполнения схем автоматизации контуры контроля
и управления показывают в сокращенном виде и непосредственно в пределах тех-
нологической схемы. Прямоугольники «Приборы местные» и «Приборы на щите»
274
ГЛАВА 3
при этом отсутствуют. Контур (независимо от количества входящих в него прибо-
ров) изображают в виде окружности (овала), разделенного горизонтальной линией.
В верхней части окружности записывают буквенное обозначение, определяющее из-
меряемый (регулируемый) параметр, а также все основные функции, выполняемые
данным контуром, в нижней — номер контура. Контур системы автоматического ре-
гулирования заканчивается изображением линии связи регулятора и исполнитель-
ного механизма с регулирующим органом. Вблизи окружности, обозначающей из-
меряемый параметр и функциональное назначение контура, указывается предельное
значение параметра.
Состав каждого контура, приведенного на схеме автоматизации, должен быть
приведен на принципиальной (электрической, пневматической) схеме и схеме внеш-
них соединений.
3.1.3 Схемы принципиальные
Принципиальные схемы определяют полный состав приборов и устройств, а так
же связей между ними, действие которых обеспечивает решение задач измерения,
регулирования, управления и сигнализации. Принципиальные схемы служат основа-
нием для разработки других документов проекта: монтажных таблиц щитов и пуль-
тов, схем внешних соединений и т. п.
К принципиальным схемам относят принципиальные электрические и пневма-
тические схемы контуров контроля, регулирования и управления, а также принци-
пиальные схемы питания.
Допускается совмещение схем различного функционального назначения (на-
пример, принципиальной схемы и схемы питания, принципиальной схемы и схемы
внешних соединений и т. д.).
Принципиальные электрические схемы выполняют по ГОСТ 2.701 и ГОСТ 2.702.
Схемы с применением комбинированных средств автоматики (пневматических и элек-
трических) выполняют по ГОСТ 2.701. На принципиальных схемах должна быть табли-
ца с заголовком «Перечень элементов», куда заносят данные о технических средствах,
изображенных на принципиальной схеме по ГОСТ 2.701. Провода в принципиальных
электрических схемах имеют определенные номера. Обозначение участков цепей слу-
жит для их опознания и отражает их функциональное назначение. Все участки цепей,
разделенные контактами аппаратов, обмоток реле, приборов, машин, резисторами и
другими элементами, должны иметь разное обозначение. Участки цепей, проходящие
через разъемные, разборные или неразборные контактные соединения, должны иметь
одинаковое обозначение. Для обозначения цепей применяются арабские цифры и про-
писные буквы латинского (реже кириллица) алфавита. Примеры обозначений прово-
дов: 11,35, 432, 801, LI, L2, L3 или А, В, С (обозначения фаз), L+, L- (для постоянного
тока), М (общая точка). Рекомендуемые номера для цепей управления, регулирования,
измерения: 1-399; для цепей сигнализации: 400-799; для цепей питания: 800-999.
На принципиальных пневматических схемах контроля и управления помимо
приборов, входящих в состав контуров, показывают линии питания сжатым возду-
хом и линии подвода электропитания. Импульсные линии связи, подводящие изме-
ряемые и регулируемые среды к датчикам, измерительным приборам и регуляторам,
на пневматических схемах не изображают.
Пневматические приборы (за исключением исполнительных механизмов и регу-
лирующих органов, изображаемых по ГОСТ 21.404) показывают упрощенно в виде
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
275
прямоугольников. В кружках, располагаемых по контуру прямоугольника, обознача-
ют входные и выходные штуцеры для подключения командных линий связи и пита-
ния. Внутри прямоугольника приводится буквенно-цифровое обозначение прибора,
которое состоит из буквенного обозначения, соответствующего функциональному
назначению прибора, и его порядкового номера (например: Ф2 — фильтр воздуха
№ 2, П31 — программный задатчик № 1 и пр.).
Станции управления и переключающие устройства изображают упрощенно, в
развернутом виде для одного из режимов (ручной, автоматический и др.). Линии
связи на пневматических схемах выполняют сплошными тонкими линиями, линии
электропитания — штрихпунктирными тонкими линиями. Направление пневмати-
ческого сигнала показывают стрелками.
На пневматических схемах питания показывают коллекторы сжатого воздуха,
стабилизаторы давления, фильтры, манометры, запорную арматуру и др. Стабилиза-
торы давления, запорные вентили и трехходовые краны изображают по ГОСТ 2.785,
манометры — по ГОСТ 2.781, и т. д.
3.1.4 Схемы соединений и подключения внешних проводок
Соединения и подключения внешних проводок показывают в виде схем или та-
блиц. Схемы соединений и подключения выполняют раздельно для каждого автома-
тизируемого узла или блока (например, блок насосов, блок реакторов и т. д.).
Таблицы выполняются только для единичных щитов на листах формата А4. Та-
блицы соединений и подключения выполняются по соответствующим формам.
Для двух- или трехсекционных щитов, а также для щитов, содержащих поворот-
ные конструкции, таблицы для каждой секции начинают с нового листа. Для трех-
секционных щитов таблицы начинаются с третьей секции (т. е. в порядке их располо-
жения на виде с внутренней стороны). Проводки, которые минуют сборки зажимов,
(например, термоэлектродные провода), в таблицы не записываются.
На первом листе таблицы соединений (подключения) сверху под заголовком
«Технические требования» приводят ссылки на принципиальные схемы и схемы
внешних проводок, на основании которых выполнена таблица. Таблица соединений
заполняется по возрастанию номеров маркировки цепей в принципиальной элек-
трической схеме и по методу непрерывности цепи, при котором, начало каждого по-
следующего проводника должно быть на том аппарате, где окончился предыдущий
проводник, или на аппарате, расположенном рядом.
Последовательность записи групп проводников: проводники электрических
принципиальных схем, проводники измерительных цепей (кроме термоэлектриче-
ских проводов), проводники для заземления приборов и аппаратов.
Порядок заполнения таблицы соединений следующий.
В графе «Проводник» указывают маркировку провода по принципиальной схеме
или по схеме внешних проводок. В графах «Откуда идет» и «Куда поступает» приво-
дят адрес присоединения проводников, например: поз.12б-К2:4...12в-К1:5, где 126 и
12в — позиции приборов по спецификации, К1 и К2 — колодки приборов, 4 и 5 —
номера выводов.
В графе «Данные провода» для проводов указывается марка, сечение и при не-
обходимости цвет провода. При отсутствии у электроаппаратуры (например, реле)
заводской нумерации выводов им присваивают условные номера, которые наносят
на монтажном символе. Например: поз.12/НГ11; no3.ll/S5, S6, S7; позЛб/Rl, R2.
276
ГЛАВА 3
Таблицы подключения проводок выполняются в порядке, соответствующем
расположению приборов, аппаратов и зажимов в щите на виде с внутренней сто-
роны слева направо и сверху вниз последовательно по стенкам щита. В графе «Вид
контакта» указывают позицию прибора по спецификации или позиционное обо-
значение аппарата, блока зажимов, рейки с набором зажимов. Условные обозна-
чения контактов и катушки: «з» — замыкающий контакт, «р» — размыкающий
контакт, «к» — катушка. Графы «Вывод» и «Вид контакта» заполняют только для
занятых выводов.
Электропроводки систем автоматизации выполняются кабелями и изолирован-
ными проводами на кабельных конструкциях, лотках, в пластмассовых и стальных
защитных трубах, защитных рукавах и в специальных каналах. Способ прокладки
зависит от условий окружающей среды, расположения оборудования, удобства экс-
плуатации и других факторов.
Выбор проводов и кабелей производится из условия допустимого их нагрева
электрическим током согласно нормам ПУЭ. Определение количества резервных
проводов и жил кабелей должно производиться с учетом следующих требований:
• при прокладке проводов в защитных трубах рекомендуется предусматривать ре-
зерв в размере 10% от количества рабочих проводов, но не менее одного провода;
• количество резервных жил медных кабелей выбирается из следующих сообра-
жений: при числе рабочих жил 8...26 — одна резервная жила; при 27...59 рабочих
жилах — две; при 60... 105 рабочих жилах — три; при 2...7 рабочих жилах резерв
не предусматривается;
• количество резервных жил алюминиевых кабелей выбирается из расчета: при чис-
ле рабочих жил 4... 10 — одна резервная жила; при 14...37 рабочих жилах — две.
При проектировании систем автоматизации наиболее широко применяются кон-
трольные кабели, кабели управления и кабели термоэлектродные.
Контрольные кабели применяются в цепях с номинальным напряжением перемен-
ного тока до 600 В при частоте до 100 Гц или в цепях напряжения постоянного тока до
1000 В. Контрольные кабели изготавливаются с медными или алюминиевыми жилами.
Кабели управления применяются при напряжении переменного тока до 250 В с
частотой до 1000 Гц или до 350 В постоянного тока. Кабели термоэлектродные ис-
пользуются для удлинения термоэлектродов термоэлектрических преобразователей
в цепях измерения температуры.
Контрольные кабели
Ниже приводятся марки контрольных кабелей, наиболее часто применяемые в
проектах автоматизации, с расшифровкой марки кабеля.
• КРВГ — кабель контрольный (К) с изоляцией из резины (Р), оболочка из поливи-
нилхлоридного (В) пластика, гибкий (Г); КРВГЭ — то же, экранированный; число
медных жил кабеля 4.. .37, сечением 0,75.. .6 мм2.
• КРВБ — изоляция из резины, оболочка из поливинилхлоридного пластиката,
броня (Б) из двух стальных лент, наружный покров; число жил кабеля 4...37, се-
чением 1.. .6 мм2.
• КРВБГ — изоляция из резины, оболочка из поливинилхлоридного пластиката,
броня из двух стальных лент, голый.
• КВВГ — изоляция из поливинилхлоридного пластиката, оболочка из поливи-
нилхлоридного пластиката; КВВГЭ то же, общий экран (Э) из алюминиевой или
медной фольги; число медных жил 4.. .37, сечением 0,75.. .6 мм2.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
277
• КВсВГ — изоляция из самозатухающего (с) полиэтилена, оболочка из поливи-
нилхлоридного пластиката.
• КВБбШв — изоляция из поливинилхлоридного пластиката (В), броня из двух
стальных лент (Бб), шланг (Ш) из поливинилхлоридного (в) пластиката.
Полная маркировка содержит также количество жил и сечение одной жилы,
например КВВГ 4x2,5; КРВГ 37x1,5. Здесь 4 и 37 — количество жил; 2,5 и 1,5 — се-
чения жил, мм2.
Контрольные кабели с алюминиевыми жилами маркируются по тому же принци-
пу, как и с медными жилами, но с буквой А, например: АКВВГ 4x2,5.
Кабели управления
• КУПВ — кабель управления (КУ) с полиэтиленовой (П) изоляцией в поливи-
нилхлоридной (В) оболочке; КУПЭВ и КУПЭР — то же, экранированные; число
жил 4... 108 (без экрана) и 4.. .52 (экранированный), сечением 0,35... 1,5 мм2.
• КУГВВ — кабель управления гибкий (Г) с медными жилами, с поливинилхлорид-
ной изоляцией и оболочкой (ВВ).
• КУГВЭВ — то же, с экранированными (Э) жилами.
• КУГВВЭ — кабель с медными жилами, с поливинилхлоридной изоляцией, в об-
щем экране (Э), наружная поливинилхлоридная оболочка.
Кабели управления выпускаются только с медными жилами.
Провода термоэлектродные
Применяются для удлинения термоэлектродов термоэлектрических преобразо-
вателей (термопар). Имеют следующие градуировки (по названиям материала жил):
М — медь-константан; П — медь-сплав «ТП»; ХА — хромель-алюмель; ХК —
хромель-копель; МК — медь-копель; НМ-МТ — сплав «никель-медь» — сплав
«медь-титан».
В проектах автоматизации широко применяются следующие марки термоэлек-
тродных проводов: ПТВ 2x0,2; 2x1,5 — провод (П) термоэлектродный (Т) с поли-
винилхлоридной (В) изоляцией (градуировки М, П, ХК и МК). ПТГВ 2x0,75; 2x1,0;
2x1,5; 2x2,5 — то же, но гибкий (Г); ПТВП 2x0,75; 2x1,0 — то же, но в оплетке из
стальной оцинкованной проволоки (П); ПТФ 1x0,5; 1x1,5; 1x2,5; 1x4,0 — провод
термоэлектродный с изоляцией из фторопластовой (Ф) пленки и оплетке из стекло-
нитей, пропитанных кремнийорганическим лаком (жилы из сплавов НМ или МТ);
ПТФДЭ 2x0,5; 2x1,5; 2x2,5; 2x4,0 — два (Д) провода ПТФ в общей оплетке из луже-
ных медных проволок, которые являются экраном (Э).
Кабели термоэлектродные
• КМТВ М — кабель (К) многожильный (М), термоэлектродный (Т), с поливинил-
хлоридной (В) изоляцией и оболочкой с жилами медь-константан (М);
• КМТВ ХК — то же, с жилами хромель (Х)-копель (К);
• КМТВЭВ М — кабель многопроволочный, термоэлектродный, с поливинилхло-
ридной изоляцией, в экране (Э) из медной или алюминиевой фольги, в поливи-
нилхлоридной (В) оболочке, с жилами медь-константан (М).
• КМТВЭВ ХК — то же, с жилами хромель-копель.
Кабели термоэлектродные выпускаются с жилами сечением 2,5 мм2, количество
жил 8 или 14. Пример полной маркировки КМТВ ХК 14x2,5.
Провода установочные
Применяются в цепях с переменным напряжением до 450 В и частотой до 400 Гц
или при постоянном напряжении до 1000 В.
278
ГЛАВА 3
Широко применяются следующие марки проводов:
• ПВ1 — провод (П) с медной жилой, с поливинилхлоридной изоляцией (В). При-
мер полной марки: ПВ 1x1,5;
• ПВ2 — то же, но гибкий;
• ПВЗ — повышенной гибкости. Изготавливается одно- или двухжильным. При-
меры: ПВЗ 1x2,5; ПВЗ 2x2,5;
• ППВ — провод (П) с медными жилами, с поливинилхлоридной изоляцией,
плоский (вторая П), с разделительным основанием. Выпускается одно-, двух- и
трехжильным, сечением от 0,75 до 4 мм2. Примеры: ППВ 1x1,5; ППВ 2x1,5; ППВ
3x1,5.
Установочные провода выпускаются также и с алюминиевыми жилами. Эти про-
вода изготавливаются одно-, двух- и трехжильными. Примеры обозначений: АПВ
1x2,5; АПВ 3x2,5; АППВ — 2x2,5.
Трассы электропроводок средств автоматизации, как правило, совпадают с трасса-
ми силовых электропроводок. От условий прокладки зависит уровень помех и надеж-
ность систем автоматизации. В связи с этим запрещается объединение в одном кабеле:
• измерительных цепей и цепей управления, сигнализации, питания и т. п., вклю-
чая цепи питания исполнительных механизмов и задвижек;
• цепей пожарной сигнализации и пожарной автоматики.
При совместной прокладке контрольных и силовых кабелей необходимо соблю-
дать следующие требования:
• при двухстороннем расположении кабельных конструкций — на противополож-
ных сторонах;
• при одностороннем расположении кабельных конструкций — контрольные кабе-
ли прокладываются под силовыми с разделительной прокладкой из асбоцемента.
Прокладка проводов и кабелей осуществляется в коробах и лотках.
Короба состоят из металлических корпусов и крышек (толщиной 1,5 мм); крыш
ки запираются замками-защелками, секции соединяются сваркой. Габариты секций:
сечение 100x100, 150x150, 200x200 мм2, длина 2100 мм. Виды соединений (секций):
прямые; угольник горизонтальный (поворот в сторону); угольник вертикальный с
наружной крышкой (поворот вверх, поворот вниз); тройник горизонтальный; трой-
ник вертикальный; крестовина. Короба являются механической защитой проводов и
кабелей. Провода и кабели должны занимать не более 60% сечения короба.
Лотки состоят из перфорированных металлических корпусов. Габариты секций:
ширина 85,145, 225 мм, длина 2000 мм, высота борта 25 мм. Лотки с высокими борта-
ми не имеют сплошного дна, которое заменяется перфорированными металлическими
полосами. Габариты секций: ширина 200,400 мм; длина 2000 мм; высота борта 100 мм.
Виды соединений (секций): прямые, угловые горизонтальные, угловые вертикаль-
ные, тройниковые. Лотки являются несущей конструкцией и применяются для кабелей
при открытой прокладке. Укладка в лотках осуществляется в один слой, в лотках с вы-
сокими бортами — в несколько. Высота установки лотков — не менее 2 м.
Электропроводки в защитных трубах применяются для прокладки проводов и
небронированных кабелей в тех случаях, когда другие способы прокладки нецелесо-
образны или не рекомендуются (в коробах, на лотках, открытые кабельные провод-
ки). Для прокладки используются стальные и пластмассовые трубы.
Размеры труб:
• стальные водогазопроводные трубы по ГОСТ 3262-75, Оу = 15. ..50 мм;
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ 279
• стальные электросварные трубы по ГОСТ 10704-76, Dy = 20...50 мм;
• полиэтиленовые трубы по ГОСТ 18599-83, DK = 16.. .50 мм;
• полипропиленовые трубы по ТУ 3871027100-76, £>н = 25...50 мм;
• винипластовые трубы по ТУ 19-215-83, £>н = 16. ..50 мм,
где D — диаметр условный, DH — диаметр наружный.
Трубные проводки — это совокупность труб и трубных кабелей (пневмокабелей),
соединительных и присоединительных устройств, арматуры, устройств защиты от
внешних воздействий, крепежных установочных узлов и деталей, собранных в еди-
ную конструкцию, проложенную и закрепленную на элементах зданий или техноло-
гическом оборудовании.
По расположению на объекте трубные проводки делят на внутренние, наружные,
скрытые и открытые, а по функциональному назначению — на основные и вспомога
тельные. К основным трубным проводкам относятся: импульсные, предназначенные
для передачи воздействия контрол ируемой технологической среды на чувствительные
элементы измерительных преобразователей и приборов непосредственно или через
разделительные среды; командные, обеспечивающие передачу командных сигналов
от передающих устройств к приемным; питающие, обеспечивающие подачу сжатого
воздуха к пневматическим техническим средствам автоматизации. Вспомогательные
трубные проводки: обогревающие, охлаждающие и дренажные. Трубные проводки
выполняются из черных и цветных металлов или полимерных материалов.
Трубные проводки должны обеспечивать возможность проведения испытаний
приборов во время монтажа, наладки и эксплуатации, а также продувки и промывки
приборов без остановки оборудования; заполнения приборов и импульсных трубок
разделительными жидкостями; удаления газовых пузырьков из приборов и импульс-
ных трубок, заполненных жидкостью; удаления конденсатов жидкостей из приборов
и импульсных трубок, заполненных газами.
Трубные проводки должны иметь уклоны для стока конденсата или отвода газов.
В верхних точках импульсных трубных проводок устанавливаются газосборники,
а в нижних точках — конденсатосборники. При наличии пульсаций среды, запол-
няющей импульсные проводки, должны устанавливаться сглаживающие устройства
(демпферы).
Открытые кабельные электропроводки выполняются на кабельных металличе-
ских конструкциях. Кабельные конструкции для прокладки кабелей комплектуют-
ся из серийно изготавливаемых стоек, полок, подкосов для полок, скоб. Кабельные
конструкции монтируются на стенах и применяются для бронированных кабелей.
Небронированные кабели прокладываются на лотках, установленных на кабельных
конструкциях. К закрытым кабельным проводкам относятся кабельные электропро-
водки в каналах, туннелях, коллекторах, блоках, траншеях. Кабели в коллекторах,
туннелях, каналах укладываются на кабельных конструкциях, устанавливаемых на
боковых стенках. При глубине канала менее 0,9 м кабели прокладываются по дну.
Рекомендуется на схемах внешних соединений приводить схемы подключения элек-
тропроводок к местным приборам, а также к приборам, установленным непосредственно
на технологическом оборудовании и трубопроводах. Приборы изображают упрощенно
в виде прямоугольников или внешних очертаний приборов. Для входных и выходных
сигналов внутри изображений приборов показывают колодки зажимов в форме прямо-
угольников или кружков. Внутри прямоугольника, обозначающего прибор, указывают
тип прибора и номер типового монтажного чертежа (ТМЧ) установки прибора.
280
ГЛАВА 3
Обозначение жил кабелей и проводов на схемах соединений и подключения при-
нимают в соответствии с принципиальными электрическими схемами.
На схеме внешних соединений в общем случае показывают первичные приборы
и исполнительные механизмы, установленные непосредственно на технологическом
оборудовании и коммуникациях; местные приборы и групповые установки приборов;
щиты, пульты и комплексы технических средств; внешние электрические и трубные
проводки между всеми техническими средствами автоматизации; защитное заземле-
ние и зануление систем автоматизации; перечень элементов схемы по ГОСТ 2.701.
В верхней части чертежа располагается таблица с наименованием строк: «Наиме-
нование параметра и место отбора импульса», «Категория трубной проводки», «Обо-
значение чертежа установки», «Позиционное обозначение (по спецификации обору-
дования)». Под таблицей изображают первичные преобразователи, ниже — местные
приборы, щиты, пульты и др.
Внешние электрические и трубные проводки выполняют сплошными толстыми
линиями. При этом проводки, проложенные в коробках, изображают двумя парал-
лельными тонкими линиями (расстояние между линиями 3-4 мм). Для каждой про-
водки над изображающей ее линией приводится техническая характеристика провод-
ки (тип и марка кабеля, провода, трубы и т. д.) и длина проводки в метрах. Допускается
длину проводки указывать под линией проводки. Для электропроводок в защитных
трубах под линией указывают характеристику и длину защитной трубы. Контрольным
кабелям и защитным трубам, в которых проложены жгуты проводов, присваивают
порядковые номера. Порядковые номера коробам присваивают с добавлением буквы
К. Трубным проводкам (импульсным, командным, питающим, дренажным, вспомога-
тельным, пневмокабелям) присваивают порядковые номера с добавлением перед ними
цифры 0. Номера проводок указывают в окружностях, помещаемых в разрыве линий.
Проводам, используемых в качестве нулевых защитных проводников, присваивают
цифровое обозначение с добавлением буквы N (например, 801N или N801).
В перечень элементов, выполняемый по ГОСТ 2.701, включают запорную арма-
туру, соединительные коробки, кабели, провода и пневмокабели, материалы для за-
щитного заземления и зануления оборудования и проводок.
Согласно правилам выполнения схем подключения внешних проводок на схеме
подключения помимо изображений подключаемых приборов показывают подключе-
ние к ним кабелей, проводов и труб с их обозначениями (номерами).
Правила выполнения таблиц соединений и подключения внешних проводок
В графах таблицы соединений указывают:
• в графе «Кабель, жгут, труба» — номер электрической или трубной проводки;
• в графе «Направление» — наименование или обозначение технических средств
автоматизации, от которых (откуда) и к которым (куда) направлена данная сое-
динительная проводка;
• в графе «Направление по чертежам расположения» — адрес прокладки внешних
проводок;
• в графе «Измерительная цепь» ставят «плюс» — только для измерительных цепей;
• в графе «Чертеж установки» — обозначение чертежа установки приборов средств
автоматизации, указанных в подзаголовке «Откуда» графы «Направление».
Правила выполнения таблицы подключения.
В таблицу подключений записывают вначале электрические проводки, затем
(с нового листа) трубные.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
281
В графах таблицы подключения указывают:
• в графе «Кабель, жгут» — номер кабеля, провода, жгута проводов, пневмокабеля,
подключаемых к устройству, указанному в заголовке;
• в графе «Проводник» — обозначения жил кабелей, проводов, пневмокабелей.
Если два проводника подключают к одному выводу (зажиму), рядом с обозначе-
нием проводника ставят «звездочку»;
• в графе «Вывод» — обозначение вывода и номер зажима (сборки переборочных
соединителей и номер соединителя), т. е. место подключения жил кабеля (труб)
в данном устройстве.
3.1.5 Чертежи расположения оборудования и внешних проводок систем
автоматизации
На чертежах расположения оборудования и внешних проводок систем автома-
тизации (планах, разрезах, узлах) показывают контуры зданий (сооружений) с рас-
положением технологического оборудования и коммуникаций; технические средства
автоматизации; потоки проводок, одиночные электрические и трубные проводки,
несущие и опорные конструкции для их прокладки; проходы проводок через стены и
перекрытия; спецификацию к чертежам расположения по ГОСТ 21.101.
На чертежах расположения приводят оси здания (сооружения), отметки полов
этажей и площадок, на которых устанавливают технические средства автоматизации;
классы взрыво- и пожароопасных зон, категорию и группу взрывоопасных смесей и
границы взрывоопасных зон в помещениях и наружных установках в соответствии с
требованиями Правил устройства электроустановок (ПУЭ).
Условные графические изображения щитов, пультов, одиночных и групповых
установок приборов, внешних проводок, соединительных и протяжных коробок вы-
полняют по ГОСТ 21.614.
В спецификацию к чертежу расположения включают несущие и опорные кон-
струкции; трубные блоки; конструкции проходов проводок через стены и перекры-
тия зданий и сооружений; конструкции узлов установки и крепления для прокладки
проводок; монтажные изделия и материалы.
3.1.6 Чертежи установок средств автоматизации
При отсутствии типовых чертежей в составе основного комплекта выполняют
чертежи установок приборов, щитов, пультов, крепления электрических и трубных
проводок (далее — чертежи установок). На чертежах установок в общем случае по-
казывают:
• упрощенное изображение несущей конструкции и расположенные на ней приборы;
• подключение к приборам внешних проводок;
• размеры между осями приборов;
• спецификацию по ГОСТ 21.101;
В спецификацию к чертежу установки включают изделия и материалы в следую-
щей последовательности:
• технические средства автоматизации;
• изделия для установки и крепления (рамы, стойки, кронштейны и т. д.);
• изделия и детали, необходимые для монтажа электрических и трубных проводок
(соединительные коробки, соединители и т. д.);
• кабели, провода, трубы.
282
ГЛАВА 3
3.1.7 Чертежи общих видов нетиповых средств автоматизации
Эти чертежи разрабатываются при отсутствии типовых установочных чертежей
приборов и технических средств или при необходимости разработки нетиповых кон-
струкций закладных устройств, щитов и пультов.
Эскизному чертежу устройства присваивают обозначение, состоящее из обозначе-
ния основного комплекта рабочих чертежей по ГОСТ 21.101, через точку указывается
буква шифра Н и порядковый номера эскизного чертежа (например, 2345-11-АТХ.Н1).
Чертеж единичного щита в зависимости от функционального назначения и кон-
структивных особенностей содержит: спецификацию; чертеж «Вид спереди»; чертеж
«Вид на внутренние плоскости»; таблицу надписей. На чертеже «Вид спереди» еди-
ничного щита показывают приборы, аппараты сигнализации и органы управления,
элементы мнемосхем, надписи о назначении приборов. На чертеже «Вид на внутрен-
ние плоскости» щитов боковые стенки, поворотные конструкции, крышки и т. п.,
находящиеся в разных плоскостях, изображают условно развернутыми в плоскости
чертежа. Над изображением помещают заголовок «Вид на внутренние плоскости
(развернуто)». На изображения плоскостей наносят:
• приборы, электро- и пневмоаппараты;
• изделия для монтажа электрических и трубных проводок;
• элементы крепления внутрищитовой аппаратуры;
« жгуты электрических и трубных проводок.
3.1.8 Спецификация оборудования, изделий и материалов
Спецификацию оборудования, изделий и материалов выполняют по ГОСТ 21.110.
В спецификацию оборудования включают все виды технических средств автома-
тизации, в том числе нетиповые, которые должны быть смонтированы при выполне-
нии монтажных работ.
Спецификация оборудования состоит из разделов:
• приборы;
• комплексы технических средств;
• щиты и пульты;
• электроаппарата;
• трубопроводная арматура;
• кабели и провода;
• материалы;
• монтажные изделия;
• технические средства автоматизации, поставляемые комплектно с оборудованием.
Исходными материалами для проектирования общих видов щитов и пультов
являются схемы автоматизации, принципиальные схемы и чертежи щитового по-
мещения.
Рекомендуется выполнять спецификацию щитов и пультов самостоятельным до-
кументом. В этом случае спецификациям присваивают следующие наименования и
обозначения: а) спецификация оборудования, изделий и материалов— СГ, б) специ-
фикация щитов и пультов (включая электроаппаратуру) — С2.
Приборы и средства автоматизации записывают в порядке технологических па-
раметров:
• приборы и регуляторы для измерения и регулирования: температуры; давления и
разрежения; расхода и количества; уровня; состава и качества вещества;
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
283
• прочие приборы, регуляторы и комплектные устройства;
• вспомогательные устройства.
Учитывая специфику приборов для измерения состава и качества вещества, для
них принимают следующий порядок записи: газоанализаторы однокомпонентные;
газоанализаторы многокомпонентные; сигнализаторы концентрации газов; анали-
заторы и концентратомеры жидкостей; измерители электропроводности; рН-метры;
плотномеры; вискозиметры; солемеры; влагомеры.
В пределах контура приборы записывают в следующем порядке: первичный при-
бор, преобразователь, вторичный прибор, функциональный блок, регулятор (кон-
троллер), исполнительное устройство, вспомогательные устройства (в порядке воз-
растания буквенных обозначений по ГОСТ 21.408).
Вспомогательные устройства, не относящиеся конкретно к определенному ком-
плекту приборов и регуляторов, необходимые для работы разных комплектов аппа-
ратуры, и имеющие одинаковые технические характеристики (например, манометры
для измерения давления питания сжатым воздухом, фильтры и редукторы воздуха,
блоки группового питания приборов сжатым воздухом — БИВ), включают в специ-
фикацию в конце раздела.
В спецификации предусматривают необходимый ЗИП, обеспечивающий замену
приборов на время их ремонта, наладки и поверки. При подсчете длин кабелей и про-
водов необходимо учитывать увеличение длины на 6%, а количества труб и проката
на 4-5%.
Текстовые материалы проекта выполняются в соответствии с ГОСТ 2.105-95
ЕСКД и ГОСТ 2.105-96 ЕСКД.
3.1.9 Классификация щитов и пультов
По назначению:
• оперативные — с помощью которых осуществляется контроль и управление тех-
нологическим процессом;
• диспетчерские — с помощью которых диспетчер, получающий информацию о
состоянии технологического процесса, ведет наблюдение и при необходимости
осуществляет управление процессом.
По исполнению:
• шкафные одиночные щиты двух- и трехсекционные с задними дверями;
• панельные щиты с каркасом;
• шкафные щиты с передней и задней дверьми;
• стативы для установки вспомогательной аппаратуры;
• пульты для размещения аппаратуры управления и сигнализации.
Более подробно о размерах щитов, их комплектации и характеристик см. в п. 3.2
главы 3 раздела 1 «Щитовое оборудование».
На фасадной панели проектируемого щита устанавливаются:
• измерительные и регулирующие приборы;
• светосигнальная аппаратура;
• мнемосхемы;
• переключатели и кнопки;
• аппаратура управления оперативного назначения.
Средства автоматизации и аппаратура управления компонуются функционалы
ными группами в порядке хода технологического процесса.
284
ГЛАВА 3
Рекомендуемая высота установки (от пола до нижнего края прибора), мм:
• показывающие приборы и сигнальная аппаратура: 950-1900;
• регистрирующие приборы: 1100-1700;
• оперативная аппаратура управления (кнопки, переключатели): 800-1600;
• мнемосхемы 1000-1900.
Рекомендуемый масштаб чертежа одиночного щита 1:10, составного щита 1:25.
На чертежах общих видов щиты, приборы, средства автоматизации, аппараты,
элементы их крепления и т. п. изображают упрощенно в виде внешних очертаний
сплошными основными линиями.
Шкафам, панелям, пультам, а также приборам и средствам автоматизации, аппа-
ратам и монтажным изделиям присваиваются номера позиций в порядке записи их в
перечень составных частей.
Размеры до щитовых приборов на чертеже общего вида щита проставляют от
следующих базовых линий: по вертикали — от нижнего края фасадной панели щита;
по горизонтали — от вертикальной оси симметрии фасадной панели.
На чертеже щита указываются дециметровые шкалы стоек щитов, которые слу-
жат для координации установленной внутри аппаратуры по вертикали, а также жгуты
электрических проводок (кроме вертикальных жгутов), прокладываемых в щитах.
Боковые стенки щита изображаются условно развернутыми в плоскости чертежа.
Над изображением помещают заголовок «Вид на внутренние плоскости (развернуто)».
На внутренних плоскостях щитов показывают приборы, электроаппаратуру, в
том числе пневмоаппаратуру, изделия для монтажа электропроводок (блоки зажи-
мов, рейки с наборными зажимами, колодки маркировочные, упоры), скобы, уголь-
ники и т. д.
Для всех приборов, электроаппаратуры, блоков зажимов и т. п. над ними или
справа от них указывают: для приборов — позиции по спецификации; для электро-
аппаратуры — позиционные обозначения по принципиальным схемам.
Для размещения щитов и пультов предусматриваются специальные оператор-
ские и вспомогательные помещения.
В операторских помещениях устанавливается аппаратура оперативного контро-
ля и управления, мнемосхемы, рабочие станции, контроллеры и пр. Вспомогатель-
ные помещения используются для размещения технических средств автоматизации
непосредственно у технологического оборудования.
В настоящее время многие проектные институты и организации при разработ-
ке проектов автоматизации используют Американский стандарт ISA S5.1-84 (92)
INSTRUMENTATION SYMBOLS & IDENTIFICATION (formerly ANSI/ISA-5.1-84
(92)). К настоящему времени оригинал стандарта не русифицирован. Распростране-
нием оригинала стандарта занимается, в частности, ФГУП СТАНДАРТИНФОРМ.
В данном стандарте имеется ряд новых принципиальных обозначений, не
вошедших в ГОСТ 21.404, которые касаются обозначений современных средств
автоматизации — контроллеров, рабочих станций, локальных вычислительных
сетей и т. п. В целом, по аналогии с упрощенным способом выполнения схем
автоматизации по ГОСТ 21.404, стандарт S5.1 позволяет сократить число обо-
значений и линий связи, что делает чтение схем автоматизации более понятным.
Однако при составлении спецификаций необходимо следить за тем, чтобы все
приборы и компоненты контуров, не обозначенные на схеме автоматизации, вош-
ли в спецификацию.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
285
3.2. Щитовое оборудование
3.2.1 Щиты и пульты
Щиты (шкафы) предназначены для размещения приборов, регуляторов, пуско-
регулирующей, коммутационной и сигнальной аппаратуры и других средств авто-
матизации, а также для удобства размещения, обслуживания и защиты от тепловых,
электромагнитных и механических воздействий щитовых приборов.
Основные принципы проектирования современных шкафов управления:
• Модульность: полностью сборный шкаф, включающий каркас (состоит из 4-х
стоек, закрепленных к верхней и нижней рамам), заднюю и боковые панели, пе-
реднюю дверь (стальная или из закаленного стекла), верхнюю панель и цоколь. В
зависимости от заказа шкафы могут иметь заднюю и (или) боковую дверь.
• Термостатирование: устройство теплообмена, состоящее из терморегулятора с
системой вентиляции и (или) обогрева шкафа.
• Унифицированные монтажные, установочные и крепежные изделия (монтажные
платы, вертикальные и горизонтальные рейки, кронштейны, закладные гайки,
петли, дверные ограничители, платы кабельного ввода, замки и ручки).
Классификация шкафов управления:
Стандартный напольный шкаф по спецификации западных фирм SAREL, RITTAL,
SCHROFF и др. (рис. 3.1).
• Высота 1200 мм (ширина 600 и 800 мм; глубина 600 и 800 мм).
• Высота 1600 мм (ширина 600 и 800 мм; глубина 600 и 800 мм).
• Высота 1800 мм (ширина 600, 800 и 1000 мм; глубина 400, 500, 600 и 800 мм).
• Высота 1800 мм (ширина 1000 мм; глубина 400 и 600 мм).
• Высота 1800 мм (ширина 1200 мм; глубина 400, 500 и 600 мм).
• Высота 2000 мм (ширина 400 мм; глубина 500 и 600 мм).
• Высота 2000 мм (ширина 600,800,1000 и 1200 мм; глубина 400, 500, 600 и 800 мм).
• Высота 2200 мм (ширина 600, 800 и 1200 мм; глубина 600 и 800 мм).
Щиты по спецификации заводов-изготовителей РФ (рис. 3.2)
• Щит шкафной с правой дверью (ЩШ-ПД). Высота 2200 мм (ширина 600 и 1000
мм; глубина 800,1000 и 1200 мм).
• Щит шкафной с левой дверью (ЩШ-ЛД). Высота 2200 мм (ширина 600 и 1000 мм;
глубина 800,1000 и 1200 мм).
• Щит шкафной с задней дверью (ЩШ-ЗД). Высота 22(Х) мм (ширина 600, 800,1000
и 1200 мм; глубина 600 и 800 мм).
Рис. 3.3
Рис. 3.1
Рис. 3.2
286
ГЛАВА 3
Рис. 3.4
• Щит шкафной с задней дверью, открытый с двух сторон (ЩШ-ЗД-О2). Высота
2200 мм (ширина 600, 800,1000 и 1200 мм; глубина 600 и 800 мм).
• Щит шкафной с задней дверью, открытый справа (ЩШ-ЗД-ОП). Высота 2200 мм
(ширина 600,1000 и 1200 мм; глубина 600 и 800 мм).
• Щит шкафной с задней дверью, открытый слева (ЩШ-ЗД-ОЛ). Высота 2200 мм
(ширина 600,1000 и 1200 мм; глубина 600 и 800 мм).
• Щит шкафной с передней и задней дверью (ЩШ-ПЗД). Высота 2200 мм (ширина
600, 800,1000 и 1200 мм; глубина 600 и 800 мм).
• Щит шкафной с передней и задней дверью (ЩШ-ПЗД). Высота 1800 мм (ширина
600, 800,1000 и 1200 мм; глубина 400 и 600 мм).
• Щит шкафной малогабаритный с передней (задней) дверью (ЩШМ). Высота 400,
600,1000 и 1400 мм (ширина 300, 400,600 и 800 мм; глубина 250,350, 500 и 600мм).
Панельные и секционные щиты по спецификации заводов-изготовителей РФ (рис. 3.3)
• Щит панельный с каркасом (ЩПК). Высота 2200 мм (ширина 600, 800 и 1000 мм;
глубина 600 мм).
• Щит панельный малогабаритный (ЩПМ). Высота 400 (ширина 300 мм; глубина 600
мм); высота 600 мм (ширина 400 мм; глубина 600 мм), высота 1000 мм (ширина 600
и 800 мм; глубина 600 мм).
• Секционный щит (состоит из 2, 3 и более секций). Высота 2280 мм (ширина сек-
ций 600, 800 и 1000 мм). Каждая секция имеет помимо базовой панели также
панель вспомогательную (ПнВ) шириной 600, 800 и 1000 мм, панель вспомога-
тельную с дверью (ПнВ-Д) шириной 1000 мм, панель декоративную (ПнД) шири-
ной 600, 800, 1000, 1200, 1400, 1600 и 1800 мм, панели торцевые левую и правую
(ПнТ-Л и ПнТ-П) шириной 600 мм. Высота декоративных панелей 600, 800 и 1000
мм, остальных — 2280 мм.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
287
Пульты (панели) управления по спецификации за-
падных фирм SAREL, RITTAL, SCHROFF, ETA и др.
Полностью сборный пульт управления с откид-
ной верхней панелью или пульт управления, состоя-
щий из основания, консоли (столешницы) с откид-
ной панелью и верхней части с откидной передней
панелью показан на рис. 3.4. Откидные панели обе-
спечивают удобство монтажа и обслуживания уста-
новленного оборудования, пускорегулирующей и
сигнальной аппаратуры. Высота пульта 1400 мм, ширина 1200,1400 и 1600 мм, глубина
600 и 800 мм. На рис. 3.4, в показан пульт фирмы RITTAL «TopPult».
Стандартный настенный шкаф (рис. 3.5):
• высота 300 мм (ширина 200,300 и 400 мм; глубина 150 и 200 мм);
• высота 400 мм (ширина 300, 400 и 600 мм; глубина 150, 200 и 250 мм);
• высота 600 мм (ширина 400 и 600 мм; глубина 200, 250, 300 и 400 мм);
• высота 800 мм (ширина 600 и 800 мм; глубина 250 и 300 мм);
• высота 1000 мм (ширина 600, 800 и 1000 мм; глубина 250, 300 и 400 мм);
• высота 1200 мм (ширина 800 и 1000 мм; глубина 300 и 400 мм).
К принадлежностям настенных шкафов относятся монтажные платы, рейки, пла-
ты кабельного ввода, замки, приборы освещения, терморегуляторы и др.
Пульты отдельно стоящие и приставные по спецификации заводов-изготовителей РФ
• Пульт (П). Высота 900 мм (ширина 600,800,1000 и 1200 мм; глубина 600 и 800 мм).
• Пульт приставной (ПП). Высота 900 мм (ширина 600,800,1000 и 1200 мм; глубина
400 и 600 мм).
• Пульт приставной правый (ПП-П). Высота 900 мм (ширина 600, 800, 1000 и 1200
мм; глубина 400 и 600 мм).
• Пульт приставной левый (ПП-Л). Высота 900 мм (ширина 600, 800, 1000 и 1200
мм; глубина 400 и 600 мм).
• Пульт с вертикальной приборной приставкой (ПВП). Высота 1600 мм (ширина
600, 800,1000 и 1200 мм; глубина 1200 мм).
• Пульт с наклонной приборной приставкой (ПНП). Высота 1200 мм (ширина 600,
800,1000 и 1200 мм; глубина 1200 мм).
Основные характеристики шкафов и пультов
К ним относят:
• Габариты и исполнение шкафа.
• Степень защиты шкафа IP и IK (IP— степень защиты от проникновения твердых
тел и воды, диапазон от IP11 до IP68; IK— степень защиты от внешних механиче-
ских ударов; диапазон— от IK01 до IK10). Большинство шкафов имеют степень
защиты IP50...IP66 и IK08...IK10.
• Материал корпуса. Используются стальной лист толщиной 1,5...2,0 мм (нержа-
веющая сталь). Для настенных шкафов используются (помимо стального листа)
следующие материалы: ударостойкий фибергласс, поликарбонат и ABS. Настен-
ные шкафы из фибергласса, поликарбоната и ABS используются в производствах
с агрессивными средами (гальваника, нефтепереработка, другие химические
производства). Для герметизации корпусов используются прокладки из полиу-
ретана. Температурный диапазон при эксплуатации корпусов из поликарбоната
от -50 до +130 °C, из ABS от -40 до +70 °C.
288
ГЛАВА 3
• Цвет покрытия шкафа. Цвет должен соответствовать стандарту МЭК (RAL 7032,
RAL 7035, RAL 2000 и др). Основные цвета: серый, светло-серый, светло-голубой,
серебристый и черный (для цоколя и рамы).
Термостатирование шкафа
.Средства термостатирования должны обеспечить постоянную температуру и влаж-
ность внутри шкафа при колебаниях наружной температуры и влажности. Встроенный
внутрь термостат управляет врезными вентиляторами и нагревателями. Как правило,
поток воздуха распространяется снизу вверх с помощью расположенных внизу шкафа
Рис. 3.6
19 "-нагнетателей и выходит через щели в верхней пане-
ли шкафа. Блок 19'-нагнетателей, состоящих из 3 венти-
ляторов, имеет высоту 1U, 2U или 3U. Для фильтрации
воздуха, проходящего через приточные и вытяжные от-
верстия, применяются фильтры из синтетического во-
локна [3.16].
На рис. 3.6 показаны блок врезных вентиляторов
(рис. 3.6, й) и система воздуховода фирмы Rittal (рис.
3.6, б). Также используется замкнутая система венти-
ляции, при которой воздух циркулирует внутри шка-
фа без выхода наружу.
Шкафы и пульты для АСУ ТП должны соответ-
ствовать стандарту МЭК 60439-1, ГОСТ Р 51321.1-2000,
ГОСТ 10985-80 и др. Согласно СПДС (Система Про-
ектной Документации для Строительства), ГОСТ 21.101
(Правила выполнения рабочей документации автома-
тизации технологических процессов) и ГОСТ 21.408-93
исходными материалами для проектирования щитов и
пультов являются рабочие чертежи проекта — схемы автоматизации, чертежи фасадов
и схемы внутренних соединений щитов и пультов, принципиальные электрические и
пневматические схемы, таблицы соединений и подключений внешних проводок и черте-
жи установок средств автоматизации.
В целом, выбор шкафов и пультов определяется следующими условиями:
• функциональное назначение проекта (контроль, сигнализация, управление, мо-
ниторинг процесса и др.);
• количество средств автоматизации и их габариты, размещаемые на передних па-
нелях, поворотной раме и внутри шкафа или пульта;
• удобство монтажа, обслуживания и ремонта;
• допустимые площади размещения шкафов или пультов;
• правила техники безопасности в части расстояний между шкафами и оборудова-
нием, а также проходов для обслуживания;
• климатические условия в месте установки шкафа или пульта (температура, влаж-
ность, процентное содержание вредных примесей...);
• возможные электромагнитные и механические воздействия на шкафы и пульты.
3.2.2 Низковольтная аппаратура
К низковольтной аппаратуре принято относить низковольтные коммутацион-
ные изделия (реле, пускатели, кнопки и кнопочные посты, переключатели, автомати-
ческие выключатели, устройства пусковые и др.), а также светосигнальную арматуру
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
289
(сигнальные лампы, световые табло, светосигнальные колонны). Низковольтная ап-
паратура применяется в электрических цепях с напряжением до 1000 В (в основном с
напряжением 220/230/240, 380/400, 600/690 VAC и 12, 24, 48, ПО VDC).
Реле. Реле подразделяются на промежуточные реле, реле времени, реле контроля
тока, напряжения, температуры, реле защиты электродвигателей (от обрыва фаз, к.з.,
перегрузки по току, перегрева) и др. Основное внимание ниже отводится промежу-
точным реле, широко используемым в щитовом оборудовании. Характеристики др.
типов реле указаны в каталогах отечественных производителей реле (ООО «Реле и
автоматика», ОАО «Завод Электропульт», ОАО «Кашинский завод электроаппарату-
ры», ООО «Элефант» и др.), а также в каталогах зарубежных фирм (FINDER, Rockwell/
Allen Bradley, Omron, Releco и др.).
Основными характеристиками промежуточных реле являются: напряжение пи-
тания, число и тип контактов, максимально допустимый ток через контакты реле
(максимальное напряжение переключения), наличие/отсутствие индикации включе-
ния/отключения, габариты, вид монтажа (печатная плата или розетка), число циклов
срабатывания при полной нагрузке, время срабатывания, напряжение изоляции
между обмоткой и контактами, допустимая температура окружающей среды, степень
защиты по МЭК и др.
Напряжение питания постоянного тока (по исполнениям) у промежуточных
реле составляет: 6, 9, 12, 15, 24, 27, 48, 60, ПО, 220 VDC (реже используются 5, 80, 125
VDC). Напряжение питания переменного тока (по исполнениям) составляет: 6,12,24,
36, 40, 48, 60, 110,127, 220, 380 VAC (реже используется 550 и 660 VDC). Напряжение
питания реле, устанавливаемых на печатные платы, составляет: 5,6,7,9,12,14,18,21,
24, 28, 36,48,60,90, 100 VDC.
Контакты реле делятся на замыкающие (НО, NO), размыкающие (НЗ, NC) и пере-
ключающие (П, СО). Число контактов составляет (по исполнениям реле) от 1 до 8.
Рис. 3.7
Наибольшее применение в схемах автоматизации находят реле с переключающими
контактами (до 4П).
Коммутируемое напряжение постоянного и переменного тока для большинства
отечественных реле составляет 12 (24).. .250 В (для реле серий РПЛ, РЭВ от 24 до 660 В).
Максимальное коммутируемое напряжение реле зарубежных фирм составляет 250 В и
400 В. Механический ресурс реле (число циклов срабатывания) составляет для различ-
ных типов промежуточных реле от 10-106 до 50-Ю6. Для некоторых реле зарубежных
фирм при заказе оговаривается материал контакта и контактной цепи (AgCdO, AgNi,
AgSnO2 и др.). Время срабатывания/возврата контактных
групп составляет порядка 10 мс. Напряжение изоляции меж-
ду обмоткой и контактами составляет от 2000 до 4000 VAC.
Для удобства эксплуатации при замене реле исполь-
зуются розетки для установки (монтажа) на DIN-рейку,
панель или печатную плату. На рис. 3.7 показано реле, со-
стоящее из вставного блока серии 55.34 и розетки серии 94
фирмы FINDER.
Диапазон рабочих температур отечественных реле со-
ставляет от -(20.. .45 °C) до + (40... 55 °C). Для реле западных
фирм этот диапазон составляет от -40 до +70°С (+85°C).
В табл. 3.1 (с. 333) приведены основные характеристи-
ки промежуточных реле.
10 Зак. 3801
290
ГЛАВА 3
Электромагнитные пускатели. Пускатели представляют собой силовые реле и
применяются в схемах управления (пуска) электродвигателей приводов, вентиля-
торов, включения/отключения нагревателей и другого силового оборудования пу-
тем непосредственного подключения к сети. При наличии электротепловых реле
пускатели осуществляют защиту электродвигателя от перегрузки (диапазон регу-
лирования номинального тока несрабатывания составляет от 0,1...0,14 до 90...125
А и более в зависимости от типа теплового реле).
Напряжение питания катушек отечественных пускателей при частоте 50 Гц со-
ставляет: 24,36,40,48,110,127,220, 230, 240,380,400,415, 500 и 660 VAC. При частоте
60 Гц напряжение составляет 24, 36, 48, 110, 220, 380, 415,440 VAC.
Пускатели подразделяют по назначению на реверсивные и нереверсивные, а так-
же по наличию или отсутствию теплового реле. К характеристикам пускателя также
относят число и тип контактов, степень защиты (IP), класс износостойкости, клима-
тическое исполнение и др.
Среди отечественных пускателей можно отметить ПМ12 (исполнение ПМ12-
ОЮххх, -025ххх, -040ххх, -ОбЗххх, -125ххх). Исполнение ПМ12-010 имеет 3 главных
контакта НО и 2 вспомогательных контакта (1НО, 1НЗ). Исполнение ПМ12-025 име-
ет число вспомогательных контактов (НО и НЗ) от 2 до 10 и т. д.
Пускатели серии ПМЕ-200 (ПМЕ-211, -212, -213, -214, -221, -222) применяются для
дистанционного пуска непосредственным подключением к сети, остановки и реверси-
рования трехфазных асинхронных электродвигателей мощностью 11 кВт и более при
напряжении до 660 VAC (ПМЕ-213 и ПМЕ-214). Номинальное напряжение питания ка-
тушек пускателя составляет 24,36,42,48, ПО, 127,220,380 и 500VAC. Исполнение пуска-
Рис. 3.9
телей по номинальному току тепловых реле РТТ-1:5; 6,3; 8; 10; 12,5;
16; 20; 25 А. Число главных контактов — ЗНО, число вспомогатель-
ных контактов от 1НО (ПМЕ-211) до 4НО+4НЗ (ПМЕ-214).
Пускатели ПМА-3000 на номинальный ток до 40А выпуска-
ются на напряжение питания катушек: 24,36,40,42,48,110,127,
220,230,240, 380,400,415 440,500 и 660В. Пускатели используют-
ся с тепловыми реле РТТ-211.
В табл. 3.2 (с. 334) приведены характеристики трехполюс-
ных электротепловых токовых реле с температурной компенса-
цией ОАО «Кашинский завод электроаппаратуры».
Модульные пускатели зарубежных фирм (ABB, Schneider
Electric и др.) состоят из 2.. ,3-х элементов, к которым относятся
автоматический выключатель, рубильник с предохранителем,
контактор, электронное реле перегрузки, вспомогательные кон-
такты, элементы механической блокировки и др.
На рис. 3.8 представлен пускатель с контактором фирмы
Schneider Electric.
Фирма ABB выпускает трехполюсные контакторы на
мощность от 4 кВт (9 А) до 400 кВт (750 А) при напряжении
400 VAC и от 4 кВт (7 А) до 400 кВт (700 А) при напряжении
690 В. Также выпускаются 4-х полюсные контакторы на ток от
25 А до 125 А. При заказе следует указать типоряд контактора,
номинальный ток, количество главных (силовых) и вспомога-
тельных контактов.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ 291
Фирма Schneider Electric производит 4-полюсные пускатели на 400 VAC серии LC1
Кхх на мощность от 0,37 кВт (6 А) до 900 кВт (1800 А). Другая серия пускателей фир-
мы— LC1-CT контакторы. Модульные контакторы серии СТ (рис. 3.9) коммутируют
токи до 100 А (напряжение 230...240 VAC). Количество полюсов (от 1 до 4) достигает-
ся компановкой модулей шириной 9 мм. Однополюсный контактор состоит из двух
модулей, имеет 1НО контакт, номинальный ток 25 А. 2-полюсный контактор СЕ в за-
висимости от номинального тока от 16 до 100 А состоит из 2,4 или 6 модулей и имеет
2 НО контакта. 3-х полюсный контактор состоит из 4-х или 6-ти модулей на ток 25,
40 или 63 VAC, имеет 3 НО или 2 НО+1 НЗ контактов. 4-полюсный контактор состоит
из 4 или 6 модулей (25 А или 63 А), или 12 модулей (100 А). Число контактов: 4 НО, 4
НЗ или 2 НО+2 НЗ. Выпускается серия 2-, 3- и 4-полюсных контакторов серии СТ с
ручным управлением. Эти контакторы позволяют вручную коммутировать цепи до
63 А. При этом они оборудованы переключателем на 3 положения: автоматический
пуск, ручной пуск и удержание, останов. Для контакторов серии СТ выпускаются
вспомогательные устройства: вспомогательные контакты (НО+НЗ), реле времени
(выдержка при включении, подача напряжения на определенное время и др.), модуль
подачи командного импульса длительностью 250 мс, модуль ограничения напряже-
ния в цепи управления и др.
Кнопки и кнопочные посты
Кнопки управления характеризуются следующими основными показателями:
• с фиксацией или без фиксации (с пружинным возвратом);
• тип и число контактов (НО, НЗ) в контактной группе;
• с подсветкой или без подсветки;
• размеры, форма и цвет кнопки;
• ток и напряжение коммутации;
• тип подключения (под винт, пайка, разъем и т. д.);
• кнопка аварийного останова с фиксацией, кнопка «под ключ»;
Кнопки зарубежных фирм с целью унификации элементов выпускаются состав-
ными в виде двух модулей (непосредственно кнопка и контактная группа), а в случае
кнопки с подсветкой в виде трех модулей (модуль светодиода, контактная группа,
кнопка). Также выпускаются кнопки с подсветкой и без подсветки в сборе. В слу-
чае подсветки кнопки напряжение питания составляет 12...24 VDC, 48...120 VAC,
230. ..240 VAC. Ресурс кнопок составляет порядка 10-106 циклов. На рис. 3.10 показана
составная кнопка с подсветкой типа ХВ6 DW ЗВ5В фирмы Schneider Electric.
Кнопочные посты управления в сборе применяются для установки «по месту»
(вне щита) и состоят из одной, двух («пуск» и «стоп»), трех кнопок или из двух кно-
пок и сигнальной лампы.
Рис. 3.10
Рис. 3.11
292
ГЛАВА 3
В табл. 3.3 (с. 335) приведены основные характеристики кнопок и кнопочных
постов.
Переключатели
Аналогично кнопкам переключатели, используемые в системах управления, мо-
гут быть как составными (ручка переключателя и контактный блок, а при наличии
подсветки также блок светодиода), так и в сборе (рис. 3.11).
Основные характеристики переключателей:
• число положений: 2-, 3-и 4-позиционные;
• наличие или отсутствие фиксации;
• тип и количество контактов контактного блока;
• наличие или отсутствие подсветки;
• тип переключающего устройства (ручка, ключ);
• цвет ручки переключателя;
• габаритные размеры и др.
В табл. 3.4 приведены характеристики ряда переключателей фирм Schneider
Electric и Rockwell Automation/Allen Bradley.
Сигнальная арматура
Промышленностью РФ выпускается сигнальная арматура различных типов: АЕ,
АМЕ, АС-1201, АС-220, АСЛ, АВР, АСКМ и др. с лампами серии КМ, ТЛ, неоновыми
и лампами накаливания на напряжения 24 VDC, 220/380 VAC.
Однако, в связи с ограниченным ресурсом этих ламп (ресурс ламп накаливания
составляет около 3000 ч, неоновых — 20000 ч) в промышленности находят приме-
нение светодиодные сигнальные лампы серии СКЛ. Ресурс
светодиодных ламп от 25000 до 100000 ч. К достоинствам
гЯ ,1 а светодиодных ламп также относятся малое потребление, вы-
~ сокая ударо- и вибропрочность, малое тепловыделение, вы-
сокая цветовая эффективность и малые габариты. С учетом
Рис. 3.12 замены лампы серии СКЛ выпускаются в конструктивном
Рис. 3.13
исполнении, с цветом свечения, типом цоколя в соответ-
ствии с заменяемыми сигнальными арматурами. СКЛ вы-
пускаются 3-х цветов: красный, зеленый, желтый. По заказу
выпускаются светодиодные лампы белого, синего и оранже-
вого цветов.
На рис. 3.12 приведен общий вид светодиодной лампы
СКЛ-12.
В табл. 3.5 приведены характеристики отечественных
светосигнальных ламп.
Сигнальные блоки подразделяются на блоки постоянно-
го свечения и блоки со вспышкой. Сигнальный блок состоит
из базового блока и 1...5-ти светосигнальных блоков (цвет
линзы по заказу) или одного звукового блока (рис. 3.13).
В табл. 3.6 приведены характеристики светодиодных
сигнальных ламп, сигнальных блоков и светосигнальных ко-
лонн зарубежных фирм.
Для отображения световой буквенно-цифровой преду-
предительной и аварийной сигнализации, а также с целью
повышения информативности сигнала на лицевых панелях
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ 293
щитов устанавливаются световые табло. В табл. 3.7 (с. 338) приведены характеристи-
ки световых табло ОАО «Завод Электропулы».
Автоматические выключатели
Автоматические выключатели предназначены для питания и защиты от перегру-
зок и коротких замыканий электрических цепей с потребителями различного назна-
чения, в том числе для пуска и останова электродвигателей (рис. 3.14).
Основные характеристики автоматических выключателей:
• число полюсов;
• номинальный ток, А;
• номинальное напряжение, В;
• минимальное рабочее напряжение, В;
• отключающая способность, кА;
• число допустимых циклов срабатывания;
• время срабатывания, мс;
• наличие подсветки;
• габаритные размеры, мм и др.
Минимальное время срабатывания требуется при токе короткого замыкания, воз-
никающем при контакте фазного и заземленного нулевого проводников. Ток перегруз-
ки, который является следствием подключения к сети слишком большого числа по-
требителей, также требует быстрого отключения от сети. Токи утечки (порядка 30 мА
при прямом контакте и 300 мА при косвенном контакте), возникающие при наруше-
нии изоляции или контакте с токоведущими частями электрооборудования, вызывают
срабатывание дифференциальных автоматических выключателей (рис. 3.15).
В табл. 3.8 (с. 338) приведены основные технические характеристики отечествен-
ных и зарубежных автоматических выключателей.
3.3. Промышленные компьютеры (ПК)
3.3.1 Архитектура и отличительные особенности ПК
Промышленный компьютер (ПК) представляет собой PC-совместимую плат-
форму специального исполнения, которое гарантирует повышенную надежность в
жестких условиях промышленной эксплуатации. К таким неблагоприятным произ-
водственным условиям относятся повышенные температура и влажность, наличие
вибраций и ударов, запыленность и задымленность помещений, наличие электро-
проводящих частиц (графитовая и угольная пыль) и др.
294
ГЛАВА 3
Архитектура ПК отличается от архитектуры офисных компьютеров наличием
сторожевого таймера, энергонезависимой памяти, дополнительными интерфейсами
и конструктивным исполнением.
Сторожевой таймер — это устройство, выполняющее автоматическую переза-
грузку ПК или вырабатывающее немаскируемое прерывание при зависании (сбое)
программы. В сторожевой таймер записывается значение определенного интервала
времени, и таймер производит обратный отсчет. При нормальной работе программа
периодически восстанавливает исходное значение интервала времени, и таймер не
успевает обнулиться. В случае сбоя программы, когда она перестает обращаться к
таймеру, последний обнуляется, и происходит прерывание или перезагрузка опера-
ционной системы. Время перезагрузки может составлять от 1 до 250 с.
Энергонезависимая память — участок памяти с быстрым доступом, практически
без ограничений по числу циклов перезаписи, и сохраняющий информацию при от-
ключении питания. Эта статическая память, объем которой в современных ПК не-
прерывно возрастает, используется для хранения наиболее важной информации.
Современные твердотельные накопители (флэш-диски) имеют время произволь-
ного доступа менее 0,1 мс, скорость обмена до 16 Мбайт/с, число циклов перезаписи
до 1 млн, встроенную функцию EDC/ECC (коррекция ошибок), время наработки на
отказ не менее 1 млн часов. Емкость твердотельных накопителей немного уступает
емкости накопителей на жестких магнитных дисках (НЖМД).
Конструктивные особенности ПК призваны обеспечить надежную работу ПК в
широком диапазоне температур, защиту от атмосферных и механических внешних
воздействий, возможность круглосуточной работы в цеховых условиях, низкий уро-
вень излучения и помех, возможность расширения и интеграции с системой управ-
ления, удобство обслуживания и др.
Современные ПК способны работать в диапазоне температур от 0 до +50 °C, а от-
дельные ПК от -10 до +60 °C (нижний предел обусловлен качеством изображения ЖК
мониторов, а верхний — допустимой рабочей температурой процессоров). Предельная
влажность окружающей среды ПК составляет 95%. Для предотвращения перегрева ПК
оснащены вентиляторами и сигнализатором температуры в зоне процессоров.
Защита от воздействий окружающей среды согласно международному стандар-
ту IEC 529 указывается в паспорте на ПК. Как правило, степень защиты по лицевой
панели для операторских ПК соответствует IP65 (полная защита от пыли и струй
воды, выбрасываемых с произвольного направления). Такая защита обеспечивает-
ся пленочным исполнением клавиатуры передней панели ПК, наличием сенсорного
экрана, герметизацией стыков с помощью резиновых уплотнений. При необходимо-
сти защиты не только передней панели, но и всего корпуса ПК последний должен
устанавливаться в герметичный шкаф управления с системой терморегулирования
(например, фирм Schroff, Rittal и др.)
Существуют ПК полностью герметичные (без вентиляторов и вентиляционных
отверстий в корпусе), с малым энергопотреблением и естественным охлаждением с
отводом тепла в окружающую среду через корпус.
Защита от электромагнитных помех и низкий уровень излучения обеспечивается
выбором материала корпуса — специальных сортов стали и лицевой панели (алюми-
ний). Излучение снижается при применении жидкокристаллических мониторов.
Способность ПК противостоять вибрационным и ударным нагрузкам обеспечи-
вается рядом Конструктивных решений, а именно:
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
295
• многоточечное крепление сменных плат;
• амортизирующее (антивибрационное) крепление жесткого диска;
• использование твердотельных накопителей (флэш-дисков) и процессоров с низ-
ким энергопотреблением и не нуждающихся в охлаждении вентиляторами.
Высокая надежность ПК обеспечивается надежностью отдельных элементов, их
резервированием, мерами повышения долговечности отдельных узлов ПК. Так, в ПК
используются резервированные блоки питания с возможностью «горячей замены»
(без выключения ПК), резервированные накопители на жестких дисках с RAID-
массивами (хранение информации одновременно на нескольких носителях), пылеу-
лавливающие фильтры и др. Корпус ПК, выполненный из стали толщиной до 1,25 мм,
дополнительно усилен ребрами жесткости, имеет запирающуюся переднюю крышку,
закрывающую доступ к отсекам накопителей, тумблерам и кнопкам, портам USB и
др., что способствует повышению надежности функционирования ПК. Взрывозащи-
щенные ПК имеют взрывозащищенные ЖК дисплеи, клавиатуру и мышь, соединен-
ные вместе с помощью волоконно-оптических кабелей.
Возможность расширения является важной характеристикой ПК, поскольку по-
зволяет в одном корпусе дополнительно устанавливать различные платы ввода/выво-
да, контроллеры, коммуникационные модули и др. Для этого используются многосло-
товые (до 20 слотов) высоконадежные объединительные платы. На системной шине ПК
могут функционировать различное число плат формата ISA и PCI. Так, системная шина
ISA допускает установку до 18 плат, для расширения шины PCI используются активные
объединительные платы с дополнительными мостами. Объединительная плата за счет
сегментации системной шины позволяет устанавливать на ней разные процессорные
платы, так что на одной плате может быть установлено до 4 автономных компьютеров.
Все это увеличивает функциональные возможности современных ПК.
Поскольку процессорная плата, установленная в один из слотов объединитель-
ной платы, может быть легко заменена без традиционной и трудоемкой разборки
компьютера, что характерно для офисного компьютера, ремонт и обслуживание ПК
существенно упрощаются.
Промышленные компьютеры выпускаются в различных формфакторах: формате
PICMG (PCI+ISA), PCI, ISA, АТ и др., полного или половинного размера, поддержи-
вают различные системные шины (ISA, PCI, CompactPCI, MicroPCI). В ПК находят
применение процессоры Intel, AMD, IBM, Motorola и ряд др. В качестве мониторов ПК
используются жидкокристаллические мониторы, имеющие по сравнению с монитора-
ми на ЭЛТ ряд неоспоримых преимуществ, в том числе малое энергопотребление, не-
чувствительность к внешним электромагнитным полям и низкий уровень электромаг-
нитного излучения, безвредность для глаз человека,
меньшие габариты и вес и др. К недостаткам следует
отнести несколько худшую цветопередачу, большую
стоимость. Угол обзора современных ЖК-дисплеев в
ПК составляет 160...170 градусов, размер экрана от
5,7" до 32", наработка на отказ до 100000 ч.
В зависимости от условий применения выпуска-
ются ПК следующих классов.
Рабочая станция (WS — Workstation)
Рабочая станция (рис. 3.16) имеет: рис 3 щ
• встроенный ЖК монитор;
296
ГЛАВА 3
• встроенную мембранную клавиатуру и встроенный манипулятор TouchPad;
• тип процессорной платы: промышленная плата формата PICMG;
• предустановленную ОС Windows 98/2000/NT7XP;
• число слотов расширения на пассивной объединительной плате: 4xISA, 4хРС1
или в др. сочетаниях;
• процессоры: Intel, AMD, Power PC др.
• оперативную память до 4 Гбайт,
НЖМД 120 Гбайт;
• контроллер Ethernet 10/100 Base-T, порты ввода/вывода RS-232/RS-422/RS-485,
USB 2.0, LPT, PS/2;
• встроенный DVD-ROM (DVD-RW по заказу);
• возможность монтажа в 19’' стойку (высота в стойке 4U или 8U);
• аналогорезистивный сенсорный экран (по заказу).
Промышленный панельный компьютер (ППК)
Промышленные панельные компьютеры (ППК) (рис. 3.17) являются высокоин-
тегрированными PC-совместимыми компьютерами широкого применения, в том
числе в тяжелых промышленных условиях. ППК устанавливаются на столе, на стене,
на фасаде щитов и пультов управления. ППК имеют малую глубину корпуса, дохо-
дящую в отдельных моделях до 40 мм и менее. Другой особенностью ППК является
наличие встроенной аккумуляторной батареи, обеспечивающей возможность авто-
номной работы ППК в течение одного часа.
ППК имеют шасси из нержавеющей стали и герметичную алюминиевую переднюю
панель толщиной до 10 мм с закаленным стеклом для защиты ЖК-дисплея. Известны
промышленные панельные компьютеры, имеющие литой корпус из алюминиевого или
магниевого сплава, рассеивающий тепло при работе ППК и позволяющий обойтись без
охлаждающих вентиляторов. Степень защиты ППК по передней панели составляет не
менее IP65. Напряжение питания ППК 180.. .260 РАС или 18.. .25 VDC. ППК снабжены
ЖК-дисплеями размером от 5,7 "до 17" по диагонали (5,7", 6,0", 6,4", 10,4", 12,1", 15", 17").
Максимальное разрешение ЖК-дисплеев ППК составляет 1280x1024 пикселей. Масса
ППК от 1,5 до 10 кг, допустимая вибрация 1,5 g, ударная нагрузка до 10 g.
Rack PC
Rack PC (рис. 3.18) — промышленные компьютеры, устанавливаемые в 19" шка-
фы управления, пульты и консоли 19' формата. Большинство ПК этого класса не
имеют встроенного монитора. Оптимальное соотношение цены, производительно-
сти и надежности обеспечивают широкое применение этих ПК в различных отраслях
промышленности.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
297
Отличительные характеристики ПК класса Rack PC:
• тип процессоров: Pentium 4, Pentium III, Celeron D и др;
• число слотов расширения: (3...12)xPCI, (1...8)xISA;
• оперативная память: 128... 1024 МБ;
• допустимая рабочая температура: О...6О°С.
Остальные характеристики приведены в табл. 3.9 (с. 340).
ВохРС
ВохРС (рис. 3.19) — промышленные компьютеры блочного (компактного) испол-
нения, устанавливаемые внутри щитов и пультов, на стене, в коммутационных шка-
фах или непосредственно на оборудовании. За счет малых габаритов эти ПК занимают
ограниченное пространство. В классе ВохРС выпускаются различные «бортовые вы-
числители» или спецЭВМ для установки в составе бортовых систем управления на на-
земном, морском и воздушном транспорте. Эти ПК работают при температурах от -40
до+65 °C (иногда и более), при вибрациях до 10 g (20...2000 Гц), при одиночных ударах
до 100 g и более и многократных ударах до 20 g. За счет высокой герметичности эти ПК
работают при влажности воздуха до 100% и пониженном атмосферном давлении до 5
мм рт. ст. На рис. 3.19 показан ВохРС типа UNO-2176 фирмы Advantech.
Отличительные характеристики ПК класса ВохРС:
• тип процессоров: Pentium 4, Pentium III, Celeron D;
• процессорная плата: PICMG, ISA, PCI, ATX;
• оперативная память: 128Мбайт...1 Гбайт;
• твердотельный диск: Compact Флэш, DiskOnChip;
• число слотов расширения: (1...3)xISA, (3...7)хРС1;
Остальные характеристики приведены в табл. 3.9
TowerPC
TowerPC (рис. 3.20) — ПК настольного исполнения для установки на столах в опе-
раторских помещениях и пунктах управления. Эти ПК также могут использоваться в
качестве серверов или рабочих станций.
Отличительные характеристики ПК класса TowerPC:
• тип процессоров: Pentium, Celeron, PowerPC и др.;
• процессорная плата: PICMG;
• число слотов расширения: (2...4)xISA, (4..,6)хРС1;
• оперативная память: от 512 МБ.
Остальные характеристики приведены в табл. 3.9.
Переносные ПК (серия «mobile» или «portable»)
Переносные ПК представляют собой портативную переносную рабочую станцию
(рис. 3.21). ПК имеет встроенный TFT ЖК-дисплей с изменяющимся углом наклона
Рис. 3.21
Рис. 3.19
Рис. 3.20
298
ГЛАВА 3
размером 12,1"или 14,1 "по диагонали (разрешение 1024x768 точек). Предназначен
для работы в полевых условиях, на удаленном объекте и др., где невозможно или за-
труднено применение обычных ПК.
Отличительные характеристики переносных ПК:
• тип процессора Pentium 4, Celeron D;
• число слотов расширения: 8xISA, 4xISA/PCl;
• оперативная память: 256 Мбайт...2 Гбайт;
• откидная полнофункциональная клавиатура с манипулятором Touch Pad.
Остальные характеристики приведены в табл. 3.9.
Промышленный планшетный компьютер
Промышленный планшетный компьютер (рис. 3.22) предназначен для эксплуа-
тации в качестве носимого (вес 2 кг) средства сбора, обработки и отображения ин-
формации (ОС Windows 2000/ХР, Linux) в полевых условиях и в промышленных це-
хах с повышенной влажностью воздуха, конденсатом,
С виигт : * пылью, пониженным давлением, пониженной или
\ » повышенной температурой, при наличии радиоча-
стотных и электромагнитных полей. Планшетный ПК
(270x197x46 мм) оснащен восемью программируемы-
V ми клавишами (кнопками) управления и может быть
- оперативно установлен в транспортное средство с по-
мощью специального кронштейна и выполняет функ-
ции как бортового, так и носимого компьютера. Жест-
Рис. 3.22 кий диск установлен в съемный модуль с применением
специальных амортизаторов.
ПК сохраняет работоспособность в условиях сильных радиочастотных электро-
магнитных полей напряженностью до 30 В/м и частотой до 4000 МГц, а также магнит-
ных полей промышленной частоты напряженностью до 1000 А/м. Корпус изделия
выполнен путем литья из алюминий-магниевого сплава, что обеспечивает высокую
стойкость к внешним механическим воздействиям (вибрация и удары).
Все разъемы изделия снабжены резиновыми заглушками для обеспечения защиты
от влаги и пыли. Ввод информации и управление осуществляются главным образом с
помощью сенсорного экрана и восьми функциональных клавиш, которые могут быть
запрограммированы на вызов необходимых прикладных программ. Возможно под-
ключение внешней промышленной клавиатуры через порт USB. ПК оснащен аккуму-
ляторной батареей, обеспечивающей автономную работу в течение от 2 до 4 часов.
Планшетный ПК имеет порты ввода/вывода: RS-232C, USB 2.0, LAN (опция),
COM-порт, металлический байонетный разъем электропитания, два слота PCMCIA
типа II (опция). Через COM-порт может быть подключен расширитель портов, на
котором имеются четыре USB 2.0 (два из них с нестандартными разъемами), два RS-
232С, LAN, Modem, VGA, Mic-in, Audio-out.
Промышленный карманный компьютер
Промышленный защищенный карманный компьютер (рис. 3.23) предназна-
чен для эксплуатации в качестве навигационного устройства (в комплекте с GPS-
приемником и навигационным программным комплексом), а также в качестве носи-
мого (вес 450 г) средства сбора, обработки и просмотра информации (ОС Windows
Net 4.2, Microsoft Windows Mobile 2003) в полевых условиях и промышленных цехах
с повышенной влажностью воздуха, пылью, пониженным давлением, повышенной
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
299
температурой, в условиях вибраций и ударных нагрузок, а также в качестве бортово-
го компьютера в транспортных средствах.
Так, сверхмалые габариты промышленного карманного компьютера «Кулон»
НПО «Техника-сервис» (90x150x33, мм) и масса (450 г) устройства обеспечивают вы-
сокий уровень мобильности и доступности вычислительных ресурсов. Карманный
компьютер имеет разрешение экрана VGA (640x480,256 цветов) и позволяет отобра-
жать больший, по сравнению с другими карманными компьютерами, объем инфор-
мации. Это дает дополнительные преимущества при использовании устройства для
навигации, работы с электронными таблицами и Интернетом.
Карманный компьютер «Кулон» имеет слот PCMCIA, последовательный порт
RS-232, выведенный на внешний разъем DB-9 на корпусе изделия, и ____
USB 1.1, что дает возможность подключения широкого спектра пери-
ферийного оборудования (внешних накопителей, ЦАП/АЦП и т. д.), Ли i
оснащенного драйверами под соответствующие операционные систе- М ~
мы. Компьютер оснащен штатным аккумулятором высокой емкости Н *
(1800 мА-ч), обеспечивающим длительность автономной работы из-
делия до 13 ч (в зависимости от яркости подсветки и ресурсоемкости
приложений). На переднюю панель выведена клавиша включения/вы-
ключения беспроводного интерфейса, для удобства использования и Рис 3 2з
экономии заряда батареи (продление срока автономной работы). Кор-
пус изделия выполнен путем литья из алюминий-магниевого сплава, что обеспечива-
ет высокую стойкость к внешним механическим воздействиям, таким как вибрации и
удары. Все разъемы компьютера защищены резиновыми заглушками для обеспечения
их защиты от влаги и пыли. Ввод информации и управление осуществляется с помо-
щью сенсорного экрана и четырех функциональных клавиш, которые могут быть за-
программированы на вызов отдельных баз данных, программных средств и пр. Воз-
можно подключение внешней промышленной USB-клавиатуры. Компьютер комплек-
туется станцией для связи с любым компьютером, оснащенным шиной USB 1.1.
3.3.2 Технические характеристики промышленных компьютеров
В табл. 3.9 приведены технические характеристики представительных моделей
(типов) ПК ряда фирм, необходимых для выбора ПК в соответствии с требованиями
конкретного производства.
Отсутствующие в ряде ячеек таблицы данные (тип процессора, HDD и др.) при
заказе ПК выбираются пользователем. Ряд характеристик, присущих базовым кон-
фигурациям, опущены, так как являются общими для ПК. К таким характеристикам
относятся:
• операционная система: в ПК используются ОС Microsoft Windows 98/2000/NT7
ХР/ХР Embedded/CE.NET, MS DOS 6.22;
• материнская плата: ASUS компании ASUS;
• дисковод FDD 1,44 Мбайт предустановлен;
• накопитель CD/DVD предустановлен;
• органы управления на передней панели: клавиши питания, RESET, индикаторы
питания, разъемы клавиатуры, мыши и др.
Отдельные классы ПК имеют конструктивные особенности. Так, к особенностям
корпуса Box PC относятся дополнительные планки для крепления ПК в шкафу, на
стене и пр. Корпуса RACK PC, WS и др. имеют антивибрационное крепление плат и
300
ГЛАВА 3
жестких дисков, дверцы с ключом для ограничения досту-
х, ’ па к кнопкам управления и дисководам.
г *> •• * } Д Lgl. Блоки питания ПК обладают высокой надежностью
йфЯКЙЯм ‘ ’ и долговечностью, поддерживают PFC-функцию (Power
.дЛг Factor Correction — режим коррекции напряжения пита-
V ния), защиту от перенапряжений и коротких замыканий
по выходу (при повышении выходного напряжения часть
нагрузки отключается, а при коротком замыкании отклю-
чается весь блок питания). Кроме того, блоки питания
имеют тепловую защиту: при повышении температуры до 9О...11О°С блок питания
отключается.
Система резервирования питания ПК предусматривает размещение в корзине
от 2 до 4 блоков питания с функцией «горячей» замены. При этом общая нагрузка
равномерно распределена по блокам питания так, что каждый из блоков нагружен
на 50% мощности (при двух блоках) или на 1/3 мощности (при трех блоках пита-
ния) и т. д. При выходе одного из блоков питания нагрузка автоматически перерас-
пределяется на оставшиеся работоспособные блоки питания. Неисправный блок
может быть заменен без остановки работы ПК. На рис. 3.24 показан общий вид
блоков питания, а в табл. 3.11 (с. 347) приведены основные технические характери-
стики блоков питания фирмы ICP Electronics.
TFT ЖК-мониторы имеют различные размеры по диагонали и соответственно
различное оптимальное разрешение изображения (табл. 3.13, с. 348).
Достоинства ЖК-дисплеев определяются их характеристиками:
• частота развертки по горизонтали 30. ..97 кГц;
• отсутствие мерцания, хорошая геометрия изображения;
• низкое энергопотребление;
• высокая стойкость к вибрациям и ударам;
• отсутствие рентгеновского излучения;
• высокие яркость и контрастность;
• малые размеры и вес;
• исполнения с сенсорным экраном.
3.3.3 Стандарты шин расширения
Промышленная шина расширения (expansion bus) прошла большой путь разви-
тия в направлении увеличения разрядности передаваемых данных, скорости обмена
данными, конструктивных усовершенствований и стандартизации.
К первым промышленным шинам расширения относятся шины ISA, EISA, Mi-
croPC. В начале 90-х годов разработаны шины PCI, CompactPCI, VME и др.
Шина расширения ISA (Industry Standard Architecture) является 8/16 разрядной
шиной (16 бит данных и 24 бит адреса). Скорость передачи данных в зависимости
от разрядности — 8/16 Мбайт/с. Тактовая частота — 8 МГц. Несмотря на низкую
скорость обмена, шина имеет ряд достоинств, к которым относятся поддержка до 20
плат расширения. Также процессорные платы на шине ISA в 5.. .6 раз дешевле анало-
гичных плат на др. системных шинах. Шина ISA используется до настоящего времени
при управлении процессами, где не требуется высокого быстродействия.
Шина расширения EISA (Extended Industry Standard Architecture) — расширенная
ISA-шина, разработанная по инициативе фирмы Compaq в 1988 г. Это стандартизо-
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
301
ванная 32-разрядная синхронная шина с тактовой частотой 8 МГц. Максимальная
скорость обмена в пакетном режиме (длина пакета 1024 байта) составляет 32 Мбайт/с.
Допускается установка до 8 слотов и плат расширения.
Шина расширения PCI (Peripheral Component Interconnect — шина соединения
периферийных компонентов)— разработана фирмой Intel в 1992 г. и представляет
собой 32/64-разрядную синхронную, процессорно-независимую шину. Пропускная
способность при тактовой частоте 33 МГц составляет 132 Мбайт/с (32-разрядная) и
264 Мбайт/с (64-разрядная). При тактовой частоте 66 МГц пропускная способность
в 2 раза больше (264/528 Мбайт/с). Число слотов расширения — 4, число контактов
коннектора — 188. Для подключения к шине более 4-х периферийных устройств ис-
пользуются мосты PCI (PCI Bridge). Две шины PCI соединяются одноранговым мо-
стом. Для подключения др. шин (ISA, CompactPCI) используются специальные мо-
сты. Увеличенное число шин расширения PCI используется в серверах баз данных.
Шина PCI поддерживается организацией PCISIG (PCI Special Interest Group). Стан-
дартная спецификация шины - PCI v2.1. В 1995 г. для поддержки шины PCI создан
консорциум PICMG (PCI Industrial Computer Manafactures Group).
Шина PCI-X создана для увеличения пропускной способности за счет повыше-
ния разрядности данных. Шина PCI-Х является 64-разрядной шиной. При тактовой
частоте 66 МГц пропускная способность составляет от 533 до 4356 Мбайт/с.
Шина Industrial PCI (IPCI) предложена в 1995 г. рядом европейских фирм. До-
пускает размещение на пассивной объединительной плате до 5 плат PCI в формате
3U или 6U.
Шина PCI+ISA предложена в 1995 г. консорциумом PICMG для интеграции плат
ISA и РО на пассивной объединительной плате. Число плат расширения — до 4.
Шина CompactPCI (CPCI) разработана фирмой Intel и консорциумом PICMG в
1995 г. для увеличения числа слотов расширения и размещения плат размером 3U и
6U. Стандарт шины — IEEE 1101.11. Тип шины СРС1 — синхронная, мультиплексиру-
емая, процессорно-независимая шина разрядностью 32/64. Пропускная способность
шины соответственно 133/266 Мбайт/с. Тактовая частота 66 МГц. Число коннекторов
на плате 3U — 1, на плате 6U — 2. Коннекторы — пятирядные 235-штырьковые с
шагом между контактами 2 мм. За счет высокого качества системного разъема (стан-
дарт МЭК 1076-4-101) удалось увеличить число слотов расширения по сравнению с
шиной PCI с 4 до 8. Контакты цепей питания разъема удлиненные. При установке
модуля в первую очередь подключается питание, а при выемке модуля питание со-
храняется дольше, за счет чего облегчается «горячая» замена модуля. Для увеличения
числа слотов до 20 используются мосты PCI. Спецификация CPCI использует про-
цессоры Pentium, Alpha, Power PC, AMD и др. С процессорами Pentium используются
ОС MS DOS, Windows 95/98/NT, OS/2, UNIX, Linux. С процессорами Power PC — ОС
AIX, Solaris, МасОС и др. Наиболее популярными ОС жесткого реального времени
являются ОС OS/2, QNX, VxWorks. Основными производителями компонентов СРС1
являются фирмы Motorola, DEC, Force, PEP Modular Computers, Inova Computers и др.
Предполагается, что шина CPCI в будущем заменит шину ISA.
Шина PXI (PCI extensions for Instrumentation) разработана фирмой National Ins-
truments на базе шины CompactPCI и в тех же конструктивах. Представляет собой
модульную инструментальную платформу для высококачественных измерений.
Шина VMEbus (Versa Module Eurocard bus) разработана группой компаний во
главе с фирмой Motorola. Разрядность адреса шины — 16/32/64 бит, разрядность дан-
302
ГЛАВА 3
ных — 8/16/32/64 бит. Скорость передачи данных — 80 Мбайт/с. Шина поддерживает
установку до 21 плат расширения. Стандарт шины — ANSI/VITA 1-1994.
Стандарты РС/104 и РС/104 Plus разработаны для уменьшения габаритов и
потребления энергии аппаратно-программным комплексом на шинах расширения
ISA (РС/104) и PCI (РС/104 Plus). Стандарт МЭК — Р996 1 Standard for Compact
Embedded — PC Modules (стандарт для компактных PC-модулей). Стандарт ориен-
тирован на встраиваемые системы, работающие в жестких условиях производства.
Габариты плат уменьшен до размера 3,6"хЗ,8" (91,5x96,5 мм). Высота одного моду-
ля — 24 мм, а два состыкованных модуля занимают высоту 2 ". Прочные и надежные
штырьковые 40- и 64-контактные разъемы (общее число контактов 104) заменили
стандартные ламельные разъемы PC. Стандарт РС/104 полностью совместим с 8/16
разрядной шиной ISA и отличается только типом коннектора и нагрузкой линий
связи. Стандарт РС/104 Plus совместим с шиной РС1 и имеет дополнительный кон-
нектор для шины PCI. Диапазон температур модулей в стандарте РС/104 и РС/104
Plus составляет -40...+85 °C (в отдельных спецификациях -65...+125 °C). В этих
стандартах выпускаются интерфейсы Ethernet, ArcNet, CAN, Profibus, Interbus и др.
Стандарт РС/104 поддерживается консорциумом РС/104, который объединяет око-
ло 50 фирм.
Формат MicroPC разработан фирмой Octagon System. Промышленные компьюте-
ры, контроллеры и модули формата MicroPC применяются в диапазоне температур
-40...+85°С, имеют уменьшенные размеры плат (124,5x114,3 мм). За счет 4-точечной
системы креплений плат повышается механическая прочность изделий в формате
MicroPC. Платы выдерживают вибрацию до 5 g и ударные нагрузки до 20 g. Наработ-
ка на отказ плат MicroPC составляет до 200000 часов. Формат MicroPC полностью
совместим с шиной ISA, а также используется с поддержкой шины PCI. Напряжение
питания модулей формата MicroPC составляет 5 VDC.
3.3.4 Операционные системы реального времени (ОСРВ)
Операционная система (ОС) — Operating System (OS) — комплекс программ,
обеспечивающих управление основными ресурсами вычислительной системы ком-
пьютера (процессора, оперативной памяти, периферийных устройств). ОС являет-
ся основной частью системного программного обеспечения. К основным функциям
операционных систем относятся ведение файловой системы, распределение опера-
тивной памяти, динамическая компоновка выполняемых программ, обработка пре-
рываний, обеспечение многозадачной работы, взаимодействие с оператором, сетевое
взаимодействие и другие функции.
Операционную систему составляют монитор, загрузчик, супервизор, планиров-
щик и набор системных обслуживающих программ (утилит). При включении ком-
пьютера операционная система загружается в первую очередь и далее служит плат-
формой и средой для дальнейшей работы компьютера.
Операционная система реального времени (ОСРВ), используемая в системах
контроля и управления, имеет отличия от обычной ОС. По определению, данному
Мартином Тиммерманом, система реального времени — это система, которая пред-
сказуемо (в смысле времени реакции) реагируют на не предсказуемые (по времени
появления) внешние события [3.17].
Таким образом, система работает в режиме реального времени, если ее быстродей-
ствие адекватно скорости протекания физических процессов в системе контроля или
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
303
управления. При этом необходимо соотносить быстродействие контроллеров, рабо-
тающих под этой ОСРВ, с различной периферией и другим оборудованием АСУТП.
Основными требованиями, предъявляемыми к системам реального времени, от-
носятся: предсказуемость, возможность параллельного выполнения нескольких за-
дач (многозадачность), возможность обеспечения механизма наследования приори-
тетов и безотказность работы в течение длительного времени.
Различают системы жесткого и мягкого реального времени. Системой жесткого ре-
ального времени (hard) называется система, неспособность которой обеспечить реакцию
на внешние события в заданное (минимальное) время, квалифицируется как отказ.
К системам мягкого реального времени (soft) относят системы, не подпадающие в
категорию жестких систем. Время реакции таких систем может быть несколько боль-
ше заданного.
К ОСРВ относятся следующие операционные системы: QNX, UNIX, RT Linux, Vx-
Works, MS DOS, PC DOS, Windows NT, Windows CE.NET, OS-9, OS 2000, OS 5000, OS/2
и некоторые др. [3.18-3.22].
В настоящее время существует большое число ОС (более 100), которые класси-
фицируются по следующим признакам:
• по количеству пользователей, одновременно обслуживаемых системой, различа-
ют одно- и многопользовательские ОС;
• по числу процессов, которые одновременно выполняются под управлением ОС:
существуют одно- и многозадачные ОС (далее рассматриваются только многоза-
дачные ОС);
• по типу доступа пользователя к системе: системы с пакетной обработкой, систе-
мы с разделением времени и системы реального времени;
• по типу аппаратно-программного комплекса: одно- и многопроцессорные ОС,
сетевые ОС и распределенные ОС.
Далее рассматриваются наиболее известные ОСРВ.
Операционная система QNX (QNX Software System, Канада)
QNX представляет собой 16/32-разрядную операционную систему, которую
пользователь может конфигурировать по своему усмотрению. Система QNX постро-
ена по технологии FLEET (Fault-tolerance — отказоустойчивая, Load-balancing — ре-
гулирующая нагрузку, Efficient — эффективная, Extensible — расширяемая, Transpar-
ent — прозрачная).
QNX соответствует требованиям стандарта POSIX (Portable Operating System
Interface — интерфейс переносимых операционных систем). Она ориентирована на
приложения реального времени и обеспечивает мультизадачность, приоритетную
диспетчеризацию, быстрое переключение контекстов — все необходимые составля-
ющие системы реального времени.
QNX является гибкой, эффективной, модульной и простой системой за счет двух
фундаментальных принципов:
• архитектуры типа микроядра;
• связей между процессами, базирующихся на сообщениях.
QNX состоит из малого ядра (микроядра), управляющего группой взаимодей-
ствующих процессов. Размер ядра QNX — менее 8 кбайт. Оно предназначается толь-
ко для двух существенных функций:
• передачи сообщений — ядро руководит маршрутизацией всех сообщений между
всеми процессами во всей системе;
304
ГЛАВА 3
• диспетчеризации — диспетчер является частью ядра и вызывается всякий раз,
когда процесс изменяет состояние в результате полученного сообщения или пре-
рывания.
Управление всем сервисом QNX, за исключением предоставляемого ядром, про-
изводится как управление стандартными процессами QNX.
Архитектура QNX позволяет пользователю наращивать ОС собственными про-
граммами, чтобы обеспечить новый сервис. Драйверы устройств являются про-
цессами, которые избавляют операционную систему от специфики, требуемой для
поддержки конкретного оборудования. Поскольку драйверы запускаются как стан-
дартные процессы, добавление нового драйвера в QNX не влияет на другие части
операционной системы. Единственное изменение, которое необходимо выполнить в
окружении QNX, это запуск нового драйвера.
Операционная система QNX Neutrino RTOS
RTOS (Realtime Operating System) корпорации QNX Software Systems является ми-
кроядерной операционной системой, которая обеспечивает многозадачный режим
с приоритетами и имеет клиент-серверную архитектуру. В среде QNX Neutrino каж-
дый драйвер, приложение, протокол и файловая система выполняются в защищенном
адресном пространстве вне ядра. В случае сбоя любого компонента он может автома-
тически перезапуститься без влияния на другие компоненты или ядро. Хотя система
QNX является конфигурируемой, т. е. отдельные модули можно загружать статически
или динамически, нельзя сказать, что она использует подход, основанный на компо-
нентах. Все модули полагаются на базовое ядро и спроектированы таким образом, что
не могут использоваться в других средах.
QNX Neutrino RTOS состоит из ядра, планировщика процессов (process manager)
и расширенных сервисов на уровне пользователя. ОС реализует в ядре только наи-
более фундаментальные сервисы, такие как передача сообщений, сигналы, таймеры,
планирование потоков, объекты синхронизации. Все другие сервисы ОС, драйверы и
приложения выполняются как отдельные процессы, которые взаимодействуют через
синхронную передачу сообщений.
Планировщик процессов строится на базисе ядра и обеспечивает дополнитель-
ную семантику уровня процессов, управление памятью и путями доступа к файлам.
Все другие компоненты: файловые системы, набор протоколов, очереди сообщений,
приложения выполняются в защищенном адресном пространстве и являются рас-
ширенными сервисами. Взаимодействие компонентов осуществляется через переда-
чу сообщений. Передача сообщений играет роль виртуальной «программной шины»,
которая позволяет оперативно динамически подгружать и отгружать любой компо-
нент. Как следствие, любой модуль, даже драйвер устройства, может быть замещен
или перезапущен оперативно, для чего в большинстве ОСРВ требуется перезапуск
системы. Сообщения передаются прозрачно через границы процессора, обеспечивая
бесшовный доступ к любому ресурсу в сети.
Обладая вытесняющим микроядром и планировщиком с приоритетным обслу-
живанием, QNX Neutrino RTOS способна быстро и с высокой предсказуемостью реа-
гировать на события реального времени.
QNX Neutrino RTOS имеет малые времена обработки прерываний, быстрое
переключение контекстов. Инверсия приоритетов преодолевается с помощью рас-
пределенного наследования приоритетов. Упрощенное моделирование активностей
реального времени проводится через синхронную передачу сообщений. Вложенные
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
305
прерывания и фиксированная верхняя граница времени обработки прерывания га-
рантируют, что высокоприоритетные прерывания обрабатываются быстро с пред
сказуемым временем.
Операционная система UNIX
ОС UNIX является многопользовательской многозадачной операционной систе-
мой с разделением времени. Несмотря на многообразие версий UNIX, архитектура и
основные интерфейсы системы достаточно жестко стандартизованы. Основной ор-
ганизацией, занимающейся выработкой стандартов для UNIX, является Open Group,
возникшая в результате слияния Х/Open и OSF в 1997 г. В операционной системе
UNIX традиционно поддерживается классическая схема мультипрограммирования.
Система имеет возможность параллельного выполнения нескольких пользователь-
ских программ. Поскольку каждый процесс выполняется в собственной виртуальной
памяти, процессы в системе защищены друг от друга.
В компьютерах с архитектурой SMP несколько процессоров имеют доступ к общей
памяти через высокоскоростной общий интерфейс. Диспетчер процессов, обеспечива-
ющий распределение ресурсов процессоров между процессами, использует кольцевой
режим планирования (round robin). Основной смысл такого планирования состоит в
том, что время процессоров делится на кванты фиксированного размера, а процессоры,
готовые к выполнению, выстраиваются в кольцевую очередь. Очевидно, что чем больше
процессоров в системе, тем меньше процессов остается в очереди на исполнение, по-
скольку они распределяются на любые свободные в данный момент ЦПУ Кроме того,
в ОС UNIX был внедрен механизм легковесных процессов (light-weight processes) или
нитей управления. Нити — это процессы, исполняющиеся в одной и той же виртуаль-
ной памяти обычного (обладающего виртуальной памятью) процесса. Механизм нитей
позволяет еще больше поднять эффективность работы SMP-систем, так как позволяет
распараллеливать выполнение даже в рамках одного процесса. Синхронизация выпол-
нения нитей достигается при помощи механизма замков (lock). Многопотоковость по-
могает решить и другую проблему — обеспечение работы в режиме реального времени.
Большинство версий UNIX в настоящее время поддерживают мяп<ое реальное
время (SCO, DEC UNIX, Reliant UNIX, IRIX, Solaris). Кроме того, существуют реализа-
ции UNIX-подобных систем с поддержкой жесткого реального временем (LYNX, QNX).
Такие ОС широко используются для управления контроллерами, в системах сбора ин-
формации, для создания интерактивных систем ввода и т. д. К особенностям таких вер-
сий UNIX относятся чрезвычайно компактное ядро с возможностью размещения его в
ПЗУ и отсутствие или запрещение выгрузки процессов во внешнюю память.
Сейчас большая часть операционных систем семейства UNIX является 64-раз-
рядными, в отличие от Windows NT, остающейся по-прежнему 32-разрядной и суще-
ствующей только на двух платформах — Intel и DEC Alpha, хотя изначально эта ОС
задумывалась как многоплатформенная.
К важным свойствам ОС UNIX относятся ряд специальных черт, позволяющих
автоматически переконфигурировать системы после выхода из строя отдельных ком-
понентов, дублировать наиболее критические компоненты систем, производить ав-
томатическую перезагрузку системы в случае ее краха (LAR-функции).
Практически все версии UNIX поддерживают высокий уровень масштабируе-
мости для симметричных мультипроцессорных систем. Как правило, хорошая мас-
штабируемость определяется как линейный рост производительности с увеличением
числа процессоров. Однако это не всегда так, поскольку общая производительность,
306
ГЛАВА 3
естественно, зависит от масштабируемости общесистемных интерфесов (шин, ком-
мутаторов), дисковой подсистемы и от подсистемы оперативной памяти и от других
составляющих.
ОС UNIX широко используется для реализации кластерных решений. Как из-
вестно, под кластерами традиционно понимается объединение нескольких стан-
дартных вычислительных систем (называемых узлами), используемых как единое
целое для обеспечения доступа пользователей к приложениям, системным ресур-
сам и данным.
Кластерные решения обеспечивают высокий уровень надежности: при выходе
из строя одного или даже нескольких узлов, работа приложения может быть про-
должена на любых других узлах, входящих в состав кластера. При этом дополни-
тельная нагрузка будет равномерно распределяться среди работающих узлов кла-
стера. Второй важной задачей, решаемой при помощи кластерных технологий, яв-
ляется увеличение производительности путем добавления новых узлов и усиления
существующих.
Интерфейс с командной строкой позволяет чрезвычайно просто и гибко с мини-
мальными трудозатратами осуществлять администрирование сложных сетей и объ-
ектов операционной среды. Оболочки командной строки, входящей в состав Unix,
поддерживают развитые языки сценариев, которые часто оказываются наиболее
эффективным средством автоматизации сложных задач администрирования. Кроме
того, администраторы и пользователи UNIX могут работать в системе через различ-
ные графические оконные интерфейсы, в том числе и через удобный стандартизован-
ный интерфейс CDE (Common Desktop Environment).
В системе UNIX, как в многопользовательской среде, всегда большое внимание
уделялось проблеме безопасности. Основные принципы и уровни безопасности для
ОС UNIX разрабатываются на основе документа Национального центра компью-
терной безопасности США (NCSC) «Критерии оценки надежных компьютерных си-
стем», известного как «Оранжевая книга». Оранжевая книга определяет иерархию 4
уровней безопасности, каждый последующий из которых строже предыдущего.
Для большинства версий UNIX стандартным является уровень безопасности С2:
управляемая защита доступа с требованием возможностей ревизии, защиты паро-
лем, других средств контроля владения и использования ресурсов, строгого тестиро-
вания и документирования.
За время существования UNIX для этой операционной системы было написано
огромное количество приложений. Объем программного обеспечения написанного
для UNIX настолько велик, что уже сам по себе обеспечит этой ОС долгую жизнь.
Для разных версий UNIX это количество к настоящему времени достигает более
10000. Только для Solaris фирмы Sun Microsystems ежемесячно появляется более 150
новых приложений.
ОС Linux и ОС RT-Linux
Базовая версия операционной системы Linux разрабатывалась на основе модели
UNIX и задумывалась как ОС для настольных компьютеров. Таким образом, с про-
граммной точки зрения ОС Linux является UNIX-подобной операционной системой.
Значительная часть ПО, написанного за последние два десятка лет для ОС UNIX,
может без каких-либо изменений использоваться и в ОС Linux. В традиционных
версиях ОС Linux для взаимодействия с оператором имеется алфавитно-цифровая
консоль, позволяющая управлять загрузкой операционной системы, осуществлять
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
307
ввод команд и контролировать работу ОС. Как и во всех версиях ОС UNIX, хранение
и поиск постоянных данных и исполняемых программ осуществляется в ОС Linux
средствами файловой системы. Различные устройства также представляются в виде
специальных файлов. Реализованная на дисковых накопителях файловая система яв-
ляется неотъемлемой частью исполнительной среды ОС Linux.
По вышеприведенной классификации ОС Linux является многопользователь-
ской многозадачной сетевой ОС. Количество одновременно исполняемых задач
ограничиваются только объемом памяти и временными соотношениями между
ними. ОС Linux поддерживает стандарты открытых систем и протоколы сети Inter-
net. Все компоненты системы, включая исходные тексты, распространяются с ли-
цензией на свободное копирование и установку для неограниченного числа поль-
зователей.
Характерные особенности ОС Linux:
• многозадачность (является обязательным условием) и многопользовательский
режим;
• защищенный режим процессора (386 protected mode);
• защита памяти процесса — сбой программы не вызывает зависания системы;
• экономная загрузка — Linux считывает с электронного диска только те части
программы, которые используются для выполнения в данный момент времени;
• виртуальная память со страничной организацией (т. е. на диск из памяти вытес-
няется не весь неактивный процесс, а только требуемая страница); объем вирту-
альной памяти до 3 Гбайт;
• ОС и все программы работают каждый в своем виртуальном адресном простран-
стве, и таким образом не имеют возможности изменять код или данные другого
процесса;
• сертификация по стандарту POSIX.1, совместимость со стандартами System V и
BSD на уровне исходных текстов;
• наличие бесплатного исходного текста всех программ, включая тексты ядра,
драйверов, средств разработки и приложений.
• управление заданиями в стандарте POSIX; совместима на уровне исходных кодов
с UNIX SVR4 и BSD 4.4, что предоставляет возможность быстрого переноса про-
граммного обеспечения под другие программные (совместимые с UNIX и POSIX)
и аппаратные платформы (Alpha и Sparc);
• наличие собственной файловой системы и поддержка ряда распространенных
файловых систем (MINIX, Xenix, файловые системы System V);
• прозрачный доступ к разделам DOS (или OS/2 FAT), поддержка всех стандарт-
ных форматов CD ROM и поддержка сети TCP/IP, включая протоколы FTP, Telnet,
NFS и др.
Открытость исходных текстов и архитектуры ОС Linux наряду с растущей по-
пулярностью заставляют программистов переносить свои наработки на аппаратные
платформы SGI, IBM, Intel, Motorola и др. В частности, Motorola активно работает
в своей традиционной сфере встраиваемых систем и продвигает на рынок продукт
LinuxEmbedded.
Стандартное Linux-ядро занимает около 1,5 Мбайт, а требуемый этим ядром объ-
ем памяти составляет более 4 Мбайт. Кроме того, требуется память для поддержания
файловой системы, а если система работает в бездисковом режиме, то и память для
электронных дисков. Ядро имеет модульную структуру, что позволяет манипулиро-
308
ГЛАВА 3
вать неиспользуемыми в конкретных приложениях функциональными возможно-
стями. Дистрибутив ОС Linux занимает несколько сотен Мбайт.
Операционная система Linux не является ОС реального времени. В ОС Linux
реализован механизм планирования процессов, который называется режимом рав-
ноправия и который предназначен для систем с разделением времени. В ОС Linux
отсутствуют ограничения на захват процессора процедурами обслуживания преры-
ваний. При этом приоритет таких процедур превышает приоритет любой пользова-
тельской задачи. Иными словами, даже в чрезвычайно быстрых системах с мощными
процессорами класса Pentium время отклика пользовательских процессов в условиях
перегрузки может достигать сотен миллисекунд и даже секунд, что недопустимо для
ОСРВ. Поэтому для управления процессами в режиме реального времени использу-
ется ОС RT-Linux.
ОС RT-Linux — это система, в которой Linux-ядро является отдельной задачей,
выполняемой под управлением небольшой управляющей программы-диспетчера,
работающей в реальном времени. Приложения реального времени исполняются под
управлением этой программы, остальные — под управлением ядра Linux. Одним из
преимуществ этого метода является то, что программа-диспетчер реального времени
может иметь достаточно малые размеры и простую структуру, что облегчает провер-
ку соответствия системы требованиям реального времени. Кроме того, ОС Linux, ис-
полняющая обычные (не real-time) задачи, является в данном случае обыкновенной
Linux, совместимой с другими версиями этой операционной системы и допускающей
быстрое осуществление различных модификаций и модернизаций.
Таким образом, запуск из ядра реального времени Linux-ядра осуществляется
как задача с наименьшим приоритетом. В RT-Linux все прерывания обрабатыва-
ются ядром реального времени, а в случае отсутствия обработчика реального вре-
мени — передаются Linux-ядру. Фактически Linux-ядро является простаивающей
(idle) задачей операционной системы реального времени, запускаемой только в том
случае, если никакая задача реального времени не исполняется. Такое решение со-
четает в себе открытость системы с поддержкой приложений жесткого реального
времени.
ОС Windows NT с RTX
ОС Windows NT — многозадачная операционная система разработки фирмы Mi-
crosoft. Основным достоинством ОС Windows является повышенная надежность. В
основе системы управления памятью Windows NT лежит система виртуальной памя-
ти, встроенная в ядро ОС.
Каждое приложение может использовать до 2 Гбайт отдельного адресного про-
странства виртуальной памяти. Для создания виртуальной памяти используются
дисковые устройства. Система виртуальной памяти Windows NT позволяет создать
до 16 отдельных файлов страниц, расположенных на разных дисковых устройствах,
установленных в компьютере.
ОС Windows NT использует все возможности защищенного режима процессора,
в частности - переключение задач и страничную организацию. Используя 32-разряд-
ное смещение, приложение может работать с памятью объемом до 4GB без примене-
ния сегментных регистров процессора.
Каждому приложению (или процессу) предоставляется линейное адресное про-
странство размером 4 Гбайт. Область размером 2 Гбайт предоставлена приложению,
другие 2 Гбайт адресуемого пространства зарезервированы для использования ОС.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
309
Разделение адресных пространств выполняется с помощью назначения прило-
жениям индивидуальных наборов таблиц страниц виртуальной памяти. В результате
для каждого приложения выполняется отображение линейных адресов в собствен-
ный набор страниц виртуальной памяти, не пересекающийся с набором страниц дру-
гих приложений.
Полное изолирование адресных пространств создает трудности при необходи-
мости организации обмена данными между различными приложениями. Для орга-
низации обменов применяются дескрипторы прототипа РТЕ (prototype Page Table
Entry). Дескрипторы РТЕ создаются ОС для совместного использования страниц,
содержащих исполняемый код, а также для работы с файлами. Есть также способ ор-
ганизации общей памяти при помощи библиотек динамической компоновки DDL.
Расширение реального времени RTX (Real Time Extension) для ОС Windows NT
корпорации Ventur Com позволяет создавать приложения для высокоскоростного
управления с детерминированным временем реакции на внешние события.
RTX интегрировано в ядро Windows NT и для обеспечения необходимых функ-
ций использует сервис Windows NT и API WIN32. Каждый процесс RTX выполняет-
ся как драйвер устройства ядра NT, при этом процессы не защищены друг от друга.
Такая реализация приводит к быстрому переключению контекста, но небезопасна с
точки зрения конфиденциальности.
RTX добавляют к Windows NT специфическую для реального времени функцио-
нальность, а именно: обеспечивается возможность создавать процессы реального
времени, управляемые собственным планировщиком. Планировщик работает по
правилам реального времени и использует алгоритм вытеснения по приоритетам.
Процессы реального времени и стандартные процессы Win32 имеют средства взаи-
модействия друг с другом. Процессы реального времени имеют свой собственный
программный интерфейс RTAPI, реализующий развитый набор средств, характер-
ный для программных интерфейсов (API) ОСРВ. Приложение может использовать
как стандартные функции Win32, так и специфические функции API реального вре-
мени (RTAPI). Имеется возможность контроля над работоспособностью и времена-
ми реакции системы, что гарантирует ее предсказуемость (зависания стандартных
приложений Windows NT не приводят к зависанию приложений реального време-
ни); предоставляется возможность работы с быстрыми часами и таймерами высоко-
го разрешения, а также обеспечивается возможность прямого доступа к памяти и
физическим устройствам.
ОСРВ VxWorks
Операционная система реального времени VxWorks и инструментальная среда
Tornado фирмы Wind River Systems предназначены для разработки ПО встроенных
компьютеров, работающих в системах жесткого реального времени.
Операционная система VxWorks является системой с кросс-средствами разра-
ботки прикладного программного обеспечения, при этом разработка ведется на ин-
струментальном компьютере (host) в среде Tornado для последующего исполнения на
целевой машине (target) под управлением VxWorks.
ОС VxWorks поддерживает целевые архитектуры (targets): Motorola 680x0 и
CPU32, PowerPC; Intel 386/486/Pentium, Intel 960; Spare, Mips R3000/4000; AMD 29K,
Motorola 88110; HP РА-RISC; Hitachi SH7600; DEC Alpha.
OCPB VxWorks построена по технологии микроядра, т. e. на нижнем непреры-
ваемом уровне ядра выполняются только базовые функции планирования задач и их
310
ГЛАВА 3
управления коммуникацией/синхронизацией. Все остальные функции операцион-
ной системы более высокого уровня (управление памятью, вводом/выводом, сетевые
средства и т. д.) базируются на простых функциях нижнего уровня, что позволяет
обеспечить быстродействие и детерминированность ядра, а также легко строить не-
обходимую конфигурацию операционной системы.
В многозадачном ядре Wind используется алгоритм планирования задач, учиты-
вающий приоритеты и включающийся по прерываниям. В качестве основного средства
синхронизации задач и взаимоисключающего доступа к общим ресурсам в ядре Wind
применены семафоры. Имеется несколько видов семафоров, ориентированных на раз-
личные прикладные задачи: двоичные, целочисленные, взаимного исключения и POSIX.
Все аппаратно-зависимые части ОС VxWorks вынесены в отдельные модули для
того, чтобы разработчик встроенной компьютерной системы мог сам портировать
VxWorks на свою нестандартную целевую машину.
ОС VxWorks была первой операционной системой реального времени, в которой
реализован протокол TCP/IP с учетом требований реального времени. ОС VxWorks
поддерживает все сетевые основные средства и протоколы (TCP, IP, UDP, ARP, PPP,
Telnet, FTP, NFS и др.).
Реализация SNMP-агента предназначена для применения ОС VxWorks в интел-
лектуальном сетевом оборудовании (хабы, мосты, маршрутизаторы, повторители) и
других устройствах, работающих в сети.
Трассировку системных событий (переключения задач, запись в очередь сообще-
ний, установка семафора и т. д.) позволяет вести динамический анализатор WindView,
который отображает накопленные в буфере события на временной диаграмме анало-
гично экрану логического анализатора.
Специально для систем с сильно ограниченным объемом памяти компания Wind
River Systems разработала редуцированное ядро WindStream, которое требует для ра-
боты не более 8 кбайт ПЗУ и 2 кбайт ОЗУ При этом для WindStream применим весь
спектр инструментальных средств VxWorks, включая WindView.
В качестве интерфейса между инструментальной и встроенной целевой машина-
ми используются внутрисхемные эмуляторы и ROM-эмуляторы, включаемые в гнез-
до ПЗУ микропроцессора целевой системы.
Инструментальная среда Tornado имеет открытую архитектуру, что позволя-
ет другим фирмам-производителям интегрировать свои программные продукты с
Tornado. В стандартную конфигурацию Tornado входят ядро VxWorks и системные
библиотеки, дистанционный отладчик, конфигуратор и др.
ОС 2000.
ОС 2000 является ОС реального времени. Разработка ОС РВ базируется на прин-
ципах соответствия международным стандартам, мобильности, использования кон-
цепции микроядра и объектно-ориентированного подхода.
При разработке операционной системы использовались международные стан-
дарты POSIX 1003.1, стандарт на мобильные операционные системы (программный
интерфейс) и стандарт С, описывающий язык и библиотеки языка С.
В рамках стандарта POSIX реализованы математические функции, функции об-
работки символов и строк, функции распределения памяти и др.
Использование стандартов при разработке операционной системы облегчает
создание мобильных прикладных программ, т.е. их переносимость с одной ОС на
другую.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
311
Операционная система состоит из ядра и системных потоков управления. Ядро
выполняет функции планирования, синхронизации и взаимодействия потоков управ-
ления, а также низкоуровневые операции ввода/вывода. Функции ядра выполняются
в контексте вызвавшего его потока управления или функции обработки прерыва-
ния. Микроядро представляет собой небольшую часть ядра ОС, функциями которой
пользуются другие части ОС. Микроядро содержит функции управления потоками
нижнего уровня и средства синхронизации. Все другие функции (например, захват и
освобождение семафора, низкоуровневые операции ввода/вывода) выполняются вне
микроядра, используя его функции.
Системные потоки выполняют более сложные функции операционной систе-
мы, такие как ввод/вывод информации по сети или обмен информацией с файло-
вой системой. Использование системных потоков для сложных и протяженных во
времени функций ОС позволяет продолжать работу параллельно с выполнением
этих функций.
При оценке систем реального времени используются две важнейшие характери-
стики: время ответа на прерывание и время ответа потока управления.
Время ответа на прерывание — это время между моментом, когда был выставлен
запрос на прерывание, и моментом, когда начала выполняться первая команда функ-
ции обработки прерывания. Время ответа потока управления — это время между мо-
ментом, когда был выставлен запрос на прерывание, и моментом, когда начала выпол-
няться первая команда потока, который должен отреагировать на это прерывание.
Для разработки прикладного программного обеспечения используется ком-
плекс, состоящий из двух ПЭВМ, соединенных по сети: инструментальная ПЭВМ
с ОС UNIX и целевая ПЭВМ, для которой разрабатывается программное обе-
спечение. Разработка программного обеспечения ведется на инструментальной
ПЭВМ. Средства разработки позволяют оттранслировать программу, написанную
на языках С и Ассемблер, а также отлаживать программу, загруженную в целевую
машину.
Так как прикладная программа обычно представляет собой несколько парал-
лельно выполняемых потоков управления, то возникает потребность в средствах
синхронизации. В соответствии с POSIX реализованы следующие средства синхро-
низации: целочисленные семафоры, мьютексы и условные переменные. Семафоры
обеспечивают две основные операции: захват семафора и освобождение семафора. В
обеих операциях используется счетчик семафора — целое число, начальное значение
которого определяется при создании семафора. Начальное значение определяет мак-
симальное количество потоков управления, которые могут одновременно захватить
семафор.
Мьютексы имеют много общего с семафорами. Они также используются для
синхронизации потоков управления на основе операций захвата мьютекса и осво-
бождения мьютекса. Основные отличия мьютексов от семафоров состоят в том, что
мьютекс может быть захвачен не более чем одним потоком управления. Освободить
мьютекс может только владелец, захвативший его. В силу этого мьютексы нельзя ис-
пользовать в функциях обработки прерываний.
В ОС реализованы функции часов и таймеров. Для хранения даты и времени в
системе используются различные структуры данных, позволяющие хранить время в
секундах и наносекундах. Программные таймеры позволяют запланировать выпол-
нение какой-либо деятельности в определенный момент времени в будущем.
312
ГЛАВА 3
Базовые операции ввода/вывода, а также асинхронный ввод/вывод реализованы
в соответствии со стандартом POSIX, который обеспечивает единообразный доступ
к устройствам различных типов. Потоки ввода/вывода и форматированный ввод/вы-
вод реализован в соответствии со стандартом С.
Устройства и файлы являются основными понятиями системы ввода/вывода.
Устройства делятся на физические (например, последовательный и параллельный
порт, диск) и логические (например, программные каналы, сокеты).
Для ввода (чтения) информации из устройства и вывода ее в устройство исполь-
зуется понятие файла. Одним устройствам (например, последовательному порту) со-
ответствует один файл, другим (например, диску) — несколько файлов. Файлы, соот-
ветствующие устройствам первого типа, называются специальными файлами.
Устройства с прямым доступом (диски, флэш-память, оперативная память) мо-
гут содержать несколько файлов, каждый из которых рассматривается как последо-
вательность байтов. Внутри файла также обеспечивается прямой доступ. Такие фай-
лы называются регулярными.
Программный канал представляет собой логическое устройство, предназначен-
ное для передачи данных между потоками управления. Данные, записанные в про-
граммный канал, считываются оттуда в порядке поступления (First-In-First-Out,
первым записан — первым прочитан). Существует 2 типа программных каналов:
именованные и неименованные. Первым соответствуют файлы типа FIFO, вторым —
файлы типа PIPE. Операция записи и чтения обеспечивают целостность данных и
целостность файлов.
ОС 5000
ОС 5000 — операционная система реального времени.
ОС 5000 обладает следующими функциональными возможностями:
• управление выполнением задач;
• взаимодействие между задачами через аппарат передачи сообщений;
• включение процедур по прерываниям;
• поддержка текущего времени суток и даты, управление программными таймера-
ми, генерация временных меток;
• вызов при инициализации ОС указанных при генерации пользовательских про-
цедур;
• динамическое выделение группы событий и синхронизация выполнения задач с
ними;
• управление ресурсами с последовательным доступом и семафорами;
• управление драйверами функциональных клавиатур, сети МАПС, сети RS-485;
• управление передачей данных между абонентами разных сетей (нижнего и верх-
него уровней) — организация моста и др.
ОС Microware OS-9
Операционная система реального времени OS-9 корпорации Microware System
является многозадачной, многопользовательской операционной системой для
встраиваемых приложений, работающих в режиме реального времени. Эта систе-
ма предназначена для работы в таких системах, как мобильные телекоммуника-
ционные устройства, встраиваемые терминалы доступа в Интернет, интерактив-
ные цифровые телевизионные приставки. OS-9 работает на процессорах Motorola,
ARM/StrongARM, Intel IXP1200 Network Processor, MIPS, PowerPC, Hitachi SuperH,
Intel Pentium и др.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
313
Ядро OS-9 является масштабируемым, полностью вытесняемым, поддерживает
функционирование большого числа процессов с различными уровнями приорите-
тов (до 65535)и обеспечивает работу до 255 пользователей. Ядро OS-9 содержит
более 90 системных вызовов, которые дают возможность управлять динамическим
режимом диспетчеризации, распределением памяти, межпроцессорной коммуни-
кацией и т. д.
Благодаря наличию стандартизованной коммуникационной среды в OS-9 до-
ступны современные и наиболее перспективные коммуникационные протоколы, та-
кие как ISDN, ATM, Х.25 и др.
Корпорация Microware одной из первых лицензировала Java для встраиваемых
приложений и является лидером по предложению разнообразных средств и прило-
жений в рамках OS-9 для различных классов устройств. В OS-9 пользователю пред-
лагается Java VM, Java-Compiler/JIT, Java-ROMizer, Java Applets Lib, Embedded Java,
Personal Java.
В качестве интегрированной кросс-среды разработки приложений для OS-9 ис-
пользуется пакет Hawk корпорация Microware, который функционирует на платформе
MS Windows NT. Hawk является открытой средой и предоставляет сторонним разра-
ботчикам инструментальных средств более сотни API, позволяющих включать в со-
став среды Hawk продукты известных фирм разработчиков инструментального ПО.
Для тестирования и верификации ПО разработано средство верификации про-
граммного обеспечения CodeTEST (Applied Microsystems), встраиваемое в Hawk.
Это средство дает возможность осуществлять трассировку встраиваемого ПО и
контролировать его характеристики, а также ход выполнения тестов и распределе-
ние памяти.
ОСРВ Windows СЕ .NET
Windows СЕ — это полноценная 32-разрядная, объектно-ориентированная, мно-
гозадачная операционная система семейства Microsoft Windows с поддержкой фикси-
рованной очереди приоритетов с исполнением до завершения.
Аббревиатура СЕ по одной версии означает Consumer Electronic, по другой —
Consumer Edition. Уже сейчас эта система используется в Интернет-приставках (WebTV),
сотовых телефонах, карманных компьютерах, в автомобилях, промышленных системах
и т. п. Изначально она разрабатывалась для блокнотных ПК. Однако эта операционная
система развивается очень динамично. Ее последняя версия представляет собой ОС
реального времени, поддерживающую все основные интерфейсы и механизмы взаимо-
действия приложений, реализованные в Windows NT. Поэтому специалисты АСУ ТП
используют ее на уровне контроллеров в промышленной автоматике.
Первый вариант ОС Windows СЕ — Windows СЕ 1.0 выпущен компанией
Microsoft в 1996 г. В сентябре 1997 года была выпущена Windows СЕ 2.0. В ней были
расширены возможности управления питанием, реализована поддержка экранов с
более высоким разрешением и глубиной цвета, встроенных модемов и т. д. Через год
появилась очередная версия — Windows СЕ 2.1. В ней также улучшена работа с гра-
фикой, расширены возможности файловой системы, включены криптографические
средства (Crypto API).
Архитектура Windows СЕ соответствует монолитной модели архитектуры ОС,
однако для повышения масштабируемости часть сервисов системы оформлена как
отдельные модули, взаимодействующие с ядром по технологии СОМ. Модульность
Windows СЕ является ее главным преимуществом. Можно создать систему только из
314
ГЛАВА 3
базового ядра, или систему только с поддержкой экрана, интерфейса и пр. Это позво-
ляет создавать операционную систему под конкретное устройство и его функции
Для полноценной работы Windows СЕ, использующей все компоненты архитек-
туры, требуется всего 2 Мбайт ПЗУ, причем выполняться она может (даже с графиче-
ской оболочкой) в оперативной памяти менее 512 кбайт.
В управлении памятью система Windows СЕ реализует виртуальную модель, ког-
да каждый процесс имеет индивидуальное адресное пространство, что обеспечивает
высокую степень защищенности данных и кода.
Поскольку ОС Windows СЕ является Win32-coBMecTHMoi1, разработка системы
реального времени на базе этой ОС проводится с использованием богатого набора
инструментальных средств. Также компания Microsoft предоставляет специализиро-
ванные средства разработки приложений для Windows СЕ.
В 2000 году появилась ОС Windows СЕ 3.0. Ее основными достоинствами по срав-
нению с предыдущими версиями являются:
• операционная система реального времени;
• поддержка Win32 API;
• поддержка технологий СОМ+, DCOM, RPC, DirectX, DHTML;
• поддержка стандартных коммуникационных Internet-протоколов: TCP/IP и РРР;
• поддержка Microsoft Message Queue Services (MSMQ);
• расширение возможностей файловой системы: максимальный размер объекта
увеличен до 256 Мбайт, а файла в нем — до 32 Мбайт;
• файловая система API расширяется до стандарта Win32;
• число уровней приоритетов увеличено с 8 до 256 (для потоков с одинаковым
приоритетом используется управление на основе предустановленных для пото-
ков квантов и приоритетов).
Версия Windows СЕ 5.0 объединяет возможности ОСРВ и последние техноло-
гии Windows. При старте Windows СЕ создает виртуальное адресное пространство
емкостью 4 Гбайт, разделенное на ядро и пользовательское пространство, которое
делится на слоты по 32 Мбайт. Инструментальная среда разработки — пакет Platform
Builder.
Следует различать систему реального времени (СРВ) и операционную систему
реального времени (ОСРВ). Первая включает в себя следующие элементы: аппара-
туру, операционную систему и прикладное ПО. ОСРВ это только один из элементов
СРВ и она должна обеспечивать набор функций, позволяющих всей системе соот-
ветствовать предъявляемым к ней требованиям.
Windows СЕ обладает всеми необходимыми для встроенных приложений свой-
ствами компактности, масштабируемости, ОС жесткого реального времени, много-
платформенности.
Компактность. Windows СЕ является самой компактной из всех операционных
систем семейства Windows. Минимальная конфигурация, включающая в себя ядро
и основные службы, требует менее 500 Кбайт. Полнофункциональный вариант ОС,
с графическим интерфейсом пользователя, коммуникационными возможностями
и т. п. занимает около 2,5 Мбайт. При этом большинство компонентов могут быть
записаны в ПЗУ контроллера и, следовательно, отнимают минимум оперативной
памяти.
Масштабируемость. Windows СЕ состоит из набора компонентов, некоторые из
которых являются обязательными, а некоторые — факультативными.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
315
ОС жесткого реального времени. Заложенные в Windows СЕ средства позволяют
использовать эту ОС в качестве операционной системы реального времени.
Поддержка различных аппаратных платформ. Windows СЕ поддерживает раз-
личные вычислительные платформы компании Microsoft.
Высокая надежность устройств с Windows СЕ обеспечивается тем, что эти си-
стемы могут выполняться непосредственно из ROM или специальной флэш-памяти.
При желании прикладные программы можно разместить в той же флэш-памяти, что
позволит существенно повысить надежность всей системы.
ОС MS DOS
ОС MS DOS будет сохранять довольно прочные позиции на уровне контролле-
ров в системах управления. Это объясняется в первую очередь стабильностью этой
операционной системы, ее дешевизной, нетребовательностью к ресурсам и просто-
той в эксплуатации. MS DOS не является ОСРВ. Поэтому поддержка работы в ре-
альном времени осуществляется исполнительными модулями, реализующими соот-
ветствующие функции. Это требует от программистов более высокой квалификации
в области работы систем реального времени, понимания основ контроля и управле-
ния технологическими процессами. Примером применения ОС MS DOS компанией
AdAstra является система Trace Mode до версии 4.20. После этой версии исполни-
тельные модули разрабатывались для Windows 3.1 и Windows NT. Кроме того, в Trace
Mode версии 5.0 исполнительные модули для контроллеров разработаны для запуска
под MS DOS. Хотя MS DOS имеет много недостач ков и ограничений, но она остается
на рынке и занимает значительную его долю. В новой версии системы значительно
увеличен вычислительный ресурс.
Другие ОС
Существует ряд операционных систем реального времени для встраиваемых си-
стем. К ним относятся ОСРВ Jbed, Nucleus, RTOS CORTEX, DeltaOS и др.
Система Jbed фирмы Oberon Microsystems является ОСРВ с ядром, ориентирован-
ным на Java-технологию, и может рассматриваться как Java-платформа для встроен-
ных систем и систем реального времени.
Операционная система Nucleus корпорации Accelerated Technology предназначена
для встраиваемых приложений. Nucleus является кросс-системой, т. е. программный
продукт создается на одной программно-аппаратной платформе, а выполняется на
другой. ОСРВ Nucleus поставляется вместе с открытым кодом.
CORTEX — это многозадачная ОСРВ для встраиваемых приложений, разрабо-
танная корпорацией ARTESYS (Australian Real Time Embedded Systems). Исходный
код системы свободно распространяется для образовательных и некоммерческих
целей.
DeltaOS является ОСРВ для встраиваемых приложений, разработанной китай-
ской корпорацией CoreTek Systems. Система поддерживается для наиболее популяр-
ных семейств микропроцессоров, таких как PowerPC, Intel Х86, ARM, MIPS.
Более подробные сведения об этих ОСРВ приведены в работе [3.22].
3.3.5 Флэш-диски
В последние годы отмечается стремительный рост интереса к твердотельным на-
копителям информации, выполненным по флэш-технологии. Использование флэш
дисков вместо обычных накопителей находит самое широкое применение:
• в мобильной аппаратуре;
316
ГЛАВА 3
• бортовых системах сбора и регистрации;
• отказоустойчивых системах промышленной автоматизации;
• телекоммуникационном оборудовании;
• для других задач, требующих сочетания повышенной надежности, вибро- и уда-
ропрочности, быстродействия в жестких условиях эксплуатации.
Флэш-диски можно условно разделить на несколько категорий:
1. Устройства памяти в виде микросхем (DiskOnChip), которые устанавливают-
ся в специальные панельки, размещенные на процессорной плате (рис. 3.25). Объ-
ем памяти от 128 Мбайт, интерфейсы IDE, USB 2.0. В данном случае функции по-
стоянного и энергонезависимого запоминающего устройства выполняются одной
микросхемой. Большинство промышленных процессорных плат имеют разъем для
установки DiskOnChip. После установки микросхемы на плату в системе появляется
дополнительный накопитель, ничем не отличающийся, с точки зрения операционной
системы, от обычного жесткого диска.
2. Устройства памяти в виде съемных (заменяемых) модулей в формате карт
PCMCIA (тип I, II и III), карт Compact Flash и Multimedia Card. Это быстрые, ком-
пактные съемные устройства, допускающие установку и извлечение в процессе рабо-
ты системы. Они полностью эмулируют жесткий диск и удобны тем, что могут быть
использованы в качестве переносных накопителей информации. Объем памяти от
512 Мбайт, интерфейс Compact Flash, тип 1. Для установки в систему эти устройства
требуют специальных разъемов, которыми оснащены многие промышленные ком-
пьютеры и контроллеры (рис. 3.26).
3. Устройства памяти, конструктивно выполненные в виде корпуса обычного
жесткого диска формата 2.5", 3.5" или 5.25" со стандартными интерфейсами IDE,
SATA и SCSI. Такие устройства полностью совместимы с обычными жесткими дис-
ками по интерфейсным разъемам и способам подключения, имеют высокую сте-
пень надежности, не создают акустических и электромагнитных шумов, обладают
низким энергопотреблением, малым весом, мало восприимчивы к вибрациям и
ударам (рис. 3.27).
4. Устройства памяти в виде модулей (DiskOnModule) со стандартным интерфей-
сом IDE. Модульные IDE флэш-диски представляют собой маленькую платку с 40-
или 44-контактным разъемом. Они предназначены для непосредственной установ-
ки в IDE-разъем процессорной платы и имеют два варианта исполнения: с прямым
вертикальным разъемом и с L-образным разъемом, благодаря чему могут устанав-
ливаться параллельно процессорной плате (3.28). Модульные IDE флэш-диски так-
же полностью эмулируют работу обычного жесткого диска. Объем памяти — от 32
Мбайт до 100 Гбайт и более.
Рис. 3.25
Рис. 3.26
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
317
Рис. 3.28
Рис. 3.29
5. Адаптеры РС/104 для электронных дисков. Если па Вашей процессорной пла-
те нет необходимого разъема для установки DiskOnChip, модулей Сотрас1Флэш и
плат PCMCIA, можно воспользоваться платами расширения с интерфейсами ISA или
РС/104. На такие платы можно установить 2-4 микросхемы DiskOnChip, 1 модуль
Сотрас1Флэш или 1-2 карты PCMCIA (рис. 3.29).
Скорость обмена (чтение/запись) флэш-дисков — от 10 до 40 Мбайт/с (в SSD 5000
до 60 Мбайт/с), число циклов стирания/записи — от 2 млн для DiskOnChip до 5 млн
для накопителей серии SSD с интерфейсом SCSI.
3.4. Панели оператора
Операторская панель представляет собой устройство оперативного ввода и ото-
бражения буквенно-цифровой или графической информации при обмене данными с
удаленным контроллером или компьютером. Эта информация отображается на экра-
не текстовых или графических панелей оператора при подключении их к контролле-
ру или компьютеру по последовательным интерфейсам RS-232, RS-422/RS-485. По-
мимо буквенно-цифровой информации на экране панели оператора отображаются
графики, диаграммы, тренды, динамические рисунки и пр.
В качестве устройства ввода применяется функциональная пленочная клавиа-
тура или сенсорный экран. Помимо клавиш и жидкокристаллического индикатора
на лицевую панель могут быть выведены светодиодные индикаторы работы каналов,
сигнализации аварии и др.
Панель оператора обменивается информацией по сетям Ethernet, Modbus, Profi-
bus, DeviceNet и др. Панель оператора имеет возможность подключения к контрол-
лерам большинства фирм производителей. Программное обеспечение панелей опе-
ратора для конфигурации под ОС Windows 98/NT/2000/XP обеспечивает удобное и
легкое программирование панелей.
Таким образом, применение операторской панели во многих случаях более эко-
номично, чем применение полноценного компьютера или монитора. Помимо ото-
бражения измеряемых параметров операторская панель позволяет управлять про-
цессом, изменяя задание регуляторам или состояние исполнительных механизмов.
Встроенные часы реального времени имеют функцию автоматического перехода на
летнее время. Часы реального времени в ПЛК гарантированно синхронизируются с
часами реального времени панели. Панель оператора позволяет просто создать отчет
и сохранить его. Отчет представляет собой текстовый блок и содержит информацию
318
ГЛАВА 3
об изменении значений параметров процесса (регистров управляющего контрол-
лера) во времени. Печать отчета может производиться либо в определенное время,
либо по событию. Возможность защиты паролем различных объектов и кнопок по-
зволяет избежать постороннего воздействия на производственный процесс. Можно
установить несколько уровней защиты, что позволяет предоставлять различным
пользователям различные права.
Ряд панелей оператора могут отсылать аварийные и обычные отчеты, тренды и
рецептуры по электронной почте. Сообщения также могут пересылаться на мобиль-
ные телефоны в виде SMS.
Операторские панели имеют слоты для одной или двух карт расширения. До-
ступны следующие типы карт расширения:
• IFC-MC используется для увеличения памяти терминала PCMCIA флэш-картой.
Память может использоваться как для самого проекта, так и для хранения ре-
зервной копии приложений, трендов и рецептов.
• IFC-PI используется для подключения принтера через параллельный порт.
« IFC-ETTP и IFC-ETCX используются для подключения терминала к Ethernet по
TCP/IP протоколу. Подключение осуществляется витой парой, либо коаксиаль-
ным кабелем.
Получили применение текстовые и графические панели оператора.
Текстовые панели с буквенно-цифровым монохромным ЖК-дисплеем с подсвет-
кой имеют 2 (4) строки по 20 символов или 8 строк по 40 символов. Общее число
клавиш, в том числе программируемых, у текстовых панелей колеблется от 5 до 30.
Число пикселей экрана от 122x32,128x64 до 160x180.
К числу функциональных возможностей текстовых панелей оператора относят
парольную защиту, а также защиту ввода данных, создание архивов, трендов, алар-
мов, диаграмм, барграфов, ввод/вывод дискретных сигналов, симуляцию щитовых
приборов, индикацию состояния оборудования, математические и другие функции.
На рис. 3.30 показана текстовая панель TD200 фирмы Siemens.
Графические панели оператора с монохромным и цветным сенсорным экраном
позволяют создавать мнемосхемы процесса, динамически отображать значения
переменных, управлять процессом с помощью функ-
циональных клавиш, переключать страницы экрана и
создавать отчеты, выводя страницы экрана на печать с
указанием даты и времени, осуществлять диагностику
контроллера или компьютера. Для проектирования изо-
бражений в состав ПО панелей входят встроенные гра-
фические компоненты, а также изображения различных
видов кнопок, тумблеров, переключателей, измерительных приборов и регулято-
ров, часы, самописцы и др.
Графические панели имеют многоязыковую поддержку приложений и все другие
функции текстовых панелей оператора. Размер монохромного или цветного экрана
(поддержка 128 или 256 цветов) в зависимости от модели составляет от 5,7" до 12,1".
Графическая панель оператора с клавиатурой может иметь до 40 функциональных и
сервисных буквенно-цифровых клавиш и имеет за счет этого большие габариты, чем
панели оператора с сенсорным экраном.
На рис. 3.31 показана панель ТР170В фирмы Siemens, на рис. 3.32 — панель Cimrex
90D фирмы Beijer Electronics, а на рис. 3.33 QuickPanel фирмы GE Fanuc.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
319
Рис. 3.32
Рис. 3.33
Рис. 3.31
Рис. 3.34
Отдельную группу составляют мобильные (переносимые на руке) панели опе-
ратора с цветным или монохромным ЖК-индикатором (табл. 3.11). Мобильные
панели позволяют выполнять функции оперативного управления и мониторинга
параметров из любой точки системы. Терминалы при этом должны иметь специ-
альные соединительные коробки. При необходимости мобильная панель может
быть запрограммирована на непосредственное подключение к контроллеру, ком-
пьютеру или к сети через встроенный интерфейс (например, RS-485, Profibus и др.).
Подключение и отключение мобильных панелей оператора может производиться
во время работы оборудования.
На рис. 3.34 представлена мобильная панель фирмы Siemens.
Панели оператора могут соединяться с контроллером или компьютером в режи-
ме точка-точка, с использованием полевой шины в режиме одна панель — несколько
ПЛК и один ПЛК — несколько панелей оператора или в сетевой
архитектуре (Ethernet TCP/IP, Modbus Plus, Profibus DP, Devi-
ceNet). Степень защиты большинства панелей оператора IP65.
Программирование панелей оператора осуществляется с по-
мощью специализированного ПО, работающего в среде Windows
98/NT/2000/XP. Сохранение и перенос данных и параметров
настройки возможен также с помощью SMS-карт (Smart Media
Card). Программирование панелей оператора производится на
языке LD или др. по стандарту IEC 61131-3.
Пакеты программирования помимо многоязыковой поддержки имеют разви-
тую библиотеку графических символов и примитивов. В состав пакетов програм-
мирования обычно входят драйверы контроллеров большинства крупных фирм-
производителей.
В табл. 3.10 приведены основные технические характеристики панелей оператора
различных фирм-производителей.
3.5. Источники бесперебойного питания (ИБП)
Защита электропитания систем сбора и обработки информации, контроля и
управления технологическими процессами является важнейшим условием надежной
работы оборудования. ИБП позволяют не только фильтровать скачки напряжения
питания, но и корректно завершить работу всех приложений в случае длительного
отключения электропитания либо восстановить питание при кратковременном его
отключении.
ИБП применяются для питания ответственных серверов БД РВ, локальных сетей,
различного оборудования для автоматизации и управления, телекоммуникационных
320
ГЛАВА 3
Рис. 3.35
систем и систем безопасности. Благодаря нали-
чию коммуникационного порта RS-232 обеспе-
чивается связь ИБП с компьютером и монито-
ринг состояния ИБП.
Исходя из различия мощностных характе-
ристик ИБП имеют следующие конструктивные
исполнения: настольное, напольное (стоечное)
и 19"исполнение (рис. 3.35).
Для различных моделей мощность ИБП ко-
леблется от 75 Вт (время автономной работы
30...40 минут), 300 Вт (время автономной ра-
боты 10...30 мин), 3...5 кВт (время 8...10 мин),
15...80 кВт (время 6...8 мин) до 600 кВА и бо-
лее.
При перерывах времени отключения электропитания более 30 мин целесообраз-
но использование резервного питания от дизель-генератора.
Среди наиболее часто встречающихся неисправностей электропитания наблюда-
ются следующие:
• пропадание или резкие скачки напряжения;
• электромагнитные и радиочастотные помехи;
• колебания частоты питающего напряжения;
• искажение синусоидальной формы напряжения;
• переходные процессы при коммутации силовых элементов;
• высоковольтные импульсы и др.
К методам устранения неисправностей электропитания относят следующие:
• Переход на питание от встроенных аккумуляторных батарей (АБ) при пропада-
нии электропитания или значительном повышении (понижении) входного на-
пряжения. Время переключения составляет 2...4 мс. Форма напряжения при пи-
тании от АБ синусоидальная или прямоугольная. Время работы от АБ зависит от
нагрузки — при уменьшении нагрузки время работы от АБ увеличивается.
• Фильтрация входного напряжения с защитой от высоковольтных импульсных
помех и провалов напряжения с коррекцией амплитуды входного напряжения.
• Переключение нагрузки ИБП на внешнюю сеть в случае длительной перегрузки
или перегрева или других неисправностей без перерыва электропитания.
• Модульное конфигурирование ИБП с автоматическим отключением неисправ-
ного модуля и перераспределением нагрузки. Замена модуля осуществляется без
отключения нагрузки от питающей сети.
• Резервирование ИБП с равномерным распределением нагрузки. При этом номи-
нальная мощность работы параллельной системы ИБП с резервированием равна
номинальной мощности одного ИБП.
К другим особенностям ИБП относятся автоматическое тестирование со-
стояния АБ, высокая перегрузочная способность (возможность выдерживать
значительные перегрузки, вплоть до 200...300%, без перехода на by-pass). Режим
by-pass — это режим обхода питания ИБП по схеме on-line на питание критичной
нагрузки входным сетевым напряжением. Также в ИБП используется возможность
увеличения времени батарейной поддержки и уменьшения времени заряда батарей
за счет дополнительного зарядного устройства, дистанционное включение/отклю-
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ 321
чение ИБП с помощью пульта дистанционного управления. Важной характеристи-
кой ИБП является принцип резервирования N+l, N+2, N+3, заключающийся в том,
что при выходе одного из модулей ИБП нагрузка равномерно распределяется сре-
ди оставшихся N модулей. Кроме того, при уменьшении нагрузки лишние модули
ИБП отключаются.
Наибольшее применение получили следующие типы ИБП [3.23, 3.24]:
• ИБП по схеме с двойным преобразованием энергии или On-line ИБП. Точность
стабилизации выходного напряжения при сбалансированной нагрузке 1...3%.
• ИБП с переключением (Standby UPS или off-line, рис. 3.36).
В нормальном режиме выпрямитель подзаряжает АБ. При уменьшении или
пропадании питания срабатывает переключатель, продолжая питать нагрузку от
АБ. Однако, на время переключения (3...5 мс) образуется разрыв в питающем на-
пряжении.
• ИБП, взаимодействующие с сетью (Line Interactive UPS, рис. 3.37). ИБП от-
личается наличием автотрансформатора, подключенного к нагрузке. Таким
образом, этот ИБП регулирует напряжение на выходе. Выходное напряжение
растет, если напряжение на входе падает и наоборот. ИБП, взаимодействую-
щие с сетью, регулируют выходное напряжение ступенчато. При уменьшении
напряжения на 12...15% подключается повышающая обмотка автотрансфор-
матора, которая повышает выходное напряжение на 12... 15% и наоборот. При
более значительном изменении сетевого напряжения ИБП переключается на
работу от АБ.
• Феррорезонансные ИБП (Ferroresonant UPS). Схема ИБП этого класса отличает-
ся от предыдущей тем, что в ней вместо автотрансформатора включен ферроре-
зонансный трансформатор. Его основное назначение — стабилизация выходного
напряжения. Поскольку феррорезонансный трансформатор обладает значитель-
ной индуктивностью в момент переключения нагрузка питается энергией, нако-
пленной в магнитном поле трансформатора. Таким образом, в момент переклю-
чения нет разрыва питающего напряжения. Это позволяет отнести этот тип ИБП
к типу On-line ИБП. Точность стабилизации выходного напряжения 1...5%. При
снижении нагрузки погрешность уменьшается.
Большинство известных ИБП являются «On-line» ИБП, схема построения кото-
рых характеризуется двойным преобразованием входного напряжения. В нормальном
режиме работы входное напряжение преобразуется в постоянное, а затем с помощью
инвертора вновь преобразуется в переменное напряжение. При пропадании входного
напряжения инвертор, постоянно подключенный к АБ, мгновенно переходит на пита-
11 Зак. 3801
322
ГЛАВА 3
ние от нее, продолжая обеспечивать нагрузку переменным напряжением без разрыва
синусоиды входного напряжения и без искажения ее формы. ИБП по схеме «On-line»
имеют на входе стабилизатор напряжения, предотвращающий переход ИБП на пита-
ние от АБ при колебаниях входного напряжения. ИБП по схеме «Оп-Ипе» используют-
ся для ответственных применений (питание файл-серверов, рабочих станций и пр.).
Основные типы ИБП имеют синусоидальную форму выходного напряжения. Ко-
эффициент гармонических искажений On-line ИБП и феррорезонансных ИБП < 5%.
Некоторые On-line ИБП способны корректировать форму выходного напряже-
ния даже при работе с нелинейными нагрузками значительной мощности.
Борьба с импульсными помехами в ИБП осуществляется установкой варистор-
ной защиты (варисторный шунт) и гальваническим разделением сигналов.
Системы бесперебойного питания делят на децентрализованные, централизо-
ванные и структурированные.
Децентрализованные системы бесперебойного питания предполагают наличие
большого числа маломощных ИБП для каждого из терминалов и одного дизель-
генератора. Они позволяют функционировать при отключении питания каждый
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
323
терминал самостоятельно в течение определенного времени в зависимости от мощ-
ности ИБП.
Централизованные системы включают несколько работающих параллельно ИБП
и одного или нескольких дизель-генераторов. Такая структура применяется для боль-
ших систем и крупных объектов.
Структурированные системы занимают промежуточное место между децентра-
лизованными и централизованными системами. Структурированные системы бес-
перебойного питания включают несколько ИБП средней или большой мощности
(«On-line» ИБП) и один или несколько дизель-генераторов. Применяются для пита-
ния систем управления небольших участков или цехов.
Среди режимов работы ИБП известны следующие:
• нормальный — когда нагрузка получает питание от электросети, а АБ находится
в режиме контролируемого подзаряда;
• аварийный — нагрузка получает переменное напряжение питания от инвертора,
который питается от АБ;
• «холодный старт» — режим автономного запуска ИБП при отсутствии напряже-
ния на его входе.
Большинство ИБП имеют КПД (отношение мощности, потребляемой нагрузкой,
к полной мощности, потребляемой ИБП), равное 70.. .80%.
К числу используемых аккумуляторов относят герметичные свинцово-кислотные
или свинцово-гелиевые герметичные необслуживаемые аккумуляторы (напряжение
12 В, емкость 7 А-ч), срок службы порядка 5 лет в соответствии с EUROBAT.
Программное обеспечение, как правило, входит в комплект поставки ИБП.
На рис. 3.38 представлен ИБП фирмы Powerware 9125 RM, на рис. 3.39 ИБП HF
Top Line фирмы Meta System, на рис. 3.40 ИБП фирмы Liebert и на рис. 3.41 — модуль
РМС фирмы RITTAL. Модуль РМС включает выпрямитель, усилитель, инвертор,
статический байпас и микропроцессорную систему контроля работы ИБП, вклю-
чая систему зарядки аккумуляторов. Выпускаются модули на мощности 10, 20, 30
и 40 кВА.
В табл. 3.12 приведены основные технические характеристики ИБП.
3.6. Локальные микропроцессорные регуляторы
3.6.1 Назначение и характеристики микропроцессорных регуляторов
Локальные микропроцессорные регуляторы предназначены для измерения, сиг-
нализации и регулирования технологических параметров в локальных системах авто-
матизации. Регуляторы входят в состав распределенных систем управления, а также
могут использоваться автономно в структуре систем автоматического регулирования.
Микропроцессорный регулятор представляет собой функционально закончен-
ное микропроцессорное программируемое устройство.
К характерным особенностям микропроцессорных регуляторов относятся:
• Цифровая индикация текущих значений параметров и задания.
• Конфигурация регулятора кнопками с панели прибора.
• Жесткая или свободно-конфигурируемая структуры.
• Совмещение функций измерения, индикации, сигнализации и регулирования.
• Входные и выходные каналы (аналоговые, дискретные).
• Наличие программного задатчика (число сегментов программы).
324
ГЛАВА 3
• Алгоритмические функции регулирования (позиционное, ПИД-регулирование,
следящее, соотношения, каскадное и др.).
• Наличие режима автонастройки параметров регулятора.
• Функция ручного управления с панели регулятора.
• Связь с персональным компьютером (наличие интерфейса RS-232C, RS-422/ RS-
485) и возможность программирования с компьютера.
Достоинства микропроцессорных регуляторов:
• высокие технические характеристики: точность, многофункциональность, бы-
стродействие и др.;
• удобство обслуживания, ремонтопригодность;
• простота настройки, отсутствие требований знания программирования;
• малые габариты, низкая стоимость.
К недостаткам регуляторов следует отнести малоканальность (от одного до че-
тырех каналов), ограничение алгоритмов управления, связанное с ограничением
памяти.
Рассмотрим особенности локальных микропроцессорных регуляторов более
подробно.
1. Цифровая индикация текущих и заданных значений параметра осуществля-
ются с помощью жидкокристаллического дисплея с высокой разрешающей способ-
ностью или с помощью 4...6-разрядных семисегментных индикаторов (высота сим-
волов 8 или 14 мм). На ЖК-дисплее могут отображаться тренды технологических
параметров, гистограммы, буквенно-цифровая индикация значений параметров, а
также небольшие мнемосхемы процесса. Размер экрана ЖК-дисплея от 50x100 мм до
134x130 (5"). Примером регуляторов с ЖК-дисплеем служат, например, программ-
ный регулятор процесса IMAGO 500 фирмы JUMO (Германия) и одноконтурный кон-
троллер серии YS-100 (-131, -136) фирмы YOKOGAWA.
Светодиодные индикаторы могут иметь регулируемую яркость, устанавливае-
мую с компьютера через интерфейс RS-232. Помимо значений задания параметра на
индикаторы выводится информация, необходимая при программировании регуля-
тора. На индикаторы также выводится информация об обрыве датчиков, превыше-
нии значения заданного интервала, сообщения об ошибках (диагностика) и др. На
отдельном индикаторе отображается номер канала. Цвет свечения индикаторов —
красный и зеленый.
2. К числу достоинств микропроцессорных регуляторов относится удобная и
простая установка задания, а также конфигурация регулятора с помощью кнопок на
лицевой панели прибора. К числу параметров конфигурации регулятора относятся:
установка заданного значения параметра, а в случае программного регулирования —
установка параметров программы (времени и значения параметра на каждом участ-
ке программы), выбор входного сигнала от датчика (тип термопары или термометра
сопротивления, аналоговый сигнал, диапазон измерения), уставка значений пара-
метров сигнализации и гистерезиса уставок, тип выходного сигнала (ШИМ, ФИМ,
аналоговый или дискретный выход), параметры П-, ПИ- или ПИД-регулятора, дли-
тельность импульса, время перехода индикаторов регулятора в «спящий» режим с
пониженной яркостью и др. Важной характеристикой регулятора является возмож-
ность перехода с помощью кнопок на панели регулятора в режим дистанционного
управления и формирования сигналов «больше» — «меньше» с выхода регулятора
на исполнительный механизм. Контроль за положением вала исполнительного меха-
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
325
низма или состоянием магнитного пускателя (реле) осуществляется с помощью бар-
графа или индикаторов на панели регулятора.
3. Микропроцессорные регуляторы имеют жесткую или свободно-кон-
фигурируемую структуру. Жесткая структура регулятора, формируемая заводом-
изготовителем, ограничивает возможности конфигурации регулятора потребите-
лем. Однако такие микропроцессорные регуляторы более простые в обслуживании
и имеют более низкую стоимость. Сохраняются возможности установки заданных
значений технологического параметра, сигнализации, установки параметров ПИД-
регулятора, ручное управление и некоторые другие. Свободно-конфигурируемая
структура регулятора допускает использование всего набора функций потребителем
в зависимости от требований технологического процесса. Режим конфигурации ре-
гулятора с помощью кнопок на панели прибора защищен от несанкционированного
доступа паролем или может быть разрешен при определенной последовательности, в
том числе временной, нажатия кнопок.
4. Микропроцессорный регулятор совмещает функции измерения, индикации
измеряемого параметра, задания, номера канала измерения и функции регулятора.
Многие микропроцессорные регуляторы имеют функцию измерения и индикации
до восьми и более каналов измерения с поочередной автоматической или по вызову
оператора индикацией значений этих параметров на индикаторах регулятора. Функ-
ция сигнализации предусматривает сигнализацию по верхнему, нижнему пределу
значения параметра, по величине отклонения параметра от заданного значения, по
скорости изменения параметра и др. К функциям регулирования относятся функции
2- или 3-позиционного регулирования, регулирования с непрерывным или ШИМ
выходным сигналом. С помощью регулятора могут быть реализованы различные
схемы управления — одноконтурная и многоконтурная (до двух контуров), каскад-
ная, управление по возмущению, программное управление.
5. Большинство микропроцессорных регуляторов имеют ограниченное число
входных и выходных каналов. Число аналоговых входов, как правило, 1 или 2. Из-
вестны регуляторы с числом входных каналов от 2 до 5, а также многоканальные
микропроцессорные регуляторы с числом каналов до 10. К аналоговым входам от-
носятся входы для термопар, термометров сопротивления, унифицированных то-
ковых сигналов и сигналов напряжения. Выходные аналоговые сигналы: токовые
сигналы (0...5, 0/4...20 мА), сигналы напряжения (1...5, 0...10 В и др.), частотный
сигнал. Число аналоговых выходных сигналов 1 или 2. К дискретным входным
сигналам относят импульсные сигналы, дискретные входы от контактов реле, ко-
нечных выключателей и пр. К дискретным выходным сигналам относятся релей-
ный выход (СК— «сухой контакт» или «сухой ключ») или транзисторный выход
р-п-р или п-р-п (ОК — «открытый коллектор», 24 VDC/150 mA). Транзисторный
выход может использоваться для управления силовыми тиристорными блоками.
Управление мощностью нагревателя по методу ШИМ состоит в том, что нагрузка
включается на долю периода, а среднее значение выводимой мощности определя-
ется отношением времени включения к периоду ШИМ. Помимо метода ШИМ ис-
пользуется фазоимпульсное управление (ФИМ) тиристорами, при котором тири-
сторы каждый полупериод открываются с регулируемой фазовой задержкой от 0 до
180° (управление по углу отсечки в каждом полупериоде). Помимо тиристоров для
управления нагрузкой используются симисторы. Симистор, имеющий оптическую
развязку цепи управления от силовой цепи (оптосимистор), управляет открытием
326
ГЛАВА 3
тиристора в момент напряжения на тиристоре близком к нулю. При 100%-ной мощ-
ности нагрузка (нагреватель) включена постоянно; при 90%-ной мощности нагруз-
ка выключена каждый десятый период; при 50%-ной мощности нагрузка включена
каждый второй период; при 25%-ной мощности нагрузка включена каждый четвер-
тый период и т. д. Число дискретных входов регулятора от 2 до 4, дискретных вы-
ходов — до 6, в том числе один дискретный выход используется для сигнализации
неисправности регулятора. К числу аналоговых выходов относится встроенный
цифро-аналоговый преобразователь с выходным сигналом 0...5, 0/4...20 мА.
Более подробные данные о числе и характеристики входных и выходных сигна-
лов приведены в табл. 3.14.
6. Наличие программного задатчика существенно расширяет возможности
микропроцессорных регуляторов. Длительность программы определяется числом
участков программы (сегментов) и длительностью каждого сегмента. Большинство
программируемых ПИД-регуляторов имеют программные задатчики на 10... 12
участков. Однако, известны ПИД-регуляторы с числом участков программы до 49 и
99 сегментов. Запись программы в память регулятора состоит в задании числа участ-
ков программы, а также координат точек по оси абсцисс (ось времени) и оси ординат
(ось значений параметра). Число программ, хранящихся в памяти регулятора и гото-
вых к включению, составляет от 10 до 50. При остановке программы оператором или
по причине отсутствия питания дальнейший ход программы продолжается с точки
прерывания.
7. В микропроцессорных регуляторах предусмотрены различные режимы регу-
лирования, в том числе позиционное и ПИД-регулирование. Позиционное регули-
рование применяется в процессах, когда не требуется высокого качества регулиро-
вания. При этом достоинствами позиционного регулирования являются его про-
стота, наглядность алгоритма его работы, отсутствие большого числа параметров
настройки и необходимости обслуживания квалифицированными специалистами.
Для позиционного регулирования в структуре микропроцессорного регулятора ис-
пользуются элементы дискретного выхода: реле, транзисторы или оптосимисторы.
Для усиления сигнала управления с выхода «сухого» контакта слаботочного реле
(СК) сигнал поступает на более мощное реле или магнитный пускатель. Выходной
сигнал транзистора (оптотранзистора) применяется, как правило, для управления
низковольтным реле (до 50 В) или поступает на вход однофазного или трехфазного
тиристорного силового блока. В случае релейного выхода для защиты транзистора
из-за большого тока самоиндукции рекомендуется параллельно обмотке реле уста-
навливать диод. В случае коммутации силовых нагрузок большой мощности (на-
пряжение 380 В, токи 50 А и более) рекомендуется использовать оптосимисторы и
оптосимисторные силовые блоки. Оптосимисторы имеют внутреннюю схему пере-
хода через ноль, гальванически изолированы (как и оптотранзисторы) от схемы
управления, не создают помехи, не вызывают искру и имеют длительный ресурс
работы. Оптосимисторы также используются для управления парой встречно-
параллельно включенных тиристоров. В тех случаях, когда требуется повысить точ-
ность позиционного регулирования, вместо двухпозиционного используется трех-
позиционное регулирование. При этом, в случае управления, например, тепловым
объектом, один из дискретных выходов используется для подачи основной мощно-
сти, а другой дискретный выход обеспечивает собственно регулирование подачей
относительно небольшой мощности. Когда не допускается частая коммутация на-
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ 327
грузки, что свойственно позиционному регулированию, в регуляторе устанавлива-
ют определенную величину гистерезиса.
В микропроцессорных регуляторах, как правило, имеются несколько дискретных
выходов типа СК или ОК, которые могут быть использованы как для управления, так
и для сигнализации отклонения измеряемого параметра от задания.
Алгоритм ПИД-регулирования, а также режим автоматической настройки па-
раметров регулятора (коэффициент усиления, время интегрирования и расчетное
время дифференцирования), заложен в подавляющем большинстве микропроцес-
сорных регуляторов. В тех случаях, когда режим автонастройки параметров регуля-
тора отсутствует либо дает неудовлетворительные результаты в силу технологиче-
ских особенностей объекта управления, оптимальные параметры настройки ПИД-
регулятора приходится находить опытным путем, например, по виду переходной
характеристики объекта.
8. Режим автоматической настройки оптимальных параметров регулятора
может осуществляться по различным методикам [3.19]. Общее для этих режимов
является то, что выход регулятора на определенное короткое время отключается
от объекта и по анализу входного сигнала с использованием критерия Циглера —
Никольса или других критериев рассчитываются параметры регулятора. Рассчи-
танные за 2...5 шагов эти параметры автоматически заносятся в память регулято-
ра, после чего регулятор немедленно вступает в процесс регулирования с новыми
оптимальными параметрами настройки. Режим автонастройки рекомендуется по-
вторить при изменении свойств объекта или режима работы. В технических харак-
теристиках регуляторов заранее указывается отношение времени интегрирования
к времени дифференцирования для расчета последнего или это отношение про-
граммируется наравне с другими параметрами. Как правило, это отношение со-
ставляет: Т /Т =4,5...5.
И д
9. Локальные микропроцессорные регуляторы имеют станцию дистанционного
управления, включающую переключатель «ручное - автоматическое» и две кнопки
управления «больше» и «меньше», с помощью которых осуществляется управление
реверсивным исполнительным механизмом, электромагнитным клапаном и пр. Для
контроля положения исполнительного механизма или состояния клапана применя-
ются барграф и (или) светодиодные индикаторы.
10. Большинство микропроцессорных регуляторов имеют интерфейс связи с
компьютером (RS-232), а также интерфейс RS-485 для связи с распределенной систе-
мой сбора данных и управления, в том числе с другими регуляторами, терминалами
и станциями сбора данных (до 31 устройства по протоколу Modbus RTU на макси-
мальную длину 1200 м). С использованием прилагаемого программного обеспечения
осуществляется установка и настройка параметров регулятора. Программа позволя-
ет архивировать данные, выводить на экран тренды, сообщения о превышении пара-
метрами установок.
3.6.2 Технические характеристики локальных микропроцессорных регуляторов
Среди множества микропроцессорных регуляторов, выпускаемых почти каждой
крупной фирмой, специализирующейся на производстве программно-аппаратных
средств АСУ ТП, можно выделить одно- и многоканальные ПИД-регуляторы, про-
граммные регуляторы, различающиеся характером выходного сигнала, коммуника-
ционными возможностями, габаритом и др.
328
ГЛАВА 3
Рис. 3.42
В табл. 3.14 приведены технические характеристики некоторых типов микропро-
цессорных регуляторов.
Напряжение питания микропроцессорных регуляторов, приведенных в табл.,
220 VAC. Регуляторы UP350, UP550/570, TROVIS 6494 и IMAGO 500 имеют дополни-
тельно источники питания 15 и 24 VDC.
Габариты регуляторов соответствуют стандарту DIN 43700 и составляют (ШхВ)
96x96,48x96, 96x48 или 48x48 мм.
На рис. 3.42 показан общий вид микропроцессорных регуляторов UP350 (а),
UP550/750 (б), IMAGO 500 (в), Т424 (г), DTA 9696 (б), ТКМ 21 (е), Термодат (ж), US
1000 (з).
Помимо основных функций, представленных в разделе 3.6.1, ряд микропроцес-
сорных регуляторов выполняют дополнительные функции, а именно:
• фильтрацию, масштабирование, извлечение квадратного корня;
• математические и логические функции (сложение, вычитание, умножение, срав-
нение, вычисление среднего арифметического и др.);
• автоматическую регулировку уровня засветки дисплея;
• обеспечение питания регулятора от встроенных источников питания и др.
3.7. Взрывозащита АСУ ТП
В «Правилах устройств электроустановок» (ПУЭ) под взрывоопасной зоной под-
разумевается помещение или ограниченное пространство в помещении, в котором
имеются или могут образоваться взрывоопасные смеси.
Согласно МЭК 79-1 А, 79-4 и ГОСТ 12.1.01-78 устанавливается следующая клас-
сификация взрывоопасных смесей: 1 — метан на подземных горных работах; II —
другие горючие газы и пары за исключением метана. Все газы и пары разделены на
три взрывоопасные группы по категориям ПА, ПВ и ПС. Для каждой из групп опре-
делен безопасный экспериментальный максимальный зазор (БЭМЗ) между флан-
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
329
цами оболочки, через который не распространяется взрыв наружу, и температура
самовоспламенения. Для категории смеси ПА величина зазора составляет 0,9 мм и
более, для ПВ — от 0,4 до 0,8 мм, для ИС — менее 0,45 мм[1.107-1.109]. В зависимо-
сти от температуры самовоспламенения взрывоопасные смеси делят на следующие
группы: Т1 (температура воспламенения более 450 °C); Т2 (температура самовос-
пламенения 300...450°C); ТЗ (200...300°C); Т4 (135... 200°С); Т5 (1ОО...135°С); Тб
(85...100°C). Более высокий температурный класс перекрывает более низкие тем-
пературные классы.
В Европе, в том числе в России, руководствуются рекомендациям стандарта
МЭК 79-10, согласно которому взрывоопасные зоны для газов и паров делят наследу-
ющие зоны: зона 0 (группа II) — взрывоопасная смесь присутствует постоянно; зона
1 (группа II) — зона с возможностью появления взрывоопасной смеси; зона 2 (группа
II) — появление взрывоопасной смеси возможно при неправильной эксплуатации,
опасность возникает в редких случаях. Аналогично, для пыли взрывоопасные зоны
делят на зону 20 (непрерывная или частая опасность), зону 21 (случайная опасность)
и зону 22 (редкая опасность ввиду неправильной эксплуатации). В соответствии с
Европейской директивой зоны 20, 21 и 22 также относятся к группе И. Европейская
норма взрывозащиты имеет аббревиатуру АТЕХ (с французского ATmosphere EXplo-
sible) и охватывает все виды Европейской взрывозащиты.
В США и Канаде взрывоопасные зоны делят на классы. Класс I — легковос-
пламеняющиеся газы и пары; класс II — легковоспламеняющиеся пыль и порошки;
класс III — легковоспламеняющиеся вещества в жидком или твердом состоянии;
класс I делят на группы: А (ацетилен), В (водород), С (этилен, этил), D (ацетон,
аммиак, бензол, бутан, гексан и аналогичные газы); класс II включает группы Е (по-
рошок алюминия, магния и др.), F (угольная пыль), G (горючая пыль, в том числе
от древесины, пластмассы и пр.).
Известны следующие типы взрывозащиты:
d — взрывонепроницаемая оболочка (ГОСТ 22782.6-81);
е — повышенная надежность;
ia — искробезопасная электрическая цепь (зона 0);
ib — искробезопасная электрическая цепь (зона 1);
h — герметичная изоляция;
m — герметизация;
п — отсутствие искрообразования (отсутствие воспламенения);
о — погружение в масло;
р — метод повышенного давления;
q — заполнение порошком;
s — специальная защита.
Взрывозащита типа h, m, п и s соответствуют европейским стандартам.
Взрывозащита типа d предусматривает наличие в аппарате щелей, проходя через
которые взрывоопасная смесь быстро охлаждается на воздухе и теряет способность к
воспламенению (стандарт МЭК 60079-1). Тип взрывозащиты е предусмат ривает.спосо-
бы предотвращения искрообразования (блокировка, отключение и др.).
Тип взрывозащиты ia и ib (искробезопасная электрическая цепь — ИБЦ)
основан на принципе ограничения энергии, запасенной в электрической цепи,
что делает любую электрическую цепь неспособной к воспламенению (стандарт
МЭК 60079-1). Этот вид взрывозащиты находит наибольшее применение для
330
ГЛАВА 3
контрольно-измерительных приборов и оборудования. Основным преимуществом
14БЦ является повышенная надежность эксплуатации устройств и удобство их об-
служивания.
Уровни взрывозащиты Ex ia и Ex ib соответствуют стандарту МЭК 60079-11-99
и ГОСТ 3 51330.10-99. Тип взрывозащиты Ex ia — особо взрывобезопасный, допу-
скает до 2-х независимых неисправностей и применим для зон 0, 1 и 2. Тип взрыво-
защиты Ex ib допускает одну неисправность и применим для зон 1 и 2. Допустимые
безопасные параметры электрической цепи: максимальное напряжение разомкнутой
цепи — до 30 В, максимальный ток (ток короткого замыкания) — 100 мА, максималь-
но допустимая мощность — 0,45 Вт. Ограничение энергии осуществляется блоками
искрозащиты на стабилитронах или с помощью гальванически изолированных раз-
вязывающих устройств (трансформаторы, оптопары, реле).
Тип взрывозащиты Ex п соответствует стандарту МЭК 60079-15.
Взрывозащита h предусматривает герметичную изоляцию, например заливку не-
подвижных частей конструкции компаундом. Тип взрывозащиты о (погружение в
масло) применяется для изоляции элементов электрической цепи от атмосферы, на-
пример в масляных трансформаторах.
Пример маркировки по взрывозащите оборудования по ГОСТ 22782.6-81:1 Ex ia
I1B ТЗ. 1 — номер зоны взрывоопасной среды; Ех — знак для электрооборудования,
созданного в соответствии со стандартами МЭК; ia — обозначение типа защиты
(ИБЦ); ПВ — категория взрывоопасной смеси; ТЗ — группа взрывоопасной смеси.
В качестве другого примера рассмотрим маркировку газоанализатора СТМ 10 с
видом взрывозащиты 1Ех d ПС Т4.
1 — зона 1 с вероятностью появления взрывоопасной смеси при нормальной ра-
боте; d — тип взрывозащиты — взрывонепроницаемая (герметичная) оболочка; ПС —
класс II, группа С (атмосфера, содержащая этилен или газы и пары равнозначной опас-
ности); Т4 — группа смесей с температурой самовоспламенения от 135 до 200°С.
Взрывозащищенное оборудование подразделяется на элементарные устройства,
искробезопасное и связанное оборудование [1.107,1.108].
К элементарным устройствам относят устройства, у которых не превышены значе-
ния параметров: 1,2 В; 0,1 А; 20 мкДж; 25 мВт (термопары, термометры сопротивления,
светодиоды, контакты). Эти устройства могут быть размещены во взрывоопасной зоне.
Искробезопасное оборудование — это оборудование, у которого внешние и вну-
тренние электроцепи искробезопасны. Внешнее оборудование (клапаны, преобразо-
ватели и пр.), устанавливаемые во взрывоопасной зоне, должно быть сертифициро-
вано на искробезопасность.
Связанное оборудование — это оборудование или его цепи, которые при нор-
мальном или аварийном режиме работы не отделены гальванически от искробезо-
пасных цепей. Это оборудование должно размещаться во взрывобезопасной зоне.
При установке во взрывоопасной зоне оборудование должно быть сертифицировано
на взрывозащиту.
Для установки во взрывоопасной зоне выпускается различное взрывозащищен-
ное оборудование. К числу такого оборудования, например, относятся:
• операторские станции iPC-Ex фирмы Peppel+Fuchs;
• панельные PC типа PS-Ex410 фирмы Peppel+Fuchs;
• мониторы iPX-Ex фирмы Peppel+Fuchs;
• текстовые и графические терминалы TERM Ех фирмы Peppel+Fuchs;
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
331
• распределительные и сигнальные коробки (корпуса) Ех фирмы Rittak
• стальные корпуса фирмы Weidmuller;
• клеммы с маркировкой взрывозащиты Ех е фирмы WAGO.
Устройства ввода/'вывода с видом взрывозащиты «искробезопасная электрическая
цепь» (группа компаний «Pepperl+Fuchs»).
Производителем таких устройств является ряд фирм, среди которых компания
Eicon Instruments, входящая в группу компаний Pepperl+Fuchs.
Напомним, что в России взрывоопасные зоны подразделяются на зоны 0 (класса
В-1 — с выделением горючих газов или легковоспламеняющихся жидкостей и воз-
можностью образования с воздухом взрывоопасных смесей), зоны 1 (класса В-1а —
когда такие смеси могут образовываться только в результате аварий и неисправно-
стей). Для смесей воздуха с мелкодисперсными твердыми горючими веществами
установлены взрывоопасные зоны 20,21 (класса В-II) и 22 (класса В-На).
Барьеры искрозащиты выпускаются многими зарубежными и отечественными
фирмами и делят на активные и пассивные барьеры искрозащиты.
Активные барьеры обеспечивают искробезопасность и питание датчиков с уни-
фицированным выходным сигналом 0/4.. .20 мА (электропневматические преобразо-
ватели, датчики с выходным унифицированным сигналом). Обеспечение искробезо-
пасности цепей первичных преобразователей достигается применением гальваниче-
ской развязки на основе разделительных трансформаторов и оптронов, а также схем
ограничения тока и напряжения.
Пассивные барьеры искрозащиты обеспечивают искробезопасность датчиков, не
имеющих источников питания (термопары и термометры сопротивления без унифи-
цированного выходного сигнала, сухие контакты и пр.). Основное отличие между ак-
тивным барьером с гальванической изоляцией и пассивным барьерами заключается
в том, что в активном барьере присутствуют безопасные элементы, назначением ко-
торых является ограничение опасного сигнала по напряжению и току, передаваемого
во взрывоопасную зону.
Как правило, конструктивно блок искрозащиты представляет собой неразбор-
ный блок, залитый компаундом (рис. 3.43). Принцип взрывозащиты заключается в
том, что при появлении опасного напряжения на зажимах барьера, значение которо-
го превышает порог стабилизации, в цепи появляется ток, вызывающий срабатыва-
ние предохранителя.
Блоки искрозащиты на стабилитронах используют защищенные плавкими пре-
дохранителями стабилитроны для ограничения напряжения шунтированием ава-
рийного тока на землю. В нормальном режиме напряжение пробоя стабилитрона не
нарушается и он не проводит ток. При аварии во взрывобезопасной зоне и при пре-
332
ГЛАВА 3
вышении напряжения пробоя стабилитрон переходит в режим стабилизации напря-
жения, проводя ток, который ограничивается резистором; при дальнейшем увели-
чении тока срабатывает предохранитель. На рис. 3.44 показаны блоки искрозащиты
(1Z600 фирмы Eicon Instruments.
Заземление барьера достигается его установкой на заземляющую DIN-рейку (эк-
випотенциальное заземление, при котором сохраняется равный потенциал для раз-
личных проводящих частей). Также имеется одна клемма для заземления проводом
(рис. 3.45). Устройства, устанавливаемые во взрывоопасной зоне, должны быть изо-
лированы от земли. При необходимости их заземления применяются барьеры с галь-
ванической развязкой.
Барьеры искрозащиты с гальванической развязкой серии (1D300 и (1D400 (одно-
канальные и двухканальные) фирмы Eicon Instruments имеют широкий спектр функ-
циональных возможностей (ввод/вывод аналоговых и дискретных сигналов, преоб-
разование сигналов термопар, термометров сопротивления, включая токовый сигнал
4...20 мА, управление клапанами, ретрансляцию «СК» в опасной зоне на релейных
контактах или на оптоизолированном транзисторном выходе типа «ОК» и др.), мон-
тируются на DIN-рейку.
В табл. 3.15 приведены барьеры искрозащиты с гальванической развязкой (моду-
ли дискретного ввода/вывода).
Рабочий режим модуля конфигурируется пользователем: вход — контакт или
проксимитор; входной контакт — нормально разомкнут или нормально замкнут;
выходной транзистор — нормально закрыт или нормально открыт; сигнализация
обнаружения повреждения линии.
К другим барьерам искробезопасности с гальванической развязкой относятся
4-канальные модули дискретного ввода/вывода HiD серии 2000. Модули имеют све-
тодиодные индикаторы статуса сигнала и аварии, малую потребляемую мощность,
монтируются на объединительной плате.
Модули HiD серии 3000 объединяются по шине Fieldbus. Задание и контроль па-
раметров с управляющего персонального компьютера осуществляются через шину
Profibus.
Группой компаний Pepperl+Fuchs выпускается искробезопасная система интер-
фейсов дистанционного процесса IS-RPI. Искробезопасные блоки ввода/вывода мо-
гут устанавливаться прямо во взрывоопасной зоне, что значительно сокращает стои-
мость электропроводки. Каждый функциональный модуль соединяет 16-канальные
блоки ввода/вывода. Межсетевой интерфейс питает до 8 функциональных модулей
и соединяет их с внешней полевой шиной (Profibus, ControlNet, Modbus, Foundation
Fieldbus). Таким образом, один межсетевой интерфейс обеспечивает питание и со-
пряжение до 128 входов/выходов с полевой шиной. В систему IS-RPI входят функ-
циональные модули, представленные в табл. 3.16.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
333
3.8. Техничксие характеристики оборудования и компонентов
распределенных систем управления
Таблица 3.1. Технические характеристики промежуточных реле
Тип реле (фирма) Напряжение питания Диапазон коммутируемых токов, А / напряжения, В Количество контактов Способ крепления Габариты (ШхГхВ), мм
РП-12 (ООО «Реле и автоматика») 100, ПО, 220 VAC 0,01...5/24...250 1НО, 1НЗ, 2П На панель 98x147x136
РП-21 (ООО «Реле и автоматика») 6,12,24,27,48,60, 110 VDC; 12,24,36,40, ПО, 127, 220,230, 240 VAC 0,003...6/12...220 VDC; 12...380 VAC 0...4НО, 0...2 НЗ, 0...4П DIN-рейка 34x34x54
РП-16 (ООО «Реле и автоматика») 12,24,48, 110,220, VAC 0,05...5/24...220 4НО, 2НЗ, 2П На панель 66x138x151
НН54Р (ООО «Реле и автоматика») 12,24, ПО VDC; 12,24, ПО, 220 VAC 3,0/12...230 4П DEN-рейка 29x30x75
НН53Р (ООО «Реле и автоматика») 12,24, ПО VDC; 12, 24, ПО, 220 VAC 5,0/12...230 ЗП DIN-рейка 29x30x75
РЭП-34-22 (ОАО «Каширский завод электро- аппаратуры») 12,24,36,40,48, ПО, 220,230,240,380,400, 415,440,500,660 VAC 0,01... 10/12...220 VDQ 12...660VAC 2НО.2НЗ; ЗНО, 1НЗ; 4НО, 4НЗ; 6НО, 2НЗ; 8НО Розетка на DIN-рейку 56x39,5x72
55.34 (FINDER, «Германия») 6,12,24,48,60,110, 120,230,240 VAC; 6, 7,9,24,48,60, 110 VDC 5... 10/250; 400 (1,5 А) 4П Розетка се- рии 94.04 на DIN-рейку 20,7x27,7x37,2
Таблица 3.2. Технические характеристики трехполюсных электротепловых
токовых реле
Тип реле Номинальный ток, А Номинальный ток несменных нагревательных элементов Количество контактов Номинальное напряжение, В
PTT-lxx 0,2...25; 10...40; 5...25; 5...40 0,2; 0,25; 0,32; 0,4; 0,5; 0,63; 0,8; 1,0; 1,25; 1,6; 2,0; 2,5; 3,2; 4,0; 5,0; 6,3; 8,0; 10; 12,5; 16; 20; 25; 34 1П; 1НЗ 660 VAC; 440 VDC
РТТ-2 12,5...40; 50; 63 10; 12,5; 16; 20; 25; 32; 40; 63 Ш; 1НЗ 660 VAC; 440 VDC
РТТ5-10-ххх 0,25... 10 0,25; 0,32; 0,4; 0,5; 0,63; 0,8; 1,0; 1,25; 1,6; 2,0; 2,5; 3,2; 4,0; 5,0; 6,3; 8,5 Ш; 1НЗ 660 VAC; 440 VDC
334
ГЛАВА 3
Таблица 3.3. Характеристики кнопок и кнопочных постов
Тип кнопки Наличие фиксации Тип кон- такта Наличие подсветки Форма головки Цвет кнопки Диаметр отвер- стия в панели, мм
XB6DW3B5B Нет 1НЗ+1НО Да Прямоугольная Зеленый 16,2+°'2
ХВ6 DF 4В5В Да 1НЗ+1НО Да Прямоугольная Красный 16,2*w
ХВ4 ВА 21 Нет 1НО Нет Круглая Черный 22,5
ХВ4 BW 34В5 Нет 1НЗ+1НО Да Круглая Красный 22,5
ХВ5АА31 Нет 1НО Нет Круглая Зеленый 22,5
ХВ5 AW 34В5 Нет 1НО+1НЗ Да Круглая Красный 22,5
ХВ7ЕА31Р Нет 1НО Нет Круглая Зеленый 22,4
XB7EW34 Нет 1НО Да Круглая Красный 22,4
ХВ7 EN 03 Да 1НО Нет Круглая Зеленый 22,4
90001 KR9P35RH13 (кнопка аварийного останова) Да ш Да Круглая Красная 31
ХВ5 АТ42» (кнопка аварийного останова) Да 1НЗ Нет Грибовидная Красный Диаметр кнопки 40 мм
Кнопочные посты: XALD213 (2-кпопочный) XALD324 (3-кнопочный) XAL D363B (2-кнопочный пост с сигнальн. лампой) Schneider Electric Франция Нет Нет Нет 1НО+1НЗ 2НО+1НЗ 1НО+1НЗ Нет Нет Да Круглая Круглая Круглая 1 — зеленый; 1 — красный 1 — белый; 1 — красный; 1 — черный 1 — зеленый; 1 — красный Лампа — красная —
800ES-FA3 (копт, блок 800Е- 3LX10) Нет 1НО Нет Круглая Зеленый 22,4
800ES-FA4 (конт. блок 800Е- 3LX01) Нет 1НЗ Нет Круглая Красный 22,4
800ES-LF3 (конт. блок 800Е 3DL0X10) Нет 1НО Да Круглая Зеленый 22,4
800ES-LF4 (конт. блок 800Е- 3DL0X10) Нет 1НЗ Да Круглая Красный 22,4
800ES-MM4 (конт. блок 800Е- 3LX01) Allen-Bradley, США Нет 1НЗ Нет Грибовидная Красный Диаметр кнопки 40 мм
11 Кнопки аварийного останова могут быть диаметром 35, 41, 57 мм. Тип толкателя — с пружинным
возвратом и типа «тяни-толкай».
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
335
Таблица 3.4. Технические характеристики переключателей
фирм Schneider Electric и Allen-Bradley
Тип переключателя в сборе Состав комплекта Количество и тип положений Тип контакта Наличие подсветки Цвет ручки Диаметр отверстия в панели, мм
Переключатели фирмы Schneider Electric, Франция
ХВ4 BD21 ZB4BZ101 ZB4BD2 2 с фиксацией 1НО Нет Черная 22,5
ХВ4 BD33 ZB4BZ103 ZB4 BD3 3 с фиксацией 2НО Нет Черная 22,5
ХВ7 ED33P — 3 с фиксацией 2НО Нет Черная 22,5
ХВ4 BG33 (с ключом) ZB4 BZ103 ZB4 BG3 3 с фиксацией 2НО Нет Черная 22,5
№ контактов:
K2D012QLH — «0» + 2 1,2-3,4(45°)
(2-полюсн.) K10D002UCH (3-полюсн.) — (0,45 °, 90 ’) «0» + 2 (0,60°, 300°) 5,6-7,8 (90°) 1,2-5,6-9,10 (60°) 3,4-7,8-11,12(300°) Нет Черный 22
Переключатели фирмы Allen-Bradley, США
800EP-SM32 +800Е -3LX11 3 с фиксацией «0»-«+60 °»-«-60°» 1НО, 1НЗ Нет Черный 22,5
800EP-SM42 +800Е -3LX11 4 с фиксацией 1НО, 1НЗ Нет Черный 22,5
800EP-LSM43 +800Е -3DL0X11 3 с фиксацией «0»-«+60 °»~«-60 °» 1НО, 1НЗ Да Черный 22,5
800EP-LSM43 +800Е -3DL0X11 4 с фиксацией 1НО, 1НЗ Да Черный 22,5
800EP-KM3R3 (с ключом) +800Е -3LX11 3 с фиксацией «0»—«+60 °>>—«~60 °» 1НО, 1НЗ Нет Черный 22,5
Таблица 3.5. Характеристики светосигнальных ламп типа СКЛ
ЗАО «Протон-Импульс», г. Орел
Тип СКЛ Заменяемая арматура Тип цоколя Напряжение питания Диаметр отверстия в панели, мм Габаритные размеры (DxL), мм
1 2 3 4 5 6
СКЛ-1 СЦ128, СМ28, РН6, РН55, РН60, РН110, АС220 B15d/18 VAC: 110,127,220,380 VDC: 24,48 — 23,5x88,5
СКЛ-2 — 20,5x55
СКЛ-3 B15S/18 VAC: 220 — 23,5x90
СКЛ-4 VAC: 127,220, 380 VAC, VDC: 24,48,110,220 — 20,5x57
СКЛ-5 Ж54, Ж110 В22 — 22x55
СКЛ-6 РН6, PH-110, РН-120, РН-127, Ж75 Е14 — 20,5x63
СКЛ-7 ИЛК, ИЛЖ, В220, В230 Е27 — 28x57
СКЛ-8 А6.А12, А24, АНМ B9s VAC: 220 VAC, VDC: 24 — 12x34
336
ГЛАВА 3
окончание табл. 3.5
1 2 3 4 5 6
СКЛ-9 РН6,РН-110, РН-120, РН-127, Ж75 Е14 VAC: 127, 220,380 VAC, VDC: 24,48,110,220 — 23,2 x 57
СКЛ-10 СЦ128, СМ28, РН6, РН55, РН60, РН110, АС220 B15d/18 — 23,2x57
СКЛ-11 (бесцоколь- ная) АС-220, АЕ, АЕР — 27+o.s 36x57
СКЛ-12 (бесцоколь- ная) AM, АСЛ, АМЕ — 27<-o.s 30x57
СКЛ-13 — Е10/13 VAC: 220 VAC, VDC: 24 — 12x34
СКЛ-14 (бесцоколь- ная) AM, АСЛ, АМЕ — VAC: 127,220,380 VAC, VDC: 24,48,110,220 22t0,5 30x62
СКЛ 15 (бесцоколь- ная) АСКМ — VDC: 24 8+0.5 13x38
СКЛ-16 (бесцоколь ная) АС1201, АВР-01 — VAC: 127 VAC, VDC: 24, 48, 220 14’“'5 18,5 x 50
СКЛ-17 (бесцоколь- ная) — — VAC: 220 VDC: 24 8+0,5 13x38
СКЛ-18 (бесцоколь- ная) — — VAC: 127, 220 VAC, VDC: 24,48 14+0’5 20x53
Примечание: СКЛ11, СКЛ14 имеют винтовые контакты, остальные бесцокольные лампы имеют ламельные
контакты под пайку. Цокольные лампы СКЛ6, СКЛ7, СКЛ9 и СКЛ 13 имеют винтовой цоколь, остальные —
типа «байонет».
Таблица 3.6. Характеристики светосигнальных ламп зарубежных фирм
Тип Цвет светодиода Напряжение питания Диаметр отверстия в панели, мм Габаритные размеры (DxL), мм Степень защиты
1 2 3 4 5 6
Светодиодные сигнальные лампы Schneider Electric, Франция
XVLA1 XVLA2 XVL A3 Зеленый, крас- ный, желтый VAC, VDC: 5,12,24,48 8,2 8,2 12,2 12x32 10x34 16x45 IP40, IP65
XB7 EVxx Белый, зеленый, красный, желтый, синий, оранже- вый VAC, VDC: 24 (В) VAC: 120 (G) VAC: 230,240 22,4 29x42 1Р40
9001 KR35Lxxx Зеленый, крас- ный, желтый VAC, VDC: 24, 48,120 31 IP66
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
337
Окончание табл. 3.6
1 2 3 4 5 6
Светодиодные сигнальные блоки Schneider Electric, Франция
Постоянного свечения: XVBL ОВ XVBLOG XVBL ОМ Белый, зеленый, красный, желтый, синий, оранже- вый 24 VDC 120 VAC 230 VAC Цоколь BAI 5d Диаметр 70 IP66
XVBC21 (базовый) Белый, зеленый, 24 VDC
XVBC2B красный, желтый. 120 VAC Цоколь BA 15d Диаметр 70 IP66
XVBC2G синий, оранже- 230 VAC
XVBC2M вый
Блоки со вспышкой: Белый, зеленый,
XVBL1B красный, желтый, 24 VDC Цоколь BA 15d Диаметр 70 IP66
XVBL1G синий, оранже- 120 VAC
XVBL1M вый 230 VAC
XVPC21 Белый, зеленый, 24 VAC, VDC Газоразрядная Диаметр 50 IP65
(базовый) красный, желтый, трубка 0,3 Дж;
XVPC6B синий,
оранжевый
XVPC6M 230 VAC Газоразрядная трубка 0,6 Дж; Диаметр 50 IP65
Светосигнальные колонны (светодиодные) Schneider Electric, Франция
2 сигналь- ных блока + Красный, зеленый
зуммер: постоянного
XVMB2RGS свечения 24 VDC Диаметр 45 IP42
XVMG2RGS 120 VAC
XVMM2RGS 3 сигналь- ных блока + 230 VAC
зуммер: Красный, оран- —
XVMB2RAGS жевый, зеленый 24 VDC Диаметр 45 IP42
XVMG2RAGS постоянного 120 VAC
XVMM2RAGS свечения 230 VAC
4 сигналь- Белый, зеленый,
ных блока + оранжевый, —
зуммер: красный Диаметр 70 IP40
XVDB2SGAR 5 сигнальных Оранжевый, 24 VDC
блоков: синий, зеленый,
XVEC2B красный, 24 VDC —
XVEC2G прозрачный 120 VAC Диаметр 70 IP54
XVEC2M 230 VAC
Светосигнальная колонна фирмы RITTAL, Германия
СИД1’ Красный, желтый, 24 VAC,VDC 20 Диаметр 70 IP65
(арт. 2372.100) зеленый (высота 177)
О Модульная сигнальная колонна СИД может включать до 4...5 сигнальных блоков (при одинаковом
напряжении питания) и акустический элемент.
338
ГЛАВА 3
Таблица 3.7. Характеристики световых табло ОАО «Завод Электропульт».
Тип Напряжение питания Тип лампы накаливания Тип цоколя Размер светового поля (Н х L), MiM Размер отверстия в панели щита, мм
ТСБ VAC: 60,127,220 2хЦ60-8 (Ц60-10, Ц127-10, Ц215-10) B15d/18 39x92 39x104
тем VAC: 60,127,220 2хЦ60-8 (Ц60-10, Ц127-10, Ц215-10) B15d/18 27x38 39x49
тскл VAC, VDC: 220 VDC: 6,12,24,48,60 KM — 28x28 31x41
тсс VDC: 110 2xPH 110-8 — 28x93 39x104
Таблица 3.8. Характеристики автоматических выключателей
Тип Число полюсов Номинальный ток, А Номинальное напряжение, В Ток отключе- ния, kA Число циклов Габаритные раз- меры (ВхШхГ), мм
1 2 3 4 5 6 7
Отечественные автоматические выключатели (ОАО «Электроприбор», Курск)
АП50Б-2М АП50Б-ЗМ 2 3 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 50; 63 500 VAC 220 VDC 500VAC 0,3...6,0; 0,5...40 50000 138,5x81x89 138,5x103x89
АП-63 I 0,6; 0,8; 1; 1,25; 1,6; 2,5; 3,15; 4; 5; 6,3; 8; 10; 12,5; 16; 20; 25 380 VAC НО VDC 3,5; 2,5 30000 138x28x84
BA 13-29 2; 3 0,6; 0,8; 1; 1,25; 1,6; 2,5; 3,15; 4; 5; 6,3; 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50; 63 660 VAC 440 VDC 12; 10 30000 157x88x122 (ЗР)
ВА21-29 1; 2; 3 0,6...63; 0,6...63; 80; 100 380 VAC 240 VDC 380 VAC 6; 10; 4; 6 30000 147x35x125(1Р) 147x88x121 (ЗР)
ВМ-40 (модульный) 1; 2; 3 2; 3; 4; 5; 6; 8; 10; 13; 16; 20; 25; 32; 40 230/400 VAC 48 VDC 230 VAC 90 VDC 400 VAC 4,5 10000 80x18x74: 80x35,6x74; 80x53,2x74
АЕ 2040 3 16; 20; 25; 31,5; 40; 50; 63 660 VAC 4 20000 207x75x120
АЕ 2050 3 80; 100 380 VAC 6 20000
Автоматические выключатели фирмы АВВ, Германия
Серия S230R: S231R S232R S233R S234R 1 2 3 4 6; 10; 16; 20; 25; 32; 40 230/400 VAC 4,5 10000 4 модуля
Серия S250: S251 S252 S253 S254 1 2 3 4 0,5; 1; 1,6; 2; 3; 4; 6; 8; 10; 13; 16; 20; 25; 32; 40; 50; 63 230/400 VAC 6 10000 4 модуля
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
339
Окончание табл. 3.8
1 2 3 4 5 6 T_ 7
Серия S280: S281 S282 S283 1 2 3 80; 100 230/400 VAC 6 10000 1...3 модуля
Серия S500: S500 3 6; 8; 10; 13; 16; 20; 25; 32; 40; 50; 63 230/400 VAC 25 10000 3 модуля
Серия SACE Ттах: TmaxTl IP TmaxTl 1 3; 4 160 230/240 VAC 125 VDC 690 VAC 25 4 8000 130x25,4x70( IP) 130x76x70
Серия SACE Lomax1’ 3; 4 125 500 VAC 250 VDC 8 8000 120x78x70
Автоматические выключатели фирмы Schneider Electric, Франция
СбОа C60N С60Н C60L C120N С120Н C32H-DC 1.2,3,4; 1,2 2 ; 4;6 ; 10; 16 ; 20 ; 25 ; 32 ; 40 0,5; 1; 2; 3; 4; 6; 10; 16; 20; 25; 32; 40; 50; 63 0,5; 0,75; 1; 2; 3; 4; 6; 10; 16; 20; 25; 32; 40; 50; 63 0.5; 1; 2; 3; 4; 6; 10; 16; 20; 25; 32; 40; 50; 63 63; 80; 100; 125 10; 16; 20; 25; 32; 40; 50; 63; 80; 100; 125 1; 2; 3; 6; 10; 16; 20; 25; 32; 40 (DC) 230/400 VAC 240/415 VAC 440 VAC 440 VAC 125 VDC(IP) 250 VDC (2P) 4,5; IP: 10 (230VAC) IP: 3 (400VAC) 2. 3,4P: 20 (230VAC) 10 (400VAC) 10 IP: 25 2,3,4:50 IP: 3; 2,3,4P : 6 IP: 4,5; 2, 3,4:10 20000 10000 10000 10 000 5000 10000 1...3 модуля 3 модуля
Дифс )еренциальные автоматические выключатели г шрмы Schneider Electric, Франция
Серия ELETTROSTOP: DS 941/951 DS 650/670 F500K F360 АВВ, Германия 1;2 2 6...40 0,5...63 0,4...45 16...80 230/240 VAC 230/400 VAC 230/400/690 VAC 230/400 VAC 3; 6; 7,5; 25; 1,5 10000/ 20000 Ток утечки 30...300 мА
DPN N Vigi ID AD 63 Schneider Electric, Франция 1; 2; 3;4 2; 4 2 6; 10; 16; 20; 25; 32; 40 25; 40; 63; 80; 100 16; 25; 40 230 VAC 240 VAC 230 VAC 4,5 20000 20000 20000 Ток утечки 30...300 мА
О Серия SACE IsomaxS (S1...S8) рассчитана на токи от 160 до 3200 А.
Таблица 3.9. Технические характеристики промышленных компьютеров
Тип, фирма Процессор Число слотов рас- ширения Операт. память, Мб HDD Гбайт Коммуникации Дисплей (ТЕТЖК) Клавиату- ра (число клавиш) Потреб, мощ- ность, Вт Габариты (ШхВхГ) мм
ISA PCI
Рабочие станции
AWS-8248V (Advantech) Celeron 400 МГц 9 4 — — Ethernet 10/100 Base-T; 3xRS-232; lxRS-485 15" 60 300 482x356x229
AWS-9124 (Advantech) 4х (ISA/ PCI) 256 — 12,1" 200 342x280x205
WS-855A (ICOS) — 10 256 80 IxUSB; lxPS/2 15" 60 300 482x354x265
Front Station 5244 (Ниешанц-Автоматика) Pentium 4 2,4 ГГц 4 4 256 80 Ethernet 10/100 Base T;2xRS-232;lxUSB 2.0; IxLPT 15" 60 300 483x354x265
WS-615 (ICP Electronics) — 7x (ISA/PCI) — — lxRS-232, lxRS-485, PS/2, IxLPT 15" 51+24 250 483x266x265
Промышленные панельные компьютеры (ППК)
РРС-154Т (Advantech) Pentium 4 3,06 ГГц — 1 2 Гбайт — Ethernet 10/100 Base-T; PS/2; 2xRS-232; 4xUSB2.0;lxLPT 15" — 180 420x323x105
РРС-174Т (Advantech) — 2 2 Гбайт PS/2; 3xRS-232; 4xUSB 2.0; IxLPT 17" — 180 446x382x127
IPPC-9120/9150 (Advantech) Pentium III 850 МГц 1 1 256 — Ethernet 10/100 Base-T; 3xRS-232; lxRS-485; 2xUSB 2.0; IxLPT 15" — 70 402x302x127
TPC-1570 (Advantech) Celeron M 1 ГГц 1 (PC 104+) 256... 512 — Ethernet 10/100 Base-T; 2XRS-232; lxRS-485; 2xUSB 2.0;lxLPT; PS/2 15" — 24 VDC 383x307x55
340 глава з
ROBO-5000-5163T (1COS) Pentium III 1 ГГц — 1 1 Гбайт 40 3xRS-232;lxRS-485; 2xUSB 2.0; IxLPT; 15" — 150 410x309x103
ROBO -5000-5163Т (ICOS) Celeron 2 ГГц — 1 2 Гбайт 40 Ethernet 10/100 Base-T; 3xRS-232; 2xUSB 2.0; IxLPT; 17" — 200 452x356x103
PC 670-15» (Siemens) Celeron 300 МГц IxISA/ PCI, IxPCI, IxPCMCI 256 8 Ethernet 10/100 Base-T; 2xUSB 2.0; Profibus DP 15" 94 300 483x355x130
RACK PC
ROBO-2000-4075 (ICOS) Pentium 4 2,8 ГГц — 3 3x PCI-x 1024 120 4xRS-232: 4xUSB 2.0 — — 525 482x177x450
ROBO-2000-4775 (ICOS) Pentium 4 3,2 ГГц 5 8 2 Гбайт 160 — — 400
RACK-307 (ICP Electronics) — lOxISA/PCI — — PS/2 7" (моно) — 250 430x177x465
RACK-300A (ICP Electronics) — 9xBP—145/ PCI — — PS/2 — — 200 430x177x430
IPC-510-SYS1-4 (Advantech) Pentium 4 2,8 ГГц — 4 512 80 Ethernet 10/100 Base-T; lxRS-232;8xUSB 2.0; IxLPT; 2xPS/2 — — 300 482x177x450
IPC-510-SYS2-1 (Advantech) Celeron 2,53 ГГц 7 4 512 80 Ethernet 10/100 Base-T; 2xRS-232;6xUSB 2.0; IxLPT; lxPS/2 — — 250
FRONT RACK 4544 (Ниешанц-Автоматика) Celeron D 2,53 ГГц 1 3 256 40 Ethernet 10/100 Base-T; lxRS-232; 4xUSB2.0; IxLPT — 310 431x176x480
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
Окончание табл. 3.9
Тип, фирма Процессор Число слотов рас- ширения Операт. память, Мбайт HDD Гбайт Коммуникации Дисплей (TFTJKK) Клавиату- ра (число клавиш) Потреб, мощ- ность, Вт Габариты (ШхВхГ) мм
ISA PCI
ARK-3389 (Advantech) Pentium M 1,4 ГГц — — 256 — Ethernet 10/100 Base-T; lxRS-232; lxRS-485 IxUSB 2.0; lxPS/2 — — 46 (12...24 VDC) 264,5x69x137
UNO-2176 (Advantech) Celeron М I ГГц, PentiumM 1,4 ГГц PCMCIA, PC-104 512 — 2xEthernet 10/100 BaseT, 2xRS-232/422/485, 2xUSB — — 24 255x152x59
Simatic BOX PC620 (Siemens) Pentium 111 700 МГц 2-3 2-3 64...768 20 Ethernet 10/100 Base-T; 1XUSB2.0; Profibus DP — — 200 88x254x266
PC7 rugged (SBS Technologies) Celeron 556 МГц Зх РС/104+ 64...512 20 Гбай- тайт; Флэш—2 2xEthernet 10/100 Base-TX; 2xRS-232 2xRS-422/485; — — 40 (10...30 VDC) 220х83х 125
AMC-cPCI 3000 (SBS Technologies Проц. Модуль RL4 PowerPC 500 МГц ОС: Vx Works 2 128 Флэш— 64 Мбайт IxEthernet 10/100 Base-T; 4xRS-232 /422/485; — — 65 (16...40 VDC) 273х89х 325
Tower PC
Simatic PC R145 PHI Tower (Siemens) Pentium III 600 МГц 3-4 5-6 64...768 20 Ethernet 10/100 Base-T; Profibus DP — — 300 170x350x445
Front Desk Wall 1244 (Ниешанц- Автоматика) Celeron D 2,4 ГГц 2 4 256 40 ’ Ethernet 10/100 Base-T; 2xRS-232; 8xUSB 2.0; IxLPT — — 300 192x253x432
Переносные ПК («mobile»)
PWS-1409/TP (Advantech) — 4 4 Определяется пользователем 14,1" 108 300 400x320x200
ROBG-4000-5074M (1COS) Pentium 4 2,8 ГГц 3 4 256... 2 Гбайт 40 Ethernet 10/100 Base-T; 4xRS-232;6xUSB 2.0; IxLPT 15" 108 400 400x356x260
ROBO 4000-POLAR (1COS) Celeron 2,4 ГГц — 6 256... 1 Гбайт 40 2xRS-232; 2xUSB2.0; IxLPT 15" 108 350 400x201x230
FRONT-Portable 4244 (Ниешанц- Авгоматика) Celeron D 2,4 ГГц 3 4 256 80 Ethernet 10/100 Base-T; 2xRS-232; 2xUSB 2.0; IxLPT 12" 108 300 400x291x210
Mobile Forse Getac M220 (MiTAC Technology Corp.) Pentium М 1,6 МГц — 2 256... 2 Гбайт 80 Ethernet 10/100 Base-T; lxRS-232; 2xUSB 2.0; IxLPT; lxPS/2;GSM 14,1" 87 40 (12...32 VDC); 200 (100... 240 VAC) 328x272x42
Промышленные планшетные компьютеры
ГРАНАТ (НПО «Техника- Сервис») Pentium М 2,2 ГГц — — 512... 1 Гбайт 20... 120 lxRS-232; lxUSB2/0; 2x PCMCIA; IxLAN 8,4" XGA 8 функц. клавиш Внешний: 100... 240 VAC 270x197x46
Промышленные карманные компьютеры
КУЛОН (НПО «Техника-Сервис») xScale РхА255 400 МГц — — 128 — 2xRS-232; 1 PCMCIA; 1XUSB2.0 4" VGA 4 функц. клавиши Аккумул. 7,4В» 1800 тАч 90x150x33
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ___________343
Таблица 3.10. Технические характеристики панелей оператора
Модель Тип панели Число строк символов Число клавиш ПРЦ, ОС, объем памяти Размер экрана Интерфейс Питание Габариты Пакет ПО
Simatic TD 200 (Siemens) Текстовая клавишная 2x20 10 — — RS-485 24 VDC, 100 mA 148x76 Step 7 Micro/ Win
Simatic TP 070 (Siemens) Графическая сенсорная — — RISC,66 МГц, Wind. СЕ 128 кбайт 5,7" RS-485 24 VDC, 240 mA 221X156 Step7 Micro/ Win
Simatic OP 17 (Siemens) Текстовая клавишная 4x20 22-системные; 24-функц-е RMOS, 256 кбайт — RS-232/ RS-485 (MPI, ProfibusDP) 24 VDC, 250 mA 240x204 Simatic ProTool/ Pro v5.2
Simatic TP 170B (Siemens) Графическая сенсорная — — RISC, 66 МГц, Wind. СЕ 768 кбайт 5,7" RS-232/ RS-485 (MPI, ProfibusDP) 24 VDC, 250 mA 240x252 ProTool/ Pro v5.2
Simatic OP 170B (Siemens) Графическая клавишная — 35-системные; 24-программи- руемые RISC, 66 МГц, Wind. СЕ 768 кбайт 5,7" RS-232/ RS-485 (MPI, ProfibusDP) 24 VDC, 250 mA 240x252 ProTool/ Pro
Simatic TP 270-10 (Siemens) Графическая сенсорная — — RISC 64 разр., 66 МГц, Wind. СЕ 2 Мбайт 10,4" цветной RS-232/ RS-485, USB. та Ethernet TCP/IP. MPI, Profibus 24 VDC, 900 mA 335x275 ProTool v6.0
Simatic OP 270-10 (Siemens) Графическая клавишная — 38-системные; 36-программи- руемые RISC 64 разр., 66 МГц, Wind. СЕ, 2 Мбайт 10,4" цветной RS-232/ RS-485, USB. Карта Ethernet TCP/IP. MPI, Profibus 24 VDC, 900 mA 483x310 ProTool v6.0
Simatic MP370 (Siemens) МФ графическая клавишная — 38-системные, 36-программи- руемые RISC 64-разр., Wind. СЕ, 12 Мбайт 12,1" цветной RS-232/RS-422/RS-485; RS-232. MPI/Profibus Ethernet 24 VDC, 1150 mA 483x310 ProTool v5 I SP3
XBTP (Schneider Electric) Текстовая клавишная 2x20 или 4x40 12-функц-е; 10-сервис-е 80386, Magelis, 8 Мбайт — RS-232/ RS-485, (ASi, Modbus) 24 VDC, 400 mA 253x152 XBTL1003
XBTF01 (Schneider Electric) 1рафическая клавишная — 10-функц-е; 12-сервисные; 8-прогр-е 80386, Magelis, 8 Мбайт 5,7” RS-232/ RS-485, (ASi, Modbus, EthernetTCP/IP) 24 VDC, 1400 mA 220x265 XBT L 1003
344 глава з
ХВТ F03 (Schneider Electric) Графическая сенсорная — — Pentium, Magelis, 32 Мбайт 10,4" цветной RS-232/ RS-485, EthernetTCP/IP 24 VDC, 1400 mA 296x222 XBTL1003
GT1155 (Mitsubishi Electric) Графическая сенсорная — — 4 Мбайт 5,7" RS-232/ RS-485 24 VDC, 400 mA 164x135 GT Works 2
MAC E700 (Mitsubishi Electric) Графическая клавишная — 16-функцион. 6 tochkey 400 кбайт-8 Мбайт Цветной 640x480 RS-232/RS-485 (Profi-busDP) 24 VDC, 214x232 E Desig-ner
Dayapanel (GE Fanuc) Текстовая клавишная 8x40 10 100 страниц — RS-232/ RS-485, (Profi-bus, Genius) 24 VDC, 208x188 Cimplici-ty
QuickPanel (GE Fanuc) Графическая сенсорная — — RISC, 100 МГц, 4 Мбайт 12,1" цветной EthernetTCP/IP 24 VDC 317x243 Cimplici-ty
H-K30m-S (Beijer Electronics) Текстовая клавишная 2x20 или 4x40 16 (10-програм- мируемые) RISC, 4 Мбайт 3" RS-232/ RS-422/ RS-485 24 VDC 173x105 Information Designer
Cimrex 90 D (Beijer Electronics) Графи- ческая, текстовая — 22-функцио- нальные RISC, 1,6 Мбайт 10,4" цветной RS-232, RS-422 24 VDC 367x274 Information Designer
ExterT150 (Beijer Electronics) Графическая сенсорная — — RISC, 416 МГц, 64 Мбайт 15" цветной RS-232, RS-485 /422, Ethernet 24 VDC 356x279 Information Designer
HMI1206 (Brainchild) Графическая сенсорная — — SHARP-ARM9 200 МГц, 32 Мбайт 12,1" цветной RS-232/RS-485, Ethernet 24 VDC 312x246 HMI Studio
PWS 3260-TFT (Hitech) Графическая сенсорная — — RISC, 206 МГц, 4 Мбайт 10,4" цветной RS-232, RS-422, RS-485 24 VDC, 800 mA 286x211 ADP
TP04G (Delta Electronics) Текстовая клавишная 4x16, 8x16, 8x25 10-функцио- нальные 16-разр. ПРЦ, 256 кбайт 3" RS-232, RS-485 24 VDC, 250 mA 147x97 TPEdit
DOP-A75CSTD (Delta Electronics) 1рафическая сенсорная — ^пользователь- ские RISC, 202 МГц, RealTime OS, 32 Мбайт 7,5" цветной RS-232, USB, RS-232/RS-485 24 VDC, 400 mA 243x178 SCRedit
EZ-420 (DirectLogic) Текстовая клавишная 4x20 5 — — RS-485 (Modbus RTU) 24 VDC — EZ-Textedit
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ___________345
Окончание табл. 3.10
Модель Тип панели Число строк символов Число клавиш ПРЦ, ОС, объем памяти Размер экрана Интерфейс Питание Габариты Пакет ПО
EZ-S8C-F (Direct Logic) Графическая сенсорная — 192 Touch Screen Motorola, 40 МГц, 512 кбайт -1 Мбайт 8,2" цветной RS-232, RS-232/RS- 422/RS-485 24 VDC, 700 mA 216x268 EZ-Touchedit
Blue 300 (Maple Systems) Графическая клавишная — 5-функц-ые 5- пользователь- ские; 256 кбайт 3" RS-232, RS-485 (Modbus) 24 VDC, 140 mA 147x97 EZware 5000
Gold Series, мод. 215A (Maple Systems) Графическая сенсорная — — Intel Celeron 2,0 ГГц, Wind. ХР, 256 кбайт, /40 Гайт 15" 4xCOM 2xUSB 2.0, Ethernet 10/100/1000 100-240 VAC 300x400x X100 WebStudio, v.6.1
V04 (ЗАО Текон, Россия) Текстовая клавишная 4x16, 8x21 29 16-разр. ПРЦ, 14,7 МГц, 128 кбайт 3" RS-232, RS-485 (T4000, CAN) 24 VDC, 200 mA 180x105 Настройка c клавиатуры или по про- токолу Т4000
Мобильные панели оператора
Simatic Mobile Panel 170 (Siemens) Графическая клавишная + сенсорная — 14-программи- руемые RISC, 66 МГц, Wind. СЕ, 768 кбайт 5,7" RS-232, RS 422/RS-485, (МР1/ ProfibusDP) 24 VDC, 300 mA (через соединит, коробку) Диам. 245x58 Simatic ProTool/Lite, Simatic ProTool/ Pro v6.0
GP2301 HL (Digital/Pro-face) Графическая клавишная + сенсорная — 12-программир., 16-сенсорные 1 Мбайт 5,7" RS-232/ RS-422, Modbus+, Profibus 24 VDC, 500 mA 253xl85x x75 GP-PRO/ PB1I1
MT8121T (Weitek) Графическая сенсорная — — RISC 200 МГц, 64 Мбайт, флэш 32 Мбайт 12,Г RS-232, 2xRS-232/RS-485, Ethernet 10/100 BaseT, 3xUSB 2.0 24 VDC 204x150x x50 Easy Builder
ГЛАВА 3
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
347
Таблица 3.11. Технические характеристики блоков питания ICP Electronics
Модель Тип Мощность, Вт Входное напряжение, В Ток нагрузки, А Рабочая температура, °C Габариты, мм
АСЕ-С232 АТ (дублирован) 2x230 110/220 VAC При +5 В: 20 При+12 В: 10 При -5 В: 0,5 При -12 В: 0,5 0...+50 150x140x86
АСЕ-828А АТХ 280 90...130 ТАС;18О...26О VAC При +5 В: 25 При +12 В: 10 При -5 В: 0,5 При -12 В: 0,5 -20...+70 150x140x86
АСЕ-925С АТ 250 24 VDC (19...30 VDC) При +5 В: 25 При +12 В: 6 При -5 В: 1,0 При-12 В: 2,0 -20...+70 150x140x86
Таблица 3.12. Характеристики источников бесперебойного питания
Модель, фирма Мощность, кВА Время автономной работы, мин. (нагрузка, ВА) Входное- выходное на- пряжение, В Интерфейс Габариты (ШхВхГ), мм Тип ИБП
1 2 3 4 5 6 7
Power ware 5115 0,5 0,7 1,0 1,4 5(500) 13(500) 15(500) 28(500) 220/230/240 — 150x185x268 (для 0,5 кВА) Line- Interactive *
Powerware 9305 7,5 10,0 15,0 44 30 18 3x380 2XRS-232 400x710x750 On-line
Powerware 9315 Powerware 200 400 8...35 7...21 3x380 RS-232, RS-485 1654x1867x800 1880x1867x800 On-line
(Великобритания)
Dialog Active Rack DAR300 3 12 230 RS-232, USB 482,6x133x490 (19" исп.) Модульный
Dialog Power Centre 11 12DPC 200 Riello UPS 200 10...30 380/400/415 RS-232/ RS-422 «СК» 1500x1800x900 On-line
Manufacturing (Италия)
HF Top Line Meta System 4 7...22 230 RS-232, «СК» 560x480x270 On-line
(Италия)
Primewave 10 10 220/230/240 RS-232, «СК» 430x1200x800 On-line
Conceptpower Ne Wave 20 10 230/3x380 RS-232, «СК» 483x400x675 On-line
(Швейцария)
348
ГЛАВА 3
окончание табл. 3.12
1 2 3 4 5 6 7
MASTERYS- ВС312 Socomec Sicon UPS (Франция- Италия) 12 12 230/3x400 RS-232 444x700x795 On-line
UPStation GXT Liebert (США) 6 10 7(100%) 10 (100%) 230 RS-232 558x260x800 640x340x965 On-line
7857.403 RITTAL (Германия) 2 10 (100%), 22 (50%) 220/230/240 ±3% RS-232 482,x89x410 On-line
DC UPS24B/7A-4 (Siemens) 0,16 2 24 VDC RS-232 168x156x112 On-line
* ИБП со стабилизатором напряжения на входе. Инвертор формирует выходное напряжение только
при работе батарей. В нормальном режиме питание нагрузки осуществляется от сети.
Таблица 3.13. Разрешение TFT ЖК-мониторов
Размер по диагонали Разрешение, пиксель Размер по диагонали Разрешение, пиксель
5,7" (моно) 320x240 12", 12,1" 800x600
6,0" 640x480 13,3" 1024x768
6,4" 640x480 14,1" 1024x768
10,0" 800x600 15" 1024x768
10,4" 800x600 17" 1280x1024
Таблица 3.14. Технические характеристики микропроцессорных регуляторов
Тип, изготовитель Число каналов Программ, задатчик Авто- настройка Входные сигналы Выходные сигналы Интерфейс Число индикаторов
Текущие Заданные
UP350 1 10 сегментов Да 4...20 мА — 1, дискретные — 2 4...20 мА — 1, релейные — 2 - 4 4
UP550/750 2 99 сегментов Да 4... 20 мА — 1, дискретные — 7 4...20 мА — 1, релейные — 2 - 5 Дисплей
US1000 Yokogawa (Япония) 2 — Да 4...20 мА— 1, универсал.— 2; цифровые: 2...7 4...20 мА— 1,0...10В— 1, цифровые: 3...7 RS-485 5 5
МТ-96 FOTEK (Тайвань) 1 — Да Термопары: J, К; ТС: PtlOO; 4...20 мА, 0...10В Термопары: R, J, К, Т, Е, В, N, L; ТС: PtlOO RS-485 4 4
731С Foxboro, США 1 — — Термопары: S, R, I, К, Т, Е, В, NW, L; ТС: PtlOO; 4...20 мА, 10 В 4...20 мА — 1, релейные — 4 RS-422/RS-485 4 4
DTA 9696 Delta Electronics Inc. (Тайвань) 1 — — Термопары: S, R, J, К, Т, Е, В, N, L; ТС: PtlOO 4..20 мА — 1, релейные — 2, рпр — 1 RS-485 4 4
TROVIS 6494, SAMSON (Германия) 2 — Да 4...20 мА, 0...10 В, PtlOO, PtlOOO, NilOO, NilOOO дискретные — 1 4...20 мА— 1, релейные — 2, рпр — 1 — 4 4
IMAGO-500 JUMO (Германия) 8 50 программ Да 0...50 мВ,0...1 В, 0...10B, 4...20 мА, дискретные — 2 4...20 мА— 1, релейные — 24 RS-422/RS- 485, Profibus DP 5''- дисплей (100x134 мм)
UDC 2000 Honeywell (США) 2 12 сегментов Да Термопары: S, R, J, К, Т, Е, В, NW; ТС: PtlOO;4...20 мА,1...5В 4...20 мА, 1.. .5В, релейные — 2 — 4 6
ТКМ 21 АО «Текон», Россия 2 — Да Термопара, ТС, 0.. .5,0/4.. .20 мА, дискретные — 4 0...5,0/4...20 мА, релейные — 4 RS-485 4 4
Термодат-15М1 2...4 30 программ по 15 шагов каждая — Термопары: S, R, J, К, Т, Е, В, NW, L; ТС: PtlOO; 0...50 мВ рпр — 4, релейный — 1 RS-232/RS-485 4; ЖК-дисплей (2 строки)
Термодат - 19Е2 «Системы контроля» (Рос- сия) 4 4 программы по 20 участ- ков каждая Да Термопары: S,R,J,K,T,E,B,NW, L; ТС: PtlOO; 0...50 мВ; 0...20 мА 4.. .20 мА, релейный, рпр, симистор RS-485 ЖК-дисплей (320x240 точек)
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ___________349
Окончание табл. 3.13
Тип, изготовитель Число каналов Программ, задатчик Авто- настройка Входные сигналы Выходные сигналы Интерфейс Чйсло индикаторов
Текущие Заданные
Метакон 613 «КонтрАвт» (Россия) 1 10 сегментов Да Термопары: S, J, К, В, N, L, А; 0...50 мВ, 0/4...20 мА, дискретные — 2 рпр — 8 RS-485 4 —
Минитерм* 400 «МЗТА» (Россия) 1 10 сегментов Да Термопары: S, К, L; 0...50 мВ, 0...10 В, 0...5 мА, 0/4...20 мА, дискретные — 2 0... 10В, 0...5 мА, 0/4...20 мА, релейный — 1, рпр — 2 RS-232 4 4
ТРМ202 2 — — Термопары: J, К, В, N, LR, S, Т, А; ТС: ТСП, ТСМ; 0...5,0/4...20 мА; 0...1 В;-50...+50 мВ Дискретный — 1; 4...20 мА RS-485 (про- токол ОВЕН) 4 4
ТРМ138 8 — — Термопары: J, К, В, N, LR, S, Т, А; ТС: ТСП, ТСМ; 0...5,0/4.. .20 мА; 0...1 В; 0...50мВ Дискретные — 8 или 4...20 мА — 8 RS-485 (про- токол ОВЕН) — —
ТРМ101 2 — Да Термопары: J,K,B,N,LR,S,T,A; ТС: ТСП, ТСМ; 0.. .5,0/4... 20 мА; 0...1В; -50...+50 мВ Дискретный — 1; 4.. .20 мА или 0... 10 В RS-485 (про- токол ОВЕН) 4 4
ТРМ151 «ОВЕН» (Россия) 2 12 программ по 10 шагов каждая Да Термопары: L, К, J, N, R, S, В, А-1,2,3; ТС: ТСМ, ТСП 0/4...20 мА; СК СК, прп, 4.. .20 мА, 0.. .10 VDC, симисторные оптопары RS-485 (про- токол ОВЕН) 4 4
МИК-22 2 — — Термопары:К, L ТС: ТСП, ТСМ; 0...5,0/4...20 мА; 0... 10 В. Дискретные — 2 0...5, 0/4...20 мА; 0...10 В. Дискретные — 4 RS-485 4 4
МТР-44 «МИКРОЛ» (Россия) 8 4 программы по 15 шагов каждая — ТС: ТСП, ТСМ; 0...5, 0/4...20 мА; 0...10 В. Дискретные — 2 Дискретные — 8 RS-485 4 —
ТП-402 ВАРТА (Россия) 1 — — Термопары: R, К, В, L, А Симисгорный — 1; тиристорный — 1 — 4 —
Минитерм 400: напряжение питания 24 VDC.
ОБОРУДОВАНИЕ И КОМПОНЕНТЫ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
351
Таблица 3.15. Барьеры искрозащиты с гальванической развязкой Eicon Instruments
Тип модуля Число каналов Входной сигнал в безопасной зоне Выходной сигнал в опас- ной зоне Питание Общие характеристики
pD4Il 1 «СК» Релейный выход 24 VDC, 25 мА Рабочая температура 0...60 °C; изоляция 2500 В (для серии 400)
pD412 2 «СК» Релейный выход 24 VDC, 25 мА
pD431/432 Vi «СК» Релейный выход, 2А 24 VDC, 15 мА
J.1D441/442 1/2 «СК» 2 оптотранзистора 24 VDC, 20 мА Подключение «под винт»; габариты: 16,4x112x92 мм
pD471/472 1/2 20...30 VDC 2 оптотранзистора(40 мА при 24 VDC, 10 мА при 12 VDC), нагрузка 300 Ом 20...30 VDC
Таблица 3.16. Функциональные модули искробезопасной системы IS-RP1
Тип модуля Функция Число каналов Общие характеристики
RSD-BI-EX16 Двоичный вход 16 HART-совместимость; искробезопасное питание в о взрывобезопасном корпусе; «горячая» замена модулей
RSD-BO-Ex4 Двоичный вход 4
RSD-CI-Ex8 Аналоговый вход 8
RSD-CI-Ex8.H Аналоговый вход с протоколом HART 8
RSD-CO-Ex8 Аналоговый вход 8
RSD-CO-Ex8.H Аналоговый выход с протоколом HART 8 Возможность передачи сигналов из взрывоопасной зоны оптоволоконными линиями связи
RSD-TI-Ex8 Аналоговый температурный преоб- разователь (термопары и термометы сопротивления) 8
RSD-CT1-Ex2 Счетчик 2
__________РАЗДЕЛ II____________
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
РАСПРЕДЕЛЕННЫХ АСУ ТП
ГЛАВА 4. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
4.1. Языки программирования ПЛК по стандарту IEC 61131-3
Языки программирования контроллеров описаны в стандарте IEC 61131-3. В нем
же описаны текстовые языки IL (Instruction List — Список инструкций) и ST (Structured
Text — Структурированный текст), графические языки LD (Ladder Diagram— Язык Ди-
аграмм Лестничной Логики) и FBD (Function Block Diagram — Язык Диаграмм Функцио-
нальных Блоков), а также язык графических схем SFC (Sequential Function Chart — Язык
последовательных функциональных схем).
Вопросам программирования контроллеров по стандарту IEC-61131-3 посвящены
работы [4.1-4.7].
4.1.1 Объекты адресации языков программирования ПЛК
Основные объекты адресации языков программирования ПЛК представляют собой
либо биты, соответствующие дискретным логическим переменным, либо слова того или
иного формата, соответствующие числовым данным.
Объекты-биты имеющие длину, соответствующую одному разряду, принимают
значения 0 или 1 и соответствуют либо дискретным сигналам ввода/вывода, либо ре-
зультатам выполнения тех или иных логических операций (0 соответствует понятию
«ложь» — fal se, 1 — понятию «истина» — t rue).
• Биты ввода/вывода. Биты являются логическим отображением электрического со-
стояния ввода/вывода. Биты хранятся в памяти данных и обновляются в цикле при
каждом сканировании задачи, в которой они сконфигурированы.
• Внутренние биты. Внутренние биты %М1 используются для хранения промежуточ-
ных состояний во время выполнения программы.
• Системные биты. Системные биты с %S0 до %S12 7 следят за корректностью опера-
ций ПЛК в процессе работы программы приложения.
• Биты функциональных блоков. Биты функциональных блоков соответствуют выхо-
дам специальных программных блоков, разработанных программистом. Эти выхо-
ды могут быть подсоединенными непосредственно (физически), либо использовать-
ся как объекты.
• Биты, выделяемые из слова. Используя программное обеспечение, можно выделять
один из 16 битов из объекта типа «слово» (word).
• Объекты-слова имеют различную длину и позволяют описывать числовые данные.
• Байт. Формат длиной 8 бит используется для операций над символьными строками.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
353
• Слово одинарной длины. 16-битные слова могут содержать алгебраическую вели-
чину в диапазоне от -32 768 до 32 767.
• Слово двойной длины. 32-битные слова могут содержать алгебраическую вели-
чину в диапазоне от -2 147 483 648 до 2 147 483 647. Эти слова хранятся в памяти
в виде двух последовательных слов одинарной длины.
• Слова с плавающей точкой используются при выполнении некоторых матема-
тических операций.
Адресация переменной величины в стандарте IEC 61131-3 осуществляется следу-
ющим образом. Сначала записывается символ стандарта %, затем тип объекта (I —
ввод, Q — вывод), затем формат объекта (бит или слово), адрес (номер корзины,
номер модуля, номер канала — для величин ввода/вывода или номер регистра для
внутренних переменных ПЛК).
Формат адресации величины, вводимой или выводимой из ПЛК, представлен в
табл. 4.1 (п), внутренней переменной ПЛК — в табл. 4.1 (б).
Таблица 4.1а
% I или Q X, W или В X У i
Символ IEC I — вход Q — выход X — бит W — слово D— двойное слово Номер корзины Номер модуля Номер канала
Таблица 4.16
% М, К или S X, В, W, D или F i
Символ IEC М — внутренний К — константа S — системный X — бит В — байт W — слово D — двойное слово F — слово с плавающей точкой Адрес (номер ячейки памяти)
4.1.2 Язык Ladder Diagram (LD)
Язык LD представляет собой графическую интерпретацию процесса разработки
релейно-контактных схем. В настоящее время язык LD является одним из наиболее
распространенных языков программирования ПЛК. Этот язык наиболее удобен для
программирования небольших задач дискретной логики, поэтому многие компакт-
ные контроллеры имеют язык LD в качестве основного языка для разработки про-
грамм управления.
Программы, написанные на языке LD, состоят из ступеней, которые выполня-
ются ПЛК последовательно, слева направо. Ступень состоит из набора графических
элементов (ячеек), ограниченных слева и справа условными шинами питания.
Набор графических элементов языка LD включает:
• входы/выходы ПЛК (кнопки, контакты реле, конечные выключатели, сигналы
датчиков, индикаторные лампы и т. д.);
• стандартные управляющие системные функции (таймеры, счетчики и т. д.);
• арифметические, логические и специальные операции;
• внутренние переменные ПЛК.
12 Зак. 3801
354
ГЛАВА 4
Дискретные входы ПЛК и результаты выполнения логических операций пред-
ставляются в виде условных контактов реле, нормально разомкнутых (замыкаются
при появлении сигнала на соответствующем входе или истинности поставленного
в соответствие данному контакту логического выражения) и нормально замкнутых
(с логикой работы, обратной предыдущей).
Дискретные выходы ПЛК или результаты выполнения данной ступени представля-
ются в виде обмотки реле, питание на которой появляется после прохождения сигнала от
левой условной шины питания через все находящиеся на ступени элементы. Левая шина
соответствует исходному питанию схемы, правая - выходу схемы, сигнал в котором по-
является после замыкания всех контактов и выполнения всех логических условий.
Графические элементы языка LD можно условно разделить на базовые элементы,
функциональные и операционные блоки. Каждый базовый элемент занимает одну
ячейку (одну колонку в одной строке). Блоки могут занимать несколько ячеек.
Базовые блоки языка LD приведены в табл. 4.2.
Ступень содержит до 7-ми строк и до 11-ти колонок, разделенных на две зоны —
проверочную зону и зону действий. Каждая ступень может быть снабжена меткой и
комментарием. Метки могут быть использованы для идентификации ступени внутри
программного объекта (головной программы, подпрограммы и т. д.), но не являются
обязательными. Метки имеют синтаксис %Li (где i от 0 до 999) и располагаются в
левом верхнем углу перед шиной питания. Каждая метка может присваиваться только
одной ступени в пределах данного программного объекта. Система сканирует ступени
в том порядке, как они были введены, независимо от порядка нумерации меток.
В состав ступени может быть введен комментарий, содержащий до 222 алфавитно-
цифровых символов и обрамленный с обоих концов символами (* и *), что упрощает
интерпретацию ступени. Введение комментария не является обязательным. Коммен-
тарий запоминается в ПЛК и в любой момент может быть вызван пользователем.
Следует учитывать, что комментарии используют память программ.
Ступень изображается в форме, похожей на релейные диаграммы. Простейшие
проверочные элементы и элементы действия занимают одну строку и одну колонку
ступени. Все линии контактов начинаются от левой шины питания и должны закан-
чиваться на правой шине питания (правая шина питания может не показываться).
Проверочные операции всегда располагаются в колонках с 1 по 10. Операции дей-
ствия всегда располагаются в колонке 11. Предполагается, что между шинами пита-
ния протекает ток, который имеет следующее направление:
• по горизонтальным связям — слева направо;
• по вертикальным связям — в обоих направлениях.
Проверочная зона содержит контакты, которые могут быть помечены любым
ранее определенным битовым объектом, функциональные блоки и блоки сравнения.
Зона действий содержит:
• прямые, инверсные, фиксирующие и инверсно-фиксирующие обмотки, которые
могут быть помечены любым битовым объектом;
• операционные блоки;
• другие «обмотки» (Call, Jump, Halt, Return).
На одной линии возможно до 10-ти контактов. В одной колонке максимально мо-
жет проверяться параллельно до 7-ми контактов. До 7-ми обмоток могут быть вклю-
чены параллельно. Ступень может быть разделена на несколько независимых линий
контактов, причем каждая линия управляет независимой обмоткой.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
355
Таблица 4.2. Базовые элементы языка LD
Наименование Символ Функция
Элементы условий Нормально откры- тый контакт п Контакт замкнут, когда битовая переменная, которая управляет им, принимает значение 1
Нормально закры- тый контакт и Контакт замкнут, когда битовая переменная, которая управляет им, равна 0
Контакты, срабаты- вающие по перепаду -|р|- Возрастающий перепад: контакт замкнут, когда битовая переменная, которая управляет им, изменяется с 0 до 1
М Убывающий перепад: контакт замкнут, когда битовая переменная, которая управляет им, изменяется с 1 до 0
Элементы действия Прямая обмотка ч )- Устанавливает соответствующий битовый объект в значение, равное результату, полученному в проверочной зоне
Обратная обмотка -(/)- Устанавливает соответствующий битовый объект в значение, равное инверсии от результата, полученного в проверочной зоне
Устанавливающая обмотка 4S)- Устанавливает соответствующий битовый объект в 1, когда результат, полученный в проверочной зоне, равен 0
Сбрасывающая обмотка 4R)- Сбрасывает соответствующий битовый объект в 0, если результат, полученный в проверочной зоне, равен 1
Условный переход к другой ступени »%Li Обеспечивает соединение с помеченной строкой, при- чем последняя может быть расположена до или после текущей ступени
Возврат из под- программы <RETURN> Зарезервировано для подпрограмм SR, позволяет возвращаться в вызывающий модуль, когда результат, полученный в проверочной зоне, равен 1
Останов программы <HALT> Останов выполнения программы, когда результат, по- лученный в проверочной зоне, равен 1
Проверочные элементы Блоки: таймер; счетчик; одновибратор; ре- гистр; контроллер барабана D Каждый из блоков стандартной функции использует входы/выходы, через которые обеспечиваются связи с другими графическими элементами
Вертикальный блок сравнения О Позволяет сравнивать два операнда. В зависимости от результата соответствующий вход принимает значение равное 1. Размер: 2 колонки/4 строки
Горизонтальный блок сравнения «Compare» -I н Позволяет сравнивать 2 операнда. Выход принима- ет значение равное 1, если при сравнении получен истинный результат. (Блок может содержать до 4096 символов). Размер: 2 колонки/1 строка
Элемент действия Операционный блок «Operate» 4 j- Выполняет арифметические, логические и другие опера- ции. Использует синтаксис языка структурированного текста. (Блок может содержать до 4096 символов). Размер: 4 колонки/1 строка
356
ГЛАВА 4
Операционные блоки всегда расположены в зоне действий. Внутри блока запи-
сывается фраза на языке ST. Операционный блок должен быть присоединен непо-
средственно к правой шине питания.
Ступени исполняются последовательно друг за другом. Каждая ступень испол-
няется слева направо. В тех случаях, когда встречается вертикальная связь, выполня-
ется подступень, соответствующая этой связи, и только после этого возобновляется
исполнение оставшейся части ступени.
4.1.3 Язык Instruction List (IL)
Язык Instruction List (IL) в наборе стандартных языков — это унификация ин-
терфейса языка программирования низкого уровня, неориентированного на какую-
либо микропроцессорную архитектуру. У языка IL есть очень важное качество:
на его основе можно создавать оптимальные по быстродействию программные
единицы.
Программа, написанная на языке IL, состоит из набора инструкций, выполняемых
ПЛК последовательно. Каждая инструкция состоит из кода инструкций и операнда.
Пример инструкции: LD %11.0, где LD — код инструкции, %11.0 — операнд.
Инструкции активизируют:
• входы/выходы ПЛК;
• стандартные системные управляющие функции (таймеры, счетчики и т. д.);
• арифметические и логические операции и операции пересылки;
• внутренние переменные ПЛК.
Существуют два типа инструкций:
• проверочные инструкции, которые содержат условия необходимые для того, что-
бы выполнилось действие, например: LD, AND, OR и т. д.;
• инструкции действия, следующее за проверочной последовательностью, напри-
мер: ST, STN, R и др.
Список некоторых базовых инструкций языка IL приведен в табл. 4.3.
Таблица 4.3. Базовые инструкции языка IL
Наименование Инструкции Эквивалентные функции LD
] 2 3
Проверочные инструкции LD, LDN, LDR, LDF H F ~H~ - p|~4F
AND, ANDN, ANDR, ANDF HHF HHpF H1 H-
OR, ORN, ORR, ORF 4^
AND, OR (8 уровней вложения)
MPS MRD MPP Щ M SB TT?
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
357
Окончание табл. 4.4
1 2 3
Инструкции действия ST, STN, S, R -0- -(/)- -(S)- -(R)-
IMP, 1МРС, JMPCN Используется для перехода (безусловного, условного при булев- ском результате равном 1 или условного при булевском результате равном 0) на помеченную инструкцию, которая может быть рас- положена в списке инструкций, как перед текущей инструкцией, так и после нее
SRn Используется для перехода к началу подпрограммы.
RET, RETC, RETCN Возврат из подпрограммы (безусловный, условный при булевском результате, равном 1, условный при булевском результате, равном 0)
END, ENDC, ENDCN Конец программы (безусловный, условный при булевском резуль- тате, равном 1, условный при булевском результате, равном 0)
HALT Выполнение программы останавливается
Проверочные элементы Блоки: таймер; счетчик; одновибратор; регистр; контроллер барабана Существуют инструкции для управления каждым из стандарт- ных функциональных блоков. Для активизации вводов/выводов функциональных блоков используется специальная структурная форма
LD[ ] AND[ ] 0R[ ] Пример: LD[%MW10<1000] Используются для сравнения двух операндов. Выход становится равным 1, если при выполнении проверочной операции получаем истинный результат. Результат равен 1, если содержимое ячейки памяти для пере- менной MW10 меньше 1000
Элементы действия [ 1 Пример: [%MW10:=%MW0+100] Элементы выполняют логические, арифметические и другие опе- рации. Используется синтаксис языка ST. К содержимому ячейки памяти для переменной MW0 прибавля- ется 100; полученная сумма размещена в ячейке памяти внутрен- ней переменной MW10
Программой является последовательность инструкций. Каждая последователь-
ность должна содержать одну или несколько проверочных инструкций. Результаты
проверочных инструкций используются в одной или нескольких инструкциях дей-
ствия. Каждая инструкция занимает одну строку. Последовательность инструкций
начинается с восклицательного знака (формируется автоматически). Восклицатель-
ный знак может включать комментарий и может быть идентифицирован меткой.
Пример:
! ("Waiting for drying*)
%L2:
LD %IO.1
AND %M10
ST %Q2.5
Комментарий может быть расположен в начале последовательности инструкций.
Он может занимать до 3-х строк (222 алфавитно-цифровых символов) и должен быть
обрамлен символами (*...*).
Метки используются для идентификации последовательности инструкций в про-
граммном объекте (в основной программе, в подпрограмме и т. д.), но не являются
358
ГЛАВА 4
обязательными. Метка имеет следующий синтаксис: %L1 (где! —от 0 до 999), и рас-
полагается в начале последовательности инструкций. Метка может быть назначена
один раз для единственной последовательности инструкций в данном программном
объекте.
Последовательность всегда должна быть помечена для обеспечения соответству-
ющих связей при программном переходе. Система сканирует последовательность
инструкций в том порядке, как они были введены независимо от значений чисел,
используемых при формировании меток.
Последовательность выполнения инструкций может быть изменена с помощью
скобок. Правила выполнения языка инструкций:
• За каждой открывающей круглой скобкой должна последовать закрывающая
скобка. Открывающая скобка ставится в инструкции после операции. Инструк-
ции, заключенные в скобки, выполняются в первую очередь.
• Метки %Li не должны располагаться в выражении между круглыми скобками.
Это правило справедливо также для инструкций перехода — JMP, и инструкций
вызова подпрограмм — SR1.
• Инструкции ST, STN, S и R не могут быть запрограммированы между круглыми
скобками. Существуют три типа инструкций, которые используются для обра-
ботки содержимого ячеек в особом порядке. Они используют буфер в виде стека,
который способен запоминать вплоть до трех битов булевских данных.
• Инструкция MPS (Memory PuSh) запоминает на вершине стека последний ре-
зультат проверочной инструкции и сдвигает другие данные в направлении дна
стека.
• Инструкция MRD (Memory ReaD) считывает содержимое вершины стека.
• Инструкция МРР (Memory РоР) считывает вершину стека и сдвигает другие дан-
ные в нем в направлении вершины стека.
Программы списка инструкций выполняются последовательно — инструкция за
инструкцией. Первой инструкцией обязательно должна быть либо оператор LD («за-
грузить значение операнда в буфер»), либо безусловная инструкция перехода (напри-
мер, JMP). Все инструкции (за исключением LD и безусловных инструкций перехода)
используют булевский результат предыдущей инструкции.
Пример:
LD %1.1 Булевский результат =состоянию бита %1.1
AND %м0 Булевский результат = AND предыдущего булевского результата и состояния бита %МО.
OR %М10 Булевский результат = OR предыдущего булевского результата и состояния бита %М10
ST %Q2.0 Бит %Q2.0 принимает состояние предыдущего булевского результата. Оператор ST означает «присвоить значение буфера операнду»
4.1.4 Язык Structured Text (ST)
Язык Structured Text (ST) относится к классу текстовых языков высокого
уровня. Язык структурированного текста является основным для программирова-
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
359
ния последовательных шагов и транзакций языка SFC. Кроме этого, он имеет “выхо-
ды” во все остальные языки, что делает его универсальным в применении разными
категориями пользователей. Язык ST используется для создания программ путем за-
писи строк программ, состоящих из алфавитно-цифровых символов.
Основными инструкциями языка ST являются:
• битовые инструкции;
• арифметические и логические инструкции для слов и двойных слов;
• арифметические инструкции для чисел с плавающей точкой;
• инструкции числового сравнения слов, двойных слов и чисел с плавающей точкой;
• числовые преобразования;
• инструкции для таблиц, заполненных битами, словами, двойными словами и
числами с плавающей точкой;
• инструкции для строк из символов;
• инструкции для алфавитно-цифрового сравнения;
• инструкции для управления временем;
• инструкции для управления программой (программные инструкции);
• инструкции для управления ходом выполнения программы (управляющие ин-
струкции);
• инструкции для стандартных функциональных типов;
• инструкции предметной области (связь, ПИД-регулирование и др.).
Некоторые команды языка ST приведены в табл. 4.4.
Таблица 4.4. Основные команды языка ST
Изображение Функция
Битовые инструкции
= Битовое присвоение
OR Булевское ИЛИ
AND Булевское И
XOR Булевское ИСКЛЮЧАЮЩЕЕ ИЛИ
NOT Инверсия
RE Возрастающий фронт
FE Убывающий фронт
SET Установка в 1
RESET Сброс в 0
Числовое сравнение для слов, двойных слов и чисел с плавающей точкой
< Строго меньше чем
> Строго больше чем
<= Меньше или равно
>= Больше или равно
= Равно
о Не равно (отлично от)
Целочисленная арифметика над словами и двойными словами
+, ", / Сложение, вычитание, умножение, целочисленное деление
REM Остаток от целочисленного деления
SQRT Целочисленный квадратный корень
ABS Абсолютное значение
INC Приращение на единицу
DEC Уменьшение на единицу
360
ГЛАВА 4
Программы на языке ST составляются из выражений. Каждое выражение языка
состоит из метки, комментариев и инструкций. Каждый из этих элементов может
отсутствовать. Каждое выражение начинается с восклицательного знака (может по-
рождаться автоматически).
Пример:
! %1_2: (’-Предложение с меткой, комментариями *)
SET %%м0; %мы4 := %mw2 + %mw9;
(* и различными инструкциями *)
%MF12:= SQRT (%MF14);
В комментарии может быть использован любой символ (не более 256 сим-
волов). Комментарий занимает несколько строк и доступен пользователю в любой
момент времени.
Метка используется для отсылки к выражению в программной единице (в голов-
ной программе, в подпрограмме и т. д.), но не является обязательной. Метка распола-
гается в начале выражения и имеет следующий синтаксис: %L1 , где 1 — целое число
от 0 до 999. В пределах программной единицы (подпрограмма, головная программа,
программный модуль) конкретная метка может быть употреблена для единственного
выражения. Отсылка к выражению может быть сделана с любого места программы с
помощью инструкции безусловного перехода.
Выражение на языке ST может содержать несколько инструкций, при этом каж-
дая инструкция должна заканчиваться символом ’;'.
В языке ST имеется четыре управляющие структуры:
• условное действие IF;
• условные итеративные действия WHILE и REPEAT;
• повторяющееся действие FOR.
Каждая управляющая структура обрамляется ключевыми словами. Допускается
вложение управляющих структур независимо от их типа. Управляющие структуры
могут предшествовать или следовать за любой инструкцией.
Условное действие IE..END_IF
Простейшая форма (инструкция выполняет действие, если условие истинно).
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
361
Общая форма
Синтаксис
Функционирование
IF условие 1 then
действие 1;
ELSIF условие 2 THEN
действие 2;
ELSE
действие 3;
END_IF;
Условное итеративное действие WHILE...END_WHILE
Инструкция выполняет повторно действие, пока условие истинно.
Синтаксис
Функционирование
while условие DO
действие;
END-WHILE;
Условие проверяется до выполнения действия. Если при первой проверке усло-
вие ложно, то действие не выполняется. Если условие истинно, то инструкция вы-
полняет действие повторно
Условное итеративное действие REPEAT...END_REPEAT
Инструкция выполняет повторно действие, пока условие истинно.
Синтаксис Функционирование
REPEAT действие; UNTIL условие END-REPEAT; ► Начало Repeat
Действие
Ложно / < Усл Истинно >вие \ Окончание * Repeat
Инструкция повторяет действие до момента, пока условие не станет истинно.
Условие проверяется после выполнения действия. Если при первой проверке условие
ложно, то действие выполняется еще один раз.
362
ГЛАВА 4
Повторяющееся действие FOR...END_FOR
Инструкция выполняет обработку операции определенное число раз, увеличи-
вая индекс на 1 в каждом цикле.
Когда индекс строго больше конечного значения, выполнение программы про-
должается с инструкции, следующей за ключевым словом ENDJFOR.
Индекс увеличивается автоматически, без участия пользователя.
Выход из цикла посредством инструкции EXIT.
Ключевое слово EXIT используется для остановки вычислений в цикле и продол-
жении с инструкции следующей за ключевым словом конца цикла. Слово может быть
использовано только внутри одного из грех циклов: WHILE, REPEAT или FOR.
Программа на языке ST выполняется последовательно (инструкция за инструк-
цией) относительно управляющих структур. В случае арифметических или булевых
выражений, состоящих из различных операторов, правила приоритета определены
между разными операторами.
Пример:
NOT %MW3 * 25 AND %MW10 + %MW12
В этом примере выполняется NOT перед %MW3, затем результат умножается
на 25. Вычисляется сумма %MW10 и %MW12, затем логическое AND вычисляется
между результатами умножения и сложения.
Когда есть конфликт между двумя операторами одного и того же приоритета,
первый оператор берет приоритет операций (оценка выполняется слева направо).
Пример:
%MW34 * 2 REM 6
В этом примере %MW34 сначала умножается на 2, затем результат используется
в вычислении модуля.
Круглые скобки меняют порядок выполнения операций. В следующем примере
сложение имеет более высокий приоритет, чем умножение.
Пример:
(%MW10 + %MW11) * %MW12
Круглые скобки могут быть вложены; число уровней вложения не ограничивает-
ся. Круглые скобки также используются для избежания некорректной интерпрета-
ции программы.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
363
Пример:
NOT %MW2 о %MW4 + %MW6
При помощи оператора управления приоритетом, получена следующая интер-
претация:
((NOT %MW2) < > (%MW4 + %MW6))
4.1.5 Язык Sequential Function Chart (SFC)
Основой языка SFC послужила модель «сетей Петри» (разделение системы на
множество простых позиций). Окончательно стандарт SFC сформировался на базе
стандарта «Grafcet» (стандарт МЭК 848).
Язык последовательных функциональных схем (Sequential Function Charts,
или Grafcet) позволяет формулировать логику программы на основе чередующих-
ся процедурных шагов и транзакций (условных переходов), а также описывать
последовательно-параллельные задачи в понятной и наглядной форме.
Строго говоря, SFC не является языком программирования. Это средство про-
ектирования прикладного программного обеспечения, которое всегда является ком-
плексом большого числа программных единиц: программ, функциональных блоков
и функций. Обеспечение параллельности выполнения программ, установление и
контроль состояния процессов, обеспечение синхронизации по приему и обработке
данных, описание однозначно понимаемых и заказчиком, и исполнителем состояний
автоматизируемого процесса — все это возможно при использовании SFC. Однако
SFC не имеет средств для описания шагов и переходов, которые могут быть выра-
жены только средствами других языков стандарта IEC. Структура языка SFC пред-
ставлена на рис. 4.1.
Начальный шаг (Init): описывает
начальное положение ПЛК.
>. Переход: соответствующие условия перехода
означают логические условия, необходимые
для обновления этого перехода.
Одновременная активация шагов 3 и 7
(расщепление по И). Шаги 3,4,5,6 и 7,8,9 задают две
последовательности, которые могут выполняться
одновременно.
^.Селекция последовательности (расщепление по
ИЛИ) с шага 3 до шага 4 или шага 5.
Окончание селекции последовательности
(объединение по ИЛИ) с шага 4 или шага 5 в шаг 6.
Окончание последовательности шагов: позволяет
синхронизировать одновременно выполняемые
последовател ьности.
^Одновременная деактивация шагов 6 и 9
(объединение по И).
Шаг: связанная с шагом операция выполняется
только в том случае, если шаг активирован.
Рис. 4.1
364
ГЛАВА 4
Графическое описание последовательных операций управляющих систем, а так-
же различных встречающихся ситуаций, выполняется с использованием прос тейших
графических символов.
Операции, связанные с шагами, обозначаются в общей форме типа «что должно
быть сделано», когда шаги активированы. В частности, они описывают порядок, по
которому они должны быть посланы в приложение (автоматизированный процесс)
или в другие автоматизированные системы. Последовательность активизированных
шагов в любой заданный момент времени определяет ситуацию в диаграмме языка
SFC. Шаги обозначаются в виде прямоугольников.
Переходы и директивные (командные) связи представляются в символической
форме возможных продвижений активированных шагов. Переходы между шагами
всегда определяются тем или иным условием.
Основные правила составления SFC- диаграммы:
• первая строка используется для входов соединителей-источников;
• последняя строка используется для входов соединителей-приемников.
Назначение соединителей состоит в обеспечении непрерывности диаграмм в
случаях, когда направленные линии связи либо на одной странице, либо между дву-
мя соответствующими страницами — не могут быть обозначены. Эта непрерывность
обеспечивается соединителем-приемником, который всегда имеет соответствующий
соединитель-источник. На диаграмме с использованием соединителей могут быть обо-
значены циклические возвраты. Последовательность может быть возобновлена с ис-
пользованием соединителей. Соединители используются также в случаях, когда ветвь
является более длинной, чем размер страницы.
• Четные строки (с 2 по 12) содержат символы шагов и соединителей-приемников
• Нечетные строки (с 3 по 13) содержат символы переходов и соединителей-
источников.
• Каждый шаг нумеруется (с 0 по 127) в любом порядке.
• На одной странице может быть размещено несколько диаграмм.
• Количество переходов в верхней части конца выбора последовательности (объ-
единение по ИЛИ) или нижней части начала выбора последовательности (раз-
деление по ИЛИ) не должно превышать 11.
• Выбор последовательности может быть ориентирован слева направо.
• Количество шагов в нижней части одновременной активации (объединение по
И) или в верхней части одновременной деактивации (разделение по И) не долж-
но превышать 11.
• Одновременная активация всегда представлена слева направо.
• Одновременная деактивация всегда представлена справа налево.
Макрошаг предназначен для представления последовательности шагов в виде одного
графического элемента. Его отличительным знаком являются две горизонтальные черты
на графическом элементе. Входной шаг подчиняется тем же правилам, что и остальные
шаги, выходной шаг не может иметь какого-либо связанного с ним действия.
Каждый шаг связан с действиями, которые могут быть запрограммированы на
языках LD, IL или ST. Эти действия сканируются только в том случае, если шаг, с
которым они связаны, является активным. Единичное действие может содержать не-
сколько программных элементов (последовательностей, выражений или циклов).
Каждый переход имеет связанные с ним условия, которые могут программиро-
ваться на языках LD, IL или ST. Условия перехода сканируются только тогда, когда
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
365
переход, с которым они связаны, разрешен. Условия перехода соответствуют ступе-
ням, списку инструкций или выражению структурированного текста, составляющих
последовательность проверок бит или/и слов. Если условия перехода не запрограм-
мированы, то предполагается, что условия перехода ложны (false). Основные графи-
ческие элементы языка SFC приведены в табл. 4.5
Таблица 4.5. Графические элементы языка SFC
Обозначение Символ Функции
Начальные шаги □ 1 4 ЛИ ш 1 Обозначает начальные шаги, которые активируются после запуска цикла инициализации или холодного перезапуска
Одиночные шаги ф 4ЛИ ф Обозначает, что система управления находится в устойчи- вом состоянии. Все конфигурированные шаги в пределах максимального количества могут быть активизированы одновременно
Макрошаги Обозначает макрошаг: определенную последовательность шагов и переходов
Шаги макрошага ф «ЛИ ИЛИ ф 0U' -1 г Обозначает шаги макрошага. Допускается один IN и один OUT шаг для каждого макрошага
Переходы — Используется для перехода от одного шага к другому. Логи- ческие условия, связанные с данным переходом, определяют условия, необходимые для начальной установки (обнуле- ние) данного перехода.
Разветвление по И + Переход от одного шага к нескольким. Допускается актива- ция максимально 11 шагов одновременно
’ 1
Разветвление по ИЛИ - Переход от одного шага к нескольким шагам. Используется для выполнения выбирающей последовательности макси- мально к 11 шагам
Соединитель источника г «п» — это номер шага, от которого принимается управление (шаг источника)
Соединитель приемника п «п» — это номер шага, куда передается управление (шаг приемника)
Основные достоинства языка SFC можно определить следующим образом:
• Высокая выразительность. Язык SFC имеет те же возможности, что и диаграммы
состояний, и является наиболее подходящим средством для описания динамиче-
ских моделей.
• Графическое представление. Благодаря графической мнемонике SFC максималь-
но прост в использовании и изучении. Вместе с тем он является наглядным сред-
ством представления логики на разных уровнях детализации.
• Предварительное проектирование ПО. Использование языка SFC на ранних эта-
пах проектирования прикладного ПО позволяет снять многочисленные непони-
мания между заказчиком, проектировщиком ПО и программистом.
366
ГЛАВА 4
4.1.6 Язык Functional Block Diagram (FBD)
Язык диаграмм функциональных блоков (Function Block Diagram) позволяет соз-
дать программную единицу практически любой сложности на основе стандартных
функциональных блоков (арифметические, тригонометрические, логические блоки,
ПИД-регуляторы, блоки, описывающие некоторые законы управления, мультиплек-
соры и т. д.). Это языковое средство использует технологию инкапсуляции алгорит-
мов обработки данных и законов регулирования. Программирование сводится к
сборке готовых компонентов.
Язык FBD описывает функции преобразования входных переменных контрол-
лера в выходные в виде сочетания элементарных функциональных блоков. Выход
функционального блока может быть соединен с входами других блоков. Каждый
функциональный блок представляет собой прямоугольник, внутри которого имеется
обозначение функции, выполняемой блоком.
Имеются следующие формальные правила языка FBD:
• функциональные блоки могут располагаться произвольно в поле программы;
• не может быть несоединенных входов и выходов функционального блока;
• соединение блоков может выполняться также при помощи ссылок с определен-
ными именами;
• функциональные блоки выполняются слева направо, сверху вниз;
• на входе функционального блока может быть константное выражение, любая
внутренняя или входная переменная контроллера;
• на выходе блока может быть любая внутренняя или выходная переменная ПЛК.
В табл. 4.6 представлены основные функциональные блоки языка FBD.
Таблица 4.6 Функциональные блоки языка FBD
Наименование Обозначение Описание
1. Функции двоичного типа NOT AND OR XOR SET RESET Логическое отрицание Логическая конъюнкция Логическая дизъюнкция Исключающее ИЛИ Присвоение переменной единицы Обнуление переменной
2. Функции управления RETURN GOTO CALL Возврат из подпрограммы Безусловный переход Вызов подпрограммы
3. Арифметические функции ADD SUB DIV MUL Сложение Вычитание Деление Умножение
4. Функции сравнения II V A V A || Равно Не равно Больше Меньше Больше или равно Меньше или равно
5. Математические функции ABS EXPT LOG SQRT Модуль Экспонента Логарифм Корень
6. Тригонометрические функции ACOS ASIN ATAN COS SIN TAN Арккосинус Арксинус Арктангенс Косинус Синус Тангенс
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
367
4.2. Примеры программирования на языках IEC 61131-3
4.2.1 Язык Ladder Diagram (LD).
Пример 1. Рассмотрим схему включения пускателя
%! 2.2 %1 2.3 %Q 3.1 с помощью контактов реле.
Реле _| I Реле Пускатель 1/1 1 1 Каждому контакту в языке LD ставится в соответ- ствие логическая переменная TRUE (контакт замкнут) или FALSE (контакт разомкнут). Контактом реле управ- ляет булева величина. При поступлении 1 по адресу %1 2.2 н.о. контакты реле замыкаются. Результат, по-
1 1 %12.1 Пускатель _1 I ИГ “1 I
1 1 лученный в проверочной зоне, устанавливает прямую обмотку (%Q 3.1) в 1.
Пример 2. Рассмотрим пример наполнения бака водой. При достижении уровнем
воды верхней отметки (Мах) сигнализатор верхнего уровня выдает на вход контрол-
лера дискретный сигнал 1. По истечении интервала времени (5 с), необходимого
для успокоения уровня жидкости и исключения ложных срабатываний, контроллер
должен включить насос для откачки жидкости.
%12.1 ----- %I2.2%Q3.1 %12.1 ----- %Q3.1
Мах %1 2.3 Насос -II TON In Q t#5c Min Насос —И ( )— Max HI %12.2 _ Min TON In Q t#5c Насос (S)— %Q 3.2 Насос
1'1
%I 3.1 %13.2 %Q 3.5
Bxofll Вход2 Выход
HI— HI— ( 1
%I 3.1 %13.3
Bxofll ВходЗ
HI— HI—
%I 3.2 %I3.3
Вход2 ВходЗ
П1—
При достижении уровнем нижней отметки (Min) сигнализатор нижнего уров-
ня должен выдать дискретный сигнал для остановки насоса. Если уровень достигнет
верхней отметки (Мах =1), насос включится с задержкой 5 с. При достижении уров-
нем нижней отметки (Min = 1) насос выключится.
Эта же задача может быть запрограммирована с помощью устанавливающей и
сбрасывающей обмоток. В следующей программе с приходом сигнала Мах битовый
объект (насос) устанавливается в 1. С приходом сигнала Min битовый объект (насос)
сбрасывается в 0 (насос выключается).
Пример 3. Определение достоверности сигнала (го-
лосование 2 из 3-х) [2.1].
Для повышения достоверности сигнала использует-
ся принцип троирования входных (выходных) сигналов.
При совпадении значений 2-х сигналов из 3-х зна-
чение двух равных сигналов считается достоверным.
Этот метод называется «голосование 2 из 3-х».
На языке LD могут быть запрограммированы ло-
гические операции «И», «ИЛИ», «НЕ» и др. Последова-
тельное соединение контактов равнозначно логической
операции «И», параллельное «ИЛИ». Операция «НЕ» реализуется инверсным кон-
тактом.
В следующем примере 4 запрограммирована одновременная работа двух свето-
форов со временем горения каждой из ламп в течении 5 с. В комментариях к про-
368
ГЛАВА 4
М1
М2
М3
М4
Мб
TS1
М1
М2 •
М5
TIMER М
------- en "Eno
ТС1 — TCoil
60— TValue
TIMER M J
-------EN "ENO'
TC6 — TCoil
50----TValue
TIMER M
—-— en "Eno
TC4— TCoil
50— TValue
TIMER M
---------EN "ENO
TC5----TCoil
50— TValue
TIMER M
-------en "Eno
TC3— TCoil
60----TValue
TIMER M
--------en Eno
TC2— TCoil
• 60— TValue
•М2 •
—,«>
М3 -
JS>
М3
IR>
• М4
1—IS>
j РежиыГТкрасн 2звл
| Рёжмм2:1 краем 2эел (морг)
РежммЗ: 1 краем 1жвлт2желт
Режим4. 1звл 2красн
| РежммБ. 1 зел (морг) 2красн
Режимб: 1желт2красн2жвлт
| Выкл режима! Вкл режима 2
| Выкл режима2 Вкл режима 3
[ Выкл режимаЗ Вкл режиме 4
грамме под цифрой 1 подразумевается режим светофора N1, а под цифрой 2 — соот-
ветственно режим светофора N2. При подаче питания в течение выдержки времени
5 с, определяемой таймером, горит красная лампа светофора N1 и зеленая лампа све-
тофора N2 (режим 1). Дальнейшие режимы определяют переключение ламп светофо-
ра в соответствии с общепринятой идеологией работы светофоров. Время мигания
зеленой и желтой ламп формируется таймером и модулем ALT_M смены состояния
мигания.
4.2.2 Язык Instruction List (IL)
Программа на языке IL представляет собой последовательность инструкций (ко-
манд). Необходимо помнить, что скобки изменяют порядок выполнения инструкций.
Открывающая скобка ставится в инструкции после операции, а закрывающая скобка
ставится в отдельной строке. Инструкции, заключенные в скобки, выполняются в
первую очередь.
Для большей наглядности ниже приводятся примеры на языке LD и соответству-
ющие им программы на языке IL, состоящие из кодов инструкций и операндов.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
369
%12.1 %1 2.2 %О3.1
{ )-- LD %1 2.1
AND %! 2.2
OR Й 2.3
ST %Q 3.1
%] 3.1 %13.2 %O3.5
НН —н— %13.3 %1 3.4 41 1Н~ Н )— LD %Т3.1 AND( %I3.2 OR %I3.3 AND %I3.4 ) ST %Q2.1
%I 3.1 %I3.2 %! 3.4 %Q3.5
HI-------II-
%I2.3
HI---------
Вход 1 %13.1 Вход 2 %l 3.2 ] г—HH II Вход 1 %I 3,1 Вход 3 %13.3 —II II Вход 2 %I 3.2 Вход 3 %I 3.3 ыход %Q 3.5 —' ’
II II
%I3.1 %I3.2 %I3.3 %I3.4 %Q 3.5 LD
~I |——I I--1 I—H I---( )— AND(
AND
OR
%13.5 %I3.6
AND
)
AND
ST
LD %I3.1
AND %I3.2
0R( %I3.1
AND %I3.3
)
ORC %I3.2
AND %I3.3
)
ST %Q3.5
%I3.1
%I3.2
%I3.3
%I3.5
%I3.6
%I3.4
%Q3.5
%I 3.3
-----1 I-
Пример вычислений:
Y = 20x(5+3)
(LD — загрузить значение
операнда в аккумулятор.
MUL — умножить.
ADD — сложить.
ST — присвоить значение
буфера операнду Y).
LD
OR
AND
AND
ST
ST
%I3.1
%I3.3
%I3.2
%I3.4
%Q3.5
%Q3.6
LD 20
MUL( 5
ADD 3
)
ST Y
4.2.3 Язык Structured Text (ST)
Язык ST является текстовым языком высокого уровня.
Программы на языке ST составляются из выражений. Каждое выражение языка
состоит из метки, комментариев и инструкций. Каждый из этих элементов может
отсутствовать. К числу инструкций языка ST относятся битовые инструкции, ариф-
метические и логические инструкции для слов и двойных слов, арифметические ин-
струкции для чисел с плавающей точкой и др.
Для большей наглядности ниже приводятся примеры на языке LD и соответству
ющие им программы на языке ST.
% I 3.4 %Q 3.5
HI-------( и-
%Q3.5:=C%i3.1 or %I3.3) and %I3.2 and %I3.4
bOut:=(lnl AND In2)OR(lnl AND In3)
OR (In2 AND In3)
Примеры выражений на языке ST:
! SET %MW6;
(установить в 1 внутреннюю переменную — слово; 6 — адрес ячейки памяти).
370
ГЛАВА 4
! %MW4:=%MW2 + %MW9;
(присвоить внутренней переменной MW4 результат сложения %MW2 и %MW9).
! %MW24:=SQRT(%MF30);
(присвоить переменной MW24 значение корня квадратного из величины MF30).
Круглые скобки определяют приоритет (первоочередность) действий.
(%MW10 + %MW11) * %MW12;
(в первую очередь выполняется сложение, а затем умножение).
4.2.4 Язык Sequential Function Chart (SFC)
Язык SFC представляет последовательность шагов и условных переходов (тран-
закций). В качестве примера рассмотрим программу управления наполнением ре-
зервуара водой, ее нагрев до заданной температуры и слив. Функциональная схема
приведена ниже.
I
Резервуар пустой
Пустой старт
Выпускной клапан закрыть
Включить насос
Бак полный
Выключить насос
Включить нагреватель
Нагрев
Отключить нагреватель
Паузам «time out»
Конец паузы
Бак пустой
Комментарий
Команда старт
Начать заполнение бака
Датчик верхнего уровня
Максимальный уровень
Температура заданная
Время ожидания
Время ожидания истекло
Опорожнение бака
Резервуар пустой
SFC-диаграмма выполняется, как правило, сверху вниз. Начальный шаг (Init)
должен присутствовать обязательно, но может быть пустым. Слева от прямо-
угольника, обозначающего действие, может указываться классификатор действий:
N (Non-Stored) — несохраняемое действие (выполняется при активности шага); S
(Stored) — сохраняемое действие; R (Reset) — сброс; L (time Limited) — ограничение
во времени и др.
Допускается ветвение (одновременное выполнение действий). Каждая парал-
лельная ветвь должна начинаться и заканчиваться шагом.
Программы списка инструкций выполняются последовательно — инструкция за
инструкцией. Первой инструкцией обязательно должен быть либо оператор LD («за-
грузить значение операнда в буфер»), либо безусловная инструкция перехода (напри-
мер, JMP). Все инструкции (за исключением LD и безусловных инструкций перехода)
используют булевский результат предыдущей инструкции.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
371
Пример:
LD %1.1 AND%M0 Булевский результат = состоянию бита % 1.1 Булевский результат = AND предыдущего булевского результата и состояния бита %М0.
OR %М10 Булевский результат = OR предыдущего булевского результата и со- стояния бита %М10.
ST %Q2.0 Бит %Q2.0 принимает состояние предыдущего булевского ре- зультата. Оператор ST означает «присвоить значение буфера опе- ранду»
В табл. 4.7 приведены примеры реализации некоторых операций на языке FBD.
Таблица 4.7 Примеры программирования на языке FBD
Выполняемая операция Изображение Описание
Обнаружение перепада сигнала In In ) 1* =1 Out Двоичная переменная Out примет значение TRUE тогда и только тогда, когда переменная In изменит свое состояние
П- регулятор Vai Ref Рассогласование между текущим значением величины Vai и заданием Ref умножается на коэффициент Кт и используется в качестве управляющего воздействия
— * Out
Km
Ограничение нижнего предела делителя Vai Vmin Переменная Error принимает значение TRUE если Vai < Vmin Программа обеспечивает деление перемен- ной Sampl на значение переменной Vai. Переменная делителя Vai снизу ограничена значением Vmin
< Error
Sampl / Res
Vai Vmin Lim Inp Max Min
4.3. Инструментальные системы программирования ПЛК
4.3.1 Система программирования ISaGRAF фирмы ICS Triplex ISaGRAF, Канада
Система программирования ISaGRAF представляет собой масштабируемую тех-
нологию программирования контроллеров, позволяющую создавать приложения
как для локальных ПЛК, так и для ПЛК, распределенных по сети [4.2].
Новая версия ISaGRAF 5.0, соответствующая стандартам МЭК 61131-3 и 61499,
значительно расширяет возможности системы. Стандарт МЭК 61499 определяет ис-
пользование функциональных блоков в распределенных процессах контроля и управ-
ления. В качестве распределенных устройств выступают ПЛК, микроконтроллеры
или интеллектуальные полевые устройства (датчики и исполнительные механизмы).
Система программирования ISaGRAF состоит из двух основных компонентов:
372
ГЛАВА 4
• системы разработки ISaGRAF Workbench;
• системы исполнения или целевой системы ISaGRAF Target.
Отличительные особенности системы ISaGRAF:
• Поддержка всех пяти языков программирования ПЛК по стандарту МЭК 61131-3
(SFC, FBD, LD, ST, IL и дополнительного языка Flow Chart). ISaGRAF позволяет
объединить программы (процедуры), написанные на разных языках программи-
рования, а также вставлять кодовые последовательности из одного языка в кодо-
вые последовательности, написанные на др. языке программирования. Единой
средой разработки для различных программно-аппаратных платформ служит
ISaGRAF Workbench.
• Наличие мощного отладчика, позволяющего во время работы прикладной про-
граммы контролировать значения всех переменных, кодовые последовательности.
• Поддержка протоколов Modbus RTU/TCP, CAN, Profibus, обмен данными между
ПЛК по сети Ethernet (протокол TCP/IP).
• Открытость системы и возможность установки ISaGRAF-ядра на любую
программно-аппаратную платформу с любыми интерфейсами ввода/вывода,
сетевыми интерфейсами и функциональными блоками, программируемыми на
языках «С».
• Возможность разработки драйверов для модулей ввода/вывода пользователя-
ми. Для реализации драйверов под ISaGRAF необходим программный пакет
ISaGRAF I/O Development Tool. К пакету прилагается документация на русском
языке, объектные и исполнительные файлы целевой системы, утилиты и библио-
теки для разработки драйверов.
• Наличие библиотеки готовых драйверов для работы с устройствами ввода/
вывода многих фирм-производителей (PEP Modular Computer, ABB, Motorola,
Weidmuller, Industrial Computer Source, ЗЭиМ, ГК Текон и др.).
• Подсветка синтаксиса различным цветом в редакторах языков ST и IL.
• Наличие системы паролей для защиты системы ISaGRAF от несанкционирован-
ного доступа.
Система разработки ISaGRAF Workbench устанавливается на PC-совместимом ПК
под управлением ОС Windows NT. Система исполнения ISaGRAF Target включает в
себя ядро ISaGRAF и набор драйверов Modbus RTU/TCP Master/Slave, а также набор
модулей ввода/вывода для выбранной платформы. Система в зависимости от версии
работает также под управлением других ОС, в том числе Windows 2000/ХР, MS-DOS,
Linux, OS-9, QNX, VxWorks, MiniOS7. Возможна работа системы ISaGRAF без ОС.
После создания приложения в ISaGRAF Workbench происходит компиляция
проекта с генерированием машинонезависимого TIC-кода (Target Independent
Code). Затем происходит загрузка TIC-кода приложения в целевую систему ISaGRAF
Target, содержащую TIC-интерпретатор (для генерирования «С»-исполняемых
файлов требуется «С»-компилятор). На одном физическом ПЛК может быть соз-
дано неограниченное число ресурсов («виртуальных» ПЛК). Для каждого ресур-
са декларируются переменные 3 х типов: внутренние, входы и выходы. Это пере-
менные простого типа (Boolean, Integer, Real, String, Timer), массивы и структуры.
Переменные могут быть связаны с локальными устройствами ввода/вывода или с
устройствами, распределенными по сети. При этом одна и та же программа может
выполняться на различных ПЛК с различными ОС и различными устройствами
ввода/вывода.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК 373
Связь ISaGRAF со SCADA-системами осуществляется через ОРС-сервер. Компа-
ния «ФИОРД», которая является официальным представителем компании ICS Triplex
ISaGRAF в России и Белоруссии, поставляет «Стартовый Пакет Разработчика». Пакет
представляет собой полностью русифицированное ПО для различных уровней авто-
матизации с полным комплектом документации и технической поддержкой проек-
тов. В состав пакета входят приложения ISaGRAF Target, ISaGRAF Workbench, SCADA
PcVue HMI Station (SCADA-система с набором драйверов для различных УСО), ISa
Vue Utilities (разработка компании ФИОРД), документация Getting Started Manual
(русифицированное описание продуктов ISaGRAF и PcVue) и ISaGRAF ОРС Server.
Дополнительно могут быть предоставлены следующие приложения: ISaGRAF Archive
(система ведения архива в контроллерах), ISaGRAF I/O Development Tool, ISaGRAF
драйверы с поддержкой сетевых протоколов CAN и Profibus и Plant Vue ОРС Client
Development License (автономная система класса SCADA для разработки систем сбо-
ра данных и управления верхнего уровня). Plant Vue является ОРС-клиентом и под-
держивает архивацию переменных в БД, работу с трендами и алармами.
Компания «Науцилус» предлагает систему ISaGRAF для ОС QNX, Linux и ПЛК
МФК и ТКМ52 ГК «Текон». Компания реализовала связь ISaGRAF по сети Ethernet
со SCADA-системами Real Flex, Sitex, Wizcon и iFIX на базе разработанного ОРС-
сервера. При этом SCADA-системы Real Flex и Sitex работают под управлением ОС
QNX, a Wizcon и iFIX — Windows NT.
Система ISaGRAF поддерживает многие аппаратные платформы: 1-7ххх, 1-8ххх
и LinCon (ICP DAS), х86 (DOS, QNX, Linux), PC/104 (Eurotech), VME и Industrial PC
(SBS Technologies), RTU 188 (Fastwel), CX-1000 (Beckhoff), МФК, TKM52 и P06 (ГК
Текон), Р130 ISa, КРОСС и ТРАССА (ЗЭиМ), TREI и др.
Для программирования PC-based контроллеров применяется система ISaGRAF
Enhanced — PC-ориентированное ПО для разработки, исполнения и визуализации
приложений системы управления. Средой разработки является ISaGRAF Enhanced
Workbench, в которой осуществляется настройка тревог, событий и трендов. Соз-
данное в Enhanced Workbench приложение по сети Ethernet загружается в целевую
систему под ОС Windows СЕ 3.0, QNX 4.25, Windows NT и др. На одном физическом
ПЛК может исполняться до 16 «виртуальных» ПЛК, при этом каждый из них может
использовать один или более драйверов для связи с полевым оборудованием. В со-
став системы входят ОРС-сервер, Alarm&Events и Trending-модули, а также готовые
драйверы устройств ввода/вывода. НМ1 позволяет создавать экранные формы ин-
терфейса оператора и связывать их с тэгами, получаемыми от ОРС-сервера. Trending-
модули позволяют вести распределенную историческую БД. Для разработки соб-
ственных драйверов для целевых систем ISaGRAF Enhanced QNX 4.25 и Linux RTAI
используется Driver Development Kit. ISaGRAF Enhanced Workbench поддерживает
ОС Windows 95/2000/NT, а целевая система поддерживает ОС QNX 4.25, Windows СЕ
3.0 и Linux RTAI.
Последние версии ISaGRAF со средой разработки ISaGRAF Workbench поддер-
живают системы контроля и управления движением по рекомендациям PLCOpen
для систем с ЧПУ в станкостроении и робототехнике.
4.3.2 Система программирования CoDeSys фирмы Smart Software Solution GmbH (3S)
Комплекс CoDeSys представляет собой инструментальную систему програм-
мирования ПЛК на языках стандарта МЭК 61131-3. CoDeSys является аппаратно-
374
ГЛАВА 4
независимым комплексом разработки программного обеспечения ПЛК и поставля-
ется бесплатно. Описанию комплекса посвящены работы [4.3-4.6] и публикации в
журнале «Промышленные АСУ и контроллеры» (NN 2-11, 2006 г. и 1, 4, 2007 г.).
Комплекс CoDeSys используется для программирования контроллеров, произво-
димых как зарубежными фирмами (ABB, Beckhoff, Kontron, Moeller, VVAGO и др.), так
и отечественными (Fastwel, ОВЕН).
Отличительные особенности системы CoDeSys:
• Реализация языков программирования по стандарту МЭК 61131-3. Важнейшие
компоненты системы написаны на языке ST. Широко используется язык SFC.
• Прямая генерация машинного кода (генератор кода CoDeSys представляет собой
компилятор программы с ЯВУ в машинный код). Для генерации машинного кода
в конкретный ПЛК используются специальные файлы конфигурации целевой
платформы (TSP), в которых задаются тип процессора, распределение памяти и
др. Генерируемый машинный код пригоден для исполнения на любых однотип-
ных процессорах аппаратных средств.
• Встроенный эмулятор помогает отладить программу без контроллера и др. аппа-
ратных средств. Режим эмуляции включается двумя способами: выбором None в
качестве аппаратной платформы (без контроллера) и установкой Simulation mode
в окне Online при работе с реальным ПЛК.
• Визуализация разрабатываемого проекта благодаря встроенным серверам дан-
ных (DDE и ОРС).
• Большой набор сервисных функций, ускоряющих разработку программы.
• Использование в текстовом редакторе синтаксического цветового выделения
ошибок (ключевые слова высвечиваются синим цветом, комментарии — зеле-
ным, а ошибки — красным).
• Наличие демонстрационной версии SoftPLC для Windows NT/XP (2-часовые
демоверсии включены в стандартный дистрибутив CoDeSys SP WinNT или
CoDeSys SP RTE).
Базовый состав комплекса CoDeSys включает среду программирования на ПК с
ОС Windows NT/XP/2000 и систему исполнения. Ядро системы исполнения написано
на языке С. Комплекс адаптирован для работы с различными классами контролле-
ров, включая PC-based контроллеры. Компанией «Пролог» выполнена русификация
документации комплекса CoDeSys.
Система исполнения обеспечивает загрузку и отладку кода прикладной програм-
мы. ПЛК подключается к ПК рабочего места программиста через COM-порт (RS-232)
или по интерфейсам RS-422/485. Связь среды разработки на ПК и ПЛК осуществля-
ется с помощью приложения — шлюза связи (gateway) на основе протокола TCP/IP.
При подключении через COM-порт настраиваются параметры интерфейса — номер
порта, скорость обмена, контроль паритета и число стоп-бит. Таким образом, разра-
ботка программы может вестись на удаленном ПК и взаимодействовать с др. ПК по
сети Internet, а с ПЛК — через модем.
Составление программы предусматривает обязательное определение типов
данных. CoDeSys поддерживает набор стандартных типов данных: биты, строки,
массивы, структуры и др. С помощью отладчика программы последняя может
быть остановлена для проверки правильности переменных, а в режиме работы
программы по циклам легко проверить правильность выполнения программы с
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
375
контролем значений всех переменных (механизм графической трассировки значе-
ний переменных).
При структурном программировании текст программы должен включать под-
программы — программные компоненты POU. В стандарте МЭК 61131-3 определены
3 типа POU: функция (FUNCTION), функциональный блок (FUNCTION BLOCK) и
программа (PROGRAM). Результаты работы функции определяются только значе-
ниями ее параметров. Функциональный блок — подпрограмма с собственной струк-
турой данных. Программа в CoDeSys представляет собой глобальный объект и при-
меняется для больших программных модулей.
Комплекс CoDeSys включает пять языков программирования: IL, ST, LD, FBD
и SFC. Программа, созданная на одном из языков программирования (например,
ST), может быть конвертирована в программу на другом языке программирования
(например, IL). Программы CoDeSys по МЭК 61131-3 можно экспортировать и им-
портировать.
Встроенный компилятор CoDeSys V2.3 имеет генераторы кода микропроцессо-
ров Intel 8051, 80x86/Pentium, Motorola MC68000, Power PC и др.
Встроенная в CoDeSys система визуализации (тренды, алармы, примитивы и др.)
приближается к возможностям SCADA-систем. Созданный проект визуализации мо-
жет быть использован любым ПК с помощью Win32 приложения CoDeSysHMI через
Web-браузер.
При совместной разработке проекта группой программистов интеграция кли-
ентских приложений и ENI-сервера осуществляется с помощью ENI 3S (ENgineering
Interface — инжинирингового интерфейса 3S).
Простые системы исполнения CoDeSys работают в ПЛК без ОС. Комплекс
CoDeSys SP RTE имеет собственное ядро жесткого РВ под Windows 2000/NT/XP. Есть
8-, 16- и 32-битные модификации CoDeSys SP для процессоров соответствующей раз-
рядности (в основном без ОС). Однако в настоящее время 3S предлагает решения
для ОС Windows NT/XP/CE, QNX и Linux. Использование CoDeSys с PC-based ПЛК
расширяет возможности программирования ПЛК.
Система CoDeSys имеет программный инструментарий CoDeSys SoftMotion для
управления движением (станки и обрабатывающие центры с ЧПУ и др.).
Новая версия CoDeSys V3.0 включает новые опции и полностью совместима с
предыдущими версиями комплекса.
4.3.3 Система программирования Unity Pro
компании Schneider Electric, Франция
Система программирования контроллеров Unity Pro входит в состав ПО Unity
Studio, предназначенного для управления полномасштабными проектами. Пакет
Unity Studio помимо системы программирования Unity Pro включает пакет Power
Suite для программирования приводов и пускателей, XBTL-1000 для разработки ин-
терфейсов оператора и OFS-сервер для связи ПЛК с верхним уровнем интегрирован-
ной системы управления предприятием.
Пакет Unity Pro базируется на более ранних системах программирования кон-
троллеров PL7 и Concept и предназначен прежде всего для работы с ПЛК Premium,
Atrium и Quantum. Однако поскольку Unity Pro базируется на открытых стандартах
МЭК, имеется возможность конвертирования приложений для использования раз-
личными программно-аппаратными платформами. Помимо ПЛК система Unity Pro
ГЛАВА 4
376
поддерживает различные интеллектуальные устройства ввода/вывода и полевые
шины, в том числе Ethernet [4.8-4.9].
Дополнительный набор средств разработки Unity EFB позволяет создавать функ-
ции и функциональные блоки на языке С, которые впоследствии могут использо-
ваться в любом приложении, созданном с помощью Unity Pro.
Отличительные особенности ПО Unity Pro:
• Поддержка пяти языков программирования по стандарту МЭК 61131-3 (LD, SFC,
FBD, ST и IL).
• Наличие мощных графических редакторов и отладчика, в том числе наличие
встроенного симулятора. Графический редактор Microsoft Visio предостав-
ляет в распоряжение разработчика стандартные библиотеки объектов (ПЛК,
привод, сети и др.) и обеспечивает наглядное представление проектируемого
процесса.
• Встроенные графические элементы Unity Pro позволяют создавать и видоизме-
нять экраны оператора в процессе работы.
• Открытая архитектура клиент-сервер обеспечивает локальный или удаленный
доступ к ресурсам приложения при помощи интерфейсов COM/DCOM.
• Компоненты пакета Unity Pro (данные, кодовые последовательности, модули),
хранящиеся в библиотеках на локальном или удаленном ПЛК, могут совместно
использоваться всеми разработчиками проекта.
• Обмен данными (переменные, программы, конфигурации) в Unity Pro осущест-
вляется по стандарту XML. Обмен данными в формате XML обеспечивает взаи-
модействие создаваемых программных продуктов с приложениями сторонних
разработчиков. Возможен экспорт/импорт данных между частями различных
приложений.
• Наличие средств диагностики пакета Unity Pro, позволяющих быстро выявлять
ошибки в программах.
• Возможность создания архива действий оператора с метками времени и иденти-
фикацией оператора.
Для программистов, работающих с языками VBA, VB или C++, а также для доступа
к серверам Unity Pro и Unity Studio используется ПО Unity Developer Edition (UDE).
Интеграция ПЛК и ЧМИ осуществляется с помощью средства разработки и гене-
рации приложений Unity Applications Generator (UAG). При разработке проекта с ис-
пользованием UAG возможно использование стандартных объектов типа «клапан»,
«двигатель», «ПИД-регулятор» и др.
Во время разработки проекта Unity Pro осуществляет автоматическое присвое-
ние адресов переменным, обеспечивая тем самым универсальность базы данных.
В режиме просмотра проект представляется в виде функциональных модулей.
Специальные объекты, созданные и используемые при помощи пакета Unity Pro,
а также структуры данных и функциональные блоки, могу! группироваться в библи-
отеки и повторно использоваться в др. приложениях.
Оперативная диагностика процесса обеспечивается возможностью прямого до-
ступа к модулям приложения в процессе работы системы. К интегрированным сред-
ствам диагностики приложений относятся отображение сообщений сигнализации
(алармов), сохраненных в диагностической памяти ПЛК.
Причиной этих сообщений могут быть неисправность ПЛК, ошибка при выпол-
нении программы и др.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК
377
4.3.4 Система программирования STEP7 фирмы Siemens, Германия
Пакет ПО STEP7 является интегрированным пакетом программирования кон-
троллеров Simatic S7-300, S7-400, С7 и WinAC. Упрощенная версия STEP7 Lite пред-
назначена для программирования простых систем управления на базе ПЛК S7-300
и С7, а также станций систем распределенного ввода/вывода ET200S/ET200X. Про-
граммы, созданные в STEP7 Lite, поддерживаются пакетом ПО STEP7. Для програм-
мирования контроллеров S7-200 применяется пакет ПО STEP7 Micro/Win [4.10].
Помимо программирования ПЛК пакет STEP7 используется для конфигурирова-
ния аппаратуры и промышленных сетей, программирования и диагностики систем
человеко-машинного интерфейса и управления на базе контроллеров Simatic.
Пакет STEP7 поставляется в виде самостоятельного программного пакета для ПК
под управлением ОС Windows 2000/ХР (объем ОЗУ не менее 64 Мбайт, ПЗУ — от 200
до 380 Мбайт), а также входит в комплект поставки программаторов Simatic Field PG
и Simatic Power PG. Для подключения ПЛК к ПК последний должен быть оснащен
МР1 картой и USB/MP1 адаптером с соединительным кабелем.
В состав пакета STEP7 входит набор инструментальных средств:
• Simatic Manager — основной компонент системы, позволяющий управлять всеми
частями проекта, осуществлять быстрый поиск и запуск приложений.
• Symbol Editor — программа определения символьных имен, типов данных, ввода
комментариев для глобальных переменных.
• Hardware Configuration — инструментальное средство для программного конфи-
гурирования аппаратуры и настройки параметров всех модулей. Выполняется
автоматическая проверка корректности всех вводимых данных.
• Communication — программа для задания управляемой по времени циклической
передачи данных между компонентами автоматизации через MPI или по сетям
Profibus или Industrial Ethernet.
• System Diagnosis — программа, предоставляющая пользователю обзор состояния
контроллера.
• Information Functions — компонент для быстрого обзора данных CPU и проверки
написанной пользователем программы.
Редактор программ STEP7 позволяет выполнять разработку проекта на языках
Statement List (STL), Ladder Diagram (LAD), Function Block Diagram (FBD) по стан-
дарту МЭК 61131-3. Для специальных задач могут использоваться дополнительные
языки программирования высокого уровня или технологически ориентированные
языки. Все файлы программ пользователя и все файлы STEP7 объединяются в блоки,
что улучшает структуру программы.
Программа STEP7 может содержать организационные блоки (ОВ), функциональ-
ные блоки (FB), функции (FC), блоки данных (DB), а также блоки, встроенные в ОС
CPU: системные функциональные блоки (SFB), системные функции (SFC) и систем-
ные блоки данных (SDB).
STEP7 поддерживает мощную систему команд, позволяющих выполнять логиче-
ские и математические операции с плавающей точкой, управлять ходом выполнения
программы, обслуживать таймеры и счетчики, преобразовывать и пересылать фор-
маты данных, обеспечивать работу мультипроцессорных систем S7-400 и пр.
STEP7 Lite — недорогое программное обеспечение для реализации простых авто-
номных систем на базе контроллеров Simatic S7-300/C7, а также станций систем рас-
378
ГЛАВА 4
пределенного ввода/вывода ET200S/ET200X с интеллектуальными интерфейсными
модулями, работающими без связи с сетью Profibus.
Пакет S7-PLC SIM — эмулятор работы ПЛК Simatic S7-300/S7-400/C7/WinAC на
компьютере или программаторе. S7-PLC SIM позволяет обнаружить ошибки в про
грамме, повысить ее качество и ускорить разработку проекта. С помощью пакета S7-
PLC SIM выполняется отладка программ, написанных в STEP7. При этом тестируе-
мая программа загружается в эмулируемый контроллер. S7-PLC SIM поддерживается
программным пакетом Step7 Lite.
4.3.5 Система программирования «ПОЛИГОН» ООО «Промавтоматика»
Система программирования PC-совместимых контроллеров, разработанная
ООО «Промавтоматика», состоит из конфигуратора, графического редактора и
менеджера проектов. Конфигуратор служит для выбора и редактирования аппа-
ратного состава проекта, а Графический редактор — для графического представ-
ления алгоритмов работы программы и их отладки в режиме реального времени.
Менеджер проектов обеспечивает сервисные функции при разработке проекта.
Создаваемый проект состоит из 3-х частей: программной, аппаратной и объек-
тов.
Аппаратная часть, формируемая конфигуратором, включает данные о принятом
в проекте оборудовании. Конфигуратор предоставляет состав оборудования в виде
древовидной структуры (например, крейт - плата ввода/вывода - регистр - канал
или крейт - плата CPU - СОМ-порт - модуль). Аппаратная часть проекта с помощью
команды «Передать проект в редактор» преобразуется в формат программной части
проекта.
Программная часть проекта, представленная в виде модулей, содержит основной
алгоритм работы программы контроллера и редактируется в Графическом редакторе.
Основным элементом программной части является функциональный блок, представ-
ляющий собой законченный алгоритм определенной функции с заданным числом
входных и выходных параметров. ПО «Полигон» содержит обширную библиотеку
функциональных блоков, поддерживающих арифметические и логические функции,
драйверы устройств ввода/вывода, интерфейсы различных модулей, регуляторов,
дисплеев. Возможно создание новых функциональных блоков с помощью програм-
мы «мастер».
ПО «Полигон» поддерживает большое число плат ввода/вывода MicroPC, моду-
лей сбора данных и управления ADAM фирмы Advantech (серий 4000 и 5000), ПЛК
Beckhoff, PC-совместимых контроллеров серии MIC и др.
Кроме аппаратной части в Конфигураторе создаются и редактируются объекты,
в качестве которых выступают реакторы, резервуары и др. Связь объекта с проек-
тируемой системой осуществляется через каналы ввода/вывода (аналоговые и дис-
кретные). С аппаратной частью проекта объекты связываются путем простого пере-
таскивания канала из объектов в канал аппаратной части.
Заключительным этапом создания программного обеспечения является трансля-
ция проекта, которая проводится в Графическом редакторе, и перенос полученного
ехе-файла в память контроллера. В Графическом редакторе предусмотрены различ-
ные функции работы с контроллером по интерфейсу RS-232 — запись программы
в ПЛК, пуск и остановка программы, просмотр файлов в контроллере, создание и
удаление каталогов и др.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ПЛК 379
Для тестирования программного обеспечения используется отладчик. В режиме
отладки на контроллере запускается программа, а в Графическом редакторе открыва-
ется соответствующий проект для его просмотра в режиме реального времени. Так-
же предусмотрена функция печати проекта и др.
4.3.6 Система программирования PXI-контроллеров Lab VIEW компании
National Instruments, США
LabVIEW является системой моделирования, измерения, тестирования и управ-
ления компании National Instruments. В названии программы LabVIEW VI означает
«Виртуальный Прибор», поскольку в блок-схеме при графическом программиро-
вании используются внешний вид и функциональность традиционных физических
приборов — осциллографов, генераторов и пр.
Операторский интерфейс LabVIEW содержит лицевую панель создаваемого при-
бора, на которой размещены управляющие элементы,- тумблеры, кнопки, переклю-
чатели и др. Помимо управляющих элементов на экран выводятся графики (тренды),
гистограммы, лампочки и др. элементы отображения.
Аналогично традиционным языкам программирования LabVIEW включает пе-
ременные, типы данных, структуры циклов и последовательностей. Созданный код
может быть использован в виде библиотек DDL и интегрирован с открытыми стан-
дартами (ActiveX, ОРС, TCP и др.).
В LabVIEW имеется более 500 встроенных функций для анализа данных. Это
функции частотного анализа, генерации сигналов, математической обработки, ап-
проксимации кривых, статистического анализа и др.
Представление данных включает их визуализацию на экране дисплея в виде двух-
и трехмерных изображений, генерацию отчетов и управление данными, включая та-
кие атрибуты их представления, как цвет, масштаб, тип графики. Генерация отчетов
осуществляется в виде текстовых документов в форматах Microsoft Word, Microsoft
Excel и HTML.
В качестве средств разработки виртуальных измерительных приборов использу-
ются компоненты LabVIEW VI Analyzer, LabVIEW State Diagram Toolkit и LabVIEW
Express VI Development Toolkit. Для генерации отчетов в форматах Microsoft Word
и Microsoft Excel применяется ПО LabVIEW Report Generation Toolkit for Microsoft
Office. Взаимодействие с БД осуществляется с помощью технологии Microsoft ADO и
GJ LabVIEW Database Connectivity Toolkit.
Для анализа и обработки сигналов применяется ПО LabVIEW Digital Filter Design
Toolkit (проектирование цифровых фильтров), LabVIEW Advanced Signal Processing
Toolkit (анализ во временной и частотной областях) и LabVIEW Vision Development
Module (захват, обработка и вывод изображений) и др.
ГЛАВА 5. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
РАБОЧИХ СТАНЦИЙ
5.1. SCADA-системы распределенных систем управления
К настоящему времени SCADA-система (Supervisory Control And Date Acquisition —
система сбора данных и оперативного диспетчерского управления) является обязатель-
ным атрибутом автоматизированной системы оперативно-диспетчерского управления.
SCADA-системы устанавливаются на диспетчерских станциях, локальных технологиче-
ских станциях, а также на операторских станциях различного назначения. Аппаратной
платформой для SCADA-систем служат рабочие станции на базе промышленных персо-
нальных компьютеров (ППК), панельные компьютеры и операторские панели. Отдель-
ные компактные модификации SCADA-систем устанавливаются во флэш-памяти кон-
троллеров (например, Trace Mode, MasterSCADA и др.).
Наряду с многофункциональными, рассчитанными на большое число тэгов, SCADA-
системами, которые предназначены для применения в сложных системах управления
крупными предприятиями, в последние годы повысился спрос на небольшие SCADA-
системы, потребность в которых определяется желанием небольших предприятий ма-
лого и среднего бизнеса проектировать и использовать системы управления по анало-
гии (в смысле функциональности) с крупномасштабными предприятиями. Хотя малые
SCADA-системы рассчитаны на меньшее число каналов и уступают крупным, таким, как
InTouch, iFIX, Genesis и др., в быстродействии, отсутствии ряда компонентов и пр., они
имеют значительно меньшую стоимость, занимают небольшой объем памяти и характе-
ризуются быстрым рестартом и отсутствием функциональной избыточности. В любом
случае установка недорогой малой SCADA-системы является эффективным и более це-
лесообразным решением, чем разработка собственного программного продукта.
Несмотря на вышеизложенное, все SCADA-системы имеют ряд общих функций, а
именно:
• сбор и обработка данных о параметрах процесса (фильтрация, нормализация, мас-
штабирование, линеаризация и др. для приведения данных к нужному формату);
• хранение (архивирование) полученной информации в базе данных;
• представление данных в цифровой, символьной или иной форме; это может быть
динамизация значений переменных, представление значений переменных в виде
графиков в функции времени (трендов), гистограмм и др.;
• сигнализация изменений хода технологического процесса, особенно в предаварий-
ных и аварийных ситуациях в виде системы алармов; при этом может осуществлять-
ся регистрация действий обслуживающего персонала в аварийных ситуациях;
• формирование сводок, журналов и других отчетных документов о ходе технологиче-
ского процесса на основе информации, собранной в архивах;
• формирование и сохранение в памяти команд оператора по изменению параме-
тров настройки и режима работы контроллеров, исполнительных устройств (пуск-
останов, открытие-закрытие и др. функции).
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
381
• Автоматическое управление ходом технологического процесса в соответ-
ствии с имеющимися в SC ADA-системах алгоритмами управления (ПИ-, ПИД-
регулирование, позиционное, нечеткое регулирование и др.). Данные функции
рекомендуется использовать для решения задач невысокого быстродействия.
Таким образом, SCADA-системы являются мощным инструментом для разработ-
ки ПО РСУ
Наиболее распространенные на сегодняшний день SCADA-системы приведены
в таблице 5.1.
Таблица 5.1. SCADA-системы
№ Наименование Фирма - производитель
1 InTouch Wonderware, США
2 Genesis32 Iconics, США
3 iFIX Intellution, США
4 Trace Mode AdAstra, Россия
5 Real Flex BJ Software Systems (BJSS), США
6 Cimplicity GE Fanuc, США-Япония
7 WinCC, Simatic WinCC flexible Siemens, Германия
8 Citect (Vijeo Citect) Schneider Electric, Франция
9 Vijeo Look, Monitor Pro Schneider Electric, Франция
10 Pc Vue ARC Informatique, Франция
11 MX SCADA Mitsubishi Electric, Япония
12 Clear SCADA Control Microsystems, Канада
13 Elipse SCADA, Elipse E3 Elipse Software LTDA, Бразилия
14 RSView 32 Rockwell Automation, США
15 MOSCAD Motorola, США
16 Phocus Jade Software, Великобритания
17 WizFactory PC Soft International Inc., СШЛ Израиль
18 Genie 3.0, AStudio Advantech, Тайвань
19 Lab View National Instruments, США
20 IMAGE Numpha Soft, Финляндия-Россия
21 MasterSCADA ИнСАТ, Россия
22 VNS ИнСАТ, Россия
23 КРУГ 2000 КРУГ, Россия
24 Сириус QNX ЗАО «Предприятие Реалтайм», Россия
25 МИКСИС (MIKSys) МИФИ, Россия
26 CKAT-M «Центрпрограммсистем», Россия
27 КАСКАД АО «Элара», Россия
28 VIORD microSCADA ФИОРД, Россия
Краткое описание возможностей большинства SCADA-систем приведено в рабо-
тах [2.9, 5.1-5.15]. Ниже приведено описание SCADA-систем, не рассмотренных в ра-
боте [2.9], а также SCADA-систем, представленных на российском рынке в последние
несколько лет, в том числе SCADA-системы для малых производств.
382
ГЛАВА 5
К числу таких SCADA-систем относятся: ClearSCADA компании Control Micro-
systems (Канада), Vijeo Citect компании Schneider Electric (Франция), MX SCADA ком-
пании Mitsubishi Electric (Япония), Elipse ЕЗ компании Elipse Software (Бразилия), Pc-
Vue компании ARC Informatique (Франция), RSView 32 компании Rockwell Automation
(США), SimaticWinCC flexible компании Siemens (Германия) и «Сириус QNX» ЗАО
«Предприятие Реалтайм».
Для наиболее полного изучения возможностей SCADA-систем ниже рассматри-
вается структура и функции SCADA-системы InTouch фирмы Wonderware (США).
5.1.1 SCADA-система InTouch
Программное обеспечение InTouch является объектно-ориентированным
человеко-машинным интерфейсом (HMI — Human Machine Interface) для процессов
сбора данных и управления и позволяет контролировать и управлять объектами и
системами, используя графические объекты.
Основные функции SCADA-система InTouch: отображение параметров объекта
управления, текущих и исторических трендов, отображение и регистрация аварий-
ных сигналов (алармов).
Средства объектно-ориентированного проектирования позволяют создавать
динамические изображения, поддерживают их вращение, дублирование, копирова-
ние, вставку, стирание и др. операции. Анимационные связи поддерживают работу
с дискретными, аналоговыми и строковыми переменными, горизонтальными и вер-
тикальными движками и кнопками, а также связаны с размером и цветом текста, его
местоположением, вращением и мерцанием.
InTouch содержит полную библиотеку мастер-объектов (Wizard), включающую
предварительно сконфигурированные вспомогательные средства — переключатели,
ползунковые регуляторы, счетчики и др. Возможно создание собственных мастер-
объектов применительно к конкретной системе.
Приложение Productivity Pack, являющееся дополнением к InTouch, содержит би-
блиотеку более чем 2000 мастер-объектов, универсальные средства просмотра на 200
файловых форматов, генератор мастер-объектов и пр. InTouch позволяет организовать
взаимодействие с другими приложениями, используя следующие стандартные средства:
• DDE-обмен (Dynamic Data Exchange — динамический обмен данными). Боль-
шинство серверов ввода/вывода (например, контроллеры) поддерживают DDE-
обмен для передачи данных в InTouch-приложение. Приложение Excel также
использует DDE-механизм. Используя NetDDE, поставляемый с InTouch, пользо-
ватель получает возможность связи по DDE между задачами на разных РС через
сеть. Поддерживается связь между Windows, VNS и UNIX с помощью протоколов
NetBIOS, TCP/IP и DecNET, а также через последовательный канал.
• OLE-технология (Object Linking and Embedding — включение и встраивание объ-
ектов). Используется для взаимодействия с другими пользовательскими приложе-
ниями.
• ОРС-программы (OLE for Process Control — OLE для управления процессами).
SCADA-система InTouch постоянно развивается в различных версиях. За послед-
ние годы на рынке внедрены версии 7.11, 8.0, 9.5, 10.
InTouch 7.11, поддерживаемая ОС Windows NT, является одним из компонентов
интегрированного пакета программного обеспечения для полной автоматизации
производства FactorySuite 2000.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
383
Компоненты FactorySuite используются на трех уровнях автоматизации:
• на контроллерном уровне — управление процессом с помощью ПЛК и рабочих
станций;
• на диспетчерском уровне (уровне SCADA-систем) — супервизорное управление
технологическим процессом;
• на уровне MES-систем — оперативно-диспетчерское управление процессом.
Пакет FactorySuite построен на открытых технологиях COM, DCOM, ОРС, Ac-
tiveX и содержит большое число серверов ввода/вывода, обеспечивающих связь с
оборудованием, приборами и устройствами связи. Вся информация накапливается в
реляционной базе данных реального времени (БД PB) IndustrialSQL Server. За счет ис-
пользования протокола SuiteLink обеспечивается высокое быстродействие, компакт-
ность хранения данных. IndustrialSQL Server использует возможности Microsoft SQL
Server, в том числе его возможности фильтрации, объединения и обработки данных
для удобства их запроса и выборки. IndustrialSQL Server может автоматически об-
новлять статистические данные в виде сводных таблиц с заданной производитель-
ностью, фиксируя средние, а также максимальные и минимальные значения пара-
метров. Данные из SQL сервера в виде отчетов могут передаваться в Internet и далее
удаленным пользователям, а также через GSM-модем запрашиваться и передаваться
потребителям. Кроме IndustrialSQL Server в FactorySuite входят приложения-клиенты
FactoryOffice, предназначенные для создания текущих и архивных трендов, графиков
и таблиц.
Помимо объектно-ориентированной графики, анимационных связей и библио-
теки мастер-объектов InTouch дает пользователям возможность удаленного доступа
к источникам данных ввода/вывода (например, Microsoft Excel) без необходимости
создания тэгов (тэг — это запись базы данных, содержащая информацию о параме-
тре процесса) в локальной базе данных тэгов.
Другими функциями InTouch являются одновременная поддержка многочислен-
ных источников алармов (поддержка от 1 до 999 приоритетов алармов). Алармы мо-
гут быть выведены на экран, записаны на диск и выведены на печать. Также InTouch
позволяет создавать исторические тренды и тренды реального времени с возможно-
стью одновременного отображения до 8-ми переменных (тренд реального времени
поддерживает работу с четырьмя переменными). При этом каждая переменная чи-
тается из собственного файла. Возможен экспорт данных в Excel, файл данных или
в канал DDE. Кроме того, пользователь имеет возможность генерирования рапорта
напрямую из проекта InTouch путем прямого форматирования экрана, вывода на пе-
чать или рассылки по электронной почте.
Благодаря наличию функции SPC (Statistical Process Control — Статистическое
Управление Процессом) InTouch предоставляет возможность статистического управ-
ления процессом на уровне оператора.
Система паролей InTouch предоставляет встроенную систему доступа на 10000
уровней, гарантирующую надежную защиту системы.
Пакет InControl — это система программирования и управления с открытой ар-
хитектурой реального времени, позволяющая создавать архитектуру SoftPLC с за-
меной традиционного ПЛК на PC, подключенный к устройствам ввода/вывода че-
рез локальные сети Profibus, Modbus и др. InControl поддерживает языки релейной
логики (LD), последовательных функциональных схем (SFC) и структурированного
текста (ST) по стандарту IEC 61131-3. Поддерживается технология ActiveX (П14-,
384
ГЛАВА 5
ПИД-регуляторы, нечеткая логика и др.). Также допускается программирование с
использованием традиционных языков программирования. InControl поддерживает
различные промышленные интерфейсы и сети — Profibus, DeviceNet, Interbus, DDE,
SDS, Internet и др. Подобно другим компонентам FactorySuite InControl через набор
мастер-объектов интегрируется с InTouch.
Пакет InTrack — система управления производственными процессами — от за-
купки сырья, материалов и комплектующих до выпуска готовой продукции. Раз-
личные схемы производственных процессов создаются в специальном графиче-
ском редакторе и включают мастер-объекты, среди которых есть производственные
цепочки, материальные ресурсы, продукты и пр. Таким образом, в рамках одной
прикладной программы совмещаются функции SCADA-системы и MES-системы
(Manufacturing Execution System — производственная исполнительная система).
Использование DDE-обмена и OLE-технологии позволяют организовать связь с
устройствами ввода/вывода, а также с системами верхнего уровня MRP (Manage-
ment and material Resource Planning — система планирования ресурсов предприя-
тия). InTrack включает в себя, подобно InTouch, тэги, текущие и исторические трен-
ды, алармы, сценарные функции и мастер-объекты. За счет встроенных функций
открывается возможность автоматизации задач учета, планирования и диспетче-
ризации производства.
InBatch — гибкая система управления процессами дозирования и смешения в
металлургической, химической, пищевой и др. отраслях промышленности. Име-
ется возможность моделировать процессы, создавать рецепты и имитировать их
исполнение, а также управлять реальным процессом. InBatch тесно интегрирован
с InTouch, что позволяет оператору вести мониторинг периодических процессов
дозирования и смешения. Кроме того, InBatch имеет набор функций для интегра-
ции с ERP-системами (Enterprise Resource Planning — система планирования про-
изводства), в том числе осуществлять планирование сроков поставки материалов,
выполнения заказов и пр.
FactorySuite Web Server с помощью утилиты Application Publisher выполняет функ-
ции преобразования созданных InTouch приложений в вид, доступный для просмо-
тра с любого удаленного узла и управления производственным процессом в режиме
реального времени через Internet и Intranet.
Версия InTouch 8.0 пакета FactorySuite А2 на платформе ArchestrA компании
Invensys объединяет все компоненты FactorySuite А2. В числе новых компонен-
тов — сервер приложений Industrial Application Server (IAS). IAS включает БД Gal-
axy co средой разработки приложений IDE (Integrated Development Environment)
и средой исполнения. IAS обеспечивает сбор и обработку информации в режиме
РВ, управление подсистемами алармов и событий, сервисы управления данными и
может быть полнофункциональным или распределенным (БД, компоненты, среда
разработки и среда исполнения разнесены по рабочим станциям). IAS в отличие от
InTouch 7.11 оперирует не с тэгами, а с объектами («аналоговое устройство», «дис-
кретное устройство», «платформа», «переключатель» и др.). Использование плат-
формы ArchestrA обеспечивает интеграцию IAS, БД IndustrialSQL Server и SCADA-
системы InTouch 8.0, сокращая время разработки приложений для автоматизации
всего производства.
На технологии ArchestrA основана программная платформа Wonderware System
Platform 3.0 для управления производством.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
385
Новая версия InTouch 9.5 по итогам опроса читателей журналов Control Engineer-
ing и Control Magazine признана лучшим программным пакетом в категории «НМ1 и
SCADA» [5.3].
InTouch 9.5 имеет ряд преимуществ, среди которых возможность резервирова-
ния, новые средства проектирования, дополнительные возможности алармов.
Графический интерфейс пользователя (GUI — Graphical User Interface) позволяет
быстро и просто разрабатывать графическое представление процесса.
К числу новых возможностей создания графического интерфейса относится тех-
нология SmartSymbols, позволяющая создавать шаблоны графических символов и
связывать их с объектами приложения ArchestrA, локальными тегами InTouch с помо-
щью удаленных ссылок (Remote Tag Referencing). Используя технологию SmartSymbols
пользователь может создавать из набора графических объектно-ориентированных
средств стандартизованные библиотеки объектов.
Редактор QuickScript позволяет настроить приложения InTouch в соответствии с
требуемой спецификацией. Компонент InTouch Fast Switch предназначен для быстрого
переключения из среды разработки в среду исполнения и наоборот простым нажатием
клавиши. Для доступа к удаленным тегам или изменения источников данных для объек
тов приложения ArchestrA введена новая функция сценариев lOSetRemoteReferences.
Архитектура InTouch 9.5 допускает установку SCADA-системы как на отдельном
компьютере, так и в клиент-серверной среде. Механизм конфигурации сервера тегов
позволяет разработчику назначать один или несколько компьютеров в качестве сер-
веров тегов. Динамическая среда разработки сетевых приложений (NAD) позволяет
с одного сервера обслуживать приложения InTouch. Для наблюдения за технологиче-
ским процессом используется механизм InTouch View.
InTouch 9.5 имеет расширенные возможности визуализации алармов (функции):
• Функция отображения распределенных алармов (Distributed Alarm Display) позво-
ляет оператору во время работы выбрать заранее сконфигурированные алармы.
• Функция управления просмотром БД (Database View Control) отображает алар-
мы, зарегистрированные в БД.
• Функция управления просмотром алармов (Alarm Viewer Control) является эле-
ментом управления ActiveX, позволяющим просмотр как текущих, так и истори-
ческих данных.
Программный пакет InTouch 9.5 является универсальным клиентом FactorySuite
для любого программного обеспечения фирмы Wonderware. Он может использовать-
ся совместно с Industrial Application Server, IndustrilSQL Server, InTrack, InBatch, DT
Analist и другими приложениями.
Новая версия InTouch 10.0 имеет следующие новые достоинства:
• новые независимые от разрешения экрана графические объекты;
• многопользовательская разработка и редактирование разрабатываемого проекта;
• мощный набор графических символов с интегрированными сценариями и сред-
ствами связи, графическая анимация и разнообразный инструментарий;
• интеграция с Wonderware System Platform 3.0 с возможностью масштабирова-
ния — от одиночного узла с HMI до систем диспетчерского управления в мас-
штабе предприятия (до 400 PC и до 1 млн точек ввода/вывода);
• полная совместимость с предыдущими версиями InTouch;
• встроенные средства для согласованной обработки и визуализации качества
данных.
13 Зак. 3801
386
ГЛАВА 5
В InTouch 10.0 имеется встроенная библиотека символов ArchestrA, включаю-
щая более 500 графических символов, которые могут быть модифицированы или ис-
пользоваться без изменений. Каждый атрибут графики может быть индивидуально
анимирован. ArchestrA символы предоставляют доступ к стандартным элементам
управления, таким, как Web-браузеры, компоненты ERP-систем и другие приложе-
ния, поддерживающие .NET.
Среда разработки Wonderware Development Studio обеспечивает общую интегри-
рованную среду разработки (IDE) для Wonderware System Platform 3.0 и InTouch 10.0.
Функция InTouch Fast Switch позволяет осуществить быстрое переключение из среды
разработки в среду исполнения и наоборот.
InTouch 10.0 поддерживает мультиэкранный режим и позволяет создавать мно-
гоэкранные HMI приложения.
Программное обеспечение InTouchlO.O включает следующий инструментарий по
анализу и поиску неисправностей:
• Distributed Alarm Display — предоставляет суммарную информацию по текущим
аварийным сигналам;
• Alarm Viewer Control — элемент управления ActiveX, отображающий текущие и
исторические аварийные сигналы;
• Database View Control — отображает историческую информацию по аварийным
сигналам для анализа событий.
InTouch 10.0 может работать как ОРС-клиент и как ОРС-сервер. Серверы ввода/
вывода от Wonderware предоставляют доступ к данным по технологии ОРС, прото-
колу Wonderware SuiteLink или по протоколу Microsoft DDE. Также можно исполь-
зовать инструментарий ArchestrA DA Server Toolkit для создания дополнительных
серверов.
InTouch 10.0 включает несколько встроенных моделей и функций безопасности:
• систему безопасности с разделением уровней доступа по паролю;
• аутентификацию Microsoft Windows;
• защиту на уровне данных — при установке системной платформы Wonderware
System Platform 3.0;
• программное обеспечение InTouch 10.0 Read Only, допускающее только чтение
данных.
Предыдущие версии пакета InTouch русифицированы и адаптированы к рос-
сийскому рынку. Благодаря программе технической поддержки имеется возмож-
ность прохождения курсов обучения по Интернету с использованием обширной
онлайновой базы знаний. Число внедрений программного обеспечения InTouch
превышает 450 тыс на более чем 100000 объектах. Проекты с применением
SCADA-системы InTouch широко используются в различных отраслях промыш-
ленности.
Вопросам выбора SCADA-систем, а также описанию структуры, компонентов и
характеристик SCADA-систем посвящены работы [5.1, 5.2, 5.4, 5.7, 5.10, 5.15].
5.1.2 SCADA-система PcVue компании ARC Informatique (Франция).
SCADA-система PcVue использует объектную технологию создания приложений
и работает под управлением ОС Windows 2000/ХР, Server 2003 как в среде автоном-
ной, так и клиент-серверной архитектуры.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
387
Среди возможностей PcVue отметим следующие: динамическое конфигуриро-
вание, графический интерфейс с использованием архитектуры Document/ View, соз-
дание 3D мнемосхем, резервирование сервера со структурированной БД, использо-
вание объектно-ориентированной технологии и международных стандартов (DDE,
ОРС, ODBC и др.).
Подобно другим SCADA-системам PcVue сохраняет возможности визуализации
процесса, создания трендов, алармов, отчетов и расписаний. Возможно создание
программ пользователя на языке VBA.
SCADA-система PcVue снабжена обучающей программой и примерами различ-
ных проектов.
В состав компонентов ПО помимо SCADA-системы PcVue входят:
• Plant Vue — приложение для небольших производств. Графический интерфейс
аналогичен SCADA-системе PcVue. Plant Vue имеет достаточно мощный инстру-
мент работы с историческими данными, но в то же время имеет ограниченное
число переменных (до 2000), устанавливается только на одной станции. Исполь-
зуется, как правило, в локальных системах автоматизации при управлении от-
дельными объектами.
• Lon Vue — ПО для управления интерфейсом сети Lon Works (работает под Win-
dows). Данные в режиме РВ поступают в Lon Works через ОРС-серверы.
• Data Vue — инструментарий для получения исторических данных, трендов, фай-
ла регистрации и отчетов данных от PcVue. Поддерживает форматы PcVue, Ac-
cess, Oracle v.8, SQL Server.
• Web Vue — программный продукт, работающий с Web-браузером и обеспечи-
вающий удаленное отображение и управление технологическими процессами
через Internet или Intranet. Безопасная передача данных осуществляется через
SSL-соединение. Последняя версия Web Vue 3.0 предусматривает Web-сервис си-
стемы. При этом PcVue выступает в качестве Web-клиента, имеющего удаленный
доступ через Internet к Web-серверу с Web Vue.
Графический интерфейс PcVue поддерживает векторные рисунки, импортируе-
мые растры, допускает свободное вращение изображений, заливку, изменение цвета
и масштаба изображений, копирование и др.
Диаграммы исторических трендов и трендов реального времени могут быть
встроены в мнемосхему. При этом допускается масштабирование окна с трендами,
одновременное масштабирование оси времени и оси значений, динамическое назна-
чение переменных трассам и пр.
Генератор отчетов PcVue позволяет распечатывать отчеты в РВ или из БД. Также
могут быть распечатаны или внесены в архив сообщения о тревогах.
Объектно-ориентированная технология использует объектные библиотеки, со-
держащие несколько сотен двух- и трехмерных предварительно сконфигурирован-
ных объектов (реакторы, вентили, трубопроводы и т. п.). Каждый объект может быть
изменен и сохранен либо создан заново в соответствии с требованиями пользова-
теля. Все созданные объекты распространяются на все мнемосхемы, в которых они
используются.
Коммуникационные возможности PcVue определяются собственным коммуни-
кационным менеджером, поддерживающим протокол TCP/IP. Для обмена данными
в реальном времени с устройствами независимых производителей PcVue действует,
как ОРС-клиент. Для создания и выполнения структурированных программ исполь-
388
ГЛАВА 5
зуются скрипты на языке Microsoft VBA. При этом имеется возможность обращения
к свойствам объектов ActiveX и Java Beans. В мнемосхемы разработчик может встраи-
вать компоненты от независимых производителей оборудования.
Интеграция данных от PcVue с MES-приложениями осуществляется с помощью
СУБД по интерфейсам ODBC или ADO. Для автоматического конфигурирования БД
применяется Smart Generator с использованием интерфейса XML. Генератор поддер-
живает среду разработки Unity и CoDeSys.
К новым функциям PcVue 8.10 относятся функция сервера исторических данных
(СИД). Новый СИД имеет более высокую производительность, большую безопас-
ность, открытость и доступность. Высокая производительность означает сбор дан-
ных по событиям со скоростью несколько сотен в секунду. При недоступности БД
поток данных направляется в буфер (объем буфера — десятки тысяч переменных),
откуда генерируется во временные файлы, которые затем направляются в освобо-
дившуюся БД.
Данные СИД доступны различным клиентам благодаря функции репликации
(механизм копирования данных из одной БД в другую). Таким образом, если недо-
ступен первый сервер БД, то данные направляются во второй, а при освободившемся
первом сервере в него направляются данные со второго сервера.
К другим новинкам относятся: возможность отправки через SMTP-сервер по
электронной почте сообщений, в том числе тревожных сообщений, службе поддерж-
ки компании; возможность представления нескольких мнемосхем в одном окне; им-
порт/экспорт текстовых сообщений на разных языках и др.
SCADA-система PcVue используется в промышленности, строительстве, при ав-
томатизации зданий и в других областях.
5.1.3 Clear БСАОАкомпании Control Microsystems (Канада)
ClearSCADA представляет собой программный пакет с расширяемой клиент-
серверной архитектурой, соответствующий международным стандартам (ОРС, OLE,
ODBC, HTTP/XML и др.), и содержит открытые протоколы связи Modbus RTU/ASC
II, DNP3 и DF1. Также ClearSCADA поддерживает последовательные интерфейсы
(RS-232, RS-422, RS-485), линии радиосвязи, коммутируемые телефонные линии,
LAN/WAN и программно совместима с контроллерами SCADAPack.
Доступное число точек ввода/вывода на сервере — 500,1500, 5000,25 000 и 50 000.
Сервер в базовой конфигурации содержит различные драйверы (Modbus, SCADA-
Pack Modbus, ОРС клиент, SNMP, ODBS/SQL и др.), историческую БД, подсистему
событий и алармов, систему переадресации данных по E-mail и на пейджер.
ClearSCADA работает с двумя типами клиентов: ViewX и WebX. Клиент ViewX
обеспечивает интерфейс пользователя с функциями визуализации и отображения
данных на экране, алармов и трендов, ведение журнала событий. Каждый клиент
ViewX может одновременно подключаться к 64 системам с различным числом точек
ввода/вывода. Интегрированная среда разработки (IDE) позволяет проводить отлад-
ку системы в режиме on-line.
Клиент WebX предназначен для контроля и управления SCADA-системой путем
Web-технологии через стандартный браузер. Работа с системой осуществляется через
безопасное SSL-соединение (Secure Sockets Layer) с использованием логина и пароля.
Интеграция аппаратных средств в ClearSCADA обеспечивается за счет сохране-
ния в БД конфигурации удаленных устройств (RTU), автоматического обновления
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
389
параметров настройки системы, сохранения данных в исторической БД, синхрони-
зации системного времени и удаленной диагностики. Для программирования кон-
троллеров ClearSCADA имеет пять взаимозаменяемых языков программирования по
стандарту IEC 61131-3.
Для ускорения разработки проекта в ClearSCADA имеются шаблоны различных
технологических аппаратов (насосы, емкости, дозаторы и пр.), электроаппаратуры,
средств связи и сигнализации, а также групповые элементы для оперативного интер-
фейса верхнего уровня (технологические установки, насосные станции и т.п.).
Высокая надежность ClearSCADA обеспечивается двойным и тройным резервиро-
ванием серверов, клиентов, средств связи. При обрыве сетевых соединений и их после-
дующем восстановлении все данные в фоновом режиме из буферной памяти RTU/PLC
переносятся в БД. Степень безопасности объекта (проекта) обеспечивается различными
уровнями доступа пользователей с индивидуальными паролями и системой шифрова-
ния паролей. ClearSCADA ведет журнал записи действий пользователей с сохранением
информации о категории клиента, его имени и адреса, времени записи и др.
Для работы в сети Internet используется протокол защищенных сокетов (SSL) и
личные пароли. Лицензирование ClearSCADA осуществляется через программный
или аппаратный ключ. В отличие от ряда других SCADA-систем лицензируется не
число тэгов, а число точек ввода/вывода.
5.1.4 MX SCADA компании Mitsubishi Electric (Япония)
Пакет программ MX SCADA поддерживает распределенную apxiri ектуру клиент-
сервер. Интерфейс MX MMI предназначен для визуализации и управления объек-
тами с числом входов/выходов до 300 и используется как в локальной, так и в сете-
вой версии. Особенностью MX SCADA является наличие обучающих модулей Quick
Start, используемых на всех этапах разработки приложений проекта. MX SCADA
имеет встроенную библиотеку графических объектов и технологию Drag&Drop для
ускорения разработки приложения.
Разработка экранной графики осуществляется благодаря готовым к использо-
ванию символам (dynamos), функции Trend (тренды в режиме реального времени),
обработки алармов, парольных сообщений и рецептов.
К компонентам MX SCADA относятся MX SCADA Server, MX Remote, MX TV,
MX-View, MX Chart, MX OPC Server, MX Monitor.
MX SCADA Server устанавливается на диспетчерской станции и связана с БД.
Сервер используется как в локальной, так и в сетевой версии — для обмена данными
с др. SCADA-серверами либо с компонентами MX View, MX TV или MX MMI.
MX Remote — программный пакет доступа удаленных пользователей в систему
для получения данных о процессе.
MX TV — программное средство просмотра текущих и исторических данных из
реляционной БД, через DDE-сервер, MMI, от видеокамер, а также просмотр ASCII
данных.
MX View — клиентское приложение для дополнительных рабочих мест операто-
ров. Каждое клиентское место с установленным MX View связано по сети со SCADA-
серверами.
Программные модули MX Chart, MX OPC Server и MX Monitor объединены в па-
кет коммуникационных утилит MX Components. Отличительные особенности MX
Components:
390
ГЛАВА 5
• поддержка Access, Excel, VBA и C++;
• мониторинг состояния ПЛК через HTML-страницы с помощью стандартного
Web-браузера;
• мониторинг состояния ПЛК через Internet или Intranet с поддержкой технологии
Active Server Pages (ASP);
• поддержка ОС Windows 98/2000/NT V.4/XP.
Подсоединение к ПЛК осуществляется через последовательные порты RS-232/422,
Ethernet, CC-Link и сети MELSEC.
MX Chart обеспечивает быстрый доступ к данным через ПЛК с отображением их
в MS Excel.
MX ОРС Server обеспечивает безопасный доступ контроллеров Mitsubishi Electric
к любому ОРС-совместимому ПО, в том числе к ПО верхнего уровня.
MX Monitor предназначен для разработки графического интерфейса с помощью
Visual Basic или C++.
К средствам визуализации Mitsubishi Electric также относится GT SoftGOT, разра-
ботанное для операторских панелей GOT, но позволяющее разрабатывать оператор-
ский интерфейс на персональном компьютере. Это дает возможность использовать
возросший объем памяти для хранения информации, возможность обмена данными
с MS Excel и др. К числу пакетов визуализации для РС на базе панелей МАС Е от-
носится пакет E-View, занимающий промежуточное положение между пакетом для
программирования панелей оператора и SCADA-системой. Достоинства пакета: воз-
можность хранения большого объема данных, поддержка E-mail, SMS и FTP. E-View
содержит обширную библиотеку объектов, использующих технологию ActiveX.
Программные продукты компании Mitsubishi Electric объединены в программном
обеспечении MELSOFT — Mitsubishi Electric SOFTware.
5.1.5 SCADA-система Advantech Studio (AStudio) компании Advantech, Тайвань.
SCADA-система AStudio является составной частью концепции eAutomation фир-
мы Advantech. Данная концепция базируется на технологии IBM PC-совместимых ап-
паратных средствах, сети Ethernet и Web-технологии сбора и передачи данных на всех
уровнях иерархии системы управления предприятием. Все клиенты, расположенные
на нижних и верхнем уровнях производственной структуры, объединены локальной
сетью и используют Internet-технологию доступа к данным [5.9].
AStudio поддерживает среду исполнения для ОС Windows 2000/ХР и Windows СЕ
для встраиваемых систем. AStudio через встроенный Web-сервер, совместимый с MS
Internet Explorer, поддерживает HTML-страницы с передачей по сети или телефон-
ной линии, передачу электронной почты.
AStudio имеет графический редактор и библиотеку графических символов. Име-
ется возможность построения графиков на основе текущих и исторических данных
(трендов), создания гибкой системы формирования отчетов и таблиц, редактирования
и загрузки проектов. При использовании языков программирования по МЭК 61131-3
возможно динамическое переключение языка проекта. Также AStudio имеет большую
библиотеку встроенных функций для создания скриптов, систему парольной защиты
проекта с большим числом уровней доступа (до 256 уровней).
К достоинствам AStudio относятся большое число драйверов (более сотни) для
контроллеров основных производителей программно-аппаратных средств. Настрой-
ка любого драйвера сопровождается файлом помощи.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
391
Обмен данными между SCADA-системой AStudio и Windows-приложениями
осуществляется по протоколам DDE, TCP/IP, ODBC. Также поддерживаются и другие
стандарты: ОРС, XML, ActiveX и др.
AStudio допускает экспорт и импорт отчетов, конфигурационных профилей и те
кущих данных в XML-формате, интеграцию с Microsoft Word и Excel, просмотр одним
браузером данных нескольких клиентов, обмен данными в сетях Internet и Intranet
и др. AStudio имеет мощную библиотеку математических функций (более 100 функ-
ций) и используется в резервированных системах с дублированием модулей, сервера
TCP/IP и баз данных. AStudio применяется при автоматизации в средних и малых
распределенных системах управления.
5.1.6 SCADA-система ADAMView компании Advantech, Тайвань
ADAMView — программное обеспечение начального уровня для построения не-
больших систем сбора, анализа, визуализации данных и управления, работающее под
управлением операционных систем Windows 98/NT/2000/XP. Специальная оболочка
для построения пользовательских приложений значительно сокращает время их раз-
работки и максимально облегчает этот процесс. Весь процесс разработки сводится
к «рисованию» системы на экране с последующей привязкой к физическим каналам
ввода/вывода. Для построения комплексных систем и организации сложных алго-
ритмов обработки данных имеется возможность использования встроенного языка
Basic Script.
Открытая архитектура ADAMView позволяет легко интегрировать его с другими
приложениями через механизмы OLE, DDE, ODBC.
ADAMView обеспечивает:
• поддержку до 150 каналов ввода/вывода;
• легкий для освоения человеко-машинный интерфейс;
• объектно-ориентированную графику;
• исторические тренды;
• возможность генерации отчетов;
• возможность написания программ на Basic Script;
• многозадачный режим работы;
• поддержку механизмов DDE, OLE, ODBC, технологии ОРС;
• лёгкую интеграцию с системами программирования МЭК 61131.
ADAMView является 32-разрядным приложением и обеспечивает многозадачный
режим работы при параллельном сканировании задач для повышения эффективности
операций ввода/вывода, обновления графической информации на экране и диалог с
оператором. Это обеспечивает высокую производительность работы системы.
ADAMView поддерживает спецификацию ОРС. Технология ОРС обеспечива-
ет возможность использования в системах на базе ADAMView оборудования дру-
гих производителей (в частности, любых PLC-контроллеров). Для этого достаточно
иметь соответствующие ОРС-серверы.
Поддержка протокола TCP/IP обеспечивает возможность работы с данными тех-
нологического процесса в реальном времени с любого узла сети через Internet, а так-
же дистанционное управление процессом.
SCADA-система ADAMView поддерживает работу с контроллерами ADAM се-
рий 4000, 5000 и 6000 и включает базу данных на 150 точек ввода/вывода, драйверы
и ОРС сервер.
392
ГЛАВА 5
5.1.7 SCADA-система Vijeo Look компании Schneider Electric, Франция
Vijeo Look базируется на открытых международных стандартах, среди которых
компоненты ActiveX (включая WEB-браузер) и lava Bean, использующие объектно-
ориентированный подход, встроенный сервер OFS (OPC Factory Server), ПО Microsoft
VBA, интерфейс ADO (Active Data Object) доступа к БД и др. ПО Vijeo Look позволяет
сохранять все переменные, поступающие через ОРС-сервер в БД и включает в себя
поддержку реляционной БД MSDE (Microsoft Data Engine), поставляемой с Vijeo Look,
для доступа к которой используется ПО Microsoft Access. БД MSDE позволяет сохра-
нять объем данных до 2 Гбайт (около 5,5 млн записей).
Стандарт ActiveX обеспечивает взаимодействие программных компонентов, рас-
положенных как на одном PC, так и на удаленных PC, объединенных сетью. Архитектура
компонентов Java Bean позволяет использовать сети с разнородными ОС и аппаратными
средствами. Можно связывать свойства компонентов ActiveX и Java Beans со значениями
переменных сервера ОРС, в частности сервера данных OFS. Доступ к свойствам компо-
нентов ActiveX, переменным ОРС и компонентам среды проекта осуществляется с по-
мощью языка MS VBA, который поставляется с ПО Vijeo Look.
SCADA-система Vijeo Look предназначена для работы на PC с ОС Windows 2000/
ХР и поддерживает контроллеры Schneider Electric: Twido, TSX Micro, Modicon Pre-
mium/ Atrium/Quantum/Mo mentum.
SCADA-система Vijeo Look используется для малых систем визуализации и рас-
считана на 128, 512 или 1024 точек ввода/вывода. Тем не менее, Vijeo Look имеет все
необходимые функции SCADA-систем, используемых в больших системах.
Функции визуализации используются для отображения на экране переменных,
считываемых из ПЛК, для архивирования переменных в БД и программной обработ-
ки данных. Переменные могут быть представлены в виде значений, исторических и
текущих трендов, анимированной цветной графики и т. д. Приложения Vijeo Look
разрабатываются с помощью программы Конфигуратор (Configuration Explorer).
Связь с ПЛК устанавливается после выбора файла переменных, протокола связи и
адреса ПЛК. Программа может быть использована для редактирования переменных,
конфигурации дополнительных серверов ОРС и БД, создания переменных для трен-
дов и пр. Все переменные в окне Configuration Explorer делятся на следующие типы:
HMI, диагностические и АПС (Аварийно-Предупредительная Сигнализация), встро-
енной обработки, переменные архивов и трендов.
Для создания графических объектов используются следующие инструменты:
библиотеки графических объектов, компоненты ActiveX и Java Bean, собственные
графические элементы Vijeo Look, функции Zoom (увеличение) и Panoramic (пано-
рама), тренды и др. Библиотека графических объектов включает около 100 двух- и
трехмерных графических объектов. Библиотеки дополнены набором специфических
символов (конвейеры, PID, пиктограммы компонентов Schneider Electric и др.). Все
эти объекты являются готовыми к привязке к переменным ПЛК. ПО Vijeo I.ook по-
зволяет создавать до 8 независимых трендов в одном окне просмотра. Тренды реаль-
ного времени отображают данные из БД. Частота обновления данных задается при
конфигурировании.
Функция управления производственными рецептами поддерживает до 1000 ре-
цептов для каждого приложения (в каждом рецепте допускается до 1000 элементов).
Помимо возможности создания, рецепты могут быть сохранены или экспортирова-
ны в другие приложения.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ 393
ПО Vijeo Look устанавливается на одной рабочей станции и используется как в
локальной, так и в сетевой версии. Подключение к сетям Ethernet, Modbus Plus и Fip-
Way осуществляется с помощью соответствующих сетевых карт, а к шинам Modbus и
Uni-Telway — с помощью интерфейсов RS-232 или RS-485.
Помимо функций визуализации Vijeo Look обладает функциями диагностики,
обработки, коммуникации, записи в БД и трассировки, печати сообщений АПС и
функцией безопасности.
К функциям диагностики относятся управление, визуализация и квитирование
переменных типа АПС, диагностика для сетевых модулей Ethernet TCP/IP для плат-
форм Micro, Premium, Quantum и Momentum. Переменные сохраняются в блоке па-
мяти ПЛК (Diag Buffer). Встроенное программное средство Diag Viewer предоставля-
ет оператору инструмент для наблюдения за состоянием системы.
Функция обработки позволяет назначить любому графическому объекту анима-
цию (вращение, перемещение, изменение размера и пр.), написанную на языке VBA.
Имеется возможность встраивания программы на языке VBA в приложение системы
визуализации.
Поскольку Vijeo Look имеет архитектуру клиент-сервер, то возможен удаленный
или локальный обмен данными с другими приложениями, сбор и пересылка данных
с ПЛК. Данные поступают через коммуникационный сервер ОРС, который имеет
прямой доступ к БД РВ Vijeo Look. Так как Vijeo Look является одновременно серве-
ром и клиентом ОРС, это позволяет SCADA-приложениям обмениваться данными с
ПЛК и другими программными продуктами, имеющими интерфейс ОРС.
Функция записи переменных в БД и трассировки (контроль изменения данных
во времени) позволяет записанные в БД данные экспортировать в форматах CSV
(Comma Separated Values) или XML. Значения переменных записываются в БД по из-
менению их состояния или периодически. При этом имеется возможность выбора
типа БД, размещения БД и наименования таблицы БД. Поскольку используется ре-
ляционная модель БД, для записи необходим минимальный объем памяти (атрибуты
переменных, не изменившихся за определенный промежуток времени, записывают-
ся только один раз). Все данные в БД записываются в символьной форме по имени
объекта (клапан, насос, расход, температура и т. д.). Из баз данных используются БД
MSDE или др. стандартные БД (MS SQL Server, ORACLE, SYBASE и др).
Функция безопасности определяется идентификацией пользователя по имени и па-
ролю, а также по уровням доступа. ПО Vijeo Look допускает возможность работы только
одного пользователя в каждый момент времени. HMI базируется на системе пользова-
тельских профилей безопасности, связанных с графическими объектами (окно, анима-
ция, поле ввода и т. д.). Каждый объект имеет список авторизованных профилей.
SCADA-система Vijeo Look осуществляет сбор, визуализацию архивирование
данных на одном и том же РС, поэтому рекомендуется не завышать частоту сбора
данных, количество переменных для хранения в БД и число обрабатываемых сиг-
налов АПС. Дальнейшее развитие возможностей SCADA-системы реализовано в
SCADA-системе Vijeo Citect Lite, приходящей на смену Vijeo Look.
5.1.8 SCADA-система Monitor Pro v7.2 компании Schneider Electric, Франция
ПО Monitor Pro v7.2 имеет архитектуру клиент-сервер и предназначено для ви-
зуализации и диспетчерского управления средних и больших распределенных систем
управления.
394
ГЛАВА 5
В состав ПО Monitor Pro v7.2 входит база данных MS SQL Server 2000 и коммуни-
кационные протоколы Schneider Electric, в том числе ОРС-сервер (OFS).
К др. средствам коммуникации относятся сетевые протоколы Modbus TCP/IP,
Modbus Plus и FipWay.
Monitor Pro v7.2 является многопользовательским SCADA-приложением, работа-
ющим на платформах Windows 2000/ХР. В зависимости от масштаба системы управ-
ления предлагаются исполнения на число точек ввода/вывода от 300 (4800 перемен-
ных) до 50000 (800 тыс переменных). Учитывая открытость Monitor Pro, возможна
работа системы с ПЛК сторонних производителей, для чего поставляются (вместе с
Monitor Pro v7.2) коммуникационные драйверы для связи с устройствами сторонних
производителей.
Monitor Pro имеет функцию обмена информацией между несколькими сервера-
ми в общей структуре (функция VRN — Virtual Real-time Network, виртуальная сеть
реального времени). Каждая станция может быть сервером для одних и клиентом для
других станций в сети. Также имеется функция VRR (Virtual Real-time Redundancy —
виртуальная сеть реального времени с резервированием), с помощью которой мож-
но построить систему с резервированием серверов.
Функция визуализации Monitor Pro использует объектно-ориентированный ре-
дактор, работающий в среде Windows, состоящий из Построителя (Client Builder) и
конфигуратора (Configuration Explorer).
Для ускорения разработки проекта Client Builder использует объектно-
ориентированную графику, библиотеку стандартных объектов, контейнеры объек-
тов ActiveX и Java Bean, набор готовых компонентов ActiveX для просмотра журнала
АПС, трендов и БД. Для любого графического объекта может быть задана анимация,
написанная на языке VBA.
Configuration Explorer поддерживает одновременную разработку приложения с
нескольких сетевых станций, тем самым допуская доступ одного пользователя к не-
скольким серверам и нескольких пользователей к одному серверу Monitor Pro v7.2.
Управление безопасностью в Monitor Pro аналогично модели безопасности Win-
dows NT. После создания пользовательских учетных записей (имя и пароль) каж-
дой учетной записи назначается профиль, который определяет видеокадры, слои и
графические объекты в слоях. Доступ пользователя к разрешенному ему профилю
осуществляется в режиме РВ, редактирования или с рабочего стола через иконку.
При разработке системы визуализации с помощью Client Builder используется
БД РВ, находящаяся в оперативной памяти сервера. Все задачи приложения (мате-
матическая обработка данных, отчеты, коммуникации API, интерфейс ODBC и др.)
используют информацию БД, считывая и записывая в нее данные. Клиентское при-
ложение подключается к серверам приложения через интерфейс ОРС клиента в ре-
жиме РВ. Таким образом, БД РВ, расположенная в оперативной памяти RAM, являет-
ся ядром ПО визуализации Monitor Pro.
БД РВ содержит данные следующих типов: двоичные данные, слова (16 бит),
двойные слова (32 бита), значения с плавающей точкой (64 бита) и строковые пере-
менные (до 256 бит).
Функция диагностики определяет режим генерирования сигналов АПС, их ото-
бражение с использованием ActiveX, архивирование, печать в реальном времени,
квитирование АПС, а также создание распределенной БД АПС. Отображение сигна-
лов АПС осуществляется через интерфейс Diag Viewer блока Diag Buffer.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
395
Данные с любого сервера Monitor Pro могут быть отображены в виде трендов
реального времени и исторических трендов. Последние выбираются из архива ре-
ляционной БД. Число переменных в окне трендов и число окон неограниченно.
Управляющие элементы ActiveX связаны с реляционной БД через независимый
сервер трендов, встроенный в Monitor Pro. От сервера трендов данные поступают
клиенту ActiveX.
Доступ к реляционной БД осуществляется с помощью интерфейса ODBC. В каче-
стве реляционной БД используется SQL Server 2000, поставляемый с Monitor Pro, или
стандартные БД с интерфейсом ODBC (Dbase IV, Oracle, Sybase и др.). В свою очередь
БД РВ по интерфейсу обмена информацией с реляционными БД имеет возможность
читать и обновлять таблицы реляционной БД. Среди клиентских задач, имеющих
доступ к реляционной БД, основными являются архивирование АПС, сохранение и
просмотр данных, ведение журнала трендов и др.
Функция рецептов Monitor Pro может управлять до 1000 различных типов рецеп-
тов (8000 элементов БД для каждого рецепта).
Функция генератора отчетов поддерживает печать данных из БД в нужном формате.
Отчеты могут передаваться по сети или сохраняться на жестком диске в формате ASCII.
С 2007 г. компания Schneider Electric рекомендует преимущественное использова-
ние SCADA-системы Vijeo Citect1 v7.0, имеющей определенные преимущества перед
Monitor Pro v7.2.
5.1.9 SCADA-система RSView32 компании Rockwell Automation, США
RSView32 — это интегрированное, основанное на компонентах программное
обеспечение человеко-машинного интерфейса (HMI) для контроля и управления
автоматизированными устройствами и процессами. RSView32 создана с использо-
ванием открытых технологий, которые обеспечивают максимально эффективную
связь с другими продуктами Rockwell Software, продуктами Microsoft и сторонними
приложениями.
RSView32 — программный продукт HMI, в котором использованы следующие
преимущества передовых технологий фирмы Microsoft:
• Открытие графических дисплеев в виде OLE контейнеров для элементов управ-
ления ActiveX, что дает возможность встраивать в собственные проекты уже
готовые решения, выбирая их из элементов управления ActiveX сторонних по-
ставщиков.
• Разработка моделей объекта для выделения отдельных частей его основных функ-
циональных возможностей, что позволяет RSView32 легко взаимодействовать с
другими программными продуктами, основанными на компонентах.
• Использование языка Visual Basic for Applications (VBA) фирмы Microsoft в каче-
стве встроенного языка программирования
• Поддержка стандартов ОРС как для сервера, так и для клиента, с целью осущест-
вления быстрой и надежной связи с аппаратными устройствами различных по-
ставщиков.
• Реализация технологии Add-On Architecture (АОА) для расширения функцио-
нальных возможностей RSView32 и интеграции новых свойств в ядро RSView32.
1 Компанией Schneider Electric приобретена SCADA-система Citect и выпускается под именем Vijeo Citect. Б
настоящее время распространяется Vijeo Citect v7.0, способная заменить SCADA-систему Monitor Pro.
396
ГЛАВА 5
SCADA-система RSView32 предлагает уникальный набор инструментов для по-
вышения производительности, в том числе имитация выполнения при разработке
посредством нажатия кнопки, редактирование отдельных объектов в группе без на-
рушения группы или влияния на анимацию, движение и перетаскивание объектов с
помощью ПО Object Smart Path.
Также RSView32 имеет возможность представления множества механизмов с по-
мощью одного графического дисплея, используя метки-заполнители тегов и файлы
параметров, быстрой замены имен тегов и символьных строк с помощью подстанов-
ки тегов, простой импорт графики, разработанной в других приложениях для созда-
ния изображений.
RSView32 с помощью интерактивных справочных систем RSView32, учебников
и проектов-примеров позволяет получить необходимую помощь при разработке
проектов.
5.1.10 SCADA-система Elipse ЕЗ компании Elipse Software, Бразилия
Elipse ЕЗ — программный продукт, представляемый на рынке компанией Elipse
Software с 2001 г. Описание предыдущей SCADA-системы этой компании Elipse Win-
dows приведено в [ 2.9].
Elipse ЕЗ является объектно-ориентированной SCADA-системой, основанной
на концепции «Application Domain», которая содержит большой объем графических
объектов и поддерживает работу с HTML-страницами через Интернет и Интранет.
Аналогично с другими SCADA-системами Elipse ЕЗ поддерживает форматы баз
данных (MS SQL Server, Oracle, MDB), использует базы данных для формирования
отчетов, архивов, трендов, алармов, рецептов и пр. Возможна интеграция любых
ActiveX-объектов в создаваемое приложение или библиотеку. Обеспечивается пол-
ностью безопасная среда выполнения, управляющая доступом пользователя к окнам
и экранным объектам (функция Security). К числу других функций системы относит-
ся функция Hot-Standby — поддержка дублирующих устройств, которые активизиру-
ются в случае отказа первичных серверов.
Elipse ЕЗ основана на клиент-серверной архитектуре с поддержкой стандартов
ОРС, ODBC, DDE и др. и выпускается в 3-х версиях: ЕЗ Studio (содержит ядро си-
стемы ЕЗ Server), ЕЗ Server 5000 (поддержка 5000 точек ввода/вывода) и Unlimited ЕЗ
Server (поддержка до 1 млн точек ввода/вывода).
В состав ЕЗ Server входят приложения Viewer (визуализация и управление), I/O
Driver (связь с устройствами ввода/вывода), DB Server (управление базами данных),
Scripts (поддержка языка программирования VBScript), Reports (средство для созда-
ния отчетов), ОРС Client (поддержка ОРС, как клиент) и ЕЗ Web Server (обмен дан-
ными через Internet с использованием навигатора Internet Explorer. Возможна работа
SCADA-системы при создании проекта на различных компьютерах.
Приложение ЕЗ Server и ЕЗ Studio работают на платформах Microsoft Windows
2000/ХР, а ЕЗ Viewer на любом ПК под управлением ОС Windows 98/Me/NT 4.0/2000/
ХР. Требования для установки системы под Windows 2000/ХР: процессор Celeron,
Pentium II или выше; RAM — 128 Мбайт, HDD — 100 Гбайт свободного места, IxLPT
порт, сетевая и видеокарта.
5.2. Методика выбора SCADA-систем
Рассмотрим основные показатели, определяющие выбор той или иной SCADA-
системы:
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
397
• Максимальная гибкость, в том числе масштабируемость и открытость SCADA-
системы (поддержка механизма взаимодействия ОРС, основанного на объектной
модели COM/DCOM, а также других стандартов).
• Соответствие функциональным требованиям разрабатываемой АСУ ТП, вы-
сокие технические характеристики, поддержка аппаратных средств (контрол-
леров, интеллектуальных датчиков и компонентов УСО); удобство интерфейса
оператора.
• Степень сложности и эффективности разработки ПО, затраты времени на раз-
работку, инструментальные возможности разработки баз данных, качество гра-
фического редактора (палитра, тренды и пр.).
• Качество, полнота и доступность технической документации, ее русификация,
наличие помощи (help) и учебных пособий, удобный пользовательский интер-
фейс, наличие демоверсии, возможность сопровождения и обучения, процедура
обновления приобретенного ПО и др.
• Известность торговой марки, отзывы пользователей о работе SCADA-системы по
данным эксплуатации на производстве.
• Возможность интеграции с корпоративными системами верхнего уровня, в том
числе возможность интеграции с продуктами смежного назначения— СУБД,
бухгалтерскими и складскими программами, электронными таблицами и др.
• Надежность, возможность работы на опасных производствах с большим числом
контролируемых параметров, устойчивость к сбоям внешних компонентов си-
стемы и ошибочным действиям персонала.
• Стоимость пакета и совокупная стоимость проекта, цена лицензии на исполни-
тельные модули пакета (run-time модули). В этот показатель входят зависимость
цены от числа тэгов, при необходимости — стоимость обучения, обновления и
сопровождения пакета. Процедура лицензирования пакета косвенным образом
влияет на выбор системы. Программный ключ в случае повреждения жесткого
диска должен быть обновлен за пониженную плату. Поэтому защита системы
электронным ключом более предпочтительна с точки зрения переноса продукта
с одного компьютера на другой в режиме реального времени, хотя и налагает до-
полнительные требования сохранности ключа.
Помимо этих функций не менее важной характеристикой является производи-
тельность ПО, в частности СУБД, а также наличие функций ускорения разработки
проекта (автопостроение БД РВ, наличие библиотек алгоритмов контроля и управле-
ния, сквозное программирование системы и пр.).
Здесь же следует отметить и возможность взаимодействия SCADA-системы с си-
стемами управления, предполагаемыми к установке или уже функционирующими на
объекте. Большинство производителей SCADA-систем обеспечивают свои продукты
драйверами, позволяющими им беспрепятственно вписываться в уже существующие
системы управления, взаимодействуя с установленным оборудованием и програм-
мным обеспечением.
На некоторых предприятиях та или иная SCADA-система принята в качестве
корпоративного стандарта (например, InTouch на предприятиях Лукойл, iFIX на ПО
«Пикалевский глинозем», Trace Mode на комбинате «Североникель»), на других —
в системах управления технологическими процессами используются различные
SCADA-системы.
398
ГЛАВА 5
5.3. ОРС-стандарт взаимодействия SCADA-систем и ПЛК
Стандарт ОРС (OLE for Process Control) — это стандарт взаимодействия между
программными компонентами системы сбора данных и управления, основанный на
объектной модели COM/DCOM фирмы Microsoft. Стандарт установлен Междуна-
родным комитетом ОРС Task Force. Стандарт ОРС приходит на смену DDE-обмена
(Dynamic Date Exchange) — динамического обмена данными. COM (Component Ob-
ject Model) — модель многокомпонентных объектов, позволяющая приложению вы-
зывать те или иные функции объекта, находящегося в адресном пространстве при-
ложения. Если объект распределен по сети или находится в другой программе того
же компьютера, то мы имеем распределенный COM (Distributed СОМ) или DCOM.
Таким образом, DCOM является по сути сетевым расширением СОМ.
ОРС-технология создана консорциумом ОРС Foundation, куда входят более 170
ведущих производителей аппаратно-программных средств промышленной автома-
тизации. Среди них фирмы Siemens, Fisher-Rosemount, Honeywell, Rockwell Automation,
Iconics и др. Деятельность OPC Foundation осуществляется в рабочих группах по на-
правлениям (ОРС Date Access Working Group, OPC Alarm and Events Working Group,
OPC Historical Working Group, OPC Security Working Group, OPC Windows CE Work-
ing Group и др.) [5.16, 5.17].
ОРС-взаимодействие основано на клиент-серверной архитектуре. В качестве
ОРС-клиента выступает, например, SCADA, а в качестве ОРС-сервера — контролле-
ры, УСО и пр. Основные производители SCADA- систем поддерживают технологию
ОРС. Это SCADA-системы Genesis32 (фирма Iconics), iFIX (фирма Intellution), Factory
Suite (фирма Wonderware) и др. При этом все компоненты SCADA- систем могут взаи-
модействовать между собой через ОРС, выполняя функции в зависимости от задачи
либо сервера, либо клиента.
ОРС-серверы разрабатываются и поставляются производителями контроллеров
и др. аппаратуры или поставщиками SCADA-систем.
Стандарт ОРС включает 3 спецификации [5.16]:
1. Доступ к данным реального времени (Data Access) или стандарт DA.
2. Обработка тревог и событий (Alarm&Events) или стандарт А&Е.
3. Доступ к историческим данным (Historical Data Access) или стандарт HDA.
ОРС-серверы физических устройств (контроллеров) являются, как правило, сер-
верами данных (Data Access Servers).
Сервер тревог по состоянию тега, полученного от сервера данных, оповещает
клиентов, посылая сигнал тревоги, и получает от клиентов подтверждение получен-
ного сигнала.
Серверы исторических данных также используют данные, получаемые в реаль-
ном времени от сервера данных, и архивируют их, предоставляя затем эти данные
другим приложениям для построения, например, трендов, гистограмм или таблиц.
Помимо этих основных спецификаций стандарта ОРС существуют и ряд других
спецификаций. Так, отдельный класс ОРС-серверов представляют специализирован-
ные ОРС-серверы конкретных аппаратных устройств [5.18, 5.19].
Рассмотрим работу ОРС-сервера в клиент-серверной архитектуре.
При использовании COM/DCOM технологии реализуется информационный
обмен между COM-объектами. Вызов любой функции объекта осуществляется че-
рез COM-интерфейс, представляющий определенную структуру памяти, содержа-
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
399
щую массив указателей на все функции интерфейса. Этот вызов реализуется через
агента-посредника, так называемого Proxy/Stab DLL, представляющего функции
объекта. Модуль Proxy («заместитель») принадлежит клиенту, а модуль Stab (за-
глушка) расположен в сервере. Proxy реагирует на запрос клиента, кодируя и паке-
тируя параметры функции, после чего передает их по каналу серверу. На стороне
сервера модуль Stab распаковывает вызов клиента и передает его серверу, заставляя
реальный объект выполнить заданную функцию. Результат выполнения функции
возвращается обратно приложению-клиенту. Этот процесс получил название «мар-
шалинг» (marshaling — транспортировка). Основной спецификацией ОРС является
спецификация Data Access (DA). Базовым понятием спецификации является эле-
мент данных (OPCItem объект), т. е. фактически один из параметров технологи-
ческого процесса, имеющий значение (Data Value), время последнего обновления
(Time Stamp) и признак качества (достоверности) значения (Quality). Следующим
вверх по иерархии является понятие группы элементов (ОРС Group-объект) — соз-
дается ОРС-сервером по требованию клиента, который задает частоту обновления
данных этой группы. Для каждого клиента сервером создается своя группа. Эле-
менты в группе имеют имена, которые являются по сути именами реальных пере-
менных (тегов). Имена тегов клиентом запрашиваются по специальному интерфей-
су lOPCBrowseServerAdressSpace.
На верхней ступени иерархии находится сам OPCServer-объект. Для подключе-
ния ОРС-сервера к реальному объекту OPCItem-объекты содержат ссылки на соз-
данные ОРС-сервером теги. Пример полного имени тега: Контроллер_1. Модуль_2.
Аналоговый вход_1.
Обмен данными между клиентом и ОРС-сервером может быть в трех режимах:
синхронный режим чтения/записи данных, асинхронный режим чтения/записи дан-
ных, режим подписки (только чтение данных).
При синхронном режиме ОРС-клиент запрашивает у ОРС-сервера интересую-
щие его переменные и находится в режиме ожидания. После выполнения запроса
ОРС-клиент считывает значения переменных.
При асинхронном режиме обмена ОРС-клиент запрашивает у ОРС-сервера зна-
чения переменных с заданной частотой обновления данных, определенной при соз-
дании OPCGroup, и продолжает работать. После выполнения запроса ОРС-сервер
сам оповещает об этом ОРС-клиента. Этот режим является наиболее распространен-
ным в силу экономии вычислительных ресурсов и времени.
Режим подписки аналогичен асинхронному режиму с той лишь разницей, что
ОРС-сервер посылает ОРС-клиенту уведомление лишь в случае изменения значений
переменных. Передача этих данных осуществляется единым блоком для снижения
временных затрат, что особенно важно при обмене по сети.
Одной из основных характеристик ОРС-сервера является его производитель-
ность. Известны три вида ОРС-серверов в зависимости от их местонахождения.
• Внутризадачный ОРС-сервер (InProcess Server), находящийся в адресном про-
странстве ОРС-клиента. Этот ОРС-сервер оформлен, как динамическая библио-
тека (DLL), а не как самостоятельная программа.
• Локальный ОРС-сервер (Local Server) — сервер работает в отдельной самостоя-
тельной программе того же компьютера, в котором расположен ОРС-клиент.
• Удаленный ОРС-сервер (Remote Server) расположен на другом (удаленном по
сети) компьютере.
400
ГЛАВА 5
Естественно, производительность внутризадачного сервера выше локального,
а последнего — выше, чем удаленного. Однако другим важным фактором, влияю-
щим на производительность ОРС-сервера, является возможность группировки дан-
ных, отправляемых ОРС-клиентам. Так, по данным Web-узла ОРС Foundation (www.
opcfoundation.org) предельная пропускная способность внутризадачного сервера
(процессор Pentium 233 МГц) составляет до 1 млн элементов ОРС в секунду, что яв-
ляется вполне достаточным для подавляющего числа процессов.
Пропускная способность локального ОРС-сервера составляет от 3000 до 60 000
элементов в секунду. Для удаленного ОРС-сервера по сети Ethernet 10 Base-T про-
пускная способность колеблется от 330 до 7000 элементов в секунду. Типовая струк-
тура ОРС-сервера с открытой архитектурой представлена на рис. 5.1 [5.18].
Открытая архитектура ОРС-сервера предусматривает возможность его работы
(после небольшой доработки) с любым аппаратным или программным средством,
поддерживающим технологию ОРС. Чтение данных с устройств ввода или прямо
из кэш-памяти данных осуществляется с помощью функции Read(). В свою очередь
функция ReadFromDevices() опрашивает устройство ввода и передает данные ОРС-
клиенту. Функция Write() служит для записи данных ОРС-клиента на устройство
вывода и/или в кэш-память данных. Функции обновления устройства ввода, кэш-
памяти данных и ОРС-клиентов осуществляются с частотой, заданной клиентом при
формировании OPCGroup.
Таким образом, разработчик АСУ ТП при выборе SCADA-системы, контрол-
леров и другой аппаратуры, поддерживающих технологию ОРС, может рассчи-
тывать на взаимопонимание компонентов системы. К сожалению, при наличии в
системе аппаратных средств других фирм, интерфейсы которых не поддерживают
ОРС-взаимодействие, использование их в сетевом обмене данными затруднен. В
этом случае требуется разработка специализированных ОРС-серверов, обладаю
щих свойствами открытости. При этом разработчик (пользователь) должен напи-
сать динамическую библиотеку (DLL), содержащую полный код, необходимый для
управления конкретным устройством, либо обеспечить связь с соответствующей
DLL, поставляемой производителем этого устройства.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
401
Специализированный ОРС-сервер разрабатывается на основе программной за-
готовки, созданной некоторыми фирмами. Так, фирма Iconics, изначально спроек-
тировавшая SCADA-систему Genesis32 на основе ОРС-технологии, предлагает ОРС
ToolWorX, оформленный в виде дополнительного мастера в Wizard, который встроен
в среду разработки Visual C++. Мастер генерирует проект, в котором требуется вы-
полнить модификацию фрагментов кода, связанных со спецификой обслуживаемого
устройства нижнего уровня.
Так на базе Iconics ToolWorX создан универсальный ОРС-сервер/Universal ОРС
Server фирмы Fastwel. Этот ОРС-сервер предусматривает подключение динамиче-
ской библиотеки (DLL), написанной пользователем для конкретного устройства.
Недостатком ОРС-сервера служит то, что клиент получает данные из внутреннего
буфера DLL, а не непосредственно от устройства ввода, что служит причиной не-
которой временной задержки обмена данными. Эти недостатки устраняются в пред-
лагаемых структурах ОРС-серверов, описанных в работах [5.18, 5.19].
Для разработки ОРС-сервера в АСУ ТП, использующей SCADA-систему FIX Dy-
namics, целесообразно использовать пакет для разработки ОРС-приложений фирмы
Intellution.
5.4. Базы данных и системы управления базами данных.
5.4.1 Модели баз данных.
Выполнение прикладных программ предусматривает преобразование и логи-
ческую обработку данных, их хранение, защиту и архивацию в базе данных (БД), а
также взаимодействие прикладной программы с файловой системой операционной
системы компьютера. Любое вновь созданное приложение выполняется в архитек-
туре клиент-сервер [5.20-5.27].
Системой баз данных2 называют компьютерную систему хранения однотипных
записей. Известны однопользовательские БД (single-user system) и многопользова-
тельские БД (multi-user system). Все данные в БД являются интегрированными (пред-
ставляют совокупность файлов данных) и разделяемыми (с возможностью исполь-
зования одних и тех же данных разными пользователями). Обработка всех запросов
пользователей к БД осуществляется программным обеспечением, которое принято
называть диспетчер базы данных (database manager), сервер базы данных (database
server) или, как принято в настоящее время, система управления базой данных —
СУБД (DataBase Management System — DBMS). Под СУБД понимают совокупность
языковых и программных средств, предназначенных для создания, ведения и со-
вместного использования БД многими пользователями. Большинство СУБД имеют
встроенный язык запросов (SQL).
Основные достоинства БД: возможность совместного доступа к данным разных
пользователей, сокращение избыточности данных, возможность поддержки транзак-
2 В 1968 г. появилась первая промышленная СУБД IMS фирмы IBM. СУБД IMS имела иерархическую
структуру. В 1970 г. американский математик Э. Ф. Кодд впервые сформулировал основные понятия ре-
ляционной модели данных (от англ, relation — отношение), которая включает 7 основных операций и
одну дополнительную (операции фильтрации, условного соединения, деления и др.). В 1975 г. появился
первый стандарт Ассоциации по языкам систем обработки данных — Conference of Data System Language
(CODASYL).
402
ГЛАВА 5
ций, обеспечение целостности данных, организация защиты данных, возможность
стандартизации данных и др.
Трехуровневая система организации БД по стандарту ANSI (American National
Standards Institute — Американский национальный институт стандартов) приведена
на рис. 5.2.
Архитектура системы БД представляет три уровня: внутренний или физический,
концептуальный или логический и внешний или пользовательский).
Внешний (пользовательский) уровень
Рис. 5.2
Внутренний уровень — это внутреннее представление всей БД в виде внутрен-
них (хранимых) записей. Данные размещаются в файлах или на внешних носителях.
Внутреннее представление предполагает наличие неограниченного адресного про-
странства.
Концептуальный (логический) уровень представлен реляционными таблицами и
операторами выборки строк и столбцов таблиц. Таким образом, это уровень реляци-
онной модели данных. Внешний (пользовательский) уровень — это индивидуальный
уровень пользователей.
Доступ к данным БД происходит в следующей последовательности: пользователь
на языке SQL выдает запрос на доступ к БД; СУБД перехватывает и анализирует за-
прос; СУБД просматривает внешнюю и концептуальную схемы, а также структуру
хранения данных и выполняет необходимые операции в хранимой БД с преобразо-
ванием типов данных.
Если доступ к данным сервера осуществляется на уровне файлов с разделением
доступа средствами ОС, то такие приложения построены по типу «файл-сервер».
Недостатками таких приложений является высокая нагрузка на клиентскую
часть, трудность разделения доступа при работе нескольких пользователей, высокая
нагрузка на сеть при передаче файлов от одного компьютера к другому. К файловым
структурам хранения информации в базе данных относятся файлы прямого досту-
па, файлы последовательного доступа, индексные файлы, инвертированные списки и
взаимосвязанные файлы.
К файлам прямого доступа относят файлы с постоянной длиной записи, располо-
женные на устройствах прямого доступа (УПД).
Индексные файлы состоят из индексной области (индексного файла) и основной
области (основного файла). Инвертированные списки представляют собой трехуров-
невую структуру, начальный файл (или часть файла) которой содержит значение вто-
ричного уровня (ключа). На втором уровне — блоки с номерами записей одинаковых
значений вторичного ключа и на третьем уровне — основной файл.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
403
Управление файловой структурой относится к ОС и в сравнении с СУБД имеет
следующие недостатки: система управления файлами не имеет сведений о внутрен
ней структуре записей; система защиты и поддержки целостности записей недоста-
точна или отсутствует; восстановление данных и параллельный доступ к данным за-
труднен или отсутствует; отдельные файлы не являются «интегрированными» или
«разделяемыми».
В распределенных системах управления база данных используется многими
пользователями, поэтому имеет место распределенная обработка данных. Если база
данных распределена по нескольким компьютерам и используется многими пользо-
вателями, то такая система называется системой распределенных баз данных. Досто-
инства распределенной обработки данных [5.24]:
• возможность параллельной обработки данных и, как следствие, увеличение ско-
рости обработки.
• серверный ПК может быть изготовлен более мощным по производительности.
• клиентский ПК может быть максимально приближен к потребностям конкрет-
ного пользователя для увеличения сроков его готовности.
В распределенной клиент-серверной архитектуре доступа к данным функции
между клиентским и серверным приложениями распределяются нижеследующим
образом [5.24]. Функции ввода и отображения данных (Presentation Logic) и при-
Клиент
Рис. 5.3
кладные функции (Business Logic) находят-
ся на стороне клиента, а функции обработки
данных внутри приложения (Database Logic).
Также БД с ядром СУБД находятся на сторо-
не сервера. Двухуровневая модель удаленного
доступа к данным RDA (Remote Data Access)
представлена на рис. 5.3. К недостаткам моде-
ли RDA относятся большая загрузка клиент-
ского приложения и сети обмена данными.
Современные СУБД поддерживают трех-
уровневую модель «клиент-сервер», представ-
ленную на рис. 5.4. В основе модели лежит механизм процедур — специальных про-
граммных модулей, хранящихся в БД и управляемых непосредственно СУБД.
На стороне клиента сохраняются только функции ввода и отображения данных.
Такой разгруженный клиент называется «тонким клиентом». Промежуточный уро-
вень между клиентом и сервером занимает сервер приложений с прикладными функ-
циями. При этом сервер БД выполняет исключительно функции СУБД — создание и
ведение БД, хранение данных, создание резервных копий, управление транзакциями.
Сервер
Клиент Запуск приложений Сервер БД
вывода
Рис. 5.4
404
ГЛАВА 5
Хранимые процедуры (Stored Procedure) в сервере БД являются подпрограммами,
которые выполняются на сервере. Они пишутся на специальных встроенных язы-
ках программирования и включают любые операторы языка SQL (Structured Query
Language — Структурированный Язык Запросов). В коммерческих СУБД использу-
ются собственные языки программирования (PL/SQL в Oracle, Transact SQL в MS SQL
Server).
В современных БД организация взаимодействия клиент-сервер осуществляется
с использованием мультипроцессорных серверных платформ. При этом достигается
возможность запуска нескольких серверных процессов на различных процессорах
многопроцессорного сервера.
Многопотоковая мультисерверная архитектура представлена на рис. 5.5 [5.22].
| Клиент 1 < » > Серверный процесс 1 CPU1 — БД
| Клиент 2
Клиент 3 Серверный процесс 2
CPU 2 —
|Клиент 4
Клиент 5 Серверный процесс 3
— CPU3
Клиент 6
Рис. 5.5
Одним из важнейших показателей надежности БД является степень защиты ин-
формации. Так, в БД MS SQL Server 6.5 поддерживаются несколько режимов про-
верки прав пользователя, — стандартный (Standard), интегрированный (Integrated
Security) и смешанный (Mixed).
Стандартный режим предполагает наличие у пользователя учетной записи поль-
зователя домена NT Server и MS SQL Server (имя пользователя и пароль).
Интегрированный режим предполагает наличие учетной записи в ОС как поль-
зователя только домена (задается имя пользователя и пароль).
БД MS SQL Server 7.0 имеет два режима: интегрированный (Windows NT Authen-
tication Mode) и смешанный (Mixed Mode). При этом последовательно проводятся
проверки имени пользователя и пароля.
Для защиты закрытых сетей (особенно intranet) от несанкционированного до-
ступа со стороны пользователей Internet используются системы, которые называются
брандмауэр (Firewall). Все сообщения, которые входят или выходят из сети Intranet,
проходят через брандмауэр.
Основные типы брандмауэров:
• Пакетный фильтр. Просматривается каждый пакет на соответствие его опреде-
ленных пользователем правил.
• Шлюз приложения. Применяется для серверов FTP и Telnet.
• Шлюз на уровне цепи. Проверяется безопасность на уровне TCP или UDP соеди-
нения. После соединения пакеты передаются без проверки.
• Прокси-сервер. Программа, установленная на защитном экране, которая дей-
ствует от имени внутреннего пользователя корпоративной сети. Прокси-сервер,
называемый агентом, устанавливает связь с внешним пользователем, аутентифи-
цирует его и разрешает (или запрещает) использовать ресурсы данной сети.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
405
5.4.2 Клиент-серверная архитектура доступа к данным
Выполнение прикладных программ предусматривает преобразование и логи-
ческую обработку данных, их хранение, защиту и архивацию в базе данных (БД),
а также взаимодействие прикладной программы с файловой системой операцион-
ной системы (ОС) компьютера. Любое вновь созданное приложение выполняется в
архитектуре клиент-сервер. Серверная часть приложения обрабатывает данные на
уровне файлов и БД. Сервер представляет по сути СУБД, которая поддерживает все
функции СУБД: определение данных, манипулирование и защиту данных, поддер-
жание их целостности и пр. Клиентская часть приложения служит для обработки
данных, полученных от сервера данных. Клиент — это различные приложения как
встроенные, так и написанные пользователями. Встроенные приложения — это при-
ложения, поставляемые поставщиками СУБД (инструментальные средства) или дру-
гими поставщиками ПО. К ним, например, относятся генератор отчетов, электрон-
ные таблицы, статистические пакеты и др. К числу специальных «служебных» при-
ложений (клиентов) относятся утилиты. Утилиты — это специальные программы
администратора БД, в том числе инструменты загрузки, выгрузки и реорганизации
БД, статистические инструменты показателей качества БД и др.
Наибольшее распространение получила архитектура клиент-сервер. БД служит
для хранения данных, а система управления базой данных (СУБД) — для доступа к
данным, их хранению, защите и резервному копированию. Файловые операции и об-
мен с БД реализуются на сервере, а клиентские приложения освобождаются от этих
функций. За клиентским приложением сохраняются функции запроса, получения и
обработки данных от СУБД [5.26, 5.28].
Основные функции СУБД:
• управление данными во внешней памяти (на жестких дисках);
• управление буферной памятью ОЗУ для повышения скорости обмена данными;
• управление транзакциями для поддержания логической целостности БД; при
выполнении операций над данными (выполнении транзакции) СУБД фиксирует
Файлы журналов
Файлы системного
каталога
Вспомогательны е
файлы
Ядро СУБД
Транслятор
SQL-запросов
Модуль управления
данными во внешней
памяти
Модуль управления
буферами
оперативной памяти
Модуль управления
транзакциями
Модуль управления
журналами
Оперативная
память
Разделяемая
область памяти
Память СУБД
для пользовательского
процесса 1
Память СУБД
для пользовательского
процесса N
Рис. 5.6
406
ГЛАВА 5
(commit) все изменения в БД. В противном случае осуществляется откат (roll-
back) транзакции и изменения в БД не производятся.
• протоколирование; в случае аппаратного или программного сбоя СУБД должна
восстановить все данные в БД, находящиеся в ней до сбоя, поэтому все измене-
ния в БД протоколируются в журнале до введения их в БД.
• Поддержка языков баз данных. В основном используются два языка: язык опреде-
ления схем данных (Schema Definition Language, SDL), определяющий логическую
структуру БД, и язык манипулирования данными (Data Manipulation Language,
DML), содержащий набор операторов манипулирования данными.
При размещении клиентского приложения и сервера на разных компьютерах
в составе сети по сети передаются только запросы клиента и получение данных от
СУБД. Тем самым снижается нагрузка на сеть. Обобщенная структура СУБД при-
ведена на рис. 5.6 [ 5.24]
СУБД делятся на иерархические, сетевые, реляционные и объектно-ориен-
тированные. Среди СУБД на рынке промышленной автоматизации получили приме-
нение Oracle, MS SQL Server, Industrial SQL Server, Industrial Application Server, Sybase,
DB2, iHistorian и др.
Наибольшее распространение имеют реляционные базы данных (Oracle 8i кор-
порации Oracle, DB2 фирмы IBM, Ingress II корпорации Computer Associates Interna-
tional, Inc., Informix Dynamic Server корпорации Informix Software, Inc., MS SQL Server
корпорации Microsoft, Sybase Adaptive Server корпорации Sybase, Inc., Industrial SQL
Server, Industrial Application Server и др.).
Реляционная модель данных представляет информацию в виде совокупности вза-
имосвязанных таблиц, которые называются отношениями или реляциями [5.18-5.21].
К основным понятиям реляционной модели данных относят:
• Тип данных (целочисленные, вещественные, строковые, специальные типы дан-
ных и типы двоичных объектов).
• Домен: множество неделимых значений одного и того же типа (по сути — это
наименование столбцов таблицы).
• Атрибуты: именованные столбцы отношения (таблицы). Список имен атрибу-
тов с указанием имен доменов называется схемой отношения, а число атрибу-
тов — степенью отношения. Множество именованных схем отношений назы-
вается схемой БД.
• Кортеж: имя атрибута и его значение. Степень кортежа (число элементов в корте-
же) совпадает со степенью соответствующей схемы отношения.
• Ключ отношения: атрибут, однозначно определяющий каждый кортеж отноше-
ния и обеспечивающий уникальность строк таблицы. Ключ, содержащий один
атрибут, называется простым ключом. Ключ, состоящий из нескольких атрибу-
тов, называется сложным или составным ключом.
Другим важным понятием реляционной модели является взаимосвязанность та-
блиц. Эта связь устанавливается по общему атрибуту, который является внешним
ключом. Таким образом, внешний ключ — это атрибут (или их множество) одно-
го отношения, являющийся ключом другого отношения. Ключи реализуются в виде
объектов, называемых индексами. Индекс дает информацию о точном физическом
расположении данных в таблице. При установлении связи между таблицами одна из
них является главной (master), содержащей все необходимые записи, а другая — под-
чиненной (detail).
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
407
Таким образом, реляционная база данных является совокупностью отношений
(таблиц), содержащих всю информацию БД. Свойства таблиц реляционной БД:
• каждая таблица состоит из однотипных строк и имеет уникальное имя;
• строки таблицы имеют фиксированное число столбцов и значений;
• столбцы таблицы имеют уникальные имена и в каждом столбце размещаются
однородные значения.
5.4.3 Структурированный язык запросов (SQL). Управление транзакциями.
Запрос данных от клиентского приложения к серверу осуществляется на язы-
ке SQL (Structured Query Language — язык структурированных запросов). Язык
SQL принят ANSI в качестве стандарта в 1986 г. и расширен в 1992 г. В настоящее
время — это язык ANSI SQL-92 или SQL/92. Язык SQL является интегрированным
языком реляционной БД и определяет как схему реляционной БД, так и манипули-
рование данными. Специальные операторы языка SQL определяют представления
БД [5.22-5.24, 5.28].
Типы команд языка SQL:
• Команды языка DDL (Data Definition Language — язык определения данных). Ис-
пользуется для изменения структуры БД (создания и удаления таблиц).
• Команды языка DML (Data Manipulation Language — язык манипулирования дан-
ными). Может загружать, модифицировать и удалять данные.
• Команды языка DCL (Data Control Language — язык управления данными). Обе-
спечивает управление доступом к БД.
• Команды языка DQL (Data Query Language — язык запросов к данным). Форми-
рует запросы к БД.
• Команды администрирования БД.
• Команды управления транзакциями.
Типы данных языка SQL: символьные строки переменной длины, целые и точные
числа, типы представления даты, времени и временного интервала.
К числу операторов языка SQL относятся следующие операторы:
• SELECT — оператор выборки данных;
• INSERT — добавление в таблицу новых данных;
• UPDATE — обновление (изменение) данных таблицы;
• DELETE — удаление данных из таблицы;
• REFERENCES — ссылка на столбцы таблицы в описаниях требований поддержки
целостности данных;
• USAGE — предоставление права использования доменов;
• GRANT — предоставление привилегий доступа к данным;
• REVOKE — отмена привилегий доступа к данным.
При обработке SQL-запросов СУБД обращается к системному каталогу БД, кото-
рый представляет собой совокупность специальных таблиц. Все системные таблицы
объединены системным идентификатором пользователя. В стандарте SQL определе-
ны следующие системные таблицы: USERS (одна строка для каждого идентификатора
пользователя с паролем), SCHEMA (одна строка для каждой информационной схе-
мы), DOMAINS (одна строка для каждого домена), TABLES (одна строка для каждой
таблицы с указанием имени, числа столбцов, размера данных столбцов).
Взаимодействие клиентского приложения и сервера определяется также меха-
низмом транзакций [5.21-5.24].
408
ГЛАВА 5
Транзакцией называется логическая единица работы, состоящая из одного или
более SQL-операторов и являющаяся неделимой. По стандарту ISO модель транзак-
ций построена на операторах COMMIT и ROLLBACK. Транзакция запускается SQL-
оператором, инициируемым пользователем, или программой. Завершается тран-
закция вводом оператора COMMIT, что свидетельствует об успешном завершении
транзакции (внесение изменений в БД). Ввод оператора ROLLBACK означает отказ
от изменений в БД. Если SQL-оператор входит в текст программы, то транзакция бу-
дет успешно завершена и без оператора COMMIT.
При типовых часто повторяющихся запросах к серверу, когда со стороны сервера
включается механизм распознавания запроса и проверки его правильности, увели-
чивается время на обмен данными.
В современных серверах данных используется механизм предопределенных вы-
борок (VIEW) и хранимых процедур сервера. И в этом случае работа клиентских
приложений не зависит от типа СУБД. Подсистема обработки транзакций типичной
СУБД приведена на рис. 5.7.
Менеджер транзакций координирует работу транзакций. Планировщик отвечает
за управление параллельности. Менеджер восстановления возвращает БД в исходное
состояние в случае отказа, а менеджер буферов отвечает за передачу данных из ОЗУ
в дисковую память.
Для сокращения времени обмена данными между клиентскими приложениями и сер-
вером используется динамически загружаемые библиотеки (DLL — Dynamic Link Library).
Клиентское приложение формирует запрос к соответствующей функции DLL на языке
SQL. После установления связи с сервером DLL передает запрос, получает ответ и передает
его клиентскому приложению. Поскольку для определенного типа сервера существует своя
DLL со своими функциями, клиентские приложения зависят от типа СУБД.
Для устранения этого недостатка фирмой Microsoft разработан стандарт ODBC
(Open Database Connectivity — открытый доступ к базам данным), использующий
единый универсальный интерфейс доступа к различным БД (рис. 5.8). Для этого тре-
буется лишь соответствующий ODBC-драйвер и источник данных. В настоящее вре-
мя ODBC-драйверы имеются для более чем 50 различных типов БД.
Рис. 5.8
Рис. 5.7
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ 409
В архитектуру стандарта ODBC входят:
• приложение, которое выполняет обработку данных, вызов функций библиотеки
ODBC для отправки SQL-операторов в СУБД и выборки полученной СУБД ин-
формации;
• менеджер драйверов, выполняющий загрузку драйверов (представляет собой би-
блиотеку DLL);
• драйверы и агенты баз данных, обрабатывающие вызовы функций ODBC и на-
правляющие SQL-запросы к БД, а также возвращающие полученные результаты
приложению;
• источники данных (данные БД).
ODBC драйвер передает запросы клиента базе данных на языке, поддерживае-
мом конкретной СУБД. Источник данных содержит имя пользователя и его пароль.
Клиентское приложение взаимодействует с сервером путем набора системных вызо-
вов к источнику данных. Последний транслирует запросы клиента драйверу ODBC и
получает ответы. Драйвер ODBC обменивается данными с СУБД. При необходимо-
сти работы с др. СУБД в источнике данных указывается другой тип ODBC-драйвера.
Тем самым достигается независимость ПО клиентского приложения от типа СУБД.
Современные лицензируемые СУБД, ориентированные на работу большого чис-
ла пользователей, избавляют разработчика клиентских приложений самостоятельно
разрабатывать средства хранения и разделения доступа к данным, их защиты от не-
санкционированного доступа и резервного копирования. Эти функции осуществля-
ются выбранной СУБД. Хотя функции управления данными реализуются на сервере,
обработка этих данных выполняется клиентскими приложениями, что является од-
ним из немногих недостатков обмена данными в архитектуре клиент-сервер.
Доступ к БД через Internet на основе Web-технологии используется в локальных
сетях, называемых интрасетями (intranets) [ 5.29]. Язык HTML интерпретируется Web-
браузером ОС клиента для доступа к БД, размещаемой на Web-сервере (рис. 5.9).
Для доступа к БД через Web используется преобразование содержимого БД в стати-
ческие или динамические гипертекстовые документы. Для организации динамических
гипертекстовых документов используются специальные приложения CGI, ISAPI, ASP
и др., которые вызываются Web-сервером после получения запросов от Web-клиента.
После обработки приложением запроса клиента и выборки информации из БД, прило-
жение формирует выходной HTML-документ и передает его клиенту. Интерфейс CGI
(Common Gateway Interface — общий шлюзовый интерфейс) представляет собой про-
грамму преобразования форматов баз данных в формат языка HTML, программу реа-
лизации задач поиска в удаленных базах данных, использования графических меню.
Интерфейс ISAPI (Internet Server Application Programming Interface — прикладной про
граммный интерфейс для Интернет-сервера) представляет собой интерфейс доступа к
серверу Интернета фирмы Microsoft, предназначенный для программного управления
сервером. ISAPI-программы — это специальный вид приложений, обрабатывающих
пользовательские запросы и отображающих их вывод в виде потока HTML, который
поступает непосредственно в web-браузер клиента [5.29, 5.30].
Рис. 5.9
410
ГЛАВА 5
5.4.4 БД и СУБД.
Ниже рассматриваются некоторые БД для систем управления.
5.4.4.1 IndustrialSQL Server
IndustrialSQL Server— открытая реляционная база данных реального времени (БД
РВ) промышленного назначения, разработанная корпорацией Wonderware [5.31].
IndustrialSQL Server является расширением MicrosoftSQL Server и предоставляет
возможность регистрации больших объемов данных с высокой скоростью (разреше-
ние около одной мс). Данные о производственном процессе в РВ интегрируются в базе
данных с архивными данными, событийными, итоговыми и отчетными данными.
Доступ ко всей информации возможен с любого клиентского приложения, ко-
торое имеет доступ к MS SQL Server. IndustrialSQL Server использует язык структу-
рированных запросов SQL в качестве интерфейса между серверной и клиентскими
частями.
По сравнению с традиционными реляционными базами данных IndustrialSQL
Server позволяет хранить данные на небольшом объеме дискового пространства. Так,
двухмесячный архив предприятия с 4000 параметров, опрашиваемых с периодично-
стью от нескольких секунд до нескольких минут, занимает до 2 Мбайт дискового
пространства. При этом алгоритм сжатия информации гарантирует высокое раз-
решение и качество данных. IndustrialSQL Server содержит временные характеристи-
ки событий (изменение переменных, обновление, удаление, вставка) с выполнением
определенных действий в зависимости от событий (например, выдача сменных отче-
тов, посылка сообщений о запуске оборудования и пр.). За счет того, что IndustrialSQL
Server автоматически обновляет сводные таблицы с заданной производительностью,
записывая в них максимальные, минимальные, средние значения параметров и др.,
таблица всегда отражает реальное состояние процесса.
Все приложения, работающие с MS SQL Server, могут быть подключены и к Indus-
trialSQL Server. Таким образом, текущая информация (сводные или конфигурацион-
ные данные и другая информация) сохраняются в IndustrialSQL Server.
Области применения IndustrialSQL Server охватывают задачи широкого круга
специалистов: инженеров АСУ ТП, службы ремонта оборудования, персонала ОТК,
операторов, экономистов. Клиентские приложения, размещенные на рабочих стан-
циях специалистов предприятия, включают набор клиентских программ фирмы
Wonderware. К ним относятся SCADA-система InTouch, SQL-приложения, MS Access,
Excel, Word, Lotus, программы математического и статистического анализа, приложе-
ния пользователя (разработанные с использованием инструментальных программ-
ных средств, включая Visual Basic, Delphi, Power Builder, C++).
Таким образом, IndustrialSQL Server представляет собой мощную БД с возмож-
ностями традиционных реляционных БД, так как базируется на MS SQL Server, но
обладает дополнительными свойствами, связанными с регистрацией БД в реальном
времени. Со сформированными в РВ таблицами возможна работа по стандартным
SQL-запросам. IndustrialSQL Server использует такие возможности встроенного MS
SQL Server, как интерфейсы для обмена электронной почтой, Internet-обмена данны-
ми (передача и прием данных через Internet), мощные возможности MS SQL Server по
фильтрации и обработке данных, но в реальном времени.
Основные характеристики IndustrialSQL Server:
• Архитектура клиент/сервер является средой между станциями верхнего уровня,
ответственными за обработку финансовой и экономической информации пред-
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
411
приятия, и станциями диспетчерского уровня, обеспечивающими визуализацию
данных процесса в РВ.
• Программно-аппаратные требования: ОС — MS Windows NT 4.0; Internet Explor-
er 5.0; ПРЦ — Pentium Pro 200 МГц; 256 Мб RAM; сети — Ethernet, Novell, Token
Ring, Arcnet, Decnet.
• Масштабируемость (обработка от нескольких сотен до сотен тысяч параметров).
• Использование клиентских программ и программных пакетов третьих фирм, вклю-
чающих средства статистического анализа, создания и управления отчетами, диа-
граммы, тренды, графики, в том числе по интеграции с системами верхнего уровня.
Для отображения данных в SCADA-системе InTouch из БД IndustrialSQL Server
через Internet используются следующие ActiveX-объекты:
• ActiveDataGrid служит для выполнения SQL-запроса, который возвращает ре-
зультаты выборки из БД любых SQL-серверов;
• ActiveGraph используется для поиска исторических данных из БД IndustrialSQL
Server и отображения значений переменных в виде трендов;
• ActiveTagBrowser дает иерархический обзор имен тэгов (переменные, события,
серверы ввода/вывода) в базе данных IndustrialSQL Server.
• ActiveTimeSelector используется для просмотра и выбора исторических данных
за определенный период времени из IndustrialSQL Server.
Благодаря тому что IndustrialSQL Server отличается простотой обслуживания и
низкой стоимостью, IndustrialSQL Server может использоваться как выделенный сер-
вер производственной линии или определенного производственного оборудования.
В условиях удаленного доступа IndustrialSQL Server может использоваться как Web-
Server или GPRS Server.
Для генерации отчетов и обновления графиков из IndustrialSQL Server и исполь-
зования их в процессах управления производством используется ActiveFactory.
Новая версия БД IndustrialSQL Server 9.0 снабжена дополнительными функция-
ми [5.32]:
• возможностью интеграции с информационными системами фирм Siemens, ABB,
Rockwell Automation, Honeywell и др.;
• интеграцией с Industrial Application Server (IAS) — сервером промышленных
приложений, который используется для интеграции систем нижнего и верхнего
уровней системы.
Совмещение и анализ данных РВ и архивной информации способствует более
эффективному управлению предприятием. Коммуникационные возможности Indus-
trialSQL Server основаны на технологиях ОРС, DDE, стандарте SQL и средствах до-
ступа к БД ODBC IndustrialSQL Server.
Полный набор инструментального ПО для управления предприятием объединя-
ется в открытую программную архитектуру ArchestrA. Помимо ActiveFactory в со-
став ArchestrA входят следующие программные компоненты [2.32]:
• QI Analyst — статистический анализ в РВ, базирующийся на данных о технологи-
ческом процессе из IndustrialSQL Server;
• DT Analyst — анализ работы оборудования, отслеживание времени работы, про-
стоев оборудования;
• Web-портал SuiteVoyager — функция ПО SuiteVoyager, обеспечивающая обмен
данными между IndustrialSQL Server и другими программными продуктами ком-
пании Wonderware;
412
ГЛАВА 5
• РЕМ — набор объектов для IAS, осуществляющих сбор данных и сохранение их
в IndustrialSQL Server.
Сбор данных для IndustrialSQL Server осуществляется, помимо 1AS, также через
IndustrialSQL Data Acqusition Service (IDAS). IDAS и IAS поддерживают функции ре-
зервирования и защиты от сбоев IndustrialSQL Server.
Надежность сервера БД IndustrialSQL Server поддерживается на кластерных си-
стемах. Когда возникает сбой IndustrialSQL Server, установленного на основном ком-
пьютере, автоматически запускается IndustrialSQL Server на резервном компьютере.
К основным особенностям архитектуры ArchestrA относятся следующие:
• централизованная настройка приложений в соответствии с заданными требова-
ниями;
• архивная БД для сбора производственных данных, сигналов тревог и событий.
• интеграция полевых и локальных устройств и сетей;
• средства управления предприятием на основе технологии TCP/IP;
• наличие функций удаленной диагностики на базе локальных Web-серверов.
Основой архитектуры является Industrial Application Server (IAS), представляю-
щий собой сервер интеграции данных в РВ, сигналов тревог и событий. IAS удовлет-
воряет следующим требованиям производства в РВ:
• высокой скоростью выполнения операций в РВ;
• возможностью обработки больших объемов данных и сообщений о событиях;
• возможностью взаимодействия с тысячами локальных или удаленных устройств.
БД IndustrialSQL Server и Industrial Application Server широко используются в раз-
личных отраслях промышленности (целлюлозно-бумажная, химическая, нефтепере-
рабатывающая и др.).
5.4.4.2 iHistorian.
Для интеграции систем нижнего и верхнего уровней системы автоматизации
производства фирмой Intellution (США) разработан программный пакет iHistorian
[5.33, 5.34]. Концепция построения многоуровневой информационно-управляющей
системы на базе ПО iHistorian получила название Plant Intelligence.
Архитектура iHistorian представлена на рис. 5.10.
К основным достоинствам системы относятся: масштабируемость, высокая про-
изводительность и простота настройки. Объем архива, создаваемого средствами
iLIistorian, составляет от 100.. .300 до 100000 параметров на одном сервере. Кроме того,
iHistorian поддерживает многосерверную распределенную архитектуру. Сбор данных
осуществляется с помощью специальных программных модулей (коллекторов).
Коллекторы делят на две группы:
• Plant Data Collectors: сбор данных от ПЛК, SCADA-систем и от др. источников
данных.
• Transformation Collectors: реализация вычислительных функций и обмена дан-
ными между серверами.
К Plant Data Collectors относятся коллекторы для SCADA-систем iFIX, FIX 32,
ОРС и файл-коллектор. ОРС-коллектор используется для сбора данных от серверов.
Файл-коллектор осуществляет сбор данных из файлов в формате CSV и XML.
В группу Transformation Collectors входят вычислительные модули, которые осу-
ществляют преобразование собранных данных с использованием Visual Basic Script и
сохранение их на сервере iHistorian.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
413
Рис. 5.10
Сервер iHistorian имеет мультифайловую структуру архива. Благодаря нереляци-
онному типу базы данных, сервер iHistorian имеет более высокое быстродействие (ско-
рость записи и чтения с жесткого диска составляет более 20000 событий в секунду).
Администрирование iHistorian носит упрощенный характер по сравнению с
реляционными базами данных. С помощью OLE DB провайдера пользователь мо-
жет работать с архивом iHistorian как с обычной реляционной базой, состоящей из
восьми таблиц, используя SQL-запросы. Вместе с OLE DB провайдером поставляется
программа-утилита выполнения SQL-запросов— iHistorian Interactive SQL.
Для увеличения объема сохраняемых данных используется двойное сжатие мас-
сива данных, — на уровне коллектора и на уровне сервера. Для iHistorian Server долж-
ны соблюдаться минимальные требования: процессор Pentium III 500 МГц, 256 Мб
RAM, 2 Гб на жестком диске.
Настройка iHistorian осуществляется с помощью ПО Administrator Website, уста-
навливаемого на сервере. Web-администратор предоставляет графический интер-
фейс для конфигурирования тегов, коллекторов, данных, копирования, анализа си-
стемных тревог и сообщений.
Данные iHistorian поступают от клиентских приложений, в частности от SCADA-
системы iFIX. В SCADA-системе iFIX можно строить графики и мнемосхемы на осно-
ве данных из iHistorian. Встраиваемые в iFIX модуль Excel Add-In позволяет создавать
отчеты, модуль iDownTime — анализировать события (продолжительность работы и
простоев). Модуль infoAgent представляет собой Web-клиента для визуализации и
анализа данных из iHistorian. Компонента iHistorian API — программный интерфейс
iHistorian, который обеспечивает связь между клиентами и сервером iHistorian.
5.4.4.3 БД ORACLE фирмы Oracle
Реляционные базы данных ORACLE в настоящее время являются широко распро-
страненными БД и достигают размеров сотен гигабайт. Для более детального озна-
414
ГЛАВА 5
комления с БД ORACLE можно рекомендовать литературу [5.36, 5.37]. БД ORACLE
поддерживается большим числом пользователей и удовлетворяет международным
стандартам по ОС, протоколам, интерфейсам, языкам доступа к БД.
БД ORACLE может быть представлена физической и логической структурами.
Физическая структура — это файлы ОС трех типов: один или несколько файлов дан-
ных; два и более файлов журнала повторения работы; один или несколько управляю-
щих файлов.
Файлы данных принадлежат одной БД и не могут изменять свой размер. Фай-
лы данных формируют логическую структуру в виде табличного пространства. Та-
бличные пространства — это логические единицы хранения данных; они служат для
того, чтобы группировать вместе взаимосвязанные логические структуры. Каждая
БД имеет одно или более табличных пространств, для каждого из которых создаются
файлы данных для физического хранения данных. Емкость памяти табличного про-
странства равна сумме емкости его файлов, а суммарная емкость табличных про-
странств составляет общую емкость БД. Табличное пространство может быть в со-
стоянии ONLINE (доступно) или OFFLINE (недоступно). При обращении к файлам
данных последние размещаются в кэш-памяти ORACLE.
Файлы журнала повторения работы регистрируют все изменения в БД. При не-
возможности доступа к данным в процессе работы эти данные могут быть получены
из журнала повторения. Таким образом, в случае сбоя или отключения питания дан-
ные могут быть восстановлены.
Управляющие файлы БД служат для записи и хранения физической структуры
БД. Управляющий файл имеет имя БД, имена файлов данных, временную метку соз-
дания БД.
Логическая структура БД ORACLE определяется помимо табличных пространств
также объектами схем БД (схемы, объекты схем, таблицы, кластеры и пр.).
Схема — это набор объектов. Объекты схемы включают такие структуры, как
таблицы, индексы, хранимые процедуры, кластеры. Объекты одной и той же схе-
мы могут находиться в различных табличных пространствах. Таблица — основ-
ная единица хранения данных в БД ORACLE. Данные хранятся в виде строк и
столбцов. Каждая таблица является нумерованной, а каждому столбцу дается имя
и тип данных.
Представление данных из одной или нескольких таблиц называется обзором.
Генерация значений столбцов таблицы БД называется последовательностью, а сово-
купность SQL-запросов к БД — процедурой. Группа из одной или нескольких таблиц,
физически хранящихся вместе, называется кластером. Кластеры могут иметь общие
столбцы данных. Взаимосвязанные столбцы таблиц в кластере называются ключом
кластера. Так как ключ кластера имеет соответствующий индекс, то строки таблицы
извлекаются с минимальными временными затратами.
Данные БД ORACLE хранятся в блоках данных, каждый из которых содержит
определенное число байт физического пространства на диске. Определенное число
блоков данных образуют экстент, а набор экстентов образуют сегмент.
Память БД представляется в виде структур, предназначенных для решения опре-
деленных задач. Глобальная область системы (SGA) состоит из буферного КЭШа БД и
буфера журнала повторения. Данные, хранящиеся в SGA, используются всеми поль-
зователями БД. Буферный кэш хранит только свежие данные, еще не записанные на
диск. Часть глобальной области предназначена для обработки SQL-запросов.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
415
Глобальная область программы (PGA) — буфер памяти, содержащий данные и
управляющую информацию. Механизм исполнения ОС последовательности шагов
программы называется процессом.
В БД ORACLE предусмотрены пользовательские (клиентские) процессы (ис-
полнение программного кода прикладной программы) и процессы БД ORACLE.
К последним относятся процессы сервера, фоновые процессы, писатель базы дан-
ных DBWG, писатель журнала LGWR, монитор системы SMON, монитор процессов
PMON, архиватор ARCH и др.
Запуск БД ORACLE сопровождается распределением глобальной области систе-
мы (SGA) и запуском фоновых процессов ORACLE.
5.4.5 Серверы баз данных
Возросший объем информации, охватывающий все уровни иерархической
структуры предприятия, включая производственную, хозяйственную, финансовую
и другие виды деятельности предприятия, предъявляет повышенные требования
к устройствам хранения, обработки и обмена данными. Эти задачи возлагаются на
компьютеры с большими вычислительными ресурсами — серверы. Сервером при-
нято считать мощный компьютер, подключенный к сети и используемый многими
пользователями, как центр обработки и хранения данных.
Концепция сервера основана на использовании как одного, так и нескольких
компьютеров для решения специфических задач — хранения, обработки, преобразо-
вания информации, печати и пр.
Сервер может быть выделенный или совместно используемый, централизован-
ный или распределенный. Выделенный сервер имеет более высокую производитель-
ность и более надежную защиту данных, но является более дорогим. Производи-
тельность выделенного сервера ниже из-за более частых прерываний операционной
системы при обслуживании ряда пользователей. Централизованный сервер подразу-
мевает использование одного компьютера для выполнения сервисных функций, что
делает его надежность выше, чем у распределенного сервера.
В зависимости от вычислительной мощности серверы подразделяются на сле-
дующие типы: сервер рабочих групп, сервер подразделения (отдела), сервер пред-
приятия, корпоративный сервер и Internet-сервер (Web-сервер). Встречается деление
серверов на серверы начального, среднего и высшего уровней (классов).
Сервер рабочих групп (сервер начального уровня) используется для сетевой пе-
чати, управления файлами и удаленного доступа по сети. Сервер подразделения (сер-
вер среднего уровня) служит для организации работы приложений для нескольких
рабочих групп, электронной почты, поддержки работы удаленных подразделений.
Сервер предприятия — мощный сервер для управления предприятием в целом. Сер-
вер эффективен при формировании кластеров и отказоустойчивых вычислительных
систем, поддерживает работу ERP, ЕАМ и других систем верхнего уровня. Корпора-
тивный сервер — мощный сервер для работы с большими базами данных, приложе-
ниями сложных информационных систем и Web-приложений. Сервер эффективен
при формировании кластеров и отказоустойчивых вычислительных систем. Internet-
сервер (сервер Internet-приложений) эффективен при работе с Web-приложенйями,
требующими непрерывной работы с высокой производительностью.
Основные требования, предъявляемые к серверам:
• высокая надежность хранения данных;
416
ГЛАВА 5
• защита данных от несанкционированного доступа;
• возможность наращивания дискового пространства и вычислительной мощно-
сти (до сотен терабайт);
Отличительными особенностями серверов являются многопроцессорность (до
16 процессоров, в том числе RISC-процессоров с поддержкой режима многопро-
цессорной обработки), большой объем HDD-памяти (многомодульность памяти),
многоуровневая шинная архитектура, поддержка RAID — технологии дисковых мас-
сивов.
Транзакционная производительность сервера по тесту ТРС-С измеряется в еди-
ницах tpmC (примерно 60000 для сервера среднего класса).
Для накопления и обработки больших массивов информации существуют сете-
вые хранилища данных, удовлетворяющие требованиям быстрого доступа к данным
по сети, резервирования хранимой информации в условиях сбоев и сетевых помех,
управления массивами независимо от платформ и конфигураций вычислительных
систем, использования высокоскоростной шины PCI-Х и др.
Среди фирм, выпускающих серверы различной производительности и назначе-
ния, отметим компании Hewlett-Packard, Sun Microsystems, Motorola, Siemens, Compaq,
ICP Electronics Inc., 1-0 Data и др. Серверы компании Hewlett-Packard обладают ря-
дом функциональных достоинств, среди которых функции предотвращения отказов,
масштабирования ресурсов и функции удаленного управления ресурсами. Компания
Hewlett-Packard выпускает серверы начального уровня — HP L1000 и L2000, среднего
уровня — HP N4000, LT6000 и другие, серверы разработки Web-приложений.
Фирма Compaq выпускает 4-х процессорные серверы ProLiant 6500 на базе про-
цессоров Pentium III с ОС Windows NT и др. Серверы начального уровня PRIMERGY
серии ТХ и RX выпускает компания Fujitsy Siemens Computers. Серверы серии ТХ150
с ПРЦ Intel Pentium 4, ТХ — 2 ПРЦ Intel Xeon, ТХ300 — 2 ПРЦ Intel Хеоп выполнены
в напольном исполнении. Серверы RX100, RX200 и RX300 используются в качестве
Web-серверов и выполнены в шкафном исполнении. Компания 1-0 Data выпускает
сетевой накопитель типа HDL-xxxU различной емкости (250 Гбайт и более). Все на-
копители работают под управлением ОС Windows 98/ME/NT/2000/XP.
Рядом фирм (Sun Microsystems, Motorola, Siemens и др.) выпускаются модульные
или сверхплотные (blade) серверы в виде отдельных плат с возможностью «горячей»
замены. Blade-серверы реализуют переход от концепции множества территориально
распределенных серверов к единому центру обработки, где каждый сервер выполни-
Рис. 5.11
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РАБОЧИХ СТАНЦИЙ
417
ет свои функции. Линейка blade-серверов компании Hewlett-Paccard HP ProLiant BL
используется в корпоративных вычислительных центрах.
В последние годы получили применение blade-серверы на основе специфика-
ций АТСА (Advanced Telecommunications Computing Architecture) и MicroTCA [5.38].
Эти серверы используют лучшие характеристики платформы PICMG — компактный
корпус для плотной установки процессорных и коммуникационных модулей, удоб-
ную объединительную панель с реализацией протоколов Ethernet (АТСА 3.1). На
рис. 5.11, а приведен общий вид blade-сервера, на рис. 5.11, б — встраиваемый сервер
и на рис. 5.11, в — серверный корпус Intel SC5200.
Корпусное оборудование для систем АТСА и microTCA предлагают фирмы Rittal
(RiTCA) в форматах 2U...5U, 12U, 13U и Schroff (microTCA). С созданием архитек-
туры АТСА появился новый класс мезонинов — Advanced Mezzanine Cards (АМС).
Таким образом, уровень масштабируемости серверов может быть представлен следу-
ющим образом: «стойка (Rack) — шасси (Shelf) — модуль (Blade) — мезонин (АМС)».
На базе новых модулей АМС создана спецификация microTCA.
К числу новых blade-серверов по спецификации АТСА компании Hewlett-Packard
относится сервер bh5700 с 14 слотами для двухпроцессорных модулей на базе процес-
соров Хеоп. Семейство blade-серверов компании Motorola Avantellis 3000 обеспечивают
уровень готовности «5 девяток». Коммуникационные серверы Centellis 4000 компании
Motorola имеют интерфейс Ethernet с пропускной способностью 10 Гбит/с.
В 2007 г. корпорация IBM представила новую систему BladeCenter НТ с про-
пускной способностью внутренней подсистемы ввода/вывода одного сервера до 40
Гбит/с. Суммарный показатель пропускной способности этого сервера с системной
объединительной панелью достигает 1,2 Тбит/с.
14 Зак. 3801
___________РАЗДЕЛ III______________
ПРОМЫШЛЕННЫЕ СЕТИ
РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
ГЛАВА 6. ПРОМЫШЛЕННЫЕ СЕТИ:
АРХИТЕКТУРА, ОБОРУДОВАНИЕ, ХАРАКТЕРИСТИКИ
6.1. Архитектура промышленных сетей
Промышленная сеть — это среда передачи данных, включающая набор стандартных
протоколов обмена данными, связывающих воедино оборудование различных произво-
дителей, а также обеспечивающих взаимодействие нижних и верхнего уровней системы
управления предприятием.
Основные требования, предъявляемые к промышленной сети:
• Высокая производительность и помехоустойчивость.
• Предсказуемость времени доставки информации.
• Доступность и простота организации физического канала передачи данных.
• Максимально широкий сервис для приложений верхнего уровня.
• Минимальная стоимость устройств аппаратурной реализации.
• Максимальный доступ к каналу с минимальным временем ожидания в очереди.
• Возможность резервирования сети и сетевых устройств.
Вопросам рассмотрения протоколов, стандартов и интерфейсов промышленных се-
тей посвящено много работ [6.1-6.12, 6.14, 6.16].
6.1.1 Модель ISO/OSI
Стандартный цифровой протокол должен отвечать следующим требованиям:
• возможности подключения нескольких приборов к одной полевой шине;
• возможности совместного функционирования приборов разных производителей;
• равноправной связи между интеллектуальными приборами, подключенными к по-
левой шине;
• расширению возможностей передачи данных по сравнению с аналоговой связью
(увеличение производительности и скорости передачи);
В 1994 г. организацией Fieldbus Foundation, объединяющей более 125 компаний,
введен стандарт Fieldbus (IEC- 61158-2), включающий восемь подстандартов на сети
Foundation Fieldbus, Control Net, Profibus, F-Net, Interbus и др.
Сети с информационными потоками между контроллерами, датчиками сигналов
и исполнительными механизмами объединяются общим названием «промышленные
сети» (Fieldbus, или «полевая» шина). К настоящему времени в мире насчитывается свы-
ше 300 типов сетей различного назначения.
В 1979 году подкомитет Международной организации по стандартизации (FSO)
TC97/SC16 для разрешения проблемы взаимодействия сетевых систем с различными
ПРОМЫШЛЕННЫЕ СЕТИ
419
видами вычислительного оборудования и различающимися стандартами протоко-
лов подготовил отчет с описанием эталонной «Модели взаимодействия открытых
систем» (OSI — Open System Interconnection или открытая семиуровневая модель).
В литературе часто используется термин «модель ВОС» — модель Взаимодействия
Открытых Систем.
В табл. 6.1 представлены уровни и функции модели OSI.
Таблица 6.1 Уровни модели OSI
Уровень Наименование уровня Функции
7 Прикладной (Application) Обеспечивает связь программ пользователя с объектами сети
6 Представление данных (Presentation) Определяет синтаксис данных, управляет их отображением на вирту- альном терминале
5 Сеансовый (Session) Управляет ведением диалога между объектами сети
4 Транспортный (Transport) Обеспечивает прозрачность передачи данных между абонентами сети
3 Сетевой (Network) Определяет маршрутизацию “пакетов” сети и связь между сетями
2 Канальный (Data Link) Передача данных (“кадров”) по каналу, контроль ошибок, синхрони- зация данных
1 Физический (Physical) Установление и поддержка физического соединения
Большинство промышленных сетей поддерживают 1-й, 2-й и 7-й уровни OSI-
модели — физический, канальный и прикладной.
• Физический уровень обеспечивает необходимые механические, функциональные
и электрические характеристики для установления, поддержания и размыкания
физического соединения (стандарт Х.21 ICCTT- Международный консультатив-
ный комитет по телефонии и телеграфии).
• Канальный уровень гарантирует передачу данных между устройствами. Этот
уровень управляет не только сетевым доступом, но и механизмами защиты и
восстановления данных в случае ошибок при передаче (стандарт HDLC ISO).
• Сетевой уровень определяет функции маршрутизации «пакета» через несколько
логических каналов по одной или нескольким сетям. Принадлежностью пакета
является сетевой адрес (стандарт Х.25 ICCTT).
• Транспортный уровень решает задачи прокладки маршрута в сети и продвиже-
ния пакета данных по маршруту. Используется механизм «окна» с подтвержде-
нием получения данных от отправителя (стандарт Европейской организации
производителей ЭВМ ЕСМА-72).
• Сеансовый уровень определяет синхронизацию информационного взаимодей-
ствия прикладных процессов обмена данными, т. е. поддержание диалога между
процессами определенного типа (стандарт ЕСМА-75).
• Уровень представления данных обеспечивает представление данных в требуе-
мом формате. Хранение и обработка данных осуществляется СУБД (стандарт
ЕСМА- 84, -86, -88).
• Прикладной уровень обеспечивает поддержку прикладных процессов и про-
грамм конечного пользователя и управление взаимодействием этих программ с
различными объектами сети передачи данных.
Протокол модели OSI представляет набор правил, определяющих начало, сам
процесс связи и его окончание между одноранговыми объектами.
420
ГЛАВА 6
Уровням 1 и 2 модели OSI соответствуют стандарты IEEE 802.x. В стандарте IEEE
802.2 уровень 2 разделен на два подуровня: подуровень управления доступом к сре-
де — MAC (Medium Access Control) и подуровень управления логическим каналом —
LLC (Logical Link Control). Стандарты, описывающие физический уровень и МАС-
подуровень:
• Стандарт IEEE 802.3 на физическом уровне представляет собой стандарт сети
Ethernet, основанный на множественном доступе с прослушиванием несущей и
обнаружением коллизий — CSMA/CD. Сюда также относятся Fast Ethernet (стан-
дарт 802.3u) и Gigabit Ethernet (стандарты 802.3z и 802.3ab — Gigabit Ethernet на
витой паре категории 5).
• Стандарт IEEE 802.4 — на физическом уровне маркерная шина (Token Ring).
• Стандарт IEEE 802.5 — на физическом уровне это маркерное кольцо (Token
Ring).
6.1.2 Топология промышленных сетей
Сетевая топология описывает способ (тип) сетевого соединения различных
устройств. Существует несколько видов топологий, отличающихся друг от друга по
трем основным критериям: режим доступа к сети, средства контроля передачи и вос-
становления данных и возможность изменения числа узлов сети. Основными сете-
выми топологиями являются звезда, кольцо и шина. Известны также древовидная/
иерархическая (tree/hierarchical) топология, ячеистая (mesh) и смешанная (mixed)
топологии.
Структура «звезда» (star)
В данной топологии (рис. 6.1), называемой также радиальной структурой, вся ин-
формация передается через центральный узел. Каждое устройство имеет свою соб-
ственную среду соединения. Все периферийные станции
могут обмениваться друг с другом только через централь-
ный узел. Преимущество этой структуры в том, что никто
не может влиять на среду передачи. С другой стороны,
центральный узел должен быть исключительно надеж-
ным устройством как в смысле логического построения
сети (отслеживание конфликтных ситуаций и сбоев), так
и физического, поскольку каждое периферийное устрой-
ство имеет свой физический канал связи и, следователь-
но, все они должны обеспечивать одинаковые возмож-
ности доступа. Дополнительное устройство может быть
включено в сеть только в том случае, если организован
порт для его подсоединения к центральному узлу.
Структура «кольцо» (ring)
В кольцевой структуре (рис. 6.2) информация пере-
дается от узла к узлу по физическому кольцу. Приемник
копирует данные и регенерирует их вместе со своей кви-
танцией подтверждения следующему устройству в сети.
Когда начальный передатчик получает свою собственную
квитанцию, это означает, что его информация была кор-
ректно получена адресатом.
Рис. 6.2
ПРОМЫШЛЕННЫЕ СЕТИ
421
В кольце не существует определенного централизованного контроля. Каждое
устройство получает функции управляющего контроллера на строго определенный
промежуток времени. Отказ в работе хотя бы одного узла приводит к нарушению
работы кольца и, следовательно, к остановке передачи. Существует также структура
«двойное кольцо», в котором одна ветвь является рабочей, другая — резервной.
Структура «шина» (bus)
В шинной структуре (рис. 6.3) все устройства подсоединены к общей среде пере-
дачи данных или к шине. В отличие от «кольца» адресат получает свой информаци-
онный пакет без посредников. Процесс подключения дополнительных узлов к шине
не требует аппаратных доработок со стороны уже работающих узлов сети, как это
Рис. 6.3
имеет место в случае топологии «звезда». Однако
шинная топология требует жесткой регламента-
ции доступа к среде передачи. Данная структура
также носит название «общая шина»» и «маги-
страль». Существуют магистральные структуры
разомкнутая и типа «петля».
6.1.3 Методы организации доступа к линии связи
Метод доступа — это набор правил, позволяющий пользователям работать с
локальной сетью, не мешая друг другу. Метод доступа реализуется на физическом
уровне. Если несколько устройств коммутируются между собой через общую линию
связи (шину), то должен быть определен ясный и понятный протокол доступа к ней.
Существуют два метода упорядоченного доступа: централизованный и децен-
трализованный.
Метод MASTER-SLAVE (централизованный метод) находит свое применение
в промышленных сетях как на контроллерном уровне (field level), так и на уровне
датчиков и исполнительных механизмов (sensor/actuator level). Право инициировать
циклы чтения/записи на шине имеет только MASTER-узел. Он адресует каждого из
пассивных участников (SLAVE-узлы) и обменивается с ними данными. В рамках про-
токола решаются такие задачи, как защита данных, обнаружение ошибок при пере-
даче, восстановление данных. На скорость и объем передаваемой информации есте-
ственным образом влияет среда передачи.
Если на Мастере произошла авария, то и циклы обмена по шине останавливают-
ся. Именно по этой причине децентрализованный контроль с переходящими функ-
циями мастера от одного участника (узла сети) к другому получил наибольшее рас-
пространение. Здесь права Мастера назначаются группе устройств сети.
Приняты и широко используются две модели децентрализованного доступа: мо-
дель CSMA/CD и модель с передачей маркера.
Модель CSMA/CD (Ethernet, стандарт IEEE 802.3). Наиболее известным меха-
низмом управления локальной сетью шинной конфигурации является метод мно-
жественного доступа с контролем несущей и обнаружением конфликтов (CSMA/
CD — Carrier Sense Multiple Access with Collision Detect). Наиболее широко извест-
ная реализация этого метода — спецификация Ethernet. Все станции на шине имеют
право передачи данных. Каждая из них постоянно прослушивает шину. Если шина
свободна, любая из станций сети может занять шину под свой цикл передач. В том
случае, когда несколько станций претендуют на шину одновременно, это приводит
к так называемому конфликту (коллизии), и тогда станции снимают свою заявку на
422
ГЛАВА 6
случайный промежуток времени, задаваемый случайным генератором, и затем через
удвоенный промежуток времени вновь выходят в сеть.
Одним из реальных способов определения наличия коллизий при передаче, на-
пример по коаксиальному кабелю, является способ определения коллизий по повы-
шенному уровню постоянной составляющей сигнала. Детектор коллизий определяет
превышение уровнем сигналов определенного порога (около 1,5 В.), что означает, что
на кабель работает более одного передатчика. Метод CSMA/CD получил широкое
распространение и наиболее эффективен в условиях относительно низкой общей за-
грузки канала (менее 30%). В условиях большей загрузки канала выгоднее использо-
вать сети, реализующие модель с передачей маркера.
Модель с передачей маркера (Token Passing Model, стандарт IEEE 802.4).
Сети с передачей маркера относятся к детерминированным сетям с предсказа-
нием времени передачи. Наиболее известными сетями являются Token Ring и
FDDI (Fiber Distributed Data Interface). Право на доступ к шине передается в цикле
от устройства к устройству. Порядок передачи зависит от прикладной задачи и
определяется на стадии планирования системы. Этот метод предлагает каждому
участнику сети «справедливое» разделение шинных ресурсов в соответствии с их
запросами. Принцип передачи маркера используется в системах, где реакция на
события, возникающие в распределенной системе, должна проявляться за опре-
деленное время.
6.1.4 Физические каналы передачи данных
Основными достоинствами промышленных сетей являются недорогие линии и
надежность передачи данных. Данные передаются последовательно бит за битом, как
правило, по одному физическому каналу. Такой режим передачи не только эконо-
мит кабельное оборудование, но и позволяет решать задачи по надежной передаче
данных на большие расстояния. Время передачи, однако, увеличивается пропорцио-
нально длине битовой строки.
Асинхронный режим передачи данных осуществляется через СОМ-порт
(Communication Port — коммуникационный порт) персонального компьютера по
стандарту RS-232C. Компьютер может иметь до 4-х COM-портов с поддержкой на
уровне BIOS. Если необходимо большее число СОМ-портов, то устанавливается спе-
циальный адаптер-мультиплексор на 4, 8, 12, 16 и более COM-портов. Если порты
на системной плате конфигурируются через BIOS Setup, то порты на плате расши-
рения — с помощью джамперов. Базовые адреса СОМ1-СОМ4: 3F8h, 2F8h, 3E8h и
2E8h. К COM-порту компьютера могут подключаться коммуникационные и другие
внешние устройства с последовательным интерфейсом. Асинхронный режим пере-
дачи является байт-ориентированным.
Для организации сетевого обмена в промышленности используются следующие
физические каналы: коаксиальный кабель, витая пара, оптоволокно, радиоканал и
14К-канал.
Коаксиальный кабель. Первые сети Ethernet были построены на протоколе
10base5, использующей в качестве среды передачи данных «толстый» коаксиальный
кабель (ThickNet). Марки кабеля — RG-8 и RG-11, волновое сопротивление 500 Ом,
диаметр кабеля — 12 мм, диаметр внутреннего проводника — 2,17 мм. Использовать
его оказалось не слишком удобно, и практически сразу появился более простой и
дешевый вариант 10base2, использующий «тонкий» коаксиальный кабель ThinNet.
ПРОМЫШЛЕННЫЕ СЕТИ
423
Марки кабеля: RG-58/U, RG-58A/U и RG-58C/U. Кабель RG-58A/U — многожильный,
остальные имеют сплошной гибкий проводник диаметром 0,89 мм. Волновое сопро-
тивление — 50 Ом. Известны также телевизионный коаксиальный кабель марки RG-
59 с волновым сопротивлением 75 Ом и марки RG-62 с волновым сопротивлением
93 Ом, используемый в сетях ArcNet. К достоинствам коаксиального кабеля следует
отнести сравнительно большое расстояние передачи информации (до 10 км), к недо-
статкам — сложность в монтаже и высокую стоимость.
Витая пара. Является сегодня наиболее популярной физической средой для по-
строения современных сетей. Это недорогой и универсальный кабель для создания
локальных коммуникаций практически любого уровня сложности. Витая пара — это
изолированные проводники, попарно свитые между собой некоторое число раз на
определенном отрезке длины, что требуется для уменьшения перекрестных наводок
между проводниками. Как правило, кабель имеет 4 пары в одной оболочке. Реже встре-
чаются двухпарные варианты, которые можно применять с ограниченным числом се-
тевых протоколов. Проводники изготовлены из медной проволоки толщиной 0,5-0,65
мм. Материал изоляции — поливинилхлорид (PVC), для более качественных образцов
5-й категории — полипропилен (РР), полиэтилен (РЕ). Особенно высококлассные ка-
бели имеют изоляцию из вспененного (ячеистого) полиэтилена, который обеспечивает
низкие диэлектрические потери, или из тефлона, работающего в широком диапазоне
температур. Внешняя оболочка кабеля имеет толщину 0,5 - 0,6 мм и обычно изготав-
ливается из поливинилхлорида. Конструкция кабельного сердечника достаточно раз-
нообразна. Высококачественные кабели имеют парную (по две пары между собой) или
четверочную скрутку (все четыре пары вместе). Последний вариант позволяет умень-
шить толщину сердечника и достигнуть лучших электрических характеристик. Форма
внешней оболочки также может быть различна. Чаще других применяется круглая, а
для 2-х парных кабелей — овальная. Для напольной прокладки, по очевидной причине,
используется плоский кабель. Кабели для наружной прокладки имеют влагостойкую
оболочку из полиэтилена, которая наносится вторым слоем поверх обычной, поливи-
нилхлоридной. Кроме этого, возможно заполнение пустот в кабеле водоотталкиваю-
щим гелем и бронирование с помощью гофрированной ленты.
По наличию или отсутствию экрана различают следующие типы кабелей:
UTP (Upscreen Turn Pair — незащищенная витая пара) — кабель, витые пары ко-
торого не имеют индивидуального экранирования;
• FTP (Foil Turn Pair — фольгированная витая пара) — кабель имеет общий экран
из фольги, однако у каждой пары нет индивидуальной защиты;
• STP (Screen Turn Pair — защищенная витая пара) — каждая пара имеет экран;
• ScTP (Screen Turn Pair — экранированный кабель) — кабель может как иметь, так
и не иметь защиту отдельных пар.
Экран выполняется либо плетеным из медной проволоки (хорошо защищает от
низкочастотных наводок), либо из токопроводящей фольги (пленки), которая бло-
кирует высокочастотное электромагнитное излучение. Также на практике часто ис-
пользуют двойные экраны (HIGHT Screen), в которых используются оба способа.
Неэкранированный медный кабель UTP в зависимости от электрических и меха-
нических характеристик подразделяют на семь категорий в зависимости от диапазо-
на частот передаваемых сигналов. Категория 1.. .4 использует диапазон частот от 20
кбит/с до 20 МГц; категория 5 — 100, 155 и 1000 Мбит/с; категория 6 — до 200 МГц;
категория 7 — до 600 МГц.
424
ГЛАВА 6
Кабели на основе экранированной витой пары (ЭВП) типа STP применяются для
передачи данных по стандарту фирмы IBM. Кабель подразделяется на следующие типы:
• Туре 1 (стандарт EIA-568A). Состоит из 2-х пар скрученных проводов (до 12 вит-
ков на 1 м), экранированных оплеткой. Электрические параметры соответствуют
кабелю UTP 5-й категории, волновое сопротивление равно 150 Ом. Применяется
в сетях Fast Ethernet.
• Type 2. Состоит из 2-х пар экранированных проводов для передачи данных (STP) и
2-х пар неэкранированных проводов для передачи голосовых сообщений (UTP).
• Туре 3. Состоит из 2-х, 3-х или 4-х пар неэкранированных проводов UTP (теле-
фонный кабель).
• Туре 5. Оптоволоконный кабель (ВОК).
• Туре 6. 2 пары экранированных проводов (STP).
Оптоволоконный кабель. Волоконно-оптические1 линии связи (ВОЛС) имеют
следующие преимущества: нечувствительность к внешним магнитным полям, ко-
лебаниям температуры и влажности, высокая пропускная способность (> 30 Гбит/с),
малое затухание в полосе частот (до 0,2 дБ/км), отсутствие коротких замыканий, ма-
лые габариты и масса.
К недостаткам следует отнести более высокую стоимость волоконно-оптического
кабеля (ВОК) и различной коммутационной аппаратуры (оптические коннекторы,
соединительные розетки, аттенюаторы, адаптеры, разветвители и др.).
Формирование светового потока на передающем конце ВОК осуществляется по-
лупроводниковым лазером (для больших расстояний) или светодиодом, на прием-
ном конце — фотоприемником. При эффективной длине волны А = 0,8-0,9 мкм. ис-
пользуются кремниевые фотодиоды, при А = 1,3-1,5 мкм — германиевые фотодиоды.
Основой световода является оболочка из плавленого кремнезема (SiO2) и сердцевина
из кварцевого стекла, легированного оксидами (SiCl4, GeCl4, РОС13).
В зависимости от распределения показателя преломления и диаметра световода
различают 3 типа волоконных световодов:
Внешняя оболочка
Гофрированная броня
Внутреннее
полиэтиленовое покрытие
Упрочняющие элементы
Центральный
силовой элемент
Полимерная трубка
Волокна
в покрытии 250 мкм
Гидрофобный гель
Рис. 6.4
• многомодовый световод со сту-
пенчатым изменением показателя
преломления (ПП);
• многомодовый световод с плав-
ным изменением ПП;
• одномодовый световод.
В многомодовых световодах
(MMF — Multi Mode Fiber) стандарт
определяет два типа кабелей: с диа-
метром сердцевины 62,5 и 50 мкм, и
диаметром оболочки 125 мкм. Полоса
пропускания многомодовых светово-
дов — от 500 МГц/км и более, одномо-
довых — до десятков и сотен ГГц/км.
1 Первое кварцевое волокно, пригодное для оптической связи, было получено фирмой «Corning Glass
Inc.» (CHIA) в 1970 г. В 1975 г. разработан передатчик светового потока в виде светоизлучающего диода,
работающего на длине волны 0,85 мкм. В 1978 г. появились одномодовые диодные лазеры на 1,3 мкм, а в
1982 г. — на длине волны 1.55 мкм. 1988 г. ознаменовался вводом в действие первой трансатлантической
ВОЛС ТАТ-8. В 2000 г. введена в действие ВОЛС национального масштаба длиной 45 тыс. км.
ПРОМЫШЛЕННЫЕ СЕТИ
425
Основная характеристика световода — показатель степени затухания (логарифм
отношения интенсивностей сигналов на входе и выходе) в дБ. Современные техноло-
гии производства ВОЛС переходят с длины волны X = 0,85 мкм и X = 1,3 мкм на дли-
ну волны X =1,55 мкм. В табл. 6.2 приведены основные характеристики волоконных
световодов.
ВОК включает от 2 до 36 и более волокон, помещенных в резиновую и свинцовую
оболочки и прокладывается в трубах или траншеях. Для повышения механической
прочности в центре ВОК имеется силовой элемент (металлический трос и др.). На
рис 6.4 показан общий вид волоконно-оптического кабеля.
Таблица 6.2. Характеристики световодов
Тип волокна Диаметр сердцевины/ оболочки, мкм Длина волны, мкм. Полоса пропускания, МГц/км Потери (затухание), дБ/км
Одно- 9,5/125 1,3 — 0,35
МОДОВЫЙ 9,5/125 1,55 до 10 ГГц/км 0,25
Много- 50/125 0,85 400 2,7
модовый 50/125 1,3 500 0,75
62,5/125 0,85 160 2,7
62,5/125 1,3 500 0,75
Для передачи и приема сигналов по оптическому кабелю применяются различ-
ные волоконно-оптические соединительные изделия: коннекторы, соединительные и
пере-ходные розетки, адаптеры, аттенюаторы, разветвители и пр.
Коннекторы различаются способом фиксации оптического кабеля в аппаратуре,
условиями эксплуатации (стойкость к вибрации и ударам, диапазон температур) и др.
Стандарты коннекторов следующие:5Т (байонетное соединение), SC и LC (соеди-
нение защелкой), FC (резьбовое соединение). Соединительные розетки применяются
для обеспечения надежного физического контакта соединяемых коннекторов. Мно-
гомодовые розетки имеют высокоточный центратор из бронзы, одномодовые - из
керамики. На рис. 6.5 показаны коннекторы и розетки стандартов ST (рис. 6.5, a), SC
(рис. 6.5, б) и FC (рис. 6.5, в).
Переходные адаптеры применяются для перехода от коннекторов одного стан-
дарта к коннекторам другого стандарта. На рис. 6.6 представлены переходные адап-
теры FC-SC (рис. 6.6, a), FC-ST (рис. 6.6, 6) и SC-ST (рис. 6.6, в).
Аттенюаторы используются для снижения мощности оптического сигнала. Зату-
хание сигнала достигается за счет калиброванного воздушного зазора между стыкуе-
мыми коннекторами (рис. 6.7, а) или промежуточного световода с заданным коэффи-
циентом затухания (рис. 6.7, б).
Оптические кабели, к числу которых относят кабели для внутриобъектовой про-
кладки и магистральные оптические кабели, выпускаются многими зарубежными
фирмами (Corning, Nokia, Samsung, FujiKura, Nexans, FinMark и др.), а также «Союз-
кабель» (Белоруссия), «Одескабель» (Украина).
Среди отечественных производителей оптических кабелей отметим ЗАО «Севка-
бель-Оптик», «Сарансккабель-Оптика», ООО «Оптен», ЗАО НФ «Электропровод»,
ЗАО «ТрансВок», ЗАО «Лусент Текнолоджис Связьстрой-1» и др.
Оптические параметры оптических кабелей должны удовлетворять требованиям
и рекомендациям Международного союза электросвязи (МСЭ-Т).
ЗАО «Севкабель-Оптик» производит оптические кабели марок ОПС, ОПХ ДПС,
ДПО, ДПЛ, ДНО, ДПН и др. (более 15 марок). Диаметр кабелей от 10 до 20 мм, ко-
426
ГЛАВА 6
Коннекторы
Розетки
Переходные
адаптеры
Рис. 6.7 Рис. 6.8
личество волокон в одном кабеле от 2-х до 144-х и более, температура эксплуатации
-60...+70 °C. Кабели марок ДНО и ДПН применяются для прокладки внутри зданий
по стенам, в вертикальных и горизонтальных кабель-проводах, в тоннелях и коллек-
торах. Кабели ОПС, ОПУ, ДПС — для прокладки непосредственно в грунте, ДПО и
ДПЛ - в защитных полиэтиленовых трубах.
ЗАО «ПТ Плюс» — официальный дистрибьютор фирмы Corning Cable Systems
GrnbH&Co.KG предлагает оптические кабели для внутриобъектовой прокладки
Corning FutureLink. Тип волокна в кабеле — одномодовое OS1 (9 мкм), многомодовое
ОМ2 и ОМЗ (50 мкм) и многомодовое ОМ1 (62,5 мкм). По числу волокон кабели де-
лятся на одноволоконные (диаметр внешней оболочки 2 и 2,9 мм), двухволоконные
(2,9x5,8 или 2x4 мм) и многоволоконные. Многоволоконный (распределительный)
внутриобъектовый кабель (Distribution Cable) используется при прокладке в кабель-
ных каналах внутри помещений. Число волокон — от 2 до 24, наружный диаметр от
4,5 до 10,6 мм соответственно.
Также для использования в волоконно-оптических линиях связи применяются
различные кабельные сборки. На рис. 6.8 показаны оптические патч-корды с коннек-
торами различных стандартов. Стандартные одномодовые и многомодовые оптиче-
ские патч-корды представляют одножильный кабель диаметром 2 и 3 мм, а также ду-
плексный кабель сечением 1,8x3,6, 2,0x4,0 и 3,0x6,0 мм. Многоволоконная кабельная
сборка представляет собой отрезок многожильного оптического кабеля заданной
ПРОМЫШЛЕННЫЕ СЕТИ
427
длины с коннекторами необходимого стандарта. С обеих сторон кабельной сборки
имеются металлопластиковые рукава, защищающие коннекторы при прокладке ка-
беля. К числу магистральных оптических кабелей ЗАО «ПТ Плюс» предлагает кабели
ОКГ, ДПО, ДПТ, ОКТ, ОПС, ОКБ и другие, производства Российских предприятий,
в том числе кабели с броней из стальной проволоки (ОКБ, ОПС, ТОС, ДПС) и сталь-
ной ленты (ОКК, ДПТ).
6.2. Активное оборудование промышленных сетей
В сети активные устройства осуществляют формирование, преобразование, ком-
мутацию, а также прием сигнала с использованием внешнего источника энергии.
Активные устройства можно (с некоторой долей условности) разделить на рабо-
чие станции (источники и приемники сигнала), повторители, концентраторы, ком-
мутаторы, мосты и маршрутизаторы.
Рабочими станциями в промышленной сети могут быть как ПЭВМ, ПЛК, так и
другие интеллектуальные устройства.
6.2.1 Повторители и концентраторы
Одной из основных задач, которая стоит перед любой технологией транспорти-
ровки данных, является возможность их передачи на максимально большое рассто-
яние. Физическая среда накладывает на этот процесс свое ограничение — уровень
сигнала падает и прием становится невозможным. Поскольку для распознавания
сигнала важно соотношение сигнал/шум применяют не усиление, а повторение (ре-
генерацию) сигнала. При этом устройство на входе принимает и восстанавливает
сигнал (его мощность, амплитуду, фронты), а затем генерирует на выходе его точ-
ное подобие.
Первоначально в сетях использовался коаксиальный кабель с топологи-
ей «шина», и нужно было соединять между собой всего несколько протяженных
сегментов. Для этого в сети использовались повторители (repeater), имевшие два
порта при расстоянии между повторителями до 185 м. Многопортовые сетевые
устройства принято называть концентраторами (concentrator). Их физический
смысл такой же, как и повторителя, но восстановленный сигнал транслировался
на все активные порты, кроме того, с которого поступил сигнал (исключение со-
ставляет концентратор сети Token Ring, который повторяет сигнал только на том
порту, к которому подключен следующий в кольце компьютер). С появлением про-
токола lObaseT (витой пары) многопортовые повторители для витой пары стали
называться хабами (hub), а для коаксиального кабеля — репитерами. Необходимо
отметить, что концентраторы работают на физическом уровне модели OSI. Все пор-
ты концентратора равноправны, логической обработке сигнал не подвергается, не
буферизируется, коллизии не обрабатываются (только фиксируются их наличие на
индикаторах некоторых типов).
В автоматическом режиме концентраторы выполняют следующие функции:
• Автосегментация (network integrity) — автоматическое включение или отклю-
чение порта. Порт, к которому подсоединена неисправная линия, или не под-
ключено какое-либо активное устройство, считается свободным и находится в
неактивном режиме. При обнаружении устройства работоспособность порта
восстанавливается.
428
ГЛАВА 6
• Отображение состояния портов (или устройства в целом) на светодиодных
индикаторах. Индицируются состояние порта (Port Status), наличие коллизий
(Collisions), активность канала передачи (Activity) и наличие питания (Power);
• Обнаружение ошибки полярности (перепутаны проводники внутри пары) при ис-
пользовании витопарного кабеля и автоматическое переключение полярности.
По скорости различают хабы lObaseT и XOObaseT. Часто встречаются смешанные
конструкции, которые работают на полную скорость только в том случае, если сое-
динены с оборудованием lOObaseT. Встречается разделение повторителей на классы
I и II. Повторители I класса полностью декодируют входящий сигнал, преобразуют
его в логическую форму и передают на активные порты (задержка в районе 0,7 мс).
При этом возможно использование нескольких технологий одновременно, напри-
мер, 100BaseT4, lOOBaseTX или lOOBaseFX. Повторители II класса восстанавливают
форму сигнала без его явного преобразования в логический вид. Соответственно,
в этом случае задержка передачи заметно меньше (менее 0,46 мс по стандарту), но
можно использовать только один протокол. Основное назначение концентраторов
(хабов) — это объединение территориально сосредоточенных рабочих станций в
группу или использование хабов в качестве ретрансляторов (повторителей) для свя-
зи нескольких рабочих групп.
Концентраторы делят на следующие классы:
• Начальный уровень (5-или 8-портовые концентраторы). Часто концентраторы
имеют порт для подсоединения коаксиального кабеля BNC (Bayonet Neill Concel-
man), реже — порт AUI (Attachment Unit Interface). При невысокой стоимости
являются простым и дешевым решением для сети небольшого размера.
• Средний уровень. Это 12-, 16-и 24-портовые устройства. Имеют 19-дюймовое ис-
полнение, BNC или AUI порты. Используются для построения средних и малых
сетей.
6.2.2 Мосты и коммутаторы
Если два (или более) сегмента сети слишком велики для объединения их в
один коллизионный домен и к тому же территориально удалены друг от друга,
применяют мост (Bridge). Как и повторители, мосты принимают данные на вхо-
дящий порт и передают их на исходящий с восстановленными уровнем и формой
сигнала.
Мост принимает входящий пакет данных в свой буфер, определяет его целост-
ность и анализирует заголовок кадра на предмет МАС-адреса отправителя и получа-
теля. При этом каждая половина моста, анализируя поле адреса отправителя, ведет
таблицу адресов узлов, находящихся на своей стороне. На другую сторону моста пе-
редаются только пакеты широковещательной рассылки (Broadcast) и пакеты, не име-
ющие получателя на своей стороне. Таким образом, в отличие от повторителей, кол-
лизии не транслируются. Буферизация данных перед их отправкой (store and forward)
приводит к возникновению большей по сравнению с концентраторами задержки, что
несколько снижает скорость работы сети. С другой стороны, количество устройств,
которые разделяют между собой физическую среду, снижается. В результате обычно
реальная скорость передачи данных возрастает. Первые мосты были, подобно по-
втор ителям, двухпортовыми. Но с появлением технологии lObaseT, построенной на
многопортовых хабах, получили применение многопортовые мосты. Многопорто-
вый мост представляет собой коммутатор (switch).
ПРОМЫШЛЕННЫЕ СЕТИ
429
Коммутаторы выполняют те же функции, что и мосты, но используются как сред-
ство уменьшения числа узлов в доменах коллизий. Коммутаторы имеют число портов
до 24... 30, а модульные коммутаторы — до сотни портов. Переход от концентраторов
(хабов) к коммутаторам (switch) и от полудуплексных каналов связи к дуплексным
решил вопрос о возможности блокировки обмена по сетевому каналу из-за наличия
коллизий в сети Ethernet.
Тем не менее совсем из сетевого лексикона мосты не исчезли. Так называют
устройства, предназначенные для связи ЛВС с другой физической средой, напри-
мер, по радиоканалу, модемной связи или другими способами. При этом с одной
стороны моста пакеты будут преобразованы в какой-либо иной протокол каналь-
ного уровня, а с другой — восстановлены обратно. Однако мосты не могут вы-
полнять фрагментацию и повторную сборку пакетов более высокого (сетевого)
уровня. Как следствие, многие мосты имеют ограничение по размеру передавае-
мого пакета данных и слишком большой пакет может быть отброшен как повреж-
денный.
6.2.3 Маршрутизаторы и шлюзы
Маршрутизатор (роутер, router) — это устройство, связывающее три нижних
уровня и устанавливающее соединение на четвертом (транспортном) уровне. Задача
маршрутизатора — выбор маршрута передачи данных. Соответственно, если мосты
для передачи кадров используют адреса физического уровня (МАС), то маршрути-
заторы (роутеры) обычно используют IP-адреса глобальной сети Интернет. Для это-
го им, как минимум, нужно развернуть пакет данных, извлечь из его поля данных
дейтаграмму IP, и по ее заголовку направить пакет. Однако большинство маршру-
тизаторов работает по еще более сложному алгоритму, используя для передачи дан-
ных протоколы следующих уровней модели OSI: TCP, UDP, Novell IPX, AppleTalk II и
др. Подобно повторителям, маршрутизаторы используют буферизацию сигнала, за-
тем восстанавливают уровень и форму передаваемого сигнала. Так же, как и мосты,
маршрутизаторы не передают адресату коллизии или поврежденные кадры, и из-за
буферизации имеют задержку при передаче.
Маршрутизаторы могут соединять сети с различными протоколами доступа, напри-
мер Ethernet и ArcNet. В случае установления связи с помощью маршрутизатора верхние
уровни модели OSI (5,6 и 7) отправителя и получателя должны быть одинаковыми.
Шлюз (gateway) — устройство, служащее для объединения разнородных сетей,
т.е. сетей с различными протоколами. Шлюз выполняет протокольное преобразова-
ние для всех семи уровней модели OSI. Они обычно применяются для соединения ло-
кальных сетей, преобразования протоколов обмена и передачи пакетов информации
между двумя различными сетями. Также шлюз может выполнять функции маршру-
тизатора (роутера), однако скорость обмена будет невысокой.
6.3. Открытые промышленные сети
Открытые промышленные сети — это сети, на которые распространяются меж-
дународные стандарты промышленных сетей [6.6-6.12]. Только при использовании
принципов открытых систем интеграция изделий разных производителей в одну
сеть может быть решена без особых проблем. Предпочтительность того или иного
сетевого решения как средства транспортировки данных можно оценить по следую-
щей группе критериев:
430
ГЛАВА 6
• объем передаваемых полезных данных;
• время передачи фиксированного объема данных;
• удовлетворение требованиям задач реального времени;
• максимальная длина шины;
• допустимое число узлов на шине;
• помехозащищенность;
• денежные затраты в расчете на узел.
В зависимости от области применения весь спектр промышленных сетей можно
разделить на два уровня:
• контроллерные сети (Field level) — промышленные сети, решающие задачи по
управлению процессом производства, сбором и обработкой данных на уровне
промышленных контроллеров;
• сенсорные сети (Sensor/actuator level) или сети низовой автоматики, решающие
задачи опроса датчиков и управления работой различных исполнительных ме-
ханизмов.
Промышленные сети контроллерного уровня: PROFIBUS (Process Field Bus): -DP,
-PA, -FMS; BITBUS; ControlNet; CAN (Controller Area Network).
Сенсорные сети (сети низовой автоматики): ASI (Actuator/Sensor Interface); HART;
Modbus; Modbus Plus; Interbus-S; DeviceNet;
Универсальные сети: LON (Local Operating Network); FIP (Factory Instrumentation
Protocol), Foundation Fidelis, Ethernet.
6.3.1 Сенсорные сетн (сети низовой автоматики)
6.3.1.1 AS-Interface (ASI)
Основная задача ASI — интерфейса нижнего уровня — связать в единую инфор-
мационную структуру устройства нижнего уровня, а именно датчики и разнообраз-
ные исполнительные механизмы, имеющие соответствующий сетевой интерфейс.
Название описываемой сети раскрывает ее назначение: Actuators Sensors Interface
(ASI) — интерфейс исполнительных устройств и датчиков.
Впервые ASI-протокол вышел на рынок в конце 1989 г. и сегодня поддержан рядом
известных фирм: IBM, Siemens, Pepperl+Fuchs, Allen-Bradley, Limberg и др. Существует и
одноименная ассоциация по поддержке этой сети — ASI. С помощью ASI можно стро-
ить системы, в которых датчики и контроллеры связаны одной сетью, причем ASI имеет
шлюзы в другие промышленные сети: ModBus, Profibus, Interbus, Device Net и др.
Каждый узел ASI-сети должен иметь специальную интерфейсную микросхему с
поддержкой ASI-протокола. ASI-интерфейс позволяет передавать как данные, так и
питание к узлам сети по одной паре проводов.
Топологией ASI-сети может быть шина, кольцо, дерево или звезда. Общая длина
сегмента составляет не более 100 м, а с использованием репитеров до 300 м. Мак-
симальное время цикла составляет 5... 10 мс. MASTER-узел ASI-сети контролирует
работу сети, организует обмен данными с PLC. Зачастую ASI-MASTER оформляется
в виде отдельной платы контроллера или компьютера. Максимальное число ведо-
мых устройств (SLAVE), подключаемых к одному MASTER-узлу, до 62 устройств. В
качестве физической среды передачи данных используется 2-проводной кабель ASI-
кабель (питание и данные передаются по одному кабелю), представляющий собой
кабель, в котором оба проводника упакованы в специальную мягкую резиновую обо-
ПРОМЫШЛЕННЫЕ СЕТИ
431
лочку, которая делает этот кабель гибким и устойчивым к многократным изгибам.
Скорость передачи ограничена до 156 кбит/с, дальность передачи — 300 м.
6.3.1.2 HART
HART-протокол (Highway Addressable Remote Transducer), разработанный фир-
мой Fisher Rosemount Inc. в середине 80-х годов, реализует принцип частотной мо-
дуляции для организации цифровой передачи, основанной на технологии 4-20 мА
(рис 6.9). На аналоговый сигнал 4-20 мА накладывается частотно модулированный
цифровой сигнал с амплитудой колебаний ±0,5 мА. Логической единице соответ-
ствует частота 1200 Гц, логическому нулю — 2200 Гц. Физический канал — экраниро-
ванная витая пара.
HART-протокол позволяет передавать данные со скоростью до 1200 бит/с. В нем
реализована схема отношений между узлами сети по принципу MASTER/SLAVE. В
сети может присутствовать до 2-х MASTER-узлов (обычно один). Второй MASTER,
как правило, освобожден от поддержания циклов передачи и занят под связь с какой-
либо системой контроля/отображения данных. Стандартная топология организова-
на по принципу «точка-точка» или «звезда».
Для передачи данных по сети используются два режима:
• по схеме «запрос/ответ», т.е. асинхронный обмен данными (один цикл уклады-
вается в 500 мс);
• все пассивные узлы непрерывно передают свои данные на MASTER-узел (время
обновления данных в MASTER-узле 250-300 мс).
Возможно построение топологии типа «шина» (до 15 узлов), когда несколько
узлов подключены на одну витую пару. Питание осуществляется по шине. Наличие
международной организации «HART Communication Foundation» позволяет активно
продвигать эту промышленную сеть в среде пользователей.
6.3.1.3 MODBUS.
Протокол сети разработан фирмой Modicon (в настоящее время входит в группу
Schneider Electric, Франция) для сбора данных контроллерами Modicon. Специаль-
ный физический интерфейс для него не определен. Эта возможность предоставле-
на самому пользователю: RS-232C, RS-422, RS-485 или же токовая петля 4-20 мА.
432
ГЛАВА 6
Однако, чаще других используется интерфейс RS-485. Протокол MODBUS работает
по принципу MASTER-SLAVE или «ведущий-ведомый». Конфигурация на основе
этого протокола предполагает наличие одного MASTER-узла и до 247 SLAVE-узлов.
MASTER-узел инициирует циклы обмена данными.
Существует два типа запросов:
• запрос/ответ (адресуется только один из SLAVE-узлов);
• широковещательная передача (broadcast message); MASTER через выставле-
ние адреса 0 обращается ко всем SLAVE-узлам сети одновременно без квити-
рования.
Протокол MODBUS описывает фиксированный формат команд, последователь-
ность полей в команде, обработку ошибок и исключительных состояний, коды функ-
ций. Для кодирования передаваемых данных используются форматы ASCII (Ameri-
can Standard Code for Information Interchange) и RTU (Remote Terminal Unit).
Каждый запрос co стороны ведущего узла включает адрес абонента (адрес 0 ис-
пользуется для широковещательной передачи), код команды ведомому устройству
(чтение, запись и т. д.), размер поля данных (собственно данные или буфер под дан-
ные) и контрольный CRC-код. Функция обслуживания тайм-аута реализована для
фиксирования коллизий при приеме/передаче данных.
В режиме ASC II информация передается в виде последовательности символов.
Структура передаваемого символа: 1 стартовый бит, 7 бит данных, 1 бит контроля
четности, 1 стоповый бит (при контроле четности) или 2 стоповых бита (без контро-
ля четности). Символы передаются с интервалом (паузой) до одной секунды.
В режиме RTU структура символа следующая: 1 стартовый бит, 8 бит данных,
1 бит контроля четности (при отсутствии контроля четности бит отсутствует),
1 стоповый бит (при контроле четности) или 2 стоповых бита (без контроля чет-
ности). Сообщение представляет собой последовательность символов, переда-
ваемых без пауз. Сообщение включает адрес в диапазоне 1-247 (1 символ), код
функции в диапазоне 1-255 (1 символ), данные (п символов) и контрольная сум-
ма (2 символа). Скорость передачи данных в сети Modbus — 19,2 кбит/с.
Протокол MODBUS является наиболее распространенным в мире. Хотя ограни-
чения этого протокола достаточно очевидны, он привлекает простотой логики и не-
зависимостью от типа интерфейса.
Modbus Plus. Спецификация Modbus Plus является модификацией протокола
Modbus. Скорость передачи данных по сети Modbus Plus до 2 Мбит/с. Сетевая шина
использует одиночный или для улучшения надежности системы двойной кабель.
В качестве физической среды используется экранированная витая пара. До 32 узлов
может быть подключено к кабелю сети длиной 450 м без повторителя и до 1800 м
с повторителем, а количество узлов сети с повторителем до 64. Сети соединяются
между собой с помощью мостов. В этом случае сообщения из узла в одной сети могут
быть переданы узлу в другой сети.
В отличие от сети Modbus сеть Modbus Plus является одноранговой, т. е. любое
устройство может инициировать транзакцию, являясь как ведущим, так и ведомым.
Передача данных внутри сети использует механизм передачи маркера. В каждый
момент передачу запросов осуществляет только один узел. Узел, получивший запрос,
сразу отправляет подтверждение его получения. После завершения сеанса опроса
узлов активный узел передает маркер следующему узлу с большим адресом и т. д.
Протокол Modbus Plus реализует функцию маршрутизации до 6 сетей.
ПРОМЫШЛЕННЫЕ СЕТИ
433
6.3.1.4 Interbus.
Сеть Interbus — одна из первых промышленных шин, получивших широкое
распространение, разработана фирмой Phoenix Contact в 1984 г. Interbus остается
популярной и сегодня благодаря дальности охвата, гибкости, быстродействию,
диагностическим средствам и автоадресации. Физический уровень Interbus осно-
ван на стандарте RS-485 и напоминает обычную сеть с многоотводными соедине-
ниями, однако в действительности представляет собой последовательное кольцо
на базе сдвиговых регистров. Каждый подчиненный узел имеет два коннектора:
через один коннектор данные принимаются, через другой передаются в следую-
щий узел. Информация об адресе в протоколе отсутствует, данные в сети пере-
сылаются по кругу, и главное устройство всегда способно определить, из какого
узла считывается или в какой узел передается информация по положению этого
узла в кольце.
Благодаря необычной сетевой топологии Interbus имеет два дополнительных
преимущества. Во-первых, кольцевая топология дает главному устройству возмож-
ность самому себя конфигурировать, причем в некоторых случаях данный процесс не
требует вмешательства со стороны пользователя. Во-вторых, точность сведений о се-
тевых отказах и месте их возникновения значительно упрощает процесс их поиска и
устранения. Максимальное число узлов в сети — 512, длина соединения (расстояние
между узлами) до 400 м. Общая дальность охвата сети до 12,8 км, скорость переда-
чи — 500 кбит/с). Размер сообщения — 512 байт данных на узел, число передаваемых
блоков не ограничено.
6.3.1.5 DeviceNet
Протокол DeviceNet, разработанный фирмой Allen-Bradley (США) в 1994 г, име-
ет шинную топологию, физический канал — 4-проводный кабель. Помимо функ-
ции чтения состояния дискретных датчиков и управления пусковыми устройства-
ми, сеть позволяет передавать значение температуры и тока нагрузки пусковых
устройств, изменять скорость приводов и регулировать порог срабатывания дат-
чиков.
К сети могут быть подключены 64 узла (всего до 2048 устройств — по 32 на узел).
Для связи используется комбинация ответвителей и экранированной витой пары.
Ответвители DevicePort — пассивные, многопортовые, поставляются с 4-мя или 8-ю
герметичными микропортами быстрого отключения. Данные посылаются по необ-
ходимости короткими пакетами. Определены три значения скорости передачи дан-
ных: 125, 250 или 500 кбит/с. Длина магистрали (толстый кабель диаметром 12,2 мм)
соответственно 500, 250 и 100 м (длина одиночных отводов — 6 м).
6.3.2 Контроллерные сети
6.3.2.1 Сеть BITBUS
Протокол BITBUS разработан фирмой Intel в 1984 г. для построения распределен-
ных систем, в которых должны быть обеспечены высокая скорость передачи, детер-
минизм и надежность. За основу был взят широко известный протокол управления
каналом передачи данных, разработанный фирмой IBM — SDLC (Synchronous Data
Link Control). Сеть использует принцип MASTER/SLAVE. Физический интерфейс
основан на стандарте RS-485 и представляет собой экранированную витую пару.
434
ГЛАВА 6
Институтом инженеров по электротехнике и радиоэлектронике (IEEE) BITBUS-
протоколу был присвоен статус стандарта (IEEE 1118).
Максимальная длина локальной сети BITBUS составляет 13,2 км, общее число або-
нентов в сети — до 240. Длина одного сегмента (гальванически изолированный участок
сети) составляет 1,2 км. Число абонентов и ретрансляторов в одном сегменте — 28.
Протокол не дает возможности построения сложных систем — структура его
информационных пакетов проста. Все это позволяет говорить о BITBUS как о про-
токоле относительно простом и не требующем больших аппаратных затрат на его
реализацию. Использование многоуровневой сетевой структуры оправдано тогда,
когда нужно состыковать несколько BlTBUS-сетей, использующих различные скоро-
сти передачи данных.
Информационный обмен организован по принципу «MASTER — SLAVE». Функ-
ции MASTER-узла могут концентрироваться в одном узле и распределяться по не-
скольким MASTER-узлам. В этом случае необходима организация механизма переда-
чи телеграммы-маркера (права доступа к шине) от одного MASTER-узла к другому.
Протокол BITBUS определяет два режима передачи данных по шине:
• синхронный режим. Используется при необходимости работы на большой ско-
рости, но на ограниченных расстояниях. В этом случае топология сети включает
до 28 узлов, а длина шины до 30 м. Скорость передачи от 500 до 2400 кбит/с. Син-
хронный режим передачи предполагает использование двух дифференциальных
сигнальных пар — одной для данных, другой для синхронизации.
• режиН с самосинхронизацией. Использование этого режима позволяет значи-
тельно удлинить шину. Стандартом определены две скорости передачи: 375 кбит/с
(до 300 м) и 62,5 кбит/с (до 1200 м). Используя шинные репитеры, можно объеди-
нять последовательно несколько шинных сегментов (до 28 узлов на сегмент). В
этом случае общее число узлов до 240, длина общей шины — 13,2 км. При этом в
режиме передачи используются две дифференциальные пары: одна для данных и
одна для управления репитером.
6.3.2.2 Сеть PROFIBUS
Протокол PROFIBUS (PROcess Field BUS) разработан группой немецких компа-
ний: Siemens, Bosch, и Klockner-Moeller. Основные задачи сети:
• организация связи с устройствами, гарантирующими быстрый ответ;
• создание простой и экономичной системы передачи данных, основанной на от-
крытых стандартах;
• реализация интерфейса между уровнями 2 и 7 OSI-модели.
Стандарт протокола описывает уровни 1, 2 и 7 OSI-модели. В PROFIBUS исполь-
зуется гибридный метод доступа в структуре MASTER/SLAVE и децентрализованная
процедура передачи маркера. Сеть может состоять из 122 узлов, из которых 32 мо-
гут быть MASTER-узлами. Адрес 0 зарезервирован для режима широкого вещания
(«broadcast»). Общая схема PROFIBUS-сети представлена на рис. 6.10.
В среде MASTER-узлов по возрастающим номерам узлов передается маркер, ко-
торый предоставляет право ведения циклов чтения/записи на шине. Все циклы стро-
го регламентированы по времени, организована продуманная система тайм-аутов.
Протокол хорошо разрешает разнообразные коллизии на шине. Настройка всех
основных временных параметров определяется пользователем. Говоря о PROFIBUS,
необходимо иметь в виду, что под этим общим названием понимается совокупность
ПРОМЫШЛЕННЫЕ СЕТИ
435
Рис. 6.10
трех различных, но совместимых протоколов: PROFIBUS-DP, PROFIBUS-FMS и
PROFIBUS-PA.
Сеть PROFIBUSDP
Сеть PROFIBUS-DP применяется на нижнем уровне для высокоскоростного
обмена данными с оконечными устройствами. Протокол физического уровня ба-
зируется на стандарте RS-485. Длительность цикла опроса зависит от числа узлов в
сети и для скорости обмена 1,5 Мбит/с и числа станций 32 составляет не более 6 мс.
Физическая среда — витая пара (RS-485) или оптоволоконный кабель. Скорость об-
мена от 9,6 кбит/с (на длине 1200 м) до 12 Мбит/с (достигается на длине сегмента
100 м.). На шине может быть до 124 ведомых устройств. DP-протокол представляет
функциональное подмножество 2-го уровня протокола PROFIBUS-FMS. Уровень 7 в
PROFIBUS-DP не описан. Стандарт — EN 50170.
Сеть PROFIBUS-PA
Этот протокол используется в устройствах, работающих в опасных произ-
водствах, и позволяет подключать к одной шине датчики и преобразователи
изолированно друг от друга. В основе протокола РА (Process Automation) лежит
протокол ISP (Interoperable Systems Project). Физический уровень (уровень 1 OSI-
модели) реализует стандарт IEC 61158-2 (с внутренней защитой данных). Уровень
2 — это функциональное подмножество стандарта DIN 19245. Структура прото-
кола Profibus-PA сравнима с Profibus-DP (формат данных одинаковый). Сегмент
PROFIBUS-PA имеет длину до 1900 м, длина ответвлений — 120 м; в одном сегмен-
те может подключаться до 31 устройства (на опасных участках рекомендуется до
10 устройств). Скорость обмена между узлами сети — 31,2 кбит/с. За счет идентич-
ности коммуникационных протоколов возможно объединение сетей Profibus-DP и
Profibus-PA. Для этого используется интерфейс DP/PA, позволяющий объединять
до 5 шин Profibus-PA.
Сеть PROFIBUS-FMS
Этот протокол общего назначения разработан для связи контроллеров и ин-
теллектуальных устройств. Он описывает уровни 1, 2 и 7 OSI-модели. Основное его
назначение — передача больших объемов данных. Распределенная система управле-
ния может состоять из устройств, реализующих все три тина стандарта, однако РА-
устройства необходимо подключать к PROFIBUS-PA через разделительные мосты.
6.3.2.3 Сеть ControlNet
Сеть ControlNet (Allen-Bradley) основана на топологии общей шины, однако ее
можно сконфигурировать как в виде звезды, так и в виде древовидной структуры.
Сеть ControlNet — управляющая сеть, удовлетворяющая требованиям приложе-
ний реального времени с высокой пропускной способностью. Сеть объединяет функ-
ции сети ввода/вывода и сети обмена «точка-точка», обеспечивая высокую произво-
436
ГЛАВА 6
дительность для обеих функций. Все устройства ControlNet имеют прямой доступ к
данным в сети Foundation Feildbus. Сеть ControlNet обеспечивает избыточность но-
сителя, что позволяет поддерживать функционирование системы при повреждении
кабеля и взрывобезопасность при использовании оптоволоконного канала передачи.
Скорость передачи данных 5 Мбит/с. В любом месте шины сегмента можно устано-
вить через ответвитель до 99 адресуемых узлов.
6.3.2.4 Сеть CANbus
Протокол сети CANbus разработан компанией Bosch (Германия). CAN (Control
Area Network) — протокол, получивший статус международного стандарта ISO
11898-1. Он отвечает требованиям задач реального времени и способен обнаружи-
вать и исправлять ошибочные сообщения с высокой степенью вероятности. Для сети
CAN определены 1-й и 2-й уровни модели OSI. Многие разработки седьмого уров-
ня для CAN оформлены как самостоятельные протоколы: SDS (фирма Honeywell),
DeviceNET (фирма Allen Bradley), CAL (ассоциация GA) и др.
CANbus — это последовательная шина, механизм работы которой описывает-
ся моделью децентрализованного контроля за доступом к шине, так называемой
моделью CSMA/CM (модернизированный вариант модели CSMA/CD). Возможные
коллизии, связанные с одновременным запросом шины, разрешаются на основе
приоритетности передаваемых сообщений. В CANbus каждый блок данных со-
держит дополнительный 11-битовый идентификатор, который является, по сути,
приоритетом данного сообщения. Каждый узел-приемник в сети CANbus выбира-
ет предназначенные для него сообщения. Возможные коллизии, связанные с одно-
временным запросом шины, разрешаются на основе приоритетности сообщений:
право на работу с шиной получит тот узел, который передает сообщение с наивыс-
шим приоритетом. В каждом сообщении может быть передано от 0 до 8 бит данных.
Большие блоки можно передавать за счет использования принципа сегментации.
Фирма Bosch предоставила следующим компаниям лицензионное право на вы-
пуск микросхем для CANbus: Intel, Intermetall, Motorola, National Semiconductor, NEC,
Philips, SGS-Thompson, Siemens, IAM и Inicore.
6.3.3 Универсальные сети
6.3.3.1 CeibWorldFIP
Протокол WorldFIP (World Factory Instrumentation Protocol) был разработан
на основе французского стандарта, известного как NFC46-600 или FTP (Fieldbus
Internet Protocol). В состав его разработчиков входят Honeywell, Cegelec, Baily
Controls, Allen Bradley, Telemecanique и др., производящие полевые устройства, в
которых используется система сообщений. Протокол FIP нацелен на высокие ско-
рости передачи и строго определенные интервалы обновления данных.
Протокол организован посредством централизованного/децентрализованного
доступа к шине и для передачи данных использует режим широкого вещания (broad-
cast) путем отправки broadcast-пакетов. При помощи широкополосного канала связи
могут быть соединены до 256 станций, расположенных на расстоянии до 2 км.
Контроль передачи осуществляется центральным узлом сети — «арбитром». Ар-
битр имеет три рабочих цикла. Продолжительность каждого цикла устанавливается
самим пользователем:
1. Циклический трафик
ПРОМЫШЛЕННЫЕ СЕТИ
437
Арбитр сети имеет таблицу циклического опроса, состоящую из поименован-
ных переменных. Порядок опроса устанавливается в соответствии с этой таблицей.
Арбитр имеет доступ более чем к одной таблице опроса, но только одна из них
может иметь активный статус. В конце Цикла эта таблица может быть модифици-
рована. Такой трафик применяется в приложениях, ориентированных на пакетную
обработку данных.
2. Периодический трафик
Арбитр обращается к отдельным переменным из каждого узла сети по запросу.
Запросы на работу с переменными генерируются во время циклического трафика.
Данный трафик используется наиболее часто.
3. Обслуживание сообщений
Арбитр предоставляет право на передачу любому устройству сети, запросивше-
му эту функцию во время циклического графика. Получив это право, устройство мо-
жет передать свое сообщение (с подтверждением или без) одному или всем устрой-
ствам, подсоединенным к шине. Функции управления процессом обмена данными
могут быть распределены на шине между различными устройствами. Это возможно
потому, что, с одной стороны, все «приемники» принимают одинаковые переменные
одновременно, а с другой — время обновления данных и их передача подчиняются
строгому контролю.
Основной поток данных организован как набор отдельных переменных, каждая
из которых идентифицирована своим именем. Любая переменная, обработанная в
одном узле-передатчике, может быть прочитана всеми узлами-приемниками одно-
временно. Режим широкого вещания избавляет от процесса присваивания каждому
устройству уникального сетевого адреса. Результаты обработки каждой переменной
узлом-передатчиком доступны для чтения всеми узлами-приемниками, входящими
в состав сети.
Таким образом, WorldFIP это система fieldbus, функционирующая как распреде-
лённая база данных реального времени.
Для построения сети полевых устройств на основе WorldFIP разработан спектр
специализированных коммуникационных чипов:
• FULLFIP2 — для оконечных устройств и контроллеров;
• FIPIU2 — для организации сети на основе интеллектуальных устройств;
• FIPCO1 — для простых fieldbus-устройств.
Чипы поддерживают скорости передачи 31,25 Кбод; 1; 2,5 и 5 Мбод.
Физическая среда WorldFIP — витая пара или оптоволоконный кабель по стан-
дарту IEC 1158-2. Сеть WorldFIP применяется в нефтехимической, электротехниче-
ской, газовой, металлургической и ряде других отраслей промышленности.
6.3.3.2 Сеть LON Works
Протокол LON был разработан американской компанией Echelon Corp, для по-
строения систем с большим числом каналов данных, получаемых на основе коротких
сообщений. Сеть Lon Works поддерживает международная организация «The LonMark
Interoperability Association», объединяющая свыше 100 компаний по всему миру.
В основе LON-технологии лежит использование специального интерфейсного
Neuron-кристалла, разработанного и производимого компаниями Toshiba и Motorola
(типы 3120 и 3150). Этот однокорпусный кристалл содержит три микропроцессора:
• МАС-процессор — поддерживает первый и второй уровни OSI-модели;
438
ГЛАВА 6
• NET-процессор — реализует функции с третьего по шестой уровень;
• АРР-процессор — обрабатывает функции прикладного уровня.
Тактовая частота микропроцессоров 10 МГц. Скорость передачи данных в сети
от 4,88 Кбод до 1,25 Мбод (чаще используются скорости 78 кбод и 1,25 Мбод).
Lon-сеть может состоять из сегментов, имеющих различные физические среды
передачи: витая пара, коаксиальный и оптический кабели, радиочастотный и инфра-
красный каналы. Для каждого типа физического канала существуют трансиверы,
обеспечивающие работу сети на различных по длине каналах, скоростях передачи
и сетевых топологиях. При разрешении коллизий используется предсказывающий
алгоритм их предупреждения, т. е. доступ к каналу упорядочивается на основе зна-
ния о предполагаемой нагрузке канала. Передающий узел получает доступ к каналу
со случайной задержкой из некоторого диапазона. Для предотвращения снижения
пропускной способности сети величина задержки представлена как функция числа
незавершенных заданий (backlog), стоящих в очереди на выполнение. Способность
предсказывающего алгоритма, реализованного на МАС-уровне, основана на оценке
числа незавершенных заданий.
Все данные, передаваемые по LON-сети, имеют стандартный сетевой тип (Standard
Network Variable Type, SNVT). Отдельные узлы посылают свои SNVT-переменные в
центральный узел, который хранит у себя их местоположение в сети.
Метод доступа к среде передачи данных — CSMA/CD (используется в сети CAN-
bus). Максимальный размер LON-сети — 32 000 узлов, соединенных различными фи-
зическими средами в произвольной сетевой конфигурации (в основном «шина»).
6.3.3.3 Сеть Foundation Fieldbus
Один из самых молодых (1997 год) и динамично развивающихся стандартов на
промышленную сеть. Foundation Fieldbus представляет собой открытый протокол,
позволяющий использовать программно-аппаратные средства различных произво-
дителей. Fieldbus Foundation является ассоциацией, появившейся в результате слия-
ния североамериканских компаний ISP-Foundation (Fisher Rosemount, Yokogawa, Fox-
boro, Siemens) и WorldFIP (Honeywell, Groupe Schneider, Allen-Bradley и др.).
Foundation Fieldbus представляет собой двухуровневый сетевой протокол, соче-
тающий черты мощной информационной магистрали для объединения компьюте-
ров верхнего уровня и управляющей сети, объединяющей контроллеры, датчики и
исполнительные механизмы.
Стандарт определяет два уровня сети. На нижнем уровне (Н1) в качестве физи-
ческой среды передачи данных за основу взята модифицированная версия стандарта
IEC 61158-2. Уровень Н1 предназначен для объединения устройств, функционирую-
щих во взрывоопасных газовых средах. Скорость передачи на уровне Н1 составляет
31,25 кбит/с.
На верхнем уровне (протокол Н2) в настоящее время используется Foundation
Fieldbus HSE (High Speed Ethernet), основанный на сети Fast Ethernet co скоростью
передачи 100 Мбит/с (стандарт IEC 61158).
Особенностью стандарта Foundation Fieldbus является то, что в нем определен
дополнительный пользовательский уровень (User Level), позволяющий применяя
определенные функциональные блоки (например, аналоговый ввод или вывод, П14Д-
регулятор и др.) строить промышленные сети с распределенным интеллектом.
ПРОМЫШЛЕННЫЕ СЕТИ
439
Максимальное число узлов составляет 240 на сегмент (поддерживается до 65000
сегментов), длина соединения до 1900 м (для Н1).
Методы обмена сообщениями: клиент/сервер (Client/Server), издатель/подписчик
(Publisher/Subscriber), уведомление о событиях (Event Notification).
Сеть Foundation Fieldbus может быть использована в качестве полной замены
аналогового стандарта токовой петли 4...20 мА.
Основная область применения этой сети — нижний уровень распределенной систе-
мы автоматизации с объединением устройств, работающих во взрывоопасных средах и
использующих сеть как для информационного обмена, так и для питания датчиков.
6.3.4 Сеть Ethernet / Industrial Ethernet
Сеть Ethernet в силу ее широкого применения на разных уровнях иерархии систем
управления можно отнести к универсальным сетям. Число сетей Ethernet (стандарт
IEEE 802.3) в настоящее время превышает несколько миллионов, а число пользовате-
лей — десятки и сотни миллионов и непрерывно увеличивается. Технологию Ethernet
называют DIX-технологией по начальным буквам фирм-разработчиков: DEC, Intel и
Xerox. Спецификация Ethernet была опубликована в 1980 г. (стандарт IEEE 802.3). В
1995 г. опубликован стандарт IEEE 802.3u (Fast Ethernet), в 1997 г. — IEEE 802.3z (Gigabit
Ethernet), в 1999 г. — IEEE 802.3ab (Gigabit Ethernet на витой паре категории 5).
Протокол Ethernet — открытый промышленный сетевой стандарт, который
поддерживает неявный обмен сообщениями (обмен сообщениями ввода/вывода в
реальном времени), явный обмен (обмен сообщениями) и использует широко рас-
пространенные чипы связи Ethernet и физические носители. Поскольку технология
Ethernet используется с конца 70-х годов XX века и широко распространена во всем
мире, продукты Ethernet поддерживают большое число поставщиков оборудования
для автоматизации. Использование Ethernet обеспечивает доступ ко всем устрой-
ствам уровня данных из Internet [6.6, 6.10-6.12, 6.14].
Сеть Ethernet использует двухуровневый протокол стандарта Ethernet TCP/IP
(Transmission Control Protocol/ Internet Protocol) — протокол управления и передачи/
протокол Интернета. Поскольку технология Ethernet и стандартные блоки протокола
TCP/IP опубликованы для общественного использования, стандартизованные сер-
висные программы и физические носители производятся массово и легко доступны.
Стандарты TCP/IP являются открытыми и постоянно совершенствуются. Протокол
TCP/IP является двухуровневым.
IP-протокол является базовым протоколом нижнего уровня стека TCP/IP. На-
помним, что протоколом принято называть формализованные правила, опреде-
ляющие последовательность и формат сообщений, которыми обмениваются сете-
вые компоненты, находящиеся на одном уровне, но в разных узлах (отправителя
и получателя). Иерархически организованный набор протоколов взаимодействия
узлов в сети называется стеком коммуникационных протоколов, одним из которых
является стек TCP/IP.
IP-протокол — это протокол сетевого уровня, который отвечает за передачу ин-
формации по сети, т. е. за правильность доставки сообщения (message) по указанно-
му адресу. Информация передается блоками, которые называются дейтаграммами.
Протокол IP не исключает потерь данных или доставки дейтаграмм с ошибками.
При передаче дейтаграмм IP-протокол выполняет фрагментацию дейтаграмм на
передающей стороне и их сборку на приемной стороне, если размер кадров в сети от-
440
ГЛАВА 6
личается от размера исходных дейтаграмм. Дейтаграмма состоит из заголовка и поля
данных. Размер дейтаграммы, способной быть принятой устройствами в сети, со-
ставляет 576 байт. Именно поэтому при большой длине дейтаграммы производится
ее фрагментация, т. е. разделение на части. После передачи фрагментов дейтаграммы
маршрутизатором эти фрагменты на приемной стороне объединяются.
По своим функциям IP-протокол, являясь протоколом сетевого уровня, образует
с протоколом межсетевых управляющих сообщений отдельный межсетевой уровень.
Модуль IP подготавливает заголовок дейтаграммы, подсоединяет к нему данные, по-
лучаемые от протоколов верхнего уровня TCP и UDP, определяет подсетевой адрес и
передает их модулю, реализующему протокол сетевого уровня подсети отправителя.
Последний создает заголовок пакета подсети, присоединяет к нему в качестве данных
дейтаграмму и передает пакет через подсеть отправителя. Затем вызывается модуль
протокола сетевого уровня подсети получателя, который в свою очередь создает за-
головок пакета, присоединяет к нему в качестве данных дейтаграмму и отправляет
пакет получателю. Станция-получатель освобождает дейтаграмму от заголовка па-
кета и передает ее модулю IP, определяющему какой прикладной программе предна-
значена дейтаграмма. После этого, в ответ на системный вызов, данные передаются
прикладной программе получателя вместе с адресом отправителя и др. параметрами.
В настоящее время используется 32-битная адресация IP-адреса (IP v.4). Версия IP v.6
способна расширить адресное пространство до 128 бит.
Для определения локального или физического адреса по IP-адресу использу-
ется протокол разрешения адресов ARP (Address Resolution Protocol), описанный в
документе RFC 826. Обратная задача представляет нахождение IP-адреса по извест-
ному физическому адресу и решается с помощью реверсивного протокола разреше-
ния адреса RARP (Revers Address Resolution Protocol). Протокол ARP работает, когда
модуль IP посылает пакет на уровень сетевых стандартов по известному IP-адресу
станции назначения, по которому определяется МАС-адрес получателя.
Протокол TCP является основным транспортным протоколом стека TCP/IP, рас-
полагается над межсетевым протоколом IP и обеспечивает передачу пакета данных.
Протокол TCP предоставляет возможность передачи непрерывного потока октетов,
упакованных в сегменты. Данные перед отправкой поступают в буфер, откуда для
передачи на сетевой уровень отбирается определенная часть, называемая сегментом.
Размер сегмента должен быть таким, чтобы при упаковке в IP-дейтаграмму мог поме-
ститься полностью. На приемной стороне модуль протокола TCP помещает получен-
ные данные сегмента в буфер прикладной программы получателя. С модулем про-
токола TCP связан модуль протокола IP, обеспечивающий передачу пакета по сети.
Протокол TCP позволяет восстанавливать данные при их искажении или потере. Это
достигается путем проверочного суммирования и присвоения последующего номера
каждому передаваемому октету данных и требования положительного подтвержде-
ния приема данных от TCP получателя.
Для связи двух процессов их протоколы TCP должны установить соединение,
т. е. получить информацию о состоянии сторон. Информация включает адреса сто-
рон, последовательные номера передаваемых данных, размер окна, определяющего
диапазон разрешенных для передачи номеров.
В структуре протокола, естественно, отсутствует сеансовый уровень, а приклад-
ной и представительный уровни объединены. Таким образом, протоколы TCP/IP
охватывают верхние уровни модели OSI, начиная с 3-го. На сетевом уровне, поми-
ПРОМЫШЛЕННЫЕ СЕТИ
441
мо протокола IP, используются протоколы ARP, RARP, ICMP и др. На транспортном
уровне используются протоколы UDP и TCP. На объединенном уровне представ-
ления данных и прикладном уровне используются протоколы TELNET, FTP, SMTP,
SNMP, OSPF и др. протоколы сети Internet.
Важным протоколом канального уровня по стандарту ISO является протокол
HDLC (Highlevel Data Link Control— протокол управления каналом передачи дан-
ных). Протокол HDLC применяется для выделенных линий связи (каналы могут быть
выделенными или коммутируемыми). Основные функции протокола — присвоение
и управление IP-адресами, формирование пакета данных, восстановление искажен-
ных и утерянных кадров, управление потоком кадров. Типичные устройства, обме-
нивающиеся данными по сети Ethernet, — ПЛК, персональные компьютеры, роботы,
устройства человеко-машинного интерфейса, адаптеры входов/выходов, устройства
ввода/вывода.
Сеть Ethernet использует различные физические среды: витые пары, волоконно-
оптический кабель, реже коаксиальный кабель. Основная топология — звездоо-
бразная с центральным узлом (hub или switch). Допустимые размеры сети Ethernet
определяются ограничениями на длину кабельного сегмента, связанную с затухани-
ем и искажениями формы сигнала. Для среды 10Base2 допустимая длины сегмента
185 м (в отдельных случаях до 300 м), для среды 10Base5 — 500 м, lOBaseT (lOOBaseTX,
100BaseT4) — 100 м. К другим ограничениям относятся ограничение числа узлов в
домене коллизий (до 1024). Число повторителей между любой парой узлов в сетях
Ethernet — не более 4-х, Fast Ethernet — 1 или 2, Gigabit Ethernet — 1.
Для Fast Ethernet стандарт 100BaseT4 предусматривает 4 витых пары для кабеля
3, 4 и 5 категории; lOOBaseTX — 2 витых пары для кабеля категории 5; lOOBaseFX — 2
волоконных световода (62,5/125 мкм.)
Обычно сеть Ethernet использует топологию «активная звезда», в которой груп-
пы устройств связаны непосредственно с коммутатором. Преимущество такой то-
пологии заключается в поддержке скоростей как 10 Мбит/с, так и 100 Мбит/с. При
этом коммутаторы Ethernet согласуют скорость передачи данных. Сеть Ethernet пред-
назначена для работы с большими объемами данных (1518 байт в пакете). В струк-
туре сети используются концентраторы (habs), коммутаторы (swithes), трансиверы
(transceivers), маршрутизаторы (routers) и повторители (repeaters).
В табл. 6.3 приведены стандарты сети Ethernet.
Таблица 6.3. Стандарты сети Ethernet
Ethernet Fast Ethernet Gigabit Ethernet
Тип среды Характеристики Тип среды Характеристики Тип среды Характеристики
10Base2 Сетевая среда с исполь- зованием тонкого КК, 10 Мбит/с. Топология — шина tOOBaseTX Сетевая среда с использованием неэкранированной витой пары, 100 Мбит/с, топология— звезда 1000Base-SX 850 пт лазерный ис- точник, многомодовое оптоволокно, длина до 300 м (62,5 мкм) и до 550 м (50 мкм)
10Base5 Сетевая среда с исполь- зованием толстого КК, 10 Мбит/с. Топология — шина
442
ГЛАВА 6
Окончание табл. 6.3
Ethernet Fast Ethernet Gigabit Ethernet
Тип среды Характеристики Тип среды Характеристики Тип среды Характеристики
lOBaseT Сетевая среда с исполь- зованием неэкраниро- ванной витой пары, 10 Мбит/с, топология — звезда IDOBaseFX Сетевая среда с ис- пользованием ВОК, 100 Мбит/с, тополо- гия — звезда 1000Base-LX 1300 nm лазерный источник, одномодо- вое оптоволокно(до 3000 м)
lOBaseFL Сетевая среда с исполь- зованием ВОК, 10 Мбит/с, топология — звезда I00OBase-CX Двухпроводный экра- нированный кабель STP (экранированная витая пара) (до 25 м)
Сеть Industrial Ethernet
Наметившаяся тенденция интеграции систем управления на базе единой широко
распространенной сети Ethernet привела к необходимости разработки специального
программного и аппаратного обеспечения, способного работать в жестких условиях
эксплуатации, характерных для нижних уровней систем управления.
Лидером на мировом рынке сетевых технологий по исследованиям RSI стала техно-
логия Industrial Ethernet, объем которой среди всех полевых шин составил 32,1% в 2003 г.,
эта доля увеличилась до 70% к 2006 г., а к 2008 г. составила около 95% [6.10,6.14,6.16].
Промышленный Ethernet, разработанный на базе офисной сети Ethernet и ис-
пользуемый в промышленности, должен удовлетворять ряду требований:
• Возможность работы в тяжелых промышленных условиях (температура от -40 °C
до +75 °C, электромагнитные помехи, вибрация и пр.).
• Устойчивость к сбоям и возможность резервирования, в том числе «горячее ре-
зервирование».
• Низкие требования к обслуживанию сети и сетевого оборудования.
• Соответствие международным стандартам по электромагнитной совместимости,
помехоустойчивости, взрывобезопасности и др. показателям.
• Возможность интеграции с программно-техническими комплексами разных
производителей, а также с другими промышленными сетями, используемыми на
производстве.
• Возможность интеграции с системами верхнего уровня (MES-, ERP-, ЕАМ- си-
стемами).
• Работа в сети должна осуществляться в режиме жесткого реального времени.
Industrial Ethernet появился на рынке промышленной автоматизации в 1985 г
и принят основными производителями средств автоматизации (Siemens, Schneider
Electric. Rockwell Automation и др). Industrial Ethernet использует технологию множе-
ственного доступа к шине с прослушиванием несущей и обнаружением коллизий.
Пересылка данных ведется кадрами. Хотя стандарта Industrial Ethernet пока «де-
факто» не существует, предварительные рекомендации совместимы со стандартами
ASi, Profibus, SimaticNet и др.
Для работы в режиме РВ (технология RTPS — RealTime Publisher Subscriber) в
жестких промышленных условиях разработаны и предлагаются следующие сети
Industrial Ethernet:
ПРОМЫШЛЕННЫЕ СЕТИ
443
• EtherCAT компании Beckhoff (EtherCAT Technology Group);
• PROFINET компании Siemens (PNO);
. EtherNet/IP (ODVA);
• Modbus TCP (Schneider Electric, Modbus-IDA User Group) [6.18].
Сеть EtherCAT (Ether for Control Automation Technology) — сеть стандарта
Ethernet, топология сети — кольцо, структура сети — ведущий/ведомые. Пакет
с данными (фрейм) обходит последовательно по кольцу ведомые устройства, ко-
торые дополняют пакет своими данными. Собранные от всех ведомых устройств
данные возвращаются к ведущему контроллеру, связанному с компьютером, где
осуществляется их обработка, архивирование и визуализация. За счет задержки
всего в несколько наносекунд реализуется поддержка режима реального времени.
Некритичные ко времени данные передаются во временные промежутки пере-
дачи данных в РВ.
Сеть PROFINET (Profibus+Ethernet) v2 и v3, разработанная на основе сетей Profi-
bus и Ethernet, представляет собой промышленный вариант сети Ethernet 100 Base ТХ.
Существуют 3 модификации сети: Profinet NRT (Non-Realtine), Profinet RT (Realtime),
Profinet IRT (Isochronous Realtime). Сеть Profinet позволяет интегрировать полевые
сети (Profibus, Interbus, DeviceNet и др.) в открытую сеть на базе Industrial Ethernet.
Физический канал — экранированная витая пара категории 5 класса D (стандарт
IEEE 802.3 ab), длина сети 100 м, скорость передачи 100 Мбит/с. Используются также
сети распределенного ввода/вывода PROFINET Ю и модульные системы управления
PROFINET СВА (Component Based Automation).
EtherNet/IP (Industrial Ethernet Protocol) базируется на протоколах TCP, UDP, IP
3-го и 4-го уровней модели OSI. Протокол Ethernet/IP был разработан в 2000 г. груп-
пой ODVA (Open Devicenet Vendor Association) и совместим с протоколом DeviceNet.
Этот протокол поддерживают помимо ODVA также организации IAONA (Industrial
Automation Open Network Alliance), IDA (Interface for Distributed Automation) и CI
(Controlnet International).
Помимо этих протоколов на 5...7 уровнях модели OSI используются протоколы
FTP, HTTP, SNMP, SMTP и др.
Повышение скорости передачи в сетях Industrial Ethernet достигается примене-
нием стандарта сетей Fast Ethernet. Industrial Fast Ethernet базируется на стандарте
Ethernet для витой пары со скоростью до 100 Мбит/с.
Общими для этих сетей являются формат данных (минимальный пакет 64 байта,
максимальный — 1518 байт, длина адресного поля — 48 байт), технология доступа к
сети CSMA/CD, возможность использования в сети повторителей (в сети Fast Ethernet
не более двух повторителей). С целью повышения надежности время доставки пакета
в сети Fast Ethernet ограничено, что при высокой скорости передачи 100 Мбит/с при-
вело к уменьшению длины сети. Так, при использовании витой пары размер сети Fast
Ethernet составляет 205 м, а при использовании оптоволокна — 320 м (в то же время
длина сегмента сети Ethernet составляет 4520 м).
Все большее применение в системах промышленной автоматизации находят сети
Gigabit Ethernet (10GE) со скоростью передачи данных до 10 Гбит/с в дуплексном ре-
жиме. Спецификация 10GBase-X предусматривает в качестве физического канала
экранированную витую пару, lOGBase LX4 — оптический кабель (1300 нм), lOGBase-
SR, -LR, -ER — оптический канал передачи данных на длинах 850,1300 и 1550 нм со-
ответственно (стандарт IEEE 802.3az).
444
ГЛАВА 6
Производителями сетевого оборудования стандарта Industrial Ethernet на миро-
вом рынке являются компании Hirschmann (Германия), Siemens, Моха Technologies Со
Ltd (Тайвань), Harting (Германия), Westermo (Швеция), Korenix (Германия), Phoenix
Contact (Япония), Cisco Systems Inc. и др.
В состав сетевого оборудования Industrial Ethernet входят трансиверы, хабы,
коммутаторы (управляемые, неуправляемые, модульные).
Основные отличительные особенности оборудования Industrial Ethernet:
• повышенная надежность, связанная с отсутствием вентиляторов охлаждения
(время наработки на отказ безвентиляторных устройств повышается до 15 лет);
• расширенный диапазон рабочих температур от -40 до +60 °C (вместо
+10...40 °C);
• повышенная механическая прочность (установка в шкафах, крепление на DIN-
рейку, зажимы «под винт», отсутствие разъемов и др.);
• пониженное напряжение электропитания (в основном 24 VDC), применение ре-
зервированного питания и источников бесперебойного питания (ИБП);
• резервирование сетей и оборудования (применение высокоскоростных техноло-
гий восстановления работоспособности оборудования: сетей HIPER Ring, Super-
Ring, протокола RSTR и др.).
Среди сетевого оборудования Industrial Ethernet находят применение неуправ-
ляемые и управляемые коммутаторы, конверторы и концентраторы.
Сети Industrial Ethernet используют топологии шина, звезда и кольцо, в том числе
двойное кольцо с резервированием каналов.
Например, сеть HIPER Ring компании Hirschmann с кольцевой резервированной
топологией включает до 80-ти двухпортовых коммутаторов со временем переключе-
ния сети в случае отказов до 50 мс. Физический канал передачи данных по гигабитно-
му сегменту — кабель с 4-мя витыми парами 5-й или 6-й категории, из них две витых
пары служат для передачи сигнала, а две — для цепей питания.
В последнее время находит развитие технология передачи сигнала и питания по
одной витой паре РоЕ (Power over Ethernet), что приводит к сокращению проводов и
повышению надежности канала связи.
Приведем краткую характеристику оборудования Industrial Ethernet.
Компания Hirschmann производит промышленные неуправляемые коммута-
торы серии Spider II для Fast Ethernet (8 портов для витой пары и 2 порта 10/100
Base-FX для оптического кабеля) и для Gigabit Ethernet (5 портов 10/100/1000
Base-T). Все коммутаторы поддерживают автоматическое определение типа сое-
динения, полярности и скорости передачи по витой паре. Диапазон рабочих тем-
ператур -4О...+7О°С. К управляемым коммутаторам относятся промышленные
коммутаторы семейства R340, имеющие 9 портов Ethernet 10/100/1000 Base-T для
подключения витой пары или оптического кабеля. Диапазон рабочих температур
-40...+70 °C.
Компания Siemens выпускает несколько типов коммутаторов [6.17]:
• неуправляемые коммутаторы SCALANCE Х005/Х100 с числом портов от 4-х до
24-х для сетей Ethernet 10/100 Base-T;
• управляемые коммутаторы SCALANCE Х200/Х200 IRT для сетей Ethernet 10/100
Base-T с временем реконфигурации сети до 0,3 с.
• управляемые коммутаторы SCALANCE Х300 для сетей Ethernet 10/100/1000
Base-T;
ПРОМЫШЛЕННЫЕ СЕТИ
445
• модульные коммутаторы SCALANCE Х400, в состав которых входят коммутато-
ры, конверторы, модули расширения для сетей Ethernet 10/100/1000 Base-T.
Коммутаторы SCALANCE Х005/Х100 применяются в линейных и звездообраз-
ных топологиях сетей, остальные также и в кольцевых топологиях сети.
Беспроводная связь обеспечивается с помощью точек доступа SCALANCE W78x
(скорость обмена до 54 Мбит/с на частотах 2,4 ЕЕц и 5 ЕЕц) и модулей Ethernet-
клиентов, в том числе мобильных. Число подключаемых модулей Ethernet-клиентов —
от одного до восьми.
Компания Phoenix Contact выпускает неуправляемые коммутаторы FL SWITCH
SFN и FL SWITCH SF с поддержкой Gigabit Ethernet, управляемые модульные ком-
мутаторы FL SWITCH MMS (2...24 порта) и компактные коммутаторы FL SWITCH
MCS (16 портов витой пары или 14 портов витой пары и 2 порта для оптического ка-
беля). Новые коммутаторы Factory Line серии GT имеют не 2, а 8 адресуемых гигабит-
ных портов (коммутатор FL SMCS 8GT). Управляемые коммутаторы поддерживают
протокол SN МР.
Компания Korenix производит неуправляемые коммутаторы JetNet ЗОЮ (10 пор-
тов, из них 7 портов Ethernet 10/100 ТХ и 3 порта Gigabit Ethernet) и неуправляемые
коммутаторы начального уровня JeNet 3000 и JetNet 3500, а также управляемые мно-
гопортовые коммутаторы JetNet 4500 и JetNet 5010 G по технологии Super Ring.
Линейка коммуникационного оборудования компании Моха Technologies вклю-
чает различные коммутаторы, полнофункциональные преобразователи Industrial
Ethernet в оптоволокно, промышленные Ethernet серверы, устройства беспроводного
Industrial Ethernet, программируемые коммуникационные шлюзы для связи сетей с
Ethernet, многопортовые интеллектуальные платы и др.
Построение разветвленных сетей требует применения многопортовых коммута-
торов. Модельный ряд коммутаторов фирмы Моха Technologies включает как управ-
ляемые, так и неуправляемые коммутаторы серий EDS-205, -305, -308, -405А, -508А,
-726 и ED6008.
EDS-205 — 5-ти портовые неуправляемые коммутаторы (5 портов Ethernet 10/100
BaseT), относящиеся к офисным устройствам. Применяются в основном в сетях при
автоматизации зданий. Питание 12. ..48 VDCили 18. ..30 VAC.
EDS-305 и -308 — 5-ти или 8-ми портовые неуправляемые коммутаторы. От-
личаются возможностью оповещения о сбоях питания и обрыва линий связи, под-
ключения резервного питания 24 VDC. Обладают защитой от «широковещательного
шторма» (исключение ошибочных широковещательных Ethernet пакетов, способных
вывести из строя сетевое оборудование).
EDS-405A — 5-портовые управляемые резервируемые коммутаторы. Применя-
ются для построения магистральных резервируемых Ethernet-сетей по технологии
Turbo Ring (двойное кольцо). Время восстановления сети после сбоев, а также вре-
мя переключения на резервную линию составляет не более 300 мс. Также имеется
возможность подключения резервного источника питания и функция оповещения о
сбоях питания и обрыве линий связи.
EDS-508A — 8-портовые управляемые коммутаторы. Поддерживают все функ-
ции предыдущих серий и дополнительно выполняют функции управления приори-
тетами трафика, гарантированное время доставки (функция QoS), сегментацию
(разделение на независимые участки) сетей (функция VLAN) и управления данны-
ми (функция IGMP).
446
ГЛАВА 6
EDS-726 — современный 26-портовый управляемый модульный коммута-
тор стандарта Gigabit Ethernet. Помимо модулей Gigabit Ethernet по стандартам
10/100/1000 BaseT(X) или 1000 BaseSX/LX поддерживаются модули Fast Ethernet по
стандарту 10/100 BaseT(X) и 100 BaseFX. Коммутатор позволяет установить (по зака-
зу) три вида однопортовых модулей Gigabit Ethernet и 8 видов 4-х портовых модулей
Fast Ethernet для витой пары или оптоволокна. Управление работой коммутатора осу-
ществляется в режиме РВ, поддерживается управление сетью по протоколам SNMP
vl/v2C/v3 и RMON, а также управление сетью при помощи WEB-браузера, Windows-
утилиты или Serial/Telnet-консоли.
EDS-6008 — 8-портовый управляемый коммутатор. Разработан для применения в
жестких условиях эксплуатации (взрывоопасность среды, температуры - 40... +75 °C).
Остальные характеристики аналогичны EDS-508.
С целью повышения живучести сети и надежности передачи информации про-
токол Industrial Ethernet предусматривает резервирование сетей Industrial Ethernet.
Среди методов построения резервированных сетей Industrial Ethernet известны
следующие:
• Быстрое связующее дерево (STP — Spanning Tree Protocol) — коммутаторы авто-
матически настраиваются на дополнительные соединения; время реконфигура-
ции <5 с (стандарт IEEE 802.1w). Используется в основном для офисных систем
верхнего уровня.
• Объединение звеньев («группообразование») — четыре физических звена и одно
логическое звено с использованием одного МАС-адреса (стандарт IEEE 802. Id);
время реконфигурации <1 с.
• Двойное подключение (избыточное звено) — основной и резервный порты ком-
мутатора настраиваются независимо; время переключения < 1 с.
• Отказоустойчивое дублирование — соединение двух сетей помимо основного зве-
на с помощью добавочного (избыточного) звена; время реконфигурации <1 с.
На рис. 6.11 показан Ethernet-коммутатор EDS 508, на рис. 6.12 — коммутатор EDS
726 фирмы МОХА Technologies и на рис. 6.13 — коммутатор Т200 фирмы Westermo.
Коммутатор Т200 используется в диапазоне температур -40...+65°C. Время рекон-
Рис. 6.13
Рис. 6.14
Рис. 6.15
ПРОМЫШЛЕННЫЕ СЕТИ
447
фигурации избыточного звена в кольцевой топологии менее 50 мс. Число коммутато-
ров в кольце достигает 200.
При необходимости беспроводного соединения Ethernet-устройств (контрол-
леры, системы сбора данных, приборы) используются преобразователи (адаптеры)
для подключения этих устройств к беспроводной сети Wireless Ethernet (протокол
802.11b). Применяются преобразователи проводного Ethernet (10 BaseT) в беспро-
водной Ethernet и преобразователи последовательных интерфейсов RS-232/RS-422/
RS485 в беспроводной Ethernet.
На рис. 6.14 показан преобразователь Ethernet 10 BaseT в беспроводной Ethernet
типа AWK-1110, а на рис. 6.15 — четырехпортовый преобразователь RS-232/RS-422/
RS-485 в беспроводной Ethernet — NPort W2004 фирмы Моха Technologies.
6.3.5 Сети верхнего уровня
Сеть Token Ring. Разработана фирмой IBM в 1985 г. (стандарт IEEE 802.5).
Поставщиками сетевого оборудования являются фирмы Protean и ЗСОМ, программ-
ного обеспечения — Novell, ЗСОМ, Univation. В сети используется метод передачи
маркера по кольцу (кольцевая топология сети). Перемещаясь по кольцу маркер пре-
доставляет последовательно каждой рабочей станции право на передачу сообщения.
Станция, получив пустой маркер, может его заполнить сообщением любой длины
(frame-кадр), но в течение определенного времени, определяемого специальным тай
мером. Кадр перемещается по кольцу и каждая станция регенерирует его. Станция,
которой предназначено сообщение, копирует его, отмечая как принятый, но не вы-
водит сам кадр из кольца. Эту функцию выполняет передающая станция, когда кадр
возвращается к ней обратно.
Достоинством сети является возможность проверки достоверности кадра и ра-
ботоспособности принимающей станции. Кроме того, сеть имеет механизм приори-
тета, когда отдельные станции могут получать маркер быстрее других и дольше его
удерживать.
При использовании звездообразной кольцевой топологии станции связаны с
концентратором, а последние соединяются по кольцевой схеме. Это дает возмож-
ность отключить неисправную станцию без нарушения работы всей сети. Макси-
мальное расстояние между станцией (узлом) и концентратором — 300 м„ а между
концентраторами — 2000 м. Число станций, подключаемых к одному концентрато-
ру — 8. Максимальное число станций для сети с IBM-кабелями — 260, с ветвями на
витой паре — 72. Скорость передачи в сети Token Ring от 4 до 10 Мбит/с.
Сеть ARCNET. Сеть разработана фирмой Datapoint Corp, в 1977 г. Основными по-
ставщиками оборудования являются фирмы Datapoint, Standard Microsystems и Pure
Data. В сети используется метод доступа с эстафетной передачей для сетей со звездо-
образной топологией. Каждая станция подключается к концентратору, являющемуся
центральной точкой звезды. Концентраторы соединяются между собой шиной. Чис-
ло станций, подключаемых к одному концентратору, может составлять 4, 8, 16 или
32. Станция может передавать сообщение только тогда, когда получит маркер (token).
Маркер представляет собой последовательность битов данных, созданную одной из
станций. Всем станциям сети присвоены номера или адреса от 0 до 255 (максималь-
ное число станций в сети — 256). Маркер перемещается по сети от станции к станции
строго в порядке возрастания сетевых номеров независимо от того, в каком сегменте
сети расположена станция. От станции 255-й маркер переходит к 0-й, создавая таким
448
ГЛАВА 6
образом логическое кольцо. При получении маркера станция формирует пакет дан-
ных объемом до 512 байт путем добавления к маркеру адреса станции назначения,
собственного адреса и до 508 байтов информации. Сформированный таким образом
пакет переходит от станции к станции, пока не достигнет адресата, где данные вы-
водятся из пакета, а маркер переходит к следующей станции. Для передачи большего
объема информации (чем 508 байт) может потребоваться несколько проходов мар-
кера по сети.
Преимуществом эстафетной передачи является возможность расчета ее произ-
водительности (времени и объема передач). Недостатком — необходимость регене-
рирования маркера каждой станцией, а в случае неисправности станции — искаже-
ние или потеря маркера. Поэтому применяются специальные меры для регенерации
(восстановления) маркера.
К каждому концентратору возможно подключение до 8-ми станций, каждая из
которых может быть удалена от концентратора на расстояние до 600 м. Скорость
передачи информации в сети составляет 2,5 Мбит/с.
Технические характеристики промышленных сетей приведены в табл. 6.4 на
с. 459. Общее число промышленных сетей к настоящему времени достигает около
250. В таблице приведены наиболее часто применяемые сети в распределенных си-
стемах управления.
6.4. Беспроводные сети систем управления.
Беспроводные сети в последние годы находят все большее применение в рас-
пределенных системах управления. Стандартизация сетей, унификация и большой
выбор сетевого оборудования, высокое качество связи и высокая скорость передачи
информации, надежная защита от несанкционированного доступа, широкий диапа-
зон охвата территории, интеграция с проводными промышленными сетями, просто-
та обслуживания и, конечно, отказ от дорогостоящих кабельных сетей — основные
причины широкого использования беспроводных технологий связи [6.18-6.29].
Беспроводные сети подразделяются в зависимости от признаков:
• по способу обработки информации — на аналоговые и цифровые;
• по местонахождению абонентов — на подвижные (мобильные) и неподвижные
(стационарные);
• по ширине полосы передачи данных — на узкополосные, широкополосные и
сверхширокополосные;
• по территориальной протяженности — на персональные, локальные, региональ-
ные (городские) и глобальные;
• по виду передаваемой информации — на системы передачи голоса, видео и
данных.
Беспроводные сети широко применяются для мониторинга и управления удален-
ными объектами, которые характеризуются следующими особенностями:
• удаленные объекты могут быть необслуживаемыми, т. е. на этих объектах отсут-
ствует постоянный обслуживающий персонал;
• доступ этих объектов к кабельным трассам затруднен или отсутствует;
• объекты характеризуются жесткими условиями эксплуатации (повышенная
влажность, большой диапазон температур, сильные электромагнитные поля
и т. п.);
ПРОМЫШЛЕННЫЕ СЕТИ
449
• объекты могут быть мобильными2;
• объекты имеют ограниченный объем данных для контроля и управления.
Новой тенденцией применения беспроводных сетей является создание беспро-
водных приборов контроля температуры, давления, расхода и др. Беспроводные ре-
шения Smart Wireless от компании Emerson Process Management позволяют переда-
вать значения параметров от беспроводного датчика температуры Rosemount 648 или
беспроводного датчика давления Rosemount 3051S в беспроводную сеть к беспровод-
ному шлюзу 1420. Питание беспроводных приборов осуществляется от искробезо-
пасного модуля питания и, таким образом, эти приборы могут устанавливаться во
взрывоопасных средах. Собранные шлюзом 1420 данные передаются по проводным
линиям связи (Ethernet, RS-485) к рабочей станции или ПЛК.
К организациям, участвующим в разработке стандартов беспроводных сетей,
относятся: Международный телекоммуникационный союз (ITU — International Tele-
communications Union), Международная организация по стандартизации (ISO), соз-
данная на базе Международной электротехнической комиссии (IEC — International
Electrotechnical Commission), Институт инженеров по электротехнике и электронике
(IEEE — Institute of Electrical and Electronics Engineers).
Беспроводные системы связи делят на системы первого поколения, второго
(2G), третьего (3G) и четвертого (4G). Системы первого поколения представляли
собой системы с аналоговыми каналами. Сетью первого поколения в США была
сеть AMPS (Advanced Mobile Phone System — усовершенствованная система мобиль-
ной телефонной связи). Для этой сети были выделены две полосы частот по 25 МГц:
(869-894 МГц) — для передачи сигналов от базовой станции до мобильных устройств
(прямой канал) и (824-849 МГц) — для передачи сигналов от мобильных устройств
на базовую станцию (обратный канал). Оператору выделялось по 12,5 МГц в каж-
дом направлении, разбитом на полосы по 30 кГц. Таким образом, оператор может
поддерживать 416 каналов. Сети первого поколения эксплуатировались в различных
странах в период 1983-85 гг.
К сетям второго поколения (2G) относят сети GSM, IS-136, IS-95 и др.
В конце 90-х годов компанией Bell System предложен принцип сотовой беспро-
водной связи, который заключается в использовании большого числа маломощных
передатчиков.
Поскольку зона действия передатчика мала, общая площадь разбивается на ячей-
ки или соты (cell), каждая со своей антенной.
Каждой ячейке выделяется своя полоса частот, обслуживаемая базовой стан-
цией. В состав базовой станции входят передатчик, приемник и модуль управления
(контроллер).
Основные достоинства сотовой связи:
• радиопомехи не связаны с расстоянием между сотами, а определяются отноше-
2 Первые подвижные передатчики и система двусторонней подвижной связи для департамента полиции
были созданы в 1930 г. в США. К 1940 г. полицейские системы США использовали принцип частотной
модуляции сигналов. Концепция сотовых сетей сформулирована в 1947 г. инженером компани Bell System
Д.Х. Рингом. В 1978 г. введена система сотовой связи HCMTS, а в 1983 г. AMPS (США), в 1985 г. - TACS
(Великобритания), в 1986 г. — NETZ-C (Германия) и др. В 1981 г. компания Ericsson (Швеция) ввела в экс-
плуатацию стандарт NMT-450 (Nordic Mobile Telephone — мобильная телефония для северных стран). В
1992 г. в Финляндии началось внедрение стандарта 2-го поколения - GSM. В 1993 г. разработан стандарт на
основе метода CDMA. В 2001 г. в Японии впервые запущен стандарт 3-го поколения W-CDMA оператором
связи NTT DoCoMo.
15 Зак. 3801
450
ГЛАВА 6
нием расстояния между сотами с одной и той же частотой и радиуса соты; радиус
соты определяется мощностью передатчика и высотой антенны;
• принцип дробления соты, заключающийся в том, что при ослаблении сигнала
большая сота может быть преобразована в соты меньшего радиуса.
Для удобства графического изображения соты изображаются в виде шестиуголь-
ника (гексагональная структура) с базовой станцией в центре соты. Каждая станция
соединяется проводной или беспроводной связью с коммутатором мобильной теле-
коммуникации MTSO (Mobile Telecommunications Switching Office) или по другим ис-
точникам с центром коммутации подвижной связи MSSC (Mobile Services Switching
Center) [6.18, 6,26]. Один коммутатор обслуживает несколько базовых станций.
Между мобильным устройством и базовой станцией существуют каналы связи
двух типов: каналы управления (поддержка звонка, установление связи и пр.) и ин-
формационные каналы (передача речи и данных). Включенное мобильное устрой-
ство в результате сканирования каналов выбирает наиболее мощный настроечный
канал (как правило, от ближайшей к нему базовой станции). Затем осуществляется
процедура квитирования для опознавания пользователя и определения его местопо-
ложения в пределах соты. Каждое мобильное устройство имеет модуль идентифи-
кации абонента SIM (Subscriber Identity Module). Дальнейший порядок соединения
двух абонентов начинается с отправки номера вызываемого абонента по выбранному
каналу на базовую станцию, которая в свою очередь отправляет запрос на коммута-
тор MTSO. Последний устанавливает связь с вызываемым, отправляя адресное со-
общение той базовой станции, в зоне которой находится вызываемый абонент. При
распознавании своего номера в настроечном канале вызываемый абонент оповеща-
ет свою базовую станцию, которая соединяется с коммутатором MTSO. После этого
коммутатор устанавливает канал связи между базовыми станциями двух абонентов.
В течение этого соединения происходит обмен речевыми сообщениями и данными
двух мобильных устройств по каналу между базовыми станциями и коммутатором.
При переходе абонентов в др. зоны (соты) осуществляется автоматическое переклю-
чение каналов (и базовых станций) без прерывания связи. Основным параметром
при переключении является интенсивность сигнала от мобильного устройства к ба-
зовой станции.
Поскольку коммутатор MTSO подключен к коммутатору телефонной сети, то
возможно установление соединения между мобильным пользователем и стационар-
ным абонентом телефонной сети.
Методы доступа к среде передачи данных в беспроводных сетях следующие:
• множественный доступ с частотным разделением FDM (Frequency Division
Multiplexing), когда каждое устройство работает на строго определенной частоте;
• множественный доступ с временным разделением TDM (Time Division
Multiplexing), когда радиостанции работают на одной частоте, но в различные
промежутки времени;
• множественный доступ с кодовым разделением CDM (Code Division Multiplexing),
когда все радиостанции передают сигналы на одной и той же частоте, но с разной
кодировкой.
На механизме разделения каналов (CDMA — CDM Access) основаны стандарты
сотовой связи IS-95a, cdma 2000 и др.). В схеме CDM передатчик заменяет каждый
бит данных на CDM-символ в виде кодовой последовательности длиной 11,16, 32, 64
и т. д. бит (эта последовательность называется чипом). Приемник настроен на при-
ПРОМЫШЛЕННЫЕ СЕТИ
451
ем CDM-кода передатчика, при этом сигналы других передатчиков с другими CDM-
кодами воспринимаются этим приемником как аддитивный шум. Используется ме-
тод частотного уплотнения, когда в определенной последовательности центральная
частота каждого передатчика дискретно изменяется (метод частотных скачков). При-
емник при этом синхронно перестраивается на частоту передатчика.
Достоинством кодового уплотнения является повышенная помехозащищен-
ность.
Известен также метод временных скачков, при котором момент передачи паке-
тов информации изменяется по псевдослучайному закону.
Для схемы уплотнения при TDM-доступе используются два алгоритма: фикси-
рованное распределение центральной станцией времени начала передачи между або-
нентами и метод случайного доступа к сети. Усовершенствованием последнего ме-
тода является метод множественного доступа с детектированием несущей — CSMA
(Carrier Sense Multiple Access). Детектирование несущей означает, что канал прослу-
шивается устройством и если канал занят, то передатчик переходит в ждущий ре-
жим. Все устройства в этой схеме являются равноправными. Разновидностью метода
CSMA является метод CSMA/CA (СА — Collision Avoidance — предотвращение кон-
фликтов), который используется в беспроводных сетях стандарта IEEE 802.11.
Применяются также методы множественного доступа с распределением по запро-
су DAMA (Demand Assigned Multiple Access), схемы TDMA с резервированием и др.
6.4.1 Сети GSM
Стандарт GSM (Global Mobile System for mobile communication - глобальная си-
стема мобильной связи), введенный в 1990 г„ представляет собой стандарт сотовой
связи на частотах 900, 1800 и 1900 МГц. Стандарт DCS 1800 для частот 1800 МГц ис-
пользуется в Европе, а стандарт PCS 1900 для частот 1900 МГц — в США [6.18-6.19].
Стандарт GSM основан на технологии множественного доступа с разделением по
времени TDMA (Time Division Multiple Access). Диапазон рабочих частот передачи
сигнала мобильным устройством составляет 890...915 МГц и диапазон частот приема
сигнала базовой станции — 935...960 МГц. Ширина канала 200 кГц (для GSM 1800 —
1700. ..1785 и 1805. ..1880 соответственно), по 25 кГц на канал, число пользователей на
один канал равно 8. В GSM 900 весь диапазон делится на 124 канала (124 канала на пе-
редачу и 124 канала на прием данных с частотным интервалом между каналом переда-
чи и каналом приема данных 45 МГц). Канал разбит на 25 кадров длительностью 4,615
мкс каждый. Таким образом, мультикадр имеет длительность 115 мс. Кадр состоит из 8
канальных интервалов, каждый длительностью 577 мкс (тайм-слот для приема и пере-
дачи, выделенный каждой станции). В каждом канальном интервале данные занимают
объем 57 бит. Таким образом, мобильная станция передает базовой станции инфор-
мацию в течение 577 мкс каждые 4,615 мс. Базовая станция связывается с мобильной
станцией так же, но на частоте на 45 МГц выше (для разноса частот передачи и приема).
После передачи 148 бит передатчик «молчит» в течение защитного интервала 30,44 мкс,
что по времени эквивалентно передаче 8,25 бит [6.19].
Максимальное удаление мобильной станции от базовой для GSM 900 составляет
порядка 35 км (для GSM 1800 до 10 км). Радиус соты в 35 км. ограничен временной
задержкой распространения сигнала.
Используя GSM-модемы операторские станции могут обмениваться с контролле-
ром, используя SMS-сообщения или прямое соединение.
452
ГЛАВА 6
К преимуществам GSM-связи относятся:
• использование SIM-карт для доступа к каналу связи с функциями идентифика-
ции пользователя;
• использование технологии SMS (Short Message Service — служба коротких сооб-
щений) при обмене с ПК, ПЛК и сотовыми телефонами буквенно-цифровыми и
текстовыми сообщениями в объеме до 160 символов;
• аутентификация абонента и идентификация абонентского оборудования и др.
GSM-телемеханика обеспечивает хорошее качество связи, простоту установки
и обслуживания оборудования, автоматический роуминг (маршрутизацию) различ-
ных сетей GSM с широким охватом территории и мобильность.
Это дает возможность безлюдного обслуживания удаленных объектов нефтегазо-
вого комплекса, тепловых пунктов, насосных станций, сетей учета энергоресурсов.
Различные фирмы выпускают промышленные контроллеры с GSM-портами для
подключения GSM-модема (контроллеры Alpha фирмы Schneider Electric, М90 фирмы
Unitronics, ADAM 5510/SLG фирмы Advantech, ТЕКОНИК фирмы Текон и др.).
' Для программирования контроллеров применяются различные пакеты ПО,
например: GSM Control, GPRS/WAP-Tool и GSM-Dial компании Klinkmanm, Micro
TRACE MODE GSM+ фирмы AdAstra Research Group (предустановленно в контрол-
леры ТЕКОНИК и ADAM 5510/SLG); SMS RTD Mobile ToolKit для встраиваемого мо-
дема COM 17035 формата РС/104 корпорации RTD (Real Time Devices); Empty Profile
для модуля ММ-7188 (на основе модуля 1-7188) и модуля ММ-7188 Ethernet компа-
нии ICPDAS [6.20-6.23].
Для объединения различных устройств в мобильную сеть GSM предназначены
GSM-модемы. Применяются GSM-модемы двух типов: законченные (аппаратные)
модемы с последовательным портом для связи с ПЛК или ПК (GSM-модемы Siemens
Ml, М20Т и ТС35Т) и модульные малогабаритные модемы на печатной плате (GSM-
модуль Siemens ТС35 или Siemens МС35 на плате формата РС/104).
Ряд фирм выпускает аппаратно-программные комплексы для построения сетей
GSM на общей платформе (шасси) которых размещены базовая станция, контроллер,
коммутатор, модемы (например, комплекс WAVE Express компании interWAVE Com-
munications Inc.).
К сетям стандартов 2-го поколения помимо GSM (900 и 1800 МГц) относятся сети
стандарта CDMA (Code Division Multiple Access — множественный доступ с кодо-
вым разделением каналов). Спецификация IS-95 (cdmaOne) стандарта GSM исполь-
зует частотный диапазон 824...840 и 869...885 МГц (интервал 45 МГц). Для увеличе-
ния скорости передачи по спецификации IS-95b разработана широкополосная сеть
WCDMA. Скорость передачи в сети WCDMA до 64 кбит/с. Дальнейшим развитием
спецификации IS-95 является проект cdma2000, использующий утроение спектраль-
ной полосы канала cdmaOne с частоты 1,25 до 3,75 МГц, что позволяет увеличить
скорость передачи до 2 Мбит/с.
В целом по данным [6.29] 70% сетей подвижной связи в 130 странах принадлежат
сетям GSM, 15% — стандарту CDMA (IS-95), 9% — стандарту TDMA (IS-136) и 5%
рынка занимают сети японского стандарта PDC. Число абонентов стандарта GSM не-
прерывно растет: 1995 г — 13 млн, 2000 г — 456 млн, 2003 г — 847 млн, 2007 г — более
1,5 млрд. По прогнозам специалистов данный стандарт будет определяющим в тече-
ние ближайших 5-10 лет.
К другим системам 2-го поколения относятся системы IS-136 и IS-95.
ПРОМЫШЛЕННЫЕ СЕТИ
453
Система IS-136 использует метод доступа TDMA. Полоса частот базовой станции
составляет 869-894 МГц, мобильного устройства — 824...849 МГц, ширина канала
30 кГц, число дуплексных каналов 832, число пользователей на один канал равно 3,
мощность мобильного устройства до 3 Вт.
Система IS-95 использует метод доступа CDMA. При этом методе доступа каж-
дой ячейке выделяется полоса частот, разделенная на две части для прямого и об-
ратного каналов. При полнодуплексной связи мобильное устройство использует оба
канала. Передача данных осуществляется по схеме расширения спектра методом
прямой последовательности (DSSS), при котором используется дробление кода для
увеличения скорости передачи данных и расширения полосы частот. Полоса частот
базовой станции и мобильных устройств аналогичны системе IS-136. Ширина канала
составляет 1250 кГц, число дуплексных каналов — 20, число пользователей на один
канал — 35.
Дальнейшим развитием стандарта и сети GSM стал стандарт GPRS.
6.4.2 Сети GPRS
Стандарт GPRS (General Packet Radio Service — услуга пакетной передачи данных
по радиоканалу) или сетевая служба 2,5G. Оператор GPRS предоставляет пользовате-
лю услуги связи с расчетом исходя из объема переданных данных, а не в зависимости
от времени связи, как в сети GSM. Скорость передачи данных по каналу GPRS дости-
гает 40... 115 кбит/с (с использованием GSM/ GPRS модема Siemens МС35 в режиме
GPRS или GPRS-модема Siemens МС35Т в режиме приема данных до 85,6 кбит/с), в то
время как по GSM-каналу только 10... 16 кбит/с. GPRS-модемы могут быть постоянно
подключены к сети, благодаря чему не тратится время на набор номера абонента и га-
рантируется передача и прием данных без задержек. Повышенная скорость передачи
объясняется тем, что пакетная коммутация гарантирует быстрое установление соеди-
нения и абонент занимает канал только на момент передачи. При пакетной коммута-
ции данные передаются в интервалы, свободные от речевого трафика [6.19,6.23].
GPRS поддерживает все основные протоколы передачи данных, в том числе
Интернет-протокол IP. Без дополнительных устройств GPRS позволяет реализовать
соединение через интерфейсы TCP/IP или Х.25 с различными устройствами. Также
GPRS позволяет осуществить многоточечную передачу данных между провайдером
сети и группой мобильных GPRS-абонентов. При совместимости с GPRS/WAP возмо-
жен доступ с сотового телефона к серверу БД. Использование для доступа к данным
глобальной сети Интернет позволяет получать данные и управлять удаленными объ
ектами в любом месте и в любое время. Этим реализуется предлагаемая фирмой Intel
концепция «обеспечения взаимодействия вычислительных и коммуникационных
устройств в любом месте и в любое время между различными устройствами». Данная
концепция также стимулирует применение клиентских мобильных (карманных) ПК
на базе архитектуры Intel Personal Internet Client Architecture (Intel PCA).
Структура GPRS-системы включает два основных узла — узел поддержки SGSN
(Serving GPRS Support Node) и шлюз GGSN (Gateway GPRS Support Node).
В функции узла поддержки SGSN входят контроль доставки пакетов данных
пользователям, проверка по реестру перечня разрешенных услуг, регистрация або-
нентов сети. При регистрации мобильному абоненту выдается временный номер для
пакетной передачи данных. При этом местонахождение абонента определяется в за-
висимости от его состояния: IDLE (неработающий или отключен), STANDBY (режим
454
ГЛАВА 6
j ожидания) или READY (готовность). В режиме IDLE абонент не от-
Г слеживается, в режиме STANDBY местоположение абонента извест-
Д но в пределах области маршрутизации, а в режиме READY известно
В с точностью до соты.
^В^В В функции шлюза GGSN входит роуминг данных, поступающих
ЕВ к абоненту и от абонента, адресация данных, присвоение IP-адресов,
' ^^^В тарификация услуг и др.
Система GPRS имеет несколько классов QoS (Quality of Service —
качество сервиса), — приоритет, скорость обмена, степень надежно-
сти. В число сервисных функций входят также контроль параметров
управления объектами за счет встроенных ПИД-регуляторов, сигна-
лизация отклонений параметров от заданных значений, включение/
отключение объектов, аппаратный WatchDog и др.
Сессия передачи по GPRS-каналу характеризуется типом про-
токола передачи (PDP — Packet Data Protocol), PDP-адресом мобильного абонента,
адресом шлюза GGSN. При пакетной передаче данных предусмотрено два вида сое-
динений: РТР (Point-to-Point — «точка-точка») и РТМ (Point-to-Multipoint — «точка-
многоточие»),
GPRS-модемы, как и GSM-модемы, выпускаются в виде законченных устройств
(рис. 6.16) и в виде встраиваемых модулей. Так, модемы Siemens ТС35 Terminal и МС35
Terminal поддерживают все функции сотового телефона, но с управлением не с помо-
щью клавиатуры, а по интерфейсу RS-232. Поэтому модем может быть легко включен
в любую промышленную сеть с помощью соответствующих преобразователей (на-
пример, для сети на базе интерфейса RS-485 могут использоваться преобразователи
RS-232/RS-485 ADAM 4521, а для включения в сеть Ethernet — ADAM 6531 и др.).
Постоянный рост числа пользователей услуг мобильной связи по каналам GSM/
GPRS и увеличение выпуска беспроводных мобильных и карманных ПК, мобильных
телефонов с поддержкой протокола WAP с доступом через Интернет к БД, различ-
ным протоколам и промышленным шинам свидетельствует о развитии в ближайшие
годы GSM/GPRS-телемеханики.
Помимо стандарта GPRS к сетям 2,5G относят сети, основанные на технологи-
ях HSCSD (скорость передачи 9,6...57,6 кбит/с) и EDGE (скорость передачи 64...384
кбит/с).
6.4.3 Беспроводные системы связи 3-го и 4-го поколения (3G и 4G)
Основные отличия систем 3G (Third Generation) от систем связи 2-го поколения
заключаются в том, что имеется возможность передачи больших объемов информа-
ции с высокой скоростью и доступа в беспроводной Интернет.
К другим достоинствам относятся полная унификация оборудования, предо-
ставление полного набора услуг мультимедиа через стационарную, мобильную или
спутниковую системы связи, глобальный роуминг, позволяющий абоненту пересе-
кать границы государств, используя при обмене данными и речевыми сообщениями
один и тот же номер и одно и то же мобильное устройство.
Технология 3G базируется на методе доступа CDMA (множественный доступ с
кодовым разделением каналов).
Основой архитектуры является технология IP с пакетной передачей данных и
оплатой за объем передаваемой информации, а не за время связи.
ПРОМЫШЛЕННЫЕ СЕТИ
455
Системы связи 3G работают на частоте 2 ГГц со скоростью 2 Мбит/с. Существуют
два стандарта системы 3G: UMTS (Universal Mobile Telecommunication Systems — уни-
версальная мобильная телекоммуникационная система) и CDMA 2000 (Code Division
Multiple Access — мультидоступ с кодовым разделением каналов).
Стандарт UMTS (или W-CDMA) распространен в основном в Европе, а стандарт
CDMA 2000 — в США и Азии. Международный альянс ITU в программе IMT 2000
определил следующие скорости обмена данными: для быстрых мобильных абонен-
тов (в поездах, автомобилях и пр.), перемещающихся со скоростью до 120 км/ч, — 144
кбит/с; для медленных абонентов при скорости до 3 км/ч — 384 кбит/с; для непод-
вижных абонентов (в помещениях) — до 2048 кбит/с.
В России в октябре 2007 г. коммерческую сеть связи UMTS запустил оператор со-
товой связи «Мегафон». Лицензии на услуги 3G получили также ОАО «МТС» и ОАО
«ВымпелКом».
К числу перспективных беспроводных сетей 4-го поколения (4G) относят сети
со скоростью обмена до 20, а в дальнейшем и до 100 Мбит/с, которые представляют
собой комбинацию сетей 2G и аналога беспроводных локальных сетей. Сети 4G по-
зволят получать на мобильные терминалы видеоизображения высокого качества и
телевизионные программы. Данные характеристики сети связи 4G могут быть по-
лучены по прогнозам специалистов к 2010 году.
6.4.4 Технология WiFi (стандарты IEEE 802.1 la/b/g)
Первоначальный стандарт беспроводных локальных сетей IEEE 802.11 охва-
тывает два нижних уровня модели ISO/OSI, а именно Physical (физический) и
Data Link (канальный). В стандарте IEEE 802.2 канальный уровень разделен на два
подуровня: LLC (Logical Link Control — управление логическим каналом) и МАС
(Medium Access Control — управление доступом к среде). МАС подуровень опи-
сан в стандарте IEEE 802.11. На физическом уровне стандарт определяет функци-
ональные и электрические характеристики физического соединения и скорость
передачи данных. МАС уровень управляет доступом к сети, механизмом защиты
и восстановления данных. Предусмотрена передача пакетов с 48-ми битовыми
адресами.
Стандарт IEEE 802.11 определяет сотовую архитектуру беспроводной сети
передачи данных. Каждая сота управляется базовой станцией, в зоне обслужи-
вания которой находятся пользовательские станции. Базовые станции связаны
между собой и при переходе мобильной станции пользователя из зоны обслужи-
вания одной базовой станции в другую распределительной системой гарантиру-
ется подсоединение этой мобильной станции к сети. Механизм защиты данных
предусматривает помимо кодирования данных также аутентификацию станций
передачи и приема данных. Дальнейшим развитием стандарта IEEE 802.11 явля-
ются стандарты IEEE 802.11 a, IEEE 802.11 b и IEEE 802.11 g, которые принято отно-
сить к технологии WiFi (Wireless Fidelity — беспроводная сеть высокой точности)
по аналогии с HiFi. Стандарт разработан консорциумом Wi-Fi Alliance в составе
80 компаний на базе стандарта 802.11. Связь обеспечивается в радиусе 80...300 м
от точки доступа. При увеличении мощности приемо-передающих устройств и
антенны расстояние может быть увеличено до нескольких километров.
Стандарт IEEE 802.11а использует диапазон частот 5,15...5,825ГГцс шириной ка-
нала 20 МГц. Формирование сигнала осуществляется в частотной области методом
456
ГЛАВА 6
мультиплексирования по ортогональным частотам (OFDM — Orthogonal Frequency
Division Multiplexing). В зависимости от скорости кодирования передача осуществля-
ется со скоростью 6...54 Мбит/с на расстоянии до 100 м.
Стандарт IEEE 802.11b использует частоту 2,4 ГГц со скоростями передачи до 5,5
и 11 Мбит/с.
Стандарт IEEE 802.11g также использует ту же частоту 2,4 ГГц, но скорость пере-
дачи увеличена до 54 Мбит/с. Стандарт определяет метод передачи DSSS (Direct Se-
quence Spread Spectrum — расширение спектра методом прямой последовательности)
или формирование широкополосного сигнала во временной области. Стандарт IEEE
802.11g совместим со стандартом IEEE 802.11b, т. е. использует метод OFDM и имеет
скорость передачи до 54 Мбит/с.
Поскольку доступ к сети использует модель CSMA/CD, для предотвращения кон-
фликтов стандартом IEEE 802.11 предусмотрен защитный механизм, предусматриваю-
щий перед началом работы в сети передачу «запроса на передачу» (RTS —Request То
Send) и получение подтверждения «можно передавать» (CTS — Clear То Send). Меха-
низм RTS/CTS используется в сетях по стандартам IEEE 802.11b и IEEE 802.11g.
6.4.5 Беспроводная технология Bluetooth (стандарт IEEE 802.15)
Основана на пакетном способе обмена информацией с разделением по времени в
полосе частот 2,4.. .2,48 ГГц. Стандарт предусматривает дуплексный способ передачи,
защиту данных идентификацией абонента и устройства и применяется для обмена
данными на небольших расстояниях (до 100 м), например, связь беспроводных теле-
фонов, компьютеров и др. [6.25].
Основные достоинства технологии Bluetooth: малая мощность передатчика и ма-
лое энергопотребление из-за небольшого радиуса действия; высокая помехоустойчи-
вость; низкая стоимость. Структура устройства Bluetooth включает трансивер, кон-
троллер связи, управляющее устройство для обмена данными с терминалом. В 2003 г.
сформированы два новых стандарта — 802.15.3 (высокоскоростной) и 802.15.4 (низ-
коскоростной или стандарт ZigBee).
Основные характеристики радиоинтерфейса Bluetooth: вид модуляции - метод
частотных скачков (до 1600 скачков в секунду); скорость обмена данными — 1, 2 и
3 Мбит/с; количество устройств в сети не ограничено; мощность передатчика — 100
мВт; радиус действия — 10... 100 м.
В 1998 г. компании IBM, Intel, Toshiba и Nokia сформировали группу Bluetooth
SIG (Special Interest Group) для создания технологии беспроводного соединения мо-
бильных устройств, куда впоследствии вошли свыше 200 фирм.
В 2001 г. вышла версия Bluetooth 1.1 (стандарт IEEE 802.15.1),
в 2003 г. — версия Bluetooth 1.2 и в 2004 — Bluetooth 2.0+EDR
(Enhanced Data Rate) с расширенным набором скоростей пере-
дачи данных до 1, 2 и 3 Мбит/с. Стандарт описывает пакетный
способ передачи данных в диапазоне частот от 2400 до 2483,5
МГц. Используется метод расширения спектра при скачкоо-
бразном изменении частоты FHSS (Frequency Hopping Spread
Spectrum). Вся полоса частот делится на подканалы (79 для
США и Европы и 23 для Испании и Франции) шириной 1МГц
каждый и интервалом между частотами 140... 175 кГц. Канал
представляет собой псевдослучайную последовательность
I
Рис. 6.17
ПРОМЫШЛЕННЫЕ СЕТИ
457
скачков по 79 подканалам. Канал делится на временные сегменты по 625 мкс (слот),
каждому из сегментов соответствует свой подканал (несущая). При частотных
скачках передатчик синхронно с приемником со скоростью 1600 скачков в секунду
«перескакивает» с несущей на несущую. При наличии шума в канале осуществля-
ется переход на другой канал и так до тех пор, пока не будет найден свободный от
шума канал [6.19, 6.25].
Bluetooth поддерживает соединения «точка/точка» и «точка/многоточка». Два и
более устройств, использующих один и тот же канал, образуют пикосеть (piconet).
Одно из устройств в пикосети является основным (master), а другие — подчинен-
ными (slaves). В одной пикосети может быть до 7 активных slaves; остальные slaves
находятся в режиме «парковки» (park), оставаясь синхронизированными с основным
устройством. Несколько пикосетей образуют распределенную сеть, в которой master
одной пикосети может быть slave в другой пикосети.
Стандарт Bluetooth определяет дуплексную передачу с временным разделением
TDD (Time Division Duplexing). Время передачи пакетов может занимать до 5 вре-
менных сегментов по 625 мкс. Протокол поддерживает асинхронную передачу ACL
(Asynchronous Connection Less), синхронную передачу SCO (Synchronous Connection
Oriented) и одновременную асинхронную передачу данных и синхронную передачу
голоса. Синхронные каналы SCO применяется для соединений «точка-точка» для пе-
редачи речевых сообщений со скоростью 432,6 кбит/с по интерфейсам USB, RS-232.
ACL поддерживает соединения «точка/точка» и «точка/многоточка» со скоростью
передачи 723,3/57,6 кбит/с в асимметричном режиме и 432,6 кбит/с в симметричном
режиме. Для каждого из видов связи используются 12 типов пакетов и 4 контрольных
пакета являются общими.
Каждому устройству Bluetooth присвоен уникальный 48-разрядный физический
адрес. Формат пакета Bluetooth содержит код доступа (72 бита), заголовок (54 бита)
и информационное поле (0.. .2745 бит). В код доступа входят биты синхронизации на
основе адреса и контрольной суммы. Заголовок содержит адрес активного устрой-
ства, код типа данных, бит готовности к приему данных, бит подтверждения приема
и контрольную сумму. Информационное поле содержит поле данных и поле голосо-
вых сообщений.
Устройства Bluetooth могут находиться в трех режимах: режим Standby, режим
подключения к сети и режим «парковки». В режиме Standby устройство включено и
готово к работе. Из состояния Standby устройство переходит в режим сканирования
адресованных ему сообщений. Приняв сообщение, устройство отсылает Мастеру
идентификационный пакет. Если устройство зарегистрировано в пикосети, Мастер
посылает пакет синхронизации, а подчиненное устройство в ответ посылает под-
тверждение приема. После этого считается, что соединение установлено и осущест-
вляется обмен данными.
В версии Bluetooth 2.0+EDR в режиме EDR применяется дифференциальная фа-
зовая модуляция. В результате при базовой скорости 1 Мбит/с скорость вырастает до
2 и 3 Мбит/с. Модем стандарта Bluetooth показан на рис. 6.17.
К другим стандартам относят стандарт IEEE 802.15.3 для беспроводных сетей
WPAN (частота 2,4 ГГц, скорость передачи данных 11, 22, 33, 44 и 55 Мбит/с на рас-
стоянии до 100 м, число пользователей в сети — до 245) и стандарт IEEE 802.15.4
для сетей ZigBee (скорость передачи до 250 кбит/с на расстоянии до 10 м). Стандарт
ZigBee (Zig — зигзаг, Вее — пчела) описывает низкоскоростную сеть, разработан-
458
ГЛАВА 6
ную компаниями Invensys, Honeywell, Mitsubishi Electric, Motorola и Philips. Исполь-
зуются 3 диапазона частот: 868,0...868,6 МГц (1 канал), 902...928 МГц (10 кана-
лов, шаг частот 2 МГц) и 2400...2483 МГц (16 каналов, шаг частот 5 МГц). Топология
сети — «звезда» и «точка/точка».
6.4.6 Стандарт IEEE 802.16
Дальнейшее повышение диапазона частот предусматривается в стандартах IEEE
802.16.1 (10. ..66 ГГц) и IEEE 802.16.3 (2. ..11 ГГц). Основным механизмом управления
передачей и приемом данных стандарта IEEE 802.16 служат управляющие сообще-
ния, которые регламентируют профили пакетов, управление доступом к каналу по
запросу, механизмы защиты и пр. [6.19].
Для увеличения дальности передачи до сотни и более километров используются
стационарные радиосети на выделенной частоте. Передача информации организует-
ся с использованием радиомодемов, работающих на базе GSM-технологии.
В число характеристик радиосети входят: диапазон частот (900 МГц и 2,4 ГГц); шаг
сетки частот (6,25; 12,5; 25 КГц и др.); потребляемый ток и рабочее напряжение; чув-
ствительность приемника; выходная мощность передатчика; полоса пропускания.
К характеристикам радиомодема относятся скорость передачи, вид модуляции,
дальность передачи. Использование радиомодемов с выделенной частотой имеет не-
которые недостатки: необходимость лицензирования частоты, а при необходимости
увеличения дальности связи требуется установка репитеров. К недостаткам радио-
канала относят высокую стоимость приемопередающих устройств, низкую помехо-
защищенность и трудности в обеспечении секретности передаваемой информации.
6.4.7 Инфракрасный канал (ИК-канал)
Инфракрасная связь IR (Infrared) Connection (стандарт IrDA 1.1) позволяет осу-
ществить беспроводную связь между двумя устройствами, находящимися друг от
друга на расстоянии до нескольких метров [6.18]. В отличие от радиоканала ИК-
канал нечувствителен к электромагнитным помехам и может использоваться в про-
изводственных условиях. Различные ИК-системы позволяют обмениваться со скоро-
стями от 115,2 кбит/с до 5 Мбит/с. В качестве передатчика используется светодиод с
эффективной длиной волны X = 880 нм, в качестве приемника — PIN-диод. Наиболее
часто используется топология — шина. Недостатками ИК-канала являются достаточ-
но высокая стоимость передатчиков и приемников, а также трудности обеспечения
секретности передаваемой информации.
ПРОМЫШЛЕННЫЕ СЕТИ
459
Таблица 6.4. Характеристики промышленных сетей
Шина Разработчик технологии Топология сети Физическая линия связи Максимальное число устройств Максимальная длина соеди- нения Скорость обмена
ASi ASi Consortium 1993 Общая шина, кольцо, древовидная звездообразная и другие вп 31 подчиненное устройство 100 м, с ре- трансляторами 300 м 156 кбит/с
Hart Fisher- Rosemount Inc, 1985 Точка-точка, звезда, шина эвп 15 (топология - шина) Неограничено 1,2 кбит/с
Modbus RTU/ ASCII Schneider Electric, 1979 Общая шина, звездообразная, древовидная сеть с сегмен- тами эвп 247 узлов на сегмент 350... 1200 м 75...57600 бит/с
Modbus Plus Schneider Electric Общая шина вп 32 узла на сег- мент, не более 64 узлов 450 м на сегмент; общая длина — 1800 м 1 Мбит/с
Interbus-S Phoenix Contact, 1984 Сегменти- рованная с Т-образными отводами вп, вок, контактное кольцо 512 узлов 400 м на сегмент, общая протяженность не более 12,8 км 500 кбит/с; 2 Мбит/с
DeviceNet Allen-Bradley, 1994 Магистральная линия с ответ- влениями (6 м) ВП (4-х проводная) для передачи сигнала и напряжения питания 64 узла (32 устройства на один узел) 100,250, 500 м (зависит от скорости передачи); с ретранслятора- ми до 6 км 125,250 или 500 кбит/с
PROFIBUS DP Siemens, 1994 Линейная, звездообразная, кольцевая вп, вок 127 узлов (124 Slave, 4 Master), 4 сегмента До 24 км (ВОК) 12 Мбит/с (100 м), 9,6 кбит/с (1200 м)
PROFIBUS PA Siemens. 1995 Линейная, звездообразная, кольцевая вп, вок 127 узлов (124 подчи- ненных — 4 сегмента, 3 ретранслятора) и 3 главных устройства 1900 м 31,25 кбит/с
BitBus Intel, 1984 Звезда, кольцо эвп 240 (28 в сегменте) От 1,2 км до 13,2 км 500,2400 кбит/с
Control Net Allen-Bradley, 1996 Линейная, древовидная, звездообразная и их комбина- ции кк, вок 99 узлов (с от- ветвителями) 1000 м (КК) 2 узла; 250 м с 48 узлами; 3 км (ВОК), 30 км (ВОК с ретран- сляторами) До 5 Мбит/с
CANopen CAN, IN Automation, 1993 Магистральная с ответвления- ми ВП + допол- нительная ВП для сигнала и напряжения 127 узлов 25-1000м (зависит от скорости пере- дачи) 125,250,500 и 1000 кбит/с
460
ГЛАВА 6
Шина Разработчик технологии Топология сети Физическая линия связи Максимальное число устройств Максимальная длина соеди- нения Скорость обмена
Foundation Fieldbus Hl Foundation Fieldbus, 1995 Звездообраз- ная или общая шина вп, вок 240 на сегмент, 65000 сегмен- тов 1900 м 31,25 кбит/с
Foundation Fieldbus (HSE) Foundation Fieldbus, 1997 Звездообразная вп, вок IP адреса- ция; число устройств практически неограничено ВП — 100 м, ВОК — 2 км 100 Мбит/с
WorldFIP WorldFIP, 1988 Общая шина вп, вок 256 узлов До 40 км 31 кбит/с; 1; 2.5; 5 Мбит/с
LonWorks Echelon Corp., 1991 Общая шина, кольцо, петля, звездообразная вп, вок, силовой кабель 32 000 на домен 2 км 78 кбит/с
Ethernet DEC, Intel, Xerox. Ethernet — 1976; Fast Ethernet — 1995; Gigabit Ethernet — 1997 Общая шина, звездообразная Тонкий КК, толстый КК, ВП, вок. 1024 узла, больше при установке маршрутиза- торов ВП-100 м., тонкий КК — 185 м., толстый КК - 500 м., одномодовый ВОК—10 км., многомодовый ВОК — 2 км. 10 Мбит/с, 100 Мбит/с, 1000 Мбит/с
Token Ring IBM, 1985 Кольцевая, звездообраз- ная кольцевая топологии IBM-кабель, ВП 260 (IBM- кабель), 72 (ВП) 60 км (IBM- кабель), 18 км (ВП) 4-10 Мбит/с
ARCNET Datapoint Corp., 1977 Звездообразная, общая шина, распределенная звездообразная КК, ВП, ВОК 256 узлов 600м(КК); 120 м (ВП); 3,6 км (ВОК) 2,5 Мбит/с
Р А 3 Д Е Л
IV
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ (РСУ)
ГЛАВА 7. АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
7.1. Виды обеспечений РСУ
К числу общих требований, предъявляемых к РСУ, относят соответствие норма-
тивным документам, ГОСТам и международным стандартам, требованиям техническо-
го задания при проектировании или модернизации РСУ, масштабируемость системы с
возможностью наращивания или изменении функциональной структуры, открытость
системы (использование компонентов разных производителей). Не менее важными тре-
бованиями являются следующие:
• соответствие заданным характеристикам системы: надежности, точности, быстро-
действия и др.;
• соответствие стратегии управления в соответствии с принятыми критериями и це-
лью управления;
• программно-аппаратная и информационная совместимость с системами верхних и
нижних уровней иерархии РСУ;
• соответствие требованиям эргономики (форма представления информации, рас-
положение аппаратных средств, удобство обслуживания и т. п.).
Общее число требований определяется заказчиком и помимо требований в соот-
ветствии с МЭК и ГОСТ может включать частные требования, учитывающие спец-
ифику конкретного технологического процесса (пожаро- и взрывобезопасность, мо-
ниторинг и пр.). Основными видами обеспечений или компонентами РСУ являются
следующие:
• оперативный персонал, обеспечивающий работоспособность системы;
• организационное обеспечение системы;
• информационное обеспечение;
• техническое обеспечение;
• программное обеспечение;
• метрологическое обеспечение;
• лингвистическое обеспечение.
Структура различных видов обеспечений РСУ представлена на рис. 7.1.
Оперативный персонал РСУ — это персонал, осуществляющий контроль, управ-
ление и обслуживание объектов управления. В состав оперативного персонала входят
технологи — операторы, диспетчеры, инженеры и слесари КИПиА, электрики и др.
Организационное обеспечение — это совокупность технической документации, опре-
деляющей порядок и правила функционирования оперативного персонала. Сюда входят
462
ГЛАВА/
инструкции и технологические регламенты, инструкции по эксплуатации, правила
поведения в аварийных и предаварийных ситуациях и др.
Информационное обеспечение — это совокупность массивов данных баз данных.
С развитием интеллектуальных датчиков входная информация поступает по цифро-
вых каналам связи.
Техническое обеспечение — комплекс технических средств, необходимых для
функционирования РСУ в различных режимах (нормальном, предаварийном и ава-
рийном). В его состав входят средства получения, преобразования и передачи ин-
формации (датчики, преобразователи, локальные сети и пр.), информационные и
управляющие вычислительные комплексы (контроллеры, серверы, промышленные
компьютеры и пр.), исполнительные устройства, а также средства наладки и ремонта
технических средств.
Программное обеспечение, создаваемое на основе математического и алгоритми-
ческого обеспечения, реализуется в виде пакета прикладных программ. Математиче-
ское обеспечение, которое в состав структуры РСУ не входит, представляет собой со-
вокупность математических моделей, формирующих алгоритмы управления процес-
сом. Помимо выбора модели управления формируются цель и критерии управления,
а также ограничения на переменные. Таким образом, математическое обеспечение
представляет собой «идеологическое» ядро системы.
Метрологическое обеспечение — это совокупность технических и программных
средств, обеспечивающих заданную точность работы РСУ
Лингвистическое обеспечение — совокупность языковых средств для разработки
программного обеспечения, представления данных и общения оператора с ЭВМ.
Рис. 7.1
Более подробно информационное, алгоритмическое, метрологическое и др. виды
обеспечений рассмотрены в работах [7.1-7.4, 7.6-7.11]
7.2. Алгоритмы управления. Основные понятия
Алгоритмом управления называется порядок (инструкция) операций ввода и об-
работки данных и выработки управляющих воздействий, выраженная на формаль-
ном языке математических зависимостей и логический условий.
Термин «алгоритм» происходит от имени узбекского математика Аль-Хорезми,
разработавшего в IX в. н. э. правила выполнения четырех арифметических операций
с многоразрядными числами.
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
463
Алгоритмическое обеспечение подразделяется в зависимости от структуры и за-
дач РСУ на алгоритмическое обеспечение информационных функций и алгоритми-
ческое обеспечение управляющих функций.
К алгоритмам информационных функций относятся: масштабирование резуль-
татов измерения, сглаживание и линеаризация (фильтрация) входных переменных,
интегрирование (суммирование) данных, извлечение квадратного корня из входных
переменных и др. математические преобразования (возведение в степень, дифферен-
цирование, вычитание и пр.), коррекция результатов измерения и др.
К алгоритмам управления относят различные алгоритмы локального управления
(позиционное, П-, ПИ- и ПИД-регулирование), алгоритмы адаптивного, робастного,
ситуационного, нейро-нечеткого управления, оптимального демпфирования пере-
ходных процессов и многие др.
К особенностям алгоритмов управления относятся: функционирование в ре-
альном масштабе времени (в темпе с процессом), использование в большей степени
логических операций, нежели вычислительных, функциональная распределенность
алгоритмов управления и ряд др.
Описание алгоритмов контроля и управления можно найти в литературе [7.3-7.7].
К основным свойствам алгоритма относятся дискретность алгоритма, элемен-
тарность шагов алгоритма, детерминированность, массовость и результативность
алгоритма.
Выбор алгоритма управления определяется требованиями надежности, точности,
быстродействия системы, степенью участия оператора в управлении системой и др.
При разработке алгоритма управления следует учитывать временные ограничения при
разработке вычислительных алгоритмов, а в ряде случаев ограничения объема памя-
ти программ и характеристик контроллеров. Упрощение алгоритма управления может
идти в направлении уменьшения точности вычислений, увеличения времени вычисле-
ний при решении задачи по частям, использования стандартных алгоритмов и т. п.
Известны следующие формы представления алгоритма управления: словесное
описание, операторная форма записи алгоритма, описание алгоритма с применением
графических символов и текстовое описание структурированных программ (ТОСП)
или псевдокод.
Управление сложными технологическими процессами в условиях неполноты
знаний об объектах управления, высоком уровне помех и при наличии перекрест-
ных связей между каналами управления не позволяют провести эффективный син-
тез моделей и алгоритмов управления формальными традиционными методами. Все
большее применение находят методы теории нечетких множеств, методы робастно-
го, адаптивного, ситуационного и др. видов управления.
Методы нечеткого управления основаны на выработке управляющих правил в
условиях, при которых неполнота информации о процессе не позволяют использо-
вать классические методы управления. Основным методом получения управляющих
правил является метод экспертных оценок, базирующийся на знаниях экспертов.
Нечеткая модель процесса, составленная на основе импликаций (связки «если»...,
«то»...), описывающих возможные состояния объекта, подвергается структурной
идентификации с оценкой параметров модели. Также используются самонастраи-
вающиеся нейро-нечеткие регуляторы с использованием нейронных сетей. Исследо-
ванию методов нечеткого управления и нечетких множеств посвящено много работ,
среди которых отметим работы [7.12-7.25].
464
ГЛАВА 7
Методы робастного управления используются при параметрической или струк-
турной неопределенности модели объекта, вызванной недостатком информации. При
этом неопределенность объекта рассматривается как неопределенность отдельных по-
казателей или характеристик, таких как быстродействие, устойчивость и др. Как пра-
вило, робастный регулятор является робастным по отношению к выбранному показа-
телю, а информация, характеризующая неопределенность, не используется в управле-
нии. Описание методов робастного управления приведено в работах [7.15, 7.50-55].
Методы адаптивного управления применяются при постоянно меняющихся под
воздействием внешних условий показателях качества управления. Математическая
модель объекта управления с адаптивным регулятором постоянно уточняется по ре-
зультатам компенсации отклонений параметров состояния, вызванных, в том числе,
изменением внешних условий. Таким образом, адаптивный регулятор учитывает как
изменение состояния объекта, так и изменения внешней среды. Вопросам адаптив-
ного управления посвящены работы [7.28-7.42].
Методы ситуационного управления основаны на анализе ситуации после поша-
гового управляющего воздействия на объект управления. Уточнение коэффициен-
тов ситуационной модели осуществляется после выбранного временного интервала
и изменения параметров состояния объекта. Вопросам ситуационного управления
посвящены работы [7.56-7.60].
7.3. Нечеткие и нейро-нечеткие системы управления
Нечеткость, т. е. отсутствие четких границ в описании процесса, характеризу-
ет расплывчатость описания (нечеткость не следует отождествлять с неопределен-
ностью). К нечеткости описания относят такие величины, как показатели качества
продукции (плотность, влажность, температура и др., которые нельзя четко описать
в каждый момент времени), производительность, экономические показатели и пр.
Понятие нечетких множеств1 (подмножеств) впервые предложено Л.А. Заде [7.12,
7.13]. По определению Л.А. Заде нечетким множеством является набор объектов, дей-
ствий или наблюдений, связанных с их соответствующими степенями принадлежно-
сти множеству. Степени или функции принадлежности имеют значения от 0 до 1.
Функция принадлежности элемента «х» нечеткому множеству «А» обозначает-
ся цА(х). Если цА(х) =1, тогда объект полностью принадлежит множеству А, а если
рА(х) = 0, то не принадлежит. Эти выражения записываются следующим образом:
рл(х) = 1, если х е А; рд(х) = 0, если х £ А
Нечеткое множество А представляется в виде упорядоченных соответствий:
А = ((х, рл(х)) | х е X.
Пусть рл(х!) = 0, рл(х2) = 1, рл(х3) = 0,2, рл(х4) = 0,9. Представим нечеткое множество
А через элементы множества Е = {х^ х2, х3, х4} с помощью функций принадлежности:
А = {(х,, 0), (х2,1), (х3,0,2), (х4, 0,9)},
т.е. элемент х} не принадлежит множеству А, элемент х2 полностью принадлежит
множеству А, элемент х3 принадлежит множеству А в малой степени, элемент х4 при-
надлежит множеству А в большей степени.
J Теория множеств, как наука, впервые предложена Г. Кантором. Множество — это набор, совокупность,
собрание каких-либо объектов, называемых его элементами, обладающих общим для всех них характери-
стическим свойством.
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
465
Рис. 7.2 Рис. 7.3 Рис. 7.4
В теории нечетких множеств используются лингвистические переменные, т. е.
переменные, значениями которых являются не числовые значения, а характеристи-
ческие слова (например, вода может быть теплой, холодной, горячей; давление: высо-
кое, низкое и т. д.). Считается, что для большинства случаев число лингвистических
значений переменных, используемых при синтезе нечеткого регулятора, составляет
от 2-х до 12 элементов.
Функции принадлежности могут быть выражены в графической интерпретации.
На рис. 7.2 элемент х, е А характеризуется одномерной функцией принадлежности
р .(Xj) = 1, т. е. X] принадлежит множеству А полностью, а х2е А имеет рл(х2) = 0,8,
т. е. принадлежит А частично. Аналогично на рис. 7.3 изображены значения функции
принадлежности рБ(х) множества В. На рис. 7.4 представлено совместное положение
функций принадлежности рд(х) и рБ(х). Как видно на рис. 7.4 элемент х2е А принад-
лежит А частично с весом 0,8. В то же время х2е В принадлежит В частично с весом
0,5. Элемент х3е А принадлежит А частично с весом 0,5 и одновременно принадлежит
В с весом 0,8. Таким образом, граница между множествами А и В является размытой
(нечеткой).
В работе [7.15] рассмотрены функции при-
надлежности треугольного типа на примере
смешения горячей и холодной воды (рис. 7.5).
Множество А обозначает холодную воду, а
множества В — горячую. Функции принадлеж-
ности рл(х) = 0,5 и рв(х) = 0,5 определяют одно-
временно холодную и горячую воду, а рл(х) +
+ рв(х) = 1.
Ниже рассмотрен пример управления тем-
пературой воды с использованием лингвисти-
ческих переменных. Продукционное нечеткое правило (Fuzzy Rule) й, имеет вид:
«если температура воды на выходе низкая (вода холодная) и температура воздуха
низкая (воздух холодный), то следует увеличить расход горячей воды на входе (при-
открыть вентиль) и уменьшить расход холодной воды (прикрыть вентиль). Нечеткие
условия: элемент х1 — температура воды на выходе; A т — холодная; х2 — температура
воздуха; А2 — холодный. Нечеткие выводы: — угол (ход) открытия вентиля; В] —
большой; у2 — угол (ход) закрытия вентиля холодной воды; В2 — большой.
Формализованное представление выглядит так:
R^. если х1=А1их2 = А2, тогда уг = В1иу2 = В2,
466
ГЛАВА?
где Ар А2, В и В2 — нечеткие множества с соответствующими функциями принад-
лежности.
Совокупность нечетких продукционных правил образуют нечеткую базу правил:
Rp. если...., тогда...; i = 1, к.
Помимо функций принадлежности треугольного типа используются функции
трапецеидальной, колоколообразной формы и многие др.
К свойствам нечетких множеств относятся (рис. 7.6):
• высота нечеткого множества hgt (от height); нечеткое множество с hgt = 1 называ-
ется нормальным, а при hgt <1 — субнормальным;
• основание нечеткого множества supp (от support); если supp < °° , то основание
называется компактным;
• ядро (core) или центр нечеткого множества;
• а — сечение нечеткого множества Аа = {х е А| рл(х)> а. Ядро нечеткого множе-
ства (core) равно а-сечению с а = 1.
Множеством а-уровня нечеткого множества А называется множество
Аа= {х |рА(х) > а}. Пусть а е [0,1].
Имеем, например, множество: А = (х3 | 0,8), (х2 | 0,1), (х3 | 1), (х4 | 0,3), (х5 | 0,6),
(х6 | 0,2), (х„ | 0,5). Множество на уровне а = 0,3 имеет вид: Ас|=0 3 = (хт 11), (х21 0), (х311),
(х4 | 1), (х51 1), (хб | 0), (х7 | 1). Множество на уровне а = 0,55 имеет вид: Aq ( 55 = (Xj 11),
(х2 | 0), (х31 1), (х4 | 0), (х5 | 1), (х6 | 0), (х7 | 0).
Используются следующие операции на нечетких переменных: сложение, вычита-
ние, умножение и деление. При этом проявляются следующие свойства:
• коммутативность: а-b = b-а; а+b = Ь+а;
• ассоциативность: а-(Ь-с) = (а-Ь)-с; а+(Ь+с) = (а+Ь)+с;
• идемпотентность: а'-а < а'; а'+а > а;
• дистрибутивность: а-(Ь + с) < а-b + а-с; а + b-с > (а + Ь)-(а + с).
При графическом представлении нечетких величин их сложение осуществляет-
ся сложением нижней и верхней границ соответствующего им а-сечения (рис. 7.7).
Вычитание из одной нечеткой величины другой нечеткой величины осуществля-
ется сложением изображения вычитаемого и уменьшаемого. Умножение нечетких
величин, находящихся в пространстве R, обладае т свойствами коммутативности и
ассоциативности. Результат умножения находится в пространстве R и является вы-
пуклым и нормализованным. Деление нечеткой величины «а» на нечеткую величину
«Ь» осуществляется умножением делимого «а» на инверсию делителя «Ь». Если ве-
Рис. 7.6
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
467
Рис. 7.7
личины «а» и «Ь» находятся в пространстве R, то и частное от деления принадлежит
пространству R.
Принципы синтеза нечеткого регулятора:
• Форма функции принадлежности определяет вид и крутизну статической харак-
теристики нечеткого регулятора.
• Увеличение наклона крайних значений функции принадлежности расширяет
диапазон управления нечеткого регулятора.
• Увеличение крутизны функции принадлежности уменьшает статическую ошиб-
ку регулятора.
Последовательность преобразования входной физической переменной в выход-
ную переменную в системе с нечетким регулятором включает следующие этапы:
• Преобразование входной переменной в нечеткое множество (фазификация).
• Логическая обработка нечетких множеств.
• Преобразование нечеткой переменной в выходную физическую переменную (де-
фазификация); используются различные методы разбиения фигуры под функци-
ей принадлежности: метод центра тяжести, метод медианы, метод среднего мак-
симума и др.
На рис. 7.8 представлен график определения выходной переменной по методу
«центра тяжести». При аппроксимации функций принадлежности прямыми линия-
ми имеем:
р (х) = к-х+ b, 0<х< 1; р(у) = т-у + с, 0<у < 1.
Максимальное значение выходной переменной утах определяется координатой
центра тяжести прямоугольного треугольника на значении равном 2/3 основания.
Минимальное значение у находится на значении равном 1/2 основания.
Алгоритм управления нечеткого регулятора может быть задан системой уравне-
ний [7.15]:
Рис. 7.8
468
ГЛАВА 7
R, :Ao,i =A °(Ai ^•A21)=bi
^2 • Л о)г _Л ° (A|2 —> A22) — B2
К„-А„ °r„ =A„ °(A„ -> A„) = B,.- Rt =l -n
Локальные выводы в виде нечетких множеств В. объединяются в общий вывод В
из базы правил К. (i = 1, и): В = UB, (г = 1, n). A (i = 1, и) =fuzz (х.) — этап фазифика-
ции.
7.4. Адаптивные системы управления
Адаптивной системой управления называется система управления, поддержи-
вающая заданный показатель качества управления при изменяющихся условиях
внешней среды и параметров объекта. В работе [7.35] адаптивной системой управле-
ния называется система, в которой при изменении условий ее функционирования на
основании текущей информации о выходных переменных, внешних воздействиях и
условиях работы изменяется структура и параметры регулятора или вводятся допол-
нительные обратные связи по выходным переменным для обеспечения оптималь-
ного (заданного) функционирования системы. Адаптивный подход к построению
систем управления обусловлен необходимостью повышения эффективности управ-
ления систем в условиях неопределенности описания объекта управления вследствие
недостатка информации и характеризует способность системы приспосабливаться к
изменяющимся условиям.
Теория адаптивных систем и методы адаптивного управления изложены в ра-
ботах [7.26, 7.28-7.42]. Структура адаптивной системы включает два контура об-
ратной связи — основной контур с регулятором на основе управления по отклоне-
нию, возмущению или комбинированного управления, и корректирующий контур с
устройством адаптации, предназначенным для подстройки параметров регулятора
(рис. 7.9). На рисунке приняты обозначения: x(t) — входные переменные, y(t) — вы-
ходные переменные, U(t) — управляющие воздействия, ОУ — объект управления,
УА— устройство адаптации (адаптер), ПП — первичный преобразователь, e(t) —
рассогласование, z(t) — неконтролируемые возмущения. Регулятор (Р) и устройство
адаптации образуют адаптивный регулятор.
Адаптивные системы включают два класса систем: самонастраивающиеся и са-
моорганизующиеся. Самонастраивающиеся системы делят на поисковые, беспоис-
ковые и комбинированные адаптивные системы. Беспоисковые адаптивные системы
подразделяют на системы с эталонной моделью и адаптивные системы с идентифика-
тором. К самонастраивающимся системам относятся системы, в которых настраива-
ются параметры регулятора без изменения алгоритма (структуры) регулятора. Если
изменяется также и структура регулятора, то система относится к классу самоорга-
низующихся систем.
Эффективность адаптации тем больше, чем больше изменения параметров объ-
екта и чем медленнее (за больший промежуток времени) эти изменения. При мед-
ленных изменениях параметров объекта говорят о статической адаптации, а при бы-
стрых изменениях — о динамической адаптации.
Самонастраивающиеся системы. В зависимости от способа получения инфор-
мации адаптивные системы делят на беспоисковые, поисковые и комбинированные.
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
469
Рис. 7.10
В поисковых адаптивных системах формируются пробные управляющие воздей-
ствия с целью достижения критерия адаптации, который в экстремальных системах
выражается экстремальной (минимаксной) зависимостью параметров состояния си-
стемы от входных переменных. Поисковые системы используются, как правило, для
нахождения оптимальных условий работы системы в статике.
Беспоисковые системы делят на системы с прямой и непрямой адаптацией. В си-
стемах с прямой адаптацией на основании априорной и текущей информации о со-
стоянии системы, параметров и входных воздействий вычисляется мера качества, фор-
мируемая с помощью частотных или временных характеристик, а также с использова-
нием эталонной модели (рис. 7.10). На рисунке приняты обозначения: ЭМ — эталонная
модель (остальные обозначения см. на рис. 7.9). Рассогласование между заданной и по-
лученной мерой качества служит для изменения настроек регулятора в целях сведения
рассогласования к нулю или к некоторой заданной величине. Эталонная модель пред-
ставляет собой динамическое звено, выбранное на основе априорной информации о
переменных управления. При использовании эталонной модели адаптация параме-
тров регулятора осуществляется в соответствии с рассогласованием выходных сигна-
лов основного контура и эталонной модели Ay(t) = у0(1) - уэ(/)> поступающим на вход
устройства адаптации и далее на изменение параметров регулятора. Эталонная модель
может быть включена параллельно основному контуру (параллельная структура) или
последовательно с регулятором и объектом управления (последовательная структура).
В последнем случае к устройству адаптации поступает сигнал, равный разности вход-
ного сигнала системы и выходного сигнала основного контура.
В системах непрямого адаптивного управления осуществляется идентификация
объекта и по полученным параметрам вычисляются коэффициенты регулятора. Под
идентификацией объекта управления понимают получение или уточнение по экспе-
риментальным данным модели реального объекта (процесса). Эффективность иден-
тификации определяется по степени близости реакции реального объекта и модели.
Классическое определение понятия идентификации, данное Заде: «Идентификация
состоит в отыскании по входным и выходным сигналам некоторой системы эквива-
лентной ей системы из некоторого заданного класса».
Вопросам идентификации посвящено много работ, среди которых отметим работы
[7.32,7.34,7.43-7.47]. Методы идентификации классифицируют по ряду признаков. По
информационному признаку методы идентификации делят на поисковые и беспоис-
ковые, по наличию или отсутствию пробных входных сигналов — методы активной
или пассивной идентификации, по принципу построения модели — с использованием
или без использования результатов идентификации и др.
Идентификация без принудительного воздействия на объект (без подачи на объ-
ект пробных сигналов), основанная на реакции объекта с обратной связью только на
возмущения и шум, называется пассивной идентификацией. Такая идентификация
470
ГЛАВА 7
применяется в случаях, когда не рекомендуется вносить дополнительные возмуще-
ния из-за вероятности нарушения режима нормального функционирования объекта.
Пассивная идентификация характеризуется невысоким быстродействием и меньшей
надежностью по сравнению с активной идентификацией.
Активная идентификация предполагает нанесение пробных сигналов (как пра-
вило, синусоидальной формы, а также ступенчатой или импульсной формы). Точ-
ность активной идентификации повышается с ростом амплитуды пробных сигналов.
Увеличение амплитуды и полосы частот необходимы в случае быстрых изменений
параметров объекта. Однако при этом возрастает погрешность идентификации.
Пробный сигнал малой амплитуды может генерироваться специальным устрой-
ством или выделяться с помощью фильтров из сигнала управления. После детекти-
рования и сглаживания низкочастотным фильтром сигнал сравнивается с опорным
сигналом, после чего разностный сигнал усиливается и поступает в корректирующее
звено, осуществляющее желаемый алгоритм адаптации.
Параметрическая идентификация объекта управления заключается в следую-
щем.
Предположим, что задана модель в операторном виде:
Xм (t) = FM(xM(t)); Xм = х ; хм = х .
Оператор модели х“х (t) = FM (хвх (t), а), где а — вектор постоянных параметров.
Задача параметрической идентификации заключается в следующем: на осно-
ве экспериментальных данных x“x(t) е X°x(f), x°bIx(t) е Хвых(<) указать значение
вектора параметров а, при котором модель хм (t) = Fu(xM(t)) наилучшим обра-
зом аппроксимирует оператор объекта хвых (t) = F (хвх (/)) на множествах сигналов
хвх (t) е Хвх (f), x°blx(t) eX°ux(i) . Вышеприведенная модель характерна для детерми-
нированного непрерывного процесса. Детерминированная модель с дискретным
временем ищется в виде х^х(t) = FM (хвх (t), п).
Беспоисковые системы используются при быстрых изменениях динамических
свойств объекта управления и внешних условий и предназначены для оптимизации
работы системы в динамике.
Поисковые адаптивные системы. Поисковые системы используют специальные
пробные сигналы для получения недостающей информации и затрачивают на это
определенное время. К числу систем, осуществляющих поиск экстремума показателя
эффективности системы, относятся экстремальные системы.
Системами экстремального управления называются такие системы, в которых за-
дающие воздействия определяются в соответствии с экстремумом некоторой функ-
ции F(yp у2>.которая зависит как от выходных переменныхyvу2„.,,уп , так и от
неконтролируемых параметров системы и времени t, и изменяется во времени отно-
сительно медленно. Условием экстремума функции F(y ,у2,...,уп) является равенство
нулю частных производных этой функции в точке экстремума:
dF/dy} = 0; dF/dy2 = 0 ... dFldyn = 0.
Градиент функции gradF = (dF/dy{) + К2 (dF/dy2) + ... + Кп (dFldyn) = 0 в точке
экстремума ,К2...,Кп — векторы осей переменных величин ур у2,. ,уп')-
В экстремальных системах задача поиска градиента и дальнейшего удержания
системы в точке экстремума решается различными способами, среди которых способ
отыскания экстремума по производной по времени функции F(y}, у2,...,уп), способ
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
471
градиента, способ наискорейшего спуска, способ запоминания экстремума и др., под-
робно рассмотренные в литературе [7.26, 7.30, 7.34].
Производная по времени функция F(ylty2,...,yn) равна:
dF/dt = (dF/dyJ (dyjdt) + ... + (dFIdyJ (dynldt).
Задавая поочередно скорости изменения переменных ур...,уи и измеряя произ-
водную по времени dF/dt, находят составляющие градиента функции gradF.
Способ градиента заключается в обеспечении пошагового движения системы в
направлении вектора градиента (К — коэффициент пропорциональности):
dyjdt = KCdF/dyJ; dyjdt = K/dF/dyJ; Ду, = K(dF/dyt) ... Дун = KfdF/dy,).
Траектория движения изображающей точки системы оказывается нормальной к
поверхности F(y,... у ) = const. В точке экстремума производная функции обращает-
ся в нуль и ее движение представляет монотонно сходящийся процесс.
При способе наискорейшего спуска движение изображающей точки системы
происходит по направлению вектора градиента функции F(yv уудо тех пор,
пока производная функции F не обратится в нуль, после чего вновь определяется на-
правление вектора градиента и движение вдоль вектора до обращения в нуль произ-
водной F и так до достижения точки экстремума. Способ характеризуется быстрым
приходом изображающей точки в зону экстремума.
Способ запоминания экстремума заключается в сохранении вынужденного или
автоколебательного движения системы в зоне экстремума и фиксации параметров
системы запоминающим устройством. Градиент функции F определяется по разно-
сти текущего и экстремальных значений функции.
Синтез адаптивных систем заключается в выборе цели управления и структуры
регулятора, определение параметров настройки регулятора, выборе и обосновании
алгоритма адаптации. К методам синтеза адаптивных регуляторов относятся ме-
тод рекуррентных целевых неравенств, локальной адаптации, методы адаптации на
основе теории оценивания и функций Ляпунова и др. [7.30, 7.37, 7.40, 7.41].
Самоорганизующиеся системы — это адаптивные системы с изменяемым алго-
ритмом, т. е. структурой регулятора. Функциональная схема самоорганизующейся
системы аналогична схеме самонастраивающейся системы, однако воздействие со
стороны устройства адаптации (УА) на регулятор вызывает изменение не параме-
тров, а структуры регулятора. Корректирующий сигнал устройства адаптации явля-
ется, как правило, дискретным и вызывает переключение операторов (передаточных
функций) регулятора. Таким образом, самоорганизующиеся системы являются адап-
тивными системами с переменной структурой и используют аппарат математической
логики [7.29]. Поддержание заданного критерия качества управления осуществляет-
ся подключением соответствующего корректирующего звена в основном контуре си-
стемы. Возможность оперативного изменения структуры регулятора в период адап-
тации значительно расширяет возможности самоорганизующихся систем по сравне-
нию с другими адаптивными системами.
К достоинствам самоорганизующихся систем относится способность к самообу-
чению. Это достигается установкой второго контура адаптации со своим устрой-
ством управления, более медленным, чем первый контур. Устройство адаптации
второго контура, представляющее собой вычислительное устройство с памятью, слу-
жит для корректировки алгоритма адаптации первого контура. Система может быть
ГЛАВА 7
472
дополнена еще более медленным третьим контуром адаптации, воздействующим на
алгоритм второго контура и т. д. Каждый из контуров адаптации поддерживает свой
критерий оптимизации. Дальнейшее развитие самоорганизующихся систем связано
с методами искусственного интеллекта.
7.5. Робастные системы управления
Оптимальные системы, используемые при управлении технологическими про-
цессами, являются не грубыми, т. е. оказываются чувствительными к изменениям
параметров системы. Для оценки степени влияния изменений параметров на свой-
ства системы (устойчивость, быстродействие, качество системы и т. п.) используется
понятие чувствительности этих свойств к вариациям параметров. При этом чувстви-
тельность характеризуется коэффициентом чувствительности в виде частных про-
изводных по варьируемому параметру. К другим свойствам системы управления от-
носятся понятия грубости и робастности.
Грубая система автоматического управления (САУ) — это система, обладающая
малой чувствительностью к изменениям параметров. Существует грубость по устой-
чивости системы и грубость по показателям качества переходных процессов.
Робастная САУ — это система, структура которой обеспечивает независимость
(инвариантность) показателя устойчивости и качества управления от изменения па-
раметров системы. Робастные системы (от слова robust — крепкий) применяются при
изменении внешних воздействий и параметров системы.
Исследованию робастных систем посвящено в последние годы много публика-
ций, в том числе работы [7.49-7.55]. Для синтеза робастных систем предложен новый
критерий оптимальности на основе Н-нормы многомерной передаточной функции
замкнутой системы [7.48]. -норма служит мерой усиления системы и трактуется
как энергия выхода системы при подаче на вход сигнала с единичной энергией. В ра-
боте [7.55] Н -норма трактуется как величина модуля максимально удаленной от на-
чала координат точки годографа амплитудно-фазовой характеристики системы по
ошибке.
Задачей синтеза системы, выходом которой является ошибка, а входом внешнее
возмущение, является минимизация Н -нормы передаточной функции системы.
Минимизация энергии выхода заключается в нахождении управления U(t), миними-
зирующего Н-норму передаточной функции системы ||И7ош|| -> min (рис. 7.11). На
рисунке приняты обозначения: J(t) — вектор внешних воздействий, x(t) — вектор
минимизируемой ошибки, У(() — вектор выходного сигнала и ГЦ) — выходной век-
тор регулятора. Неопределенность в передаточной функции может представлять ад-
дитивную или мультипликативную непараметрическую неопределенность. Возник-
новение неопределенностей в системе связано с действием возмущений (внешних и
внутренних), носящих случайный характер.
В последние годы решение задачи И -оптимизации получило название «2-Рик-
кати подхода», при котором оптимальная задача заменялась субоптимальной. При
этом постановка задачи осуществляется в частотной области, а ее решение ищется с
использованием метода пространства состояний [7.49].
В настоящее время Н -теория распространяется на стационарные непрерывные
и дискретные системы, а в последние годы также на нестационарные системы.
Цель управления робастных систем определяется в виде фазовых ограничений,
т. е. ограничений на координаты вектора состояния системы. Метод фазовых ограни-
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
473
чений позволяет для многомерных динамических систем синте-
зировать заданное управление. Пусть в пространстве состояний
Н задано замкнутое множество Q, т. е. Q е Н, а мерой близости
элемента h от замкнутого множества Q является рн (й, Q). Дина-
мическая модель в пространстве состояний описывается обык-
новенными дифференциальными уравнениями в форме Коши:
_________ Х(Ц
U(t)
I— W (р)
Рис. 7.11
Y(t)
х= F (х, U, N, a, t); x(f0) = х0; t > t0,
где х — вектор состояния; U —вектор управления; N — вектор возмущений; а — век-
тор параметров объекта; t — время.
Цель управления динамической системы может быть представлена в виде огра-
ничений на вектор состояния. Тогда цель управления для решения задачи стабили-
зации имеет вид
х(1) е Q(t), t > t0,
где Q(t) е R" — множество в пространстве состояний R" .
Таким образом, траектория x(t) воспроизводится объектом с заданной точно-
стью, если объект находится в замкнутой окрестности O(x(t)). Если решается задача
обеспечения качества переходных процессов, то задача сводится к нахождению об-
ласти D(t) пространства состояний, где удовлетворяются показатели качества пере-
ходных процессов:
x(t) е D(t), t > t0.
Таким образом, цель управления формулируется следующим образом: для любой
траектории x(t) объекта х= F(x, U, N, a, t); x(t0) = xQ; t > tfj, начинающейся в некото-
рой Е-окрестности множества Q(t0), т. е. x(t0) = xQ е QE(t), в каждый текущий момент
времени t > tQ функционирования объекта должна существовать такая Е-окрестность
множества Q(t0), для которой x(t) е Qe(t).
Одним из важнейших свойств системы является ее устойчивость. Робастной устой-
чивостью называется способность управляемого процесса сохранять устойчивость при
наличии неопределенностей. К неопределенностям относят неточно заданные коэффи-
циенты уравнения, неучтенные производные в описании модели или др. отклонения мо-
дели от реальной системы. Неопределенность может быть структурной и неструктурной.
Согласно Ht -теории робастная устойчивость в системе с IV )б и Wpei достигается при нор-
мальной передаточной функции от входа/(1)к выходу %! (t) при условии ||l( IVo, VV )| | те<
< е-1 и IV ег стабилизирует управление U номинального объекта W = U (IV(|, 0) [7.37].
В работе [7.55] рассматривается синтез робастных систем для управления объек-
тами с запаздыванием, синтез робастных каскадных систем и примеры исследования
устойчивости систем с использованием аппарата MATLAB. Приводится новый под-
ход к исследованию робастных систем.
7.6. Ситуационные системы управления
Ситуационное управление, впервые предложенное Д.А. Поспеловым и Ю.И.
Клыковым [7.56-7.58], основано на использовании модельного языка и механизмов,
характерных для человека-оператора, управляющего сложным объектом. Модельный
язык применяется для формирования у оператора концептуальной модели, адек-
ватной задачам управления. Данный подход базируется на разбиении деятельности
474
ГЛАВА 7
оператора на два класса задач: на те, кото-
рые допускают алгоритмическое описание и
решаются классическими методами теории
управления, и на те, которые не могут быть
формализованы известными методами. В
основе методов ситуационного управления
лежит семиотическая модель.
Модельный язык представляет семиоти-
ческую систему, содержащую средства опи-
сания проблемных ситуаций, структурных
моделей проблемных ситуаций и средства
описания целей преобразования структур.
Этот язык позволяет не только описать си-
туации, складывающиеся на объекте управ-
ления, но и осуществить прогноз поведения
объекта, а также оптимизацию управления.
Основой языка является система понятий и
отношений между ними, позволяющих структурировать ситуацию.
Семиотическая модель является знаковой системой и использует данные и зна-
ния. Данными служат текущие ситуации, а знаниями — множество ситуаций и спо-
собы перехода от одного описания объекта к другому.
Большинство задач, решаемых методами ситуационного управления, относится
к классу задач оперативно — диспетчерского управления большими системами.
Для рассмотрения принципа ситуационного управления напомним традицион-
ную схему управления многомерного объекта (рис. 7.12). На рис. обозначены: Х(...
Хп — контролируемые входы; — неконтролируемые входы (возмущения); Ц...
Un — управляющие воздействия, Y},..., Yn — выходные переменные. Вектор выходных
величин системы, таким образом, Y = F (х, (, U).
Корректирующий вектор Z от ЛПР (лица, принимающего решение) формируется
при отклонении критерия от заданного значения в случае неудовлетворительной ра-
боты системы управления. Это возникает при управлении плохо определенным или
слабо структурированным объектом. Такие объекты изучаются с помощью аппарата
нечетких множеств, методов адаптивного и робастного управления и т. д.
Постановка задачи ситуационного управления исходит из описания ситуаций (те-
кущей и полной) и их преобразований от исходной до целевой ситуации. Текущая си-
туация (Q.) — это совокупность сведений о структуре объекта управления и его функ-
ционировании в данный момент времени. Полная ситуация (S.) — это совокупность,
состоящая из текущей ситуации, знаний о состоянии системы управления в данный
момент и знаний о стратегии управления. Процедура управления имеет вид:
Sf;Qy=>Qb
1 ик 11
где Uk — одношаговое воздействие на объект управления.
Процедура управления заключается в том, что если на объекте сложилась ситуа-
ция Q., состояние системы управления и стратегия управления, определяемые S., по-
зволяют произвести воздействие Uk, то управляющее воздействие осуществляется,
и текущая ситуация Q. переходит в новую ситуацию Qr Очевидно, что существует
ограниченное множество полных ситуаций {SJ и определенное число возможных
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
475
управляющих воздействий {Ц.}. С помощью процедур классификации можно опре-
делить соответствие полных ситуаций S. и управляющих воздействий Uk. Чем больше
число возможных ситуаций и меньше число управлений, тем эффективнее работа
системы ситуационного управления.
Язык ситуационного управления базируется на двух гипотезах, заключающихся в
том, что вся информация об объекте управления может быть выражена на естествен-
ном языке и текст на естественном языке может быть переведен на формальный язык
семиотической системы. Для этого язык ситуационного управления имеет свои прави-
ла обозначений. Так, «понятие» обозначаются строчной латинской буквой, а «понятие-
класс» — прописной. Имена обозначаются буквами I и i (иметь имя— р). Отношения
(количественные, временные, информационные и др.) обозначаются буквой г. Дей-
ствия — буквой d, модификаторы — mj, квантификаторы — V, модальность —f оцен-
ка — V.. Для примера покажем обозначение ситуации: на печи типа ПГ-7 наплавляется
блок N4. Обозначим блок — «я», печь — «Ь», наплавляется — «d», имя блока N4 — «/'»,
имя печи ПГ-7 — «г2». Тогда описание ситуации следующее: (а р г,) (b р i2) (a d b).
В языках предел явления данных используются единицы, называемые слотами
(например, {<печь> <номер печи> <ПГ-7> <состояние> <исправна, ремонт> <блок>
<диаметр> <160,180> <плавильщик>]. Ряд слотов образуют структурную единицу —
фрейм. Для более полного описания ситуаций используется сценарий — дерево,
вершинам которого соответствуют события или части объекта (элементы), а ребра
отождествляются с отношением подчинения г («часть-целое»). Число вершин дерева
определяется числом элементов дерева А = (х°, R0), х° е (i = 1,2,..., и).
Метод управления, основанный на введении понятия ситуации, классификации си-
туаций и их преобразовании, называется методом ситуационного управления (МСУ).
К особенностям МСУ относятся следующие:
• применяется в случаях, когда невозможно идентифицировать объект управления
традиционными способами (число и размерность уравнений большие и т. п.);
• описание ситуаций осуществляется на модельном языке, отражающем основные
параметры, количественные и качественные свойства объекта;
• первоначальные сведения для классификации и экстраполяции ситуаций фор-
мируются экспертами; система обладает свойством самообучения, которое бази-
руется на статистической обработке данных;
• методы ситуационного управления являются эвристическими
Вопросам ситуационного управления посвящены работы [7.56-7.60].
В работе [7.60] рассматриваются нечеткие ситуационные алгоритмы обработки
информации. Ситуационные системы с нечеткой логикой делятся на два класса: «си-
туация - действие» (С-Д) и «ситуация - стратегия управления - действие» (С-СУ-Д).
При этом существует набор эталонных описаний состояний объекта управления в
виде нечетких ситуаций-нечетких множеств. Описание текущего состояния объ-
екта также представляется в виде нечеткой ситуации. Далее осуществляется сопо-
ставление текущего состояния с эталонным, используя специальные меры близости.
Помимо эталонных нечетких ситуаций имеются соответствующие им управляющие
сигналы. Решение заключается в сопоставлении текущей нечеткой ситуации с эта-
лонными ситуациями, выбором наиболее близкой эталонной ситуации и выдаче со-
ответствующего управляющего воздействия.
Показано, что процедура использования нечетких множеств с функциями при-
надлежности, построенными по результатам опроса экспертов, имеют существенный
476
ГЛАВА 7
недостаток, заключающийся в том, что при изменении условий функционирования
нечетких моделей требуется корректировка нечетких множеств для сохранения адек-
ватности модели объекту. А это может быть произведено только повторным опросом
экспертов и построением новых функций принадлежности.
7.7. Искусственные нейронные сети
Искусственные нейронные сети (ИНС) относятся к классу интеллектуальных си-
стем и возникли на стыке теории управления, математической статистики, нейрофи-
зиологии, информатики и др. наук. ИНС являются некоторым отдаленным подобием
работы мозга человека2, подверженного действию биологических нейронов, произ-
водительность каждого из которых определяется электрохимическими характери-
стиками его синапса («синапс» — от греч. слова «соединение» или «связь» — области
контакта нервных клеток друг с другом [7.15, 7.16, 7.69-7.71].
Несмотря на отдаленное сходство с анатомией мозга, нейронные сети обладают
рядом схожих свойств, главными из которых являются:
• параллелизм вычислений при распределенном представлении информации;
• способность к обучению;
• способность автоматического обобщения результатов в условиях шума и иска-
жений входных сигналов;
• высокая отказоустойчивость с сохранением работоспособности сети при выходе
из строя части нейронов.
Начальным этапом развития теории ИНС считают публикацию работы В. Мак-
Каллокка и В. Питтса о возможности формализации любой хорошо заданной системы
«вход-выход» в виде нейронной сети [7.62]. Развитию теории ИНС способствовали от-
крытие способности нейронных сетей к обучению Д. Хебом [7.63], изобретение Ф. Ро-
зенблатом персептрона (искусственный нейрон, дендриты которого заменены входами,
умноженными на весовые коэффициенты), работы по самоорганизации ИНС на базе те-
ории адаптивного резонанса [7.64], создание когнетрона [7.65], сетей Д. Хопфилда [7.66]
и Т. Кохерена [7.67]. Более подробная библиография работ по ИНС приведена в [7.15].
Дадим определение ИНС.
Искусственная нейронная сеть — это вычислительная модель, обладающая спо-
собностями к адаптации или обучению, обобщению или кластеризации (классифи-
кация образов с размещением близких образов в один кластер), функционирование
которых основано на параллельных вычислениях.
В работе [7.63] дается определение ИНС с позиции теории автоматов как систе-
мы, алгоритм решения задачи которой представлен сетью нейронов, объединенных
взаимосвязями, носящими характер весовых коэффициентов. В то же время ИНС с
позиции вычислительной техники представляется вычислительной системой с архи-
2 Мозг состоит из более 100 млрд нервных клеток — нейронов, каждая из которых имеет около 10000
связей. Нейрон имеет тело (сому), дерево входов — дендритов и выход — аксон. В нейрон по его вход-
ным отросткам (дендритам) поступают входные сигналы, которые передаются другим нейронам через
выходные отростки — аксоны. По сути точку соединения дендрита и аксона называют синапсом. Синапс
выполняет функции весового коэффициента, усиливая или ослабляя входной сигнал. Возбуждение по
биологическому нейрону передается в обе стороны. Передача возбуждения в нервных клетках с нервных
волокон происходит под действием серии импульсов. При этом импульсы возбуждения, передаваемые по
нейрону (нервная клетка), воздействуют на целый ряд нейронов. Биологические нейроны под действием
положительных (возбуждающих) импульсов генерируют выходной импульс, а при действии отрицатель-
ного (тормозящего) импульса выходной импульс отсутствует.
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
477
тектурой, в которой программирование заключается в изменении коэффициентов
между процессорными элементами.
Первое систематическое изучение ИНС предпринято В. МакКаллокком и В. Пит-
тсом в 1943 г. В качестве модели нейрона было предложено использовать пороговый
элемент, вычисляющий взвешенную сумму входных сигналов и формирующий на
выходе 1, если сумма больше порогового значения, или 0, если меньше.
На рис. 7.13 приведена структура сети с пороговым элементом. Сумматор умно-
жает каждый входной сигнал х. на вес W- и суммирует взвешенные входы. Если по-
лученная сумма больше порогового значения, то на выходе будет 1, а если меньше,
то 0. Такая система называется персептроном (от латинского слова perception — по-
нимание, восприятие). По сути персептрон — это искусственный нейрон, дендриты
которого заменены входами, умноженными на весовые коэффициенты.
Формальная модель искусственного нейрона представлена на рис. 7.14. На ри-
сунке приняты обозначения:
Х;. (г = 1...и) — сигнал, поступающий на вход нейрона с др. нейрона; IV. (J =
= 1...и) — весовые коэффициенты нейрона, настраиваемые в процессе обучения;
Qk — порог срабатывания; F. — функция возбуждения (активационная функция);
Yk— выходной сигнал нейрона.
X,
Хэ
Хп
Порог
Out
Рис. 7.13 Рис. 7.14
В искусственном нейроне вычисляется скалярное произведение вектора входных
сигналов (X) и вектора весовых коэффициентов (IV). Далее сигнал преобразуется ак-
тивационной (передаточной) функцией нейрона (F.) в выходной сигнал Y. Наиболь-
шее распространение получили следующие активационные функции: пороговая —
F(x) = sign(x), линейная — F(x) = к-х и сигмоидальная — Е(х) = 1/(1+е х). В общем
случае ИНС представляет собой направленный граф со взвешенными связями, узла-
ми которого являются искусственные нейроны. В зависимости от топологии сети из-
вестны 2 класса ИНС — сети прямого действия (с прямой связью или «feedforward»)
и рекуррентные сети (сети с обратной связью или «feedback»).
В ИНС прямого действия сигналы распространяются в одну сторону (граф без
петель), в сетях с образной связью выходной сигнал нейрона передается др. нейрону
на том же уровне (слое) или на предыдущем. При сравнении сетей «feedforward» и
«feedback» следует отметить, что сети «feedforward» имеют большую емкость и рабо-
тают быстрее по сравнению с сетями «feedback».
Объединение нейронов в сетевую структуру образует многослойную нейронную
сеть (МНС) прямого действия («feedforward»). Наиболее простой является двухслой-
ная сеть, состоящая из промежуточного (скрытого) слоя, т. е. не имеющего непосред-
ственной связи с внешней средой, и выходного слоя (рис. 7.15).
Важнейшим свойством ИНС является способность к обучению. Обучение сети —
это процедура подстройки весовых коэффициентов. Алгоритмы обучения встреча-
ются во многих сетевых парадигмах (парадигма — от греческого слова, означающего
пример, образец).
478
ГЛАВА 7
Для обучения сети на входной слой многократно подаются образцовые сигналы,
распознаванию которых сеть должна быть обучена. Для получения желаемого вы-
ходного сигнала осуществляется коррекция весовых коэффициентов.
Процедура обучения заключается в следующем:
• из выборки входных сигналов выделяются 2 группы сигналов — обучающие и
тестовые;
• назначаются весовые коэффициенты из диапазона-1 ... + 1;
• осуществляется прямой проход сети от входного слоя через скрытые слои ко
входному слою для первого образца обучающей группы (вычисляется сумма
произведений входов на весовые коэффициенты с выдачей функции активации
(а. = + ©р на нейроны следующего слоя;
• определяется ошибка как разность между действительным и заданным значени-
ем каждого нейрона выходного слоя;
• определяется ошибка каждого нейрона скрытого слоя при обратном распростра-
нении ошибок по связям к нейронам скрытых слоев;
• производится коррекция весов нейронов в целях минимизации ошибки £;
• вновь осуществляется прямой проход сети для следующего образца обучающей
группы.
Фаза обучения заканчивается после определенного числа проходов после дости-
жения критерия минимума ошибки. После обучения сеть проверяется на тестовые
сигналы без изменения весов. При удовлетворительном результате считается, что
сеть готова к работе.
Как было сказано, уровень активации нейрона «а», полученный в результате сум-
мирования произведений входа на весовой коэффициент, аналогичный синаптиче-
ской силе, преобразуется передаточной функцией нейрона в выходной сигнал У.
Величина ошибки в выходном слое Е равна:
Е=Щ-а]У/2,
где dj — желаемый (заданный) выход, а.= Y,N.ixi— действительный выход того же
нейрона.
Минимизация ошибки осуществляется с помощью метода градиентного спуска.
После и-й итерации весовые коэффициенты обновляются в соответствии с равен-
ством
№..(«+1) = w/n) + Aw^n),
где Aw (и) пропорциональна градиенту -dE/dw^ и вновь вычисляется ошибка.
Если процесс нахождения минимума ошибки затягивается («медленное схожде-
ние»), то к этой сумме добавляется взвешенный момент k-Awf/.(n-l), где к - 0,9. Если
Рис. 7.15
Рис. 7.16
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РСУ
479
же весовые коэффициенты оказались слишком большими, то от этой суммы вычита-
ется взвешенный момент у-Д-ил.(и-1), где у = 0... 1.
В процессе обучения ИНС используются два подхода: детерминированный и сто-
хастический. При детерминированном методе обучения осуществляется последова-
тельная коррекция весов и выходов сети. Стохастические методы (Больцмановское
обучение, обучение Коши и др.) изменяют веса случайным образом, сохраняя луч-
шие результаты.
Для повышения быстродействия ИНС используются системы с обратной связью,
получившие по имени автора таких сетей название сетей Хопфилда. Сеть с обрат-
ной связью, состоящая из двух слоев, показана на рис. 7.16. Каждый нейрон первого
слоя вычисляет взвешенную сумму своих входов, выдавая сигнал NET (NET = xl-wt +
+ x2-w + ...+ xn-wj, который затем с помощью нелинейной функции F преобразу-
ется в сигнал OUT. Сети с обратной связью обладают устойчивостью, если матрица
сети симметрична, т. е. w- = w.p и имеются нули на диагонали матрицы, т. е. и'.. = 0
для всех i.
Задачи компьютерного распознавания образов привели к созданию когнитрона
[7.65]. Когнитрон состоит из связанных слоев нейронов двух типов: тормозящих и
возбуждающих и представляет собой модель системы восприятия человека. Даль-
нейшее улучшение свойств когнитрона привело к созданию неокогнитрона — новой
модели зрительного восприятия образов [7.17, 7.65, 7.68].
Компания SGS-'Ihomscm Microelectronics выпускает нечеткий процессор WARP
(Weight Associative Rule Processor), способный обрабатывать до 256 правил, имеющий
до 16 функций принадлежности на одной входной переменной и до 128 функций при-
надлежности на 16-ти выходных переменных. PC-совместимое программное обеспе-
чение поддерживает эмуляцию нечеткого регулятора в процессе управления [7.14].
Рис. 7.17
480
ГЛАВА 7
Улучшение показателей качества регулирования системы с нечетким регулято-
ром может быть достигнуто при использовании механизма обучения регулятора.
Обучаемые нечеткие регуляторы должны обладать способностью приобретения зна-
ний о поведении объекта и на основании этих знаний формировать такие управляю-
щие воздействия, при которых показатели качества процесса регулирования будут
оптимальными. В процессе обучения помимо регулятора участвует модель объекта,
параметры которой изменяются в зависимости от поведения и характеристик объ-
екта управления. Известна нечеткая TS-модель ANFIS (Adaptive Network-based Fuzzy
Inference Systems) co структурой пятислойной нейронной сети прямого действия,
представленная на рис. 7.17 [7.25].
Дальнейшее развитие нейросетевых регуляторов привели к созданию нейроком-
пьютера, моделирующего работу мозга, и представляющего собой ЭВМ 6-го поколе-
ния. Структурная схема нейрокомпьютера приведена на рис. 7.18. Основные отли-
чия системы с нейрокомпьютером от обычной системы управления с ЭВМ в контуре
обратной связи: большое число нейронов (до 108) и высокое быстродействие; про-
граммирование алгоритма заменяется обучением, т. е. нейрокомпьютер моделирует
работу мозга человека; параллельная работа нейронов заменяет последовательную
обработку данных в обычной системе. Помимо нейрокомпьютеров выпускаются
нейромодули с нейропроцессорами для обычных ЭВМ.
Рис. 7.18
ГЛАВА 8. РАСПРЕДЕЛЕННЫЕ
СИСТЕМЫ УПРАВЛЕНИЯ (РСУ)
8.1. Общие характеристики РСУ
Основными характеристиками РСУ технологическим процессом являются архитек-
тура и структура системы, информационная емкость, открытость, масштабируемость,
надежность, быстродействие, экономичность и др.
В настоящее время крупные фирмы производят все необходимое оборудование
(рабочие станции, серверы, контроллеры, сетевые компоненты, преобразователи, про-
граммное обеспечение и пр.) для построения РСУ, которые внедряют на предприятиях
в освоенных ими отраслях промышленности РФ. К числу первых РСУ (1975 г.), ставших
в определенном смысле эталоном распределенных систем управления, была TDC-3000
фирмы Honeywell, США. Порядка 10 таких систем было закуплено в СССР для заводов
по производству минеральных удобрений, а также для заводов нефтеперерабатывающей
промышленности. Эти системы прошли модернизацию и поныне успешно работают на
предприятиях. Примером может служить АО «Акрон» (в прошлом ПО «Азот»), г. Вели-
кий Новгород.
В настоящее время помимо TDC-3000 находят применение такие РСУ как Total Plant
Solution (TPS) и Experion PKS фирмы Honeywell, Damatic XDi (Valmet Automation), Simatic
PCS7 (Siemens), Centum CS3000 (Yokogawa), I/A Series (Foxboro), CONTRONIC (Hartmann-
Braun) и др. Среди российских распределенных систем управления — МСКУ 2М (АО
«Импульс»), Техноконт (ГК «Текон»), ПТК «Квинт» и др.
Современные РСУ используют промышленные рабочие станции, многоканальные
контроллеры (PC-based и модульные), станции распределенного ввода/вывода, открытые
промышленные сети (Industrial Ethernet, Profibus, CAN и др.), интеллектуальные устрой-
ства ввода/вывода, беспроводные устройства передачи информации, WEB-технологию
обмена данными.
В последние годы ведущие зарубежные фирмы (Siemens, Mitsubishi Electric, GE Fanuc,
Invensys, Honeywell, Schneider Electric, Valmet и др.) выпускают программные средства для
интеграции систем управления производством в целом как на уровне технологических
процессов, так и на уровне финансово-хозяйственной деятельности предприятия.
Архитектура РСУ определяется уровнями иерархии системы, набором программно-
технических средств, сетевой архитектурой, интеллектуализацией преобразователей,
возможностями резервирования и рядом других параметров.
В зависимости от комплекса решаемых задач информационная емкость системы
включает различное число каналов ввода/вывода, способных обрабатывать от сотен до
тысяч и десятков тысяч сигналов. Для приема, хранения и обработки большого числа
параметров применяются базы данных реального времени (БД РВ) — реляционные, се-
тевые, иерархические или объектно-ориентированные. Сервер БД РВ является ядром
интегрированной системы управления, обеспечивая форматирование массивов данных
16 Зак. 3801
482
ГЛАВА 8
от технологического процесса для их анализа и использования на верхнем уровне
управления предприятием.
Открытость системы управления предполагает использование в структуре си-
стемы открытых международных стандартов на аппаратное и программное обеспе-
чение, языки программирования контроллеров, активное оборудование вычисли-
тельных сетей и т. п., позволяющих совместное применение программно-аппаратных
средств различных производителей. Масштабируемость системы означает возмож-
ность построения систем управления на базе программно-технических средств ма-
лой, средней или большой емкости. При этом возможно как наращивание системы,
так и ее локализация. Масштабируемость допускает легкость модернизации системы
без серьезных изменений ее структуры. Надежность, быстродействие и экономич-
ность системы управления являются важными характеристиками системы управ-
ления. Открытые технологии синтеза системы позволяют оптимизировать выбор
программно-технических средств и устройств ввода/вывода параметров процесса по
критерию цена/производительность. Для повышения надежности узлов и системы
в целом применяются наряду с отказоустойчивыми компонентами и системами их
резервирование (дублирование и троирование), а также специальные меры защиты в
условиях агрессивных, взрывоопасных сред, сильного электромагнитного излучения
и пр. Быстродействие системы определяется быстродействием (инерционностью)
преобразователей, контроллеров, других узлов системы, а также алгоритмическим
обеспечением систем управления (выбор алгоритмов управления, время опроса дат-
чиков, объем выборки и др.).
8.2. TDC-3000 — распределенная система управления фирмы
Honeywell
Структура РСУ TDC-3000 фирмы Honeywell (США) — трехуровневая [8.1]. Поле-
вой (нулевой) уровень представляют датчики и исполнительные механизмы. Харак-
теристика аналоговых сигналов: 4...20 мА, дискретных: «СК» и 24 VDC. В качестве
входных сигналов также используются сигналы термопар и термометров сопротив-
ления. Общее число аналоговых сигналов ввода/вывода около 1000, дискретных по-
рядка 1100. Структура системы TDC-3000 приведена на рис. 8.1.
Контроллерный уровень представлен контроллерами ввода/вывода аналоговых
и дискретных сигналов и представляет собой уровень управления технологическим
процессом. Диспетчерский уровень — уровень управления производством. На этом
уровне располагаются дублированные диспетчерские станции (Universal Station),
исторический модуль (History Module), модуль связи и сетевой шлюз. Верхний уро-
вень — уровень управления и планирования предприятия (завода). На этом уровне
информация с нижних уровней интегрируется с компьютерной системой DEC VAX/
VMS, решая задачи выбора стратегии управления, моделирования процесса и бизне-
са, планирования производства, управления запасами, расчета стоимости сырья.
В структуре TDC-3000 используются следующие коммуникационные сети: LCN,
UCN и DH. От интеллектуальных датчиков информация по цифровым каналам
передается к менеджеру процесса, в качестве которого выступает базовый модуль-
ный контроллер (локальная технологическая станция). Далее сигналы передаются
в магистраль данных DH (Data Hiway), связанную шлюзами с высокоскоростной
локальной сетью управления LCN (Local Control Network). К сети LCN подключены
станции US, History Module, Application Module и Archive Module. Шина LCN состо-
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
483
И нтеллектуальные
устройства 3000
Рис. 8.1
ит из сегментов коаксиального кабеля длиной 300 м, соединенных оптоволоконным
кабелем длиной 2000 м с помощью расширителей LCNE. Расширители LCNE уста-
навливаются в свободные слоты рабочих станций и соединяют один коаксиальный
кабель с двумя оптоволоконными (приемным и передающим). В LCN через шлюз
поступают данные от универсальной сети управления UCN (Universal Control Net-
work). Скорость передачи данных по сетям LCN и UCN составляет 5 Мбит/с.
Основные функции системы: контроль и управление непрерывными и периоди-
ческими процессами; отображение и печать трендов; создание базы данных; сигнали-
зация и блокировка; контроль состояния оборудования и диагностика системы.
Архитектура TDC-3000 предусматривает резервирование на нескольких уров-
нях: резервирование модулей ввода/вывода, модулей интерфейсов сети и шлюза,
операторских станций.
Менеджер компьютерной сети (PCNM) обеспечивает доступ инженерам и дру-
гим пользователям к данным технологического процесса, просмотр их на мнемосхе-
мах и в таблицах в реальном времени. Для этого применяется специализированный
ПЛК, устойчивый к сбоям. В контроллере используется тройное модульное резерви-
рование по алгоритму голосования «два из трех».
8.3. Total Plant Solution (TPS) компании Honeywell
Дальнейшее развитие TDC-3000 получила в открытой системе Total Plant Solution
(TPS). Структура системы представлена на рис. 8.2 [8.2].
Система TPS состоит из нижеследующих основных компонентов.
Глобальная пользовательская станция GUS (Global User Station) на платформе
Windows NT. GUS представляет собой современный HMI, обеспечивая возмож-
ность работы на одной станции с несколькими мониторами, интеграцию на лю-
бом операторском дисплее как технологической, так и коммерческой информа-
ции. GUS использует современные технологии Microsoft, такие как ActiveX, ОРС,
ODBC и др. Распределение графики и различной документации между станциями
GUS осуществляет главный контроллер области PDC (Primary Domain Control-
484
ГЛАВА 8
Коммерческие приложения/
планирование ресурсов
предприятия Настольная система Сервер приложений
Компоновщик TPS Uniformance Uniformance
Узлы
пользовательские
станции
администратор процесса (HPM) контрольно- Система управления
измерительная безопасностью FCS
аппаратура
Рис. 8.2
ler). GUS поддерживает все функции операторского интерфейса: динамические
мнемосхемы, системную сигнализацию, сообщения, отчеты, тренды, данные о
состоянии технологического оборудования. Система TPS обрабатывает до 25 000
точек, объединенных в 100 блоков. Последние разделены на 10 зон ответственно-
сти, причем за каждой из зон закреплена операторская консоль. Каждая консоль
обрабатывает 36 блоков по 250 точек на каждый блок. Операторы консолей мо-
гут контролировать ход технологического процесса, формировать управляющие
воздействия в пределах зон, находящихся под их контролем, а также управлять
сигнализацией.
Мнемосхемы операторских панелей разделены на 3 категории: дисплеи техноло-
гического процесса, системные и функциональные дисплеи. В качестве менеджера
окон дисплеев используется ПО Safe View, с помощью которого экран разделен на ряд
областей с привязкой к ним соответствующих дисплеев. Станции GUS объединены
в сеть TPS Process Network (TPN) с сервером GUS и далее с подключенными по сети
Ethernet клиентами GUS.
Платформа прикладных задач АРР (Application Processing Platform). На АРР уста-
новлены прикладные программы, моделирующие весь производственный процесс.
АРР использует стандартный модуль прикладных программ (AM). При использова-
нии модуля возможен обмен данными с несколькими TPN, с рабочими станциями и
другими устройствами информационной сети предприятия (PIN). Механизм досту-
па к данным осуществляется с помощью ОРС, а интерфейс связи Honeywell HCI (Hon-
eywell Communication Interface) осуществляет связь между серверами и клиентами
системы TPS. К дополнительным функциям HCI относятся оповещение операторов
и прикладных систем о сбоях в работе датчиков. ОРС имеет доступ к данным РВ, на-
ходящимся в модулях TRN или PCN (узел сети управления установкой).
АРР работает в среде ОС Windows NT 4.0. Базовое ПО АРР содержит пакет реше-
ний АРР (АРР Solution Package), позволяющий передавать данные в TRN в режиме РВ
любому приложению ОРС или НС1.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
485
Директор прикладных задач (Application Director) представляет собой ПО для
управления и контроля за работой прикладных программ под ОС Windows NT. В пе-
речень функций входят контроль и управление процессом, выдача отчетов и др. Ди
ректор прикладных программ состоит из нескольких загрузочных модулей (шагов)
и одного управляющего загрузочного модуля, называемого «последовательностью».
Последовательности и шаги выполняются друг за другом. Среда исполнения имеет
возможность управлять исполнением шагов приложений, корректировать входные
параметры процесса и осуществлять сбор данных от модулей ввода/вывода. Допол-
нительное ПО разработчиков может быть установлено на АРР только при наличии в
PCN или PIN главного контроллера области PDC.
Uniformance PHD — БД РВ, которая отслеживает динамику работы предприятия,
ведет архив данных PHD Data Historian и модель предприятия. PHD объединяет БД
с реляционным архивом событий. ПО Uniformance собирает данные от источников,
форматирует их в своей унифицированной структуре, представляя собой програм-
мную основу для систем планирования ресурсов предприятия ERP (Enterprise Resourse
Planning). Управление ресурсами предприятия, под которыми подразумевают управле-
ние финансовыми, материальными ресурсами и готовой продукцией, осуществляется
на базе Единых производственных решений Hi-Spec, состоящих из 4-х приложений:
• Business.Flex — объединение коммерческих задач предприятия с задачами управ-
ления технологическим процессом;
• Profit.Plus — задачи повышения производительности производства;
• @sset.MAXTM — задачи диагностики и предотвращения аварий и сбоев в работе
оборудования;
• Uniformance — управление информацией за счет использования БД для под-
держки системы ERP.
Высокопроизводительный менеджер процесса НРМ (High-Performance Process
Manager). НРМ представляет собой мощный контроллер компании Honeywell на мно-
гопроцессорной платформе 68040 для непрерывных, периодических и смешанных про-
цессов. НРМ обменивается информацией со станциями GUS по сети UCN с помощью
коммуникационного процессора. Управляющий процессор выполняет функции ана-
логового и дискретного управления, блокировки и моделирования. Поддерживается
функция резервирования контроллера и антикоррозийная защита за счет покрытия
плат тонкой полимерной пленкой. Обработка входных/выходных сигналов осущест-
вляется процессором ЮР (Input/Output Processor), который позволяет установку раз-
личных карт аналогового и дискретного ввода/вывода, сетевой карты Foundation Field-
bus Hl и др. НРМ поддерживает до 40 ЮР, устанавливаемых на расстоянии до 8 км
от каркаса НРМ. Все соединения, в том числе искробезопасные с гальванической раз
вязкой, осуществляются через полевые терминальные панели FTA (Field Termination
Assemblies). Скорость обработки входных/выходных сигналов ЮР составляет до 800
контуров управления (циклов) в секунду независимо от загрузки НРМ.
Специализированный контроллер FSC-SM противоаварийной защиты (Fail Safe
Control). FSC обеспечивает ведение процесса в безопасном режиме противоаварий-
ной защиты (ПАЗ). Для этого используется диагностика и концепция дублированно-
го канала, разработанные специально для контроллеров ПАЗ. Контроллер FSC-SM
(FSC Safety Manager) представляет собой отказоустойчивый контроллер с двойным
резервированием в сети UCN. Функции ПАЗ отделены от стратегии управления про-
цессом и замкнуты на отдельную «сеть безопасности» (Safety Network). Через сеть
486
ГЛАВА 8
UCN контроллер FSC-SM имеет связь с модулями Safety Manager, Process Manager,
Advanced Process Manager, Logic Manager, High-Performance Process Manager, с опера-
торами и инженерами через станции UWS, GUS. Для отображения аварийной сиг-
нализации используются светодиоды клавиатуры, обзорные аларменные дисплеи и
мнемосхемы.
Foundation Fieldbus Hl — открытая сеть низовой автоматики по стандарту IEC
61158-2. Технология Foundation Fieldbus (FF) полностью заменяет токовую петлю
4...20 мА, обеспечивая управление устройствами низовой автоматики и сокращая
расходы на кабельные соединения благодаря функциям диагностики сети. Используя
технологию OpenField в устройства низовой автоматики через сеть FF загружается
ПО OpenField, благодаря чему эти устройства наделяются независимо от контролле-
ра функциями управления. При этом снижаются затраты на операторское обслужи-
вание этих устройств, сокращаются простои оборудования и пр.
Через сеть FF устройства, подключенные к сети, имеют возможность обмена инфор-
мацией с базовой системой и друг с другом благодаря DD (Device Description — «Опи-
сание устройства»), поставляемому вместе с устройствами низовой автоматики. DD за-
гружается в TPS Builder. FF взаимодействует с TPS через процессор ввода/вывода (ЮР),
находящийся в НРМ. Каждый ЮР имеет свою терминальную панель FTA, к которой
может быть подключено до 4-х сетей FE Таким образом, данные по сетям FF через ЮР
могут передаваться к операторским станциям, серверам и системам верхнего уровня.
TPS Builder (построитель TPS) и DOC3000 — современные инструменты для
конфигурирования системы TPS. TPS Builder графическим методом позволяет ском-
поновать схемы управления процессами, используя комбинацию функций НРМ и
устройств Fieldbus.
DOC3000 является средством управления БД и документирования в системе TPS.
DOC3000 разработан для проектирования систем управления и включает базовый
модуль и модули расширения. Базовый модуль позволяет в графическом виде выво-
дить на экран обзор TPN, теги, ресурсы UCN, блок целостности БД и др. Модули рас-
ширения (Control Map Manager, Manager DS, Document Manager, Alarm Manager и др.)
предоставляют информацию о схемах управления, мнемосхемах, документировании,
аварийной сигнализации и т. п.
Построитель мнемосхем (Display Builder) — средство разработки пользователь-
ских мнемосхем с привязкой объектов мнемосхем к точкам, которые отображают
данные параметров технологического процесса. Display Builder импортирует в мне-
мосхемы ActiveX, тренды, электронные таблицы и др. по технологии OLE Automation.
Помимо OLE поддерживается стандарт открытой связи с БД ODBC (Open Data Base
Connectivity). Созданные мнемосхемы поддерживают доступ к данным для серверов,
используя стандарт ОРС. Построитель TPS предоставляет возможность инженерам
разработать различные стратегии управления процессом в виде одноконтурных или
многоконтурных систем управления, которые могут быть преобразованы и просмо-
трены как мнемосхемы GUS в РВ.
8.4. Total Plant Alcont компании Honeywell
Total Plant Alcont (TPA) — интегрированная система управления технологическим
и производственным процессами. Функции управления бизнес-процессами в ТРА от-
сутствуют. Основными компонентами ТРА являются отдел (department), ответствен-
ный за управление технологическими объектами или производственным участком.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
487
Отдел формируется на собственной системной шине (System Highway), к кото-
рой подключаются технологические и диспетчерские рабочие станции. Функции
операторов-диспетчеров распределены по областям процесса (process area). Область
процесса — это выделенная часть технологического процесса (участок, цех) со свои-
ми функциями контроля, управления и сигнализации. Общее количество областей
на отдел не более 100, а на одного оператора не более 20. Для всех областей использу-
ется единый набор программных и технических средств.
Все отделы предприятия объединены общезаводской шиной управления. Ин-
формация через общезаводскую шину управления поступает в локальную сеть пред-
приятия LAN (Local Area Network), в качестве которой используется сеть Ethernet, и
далее на операторские станции верхнего уровня. К этим станциям относятся станция
проектирования (DXM), универсальные станции GUS, офисные станции и ряд др.
Удаленные системные модули отделов подключаются к сети, состоящей из одной
или нескольких системных шин (System Highway) типа Upline (Upline Highway). Шина
Upline используется как системная шина (System Highway), как процессовая шина
(Process Highway) и как общезаводская шина (Mill Highway).
Системная шина (System Highway) Upline имеет длину до 2000 м, скорость обмена
1, 2 или 4 Мбит/с, физическая среда — дублированный тонкий коаксиальный кабель
или оптоволокно. К шине Upline может быть подключено до 16 модулей.
Процессовая шина (Process Highway) служит для подключения процессовых мо-
дулей к операционному модулю ОМ (Operation Module).
Общезаводская шина (Mill Highway) используется для объединения подсистем
управления отделами. Общезаводская шина с помощью операционных модулей свя-
зана с шиной LAN.
Сигналы от приборов низовой автоматики поступают на модули станций вво-
да/вывода. Каркасы модулей ввода/вывода с помощью шины Upline подключаются
к процессовому модулю РМ. К шине может быть подключено до 4-х каркасов ввода/
вывода. Помимо шины Upline для связи с приборами низовой автоматики исполь-
зуются сети Profibus DP, Interbus и DeviceNet. Ведущим устройством (Master) в сетях
служит полевой контроллер FC (Field Controller). Компонентами системы Total Plant
Alcont являются рабочие станции и модули.
Глобальная станция пользователя (GUS) представляет собой рабочую станцию
с ОС Windows NT. GVS подключается к общезаводской шине предприятия и с по-
мощью адаптера ETI к шине системы Alcont. На двух мониторах станции оператору
представляется вся необходимая технологическая и производственная информация.
Операционный модуль ОМ (Operation Module) выполняет функции сервера БД РВ:
хранит информацию о состоянии системы, собирает и сохраняет данные о наруше-
ниях и отказах в системе, генерирует отчеты. Совместно с модулем сохранения (Safe
Module) выполняет функцию архивирования данных. ОМ подключается к общеза-
водской и системной шинам.
Конструктивно ОМ представляет собой 19" каркас, в который устанавливаются
платы модулей. Среди модулей — процессор XPR-A, платы памяти на 8 Мбайт ЕММ
(Eight Megabyte Memory), ETI — карта интерфейса связи с GUS, UIX-процессор ин-
терфейса связи с процессовой шиной, SCI (Serial Communication Interface — интер-
фейс периферийных устройств) и блок питания модулей LPS (Line Power Supply).
Процессовый модуль PM (Process Module) выполняет следующие функции кон-
троля и управления в пределах выделенной области процесса (process area):
488
ГЛАВА 8
• осуществляет контроль технологических параметров процесса и параметров со-
стояния оборудования;
• формирует тренды, алармы и отчеты;
• реализует различные алгоритмы управления — от ПИД-регулирования и логи-
ческого управления до более сложных алгоритмов многосвязного регулирования
и оптимизации процесса.
Главным процессором РМ, как и модуля ОМ, является процессор типа XPR-A.
РМ подключается через интерфейс процессора XPR-A к системной шине Upline. В
каркасе модуля РМ размещаются модули ввода/вывода. Полевые модули аналогово-
го и дискретного ввода/вывода подключаются к полевой шине lOLine и далее через
интерфейс UIX к РМ. Кроме того, полевые модули могут подключаться к РМ через
полевую шину Interbus по интерфейсу IBI. Среди модулей, подключаемых к открытой
шине Interbus, — стандартные модули аналоговых входов/выходов (0/4.. .20 мА), дис-
кретных входов/выходов, термометры сопротивления с НСХ PtlOO, а также модули
разработки фирмы Honeywell-Measures.
Модуль проектирования Efim (Design Module). Модуль предназначен для проек-
тирования аппаратно-программного обеспечения системы управления. Техническое
обеспечение Dam аналогично станции GUS.
Полевой контроллер FC (Field Controller). FC — открытый контроллер полевой
шины для управления непрерывными и периодическими процессами и оборудова-
нием, в том числе электроприводами, а также для диагностики каждого канала, под-
ключенного к FC. Полевой контроллер FC поддерживает протоколы полевых шин
Profibus DP, Interbus и DeviceNet. К каждому FC может быть подключено две полевые
шины. FC способен обрабатывать до 200 контуров (время цикла 20 мс) и 2000 сигна-
лов ввода/вывода. В структуре полевой шины Master/Slave FC выполняет функции
ведущего устройства. Данные диагностики и сигнализации от устройств, подключен-
ных к полевым шинам, обрабатываются контроллером и отображаются на экранах
операторских станций.
В состав контроллера входят платы процессора, источника питания, плата интер-
фейсов и объединительная задняя панель. Платы размещены в корпусе контроллера,
снабженного защелками для установки на DIN-рельс. Плата интерфейса включает
два интерфейса с шиной Uplink и два независимых интерфейса с полевыми шинами
Profibus DP, Interbus или DeviceNet.
Прикладное ПО контроллера FC включает библиотеку стандартных функций
контроля и управления, а также алгоритмы статистического управления, оптимиза-
ции, управления с прогнозированием, нейросетевые алгоритмы, а также алгоритмы
управления на основе нечеткой логики.
8.5. Система Plant Scape фирмы Honeywell
Система Plant Scape — открытая интегрированная масштабируемая распределен-
ная система управления периодическими и непрерывными процессами, поддержива-
ющая архитектуру клиент-сервер на базе Windows NT. Минимальная конфигурация
представляет собой операторскую станцию и контроллер (рис. 8.3).
Состав системы Plant Scape:
• сервер на основе MS Windows NT с операторским интерфейсом, функциями
хронологического архива и отчетов;
• операторские станции (локальные и удаленные);
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
489
• гибридный контроллер С100/С200 для дискретного интегрированного
управления;
• открытая сеть ControlNet;
• интернет-технология для документирования и поддержки делового режима;
• объектно-ориентированные программные средства для построения стратегий
управления.
Основным управляющим узлом является гибридный контроллер, включающий в
себя один из четырех процессоров: управляющий, логический, процессор контролле-
ра С200 и процессор контроллера L100.
Независимо от варианта процессора гибридный контроллер состоит из каркаса,
устройств ввода/вывода, блока питания и коммуникационных модулей.
Система Plant Scape имеет возможность непосредственного взаимодействия с
любыми открытыми SCADA-системами. Система Plant Scape SCADA обеспечивает
интеграцию с широким спектром PLC и RTU (удаленные терминальные устройства)
других производителей.
Интегрированная платформа Plant Scape представляет собой мощную систему
сетевого обмена и супервизорного управления, в состав которой входят:
• интегрированные дисплеи графики, отчетов, сигнализации;
• операторские станции, работающие с резервированным сервером;
• интегрированные системы диагностики с БД и ПЛК;
• стратегии управления с полным документированием;
• стандартные и определяемые пользователем шаблоны прикладных задач.
Гибридный контроллер. На рис. 8.4 приведен общий вид гибридного контроллера
С200. Он состоит из каркаса (шасси), блока питания 1, двухплатного модуля управляю-
щего процессора С200 2 с ОЗУ 8 Мб, процессором 100 МГц, ПЗУ 4 Мбайт, интерфейсом
ControlNet 3, модулей ввода/вывода 4 (рис. 8.4, а). Скорость обмена по сети ControlNet
составляет 5 Мбит/с, физическая среда — коаксиальный кабель, топология — «маги-
страль с ответвлением», длина сегмента 1 км, общая длина кабеля с 5-ю повторителя-
ми — 6 км.
Для обеспечения резервирования управляющего процессора предусмотрен мо-
дуль резервирования 5 процессора типа С200, устанавливаемый вместо модулей ввода/
Рис. 8.3
490
ГЛАВА 8
вывода (рис. 8.4, б). Соединение модулей процессоров осу-
ществляется через оптоволокно.
Модуль логического процессора L100 включает много-
задачный ПРЦ с 32-битной памятью объемом до 256 Кбайт.
Модуль имеет серийный порт для программирования и
диагностики.
8.5.1 Программное обеспечение системы Plant Scape
ПО системы Plant Scape представляет собой объектно-
ориентированный программный пакет (компоновщик
управления) для проектирования, документирования и контроля системы, вклю-
чающий библиотеку функциональных блоков (FB). FB объединяются между собой
в «программные шины», образуя прикладные системы и стратегии управления. FB
входят в состав модулей управления CM (Control Modules), а если это FB управле-
ния последовательностью, то они входят в состав модулей управления последова-
тельностью SCM (Segmental Control Modules). СМ и SCM играют роль контейнеров
для FB (например, в контуре ПИД-регулирования четыре FB «заключены» в мо-
дуль управления — контейнер F1C 105).
Компоновщик управления использует пиктограммы, которые можно объеди-
нять, а также шаблоны для выбора и изменения стратегий управления.
Типы FB включают в себя блоки: параметров процесса, регулирующего управле-
ния, управления двигателем, дискретный логический, управления последовательно-
стями, а также блоки флагов, чисел и таймеров.
Среда выполнения управляющей программы CEE (Control Execution Environ-
ment) в оболочке управления CS01 (Control Solver) предназначена для обеспечения
работы управляющего процессора С100/С200. Максимальное количество модулей
ввода/вывода на СЕЕ равно 64.
8.5.2 Принципы построения системы Plant Scape
Построение системы основано на конфигурировании системы из общих элемен-
тов, к которым относятся данные о пользовательских точках, после чего пользователь
получает доступ к различного рода дисплеям — дисплеям обзора событий, сигнализа-
ции, трендов, дисплеям регулирования контуров, диагностическим дисплеям и др.
Сбор информации о процессе заносится в базу данных Total Plant Uniformance.
Конфигурируемое создание трендов включает одинарные, двойные и тройные гисто-
граммы, векторные и групповые тренды, масштабируемые тренды, комбинирован-
ные реальные и исторические тренды.
Среда функций подготовки отчетов включает в себя:
• журнал событий и сигнализаций;
• журнал атрибутов критических точек (дефектные данные, выход за заданные
пределы, задержка сигнала и пр.);
• журнал анализа простоев оборудования;
• отчеты в свободном формате (математические и статистические функции,
среднеквадратическое отклонение и пр.).
Функция безопасности предоставляет до 6 уровней безопасности для ограниче-
ния доступа к функциям Plant Scape и до 255 уровней — к функциям управления
отдельными установками.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
491
Сетевые возможности системы Plant Scape заключаются в подсоединении
устройств к сети Foundation Fieldbus Hl, которая функционирует как отдельный ком-
муникационный контроллер.
8.5.3 Прикладные программы системы Plant Scape
К числу прикладных программ системы относятся следующие программы:
• управление по рецептам (до 30 элементов в рецепте); отдельные элементы
доступны для масштабирования;
• анализ простоев: выявление любых отказов оборудования или технологических
задержек, а также времени простоев;
• график обработки точек: автоматическое создание временных графиков
обработки точек.
8.5.4 Сетевые средства системы Plant Scape
Сетевыми средствами системы являются следующие:
• Сетевой сервер (общее число точек сервера от 10 до 20 тыс.). Сервер задействован
на каждом узле сети системы Plant Scape для эффективного доступа в РВ к БД Plant
Scape различных сетевых приложений, таких как Microsoft Data Exchange, Network
API. Приложениям, работающим в сети Microsoft Excel, можно получать данные
от системы Plant Scape. Другие приложения, в том числе написанные на Си, могут
получать данные в РВ через сетевой интерфейс прикладных программ (API).
• Драйвер ODBC, предназначенный для связи клиентских приложений с БД
сервера. Приложение Microsoft Access может связываться с БД сервера при помощи
команд SQL. При этом БД сервера представляет собой некоторое число открытых
только для чтения таблиц ODBC с информацией об истории процесса и событий.
Также существует опция обмена данными через ODBC, которая представляет
собой двухсторонний обмен данными между БД сервера и совместимой с
ODBC сетевой БД производства третьих фирм. Здесь также используется язык
структурированных запросов SQL. Драйверы ODBC имеются в базах данных Mi-
crosoft SQL Server, Oracle 7, Microsoft Access, Sybase 10 и др.
• Резервирование. Подсистема резервирования включает две одинаково
сконфигурированные системы с серверами Windows NT, одна из которых
является главной, а другая второстепенной. При этом обе базы данных являются
полностью синхронными в любой момент времени.
Наряду с ПО Сервера процесса и Сервера SCADA в системе имеется объектно-
ориентированный построитель мнемосхем, с которым поставляется библиотека
изображений (резервуаров, клапанов, трубопроводов, транспортеров и пр.).
В целом Plant Scape является интегрированной эффективной системой, позволя-
ющей решать комплекс задач для повышения производительности при управлении
промышленным производством.
8.6. Система автоматизации PMD фирмы Honeywell
Система PMD (Process Machinery Drives) является следующим поколением си-
стемы Total Plant Alcont и полностью с ней совместима. Технология PMD позволя-
ет использовать единую систему автоматизации для управления на промышленном
предприятии процессами непрерывного производства, машинным оборудованием и
системами электропривода.
492
ГЛАВА 8
Функция управления в системе PMD реализуется с помощью высокопроизво-
дительного сетевого контроллера. Для повышения быстродействия и надежности
используется отказоустойчивая сеть FTE (Fault Tolerant Ethernet — отказоустойчи-
вый Ethernet) на основе Industrial Ethernet. Протокол FTE находится в стеке протоко-
лов между уровнями Ethernet и IP. Физическая среда — дублированная витая пара,
скорость обмена по сети 10 Мбит/с. Топология сети — общая шина с протоколами
сетевого и транспортного уровней TCP/IP. Протокол сети Industrial Ethernet имеет
встроенные функции резервирования, гарантирующие сохранение подключения
устройств в условиях помех. Применение Ethernet-ком мутаторов гарантирует раз-
решение коллизий в случае множественного доступа в сеть.
Отделы (department) системы PMD представляют собой устройства, объединен-
ные системной шиной (System Net), являющейся отказоустойчивой сетью TCP/IP на
базе Ethernet. На канальном уровне используются протоколы Ethernet. На сетевом
уровне используется протокол IP, отвечающий за передачу информации по сети, т. е.
за правильность доставки сообщения (message) по указанному адресу. На транспорт-
ном уровне используются протоколы TCP или UDP.
В состав устройств PMD входят цеховые контроллеры, доменный сервер про-
цесса PDS (Process Domain Server), модуль проектирования DXM, пользовательские
интерфейсы HMIWeb.
Цеховой контроллер FC (Field Controller) имеет два независимых интерфейса
Profibus DP, DeviceNet или Interbus. Также в контроллере имеется интерфейс последо-
вательной передачи данных RS-485 и интерфейс сети Upline. К системной сети кон-
троллер подключается через интерфейс Ethernet. В контроллере используется 64-раз-
рядный процессор фирмы Intel.
Доменный сервер процесса (PDS) служит для управления базовыми функциями,
связанными с обработкой и передачей данных.
Основные функции PDS:
• хранение всех системных данных;
• сбор и передача (маршрутизация) данных;
• генерация отчетов (рапортов);
• распределение архивируемых данных среди пользователей.
Обмен информацией с БД на сервере, предназначенном для хранения системного
архива (Open Data Base History Server), осуществляется с помощью драйверов ODBS
и OLE DB провайдеров на базе объектов ADO (Active Data Objects).
Через системную шину FTE обеспечивается обмен данными между контролле-
рами FC, серверами процесса (PDS) и операторскими станциями (HMIWeb Stations),
представляющими собой Web-узлы. Сервер PDS помимо функций архивирования
системных данных, автоматически загружает системное ПО и приложения в цеховые
контроллеры, создает карты маршрутов для быстрой передачи данных по сетям.
Каждое подразделение имеет свой физически выделенный сервер. Сервер PDS
базируется на ОС Windows 2000/NT, процессоре Pentium III. В качестве БД использу-
ется SQL Server. Данные с сервера используются для управления процессом, состав-
ления прогнозов, отчетов, таблиц, аварийных сообщений и тревог. К серверу PDS
подключен доменный коммутатор, к которому подключены другие устройства.
Все прикладные инструменты для организации функций управления, тести-
рования и проектирования, установлены в модуле проектирования и включают
в себя компоновщик (построитель) системы (System Builder), компоновщик бло-
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
493
ков (Block Builder) и построитель изображений и экранных форм (HMIWeb Dis-
play Builder). Все приложения используются для построения структуры системы
управления, конфигурирования сетевой топологии, выбора функций управления.
Настройка и моделирование контуров систем автоматического регулирования
осуществляются с помощью пакетов ПО ExperTune фирмы Honeywell и Tune UP
фирмы Valmet Automation.
Система Alcont PMD содержит развитый интерфейс связи технологических дан-
ных нижних уровней иерархии с системами верхнего уровня для учета работы пред-
приятия в целом. Пользовательский интерфейс связи основан на Web-технологии
обмена данными с использованием стандартов Internet, форматов HTML, протоко-
лов Ethernet, технологии ОРС, инструментов ActiveX и др. открытых стандартов и
протоколов.
HMIWeb передает данные технологического процесса и системные данные че-
рез окно операторского интерфейса. Для этого используется панель инструментов.
В верхней части окна в зоне сообщений отображаются пояснительные сообщения,
а в зоне команд — вводимые команды. В нижней части окна отображается строка
аварийных сообщений и строка состояния системы. Основная часть окна занята те-
кущим изображением с возможностью вывода диаграмм, трендов, графических изо-
бражений контуров.
Оператор имеет возможность контролировать технологический процесс и изме-
нять заданные значения параметров. К дополнительным функциям относятся воз-
можность пересылки аварийных и диагностических сообщений, а также сообщений
о простое оборудования.
Таким образом, интеграция функций управления процессом, оборудованием и си-
стемами электропривода в рамках единой системы имеет следующие преимущества:
• разработка единого проекта в единой среде программирования;
• упрощенное управление единой базой данных;
• повышение эффективности работы операторов;
• значительное повышение эффективности всего производственного процесса
благодаря мониторингу его отдельных этапов и др.
8.7. Experion PKS - новая РСУ фирмы Honeywell
Данная система является дальнейшим развитием предшествующих РСУ фирмы
Honeywell — TDC 3000, Total Plant Solution, Plant Scape и др. Система Experion PKS,
архитектура которой приведена на рис. 8.5, также предназначена для управления не-
прерывными и дискретными процессами, оборудованием и системами электропри-
вода [8.3].
Experion PKS (Process Knowledge Solution — «Система знаний о процессе») на-
капливает знания о процессе и управляет процессом и оборудованием. В системе
сохранен принцип деления процесса на отделы (department) по технологическому
принципу. Все станции и узлы подключены к общесистемной шине FTE.
Новым архитектурным решением системы Experion PKS являются средства ком-
муникации с устройствами I/O, которые не привязаны к какому-либо конкретному
контроллеру. Это значит, что данные устройства ввода/вывода не связаны с конкрет-
ным контроллером, а доступны всем устройствам системы Experion PKS на шине
FTE. Таким образом, любые данные могут быть доступны через системную шину не-
зависимо от физического местонахождения устройства ввода/вывода.
494
ГЛАВА 8
УпрЙВПвНИЯ прсцеслом
ПриЭОДы
беспроводной
саязя
Цифровое
видео
Защити имаестииий при
интеграции систем TDC/TPS
Рис. 8.5
К другим достоинствам системы Experion PKS относятся:
• масштабируемость системы, т. е. возможность управления как отдельными
процессами, так и производством в целом;
• единая БД, доступная всем пользователям на различных уровнях иерархии;
• доступность информации через средства Internet/Intranet по технологии HMI-
Web с форматированием данных на языке XML;
• открытость системы, использующей международные стандарты ОРС, СОМ/
DCOM, OLE, ActiveX, типовую связь с СУБД на языке SQL по протоколу ODBC;
• использование открытых промышленных и полевых сетей.
8.7.1 Техническая структура Experion PKS
Иерархия системы Experion PKS — трехуровневая. Верхний информационный
уровень представлен рабочими станциями и серверами корпоративной сети на базе
Ethernet в двух вариантах:
• нерезервированная сеть Ethernet/Fast Ethernet со скоростью передачи данных
10/100 Мбит/с, максимальная длина сегмента сети — 1 км, число сегментов 6 при
пяти повторителях, число узлов в сегменте — 12.
• FTE (отказоустойчивый Ethernet) на базе резервированных кабелей со множе-
ственными связями между узлами сети (до 4-х портов на каждом узле сети); это
обеспечивает сохранение связи при отдельных сбоях в сети. Скорость передачи
данных 100 и 1000 Мбит/с.
На контроллерном уровне используются контроллеры С200, С300 и НРМ. Связь
контроллеров осуществляется с помощью Ethernet, FTE и ControlNet. Длина сегмента
сети ControlNet составляет 1 км, число узлов на сегменте сети — 32.
На полевом уровне используются сети Foundation Fieldbus, Profibus DP, Control-
Net и HART-протокол.
Техническое обеспечение системы Experion PKS представлено контроллерами
С200, С300, НРМ, FSC, рабочими станциями HMIWeb, станцией проектирования
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
495
DM, модулями связи I/O Web и PMD-сервером. Устройства ввода/вывода и PMD-
сервер подключены к системной шине через коммутатор домена (switch domain).
Модульный контроллер С200 (совместная разработка компании Honeywell и Al-
len Bradley), который является основным контроллером системы PlantScape, исполь-
зуется в процессах с небольшим числом входных/выходных сигналов без резервиро-
вания. Интеллектуальные модули ввода/вывода контроллера располагаются в карка-
се станции ввода/вывода, соединенной с основным контроллером оптоволоконной
шиной ControlNet. К одному контроллеру может быть подключено до 64 модулей
ввода/вывода, среди которых:
• модули AI на 8, 16 каналов; разрядность 14 бит, диапазон входных сигналов 0.. .5
VDC, 4.. .20 мА, погрешность ±0,075%;
• модуль термопар и термометров сопротивления на 16 и 32 канала; разрядность
15 бит;
• модуль дискретных входов на 32 канала;
• модуль дискретных выходов на 16 и 32 канала; тип выходного сигнала «СК» (265
VAC, 2,5А).
Характеристики контроллеров С200, С300 и НРМ приведены в табл. 8.1.
Таблица 8.1. Характеристики контроллеров С200, С300 и НРМ
Наименование С200 C300 HPM
Производительность, ед. (PU) 1800 3600 800
Частота сканирования 50 мс.... 2 с 250 MC....I c
Интерфейс FTE, ControlNet FTE UCN
Число модулей ввода/вывода 64 40
Объекты резервирования Модули ввода/вывода РМЮ Модули ввода/вывода Series C Модули ввода/вывода РМЮ
Искрозащита Rail I/O Series Н Модули Series C Терминальные панели GI/ ISFTA
Поддержка протоколов Profibus, Fieldbus, DeviceNet, Modbus, HART Fieldbus, Modbus
Большинство модулей имеют групповую гальваническую развязку.
Модульный контроллер С300 является основным контроллером системы с ин-
терфейсом FTE и искробезопасными резервированными модулями ввода/вывода.
Помимо этих контроллеров в системе Experion PKS используются контроллеры
PLC-5 и LC5550 семейства Allen Bradley, выпускаемые фирмой Rockwell Automation. В
системе противоаварийной защиты используется специальный контроллер ПАЗ — Fail
Safe Controller (FSC), процессор которого имеет четырехкратное резервирование.
Удаленные модули ввода/вывода имеют пыле-, влагозащищенное и антикорро-
зийное исполнение. Полевые модули ввода/вывода фирмы Honeywell, подключаемые
с помощью процессора интерфейса CIP и шины CANopen, имеют следующие харак-
теристики:
• модуль RBI дискретного ввода, 16-канальный; тип входного сигнала «СК» и «ОК».
Модуль имеет два источника питания +5 VDC, +24 VDC (2А) для двух групп по
8 каналов;
• модуль RBO дискретного вывода, 16-канальный; питание +5 VDC, +24 VDC (2А);
• модуль RAI аналогового ввода, 8-канальный для подключения двухпроводных или
трехпроводных датчиков. Модуль имеет специальные 4-проводные интерфейсы
со съемными зажимными разъемами; питание +5 VDC, +24 VDC (2А);
496
ГЛАВА 8
• модуль RAO аналогового вывода, 8-ми канальный. Модуль имеет специальные
4-проводные интерфейсы со съемными зажимными разъемами; питание +5 VDC,
+24 VDC (2А).
Помимо удаленных модулей ввода/вывода и для расширения числа полевых шин
с подключенными к ним устройствами ввода/вывода используются модули связи I/O
Web (I/O Web Device Link). Модуль связи I/O Web связан с шиной FTE по интерфейсу
Ethernet. По отношению к модулям I/O, подключенным к полевой шине, модуль I/O
Web является ведущим.
В связи с тем что данные модулей I/O через модуль связи I/O Web доступны лю-
бым контроллерам, подключенным к сети FTE, устройства I/O размещаются в не-
посредственной близости от источников сигнала. Это существенно сокращает за-
траты на кабельную продукцию. Модуль связи I/O Web имеет три ин терфейса связи
с полевыми шинами, из них два фиксированных интерфейса с модулями Honeywell
и один интерфейс по выбору с полевыми шинами Profibus, DeviceNet, Interbus, Con-
trolNet, LON. Кроме того, модуль связи I/O Web имеет два порта CANopen. В свою
очередь для подключения модулей I/O к сети CANopen используется CIP (процес-
сор интерфейса CAN). К одному CIP может быть подключено до 8 дискретных или
аналоговых модулей ввода/вывода, а к шине CANopen — до 31 CIP. Таким образом,
общее число модулей I/O на шине CANopen достигает 248 модулей.
В системе Experion PKS используются рабочие станции (PC), характеристики ко-
торых приведены в табл. 8.2.
Таблица 8.2. Характеристики рабочих станций Experion PKS
Наименование Experion Station Mobile PKS
Console (ES-C) TPS (ES-T) Console Extension (ES-CE) Flex(ES-F)
Назначение PC повышенной надежности Базовая PC Клиентские рабочие станции Технологическая PC
Интерфейс FTE LCN Ethernet Беспроводная радиосеть 2,4 ГГц
Источник данных процесса C200, СЗОО NIM ES-C или ES-T ES-V или ESVT eServer, Mobile Station Server
Максимальное число узлов в сети 10 20 3 40 40
Интерфейс оператора HMIWeb; PC Experion HMIWeb; сре- да мнемосхем GUS HMIWeb; PC Experion или среда мнемосхем GUS HMIWeb; PC Experion
Шина CANopen обеспечивает последовательную передачу данных между I/O Web
Link Device и полевыми адаптерами, к которым подключены модули I/O. Скорость
передачи может быть выбрана 50, 100, 200, 500 и 1000 Кбит/с. Максимальная длина
шины 1000, 400, 180, 100 и 40 м соответственно. Передача сообщений по шине CANo-
pen сопровождается идентификацией ошибок. Физическая среда — витая пара. Шина
использует код NRZ (Non Return to Zero), который обеспечивает постоянное состояние
шины в течение передачи одного или нескольких битов. Если состояние шины остается
неизменным в течение передачи 5 битов, то добавляется бит противоположной поляр-
ности, чем обеспечивается синхронность работы шины для всех узлов сети.
В сети Ethernet каждая операторская станция имеет индивидуальную линию свя-
зи с контроллерами и рабочими станциями, что повышает автономность ее функ-
ционирования в сети.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
497
Рабочая станция Flex (ES-F) в качестве клиентской станции может быть подклю-
чена к серверу Experion PKS через сеть Ethernet постоянно или временно по желанию
пользователя.
Станция Console (ES-C) имеет непосредственный доступ к контроллерам С200
и С300 минуя сервер, чем обеспечивается быстрота реакции на события. К станции
Console подключается станция Console Extension (ES-CE), являющаяся расширите-
лем станции Console.
Все станции базируются на платформе с ОС Windows 2000/ХР и процессором
Pentium IV. Конфигурация сервера: ОС Windows 2000 Server, процессор Pentium III
или Xeon.
Станция проектирования DM (Design Module) обеспечивает доступ к системно-
му построителю (System Builder), построителю блоков (Block Builder) и построителю
дисплеев операторской станции (HMIWeb Display Builder).
8.7.2 Программное обеспечение системы Experion PKS
ПО Experion PKS обеспечивает контроль, управление, диагностику, докумен-
тирование и другие функции управления предприятием. Программное обеспе-
чение Control Execution Environment (CEE) применяется для контроллеров С200,
реализующих алгоритмы контроля и управления, сервера Experion PKS (измене-
ние задания регуляторам и управление исполнительными механизмами) и рабочих
станций, служащих для моделирования и отладки программ, а также в качестве
обучающих комплексов.
Инструментальной средой программирования контуров контроля и управления
является графический конфигуратор Control Builder. В процессе программирования
используются типовые программные модули математических операций (линеариза-
ция, масштабирование, фильтрация и др.), модули логических операций, алгоритмы
П-, ПИ- и ПИД-регулирования, каскадного управления, регулирования соотноше-
ния, модули расчета расходов газов и др.
Инструментальной средой программирования рабочих станций по Web-
технологии является пакет HMIWeb Display Builder, с помощью которого реализуют-
ся функции SCADA-систем, в том числе создаются дисплейные кадры различных ти-
пов, мнемосхемы, отображаются панели приборов и контуров управления, графики
и тренды, аварийные ситуации и сообщения о тревогах. Аварийные сообщения мо-
гут передаваться на пейджеры и по электронной почте. К функциям SCADA-систем
относятся также формирование отчетов, протоколов, парольной защиты с несколь-
кими видами допусков и авторизацией персонала.
Контроль нештатных ситуаций осуществляется экспертными оценками событий
за определенные промежутки времени от момента возникновения событий до его
подтверждения и устранения оператором, а также путем сопоставления трендов.
Помимо программы контроля нештатных ситуаций существует программа ана-
лиза работы оборудования, основанная на статистическом моделировании различ-
ных условий эксплуатации и прогнозировании отказов в работе оборудования.
К программным пакетам, обеспечивающим доступ к информации системы Expe-
rion PKS, хранящейся в СУБД (Uniformance PHD), относится пакет ПО eServer’
Таким образом, система Experion PKS является открытой отказоустойчивой систе-
мой, интегрированной с системами верхнего уровня, обеспечивающей управление тех-
нологическим процессом и контроль состояния оборудования и нештатных ситуаций.
498
ГЛАВА 8
8.8. ИАСУ Damatic XD и XD* фирмы Valmet Automation.
Интегрированная автоматизированная система управления Damatic XD пред-
назначена для управления непрерывными и периодическими процессами. Тополо-
гией сети системы Damatic XD является общая шина. Физическая среда передачи
данных — дублированный коаксиальный кабель, состоящий из сегментов длиной 2
км. С помощью станций расширения число сегментов шины может быть увеличе-
но до четырех. К каждому сегменту возможно подключение до 50 станций. Каждая
станция подключается к шине через сетевой модуль NCU (Network Control Unit).
Для восстановления амплитуды и формы сигнала при большой длине сети устанав-
ливаются репитеры, способные регенерировать сигнал и устранять сбои в сети. Ско-
рость обмена данными в сети составляет 2 Мбит/с. Метод доступа к системной шине
— эстафетная передача с протоколом «token passing», который разработан фирмой
Valmet Automation, и отличается от аналогичных протоколов IEEE 802.4 и IEEE 802.5.
Логическая структура общей шины — логическое кольцо. Система Damatic XD не
предусматривает управление системами верхнего уровня.
Система Damatic XDi является следующим после Damatic XD поколением распреде-
ленных систем управления. В отличие от системы Damatic XD в структуре Damatic XDi
предусмотрены аппаратно-программные средства общезаводского управления [8.4].
В системе Damatic XDi используются две системные шины: системная шина Damatic
XD и шина Ethernet с передачей данных по стандартному протоколу IEEE 802.3.
• Рабочие станции системы Damatic XDi подключены к системным шинам следую-
щим образом:
• к системной шине Damatic XD подключены процессовые станции и станция диа-
гностики;
• к шине Ethernet подключены станции проектирования, станции информацион-
ного менеджмента (XTS) верхнего уровня системы и модем связи с сетью Internet
и корпоративной сетью ValNet фирмы Valmet Automation. Связь между двумя
шинами осуществляется с помощью связных станций-шлюзов.
8.9. Система metsoDNA компании Metso Automation1
Система metsoDNA (Dynamic Network Application — Динамическая Сеть Прило-
жений) предназначена для решения технологических задач и эффективного управле-
ния производством. Структура системы metsoDNA приведена на рис. 8.6.
MetsoDNA, совместимая с системами Damatic, Damatic XD и Damatic XDi, явля-
ется дальнейшим развитием системы Damatic XDi. Открытая двухуровневая архи-
тектура системы основана на масштабировании, использовании открытых стандар-
тов ОРС, ADO, ODBC, ActiveX, а также открытых стандартах полевых шин Profibus,
Foundation Fieldbus и HART-протокол [8.5-8.7].
Основу metsoDNA составляют несколько сетей, реализующих определенные функ-
ции системы: полевого контроля FA (Field Activity), управления СА (Control Activity), опе-
ратора ОА (Operation Activity), управления информационными ресурсами IA (Informa-
tion Activity), инжиниринга и технического обслуживания ЕА (Engineering Activity) и др.
К числу сетей относятся сеть диспетчерской, сеть управления технологическим
процессом, полевые сети, офисная сеть предприятия.
1 Фирма Metso Automation преобразована из фирмы Valmet Automation. Членом Metso Corporation также
является фирма neles Automation [8.5}.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
499
Рис. 8.6
Техническое обеспечение системы metsoDNA включает рабочие станции моде-
лей S и М, серверы моделей L, XL и XXL с функцией резервного дублирования RAID,
панельные компьютеры моделей S и М, портативные и мобильные ПК, беспровод-
ная сетевая офисная и полевая станции с подключением к сети Ethernet. Устройства
вывода графической информации (мониторы 37" и более, проекторы с диагональю
экрана до 150”), принтеры, сетевые компоненты (концентраторы, коммутаторы,
маршрутизаторы Ethernet).
В системе metsoDNA эксплуатируются следующие сети:
• Сеть диспетчерской и офиса: физическая среда — витая пара, ВОК, беспровод-
ный Ethernet.
• Промышленная сеть управления технологическим процессом: физическая сре-
да — коаксиальный кабель, ВОК, Ethernet.
• Полевая шина ввода/вывода metsoDNA: физическая среда — коаксиальный ка-
бель, ВОК.
• Полевая шина Ethernet: физическая среда — коаксиальный кабель, ВОК, витая пара.
• Полевая шина встроенных устройств ввода/вывода: физическая среда — витая пара.
• Полевая шина сети Eoundation Fieldbus Hl: физическая среда — витая пара.
• Шина Profibus DP: физическая среда — RS-485, ВОК.
В состав технического обеспечения входят также шкафное оборудование — шка-
фы VME, шкаф для ПК, полевые терминалы, шкафы устройств ввода/вывода и крос-
совых соединений, полевые шкафы, шкафы распределения электропитания и пр.
Основные достоинства системы metsoDNA проявляются при рассмотрении спосо-
бов интеллектуальных решений при выполнении функций, заложенных в системе.
8.9.1 Функция полевого контроля
В состав полевых устройств системы metsoDNA входят:
• каркасные модули ввода/вывода;
• встроенные интеллектуальные модули ввода/вывода;
• устройства интерфейсной связи с шинами Foundation Fieldbus Hl, Profibus DP/
PA, ASi и HART;
• встроенные программируемые модули ввода/вывода электропитания.
500
ГЛАВА 8
Наименование и характеристики модулей ввода/вывода каркасного исполнения
приведены в табл. 8.3.
Таблица 8.3. Характеристики модулей ввода/вывода metsoDNA
Наименование Тип модуля Входной/ выходной сигналы Наименование Тип модуля Входной/выходной сигналы
Модуль аналого- вого ввода АШ1, АШ8 АШ 41 0/4...20 мА, 0/10...50 мА, 0/1...5В 0/4...20 мА, 0/10.. .50 мА, 0/1..,5В (с гальваноразвязкой и сигнализацией) Модуль аналогового ввода/вывода ACU (2 канала) AI: 0. ..20 мА, 0...5 VDC 0... 10 VDC. АО: 4...20 мА, 1...5 VDC, 2... 10 VDC.
Модуль аналого- вого вывода AOU I, AOU 4 0/4...20 мА, 0/10...50 мА 0/1...5 В Модуль дискретных входов ВШ4, BIU 8, BIU 82/84 ВШ 83/85 4 канала; 8 каналов (СК); 8 каналов (ОК); 8 каналов (ОК), оптоизоляция.
Модуль датчиков температуры тю 6, TIU41, TIU42 ТС (Pt 100); ТП (с гальванораз- вязкой и сигнализа- цией) Модуль дискретных выходов BOU 8, BOU 82, BOU 83, BOU84/85 8 каналов (СК); 8 каналов (СК); 8 каналов в/ч коммутация; 8 каналов в/ч коммутация;
Программируе- мые логические модули PLU 1, PLU2, PLU3 8 входов; 4 выхода; 2 выхода (5 ш$) Модуль входов измерения частоты FIU 1 0.. 10 кГц; 0.. .200 кГц импульс ный
Характеристики встроенных модулей ввода/вывода приведены в табл. 8.4.
Таблица 8.4. Характеристики модулей ввода/вывода
Наименование Тип модуля Входной/выходной сигналы Наименование Тип модуля Входной/выходной сигналы
Модуль анало- гового ввода МС/С1 1 вх. 1/2/5 А Модуль релей- ного выхода MC/2021 2 выхода 120/230 VAC (4 А); 2 входа 120 VAC
Модуль релей- ного вывода МС/031 1 выход 120/230 VAC (4 А); 3 входа 120/230 VAC Модуль релей- ного выхода рМС 1 выход 120/230 VAC (4 А); 3 входа 120/230 VAC
Характеристики встроенных полевых модулей ввода/вывода приведены в табл. 8.5.
Таблица 8.5. Характеристики встроенных полевых модулей ввода/вывода
Наименование Тип модуля Входной/выходной сигналы Наименование Тип модуля Входной/выходной сигналы
Модуль про- цессора PCR/ECR1 Интерфейс Ethernet Модуль анало- гового вывода AOR4 4 выхода: 0/4.. .20 мА, 0/1...5 VDC, 0/2...10 VDC
Модуль анало- гового ввода AIR 8; AIF2 8 каналов 0/4.. .20 мА. 0/1...5 В. 2 быстрых канала 0/4.. .20 мА, 0/1...5В, ±10 В Модуль дис- кретного выхода BOR82 8 каналов (СК); IA/50 V4C или 1А/75 VDC
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
501
Окончание табл. 8.5
Наименование Тип модуля Входной/выходной сигналы Наименование Тип модуля Входной/выходной сигналы
Модуль дис- кретного ввода B/R82 8 каналов (ОК), блок питания Адаптер связи SLR 2 Подключение 2-х последов-х портов: RS-232, RS-485,0...20 мА
Модуль импульсного ввода FIR 82 Частотный импульсный ввод 0...400 кГц; 4...20 мА, RS-485 Высокоскорост- ной канал связи RS-485 До 128 исполнительных устройств
1 Программирование процессора PCR осуществляется с помощью языков стандарта IEC 61131-3
Процессовый контроллер PCR (Process Control Reserve) установлен на базовом
модуле, в который могут быть установлены еще 4 платы ввода/вывода. С помощью
модулей расширения число плат ввода/вывода достигает 16. Контроллер PCR под
ключается к станции управления технологическим процессом через шину Ethernet.
Контроллер способен обрабатывать от 20 до 70 сигналов со временем цикла до 50 мс.
ПО Soft PCR, установленное на ПК, имеет возможность доступа к собственным моду-
лям ввода/вывода, а также через другие PCR к другим модулям ввода/вывода.
Инструментальной средой программирования PCR по стандарту IEC 61131-3 яв
ляется lecCAD, работающая в ОС Windows NT.
Устройства интерфейсной связи:
• Шина Foundation Fieldbus (FF). Спецификация FF определяет очередность об-
служивания функциональных блоков программы, заложенной в процессовом
контроллере, выявляя характер неисправностей и событий. При этом неважно к
каким полевым устройствам относятся анализируемые функциональные блоки.
Программа-конфигуратор шины FF устанавливается на ПК или сервере. Интер-
фейс шины FF (FFIC) представляет собой модуль, установленный в каркас вместе
с модулями ввода/вывода, и подключается к процессовой шине с помощью кон-
троллера шины последовательной передачи данных SBS32.
• Шина Profibus DP. Связь между контроллерами и полевыми устройствами осущест-
вляется по высокоскоростной линии последовательной передачи данных. Обмен
данными осуществляется циклически в соответствии со стандартом EN 50170. Ин-
терфейс шины Profibus DP представляет собой плату Profibus Master SST (компания
S-S Technologies'). Интерфейсная плата SST поддерживает до 96 slave-устройств.
Profibus РА ProfibusDP
parameters master
Profibus РА (31,2 кбит/с)
Profibus DP -re zt I
93,75 коит/с
DP-slave устройства
До 30 полевых устройств
на РА-преобразователь
Рис. 8.7
502
ГЛАВА 8
• Шина Profibus РА. Протокол шины Profibus РА базируется на стандарте
IEC 1158-2. Формат данных РА соответствует формату данных DP. Питание
и данные передаются в Profibus РА по двухпроводному кабелю. В одном сег-
менте может быть подключено до 31 устройства, на взрывоопасных участках
— до 10. За счет идентичности коммуникационных протоколов возможно
объединение Profibus DP и Profibus РА с помощью преобразователя DP/PA
или интерфейса DP/PA link, который в системах Siemens функционирует на
шине Profibus DP как ведомое устройство, а на шине Profibus РА как ведущее
устройство.
В системе metsoDNA интерфейс DP/PA link является ведомым устройством. Ин-
терфейс DP/PA может объединить до 5 шин Profibus РА. В случае использования в
качестве интерфейса преобразователя Pepperl+Fuchs все подключенные к шине Profi-
bus РА устройства будут работать как ведомые. Максимальное число устройств — 96,
скорость обмена до 93,75 кбит/с (рис. 8.7).
8.9.2 Функция управления
Система metsoDNA осуществляет управление технологическим процессом и про-
изводством, противоаварийную защиту и пакетное управление. Условно управление
подразделяется на базовое и расширенное управление.
Под базовым управлением подразумевают:
• аналоговое и логическое управление;
• быстродействующая противоаварийная защита;
• управление на базе встроенных интеллектуальных полевых модулей;
• пошаговое (последовательное) управление по стандарту IEC 60848 и рецептур-
ное управление (с помощью таблиц параметров).
Расширенное управление системы metsoDNA содержит:
• управление нечеткой логикой;
• нейросетевое управление;
• управление технологическим процессом на базе языка JAVA.
Управление нечеткой логикой основано на опыте оператора в условиях нефор-
мализованного представления системы управления. Решения, основанные на не-
четкой логике, характерны для процессов с большим числом неконтролируемых
параметров с перекрестными связями. Алгоритм нечеткой логики формируется
путем задания параметров, имеющихся в функциональных блоках нечеткой логи-
ки системы metsoDNA. Эти блоки являются элементами встроенных систем управ-
ления сигналами неисправностей, принудительного управления (пуск, останов) и
сигналами переключений.
Управление на базе нейронных сетей использует принцип «обучения», посред-
ством которого протокол по установлению соединений подстраивается к переда-
ваемым данным. Нейронные сети могут «обучаться» на имитационных моделях. По
сути, нейронная сеть представляет собой модель с большим числом параллельно
функционирующих простых процессов со множеством связей. Вместе с экспертной
системой нейронная сеть становится и самообучающейся.
Программные средства DNAneuroSense основаны на двух методиках построения
нейронных сетей:
• многослойное восприятие (МЕР);
• карта самоорганизации (SOM).
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
503
Таким образом, с помощью ПО DNAneuroSense можно создать следующие моде-
ли технологического процесса:
• модель NeurolNet с многослойным восприятием (MLR);
• карта самоорганизации (SOM);
• динамические линейные модели ARX;
• линейные статические регрессионные модели;
• пользовательские статические модели.
8.9.3 Функция оператора
Функция оператора обеспечивает мгновенный доступ к данным и информаци-
онным ресурсам технологического процесса. Информационные ресурсы составляют
базу знаний, созданную за длительный промежуток времени.
«Рабочий стол» операторской станции содержит несколько графических окон,
панель наиболее часто используемых дисплеев и заглавное окно с изображением
мнемосхемы процесса. Здесь же отображается строка неисправности и возможная
ее причина. Наиболее частые операции, такие как включение/отключение насосов,
открывание/закрывание клапанов, выполняются с помощью активных графических
схем. Пользовательский интерфейс системы metsoDNA предоставляет оператору ин-
формацию о неисправностях, которая поступает через каждую 1 мс.
Первый тревожный сигнал отображается мерцающим оранжевым цветом. При
возникновении аварийной ситуации (второй тревожный предел) раздается звуковой
сигнал. В обоих случаях на экране в строке аварийных сообщений указывается время
с точностью до миллисекунд, степень важности сообщения, номер технологического
элемента, его словесное название и описание характера неисправности. Эта же ин-
формация поступает на принтер аварийных сообщений. Если аварийная ситуация
возникла и ее не удалось предотвратить, metsoDNA предлагает использовать функ-
цию управления знаниями. Оператор описывает суть неисправности, предполагае-
мые пути ее решения и возможные симптомы ее проявления в будущем. К журналу
неисправностей прикладываются тренды за определенный промежуток времени. За
счет этих сообщений формируется база знаний системы metsoDNA. В случае воз-
никновения аварийных ситуаций на удаленном полевом оборудовании используется
беспроводная связь и передача SMS-сообщений.
8.9.4 Функция управления информационными ресурсами
Система metsoDNA включает в себя инструментальные средства по управлению
информационными ресурсами, которые формируют эффективную систему приня-
тия решений.
К инструментальным средствам относятся:
• описания контуров управления с динамическими значениями сигналов;
• руководства по обслуживанию и эксплуатации программно-технических средств;
• трехмерные модели производства, отображаемые на графических дисплеях
процесса;
• ежедневник DNAdiary.
В описании контуров управления описывается его функции, значения параме-
тров, состояния сигналов и пр.
Руководства по обслуживанию, хранящиеся в диспетчерской, не доступны в кри-
тических ситуациях. Поэтому оператору предоставляется возможность вывода ви-
деограммы процесса или оборудования с описанием принципов работы.
504
ГЛАВА 8
Модель производства создается на этапе проектирования в 3-мерной модели
CAD. Эта информация доступна в окне Web-браузера. Ссылка на физическое рас-
положение оборудования в 3-мерном пространстве помогает быстрее отыскать ме-
стоположение агрегата.
Ежедневник DNAdinary сохраняет события процесса не в операторском журнале,
а в виде видеограмм с указанием даты, времени дня (утро, вечер), точного времени
(часы, минуты) события, фамилии оператора и пр. Поэтому просмотр событий за за-
данный промежуток времени позволяет быстро провести анализ ситуации.
Данные о состоянии технологического процесса хранятся в исторической базе
данных (БДРВ) DNA Historian и доступны при помощи стандартных интерфейсов
ODBC или основанном на OLE ADO (ActiveX Data Objects) интерфейсе. Оба интер-
фейса поддерживаются стандартными или офисными приложениями Microsoft Excel
или Visual Basic. БДРВ DNA Historian основана на технологии иерархической базы
данных, оптимизированной для высокоскоростной обработки. Ядро БД позволяет
пользователю находить событие в виде комбинации атрибутов, каждый из которых
может быть целым числом, символом или логическим выражением. Аналоговый па-
раметр может быть определен при помощи 60 атрибутов, куда входят имя, описание,
значение, единицы измерения, пределы срабатывания и др.
Доступ к реляционным данным и данным реального времени осуществляется с
помощью интерфейса ODBC ОАМ (Open Access Module). Для пользователей Oracle
этот интерфейс позволяет передавать данные между DNA Historian и Oracle в обе
стороны при поддержке драйвера Oracle ODBC. Помимо БД Oracle поддерживаются
Microsoft SQL Server и Microsoft Access.
DNA Alarm Historian представляет собой высокопроизводительную БД техноло-
гического процесса и сигнализации. Эта БД используется совместно с DNA Alarm и
DNA Alarm Browser. DNA Alarm Historian построена с использованием технологии
Oracle 81 RDBMS и доступ к ней осуществляется с помощью драйвера Oracle ODBC.
DNA Process Explorer отображает данные из БД DNA Historian на экране дисплея
в виде трендов, диаграмм, видеограмм и мнемосхем процессов в статике и динамике.
Для просмотра событий за определенный промежуток времени используется «ли-
нейка времени» или календарь.
Для проведения статистических анализов предназначено ПО DNA Summary, ко-
торое доступно из DNA Process Explorer. По каждой переменной можно получить
средние, минимальные и максимальные значения. Возможно использование в окне
трендов до десяти переменных.
DNA total — средство построения отчетов. В отчетах могут быть использованы
любые переменные из DNA Historian. Также это приложение доступно из DNA Pro-
cess Explorer.
DNA runtime — обрабатывает данные о состоянии оборудования и оптимизи-
рует интервалы времени между обслуживаниями, а также ведет статистику времени
работы оборудования.
DNA replay — повторяет в хронологическом порядке события, параметры кото-
рых сохранены в исторической БД, в результате чего быстро определяется причина
неисправности оборудования.
'DNA AlarmBrowser — средство просмотра и обработки списков сигнализации и
событий. Сортировать события можно по временному интервалу, имени перемен-
ной, описанию переменной, источнику сигнала и др.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
505
DNA Alarm — средство анализа сигнализации и событий. Анализируется частота
поступления сигнала и причина сигнализации. Может быть выбран критерий сорти-
ровки сигнализации аналогично вышеприведенному.
DNA logReport — средство подготовки отчетов за определенный интервал вре-
мени — 8 часов, 1 день, 1 неделя или 1 месяц. Используется любая переменная из
исторической БД.
DNA spc — формирует статистику о состоянии процесса и качестве продукта в
реальном времени (РВ). DNA spc, вызываемое из DNA Process Explorer, предостав-
ляет оператору возможность создания диаграмм и гистограмм на основе статистики
состояния процесса.
DNA multivariate — пакет моделирования для анализа данных технологического
процесса. Приложение доступно из DNA Process Explorer и помогает определять и
диагностировать неисправности.
DNA event — управляет обработкой событий и сигнализации в DNA Historian,
отслеживает сообщения о сигнализации, изменениях в ходе процесса, а также дей-
ствия оператора.
DNA batch Reporting — обрабатывает информацию о текущем процессе для мо-
ниторинга и анализа. Результаты вычислений сохраняются в БД, используются в от-
четах или экспортируются в MS Excel.
DNA calc — предназначено для вычисления эффективности производства, ма-
териального баланса, средних показателей, статистических данных, времени работы
оборудования и т. п. Формулы для расчетов могут быть заданы в CalcScript, Microsoft
Excel, в скрипте Visual Basic.
DNA historian ODBC — 32-битный драйвер ODBC, который представляет собой
интерфейс связи с данными в DNA Historian.
DNA trend@Web — пользовательский интерфейс к данным технологическо-
го процесса при помощи браузера Internet Explorer. Экран представляет страницу
(файл) формата HTML (Hyper Text Markup Language) и содержит компоненты для
визуализации данных.
8.9.5 Функция инжиниринга и технического обслуживания
Данная функция управляет всей документацией, необходимой для проектиро-
вания производства, запуска технологического процесса и его технического обслу-
живания. Программа управления документацией ALMA@Web связывает данные
устройств, контуров управления, SCADA-системы, любой другой документации MS
Windows NT.
MetsoDNA имеет мощные проектные библиотеки приложений, тэгов, значе-
ний параметров для конкретных условий, в результате чего возможно создание
надежных контуров управления. В состав библиотеки входят различные устрой-
ства — датчики температуры, давления, уровня и пр. Функция инжиниринга и
технического обслуживания основана на объектно-ориентированной навигации
по иерархическому дереву древовидной структуры. Внутри дерева можно вы-
брать объект автоматизации (например, контроллер), далее выбрать для него не-
обходимую операцию (например, ПИД-регулирование), проверить целостность
контура и вывести его на печать. Интерфейс ApplALMA может быть использован
для модификации контуров управления путем изменения тэгов значений пара-
метров.
506
ГЛАВА 8
Программа Function Explorer позволяет вносить изменения в один или несколь-
ко контуров управления, вплоть до изменения параметров одновременно для всех
контуров. Программа Crustal Reports служит для создания отчетов за смену, за не-
делю, за месяц. Вывод архивных трендов осуществляется программой Aspentech
Process Explorer.
Программа FTest с помощью виртуальной сети Virtual metsoDAN позволяет те-
стировать контуры управления перед их загрузкой в реальную систему.
Настройка оптимальных параметров ПИД-регуляторов производится с помо-
щью служебной программы TuneUp. Эта программа выполняет тестирование техно-
логического процесса, имитирует его и определяет оптимальные параметры регуля-
тора. Эта же настройка может быть осуществлена с помощью специального алгорит-
ма оптимизации.
Система самодиагностики metsoDNA основана на контроле с помощью браузера
Diagnostics@Web состояния системы управления и информационной сети. Для это
го вся система metsoDNA изображается в виде древовидной структуры, на которой
представлена вся схема размещения аппаратных и программных компонентов систе-
мы. Каждый компонент системы с помощью индикатора может сигнализировать о
неисправности. При этом выводятся данные о причине неисправности. Неисправ-
ность любого компонента может быть передана обслуживающему персоналу по бес-
проводной связи. Беспроводная сеть Ethernet состоит из базовых станций и платы
PCMCIA с антенным модемом, установленным на каждой операторской станции. Ра-
диус охвата сигнала составляет до 100 м.
8.9.6 Функция совместимости
Поскольку система metsoDNA представляет собой открытую сеть с интерфейса-
ми по международным стандартам и совместима с контроллерами, промышленными
компьютерами, модулями и др. внешними устройствами различных производителей,
функция совместимости metsoDNA играет существенную роль.
В metsoDNA имеются модули интерфейсной связи с системой DAMATIC, с ПЛК,
ПК и модулями интерфейсной связи по протоколу Ethernet TCP/IP. Протоколом свя-
зи модуля с ПК является протокол ТЕК-126, использовавшийся в системе DAMATIC,
а также протоколы CNP и ENP. Для ОС Windows NT, UNIX, MS-DOS физическое под-
ключение по протоколам CNP или ENP может быть выполнено по асинхронной свя-
зи (RS), либо по сети Ethernet.
Модуль интерфейсной связи с системой DAMATIC базируется на узле DIS VME,
подключенном к диспетчерской шине DAMATIC.
Модули связи с ПЛК используют протоколы ModbusRTU, протоколы фирм
AllenBradley fdx и Siemens 3964/3964R, а также протоколы Ethernet. Физическое
подключение к узлу VME может быть выполнено с использованием асинхронной
связи RS, а подключение к Windows NT — с использованием RS-232/485, Ethernet
или Profibus DP.
Сервер ОРС metsoDNA поддерживает типы данных and, ints, inti, bin, intsev,
intlev, binev, txt2 и других ОРС сервер совместим со SCADA-клиентами FIX Dyna-
mix 2.0 компании Intellution, InTouch корпорации Wonderware, ProcessX Explorer
компании Marticon System Inc. и другими. Характеристики ОРС сервера metsoDNA:
до 2000 переменных на один ОРС сервер; скорость обмена до 1000 переменных в
секунду.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
507
8.9.7 Функция управления ресурсами предприятия
Функции управления ресурсами metsoDNA MES построены по модульному
принципу. Каждый модуль отвечает за конкретные функции. К модулям MES систе-
мы metsoDNA относятся модули:
• обработки заказов;
• планирования производства;
• учета готовой продукции;
• управления складами;
• управления процессом производства;
• управления качеством;
• расчета себестоимости.
При настройке и работе модулей используют методы математической оптимизации.
8.10. Распределенная система управления на базе комплекса тех-
нических и программных средств I/A Series фирмы Foxboro
Комплекс технических и программных средств Intelligent Automation Series (I/A
Series) позволяет строить распределенные системы управления от нескольких десят-
ков до десятков тысяч входов/выходов. Использование 32-разрядных процессоров
фирмы Intel, MicroSPARC RISC процессоров и SuperSPARC RISC процессоров и раз-
витого ЧМИ обеспечивают высокую надежность и живучесть системы.
Основные показатели системы — открытость, высокий уровень интеграции, в
том числе общезаводской, низкая стоимость, высокая надежность и др.
Открытость системы обеспечивается использованием стандартных протоколов,
интерфейсов и наличием интерфейсных модулей для подключения к стандартным
промышленным сетям. Используются ОС Venix или Solaris, совместимые с универ-
сальной системой UNIX System5 и Windows NT. Использование стандартных интер-
фейсов и протоколов (RS-485, IEEE 802.3,802.4) позволяет расширять систему в соот-
ветствии с задачами и стратегией управления.
В системе I/A Series используется гибкий модульный подход к построению систе-
мы. Процессорные модули являются функциональными и вместе с другими модуля-
ми позволяют строить оптимальные системы управления.
Высокая надежность гарантируется надежностью комплектующих, использова-
нием отказоустойчивых архитектур системы, минимизацией времени восстановле-
ния после отказа. Используются два уровня защиты: платы устанавливаются в за-
щищенных корпусах (1-й уровень защиты); модули устанавливаются в герметизи-
рованных шкафах с теплоотводом (2-й уровень защиты). Магистрали MAP(LAN),
внутрисистемная магистраль NODEBUS и магистраль ввода/вывода Fieldbus резер-
вируются. Используется также диагностика модулей в режиме on-line.
Все датчики и преобразователи являются интеллектуальными и обмениваются
данными с системой через полевые модули и другие системы. В I/A Series на обще-
заводском уровне используются электронные таблицы РВ (Prelude) и реляционная
база данных.
Архитектура системы I/A Series (рис. 8.8) базируется на следующих основопола-
гающих принципах:
• использование трехуровневой структуры промышленных сетей;
• распределенность всех функций системы по процессорным модулям;
508
ГЛАВА 8
• использование двухпроводных линий связи с гальванической развязкой для
связи модулей;
• применение стандартных сетей с протоколами MAP, Х.25, Ethernet.
8.10.1 Техническое обеспечение системы
В средствах I/A Series используется 3 вида модулей: процессорные, интерфейсные
и модули ввода/вывода. Процессорные и интерфейсные модули являются станция-
ми локальной вычислительной сети, которые объединяются системной магистралью
Nodebus (Стандарт IEEE 802.3, 10 Мбит/с). На шине Nodebus применяется вероят-
ностный метод доступа к шине при максимальной нагрузке 15%. Каждое устройство,
подключенное к шине, имеет дублированный порт связи для адресования к другим
устройствам напрямую (адресование по имени, а не по адресу). К одной шине может
быть подключено до 64 станций. Шина может быть с помощью двух пар расширите-
лей увеличена до длины 697 м.
Основные станции системной шины Nodebus:
• прикладной процессор АР (Applied Processor);
• процессор рабочей станции WP (Workstation Processor);
• персональная рабочая станция PW (Personal Workstation);
• управляющий процессор СР (Control Processor);
• процессор связи;
• шлюзы GW (Gateway).
Высокая отказоустойчивость системы гарантируется тем, что в отличие от обыч-
ного дублирования с одним работающим на выходе процессором, в системе I/A Se-
ries работают одновременно два процессора, сравнивая в конце каждого машинного
цикла выходные данные на идентичность. В случае их равенства эти данные посту-
пают к модулям.
Локальная сеть (LAN) работает по протоколу обмена IEEE 802.4 (Token Passing
Bus), скорость обмена — 5 Мбит/с, физическая среда — кабель RG-11 или оптово-
локно. Максимальная дальность сети 19 км, максимальное число подключаемых шин
Nodebus — 100.
Прикладной процессор (АР) типа 20 или 51 используется для хранения данных
о процессе, архивации сообщений и данных, хранения электронной документации.
Процессор программируется на языках СИ и Фортран.
Процессор рабочей станции (WP) типа 30 или 51 является составной частью опе-
раторской станции операторов-технологов, инженеров, операторов, администрато-
ров и пр. Каждый пользователь имеет свой уровень защиты от несанкционирован-
ного пользования.
Персональная рабочая станция (PW) строится на основе персонального ком-
пьютера. Станция PW подсоединяется к шине Nodebus через интерфейсный мо-
дуль. В малых системах к станции PW подключаются модули ввода/вывода (до 48
модулей).
Управляющий процессор (СР) типа 40, 60 служит для сбора данных от датчиков
через модули полевой шины FBM (Field Bus Module), их обработки по определенным
алгоритмам. Управляющий процессор 40 является высокопроизводительной стан-
цией с возможностью резервирования. Совместно с модулями FBM осуществляет
регулирование, логическое и последовательное управление, а также сбор данных.
С помощью интерфейса оператора через шину Nodebus число поддерживаемых FBM
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
509
составляет до 64. Среди алгоритмов — ПИД-регулирование, каскадное регулирова-
ние, упреждающие алгоритмы управления и другие.
Управляющий процессор типа 60 (СР60) и управляющий процессор 60Simplex
(CP60S) с модулями FBM выполняют аналогичные с процессором 40 функции. Алго-
ритмы реализованы в виде функциональных управляющих блоков. Отображение и
настройка параметров выполняются с любой операторской станции. Характеристи-
ки СР60: память для блоков — 2,6 Мбайт; число блоков — 4000 (размер одного блока
до 32 кбайт); число поддерживаемых модулей FBM — 120; основной цикл обработки
0,1; 0,2; 0,5; 1; 2 с.
Полевая шина поддерживает до 64 модулей и микропроцессорных устройств, ко-
торые получают сигналы от датчиков и осуществляют их преобразование (аналого-
цифровое и цифро-аналоговое). Для дискретных модулей время регистрации собы-
тий не более 10 мс.
Шлюзы (GW) поддерживают передачу данных по сетям Ethernet TCP/IP, DECnet,
Modbus и Allen Bradley Data I lighway. Шлюз отвечает за передачу данных от контрол-
леров в БД системы I/A Series.
Персональная рабочая
станция /~~
Процессор
интерфейса
с LAN ?
Шина Modbus
(64 процессора)
Процессор
рабочей станции 30
Процессор
рабочей станции 50
Прикладной
процессор 20
Резерв
Шина
Fieldbus
Управл.4
процессор
Прикладной
процессор 51
НГМД
Процессор
СВЯЗИ j.
НГМД
-|нжмд
-g НЖМД
Заводская сеть
Интеграторы
и шлюзы
Рис. 8.8
8.10.2 Программное обеспечение
Программное обеспечение системы включает ОС, пакеты программ реализации
технологических функций, расчетов, средства конфигурирования и разработки про-
грамм. В процессорных модулях 10, 20 и 30 используются две ОС. Исполнительная
ОСРВ RTES (Real Time Executive System) используется во всех процессорных моду-
лях. Прикладная ОСРВ RTAS (Real Time Application System) используется в приклад-
ных процессорах и в процессорах операторских станций.
RTES построена на ОС VRTX и включает подсистему управления объектами (Ob-
ject Manager) и подсистему связи. Объектами служат файлы, переменные, расчетные
параметры, различные устройства. Object Manager обеспечивает к ним доступ по
имени из любой точки системы.
510
ГЛАВА 8
RTAS построена на ОС Venix, совместимой с ОС UNIX System5. ОС Venix обе-
спечивает работу в сети с доступом к удаленным ресурсам. Аналогично RTES ОСРВ
RTAS также имеет подсистемы связи и управления объектами (Object Manager). Дис-
кретность отсчета времени RTES — 0,1 с, RTAS — 1с. Помимо вышеуказанных ОС, в
I/A Series используется ОС Windows NT.
В пакет программ входят: интегрированный пакет управления, а также пакет
программ ЧМИ, общесистемные пакеты и пакеты прикладных программ (ППП).
Интегрированный пакет управления позволяет осуществлять функции регулирова-
ния, последовательного и логического управления. Циклы регулирования по отдельным
контурам могут задаваться из ряда значений: 0,05; 0,1; 0,5; 1; 2; 10; 30 с; 1; 10; 60 мин. Кон-
фигурирование пакета осуществляется в диалоговом режиме и для конфигурирования
логических контуров применяется язык релейно-контактных схем.
В пакет программ ЧМИ входят ПО представления видеограмм реального време-
ни, подсистема сигнализации, ПО электронной документации, библиотека графиче-
ских символов, конфигураторы системы.
В общесистемные пакеты программ входят система управления распределенными
файлами, подсистема управления данными реляционной БД Informix, пакет программ
для работы с таблицами Prelude, система программирования на языках СИ и Фортран.
Пакеты прикладных программ выполняются на прикладных процессорах и по-
зволяют выполнять сложные функции управления. Также в ПО системы входят паке-
ты архивирования, моделирования и пакет программ оптимизации. Библиотека ма-
тематических программ содержит подпрограммы быстрого преобразования Фурье,
обработки сигналов, обработки изображений, векторных и матричных операций.
Библиотека расчета физических свойств используется для расчета свойств различ-
ных материалов и веществ. Пакет программ статистического управления выводит
данные в виде гистограмм с наложенной кривой нормального распределения, диа-
грамм и статистические характеристики параметров.
8.11. Распределенная система управления Centum CS3000 компа-
нии Yokogawa Electric
РСУ Centum CS3000 является интегрированной многофункциональной и откры-
той системой, реализующей концепцию Предприятие-Технология-Решение фирмы
Yokogawa. Система используется для управления средними и большими предприяти-
ями и легко интегрируется с системами MES и ERP, а также с системами автоматиза-
ции (FA). ЧМИ системы базируется на ПК с ОС Windows 2000/NT с использованием
открытых протоколов и стандартов ОРС, DDE, ActiveX, MS Excel и других [8.8, 8.9].
Архитектура системы Centrum CS3000 представлена на рис. 8.9.
Система Centum CS3000 представляет собой совокупность блоков-доменов (до
16), каждый из которых включает до 64 станций, из них максимальное число станций
оператора — 16. Максимальное число станций на всю систему составляет 256.
Система реализует различные функци — функции управления, контроля, функ-
ции проектирования с функциями тестирования, коммуникационные функции и др.
8.11.1 Функции управлени я
Функции управления включают ПИД-регулирование, логическое управление
(управление последовательностью), адаптивное управление и другие. Система под-
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
511
Сеть Ethernet
Рис. 8.9
держивает интеллектуальные устройства КИПиА на базе стандарта Foundation Field-
bus. Вся информация системы документируется на диске в формате PDF (Adobe Por-
table Document Format), доступном в Internet.
Основное оборудование системы включает станции оператора HIS (Human In-
terface Station), станции управления участком FCS (Foundation Control Station), усо-
вершенствованные станции управления (APCS), станции проектирования (ENG),
преобразователи шины, блоки межсетевой связи CGW (Connect Gateway), система
обеспечения безопасности (ProSafe), сети V, Ethernet, Foundation Fieldbus. Блоки
экранных панелей Foundation Fieldbus представляют собой вид блоков автоматиче-
ского управления с различными функциями управления FCS. Общее число контро-
лируемых тэгов системы Centum CS3000 составляет до 100 тыс.
Станция оператора (HIS) консольного типа может включать двойные экраны
(ЭЛТ или ЖКД), защищенную клавиатуру с функциональными клавишами, допол-
нительные каналы дискретного ввода/вывода.
Станция управления участком (FCS) может быть трех типов: стандартная (KFCS),
компактная (SFCS) и станция управления участком типа LFCS. Стандартная станция
управления участком KFCS включает блок управления участком FCU (Foundation Con-
trol Unit) с процессорной платой (CPU), блоком питания, блоками шины ESB, сети V
и аккумуляторным блоком (АВ). Двойное резервирование предусмотрено для блоков
CPU, АВ, блоков питания и платы шины ESB. Шина ESB (шина расширенной последо-
вательной объединительной платы) является шиной связи для подключения к FCU ло-
кальных узлов системы (расстояние до 110 м). Для подключения полевых устройств по
шине Ethernet используется модуль шины ER. Модули ввода/вывода устанавливаются в
станции распределенного ввода/вывода, в состав которой входят также блок питания,
интерфейсные модули шины ESB и CPU. Блоки FCU и блоки обработки сигналов от
датчиков (NU) монтируются в шкафах и универсальных стойках. Модули аналогового
ввода/вывода — 8- и 16-канальные, модули дискретного ввода/вывода — 32-канальные.
Кабели от полевых устройств подключаются к модулям с помощью зажимных клемм.
512
ГЛАВА 8
V сеть 1
Рис. 8.10
Сеть V — шина управления реального времени двойного резервирования, ско-
рость обмена данными по сети — 10 Мбит/с. Логическим сегментом сети V является
домен. При достижении в домене максимального числа станций (64) подключается
новый домен. Для расширения сети V используются пара повторителей и два опти-
ческих повторителя, при этом общая длина сети составляет до 20 км. Станции опе-
ратора (HIS) могут быть удалены от сети на 185 м или 500 м в зависимости от типа
кабеля. Станции HIS и ENG объединяются по сети Ethernet. Для сбора и высокоточ-
ного преобразования данных от датчиков и исполнительных устройств применяется
сеть Foundation Fieldbus.
Станция управления участком (FCS) имеет двойное резервирование. При этом
резервируется плата CPU, коммутатор сети V и источники питания (рис. 8.10). На
каждой процессорной плате имеются два процессора, выполняющие одни и те же вы-
числения. Результаты вычислений непрерывно в каждом цикле сравниваются между
собой. Если результаты вычислений совпадают, значит плата работает без ошибок.
В этом случае результаты вычислений передаются в блок памяти и на интерфейс-
ную плату шины. Для основной памяти используется код с исправлением ошибок
(ЕСС), который может исправлять ошибки изменений состояния бита во время пере-
дачи. Если результаты вычислений от CPU1 и CPU2 не совпадают, то сравнивающее
устройство (компаратор) воспринимает это как «нештатное состояние» и переклю-
чается на резервную процессорную плату. Поскольку резервная процессорная плата
выполняла те же вычисления, что и основная, то результаты вычислений передаются
на интерфейсную шину без изменений.
8.11.2 Функции контроля и управления
К функциям контроля и управления относятся следующие функции:
• Общие функции (окно навигатора, функция обработки сигнализации, печати
экрана, рабочего режима экрана и другие).
• Стандартные окна управления и контроля (графическое окно, окно навигатора,
окно тренда, окно контроля сообщений).
• Функции поддержки управления и контроля (функции отчета, защиты, функции
исторических и голосовых сообщений и другие).
• Функции техобслуживания (окно дисплея состояния FCS, окно дисплея состояния
BCV, окно Help и другие).
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
513
• Окна дисплея состояния управления (окна схемы управления, окно таблицы
последовательности, окно логической схемы, SFC и другие).
• Функция тренда (тренды и их настройка, функция архивирования).
• Функция установки и сбора данных на FCS.
8.11.3 Функции управления станцией управления участком (FCS)
К функциям управления FCS относятся непрерывное, логическое и другие виды
управления непрерывных и периодических процессов.
Функции управления FCS следующие:
• Стандартные функции (функции блоков регулирующего управления, блоков
управления последовательностью, вычислительных блоков, блоков экранной
панели, функции управления блоком приборов).
• Дополнительные функции (функции связи подсистем, функции внешнего блока,
функции управления периодом и др.)
Прикладные программы на языке функциональных схем (SFC) выражаются таб-
лицей последовательности или программой на языке SEBOL (Sequence and Batch Oriented
Language — язык, ориентированный на периодическую и последовательную работу).
В список функциональных блоков входят блоки регулирующего управления
(ПИ-, ПД-, ПИД-регуляторы, 2- и 3-позиционные регуляторы, широтно-импульсный
регулятор, блок соотношения, программный регулятор, блоки аналогового и дис-
кретного ввода/вывода и др.), блоки последовательности, вычислительные блоки,
блоки приборов и операций (операции на языке SEBOL и на языке SFC), блоки мони-
торов состояния клапанов и др.
8.11.4 Коммуникационные функции системы
Присоединение к подсистемам Centum CS3000 осуществляется с помощью модулей
связи АСМ11/ АСМ 12 или с использованием коммуникационных плат АСМ21/ АСМ22,
которые устанавливаются в компактную станцию управления участком (SFCS).
Коммуникационные модули служат для организации обмена данными по RS-232,
RS-422/RS-485 и по сети Ethernet. Для реализации функций управления контролле-
ры используют программные коммуникационные пакеты Modbus, MELSEC-A, Allen-
Bradley, Siemens, SYSMAC, Gas Chromatograph, FA-M3 и др.
8.11.5 Функции проектирования
Эти функции используются для проверки системы при создании БД, монито-
ринга, проверки функций управления и контроля, а также обслуживающих функций
(самодокументирования и поиска имен тэгов). Моделирование функций управления
осуществляется с помощью тестов. Рабочей средой функции проектирования могут
быть станция HIS или выделенный ПК. Возможно параллельное проектирование в
сети функций проектирования несколькими проектировщиками.
Процедура проектирования включает следующие этапы: разработка характе-
ристик системы; разработка структуры системы (в том числе разработка деталей);
генерирование системы; индивидуальная проверка; общая проверка; проверка на ре-
альном процессе.
Проект представляет собой БД конфигурацию системы со станциями FCS и HIS
в системе. Построитель системы включает в себя свыше 40 программ генерирования
общих функций проекта, функций контроля и управления.
17 Зак. 3801
514
ГЛАВА 8
8.11.6 Функции техобслуживани я
Функции техобслуживания включают в себя функции оперативного и дистанци-
онного техобслуживания. Функции оперативного техобслуживания позволяют из-
менять функции управления в ходе процесса.
Функция дистанционного техобслуживания позволяет подключить систему Cen-
tum CS3000 к системе сервисного обслуживания фирмы Yokogawa Engineering Service
(рис. 8.11).
HIS
(станция
Centum CS3000
переключающая сеть
сервисного центра Yokogawa
Рис. 8.11
8.12. Распределенная система управления
CENTUM CS фирмы Yokogawa Electric
Большая распределенная система управления Centum CS является открытой си-
стемой, использующей стандарты вычислительных сетей — сеть Ethernet, оптоволок-
но, стандартные fieldbus. Среди используемых ОС — UNIX, Windows NT и др.
Аналогично вышеприведенной системе Centum CS3000 система Centum CS для
повышения надежности использует идеологию двойного резервирования.
На рис 8.12 приведена структура системы Centum CS (1 — станция ISC; 2 —
принтер; 3 — блок твердой копии; 4 — станция НР9000 сер. 700; 5 — шлюз GGW;
6 — сеть Ethernet; 7 — сеть Vnet; 8 — станция FCS; 9 — шкаф ввода/вывода; 10 — пре-
Рис. 8.12
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ 515
образователь шины BCV; 11 — шина RIO; 12 — блок узлового интерфейса; 13 — по-
вторитель оптической шины для Vnet; 14 — повторитель оптической шины для RIO;
15 — расширение системы Centum CS).
Для обучения операторов управлению технологическим процессом на основе
реалистичной симуляции процесса с использованием реального программного обе-
спечения фирмой выпускается Симулятор Технологического Процесса (СТП), с по-
мощью которого осуществляется не только обучение до стадии пуска процесса, но и
проверка их знаний и навыков в процессе промышленной эксплуатации. Среди функ-
ций СТП —симуляция обратных связей контуров управления и параметров процес-
са, управление моторами и механизмами, пуск и останов оборудования, управление
производительностью и качеством продукции и др. Программное обеспечение СТП
состоит из ПО реальной системы управления и ПО симуляционных модулей.
Как видно из рисунка, архитектура системы Centum CS — трехуровневая. На
нижнем уровне используются станции управления участком (FCS), расширитель-
ные шкафы ввода/вывода, подключаемые к шине V. С помощью коммуникационно-
го блока-шлюза (CGW) эта шина подключается к сети Ethernet. К сети Ethernet под-
ключены также диспетчерские станции (информационно-командные станции ISC),
станция-построитель (НР9000 серии 700), принтер и др. Сетью верхнего уровня так-
же служит сеть Ethernet.
Система позволяет обслуживать до 100000 тэгов. Аналогично системе Centum
CS3000 данная система состоит из доменов, в состав каждого из которых входят до 64
станций (ICS, FCS, BCV, CGW). Общее число станций ISC не должно превышать 16
станций. С помощью преобразователя шины BCV система может быть расширена до 16
доменов. При этом максимальное число подключенных станций составит 256 станций.
8.13. Распределенная система
CENTUM CS1000 фирмы Yokogawa Electric
управления
Система управления CENTUM CS1000 относится к малым открытым распреде-
ленным системам управления. CENTUM CS1000 продолжает линию распределенных
систем управления CENTUM фирмы Yokogawa Electric, которые зарекомендовали
себя как надежные, отказоустойчивые и удобные в эксплуатации системы.
Основные задачи, решаемые системой управления CENTUM CS1000:
• безопасное ведение технологических процессов;
• реализация решений задач оптимального управления;
• обеспечение устойчивости процессов регулирования;
• управление периодическими процессами;
• взаимодействие с подсистемами верхнего и
нижнего уровня;
• сбор и накопление данных.
Система Centum CS1000 (рис. 8.13) отличается от
других систем управления семейства Centum тем, что
она имеет небольшой размер и не может масштабиро-
ваться, благодаря чему имеет относительно небольшую
стоимость. Система CS1000 предназначена, в основном,
для управления небольшими малотоннажными произ-
водствами или технологическими процессами со срав-
нительно несложной технологической схемой.
516
ГЛАВА 8
Основные достоинства системы:
• Гибкая система резервирования, позволяющая резервировать элементы
центрального процессора, системные интерфейсы, системные магистрали
передачи данных, коммуникационные модули, модули Foundation Fieldbus.
• Гибкая конфигурация каждого рабочего места оператора с возможностью
независимого накопления исторической информации.
• Рабочее место оператора комплектуется сенсорной клавиатурой, которая
позволяет осуществлять прямой доступ к любому технологическому окну путем
нажатия функциональной клавиши.
• Связь с подсистемами верхнего и нижнего уровней:
- передача информации в общезаводскую сеть с использованием протокола ОРС;
- связь с подсистемами нижнего уровня (PLC, SCADA).
• Функция виртуального тестирования, позволяющая выполнять отладку при-
кладного программного обеспечения без подключения контроллеров и с под-
ключением контроллеров.
• Минимальная конфигурация системы включает одну станцию управления
участком (FCS) и одну станцию оператора (HIS), максимальная конфигурация
системы включает 16 станций управления участком (FCS) и 8 станций управле-
ния (HIS). Станция управления участком (FCS) поддерживает до 16 контуров
управления и включает до 5 блоков с модулями входов/выходов. Максимальное
число каналов станции FCS: аналогового ввода/вывода 128, дискретного ввода/
вывода — 512.
Программное обеспечение системы определяется большим числом функцио-
нальных блоков в зависимости от модели станции управления участком — стандарт-
ной или расширенной, хранящихся в базе данных. Типы функциональных блоков:
блоки автоматического регулирования, SFC-блоки, таблицы последовательностей,
вычислительные блоки, блоки приборов, блоки переключателей, рабочие блоки.
Стандартная БД позволяет конфигурировать систему с разным числом блоков для
выполнения функций мониторинга, автоматического регулирования, логического
управления, логического мониторинга и периодического управления.
Так, для расширенной модели FCS при логическом управлении увеличивается
число блоков SFC (10 вместо 5), блоков автоматического управления (250 вместо 80),
добавляются блоки приборов (10 блоков) и рабочие блоки (100 блоков).
Система CENTUM CS1000 поддерживает режим полного экрана и смешанный
многооконный режим с окнами управления. Максимальное число окон (окна мне-
мосхем, окна обзора, окна группы трендов и окна группы управления) — 1000, окон
настройки прибора — 8000, окон одиночного тренда — 1024, одно окно руководящих
сообщений и одно окно тревог.
Система CENTUM CS1000 базируется на ПК с ОС Windows NT и полностью со-
вместима со всеми системами семейства CENTUM.
Система CS1000 использует новые станции управления DAQStation СХ, совмещаю-
щие функции управления (контроллера) и регистрации (безбумажного регистратора).
Дополнительно к этим функции станции обладают функциями HMI. Одна станция под-
держивает 6 контуров управления, в том числе одноконтурное, каскадное регулирование
и пр. Допускается подключение до 16 регуляторов серии Green (UT350, UT450, UT550,
UT750) для СХ2000 и до 4 регуляторов для СХ1000. Станции применяются для работы в
жестких условиях эксплуатации. Лицевая панель станции имеет степень защиты IP65.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
517
К функциям регистрации относятся функции памяти (на Compact Flash или Zip-
дисках), реализуемые с помощью файлов данных дисплея (долгосрочная за] гись трендов)
и файлов данных событий (детальный анализ данных). Период сохранения данных от 5
часов до 49 дней.
Размеры цветного ЖК дисплея станции СХ2000 — 10,4", станции СХ1000 — 5,5".
Станции на лицевой панели имеют функциональные клавиши, клавиши заданий и
рабочие клавиши. Станция СХ1000 имеет гнездо для внешних съемных носителей.
К дисплеям операций управления относятся дисплей-эмулятор контроллера, ди-
сплей лицевых панелей, а также дисплеи настройки, программ, состояния дискрет-
ных входов/выходов, трендов и др.
Дисплеи измерительных каналов включают дисплей архивных трендов, инфор-
мационный дисплей, 4-оконный дисплей (СХ2000) и сводный дисплей.
В качестве ПО применяются пакеты DAQSTANDARD, DAQExplorer, DAQLogger,
совместимые с Windows NT 4.0/2000/ХР.
Станция DAQStation используется как терминал управления и связи с ПЛК.
Станция обеспечивает контроль (6, 10, 20 входных каналов), управление (до 6 кон-
туров управления) и сбор данных с удаленных ПЛК (до 16 ПЛК). Напряжение пи-
тания 24 VDC.
Характеристики каналов ввода/вывода:
• дискретный вход: 6 каналов (расширение до 12 каналов);
• дискретный выход: 4 канала «ОК» (расширение до 12 каналов) и 2 канала RO;
• аналоговый вход: 4.. .20 мА, (20.. .50 мВ), сигналы от термопар и термометров со-
противления;
• аналоговый вход 4...20 мА, RD, импульсы напряжения.
Используемые станциями интерфейсы связи: Ethernet lOBaseT, RS-232, RS-485,
Modbus.
На рис. 8.14 приведен общий вид стан-
ций DAQStation СХ2000 (а) и СХ1000 (б). х >
К числу новых разработок компании
Yokogawa Electric относятся станции сбора
данныхDX100, DX200, DX1000, DX2000. Число |*J ' ' »
каналов станций DX100/DX200 варьируется
от 2 до 30 и может быть расширено до 60. Об-
мен информацией осуществляется по прото-
колам Foundation Fieldbus и Modbus. Станции
сбора данных DX1000/2000 предназначены
для сбора, обработки и архивации больших объемов информации по каналам Ethernet
и RS-232/485. Число входных каналов: 2,4,6,8,10,12,20,30,40,48 с возможностью рас-
ширения до 348 входных каналов. Напряжение питания: 24 VDC, исполнение IP65.
8.14. Распределенная система управления STARDOM фирмы
Yokogawa Electric
STARDOM представляет собой систему управления с открытой архитектурой на
сетевой основе с использованием WEB-браузера в качестве интерфейса оператора.
В качестве сетей управления используются любые сети по протоколу TCP/IP, в том
числе Ethernet, беспроводные сети, оптоволокно.
518
ГЛАВА 8
В состав системы входят автономные ПЛК типа и FC] (Field Control Junction —
полевой блок управления) и FCN (Field Control Node — полевой узел управления).
Контроллеры имеют встроенные контуры ПИД-регулирования, программируются
на пяти языках по стандарту IEC 61131-3 и обеспечивают запуск прикладных про-
грамм-WEB-сервера, а также рассылку по электронной почте.
Модульный контроллер FCJ имеет фиксированный набор модулей с числом ана-
логовых каналов 6 AI/2 АО (вход 1...5 VDC, выход4...20 мА), дискретных 16DI/16DO.
Имеется 2 порта связи по каналу Foundation Fieldbus.
Модульный контроллер FCN поддерживает до 26 различных модулей, размещае-
мых не более чем в 3-х каркасах.
Модули аналогового ввода рассчитаны на входные сигналы 4...20 мА (8 кана-
лов с поканальной гальванической изоляцией или 16 каналов с групповой), сигналы
напряжения (1...5)/(-10...+10) VDC (16 каналов), сигналы термопар (16 каналов) и
терморезисторов (12 каналов). Модули аналогового вывода: -10. ..+10 VDC (16 кана-
лов), 4...20 мА (8 каналов). Модули аналогового ввода/вывода: (1...5 VDC)/4...20 мА
(8AI/8AO), 4...20 мА/4...20 мА (8AI/8AO).
Модули дискретного ввода: 24 VDC (32 и 64 канала), 220 VAC (16 каналов).
Коммуникационные модули: Foundation Fieldbus (4 порта), RS-232 (2 порта), RS-
422/RS-485 (2 порта).
В качестве программного обеспечения используется пакет многоцелевого серве-
ра данных VDS, работающего под ОС Windows и снабженного ОРС-сервером. Пакет
ПО содержит библиотеки прикладных программ управления предприятием и интер-
фейсы связи с оборудованием фирм Mitsubishi Electric и Omron.
8.15. Система автоматической противоаварийной защиты Рго-
SAFE фирмы Yokogawa Electric
Системы противоаварийной защиты (ПАЗ) семейства ProSAFE, отвечающие
международным стандартам IEC 1508/1511 — ProSAFE-DSP и ProSAFE-PLC. Извест-
на также измерительная система безопасности ProSafe-RS.
ProSAFE-DSP представляет собой логический контроллер со встроенной систе-
мой самотестирования элементов ПАЗ. Системное и диагностическое ПО у контрол-
лера отсутствует.
ProSAFE-PLC — программируемый логический контроллер, состоящий из смен-
ных модулей управления и ввода/вывода. Основу конфигурации loolD в ProSAFE-PLC
составляет сдвоенная архитектура контроллера, обеспечивающая максимальную на-
дежность и защиту выходных сигналов контроллера (D — означает самодиагностику
каждого канала ввода/вывода). Восстановление структуры путем замены модулей осу-
ществляется в режиме on-line без остановки технологического процесса.
Для создания отказоустойчивой архитектуры используется резервированная
конфигурация loolD и в результате дополнительного резервирования получают
четырехполюсную архитектуру loo2D. В случае отказа эта система переходит в
конфигурацию loolD и продолжает работу без остановки технологического про-
цесса.
В состав системы ProSafe-RS входят Контроллер Системы Безопасности (SCS),
Инженерная Станция Системы Безопасности (SENG) и шина управления в реальном
времени Vnet, объединяющая системы SCS и SENG.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
519
Контроллер SCS обеспечивает эксплуатационную безопасность, а станция SENG
выполняет функции проектирования и текущего обслуживания контроллера SCS.
Возможна интеграция системы ProSafe-RS с интегрированной системой управления
производством CENTUM CS 3000. Для управления контроллером SCS может исполь-
зоваться Станция Оператора (HIS) системы CS 3000.
8.15.1 Инженерная Станция Системы Безопасности (SENG)
Для настройки конфигурации системы ProSafe необходима установка пакета про-
граммного обеспечения CHS5100 Safety System Generation and Maintenance Package,
предназначенного для формирования и обслуживания системы безопасности на IBM
PC-совместимом компьютере. В данной конфигурации станция SENG выполняет
функции проектирования и технического обслуживания. Станция SENG функцио-
нирует под управлением ОС Microsoft Windows ХР.
8.15.2 Контроллер Системы Безопасности (SCS)
Контроллер SCS выполняет функции обеспечения эксплуата-
ционной безопасности, регистрации последовательности событий
(SOER), интеграции с системой CENTUM CS 3000, подключения к
шине Modbus, обеспечивающей связь контроллера SCS с другими
системами. Контроллер SCS состоит из Модуля Системы Безопас-
ности (SCU), представляющего собой узел ЦПУ, и модулей узлов
безопасности (узел ввода/вывода). Существует два типа узлов
ЦПУ: основной модуль системы безопасности и темпера! урно-
адаптивный модуль системы безопасности (оснащенный венти-
лятором).
Для подключения узла ЦПУ к узлу ввода/вывода используется
ESB. Допускается монтаж модуля ввода/вывода в узле ЦПУ.
Минимальная конфигурация системы включает следующее
оборудование: SENG — одно устройство; SCS — одно устройство.
Максимальная конфигурация системы — 64 устройства, включая
контроллеры SCS и станции SEN.
Иерархия системы — трехуровневая (три уровня шины yi (рав-
нения, связанных посредством двух шинных преобразователей).
На рис. 8.15 представлена система ПАЗ ProSAFE.
Рис. 8.15
8.16. Система Freelance 2000 компании АВВ
Система Freelance 2000 в силу ее высокой конкурентоспособности в настоящее
время считается наиболее перспективной среди систем, выпускаемых концерном
АББ. Высокие технические характеристики и постоянное развитие системы, отно-
сительно низкие цены, сопоставимые с ценами отечественных производителей, на-
личие Метрологического Сертификата Госстандарта России и разрешения Госгор-
технадзора на эксплуатацию системы на пожаро- и взрывоопасных производствах
обусловливают высокий спрос на эту систему на российском рынке.
Система Freelance 2000 представляет собой компактную, мощную, функциональ-
но развитую систему управления. Она реализована на базе процессорных плат и плат
ввода/вывода, монтируемых в стандартных стойках. В качестве операторских и ин-
женерных станций выступают персональные компьютеры.
520
ГЛАВА X
В системе используются до 10 операторских станций, одна инженерная станция и
до 10 процессовых станций, каждая из которых может быть расширена дополнитель-
но четырьмя стойками с платами ввода/вывода.
Процессовые станции Freelance типа D-PS имеют эксплуатационные характери-
стики, позволяющие использовать их непосредственно в промышленных цехах. Они
обладают высокой электромагнитной совместимостью и устойчивостью к наводкам,
выдерживают повышенную температуру окружающей среды, устойчивы к механиче-
ским воздействиям.
Каждая процессовая станция с четырьмя стойками расширениями может быть
оснащена 44-мя 16- и 32-канальными модулями ввода/вывода с максимальным чис-
лом каналов до 1408.
Процессорная плата использует мощный 32-разрядный RISC-процессор с сопро-
цессором для шины Ethernet. Вычислительная мощность процессовых станций обес-
печивает минимальный цикл ввода/вывода 2 мс для дискретных сигналов и 10 мс для
аналоговых сигналов.
В системе используются различные модули аналогового и дискретного ввода/вы-
вода. Модули универсальны по размерам и могут быть вставлены на любое свобод-
ное место в каркасе, что существенно облегчает в дальнейшем необходимые модифи-
кации и расширения системы.
Для автоматизации территориально распределенных объектов или объектов,
оснащенных интеллектуальными датчиками, используются полевой контроллер и
выносные устройства связи с объектом. Полевой контроллер ABB Fieldcontroller
800-АС 800F может быть присоединен к процессовой станции или может подклю-
чаться непосредственно к сети. Выносные устройства связи обмениваются информа-
цией с контроллерами или процессовыми станциями по полевым шинам Profibus-DP
и Modbus. ABB выпускает три модификации выносных устройств связи с объектом:
Contrans 1 Remote, S-800 и S-900 в искробезопасном исполнении.
Основные стойки и их расширения, полевые контроллеры и выносные модули вво-
да/вывода могут быть смонтированы в стандартных шкафах, иметь настольное испол-
нение или монтироваться на стене помещения на стандартной монтажной рейке.
Операторские и инжиниринговые станции построены на базе офисных или про-
мышленных ПК и работают под управлением ОС Windows NT. По желанию Заказ-
чика могут использоваться рабочие станции Hewlett Packard с X-терминалами, рабо-
тающие под управлением ОС UNIX.
Операторский интерфейс (DigiVis) полностью русифицирован и обеспечивает
все традиционные функции контроля и управления процессом на базе многоокон-
ного санкционированного доступа к информации и функциям, а также просмотр и
анализ архивной информации на операторских станциях.
Программное обеспечение для конфигурирования и on-line изменений (DigiTool)
поддерживает ведение единой информационной базы проекта, упрощенное графиче-
ское конфигурирование задач на основе развитой библиотеки функциональных бло-
ков, разработку специфических программ на языке высокого уровня, эффективную
подготовку графических кадров для операторских станций с расширенными воз-
можностями их динамизации, использование встроенных изображений и развитой
библиотеки технологических символов.
Пакет DigiLock организует санкционированный доступ к функциям управления
в реальном времени. Программы DigiBrowse обеспечивают работу с архивами дан-
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
521
ных на автономных компьютерах. Пакет DigiBatch предназначен для управления ци-
клическими процессами и рецептурами.
Процессовые, операторские и инжиниринговые станции могут соединяться в сеть
магистральной или звездной структуры с помощью коаксиального или оптоволокон-
ного кабелей или витой пары. Скорость обмена — 10 Мбит/с на расстоянии до 500,4000
и 20000 м в зависимости от модификации, протокол обмена Ethernet TCP/IP.
Обмен информацией с внесистемными компьютерами (удаленными терминала-
ми) осуществляется с помощью DigiDDE, в том числе и непосредственно через сеть.
Система Freelance за счет простоты и совершенства аппаратного и программно-
го обеспечений позволяет реализовать полный набор традиционных функций АСУ
ТП с наименьшими финансовыми и трудовыми затратами, а также легко включать в
систему компьютеры, выполняющие разнообразные прикладные расчеты, прогнози-
рование и оптимизацию. Возможность резервирования процессорных плат, блоков
питания и сетевой магистрали гарантирует высокую надежность эксплуатации.
Процессовая станция D-PS имеет следующие характеристики:
• Максимум 44 слота для модулей ввода/вывода.
• Связь с полевым вводом/выводом через шину DigiNet Р.
• Модули ввода/вывода для обработки как аналоговых, так и дискретных сигналов.
• Простота замены съемных модулей.
• Отсутствие элементов настройки на модуле (переключателей адреса и потен-
циометров).
• Температурный контроль CPU и модулей ввода/вывода.
• Простота монтажа (в 19 стойке, шкафу, на стене).
• Устойчивость к электромагнитным помехам в соответствии с промышленным
стандартом NAMUR и EN 61000-4, уровень 3.
Базовый вариант процессовой станции D-PS состоит из центрального блока, ко-
торый всегда включает модуль связи, модуль CPU и до 8 слотов для модулей ввода/
вывода. К центральному устройству может быть подсоединено до четырех модуль-
ных стоек ввода/вывода. Шина процессовой станции DigiNet Р соединяет централь-
ный блок и устройства ввода/вывода.
Модуль CPU центрального блока через шину процессовой станции DigiNet Р
управляет устройствами ввода/вывода. Поэтому устройства ввода/вывода не требу-
ют наличия дополнительного модуля CPU.
Модули Freelance 2000 устанавливаются в стойках и закрепляются зажимными
винтами. Все модули имеют металлические кожухи, которые обеспечивают механи-
ческую и электрическую защиту.
Freelance Select имеет следующие характеристики:
• Поддержка технологии Fieldbus на базе Profibus.
• Три высокоскоростные линии fieldbus.
• Поддерживает различные типы fieldbus: PROFIBUS-DP, Modbus, CAN.
• Единая унифицированная база данных для полевых устройств.
• Средства диагностики для профилактического обслуживания.
• Температура окружающей среды О...6О°С.
• Модули fieldbus могут устанавливаться или демонтироваться без выключения
питания.
• Freelance сертифицирована по устойчивости к электромагнитным помехам
(ЕМС) в соответствии с EN50082
522
ГЛАВА 8
8.16.1 ABB Fieldcontroller 800 — AC 800F
ABB FieldController 800, помимо выполнения «традиционных» задач процессо-
вой станции, собирает и обрабатывает диагностические и технологические данные,
поступающие по линиям fieldbus.
• К АС 800 могут быть подключены до четырех различных модулей fieldbus.
FieldController 800 может взаимодействовать с системой Freelance 2000 через стан-
дартную линию связи Ethernet.
В качестве опции ABB FieldController 800 обеспечивает следующие уровни резер-
вирования:
• резервирование устройств с двумя FieldControllers;
• резервирование блоков питания (24 VDC);
• резервирование интерфейса Ethernet;
• резервирование кабелей для Profibus DP с использованием внешнего оборудования
(RLM01).
8.16.2 Обзор модулей дискретного ввода
Характеристики модулей:
• наличие светодиодов статуса входов/выходов;
• автоматическое обнаружение ошибок и сигнализация;
• интегрированный контроль температуры;
• контроль состояния датчиков и обрыва линии связи;
• защита от неправильной полярности дискретных входов;
• возможность замены модулей в «горячем» режиме;
• отсутствие переключателей, перемычек и потенциометров — все установки кон-
фигурируются или сконфигурированы программно.
В табл. 8.6 представлены характеристики модулей дискретного ввода.
Таблица 8.6. Характеристики модулей дискретного ввода
Показатель Тип модулей
DDI01 DD102 DDI03 DDI04 DDI05
Число каналов 32 16 16 28 32
Гальваноизоляция 8 каналов На канал На канал 6/14 каналов 8 каналов
Входные сигналы 0...5В, 15...ЗОВ 0...5В, 15...70 В 0...5В, 79...250 В <1,2 мА, > 2,1 мА 0...25В, 90...250 В
Внешнее питание 24 VDC 24...60 VDC/VAC 115...230 VAC 24 VDC 115...230 VAC
Потребляемая Мощность, Вт 1.8 2.7 2,7 3,6 5
Вес, кг 1,7 1,7 1,7 1,8 1,7
Мин. цикл скани- рования, мс 2 2 2 2 2
8.16.3 Обзор модулей дискретного вывода
Характеристики модулей:
• Защита дискретных выходов от короткого замыкания и перегрузки.
• Внешнее напряжение питания выходов.
Остальные характеристики аналогичны модулям дискретного ввода.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
523
В табл. 8.7 приведены характеристики модулей дискретного вывода.
Таблица 8.7. Характеристики модулей дискретного вывода
Показатель Тип модулей
DDO01 DDO02 DDO03 DDO04
Число каналов 32 16 16 16
Гальваноизоляция 8 каналов На канал На канал На канал
Выходные сигналы До 0,5 А Релейные контакты 5,0А 250 Вт Релейные контакты 5,0А 250 Вт Релейные контакты 5,0А 250 Вт
Внешнее питание 24 VDC 24...230 VDC/VAC 24...60 VDC/VAC 115...230 VDC/VAC
Потребляемая мощность, Вт 2,4 8,8 8,8 8,8
Вес, кг 1,7 1,7 1,7 1,7
Мин. цикл скани- рования, мс 2 2 2 2
8.16.4 Обзор модулей аналогового ввода
Характеристики модулей:
• преобразование входных сигналов;
• конфигурируемый цикл сканирования ввода/вывода;
Остальные характеристики аналогичны модулям дискретного ввода.
В табл. 8.8 приведены характеристики модулей аналогового ввода.
Таблица 8.8. Характеристики модулей аналогового ввода
Показатель Тип модулей
DAI01 DAI02 DA103 DAI04 DAI05
Число входов 16 16 16 8 16
Гальваноизоляция по группам из 8 каналов 8 каналов 8 каналов На канал 8 каналов
Входные сигналы 0...20 мА или 4...20 мА 0...10В 0...20мА или 4...20 мА PtlOO, датчики со- противления, мВ, термопары 4...20 мА
Внешнее питание 24 VDC
Потребляемая мощ- ность, Вт 9.6 9,6 9,6 3 2,4
Вес, кг 1,7 1,7 1,7 1,7 1,8
Мин. цикл сканиро- вания, мс 10 10 10 500 10
8.16.5 Обзор модулей аналогового вывода
. Характеристики модулей:
• Защита аналоговых выходов (DAO 01) от короткого замыкания и перегрузки.
Остальные характеристики аналогичны модулям аналогового ввода.
В табл. 8.9 приведены характеристики модулей аналогового вывода.
524
ГЛАВА 8
Таблица 8.9. Характеристики модулей аналогового вывода
Показатель Тип модулей
DAO01 DFI01 (частотный ввод)
Число входов/выходов 16 12 входов: 4 входа счетчиков IN; 8 двоичных входов управления EN, RS (2 на канал); 8 двоичных выходов управления 01,02 (2 на канал); 24 В, 0,5 А
Гальваническая изоляция 8 каналов 4 электрически изолированных каналов счетчиков
Вход — IN: max. 45 кГц
Выход 0...20 мА или 4...20 мА О1,02:24 В, 0,5 А; защита от короткого замыкания
Внешнее питание 24 VDC 24 VDC
Потребляемая мощность, Вт 1,2 (6,5 Вт на группу) 18 (max 100 Вт)
Вес, кг 1,7 1,8
Мин. цикл сканиро- вания, мс 10 10
8.16.6 Операторская и инженерная станции
В качестве операторских и инженерных станций используются офисные или про-
мышленные компьютеры, оснащенные дополнительно матричными или лазерными,
черно-белыми или цветными принтерами. Офисные компьютеры могут комплекто-
ваться (по желанию заказчика) мониторами 15", 17", 19" или 21". В сложных про-
мышленных условиях используются промышленные рабочие станции с монитором
15", степенью защиты IP65, рабочим диапазоном температур от 0 до +50°C, влаго-,
вибро- и удароустойчивые. Вычислительная мощность компьютеров выбирается в
зависимости от характера решаемых задач, количества контролируемых и управляе-
мых переменных и требуемого времени реакции.
8.16.7 Программное обеспечение.
Система Freelance 2000 использует следующие приложения:
• DigiVis для управления и наблюдения за процессом;
• DigiTool для конфигурирования, определения параметров и запуска.
Дополнительное программное обеспечение: DigiLock — управление доступом,
параметры оператора; DigiBrowse — работа с архивными файлами; DigiDDE — дина-
мический обмен данными между окнами; DigiBatch — пакет рецептуры (опционный);
Telecontrol Library IEC 870-5; Sartorius Scale Interface; Interbus FB; Freelance 100/Protronic
FB; OPC Server; DMS/API; Sequence of events — последовательность событий.
8.17. Распределенная система управления DeltaV компании Emer-
son Process Management (США)
Распределенная система управления DeltaV компании Fisher-Rosemount Systems
Inc., входящей наряду с компаниями Fisher Controls, SAAB — Rosemount и др. в состав
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
525
корпорации Emerson, является масштабируемой открытой платформой для полевой
архитектуры PlantWeb.
Система DeltaV предназначена для управления непрерывными и периодически-
ми процессами на малых и средних производствах. Общее число параметров ввода/
вывода для управления и сигнализации около 30000 и около 50000 для регистрации.
Система находит применение на предприятиях химической, целлюлозно-бумажной,
фармацевтической, пищевой отраслей промышленности, а также на объектах ком-
мунального хозяйства.
К преимуществам системы DeltaV относится взаимодействие с интеллектуаль-
ными полевыми приборами. Интеллектуальные цифровые приборы и устройства,
такие как датчики и клапаны, значительно увеличивают поток информации о про-
цессе и состоянии оборудования, при этом их возможности позволяют строить си-
стему с топологией полевой шины.
Система DeltaV базируется на самых современных технологиях с использовани-
ем ПК с процессором Intel Pentium, программного обеспечения для операционной
системы Windows NT/ХР, интерфейсов OLE и ОРС, объектно-ориентированной базы
данных, протоколов цифровой шины Foundation Fieldbus и HART, сети Ethernet с
протоколом TCP/IP, а также графических языков программирования по стандарту
IEC 61131-3. Помимо протоколов полевых шин Foundation Fieldbus и HART система
DeltaV поддерживает в одном контроллере без применения промежуточных адапте-
ров или конвертеров протоколы шин ASi, Profibus DP и DeviceNet.
Структура системы DeltaV минимальной конфигурации состоит из полевого кон-
троллера с соответствующими модулями ввода/вывода, рабочей станции на базе ПК с
модульным ПО сер. Performance и сети Ethernet с под-
держкой функции автоматического распознавания и
конфигурирования новых узлов системы и полевых
приборов (рис. 8.16). Контроллер состоит из платы
контроллера (аппаратная часть) и лицензии контрол-
лера, определяющейся числом каналов ввода/выво-
да по всей системе. В системе DeltaV используются
два типа контроллеров — М5 Plus и MD. Контроллер
MD имеет по сравнению с М5 Plus большую память
и производительность. Использовать контроллер М5
Plus рекомендуется в том случае, если число каналов
ввода/вывода не превышает 300. В остальных прило-
жениях рекомендуется Применять контроллеры MD.
Кроме того, контроллер MD служит для управления
рецептурами, резервирования ввода/вывода и вы-
полнения других функций.
Максимальный размер системы DeltaV (версия
6.32) включает до 100 контроллеров и до 60 рабочих
станций на базе ПК.
Топология сети системы DeltaV — звезда, поэто- рИс. 8.16
му все узлы (рабочие станции и контроллеры) яв-
ляются равноправными. При этом каждая рабочая станция получает данные непо-
средственно от контроллера, а выход из строя любого узла не влечет за собой сбой
в работе других узлов. Начиная с версии 5 имеется возможность дополнительной
526
ГЛАВА 8
организации удаленных (не находящихся в сети управления) операторских и инже-
нерных станций.
Конфигурирование системы осуществляется с помощью графических програм-
мных средств Explorer DeltaV и Control Studio. Программа управления создается в
графическом виде методом «перетаскивания» (drag & drop) объектов из системной
библиотеки и связывания объектов. Библиотека системы DeltaV поставляется с на-
бором типовых функциональных блоков, которые пользователь может применить,
изменить или доработать в соответствии с задачей управления.
В системе DeltaV существует шесть категорий функциональных блоков:
• Блоки ввода/вывода (I/O Blocks) осуществляют масштабирование, преобразова-
ние и фильтрацию входных и выходных сигналов для использования в других
функциональных блоках или полевых приборах.
• Математические блоки (Math) выполняют математические функции для преоб-
разования, интегрирования и накопления данных.
• Блоки таймеров/счетчиков (Timer/Counter) выполняют функции таймеров и
счетчиков для управления и логических последовательностей.
• Логические блоки (Logical) выполняют логические действия для управления, дис-
петчеризации и блокировки.
• Блоки аналогового управления (Analog Control) выполняют различные алгорит-
мы для аналогового управления.
• Блоки усовершенствованного управления (Advanced Control) выполняю! слож-
ные алгоритмы для усовершенствованного управления процессами.
Дополнительно существует набор специальных блоков (Special Items), содержа-
щих входные и выходные параметры и внутренние параметры для чтения и записи.
Важной особенностью системы DeltaV является ее масштабируемость. Наращи-
вание системы, состоящей из одной рабочей станции и одного контроллера, осущест-
вляется добавлением новых аппаратных и программных средств. При этом система
благодаря функции «Авточувствительность» автоматически распознает и конфигу-
рирует контроллеры, модули ввода/вывода и интеллектуальные полевые приборы,
как только они подключаются к системе.
Система DeltaV обладает функцией «Контроль Качества Управления». Специаль-
ная программа в составе системы «Инспектор» собирает данные со всех контуров ре-
гулирования для анализа качества управления технологическим процессом. На экра-
не программы «Инспектор» для каждого параметра отображаются качество входного
сигнала, достижение выходным сигналом одного из пределов, нештатный режим кон-
туров регулирования, после чего программа вычисляет два интегральных параметра:
качество регулирования и время работы контуров регулирования в штатном режиме.
В систему DeltaV встроены алгоритмы автонастройки контуров регулирования,
управления по методу нечеткой логики, по модели с прогнозированием, нейросете-
вые и статистические алгоритмы управления.
Подсистема архивирования данных DeltaV построена на платформе PI SYSTEM
компании OSI Software.
Контроллер и модули ввода/вывода могут быть смонтированы в кроссовых шка-
фах непосредственно на объекте, что существенно уменьшает объем монтажных и
наладочных работ. Модули ввода/вывода можно снимать и устанавливать на объекте
без отключения питания, что обеспечивает возможность расширения системы в «го-
рячем режиме» (on-line) без ее останова.
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ 527
Система DeltaV позволяет резервировать основные компоненты системы — кон-
троллеры, блоки питания, сеть управления, платы ввода/вывода. При этом резерв-
ный модуль может быть добавлен к основному в горячем режиме.
Контроллеры DeltaV разработаны с учетом подключения по полевой шине и ис-
пользования большого потока информации, поступающего от интеллектуальных
приборов. В состав системы DeltaV, помимо ПК и контроллеров, входят различные
блоки ввода/вывода, в том числе модули со встроенными барьерами искрозащиты.
Контроллеры монтируются на двух- или на четырехслотовой несущей панели для
блоков питания и контроллеров. Двухслотовые несущие панели применяются в том
случае, если платы ввода/вывода монтируются на горизонтальной несущей панели, а
четырехслотовые несущие панели применяются в том случае, если платы ввода/в.ы-
вода монтируются на вертикальной несущей панели.
Имеются три типа несущих панелей, монтируемых горизонтально: двухслотовая
несущая панель для источника питания и контроллера, 8-слотовая несущая панель
интерфейсов ввода/вывода и восьмислотовая искробезопасная несущая панель ин-
терфейсов ввода/вывода. Типы несущих панелей, устанавливаемых вертикально: два
типа четырехслотовых несущих панелей источников питания и контроллера и два
типа восьмислотовых несущих панелей интерфейсов ввода/вывода.
Среди плат ввода/вывода, устанавливаемых на несущих панелях, имеются платы
аналогового ввода 8-канальные (4.. .20 мА, 1.. .5 VDC, 4.. .20 мА с поддержкой HART),
дискретного ввода 8-канальные (24 VDC, 120 VAC, 230 VAC, СК), аналогового вы-
вода 8-канальные (4...20 мА, 4...20 мА с поддержкой HART), дискретного вывода
8-канальные (24 VDC, 120/230 VAC) и 32-канальные (24 VDC), а также интерфейсные
платы ASi, DeviceNet, Profibus DP, Fieldbus Hl и платы ввода сигналов от термопар и
термометров сопротивления.
К одному контроллеру можно подключить до 64 плат ввода/вывода. Чтобы га-
рантировать правильность установки плат ввода/вывода, клеммные блоки снаб-
жены ключами защиты, которые соответствуют ключам на платах ввода/вывода.
Ключи гарантируют соответствие плат ввода/вывода и клеммных блоков. Плата
ввода/вывода устанавливается в клеммный блок только в том случае, если ключи
совпадают.
Для организации сети используются концентраторы, репитеры и коммутаторы.
Физическая среда — экранированная витая пара (медный кабель категории 5) или
оптоволоконный кабель. Расстояние между 12-портовыми концентраторами при ис-
пользовании оптоволоконного кабеля не более 2000 м.
В сети управления может быть до 120 узлов. Для простой системы, состоящей из
одной рабочей станции и одного контроллера (при расстоянии между ними не бо-
лее 100 м), может быть изготовлен специальный кабель для сети без концентратора.
Небольшие системы, в которых используется концентратор, включают контроллер с
подсистемой ввода/вывода и рабочую станцию «Professional+». Длина кабеля (экра-
нированная витая пара) каждого сегмента должна быть не более 100 м. Для малых
систем рекомендуется применение 8-портовых концентраторов.
Сети управления крупных систем DeltaV могут включать в себя несколько кон-
центраторов или коммутаторов. В системе DeltaV могут применяться концентра-
торы с 8,12 или 24 портами (VE6001P1, VE6003P1F0, VE6004P1F0 соответственно).
Тип и число необходимых концентраторов или коммутаторов зависит от числа ра-
бочих станций и контроллеров в системе. Для определения типов и числа концен-
528
ГЛАВА 8
траторов в системе необходимо определить число портов для нерезервированной
сети управления; затем на основе полученного значения узлов следует рассчитать
число концентраторов. Для резервированной сети управления число концентрато-
ров следует удвоить. Концентраторы применяются при небольшом числе контрол-
леров (до 20) и узлов системы (до 32). При большем числе контроллеров и узлов
системы применяются коммутаторы. Коммутатор выполняет те же функции, что и
концентратор, но с большей производительностью. Коммутаторы в системе DeltaV
могут работать со скоростями 10 или 100 Мбит/с. В системе DeltaV используются
12-портовые коммутаторы 10BaseT/100BaseTX модели VE6008P1F0 и 24-портовые
коммутаторы 10BaseT/100BaseTX модели VE6009P1F0. Расстояние между комму-
татором и любым узлом не более 200 метров при использовании медного кабеля
lOBaseT.
8.18. Микропроцессорная система контроля и управления
МСКУ 2М АО «Импульс»
МСКУ 2М является дальнейшим развитием предыдущей системы — МСКУ М.
По структурной и архитектурной реализации, функциональной полноте, надеж-
ности, удобству эксплуатации и другим характеристикам МСКУ 2М находится на
уровне лучших мировых образцов в области средств автоматизации [8.10].
Основными характеристиками системы являются:
• Модульность. Система МСКУ 2М позволяет создавать посредством простой
компоновки программно-технические комплексы любой степени сложности и
любого рассредоточения. Создание ПО — это процесс компоновки и настройки
программных средств из состава универсальной библиотеки программных моду-
лей, практически не требующий специальных знаний по программированию.
• Гибкая структура. МСКУ 2М построена по принципу распределенной децен-
трализованной микропроцессорной системы контроля и управления. При этом
обеспечивается повышение общей производительности за счет перераспределе-
ния функций между элементами системы, возможность поэтапного расширения
функциональных возможностей системы управления на фоне ее промышленной
эксплуатации.
• Функциональная полнота. МСКУ 2М имеет все функции и средства, необходимые
для создания единой интегрированной системы управления технологическими
процессами: регистрацию и обработку параметров производственного процесса,
регулирование, управление, защиты и блокировки, сигнализации, вычислитель-
ные операции, оптимизацию, экспертные системы, визуализацию процесса на
экранах коллективного пользования и мониторах, дистанционное управление.
МСКУ 2М обеспечивает реализацию всего диапазона управления — от однокон-
турного регулирования до адаптивного управления сложнейшими технологиче-
скими процессами.
• Открытость. Широкое разнообразие стандартных интерфейсов МСКУ 2М и
использование стандартных программных модулей обеспечивают стыковку с
любыми другими системами и приборами автоматизации.
• Высокая надежность. Надежность систем на базе МСКУ 2М обеспечивается
комплексом организационных, технологических, аппаратных, системных и про-
граммных решений:
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
529
- тщательной конструктивной проработкой системы и ее компонентов (в изде-
лиях МСКУ 2М используется продукция таких известных фирм, как Intel, IBM,
Motorola, Texas Instruments, Octagon Systems, Siemens и др.);
- выбором надлежащей элементной базы, входным контролем комплектующих
и их выбраковкой;
- всесторонними испытаниями блоков, элементов, узлов, устройств, програм-
мно-технических комплексов;
- возможностью резервирования (дублирование, троирование) на уровне узлов,
модулей, подсистем и шин передачи данных;
- резервированными фидерами электропитания, аккумуляторной поддержкой,
использованием источников бесперебойного питания;
- встроенными аппаратно-программными средства диагностики, позволяющи-
ми обнаружить неисправный блок, блокировать его работу, а после его замены
обеспечить автоматическое включение в рабочий режим;
- контролем выдаваемых на управляемый объект сигналов;
- безударным переходом на ручное управление исполнительными механизмами
при отказе управляющей системы.
8.18.1 Основные компоненты МСКУ 2М
Для высокоскоростного обмена информацией между компонентами системы
служат как специальные промышленные локальные вычислительные сети (ЛВС), так
и универсальные ЛВС типа Ethernet. В качестве специальной ЛВС в МСКУ 2М ис-
пользуется модульная асинхронная перестраиваемая сеть МАПС. Обеспечивается
также работа по протоколам BSC, VX.25/2, HDLC, NET BIOS и др.
Для организации верхнего уровня АСУ ТП используются рабочие станции
ПС5110. На их базе компонуются рабочие места операторов-технологов, высо-
копроизводительные вычислители для оптимизационных задач и экспертных
систем, информационные серверы, инженерные станции и станции другого на-
значения.
Для организации нижнего уровня АСУ ТП предназначены микропроцессорные
комплексы контроля и управления второго поколения (МСКУ 2) — программируе-
мые контроллеры, осуществляющие прием и необходимую обработку информации
от объекта, управление технологическим оборудованием, регулирование параме-
тров технологического процесса, защиту оборудования и блокировки аварийных
процессов.
Базовое ПО МСКУ 2М составляют: системное ПО МСКУ 2, средства программи-
рования МСКУ 2, системное ПО операторских и рабочих станций.
Функциональная структура МСКУ 2М приведена на рис. 8.17.
Непосредственный выход на верхний уровень имеют рабочие станции ПС 5110,
IBM PC совместимые ПЭВМ, ряд моделей МСКУ. Выход в сети верхнего уровня дру-
гих компонентов МСКУ 2М обеспечен через шлюз на базе ПС 5110 или IBM PC/AT.
Служба единого времени в МСКУ 2М организуется на базе сети единого вре-
мени с использованием сигналов спутниковых навигационных систем РФ (ГЛО-
НАСС) и США (NAVSTAR). Обеспечена работа по интерфейсам МВС, RS-485,
RS-232C, ИРПС.
Характеристики промышленной локальной сети МАПС:
• топология — шина (в сети до трех магистралей);
18 Зак. 3801
530
ГЛАВА Я
Рис. 8.17
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
531
• базовый сетеобразующий элемент — сегмент магистрали;
• физическая среда — радиочастотный кабель, оптоволокно;
• способ резервирования — аппаратный (дублирование, троирование);
• максимальное число абонентов в одной сети — 64;
• максимальное число абонентов на одном сегменте — 16;
• максимальная длина сегмента — 1200 м.
Состав сетевого оборудования: контроллер сети резервированный КЛСР02, связ-
ные контроллеры для подключения к сети МАПС, модемы обмена данными между
абонентами по магистрали.
Локальная сеть Ethernet: соответствует требованиям стандартов Ethernet IEEE
802.3 industry standard 10 Mbps baseband CSMA/CD (lOBaseT) and 100 Mbps baseband
CSMA/CD (100Base-TX, FX) standards. Пропускная способность — 10/100 Мбит/с.
Физическая среда — витая пара, оптоволокно. Коммутаторы Ethernet 10/100Base-T
обеспечивают построение сети на базе витой пары и оптоволокна. Количество пор-
тов — 10 с возможностью установки коммутирующих модулей 10Т(8), 100ТХ(8), 10-
FL(4), 100FX(4), Gigabit (1).
Ethernet на оптоволокне использует модульный коммутатор HP ProCurve Switch
8000М на 40 портов 100Mbps FO (SC). Длина линий связи до 2 км, пропускная способ-
ность 4,67 млн пакетов в секунду (пакеты по 64 байта).
Оборудование верхнего уровня (АРМ операторов-технологов, вычислительные
комплексы, инженерные серверы, серверы документирования и т. п.) компонуется на
базе рабочих станций ПС 5110 и IBM PC-совместимых ПЭВМ.
Номенклатура изделий и конструктивов обеспечивает возможности проектной
компоновки рабочих мест от локальных пультов оператора до крупных многоэкран-
ных систем и имеет следующие характеристики:
• развитые средства человеко-машинного взаимодействия на базе цветных мони-
торов в промышленном исполнении, алфавитно-цифровых и функциональных
клавиатур;
• эргономику конструкций, учитывающую особенности работы операторов-
технологов АСУ ТП;
• многоуровневую защиту от несанкционированного доступа;
• выход в локальные сети МАПС, Ethernet, коммутируемые и некоммутируемые
каналы связи, физические линии;
• соответствие требованиям ГОСТ 29254-91 по электромагнитной совместимости,
требованиям МЭК 950 по безопасности.
Рабочие станции ПС 5110 — IBM PC совместимые промышленные компьютеры на
базе IBM PC. Аппаратные средства ПС 5110 сертифицированы для использования на
АЭС. ПС 5110 обладают высокой коррозийной стойкостью, стойкостью к воздействию
повышенной влажности, вибрации, пыли, перенапряжений и провалов в питающей сети,
электромагнитных помех. Поддерживаются ОС QNX, Linux, Windows 2000/NT, ОС5000.
В качестве подсистем нижнего уровня используются микропроцессорные ком-
плексы контроля и управления МСКУ, предназначенные для создания интеллекту-
альных автономных систем контроля и управления, устройств и приборов; комплек-
сы являются проектно-компонуемыми изделиями. Типы и количество каналов связи
с объектом, конструктивное исполнение определяется требованиями пользователя.
МСКУ содержат каналы связи с объектом с искробезопасными входными цепями
уровня «ia» с маркировкой взрывозащиты ExiallC.
532
ГЛАВА 8
Рис. 8.18
МСКУ представляет собой комплекс техниче-
ских средств, в состав которого входят микропро-
цессорные контроллеры (КМп), блоки связи с объ-
ектом (БСО) различного функционального назначе-
ния, блоки связи (БСв) и кроссовое оборудование.
Каждый блок является конструктивно автономным
и функционально законченным изделием.
Любая конфигурация МСКУ содержит ядро,
состоящее из одного или трех микропроцессорных
контроллеров, соединенных между собой специальными связями.
Совокупность блоков связи с объектом обеспечивает ввод/вывод практически
всех типов аналоговых и дискретных сигналов, определенных действующими стан-
дартами и включает в себя: блоки ввода аналоговых сигналов, блоки ввода частотных
и импульсных сигналов, блоки ввода дискретных сигналов, блоки формирования
дискретных, импульсных и аналоговых сигналов, а также комбинированные блоки.
Подключение различных устройств ввода/вывода — дисплеев, устройств печати,
функциональных клавиатур, пультов, щитовых устройств цифровой и алфавитно-
цифровой индикации, а также ПЭВМ обеспечивается через блоки связи БСв по ин-
терфейсам RS-232C и ИРПС. Выход в сети осуществляется через КМп, блоки связи и
модуляторы-демодуляторы МДМ.
В состав кроссового оборудования входят панели соединительные (ПСд) и крос-
совые (ПКр), на которые устанавливаются элементы нормализации и обеспечивается
присоединение внешних кабелей. ПСд, ПКр размещаются в кроссовых отсеках шка-
фов МСКУ или в выносных кроссах.
Повышенные характеристики надежности и живучести МСКУ достигаются за
счет структурного резервирования (троирования), развитой системы контроля и
диагностики, автоматической реконфигурации при отказе резервированных частей,
обеспечения электропитания от двух независимых фидеров постоянного или пере-
менного тока, сохранения информации в ОЗУ при отключении электропитания и
последующего автоматического восстановления работоспособности МСКУ после
включения питания, а также за счет цифровой коррекции результатов преобразова-
ния входных аналоговых сигналов.
Функции управления, контроля и связи в МСКУ выполняют РС-совместимые
контроллеры КМп-14, КМп-15, КМп-20. Новый контроллер микропроцессорный
КМп-20 (рис. 8.18) построен на базе стандартных модулей РС/104 (шина РС/104 пол-
ностью соответствует шине ISA с пропускной способностью 16 Мбит/с).
Блоки связи с объектом, как и блоки, выходящие на интерфейс ИРПС, компону-
ются в двухэтажный каркас монтажный. Кроссовое оборудование с панелями соеди-
нительными (ПСд) устанавливается в каркасы кроссовые. Число устанавливаемых
ПСд в каркасы — 32. К ПСд с одной стороны подключаются объектовые кабели связи
через индивидуальные соединители фирмы WAGO, с другой стороны — подключа-
ются блоки связи с объектом.
8.18.2 Программное обеспечение МСКУ 2М
В МСКУ 2 в качестве базовой операционной системы использоваться QNX
канадской кампании QNX Software System. Система QNX может загружаться из
ПЗУ, Flash-памяти или с помощью удаленной загрузки по сети. QNX соответству-
РАСПРЕДЕЛЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
533
ет требованиям стандарта POSIX (Portable Operating System Interface — Интер-
фейс переносимых операционных систем). Она ориентирована для приложений
реального времени и обеспечивает мультизадачность, приоритетную диспетче-
ризацию, быстрое переключение контекстов — все необходимые составляющие
системы реального времени.
В рабочих станциях ПС5110 и IBM-совместимых ПЭВМ в качестве операцион-
ной системы используется ОС Linux — многопользовательская многозадачная ОС.
Количество одновременно исполняемых задач ограничиваются только объемом
памяти и временными соотношениями между ними. ОС соответствует стандарту
POSIX, а также совместима на уровне исходных кодов с UNIX SVR4 и BSD 4.4, что
предоставляет возможность быстрого переноса программного обеспечения под
другие программные (совместимые с UNIX и POSIX) и аппаратные платформы
(Alpha и Sparc). В рабочих станциях ПС5110 и IBM-совместимых ПЭВМ в качестве
операционной системы также может использоваться Windows NT. Основным до-
стоинством ОС Windows NT является повышенная надежность. В основе системы
управления памятью Windows NT лежит система виртуальной памяти, встроенная
в ядро ОС.
В состав ПО входит также система визуализации и диспетчерского управления
(SCADA-система). Помимо специализированной SCADA-системы МСКУ М КОРУНД
используются открытые SCADA-системы Genesis, In Touch, Trace Mode и др. Основ-
ным их назначением является выполнение функций сбора, обработки и отображения
технологической информации, ведения архива нарушений технологического процес-
са и архива (журнала) изменений значений параметров технологического процесса,
подготовки и выдачи отчетов о ходе технологического процесса, ручного управления
объектом. ОРС-сервер обеспечивает взаимосвязь МСКУ 2 и рабочих станций, функ-
ционирующих под управлением системного ПО МСКУ 2М, с рабочими станциями,
функционирующими под управлением заимствованных SCADA систем.
8.19. Распределенная система управления на базе
ПТК «ТЕХНОКОНТ» ГК «ТЕКОН»
В группу компаний «ТЕКОН» входят ЗАО «ТЕКОН», ЗАО «ПК Промконтрол-
лер», ЗАО «ТеконГруп». Многофункциональный комплекс программно-аппаратных
средств «Техноконт» является основой построения распределенных систем управле-
ния различной сложности. Распределенность системы имеет как топологический, так
и функциональный характер. РСУ на базе ПТК «Техноконт» является трехуровневой.
Нижний уровень — уровень технологического контроля и управления, регулирова-
ния, блокировки и сигнализации. На нижнем уровне реализуются функции техниче-
ского и коммерческого учета энергоресурсов. Средний уровень — уровень контроля
и управления объектами на базе ПЛК. Верхний уровень — уровень визуализации и
управления процессом, сбора данных, архивирования и дистанционного управления
с возможностью выхода на бизнес-уровень.
Основной ЛВС нижнего уровня является промышленная сеть BITBUS, сетью
верхнего уровня служит сеть Ethernet или ArcNet.
Сеть BITBUS состоит из сегментов — гальванически изолированных участков
сети протяженностью 1,2 км. Общее число абонентов и ретрансляторов в сегменте
не более 28. Максимальное число абонентов (контроллеров и других микропроцес-
534
ГЛАВА 8
сорных устройств) в локальной сети — 240. Общее число локальных сетей BITBUS в
системе до 15.
Объединение сетей BITBUS и Ethernet осуществляется с помощью контроллера
сети BITBUS типа microTCX, который связывает контроллеры в сети BITBUS с РС-
совместимыми ПЭВМ или операторскими станциями на их основе. microPC выпу-
скается в стандарте PC и микроРС на шине ISA.
Общее число операторских станций в системе с одной сетью BITBUS не более
15.
На нижнем уровне РСУ используются PC-совместимые контроллеры ТКМ52,
одноконтурные ПИД-регуляторы ТСМ21, контроллеры ввода аналоговых сигналов
ТСМ11 и интеллектуальные датчики температуры ТСТ11, моноблочные контролле-
ры ТКМ410 и ТЕКОНИК, устройства умощнения дискретных сигналов ТСВ08 и др.
На среднем (контроллерном) уровне используются многофункциональные РС-
совместимые контроллеры МФК, МФКЗООО, ТКМ700.
На рис. 8.19 приведена структура РСУ на базе ПТК «Техноконт». Характеристики
используемых контроллеров МФК, МФКЗООО, ТКМ-700, ТКМ-52 и ТКМ-410 при-
ведены в параграфе 2.2.
3 уровень
АСУПТ
Сеть ЭВМ (ArcNet, са™ BITBUS
EtherNet и пр.)
АРМы
операторов-
технологов
иТСХ
2 уровень
АСУПТ
Локальная сеть
BITBUS №1
1 уровень
АСУПТ
Локальная сеть BITBUS №2
Устройства аналогового ввода
Рис. 8.19
РАЗДЕЛ
V
ИНТЕГРИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ГЛАВА 9. ПРИНЦИПЫ И ОСНОВЫ ИНТЕГРАЦИИ
СИСТЕМ УПРАВЛЕНИЯ
9.1. Интегрированные системы управления предприятием
Интеграция задач оптимального управления предприятием предусматривает их ре-
шение на общесистемном уровне в рамках корпоративной информационной системы
(КИС), обеспечивающей информационную поддержку производственных, администра-
тивных и управленческих процессов [9.1-9.10].
При интеграции задач управления предприятием решаются задачи оптималь-
ного проектирования с использованием современных методов и решений — теории
многокритериального анализа, методов принятия решений в условиях неопреде-
ленности, методов анализа управляемости процессов, методов интеллектуального
управления и др.
Интеграция задач управления и проектирования состоит в том, что проектируемая
система должна обладать свойствами управляемости, гибкости, экономичности и живу-
чести. При этом проектирование оборудования и системы управления должно осущест -
вляться одновременно в рамках единого подхода к решению этих задач.
Система называется управляемой, если существует управление, обеспечивающее
переход системы из произвольного начального состояния в произвольное (заданное)
конечное состояние за конечное время.
Способность системы функционировать при наличии возмущений называется гиб-
костью. Гибкость определяется как адаптируемость системы к изменению режимных
параметров путем корректировки оборудования и системы управления. Параметром,
определяющим гибкость интегрированной системы, принято считать меру гибкости.
Мера гибкости — это область независимого изменения возмущений или область допу-
стимых возмущений, которая определяется ограничениями, наложенными на систему.
Мера гибкости (индекс гибкости) представляет некоторое неотрицательное веществен-
ное число, характеризующее область изменения возмущений, при которых удается най-
ти управление, удовлетворяющее ограничениям на векторы состояния, управления и
возмущений [9.1].
Корпоративные информационные системы управления предприятием делятся на
однопользовательские, групповые и корпоративные. Однопользовательские КИС со-
держат в своем составе приложения, размещенные на одном компьютере. Групповые
КИС— это системы, объединенные в локальные сети и используемые совместно на
уровне отдела, цеха, отдельного подразделения. Для этих систем общими являются
536
ГЛАВА 9
БД или совокупность файловых структур. Корпоративные системы объединяют
несколько групповых систем в масштабах всего предприятия и имеют клиент-
серверную архитектуру.
9.2. Интеграция систем управления. Иерархия современных си-
стем управления
Под интеграцией систем управления понимается создание единого информа-
ционного пространства предприятия на основе объединения разнородных автома-
тизированных систем управления во взаимосвязанную интегрированную систему
управления для повышения оперативности и эффективности работы предприятия.
Под единым информационным пространством подразумевается возможность до-
ступа ко всей информации, поступающей от различных систем, руководителей
подразделений и предприятия в целом, ответственных за производительность и
качество продукции, возможность обмена данными в реальном масштабе времени
между приложениями и компонентами систем управления. Понятие интеграции
автоматизированных систем согласно ГОСТ 34.003-90 применимо к любой сово-
купности двух и более взаимосвязанных автоматизированных систем, в которой
функционирование одной из них зависит от результатов функционирования дру-
гой так, что эту совокупность можно рассматривать как единую автоматизирован-
ную систему [9.2, 9.3, 9.8-9.10].
При рассмотрении интегрированных систем обычно имеют ввиду горизонталь-
ную и вертикальную интеграцию автоматизированных систем. Горизонтальная ин-
теграция подразумевает объединение автоматизированных систем на одном уровне
иерархии, а вертикальная — объединение смежных уровней иерархии систем управ-
ления.
Также известны следующие виды интеграции систем управления: организацион-
ная, функциональная, информационная, программная и техническая.
Организационная интеграция предполагает оптимизацию деятельности персо-
нала, ответственного за функционирование всей системы; функциональная инте-
грация — единство главных и вспомогательных функций, декомпозиция функцио
нальной структуры и согласованность критериев эффективности всех компонентов
системы; информационная интеграция — единое информационное пространство,
единый подход к сбору, обработке и передаче информации на всех уровнях иерар-
хии; программная интеграция — это совместимость и совместное использование
программного обеспечения на всех уровнях иерархии; техническая интеграция —
это открытость средств низовой автоматики, контроллеров, средств вычислительной
техники, локальных сетей и пр. для распределенной обработки и представления дан-
ных и решения задач управления.
Для решения задач интеграции систем необходима стандартизация аппаратно-
программного обеспечения, в том числе интерфейсов, протоколов связи, баз данных,
систем программирования и т. д. Многими крупными фирмами-производителями вы-
пущены программные продукты для интегрированного управления предприятием: PI
System (OSI Software), Total Plant Solution (Honeywell), PCS7 (Siemens), Enterprise Technol-
ogy Solution (Yokogawa), Proficy Historian (GE Fanuc), Factory Suite (Invensys) и др.
С развитием информационных технологий наблюдается развитие интегрирован-
ных систем управления. Основные тенденции развития следующие:
ПРИНЦИПЫ И ОСНОВЫ ИНТЕГРАЦИИ СИСТЕМ УПРАВЛЕНИЯ
537
• Модернизация и смена поколений интегрированных систем управления, со-
вершенствование аппаратного и программного обеспечения, появление новых
версий SCADA-систем и инструментальных систем программирования кон-
троллеров.
• Увеличение роли и значения оперативно-диспетчерского управления и диспет-
черской службы предприятия, что связано со сложностью и слабой формализуе-
мостью ряда технологических процессов.
• Преобразование функций оператора, переход от функций контроля и оператив-
ного управления к функциям оперативной оптимизации с поддержанием задан-
ных критериев эффективности.
• Использование приемов моделирования процессов и оборудования, а также си-
стем оптимального управления.
Уровни иерархии интегрированных систем управления дают представление о
структуре информационно-управляющей системы предприятия. Иерархия систем
управления носит условный характер и, как правило, включает 4 уровня иерархии.
Наивысший 4-й уровень иерархии занимают административные системы ERP
(Enterprise Resource Planning — системы планирования ресурсов предприятия), зада-
чей которых является автоматизированное управление финансово-экономической и
административно-хозяйственной деятельностью предприятия. Под ресурсами пред-
приятия понимаются его финансовые, материальные, сырьевые ресурсы и готовая
продукция.
3-й уровень иерархии — уровень MES-систем (Manufacturing Execution System —
система управления производственным процессом). К задачам MES-систем отно-
сятся оперативное планирование производства, оптимизация производственных
графиков, управление качеством и сроками поставок готовой продукции в режиме
реального времени. Этому уровню соответствуют также АСОДУ — автоматизиро-
ванные системы оперативно-диспетчерского управления и АСКУЭ — автоматизиро-
ванные системы контроля и управления энергоресурсами.
2-й уровень иерархии — это уровень АСУ ТП или DCS (Distributed Control Sys-
tems — распределенные системы управления). Этот уровень иногда принято под-
разделять на два подуровня: диспетчерский или подуровень SCADA-систем и кон-
троллерный подуровень. Нетрудно заметить близость подуровня SCADA-систем и
АСОДУ уровня MES-систем.
1-й уровень — это уровень устройств связи с объектом (УСО), в том числе ин-
теллектуальных средств автоматизации (интеллектуальных преобразователей и ис-
полнительных устройств).
Нулевой или полевой уровень — уровень датчиков и исполнительных механиз-
мов (неинтеллектуальных). Полевой уровень может быть объединен с первым уров-
нем иерархии систем управления.
В ряде публикаций рассматриваются корпоративные системы управления не-
сколькими предприятиями одной фирмы с числом уровней иерархии до пяти, вклю-
чая наивысший бизнес-уровень. Многие системы могут быть двух- и трехуровневы-
ми в зависимости от специфики производства и производственных мощностей.
ГЛАВА 10. ERP- И MES-СИСТЕМЫ
ВЕРХНЕГО УРОВНЯ РСУ
10.1. Системы планирования ресурсов предприятия (ERP-системы)
ERP-системы (Enterprise Resource Planning Systems — системы планирования ресур-
сов предприятия) предназначены для оптимизации бизнес-процессов, прогнозирования
стратегии развития предприятия на основе анализа его финансовых, материальных и
сырьевых ресурсов и представляют собой программно-аппаратный комплекс верхнего
уровня иерархии.
Основные подсистемы для решения задач большинства ERP-систем:
• Подсистема «Финансы». Служит для анализа финансовой деятельности предприя-
тия и включает модули расчетов с поставщиками, заказчиками, распределения за-
трат, финансовые планы и расчеты.
• Подсистема «Управление производством». Включает модули планирования и управ-
ления заказами, планирования и моделирования производства, расчета потребно-
сти в сырье и материалах, управления обслуживанием и ремонтами, прогнозирова-
ния сбыта и др.
• Подсистема «Логистика». Предназначена для управления полным циклом производ-
ства — от получения сырья и материалов (управление цепочками поставок) до про-
изводства и сбыта готовой продукции, а также гарантийного обслуживания.
• Подсистема «Кадры». Предназначена для управления персоналом, кадрового учета,
аттестации и переподготовки кадров и т. п.
• Модули управления запасами сырья и материалов, складского учета, управления
транспортом и др.
К тенденциям развития ERP-систем относится ориентация ERP-систем на опре-
деленные отрасли промышленности, что объясняется достигнутыми успехами при
внедрении систем, наиболее полного учета специфики производства или по причине
лучшей конкурентоспособности. Другой тенденцией является постоянное развитие
ERP-систем путем интеграции зарекомендовавших себя компонентов и модулей дру-
гих ERP-систем. Следует отметить сближение и взаимодействие ERP- и MES-систем в
вопросах формирования заказов, контроля состояния сырья, материалов и комплек-
тующих на складах, согласования транспортных потоков, обработки на уровне ERP-
системы информации, полученной в режиме реального времени от MES-системы [9.9,
10.5, 10.8].
Среди большого числа известных ERP-систем отметим зарубежные ERP-системы PI
System, Protean, J.D. Edwards, MAX, R3, iReneisance, а также отечественные ERP-системы
Галактика, Парус и др.
ERP- И MES-СИСТЕМЫ ВЕРХНЕГО УРОВНЯ РСУ
539
10.1.1 ERP-система Protean
Protean — это система для предприятий химической, фармацевтической и других
отраслей промышленности с непрерывным циклом производства. Система включает
модули, ответственные за производство, управление финансами, составление рецеп-
тур, управление материально-производственными запасами, снабжение, планирова-
ние, составление графиков, расчет себестоимости продукции и управление заказами.
Protean работает на платформе таких СУБД, как Oracle, Microsoft SQL Server, DB2.
Protean поддерживает технологию OLE, обеспечивает интеграцию с электронными
таблицами, электронной почтой, системами автоматизации документооборота.
Производственный модуль служит для управления технологическими процесса-
ми с учетом возможных колебаний качества сырья и параметров процессов. Функ-
ция Schedule Management позволяет составлять графики работ и контролировать вы-
полнение планов производства, а функция Schedule Activity Reporting — составлять
отчеты по различным видам деятельности предприятия, в том числе по затратам,
производственным потерям и др.
Модуль планирования предназначен для улучшения качества обслуживания
клиентов путем оптимизации производственных графиков, которые возможно про-
смотреть благодаря функции Resource Scheduling и внести необходимые изменения в
поставку сырья и материалов.
Модуль калькуляции издержек производства позволяет контролировать себе-
стоимость продукции на всех этапах ее производства. Функция Cost Modeling опти-
мизирует работу предприятия по критерию максимальной рентабельности.
Модуль управления снабжением автоматизирует операции снабжения в соответ-
ствии с полученными заказами. Особенностью подсистемы является сопровождение
каталогов необходимой продукции (сырья, материалов, запасных частей, упаковки и
пр.) в реальном масштабе времени.
10.1.2 ERP-система ГАЛАКТИКА корпорации «ГАЛАКТИКА», Россия
Комплексная информационная система (КИС) ГАЛАКТИКА является много-
пользовательской сетевой системой управления деятельностью предприятия, на-
правленной на решение задач планирования, оперативного управления, учета, кон-
троля и анализа деятельности предприятия.
Система поддерживает наиболее распространенные серверные платформы — Per-
vasive SQL, MS SQL Server, Oracle. К основным принципам построения системы отно-
сятся открытость, модульность, универсальность, адаптируемость, корпоративность.
В состав системы ГАЛАКТИКА входят:
• контур управления финансами (управление бюджетом, платежный календарь,
финансовый анализ);
• контур управления персоналом (управление кадрами, заработная плата);
• контур бухгалтерского учета (финансово-расчетные и кассовые операции, учет
основных средств и материальных ценностей, налоговые регистры, финансовая
и бухгалтерская отчетность, векселя и кредиты, фактические затраты);
• контур логистики (управление снабжением и сбытом, складской учет, расчеты с
поставщиками и получателями, управление договорами);
• контур управления производством (управление заказами, технико-экономи-
ческое планирование, техническая подготовка производства, учет материаль-
ных ценностей, техническое обслуживание и ремонт оборудования);
540
ГЛАВА 10
• контур отраслевых и специализированных решений (управление автотранспор-
том, капитальным строительством, рекламной деятельностью; розничная тор-
говля и сервисное обслуживание и др.).
КИС ГАЛАКТИКА ориентирована на управление предприятиями в различных
отраслях промышленности.
10.1.3 ERP-система IndustriallT Extended Automation System 800xA компании ABB
Система Industrial IT System 800xA является системой интегрированного управ-
ления процессами производства и управления предприятиями различных отраслей
промышленности.
В задачи системы входят:
• контроль технологического процесса в целях улучшения качества продукции;
• планирование и управление ресурсами предприятия (ERP-система);
• управление цепочками поставок (SCM);
• повышение рентабельности производства путем соотношения затрат и качества
продукции;
• управление взаимоотношениями с клиентами (система СРМ снижает затраты за
счет улучшения функционирования службы взаимоотношений с потребителем).
В качестве пользовательского интерфейса в системе используется интерфейс
VITRIN. В состав Industrial IT System 800хА входят подсистемы «Планирование про-
изводства и оптимизация», «Контроль производства продукции», «Управление каче-
ством», « Управление энергетическими ресурсами и оптимизация» и др.
В качестве примера приведены функции основных подсистем.
Функции подсистемы «Планирование производства и оптимизация»:
• оптимизация производительности работы предприятия, минимизация степени
незавершенности производства;
• оптимизация процесса выполнения плановых заданий;
• повышение производительности работы оборудования;
• прогнозирование ситуаций возникновения перегрузок и помех в производстве.
Функции подсистемы «Контроль производства продукции»:
• улучшение производственного планирования за счет предоставления достовер-
ной информации о сырье, заказах, состоянии производства;
• оптимизация выполнения заказов путем учета и отслеживания готовых материа-
лов;
• оптимизация процессов производства, обработки, упаковки и планирования по-
ставок продукции;
• контроль и управление производством за счет данных РВ во избежание перепро-
изводства или нехватки ресурсов.
Функции подсистемы «Управление качеством»:
• контроль качества продукции в соответствии с установленными требованиями и
эффективное управление качеством;
• составление отчетов по качеству продукции;
• планирование качества продукции от сырья до конечной продукции;
• сбор и анализ данных на каждом шаге технологического процесса (статистиче-
ский контроль качества).
Функции подсистемы «Управление энергетическими ресурсами и оптимизация»:
• планирование потребности расхода энергии;
ERP- И MES-СИСТЕМЫ ВЕРХНЕГО УРОВНЯ РСУ
541
• минимизация расхода энергии за счет оптимизации использования ресурсов и
оптимального календарного планирования производства;
• планирование нагрузки и мониторинг линий связи и отключений нагрузки;
• прогнозирование потребления электроэнергии, расхода пара и топлива;
• управление операциями закупки и продажи электроэнергии.
10.2. Системы управления производством (MES-системы)
Эффективное управление современным предприятием основано на интеграции
информационных ресурсов предприятия в целом — от уровня низовой автоматики
до уровня планирования и управления производством и доступности этой инфор-
мации на всех уровнях принятия решений. Полная и оперативная информация о со-
стоянии производственного процесса, запасах сырья, потребленных ресурсах и вы-
работанной продукции необходима для эффективного управления как дискретным,
так и непрерывным производственными процессами.
Наибольшее развитие в последние годы получили MES (Manufacturing Execution
System — производственные исполнительные системы), призванные обеспечить
производственный и руководящий персонал (диспетчерские службы, руководители
подразделений, службы главного механика, главного энергетика, главного технолога)
необходимой для управления технологической информацией. Также MES-системы
принято называть Manufacturing Enterprise Solutions или решения для промышлен-
ных предприятий.
MES-системы относят к классу общепромышленных систем управления дис-
кретными и непрерывными производствами в масштабе самостоятельного подраз-
деления — крупного цеха или завода в составе фирмы (корпорации). Ввиду наличия
функций сбора информации и управления у MES-систем эти системы, по сведениям
разных источников, именуют информационно-управляющими системами (ИУС),
интегрированными системами управления (ИСУ), информационными системами
управления предприятием (ИСУП), информационными системами производства
(ИСП) и пр.
За счет получения производственной информации в реальном масштабе време-
ни и возможностей мгновенной реакции на отклонения результатов производства
от плановых показателей, MES-системы позволяют оптимизировать производствен-
ный процесс. Поскольку MES-системы обрабатывают всю производственную инфор-
мацию, включая расчет экономических показателей вплоть до расчета себестоимо-
сти продукции, MES-системы связаны с ERP-системами. Функции MES-систем могут
быть также интегрированы с другими системами управления предприятием (SCM,
CRM, SCADA-системами и др.).
Таким образом, MES-системы являются связующим звеном в интеграции произ-
водственного предприятия.
Толчком к развитию MES-систем стали успехи PI System — информационной си-
стемы предприятия фирмы OSI Software, предназначенной для сбора и унификации
информации на центральном сервере системы.
Международная ассоциация производителей систем управления производством
MESA (Manufacturing Enterprise Solution Association) определила 11 основных функ-
ций MES-систем:
• Контроль состояния и распределение ресурсов предприятия (управление обору-
дованием, материалами, персоналом, документацией и пр.).
542
ГЛАВА 10
• Оперативное планирование (расчет производственных расписаний в зависимо-
сти от специфики изделий и технологии производства).
• Диспетчеризация производства (управление производственным процессом из-
готовления продукции на всех этапах производства).
• Управление документами (ведение плановой и отчетной цеховой документации,
контроль прохождения документации по изготовлению продукции).
• Сбор и хранение данных (получение, хранение и передача данных относительно
производимой продукции).
• Управление персоналом (обеспечение возможности управления персоналом).
• Управление качеством продукции (обеспечение контроля качества продукции на
основе данных измерения качества в реальном времени, выявление отклонений
от заданного качества).
• Управление производственными процессами (мониторинг производственного
процесса, автоматическая или ручная корректировка хода процесса).
• Управление техобслуживанием и ремонтом (управление обслуживанием обору-
дования, его плановым и оперативным ремонтом).
• Отслеживание истории продукта (визуализация информации о месте и времени
выполнения работ по каждому изделию, в том числе отчеты об исполнителях,
комплектующих, материалах, условиях производства и пр.).
• Анализ производительности (представление подробных отчетов о результатах
производственных операций).
Традиционно этому уровню иерархии соответствуют АСОДУ — автоматизи-
рованные системы оперативно-диспетчерского управления, АСОДУЭ — автома-
тизированные системы оперативно-диспетчерского управления энергоресурсами,
ЕАМ-системы (Enterprise Asset Management — Управление производственными
фондами), LlMS-системы (Laboratory Information Management System — Система
управления лабораторной информацией). ЕАМ-системы предназначены для ком-
плексной автоматизации процессов эксплуатации, технического обслуживания
и ремонта оборудования, включая связанные с этим функции снабжения и веде-
ния складского хозяйства предприятия. Примером ЕАМ-системы служит система
Avantis. Pro.
Сбор, обработка и хранение всей информации осуществляется, как правило, на
нескольких резервированных серверах реального времени, где разнородная инфор-
мация от различных систем (ПЛК, SCADA, DCS, модулей ввода/вывода и пр.) пере-
водится в вид, удобный для представления пользователям.
Для создания систем управления производством использовались технологии ре-
ляционных баз данных, таких как Oracle, Microsoft SQL Server, DB2 и др. Однако с
увеличением объема и скорости изменения информации, реляционные БД оказа-
лись не в состоянии получать информацию в том же темпе, в котором она поступает
от современных источников информации (десятки тысяч данных за доли секунды).
Отсюда возникла необходимость создания специализированных корпоративных ин-
формационных систем реального времени.
К настоящему времени все крупные компании-разработчики аппаратного и про-
граммного обеспечения АСУ ТП выпустили пакеты ПО комплексной (полной) авто-
матизации производства. Это или отдельные интегрированные пакеты, работающие
независимо от типа установленной SCADA-системы, или клиентские приложения к
ранее выпущенным SCADA-системам.
ERP- И MES-СИСТЕМЫ ВЕРХНЕГО УРОВНЯ РСУ
543
К полномасштабным системам управления производством относятся Plant In-
formation System (PI System) фирмы OSI Software (США), PCS7 фирмы Siemens (Гер-
мания), Preactor фирмы Preactor International (Англия), Plant2Business фирмы CiTech-
nologies, «T-Factory 6» компании AdAstra Research Group (Россия), «Орбита» и «СКАТ»
фирмы «ПЛК-системы» (Россия), ФОБОС (Россия) и ряд др.
Фирма Wonderware (США) разработала интегрированный пакет полной автома-
тизации производства Factory Suite, компонентом которого является InTrack — си-
стема оперативно- диспетчерского управления материальными потоками и произ-
водственными запасами и InBatch — система управления дозированием и смешением
компонентов, в том числе моделирование этих процессов и составление рецептов.
Фирма Citect выпускает аналогичные пакеты Trace и Batch. Фирма Intellution
(США) разработала программный пакет промышленной автоматизации iHistorian,
поддерживающий концепцию построения информационно-управляющих систем
производства Plant Intelligence. Помимо этих компонентов в состав MES-систем вхо-
дят системы материальных и энергетических балансов, системы планирования тех-
нологических и производственных процессов, системы моделирования и системы
управления документооборотом [10.5,10.12].
MES-системы ФОБОС и Preactor применяются в основном для управления дис-
кретными производствами. Более подробные данные о MES-системах приведены в
работах [10.1, 10.6].
Одним из важнейших компонентов MES-систем является АСОДУ — Автомати-
зированная Система Оперативно-Диспетчерского Управления.
К целям и задачам АСОДУ относятся:
• Повышение качества выпускаемой продукции за счет контроля и управления ка-
чественными показателями процесса.
• Увеличение производительности за счет сокращения простоев оборудования.
• Уменьшение затрат материалов и сырья на единицу выпускаемой продукции за
счет оптимизации управления процессом.
• Наглядное представление хода производственного процесса в реальном времени
с возможностью оперативной корректировки диспетчером хода процесса.
• Оперативная информация о нарушениях хода производственного процесса (сиг-
нализация, оповещение).
• Интеграция в единую систему разнородных подсистем АСУТП, АСКУЭ, систем
технического учета, систем автоматизации вспомогательных производств.
• Интеграция с системами организационно-экономического уровня управления
предприятием (BAAN, SAP R/3, Oracle, iRenaissances и др.).
Структура АСОДУ представляет собой трехуровневую систему с распределен-
ной сетью сбора и обработки данных.
• Уровень локальных систем автоматизации (нижний уровень иерархии) включает
АСУ ТП на базе ПЛК со станциями удаленного ввода/вывода технологических па-
раметров от цехов и участков, системы коммерческого и технического учета энер-
горесурсов (АСКУЭ), системы автоматизации вспомогательных производств.
• Уровень базы данных АСОДУ производства, включающий серверы производств,
АРМ диспетчеров, технологов, мастеров смены, заводской лаборатории и др.
• Уровень клиентских приложений — АРМ центрального диспетчера предприятия,
АРМ заводоуправления (директор по производству, главный инженер, главный
метролог, главный энергетик).
544
ГЛАВА 10
Основными преимуществами систем АСОДУ являются:
• Масштабируемость. Возможности наращивания информационной емкости си-
стемы путем добавления новых станций сбора информации, ПЛК, высокопроиз-
водительных серверов, АСУТП, АСКУЭ.
• .Открытость. Использование стандартных средств ввода/вывода, ПЛК, рабочих
станций, интерфейсов, программных продуктов (SCADA-систем, ОРС, DDE и
др.). Использование открытых систем допускает интеграцию АСОДУ с система-
ми верхнего уровня предприятия.
• Информативность. Сбор, обработка данных и формирование информации при-
менительно к каждому типу рабочей станции применительно к потребностям
конкретного пользователя. Для диспетчерской службы — это параметры процес-
са в реальном времени, для технологов — соблюдение режимов работы оборудо-
вания в соответствии с технологическим регламентом и т. д.
• Оперативность. Доступность на всех уровнях оперативной информации о сбоях
в работе оборудования, систем управления, приборов или отклонении протека-
ния процесса, а также возможность реакции на эти сбои и отклонения режимов.
• Надежность. Достигается использованием высоконадежного оборудования ми-
ровых производителей аппаратно-программных средств: датчиков, контролле-
ров, рабочих станций, промышленных сетей, серверов. Также используются диа-
гностика, резервирование (в том числе двойное резервирование) компонентов и
системы в целом.
К базовым компонентам АСОДУ относятся база данных реального времени
(БДРВ), SCADA-система, средства коллективного отображения информации, сети
обмена данными, Web-сервер (при наличии Intranet-сети предприятия).
БДРВ является общезаводской базой данных предприятия, предназначенной для
сбора, сжатия, хранения и копирования данных о событиях и реакциях на эти со-
бытия. К числу этих данных относятся различные данные, поступающие в БДРВ по
протоколам DDE, ОРС, ODBC, SQL и запрашиваемые клиентами через интерфейс
SQL-сервера (более подробно БДРВ рассмотрены в главе 5).
SCADA-система позволяет вести объектно-ориентированный контроль на всех
этапах технологического процесса на основе мнемосхем процессов с использованием
стандартных протоколов обмена (DDE, ОРС).
Средства коллективного отображения информации на производстве исполь-
зуются статические и/или динамические, стационарные и/или мобильные. Наи-
более распространенными системами коллективного отображения являются ви-
деостены, компонуемые из составных экранов различных размеров с высоким
разрешением.
Сети обмена данными включает промышленные сети нижнего уровня (field-
bus) для связи интеллектуальных датчиков и исполнительных механизмов, серверы
БДРВ и сети Ethernet (Industrial Ethernet) для связи серверов БДРВ, АРМ операторов,
АСКУЭ и систем верхнего уровня.
Технологический Web-сервер предоставляет возможность мониторинга опе-
ративных данных технологического процесса через локальную Intranet-сеть пред-
приятия. Web-сервер является основным связующим звеном в клиент-серверной
архитектуре связи по сетям Internet/Intranet. В Web-сервер входят средства про-
смотра Web-страниц, подготовки рапортов на основе данных технологических
процессов.
ERP- И MES-СИСТЕМЫ ВЕРХНЕГО УРОВНЯ РСУ
545
Рассмотрим MES-системы «СКАТ», «ФОБОС» и «Preactor». Ряд MES-систем («Р1
System», «Plant2Business», «Simatic PCS7», «Т-Factory 6») рассмотрены в работах [2.9,
10.1,10.5, 10.8].
10.2.1 MES-система «СКАТ»
Информационная система управления производственными процессами пред-
приятий и корпорации (АО «ТоксСофт», Россия). В основу архитектуры СКАТ за-
ложены следующие технические решения:
• язык программирования и среды исполнения приложений Java;
• объектная модель представления и хранения данных;
• режим реального времени (РВ).
Архитектура СКАТ — трехуровневая.
Нижний уровень — уровень источников и потребителей информации MES-
системы. Обмен данными с АСУ ТП осуществляется через ОРС, с БДРВ - через ин-
терфейс ODBC.
Уровень клиентов СКАТ (диспетчерский уровень) — уровень интерфейсных
приложений для создания мнемосхем, графиков, таблиц.
Уровень серверов СКАТ — уровень программных модулей по обработке и хране-
нию данных в реляционной БД.
СКАТ поддерживает следующие типы клиентов: АРМ специалиста, сервер за-
дач и консоль администратора. В состав клиента СКАТ входят также исполняемый
модуль ядра клиента СКАТ с системными службами клиента, библиотекой компо-
нентов и клиентом JBoss. АРМ специалиста служит для организации ЧМИ между
MES-системой и пользователем. Сервер задач предназначен для выполнения при-
кладных функций MES-системы (программ обмена данными с другими системами).
Консоль администратора является рабочим местом администратора и разработчика
MES-системы.
Сервер СКАТ включает базу данных и объектов, системные службы СКАТ и сер-
верные прикладные модули. В состав сервера СКАТ входит исполняемый модуль
ядра сервера СКАТ с системными службами, библиотекой компонентов, сервером
JBoss и сервером реляционной БД.
Основой архитектуры СКАТ БД является объектная информационная модель про-
изводственного процесса. Для хранения данных в системе используется реляционная БД
(MS SQL Server, Oracle, MySQL). Информационная модель базируется на программных
модулях «Плагин» и «Задача». Прикладная программа «Плагин» имеет уникальное имя в
системе, с помощью которого можно получить к нему доступ со стороны клиента.
«Плагин», который может быть любым классом Java, реализует интерфейс для
встраивания его в клиентское приложение. Вложение его в серверный контейнер де-
лает его серверным прикладным модулем.
10.2.2 MES-система ФОБОС
MES-система ФОБОС является интегрированной системой технологической
подготовки производства, оперативного календарного планирования и диспетчер-
ского контроля [10.1,10.6]. Центральным модулем системы ФОБОС является модуль
ФОБОС-директор. Модуль предназначен для контроля за материальными и инфор-
мационными потоками предприятия. Модуль позволяет отслеживать весь ход вы-
полнения производственного заказа — от разработки, запуска в производство и вы-
546
ГЛАВА 10
полнения заказа в режиме реального времени. Модуль ФОБОС-директор поддержи
вает интеграцию системы с системами класса ERP, CAD/CAM, SCADA. На рис. 10.1
представлена архитектура MES-системы ФОБОС.
Модуль ФОБОС-директор выполняет следующие функции:
• моделирование материальных потоков в условиях различных режимов работы
оборудования и сроков заказа;
• гибкая настройка системы на любые заказы производства;
• формирование данных для расчета загрузки оборудования и оптимизации про-
цесса выполнения заказов;
• контроль прохождения заказов на производстве;
• визуализация информационных потоков с данными интегрируемых систем;
• статистическая и экспертная оценка эффективности выполнения производ-
ственных заказов, возможность корректировки процесса изготовления на каж-
дом этапе.
Рис. 10.1
Система ФОБОС отвечает требованиям ISO 9000 по управлению процессом про-
изводства, идентификации и контролю продукции, имеет возможности корректи-
рующих и предупреждающих воздействий на процесс.
Основными функциональными компонентами системы ФОБОС являются:
• ФОБОС «Технологическая подготовка».
• ФОБОС «Финансово-экономическая производственная деятельность».
• ФОБОС «Оперативное планирование и диспетчерский контроль».
ERP- И MES-СИСТЕМЫ верхнего УРОВНЯ РСУ
547
• ФОБОС «Цеховой склад».
Функции модуля «Технологическая подготовка»:
• Создание материальных карт на комплекты изготавливаемых и покупных дета-
лей, входящих в состав производимого изделия.
• Создание технологических регламентов процессов обработки изделий с привяз-
кой к имеющемуся оборудованию.
• Автоматизированное нормирование заготовительных операций, а также опера-
ций по специальной обработке деталей.
• Создание списка технологических маршрутных карт с указанием трудоемкости и
расчетом суммарных затрат на изделие.
• Ведение архива технологических процессов и данных о типовых операциях.
• Нормирование технологических операций (модуль «Деймос») с выбором
оснастки, средств измерений и вспомогательных материалов для изготовления
изделия.
Функции модуля «Финансово-экономическая производственная деятельность»:
• Расчет фактической себестоимости изготавливаемой продукции с учетом про-
стоев и ремонтов оборудования.
• Минимизация себестоимости продукции за счет оптимальной загрузки оборудо-
вания и эффективного использования задела.
• Составление калькуляции текущих производственных затрат, поддержка про-
граммных интерфейсов с системами бухгалтерского и экономического учета.
Функции модуля «Оперативное планирование и диспетчерский контроль»:
• Оперативное планирование и диспетчерский контроль прохождения заказов осу-
ществляются с помощью расчета оптимального производственного расписания
и последующего мониторинга его выполнения. В основу расчета и управления
производственным расписанием положен математический оптимизационный
аппарат, позволяющий моделировать 100 сценариев по выбранным значениям
критериев оптимизации.
• Создание и корректировка производственных планов цеха.
• Расчет производственного расписания загрузки оборудования и представление
его в виде таблиц, графиков и диаграмм.
• Формирование сменно-суточных заданий на каждое рабочее место.
• Формирование оперативных маршрутных карт с контролем их прохождения.
• Автоматизированный контроль за состоянием производственного процесса,
расчет времени простоя оборудования.
• Печать внутрицеховых документов — маршрутных карт, нарядов, графиков.
Функции модуля «Цеховой склад»:
• Управление закупкой недостающих деталей и контроль межоперационных заде-
лов.
• Встроенная подсистема отдела технического контроля (ОТК).
• Учет исправимого и неисправимого брака. Корректировка размеров партий в за-
висимости от задела.
10.2.3 MES-система Preactor
Preactor представляет собой систему оперативного планирования, оптимиза-
ции и управления производством на основе баланса между спросом на продукцию
(объемом заказов) и производственной мощностью предприятия на текущий момент
548
ГЛАВА 10
времени. Расчет и поддержка производственных расписаний на основе достоверных
данных о состоянии и загрузке ресурсов в каждый момент времени составляют осно-
ву конечного планирования мощностей предприятия.
Пакет Preactor представляет собой семейство программных продуктов — от про-
стых планировщиков до комплексных систем планирования и оптимизации произ-
водства. Системы расчета расписаний (FCS) включают три класса систем: Preactor
Lite+, Preactor 200 FCS, 300 FCS и Preactor APS.
Preactor Lite+ представляет собой ПО фиксированной конфигурации, предна-
значенное для небольших предприятий. Preactor 200 FCS и Preactor 300 FCS явля-
ются более мощными приложениями и предназначены для интеграции с системами
верхнего уровня (MRP, ERP) и используются на средних предприятиях с большими
функциональными задачами.
Семейство систем оперативного планирования Preactor APS обладает еще более
широкими возможностями. В состав Preactor APS входят дополнительные модули
управления производственными запасами и движением материалов, а также модули
управления сетью поставок с помощью модуля SCS (Supply Chain Server — Сервер
Сети Поставок). Благодаря этому модулю обработка запросов на продажу готовой
продукции может осуществляться в режиме реального времени, а также удаленно по
электронной почте.
Preactor APS выполняет расчет расписаний с применением средств статического
управления материалами SMC (Static Materials Control). При этом Preactor APS ис-
пользует введенные в систему ограничения и атрибуты материалов, полуфабрика-
тов, сырья. На основании полученной информации модуль SMC при считывании из
ERP/MRP информации об имеющихся заказах может автоматически разделять или
объединять материалы и полуфабрикаты прошлых переделов для последующей об-
работки.
Системы Preactor могут объединяться в локальную сеть при помощи Preactor
Execution System. Передача информации исходит от главной системы (Master) в под-
системы просмотра (Viewer). Передаваемые данные могут использоваться отделами
сбыта, начальниками цехов и другими пользователями Viewer.
Система Preactor может использоваться как автономно, так и с др. программным
обеспечением. Информация в БД, производственные планы и расписания записыва-
ются в формате ASC II. Благодаря этому возможна передача ASC П-файлов от Preac-
tor к поддерживающим этот формат приложениям Excel, Visual Basic и др.
Взаимодействие системы Preactor с окружающей программной средой представ-
лено на рис. 10.2. Preactor взаимодействует с системами ERP/MRP, системами сбора
данных, бухгалтерскими программами и другими приложениями.
Информация о заказах (заказчик, номер заказа, размер партии, дата отгрузки и
др.) загружается в Preactor из общей БД и хранится в собственной базе данных систе-
мы Preactor. Однако применяется вариант хранения всей информации в общей БД, а
в БД Preactor информация передается только по запросу.
Важным шагом на пути эффективного планирования является управление всей
сетью поставок. Сеть поставок включает поставщиков, заводы-изготовители суб-
подрядчиков, собственные производственные цеха с самостоятельным планирова
нием. При этом все производственные расписания отдельных подразделений долж-
ны быть согласованы с единым расписанием. В этом состоит суть распределенного
планирования SCS. Каждый участник сети поставок имеет собственный сервер
ERP- И MES-СИСТЕМЫ ВЕРХНЕГО УРОВНЯ РСУ
549
Рис. 10.2
планирования Preactor, который поддерживает текущее расписание в режиме РВ.
Каждый из серверов соединен с локальной системой планирования и получает от
нее информацию для текущего расписания, а также информацию от локальных си-
стем сбора данных и ERP/MRP-систем. Более подробно MES-система Preactor рас-
смотрена в работе [10.7].
К числу MES-систем относится MES-система SIMATIC IT фирмы Siemens. При-
водится следующее определение MES-системы, данное ассоциацией MESA. «Система
оперативного управления производством (MES) — это динамическая информацион-
ная система, управляющая эффективным исполнением производственных операций.
Используя точные текущие данные, MES-система регулирует, инициирует и про-
токолирует работу предприятия по мере возникновения событий. Набор функций
MES позволяет управлять производственными операциями от момента появления
заказа на производстве до доставки готового продукта. MES предоставляет наиболее
важную информацию о производственной деятельности для всей организации и обо
всей цепочке поставок посредством двухстороннего взаимодействия».
Модель оперативного управления производством SIMATIC IT включает модель
оборудования, модель материалов и модель персонала. Модели включают опреде-
ления и описания технологического оборудования, материалов и обслуживающего
персонала, описание технологического процесса, расписание запуска производства
и расчет производительности. Модели производства, созданные в среде SIMATIC IT,
могут сохраняться в библиотеках и загружаться в другие проекты.
Ядром системы и носителем всей модели является компонент SIMATIC IT Pro-
duction Suit, с помощью которого решаются вопросы учета материалов, персонала,
времени простоя и работы оборудования, управления заказами, контроля хода про-
изводственного процесса и др.
SIMATIC IT является модульной системой, состоящей из различных модулей,
решающих определенные задачи. К числу основных модулей относятся Material Man-
ager — ММ (ведомость материалов с учетом их поступления и расхода), Personal
Manager — РМ (информация о персонале и графиках работы персонала), Production
Order Manager — PRM (создание расписания производственных заказов), Massaging
Manager — ММ (запрос и подтверждение выполнения производственной операции),
SIMATIC IT Historian (хранение и обработка данных), SIMATIC IT Unilab. Модуль
SIMATIC IT Unilab представляет собой LIMS-систему (Laboratory Information Man-
agement System — Информационная система управления лабораторией).
550
ГЛАВА 10
К другим моделям относятся SIMATIC IT Interspec, Report Manager, Client Appli-
cation Builder и др. Для построения модели производства используется компонент
Production Modeler (РМ). Построение модели осуществляется в следующей после-
довательности:
• определение местоположения и участков размещения оборудования;
• создание базовых и новых типов оборудования;
• создание производственных правил (правил выбора оборудования, процесса
и т. п.);
• создание производственных операций для выполнения заказов на производство.
Таким образом, SIMATIC IT представляет собой мощную масштабируемую MES-
систему, удовлетворяющую стандарту на MES-системы.
10.2.4 Автоматизированные системы оперативного диспетчерского управления
энергоресурсами (АСОДУЭ)
В состав АСОДУЭ входят автоматизированные системы коммерческого и техни-
ческого учета электроэнергии (АСКУЭ), АСУТП котельных, тепловых и электриче-
ских подстанций, системы диспетчерского контроля и управления энергоснабжени-
ем и т. п.
Основные функции АСОДУЭ:
• Мониторинг текущего состояния устройств энергосистемы, режимов потребле-
ния энергии в реальном времени.
• Сигнализация нарушений и сбоев в работе системы, недопустимых отклонений
режимов работы, автоматический контроль уровня энергопотребления.
• Обеспечение персонала службы главного энергетика достоверной информацией
о состоянии и параметрах контролируемых устройств.
• Рациональное планирование потребления энергоресурсов, выявление потерь энер-
гии и планирование режимов работы оборудования в целях экономии затрат.
• Повышение точности измерений и оперативности представления информации.
• Организация обмена данными с системами верхнего уровня (ERP, MRP) по сети.
Современные АСОДУЭ являются открытыми и масштабируемыми распределен-
ными системами, включающими, как правило, три уровня иерархии системы:
• Нижний уровень АСОДУЭ представляет собой распределенную систему сбора
данных о параметрах потребляемой электрической и тепловой энергии, воды,
технических и горючих газов.
• Средний уровень АСОДУЭ (диспетчерский уровень) представлен серверами баз
данных и SCADA-системами для хранения, обработки и отображения информа-
ции в режиме реального времени.
• Верхний уровень АСОДУ включает АРМ специалистов в области энергоснабже-
ния предприятия. Информация на АРМ поступает от технологического сервера
БДРВ и Web-сервера АСОДУЭ.
В состав MES-систем входят также Автоматизированные Системы Контроля и
Учета Энергоресурсов (АСКУЭ), рассмотренные в разделе 1.11.
10.2.5 ЕАМ-системы
ЕАМ-системы являются одной из составляющих MES-систем. ЕАМ-система
предназначена для комплексной автоматизации процессов эксплуатации, техниче-
ского обслуживания и ремонта оборудования в режиме РВ, включая функции снаб-
ERP- И MES-СИСТЕМЫ ВЕРХНЕГО УРОВНЯ РСУ
551
жения и ведения складского учета. Примером ЕАМ-системы может служить система
Avantis. Pro компании Wonderware.
ЕАМ-система Avantis. Pro представляет собой корпоративную систему управле-
ния основными производственными фондами.
Основные функции системы Avantis. Pro:
• управление технологическими объектами (оборудование, линия, завод и др.);
• паспортизация (инвентаризация) основных фондов;
• управление ремонтными работами и планово-предупредительным техническим
обслуживанием;
• управление снабжением;
• управление складским хозяйством и материально-техническими ресурсами.
Для реализации вышеперечисленных функций система Avantis. Pro состоит из
ряда модулей: «Управление ремонтными работами», «Склад», «Снабжение» и др. На-
личие базы данных по всем объектам позволяет решить задачи по инвентаризации и
паспортизации основных фондов.
Модуль «Управление ремонтными работами» предоставляет операторам всю не-
обходимую информацию о ремонтных и профилактических работах с оборудовани-
ем. Интеграция с модулями «Снабжение» и «Склад» гарантирует наличие запасных
частей и материалов для ремонта.
Функция планово-предупредительных ремонтов (ППР) способна автоматически
генерировать наряд-заказы на ремонтные работы исходя из заданных пользователем
критериев, основанных на статистических данных, суммарном времени работы обо-
рудования, временных интервалах и пр.
Avantis. Pro интегрируется с пакетом FactorySuite компании Wonderware для опе-
ративного сбора данных с цехового уровня в реальном времени. Результатом этого
является выработка упреждающего технического обслуживания на основе матема-
тического анализа временных рядов параметров процесса, характеризующего скры-
тые тенденции в состоянии оборудования.
Благодаря автоматическому контролю операций пуска, останова, срабатыва-
ния блокировок и превышения параметров процесса система обеспечивает персо-
нал сведениями по технике безопасности, обеспечивая повышенную безопасность
персонала.
Модуль «Склад» служит для управления складским хозяйством и материальны-
ми ресурсами для обслуживания оборудования, минимизации необходимых запа-
сов, ведения учета комплектующих, их приемку и складирование, отпуск и инвента-
ризацию.
Модуль «Снабжение» предназначен для минимизации стоимости закупок боль-
ших объемов материально-технических средств, обработки заказов на поставку, по-
ступлений на склад и пр.
В целом система Avantis. Pro способствует повышению эффективности работы
предприятия и лучшему использованию производственных фондов.
Для анализа бизнес-процессов, представления данных о продукции в электрон-
ном виде используется так называемая CALS-технология (Continuous Acquisition and
Life cycle Support — непрерывность поставок продукции и поддержка ее жизненного
цикла). Система CALS разработана в 80-х годах в Министерстве обороны США для
повышения эффективности разработки, производства, поставки и эксплуатации во-
енной техники.
552
ГЛАВА 10
10.2.6 LIMS-системы
LIMS (Laboratory Information Management System — система управления лабо-
раторной информацией) представляет собой современную систему автоматизации
процессов управления деятельностью заводской лаборатории и входит в структуру
MES-системы. Основное назначение LIMS — контроль и повышение качества про-
дукции в соответствии со стандартом ISO серии 9000 (ГОСТ Р ИСО 9001-2001 —
отечественный аналог ISO 9001).
Современная LIMS — это специализированные программные средства автома-
тизации лабораторных процессов контроля качества [10.9-10.11]. Сюда относятся
данные анализов проб, физико-химического состава сырья, замеры различных пара-
метров (плотности, pH, температуры и пр.).
Основные задачи LIMS:
• фиксирование запросов на выполнение лабораторных анализов и невыполнен-
ных заказов;
• печать аналитических данных и результатов анализов;
• защита данных от несанкционированного доступа.
К настоящему времени разработано и используется на мировом рынке не менее
100 LIMS, в том числе LIMS 4-го поколения [10.11]. На российском рынке применя-
ются LIMS компаний Lab Ware и Creon LabControl.
LIMS LabWare является одним из лидеров класса LIMS (свыше 1000 инсталля-
ций). Система формализует процесс взятия проб, обработки и хранения анали-
тической информации. Для этого введены понятия «образец», «тест», «анализ»,
«результат», «отчет» и др. Так, образцу может быть назначен анализ определения
плотности (тест). Результат анализа сравнивается со стандартом и фиксируется в
виде отчета. Для конфигурирования и настройки системы используются менедже-
ры проектов, таблиц, партий и др. По принципу построения LIMS LabWare является
клиент-серверной системой, работающей в среде Windows 95/98/2000. В качестве БД
используется любая БД, расположенная на сервере или любом компьютере сети, а
также любая БД, доступная через интерфейс ODBC. Для генерации отчетов может
использоваться пакет Crystal Reports. В дальнейшем отчеты могут экспортироваться
в форматы Word, Excel, Text и др., а также рассылаться по электронной почте.
Одной из функций LIMS-систем является автоматическое планирование работ и
генерация отчетов в виде временных графиков, которые контролируют процесс ла-
бораторных анализов.
В иерархии системы управления предприятием LIMS, являясь частью MES-
системы, интегрируется как со SCADA-системами диспетчерского уровня, так и с
ERP-системами административного уровня. Выполнение ERP-системой задач закуп-
ки материалов, планирования и поддержки производства зависят от информации о
качестве продукции, предоставляемой LIMS-системой. С другой стороны, графики
и объем лабораторных испытаний зависят от планируемого выпуска продукции и
других параметров, предоставляемых ERP-системой.
В работе [10.11] приводится пример интеграции LIMS LabWare с ERP-системой
SAP R/3 компании SAP AG. Основным компонентом SAP R/3, ответственным за
управление качеством, является модуль SAP R/3 QM (Quality Management — управ-
ление качеством), способным вызывать различные функциональные модули по за-
просу LIMS. Модуль QM служит контейнером для функциональных модулей и под-
держивает задачи планирования, проверки и управления качеством и частично спо-
ERP И mes-системы верхнего УРОВНЯ РСУ 553
собен заменить LIMS. Для интеграции SAP R/3 и Lab Ware служит интерфейс QM-IDI
(Inspection Data Interface in Quality Management — интерфейс данных испытаний в
управлении качеством).
Таким образом, LIMS является полнофункциональным средством управления
лабораторией, позволяющим автоматизировать все процессы жизнедеятельности
лаборатории по контролю качества продукции и повышению эффективности про-
изводства.
Приложение
Схемы подключения ПЛК
В состав проекта входят принципиальные схемы регулирования параметров
процесса с контроллером или рабочей станцией в контуре регулирования. При вы-
боре контроллера проводится процедура компоновки выбранного контроллера. Под
компоновкой контроллера понимается выбор и размещение в корзине модульного
контроллера, а при необходимости и на пассивной плате, необходимых модулей. В
случае выбора распределенных систем сбора данных и управления компоновка си-
стемы подразумевает определение состава и местоположения отдельных модулей и
базового контроллера. При выборе моноблочного (компактного) контроллера с мо-
дулями расширения компоновка контроллера также предполагает определение не-
обходимых функциональных модулей и их местоположения (шкаф, DIN-рейка, ком-
муникационная коробка и пр.).
Разработка принципиальных схем контроля и управления с использованием
ПЛК, модулей ввода/вывода, коммуникационных и специальных модулей предпола-
гает знание назначения параметров и расположения контактов и разъемов аппарату-
ры. Отображение значений портов и контактов устройств достигается различными
способами.
Табличный способ предполагает обозначение в таблице №№ разъемов, №№ кон-
тактов в каждом разъеме, обозначения сигналов и назначения сигналов.
Для примера рассмотрим обозначение интерфейсов контроллера ТСМ51 ГК «Те-
кон». На рис. 1 показано расположение разъемов ПЛК ТСМ51.
LPTO СОМ1 COMO BITBUS
ХР5 DB25F XP4DB9M XP3DB9M ХР1 DB9F ВЫКЛ. СЕТЬ
Рис. 1
Ниже представлена табличная форма обозначения контактов интерфейсов BIT-
BUS и СОМ1.
Таблица 1. Обозначение контактов интерфейса BITBUS
! Контакты ХР1 DB9F Обозначение сигнала Назначение
1 NC He подключен
2 GND Земля
3 DATA* Инверсные данные
4 RTS* Инверсное управление
5 RGND Экран кабеля
6 NC Не подключен
7 GND Земля
8 DATA Данные
9 RTS Управление
СХЕМЫ ПОДКЛЮЧЕНИЯ ПЛК
555
Таблица 2. Обозначение контактов интерфейса COM1
Контакты XP4DB9M Обозначение сигнала Назначение
1 DCD Детектор несущей
2 RXD Прием данных порта СОМ]
3 TXD Передача данных порта С0М1
4 DTR Готовность терминала
5 GND Цифровая земля
6 DSR Готовность модема
7 RTS Запрос передачи
8 CTS Сброс передачи
9 RI Индикатор звонка
Ниже показано расположение разъемов на крепежной планке модуля аналогово-
го ввода АО8 ПЛК типа MFC ГК «Текон»:
Выход 0-7 О О
ХРЗ Красн. Зелен.
Рис. 2
Таблица 3. Обозначение контактов модуля АО8
Контакты XP3DB37M Обозначение сигнала Назначение
1 + АОО «Плюс» аналогового вывода канала 0
3 + АО 1 «Плюс» аналогового вывода канала 1
5 + АО2 «Плюс» аналогового вывода канала 2
7 + АОЗ «Плюс» аналогового вывода канала 3
9 + АО4 «Плюс» аналогового вывода канала 4
11 + АО5 «Плюс» аналогового вывода канала 5
13 + АО6 «Плюс» аналогового вывода канала 6
15 + АО7 «Плюс» аналогового вывода канала 7
20 -АОО «Минус» аналогового вывода канала 0
22 -АО 1 «Минус» аналогового вывода канала 1
24 -АО 2 «Минус» аналогового вывода канала 2
26 - АОЗ «Минус» аналогового вывода канала 3
28 - АО4 «Минус» аналогового вывода канала 4
30 -АО 5 «Минус» аналогового вывода канала 5
32 -АО 6 «Минус» аналогового вывода канала 6
34 -АО 7 «Минус» аналогового вывода канала 7
Другой способ отображения интерфейсов и контактов контроллера показан
ниже на примере модуля дискретного ввода FP2-X 16D2 контроллера FP2 фирмы
Matsushita Automation Controls (Япония).
Общий вид модуля FP2-X 16D2 приведен на рис. 3(7 — светодиодные индикато-
ры состояния входов; 2 — рычаг отсоединения модуля; 3 — винты для подключения
проводов; 4 — защитная планка).
556
ПРИЛОЖЕНИЕ
Рис. 3
Таблица 4. Обозначение контактов модуля X16D2
Контакт Цепь
0 Дискретный вход канала 0
1 Дискретный вход канала 1
2 Дискретный вход канала 2
3 Дискретный вход канала 3
4 Дискретный вход канала 4
5 Дискретный вход канала 5
6 Дискретный вход канала 6
7 Дискретный вход канала 7
COM (+/-) Общий провод
8 Дискретный вход канала 8
9 Дискретный вход канала 9
A Дискретный вход канала 10
В Дискретный вход канала 11
C Дискретный вход канала 12
D Дискретный вход канала 13
E Дискретный вход канала 14
F Дискретный вход канала 15
COM (+/-) Общий провод
Ниже на примере базового модуля дискретного ввода/вывода MELSEC FX 2NC-
16 контроллера FX 2NC компании Mitsubishi Electric показано обозначение контак-
тов (при отсутствии их нумерации).
Модуль MELSEC FX 2NC-16, поз....
Конт. Цепь Цепь Конт.
ХО ВходО Выход 0 Y0
XI Вход 1 Выход 1 Y1
Х2 Вход 2 Выход 2 Y2
хз Вход 3 Выход 3 Y3
Х4 Вход 4 Выход 4 Y4
Х5 Вход 5 Выход 5 Y5
Х6 Вход 6 Выход 6 Y6
Х7 Вход 7 Выход 7 Y7
СОМО Общий + 24VDC +V0
При наличии чертежа обще-
го вида соединительных клемм-
ников модуля или контроллера
дополнительных таблиц соеди-
нений не требуется.
На рис. 4 показано обозна-
чение контактов контроллера
FX1N 14 MR-ES/UL (8 дискрет-
ных входов, 6 релейных выхо-
дов типа «СК») (питание кон-
троллера 24 VDC).
На рис. 5 приведено обозначение контактов 4-х канального модуля аналогового
ввода FX 2NC-4AD контроллера FX2NC.
। <| &$j xi i хз l is.nr, i л г •:
1 V V ’ MITSUBISHI 1 _ । _с11 hl
р ж h Я
rorrwrvi I 12 I УЗ I S-г I Yb ' •
av iCOMofcOMtlitelSoHiicojwcoMs, • r
Рис 5
Рис. 4
СХЕМЫ ПОДКЛЮЧЕНИЯ ПЛК
557
На рис.6 показано обозначение контактов модуля FX3U-232 нового контроллера
FX3U, а на рис. 7 - обозначение контактов модуля FX3U-485.
1 CD(DCD)
2 RD(RXD)
3 SD(TXD)
4 ER(DTR)
5 SG(GND)
6 DR(DSR)
7 •
8 •
9 •
5 poles
RDA
RDB
SPA
SDB
SG
Рис. 6
Рис. 7
Ряд фирм приводит еще более подробное обозначение клеммных колодок. На
рис. 8 и 9 приведено обозначение контактов аналогового и дискретного ввода моно-
блочного контроллера Unitronics М90
Рис. 8
Рис. 9
На рис. 10 показано обозначение клеммных колодок модуля дискретного ввода
SM321 (DI 32x24 VDC), а на рис. 11 - модуля дискретного вывода SM322 (DO 16x30
VDC / 230VAC) контроллера SYSTEM 300V фирмы VIPA.
Il 29
' 12..19
:| 20
ф' 21
Ж 22 29
:: 32.39
V 40
Не используй ich
Вход 1.0.1.7
ВХОД f.8.1.15
Земля
Не используй 1СА
Вход 1.16.1 23
Вход I.24..I.35
Земля
2...Э
10
11
12. .19
20
F
Питание 246 (+)
Выход G 0. Q7
Земля 1
11иганив 24н (+)
Выход 0 8.0.18
земля 2
Рис. 10
Рис. 11
На рис. 12 показан модуль аналогового ввода сигналов напряжения SM 331 (AI
8x12 бит) контроллера S7 300 фирмы Siemens.
На рис. 13 показан модуль аналогового ввода на 8 каналов типа CS1W-AD081,
схема подключения и обозначение контактов контроллера CS1W фирмы OMRON.
558
ПРИЛОЖЕНИЕ
CS1W-AD3B1
Рис. 12
сн о
CH 1
CH 2
снз
CH 4
CHS
CH 6
CH?
CS1W-AD0S1
Input 1
Input3
Inputs
Input?
Input 2 (+) B1 Al Input 1 (t)
Input 2 (-) B2 A2 Input t (-)
AG B3 A3 AG
Input 4 (+) B4 A4 Input 3
Input 4 (-) B5 A5 Input 3 (-)
Input? (+) 66 A6 Input5(+)
Input 6 (-) B7 A7 Input 5 (-)
AG БВ A8 AG
Input 8 (+) B9 A9 Input 7 (+J
Input 8 (-) B10 A10 Input 7 (—j
A11 NC
Рис. 13
СХЕМЫ ПОДКЛЮЧЕНИЯ ПЛК
559
На рис. 14 аналогично показан модуль аналогового вывода на 8 каналов типа
CS1W-DA08V, схема подключения и обозначение контактов контроллера CS1W фир-
мы OMRON.
а
Рис. 14
NC
Oulpul 2 •+)
Output 2 (-)
Output 4 (+)
Output 4 (-)
Output 6 (+>
Output 6 (->
Output 8 (+)
Output 8 (-)
"ЙС
А1 NC
А2 Output 1 (+)
АЗ Output ! (-)
А4 Output 3 (♦)
А5 Output 3 (-)
А6 Output 5 (+)
А7 Output 5 (-)
А8 Output 7(+)
А9 Output 7 (-)
А10 NC
A1S NC
На рис. 15 представлена схема подключения модуля дискретного ввода на 16 ка-
налов типа TSX DEY 16D2 контроллера Modicon TSX Premium. На рис. 16 показан
модуль аналогового ввода на 8 каналов типа 140 АС1 030 00, а на рис. 17 - модуль ана-
логового вывода на 8 каналов типа 140 АСО 130 00 контроллера Modicon Quantum
фирмы Schneider Electric.
140 ACI03000
140 АС013000
Обратный
N/C
Монитор £
Обратный провод г"
N/C
N/C
МониторБ
Обратный провод?
Выход 2
Обратный провод 1 тГ
-----------——4
Выход 5 ,
J |V^T|
Обратный провод
Обратный провод
Выход 4
j Полевое | {приемник)
I устройство |
Н Полевое
устройство
I Монитор 3
Монитор 4
Монитор 1
Монитор 7
Выход 6
J Полевое [ (приемник)
| устройство |
Обратный
Выход 7
J 'полевое I (приемник) ’^1'' '
| устройство I Мониторе
Обратный проеод^,^' Т
[выходе J;
th- Питание
зр- контура
24 поот.т.
N/C
N/C
560
ПРИЛОЖЕНИЕ
Рис. 19
На рис. 18 показан модуль дискретного ввода/вывода на 32 канала (16 DI и 16 DO)
типа ВМХ DDM 3202К, а на рис. 19 - модуль дискретного вывода на 64 канала типа
ВМХ DDO 6402К нового контроллера Modicon М340 компании Schneider Electric.
ГК «Текон» выпускает интеллектуальные модули ввода/вывода «Теконик» для
построения распределенных систем управления. На рис. 20 показан модуль дискрет-
ного ввода типа Т3702.
Рис.20
В таблицах 7 и 8 даны обозначения и назначение контактов модуля.
СХЕМЫ ПОДКЛЮЧЕНИЯ ПЛК
561
Таблица 7
Обозначение контакта разъема ХРЗ Назначение контакта
12, 11 Общий провод каналов 1... 8 группы 1
10 Вход канала 1
9 Вход канала 2
8 Вход канала 3
7 Вход канала 4
6 Вход канала 5
5 Вход канала 6
4 Вход канала 7
3 Вход канала 8
1,2 Общий провод каналов 1...8 группы 1
Таблица 8
Обозначение контакта разъема ХР4 Назначение контакта
1,2 Общий провод кана- лов 9... 16 группы 2
3 Вход канала 9
4 Вход канала 10
5 Вход канала 11
6 Вход канала 12
7 Вход канала 13
8 Вход канала 14
9 Вход канала 15
10 Вход канала 16
11,12 Общий провод кана- лов 9... 16 группы 2
В таблицах 9 и 10 приведены данные по модулю аналогового ввода сигналов от
термопар типа «Теконик» Т3204.
Таблица 9
№ контакта разъема ХРЗ Обозначение кон- такта Назначение контакта
1-4 - Не подключен
5 IN1+ Вход канала 1 (+)
6 IN1 Вход канала 1 (-)
7 IN2+ Вход канала 2 (+)
8 IN2- Вход канала 2 (-)
9 IN3+ Вход канала 3 (+)
10 IN3- Вход канала 3 (-)
И 1N4+ Вход канала 4 (+)
12 IN4- Вход канала 4 (-)
Таблица 10
№ контакта разъема ХР4 Обозначение кон- такта Назначение контакта
1 + 5V Напряжение для датчика КХС
2 CJCI + датчика КХС
3 CJCE - датчика КХС
4 GND Земля
5 IN5+ Вход канала 5 (+)
6 1N5- Вход канала 5 (-)
7 IN6+ Вход канала 6 (+)
8 IN6- Вход канала 6 (-)
9 IN7+ Вход канала 7 (+)
10 IN7- Вход канала 7 (-)
И IN8+ Вход канала 8 (+)
12 IN8- Вход канала 8 (-)
На рис. 21 показаны номера контактов модуля аналогового ввода сигналов термопар
ADAM 6018 (8 термопар типа J, К, Т, Е, R, S, В) и 8 DO (тип «ОК») серии ADAM 6000
с интерфейсом Ethernet.
19 Зак 3801
562
ПРИЛОЖЕНИЕ
Wilt»
Рис. 21
ГЛОССАРИЙ
Access Server — Сервер доступа. Коммуникационный процессор, соединяющий асин-
хронные устройства с локальной или глобальной сетью. Выполняет синхронную и асин-
хронную маршрутизацию поддерживающих его протоколов (сетевой сервер доступа).
ActiveX— технология создания апплетов без применения языка Java, используемая в
Microsoft Windows. Апплеты ActiveX загружаются дольше эквивалентных Java-апплетов,
однако они в большей мере используют возможности ОС Windows.
Adapter — плата сетевого интерфейса, предоставляющая возможности сетевой свя-
зи для компьютерной системы.
ADSL (Asymmetric Digital Subscriber Line) — ассиметричная цифровая абонентская
линия.
ANSI (American National Standards Institute) — Национальный институт стандар-
тов США.
API (Application Programming Interface) — интерфейс прикладного программиро-
вания. Спецификация вызовов функций, образующих интерфейс некоторой службы.
Applet — небольшая программа, — чаще всего в контексте программирования на
языке Java, которая откомпилирована и вставлена в HTML-страницу.
ARCnet (Attached Resource Computer network) — локальная сеть с присоединен-
ными ресурсами. Сеть с маркерным доступом и пропускной способностью 2,5 Мбит/с,
созданная компанией Datapoint Corporation в начале 1980-х годов.
ARP (Adress Resolution Protocol) — протокол сетевого уровня, отвечающий за вза-
имное преобразование аппаратных и сетевых адресов.
AS (Autonomous System) — сетевая область в виде группы маршрутизаторов и сетей,
объединенных по иерархическому принципу, находящихся под единым управлением и
совместно использующих общую стратегию маршрутизации.
ASCII (American Standard Code for Information Interchange) — Американский стан-
дартный код обмена информацией. 8-разрядный код для представления символов (7 бит
+ 1 контрольный бит).
ASI — сервисный интерфейс ATM Service Interface.
ATM (Asychronous Transfer Mode) — режим асинхронной передачи. Международ-
ный стандарт поэлементной передачи, когда несколько типов данных передаются в виде
ячеек фиксированной длины (53 байта). Ячейки обрабатываются на аппаратном уровне,
что позволяет сократить задержки при передаче.
Backplane — объединительная плата, физическое соединение между интерфейсным
процессором или платой, шинами данных и шинами распределения питания системного
блока компьютера; предназначена для увеличения числа слотов в системе.
Bridge — мост, устройство для соединения и передачи пакетов между двумя сете-
выми сегментами, использующими один протокол передачи данных. Мосты действую!
на канальном уровне (уровень 2) эталонной модели OSI. В основном мост фильтрует и
передает входящий кадр на основе его МАС-адреса.
Broadcast transmission — широковещательная передача. Коммуникационный прото-
кол, выполняющий одновременную передачу данных от одного узла ко всем остальным.
564
ГЛОССАРИЙ
Browser — клиентское приложение с GUI-интерфейсом, программа просмотра
(чтения) гипертекста в формате HTML и преобразования его для представления
пользователю (User). Программа-навигатор, с помощью которой производится до-
ступ пользователей к ресурсам Internet. Web- браузеры для ОС Windows- MS Internet
Explorer, Mosaic и Netscape Navigator.
CAD (Computer-Aided Design) — система автоматического проектирования.
CAD/CAM (Computer-Aided Design/Computer-Aided Manufacturing) — система
автоматического проектирования и производства.
CALS-технология (Continuous Acquisition and Life cycle Support) — технология
непрерывности поставок продукции и поддержки ее жизненного цикла.
CAN (Customer Access Network) — сеть с абонентским доступом.
СВЕМА (Computer and Business Equipment Manufacturers Association) — Ассо-
циация производителей компьютеров и оргтехники.
CDMA (Code Division Multiple Access) — множественный доступ с кодовым раз-
делением каналов.
CD-R (Compact Disk Recordable) — компакт-диск с возможностью дозаписи.
CD-ROM (Compact Disc Read Only Memory) — постоянное запоминающее
устройство на компакт-диске.
Cluster — кластер. Группа процессоров в многопроцессорной ЭВМ. Группа, блок,
совокупность. Группа блоков памяти на диске, распределяемая ОС как единое целое.
На дискете емкостью 1,44 Мбайт каждый кластер — один сектор для одного файла.
Combo CD-RW & DVD-ROM — накопитель на оптических дисках, позволяющих
читать диски CD, CD-R, CD-RW, DVD-R, записывать диски CD-R, CD-RW и переза-
писывать диски CD-RW.
CompactFlash — стандарт твердотельных Flash-накопителей. Главные достоин-
ства — возможность «горячей» замены и Рйщ&Р1ау-подключения.
CORBA (Common Object Request Broker Architecture) — архитектура брокера
общих объектных запросов. Стандарт технологии для информационных систем с
распределенной обработкой данных.
COTS products — коммерческие программные продукты.
CPM (Command Processor Module) — модуль обработки команд.
CPU (Central Processor Unit) — центральный процессор.
CSMA/CA (Carrier Sense Multiple Access/ Collision Avoidance) — многократный
(множественный) доступ с восприятием несущей и предотвращением столкновений
(конфликтов).
CSMA/CD (Carrier Sense Multiple Access/ Collision Detect) — множественный
доступ с контролем несущей и обнаружением столкновений (конфликтов). Ме-
ханизм доступа, при котором устройства, готовые для передачи данных, сначала
проверяют наличие несущей частоты. Если ее нет в течение заданного промежутка
времени, то устройство может приступать к передаче данных. При одновремен-
ной передаче двумя устройствами возникает конфликт (коллизия), который может
быть обнаружен вызвавшими ее устройствами. Коллизия на некоторое время за-
держивает передачу данных этими устройствами. CSMA/CD — доступ использует-
ся в Ethernet и IEEE 802.3.
Databank — банк данных. Информационная система, в которой реализованы
функции централизованного хранения и накопления информации одной или не-
скольких баз данных.
ГЛОССАРИЙ
565
Database management system — система управления БД (СУБД). Комплекс про-
граммных средств для управления базами данных. К СУБД относятся MS Access 2000,
Visual Fox Pro 5.0, dBase IV и др.
Database server — сервер базы данных. Компьютер сети, выполняющий функцию
хранения данных и предоставления их по запросам рабочих станций.
DBase — семейство систем управления базами данных фирмы DBI для персо-
нальных ЭВМ.
DB (Data Base) — База данных (БД). Совокупность взаимосвязанных данных
и СУБД. Хранение и обработка данных БД подчиняются определенной идеологии.
Наиболее распространены реляционная и объектно-ориентированная базы данных.
Совокупность данных, хранимых в памяти ПК и отображающих состояние и взаи-
мосвязь объектов.
DB2 — Система управления базой данных фирмы IBM, входящая в состав опера-
ционной системы OS/2.
DB connector — Data Bus connector — разъем шины данных. Тип разъема, исполь-
зуемый для подключения последовательного и параллельного кабелей к шине данных.
Их имена записываются в виде DB-x, где х — количество проводов в разъеме.
DBCL (DataBase Control Language) — язык управления базами данных.
DCOM (Distributed Component Object Model) — распределенная компонентная
объектная модель. Протокол, позволяющий компонентам программного обеспече-
ния взаимодействовать непосредственно через сеть. Разработан фирмой Microsoft
и может использоваться с несколькими типами сетевой транспортировки данных,
включая протокол HTTP.
DCS — (1. Data Communication System — система передачи данных. 2. Distributed
Computer System — распределенная вычислительная система. 3. Distributed Control
System — распределенная система управления).
DDE (Dynamic Data Exchange) — динамический обмен данными.
DDL (Data Definition Language) — язык описания данных в структуре баз дан-
ных (например язык SQL).
DDMA (Disk Direct Memory Access) — прямой доступ к дисковой памяти.
DIN (Deutsche Industries Norm) — Национальный институт стандартов Гер-
мании.
DIO (Digital Input/Output) — двунаправленный цифровой ввод/вывод.
DLL (Dynamic Link Library) — динамически подключаемая библиотека.
DNS (Domain Name System) — доменная система именования. Система, позво-
ляющая хост-компьютерам сети Internet связываться друг с другом для передачи
электронной почты, установления сессий FTP и др. Применяется иерархическая си-
стема имен вида hostname.hostname.hostname, каждый уровень которой называется
доменом. Домен старшего уровня находится справа.
DOC (Dick On Chip) — компактный флэш-диск, устанавливаемый в 26-контакт-
ный разъем на процессорной плате.
DRAM (Dynamic Random Access Memory) — динамическая оперативная память.
Оперативная память, где информация хранится в конденсаторах и периодически обнов-
ляется. Модули DRAM имеют более простую структуру и большую емкость, чем SRAM.
Driver — Драйвер. Программа операционной системы, обслуживающая отдель-
ные периферийные устройства, написанная на машинно-ориентированном языке
программирования.
566
ГЛОССАРИЙ
DSSS (Direct Sequence Spread Spectrum) — расширение спектра методом прямой
последовательности.
ЕСМА (European Computer Manufacturers Association) — Европейская Ассоциа-
ция производи гелей компьютеров.
EIA (Electronics Industries Association) — Ассоциация электронной промышлен-
ности.
EISA (Extended Industry Standard Architecture) — расширенная стандартная про-
мышленная архитектура. Стандарт шины 32-разрядных микропроцессоров, исполь-
зуемый в персональных компьютерах, серверах на их основе и некоторых рабочих
станциях, а также в серверах под управлением ОС UNIX.
ELAN (Enhanced Local Area Network) — улучшенная локальная сеть.
E-mail (Electronic-mail) — электронная почта. Широко используемое сетевое
приложение передачи текстовых сообщений между конечными пользователями
электронным способом по сетям различного типа с помощью различных сетевых
протоколов.
EPROM (Erasable Programmable Read Only Memory) — программируемое c
помощью программатора постоянное запоминающее устройство (ППЗУ), допу-
скающее многократное перепрограммирование. Энергонезависимые микросхемы
программируются при изготовлении и, при необходимости, могут перепрограм-
мироваться. Стираемое PROM. EEPROM (Electrically Erasable Programmable
Read-Only Memory) — электрически стираемая программируемая постоянная
память.
Ethernet — спецификация широкополосной LAN, предложенная компанией
Xerox Corporation и созданная совместно Xerox, Intel и Digital Equipment Corporation.
Сети Ethernet используют CSMA/CD и могут работать с разными типами кабелей с
пропускной способностью до 10 Мбит/с. Спецификация Ethernet аналогична стан-
дартам IEEE 802.3.
Fast Ethernet — обобщенное название группы спецификаций Ethernet с пропуск-
ной способностью 100 Мбит/с. Fast Ethernet обеспечивает десятикратное увеличение
скорости по сравнению со спецификацией lOBaseT Ethernet, сохраняя формат кадра
и МАС-механизмы. Благодаря унификации в сетях Fast Ethernet возможно использо-
вание приложений и инструментов управления сетью lOBaseT. В основе Fast Ethernet
лежит спецификация IEEE 802.3.
FDDI (Fiber Distributed Data Interface) — кольцевая оптоволоконная высоко-
скоростная локальная сеть. Скорость передачи до 100 Мбит/с, топология — двой-
ное кольцо, метод доступа — детерминированный с передачей маркера. Макси-
мальное число станций — 500 (двойное кольцо) или 1000 (одинарное кольцо).
Расстояние между станциями до 2 км при многомодовом и до 60 км при одно-
модовом кабеле.
FDMA (Frequency Division Multiple Access) — множественный доступ с частот-
ным разделением.
FHSS (Frequency Hopping Spread Spectrum) — расширение спектра методом
скачкообразной перестройки частоты.
Flash memory — Флэш-память. Энергонезависимое запоминающее устройство,
содержимое которого стирается и перепрограммируется по мере необходимости.
Флэш-память разработана компанией Intel и лицензирована для использования дру-
гими производи гелями.
ГЛОССАРИЙ
567
FTP (File Transfer Protocol) — протокол передачи файлов. Протокол уровня при-
ложений, который является частью стека протоколов TCP/IP и предназначен для
передачи файлов между сетевыми узлами.
Gigabit Ethernet — разновидность спецификации Ethernet, одобренная IEEE ко-
митетом стандартизации 802.3z в 1996 г. для высокоскоростной передачи данных со
скоростью до 1 Гбит/с по неэкранированной витой паре категории 5 и выше на рас-
стояние до 100 м. или по оптоволокну.
GPRS (General Packet Radio Services) — общий сервис пакетной радиопередачи;
общие услуги пакетной радиосвязи.
GPS (Global Positioning System) — система глобального позиционирования.
GSM (Global System Mobile; Global System for Mobile communications) — гло-
бальная система мобильной связи; глобальная система мобильных коммуникаций.
HDLC (High-level Data Link Control) — канальный протокол передачи данных —
бит-ориентированный или знак-ориентированный.
HOST — Хост. 1. Центральный компьютер, который содержит программы и фай-
лы, используемые другими компьютерами (клиентами) сети. 2. Компьютер, подклю-
ченный к сети, например Internet, и имеющий свой сетевой адрес. Для пользователей
сети этот адрес представлен именем домена, которое имеет внутреннее численное
представление.
HTML (HyperText Markup Language) — язык гипертекстовой разметки. Простой
язык гипертекстового форматирования, в котором для указания способа отображе-
ния некоторой части документа (например, в Web-браузере) используются теги.
HTTP (HyperText Transfer Protocol) — протокол передачи гипертекстовых фай-
лов. Протокол, используемый Web-браузерами и Web-серверами для передачи фай-
лов, например текстовых или графических.
IEEE (Institute of Electrical and Electronics Engineers) — Институт инженеров по
электротехнике и электронике. Занимается созданием коммуникационных и сетевых
стандартов. LAN-стандарты IEEE в настоящее время являются доминирующими для
локальных сетей.
Interface — Интерфейс. 1. Соединение между двумя системами или устройства-
ми. 2. Сетевое соединение. 3. Граница между смежными уровнями модели OSI.
IP (Internet Protocol) — IP-протокол. Протокол сетевого уровня из набора ТСР/
IP для объединения сетей без подтверждения соединения. IP-протокол обладает воз-
можностями адресации, спецификации типа обслуживания, фрагментации и сбор-
ки, а также обеспечения безопасности.
IP-address — IP-адрес или Internet-адрес. 32-разрядный адрес, присваиваемый
хостам с помощью протокола TCP/IP. Записывается в виде 4-х октетов, разделенных
точками (в десятичном формате). Каждый адрес состоит из сетевого номера, допол-
нительного номера подсети и номера хоста. Номер сети и подсети используется для
маршрутизации, а номер хоста — для адресации хоста сети или подсети. IP-адрес
идентифицирует компьютер, подключенный к сети Internet. В настоящее время про-
исходит плавная замена на 128-значные адреса версии IPv6.
IP-datagram — IP-дейтаграмма. Единица (блок) информации, передаваемая в
распределенной сети, построенной на базе стека протоколов TCP/IP. Содержит адре-
са отправителя и получателя, поля, определяющие длину дейтаграммы, контрольную
сумму заголовка, флаги, отражающие фрагментацию дейтаграммы, и собственно
данные.
568
ГЛОССАРИЙ
IPX (Internetwork Packet Exchange) — базовый протокол NetWare, отвечающий
за адресацию и маршрутизацию пакетов.
ISA (International Standard Association) — Международная ассоциация стандар-
тизации.
ISO (International Organization for Standardization) — Международная органи-
зация по стандартизации, обеспечившая разработку и поддержку глобальных стан-
дартов в сфере коммуникаций и обмена информацией. ISO разработала популярную
модель взаимодействия открытых систем OSL
ITU (International Telecommunications Union) — Международный союз электро-
связи
LAN (Local Area Network) — локальная сеть. Высокоскоростная компьютерная
сеть, покрывающая относительно небольшую площадь (до нескольких км). Локаль-
ные сети объединяют рабочие станции, периферийные устройства, терминалы и дру-
гие устройства, находящиеся в одном здании или на другой небольшой территории.
Наиболее популярными LAN-технологиями являются Ethernet, FDDI и Token Ring.
LCD (Liquid Crystal Display) — жидкокристаллический дисплей.
Linux — семейство UNIX-подобных операционных систем.
MAC (Media Access Control) — управление доступом к передающей сре-
де. Низший из двух подуровней канального уровня, определенный IEEE. МАС-
подуровень управляет доступом к совместно используемым носителям. Напри-
мер, определяет, будет ли использоваться передача маркера или схема разреше-
ния конфликтов.
MACadress — МАС-адрес. Стандартный адрес канального уровня, который тре-
буется задавать для каждого порта или устройства, подсоединенного к локальной
сети. Другие устройства используют эти адреса для обнаружения специальных сете-
вых портов, а также для создания и обновления таблиц маршрутизации и структуры
данных. Длина МАС-адреса — 6 байт, а содержимое регламентируется IEEE. МАС-
адреса также называют аппаратными или физическими адресами.
Modbus — протокол передачи данных в сетях RS-485 (протокол Modbus ASC II и
Modbus RTU) или Ethernet (протокол Modbus TCP).
MPI (MultiPoint Interface) — многоканальный интерфейс.
ODBC (Open Database Connectivity) — открытый доступ к базам данных.
OEM (Original Equipment Manufacturer) — производитель комплектного обору-
дования.
Online — режим онлайн. 1. Режим соединения с компьютером. 2. Оперативное
средство, например помощь, доступная в любое время работы системы.
Oracle — реляционная база данных, разработанная фирмой Oracle Corp. Предо-
ставляет возможность ее реализации на различных аппаратных платформах — от
больших компьютеров до персональных.
OS/2 — Операционная система для IBM-совместимых компьютеров с процессо-
ром 386 и выше. Обеспечивает выполнение приложений DOS и Windows.
OSI (Open System Interconnection) — взаимодействие открытых систем. Между-
народная программа стандартизации, созданная ISO и ITU-T для разработки стан-
дартов межсетевого обмена данными, способствующих функциональной совмести-
мости оборудования различных производителей.
PDF (Portable Document Format) — переносимый формат документов) —
кроссплатформенный формат электронных документов, созданный фирмой
ГЛОССАРИЙ
569
Adobe Systems с использованием ряда возможностей языка PostScript. В первую
очередь предназначен для представления в электронном виде полиграфической
продукции. Традиционным способом создания PDF-документов является вирту-
альный принтер, то есть документ как таковой готовится в своей специализиро-
ванной программе — графическом или текстовом редакторе, САПР и т. д., а затем
экспортируется в pdf-формат для распространения в электронном виде, передачи
в типографию и т. п.
PPP (Point-to-Point Protocol) — протокол двухточечного соединения. РРР зави-
сит от двух протоколов: LCP и NCP.
PCMCIA (Personal Computer Memory Card International Association) — Между-
народная Ассоциация производителей плат памяти персональных компьютеров.
PROM (Programmable Read Only Memory) — программируемое постоянное за-
поминающее устройство (ПЗУ), которое можно запрограммировать с помощью про-
грамматора.
Protocol — Протокол. Формальное описание набора правил и соглашений, кото-
рые управляют обменом информацией между устройствами по сети.
Proxy — Прокси («заместитель»). 1. Объект, который для большей эффективно-
сти дублирует другой объект. 2. Специальные шлюзы, которые ретранслируют один
сеанс Н.323 другому сеансу.
Proxy server — Прокси-сервер. Промежуточная программа, которая действует
одновременно как сервер и клиент запросов по поручению других клиентов. Запро-
сы обслуживаются внутри или за счет передачи их другим серверам. Прокси-сервер
интерпретирует и, если это необходимо, переписывает сообщение запроса перед его
дальнейшей передачей.
RAID (Redundant Array of Inexpensive Dicks) — массив резервных дисков. Группа
дисков, работающих, как одно целое. Дисковый массив.
RAM (Random Access Memory) — оперативное запоминающее устройство (ОЗУ).
Запоминающее устройство с произвольной выборкой (ЗУПВ) для временного хране-
ния информации.
Relay — Ретранслятор. Устройство по терминологии OSI, которое соединяет не-
сколько сетей в единую сетевую систему. На канальном уровне (уровень 2) ретран-
слятором является мост, на сетевом уровне (уровень 3) — маршрутизатор. В отличие
от моста и маршрутизатора обеспечивает обслуживание по типу передачи данных с
промежуточным хранением, а не в реальном времени.
Remote system — Удаленная система. Система или маршрутизатор, присоединенные
к сети с удаленным доступом и являющиеся инициатором или получателем вызова.
Repeater — Повторитель. Устройство для регенерации и распространения сигна-
лов между двумя сегментами сети.
Ring — Кольцо. Соединение нескольких станций по логической кольцевой топо-
логии. Информация передается последовательно между активными станциями. На
этой топологии основаны сети Token Ring, FDDI и CDDI.
RISC (Restricted Instruction Set Computer) — архитектура микропроцессора с со-
кращенным набором команд.
RJ connector (Registered Jack Connector) — зарегистрированный контактный
разъем. Стандартные разъемы (RJ-разъемы), которые используются в телефонных
и сетевых соединениях, например, lOBaseT и др. Распространенные RJ-разъемы —
RJ-11, RJ-12, RJ-45.
570
ГЛОССАРИЙ
ROM — Read-Only Memory — постоянное запоминающее устройство (ПЗУ).
Энергонезависимое запоминающее устройство, используемое для хранения данных,
которые заносятся в устройство при его изготовлении.
Router — Маршрутизатор. Устройство сетевого уровня, которое определяет
оптимальный маршрут сетевого трафика. Пакеты данных направляются маршрути-
затором из одной сети в другую на основании информации сетевого уровня.
RPC (Remote Procedure Call) — вызов удаленных процедур.
RS-232 — Интерфейс физического уровня. Стандарт EIA/TIA-232, созданный EIA
и TIA, который поддерживает работу на скорости до 64 кбит/с.
RS-422 — электрически сбалансированная реализация стандарта EIA/TIA-449
для высокоскоростной передачи данных (до 2 Мбит/с). В настоящее время входит в
стандарт EIA-530.
RS-485 — интерфейс последовательной передачи данных в режиме «точка-
многоточка» на расстояние до 1200 м со скоростью 920 Кбит/с; число устройств в
сети — до 32; максимальное число подключенных устройств — до 256.
SBS (Single Board Computer) — одноплатный компьютер, печатная плата, оснащен-
ная процессором, ОЗУ набором микросхем и интерфейсами для ввода/вывода данных.
SCSI (Small Computer System Interface) — интерфейс малых компьютеров.
SDS (Smart Distributed System) — сеть ведущий/ведомый; разработана фирмой
Honeywell; скорость обмена 1 Мбит/с на шине длиной 23 м, число устройств — 64,
длина ответвления — 0,3 м (при скорости 500 Кбит/с на длине 90 м число устройств —
126, длина ответвления — 0,9 м))
Segment — Сегмент. 1. Секция сети, ограниченная мостами, маршрутизаторами
или коммутаторами. 2. В сел и с шинной топологией — непрерывная электрическая
цепь, часто соединенная с др. сегментами с помощью повторителей. 3. По специфика-
ции TCP — одиночный информационный модуль транспортного уровня.
Server — Сервер. Специализированная станция. Узел сети, обычно локальный, в
котором обеспечивается обслуживание сетевых терминалов путем управления рас-
пределением вычислительного ресурса совместного пользования.
Session — Сеанс. Взаимосвязанный набор коммуникационных транзакций меж-
ду двумя и более сетевыми устройствами.
SIM-карта (Subscriber Identification Module) — модуль идентификации абонен-
та. Микропроцессорный модуль, обеспечивающий идентификацию абонента в сетях
стандарта GSM.
Simplex — Симплекс. Физическое или логическое соединение двух точек, при
котором осуществляется однонаправленная передача данных между станцией-
источником и станцией-приемником.
Site — Сайт. Место, местоположение информации в www, совокупность страниц,
объединенных по смыслу.
SMTP (Simple Network Management Protocol) — простой протокол (передачи)
электронной почты.
SNAP (Standard Network Access Protocol) — стандартный протокол доступа к сети.
SNMP (Simple Network Management Protocol) — простой протокол управления
сетью. Протокол прикладного уровня, используемый в сетях TCP/IP. SNMP предо-
ставляет средства контроля и управления сетевыми устройствами, их конфигураци-
ей, производительностью и безопасностью, а также средства сбора статистической
информации.
ГЛОССАРИЙ
571
Source address — Адрес источника. Адрес сетевого устройства, посылающего
данные. Адрес сетевого устройства, принимающего данные — destination address.
SQL (Structured Query Language) — язык структурированных запросов. Между-
народный стандартный язык для описания и доступа к реляционным базам данных.
SRAM (Static Random Access Memory) — статическое запоминающее устройство
с произвольной выборкой. Оперативное запоминающее устройство, содержимое ко-
торого сохраняется при наличии питания. В отличие от DRAM, SRAM не требует
постоянного обновления. Статическое RAM.
STP (Shielded Twisted-Pair) — экранированная витая пара. Сетевой кабель с дву-
мя изолированными скрученными проводами и экранирующим слоем, снижающим
воздействие электромагнитных помех. Провода могут быть экранированными и не-
экранированными.
Stub — Заглушка. Заменяющая компонента, которая временно используется в
программе с тем, чтобы можно было продолжать ее разработку.
Switch — Коммутатор. Сетевое устройство, обеспечивающее фильтрацию и пере-
сылку кадров с учетом адреса приемника. Коммутатор работает на канальном уровне
модели OSI (уровень 2).
Tag — Тэг. Идентификационная информация, в том числе номер.
TCP/IP (Transmission Control Protocol/ Internet Protocol) — протокол управле-
ния передачей данных/ Интернет-протокол. Общее название протоколов, разрабо-
танных Министерством обороны США и используемых исследовательским Управ-
лением Министерства в исследованиях по объединению сетей. В TCP используется
тройное квитирование установления связи, подтверждение приема сообщений,
обеспечение высоконадежной дуплексной передачи данных по установленным со-
единениям.
TDMA (Time Division Multiple Access) — множественный доступ с временным
разделением.
Token Ring — локальная сеть с передачей маркера, разработанная и поддержива-
емая компанией IBM. Сеть Token Ring имеет кольцевую топологию и работает со ско-
ростью 4 или 16 Мбит/с по стандарту IEEE 802.5 (LAN — стандарт, который описы-
вает физический уровень и МАС-подуровень канального уровня. В нем используется
доступ на основе передачи маркеров по кабелю STP аналогично IBM Token Ring).
Touch Pad — сенсорная панель, выполняющая функции манипулятора «мышь» в
компактных компьютерах.
Touch Screen — сенсорный экран (емкостной или резистивный); устанавлива-
ется поверх дисплея компьютера и позволяет управлять курсором «мыши» при-
косновением к соответствующему участку экрана. Подключаются по интерфейсу
RS232 или PS/2.
Transceiver (transmitter/receiver) — Трансивер (приемо/передатчик). Схема, обе-
спечивающая электрическое или оптическое соединение компьютера и носителя
данных. Также служит для двунаправленной передачи между адаптером и сетевым
кабелем или между двумя сегментами сетевого кабеля. Основное назначение — уси-
ление и преобразование сигнала. Выполняется как отдельное устройство или встрое-
но в сетевой адаптер.
Transaction — Транзакция. Ориентированный на результат элемент обработки
соединения. Неделимая последовательность операций над данными БД. Входное со-
общение, отражающее некоторое событие или процесс изменения файла, вызванное
572
ГЛОССАРИЙ
входным сообщением. Дискретная операция в системе, например взаимодействие
между узлами сети по принципу запрос-ответ.
Transaction file — файл транзакций. Файл, содержащий элементы транзакций и
используемый для обновления главного файла базы данных.
Transaction request — запрос транзакции. Начальная часть транзакции, в которой
узел запрашивает другой узел выполнить операцию и возвратить реакцию (ответ).
UDP (User Datagram Protocol) — протокол дейтаграмм пользователя. Протокол
из набора протоколов TCP/IP использует протокол IP для доставки данных. В отли-
чие от TCP, протокол UDP обеспечивает обмен дейтаграммами без подтверждения.
UPS (Uninterruptible Power Supply) — бесперебойный источник питания.
USB (Universal Serial Bus) — универсальная последовательная шина. Спецификация
USB 1/1 поддерживает обмен данными со скоростью до 12, a USB 2.0 — до 480 Мбит/с.
Utility program — программа — утилита, утилита. Служебная программа управ-
ления файлами, каталогами, восстановления и защиты файлов от вирусов и с по-
мощью паролей, получения информации о компьютере, ремонта и дефрагментации
диска. Различают сервисные, функциональные и информационные утилиты.
UTP (Unshielded Twisted- Pair) — неэкранированная витая пара.
VGA (Video Graphic Adapter) — видеографический адаптер (SVGA — супер VGA).
WAN (Wide Area Network) — глобальная (территориальная) сеть.
WAP (Wireless Application Protocol) — протокол беспроводных приложений.
Watchdog Timer — сторожевой таймер. Аппаратное устройство, обеспечиваю-
щее перезапуск компьютера в случае «зависания». Сторожевой таймер может быть
запрограммирован на время от нескольких миллисекунд до нескольких минут.
Wireless LAN — беспроводная локальная сеть Ethernet стандарта IEEE 802.11b,
позволяющая организовать беспроводное соединение на расстояние до 300 м.
WWW (World Wide Web) — всемирная паутина. Глобальная гипертекстовая си-
стема Internet. Система с архитектурой клиент-сервер, основанная на языке HTML и
протоколе HTTP. Большая сеть серверов Internet, предоставляющая доступ к гипер-
текстовым документам и другие услуги терминалам, работающим с пользовательски-
ми приложениями, такими, как браузер.
Дуплексный режим — режим одновременной передачи данных в обоих направ-
лениях между двумя соединенными точками (физическими или логическими).
Квитирование — метод управления передачей данных между двумя устройства-
ми, при котором одно из них передает данные другому только при условии получения
подтверждения запроса на передачу (процесс синхронизации приема-передачи); вза-
имное подтверждение шагов протокола обмена обоими участниками транзакции.
Кластер — минимальная единица размещения информации на диске, состоящая
из двух или более смежных секторов дорожки. Число секторов в кластере равно це-
лой степени числа 2 (для FAT 16 для диска с объемом памяти 1,2 Г байт размер кластера
равен 32 Кбайт, для 2 Гбайт — 64 кбайт). Размер кластера для FAT32 при емкости дис-
ка до 32 Гбайт — 15 кбайт. Кластеры, выделенные одному файлу, могут находиться в
любом свободном месте дисковой памяти (фрагментированные файлы). Для исполь-
зования свободного пространства в кластерах другими файлами применяется сжа-
тие диска. Общее пространство дисковой памяти нескольких компьютеров (рабочих
станций) принято относить к кластерной системе COW (Cluster of Workstation — кла
стер рабочих станций).
глоссарий 573
КЭШ-память — промежуточная память с быстрой выборкой, обращение к кото-
рой осуществляется по ассоциативному методу; быстродействующая память между
процессором и основной памятью с наиболее часто адресуемыми ячейками. В ие-
рархии памяти системы имеются регистры процессора, которые являются самыми
быстродействующими ЗУ, а на более низком уровне доступности имеются ячейки
оперативной памяти. КЭШ предназначен для выравнивания степени доступности
устройств этих двух типов за счет временного хранения содержимого ячеек опера-
тивной памяти.
Полудуплексный режим — режим, при котором передача информации между
двумя физическими или логическими объектами в каждый момент времени осу-
ществляется только в одном направлении. Характеристикой полудуплексного режи-
ма является время реверсирования, т. е. время, за которое производится переход от
передачи сообщений к приему и наоборот.
Распределенная база данных — совокупность баз данных, распределенная по
взаимосвязанным ресурсам вычислительной системы и доступная для совместного
использования.
Энкодер — кодирующее устройство, шифратор. Программа, выполняющая шиф-
рование.
Литература
К ГЛАВЕ 1.
1.1. Джемисон Дж.Э., Р.Х. Мак-Фи, Дж.Н. Пласс и др. Физика и техника инфракрасного из-
лучения. Пер. с англ. Н.В. Васильченко. — М.: Сов. Радио, 1965. — 642 с.
1.2. Воронкова Е. М., Гречушников Б.Н., Дитслер Г.И., Петров И.П. Оптические материалы для
инфракрасной техники. — М.: Наука, 1965. — 335 с.
1.3. Гордов А.Н. Основы пирометрии. — М.: Металлургия, 1971. — 447 с.
1.4. Харазов В.Г. Автоматизация высокотемпературных процессов. — Л.: Энергия, Л/О. —
1974. — 112 с.
1.5. Свет Д.Я. Оптические методы измерения истинных температур. — М.: Наука, 1982. — 296 с.
1.6. Гордов А.Н. Пирометрия (контактные методы). Учебное пособие. — Л.: ЛИТМО, 1982. — 87 с.
1.7. Линевег Ф. Измерение температур в технике. Справочник / Пер. с нем. под ред. Л.А. Чари-
хова — М.: Металлургия, 1983. — 544 с.
1.8. Гордов А.Н. Пирометрия (неконтактные методы). Учебное пособие. — Л.: ЛИТМО, 1983. — 81 с.
1.9. Кулаков М.В. Технологические измерения и приборы для химических производств. — 3-е
изд. перераб. и доп. — М.: Машиностроение, 1983. — 424 с.
1.10. Харазов В.Г. Управление высокотемпературными процессами с помощью ЭВМ. — Л.:
Стройиздат, 1983. — 320 с.
1.11. Козелкин В.В., Усольцев Н.Ф. Основы инфракрасной техники. — М.: Машиностроение,
1985.— 264 с.
1.12. Добровинский И.Е., Куритник И.П. Измерение высоких температур в промышленности
— М.: ВНИИКИ, 1988. — 40 с.
1.13. Гордов А.Н., Жагулло О.М., Иванова А.Г. Основы температурных измерений. — М.: Энер-
гоатомиздат, 1992. — 304 с.
1.14. Гарсиа В. Измерение температуры: теория и практика // Современные технологии авто-
матизации. — 1999. — № 1. — С. 82-87.
1.15. Белевцев А., Богатов В., Каржавин А. и др. Термоэлектрические преобразователи темпера-
туры. Теория, практика, развитие // Современные технологии автоматизации. — 2004. —
№ 2. — С.66-76.
1.16. Гусев Г.В., Харазов В.Г. Измерение высоких температур в промышленности бесконтактны-
ми термометрами (пирометрами излучения) // Промышленные АСУ и контроллеры. —
2006. — № 5. - С. 47-51.
1.17. ГОСТ Р 8.585-2001. Термопары. Номинальные статические характеристики преобразова-
ния.
1.18. ГОСТ 6651 -94. Термометры сопротивления.
1.19. Кремлевский П.П. Расходомеры и счетчики количества веществ: Справочник. 5-е изд.
перераб. и доп — Кн.1. — СПб.: Политехника, 2002. — 409 с.
1.20. Кремлевский П.П. Расходомеры и счетчики количества веществ: Справочник. 5-е изд.
перераб. и доп — Кн. 2 / Под общ. ред. Е.А. Шорникова. — СПб.: Политехника, 2004. —
412 с.
1.21. Андронов И.В. Измерение расхода жидкостей и газов. — М.: Энергоиздат, 1981. — 86 с.
1.22. Антонов Н.Н. Измерение массового расхода жидкости. Обзор. — М.: ВНИИКИ, 1981. — 32 с.
1.23. Бесконтактный метод измерения скорости (расхода) токопроводящих сред (токовихревой
метод) / Типикин В.А., Арнольдов М.Н., Крайнова В.И. и др. — Обнинск: ФЭИ, 1981. — 31 с.
ЛИТЕРАТУРА
575
1.24. Пугачев Н.С. Приборы для измерения расхода и количества жидкостей, газов, паров и
их поверка. — М.: Изд-во стандартов, 1982. — 68 с.
1.25. Измерение расхода и количества жидкостей и газов с помощью стандартных сужаю-
щих устройств. — М.: Стандартинформ, 2007. — 243 с.
1.26. Обновленский П.А., Соколов Г.А. Тепловые системы контроля параметров процессов
химической технологии. — Л.: Химия, 1982. — 174 с.
1.27. Плаксин В.А. Современные зарубежные средства измерения расхода и количества
жидкостей и газов. - М.: ЦНИИТЭнефтехим, 1985. — 79 с.
1.28. Гордюхин А.И. Измерение расхода и количества газа и его учет. — Л.: Недра. Л/О,
1987. — 215 с.
1.29. Пугачев Н.С. Измерение расхода жидкости, газа и пара: учебное пособие. — М.:
РИСМ, 1988. — 93 с.
1.30. Приборы для измерения и регулирования давления, перепада давлений, разрежения,
расхода и количества жидкостей и газов, уровня жидкостей и сыпучих материалов. —
М.: ВНИИ информ, и экономики (Информприбор), 1988. — 118 с.
1.31. Измерение и регулирование расхода и уровня в автоматизированных системах
управления: сб. науч. тр. — М.: ГосНИИ теплоэнергетического приборостроения,
1988. — 24 с.
1.32. Мясников В.И. Ультразвуковые методы измерения расхода воды в напорных трубо-
проводах больших диаметров: Автореф. дис. на соиск. учен. степ, к.т.н. — М.: Всес.
НИИ ВКИГС, 1989. — 24 с.
1.33. Френкель В.А. Измерение расхода жидкостей и газов в малотоннажных производ-
ствах и на экспериментальных установках. — М.: ЦНИИТЭнефтехим, 1989. — 82 с.
1.34. Современные средства измерения расхода и количества: Перспективы. Расчет. Экспе-
римент: Сб. науч, тр./ Межотрасл. гос. об-ние по разр. и пр-ву приборов пром, контро-
ля и регулирования технол. процессов. Гос. НИИ теплоэнерг. Приборостроения — М.:
НИИ Теплоприбор, 1990. — 115 с.
1.35. Совершенствование средств измерения расхода жидкости, газа и пара: Материалы науч,-
техн. конф. 17-18 марта / под ред. П.П. Кремлевского. — СПб.: ЛДНТП, 1992. -126 с.
1.36. Совершенствование измерений расхода жидкости, газа и пара: 11-я конф, памяти П.П.
Кремлевского: Материалы форума Междунар. науч, -практич. конф./ [Сост. сб. В.И.
Лачков]. — СПб.: Политехника, 1999. — 404 с.
1.37. Совершенствование измерений расхода, регулирование и коммерческий учет
энергоносителей: Материалы 3-го междунар. науч.-пракг. форума двух конф.: 18-й —
«Коммерч, учет энергоносителей» и 13-й — «Совершенствование измерений расхода
жидкости, газа и пара» 2-4 дек. 2003. - СПб.: Борей-Арт, 2003. — 477 с.
1.38. Елизарьева М.Ю. Разработка и исследование вихревых приборов для измерения расхода
потока жидкости. — Автореф. дис. на соиск. учен. ст. к.т.н. — Красноярск, 2004. — 20 с.
1.39. Измерение расхода: автоматизация технологических процессов / Эталон прибор.
Челябинск: Группа компаний Эталон, 2005. — 352 с.
1.40. Гроссман Н.Я., Шнырев Г.Д. Автоматизированные системы взвешивания и дозирова-
ния. — М.: Машиностроение, 1988. — 296 с.
1.41. Вотлохин Б.З. Приборы для измерения расхода сыпучих материалов. — М.: ЦНИИТЭ-
нефтехим, 1979. — 48 с.
1.42. Видинеев Ю.Д. Автоматическое непрерывное дозирование сыпучих материалов. 2-е,
перераб. изд. — М.: Энергия, 1974. — 119 с.
1.43. Видинеев Ю.Д. Дозаторы непрерывного действия. — М.: Энергия, 1978. — 183 с.
1.44. Весы и дозаторы весовые: Справочник / С.П. Маликов, С.С. Михайловский, Л.Н.Старо-
стина, П.К. Клементьев. — М.: Машиностроение, 1981. — 320 с.
576
ЛИТЕРАТУРА
1.45. АСУ процессами дозирования / А.А. Денисов, В.С. Нагорный, М.М. Телемтаев, В.П. Вое-
1.46. Соколов М.В., Гуревич АЛ. Автоматическое дозирование жидких сред. — Л.: Химия,
1987. — 400 с.
1.47. Фарзане Н.Г. Технологические измерения и приборы. Учебник для вузов / Н.Г. Фарза-
не, Л.В. Плясов, А.Ю. Азим-Заде. — М.: Высш, школа, 1989. — 456 с.
1.48. Основы метрологии и электрические измерения: учеб, для вузов / Под ред. Е.М. Души-
на. — 6-е изд. перераб. и доп. — Л.: Энергоатомиздат, 1987. — 480 с.
1.49. Кириллина Р.С., Чириков В.И., Шабалин С.А. Манометры, вакуумметры. Мановакуу-
метры. — М.: Изд. Стандартов, 1993. — 249 с.
1.50. Титовский А.В., Дружинина А.А. Технические измерения и приборы / Учебное посо-
бие. Мин-во образования РФ.— Красноярск, 2003. — 116 с.
1.51. Измерения в промышленности: Справочник в 3 кн. под ред. проф. д-ра Профоса. Кн.
3: Способы измерения и аппаратура. — М.: Металлургия. - 1990. — 343 с.
1.52. Шкатов Е.Ф. Технологические измерения и КИП на предприятиях химической про-
мышленности. Учебн. пособие для техникумов. — М.: Химия, 1986. — 320 с.
1.53. Измерение электрических и неэлектрических величин. Учебн. пособие для студентов
вузов по спец. «Информ.-измерит. техника» / Н.Н. Евтихеев, Я.А. Купершмидт, В.Ф.
Папуловский, В.Н. Скугоров. Под общ. ред. акад. Н.Н. Евтихеева. — М.: Энергоато-
миздат. — 1990. — 350 с.
1.54. Старостин В.А. Технологические измерения и контрольно-измерительные приборы в
промышленности строительных материалов: учеб, для техникумов. — 3-е изд., пере-
раб. и доп. — М.: Стройиздат, 1988. — 304 с.
1.55. Рясков С.А. Технологические измерения и приборы: учебное пособие. — Воронеж:
Изд-во ВГТУ, 1998. - 63 с.
1.56. Сажин С.Г. Технологические измерения и приборы: Учебное пособие. — Н.Новгород:
НГТУ, 2001. — 137 с.
1.57. Мухамедзянов А.Х. Технологические измерения и приборы в нефтеперерабатывающей
и нефтехимической промышленности: учебное пособие. — Уфа:УНИ, 1988. — 95 с.
1.58. Гриб В.С. Технологические измерения и приборы в нефтяной промышленности: Учеб-
ное пособие. — Уфа: УНИ, 1985. — 80 с.
1.59. Кондрашкова ГА. Технологические измерения и приборы в целлюлозно — бу-
мажной промышленности: учебник для вузов по специальности «Автоматизация
и комплексная механизация хим.-технол. процессов. — М.: Лесная промышлен-
ность, 1981. — 375 с.
1.60. Логинов В.Т. Технологические измерения и приборы: учебное пособие. — М.: МИСиС,
1983. — 128 с.
1.61. Датчики давления. Тематический каталог №1, ГК «Метран», 2007. — вып. 1, 2.
1.62. Камразе А.Н. Контрольно-измерительные приборы и автоматика. — 2-е изд. перераб.
и доп. — Л.: Химия, 1988. — 224 с.
1.63. Жданкин В. К. Приборы для измерения уровня // Современные технологии автомати-
зации. — 2002. — №3. — С. 6-19.
1.64. Корнеева ТВ. Толковый словарь по метрологии, измерительной технике и управлению
качеством. Основные термины. — М.: Рус. Яз„ 1990. — 464 с.
1.65. Крошкин А.Н. Измерение уровня: микроволны или ультразвук И Автоматизация в
промышленности. — 2005. — № 2. — С. 29-33.
1.66. Лопатин С.С., Пфайффер X. Датчики предельного уровня для жидкостей. Физические
принципы работы и возможности вибрационных датчиков // Автоматизация в про-
мышленности. — 2004. — № 12. — С.24—29.
ЛИТЕРАТУРА
577
1.67. Система многоканальная измерения уровня и раздела жидких сред РУПТ-МН- РС64.
Промышленный каталог. СКВ «Приборы и системы»: Рязань, 2004.
1.68. КСР - Магнитострикционные датчики уровня (высокоточные). Каталог фирмы KSR
KUEBLER Niveau-Messtechnik AG. — 2005.
1.69. Коллеров Д.К. Газоанализаторы: Проблемы практической метрологии. — М.: Изд-во
стандартов, 1980. — 175 с.
1.70. Инфракрасные газоанализаторы / Б.А. Безух, Л.А. Бондарчик, К.Н. Дятлов и др. —
Минск: ОНТИ и патентоведения. Ин-т физики, 1980. — 27 с.
1.71. Бреслер П.И. Оптические абсорбционные газоанализаторы и их применение, 1980.— 163 с.
1.72. Анализ газов с применением современных средств микроэлектроники и полупровод-
никовой техники: (Сб. науч. тр. ВНИИАП)/ ВНИИ аналит. приборостроения. — Киев:
ВНИИАП, 1982. — 100 с.
1.73. Газоаналитические измерения в промышленности. Сб. науч. Тр. / ВНИИ аналитиче-
ского приборостроения. — Киев: ВНИИАП, 1984. — 84 с.
1.74. Баратов А.Н. Термохимические газоанализаторы / А.Н. Бархатов, В.А. Савельев,
Л.Т. Танклевский — М.: ГИЦ, 1986. — 51 с.
1.75. Инфракрасные абсорбционные газоанализаторы / А.А. Дашковский и др. Приборы
и средства автоматизации и системы управления ТС-4. Аналитические приборы и
приборы для научных исследований: Обзорн. информ./ Информприбор. Приборы для
научных исследований.— М.: Информприбор, 1990. Вып.1.— 64 с.
1.76. Котов В.П. Газоанализаторы по теплопроводности: учебное пособие / В.П. Котов, В.Е.
Курочкин. СПб.: СПбГУАП, 1998. — 25 с.
1.77. Котов В.П. Магнитные приборы и методы газового анализа: учебное пособие / В.П.
Котов, В.Е. Курочкин. СПбГУАП, 1998. — 36 с.
1.78. Никифоров Ю.В. Методы и системы анализа газов: учебн. пособие / Ю.В. Никифоров:
Моск. гос. техн, ун-т им. Н.Э. Баумана. — М.: Изд-во МГТУ, 2000. — 44 с.
1.79. Ельяшевич М.А.. Атомная и молекулярная спектроскопия. 2-е изд. — М.: Эдиториал
УРСС, 2001. —896 с.
1.80. Барнс. А. Колебательная спектроскопия: Современные воззрения. Тенденции разви-
тия. Пер. с англ. M.R Алиева и др. — М.: Мир, 1981. — 480 с.
1.81. Лазерная аналитическая спектроскопия / В.С. Антонов, Г.И. Беков, М.А. Большов и
др. — М.: Наука, 1986. — 318 с.
1.82. Будников Г.К., Майстренко В.Н., Веселев М.Р. Основы современного электрохимиче-
ского анализа. — М.: Мир, Бином ЛЗ, 2003. — 592 с.
1.83. Гришаева Т.И. Методы люминесцентного анализа: учеб, пособие для вузов. — СПб.:
АНО НПО «Профессионал», 2003. — 226 с.
1.84. Гришаева Т.И. Методы колебательной спектроскопии: учеб, пособие. — СПб.: СПбГТИ,
1996. — 123 с.
1.85. Стенхольм. С. Основы лазерной спектроскопии. — М.: Мир, 1987. — 312 с.
1.86. Левшин Л.В., Салецкий А.М.. Оптические методы исследования молекулярных систем.
4.1. Молекулярная спектроскопия. — М.: МГУ, 1994. — 319 с.
1.87. Левшин Л.В., Салецкий А.М. Люминесценция и ее измерение. — М.: МГУ 1989. — 277 с.
1.88. Рафальсон А.Э. Масс-спектрометры: Современное состояние и тенденции развития:
Ин-т аналит. приборостроения. — Л.: НТО АН СССР, 1988. — 48 с.
1.89. Нолтинг. Б. Новейшие методы исследования биосистем / Пер. с англ. — М.: Техносфе-
ра, 2005. — 254 с.
1.90. Лебедев А.Т. Масс-спектрометрия в органической химии. — М.: БИНОМ Лаборатория
знаний, 2003. — 493 с.
578
ЛИТЕРАТУРА
1.91. Заикин В.Г., Варламов А.В., Микая А.И., Простаков Н.С. Основы масс-спектрометрии
органических соединений. — М.: МАЙК «Наука / Интерпериодика». 2001. — 286 с.
1.92. Приборы контроля окружающей среды / Под ред. В.Е. Манойлова. — М.: Атомиздат,
1980. — 216 с.
1.93. . Весоизмерительное оборудование: справочник / Н.А. Лотков, А.И. Полухин, А.В. Тант-
левский, В.Д. Черных. — 2 изд. перераб. и доп. — М.: Агропромиздат, 1989. — 240 с.
1.94. Гроссман Н.Я., Шнырев Г.Д. Автоматизированные системы взвешивания и дозирова-
ния. — М.: Машиностроение, 1988. — 296 с.
1.95. Весы и дозаторы весовые: Справочник / С.П. Маликов, С.С. Михайловский, Л.Н.
Старостина, П.К. Клементьев. — М.: Машиностроение, 1981. — 296 с.
1.96. Выключатели бесконтактные. Каталог продукции. ЗАО «МЕГА-К». — Калуга, 2005. — 124 а
1.97. Датчики. Бесконтактные выключатели. Каталог продукции. ЗАО «СЕНСОР». — Ека-
теринбург, 2005. — 108 с.
1.98. Электрические измерения. Средства и методы измерений. / Под ред. Е.Г.Шрамкова —
М.: «Высшая школа», 1972. — 520 с.
1.99. Куликовский К.Л., Купер В.Я. Методы и средства измерений: учеб, пособие для ву-
зов. — М.: Энергоатомиздат, 1986. — 448 с.
1.100. Курзенков Г.Д. Аналоговые и цифровые измерители параметров электрических це-
пей: учеб, пособие — М.: Моск. гос. техн, ун-т, 1999. — 92 с.
1.101. Коловертнов Ю.Д. Аналоговые электроизмерительные приборы/ Ю.Д. Коловертнов,
ЕЮ. Коловертнов, Н.А. Ишинбаев; Уф. гос. нефт. техн. ун-т. — Уфа: Изд-во УГНТУ
2000. — 72 с.
1.102. Утвержденные типы средств измерений. Электрические и магнитные измерения. —
2002. — 268 с.
1.103. Метрология, стандартизация, сертификация и электроизмерительная техника: учеб,
пособие для студ. вузов / К.К. Ким, Г.Н. Анисимов, В.Ю. Барборович, Б.Я. Литвинов;
под ред. К.К. Кима — М.: Питер, 2006. — 367 с.
1.104. Булгаков О.М. Приборы и методы измерения электрических величин: учеб, пособие /
О.М. Булгаков. — Воронеж: ВИ МВД России, 1999. — 109 с.
1.105. Раннев ЕЕ, Тарасенко А.П. Методы и средства измерений: учеб, для вузов. — М.: Из-
дат. Центр «Академия», 2003. — 336 с.
1.106. Тартаковский Д.Ф., Ястребов А.С. Метрология, стандартизация и технические сред-
ства измерений: Учебник для вузов. — М.: Высш, школа, 2001. — 205 с.
1.107. Жданкин В. Некоторые вопросы обеспечения взрывобезопасности оборудования И
Современные технологии автоматизации. — 1988. — №2. — С. 98-106.
1.108. Жданкин В. Вид взрывозащиты «Искробезопасная электрическая цепь» // Современ-
ные технологии автоматизации. — 1999. — №2. — С. 72-83.
1.109. Жданкин В. Взрывоопасные зоны, сравнение видов взрывозащиты // Современные
технологии автоматизации. — 2000. — № 1. — С. 66-73.
1.110. Кузнецов Ф.Д., Алексеев Б.А. Техническое обслуживание измерительных трансформа-
торов тока и напряжения. — ЭНАС-Глобулс, 2004. — 96 с.
1.111. Номенклатурный каталог продукции. Технические средства автоматизации техноло-
гических процессов ОАО «ЗЭиМ». — Чебоксары, 2006. — 54 с.
1.112. Сандлер А.С., Сарбатов Р.С. Автоматическое частотное управление асинхронным
двигателем. — М.: Энергия. — 1974.
1.113. Авдзейко В.И. Управляемые вентильные преобразователи частоты: учебн. пособие /
В.И. Авдзейко, В.П. Петровиич, А.Ю. Рождественский; Мин-во высш, и спец, образов.
РСФСР, Томск. Политехи, ин-т. — Томск: ТПИ, 1989. — 95 с.
ЛИТЕРАТУРА
579
1.114. Преобразователи частоты в современном электроприводе: Доклады науч.-практ. семи-
нара. — М.: Изд-во МЭИ, 1992. — 72 с.
1.115. Дартау В.А., Павлов Ю.П., Рудаков В.В., Аверкиев А.Л., Козярук А.Е. Теоретические
основы построения частотных электроприводов с векторным управлением // Автома-
тизированный электропривод. — М.: Энергия, 1980. — С. 93-101.
1.116. Рудаков В.В., Столяров И.М., Дартау В.А. Асинхронные электроприводы с векторным
управлением. — Л.: Энергоатомиздат, 1987. — 134 с.
1.117. Соколовский Г.Г. Теория и системы электропривода (электроприводы переменного
тока). Учебное пособие. — СПб.: ТЭТУ, 1999. — 78 с.
1.118. Лопухина Е.М. Асинхронные исполнительные микродвигатели для систем автомати-
ки: учеб, пособие техн, вузов. — М.: Высш, школа, 1991. — 367 с.
1.119. Петров В.В., Гордеев АА. Нелинейные сервомеханизмы. — М.: Машиностроение, 1979. — 471 с
1.120. Осин И.Л., Юферов Ф.М. Электрические машины автоматических устройств: учеб,
пособие для вузов. — М.: Изд-во МЭИ, 2003. — 424 с.
1.121. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления. — М.:
Энергоатомиздат, 1987. — 200 с.
1.122. Пневмоавтоматика / Под. ред. А.А. Таля. — М.: Наука, 1974. — 241 с.
1.123. Герц Е.В., Крейкин Г.В. Расчет пневмоприводов. Справочное пособие. — М.: Машино-
строение, 1975. — 272 с.
1.124. Берендс Т.К., Ефремова Т.К., Тагаевская А.А., Юдицкий С.А. Элементы и схемы пнев-
моавтоматики. — М.: Машиностроение, 1976. — 246 с.
1.125. 1ерц ЕВ. Динамика пневматических систем машин. — М.: Машиностроение, 1985. — 256 с.
1.126. Ефремова Т.К., Тагаевская А.А., Шубин А.Н. Пневматические комплексные техниче-
ские средства автоматизации. — М.: Машиностроение, 1987. — 280 с.
1.127. Замятин В.К. Технология и оснащение сборочного производства машиноприборо-
строения. Справочник. — М.: Машиностроение, 1995. — 608 с.
1.128. Гибкие производственные системы сборки / П.И. Алексеев, А.Г. Герасимов, Э.П. Давы-
денко и др. — Л.: Машиностроение, 1989. — 349 с.
1.129. Шарков А.А., Притыко Г.М., Палюх Б.В. Автоматическое регулирование и регулято-
ры. — М.: Химия, 1990. — 287 с.
1.130. Пневмоавтоматика: Всес. совещание. М., окт. 1996: Тез. докл. — М.: ИПУ — 1996. — 50 с.
1.131. Безменов В.С., Ефремова Т.К., Тагаевская А.А., Ефремов В.А. Применение пневмати-
ческих дозаторов жидких продуктов в автоматических линиях. Приборы и системы
управления. — №4. — 2003. —- С. 31-34.
1.132. Соколов М.В., Харазов В.Г. Пневмоавтоматика: вчера, сегодня, завтра // Автоматиза-
ция в промышленности. — 2006. —№ 5. — С. 33-36.
1.133. Лысенко О.Н. Определение положения штока пневматического цилиндра с помощью
магнитных датчиков от компании SICK AG И Автоматизация в промышленности. —
2006. — № 5. — С. 40-42.
1.134. Трофимович А.Г. Пневмооборудование для систем управления // Автоматизация в
промышленности. — 2006. — №5. — С. 45-46.
1.135. Горюнов В.А. Пневмогидроавтоматика: учеб, пособие / В.А. Горюнов, Е.А. Дьячков,
Э.П. Чаплыгин; Федер, агенство по образованию, Волгогр. гос. техн. ун-т. — Волгоград:
Политехник, 2006. — 173 с.
1.136. Гидравлика, гидромашины и гидропневмоприводы: учеб, пособие для студентов’ву-
зов/ Т.В. Артемьева и др. — М.: Academia. — 2005. — 334 с.
1.137. Серохвостов А.Л. Гидравлика, гидропривод и гидропневмоавтоматика: учеб, пособие
для студентов техн, вузов / А.Л. Серохвостов; М-во общ. и проф. образования РФ,
Сам. гос. техн. ун-т. — Самара: Сам. ГТУ 1999. — 194 с.
580
ЛИТЕРАТУРА
1.138. Вольнов О.И. Устройства гидропневмоавтоматики и приводы с автоматическим управ-
лением: учеб, пособие для студ. спец. 210200 и 210300 / О.И. Вольнов; М-во образов. РФ,
Нижегор. гос. техн, ун-т. — Нижний Новгород: Нижегор. гос. тех. ун-т, 1999. — 110 с.
1.139. Симанин Н.А. Гидравлика, гидроприводы и гидроавтоматика технологического обо-
. рудования: учеб, пособие / Н.А. Симанин, Я.Н. Ярмоленко; М-во образов. РФ, Пенз.
гос. ун-т. — Пенза: Изд-во ПГУ, 2003. — 130 с.
1.140. Гидравлические и пневматические приводы промышленных роботов и автоматиче-
ских манипуляторов / Г.В. Крейнин, И.Л. Кривц, Е.Я. Винницкий, В.И. Ивлев. — М.:
Academia, 2005. — 334 с
1.141. Ситников Б.Т. Гидропневмопривод и гидроавтоматика: учеб, пособие / Пенз. гос. техн,
ун-т. — Пенза: Изд-во Пенз. гос. техн, ун-та, 1995. — 93 с.
1.142. Нагорный В.С., Денисов А.А. Устройства автоматики гидро- и пневмосистем: учеб,
пособие техн, вузов. — М.: Высш, школа, 1991. — 367 с.
1.143. Кожевников А., Сафронов В., Прокопенко Л., Ерохин И. Коммерческий учет энергоре-
сурсов И Современные технологии автоматизации. — 1997. — № 3. — С. 62-67.
1.144. Гуртовцев А.Л. Комплексная автоматизация энергоучета на промышленных пред-
приятиях и хозяйственных объектах // Современные технологии автоматизации. —
1999. — №3. — С. 34-47.
1.145. Распутин А., Федотов И. Программно-технический комплекс ЭКОМ: Учет и управление
энергоресурсами // Современные технологии автоматизации. — 2000. — № 3. — С. 38-44.
1.146. Вольский Д.Б. Автоматизация контроля и учета энергоресурсов предприятия // Авто-
матизация в промышленности. — 2003. — № 2. — С. 38-41.
1.147. Информационный каталог // ЗАО «ВЗЛЕТ», 2005. — 96 с.
1.148. Информационный каталог // ЗАО «НПФ Логика», 2006, — 256 с.
1.149. Информационный каталог // ЗАО «НПФ Теплоком», 2005. — 102 с.
1.150. Каталог изделий ОАО «Ставропольский радиозавод СИГНАЛ», 2006. — 90 с.
1.151. Краткий каталог продукции ОАО «ЛЭМЗ», С. -Петербург, 2006. — 26 с.
1.152. Система технического учета электроэнергии, НПЦ «Спецсистема». — Минск. — 2006.
К ГЛАВЕ 2.
2.1. Мишель Ж. Программируемые контроллеры: архитектура и применение. — М.: Ма-
шиностроение / Пер. с фр. И.В. Федотова. — 1992. — 318 с.
2.2. Аристова Н.И., Корнеева А.И. Промышленные программно-аппаратные средства на
отечественном рынке АСУТП. — М.: ООО Изд-во «Научтехлитиздат», 2001. — 399 с.
2.3. Алексейчук А.А., Гребенюк Е.А., Ицкович Э.Л. Современные АСУП: их выбор для
конкретных предприятий // Промышленные АСУ и контроллеры. — 2003. — №6. —
С. 14-18.
2.4. Ицкович Э.Л. Особенности микропроцессорных ПТК разных фирм и их выбор для
конкретных объектов // Приборы и системы управления. — 1997. — №8. — С. 1-5.
2.5. Микропроцессорные системы / Под общ. ред. Д.В. Пузанкова. — СПб.: Политехника,
2002. — 935 с.
2.6. Ицкович Э.Л. Классификация микропроцессорных программно-технических ком-
плексов И Промышленные АСУ и контроллеры. — 1999. — №10. — С. 8-11.
2.7. Ицкович Э.Л. Особенности выбора средств и систем автоматизации // Автоматиза-
ция в промышленности. — 2005. — № 12. — С. 7-10.
2.8. Ицкович Э.Л. Особенности современных контроллеров, предназначенных для автома-
тизации ТП // Автоматизация в промышленности. — 2006. — № 4. — С. 3-9.
2.9. Анашкин А.С., Кадыров Э.Д., Харазов В.Г. Техническое и программное обеспечение
распределенных систем управления. — С.-Петербург: «П-2», 2004. — 368 с.
ЛИТЕРАТУРА
581
2.10. Куприянов М.С., Мартынов О.Е., Панфилов Д.И. Коммуникационные контроллеры
фирмы Motorola. — СПб.: БХВ-Петербург, 2001. — 560 с.
2.11. Шагурин И.И. Микропроцессоры и микроконтроллеры фирмы Motorola. — М.: Радио
и связь, 1998. — 556 с
2.12. Шагурин И.И., Мокрецов М.О., Ванюлин В.А., Шкуренков А.Л. Процессорно- комму-
никационные модули для распределенных систем автоматического управления // Про-
мышленные АСУ и контроллеры. — 2002. — № 12. — С. 43-47.
К ГЛАВЕ 3.
3.1. Проектирование систем автоматизации технологических процессов: Справочное по-
собие/ А.С. Клюев, Б.В. Глазов, А.Х. Дубровский, А.А. Клюев; под ред. А.С. Клюева. —
2-е изд. перераб. и доп. — М.: Энергоатомиздат, 1990. — 464 с.
3.2. Шувалов В.В., Огаджанов Г.А., Голубятников В.А. Автоматизация производственных
процессов в химической промышленности. — М.: Химия, 1991. — 478 с.
3.3. Полоцкий Л.М., Лапшенков Г.И. Автоматизация химических производств. — М.:
Химия, 1982. — 250 с.
3.4. Бабин A.I4. Автоматизация технологических процессов. Проектирование автоматизи-
рованных систем: учебн. пособие. Мин-во образования РФ, ГУО ВПО «Уральский гос.
ун-т». — Екатеринбург: УТЛТУ 2002. — 129 с.
3.5. Федоров Ю.Н. Основы построения АСУТП взрывоопасных производств. М.: Синтег
(НПО СИНТЕГ), 2005. - 1400 с.
3.6. ГОСТ 2.701-84 ЕСКД. Схемы. Виды и типы. Общие требования к выполнению.
3.7. ГОСТ 2-105-95 ЕСКД. Общие требования к текстовым документам.
3.8. ГОСТ 2.105-96 ЕСКД. Текстовые документы.
3.9. ГОСТ 21.408-93. Правила выполнения рабочей документации автоматизации техно-
логических процессов.
3.10. ГОСТ 21.101-93 СПДС. Основные требования к рабочей документации.
3.11. ГОСТ 21.110-95 СПДС. Правила выполнения спецификации оборудования, изделий и
материалов.
3.12. ГОСТ 21.401 -88 СПДС. Технология производства. Основные требования к рабочим
чертежам
3.13. ГОСТ 21.404-85 СПДС. Автоматизация технологических процессов. Обозначения
условные приборов и средств автоматизации в схемах.
3.14. ГОСТ 21.614-88 СПДС. Изображения условные графические электрооборудования и
проводок на планах.
3.15. ГОСТ Р 51330.3-99. Электрооборудование взрывозащищенное.
3.16. Каталог 31 фирмы RITTAL. Интернет ссылка www.rittal.ru
3.17. Martin Timmerman, Bart Van Beneden, Lourent Uhres. RTOS Evaluation Kick Off! // Real-
Time Magazine. — 1998. — №3.— P. 6-10.
3.18. Стопинге В. Операционные системы: внутреннее устройство и принципы проектиро-
вания: пер. с англ. Д.Я. Иваненко и др. — М.: Изд. дом «Вильямс», 2004. — 843 с.
3.19. Гордеев А.В. Операционные системы: учеб, для вузов. — СПб.: Питер, 2004. — 415 с.
3.20. Таненбаум Э, Вудхалл А. Операционные системы: разработка и реализация. Пер. с
англ. Д. Шинтякова. — СПб.: Питер, 2006. — 575 с.
3.21. Олифер В.Г., Олифер Н.А. Сетевые операционные системы: учеб, пособие. — СПб.:
Питер. 2003. — 538 с.
3.22. Бурдонов И.Б., Косарев А.С., Пономаренко В.Н. Препринт Института системного про-
граммирования РАН. Интернет ссылка: www.isras.ru
582
ЛИТЕРАТУРА
3.23. Козляев Ю.Д. Системы бесперебойного электропитания телекоммуникационного узла. Но-
восибирск: Сибирский гос. университет телекоммуникаций и информатики. — 2005. — 35 с.
3.24. Лопухин А.А. Источники бесперебойного питания без секретов. Интернет-сайт
www.electromarket. ги
К ГЛАВЕ 4.
4.1. Средства автоматизации для промышленных предприятий и ВПК. — Компания «Фи-
орд», 2006.
4.2. Интернет ссылка: www.isagraf.ru
4.3. Петров И.В. Программируемые контроллеры. Стандартные языки и приемы прикладно-
го программирования / Под ред. В.П. Дьяконова. — М.: Солон-Пресс. — 2004. — 256 с.
4.4. Петров И.В. CoDeSys — новый уровень инструментального программирования ПЛК
И Современные технологии автоматизации. — 2005. — № 2.— С. 96-98.
4.5. Золотарев С.В., Петров И.В. Интегрированный комплекс МЭК 61131-3 программиро-
вания - CoDeSys // Промышленные АСУ и контроллеры. — 2005. — №4, — С.29-33.
4.6. Руководство пользователя по программированию ПЛК в CoDeSys 2.3. 3S — Smart
Software Solutions GmbH.
4.7. Интернет ссылка: www.3s-software.com
4.8. Макаров М.Д. Пакет Unity — универсальное средство разработки приложений И
Автоматизация в промышленности. — 2005. — №6. — С. 18-19.
4.9. Schneider Electric: Добро пожаловать в новый мир автоматизации И Промышленные
АСУ и контроллеры. — 2005. — №7. — С. 39-40.
4.10. Компоненты для комплексной автоматизации. Каталоги SIMATIC. — 2006. — 172 с.
К ГЛАВЕ 5.
5.1. Деменков Н.П. SCADA-системы, как инструмент проектирования АСУТП: учеб, посо-
бие. — М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. — 328 с.
5.2. Андреев Е.В., Куцевич Н.А., Синенко О.В. SCADA-системы: взгляд изнутри. Изд-во
РТСофт, 2004. — 171 с.
5.3. Новая версия InTouch 9.5 И Автоматизация в промышленности. — 2005. — № 12. —
С. 23-25.
5.4. Шерешевский Л.А. Вопросы открытости современных SCADA-систем на примере
Simatic WinCC II Промышленные АСУ и контроллеры. — 2004. — № 3. — С. 29-31.
5.5. Прошин А.И. Новые возможности среды исполнения контроллеров SCADA «КРУГ-
2000» // Промышленные АСУ и контроллеры. — 2005. — № 3. — С. 35-36.
5.6. Прошин Н.Д., Гурьянов Л.В. SCADA «КРУГ-2000». Версия 3.0 И Промышленные АСУ
и контроллеры. — 2006. — №10. — С. 30-33.
5.7. CitectSCADA 6.0 - новое поколение SCADA-систем. Пример новых возможностей И
Промышленные АСУ и контроллеры. — 2005. — № 8. — С. 35-37.
5.8. Лигун Л.Е. Как правильно выбрать SCADA-систему. Экономическая эффективность //
Промышленные АСУ и контроллеры. — 2002. — № 7. — С. 55-57.
5.9. Никитин A. Advantech Studio — SCADA с поддержкой Web-технологий // Современ-
ные технологии автоматизации. — 2003. — №1. — С. 54-59.
5.10. Ляпунов С.И., Корнеева А.И. Некоторые особенности развития SCADA-систем // Про-
мышленные АСУ и контроллеры. — 2002. — № 11. — С. 37-39.
5.11. Ицкович Э.Л. Рациональная последовательность модернизации существующих систем авто-
матизации производства И Промышленные АСУ и контроллеры. — 2005. — № 1. — С. 11-13.
5.12. Куцевич Н.А. SCADA-системы. Стратегия клиентских приложений // Мир компьютер-
ной автоматизации. — 2001. — № 1. — С. 38-45.
ЛИТЕРАТУРА
583
5.13. Матвейкин В.Г., Фролов С.В., Шехтман М.Б. Применение SCADA-систем при автома-
тизации технологических процессов. — М.: Машиностроение, 2000. — 176 с.
5.14. Деменков Н.П., Пожидаева К.В. Технико-экономические показатели выбора SCADA-
систем И Промышленные АСУ и контроллеры. — 2006. — №4. — С. 51-53.
5.15. Ицкович Э.Л. Выбор пакета визуализации измерительной информации (SCADA-
программы) для конкретной системы автоматизации производства // Приборы и
системы управления. — 1996. — № 10. — С. 20-24.
5.16. Теркель Д.А. OLE for Process Control - свобода выбора II Современные технологии
автоматизации. - 1999. — № 3. - С. 28-32.
5.17. Роджерсон Д. Основы СОМ / Пер. с англ. - М.: Издательский отдел «Русская редак-
ция», 1997. — 350 с.
5.18. Давыдов В.Г., Чыонг Динь Тяу. ОРС-серверы с открытой архитектурой — средства
взаимодействия компонентов в промышленной автоматизации // Автоматизация в
промышленности. — 2003. — У7. — С. 10-15.
5.19. Чыонг Динь Тяу, Давыдов В.Г. Организация обмена данными между ОРС-
приложениями // Автоматизация в промышленности. — 2003. — № 10. — С. 23-27.
5.20. К. Дж. Дейт. Введение в системы баз данных.— 8-е изд. — М.: Издат. Дом «Вильямс»,
2005. — 1328 с.
5.21. К. Конноли, К. Бегг. Базы данных. Проектирование, реализация и сопровождение.
Теория и практика.— 3-е изд. — М.: Издат. Дом «Вильямс»., 2003. — 1436 с.
5.22. Г. Гарсиа-Молина, Дж. Ульман, Дж. Уидом. Системы баз данных. Полный курс. — М.:
Издат. Дом «Вильямс», 2003. — 1088 с.
5.23. Избачков Ю.С., Петров В.Н. Информационные системы: учебник для вузов.— 2-е
изд. — СПб.: Питер, 2005. — 656 с.
5.24. Карпова ТС. Базы данных: модели, разработка, реализация: учебное пособие. — СПб.:
Питер Бух., 2001. — 303 с.
5.25. Хомоненко А.Д. Базы данных: учебник для вузов. — СПб.: Корона принт., 2003. — 665 с.
5.26. Солодовников И.В. Базы данных: учебн. пособие. — М.: Университет Натальи Несте-
ровой, 2005. — 104 с.
5.27. Егоров А.Н., Крупенина Н.В. Управление базами данных в сетях: учебн. пособие. —
СПб.: СП ГУВК, 2001. — 104 с.
5.28. Дунаев В.В. Базы данных. Язык SQL. — СПб.: БХВ-Петербург, 2006. — 288 с.
5.29. Федоров А., Елманова Н. Архитектура современных Web-приложений // Компьютер
Пресс. — 2002. — № 6. — С. 24-26.
5.30. Спэнбауэр С. Internet Explorer: ответный удар И Мир ПК. — 1997. — №7. — С. 33-41.
5.31. Новые объектно-ориентированные приложения Wonderware-ArchestrA и Industrial
Application Server 11 Автоматизация в промышленности. — 2005. — № 6. — С. 20-22.
5.32. Сервер баз данных Wonderware Industrial SQL Server 9.0 И Автоматизация в промыш-
ленности. — 2006. — №6. — С. 51-54.
5.33. Толмасская 14.14., Терлецкий М.Ю. Два ноль в пользу iHistorian. И Автоматизация в
промышленности. — 2003. — № 4. — С. 27-31.
5.34. Терлецкий М.Ю. iHistorian - ключ к интеграции ERP и SCADA // PC Week. — 2002. —
№ 8. — С. 21-24.
5.35. Молчанов А.Ю. Технология создания прикладных программ для распределенных
вычислений И Автоматизация в промышленности. — 2005. — № 1. — С. 13-17.
5.36. Т. Кейт. ORACLE для профессионалов: архитектура, программирование и особенно-
сти версий 9i и 10g. — М.: Издат. Дом «Вильямс», 2007. — 848 с.
5.37. Д. Пери, Д. Пост. Введение в ORACLE 10 g. — М.: Издат. Дом «Вильямс», 2006. — 704 с.
584
ЛИТЕРАТУРА
К ГЛАВЕ 6.
6.1. Блэк Ю. Сети ЭВМ: протоколы, стандарты, интерфейсы. — М.: Мир, 1990. — 510 с.
6.2. Золотов С. Протоколы Internet. — СПб.: БХВ-Петербург, 1998. — 304 с.
6.3. Новиков Ю.Г., Карпенко Д.Г. Аппаратура локальных сетей: функции, выбор, разработ-
ка. — М.: ЭКОМ, 1998. — 286 с.
6.4. Олифер В.Г., Олифер Н.А. Компьютерные сети. Принципы, технологии, протоколы. —
СПб.: Питер, 2002. — 668 с.
6.5. Протоколы информационно-вычислительных сетей. Справочник. — М.: Радио и
связь, 1990. — 504 с.
6.6. Любашин А.Н. Промышленные сети И Мир компьютерной автоматизации. — 1999. —
№ 1. — С. 38-44.
6.7. Современные компьютерные сети. 2-е изд. / В. Стопинге и др. — СПб.: Питер, 2003. —
783 с.
6.8. Семенов Ю.А. Протоколы Internet: Энциклопедия. — М.: Горячая линия — Телеком,
2001. — 1096 с.
6.9. Эрглис К.Э. Интерфейсы открытых систем. — М.: Горячая линия. — Телеком, 2000. —
783 с.
6.10. Industrial Ethernet — наиболее используемая промышленная шина 2003 г. И Автомати-
зация в промышленности. — 2004. — №7. — С. 20-22.
6.11. Кругляк К.В. Промышленные сети: цели и средства // Современные технологии авто-
матизации. — 2002. — № 4. — С. 6-17.
6.12. Егоров Е.В. О промышленных сетях — без формул и диаграмм И Автоматизация в
промышленности. — 2003. — № 11. — С. 25-30.
6.13. Гук М.Ю. Аппаратные средства локальных сетей. Энциклопедия. — СПб.:Питер,
2002. — 576 с.
6.14. Д.Б. Фролигин. Технические характеристики и анализ производительности сети
Industrial Ethernet И Промышленные АСУ и контроллеры. — 2000. — №5. — С. 55-57.
6.15. Д,П. Мелехин. Интегрированная информационная сеть предприятия И Промышлен-
ные АСУ и контроллеры. — 2003. — № 3. — С. 12-13.
6.16. Sink Perry. Industrial Ethernet: все более ясные очертания И Мир компьютерной авто-
матизации. — 2001. — №4. — С. 58-60.
6.17. Столлингс В. Современные компьютерные сети: пер с англ. — СПб.: Питер, — 2003. —
782 с.
6.18. Столлингс В. Беспроводные линии связи и сети: пер. с англ. А.В. Высоцкого и др. —
М.: Изд. дом «Вильямс», 2003. — 638 с.
6.19. Шахнович И.В. Современные технологии беспроводной связи. — М.: Техносфера,
2006. — 287 с.
6.20. GSM-активатор TraceMode 5 в контроллерах и на операторских станциях И Автомати-
зация в промышленности. — 2003. — № 1. — С. 26-28.
6.21. Компания Klinkmann. Новая технология в области автоматизации с беспроводной
связью И Автоматизация в промышленности. — 2003. — №1. — С. 29-30.
6.22. Потемкин В.Д., Бондаренко Д.В. ММ-7188Е: путь к интеграции распределенных
промышленных систем и GSM-технологиям И Автоматизация в промышленности. —
2003. — № 1. — С. 34-36.
6.23. Компания «Индустриальные компьютерные системы». СОМ 17035 — GSM 900/1800
GPRS модем и 12-канальный приемник GPS в формате РС/104 И Автоматизация в
промышленности. — 2003. — №1 . — С. 37.
ЛИТЕРАТУРА
585
6.24. Жиленков Н. Новые технологии беспроводной передачи данных И Современные
технологии автоматизации. — 2003. — № 4. — С.44-47.
6.25. Технология беспроводной связи Bluetooth // Промышленные АСУ и контроллеры. —
2004. — № 3. — С. 51-54
6.26. Телекоммуникационные технологии: введение в технологии GSM: учеб, пособие для
высш. учеб, заведений / С.Б. Макаров, Н.В. Певцов, Е.А. Попов, М.А. Сиверс. — М.:
Издательский центр «Академия», 2006. — 206 с.
6.27. Феер К. Беспроводная цифровая связь. Методы модуляции и расширения спектра:
пер. с англ./ под ред. В.И. Журавлева. — М.: Радио и связь, 2000. — 520 с.
6.28. Тихвинский В.О. Сети подвижной связи третьего поколения. Экономические и техни-
ческие аспекты развития в России. — М.: Радио и связь, 2002. — 312 с.
6.29. The World GSM Association. GSM Statistics, www.gsmworld.com
К ГЛАВЕ 7.
7.1. Информационно-управляющие человеко-машинные системы: Исследование, про-
ектирование, испытания. Справочник / Под общ. ред. проф. А.И. Губинского и проф.
В.Г. Евграфова. — М.: Машиностроение, 1993. — 527 с.
7.2. Избачков Ю.С., Петров В.Н. Информационные системы: учебник для вузов. 2-е изд. —
СПб.: Питер, 2005.— 656 с.
7.3. Макаров В.Л. Алгоритмы управления в АСУ ТП: учеб. Пособие.— Л.: СЗПИ, 1983.— 78 с
7.4. Ерофеев А.А. Алгоритмы управления промышленных автоматических систем / СПб.,
Гос. техн. ун-т. — СПб.: Политехника, 1992. — 103 с.
7.5. Анисимов Д.Н. Нечеткие алгоритмы управления: учеб, пособие по курсу: «Нечеткие
алгоритмы управления»; Мин-во образов. РФ, МЭИ.— Изд-во МЭИ, 2004.— 80 с.
7.6. Юрков Н.К. Модели и алгоритмы управления интегрированными производствен-
ными комплексами / Ю.К. Юрков; Мин-во образов. РФ, Пенз. гос. ун-т.— Пенза:
ПГУ, 2003,— 197 с.
7.7. Алгоритмы управления и идентификации: сб. науч. тр. / МГУ им. М.В. Ломоносова,
Ин-т систем, анализа РАН; под ред. С.В. Емельянова. — М.: Диалог-МГУ 1997.— 170 с.
7.8. Основы метрологии: учеб, пособие для студ. вузов, обучающихся по специальности
210100 «Управление и информатика в техн, системах» / А.А. Дегтярев, В.А. Летягин,
А.И. Погалов, С.В. Угольников. Мин-во образ. РФ. — М.: МИЭТ, 2004.— 171 с.
7.9. Метрология, стандартизация и сертификация: учеб, для вузов / Я.М. Радкевич,
А.Г. Схиртладзе, Б.И. Лактионов.— 2-е изд., доп.— М.: Высш, шк., 2006.— 800 с.
7.10. Цветков Э.И. Алгоритмические основы измерений.— СПб.: Энергоатомиздат. СПб.
Отдел, 1992.— 266 с.
7.11. Дымов Ю.В. Метрология, стандартизация и унификация, учеб, для вузов. 2-е изд.—
СПб.: Питер, 2004.— 432 с.
7.12. Zadeh Е.А. Fuzzy Sets// Inform. And Control, 1965.— №8.— p. 338-353.
7.13. Заде Л.А. Понятие лингвистической переменной и его применение к принятию при-
ближенных решений.— М.: Мир, 1976. — 165 с.
7.14. Кофман А. Введение в теорию нечетких множеств. Пер. с франц. В.Б.Кузьмина.— М.:
Радио и связь, 1982.— 432 с.
7.15. Методы робастного, нейро-нечеткого и адаптивного управления И учеб, под ред.
проф. К.А. Пупкова. 2-е изд.— М.: Изд-во МГТУ им. Н.Э. Баумана, 2002.— 743 с.
7.16. Згуровский М.З. Интегрированные системы оптимального управления и проекти-
рования И учебн. пособие для вузов.— Киев: Вища школа, 1990.— 350 .
7.17. Яхьяева Г.Э. Нечеткие множества и нейронные сети: учебн. пособие / Г.Э. Яхьяева.— М.:
Интернет-университет информ, технологий: Бином. Лаборатория знаний, 2006. — 314 с.
586 ЛИТЕРАТУРА
7.18. Новые методы управления сложными системами.— М.: Наука, 2004.— 333 с.
7.19. Семенова Д.В. Нечеткие множества: теория и практика: учеб, пособие / Д.В. Семенова;
Федер. Агентство по образованию, Красноярский гос. университет, 2006.— 245 с.
7.20. Чернов В.Г. Нечеткие множества в задачах управления и принятия решений: текст
лекций / В.Г. Чернов: Мин-во общ. и проф. образования РФ, Владимирский, гос. ун-т,
1999.— 85 с.
7.21. Деменков Н.П., Мочалов И.А. Нечеткий логический регулятор в задачах управления //
Промышленные АСУ и контроллеры.— 1999.— № 2.— С. 30-35.
7.22. Деменков Н.П. Нечеткое управление в технических системах И учебн. пособие МГТУ
им. Н.Э. Баумана. М.: 2005. — 198 с.
7.23. Прикладные нечеткие системы / Пер. с яп. К. Асаи, Д. Ватада, С. Иван и др. / Под ред.
К. Тэрано, К. Асан, М. Сугено.— М.: Мир, 1993.— 368 с.
7.24. Ротач В.Я. Экспертная оценка алгоритмов управления методами нечеткой логики и
теории вероятностей // Теплоэнергетика, 2002 .— № 4.— С. 51-56.
7.25. Кудинов Ю.И., Дорохов И.Н., Пащенко Ф.Ф. Нечеткие регуляторы и системы управле-
ния. ИПУ им. В.В. Трапезникова.— М.: 2006.— 19 с.
7.26. Методы классической и современной теории автоматического управления: учебник
в 5-и томах — 2-е изд. перераб. и доп. Т. 5: Методы современной теории автоматиче-
ского управления / под ред. К.А. Пулкова, Н.Д. Егупова.— М.: Изд-во МГТУ им. Н.Э.
Баумана, 2004.— 784 с.
7.27. Лавров И.А., Максимова Л.Л. Задачи по теории множеств, математической логике и
теории алгоритмов.— 5-е изд., исправл.— М.: Физматлит, 2004.— 256 с.
7.28. Ким Д.П. Теория автоматического управления. Т. 2. Многомерные, нелинейные, оп-
тимальные и адаптивные системы: учеб, пособие.— М.: Физматлит, 2004.— 464 с.
7.29. Юревич Е.И. Теория автоматического управления.— 3-е изд.— СПб.: БХВ-Петербург,
2007. — 560 с.
7.30. Теория систем автоматического управления / В.А. Бессекерский, Е.П. Попов.— Изд. 4 е
перераб. и доп.— СПб.: Профессия, 2004.— 752 с.
7.31. Лурье Б.Я., Энрайт П.Дж. Классические методы автоматического управления / под ред.
А.А. Ланнэ. — СПб.: БХВ-Петербург, 2004. — 640 с.
7.32. Катков М.С. Непрерывные системы адаптивного управления с идентификаторами.—
М.: Изд-во МПИ «Мир книги», 1992.— 385 с.
7.33. Романенко В.Д. Адаптивное управление технологическими процессами на базе микро-
ЭВМ. Учебное пособие по спец. «Автоматизация технологических процессов и произ-
водств».— Киев: Вища школа, 1990.— 333 с.
7.34. Справочник по теории автоматического управления / Под ред. А.А. Красовского.—
М.: Наука. Гл. ред. физ.-мат. лит., 1987.— 712 с.
7.35. Ядыкин И.Б., Шумский В.М., Овсепян Ф.А. Адаптивное управление непрерывными
технологическими процессами.— М.: Энергоиздат, 1985.— 240 с.
7.36. Адаптивные системы автоматического управления: учеб, пособие // В.Н. Антонов,
А.М. Пришвин, В.А. Терехов, А.Э. Янчевский / Под ред. проф. В.Б. Яковлева.— Л.: Изд-
во ЛГУ 1984.— 202 с.
7.37. Фомин А.М., Фрадков А.Л., Якубович В.А. Адаптивное управление динамическими
объектами. — М.: Наука, 1981.— 447 с.
7.38. Адаптивное управление технологическими процессами / Ю.М. Соломенцев, В.Г. Ми-
трофанов, С.П. Протопопов и др.— М.: Машиностроение, 1980. — 536 с.
7.39. Методы классической и современной теории автоматического управления: учебник в
5-ти томах: 2-е изд. перераб. и доп. Т. 2: Статистическая динамика и идентификация
ЛИТЕРАТУРА
587
систем автоматического управления / Под ред. К.А. Пупкова, Н.Д. Егупова.— М.: Изд-
во МГТУ им. Н.Э. Баумана, 2004.— 640 с.
7.40. Петров Б.Н., Рутковский В.Ю., Земляков С.Д. Адаптивное координатно-параметри-
ческое управление нестационарными объектами. — М.: Наука, 1980.— 243 с.
7.41. Тимофеев А.В. Построение адаптивных систем управления программным движени-
ем.— Л.: Энергия, 1980.— 300 с.
7.42. Живоглядов В.П. Адаптивное и оптимальное управление динамическими системами:
Сб. статей / АН Кирг. ССР.— Бишкек: Илим, 1991.— 218 с.
7.43. Цыпкин Я.З. Информационная теория идентификации.— М.: Наука, Физматлит,
1995,— 336 с.
7.44. Дейч А.М. Методы идентификации динамических объектов.— М.: Энергия, 1979.— 380 с.
7.45. Современные методы идентификации систем: Пер. с англ. / Под ред. П. Эйкхоффа.—
М.: Мир, 1983.— 400 с.
7.46. Дисперсионная идентификация / Райбман Н.С., Капитоненко В.В., Овсепян Ф.А.,
Варлаки П.М. / Под ред. Н.С.Райбмана.— М.: Наука, 1981.— 336 с.
7.47. Сейдж Э.П., Мелса Дж. Л. Идентификация систем управления.— М.: Наука. Гл. ред.
физ.-мат. лит., 1974.— 248 с.
7.48. Zames G. Feedback and optimal sensitivity: model reference transformations, multiplicative
seminars and approximate inverses 11 IEEE Trans. Auto. Control, vol. AC-26. j2
7.49. Методы классической и современной теории автоматического управления: учебник в
5-ти томах: 2-е изд. перераб. и доп. Т. 3. Синтез регуляторов систем автоматического
управления/ под ред. К.А. Пупкова, Н.Д. Егупова.— М.: Изд-во МГТУ им. Н.Э. Баума-
на, 2004,— 616 с.
7.50. Бессекерский В.А., Небылов А.В. Робастные системы автоматического управления.—
М.: Наука, Гл. ред. физ.-мат. лит., 1983. — 240 с.
7.51. Позняк А.С. Основы робастного управления (Н<=° - теория): Учеб, пособие / Моск,
физ.-техн. ин-т.— М.: МФТИ, 1991. — 128 с.
7.52. Конструирование робастных систем управления с использованием методов Нм-
оптимизации. Обзор/ Под. Ред. Е.А. Федосова. — ГосНИИАС, 1991.
7.53. Курдюков А.П. Основы робастного управления: Учеб. Пособие / Под. ред. К.А. Попко-
ва; Моск. гос. техн, ун-т им. Н.Э. Баумана. — М.: Изд-во МГТУ, 1995.— 50 с.
7.54. Потемкин В.Г. Система MATLAB. Справочное пособие/ Пакет программ Robust
Control Toolbox. М.: Диалог-МИФИ, 1997. — 350 с.
7.55. Фокин А.Л. Робастное управление технологическими процессами: Учеб, пособие /
АЛ. Фокин, В.В. Сыроквашин, П.А. Бороздин.— СПб.: СПбГТИ (ТУ), 2007.— 201 с.
7.56. Клыков Ю.И. Ситуационное управление большими системами.— М.: Энергия, 1974.—
135 с.
7.57. Клыков Ю.И. Семиотические основы ситуационного управления, учеб, пособие.— М.:
МИФИ, 1974,— 171 с.
7.58. Поспелов Д.А. Большие системы (ситуационное управление).— М.: Знание, 1975.— 64 с.
7.59. Поспелов Д.А. Ситуационное управление: теория и практика.— М.: Наука, 1986.— 281 с.
7.60. Мелихов А.Н., Берштейн Л.С., Коровин С.Я. Ситуационные советующие системы с
нечеткой логикой. — М.: Наука. Гл. ред. физ.-мат. лит., 1990.— 272 с.
7.61. Информатика: Базовый курс: учеб, для вузов / Под ред. С.В. Симоновича.— СПб. и др.:
Питер, 2002.— 638 с.
7.62. McCulloch W., Pitts W. A logical calculus of the ideas immanent in nervous activity 11
Bulletin of mathematical biophysics.— 1943.— Vol. 5.— P. 115-133
7.63. Hebb D.O. The organization of behavior: A neuropsychological theory.— N.-Y: Wiley,
1949.— 436 p.
588 ЛИТЕРАТУРА
7.64. Rosenblatt F. Principles of Neurodynamics: Perceptron and the Theory of Brain Mecha-
nisams.— Washington DC: Spartan Books, 1962.— 480 p.
7.65. Fukushima K. Cognitron: A self-organizing multilayered neural network 11 Biolog. Cy-
bernetics.— 1975.— Vol. 20.— P. 121-136
7.66. Hopfield J.J. Neural networks and physical systems with emergent collective computational
abilities 11 Proc. National Acad. Science.— 1982.— Vol. 79.— P. 2554-2558
7.67. Koheren T. Self-Organization and Associative Memory.— New-York: Springer-Veriag.
1988,— 620 p.
7.68. Нейросетевые системы управления I В.А. Терехов, Д.В. Ефимов, И.Ю. Тюкин и др.—
СПб.: Изд-во С. Петербург. Ун-та, 1999.— 264 с.
7.69. Джейн А.К., Муиуддин К.М. Введение в искусственные нейронные сети // Открытые
системы.— 1977.— №4.— с. 17-24
7.70. Гаврилов А.И. Перспективы применения нейросетевых технологий в системах ав-
томатического управления И Вестник МГТУ им. Н.Э. Баумана. Приборостроение.—
1998,— С. 119-126
7.71. Горбань А.Н. Обучение нейронных сетей.— М.: СП «Рага Graph», 1990.— 160 с.
К ГЛАВЕ 8.
8.1. TDC 3000 System. System Technical Data: Honeywell Inc. 1990. — 22 p.
8.2. PlantScape. Спецификация системы и контроллеров PlantScape и технологические
данные. — Honeywell Inc. — Вып. 200. — 1995. — 26 с.
8.3. Подьяпольский С.В., Родионов А.В., Соркин Л.Р. Распределенная система управления
нового поколения Experion PKS компании Honeywell // Промышленные АСУ и кон-
троллеры. — 2005. — № 9. С. 1-6.
8.4. Damatic XDi. Общие сведения о системе Damatic XDi. И Valmet Automation, 1995. — 366 с.
8.5. Описание системы nelesDNA. — Finland: Neles Automation, 2000. — 49 с.
8.6. Юленен Й. Динамическая сеть приложений от Metso Automation // Промышленные
АСУ и контроллеры. — 2004. — №11. — С. 7-11.
8.7. Описание системы metsoDNA // Metso Automation, 2005. — 76 с.
8.8. Блюм А.С., Панкратов Д.А., Исаенко И.В., Седов С.А. Решения Yokogawa в области
автоматизации ТП целлюлозно-бумажной промышленности И Автоматизация в про-
мышленности — 2004. — № 10. — С. 28-30.
8.9. Интегрированная система управления производством CENTUM CS 3000II Техниче-
ская информация TI 33Q1B10-01R: Компания YOKOGAWA, 2001. — 86 с.
8.10. Микропроцессорная система контроля и управления МСКУ 2М. — Северодонецк: АО
«Импульс», 2001. — 54 с.
8.11. Скороходов В.В., Тимошенко Д.П., Филимонов Д.А. МФК-3000 — программируемый
контроллер для ответственных применений и крупномасштабных АСУ ТП // Про-
мышленные АСУ и контролеры. — 2005. — № 10. — С. 10-17.
К ГЛАВЕ 9.
9.1. Методы разработки интегрированных АСУ промышленными предприятиями И Г.М.
Уланов, Р.А. Алиев, В.П. Кривошеев. — М.: Энергоатомиздат, 1983. — 320 с.
9.2. Леныпин В., Синенко О. Интеграция на пути повышения эффективности предприя-
тия. // Мир компьютерной автоматизации, 2000. — № 1. — С. 12-16.
9.3. Любашин А.Н. Системная интеграция и системный консалтинг. — Мир компьютер-
ной автоматизации, 2000. — №1. — С. 55-59.
9.4. Информационно-управляющие системы. Эволюция. Проблемы. Решения / Т.Б. По-
тапова // Промышленные АСУ и контроллеры, 2002. — № 7. — С. 23-25.
ЛИТЕРАТУРА
589
9.5. Потапова Т.Б. Комплексная автоматизация производства. Мировые стандарты и ра-
циональный уровень // Автоматизация в промышленности. — 2003. — № 1. — С. 5 10.
9.6. Потапова Т.Б. Большая автоматизация. Информационно-управляющие системы
(ИУС) в непрерывных производствах. — Тула: Гриф и К, 2006. — 294 с.
9.7. Куцевич И.В. Инструментарий для интеграции разнородных подсистем // Мир ком-
пьютерной автоматизации. — 2001. — №1. — С. 33-37.
9.8. Славин Р. Единственный путь повышения эффективности производства — интегра-
ция «снизу-вверх». — Мир компьютерной автоматизации, 2000. — № 1. — С. 17 22.
9.9. Ицкович Э.Л. Методы рациональной автоматизации производства.— М.: Инфра-
инженерия, 2009.— 240 с.
9.10. ГОСТ 34.003-90. Информационная технология. Автоматизированные системы. Тер-
мины и определения // Информационная технология. Комплекс стандартов и руково-
дящих документов на автоматизированные системы. — М.: Комитет стандартизации и
метрологии СССР, 1991. — 144 с.
К ГЛАВЕ 10.
10.1. Будник Р.А. MES-система Фобос: оперативное управление + интеграция информаци-
онных систем производства // Автоматизация в промышленности, 2003. — №9. — С.
43-45.
10.2. Дульнева В.В., Сюч Э.О. Для чего внедряют PI System в России и за рубежом // Про-
мышленные АСУ и контроллеры, 2003. — №4. — С. 35-39.
10.3. Мусаев А.А., Шерстюк Ю.М. Автоматизация диспетчеризации производственных про-
цессов промышленных предприятий И Автоматизация в промышленности, 2003. —
№ 9. — С. 36-43.
10.4. Информационно-управляющая система «Орбита» / Т.Б.Потапова, В.Ф.Шварцкопф //
Промышленные АСУ и контроллеры.— 2002. — № 11. — С. 5-9.
10.5. Куцевич Н.А. От SCADA-систем к SCADA-продуктам и MES-компонентам И Мир
компьютерной автоматизации. — 2003. — № 4. — С. 20-28.
10.6. ФОБОС. Manufacturing Execution System. — М.: RTSoft, 2006.
10.7. Preactor. Обзор продуктов FCS, APS, SCS. — M.: RTSoft, 2006.
10.8. Хамицкий В.А. MES-система. Что делать? II Мир компьютерной автоматизации. —
2003. — № 4. — С. 64-72.
10.9. Куцевич И.В. Введение в LIMS И Мир компьютерной автоматизации. — 2002. —
№ 4. - С. 32.
10.10. Нуцков В.Ю. Лабораторно-измерительные системы (I.IMS) И Мир компьютерной
автоматизации. — 2002. — № 12. — С. 16.
10.11. Нуцков В.Ю., Хиллхауз Б. Интеграция Lab Ware LIMS и SAP R/3 QM // Мир компью-
терной автоматизации. — 2003. — №4. — С. 56-63.
10.12. Бочкарева Н.Н. Балансовая система Datacon: беглый взгляд // Мир компьютерной
автоматизации. — 2002. — № 4. — С. 32.
10.13. Толковый словарь по вычислительным системам / Под общ. ред. Иллингуорта. — М.:
Машиностроение, 1990. — 560 с.
10.14. Современный англо-русский словарь по вычислительной технике — М.: ИП Радио
Софт, 2000. — 608 с.
Список сокращений
АСОДУ — Автоматизированная система оперативно-диспетчерского управления.
АСКУЭ — Автоматизированная система контроля и учета энергоресурсов.
АСУ — Автоматизированная система управления.
АСУП — АСУ предприятием.
АСУТП — АСУ технологическим процессом.
АЦП — аналого-цифровой преобразователь
БД — база данных.
БД РВ — БД реального времени.
ВОК — волоконно-оптический кабель.
ЖКИ — жидкокристаллический индикатор.
ИМ — исполнительный механизм.
ЛВС — локальная вычислительная сеть.
ОС — операционная система.
ОС РВ — ОС реального времени.
ПК — персональный компьютер.
ППК — промышленный персональный компьютер.
ПИД-регулятор — пропорционально-интегро-дифференциальный регулятор.
ПЛК — программируемый логический контроллер.
ПО — программное обеспечение.
ПП — первичный преобразователь.
ПТК — программно-технический комплекс.
РСУ— распределенная система управления.
РВ — реальное время.
САУ — система автоматического управления.
СУБД — система управления БД.
ТП — термоэлектрический преобразователь (термопара).
ТС — термосопротивление.
ТОУ — технологический объект управления.
УВК — управляющий вычислительный комплекс.
УСО — устройство связи с объектом.
ЦАП — цифро-аналоговый преобразователь.
ЧМИ — человеко-машинный интерфейс.
ШИМ — широтно-импульсная модуляция.
ЭИМ — электрический исполнительный механизм.
СОМ — модель многокомпонентных объектов фирмы Микрософт.
DCOM — распределенная СОМ.
IEC — Международная электротехническая комиссия.
ISO — Международная организация по стандартизации.
RTU — дистанционное терминальное устройство.
VAC — напряжение переменного тока (в вольтах).
VDC — напряжение постоянного тока (в вольтах).
Харазов В.Г.
ИНТЕГРИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
ISBN 978-5-93913-176-6
Издание осуществлено при участии ООО «Простор»
Издательство «Профессия»
Санкт-Петербург, 191002, а/я 600
Тел./факс: (812) 740-12-60.
E-mail: bookpost@professija.ru
www.professija.ru
Подписано в печать 28.04.09. Формат 70 х 100'/,6. Печ. л. 37.
Тираж 2000 экз. Заказ № 3801
Отпечатано с готовых диапозитивов
в ГУП «Типография «Наука»
199064, Санкт-Петербург, В. О., 9 линия, 12