































































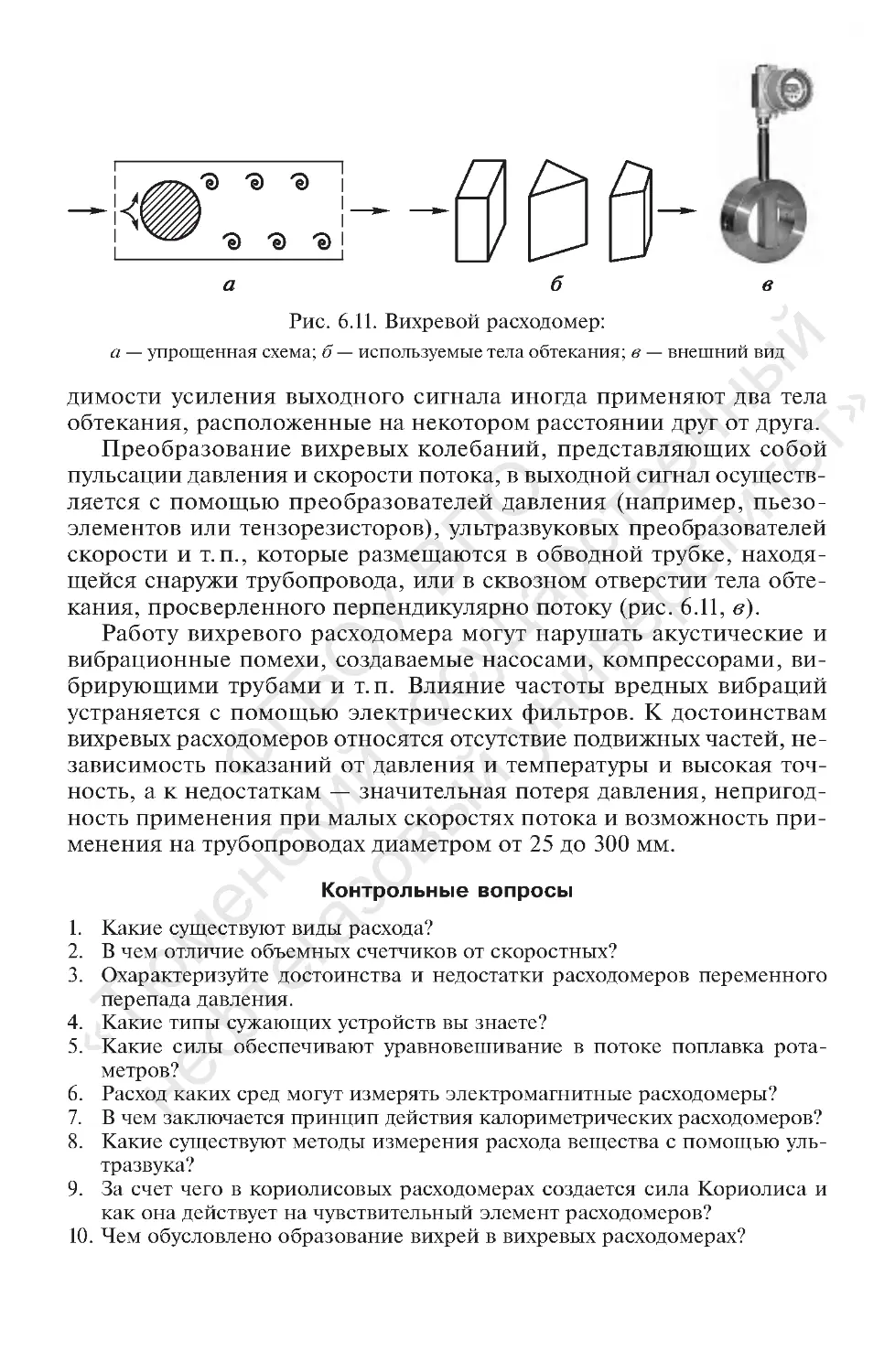






































































































Автор: Прахова М.Ю. Шаловников Э.А. Ишинбаев Н.А. Щербинин С.В.
Теги: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика автоматизация учебное пособие для студентов нефтегазовое производство
ISBN: 978-5-4468-0658-4
Год: 2014
Под редакцией М.Ю . Праховой
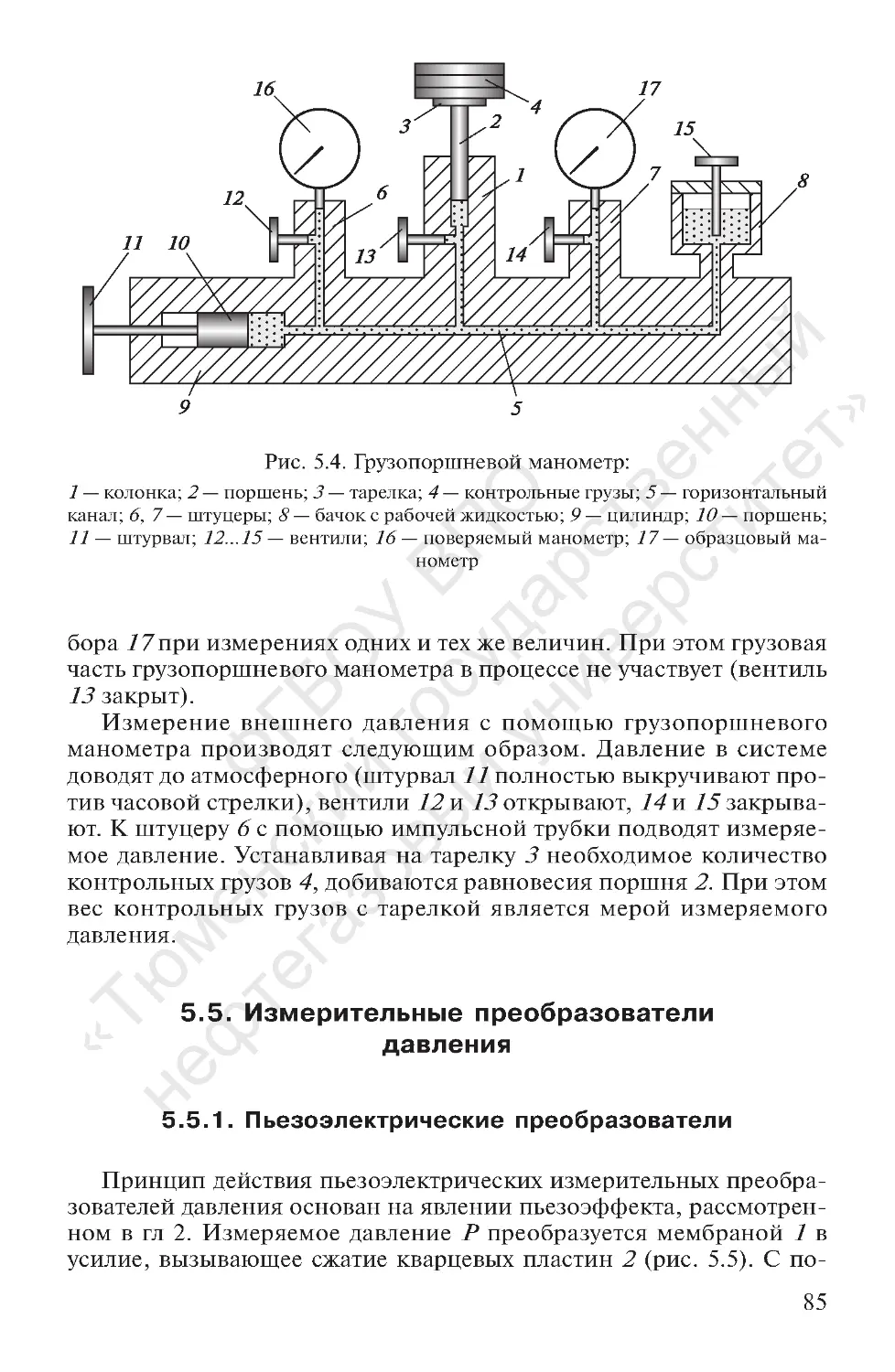
основы
автоматизации
производственных
процессов
нефтегазового
производства
Допущено
Учебно-методическим объединением вузов
Российской Федерации по нефтегазовому образованию
в качестве учебного пособия для студентов высших учебных заведений,
обучающихся по направлению подготовки бакалавров «Нефтегазовое дело»
2-е издание, исправленное
Высшее образование
БАКАЛАВРИАТ
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
Рецензенты:
кандидат технических наук, профессор,
зав. каф едрой «Автоматизация технологических процессов»
РГУ нефти и газа им. И .М .Губкина В.Е.Попадько;
гл. инженер ОАО «Уральское объединение трубопров одного транспорта
нефтепродуктов» Р.Х .Хажиев
УДК 681.5(075.8)
ББК 32.965я73
О-753
Оригинал-макет данного издания является собственностью
издательского центра «Академия», и его воспроизведение любым способом
без согласия правообладателя запрещается
© Прахова М.Ю., Шаловников Э.А ., Ишинбаев Н.А .,
Щербинин С.В ., 2012
© Образовательно-издательский центр «Академия», 2012
© Оформление. Издательский центр «Академия», 2012
ISBN 978-5 -4468 -0658-4
Основы автоматизации производственных процессов нефте-
газового производства : учеб. пособие для студ. учреждений
высш. образования / [М.Ю .Прахова, Э.А .Шаловников,
Н. А. Ишинбаев, С. В. Щербинин] ; под ред. М. Ю . Праховой. —
2-е изд., испр. — М. : Издательский центр «Академия», 2014. —
256 с. — (Сер. Бакалавриат).
ISBN 978-5 -4468-0658-4
Учебное пособие создано в соотв етствии с Федеральным государств енным
образовательным стандартом по направлению подготовки «Нефтегазов ое дело»
(квалификация «бакалавр»).
В нем рассмотре ны основные средств а автоматизации, используе мые в
современных трехуровневых автоматизиров анных системах управления техно-
логическими процессами: датчики, средств а измерения основных технологи-
ческих параметров (температура, уров ень, давление, расход, вибрация, состав
и физико-химические свойства жидких и газовых сред), р еле, цифровые устр ой-
ств а, а также принципы построе ния систем тел емеханик и. Даны элементы
теории автоматического регулирования. Особое внимание уделено современ-
ным системам на базе контроллеров и микропроцессоров, а также способам
передачи цифровой информации.
Для студентов учреждений высшего образования.
УДК 681.5(075.8)
ББК 32.965я73
О-753
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
ПРЕДИСЛОВИЕ
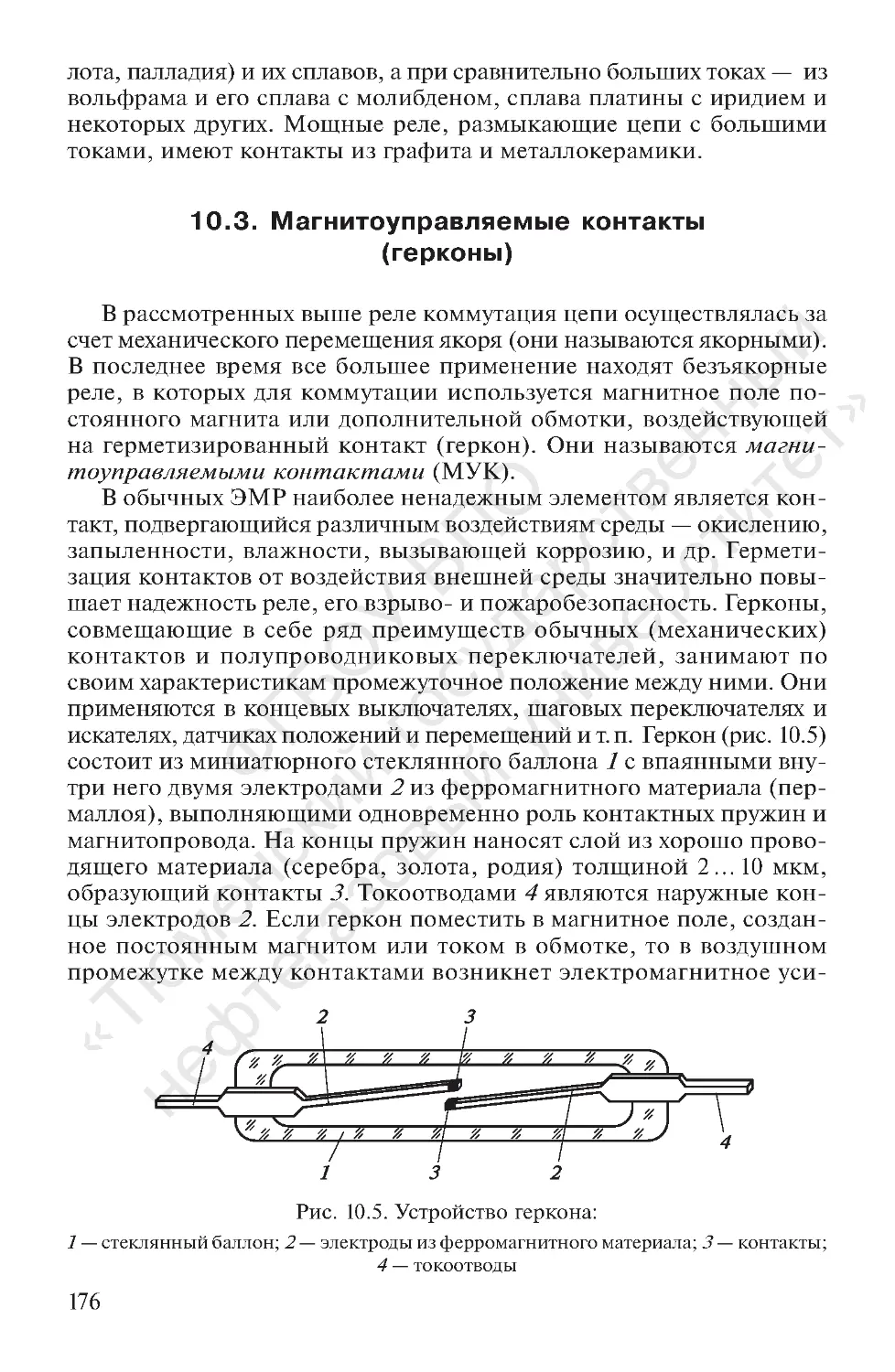
В данном учебном пособии рассматриваются вопросы, изучаемые
в дисциплине «Основы автоматизации технологических процессов
нефтегазового производства».
Структура пособия продиктована следующими соображениями.
Данная дисциплина относится к базовой части профессионального
цикла, т. е . предназначена для формирования у студентов базовых
представлений о технических средствах, входящих в состав систем
автоматизции. Поэтому авторы сочли целесообразным основное
внимание уделить методам измерения того или иного параметра (как
традиционным, так и новым), указав присущие им особенности, до-
стоинства, недостатки и области применения. Кроме основных тех-
нологических параметров (температура, давление, расход, уровень)
рассмотрен контроль вибрации, состава газа, плотности, вязкости,
влагосодержания, так как в нефтегазовом производстве на эти пара-
метры приходится значительный объем измерений. Большое внима-
ние уделено вопросам преобразования и передачи информции в
системах автоматизации, структуре и видам современных систем АСУ
ТП, которые определяют роль и место рассмотренных технических
сред при их проектировании.
Учебное пособие предназначено для студентов технических вузов,
обучающихся по направлениям подготовки «Нефтегазовое дело»
130501 (специалисты), 131000 (бакалавры), 220700 «Автоматизация
технологических процессов и производств в нефтяной и газовой про-
мышленности».
Авторы выражают искреннюю признательность доцентам кафедры
АТПП Уфимского государственного нефтяного технического универ-
ситета Л. Н. Латышеву, С. В. Емецу, И. Н. Мымрину, А. И. Ишемгужину
за советы и помощь при подготовке учебного пособия, сотруднику
фирмы «Просафт» А. В . Казанцеву за материалы для гл. 14 и рецен-
зенту кандидату технических наук, профессору РГУ нефти и газа
им. И. М . Губкина, заведующему кафедрой «Автоматизация техноло-
гических процессов» В. Е. Попадько за ряд ценных замечаний, кото-
рые были учтены при окончательном редактировании пособия.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
4
ВВЕДЕНИЕ
Автоматика — это отрасль науки и техники, охватывающая тео-
рию и принципы построения систем, действующих без непосред-
ственного участия человека.
Автоматизацией производственного процесса (АПП) называют
такую организацию этого процесса, при которой его технологические
операции осуществляются автоматически с помощью специальных
технических устройств без непосредственного участия человека. АПП
предполагает контроль, регулирование и управление производствен-
ным процессом, а также защиту процесса от аварийных режимов и
сигнализацию отклонений от номинальных режимов. Контроль — это
установление соответствия между состоянием (свойством) объекта
контроля и заданной нормой, определяющей качественно различные
формы его состояния. Регулирование — это поддержание постоянным
значения некоторой заданной величины, характеризующей процесс,
или изменение его по заданному закону, осуществляемое с помощью
изменения состояния объекта или действующих на него возмущений
и воздействия на регулирующий орган объекта. Управление — это
осуществление совокупности воздействий, выбранных из множества
возможных на основании определенной информации и направленных
на поддержание или улучшение функционирования управляемого
объекта в соответствии с целью управления.
Историю развития систем автоматизации можно условно разделить
на три этапа, на каждом из которых меняется характер объектов и
методов управления, средств автоматизации и других компонентов,
составляющих содержание современной системы управления.
Первый этап отражает переход от систем автоматического кон-
троля (САК) к системам автоматического регулирования (САР). САК
(рис. В .1, а) некоторого объекта контроля (ОК) включает в свой со-
став, по меньшей мере, два измерительных устройства, соединенных
между собой каналом связи (КС). Одно из этих измерительных
устройств воспринимает измеряемый параметр Хвых объекта контро-
ля, который изменяется под действием возмущающих воздействий
(ВВ); это устройство называют датчиком (Д) (или первичным изме-
рительным преобразователем). Датчик служит для преобразования
измеряемого физического свойства в сигнал Y (например, электри-
ческий ток, давление сжатого воздуха и т. д .), который удобно пере-
давать по КС. Другое устройство, называемое вторичным прибором
(ВП), измеряет сигнал, поступающий по КС и несущий информацию
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
5
о значении измеряемого параметра, и представляет его в форме,
удобной для восприятия оператором (О). Наблюдая за показаниями
ВП и зная установленную норму для значения измеряемого параме-
тра, оператор может осуществлять контроль, а при необходимости и
ручное регулирование ОК.
На рис. В .1, б показана схема САР. Необходимость регулирования —
как ручного, так и автоматического — вызвана тем, что на объект
регулирования (ОР) постоянно действуют различные дестабилизи-
рующие факторы, нарушающие однозначность связи между входным
Хвх и выходным Хвых параметрами объекта. Эти факторы называют
возмущающими воздействиями (ВВ). Под влиянием ВВ выходной
параметр Хвых отклоняется от заданного значения Yзад. Сигнал Y, со-
ответствующий текущему значению Хвых, поступает на автоматический
регулятор (АР) и при необходимости на ВП. В АР, кроме сигнала Y,
поступает сигнал Yзад (задание), пропорциональный заданному зна-
чению регулируемого параметра. АР выполняет определенные вы-
числительные операции в соответствии с заложенным в него законом
регулирования и вырабатывает сигнал Z — регулирующее воздей-
ствие, поступающее на исполнительный механизм (ИМ), который
изменяет Хвх до тех пор, пока параметр Хвых не достигнет заданного
значения. Оператор может следить за процессом регулирования и при
необходимости менять заданное значение регулируемого параметра
(уставку регулятора). Таким образом, объектами управления на этом
этапе являются отдельные параметры, установки, агрегаты; решение
задач стабилизации, программного управления, слежения переходит
от человека к автоматическому регулятору. У человека остаются
функции расчета задания и параметров настройки регуляторов.
Рис. В .1. Структурные схемы систем автоматизации:
а — САК; б — САР; в — САУ; ОК — объект контроля; Д — датчик; ВП — вторичный
прибор; КС — канал связи; О — оператор; ВВ — возмущающие в оздействия;
Хвх, Хвых — входной и выходной параметры объекта; Y — сигнал; ОР — объект регули-
рования; АР — автоматический регулятор; ИМ — исполнительный механизм;
ОУ — объект управления; Yзад — заданное значение выходного параметра; Z — регули-
рующее в оздействие; МПК — микропроцессорный комплекс
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
6
Второй этап — автоматизация технологических процессов. Объ-
ектом управления становится рассредоточенная в пространстве систе-
ма; с помощью систем автоматического управления (САУ) реализуют-
ся все более сложные законы управления, решаются задачи оптималь-
ного и адаптивного управления, проводится идентификация объекта и
состояний системы. Характерной особенностью этого этапа является
внедрение в управление технологическими процессами систем теле-
механики и микропроцессорных комплексов, на которые возлагаются
функции контроля и регулирования отдельных параметров объекта
управления. Человек все больше отдаляется от него, между ними вы-
страивается целый ряд локальных измерительных систем, исполнитель-
ных механизмов, средств телемеханики, мнемосхем и других средств
отображения информации. Схема САУ приведена на рис. В .1, в. Микро-
процессорный комплекс (МПК) осуществляет оптимальное управление,
анализируя всю доступную информацию об объекте и выбирая из мно-
жества возможных регулирующих воздействий Z1 ... Zn то, которое со-
ответствует запрограммированной в него цели управления.
Третий этап — переход к автоматизированным системам управ-
ления технологическими процессами (АСУ ТП). Современная систе-
ма управления производством представляет собой многоуровневую
человеко-машинную структуру, создаваемую на основе автоматиче-
ских информационных систем сбора данных и вычислительных
комплексов, которые постоянно совершенствуются по мере эволюции
технических средств и программного обеспечения. Первые три уров-
ня из этой структуры реализуют собственно АСУ ТП, а остальные
уровни предполагают административное управление производствен-
ными процессами. Таким образом, современные АСУ ТП (рис. В .2)
можно разделить на три уровня: нижний, средний и верхний. Данные,
собранные нижестоящим уровнем, поступают на вышестоящий, т. е .
реализуется классическая схема управления: восходящий поток дан-
ных и нисходящий поток команд.
На н и ж н е м у р о в н е располагаются датчики, исполнительные
механизмы, преобразователи и вторичные приборы. Они собирают
информацию об объекте автоматизации и преобразуют физические
свойства (температуру, давление и т. д .) в нормированные электри-
ческие или цифровые сигналы.
Основнымитехническимисредствами среднего уровня яв-
ляются программируемые логические контроллеры с модулями ввода/
вывода. На этом уровне по программе, содержащейся в контроллере,
реализуются локальная обработка входных сигналов, выдача управляю-
щих команд на исполнительные механизмы, а также выполняются
функции автоматического ведения режимов блокировок и защит.
Верхний уровень находится в помещении операторной и
оснащен высоконадежным персональным компьютером в промыш-
ленном исполнении. Компьютер служит для визуализации всех кон-
тролируемых и управляемых параметров, оперативного управления
технологическим процессом, автоматического ведения архивов, фор-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
7
Рис. В .2. Структурная схема трехуровневой АСУ ТП
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
8
мирования отчетов. Как правило, все перечисленные функции осу-
ществляются с помощью так называемых SCADA-систем (Supervisory
Control And Data Acquisition) — систем диспетчерского управления и
сбора данных. SCADA-системы позволяют создавать мнемосхемы,
отображающие ход технологического процесса на мониторе операто-
ра. При этом возможны представление графиков (трендов) измеряемых
величин, сообщений о неисправностях и авариях, ввод в систему
управления команд оператора и т. д .
Обмен между контроллером и операторской станцией осуществ-
ляется по промышленной сети (тип интерфейса и протокол опреде-
ляются используемым контроллером).
Таким образом, от этапа к этапу меняются не только используемые
технические средства, но и функции человека (оператора/ диспетче-
ра), призванного обеспечить регламентное функционирование тех-
нологического процесса. Расширяется круг задач, решаемых на
уровне управления; ограниченный прямой необходимостью управ-
ления технологическим процессом набор задач пополняется каче-
ственно новыми задачами, ранее имеющими вспомогательный ха-
рактер или относящимися к другому уровню управления. Диспетчер
в многоуровневой АСУ ТП получает информацию с монитора ЭВМ
или с электронной системы отображения информации и воздейству-
ет на объекты, находящиеся от него на значительном расстоянии, с
помощью телекоммуникационных систем, контроллеров, интеллек-
туальных исполнительных механизмов. Необходимым условием
эфф ективной реализации диспетчерского управления, имеющего
ярко выраженный динамический характер, становится работа с ин-
формацией, т. е . процессы сбора, передачи, обработки, отображения,
представления информации. От диспетчера уже требуется не только
Рис. В .3. Примерное распределение доли измерений основных технологи-
ческих параметров в общем объеме измерений для непрерывных произ-
водств
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
профессиональное знание технологического процесса, основ управ-
ления им, но и опыт работы в информационных системах, умение
принимать решение (в диалоге с ЭВМ) в нештатных и аварийных
ситуациях и многое другое. Диспетчер становится главным действую-
щим лицом в управлении технологическим процессом.
Работа любой системы автоматизации начинается с измерения
технологических параметров какими-либо датчиками. Сейчас в
различных отраслях промышленности измеряется более 800 пара-
метров. Однако для непрерывных производств, какими являются
все предприятия нефтегазовой и нефтеперерабатывающей про-
мышленности, измерения температуры, давления, расхода, уровня
и количества вещества составляют примерно 86 % от общего числа
измерений, а остающиеся 14 % — измерения состава, физико-
химических свойств вещества, а также электрических и некоторых
других величин (рис. В.3). Далее в учебном пособии будут подроб-
но рассмотрены методы измерения перечисленных параметров,
основные элементы систем автоматизации и принципы построения
этих систем.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
10
МЕТРОЛОГИЧЕСКИЕ ОСНОВЫ ТЕХНИЧЕСКИХ
ИЗМЕРЕНИЙ
1.1 . Основные сведения о метрологии
Любые измерения являются объектом метрологии — науки об
измерениях, методах и средствах обеспечения их единства и способах
достижения требуемой точности. Слово «метрология» образовано от
двух греческих слов:
μετρо́ + λо́γо́ξ
измерение, мера + учение, слово.
По своей сути метрология является наукой о получении количе-
ственной информации опытным путем, т. е . экспериментально, по-
средством измерения. Большинство реальных объектов обладает
таким многообразием свойств, что получить количественную инфор-
мацию о каждом из них невозможно, да и не нужно. С помощью
средств измерения (СИ) получают количественную информацию о
наиболее существенных свойствах объекта. Для сопоставления ре-
зультатов измерений, выполненных различными СИ в разных местах
и в разное время, необходимо обеспечить единство измерений.
Измерительная информация позволяет сформировать модель
объекта — упрощенное представление об объекте на основе коли-
чественных данных о его наиболее существенных свойствах. Чем
большее число свойств учитывается, тем точнее количественная ин-
формация о них, тем полнее модель отражает реальный объект. Ка-
чественное представление о модели объекта (номенклатура свойств,
представляющих интер ес) должно быть сформировано заранее
(apriori), а измерительные задачи состоят в получении конкретных
количественных данных. Любое свойство может проявляться в боль-
шей или меньшей степени, т. е . иметь количественную характеристи-
ку. Следовательно, любое свойство может быть измерено. При этом
каждое свойство может быть охарактеризовано по-разному. Напри-
мер, пространственную протяженность можно характеризовать рас-
стоянием между двумя точками пространства, а можно углом между
направлениями на них из точки наблюдения.
Для проведения измерений необходимы измерительные шкалы.
В соответствии с МИ 2365-96 в теории измерений различают пять
основных типов шкал измерений: наименований, порядка, разностей
(интервалов), отношений и абсолютные.
Глава 1
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
11
Шкала наименований основана на приписывании объекту знаков
(цифр), играющих роль простых имен с целью их идентификации
или для нумерации классов (например, обозначения резисторов в
схеме — R6, R18). По этому обозначению можно установить, что эле-
менты принадлежат к одному классу — классу резисторов. Но по этой
шкале нельзя установить, на сколько или во сколько их значения
больше (меньше) относительно друг друга, т. е . нельзя производить
операции сравнения и арифметические действия.
Шкала порядка (рангов) представляет собой ранжированный
ряд — упорядоченную последовательность размеров Q1 < Q2 < ...<
<Q j <..., каждый из которых больше предыдущего, хотя сами раз-
меры неизвестны. Для обеспечения измер ений по шкале порядка
некоторые точки на ней можно зафиксировать в качестве опорных
(реперных). Этим точкам шкалы могут быть присвоены цифры, на-
зываемые баллами. Знания, например, оцениваются по 4-балльной
реперной шкале: неудовлетворительно, удовлетворительно, хорошо,
отлично. Примерами таких шкал порядка являются: шкала Моаса для
определения твердости минералов (10 опорных точек), шкала Рихте-
ра для определения интенсивности землетрясений (12-балльная
шкала), шкала твердости металлов (Бринелля, Виккерса, Роквелла).
Недостатком шкал порядка является неопределенность интервалов
между реперными точками.
В шкале интервалов известен только масштаб между реперными
точками, сами же реперные точки (начало отсчета) выбираются про-
извольно по соглашению между учеными. По этой шкале можно судить
не только о том, что один размер больше другого, но и о том, на сколь-
ко больше. Однако по шкале интервалов нельзя оценить, во сколько
раз один размер больше (меньше) другого. К данным шкалам отно-
сятся шкалы температур (Фаренгейта, Реомюра, Цельсия).
Наиболее совершенной является шкала отношений. По ней мож-
но определить не только, на сколько один размер больше (меньше)
другого, но и во сколько раз он больше (меньше). Шкала отношений
представляет собой интервальную шкалу с естественным (абсолют-
ным) началом отсчета. Примером шкалы отношений является термо-
динамическая температурная шкала Кельвина (псевдоним англий-
ского ученого Джона Томпсона). В качестве естественной реперной
точки в этой шкале принят абсолютный ноль — при данной темпе-
ратуре прекращается тепловое движение молекул. По шкале Кельви-
на можно отсчитывать абсолютное значение температур и определять
не только на сколько градусов одна температура больше (меньше)
другой, но и во сколько раз больше (меньше):
T1/T2 = n.
На современном этапе научно-технического прогресса измеритель-
ная информация нужна практически во всех областях человеческой
деятельности. Правильные, точные и достоверные измерения обеспе-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
12
чивают соответствие выпускаемой продукции требованиям стандартов,
техническим условиям и другой нормативно-технической документа-
ции. Таким образом, измерения лежат в самой основе производства и
в огромной мере определяют возможность получения качественной
продукции. Массовость измерений, огромное разнообразие измеряемых
физических величин, методов и средств измерений, применяемых в
народном хозяйстве, потребовали разработки в рамках государственной
системы стандартизации единой системы метрологического обеспече-
ния разработки, производства, испытаний и эксплуатации продукции,
научных исследований и других видов деятельности во всех отраслях
хозяйства. Под метрологическим обеспечением понимается установ-
ление и применение научных и организационных основ, технических
средств, правил и норм, необходимых для достижения единства и тре-
буемой точности измерений. Общие единые правила и нормы метро-
логического обеспечения устанавливаются в стандартах Государствен-
ной системы обеспечения единства измерений (ГСИ).
1.2 . Понятие измерения. Виды средств измерения
В общем случае измерением называется совокупность операций
по применению технического средства, хранящего единицу физиче-
ской величины, обеспечивающих нахождение соотношения (в явном
или неявном виде) измеряемой величины с ее единицей и получение
значения этой величины.
Физическая величина (ФВ) — одно из свойств физического объ-
екта (физической системы, явления или процесса), общее в каче-
ственном отношении для многих физических объектов, но в количе-
ственном отношении индивидуальное для каждого из них. В про-
цессе измерения получают значение ФВ Х — выражение ее размера
в виде некоторого числа принятых для нее единиц. Обычно оно вы-
ражается в виде формулы
X
= { х}[х],
(1.1)
где {х} — число ФВ; [х] — единица ФВ.
Число ФВ представляет собой отвлеченное число, входящее в ее
значение, а единица ФВ — ФВ фиксированного размера, которой
условно присвоено числовое значение, равное 1.
Значение ФВ может быть истинным, действительным и результа-
том. истинное значение ФВ — это значение, которо е идеальным
образом характеризует в качественном и количественном отношении
измеряемую ФВ. Это абсолютная истина, достичь которую невоз-
можно. Для измеряемого свойства это значение является постоянной
величиной. На практике вместо истинного значения ФВ пользуются
ее действительным значением. Действительное значение ФВ — это
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
13
значение, полученное экспериментальным путем и настолько при-
ближающееся к истинному значению, что в поставленной измери-
тельной задаче может быть использовано вместо него. Благодаря
постоянному развитию измерительной техники оно является пере-
менной величиной. Результат измерения ФВ — это значение, по-
лученное путем ее измерения (х).
В процессе измерения используется средство измерения — тех-
ническое средство, предназначенное для измерений, имеющее нор-
мированные метрологические характеристики (МХ), воспроизводя-
щее и (или) хранящее единицу ФВ, размер которой принимают не-
изменным (в пределах установленной погрешности) в течение
известного интервала времени.
По виду СИ подразделяются на измерительные преобразователи,
измерительные приборы, измерительные устройства, измерительные
установки, измерительные системы и меры.
измеpительный преобразователь (ИП) — это техническое сред-
ство с нормированными MX, служащее для преобразования изме-
ряемой величины в другую величину, или измерительный сигнал,
удо бный для обработки, хранения, дальнейшего пр еобразования,
индикации или передачи. Информация с выхода измерительного
преобразователя недоступна для восприятия наблюдателем. По по-
ложению ИП в измерительной цепи — совокупность элементов СИ,
образующих непрерывный путь прохождения измерительного сигна-
ла, который содержит количественную информацию об измеряемой
ФВ, от входа до выхода — и по функции преобразования различают
следующие виды ИП.
Первичный ИП — измерительный преобразователь, на который
непосредственно воздействует измеряемая ФВ, т. е . первый преоб-
разователь в измерительной цепи. Конструктивно обособленный
первичный ИП, от которого поступают измерительные сигналы (он
«дает» информацию), называется датчиком, а часть первичного ИП,
непосредственно воспринимающая измеряемую ФВ, — чувстви-
тельным элементом.
Передающий ИП — измерительный преобразователь, предназна-
ченный для дистанционной передачи сигнала измерительной инфор-
мации.
Масштабирующий ИП предназначен для изменения размера из-
меряемой ФВ в заданное число раз. Функциональный преобразова-
тель используется для изменения выходной величины в определенной
функции от входной, например выходная величина является лога-
рифмом значения входной величины.
измерительный прибор — это СИ, предназначенное для получе-
ния значений измеряемой ФВ в установленном диапазоне и ее ин-
дикации в форме, доступной для непосредственного восприятия
наблюдателем. Показывающий ИП допускает только отсчет показа-
ний, регистрирующий обеспечивает запись показаний на диаграмму
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
14
или печать значений в графической или цифровой форме. Сигнали-
зирующий ИП подает световой или звуковой сигнал при достижении
измеряемой величины определенного значения, а интегрирующий
суммирует показания за определенный промежуток времени. У анало-
гового ИП показания являются непрерывной функцией измеряемой
величины, а у цифрового выходной сигнал дискретный.
измерительная установка — совокупность функционально
объединенных мер, измерительных приборов, измерительных преоб-
разователей и других устройств, предназначенных для измерений
одной или нескольких ФВ и расположенных в одном месте.
измерительная система — совокупность функционально объеди-
ненных мер, измерительных приборов, измерительных преобразова-
телей, ЭВМ и других технических средств, размещенных в разных
точках контролируемого объекта с целью измерений одной или не-
скольких ФВ, свойственных этому объекту, и выработки измеритель-
ных сигналов в разных целях.
Мера — СИ, предназначенное для воспроизведения и (или) хра-
нения ФВ одного или нескольких заданных размеров, значения ко-
торых выражены в установленных единицах и известны с необходи-
мой точностью.
информационно-измерительная система (ИИС) — совокупность
функционально объединенных измерительных, вычислительных и
других вспомогательных технических средств для получения измери-
тельной информации, ее преобразования, обработки с целью пред-
ставления потребителю (в том числе ввода в АСУ) в требуемом виде
либо автоматического осуществления логических функций измере-
ния, контроля, диагностирования, идентификации (распознавание
образов).
1.3. Виды и методы измерений
Существует несколько видов измерений. При их классификации
исходят из характера зависимости измеряемой величины от времени,
вида уравнения измерений, условий, определяющих точность резуль-
тата измерений, и способа выражения этих результатов.
Статические измерения — это измерения, при которых изме-
ряемая ФВ остается постоянной во времени в процессе измерения;
динамические измерения — измерения, при которых измеряемая ФВ
изменяется в процессе измерения. Прямые измерения — измерения,
при которых искомое значение ФВ находят непосредственно из
опытных данных: x = { x}[x] . Примером прямых измерений может
служить измерение температуры стеклянным термометром. При
косвенных измерениях искомое значение (y) определяется по резуль-
татам прямых измерений (xi) величин, связанных с искомой извест-
ной функциональной зависимостью:
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
15
y=f(x1,x2, ..., xn).
(1.2)
Примером косвенного измерения является измерение сопротив-
ления резистора методом амперметра — вольтметра, т. е . по результа-
там прямых измерений протекающего по резистору тока и напряже-
ния на нем: R = U/ I. При совокупных (совместных) измерениях
искомое значение (yj) определяется по результатам прямых измерений
одноименных (разноименных) значений xi путем решения системы
уравнений
xi = f(yj) =f(y1, y2, ..., ym),
(1.3)
где i =1 ...n, j =1 ...m, n≥ m; xi — результаты прямых измерений;
yj — искомые значения.
Если xi — одноименные ФВ, это совокупный вид измерения, а
если разноименные, то совместный.
Наиболее распространенными являются прямые измерения, слу-
жащие основой для более сложных видов измерений. Они могут
осуществляться двумя методами: методом непосредственной оценки
и методом сравнения с мерой. Под методом измерения в общем
случае понимается совокупность использования принципов и средств
измерений.
При методе непосредственной оценки значение ФВ определяет-
ся прямо (непосредственно) по отсчетному устройству СИ (например,
измерение давления обычным манометром).
Метод сравнения с мерой подразумевает сравнение измеряемой
величины с величиной, воспроизводимой мерой. В зависимости от
используемой меры (постоянной или регулируемой) он подразделя-
ется на дифференциальный и нулевой методы.
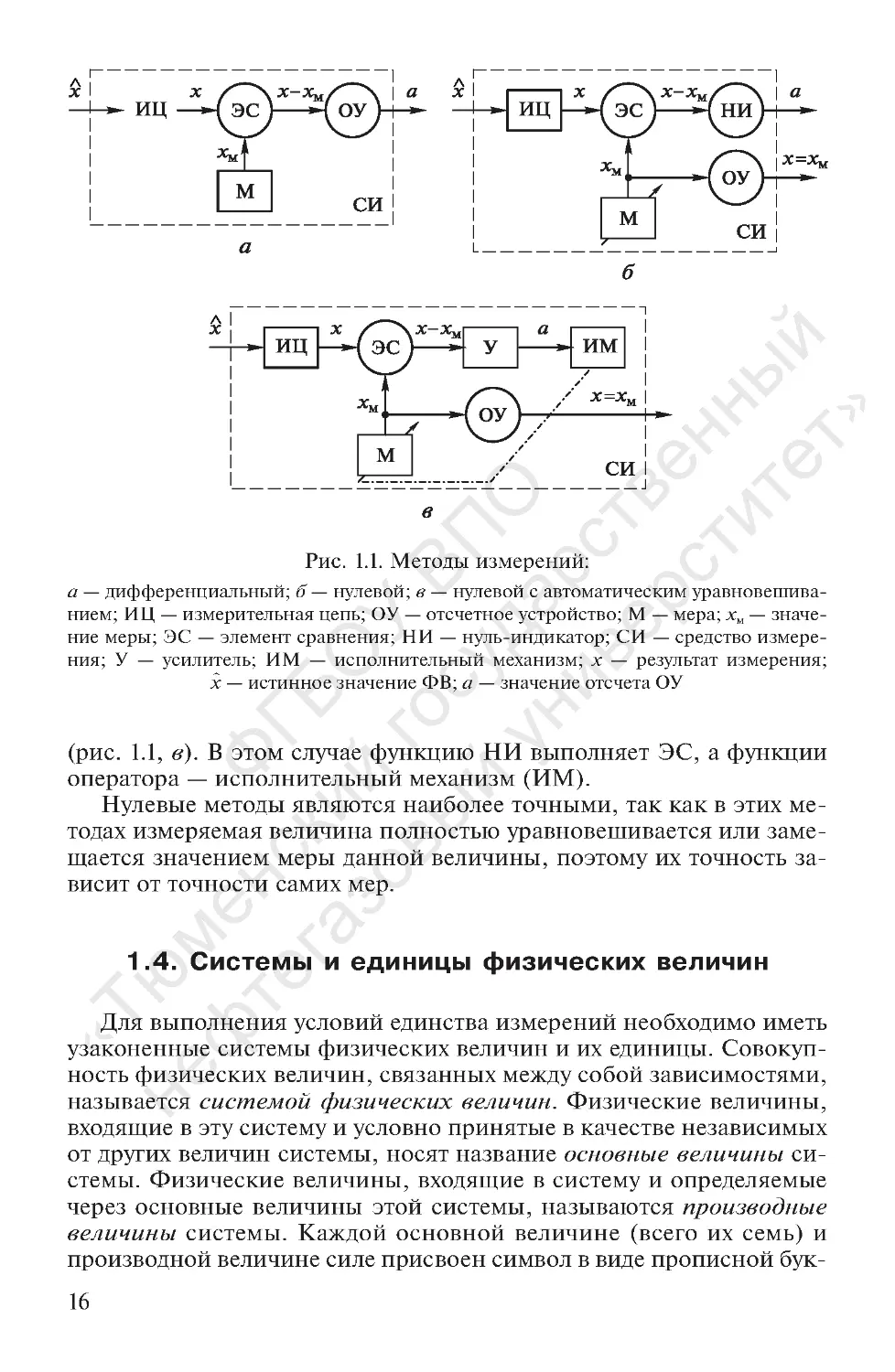
Дифференциальный ( разностный) метод предусматривает из-
мерение разности между измеряемой величиной и мерой (рис. 1.1, а).
Элемент сравнения (ЭС) определяет разность между измеряемой
величинойимерой:±a=x –xм;x=xм±a;xм = const.Результатиз-
мерения x отсчитывается по значению меры хм и разности a по от-
счетному устройству. Точность этого метода тем выше, чем меньше
разность a. При нулевом методе измеряемая величина уравновеши-
вается известной, воспроизводимой мерой (рис. 1.1, б ). Мера в этом
случае является регулируемой (xм = var) и уравновешивает измеряемую
величину x, т. е . нуль-индикатор (НИ), фиксирует разность ± a =
= x – xм = 0; отсчетное устройство (ОУ) представляет это значение
меры как результат измерения: x = xм.
Примером дифференциального и нулевого методов сравнения
является взвешивание неизвестного груза соответственно на разно-
плечих и равноплечих весах.
В измерительных устройствах, используемых в составе систем
автоматизации, ур авновешивание осуществляется автоматически
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
16
(рис. 1.1, в). В этом случае функцию НИ выполняет ЭС, а функции
оператора — исполнительный механизм (ИМ).
Нулевые методы являются наиболее точными, так как в этих ме-
тодах измеряемая величина полностью уравновешивается или заме-
щается значением меры данной величины, поэтому их точность за-
висит от точности самих мер.
1.4. Системы и единицы физических величин
Для выполнения условий единства измерений необходимо иметь
узаконенные системы физических величин и их единицы. Совокуп-
ность физических величин, связанных между собой зависимостями,
называется системой физических величин. Физические величины,
входящие в эту систему и условно принятые в качестве независимых
от других величин системы, носят название основные величины си-
стемы. Физические величины, входящие в систему и определяемые
через основные величины этой системы, называются производные
величины системы. Каждой основной величине (всего их семь) и
производной величине силе присвоен символ в виде прописной бук-
Рис. 1.1. Методы измерений:
а — дифференциальный; б — нулев ой; в — нулев ой с автоматическим уравнов ешив а-
нием; ИЦ — измерительная цепь; ОУ — отсчетное устройств о; М — мера; xм — значе -
ние меры; ЭС — элемент сравнения; НИ — нуль-индикатор; СИ — средство измере-
ния; У — усилитель; ИМ — исполнительный механизм; x — результат измерения;
^
x — истинно е значение ФВ; а — значение отсчета ОУ
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
17
вы латинского и греческого алфавитов, называемой размерностью
(dimension) основной физической величины: длина — L, масса — M,
время — T, сила — F, ток — I, термодинамическая температура — θ,
количество вещества — N, сила света — J . Размерностью производной
ФВ x называется выражение, отражающее связь этой величины с
основными ФВ системы; она представляет собой произведение раз-
мерностей основных величин, возведенных в соответствующие сте-
пени:
dimx=L
a
MbNγ... .
(1.4)
Показатели степени a, b, γ являются целыми или дробными, по-
ложительными или отрицательными числами и называются показа-
телями размерности. Например, размерность давления р, являю-
щегося производной ФВ, можно выразить через размерности основ-
ных величин следующим образом:
p
F
s
Fm
gg
l
t
p
ml
st
== ==
;;;;
22
dimm=M;diml=L;dimt=T;dims=L2;
dimp=M×L×L-2×T-2
= M×L-1×T-2
.
Измерение физических величин возможно лишь в том случае, если
для каждой из них выбраны соответствующие единицы. Системой
единиц ФВ называется совокупность основных и производных единиц
ФВ, относящихся к некоторой системе ФВ, и образованная в соот-
ветствии с принятыми принципами. В настоящее время общепри-
нятой является Международная система единиц (СИ или SI — system
international ). Ее основные единицы приведены в приложении 1.
Производные единицы Международной системы единиц образуются
на основании законов, устанавливающих связь между ФВ или на
основании определения ФВ, при этом единица производных ФВ со-
стоит из единиц основных ФВ. В некоторых случаях для выражения
производных величин приняты собственные наименования, чаще
всего это имена ученых.
Размеры системных единиц ФВ на практике часто неудобны, так
как или слишком велики, или слишком малы, поэтому используются
внесистемные единицы ФВ: кратные и дольные. Кратной (дольной)
единицей называют единицу, в целое число раз б'ольшую (меньшую)
системной или внесистемной единицы. Для обозначения множителя,
или коэффициента пересчета, используются соответствующая при-
ставка перед названием единицы и дополнительная буква (буквы)
в размерности, например мега (множитель 106) или микро (10-6).
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
18
К внесистемным единицам ФВ также относятся относительные и
логарифмические.
Относительная величина представляет собой безразмерное от-
ношение некоторой ФВ х1 к одноименной ФВ х0, принимаемой за
исходную:
k
x
x
=
{}
{}
.
1
0
Относительные величины могут выражаться в безразмерных едини-
цах (k = 1·10
0
); в процентах (k = 1·10
-2
); в промилле (k = 1·10
-3
);
в миллионных долях — м. д. (или ppm) (k = 1·10
-6
). Логарифмическая
величина представляет собой логарифм (десятичный, натуральный
или при основании 2) безразмерного отношения двух одноименных
физических величин. Единицей логарифмической величины являет-
ся бел (Б), определяемый следующими соотношениями:
12
1
2
1
2
Б==
lg
lg,
N
N
F
F
где N1 = 10N2; FF
12
10
=
; N1 и N2 — одноименные энергетические
величины (мощность, энергия и т. д. ); F1 и F2 — одноименные сило-
вые величины (напряжение, сила тока, давление и т. д . ) .
На практике чаще используется децибел (1 Б = 10 дБ).
1.5 . Метрологические характеристики средств
измерений
Метрологическая характеристика (MX) средства измерения —
это характеристика одного из свойств СИ, влияющая на результат
измерений и на его погрешность. Для каждого типа СИ устанавли-
ваются свои МХ. Метрологические характеристики, устанавливаемые
в нормативно-технической документации (НТД) на данное СИ, на-
зываются нормируемыми MX, а определяемые экспериментально —
действительными МХ.
К метрологическим хар актеристикам относятся статические и
динамические характеристики, чувствительность, порог чувствитель-
ности, диапазон измерения, цена деления шкалы и т. д . Статическая
характеристика (СХ) — это функциональная зависимость выходной
величины y от входной x в статическом режиме (рис. 1.2). При этом
режиме входные и выходные величины СИ не изменяются во време-
ни (стационарный или равновесный режим). Более точно СХ можно
определить как зависимость информативного параметра выходного
сигнала от информативного параметра входного сигнала в статиче-
ском режиме. В общем случае эта зависимость представляет собой
некоторое нелинейное уравнение преобразования у = f(х). Для из-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
19
мерительных преобразователей и измерительных приборов с неиме-
нованной шкалой или со шкалой, отградуированной в единицах,
отличных от единиц измеряемой величины, СХ называется также
функцией преобразования, а для остальных измерительных прибо-
ров — характеристикой шкалы.
В реальных условиях эксплуатации на СИ действуют влияющие
факторы φ (внутренние и внешние), которые не несут информацию
об измеряемом параметре. Если они не равны нормам, то зависимость
у = f(х) называется рабочей СХ, а если равны — номинальной или
градуировочной СХ у = fsf( х). Градуировочные характеристики СИ
получаются экспериментальным путем и могут быть заданы в виде
формул, графика или таблицы (например, градуировочные таблицы
для термометров сопротивления и термопар).
Важным параметром СИ является угол наклона статической ха-
рактеристики к оси абсцисс (для линейных СХ) или касательной к
этой характеристике в точке отсчета (для нелинейных СХ). Тангенс
угла наклона называется чувствительностью СИ (S). Чувствитель-
ность СИ — это свойство, определяемое отношением изменения
выходного сигнала этого средства к вызывающему его изменению
измеряемой величины:
S
yy
xx
=
-
-
=
вн
вн
tga;
(1.5)
S
y
x
dx
dy
x
==
=
→
lim.
D
D
D
0
tga
Различают абсолютную и относительную чувствительности.
Абсолютная чувствительность определяется по формуле
S
y
x
=
D
D
,
(1.6)
Рис. 1.2 . Статические характеристики СИ:
1 — линейная; 2 — нелинейная; хн, хв, ун, ув — соответственно нижнее и верхнее значе-
ния входных и выходных величин СИ; a — угол наклона СХ
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
20
а относительная — по формуле
S
y
xx
0=
D
D
,
(1.7)
где Dy — изменение сигнала на выходе СИ; Dx — изменение изме -
ряемой величины; x — измеряемая величина.
Если статическая характеристика СИ нелинейна, то чувствитель-
ность в различных точках диапазона будет различной, а шкала — не -
равномерной. При линейной статической характеристике чувстви-
тельность СИ постоянна, а шкала равномерная.
Порог чувствительности СИ — это наименьшее значение из-
менения ФВ, начиная с которого может осуществляться ее измерение
данным средством.
Для шкальных отсчетных устройств используются характеристики,
показанные на рис. 1.3.
Цена деления шкалы (постоянная прибора) — разность значений
величины, соответствующих двум соседним отметкам шкалы СИ, т. е .
количество единиц величины, содержащихся в одном делении шкалы.
Диапазон измерений — область значений величины, в пределах ко-
торой нормированы допускаемые пределы погрешности СИ. Значе-
ния величины, ограничивающие диапазон измерений снизу и сверху
(слева и справа), называют соответственно нижним xн и верхним xв
пределом измерений. Область значений шкалы, ограниченная на-
чальным и конечным значениями шкалы, называется диапазоном
показаний.
Цена деления шкалы C однозначно связана с числом делений n
шкалы и чувствительностью S:
Рис. 1.3 . Шкала измерительного прибора:
хн — нижний предел измерения; хв — в ерхний предел измерения
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
21
C
xx
n
CS
=
-
=
вн
;,
1
а число делений n — с классом точности (А) СИ: n ≥ 10/ 2A (понятие
класса точности будет дано в подразд. 1.6).
Поэтому значение измеряемой величины должно быть отсчитано
по шкале с погрешностью в половину деления.
Динамическая характеристика СИ (рис. 1.4) — это зависимость
выходного сигнала от входного в динамическом режиме (в этом
режиме входные и выходные величины изменяются во времени)
y(t) = f [x[( t)]]. Динамический (неустановившийся, или переходный)
режим — переход СИ из одного установившегося режима в другой.
Так как практически все СИ имеют в своем составе инерционные
элементы (подвижные механические узлы; электрические, пневмати-
ческие или гидравлические емкости, индуктивности; элементы, об-
ладающие тепловой инерцией, и т. д . ), то при мгновенном изменении
входного сигнала выходной сигнал изменяется с запаздыванием по
определенному закону (кривые переходных процессов, или кривые
разгона). Закон изменения этих характеристик может быть колебатель-
ным, апериодическим, дифференциальным, интегральным. Динами-
ческие характеристики описываются дифференциальными уравне-
ниями, передаточной функцией, амплитудно-фазовой, амплитудно-
частотной и ф азо-частотной характеристиками (см. гл. 13), а также
переходной и импульсной функциями. Для определения параметров
динамических характеристик СИ используют теорию автоматическо-
го управления (регулирования). Важным параметром динамического
Рис. 1.4. Динамическая характеристика СИ:
х — измерительный сигнал; у — выходной сигнал; y0 — установившееся значение вы-
ходной величины; t — время; T — постоянная времени; τ — время, з а которое выход-
ная величина примет установившееся значение у0
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
22
режима является время завершения переходного процесса (проме-
жуток времени τ от момента подачи измерительного сигнала x до
момента установления постоянного выходного сигнала y = const). На
практике широко используется постоянная времени Т (это время, за
которое выходной сигнал достиг бы нового установившегося значе-
ния, если бы изменялся с постоянной скоростью, равной начальному
значению). Обычно за Т принимают время, за которое выходная
величина y достигает уровня y = 0,632y0, где у0 — установившееся
значение выходной величины.
1.6 . Погрешности измерений и средств
измерений
При любых измерениях важно оценить их точность. Термин «точ-
ность измерения», т. е. степень приближения результатов к некото-
рому истинному значению, не имеет строгого определения и исполь-
зуется для качественного сравнения измерительных операций. Для
количественной оценки существует понятие «погрешность измере-
ния». Любой результат измерения является случайным, поэтому для
оценки его достоверности используются две характеристики: мате-
матическое ожидание Mx
()
θ=
—
среднее значение, вокруг кото-
рого группируются все случайные результаты измерения x1... xn, и
дисперсия D (θ) — степень разбросанности результатов относитель-
ного математического ожидания.
Понятия «точность» и «погрешность» можно пояснить на при-
мере стрельбы по мишени из артиллерийского орудия. Центр мише-
ни (точка наводки орудия на цель) — истинное значение, или мате-
матическое ожидание, причем M(θ) = 0. Точки попадания снарядов
в мишень — это результаты измерения (случайные величины), так
как на полет снаряда действуют случайные факторы: ветер, неравно-
мерно распределенная масса и сама масса снарядов, водные прегра-
ды (притягивают снаряды при их полете) и т. д. Точность стрельбы h
тем выше, чем кучнее, т. е . ближе к цели (центру мишени) ложатся
снаряды. Отклонение же снарядов от центра мишени характеризует-
ся погрешностью стрельбы d; чем ближе к цели попадают снаряды,
тем меньше погрешность стрельбы и выше точность. Следовательно,
точность h и погрешность d обратно пропорциональны: h = 1/ | d |.
Погрешность измерения (D) — это отклонение результата изме-
рения от истинного значения измеряемой величины. Функциональ-
ная зависимость выходной величины имеет вид xfx
=
(; ),
D где
D=xx
-
—
погрешность результата.
Точность измерения (h) — это близость результатов измерения к
истинному значению измеряемой величины.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
23
В общем виде погрешность измерения имеет следующие состав-
ляющие:
D = D( x)*Dнаб*Dм*Dобр*DСИ,
(1.8)
где D(x) — погрешность от нестабильности измеряемой величины х;
Dнаб — погрешность наблюдателя; Dм — погрешность метода измере-
ния; Dобр — погрешность метода обработки результата; DСИ — погреш-
ность применяемого средства измерения.
Символом «*» обозначены знаки неопределенности суммирования
между составляющими погрешности измерения, так как вопрос о
законах сложения решается в каждом конкретном случае.
Таким образом, понятия погрешность измерения и погрешность
Си отличаются друг от друга. Первые четыре составляющие погреш-
ности измерения могут быть уменьшены или даже сведены к нулю.
Последняя погрешность DСИ — погрешность СИ — является неустра-
нимой погрешностью.
Погрешности средств измерения DСИ классифицируются по ряду
признаков.
По форме записи погрешностиСИделятсянаабсолютнуюD,
относительную d и приведенную γ. Абсолютная погрешность — это
разность между результатом и истинным значением измеряемой ве-
личины:
D=xx
-
.
(1.9)
Эта погрешность характеризует только количественную сторону
результата измерения, но не отражает качественную сторону про-
цесса измерения; например, погрешность измерения расстояния
между двумя объектами D = 2 км не позволяет однозначно сделать
вывод о качестве измерения. Относительная погрешность — это
отношение абсолютной погрешности к истинному значению из-
меряемой величины. Она характеризует погрешность результата
измерения
d=±
D
x
.
(1.10)
Измерительный прибор измеряет ФВ переменного значения. Его
качество не может характеризоваться относительной погрешностью,
так как она уменьшается с увеличением истинного значения изме-
ряемой величины:
dd
1
1
1
11
1
2
2
2
22
2
=±
=±
=±
=±
DD
x
xx
xx
xx
x
–
,
–
;
так как x1 < x2, D1 ≈D2, то d2 < d 1, т. е. в этом случае погрешность прибора
будет находиться в пределах изменения d1...d2 этой погрешности.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
24
Любое же СИ должно характеризоваться одной погрешностью.
Исходя из этого существует «золотое правило» в метрологии:
в многопредельных измерительных приборах измерение ФВ прово-
дится в последней трети шкалы.
Качество измерительного прибора характеризуется приведенной
погрешностью. Приведенная погрешность — это отношение абсо-
лютной погрешности к базовому значению:
γ=±
D
N
,
(1.11)
где N = const — базовое значение, за которое в измерительных при-
борах принят диапазон измерения N = (xв - xн).
На практике вместо истинного значения измеряемой величины
используется ее действительное значение:
D=x-xд; dγ
=±
≈=
±
DD
D
xx
N
д
;.
Относительная и приведенная погрешности могут выражаться не
только в безразмерных единицах, но и в процентах:
dγ
=±
⋅=
±⋅
DD
xN
100
100
%;
%.
По режиму измерения погрешностиделятсянастатиче-
ские Dst и динамические Ddy n. Статическая погрешность формируется
в статическом режиме. Абсолютная погрешность СИ в статическом
режиме
DD
st
xxx
==
-
().
(1.12)
В динамическом режиме формируется динамическая погрешность.
Абсолютная погрешность СИ в динамическом режиме
Dxt
xt xt
() () ().
[]=-
(1.13)
Абсолютная динамическая погрешность имеет вид
D
dyn = D[x(t)]-Dst .
(1.14)
Повнешним условиям примененияСИпогрешности
делятся на основную D0 и дополнительную Dc. Кроме измеряемой
величины на СИ оказывают влияние различные влияющие факторы φi
(внутренние и внешние), которые не несут информацию об изме-
ряемой величине, но искажают ее. Таким образом, результат измере-
ния является функцией всех этих величин:
хfx
с
=
()
...
,,,,.
Dφφ
1
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
25
Для каждого СИ в нормативно-технической документации (НТД)
указываются диапазоны изменения влияющих факторов, которые для
данного СИ являются нормами (φref). Эти значения могут быть даны
в виде одного числа (влажность Wref = 60 %) или в виде диапазона
чисел(θref =(20±5)°C,Uref =±
220 15
10 B ). Если в условиях эксплуатации
СИ влияющие факторы имеют нормальные значения или находятся
в пределах нормальной области этих значений (φi = φref), то такие
условия эксплуатации называются нормальными, а погрешность СИ,
формируемая в этих условиях, — основной, так как присуща только
самому СИ, отражает свойство только самого СИ и является его
основной (главной) погрешностью. Результат, полученный в нормаль-
ных условиях эксплуатации, равен
xf
x
00
=
()
,,
D
а основная абсолютная погрешность
D00
=-
xx
.
(1.15)
Если влияющие величины не равны нормам (φi ≠φref), то результат,
полученный в рабочих условиях эксплуатации, будет равен
xp = f(x, Dp),
а абсолютная погрешность для этих условий эксплуатации равна
Dpp
=-
xx
.
(1.16)
Дополнительная погрешность — это разность между погрешно-
стью в рабочих условиях эксплуатации и основной погрешностью,
она имеет вид
D
ci =Dpi-D0
(1.17)
и формируется по каждому влияющему фактору φi .
Суммарная дополнительная погрешность D c равна
DD
cc
i
i
l
=
=
∑2
1
,
где D ci — дополнительная погрешность по φi влияющему фактору;
l — число влияющих факторов.
В НТД на СИ кроме нормальных указываются также рабочие об-
ласти влияющих величин φi и дополнительные погрешности по
каждой из них, что позволяет определить общую погрешность для
конкретных условий измерения (если они не выходят за пределы
рабочих условий эксплуатации).
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
26
По характеру появления погрешностиСИделятсяна
систематическую D s и случайную °D. Систематической называют
составляющую погрешности, остающуюся постоянной или изменяю-
щуюся по определенному закону от измерения к измерению. Обыч-
но систематические погрешности исключаются из результата изме-
рения различными способами. Случайной называют составляющую
погрешности, которая изменяется случайным образом при повторных
измерениях одного и того же истинного значения измеряемой вели-
чины. Исключить ее из результата невозможно, но оценить необхо-
димо. Для этого используются теория вероятностей и математическая
статистика.
Позависимости между величиной погрешности
и значением измеряемой величины погрешностиСИ
делятся на аддитивные, мультипликативные и гистерезиса.
Аддитивная погрешность постоянна по величине и не зависит от
значения измеряемой величины: D a (xi) = ± a. Ее причиной, напри-
мер, может быть сбитая шкала СИ.
Мультипликативная погрешность пропорциональна измеряемой
величине: D м (xi) = ± bxi; ее причиной может быть, например, изме-
нение параметров отдельных элементов.
Погрешность гистерезиса — это несовпадение результатов из-
мерений при прямом и обратном ходе (причинами гистерезиса явля-
ются люфт, сухое трение, упругое последействие и т. п . ). Количествен-
но погрешность гистерезиса (вариация) определяется как разность
между результатами измерений одного и того же значения измеряемой
величины, полученными при движении со стороны меньших значе-
ний до данного значения (прямой ход) и со стороны больших значе-
ний до данного значения (обратный ход). Вариация Н для стрелочных
приборов определяется по формуле
Нxx
=
′- ′′,
где x′ и x′′ — результаты, полученные соответственно при прямом и
обратном ходе.
При технических измерениях каждому СИ присваивается опреде-
ленный класс точности. Класс точности (А) — это о бобщенная
метрологическая характеристика, определяющая различные свойства
СИ и включающая в себя систематическую и случайную составляю-
щии погрешности. Класс точности нормируется предельными значе-
ниями основной погрешности в виде абсолютной, относительной или
приведенной.
Классами точности, определенными по абсолютной погрешности
Dop, нормируются меры. Такой класс точности обозначается римской
цифрой или прописной буквой латинского алфавита, причем чем
больше цифра или дальше буква от начала алфавита, тем больше по-
грешность.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
27
Класс точности, который обозначается на СИ цифрами, заклю-
ченными в окружность 1,5 , определяется по относительной погреш-
ности
dop
op
x
A
=±
⋅
=±
D 100%
,%,
где x — результат измерения. Такими классами точности нормируют-
ся мосты переменного тока, счетчики электрической энергии, дели-
тели напряжения, измерительные трансформаторы. Цифровые СИ
нормируются классами точности, которые также определяются от-
носительной погрешностью
dop
cd
x
x
=± +-
в
1,%,
причем
cb
a
x
d
a
x
=+
=
вв
;,
где а = Dа(x) и b = Dм(x) — аддитивная и мультипликативная состав-
ляющие погрешности соответственно; xв — верхний предел измерения
СИ. Такой класс точности может быть обозначен, например, 0,02 / 0,01
(с = 0,02, d = 0,01). При нормировании класса точности по приве-
денной погрешности γop для СИ с неравномерной шкалой (например,
омметров и амперметров) она определяется по формуле
γop
op
N
x
A
=±
⋅
=±
D 100%
,
где xN — длина шкалы или ее части; обозначается такой класс точ-
ности на СИ цифрами с галочкой внизу — 1,5
∨
.
Для нормирования класса точности всех аналоговых СИ исполь-
зуется приведенная погрешность
γop
op
N
A
=±
⋅
=±
D 100%
,
где N = xв - xн — предел измерения СИ.
Обозначается такой класс точности цифрами, например: 2,0. От-
влеченные положительные числа A, c, d в формулах выбираются из
ряда (1,0; 1,5; 2,0; 2,5; 4,0; 5,0; 6,0)10n, где n = -3; -2; -1; 0; 1, и назы-
ваются классами точности.
Средство измерений может иметь два и более классов точности.
Например, при наличии у него двух и более диапазонов измерений
одной и той же физической величины (многопредельные измеритель-
ные приборы) или при измерении одним СИ нескольких физических
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
28
величин (разные классы точности для каждой измеряемой величины).
Зная класс точности СИ, можно определить действительное значение
измеряемой величин xд:
xд = x±Dop,
или, зная предел допускаемой основной погрешности Dop, соответ-
ствует ли данное СИ своему классу точности.
Показателями качества измерения являются также правильность,
сходимость и воспроизводимость измерений. Правильность отража-
ет близость к нулю систематических погрешностей в их результатах.
Сходимость отражает близость друг к другу результатов измерений,
выполняемых в одинаковых условиях. Воспроизводимость отражает
близость друг к другу результатов измерений, выполняемых в раз-
личных условиях (в разное время, в различных местах, разными
методами и средствами измерения).
1.7. Градуировка и поверка средств измерений
Все СИ перед эксплуатацией подлежат процедуре градуировки,
а в процессе эксплуатации — периодической процедуре поверки.
Градуировка — это операция нанесения на шкалу СИ отметок, соот-
ветствующих показаниям рабочего эталона (для измерительных
приборов), или определения градуировочной характеристики СИ (для
измерительных преобразователей). Поверка — это операция, прово-
димая метрологическими службами и заключающаяся в установлении
пригодности СИ к применению на основании экспериментально
определенных метрологических характеристик и контроля их соот-
ветствия НТД. Основной метрологической характеристикой, опреде-
ляемой при поверке СИ, является его погрешность. Она находится
на основании сравнения поверяемого СИ с более точным рабочим
эталоном.
Поверка измерительных приборов проводится одним из двух ме-
тодов:
1) непосредственное сравнение величин, измеряемых СИ, и ве-
личин, воспроизводимых рабочими эталонами соответствующего
класса точности;
2) непосредственное сличение показаний поверяемого и некото-
рого рабочего эталона при измерении одной и той же величины.
Основой данного метода служит одновременное измерение одного и
того же значения физической величины поверяемым СИ и рабочим
эталоном. Разность показаний этих приборов равна абсолютной по-
грешности поверяемого СИ.
Важным при поверке является выбор оптимального соотношения
между допускаемыми погрешностями рабочего эталона и поверяе-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
мого СИ. Обычно рабочие эталоны выбираются таким образом,
чтобы это соотношение было 1 : 3 или 1 : 5.
Контрольные вопросы
1. Что означает понятие «метрология»?
2. В чем разница между истинным и действительным значением физиче-
ской величины?
3. Что такое шкала отношений? Приведите пример такой шкалы.
4. Что такое дольные и кратные единицы измерений?
5. Какие измерения относятся к косвенным? Приведите пример.
6. Какие причины могут привести к появлению аддитивной погрешно-
сти?
7. В чем заключается разница между погрешностью измерения и погрешно-
стью средства измерения?
8. Приведите классификацию средств измерения.
9. Что понимается под нормальными условиями измерения?
10. Может ли средство измерения иметь несколько классов точности?
11. В чем состоит разница между поверкой и градуировкой?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
30
Глава 2
ЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ МЕХАНИЧЕСКИХ ВЕЛИЧИН
2.1. Индуктивные датчики
Принцип работы индуктивных датчиков (ИД) основан на изме-
нении индуктивности или взаимоиндуктивности обмотки с магни-
топроводом вследствие изменения магнитного сопротивления маг-
нитной цепи датчика под воздействием измеряемой величины. ИД
относятся к классу параметрических датчиков. Наиболее широко ИД
применяются для преобразования линейных и угловых перемещений,
а также технологических параметров, преобразуемых в перемещение
(давление, расход и др.). Они также используются в дефектоскопии
для определения наличия дефектов, толщины немагнитных покрытий
на стали и в ряде других областей.
Простейший одинарный (однотактный) иД линейного пере-
мещения (рис. 2 .1, а) с переменным воздушным зазором d, значение
которого является измеряемой величиной, состоит из сердечника 1,
подвижного якоря 2, связанного с контролируемым объектом X, и
обмотки питания 3, которая является одновременно измерительной
обмоткой. В этом датчике происходит цепочка преобразований
X→d→Rм→Ф→L→Z→I, гдеX — измеряемое перемещение;d—
воздушный зазор между сердечником и якорем; Rм — м агнитн о е
сопротивление цепи датчика; Ф — магнитный поток; L — индуктив-
ность обмотки 3; Z — ее полное сопротивление; I — ток в обмотке.
Статическая характеристика датчика представляет собой зависи-
мость тока I в обмотке от зазора d. Ток I в обмотке
I
U
Z
U
RL
U
L
==
+
≈
ппп
22
()
,
ω
ω
(2.1)
где Uп — напряжение питания; R — активное сопротивление обмот-
ки; ω — циклическая частота напряжения питания; L — индуктив-
ность обмотки.
Поскольку R << ω L, активным сопротивлением можно пренебречь.
Индуктивность L и магнитный поток Ф равны соответственно
L
w
I
=
Ф
;
(2.2)
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
31
Ф
м
=
wI
R
,
(2.3)
где w — число витков обмотки; Rм = Rмс
+ Rмв
; Rмс
, Rмв
—
магнитное
сопротивление магнитопровода, стали и воздушного зазора соответ-
ственно.
С учетом того, что Rмс
<< Rмв
, получим формулу для индуктивности:
RR
wI
L
wS
мм
в
Ф
≈=
==
2
22
2
d
μ
μ
d
μ
d
;;,
(2.4)
где μ — магнитная проницаемость воздуха; S — площадь поперечно-
го сечения сердечника.
После подстановки всех выражений в (2.1) статическая характе-
ристика будет иметь вид
I
U
w
k
==
2
2
пd
ωμ
d.
(2.5)
Таким образом, с учетом сделанных допущений расчетная стати-
ческая характеристика I = f(d) одинарного индуктивного датчика
будет линейной (пунктирная линия на рис. 2 .1, б ). Реальная харак-
Рис. 2.1. Индуктивные датчики:
а — конструкция одинарного индуктивного датчика с переменным в оздушным зазо-
ром; б — его статическая характеристика; в — дифференциально-трансформаторный
датчик; 1 — сердечник; 2 — подвижный якорь; 3 — о бмотка питания (измерительная
обмотка); 4 — измерительный прибор; Х — пе ремещение контролируемого объекта;
d — в оздушный заз ор; Ф — магнитный поток; Uп — напряжение питания; I — ток в
обмотке; Uвых — выходное напряжение; W1 — первичная обмотка; W21 и W22 — вторич-
ные обмотки
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
32
теристика (сплошная линия на том же рисунке) на начальном (до
точки А) и конечном (после точки В) участках отличается от рас-
четной. Это связано с тем, что при малом зазоре Rмс
становится
сопоставимым с Rмв
, а при большом зазоре начинает влиять актив-
ное сопротивление R обмотки. Участок АВ является рабочей зоной
датчика. По ее центру выбирается начальное значение зазора d0
(точка С ).
Одинарные ИД имеют небольшое относительное перемещение
Dd/ d0 = 0 ,1 ... 0,15. Целый ряд недостатков, таких как малая рабочая
зона, невысокая чувствительность, влияние на результат преоб-
разования электромагнитного усилия притяжения якоря к сердеч-
нику, колебания температуры и напряжения питания, существенно
ограничивает их практическое использование. Обычно такие дат-
чики применяются в тех случаях, когда необходимо ступенчатое
релейное управление, например в качестве бесконтактных датчиков
положения, концевых выключателей, датчиков положения и др. Для
измерения же небольших перемещений применяются двухтактные
(реверсивные) ИД, включаемые по дифференциальной схеме. Эти
датчики состоят из двух сердечников, идентичных по конструктив-
ным и магнитным параметрам, с двумя также одинаковыми обмот-
ками, включенными последовательно и встречно. Между ними
располагается общий якорь. Измерительный прибор (ИП) включен
таким образом, что через него протекает разность токов в обмотках.
При среднем положении якоря зазоры между ним и каждым из сер-
дечников одинаковы, индуктивности обеих обмоток и токи в них
также одинаковы, т. е . результирующий ток через ИП отсутствует.
При перемещении якоря один из токов уменьшится на DI, а другой
ток возрастет на DI, в результате чего ток через ИП будет равен I = 2DI.
Если направление движения якоря изменится, направление тока
также изменится на обратное. Статическая характеристика остается
линейной для рабочей зоны Dd/ d0 = 0,3 ... 0,4. Такие датчики ис-
пользуются для измерения малых перемещений (от сотых долей
микрометра до 3 ... 5 мм).
Принцип действия трансформаторных (взаимоиндуктивных)
датчиков также основан на изменении индуктивности обмоток при
перемещении якоря. Особенностью трансформаторных ИД является
то, что в них отсутствует электрическая связь между обмоткой пита-
ния (возбуждения) и измерительной обмоткой, что позволяет менять
напряжение на выходе нагрузки независимо от величины напряжения
источника питания. Наводимая в измерительной обмотке ЭДС
Е равна
E
= WиωФ = f(d),
(2.6)
где Wи — число витков измерительной обмотки; ω — циклическая
частота напряжения питания; Ф — амплитуда магнитного потока; d —
воздушный зазор между якорем и сердечником.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
33
Следовательно, изменяя Wи, можно получить любое требуемое
значение выходного сигнала. Наибольшее распространение получил
дифференциально-трансформаторный датчик (рис. 2.1, в), принцип
действия которого основан на изменении потокосцепления между
двумя системами обмоток при перемещении подвижного плунжера.
Первичная обмотка W1 равномерно распределена по длине датчика.
Две одинаковые вторичные обмотки W21 и W22, расположенные на
разных половинах датчика, включены последовательно и встречно.
При симметричном расположении подвижного плунжера ЭДС Е21 и
Е22, наводимые во вторичных обмотках, компенсируют друг друга,
поэтому Uвых = 0. При перемещении плунжера появится выходное
напряжение Uвых = Е21 - Е22, фаза которого будет зависеть от направ-
ления перемещения плунжера.
Существуют также трансформаторные датчики угла поворота.
Индуктивные датчики обладают такими достоинствами, как
простота конструкции и надежность в работе; большая выходная
мощность, позволяющая во многих случаях обойтись без усилителя;
высокая чувствительность и разрешающая способность; безынерци-
онность (при условии, что частота изменения измеряемого переме-
щения гораздо меньше частоты источника питания); наличие на
статической характеристике большого линейного участка; возмож-
ность работы непосредственно от сети переменного тока.
2.2. Емкостные датчики
Принцип действия емкостных датчиков (ЕД), которые также
являются датчиками параметрического типа, основан на изменении
емкости конденсатора под воздействием измеряемой величины. Чаще
всего ЕД выполняются в виде плоскопараллельного или цилиндри-
ческого конденсатора переменной емкости. Емкость С плоского ЕД
определяется по формуле
C
S
=
εε
d
0
,
(2.7)
где ε0 — электрическая постоянная; ε — относительная диэлектри-
ческая проницаемость среды между пластинами; S — площадь пла-
стин; d — расстояние (зазор) между пластинами.
Поскольку емкость датчика зависит от трех параметров (S, d, ε), то
существуют ЕД трех типов: 1) датчики с переменной площадью пере-
крытия пластин S — для измерения линейных и угловых перемещений,
усилий; 2) датчики с переменным зазором d, которые используются для
измерения малых перемещений, быстропеременных параметров, таких
как вибрация, ускорение; 3) датчики с переменной диэлектрической
проницаемостью среды ε — для измерения уровня, влажности, концен-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
34
трации, в охранной сигнализации и др. Статические характеристики
датчиков перемещения будут соответственно иметь вид
C
Sa
x
1
0
0
0
0
==
εε
d
εε
d
;
(2.8)
C
S
x
2
0
0
=
±
εε
d
,
(2.9)
где а — ширина пластин конденсатора; х — измеряемое перемещение;
d0 — начальный зазор.
Емкостные датчики с переменным воздушным зазором целесооб-
разно использовать для измерения малых линейных перемещений
(менее 1 мм), причем максимальное перемещение Х не должно пре-
вышать 0,1d0. Это позволяет выбрать на статической характеристике
достаточно линейный участок. Емкостный датчик с переменной
площадью перекрытия пластин используется для измерения больших
линейных (более 1 см) и угловых (до 180°) перемещений.
Измерение емкости датчиков производится мостовым, резонансным
или импульсным методом. Для повышения чувствительности использу-
ют источники питания высокой частоты (от 400 Гц до нескольких мега-
герц). Преимуществами емкостных датчиков являются простота кон-
струкции, высокая чувствительность, малая инерционность, небольшой
вес и габариты, отсутствие подвижных контактов, простота приспособ-
ления формы конденсатора к различным задачам; недостатками —
низкая выходная мощность, нестабильность характеристик при измене-
нии параметров окружающей среды, необходимость тщательной экра-
нировки датчика и применения высокочастотного источника питания.
2.3 . Индукционные датчики
индукционный датчик относится к генераторным датчикам и
представляет собой устройство, состоящее из обмотки и магнитной
системы, осуществляющее преобразование контролируемой скорости
линейных или угловых перемещений в ЭДС. Принцип действия
основан на зависимости ЭДС, индуктируемой в обмотке при изме-
нении магнитного потока, пронизывающего ее витки, от скорости
его изменения в соответствии с законом электромагнитной индукции
Фарадея.
Эта ЭДС е определяется выражением
eW
t
=-
dФ
d
,
(2.10)
где W — число витков обмотки; Ф — магнитный поток.
Индукционные датчики подразделяются на две группы: в первом
случае обмотка перемещается относительно постоянного магнита,
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
35
совершая линейное Х или угловое φ перемещение, а во втором фер-
ромагнитная деталь (якорь или кольцо), механически связанная с
источником перемещений, перемещается относительно неподвижных
магнита и обмотки. У индукционного датчика скорости линейных
перемещений первого типа (рис. 2.2, а) обмотка, механически свя-
занная с подвижной частью устройства, перемещается относительно
магнитов; при этом ЭДС, индуктированная в обмотке, снимается
непосредственно с нее. У датчика угловых перемещений (рис. 2.2, б)
устройство аналогичное, но ЭДС снимается через коллектор. Маг-
нитный поток в обоих случаях постоянен и равен Ф. ЭДС Е на вы-
ходе датчика равна
EK
x
t
EK
t
==
пп
Ф
d
d
илиФ
d
d
,,
φ
(2.11)
где Кп — коэффициент пропорциональности, определяемый кон-
структивными параметрами датчика; х, φ — линейное и угловое пере-
мещение соответственно.
В индукционных датчиках второй группы (рис. 2 .2, в, г) обмотка
и магнитопровод неподвижны, а кольцо или якорь, связанные меха-
нически с контролируемым устройством, являются подвижными.
В этих датчиках поток Ф не является постоянным, что обусловлено
изменением во времени магнитного сопротивления.
Рис. 2.2. Индукционные датчики скорости перемещений:
а, в — линейных; б, г — угловых; 1 — обмотка; 2 — источник перемещений; 3 — маг-
ниты; 4 — якорь
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
36
Наибольшее изменение магнитного потока
D
D
Ф
ммм
=-
+
F
R
F
RR
,
(2.12)
где F — намагничивающая сила; Rм и Rм +DRм — крайние значения
магнитного сопротивления.
Чем больше скорость вращения, тем больше изменение магнит-
ного сопротивления и индуктированная ЭДС. Таким образом, вход-
ной величиной датчика является скорость вращения или перемеще-
ния, а выходной — индуктированная ЭДС (в случае углового пере-
мещения выходной величиной может быть частота электрического
сигнала в обмотке).
Индукционные датчики обеих групп имеют линейную статиче-
скую характеристику, представляющую собой зависимость ЭДС от
скорости перемещения. Достоинствами этих датчиков являются
сравнительно высокая точность и высокая чувствительность, что
позволяет использовать их непосредственно для измерения скоро-
сти без усилителей и других промежуточных элементов, а недо-
статками — влияние величины нагрузки на точность преобразо-
вания, а также наличие момента, действующего на вал, скорость
которого измеряется.
2.4 . Вихретоковые датчики
Вихретоковый метод контроля основан на анализе взаимодей-
ствия внешнего электромагнитного поля с электромагнитным полем
вихревых токов, наводимых им в электропроводящем объекте кон-
троля. В качестве источника электромагнитного поля чаще всего
используется индуктивная катушка (одна или несколько), называе-
мая вихретоковым преобразователем (ВТП). Синусоидальный (или
импульсный) ток, действующий в катушках ВТП, создает электро-
магнитное поле, которое возбуждает вихревые токи в электропро-
водящем объекте. Электромагнитное поле вихревых токов воздей-
ствует на катушки преобразователя, наводя в них ЭДС или изменяя
их полное электрическо е сопротивление. Регистрируя напряжение
на катушках или их сопротивление, получают информацию о свой-
ствах объекта или о положении преобразователя относительно него.
Особенность вихретокового контроля в том, что его можно прово-
дить без контакта преобразователя и объекта. Их взаимодействие
происходит на расстояниях, достаточных для свободного движения
преобразователя относительно объекта (от долей миллиметров до
нескольких миллиметров). Поэтому этими методами можно получать
хорошие результаты контроля даже при высоких скоростях движения
объектов.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
37
Вихретоковые датчики (ВТД) используются для бесконтактного
измерения вибрации, перемещения и частоты вращения электро-
проводящих объектов. Они применяются для диагностики состояния
промышленных турбин, компрессоров, электромоторов. Наиболее
часто объектом контроля являются осевое смещение и радиальная
вибрация вала ротора относительно корпуса. ВТД используются так-
же для контроля качества электропроводящих объектов (обнаружение
несплошностей материалов) в дефектоскопии, толщины изоляцион-
ного слоя на металлическом основании (толщинометрия), обнаруже-
ния электропроводящих объектов, например трубопроводов (метал-
лоискатели) в качестве бесконтактных концевых выключателей.
Вихретоковый датчик состоит из вихревого пробника 2 и элек-
тронного блока 1, соединенных кабелем 3 (рис. 2.3, а). В торце ди-
электрического наконечника 5 вихревого пробника находится катуш-
ка индуктивности 6 (одна или несколько). Электронный блок воз-
буждает в ней электр омагнитные колебания, в р езультате чего
возникает электромагнитное поле, взаимодействующее с материалом
контролируемого объекта. Если материал обладает электропровод-
ностью, на его поверхности наводятся вихревые токи, которые, в свою
очередь, изменяют параметры катушки — ее активное и индуктивное
сопротивление. Степень этого изменения зависит от зазора между
контролируемым объектом и торцом датчика; значение этого зазора
является входным пар аметром датчика. Оно составляет несколько
Рис. 2.3. Вихретоковый датчик:
а — конструкция; б — изменение выходного напряжения в зависимости от зазора;
1 — электронный блок; 2 — вихревой пробник; 3 — соединительный кабель; 4 — ме -
таллический цилиндрический корпус с резьбой; 5 — диэлектрический наконечник;
6 — плоская катушка индуктивности; А — амплитуда; d — измеряемый заз ор; Uвых —
выходное напряжение
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
38
миллиметров и зависит от диаметра катушки, заключенной в торце
диэлектрического наконечника. Выходным сигналом является на-
пряжение, пропорциональное измеряемому зазору (рис. 2 .3, б);
обычно оно составляет несколько мВ на 1 мкм. Пробник может иметь
различное конструктивное выполнение, так как его конструкция за-
висит от места монтажа и диапазона измерения.
Приоритетной областью использования вихретоковых датчиков,
как уже упоминалось, является контроль осевого смещения и попе-
речного биения валов больших турбин, компрессоров, электромото-
ров, в которых используются подшипники скольжения. Вихретоковый
метод обеспечивает высокую точность, поскольку не имеет нижнего
предела по частоте вибрации и не требует математической обработки
результатов измерения ввиду прямого соответствия выходного сиг-
нала текущему смещению вала или измерительного буртика относи-
тельно корпуса.
2.5 . Пьезоэлектрические датчики
Пьезоэлектрическим датчиком (ПЭД) называется устройство,
использующее пьезоэлектрический эффект для преобразования пере-
менных механических усилий в количество электричества (заряд).
ПЭД относятся к генераторным датчикам и используются для из-
мерения вибраций, переменных давлений, усилий и других параме-
тров. Принцип действия ПЭД основан на прямом пьезоэлектриче-
ском эффекте, т. е . появлении электрических зарядов на гр анях
некоторых диэлектриков при их деформации. К таким диэлектрикам
относятся кварц, турмалин и др., наиболее распространенным явля-
ется кварц. Пьезоэлектрические свойства в кристаллах проявляются
в зависимости от ориентации их осей: главной (оптической) оси Z и
перпендикулярных к ней электрической оси X и механической оси Y
(рис. 2 .4, а). Электрическая ось соединяет симметричные точки кри-
сталла, в которых электрический заряд имеет наибольшее значение.
ПЭД вырезают из кристалла кварца в форме пластины (параллеле-
пипеда). При отсутствии деформации все заряды в пластине ском-
пенсированы, и она является электрически нейтральной. При дей-
ствии измеряемой силы Fx вдоль оси Х на гранях пластины, перпен-
дикулярных к этой оси, возникают разнополярные электрические
заряды qx (продольный пьезоэффект). Значения зарядов в этом случае
не зависят от геометрических размеров пластины и определяются
только измеряемым усилием:
q
x = KпFx,
(2.13)
где Kп — пьезомодуль материала пластины.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
39
Если пластину подвергнуть сжатию по оси Y, то заряды снова
появятся на тех же гранях, но их знак будет противоположным. Кро-
ме того, в этом случае значение заряда будет зависеть от размеров
пьезопластины:
qK
b
a
F
xx
=-
п
,
(2.14)
где a, b — размеры пьезопластины в направлении X, Y соответ-
ственно.
Знаки зарядов на гранях пластины зависят от направления из-
меряемого усилия (сжатие или растяжение). При приложении силы
вдоль оси Z пьезоэффект не возникает, так же как и при одновремен-
ном сжатии по всем осям. Для съема сигнала на гранях, перпендику-
лярных к оси X, устанавливаются специальные обкладки, с которых
снимается ЭДС Е, равная
E
q
C
x
=
п
,
(2.15)
где Сп — собственная емкость датчика, определяемая по формуле
C
f
a
x
п=
εε
0
,
(2.16)
где ε0 — электрическая постоянная; ε — диэлектрическая проницае-
мость материала пластины; fx — площадь грани, перпендикулярной
к оси X; а — толщина пластины.
Обычно для увеличения чувствительности пьезодатчика несколь-
ко пластин соединяются параллельно; при этом заряды одноименно
заряжающихся плоскостей должны складываться. На рис. 2 .4, б при-
Рис. 2.4. Пьезоэлектрические датчики:
а — пьезопластина из кварца; б — схема пьезодатчика; Х — электрическая ось; Y — ме -
ханическая ось; Z — оптическая ось; Fx, Fy, Fz — измеряемые силы соотв етств енно по
осям X, Y, Z; a, b — р азмеры пьезопластины в направлении X, Y соотв етственно; Ех —
измеряемая ЭДС; Э — электроды; 1 — пластинка кв арца; 2 — корпус; 3 — станиолевая
прокладка; 4 — изоляционная прокладка
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
40
ведена простейшая схема пьезоэлектрического датчика, состоящего
из четырех кварцевых пластинок 1. Между ними находятся станио-
левые прокладки 3, которые служат одним из выводов, а второй вы-
вод имеет контакт с корпусом 2. Изоляционная прокладка 4 служит
для уменьшения утечки зарядов.
Достоинства ПЭД: возможность измерения быстропеременных
величин (с частотой изменения до 7 ... 100 кГц), малые габариты, про-
стота устройства; недостатки: невысокая чувствительность, невы-
сокая мощность выходного сигнала, непригодность к измерению
статических величин, так как после снятия нагрузки заряды через
некоторое время исчезают.
2.6 . Тензометрические датчики
(тензорезисторы)
Принцип действия тензорезисторов (ТР) основан на явлении
тензоэффекта — изменении активного электрического сопротив-
ления проводниковых и полупроводниковых материалов при дефор-
мации под воздействием механических усилий. Связь между измене-
нием сопротивления тензорезистора и его деформацией устанавли-
вается соотношением
DD
R
R
S
l
l
=
Т,
(2.17)
где DR/ R — относительное изменение сопротивления тензорезисто-
ра; Dl/ l — относительное изменение его длины; SТ — коэффициент
тензочувствительности, определяемый материалом ТР.
Тензочувствительность считается положительной, если DR /R > 0,
и отрицательной, если DR / R < 0.
Металлы, используемые для изготовления тензорезисторов (кон-
стантан, нихром, хромель), имеют значение SТ = 2,0 ... 2,5. Провод-
никовые тензорезисторы бывают двух видов: проволочные и фольго-
вые. Они используются в основном для измерения деформаций и
напряжений в механических конструкциях. Проволочный тензоре-
зистор выполняется из проволоки диаметром 0,02 ... 0,05 мм, которая
наклеивается на бумагу или изоляционную пленку в виде петель и
покрывается лаком; концы проволоки с помощью выводов подклю-
чаются к измерительной схеме. Тензорезистор наклеивается на по-
верхность детали так, чтобы длинная сторона петель (база датчика)
совпадала с направлением измеряемой деформации. Длина петель
составляет обычно 5... 20 мм; сопротивление тензорезистора —
30... 500 Ом. Изменение сопротивления, вызванное деформацией,
очень мало (от тысячных до десятых долей ома), поэтому для его из-
мерения используются мостовые схемы, причем тензорезисторы
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
41
включаются в два или четыре плеча измерительного моста. Статиче-
ская характеристика тензорезистора определяется выражением
R
= R0(1 ± STσ),
(2.18)
где R0 — начальное сопротивление тензорезистора (при отсутствии
деформации); σ — измеряемая деформация.
Знак в формуле (2.18) зависит от вида деформации: «+ » — для рас-
тяжения и «-»
—
для сжатия.
Фольговый ТР аналогичен проволочному, но его решетка выпол-
нена из константановой фольги прямоугольного сечения толщиной
4 ... 12 мкм. Такие тензорезисторы обеспечивают бо́льшую точность
преобразования, так как на них не сказываются поперечные дефор-
мации.
К достоинствам проводниковых тензорезисторов относятся: про-
стота конструкции, малые габариты, возможность измерения механи-
ческих параметров статических и динамических процессов; к недо-
статкам — невысокая чувствительность, большая температурная
погрешность, требующая специальных схем компенсации, одноразовость
использования (при снятии с детали тензорезистор разрушается).
Полупроводниковые тензорезисторы имеют ряд преимуществ
перед проводниковыми, прежде всего гораздо бо́льшую чувствитель-
ность (в 50 ... 60 раз). Однако малая механическая прочность, нели-
нейность статической характеристики, сильное влияние внешних
условий и большой разброс параметров внутри одинаковой партии
долго ограничивали их применение. И только после того как появи-
лась возможность изготавливать тензорезистор непосредственно на
кристаллическом элементе, выполненном из диэлектрика, чаще все-
го сапфира, полупроводниковые тензорезисторы стали исключитель-
но популярными. Такая монокристаллическая структура получила
название «кремний на сапфире» — КНС . Сапфировая мембрана об-
ладает упругими свойствами, приближающимися к идеальным. Сцеп-
ление кремниевых тензорезисторов с мембраной за счет молекуляр-
ных сил позволяет отказаться от использования клеящих материалов
и улучшить метрологические характеристики преобразователей.
Планарная технология позволяет одновременно формировать в по-
лупроводнике тензорезисторы, элементы термокомпенсации и ми-
кроэлектронный блок обработки сигнала. Тензорезиcторы мостовой
схемы можно располагать на мембране так, что при деформации они
будут иметь разные по знаку приращения сопротивления, что повы-
шает чувствительность тензодатчика в целом. Более подробно эти
датчики будут рассмотрены в гл. 5.
Контрольные вопросы
1. В изменение какой величины преобразуется механическое перемещение
в индуктивных датчиках?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
2. В чем заключается основное различие между индуктивными и взаимо-
индуктивными (трансформаторными) датчиками?
3. Какие виды емкостных датчиков вы знаете?
4. На какие группы подразделяются индукционные датчики?
5. Для контроля каких параметров насосно-компрессорного оборудования
можно использовать вихретоковые датчики?
6. Одной из областей использования вихретоковых датчиков является тол-
щинометрия — определение толщины слоя диэлектрика на металличе-
ском основании. Можно ли использовать ВТД для измерения слоя ме-
таллизации на диэлектрическом основании?
7. Почему пьезоэлектрические датчики нельзя использовать для измере-
ния статических величин?
8. С какой целью в пьезодатчиках используют несколько пьезопластин,
соединенных параллельно?
9. В чем заключаются особенности тензорезисторного датчика структуры
КНС?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
43
Глава 3
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
3.1. Понятие температуры. Температурные шкалы.
Классификация средств измерения температуры
Температура вещества характеризует степень нагретости тела.
Температуру можно измерить косвенно по термометрическому свой-
ству, изменяющемуся с изменением температуры монотонно и одно-
значно. При изменении температуры твердого тела изменяются его
линейные размеры, плотность, твердость, модуль упругости, электро-
проводность, теплопроводность, теплоемкость и ряд других свойств.
Свойства газов, жидких тел (фазовые состояния, плотность, объем,
вязкость и др.) также являются функцией температуры вещества.
Температура вещества — это непрерывная физическая величина,
для ее измерения необходима шкала, на основе которой можно уста-
новить единицу измерения температуры — «градус». Для построения
температурной шкалы выбирают опорные (реперные) точки θ, харак-
теризующиеся неизменностью и воспроизводимостью температуры
вещества при определенных физических условиях. Такими опорными
точками обычно выбираются температуры кипения или затвердева-
ния чистых веществ; им присваиваются определенные числовые
значения θ1 и θ2. Тогда единица измерения температуры — градус —
определится как
1
12
градус =
-
θθ
n
,
где n — целое число, на которое разбивается температурный интервал
между опорными точками.
Такие температурные шкалы, построенные на основе термо-
метрических свойств веществ, появились в первой половине XVIII в.
Первым такую шкалу предложил Фаренгейт в 1723 г. В качестве
термометрического вещества он использовал спирт, а в качестве
нижней реперной точки взял температуру смеси снега с хлоридом
аммония и присвоил ей численное значение 0. Температуру своего
тела Фаренгейт принял за 100 градусов, а за верхнюю реперную точ-
ку — температуру кипения воды, присвоив ей численное значение
212. Температура таяния льда в этом случае оказалась равной 32. Весь
температурный диапазон между таянием льда и кипением воды Фа-
ренгейт разделил на 180 равных частей и получил масштаб шкалы в °F.
В настоящее время эта шкала используется в США, Англии, Канаде,
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
44
Индии. В 1736 г. свою шкалу предложил Реомюр. В качестве термо-
метрического вещества он использовал спирт, затем ртуть. За нижнюю
реперную точку Реомюр принял температуру плавления льда и при-
своил ей численное значение 0, а за верхнюю реперную точку —
температуру кипения воды, присвоив ей численное значение 80. Весь
температурный диапазон он разделил на 80 равных частей и получил
масштаб шкалы в °R. Сейчас эта шкала практически не используется,
хотя термометры с этой шкалой сохранились во Франции и в Квебе-
ке (Канада). С 1742 г. начала применяться привычная нам темпера-
турная шкала, предложенная Цельсием, в которой в качестве двух
реперных точек приняты температура таяния льда (0 °С) и темпера-
тура кипения воды (100 °С) при давлении 760 мм рт. ст. и ускорении
силы тяжести 9,80665 м/ с2. Удобство этой шкалы, а также ее практи-
чески полное совпадение с Международной практической темпера-
турной шкалой МТШ-90 (в ней нижней реперной точкой является
тройная точка воды — точка равновесия воды в твердой, жидкой и
газообразной фазах, которая лежит выше точки таяния льда на 0,01 °С)
обусловило широкое использование шкалы Цельсия в СИ темпера-
туры.
Перевод °С в °F и в °R можно сделать по формуле
θθθ
°°
°
=-
=
С
5
9
32
5
4
().
FR
Цельсий, как и другие исследователи, полагал, что зависимость
между изменением температуры и объемным расширением жидкости
линейная. Однако в природе не существует жидкостей с линейной
зависимостью между объемным расширением и температурой. Поэ-
тому показания термометров совпадают только в реперных точках.
Рассмотренные температурные шкалы относятся к шкале ин-
тервалов (см. гл . 1), в которых начало отсчета выбирают ученые
по своему усмотрению. Кроме того, для установления шкалы тре-
буется две реперные точки. В гл. 1 была рассмотрена шкала от-
ношений, которая может быть установлена на основе одной ре-
перной точки. Ее построение возможно для физических величин,
которые имеют естественное (абсолютное) начало отсчета, т. е.
« 0 ». В 1848 г. английский ученый Томсон (его псевдоним лорд
Кельвин) предложил температурную шкалу, в которой температу-
ра отсчитывается от абсолютного нуля (состояние, соответствую-
щее минимальной теоретически возможной внутренней энергии
тела). Шкала получила название абсолютной термодинамической
шкалы, основной единицей которой является кельвин. Градус
Кельвина определяется как 1/ 273,16 части температуры тройной
точки воды (температурой равновесия между жидкой, твердой
водой и ее паром). Для воспроизведения кельвина интервал меж-
ду абсолютным нулем и температурой тройной точки воды делит-
ся на 273,16 части.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
45
В абсолютной термодинамической шкале температура Кельвина
Т (К ) через температуру в градусах Цельсия, Фаренгейта и Реомюра
выразится как
T(K) = θ °C +273,16 = (5/9)°F +255,38 = (5/4)°R +273,16.
По размеру кельвин равен градусу Цельсия.
В настоящее время используются следующие СИ температуры: тер-
мометры расшир ения, манометрические термометры, пирометры,
термопары (термоэлектрические преобразователи) и термометры со-
противления. Первые три вида термометров можно отнести к приборам,
а последние два — к преобразователям. Действие термометров расши-
рения основано на тепловом расширении жидкостей и твердых тел при
изменении температуры. В качестве примера можно привести ртутный
стеклянный термометр. Пирометры являются бесконтактными при-
борами и определяют температуру тел по их тепловому излучению.
3.2 . Манометрические термометры
Принцип действия манометрических термометров (МТ) основан на
зависимости давления рабочего (термометрического) вещества в замкну-
том объеме (термосистеме) от температуры. В соответствии с агрегатным
состоянием рабочего вещества в термосистеме манометрические термо-
метры подразделяют на газовые, жидкостные и конденсационные (па-
рожидкостные). По устройству термометры всех типов аналогичны.
Термосистема манометрического термометра (МТ) (рис. 3 .1) состо-
ит из термобаллона 1, капилляра 2 и пружинного манометра 3. Чув-
ствительный элемент термометра (термобаллон) погружается в объект
измерения, и термометрическое вещество в термобаллоне достигает
температуры измеряемой среды. При изменении температуры рабоче-
го вещества в термобаллоне изменяется давление, которое через капил-
лярную трубку передается на пружинный манометр, шкала которого
отградуирована в градусах Цельсия. Термобаллон представляет собой
цилиндр, изготовленный из латуни или специальных сталей, стойких
к химическому воздействию измеряемой среды. Диаметр термобаллона
находится в пределах от 5 до 30 мм, а его длина — 60 ... 500 мм. Капилляр
представляет собой медную или стальную трубку с внутренним диаме-
тром 0,1... 0,5 мм. Выпускаются также термометры с унифицированны-
ми пневматическими и электрическими выходными сигналами.
Газовые манометрические термометры заполняют газом, химиче-
ски инертным, с малой теплоемкостью, который легко получить в
чистом виде. Таким газом является азот или гелий. Принцип работы
этих термометров основан на использовании закона Гей-Люссака:
Pθ = P0(1+ b(θ- θ0)),
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
46
где Pθ и P0 — давление газа при температурах θ и 0 °С; b — термиче-
ский коэффициент давления газа, равный 1/ 273,15, или 0,00366 К-1
.
Диапазон измерения от -150 до + 600 °С. Начальное давление в
газовых термометрах устанавливают в зависимости от пределов из-
мерения 0,98 ... 4,7 МПа (10 ... 50 кгс/ см2). Это начальное давление
создается для увеличения чувствительности термометра и уменьшения
барометрической погрешности, возникающей при изменении давле-
ния окружающей среды. Для компенсации погрешностей от колеба-
ний температуры окружающей среды обычно применяется компен-
сационно е устр ойство, представляющее собой биметаллическую
пружину, связанную с указателем прибора и действующую в направ-
лении, противоположном действию манометрической пружины.
Недостатком газовых манометрических термометров является
ср авнительно большая тепловая инерция, обусловленная низким
коэффициентом теплообмена между стенками термобаллона и на-
полняющим его газом и малой теплопроводностью газа, а также
большие размеры термобаллона, что затрудняет установку его на
трубопроводах малого диаметра. Кроме того, в процессе эксплуатации
газовых термометров возможны случаи нарушения герметичности и
утечки газа, что не всегда можно заметить. Последнее обстоятельство
приводит к необходимости частой поверки этих приборов.
Манометрические ж и д к о с т н ы е термометры заполняют жид-
костью под некоторым начальным давлением. Жидкости, применяе-
мые для термометров, должны обладать возможно бо́льшим терми-
Рис. 3 .1. Манометрический термометр:
а — схема; б — внешний вид; 1 — термобаллон; 2 — капилляр; 3 — пружинный мано-
метр
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
47
ческим коэффициентом объемного расширения, высокой теплопро-
водностью и должны быть химически инертными к материалу
термометра. В качестве таких жидкостей используются ртуть (диа-
пазон измерений от -30 до + 600 °С), ксилол (диапазон измерений от
- 40 до + 200 °С), толуол, пропиловый спирт, силиконовые жидкости
(диапазон измерений от -150 до + 300 °С). Чтобы жидкость не заки-
пела, в термометре создают начальное давление 1,47 ... 1,96 МПа
(15 ... 20 кгс/ см2). Ввиду того что жидкость практически несжимаема,
объем термобаллона в жидкостных МТ в отличие от газовых должен
быть согласован со свойствами используемой манометрической пру-
жины. Давление окружающей среды не оказывает влияния на работу
термометра из-за большого рабочего давления; температурная ком-
пенсация осуществляется посредством биметаллической пружины.
Для этих термометров характерна гидростатическая погрешность,
возникающая в том случае, когда манометр и термобаллон оказыва-
ются расположены на разной высоте. Эта погрешность устраняется
после монтажа прибора смещением стрелки манометра.
Вконденсационных (парожидкостных) манометрических
термометрах термобаллон заполняется на 2/3 объема низкокипящей
жидкостью. В замкнутой системе термометра всегда существует ди-
намическое равновесие одновременно протекающих процессов ис-
парения и конденсации. При повышении температуры усиливается
испарение жидкости и увеличивается упругость пара, а в связи с этим
усиливается также процесс конденсации. В результате этого насы-
щенный пар достигает некоторого определенного давления, строго
отвечающего измеряемой температуре. Давление пара, изменяясь с
температурой, передается через среду, заполняющую капилляр, ма-
нометрической трубке. Жидкость, применяемая в этих приборах,
должна иметь точку кипения достаточно низкую, чтобы обеспечить
необходимое давление в пределах измеряемых температур (от - 50 до
+ 350 °С). Термобаллон термометра заполняют с таким расчетом,
чтобы при наиболее низкой температуре в нем осталось некоторое
количество пара, а при наиболее высокой — некоторое количество
неиспарившейся жидкости, причем капилляр должен оставаться по-
груженным в жидкость во всем диапазоне измерения. В качестве
термометрического вещества в конденсационных МТ используются
легкокипящие жидкости, в частности: пропан, ацетон, толуол, эти-
ловый эфир и т.д.
Эти термометры наиболее чувствительны из всех МТ, так как
давление насыщенного пара резко изменяется с температурой. К до-
стоинствам парожидкостного термометра следует отнести и то, что
изменение температуры манометрической трубки и капилляр а не
влияет на давление в системе. Это позволяет располагать вторичный
прибор на больших расстояниях (до 75 м) от термобаллона по срав-
нению с газовым и жидкостным термометрами (до 40 м). Гидроста-
тическая погрешность компенсируется так же, как в жидкостных
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
48
термометрах, а барометрическая имеется только на начальном участ-
ке шкалы.
К недостаткам парожидкостного термометра следует отнести не-
линейность шкалы. В некоторых моделях для получения равномерной
шкалы используются специальные линеаризующие устройства.
Все манометрические термометры отличаются простотой конструк-
ции, возможностью дистанционной передачи показаний (либо по
капилляру, либо посредством унифицированного электрического или
пневматического сигнала). Основное достоинство этих термометров —
возможность их использования на взрывоопасных объектах.
3.3. Измерение температуры термометрами
сопротивления (терморезисторами)
3.3.1 . Металлические (проводниковые) ТС
Принцип действия термометров сопротивления (ТС), или тер-
морезисторов, основан на свойстве металлов и полупроводников
изменять свое электрическое сопротивление с изменением темпера-
туры. Качество ТС характеризуется его чувствительностью к измене-
нию температуры и определяется температурным коэффициентом
сопротивления (ТКС) aТ, представляющим собой относительное из-
менение сопротивления при изменении температуры на один гра-
дус:
a
θθ
θ
T
RR
R
=
-
-
-
0
00
1
()
(),
°С
(3.1)
где Rθ — сопротивление при температуре θ; R0 — начально е сопро-
тивление ТС (обычно при 0 °С).
Металлы имеют положительный ТКС, а полупроводники, как пра-
вило, отрицательный. Это означает, что у металлов при увеличении
температуры сопротивление увеличивается, а у полупроводников —
уменьшается. При этом по модулю ТКС полупроводников на порядок
выше, чем у металлов.
Металлические ТС выполняются преимущественно из меди или
платины. Медь — один из недорогостоящих металлов, легко полу-
чаемых в чистом виде. Медный ТС (ТСМ) имеет линейную зависи-
мость сопротивления от температуры:
Rθ = R0[1 +aT(θ - θ0)],
(3.2)
где Rθ — сопротивление термометра, Ом, при температуре θ °С на-
грева ТСМ; R0 — сопротивление термометра, Ом, при температуре
θ0=0°C;aТ—ТКСмеди°C
-1
.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
49
Диапазон рабочих температур — от
-200до+200°С,таккакпри
температуре более 200 °C медь активно окисляется и поэтому не ис-
пользуется. Платина является наилучшим материалом для ТС. Не-
достатком платиновых ТС (ТСП) является нелинейность функции
Rθ = f(θ), которая для области положительных температур может быть
записана в виде
R
θ = R0[1+aT(θ-θ0)+bT(θ-θ0)2],
(3.3)
где aТ и bТ — ТКС платины.
Эти ТС широко применяются для измерения температуры в ин-
тервале от -260 до + 1 100 °С.
Существуют различные типы медных и платиновых ТС, отличаю-
щиеся градуировкой (значением сопротивления при 0 °С). При этом
приняты такие обозначения для платиновых: 1П, 10П, 50П, 100П,
500П; для медных: 10М, 50М, 100М. Число перед буквой обозначает
сопротивление ТС при 0 °С (Ом), а буква — материал, из которого
изготовлен ТС (П — платина, М — медь). Устройство промышлен-
ного термометра сопротивления показано на рис. 3.2, а. В корпусе 1
расположена тонкая проволока 2 из платины или меди, которая на-
матывается на каркас 3 из керамики, стекла или пластмассы. Прово-
Рис. 3.2. Промышленные ТС:
а — проводниковый; б — термистор; 1 — корпус; 2 — пров олока; 3 — каркас; 4 — изо -
ляционные трубки; 5 — разъем; 6 — соединительная головка; 7 — штуцер
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
50
лока (ЧЭ термометра) припаивается к выводным проводам, которые
через изоляционные трубки 4 подводятся к разъему 5 в соединитель-
ной головке 6. ТС устанавливается на объекте измерения с помощью
штуцера 7.
Чувствительный элемент медного термометра сопротивления
ТСМ представляет собой медную эмалированную проволоку диа-
метром 0,1 мм, намотанную на пластмассовый каркас и покрытую
сверху сло ем лака. К концу медной проволоки припаяны медные
выводы диаметром 1,0 ... 1,5 мм. Чувствительный элемент платино-
вого термометра сопротивления ТСП выполнен из платиновой про-
волоки диаметром 0,07 мм, бифилярно намотанной на каркас 3.
К концу платиновой проволоки припаяны серебряные выводы диа-
метром 1 мм.
К преимуществам проводниковых термометров сопротивления
относятся: возможность градуировки термометра в значительном
диапазоне на любой температурный интервал; высокая степень точ-
ности измерения температуры; возможность расположения вторич-
ного измерительного прибора на значительном расстоянии от места
измерения температуры; централизация контроля температуры пу-
тем присоединения нескольких термометров к одному измеритель-
ному прибору. К недостаткам термометров сопротивления следует
отнести: необходимость постороннего источника питания, ограни-
чение по его применению во взрывоопасной среде, значительную
длину чувствительного элемента, не позволяющую измерить темпе-
ратуру в заданной точке, и разрушаемость при вибрациях (платино-
вых термометров).
3.3.2. Полупроводниковые термометры
сопротивления
Полупроводниковые ТС называются термисторами. Сопротив-
ление термисторов при нагреве изменяется по закону
RR
Т
TT
T
=
--
0
0
ea()
.
(3.4)
Достоинства термисторов — высокая чувствительность, малые
габариты.
Характерной особенностью термисторов является резкое умень-
шение электрического сопротивления при повышении температуры.
Для изготовления термисторов используют смеси двуокиси титана и
окиси магния, окиси никеля в соединении с окислами марганца,
смеси окислов марганца, никеля и кобальта, окиси железа в соеди-
нении с такими веществами, как MgAl2O4, MgCr2O4 и др. Различным
сочетанием компонентов и их пропорций можно изменять электро-
проводность и температурный коэффициент сопротивления.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
51
Конструктивно термисторы пр едставляют собой миниатюрные
конструкции дисковой, шариковой и других форм с металлически-
ми выводами (рис. 3 .2, б ). Диаметр стержня термистора составляет
от 20 мкм до 5...10 мм, длина — 1...50 мм. Диаметр диска — от 1 мм
до нескольких сантиметров, толщина 0,02... 1 мм. Для защиты от
влаги их покрывают слоем лака или стекла.
Высокий температурный коэффициент ТС обусловливает высокую
чувствительность. Термисторы имеют малую тепловую инерцию, а
также малые габариты, что позволяет измерять температуру в труд-
нодоступных местах. Кроме того, их высокое омическое сопротивле-
ние (30... 40 кОм) позволяет пренебрегать сопротивлением подво-
дящих проводников и переходными контактными сопротивлениями.
К недостаткам полупроводниковых ТС следует отнести разброс их
параметров (в частности, начального сопротивления). Поэтому они
в основном применяются не для измерения температуры, а для ее
контроля и сигнализации.
3.3.3. Измерительные схемы термометров сопротивлений
Для точных измерений температуры и метрологической аттестации
ТС получили применение мосты постоянного тока. Рассмотрим че-
тырехплечий мост постоянного тока (рис. 3.3, а). Введем следующие
основные понятия: a, b, c, d — вершины моста; ad, db, bc, ca — пле-
чи моста; ab — диагональ питания; cd — измерительная диагональ;
acb и adb — ветви моста; R1, R2, R3 и R4 — сопротивления плеч мо-
ста. Плечи моста, не имеющие общей точки соединения, называют-
ся противоположными (ac и db), а имеющие ее — смежными (ac и
ad). Измерения с помощью мостов основаны на способности мосто-
вых схем находиться в состоянии равновесия — это состояние, при
котором напряжение на измерительной диагонали равно нулю при
наличии напряжения питания.
Для вывода уравнения равновесия моста воспользуемся вторым
законом Кирхгофа: сумма напряжений в замкнутом контуре равна
нулю. Для контура cdbc сумма напряжений, действующих в нем,
равна нулю:
UUUU
cdbc
cd
db
bc
=+-=
∑
0
(3.5)
или
UUUI
RIR
UR
RR
UR
RR
cd
bc
db
=-=-=
+
-
+
=
14 23
4
14
3
23
пп
=
+
-
+
U
R
RR
R
RR
п
4
14
3
23
.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
52
При равновесии моста напряжение на его измерительной диаго-
нали равно 0, следовательно, равенство (3.5) примет вид
UU
R
RR
R
RR
cd=
+
-
+
=
п
4
14
3
23
0,
т.е.
R
RR
R
RR
4
14
3
23
+
=
+
.
Преобразуя, получим уравнение равновесия моста в виде
R
4R2 = R1R3.
(3.6)
Рис. 3.3 . Измерение сопротивления мостовым методом:
а — схема моста постоянного тока; б — автоматический уравновешенный мост;
в — схема эквивалентного реохорда Rэр; ЭУ — электронный усилитель; РД — рев ерсив-
ный двигатель; Rэр — сопротивление эквив алентного реохорда; Rθ — сопротивление
ТС; R1, R2, R3, R4 — резисторы мостовой схемы; Rл1—Rл3 — сопротивления линии связи;
λ — координата положения движка реохорда; DU — напряжение на измерительной
диагонали; Uп — напряжение питания; Rр — сопротивление рабочего реохорда;
Rш — сопротивление шунта; Rп — сопротивление для изменения диапазона измерения
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
53
Словесная формулировка условия равновесия моста — при равно-
весии моста произведения сопротивлений его противоположных
плеч равны между собой.
Для измерения температуры посредством ТС используются авто-
матические уравновешенные мосты с переменным отношением плеч;
упрощенная схема такого моста с трехпроводной линией связи по-
казана на рис. 3 .3, б. Автоматическими мосты называются потому,
что состояние равновесия в них достигается без участия человека с
помощью следящей системы. Элементы моста рассчитываются таким
образом, чтобы при начальном значении сопротивления ТС движок
реохорда находился в одном из крайних положений. Для получения
линейной зависимости положения движка реохорда от изменения
сопротивления резистора Rθ последний включается в плечо, приле-
жащее к реохорду Rэр. В качестве нуль-индикатора в автоматических
мостах используется электронный усилитель (ЭУ). При равновесии
моста напряжение на его измерительной диагонали cd равно нулю
(DU = 0).
При изменении температуры θ изменяется сопротивление Rθ и
мост выходит из равновесия, т. е. в диагонали cd появляется напря-
жение небаланса DU, которое усиливается ЭУ до значений, достаточ-
ных для вращения ротора реверсивного двигателя (РД) в соответ-
ствующую сторону, в зависимости от знака напряжения небаланса.
Вал РД, связанный с движком реохорда, перемещает его до тех пор,
пока DU не станет равным нулю. Одновременно с движком реохорда
перемещается стрелка, указывающая по шкале положение движка λ
(значение измеряемой температуры).
При изменении θ от минимального до максимального значения
измеряемой температуры движок перемещается из одного крайнего
положения в другое.
Сопротивление эквивалентного реохорда Rэр (рис. 3 .3, в) пред-
ставляет собой параллельное соединение трех резисторов: рабочего
реохорда Rр, сопротивления шунта Rш и резистора Rп, определяюще-
го диапазон измерения.
Параллельно соединенные резисторы Rр и Rш образуют так на-
зываемый стандартный реохорд (его сопротивление обычно состав-
ляет 90 или 130 Ом), а все три резистора — так называемый эквива-
лентный реохорд.
Параметр λ характеризует координату положения движка эквива-
лентного реохорда Rэр в каждый момент времени в соответствии с
текущим значением измеряемой температуры и равен
λ=
DR
R
эр
эр
.
При λ = 0 движок находится в левом конце реохорда, при λ = 1 —
в правом конце реохорда, при 0 < λ<1 движок занимает промежуточ-
ное положение.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
54
Пусть при температуре, соответствующей начальному значению
шкалы прибора, измеряемое сопротивление равно
R
θ = Rθнач,
(3.7)
а при изменении температуры
R
θ=Rθнач+DRθ.
(3.8)
Условие равновесия для промежуточной точки шкалы имеет вид
(0 <λ<1)
(
R1+λRэр)(R3+Rл3)=[(1-λ)Rэр+R2+Rл1+Rθ]R4.
(3.9)
Условие равновесия для начальной точки шкалы (λ = 0):
R1(R3 + Rл3) = (Rэр + R2 + Rл1 + Rθнач)R4.
(3.10)
Вычитая из (3.9) равенство (3.10) с учетом р авенств (3.7), (3.8)
и решая получившееся уравнение относительно λ, получим
λ
θ
=
++
DR
R
RR RR
4
433
рл
()
.
(3.11)
Таким образом, координата положения движка λ в каждый момент
времени соответствует текущему значению измеряемой температуры
ТС, причем зависимость ее от приращения измеряемого сопротив-
ления DRθ линейна. Так как сопротивление медного термометра со-
противления типа ТСМ линейно зависит от температуры, шкала
моста, работающего в комплекте с ним, проградуированная в едини-
цах измерения температуры, тоже линейная, или равномерная. Мо-
сты, работающие с платиновыми термометрами сопротивления типа
ТСП, имеют нелинейную шкалу.
В реальных условиях эксплуатации ТС размещен на технологиче-
ском объекте и удален от измерительного моста на сотни метров.
В этом случае он соединяется с измерительным мостом, как правило,
медными изолированными проводами, которые называются линиями
связи Rл. При изменении температуры окружающей среды сопро-
тивление проводов тоже изменяется, что влияет на точность измере-
ния. Степень этого влияния сопротивления линии связи на результат
измерения зависит от схемы подключения ТС к измерительной схеме
моста, т. е . от количества проводов (двух-, трех- и четырехпроводные
схемы). Наибольшее распространение получили трехпроводные схе-
мы включения, в которых влияние сопротивления линии связи не-
значительно.
В настоящее время широкое распространение получили пре-
образователи сопротивления ТС в унифицированный электриче-
ский сигнал, что позволяет подключать терморезисторы сразу к
контроллеру. Принцип действия такого преобразователя рассмотрен
вгл.9.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
55
3.4. Измерение температуры термоэлектрическими
термометрами (термопарами)
3.4.1 . Сущность термоэлектрического метода
измерения температуры
В основу измерения температуры с помощью термоэлектриче-
ских термометров положены термоэлектрические явления, открытые
Зеебеком в 1821 г. При соединении одних концов двух одинаково на-
гретых проводников из разнородных материалов, причем в первом
материале количество свободных электронов в единице объема боль-
ше, чем во втором, последние будут диффундировать из первого
проводника во второй в большем числе, чем обратно. Таким образом,
второй конец первого проводника станет заряжаться положительно,
а второго проводника — отрицательно. Образующееся при этом в
месте соединения (спае) проводников электрическое поле будет
противодействовать этой диффузии, в результате чего наступит со-
стояние подвижного равновесия, при котором между свободными
(вторыми) концами указанных проводников появится некоторая раз-
ность потенциалов. С увеличением температуры проводников значе-
ние этой разности также увеличивается. Если взять цепь (рис. 3.4, а),
составленную из двух различных проводников А и В (например, меди
и платины), то при подогреве спая 1 в цепи появится электрический
ток, который в более горячем спае 1 направлен от платины В к меди А,
а в холодном спае 2 — от меди к платине. При подогреве спая 2 ток
получает обратное направление. Такие токи называются термоэлек-
трическими. Электродвижущая сила, обусловленная неодинаковыми
Рис. 3.4. Термоэлектрическая цепь:
а — без подключения измерительного прибора; б — с подключением измерительного
прибора; в — характеристика термопары; A и B — пров одники (термоэлектроды);
1 и 2 — соответств енно горячий и холодные спаи; C — соединительные провода (тре-
тий пров одник); ИП — измерительный прибор; EAB — ЭДС термоэлектрической цепи
(термопары)
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
56
температурами мест соединения 1 и 2, называется термоэлектро-
движущей силой (термоЭДС), а создающий ее преобразователь — тер-
моэлектрическим преобразователем или термопарой (ТП). Спай
1, погружаемый в измеряемую среду, называется рабочим или горя-
чим спаем термопары; второй спай 2 носит название свободного, или
холодного, спая. Проводники, образующие термопару, называются
термоэлектродами.
Суммарную электродвижущую силу ЕAB замкнутой цепи из про-
водников А и В, спаи которой нагреты до температур θ и θ1, можно
выразить уравнением
E
AB(θ, θ1) = eAB(θ) + eBA(θ1),
(3.12)
где eAB(θ) — ЭДС, вызванная диффузией электронов из материала А
в материал В при температуре θ; eBA(θ1) — ЭДС, вызванная диффу-
зией электронов из материала В в материал А при температуре θ1.
Если температуры спаев 1 и 2 одинаковы, т. е . θ = θ1 = θ0, то
E
AB(θ0, θ0) = eAB(θ0) + eBA(θ0) = 0
(3.13)
или
e
AB(θ0) = - eBA(θ0).
(3.14)
Таким образом, для замкнутой цепи (рис. 3.9, а) уравнение (3.12)
с учетом (3.14) примет вид
e
AB(θ, θ1) = eAB(θ) - eAВ(θ1).
(3.15)
Уравнение (3.15) называется основным уравнением термоэлек-
трических преобразователей. Из него следует, что возникающая в
контуре термоЭДС зависит от разности температур спаев 1 и 2. Если
температуру спая 2 поддерживать постоянной, т. е . θ1 = θ0 = const, то
eAB(θ1) = eAB(θ0) = C = const и
E
AB(θ, θ1) = eAB(θ) - C = f(θ).
(3.16)
Таким образом, ЭДС термоэлектрического преобразователя при
постоянной температуре холодного спая 2 зависит только от темпе-
ратуры горячего спая 1. Если для данной термопары эксперименталь-
но, т. е . путем градуировки, найдена зависимость (3.16), то измерение
температуры θ1 сводится к определению термоЭДС, которая невели-
ка (0,01 ...0 ,06 мВ на 1 °С), но все же достаточна для измерения по-
средством измерительного прибора. Он включается в разрыв холод-
ного спая термопары 2 (рис. 3 .4, б) при помощи проводников С.
В этом случае термоЭДС, развиваемая термопарой, равна
E
ABС(θ, θ1) = eAВ(θ) + eВС(θ1) + eCA(θ1).
Если θ = θ1, то EABС(θ1, θ1) = eAВ(θ1) + eВС(θ1) + eCA(θ1) = 0.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
57
Тогда
- eAВ(θ1) = eВС(θ1) + eСА(θ1)
или
EABС(θ, θ1) = eAВ(θ) - eAВ(θ1) = EAB(θ, θ1).
(3.17)
Уравнение (3.17) совпадает с основным уравнением термоэлектри-
ческих преобразователей (3.15). Поэтому включение в цепь термо-
пары соединительных проводов и измерительных приборов на рабо-
ту термопары не влияет.
3.4.2. Типы термопар, их градуировочные
характеристики
В качестве термоэлектродных материалов ТП преимущественно
применяются те металлы и сплавы, которые в паре друг с другом раз-
вивают сравнительно большие термоЭДС. К термоэлектродным ма-
териалам предъявляется ряд требований, таких как жаростойкость и
механическая прочность; химическая инертность; термоэлектрическая
однородность; стабильность и воспроизводимость термоэлектрической
характеристики; однозначная, желательно близкая к линейной, за-
висимость термоЭДС от температуры; высокая чувствительность.
Наибольшее распространение для изготовления термоэлектри-
ческих термометров получили платина (Pt), платинородий (90 %
Pt+10%Rh),хромель(9,5%Cr+90,5%Ni),алюмель(94,5%Ni+
+2%Al+1%Si+2,5%Mn) и копель(55,4%Cu+44% Ni+
+ 0,5 % Mn + 0,1 % Fe). Для измерений в лабораторных установках
находят также применение медь, железо, константан и др. Наиболее
распространенными типами ТП являются: ТХА (К-тип по междуна-
родному обозначению) — хромель — алюмелевые; ТХК (L-тип) —
хромель — копелевые; ТПП (S-тип) — платинородий — платиновые
и т. д. При наименовании ТП первым обычно указывается положи-
тельный термоэлектрод.
ТП типа ТПП применяются для измерения температур в области
300 ... 1 600 °С в окислительной и нейтральной среде. Эти ТП нахо-
дятся в числе лучших термоэлектрических преобразователей по точ-
ности и воспроизводимости термоЭДС. ТП типа ТХК широко при-
меняются для измерения температур различных сред в области от
- 20 0 °С до + 600 °С. ТП типа ТХА применяются для измерения тем-
ператур газовых сред, пара и жидкостей в области от - 200 °С до
+ 800 °С.
В явном виде зависимость (3.16) не может быть получена аналитиче-
ски с достаточной точностью. Поэтому при измерении температур эта
зависимость для различных типов ТП устанавливается эксперименталь-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
58
но путем градуировки и построения графика или таблицы зависимости
термоЭДС от температуры. При градуировке ТП температура свободных
концов θ0 обычно поддерживается постоянной и равной 0 °С.
В общем случае характеристика ТП имеет вид, показанный на
рис. 3 .4, в. При измерениях в реальных условиях температура сво-
бодных концов (холодного спая) ТП θ1 не равна 0 °С, что приводит к
необходимости введения поправки. Если θ1 > 0 °С, термоЭДС ТП,
приведенная к 0 °С, равна
E
(θ2, θ0) = E(θ2, θ1) + E(θ1, θ0),
(3.18)
где E(θ1, θ0) — поправка на температуру холодного спая термопары;
E(θ2, θ1) — результат измерения термоЭДС в реальных условиях. При
температуре же холодного спая ТП, меньшей 0 °С, т. е . при θ1, < 0 °С,
приведенная термоЭДС равна
E
(θ2, θ0) = E(θ2, θ1, ) - E(θ1, , θ0),
(3.19)
Таким образом, перед определением температуры по градуиро-
вочной таблице к результату измерения прибавляется поправка или
вычитается из результата (при температуре холодного спая соот-
ветственно больше или меньше 0 °С). Такой ручной способ введения
поправки требует наличия вспомогательного термометра, например
ртутного, и гр адуировочной таблицы соответствующего типа ТП.
В настоящее время поправки на температуру свободных концов ТП
вводятся автоматически при помощи специальных термокомпенси-
рующих устройств. Эти устройства располагаются отдельно или
встраиваются во вторичный прибор.
ТП и вторичный прибор (ВП) соединяются между собой при по-
мощи проводов, которые называются удлинительными или компен-
сационными. Эти провода состоят из двух жил, изготовленных из
металлов или сплавов, имеющих одинаковые или схожие термоэлек-
трические свойства с термоэлектродами ТП. Посредством удлиняю-
щих проводов производится как бы удлинение термоэлектродов ТП,
позволяющее отнести свободные концы от объекта измерения в ме-
сто установки ВП. Для ТП из неблагородных металлов удлиняющие
провода изготавливаются чаще всего из тех же материалов, что и
термоэлектроды ТП. Для ТП из благородных металлов в целях уде-
шевления удлиняющие провода выполняются из материалов, раз-
вивающих в паре между собой примерно ту же термоЭДС в диапазо-
не изменения температуры в месте установки ВП, что и ТП.
3.4.3. Конструкция термопары
ТП представляет собой две проволоки из разнородных материалов,
нагреваемые концы которых скручиваются, а затем спаиваются или
свариваются. Конструкция ее аналогична конструкции терморезисто-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
59
ра (см. рис. 3.2, а). В металлическом корпусе расположены термоэлек-
троды с изоляционными трубками, изготовленными из фарфора или
окислов алюминия, магния, бериллия. Рабочий спай термопары обыч-
но приваривается к дну корпуса. К термоэлектродам в соединительной
головке через разъем подсоединяются удлинительные провода. Термо-
пара вводится в объект измерения и крепится на нем с помощью
штуцера. Выпускаются ТП с одним чувствительным элементом (оди-
нарные) и с двумя (двойные). Двойные ТП применяются для измере-
ния температуры объекта двумя вторичными приборами, установлен-
ными в разных местах. Длина погружаемой части ТП в измеряемую
среду выполняется различной для каждого конкретного типа ТП.
3.4.4. Измерительные схемы для термопар
Наиболее широко используется компенсационный метод измере-
ния термоЭДС. Этот метод основан на компенсации неизвестной
термоЭДС, развиваемой термопарой ТП, известным падением рабо-
чего напряжения Up, создаваемым током от дополнительного источ-
ника питания Uп (рис. 3 .5, а).
Замкнутый контур I содержит дополнительный источник Uп и
реохорд Rp. Реохорд представляет собой переменный резистор из
тонкой калиброванной проволоки (выполненной из специального
сплава), намотанной на цилиндрический стержень и снабженный
подвижным контактом для изменения сопротивления. Этот контур
называется компенсационным. Второй контур II (контур abcd) вклю-
чает в себя термопару (ТП), термоЭДС, EТП которой измеряется,
чувствительный гальванометр, выполняющий функции нуль-
индикатора (НИ), а также часть реохорда rp от точки d до подвижно-
го контакта с движком реохорда. Источник измеряемой термоЭДС
EТП включен встречно с дополнительным источником Uп так, что токи
от обоих источников на участке rp идут в противоположных направ-
лениях. Для контура abcd на основании второго закона Кирхгофа
можно записать:
UUUЕ
abcd
∑=+
-=
НИ
рТ
П0
илиUНИ=EТП–UР.
Перемещая движок реохорда, можно добиться, чтобы ток, проте-
кающий по НИ, равнялся нулю: IНИ = 0, тогда и напряжение UНИ = 0,
т.е.
E
ТП=Uр=Iрrр,
(3.20)
где Ip — рабочий ток в контуре II, равный
I
U
RR
р
п
рб
=
+
.
(3.21)
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
60
Рис. 3.5. Измерение термоЭДС компенсационным методом:
а — измерительная схема; б — автоматический потенциометр; ТП — термопара;
НИ — нуль-индикатор; мА — миллиамперметр; Rлс — сопротив лен ие л инии св язи;
Rр — сопротивление реохорда; Rб — балластное сопротивление; rр — сопротивление
нижнего участка реохорда; ЕТП — ЭДС термопары; Uп — напряжение дополнительного
источника; Uр — рабочее напряжение; UНИ — падение напряжения на НИ; IНИ — ток
через НИ; Iр — рабочий ток; РД — рев ерсивный двигатель; ЭУ — электронный усили-
тель; ИПС — источник питания стабилизиров анный; Rэр — сопротивление эквив а-
лентного реохорда; Rн — сопротивление для подгонки стрелки потенциометра на на-
чальную отметку шкалы; Rм — компенсационный терморезистор; R1 и R2 — сопротив-
ления из манганина; RУ — сопротивление для установки рабочего тока; Ucd — напряже-
ние небаланса; λ — координата положения движка реохорда; I1 и I2 — рабочие токи в
в етвях моста
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
61
Подставляя равенство (3.21) в (3.20), для падения напряжения на
термопаре получим, что
Е
U
RR
r
ТП
п
рб
р
=
+
.
(3.22)
Равенство нулю тока через НИ означает, что ток в контуре II не
протекает, следовательно, потребления мощности от ТП не проис-
ходит, т. е .
E
ТП = Iрrр.
(3.23)
Изменение сопротивления rp на участке cd реохорда прямо про-
порционально линейному перемещению движка реохорда R p,
т. е. измерительная шкала линейная и прибор можно проградуировать
в единицах измерения термоЭДС. Для сохранения градуировки не-
обходимо в равенстве (3.23) обеспечить постоянство рабочего тока,
т. е . Iр = k = const. Для этого в схеме предусмотрены миллиамперметр
(мА) без оцифрованных отметок и переменное балластное сопро-
тивление Rб. Перед измерением, в связи с тем что источник питания
со временем меняет свое напряжение Uп, проводится контроль рабо-
чего тока. Для этого изменением сопротивления Rб стрелка милли-
амперметра подводится к соответствующей отметке на шкале. Таким
образом, компенсационная схема работает в двух режимах: 1) кон-
троль рабочего тока (мА); 2) измерение (НИ). Для подключения
термопары к измерительной схеме применяется проводная линия
связи, имеющая свое сопротивление Rлс. Под воздействием темпера-
туры окружающей среды его значение изменяется, но так как в момент
отсчета результата измерения ток в контуре abcd равен нулю, потре-
бление энергии в линиях связи отсутствует, т. е . изменение сопротив-
ления линии связи, а также внутреннего сопротивления термопары
при изменении температуры окружающей среды на результат измере-
ния в компенсационных схемах не влияет.
Компенсационный метод измерения термоЭДС реализован в ав-
томатических потенциометрах (рис. 3.5, б ). В данной схеме из-
меряемая термоЭДС компенсируется (уравновешивается) напряже-
нием измерительной диагонали моста, работающего в неуравнове-
шенном режиме. В качестве нуль-индикатора в автоматических
потенциометрах используется электронный усилитель (ЭУ).
Для питания мостовой измерительной схемы используется источ-
ник стабилизированного питания ИПС, в котором напряжение пере-
менного тока 6,3 В выпрямляется и стабилизируется в выходное на-
пряжение постоянного тока 5 В. При помощи сопротивления Rу
напряжение на диагонали питания моста Uab устанавливается равным
1,019 В. Следует отметить, что сопротивление стабилизации Rу подо-
брано с малым температурным коэффициентом сопротивления
(ТКС), что обеспечивает его постоянство при изменениях темпера-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
62
туры окружающей среды. Таким образом, происходит стабилизация
рабочих токов I1 и I2 в ветвях моста.
Процесс измерения основан на постоянном контроле равенства
термоЭДС ЕТП и напряжения Ucd, возникающего на измерительной
диагонали мостовой схемы (между точками c и d):
I
2(λRэр + Rн) – I1Rм = EТП.
(3.24)
Если это равенство нарушается, на входе ЭУ появляется напряже-
ние DU, которое будет равно DU = EТП – Ucd. На выходе ЭУ форми-
руется управляющий сигнал, под действием которого ротор ревер-
сивного двигателя (РД) поворачивается на определенный угол, про-
порциональный абсолютному значению напряжения DU (направление
угла поворота ротора РД зависит от знака напряжения DU ). Угловое
перемещение ротора РД преобразуется в линейное перемещение
движка реохорда, т. е. компенсация осуществляется за счет изменения
параметра λ в равенстве (3.24). Движок реохорда Rэр перемещается
до тех пор, пока сигнал разбаланса не станет равным нулю. Дости-
жение полного равенства измеряемой термоЭДС и компенсирующе-
го напряжения на измерительной диагонали моста EТП = E(θ, θ1) = Ucd
достигается благодаря тому, что система автокомпенсации является
астатической из-за наличия в системе регулирования разбаланса
интегрирующего звена, в качестве которого выступает РД. В резуль-
тате каждому новому значению температуры горячего спая θ соот-
ветствует новое положение движка реохорда.
ТермоЭДС, как уже отмечалось, зависит от разности температур
горячего и холодного спая и, следовательно, изменяется при измене-
нии любой из них. Движок реохорда, связанный с указателем шкалы,
должен перемещаться только при изменении измеряемой температу-
ры, т. е . температуры горячего спая. Это достигается посредством
автоматического введения поправки на температуры холодного спая
с помощью компенсационного резистора Rм. Этот резистор выпол-
няется из медной проволоки и находится рядом с местом подключе-
ния свободных концов термопары (удлинительных проводов), т. е. их
темпер атура одинакова и соответствует температуре окружающей
среды. Пусть, например, эта температура возросла, в результате чего
термоЭДС уменьшилась на DEТП. Одновременно с этим сопротивле-
ние резистора Rм возрастет на DRм и уравнение компенсации (3.24)
примет вид
I2(λRэр + Rн) – I1(Rм +DRм) = EТП – DEТП,
(3.25)
т. е. изменение термоЭДС в этом случае компенсируется изменением
сопротивления компенсационного резистора:
DEТП = I1D Rм.
В настоящее время широкое распространение получили преоб-
разователи термоЭДС в унифицированный электрический сигнал,
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
что позволяет подключать термопары сразу к контроллеру. Принцип
действия такого преобразователя рассмотрен в гл. 9 .
Контрольные вопросы
1. Дайте определение понятия «температура».
2. Перечислите основные виды температурных шкал.
3. Назовите основные конструктивные части манометрических термомет-
ров.
4. Какие типы термометров сопротивлений вы знаете?
5. Каков физический смысл температурного коэффициента сопротивле-
ния?
6. Дайте словесную формулировку условия равновесия моста.
7. Дайте определение понятия «термоэлектрический эффект».
8. Что такое холодный и горячий спай термопары?
9. Назовите основные термоэлектродные материалы и типы термопар.
10. Как изменится термоЭДС при включении в цепь термопары третьего
проводника?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
64
Глава 4
ИЗМЕРЕНИЕ УРОВНЯ
4.1. Общие сведения об измерении уровня.
Классификация средств измерения уровня
Уровнем называют высоту заполнения технологического объекта
(емкости, резервуара, аппарата) рабочей средой — жидкостью или
сыпучим веществом. Информация об уровне является ключевой для
организации контроля и управления технологическими процессами
при добыче, транспорте и переработке нефтепродуктов. Уровень из-
меряют в единицах длины. Средства измерения уровня называют
уровнемерами.
По принципу действия уровнемеры можно подразделить на сле-
дующие группы:
• визуальные;
• поплавковые, которые основаны на определении положения
поплавка, находящегося на поверхности жидкости или на границе
двух сред;
• буйковые, которые основаны на измерении выталкивающей
силы, действующей на массивное тело (буек), частично погруженное
в жидкость;
• гидростатические, основанные на измерении гидростатическо-
го давления столба жидкости;
• электрические, в которых используется зависимость измеряе-
мого уровня от электрических параметров рабочей среды (диэлектри-
ческая проницаемость, проводимость);
• акустические, основанные на принципе отражения от поверх-
ности жидкости звуковых волн;
• радарные, основанные на принципе отражения от поверхности
сигнала сверхвысокой частоты (СВЧ);
• радиоизотопные, основанные на использовании интенсивности
потока ядерных излучений, зависящего от уровня жидкости.
Акустические и радарные уровнемеры относятся к бесконтактно-
му, а остальные — к контактному типу.
Приведенная классификация является общепринятой и охваты-
вает широко распространенные уровнемеры. Существуют уровнеме-
ры, в которых используется комбинация нескольких принципов
действия.
СИ уровня делятся также на приборы для непрерывного слежения
за уровнем (собственно уровнемеры) и приборы для сигнализации
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
65
о предельных значениях уровня (сигнализаторы уровня). По диапа-
зону измерения различают уровнемеры широкого (0 ... 20) м и узко-
го (0 ± 0,5) м диапазонов.
4.2 . Уровнемеры непрерывного действия
4.2.1. Визуальные уровнемеры
К визуальным уровнемерам относятся мерные рейки, рулетки,
уровнемерные стекла и т. д . Наиболее распространенными уровне-
мерами данного вида являются уровнемерные стекла, действующие
по закону сообщающихся сосудов. Указательное стекло соединяется
с емкостью нижним концом (для открытых сосудов) или обоими
концами (для сосудов с избыточным давлением или разрежением).
Наблюдая за положением уровня жидкости в стеклянной трубке,
можно судить об изменении уровня в емкости. Указательные стекла
снабжают вентилями или кранами для отключения их от сосуда и
продувки системы. Из-за низкой прочности указательные стекла не
рекомендуется употреблять длиной более 0,5 м, поэтому при контро-
ле уровня, изменяющегося больше чем на 0,5 м, устанавливают не-
сколько стекол так, чтобы верх предыдущего стекла перекрывал низ
последующего.
Указательные стекла рассчитаны на давление до 2,94 МПа и тем-
пературу до 300 °С. Абсолютная погрешность измерения уровня с
помощью уровнемерных стекол составляет ± (1 ... 2 ) мм.
4.2.2. Поплавковые уровнемеры
Поплавковые м е х а н и ч е с к и е уровнемеры являются наиболее
простыми среди существующих разновидностей уровнемеров. Полу-
чили распространение поплавковые уровнемеры узкого (0 ± 200) мм
и широкого (0 ... 20) м диапазонов. Поплавковые уровнемеры узкого
диапазона обычно представляют собой устройства, содержащие ша-
рообразный или цилиндрический поплавок диаметром 80 ... 200 мм,
выполненный из нержавеющей стали или полипропилена. Поплавок
плавает на поверхности жидкости и через штангу и специальное
сальниковое уплотнение соединяется либо со стрелкой измеритель-
ного прибора, либо с преобразователем угловых перемещений в
унифицированный электрический или пневматический сигнал. Класс
точности этих уровнемеров составляет 1,5.
Чувствительным элементом поплавковых уровнемеров широкого
диапазона (например, серии УДУ) является поплавок, подвешенный
на мерной ленте и перемещающийся вдоль направляющих струн.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
66
Мерная лента представляет собой стальную перфорированную лен-
ту, которая проходит через систему гладких роликов и либо нама-
тывается на мерный шкив (при повышении уровня), либо сматыва-
ется с него (при понижении уровня). Таким образом, линейное
перемещение поплавка преобразуется в угловое перемещение мер-
ного шкива, связанного с отсчетным устройством. Необходимое
натяжение мерной ленты обеспечивается, например, пружинным
двигателем.
Серьезными недостатками поплавковых уровнемеров являются
низкая точность (± 4 мм при местном отсчете и ±10 мм придистан-
ционной передаче показаний), невысокая механическая надежность
и низкая чувствительность (при изменении уровня поплавок должен
преодолевать силы трения во всех узлах измерительного механиз-
ма).
Поэтому в настоящее время поплавковые уровнемеры такого типа
не используются. Поплавок применяется только для фиксации теку-
щего значения уровня, а его линейные перемещение преобразуются
в унифицированные сигналы.
Впоплавковыхмагнитострикционных уровнемерах
(рис. 4.1) для определения положения поплавка используется магни-
тострикционный эффект. Направляющая труба 1 содержит в себе
волновод 2 (тонкая проволока из никелевого сплава), по которому
через фиксированные промежутки времени распространяются ко-
Рис. 4 .1. Поплавковый магнитострикционный уровнемер:
а — схема; б — внешний вид; 1 — направляющая труба; 2 — волнов од; 3 — поплав ок;
4 — постоянный магнит; 5 — корпус
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
67
роткие импульсы тока. При распространении импульса тока возни-
кает радиальное магнитное поле вокруг волновода. Поплавок 3 с по-
стоянным магнитом 4 перемещается вместе с изменением уровня по
трубе. При пересечении магнитного поля токового импульса с маг-
нитным полем постоянного магнита в месте нахождения поплавка в
волноводе возникает крутильная деформация (магнитострикционный
эффект), которая в виде механической (ультразвуковой) волны рас-
пространяется вдоль волновода с известной скоростью в оба конца.
Пьезоэлемент, размещенный в корпусе 5 вторичного преобразовате-
ля, преобразует полученные механические волны в электрический
импульс. С помощью микропроцессорной электроники измеряется
интервал времени между отправленным и принятым импульсами,
который пропорционален измеряемому уровню.
4.2.3. Буйковые уровнемеры
Принцип действия буйковых уровнемеров основан на том, что на
погруженное в жидкость тело действует со стороны жидкости вы-
талкивающая сила. По закону Архимеда эта сила равна массе жидко-
сти, вытесненной телом. Количество вытесненной жидкости зависит
от глубины погружения тела, т. е . от уровня жидкости в емкости.
Таким образом, в буйковых уровнемерах измеряемый уровень пре-
образуется в пропорциональную ему выталкивающую силу. Чувстви-
тельным элементом в этих уровнемерах является цилиндрический
буек, изготовленный из материала с плотностью, большей плотности
жидкости. Зачастую буек выполнен в виде трубы из нержавеющей
стали, запаянной с обеих концов, к одному из которых приделан
крючок. Буек находится в вертикальном положении и частично по-
гружен в жидкость.
Длина буйка подбирается приближенной к максимальному из-
меряемому уровню в аппарате.
При изменении уровня жидкости в аппарате согласно закону Ар-
химеда выталкивающая сила, действующая на буек, равна
F = ρжgV = ρжgSh,
где ρж — плотно сть измеряемой жидкости; g — ускорение свободно-
го падения; V — объем вытесненной буйком жидкости; S — площадь
поперечного сечения буйка; h — длина буйка, погруженного в жид-
кость.
Выталкивающее усилие измеряется различными способами — на -
пример, во вторичном измерительном преобразователе с помощью
тензоэлемента преобразуется в сопротивление, а затем в унифици-
рованный сигнал, например в ток.
Минимальный диапазон измерений буйковых уровнемеров со-
ставляет (0 ... 0,02) м, максимальный — (0 ... 16) м. Буйковые уровне-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
68
меры применяются при температуре рабочей среды от - 40 до + 400 °С
и давлении до 16 МПа. Основная приведенная погрешность буйковых
уровнемеров лежит в пределах 0,5 ... 1,5 %.
4.2.4. Гидростатические уровнемеры
Измерение уровня гидростатическими уровнемерами сводится к
измерению гидростатического давления Р, создаваемого столбом
жидкости h постоянной плотности ρ, согласно равенству
P
= ρgh.
Измерение гидростатического давления может осуществляться не-
сколькими способами. Самый простой из них — измерение уровня
манометром (М), подключаемым на высоте, соответствующей нижне-
му предельному значению уровня. Применяемый для этих целей ма-
нометр может быть любого типа с соответствующими пределами из-
мерений.
Измерение гидростатического давления таким методом целесо-
образно в резервуарах, работающих при атмосферном давлении.
В противном случае показания М будут складываться из гидроста-
тического и избыточного давлений. Для измерения уровня жидкости
в технологических аппаратах, находящихся под давлением, широкое
применение получили дифференциальные манометры, подключае-
мые к резервуару на высоте, соответствующей нижнему предельному
значению уровня, и к газовому пространству над жидкостью. С по-
мощью дифманометров возможно также измерение уровня жидкости
в открытых резервуарах и уровня раздела жидкостей.
Гидростатические уровнемеры применяются для однородных жид-
костей в емкостях без существенного движения рабочей среды. Они
позволяют производить измерения в диапазоне до 250 кПа, что соот-
ветствует уровню 25 м (для воды), с точностью до 0,1 % при избыточ-
ном давлении до 10 МПа и температуре рабочей среды в диапазоне
- 4 0 ...+120 °С. Важным достоинством гидростатических уровнемеров
является высокая точность при относительной дешевизне и простоте
конструкции. Существенным недостатком является большая погреш-
ность от изменения температуры контролируемой среды.
4.2.5. Емкостные уровнемеры
Принцип действия емкостных уровнемеров основан на зависимо-
сти электрической емкости чувствительного элемента от уровня
жидкости. Конструктивно емкостные чувствительные элементы вы-
полняются в виде коаксиально расположенных цилиндрических
электродов или параллельно расположенных плоских электродов.
Первые получили большее распространение.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
69
Для неэлектропроводных жидкостей применяется уровнемер,
схема которого показана на рис. 4 .2. В этом уровнемере чувствитель-
ный элемент состоит из двух коаксиально расположенных электродов
1 и 2, частично погруженных в жидкость. Электроды образуют ци-
линдрический конденсатор, межэлектродное пространство которого
до высоты h заполнено жидкостью, а пространство Н — h
—
парога-
зовой смесью. В общем виде электрическая емкость цилиндрическо-
го конденсатора определяется уравнением
C
H
D
d
=
20
πεε
ln
,
где ε — относительная диэлектрическая проницаемость вещества,
заполняющего межэлектродное пространство; ε0 — электрическая
постоянная; Н — высота электродов; D, d — диаметры наружного и
внутреннего электродов соответственно.
Для цилиндрического конденсатора, межэлектродное простран-
ство которого заполняется веществами, обладающими различными
диэлектрическими проницаемостями, полная емкость Сп определя-
ется выражением
C
п = C0+C1+C2,
где C0 — емко сть проходного изолятора; C1 — емкость межэлектрод-
ного пространства, заполненного жидкостью; C2 — емкость межэлек-
тродного пространства, заполненного парогазовой смесью.
Таким образом, полная емкость чувствительного элемента будет
равна
CC
h
D
d
Hh
D
d
п
жг
=+
+
-
0
00
22
πε επ
εε
ln
()
ln
.
Рис. 4 .2 . Емкостный уровнемер:
1, 2 — электроды
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
70
Так как для паров жидкости и газов εг ≈ 1, последнее выражение
можно преобразовать следующим образом:
C
п = C0+CпH+Cп(εж - 1)h,
где
C
D
d
п=
20
πε
ln
.
Таким образом, емкость чувствительного элемента пропорцио-
нальна уровню жидкости. Для измерения уровня электропроводных
жидкостей электроды конденсатора покрывают фторопластовой изо-
ляцией.
Преобразование электрической емкости в сигнал измерительной
информации осуществляется импульсными методами. В основе им-
пульсных методов лежат переходные процессы в RC-цепи, периоди-
чески подключаемой к источнику питания. Используются также
неуравновешенные мосты переменного тока, в одно из плеч которо-
го включается емкость первичного преобразователя.
Условия применения емкостных уровнемеров по характеристикам
рабочей среды: температура - 40...+ 200 °С, давление — до 2,5 МПа,
диапазон измерения — до 3 м (30 м — для гибких и тросовых чув-
ствительных элементов). Основная приведенная погрешность ем-
костных уровнемеров лежит в пределах от 1 до 3 %.
Емкостные уровнемеры чаще применяют для измерения уровня
чистых, однородных и неэлектропроводных жидкостей (бензин, ке-
росин). Это связано с тем, что такие факторы, как загрязнение
электродов, изменение диэлектрических свойств и электрической
проводимости измеряемой среды, приводят к недопустимой погреш-
ности измерений.
4.2.6. Акустические уровнемеры
В акустических уровнемерах (рис. 4 .3) уровень определяют по
времени прохождения звуковых волн расстояния от излучателя до
границы раздела двух сред и обратно до приемника излучения. Функ-
ции источника и приемника ультразвуковых колебаний выполняет
пьезоэлемент. Генератор с определенной частотой вырабатывает
электрические импульсы, которые преобразуются пьезоэлементом в
ультразвуковые колебания. Ультразвуковые колебания распространя-
ются вдоль акустического тракта, отражаются от поверхности среды
и воспринимаются тем же пьезоэлементом. Уровень вещества h
определяется из выражения
hH ct
=-
1
2
,
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
71
где Н — высота резервуара; с — скорость распространения ультра-
звука в данной среде; t — время прохождения ультразвуком расстоя-
ния от излучателя до границы раздела двух сред и обратно до при-
емника излучения.
Преимуществом акустических уровнемеров является независи-
мость их показаний от физико-химических свойств и состава рабо-
чей среды. К недостаткам следует отнести влияние на показания
уровнемеров температуры, давления и состава газа, от которых за-
висит скорость звуковых волн. Скорость распространения ультра-
звука зависит от температуры — изменение составляет около 0,18 %
на 1 °С. Для устранения этого влияния в ультразвуковых уровнемерах
применяется термокомпенсация с помощью встроенного термодат-
чика.
Диапазон работы акустических уровнемеров — до 25 м. Основная
приведенная погрешность измерений составляет 1 ... 2 %. Температур-
ный диапазон рабочей среды -30 ...+120 °С, давление — до 4 МПа.
4.2 .7 . Радарные уровнемеры
Радарные уровнемеры — наиболее сложные и высокотехнологич-
ные средства измерения уровня. Для зондирования рабочей зоны и
определения расстояния до объекта контроля здесь используется
электромагнитное излучение СВЧ-диапазона. Обычно рабочая ча-
стота радарных уровнемеров независимо от типа варьирует от 5,8 до
26 ГГц. Чем выше частота, тем у́же луч и тем выше энергия излучения,
а следовательно, сильнее отражение.
В настоящее время в радарных системах контроля уровня при-
меняются преимущественно две технологии: с непрерывным частот-
но-модулированным излучением (FMCW — frequency modulated
continuous wave) и импульсным излучением сигнала.
Принцип действия уровнемера с частотно-модулированным
сигналом заключается в следующем (рис. 4 .4, а). Микроволновый
Рис. 4.3. Акустический уровнемер
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
72
генератор датчика уровня формирует радиосигнал, частота которого
изменяется во времени по линейному закону — линейный частотно-
модулированный сигнал. Этот сигнал излучается в направлении
продукта, отражается от него, и часть сигнала через определенное
время Dt, зависящее от скорости света и расстояния до продукта,
возвращается обратно в антенну. Излученный и отраженный сигналы
смешиваются в антенне уровнемера, и в результате образуется сигнал,
частота которого равна разности частот излученного и принятого
сигналов Df и, соответственно, расстоянию от антенны до измеряе-
мого продукта (рис. 4.4, в). Дальнейшая обработка сигнала осуществ-
ляется микропроцессорной системой датчика уровня уровнемера и
заключается в точном определении разностной частоты Df сигнала и
пересчете ее значения в значение уровня наполнения резервуара.
В радарных уровнемерах импульсного типа используется метод
определения расстояния, основанный на непосредственном измере-
нии времени прохождения СВЧ-импульса от излучателя до контро-
лируемой поверхности и обратно. Радарные уровнемеры импульсно-
го типа обладают рядом преимуществ перед устройствами, исполь-
зующими технологию FMCW. Во-первых, принимаемые эхо-сигналы
вне зависимости от природы их источника разнесены во времени,
что обеспечивает их более простое разделение. Во-вторых, среднее
энергопотребление импульсных уровнемеров составляет единицы
мкВт (пиковая мощность при излучении СВЧ-импульса составляет
около 1 мВт), что позволяет использовать для их подключения двух-
проводную схему с питанием от измерительной цепи со стандартным
токовым сигналом 4 ... 20 мА; в приборах, работающих по технологии
FMCW, энергопотребление существенно выше из-за непрерывного
характера излучения, а также постоянно выполняемой математиче-
ской обработки эхо-сигнала. И в-третьих, в импульсных уровнемерах
Рис. 4.4. Радарный уровнемер:
а — схема; б — внешний вид; в — временна́ я диаграмма работы
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
73
электроника для выполнения первичной обработки сигнала проще,
а сама обработка выполняется исключительно аппаратными сред-
ствами; в результате благодаря меньшему числу комплектующих на-
дежность прибора получается потенциально выше.
Радарные уровнемеры — наиболее универсальные средства изме-
рения уровня. Не имея непосредственного контакта с контролируемой
средой, они могут применяться для агрессивных, вязких, неоднород-
ных жидких и сыпучих материалов. От ультразвуковых бесконтактных
уровнемеров их выгодно отличает гораздо меньшая чувствительность
к температуре и давлению в рабочей емкости, к их изменениям, а
также большая устойчивость к таким явлениям, как запыленность,
испарения с контролируемой поверхности, пенообразование. Радар-
ные уровнемеры обеспечивают высокую точность (до 1 мм), что по-
зволяет использовать их в системах коммерческого учета. Вместе с тем
существенным сдерживающим фактором применения радарных уров-
немеров остается высокая стоимость данных приборов.
Диапазон измерения радарных уровнемеров достигает 40 м при
спокойной поверхности контролируемой жидкости. Абсолютная по-
грешность измерения уровня может составлять ± 1 мм в диапазоне
до30м.
4.2.8. Радарные волноводные уровнемеры
Данный тип уровнемеров относится к уровнемерам контактного
типа. Принцип действия волноводного уровнемера основан на тех-
нологии рефлектометрии с временны́ м разрешением TDR (Time
Domain Reflectome-try). Микроволновые радиоимпульсы малой мощ-
ности направляются вниз по зонду, погруженному в технологическую
среду, уровень которой нужно определить (рис. 4 .5). Когда радио-
импульс достигает среды с коэффициентом диэлектрической про-
ницаемости, отличной от проницаемости газа над поверхностью
среды, то из-за разности коэффициентов диэлектрических прони-
цаемостей происходит отражение микроволнового сигнала в обратном
направлении. Временно́й интервал между моментом передачи зон-
дирующего импульса и моментом приема эхо-сигнала пропорциона-
лен расстоянию до уровня контролируемой среды. Аналогичным
образом измеряется расстояние между датчиком и границей раздела
двух жидких сред с различными коэффициентами диэлектрической
проницаемости. Интенсивность отраженного сигнала зависит от раз-
ницы коэффициентов диэлектрических проницаемостей сред на
границе. Чем выше эта разность, тем выше интенсивность отражен-
ного сигнала. Волноводная технология имеет ряд преимуществ по
сравнению с другими методами измерения уровня, поскольку радио-
импульсы практически невосприимчивы к составу среды, атмосфере
резервуара, температуре и давлению.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
74
Поскольку радиоимпульсы направляются по зонду, а не свободно
распространяются в пространстве резервуара, то волноводная техно-
логия может с успехом применяться для малых и узких резервуаров,
а также для резервуаров с узкими горловинами. Радарные волновод-
ные уровнемеры используются в сложных условиях (пар, пена, на-
липания, волны, кипение, резкие скачки уровня и т. д . ) . Точность
измерений не зависит от плотности, диэлектрической проницаемости
рабочей среды и давления.
Диапазон измерения радарных волноводных уровнемеров — до 30 м.
Абсолютная погрешность измерения ± (3 ... 5 ) мм.
4.3 . Сигнализаторы уровня
Сигнализация достижения определенных значений уровня в про-
мышленных емкостях без постоянного непрерывного контроля яв-
ляется стандартной, широко распространенной задачей. Примерами
могут служить защита от переполнения, проверка минимального и
максимального уровня заполнения резервуаров. В настоящее время
широкое распространение получили следующие типы сигнализаторов
уровня: кондуктометрические, емкостные, поплавковые, вибрацион-
ные и ультразвуковые.
Кондуктометрические сигнализаторы уровня являются наиболее
простыми и дешевыми. Чувствительный элемент представляет собой
два изолированных друг от друга электрода. Иногда в качестве одно-
го из электродов используется металлическая стенка резервуара.
Электроды включены в электрическую цепь с источником питания
и выходным реле. Принцип работы заключается в электрическом
замыкании рабочей жидкостью (по достижении нужного уровня)
Рис. 4.5. Волноводный уровнемер
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
75
электродов чувствительного элемента. При замыкании электродов
в электрической цепи начинает протекать ток, который приводит к
срабатыванию реле. Для того чтобы исключить такие эффекты, как
электролиз жидкости или взрыв, применяется постоянный или пере-
менный ток достаточно малой мощности.
Кондуктометрические сигнализаторы применимы для электро-
проводных жидкостей (проводимость более 0,2 См/ м), таких как
технологическая вода, слабые растворы кислот и щелочей в цистер-
нах, баках, паровых котлах. Эти сигнализаторы используются при
температуре до 350 °С и давлении до 6,3 МПа (как правило, для стан-
дартных исполнений 200 °С и 2,5 МПа).
Примерами кондуктометрических сигнализаторов являются: РОС-
301, ЭРСУ, САУ-М6, СУ-300И .
Основные достоинства: простота и прочность; отсутствие движу-
щихся механических частей; простая регулировка и обслуживание.
К недостаткам следует отнести непригодность для клейких веществ
и диэлектриков; кроме того, масляные вещества могут вызывать на-
липание на электроды тонкого слоя непроводящего покрытия, что
может быть причиной отказа.
Емкостные сигнализаторы широко распространены и исполь-
зуются для определения наличия рабочей среды, как жидкой, так и
сыпучей, как электропроводной, так и неэлектропроводной. Чувстви-
тельный элемент представляет собой два изолированных друг от
друга электрода, образующих электрический конденсатор. Часто в
качестве одного из электродов используется металлическая стенка
резервуара. Емкостные сигнализаторы отличаются большим разно-
образием конструктивных исполнений для конкретных применений,
могут быть стержневого, трубчатого типов, гибкие, тросовые и т. п .
Для датчиков, работающих в проводящей среде, необходимо исполь-
зовать конструкцию с изолированным электродом.
Принцип действия сигнализаторов основывается на изменении
электрической емкости конденсатора при контакте с рабочей средой
из-за различия диэлектрической проницаемости. При контакте
электрода с рабочей средой электрическая емкость конденсатора, как
правило, увеличивается, поскольку диэлектрическая проницаемость
любой среды больше диэлектрической проницаемости воздуха. Кон-
денсатор включается в частотозадающую цепь генератора электриче-
ских колебаний. Увеличение емкости конденсатора приводит к
уменьшению частоты колебаний генератора и формированию сигна-
ла, преобразуемого в дальнейшем к срабатыванию выходного реле.
Распространенными моделями емкостных сигнализаторов явля-
ются РОС-101 и РОС-102 .
Поплавковые сигнализаторы отличаются простотой и универ-
сальностью, в простейшем варианте состоят из поплавка, соединен-
ного с механизмом переключения контактов с помощью механической
или магнитной связи. При магнитной связи поплавок снабжается
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
76
магнитом, который скользит по направляющему стержню. В стержне
находятся микропереключатели (герконы), которые при прохождении
через них поплавка с магнитом меняют свое состояние.
Распространенные сигнализаторы этого типа: РОС-400, РОС-401,
ДРУ-1ПМ.
К достоинствам поплавковых сигнализаторов можно отнести про-
стоту, прочность, невысокую стоимость, устойчивость к неблагопри-
ятным внешним воздействиям. Недостатками являются непригод-
ность для клейких жидкостей, зависимость точки срабатывания от
изменений (колебаний) плотности рабочей среды.
Вибрационные сигнализаторы уровня (рис. 4.6) широко распро-
странены за рубежом и в меньшей степени в России. Чувствительным
элементом служит резонатор камертонного типа (из-за формы его
часто называют колебательной вилкой). Принцип действия основан
на зависимости амплитуды колебаний резонатора от окружающей
среды. Погружение чувствительного элемента в контролируемую
среду вызывает резкое уменьшение амплитуды колебаний вплоть до
их полного гашения. Смена состояния колебания состоянием покоя
или наоборот сигнализирует о достижении предельного уровня.
Диапазон применимости сигнализаторов по температуре -50 ...+250 °С,
по давлению — до 6,4 МПа, плотность рабочей среды в преде-
лах 0,5 ... 2 ,5 г/ см3. Датчики обеспечивают точность срабатывания
±1мм.
Распространенными марками вибросигнализаторов являются
серии Optiswitch фирмы Krohne, Liquiphant фирмы Endress + Hauser,
Vibranivo фирмы UWT.
Основные достоинства вибрационных сигнализаторов: простота;
не требуется регулировка в месте установки; отсутствуют движущие-
Рис. 4 .6 . Вибрационный сигнализатор уровня
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
ся части; нечувствительны к турбулентности, образованию пены и
внешней вибрации; допускают любую пространственную ориента-
цию; нечувствительны к большинству физических свойств измеряе-
мого вещества (исключение — плотность).
Недостатком является возможность отказов при наличии в жид-
костях клейких веществ и твердых частиц, которые могут заклинивать
колебательную вилку.
Ультразвуковые сигнализаторы отличаются надежностью и ста-
бильностью рабочих характеристик. Чувствительный элемент пред-
ставляет собой пару излучатель — приемник. Он может размещаться
в емкости как горизонтально, так и вертикально. Принцип действия
основан на зависимости скорости распространения, а следовательно,
и времени распространения ультразвуковых волн между излучателем
и приемником, в качестве которых используются пьезоэлектрические
преобразователи, от рабочей среды. Электронный блок сигнализато-
ра оценивает время распространения ультразвуковых волн и при
наличии отклонения замыкает или размыкает выходное реле. По-
грешность срабатывания сигнализаторов типа УЗС составляет ± 2 мм
(при вертикальной установке). Эти сигнализаторы могут использо-
ваться при температуре до 250 °С и давлении до 1,6 МПа.
Популярные ультразвуковые сигнализаторы — это УЗС-10Х, УЗС-
20Х, УЗС-3ХХ, УЗС-4ХХ, УЗР-1.
Контрольные вопросы
1. Какие физические явления используются в магнитострикционном уров-
немере?
2. Какие уровнемеры относятся к контактным, а какие — к бесконтакт-
ным?
3. Какие свойства измеряемой жидкости оказывают влияние на результат
измерения поплавкового уровнемера?
4. Почему показания гидростатических уровнемеров зависят от температу-
ры?
5. Какие свойства контролируемой среды используются в электрических
уровнемерах?
6. Влияют ли на результат измерения уровня ультразвуковым методом хи-
мические и физические свойства среды?
7. Поясните принцип действия радарного уровнемера.
8. В чем состоит отличие технологии FMCW от импульсной в радарных
уровнемерах?
9. Поясните принцип действия волноводного уровнемера.
10. Объясните принципы действия вибрационных сигнализаторов уровня.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
78
Глава 5
ИЗМЕРЕНИЕ ДАВЛЕНИЯ
5.1. Общие сведения об измерении давления.
Классификация СИ давления
Давлением называется отношение силы, действующей перпенди-
кулярно поверхности, к площади этой поверхности. Давление — одна
из основных величин, определяющих термодинамическое состояние
веществ и ход технологических процессов. Различают следующие
виды давления: атмосферное, абсолютное, избыточное и вакуум (раз-
режение). Атмосферное (барометрическое) давление — это давле-
ние, создаваемое массой воздушного столба земной атмосферы.
Абсолютное давление отсчитывается от абсолютного нуля, за который
принимается давление внутри сосуда, из которого полностью откачан
воздух. избыточное давление представляет собой разность между
абсолютным и барометрическим давлениями, а вакуум (разреже-
ние) — разность между барометрическим и абсолютным давлением.
В Международной системе единиц (SI) за единицу давления принят
паскаль (Па) — давление, создаваемое силой в 1 ньютон (Н), равно-
мерно распределенной по поверхности площадью 1 м2 и направленной
нормально к ней. В технической системе единиц (МКГСС) давление
выражается в килограммах силы на квадратный сантиметр (кгс/ см2)
и килограммах силы на квадратный метр (кгс/ м2). Единица кгс/ см2
получила название техническая, или метрическая атмосфера (ат).
Помимо указанных существуют также такие внесистемные единицы
измерения давления, как бар, миллиметр ртутного столба (мм рт. ст .),
миллиметр водного столба (мм вод. ст.), а также физическая, или
нормальная, атмосфера (атм), которая эквивалентна 760 мм рт. ст.
В англоязычных странах широко распространена единица давления пси
(psi = lbf/ in2) — фунт силы на квадратный дюйм (1 фунт = 0,4536 кг). При
измерении абсолютного и избыточного давления используются соот-
ветственно обозначения psia (absolute — абсолютный) и psig (gage — из-
быточный). В приложении 2 указаны коэффициенты перевода одних
системных или внесистемных единиц давления в другие.
В качестве СИ давления используются как измерительные при-
боры, так и измерительные преобразователи. Приборы для измерения
давления в зависимости от измеряемого давления делятся: на мано-
метры (для измерения избыточного давления); барометры (для
измерения атмосферного давления); вакуумметры (для измерения
разрежения); мановакуумметры (для измерения избыточного дав-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
79
ления и разрежения); напоромеры и тягомеры (для измерения малых
давлений); дифференциальные манометры, или дифманометры (для
измерения разности давлений). По принципу действия приборы для
измерения давления подразделяются на жидкостные, деформацион-
ные, электрические и грузопоршневые. Измерительные преобразо-
ватели давления в зависимости от используемого в них физического
эффекта могут быть тензорезисторными, пьезоэлектрическими, ем-
костными, резонансными, волоконно-оптическими, гальваномаг-
нитными, акустическими и др. Наибольшее распространение полу-
чили тензорезисторные и емкостные преобразователи.
5.2 . Жидкостные манометры
В жидкостных манометрах измеряемое давление уравновешива-
ется гидростатическим давлением столба рабочей жидкости, высота
которого будет являться мерой измеряемого давления. В качестве
рабочей (манометрической) жидкости применяются дистиллирован-
ная вода, этиловый спирт, трансформаторное масло. Эти манометры
предназначены для измерения избыточного давления до 0,1 МПа,
разрежения и разности давлений и являются наиболее простыми СИ
давления, которые были изобретены еще в XVI в. Леонардо да Винчи.
В настоящее время удельный вес жидкостных манометров по срав-
нению с манометрами других типов относительно невелик и, веро-
ятно, будет уменьшаться и в дальнейшем. Тем не менее при измере-
ниях особо высокой точности в области давлений, близких к ат-
мосферному, они пока незаменимы. Жидкостные манометры
используются в основном в качестве образцовых приборов для лабо-
раторных и технических измерений.
В зависимости от конструкции сосуда с рабочей жидкостью жид-
костные манометры могут быть U-образные (двухтрубные) и чашечные
(однотрубные) с вертикальной или наклонной трубкой. U-образный
манометр представляет собой изогнутую в виде латинской буквы U
стеклянную трубку, заполненную до половины рабочей жидкостью.
Трубка закрепляется вертикально на твердом основании. Отсчет про-
изводится по шкале, имеющей нулевую отметку при равенстве давле-
ний в обоих коленах трубки. Измеряемая величина уравновешивается
столбом рабочей жидкости, высота которого равна сумме высот стол-
бов в обоих коленах трубки. При измерении давления или разрежения
один конец трубки оставляют открытым в атмосферу, а другой соеди-
няют с объектом измерения; при измерении разности давлений их
подводят к обоим концам трубки. Из-за того что сечения трубок не
всегда одинаковы, на практике приходится снимать показания двух
высот. Этот недостаток устранен в чашечных манометрах.
В чашечных (однотрубных) манометрах одна из трубок замене-
на широким сосудом, сообщающимся с измерительной стеклянной
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
80
трубкой (вертикальной или наклонной). Площадь сечения сосуда
значительно больше, чем площадь сечения измерительной трубки.
При измерении давления или разности давлений большее из них по-
дается в сосуд, а меньшее — в измерительную трубку. При точных
измерениях применяются чашечные манометры с наклонной трубкой,
имеющие бо́льшую чувствительность (микроманометры). Показания
манометра при измерениях определяются по длине столбика рабочей
жидкости в трубке, имеющей угол наклона a.
5.3 . Деформационные манометры
Принцип действия деформационных манометров основан на
упругой деформации чувствительных элементов под действием из-
меряемого давления. Благодаря высокой точности, простоте конструк-
ции, надежности и низкой стоимости деформационные манометры
получили широкое распространение в промышленности для измере-
ния давления, разрежения и разности давлений. Они выпускаются
показывающими, регистрирующими и могут оснащаться преобразо-
вателями в унифицированный сигнал измерительной информации
для дистанционной передачи показаний.
В качестве чувствительных элементов в деформационных мано-
метрах применяют трубчатые пружины, сильфоны и мембраны.
Трубчатая пружина (манометрическая пружина, или трубка Бурдо-
на) представляет собой упругую криволинейную металлическую по-
лую трубку, один конец которой имеет возможность перемещаться,
а другой жестко закреплен (рис. 5.1, а). Трубка в свободном состоянии
в сечении имеет форму эллипса (разрез А—А на рис. 5 .1, б ). При по-
вышении давления внутри трубки она начинает раскручиваться. Это
Рис. 5.1. Манометр с трубчатой пружиной:
а, б — процесс деформации трубки Бурдона; в — схема; 1 — трубчатая пружина;
2 — держатель; 3 — тяга; 4 — зубчатый сектор; 5 — шестерня; 6 — стрелка; 7 — шкала;
8 — штуцер; Р — измеряемое давление
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
81
связано с тем, что под действием давления трубка «округляется», т. е.
малая ось эллипса увеличивается, в то вр емя как длина пружины
остается неизменной.
Под действием измеряемого давления Ризм трубка Бурдона дефор-
мируется в поперечном сечении, принимая форму, изображенную на
рис. 5 .1, б пунктиром. Продольные волокна элемента пружины рас-
тягиваются наиболее значительно у малой полуоси. В продольных
волокнах наружного радиуса трубки Бурдона будет возникать рас-
тяжение, а в волокнах внутреннего радиуса — сжатие . Вследствие того
что волокна стремятся сохранить свою первоначальную длину, труб-
ка Бурдона будет разгибаться. При этом свободный конец трубки
совершит некоторое линейное перемещение λ. Кривизна трубки
уменьшится на угол ∆γ = γ - γ1, а малая о сь эллипса увеличится на ∆b.
С учетом неизменности длины пружины можно записать
R
γ = R1γ1;
(5.1)
r
γ = r1γ1,
(5.2)
где R, r и R1, r1 — внешний и внутренний радиусы трубок до и после
деформации соответственно.
Вычитание (5.2) из (5.1) дает равенство
(
R - r)γ = (R1 - r1)γ1,
(5.3)
причемR -r =b,аR1-r1=b1.
С учетом того что γ1 = γ - ∆γ, а b1 = b +∆b, выражение (5.3) приво-
дится к виду
∆
∆
∆
γ
γ
=
+
b
bb
.
(5.4)
Это выражение представляет собой уравнение шкалы манометра с
трубчатой пружиной. Трубчатый манометр тем чувствительнее, чем
больше первоначальный угол закручивания, радиус кривизны R труб-
ки и чем меньше толщина δ ее стенок. Чувствительность пружины
Бурдона, а также ее жесткость в сильной степени зависят от отношения
а/ b осей поперечного сечения и формы сечения (массы металла)
вблизи концов большой оси. Пружина круглого сечения практически
нечувствительна к давлению, так как ее поперечное сечение не дефор-
мируется при воздействии давления.
Манометр с трубчатой пружиной (рис. 5 .1, в) состоит из труб-
чатой пружины 1, один конец которой впаян в отверстие держателя
2, а другой конец наглухо запаян и несет на себе тягу 3. Полость
пружины связана с измеряемой средой через канал в держателе.
Перемещение свободного конца пружины передается зубчатому сек-
тору 4 и шестерне 5, на оси которой насажена стрелка 6 прибора для
отсчета показаний на шкале 7. Прибор устанавливается на техноло-
гическом объекте с помощью штуцера 8. Верхний предел измерения
таких манометров 103 МПа.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
82
Сильфон представляет собой тонкостенную трубку с кольцевыми
гофрами на боковой поверхности. Его упругость определяется мате-
риалом и толщиной стенки, числом гофр и их кривизной. Сильфоны
изготавливают из бронзы, нержавеющей стали и т. д . Схема сильфон-
ного дифманометра показана на рис. 5.2.
Под действием разности давлений сильфон 1, расположенный в
плюсовой камере дифманометра, сжимается, и кремнийорганическая
жидкость, заполняющая внутреннюю полость сильфона 1, частично
вытесняется во внутреннюю полость сильфона 2, находящегося в
минусовой камере дифманометра. При этом перемещается шток 3,
жестко соединенный с дном сильфона 2. Со штоком соединен конец
рычага 4, на который насажена стрелка прибора 5 для отсчета по-
казаний по шкале 6. Для увеличения жесткости сильфонов внутри
них могут быть установлены винтовые пружины.
Сильфоны более чувствительны к изменению давления, чем труб-
чатые пружины. Поэтому сильфонные манометры применяют для
измерения сравнительно небольших разрежений и давлений.
В сильфонных манометрах суммарная жесткость пружины и силь-
фона Км определяется как
КК
К
n
мп
с
=+,
(5.5)
где Кп — жестко сть пружины; Кс — жестко сть одного гофра; n — чис-
ло гофр.
Противодействующее усилие Fпр, создаваемое пружиной и силь-
фоном при их сжатии на величину h, равно
F
пр = Kмh.
(5.6)
Верхний предел измерений сильфонных манометров 0,4 МПа.
Сильфоны также применяются в качестве гибких соединений
трубопроводов, компенсаторов температурных удлинений, упругих
разделителей сред и т. п .
Рис. 5.2. Сильфонный дифманометр:
1, 2 — сильфоны; 3 — шток; 4 — рычаг; 5 — стрелка;
6 — шкала; Р1, Р2 — измеряемое давление
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
83
Мембраны (или пластинчатые пружины) представляют собой
гибкие плоские или гофрированные диски, способные получать
прогиб под действием давления. Статическая характеристика пло-
ских мембран изменяется нелинейно с увеличением давления, по-
этому в качестве рабочего участка используют небольшую часть
возможного хода. Гофрированные мембраны могут применяться при
больших прогибах, чем плоские, так как имеют значительно мень-
шую нелинейность характеристики. При этом чем больше глубина
гофр, тем линейность статической характеристики выше. Различают
упругие и эластичные мембраны. У п р у г и е мембраны выполняют-
сяизстали,бронзы,латуниидр.Эластичные мембраныизго-
тавливаются из прорезиненной ткани, тефлона и т. п . и предназна-
чены для измерения малых давлений и разности давлений. Для уве-
личения перестановочного усилия и уменьшения нелинейности
характеристики применяют эластичные мембраны с жестким цен-
тром, представляющим собой два металлических диска, закрепленных
с двух сторон на мембране.
В мембранном манометре (рис. 5 .3) мембрана 1 зажимается или
приваривается по краю между двумя фланцами 2. Давление, действую-
щее на мембрану, вызывает ее прогиб, в результате которого изогнутый
шток 3 совершает вертикальное перемещение. Перемещение штока
передается зубчатому сектору 4 и шестерне 5, на оси которой насажена
стрелка 6 прибора для отсчета показаний по шкале 7. Прибор устанав-
ливается на технологическом объекте с помощью штуцера 8.
В результате кольцеобразного крепления мембраны менее вос-
приимчивы к вибрациям по сравнению с трубчатыми пружинами,
однако погрешность показаний при изменениях температуры у них
больше. Благодаря опорам для мембран достигается повышенная
стойкость к перегрузкам. Покрытия или фольга, наносимые на по-
верхность мембран, обеспечивают защиту от коррозийных измеряе-
мых сред. Широкие соединительные отвер-
стия или открытые соединительные фланцы,
а также возможности по промывке делают
мембраны особенно пригодными при работе
с высоковязкими, загрязненными или кри-
сталлизующимися веществами.
При необходимости получения большого
прогиба мембраны соединяются в так назы-
ваемые мембранные коробки, а также блоки,
Рис. 5.3. Мембранный манометр:
1 — гофриров анная мембрана; 2 — фланцы; 3 — шток;
4 — зубчатый сектор; 5 — шестерня; 6 — стрелка; 7 —
шкала; 8 — штуцер; Р — измеряемое давление
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
84
собранные из нескольких коробок. Манометры с мембранной короб-
кой особенно пригодны для измерений давления газообразных сред.
При измерении атмосферного давления получили распространение
гофрированные мембранные коробки, из внутренней полости кото-
рых удален воздух.
Верхний предел измерений мембранных манометров 2,5 МПа.
5.4 . Грузопоршневые манометры
Принцип действия грузопоршневых манометров основан на
уравновешивании измеряемого давления калиброванным грузом,
действующим на поршень. Они применяются для измерения давления
до 103 МПа, а также для градуировки и поверки манометров других
типов.
Грузопоршневой манометр (рис. 5.4) имеет грузовую и поршневую
части. Грузовая часть состоит из колонки 1, в центр альной части
которой имеется полированный цилиндрический канал, в который
вставляется поршень 2. Поршень в верхней части имеет тарелку 3,
на которую накладываются контрольные грузы 4. Канал колонки со-
общается с горизонтальным каналом 5, который соединен со штуце-
рами 6 и 7, бачком с рабочей жидкостью 8 и поршневой частью ма-
нометра. Поршневая часть состоит из цилиндра 9 с поршнем 10, шток
которого выполнен в виде винта со штурвалом 11. Вентили 12 ... 15
служат для перекрытия соответствующих каналов. Полость системы
заполнена рабочей жидкостью (трансформаторным маслом). В шту-
цер 6 устанавливается поверяемый манометр 16. Давление в системе
изменяют, перемещая поршень 10 с помощью штурвала 11 (при этом
вентиль 15 закрыт). На поршень 2, свободно перемещающийся в
канале колонки 1, действуют две противодействующие силы: сила,
создаваемая давлением жидкости, и сила тяжести поршня и грузов.
При равенстве этих сил поршень уравновешивается и поднимается
на определенную высоту. При равновесии поршня создаваемое им
давление Р будет равно
P
G
S
=
,
(5.7)
где G — вес поршня и грузов; S — площадь попер ечного сечения
поршня.
Площадь обычно составляет 1 см2, поэтому создаваемое давление
равно весу поршня и груза. Вес поршня с тарелкой равен 1 кг. Вес
отдельных грузов указывается на них. Таким образом, поверка ма-
нометров производится путем сравнения показаний поверяемого
прибора 16 с весом поршня с грузами (элементы 2, 3, 4). Поверку
манометров можно также осуществлять методом непосредственного
сличения показаний поверяемого прибора 16 и образцового при-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
85
бора 17 при измерениях одних и тех же величин. При этом грузовая
часть грузопоршневого манометра в процессе не участвует (вентиль
13 закрыт).
Измерение внешнего давления с помощью грузопоршневого
манометра производят следующим образом. Давление в системе
доводят до атмосферного (штурвал 11 полностью выкручивают про-
тив часовой стрелки), вентили 12 и 13 открывают, 14 и 15 закрыва-
ют. К штуцеру 6 с помощью импульсной трубки подводят измеряе-
мое давление. Устанавливая на тарелку 3 необходимое количество
контрольных грузов 4, добиваются равновесия поршня 2. При этом
вес контрольных грузов с тарелкой является мерой измеряемого
давления.
5.5 . Измерительные преобразователи
давления
5.5 .1 . Пьезоэлектрические преобразователи
Принцип действия пьезоэлектрических измерительных преобра-
зователей давления основан на явлении пьезоэффекта, рассмотрен-
ном в гл 2. Измеряемое давление Р преобразуется мембраной 1 в
усилие, вызывающее сжатие кварцевых пластин 2 (рис. 5.5). С по-
Рис. 5.4 . Грузопоршневой манометр:
1 — колонка; 2 — поршень; 3 — тарелка; 4 — контрольные грузы; 5 — горизонтальный
канал; 6, 7 — штуцеры; 8 — бачок с рабочей жидкостью; 9 — цилиндр; 10 — поршень;
11 — штурв ал; 12...15 — в ентили; 16 — поверяемый манометр; 17 — образцовый ма-
нометр
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
86
мощью обкладок 3 снимается выходной сигнал в виде ЭДС. Выраже-
ние для измеряемого давления Р имеет вид
P
Ef
kFd
=
ε
,
(5.8)
где E — ЭДС на обкладках датчика; ε — диэлектрическая проницае-
мость материала пластин; f — площадь грани, перпендикулярной к
оси деформации; k — пьезоэлектрическая постоянная материала пла-
стин; F — эффективная площадь мембраны; d — толщина пластин.
Из-за утечки заряда с кварцевых пластин пьезодатчики давления
не используются для измерения статических давлений. Одна из сфер
их применения — преобразование быстропеременного и импульсно-
го давления в электрический сигнал в вихревых расходомерах, рас-
сматриваемых в гл. 6. Верхний предел измерений пьезоэлектрических
измерительных преобразователей давления 100 МПа.
5.5.2. Тензорезисторные преобразователи
Принцип действия тензорезисторных измерительных преобразова-
телей давления основан на явлении тензоэффекта, рассмотренном
в гл. 2 . На сегодняшний день тензорезисторные измерительные преоб-
разователи давления (в переводной литературе их иногда называют
пьезорезисторными, не надо путать с пьезоэлектрическими) являются
самыми популярными в мире. Они представляют собой металлическую
и (или) диэлектрическую измерительную мембрану, на которой раз-
мещаются тензорезисторы. Деформация мембраны под воздействием
внешнего давления приводит к локальным деформациям тензорезисто-
ров, включенным обычно в плечи четырехплечего уравновешенного
моста. При этом одна пара тензорезисторов, включенных в противопо-
ложные плечи моста, имеет положительную тензочувствительность, а
Рис. 5.5. Пьезодатчик давления:
1 — мембрана; 2 — кв арцевые пластины; 3 — обкладки; Р — измеряемое давление
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
87
другая — отрицательную. Их сопротивления при подаче давления со-
ответственно увеличиваются и уменьшаются на величину DR. При от-
сутствии давления все четыре сопротивления равны по величине и мост
сбалансирован. При подаче давления баланс (равновесие) моста на-
рушается, и в измерительной диагонали моста будет протекать ток. Этот
токовый сигнал и является мерой измеряемого давления.
Как уже было отмечено в гл. 2, тензорезисторы выполняются как
из металлов (проволочные, фольговые), так и из полупроводников.
Поскольку чувствительность полупроводниковых тензорезисторов в
десятки раз выше, чем у металлических, и, кроме того, интегральная
технология позволяет в одном кристалле кремния формировать одно-
временно как тензорезисторы, так и микроэлектронный блок обра-
ботки, то в последние годы получили преимущественное развитие
интегральные полупроводниковые тензорезисторные чувствительные
элементы. Такие чувствительные элементы реализуются двумя спо-
собами: 1) по гетероэпитаксиальной технологии «кремний на сап-
фире» (КНС), в соответствии с которой тонкая пленка кремния
выращивается на подложке из сапфира, припаянной твердым при-
поем к титановой мембране (рис. 5 .6, а); 2) по технологии диффузи-
онных резисторов с изоляцией их от проводящей кремниевой под-
ложки p-n-переходами — технология «кремний на кремнии» (КНК).
В структуре КНК мембрана из монокристаллического кремния раз-
мещается на диэлектрическом основании с использованием легко-
плавкого стекла или методом анодного сращивания (рис. 5.6, б).
Особенно широкое применение в изготовлении общепромышлен-
ных измерительных преобразователей давления в настоящее время
получила технология КНС. К ее преимуществам можно отнести хо-
рошую защищенность чувствительного элемента от воздействия
любой агрессивной среды, налаженное серийное производство, низ-
кую стоимость. Однако структура КНС имеет и недостатки: времен-
Рис. 5.6. Тензорезисторные чувствительные элементы:
а — технология КНС; б — технология КНК
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
88
ную нестабильность градуировочной характеристики и существенную
погрешность гистерезиса от давления и температуры. Это обуслов-
лено неоднородностью конструкции и жесткой связью мембраны с
конструктивными элементами датчика. Измерительные преобразо-
ватели давления, выполненные на основе структуры КНК, имеют
бо́льшую временную и температурную стабильность по сравнению с
преобразователями на основе КНС-структур.
Наибольшую погрешность в результат измерения давления с
помощью тензорезисторных измерительных преобразователей
вносит изменение температуры. Для ее уменьшения в связи с ши-
роким применением в последнее время интеллектуальных преоб-
разователей, как правило, используется автоматическо е введение
поправок на температуру. При этом первичный преобразователь
(тензорезисторный чувствительный элемент) подвергается пред-
варительной градуировке при различных значениях температуры.
Эти градуировочные данные вводятся в память микропроцессора
интеллектуального преобразователя. При эксплуатации преобра-
зователя измеряются температура и выходной ток датчика, и путем
аппроксимации градуировочных данных вычисляется измеряемое
давление.
5.5.3. Емкостные преобразователи
В емкостном измерительном преобразователе давления измеряе-
мое давление воспринимается металлической мембраной, являющей-
ся подвижным электродом конденсатора. Неподвижный электрод
изолируется от корпуса с помощью изолятора. Зависимость емкости С
конденсатора от перемещения d мембраны, которое, в свою очередь,
зависит от давления, имеет вид
C
S
=
+
εε
dd
0
0
,
(5.9)
где ε0 — электрическая постоянная; ε — диэлектрическая проницае-
мость среды, заполняющей межэлектродный зазор; S — площадь
электродов; d0 — расстояние между электродами при давлении, рав-
ном нулю.
В емкостных дифференциальных измерительных преобразователях
давления (рис. 5 .7) чувствительный элемент состоит из двух соеди-
ненных конденсаторов. Воздействие давления вызывает изменение
положения измерительной (сенсорной) мембраны центральной об-
кладки конденсатора, которое приводит к изменению обеих емкостей
конденсаторов.
Емкостные преобразователи давления применяют для измерения
быстро изменяющегося давления с верхним пределом до 120 МПа.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
89
5.5.4. Резонансные преобразователи
Резонансный принцип используется в датчиках давления на осно-
ве вибрирующего цилиндра, струнных датчиках, кварцевых датчиках,
резонансных датчиках на кремнии. В основе метода лежат волновые
процессы: акустические или электромагнитные. Это и объясняет вы-
сокую стабильность датчиков и высокие выходные характеристики
прибора.
Частным примером может служить резонансный измерительный
преобразователь давления с кремниевым механическим резонато-
ром — разработка фирмы Yokogawa (DPHarp-технология). Крем-
ниевый резонатор (рис. 5 .8) представляет собой параллелепипед
плоской формы, защищенный герметичной капсулой и интегриро-
ванный в плоскость кремниевой мембраны. Резонатор возбуждается
сигналом переменного тока и окружающего магнитного поля. В за-
висимости от знака приложенного давления резонатор растягивается
или сжимается, в результате чего частота его собственных механиче-
ских колебаний растет или уменьшается соответственно. Колебания
механического резонатора в постоянном магнитном поле преобразу-
ются в колебания электрического контура, и в итоге на выходе чув-
ствительного элемента образуется цифровой (частотный) сигнал,
пропорциональный величине измеряемого давления.
Кроме кремниевых резонансных чувствительных элементов суще-
ствуют кварцевые резонансные чувствительные элементы, принцип
действия которых аналогичен принципу действия кремниевых.
Рис. 5 .7. Емкостный дифференциальный измерительный преобразователь
давления:
а — схема чувствительного элемента (емкостной ячейки); б — изо бражение чув-
ствительного элемента в разрез е; 1 — капсульная защита; 2 — пластины конденсатора;
3 — сенсорная мембрана; 4 — разделительные мембраны; 5 — заполняющая жид-
кость; 6 — со единительные провода
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
90
Преимуществами резонансных датчиков являются высокая точ-
ность и стабильность характеристик, которые зависят от качества
используемого материала. К недостаткам можно отнести: индивиду-
альную характеристику преобразования давления, значительное
время отклика, невозможность проведения измерений в агрессивных
средах без потери точности показаний прибора.
5.6 . Особенности эксплуатации и монтажа СИ
давления
Получение достоверных р езультатов при измерениях давления
зависит не только от характеристик используемого СИ, но и от их
правильного монтажа, а также соблюдения условий эксплуатации.
Существует несколько положений, которые должны выполняться
независимо от характера производства.
Присоединение СИ давления к объекту измерения осуществляет-
ся одним из трех способов: 1) давление подводится к СИ давления
по импульсным линиям (с внутренним диаметром 2 ... 15 мм и длиной
до 50 м); 2) СИ давления вворачиваются в гнездо или специальный
штуцер непосредственно в местах отбора давления; 3) СИ давления
устанавливаются в отверстия и привариваются к объектам.
При монтаже СИ давления с помощью импульсных линий необ-
ходимо соблюдать следующие требования. Место отбора давления в
жидких средах не рекомендуется выбирать в нижних и верхних точках
трубопроводов во избежание попадания шламов, взвесей и газов в
импульсные линии, а в газовых средах — в нижних точках во избе-
жание попадания влаги в импульсные линии. По этой же причине
импульсные линии прокладывают без перегибов и с установкой кон-
денсатоотводчиков. Необходимо, чтобы устройства отбора давления
Рис. 5.8 . Кремниевый резонансный чувствительный элемент
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
91
не вызывали возмущения течения среды, т. е . края отверстий в стен-
ках трубопроводов не выступали в ее поток.
При измерении давлений агрессивных и вязких сред, а также сред,
застывающих при обычных температурах воздуха (например, мазут),
для защиты СИ давления применяются мембранные или жидкостные
разделительные емкости (разделители), с помощью которых внутрен-
няя полость измерительного прибора отделяется от рабочей среды.
В случае использования мембранных разделителей внутренняя по-
лость СИ давления и пространство до мембраны заполняются крем-
нийорганической жидкостью, при этом жесткость мембраны разде-
лителя должна быть намного меньше жесткости чувствительного
элемента СИ давления. Мембранные разделители вносят в показания
прибора дополнительную погрешность около 1 %.
Мембранные разделители изготавливаются с закрытой и откры-
той мембранами. Разделители с з а к р ы т о й мембраной состоят из
верхнего и нижнего фланцев, между которыми устанавливается
мембрана. В конструкции разделителей с о т к р ы т о й мембраной
отсутствует нижний фланец. Открытая мембрана не дает возмож-
ности кристаллизующимся средам и твердым осадкам скапливаться
в значительном количестве, затрудняющем или совершенно пре-
кращающем передачу давления к чувствительному элементу. Кроме
того, она доступна для периодической очистки. При монтаже раз-
делителей с открытой мембраной присоединение этих разделителей
к месту отбора давления осуществляется фланцами, закрепляемыми
болтами.
В жидкостных разделительных сосудах применяется нейтраль-
ная жидкость, контактирующая с чувствительным элементом СИ
давления и с агрессивной средой, давление которой измеряется, при
этом плотность нейтральной жидкости должна существенно отли-
чаться от плотности измеряемой среды. Использование жидкостных
разделителей при измерении жидких сред может со временем при-
вести к смешиванию в результате диффузии измеряемой и раздели-
тельной среды, т. е . к утрате самой разделительной функции с соот-
ветствующими последствиями, а при измерении газовых сред — к
диффузии газа в разделительную среду с переводом ее в двухфазное
состояние с потерей функции несжимаемости, что ведет к росту по-
грешности измерения давления.
Приборы для измерения давления лучше всего размещать так,
чтобы на них дополнительно не действовало давление столба жидко-
сти в линии, иначе в показания манометра вводится указываемая на
приборе поправка со знаком « + » (если манометр расположен выше
места отбора давления) и « - » (если прибор расположен ниже). При
температуре среды более 25 °С также вводится поправка к показани-
ям на каждые 10 °С. При измерении пульсирующего давления (на-
пример, в напорной линии насосов) для его сглаживания перед ма-
нометром устанавливают дроссель.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
Показывающие приборы для измерения давления выбираются
таким образом, чтобы конечное значение их шкалы превышало из-
меряемую величину при стабильном давлении в 1,5 раза, а при колеб-
лющемся — в 2 раза. В обоих случаях минимальное измеряемое
давление должно быть не меньше 1/ 3 диапазона шкалы прибора.
Рабочие средства измерений давления подвергаются периодиче-
ским поверкам образцовыми грузопоршневыми манометрами. Для
большинства СИ давления межповерочный интервал составляет один
год. Если СИ работают в условиях повышенной вибрации и темпе-
ратуры, этот период может быть сокращен.
Контрольные вопросы
1. Какие существуют виды давления?
2. В чем отличие приборов для измерения давления от измерительных пре-
образователей давления?
3. В чем заключается принцип действия жидкостных манометров?
4. Какой из деформационных чувствительных элементов применяется для
измерения бо́льших значений давления: трубка Бурдона или сильфон?
Почему?
5. В чем преимущество гофрированных мембран перед плоскими?
6. Какие вы знаете типы полупроводниковых тензорезисторных чувстви-
тельных элементов?
7. В чем заключается принцип действия резонансных измерительных пре-
образователей давления?
8. Какие устройства используются для защиты манометров от действия вы-
соких температур и агрессивных сред?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
93
Глава 6
ИЗМЕРЕНИЕ РАСХОДА
6.1. Общие сведения об измерении расхода.
Классификация СИ расхода
Расход протекающих по трубопроводам жидких и газообразных
веществ является одним из важнейших параметров технологических
процессов.
Расходом вещества называется количество вещества (объем V или
масса m), протекающее через данное сечение канала в единицу вре-
мени. Соответственно, различают объемный расход, измеряемый в
м3/ с (м3/ ч, л/ мин и т. д. ), и массовый расход, измеряемый в кг/ с
(кг/ ч, т/ ч и т. д. ) . СИ расхода называются расходомерами. Расход
может быть средним и мгновенным. Средний расход — это отношение
количества вещества к некоторому промежутку времени Dt:
QV
t
G
m
t
ср
ср
==
DD
,.
(6.1)
Мгновенный расход — это производная от количества вещества
по времени:
QdV
dt
G
dm
dt
==
,.
(6.2)
Расходомеры измеряют мгновенный расход. Для измерения количе-
ства вещества за определенный период времени применяются расходо-
меры с интеграторами или счетчики. интегратор непрерывно сумми-
рует показания расходомера, а количество вещества определяется по
разности показаний интегратора за требуемый промежуток времени:
VQ
dt mG
dt
t
t
t
t
==
∫∫
1
2
1
2
,.
(6.3)
Счетчики также измеряют количество вещества за некоторый
промежуток времени (сутки, месяц и т. д . ) . По показаниям счетчиков
можно определить ср едний расход по формулам (6.1). Количество
вещества V, прошедшее через счетчик за выбранный промежуток
времени Dt = t2 - t1, определяется по разности показаний счетчика N2
и N1, взятых в моменты времени t2 и t1:
V=q(N2-N1),
(6.4)
где q — постоянная счетчика, определяющая количество вещества,
приходящееся на единицу показания счетчика.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
94
Постоянная счетчика определяется экспериментально.
Измерение расхода и количества является сложной задачей, по-
скольку на показания приборов влияют физические свойства изме-
ряемых потоков: плотность, вязкость, соотношение фаз в потоке
и т. п . Физические свойства измеряемых потоков, в свою очередь,
зависят от условий эксплуатации, главным образом от температуры
и давления.
При измерении расходов газа с целью получения результата из-
мерения, не зависящего от давлений и температуры потока, его вы-
ражают в объемных единицах, приведенных к нормальным условиям
(нм3). В качестве нормальных условий в технике приняты: темпера-
тура tн = 20 °С, давление Рн = 101 325 Па (760 мм рт. ст.) и относитель-
ная влажность φ = 0 %.
Для измерения расхода и количества жидкостей и газов использу-
ются различные виды СИ: объемные счетчики, турбинные (скорост-
ные) расходомеры, расходомеры переменного перепада давления
(дроссельные), расходомеры постоянного перепада давления (рота-
метры), электромагнитные, тепловые (калориметрические), ультра-
звуковые, вихревые, кориолисовые и некоторые другие расходомеры.
Выбор расходомера определяется большим количеством факторов,
таких как измеряемая среда, ее термо- и гидродинамические харак-
теристики, требуемые диапазон и точность измерения и ряд других.
6.2 . Объемные счетчики
Принцип действия объемных счетчиков основан на непосред-
ственном отмеривании объемов измеряемой среды с помощью мер-
ных камер известного объема и подсчета числа порций, прошедших
через счетчик. Наиболее распространенным объемным счетчиком
различных жидкостей, в том числе нефти и нефтепродуктов, являет-
ся объемный шестеренчатый счетчик (рис. 6 .1). Внутри корпуса 1
размещены две находящиеся в зацеплении овальные шестерни 2 и 3.
Набегающий на шестерни измеряемый поток заставляет их вращать-
ся. Вращение шестерен происходит в направлении стрелок. В поло-
жении, представленном на рис. 6.1, а, происходит заполнение объема
между корпусом и левой частью шестерни 2, а объем правее этой
шестерни вытесняется. В том же положении между шестерней 3 и
корпусом отсекается измеряемый объем жидкости V1, которая будет
затем вытесняться в положениях, представленных на рис. 6.1, б и в.
За один оборот шестерен измерительные полости V1 и V2 дважды на-
полняются и дважды опорожняются. В итоге за один оборот через
счетчик проходит объем жидкости, равный четырем объемам V1 (или
V2). Ось одной из шестерен вращает счетный механизм, расположен-
ный вне корпуса прибора. Эти счетчики имеют высокую точность
измерения, малую потерю давления, независимость показания от
вязкости. Однако их недостатком является необходимость хорошей
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
95
фильтрации измеряемой среды от механических примесей, а также
высокий уровень акустического шума. Диапазон измерений объемных
шестеренчатых счетчиков составляет от 0,01 до 250 м3/ ч.
Для измерения количества нефтепродуктов, минеральных масел
и ряда агрессивных жидкостей используются объемные лопастные
счетчики (рис. 6.2).
Счетчик представляет собой цилиндрический корпус 1 с подвижным
барабаном 2, внутри которого расположен неподвижный кулачок 3.
Рис. 6.1. Объемный шестеренчатый счетчик:
а ... в — принцип действия; г — внутреннее устройство: 1 — корпус; 2, 3 — овальные
шестерни; V1, V2 — измерительные полости
Рис. 6.2. Объемный лопастной счетчик:
1 — цилиндрический корпус; 2 — подвижный барабан; 3 — неподвижный кулачок;
4 — ролик; 5 — лопасть; 6 — вкладыш
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
96
На кулачок опираются четыре ролика 4 с закрепленными на них
лопастями 5. В пространстве между внутренней поверхностью кор-
пуса и внешней поверхностью барабана движется измеряемая жид-
кость. Барабан вращается за счет давления поступающей жидкости,
действующей на лопасти. При вращении барабана ролики катятся по
кулачку, при этом лопасти поочередно занимают место снаружи и
внутри барабана. Вращение барабана передается на счетный меха-
низм. За один оборот барабана через счетчик проходит объем жид-
кости, соответствующий кольцевому пространству между корпусом
и барабаном. Перетеканию жидкости из входа на выход препятству-
ет вкладыш 6. Верхний предел измерений объемных лопастных счет-
чиков 300 м3/ ч.
6.3. Турбинные (скоростные) расходомеры
и счетчики
Турбинные расходомеры (счетчики) применяются для определения
объемного расхода (количества) измеряемой среды. Турбинные счет-
чики в отличие от объемных не имеют измерительных камер и про-
изводят косвенное измерение объема. Чувствительным элементом
турбинных расходомеров является турбина, приводимая во вращение
потоком жидкости, протекающим через расходомер. Число оборотов
турбины n в единицу времени пропорционально скорости омываю-
щего ее потока:
n
= kW,
(6.5)
где k — коэффициент пропорциональности, зависящий от вида тур-
бины; W — скорость потока в некотором сечении F расходомера.
Объемный расход Q через расходомер равен
Q
= WF.
(6.6)
Решая совместно (6.5) и (6.6), получим
n
kQ
F
=
.
(6.7)
Подставив в это выражение значение расхода из выражения (6.2)
и проинтегрировав полученную зависимость в интервале времени
t2 — t1, получим
ndt
kdV
F
=
;
V
F
k
NN
=-
()
,
21
(6.8)
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
97
где N2 - N1 — разность показаний счетчика в интервале времени
t2—t1.
Если турбинный счетчик снабжен тахометром, то он измеряет
объемный расход потока.
Существуют турбины двух видов: аксиальная и тангенциальная.
Аксиальная турбина представляет собой многозаходный винт, ось
вращения которого параллельна измеряемому потоку. Тангенциальная
турбина представляет собой турбину с лопастями, ось вращения ко-
торой перпендикулярна измеряемому потоку. Вращение обеих турбин
в счетчиках через передаточный механизм передается счетному устрой-
ству. Турбинные счетчики с аксиальной турбиной (рис. 6.3, а, б ) ис-
пользуются для измерения объема неагрессивных жидкостей и газов
в трубопроводах диаметром 50... 300 мм. Диапазон измерений по рас-
ходу составляет 3... 1 300 м3/ ч. Турбинные счетчики с тангенциальной
турбиной (рис. 6 .3, в) используются для измерения объема неагрес-
сивных жидкостей (в основном воды) в трубопроводах диаметром
15 ... 40 мм. Диапазон измерений по расходу составляет 3... 20 м3/ ч.
Недостатком турбинных счетчиков (расходомеров) является за-
висимость показаний от вязкости измеряемой среды.
6.4 . Расходомеры переменного перепада давления
(дроссельные)
Одним из самых распространенных принципов измерения рас-
хода жидкостей, газов и паров является принцип переменного пере-
пада давления на сужающем устройстве. В трубопроводе устанав-
ливается сужающее устройство. При протекании измеряемого потока
через отверстие этого устройства скорость потока увеличивается по
сравнению со скоростью до сужения. Благодаря этому давление по-
тока на выходе из сужающего устройства уменьшается, и на нем соз-
дается перепад давления, который зависит от скорости в сужении,
т. е . от расхода потока. На рис. 6 .4 показаны схема дроссельного рас-
ходомера и график изменения давления по длине трубопровода. Из-
Рис. 6.3 . Турбинный счетчик:
а, б — с аксиальной турбиной; в — с тангенциальной турбиной
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
98
меряемая среда протекает через отрезок трубопровода 1, в котором
установлено сужающее устройство 2. На рис. 6.4 видно, что давление
среды P непосредственно перед сужающим устройством несколько
возрастает P1, затем по сле него падает P2, далее достигает минимума
и снова возрастает. Перепад давления на сужающем устройстве
(DP = P1 - P2) измеряется дифманометром (ДМ). Также можно уви-
деть, что установившееся значение давления после сужающего устрой-
ства не достигает своего первоначального значения. Эта потеря
давления dP, называемая безвозвратной потерей давления, связана с
затратой части энергии потока на вихреобразования за сужающим
устройством и на трение.
Выражения для объемного Q и массового G расходов среды, про-
текающей через сужающее устройство, имеют вид
Рис. 6.4. Дроссельный расходомер и график
изменения давления по длине трубопровода:
1 — отрезок трубопров ода; 2 — сужающее устрой-
ств о
Рис. 6.5. Стандартные сужающие устройства:
а — диафрагма; б — сопло; в — труба Вентури; d — диаметр входного отв ерстия СУ;
P1, P2 — значения давлений до и после СУ
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
99
QdPFP
==
aεπ
ρ
aε
ρ
2
0
8
2
DD
;
(6.9)
Gd
P
FP
==
aεπ
ρ
aε
ρ
2
0
8
2
D
D,
(6.10)
где a — коэффициент расхода; ε — поправочный множитель на рас-
ширение измеряемой среды (для сжимаемых сред ε < 1, а для несжи-
маемых ε = 1); d — диаметр входного отверстия сужающего устройства;
DP = P1 - P2 — разность давлений до и после сужающего устройства;
ρ — плотность среды; F0 — площадь сечения входного отверстия
сужающего устройства.
В дроссельных расходомерах в качестве сужающих устройств ис-
пользуются диафрагмы (рис. 6.5, а), сопла (рис. 6.5, б), трубы Вен-
тури (рис. 6.5, в) и различные их модификации. Характерной осо-
бенностью сопл и труб Вентури является меньшая, чем для диафрагм,
безвозвратная потеря давления.
6.5 . Расходомеры постоянного перепада давления
(ротаметры)
Ротаметр (рис. 6 .6) представляет собой вертикальную конусную
трубку 1, в которой находится поплавок 2. Измеряемый поток, про-
ходя через ротаметр снизу вверх, создает перепад давлений до и
после поплавка. Этот перепад давлений, в свою очередь, создает
подъемную силу, которая уравновешивается весом поплавка (в слу-
чае произвольного направления потока — силой противодействую-
щей пружины).
Если расход через ротаметр изменится, то изменится и перепад
давлений. Это приведет к изменению подъемной силы и, соответ-
ственно, к нарушению равновесия поплавка. Поплавок начнет пере-
мещаться; так как трубка ротаметра конусная, то при этом будет
изменяться площадь проходного сечения в зазоре между поплавком
и трубкой.
В результате произойдет изменение перепада давлений, а следо-
вательно, и подъемной силы. Когда перепад давлений и подъемная
сила снова вернутся к прежним значениям, поплавок уравновесится
и остановится. Таким образом, каждому значению расхода через
ротаметр соответствует определенное положение поплавка. Во из-
бежание трения и удара поплавка о стенку трубки в его верхнем обо-
де выполнены наклоненные к вертикали прорези 3. Вещество, про-
текая через прорези, придает поплавку вращение, и он центрируется
в середине потока.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
100
Уравнение объемного расхода для ротаметра имеет вид
QF
gV
f
=
-
()
a
ρρ
ρ
к
п
2
,
(6.11)
где a — коэффициент расхода; Fк — площадь кольцевого отверстия
между верхней частью поплавка и конусной трубкой; g — ускорение
свободного падения; V — объем поплавка; ρп — плотность материала
поплавка; ρ — плотность вещества потока; f — площадь наибольше-
го поперечного сечения поплавка.
Из этого выражения следует, что если коэффициент расхода a при-
нять постоянным, то расход вещества может быть определен по зна-
чению площади кольцевого отверстия Fк. Учитывая, что Fк — функция
положения поплавка, значение высоты его подъема служит мерой рас-
хода.
Ротаметры выпускаются со стеклянными и металлическими труб-
ками. У ротаметров со стеклянной трубкой шкала нанесена прямо на
поверхности трубки. Такие ротаметры предназначены для измерения
газов или прозрачных жидкостей. Указателем служит верхняя гори-
зонтальная плоскость вращающегося поплавка. В ротаметрах с ме-
таллической трубкой используется дистанционное измерение поло-
жения поплавка при помощи преобразователей линейного переме-
щения в унифицированный электрический или пневматический
сигнал.
Ротаметры имеют большой диапазон измерения (отношение верх-
него предела измерения к нижнему 10 : 1) и сохраняют точность из-
мерений даже при очень малых расходах; используются для измерения
Рис. 6.6. Ротаметр:
1 — конусная трубка; 2 — поплавок; 3 — прорези
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
101
объемного расхода плавно меняющихся однородных потоков чистых
и слабозагрязненных жидкостей и газов.
6.6. Электромагнитные (индукционные)
расходомеры
Принцип действия электромагнитных расходомеров (ЭМР) осно-
ван на законе электромагнитной индукции, согласно которому в
проводнике, движущемся в магнитном поле, индуцируется ЭДС,
пропорциональная скорости движения проводника. Роль проводни-
ка в данном случае выполняет электропроводная жидкость, проте-
кающая по трубопроводу и пересекающая магнитное поле. При этом
на измерительных электродах наводится ЭДС, пропорциональная
скорости движения жидкости, следовательно, и ее расходу. Отрезок
металлической немагнитной трубы 1, которая устанавливается меж-
ду фланцами трубопровода с измеряемым потоком жидкости, рас-
полагается между полюсами магнита 2, перпендикулярно направле-
нию магнитных силовых линий (рис. 6.7). Внутренняя поверхность
трубы покрыта электроизоляционным материалом (эмаль, стекло-
пластик, резина и др.) . Выходной сигнал снимается с двух изолиро-
ванных электродов 3, установленных в стенке трубопровода и под-
ключенных к измерительному прибору 4 (милливольтметру или по-
тенциометру).
ЭДС Е, индуцируемая в проводнике, движущемся в постоянном
магнитном поле, равна
E
= BWD,
(6.12)
где В — магнитная индукция; W — средняя скорость потока жидко-
сти; D — внутренний диаметр трубопровода.
Рис. 6.7. Электромагнитный расходомер:
1 — немагнитный участок трубы; 2 — магнит; 3 — изолированные электроды; 4 — из -
мерительный прибор
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
102
Поскольку скорость потока пропорциональна объемному расходу Q:
W
Q
F
=
,
(6.13)
где F — площадь внутреннего сечения трубопровода, которую можно
записать как
F
D
=
π
2
4
.
Тогда выражение для ЭДС примет вид
E
B
D
Q
=
4
π
,
(6.14)
откуда следует, что при постоянной магнитной индукции измеряемая
ЭДС линейно зависит от объемного расхода жидкости.
При использовании постоянного магнитного поля за счет поля-
ризации измеряемой среды на электродах возникает паразитная ЭДС,
уменьшающая индуцируемую ЭДС и приводящая к значительным
погрешностям измерения. Для ее устранения используются электро-
магниты, питаемые переменным током и создающие переменное
магнитное поле.
ЭМР обладают рядом достоинств: 1) возможность измерения рас-
хода агрессивных, абразивных и вязких жидкостей (степень агрессив-
ности измеряемых сред определяется материалом изоляции трубы и
электродов); 2) на показания не влияют взвешенные в жидкости
частицы и пузырьки газа, а также такие параметры измеряемого по-
тока жидкости, как давление, температура, вязкость, плотность и т. п. ;
3) ЭМР позволяют проводить измерения без потери давления; 4) ЭМР
практически безынерционны и поэтому могут быть использованы
при измерении быстро меняющихся потоков. Недостатком является
возможность измерения расхода только электропроводных жидкостей.
Верхний предел измерения ЭРМ — 2 500 м3/ ч.
6.7 . Тепловые расходомеры
Существует несколько разновидностей тепловых расходомеров.
Наиболее распространены тепловые калориметрические расходо-
меры, принцип действия которых основан на нагреве потока вещества
и измерении разности температур до и после нагревателя. На рис. 6.8
показаны схема такого расходомера и кривые распределения темпе-
ратуры среды до и после нагревателя при его постоянной выделяемой
тепловой мощности.
В трубопроводе 1 установлен нагреватель потока 2. На р авных
расстояниях от центра нагревателя расположены термопреобразова-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
103
тели 3, измеряющие температуру потока до и после нагр ева. Для
неподвижной среды распределение температуры в ней (на графике —
сплошная линия) симметрично относительно оси нагревателя, и
поэтому разность температур Dt = t2 - t1 = 0. При некоторой малой
скорости потока распределение температуры (на графике — штрихо-
вая линия) несимметрично и несколько смещается вправо. При малых
расходах температура t1 падает вследствие поступления холодного
вещества, а температура t2 возрастает, вследствие чего Dt увеличива-
ется с ростом расхода. С дальнейшим увеличением расхода при по-
стоянной мощности нагревателя t2 станет убывать, в то время как t1
практически постоянна, т. е. Dt будет уменьшаться. Таким образом,
при малых расходах разность температур Dt прямо пропорциональна
расходу, а при больших — обратно пропорциональна.
Зависимость между массовым расходом G и разностью темпера-
тур Dt при больших расходах определяется уравнением теплового
баланса:
G
N
kct
=
D
,
(6.15)
где N — мощность нагревателя; k — поправочный множитель на не-
равномерность распределения температур по сечению трубопровода;
c — теплоемкость вещества при температуре (t1 + t2)/ 2.
Отсюда следует, что измерение массового расхода может быть
осуществлено двумя способами: 1) по значению подаваемой к на-
гревателю мощности N, обеспечивающей постоянную заданную
разность температур Dt; 2) по значению разности Dt при постоян-
ной N.
В соответствии с первым способом расходомер работает как регу-
лятор температуры нагрева потока. При изменении Dt мощность N
автоматически изменяется до тех пор, пока Dt не достигнет заданно-
го значения. Массовый расход при этом определяется по шкале ватт-
метра в цепи нагревателя. Для уменьшения расходуемой мощности
обычно ограничивают заданное значение Dt в пределах 1... 3 °С.
Рис. 6.8. Схема калориметрического рас-
ходомера и кривые распределения темпе-
ратуры по длине трубопровода:
1 — трубопр овод; 2 — нагреватель потока; 3 —
термопр еобразователи; t — темпер атур а; L —
длина трубопров ода; Dt — измеряемая разность
температур
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
104
По второму способу, когда к нагревателю подводится постоянная
мощность, расход определяют по прибору, измеряющему разность
температур. Недостатком этого способа является гиперболический
характер шкалы, а значит, и падение чувствительности при увеличе-
нии расхода.
В качестве преобразователей температуры в калориметрических
расходомерах могут быть использованы термоэлектрические преоб-
разователи, термопреобразователи сопротивления и др.
Калориметрические расходомеры в основном применяют для из-
мерения малых расходов чистых газов. Основное преимущество этих
расходомеров — измерение массового расхода газа без измерения его
давления и плотности.
Существуют тепловые расходомеры, у которых нагреватель и тер-
мопреобразователи размещают на наружной стенке трубы и пере-
дача теплоты к потоку осуществляется через стенку трубы.
6.8 . Ультразвуковые расходомеры
Принцип действия ультразвуковых расходомеров основывается на
изменении скорости распространения ультр азвуковых колебаний
(УЗК) в неподвижной и подвижной среде. Существует три метода
измерения расхода вещества с помощью ультразвука: 1) по разности
времен распространения УЗК, направленных по потоку и против
него; 2) по степени отклонения УЗК, направленных перпендикуляр-
но к потоку, от первоначального направления; 3) метод, основанный
на эффекте Доплера (доплеровские расходомеры). В качестве
излучателей-приемников УЗК во всех методах используются пьезо-
электрические преобразователи.
В соответствии с п е р в ы м методом излучатели (они же являют-
ся и приемниками) УЗК располагаются диаметрально противопо-
ложно с внешней стороны трубопровода таким образом, чтобы их
плоскости были расположены под некоторым углом θ к оси трубы
(рис. 6 .9, а). УЗК под углом a = 90° - θ к оси трубопровода проходят
в измеряемом веществе путь длиной L. Если W — скорость движения
вещества, с — скорость распространения УЗК в неподвижном из-
меряемом веществе, то значения времени прохождения УЗК указан-
ного пути по направлению движения потока t1 и против него t2 будут
равны соответственно
t
L
cW
t
L
cW
12
=
+
=
-
cos
,
cos
.
aa
(6.16)
Тогда разность Dt = t2 - t1 запишется следующим образом:
Dt
LW
cW
=
-
2
222
cos
cos
.
a
a
(6.17)
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
105
Таким образом, разность Dt зависит от скорости движения веще-
ства, следовательно, от объемного расхода. Она может быть измерена
одним из трех способов: 1) время-импульсным, основанным на из-
мерении собственно Dt; 2) фазовым, при котором измеряется разность
фазовых сдвигов УЗК, направленных по потоку и против него; 3) ча-
стотным, при котором измеряется разность частот повторения корот-
ких импульсов или пакетов УЗК, направленных по потоку и против
него. Последний метод получил наибольшее распространение.
В соответствии со в т о р ы м методом измерения расхода вещества
с помощью ультразвука УЗК излучает лишь один пьезоэлемент, а вос-
принимаются они одним или двумя пьезоэлементами (рис. 6.9, б ). Угол
отклонения УЗК от перпендикулярного направления b определяется
уравнением
tgb= =
x
D
W
c
,
(6.18)
где х — линейное отклонение луча на приемном пьезоэлементе; D —
диаметр трубы.
Следовательно,
x
WD
c
=
,
(6.19)
т. е . линейное отклонение пропорционально скорости, или объемно-
му расходу.
Величина линейного отклонения определяется по выходному сиг-
налу усилителя, на который поступает сигнал с приемного пьезоэле-
мента. При одном приемном пьезоэлементе количество акустической
энергии, поступающей на него, будет уменьшаться с ростом скорости,
и выходной сигнал усилителя будет падать. Поэтому используется
схема с двумя приемными пьезоэлементами, расположенными сим-
метрично относительно излучателя, так как в этом случае выходной
Рис. 6 .9. Ультразвуковые расходомеры:
а — основ анные на измерении разности времен распространения УЗК, направленных
по потоку и против него; б — основ анные на измерении степени отклонения УЗК, на-
правленных перпендикулярно к потоку, от первоначального направления; в — допле-
ровские расходомеры; a, b, θ — углы; W — скорость движения веществ а; L — расстоя-
ние между пьезоэлементами; D — диаметр трубы; х — линейное отклонение луча на
приемном пьезоэлементе
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
106
сигнал дифференциального усилителя возрастает с ростом скорости
потока.
Т р е т и й метод измерения расхода вещества с помощью ультра-
звука основывается на зависимости от расхода доплеровской разно-
сти частот, возникающей при отражении УЗК от неоднородностей
потока. В соответствии с этим методом излучатель и приемник УЗК
размещают на одной стороне трубопровода (рис. 6 .9, в). Доплеровская
разность Df исходной f1 и отраженной f2 частот УЗК определяется
выражением
Dfff
fW
c
=-=
12
1
2c
os
,
a
(6.20)
т. е . доплеровская разность частот пропорциональна скорости, или
объемному расходу.
Сигнал с приемного пьезоэлемента поступает на фильтр-выпря-
митель, далее на усилитель и, наконец, на измеритель доплеровского
сдвига частот.
Достоинством ультразвуковых расходомеров является возможность
установки прибора на трубопроводах диаметром от 10 мм и более, а
также измерение расхода любых жидких сред, в том числе неэлектро-
проводных. Недостатки: необходимость индивидуальной градуиров-
ки; зависимость от профиля скоростей, который меняется с измене-
нием расхода; влияние на показания изменений физико-химических
свойств вещества и его температуры, от которых зависит скорость
ультразвука.
6.9 . Расходомеры Кориолиса
Принцип действия кориолисовых расходомеров основан на обе-
спечении условий возникновения в трубопроводах с потоком жид-
кости силы Кориолиса, которая пропорциональна массовому рас-
ходу жидкости, с последующим преобразованием этой силы в дефор-
мацию, временной интервал или разность фаз двух сигналов.
Сила Кориолиса действует на тела, которые участвуют одновре-
менно в двух движениях: вращательное движение и прямолинейное
движение, в частности по радиусу вращательного движения. Направ-
ление силы Кориолиса зависит от направления прямолинейного
движения: если оно направлено по радиусу от центра вращательного
движения, сила Кориолиса направлена против направления враще-
ния, а если прямолинейное движение направлено к центру, эта сила
направлена по направлению вращательного движения. Сила Корио-
лиса лежит в плоскости вращательного движения и перпендикулярна
к скорости прямолинейного движения.
Как же создают условия возникновения силы Кориолиса при из-
мерении расхода? Прямолинейное движение — это движение жидкости
по трубопроводу. Вращать трубопровод с потоком жидкости нереально,
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
107
поэтому на практике реализуют так называемые «малые вращения» —
колебания (вибрации) определенной части трубопровода относительно
жестко закрепленной другой части. Таким образом, оба условия воз-
никновения силы Кориолиса оказываются выполненными. Вибрирую-
щую часть трубопровода обычно выполняют в виде U-образной трубки,
концы которой жестко закреплены (рис. 6 .10, а). Поток жидкости вте-
кает в точке крепления во входную трубку, а после изгиба трубки вы-
текает по выходной трубке также в точке крепления.
Рассмотрим, как направлены силы Кориолиса, действующие на
входную и выходную трубки при «малых вращениях» (вибрациях) за-
кругленной части U-образной трубки относительно точек крепления.
Пусть закругленная часть U-образной трубки движется вверх
(рис. 6.10, б ). Во входной трубке жидкость движется от центра «малых
вращений», следовательно, сила Кориолиса направлена против направ-
ления вращения, т. е . вниз . Поток жидкости через выходную трубку
направлен к центру «малых вращений», поэтому сила Кориолиса на-
правлена по направлению вращения, т. е. вверх. При движении закру-
гленной части вниз силы Кориолиса направлены в противоположные
стороны.
Таким образом, во входной половине трубки сила Кориолиса пре-
пятствует смещению трубки, а в выходной половине — способствует.
Это приводит к отставанию колебаний входной трубки от выходной
во времени (по фазе). Запаздывание во времени (по фазе) колебаний
входной и выходной трубок прямо пропоционально силе Кориолиса,
следовательно, массовому расходу. В существующих расходомерах,
как правило, измеряют не время запаздывания, а пропорциональную
ему разность колебаний входной и выходной трубок. Для этого при-
меняются два индуктивных датчика положения, преобразующие
механические колебания входной и выходной трубок в электрические
колебания с последующим определением их разности фаз.
Помимо расходомеров с изогнутыми трубками выпускаются рас-
ходомеры с прямыми трубками, которые работают по тому же прин-
ципу. В первой половине расходомера жидкость разгоняется под воз-
действием собственной инерции, а затем снижает скорость в его
Рис. 6 .10. Расходомер Кориолиса:
а — чув ствительный элемент; б — силы, действующие на трубку; в — внешний вид
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
108
второй половине. Инерция жидкости создает силу Кориолиса, которая
незначительно искривляет измерительную трубку. Степень искривле-
ния пропорциональна массовому расходу. Для определения степени
искривления также используются датчики положения. Кориолисовые
расходомеры используются для измерения расхода жидкостей и газов
на трубопроводах диаметром, как правило, до 60 мм. Они могут при-
меняться для измерения расхода жидкостей с изменяющейся плотно-
стью, как электропроводных, так и неэлектропроводных.
6.10. Вихревые расходомеры
Принцип действия вихревых расходомеров основан на зависимо-
сти от расхода частоты колебаний давления, возникающих в потоке
в процессе вихреобразования или колебания струи. Существует не-
сколько разновидностей вихревых расходомеров, наиболее распро-
страненными из которых являются расходомеры, имеющие в первич-
ном преобразователе неподвижное тело, при обтекании которого с
обеих его сторон попеременно возникают срывающиеся вихри, соз-
дающие пульсации давления (рис. 6.11, а).
В этом расходомере вихри образуются по причине того, что непо-
средственно за телом, находящимся в потоке, давление потока умень-
шается, и пограничный слой, обтекающий тело, отрываясь от него,
изменяет направление своего движения. Этот процесс происходит с
обеих сторон тела. Но так как развитие вихря с одной стороны пре-
пятствует такому же развитию с другой стороны, то образование
вихрей с двух сторон тела происходит поочередно. При этом за телом
образуется так называемая вихревая дорожка Кармана. Частота сры-
ва вихрей пропорциональна объемному расходу вещества.
Для тела цилиндрической формы, помещенного в потоке, связь
частоты срыва вихрей f и объемного расхода Q устанавливается вы-
ражением
QSd
Sh
f
=
,
(6.21)
где S — площадь наименьшего поперечного сечения потока вокруг ци-
линдра; d — диаметр цилиндра; Sh — число Струхаля, характеризующее
периодические процессы, связанные с движением жидкости или газа.
Число Струхаля постоянно в определенном диапазоне измерений
расхода.
Однако преимущественное применение в вихревых расходомерах
нашли тела необтекаемой формы, в основном призмы с прямо-
угольным, треугольным или трапецеидальным основанием, причем
основания треугольников и призм обращены навстречу потоку
(рис. 6 .11, б). Такие тела образуют сильные и регулярные вихревые
колебания, хотя и создают бо́льшую потерю давления. При необхо-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
димости усиления выходного сигнала иногда применяют два тела
обтекания, расположенные на некотором расстоянии друг от друга.
Преобразование вихревых колебаний, представляющих собой
пульсации давления и скорости потока, в выходной сигнал осуществ-
ляется с помощью преобразователей давления (например, пьезо -
элементов или тензорезисторов), ультразвуковых преобразователей
скорости и т. п., которые размещаются в обводной трубке, находя-
щейся снаружи трубопровода, или в сквозном отверстии тела обте-
кания, просверленного перпендикулярно потоку (рис. 6 .11, в).
Работу вихревого расходомера могут нарушать акустические и
вибрационные помехи, создаваемые насосами, компрессорами, ви-
брирующими трубами и т. п . Влияние частоты вредных вибраций
устраняется с помощью электрических фильтров. К достоинствам
вихревых расходомеров относятся отсутствие подвижных частей, не-
зависимость показаний от давления и температуры и высокая точ-
ность, а к недостаткам — значительная потеря давления, непригод-
ность применения при малых скоростях потока и возможность при-
менения на трубопроводах диаметром от 25 до 300 мм.
Контрольные вопросы
1. Какие существуют виды расхода?
2. В чем отличие объемных счетчиков от скоростных?
3. Охарактеризуйте достоинства и недостатки расходомеров переменного
перепада давления.
4. Какие типы сужающих устройств вы знаете?
5. Какие силы обеспечивают уравновешивание в потоке поплавка рота-
метров?
6. Расход каких сред могут измерять электромагнитные расходомеры?
7. В чем заключается принцип действия калориметрических расходомеров?
8. Какие существуют методы измерения расхода вещества с помощью уль-
тразвука?
9. За счет чего в кориолисовых расходомерах создается сила Кориолиса и
как она действует на чувствительный элемент расходомеров?
10. Чем обусловлено образование вихрей в вихревых расходомерах?
Рис. 6.11. Вихревой расходомер:
а — упрощенная схема; б — используемые тела обтекания; в — внешний вид
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
110
Глава 7
ИЗМЕРЕНИЕ ВИБРАЦИИ И ЧАСТОТЫ ВРАЩЕНИЯ
МЕХАНИЗМОВ
7.1 Общие сведения об измерении вибрации
Механические колебания тела носят название вибрация. Как из-
вестно, простейшим видом колебаний являются гармонические
(синусоидальные) колебания, характеризующиеся кр оме частоты
такими параметрами, как амплитуда смещения А (измеряется в мм
или мк), амплитуда скорости v (измеряется в см/ с) и амплитуда уско-
рения а (измеряется в см/ с2). В промышленности же наиболее рас-
пространенным видом колебаний являются негармонические коле-
бания, возникающие в результате сложения ряда простых колебаний
с самыми различными амплитудно-частотными характеристиками.
Механические колебания (вибрация) в большинстве случаев пред-
ставляют собой нежелательные явления, часто накладывающиеся на
закономерные процессы движения. Для механизмов роторного типа
(электродвигатели, насосы, вентиляторы, турбины, генераторы и т. д . )
контроль параметров вибрации очень распространен. Обусловлено
это тем, что вибрация является следствием действия возмущающих
сил в самом механизме, и, соответственно, сигнал вибрации несет в
себе информацию о состоянии механизма, его кинематических связей
и отдельных узлов. При этом теория и практика анализа вибросиг-
налов к настоящему времени столь отработаны, что можно получить
достоверную информацию практически по любому дефекту монтажа,
изготовления или износа и устранить вибрацию.
В зависимости от того, в какой размерности измеряет вибрацию
каждый конкретный вибродатчик, их подразделяют на три основных
типа, различающиеся по конструкции и особенностям применения:
1) датчики, измеряющие вибрацию в размерности виброперемещения
(вибросмещения); 2) датчики, измеряющие вибрацию в размерности
виброскорости; 3) наиболее распространенные в настоящее время
датчики, измеряющие вибрацию в размерности виброускорения.
7.2 . Датчики виброперемещения (вибросмещения)
В качестве датчиков виброперемещения и осевого сдвига в на-
стоящее время преимущественно используются вихретоковые дат-
чики. Общий принцип действия вихретоковых преобразователей
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
111
(ВТП) достаточно прост и подробно рассмотрен в гл. 2 . Устройства
для измерения осевого сдвига на основе ВТП часто называются прок-
симетрами.
Вихретоковый вибродатчик конструктивно представляет со бой
катушку индуктивности, подключенную к высокочастотному генера-
тору. Внешне катушка напоминает резьбовую шпильку, что сделано
для удобства установки необходимого начального зазора с контроли-
руемым валом. При приближении к торцу катушки стального масси-
ва, например вала или другого элемента конструкции, происходит
изменение индуктивности катушки-датчика за счет изменения вели-
чины вихревых потоков рассеивания, замыкающихся через массив.
Такие датчики в настоящее время широко используются для контро-
ля осевого сдвига мощных компрессоров и для контроля вибропере-
мещения валов в них. Катушка крепится на корпусе компрессора.
Вихретоковый датчик в этом случае контролирует относительное
перемещение вала относительно корпуса компрессора в направлении
оси датчика — шпильки.
Устройство для контроля вибрации центробежного нагнетателя
газоперекачивающего агрегата (рис. 7.1, а) содержит две пары вихре-
токовых преобразователей относительной вибрации 2, 5 и 1, 7, уста-
новленных в теле корпусов подшипников 3 вала 4 нагнетателя;
электронные блоки 8, 9, 10 и 11, соединенные с ВТП; блок обработ-
ки сигналов 12; многоканальный вторичный электронный прибор 13;
регистратор вибрации 14; электронный осциллографический инди-
катор формы колебаний вала 15. В торцах ВТП расположены плоские
катушки 6, намотанные тонким проводом и питаемые напряжением
высокой частоты (1... 1,5 МГц) от электронных блоков 8 ... 11. Как
уже отмечалось, принцип действия ВТП основан на преобразовании
значения зазора между торцом преобразователя и объектом контро-
ля в выходное напряжение. Генераторы электронных блоков 8 ... 11
вырабатывают высокочастотный сигнал, поступающий на катушку 6,
которая в окружающем пространстве создает магнитное поле. При
отсутствии вблизи катушки металла потери мощности радиочастот-
ного сигнала также отсутствуют и выходное напряжение генератора
максимально. При приближении к рабочему торцу катушки прово-
дящего материала, каким является вал нагнетателя, вихревые токи,
генерируемые в поверхности материала, приводят к потере мощности
сигнала и пропорциональному уменьшению выходного напряжения
генератора. При достаточно малых зазорах вся мощность генератора
поглощается проводящей поверхностью.
В каждой точке контроля вибрации устанавливаются два ВТП, рас-
положенные под прямым углом. Преобразователи 5 и 7 служат для
измерения вертикальной составляющей вибрации, а 1 и 2 — горизон-
тальной. Все ВТП устанавливаются в теле корпусов подшипников с
постоянным зазором d, равным 1 ... 1,2 мм. В исходном положении,
когда вал 4 нагнетателя неподвижен, при заданных зазорах d между
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
112
поверхностью вала и торцами ВТП на выходе электронных блоков
8 ... 11 формируется напряжение постоянного тока Uвых, пропорцио-
нальное зазору d. По шкалам вторичного прибора 13 можно опреде-
лить размеры всех зазоров между поверхностью вала 4 и торцами ВТП
(выбор ВТП осуществляется с помощью переключателя каналов из-
мерения). При вращении вала с частотой ω вследствие колебания
поверхности вала относительно корпусов подшипников расстояние
d между поверхностью вала и торцами ВТП изменяется, что приводит
к изменению добротности колебательных контуров, образованных
элементами в электронных блоках 8 ... 11 и катушками 6 в торцах
ВТП. Зависимость выходных напряжений U электронных блоков от
зазора d (для одного преобразователя) приведена на рис. 7.1, б. При
неподвижном вале нагнетателя и зазоре dср между торцом ВТП и по-
верхностью вала на выходе электронных блоков 8 ... 11 устанавлива-
ется напряжение постоянного тока Uср, пропорциональное зазору dср
Рис. 7.1. Устройство для контроля вибрации центробежного нагнетателя
на основе вихретоковых датчиков:
а — функциональная схема: 1, 2, 5, 7 — вихретоковые преобразователи относительной
вибрации; 3 — тело корпуса подшипников; 4 — в ал нагнетателя; 6 — плоские катушки;
8...11
—
электронные блоки; 12 — блок обработки сигналов; 13 — многоканальный
вторичный электронный прибор; 14 — регистратор вибрации; 15 — электронный
осциллографический индикатор формы колебаний в ала; ω — циклическая скорость
вращения; d — контролируемый зазор;
б — зависимость выходного сигнала от зазора для одного датчика: 1 — выходное на-
пряжение электронного блока; 2, 3 — напряжение Uср, соотв етствующее среднему зна-
чению з азора dср; 4 — изменение заз ора d
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
113
(прямые 2 и 3 соответственно). При вращении вала зазор d изменя-
ется (кривая 4), что приводит к пропорциональному изменению
выходного напряжения электронного блока (кривая 1) по закону из-
менения зазора между катушкой ВТП и поверхностью вала.
Чувствительность ВТП в комплекте с электронными блоками обе-
спечивает надежное измерение колебаний вала в диапазоне от 0 до
150 мкм. Выходные сигналы всех электронных блоков подаются на
блок обработки сигналов 12 (см. рис. 7.1, а), который обеспечивает
преимущественное выделение максимального сигнала для каждой
пары ВТП, пропорционального максимальному биению вала. Вто-
ричный прибор 13 обеспечивает возможность отсчета колебаний вала
по каждому каналу в микрометрах, измерения зазоров в миллиметрах,
световую предупредительную и аварийную сигнализации, а также
формирование выходных релейных сигналов при достижении коле-
баниями вала предупредительного или аварийного значения, которые
подаются в систему защиты газоперекачивающего агрегата по уровню
вибрации.
Зависимость выходного сигнала вихревого датчика от расстояния
между катушкой и массивным элементом конструкции (чаще всего
вала) нелинейна, что является его недостатком.
Вихретоковый датчик измеряет не абсолютное перемещение вала
в неподвижных координатах, а относительно е вибросмещение,
определяемое в системе координат точки крепления катушки датчи-
ка. При общепринятом стандартном способе монтажа датчика не-
подвижная система координат связана с корпусом компрессора.
С одной стороны, это является достоинством установки проксиметра,
так как происходит прямое измерение зазора между валом и корпу-
сом, но, с другой стороны, это и очень большой недостаток, резко
снижающий возможности диагностики состояния компрессора.
Во-первых, в этом случае в регистрируемый вибросигнал вносится
значительная погрешность из-за большого количества помех. При-
чина этих помех заключается в том, что вибрации корпуса компрес-
сора с закрепленным датчиком воспринимаются измерительной
системой как вибрации вала, и разделить их не представляется воз-
можным. Во-вторых, при использовании в качестве вибродатчиков
ВТП из диагностирования исключается большой и информативный
класс высокочастотных вибраций. Это происходит потому, что ча-
стотный диапазон даже самых лучших проксиметров является очень
узким и обычно не превышает 1 000 Гц. Для высокоскоростного ком-
прессора, например при 15 000 об/ мин, могут регистрироваться
только гармоники не выше третьей-четвертой. Как результат, более
половины всех возможных причин возникновения повышенной виб-
рации в компрессоре выпадает из рассмотрения (состояние зубчатой
пары мультипликатора, проблемы монтажа компрессора, связанные
с вибрацией непосредственно корпуса компрессора, на котором
монтируется датчик-катушка).
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
114
Рядом известных фирм, работающих в области вибродиагностики,
наработан значительный диагностический аппарат, диагностические
правила, по которым при помощи информации с проксиметров мож-
но выполнить диагностику некоторых дефектов. Основу такой диаг-
ностики составляет рассмотрение на экране осциллографа динами-
ческой траектории движения контролируемого вала в двух коорди-
натах, которую можно построить по данным двух взаимно
перпендикулярных датчиков, используя вибросигналы для «разверт-
ки» луча на экране. Тем не менее возможности вибродиагностики с
помощью проксиметров весьма ограничены по сравнению с другими
средствами измерения.
Оптимальная область применения вихретоковых вибродатчиков-
проксиметров в вибродиагностике — это контроль осевого сдвига
валов.
7.3. Датчики виброскорости
Это достаточно узкий в настоящее время класс вибродатчиков,
называемых так, потому что выходной сигнал с этих вибродатчиков
пропорционален виброскорости.
Классический магнитоиндукционный датчик виброскор ости
представляет собой сильный кольцевой магнит, в зазоре которого
перемещается катушка, связанная с инерционной массой. По за-
кону электромагнитной индукции при перемещении конструкции
оборудования, на которой установлен датчик, в катушке будет на-
водиться электродвижущая сила (ЭДС), по величине всегда прямо
пропорциональная скорости перемещения катушки в магнитном
поле. К достоинствам этого датчика можно отнести его простоту и
хорошую стабильность основных параметров. Конструктивно эти
пр еобразователи выполнены так, что их можно использовать для
измерения как абсолютной, так и относительной виброскорости.
Применение дополнительного электронного интегрирования или
дифференцирования измерительного напряжения позволяет ис-
пользовать датчики абсолютной виброскорости для измерения ви-
броперемещений и виброускорений. Недостатком является ограни-
ченный диапазон частот, от 10 до 1 000 Гц (измеряемые виброско-
рости находятся в пределах от 0,1 до 100 мм/ с), а также большая
масса постоянного магнита, существенно затрудняющая крепление
датчика.
Принцип действия оптического (лазерного) датчика виброско-
рости основан на измерении сдвига частоты DF(t) лазерного излуче-
ния, рассеянного движущимся со скоростью V
–
(t) объектом (эффект
Доплера), и заключается в сложении отраженного от объекта опти-
ческого сигнала, несущего информацию о колебательной скорости
объекта, с излучаемым оптическим гетеродином сигналом:
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
115
DΩΩΩ
Ft
Vt
n
Vt
Q
Vp
() ()
()
cos,
=⋅
+=
+=+
222
λλλ
(7.1)
где λ = 0,78 мкм — длина волны лазерного излучения; Ω — постоянный
сдвиг частоты рассеянного излучения, формируемый оптоэлектронной
схемой прибора (оптическим гетеродином); V
–
(t) — вектор колебатель-
ной скорости объекта; n
–
—
направление лазерного луча; Q — угол
между V
–
(t)иn
–
;Vp=|V
–
(t)|cosQ — проекция вектора колебательной
скорости на направление луча лазера.
Измерение производится с помощью оптического гетеродина и
частотного детектора, напряжение на выходе которого пропорцио-
нально разности DF(t) - Ω.
Этот датчик предназначен для измерения продольной к лучу ла-
зера проекции виброскорости поверхности исследуемого объекта.
Поверхность исследуемого объекта может быть любая и не требует
специальной подготовки. В состав датчика (рис. 7.2) входят измери-
тельная головка 1, электронный блок 2 и соединительный кабель 3.
Сигнал от измерительной головки 1 поступает на электронный блок
2, имеющий индикатор качества измеряемого сигнала, и далее на
цифровой анализатор. Анализатор позволяет измерять диагностиче-
ский сигнал в диапазоне частот от 0,5 Гц до 30 кГц. Диапазон изме-
ряемых виброскоростей — до 400 мм/ с. Расстояние до объекта — от 0,5
до 5 м. Измерительная головка с объективом лазерного преобразо-
вателя закреплена на штативе, который обеспечивает возможность
направлять лазер на объект контроля под любым углом. Для удобства
работы (в части фиксации точки измерения вибрации на корпусе
Рис. 7.2 . Оптический (лазерный) преобразователь виброскорости:
1 — измерительная головка с объектив ом; 2 — электронный блок; 3 — соединитель-
ный кабель; V
–
—
вектор колебательной скорости объекта; n
–
—
направление лазерного
луча; Q — угол между V
–
иn
–
; Vp — проекция вектора колебательной скорости на на-
правление луча лазера; Vn — проекция в ектора колебательной скорости на ось, пер-
пендикулярную направлению луча лазера
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
116
контролируемого агрегата) в состав оптической схемы включен лазер
подсветки, длина волны которого (0,63 мкм) находится в видимой об-
ласти спектра. Его луч полностью совмещен с лучом инфракрасного
лазера. В процессе измерения головка лазера направляется на корпус
диагностируемого агрегата, и после включения электронного блока
лазер подсветки фокусируется на корпусе агрегата.
7.4 . Датчики виброускорения
Это наиболее распространенный в настоящее время вид вибро-
датчиков, имеющий наиболее широкий частотный диапазон. Датчи-
ки этого типа очень просты по своему устройству, в результате чего
надежны, имеют небольшую массу и габариты.
Пьезоакселерометр конструктивно представляет собой пьезокри-
сталл с укрепленной сверху небольшой фиксированной массой.
Вибрации оборудования передаются на корпус датчика, он переме-
щается вместе с кристаллом. Масса, укрепленная на кристалле, воз-
действует при этом на кристалл с силой, пропорциональной произве-
дению ускорения на величину этой массы. На поверхностях кристалла
в результате пьезоэффекта возникает заряд, также пропорциональный
ускорению контролируемой точки.
Схема такого вибродатчика представлена на рис. 7.3 . Пьезопла-
стины 1 соединены с массивным грузиком 2 и закреплены в корпусе
датчика с помощью пружин 4. Ориентация пластин такова, что воз-
никающие на них при сжатии заряды складываются на центральном
электроде 3. При вибрации грузик давит на пьезоэлемент, что при-
водит к возникновению пьезоэффекта. Поскольку заряд, возникаю-
щий на противоположных поверхностях пьезоэлемента, пропорцио-
нален приложенной силе, а сила, в свою очередь, зависит от ускоре-
ния инерционной массы грузика, электрический сигнал датчика
пропорционален виброускорению.
Вибропреобразователи на основе пьезоакселерометров обычно
содержат два таких датчика для измерения вертикальной и горизон-
тальной составляющих вибрации. Сами датчики устанавливаются,
например, на крышках подшипников таким образом, чтобы измерять
вибрацию в двух направлениях, перпендикулярных к оси агрегата.
Рис. 7.3. Пьезоэлектрический вибродатчик:
1 — пьезопластины; 2 — массивный грузик; 3 — центр альный электрод; 4 — пружины
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
117
Выходной сигнал пьезоакселерометра может быть проинтегри-
рован для получения сигнала, пропорционального виброскорости.
При необходимости измерительный канал и шкала показывающего
прибора могут быть отградуированы по амплитуде вибросмещения,
так как для простых гармонических колебаний связь между ампли-
тудами вибросмещения и вибрационного ускорения выражается
формулой
a
= ω2A,
(7.2)
где а — амплитуда виброускорения; ω = (2πn)/ 60 — циклическая
частота; n — частота вращения вала турбины, об/ мин; А — амплиту-
да вибросмещения.
Проблема достоверности измерений и корректности поставленных
в процессе вибродиагностики диагнозов во многом определяется
качеством пьезоэлектрических датчиков, которое оценивается не-
сколькими основными параметрами. К ним относятся:
1) частотный диапазон — чем он шире, тем шире возможности
датчика (у лучших датчиков он начинается с десятых долей герца и
заканчивается в высокочастотной зоне на уровне порядка трех десят-
ков килогерц);
2) чувствительность в поперечном направлении — она показыва-
ет способность датчиков отстраиваться от помех, действующих на
датчик в направлении, не совпадающем с направлением измерения
вибросигнала, обычно в перпендикулярном направлении;
3) наличие встроенного усилителя заряда, делающего работу дат-
чика независимой от длины кабеля, которым датчик подключается к
прибору (хотя наличие встроенного усилителя снижает диапазон
рабочих температур, в которых может работать датчик).
В последнее время появились трехкоординатные датчики, в кото-
рых в одном корпусе устанавливаются три пьезокристалла, ориенти-
рованные в разных осях. Они особенно удобны для систем стацио-
нарного вибромониторинга; недостатком этих пьезокристаллических
вибродатчиков является невысокая частота собственного резонанса
(она не превышает нескольких килогерц) из-за использования кор-
пуса сложной конструкции.
Емкостные вибродатчики имеют достаточно простое устройство
и принцип действия. На кристалле микросхемы методами микро-
электроники формируется упругоперемещаемый элемент. При пере-
мещениях такого элемента под действием внешних ускорений меня-
ется расстояние до неподвижных электродов, выполняющих функции
электродов конденсатора. Все электроды включены в колебательные
контуры генератора, который сформирован на этом же кристалле
микросхемы. Далее сигнал с переменной частотой преобразуется в
переменное выходное напряжение. Внешние размеры микросхемы
такого датчика, реализующей все функции преобразования, малы,
обычно площадь ее корпуса меньше 0,5 см.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
118
При вибрации микросхемы на ее выходе появляется напряжение,
пропорциональное виброускорению. Выходное напряжение емкост-
ного датчика определяется взаимным положением «обкладок конден-
сатора», поэтому его рабочий диапазон начинается с очень малых
частот, практически с нуля герц. При «перевороте» емкостного дат-
чика напряжение на его выходе меняет свой знак, что решает большую
часть проблем, связанных с его тарировкой.
Достоинствами емкостного датчика по сравнению с пьезоакселе-
рометром являются его меньшая стоимость и более высокая техно-
логичность в изготовлении, недостатком — сравнительно невысокая
рабочая граница в области высоких частот, обычно 200 ... 1 000 Гц.
7.5. Системы измерения
и анализа вибрации
Общая структура систем измерения и анализа вибрации незави-
симо от конкретного назначения включает в себя измерительные
преобразователи, согласующие устройства, линии связи, собственно
средства анализа, базы данных и средства (программы) обработки
информации. Из измерительных вибропреобразователей чаще других
применяются рассмотренные выше пьезоэлектрические преобразо-
ватели виброускорения (акселерометры), оптические (лазерные)
преобразователи виброскорости и вихретоковые преобразователи
относительного виброперемещения (проксиметры). Кроме них для
обеспечения синхронных видов анализа вибрации часто использу-
ются либо оптические или токовихревые датчики числа оборотов,
либо датчики тока (напряжения) синхронных электрических машин,
в том числе генераторов электроэнергии.
В зависимости от задач, решаемых с помощью приборов или систем
измерения и анализа вибрации, к ним предъявляются различные тех-
нические требования. Чаще всего эти требования могут определять:
1) основные виды анализа и контролируемые параметры вибрации;
2) динамический и частотный диапазоны измерения и анализа;
3) линейность отдельных операций и параметров прибора (системы);
4) скорость выполнения операций анализа и время принятия решений;
5) количество параллельных каналов измерения и анализа; 6) поме-
хоустойчивость и надежность и т. д .
Существующие технические средства контроля вибрации можно
классифицировать следующим образом: 1) средства допускового кон-
троля и аварийной защиты; 2) индикаторы состояния объектов кон-
троля; 3) средства вибрационного мониторинга; 4) средства вибраци-
онной диагностики; 5) исследовательские приборы и системы.
Простейшими по своим функциям являются системы допуско-
вого контроля и аварийной защиты. Их обязательной функцией
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
119
является измерение величины виброскорости или вибросмещения в
стандартной полосе частот, например от 2 (или от 10) до 1 000 Гц. Для
этого в составе системы используется широкополосный фильтр со
стандартной амплитудно-частотной характеристикой. Широкая по-
лоса частот фильтра позволяет обеспечить быструю реакцию выход-
ного сигнала на скачок вибрации контролируемого оборудования,
удовлетворив тем самым требования к системам аварийной защиты
по скорости их срабатывания.
Задачей приборов, выполняющих функции индикаторов со-
стояния, является раннее обнаружение признаков одного или груп-
пы возможных дефектов контролируемого оборудования. Из всего
множества дефектов выбираются такие, которые, с одной стороны,
просто и эффективно обнаруживаются по сигналу вибрации, а с
другой — присутствуют в любой из цепочек дефектов, быстро раз-
вивающихся в предаварийном состоянии контролируемого оборудо-
вания. Примером приборов такого типа являются индикаторы со-
стояния подшипников качения по вибрации в ультразвуковом диа-
пазоне частот неподвижных элементов этих подшипников,
возбуждаемых ударными импульсами при контакте тел качения с
неподвижным кольцом подшипника. Индикаторы состояния под-
шипников обычно измеряют ультразвуковую вибрацию в достаточно
широкой полосе частот. Центральная частота этой полосы в разных
приборах может быть разной, начиная от 20 ... 30 кГц и заканчивая
значениями выше 100 кГц. Контролируются обычно среднеквадра-
тичное значение ультразвуковой вибрации (мощность ударных им-
пульсов) и форма одиночных ударных импульсов. Простота измере-
ний и доступность получаемой информации позволяют использовать
эти приборы обслуживающему персоналу без специальной подготов-
ки, а при обнаружении нештатной ситуации — вызывать специали-
стов для проведения более сложного исследования вибрации. По-
скольку индикаторы состояния дают одинаковую информацию при
появлении как неопасного одиночного дефекта, так и предаварийной
цепочки быстроразвивающихся дефектов, то проводить контроль
состояния подшипников с их помощью следует достаточно часто, не
реже 1 раза в течение 3 ... 5 сут. Существуют системы аварийной за-
щиты (сигнализации), в которых функции допускового контроля
оборудования по низкочастотной вибрации и индикатора состояния
подшипников качения по ультразвуковой вибрации объединены.
Большинство систем этой группы являются переносными.
Более сложные функции имеют системы вибрационного монито-
ринга. Их основным назначением являются обнаружение необрати-
мых изменений вибрации оборудования и прогнозирование скорости
их развития. Дополнительная задача, которая может решаться систе-
мами мониторинга, — это определение причин обнаруженных из-
менений. Эта задача решается экспертом, анализирующим результа-
ты мониторинга, в том числе с применением специальных экспертных
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
120
программ. Системы вибрационного мониторинга бывают двух типов:
защитного или прогнозирующего. Чаще других используются систе-
мы защитного мониторинга, анализирующие информацию о многих
структурных и рабочих параметрах объекта мониторинга. В таких
системах обычно проводится лишь простейший анализ вибрации с
помощью стандартных контроллеров. Лишь в некоторых случаях,
кроме величины вибрации в стандартной полосе частот, выполняет-
ся спектральный анализ вибрации в полосе частот до 1... 2 кГц.
Структура выходных данных вибрационных каналов в системах за-
щитного мониторинга, как правило, определяется стандартами на
системы автоматического контроля и управления.
Системы прогнозирующего вибрационного мониторинга вра-
щающегося оборудования основаны на спектральном анализе. Верх-
няя частота спектрального анализа составляет примерно 20 кГц
и выше, в зависимости от конструктивных особенностей и частоты
вращения объекта мониторинга. С учетом этого выбираются типы
измерительных преобразователей вибрации. Спектральный анализ
вибрации вращающегося оборудования позволяет выявить более по-
ловины из возможных развитых дефектов и на этой основе не про-
пустить ни одной цепочки дефектов, быстро развивающихся непо-
средственно перед аварией контролируемого оборудования. Именно
поэтому системы вибрационного мониторинга являются эффектив-
ным средством предупреждения аварий, а использование в их со-
ставе экспертной диагностической программы позволяет выявить
причины необходимой остановки оборудования и быстро их устра-
нить.
Поскольку далеко не все дефекты оборудования могут быть обна-
ружены задолго до отказа, давать реальный прогноз его безаварийной
работы на длительное время с помощью переносных систем мони-
торинга сложно. Поэтому абсолютно е большинство эффективных
систем вибрационного мониторинга устанавливается на оборудова-
нии штатно и проводит измерения вибрации через короткие интер-
валы вр емени. Стационарно е исполнение систем вибрационного
мониторинга существенным образом меняет требования к средствам
анализа вибрации. Появляется возможность широкого использования
виртуальных анализаторов на базе персональных компьютеров. Ком-
пьютерный анализ сигналов дает возможность оперативно проводить
практически любой вид анализа, поэтому многие стационарные си-
стемы при необходимости анализируют вибрацию и в установивших-
ся, и в переходных режимах работы оборудования, в том числе во
время его пуска и выбега. Использование многомерных видов ана-
лиза вибрации позволяет повысить эффективность экспертных си-
стем диагностики и осуществлять прогноз вибрационного состояния
оборудования. Единственным ограничивающим диагностические
возможности фактором в стационарных системах мониторинга стано-
вится конечное количество точек контроля вибрации, в каждой из
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
121
которых стационарно устанавливается измерительный преобразова-
тель. Поэтому для расширения диагностических возможностей мони-
торинга стационарные системы часто комплектуются дополнительным
переносным каналом измерения вибрации в любой точке оборудова-
ния, где на время измерения может быть установлен измерительный
преобразователь.
7.6 . Измерение частоты вращения
Под скоростью вращения U (об/ мин) обычно понимают число
оборотов n твердого тела за единицу времени t = 1 мин:
U
= n/t,
(7.3)
где t — время, мин.
В числе производных единиц Международной системы единиц
(СИ) отсутствует термин «скорость вращения» и имеются только
следующие термины:
1) угловая скорость ω (рад/ с) как отношение угла φ (рад) пово-
рота тела к времени вращения t (с):
ω=φ/t;
(7.4)
2) частота вращения f (Гц), обозначающая число полных оборотов
за единицу времени t = 1 с:
f=n/t,
(7.5)
где t — время, с.
Тем не менее в технической литературе, паспортах на приборы
единица «об/ мин» используется достаточно часто.
Устройства для измерения частоты вращения называются тахо-
метрами. По принципу действия они делятся на механические и
электрические. Наиболее простой конструкцией отличаются механи-
ческие тахометры. Они делятся на стационарные, т. е . монтируемые
неподвижно, и портативные. Стационарные механические тахометры
по принципу своего действия представляют собой приборы с инди-
кацией в непосредственной близости от объекта измерения. Они
соединяются с ним либо непосредственно, либо при помощи гибко-
го вала, ременной или цепной передачи. Поэтому измеренная вели-
чина может быть передана только на близкое расстояние.
По физическому принципу, положенному в основу измерения,
имеется два типа механических тахометров: тахометр на вихревых
токах и центробежный тахометр. Тахометр на вихревых токах име-
ет вращающийся постоянный магнит, поле которого возбуждает вих-
ревые токи в алюминиевом диске, соединенном с указателем. Воз-
никающий при этом вращающий момент пропорционален частоте
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
122
вращения магнита и перемещает указатель до тех пор, пока момент,
создаваемый вихревыми токами, не уравновесится моментом, создан-
ным возвратной пружиной. Тахометры этого типа применяют преиму-
щественно в тех случаях, когда показания должны начинаться с нуля,
соответствовать определенному направлению вращения и охватывать
широкий диапазон измерения. Силы, создающие перемещение, срав-
нительно невелики, что ограничивает возможности использования
этого типа тахометров для других целей, кроме индикации. Погреш-
ности составляют около ± 1 % и в простейших приборах достигают
± 3 % от конечного значения. Тахометры на вихревых токах выпуска-
ются серийно и рассчитаны на скорости до 5 000 об/ мин.
В центробежных тахометрах вращающийся маятник отклоня-
ется под действием центробежной силы и через рычажную передачу
приводит в движение стрелочный механизм. Отклонения стрелки
являются мерой частоты вращения. Центробежные тахометры по-
казывают частоту вращения не от нулевого, а от некоторого мини-
мального и до максимального значения, соотношение которых может
находиться в пределах от 1 : 3 до 1 : 10. Показания не зависят от на-
правления вращения. Достаточные по величине силы, сообщающие
движение стрелочному механизму, допускают приведение в действие
дополнительных управляющих и регулирующих устройств. Погреш-
ность измерения не превышает 1 %, в специальных исполнениях
составляет 0,3 %. Так как центробежный тахометр представляет собой
колебательную систему, он снабжен демпфирующим устройством.
Максимальная частота вращения, измеряемая серийно выпускаемы-
ми центробежными тахометрами, составляет 10 000 об/ мин.
Объект измерения должен обеспечивать возможность установки
тахометра или подключения его вручную. Механические тахометры
могут быть снабжены электрическими или пневматическими преоб-
разователями, позволяющими использовать их для целей управления
и контроля.
Электрические тахометры (под ними понимаются все тахометры,
дающие на выходе электрический сигнал) значительно удобнее меха-
нических как по возможности использования для измерения различ-
ных физических эффектов, так и по возможности дальнейшей обра-
ботки измерительных сигналов. Они могут быть разделены на две
основные группы: аналоговые и дискретные. Различие этих двух ме-
тодов обусловлено в основном применяемыми датчиками. Достоин-
ством как аналогового, так и дискретного способа является возмож-
ность размещения показывающего прибора на расстоянии от места
измерения, т. е . дистанционное измерение частоты вращения.
При аналоговом методе с датчика скорости снимается вы-
ходной сигнал в виде напряжения или тока, пропорционального
измеряемой скорости вращения. Такие датчики называются тахоге-
нераторами. Любой тахогенератор должен быть жестко связан с
объектом измерения и, как и механические тахометры, приводится
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
123
во вращение энергией, потребляемой от объекта измерения. Тахоге-
нераторы вырабатывают непрерывный сигнал, пропорциональный
частоте вращения объекта измерений. Их особое достоинство за-
ключается в том, что в них нет подвижных токонесущих деталей, и
поэтому они работают практически без износа.
При д и с к р е т н о м методе измерения частота вращения опреде-
ляется подсчетом числа импульсов, создаваемых при каждом обо-
роте за единицу времени, или числа единиц времени между двумя
импульсами. Съем данных измерения может осуществляться механи-
чески (в результате срабатывания контактов), но основное преиму-
щество дискретного метода заключается в возможности бесконтакт-
ной передачи данных. Электрические тахометры, взаимодействующие
с объектом измерения без непосредственного контакта с вращаю-
щимся телом, потребляют от объекта незначительное количество
энергии либо работают совсем без затраты энергии объекта. Связь
такого тахометра с объектом измерения осуществляется индукцион-
ным, магнитным или фотоэлектрическим путем. Такие тахометры
пригодны для измерения очень высоких скоростей и на очень малых
объектах. Частота импульсов, снимаемых с этих тахометров, менее
восприимчива к помехам, чем напряжение, пропорциональное ча-
стоте вращения. Тахометры этого типа, как правило, требуют источ-
ник вспомогательной электрической энергии. Между чувствительным
элементом прибора, воспринимающим измеряемую величину, и его
выходным устройством находятся элементы согласования, преобра-
зующие измерительный сигнал в форму, пригодную для дистанцион-
ной передачи измеренной величины. Так как в основу этого метода
измерения положен цифровой принцип, то, как правило, использу-
ются цифровая индикация и обработка данных измерения.
Общим для всех электрических тахометров является возможность
дистанционной передачи результатов измер ений и их контроля и
протоколирования совместно с результатами измерения других па-
раметров. Возможно преобразование выходного сигнала в цифровой
код, допускающий дальнейшую обработку в микропроцессорах.
Существует также возможность стробоскопического измерения
частоты вращения. Хотя стробоскопический эффект используется
преимущественно для исследования характера движения вращаю-
щихся тел, однако он может быть использован и для измерения ча-
стоты вращения. В этом случае съем сигнала осуществляется опти-
ческим методом, для чего на вращающуюся деталь наносят светлую
метку. Это мобильный, лишенный обратной реакции на объект спо-
соб измерения.
Точное определение частоты вращения различных механизмов
необходимо во многих областях техники. Так, частота вращения валов
газотурбинных установок является основным параметром при пусках
и остановах газоперекачивающих агрегатов. Рассмотрим несколько
таких устройств более подробно.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
124
В устройстве, показанном на рис. 7.4, а, использован магнитоин-
дукционный преобразователь. Постоянный магнит 2, закрепленный
на валу агрегата 1, и неподвижная катушка 3 образуют датчик часто-
ты вращения 4. Он соединяется с усилителем-формирователем 5
коротким (до 10 м) отрезком термостойкого экранированного про-
вода с наружной изоляцией экрана, а усилитель-формирователь со
вторичным прибором 6 — бронированным многожильным контроль-
ным кабелем. Выходные частотные реле 8, 9 и 10 обеспечивают
формирование дискретных сигналов в систему защиты и управле-
ния при достижении частотой вращения заданных значений уста-
вок. Выносной прибор 7 обеспечивает необходимой информацией
оператора. При вращении вала 1 с магнитом 2 в неподвижной ка-
тушке 3 датчика 4 индуцируется напряжение переменного тока
Uвых1, амп литуда и частота fвых которого пропорциональны частоте
вращения вала ω. Форма этого напряжения зависит от формы торце-
вых поверхностей магнита 2, от зазора и параметров катушки 3 и
представляет собой гармонически изменяющееся напряжение с обя-
зательным переходом через 0. При изменении частоты вращения
валов от минимально измеряемой (для ГТУ это 12 об/ мин, или 0,2 Гц)
до максимальной амплитуда выходного напряжения может изменяться
от0,1до300В.
Рис. 7.4. Устройство для контроля частоты вращения:
а — с магнитоиндукционным преобразователем; б — индуктивный преобразователь с
зубчатым диском; 1 — в ал агрегата; 2 — постоянный магнит; 3 — неподвижная катуш-
ка; 4 — датчик частоты вращения; 5 — усилитель-формиров атель импульсов; 6 — вто -
ричный электронный цифровой прибор; 7 — выносной прибор; 8 ... 10 — выходные
частотные реле; 11 — зубчатый диск; 12 — индуктивный преобразователь; ω — частота
вращения в ала; Uвых1 — напряжение переменного тока; Uвых2 — амплитуда прямоуголь-
ного двухполярного импульса; Uпит — напряжение питания
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
125
При малых значениях выходного сигнала, изменяющегося в пределах
от 0,1 до 2 ... 3 В и соответствующего небольшим частотам вращения
ГТУ в зоне «0-обороты» и до 400 об/мин, большое влияние на показа-
ния приборов оказывают внешние электростатические наводки, дей-
ствующие на входе прибора 6. Эти наводки, напряжения которых
сравнимы с напряжениями информативного сигнала, могут вызывать
искажения показаний и ложные срабатывания выходных реле, что
приводит к ложным остановкам газоперекачивающего агрегата. Имен-
но для исключения этих явлений в непосредственной близости от дат-
чика 4 устанавливается усилитель-формирователь импульсов 5, который
формирует прямоугольные двухполярные импульсы с постоянной ам-
плитудой (не менее 10 В), не зависящей от амплитуды выходного сиг-
нала датчика 4, и частотой, равной частоте этого сигнала. Промежуточ-
ное преобразование сигнала в прямоугольные импульсы исключает
влияние помех на показания вторичного прибора. Измерение частоты
входных импульсов, соответствующей измеряемой частоте вращения
вала 1, производится по четырех- или пятиразрядному индикатору
вторичного прибора 6. Этот прибор обеспечивает также контроль ис-
правности датчика и линий связи (световая сигнализация неисправ-
ности), ручную регулировку уставок срабатывания частотных реле
8 ... 10, визуальный контроль настройки уставок, питание постоянным
напряжением усилителя-формирователя импульсов 5 и выход элек-
трического сигнала, пропорционального измеряемой величине, для
дистанционного измерения частоты вращения вала на выносном при-
боре 7.
Поскольку на одном агрегате обычно происходит измерение и
сигнализация не менее двух частот вращения, рассмотренные устрой-
ства выполняются двухканальными и обеспечивают одновременное
измерение двух частот вращения валов ГТУ (на рис. 7.4, а показан
один канал измерения). Питание устройства осуществляется напря-
жением переменного тока 220 В. Погрешность измерения частоты
вращения и срабатывания уставок не превышает 0,2 %.
При использовании магнитоиндукционного преобразователя с
постоянным магнитом за один оборот вала ГТУ формируется только
два разнополярных импульса, частота следования которых пропор-
циональна частоте вращения вала. Это приводит к тому, что при
малых частотах вращения надежное измерение затруднено.
Более достоверные измерения обеспечивают устройства с индук-
тивным преобразователем и зубчатым диском, устанавливаемым на
валу. При использовании зубчатого диска (рис. 7.4, б ) за один оборот
вала на выходе преобразователя формируется не два импульса, а
20... 40 и более импульсов (в зависимости от числа зубцов диска),
амплитуда которых практически не зависит от частоты вращения вала
с зубчатым диском.
Существуют также устройства для контроля частоты вращения на
базе тахогенератора переменного тока, который представляет собой
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
двухфазную асинхронную электромашину с полым немагнитным
ротором. На статоре тахогенератора размещаются две сдвинутые на
90° обмотки (возбуждения и генераторная). Обмотка возбуждения
подключается к источнику переменного тока. В генераторной обмот-
ке, являющейся выходной, при вр ащении ротор а наводится ЭДС
вращения, под действием которой на выходе тахогенератора возни-
кает напряжение, амплитуда и частота которого пропорциональны
частоте вращения ротора, а следовательно, и вала: Uвых = f(ω). Эта
функция нелинейная. При изменении направления вращения рото-
ра фаза выходного напряжения изменяется на 180°.
Контрольные вопросы
1. Для чего необходимо контролировать вибрацию различных механиз-
мов?
2. На какие группы подразделяются датчики вибрации в зависимости от
измеряемого параметра?
3. Какие устройства называются проксиметрами?
4. На каком физическом эффекте основана работа оптического преобразо-
вателя виброскорости?
5. Поясните принцип действия пьезоакселерометра.
6. Как называются устройства для измерения частоты вращения?
7. В чем заключается разница между аналоговыми и дискретными электри-
ческими тахометрами?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
127
Глава 8
ИЗМЕРЕНИЕ ФИЗИКО-ХИМИЧЕСКИХ СВОЙСТВ
И СОСТАВА ЖИДКОСТЕЙ И ГАЗОВ
Управление различными технологическими процессами, в том числе
и трубопроводного транспорта, только по таким параметрам, как давле-
ние, уровень, расход и температура, не гарантирует требуемую эффектив-
ность. Во многих случаях необходим автоматический контроль состава
и физико-химических свойств (плотности, вязкости) перекачиваемых
продуктов. Например, при коммерческом учете необходимо учитывать
влагосодержание и солесодержание нефтепродуктов, для чего узлы учета
имеют в своем составе специальные блоки контроля качества.
Для контроля состава и физико-химических свойств жидкостей и
газов используются автоматические устройства аналитической техники,
являющейся отдельной отраслью измерительной техники. Это связано
со специфической особенностью этих измерений — сильным влияни -
ем на их результаты побочных факторов (температуры, давления, ско-
рости движения вещества, места его отбора на анализ и т. п. ). Поэтому
автоматические анализаторы обычно оснащены сложным дополнитель-
ным оборудованием для отбора пробы, подготовки ее к анализу, стаби-
лизации условий измерений или автоматического введения поправки
и т. п. Многообразие анализируемых веществ и широкий диапазон их
составов и свойств обусловили производство автоматических приборов
с чрезвычайно разнообразными методами анализа — плотномеров,
вискозиметров, газоанализаторов, влагомеров, хроматографов и т. д.
Если для измерения таких общетехнических параметров, как давление,
уровень, расход и температура, практически во всех производствах
применяются одни и те же приборы, то анализаторы часто создаются
для специфических задач конкретного производства.
8.1. Контроль состава газа
8.1 .1. Виды анализа и анализируемых смесей. Понятие
концентрации
Анализируемые вещества обычно представляют собой смеси различ-
ных компонентов. Эти смеси делятся на бинарные, многокомпонентные
и псевдобинарные. Бинарной называют газовую смесь, состоящую из
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
128
двух газов, или жидкость, содержащую один растворенный компонент.
Анализ бинарной смеси возможен при условии, что составляющие ее
компоненты отличаются друг от друга какими-либо физическими или
физико-химическими свойствами. Многокомпонентной называют смесь
из трех и более компонентов. Ее анализ проводят только после предва-
рительного разделения на отдельные компоненты. Псевдобинарной
называют многокомпонентную смесь, в которой неопределяемые ком-
поненты резко отличаются по физическим или физико-химическим
свойствам от определяемого компонента. Анализ такой смеси аналогичен
анализу бинарной смеси. Большинство выпускаемых промышленностью
автоматических анализаторов предназначено для определения состава и
свойств бинарных и псевдобинарных смесей.
Анализ состава бывает качественный и количественный. Целью
качественного анализа является получение информации о том, какие
компоненты входят в смесь, а количественного, кроме того, — инфор-
мации о количественном содержании каждого компонента, т. е. о его
концентрации. Концентрация — доля какого-либо компонента в сме-
си. Для характеристики концентрации используется отношение коли-
чества определяемого компонента к количеству всей взятой для анали-
за пробы. Она может быть выражена в массовых, объемных долях
(процентах) и молярных долях или единицах массовой (кг/ м3, г/ м3,
г/ см3, г/ мл) и молярной концентрации (моль/ м3, моль/ см3, моль/ мл),
т. е . в этом случае концентрация характеризуется содержанием компо-
нента в единице объема. При измерении малых концентраций исполь-
зуются единица млн-1 (ppm), составляющая одну часть на миллион
частей анализируемого газа, или 0,0001 %, и млрд-1 (ppb) — одну часть
на миллиард.
Приборы, используемые для измерения состава, являются факти-
чески средствами измерений значений не концентрации как таковой,
а тех свойств анализируемых сред, которые положены в основу реа-
лизованного в приборе метода измерения. Промышленность выпу-
скает эти приборы либо с условными шкалами (например, разделен-
ными на 100 делений), либо со шкалами, отградуированными в
единицах измеряемой величины. Например, кондуктометрические
анализаторы, в которых в зависимости от концентрации определяе-
мого компонента меняется электропроводность чувствительного
элемента, градуируются в единицах электрического сопротивления
(Ом) или проводимости (См). Для получения информации о составе
анализируемой среды производят их градуировку, т. е . опытным путем
устанавливают зависимость измеряемого прибором параметра от
концентрации.
8.1 .2. Общие сведения о газоаналитических приборах
Газоаналитические приборы являются устройствами массового
применения на объектах транспорта нефти и газа. Они используются
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
129
для контроля токсичных и взрывоопасных веществ в воздухе произ-
водственных помещений. Прежде чем перейти к рассмотрению кон-
кретных приборов, введем несколько базовых для этой области тер-
минов. Газоанализатор (ГА) — это прибор, предназначенный для
получения информации о значении концентрации измеряемого ком-
понента или суммы компонентов в анализируемой газовой смеси.
ГА, применяемые при контроле и регулировании технологических
процессов, обычно градуируют в единицах объемной доли (для высо-
коточных измерений — в единицах молярной доли). Для контроля
воздушной среды используют ГА, градуированные в единицах массо-
вой концентрации. Нулевой газ — газ, который при прохождении
через ГА не вызывает отклонение указателя показывающего устрой-
ства. Поверочная газовая смесь (ПГС) — смесь нулевого газа с из-
вестным количеством измеряемого компонента, применяемая для
градуировки и поверки ГА. Нижний (верхний) концентрационный
предел взрыва или воспламенения (НКПВ, ВКПВ) — наименьшая
(наибольшая) концентрация горючих и взрывоопасных веществ в воз-
духе, в интервале которых могут произойти воспламенение или взрыв
данной смеси от ее соприкосновения с источником воспламенения.
По исполнению ГА делятся на стационарные и переносные. Ста-
ционарные ГА, являющиеся измерительными приборами, служат для
постоянного контроля опасных концентраций в окружающем воз-
духе или потоке газа. Переносные ГА чаще всего представляют собой
индикаторы, сигнализаторы, детекторы утечки газа и используются
для выявления мест утечек и скоплений газа в колодцах, в месте про-
ведения сварочных работ при ремонте трубопроводов, при обследо-
вании различных установок. По принципу действия ГА могут быть
тепловые, магнитные, оптические, комбинированные и др. Наиболь-
шее распространение на объектах трубопроводного транспорта по-
лучили тепловые и оптические ГА.
8.1.3. Тепловые газоанализаторы
В тепловых ГА концентрация определяемого компонента опреде-
ляется по изменению теплопроводности λсм анализируемой газовой
смеси (АГС). Теплопроводность является аддитивным свойством,
поэтому для смеси n компонентов
λλ
см=
=
∑ii
i
n
C
1
,
(8.1)
где λi, Ci — соотв етственно теплопроводность и объемная концен-
трация каждого компонента.
Если АГС является бинарной или псевдобинарной, то, учитывая,
что сумма концентраций определяемого и неопределяемого компо-
нента равна 1, можно записать
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
130
λ
см = λокCок + (1 – Cок)λнк,
(8.2)
где λок, Cок — теплопроводность и объемная концентрация опреде-
ляемого компонента; λнк — теплопроводность неопределяемого ком-
понента.
Из последнего выражения можно найти искомую концентрацию
Cок:
Сок
см
нк
ок
нк
=
-
-
λλ
λλ
.
(8.3)
Существует два типа тепловых газоанализаторов: термокондукто-
метрические и термохимические.
Принцип действия термокондуктометрического ГА основан на
процессе теплопереноса в газах под действием градиента температур.
При прохождении АГС через измерительную камеру, в которой на-
ходится нагретый до определенной температуры терморезистор, про-
исходит передача тепловой энергии от этого терморезистора через
слой АГС постоянной толщины к стенкам камеры, температура ко-
торых постоянна. Если количество теплоты, отдаваемой терморези-
стором, постоянно, а теплопередача происходит только за счет тепло-
проводности через слой газа, температура терморезистора, а следователь-
но, его сопротивление будут определяться только теплопроводностью
АГС или, как следует из выражения (8.2), концентрацией определяе-
мого компонента.
ГА представляет собой неуравновешенный мост (рис. 8 .1, а), два
плеча которого образованы терморезисторами R2 и R4, помещенны-
ми в измерительные камеры, а два — сравнительными R1 и R3. Из-
мерительная камера (рис. 8.1, б) представляет собой полый цилиндр,
внутри которого коаксиально расположена платиновая нить (чувстви-
Рис. 8.1. Термокондуктометрический газоанализатор:
а — измерительная схема; б — конструкция измерительной камеры; Uпит — напряже-
ние питания; Iст — стабилизиров анный ток; R1...R4 — терморезисторы (платиновые
нити); ИП — измерительный прибор; tн, tс — температура нити и стенки; l, d — длина
и диаметр платиновой нити; D — диаметр камеры
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
131
тельный элемент). Диаметр платиновой нити 0,02... 0,05 мм; она на-
тягивается с помощью платиноиридиевых пружинок и закрепляется
в измерительной камере изоляционными втулками. Температура
газовой смеси должна быть постоянной, поэтому датчики термоста-
тируются. Для уменьшения влияния конвекции диаметр измеритель-
ной камеры выполняется как можно меньшим. Сравнительные ка-
меры бывают двух типов: герметизированные и проточные. В качестве
сравнительных смесей в герметизированных камерах используются
газовые смеси либо постоянного состава, либо с добавлением опреде-
ляемого компонента с концентрацией, соответствующей нижнему,
среднему или верхнему пределу измерения анализатора. В проточных
камер ах обычно используется АГС, очищенная от определяемого
компонента специальным поглотителем.
Теплота Q, отдаваемая терморезистором в АГС, определяется вы-
ражением
Q
ltt
D
d
=
-
()
2πλсм нc
ln
,
(8.4)
где l — длина платиновой нити, образующей терморезистор; λсм —
теплопроводность АГС; tн, tс — температура платиновой нити и
стенки камеры соответственно; D, d — диаметры камеры и платино-
вой нити соответственно.
Нагрев платиновой нити до температуры 50... 200 °С осуществля-
ется стабилизированным током I, что о беспечивает постоянство
значения Q. Искомая температура нити tн будет в этом случае равна
tt
D
d
l
IR
нc
см
=+
ln
,
2
2
πλ
(8.5)
где R — сопротивление платиновой нити.
Для градуировки анализатора через него пропускается градуиро-
вочная смесь с известным содержанием определяемого компонента.
Поскольку количество теплоты, отдаваемое чувствительным элемен-
том к стенкам камеры, не меняется, температура нити при анализе
смеси неизвестного состава находится по формуле
tt
tt
н
гс
ас
н1
сс
2=-
()
+
λ
λ
,
(8.6)
где λгс, λас — тепло проводности градуировочной и анализируемой
смеси соответственно; tн1, tн2 — со ответствующие этим смесям тем-
пературы платиновой нити.
Теплопроводность смеси n компонентов находится по формуле
(8.1). Если анализируемая газовая смесь содержит водяные пары,
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
132
то при расчетах необходимо учитывать, что водяные пары практиче-
ски полностью конденсируются, изменяя процентное содержание
других компонентов. Теплопроводность смеси в этом случае опреде-
ляется выражением
λλ
ас
HO
2
=
-
=
∑ii
i
n
C
C
1
1
,
(8.7)
где n — число компонентов в смеси; λi, Ci — теплопроводность и кон-
центрация i-го компонента; СН2О — концентрация водяных паров.
Если теплопроводности АГС λсм в измерительных камерах и вспо-
могательного газа λв в сравнительных камерах одинаковы, напряжение
на измерительной диагонали мостовой схемы отсутствует. При из-
менении концентрации определяемого компонента, а значит, и тепло-
проводности АГС условия теплопередачи в измерительных камерах
изменяются, в результате чего на измерительной диагонали появля-
ется напряжение разбаланса U:
UK
=-
λ
λλ
11
см
в
,
(8.8)
где Кλ — коэффициент преобразования термокондуктометрического ГА.
Термокондуктометрические ГА используются для измерения кон-
центрации негорючих газов (СО2, SO2 и др.) в бинарных и псевдоби-
нарных смесях. Их диапазон измерений от 0 ... 1 до 0 ... 100 %, класс
точности 2,5 ... 10 (увеличивается с уменьшением диапазона измере-
ния), время реакции 60 ... 120 с.
В термохимических ГА, используемых для измерения концентра-
ций горючих газов, используется тепловой эффект химической реак-
ции окисления определяемого компонента АГС на каталитически
активной поверхности платиновой нити, нагретой до температуры
200... 500 °С. По выделяющейся при этом теплоте и изменяющейся в
результате этого температуре нити определяется концентрация ана-
лизируемого компонента.
Изменение температуры Dt при таком окислении (горении) опре-
деляется выражением
D
t = KQнC,
(8.9)
где K — постоянный коэффициент, зависящий от природы опреде-
ляемого компонента и конструктивных параметров чувствительного
элемента; Qн, C — удельная объемная теплота сгорания и объемная
концентрация определяемого компонента соответственно.
Каталитически активная платиновая нить включается в одно из
плеч неуравновешенного моста. В этот мост входит также резистор,
выполненный из каталитически пассивной платиновой проволоки и
находящийся в камере, заполненной неопределяемыми компонента-
ми газовой смеси. Если определяемый компонент в смеси отсутству-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
133
ет, их сопротивления одинаковы. Резисторы двух оставшихся плеч
имеют постоянное сопротивление и выполнены из манганиновой
проволоки. При наличии определяемого компонента в газовой смеси
происходит его сгорание на активном резисторе, сопротивление по-
следнего возрастает, что приводит к появлению на измерительной
диагонали моста напряжения, пропорционального концентрации
определяемого компонента. Милливольтметр в измерительной диа-
гонали градуируется в единицах концентрации определяемого ком-
понента.
Такие ГА в основном используются как индикаторы и сигнализа-
торы взрывоопасных концентраций, градуируются в процентах НКПВ
и выполняются как в стационарном, так и в переносном варианте
(сигнализаторы серии СГГ, ПГФ и др.). Сигнализируемые значения
5...50% НКВП для горючих газов и паров и 5...20% НКВП для сме-
сей водорода с воздухом, время реакции не более 30 с. Существуют
также термохимические ГА, в которых реакция окисления опреде-
ляемого компонента протекает на поверхности гранулированного
катализатора, в качестве которого часто используется смесь диокси-
да марганца и оксида меди. Увеличение поверхности катализатора
позволяет снизить нижний предел измерения до долей процента.
В остальном их работа аналогична рассмотренному выше ГА.
Термохимические ГА в настоящее время являются одними из наи-
более распространенных в промышленности средств аналитической
техники. Их различные модели выпускаются как российскими, так и
зарубежными фирмами.
8.1 .4. Оптические газоанализаторы
Принцип действия оптических ГА основан на явлении избиратель-
ного поглощения анализируемым компонентом энергии излучения
определенной длины волны, причем интенсивность этого поглощения
зависит от концентрации анализируемого компонента в АГС. Эта за-
висимость описывается законом Бугера — Ламберта — Бера:
II CL
λλ
ελ
=
-
0e,
(8.10)
где Iλ, I0λ — интенсивность монохроматического излучения с длиной
волны λ на входе в поглощающий слой газа и после прохождения
через него соответственно; ελ — коэффициент поглощения излучения
определяемым компонентом на длине волны λ; С — концентрация
определяемого компонента в газовой смеси; L — толщина погло-
щающего слоя.
Произведение ελСL называется оптической плотностью Dλ:
DC
L
I
I
λλ
λ
λ
ε
==
ln
.
0
(8.11)
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
134
Каждый газ характеризуется определенным спектром поглощения.
Газы, содержащие в своем составе два и более разнородных атомов,
такие как CO, CO2, CH4, NH3, C2H2, имеют спектры поглощения в
инфракрасной (ИК) области.
Для использования этого метода измерения необходимо, чтобы
определяемый компонент имел спектр поглощения, отличающийся
от спектров поглощения других компонентов анализируемой смеси.
Лежащие в ИК-области спектры поглощения CO, CO2, CH4, NH3
изображены на рис. 8 .2, а. Хотя спектры CO2 и CO, CO2 и CH4 ча-
стично перекрываются, можно выделить длины волн, на которых
имеет место селективное поглощение ИК-излучения этими компо-
нентами, что позволяет измерять их концентрацию в многокомпо-
нентных АГС. В качестве источников излучения инфракрасных ГА
используются нихромовые излучатели, нагретые до 700 ... 800 °С. При-
емниками излучения служат батареи термопар или терморезисторов,
фоторезисторы или конденсаторные микрофоны. Схема одного из
вариантов акустического приемника ИК-излучения представлена на
рис. 8.2, б. Источником 1 создается постоянное излучение, которое
с помощью вращающегося диска с отверстиями (обтюратора) 2 и
светофильтра 3 преобразуется в пульсирующее монохроматическое
излучение. Определяемый компонент, находящийся в камере 4, по-
глощает излучение, при этом в камере возникают пульсации темпе-
ратуры, а следовательно, и давления, изображенные на рис. 8 .2, в.
Эти пульсации воспринимаются микрофонным чувствительным
Рис. 8.2. Оптико-акустический газоанализатор:
а — спектры поглощения ИК-излучения для некоторых газов; б — приемник
ИК-излучения; в — пульсации давления в камере; СО — оксид углерода; СО2 — угле-
кислый газ; СH4 — метан; С2Н6 — этан; λ — длина в олны; 1 — источник излучения;
2 — обтюратор; 3 — св етофильтр; 4 — измерительная камера; 5 — микрофонный чув-
ствительный элемент; d — зазор; С — электрическая емкость; Dр — изменение давле-
ния; t — время
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
135
элементом 5, представляющим собой конденсатор, образованный
подвижной мембраной и неподвижной пластиной. Под действием
давления мембрана перемещается, вызывая из-за колебаний зазора d
изменение емкости С конденсатора.
Используемые в промышленности оптико-акустические ГА, как
правило, представляют собой дифференциальные двухлучевые схемы
и имеют две кюветы: измерительную, через которую прокачивается
АГС, и сравнительную, которая заполняется вспомогательной газовой
смесью. В нее входят какой-либо не поглощающий ИК-излучение газ
и неопределяемые компоненты АГС со средними значениями концен-
траций. ИК-излучение (2 ... 8 мкм) поступает в измерительную и срав-
нительную камеры через фильтровые камеры, служащие для уменьше-
ния влияния на результаты измерения неопределяемых компонентов,
полосы поглощения которых частично перекрываются с полосой по-
глощения определяемого компонента. Они заполняются этими компо-
нентами, причем их концентрация должна быть больше их возможной
концентрации в АГС. Если определяемый компонент отсутствует в АГС,
поглощение импульсного ИК-излучения в обеих камерах будет одина-
ково. При появлении в АГС определяемого компонента он поглощает
часть энергии излучения, проходящего через измерительную камеру, в
результате чего в конденсаторном микрофоне возникают колебания,
частота которых составляет несколько герц.
Оптико-акустические ГА используются для измерения в много-
компонентных смесях концентраций СО, СО2, СН4, С2Н2, С3Н6 и др.
Диапазоны измерений этих анализаторов от 0 ... 0,1 до 0 ... 100 % об.
Классы точности 2,5 ... 10 (в зависимости от диапазона измерений).
8.2 . Измерение плотности жидкостей и газов
8.2.1. Общие сведения об измерении плотности
Плотностью ρ вещества называют физическую величину, опреде-
ляемую отношением массы m вещества к занимаемому им объему V:
ρ=
m
V
.
(8.12)
Плотность тела не зависит от его местонахождения на поверхности
земли и является физической константой вещества. Плотность из-
меряется в таких единицах, как кг/ м3, г/ см3. В некоторых случаях
используется понятие относительная плотность, определяемая как
отношение плотности данного вещества к плотности другого вещества
при определенных физических условиях. Относительную плотность
жидкого вещества принято выражать отношением его плотности,
взятой при нормальной температуре (20 °С), к плотности дистилли-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
136
рованной воды при температуре 4 °С. Обозначается такая плотность ρ20
4.
Относительную плотность газа принято выражать отношением
его плотности к плотности сухого воздуха, взятых при нормальных
условиях (температура 20 °С и давление 760 мм рт. ст.) . Плотность
жидкостей и газов уменьшается с увеличением температуры. Плот-
ность газов увеличивается с увеличением давления, плотность жид-
кости от давления практически не зависит.
8.2.2. Основные виды плотномеров
Средства измерения плотности называются плотномерами (ден-
ситометрами). По принципу действия выделяют весовые, поплавко-
вые, гидроаэростатические, вибрационные, акустические, радиоизо-
топные и некоторые другие плотномеры.
Принцип действия в е с о в ы х плотномеров состоит в непрерывном
взвешивании постоянного объема анализируемого вещества в неко-
торой емкости или трубопроводе. Таким образом, плотность опреде-
ляется через удельный вес. Весовые плотномеры применяют обычно
для измерения плотности суспензий, а также вязких и содержащих
твердые включения жидкостей. Они позволяют измерять плотность в
интервале 0,5 ... 2,5 г/ см3 с выделением поддиапазона 0,05 ... 0,3 г/ см3
в любой части основного интервала. Классы точности 1 ... 1,5.
П о п л а в к о в ы е плотномеры изготавливаются двух типов: с
частично погруженным поплавком и с полностью погруженным по-
плавком. В плотномерах с частично погруженным поплавком мерой
плотности жидкости служит глубина погружения поплавка. В плот-
номерах с полностью погруженным поплавком глубина погружения
поплавка (буйка) остается постоянной, а изменяется действующая на
него выталкивающая сила, пропорциональная плотности жидкости.
Плотномеры первого типа измеряют плотность от 0,005 до 0,01 г/ см3
с погрешностью 1,5 ... 3 % от диапазона измерения, а второго типа — от
0,5 до 1,2 г/ см3 с поддиапазоном 0,05 ... 0,2 г/ см3 в любой части основ-
ного интервала; их класс точности 1.
Принципдействия гидро- и аэростатических плотно-
меров основан на зависимости давления Р столба анализируемой
жидкости или газа от плотности ρ этих сред:
P
= ρgH,
(8.13)
где g — ускорение свободного падения; Н — высота столба жидкости
или газа.
Радиоизотопные плотномерыпозволяютизмерятьплотность
агрессивных, сильновязких, горячих и находящихся под большим
давлением жидкостей бесконтактным способом. Их действие осно-
вано на ослаблении радиоактивного излучения с повышением плот-
ности измеряемой жидкости.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
137
8.2.3. Вибрационные плотномеры
Вибрационные плотномеры на сегодняшний день являются наи-
более востребованными на объектах трубопроводного транспорта.
Принцип действия вибрационных плотномеров основан на зависи-
мости частоты колебаний, сообщаемых камере с анализируемым
веществом или телу, размещенному в нем, от плотности этого веще-
ства. Камера с анализируемым веществом или тело, размещенное в
нем, называется резонатором. Частота собственных колебаний f ре-
зонатора, заполненного анализируемым веществом с плотностью ρ
или находящегося в нем, описывается выражением
ff
k
=
+
0
1
1ρ
,
(8.14)
где f0 — частота колебаний резонатора при начальном значении плот-
ности анализируемого вещества; k — константа, зависящая от кон-
струкции резонатора.
Конструктивноразличают проточные и погружные виб-
рационные плотномеры. В первом случае анализируемое вещество
протекает через внутреннюю полость резонатора, во втором — резо-
натор размещается в потоке анализируемого вещества. Проточные
плотномеры являются более распространенными.
При измерении плотности в трубопроводе необходимо учитывать
влияние давления и температуры потока. Для этого обычно исполь-
зуются два резонатора: измерительный и компенсирующий. На рис.
8.3, а показан датчик плотномера, представляющий собой корпус 1
из нержавеющей стали, внутри которого расположены два тонкостен-
ных ферромагнитных цилиндра: измерительный 2 и компенсирую-
щий 3. Через измерительный цилиндр протекает жидкость, плотность
которой измеряется, а компенсирующий цилиндр заполнен образцо-
вой жидкостью (керосином). Давление измеряемой среды передается
в компенсирующий цилиндр 3 через сильфон 4, благодаря чему дав-
ление в цилиндрах 2 и 3 одинаково, и погрешность измерения плот-
ности от разности давлений в цилиндрах практически отсутствует.
Для введения температурной коррекции в компенсирующем цилин-
дре 3 установлен терморезистор 5. При измерении плотности (рис.
8.3, б) оба цилиндра 2 и 3 колеблются с собственной частотой, воз-
буждаемой электромагнитными катушками 1. Собственная частота
компенсирующего цилиндра на 80 ... 1 00 Гц больше, чем максималь-
ная частота (при наименьшей плотности перекачиваемого продукта)
измерительного цилиндра. Колебания цилиндров 2 и 3 возбуждают
в измерительных катушках 6 электромагнитные колебания с частотой
fm и fk соответственно, которые через фазосдвигающие устройства 7
поступают на усилители-ограничители 8. Узел вычитания 10 из ча-
стоты колебаний fk компенсирующего цилиндра вычитает частоту
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
138
колебаний fm измерительного цилиндра. При этом компенсируется
погрешность измерения плотности нефти, возникающая из-за на-
личия в трубопроводе, а значит, и в датчике довольно значительного
давления.
Плотность керосина, находящегося в компенсирующем цилинд-
ре 3, сильно зависит от температуры. Для уменьшения температурной
погрешности в датчике предусмотрена схема компенсации, состоящая
из терморезистора 5 и усилителя постоянного тока 9. Терморезистор
включен в чувствительное плечо мостовой схемы, выходное напря-
жение которой усиливается усилителем 9 и поступает в устройство
температурной компенсации 11, куда также поступает разностная
частота Df = fk - fm. Далее сигнал разностной частоты Dft, скорректи-
рованной по температуре, подается на схему линеаризации 12 и далее
на устройство индикации 13.
Вибрационные плотномеры позволяют измерять плотность в
диапазоне от 750 до 930 кг/ м3 с основной погрешностью не более
0,5 % в потоках с давлением до 6,4 МПа.
Рис. 8.3. Вибрационный плотномер:
а — датчик; б — функциональная схема; 1 — корпус датчика; 2 — измерительный фер-
ромагнитный цилиндр; 3 — компенсирующий ферромагнитный цилиндр; 4 — силь-
фон; 5 — терморезистор; 6 — измерительная электромагнитная катушка; 7 — фазо-
сдвигающее устройство; 8 — усилитель-ограничитель; 9 — усилитель постоянного
тока; 10 — уз ел вычитания; 11 — устройств о температурной компенсации; 12 — схема
линеаризации; 13 — устройство индикации; 14 — блок обработки и индикации дан-
ных; 15 — воз буждающая электромагнитная катушка; fm — частота колебаний измери-
тельного цилиндра; fk — частота колебаний компенсирующего цилиндра; Df — раз-
ностная частота; Dft — разностная частота, скорректиров анная по температуре
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
139
8.3 . Измерение вязкости
8.3.1 . Общие сведения об измерении вязкости
Вязкость (внутреннее трение) — свойство текучих веществ
(жидкостей и газов) оказывать сопротивление перемещению одной
их части относительно другой. Именно вязкость обусловливает ги-
дравлическое сопротивление в трубопроводах. Основной закон вяз-
кого течения описывается формулой Ньютона:
FS
dV
dn
=η
,
(8.15)
где F — тангенциальная (касательная) сила, вызывающая сдвиг сло-
ев жидкости (газа) друг относительно друга; S — площадь слоя, по
которому происходит сдвиг; dV/ dn — градиент скорости V течения
(быстроты изменения ее от слоя к слою) по нормали n.
Коэффициент пропорциональности η называется динамической
вязкостью. Он характеризует сопротивление жидкости (газа) смеще-
нию ее слоев. Величина, обратная динамической вязкости, называ-
ется текучестью φ = 1/ η.
Наряду с понятием динамической вязкости используется понятие
кинематическая вязкость ν:
ν
η
ρ
=
.
(8.16)
Единицами динамической вязкости являются Па̇с (в системе
единиц СИ) и П (пуаз). 1 Па̇с — это вязкость такой жидкости, в
которой на 1 м поверхности слоя действует сила, равная одному нью-
тону, если скорость между слоями на расстоянии 1 см изменяется на
1 см/ с. Жидкость с вязкостью 1 Па·с относится к числу высоковязких,
поэтому на практике часто используются единицы мПа ̇ с (миллипу-
аз) и сП (сантипуаз). Единицами кинематической вязкости являются
м2/ с (в системе единиц СИ) и Ст (стокс). Соотношение между ука-
занными единицами:
1П=10
-1 Па
̇
с; 1Ст=10
-4 м2/ с.
На практике иногда используют понятие условная вязкость, ко-
торая представляет собой отношение времени истечения из виско-
зиметра определенного объема некоторой жидкости ко времени ис-
течения такого же объема дистиллированной воды при температуре
20 °С. Условная вязкость измеряется в градусах ВУ.
Вязкость жидкостей с увеличением температуры уменьшается, а
газов — увеличивается.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
140
8.3.2. Средства измерения вязкости
Средства измерения вязкости называют вискозиметрами. В за-
висимости от назначения вискозиметры делятся на промышленные
(технологического контроля) и лабораторные (стационарные и пере-
носные). По режиму работы вискозиметры могут быть непрерывного
и циклического действия. По принципу действия вискозиметры де-
лятся на пять групп: ротационные, вибрационные, капиллярные,
шариковые и условной вязкости (типа воронки).
Принцип действия р о т ац и о н н ы х вискозиметров (рис. 8.4)
основан на измерении крутящего момента, возникающего на оси
ротора 1, погруженного в измеряемую среду. Этот крутящий момент
М описывается выражением
M
= kωη,
(8.17)
где k — постоянный коэффициент, зависящий от конструкции рото-
ра вискозиметра; ω — угловая скорость вращения ротора; η — дина-
мическая вязкость.
Таким образом, при постоянной угловой скорости крутящий мо-
мент однозначно определяет вязкость жидкости. Характерной осо-
бенностью ротационных вискозиметров является широкий диапазон
измеряемых значений вязкости.
Принцип действия в и б р а ц и о н н ы х вискозиметров основан
на определении амплитуды вынужденных колебаний тела правильной
геометрической формы, называемого зондом вискозиметра, при по-
гружении его в исследуемую среду. В настоящее время широко при-
меняются электронные вибрационные вискозиметры, в которых зонд
Рис. 8.4. Ротационный вискозиметр:
а — схема; б — внешний вид; 1 — ротор; ЭД — электродвигатель
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
141
совершает вынужденные колебания под воздействием импульсов
электромагнитного вибратора со встроенным датчиком амплитуды.
Эту амплитуду А колебаний зонда при постоянной возбуждающей
силе можно описать выражением
A
k
=
η
,
(8.18)
где k — постоянный коэффициент, зависящий от конструкции зонда
вискозиметра и типа исследуемой жидкости; η — динамическая вяз-
кость.
Вибрационные вискозиметры имеют значительно большую по
сравнению с ротационными вискозиметрами чувствительность, но
более узкий диапазон измеряемых значений вязкости.
Принцип действия к а п и л л я р н ы х механических вискозимет-
ров основан на закономерности истечения жидкости через капилляр,
описываемой законом Пуазейля:
QR
L
PP
=-
()
π
η
4
12
8
,
(8.19)
где Q — объемный расход жидкости; R и L — внутренний радиус и
длина капилляра соответственно; η — динамическая вязкость; P1,
Р2 — давление до и после капилляра по потоку.
При постоянном объемном расходе жидкости выражение (8.19)
можно преобразовать к виду
P
1-P2=kη,
(8.20)
где k = 8LQ/(πR4) — постоянный коэффициент для принятого рас-
хода жидкости.
Следовательно, для определения динамической вязкости жидкости
достаточно при постоянном объемном расходе измерять перепад
давлений на капилляре. Этот постоянный объемный расход анали-
зируемой жидкости создается насосом Н (рис. 8.5, а). Анализируемая
жидкость поступает в змеевик 1, где нагр евается до температуры,
поддерживаемой в термостате 2, а затем — в капилляр 3, размеры
которого выбираются в зависимости от диапазона измеряемых зна-
чений вязкости. Перепад давлений на капилляре, который пропор-
ционален динамической вязкости анализируемой жидкости, измеря-
ется дифманометром ДМ. Температура в термостате поддерживается
на уровне 50 или 100 °С. Диапазон измерений этих вискозиметров от
0...2 до 0 ...1 000 сП, класс точности 1,5 ...2,5 (в зависимости от диа-
пазона измерений).
Принцип действия ш а р и к о в ы х вискозиметров основан на
измерении скорости (или времени) движения шарика под действием
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
142
сил тяжести и трения в анализируемой жидкости. Это движение опи-
сывается законом Стокса:
V
gR
=
-
2
9
2
(),
ρρ
η
шж
(8.21)
где V — скорость равномерного падения шарика; ρш и ρж — плотности
материала шарика и жидкости соответственно; g — ускорение сво-
бодного падения; R — радиус шарика; η — динамическая вязкость.
Учитывая, что плотность анализируемой жидкости изменяется
незначительно и что она в несколько раз меньше плотности шарика,
выражение (8.21) можно преобразовать к виду
V
k
=
1
η
,
(8.22)
где kg
R
1
2
2
9
=-
()
ρρ
шж
—
постоянный коэффициент.
Обычно измерение скорости V сводится к измерению отрезка
времени τ, за который шарик, падая с постоянной скоростью, про-
Рис. 8.5. Капиллярный вискозиметр:
а — схема; б — внешний вид; 1 — змеевик; 2 — термостат; 3 — капилляр; Н — насос;
ДМ — дифманометр; Р1, Р2 — давление до и после капилляра
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
143
ходит некоторый постоянный отрезок пути L между двумя приняты-
ми отметками. В этом случае
τη
η
==
=
L
V
L
k
k
1
,
(8.23)
где k = L/ k1 — по стоянный коэффициент.
В нерабочем состоянии шарик 2 (рис. 8 .6, а) находится на нижней
сетке 4. Анализируемая жидкость из трубопровода периодически
прокачивается насосом Н по трубке 1 снизу вверх и при своем дви-
жении поднимает шарик 2 от нижней 4 до верхней 3 ограничительной
сетки. В момент касания шарика с верхней сеткой насос автомати-
чески отключается и шарик падает в неподвижной среде — анализи-
руемой жидкости. С помощью устройств 5 и 6 (например, индукци-
онных катушек) в моменты времени, когда шарик проходит две вы-
бранные отметки, отстоящие друг от друга на расстояние L по
высоте трубки, формируются электрические импульсы. Промежуток
времени между указанными импульсами, значение которого и опре-
деляет динамическую вязкость, измеряется блоком 7 (измеритель
временных интервалов). Во время измерения жидкость и шарик тер-
мостатируют с точностью 0,2 °С, для чего измерительную трубку по-
мещают во вторую, более широкую трубку, в которой поддерживают
постоянную температуру 50 или 100 °С. Диаметр трубки, в которой
проводят измерение вязкости, должен быть по крайней мере в 10 раз
больше диаметра шарика. Длина трубки подбирается с таким рас-
Рис. 8.6. Шариковый вискозиметр:
а — схема; б — внешний вид; 1 — трубка из немагнитного материала; 2 — шарик;
3, 4 — верхняя и нижняя ограничительные сетки; 5, 6 — ф ормирователи импульсов;
7 — измеритель временных интерв алов; Н — насос; L — расстояние между центрами
индукционных катушек
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
144
четом, чтобы измерять время падения шарика на средней ее части,
на отрезке, равном 1/3 —1 /2 длины трубки.
Пределы измерений вискозиметра можно менять в широком диа-
пазоне установкой расстояний между устройствами формирования
импульса и подбором размера шарика. Шариковые вискозиметры
используются для измерения вязкости до 100 Па
̇
с с погрешностью
не выше ±2%.
8.4 . Измерение влажности
8.4.1. Общие сведения об измерении влажности
Влажность газов и жидкостей — один из важных параметров тех-
нологических процессов. Влажность газов, например, необходимо
измерять в процессе осушки, при очистке газов, в газосборниках, при
кондиционировании воздуха и т. д . Измерение содержания воды в
нефти необходимо для выбора режимных параметров установок под-
готовки нефти, контроля качества товарной нефти и т. п. Влага, т. е .
наличие молекул воды в веществе, в газах содержится в виде водяно-
го пара, а в жидкостях — в виде смеси воды и самой жидкости. Для
характеристики содержания влаги в жидко стях применяются две
величины: влагосодержание и влажность. Под влагосодержанием (u)
понимается отношение массы влаги М, содержащейся в веществе, к
массе абсолютно сухого вещества M0:
u
M
M
=
0
.
(8.24)
Под влажностью W понимается отношение массы влаги M, со-
держащейся в веществе, к массе влажного вещества М1:
W
M
M
M
MM
==
+
10
.
(8.25)
Иногда эти величины выражают через веса и в процентах. В этом
случае выражения (8.24) и (8.25) принимают вид:
u
PP
P
=
-
0
0
100%;
(8.26)
W
PP
P
=
-
0
100 %,
(8.27)
где Р — вес влажного вещества; Р0 — в ес абсолютно сухого веще-
ства.
Для указания содержания влаги в материале может быть приме-
нена любая из этих величин. В теоретических исследованиях и рас-
четах содержание влаги задается влагосодержанием, а в производ-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
145
ственных условиях для той же цели чаще применяется влажность.
Переход от одной величины к другой может быть осуществлен по
соотношениям:
W
u
u
=
+
1
;
(8.28)
u
W
W
=
-
1
.
(8.29)
Влажность газов характеризуется абсолютной влажностью, от-
носительной влажностью и температурой точки росы. Абсолютная
влажность газа равна массе водяного пара, содержащегося в едини-
це объема парогазовой смеси, и равна плотности водяного пара.
Относительная влажность воздуха φ — это величина, характери-
зующая степень насыщения воздуха водяными парами. Она равна
отношению парциального давления содержащегося в воздухе водя-
ного пара Pп к парциальному давлению насыщенных водяных паров
Pн при одной и той же температуре
φ=
P
P
п
н
100 %.
(8.30)
Температура точки росы — это температура, до которой необ-
ходимо охладить влажный воздух, чтобы достичь насыщения водя-
ного пара, сохраняя постоянным массовое содержание влаги в про-
цессе охлаждения. При температуре точки росы Pп = Pн.
Средства измерения влажности жидкостей и твердых тел называ-
ются влагомерами, а газов — гигрометрами. При этом необходимо
отметить, что влагометрия представляет собой особый частный слу-
чай измерения состава вещества. В нефтегазовой промышленности
наиболее распространенными влагомерами жидкостей являются
диэлькометрические (емкостные) и сверхвысокочастотные (СВЧ)
влагомеры, а для измерения влажности газов используются диэлько-
метрические, конденсационные гигрометры, психрометры и др.
8.4.2. Диэлькометрические влагомеры
Принцип действия диэлькометрических влагомеров основан на
сильной зависимости диэлектрической проницаемости материалов
от содержания в них влаги. Это обусловлено аномально большой
диэлектрической проницаемостью воды (ε = 81 при 20 °С). Для срав-
нения, диэлектрическая проницаемость углеводородов, входящих в
состав нефти, составляет от 2 до 2,6; нефть, содержащая воду, может
поэтому рассматриваться по диэлектрической проницаемости как
псевдобинарная смесь. Измерение диэлектрической проницаемости
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
146
в диапазоне средних частот тока (0,1 ... 3 0 МГц) сводится к определе-
нию емкости конденсатора, между обкладками (электродами) кото-
рого помещено исследуемое вещество. При этом измеренная ем-
кость
C
= C0ε,
(8.31)
где С0 — емкость нез аполненного конденсатора; ε — диэлектрическая
проницаемость исследуемого вещества.
В диэлькометрических влагомерах для измерения влажности жид-
костей в основном используются коаксиальные цилиндрические
конденсаторы. При этом роль внешнего конденсатора выполняет
труба, внутри которой размещается стержень, играющий роль вну-
треннего электрода. Точность измерения диэлькометрическими
влагомерами вполне приемлема, а диапазон измерений составляет от
0,1 до 100 % об. Недостатком является дополнительная погрешность
от так называемого сорта нефти, так как нефти с различных место-
рождений имеют различные значения диэлектрической проницаемо-
сти. Эта погрешность становится существенной при малых концен-
трациях воды. Поэтому во влагомерах, рассчитанных на небольшое
влагосодержание (например, для товарной нефти), используют специ-
альную дифференциальную схему, позволяющую исключить влияние
сорта нефти на результат измерения (рис. 8 .7). Влагомер содержит
два цилиндрических конденсатора 1 и 9. Конденсатор 1 установлен
в трубопроводе 10, по которому протекает анализируемая нефть, т. е .
его емкость зависит от ее диэлектрической проницаемости εн, которая
определяется как содержанием воды в нефти, так и ее сортом. Кон-
денсатор 9 установлен в емкости 8, которая периодически заполня-
ется нефтью, очищенной в блоке осушки 7 от воды и механических
Рис. 8.7. Диэлькометрический поточный влагомер нефти:
1, 9 — цилиндрические конденсаторы; 2, 6 — генераторы; 3 — смеситель; 4 — пре об-
разователь в унифициров анный токовый сигнал; 5 — вторичный прибор; 7 — блок
осушки; 8 — емкость; 10 — трубопровод
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
147
примесей. Его емкость будет определяться диэлектрической прони-
цаемостью εно обезвоженной нефти, т. е . это значение зависит только
от сорта нефти. Конденсаторы 1 и 9 включены в колебательные кон-
туры генераторов 2 и 6, частоты колебаний которых fи и fк пропор-
циональны емкостям этих конденсаторов. Выходные сигналы гене-
раторов поступают в смеситель 3; его выходное напряжение опреде-
ляется разностью частот fр, т. е . будет функцией только концентрации
воды в нефти. Этот сигнал в преобразователе 4 преобразуется в уни-
фицированный сигнал постоянного тока. Для визуального контроля
используется вторичный прибор 5. Влагомер обеспечивает измерение
влагосодержания в диапазонах от 0 ... 3 до 0 ... 60 % об.
8.4.3. Сверхвысокочастотные влагомеры
Принцип действия сверхвысокочастотных (СВЧ) влагомеров осно-
ван на оценке степени взаимодействия исследуемого материала с
СВЧ-радиоволнами. При прохождении СВЧ-радиоволн через влажный
материал происходит поглощение и рассеяние энергии электромаг-
нитных волн частицами вещества. Для получения информации о
свойствах вещества можно использовать параметры прошедшего или
отраженного излучения. При этом конструкция и схема измеритель-
ного устройства определяются способом локализации СВЧ-радиоволн.
Наиболее распространенными являются метод с использованием про-
ходящей волны и метод с использованием отраженной волны. В этих
методах измеряемой характеристикой служат затухание, изменение
амплитуды или фазы волны. Например, во влагомере, в котором вла-
госодержание преобразуется в степень затухания сигнала, радиоволны,
вырабатываемые СВЧ-генератором, по волноводу поступают на пере-
дающую антенну, откуда направляются узким лучом на объект изме-
рения. Пройдя через него, они частично поглощаются находящейся
в анализируемом материале водой и попадают на приемную антен-
ну, откуда по волноводу поступают в измерительный блок. В этом
блоке происходит измерение затухания сигнала, его детектирование
(т. е . выпрямление) и усиление постоянной составляющей сигнала.
На практике обычно используются рупорные антенны, хотя возможно
применение направленных излучателей других типов, например ди-
электрических стержневых антенн.
Основное преимущество СВЧ-влагомеров заключается в том, что
они бесконтактны и позволяют измерять влажность в широком диа-
пазоне (0 ... 100 %) с высокой точностью. По сравнению с диэлькоме-
трическими влагомерами они имеют гораздо более высокую чувстви-
тельность, что делает приборы практически нечувствительными к
изменению состава (сорта) нефти. Выпускаемые отечественными и
зарубежными фирмами СВЧ-влагомеры часто называются также
микроволновыми.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
148
8.4.4. Кулонометрические гигрометры
В кулонометрических гигрометрах в зависимости от количества
влаги в газе изменяется ток электролиза. Он связан с концентрацией
влаги соотношением
I
cQnF
M
=
103
,
(8.32)
где I — сила тока; с — концентрация влаги; Q — расход газа; n —
число электронов, необходимое для электролиза одной молекулы
воды; F — число Фарадея; М — молекулярная масса воды.
В канале цилиндрического стеклянного корпуса 1 кулонометри-
ческого чувствительного элемента размещены родиевые электроды
2, 3 и 4, выполненные в виде геликоидальных несоприкасающихся
спиралей (рис. 8 .8). Электроды 3 и 4 расположены последовательно
друг за другом по ходу газового тракта. На стенки канала и электро-
да нанесена пленка частично гидратированной пятиокиси фосфора
Р2О5, обладающей высокой влагосорбирующей способностью. Через
чувствительный элемент в направлении, указанном стрелкой, непре-
рывно проходит анализируемый газ, расход которого поддерживает-
ся постоянным. Значение расхода выбирается таким образом, чтобы
из потока анализируемого газа извлекалась практически вся влага.
К электродам приложено напряжение от источника постоянного
тока 5, причем значение этого напряжения превышает потенциал
разложения воды. Таким образом, в гигрометре одновременно про-
исходят два процесса: непрерывное извлечение пленкой сорбирую-
щего вещества влаги из точно дозируемого потока анализируемого
газа и электролитическое разложение поглощенной влаги. В устано-
Рис. 8 .8 . Кулонометрический гигрометр:
1 — корпус; 2 — электрод родиевый общий; 3 — электрод родиевый рабочей части
чувствительного элемента; 4 — электрод родиевый контрольной части чув ствительно-
го элемента; 5 — источник питания; 6 — отсчетное устройств о; 7 — кнопка контроля
чувствительного элемента
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
149
вившемся режиме ток электролиза, контролируемый гигрометром,
является мерой абсолютного содержания влаги в газе.
В процессе работы чувствительного элемента происходит посте-
пенное уменьшение активной поверхности пленки пятиокиси фос-
фора, сорбирующей влагу, что равносильно укорачиванию чувстви-
тельного элемента со стороны входа анализируемого газа. Причиной
этого является загрязнение пленки механическими примесями и
полимеризующимися на ней компонентами анализируемого газа, а
также постепенный вынос молекул пленки газовым потоком. По
мере эксплуатации гигрометров количество влаги, не извлеченной
в чувствительном элементе при прохождении анализируемого газа,
постепенно увеличивается. Для учета этого фактора в гигрометре
предусмотрен контроль полноты извлечения влаги в чувствительном
элементе.
Диапазон измерений кулонометрических гигрометров от 10-5 до
0,1 %. Недостаток этих приборов — невозможность измерения влаж-
ности газов, которые содержат щелочные и полимеризующиеся ком-
поненты. В первом случае Р2О5 реагирует со щелочным компонентом,
во втором служит инициатором полимеризации, а образующаяся
пленка полимера препятствует поступлению водяных паров к поверх-
ности адсорбента.
8.4.5. Диэлькометрические гигрометры
Принцип их действия в целом аналогичен диэлькометрическим
влагомерам, но при этом достаточно часто в этих гигрометрах ис-
пользуется комбинация диэлькометрического и электросорбционно-
го (измерение электрической проводимости вещества, поглощающе-
го влагу) методов. В диэлькометрическом гигрометре (рис. 8 .9) из-
менение диэлектрической проницаемости происходит вследствие
сорбции паров воды из анализируемого газа. Этот газ прокачивается
Рис. 8.9. Диэлькометрический гигрометр:
1 — камера; 2 — алюминиевый стержень; 3 — никелев ая проволока; 4 — вольтметр; R0,
R1, R2, C — элементы неравнов есного моста; Uп — напряжение питания
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
с постоянным объемным расходом через камеру 1, в которой раз-
мещен алюминиевый стержень 2, по поверхности которого сделана
нарезка и нанесен оксид алюминия Al2O3. В нарезку уложена нике-
левая проволока 3. Стержень 2 и проволока 3 образуют конденсатор,
включенный в неравновесный электрический мост переменного тока.
Емкость этого конденсатора увеличивается при сорбции паров воды
оксидом алюминия и возрастании вследствие этого его диэлектриче-
ской проницаемости. Увеличение емкости измеряется вторичным
прибором (вольтметром) 4.
Гигрометры такого типа обеспечивают измерение относительной
влажности в диапазоне 20 ... 100 %. При использовании некоторых других
сорбентов нижний предел измерения может начинаться с 10-4 % об.
Контрольные вопросы
1. В каком случае анализируемая смесь может считаться псевдобинарной?
2. Почему для питания датчиков термокондуктометрических и термохими-
ческих газоанализаторов необходим источник стабилизированного тока?
3. Как определяется относительная плотность для жидкостей?
4. Каким образом в вибрационных плотномерах учитывается давление по-
тока?
5. Зависит ли диапазон измерения капиллярного вискозиметра от диаме-
тра капилляра?
6. Каким образом можно менять диапазон измерения вискозиметра с па-
дающим шариком?
7. В чем заключается разница между понятиями «влагосодержание» и
«влажность»?
8. Какая температура называется температурой точки росы?
9. Для чего служит пленка из пятиокиси фосфора в кулонометрическом ги-
грометре?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
151
Глава 9
ГОСУДАРСТВЕННАЯ СИСТЕМА ПРОМЫШЛЕННЫХ
ПРИБОРОВ И СРЕДСТВ АВТОМАТИЗАЦИИ
9.1. Основные сведения
Государственная система промышленных приборов и средств авто-
матизации (ГСП) создана с целью обеспечения техническими средства-
ми систем контроля, регулирования и управления технологическими
процессами в различных отраслях народного хозяйства. На ранних
этапах создания средств автоматизации в различных организациях и на
предприятиях разрабатывалось множество различных приборов изме-
рения и контроля со сходными техническими характеристиками, одна-
ко при этом не учитывалась возможность совместной работы приборов
различных производителей. Это приводило к увеличению стоимости
разработок сложных систем и тормозило широкое внедрение средств
автоматизации. Поэтому в 1960 г. было принято решение о создании
ГСП, а с 1961 г. начались работы по ее реализации. В настоящее время
ГСП представляет собой эксплуатационно, информационно, энергети-
чески, метрологически и конструктивно организованную совокупность
изделий, предназначенных для использования в качестве средств авто-
матических и автоматизированных систем контроля, измерения, регу-
лирования технологических процессов, а также информационно-
измерительных систем. ГСП стала технической базой для создания
автоматизированных систем управления технологическими процессами
(АСУ ТП) и производством (АСУП) в промышленности. Ее развитие
и применение способствовали формализации процесса проектирования
АСУ ТП и переходу к автоматизированному проектированию.
В основу создания и совершенствования ГСП положены следую-
щие системно-технические принципы: типизация и минимизация
многообразия функций автоматического контроля, регулирования и
управления; минимизация номенклатуры технических средств;
блочно-модульное построение приборов и устройств; агрегатное по-
строение систем управления на базе унифицированных приборов и
устройств; совместимость приборов и устройств.
Пофункциональному признакувсеизделияГСПразделены
на четыре группы устройств: 1) получение информации о состоянии
процесса или объекта; 2) прием, преобразование и передача инфор-
мации по каналам связи; 3) преобразование, хранение и обработка
информации, формирование команд управления; 4) использование
командной информации.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
152
В первую группу в зависимости от способа представления инфор-
мации входят: датчики; нормирующие преобразователи, формирую-
щие унифицированный сигнал связи; приборы, обеспечивающие
представление измерительной информации в форме, доступной для
непосредственного восприятия наблюдателем, и устройства алфа-
витно-цифровой информации, вводимой оператором вручную.
Вторая группа содержит коммутаторы измерительных цепей, пре-
образователи сигналов и кодов, шифраторы и дешифраторы, согла-
сующие устройства, средства телесигнализации, телеизмерения и
телеуправления. Эти устройства используют для преобразования как
измерительных, так и управляющих сигналов. Третью группу со-
ставляют анализаторы сигналов, функциональные и операционные
преобразователи, логические устройства и устройства памяти, за-
датчики, регуляторы, управляющие вычислительные устройства и
комплексы. В четвертую группу входят исполнительные устройства
(электрические, пневматические, гидравлические или комбиниро-
ванные исполнительные механизмы), усилители мощности, вспо-
могательные устройства к ним, а также устройства представления
информации.
Минимизация номенклатуры средств контроля и управления
реализуется на основе двух принципов: унификации устройств одно-
го функционального назначения на основе параметрического ряда
этих изделий и агрегатирования комплекса технических средств для
решения крупных функциональных задач. В настоящее время раз-
работаны параметрические ряды датчиков давления, расхода, уровня,
температуры и электроизмерительных приборов.
Агрегатные комплексы (АК) представляют собой совокупность
технических средств, организованных в виде функционально-
параметрических рядов, охватывающих требуемые диапазоны из-
мерения в различных условиях эксплуатации и обеспечивающих
выполнение всех функций в пределах заданного класса задач. Прин-
цип агрегатирования в ГСП применяют очень широко. Унифициро-
ванная базовая конструкция датчиков теплоэнергетических величин
с унифицированными пневматическим и электрическим сигналами
была создана всего из 600 наименований деталей, при этом было по-
лучено 136 типов и 863 модификации этих датчиков.
Заложенные в ГСП общие для всех изделий понятия совместимо-
сти можно сформулировать следующим образом. информационная
совместимость — совокупность стандартизированных характери-
стик, обеспечивающих согласованность сигналов связи по видам и
номенклатуре, их информативным параметрам, уровням, пространст-
венно-временны́ м и логическим соотношениям и типу логики. Для
всех изделий ГСП приняты унифицированные сигналы связи и еди-
ные интерфейсы, которые представляют собой совокупность про-
граммных и аппаратных средств, обеспечивающих взаимодействие
устройств в системе. Конструктивная совместимость — совокуп-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
153
ность свойств, обеспечивающих согласованность конструктивных
параметров и механическое сопряжение технических средств, а также
выполнение эргономических норм и эстетических требований при
совместном использовании. Эксплуатационная совместимость —
совокупность свойств, обеспечивающих работоспособность и надеж-
ность функционирования технических средств при совместном исполь-
зовании в производственных условиях, а также удобство обслуживания,
настройки и ремонта. Метрологическая совместимость — сово -
купность выбранных метрологических характеристик и свойств средств
измерений, обеспечивающих сопоставимость результатов измерений
и возможность расчета погрешности результатов измерений при ра-
боте технических средств в составе систем.
По роду используемой энергии носителяинформаци-
онных сигналов устройства ГСП делятся на электрические, пневмати-
ческие, гидравлические, а также на устройства, работающие без ис-
пользования вспомогательной энергии, — приборы и регуляторы
прямого действия. Для того чтобы обеспечить совместную работу
устройств различных групп, применяют соответствующие преобразо-
ватели сигналов. В АСУ наиболее эффективно комбинированное при-
менение устройств различных групп. Достоинства электрических при-
боров общеизвестны. Это в первую очередь высокая чувствительность,
точность, быстродействие, удобство передачи, хранения и обработки
информации. Пневматические приборы обеспечивают повышенную
безопасность при применении в легко воспламеняемых и взрывоопас-
ных средах, высокую надежность в тяжелых условиях работы и агрес-
сивной атмосфере. Однако они уступают электронным приборам по
быстродействию, возможности передачи сигнала на большое расстоя-
ние. Гидравлические приборы позволяют получать точные перемещения
исполнительных механизмов и большие усилия.
Обмен информацией между техническими средствами ГСП реа-
лизуется при помощи сигналов связи и интерфейсов.
В АСУ наиболее распространены электрические сигналы связи,
достоинствами которых являются высокая скорость передачи сигна-
ла, низкая стоимость и доступность источников энергии, простота
прокладки линий связи. Пневматические сигналы применяют в
основном в нефтяной, химической и нефтехимической промышлен-
ности, где необходимо обеспечить взрывобезопасностъ и не требу-
ется высокое быстродействие. Гидравлические сигналы в основном
применяют в гидравлических следящих системах и устройствах управ-
ления гидравлическими исполнительными механизмами.
Информационные сигналы могут быть представлены в естествен-
ном или унифицированном виде. Естественным сигналом называ-
ется сигнал первичного измерительного преобразователя, вид и диа-
пазон изменения которого определяются его физическими свойства-
ми и диапазоном изменения измеряемой величины. Обычно это
выходные сигналы измерительных преобразователей, чаще всего
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
154
электрические, которые можно передать на небольшое расстояние
(до нескольких метров). Таких сигналов в ГСП десять: линейное и
угловое перемещения, усилие, интервалы времени, постоянное и
переменное напряжение, активное и комплексное сопротивление,
электрическая емкость, частота. Вид носителя информации и диа-
пазон изменения унифицированного сигнала не зависят от измеряе-
мой величины и метода измерения. Обычно унифицированный
сигнал получают из естественного с помощью встроенных или внеш-
них нормирующих преобразователей.
Из электрических сигналов наиболее распространены унифици-
рованные сигналы постоянного тока и напряжения. Частотные сиг-
налы используют в телемеханической аппаратуре и комплексе техни-
ческих средств локальных информационно-управляющих систем.
Основные виды унифицированных аналоговых сигналов ГСП при-
ведены в приложении 4.
9.2 . Электро- и пневмосиловые преобразователи
ГСП
Для преобразования измерительной информации в унифициро-
ванный сигнал в ГСП применяются преобразователи, работающие по
принципу силовой компенсации.
Электросиловой преобразователь ГСП (рис. 9.1) преобразует уси-
лие, развиваемое измерительным устройством ИУ, в электрический
сигнал (ток). В основу преобразования «сила — ток» положен принцип
Рис. 9.1. Электросиловой преобразователь ГСП:
1, 9 — рычаги; 2 — подвижная опора; 3 — пружина (корректор нуля); 4 — сердечник;
5 — индикатор рассогласования; 6 — усилитель; 7 — катушка; 8 — постоянный магнит;
F — измеряемое усилие; Fос — усилие обратной связи; Iвых — выходной ток; l1, l2 — пле -
чи рычага; ИУ — измерительное устройств о
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
155
силовой компенсации. Измеряемое усилие F преобразуется в пере-
мещение подвижного сердечника 4 индикатора рассогласования 5,
представляющего собой дифференциально-трансформаторный пре-
образователь, на первичную обмотку которого подается питание, а две
вторичные обмотки подключены к входу усилителя 6. Это усилие F
через подвижную опору 2 уравновешивается усилием обратной связи
Fос, развиваемым магнитоэлектрическим преобразователем, состоя-
щим из стержневого постоянного магнита 8 с П-образным магнито-
проводом, в зазоре которого расположена катушка 7, жестко закреп-
ленная на рычаге 9. Обмотка рамки соединена с выходом электрон-
ного усилителя 6. При изменении значения F равновесие рычажной
системы нарушается, что приводит к перемещению рычага 1 и укреп-
ленного на нем сердечника 4 из магнитомягкого материала. Переме-
щение сердечника 4 преобразуется индикатором перемещения 5 в
электрический сигнал, поступающий на вход электронного усилите-
ля 6, который его усиливает и преобразует в ток Iвых, подаваемый в
линию связи и на вход магнитоэлектрического элемента обратной
связи. При протекании тока Iвых по катушке 7 элемента обратной свя-
зи формируется усилие обратной связи Fос
F
ос = BlIвыхn,
(9.1)
где В — магнитная индукция; l — средняя длина витка катушки;
n — число витков катушки. Перемещение рычага 1 под действием
усилий F и Fос происходит до тех пор, пока не наступит состояние
равновесия:
Fl1 = Fосl2,
(9.2)
где l1 и l2 — плечи рычагов соответственно от точки действия силы F
до неподвижной опоры и от точки действия силы Fос (подвижная
опора 2) до неподвижной опоры.
В состоянии равновесия выходной сигнал преобразователя
«сила — ток» связан с измеряемым усилием F зависимостью
I
l
lВnl
F
вых =
1
2
.
(9.3)
Таким образом, постоянный ток Iвых пропорционален усилию F,
а следовательно, и значению измеряемой физической величины. На-
стройка преобразователя на заданный предел измерения осуществля-
ется перемещением подвижной опоры 2. Начальное значение вы-
ходного сигнала преобразователя устанавливается натяжением пру-
жины 3 (корректора нуля).
Пневмосиловой преобразователь ГСП (рис. 9 .2) преобразует уси-
лие, развиваемое измерительным устройством ИУ, в пневматический
сигнал. Измеряемая физическая величина (давление, температура,
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
156
расход и др.) преобразуется в измерительном устройстве ИУ в про-
порциональное усилие F, которое воздействует на рычаг 1 и связан-
ную с ним заслонку 4. Если заслонка прикрывает неподвижное
сопло 5, что соответствует увеличению силы F, то давление Р0 в
пневмоусилителе 6 увеличивается (при полностью закрытой заслон-
ке давление Р0 равно давлению питания Рпит). Воздух под этим дав-
лением поступает в сильфон обратной связи 7 и является выходным
сигналом Рвых преобразователя. Усилие обратной связи Fос через ры-
чаг 8 передается рычагу 1 и уравновешивает усилие F, воспринимае-
мое рычагом 1 от измерительного устройства ИУ. Таким образом,
положение заслонки 4 относительно сопла 5 и давление Рвых в про-
цессе измерения в каждый момент соответствует значению измеряе-
мой физической величины. При минимальном усилии F заслонка
полностью открывает сопло, полость пневмоусилителя сообщается с
атмосферой и давление Р0 становится равным барометрическому
давлению.
Пределы измерения входного усилия F настраиваются перемеще-
нием подвижной опоры 2. Начальное значение выходного сигнала
Рвых устанавливается натяжением пружины 3 (корректора нуля).
Для состояния равновесия рычага 1 можно записать
Fl1 = Focl2,
(9.4)
где F, Foc — усилия, развиваемые измерительным устройством ИУ и
сильфоном обратной связи 7 соответственно; l1, l2 — плечи этих уси-
лий. Усилие Foc может быть выражено как
F
oc = PвыхSэф,
(9.5)
Рис. 9.2. Пневмосиловой преобразователь ГСП:
1, 8 — рычаги; 2 — подвижная опора; 3 — пружина (корректор нуля); 4 — заслонка;
5 — сопло; 6 — пневмоусилитель; 7 — сильфон обратной связи; F — измеряемое усилие;
Fос — усилие обратной связи; Рвых — давление на выходе; Р0 — давление в пневмоусили-
теле; Рпит — давление питания; l1, l2 — плечи рычага 1; ИУ — измерительное устр ойств о
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
157
где Pвых — давление выхода; Sэф — эффективная площадь сильфона
обратной связи 7.
Тогда давление выхода может быть представлено как
Р
Fl
Sl
вых
эф
=
1
2
.
(9.6)
Диапазон изменения унифицированного пневматического сигна-
ла составляет 0,02 ... 0,1 МПа, поэтому при F = 0 с помощью натяже-
ния пружины 3 (корректора нуля) производится настройка нулевого
сигнала преобразователя. С учетом этой настройки окончательное
выражение для статической характеристики имеет вид
Р
Fl
Sl
вых
эф
=+
1
2
002
,.
(9.7)
В пневмосиловом преобразователе можно изменять диапазон пре-
образования в пределах ± (10 — 20) % за счет изменения соотношения
l1/ l2 в результате перемещения точки опоры 2.
9.3. Нормирующие преобразователи ЭДС
и сопротивления в унифицированный токовый сигнал
Они применяются для введения информации от термопар или
терморезисторов в ЭВМ или в систему автоматического регулирова-
ния и предназначены для преобразования значения термоЭДС или
сопротивления терморезистора в унифицированный сигнал посто-
янного тока 0 ...5 мА.
В основу работы нормирующего пр еобразователя термоЭДС
(рис. 9.3, а) положен компенсационный метод измерения термоЭДС
с использованием схемы потенциометра с переменной силой рабо-
чего тока. Схема состоит из двух контуров: измерительного контура I
и компенсационного контура II. Контур I содержит корректирующий
мост КМ, усилитель У1 с токовым выходом Iвых и резистор Rкн.
К контуру I подсоединена термопара AB. Корректирующий мост
предназначен для введения автоматической поправки на изменение
температуры свободного конца термопары, а также компенсации
начальной термоЭДС в преобразователях, нижний предел измерения
которых не равен 0 °С. К диагонали ab питания моста подведено
стабилизированное напряжение постоянного тока. Резисторы R1, R2
и R3 — манганиновые, резистор Rм — медный. Усилитель У1 выпол-
няет функции нуль -индикатора. Контур компенсации II включает в
себя резистор Rкн и усилитель обратной связи У2. Этот усилитель
аналогичен усилителю У1, но включе н с глубокой отрицательной
связью по выходному току усилителя. Выходной ток Iос усилителя У2
является рабочим током контура II; при прохождении этого тока по
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
158
сопротивлению Rкн на нем со стороны контура II создается компен-
сирующее напряжение Uкн = IосRкн.
ТермоЭДС, развиваемая термопарой, равна ЕАВ(θ; θ1) где θ и θ1 — тем-
пературы горячего и холодного концов термопары. Напряжение, снимаемое
с измерительной диагонали КМ, равно термоЭДС, развиваемой термопарой
при температуре окружающей среды θ1: Ucd = EAB(θ1, θ0), где θ0 — темпера-
тура холодного конца, равная 0 °С. Таким образом, на один вход усили-
теля У1 поступает суммарный сигнал DU = EAB(θ, θ0), состоящий из
значения термоЭДС, приведенному к 0 °С
EAB(θ, θ0) = EAB(θ, θ0) + Ucd = EAB(θ, θ́0) + Ucd = EAB(θ1, θ0),
и падения напряжения на нормирующем компенсационном резисто-
ре Rкн:
Uкн = IосRкн.
За счет усиленного сигнала небаланса, равного DU = ЕАВ(θ, θ0) - Uкн,
на выходе усилителя У1 создается ток Iвых, ко торый поступает во
внешнюю цепь Rвн и далее в усилитель обратной связи У2. Выходной
ток Iос этого усилителя, создающий падение напряжения Uкн на ре-
Рис. 9.3. Нормирующие преобразователи в унифицированный токовый
сигнал:
а — ЭДС; б — сопротивления; I — измерительный контур; II — компенсационный
контур; У1, У2 — усилители; КМ — корректирующий мост; ИМ — измерительный
мост; Rм — медный терморезистор; Rt — терморезистор; R1 ... R4 — постоянные сопро-
тивления из манганина; Rвн — сопротивление внешней нагрузки; Rкн — нормирующий
компенсационный резистор; Iвых — ток выхода; Iос — ток обратной связи; Uпит — на-
пряжение питания; DU — напряжение небаланса; EАВ — преобразуемая термоЭДС; a,
b, c, d — в ершины КМ (ИМ); А, В — электроды термопары; Rл — подгоночные сопро-
тивления
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
159
зисторе Rкн, будет изменяться до тех пор, пока небаланс DU не до-
стигнет некоторой малой величины dU, называемой статической
ошибкой компенсации. Наличие этой ошибки приводит к тому, что
в измерительном контуре I проходит нескомпенсированный ток (чем
больше измеряемая термоЭДС, тем больше этот ток).
Исключить эту ошибку в устройствах, выполненных по статиче-
ской автокомпенсационной схеме, принципиально невозможно, так
как выходной ток преобразователя Iвых и ток контура компенсации
Iос определяются наличием этой ошибки и пропорциональны ей.
В то же время статическая ошибка автокомпенсационной схемы мо-
жет быть значительно уменьшена, если использовать усилитель с
большим коэффициентом усиления.
Измеряемая термоЭДС EAB(θ, θ0) связана с выходным током пре-
образователя Iвых следующим образом. Как уже отмечалось, напря-
жение небаланса на входе У1:
D
U = EAB(θ, θ0) - Uкн.
(9.8)
На выходах усилителей У1 и У2 формируются сигналы
Ik
Ik
U
R
выхв
х
вх
==
11
D
,
(9.9)
I
ос = k2Iвых,
(9.10)
где k1 и k2 — коэффициенты усиления усилителей У1 и У2; Iвх = DU/ Rвх —
ток, создаваемый во входной цепи усилителя У1 сигналом DU; Rвх —
сопротивление входной цепи усилителя У1.
Падение напряжения на резисторе Rкн с учетом (9.10) составит
Uкн = IосRкн = k2IвыхRкн.
(9.11)
Если подставить в выражение (9.9) DU и Uкн из формул (9.8) и
(9.11), то выходной ток можно найти как
Iвых = kEАВ(θ, θ0),
(9.12)
где k
RkkR
=
+
1
12
вх
кн
—
коэффициент преобразования нормирую-
щего преобразователя; при k1 → ∞, k = 1/ (k2Rкн).
Таким образом, выходной токовый сигнал нормирующего преоб-
разователя пропорционален скорректированному по температуре
холодного конца сигналу термопары.
В зависимости от диапазона входного сигнала нормирующие пре-
образователи, работающие в комплекте с термопарой, имеют классы
точности 0,6 ... 1,5.
Нормирующий преобразователь сопротивления в унифицирован-
ный токовый сигнал, работающий в комплекте с термопреобразова-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
160
телем сопротивления, по схеме и принципу действия аналогичен
нормирующему преобразователю ЭДС, рассмотренному выше. От-
личие указанных схем заключается в том, что в преобразователе со-
противления (рис. 9 .3, б ) вместо корректирующего моста использу-
ется измерительный неравновесный мост ИМ, в одно из плеч кото-
рого по трехпроводной схеме включен термопреобразователь
сопротивления Rt. Остальные сопротивления выполнены из манга-
нина. Сопротивления Rл служат для подгонки сопротивления соеди-
нительных проводов до номинального значения. К диагонали питания
моста ab подведено стабилизированное напряжение постоянного
тока. Выходной ток преобразователя Iвых пропорционален напряже-
нию Ucd в измерительной диагонали моста, и соотношение между
ними может быть представлено в виде
I
вых = kUcd.
(9.13)
Так как Ucd = kмRt, где kм — коэффициент преобразования моста, то
I
вых = kkмRt.
(9.14)
Таким образом, токовый сигнал нормирующего преобразователя
пропорционален текущему значению сопротивления терморезистора.
Классы точности рассматриваемого преобразователя 0,6 ... 1,5.
9.4. Интеллектуальные датчики
В последние годы появился новый класс датчиков — так называе -
мые интеллектуальные датчики. Их наиболее характерная особен-
ность — возможность не только передавать информацию об объекте
на вышестоящий уровень, но и воспринимать сигналы, поступающие
с этого уровня; можно сказать, что в отличие от обычных датчиков
интеллектуальные датчики являются устройствами с обратной связью.
Они способны самостоятельно подстраиваться под условия эксплуа-
тации и постоянно регулировать свою чувствительность. Обработка
измерений непосредственно в самом датчике увеличивает объемы
обрабатываемой информации и скорость ее обработки. Самая ценная
возможность, предоставляемая интеллектуальным датчиком, — воз-
можность получения линейного сигнала от нелинейного чувствитель-
ного элемента при помощи таблицы со ответствия, хранящейся в
памяти. Этот фактор позволяет создавать интеллектуальные датчики
с очень низкой нелинейностью.
К интеллектуальным датчикам относят датчики, имеющие в сво-
ем составе АЦП, специализированный микропроцессор, сетевой
контроллер для организации односторонней или двусторонней связи
с ПЭВМ по интерфейсам RS-232, RS-485, а также посредством про-
токолов более высокого уровня: Profibus, Fieldbus Foundation. Такие
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
161
устройства осуществляют внутреннюю коррекцию получаемого ана-
логового сигнала; в них могут использоваться протоколы связи типа
HART, Modbus и др. Настройка параметров и режимов работы, диа-
гностика и калибровка интеллектуальных датчиков осуществляется
либо локально (вручную с помощью коммуникаторов различных
типов), либо непосредственно с пульта управления. Это дает возмож-
ность исключить промежуточные звенья в цепи распределенных
систем — программно-логические контроллеры, упростить техниче-
ское обслуживание за счет дистанционной диагностики и конфигу-
рирования. Именно датчики этой группы в полной мере являются
интеллектуальными.
Интеллект датчиков обеспечивает выполнение некоторого набора
из следующих функций: 1) первичная обработка информации в самом
датчике; 2) тарировка характеристик для повышения точности из-
мерения; 3) перепрограммирование характеристики преобразования
(изменение привязки нуля характеристики и перестройка диапазона
измерения); 4) накопление данных за определенное время с их при-
вязкой к сетке времени для пакетной передачи информации в циф-
ровой форме; 5) самотестирование; 6) формирование выходных
данных в унифицированной аналоговой и/ или цифровой форме;
7) реализация режима периодической подачи и отключения питания
и других способов минимизации энергопотребления; 8) использова-
ние сторожевого таймера для предотвращения потери программного
управления; 9) передача данных в цифровой форме по унифициро-
ванному радиоканалу.
Общая структурная схема интеллектуального датчика показана на
рис. 9.4. Измеряемый физический параметр воспринимается чувстви-
тельным элементом, на выходе которого возникает электрический
сигнал, соответствующий значению параметр а. В памяти датчика
содержится эталонная (паспортная) характеристика преобразования.
При помощи одной из подпрограмм она сравнивается с текущей
характеристикой датчика, и по результатам этого сравнения в резуль-
тат измерения вносится коррекция (поправка). В зависимости от того,
в состав какой системы автоматизации входит датчик, используется
либо аналоговый выходной сигнал, либо цифровой. Передача циф-
ровых данных осуществляется либо по той же паре проводников, при
помощи которой подается напряжение питания и которая использу-
ется для передачи выходного аналогового сигнала, либо через общую
для ряда датчиков цифровую проводную сеть. В случае значительно-
го удаления датчиков от основных средств системы автоматизации
датчик с помощью отдельных специальных средств телемеханики
может общаться с контроллером по радиоканалу.
Таким образом, по сравнению с обычными, традиционными дат-
чиками современные интеллектуальные датчики обеспечивают:
1) резкое уменьшение искажений измерительной информации на
пути от датчика к контроллеру, так как вместо низковольтного ана-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
162
логового сигнала по кабелю, соединяющему датчики с контроллером,
идут цифровые сигналы, на которые электрические и магнитные
промышленные помехи оказывают несравнимо меньшее влияние;
2) увеличение надежности измерения благодаря самодиагностике
датчиков, так как каждый датчик сам оперативно сообщает операто-
ру факт и тип возникающего нарушения, тем самым исключая ис-
пользование для управления некачественных и/ или недостоверных
измерений;
3) возможность использования принципов измерения, требующих
достаточно сложной вычислительной обработки выходных сигналов
сенсора, но имеющих ряд преимуществ перед традиционно исполь-
зуемыми принципами измерения по точности, стабильности показа-
ний, простоте установки и обслуживания датчика в процессе его
эксплуатации;
4) возможность построения мультисенсорных датчиков, в которых
преобразователь получает и перерабатывает сигналы ряда однотипных
или разнотипных чувствительных элементов;
5) возможность проведения всей необходимой первичной пере-
работки измерительной информации в датчике и выдачи им искомо-
Рис. 9 .4 . Общая структурная схема интеллектуального датчика
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
163
го текущего значения измеряемой величины в заданных единицах
измерения;
6) возможность передачи в систему автоматизации не только те-
кущего значения измеряемой величины, но и добавочных сигналов
о выходе его за пределы заданных норм, а также возможность пере-
дачи по сети не каждого текущего измеряемого значения, а только
изменившегося по сравнению с предыдущим значения или вышед-
шего за пределы заданных норм значения, или значения, требующе-
го управляющего воздействия;
7) наличие в датчике базы данных для хранения значений изме-
ряемой величины за заданный длительный интервал времени;
8) возможность дистанционно с пульта оператора в оперативном
режиме выбирать диапазон измерения датчика, устанавливать ноль
прибора;
9) возможность путем программирования работы датчика на до-
статочно простом технологическом языке реализовывать в нем про-
стые алгоритмы регулирования, программного управления, блоки-
ровок механизмов;
10) возможность строить достаточно простые цепи регулирования,
программного управления, блокировок на самом нижнем уровне
управления из трех компонентов: интеллектуальных датчиков, по-
левой сети и интеллектуальных исполнительных механизмов, не за-
гружая этими вычислительными операциями контроллеры, что по-
зволяет использовать мощность контроллеров для реализации в них
достаточно сложных и совершенных алгоритмов управления.
9.5 . Элементы промышленной пневмоавтоматики
Пневмоавтоматика используется на взрыво- и пожароопасных
объектах, например при подготовке природного газа к дальнему
транспорту. Эти элементы относятся к пневматической ветви ГСП,
использующей в качестве основного источника энергии сжатый воз-
дух. Рабочий диапазон изменения входных и выходных пневматиче-
ских сигналов приборов и средств автоматизации обычно находится
в пределах 20... 100 кПа. Номинальное нормальное питающее давле-
ние сжатого воздуха составляет 140 кПа. Допустимое отклонение
давления питания установлено в пределах ± 10 % от номинального
значения. В вычислительных пневматических приборах используется
также низкий диапазон рабочих давлений 0 ... 1 000 Па.
Все пневматические регуляторы, как правило, состоят из отдель-
ных пневматических элементов: пневмосопротивлений, пневмоем-
костей, пневмоповторителей, элементов сравнения, пневмореле
и т. п. Их принцип действия аналогичен соответствующим элементам
электрических цепей, что позволяет применить при исследовании
пневматических цепей известные законы электрических цепей.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
164
При течении воздуха по каналу имеют место потери давления
вследствие вязкостного трения о стенки канала и трения между воз-
душными слоями. В местах сужения канала силы вязкостного трения
и потери давления будут значительно больше, чем на других его
участках. Таким образом, дроссели, капилляры и другие сужения
являются элементами, воспроизводящими пневмосопротивления.
Пневматической емкостью тела или устройства по аналогии с элек-
трической емкостью можно назвать его способность вмещать (на-
капливать) некоторое количество воздуха вследствие его сжимаемо-
сти.
В качестве пневматических емкостей в пневмонике применяются
пневматические камеры определенного объема. Как правило, они
используются совместно с дросселями и делятся на два типа: про-
точные и непроточные. В проточных камерах имеются один или не-
сколько входных дросселей, через которые воздух поступает в камеру,
и один или несколько выходных дросселей, через которые воздух вы-
текает из камеры. Непроточная камера имеет лишь один дроссель,
через который она сообщается с окружающей средой или с другой
пневматической камерой.
Универсальная система элементов промышленной пневмоавтома-
тики (УСЭППА) позволяет строить приборы пневмоавтоматики по
принципу электронных приборов.
Система состоит из набора унифицированных элементов дискрет-
ного и непрерывного действия, каждый из которых выполняет одну
простейшую операцию. Монтаж элементов в схемы ведется на комму-
тационных платах, внутри которых проходят каналы, необходимые для
соединения элементов друг с другом.
УСЭППА включает пневмосопротивления, пневмоемкости, уси-
лители, повторители, пневмореле, сдвоенный обратный клапан,
органы управлении (задатчики, кнопки, тумблеры), дискретные пре-
образователи, коммутирующие органы (пневмоклапаны).
На элементах УСЭППА могут быть созданы узлы непрерывного,
дискретного и непр ерывно-дискретного действия, которые часто
встречаются в различных пневматических схемах. Так, на этих эле-
ментах строятся устройства системы СТАРТ, включающие регулято-
ры, функциональные и контрольные приборы.
9.6. Исполнительные устройства
Технические средства использования командной информации и
воздействия на объект управления образуют выходную функциональ-
ную группу изделий ГСП. Эти технические средства обычно называ-
ют исполнительными устройствами. Исполнительное устройство
(ИУ) — это силовое устройство, предназначенное для изменения
регулирующего воздействия на объект управления в соответствии с
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
165
сигналом управления, поступающим на его вход от командного
устройства (блока ручного управления, регулятора, контроллера,
управляющей ЭВМ). Исполнительное устройство в общем случае
состоит из двух основных частей: исполнительного механизма (ИМ)
и регулирующего органа (РО). исполнительный механизм преоб-
разует входную командную информацию в определенное силовое
воздействие на регулирующий орган объекта управления или на сам
объект управления. Он не только изменяет состояние управляемого
объекта, но и перемещает регулирующий орган в соответствии с за-
данным законом регулирования при минимально возможных откло-
нениях. Регулирующий орган производит непосредственное регули-
рующее воздействие на объект управления. В большинстве случаев
исполнительный механизм действует от посторонних источников
энергии, так как непосредственное управление исполнительным
механизмом от первичных элементов регулирования (микропроцес-
соров, реле, датчиков) невозможно вследствие их малой мощности,
недостаточной для воздействия на регулирующий орган.
Классификация исполнительных механизмов производится прежде
всего по виду энергии, создающей усилие (момент) перемещения
регулирующего органа. Соответственно, ИМ бывают пневматические,
гидравлическиеиэлектрические.В пневматических ИМусилие
перемещения создается за счет давления сжатого воздуха на мембра-
ну, поршень или сильфон; давление обычно не превышает 103 кПа.
В гидравлических ИМусилиеперемещения создается за счет
давления жидкости на мембрану, поршень или лопасть; давление
жидкости в них обычно находится в пределах (2,5... 20) ·10 3 кПа.
Электрические ИМ по принципу действия подразделяются на
электродвигательные (электромашинные) и электромагнитные. Су-
ществуют ИМ, в которых используются одновременно два вида
энергии: электропневматические, электрогидравлические и пневмо-
гидравлические. Вид энергии управляющего сигнала может отличать-
ся от вида энергии, создающей усилие перемещения.
По характеру движения выходного элемента большинство ИМ
подразделяются на п р я м о х о д н ы е с поступательным движением
выходного элемента, п о в о р о т н ы е с вращательным движением до
360° (однооборотные) и с вращательным движением на угол более
360° (многооборотные).
В электрических системах автоматизации и управления наиболее
широко применяются электромашинные и электромагнитные исполни-
тельныемеханизмы.Основнымэлементомэлектромашинного
ИМ является электрический двигатель постоянного или переменного
тока. Такие исполнительные механизмы обычно называют электро-
приводами. Электромагнитные ИМ дискретного действия выполняют-
ся в основном на базе электромагнитов постоянного и переменного тока
и постоянных магнитов. Жесткое и упругое соединение узлов систем
осуществляют различного рода электромагнитные муфты.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
166
Регулирующие органы имеют самые разнообразные конструкции,
зависящие от объекта управления. По виду воздействия на объект их
можно подразделить на два основных типа: дросселирующие и до-
зирующие. Дросселирующие РО изменяют сопротивление
(гидравлическое, аэродинамическое) в системе путем изменения
своего проходного сечения, воздействуя на расход вещества (напри-
мер, заслонки, диафрагмы, задвижки, краны, клапаны). Д о з и р у ю щ и е
РО выполняют заданное дозирование поступающего вещества или
энергии за счет изменения производительности определенных агре-
гатов: дозаторов, насосов, компрессоров, питателей, электрических
усилителей мощности.
В настоящее время создается новое поколение ИМ — интеллек -
туальные ИМ. Это связано с появлением интеллектуальных систем
управления, под которыми понимаются системы, ориентированные
на обработку и использование знаний. В интеллектуальной системе
можно выделить следующие слои обработки неопределенной инфор-
мации (слои интеллектуальности): прогноз событий; самообучение
и адаптация; работа с базами событий, знаний и формирование ре-
шений; исполнительный слой. В самом нижнем исполнительном слое
могут использоваться классические модели систем автоматического
управления. Слои более высокого ранга можно рассматривать как
надстройку над классическими моделями, соответствующую совре-
менным информационным технологиям работы со знаниями и су-
щественно расширяющую возможности этих моделей. В зависимости
от того, сколько слоев интеллектуальности имеет та или иная систе-
ма, их можно подразделить на системы со степенью интеллектуаль-
ности в малом, в большом и в целом. Под интеллектуальным испол-
нительным механизмом (приводом) обычно понимается привод с
системой управления, имеющей степень интеллектуальности в малом.
Это означает, что функционирование системы управления привода
ограничено двумя нижними слоями интеллектуальности. Интеллек-
туальный ИМ способен совершать сложные траекторные движения,
контролировать свое состояние и адаптироваться к изменениям
внешней среды.
Создание интеллектуальных ИМ неразрывно связано с развитием
мехатроники — области науки и техники, которая занимается управ-
лением механизмов от ЭВМ. Мехатронная (механико-электронная)
система представляет собой единую систему механических, электро-
механических, электрических и электронных узлов, между которыми
осуществляется обмен энергией и информацией. Одним из основных
принципов мехатронного подхода к созданию исполнительных меха-
низмов нового поколения заключается в переносе функциональной
нагрузки от механических узлов к интеллектуальным компонентам
(электронным, компьютерным и информационным), которые гораз-
до легче перепрограммируются под новые задачи и в настоящее
время относительно недороги.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
Для интеллектуальных мехатронных устройств характерен принцип
модульности. Существует пять групп стандартных модулей. Первая
группа — двигатели (электрические двигатели, преобразующие элек-
трическую энергию в механическую). К этой группе относятся асин-
хронные трехфазные двигатели, исполнительные асинхронные микро-
двигатели, исполнительные двигатели постоянного тока, синхронные
шаговые двигатели. Вторая группа — силовые преобразователи, ис-
точники электрической энергии для управляемого двигателя. Вход и
выход у этих модулей электрический; к их числу относятся управляе-
мые выпрямители, широтно-импульсные преобразователи, преобра-
зователи частоты, электронные и магнитные усилители мощности
переменного тока. В третью группу входят передаточные устрой-
ства — механические устройства для соединения вала двигателя с
регулирующим органом объекта управления. Вход и выход у таких
модулей механический; к их числу относятся муфты, кинематические
механизмы типа редукторов и тормозные устройства. Четвертую груп-
пу образуют датчики, преобразующие скорость и/ или перемещение
в электрический сигнал. В качестве измерителей скорости и переме-
щения широко применяются тахогенераторы, поворотные трансфор-
маторы, сельсины. И наконец, пятая группа модулей — контроллеры,
микропроцессорные системы, предназначенные для управления си-
ловым преобразователем с целью реализации требуемого режима ра-
боты двигателя, соответствующего заданному закону перемещения
регулируемого органа объекта управления. Вход и выход таких модулей
электрический; обмен информацией контроллера с силовым преоб-
разователем, датчиком и, при необходимости, вышестоящей управ-
ляющей ЭВМ осуществляется на основе стандартных интерфейсов.
Таким образом, интеллектуальный мехатронный исполнительный
механизм — это объединение перечисленных модулей, снабженное
необходимым программным обеспечением для контроллера.
Контрольные вопросы
1. Какие принципы положены в основу построения ГСП?
2. Что такое естественный выходной сигнал?
3. Какие унифицированные сигналы предусмотрены в ГСП?
4. На какие группы делятся устройства ГСП по роду используемой энергии?
5. Что такое принцип силовой компенсации?
6. Как вводится поправка на температуру свободных концов термопары в
нормирующем преобразователе ЭДС в унифицированный токовый сиг-
нал?
7. Объясните понятие «интеллектуальный датчик».
8. Что означает аббревиатура УСЭППА?
9. Что такое исполнительное устройство и из каких частей оно состоит?
10. Как классифицируются регулирующие органы по виду воздействия на
объект?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
168
Глава 10
РЕЛЕЙНЫЕ ЭЛЕМЕНТЫ
10.1. Понятие релейного элемента. Виды реле
Реле (англ. relay — смена, эстафета) являются одним из наиболее
распространенных элементов в системах автоматики, предназначен-
ных для автоматической коммутации электрических цепей по внеш-
нему сигналу. Любое релейное устройство состоит из релейного
элемента с двумя состояниями устойчивого равновесия и группы
электрических контактов, которые замыкаются или размыкаются при
изменении состояния релейного элемента. Это устройство является
промежуточным элементом, назначение которого — инициировать
управляемую цепь при получении некоторого сигнала от управляю-
щей цепи (рис. 10 .1, а).
Релейным элементом или реле называется устройство, в котором
при достижении входной величиной Х определенного значения вы-
ходная величина Y меняется скачкообразно. Типичная характеристи-
ка релейного элемента показана на рис. 10.1, б. При изменении
входной величины от 0 до Х2 выходная величина остается постоянной
и равной Y1. Когда Х становится равным Х2 (Х = Х2), выходная вели-
чина скачком изменяется от значения Y1 до Y2 и при дальнейшем
увеличении Х остается неизменной. При уменьшении входной вели-
чины до значения Х1 (Х = Х1) выходная величина скачком уменьша-
ется до значения Y1 и сохраняет это значение при уменьшении Х до
нуля. Значение Х2 называется величиной срабатывания реле, а Х1 —
величиной отпускания.
Рис. 10.1. Релейное устройство:
а — схема включения в системах автоматики; б — характеристика релейного элемента:
X — входная в еличина; Y — выходная в еличина
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
169
Реле используются в системах автоматики для выполнения сле-
дующих операций: 1) управление большими выходными мощностями
посредством входных электрических сигналов сравнительно малой
мощности; 2) коммутация электрических цепей; 3) фиксация откло-
нения контролируемого параметра от заданного уровня; 4) выполне-
ние функций запоминающего или логического элемента и т. д .
Реле классифицируются по различным признакам. По роду вос-
принимаемой величины все реле делятся на электрические и неэлек-
трические (механические, тепловые, оптические, акустические и др.) .
По назначению реле делятся на реле защиты, контроля и управления.
Наиболее р аспростр аненной группой являются электрические
реле. По принципу действия они делятся на электромагнитные, маг-
нитоэлектрические, электродинамические и др. По способу комму-
тации управляемой цепи реле делятся на контактные и бесконтакт-
ные. Контактные реле воздействуют на управляемую цепь с помо-
щью контактов, замкнутое или разомкнутое состояние которых
изменяет сопротивление электрической цепи практически от 0 до ∞,
при этом имеет место или полное замыкание, или полный физиче-
ский разрыв управляемой цепи. Электрические контактные реле
представляют собой устройства, в которых входная электрическая
величина (ток, напряжение, частота) преобразуется в механическое
перемещение подвижной части, связанной с контактной системой
(поэтому эти реле часто называют электромеханическими). При по-
даче на вход сигнала определенного значения механическое пере-
мещение подвижной части реле обеспечивает замыкание или раз-
мыкание контактов, включенных в управляемую цепь. Электрические
контактные реле могут быть электромагнитными, магнитоэлектри-
ческими, электродинамическими и др. При воздействии на управ-
ляемую цепь бесконтактных реле происходит скачкообразное из-
менение параметров выходных электрических цепей (сопротивления,
например) или изменения уровня напряжения (тока). При этом на-
рушения гальванических связей не происходит, т. е . коммутация
осуществляется без механического разрыва электрической цепи.
10.2 . Электромагнитные реле постоянного
и переменного тока. Их характеристики
Электромагнитные реле (ЭМР) являются наиболее распростра-
ненным типом реле. Принцип действия ЭМР основан на взаимодей-
ствии ферромагнитного якоря с магнитным полем обмотки, по ко-
торой протекает ток, в результате чего происходит механическое
перемещение подвижной части, связанной с контактной системой.
ЭМР выполняют следующие функции: 1) гальваническая развяз-
ка между цепью управления и цепью нагрузки реле; 2) размножение
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
170
одного управляющего сигнала на несколько выходных сигналов;
3) усиление мощности управляющего сигнала; 4) независимое одно-
временное управление несколькими выходными цепями с различны-
ми уровнями тока и напряжения; 5) разделение цепей с различными
мощностями, а также цепей переменного и постоянного тока; 6) пре-
образование и нормирование уровней электрических сигналов.
По роду входного тока различаютреле постоянного тока
и реле переменного тока; реле постоянного тока, в свою очередь, под-
разделяются на нейтральные реле, работа которых не зависит от по-
лярности приложенного напряжения, и поляризованные реле, работа
которых определяется полярностью входного сигнала. По ч и с л у
обмоток различаютодно-имногообмоточныереле,апочислу
контактных групп —мало-имногоконтактныереле.
Нейтральные ЭМР постоянного тока обычно выполняются с
внешним притягивающимся якорем (рис. 10 .2, а). Такое реле пред-
ставляет собой электромагнитный механизм и ряд контактных групп,
установленных на одном основании 5. Магнитопровод электромаг-
нита состоит из ярма (корпуса) 11, сердечника 8 и якоря 6, выпол-
ненных из магнитомягкой стали. На сердечнике помещается каркас 9
с одной или несколькими обмотками 10. При протекании по обмот-
ке электрического тока якорь притягивается к сердечнику. Движение
якоря через непроводящий штифт 3 передается на одну из контактных
пружин 4, в результате чего происходит замыкание подвижного 1 и
Рис. 10 .2 . Нейтральное электромагнитное реле клапанного типа:
а — конструкция; б — временная диаграмма работы; 1 — подвижный контакт; 2 — не -
подвижный контакт; 3 — непроводящий штифт; 4 — контактные пружины; 5 — осно -
вание; 6 — якорь; 7 — штифт отлипания; 8 — сердечник; 9 — каркас; 10 — о бмотка;
11 — ярмо; 12 — возвратная пружина; I — ток в катушке реле; t — время; Iот — ток от-
пускания; Iтр — ток трогания; Iср — ток срабатыв ания; Iуст — установившееся значение
тока; tтр — время трогания; tдв — время движения; tраб — время работы; tср — время сра-
батывания; tот — время отпускания; A — точка срабатывания (момент замыкания кон-
тактов); B — точка устойчив ой работы; C — точка снятия сигнала; D — точка отпуска-
ния (момент размыкания контактов); а, b — точки начала движения якоря
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
171
неподвижного 2 контактов. Чтобы обеспечить возврат якоря в ис-
ходное положение после обесточивания обмоток (т. е . предупредить
залипание якоря), на якоре предусматривается штифт отлипания 7.
В исходном положении якорь удерживается контактными пружинами.
Иногда для этого дополнительно используют специальные возвратные
пружины 12.
Временная диаграмма работы реле (зависимость тока в обмотке I
от времени t) приведена на рис. 10.2, б. За счет индуктивности ка-
тушки реле ток в ней нарастает (убывает) не мгновенно, а постепен-
но. Работа реле делится на четыре этапа. Этап I — срабатывание реле.
Длительность этого этапа — время полного срабатывания tср, т. е . про-
межуток времени от момента подачи напряжения на катушку реле до
момента замыкания контактов (точка А). Этот промежуток склады-
вается из двух составляющих — времени трогания якоря tтр и време-
ни его движения tдв. При подаче напряжения на катушку реле ток в
ней начинает возр астать, что приводит к увеличению магнитного
потока и электромагнитного притягивающего усилия. В тот момент,
когда его значение достигнет значения противодействующего меха-
нического усилия (оно создается возвратными и контактными пру-
жинами), якорь трогается с места (этому соответствует значение
тока Iтр). По мере уменьшения зазора между сердечником и движу-
щимся якорем скорость движения якоря возрастает, и в момент до-
стижения током значения тока срабатывания Iср якорь притягивается
к сердечнику, его движение прекращается (реле срабатывает). Таким
образом, время полного срабатывания tср = tтр + tдв.
Этап II — работа реле (tраб — время работы реле). После того как
реле сработает, ток в обмотке продолжает увеличиваться (участок
А—В), пока не достигнет установившегося значения Iуст. Участок А—В
необходим для того, чтобы обеспечить надежное притяжение якоря
к сердечнику, исключающее вибрацию якоря при сотрясениях реле.
В процессе работы значение тока в обмотке реле остается неизмен-
ной. Отношение установившегося тока Iуст. к значению тока сраба-
тывания Iср назыв ается коэффициентом запаса реле по срабатыва-
нию Kз (т. е . этот коэффициент характеризует надежность работы
реле):
K
з = Iуст/Iср = 1,5 ...2.
(10.1)
Этап III — отпускание реле. Этот период длится от момента пре-
кращения подачи напряжения на обмотку реле (точка С) до момента,
когда ток в обмотке реле уменьшится до значения Iот (точка D — пре-
кращение воздействия реле на управляемую цепь). На участке CD
также различают участок трогания якоря (Сb) и участок его движения
(bD). Отношение тока отпускания к току срабатывания называется
коэффициентом возврата:
K
в = Iот/Iср = 0,4 ...0,8.
(10.2)
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
172
Этап IV — покой реле. Это отрезок времени от момента размыка-
ния контактов реле (точка D) до момента поступления нового сигна-
ла на обмотку реле. При быстром следовании управляющих сигналов
друг за другом работа реле характеризуется максимальной частотой
срабатывания (количество срабатываний реле в единицу времени).
Рассмотренное ЭМР постоянного тока является нейтральным,
так как оно реагирует только на величину входного сигнала и нечув-
ствительно к его направлению (полярности). Существуют также реле,
реагирующие не только на величину, но и на полярность входного
сигнала. Такие реле называются поляризованными. В них направле-
ние тягового усилия и, следовательно, перемещение якоря и пере-
ключение контактов зависят от полярности сигнала постоянного тока,
подаваемого в обмотку реле.
Электромагнитные реле переменного тока по принципу дей-
ствия в основном аналогичны реле постоянного тока. Однако пере-
менный ток обусловливает некоторые особенности работы реле. При
синусоидальной форме кривой напряжения, подаваемого на обмотку
реле, значение намагничивающего тока i в ненасыщенной магнитной
системе
i
= Imsinωt,
(10.3)
где Im — амплитудное значение тока; ω — частота напряжения пита-
ния; t — время.
По такому же закону будет изменяться и магнитный поток в ра-
бочем зазоре. Поскольку электромагнитное тяговое усилие Fэ про-
порционально квадрату тока, при синусоидальном намагничивающем
токе будем иметь
FFt
F
tFF
m
m
ээ
э
==
-
()
=+
sinc
os
,
~
2
2
12
ωω
(10.4)
где Fm — амплитудное значение тягового усилия; Fэ = Fm/ 2 и Fэ~
—
соответственно постоянная и переменная составляющие тягового
усилия.
Таким образом, при переменном токе тяговое усилие, сохраняя
постоянное направление, изменяется (пульсирует) с частотой, равной
удвоенной частоте 2ω приложенного напряжения. Поэтому якорь
электромагнита будет вибрировать, периодически оттягиваясь от
сердечника противодействующим усилием, что делает реле нерабо-
тоспособным. Для устранения вибрации в ЭМР переменного тока
чаще всего используют короткозамкнутый виток и многофазное пи-
тание. В этих реле на якорь действуют два потока, сдвинутые по фазе
относительно друг друга, и результирующее тяговое усилие никогда
не обращается в ноль, поскольку оба потока проходят через ноль в
разные моменты времени.
В реле с короткозамкнутым витком последний охватывает одну
из двух частей разрезанного конца сердечника, обращенного к якорю
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
173
(рис. 10.3, а). Короткозамкнутую обмотку выполняют обычно из
одного или нескольких массивных витков и часто называют экраном.
Протекающий по основной обмотке переменный ток создает пере-
менный магнитный поток Ф, который разветвляется в полюсе сер-
дечника на два потока Ф1 и Ф2; при этом один поток проходит через
свободную часть полюса, другой — через экранированную. Наличие
короткозамкнутой обмотки замедляет изменение магнитного потока,
создаваемого основной обмоткой. Такое тормозящее действие корот-
козамкнутой обмотки определяется законом электромагнитной ин-
дукции. Поэтому переменный поток Ф2, проходящий чер ез часть
конца сердечника, охваченного экраном, отстает по фазе от потока
Ф1, проходящего через другую часть конца сердечника. В результате
на якорь действуют два магнитных потока, сдвинутых по фазе на угол φ
(рис. 10 .3, б ). Эти потоки будут создавать соответственно тяговые
усилия Fэ1 и Fэ2:
F
FF
t
mm
э1
11
22
2
=-cos;
ω
(10.5)
F
FF
t
mm
э2
22
22
22
=-
-
cos(
).
ωφ
Суммарное тяговое усилие, создаваемое обоими потоками,
F
э0 =Fэ1+Fэ2 =Fэ+Fэ~,
(10.6)
Рис. 10.3. Электромагнитное реле переменного тока с короткозамкнутым
витком:
а — схема; б — изменение магнитного потока и тяговых усилий в о времени; U — пере-
менное напряжение; Ф, Ф1, Ф2 — переменные магнитные потоки; Fэ, Fэ1, Fэ2, Fэ0 — тя -
говое усилие; t — время
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
174
где F
FF
э
ээ
=
+
12
2
—
постоянная составляющая тягового усилия; Fэ~
—
переменная составляющая тягового усилия (определяемая геометрическим
сложением векторов
1
2
1
2
1
FF
ээ
2
и,
и сдвинутых по фазе относительно
друг друга на угол 2φ).
Как видно, суммарное тяговое усилие ни в какой момент времени
не обращается в ноль и, следовательно, всегда существует усилие,
удерживающее якорь от вибрации. Для полного устранения пере-
менной составляющей необходимо, чтобы F1m = F2m и фазовый угол
между потоками Ф1 и Ф2 составлял φ = π/ 2. Однако последнее условие
в этой конструкции невыполнимо, так как φ = π/ 2 может быть толь-
ко при активном сопротивлении короткозамкнутого витка, равном
нулю. Практически достигают φ ≈ 60° и при F1m ≈ F2m = Fm значение
Fэ1 ≈ Fэ2 ≈ Fm/ 2, т. е . усилие никогда не становится меньше половины
постоянной составляющей. Двухфазное реле имеет магнитопровод
из двух отдельных стержней с самостоятельными обмотками и один
общий якорь. По обмоткам протекают токи I1 и I2, сдвинутые по
фазе относительно друг друга за счет включения в одну из обмоток
фазосдвигающего элемента — емкости . Якорь находится под дей-
ствием тяговых усилий, создаваемых магнитными потоками Ф1 и Ф2
обоих стержней. Суммарное тяговое усилие определяется выраже-
нием (10.6). Если бы угол сдвига фаз между потоками Ф1 и Ф2 со-
ставлял φ = π/ 2, а создаваемые потоками тяговые усилия были
равны по амплитуде (F1m = F2m = Fm), то суммарное тяговое усилие
было бы постоянным:
F
э0 = Fm(sin2ωt + cos2ωt) = Fm = const.
(10.7)
Однако из-за наличия у емкости активного сопротивления полу-
чить такой сдвиг фаз нельзя, и в реальных реле он составляет 60... 80°,
поэтому тяговое усилие непостоянно.
Важнейшим элементом любого реле являются его контакты. Имен-
но они определяют его надежность и срок службы. По выполняемой
функции контакты делятся на з а м ы к а ю щ и е (при отсутствии
сигнала в обмотке реле они разомкнуты, а при его появлении замы-
каются), р а з м ы к а ю щ и е (при отсутствии сигнала они замкнуты,
априпоявлении—размыкаются)ипереключающие (приот-
сутствии сигнала подвижный контакт замкнут с одним из неподвиж-
ных контактов, а при его появлении замыкается с другим неподвиж-
ным контактом). Условные обозначения обмотки реле и контактов
на принципиальных электрических схемах приведены на рис. 10 .4.
Для обозначения на схемах принадлежности каждого контакта ис-
пользуется специальное двойное обозначение: вначале указывается
номер реле, а затем, через точку, — номер контакта. Например, обо-
значение К3.2 относится ко второму контакту третьего реле.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
175
В простейшем случае контакты реле образуют контактную пару, в
которой один из контактов является подвижным, а другой — непо -
движным. В замкнутом состоянии рабочие поверхности контактов
прижимаются друг к другу с некоторым контактным усилием FK,
обеспечиваемым контактными пружинами, на которых крепятся
контакты. В зависимости от формы контактных тел, обусловливаю-
щей характер соприкосновения р абочих поверхностей контактов,
различают точечные, линейные и плоскостные контакты. Точечные
контакты, обеспечивающие соприкосновение рабочих поверхностей
контактов в точке, выполняются в виде конуса и плоскости, полусфе-
ры и плоскости, двух полусфер и применяются в цепях с небольши-
ми токами (не выше 2... 3 А). Линейные контакты, обеспечивающие
соприкосновение рабочих поверхностей контактов по линии, вы-
полняются в виде клиновидных и цилиндрических тел, при этом один
из контактов может быть плоским. Линейные контакты обычно при-
меняются в цепях с токами порядка единиц и десятков ампер.
Плоскостные контакты, обеспечивающие соприкосновение рабочих
поверхностей контактов по плоскости, используются в цепях повы-
шенной и большой мощности с токами порядка десятков и сотен
ампер.
В процессе работы реле контакты могут находиться в одном из
двух состояний: разомкнутом и замкнутом. Наиболее тяжелыми
условиями работы контактов являются замкнутое состояние, когда
через них течет полный ток нагрузки, и процесс размыкания, когда
на них выделяется вся запасенная в нагрузке (за счет ЭДС самоин-
дукции в управляемой цепи) энергия, что часто приводит к образо-
ванию электрической дуги. Если управляемая цепь содержит емкость,
то при замыкании контактов может возникнуть интенсивное искре-
ние. Оба эти явления приводят к разрушению контактов и сокраще-
нию срока их службы, поэтому на практике для искро- и дугогашения
используются специальные методы, например шунтирование индук-
тивности разрываемой цепи или шунтирование контактов. В обоих
случаях запасенная в индуктивности энергия при размыкании кон-
тактов выделяется на сопротивлении шунта и дуга не образуется.
Контакты реле, предназначенные для работы при небольших то-
ках, выполняются из драгоценных металлов (серебра, платины, зо-
Рис. 10 .4. Условные обозначения обмотки реле и контактов
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
176
лота, палладия) и их сплавов, а при сравнительно больших токах — из
вольфрама и его сплава с молибденом, сплава платины с иридием и
некоторых других. Мощные реле, размыкающие цепи с большими
токами, имеют контакты из графита и металлокерамики.
10.3. Магнитоуправляемые контакты
(герконы)
В рассмотренных выше реле коммутация цепи осуществлялась за
счет механического перемещения якоря (они называются якорными).
В последнее вр емя все большее применение находят безъякорные
реле, в которых для коммутации используется магнитное поле по-
стоянного магнита или дополнительной обмотки, воздействующей
на герметизированный контакт (геркон). Они называются магни-
тоуправляемыми контактами (МУК).
В обычных ЭМР наиболее ненадежным элементом является кон-
такт, подвергающийся различным воздействиям среды — окислению,
запыленности, влажности, вызывающей коррозию, и др. Гермети-
зация контактов от воздействия внешней среды значительно повы-
шает надежность реле, его взрыво- и пожаробезопасность. Герконы,
совмещающие в себе ряд преимуществ обычных (механических)
контактов и полупроводниковых переключателей, занимают по
своим характеристикам промежуточное положение между ними. Они
применяются в концевых выключателях, шаговых переключателях и
искателях, датчиках положений и перемещений и т. п. Геркон (рис. 10.5)
состоит из миниатюрного стеклянного баллона 1 с впаянными вну-
три него двумя электродами 2 из ферромагнитного материала (пер-
маллоя), выполняющими одновременно роль контактных пружин и
магнитопровода. На концы пружин наносят слой из хорошо прово-
дящего материала (серебра, золота, родия) толщиной 2 ... 10 мкм,
образующий контакты 3. Токоотводами 4 являются наружные кон-
цы электродов 2. Если геркон поместить в магнитное поле, создан-
ное постоянным магнитом или током в обмотке, то в воздушном
промежутке между контактами возникнет электромагнитное уси-
Рис. 10 .5 . Устройство геркона:
1 — стеклянный баллон; 2 — электроды из ф ерромагнитного материала; 3 — контакты;
4 — токоотводы
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
177
лие Fэ. Когда оно окажется больше противодействующих сил, соз-
данных упругостью электродов, контакты замкнутся.
Герконы бывают вакуумные и газонаполненные. В вакуумных
герконах давление в баллоне составляет 10-5
...10
-6ммрт.ст.Они
позволяют коммутировать цепи с напряжением до 5 000 В. Газона-
полненные герконы содержат внутри баллона инертный газ (азот,
аргон). При наполнении баллона водородом при значительных
токовых нагрузках коммутируемое напряжение можно повысить до
400 ... 600 В. Выполнение контактов из благородных металлов сни-
жает контактное давление, что, в свою очередь, способствует мало-
му износу контактов при большом числе их переключений; этим
обеспечивается высокая надежность герконов. Герконы могут без-
отказно работать, допуская до 108 срабатываний при коммутируе-
мой мощности 6 Вт. Время срабатывания составляет 0,5 ... 1 мс,
время отпускания 0,3 ... 0,5 мс. К достоинствам МУК следует также
отнести незначительную себестоимость, что объясняется малым
количеством деталей.
Герконы также могут работать (в одном баллоне) на замыкание,
размыкание и переключение.
10.4 . Путевые переключающие устройства
Эти устройства широко используют при автоматизации процес-
сов, связанных с перемещениями механизмов. Путевой выключа-
тель — это аппарат для замыкания и р азмыкания электрических
цепей в системах автоматического управления электроприводами.
Он приводится в действие самим перемещающимся механизмом,
который в отдельных точках своего пути вызывает замыкание или
размыкание соответствующих контактов выключателя. При сраба-
тывании контактов путевого выключателя вырабатываются электри-
ческие сигналы, приводящие в действие устройства управления
автоматизированного электропривода. Если путевой выключатель
действует только в конце пути, т. е. ограничивает путь передвижения
механизма путем размыкания или замыкания цепи электропривода,
он называется конечным выключателем или ограничителем хода.
Один из наиболее распространенных примеров использования ко-
нечных выключателей — в схеме управления электрофицированной
задвижки для отключения электропривода при ее полном открытии
или закрытии.
По принципу действия путевые выключатели разделяют на кон-
тактные (электромеханические) и бесконтактные (индуктивные,
емкостные и др.). Контактные путевые выключатели, в свою очередь,
делятся на одно- и многопредельные, в зависимости от количества
пар рабочих контактов — одной или нескольких.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
178
10.5 . Реле времени
В общем случае срабатывание любого реле происходит с некоторой
временной задержкой после получения управляющего сигнала. Од-
нако существует специальный класс релейных устройств — реле
времени, у которых задержку срабатывания (от нескольких миллисе-
кунд до нескольких часов) можно регулировать.
Реле времени — устройство, контакты которого замыкаются (или
размыкаются) с заданной вр еменной задержкой после получения
управляющего сигнала. Задержку можно регулировать произвольно,
влияя на скорость изменения физической величины, воздействующей
на релейный элемент реле времени от момента поступления сигнала
до достижения порога срабатывания. Для создания выдержки време-
ни применяются электрическая разрядная RC-цепь, электромагнит-
ное замедление посредством создания вихревых токов в короткозам-
кнутых гильзах, механические механизмы (анкерный и планетарный),
пьезокерамические элементы и др. Существуют также программные
реле — это разновидность реле времени с несколькими контактами,
имеющими различные, независимые друг от друга выдержки време-
ни. Например, есть программные реле на основе счетчиков импуль-
сов, контакты которых замыкаются после отсчета заранее заданного
числа импульсов, подаваемых на счетчик.
10.6. Электромагнитные контакторы и магнитные
пускатели
Основным аппаратом, производящим замыкание и размыкание
главных цепей двигателя при автоматическом управлении, является
электромагнитный контактор. Это двухпозиционный аппарат с само-
возвратом, предназначенный для частых коммутаций токов и приво-
димый в действие двигательным приводом. По сути, он является
выключателем, включаемым и выключаемым при помощи электро-
магнита. Контакторы, как и мощные реле, выполняют в системах
электроавтоматики функции выходных устройств. Характерное от-
личие контакторов от реле — допустимость частых включений и от-
ключений при пуске, торможении и регулировании частоты вращения
электроприводов.
Контакторы обычно применяют одновременно с различными реле,
например реле тока, напряжения и др. Контакты этих реле включают
в цепь электромагнитов, что дает возможность производить включе-
ние и выключение силовых цепей с током от 10 до нескольких сотен
ампер и напряжением до нескольких сотен вольт. Контакторы могут
быть выполнены как для постоянного, так и для переменного тока,
одно- и многополюсными.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
179
Магнитные пускатели — это специальные пусковые устройства,
состоящие из одного или двух контакторов, тепловых реле и кнопок
управления, применяемые в основном при управлении пуском, ре-
версом, остановом трехфазных асинхронных электродвигателей. Их
повсеместное распространение объясняется тем, что в этом случае,
во-первых, кнопки «Пуск» и «Стоп» можно устанавливать в любом
удобном месте, а не рядом с магнитным пускателем, что обеспечи-
вает управление на расстоянии при минимальной длине проводов в
цепи главного тока; во-вторых, магнитный пускатель обеспечивает
автоматическое отключение электродвигателя при снятии или зна-
чительном снижении напряжения, т. е. обеспечивает так называемую
нулевую защиту.
10.7 . Типовые релейные схемы
Большинство релейных схем, используемых на объектах транс-
порта нефти и газа, представляют собой схемы управления неревер-
сивными и реверсивными электродвигателями (ЭД) различной мощ-
ности. Схема управления нереверсивным ЭД (рис. 10.6, а) работает
следующим образом. При нажатии кнопки «Пуск» SB1 замыкается
цепь питания обмотки магнитного пускателя КМ. При срабатывании
пускателя его контактами КМ1 ... КМ3 включается ЭД, а блок-контакт
КМ4 шунтирует кнопку SB1. ЭД отключается нажатием кнопки
«Стоп» SB2, разрывающей цепь питания обмотки пускателя. Блок-
контакт КМ4 обеспечивает защиту ЭД от повторного самозапуска
(нулевая защита) при исчезновении или значительном снижении
напряжения сети. Повторное включение пускателя после восстанов-
ления напряжения сети возможно только после нажатия кнопки
«Пуск» SB1. Защита ЭД от перегрузок осуществляется тепловыми
реле КК1 и КК2, нагревательное элементы которых включены в две
фазы статора, а контакты — в цепь питания обмотки пускателя. Для
нового запуска ЭД, отключенного с помощью теплового реле, не-
обходимо вручную вернуть контакты реле в исходное положение
(т. е . замкнуть их), что возможно только после того, как реле остынет
после отключения. Защита ЭД и цепей управления от коротких за-
мыканий осуществляется с помощью предохранителей FU1... FU3.
Рубильник SA предназначен для отключения цепей питания и управ-
ления ЭД при осмотрах или ремонтах.
Задвижка с электроприводом (ЗЭП) — устройство массового при-
менения на нефтебазах и нефтепроводах. Привод задвижки состоит
из реверсивного электродвигателя, вращающего червячный редуктор,
который через узел соединения поднимает или опускает «клин»,
перекрывающий проходное сечение задвижки. Схема управления
реверсивным двигателем ЗЭП показана на рис. 10.6, б. Открытие за-
движки обеспечивается нажатием кнопки «Открыть» SB1, что при-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
180
водит к срабатыванию магнитного пускателя (МП) КО. Своими
контактами КО1... КО3 он включает ЭД в направлении, соответ-
ствующем открытию задвижки. Так как этот процесс длится несколь-
ко минут, кнопка SB1 шунтируется блок-контактом МП КО4, благо-
даря чему обеспечивается включенное состояние КО после того, как
отпущена кнопка SB1. После полного открытия ЗЭП КО отключа-
ется конечным выключателем ВПО1; одновременно конечный вы-
ключатель ВПО2 замыкает цепь сигнализации открытия задвижки.
Цепь закрытия задвижки работает аналогично. При нажатии кнопки
«Закрыть» SB2 срабатывает МП КЗ, своими контактами КЗ1... КЗ3
включает ЭД в обратном направлении (реверс обеспечивается за счет
перекидывания фаз ЭД), контактом КЗ4 самоблокируется; отключение
КЗ происходит конечным выключателем ВПЗ1, а сигнализация —
ВПЗ2. Остановить ЗЭП в промежуточном состоянии при открытии
или закрытии можно нажатием кнопки «Стоп» SB3. Если запорный
узел застопорится в промежуточном состоянии или не сработают
Рис. 10.6 . Типовые релейные схемы управления:
а — трехфазным нерев ерсивным двигателем; б — задвижкой с электроприводом (трех-
фазным рев ерсивным двигателем); FU — предохранители; SB — кнопки; КК — тепло -
вые реле; КМ, KO, КЗ — магнитные пускатели; SA — рубильник; ВПО, ВПЗ — конеч -
ные выключатели
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
конечные выключатели, отключение ЭД осуществляется моментным
выключателем, разрывающим цепь МП аварийным контактом АКС.
Контакт БКС разрывает цепь питания ЭД при переходе на ручное
управление задвижкой. В цепь каждого МП включены размыкающие
контакты другого МП — так, в цепь КО включен блокировочный
контакт КЗ5, а в цепь КЗ — контакт КO5. Они не позволяют сработать
сразу обоим пускателям при ошибочном одновременном нажатии
сразу на две кнопки SB1 и SB2.
Контрольные вопросы
1. Что такое релейная характеристика?
2. Какое реле называется нейтральным?
3. Что такое время срабатывания реле?
4. Какую функцию выполняет в реле переменного тока короткозамкнутый
виток?
5. Почему герконы имеют гораздо бо́льший по сравнению с обычными
реле ресурс работы?
6. Какие требования предъявляются к контактным материалам?
7. С какой задержкой времени могут срабатывать реле времени?
8. Для чего используются путевые выключатели?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
182
Глава 11
СИСТЕМЫ ТЕЛЕМЕХАНИКИ
11.1 . Общие сведения о системах телемеханики
Телемеханика — область науки и техники, предметом которой
является разработка методов и технических средств передачи и
приема информации (сигналов) с целью управления и контроля на
расстоянии. Специфическими особенностями телемеханики являют-
ся: 1) удаленность объектов контроля и управления; 2) необходимость
высокой точности передачи измеряемых величин; 3) недопустимость
большого запаздывания сигналов; 4) высокая надежность передачи
команд управления; 5) высокая степень автоматизации процессов
сбора информации. Телемеханизация применяется тогда, когда не-
обходимо объединить разобщенные или территориально рассредото-
ченные объекты управления в единый производственный комплекс
(например, при управлении газо- и нефтепроводом) либо когда при-
сутствие человека на объекте управления нежелательно (например, в
атомной промышленности, на химических предприятиях) или невоз-
можно (например, при управлении непилотируемой ракетой).
Особое значение телемеханика приобретает в связи с созданием
автоматизированных систем управления (АСУ). Обработка данных,
полученных по каналам телемеханики, на ЭВМ позволяет значитель-
но улучшить контроль за технологическим процессом и упростить
управление. Поэтому в настоящее время понятия «телемеханика» и
АСУ ТП становятся синонимами. Разница между этими понятиями
заключается не столько в технической сути, сколько в традициях ис-
пользования в определенной области промышленности. Например,
в трубопроводном транспорте предпочитают использовать слово
«телемеханика», на промышленных предприятиях — АСУ ТП . В ан-
глоязычных источниках аналогом понятия «телемеханика» является
сокращение SCADA — Supervisory Control And Data Acquisition —
диспетчерское управление и сбор данных, в которое вкладывается,
по сути, тот же смысл.
Пример построения двухуровневой телемеханической системы,
ставшей классической схемой, показан на рис. 11.1. Контроль и управ-
ление системой осуществляют с пункта управления (ПУ), где нахо-
дятся диспетчер, аппаратура телемеханики, ЭВМ , мнемонический
щит. Объекты контроля и управления находятся на одном или не-
скольких контролируемых пунктах (КП).
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
183
Базовыми функциями системы телемеханики являются телеуправ-
ление (ТУ), телеизмерение (ТИ), телесигнализация (ТС) и телерегу-
лирование (ТР).
Телеуправление обеспечивает дистанционное управление объ-
ектом контроля. ТУ представляет собой воздействие на исполнитель-
ные органы контролируемых пунктов, имеющие дискретное состоя-
ние, путем подачи также дискретных команд. Команды ТУ обычно
двухпозиционные: включить — отключить. Управление начинается с
выдачи оператором (диспетчером) команды телеуправления с ЭВМ
или пульта управления. Команда ТУ передается с пункта управления
на контролируемый пункт по каналу связи. Контроллер КП, получив
команду ТУ, проверяет ее достоверность и выдает электрический
сигнал на исполнительное устройство (например, включает электро-
привод задвижки). Для контроля выполнения команды контроллер
КП передает на ПУ квитанцию ТУ. Применяются также более слож-
ные алгоритмы выдачи ТУ, например, с промежуточным контролем
готовности исполнительных цепей. Для защиты команд ТУ от ис-
кажений при передаче применяют специальное кодирование, напри-
мер передают команду дважды, в прямом и инверсном виде и т. п.
Обычно в одном цикле управляют только одним объектом.
Рис. 11.1. Двухуровневая система телемеханики:
ТС — телесигнализ ация; ТИ — телеизмерение; ТУ — телеуправление; ТР — телерегу-
лиров ание
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
184
Телесигнализация используется для дистанционного контроля
дискретных изменений состояния объекта, например включен/ вы-
ключен, открыт/ закрыт, норма/ авария и т. п. Для получения данных
объект оснащают датчиками состояния. В простейшем случае при-
меняют двухпозиционные контактные переключатели, но могут ис-
пользоваться и многопозиционные переключатели. Контроллер КП
опрашивает состояние датчиков и при его изменении передает ин-
формацию о событии на ПУ в короткой посылке, обычно называемой
телесигналом. Контроллер ПУ при получении ТС передает его для
обработки в ЭВМ (и на контроллер щита) для оповещения диспет-
чера и отображения изменившегося состояния объекта. Еще одной
функцией ТС является пр едупреждение оператора о превышении
заданных пороговых значений контролируемых технологических
параметров (уставок).
Телеизмерение используется для получения количественных зна-
чений непрерывных параметров контролируемого процесса, напри-
мер температуры, давления и т. п. Для измерения на объекте исполь-
зуют преобразователи, которые преобразуют эти параметры в нор-
мированные электрические сигналы. Контроллер КП измеряет
значения этих сигналов и по запросам ПУ или периодически пере-
дает их на ПУ в цифровом виде. ТИ поступают на ЭВМ и щит для
отображения. Современные системы обеспечивают точность изме-
рений 0,25 ... 0,1 %. Достоверность телеизмерений и телесигнализации
(отсутствие искажений данных при передаче по каналам связи) обе-
спечивается за счет введения в посылки кодов защиты.
Телерегулирование обеспечивает дистанционное задание уровня
воздействия на объект управления. Оно представляет собой теле-
управление объектами с непрерывным множеством состояний. Для
реализации телерегулирования используются функции ТИ — ТУ или
ТС — ТУ. Управление начинается с задания оператором величины
воздействия, а затем выдачей команды с ЭВМ. Команда ТР пере-
дается с пункта управления на контролируемый пункт по каналу
связи. Контроллер КП, получив команду ТР, проверяет ее достовер-
ность и выдает сигнал заданного уровня на исполнительное устрой-
ство (например, открывает вентиль на 60 %). Кроме ручной при-
меняется автоматизированная выдача управления. В этом случае на
ЭВМ устанавливают программу с алгоритмом вычисления величины
управления. Для предотвращения «удара» при выдаче телерегулиро-
вания осуществляется плавное изменение выходного сигнала до
достижения заданного уровня. Эту задачу обычно выполняет кон-
троллер КП.
Пункт управления — это место размещения диспетчерского пер-
сонала, аппаратуры для приема и обработки информации от контро-
лируемых пунктов. Часто под термином ПУ подразумевают контрол-
леры, непосредственно выполняющие прием и первичную обработ-
ку данных от КП. В задачи ПУ входят: 1) прием данных с КП по
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
185
каналам связи; 2) организация опроса КП при подключении несколь-
ких КП на один канал связи; 3) передача на КП команд управления;
4) передача данных и прием команд ЭВМ; 5) переадресация, пере-
дача данных на верхний уровень и прием команд с верхнего уровня
в многоуровневых системах. Для реализации полного набора пере-
численных функций контроллеры ПУ оснащаются микропроцессо-
рами и соответствующим программным обеспечением. Перенастрой-
ка программного обеспечения позволяет гибко изменять конфигура-
цию системы, протоколы обмена и алгоритмы обработки данных в
процессе эксплуатации системы. Для настройки ПУ используются
специальные программы-конфигураторы. В современных ПУ про-
граммы и настройки хранят во внутренней FLASH-памяти контрол-
леров, что обеспечивает быстрый запуск системы и восстановление
в случае сбоев.
Контролируемый пункт — это место размещения объектов кон-
троля и управления, а также аппаратура, выполняющая функции
контроля и управления, обычно называемая контроллером КП. Часто
под термином КП подразумевают один контроллер, установленный
на контролируемом объекте. Контроллер КП выполняет непосред-
ственный сбор данных с о бъекта (посредством опроса датчиков и
преобразователей) и передачу их на ПУ, реализуя функции телесиг-
нализации и телеизмерения, а также непосредственно выполняет
команды телеуправления. На крупных объектах (таких как нефтепе-
рекачивающие или компрессорные станции) могут находиться не-
сколько контроллеров КП. Для точной идентификации каждый из
них имеет свой логический номер, который называют номером или
адресом КП. В настоящее время практически все контроллеры КП
оснащены микропроцессорами и работают по заданной программе.
Программное обеспечение решает задачи сбора данных (фильтрует
дребезг контактов ТС и ослабляет сетевые наводки на цепи ТИ), вы-
полняет буферизацию событий перед выдачей в канал связи. Совре-
менные контроллеры КП вместе с базовыми функциями (ТС, ТИ,
ТУ) обеспечивают интегр ацию в систему различных электронных
устройств: приборов учета энергии, автоматических защит и т. п. На-
пример, контроллеры КП снимают показания электронных счетчи-
ков, расходомеров и передают их для обработки на ПУ по единому
телемеханическому каналу связи. Для стыковки с такими устройства-
ми применяют один из локальных интерфейсов, например RS-485 .
Информационный обмен идет с использованием одного из совме-
стимых протоколов, например Modbus.
Взаимодействие между ПУ и КП происходит по каналу связи.
Каналом связи называется совокупность технических средств и трак-
та для передачи сообщений на расстояние независимо от других
каналов. Он образуется в линии связи — проводной, радиолинии
и др. Линия связи — это физическая среда или тракт, по которым
происходит передача сигналов между КП и ПУ, например проводная
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
186
или кабельная линия, оптоволокно, выделенный телефонный канал,
радиоканал и т. п. Одна линия связи может быть использована для
образования многих каналов с независимой передачей сообщений.
Число каналов, размещаемых в одной линии связи, определяется ее
полосой пропускания, спектром сигналов и уровнем помех в линии.
При подключении к одному каналу связи нескольких КП каждый из
них должен иметь уникальный номер. Часто под ПУ и КП подразуме-
вают саму аппаратуру телемеханики. Данные между ПУ и КП пере-
дают короткими массивами, которые называют кадрами, фреймами,
посылками. Посылки вместе с данными содержат адресную часть и
проверочный код для выявления искажений в процессе передачи.
Адрес должен однозначно идентифицировать измеряемый параметр
в рамках всей системы, например номер контроллера ПУ — номер
КП — номер группы в КП — номер параметра в группе. Для защиты
данных обычно используют один из вариантов подсчета контрольной
суммы.
Способ кодирования данных и порядок обмена посылками обыч-
но называют протоколом обмена. Одним из основных требований
при выборе протокола является его надежность, т. е . способность
передавать данные без искажений и возможность повторной пере-
дачи в случае сбоя.
Мнемонический щит представляет собой табло с пассивной схе-
мой контролируемого объекта и активными элементами, отображаю-
щими текущее состояние объекта. Мнемонический щит использует-
ся для наглядного отображения состояния крупных систем, содержа-
щих до нескольких тысяч объектов контроля. Например, эти щиты
широко используются для оборудования диспетчерских пунктов не-
фтеперекачивающих и компрессорных станций, резервуарных парков
и т. п. На лицевой стороне щита рисуют или выкладывают специ-
альными мозаичными элементами схему контролируемой системы.
Для отображения состояния объектов системы в щит вмонтированы
активные элементы — единичные лампы, светодиоды и цифровые
индикаторы. Ими управляет щитовой контроллер (один или не-
сколько).
Информация на щит может как поступать в автоматическом ре-
жиме (с ПУ комплекса телемеханики или АСУ ТП), так и вводиться
по командам ручного ввода от диспетчера системы (через ПЭВМ).
В основном на щит выводят информацию двух типов: телесигнали-
зацию и телеизмерение. Для отображения состояния ТС используют
лампы или светодиодные индикаторы. На больших щитах часто ис-
пользуется модель так называемого «темного щита»: индикатор на-
чинает мигать при изменении состояния ТС, остается гореть после
квитирования и гаснет после приведения щита в соответствие с из-
менившимся состоянием. Значение измеряемых параметров отобра-
жается на цифровых индикаторах, мозаичных или семисегментных.
Для увеличения наглядности отображаемой информации могут при-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
187
меняться индикаторы разного цвета или с управляемым цветом
свечения, например зеленый — желтый — красный.
Автоматизированное рабочее место (АРМ) — это рабочее ме-
сто специалиста в какой-либо предметной области, оборудованное
компьютером и специальным программным обеспечением, помо-
гающее решать задачи в рамках деятельности этого специалиста
(например, АРМ диспетчера, АРМ технолога и т. п .) . АРМ может
быть оснащено дополнительным нестандартным оборудованием,
например, АРМ телемеханика оснащают программатором микросхем
ПЗУ, отладочным комплектом и пр. Часто под термином АРМ по-
нимают исключительно программный продукт для автоматизации
труда специалиста.
В современных системах телемеханики большое внимание уде-
ляется их программному обеспечению и интеграции с действующи-
ми системами и программными комплексами. Стандартом стало
графическое представление схем контролируемого процесса (мне-
мосхем) с «живым» отображением текущего состояния, управление
объектом с кадров мнемосхем. В программном обеспечении наблю-
дается тенденция к стандартизации программных интерфейсов
систем сбора данных и обрабатывающих программ, обеспечению
возможности экспорта собранных данных в специализированные
программы (расчета режимов, планирования, аналитические, АРМ
специалистов). С технической стороны в системах все чаще исполь-
зуются современные скоростные каналы связи (оптоволокно,
Ethernet) и беспроводные технологии (например, транкинговая и
сотовая связь). К традиционным функциям телемеханики (телесиг-
нализация, телеизмерение, телеуправление) добавляются функции
различного учета, транспорта данных с локальных автоматических
приборов. К обычным функциям контроля за изменением состояния
и превышения предельных значений добавляются возможности
текущих расчетов и логического анализа (например, балансные рас-
четы).
11.2. Передача информации в системах
телемеханики
При управлении производственным процессом происходит по-
стоянный обмен различными сообщениями о событиях, происходя-
щих в той или иной точке процесса. Эти сообщения несут информа-
цию о его состояниях (значении контролируемого параметра, со-
стоянии исполнительного механизма, уставке регулятор а) или
предназначены для изменения этих состояний (команды управле-
ния) — например, сообщение об изменении давления в трубопрово-
де или команда на закрытие задвижки.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
188
Для получателя сообщения, как правило, интерес представляет
только его новая часть — информация, т. е. содержательные сведения
(данные), ранее ему неизвестные.
Сообщения передаются с помощью сигналов. Сигналом называ-
ется носитель (переносчик) сообщения. Таким средством могут слу-
жить любые физические явления или объекты, изменение параметров
которых во времени несет информацию в прямом или закодирован-
ном виде (свет, звук, напряжение, ток, давление и т. д. ) . Наибольшее
распространение получили электрические сигналы. Сигнал должен
однозначно отображать сообщение, а после преобразований восста-
навливаться без потери информации.
Процесс передачи сообщений условно показан в виде схемы, по-
казанной на рис. 11.2. Сообщение от источника поступает в передаю-
щее устройство, которое преобразует его в сигнал, передаваемый по
каналу связи. Процесс автоматического преобразования в сигнал,
происходящий в передающем устройстве, включает в себя одну или
несколько из следующих операций: преобразование из одной физи-
ческой формы в другую, квантование, модуляцию, кодирование.
Канал связи начинается на входе передающего устройства и конча-
ется на выходе приемного устройства. В процессе передачи на сигнал
накладываются различные помехи. Приемное устройство отфильтро-
вывает их и восстанавливает по полученному сигналу сообщение для
получателя.
Рис. 11.2. Одноканальная система передачи сообщений в системах телемеха-
ники
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
189
11.3 . Преобразование сообщений для передачи
по каналам связи
В зависимости от характера изменения во времени сообщения де-
лятся на четыре группы: 1) непрерывные; 2) дискретные по времени;
3) дискретные по множеству; 4) дискретные по времени и по множе-
ству. Технологические параметры, характеризующие состояние объ-
екта управления (температура, давление, уровень, скорость и т. д. ),
представляют собой непрерывные сообщения, которые можно пред-
ставить в виде функции Х(t), причем эта функция может принимать
любые вещественные значения в диапазоне изменения аргумента t.
Сообщения, которые могут изменяться в строго определенные мо-
менты, называются дискретными по времени. Дискретные по мно-
жеству сообщения имеют ограниченное количество значений, напри-
мер: состояние крана — открыт или закрыт. Существуют также со-
общения, дискретные как по времени, так и по множеству.
Сигналы также делятся на непрерывные и дискретные. Непре-
рывный по времени сигнал — это сигнал, определенный для любого
момента времени, т. е . он также представляет собой непрерывную
функцию. Дискретные по времени сигналы — это сигналы, опреде-
ленные только в дискретные моменты времени, например через
каждую секунду.
Любое непрерывное сообщение может быть с достаточной точно-
стью передано дискретными сигналами. Процесс замены непрерыв-
ного сообщения дискретным называется квантованием. Если сообще-
ние меняется на дискретное по множеству, квантование называется
квантованием по уровню, а если на дискретное по времени — кванто-
ванием по времени.
При квантовании по уровню значение функции X(t) в произволь-
ный момент времени заменяется своим ближайшим значением, на-
зываемым уровнем квантования. Интервал между двумя соседними
уровнями называется шагом квантования. Пример: квантование по
уровню сообщения, описываемого непрерывной функцией f(t), по-
казан на рис. 11.3, а. Переход с одного уровня на другой происходит
в тот момент, когда значение функции пересекает середину шага
квантования q (на рисунке она показана пунктирной линией). Как
видно, погрешность квантования Dmax не превышает значения q/ 2.
Тогда погрешность γ, %, передачи значений функции составит
γ=±
-
()
=±
-
()
q
ff
q
ff
2
2
maxm
in
maxm
in
,
(11.1)
где fmax, fmin — соответственно максимально е и минимально е значения
квантуемой функции.
Число уровней квантования N связано с шагом квантования вы-
ражением
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
190
q
ff
N
N
ff
q
ff Nq
q
N
=
-
-
=
-
+
-=
-
=±
-
maxm
in
maxm
in
maxm
in
,
;
()
;
1
1
1
22
100
γ
%%,
%.
=
-
50
1
N
(11.2)
На практике, как правило, решается задача определения необходи-
мого числа N исходя из заданной точности передачи, т. е. значения γ.
При квантовании по в р е м е н и значения функции передаются
в определенные моменты времени независимо от того, изменилось
ее значение или нет. Необходимость такой передачи объясняется не-
сколькими причинами: во-первых, за малое время значение сообще-
ния может изменяться очень незначительно; во-вторых, обработка
сообщений получателем производится последовательно во времени;
в-третьих, передача сообщений только в фиксированные моменты
сокращает объем передаваемой и обрабатываемой информации. При-
мер квантования по времени сообщения, описываемого непрерывной
функцией f(t), показан на рис. 11.3, б. Как видно из рисунка, кван-
тованное сообщение представляется в виде отдельных отсчетов функ-
ции f(t), получаемых в моменты времени kτ, k = 1, 2,... . При получе-
нии проквантованного по времени сообщения возникает задача
восстановления значений исходного сообщения в произвольные
Рис. 11.3 . Квантование сообщения:
а — по уровню; б — по времени: fmin, fmax — минимальное и максимальное значения кван-
т уемой функции; q — шаг квантования по уровню; Dt — шаг квантования по времени
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
191
моменты, не равные kτ, k = 1, 2,... . Это возможно в том случае, если
дискретные отсчеты разделены интервалом
τ≤
1
2Fmax
,
(11.3)
где Fmax — максимальная частота изменения исходной функции (след-
ствие теоремы Котельникова).
Для передачи полученных в результате квантования дискретных
значений, как правило, используются сигналы постоянного (видеоим-
пульсы) или переменного (радиоимпульсы) тока. Видеоимпульсы могут
быть различной формы: прямоугольные, треугольные, синусоидальные,
трапецеидальные, экспоненциальные и др. Радиоимпульсы образуются
наполнением видеоимпульсов высокочастотными гармоническими
колебаниями. Сообщение в этом случае представляется изменением
одного или нескольких параметров сигнала, например: амплитуды,
частоты, фазы и т. п. Этот процесс наложения сообщения на перенос-
чик информации называется модуляцией. Основной смысл модуля-
ции — передача низкочастотного сообщения высокочастотным сигна-
лом, который обеспечивает следующие преимущества: значительное
уменьшение мощности передатчика и затухания сигнала; возможность
одновременной передачи по одной линии связи разных сообщений;
повышение достоверности передаваемых сообщений вследствие лучшей
помехозащищенности модулированных сигналов. В зависимости от
того, какой параметр переносчика меняется, модуляция может быть
непрерывной (амплитудной, частотной, фазовой) или импульсной
(широтно-импульсной и т. д. ). А сами параметры сигнала, используемые
для передачи, называются импульсными признаками. К ним относятся:
1) полярность — этот признак является наиболее помехозащищенным,
но позволяет формировать только два различных состояния; 2) ампли-
туда импульса — с помощью этого признака можно сформировать
любое число состояний, но амплитуда сигнала наиболее подвержена
действию помех; кроме того, если амплитуды соседних сигналов от-
личаются незначительно, их трудно различать на приемной стороне;
3) длительность импульса; 4) частота импульсов; 5) фаза импульса — с
помощью этого признака обычно тоже формируется только два со-
стояния, одному из которых соответствует посылка импульса, синфаз-
ного опорному сигналу, а другому сообщению — импульса, находяще-
гося в противофазе с опорным сигналом. Наиболее часто используют-
ся полярность импульса (при передаче на постоянном токе) и частота
импульсов (при передаче на переменном токе).
11.4 . Кодирование сообщений
Кодирование — это преобразование по определенному правилу
дискретного сообщения в дискретный сигнал в виде кодовых комби-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
192
наций. Обратный процесс (декодирование) должен однозначно вос-
становить передаваемо е сообщение. Целью кодирования является
эффективное использование каналов связи и увеличение достовер-
ности передачи информации.
Код (от лат. codex — свод законов) — система условных знаков,
символов для передачи, обработки и хранения различной информа-
ции. Конечная последовательность кодовых знаков называется кодо -
вым словом. Число различных символов, которые используются в
словах кода, называется основанием m данного кода, а сами символы
составляют так называемый кодовый алфавит. Число элементов кода
в кодовом слове определяет его длину, или разрядность, n. Код на-
зывается равномерным, если все кодовые комбинации одинаковы по
длине, и неравномерным, если значение n в коде непостоянно. Место
элемента в кодовом слове определяет его разряд. Число кодовых
комбинаций N, которые можно образовать в коде, называется объ-
емом кода. Характеристики кода связаны между собой зависимостью
N=m
n
. Например, в коде Морзе применяются два символа: точка и
тире. Следовательно, такой код является двоичным (m = 2). Все бук-
вы русского алфавита кодируются с помощью кодовых слов (кодовых
комбинаций) различной длины, поэтому код Морзе — неравномер-
ный двоичный.
В любой системе счисления числа представляются в виде набора
коэффициентов перед числом, которое является основанием системы
счисления и имеет определенную степень. Обычная система счисле-
ния, используемая людьми при счете, — десятичная, т. е . кодовый
алфавит содержит 10 символов — от 0 до 9. Так, например, десятичное
число 456 представляет собой набор коэффициентов, взятых из вы-
ражения 456 ↔ 4·102 + 5·101 + 6·100. Это уже есть процесс кодирования
некоторого сообщения десятичным кодом.
При передаче сообщений наиболее широкое распространение
получили двоичные коды (m = 2), использующие символы 0 и 1. Это
объясняется простотой технической реализации такого кодирования,
так как большинство элементов автоматики имеет два взаимоисклю-
чающих состояния (контакт реле замкнут или разомкнут, транзистор
открыт или закрыт). При использовании двоичных кодов кодируемые
сообщения записываются в двоичной системе счисления, т. е . пред-
ставляются в виде набора коэффициентов 1 и 0 перед числом 2 в
соответствующей степени. Например, число 6 в двоичной системе
будет иметь вид 110: 6 → 1·22 + 1·21 + 0·20 → 110.
Если десятичное число просто переводится в двоичную систему,
то полученные кодовые комбинации образуют натуральный двоич-
ный код (НДК), или двоичный код на все сочетания. Это самый
простой код, представляющий собой равномерный код длины n. В нем
для отражения значений сообщения используются все возможные ко-
довые комбинации, отличающиеся друг от друга хотя бы одним элемен-
том в каком-нибудь разряде. Число таких комбинаций N = 2
n
.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
193
Ниже в качестве примера представлена запись чисел от 0 до 9
четырехразрядным двоичным кодом.
0 0000
2
0010
4
0100
6
0110
8
1000
1
0001
3
0011
5
0101
7
0 111
9
1001
Двоично-десятичный код позволяет записать каждый разряд деся-
тичного числа в виде четырехразрядного двоичного кода, т. е. в двоич-
ной системе счисления представляется отдельно каждая цифра. Напри-
мер, число 8 247 запишется в виде 1000 0010 0100 0111 (8 → 1 000,
2→0010, 4→0100, 7→0111).
В рассмотренных кодах все возможные кодовые комбинации ис-
пользуются для передачи информации. Такие коды являются про-
стыми, или кодами без избыточности, и относятся к так называемым
непомехозащищенным кодам. Это коды, в которых имеются хотя бы
две разрешенные (т. е . используемые для передачи сообщений) кодо-
вые комбинации, переходящие одна в другую при замене в какой-
нибудь из них кодового символа другим. При этом искажение любо-
го разряда под действием помехи не может быть обнаружено, так как
приводит к возникновению другой разрешенной кодовой комбина-
ции. Например, если среди используемых кодовых комбинаций дво-
ичного трехразрядного кода имеются комбинации 110 и 010, код будет
непомехозащищенным, так как замена 1 на 0 в старшем разряде пер-
вой комбинации превратит ее во вторую. Помехозащищенными
(корректирующими) называются коды, позволяющие только обнару-
жить или обнаружить и исправить ошибки, возникающие в кодовых
комбинациях. Корректирующие коды строятся так, что для передачи
сообщения используются не все кодовые комбинации, которые мож-
но образовать посредством данного кода, а лишь некоторая их часть
(так называемые разрешенные кодовые комбинации). Тем самым
создается возможность обнаружения и исправления ошибки при не-
правильном воспроизведении некоторого числа символов. Коррек-
тирующие свойства кодов достигаются введением в кодовые комби-
нации дополнительных (избыточных) символов.
Для иллюстрации помехозащитных свойств удобно использовать
геометрическую модель кода (модель Хемминга). В соответствии с
этой моделью любой n-разрядный код представляется n-мерным
многогранником, в вершинах которого располагаются все разрешен-
ные кодовые комбинации. Соседние кодовые комбинации, имеющие
общее ребро, отличаются только в одном разряде. Расстояние между
произвольными кодовыми комбинациями, измеряемое минимальным
числом ребер между ними, называется кодовым расстоянием d. Ис-
пользуя геометрическую модель Хэмминга, можно определить связь
между кодовым расстоянием и числом обнаруживаемых (r) и исправ-
ляемых (s) ошибок. На рис. 11.4 показана модель Хэмминга для трех-
разрядного натурального двоичного кода. Все его возможные комби-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
194
нации размещены в вершинах трехмерного куба. Действие помехи
проявляется в том, что вместо любого символа 1 может появиться
символ 0 и наоборот. Пусть один из символов какой-нибудь комби-
нации заменен другим. Если при кодировании используются все
кодовые комбинации, то переданный сигнал трансформируется в
другой и код будет непомехозащищенным. Если же требуется обна-
ружить одну ошибку, то необходимо, чтобы точки, изображающие
различные сообщения, не имели общих ребер. Этому условию удо-
влетворяют только четыре точки, расположенные по диагонали гра-
ней, например: 001, 100, 010, 111, для которых d = 2 . Изменение
одного из символов этих комбинаций переводит точку в положение,
не соответствующее ни одной из выбранных четырех кодовых ком-
бинаций, и ошибка, таким образом, обнаруживается. Если же требу-
ется, чтобы одиночная ошибка была не только обнаружена, но и
исправлена, выбранные комбинации должны отличаться в трех раз-
рядах (d = 3), т.е. должны располагаться по диагонали куба (например,
000 и 111); все остальные комбинации являются запрещенными. Ми-
нимальное кодовое расстояние (наименьшее расстояние между каждой
парой комбинаций, используемых в коде) связано с корректирующи-
ми свойствами кода соотношением d = r + s + 1. Таким образом, для
придания кодам помехозащитных свойств необходимо увеличить
кодовое расстояние. Это можно сделать двумя способами: 1) исполь-
зование не всех комбинаций кода на все сочетания; 2) добавление к
комбинации НДК определенного количества контрольных разрядов
по определенному правилу. На практике, как уже отмечалось, обыч-
но используется второй способ.
Коды, позволяющие обнаружить ошибку, называются обнаружи-
вающими. Коды, позволяющие обнаружить и исправить ошибки,
называются корректирующими. Простейшим кодом, позволяющим
обнаружить все ошибки нечетной (четной) кратности, является код
с проверкой на четность (нечетность). Этот код используется, на-
пример, для обеспечения достоверности ТИ и ТС. Он образуется
добавлением к каждой кодовой комбинации еще одного контроль-
Рис. 11.4. Геометрическая модель Хэмминга трехразрядного НДК
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
195
ного символа. При защите на четность до бавляется 1, если число
единиц в основной кодовой комбинации нечетное, 0 — если число
единиц четное. При приеме кодовых комбинаций этого кода под-
считывается число единиц в них. Если оно оказывается четным, это
означает, что одиночной ошибки или ошибки нечетной кратности
нет. Поскольку одиночная ошибка наиболее вероятна, принятую
комбинацию с большой долей достоверности можно считать правиль-
ной. В ней отбрасывается последний контрольный символ и она
передается получателю. Если же число единиц в принятой кодовой
комбинации нечетное, это означает, что при передаче кодовой ком-
бинации произошла одиночная ошибка (или ошибка нечетной крат-
ности). В этом случае требуется повторить передачу этой кодовой
комбинации. При защите на нечетность проверка производится по
противоположному критерию; такой код обнаруживает ошибки чет-
ной кратности. Для защиты команд ТУ, как уже упоминалось, ис-
пользуется инверсный код. Он строится из НДК следующим образом:
если в исходной комбинации четное число единиц, то добавляет-
ся еще такая же комбинация; если же число единиц нечетное, то
добавляется комбинация, инверсно повторяющая исходную:
0110 → 01100110; 0100 → 01001011. Декодирование происходит в соот-
ветствии со следующим алгоритмом: 1) анализируется информаци-
онная часть поступившего инверсного кода; 2) если число единиц в
ней четное, то контрольная часть сохраняется неизменной, если не-
четное, контрольная часть инвертируется; 3) осуществляется побит-
ное сравнение информационной и контрольной частей; 4) если все
разряды совпадают, то принимается решение о правильном приеме,
контрольная часть отбрасывается, а информационная используется
по назначению; 5) если хотя бы один разряд не совпадает, принима-
ется решение о неправильном приеме и кодовая комбинация браку-
ется.
Оба рассмотренных кода относятся к обнаруживающим, исправ-
лять ошибки они не могут.
Технические устройства для преобразования сообщений в код и
обратно называют по-разному: кодовые преобразователи, шифрато-
ры/ дешифраторы, кодеры/ декодеры. Простейшими устройствами
этого семейства являются так называемые кодовые маски. Кодовая
маска — это устройство, используемое в преобразователях угловых и
линейных перемещений для преобразования последних в код. В за-
висимости от используемого физического принципа бывают оптиче-
ские, магнитные и электрические кодовые маски.
Кодовая маска угловых перемещений представляет собой диск,
поверхность которого разбивается на ряд концентрических окруж-
ностей (число образовавшихся колец равно числу разрядов кода) и
на сектора (число секторов в пределах кольца соответствует количе-
ству возможных кодовых комбинаций и определяет точность измере-
ния углового перемещения). Этот диск соединяется с каким-либо
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
196
чувствительным элементом, например трубкой Бурдона, и при из-
менении контролируемого параметра поворачивается на определен-
ный угол. В электрических масках сектора делаются по определенно-
му правилу проводящими и непроводящими, а диск вращается от-
носительно неподвижных щеток. В оптических масках сектора
кодовой маски делаются оптически прозрачными или непрозрачны-
ми, а сам диск вращается между несколькими источниками оптиче-
ского излучения и расположенными напротив них фотоэлементами.
В магнитных кодовых масках секторами диска экранируется магнит-
ное поле. Источником магнитного поля могут быть или постоянные
магниты, или электромагниты. В качестве чувствительных элементов
могут использоваться магнитоуправляемые контакты (герконы) или
преобразователи Холла.
Электрическая кодовая маска углового перемещения приведена
на рис. 11.5, а. Чередование проводящих и непроводящих участков
подчиняется закону натурального двоичного кода. Считывание кода
производится с помощью неподвижных щеток, расположенных по
радиусу диска. Младший разряд располагается у края диска. Изме-
нение углового положения диска вызывает изменение считываемого
кода. В результате считанный двоичный код является функцией угло-
вого положения диска. Недостатком кодовой маски НДК является
возможность возникновения больших погрешностей во время пере-
хода из одного положения в другое. Эта погрешность, называемая
Рис. 11.5. Кодовые маски:
а — конструкция электрической кодовой маски с натуральным дв оичным кодом;
б — кодовая маска с кодом Грея
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
197
погрешностью от неопределенности считывания, обусловлена не-
одновременным изменением цифр в разных разрядах вследствие
несовершенства аппаратуры. Так, при переходе щеток из положения
5 (0101) в положение 6 (0110) ошибка считывания может возникнуть
в двух младших разрядах. Фактически могут быть прочитаны кодовые
комбинации 0100, 0101, 0110 и 0111, что соответствует положениям
диска 4, 5, 6 и 7 соответственно. Из них комбинации 0100 и 0111 яв-
ляются ложными, т. е. их появление на выходе считывающего устрой-
ства приведет к возникновению погрешности. Этого недостатка
лишена кодовая маска, в которой чередование проводящих и непро-
водящих участков подчинено закону кода Грея (рис. 11.5, б). Код Грея
образуется из комбинации НДК путем суммирования по модулю два
с точно такой же комбинацией, смещенной на один разряд влево или
вправо. Сложение (суммирование) по модулю 2 — это так называемое
логическое сложение. Знак этой операции обозначается символом ⊕.
При логическом сложении сумма двух разных символов равна 1, а
двух одинаковых — 0 . Младший разряд полученной комбинации от-
брасывается. Например, результат перевода из НДК в код Грея ком-
бинации 1011: 1011 (НДК) = >1110 (код Грея):
(11.4)
При обратном преобразовании кода Грея в НДК старший разряд
кодовой комбинации остается тот же, а каждый последующий разряд
получается как результат логического сложения всех разрядов кода
Грея, начиная со старшего и заканчивая преобразуемым разрядом.
Результат перевода: 1110 (код Грея) =>1011 (НДК):
(11.5)
В коде Грея соседние кодовые комбинации различаются только в
одном разряде. В результате максимальная абсолютная погрешность
считывания не превышает одной единицы. Благодаря этому качеству
код Грея нашел широкое применение в преобразователях угловых и
линейных перемещений.
Однако при использовании этого кода необходимо помнить, что
код Грея неарифметический, т. е. в нем отсутствует постоянный вес
разряда, поэтому над ним нельзя производить арифметические опе-
рации. Кроме того, имеются определенные трудности перевода кода
Грея в десятичный код и обратно.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
Контрольные вопросы
1. Перечислите базовые функции системы телемеханики.
2. В чем заключается разница между телеуправлением и телерегулированием?
3. Охарактеризуйте понятия «линия связи» и «канал связи».
4. Какие виды сигнала вы знаете?
5. Одинаковы ли по смыслу понятия «сообщение» и «информация»?
6. На какие группы делятся сообщения в зависимости от характера изме-
нения во времени?
7. Из каких соображений определяется число уровней квантования?
8. Какие импульсные признаки сигнала существуют?
9. Что такое кодирование?
10. Почему при передаче сообщений в системах телемеханики наибольшее
распространение получили двоичные коды?
11. Почему в кодовых масках используется код Грея?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
199
Глава 12
ЦИФРОВЫЕ УСТРОЙСТВА АВТОМАТИКИ
12.1 . Логические функции и логические элементы
12.1 .1. Логические переменные и основные операции
над ними
В отличие от аналоговых устройств, в которых информационный
сигнал может принимать любые значения в некотором диапазоне, в
цифровых устройствах носителем информации является цифровой
двоичный код. Этот код состоит из множества двоичных разрядов,
каждый из которых принимает только два фиксированных значения —
«0» или «1». Двум двоичным цифрам соответствуют два состояния
электронной схемы. Обычно это два фиксированных уровня напря-
жения, которые может принимать сигнал на выходе схемы. Поэтому
все разнообразие математических операций, выполняемых цифро-
выми устройствами, основывается на двоичной системе счисления.
Как уже отмечалось, основанием этой системы служит число два, а
коэффициентами могут быть только две цифры — ноль (0) и едини-
ца (1), которые называют битами (двоичными цифрами).
В любой системе кодирования должно выполняться неравенство
N < S n, где N — количество кодируемых объектов; S — основание
кода (основание системы счисления); n — длина кода (количество
разрядов в кодовом слове). Например, для записи числа 14 в двоичной
системе счисления необходим четырехразрядный код: 24 = 16, 14 < 16.
Для хранения и обработки информации в виде текстов, формул и
чисел необходимо с помощью бит закодировать около 150 различных
символов (заглавные и строчные буквы латинского и русского алфа-
витов, знаки препинания, математические знаки, десять цифр и т. п. ),
т.е. N ≈ 150. Для этого необходимы 8-разрядные коды (28 = 256). Вось-
миразрядный код называют байтом. Емкость памяти ЭВМ оценива-
ют в килобайтах (кбайт), мегабайтах (Мбайт) и гигабайтах (Гбайт).
Все цифровые устройства основаны на принципе многократного
повторения относительно простых базовых логических схем. Связи
между этими схемами строятся на основе чисто формальных методов.
Инструментом такого построения служит булева алгебра, названная
по имени одного из ее разр аботчиков — английского математика
Дж. Буля. Применительно к цифровой технике она называется также
алгеброй логики. Логическая переменная имеет только два значения,
которые обычно называются логическим нулем и логической единицей
и обозначаются «0» и «1» или просто 0 и 1. Существует три основные
операции между логическими переменными: конъюнкция (логическое И),
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
200
дизъюнкция (логическое ИЛИ) и инверсия (логическое НЕ). Конъ-
юнкция называется также логическим умножением (12.1), дизъюнк-
ция — логическим сложением (12.2), а инверсия — отрицанием (12.3):
FABABA
B
=∧=⋅=
;
(12.1)
FABAB
=∨=+;
(12.2)
FA
=
,
(12.3)
где F — логическая (булева) функция; А и В — логические перемен-
ные.
Значения этих логических функций для всех возможных значений
двух переменных называются таблицей истинности. Для конъюнк-
ции — логического И — функция F только тогда равна 1, когда оба
ее аргумента А и В равны 1. При дизъюнкции (логическом ИЛИ) F
равна 1 тогда, когда хотя бы один из аргументов (А или В) равен 1.
Отсюда и следуют названия этих функций. Обе эти функции можно
распространить на любое число переменных. Инверсия — логическая
функция только одной переменной.
Операции над логическими переменными выполняются по опре-
деленным правилам. Прежде всего необходимо учитывать принцип
двойственности (теорема де Моргана), который в общем виде запи-
сывается так:
ABCA
BC
ABCA
BC
+++ =⋅⋅
⋅⋅⋅ =
+++
......
......
;
.
(12.4)
Для преобразования формул алгебры логики с целью их миними-
зации, как и в обычной алгебре, используются скобки, а если их нет,
то сначала выполняется отрицание (инверсия) над отдельными пере-
менными, затем логическое умножение (конъюнкция) и наконец
логическое сложение (дизъюнкция). Если черта (знак инверсии)
стоит над совокупностью букв и знаков, то она выполняется в по-
следнюю очередь. Используются также теоремы алгебры логики.
12.1 .2. Реализация логических операций элементами
цифровой техники
Логические переменные могут иметь только два дискретных зна-
чения, поэтому они реализуются с помощью схем, которые могут
находиться в двух легко различимых состояниях. Такими схемами
являются электрические переключающие схемы, выполняемые на
основе транзисторных ключей. Для представления логических пере-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
201
менных в цифровых элементах используется электрическое напря-
жение, имеющее два различных уровня: высокий, близкий по уровню
к напряжению питания (транзистор закрыт), и низкий, близкий к
потенциалу корпуса (транзистор открыт). Этим уровням можно по-
ставить в соответствие состояния логических «1» и «0». Если высокий
уровень напряжения соответствует логической «1», а низкий — ло -
гическому «0», логика называется позитивной, а если наоборот (вы-
сокий — «0», низкий — «1») — негативной логикой.
Для реализации трех основных операций алгебры логики в схемах
цифровых устройств используются основные логические элементы,
входные переменные которых часто обозначают через хi, а выходные —
через у: 1) элемент И — схема логического умножения, конъюнктор
(рис. 12.1, а); 2) элемент ИЛИ — схема логического сложения, дизъ-
юнктор (рис. 12.1, б); 3) элемент НЕ — схема логического отрицания,
инвертор (рис. 12 .1, в). Этот набор элементов называют основным
базисом или основной функционально полной системой элементов.
Это означает, что с помощью этих элементов можно создать схему,
осуществляющую любую сколь угодно сложную логическую операцию.
Помимо этих элементов часто применяются логические схемы, вы-
полняющие операции И—НЕ (рис. 12.1, г) и ИЛИ—НЕ (рис. 12.1, д);
каждая из них является функционально полной.
Информация, поступающая в цифровое устройство, представляет
дискретный (т. е . состоящий из нулей и единиц) сигнал (код). На
передачу сигнала отводится конечный отрезок времени, называемый
тактом работы устройства. Если за один такт в устройство передает-
ся один из разрядов двоичного числа, то устройство работает с по-
следовательным кодом, если же за один такт передается все двоичное
число одновременно, то устройство работает с параллельным ко-
дом.
В общем случае на вход цифрового устройства поступает множе-
ство двоичных переменных Х (x1, x 2, ... , xn), а с выхода снимается
множество двоичных переменных Y(y1, y2, ... , yn). При этом устрой-
ство реализует определенную связь (логическую функцию) между
входными и выходными переменными. В зависимости от вида этой
связи цифровые устройства делят на комбинационные и последова-
тельностные. В комбинационных устройствах значения Y в течение
Рис. 12.1. Основные логические элементы:
а — элемент И; б — элемент ИЛИ; в — элемент НЕ; г — элемент И—НЕ; д — элемент
ИЛИ—НЕ; x, x1 ... xn — входные переменные; y — выходная переменная
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
202
каждого такта определяются значениями X только в этот же такт.
Такие устройства состоят только из логических элементов. В после-
довательностных устройствах значения Y определяются значениями
X как в течение рассматриваемого такта, так и существовавшими в
ряде предыдущих тактов. Поэтому в комбинационных устройствах
при пассивных уровнях входных сигналов выходные возвращаются в
исходное состояние, а в последовательностных хранят предыдущее
состояние. Для этого в последовательностных устройствах кроме
логических должны быть еще и запоминающие элементы. Подобно
входным и выходным переменным, переменные, сохраняемые в па-
мяти устройства, тоже двоичные и зависят от значений входных пере-
менных в предыдущих тактах.
12.2. Аналого-цифровое и цифроаналоговое
преобразование. Основные элементы цифровых
устройств
В основе функционирования любой системы автоматизации лежат
информационные процессы — сбор датчиками информации об объ-
екте, ее преобразование, передача, обработка и хранение. Прежде
чем информация дойдет от отправителя до получателя, она подвер-
гается различным преобразованиям. Это связано с тем, что техноло-
гические параметры, характеризующие состояние объекта управле-
ния, представляют собой непрерывные физические величины (тем-
пература, давление, уровень, скорость и т. д . ) . Датчик, измеряющий
какой-либо параметр, преобразует его также в непрерывный сигнал,
удобный для дальнейшей передачи (чаще всего электрический). Такой
сигнал называется аналоговым — это сигнал , опр еделенный для
любого момента времени, т. е . он представляет собой непрерывную
функцию времени. Обработка же полученной информации посред-
ством микропроцессоров требует представления информации в циф-
ровой форме. В то же время существует достаточно большое количе-
ство устройств, рассчитанных на унифицированный аналоговый
входной сигнал, что требует обратного преобразования информации
в аналоговую форму. Таким образом, процесс получения необходимой
информации об объекте требует целый ряд различных преобразова-
ний; контролируемые параметры объекта преобразуются вначале в
естественные аналоговые сигналы, затем в цифровые, которые после
обработки либо передаются по одному из цифровых интерфейсов
либо преобразуются в унифицированный аналоговый сигнал. Таким
образом, все параметры подвергаются двум основным преобразова-
ниям: аналого-цифровому и цифроаналоговому.
Аналого-цифровые преобразователи (АЦП) преобразуют инфор-
мацию о сигнале в аналоговой форме, т. е . о напряжении, непрерыв-
ном во времени, в информацию о нем в форме цифрового кода —
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
203
обычно в двоичной системе счисления. Они используются, например,
для ввода информации в управляющую ЭВМ от датчиков состояния
объекта управления. На рис. 12 .2, а приведена принципиальная схе-
ма параллельного АЦП на два разряда (т. е . он преобразует входное
напряжение в двухразрядный двоичный код). Основными элемента-
ми этого АЦП являются компараторы на базе операционного усили-
теля (ОУ), работающего в импульсном режиме.
Схема, поясняющая работу компаратора, показана на рис. 12.3, а.
К неинвертирующему входу ОУ подключен источник постоянной
ЭДС Е0, а к инвертирующему входу — источник сигнала с линейно
изменяющейся ЭДС ес = kt (рис. 12.3, б). Для контура, отмеченного
штриховой линией, справедливо выражение
u
вх=ес-E0,
(12.5)
где uвх — напряжение на входе ОУ.
В момент времени t0 = Е0/ k у напряжения uвх отрицательное зна-
чение заменяется положительным (см. рис. 12 .3, б). Одновременно
напряжение на выходе ОУ скачком изменится от значения ЭДС ис-
точника питания ОУ до нуля (рис. 12 .3, в).
Опорные напряжения для компараторов АЦП (см. рис. 12 .2, а)
задаются источником постоянной ЭДС Е0 и делителем напряжения
на резисторах R. Опорный ток I0 будет равен
Рис. 12.2. Двухразрядный параллельный АЦП:
а — схема; б — процесс пре образования напряжения в код; DA1 ... DA3 — операцион-
ные усилители; ec — преобразуемый сигнал (напряжение); E0 — источник постоянной
ЭДС; R — резистор делителя напряжения; ПНК — преобразователь напряжения в код
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
204
I
E
RRRR
E
R
0
00
226
=
+++
=
.
(12.6)
Тогда опорные (пороговые) напряжения Uоп1, Uоп2, Uоп3 на первом,
втором и третьем компараторах будут равны соответственно
U
оп1 = I0R;
(12.7)
U
оп2 = I0(R + 2R);
(12.8)
U
оп3 = I0(R+2R+2R).
(12.9)
Работу преобразователя при значении ЭДС Е0 = 3 В и опорных
напряжениях компараторов 0,5; 1,5 и 2,5 В иллюстрирует рис. 12.2, б.
Если значение ЭДС преобразуемого сигнала ес < 0,5 В, то напряжения
на выходах всех компараторов равны нулю и цифровой код на вы-
ходе преобразователя равен 00. При увеличении напряжения преоб-
разуемого сигнала сначала в интервале 0,5 В ≤ ес ≤ 1,5 В изменится
значение напряжения с отрицательного на положительное на выходе
только компаратора 1, затем при 1,5 В ≤ ес ≤ 2,5 В — компараторов 1
и 2 и, наконец, при 2,5 В ≤ ес — всех компараторов. Преобразователь
напряжения в код на основе логических элементов НЕ, И и ИЛИ,
Рис. 12.3. Компаратор напряжения на базе операционного усилителя:
а — схема; б, в, г — графики изменения во времени преобразуемого сигнала, входного и
выходного напряжения ОУ соотв етственно; DA — операционный усилитель; ec — ис -
точник сигнала; E0 — источник постоянной ЭДС; Uвых — выходное напряжение; Uвх —
входное напряжение; Rн — сопротивление нагрузки; Е — ЭДС источника питания ОУ
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
205
показанный на рис. 12.2, а штриховой линией, преобразует совокуп-
ность сигналов с выходов компараторов в цифровой код.
Цифроаналоговые преобразователи (ЦАП) преобразуют цифро-
вой двоичный код в аналоговое выходное напряжение (ток). Это
позволяет, например, использовать цифровой двоичный код для
управления работой исполнительных механизмов, таких как элек-
трические двигатели, реле, выключатели и т. д . На рис. 12.4 показана
принципиальная схема четырехразрядного ЦАП с двоичными весами
сопротивлений резисторов в цепях разрядов. Аналоговый сумматор
выполнен на базе операционного усилителя. Сопротивление цепи
старшего разряда равно R; сопротивление каждого предыдущего
разряда в два раза больше, т. е. для четырехразрядного кода сопро-
тивление младшего разряда составляет 8R. Сопротивление обратной
связи — Rос. Ключи Si управляются кодом, подаваемым на вход ЦАП.
Напряжение Uвых на выходе ЦАП при опорном напряжении Е0 будет
определяться выражением
UI
Ri
i
выхо
с
=
=
∑0
3
,
(12.10)
где Ii — ток в цепи какого-либо разряда; эти токи будут равны соот-
ветственно
I
E
R
I
E
R
I
E
R
I
E
R
0
0
1
0
2
0
3
0
842
== ==
;; ;. (12.11)
Рис. 12.4. Четырехразрядный ЦАП:
Е0 — опорное напряжение; Rос — сопротивление обратной связи; nR — сопротивление
разряда; Si — ключи; Uвых — напряжение на выходе ЦАП; Ii — ток через сопротивление
разряда; Di — разряд преобразуемого кода; ОУ — операционный усилитель
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
206
Тогда напряжение на выходе ЦАП будет определяться выражени-
ем
UE
R
R
D
R
D
R
D
R
D
ER
R
D
выхо
с
ос
=
()+ ()
+
()+ ()
=
=
00123
0
3
1
8
1
4
1
2
1
8
8(()
+()
+()
+()
421
210
DDD ,
(12.12)
где Di — разряд преобразуемого кода, значение которого может быть
0или1.
Ключами служат транзисторы, обычно полевые, базовые цепи
которых подключаются к источнику цифровых сигналов в двоичной
системе счисления.
Кроме АЦП и ЦАП в цифровых устройствах автоматики широко
используются еще несколько элементов — коммутаторы, дешифра-
торы, счетчики.
Коммутатор (переключатель, мультиплексор) представляет собой
устройство с несколькими информационными и управляющими вхо-
дами и одним выходом. Эти устройства применяются в аналоговых и
цифровых многоточечных измерительных приборах, устройствах свя-
зи с объектом и т. д. Коммутаторы существуют электромеханические
и электронные; последние благодаря высокой скорости коммутации
получили преимущественное распространение. Мультиплексор пред-
ставляет собой устройство, подключающее единственный выходной
канал связи к одному из входов в зависимости от управляющего сиг-
нала, заданного двоичным кодом, — например, его выход последова-
тельно повторяет состояние его информативных входов. Это позволяет
на вход одного АЦП подключать сигналы от различных датчиков —
термопар, термопреобразователей сопротивления и преобразователей
с токовым выходным сигналом. Частота коммутации аналоговых сиг-
налов составляет 1 ... 100 Гц, импульсных — десятки кГц.
Дешифратор (декодер) представляет собой устройство, которое
преобразует m-разрядный двоичный код на входе в n-р азрядный
двоичный код на выходе. Дешифраторы используются в блоках циф-
ровой индикации, цепях логического управления исполнительными
механизмами и т. д . На рис. 12.5, а приведена одна из наиболее рас-
пространенных схем использования дешифратора — для высвечива-
ния десятичных цифр на светодиодном индикаторе. Все цифры от 0
до 9 представляются четырехразрядным двоичным кодом, который
подается на информационные входы х0, х1, х2, х3. Светодиодные ин-
дикаторы содержат семь светящихся сегментов A, B, C, D, E, F, G
(рис. 12.5, б ), из которых составляются стилизованные изображения
всех десятичных цифр. Соответственно дешифратор имеет семь вы-
ходов, каждый из которых включает свой сегмент. Таким образом,
дешифраторы преобразуют двоичные сигналы на информационных
входах в активные уровни выходных сигналов. Например, для вы-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
207
свечивания на индикаторе цифры 4 на информационные входы х0,
х1, х2, х3 подается логический 0, а на х2 — логическая 1, т. е . кодовая
комбинация 0100, соответствующая цифре 4 в двоичной форме.
В результате этого активируются выходы B, C, F, G, включающие
одноименные сегменты, и на индикаторе высвечивается цифра 4
(рис. 12 .5, в). Дешифратор работает при наличии на управляющем
входе U сигнала высокого уровня; при наличии сигнала низкого
уровня все выходы дешифратора обнуляются независимо от сигналов
на информационных входах.
Все рассмотренные элементы — АЦП, ЦАП, коммутатор и дешиф-
ратор — являются комбинационными устройствами.
Счетчик относится к последовательностным устройствам; он
предназначен для хранения двоичного кода числа и выполнения
микроопераций счета, заключающихся в изменении значения числа
на ± 1. В суммирующих счетчиках число возрастает на 1, а в вычи-
тающих — уменьшается. Если в счетчике выполняются обе операции,
он называется реверсивным. Основной хар актеристикой счетчика
является модуль счета Кс, так как от него зависит максимальное чис-
ло сигналов, которое может сосчитать счетчик. Для двоичного счет-
чика Кс = 2, тогда при наличии n разрядов он может посчитать 2n
сигналов, отобразив их в диапазоне чисел от 0 до (2n
— 1). После сиг-
нала с номером 2n происходит сброс счетчика. В приборах с цифровой
индикацией используются двоично-десятичные счетчики с Кс = 10.
Выходные состояния такого счетчика представляются в виде двоично-
десятичных кодов цифр от 0 до 9. К такому счетчику подключается
Рис. 12.5 . Дешифратор для управления семисегментным индикатором:
а — схема; б — семисегментный индикатор; в — семисегментный индикатор с горящей
цифрой 4
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
208
дешифратор, управляющий светодиодным сегментным цифровым
индикатором, показывающим число подсчитанных импульсов. Эти
счетчики используются, например, для суммирования импульсов при
определении количества жидкости, прошедшей по трубопроводу. В этом
случае показания счетчиков импульсов умножаются на цену импуль-
са (например, в м3) и отражаются на дисплеях цифровых приборов в
единицах измеряемой величины.
12.3. Микропроцессоры, микропроцессорные
системы, программируемые логические контроллеры
Микропроцессор (МП) — это программно-управляемое устрой-
ство, осуществляющее процесс обработки цифровой информации и
управление им. Основное отличие МП от всех ранее рассмотренных
цифровых устройств заключается в способе обработки информации.
В обычных цифровых устройствах — как комбинационных, так и
последовательностных — обработка входных сигналов осуществля-
ется аппаратно, за счет схемы соединения различных элементарных
элементов — И, ИЛИ, НЕ и т. д. В МП процесс обработки информа-
ции осуществляется программно, т. е. путем последовательного вы-
полнения элементарных действий — команд программы, и результат
обработки определяется этой программой. Решаемая задача, таким
образом, задается программой, а сами аппаратные средства (МП и
набор дополнительных узлов) остаются неизменными. Благодаря
этому микропроцессорные устройства являются универсальными.
Микропроцессорная система (МПС) состоит из микроЭВМ и
набора устройств ввода / вывода информации, или внешних устройств
(ВУ). ВУ представляют собой последовательные и параллельные
порты, к которым подключаются устройства, обеспечивающие вы-
числительный процесс и связь с оператором (монитор, клавиатура,
внешние запоминающие устройства и т. д . ) . Структура любой МПС
является магистрально-модульной, т. е. она состоит из набора моду-
лей, подключенных к общим магистралям, называемым шинами.
Шина — это набор линий связи, по которым передается информация
определенного типа, происходит обмен информацией между различ-
ными модулями системы.
В состав микроЭВМ кроме микропроцессора (центрального про-
цессорного элемента) входят постоянное запоминающее устройство
ПЗУ, оперативное запоминающее устройство ОЗУ и блок интерфей-
са. ПЗУ предусмотрено для хранения управляющих программ, ис-
ходных данных, необходимых для обработки информации, и полу-
ченных результатов, а ОЗУ — для хранения информации, которая
может изменяться в процессе работы системы (данные, промежуточ-
ные результаты вычислений и программы, исполняемые в текущий
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
209
момент времени). Весь обмен информацией МП с ВУ осуществляет-
ся через блок интерфейса. ВУ передают данные из внешней среды в
МП или ОЗУ или получают их из микроЭВМ. Для подключения
любого ВУ к МПС его сигналы, скорость передачи информации,
формат кодовых слов необходимо привести к стандартному виду, с
которым работает МП. Все эти преобразования данных выполняют-
ся в интерфейсном блоке. Взаимодействие узлов микроЭВМ между
собой осуществляется с помощью трех шин: шины адреса (ША),
шины данных (ШД) и шины управления (ШУ). Чтобы МП мог одно-
значно выбрать нужную ячейку памяти или регистр ВУ, они имеют
адреса. Адрес ячейки (регистра) передается от МП в память или ин-
терфейсный блок по ША (она однонаправленная, так как направле-
ние передачи информации по ней только одно — из МП). ШД явля-
ется двунаправленной, так как передача данных по ней осуществля-
ется как из МП в память и интерфейс, так и в обратном направлении.
ША и ШД состоят из параллельных линий, передача информации по
которым осуществляется одновременно для всех линий. Число
линий ШД определяется разрядностью МП, а ША — объемом па-
мяти, т. е . разрядностью двоичного кода, необходимого для адреса-
ции всех ячеек. ШУ состоит из отдельных линий, по которым пере-
даются те или иные управляющие сигналы. В основном они пере-
даются из МП в остальные узлы (сигналы чтения и записи,
указывающие, какую именно следует выполнять операцию с ячей-
кой, адрес которой выставлен на ША). Некоторые сигналы имеют
обратную направленность — в МП (осведомительные сигналы за-
проса обслуживания, поступающие от ВУ, а также сигнал сброса МП
в начальное (нулевое) состояние).
ВУ в зависимости от способа передачи информации разделяются
на две большие группы: устройства, обменивающиеся параллельны-
ми словами данных и подключенные соответственно к параллельной
шине, и устройства, обменивающиеся информацией в последователь-
ном коде, т. е . последовательно, бит за битом, и подключенные к
однопроводной шине.
Основными узлами МП являются устройство управления (УУ),
регистр команд (РК), дешифратор команд (ДШК), арифметико-
логическое устройство (АЛУ), регистр флажков (РФ), набор внутренних
регистров, состоящий из адресных регистров (РА) и регистров данных
(РД), программный счетчик (ПС) и устройство управления шинами
(УУШ). Координация работы всех узлов в соответствии с выполняемой
командой осуществляется тремя узлами: УУ, РК и ДШК. РК обеспечи-
вает хранение команды в течение всего цикла ее исполнения, а ДШК
выполняет расшифровку кода этой команды. УУ вырабатывает серию
импульсов, обеспечивающих последовательное срабатывание узлов МП
в соответствии с выполняемой командой, а также обеспечивает прием
и выдачу внешних управляющих сигналов. АЛУ обеспечивает выпол-
нение всех операций, с помощью которых осуществляется обработка
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
210
данных в МП. Оно выполняет несложные арифметические, логические
и сдвиговые операции: сложение, вычитание, логические И, ИЛИ, НЕ,
сложение по модулю 2, сдвиг влево и вправо, сложение и вычитание
единицы. В зависимости от результата операции А ЛУ формирует при-
знаки результата, называемые флажками и используемые в последую-
щих командах. Они хранятся в РФ.
Каждый регистр МП используется для временного хранения одно-
го слова данных. Регистры могут иметь специальное или многоцелевое
назначение. РА и РД являются внутренней памятью МП. РА исполь-
зуются для временного хранения двоичных чисел, с помощью кото-
рых МП вычисляет адреса ячеек памяти, к которым он обращается
в процессе работы. РД используются для непосредственного хране-
ния двоичных чисел и вычисления адр есов ячеек ОЗУ, хр анящих
двоичные числа. Через РД также происходит обмен информацией
между МП и ВУ. Программный счетчик служит для хранения адре-
са ячейки памяти, в которой хранится очередная исполняемая ко-
манда программы.
В процессе работы МП постоянно обращается к ША и ШД. Пере-
дача информации внутри МП происходит по внутр енним шинам,
которые непосредственно не связаны с внешними шинами: эта связь
осуществляется через буферное устройство управления шинами
(УУШ). Все операции в МП инициируются импульсами синхрони-
зации от генератора тактовых импульсов, частота которых характе-
ризует быстродействие МП. Для современных МП значение тактовой
частоты составляет 10 ... 200 МГц и выше.
Программируемые логические контроллеры (ПЛК) — микро-
процессорные устройства, предназначенные для управления техно-
логическим процессом. Они представляют собой устройства, пред-
назначенные для сбора, преобразования, обработки, хранения ин-
формации и выработки команд управления в реальном времени в
соответствии с набором записанных в них программ. Работа контрол-
лера заключается в выполнении следующих операций: 1) сбор сигна-
лов с датчиков; 2) обработка сигналов согласно алгоритму управления;
3) выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет
этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое кон-
троллером на выполнение полного цикла, называется временем (или
периодом) сканирования; в большинстве современных ПЛК скани-
рование может настраиваться пользователем в диапазоне от 20 до
30 000 миллисекунд. Для быстрых технологических процессов, где
критична скорость реакции системы и требуется оперативное регу-
лирование, время сканирования может составлять 20 мс, однако для
большинства непрерывных процессов период 100 мс считается впол-
не приемлемым.
По функциональным признакам в ПЛК (рис. 12.6) можно выделить
следующие элементы: 1) центральный процессор (ЦП), предназна-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
211
ченный для выполнения команд (инструкций) управляющей про-
граммы и обработки данных, размещенных в памяти; 2) память
контроллера с жестким распределением областей для размещения
различных типов данных; 3) модуль самодиагностики (МСД), который
осуществляет контроль и диагностику элементов контроллера в про-
цессе его работы и сигнализирует при обнаружении неисправностей;
4) модуль связи с оператором (МСО), с помощью которого выполня-
ется программирование контроллера и оперативное управление в
процессе эксплуатации; 5) модули ввода, обеспечивающие прием и
первичное преобразование информации от датчиков объекта управ-
ления; 6) модули вывода, предназначенные для выдачи управляющих
сигналов на исполнительные устройства (механизмы) объекта управ-
ления. Модули ввода/ вывода также называют устройствами связи с
объектом (УСО). Основными их элементами являются АЦП и
ЦАП.
интерфейс (совокупность технических и программных средств,
обеспечивающих взаимодействие различных устройств) задает пара-
метры, процедуры и характеристики взаимодействия контроллера с
верхним уровнем АСУ ТП или с другим контроллером в случае рас-
пределенной структуры АСУ ТП.
Рис. 12 .6 . Структурная схема контроллера:
ЦП — центральный процессор; МСД — модуль самодиагностики; МСО — модуль свя-
зи с оператором
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
212
Посредством внутриблочной шины различные блоки ПЛК связы-
ваются между собой через общую магистраль.
В составе с другими вспомогательными устройствами контролле-
ры выполняют различные функции: обработка информации, управ-
ление, регулирование, мониторинг, измерение, сигнализация, кон-
троль.
12.4 . Способы передачи цифровой информации
Передача цифровой информации производится по различным
сетям. Каждая из сетей имеет свои особенности, назначение и реа-
лизуется на определенном типе кабелей. Для подключения к сети все
устройства должны иметь платы с соответствующим цифровым стан-
дартом (интерфейс). Для каждого типа интерфейса и вида кабеля
существуют ограничения по числу подключаемых устройств, длине
кабеля и скорости передачи. Для увеличения числа подключаемых
устройств и длины линии используются повторители. Что же касает-
ся скорости передачи, то проблема заключается в том, что полевые
устройства (датчики, исполнительные механизмы) работают в реаль-
ном масштабе времени и для использования на полевом уровне
высокоскоростных шин необходимы специальные согласующие эле-
менты.
HART-протокол (Highway Addressable Remote Transducer) как
способ передачи цифровой информации разработан фирмой
Rosemount и занимает промежуточное положение между токовым и
чисто цифровым сигналами. Он основан на методе передачи данных
с помощью частотной модуляции. На выходной токовый сигнал
4... 20 мА измерительных преобразователей накладываются импуль-
сы переменного тока, причем сигнал с частотой 1 200 Гц соответству-
ет логической единице, а 2 200 Гц — логическому нулю (рис. 12 .7).
Рис. 12.7. Передача информации по HART-протоколу
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
213
Среднее значение наложенных синусоид равно нулю (частотно-
модулированный сигнал является двухполярным) и не влияет на
токовый сигнал. Скорость передачи данных невысокая и составляет
1,2 кбит/ с, время обновления данных 2 — 3 раза в секунду в режиме
запрос/ ответ и 3 — 4 раза в секунду в пакетном режиме, к одной цепи
может подключаться до 15 устройств. Несмотря на относительно
большую длительность цикла, в большинстве случаев он является
достаточным для управления непрерывными процессами. Основное
достоинство HART-протокола — возможность одновременного ис-
пользования аналогового токового и цифрового сигналов в одной
паре проводов, что позволяет подключать к одной линии полевые
устройства с различным выходом.
интерфейс RS-232 является наиболее простым среди RS-интерфейсов
(RS означает «рекомендуемый стандарт»). Это стандарт последователь-
ной синхронной и асинхронной передачи двоичных данных между
терминалом и конечным устройством. В нем источник и приемник
сигналов имеют заземленную точку. Информация передается в ин-
версном коде двухполярными потенциальными сигналами, логической
единице соответствует -12 В, а логическому нулю +12 В. В отсутствие
передачи данных линия находится в состоянии логической единицы
(-12 В). Поток данных передается по одному проводу бит за битом,
т. е . передающая сторона по очереди выдает в линию 0 и 1, а прини-
мающая отслеживает их и запоминает. Данные передаются пакетами
по одному байту (8 бит). Каждый байт обрамляется стартовым и сто-
повыми битами. Стартовый бит всегда передается уровнем логиче-
ского нуля, а стоповый — единицей. Может также присутствовать бит
паритета. Его состояние определяется настройками: он может до-
полнять число единичных битов данных до нечетности, четности. Эта
передаваемая последовательность называется фреймом. Данные мо-
гут передаваться как в одну, так и в другую сторону (дуплексный
режим). Скорость передачи данных стандартом не нормируется и
может составлять от 110 до 19 200 бит в секунду. Пример одного фрей-
ма (8 битов данных, контроль по нечетности, 1 стоповый бит) по-
казан на рис. 12.8, а. Получив стартовый бит, приемник выбирает из
линии биты данных через определенные интервалы времени, начиная
с младшего бита (bit 0). Бит паритета (parity) в данном случае равен 1.
Недостатком этого стандарта является низкая помехозащищенность,
что ограничивает длину линии связи до 15 м. Линия связи соединяет
источник сигнала с одним приемником. Последней модификацией
данного стандарта является модификация Е, принятая в 1991 г. как
стандрат EIA/ TIA-232E.
интерфейс RS-485, получивший широкое распространение, обе-
спечивает передачу информации на расстояние от 120 до 1 200 м, при
скорости передачи от 100 до 10 4 бит в секунду (минимальное рас-
стояние соответствует максимальной скорости передачи). В качестве
линий связи применяется витая экранированная пара с подключе-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
214
нием до 32 устройств со стандартным входным сопротивлением.
Возможно использование оптического кабеля. В основе интерфейса
RS-485 лежит принцип диф ференциальной (балансной) передачи
данных (рис. 12.8, б). Суть его заключается в передаче одного сигна-
ла (импульсы напряжения ± 1,5 В) по двум проводам, причем по
одному проводу (условно A) идет оригинальный сигнал, а по другому
(условно B) — его инверсная копия. Другими словами, если на одном
проводе «1», то на другом «0» и наоборот. Таким образом, между
двумя проводами витой пары всегда есть разность потенциалов: при
«1» она положительна, при «0» — отрицательна. Именно этой раз-
ностью потенциалов и передается сигнал. Такой способ передачи
обеспечивает высокую устойчивость к синфазной помехе. Синфазной
называют помеху, действующую на оба провода линии одинаково.
Например, электромагнитная волна, проходя через участок линии
связи, наводит в обоих проводах потенциал. Если сигнал передается
потенциалом в одном проводе относительно общего, как в RS-232,
то наводка на этот провод может исказить сигнал относительно хо-
рошо поглощающего наводки общего провода («земли»). А при диф-
ференциальной передаче искажения не происходит, так как если два
провода пролегают близко друг к другу и перевиты, то наводка на оба
провода одинакова. Потенциал в обоих одинаково нагруженных про-
водах изменяется одинаково, при этом информативная разность по-
тенциалов остается без изменений.
Формат информационных посылок и протокол обмена стандарт
не нормирует. Наиболее часто для передачи байтов данных исполь-
Рис. 12.8. Передача информации по интерфейсам:
а — RS-232; б — RS-485
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
зуются те же фреймы, что и в интерфейсе RS-232: стартовый бит,
биты данных, бит паритета (при необходимости), стоповый бит. Про-
токолы обмена в большинстве систем работают по принципу «веду-
щий — ведомый». Одно устройство на магистрали является ведущим
и инициирует обмен посылкой запросов подчиненным устройствам,
которые различаются логическими адресами.
В системах с территориально-распространенными средствами из-
мерения для передачи информации используются радиоканалы. Ра-
диомодемы, работающие на частотах 1 000... 2 500 МГц, позволяют
передавать информацию на расстояние до 5 км.
Контрольные вопросы
1. Какие значения может принимать логическая переменная?
2. Назовите основные логические операции.
3. Какие логические элементы образуют основную функционально пол-
ную систему?
4. Каково назначение АЦП?
5. Какие функции выполняет дешифратор?
6. Что такое микропроцессор?
7. Из каких элементов состоит программируемый логический контроллер?
8. Как передается информация посредством HART-протокола?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
216
Глава 13
ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ
13.1. Общие сведения о системах автоматического
управления и регулирования
Любой технологический процесс характеризуется совокупностью
технологических параметров, значения которых должны принимать
заданные значения или изменяться по определенному закону. На-
пример, транспорт нефтепродуктов по трубопроводу производится
при определенных значениях давления, температуры, расхода и др.
Физическая величина, подлежащая управлению, называется управ-
ляемой (регулируемой) величиной Y(t). Объект управления (ОУ),
или объект регулирования (ОР) — устройство, требуемый режим
работы которого должен поддерживаться извне специально органи-
зованными управляющими воздействиями U(t). В реальных услови-
ях на объект управления оказывают влияние внешние воздействия
Z(t), которые называются возмущающими. Эти воздействия вызыва-
ют изменение внутреннего состояния объекта и как следствие —
управляемых параметров.
Управление каким-либо объектом — это процесс воздействия на
него с целью обеспечения требуемого течения процесса в объекте или
требуемого изменения его состояния. Управление, осуществляемое
без участия человека, называется автоматическим. Совокупность
ОУ и управляющего устройства (УУ) пр едставляет собой систему
автоматического управления (САУ).
В САУ используется три основных принципа управления: 1) разом-
кнутое управление; 2) управление по возмущению (принцип компен-
сации); 3) управление по отклонению (принцип обратной связи).
Принцип разомкнутого управления (рис. 13 .1, а) отличается про-
стотой технической реализации. На вход управляющего устройства
подается задание X, в соответствии с которым оно вырабатывает
сигнал управления U. Этот сигнал поступает на исполнительные
элементы объекта управления. Задание формируется человеком или
специальным задающим устройством. Разомкнутый принцип управ-
ления является малоэффективным при наличии возмущающих воз-
действий Z, которые приводят к отклонению управляемого параметра
Y от заданного значения (задания).
Управление по возмущению (рис. 13.1, б ) используется тогда, ког-
да известны и измеряемы основные доминирующие возмущающие
воздействия. В этом случае в структуру р азомкнутого управления
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
217
добавляются измеритель (И) возмущения и корректирующее устрой-
ство (К). Для устранения влияния возмущающего параметра произ-
водится его измерение, в соответствии с которым производится
коррекция сигнала управления U на выходе управляющего устройства
до значения U ′.
Принцип управления по отклонению (рис. 13 .1, в) имеет замкну-
тую структуру, т. е . имеет цепь обратной связи. В этом случае сигнал
задания Х поступает на один из входов элемента сравнения ЭС, на
другой вход которого по цепи обратной связи подается измеренное
с помощью датчиков фактическое значение Y управляемого параме-
тра объекта управления. На выходе элемента сравнения возникает
сигнал D (ошибка, отклонение), который является разностью между
заданным и фактическим значениями параметров, т. е. D = Х - Y .
Управляющее устройство в зависимости от величины и знака ошиб-
ки вырабатывает сигнал управления. Таким образом, принцип зам-
кнутого управления учитывает не только задание, но и фактическое
состояние о бъекта и действующих возмущений. Поэтому данный
принцип является наиболее универсальным и позволяет успешно
решать задачи управления, несмотря на неопределенность объекта
управления и характер возмущений.
Следует отметить, что очень часто с целью улучшения качества
управления используется комбинация принципов управления по воз-
мущению и отклонению.
Класс автоматических систем, построенных на основе принципа
управления по отклонению, получил название система автомати-
ческого регулирования (САР).
Рис. 13.1. Основные принципы управления:
а — разомкнутое управление; б — управление по в озмущению; в — управление по от-
клонению; ОУ — объект управления; УУ — управляющее устройство; И — измеритель
возмущения; К — корректирующее устройство; Х — задание; Y — управляемый пара-
метр; U — сигнал управления; U ′ — скорректиров анный сигнал управления; Z — воз -
мущающее в оздействие; D — сигнал ошибки
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
218
Системы автоматического регулирования классифицируются по
ряду признаков. Например, по характеру изменения задания они
могут быть стабилизирующими, программными и следящими. Ста-
билизирующая САР — это система, алгоритм функционирования
которой содержит предписание поддерживать постоянное значение
регулируемой величины (Y = const). Программная САР — система,
алгоритм функционирования которой содержит предписание изме-
нять регулируемую величину в соответствии с заранее заданной
функцией (Y изменяется программно). Следящая САР — система,
алгоритм функционирования которой содержит предписание изме-
нять регулируемую величину в зависимости от заранее неизвестной
величины на входе САР (Y = var). Системы делятся также по функ-
циональному назначению (расхода, давления и т. п . ), виду исполь-
зуемых сигналов (аналоговые или дискретные) и энергии (электри-
ческие, пневматические, гидравлические, механические).
В САР управляющее устройство принято называть регулятором.
Регулятор выполняет основные функции управления путем выработ-
ки управляющего воздействия U в зависимости от ошибки (отклоне-
ния), т. е . U = f(D). Закон регулирования определяет вид этой зави-
симости без учета инерционности элементов регулятора. Он может
быть пропорциональным, интегральным, дифференциальным или
представлять собой комбинацию этих компонент.
Пропорциональным называется закон регулирования, при котором
управляющее воздействие пропорционально сигналу ошибки:
U
= U0+ kD,
(13.1)
где U0 — по стоянная величина; k — коэффициент пропорциональ-
ности.
интегральный закон регулирования — это закон, при котором
сигналу ошибки пропорциональна скорость изменения управляюще-
го воздействия:
UU
T
dt
t
=+∫
0
0
1
D,
(13.2)
где Т — постоянная времени интегрирования (время изодрома).
Дифференциальным называется закон, при котором управляющее
воздействие пропорционально скорости изменения сигнала ошибки:
UUT
d
dt
=+
0д
D
,
(13.3)
где Тд — время предварения.
При построении САР используются также пропорционально-
интегральный, пропорционально-дифференциальный и пропорцио-
нально-интегрально-дифференциальный законы регулирования:
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
219
Ukk
T
dtUkk
d
dt
Ukk
d
dt
k
T
dt
t
t
=+
=+
=+
+
∫
∫
12
0
12
123
0
1
1
DDD
D
D
D
D
;;
.
(13.4)
Название р егуляторов со ответствует р еализуемым им законам.
Преимуществом П-регулятора являются простота технической реа-
лизации и быстродействие. П-регулятор представляет собой усилитель
с коэффициентом усиления k. Недостаток — наличие статической
(постоянной) ошибки. Эти регуляторы целесообразно применять для
объектов с малой инерционностью. И -регуляторы обеспечивают
нулевую статическую ошибку и нечувствительность к шумам в кана-
ле измерения регулируемого параметра. Недостаток И-регулятора —
худшие свойства в переходных режимах и меньшее быстродействие.
ПИ-регулятор позволяет объединить положительные свойства про-
порционального и интегрального законов регулирования. Благодаря
наличию интегральной составляющей в алгоритме, ПИ-регулятор
обеспечивает высокую точность в установившихся режимах, а при
определенном соотношении коэффициентов k, k1 и k2 обеспечивает
хорошие показатели и в переходных режимах. Поэтому он получил наи-
большее распространение в промышленной автоматике. ПД-регулятор
реагирует не только на величину сигнала ошибки, но и на скорость его
изменения. Благодаря этому при регулировании достигается эффект
упреждения. Поэтому ПД-регуляторы используются для регулирова-
ния параметров инерционных объектов. Недостатком ПД-регулятора
является невозможность обеспечения высокой точности регулирова-
ния. ПИД-регулятор реализует наиболее гибкий закон регулирования
(в классе линейных алгоритмов), сочетающий в себе преимущества
более простых законов регулирования.
13.2 . Математическое описание САР
13.2.1 . Преобразование Лапласа и его свойства
Наиболее распространенным методом описания, анализа и син-
теза САР (САУ) является операционный метод (метод операционно-
го исчисления), в основе которого лежат прямое и обратное преоб-
разования Лапласа. Прямое преобразование Лапласа определяется
в виде
Fpftdt
pt
()(),
=
-
∞
∫e
0
(13.5)
гдеp=σ+jω.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
220
Это соотношение преобразует функцию f(t) вещественного пере-
менного t в функцию F(p) комплексного переменного p. Функцию
F(p) называют изображением функции f(t), а саму функцию f(t) на-
зывают оригиналом. Символически связь между изображением и
оригиналом записывается f(t)—F(p).
Полагают, что функция f(t) обладает следующими свойствами:
1) f(t) определена и кусочно-дифференцируема на всей положитель-
ной числовой полуоси (0 — ∞); 2) f(t) = 0 при t < 0; 3) существуют
такие положительные числа M и с, при которых выполняется соот-
ношение | f(t)| ≤ M-ct
при0≤t≤∞.
Обратное преобразование Лапласа определяется как
ft
j
Fp dp
pt
j
j
()
().
=
-∞
+∞
∫1
2πσ
σ
e
(13.6)
Рассмотрим теперь некоторые свойства преобразования Лапласа,
необходимые для решения многих задач анализа САР:
1) если функция f1(t) = Af(t), где A — постоянная величина, а
функция f(t) имеет изображение F(p), то f1(t)—AF( p);
2) если задана сумма функций f1(t) + f2(t), то, осуществляя прямое
преобразование Лапласа, находим: [ f1(t) + f2(t)]—[F1(p) + F2(p)], где
f1(t) —F1(p), f2(t) —F2(p);
3) если функция f(t) имеет изображение F( p), то для функции, за-
паздывающей на время τ, будет иметь место запись f(t -τ) —F(p)e-pτ
;
4) изображение производной по времени от функции f(t), т. е . изо -
бражение от f́(t), f́(t)—pF(p) - f(0). При нулевых начальных усло-
виях, т. е . при f(0) = 0, f́(t)—pF( p);
5) изображение для интеграла от функции f(t) при f(0) = 0, ∫ f(t)dt—
F(p)/ p.
При решении задач и выполнении технических расчетов с ис-
пользованием преобразования Лапласа приходится находить изо-
бражение функции по оригиналу и наоборот. Для облегчения рас-
четов пользуются обычно справочниками, содержащими таблицы
функций и их изображения.
13.2.2. Математические модели элементов
и систем автоматического регулирования
Любая система, в том числе и САР, состоит из элементов (звеньев).
Для получения модели системы необходимо определить модели ее
элементов. Элементы и сама система характеризуются входом (вхо-
дами) x(t) и выходом (выходами) y(t). Входы независимы, они «при-
ходят» из внешней среды. При изменении информации на входе
меняется внутреннее состояние объекта (так называют его изменяю-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
221
щиеся свойства) и, как следствие, выходы. Построить модель — это
значит найти оператор, связывающий входы и выходы. С его помо-
щью можно предсказать реакцию объекта на любой входной сигнал.
Для упрощения моделей делают следующие допущения: 1) система и
ее элементы обладают свойством стационарности; 2) элементы си-
стемы являются линейными; 3) протекающие процессы являются
непрерывными функциями времени при выполнении нулевых на-
чальных условий.
Математические модели могут быть получены теоретически из
законов физики (законы сохранения массы, энергии, импульса). Эти
модели описывают внутренние связи в объекте и, как правило, наи-
более точны. В общем случае физическая модель линейной системы
описывается дифференциальным уравнением следующего вида:
a
dy
dt
a
dy
dt
ayb
dx
dt
b
dx
dt
b
n
n
n
n
n
n
m
m
m
m
m
m
++
+=
++
+
-
-
-
-
-
-
1
1
1
01
1
1
0
......
xx, (13.7)
где ai, bi — по стоянны е коэффициенты, зависящие от параметров
системы.
Применим к левой и правой части преобразование Лапласа, счи-
тая, что все начальные условия нулевые:
apYp apYp
aYp
bpXp bpXp
b
n
n
n
n
m
m
m
m
()
()
()
()
()
++
...+
=
=+
+...+
-
-
-
-
1
1
0
1
1
0 XXp
().
Вынесем за скобки Y(p) в левой части и X(p) в правой части:
()
()
()
().
ap ap
aYp
bp bp
Xp
n
n
n
n
m
m
m
m
++
...+
=
=+
+...+
-
-
-
-
1
1
0
1
1
Разделив обе части этого равенства на ()
(),
ap ap
aXp
n
n
n
n
++
...+
-
-
1
1
0
получим передаточную функцию W(p) в виде
Wp
Yp
Xp
bp bp
b
ap ap
a
m
m
m
m
n
n
n
n
() ()
()
.
==
++
+
++
+
-
-
-
-
1
1
0
1
1
0
...
...
(13.8)
Таким образом, передаточная функция равна отношению изо-
бражений по Лапласу выходного и входного сигналов при нулевых
начальных условиях.
Передаточная функция является основной математической моде-
лью, полностью описывающей динамические свойства элемента или
системы. На основе передаточной функции можно получить ряд
частных характеристик системы, исследовать на устойчивость и т. д .
В реальных условиях очень часто на вход системы поступают гар-
монические сигналы. Для определения реакции системы на воздей-
ствие гармонических входных сигналов пользуются амплитудно-
фазовой характеристикой (АФХ), которую получают путем замены в
передаточной функции оператора p на jω:
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
222
Wj
Yj
Xj
ω
ω
ω
()= ()
().
(13.9)
АФХ представляет собой комплексное выражение, имеющее со-
ответственно амплитуду и фазу:
AW
jP
Q
ωω
()= ()
=+
22
;
(13.10)
φω
ω
() arg(),
=
Wj
(13.11)
где P и Q — вещественная и мнимая части АФХ (при условии
φω
π
().
<
2
Функция А(ω) называется амплитудно-частотной характери-
стикой (АЧХ), а φ(ω) — фазочастотной характеристикой (ФЧХ).
Чтобы выяснить физический смысл АЧХ и ФЧХ, преобразуем
выражение для АФХ в показательную форму:
Wj
Yj
Xj
Y
X
Y
X
j
j
j
Y
X
Y
() ()
()
()
()
()
()
()
()
()
ω
ω
ω
ω
ω
ω
ω
φω
φω
φω
==
=
-
-
-
e
e
e
-
-
()
φω
X()
.
Следовательно,
A
Y
X
() ()
()
;
ω
ω
ω
=
φ(ω) = φY(ω) - φХ(ω).
Таким образом, АЧХ — это отношение амплитуд выходного сиг-
нала к входному в зависимости от частоты, а ФЧХ — разность фаз
выходного и входного сигналов в зависимости от частоты.
В качестве примера рассмотрим моделирование звена в виде элек-
трической RC-цепи (рис. 13.2).
По второму закону Кирхгофа имеем uвх = iR + uвых. Ток i через
конденсатор равен
iC
du
dt
=
вых
.
Следовательно, дифференциальное уравнение этого звена запи-
шется в виде
Рис. 13 .2 . Схема RC-цепи
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
223
uC
R
du
dt
u
вх
вых
вых
=+
.
Используя преобразование по Лапласу, переходим в операторную
форму:
u
вх(p) = CRpuвых(p) + uвых(p) = (Tp + 1)uвых(p),
где Т = RC — постоянная времени.
Из последнего выражения получаем передаточную функцию
Wp
uр
uр
рТ
()= ()
()=
+
вых
вх
1
1
.
Путем замены p на jω определяем АФХ:
Wj
jТ
()
.
ω
ω
=
+
1
1
Умножив числитель и знаменатель АФХ на комплексно-сопряженное
выражение знаменателя, имеем
Wj
jT
jТ jT
T
jT
T
()
.
ω
ω
ωωω
ω
ω
=
-
+
()
-
()
=
+
-
+
1
11
1
11
22
22
Из последнего выражения легко получить АЧХ и ФЧХ, т. е . модуль
и аргумент АФХ:
A
Т
()
ω
ω
=
+
1
122
и φ(ω) = arctg(ωT ).
Многие звенья САР независимо от их физической природы описы-
ваются одинаковыми дифференциальными уравнениями, следовательно,
обладают одинаковыми динамическими свойствами. Простейшие звенья
САР, моделируемые дифференциальными уравнениями не выше второ-
го порядка, называются типовыми. Модели типовых звеньев во времен-
ной области и их передаточные функции приведены в приложении 3.
Определение передаточной функции сложной системы, в том
числе САР, производится следующим образом. Структура системы
разбивается на элементы (звенья), передаточные функции которых
либо известны, либо легко определяются. Затем последовательно
объединяют звенья и определяют передаточные функции объединен-
ных звеньев в зависимости от типа их соединения — последователь-
ного, параллельного и с обратной связью.
Последовательное соединение звеньев — это соединение, при
котором выходной сигнал предыдущего звена является входным сиг-
налом для последующего. При таком соединении n звеньев переда-
точная функция объединенного звена равна произведению переда-
точных функций исходных звеньев:
Wp Wp
i
i
n
()
().
=
=
∏1
(13.12)
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
224
Например, для соединения двух звеньев (рис. 13 .3, а):
Wp
Yр
Xр
YpYp
YpXp
WpWp
()= ()
()= () ()
()()= () ()
1
1
12
.
Параллельное соединение звеньев — это соединение, при котором
входной сигнал всех звеньев одинаков, а выходной сигнал представ-
ляет со бой сумму выходных сигналов всех звеньев. В этом случае
общая передаточная функция равна сумме передаточных функций
исходных звеньев:
Wp Wp
i
i
n
()= ()
=
∑1
.
(13.13)
Например, передаточная функция при параллельном соединении
двух звеньев (рис. 13.3, б) равна
Wp
Yр
Xр
Yp Yp
Xp
Yp
Xp
Yp
Xp
WpW
()= ()
()= ()+ ()
()=()
()+ ()
()= ()+
12 12
12
pp
().
Под обратной связью понимают передачу сигнала с выхода звена
на его вход (рис. 13.3, в). Звено W1(p) называется прямой цепью, а
W2(p) — обратной цепью. Различают положительную и отрицатель-
ную обратные связи. Если X1(p) = X(p) - Xос(p), обратная связь от-
рицательная, а при X1(p) = X(p) + Xос(p) — положительная . Для
определения общей передаточной функции запишем передаточные
функции исходных звеньев:
Wp
Yp
Xр
Wp
Xp
Yр
1
1
2
()= ()
() ()= ()
()
;;
ос
X
1(p) = X(p)±Xос(p).
Исключая из этих выражений Xос(p) и X1(p), находим передаточную
функцию звена, охваченного обратной связью:
Wp
Yp
Xр
Wp
WpWp
()= ()
()= ()
+ ()()
1
12
1
.
Рис. 13.3. Соединение звеньев:
а — последов ательное; б — параллельное; в — с обратной связью
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
225
Знак «+» соответствует отрицательной обратной связи, а знак «-»
—
положительной. Положительная обратная связь увеличивает коэф-
фициент передачи и уменьшает полосу пропускания прямой цепи, а
отрицательная о братная связь уменьшает коэффициент пер едачи
прямой цепи и увеличивает полосу пропускания. Кроме того, отри-
цательная о братная связь способствует повышению стабильности
коэффициента передачи прямой цепи.
13.3 . Устойчивость систем автоматического
регулирования
Устойчивость является одним из необходимых условий, обеспе-
чивающих нормальное функционирование автоматических систем.
В линейных САР при отклонении регулируемого параметра от
заданной величины (например, под действием возмущения или из-
менения задания) регулятор воздействует на систему таким образом,
чтобы ликвидировать это отклонение. Если система в результате
этого воздействия возвращается в исходное состояние или переходит
в другое равновесное состояние, то такая система называется устой-
чивой. Если же возникают колебания со все возрастающей амплиту-
дой или происходит монотонное увеличение ошибки регулирования,
то система называется неустойчивой.
Рассмотрим вопросы исследования устойчивости линейной си-
стемы на примере некоторой САР, описываемой линейным диффе-
ренциальным уравнением с постоянными коэффициентами:
a
dy
dt
a
dy
dt
ayb
dx
dt
b
dx
dt
b
n
n
n
n
n
n
m
m
m
m
m
m
++
+=
++
+
-
-
-
-
-
-
1
1
1
01
1
1
0
......
xx.
Требуется исследовать устойчивость САР, иными словами, требу-
ется исследовать устойчивость данного дифференциального уравне-
ния. Самый простой способ — это решить данное уравнение, пред-
ставив решение в виде суммы y(t) = yв(t) + yсв(t), где yв(t) — частное
решение дифференциального уравнения с правой частью, характе-
ризующее установившиеся состояние САР, а yсв(t) — общее решение
уравнения с нулевой правой частью, определяющее переходные про-
цессы в САР. Следовательно, устойчивость системы будет опреде-
ляться общим решением yсв (t) однородного уравнения
a
dy
dt
a
dy
dt
ay
n
n
n
n
n
n
++
+=
-
-
-
1
1
1
0
0
...
.
Общее решение этого уравнения можно записать в виде
yt ct
i
pt
i
n
i
св
e
()= ()
=
∑1
,
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
226
где pi = ai ± jbi — корни характеристического уравнения anp
n
+an-1pn-1+-
+...+a0; ci(t) — полином от t.
Общее решение yсв(t) будет ограниченным в том случае, если дей-
ствительные части корней характеристического уравнения отрица-
тельны. Таким образом, для устойчивости системы необходимо и
достаточно, чтобы все корни характеристического уравнения
имели отрицательные действительные части.
Если известна передаточная функция линейной САР
Wp
Yр
Xр
bp bp
b
ap ap
a
m
m
m
m
n
n
n
n
()= ()
()=
++
+
++
+
-
-
-
-
1
1
0
1
1
0
...
...
,
то полином знаменателя совпадает с характеристическим уравнени-
ем однородного дифференциального уравнения. Следовательно, для
устойчивости системы необходимо и достаточно, чтобы все
корни полинома знаменателя (так называемые полюса передаточной
функции) имели отрицательные действительные части.
Для того чтобы определить, устойчива ли данная система, впол-
не достаточно располагать лишь сведениями о знаке действитель-
ных частей этих корней. Существует целый ряд простых критери-
ев, которые по виду характеристического уравнения или знамена-
теля передаточной функции позволяют судить об устойчивости
системы.
Так, положительность всех коэффициентов ai характеристиче-
ского уравнения является необходимым условием устойчивости
системы. Если хотя бы один коэффициент будет отрицательным или
равным нулю, то можно сразу сказать, что система неустойчива.
Таким образом, неположительность хотя бы одного коэффициента
характеристического уравнения гарантирует неустойчивость систе-
мы, однако обратное, вообще говоря, неверно, т. е . положительность
всех коэффициентов уравнения есть необходимое и достаточное
условие лишь для систем первого и второго порядка.
Уже для систем третьего порядка положительность коэффици-
ентов характеристического уравнения недостаточна для устойчи-
вости системы.
Одним из эффективных методов анализа является критерий Гур-
вица, который определяет необходимые и достаточные условия
устойчивости системы любого порядка. Составляется матрица n × n
Гурвица по следующим правилам.
Первая строка заполняется коэффициентами характеристическо-
го уравнения с нечетными индексами, а вторая — коэффициентами
с четными индексами. Дальнейшие строки отличаются от первой
пары смещением вправо на один, два, три и так далее столбца. Все
коэффициенты с индексами, большими n, заменяются нулями. На-
пример,для полинома пятой степени a0+ a1p1+ a2p2+ a3p3+ a4p4+ a5p5
матрица Гурвица имеет вид
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
227
aaa
aaa
aaa
aaa
aaa
135
024
135
024
135
00
00
00
00
00
.
Критерий Гурвица формулируется следующим образом. Все корни
полинома имеют отрицательные вещественные части тогда и только
тогда, когда все n главных миноров матрицы (определителей Гурвица)
положительны. Поскольку для устойчивости полинома необходимо,
что бы все его коэффициенты были положительными, достаточно
проверить только (n - 1) первых определителей Гурвица. Например,
для n = 5 речь идет об определителях
а
aa
aa
aaa
aaa
aa
aaa
aaa
aaa
1
13
02
135
024
13
135
024
135
00
0
0
0
0
0
0
>>
>
,,
и
aaaa
024
0
>.
Частотный критерий Найквиста позволяет по амплитудно-
фазовой частотной характеристике (АФЧХ) разомкнутой системы
оценить устойчивость замкнутой системы. АФЧХ может быть полу-
чена экспериментально или аналитически. Аналитическое построение
АФЧХ производится обычными методами.
Для устойчивости замкнутой системы необходимо и достаточно,
чтобы АФЧХ разомкнутой системы при изменении частоты от 0 до ∞
не охватывала точку с координатами -1, j0. Если АФЧХ разомкнутой
системы проходит через точку с координатами -1, j0, то система будет
нейтральной.
Критерий Найквиста позволяет наглядно проследить влияние изме-
нения параметров передаточной функции на устойчивость системы.
13.4 . Показатели качества систем автоматического
регулирования
Система автоматического регулирования оценивается устойчивостью,
точностью в установившихся режимах и качеством переходных процес-
сов. Необходимо также, чтобы переходные процессы затухали достаточ-
но быстро с допустимыми отклонениями регулируемой величины.
Оценки качества регулирования могут быть прямыми и косвен-
ными, а также статическими и динамическими. Динамические
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
228
оценки характеризуют переходной процесс, а статические — устано-
вившийся режим.
При непосредственном определении качества регулирования на
вход системы подают тестовый сигнал. В качестве тестового сигнала
обычно используют так называемый «единичный скачок» (единичную
функцию), т. е . мгновенное изменение входного сигнала с 0 до 1 в
момент времени t = 0 (рис. 13 .4, а). Единичная функция определяет-
ся как
1
00
10
() ,;
,.
t
t
t
=
<
≥
если
если
Реакция (выходной сигнал) системы на единичный скачок назы-
вается переходной характеристикой (рис. 13 .4, б) и обозначается
h(t). По переходной характеристике определяются основные показа-
тели качества:
1) время регулирования tр — интервал вр емени, по истечении
которого отклонение переходной характеристики от установившего-
ся значения не превышает некоторой заданной величины q. Значение
q выбирают обычно равным 5 или 2 % от установившегося значения
(hуст);
2) перерегулирование — разность между максимальным значени-
ем hmax переходной характеристики и ее установившимся значением,
выраженная в процентах от установившегося значения:
σ=
-
hh
h
max
%.
уст
уст
100
(13.14)
В большинстве случаев требуется, чтобы перерегулирование не
превышало 10 ... 30 %;
3) колебательность — число колебаний за время регулирования;
допускается не более 2 ... 3 колебаний;
Рис. 13 .4 . Определение показателей качества регулирования:
а — единичная функция; б — переходная характеристика
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
229
4) статическая ошибка
D=
-
xh
x
уст
,
(13.15)
где х — задание; hуст — установившееся значение регулируемого па-
раметра.
Если принять, что х = 1, статическая ошибка равна D = 1 – hуст.
Кроме этих параметров по графику переходной характеристики
определяют время нарастания переходного процесса tн и время до-
стижения первого максимума tmax.
Существует две разновидности интегральной оценки качества САР.
интегральная абсолютная ошибка регулирования определяется
следующим выражением:
Jx
ydt
t
1
0
=-
()
∫
p
.
(13.16)
Эта оценка может быть применена только при монотонных пере-
ходных процессах при отсутствии колебаний. интегральная квадра-
тичная оценка применяется как при монотонных, так и при коле-
бательных переходных процессах и определяется следующим соот-
ношением:
Jx
ydt
t
2
2
0
=-
()
∫
p
.
(13.17)
Недостаток квадратичной интегральной оценки заключается в том,
что различные по характеру переходные процессы могут иметь одну
и ту же величину оценки.
Наряду с прямыми показателями качества, определяемыми по
переходной характеристике, используются косвенные показатели, в
частности корневые оценки качества.
Многие свойства системы можно предсказать, посмотрев на рас-
положение корней характеристического полинома на комплексной
плоскости. Прежде всего все корни для устойчивой системы должны
находиться в левой полуплоскости, т. е . слева от мнимой оси.
Быстродействие системы определяется степенью устойчиво-
сти η — так называется расстояние от мнимой оси до ближайшего
корня (или пары комплексно-сопряженных корней). Этот корень
называется доминирующим, он определяет самые медленные движе-
ния в системе и время переходного процесса, которое может быть
примерно рассчитано по формуле
t
= 3/η.
(13.18)
Степень устойчивости, несмотря на название, ничего не говорит
о близости системы к границе устойчивости, она только характери-
зует быстродействие.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
Параметр, определяющий скорость затухания колебаний в систе-
ме, называется колебательностью. Колебательность μ для пары
комплексно-сопряженных корней a ± jb вычисляется как отношение
мнимой и вещественной части корня (по модулю):
μ=b/a.
(13.19)
Чем больше эта величина, тем слабее затухают колебания, вы-
званные этими корнями, за один период колебаний.
При проектировании систем обычно требуется обеспечить бы-
стродействие не ниже заданного (степень устойчивости не меньше
заданной η min) и колебательность не выше заданной μmax.
Контрольные вопросы
1. Назовите основные принципы управления.
2. Какой принцип управления используется в САР?
3. Как классифицируются САР?
4. Назовите основные законы регулирования.
5. Охарактеризуйте понятие «передаточная функция».
6. Как определяются амплитудно- и фазочастотная характеристики?
7. Назовите основные типовые звенья динамических систем.
8. Какая обратная связь является отрицательной, а какая — положитель-
ной?
9. Объясните критерий Гурвица.
10. Как определяется переходная характеристика?
11. Назовите основные показатели качества САР.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
231
Глава 14
СОВРЕМЕННЫЕ СИСТЕМЫ АВТОМАТИЗАЦИИ
14.1. Структура и виды современных АСУ ТП
Автоматизированная система управления технологическим
процессом (АСУ ТП) — это комплекс программных и технических
средств, предназначенный для автоматизации управления техноло-
гическим оборудованием на предприятиях. Под АСУ ТП обычно
понимается комплексное решение, обеспечивающее автоматизацию
основных технологических операций на производстве в целом или
каком-то его участке, выпускающем относительно завершенный про-
дукт. Слово «автоматизированная» означает, что система управления
не полностью автономна (самостоятельна) и требует участия челове-
ка (оператора) для реализации определенных задач. Напротив, си-
стемы автоматического управления, рассмотренные во введении,
предназначены для работы без какого-либо контроля со стороны
человека и полностью автономны. В этом заключается принципиаль-
ная разница между АСУ и САУ.
Все АСУ ТП делятся на три больших класса. Во-первых, PLC-систе -
мы (Programmable Logic Controller). На русский язык это перево-
дится как «программируемый логический контроллер» (или сокра-
щенно ПЛК). Под термином ПЛК часто подразумевается аппаратный
модуль для реализации алгоритмов автоматизированного управления,
хотя этот термин имеет также более общее значение и часто исполь-
зуется для обозначения целого класса систем. Во-вторых, SCADA-
системы (Supervisory Control and Data Acquisition). На русский язык
этот термин переводится как «система телемеханики», «система теле-
метрии» или «система диспетчерского управления и сбора данных».
Последнее определение точнее всего отражает сущность и назначение
системы — контроль и мониторинг объектов с участием диспетчера.
В России термин SCADA часто используется в более узком смысле:
программный пакет визуализации технологического процесса. Одна-
ко в данном учебном пособии под словом SCADA понимается целый
класс систем управления. В -третьих, распределенные системы управ-
ления (РСУ), или в английском варианте DCS (Distributed Control
System). Естественно, такая классификация является достаточно
условной, так как в последние годы внедряются гибридные системы,
которые по ряду характерных признаков можно отнести как к одно-
му, так и к другому классу.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
232
14.1.1 . PLC-системы
Основным компонентом этих систем является программируемый
логический контроллер. Системы класса PLC наиболее подходят для
управления последовательностью технологических операций в про-
цессе изготовления какого-либо изделия. Как правило, эти операции
носят дискретный характер и требуют очень быстрой реакции со
стороны автоматики. Типовые задачи систем PLC: управление кон-
вейерными производствами; управление робототехникой; высоко-
скоростное управление приводами; управление позиционирующими
устройствами; сигнализация; оповещение. Для систем PLC характер-
но то, что они не требуют непрерывного контроля со стороны дис-
петчера (в отличие от других систем), достаточно периодической
проверки статуса. Уровень диспетчерского (операторского) управле-
ния сводится, как правило, к установке кнопочного пульта управле-
ния для запуска/ останова того или иного технологического участка
и отображения аварийных сигнализаций. Большую часть времени
система PLC работает без надзора со стороны человека, в автомати-
ческом (автономном) режиме, т. е . по сути PLC приближается к
САУ.
Структура системы PLC довольно проста: один или несколько
программируемых логических контроллеров, объединенных в единую
сеть (например, стандарта Industrial Ethernet) с помощью цифровой
шины. Обмениваясь по шине данными, контроллеры могут взаимо-
действовать друг с другом, что необходимо для их согласованной
работы. При необходимости к системе можно также подключить пульт
локального управления (кнопочный или с ЖК-панелью для простей-
шего локального управления и отображения аварийных сигнализа-
ций). Как правило, система структурирована так, что каждая техно-
логическая установка управляется своим контроллером.
Контроллеры имеют электрические входы/ выходы для подключе-
ния к ним полевых датчиков, сенсоров, исполнительных механизмов
(клапанов, позиционирующих устройств, различных приводов),
устройств оповещения и сигнализации. Количество входов/ выходов
может быть как фиксированным, так и расширяемым с помощью
дополнительно подключаемых модулей. Электрический сигнал, по-
ступающий с датчика, в подсистеме ввода/ вывода контроллера ин-
терпретируется как измерение определенной физической величины
(температуры, давления и т. п . ), потом сигнал оцифровывается (пере-
водится из аналоговой формы в цифровую, двоичную). В цифровой
форме сигнал обрабатывается в контроллере. Подсистема ввода/ вы-
вода работает и в другом направлении. Получив от контроллера
управляющую команду, подсистема ввода/ вывода переводит ее из
цифровой формы в электрическую аналоговую. Сформированный
электрический сигнал по кабелю подается на соответствующий ис-
полнительный механизм. Модули различаются по типу электриче-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
233
ского сигнала, с помощью которого они взаимодействуют с полевы-
ми приборами, и по направлению передачи сигнала. Если к модулю
подключается датчик, то модуль осуществляет ввод сигнала в систему
и называется модулем ввода; если подключается исполнительный
механизм, то модуль выводит управляющее воздействие из системы
и называется модулем вывода.
Контроллер непрерывно выполняет заложенную в него програм-
му управления по следующему циклу: считывание сигналов с датчи-
ков, математическая обработка данных в соответствии с определен-
ным алгоритмом, формирование управляющего воздействия и его
передача на исполнительные механизмы. При этом требуется высокое
быстродействие — время выполнения всего цикла составляет не бо-
лее 10...20 мс.
Для систем класса PLC характерны следующие особенности:
1) высокоскоростное управление дискретными операциями; 2) прак-
тическое отсутствие операторского уровня (высокая степень автоном-
ности); 3) быстрая реакция на дискретные события; 4) жесткая вре-
менная синхронизация работы нескольких узлов.
Также для систем PLC характерна работа в реальном времени.
Понятие реального времени в системах автоматизации включает
жесткое задание времени реакции системы на различные события
на объекте управления (замыкание/ размыкание контактов, повы-
шение/ понижение технологических параметров). При этом превы-
шение времени реакции системы управления может рассматривать-
ся как ее неиспр авность, так как потенциально может привести к
аварийной ситуации на объекте управления.
Разработка, отладка и исполнение программ управления для
PLC осуществляются с помощью специализированного программ-
ного обеспечения, широко представленного на рынке. К этому
классу инструментального ПО относятся пакеты ISaGRAF (CJ
International) — Франция/США, Conrol (Wonderware) — США,
Paradym 31 (Intellution) — США и другие.
14.1.2. SCADA-системы
Предшественниками SCADA-систем были так называемые теле-
метрические системы для дистанционного мониторинга небольшо-
го числа параметров. По мере усложнения задач автоматизации и
развития вычислительных технологий количество контролируемых
параметров возрастало. Одновременно возрастало количество оши-
бок диспетчера на потенциально опасных объектах, приводящих
при возникновении аварий к человеческим жертвам, а также к зна-
чительному материальному и экологическому ущербу. Причиной
этого была ориентация в первую очередь на применение новейших
технических (технологических) достижений, стремление повысить
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
234
степень автоматизации и функциональные возможности системы и
в то же время недооценка необходимости построения эффективно-
го человекомашинного интерфейса (HMI, Human — Machine
Interface), т. е. интерфейса, ориентированного на пользователя
(оператора). Однако, как показала практика, для построения эф-
фективных и надежных систем диспетчерского управления необхо-
димо применение нового подхода при разработке таких систем:
human-centered design (или top — down, сверху вниз), т. е. ориента-
ция в первую очередь на человека-оператора (диспетчера) и его
задачи, вместо традиционного и повсеместно применявшегося под-
хода hardware-centered (или bottom — up, снизу вверх), в котором
при построении системы основное внимание уделялось выбору и
разработке технических средств (оборудования и программного обе-
спечения).
Концепция SCADA позволяет строить эффективный человеко-
машинный интерфейс. Дружественность этого интерфейса в SCADA-
системах, полнота и наглядность представляемой на экране инфор-
мации, простота управления, удобство пользования подсказками и
справочной системой и т. д. повышает эффективность взаимодей-
ствия диспетчера с системой и сводит к минимуму его критические
ошибки при управлении.
Классическими объектами управления с применением SCADA-
систем являются нефтепроводы, газопроводы, водопроводы, удален-
ные электрораспределительные подстанции и т. д. SCADA-системы
с точки зрения процесса управления имеют некоторые характерные
особенности: 1) в них обязательно наличие человека (оператора, дис-
петчера); 2) любое неправильное воздействие может привести к от-
казу (потере) объекта управления или даже катастрофическим по-
следствиям; 3) диспетчер несет, как правило, общую ответственность
за управление системой, которая при нормальных условиях только
изредка требует подстройки параметров для достижения оптималь-
ного функционирования; 4) большую часть времени диспетчер пас-
сивно наблюдает за отображаемой информацией, его активное уча-
стие в процессе управления происходит нечасто, обычно в случае
наступления критических событий — отказов, аварийных и нештат-
ных ситуаций и пр.; 5) действия диспетчера в критических ситуациях
могут быть жестко ограничены по времени (несколькими минутами
или даже секундами).
Применение SCADA-системы добавляет дополнительный верхний
уровень автоматизации над уровнем PLC. Таким образом, эти АСУ
ТП — двухуровневые системы, так как именно на этих уровнях реа-
лизуется непосредственное управление технологическими процес-
сами.
Специфика каждой конкретной системы управления определяет-
ся используемой на каждом уровне программно-аппаратной плат-
формой.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
235
Нижний уровень — уровень объекта (контроллерный) — включа-
ет различные датчики для сбора информации о ходе технологическо-
го процесса, электроприводы и исполнительные механизмы для реа-
лизации регулирующих и управляющих воздействий. Так как инфор-
мация в контроллерах предварительно обрабатывается и частично
используется на месте, существенно снижаются требования к про-
пускной способности каналов связи. Информация с локальных кон-
троллеров может направляться в сеть диспетчерского пункта непо-
средственно, а также через контроллеры верхнего уровня.
Верхний уровень — диспетчерский пункт (ДП) — включает прежде
всего одну или несколько станций управления, представляющих со-
бой автоматизированное рабочее место (АРМ) диспетчера/ операто-
ра. Часто в качестве рабочих станций используются ПЭВМ типа IBM
PC различных конфигураций. К основным задачам, решаемым
SCADA-системами на верхнем уровне управления, относятся: 1) сбор
первичной информации от устройств нижнего уровня, причем этими
устройствами могут быть как промышленный контроллер, так и
плата ввода/ вывода; 2) ведение базы данных реального времени с
технологической информацией с возможностью ее последующей об-
работки; 3) отображение (визуализация) информации на экране
монитора в понятной для человека форме в виде мнемосхем, графи-
ков и отчетов с возможностью ограниченного управления техноло-
гическим процессом.
Дополнительные задачи, решаемые SCADA-системами: 1) аварий-
ная сигнализация и управление тревожными сообщениями; 2) под-
готовка и генерирование отчетов о ходе технологического процесса;
3) архивирование технологической информации (сбор истории);
4) обеспечение связи с внешними приложениями (СУБД, электрон-
ными таблицами, текстовыми процессорами и т. д . ) .
Для решения этих и некоторых других задач у всех современных
SCADA-систем имеются следующие основные компоненты:
1) сервер ввода/ вывода, обеспечивающий передачу данных между
физическими устройствами ввода/ вывода и остальными модулями
SCADA-системы;
2) база данных реального времени, которая собирает, хранит и
отдает информацию по требованию других компонентов;
3) клиент визуализации, обеспечивающий операторский интер-
фейс: отображает данные, поступающие от других модулей SCADA-
системы, и управляет выполнением команд оператора;
4) сервер тревог (алармов), который отслеживает данные, сравни-
вает их с допустимыми пределами, проверяет выполнение заданных
условий и отображает алармы на соответствующем узле визуализа-
ции;
5) сервер трендов, который собирает и регистрирует трендовую
информацию, позволяя отображать развитие процесса в реальном
масштабе времени или в ретроспективе в виде графиков;
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
236
6) сервер отчетов, генерирующий отчеты по истечению опреде-
ленного времени, при возникновении определенного события или
по запросу оператора.
Как правило, программный пакет SCADA состоит из двух частей:
среды разработки, где инженер рисует и программирует технологи-
ческие мнемосхемы, и среды исполнения, необходимой для выпол-
нения сконфигурированных мнемосхем в режиме повседневной
эксплуатации.
Управляющие системы SCADA строятся с использованием аппа-
ратной и программной технологий разных производителей и COTS-
технологий, нормативная база которых развивается и поддерживается
как в рамках международных (IEC/ МЭК, ISO), так и национальных
(ANSI, DIN, IEEE, ГОСТ) организаций по стандартизации. Про-
граммные продукты класса SCADA широко представлены на мировом
рынке. Это несколько десятков SCADA-систем, многие из которых
разрабатываются и в России. Наиболее популярные из них: InTouch
(Wonderware) — США; Citect (CI Technology) — Австралия; Genesis
(Iconics Co) — США; Factory Link (United States Data Co) — США;
TraceMode (AdAstrA) — Россия.
14.1.3 . Распределенные системы управления
Концепция PLC/ SCADA-систем была выработана в поисках спо-
собов организации управления на распределенных предприятиях,
занимающихся добычей, транспортировкой нефти и газа, доставкой
электроэнергии и т. п . , и отличалась преобладанием дискретного
управления. Распределенные системы управления (РСУ) изначально
были ориентированы на задачи обрабатывающей промышленности,
в которых преобладали задачи непрерывного управления, что требо-
вало больших вычислительных ресурсов и более сложных и дорогих
компонентов систем автоматизации. Однако с ростом вычислитель-
ной мощности микропроцессоров возможности PLC значительно
выросли и области применения обеих систем пересеклись. Управ-
ляющие системы на базе PLC/ SCADA по функциональности при-
ближаются к РСУ, например, включают локальное управление с
обратной связью, оптимизацию технологических процессов и анализ
данных. В свою очередь, предлагаемые РСУ трудноотличимы от их
SCADA-аналогов.
Для большинства РСУ характерна трехуровневая модель построе-
ния.
На нижнем уровне, уровне ввода/ вывода, располагаются полевые
приборы (датчики, сенсоры, исполнительные механизмы), которые
с помощью электрических кабелей подключаются к подсистеме по-
левого ввода/ вывода (IO), которая состоит из аппаратных модулей
ввода/ вывода.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
237
На среднем уровне находятся контроллеры (CPU ). На этом уров-
не решаются задачи, совпадающие с задачами PLC по обработке
поступающей из подсистемы ввода/ вывода информации, и выдача
обратно управляющих воздействий. Для решения сложных задач
контроллеры могут обмениваться между собой данными, используя
цифровые коммуникационные сети, например Industrial Ethernet.
В РСУ применяется полное резервирование модулей, в том числе и
питания. Пара контроллеров, синхронно выполняющих одну и ту же
программу управления и страхующих друг друга, называется «резер-
вированной парой».
Верхний уровень — это уровень операторского управления, объ-
единяющий серверы и операторские рабочие станции, и выполняю-
щий функции, сходные со SCADA-системами. Часто в системе вы-
деляют инженерную станцию ES (engineering station). На ней уста-
навливаются программные средства разработки, с помощью которых
технический специалист может централизованно вносить изменения
и дополнения в конфигурацию системы. Часто ES дополняют рас-
ширенными средствами диагностики состояния системы.
В отличие от PLC/ SCADA в РСУ все три уровня обычно выпол-
няются на оборудовании одного производителя и программируются
в одной единой системе. РСУ-система управления отличается высокой
децентрализацией обработки данных, при этом часть задач управле-
ния может быть вынесена даже на уровень датчиков и исполнительных
механизмов и оставаться работоспособной в отрыве от контроллер-
ного уровня.
Сферы применения РСУ многочисленны: нефте- и газоперера-
ботка, химия, нефтехимия, энергоснабжение, металлургия и т. п .
Программные продукты класса РСУ широко представлены на
мировом рынке. Наиболее популярные из них: DeltaV (Emerson
Process Managment); I/ A Series (Foxboro); CENTUM CS 3 000
(Yokogawa).
14.2 . Промышленные сети передачи данных
14.2.1. Понятие промышленной сети, ее основные
характеристики
Промышленные сети передачи данных — это базовый элемент для
построения современных АСУ ТП. Появление промышленных ком-
муникационных протоколов положило начало внедрению террито-
риально распределенных систем управления, способных охватить
множество технологических установок, о бъединить целые цеха, а
иногда и заводы. Промышленные сети обеспечивают информацион-
ные потоки между контроллерами, датчиками и разнообразными
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
238
исполнительными механизмами. Именно коммуникационные сети в
большой степени определяют качество и надежность функциониро-
вания АСУ ТП в целом. Промышленная сеть — это среда передачи
данных, набор стандартных протоколов обмена данными, позволяю-
щих связать воедино оборудование различных производителей, а
также обеспечить взаимодействие нижнего и верхнего уровней
АСУ.
Устройства, подключенные к сети, используют ее для следующих
целей: 1) передачи данных между датчиками, контроллерами и ис-
полнительными механизмами; 2) диагностики и удаленного конфи-
гурирования датчиков и исполнительных механизмов; 3) калибровки
датчиков; 4) питания датчиков и исполнительных механизмов; 5) пере-
дачи данных между датчиками и исполнительными механизмами,
минуя центральный контроллер; 6) связи между датчиками, испол-
нительными механизмами, ПЛК и верхним уровнем АСУ ТП; 7) связи
между контроллерами и системами человекомашинного интерфейса
(операторскими системами).
Средой передачи данных в промышленных сетях могут быть ка-
бели, оптоволоконные линии или беспроводная связь (радиомодемы
и Wi-Fi).
Наиболее значимыми параметрами промышленных сетей являют-
ся топология сети, объем информационного сервиса, предоставляе-
мого сетью, и способ доступа к физическому каналу передачи дан-
ных.
Сетевая топология означает способ (тип) сетевого объединения
различных устройств. Существует несколько топологий, отличаю-
щихся друг от друга по трем основным критериям: режим доступа к
сети; средства контроля передачи и восстановления данных; возмож-
ность изменения числа узлов сети. Эти топологии называются: общая
шина, кольцо и звезда. В топологии звезда вся информация пере-
дается через некоторый центральный узел, так называемый обраба-
тывающий компьютер. Каждое устройство имеет свою собственную
среду соединения. Все периферийные станции могут обмениваться
друг с другом только через центральный узел. Это обеспечивает до-
полнительную защиту всей сети от выхода из строя или отключения
узлов, позволяет существенно оптимизировать трафик, передавая
пакеты только в те лучи, где находятся их получатели. С другой сто-
роны, центральный узел должен быть исключительно надежным
устройством как в смысле логического построения сети (отслежива-
ние конфликтных ситуаций и сбоев), так и физического, поскольку
каждое периферийное устройство имеет свой физический канал
связи и, следовательно, все они должны иметь одинаковые возмож-
ности доступа. Дополнительное устройство может быть включено в
сеть только в том случае, если есть свободный порт для его подсоеди-
нения к центральному узлу. В кольцевой структуре информация пере-
дается от узла к узлу по физическому кольцу. Приемник копирует
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
239
данные, регенерирует их и вместе со своей квитанцией подтверждения
передает следующему устройству в сети. Когда начальный передатчик
получает свою собственную квитанцию, это означает, что его инфор-
мация была корректно получена адресатом. В кольце не существует
определенного централизованного контроля. Каждое устройство по-
лучает функции управляющего контроллера на строго определенный
промежуток времени. Достоинством топологии являются предска-
зуемость и высокая пропускная способность, а недостатками — вы -
сокая стоимость организации канала связи, в большинстве случаев
нерациональное использование сетевого трафика и невысокая на-
дежность: отказ в работе хотя бы одного узла приводит к нарушению
работы кольца, а следовательно, и к остановке всех передач. Самым
распространенным типом является общая шина. В любой шинной
структуре все устройства подсоединены к общей среде передачи дан-
ных, или шине. В отличие от кольца адресат получает свой инфор-
мационный пакет без посредников. Подключение дополнительных
узлов к шине не требует аппаратных доработок со стороны уже ра-
ботающих узлов сети, как это имеет место в случае топологии «звез-
да». Шинная топология требует жесткой регламентации доступа к
среде передачи. Используется как централизованный, так и децен-
трализованный контроль шины. Основными преимуществами общей
шины являются простота и дешевизна, легкость переконфигуриро-
вания, возможность подключения или отключения устройств во
время работы, применимость для сильно распределенных объектов.
К недостаткам следует отнести присутствие в каждой точке сети обще-
го трафика и опасность потери связи при одиночном обрыве канала
связи.
Информационный сервис, предоставляемый сетью, в соответствии
с моделью Международной организации по стандартизации (ISO/OSI)
имеет семь уровней. На физическом уровне определяются физические
характеристики канала связи и параметры сигналов, т. е . он обеспе-
чивает необходимые механические, функциональные и электрические
характеристики для установления, поддержания и размыкания фи-
зического соединения. Канальный уровень формирует основную
единицу передаваемых данных — пакет
—
и отвечает за дисциплину
доступа устройства к каналу связи и установление логического соеди-
нения. Он гарантирует передачу данных между устройствами, управ-
ляет не только сетевым доступом, но и механизмами защиты и вос-
становления данных в случае ошибок при передаче. Сетевой уровень
отвечает за адресацию и доставку пакета по оптимальному маршруту.
Транспортный уровень разбирается с содержимым пакетов, форми-
рует ответы на запросы или организует запросы, необходимые для
уровня сессий. Уровень сессий оперирует сообщениями и координи-
рует взаимодействие между участниками сети. Уровень представления
занимается преобразованием форматов данных, если это необходимо.
Прикладной уровень — это набор интерфейсов, доступных програм-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
240
ме пользователя, он обеспечивает непосредственную поддержку
прикладных процессов и программ конечного пользователя и управ-
ление взаимодействием этих программ с различными объектами сети
передачи данных. Большинство промышленных сетей ограничива-
ется тремя уровнями: физическим, канальным и прикладным.
Тип доступа к физическому каналу определяет регламент исполь-
зования отдельными устройствами общей линии связи. Существуют
два метода упорядоченного доступа: централизованный и децентра-
лизованный. В случае централизованного доступа к шине выделяется
узел с правами «Мастера», который назначает и отслеживает порядок
и время доступа к шине для всех других участников. При выходе его
из строя циклы обмена по шине останавливаются. Именно по этой
причине наибольшее распространение получил децентрализованный
доступ с переходящими функциями мастера от одного участника (узла
сети) к другому. Во всем мире широко приняты и используются две
модели децентрализованного доступа: с коллизиями и без коллизий.
Доступ к каналу с коллизиями (недетерминированный, или множе-
ственный, доступ) используют, например, сети Ethernet и CAN. В этом
случае все станции на шине имеют право передавать данные. Каждая
из них постоянно прослушивает шину. Если шина свободна, любой
из участников сети может занять шину под свой цикл передач. В том
случае, когда несколько станций претендуют на шину одновременно,
это приводит к так называемому конфликту (коллизии). Для разреше-
ния коллизий применяются различные приемы. Например, в сетях
Ethernet используется технология, основанная на постоянном про-
слушивании линии всеми узлами и генерации повторной попытки
занятия канала через случайный промежуток времени в случае, если
обнаружена попытка одновременного доступа к каналу нескольких
узлов. Принципиально другую форму разрешения коллизий исполь-
зует CAN-протокол, в котором разрешение коллизий производится
аппаратурой по принципу побитового сравнения сетевых адресов
конфликтующих устройств (рис. 14.1, а). Станция No 2, пытающаяся
передать очередную «единицу» из своего адреса, видит, что в канале
передается «ноль», понимает, что конфликтует, и откладывает по-
пытку занять канал на некоторое время, а станция No 1 продолжает
Рис. 14.1. Модели децентрализованного доступа к сети:
а — с коллизиями; б — без коллизий
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
241
передачу. Коллизии хотя и возникают, но разрешаются предсказуемо
и в предсказуемое время. Существуют сетевые протоколы, в которых
аргументами в споре за канал являются не сетевые адреса, а динами-
чески изменяемые приоритетные уровни пакетов. Это позволяет
пакету, несущему важную информацию и требующему немедленного
ответа, легко пробиться через поток низкоприоритетных информа-
ционных обменов. Недетерминированный доступ позволяет эффек-
тивно использовать пропускную способность канала и предоставлять
доступ в сеть нескольким активным узлам, но его эффективность
снижается при увеличении общей загрузки шины выше 30 %.
Основная масса промышленных сетевых протоколов использует
доступ без коллизий (детерминированный) по принципу «запрос —
ответ» или с помощью передачи маркера, обеспечивающий четкое и
ритмичное сетевое взаимодействие. В основе протоколов с передачей
маркера лежит принцип постоянного наличия в сети синхронизи-
рующего пакета, называемого маркером. Маркер, т. е . право на доступ
к шине, передается в цикле от устройства к устройству (рис. 14 .1, б).
Порядок передачи зависит от прикладной задачи и определяется на
стадии планирования системы. Принцип передачи маркера исполь-
зуется в распределенных системах, где реакция на возникающие со-
бытия должна проявляться за определенное время.
В целом по сравнению с подключением периферийного оборудо-
вания к контроллеру отдельными проводами промышленная сеть
имеет следующие достоинства: 1) в несколько раз снижается расход на
кабель и его прокладку; 2) увеличивается допустимое расстояние до
подключаемых датчиков и исполнительных устройств; 3) упрощается
управление сетью датчиков и исполнительных механизмов; 4) упро-
щается модификация системы при изменении типа датчиков, исполь-
зуемого протокола взаимодействия, добавлении устройств ввода/ вы-
вода; 5) обеспечиваются дистанционная настройка и диагностика
датчиков. В качестве недостатков промышленной сети необходимо
отметить следующее. При обрыве кабеля теряется возможность по-
лучать данные и управлять не одним, а несколькими устройствами
(в зависимости от места обрыва и топологии сети остается возможность
автономного функционирования сегмента сети и схемы управления).
Как следствие, для повышения надежности приходится резервировать
каналы связи или использовать кольцевую топологию сети.
14.2.2. Обзор некоторых промышленных сетей
В зависимости от области применения весь спектр промышленных
сетей можно разделить на два уровня: 1) сети верхнего (операторско-
го) уровня (terminal buses); 2) сети для системного уровня, или по-
левые шины (field buses), которые решают задачи по управлению
процессом производства, сбором и обработкой данных на уровне
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
242
промышленных контроллеров. К этой же группе относятся сети так
называемого датчикового уровня (sensor/ actuator buses), чьи задачи
сводятся к опросу датчиков и управлению работой разнообразных
исполнительных механизмов. Сегодня известно более 30 стандартов
коммуникационных сетей, специально адаптированных для про-
мышленного применения, каждый год появляются новые прогрес-
сивные технологии передачи данных.
Главной функцией полевой шины (рис. 14.2) является обеспе-
чение сетевого взаимодействия между контроллерами и удаленной
периферией (например, узлами ввода/ вывода). Помимо этого к
полевой шине могут подключаться различные контрольно-измери-
тельные приборы, снабженные соответствующими сетевыми ин-
терфейсами. Такие устройства часто называют интеллектуальными,
так как они поддерживают высокоуровневые протоколы сетевого
обмена.
Современные полевые шины должны удовлетворять определенным
техническим требованиям, возникающим из-за их эксплуатации в
тяжелых промышленных условиях. К этим требованиям относятся:
1) работа в реальном времени, т. е. передача сообщения из одного
узла сети в другой за строго фиксированный отрезок времени, кото-
рый в общем случае с учетом количества узлов, скорости передачи
данных и длины сообщений может быть рассчитан заранее;
2) возможность использования в сетях большой протяженности,
так как расстояние между объектами управления может порой до-
стигать нескольких километров;
3) наличие защиты от электромагнитных наводок. Длинные линии
в особенности подвержены пагубному влиянию электромагнитных
помех, излучаемых различными электрическими агрегатами. Сильные
помехи в линии могут исказить передаваемые данные до неузнавае-
мости. Для защиты от таких помех применяют специальные экрани-
рованные кабели, а также оптоволокно, которое в силу световой
природы информационного сигнала вообще нечувствительно к
электромагнитным наводкам. Кроме этого в промышленных сетях
используются специальные методы цифрового кодирования данных,
Рис. 14 .2 . Полевая шина
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
243
препятствующие их искажению в процессе передачи или, по крайней
мере, позволяющие эффективно детектировать искаженные данные
принимающим узлом.
По типу физической среды полевые шины делятся на два типа:
на базе оптоволоконного кабеля и на базе медного кабеля. Преиму-
щества использования оптоволокна очевидны: возможность по-
строения протяженных коммуникационных линий (протяженностью
до 10 км и более); большая полоса пропускания; иммунитет к
электромагнитным помехам; возможность прокладки во взрыво-
опасных зонах. Недостатки: относительно высокая стоимость кабе-
ля; сложность физического подключения и соединения кабелей,
снижение надежности в условиях низких температур. Полевые шины
второго типа обычно представляют собой двухпроводной кабель типа
«витая пара» со специальной изоляцией и экранированием. Преиму-
щества: приемлемая стоимость; легкость прокладки и выполнения
физических соединений. Недостатки: подверженность влиянию
электромагнитных наводок; ограниченная протяженность кабельных
линий; меньшая по сравнению с оптоволокном полоса пропуска-
ния.
Существует множество стандартов полевых шин, наиболее рас-
пространенными являются Profibus (DP, PA), Foundation Fieldbus,
Modbus, HART.
Коммуникационный протокол Modbus разработан для построения
промышленных распределенных систем управления. Специальный
физический интерфейс для него не определен. Возможность его вы-
бора предоставлена самому пользователю: RS-232C, RS-422, RS-485
или же токовая петля 20 мА. Работает по принципу централизован-
ного доступа (master — slave). Конфигурация на основе этого про-
токола предполагает наличие одного master - узла и до 247 slave - узлов
(рис. 14 .3, а). Циклы обмена данными инициирует только master - узел.
Ни одно подчиненное устройство не может самостоятельно запро-
сить или передать данные другому устройству. Существует два типа
запросов: 1) запрос/ ответ (адресуется только один из slave - узлов);
2) широковещательная передача (master - узел через выставление
адреса 0 обращается ко всем остальным узлам сети одновременно без
квитирования). Протокол Modbus можно назвать наиболее распро-
страненным в мире. Для работы со своими изделиями его использу-
ют десятки фирм, поэтому на его основе легко осуществить интегра-
цию системы автоматизации. Все универсальные SCADA/ HMI-
системы поддерживают данный протокол. Хотя ограничения этого
протокола достаточно очевидны, он привлекает простотой логики и
независимостью от типа интерфейса.
Протокол Profibus представляет собой сеть на базе общей шины
с гибридным методом доступа: централизованным (master — slave)
и децентрализованным с передачей маркера. Сеть может состоять
из 122 узлов, из которых 32 могут быть master-узлами (рис. 14 .3, б ).
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
244
Адрес 0 зарезервирован для режима широкого вещания. Существует
в трех основных вариантах. Profibus-DP
—
быстрый (до 12 Мбит/ с)
одномастерный протокол. Служит для обмена данными между кон-
троллерами и промышленными компьютерами со SCADA-системами.
Физическая среда передачи — экранированная витая пара, физиче-
ский интерфейс RS-485 . Profibus-FMS служит для связи контролле-
ров и интеллектуальных устройств и предназначен для передачи
больших объемов данных. Profibus-PA
—
сетевой интерфейс, при-
меняемый для постро ения сети, соединяющей исполнительные
устройства, датчики и контроллеры, расположенные непосредствен-
но во взрывоопасной зоне.
Протокол Foundation Fieldbus представляет собой двухуровневый
сетевой протокол. Верхний уровень сети объединяет в себе мощную
информационную магистраль для объединения компьютеров верх-
него уровня и управляющую сеть, охватывающую датчики, исполни-
тельные механизмы и контроллеры. Предоставляет полный сервис,
от передачи файлов и больших объемов информации до замыкания
контуров управления контроллеров, включая загрузку в них управ-
ляющих программ и доступ к пассивному оборудованию. Нижний
уровень сети позволяет использовать ее на взрывоопасных произ-
водствах. О собенностью сети является наличие дополнительного
пользовательского уровня, предоставляющего дополнительные воз-
можности управления оборудованием полевого уровня (датчиками и
исполнительными механизмами) без участия PLC.
Сети верхнего (операторского) уровня служат для передачи данных
между контроллерами, серверами и операторскими рабочими стан-
циями. Иногда в состав таких сетей входят дополнительные узлы:
Рис. 14 .3 . Коммуникационные протоколы:
а — Modbus с последовательной линией связи; б — Profibus
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
245
центральный сервер архива, сервер промышленных приложений,
инженерная станция и т. д . Большинство сетей верхнего уровня, при-
меняемых в современных АСУ ТП, базируется на стандарте Ethernet
или на его более быстрых вариантах FE (Fast Ethernet) и GE (Gigabit
Ethernet).
У промышленных сетей верхнего уровня есть своя специфика,
обусловленная условиями промышленного применения. Во-первых,
требуются большая пропускная способность и скорость передачи
данных. Объем трафика напрямую зависит от многих факторов: ко-
личества архивируемых и визуализируемых технологических параме-
тров, количества серверов и операторских станций, используемых
прикладных приложений и т. д. В отличие от полевых сетей жесткого
требования детерминированности здесь нет: строго говоря, неважно,
сколько времени займет передача сообщения от одного узла к друго-
му — 100 или 700 мс. Главное, чтобы сеть в целом могла справляться
с общим объемом трафика за определенное время. Наиболее интен-
сивный трафик идет по участкам сети, соединяющим серверы и
операторские станции (клиенты). Это связано с тем, что на опера-
торской станции технологическая информация обновляется в среднем
один раз в секунду, причем передаваемых технологических параме-
тров может быть несколько тысяч. Но и тут нет жестких временных
ограничений: оператор не заметит, если информация будет обнов-
ляться, скажем, каждые полторы секунды вместо положенной одной.
В то же время если контроллер (с циклом сканирования в 100 мс)
столкнется с 500-миллисекундной задержкой поступления новых
данных от датчика, это может привести к некорректной отработке
алгоритмов управления. Во-вторых, необходима отказоустойчивость.
Она достигается, как правило, путем резервирования коммуникаци-
онного оборудования и линий связи таким образом, что в случае
выхода из строя коммутатора или обрыва канала система управления
способна в кратчайшие сроки (не более 1 ... 3 с) локализовать место
отказа, выполнить автоматическую перестройку топологии и пере-
направить трафик на резервные маршруты. В-третьих, сетевое обо-
рудование должно соответствовать промышленным условиям экс-
плуатации.
Ethernet — стандарт для локальных сетей, объединяющих ПЭВМ.
Особенность этого очень распространенного стандарта состоит в
методе доступа передающего устройства к среде передачи. В Ethernet
все устройства равнозначны. Устройство прослушивает линию и на-
чинает передачу при отсутствии сигнала. В процессе передачи устрой-
ство контролирует правильность передачи собственным приемником.
При обнаружении в это время чужой передачи (по искажению при-
нимаемого сигнала) устройство прерывает передачу и выдерживает
паузу случайной длительности, после чего повторяет попытку пере-
дачи. Стандартной средой для передачи сигнала является кабель из
нескольких витых пар. Компьютеры подключают не напрямую друг
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
246
к другу, а через концентраторы, так называемые хабы (от англ. hub)
или коммутаторы («свич» — от англ. switch). Максимальная скорость
передачи данных составляет от 10 Мбит/ с до 1 Гбит/ с, в зависимости
от используемого оборудования и кабелей.
Недостатком сети является то, что используемый метод доступа
создает неопределенность времени доступа к сети, что делает ее не-
удобной для решения некоторых задач управления в реальном мас-
штабе времени, где требуется гарантированное время реакции систе-
мы на внешнее воздействие.
Поскольку Ethernet используется в сфере промышленной автома-
тизации, многие промышленные контроллеры имеют соответствую-
щие интерфейсы. Для подключения приборов, не имеющих интер-
фейса Ethernet, используются специальные преобразователи, напри-
мер конвертор RS-232 в Ethernet.
Говоря о промышленных сетях, построенных на базе технологии
Ethernet, часто используют термин промышленный Ethernet (Industrial
Ethernet). Дело в том, что в последнее время разработано множество
коммуникационных протоколов, базирующихся на стандарте Ethernet
и оптимизированных для передачи критичных ко времени данных.
Такие протоколы условно называют протоколами реального времени,
имея в виду, что с их помощью можно организовать обмен данными
между распределенными приложениями, которые критичны ко вре-
мени выполнения и требуют четкой временной синхронизации.
Конечная цель — добиться относительной детерминированности при
передаче данных. Эти протоколы включают новые алгоритмы сете-
вого обмена, диагностические функции, методы самокорректировки
и функции синхронизации, оставляя при этом канальный и физиче-
ский уровни Ethernet неизменными. Это позволяет использовать
новые протоколы передачи данных в существующих сетях Ethernet с
использованием стандартного коммуникационного оборудования.
Именно эта разновидность сетей получила название промышленно-
го Ethernet.
14.3. Человекомашинные интерфейсы
14.3.1 . HMI на базе рабочих станций оператора
Очень важным моментом в системе управления является органи-
зация взаимодействия между человеком и программно-аппаратным
комплексом. Обеспечение такого взаимодействия является задачей
человекомашинного интерфейса (HMI, human machine interface).
Слово «автоматизированная» в аббревиатуре АСУ ТП подразумевает
непосредственное участие человека в процессе реализации системой
определенных задач. Очевидно, что чем лучше организован HMI, тем
эффективнее взаимодействие человек — система управления. В со-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
247
временных АСУ ТП HMI реализуется двумя способами: 1) на базе
специализированных рабочих станций оператора, устанавливаемых
в центральной диспетчерской; 2) на базе панелей локального управ-
ления, устанавливаемых непосредственно на технологических объ-
ектах. Иногда эти два варианта комбинируются, чтобы достичь наи-
большей гибкости управления.
Рабочая станция оператора (OS, operator station) аппаратно
представляет собой персональный компьютер с несколькими широ-
коэкранными мониторами, функциональной клавиатурой и необхо-
димыми сетевыми адаптерами для подключения к сетям верхнего
уровня (например, на базе Industrial Ethernet).
На станции оператора устанавливается программный пакет ви-
зуализации технологического процесса (SCADA-система).
Существует две схемы подключения операторских станций к уров-
ню управления. По первой схеме каждая операторская станция под-
ключается к контроллерам уровня управления напрямую или с по-
мощью промежуточного коммутатора. Подключенная таким образом
операторская станция работает независимо от других станций сети и
поэтому часто называется одиночной. По второму варианту опера-
торские станции подключают к серверу или резервированной паре
серверов, а серверы, в свою очередь, подключаются к промышленным
контроллерам. Таким образом, сервер, являясь неким буфером, по-
стоянно считывает данные с контроллера и предоставляет их по за-
просу рабочим станциям. Станции, подключенные по такой схеме,
часто называют клиентскими.
14.3.2. HMI на базе панелей
локального управления
В большинстве случаев рабочие станции устанавливаются центра-
лизованно в диспетчерском центре (операторной), охватывающем
одну технологическую установку, производственный участок, а ино-
гда и целое предприятие. Однако зачастую требуются пункты локаль-
ного управления по месту. Они дают возможность персоналу, рабо-
тающему непосредственно на установке, осуществлять постоянный
мониторинг технологического процесса и локальное управление, на-
пример изменение каких-либо уставок и т. п . Эти пункты локально-
го управления называются операторскими панелями локального
мониторинга и управления.
Операторская панель представляет собой компактную вычисли-
тельную машину со встроенным жидкокристаллическим дисплеем.
Для реализации функций управления панели снабжаются блоками
кнопочного управления и/ или сенсорными экранами. Типовая панель
предоставляет пользователю следующие возможности: 1) визуализа-
ция параметров технологического процесса в текстовом или графи-
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
ческом режимах; 2) управление и обработка аварийных сообщений,
регистрация времени и даты возникновения аварийных сообщений;
3) ручное управление с помощью функциональных кнопок или сен-
сорного экрана; 4) возможность свободного программирования
графики и настройки функциональных клавиш; 5) построение диа-
грамм и трендов, отображение сводных отчетов. В графическом ре-
жиме визуализация процесса происходит с помощью интерактивных
мнемосхем, очень похожих на те, которые имеются в операторских
станциях, только более компактных (это связано с ограниченным
разрешением экрана). В текстовом режиме процесс отображается в
виде строк или в виде специальных таблиц. Поскольку текстовый
формат представления данных недостаточно нагляден и информати-
вен, графические панели получили большее распространение.
Операторские панели разных моделей различаются типом и раз-
мером экрана (монохромный или цветной), организацией управления
(сенсорный экран или функциональные кнопки), количеством под-
держиваемых сетевых коммуникационных протоколов, быстродей-
ствием процессора и объемом встроенной Flash-памяти. Интеграция
операторской панели в систему управления зависит от поддерживае-
мых сетевых протоколов и наличия соответствующих коммуникаци-
онных интерфейсов. Большинство современных панелей поддержи-
вают, по меньшей мере, два сетевых протокола: один служит для
подключения панели к полевой шине (Profibus, Modbus и т. д .), дру-
гой — для интеграции в сеть верхнего уровня (Industrial Ethernet).
Подключенная к шине панель может выступать и как ведущий узел,
и как ведомый.
Контрольные вопросы
1. На какие классы делятся все АСУ ТП?
2. Что означает понятие реального времени в системах автоматизации?
3. Каковы характерные особенности SCADA-систем с точки зрения про-
цесса управления?
4. Что такое промышленная сеть?
5. Какие виды сетевой топологии вы знаете?
6. Каким образом тип доступа к физическому каналу определяет регламент
использования отдельными устройствами общей линии связи?
7. Что такое человекомашинный интерфейс?
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
249
ПРИЛОЖЕНИЕ 1
Справочные данные к главе 1
Таблица П.1.1
Основные и дополнительные единицы физических величин
в Международной системе единиц (SI)
Физическая величина
Единица физической в еличины
Наименование
Размер-
ность
Наименова-
ние
Обозначение
междуна-
родное
русское
Длина
L
Метр
m
м
Масса
M
Килограмм
kg
кг
Время
T
Секунда
s
с
Сила электриче-
ского тока
I
Ампер
A
А
Термодинамиче-
ская температура
Q
Кельвин
K
К
Количество
вещества
N
Моль
mol
моль
Сила света
J
Кандела
cd
кд
ПРИЛОЖЕНИЯ
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
2
5
0
ПРиЛОЖЕНиЕ 2
Справочные данные к главе 5
Таблица П.2.1
Таблица соответствия единиц давления
Системы
единиц
СИ (SI)
МКГСС
Внесистемные
Единицы
давления
1Па=1Н/м2
1ат=
=1 кгс/ см2
1бар=
= 106 дин/см2
1атм=760
мм рт. ст.
1ммрт.ст. 1ммвод.ст.
1psi=
= 1 lbf/in2
Па (Pa)
1
0,980665⋅10
5
105
1,01325⋅10
5
133,322
9,80665
6,894⋅10
3
кгс/ см2 (at)
1,01972⋅10
-5
1
1,01972
1,0332
1,35951⋅10
-3
10- 4
≈ 0,07
бар (bar)
105
0,980665
1
1,01325
1,33322⋅10
-3
9,80665⋅10
-5
6,894⋅10
-2
атм (atm)
0,98692⋅10
-5
0,96784
0,98692
1
1,31579⋅10
-3
9,67841⋅10
-5
0,068
мм рт. ст.
(mm Hg)
750,06⋅10
-5
735,563
750,06
760
1
7,3556⋅10
-2
51,715
мм вод. ст.
(mm H2O)
0,101972
104
1,01972⋅10 4
1,0332⋅10 4
13,5951
1
703,08
пси (psi)
1,45⋅10
-4
14,223
14,5
14,696
0,019337
1,422⋅10
-3
1
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
ПРиЛОЖЕНиЕ 3
Справочные данные к главе 14
Таблица П.3.1
Типовые динамические звенья
Тип звена
Временная функция
Передаточная функция
Статическое
y(t) = kx(t)
W(p)=k
Дифференцирующее
ytk
dxt
dt
()= ()
W(p) = kp
Интегрирующее
yt
T
xt dt
()= ()
∫1
()1
Wp
Тp
=
Апериодическое
T
dyt
dt
yt kxt
()+ ()= ()
()1
k
Wp
Тp
=
+
Колебательное
T
dyt
dt
T
dyt
dt
ytkxt
2
2
2
1
()+ ()
+()=()
12
()
2
1
k
Wp
pp
TT
=
++
Звено запаздывания
y(t)=x(t–τς)
W(p)=е
-pτς
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
252
СПИСОК ЛИТЕРАТУРЫ
1. Автоматизация технологических процессов добычи и подготовки нефти
и газа : учеб. пособие /[Е.Б.Андреев, А.И.Ключников, А.В.Кротов и др.]. — М. :
Недра — Бизнесцентр, 2008. — 399 с.
2. Бурдун Г. Д. Основы метрологии / Г. Д. Бурдун, Б. Н . Маркин. — М. :
Изд-во стандартов, 1985. — 312 с.
3. ГОСТ 8.009 — 84. Нормируемые метрологические характеристики средств
измерений. — Введ. 1986-01 -01. — М. : Изд-во стандартов, 1984. — 4 2 с.
4. Государственная система промышленных приборов и средств автома-
тизации / под ред. Г. И. Ковалерова. — М . : ЦНИИТЭИ приборостроения,
1981. — 47 с.
5. Гриб В. С . Технические измерения и приборы в нефтедобыче : учебное
пособие с грифом УМО / В.С.Гриб. — Уфа : УГНТУ, 2004. — 103 с.
6. Жила В. А . Автоматика и телемеханика систем газоснабжения : учебник
для студентов среднего профессионального образования / В. А . Жила. — М . :
Инфра-М, 2000. — 238 с. — (Среднее профессиональное образование).
7. иванова Г. М . Теплотехнические измерения и приборы : учебник для
вузов / Г.М .Иванова, Н.Д. Кузнецов, В. С.Чистяков. — 2-е изд., перераб. и
доп. — М.:МЭИ,2005. — 460с.
8. Казанцев А . В . Современные АСУ ТП [Электронный ресурс] : [Серия статей] /
А. В. Казанцев. — М . : Прософт, 2006. — Режим доступа : htpp ://prodcs.ru. —
Загл. С экрана.
9. Касаткин А. С . Электротехника : учебник для вузов / А. С . Касаткин,
М. В . Немцов. — 11 -е изд., стер. — М . : Издательский центр «Академия»,
2008. — 544с.
10. Котюк А. Ф. Датчики в современных измерениях / А. Ф . Котюк. — М . :
Радио и связь. Горячая линия. — Телеком, 2006. — 96 с. : ил. — (Массовая
радиобиблиотека; Вып. 1277).
11. Миловзоров О. В. Электроника : учебник для вузов / О. В . Миловзоров,
И. Г. Панков. — 3-е изд., стер. — М . : Высшая школа, 2006. — 2 08 с.
12. Плотников В. М . Средства контроля и автоматизации объектов транс-
порта газа / В. М. Плотников, В. А . Подрешетников, В. У. Гончаров.
—
Л.:
Недра, 1985.
—
216с. —
(Библиотека эксплуатационника магистрального
газопровода).
13. Прахова М. Ю. Основы автоматики : учеб. пособие / М. Ю . Прахова. — Уф а :
УГНТУ, 2002. — 116 с.
14. Проектирование систем автоматизации технологических процессов :
Справочное пособие / [А. С. Клюев, Б. В . Глазов, А. Х . Дубровский и др.]; под
ред. А.С.Клюева. — М. : Альянс, 2008. — 464 с.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
15. Рачков М. Ю. Технические средства автоматизации : учебник /
М.Ю.Рачков. — 2-е изд., стер. — М. : МГИУ, 2007. — 185 с.
16. РМГ 29-99. Рекомендации по межгосударственной стандартизации :
Государственная система обеспечения единства измерений : метрология :
основные термины и определения. — Введ. 2001 -01-01. — М . : Изд-во стан-
дартов, 2000. — 31 с.
17. Соснин О. М. Основы автоматизации технологических процессов и
производств : учеб. пособие для вузов / О. М . Соснин. — М . : Издательский
центр «Академия», 2007. — 2 40 с.
18. Схиртладзе А.Г. Метрология, стандартизация и сертификация : учеб-
ник / А. Г. Схиртладзе, Я. М . Радкевич. — Старый Оскол : ТНТ, 2010. — 540 с.
19. Фарзане Н. Г. Технологические измерения и приборы : учебник для вузов /
Н.Г.Фарзане, И.В.Илясов, А.Ю .Азим-заде. — М . : Высшая школа, 1989. —
456 с.
20. Чистофорова Н. В . Технические измерения и приборы. Ч . 1. Изме-
рение теплоэнергетических параметров : учеб. пособие / Н. В . Чистофорова,
А. Г. Колмогоров. — Ангарск : АГТА, 2008. — 200 с.
21. Чудаков А. Д . Технические средства автоматизации : учебник для
вузов / А. Д. Чудаков, Б. В . Шандров. — М. : Издательский центр «Академия»,
2007. — 368 с.
22. Шишмарев В. Ю . Основы автоматического управления : учебное по-
собие / В. Ю. Шишмарев. — М . : Издательский центр «Академия», 2008. —
352 с.
23. Шишмарев В. Ю . Типовые элементы систем автоматического управ-
ления : учебник для сред. проф. образования / В. Ю . Шишмарев.
—
М.:
Издательский центр «Академия», 200 4. — 3 0 4 с.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
254
ОГЛАВЛЕНИЕ
Предисловие ..........................................................3
Введение ..............................................................4
Глава 1. Метрологические основы технических измерений .............10
1.1. Основные сведения о метрологии ................................... 10
1.2. Понятие измерения. Виды средств измерения ........................ 12
1.3. Виды и методы измерений ..........................................14
1.4. Системы и единицы физических величин ............................ 16
1.5. Метрологические характеристики средств измерений .................. 18
1.6. Погрешности измер ений и средств измерений ........................22
1.7. Градуировка и поверка средств измерений ............................28
Глава 2. Электрические датчики механических величин ...............30
2.1. Индуктивные датчики ..............................................30
2.2. Емкостные датчики ................................................33
2.3. Индукционные датчики ............................................34
2.4. Вихретоковые датчики .............................................36
2.5. Пьезоэлектрические датчики........................................38
2.6. Тензометрические датчики (тензорезисторы) .........................40
Глава 3. Измерение температуры .....................................43
3.1. Понятие температуры. Температурные шкалы. Классификация
средств измерения температуры .....................................43
3.2. Манометрические термометры ......................................45
3.3. Измерение температуры термометрами сопротивления
(термор езисторами) ................................................48
3.4. Измерение температуры термоэлектрическими термометрами
(термопарами).....................................................55
Глава 4. Измерение уровня ...........................................64
4.1. Общие сведения об измер ении уровня. Классификация средств
измерения уровня .................................................64
4.2. Уровнемеры непрерывного действия .................................65
4.3. Сигнализаторы уровня ............................................. 74
Глава 5. Измерение давления .........................................78
5.1 Общие сведения об измерении давления. Классификация СИ давления . . 78
5.2. Жидкостные манометры ............................................79
5.3.Деформационныеманометры.......................................80
5.4.Грузопоршневыеманометры........................................84
5.5. Измерительные преобразователи давления ...........................86
5.6. О собенности эксплуатации и монтажа СИ давления ...................90
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
255
Глава 6. Измерение расхода ..........................................93
6.1. Общие сведения об измерении расхода. Классификация СИ расхода ....93
6.2. Объемные счетчики ................................................94
6.3. Турбинные (скоростные) расходомеры и счетчики .....................96
6.4. Расходомеры переменного перепада давления (дроссельные) ...........97
6.5. Расходомеры постоянного пер епада давления (ротаметры) .............99
6.6. Электромагнитные (индукционные) расходомеры .................... 101
6.7. Тепловые расходомеры ............................................ 10 2
6.8. Ультразвуковые расходомеры.......................................10 4
6.9. Расходомеры Кориолиса ...........................................10 6
6.10 . Вихревые расходомеры ........................................... 10 8
Глава 7. Измерение вибрации и частоты вращения механизмов ....... 11 0
7.1 Общие сведения об измер ении вибрации ............................ 11 0
7.2 . Датчики виброперемещения (вибросмещения) ....................... 11 0
7.3 . Датчики виброскорости ........................................... 11 4
7.4 . Датчики виброускорения .......................................... 116
7.5 . Системы измерения и анализ а вибрации ............................ 118
7.6 . Измерение частоты вращения ...................................... 121
Глава 8. Измерение физико-химических свойств и состава
жидкостей и газов ......................................... 12 7
8.1. Контроль состава газа ............................................. 12 7
8.2. Измерение плотности жидкостей и газ ов ............................ 13 5
8.3. Измерение вязкости .............................................. 13 9
8.4. Измерение влажности .............................................144
Глава 9. Государственная система промышленных приборов
и средств автоматизации ................................... 151
9.1.Основныесведения...............................................151
9.2 . Электро- и пневмосиловые пре образователи ГСП .................... 154
9.3 . Нормирующие преобразователи ЭДС и сопротивления
в унифицированный токовый сигнал ............................... 157
9.4 . Интеллектуальные датчики ........................................ 160
9.5 . Элементы промышленной пневмоавтоматики ....................... 163
9.6 . Исполнительные устройства .......................................164
Глава 10. Релейные элементы ....................................... 168
10.1. Понятие релейного элемента. Виды реле ........................... 168
10.2 . Электромагнитные реле постоянного и пер еменного тока.
Их хар актеристики .............................................. 169
10.3 . Магнитоуправляемые контакты (герконы) .......................... 176
10.4 . Путевые переключающие устройства .............................. 177
10.5 . Реле времени.................................................... 178
10.6. Электромагнитные контакторы и магнитные пускатели .............. 178
10.7. Типовые релейные схемы ......................................... 179
Глава11.Системытелемеханики....................................182
11.1. Общие сведения о системах телемеханики .......................... 182
11.2. Передача информации в системах телемеханики .................... 187
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»
11.3. Преобразование сообщений для передачи по каналам связи .......... 189
11.4. Кодирование сообщений ......................................... 191
Глава 12. Цифровые устройства автоматики .........................199
12.1. Логические функции и логические элементы .......................199
12.2. Аналого-цифровое и цифроаналоговое пре образование. Основные
элементы цифровых устройств ....................................202
12.3. Микропроцессоры, микропроцессорные системы,
программируемые логические контроллеры ........................208
12.4. Способы передачи цифровой информации ......................... 212
Глава 13. Элементы теории автоматического управления
и регулирования ........................................... 216
13.1. Общие сведения о системах автоматического управления
и регулирования ................................................ 216
13.2. Математическое описание САР ................................... 219
13.3. Устойчивость систем автоматического регулирования ...............225
13.4. Показатели качества систем автоматического регулирования .........227
Глава 14. Современные системы автоматизации ...................... 231
14.1. Структура и виды современных АСУ ТП ........................... 231
14.2. Промышленные сети передачи данных ............................. 237
14.3. Человекомашинные интерфейсы ..................................246
Приложения ........................................................249
Список литературы ..................................................252
Учебное издание
Прахова Марина Юрьевна, Шаловников Эрнст Александрович,
Ишинбаев Николай Александрович, Щербинин Сергей Валерьевич
Основы автоматизации производственных процессов
нефтегазового производства
Учебное пособие
Под редакцией М. Ю . Праховой
2-е издание, исправленное
Редактор И.В .Могилевец. Технический редактор О.Н.Крайнова
Компьютерная верстка: В.Н. Заломенкова, О. В . Пешкетова. Корректоры:
Г. Н . Петрова, Е. В. Кудряшова
Изд. No 102114723. Подписано в печать 08.11.2013. Формат 60×90/16. Гарнитура «Ньютон».
Бумага офсетная. Печать офсетная. Усл. печ. л. 16,0. Тираж 1 000 экз. Заказ No
ООО «Издательский центр «Академия». www.academia-moscow.r u
129085, Москва, пр-т Мира, 101В, стр. 1, а/я 48. Тел./факс: (495) 648-0507, 616-00-29.
Санитарно-эпидемиологическое заключение No РОСС RU. AE51. H 16476 от 05.04.2013.
Отпечатано с электронных носителей, предоставленных издательством,
в ОАО «Саратовский полиграфкомбинат». www.sarpk.ru
410004, г. Саратов, ул. Чернышевского, 59.
Ф
Г
Б
О
У
В
П
О
«
Т
ю
м
е
н
с
к
и
й
г
о
с
у
д
а
р
с
т
в
е
н
н
ы
й
н
е
ф
т
е
г
а
з
о
в
ы
й
у
н
и
в
е
р
с
т
и
т
е
т
»