/







Текст
жи
JB-ьз,
• лЖЫОТ
!й»
, Vй1’
- У®
Иг
йИМ 1
-=1
•К'л:
:енер-подполковчик, доцент
БРУСКИН Д. Э.
ИНЖЕНЕР-КАПИТАН
БОКШИЦКИЙ Л. В.
ЭЛЕКТРОПРИВОД
НА САМОЛЕТЕ
=111”
с
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ВООРУЖЕННЫХ СИЛ СОЮЗА ССР
МОСКВА-1949
1961 гЛ
ИНЖЕНЕР-ПОДПОЛКОВНИК, доцент
БРУСКИН Д. Э.
ИНЖЕНЕР-КАПИТАН
БОКШИЦКИЙ Л. В.
ЭЛЕКТРОПРИВОД
НА САМОЛЕТЕ
УЧЕБНОЕ ПОСОБИЕ
ПО СПЕЦОБОРУДОВАНИЮ САМОЛЕТОВ
ДЛЯ ТЕХНИЧЕСКОГО СОСТАВА ВВС
ВООРУЖЕННЫХ СИЛ СОЮЗА ССР
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ВООРУЖЕННЫХ СИЛ СОЮЗА ССР
МОСКВА-1949
Инженер-подполковник, доцент Брускин Д. Э.,
инженер-капитан Бокшицкий Л. В.
ЭЛЕКТРОПРИВОД НА САМОЛЕТЕ
Книга предназначается в качестве учебного пособия по спецоборудо-
ваиию самолетов для технического состава ВВС Вооруженных Сил
Союза ССР. В ней освещаются теоретические основы самолетного электропри-
вода, а также назначение, принцип действия, конструктивное выполнение
отдельных элементов электрических схем автоматического и полуавтома-
тического управления на самолете.
Редактор инженер-полковник А. И. УСИК
Технический редактор Г. Н. НИКИТИН Корректор О. М. ПАВЛОВА
Г-13371 Подписано к печати 16.5.49 Объем 11 печ. л.
10,6 уч.-изд. л. Над. № 9/1876. Зак. № 176
2-я типография Управления Военного Издательства МВС СССР
. имени К. Е. Ворошилова
ГЛАВА ПЕРВАЯ
ПРИМЕНЕНИЕ ЭЛЕКТРОПРИВОДА НА САМОЛЕТЕ
§ 1. ОБЩИЕ ПОЛОЖЕНИЯ
В настоящее время нет ни одного самолета, на котором не
применялась бы в том или ином виде электрическая энергия.
Современные самолеты, а в особенности тяжелые военные
и транспортные самолеты, имеют весьма многочисленное
и сложнре оборудование, обеспечивающее надежность полета
в тяжелых метеорологических условиях и ночью, полеты
и посадку по приборам и выполнение всякого рода сложных
и ответственных заданий.
Управление различными агрегатами самолета: винтомотор-
ной группой, вооружением, средствами связи и т. п., требует
от экипажа самолета напряженного внимания и точной работы.
Вполне понятно, чтб полная или частичная автоматизация от-
дельных процессов по управлению самолетом, отдельными
агрегатами и установками значительно облегчает работу всего
экипажа, позволяет ему сосредоточить все внимание на вы-
полнение задания, что увеличивает боеспособность экипажа,
а самый полет делает более надежным и безопасным.
Для приведения в действие всего сложного оборудования,
установленного на самолете, требуется энергия, источниками
которой на самолете являются:
— мускульная энергия экипажа;
— гидравлическая энергия;
— механическая энергия;
— энергия сжатого воздуха;
— электрическая энергия.
Из всех перечисленных видов энергии электрическая энер-
гия в настоящее время имеет наибольшее распространение.
Это объясняется теми преимуществами, которые дает приме-
нение электрической энергии.
Основным преимуществом электрической энергии по сравне-
нию с другими видами является то, что она может быть легко
преобразована в любой другой вид энергии.
1
3
Применение электрической энергии позволяет легко пере-
давать и распределять энергию к ее потребителям и, кроме
того, позволяет относительно легко автоматизировать ряд со-
вершенно необходимых и ответственных операций.
Электрическая энергия как универсальный вид энергии
может быть использована для любого вида привода, в то время
как другие виды энергии могут быть использованы только
частично.
§ 2. РАЗВИТИЕ И ПРИМЕНЕНИЕ ЭЛЕКТРИЧЕСКОГО
ПРИВОДА НА самолете
Электрическую энергию на самолете широко начали при-
менять еще в первую империалистическую войну. Первона-
чально электрическая энергия использовалась только для за-
жигания авиационных двигателей, затем она потребовалась
для радиооборудования, электрического освещения и для
обеспечения специальных посадочных средств. Впервые элек-
трический! привод, и то не в чистом виде .(смешанный), начали
применять на самолете только с 1930 г.
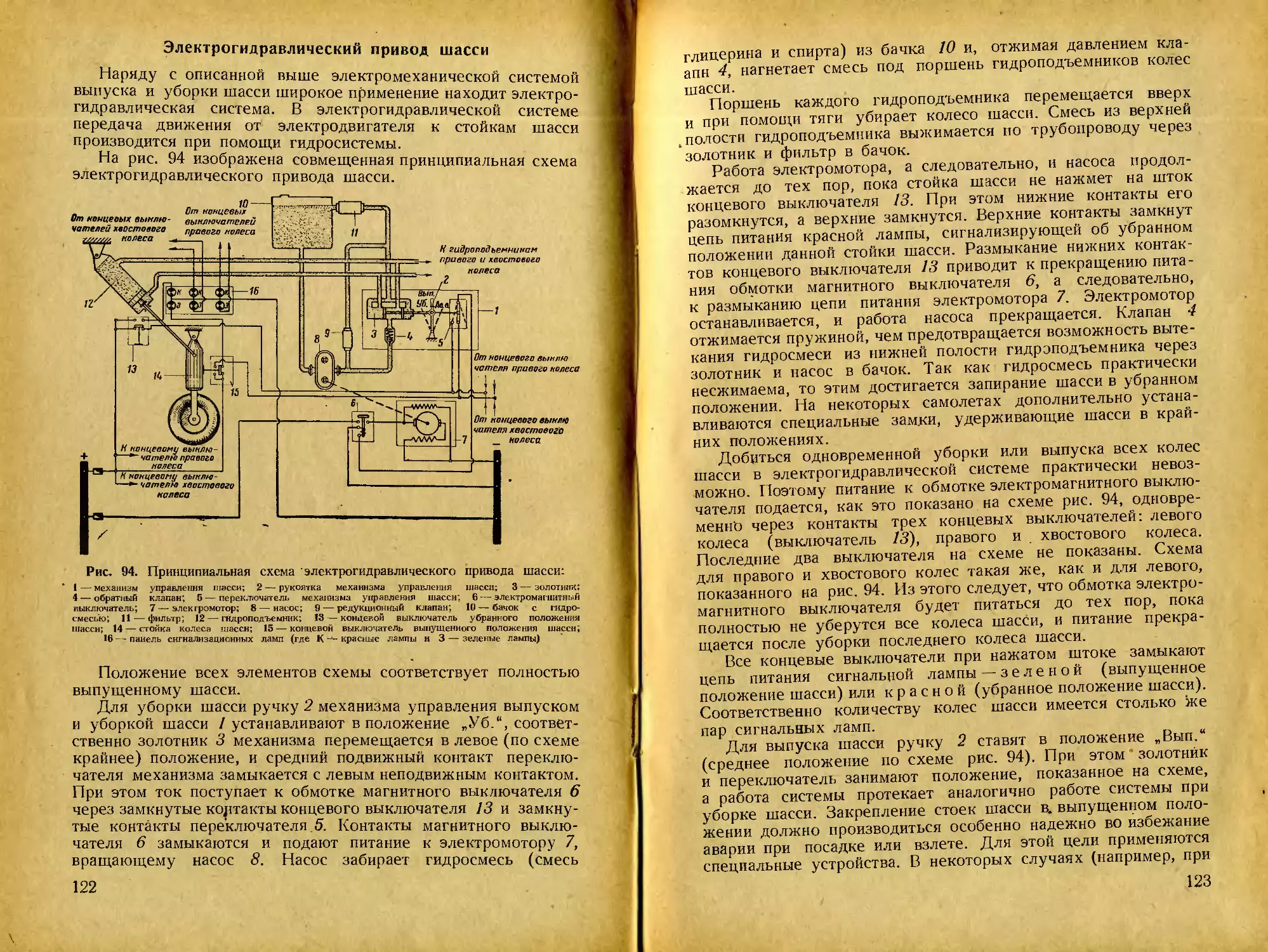
Для увеличения скорости полета появились механизмы
уборки и выпуска шасси при помощи электрогидравлического
привода.
В дальнейшем потребовалось уже проведение более широ-
кой электрификации всего самолетного привода.
Электрический привод занимает существенное место среди
всего электрооборудования самолетов и играет важную роль
в управлении самолетом, освобождая экипаж от выполнения
ряда функций и облегчая его работу.
Для приведения в действие всех сложных механизмов, ко-
торые применяются на современном самолете, например для
выпуска и уборки шасси, для изменения угла атаки стабили-
затора, открытия и закрытия бомбовых люков, поворота туре-
лей и т. д., используются электрические двигатели и ^реже
электромагниты, получающие питание от бортовой электриче-
ской сети.
Но электрический привои—это устройство более сложное,
включающее в себя не только электрический двигатель и элек-
тромагнит, а также и передающий мех-анизм от электродвига-
теля к исполнительному агрегату и всю необходимую для этой
цели аппаратуру управления.
С развитием авиации и усовершенствованием самолетов
привод отдельных механизмов на самолете приобретает все
более важное значение.
Выбор и расчет электрического привода для различных ме-
ханизмов на самолете представляют довольно трудную задачу,
так как условия работы отдельных механизмов весьма разно-
образны.
В начале развития авиации, когда самолеты имели неболь-
шое количество механизмов, которые требовали сравнительно
4
небольших усилий для приведения их в действие, применялся
ручной механический привод.
В процессе усовершенствования самолетов, увеличения ско-
рости и высоты полета, создания более мощных типов само-
летов и т. *п. появилась необходимость замены ручного меха-
нического привода энергетическим,
В качестве энергетических приводов получили распростра-
нение гидравлические, электрогидравлические, пневматические,
пневмогидравлические и электрические приводы.
Ручные механические и ручные гидравлические приводы
в настоящее время применяются только для механизмов, тре-
бующих небольших усилий при управлении ими, а также как
дублирующие аварийные приводы к особо важным механизмам
самолетов: шасси, створки бомболюков и др.
Основными элементами системы гидропривода . являются:
гидравлический насос (источник энергии), приводимый в дви-
жение от авиационного мотора; силовые гидравлические ци-
линдры; резервуар для гидросмеси; системы гидротрубопрово-
дов; распределительные краны и различные клапаны.
В качестве рабочего материала применяются различные не-
замерзающие жидкости (смесь глицерина со спиртом и др.)-
Система пневмопривода работает воздухом, который посту-
пает из специальных баллонов, установленных на самолетах.
Баллоны заряжаются на земле или во время полета от ком-
прессора, установленного на самолете и приводимого в дви-
жение от самолетного мотора.
Смешанные энергетические приводы пневмогидравлический
и электрогидравлический применяются в том случае, если при-
менение чисто электрического привода нерационально.
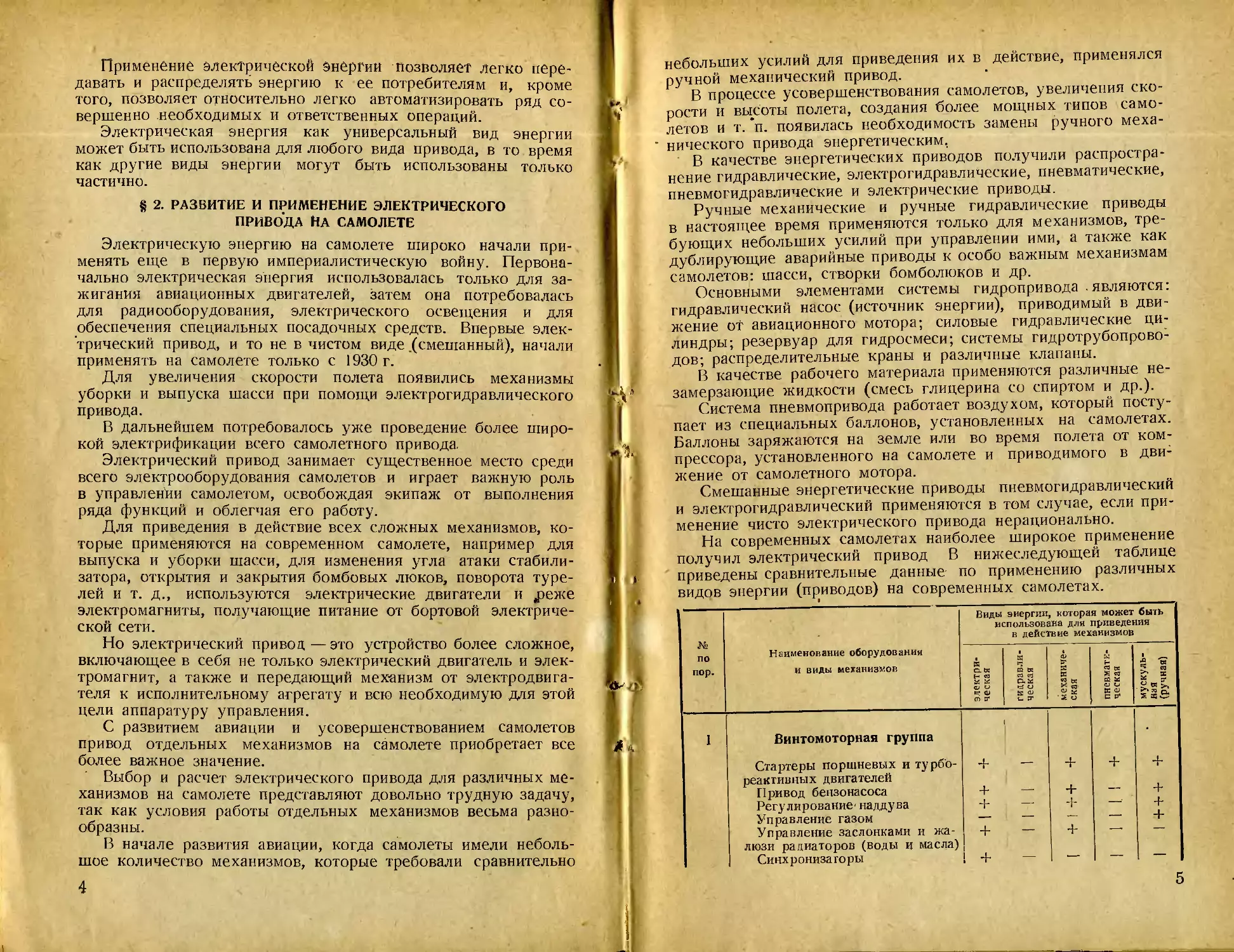
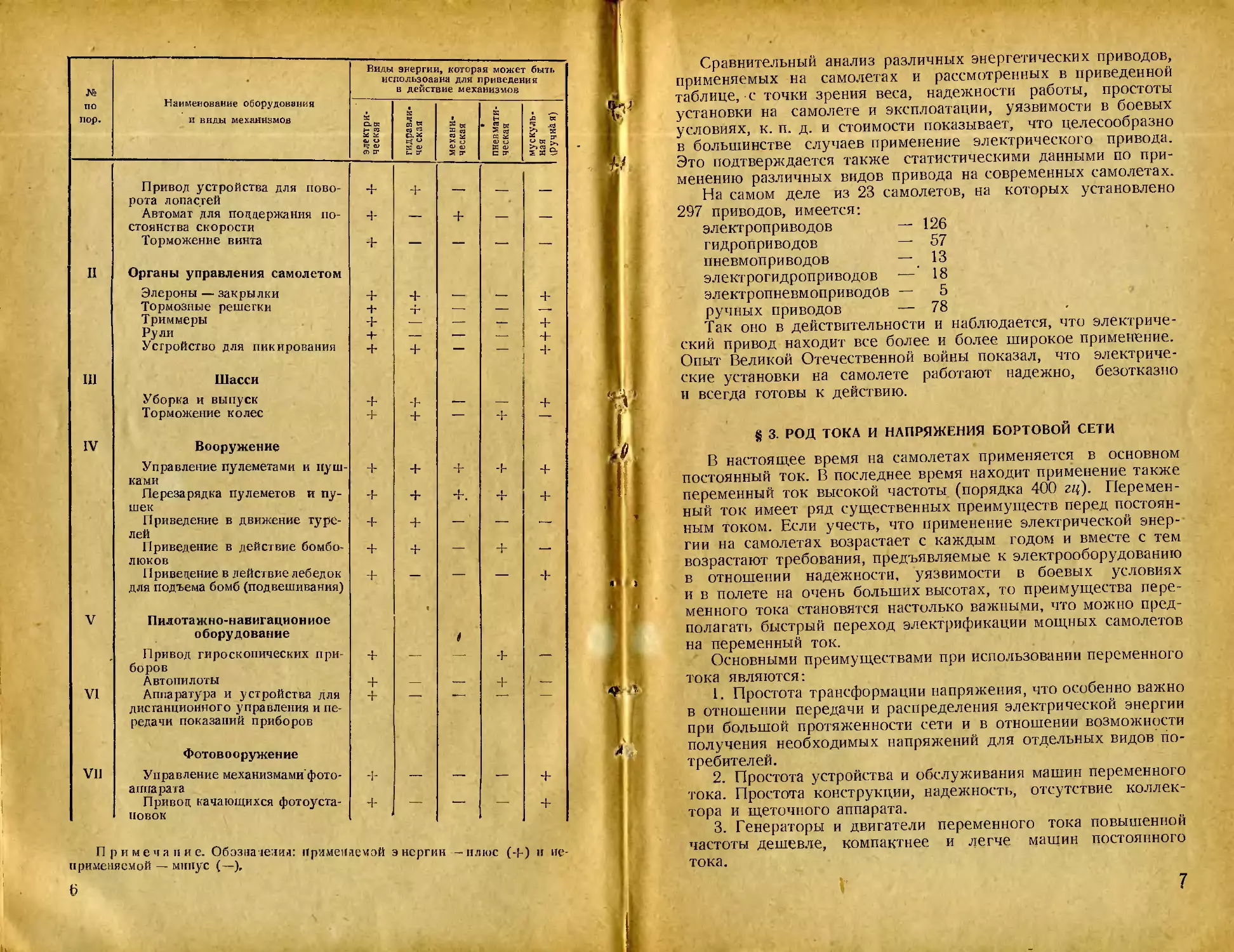
На современных самолетах наиболее широкое применение
получил электрический привод В нижеследующей таблице
приведены сравнительные данные по применению различных
видов энергии (приводов) на современных самолетах.
м
по
пор.
Наименование оборудования
и виды механизмов
Винтомоторная группа
Стартеры поршневых и турбо-
реактивных двигателей
Привод бензонасоса
Регулирование' наддува
Управление газом
Управление заслонками и жа-
Виды энергии, которая может быть
использована для приведения
в действие механизмов
люзи радиаторов (воды и масла)
5
1
1 . 1 № Наименование оборудования и виды механизмов Привод устройства для пово- рота лопастей Автомат для поддержания по- стоянства скорости Торможение винта Органы управления самолетом Элероны — закрылки Тормозные решетки Триммеры Рули Устройство для пикирования Шасси Уборка и выпуск Торможение колес Вооружение Управление пулеметами и пуш- ками Перезарядка пулеметов и пу- шек Приведение в движение туре- лей Приведение в действие бомбо- люков Приведение в действие лебедок для подъема бомб (подвешивания) Пилотажно-навигационное оборудование Привод гироскопических при- боров Автопилоты Аппаратура и устройства для дистанционного управления и пе- редачи показаний приборов Фото в о о ру же н ие Управление механизмами фото- аппарата Привод качающихся фотоуста- новок )имечапие. Обозначения: прямей яемой — минус (—)г Виды энергии, которая может быть использоаана для приведения в действие механизмов
1 1 1 1 1 1 i Lui no nop. 11 111 IV V VI VII П| римен ? -Mdiawe + + + +++ + + + + + + + + + +++ ++ g 1 II III 1 + + + + +4- + | |++ ||+ ™РЛГ‘ = i II III- I I i + + II 1 1 I 1 1 I + 1 ST b — c 2. II 1 + + I + I+ + +| lllll III ческа*яТИ" _ мускуль- Z ++ III +II++ 1+ + + +I+ III нпая . . = >11 фучная)
Сравнительный анализ различных энергетических приводов,
применяемых на самолетах и рассмотренных в приведенной
j таблице, с точки зрения веса, надежности работы, простоты
установки на самолете и эксплоатации, уязвимости в боевых
условиях, к. п. д. и стоимости показывает, что целесообразно
в большинстве случаев применение электрического привода.
Это подтверждается также статистическими данными по при-
менению различных видов привода на современных самолетах.
На самом деле из 23 самолетов, на которых установлено
297 приводов, имеется:
электроприводов — 126
гидроприводов — 57
пневмоприводов — 13
электрогидроприводов •—’ 18
электропневмоприводов — 5
ручных приводов — 78
Так оно в действительности и наблюдается, что электриче-
ский привод находит все более и более широкое применение.
Опыт Великой Отечественной войны показал, что электриче-
ские установки на самолете работают надежно, безотказно
i > и всегда готовы к действию.
§ 3. РОД ТОКА И НАПРЯЖЕНИЯ БОРТОВОЙ СЕТИ
В настоящее время на самолетах применяется в основном
постоянный ток. В последнее время находит применение также
переменный ток высокой частоты (порядка 400 гц). Перемен-
ный ток имеет ряд существенных преимуществ перед постоян-
ным током. Если учесть, что применение электрической энер-
гии на самолетах возрастает с каждым годом и вместе с тем
возрастают требования, предъявляемые к электрооборудованию
в отношении надежности, уязвимости в боевых условиях
и в полете на очень больших высотах, то преимущества пере-
менного тока становятся настолько важными, что можно пред-
полагать быстрый переход электрификации мощных самолетов
на переменный ток.
Основными преимуществами при использовании переменного
тока являются:
1. Простота трансформации напряжения, что особенно важно
в отношении передачи и распределения электрической энергии
при большой протяженности сети и в отношении возможности
получения необходимых напряжений для отдельных видов по-
требителей.
2. Простота устройства и обслуживания машин переменного
тока. Простота конструкции, надежность, отсутствие коллек-
тора и щеточного аппарата.
3. Генераторы и двигатели переменного тока повышенной
частоты дешевле, компактнее и легче машин постоянного
тока.
7
4. Простота преобразования переменного тока в постоян-
ный ток при помощи сухих выпрямителей и кенотронов (для
получения постоянного тока высокого напряжения).
Однако, несмотря на совершенно очевидные достоинства
переменного тока, имеются серьезные причины, которые слу-
жат препятствиями на пути применения переменного тока.
Большие затруднения вызывает устройство привода генера-
тора переменного тока. Для . получения тока постоянной ча-
стоты необходимо генератор переменного тока вращать с по-
стоянной скоростью, а так как последний приводится во вра-
щение от авиационного двигателя, то естественно, что скорость
его не является величиной постоянной. Над решением этой
задачи в настоящее время работают многие ученые, инженеры
и техники.
Уже сейчас имеется ряд предложений и даже выполнен-
ные конструкции, в частности с передачей вращения от авиа-
ционного двигателя к генератору через гидравлическую муфту,
которая дает на выходе постоянную скорость вращения.
Система постоянного тока на отечественных самолетах
в настоящее время имеет стандартное напряжение 24 в. Это
напряжение считается наиболее выгодным, но наблюдаются
тенденции в сторону повышения его.
Повышение напряжения выгодно по следующим сообра-
жениям:
1. Уменьшаются сечения и вес проводов, так как при оди-
наковом процентном падении напряжения сечение и вес про-
водов обратно пропорциональны квадрату напряжения.
2. Электродвигатели получаются легче и дешевле.
Низкое напряжение имеет следующие преимущества:
1. При низком напряжении уменьшается вероятность про-
боя изоляции и короткого замыкания.
2. Облегчается работа контактных органов,
3. Более надежная работа коллектора и щеток в высотных
условиях.
4. Потребление энергии на свечу в лампах накаливания
и габаритные размеры ламп при низком напряжении меньше,
а следовательно, меньше и габариты арматуры.
5. Низковольтные лампы прочнее, а лампы малой мощности
вообще трудно изготовить на высокое напряжение, так как
приходится брать слишком тонкую и длинную нить.
6. Резервная аккумуляторная батарея на малое напряжение
меньше по габаритам и легче по весу.
Высокие напряжения невыгодны и даже опасны в высотных
условиях.
На высоте порядка 15000 м над уровнем моря электриче-
ская прочность воздушного промежутка длиной в 1 см падает
больше чем на 75°/0. В сильно разряженной среде возникает
корона при напряжении порядка 200 в. Напряжение разряда
по поверхности изоляции в разряженной среде уменьшается
8 i
в несколько раз, в особенности при увлажнении и загрязнении
поверхности изоляции и при высокой температуре.
Условия охлаждения электрических машин на больших
высотах резко ухудшаются, что в ряде случаев приводит к их
перегреву.
Корона при действующем напряжении электрической си-
стемы вызывает разрушение установки вследствие обуглево-
живания хлопчатобумажной пряжи, бумаги, "масла, окисления
твердой резины, коррозии металла под влиянием озона и окис-
лов.
Таким образом, при выборе стандартного напряжения бор-
товой сети приходится учитывать ряд факторов, и в частности,
вопросы безопасности обслуживающего персонала, которые,
безусловно, осложняются при применении высокого напря-
жения.
Однако все возрастающие требования к увеличению мощ-
ности агрегатов при сохранении номинального напряжения бор-
товой сети 24 в ведут к чрезмерному увеличению токов в ма-
гистральных проводах, которые могут доходить до 2000—
3000 а.
При наличии таких токов сечение проводов должно быть
большим, и они оказываются неудобными для монтажа, ком-
мутационная аппаратура значительно возрастает по габаритам
и весу, а всякого рода неподвижные контактные соединения,
разъемы и т. п. оказываются при этом не только громоздкими,
но и трудно выполнимыми в конструктивном отношении. Это
обстоятельство в совокупности с другими вышеупомянутыми
факторами вызвало тенденцию к повышению напряжения бор-
товой сети.
•
§ 4. ОСНОВНЫЕ ТАКТИКО-ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
К ЭЛЕКТРИЧЕСКОМУ ОБОРУДОВАНИЮ
Тактико-технические требования к самолетному электро-
оборудованию определяются теми функциями, которые осу-
ществляются электрооборудованием, и специфическими усло-
виями его эксплоатации. По существу говоря, все они сводятся
к обеспечению надежности и безотказности работы всей си-
стемы электрооборудования в целом и основными из них
являются:
1. Прочность электрическая, термическая, механическая
и химическая стойкость.
2. Малый вес и небольшие габариты.
3. Надежность работы в условиях вибраций, тряски, толч-
ков и больших ускорений.
4. Безопасность в отношении пожара, взрыва и в обраще-
нии.
5. Независимость работы от изменения параметров окру-
жающей среды‘(давления, температуры, влажности).
9
6. Малое влияние на работу радиостанций и магнитных
компасов.
7. Удобство и простота контроля, монтажа и эксплоатации.
8. Независимость работы от положения в пространстве.
9. Быстрая готовность к действию.
10. Дешевизна.
Как видно, многие из вышеперечисленных требований оди-
наково применимы и к любому обычному промышленному
или транспортному электрооборудованию, однако между ними
существует резкая разница, так как условия выполнения по-
ставленных требований на самолете значительно сложнее.
Многие из этих требований взаимно противоречивы, но
в каждом отдельном случае необходимо изыскать наиболее
выгодное решение, обеспечивающее выполнение главного тре-
бования — надежности и безотказности работы.
ГЛАВА ВТОРАЯ
ОСНОВНЫЕ СВЕДЕНИЯ ПО УСТРОЙСТВУ И МЕХАНИКЕ
ПРИВОДА
§ 5. ЭЛЕМЕНТЫ ЭЛЕКТРИЧЕСКОГО ПРИВОДА
Электрический привод — это сочетание отдельных механиз-
мов и устройств, находящихся между собой в определенной
зависимости. Электрический привод образуется из электродви-
гателя (или электромагнита), передаточного устройства от
электродвигателя к рабочему агрегату (исполнительному меха-
низму) и соответствующей аппаратуры управления. Конструк-
ция передаточного механизма может быть весьма разнообраз-
ной и определяется необходимостью преобразования одного
вида движения в другой вид движения, как, например, вра-
щательное движение якоря электродвигателя в поступательное
движение выводного штока исполнительного механизма или,
наоборот, поступательное движение штока втяжного электро-
магнита — во вращательное движение вала исполнительного
механизма. Кроме того, при помощи передаточного механизма
можно устанавливать нужные соотношения между скоростью
вращения вала электродвигателя, вала поворотного или дви-
жением штока втяжного электромагнита и скоростью вращения
выводного вала исполнительного механизма. Это соотношение
называют передаточным числом.
Величина передаточного числа определяется конструкцией
редуктора, включаемого в систему передачи. В ряде случаев
такие передачи выполняются с регулируемым передаточным
числом.
Наиболее простой передачей является непосредственное
соединение электродвигателя с исполнительным механизмом.
Но такое соединение не дает возможности преобразовывать
вращательное движение в поступательное и требует одинако-
вой скорости вращения двигателя и исполнительного меха-
низма. Поэтому такие передачи в авиационном электроприводе
применяются редко,
И
Назначение аппаратуры управления, являющейся весьма
важным звеном электропривода, заключается в обеспечении
процессов включения и выключения двигателя, переключения
и регулирования его электрической цепи и защиты двигателя
от ненормальных режимов.
Основные процессы, подлежащие управлению, следующие:
— пуск двигателя в ход;
— остановка двигателя;
— электрическое торможение;
— изменение направления вращения;
— регулирование скорости;
— защита двигателя и механизма от перегрузок и повре-
ждений;
— осуществление определенной последовательности опера-
ций;
— осуществление сигнализации системы.
Аппаратура управления бывает непосредственного действия,
выполняемая в виде кнопок или переключателей, включаемых
в силовую цепь электродвигателя, используемая для мало-
мощных механизмов. На самолетах широкое распространение
получила аппаратура автоматического и полуавтоматического
действия, наилучшим образом обеспечивающая выполнение
перечисленных задач. Автоматическое управление устраняет,
а полуавтоматическое уменьшает влияние личных качеств
летного экипажа при управлении самолетом и мотором, дает
возможность дистанционного управления (т. е. управления на
расстоянии), обеспечивает строгую последовательность различ-
ных операций с применением соответствующих блокировок.
Автоматическое управление приводом может производиться:
1) посредством контакторно-релейной автоматики преры-
вистого действия, в которой основными управляющими аппа-
ратами являются контакторы и реле;
2) посредством электрических машин-регуляторов непре-
рывного действия (амплидинов);
3) посредством ионно-электронной автоматики, в которой
управление ведется при помощи электронных ламп (на очень
малые величины тока) и ионных аппаратов (на большие вели-
чины тока), не нашедшей пока широкого применения в систе-
мах авиационного электропривода.
§ 6. ОСНОВНЫЕ ПОЛОЖЕНИЯ МЕХАНИКИ ПРИВОДА
Работа всякого исполнительного механизма характеризуется
следующими параметрами:
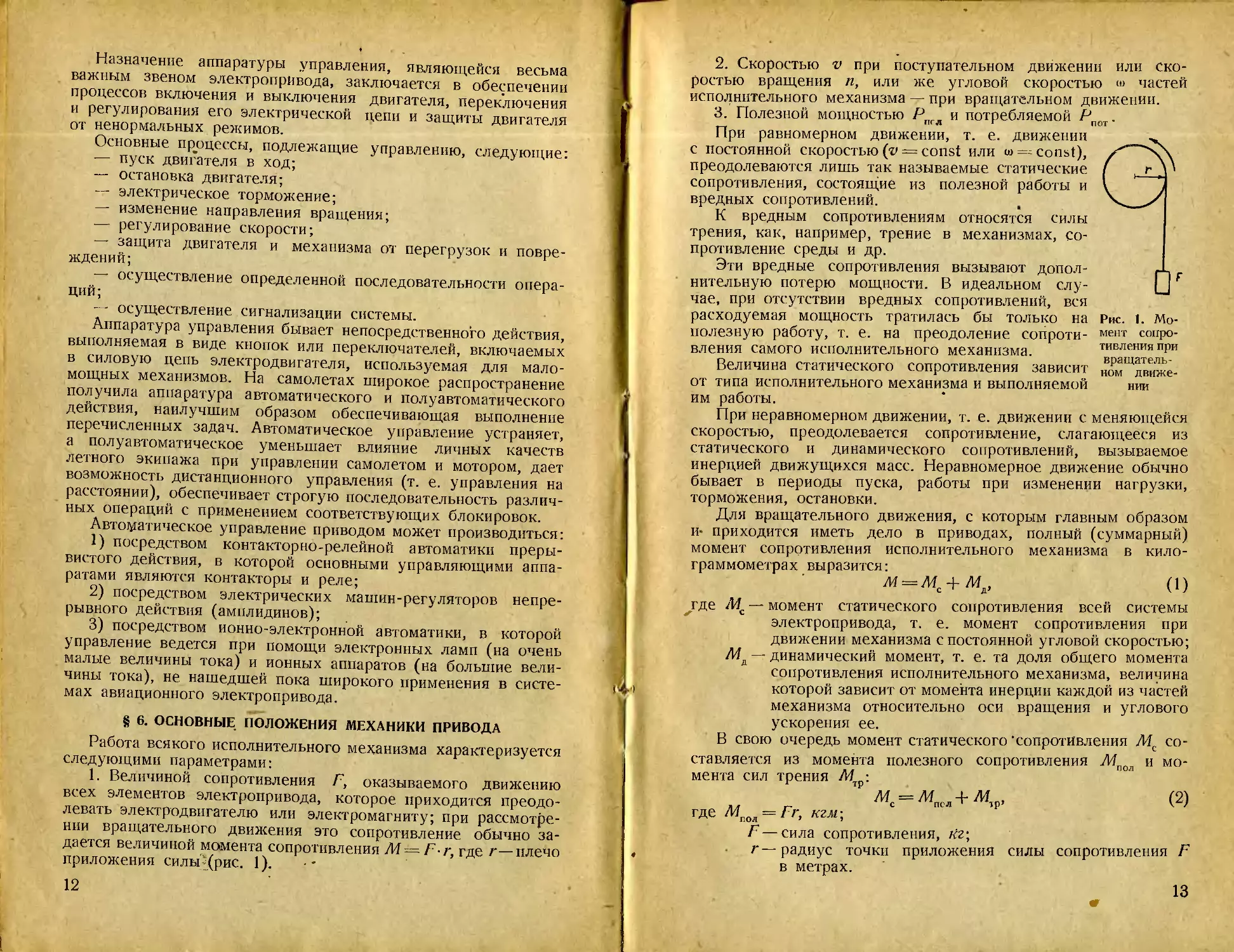
1. Величиной сопротивления F, оказываемого движению
всех элементов электропривода, которое приходится преодо-
левать электродвигателю или электромагниту; при рассмотре-
нии вращательного движения это сопротивление обычно за-
дается величиной момента сопротивления M — F-r, где /'—плечо
приложения силы (рис. 1).
12
2. Скоростью v при поступательном движении или ско-
ростью вращения п, или же угловой скоростью ш частей
исполнительного механизма — при вращательном движении.
3. Полезной мощностью Рпся и потребляемой Рпот.
При равномерном движении, т. е. движении
с постоянной скоростью (v = const ИЛИ ш = const),
преодолеваются лишь так называемые статические
сопротивления, состоящие из полезной работы и
вредных сопротивлений. ,
К вредным сопротивлениям относятся силы
трения, как, например, трение в механизмах, со-
противление среды и др.
Эти вредные сопротивления вызывают допол-
нительную потерю мощности. В идеальном слу-
чае, при отсутствии вредных сопротивлений, вся
расходуемая мощность тратилась бы только на
полезную работу, т. е. на преодоление сопроти-
вления самого исполнительного механизма.
Величина статического сопротивления зависит
от типа исполнительного механизма и выполняемой
Рис. 1. Мо-
мент сопро-
тивления при
вращатель-
ном движе-
нии
им работы.
При неравномерном движении, т. е. движении с меняющейся
скоростью, преодолевается сопротивление, слагающееся из
статического и динамического сопротивлений, вызываемое
инерцией движущихся масс. Неравномерное движение обычно
бывает в периоды пуска, работы при изменении нагрузки,
торможения, остановки.
Для вращательного движения, с которым главным образом
и- приходится иметь дело в приводах, полный (суммарный)
момент сопротивления исполнительного механизма в кило-
граммометрах выразится:
М = МС + Мл,
(1)
где /И. — момент статического сопротивления всей системы
электропривода, т. е. момент сопротивления при
движении механизма с постоянной угловой скоростью;
/Ид — динамический момент, т. е. та доля общего момента
сопротивления исполнительного механизма, величина
которой зависит от момента инерции каждой из частей
механизма относительно оси вращения и углового
ускорения ее.
В свою очередь момент статического 'сопротивления Мс со-
ставляется из момента полезного сопротивления 7Ипол и мо-
мента сил трения 7Ир:
„ г Ч=Ч..+ ",Р. (2)
где Млол = Гг, кгм\
F — сила сопротивления, кг\
точки приложения силы сопротивления F
в метрах.
13
Для удобства подсчетов, величина момента трения Мтр учи-
тывается в формуле (2) путем введения величины к. п. д.
движущейся системы исполнительного механизма:
__ полезная мощность
/‘и- 4 полезная мощность 4- потерянная мощность >
отсюда
М
• (3)
« 41. м
Кроме того, в некоторых схемах самолетного привода при
определении статического момента необходимо учитывать мо-
мент сопротивления от аэродинамических сил, действующих
на отдельные части исполнительного механизма.
На практике опре-
деление статических
сопротивлений Часто
упрощают, пренебре-
гая некоторыми силами
сопротивления. Напри-
мер, в самолетных ме-
ханизмах, снабженных
подшипниками каче-
ния, доля сопротивле-
ния. от сил трения в
суммарном статиче-
ском сопротивлении не-
велика (расчеты пока-
зывают, что она соста-
вляет всего 2—50/0), и
силами трения в та-
ких механизмах почти
всегда можно прене-
бречь.
Определение момен-
тов статического сопро-
тивления обычно про-
изводят в расчете на
самые тяжелые из воз-
можных на самолете
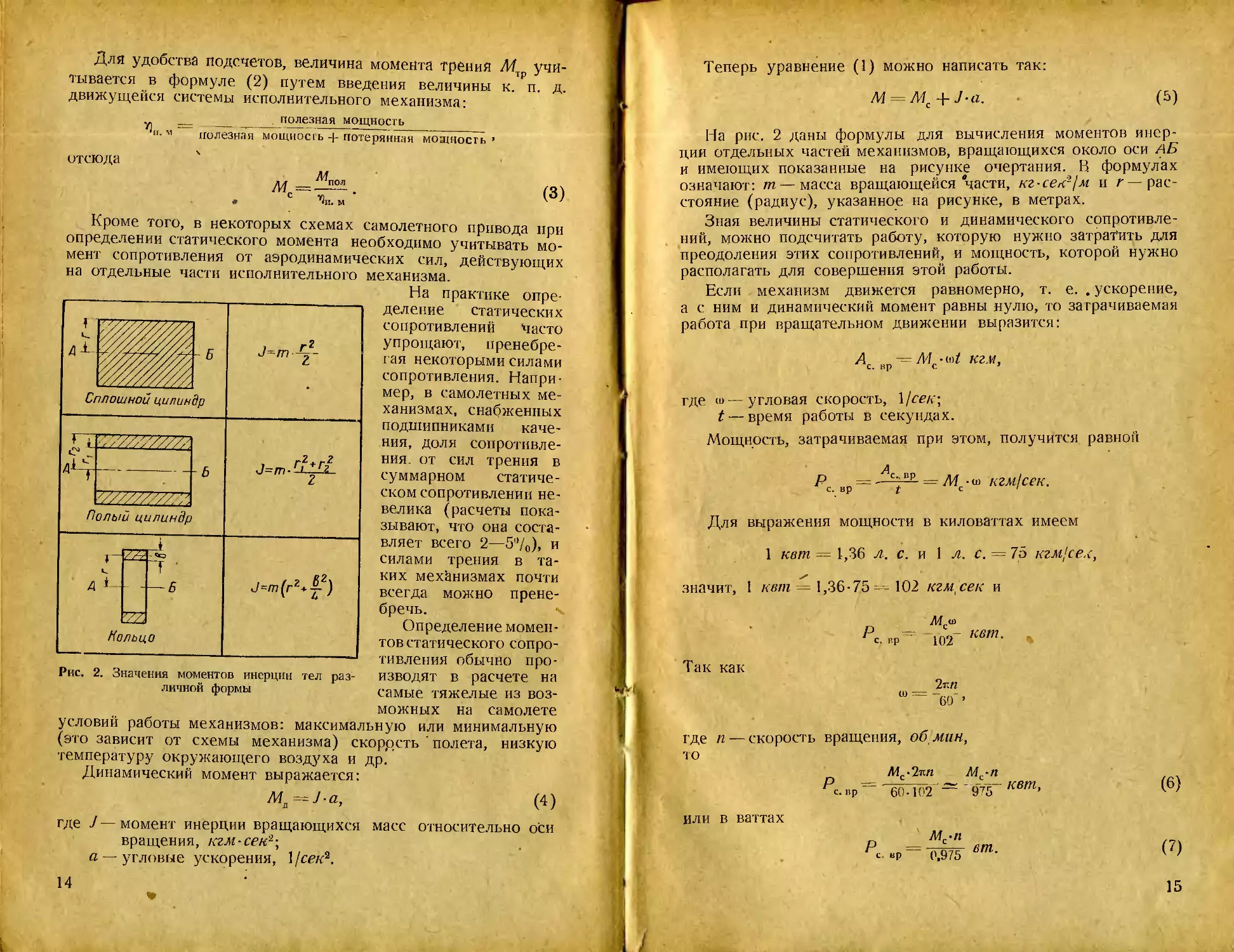
Рис. 2. Значения моментов инерции тел раз-
личной формы
условий работы механизмов: максимальную или минимальную
(это зависит от схемы механизма) скоррсть ' полета, низкую
температуру окружающего воздуха и др.
Динамический момент выражается:
Ma = J-a, (4)
где J—момент инерции вращающихся масс относительно оси
вращения, кгм-сек--,
а —угловые ускорения, 1/сек2.
14
Теперь уравнение (1) можно написать так:
/И = Mc + J-a. (5)
На рис. 2 даны формулы для вычисления моментов инер-
ции отдельных частей механизмов, вращающихся около оси АБ
и имеющих показанные на рисунке очертания. В формулах
означают: т—масса вращающейся части, кг-сек2/м и г—рас-
стояние (радиус), указанное на рисунке, в метрах.
Зная величины статического и динамического сопротивле-
ний, можно подсчитать работу, которую нужно затратить для
преодоления этих сопротивлений, и мощность, которой нужно
располагать для совершения этой работы.
Если механизм движется равномерно, т. е. . ускорение,
а с ним и динамический момент равны нулю, то затрачиваемая
работа при вращательном движении выразится:
А.
где ш—угловая скорость, \/сек;
t — время работы в секундах.
Мощность, затрачиваемая при этом, получится равной
А Вр = ' ^пр-=г7И кгм1сек.
Для выражения мощности в киловаттах имеем
1 кет = 1,36 л. с. и 1 л. с. = 75 кгм'сех,
значит, 1 кет 1,36-75 = 102 кгмсек и
А. юг’ квт- »
Так как
где п — скорость вращения, об мин,
ю
Л1с-2лл 7Ис-л
А. вр 60-102 ~ ' 975~ ,<вт’ >
или в ваттах
А. вР = о,975 вт-
15
При поступательном (прямолинейном) движении работа,
затрачиваемая в направлении движения на преодоление силы
статического сопротивления Fc, определяется выражением
4. л = кгл)> (8)
где S — путь движения в м.
Соответственно мощность выразится
А • S
Рс „ = у - = рс у = Гс • v кгм/сек, (9)
S ,
где v — -?— скорость движения за время t, м/сек.
Таким образом, при вращательном движении исполнитель-
ного механизма с неизменной скоростью потребная для дви-
жения мощность в каждый данный момент пропорциональна
произведению момента Статического сопротивления на угловую
скорость механизма или при поступательном движении меха-
низма — произведению суммарной силы статического сопроти-
вления на величину линейной скорости механизма.
Если же скорость движения механизма непостоянна, нужно
учесть работу, затрачиваемую на преодоление динамического
момента. При вращательном движении механизма эта работа
будет равна у
2 2
O)Q - О).
(ю)
где <«i — начальная угловая .скорость движения, \/сек\
nig — конечная угловая скорость движения, 1 сек.
Работа, затраченная от начала движения на преодоление
динамического момента, определяется при любой конечной
скорости и величиной кинетической энергии вращающихся
масс:
кгм- . (11)
Средняя мощность за время t при вращательном движении,
идущая на преодоление инерции вращающихся масс от начала
вращения (ы = 0) до скорости, равной «в, получается
Д. в? = кг"1сек> (12)
а когда скорость за время I изменяется от до w.2, то
2 __ 2
P^.^==J~4i~L кгм/сек. (13)
При увеличении скорости эта мощность' получается поло-
жительной, и, таким образом, ее потребуется затратить на
ускорение вращающихся частей. При уменьшении скорости
16
V >
i
мощность будет иметь отрицательное значение, т. е. она
отдается вращающимися частями исполнительного механизма
и может быть в некоторых случаях использована.
Для случая равномерно ускоренного, или равномерно за-
медленного вращательного движения ускорение постоянно:
а — const = *t,
и поэтому
М, = J-a =J-^- кгм. (14)
/
Подставляя в формулу (12) вместо выражения J ~ равную
ему величину Л4, получаем выражение для средней мощ-
ности
Jufi М ш
РД. вр = ~2Г = ~‘Г КгМ1СеК- ( 1 5)
.Если заданы начальная (ш,) и конечная (<о2) скорости, то
средняя мощность будет
М. («Во-<').)
Рд. вр = " 2 кгмГсен. (16)
При первоначальном поступательном движении и начальной
скорости -ц, = 0 работа, затрачиваемая на преодоление дина-
мического момента, определяется величиной кинетической
энергии (живой силы) движущихся масс.
Ид. п = КгМ> (17)
где т — масса тел, находящихся в движении,
v — линейная скорость, м{сек.
Средняя мощность за время t выразится
Рь.п= кгм!сек- (18)
Если скорость в начале движения была vx, а в конце дви-
жения г»2, то работа и мощность соответственно будут
§ 7. ПРИВЕДЕНИЕ МОМЕНТОВ К ПРИВОДНОМУ ВАЛУ
ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА И К ВАЛУ ДВИГАТЕЛЯ ‘
В устройствах электропривода с несколькими движущимися
частями обычно удобно рассматривать движение только на
каком-либо одном валу, учитывая влияние всех других дви-
жущихся частей на этот вал. Практически приходится эти
движения пересчитывать на приводной вал исполнительного
механизма.
Приводным валом исполнительного механизма будем назы-
вать вращающуюся часть его, 'связанную с электродвигателем,
т. е. получающую движение от двигателя непосредственно
или через передачи (выходной вал электромеханизма). Вели-
чина момента статического^сопротивления /14, на приводном
валу исполнительного механизма определяется по полезному
моменту сопротивления /Ипол рабочих частей исполнительного
механизма и по передаточному числу,/., ,, :
4'^пол
Л4 = -у кгм. (21)
с 1и. м X /
Здесь
i =
и. м щ ’
где /г, — скорость вращения ведущего (приводного) вала,
об!мин\
п.1 — скорость вращения ведомого вала, об1мин.
Учитывая потери в исполнительном механизме величиной
его к. п. д. (т]п м), получим по формулам (3) и (21) момент
на приводном валу
Требуемый момент на валу двигателя /Идв, т. е. приведен-
ный момент, при непосредственном соединении с приводным
валом исполнительного механизма равен Л4с. При наличии пе-
редачи Мдз определяют, учитывая передаточное число /пер
и к. п. д. передачи тг]пер между двигателем и приводным валом
исполнительного механизма, т. е. получаем
Мс
М = = ~1-------- НгМ
дв fnep Чпер
ИЛИ
л (23)
(24)
Дв Чи. м’^и. м’ %ep*znep
18
При холостой работе исполнительного механизма необхо-
димый момент на •валу двигателя следует подсчитывать не по
формуле (22), а пользуясь формулой (6), из которой получаем
4bV975 V
где Ро — мощность, равная сумме потерь в исполнительном
механизме Рк м и в передачах Р при холостой работе исполни-
тельного механизма,
т. е. Р(, = -Р„.м+Ппер и
п— скорость вращения
двигателя, об/мин.
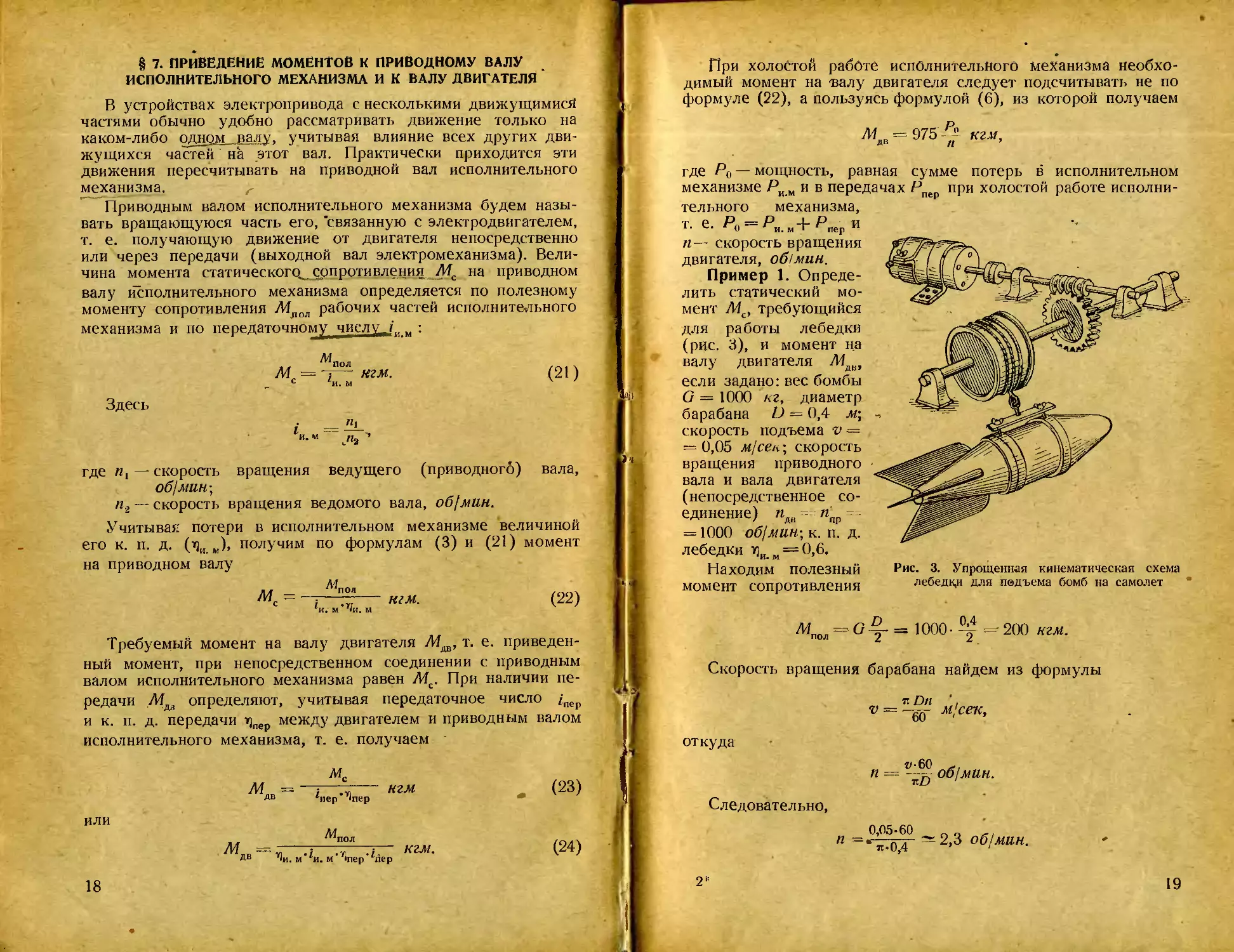
Пример 1. Опреде-
лить статический мо-
мент Л4С, требующийся
для работы лебедки
(рис. 3), и момент на
валу двигателя Л4дв,
если задано: вес бомбы
G = 1000 кг, диаметр
барабана D — 0,4 м\
скорость подъема v =
— 0,05 м/сек; скорость
вращения приводного
вала и вала двигателя
(непосредственное со-
единение) пм ппр -
= 1000 об/мин-, к. п. д.
лебедки >1и.м = 0,6.
Рис. 3. Упрощенная кинематическая схема
лебедей для подъема бомб на самолет
Находим полезный
момент сопротивления
Чол = G 4- = ,00°- °24 = 200 кгм-
Скорость вращения барабана найдем из формулы
откуда
гдбО
п = об/мин.
Следовательно,
0,05-60 _ о
П =*'я-04 ~ 2>г* об/мин.
2i:
19
ДВ
п
Передаточное число механизма
. _ япр
и. м п
По формуле (24) имеем
^^435.
•^под
ДВ %. м ’ *и. м' 4пер' *пер
Так как при непосредственном соединении = 1 и 7]пер =1,
то
Л/Г 200 „ о
Af = до.-— 0,8 ^М.
лв 0,6-435 ’
Аналогично пересчету полезного статического момента на
приводной вал исполнительного механизма, для определения
динамического момента на приводном валу также необходимо
сделать приведение (пересчет) моментов инерции всех вращаю-
щихся частей исполнительного механизма к приводному валу.
На основании закона сохранения энергии, не учитывая потерь,
можно написать следующее равенство живых сил:
7 2
•'прив '“пр _ (25)
а
где /прив — момент инерции какой-либо вращающейся части
исполнительного механизма, приведенный (пересчи-
танный) к приводному валу;
J — действительный момент инерциитой же части;
“пр И “ — угловые “Скорости приводного вала в рассматривае-
мой части.
В этом равенстве левая часть представляет работу, затра-
чиваемую на преодоление момента инерции какой-либо вращаю-
щейся части, а правая — энергию, запасаемую этой вращаю-
щейся частью исполнительного механизма.
Из формулы (25) получаем выражение для приведенного
момента инерции:
4phb=7^ кгм 'сек*- <26)
Шпр
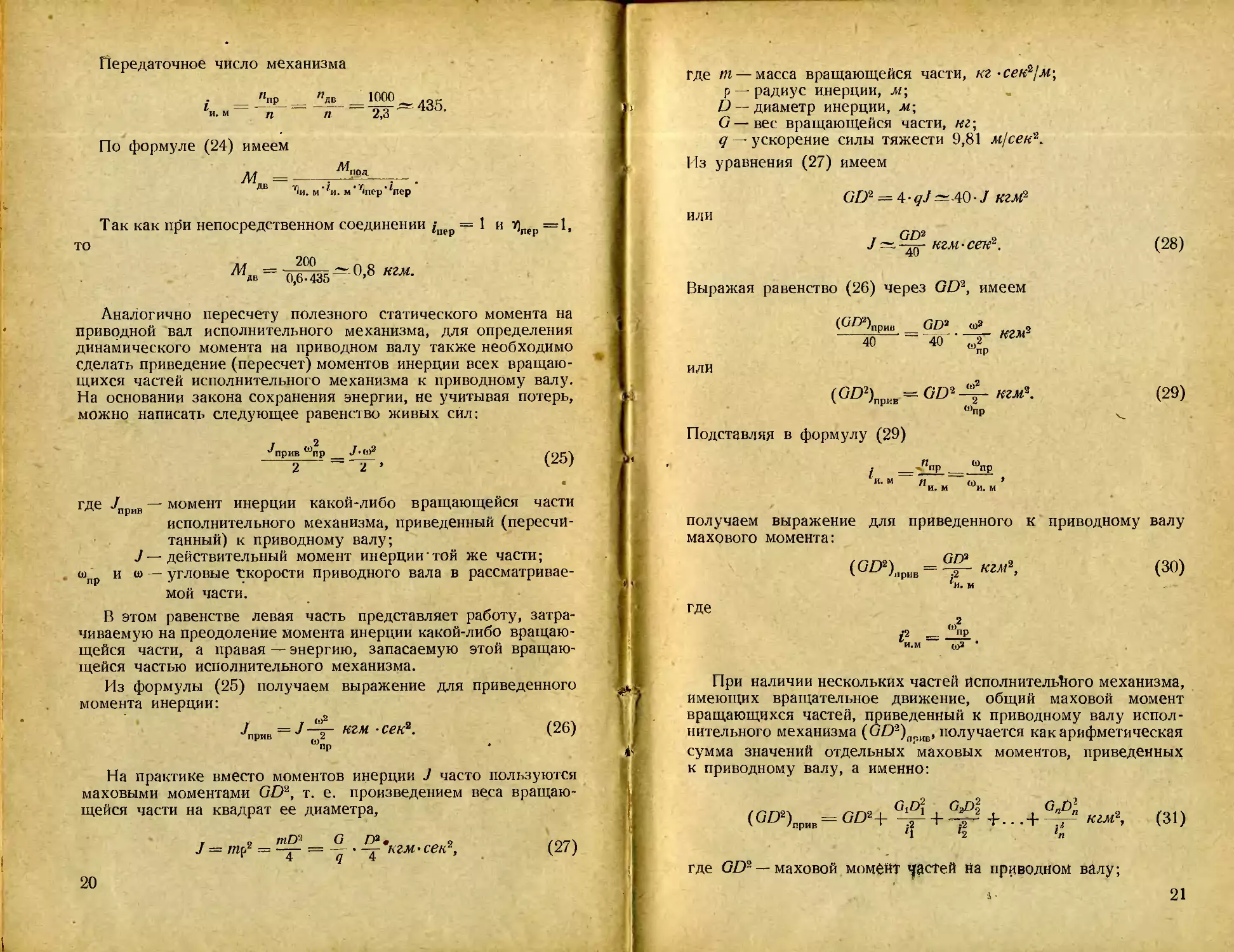
На практике вместо моментов инерции J часто пользуются
маховыми моментами GD2, т. е. произведением веса вращаю-
щейся части на квадрат ее диаметра,
r п ttliy2 G D* 9 a /СУ7\
J = mp2 = -4- = — j- кгм-сек2, (27)
20
где tn— масса вращающейся части, кг-сек2/м-,
Р — радиус инерции, ж;
D — диаметр инерции, м;
G— вес вращающейся части, л?г;
q — ускорение силы тяжести 9,81 м/сек2.
Из уравнения (27) имеем
GD2 = 4 •<?./•=< -40 • J кгм2
или
г GD2 Q tnox
J—-40- кгм-сек2. (28)
Выражая равенство (26) через GD2, имеем
(О^)прив _GD2 <о» <>
40 ~ 40 ю2 КгМ
пр
или
(G^)npHn = GZ?24-^3- (29)
•°np
Подставляя в формулу (29)
I — % __ *°пр
И- М «и. и ”4. М ’
получаем выражение для приведенного г приводному валу
махового момента:
(°D!).,P™ = ¥-(30)
1и. м
где
При наличии нескольких частей исполнительного механизма,
имеющих вращательное движение, общий маховой момент
вращающихся частей, приведенный к приводному валу испол-
нительного механизма (0£>2)ппив, получается как арифметическая
сумма значений отдельных маховых моментов, приведенных
к приводному валу, а именно:
G.D? GJ), G„bl
(°^)прИВ=^2+ ^+ -#+•••+ ~^кгм2, (31)
Ч 12 1п
где GD2 — маховой момент частей йа приводном валу;
21
GXD\-, G>Q\ Gz£>- и Z2 ...^ — соответственно махо-
вые моменты и передаточные числа отдельных частей испол-
нительного механизма.
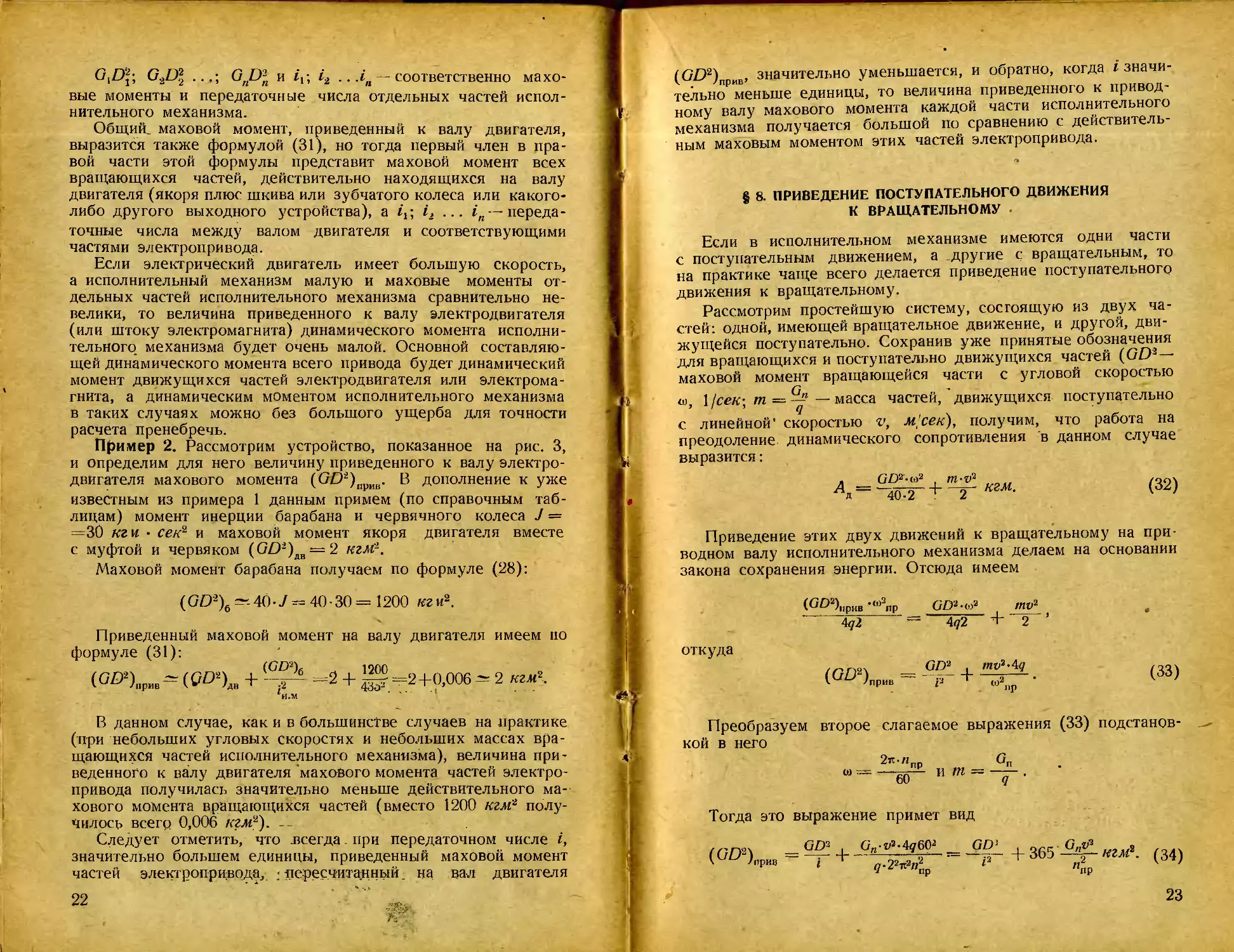
Общий, маховой момент, приведенный к валу двигателя,
выразится также формулой (31), но тогда первый член в пра-
вой части этой формулы представит маховой момент всех
вращающихся частей, действительно находящихся на валу
двигателя (якоря плюс шкива или зубчатого колеса или какого-
либо другого выходного устройства), a i, ... in— переда-
точные числа между валом двигателя и соответствующими
частями электропривода.
Если электрический двигатель имеет большую скорость,
а исполнительный механизм малую и маховые моменты от-
дельных частей исполнительного механизма сравнительно не-
велики, то величина приведенного к валу электродвигателя
(или штоку электромагнита) динамического момента исполни-
тельного механизма будет очень малой. Основной составляю-
щей динамического момента всего привода будет динамический
момент движущихся частей электродвигателя или электрома-
гнита, а динамическим моментом исполнительного механизма
в таких случаях можно без большого ущерба для точности
расчета пренебречь.
Пример 2. Рассмотрим устройство, показанное на рис. 3,
и определим для него величину приведенного к валу электро-
двигателя махового момента (G£)2)npiiB. В дополнение к уже
известным из примера 1 данным примем (по справочным таб-
лицам) момент инерции барабана и червячного колеса J =
=30 кг и • сек2 и маховой момент якоря двигателя вместе
с муфтой и червяком (О/)2)дв = 2 кгМ1.
Маховой момент барабана получаем по формуле (28):
(GO2)6—.40-7 = 40-30= 1200 кгп2.
Приведенный маховой момент на валу двигателя имеем по
формуле (31):
(ОО* + <О?)б =2+“ =2 +0,006 - 2 кг«?.
*и.м
В данном случае, как и в большинстве случаев на практике
(при небольших угловых скоростях и небольших массах вра-
щающихся частей исполнительного механизма), величина при-
веденного к валу двигателя махового момента частей электро-
привода получилась значительно меньше действительного ма-
хового момента вращающихся частей (вместо 1200 кгм* полу-
чилось всего 0,006 кгм2). -
Следует отметить, что всегда при передаточном числе i,
значительно большем единицы, приведенный маховой момент
частей электропривода, .'пересчитанный, на вал двигателя
22
(<7£>2)прив, значительно уменьшается, и обратно, когда i значи-
тельно меньше единицы, то величина приведенного к привод-
ному валу махового момента каждой части исполнительного
механизма получается большой по сравнению с действитель-
ным маховым моментом этих частей электропривода.
§ 8. ПРИВЕДЕНИЕ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
К ВРАЩАТЕЛЬНОМУ
Если в исполнительном механизме имеются одни части
с поступательным движением, а другие с вращательным, то
на практике чаще всего делается приведение поступательного
движения к вращательному.
Рассмотрим простейшую систему, состоящую из двух ча-
стей: одной, имеющей вращательное движение, и другой, дви-
жущейся поступательно. Сохранив уже принятые обозначения
для вращающихся и поступательно движущихся частей (GD*—
маховой момент вращающейся части с угловой скоростью
«, 1/сея:;/и = ^ — масса частей, движущихся поступательно
с линейной' скоростью V, м'сек}, получим, что работа на
преодоление динамического сопротивления в данном случае
выразится:
. GZX-ы2 rn-v*
i 2 кгм~
(32)
Приведение этих двух движений к вращательному на при-
водном валу исполнительного механизма делаем на
закона сохранения энергии. Отсюда имеем
основании
откуда
(GD2)npllB •о>2пр GZ)2-<o3 mv'1
4q2 ~ 4<?2 + 2
(пт — 4-
V ^прив — р Т (1)2
(33)
Преобразуем второе слагаемое выражения (33)
кой в него
подстанов-
О) =
___ПР
60
И =
Тогда это выражение примет вид
(GD-2) = № . _ GP> G,^
k Л,ри8 i Т „.22я2„2 ~ /2
«глг2. (34)
'7-22"2«пР
23
Общая формула приведенного к валу двигателя махового
момента для нескольких вращающихся и поступательно дви-
жущихся частей (звеньев) электропривода получается
(СО1),,,,. = Oft* + + ... + + 365^ +
• 6 г2 1п «дв
+ 365 + ... + 365 нгм2. (35)
П№ ИДВ
Практика показывает, что при малых линейных скоростях
даже сравнительно больших поступательно движущихся масс
величина приведенного к валу двигателя махового момента
составляется главным образом частями, находящимися на валу
двигателя.
§ 9. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОПРИВОДА
Вращающий момент на валу данного электродвигателя за-
висит от скорости вращения последнего. Эта зависимость
носит название механической характеристики электродвигателя.
Механические характеристики электродвигателей зависят от
системы возбуждения и рода тока.
Момент сопротивления исполнительного механизма в боль-
шинстве случаев при изменении положения механизма не бу-
дет оставаться постоянным и определяется так называемой
статической характеристикой механизма.
Это изменение момента статического сопротивления проис-
ходит за счет изменения внешних сил, действующих на отдель-
ные звенья механизмов при перемещении их из одного поло-
жения в другое, • а также за счет возможного применения
передаточного отношения между звеньями. Поэтому стати-
ческое сопротивление самолетных исполнительных механизмов
при заданной скорости полета, высоте и прочих внешних
условиях обычно представляет собой некоторую функцию
(зависимость) положения механизма
М=/(а)или Гс =/(/),
где первое равенство обозначает зависимость момента от
угла поворота а, а второе — зависимость статической силы F
от длины хода механизма I. Функциональную зависимость двух
величин можно" изобразить на чертеже определенной линией,
называемой графиком функции.
Статическая характеристика в механике обычно выражается
следующим уравнением:
Ч = Af,p + (Л7.н - Л(„) (36)
24
где Л4с — статический момент механизма;
Л4тр — момент сопротивления трения в движущихся частях
механизма;
Мг — статический момент при номинальном угле по-
Сн 1
ворота;
»н — номинальный угол поворота 1;
л — коэфициент, показывающий характер изменения мо-
мента от угла поворота.
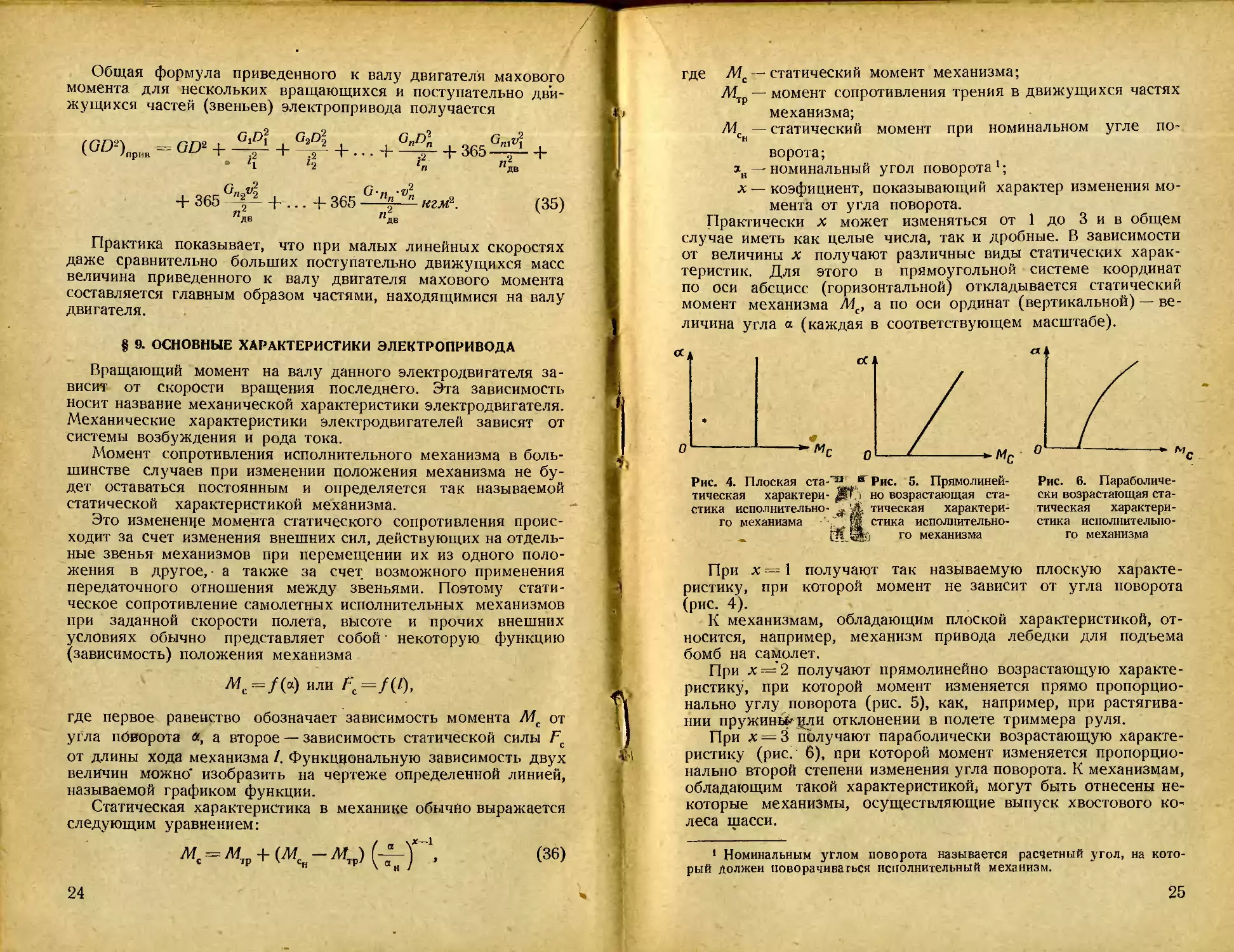
Практически х может изменяться от 1 до 3 и в общем
случае иметь как целые числа, так и дробные. В зависимости
от величины х получают различные виды статических харак-
теристик. Для этого в прямоугольной системе координат
по оси абсцисс (горизонтальной) откладывается статический
момент механизма Л4С, а по оси ординат (вертикальной) — ве-
личина угла а (каждая в соответствующем масштабе).
о
Рис. 4. Плоская ста-'21 ® Рис. 5. Прямолиней-
тическая характери- но возрастающая ста-
стика исполнительно- Л тическая характери-
го механизма •’•/ ® стика исполнительно-
— го механизма
Рис. 6. Параболиче-
ски возрастающая ста-
тическая характери-
стика исполнительно-
го механизма
При х=1 получают так называемую плоскую характе-
ристику, при которой момент не зависит от угла поворота
(рис. 4).
К механизмам, обладающим плоской характеристикой, от-
носится, например, механизм привода лебедки для подъема
бомб на самолет.
При х = 2 получают прямолинейно возрастающую характе-
ристику, при которой момент изменяется прямо пропорцио-
нально углу поворота (рис. 5), как, например, при растягива-
нии пружинькцли отклонении в полете триммера руля.
При х — 3 получают параболически возрастающую характе-
ристику (рис/ 6), при которой момент изменяется пропорцио-
нально второй степени изменения угла поворота. К механизмам,
обладающим такой характеристикой могут быть отнесены не-
которые механизмы, осуществляющие выпуск хвостового ко-
леса шасси.
1 Номинальным углом поворота называется расчетный угол, на кото-
рый должен поворачиваться исполнительный механизм.
25
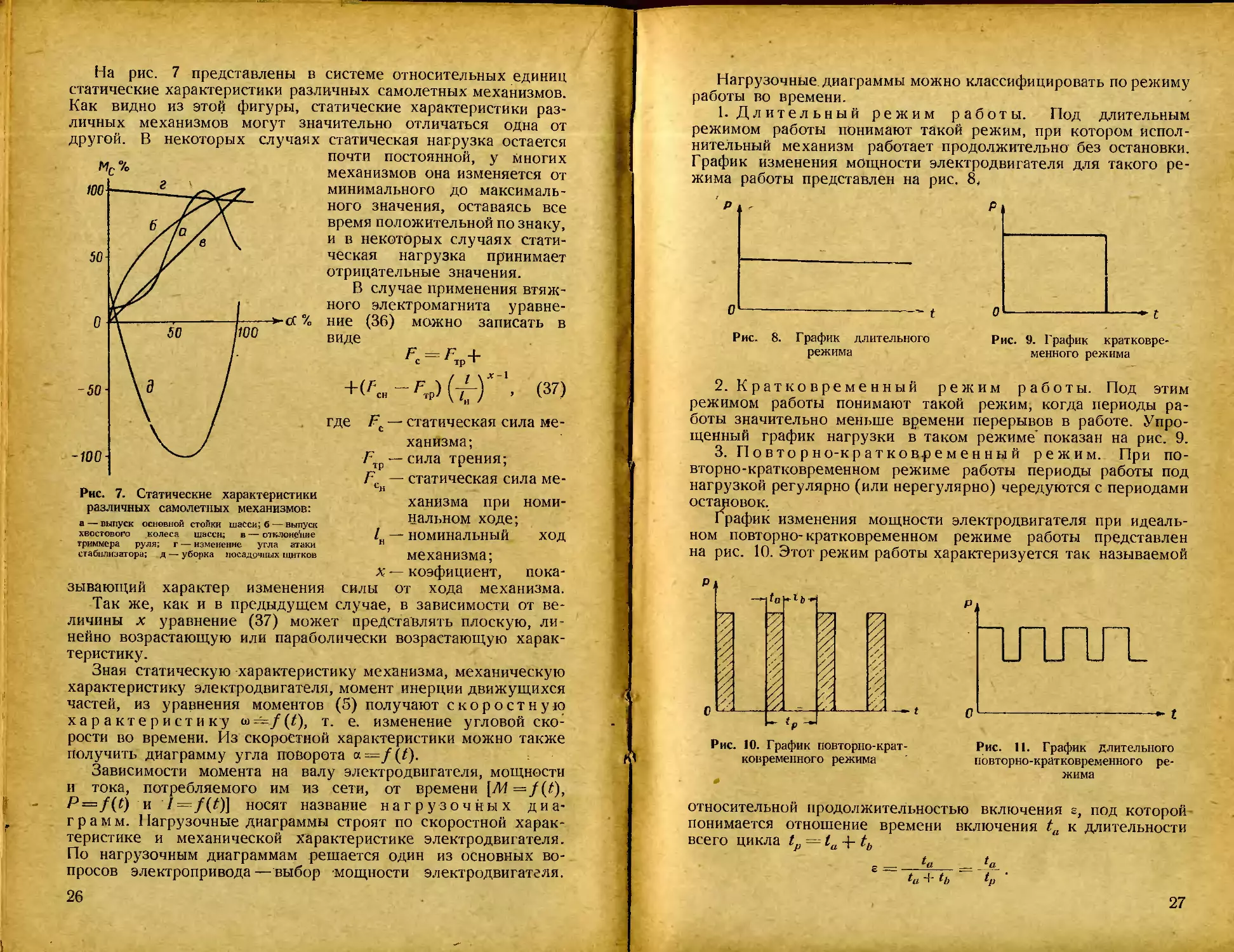
На рис. 7 представлены в системе относительных единиц
статические характеристики различных самолетных механизмов.
Как видно из этой фигуры, статические характеристики раз-
механизмов могут значительно отличаться
В некоторых случаях статическая нагрузка
личных
другой.
Рис. 7. Статические характеристики
различных самолетных механизмов:
одна от
остается
почти постоянной, у многих
механизмов она изменяется от
минимального до максималь-
ного значения, оставаясь все
время положительной по знаку,
и в некоторых случаях стати-
ческая нагрузка принимает
отрицательные значения.
В случае применения втяж-
ного электромагнита уравне-
ние (36) можно записать в
виде
Д = т„+
(37)
где Ft — статическая сила ме-
ханизма;
Т7 — сила трения;
R — статическая сила ме-
ханизма при номи-
нальном ходе;
/н — номинальный ход
а — выпуск основной стойки шасси; б — выпуск
хвостового колеса шасси; в — отклонение
триммера руля; г—изменение угла атаки
стабилизатора; д — уборка посадочных щитков МСХЗНИЗМсЦ
X — коэфициент, пока-
зывающий характер изменения силы от хода механизма.
Так же, как и в предыдущем случае, в зависимости от ве-
личины х уравнение (37) может представлять плоскую, ли-
нейно возрастающую или параболически возрастающую харак-
теристику.
Зная статическую характеристику механизма, механическую
характеристику электродвигателя, момент инерции движущихся
частей, из уравнения моментов (5) получают скоростную
характеристику “—/(О, т- е- изменение угловой ско-
рости во времени. Из скоростной характеристики можно также
получить диаграмму угла поборота а =/(/).
Зависимости момента на валу электродвигателя, мощности
и тока, потребляемого им из сети, от времени [Л4 =/(/),
P=f(t) и / = /(/)] носят название нагрузочных диа-
грамм. Нагрузочные диаграммы строят по скоростной харак-
теристике и механической характеристике электродвигателя.
По нагрузочным диаграммам решается один из основных во-
просов электропривода — выбор мощности электродвигателя.
26
Нагрузочные диаграммы можно классифицировать по режиму
работы во времени.
1. Длительный режим работы. Под длительным
режимом работы понимают такой режим, при котором испол-
нительный механизм работает продолжительно без остановки.
График изменения мощности электродвигателя для такого ре-
жима работы представлен на рис. 8,
Рис. 8. График длительного
режима
О’---------------------- С
Рис. 9. График кратковре-
менного режима
2. Кратковременный режим работы. Под этим
режимом работы понимают такой режим, когда периоды ра-
боты значительно меньше времени перерывов в работе. Упро-
щенный график нагрузки в таком режиме показан на рис. 9.
3. Повторно-кратковременный режим. При по-
вторно-кратковременном режиме работы периоды работы под
нагрузкой регулярно (или нерегулярно) чередуются с периодами
остановок.
График изменения мощности электродвигателя при идеаль-
ном повторно-кратковременном режиме работы представлен
на рис. 10. Этот режим работы характеризуется так называемой
Рис. 11. График длительного
повторно-кратковременного ре-
жима
t
относительной продолжительностью включения г, под которой
понимается отношение времени включения ta к длительности
всего цикла tp = ta ф- tb
~ tg _____1д
tg. "Г h tp
27
4. Длительный повторно-кратковременный ре-
жим. Отличается от повторно-кратковременного отсутствием
пауз. График такого режима представлен на рис. 11.
Для самолетных механизмов характерны кратковременный
и повторно-кратковременный режим работы. Примерами могут
быть механизмы, служащие для привода органов управления
самолетом, механизмы привода ВИШ и т. и. Значительно
меньшее число механизмов имеет длительный режим работы,
К таким механизмам относятся, например, электронасосы.
ГЛАВА ТРЕТЬЯ
ЭЛЕКТРОМАГНИТЫ И ИХ ХАРАКТЕРИСТИКИ
§ 10. ОБЛАСТЬ ПРИМЕНЕНИЯ ЭЛЕКТРОМАГНИТНОГО ПРИВОДА
Электромагнит — это аппарат, преобразующий электрическую
энергию в механическую.
Электромагнитный привод на самолетах применяется отно-
сительно реже, чем электромоторный. Обычно электромагнит-
ный привод применяется для тех исполнительных механизмов,
которые не требуют от привода значительных усилий и по-
движная часть которых имеет малый ход или малый угол по-
ворота. Выполнение электромагнитного привода, создающего
значительные усилия при большем ходе подвижных частей,
нецелесообразно, так как такой привод будет обладать зна-
чительным весом и большими габаритами по сравнению
с электромоторным приводом, что и представляет существен-
ный недостаток электромагнитного привода. Положительными
свойствами электромагнитного привода являются несложность
конструкции и быстрота действия. Эти свойства электромагнит-
ного привода делают особенно удобным применение его для
открытия замков бомбодержателей, спуска ударника затвора
пулеметов и пушек, открытия клапанов и кранов, приведения
в действие электросбрасывателя бомб и т. д.
На самолетах для целей электромагнитного привода наи-
большее применение получили электромагниты втяжного и по-
воротного типов.
§11. ЭЛЕКТРОМАГНИТ ВТЯЖНОГО ТИПА
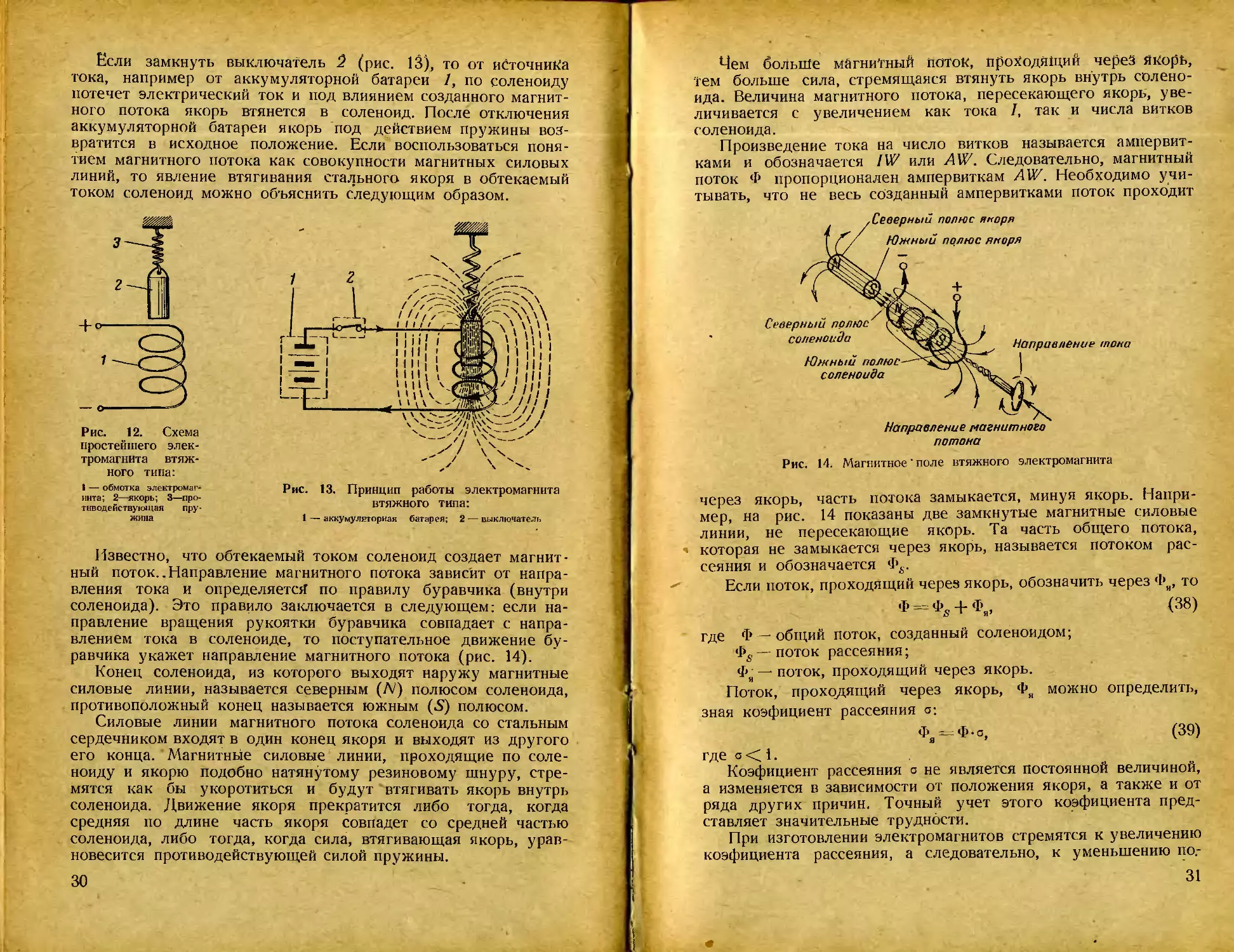
Простейший электромагнит втяжного типа состоит, как это
показано на рис. 12,из обмотки электромагнита 1, обычно
называемой соленоидом, стального якоря 2 и противодействую-
щей пружины 3.
Как известно из курса электротехники, принцип работы
электромагнита втяжного типа заключается в следующем.
29
Если замкнуть выключатель 5 (рис. 13), то от источника
тока, например от аккумуляторной батареи 1, по соленоиду
потечет электрический ток и под влиянием созданного магнит-
ного потока якорь втянется в соленоид. После отключения
аккумуляторной батареи якорь под действием пружины воз-
вратится в исходное положение. Если воспользоваться поня-
тием магнитного потока как совокупности магнитных силовых
линий, то явление втягивания стального якоря в обтекаемый
током соленоид можно объяснить следующим образом.
Рис. 12. Схема
простейшего элек-
тромагнита втяж-
ного типа:
1 — обмотка электромаг-
нита; 2—якорь; 3—про-
тиводействующая пру-
жина
Рис. 13. Принцип работы электромагнита
втяжного типа:
1 — аккумуляторная батарея; 2 — выключатель
Известно, что обтекаемый током соленоид создает магнит-
ный поток.. Направление магнитного потока зависит от напра-
вления тока и определяется по правилу буравчика (внутри
соленоида). Это правило заключается в следующем: если на-
правление вращения рукоятки буравчика совпадает с напра-
влением тока в соленоиде, то поступательное движение бу-
равчика укажет направление магнитного потока (рис. 14).
Конец соленоида, из которого выходят наружу магнитные
силовые линии, называется северным (/V) полюсом соленоида,
противоположный конец называется южным (5) полюсом.
Силовые линии магнитного потока соленоида со стальным
сердечником входят в один конец якоря и выходят из другого
его конца. Магнитные силовые линии, проходящие по соле-
ноиду и якорю подобно натянутому резиновому шнуру, стре-
мятся как бы укоротиться и будут втягивать якорь внутрь
соленоида. Движение якоря прекратится либо тогда, когда
средняя по длине часть якоря совпадет со средней частью
соленоида, либо тогда, когда сила, втягивающая якорь, урав-
новесится противодействующей силой пружины.
30
Чем больше магнитный поток, проходящий через якорь,
Тем больше сила, стремящаяся втянуть якорь внутрь солено-
ида. Величина магнитного потока, пересекающего якорь, уве-
личивается с увеличением как тока I, так и числа витков
соленоида.
Произведение тока на число витков называется ампервит-
ками и обозначается IW или AW. Следовательно, магнитный
поток Ф пропорционален ампервиткам AW. Необходимо учи-
тывать, что не весь созданный ампервитками поток проходит
Северный полюс якоря
Южный полюс якоря
Направление тона
Направление магнитноео
потопа
Северный полюс
Соленоида
Южный полюс
соленоида
Рис. 14. Магнитное ’ поле втяжного электромагнита
через якорь, часть потока замыкается, минуя якорь. Напри-
мер, на рис. 14 показаны две замкнутые магнитные силовые
линии, не пересекающие якорь. Та часть общего потока,
которая не замыкается через якорь, называется потоком рас-
сеяния и обозначается Ф5.
Если поток, проходящий через якорь, обозначить через Фя, то
Ф = Фж + Фя, (38)
где Ф —общий поток, созданный соленоидом;
Ф5 — поток рассеяния;
Фя — поток, проходящий через якорь.
Поток, проходящий через якорь, Фя можно определить,
зная коэфициент рассеяния о;
Фя = Ф-а, (39)
где а < 1.
Коэфициент рассеяния а не является постоянной величиной,
а изменяется в зависимости от положения якоря, а также и от
ряда других причин. Точный учет этого коэфициента пред-
ставляет значительные трудности.
При изготовлении электромагнитов стремятся к увеличению
коэфициента рассеяния, а следовательно, к уменьшению по,-
31
тока рассеяния, так как этот поток, не замыкаясь через якорь,
не создает механической силы, воздействующей на него.
Больше того, поток рассеяния даже уменьшает общий поток,
проходящий через якорь.
В самолетных электромагнитах поток рассеяния предста-
вляет незначительную часть от общего потока, поэтому им можно
пренебречь и для приближенного анализа явлений, происхо-
дящих в электромагните, допустимо считать, что весь поток,
созданный обмоткой электромагнита, проходит через якорь.
Как видно из рис. 13, замкнутые магнитные силовые линии,
составляющие магнитный поток Ф, проходят как через сталь-
ной якорь, так и через воздух. Этот замкнутый путь магнит-
ного потока по аналогии с электрической цепью тока назы-
вают магнитной цепью.
Численное значение магнитных силовых линий, проходящих
через единицу поверхности в ферромагнитной среде, перпен-
дикулярной к направлению магнитного поля, принято называть
величиной магнитной индукции. Зная значение магнитной
индукции, например у выхода потока из соленоида, и зная
величину поверхности S, пронизываемой под прямым углом
магнитными силовыми линиями в этом же месте, можно опре-
делить магнитный поток Ф:
Ф = BS. (40)
Если магнитную индукцию измерять в вольтсекундах на
квадратный сантиметр, а площадь S в квадратных сантиметрах,
„ - в-сек 9
то магнитный поток будет измеряться в — слг = в-сек.
Более мелкой единицей магнитного потока является макс-
велл (обозначается мксв или М)
1 мксв — ИГ 8 в-сек.
Часто магнитную индукцию измеряют не в вольтсекундах
на квадратный сантиметр, а в гауссах (обозначается гс или G)
, ,„-8 в-сек
см2
В нормальных условиях сталь способна проводить магнит-
ный поток значительно лучше, чем воздух, поэтому магнит-
ные силовые линии стремятся как бы сконцентрироваться
в стальном ' якоре. Различные вещества неодинаково проводят
магнитные силовые линии.
Способность вещества проводить магнитный поток назы-
вается магнитной проницаемостью и обозначается буквой у..
Магнитная проницаемость воздуха равна примерно единице,
магнитная проницаемость обычной стали в несколько сотен раз,
а специальной электротехнической стали в несколько тысяч раз
•больше магнитной проницаемости воздуха.
32
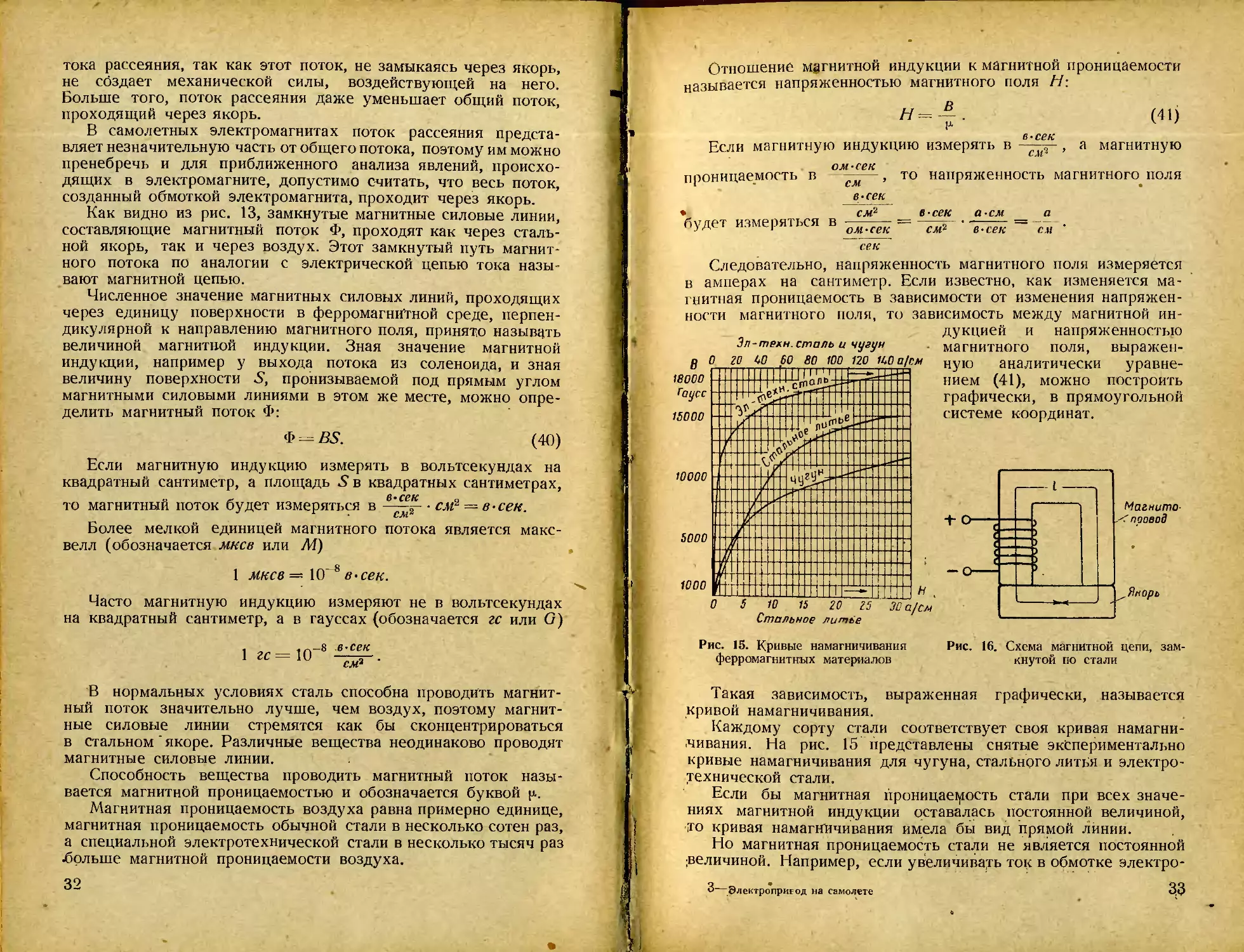
Отношение магнитной индукции к магнитной проницаемости
называется напряженностью магнитного поля Н:
(41)
в • сек
Если магнитную индукцию измерять в , я магнитную
ом-сек
проницаемость в м—, то напряженность магнитного поля
в • сек
♦ см2 в'сек а см а
будет измеряться в = -- .
сек
Следовательно, напряженность магнитного поля измеряется
в амперах на сантиметр. Если известно, как изменяется ма-
гнитная проницаемость в зависимости от изменения напряжен-
ности магнитного поля, то зависимость между магнитной ин-
дукцией и напряженностью
Эл-гпехн.стппь и чугун магнитного поля, выражен-
Рис. 15. Кривые намагничивания
ферромагнитных материалов
Рис. 16. Схема магнитной цепи, зам-
кнутой по стали
Такая зависимость, выраженная графически, называется
кривой намагничивания.
Каждому сорту стали соответствует своя кривая намагни-
чивания. На рис. 15 представлены снятые экспериментально
кривые намагничивания для чугуна, стального литья и электро-
технической стали.
Если бы магнитная проницаемость стали при всех значе-
ниях магнитной индукции оставалась постоянной величиной,
то кривая намагничивания имела бы вид прямой линии.
Но магнитная проницаемость стали не является постоянной
величиной. Например, если увеличивать ток в обмотке электро-
3 Электропривод на самолете 33
магнита с притянутым якорем (рис.
увеличению напряженности магнитного
что
Hl = IW,
16), что соответствует
поля, так как известно,
(42)
где Н — напряженность магнитного поля, ;
I — длина средней линии магнитопровода,_ см;
,/ — ток, протекающий в обмотке электромагнита, о;
V/ — число витков обмотки электромагнита,
то магнитная проницаемость стально-го якоря вначале очень
быстро возрастает, а начиная с некоторого максимального зна-
чения, по мере насыщения железа, постепенно уменьшается,
приближаясь к магнитной проницаемости воздуха. Соответ-
ственно такому характеру изменения магнитной проницаемости
магнитная индукция в стальном магнитопроводе при увеличе-
нии напряженности магнитного поля вначале очень быстро,
а потом все медленнее возрастает, достигая некоторого макси-
мального значения Вт. Дальнейшее увеличение напряженности
магнитного поля дает очень незначительное приращение ма-
гнитной индукции. Этому значению магнитной индукции соот-
ветствует насыщенное
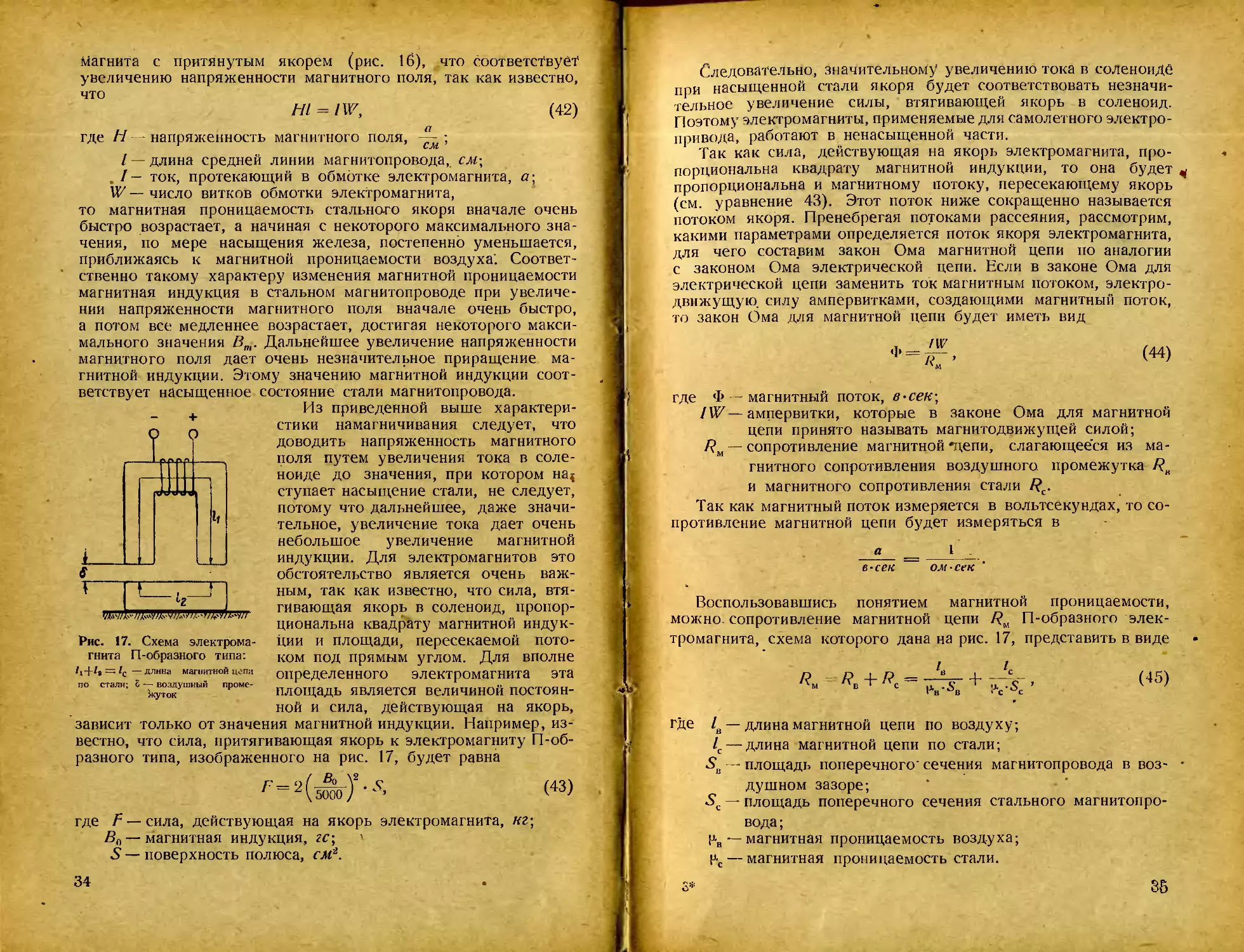
Рис. 17. Схема электрома-
гнита П-образного типа:
Zj-J-Zj = 1С — длина магнитной цепи
по стали; б — воздушный проме-
жуток
состояние стали магнитопровода.
Из приведенной выше характери-
стики намагничивания следует, что
доводить напряженность магнитного
поля путем увеличения тока в соле-
ноиде до значения, при котором на$
ступает насыщение стали, не следует,
потому что дальнейшее, даже значи-
тельное, увеличение тока дает очень
небольшое увеличение магнитной
индукции. Для электромагнитов это
обстоятельство является очень важ-
ным, так как известно, что сила, втя-
гивающая якорь в соленоид, пропор-
циональна квадрату магнитной индук-
ции и площади, пересекаемой пото-
ком под прямым углом. Для вполне
определенного электромагнита эта
площадь является величиной постоян-
ной и сила, действующая на якорь,
зависит только от значения магнитной индукции. Например, из-
вестно, что сила, притягивающая якорь к электромагниту П-об-
разного типа, изображенного на рис. 17, будет равна
5,
(43)
где F — сила, действующая на якорь электромагнита, «г;
Вп — магнитная индукция, гс;
S — поверхность полюса, см2.
34
Следовательно, значительному увеличению тока в соленоиде
при насыщенной стали якоря будет соответствовать незначи-
тельное увеличение силы, втягивающей якорь в соленоид.
Поэтому электромагниты, применяемые для самолетного электро-
привода, работают в ненасыщенной части.
Так как сила, действующая на якорь электромагнита, про-
порциональна квадрату магнитной индукции, то она будет
пропорциональна и магнитному потоку, пересекающему якорь
(см. уравнение 43). Этот поток ниже сокращенно называется
потоком якоря. Пренебрегая потоками рассеяния, рассмотрим,
какими параметрами определяется поток якоря электромагнита,
для чего составим закон Ома магнитной цепи по аналогии
с законом Ома электрической цепи. Если в законе Ома для
электрической цепи заменить ток магнитным потоком, электро-
движущую. силу ампервитками, создающими магнитный поток,
то закон Ома для магнитной цепи будет иметь вид
I — /1Е
(44)
I где Ф — магнитный поток, в-сек-,
IW—ампервитки, которые в законе Ома для магнитной
цепи принято называть магнитодвижущей силой;
/?м — сопротивление магнитной *цепи, слагающееся из ма-
гнитного сопротивления воздушного, промежутка 7?в
и магнитного сопротивления стали /?с.
Так как магнитный поток измеряется в вольтсекундах, то со-
противление магнитной цепи будет измеряться в
а 1
в-сек ом-сек
Воспользовавшись понятием магнитной проницаемости,
можно, сопротивление магнитной цепи 7?м П-образного элек-
тромагнита, схема которого дана на рис. 17, представить в виде
/ /
S + (45)
где /в — длина магнитной цепи по воздуху;
/с — длина магнитной цепи по стали;
— площадь поперечного' сечения магнитопровода в воз- •
душном зазоре;
\ — площадь поперечного сечения стального магнитопро-
вода;
Рн — магнитная проницаемость воздуха;
рс— магнитная проницаемость стали.
! s* 35
i
В простейшем электромагните, показанном на рис. 13,
большая часть магнитной цепи приходится на воздух, тогда
как на основании вышеизложенного (см. уравнение 4.5) жела-
тельно путь магнитного потока по воздуху сократить до воз-
можного минимума. Сокращение пути магнитного потока
по воздуху дает увеличение проводимости всей магнитной
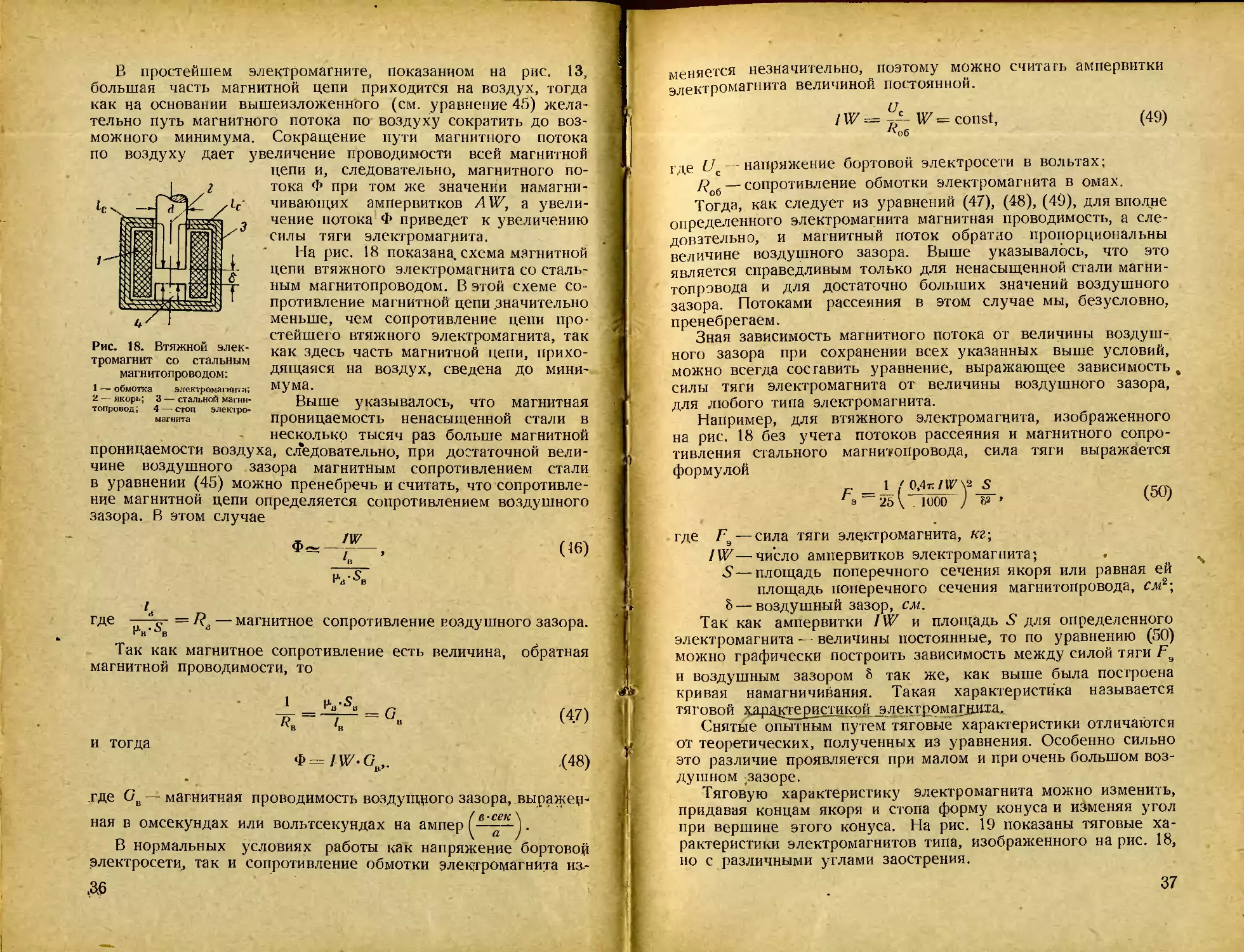
Рис. 18. Втяжной элек-
тромагнит со стальным
магнитопроводом:
1 — обмотка электромагнита;
2 — якорь; 3 — стальной магнн-
топровод; 4 — стоп электро-
магнита
цепи и, следовательно, магнитного по-
тока Ф при том же значении намагни-
чивающих ампервитков AW, а увели-
чение потока Ф приведет к увеличению
силы тяги электромагнита.
На рис. 18 показана, схема магнитной
цепи втяжного электромагнита со сталь-
ным магнитопроводом. В этой схеме со-
противление магнитной цепи значительно
меньше, чем сопротивление цепи про-
стейшего втяжного электромагнита, так
как здесь часть магнитной цепи, прихо-
дящаяся на воздух, сведена до мини-
мума.
Выше указывалось, что магнитная
проницаемость ненасыщенной стали в
несколько тысяч раз больше магнитной
проницаемости воздуха, сл*едовательно, при достаточной вели-
чине воздушного зазора магнитным сопротивлением стали
в уравнении (45) можно пренебречь и считать, что сопротивле-
ние магнитной цепи определяется сопротивлением воздушного
зазора. В этом случае
ф_______,и/
(16)
где %- = — магнитное сопротивление воздушного зазора.
Iх в * ° в
Так как магнитное сопротивление есть величина, обратная
магнитной проводимости, то
и тогда
Ф= ДГ-G ,.
в.’
(47)
.(48)
.где GB — магнитная проводимость воздушного зазора, выражец-
ная в омсекундах или вольтсекундах на ампер j.
В нормальных условиях работы как напряжение бортовоц
электросети, так и сопротивление обмотки электромагнита из.-
36
меняется незначительно, поэтому можно считать ампервитки
электромагнита величиной постоянной.
1W = °— UZ= const, (49)
''об
где Uc напряжение бортовой электросети в вольтах;
R — сопротивление обмотки электромагнита в омах.
Тогда, как следует из уравнений (47), (48), (49), для вполне
определенного электромагнита магнитная проводимость, а сле-
довательно, и магнитный поток обратно пропорциональны
величине воздушного зазора. Выше указывалось, что это
является справедливым только для ненасыщенной стали магни-
топровода и для достаточно больших значений воздушного
зазора. Потоками рассеяния в этом случае мы, безусловно,
пренебрегаем.
Зная зависимость магнитного потока от величины воздуш-
ного зазора при сохранении всех указанных выше условий,
можно всегда составить уравнение, выражающее зависимость
силы тяги электромагнита от величины воздушного зазора,
для любого типа электромагнита.
Например, для втяжного электромагнита, изображенного
на рис. 18 без учета потоков рассеяния и магнитного сопро-
тивления стального магнитопровода, сила тяги выражается
формулой
_ 1 /0,4k/U7\2 S
25 ( . 1000 ) 82 ’
где F3— сила тяги электромагнита, кг-,
IW—число ампервитков электромагнита; ,
S—-площадь поперечного сечения якоря или равная ей
площадь поперечного сечения магнитопровода, см2-,
8 — воздушный зазор, см.
Так как ампервитки IW и площадь 5 для определенного
электромагнита — величины постоянные, то по уравнению (50)
можно графически построить зависимость между силой тяги F3
и воздушным зазором § так же, как выше была построена
кривая намагничивания. Такая характеристика называется
тяговой характеристикой электромагнита.
Снятые опытным путем тяговые характеристики отличаются
от теоретических, полученных из уравнения. Особенно сильно
это различие проявляется при малом и при очень большом воз-
душном ,зазоре.
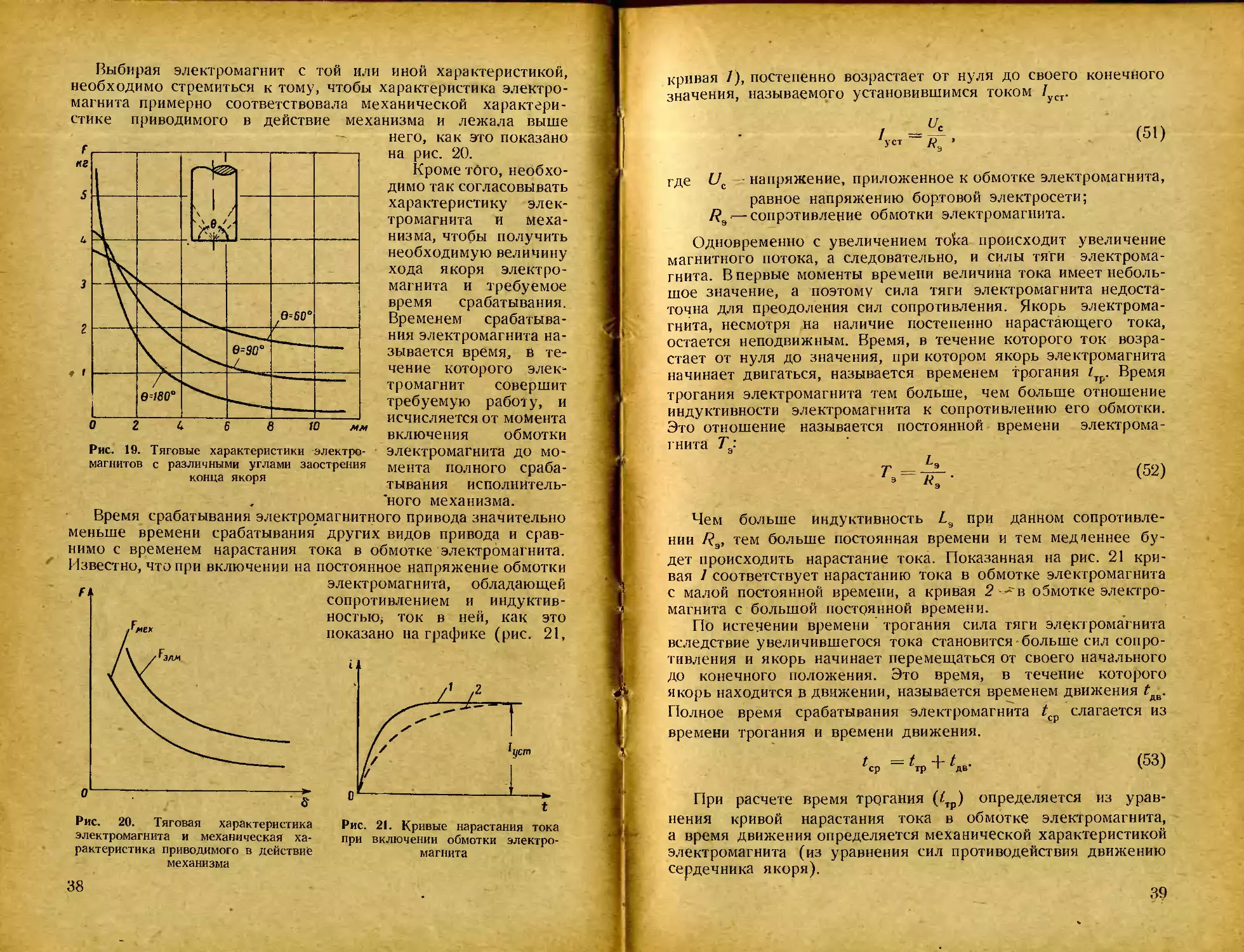
Тяговую характеристику электромагнита можно изменить,
придавая концам якоря и стопа форму конуса и изменяя угол
при вершине этого конуса. На рис. 19 показаны тяговые ха-
рактеристики электромагнитов типа, изображенного на рис. 18,
но с различными углами заострения.
37
Выбирая электромагнит с той или иной характеристикой,
необходимо стремиться к тому, чтобы характеристика электро-
магнита примерно соответствовала механической характери-
стике приводимого в действие механизма и лежала выше
него, как это показано
на рис. 20.
Кроме тбго, необхо-
димо так согласовывать
характеристику элек-
тромагнита и меха-
низма, чтобы получить
необходимую величину
хода якоря электро-
магнита и требуемое
время срабатывания.
Временем срабатыва-
ния электромагнита на-
зывается время, в те-
чение которого элек-
тромагнит совершит
требуемую работу, и
исчисляется от момента
включения обмотки
электромагнита до мо-
мента полного сраба-
тывания исполнитель-
ного механизма.
Время срабатывания электромагнитного привода значительно
меньше времени срабатывания других видов привода и срав-
нимо с временем нарастания тока в обмотке электромагнита.
Известно, что при включении на постоянное напряжение обмотки
электромагнита, обладающей
сопротивлением и индуктив-
ностью, ток в ней, как это
показано на графике (рис. 21,
Рис. 20. Тяговая характеристика
электромагнита и механическая ха-
рактеристика приводимого в действий
механизма
Рис. 21. Кривые нарастания тока
при включении обмотки электро-
магнита
38
кривая 7), постепенно возрастает от нуля до своего конечного
значения, называемого установившимся током /уст.
где Uc - напряжение, приложенное к обмотке электромагнита,
равное напряжению бортовой электросети;
7?э—сопротивление обмотки электромагнита.
Одновременно с увеличением тока происходит увеличение
магнитного потока, а следовательно, и силы тяги электрома-
гнита. Впервые моменты времени величина тока имеет неболь-
шое значение, а поэтому сила тяги электромагнита недоста-
точна для преодоления сил сопротивления. Якорь электрома-
гнита, несмотря на наличие постепенно нарастающего тока,
остается неподвижным. Время, в течение которого ток возра-
стает от нуля до значения, при котором якорь электромагнита
начинает двигаться, называется временем трогания 7 Время
трогания электромагнита тем больше, чем больше отношение
индуктивности электромагнита к сопротивлению его обмотки.
Это отношение называется постоянной времени электрома-
гнита Тэ:
г, = тг-
Чем больше индуктивность Лэ при данном сопротивле-
нии /?э, тем больше постоянная времени и тем мед пеннее бу-
дет происходить нарастание тока. Показанная на рис. 21 кри-
вая 7 соответствует нарастанию тока в обмотке электромагнита
с малой постоянной времени, а кривая 2 -^в обмотке электро-
магнита с большой постоянной времени.
По истечении времени трогания сила тяги электромагнита
вследствие увеличившегося тока становится больше сил сопро-
тивления и якорь начинает перемещаться от своего начального
до конечного положения. Это время, в течение которого
якорь находится в движении, называется временем движения t .
Полное время срабатывания электромагнита tcp слагается из
времени трогания и времени движения.
*с₽ = (53)
При расчете время трогания (/тр) определяется из урав-
нения кривой нарастания тока в обмотке электромагнита,
а время движения определяется механической характеристикой
электромагнита (из уравнения сил противодействия движению
сердечника якоря).
39
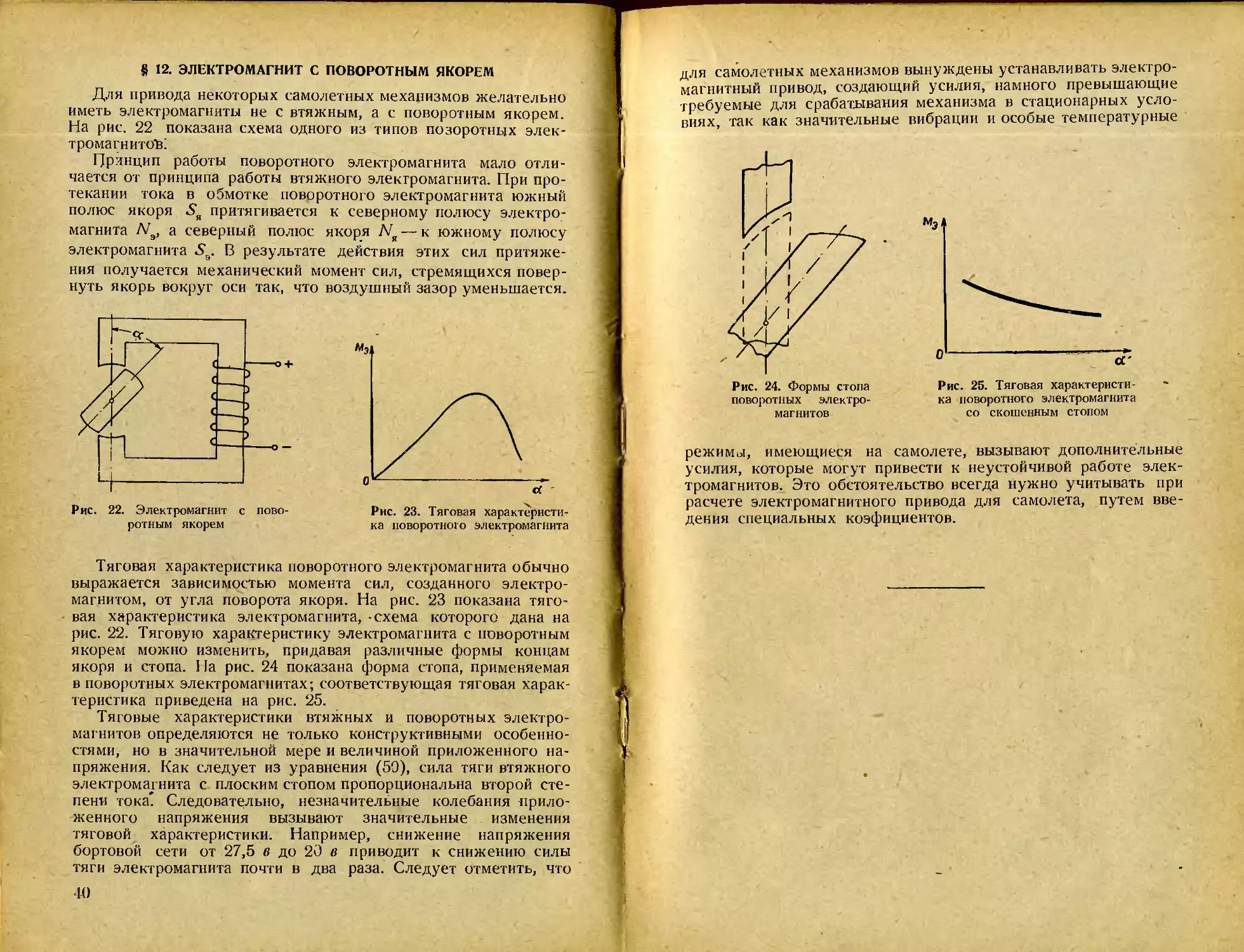
§ 12. ЭЛЕКТРОМАГНИТ С ПОВОРОТНЫМ ЯКОРЕМ
Для привода некоторых самолетных механизмов желательно
иметь электромагниты не с втяжным, а с поворотным якорем.
На рис. 22 показана схема одного из типов позоротных элек-
тромагнитов
Принцип работы поворотного электромагнита мало отли-
чается от принципа работы втяжного электромагнита. При про-
текании тока в обмотке поворотного электромагнита южный
полюс якоря 5Я притягивается к северному полюсу электро-
магнита N3, а северный полюс якоря Nn — к южному полюсу
электромагнита Ss. В результате действия этих сил притяже-
ния получается механический момент сил, стремящихся повер-
нуть якорь вокруг оси так, что воздушный зазор уменьшается.
Рис. 23. Тяговая характеристи-
ка поворотного электромагнита
Тяговая характеристика поворотного электромагнита обычно
выражается зависимостью момента сил, созданного электро-
магнитом, от угла поворота якоря. На рис. 23 показана тяго-
вая характеристика электромагнита, -схема которого дана на
рис. 22. Тяговую характеристику электромагнита с поворотным
якорем можно изменить, придавая различные формы концам
якоря и стопа. На рис. 24 показана форма стопа, применяемая
в поворотных электромагнитах; соответствующая тяговая харак-
теристика приведена на рис. 25.
Тяговые характеристики втяжных и поворотных электро-
магнитов определяются не только конструктивными особенно-
стями, но в значительной мере и величиной приложенного на-
пряжения. Как следует из уравнения (59), сила тяги втяжного
электромагнита с плоским стопом пропорциональна второй сте-
пени тока' Следовательно, незначительные колебания прило-
женного напряжения вызывают значительные изменения
тяговой характеристики. Например, снижение напряжения
бортовой сети от 27,5 в до 20 в приводит к снижению силы
тяги электромагнита почти в два раза. Следует отметить, что
40
для самолетных механизмов вынуждены устанавливать электро-
магнитный привод, создающий усилия, намного превышающие
требуемые для срабатывания механизма в стационарных усло-
виях, так как значительные вибрации и особые температурные
Рис. 24. Формы стопа
поворотных электро-
магнитов
Рис. 25. Тяговая характеристи-
ка поворотного электромагнита
со скошенным стопом
режима!, имеющиеся на самолете, вызывают дополнительные
усилия, которые могут привести к неустойчивой работе элек-
тромагнитов. Это обстоятельство всегда нужно учитывать при
расчете электромагнитного привода для самолета, путем вве-
дения специальных коэфициентов.
ГЛАВА ЧЕТВЕРТАЯ
МЕХАНИЧЕСКИЕ И ЭЛЕКТРИЧЕСКИЕ СВОЙСТВА
ЭЛЕКТРОДВИГАТЕЛЕЙ
§ 13. ПРИНЦИП ДЕЙСТВИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Электрическим двигателем называется машина, преобразую-
щая подводимую к ней электрическую энергию в механиче-
скую.
Действие электродвигателей основывается на том, что между
магнитным полем и находящимся в нем проводником с током
возникает некоторая сила взаимодействия F.
Если проводник, по которому проходит электрический ток,
внести в магнитное поле, то проводник сам начинает двигаться
под воздействием этой силы и при этом так, что при своем
движении пересекает магнитные силовые линии, т. е. напра-
вление движения проводника перпендикулярно направлению
силовых линий.
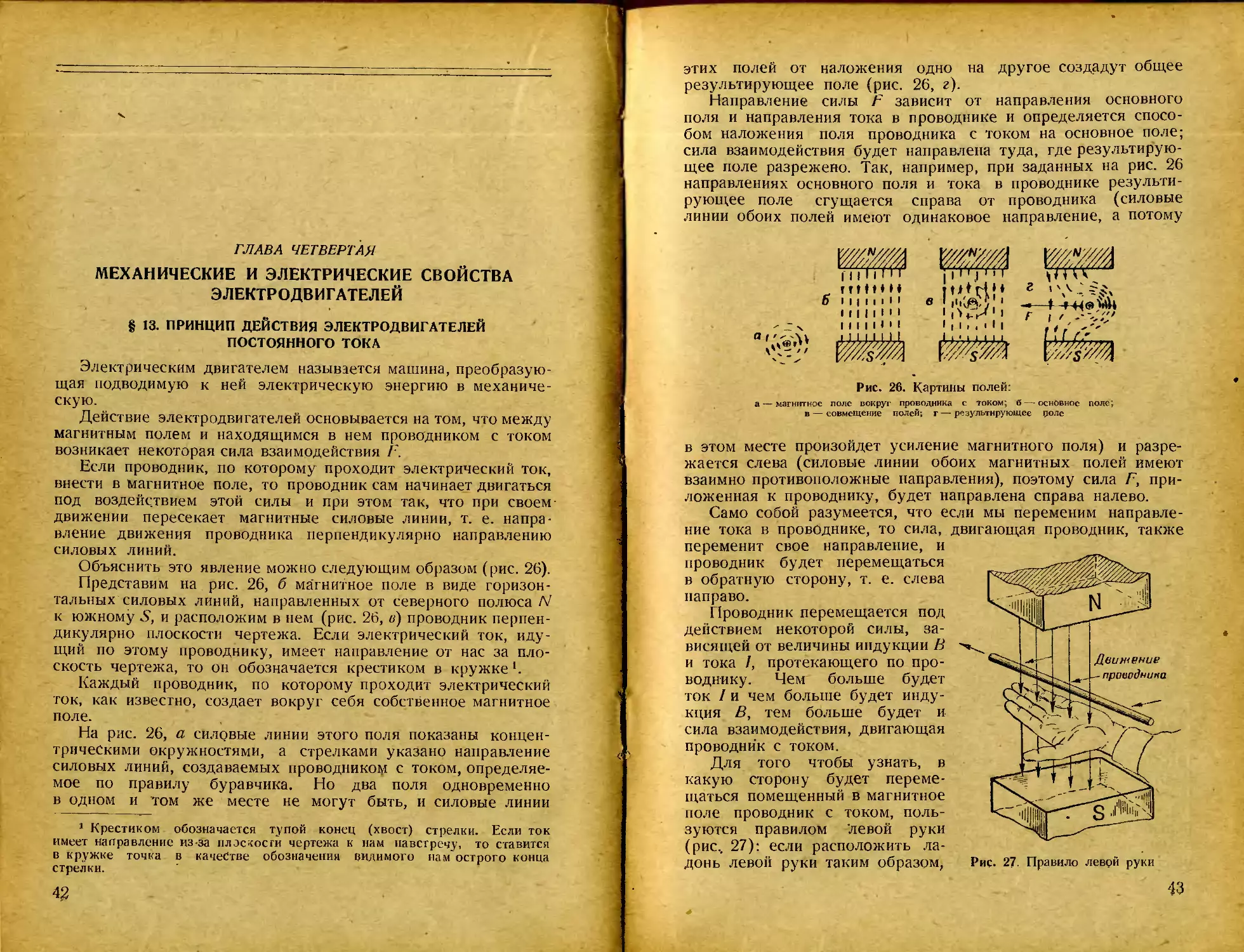
Объяснить это явление можно следующим образом (рис. 26).
Представим на рис. 26, б магнитное поле в виде горизон-
тальных силовых линий, направленных от северного полюса N
к южному S, и расположим в нем (рис. 26, е) проводник перпен-
дикулярно плоскости чертежа. Если электрический ток, иду-
щий по этому проводнику, имеет направление от нас за пло-
скость чертежа, то он обозначается крестиком в кружке1.
Каждый проводник, по которому проходит электрический
ток, как известно, создает вокруг себя собственное магнитное
поле.
На рис. 26, а силовые линии этого поля показаны концен-
трическими окружностями, а стрелками указано направление
силовых линий, создаваемых проводником с током, определяе-
мое по правилу буравчика. Но два поля одновременно
в одном и том же месте не могут быть, и силовые линии
1 Крестиком обозначается тупой конец (хвост) стрелки. Если ток
имеет направление из-за плоскости чертежа к нам навстречу, то ставится
в кружке точка в качестве обозначения видимого нам острого конца
стрелки.
42
этих полей от наложения одно на другое создадут общее
результирующее поле (рис. 26, г).
Направление силы В зависит от направления основного
поля и направления тока в проводнике и определяется спосо-
бом наложения поля проводника с током на основное поле;
сила взаимодействия будет направлена туда, где результирую-
щее поле разрежено. Так, например, при заданных на рис. 26
направлениях основного поля и тока в проводнике результи-
рующее поле сгущается справа от проводника (силовые
линии обоих полей имеют одинаковое направление, а потому
fft»t«н
О I I | I I I I ।
111 111 ' I
Рис. 26. Картины полей:
а—магнитное поле вокруг проводника с током; б—'основное поле;
в — совмещение полей; г — результирующее доле
в этом месте произойдет усиление магнитного поля) и разре-
жается слева (силовые линии обоих магнитных полей имеют
взаимно противоположные направления), поэтому сила F, при-
ложенная к проводнику, будет направлена справа налево.
Само собой разумеется, что если мы переменим направле-
ние тока в проводнике, то сила, двигающая проводник, также
переменит свое направление, и
проводник будет перемещаться
в обратную сторону, т. е. слева
направо.
Проводник перемещается под
действием некоторой силы, за-
висящей от величины индукции В
и тока /, протекающего по про-
воднику. Чем больше будет
ток /и чем больше будет инду-
кция В, тем больше будет и
сила взаимодействия, двигающая
проводник с током.
Для того чтобы узнать, в
какую сторону будет переме-
щаться помещенный в магнитное
поле проводник с током, поль-
зуются правилом левой руки
(рис.. 27): если расположить ла-
донь левой руки таким образом,
Рис. 27. Правило левой руки
43
чтобы магнитные силовые линии входили в нее, а четыре вы-
тянутых пальца направить вдоль направления электрического
тока, протекающего по проводнику, то отогнутый большой
палец укажет направление силы Г.
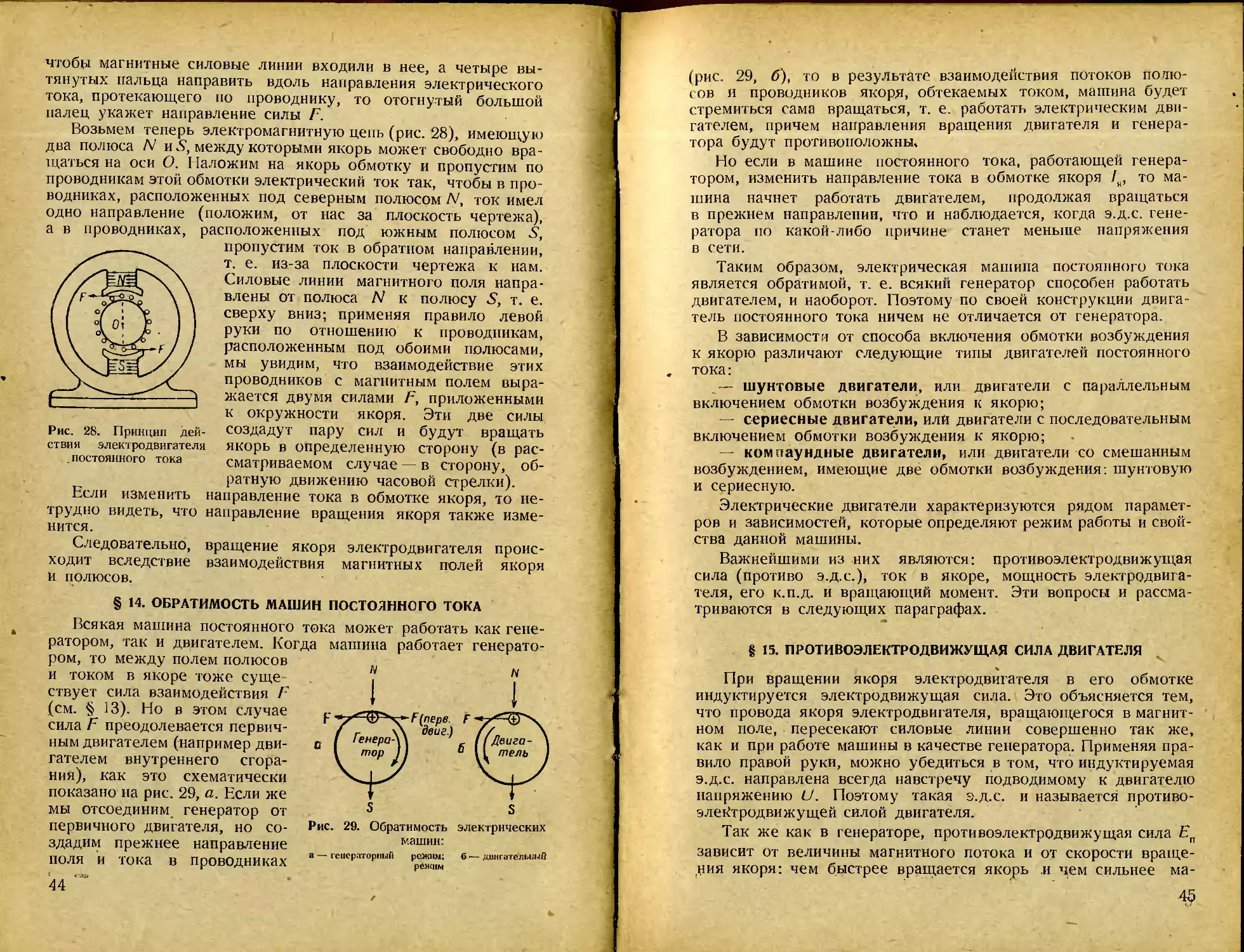
Возьмем теперь электромагнитную цепь (рис. 28), имеющую
два полюса N и S, между которыми якорь может свободно вра-
щаться на оси О. Наложим на якорь обмотку и пропустим по
проводникам этой обмотки электрический ток так, чтобы в про-
водниках, расположенных под северным полюсом N, ток имел
одно направление
а в проводниках,
Рис. 28. Принцип дей-
ствия электродвигателя
.постоянного тока
(положим, от нас за плоскость чертежа),
расположенных под южным полюсом 5,
пропустим ток в обратном направлении,
т. е. из-за плоскости чертежа к нам.
Силовые линии магнитного поля напра-
влены от полюса N к полюсу 5, т. е.
сверху вниз; применяя правило левой
руки по отношению к проводникам,
расположенным под обоими полюсами,
мы увидим, что взаимодействие этих
проводников с магнитным полем выра-
жается двумя силами F, приложенными
к окружности якоря. Эти две силы
создадут пару сил и будут вращать
якорь в определенную сторону (в рас-
сматриваемом случае — в сторону, об-
ратную движению часовой стрелки).
направление тока в обмотке якоря, то не-
направление вращения якоря также изме-
Если изменить
трудно видеть, что
нится.
Следовательно,
ходит вследствие
и полюсов.
вращение якоря электродвигателя проис-
взаимодействия магнитных полей якоря
§ 14. ОБРАТИМОСТЬ МАШИН ПОСТОЯННОГО ТОКА
Всякая машина постоянного тока может работать как гене-
ратором, так и двигателем. Когда машина работает генерато-
ром, то между полем полюсов
и током в якоре тоже суще-
ствует сила взаимодействия F
(см. § 13). Но в этом случае
сила F преодолевается первич-
ным двигателем (например дви-
гателем внутреннего сгора-
ния), как это схематически
показано на рис. 29, а. Если же
мы отсоединим генератор от
первичного двигателя, но со-
здадим прежнее направление
поля и тока в проводниках
Рис. 29. Обратимость электрических
машин:
а — генераторный режим; б — двигательный
режим
(рис. 29, б), то в результате взаимодействия потоков полю-
сов и проводников якоря, обтекаемых током, машина будет
стремиться сама вращаться, т. е. работать электрическим дви-
гателем, причем направления вращения двигателя и генера-
тора будут противоположны.
Но если в машине постоянного тока, работающей генера-
тором, изменить направление тока в обмотке якоря /я, то ма-
шина начнет работать двигателем, продолжая вращаться
в прежнем направлении, что и наблюдается, когда э.д.с. гене-
ратора по какой-либо причине станет меньше напряжения
в сети.
Таким образом, электрическая машина постоянного тока
является обратимой, т. е. всякий генератор способен работать
двигателем, и наоборот. Поэтому по своей конструкции двига-
тель постоянного тока ничем не отличается от генератора.
В зависимости от способа включения обмотки возбуждения
к якорю различают следующие типы двигателей постоянного
тока:
— шунтовые двигатели, или двигатели с параллельным
включением обмотки возбуждения к якорю;
— сериесные двигатели, или двигатели с последовательным
включением обмотки возбуждения к якорю;
— компаундные двигатели, или двигатели со смешанным
возбуждением, имеющие две обмотки возбуждения: шунтовую
и сериесную.
Электрические двигатели характеризуются рядом парамет-
ров и зависимостей, которые определяют режим работы и свой-
ства данной машины.
Важнейшими из них являются: противоэлектродвижущая
сила (противо э.д.с.), ток в якоре, мощность электродвига-
теля, его к.п.д. и вращающий момент. Эти вопросы и рассма-
триваются в следующих параграфах.
§ 15. ПРОТИВОЭЛЕКТРОДВИЖУЩАЯ СИЛА ДВИГАТЕЛЯ
При вращении якоря электродвигателя в его обмотке
индуктируется электродвижущая сила. Это объясняется тем,
что провода якоря электродвигателя, вращающегося в магнит-
ном поле, пересекают силовые линии совершенно так же,
как и при работе машины в качестве генератора. Применяя пра-
вило правой руки, можно убедиться в том, что индуктируемая
э.д.с. направлена всегда навстречу подводимому к двигателю
напряжению U. Поэтому такая э.д.с. и называется противо-
элейтродвижущей силой двигателя.
Так же как в генераторе, противоэлектродвижущая сила Еп
зависит от величины магнитного потока и от скорости враще-
ния якоря: чем быстрее вращается якорь и чем сильнее ма-
45
гнитное поле, тем больше будет противоэлектродвижущйя
сила, т. е.
Еи = Сп-Ф,
где п — скорость вращения якоря, об мин;
Ф —величина магнитного потока каждой пары полю-
сов, мксв\
С—постоянная величина для каждого типа машины.
Постоянная величина
С
Р
60
— • 10'
а
где р —- число пар полюсов;
а— число пар параллельных цепей обмотки якоря;
N — общее число проводников обмотки якоря;
10 — коэфициенг для перевода э.д.с., выраженной в абсо-
лютных единицах, в практические единицы — вольты.
Если якорь электродвигателя включен в цепь, напряжение
которой равно U, а сопротивление якоря равно /?я, то при
Рис. 30. Принци-
пиальная схема
шунтового двига-
теля
неподвижном якоре (пока якорь не начал
вращаться), по закону Ома, через него дол-
жен пройти ток, величина которого равна
Это можно наглядно видеть на примере
^Я
шунтового двигателя, принципиальная схема
которого представлена на рис. 30. Если бы
якорь электродвигателя вращался, то индук-
тирующаяся в нем противоэлектродвижущая
сила дала бы ток обратного направления и
.величина этого обратного тока по закону
Е
Ома была бы равна _Л .
^я
Таким образом, при работе электродви-
гателя через обмотку его якоря должны
проходить как бы два тока по взаимно про-
тивоположным направлениям; в действительности же, конечно,
через якорь электродвигателя будет проходить только один
ток, величина которого /я равна разности указанных двух токов:
/ =
Я *я
К,
или, по приведении к общему знаменателю,
(64)
46
Й этой формуле напряжение U сети можно считать по-
стоянным, сопротивление якоря /?я также не меняется, а по-
тому нетрудно видеть, что ток в якоре электродвигателя во
время его работы зависит от величины противоэлектродвижу-
щей силы Еп : если по каким-либо причинам Еп уменьшится,
то сила тока в якоре /я увеличится.
Из формулы (54) вытекает еще следующая зависимость:
U E. = I.R„ (55)
т. е. напряжение на зажимах электродвигателя всегда больше
противоэлектродвижущей силы Еп на величину падения на-
пряжения в якоре1.
Или иначе — напряжение U можно рассматривать как дей-
ствие сети относительно двигателя, а сумму Еа + /я •/?„ как
противодействие (реакцию) двигателя относительно сети. Дей-
ствующие и противодействующие э.д.с. находятся во взаимном
равновесии, т. е., будучи направлены в противоположные сто-
роны, равны одна другой по абсолютной величине.
Так как сопротивление якоря /?я бывает обыкновенно очень
мало (порядка сотых долей ома), то величина противоэлектро-
движущей силы близко подходит к значению напряжения на
зажимах двигателя.
§ 16. ЗАВИСИМОСТЬ ТОКА- В ЯКОРЕ ЭЛЕКТРОДВИГАТЕЛЯ ОТ ЕГО
НАГРУЗКИ
11агрузкой электродвигателя является приложенное к валу
его якоря механическое сопротивление, которое двигатель
преодолевает при своей работе. Величина тока, потребляемая
двигателем, зависит от. нагрузки: чем больше нагрузка, тем
больше и величина тока.
Действительно, как было уже сказано, величина противо-
электродвижущей силы зависит от скорости вращения якоря
электродвигателя. Следовательно, при каждом увеличении на-
грузки двигателя уменьшается скорость вращения, что вызы-
вает уменьшение противоэлектродвижущей силы Еп и в свою
очередь вызывает увеличение тока в якоре, как видно из фор-
мулы (54).
Поэтому электродвигатель для своей работы всегда берет
из цепи такой ток, который отвечает его нагрузке: увеличе-
ние нагрузки вызывает увеличение потребляемого двигателем
тока и наоборот. Значит, включив амперметр в цепь электро-
двигателя, можно судить о величине нагрузки на валу двига-
теля. „
1 Это будет справедливо для шунтового двигателя; для сериесного
и компаундного двигателей разность U — Еп разна падению напряжения
в якоре и в сериесной обмотке.
47
§ 17. МОЩНОСТЬ ЭЛЕКТРОДВИГАТЕЛЯ И EIО КОЭФИЦИЕНТ
ПОЛЕЗНОГО ДЕЙСТВИЯ
Если обозначить буквой U напряжение на зажимах двига-
телей, а буквой I потребляемый им ток при нормальной ра-
боте, то произведение U-I дает полную электрическую мощ-
ность, потребляемую двигателем из сети
Однако для практики большой интерес представляет полез-
ная механическая мощность, или мощность Р2, на валу двига-
теля, которая всегда меньше потребляемой мощности, так как
при работе электродвигателя в нем имеются потери энергии,
превращающейся в тепловую энергию, идущую на нагревание
машины.
Различают следующие виды потерь: магнитные потери на
гистерезис и токи рассеяния, электрические потери на нагрев
обмоток и механические потери на трение.
Магнитные потери Рмаг слагаются из потерь на гисте-
резис и токи рассеяния в сердечнике якоря и в полюсных
наконечниках.
Потерями на гистерезис называются потери мощности на
перемагничивание железа при вращении якоря в магнитном
поле.
При вращении якоря в его железе возникают также токи
рассеяния, являющиеся источником потерь. Токи рассеяния
возникают и в полюсных наконечниках вследствие пульсации
магнитного потока в воздушном зазоре машины при вращении
зубчатого якоря.
Электрические потери Рэл слагаются из потерь
в обмотке якоря и потерь в обмотке возбуждения.
Эти потери в обмотке якоря могут быть определены по
закону Джоуля:
Ря = % > (56)
где Ря— потери мощности в обмотке якоря, вт-,
Ra — сопротивление якоря и переходных сопротивлений
коллектора и щеток, ом-,
1а — ток в обмотке якоря, а.
При наличии обмоток дополнительных полюсов и сериес-
ной их сопротивление добавляется к Ru.
Джоулевы потери в шунтовой обмотке возбуждения опре-
деляются по формуле
P. = ‘2.-r. = U-l., (57)
,гДе Рв— потери мощности в обмотке возбуждения, л/л;
гв — сопротивление обмотки возбуждения, ом;
гв — ток в обмотке возбуждения, а;
U—напряжение на зажимах двигателя, в.
4-8
у общем можно считать, что электрические потери изме-
няются пропорционально квадрату тока нагрузки.
Механические потери Рмех слагаются из потерь на
трение в подшипниках, потерь на трение щеток о коллектор
и вентиляционных потерь.
Потери на трение в подшипниках возрастают пропорцио-
нально скорости вращения якоря. В малых и средних двига-
телях преимущественное распространение получили шарико-
вые и роликовые подшипники, имеющие меньший коэфициент
трения, а следовательно,_ и меньшие механические потери
и обладающие по сравнению со скользящими подшипниками
рядом эксплоатационных преимуществ.
Вентиляционные потери на трение о воздух вращающихся
частей резко возрастают с увеличением скорости машины
и могут достичь большой величины.
Потери на трение щеток о коллектор в основном опреде-
ляются давлением щеток на коллектор, окружной скоростью
коллектора и сортом щеток.
С изменением нагрузки механические потери возрастают
незначительно.
Преобразование подводи-
мой электрической энергии в
механическую во всех двига-
телях постоянного тока про-
исходит принципиально одина-
ково й проще всего может быть
показано на так называемой
энергетической схеме.
Рассмотрим ее на примере
шунтового двигателя, полагая,
что он работает в установив-
шемся режиме, т. е. с неко-
торой постоянной скоростью
вращения п.
Если U — напряжение на
зажимах двигателя, /я — ток
в якоре и /в— ток возбуждения (рис. 30), то полная электри-
ческая мощность, подводимая к двигателю из сети, будет
Р1 = б/(/я + /в) = Ш. (58)
Часть этой мощности, а именно б/-г'в4-/2/?я тратится на
джоулево тепло в цепи возбуждения и в цепи якоря, вклю-
чая сюда и контакт щеток. На энергетической схеме (рис. 31)
потери U-iu и /„-/?„ показаны двумя ручьями, ответвляющи-
мися от основного русла мощности. Разность между подводи-
мой мощностью и потерями составляет полную механическую
мощность, развиваемую двигателем на валу.
। Электропривод на самолете 49
Рис. 31. Энергетическая схема двига-
теля постоянного тока
Г\ - Рэл = Л - (<Ч + 'Я ) = - ^’в ) - /я Ря =
= ^я-^я=^м-
Полезная механическая мощность двигателя Р2 меньше Рм
на величину мощности Ро ~ Риаг + Рмех, необходимой для по-
крытия потерь холостого хода, т. е. магнитных и механи-
ческих потерь. Таким образом,
Р2==Рм-Р0. (59)
На энергетической схеме мощность Ро показана третьим
ручьем, ответвляющимся от мощности Рк.
Энергетическая схема дает наглядное представление о ходе
преобразования энергии и позволяет установить основные со-
отношения, характеризующие работу двигателей постоянного
тока.
Число, показывающее, во сколько раз полезная мощность
на валу электродвигателя меньше потребляемой им электри-
ческой мощности, называется коэфициентом полезного дей-
ствия (к.п.д.) электродвигателя. Следовательно, к.п.д. электро-
двигателя
чдв = р; > или • 100"/о- (6и)
Пусть Рпот представляет сумму всех потерь в машине.
Тогда -
^='П + РП0Т
и
>]дв=—^£Г-100'70. (61)
Коэфициент полезного действия каждого электродвигателя
зависит от степени его нагрузки; так, например, при работе
без нагрузки двигатель не развивает полезной механической
мощности, а потому и его к.п.д. равен нулю. С увеличением
нагрузки к.п.д. повышается, и в пределах от 3/4 до номи-
нальной нагрузки обычно имеет наибольшее значение.
Номинальными данными каждого двигателя называются
определенные значения механических и электрических вели-
чин, на которые он изготовлен и которые характеризуют нор-
мальные условия его работы при номинальном режиме.
Номинальный режим двигателя это есть режим, соответ-
ствующий условиям работы и данным, указанным на щитке
(паспорте) двигателя. 'Вычисленные по номинальным данным
значения других величин (момента вращения, мощности, ско-
рости вращения и т. д.) называются также номинальными
и соответственно обозначаются: 7Ииг,„; Л*; л „ и т. д.
НОМ ' НОМ ' ним
50
Борьба за высокий к.п.д. является одной из главных задач
конструктора. 11о и в условиях эксплоатацип машины надле-
жит также бороться за улучшение к.п.д. машины, так как
часто небрежный уход за машиной или плохо проведенный
ремонт значительно ухудшают ее к.п.д.
Величина к.п.д. современных электродвигателей в зависи-
мости от их мощности колеблется о г 80 до 85°/0 в машинах
малой мощности и до 95°/0 — в мощных электродвигателях.
Характерной особенностью большинства самолетных элек-
тродвигателей малой мощности (до 203 вт) является то, что
их номинальная мощность представляет в то же время макси-
мальную мощность, которую может развить электродвигатель.
Это делается с целью получения электродвигателей минималь-
ного веса и небольших габаритов.
Мощные электродвигатели обладают по сравнению с элек-
тродвигателями малой, мощности (при одинаковом удельном
весе) худшими условиями охлаждения, так как мощность по-
терь, приходя*щаяся на единицу- внешней поверхности, у этих
электродвигателей значительно выше. Поэтому величина по-
терь в процентах в этих электродвигателях ограничивается
допустимой температурой перегрева его частей. Кроме того,
при эксплоатацип мощных электродвигателей существенное зна-
чение имеет величина потребляемой ими энергии и желательно,
по возможности, уменьшить величину потерь.
Вследствие вышеуказанного номинальная мощность мощ-
ных электродвигателей меньше максимальной мощности, а но-
минальный к.п.д. „соответствует примерно максимуму.
§ 18. ВРАЩАЮЩИЙ МОМЕНТ ЭЛЕКТРОДВИГАТЕЛЯ
Выше уже отмечалось, что проводники обмотки якоря, по
которым проходит электрический ток, взаимодействуют с ма-
гнитным полем полюсов, и в результате проводники, располо-
женные под северным полюсом, создают одну касательную
к окружности якоря силу, а проводники, расположенные под
южным полюсом, другую касательную силу, равную по вели-
чине первой (рис. 28). Таким образом, на якорь электродви-
гателя действует пара сил, плечо которой равно диаметру
якоря D.
Из курса физики известно, что моментом пары сил относи-
тельно оси вращения называется произведение любой из рав-
ных сил на плечо пары, т. е. на кратчайшее расстояние между
параллельными силами, а потому момент пары сил, или, как
его обычно называют, вращающий момент электродвигателя
M = FD.
Диаметр якоря D, очевидно, для данного электродвигателя
остается постоянным, а потому вращающий момент зависит
4*
51
исключительно от величины касательной силы взаимодей-
ствия F, которая в свою очередь зависит от величины тока 1а, про-
ходящего по проводникам обмотки якоря, и магнитного по-
тока Ф, создаваемого полюсами электродвигателя.
Итак, вращающий момент электродвигателя
М = К1яФ, (о2)
где К— коэфициент пропорциональности, который для дан-
ного типа электродвигателя является постоянной величиной,
зависящей от числа проводников обмотки якоря, расположен-
ных под полюсами и принимающих участие в создании вра-
щающего момента, а также и от числа полюсов и числа па-
раллельных цепей обмотки якоря.
Из рассмотрения формулы (62) следует, что чем больше
будет значение тока в обмотке якоря и чем сильнее будет
магнитный поток полюсов, тем больше будет.вращающий мо-
мент электродвигателя. * • *
Если двигатель работает с нагрузкой, то это значит, что
он преодолевает какое-то сопротивление, т. е. к валу двига-
теля приложен некоторый момент сопротивлений. Следова-
тельно, о нагрузке двигателя можно судить по величине раз-
виваемого им вращающего момента.
В том случае, если вращающий момент, развиваемый
электродвигателем, станет больше момента сопротивления
исполнительного механизма, равновесие нарушится и двига-
тель начнет вращаться быстрее, т. е. скорость вращения его
якоря начнет увеличиваться, и это будет происходить до тех
пор, пока снова не наступит равновесие, обусловливаемое
равенством между вращающим моментом и моментом сопро-
тивления. И точно так же, если вращающий момент электро-
двигателя станет меньше момента сопротивления исполнитель-
ного механизма, скорость двигателя будет уменьшаться до
нового равновесия между моментами.
Способность двигателей автоматически, без помощи каких-
либо регуляторов, изменять свой момент вращения при всяком
изменении момента сопротивления исполнительного механизма
наглядно иллюстрируется уравнением вращающего момента
шунтового двигателя.
* Подставим в формулу (62) значение тока в якоре /я из вы-
ражения (54). Тогда
и, подставляя значение противоэлектродвижущей силы Еп
имеем
KQU СК&п
M = ~r-----(63)
52
КФ и ск$2
Для шунтового двигателя выражения — и — можно
считать постоянными. Обозначив их соответственно через А
п В, получим следующее выражение для момента вращения:
М = А — В-п. (64)-
Это выражение и подтверждает автоматичность следования
вращающего момента двигателя за моментом сопротивления
исполнительного механизма.
Действительно, допустим, что момент сопротивления испол-
нительного механизма вследствие увеличения нагрузки возрос;
двигатель несколько затормозится, и его скорость вращения п
уменьшится. Поэтому уменьшится также произведение В-п.
и увеличится разность А —В-п, т. е. вращающий момент дви-
гателя М возрастет до нового значения увеличившегося мо-
мента сопротивления исполнительного механизма. Если же мо-
мент сопротивления исполнительного механизма уменьшится,
то вследствие разгрузки двигателя скорость вращения и воз-
растет, произведение Вп увеличится, а разность А—Вп умень-
шится, т. е. вращающий момент двигателя- Л4 уменьшится
вместе с уменьшением момента сопротивления.
Момент вращения двигателей автоматически следует за
увеличением момента сопротивления исполнительного меха-
низма не только до величины нормального момента, но и при
перегрузке, однако не для всех двигателей одинаково, а в за-
висимости от перегрузочной способности двигателя. Под пере-
грузочной способностью подразумевается отношение макси-
мального вращающего момента, который может развить дви-
м кс
гатель, к его номинальному моменту — .
Двигатели постоянного тока могут развивать максимальный
момент ^Имакс во много раз больше номинального.' В практике
же, из-за ухудшения коммутации и появления искрения на
коллекторе, такая большая их перегрузочная способность
используется очень редко.
Особенно большое значение для двигателей имеет началь-
ный вращающий момент, т. е. вращающий момент, развивае-
мый двигателем при пуске его в ход. Объясняется это тем,
что если электродвигатель по условиям работы пускается
в ход под нагрузкой, когда, следовательно, к его валу при-
ложен некоторый момент сопротивления исполнительного ме-
ханизма, то для того, чтобы якорь электродвигателя приобрел
номинальную скорость вращения, ему необходимо преодолеть
инерцию самого якоря и всех тех приводов, которые с ним
связаны. ч
53
§ 1°. ПУСК В ХОД ЭЛЕКТРОДВИГАТЕЛЯ
При неподвижном состоянии якоря (л = 0) противоэлектро-
движущая сила в обмотке якоря равна нулю. Поэтому, если
включить электродвигатель непосредственно в сеть с напря-
жением U, то появится так называемый пусковой ток, вели-
чина которого находится по закону Ома
7я пуск= • (65)
'я
Этот ток намного превосходит величины нормального рабо-
чего тока двигателя, ибо . якорь электродвигателя обладает
очень малым сопротивлением (порядка сотых долей ома).
Например, если U — 24 в и = 0,01 ома, то
94
А, = = 2400 а.
Такой ток, конечно, не может быть допущен, так как при
этом неминуемо пострадает изоляция 'обмотки якоря и может
расплавиться припой в местах соединения обмотки с пласти-
нами коллектора, т. е., как говорят, якорь может сгореть.
Ввиду этого пуск в ход путем непосредственного приклю-
чения якоря к сети применяется обычно только для двигате-
лей малой мощности, измеряемой десятками или сотнями ватт,
имеющих относительно большое внутреннее падение напряже-
ния. Самолетные электродвигатели, поскольку в подавляющем
большинстве случаев они являются маломощными, как пра-
вило, включаются в" сеть непосредственно, без каких-либо
пусковых устройств.
Во всех прочих случаях при пуске в ход электродвигателя
в цепь его якоря вводят пусковой реостат такого сопротивле-
ния /?п, чтобы величина тока в якоре
/Япуск=У?. +У?п (GG)
не превосходила допускаемого для данного двигателя значе-
ния, или путем включения двигателя в момент запуска на по-
ниженное напряжение. '
Когда якорь электродвигателя начинает вращаться, то
в его обмотке будет индуктироваться противоэлектродвижу-
щая сила, которая, постепенно увеличиваясь, уменьшает зна-
чение тока в якоре, ибо
(67)
Увеличение противоэлектродвижущей силы Еп позволяет
постепенно уменьшать сопротивление пускового реостата,
54
и, наконец, когда двигатель приобретет номинальную скорость
вращения, пусковой реостат может быть совершенно выведен
(Л>п = Ок Схемы включения пусковых реостатов будут приве-
дены ниже, при рассмотрении особенностей различных типов
двигателей постоянного тока.
§ 20. СВОЙСТВА ШУНТОВОГО ЭЛЕКТРОДВИГАТЕЛЯ
Принципиальная схема соединений шунтового двигателя
представлена на рис. 32. Здесь последовательно с якорем,
сопротивление которого вместе с переходным сопротивлением
щеток обозначено /?я, включен
пусковой реостат, сопротивле-
ние которого обозначено че-
рез /?„, служащий для огра-
ничения тока, потребляемого
двигателем из сети во время
пуска.
Определим зависимость вра-
щающего момента от тока
якоря, для чего воспользуемся
выражением (62), из которого
следует, что момент, развивае-
мый двигателем, зависит не
только от величины тока
Рис. 32. Принципиальная схема шун-
тового двигателя с пусковым реоста-
том
якоря, а и от величины маг-
нитного потока полюсов. Величина же магнитного потока Ф
в свою очередь определяется величиной тока возбуждения:
U
(68)
Сопротивление обмотки возбуждения гц можно считать
постоянным, а потому, если напряжение сети U не меняется,
то ток возбуждения iu также остается постоянным. Следова-
тельно, магнитный поток шунтового двигателя, создаваемый
полюсами, остается постоянным.
Если пото1у остается величиной постоянной," то момент на
валу двигателя будет прямо пропорционален току якоря (или,
что то же самое, нагрузке), и графически эта зависимость
будет строго прямолинейной, как это изображено на рис. 33
пунктирной прямой.
Однако в действительности, даже при условии постоянства
напряжения на зажимах двигателя, магнитный поток не
остается постоянным при изменениях тока в якоре, а умень-
шается с увеличением !я за счет реакции якоря. Явление
реакции якоря в электродвигателе имеет много общего
с таковым же явлением в генераторе.
55
Когда по проводникам обмотки якоря проходит ток, то,
очевидно, сам якорь становится электромагнитом и создает
магнитный поток. Магнитный поток якоря, складываясь с пото-
ком, создаваемым обмоткой возбуждения, вызывает в резуль-
тате искажение основного поля полюсов.
Результирующий поток оказывается несколько смещенным
относительно первоначального положения, т. е. положения,
когда в обмотке якоря не было тока. Это смещение скажется
в смещении нейтрали — линии, проходящей через точки, где
индукция равна нулю. Эта новая нейтраль в отличие от гео-
метрической носит название физической нейтрали, причем,
если в генераторах смещение нейтрали происходит по напра-
влению вращения, то в двигателях — против направления вра-
щения.
В результате действия реакции якоря магнитный поток
машины, как это было' указано выше, уменьшается, в этом
случае реакции якоря в машине
оказывает размагничивающее
действие. Это объясняется тем,
что возрастает общее сопроти-
вление для потока, так как иска-
жение распределения индукции
в железных частях магнитопро-
вода создает относительно боль-
шее увеличение сопротивления
для потока в насыщенных ча-
стях по сравнению с уменьше-
нием сопротивления для потока
в ненасыщенных частях магнито-
провода.
Таким образом, практически зависимость момента от
нагрузки не будет оставаться прямолинейной. Если рассматри-
вать двигатель с большей реакцией якоря, то при возрастании
/я момент также возрастает до некоторого максимума, а затем
начинает уменьшаться и, вообще говоря, при некотором зна-
чении /я оказался бы равным нулю (сплошная линия на
рис. 33)..
Для определения зависимости скорости вращения двига
теля от нагрузки (так называемая скоростная характеристика)
найдем значение скорости вращения двигателя п. Восполь-
зуемся уравнением (55), в которое подставим значение
Дп = СпФ, тогда
U— СпФ = I R
я *я
И
tl~ СФ
(69)
56
Так как нами принято, что величина U и 1в остаются
постоянными, то в этих условиях на скорость шунтового дви-
гателя оказывают влияние две причины, а именно:
— омическое падение напряжения в якоре /я/?я и
— реакция якоря.
С увеличением нагрузки, т. е. тока /я, первая причина
стремится уменьшить скорость двигателя, тогда как вторая,
наоборот, — увеличить ее, поскольку при обычных условиях
реакция якоря действует размагничивающим образом.
В зависимости от того, какая из
этих двух причин преобладает, "
скорость двигателя уменьшается
пли увеличивается при увеличении ____ .
нагрузки. Обычно уменьшение маг-
нитного потока под влиянием реак- х.
ции якоря бывает незначительное, j___________ \
и первая причина влияет сильнее
на изменение скорости вращения, рис 34. Зависимость скорости
чем вторая. вращения шунтового двигателя
Рассмотренная зависимость гра- от тока якоря
фически представлена на рис. 34,
из которой следует, что шунтовой двигатель обладает падаю-
щей скоростной характеристикой, причем заметное снижение
скорости вращения при увеличившемся токе якоря объяс-
няется увеличением размагничивающего действия реакции
якоря. Однако на рабочем диапазоне снижение скорости вра-
щения оказывается очень небольшим, поэтому скоростная
характеристика шунтового двигателя называется „жесткой".
Жесткость скоростной характеристики двигателя может
быть уменьшена путем включения добавочных сопротивлений
в цепь якоря, так как это приведет к большему падению
напряжения. И, наоборот, для получения более жесткой
характеристики необходимо уменьшать, насколько это воз-
можно, сопротивление цепи якоря. Этого можно достичь
путем полного выключения сопротивлений пускового реостата
и посредством применения более мягких щеток с меньшим
переходным сопротивлением. Вместе с тем при конструирова-
нии двигателя, с этой точки зрения, стремятся сделать сопро*-
тивление якоря возможно меньшим, увеличивая сечение меди
обмотки.
Наконец, нужно отметить, что так как действие реакции
якоря оказывает незначительное влияние на изменение ма-
гнитного потока Ф, то с известной степенью точности можно
считать момент пропорциональным величине тока якоря
М~1
Я
и приведенную на рис. 34 характеристику одновременно рас-
сматривать как зависимость скорости вращения от вращающего
момента на валу двигателя.
57
Из формулы (69) следует еще одно свойство шунтового
электродвигателя. Если отключить или оборвать обмотку воз-
буждения, то поток возбуждения Ф станет очень малым (его
величина будет определяться лишь наличием остаточного
магнетизма в полюсах) и при этом скорость вращения дви-
гателя резко возрастет. Двигатель, как говорят, пойдет
„в разнос
Поэтому схемы включения шунтовых моторов строят так,
чтобы обмотка возбуждения никогда не размыкалась.
Все приведенные выше основные соотношения для электро-
двигателя с параллельным возбуждением получены в предпо-
ложении постоянства напряжения сети.
В отличие от промышленных установок, где мощность
источников электрической энергии велика и колебания подво-
димого к электродвигателю напряжения незначительны, на
самолетах мощность источников электрической энергии огра-
ничена и при включении мощных электродвигателей-возможны
значительные снижения напряжения на зажимах источников
питания.
'В ряде случаев самолетного привода можно считать, что
электродвигатели большой мощности питаются от аккумуля-
торной батареи, так как при наличии макси-
мального реле ток, отдаваемый генератором,
не может превышать определенной величины.
Рассматривая схему работы двигателя от
аккумуляторной батареи, приведенную на
рис. 35, замечаем, что всякое уменьшение на-
пряжения U вызывает уменьшение величины
тока возбуждения it, а следовательно, и маг-
нитного потока Ф* вследствие чего при по-
стоянном нагрузочном моменте на валу увели-
чится ток якоря /я (см. уравнение 62), что,
в свою очередь, приведет к еще большему
понижению напряжения на зажимах двига-
теля.
Помимо того, всегда имеет место падение напряжения
в, подводящих проводах.
Все это приводит к тому, что напряжение на зажимах
самолетного двигателя не остается постоянным, вследствие
чего его эксплоатационные характеристики могут значительно
отличаться от характеристик, снятых при номинальном напря-
жении. В первую очередь это относится к величине вращаю-
щего момента шунтового двигателя, который будет резко
уменьшаться с увеличением внутреннего сопротивления источ-
ника питания и сопротивления соединительных проводов,
так как последнее обстоятельство, помимо уменьшения тока
якоря 1я, приводит также к уменьшению магнитного по-
тока Ф.
Рис. 35. Схема со-
-единений аккуму-
ляторной батареи
и шунтового дви-
гателя
58
§ 21. СВОЙСТВА СЕРИЕСНОГО ДВИГАТЕЛЯ
Принципиальная схема соединений сериесного двигателя
приведена на рис. 36. Как видно, сериесный двигатель отли-
чается от шунтового тем, что его обмотка возбуждения вклю-
чена последовательно в цепь якоря. Таким образом, в данном
случае общее сопротивление
цепи якоря
R = R„ + RC + R„
(rjyeRc—сопротивление сериесной
обмотки возбуждения), а ток в
якоре /я является одновременно
и намагничивающим током; по-
этому величина магнитного по-
тока Ф определяется величиной
тока /я, т. е. магнитный поток
36. Принципиальная схема
находится в полной зависимости
от нагрузки двигателя.
Если двигатель работает при
небольшой нагрузке, через его
якорь и сериесную обмотку проходит слабый ток и
гничивание будет мало; при нормальной же нагрузке
перегрузке двигателя большой ток, проходящий по
и сериесной обмотке, создает значительный магнитный
Посмотрим теперь, какая существует разница между вра-
Рис.
сериесного двигателя с пусковым
реостатом
нама-
и при
якорю
поток.
щающими моментами, развиваемыми сериесным двигателем
и шунтовым.
Если в шунтовом двигателе мы могли принять изменение
вращающего момента пропорциональным силе тока в якоре
и в силу этого считать, что сила тока в якоре растет про-
порционально нагрузке (т. е. если нагрузка двигателя возрас-
тает в два раза, то и сила тока в якоре увеличивается также
в два раза), то в сериесном двигателе дело обстоит несколько
иначе, так как магнитный поток не остается постоянным,
а зависит от нагрузки. Поэтому хотя при увеличении нагрузки
двигателя якорь его и должен развить соответствующий вра-
щающий момент, это увеличение вращающего момента будет
происходить не только за счет увеличения силы тока в якоре,
но также и за счет усиления магнитного потока, ибо в пре-
делах до насыщения стали Ф = /я. Следовательно, для сериес-
ного двигателя
‘ (70)
т. е. кривая М = f (/я) (рис. 37) в начальной своей части
является параболой. Наоборот, при сильном насыщении можно
считать, что поток практически не зависит от /я. В этих усло-
59
виях Л4=/я, т, е. момент вращения изменяется почти про-
порционально току, как у шунтового двигателя.
Иначе говоря, при увеличении нагрузки сериесного (не-
насыщенного) двигателя в два раза вращающий момент также
увеличится в два раза, но сила тока при этом возрастет всего
в ]/2 раза, так как при этом возрастет еще и магнитный
поток, создаваемый сериесной обмоткой.
Отсюда следует, что при колебаниях
нагрузочного момента мощность, потре-
бляемая шунтовым двигателем, изме-
няется значительно сильнее, чем в слу-
чае использования сериесного двигателя.
Поэтому практическое применение
на самолете шунтовых двигателей ра-
ционально в тех случаях, когда на-
грузка меняется незначительно. Если же
изменения нагрузки велики, то для того,
чтобы генератор и аккумуляторная ба-
тарея испытывали меньшие толчки на-
грузки, следует применять сериесные
двигатели.
Поскольку изменения нагрузочного
Рис. 37. Зависимость мо-
мента от тока якоря для
сериесного двигателя
момента создают при применении сериесного двигателя меньшие
колебания тока, потребляемого из бортовой сети, то при этом
будут и меньшие колебания напряжения, что является также
весьма существенным фактором в условиях самолетного привода.
Кроме того, от сериесного двигателя можно получить
гораздо больший момент при пуске в ход. Действительно, при
пуске в ход двигатель в первый момейт пуска находится
в состоянии короткого замыкания (Дп = 0), при этом магнит-
ный поток достигает своего максимального значения. В шун-
товом же двигателе наблюдается иная картина, так как в нем
магнитный поток уменьшается с увеличением нагрузки и наи-
большего значения это .уменьшение достигает при коротком
замыкании, когда ток в якоре максимален.
Таким образом, при одинаковых значениях тока в якоре
пусковой момент в сериесном двигателе получается больше,
чем в шунтовом.
Из сравнения приведенных характеристик шунтового
и сериесного двигателей видно, что сериесный двигатель обла-
дает большим начальным Вращающим моментом при меньшем
потреблении мощности; следовательно, в этом случае значи-
тельно облегчаются условия пусковых режимов двигателя
с исполнительным механизмом. ' Следует отметить, что для
многих установок на самолете оказывается чрезвычайно важ-
ным иметь большие моменты при пуске.
Кроме того, величина напряжения сети, или, вернее,
напряжения на зажимах сериесного двигателя, не оказывает
69
существенного . влияния на величину
сериесного двигателя даже при пуске
напряжения сети будут отражаться
вращающего момента
его в ход; колебания
только на изменении
скорости вращения двигателя.
Посмотрим теперь, как влияет на скорость сериесного дви-
гателя изменение нагрузки на его валу.
Шунтовой электродвигатель, как это было показано ранее,
почти не изменяет своей скорости от нагрузки. Скорость же
вращения сериесного двигателя, наоборот, находится в полной
зависимости от нагрузки и изменяется в больших пределах:
при каждом увеличении нагрузки скорость сериесного двига-
теля уменьшается, а при разгрузке начинает быстро, увели-
чиваться.
Действительно, как уже указывалось, магнитный поток
сериесного двигателя изменяется вместе с нагрузкой, так как
при возрастании нагрузки увеличивается сила тока в якоре,
а следовательно, и в обмотке возбуждения; скорость же
электродвигателя зависит от величины магнитного потока:
п ^-4(^я + /?с)
СФ
(71)
С увеличением магнитного потока скорость уменьшается
и с ослаблением потока скорость увеличивается.
Благодаря малому падению напряжения в якоре и последо-
вательной обмотке возбуждения противоэлектродвижущая
сила Дп очень мало отличается по величине от напряжения
сети U, т. е. остается почти по-
стоянной. Следовательно, при
увеличении нагрузки якорь дол-
жен вращаться с меньшей скоро-
стью, чтобы при усиленном маг-
нитном потоке создать ту же са-
мую обратную электродвижущую
силу.
Итак, в сериесном двигателе
приходится ' главным образом
считаться с изменением магнит-
ного потока, которое происходит
в широких пределах, особенно
когда' электромагниты далеки
от насыщения. При больших же
значениях нагрузки магнитный
Рис. 38. Зависимость скорости
вращения сериесного двигателя
. от тока якоря
поток мало изменяется, ибо
он почти насыщает полюсы; поэтому и
скорость двигателя из-
меняется уже в меньших пределах.
Все изложенное о зависимости скорости вращения сериес-
ного двигателя от нагрузки можно видеть из рассмотрения
кривой, приведенной на рис. 38. Скоростная характеристика
сериесного двигателя в отличие от шунтового называется
„мягкой".
61
При эксплоатацип сериесных двигателей нужно иметь
в виду, что когда он работает без нагрузки (вхолостую), то
потребляемый им ток очень мал, следовательно, и магнитный
поток настолько слаб, что якорь двигателя должен вращаться
с весьма большой скоростью, чтобы развить противоэлектро-
движущую силу, величина которой мало отличалась бы от
напряжения.
Следовательно, при холостой работе скорость двигателя
может превзойти допускаемый для нее предел, и двигатель
пойдет „в разнос".
Однако в действительных условиях бывают значительные
механические потери, обусловленные трением щеток о кол-
лектор,' трением в подшипниках, о воздух, и поэтому при
холостом ходе скорость вращения самолетных электродвига-
телей не увеличивается более чем в три-четыре раза по срав-
нению с номинальной величиной.
Такое повышение скорости вращения для самолетных
электродвигателей небольшой мощности, примерно до 200 вт,
ие опасно. В электродвигателях большой мощности трехкрат-
ное повышение скорости вращения по сравнению с номиналь-
ной вызывает большие механические напряжения якоря
и может вывести его из строя. Поэтому допускать холостой
ход таких электродвигателей нельзя, и он должен быть всегда
сцеплен с исполнительным механизмом или, во всяком случае,
снабжен редуктором.
§ 22. СВОЙСТВА КОМПАУНДНОГО ДВИГАТЕЛЯ
Схема компаундного двигателя (рис. 39) повторяет схему
шунтового двигателя с добавлением сериесной обмотки воз-
буждения. Рабочие характеристики компаундного двигателя
являются промежуточными между характеристиками шунтового
и сериесного двигателей.
Сериесная обмотка может быть включена диференцпально
(встречно) или согласно с шун-
товой. В первом случае обмотки
возбуждения противодействуют
одна другой, а потому общий
магнитный поток
Ф = Ф — Ф
ш с*
При наличии последователь-
ной обмотки возбуждения уве-
личение нагрузки двигателя вы-
зывает возрастание потока, со-
здаваемого сериесной обмоткой,
и следовательно, полный поток Ф
Рис. 39. Принципиальная схема будет уменьшаться, ослабление
компаундного двигателя с пуско- же потока, как известно, ВЫЗЫ-
вым реостатом вает увеличение скорости.
62
Итак, у двигателя со смешанным возбуждением и диферен-
циальным включением обмоток при увеличении нагрузки паде-
ние напряжения в якоре вызывает уменьшение скорости,
а применение последовательной обмотки вызывает увеличение
скорости.
Естественно, что можно так подобрать число витков сериес-
ной обмотки, чтобы оба указанных действия уравновеши-
вались. При этом получится электродвигатель, скорость вра-
щения которого не будет зависеть от нагрузки. В этом
и заключается свойство компаундного двигателя с диферен-
цпальным включением обмоток возбуждения.
Но в то же время такой двигатель обладает и существен-
ными недостатками: при пуске в ход, как-это следует из пре-
дыдущего, пусковой ток двигателя в несколько раз больше
номинального; увеличивающийся же при этом поток, создава-
емый последовательной обмоткой, настолько ослабляет полный
поток, что двигатель может и не развить надлежащего вра-
щающего момента.
Другой недостаток заключается в том, что при больших
перегрузках или при ослаблении потока путем введения регу-
лировочного реостата (т. е. при регулировке скорости враще-
ния, о чем будет сказано ниже) может оказаться, что магнит-
ный поток, создаваемый последовательной обмоткой возбужде-
ния, окажется сильнее потока, образуемого параллельной
обмоткой, и полюсы изменят полярность, т. е. перемагни-
тятся. Это в свою очередь вызовет внезапную остановку дви-
гателя и стремление его вращаться в обратную сторону.
Не говоря уже о чрезмерно большом токе, который пройдет
через обмотку якоря, это совершенно недопустимо с точки
зрения работы исполнительных механизмов.
Указанные недостатки заставили отказаться от использова-
ния таких двигателей и обусловили применение на самолетах
компаундных электродвигателей с согласным включением
обмоток возбуждения.
В компаундном электродвигателе с согласным включением
обмоток возбуждения сериесная обмотка усиливает поток, со-
здаваемый шунтовой обмоткой, и общий магнитный поток
Ф = Фш + Фе.
В таком электродвигателе магнитный поток не остается
постоянным с изменением нагрузки, как это имеет место
в двигателе с параллельным возбуждением, если пренебречь
влиянием реакции якоря, и в то же время не изменяется так
резко, как в двигателе с последовательным возбуждением.
Вследствие этого зависимость вращающего момента от тока
якоря выражается кривой, лежащей между соответствующими
кривыми для сериесного и шунтового двигателя. Это в равной
степени относится и к скоростной характеристике, которая
63
представлена на рис. 40. На этом же рисунке для сравнений
приведены соответствующие характеристики для шунтового
и сериесного двигателей, откуда видно,
что наименьший пуско-
вой момент имеет шун-
товой двигатель, а наи-
больший — компаунд-
ный.
Витки сериесной об-
мотки и насыщение
компаундного двига-
теля могут быть подо-
браны таким образом,
что снижение скорости
вращения на рабочем
диапазоне для него бу-
дет почти одинаковым
с шунтовым двигате-
лем. Такой двигатель
будет обладать положи-
тельными свойствами
сериесного и шунто-
вого двигателей.
Рис. 40. Скоростные характеристики элек-
тродвигателей постоянного тока:
1 — шунтового двигателя; 2 — сериесного двигателя;
3 — компаундного двигателя
Кроме того,, при смешанном возбуждении оказывается воз-
можным еще более снизить колебания потребляемой мощности
при резких изменениях нагрузки, чем в сериесных двигателях.
Это свойство компаундных двигателей позволяет применять
их в тех случаях, когда бывают резко изменяющиеся нагрузки,
как, например, в приводе гидропомп, когда при повышении
давления требуются большие моменты, а при открытии или
закрытии золотников эти давления, а следовательно, и вра-
щающие моменты могут резко изменяться, а в некоторых слу-
чаях даже менять знак (влияние собственного веса при вы-
пуске шасси).
Однако наряду с положительными свойствами двигатели
смешанного возбуждения имеют и свои отрицательные стороны,
вследствие которых они не получили широкого применения
в самолетном электроприводе.
К недостаткам этих двигателей следует отнести:
1. Для изготовления двигателя смешанного возбуждения
требуется больше меди, чем для двигателей последовательного
возбуждения той же мощности. Это вызывает .увеличение га-
баритов и веса, увеличение потерь, а следовательно, и сниже-
ние коэфициента полезного действия.
2. Для осуществления реверса (изменения направления
вращения) двигателя смешанного возбуждения требуется бо-
лее сложная и громоздкая коммутационная аппаратура.
Последнее обстоятельство имеет весьма существенное зна-
чение для оценки выгодности применения того или иного типа
двигателя в самолетных электроприводах.
64
§ 23. ИЗМЕНЕНИЕ НАПРАВЛЕНИЯ ВРАЩЕНИЯ (РЕВЕРС)
ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Во многих самолетных электроприводах, где требуется из-
менение направления движения исполнительного механизма,
осуществление реверсирования электропривода при помощи
соответствующих переключений в передаточном механизме
привело бы к чрезмерному усложнению кинематической схемы
и конструкции, поэтому приходится устанавливать реверсивный
электродвигатель.
Направление вращения электродвигателя зависит от напра-
вления токов в обмотке его якоря и в обмотке возбуждения,
что вполне понятно, так как вращение якоря объясняется
взаимодействием магнитных полей якоря и полюсов.
Отсюда вытекают следующие положения:
1. Если одновременно переменить направление тока
и в якоре и в обмотке возбуждения, то взаимодействие остается
прежним и направление вращения двигателя не изменится.
2. Наоборот, для того чтобы изменить направление враще-
ния двигателя на обратное, надо переменить направление тока
или в якоре, оставив в обмотке возбуждения прежнее его на-
правление, или в обмотке возбуждения, оставив прежнее
направление тока в обмотке якоря.
В практике, когда двигатель по условиям работы исполни-
тельного механизма должен вращаться то в одну, то в дру-
гую сторону, изменение направления вращения производят
переключением тока только в цепи якоря, но не в обмотке
возбуждения. Объясняется это значительно большей индук-
тивностью обмотки возбуждения по сравнению с обмоткой
Рис. 41. Схема ре-
версирования се-
риесного электро-
двигателя
Рис. 42. Схема ре-
версирования шун-
тового электродви-
гателя
Рис. 43. Схема реверси-
рования компаундного
электродвигателя
5—Электропривод на самолете
65
Якоря, имеющей меньшее число витков. Г1орча контактов, пб-
лучающаяся вследствие больших экстратоков при выключении
цепи возбуждения, с одной стороны, а также медленное вос-
становление прежнего потока при переключении обмотки,
с другой стороны, делают способ перемены направления вра-
щения изменением направления тока в обмотке возбуждения
совершенно непригодным в эксплоатации.
Для реверсирования двигателей с сериесным, шунтовым
и компаундным возбуждением нужно осуществить схемы рис. 41,
42, 43 с двухполюсными переключателями. Схемы в этом слу-
чае получаются сложными; в них приходится, кроме обычного
управляющего выключателя, ставить для осуществления ре-
версирования специальный двухполюсный переключатель.
Рис 44. Схема двухполюс-
ного реверсивного электро-
двигателя
Рис. 45. Схема четырехполюс-
ного реверсивного электродви-
гателя
Для того чтобы избежать необходимости применения двух-
полюсных переключателей в качестве реверсивных двигателей,
в самолетном электроприводе применяются сериесные электро-
двигатели с двумя обмотками возбуждения. При этом в случае
двухполюсного электродвигателя, что соответствует мощности
меньше 200 вт, обмотка правого вращения располагается на
одном полюсе (рис. 44), а обмотка левого вращения — на дру-
гом-. Таким образом, магнитные потоки, создаваемые ими, на-
правлены навстречу и если включить последовательно с яко-
рем одну из обмоток возбуждения (вторая обмотка должна
быть разомкнута), то якорь электродвигателя будет вращаться
в одном направлении. Если же включить последовательно
с якорем вторую обмотку (а первую разомкнуть) й не менять
при этом направления тока в якоре, то направление вращения
изменится на обратное.
. В случае четырехполюсных электродвигателей, что соот-
ветствует мощности больше 200/;///, обмотка правого вращения
располагается на одной паре полюсов, обмотка левого враще-
ния — на другой (рис. 45). Один конец каждой из обмоток
66
возбуждения двухобмоточных двигателей присоединяется к об-
мотке якоря, вторые же концы (2—3 на рис. 44 и 45) выво-
дятся вместе со вторым концом 1 обмотки якоря в клеммовую
коробку. Из клеммовой коробки провода от обмоток возбу-
ждения включают обычно на реверсирующий переключатель,
при помощи которого можно включать в цепь ту или другую
из обмоток, а значит, изменять направление вращения электро-
двигателя. Этот же переключатель служит и для отключения
электродвигателя от сети, т. е. одновременно является и ре-
версирующим и управляющим выключателем.
Как показывает опыт, некоторое утяжеление электродви-
гателя из-за введения второй обмотки возбуждения обычно
компенсируется за счет упрощения схемы.
Шунтовые и компаундные электродвигатели не делают
двухобмоточными, так как схема, при помощи которой можно
осуществить реверсирование их, получается и в этом случае
значительно сложнее, чем для сериесного двигателя.
§ 24. РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
При использовании в электроприводах двигателей постоян-
ного тока можно осуществить плавное и в некоторых случаях
достаточно экономичное регулирование скорости вращения
в весьма широких пределах. Именно эта возможность соста-
вляет одно из самых ценных преимуществ двигателей постоян-
ного тока и в ряде случаев делает их незаменимыми.
Какими же способами можно производить регулирование
скорости вращения двигателей постоянного тока?
Ответ на этот вопрос дает анализ уравнений (69) и (71),
из которых следует, что регулирование скорости вращения
можно производить тремя способами:
1. Изменением напряжения U на зажимах двигателя.
2. Изменением омического падения напряжения в цепи
якоря (увеличением сопротивления цепи якоря).
3. Изменением магнитного потока Ф (воздействием на цепь
возбуждения).
Наибольшее распространение имеют второй и третий спо-
собы, тогда как первый возможен только в специальных уста-
новках. В силу этого он будет нами разобран отдельно.
Регулирование скорости вращения электродвигателей
постоянного тока изменением сопротивления в цепи якоря
Шунтовой двигатель. Если предположить, что шунтовой
двигатель работает от сети с постоянным напряжением, то не
будет меняться и ток возбуждения iB в цепи его шунтовой
обмотки, так как = у- > а потому и магнитный поток будет
5*
67
оставаться постоянным. Что же касается тока в якоре, то, как
известно из предыдущего, он зависит от нагрузки двигателя,
и если его не изменять, то ток в цепи якоря 1я должен оста-
ваться постоянным.
Следовательно, если в цепь якоря ввести реостат и увели-
чивать сопротивление /?рег этого реостата, то будет увеличи-
ваться падение напряжения в реостате /я/?рег и напряжение на
зажимах двигателя будет уменьшаться. При уменьшений со-
противления /? наоборот, падение напряжения в реостате
будет уменьшаться и напряжение на зажимах двигателя-будет
увеличиваться.
Итак, реостат, введенный в цепь якоря, позволяет изменять
напряжение на зажимах двигателя, что и вызывает изменение
скорости его вращения
« =-----(72)
Из приведенной формулы видно, что увеличение сопроти-
вления в цепи якоря вызывает уменьшение скорости вращения
электродвигателя, причем возможный предел ' регулирования
получается болыпой — от номинальной скорости вращения до
нуля.
Но нужно отметить, что применение этого способа приво-
дит к ухудшению ценного свойства шунтового двигателя:
обеспечивать почти неизменную скорость вращения при раз-
ных его нагрузках. Двигатель приобретает „мягкую" характе-
ристику, и изменение его скорости вращения при изменении
цагрузки происходит тем более резко, чем большее сопроти-
вление введено в цепь якоря. Хотя обыкновенный пусковой
реостат в тех случаях, когда он устанавливается, также нахо-
дится в цепи якоря, но регулировка скорости вращения элек-
тродвигателя при помощи пускового реостата не допускается,
так как подобные реостаты рассчитываются только на кратко-
временное прохождение тока и при длительном включении они
могут сгорать. Само собой разумеется, регулировочные рео-
статы могут выполнять роль пусковых реостатов.
Наконец, в регулировочном реостате вследствие большого
тока получается значительный расход электрической энергии.
Мощность, теряемая в реостате, зависит от предела регулиро-
вания и для случая работы двигателя с номинальным момен-
том может быть приближенно вычислена из выражения
где Рп, т)н и «н — соответственно номинальные мощность, к. и. д.
и скорость вращения;
пх — фактическая скорость вращения двигателя
после регулировки.
68
Резюмируя все сказанное, приходном к следующему выводу:
способ прост, но мало удобен и, главное, не экономичен; по-
этому применяется главным образом только для регулирования
скорости двигателей малой мощности.
Сериесный двигатель. Регулирование скорости вращения
при помощи добавочного сопротивления, вводимого последо-
вательно в цепь якоря, для сериесных двигателей применяется
чаще. Так же как и для шунтового двигателя, применение
этого способа обеспечивает регулирование только в сторону
снижения скорости вращения от номинальной до полной оста-
новки двигатеЛя.
Характеристики этого способа регулирования в отношении
потерь и возможности применения его те же, что и в случае
с шунтовым возбуждением.
Регулирование скорости вращения электродвигателей
постоянного тока воздействием на цепь
возбуждения
Шунтовой двигатель. Регулирование скорости вращения
шунтового двигателя путем воздействия на цепь возбуждения
производится посредством включения регулировочного рео-
стата, который мы в дальнейшем будем именовать шунто-
вым /?ш, в цепь обмотки возбужде-
ния (рис. 46).
Введением сопротивления реостата
производится уменьшение тока воз-
буждения и ослабление магнитного
потока, вследствие чего скорость вра-
щения двигателя увеличивается. При
выключении сопротивления реостата
происходят обратные явления — уве-
личение магнитного потока и умень-
шение скорости вращения двигателя
Действительно, ведь противоэлек-
тродвижущая сила, индуктирующаяся
в обмотке якоря электродвигателя,
выражается формулой
Е =-U—IR ,
t п Я ' Я 1
Рис. 46. Схема регулирова-
ния скорости вращения шун-
тового электродвигателя
воздействием на цепь воз-
буждения
но здесь падение напряжения в якоре обыкновенно очень
мало, а потому противоэлектродвижущая сила очень мало
отличается от напряжения, которое поддерживается в сети
постоянным. Следовательно, противоэлектродвижущая сида
остается почти постоянной, и она зависит в равной мере как
от скорости вращения якоря, так и от магнитного потока'.
69
Когда магнитный поток уменьшается (введением шунтового
реостата), то естественно, что якорь должен вращаться быстрее,
чтобы в ослабленном магнитном поле развить почти ту же
самую электродвижущую силу. И, наоборот, при увеличении
магнитного потока для создания той же прэтивоэлектродви-
жущей силы якорь должен вращаться с меньшей скоростью,
что мы и наблюдаем в действительности. Характерная особен-
ность данного способа регулирования скорости заключается
в плавном и незначительном изменении скорости вращения при
изменении (большого) тока возбуждения, соответствующего
низшему пределу скорости двигателя, и в резком изменении
скорости вращения при изменении (малого) тока возбуждения,
соответствующего высшей скорости двигателя.
Следует еще иметь в виду, что повышение скорости элек-
тродвигателя при помощи реостата, введенного в цепь шунто-
вой обмотки, при одной и той же нагрузке всегда сопрово-
ждается увеличением тока в якоре двигателя. Это объясняется
тем, что вращающий момент, создаваемый электродвигателем,
зависит от величины тока в якоре /я и от магнитного потока Ф
(так как М = К1ЯФ).
Значит, при данной нагрузке, которой отвечает определен-
ная величина вращающего момента М, при магнитном потоке Ф
через якорь проходит - ток 1Я. Если же мы будем уменьшать
поток Ф, то для преодоления той же нагрузки электродвига-
тель должен развить тот же вращающий момент, что возможно
только при увеличении тока якоря 7я.
Итак, всякое повышение скорости вращения шунтового
электродвигателя при помощи реостата, введенного в цепь его
шунтовой обмотки, всегда сопровождается увеличением тока
якоря. Последнее обстоятельство лимитирует увеличение ско-
рости, так как увеличение /я допустимо только до определен-
ной величины, после чего появляется искрообразование под
щетками на коллекторе.
Преимуществом этого способа регулирования скорости яв-
ляется его экономичность. Действительно, ток в шунтовой
обмотке сравнительно невелик, составляя 2—5’/0 тока якоря,
а потому шунтовой реостат получается компактным (занимает
мало места) и дешевым, а кроме того, потери мощности
в реостате невелики.
Сериесный двигатель. Схема регулирования скорости вра-
щения электродвигателя с последовательным возбуждением
путем воздействия на его цепь возбуждения показана на рис. 47.
Воздействие на целичину потока возбуждения в данном
случае осуществляется посредством реостата, включаемого
параллельно обмотке возбуждения.
Очевидно, в данном случае мы имеем дело с простым раз •
ветвлением, состоящим из двух сопротивлений: сопротивления
70
Рис. 47. Схема регулирова-
ния скорости вращения се-
риесного электродвигателя
воздействием на цепь воз-
буждения
обмотка возбуждения Z?c и сопротивления реостата 7?^, причем
ток в якоре
Л = ZB. с+ •
где гв с—ток в сериесной обмотке возбуждения и /ш —ток
в цепи шунтирующего реостата.
Данной нагрузке двигателя отвечает определенное значение
тока в якоре /я. С уменьшением сопротивления реостата
увеличивается ток /ш и уменьшается ток iB с в цепи сериесной
обмотки возбуждения, а с уменьшением магнитного потока
скорость двигателя возрастает.
Потребление мощности двигателем в этом случае увеличи-
вается, так как при уменьшенном потоке для получения од-
ного и того же момента вращения ток в якоре двигателя
должен соответственно увеличи-
ваться. Регулировочное сопротивле-
ние получается не громоздким даже
при большом токе, так как оно рас-
считывается на небольшое падение
напряжения в сериесной обмотке.
Регулирование скорости может быть
выполнено плавным. Потеря мощ-
ности, вызываемая регулированием,
получается небольшой, и значит,
данный способ достаточно эконо-
мичен. Но условия работы якоря
в отношении нагревания и комму-
тации ухудшаются.
Поэтому, если требуется регу-
лирование скорости в широких пре-
делах, то двигатель должен быть
для этой цели специально рассчитан и сконструирован.
В заключение отметим, что регулирование скорости враще-
ния двигателя с последовательным возбужденней иногда осу-
ществляется шунтированием цепи якоря.
§ 25. РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА ИЗМЕНЕНИЕМ НАПРЯЖЕНИЯ СЕТИ
Обычно напряжение сети U остается постоянным. Но в тех
случаях, когда генератор питает только один двигатель (или
несколько двигателей, работающих в одинаковых условиях),
можно непосредственно соединить зажимы обеих машин без
каких-либо пусковых или регулировочных реостатов и упра-
влять этим двигателем посредством изменения напряжения ге-
нератора U.
Одна из возможных принципиальных схем системы регули-
рования скорости вращения двигателей постоянного тока изо-
бражена на рис. 48.
71
Она состоит из трех электрических машин: генератора, пи-
тающего основной электродвигатель, вспомогательного элек-
тродвигателя, служащего для привода генератора, и основного
электродвигателя, приводящего в движение исполнительный
механизм. Поскольку напряжение генератора в данном случае
регулируемое, то питать обмотку возбуждения как самого ге-
нератора, так и двигателя от генератора нельзя. Для того
чтобы магнитные потоки генератора и основного двигателя
сделать независимыми от изменения напряжения генератора,
обмотки возбуждения обеих машин питаются от независимого
источника тока через реостаты и /?,.
Рис. 48. Схема системы регулирования скорости
вращения двигателя постоянного тока
При пуске в ход основного электродвигателя ток возбу-
ждения его можно уменьшать при помощи реостата и, следо-
вательно, подводимое к нему напряжение изменять таким
образом, чтобы ограничить пусковой ток двигателя и в то же
время обеспечить проворачивание его с некоторым ускорением.
Таким образом, для пускового режима эта система дает
следующие преимущества:
1) нет надобности в пусковом реостате;
2) нет потерь энергии в пусковых сопротивлениях;
3) упрощается управление вследствие значительного умень-
шения величины реостата и переноса управления в цепь воз-
буждения генератора.
Но самое ценное свойство такой системы состоит в том,
что она позволяет экономично и плавно регулировать скорость
вращения основного двигателя в весьма широких пределах,
например, 1:10, 1 :20 и больше.
Это регулирование ведется двояким образом. При малых
скоростях вращения реостат в цепи возбуждения двигателя /?,
полностью выведен, поток двигателя Ф остается постоянным
и равным максимальному. Изменение скорости вращения
ведется изменением подводимого к якорю электродвигателя
напряжения, т. е. изменением тока в цепи возбуждения гене-
ратора при помощи реостата
72
Скорость вращения двигателя, получаемая при максималь-
ном потоке и максимальном напряжении генератора, есть
номинальная скорость вращения двигателя.
Выше этой скорости регулирование осуществляется при
помощи реостата /?2, т. е. ослаблением тока возбуждения дви-
гателя. Так как в рассматриваемой схеме нет реостата в цепи
якоря электродвигателя, а управление производится реостатами
в обмотках возбуждения генератора или двигателя, то упро-
щается управление и уменьшаются потери энергии.
Эта система регулирования позволяет, помимо того, чрез-
вычайно просто производить реверсирование двигателя, путем
изменения направления тока возбуждения генератора, переклю-
чателем П, т. е. путем изменения полярности генератора.
Существенный недостаток системы состоит в том, что, по-
мимо основного регулируемого двигателя, здесь требуется1 по
меньшей мере еще две машины — генератор и приводной
двигатель, причем мощность каждой из них должна быть не
меньше мощности основного двигателя; кроме того, необходимо
иметь также и источники энергии для питания цепей возбу-
ждения. В некоторых случаях возможны весьма резкие измене-
ния нагрузки на валу основного двигателя. Понятно, что
в этих случаях работа генератора и, следовательно, потребляе-
мый из сети ток подвержены также резким колебаниям. Для
уменьшения этих колебаний на один и тот же вал с агрегатом
насаживается маховик (на рис. 48 он показан пунктиром).
Несмотря на незначительное внешнее отличие этой системы
от системы без маховика, условия работы всех машин суще-
ственно различаются. Роль маховика в системе сводится к сле-
дующему: при пуске агрегата кинетическая энергия (живая
сила) маховика по мере разгона агрегата возрастает и к мо-
менту установившейся скорости достигает значительной вели-
чины. Обычно говорят в таком случае, что происходит „заряд
маховика".
При внезапном увеличении нагрузки основного двигателя
нагрузка генератора соответственно возрастает. Скорость вра-
щения вспомогательного двигателя при этом уменьшается.
Теперь при этом уменьшении скорости агрегата маховик начи-
нает расходовать запасенную в нем энергию и, как говорят,
„начинает разряжаться". В этот, обычно небольшой, промежу-
ток времени мощность подводится к генератору как бы с двух
сторон: частично от вспомогательного двигателя, частично от
маховика.
При внезапном уменьшении нагрузки основного двигателя
явление протекает в обратном порядке: генератор разгружается,
и скорость вспомогательного двигателя вследствие этого начи-
нает возрастать. Кинетическая энергия маховика также возра-
стает, и происходит снова „заряд маховика". Таким образом,
маховик в этой системе уменьшает толчки тока в сети, а сле-
довательно, и колебания напряжения.
73
Общим недостатком для обеих рассмотренных систем яв-
ляется относительно большая стоимость и относительно низ-
кий коэфициент полезного действия. Поэтому обе системы
применяются для привода главным образом двигателей повы-
шенной мощности.
§ 26. СПЕЦИАЛЬНЫЕ МЕТОДЫ РЕГУЛИРОВАНИЯ СКОРОСТИ
ВРАЩЕНИЯ САМОЛЕТНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
В ряде случаев применения электрического привода само-
летных механизмов возникает необходимость поддержания
постоянства скорости вращения.
Ниже приводится описание принципа действия центробежно-
вибрационного регулятора, применяемого • для поддержания
постоянной скорости вращения электродвигателя независимо
от изменений нагрузки и напряжения на его зажимах. Такого
типа регуляторы находят применение для электродвигателей
аэрофотоаппаратов, электрических бомбосбрасывателей и т. п.
Рис. 49. Электрическая
схема центробежно-ви-
брационного регулятора
с добавочным сопротив-
лением, включенным в
цепь якоря
Рис. 50. Электрическая
схема центробежно-вибра-
ционного регулятора с до-
бавочным сопротивлением,
включенным в цепь обмот-
ки возбуждения
На рис. 49 и 50 представлены электрические схемы регуля-
торов с добавочным сопротивлением в цепи якоря и в цепи
возбуждения. Как видно из этих схем, добавочное сопротивле-
ние /?д зашунтировано контактами К. Эти контакты нормально
замкнуты в первой схеме (рис. 49), следовательно, и добавоч-
ное сопротивление замкнуто накоротко.
Если включить электродвигатель, то якорь начинает вра-
щаться и скорость вращения его будет возрастать. Как только
скорость вращения достигнет установленного предела, контакты
разомкнутся и в цепь якоря окажется введенным сопротивле-
ние /?д. Вследствие этого скорость вращения начнет умень-
шаться, и при достижении наименьшего установленного пре-
дела контакты опять замкнутся и зашунтируют добавочное
сопротивление. Далее скорость вращения будет опять воз-
74
растать, пока не разомкнутся контакты, а затем опять умень-
шаться и т. д. Таким образом, контакты будут находиться
в состоянии непрерывной вибрации, при этом скорость вра-
щения электродвигателя будет периодически изменяться
в определенных пределах около некоторого среднего значения.
Размыкание контактов происходит под действием центро-
бежных сил (регулятор поэтому - и носит название — центро-
бежный), а замыкание под действием пружины.
Поскольку при размыкании контактов приходится преодо-
левать противодействие пружины, то от силы ее натяжения
зависит среднее значение скорости вращения. Изменяя натяже-
ние пружины, можно изменять среднюю скорость вращения.
Во второй схеме (рис. 50) контакты нормально разомкнуты.
При увеличении скорости вращения под действием центро-
бежных сил они замыкаются, шунтируя сопротивление 7?д. Это
приводит к увеличению тока возбуждения, а следовательно,
и магнитного потока Ф, что, в свою очередь, снижает скорость
вращения.
Так же как в первой схеме, контакты этого регулятора
находятся в состоянии непрерывной вибрации, поддерживая
заданное среднее значение скорости вращения.
Рис. 51. Схема угольного регулятора скорости вращения
Конденсатор С, включенный параллельно вибрирующим
контактам, служит для искрогашения.
Недостатком центробежно-вибрационного регулятора скоро-
сти является наличие контактов, непрерывно замыкающих
и размыкающих цепь тока. Это вызывает искрение на контак-
тах (конденсатор С только уменьшает искрение), которое,
создавая обгорание контактов, служит источником неисправно-
стей и, кроме того, увеличивает помехи радиоприему.
Для поддержания постоянной скорости вращения, наряду
с центробежно-вибрационным регулятором, применяетя уголь-
ный регулятор, не имеющий подвижных контактов и основан-
ный на свойствах столбика, набранного из угольных шайб,
изменять свое сопротивление с изменением давления.
Схема угольного регулятора скорости представлена на
рис. 51. На вал электродвигателя насажена пружина А мем-
бранного типа с двумя грузиками В, укрепленными на ней.
Пружина А передает через шарик, служащий для умень-
шения трения, давление на угольный столбик.
75
Если вследствие увеличения нагрузки на валу двигателя
скорость вращения становится меньше номинальной, то центро-
бежные силы, действующие на грузики В, уменьшаются, пру-
жина А распрямляется и уменьшается давление на угольный
столбик. Вследствие этого сопротивление угольного столбика
увеличивается, уменьшается ток в цепи обмотки возбуждения
и скорость вращения увеличивается, приближаясь вновь
к номинальной величине.
При уменьшении нагрузки на валу двигателя скорость вра-
щения увеличивается, центробежные силы, действующие на
грузики, возрастают, вследствие чего давление пружины на
угольный столбик увеличивается, сопротивление его умень-
шается и ток в цепи обмотки возбуждения возрастает, благо-
даря чему скорость вращения уменьшается, приближаясь
к номинальной величине.
Таким образом, при изменениях нагрузки на валу двига-
теля скорость ’вращения его стремится оставаться постоянной.
Кроме рассмотренных способов поддержания постоянства
скорости вращения электродвигателя, применяются также
стабилизаторы напряжения (автоматический реостат), обеспе-
чивающие подачу на зажимы электродвигателя строго постоян-
ного напряжения, независимо от возможного колебания напря-
жения бортовой сети самолета.
Наряду с необходимостью поддержания постоянной скорости
вращения электродвигателей в ряде случаев возникает необхо-
димость изменения скорости вращения в широких пределах.
Как это уже известно, изменением магнитного потока
можно производить лишь повышение скорости вращения,
соответствующей максимальному потоку. Изменением сопро-
тивления в цепи якоря можно производить понижение скорости
вращения почти до нуля, однако этот способ имеет существен-
ные недостатки.
Поэтому для плавного изменения скорости вращения элек-
тродвигателя в широких пределах применяется схема с перио-
дическим размыканием цепи якоря, изображенная на рис. 52.
Как видно из этой схемы, в цепь якоря включены контакты
реле 6, обмотка которого может приключаться к сети при
помощи контактов 1 и 2. Положение этих контактов опреде-
ляется положением эксцентриковых шайб 3 и 4. Верхняя
шайба 4 во время работы регулятора- неподвижна и может
поворачиваться вручную рукояткой 7, вызывая опускание или
поднятие контакта /. Нижняя шайба 3 приводится во враще-
ние от вспомогательного электродвигателя 5, благодаря чему
контакт 2 периодически замыкается и размыкается с контак-
том 1. Скорость вращения вспомогательного электродвигателя
такова, что частота замыкания и размыкания контактов соста-
вляет примерно 12 периодов в секунду. Так как контакты 1 и 2
включены последовательно с обмоткой реле, то его контакты
с такой же частотой размыкают цепь якоря электродвигателя.
76
Скорость электродвигателя колеблется около какого-то
среднего значения. Эго среднее значение скорости вращения
при регулировке может изменяться от максимальной величины,
соответствующей замкнутым контактам 1 и 2 и определяемой
скоростной характеристикой двигателя, до минимальной вели-
чины, близкой к нулю.
Рис. 52. Схема устройства для изменения скорости вращения элек-
тродвигателя путем периодического размыкания цепи якоря;
1 и 2 — контакты реле; 3 и 4—эксцентриковые шайбы; 5 — вспомогательный
электродвигатель; 6 — реле; 7 — рукоятка
Недостатком этой системы являются тяжелые условия
работы реле, периодически размыкающего цепь якоря. Вслед-
ствие частых замыканий и размыканий контакты его быстро
обгорают и выходят из строя.
§ 27. ЭЛЕКТРИЧЕСКОЕ 1 ОРМОЖЕНИЕ ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
При остановке двигателя, т. е. при отключении его от сети,
якорь двигателя останавливается не сразу, а вследствие инер-
ции вращающегося якоря и инерции вращающихся частей со-
единенного с ним исполнительного механизма медленно умень-
шает свою скорость.
Часто предоставленная самой себе такая система не скоро
останавливается, так как работа сил трения в системе оказы-
вается незначительной по сравнению с накопленной кинети-
ческой энергией вращающихся масс.
Если остановка двигателя должна произойти возможно
быстрее, почти одновременно с отключением его от источника
питания, то необходимо применить торможение двигателя ме-
ханическим или электрическим способом.
77
Электрическое торможение двигателей постоянного тока
может быть произведено при помощи так называемого дина-
мического торможения, сущность которого заключается в том,
что якорь вращающегося по инерции электродвигателя замы-
кают .или на реостат, или накоротко. Электродвигатель перехо-
дит в режим работы генератором, преобразовывая кинети-
ческую энергию вращающегося якоря в электрическую энер-
гию, выделяющуюся в виде джоулева тепла. При этом, по-
скольку генератор нагружен и вращение его происходит по
инерции, уменьшение скорости вращения якоря приведет
к его полной остановке.
Объяснить действие электрического тормоза можно еще
и иначе.
Как известно, ток в якоре электродвигателя во время его
работы может условно рассматриваться состоящим из двух
токов:
/ = Z7 _ Е-
я А-я R* •
Когда электродвигатель отключается от сети, то первого
и ,
тока у, быть не может, так как не будет напряжения на за-
жимах двигателя. Второй же ток ~ будет существовать,
"я
когда якорь будет замкнут накоротко. Этот-то ток и назы-
вается тормозным током, и так как он имеет в якоре обрат-
ное направление, то тормозной ток перемагничивает якорь,
который останавливается вследствие противодействия, оказы-
ваемого потоком полюсов.
Когда якорь остановится, то тормозного тока, конечно, не
будет, так как противоэлектродвижугцая сила Еп будет равна
нулю.
Если якорь замкнут на какое-либо сопротивление, то вели-
чина тормозного тока
, _ Еп
и торможение двигателя будет слабее.
В случае реверсивного сериесного двигателя с двумя об-
мотками возбуждения (рис. 53) для осуществления динами-
ческого торможения после отключения переключателя К не-
обходимо замкнуть выключатель /, если переключатель стоял
в положении а, и выключатель 2, если переключатель К стоял
в положении Ь. Очевидно, при этом направление магнитного
потока при переходе от двигательного режима к генератор-
ному будет оставаться неизменным и условия самовозбужде-
ния не будут нарушены.
В некоторых случаях требуется быстрое торможение элек-
тродвигателя с последующим изменением направления враще-
78
ния. Это бывает необходимо, например, при электромехани-
ческом приводе винта изменяемого шага.
Достигается такое торможение с последующим реверсиро-
ванием или изменением направления магнитногр потока, или
же изменением направления тока в обмотке якоря. Происхо-
дящий при этом процесс торможения электродвигателя назы-
вают торможением противотоком.
Рис. 54. Схема тор-
можения электро-
двигателя противо-
током
Примером торможения противотоком может служить ревер-
сирование самолетного сериесного электродвигателя (рис. 54),
схема которого более подробно рассматривалась выше.
При переключении выключателя из положения 1 в положе-
ние 2 изменяется направление потока возбуждения, вследствие
чего изменяется направление вращающего момента и происхо-
дит торможение якоря электродвигателя.
§ 28. ПРИМЕНЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
РАЗЛИЧНОГО ВОЗБУЖДЕНИЯ В САМОЛЕТНОМ ЭЛЕКТРОПРИВОДЕ
Рассмотренные в настоящей главе механические и электри-
ческие свойства электродвигателей постоянного тока различ-
ного возбуждения определяют области применения их для
самолетного электропривода.
Сериесные электродвигатели в самолетных элек-
троприводах применяются чаще всего. Применение их особенно
выгодно в случае привода реверсивных исполнительных меха-
низмов тогда, когда стабильность скорости вращения не очень
важна, и в особенности для привода механизмов с большими
пусковыми сопротивлениями, резко меняющимися в процессе
работы.
В качестве примеров использования сериесных электродви-
гателей можно привести привод органов управления самоле-
том, привод закрылков, жалюзи радиаторов и т. п.
79
Шунтовые электродвигатели применяются в тех
случаях, когда требуется сохранение примерно постоянной
скорости вращения, где нет резких изменений момента сопро-
тивления исполнительного механизма, способных вызвать рез-
кие колебания* потребляемой двигателем мощности, где не
требуется изменения направления вращения. Шунтовые дви-
гатели сравнительно плохо работают при перегрузках и по-
этому следует избегать применения их в механизмах, где
возможны значительные перегрузки и где пусковой момент
должен быть большим.
Примерами использования шунтовых электродвигателей
могут служить: привод бензонасоса, привод механизмов аэро-
фотоаппаратов, привод механизмов электросбрасывателей и т. п.
Компаундные электродвигатели в самолетных
электроприводах применяются сравнительно редко. Необходи
мость в их применении возникает в тех случаях, когда испол-
нительные механизмы при пуске в ход требуют увеличенных
вращающих моментов, а во время работы (в особенности дли-
тельной) испытывают резкие изменения нагрузки, причем
скорость вращения не должна резко колебаться и должна
быть ограничена при холостом ходе, когда нет необходимо-
сти в реверсировании.
Примером применения компаундного электродвигателя
может служить электрогидравлический привод шасси.
§ 29. АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
Если на самолете используется переменный ток, то в каче-
стве электродвигателей рационально использовать асинхрон-
ные двигатели.
Асинхронные двигатели являются вообще наиболее распро-
страненными электрическими двигателями в технике. Это
Рис. 55. Принцип работы асинхронного двига-
теля:
а — вращение диска; б — вращение якоря электродвига-
теля; 1 — ролик; 2 — ремень; 3 — диск
80
в подавляющем большинстве случаев двигатели трехфазного
тока.
Изобретение трехфазного асинхронного двигателя принад-
лежит выдающемуся русскому изобретателю и инженеру
М. О. Доливо-Добровольскому.
Для выяснения принципа устройства и работы асинхрон-
ного двигателя рассмотрим следующий опыт.
На оси при помощи ролика / и ремня 2 может вращаться
подковообразный магнит NS (рис. 55,а), против которого на
другой оси помещен металлический (медный или алюминие-
вый) диск 3. Если начать вращать подковообразный магнит,
то диск 3 также начнет вращаться в ту же сторону, посте-
пенно увеличивая свою скорость, но наибольшая скорость
вращения диска всегда немного меньше скорости вращения
магнита AS.
Объяснить этот опыт можно весьма просто. Действительно,
силовые линии магнита NS пронизывают металлический диск 3,
а когда магнит вращается, то эти силовые линии также вра-
щаются, пересекая и индуктируя в диске токи рассеяния. По
закону Ленца, индуктированные токи имеют такое направле-
ние, что они противодействуют вращению магнита, стараясь
его задержать; однако они этого сделать не могут, и сам
"диск 3 увлекается магнитом в ту же сторону.
Диск 3 не может достигнуть скорости вращения, равной
скорости вращения магнита NS, по той причине, что только
при некоторой разности скоростей части диска будут пере-
секаться магнитными силовыми линиями; при равенстве ско-
ростей токи рассеяния в диске
индуктироваться не будут, а по-
тому не будет и силы взаимодей-
ствия между диском и магнитом.
Рассмотрим теперь систему, со-
стоящую из вращающихся магнитов
с полюсами NS, между которыми
на валу расположен цилиндр, на-
бранный из отдельных листов стали
(рис. 55,6). На периферии цилиндра,
в пазах, расположенных парал-
лельно оси цилиндра, уложен ряд
проводников, соединенных на кон-
цах кольцами. Эти проводники с
Рис. 56. Беличье колесо
боковыми кольцами образуют так называемое беличье ко-
лесо (рис. 56). Асинхронный двигатель, имеющий такое
устройство ротора (ротором называется вращающаяся часть
машины), носит название двигателя с короткозамкнутым ро-
тором. х.
При вращении полюсов, а следовательно, и магнитного
поля в проводниках ротора будут индуктироваться электродви-
жущие силы. С появлением этих электродвижущих сил, напра-
6— Электропривод па самолете
81
Ьлеййе котбрйтх мо&но определить пользуясь правилом пра-
вой руки, в проводниках ротора будут проходить токи.
На рис. 55,6 в проводниках верхней половины ротора токи
направлены из-за плоскости чертежа на наблюдателя, а в ниж-
ней половине — от наблюдателя за плоскость чертежа.
В результате взаимодействия этих токов с магнитным полем
полюсов появятся силы FF, действующие на проводники
ротора. Применение правила левой руки показывает, что
направление этих сил совпадает с направлением вращения
магнитного поля. Таким образом, на ротор будет действовать
вращающий момент, который приведет его во вращение
в направлении вращения магнитного поля.
Так же, как и в рассмотренном выше опыте, скорость
вращения ротора никогда не может достигнуть скорости вра-
щения магнитного поля, ибо в этом случае не было бы дви-
жения проводников относительно магнитного поля и, следо-
вательно, в роторе не было бы тока.
Поэтому данный двигатель называется асинхронным, в отли-
чие от синхронных, у которых скорость вращения ротора
равна скорости вращения магнитного поля.
82
Устройство ротора в виде беличьего колеса позволяет уве-
личить к. п. д. двигателя. Объясняется это тем, что создают
вращающее усилие только те токи, направление которых
параллельно оси барабана, и если бы последний был сплош-
ным, то токи имели бы различное направление.
Для этой же цели, т. е. чтобы избежать непроизводитель-
ных потерь на нагрев железа токами рассеяния, сердечник
ротора выполняется из отдельных железных листов, изолиро-
ванных один от другого.
В асинхронных двигателях вращающееся магнитное поле
создается не вращением полюсов магнита или электромагнита,
а неподвижной обмоткой статора (статором называется непо-
движная часть* машины) при прохождении по ней перемен-
ного, обычно трехфазного, тока.
Рассмотрим, как при этом получается вращающееся ма-
гнитное поле. Для этой цели возьмем три одинаковые непо-
движные катушки, сдвинутые в пространстве одна относи-
тельно другой на угол в 120°. По этим катушкам пропустим
трехфазный ток (рис. 57): по первой катушке ток по вто-
рой катушке ток г2 и по третьей катушке ток г3, причем эти
три тока сдвинуты по фазе на одну треть периода--------^-Т
(рис. 58).
Приняв за положительное направление тока направление
от начала к концу катушки, нанесем направление токов
в катушках для различных моментов времени (£,, t2, L,, t4).
На рис. 57 начало каждой катушки обозначено буквой Н
и конец ее буквой К.
Для момента времени (рис. 57,а)
ток в катушке 1 отсутствует, в ка-
тушке 2 имеет отрицательное напра-
вление и поэтому в начале ее напра-
влен на наблюдателя, а в катушке
3 — положительное, значит, в начале
этой катушки ток направлен от на-
блюдателя.
Каждый из токов i2, ц создает
магнитное „поле. Магнитные поля,
созданные отдельными токами, скла-
дываются, образуя результирующее
магнитное поле.
На рис. 57,а видно, что результирующее поле вначале
направлено снизу вверх.
Соответственно для момента времени t2 = Т (рис. 57,6)
в катушке 3 ток отсутствует, в катушке 2 направление тока
остается отрицательным и в катушке / положительное
направление тока.
Рис. 58. Графики . трех
токов, создающих враща-
дощееся магнитное поле
6*
83
Из этого рисунка видно, что за время Т магнитное поле
0 1
повернулось в направлении вращения часовой стрелки на
1 о
часть оборота, т. е. на 60°. За следующую — часть периода
магнитное поле опять повернется на угол 60° и т. д.
Ив сказанного ясно, что при протекании токов трехфазной
системы по трем катушкам, смещенным одна относительно
другой на 120°, создается вращающееся магнитное поле, кото-
рое в течение периода совершает один
оборот (поворачивается на угол в 360°).
В общем случае число оборотов маг-
нитного поля в минуту будет
Рис. 59. Расположение
зажимов обмоток статора
р
(74)
где / — частота переменного тока, гц\
р — число пар полюсов.
Статорная обмотка, создающая вра-
щающееся поле, укладывается в пазах
ярма, собранного из листовой стали. Для
создания двухполюсного вращающегося
магнитного поля обмотка статора должна
состоять из трех катушек или трех групп катушек. Для со-
здания четырехполюсного поля необходимо иметь в два раза
большее число катушек, т. е. шесть катушек или шесть групп
катушек и т. д.
Рис. 60. Соединение
Зажимов обмоток ста-
тора для получения
соединений звездой
Рис. 61. Соединение
зажимов обмоток ста-
тора для получения
соединений треуголь-
ником
Обмотки статора трехфазного двигателя соединяются звез-
дой или треугольником. Начала и концы обмоток оканчиваются
зажимами, которые располагаются на щитке, укрепленном на
статоре двигателя.
На рис. 59 показано расположение зажимов обмоток, а на
рис. 60 и 61 — соединение этих зажимов Для включения обмо-
ток звездой и треугольником.
84
Обмотки трехфазного асинхронного двигателя рассчиты-
ваются на определенное номинальное фазное напряжение.
Если линейное, напряжение сети, к которой присоединяется
двигатель, равно номинальному фазному напряжению двига-
теля, то его обмотки соединяются треугольником. Если линей-
ное напряжение сети в |/3 раз выше номинального фазного
напряжения двигателя, то обмотки его соединяются звездой.
1 (апример, при напряжении сети U — 380 s и номинальном
фазном напряжении двигателя 220 в его обмотки должны
быть соединены звездой.
Таким образом, каждый двигатель имеет два номинальных
напряжения, отличающихся одно от другого в уЗ раз. Ротор
асинхронного двигателя выполняется или с короткозамкнутой
обмоткой в виде беличьего колеса (рис. 56), или с так называемой
фазной обмоткой, аналогичной обмотке статора (рис. 62).
Рис. 62. Принципиальная схема асинхронного двига-
теля с фазной обмоткой ротора и пусковым рео-
статом
Концы такой фазной обмотки соединяются вместе, образуя
нулевую точку, а начала обмоток соединяются с тремя мед-
ными изолированными кольцами, укрепленными на валу дви-
гателя. На кольца накладываются щетки, при посредстве
которых последовательно с обмотками ротора соединяются
сопротивления пускового реостата.
Этот тип двигателя находит широкое применение в про-
мышленных установках.
Выше уже отмечалось, что ротор не может вращаться
с синхронной скоростью и всегда отстает от магнитного поля
статора. Если обозначить скорость вращения ротора «р,а ско-
рость вращения магнитного поля статора пс, то разность ско-
ростей вращения поля статора и ротора пс — п , отнесенная
к скорости вращения поля статора пс, носит название с к о.л ь-
ж е н и я, обозначается буквой 5 и выражается формулой
S^-^- (75)
с
85
Воспользовавшись формулой (75', выразим скорость вра-
щения ротора через скорость вращения, магнитного поля ста-
тора и скольжение
ир = (1-5)ис,- (76)
1 ак как частота переменного тока f = , то, очевидно,
частота тока в роторе
- _Р-пс nc-nv
Р 60 60 пс °- {
Таким образом, частота тока в роторе пропорциональна
скольжению и, следовательно, зависит от скорости вращения
ротора. При неподвижном роторе 51 и /р =/с, наоборот,
если бы скорость вращения ротора достигла скорости враще-
ния магнитного поля статора, то 5 = 0 и /р‘— 0-
Асинхронные двигатели, так же как и двигатели постоян-
ного тока, обладают способностью автоматически, без помощи
каких-либо регуляторов, изменять свой момент вращения при
всяком изменении момента сопротивления исполнительного
механизма.
Этот процесс происходит следующим образом.
Если нагрузка, увеличивается, то тормозной момент вызы-
вает уменьшение скорости вращения ротора. Следовательно,
возрастает относительная скорость
движения проводников ротора в
магнитном поле, что приводит к
увеличению наводимой в роторе
электродвижущей силы и тока. Это,
в свою очередь, вызывает увеличе-
ние вращающего момента до вели-
чины, равной тормозному моменту.
Итак, при постоянном напря-
жении на зажимах двигателя, при
Рис. 63. Зависимость вращаю-
щего момента асинхронного
двигателя от скольжения
изменении нагрузки, а следова-
тельно, и скольжения вращающий
момент двигателя изменяется. Эта
зависимость представлена на рис. 63.
Из рассматриваемой характеристики видно, что при синхронной
скорости вращения (5 — 0) момент, развиваемый двигателем,
равен нулю. По мере уменьшения скорости вращения, что
соответствует увеличению скольжения, вращающий момент
увеличивается и при некотором значении скольжения 5М дости-
гает максимального значения 7Итах, после чего при дальнейшем
увеличении скольжения вращающий момент уменьшается.
При увеличении нагрузки на валу электродвигателя в пре-
делах от Л1 — 0 до М = 7Итах скорость вращения уменьшается,
86
а вращающий момент возрастает до величины, при которой
он уравновешивает момент нагрузки. Если же момент нагрузки
превысит максимальный момент двигателя /Итах, то, несмотря
на уменьшение скорости вращения, вращающий момент дви-
гателя уменьшается вплоть до остановки двигателя. Поэтому
участок характеристики от 5 = 5М до 5 = 1 является не-
устойчивым, а момент /Итах носит название опрокидываю-
щего момента. В соответствии с этим рабочим участком
характеристики асинхронного двигателя является участок от
5 = 0 до 5 — 5М . На этом участке скорость вращения с уве-
личением момента уменьшается сравнительно мало и скорост-
ная характеристика асинхронного двигателя является жесткой
характеристикой, как в случае шунтового двигателя.
Ток, потребляемый асинхронным двигателем в рабочем
диапазоне изменения нагрузки, изменяется примерно пропор-
ционально изменению момента.
В этом отношении свойства асинхронного двигателя также
подобны свойствам шунтового двигателя.
ЛАаксимальный момент асинхронного короткозамкнутого
двигателя нормальной конструкции лишь в два-три раза
больше номинального, тогда как максимальный момент двига-
теля постоянного тока в шесть-семь раз больше номиналь-
ного. Но при специальном выполнении короткозамкнутых
асинхронных двигателей опрокидывающий момент можно
довести до четырехкратного от номинального.
Достоинствами асинхронных электродвигателей с коротко-
замкнутым ротором являются простота конструкции, меньший
вес по сравнению с двигателем постоянного тока на напряже-
ние 24 в, отсутствие коллектора и щеток, значительно ослож-
няющих работу двигателей постоянного тока на больших
высотах, а иногда делающих применение этих двигателей на
больших высотах практически невозможным.
К недостаткам асинхронного двигателя с короткозамкну-
тым ротором следует отнести невозможность получения мяг-
кой характеристики., желательной в некоторых случаях само-
летного электропривода; трудность получения больших отно-
шений пускового момента к номинальному моменту; трудность
регулирования скорости вращения.
Вообще говоря, скорость вращения короткозамкнутого
асинхронного двигателя можно регулировать посредством вве-
дения сопротивления в. цепь обмотки статора. Однако этот
способ регулирования скорости вращения короткозамкнутого
асинхронного двигателя ведет к резкому снижению вращаю-
щего момента двигателя, так как последний пропорционален
квадрату напряжения (Л4 = KU1}.
Асинхронные электродвигатели с короткозамкнутым рото-
ром, начинающие находить применение в самолетном электро-
приводе в связи с применением переменного тока на самоле-
87
тах, значительно отличаются от обычных асинхронных электро-
двигателей на частоту 50 гц.
Расчет показывает, что вес электродвигателя тем меньше,
чем выше его номинальная скорость вращения.
Синхронная скорость вращения асинхронных электродви-
гателей, как известно, определяется формулой
р
Из этой формулы следует, что при применении нормаль-
ной частоты 50 гц максимально возможная скорость вращения
двигателя составляет 3000 об/мин и для получения более
высокой скорости вращения, а следовательно, и более легкого
Двигателя необходимо применять повышенную частоту.
Исследования влияния частоты на размеры и вес асинхрон-
ных электродвигателей и трансформаторов самолетного типа
показали, что оптимальной частотой переменного тока для
самолетов является частота 400 гц, при которой наибольшая
возможная скорость вращения электродвигателей составляет
24 000 обIмин.
Вес асинхронных электродвигателей самолетного типа при
частоте 400 гц примерно на 4О°/о меньше веса электродвига-
телей постоянного тока, рассчитанных на 24 в, имеющих ту
же номинальную мощность и скорость вращения. В связи
с этим в последние годы была установлена как наиболее
рациональная для тяжелых самолетов трехфазная система при
частоте 400 гц с нейтралью, соединенной с корпусом самолета,
линейным напряжением 208 в и фазовым 120 в. Наличие ней-
трали, соединенной с корпусом самолета в сочетании с соеди-
нением обмотки статора двигателя звездой, позволяет увели-
чить надежность работы электродвигателя при простреле про-
водов. При простреле одного провода электродвигатель может
работать как двухфазный, при простреле двух проводов — как
однофазный.
Во многих случаях самолетные электродвигатели должны
иметь большие кратности пусковых моментов. В связи с этим
асинхронные электродвигатели самолетного типа выполняются
с глубоким пазом для обмотки ротора и беличьей клеткой из
латуни, обладающей значительно большим удельным сопро-
тивлением, чем медь.
Высокие скорости вращения электродвигателей, которые
можно получить при токе частотой 400 гц, позволяют значи-
тельно увеличить мощность, приходящуюся на единицу веса.
Одновременно с увеличением полезной мощности увеличи-
ваются также и потери, приходящиеся на единицу веса,
поскольку коэфициент полезного действия электродвигателей
является, примерно, постоянной величиной. Поэтому для под-
держания температуры электродвигателей в допустимых пре-
88
делах они выполняются с интенсивной вентиляцией. Наряду
с интенсивной вентиляцией, для того чтобы противостоять
большим температурам, Применяют обмотку статора с особо
теплостойкой изоляцией.
В заключение следует отметить, что для изменения напра-
вления вращения асинхронного двигателя нужно изменить
направление вращения магнитного поля, а для этого, в свою
очередь, достаточно поменять местами два линейных провода,
идущих к двигателю от сети. Такое переключение весьма
просто осуществить при помощи двухполюсного переклю-
чателя.
ГЛАВА ПЯТАЯ
ЭЛЕКТРОМЕХАНИЗМЫ УПРАВЛЕНИЯ САМОЛЕТОМ
И МОТОРОМ
§ 30. ОБЩИЕ СООБРАЖЕНИЯ ПО ВЫБОРУ И КОМПОНОВКЕ
ЭЛЕКТРИЧЕСКОГО ПРИВОДА
Для управления самолетом и его агрегатами применяются
различные электромеханизмы.
Электромеханизмы обеспечивают возможность дистанцион-
ного запуска авиадвигателей и управления: шасси, посадоч-
ными и тормозными щитками, заслонками, жалюзи водо-
и маслорадиаторов, створками бомболюков, триммерами рулей
и элеронов, установкой угла атаки стабилизатора и т. п.
Принципиально любая операция, которую необходимо
выполнить летчику или членам экипажа, может быть автома-
тизирована и заменена каким-либо исполнительным электроме-
ханизмом.
Задача заключается лишь в том, чтобы данный электро-
механизм был как можно более простым, не очень громозд-
ким, надежным и удобным в эксплоатации.
В зависимости от назначения кинематика и конструкция
отдельных механизмов могут значительно различаться между
собой, но в общем каждый комплектный электромеханизм'
состоит из электродвигателя, редуктора с выходным устрой-
ством, аппаратуры управления и пусковых, ограничительных
и специальных устройств.
Для наиболее распространенных приводов нашей промыш-
ленностью разработаны стандартные электромеханизмы, кото-
рые нашли широкое распространение в отечественной авиации.
Чтобы приближенно выбрать двигатель для электропривода
и наметить схему передаточного механизма, необходимо иметь
сведения о характере и режиме работы исполнительного ме-
ханизма, а также знать его нагрузочную диаграмму.
При выборе электродвигателя для привода необходимо
знать величину приведенного момента статического сопроти-
вления в зависимости от положения рабочего механизма, ско-
90
рости или времени, а также величину приведенного момента
инерции системы.
Приведение моментов статического сопротивления и момен-
тов инерции, как указывалось в главе второй, производится
обычно к валу электродвигателя.
Если приведенный момент инерции является переменной
величиной, что Справедливо для большинства самолетных ме-
ханизмов, то необходимо знать величину его в зависимости
от положения механизма.
Для большинства самолетных механизмов приведенный
момент статического сопротивления также изменяется при
изменении положения механизма. Это происходит за счет
изменения внешних сил, действующих на отдельные звенья
механизмов при перемещении их из одного положения в дру-
гое, а также за счет изменения положения отдельных звеньев.
Поэтому для самолетных механизмов приходится пользо-
ваться нагрузочными диаграммами, построенными в функции
положения механизма, определяемого или углом поворота
выходного вала, или линейным перемещением подвижного
органа.
Даже весьма поверхностное ознакомление с характером
и режимом работы исполнительного механизма дает возмож-
ность в первом приближении подобрать тип двигателя.
Если исполнительный механизм работает циклически, имеет
малый ход, небольшие габариты и время срабатывания его
должно быть малым, лучше использовать электромагнит.
Особенно выгодно использовать электромагнит в тех случаях,
когда сопротивление исполнительного механизма будет нара-
стать по мере перемещения механизма, причем статическое
сопротивление во время пуска будет минимальным. Такой ход
кривой статического сопротивления совпадает с тяговой харак-
теристикой электромагнита.
Для привода самолетных механизмов, имеющих относительно
большой ход и большие габариты, там, где нужно создать
значительный момент на валу исполнительного механизма или
значительные тяговые усилия, лучше всего применять электро-
двигатели. Какой тип электродвигателя лучше применить,
решается в каждом случае отдельно, но в основном в авиа-
ционном электроприводе используются сериесные двигатели
с обычной или реверсивной схемой соединения обмотки воз-
буждения, однако в отдельных случаях для специальных при-
водов применяются шунтовые и компаундные двигатели.
Самолетные электродвигатели в целях уменьшения их
веса и габаритных размеров делаются высокооборотными.
В то же время подвижные элементы объектов, которыми
управляют электромеханизмы, совершает относительно неболь-
шие угловые и линейные перемещений.
Вместе с тем моменты, необходимые для перемещения этих
элементов, в несколько десятков, а иногда и в сотни раз пре-
91
вышают моменты, которые развивают электродвигатели на вы-
ходном валу. Это вызывает необходимость применения редук-
торов с большими передаточными числами для осуществления
связи между валом электродвигателя и исполнительным меха-
низмом.
Редукторы обеспечивают уменьшение скорости вращения
исполнительного механизма до нескольких оборотов в минуту
и увеличивают момент на выходном валу устройства примерно
во столько же раз.
Передаточное число между электродвигателем и исполни-
тельным механизмом определяется как отношение номиналь-
ной скорости вращения электродвигателя к средней скорости
вращения, или угловой скорости, выходного вала исполнитель-
ного механизма.
В самолетных электрических механизмах применяются сле-
дующие системы редукторов:
— диференниально-планетарные;
— червячные;
— шестеренчатые.
Эти типы редукторов применяются или раздельно, или
в сочетании двух иди трех типов.
В отечественных механизмах малой мощности большое
распространение получили диференциально-планетарные системы
редукторов. В некоторых механизмах к диференциально-пла-
нетарным редукторам добавляются еще червячная или шесте-
ренчатая пара.
Для механизмов большой мощности применяются червяч-
ные редукторы. Диференциально-планетарные редукторы имеют
меньший вес и габариты, чем червячные (при больших пере-
даточных числах), но они имеют более низкий к. п. д. и менее
надежны в эксплоатации.
После того как найдено передаточное число и определен
тип редуктора, можно выбрать схему и наметить основные
данные конструкции передаточного механизма.
Часто передаточные’ механизмы для самолетных электро-
приводов выполняют в одном корпусе с электромотором или
электромагнитом.
Примером такого исполнения могут служить агрегаты
дистанционного управления. Они представляют собой электро-
механизмы, предназначенные для дистанционного управления
различными агрегатами самолета и его моторов, а именно:
У Т-1 и УТ-2 для управления триммерами рулей направле-
ния или руля высоты;
У Т-3 для управления триммерами элерона;
А П-1 и АП-З для управления триммером руля высоты при
работе по специальной*схеме;
У Н-1 для управления переключением скоростей нагнетателя
авиамотора;
92
УР-2 и УР-6 для управления заслонками и жалюзи водя-
ных и масляных радиаторов (УР-2 может быть использован
для управления створками капотов авиамоторов);
ГРИ1-1 для управления воздушными тормозами или поса-
дочными щитками;
УФ-3 для управления посадочной самолетной фарой;
УС-1 для управления стабилизатором.
Механизмы дистанционного управления (ДУ) Состоят из
редукторов, электродвигателей типа МУ, приводящих их
в движение, контактных устройств; некоторые из них имеют
тормозные устройства (АП-1; АП-З; УФ-3) и фрикционные
муфты (УН-1).
Все механизмы выполнены закрытыми, экранированными
и могут работать в любых положениях: горизонтальном, вер-
тикальном и наклонном.
§ 31. ЭЛЕКТРОДВИГАТЕЛИ ТИПА МУ
Электродвигатели типа МУ-30; МУ-50; МУ-101; МУ-101АП;
МУ-110; МУ-431; МУ-511; МУ-611; МУ-1000 предназначаются
в основном для приведения в действие механизмов ДУ.
Наименование этих типов электродвигателей читается сле-
дующим образом:
МУ — мотор управления;
30, 50, 101, 1000 — габариты и особенности конструктивного
исполнения;
АП—электродвигатель специального назначения для агре-
гата АП.
В электродвигателях МУ-110; МУ-431; МУ-511; МУ-611 пер-
вая цифра (1, 4, 5, 6) обозначает диаметр по шкале электро-
двигателей; вторая (1, 3, 1, 1) длину по той же шкале; третья
(0, 1, 1, 1) особеннности конструктивного исполнения.
Примечание. По шестигабаритной шкале электро-
двигатель МУ-30 имеет наименование МУ-210; МУ-50 —
МУ-310; МУ-100 -МУ-320; МУ- 100АП МУ-322 и
МУ-1000-МУ-610.
Электродвигатели типа МУ, кроме МУ-611, имеют сериес-
ное возбуждение и выполнены реверсивными.
Реверсирование осуществляется изменением полярности
полюсов при сохранении направления тока в обмотке якоря.
Для этой цели двигатели снабжены двумя .самостоятельными
обмотками возбуждения, расположенными на разных полюсах.
Пуск в ход электродвигателей производится включением в сеть
обмотки якоря и одной из обмоток возбуждения. При этом,
как видно из схем, приведенных на рис. 64, 65 и 66, вторая
обмотка возбуждения, оставаясь разомкнутой, бездействует.
Полюсы, на которых она размещена, выполняют функции
только магнитопровода и получают принудительную полярность,
93
противоположную полярности Соседних полюсов с обмоткой,
обтекаемой током.
Как ' видно из рис. 66, в схему МУ-511 введен четвертый
провод, служащий для электродинамического торможения
якоря путем замыкания на-
коротко его обмотки при
выключении электродвига-
теля.
Необходимо помнить, что
одновременное включение
обеих обмоток возбуждения
недопустимо, так как вле-
чет за собой ’ неизбежный
Рис. 64. Схема электродвигателей МУ-30,
МУ-50, МУ-100АП, МУ-101, МУ-110
выход двигателя из строя.
Электродвигатель типа
МУ-611 имеет компаундное
возбуждение с согласным
включением обмоток и выпускается заводом на одно правое
вращение.
Схема соединений его обмоток приведена на рис. 67.
Как следует из этой схемы, сериесная и шунтовая обмотки
возбуждения двигателя МУ-611 размещены на различных по-
люсах, чем облегчается его сборка и монтаж.
Рис. 65. Схема электродвигателей МУ-431, МУ-1000
Все электродвигатели выполнены закрытыми, экранирован-
ными и состоят из следующих основных узлов; корпуса
с полюсами и катушками возбуждения, якоря с обмоткой
и коллектором, переднего щита (со стороны выступающего
конца вала) и заднего щита (со стороны коллектора).
94
корпус электродвигателей изготовляется из мягкой ст*алй
и, кроме магнитных функций, служит также для механической
связи узлов двигателя (якоря и щитов) между собой.
Рис. 66. Схема электродвигателя МУ-511
В корпусе закрепляются полюсы с катушками возбужде-
ния. Последние намотаны изолированным проводом, а снаружи
для защиты от механических повреждений покрыты хлопчатобу-
мажной лентой и пропитаны под вакуумом изоляционным лаком.
95
Полюсы, являясь элементом магнитопровода электрической
машины, у большинства двигателей сделаны сплошными,
из мягкой отожженной стали. У некоторых двигателей (МУ-431
и МУ-511) для уменьшения потерь от паразитных токов рас-
сеяния полюсы 'набраны из листовой электротехнической
стали толщиной 1 мм.
Электродвигатели типа МУ-30; МУ-50; МУ-100АП; МУ-101;
МУ-110 имеют по два полюса; МУ-431; МУ-511; МУ-611;
МУ-1000 по четыре.
Якорь состоит из пакета железа, набранного из тонкой
листовой электротехнической стали. Для предохранения об-
мотки якоря от выбрасывания из пазов под действием центро-
бежных сил, возникающих во время вращения, пазы закры-
ваются жесткими изоляционными клиньями, а на лобовые
части обмоток якоря накладываются специальные бандажи.
Пакет якоря и коллектор напрессовываются на вал. Перед-
ние щиты металлические и у большинства двигателей выпол-
нены из алюминиевого сплава. Все щиты имеют гнезда для
шарикоподшипников, а некоторые из них, кроме того, имеют
фланцы с бортиками и отверстиями для соединения с меха-
низмами. •
В электродвигателях МУ-511; МУ-611; МУ-1000 передний
щит не имеет отверстий для прохода выводных концов, которые
подводятся к зажимам, расположенным в коллекторном щите.
В электродвигателе МУ-1000 зажимные болты имеют сна-
ружи щита обозначения 1, 2. Зажим / соответствует зажиму Я
(см. рис. 65), а зажимы 2—концам обмотки возбуждения.
Задние щиты у большинства электродвигателей также
металлические (исключение составляют МУ-431; МУ-511;
МУ-611) и имеют гнезда для обойм шарикоподшипников. В этих
щитах размещены щеткодержатели, снабженные пружинами,
нажимающими на щетки с определенным (нерегулируемым)
усилием.
Для доступа к коллектору и к щеткам в щите прорезаны
окна, закрывающиеся защитной лентой.
Для предохранения коллектора и обмотки якоря от попа-
дания смазки с шарикоподшипников последние закрыты спе-
циальными маслозащитными шайбами, надетыми на вал.
Для двигателей мощностью до 1000 вт номинальным ре-
жимом работы считается 1 минута работы при номинальной
мощности с последующим перерывом на 10 минут, а для
электродвигателей мощностью более 1000 ит — работа по
10 секунд в обоих направлениях вращения при номинальной
мощности с последующим перерывом на 10 минут.
Практически при нормальной эксплоатации самолета этот
режим выдерживается автоматически, так как исполнительные
механизмы, приводимые во вращение этими двигателями,
требуют для перекладки подвижного органа из одного край-
него положения в другое меньшего времени.
96
§ 32. РЕДУКТОРЫ
Редукторы применяются в механизмах ДУ для уменьшения
числа оборотов, передаваемых от электродвигателя к выход-
ному валу, и увеличения
На рис. 68 показан
диференциально-плане-
тарный редуктор. Кон-
струкция такого редук-
тора позволяет при не-
больших габаритах по-
лучать большие пере-
даточные числа.
На эксцентриковую
ось 4 на подшипнике
(в УР-2 на двух под-
шипниках) посажена
двойная так называе-
мая сателлитовая ше-
стерня (2 и 3). Ше-
стерня 2 (большего
диаметра) находится в
его крутящего момента.
Рис. 68. Редуктор диференциально-планетар-
ного типа:
1 — неподвижная шестерня; 2 и 3 — сателлитовая ше-
стерня; 4 — эксцентриковая ось; 5 — ведомая шестерня
3 (меньшего диаметра) сцепляется с
Последняя в большинстве механизмов
зацеплении с непо-
движной шестерней /,
закрепленной в корпусе
редуктора, а шестерня
ведомой шестерней 5.
представляет собой одно целое с выходным валом редуктора
и называется колокольной шестерней.
Эксцентриковая ось сцепляется с валом электродвигателя
и, вращаясь в шарикоподшипниках, заставляет сателлитовую
шестерню 2 обкатываться по неподвижной шестерне 1.
Сателлитовая шестерня 2, имея меньший диаметр, а сле-
Рис. 69. Устройство червячного редуктора:
1 — червячный винт; 2 — червячная шестерня; 3 — хо-
довой винт
довательно, и меньшее
количество зубьев, будет
передвигаться относи-
тельно неподвижной ше-
стерни за каждый оборот
эксцентрика (электродви-
гателя) на количество
зубьев, равное разности
зубьев неподвижной и
сателлитовой шестерен.
Таким образом, сател-
литовая шестерня, обка-
тываясь по неподвижной,
одновременно будет вра-
щаться вокруг своей оси.
Вторая сателлитовая ше-
7—Электропривод на самолете
97
стерня 3, будучи наглухо соединенной с шестерней 2, также
будет вращаться вокруг своей оси и благодаря эксцентрико-
вой оси обкатываться по ведомой (колокольной) шестерне, за-
ставляя ее вращаться.
На рис. 69 дан чертеж червячного редуктора, сделанного
в виде червячной пары, в которой червячный винт 1 ведущего
валика редуктора сочленен с ведомой червячной шестерней 2.
Втулка этой шестерни связана с выходным валом агрегата
при помощи шлицевого или резьбового соединения и в по-
следнем случае является маточной гайкой для выходного
ходового винта 3.
Передаточное число определяется числом зубцов червячной
шестерни и количеством заходов червяка.
Рис. 70. Устройство угловой передачи:
1 — ведущая шестерня; 2 — ведомая шестерня; 3 — ходовой винт
Так, при однозаходном червяке за один оборот винта (чер-
вяка) червячная шестерня повернется на один зуб.
Угловая передача (рис. 70) состоит из двух шестерен
с косыми зубьями, сочлененных под углом 90° одна к другой,
благодаря чему выходное устройство располагается перпенди-
кулярно к продольной оси агрегата. Ведущая шестерня 7
посажена на вал редуктора и сцеплена с ведомой шестерней 2,
втулка которой имеет резьбу и является маточной гайкой для
выходного ходового винта 3, оканчивающегося ушком для
сцепления с тягой управляемого органа.
§ 33. ТОРМОЗНЫЕ УСТРОЙСТВА
Для- обеспечения точности углов поворота выходного вала,
т. е. для устранения влияния инерционного выбега электро-
двигателя после выключения тока, в механизмах АП-1 и АП-З
применена специальная электромагнитная муфта типа ЭММ-2,
а в механизме УФ-3 — электромагнитный тормоз.
1. Электромагнитная муфта ЭММ-2 (рис. 71) состоит из
алюминиевого корпуса 3, в котором закреплено винтом 8 сталь-
ное ярмо электромагнита 7. В ярме помещена катушка 2.
98
Сердечником электромагнита является стальной, так называе-
мый неподвижный барабан 4, один конец которого помещен
в шарикоподшипник. Неподвижный барабан лишен возможно-
сти осевого (продольного) перемещения, но может свободно
вращаться. Консольный валик неподвижного барабана имеет
шлиц для соединения муфты с валом электродвигателя при
стыковке их.
Якорем является так называемый подвижный барабан 5,
расположенный на валике 6, соединяемом с редуктором.
Валик имеет специальный профиль с направляющими и для
уменьшения трения опирается одним концом на шарик. По-
мещенная на валике пружина 9 отжимает подвижный барабан
от неподвижного.
Для уменьшения остаточных магнитных полей ярмо и ба-
рабаны изготовлены из малоуглеродистой отожженной стали,
а валик 6 из немагнитной стали. При прохождении тока через
Рис. 71. Продольный разрез
муфты ЭММ-2:
1 — ярмо электромагнита; 2 — катушка
электромагнита; 3 — алюминиевый корпус;
4 — неподвижный барабан; 5 — подвижный
барабан; 6 — валик; 7—крышка муфты;
8 — винт; 9 — пружина
Рис. 72. Электромагнитный тормоз в
разрезе:
1 — каркас; 2 —4 катушка; 3 — сердечник; 4 — ре-
зина ; 5 — стальной стоп; 6 — цилиндрическая пру-
жина; 7 — стальной колпачок; 8 — тормозной
барабан
обмотку электромагнита подвижный барабан 5 притягивается
к неподвижному барабану 4, передавая благодаря трению
крутящий момент от вала электродвигателя к ведущему валу
редуктрра. При выключении тока магнитное притяжение про-
падает, и пружина отжимает барабан 5 от барабана 4. Валы
электродвигателя и редуктора расцепляются.
Электромагнитная муфта имеет следующие данные: »
— число витков катушки 153;
— диаметр провода 0,93 лги.;
7
99
— марка провода ПЭЛ;
— сопротивление обмотки —0,5±0,04 ом-,
— усилие пружины при сжатии ее до 7 мм 1,6±~1,9 кг.
2. Электромагнитный тормоз (рис. 72) состоит из полого
латунного каркаса 1, ввернутого в корпус, на котором между
двумя текстолитовыми шайбами расположена катушка 2.
В каркасе помещается цилиндрический сердечник 3 из мягкой
стали, имеющий на одном конце вставленную и выступающую
резину 4. Между сердечником и стальным стопом 5, заверну-
тым в верхнюю часть каркаса, помещена цилиндрическая
пружина б. Стальной колпачок 7, закрывающий снаружи тор-
моз, служит магнитопроводом. Ведущая шестерня электродви-
гателя механизма имеет тормозной барабан 8. Под действием
пружины подвижный сердечник прижимается резиновым нако-
нечником к тормозному барабану. При включении цепи элек-
тродвигателя электромагнит втягивает сердечник и освобождает
от давления тормозной барабан.
имеют специальнее контактные устр
программных шайб. По достижении
Рис. 73. Устройство и схема кулачковой про-
граммной шайбы:
1 — изоляционная панель; 2 — кулачковый барабан;
3—стопорное кольцо; 4 — штифт; 5—вал редуктора;
6 — неподвижные контакты; 7 — пружинные подвижные
контакты; 8 — кулачковая шайба
§ 34. КОНТАКТНЫЕ УСТ. ОЙСТВА
Для ограничения поворота выходного вала в необходимых
пределах все механизмы, за исключением УР-6; ГРЩ-1 и УС-1,
йства, сделанные в виде
механизмом (его валом)
определенных углов
поворота контакты
автоматически размы-
каются, разрывают цепь
тока и тем самым пре-
кращают действие ме-
ханизма. При помощи
контактных устройств
в некоторых механиз-
мах (УТ-1; УТ-2; УТ-3;
АП-1) происходит авто-
матическое включение
или выключение сиг-
нальных ламп, фикси-
рующих промежуточ-
ные положения упра-
вляемых органов.
1. Дисковые (кулач-
ковые) программные
шайбы (рис. 73) со-
стоят из изоляционной
панели /, на которой укреплены неподвижные контакты 6 и
подвижные пружинные контакты 7.
Панель с контактами укрепляется в корпусе агрегата так,
что в ее сквозное отверстие свободно проходит вал редуктора <5.
На валу редуктора жестко закреплен дисковый кулачковый
100
барабан 2, имеющий пологие вырезы, и штифт 4. На втулку
барабана свободно посажена кулачковая шайба 8, имеющая
такие же вырезы, но с гранями, резко срезанными под 90°.
В теле шайбы 8 имеется овальная прорезь, в которую входит
штифт 4 барабана. Осевое перемещение шайбы на втулке ба-
рабана ограничено пружинным стопорным кольцом 3. Пружин-
ные контакты упираются своими зубьями в поверхность ди-
скового кулачкового барабана и шайбы. При вращении вала 5,
а следовательно, и барабана 2 штифт 4 поведет за собой ку-
лачковую шайбу 8 так,
что ее вырез с резкими
гранями перекроет по-
логий вырез- бара-
бана 2, вследствие чего
после поворота вала 5
на заданный угол про-
изойдет резкое размы-
кание контактов б и 7.
При обратном враще-
нии вала 5(реверсиро-
вании механизма) по-
логий вырез барабана
перекроет вырез шайбы
Рис. 74. Устройство и схема спиральной про-
граммной шайбы:
1 — изоляционная панель; 2 — спиральная шайба; 3 — штифт;
4 — кулачковый спиральный барабан; 5 — вал редуктора;
6 — контакты; 7 — подвижные контакты; 8 — поводок
и замыкание контактов
произойдет плавно.
Кулачковые про-
граммные шайбы уста-
навливаются в тех слу-
чаях, когда угол поворота вала редуктора не превышает 260°.
2. Спиральные программные шайбы (рис. 74) устанавли-
ваются в агрегатах, в которых угол поворота вала редуктора
превышает 260°. В этих шайбах панель контактного устрой-
ства дополнительно имеет прикрепленный поводок 8.
Кулачковый спиральный барабан 4, на спиральных витках
которого имеются вырезы с пологими краями, посажен на вал 5
редуктора на шлицах для возможности перемещения вдоль
вала под действием поводка 8. На спиральном барабане имеется
штифт 3. На витки барабана навинчена спиральная шайба 2
с овальной прорезью под штифт '3 и с вырезами, края которых
срезаны под прямым углом.
Перемещение спирали относительно барабана возможно
только в пределах ее овальной прорези. При вращении вала 5
барабану сообщается вращательное движение (благодаря шли-
цам) и одновременно поступательное движение поводком 8,
вследствие чего зубья подвижных контактов 7 западают и вы-
ходят из вырезов, размыкаясь и. замыкаясь с контактами 6.
Резкое размыкание и плавное замыкание контактов происходят
та*к же, как и в кулачковых программных шайбах (вследствие
перекрытия вырезов спиральной шайбы и барабана).
101
’ § 35. ЭЛЕКТРОМЕХАНИЗМ УТ-1
Механизм предназначен для управления триммером рулей
направления. Управление самим механизмом осуществляется
нажимным переключателем типа НП-1М, находящимся в ка-
бине пилота. Для пуска в ход механизма нужно нажать ручку
переключателя. При положении ручки „Триммер вверх" обра-
зуется замкнутая цепь (рис. 75): +сети, предохранитель, пере-
ключатель НП-1М, контакт /, обмотка возбуждения электро-
двигателя (правого вращения), якорь, неподвижный контакт III
сигнальной лампы, — сети.
МУ-50
вправе по попетую
Рис. 75. Электрокинематическая схема механизма УТ-1
Вращение электродвигателя обеспечивает вращение эксцен-
трикового вала редуктора и через шестерни редуктора пере-
дается выходному валу, спиральному барабану программной
шайбы и выходному двухручейному ролику, который связан
с триммерами при помощи тросовой передачи. Согласованное
движение обоих триммеров рулей обеспечивается равномерным
натяжением тросов и предварительной регулировкой триммеров.
Максимальный угол, поворота выходного вала составляет
± 324° в обе стороны от среднего положения.
Положение вала агрегата, соответствующее взлетному углу
триммера, автоматически контролируется при помощи сигналь-’
нОй лампы, включенной в цепь контакта III программной
шайбы. Контакт /// замыкается тогда, когда его зуб западает
в среднюю прорезь спиральной шайбы (как это показано на
рис. 75).
В остальное время работы агрегата этот контакт разомкнут.
Зуб контакта III сделан меньшим по размеру, чем зубья кон-
тактов / и 11, в связи с чем в среднюю прорезь спиральной
шайбы зубья контактов I и // не западают. Это сделано для
102
того, чтобы при перекладке триммера была возможна непре-
рывная работа агрегата. Установка триммера на взлетный угол
выполняется пилотом путем выключения агрегата в момент
загорания сигнальной лампы. Максимальный угол поворота
вала механизма от середины, при котором горит сигнальная
лампа, равен 13°. Если же продолжать нажимать на ручку
переключателя, то зуб контакта /// выйдет из выреза и си-
гнальная лампа погаснет. Когда поворот выходного вала будет
равен 324° (от среднего положения), зуб контакта I западет
в крайний вырез спирали, разорвет цепь и агрегат автомати-
чески остановится, несмотря на то, что нажата ручка переклю-
чателя. Для перекладки триммера в обратном направлении
нажимают на ручку переключателя вправо. Если нет необхо-
димости в полной перекладке триммера, то достаточно от-
пустить ручку переключателя, чтобы выключить и остановить
агрегат. Тогда триммер останется в том положении, которое
выбрано для данного режима полета.
Таким образом, поворот вала механизма может произво-
диться из любого положения на любой угол, в зависимости
от продолжительности нажатия на ручку переключателя,
но не более максимального угла поворота вала от среднего
положения, т. е. триммеры руля .могут занимать любое поло-
жение в пределах углов, задаваемых профилем спиральной
шайбы.
§ 36. ЭЛЕКТРОМЕХАНИЗМЫ АП-1 И АП-3
Работа механизма АП-1 (рис. 76) аналогична работе меха-
низма УТ- 1, за исключением того, что его редуктор сцепляется
с валом электродвигателя через электромагнитную муфту
ЭММ-2. Электромеханизм применяется только для управления
триммерами руля высоты.
Кроме того, контактное устройство имеет добавочную па-
нель с контактами IV и V для управления триммерами при
МУ-100АП
Рис. 76. Электрокинематическая схема механизма АП-1
103
работе механизма в качестве автомата совместно с механиз-
мом ГРЩ-1.
Действие механизма АП-З не отличается от действия выше-
описанных агрегатов УТ-1 и АП-1.
Движение триммеру передается не тросом, а непосред-
ственно ходовым винтом механизма через тягу и качалку.
Механизм имеет контактное устройство только с двумя кон-
тактами (без сигнальной лампы), обеспечивающими поступа-
тельное движение ходового винта в пределах 3,25 t0,2 мм.
§ 37. ЭЛЕКТРОМЕХАНИЗМ УН 1
Электромеханизм УН-1 предназначен для управления пере-
ключением скоростей нагнетателя авиационного двигателя.
Пуск и реверс механизма производятся переключателем типа
ПН-10. Выходной вал механизма может занимать только два
крайних положения, соответствующих двум скоростям нагне-
тателя авиационного мотора. Для переключения нагнетателя
___Переключатель ПН-10
• 1 > ।
1/сиОрость*^ / скорость
Рис. 77. Электрокинематическая схема механизма УН-1
с первой скорости на вторую необходимо перевести ручку
переключателя в положение, при котором замыкается цепь
обмотки левого вращения электродвигателя через контакт II
программной шайбы (рис. 77). Вращение электродвигателя обес-
печивает вращение эксцентрикового вала планетарного редук-
тора и через его шестерни передается выходному валу ре-
дуктора, с которым связаны дисковая программная шайба кон-
тактного устройства, фрикционная муфта и выходная шестерня.
Поворот шестерни передается сектору поводка нйгнетателя,
который, поворачиваясь, переключает скорости нагнетателя.
104
При повороте выходного вала редуктора на 98э зуб контакта//
западет в вырез программной шайбы, разомкнет цепь электро-
двигателя и агрегат автоматически остановится независимо
от нажатия на ручку переключателя. Фрикционная муфта
обеспечивает поворот поводка до упора, защищая механизм
от перегрузки. Для переключения нагнетателя со второй ско-
рости на первую ручку переключателя переводят в противо-
положное положение, что приводит к замыканию цепи обмотки
правого вращения через контакт. В дальнейшем процесс пере-
ключения нагнетателя такой же, как и описанный выше.
§ 38. ЭЛЕКТРОНЕ ХАНИЗМЫ УР-2 И УР-6
Электромеханизмы УР-2 и УР-6 предназначены для упра-
вления заслонками радиаторов. Управление механизмом УР-2
осуществляется нажимным переключателем типа НП-1М
из кабины пилота.
Рис. 78. Электрокинематическая схема механизма УР-2
При замыкании контактов переключателя в положении
его ручки, дающем левое вращение выходного вала механизма,
через контакт II (рис. 78) программной шайбы замыкается
цепь соответствующей обмотки электродвигателя и последний
начинает вращать выходной вал механизма. Вращение вала
через выходнук? шестерню передается зубчатому сектору,
связанному с заслонкой радиатора, и заставляет ее поворачи-
ваться. Как и в других механизмах, за это время зуб кон-
такта I, передвигаясь по профилю кулачка, поднимается,
и контакты замыкаются, подготовляя механизм к реверсивному
движению.
105
По прекращении нажатия на ручку переключателя цепь
электродвигателя разрывается и движение механизма, а сле-
довательно, и заслонки прекращается. При нажиме на ручку
переключателя в противоположном направлении через вторую
замкнутую контактную пару замыкается цепь обмотки электро--
двигателя правого вращения выходного вала и заслонка пере-
мещается в обратном направлении.
При предельном отклонении заслонки радиатора (или при
предельном отклонении выходного вала 250°, что то же самое)
зуб соответствующего контакта западает в прорезь, разрывая
электрическую цепь, и механизм останавливается.
Управление механизмом УР-6 производится переключате-
лем НП-1М. Как и в УР-2, механизм дает возможность за-
слонкам радиаторов занимать любые положения в пределах
углов, задаваемых специальными концевыми выключателями,
установленными на самолете.
При всех промежуточных положениях (кроме крайних) за-
слонки контакты выключателя замкнуты (рис. 79). Поэтому
при замыкании контактов переключателя одна из цепей об-
мотки электродвигателя замыкается и двигатель приходит
во вращение, вследствие чего ходовой винт- получает посту-
пательное движение. Заслонки радиатора сочленяются с вин-
том шарнирно-рычажной передачи.
Самопроизвольное изменение угла установки заслонок
исключается благодаря применению в механизме самотормо-
зящей передачи.
106
§ 39. ЭЛЕКТРОМЕХАНИЗМ ГРЩ-1
Электромеханизм ГРЩ-1 предназначен для управления по-
садочными и тормозными щитками. Для пуска в ход меха-
низма ГРЩ-1 (рис. 80) необходимо нажать ручку переключа-
теля НП-1М (для выпуска посадочных щитков) или переклю-
чателя ППИМ (для выпуска воздушных тормозов — тормозных
решеток). В обоих случаях электродвигатель агрегата вклю-
чается в цепь через реле коробки КРР-1.
Рис. 80. Электрокинематическая схема механизма ГРЩ-1:
1; 2; 3; 4; 5 и 6 — нумерация зажимов коробки КРР-1
Из рис. 80 видно, что при замыкании контактов переклю-
чателя в положение, соответствующее выпуску посадочных
щитков или воздушных тормозов, включается шунтовая обмотка
реле коробки КРР-1, контакты которого замыкают цепь об-
мотки электродвигателя, осуществляющей правое вращение
выходного вала механизма. Вращение выходного вала пере-
дается через шарниры на трансмиссию, которая при помощи
ходовых винтов звеньевых редукторов приводит в движение
посадочные щитки или воздушные тормозы.
Для уборки воздушных тормозов или посадочных щитков
необходимо перевести ручку нажимного или перекидного
переключателя в противоположное положение.
Воздушные тормозы благодаря перекидному переключателю
ПП-1М могут занимать только два крайних положения: от-
крытое или закрытое.
Посадочные же щитки, кроме того, могут быть остановлены
в любом промежуточном положении прекращением нажатия
на ручку переключателя НП-1М. При этом контакты переклю-
чателя разорвут цепь соответствующей обмотки реле КРР-1
и электродвигатель агрегата ГРЩ-1 будет отключен от сети.
107
В крайних положениях остановка щитков производится обыч-
ными концевыми выключателями, установленными на самолете,
контакты которых также разрывают цепь обмотки реле КРР-1.
§ 40. ЭЛЕКГРОМЕХАНИЗМ УФ-3
Электромеханизм УФ-3 предназначен для управления фарой
и включается переключателем типа НП-1М. При замыкании
контактов в положении „Выпущено" (рис. 81) ток от „ + “ сети
через контакты НП-1М пойдет к замкнутому концевому вы-
ключателю механизма, обмотку возбуждения правого враще-
Рис. 81. Принципиальная электрокинематическая
схема механизма УФ-3
ния электродвигателя МУ-ПО, якорь, обмотку электромагнит-
ного тормоза и к “ сети. При этом электромагнит тормоза
втянет якорь с диском, освободив тормозной барабан, одно-
временно электродвигатель начнет вращаться, выпуская фару.
По достижении фарой крайнего положения палец сектора
механизма разомкнет вторую пару контактов, цепь электро-
двигателя разорвется и механизм автоматически остановится.
Первая пара контактов в начале хода фары замкнется, подго-
товив тем самым цепь к действию в обратном направлении.
В промежуточных положениях движение фары останавливается
108
прекращением нажатия на рукоятку переключателя. Лампа
включается и выключается независимо от положения фары
специальным выключателем.
§ 41. ЭЛЕКТРОМЕХАНИЗМ УС-1
Электромеханизм применяется для управления стабилиза-
тором самолета (установка угла атаки). Управление механиз-
мом УС-1 осуществляется нажимным переключателем типа
НП-1М, дающим возможность устанавливать стабилизатор в лю-
бом промежуточном положении в пределах угла, заданного
концевыми выключателями, в зависимости от желания летчика,
Рис. 82. Электрокинематическая схема механизма УС-1:
Г, 2; 3; 4; 5 и 6 — нумерация зажимов коробки КРР-1
которому для остановки его достаточно отпустить ручку пере-
ключателя. При замыкании контактов переключателя происхо-
дит включение шунтовой обмотки реле КРР-1 (рис. 82). Кон-
такты реле замыкают одну из цепей обмотки электродвига-
теля, например цепь правого вращения, если смотреть со сто-
роны привода, вследствие чего ходовой винт будет выходить
из резьбы в червячной шестерне механизма, которая работает
в качестве гайки.
Ходовой винт шарнирно связан с .стабилизатором и выход
его из механизма заставляет стабилизатор поворачиваться около
неподвижного лонжерона, что приводит к изменению угла
установки стабилизатора.
109
Остановка стабилизатора в крайних положениях произво-
дится при помощи обычных концевых выключателей, устана-
вливаемых на самолете, контакты которых разрывают цепь
шунтовых обмоток реле.
Самопроизвольное изменение угла установки стабилизатора
под действием аэродинамических сил невозможно ввиду того,
что ходовой винт выполнен самотормозящимся.
При необходимости поворота стабилизатора в другом на-
правлении ручка нажимного переключателя переводится в про-
тивоположное положение. В этом случае происходит замыка-
ние контактов реле, дающего левое вращение электродвига-
телю. Ходовой винт будет перемещаться в обратном напра-
влении, что приведет к повороту стабилизатора в направлении,
противоположном разобранному выше.
Рис. 83. Принципиальная схема совместной работы
агрегатов ГРЩ-1 и УС-1:,
1; 2; 3; 4; 5 и 6 — нумерация зажимов коробок КРР-1
На некоторых самолетах применяется согласованная работа
агрегатов ГРЩ-1 и УС-1 для обеспечения устойчивости само-
лета в режиме планирования и посадки с выпущенными
щитками.
110
В этом случае ведущим является агрегат ГРЩ-1, упра-
вляющий выпуском и подъемом посадочных щитков, а агре-
гат УС-1 — вспомогательным, изменяя угол атаки стабилиза-
тора в зависимости от величины угла выпуска посадочных
щитков.
Схема совместной работы агрегатов приведена на рис. 83.
Особенность этой схемы — наличие проходного выключа-
теля ВК-166 с нормально разомкнутыми контактами.
В начальный момент при нажатии на рукоятку переклю-
чателя НП-1 в работу вступает только агрегат ГРЩ-1, кото-
рый выпускает щитки. При повороте щитков на определенный
угол они нажимают на выступ сектора А и замыкают контакты
проходного выключателя ВК-166, вследствие чего замыкается
цепь электродвигателя механизма УС-1, 'и далее происходит
одновременная работа обоих механизмов до установки щитков
и стабилизатора в посадочное положение. Уборка щитков
и возвращение стабилизатора в первоначальное положение
начинаются и происходят одновременно при нажатии вверх
на рукоятку переключателя НП-1.
§ 42. СОВМЕСТ НАЯ РАБОТА АГРЕГАТОВ А П-1 И ГРЩ-1
Совместная работа механизмов АП-1 и ГРЩ-1 служит, для
автоматического управления пикированием самолета. Схема
совместной работы представлена на рис. 84.
При нормальном полете управление триммерами руля глу-
бины осуществляется электромеханизмом АП-1 при помощи
нажимного переключателя НП-1М. Питание механизма АП-1
происходит через самостоятельный предохранитель. Шунтовые
обмотки реле КРР-1, включающие электродвигатель механизма
ГРЩ-1 тормозных решеток и самый электромотор МУ-1000,
питаются соответственно также через предохранители.
На схеме обозначено убранное положение тормозных реше-
ток и нейтральное положение триммеров рулей высоты. Ручка
перекидного переключателя ПП-1М, служащего для выпуска
воздушных тормозов, находится в положении „Убрано". Вся
система обесточена.
Для ввода самолета в пикирование необходимо ручку пе-
реключателя ПП-1М перевести в положение „Выпущено", при
этом ток от „4-“ сети пойдет через предохранитель, через
контакты ПП-1М, контакты концевого выключателя выпуска
тормозных решеток ВК-83, зажим 5 коробки КРР-1, обмотку
реле, зажим 3 и „ — “ сети. Реле включает механизм ГРЩ-1,
и тормозные решетки начнут выпускаться. При полном вы-
пуске решеток (на 90') шток выключателя ВК-83 выпуска
будет нажат воздействием, полностью опущенных вниз реше-
ток, контакты его разомкнутся и доступ тока в обмотку
реле КРР-1 прекратится. Реле выключит мотор МУ-1000, и ме-
ханизм ГРЩ-1 остановится.
111
Проходной кон та нт
112
Прохождение решетками среднего положения (45°) сопро-
вождается кратковременным замыканием проходного концевого
выключателя ВК-166, в цепь посылается импульс тока и при-
водится в действие механизм АП-1, работая уже теперь
в качестве автомата пикирования. В момент замыкания ВК-166
образуется следующая цепь: „ + “ сети, переключатель ПП-1М,
контакты выключателя выпуска решеток ВК-83, контакты
ВК-166, зажим 7, обмотка реле е2 и зажим 5 коробки реле
КБР-1, „ — “ сети. Реле КБР-1 включит механизм АП-1, хотя
нажатие на шток ВК-166 быстро прекратится и шунтовая об-
мотка правого реле коробки КБР-1 будет обесточена — якорь
реле будет удерживать контактный мостик ампервитками
сериесной обмотки Л'о, и агрегат АП-1 будет продолжать ра-
ботать.
Ток от „ + “ сети будет итти через контакты ПП-1М, кон-
такт кнопки сбрасывания, зажим 4 коробки КБР-1, обмотку
реле 5", и его контактный мостик, зажим' 2 блок-реле, штеп-
сельный разъем, контакты V и / программной шайбы меха-
низма АП-1, обмотку возбуждения и якорь электродвигателя,
обмотку электромагнитной муфты ЭММ-2, неподвижный кон-
такт III сигнальной лампы, „—“ сети.
Выступающая часть кулачковой шайбы ввода охватывает
при выпуске тормозных решеток автоматическую установку
триммеров на —4,5°, на каком бы угле (в пределах от +4,5
до —4,5°) они до этого ни находились, так как профиль
кулачковой шайбы рассчитан на движение триммера именно
по этому пути.
Если отклонение триммера руля высоты почему-либо пре-
вышает ±4,5°, то автомат пикирования не сработает. Поэтому
перед пикированием триммеры руля высоты необходимо ста-
вить в нейтральное положение.
По достижении триммерами полной перекладки на необхо-
димый угол (—4,5°) зуб контакта V западет в вырез про-
граммной шайбы, контакты V разомкнутся, и механизм оста-
новится.
Вывод из пикирования может быть произведен либо без
сбрасывания бомб, либо с подачей импульса тока на электро-
сбрасыватель (ЭСБР), т. е. со сбрасыванием бомб.
Для вывода из пикирования без сбрасывания бомб необ-
ходимо нажать кнопку „вывода из пикирования11, установлен-
ную на пульте. При этом образуется цепь, включающая через
левое блок-реле коробки КБР-1 механизм АП-1 на работу
в обратном направлении. При нажатии кнопки вывода импульс
тока пройдет: „ + “ сети, контакты ПП-1М, контакт кнопки
вывода, зажим 6 коробки КБР-1, шунтовую обмотку левого
реле, зажим 5 и “ сети. Контактный мостик левого реле
замкнет механизм АП-1 по цепи: „ + “ сети, контакты ПП-1М,
контакт кнопки сбрасывания, зажим 4 коробки КБР-1, сериес-
ная обмотка и контактный мостик левого реле, зажим 1
8-—Электропривод на самолете 113
коробки КБР-1, штырь и гнездо 3 штепсельного разъема,
контакты IV и // программной шайбы механизма АП-1, об-
мотку возбуждения, якорь электродвигателя, муфту ЭММ-2,
неподвижный контакт III сигнальной лампы и „ —“ сети.
Триммеры отклонятся на 3° в обратном направлении
и займут положение, соответствующее углу —1,5° от взлет-
ного (нейтрального), после чего механизм АП-1 остановится.
Для уборки тормозных решеток ручка переключателя
ПП-1М ставится в положение „Убрано", включается обмотка
реле коробки КРР-1, и механизм ГРЩ-1 начинает работать,
убирая тормозные решетки.
В крайнем убранном положении тормозных решеток разо-*
икнется контакт ВК-83 подъема, цепь обмотки реле КРР-1
разорвется и электродвигатель механизма ГРЩ-1 будет вы-
ключен.
Вывод из пикирования со сбрасыванием бомб производится
нажимом боевой кнопки сбрасывания, установленной на штур--
вале. При этом через реле сбрасывания коробки КРС-1 по-
сылаются одновременно импульсы тока .в блок-реле вывода
и на ЭСБР.
Агрегаты АП-1 и ГРЩ-1 применяются для совместной ра-
боты без каких-либо изменений. Поэтому все’номинальные
значения моментов и усилий для агрегатов сохраняют свои
прежние величины.
§ 43. АППАРАТУРА ПУСКА, УПРАВЛЕНИЯ И ЗАЩИТЫ
САМОЛЕТНЫХ ЭЛЕКТРОМЕХАНИЗМОВ
Для управления самолетными электромеханизмами приме-
няются однополюсные переключатели нажимного и перекид-
ного типов (схематический чертеж переключателя нажимного
типа представлен на рис. 85).
Нажимные переключатели замыкают цепь лишь в том слу-
чае, если производится нажим на рукоятку, при отсутствии
Рис. 85. Кинематиче-
ская схема нажимного
нажима подвижной контакт возвращается
в нейтральное положение.
Перекидные переключатели имеют два
крайних фиксированных положения и иногда
среднее фиксированное положение подвиж-
ного контакта.
Перекидные переключатели применя-
ются в тех случаях, когда механизм имеет
только два крайних фиксированных поло-
жения, как, например, механизм управле-
ния шасси. В тех же случаях, когда меха-
низм может иметь, кроме крайних, также
и ряд промежуточных положений, как, на-
пример, в случае привода посадочных щит-
переключателя ков, применяются нажимные переключатели.
114
Нажимные и перекидные переключатели служат для включе-
ния и размыкания цепей, сила тока в которых не превышает
10 а при напряжении 24 в.
В тех случаях, когда необходимо размыкать и замыкать
цепь с большими силами токов, применяют контакторы, назы-
ваемые магнитными включателями, и реле реверса.
Коробки реле предназначены для дистанционного управле-
ния электродвигателями механизмов. Коробка реверс-реле
типа КРР-1 применяется для управления * реверсированием
мощных электромеханизмов, коробка блок-реле типа КБР-1 —
для реверсирования и одновременной блокировки электро-
механизма, коробка типа КРС-1 — для совместной работы
электромеханизмов с установками сигнализации и другими
устройствами.
Схемы коробок КРС-1, КРР-1 и КБР-1 приведены на
рис. 86, 87, 88. Конструктивно коробки реле КБР-1 предста-
вляют собой два электромагнитных реле, смонтированных
Рис. 86. Электри-
ческая схема ко-
робки. реле типа
КРС-1
Рис. 87. Электриче-
ская схема короб-
ки реверс-реле типа
КРР-1
Рис. 88. Электрическая
схема коробки реле типа
КБР-1
в одной коробке с контактной панелью и закрытых общим
кожухом. Коробка КРС-1 имеет только одно электромагнитное
реле. Все реле по конструкции идентичны и отличаются только
обмотками и габаритами. Магнитопровод реле (рис. 89) состоит
из остова 7, полюса 2, цилиндрического якоря 3, пластины 5
и втулки каркаса 4. Катушки реле КРР-1 и КРС-1 имеют одну
шунтовую обмотку 6 в отличие от реле КБР-1, имеющего две
обмотки — шунтовую и сериесную. Реле имеет два неподвиж-
ных контакта 7 и 8, изолированных от корпуса.
Якорь реле может свободно перемещаться в латунной
втулке 9 и имеет в верхней части насаженную через изоля-
ционную втулку медную скобу 10, служащую подвижным
контактом. Якорь с контактом удерживается в выключенном
состоянии спиральной пружиной 77. Плоская пружина 72
прижимает подвижный контакт к изоляционной шайбе, укреп-
ленной на якоре.
При включении шунтовой обмотки реле под напряжение
якорь, втягиваясь в катушку, преодолеет усилие пружины 11
8* .
115
и замкнет неподвижные контакты. Вследствие значительного
уменьшения зазора между якорем и полюсом электромагнитное
усилие возрастает настолько, что преодолеет действие и буфер-
ной пружины 12. Якорь будет двигаться дальше, сжимая
пружину 12, пока не упрется в полюс.
В реле коробки КБР-1 при замыка-
Рис. 89. Электромагнит-
ное реле коробок КРР-1
и КРС-1:
1 — остов; 2 — полюс; 3 — ци-
линдрический якорь; 4 — кар-
кас; 5 — пластина; 6 — шумо-
вая обмотка; 7 и 8—непо-
движные контакты; 9 — втулка;
10 —• скоба; 11 — спиральная
пружина; 12 •— буферная пру-
жина
нии контактов ток потечет по сериес
ной обмотке Sj (рис. 88), магнитный
поток которой будет удерживать кон-
такты в замкнутом положении даже-
при отключенной шунтовой обмотке ех.
При отключении обмоток катушек в
коробках КРР-1 и КРС-1, а также
сериесной обмотки в реле КБР-1 пру-
жины (плоская 12 и спиральная 11),
разжимаясь, отбросят с большой ско-
ростью якорь, а вместе с ним и под-
вижной контакт, т. е. разомкнут элек-
трическую цепь. .
Для коробок КБР-1 и КРС-1 до-
пускается 10 секунд поочередного на-
хождения каждого реле под током
(для реле КБР-1 шунтовой и сериес-
ной обмоток одновременно) с после-
дующим перерывом на 5 минут, а для
коробки реле КРР-1—20 секунд по-
очередного нахождения каждого реле
под током с последующим перерывом
на 10 минут..
Контакты реле КРР-1 рассчитаны на ток до 400 а, а кон-
такты КБР-1 и КРС-1—до 10 а.
Для того чтобы выключить цепь электродвигателя, когда
механизм приходит в крайнее положение, применяются. кон-
цевые выключатели. Концевой выключатель (рис. 90) состоит
из штока, отжимаемого пружиной в крайнее положение. Со
штоком связан подвижной контакт, замыкающийся с одним из
неподвижных контактов. Концевой выключа-
тель монтируется так, что в крайнем поло-
жении исполнительный механизм нажимает
на его шток, вследствие чего происходит раз-
мыкание подвижного контакта с одним из
неподвижных и замыкание с другим. Такой
выключатель может быть использован так же,
как проходной контакт, замыкающий или
размыкающий цепь, когда механизм прохо-
дит через определенное положение.
При небольшой мощности электродвига-
теля применяются концевые и проходные
контакты, встроенные в корпус агрегата. Для
Рис. 90. Схема кон-
цевого выключа-
теля
116
защиты электродвигателя от чрезмерных токов, могущих воз-
никнуть при коротких замыканиях и перегрузках, применяются
плавкие предохранители и тепловые автоматы. Плавкие пред-
охранители выпускаются на следующие номинальные токи:
2, 6, 10, 20, 30, 40, 60, 80 и 100 а. Номинальный ток
предохранитель выдерживает длительное время не распла-
вляясь.
При токе нагрузки, равном двойному значению номинальной
величины, предохранитель расплавляется почти мгновенно,
а полуторное значение номинального тока он выдерживает
примерно в течение 1 секунды. .
Пуск самолетных электродвигателей производится без
реостата. Таким образом, пусковые токи бывают весьма значи-
тельными, а время пуска продолжается также почти секунды.
Отсюда следует, что
плавкие предохрани-
тели могут перегорать
во время пуска или их
необходимо выбирать
на больший номиналь-
ный ток. Это является
их существенным недо-
статком, вызывающим
необходимость приме-
нения более совершен-
ных аппаратов защи-
ты — тепловых автома-
тов.
Принцип устройства
теплового автомата показан на рис. 91. Чувствительным элемен-
том его является биметаллическая пластинка А, нагревающаяся
при прохождении по ней электрического тока. Нагрев биме-
таллической пластинки вызывает изгиб ее (показано пунктиром
на рис. 91), что, в свою очередь, вызывает размыкание цепи.
Время, в течение которого на пластинке выделяется коли-
чество тепла, достаточное для ее изгиба, зависит от тока
в цепи, поэтому и время срабатывания теплового автомата
зависит от величины тока.
Тепловые автоматы надежно защищают двигатель от пере-
грева при перегрузках и в то же время даюг возможность
двигателю развивать максимальную мощность.
S 44. ЭЛЕКТРОПРИВОД ШАССИ
Общая характеристика электропривода шасси
В системах электропривода выпуска и уборки шасси совре-
менных самолетов широко применяется электромеханический
и электрогидравлический. привод. Как электромеханический,
117
так и электрогидравлический привод может быть групповым
или индивидуальным.
Групповой электромеханический привод характеризуется
выпуском и уборкой всех колес шасси от одного электро-
двигателя. При групповом элёктрогидравлическом приводе
к гидроподъемникам всех колес подается гидросмесь (смесь
глицерина и спирта) от общей гидросистемы, давление в гидро-
системе создается одним насосом.
При индивидуальном приводе каждое колесо шасси обору-
дуется отдельной, изолированной от других, электромехани-
ческой или электрогидравлической системой.
Групповой электропривод применяется главным образом
на небольших самолетах, а индивидуальный на больших само-
летах, у которых расстояние между колесами шасси сравни-
тельно велико. Недостатком применения группового электро-
механического привода на больших самолетах является
громоздкость механической передачи от электродвигателя
к стойкам шасси. Применение на таких самолетах электро-
гидравлического привода осложняется наличием трубопроводов
большой протяженности, что значительно снижает надежность
работы системы, особенно в боевых условиях. Так, например,
повреждение одной из трубок гидросистемы приводит к выходу
из строя всей системы выпуска и уборки шасси вследствие
вытекания гидросмеси через место повреждения.
Кроме электромеханического или электрогидравлического
привода, которые являются основными видами привода, на
самолетах обязательно устанавливается аварийный привод,
предназначенный для выпуска шасси в случае отказа основного
привода. Аварийный привод приводится в ^действие либо вруч-
ную одним из членов экипажа, либо от специальной аварий-
ной системы.
Электромеханический привод шасси
Принципиальная схема электромеханического .группового
привода шасси показана на рис. 92.
Как видно из этого рисунка, вращение от электродвига-
теля / передается через фрикционную муфту 2, смягчающую
толчки во время пуска и остановки привода, к понижающему
червячному редуктору и дальше от выходного вала редуктора
через муфту сцепления 7, при помощи цепной передачи 8,
к приводному валу 9. Приводной вал в местах отъема пло-
скостей имеет шлицевые разъемные соединения 10 и снабжен
шарнирами //, что обеспечивает быструю сборку и устраняет
влияние перекосов. Со стойками шасси жестко связаны червяч-
ные колеса, которые имеют сцепление с червячными винтами,
насаженными на концы приводного вала.
Таким образом, вращение приводного вала осуществляет
выпуск или уборку шасси в зависимости от направления вра-
118
щения электромотора. От этого же вала осуществляется
привод механизма уборки и выпуска хвостового или перед-
него колеса 4.
При отказе электромеханизма выпуск шасси может быть
произведен вручную. Переключение с электрического [упра-
вления на ручное и обратно производится при помощи муфты
сцепления 7. Для ручного выпуска шасси необходимо поставить
Рис. 92. Принципиальная кинематическая схема электромехани-
ческого группового привода шасси:
1 электромотор; 2 — фрикционная муфта; 3 — стойка основного колеса шасси;
4—стойка хвостового или носового колеса шасси; 5—концевой выключатель;
6 — ручка аварийного привода шасси; 7 — муфта сцепления; 8 — цепная передача;
9 — приводной вал; 10 — шлицевые разъемы; И — шарниры Гука
ручку муфты сцепления в положение „ручное управление",
что соответствует расцеплению муфты, и, пользуясь коленча-
той ручкой 6, произвести полный выпуск шасси. Расцепление
муфты сцепления 7 при ручном выпуске шасси необходимо
для предотвращения бесцельной затраты энергии на вращение
редуктора и якоря электромотора при повороте рукоятки 6.
Для схемы рис. 92 без 1 расцепления муфты 7 вообще невоз-
можно повернуть рукоятку 6, так как червячный редуктор,
установленный между муфтой 7 и фрикционной муфтой 2,
допускает вращение только со стороны электромотора, т. е,
редуктор является необратимым.
119
Управление электромотором привода шасси показано на
схеме рис. 93.
Для выпуска шасси переключатель 1 ставится в положение
„Вып.“. Так как концевой выключатель выпущенного положе-
ния шасси — выключатель 2, в это время замкнут, то обмотка
нижнего контактора обтекается током и контакты его за-
мкнутся. Этим будет подано питание к электромотору. Электро-
мотор вращается и через трансмиссию выпускает все стойки
шасси одновременно. Как только стойки шасси достигнут
Рис. 93. Электрическая схема группового электромехани-
ческого привода шасси:
1 — переключатель выпуска и уборки шасси; 2 — концевой выключатель
выпущенного положения шасси; 3—концевой выключатель убранного
положений шасси; 4— коробка реверсивных контакторов; 5 —- электро-
мотор; 6 —• выключатель иа секторе газа; 7 — концевой выключатель
размыкающийся при выпуске шасси; 8 — красная лампа; 9 — сирена
выпущенного положения, концевые выключатели 7 и 2, уста-
новленные у одной из стоек шасси, размыкаются. Концевой
выключатель 7 размыкает цепь сигнализации убранного поло-
жения шасси, а выключатель 2 размыкает питание обмотки
нижнего контактора. Контактор размыкает цепь электродвига-
теля, и работа системы прекращается.
Для уборки шасси переключатель 7 ставится в положение
„Уб.“. Так как концевой выключатель замыкается, как только
стойка шасси несколько отойдет от убранного положения, то,
следовательно, цепь питания обмотки верхнего (по схеме)
контактора оказывается замкнутой. Контакты контактора замы-
каются, и электромотор, вращаясь, производит уборку шасси.
При полностью убранном шасси концевой выключатель 3
размыкает цепь питания обмотки верхнего контактора, контакты
которого размыкаются и электромотор выключается.
Как видно из схем рис. 92 и рис. 93, концевые выключа-
тели устанавливаются только у одной из стоек шасси. Для
120
группового электромеханического привода шасси это вполне
допустимо, так как благодаря жесткой кинематической связи
выпуск и уборка всех стоек шасси происходят одновре-
менно.
При подходе к крайним положениям благодаря наличию
сил инерции некоторое время после выключения электродви-
гателя стойки шасси продолжают перемещаться. Для предот-
вращения сильных ударов стоек шасси при подходе к крайним
положениям о неподвижные части конструкции самолета на
некоторых самолетах электропривод шасси снабжается электро-
динамическим торможением. В схеме рис. 92 эти толчки,
обусловленные в основном инерцией якоря электродвигателя
(благодаря большому передаточному числу редуктора), смяг-
чаются фрикционной муфтой 2.
Положение стоек шасси контролируется как по механиче-
ским, так и по электрическим индикаторам.
Для предотвращения посадки самолета с невыпущенными
шасси применяется звуковая и световая сигнализация при
помощи сирены 9 и красной лампочки 8 (рис. 93). Как видно
из схемы, сирена й красная лампочка включены последова-
тельно с двумя выключателями. Выключатель 7 остается
замкнутым до полного выпуска шасси, выключатель 6 меха-
нически связан с рычагом газа так, что замыкается при
убранном газе. Следовательно, если самолет идет на посадку
(газ убран) и шасси полностью не выпущены, то загорается
красная лампочка и гудит сирена. На некоторых самолетах,
помимо выключателя 7, устанавливаемого у стойки основного
колеса шасси, устанавливается дополнительный контакт, кон-
тролирующий полный выпуск носового колеса шасси.
Как указывалось выше, громоздкость механической пере-
дачи движения от электродвигателя к стойкам шасси не
позволяет осуществить на больших самолетах электромехани-.
ческпй групповой привод шасси,- Поэтому для выпуска и уборки
шасси больших самолетов, где расстояния между стойками
шасси сравнительно велики, применяется электромеханический
индивидуальный привод, который характеризуется приводом
стойки каждого колеса своим электродвигателем. Примером
такого привода может служить „Электрическое колено", пред-
ставляющее собой электродвигатель, помещенный в шарнир
тяги каждой стойки шасси.
Следует отметить, что для привода шасси, кроме двига-
телей с сериесным возбуждением, как это показано на схеме
рис. 93, иногда применяют также двигатели смешанного воз-
буждения. Это объясняется тем, что при выпуске шасси
нагрузка на валу электродвигателя может, отсутствовать (ноги
шасси вываливаются под влиянием собственного веса) и в этом
случае скорость вращения сериесного двигателя может повы-
ситься до опасных пределов.
121
Электрогидравлический привод шасси
Наряду с описанной выше электромеханической системой
выпуска и уборки шасси широкое применение находит электро-
гидравлическая система. В электрогидравлической системе
передача движения от электродвигателя к стойкам шасси
производится при помощи гидросистемы.
На рис. 94 изображена совмещенная принципиальная схема
электрогидравлического привода шасси.
Рис. 94. Принципиальная схема электрогидравлического привода шасси:
I — механизм управления шасси; 2 — рукоятка механизма управления шасси; 3 — золотник;
4 — обратный клапан; 5 — переключатель механизма управления шасси; 6 — электромагнитный
выключатель; 7 — электромотор; 8—иасос; 9 — редукционный клапан; 10 — бачок с гидро-
смесью; 11 — фильтр; 12 — гидроподъемник; 13 — концевой выключатель убранного положения
шасси; 14 — стойка колеса шасси; 15 — концевой выключатель выпущенного положения шасси;
16 — панель сигнализационных ламп (где К ~ красные лампы и 3 — зеленые лампы)
Положение всех элементов схемы соответствует полностью
выпущенному шасси.
Для уборки шасси ручку 2 механизма управления выпуском
и уборкой шасси / устанавливают в положение „Уб.“, соответ-
ственно золотник 3 механизма перемещается в левое (по схеме
крайнее) положение, и средний подвижный контакт переклю-
чателя механизма замыкается с левым неподвижным контактом.
При этом ток поступает к обмотке магнитного выключателя 6
через замкнутые контакты концевого выключателя 13 и замкну-
тые контакты переключателя 5. Контакты магнитного выклю-
чателя 6 замыкаются и подают питание к электромотору 7,
вращающему насос 8. Насос забирает гидросмесь (смесь
122
глицерина и спирта) из бачка 10 и, отжимая давлением кла-
апн 4, нагнетает смесь под поршень гидроподъемников колес
шасси.
Поршень каждого гидроподъемника перемещается вверх
и при помощи тяги убирает колесо шасси. Смесь из верхней
полости гидроподъемника выжимается по трубопроводу через
золотник и фильтр в бачок.
Работа электромотора, а следовательно, и насоса продол-
жается до тех пор, пока стойка шасси не нажмет на шток
концевого выключателя 13. При этом нижние контакты его
разомкнутся, а верхние замкнутся. Верхние контакты замкнут
цепь питания красной лампы, сигнализирующей об убранном
положении данной стойки шасси. Размыкание нижних контак-
тов концевого выключателя 13 приводит к прекращению пита-
ния обмотки магнитного выключателя 6, а следовательно,
к размыканию цепи питания электромотора 7. Электромотор
останавливается, и работа насоса прекращается. Клапан 4
отжимается пружиной, чем предотвращается возможность выте-
кания гидросмеси из нижней полости гидроподъемника через
золотник и насос в бачок. Так как гидросмесь практически
несжимаема, то этим достигается запирание шасси в убранном
положении. На некоторых самолетах дополнительно устана-
вливаются специальные замки, удерживающие шасси в край-
них положениях.
Добиться одновременной уборки или выпуска всех колес
шасси в электрогидравлической системе практически невоз-
можно. Поэтому питание к обмотке электромагнитного выклю-
чателя подается, как это показано на схеме рис. 94, одновре-
менно через контакты трех концевых выключателей: левого
колеса (выключатель 13), правого и хвостового колеса.
Последние два выключателя на схеме не показаны. Схема
для правого и хвостового колес такая же, как и для левого,
показанного на рис. 94. Из этого следует, что обмотка электро-
магнитного выключателя будет питаться до тех пор, пока
полностью не уберутся все колеса шасси, и питание прекра-
щается после уборки последнего колеса шасси.
Все концевые выключатели при нажатом штоке замыкают
цепь питания сигнальной лампы — зеленой (выпущенное
положение шасси) или красной (убранное положение шасси).
Соответственно количеству колес шасси имеется столько же
пар сигнальных ламп.
Для выпуска шасси ручку 2 ставят в положение „Вып.“
(среднее положение по схеме рис. 94). При этом золотник
и переключатель занимают положение, показанное на схеме,
а работа системы протекает аналогично работе системы при
уборке шасси. Закрепление стоек шасси в. выпущенном поло-
жении должно производиться особенно надежно во избежание
аварии при посадке или взлете. Для этой цели применяются
специальные устройства. В некоторых случаях (например, при
123
недостаточно точной регулировке концевых выключателей)
может оказаться, что давление в системе превысит допусти-
мые пределы. Для предотвращения повреждения системы от
чрезмерного давления гидросмеси устанавливается редук-
ционный клапан 9, перепускающий смесь из нагнетающего
патрубка насоса через фильтр в бацок при повышенном да-
влении.
При отказе основной системы выпуск шасси производится
от аварийной системы. Давление в аварийной системе создается
ручным насосом, приводимым в действие одним из членов
экипажа самолета. Для того чтобы предотвратить одновремен-
ное действие ручного и'электрического насосов при аварийном
выпуске, что может вызвать чрезмерное повышение давления
в гидросистеме, ручку 2 (рис. 94) необходимо поставить
в положение „Ав. вып.“ (вправо до упора по схеме).
В этом положении контакты переключателя 5 разомкнуты,
а следовательно, цепь питания обмотки электромагнитного
выключателя 6 остается разомкнутой и электромотор 7 не
работает.
§ 45. ЭЛЕКТРИЧЕСКИЕ СТАРТЕРЫ ДЛЯ ЗАПУСКА АВИАДВИГАТЕЛЕЙ
Запуск современных мощных поршневых авиадвигателей
слагается из заполнения цилиндров двигателя горючей смесью,
подготовки смеси к зажиганию и воспламенения смеси.
Для заполнения ци-
линдров горючей сме-
м ' сыо коленчатый вал
Г\ двигателя должен сде-
/ \ лать за счет приложен-
/ ного извне крутящего
/ I момента не менее двух
/ полных оборотов при
УАААААААА скорости вращения
V v V v v v v 50 60 оцмин При.
мерно этой же ско-
рости вращения для
большинства современ-
° ЮГ МО' 5W' НЬ1Х авиадвигателей со-
ответствует скорость
Рис. 95. Зависимость результирующего момента Движения поршня
от сил давления газов и сил трения от угла 30 см/сек. Скорость ДВИ-
• поворота коленчатого вала ЖСНИЯ ПОрШНЯ В
1 30 см/сек является в
то же время минимально необходимой для образования горю-
чей смеси, способной воспламеняться. Следовательно, для того
чтобы произошел запуск, необходимо коленчатый вал двига-
теля принудительно повернуть не меньше чем на два полных
оборота со скоростью вращения не меньше 50—60 об/мин.
124
Принудительное вращени? авиадвигателя связано с расхо-
дом энергии, идущей на преодоление следующих моментов:
1. Момента, обусловленного силами трения.
2. Л4омента от сил давления газов, действующих на поршни.
3. Момента от сил инерции, возникающих в механизмах
винтомоторной группы.
Эти моменты не сохраняют постоянного значения, а изме-
няются в процессе запуска. Кривая изменения результирую-
щего момента (момента сопротивления авиадвигателя) от сил
давления газов и сил трения в зависимости от угла поворота
коленчатого вала представлена на рис. 95. Как видно из этого
рисунка, црмент сопротивления в начальный период достигает
максимума, затем уменьшается и колеблется около некоторой
средней величины. Колебания момента сопротивления обусло-
влены попеременными сжатиями и расширениями смеси в раз-
личных цилиндрах. Амплитуда этих колебаний тем меньше,
чем большее число цилиндров. Для современных многоцилинд-
ровых авиадвигателей амплитуда колебаний момента сопроти-
вления невелика и значительно меньше среднего значения мо-
мента сопротивления.
Момент сопротивления зависит не только от мощности
двигателя, но также от температуры тела самого двигателя.
Как правило, с понижением температуры момент сопротивле-
ния, а следовательно, и усилия, потребные для приведения, во
вращение двигателя, возрастают, вследствие чего запуск дви-
гателя зимой значительно усложняется.
Среднее значение момента сопротивления в зависимости от
мощности двигателя и от температуры изменяется в пределах
30—150 кгм.
На современных самолетах для запуска авиадвигателей
находят широкое применение электрические стартеры. Они
просты в управлении и не требуют дополнительного оборудо-
вания для запуска, как то: баллонов со сжатым воздухом,
системы воздухопроводов, кранов и пр. Эти стартеры имеют
небольшой вес по отношению к развиваемой стартером мощ-
ности и, наконец, что является весьма важным, — возможность
многократного повторного пуска.
Все существующие современные электрические стартеры
можно разбить на три основных типа: стартеры прямого дей-
ствия, стартеры косвенного действия и стйртеры комбиниро-
ванного действия.
Электрический стартер прямого действия
Схема стартера прямого действия представлена на рис. 96.
Как видно из схемы, стартер состоит из электродвигателя 1,
обычно сериесного возбуждения, понижающего редуктора 2,
фрикционной муфты 3 и храповика 4, могущего входить
в зацепление с храповиком коленчатого вала авиадвигателя 5.
125
Рис. 96. Электрический стартер прямого действия:
1 — электродвигатель; 2 — понижающий редуктор: 3 -фрик-
ционная муфта; 4 — храповик; 5 — храповик вала авнадви-
। гателя
Электрическая схема запуска авиамотора от стартера пря-
мого действия дана на рис. 97.
Включение электромотора / стартера в электрическую сеть
производится при помощи электромагнитного реле 2, цепь
питания обмотки которого замыкается кнопкой 3. Вращение
Рис. 97. Схема запуска авиадвигателя от стартера прямого
действия:
1 — электромотор стартера; 2 — электромагнитное реле; 3 - кнопка включения
стартера; 4 — пусковая катушка; 5 — кнопки включения пусковой катушки;
6 — аккумуляторная батарея
электродвигателя передается через понижающий редуктор
и фрикционную муфту к храповику. Как только храповик при-
ходит во вращенйе, он выдвигается, входит в зацепление
с 'храповиком коленчатого вала авиадвигателя и производит
запуск последнего. Одновременно с запуском авиадвигателя
замыканием контактов кнопки 5 включается пусковая катушка
зажигания. Для уменьшения момента сопротивления в первый
момент запуска рекомендуется предварительно установить
авиамотор в положение наименьшей компрессии.
Существенным недостатком стартера прямого действия яв-
ляется большая мощность электродвигателя, для питания ко-
торого требуется аккумуляторная батарея большой емкости.
126
Мощность Pj, потребная для преодоления момента сопро-
тивления авиадвигателя Л/, равна произведению этого момента
на угловую скорость и, т. е. Р, — Лйл. Действительная мощ-
ность на валу электродвигателя больше этой мощности за
счет расхода энергии на преодоление сил инерции и потерь
энергии в редукторе:
где ‘/;ре, — коэфициент полезного действия редуктора;
К — коэфициент, учитывающий увеличение мощности на
преодоление сил инерции.
Для того чтобы показать, какая мощность электродвигателя
необходима при использовании стартера прямого действия,
приведем пример расчета мощности электродвигателя и емко-
сти аккумуляторной батареи.
Если принять в среднем М = 50 кгм-, <» = 2к \/сек-, 7] =
— 0,9;' К= 1,2, то получим, что мощность электродвигателя
должна быть
Р2 = 1,2 ~ 418 KZMjcex: 4,07 кет.
Принимая к. п. д. электродвигателя равным 0,7, получим
мощность, потребляемую от сети, т. е. от аккумуляторной
батареи,
Р =7^1=5,80 кет.
е 0,7 ’
При напряжении на зажимах аккумулятора Ua = 18 «полу-
чим ток
Внутреннее падение напряжения' двадцатичетырехвольтовой
аккумуляторной батареи при напряжении на ее зажимах
U& = 18 в будет 24 — 18 = 6 в.
Разрядный ток 322 а при падении напряжения 6 в может
дать аккумуляторная батарея с внутренним сопротивлением
~ 322 ~ ом"
Номинальная емкость аккумуляторной батареи с таким,
внутренним сопротивлением составляет примерно Г00 а-ч.
Приведенные простейшие расчеты показывают, что стартер
прямого действия должен обладать мощным, а следовательно,
и большим по габаритам и весу электродвигателем, требую-
щим для питания аккумуляторную батарею большой емкости.
127
Поэтому, как правило, запуск авиамотора должен производиться
от аэродромной аккумуляторной батареи, что не всегда воз-
можно при работе самолета в фронтовых условиях. Запуск
же авиадвигателя стартером прямого действия от бортовой
аккумуляторной батареи приводит к чрезмерному разряду ак-
кумуляторной батареи. Это нельзя признать рациональным,
так как после запуска в этом случае самолет уходит в полет
с разряженной бортовой аккумуляторной батареей.
К достоинствам стартера прямого действия относится не-
большое время запуска, сравнительно небольшие потери энер-
гии и простота конструкции.
Из вышёизложенного следует, что электрические стартеры
прямого действия, при помощи которых осуществляется не-
посредственный привод авиадвигателя, пригодны для запуска
авиадвигателей небольшой и средней мощности; применение ,
же этих стартеров для запуска авиадвигателей большой мощ-
ности нерационально, так как сами стартеры и источники пи-
тания их (аккумуляторные батареи) получаются в этом случае
слишком громоздкими.
Поэтому для привода во вращение авиадвигателей бблыпой
мощности используются пусковые устройства косвенного дей-
ствия, к числу которых относятся так называемые электро-
инерционные стартеры.
Попытки применить описываемые ниже электроинерционные
стартеры для запуска турбореактивных двигателей пока не
дали удовлетворительных результатов, так как при запуске
реактивного двигателя требуется значительно большее, чем
при запуске поршневого, время, в течение которого скорость
вращения вала ротора турбины достигает необходимых обо-
ротов для запуска. Кроме того, валу ротора компрессора4
и турбины приходится сообщать значительно большую угло-
вую скорость, чем валу поршневого двигателя. Существующие
конструкции электроинерционных стартеров не могут обеспе-
чить указанных условий, поэтому для запуска турбореактив-
ных двигателей применяются стартеры прямого действия.
Учитывая приведенные выше недостатки системы запуска
от электрического стартера прямого действия, иногда приме-
няют комбинированную систему запуска (не путать со старте-
ром комбинированного действия).
Комбинированная система запуска состоит из электрического
стартера прямого действия и бензинового двигателя неболь-
шой мощности — бензостартера.
Электрический стартер служит только для запуска пуско-
вого бензинового двигателя, а поэтому может быть неболь-
шой мощности. При запуске турбореактивного двигателя по
комбинированной системе вначале запускается от электри-
ческого стартера пусковой двигатель, который раскручивает
вал ротора турбины и компрессора до скорости, необходимой
для запуска.
128
Электроинерционный стартер
Рис. 98. Принципиальная схема электро-
инерционного стартера:
1 — электродвигатель, обычно сериесного воз-
буждения;' 2|—роликовая муфта сцепления;
3 — маховик с большим моментом инепции; 4 — ре-
дуктор; 5 — фрикционная муфта; 6 — храповик
стартера; 7 — храповик коленчатого вала авиа-
двигателя
Стремление по возможности уменьшить мощность электро-
двигателей привело к созданию электроинерционных стартеров,
которые нашли наибольшее применение для запуска авиадви-
гателей. В электроинерционном стартере электродвигатель не
служит непосредственно для раскрутки коленчатого вала,
а раскручивает маховик, сообщая ему запас кинетической
энергии, достаточной для запуска авиадвигателя.
Этот запас кинетической энергии в нужный момент превра-
щается в механическую работу вращения коленчатого вала.
Принципиальная схема
электроинерционного стар-
тера дана на рис. 98.
Принцип действия элек-
троинерционного стартера
состоит в следующем: махо-
вик с большим моментом
инерции приводится во вра-
щение с большой скоростью
посредством сериесного
электродвигателя.
В маховике запасается
большая кинетическая энер-
гия, которая затем передает-
ся коленчатому валу после
сцепления храповика стартера с храповиком коленчатого вала.
Раскрутка маховика электродвигателя продолжается при-
мерно 10—20 секунд, а после сцепления маховика с колен-
чатым валом маховик отдает запасенную в нем энергию при-
• мерно в течение 3—4 секунд.
Таким образом, мощность, отдаваемая при торможении
маховика, в несколько раз больше мощности, потребляемой
при его раскрутке. ••
Электроинерционные стартеры отечественного производства
применяются двух типов: РИ-24 и РИМ-24 и представляют
собой комбинированные агрегаты для электрического и руч-
ного запуска авиационных моторов. По своей конструкции
и основным данным стартеры обоих типов одинаковы. Стартеры
состоят из механической части и электрооборудования. Меха-
ническая часть, принципиальная схема которой дана на рис. 99,
смонтирована внутри алюминиевого корпуса. Основными ее
элементами являются: маховик, редуктор, фрикционная муфта,
механизм сцепления и механизм включения.
Маховик /5. рассчитан на номинальную скорость вращения
12000—14000 об/мин и вращается при помощи электродвига-
теля или от ручного привода.
Для раскрутки электродвигателем маховик имеет фланец 16,
в который помещена автоматическая муфта 17 с заклиниваю-
9—Электропривод иа самолете 129
щими роликами. Муфта посажена на вал 18 якоря электро-
двигателя. Муфта центробежного типа, с шестью роликами,
помещенными в скошенных пазах и убранными заподлицо
с обоймой муфты (в нерабочем состоянии).
При вращении муфты ролики под действием центробежных
сил выступают из обоймы и увлекают маховик за счет сил
прения между поверхностью роликов и фланцем маховика.
Такое сцепление электродвигателя с маховиком обеспечивает
Рис. 99. Механическая часть электро-
иисрционного стартера:
.1 — корпус; 2 — пружина; 3-— храповик;
4 — стальной диск; 5 — бронзовый диск;
6 — корпус муфты; 7 — неподвижная шестерня;
8 — сателлитовая шестерня; 9 — коническая
шестерня; 10 — вал ручной раскрутки; 11 — на-
ружный рычаг; 12 — серьга; 13—ведущая
шестерня; 14 — вал маховика; 15 — маховик;
16 — фланец; 17 — роликовая муфта; 18 — вал
электродвигателя; 19-—малая двойная ше-
стерня; 20 — валик; 21 •— большая двойная
шестерня; 22—-шпилька; 23—ггружи/на хра-
повика; 24 — хвостовик
литов запрессованы в корпус 6
плавный пуск в ход всего
стартера и предохраняет элек-
тродвигатель от перегрузки
при неисправности в редук-
торе. В момент выключения
электродвигателя, когда его
обороты начнут уменьшаться,
автоматическая муфта расце-
пляет его от маховика за счет
уменьшения центробежных
усилий и увеличивающейся
разности оборотов маховика и
вала электродвигателя.
Редуктор стартера планег
тарного типа и состоит из
ведущего вала 14, на котором
укреплен маховик и нарезана
ведущая шестерня 13, малой
двойной шестерни 19, предста-
вляющей общую деталь с вали-
ком 20, большой двойной ше-
стерни 21 с внутренним и
внешним венцом, четырех са-
теллитовых шестерен 8 и не-
подвижной шестерни 7, укре-
пленной в корпусе. Оси сател-
фрикционной муфты, который
вращается при обкатке сателлитов по неподвижной шестерне 7
редуктора.
В редукторе имеется две конические шестерни 9 для воз-
можности привода маховика вращением вала 10 вручную.
Передаточное число редуктора (от маховика к выходному
устройству) равно 120,5: 1; таким образом, 12С00—14000 об/мин.
маховика преобразуются в 90—110 об/мин выходного устрой-
ства, а момент на выходном устройстве стартера по отноше-
нию к моменту маховика возрастает примерно в 120 раз.
Фрикционная муфта ограничивает момент на выходном
устройстве редуктора стартера РИ-24 до 95 кгм, а РИМ-24 —
до 140 кгм. Муфта — дискового типа.
Диски сцепляются только за счет .трения их поверхностей
под действием девяти спиральных пружин 2, в связи с.чем
130
при моментах, превышающих величины, указанные для старте-
ров РИ-24 и РИМ-24, диски будут пробуксовывать и муфта
предохранит механизм стартера от поломки при заеданиях или
других неисправностях в авиамоторе.
Механизм сцепления стартера сделан в виде подвижного
трехзубого храповика 3, посаженного на спиральные шлицы
хвостовика 24. Зубья храповика сделаны с косыми гранями
и рассчитаны на зацепление с трехзубым хвостовиком колен-
чатого вала авиамотора только при левом вращении стартера.
После запуска авиамотора храповик отжимается от хвостовика
коленчатого вала и выходит из зацепления.
В нерабочем состоянии стартера и при раскрутке маховика
храповик под действием пружины 23 занимает убранное поло-
жение и прижимает кожаную маслоуплотнительную шайбу,
предохраняющую стартер от попадания в него масла из авиа-
мотора.
Вперед по шлицам хвостовика храповик перемещается
при помощи механизма включения. Механизм включения состоит
из шпильки 22, к которой храповик крепится гайкой (имею-
щей левую резьбу), и наружного рычага 11, который связан
со шпилькой — серьгой 12. Электрическая схема соединений
электроинерционного стартера дана на рис. 100.
Рассмотрим процесс
запуска авиадвигателя
от элейтроинерцион-
ного стартера. Из прин-
ципа действия стартера
слёдует, что весь про-
цесс запуска можно
разделить на два пе-
риода: период разгона
маховика электродви-
гателем и период тор-
можения стартёра при
раскрутке коленчатого
вала.
Для раскрутки ма-
ховика стартера при-
меняется сериесный
электродвигатель, как
имеющий большой пу-
сковой момент и даю-
щий большую скорость
вращения. В первый
вика — процесс изменения тока в цепи электродвигателя и ско-
рости вращения его будет протекать во времени так, как это
показано на рис. 101. Разделим весь период разгона маховика
на три этапа и рассмотрим каждый этап в отдельности.
и мпгнето
Рис. 100. Электрическая схема включения
электроинерционного стартера:
1 — электродвигатель; 2 — электромагнитный выключа-
тель; 3 — предохранитель; 4 — кнопка управления;
5 — электромагнит храповика для управления сцепле-
нием при запуске; 6 — пусковая катушка зажигания
период запуска — период разгона махо-
9*
131
Первый этап от t = 0 до t = t\ соответствует нарастанию
тока электродвигателя при неподвижном якоре до момента
трогания якоря с места. Приложенное к зажимам электродви-
гателя напряжение уравновешивается падением напряжения
в омическом сопротивлении цепи якоря и электродвижущей
силой самоиндукции. Скорость нарастания тока в течение этого
этапа тем больше, чем меньше индуктивность цепи якоря, а сле-
довательно, чем меньше электродвижущая сила самоиндукции.
Второй этап начинается с момента трогания якоря, т. е.
с момента t — tx, и заканчивается в момент £=£1 + ^2; харак-
теризуется увеличением скорости вращения и дальнейшим
нарастанием тока до максимального значения.
~]В течение второго этапа якорь вращается, и поэтому в его
обмотке наводится электродвижущая сила вращения, действую-
щая, так же как и электродвижущая сила самоиндукции,
навстречу приложенному напряжению. Поэтому приложенное
к зажимам электродвигателя напряжение уравновешивается
омическим падением напряжения, электродвижущей силой
самоиндукции и электродвижущей
электродвижущей силой
силой вращения.
Электродвижущая
сила вращения тем
больше, чем больше
скорость вращения, а
так как скорость вра-
щения ' якоря непре-
рывно увеличивается,
то растет также и
величина электродви-
жущей силы вращения,
которая замедляет на-
растание тока. Как
видно из рис. 101, ток
в конце второго этапа
достигает максималь-
ного значения, а затем
уменьшается. Если бы
. якорь на втором этапе
оставался заторможен-
ным, например, вслед-
ствие загустевания
смазки в редукторе из-
то максимальный ток
был бы значительно
соответствующего вращающемуся якорю,
разгона маховика — от
Рис. 101. Процесс изменения тока и скорости
вращения при раскрутке маховика стартера
за пониженной температуры (зимой),
электродвигателя в этом случае /мтр
больше тока /м
Третий этап разгона маховика — от момента времени
^ = А.+ ^2 До момента t = tx + /2 + ^з характеризуется нара-
станием скорости вращения до максимального значения пшах
и уменьшением тока.
132
Когда скорость вращения маховика достигнет значения гатах>
электродвигатель отключается, а стартер через храповик
сцепляется с коленчатым валом. С этого момента начинается
второй период запуска электродвигателя — период торможения
стартера и раскрутки коленчатого вала.
В момент сцепления храповика стартера с храповиком
коленчатого вала скорость коленчатого вала равна нулю,
а скорость вращения маховика имеет максимальное значе-
ние %0> поэтому в первый момент сцепления происходит
неупругий удар — появляется проскальзывание дисков фрик-
ционной муфты. Под действием момента скольжения дисков
маховик начинает тормозиться и скорость вращения его
уменьшается. Скорость вращения коленчатого вала о>к при
этом увеличивается до значения, соответствующего равенству
этих скоростей = «>к. Дальше, если запуска не произошло,
стартер и коленчатый вал
вращаются с одинаковой
скоростью до полной
остановки. Процесс изме-
нения скорости вращения
стартера и коленчатого
вала авиадвигателя по вре-
мени показан на рис. 102.
Величина кинетиче-
ской энергии, запасаемая
в маховике в период раз-
гона, должна быть тем
больше, чем больше мощ-
ность авиадвигателя. По-
этому увеличение ^мощ-
ности авиадвигателей при-
вело к необходимости по-
вышения кинетической
Рис. 102. Изменение скорости вращения
коленчатого вала и стартера при раскрутке
коленчатого вала электроинерционным стар-
тером
энергии маховика. Если такая энергия маховика стартеров,
выпускавшихся несколько лет назад, составляла 600 кгм, то
маховики современных стартеров имеют запас энергии 2300 кгм.
Выражение для запаса кинетической энергии маховика
показывает, что увеличение ее может итти или за счет увели-
чения момента инерции, а следовательно, и веса маховика или
же за счет увеличения его скорости вращения. Последнее
более желательно, так как позволяет применять маховики
меньшего веса.
За последние несколько лет скорость вращения маховиков
электроинерционных стартеров увеличилась от 10000 до
24000 об/мин. При этом запас кинетической энергии маховика,
133
I
отнесенный к единице веса, увеличился от 200 кгм'кг до
1400 нгм/кг, т. е. в семь раз.
С точки зрения уменьшения веса маховика желательно
дальнейшее увеличение скорости его вращения, однако пре-
дедом этому являются конструктивные затруднения, вызванные
чрезвычайно большими центробежными силами, возникающими
при больших скоростях вращения. При скорости вращения
24 000 об)мин сила, действующая на проводники, заложенные
в один паз якоря, достигает 120 кг.
При таких усилиях .крепление проводников при помощи
проволочных бандажей становится ненадежным, и поэтому
электродвигатели современных стартеров выполняются с пол-
ностью закрытыми пазами якоря.
Применение закрытых пазов при большой скорости вра-
щения якоря приводит к изменению конструкции всего электро-
двигателя по сравнению с электродвигателями с открытыми
пазами якоря.
Объясняется это необходимостью применения в таких
электродвигателях дополнительных полюсов для получения
удовлетворительной коммутации. Наличие дополнительных
полюсов требует пространства для размещения сердечников
дополнительных полюсов и их обмоток. Однако это не при-
водит к увеличению •'веса и размеров электродвигателя по
сравнению с электродвигателем без дополнительных полюсов
вследствие возможности уменьшить число витков главных
полюсов возбуждения путем уменьшения воздушного зазора.
Возможность снижения ампервитков возбуждения при умень-
шении воздушного зазора объясняется тем, что у обычных
электродвигателей ампервитки воздушного зазора составляют
около 4О°/о от ампервитков возбуждения.
Небольшая величина воздушного зазора позволяет увели-
чить к. щ д. электродвигателя, так как уменьшается количество
меди, идущей на обмотку полюсов, и потери в них умень-
шаются.
Одним из существенных недостатков выпускавшихся ранее
электроинерционных стартеров являлся сравнительно малый
коэфициент полезного действия. Объясняется это наличием
фрикционной муфты, в которой неизбежно возникают потери
энергии и сравнительно низкий к. п. д. электродвигателя, слу-
жащего для раскрутки маховика. Вследствие невысокого к. п. д.
стартера ток якоря электродвигателя получается весьма боль-
шой, что ограничивает возможность питания стартера от бор-
товой аккумуляторной батареи. Это приводит к необходимости
питания стартера от аэродромной аккумуляторной батареи,
что (как указывалось выше) представляет большие неудобства,
особенно во фронтовых условиях, во время боевых действий.
При этом необходимо учитывать, что емкость аккумулятора
увеличивается с уменьшением разрядного тока и процентный
134
расход емкости аккумулятора уменьшается в большей степени,
чем уменьшается сила разрядного тока.
Увеличение к. п. д. имеет весьма существенное значение.
Повышение к. п. д. может итти по двум путям: увеличение
к. п. д. самого электродвигателя и уменьшение потерь во фрик-
ционной муфте.
Стартер комбинированного действия
Кинематическая схема стартера комбинированного действия
такая же, как и электроинерционного стартера. Различие
заключается в том, что маховик и якорь электродвигателя
связаны один с другим жестко, а не через роликовую муфту,
как в случае инерционного стартера. Кроме того, в стартере
комбинированного действия имеется устройство для подъема
щеток электродвигателя.
На рис. 103 представлена принципиальная схема электри-
ческих соединений стартера. На этой схеме показан электро-
двигатель 1, обмотка электро-
магнита 2, служащего для
опускания щеток электродви-
гателя, и электромагнита 3, слу-
жащего для сцепления храпо-
вика стартера с храповиком
коленчатого вала авиадвига-
теля.
Для запуска авиадвигателя
сперва замыкают выключа-
тель а и после достижения ма-
ховиком максимальной ско-
рости вращения, не размыкая
выключатель а, замыкают вы-
ключатель b и этим произ-
водят сцепление храповика
стартера с храповиком колен-
чатого вала.
? Кинетическая энергия, запасенная в маховике, расходуется
на преодоление сил инерции и трения в подвижных частях
авиадвигателя, в основном, в первый период после сцепления
храповиков стартера и авиадвигателя.
В течение этого периода скорость вращения коленчатого
вала достигает максимального значения. Однако стартер дол-
жен не только сообщить коленчатому валу определенную
скорость вращения, но и поддерживать вращение его с’ этой
скоростью до тех пор, пока авиадвигатель не начнет работать.
Это осуществляется во второй период запуска за счет работы
электродвигателя стартера, который работает в этом случае
как стартер прямого действия. Итак, трогание авиадвигателя
и вращение его в начальный период, при максимальных зна-
чениях момента сопротивления, производится за счет кинети-
Рис. +03. Принципиальная схема
включения стартера комбинирован-
ного действия:
1 — электродвигатель; 2 — электромагнит для
опускания щеток; 3 — электромагнит для
сцепления храповика
135
ческой энергии, запасенной в маховике, а вращение его —
за счет работы электродвигателя стартера.
Очевидно, что кинетическая энергия, требуемая только для
сообщения авиадвигателю необходимой для запуска скорости
вращения, значительно меньше той, которая требуется для
полного запуска.
В то же время и вращающий момент электродвигателя,
потребный для вращения уже приведенного в движение авиа-
двигателя, будет меньше, чем если бы он приводился в дви-
жение из состояния покоя.
Маховик стартера комбинированного действия должен быть
меньше, чем у чисто инерционного стартера, а электродвига-
тель— значительно меньшей мощности, чем у стартера прямого
действия.
Преимущества стартера комбинированного действия перед
стартером инерционного типа сказываются в том случае, если
приходится прибегать к повторным раскруткам махрвика при
тяжелых условиях запуска.
Стартеры комбинированного действия могут работать так
же, как и обычные электроинерционные стартеры. Если усло-
вия запуска не тяжелы, то применяется инерционный запуск.
Если же запуск авиадвигателя производится в тяжелых
условиях, например при низких температурах, то применяется
.комбинированный запуск.
§ 46. ЭЛЕКТРОПРИВОД ЛОПАСТЕЙ ВИНТОВ ИЗМЕНЯЕМОГО
В ПОЛЕТЕ ШАГА (ВИШ)
На современных самолетах, производящих полеты на боль-
шом диапазоне скоростей и высот, устанавливаются преиму-
щественно воздушные винты изменяемого в полете шага. Воз-
душные винты фиксированного шага применяются только на
тех самолетах, у которых как скорость, так и высота полета
сравнительно невелики.
По сравнению с винтами фиксированного шага винты изме-
няемого в полете шага, работающие совместно с регуляторами
постоянства скорости вращения, обладают следующими пре-
имуществами: более высокий к. п. д. винтомоторной установки,
повышенная предельная высота полета самолета, возможность
уменьшения лобового сопротивления воздушного винта не
работающего в полете мотора (для многомоторных самолетов)
установкой лопастей во флюгерное положение — положение
по потоку, возможность уменьшения пробега самолета при
посадке путем поворота лопасти вокруг своей оси до поло-
жения, соответствующего созданию отрицательной тяги, т. е.
путем реверсирования винта, и т. д.
Изменение угла установки лопастей ВИШ, равносильное
изменению шага, винта, производится как при помощи гидра-
влического, так и при помощи электромоторного привода.
136
Ниже рассматривается применение электромоторного привода1
для поворота лопастей относительно своей оси.
На рис. 104 показана принципиальная кинематическая схема
ВИШ, где для упрощения схемы обычно применяемый дифе-
ренциально-планетарный редуктор заменен двумя парами
шестерен с внешним зацеплением.
Принцип работы такого ВИШ заключается в следующем.
Для изменения шага винта включают электродвигатель,
вращение якоря которого, как
। это показано на рис. 104, пере-
ду дается через понижающий редук-
тор на коническую шестерик»
Рис. 104. Упрощенная кинемати-
ческая схема трехлопастного ВИШ:
1 — электродвигатель; 2 — редуктор; 3 — ко-
ническая шестерня редуктора; 4 — кониче-
ская шестерня лопасти; 5 — комель ло-
пасти; 6 — лопасть винта
Рис. 105. Общий вид трехлопаст-
ного винта:
1 — электромагнитный тормоз; 2 — электро-
двигатель; 3 — редуктор; 4 —1 контактные
кольца; 5 — лопасть; 6 — втулка винта
редуктора. Коническая шестерня редуктора, сцепленная с кони-
ческими шестернями лопастей, одновременно поворачивает все
лопасти до тех пор, пока включен электродвигатель. Как
только лопасти повернутся на заданный угол, электродвигатель
выключается и поворот лопастей прекращается. Изменяя
направление вращения электродвигателя, можно установить
винт как на большой, так и на малый шаг.
На рис. 105 представлен общий вид трехлопастного. винта
с^приводом лопастей от электродвигателя.
Рассмотрим отдельные основные части винта.
137
Большой шаг
Малый шаг
Электродвигатель. Для поворота лопастей винта приме-
няются реверсивные с сериесным возбуждением электродви-
гатели. Эти электродвигатели имеют две сериесные обмотки
возбуждения, одна из которых предназначена для левого
вращения, другая для правого. Якорь электродвигателя снаб-
жен торцевым коллектором, к которому с внешней стороны
электродвигателя прижимаются щетки. Щетки угольные, цилинд-
рические, расположены в специальных щеткодержателях.
Нажатие щеток на коллектор якоря создается спиральными
пружинами. Электрический ток к электродвигателю подводится
через концевые выключатели от
специального переключателя,
установленного в кабине летчика.
Схема включения электродвига-
теля при неавтоматическом упра-
влении показана на рис. 106.
Номинальные данные электро-
двигателей, применяемых для
винтов некоторых типов, следу-
ющие:
—- напряжение 24 в;
*=- мощность от 200 до 350 вт
— скорость вращения
1800 об/мин.
Следует отметить, что у вин-
тов различных типов основные
данные электродвигателей могут
отличаться от приведенных выше.
Например, для одного из воз-
душных винтов номинальная ско-
рость вращения электродвигателя
равна 5000 об/мин. Увеличение
скорости вращения позволяет при-
менить электродвигатели, меньшие по весу и габаритам, но
в то же время усложняется редуктор и увеличиваются потери
в нем.
При работе электродвигатель преодолевает момент, слагаю-
щийся из динамического и статического моментов. Благодаря
большому передаточному числу редуктора динамический мо-
мент в основном определяется моментом инерции якоря элек-
тродвигателя. Статический момент определяется центробеж-
ными силами, действующими на лопасти при вращении винта
от авиадвигателя, силами сопротивления от встречного потока
воздуха и силами трения.
Центробежные силы возникают при вращении винта вслед-
ствие несимметричного расположения масс ’относительно оси
лопасти и создают момент, стремящийся повернуть лопасть на
меньший шаг. Силы сопротивления от встречного потока со-
здают момент, либо совпадающий с моментом от центробежных
Концевой
выключатель
Концевой
выключатель
I Элентро-
। двигатель
Обмотка эл.магн.
тормоза
)
Рис. 106. Схема включения элек-
тромотора ВИШ при неавтомати-
ческом управлении
138
сил, либо .противоположный ему. Направление момента зави-
сит от расположения центра давления встречного потока на
лопасть (центр приложения аэродинамических сил к лопасти)
относительно оси лопасти. Обычно момент от центробежных
сил превышает момент сил аэродинамического сопротивления,
поэтому в полете лопасти винта стремятся всегда повер-
нуться на малый шаг.
Электромагнитный тормоз. Электромагнитный дисковый
тормоз, как это видно из рис. 105, расположен на внешней
торцевой стороне электродвигателя. Тормоз предназначен для
быстрой остановки электродвигателя и для фиксации шага винта.
Необходимость фиксации шага винта вызывается тем, что, как
указывалось выше, при вращении винта от авиадвигателя ло-
пасти винта стремятся повернуться на малый шаг.
На рис. 107 показано устройство элек-
тромагнитного тормоза.
Обмотка электромагнита включена
последовательно с якорем электродвига-
теля (см. рис. 106), и электрический ток
только тогда проходит по ней, когда
включен электродвигатель. При прохо-
ждении тока по обмотке якоря электро-
двигателя, а значит, и по обмотке элек-
тромагнита тормоза якорь электрома-
гнита притягивается и перемещается в
сторону электродвигателя, выходя при
этом из сцепления с кольцами. Якорь
электродвигателя имеет возможность в
этом случае свободно вращаться.
Рис. 107. Электрома-
гнитный тормоз:
1 — алюминиевый диск, вращаю-
щийся вместе с валом электро-
двигателя; 2 — кольца фер-
радо, укрепленные на алюми-
ниевом диске; 3 — дискообраз-
ный Эгкорь электромагнита,
имеющий только осевое пере-
мещение; 4 — пружины, при-
жимающие якорь к кольцам
феррадо при отключенном
электромагните’, 5 — обмотка
электромагнита тормоза; 6 — вал
электродвигателя; 7 — корпус
электродвигателя
При отключении электродвигателя
обмотка электромагнита также отклю-
чается, и пружины прижимают якорь
электромагнита к вращающимся вместе
с алюминиевым диском кольцам. Таким
образом, торможение электродвигателя,
а с ним вместе и редуктора винта осу-
ществляется в тот момент, когда цепь
электромагнита тормоза разрывается.
Редуктор. Редуктор предназначен
для уменьшения скорости вращения
приводной шестерни, сцепленной с ше-
стерней лопастей, до 0,2 об!мин и, следовательно, для увели-
чения крутящего момента этой шестерни.
Редуктор состоит из двухступенчатой планетарной передачи,
смонтированной в разъемном алюминиевом корпусе. Общее
передаточное число редуктора I—10000. В некоторых кон-
струкциях передаточное число i — 20000.
На конце редуктора, обращенном к винту, смонтировано
три концевых выключателя и один пружинный контакт. Два
’ 139
выключателя предназначены для ограничения большого или
малого шага, а третий служит для ограничения угла установки
винта во флюгерное положение. Перевод винта во флюгерное
положение (минимальное его сопротивление) производится
только на многомоторных самолетах при выходе одного из
моторов из строя. Пружинный контакт предназначен для пере-
вода винта из флюгерного положения в нормальное.
На одномоторных самолетах включено только два выклю-
чателя, которые предназначены для ограничения большого или
малого шага.
Втулка и лопасти винта. Втулка винта служит основанием
для крепления всех частей винта, изготовляется она неразъем-
ной с тремя гнездами под лопасти. Втулка монтируется на
носке вала редуктора мотора на шлицах.
Комлевые части лопастей винта помещаются в гнездах
втулки. Со стороны торца комля в лопасть наглухо ввинчи-
вается стальная коническая шестерня, вращающаяся вместе
с лопастью.
Известно^ что для получения наиболее высокого к. п. д.
винтомоторной установки необходимо скорость вращения авиа-
двигателя в некоторый пределах удерживать неизменной.
Осуществляется это изменением шага винта при отклонении
скорости вращения от заданной. В случае увеличения скорости
вращения шаг винта увеличивают (винт „затяжеляют"), и ско-
рость вращения уменьшается до заданной. В случае уменьше-
ния скорости шаг винта уменьшают (винт „облегчают"), и ско-
рость вращения увеличивается до заданной.
Управление электродвигателем привода лопастей ВИШ вруч-
ную, как это показано на схеме рис. 106, загружает и уто-
мляет летчика, отвлекая его от выполнения основных задач
полета и управления самолетом. Поэтому для удержания
неизменной, заданной летчиком, скорости вращения авиадвига-
теля применяются автоматические центробежные регуляторы.
Автоматические регуляторы поддерживают постоянную ско-
рость вращения авиадвигателя путем изменения шага винта,
независимо от изменений условий работы мотора и полета
самолета.
Применяется два типа автоматических центробежных регу-
ляторов: электроцентробежный регулятор и электрогиуфоцен-
тробежный регулятор. Первый позволяет осуществить автома-
тическое регулирование скорости вращения по принципу
„включено—выключено", второй — по принципу пропорциональ-
ного регулирования.
На рис. 108 представлена схема управления ВИШ одномо-
торного самолета при работе совместно с электроцентробежный
регулятором, т. е. схема автоматического регулирования по
принципу .„включено—выключено".
Эта схема (рис. 108) соответствует установившемуся ре-
жиму работы мотора и включению тумблера на автоматическое
140 '
Рис. 108. Принципиальная схема управления винтом:
1 — пружина регулятора; 2 — грузики регулятора; 3 — подвижный контакт регулятора U
4 — неподвижный контакт регулятора (большой шаг); 5 — неподвижный контакт регулятора
малый шаг); 6 и 8 — обмотка диференциального реле; 7 — подвижный контакт днферен-
цнального реле; 9 — корпус регулятора скорости вращения; 10 — аварийный выключатель;
11 — рычаг упрабления скоростью вращения авиадвигателем; 12 — электромотор привода
лопастей ВИШ; 13—редуктор привода лопастей ВИШ; 14 — контактные кольца ВИШ;
15 — диференциальное реверсивное реле; 16 — переключатель
регулирование. Все возможные положения тумблера показаны
на рис. 109.
Рассмотрим работу схемы (рис. 108). Скорость вращения
авиадвигателя задается созданием предварительного сжатия
пружины 1 регулятора, путем перестановки рычага управления
скоростью вращения. Грузики 2, приводимые во вращение от
авиадвигателя, расходятся под действием центробежных сил
и стремятся переместить подвижный контакт 3, но этому пе-
ремещению препятствует пружина 7; поэтому, когда скорость
Включение
но уменьшение шого
винто
Скорость вращения
увеличивается
Выключено
винт работает с фикси-
рованным шагом
Включение на
увеличение шаги
винта
Скорость вращения
уменьшается
Включено
на автоматическое
регулирование
Скорость вращении
поспшянна
Рис. 109. Положения переключателя изменения шага винта
141
вращения авиадвигателя равна заданной, то грузики регу-
лятора расходятся только до положения, при котором подвиж-
ный контакт 3 занимает среднее положение и не замыкается
ни с одним из крайних контактов. Цепь электродвигателя
в этом случае остается разомкнутой, и лопасти неподвижны
относительно своих осей.
Если же вследствие каких-либо причин, например, вслед-
ствие входа самолета в атмосферу с меньшей плотностью воз-
духа, момент, необходимый для вращения винта, станет меньше
момента, развиваемого авиадвигателем, то скорость вращения
авиадвигателя возрастет, грузики регулятора разойдутся, со-
жмут возвратную пружину регулятора и переместят подвиж-
ный контакт вправо до замыкания с контактом 4. Этим самым
будет подано питание в верхнюю обмотку диференциального
реверсивного реле 6. Якорь реле 7 притянется вверх и по-
движный — средний — контакт реле замкнется с верхним кон-
тактом. Через эти замкнутые контакты реле подается питание
к электродвигателю винта. Лопасти винта начнут поворачиваться
в сторону увеличения шага винта. По мере установки лопастей
на большой шаг момент, необходимый для вращения винта,
увеличивается и скорость вращения авиадвигателя начинает
уменьшаться. Как только скорость вращения достигнет задан-
ного значения, грузики под действием возвратной пружины
регулятора сойдутся и подвижный контакт разомкнется с пра-
вым неподвижным. Питание обмотки реле прекратится, и кон-
такты, замыкающие цепь на электродвигатель, разомкнутся.
Ток в цепи электродвигателя прерывается и вступает в действие
электромагнитный тормоз, удерживающий лопасти винта от
дальнейшего изменения шага. По скорость вращения авиадви-
гателя не остается равной заданной, а под влиянием сил
инерции продолжает уменьшаться. Грузики регулятора схо-
дятся еще больше, и подвижный контакт 3 замыкается с ле-
вым неподвижным контактом 5.
Рис. 110. График процесса стабилизации
скорости вращения авиадвигателя при
работе с ВИШ
Благодаря этому получает
питание нижняя обметка 8
диференциального реверсив-
ного реле. Нижние контакты
реле замыкаются и подают
питание к электродвигателю
винта.
Лопасти винта начинают
поворачиваться в сторону
уменьшения шага винта, и
дальше процесс изменения
скорости авиадвигателя и
угла установки лопастей
повторится. Таким образом,
возникнут колебания скоро-
сти вращения авиадвигателя
и угла установки лопасти.
142
Электродвигатель винта выбирается с такой характеристикой,
что эти колебания будут затухающими и через некоторый
промежуток времени установится заданная скорость вращения
при новом значении шага винта.
Графическое изображение процесса стабилизации скорости
вращения дано на рис. 110,
где <о — угловая скорость вращения авиадвигателя;
Л1д — момент авиадвигателя;
/Ипр— момент, который необходимо преодолевать для вра-
щения винта;
<р — угол установки лопасти.
Как следует из вышеизложенного, при регулировании" по
принципу „включено—выключено" возможны довольно t дли-
тельные колебания. Время, в течение которого колебания
затухают, можно значительно уменьшить, если скорость пово-
рота лопасти винта будет уменьшаться по мере приближения
Рис. 111. Электрогидроцентробежный регулятор:
1 — грузики регулятора; 2 — золотник; 3 — цилиндр; 4 — поршень; 5 — средний
контакт; 6-—верхний контакт; 7—нижний контакт; 8 — ролик; 9 — кулачковая
шайба
к заданной скорости вращения авиадвигателя. Этот принцип
осуществлен при пропорциональном регулировании с приме-
нением электрогидроцентробежного регулятора. Принципиаль-
ная схема электрогидроцентробежного регулятора показана
на рис. 111.
Принцип работы такого регулятора заключается в сле-
дующем.
Грузики регулятора 7, приводимые во вращение от авиа-
двигателя, воздействуют не на подвижный контакт, как при
регулировании электроцентробежного регулятора, а на золот-
ник 2, открывающий доступ масла в цилиндр 3. В зависимости
143
ют скорости вращения авиадвигателя грузики изменяют поло-
жение золотника, а это, в свою очередь, вызывает изменение
давления масла в цилиндре 3.
При увеличении скорости вращения давление на поршень 4,
расположенный в цилиндре 3, увеличивается, и средний кон-
такт 5, связанный с поршнем 4, приблизится к верхнему кон-
такту 6. При уменьшении скорости вращения средний кон-
такт 5 соответственно приблизится к нижнему контакту 7.
Контакты 6 и 7 механически связаны с роликом 8, скользя-
щим по кулачковой шайбе 9, приводимой во вращение от
авиадвигателя. Благодаря такому устройству контакты 6 и 7
находятся в непрерывной вибрации с частотой до 10 циклов
в секунду. Если контакт 5 находится в среднем положении,
то контакты 6 и 7 не замыкаются с ним, но как только кон-
такт 5 отойдет (вверх или вниз) от среднего положения, то
соответствующий контакт (верхний 6 или нижний 7) начнет
периодически на некоторый промежуток времени замыкаться
с контактом 5. Время, в течение которого контакты находятся
в замкнутом состоянии, будет увеличиваться по мере сбли-
жения контактов.
Рис. 112. Электрическая схема управления приводом ВИШ
На средний контакт 5, как это показано на схеме рис. 1*12,
подается через переключатель и аварийный выключатель
плюс от бортовой электросети. Крайние контакты 6 и 7 свя-
заны с соответствующими обмотками диференциального ревер-
сивного реле. Следовательно, периодическое замыкание кон-
такта 5 с контактом 6 или 7 вызывает периодическое замы-
кание соответствующих контактов диференциального ревер-
сивного реле с тем же временем замкнутого состояния, что
и у контактов регулятора.
Изменение времени замкнутого состояния контактов при-
водит к изменению среднего значения электрического тока,
144
протекающего через электродвигатель привода лопастей ВИШ.
Чем больше время замкнутого . состояния контактов, тем
больше среднее значение тока, протекающего через электро-
двигатель. Это время, как рассмотрено выше, зависит от
давления масла в цилиндре 3, а следовательно, от скорости
вращения авиадвигателя.
По мере приближения скорости вращения к заданной кон-
такт 5 будет перемещаться к среднему равновесному поло-
жению и время замкнутого состояния контактов, а следова-
тельно, и среднее значение тока электродвигателя будут
уменьшаться. При среднем положении контакта 5 ток в элек-
тродвигателе равен нулю. Соответственно изменению вели-
чины электрического тока в электродвигателе изменяется ско-
рость поворота лопастей винта.
Поэтому скорость поворота лопасти при пропорциональном
регулировании уменьшается по мере приближения к заданной
скорости вращения авиадвигателя.
Колебательный процесс, описанный выше для регулирова-
ния по принципу „включено—выключено", возможен и при
пропорциональном регулировании, но затухать он будет очень
Рис. ПЗ.жИзменение скорости вращения авиадви-
гателя за время стабилизации
быстро, и практического значения время затухания при при-
менении электрогидроцентробежного регулятора иметь не
будет. Изменение скорости вращения за время стабилизации
показано на рис. 113.
Электрическая схема управления ВИШ, приведенная на
рис. 112, совершенно одинакова как для пропорционального
регулирования, так и для регулирования по принципу „вклю-
чено—выключено". Это очевидно и из сравнения схем (рис. 108
и рис. 112). Аварийный выключатель, показанный на рис. 108
и рис. 112, предназначен для отключения схемы автоматического
управления при остановленном авиадвигателе. Аварийный
выключатель замыкается давлением масла, поступающего из
нагнетающей магистрали мотора.
10—-Электропривод на самолете
145
Установка аварийного выключателя вызвана тем обстоя-
тельством, что при неработающем авиадвигателе подвижный
контакт регулятора находится в соприкосновении с нижним
(рис. 112) неподвижным, обеспечивающим подачу тока на
обмотку малого шага электродвигателя. По этой причине схема
может оказаться обтекаемой все время электрическим током,
что, безусловно, нежелательно.
§ 47. ЭЛЕКТРОПРИВОД РУЛЕЙ УПРАВЛЕНИЯ САМОЛЕТОМ
Для надежного управления самолетом, особенно в связи
с применением автопилотов, предназначенных для автоматиче-
ской стабилизации самолета относительно продольной попе-
речной и вертикальной осей, потребовалась установка надеж-
ного привода рулей и элеронов.
Последнее время в качестве такого привода используется
электрический привод.
Как известно, процесс стабилизации режима полета заклю-
чается в том,«что на любое отклонение самолета от заданного
ему полетного положения, возникающего вследствие воздей-
ствия внешних факторов, например порыва ветра, автопилот
отвечает отклонением соответствующего руля. Развиваемый
при этом аэродинамический момент восстанавливает само-
лет в заданное положение. Так как автопилот стабилизирует
положение самолета относительно трех взаимно перпендику-
лярных осей — продольной, поперечной и вертикальной, то цн
должен управлять всеми тремя рулями самолета: рулем
направления, рулем глубины и элеронами, т. е. управлять
тремя рулевыми машинами, электродвигатели которых и явля-
ются приводными устройствами рулей.
Чувствительным элементом, воспринимающим отклонение
самолета от заданного ему полетного положения, является
гироскоп. Конструктивно гироскоп представляет собой мас-
сивный маховик, насаженный на одну ось. с ротором электро-
двигателя постоянного тока. Статор электродвигателя является
одновременно и подвижным кожухом гироскопа, могущим
поворачиваться вокруг оси. Неподвижный — внешний — корпус
гироскопа жестко скреплен с самолетом. Для привода махо-
вика (ротора) гироскопа применяются шунтовые электродви-
гатели с номинальной скоростью вращения 7500—8000 об/мин.
Включение электродвигателя производится на весь период
работы автопилота.
В упрощенном виде схема работает следующим образом.
На оси ротора гироскопа жестко закрепляется ползунок
потенциометра, который скользит при смещении оси ротора
по закрепленной неподвижно обмотке потенциометра.
При отклонении самолета от заданного положения вместе
с самолетом повернется и неподвижный (внешний) кожух
гироскопа, а ось ротора гироскопа останется в прежнем поло-
146
жении. Следовательно, ползунок сместится относительно
обмотки потенциометра на некоторый угол. Пропорционально
смещению ползунка изменится и напряжение, снимаемое
с потенциометра.
Напряжение, снимаемое с потенциометра, подается к спе-
циальному устройству, которое посредством электрического
привода отклоняет руль самолета на угол, пропорциональный
напряжению, снятому с потенциометра, а следовательно, на
угол, пропорциональный отклонению самолета от заданного
положения. Такими специальными устройствами являются
рулевые машинки в сочетании с электромеханическим или
с другим типом уси-
лителя.
Ниже рассматри-
ваются две схемы
управления электро-
приводом рулей са-
молета.
Первая схема,
основанная 'на ис-
пользовании системы
регулирования ско-
рости (см. § 25), дана
на рис. 114.
Принцип работы
этой схемы заклю-
чается в следующем.
Питание управля-
ющей обмотки воз-
буждения 5 генера-
тора 4 осуществляет-
ся от движков двух
потенциометров, ме-
ханически связан-
ных с осью .гиро-
скопа. При откло-
нении самолета от
заданного положе-
ния движки потен-
циометров смеща-
ются, вследствие
чего на обмотке
возбуждения 5 по-
Рис. 114. Схема регулирования для управления
электроприводом рулевой машинки:
1 — потенциометр, ползунки которого связаны с осью гиро-
скопа; 2 —• электромагнитная муфта, предназначенная для
расцепления выходного вала рулевой машинки с рулем:
3 — приводной _ электродвигатель; 4 — генератор, питающий
приводной двигатель^ 5 основная обмотка возбуждения
генератора (управляющая обмотка); 6 — компаундный электр э-
двигатель, являющийся приводом генератора; 7 — руль само-
лета
является напряжение, пропорциональное смещению движков.
Это вызывает появление напряжения на зажимах генератора 4,
а следовательно, и на зажимах якоря электродвигателя 3. Напря-
жение это тем больше, чем больше отклонение самолета от
заданного положения. Электродвигатель 3 имеет независимое
возбуждение, поэтому скорость вращения его пропорцио-
10*
147
нальна напряжению на зажимах якоря. Таким образом, ско-
рость поворота руля примерно пропорциональна отклонению
самолета от заданного курса.
Вторая схема управления электроприводом рулей дана на
рис. 115.
Принцип работы схемы заключается в следующем .
Рис. 115. Принципиальная схема управления рулем от автопилота:
1 — гироскоп; 2—обмотка потенциометра гироскопа с движком; 3 — рулевая машинка;
4 — обмотка потенциометра рулевой машинки; 5 — барабан рулевой машинки; 6 — усилитель:
7 — руль самолета; 8 — трансформатор, питающий схему мостика
Как видно из схемы, потенциометр гироскопа и потенцио-
метр рулевой машинки соединены между собой по мостико-
вой схеме. К одной из диагоналей мостика подводится пере-
менное напряжение, в другую диагональ включен усилитель
(рис. 116).
Трансдзормитор питании
схемы мостина
Рис. 116. Мостиковая схема соединения потенциометров
гироскопа и рулевой машинки
Когда самолет находится в заданном положении, мостико-
вая схема находится в равновесии, т. е. произведения сопро-
148
тивлений противоположных плеч равны между собой. В этом
случае разность потенциалов точек, в которых ползунки
касаются обмоток потенциометров, равна нулю. При отклоне-
нии самолета от заданного положения равновесие мостика
нарушается, так как ползунок гироскопа смещается относи-
тельно первоначального положения. Возникающая при этом
разность потенциалов через усилительное устройство подается
в рулевую машинку и приводит ее в движение.
Вращение барабана рулевой машинки будет продолжаться
до тех пор, пока ползунок рулевой машинки, скользя по
обмотке потенциометра, не займет такое положение, при кото-
ром мостиковая схема окажется' вновь уравновешенной.
Очевидно, чем большее отклонение от заданного положения
приобретает самолет, тем больший ход должен сделать пол-
зунок по потенциометру рулевой машинки для того, чтобы
мостиковая схема оказалась вновь в состоянии равновесия;
следовательно, руль также отклонится на большой угол.
Разность потенциалов, возникающая в результате наруше-
ния равновесия мостика, усиленная усилителем, подается на
электромагнит рулевой машинки. Электромагниты, срабатывая,
вводят в зацепление вал постоянно вращающегося шунтового
электродвигателя с барабаном рулевой машинки. От барабана
посредством тросовой передачи вращение передается на руль
самолета.
ГЛАВА ШЕСТАЯ
ЭЛЕКТРОПРИВОД ДЛЯ СПЕЦИАЛЬНЫХ ЦЕЛЕЙ
§ 48. ЭЛЕКТРОПРИВОД БОМБАРДИРОВОЧНОГО ВООРУЖЕНИЯ
Авиационные бомбы подвешиваются к самолету на спе-
циальных устройствах, называемых бомбодержателями.
Бомбодержатель состоит из замка, удерживающего бомбу,
и привода, расцепляющего запирающую систему замка при
сбрасывании бомбы.
Импульс электрического тока посылается к электрическому
приводу бомбодержателя либо непосредственно от боевой
кнопки бомбардира, либо от электрифицированного аппарата—
электросбрасывателя (ЭСБР).
Бомбодержатели
Устройство того или иного типа бомбодержателя опреде-
ляется: весом и количеством подвешиваемых на него бомб,
характером бомбометания (бомбометание с пикирования или
с горизонтального полета), конструкцией самолета и т. д.
Для подвешивания тяжелых бомб обычно применяются оди-
ночные бомбодержатели, а для подвешивания нескольких
мелких бомб — кассетные бомбодержатели.
Бомбодержатель состоит из системы кинематически свя-
занных между собой рычагов и пружин, называемых замком,
и привода, производящего операцию раскрытия замка. Пре-
имущественное распространение в последнее время получили
приводы электромагнитный и механический.
Электромагнитный привод обычно является основным,
а механический используется в качестве аварийного, на слу-
чай выхода из строя основного привода.
На рис. 117 показана принципиальная схема замка с основ-
ным электромагнитным и аварийным механическим приводами.
Взаимное расположение отдельных частей замка на рис. 117
соответствует положению, когда бомба подвешена и вся
система подготовлена к сбрасыванию бомб. Для сбрасывания
150
бомбы необходимо кнопкой 8 замкнуть цепь электрического
тока от бортовой электросети к обмотке электромагнита /.
В результате прохождения тока по обмотке электромагнита
сердечник 2 втягивается в катушку и через тягу перемещает
защелку 3 в сторону электромагнита. Конец длинного плечй
запирающего рычага 4 соскакивает с упора защелки и про-
исходит расцепление между запирающим и несущим’1 рыча-
гами 5. Под действием силы тяжести бомбы несущий рычаг
Рис. 117. Замок бомбодержателя с электромагнитным при-
водом:
1 — обмотка электромагнита; 2 — якорь электромагнита; 3 — защелка; 4 — за-
пирающий рычаг; 5 — несущий рычаг; 6 — ушко бомбы; 7 — бомба;
8 — кнопка сбрасывания; 9 — ручка аварийного сбрасывания
поворачивается против направления часовой стрелки, ушко
бомбы 6 соскакивает с крюка несущего рычага, и бомба отде-
ляется от самолета. При отказе в работе электромагнитного
привода производится аварийное сбрасывание бомбы переме-
щением защелки от рукоятки аварийного сбрасывания вруч-
ную. Замок открывается в этом случае точно так же, как
и при работе электромагнитного привода.
Во избежание случайного открытия замка во время полета
над своей территорией рукоятка аварийного сбрасывания пере-
водится в сторону, противоположную аварийному сбрасыванию,
т. е. ставится на предохранитель и стопорится. В этом случае
защелка переместиться в сторону электромагнита не может
и замок не откроется.
Повышенные требования к удобообтекаемости современных
скоростных бомбардировщиков вынуждают часть бомбодержа-
151
телей устанавливать внутри самолета в специальных бомбовых
отсеках. Люк бомбового отсека закрывается снизу створками.
Створки бомболюка обычно открываются непосредственно
перед бомбометанием при помощи электромоторного привода.
Электромотор привода включается от специального переклю-
чателя, установленного на щитке. В крайних положениях
створок (полностью открыты или полностью закрыты) электро-
мотор привода створок отключается концевыми выключате-
лями, которые устанавливаются непосредственно у створок
бомболюка.
Во избежание ошибочного сбрасывания бомб при закры-
тых створках питание всех приводов бомбодержателей, рас-
положенных в данном бомбовом отсеке, проводится через
блокировочные контакты бомболюка. Эти контакты механи-
чески связаны со створками и замыкаются только при пол-
ностью открытых створках.
Электросбрасыватели
Питание привода бомбодержателя непосредственно от
кнопки сбрасывания может применяться в тех случаях, когда
самолет вооружается только одной бомбой (например торпедо-
носец) или когда все подвешиваемые к самолету бомбы сбра-
н приводом
бомбодержателей
Рис. 118. Принципиальная схема простейшего ЭСБР с электромагнит-
ным приводом:
1 — электромагнит; 2 — якорь электромагнита; 3 — собачка; 4 — храповик; 5 — подвиж-
ный щеточный контакт; 6 — неподвижные контакты; 7 — пружина собачки; 8 — кнопка
сбрасывания
сываются одновременно (залповое сбрасывание). В тех же слу-
чаях, когда желательно за один боевой заход сбросить только
часть бомб или одну бомбу, а остальные оставить, прибегают
к установке на самолете полуавтоматических аппаратов, рабо-
тающих от электромагнитного привода и называемых электро-
сбрасывателями (ЭСБР). Полуавтоматический ЭСБР позволяет
152
производить как одиночное сбрасывание, так и залповые — по
нескольку бомб в залпе.
На рис. 118 дана принципиальная схема простейшего ЭСБР,
в котором поступательное движение якоря электромагнита
преобразуется во вращательное движение храповика.
Работа ЭСБР для случая одиночного сбрасывания проте-
кает в следующем порядке.
Кнопка сбрасывания 8 замыкает цепь питания электрома-
гнита 7, якорь электромагнита 2 втягивается в соленоид
и через систему рычагов перемещает собачку 3.
Собачка поворачивает храповик, а следовательно, и закреп-
ленный на храповике подвижный щеточный контакт на угол,
соответствующий переходу щеточного контакта с одного
неподвижного контакта на другой. А так как подвижный кон-
такт соединен с плюсом бортовой электросети, а неподвижные
с приводами бомбодержателей, то при каждом срабатывании
ЭСБР будет подаваться питание в привод очередного бомбо-
держателя. Предварительно установив подвижный щеточный
контакт в положение 11, получим за каждое сбрасывание ЭСБР
залповое сбрасывание двух бомб, так как щеточный контакт
одновременно замыкает два неподвижных контакта. Таким же
образом можно получить залповое сбрасывание четырех бомб
и т. д. Для этого необходимо добавить нужное число непо-
движных контактов.
Высокие скорости современных бомбардировщиков, нали-
чие мощной противовоздушной обороны противника и ряд
других факторов чрезвычайно затрудняют поражение объекта
бомбометания одной бомбой или залпом бомб. Поэтому появи-
лась необходимость сбрасывания нескольких бомб через малые
(до 0,05 секунды) интервалы времени между сбрасываниями.
Такое бомбометание называется серийным и осуществляется
при помощи автоматических ЭСБР.
Автоматический ЭСБР состоит из переключателя, анало-
гичного переключателю рассмотренного выше полуавтоматиче-
ского ЭСБР, и временного механизма, обеспечивающего соот-
ветствующую выдержку времени между посылками импульсов
к приводам бомбодержателей.
В рассматриваемом ниже автоматическом ЭСБР для созда-
ния выдержки времени использован времени эй механизм
с приводом от шунтового электродвигателя, который снабжен
центробежным регулятором скорости вращения. Принципиаль-
ная схема автоматического ЭСБР показана на рис. 119.
Принцип работы центробежного электрического регулятора
заключается в следующем.
При подаче питания якорь электромотора начинает вра-
щаться, при этом нарастание скорости вращения происходит
очень быстро вследствие малой инерции якоря и незначитель-
ных масс подвижных частей. Как видно из схемы, в цепь
якоря включено добавочное сопротивление 3, нормально шун-
• 153
тированное контактами Kt и К2 центробежного регулятора.
В пределах о г нуля до заданной скорости вращения контакты
центробежного регулятора остаются замкнутыми и электромо-
тор работает так, как если бы он был включен в цепь непо-
средственно, без регулятора. При скорости вращения больше
заданной контакт /<п укрепленный на пружине, размыкается
V IV III U I
н приводам
бомбодержателей
Рис. 119. Принципиальная схема автоматического ЭСБР с электро-
моторным приводом:
1 — выключатель ЭСБР; 2 — кнопка сбрасывания бомб; 3 — добавочное сопротивление;
4 — электродвигатель с шунтовым возбуждением; 5 — электрический центробежный регу-
лятор скорости вращения: /<> — подвижный контакт регулятора; А'2 — неподвижный контакт
регулятора; 6 — кулачковый или кодовый диск; 7—анкерная собачка; 8 — храповик
(зубчатая шестерня); 9 — пружина храповика; 10— неподвижные контакты; 11 — подвижный
контакт; 12 — плюсовая панель переключателя ЭСБР
\
с контактом К2 под .действием центробежной силы и тем
самым добавочное сопротивление 3 включается в цепь якоря
последовательно. После включения добавочного сопротивления
скорость вращения якоря снижается до величины, при кото-
рой контакт Ку вследствие уменьшения центробежной силы
замыкается и вновь шунтирует добавочное сопротивление,
что, в свою очередь, приводит к увеличению скорости вра-
щения якоря.
154 •
Таким образом, скорость вращения поддерживается постоян-
ной в пределах 1—5’’/0 при изменении подводимого напряже-
ния от 20 до 30 в.
Постоянство скорости вращения электродвигателя обеспе-
чивает вполне определенную скорость вращения кулачкового
диска Л; так как по кулачковому диску скользит хвостовик
анкерной собачки, то число колебаний анкерной собачки опре-
деляется количеством выступов на вращающемся с опреде-
ленной скоростью кулачковом диске.
Анкерная собачка сцеплена с зубчатой шестерней 8 так,
что за одно колебание анкерной собачки зубчатая шестерня
имеет возможность повернуться только на один зуб. Устано-
вив против анкерной собачки диск с тем или иным количе-
ством выступов, можно установить вполне определенное коли-
чество колебаний анкерной собачки в единицу времени,
а следовательно, определенное количество поворотов зубча-
той шестерни в единицу времени. При установке кулачкового
диска с малым количеством выступов зубчатая шестерня за
единицу времени повернется на малый угол. При установке
кулачкового диска с большим количеством выступов зубчатая
шестерня за единицу времени повернется на большой угол.
Так как на зубчатой шестерне укреплен подвижный контакт,
замыкающий плюсовую ламель поочередно с каждым непо-
движным контактом, то каждому повороту зубчатой шестерни
соответствует посылка импульса электрического тока к при-
воду очередного бомбодержателя.
Следовательно, изменение интервалов времени между сбра-
сываниями бомб можно произвести перестановкой кулачковых
дисков, отличающихся один от другого количеством выступов.
Такая перестановка в ЭСБР производится поворотом специ-
альной ручки, кинематически связанной с набором дисков.
§ 49. ЭЛЕКТРОПРИВОД СТРЕЛКОВО-ПУШЕЧНОГО ВООРУЖЕНИЯ
Управление открытием и прекращение огня из пулеметов
и пушек осуществляется от специальной кйопки открытия
огня, установленной
в кабине стрелка^.
Кнопка открытия
огня замыкает цепь
питания к электрэ-
спуску оружия.
Электроспуск пред-
ставляет обычный
электрома гнитный
привод, якорь кото-
рого связан со спус-
ковым механизмом
оружия.
Рис. 120. Электроспуск с втяжным якорем:
1 — корпус электроспуска; 2.— обмотка электромагнита; 3 — не-
подвижный сердечник; 4 —f противодействующая пружина;
5 — якорь электромагнита; 6 — приводная тяга электро-
спуска
155
Как указывалось в § 6, электромагнит с втяжным якорем
обычной цилиндрической формы создает минимальное усилие
в начале хода якоря и максимальное в конце хода. Так как
для спуска максимальный. момент требуется в самом начале
хода, то очень часто в электроспусках применяют ма-
гнитную систему, показанную на рис. 120, либо устанавливают
электромагниты с поворотным якорем.
Следует отметить, что величина хода поворотного якоря
незначительна. Это обстоятельство ограничивает применение
электромагнитов с поворотным якорем для спуска.
Перезарядка оружия требует значительно больших усилий,
чем спуск. Поэтому для перезарядки применяется не электро-
магнитная, а электропневматическая система. В эдектропневмати-
Рис. 121. Схема управления электроприводом
пушки:
1 — главный выключатель; 2 — кнопка открытия огня,
3 — контакты, замыкающиеся в крайнем заднем положении
ползушки; 4 —• контакты', размыкающиеся в крайнем
заднем положении ползушки; 5 — контакты, раз-
мыкающиеся в крайнем заднем положении подвижных
частей ' пушки; 6 — реле реверса электродвигателя;
7 — промежуточное реле; 8 — реле включения электро-
спуска; 9 — электроспуск; 10 — реле времени, размыкаю-
щее свои контакты с выдержкой времени; 11 — электро-
двигатель перезарядки
ческих системах пере-
зарядка производится
пневматическим агре-
гатом, создающим необ-
ходимые усилия за счет
давления сжатого воз-
духа на поршень. Пор-
шень через систему тяг
и рычагов связан с ме-
ханизмом перезарядки.
Открытие клапана,
впускающего воздух в
цилиндр пневмопереза-
рядки, обычно осуще-
ствляется поворотным
электромагнитом.
Питание к обмотке
электромагнита по-
дается от бортовой
электросети через вы-
ключатель, установлен-
ный в кабине стрелка.
В последнее время
начинают применять си-
стемы с полуавтомати-
ческой и автоматиче-
ской перезарядкой ору-
жия. Такие системы
освобождают стрелка
от операций включения
системы перезарядки
при возникновении за-
держек в стрельбе и
объединяют управле-
ние спуском и переза-
рядкой в одной кнопке.
156
В качестве примера системы полуавтоматической переза-
рядки ниже рассматривается схема управления приводом
системы спуска и перезарядки авиационной пушки. Принци-
пиальная схема электрического управления приводом пушки
дана на рис. 121.
Включение схемы производится замыканием выключателя 7.
Через замкнутые контакты выключателей 7 и 5 и через за-
мкнутые контакты реле 7 ток поступает в обмотку реле 6.
Реле 6 переключает подвижные контакты вправо и включает
электродвигатель 11, который посредством ползунка, укреп-
ленного на передаточной шарнирной цепи, отводит подвиж-
ные части пушки в крайнее заднее положение. В этом положе-
нии подвижные части, разомкнув контакты 5, удерживаются
на шептале.
Достигнув крайнего заднего положения, ползунок замы-
кает контакты 3, чем подготовляется цепь двигателя на обрат-
ное вращение, и размыкает контакты 4, что предотвращает
преждевременное включение электроспуска и прекращение
перезарядки.
С размыканием подвижными частями контактов 5 прекра-
щается электрическое питание обмотки реле 6, а следова-
тельно, двигатель переключается на обратное вращение. Вра-
щаясь, двигатель переводит ползунок в крайнее переднее
положение. В переднем положении ползунок размыкает кон-
такты 3 и замыкает контакты 4. Цепь питания двигателя раз-
рывается контактами 3, и двигатель останавливается. После
перечисленных выше процессов пушка заряжена и готова
к стрельбе.
Открытие стрельбы производится замыканием контактов 2
(нажатием на кнопку). Через контакты 2 подается питание в об-
мотки реле 8 и 10. Реле 8 включает электроспуск 9, а реле /О—
промежуточное реле 7. Реле 7, в свою очередь, размыкает
цепь питания обмотки реверсивного реле 6, чем предотвра-
щается включение двигателя перезарядки.
Автоматическая стрельба продолжается до тех пор; пока
не будут разомкнуты контакты 2 или пока не произойдет
задержки в стрельбе, требующей перезарядки.
‘В случае размыкания контактов 2 (стрелком отпущена кнопка)
отключается питание обмоток реле 8 и 10. Реле 8 размыкает
цепь питания электроспуска, а реле времени 10 через 0,4—
0,8 секунды размыкает цепь питания промежуточного реле 7.
За это время подвижные части пушки успевают произвести
последний выстрел и отойти в крайнее заднее положение.
В этом положении подвижные части удерживаются на шептале,
а контакт 5 размыкает цепь питания реле 6, что предотвра-
щает включение двигателя перезарядки.
Если в стрельбе произошла задержка, то достаточно разо-
мкнуть выключатель 2 (отпустить кнопку), как выключатся
реле 8 и 10, а следовательно, выключится электроспуск 9 и реле 7.
157
Но так кйк подвижные части при Задержке ё стрельбе
находятся в переднем положении, то контакты 5 замкнуты.
Через эти контакты подается питание в обмотку реверсивного
реле, включающего мотор перезарядки. Дальше работа системы
перезарядки происходит точно так жё, ка,к и при включении
схемы в работу (см. выше).
В системе стрелково-пушечного вооружения применяется
ряд и других, не описанных выше, электрических приводов,
имеющих вспомогательное значение. Из них можно, например,
указать на электрифицированные автоматические механизмы
подтяга ленты, необходимые для обеспечения подачи ленты
с патронами к оружию, сигнализационные блинкеры с электро-
магнитным приводом и т. д.
§ 50. АМПЛИДИН И ЕГО ПРИМЕНЕНИЕ В ПОДВИЖНЫХ СТРЕЛКОВЫХ
УСТАНОВКАХ
Амплидинные генераторы, или амплидины, нашли широкое
применение в авиации для управления электрифицированными
турельными установками. Их используют почти во всех совре-
менных подвижных электрифицированных установках для
питания приводных электродвигателей.
Благодаря применению амплидинов схемы управления обес-
печивают плавное и почти пропорциональное отклонение
рукояток управления, изменение скорости вращения турели
по величине и направлению в широких пределах, независимо
от механической нагрузки.
Амплидин является видоизменением обычного генератора,
изображенного на схеме А рис. 122, где для упрощения об-
мотка возбуждения показана только на северном полюсе. Ток,
проходящий по обмотке возбуждения генератора, создает
основное поле возбуждения, показанное в виде петель вокруг
щеток, а рабочий ток, проходящий по обмотке якоря, создает
вредное (искажающее основное поле) поле реакции якоря,
показанное в виде окружностей на северном и южном полю-
сах.
Если применять обычные генераторы в приводных устрой-
ствах стрелковых установок, то регулирование выходного
напряжения необходимо было бы производить изменением
большой мощности, затрачиваемой на возбуждение, что не
позволяло бы пользоваться точными приборами управления.
Поэтому необходимо иметь специальный тип генератора, ко-
торый создавал бы ту же выходную мощность при значительно
сниженной мощности возбуждения.
Простое снижение мощности возбуждения пропорционально
•уменьшает поля возбуждения и реакции якоря и снижает
выходную мощность генератора. Увеличение выходной мощ-
ности до первоначального значения при сниженной мощности
возбуждения достигается в амплидине соединением накоротко
158
основных щеток обычного генератора и введением новых
рабочих щеток, сдвинутых относительно основных на 90°.
Соединение накоротко щеток у генератора со сниженной
мощностью возбуждения (схема Б, рис. 122) вызывает значи-
тельное увеличение тока в обмотке якоря и соответствующее
увеличение поля реакции якоря. Подбором сопротивления
короткозамкнутой цени можно достичь того, что, несмотря
Схема-. А
Обычный генератор
Схема Б
Генератор с уменьшенным возбуждением
и короткозамкнутыми щетками
Схема Г
Изображение амплидина на
принципиальных электрических
схемах
Условные обозначения направления токов в якоре
+ • Направление тона в якоре генератора и тона ксрпткозомннутой цепи в якоре амплидина
© @ Направление тока внешней цепи в яноре амплидина
Рис. 122. Схема образования амплидина:
1 — обмотка возбуждения (управляющая обмотка); 2 — нагрузка; 3 — основное поле возбужде-
ния; 4 — поле реакции якоря; 5 — короткозамкнутая цепь; 6 рабочее поле возбуждения
амплидина; 7 — компенсационная обмотка
159
на снижение Мощности возбуждений, Ноле реакции ЯКоря
(или, как его часто называют, поперечное магнитное поле)
становится равным основному полю возбуждения (продольное
магнитное поле) обычного генератора.
Новые рабочие щетки, поставленные на геометрической
нейтрали поперечного магнитного поля, позволяют использо-
вать его в качестве рабочего поля возбуждения (схема В,
рис. 122), вследствие чего выходная мощность достигает пер-
воначального значения.
С рабочими щетками связана внешняя цепь, в которую
амплидин отдает свою энергию. Так как ток рабочей цепи
создает в якоре магнитное поле, направленное навстречу ма-
гнитному полю, которое получается от прохождения тока по
Рис. 123. Внешняя характеристика
амплидина >
обмотке возбуждения, то для
полного или частичного устра-
нения продольной реакции
якоря амплидин снабжается
компенсационной обмоткой.
Компенсационная обмотка
включается последовательно с
нагрузкой и размещается на
статоре (на схеме В компен-
сационная обмотка для упро-
щения показана только на
южном полюсе). Компенсация
должна быть весьма тщатель-
ной, так как магнитное поле
реакции якоря оттока нагрузки
превышает поле обмотки управления в 20—30 раз, поэтому
компенсационная обмотка выполняется распределенной.
Смотря по тому, насколько поле якоря скомпенсировано
компенсационной обмоткой, напряжение на амплидине (а сле-
довательно, и скорость вращения приводного двигателя) при
изменении нагрузки может меняться приближенно по одной
из прямых, изображенных на рис. 123.
Обычно осуществляется полная компенсация или недоком-
пенсация, так как перекомпенсация амплидина (при поле компен-
сационной обмотки, большем, чем поле якоря) ведет к его
самовозбуждению и неустойчивой работе.
Помимо компенсационной обмотки, амплидины снабжаются
еще так называемой успокоительной или стабилизирующей
обмоткой, так как вследствие очень высокого коэфициента
усиления они без успокоительной обмотки работают неустой-
чиво, т. е. с колебаниями тока, напряжения и скорости вра-
щения приводного двигателя. Работа этой обмотки будет более
подробно описана ниже.
В результате рассмотрения схемы устройства и принципа
действия амплидина можно установить, что в машинах этого
типа якорь выполняет функцию магнитного индуктора и глав-
160
ной, рабочей цепи для отдачи электрической энергии и что
эти машины имеют каскадный двухступенчатый способ возбу-
ждения, в котором первой ступенью является магнитное поле
обмотки управления, а второй — поле якоря, получающееся
довольно сильным при коротком замыкании дополнительных,
(поперечных) щеток.
Благодаря такому способу возбуждения имеется возмож-
ность путем изменения небольшой мощности в цепи управле-
ния регулировать сравнительно большими мощностями элек-
трической энергии, которая отдается во внешнюю (рабочую)
цепь; так например, в амплидинах мощностью от 0,50 до 25 кет
потребляемая мощность в цепи возбуждения составляет от
0,25 до 0,75 вт. Поэтому вышеописанный тип машины посто-
янного тока можно рассматривать как своеобразный двухсту-
пенчатый электромеханический усилитель мощности, в кото-
ром первая ступень усиления — от основной цепи возбуждения
к оси поперечных щеток и вторая — от оси поперечных щеток
к оси основных (продольных).
Так как каждая ступень усиления имеет нормальный коэ-
фициент усиления порядка 100, то общий коэфициент усиле-
ния амплидина по мощности может достигать
АГуСил= 100’100= Ю000.
Коэфициентом усиления (А"усил) мы называем отношение от-
даваемой мощности к мощности, потребляемой управляющей
обмоткой.
Другим существенным достоинством амплидина является
большая скорость изменения напряжения на зажимах привод-
ного двигателя при изменениях тока управления.
Благодаря этому при помощи амплидина представляется
возможным создать привод, быстро реагирующий на изменение
очень малых токов управления, что представляет весьма цен-
ное свойство в случае привода самолетных турелей.
Из недостатков амплидина следует отметить сравнительно
низкий к. п. д. системы электродвигатель — амплидин — привод-
ной электродвигатель.
В конструктивном отношении амплидин с электродвигате-
лем, приводящим его во вращение, представляет собой агре-
гат, в цилиндрическом корпусе которого заключен компаунд-
ный (реже шунтовой) электродвигатель постоянного тока,
к которому подводится напряжение 27 в. Якорь амплидина
расположен на одном валу с якорем электродвигателя. Цилин-
дрический корпус из сплава „электрон" имеет прилив, закан-
чивающийся снизу фланцами для крепления к турели или
фюзеляжу самолета. Сбоку расположена коробка с реостатами,
регулирующими степень компенсации, и штыревой разъем для
подключения к электрической схеме. С противоположной сто-
11—Электропривод на самолете
161
роны расположен конденсатор, служащий для устранения
помех радиоприему.
Окна в корпусе для доступа к щеткам и коллектору,
а также и вентилятор, расположенный со стороны электродви-
гателя, закрыты защитными крышками.
Вентилятор создает поток воздуха, поступающего через
отверстия в защитной крышке со стороны амплидина, прого-
няет через весь агрегат, выбрасывая его через- радиальные
отверстия в защитной крышке электродвигателя. Этим дости-
гается интенсивное охлаждение коллекторов, якорей и статор-
ных обмоток амплидина и электродвигателя.
Для балансировки вращающегося в шарикоподшипниках
ротора на вал насажено три массивных латунных кольцд.
Следует отметить, что балансировка ротора должна быть
очень точной вследствие значительной длины, малых воздуш-
ных зазоров, больших скоростей вращения и значительного
момента инерции ротора. Неуравновешенность ротора вызы-
вает появление вибраций, сопровождающихся отбросом щеток
от коллектора амплидина, в результате чего нормальная ра-
бота амплидина нарушается.
Как статор, так и ротор набраны из листового железа
толщиной 0,3' мм. Пазы якоря имеют скос на половину ши-
рины зуба. Компенсационная обмотка, распределенная по
пазам полюсов, обмотка возбуждения катушечного типа, охва-
тывающая один из полюсов, и успокоительная, охватывающая
второй полюс амплидина, выполнены из медного эмалирован-
ного провода.
Как электродвигатель, так и амплидин рассчитаны для ра-
боты в повторно-кратковременном десятиминутном режиме
при полной нагрузке, т. е. для работы в продолжение десяти
минут в течение каждого часа.
Амплидин в стрелковых установках применяется для пита-
ния приводных электродвигателей, скорость вращения которых
регулируется изменением величины напряжения, подводимого
к обмотке возбуждения амплидина, а следовательно, измене-
нием величины его выходного напряжения.
Ниже приводится описание электрических схем управления
двух турелей (в дальнейшем будем их именовать схема А
и схема 5), из которых можно более подробно уяснить себе
процессы, происходящие при работе амплидина, и преиму-
щества его применения.
Каждая турель имеет круговой обстрел в горизонтальной
плоскости и поворот пулеметов — в вертикальной плоскости.
Управление наводкой и огнем пулеметов электрическое.
Основой конструкции турели являются турельные кольца.
Стальное неподвижное кольцо с зубчатым венцом на нижнем
торце крепится к конструкции самолета. Подвижное кольцо,
162
на котором смонтированы все механизмы и агрегаты турели,
представляет собой отливку сложной конфигурации из алюми-
ниевого сплава. Стрелок управляет пулеметами, сидя на вра-
щающемся вместе с турелью сиденье.
Турель приводится в движение двумя электродвигателями
(горизонтальной и вертикальной наводки), для питания кото-
рых применяется соответственно два амплидина, причем схемы
включения амплидинов в* обоих приводах принципиально оди-
наковы и между собой не связаны. Поэтому рассмотрению
подлежат электрические схемы включения амплидинов только
для схем горизонтальной наводки.
Рис. 124. Принципиальная электрическая схема включения амплидина
на турели А:
1 — компаундный электродвигатель; 2 — амплидин; 3 — конденсатор; 4 — сопротивление;
5 — вибратор; 6 — вторичная обмотка трансформатора ’ вибратора; 7 и 8 — реостаты,
шунтирующие компенсационную обмотку; 9 — рабочий потенциометр; 10 — дополнительное
сопротивление; 11—приводной электродвигатель турелн; 12 — реле увеличения скорости
Применение амплидинов для питания электрических приво-
h дов позволило обеспечить плавное изменение скорости враще-
ния турели от 0 до С0и в секунду и поворота пулеметов от
0 до 45°' в секунду. Принципиальная электрическая схема
включения амплидина на турели А показана на рис. 124. Якорь
амплидина 2 приводится во вращение компаундным электро-
двигателем 1. Выходное напряжение амплидина подается на
। якорь приводного электродвигателя турели 11 с независимым
возбуждением от бортовой сети.
ц* 163
J
Скорость вращения этого электродвигателя зависит от ны-
ходного напряжения амплидина (при неизменном возбуждении
и постоянной нагрузке).
Напряжение на обмотку возбуждения b амплидина 2 по-
дается от рабочего потенциометра 9, находящегося под напря-
жением бортовой сети. Величина и полярность подводимого
напряжения зависят от положения . движка потенциометра,
связанного с ручками управления турелью (рис. 125). Чтобы
повернуть турель в горизонтальной плоскости, нужно повора-
чивать рукоятки управления влево или вправо. Вместе с ру-
коятками поворачивается щетка потенциометра горизонталь-
ного привода. Между отклоненной
Рис. 125. Конструктивная схема коробки
хуправления:
1 — зубчатый стержень горизонтального ч потенцио-
метра; 2 — ограничитель горизонтального поворота
рукояток; 3 — левая рукоятка; 4 — упоры вертикаль-
ного ограничителя; 5 — ограничитель вертикального по-
ворота рукояток; 6 — зубчатый сектор вертикального
потенциометра; 7 — правая рукоятка; 8 — спусковой
крючок; 9 — вертикальный потенциометр; 10 — упоры
горизонтального ограничителя; 11 — горизонтальный по-
тенциометр; 12 — щетка; 13 — корпус коробки;
14 — выключатель ларингофона; 15 — кнопка повышен-
ной скорости; 16 — рычаг предохранительных выклю-
чателей
щеткой и нулевой точкой
потенциометра (ЛБ на
рис. 124) появляется раз-
ность потенциалов, и по
цепи управления идет ток.
Ток управления вызывает
появление усиленного в
несколько тысяч раз тока
во внешней цепи ампли-
дина, и электродвигатель
начинает работать, при-
водя в движение под-
вижное кольцо турели.
Так как скорость враще-
ния электродвигателя за-
висит от величины тока
управления, то, значит,
она определяется углом
поворота рукояток упра-
вления.
Итак, с изменением
направления вращения
ручек управления от ней-
трального положения из-
меняется направление
вращения приводного
электродвигателя, а с
увеличением самого от-
клонения увеличивается скорость этого вращения. Однако
для получения точной пропорциональности между величиной
отклонения ручек управления и скоростью вращения электро1
двигателя необходимо введение в схему добавочных компен-
сационных устройств, в противном случае эта скорость зави-
села бы от нагрузки приводного электродвигателя и изменялась
с изменением этой нагрузки при неизменном положении ручек
управления. При неизменном положении ручек управления,
т. е. при неизменном токе возбуждения амплидина, а следо-
вательно, и его напряжении, с увеличением нагрузки на при-
164
водной электродвигатель будет снижаться его скорость враще-
ния. Снижение же скорости вызывает увеличение тока в якоре
/ (J—СФп \
электродвигателя ' /я =—„—), а следовательно, и в якоре
амплидина.
Последнее обстоятельство, в свою очередь, вызывает вто-
рую причину, влияющую на скорость вращения приводного
электродвигателя. Вследствие падения напряжения в цепи
якоря из-за увеличивающегося тока уменьшится напряжение
амплидина, что повлечет за собой дальнейшее снижение ско-
рости вращения приводного электродвигателя.
Нарушение пропорциональности между положением ручек
управления и скоростью приводного электродвигателя может
происходить также из-за
непостоянства напряже-
ния на выходных зажи-
мах амплидина, вызывае-
мого непостоянством ско-
рости вращения его соб-
ственного электродвига-
теля, что может быть
следствием случайного
нарушения режима по-
следнего.
С целью частичной
компенсации всех этих
Рис. 126. Принципиальная схема обратной
связи по напряжению .(обозначения те же,
что на рис. 124)
мешающих влияний на
работу приводного дви-
гателя в схеме турели А
предусмотрено дополни- •
тельное сопротивление 10, подключенное
непосредственно на
полное напряжение на выходе амплидина, так называемое
сопротивление обратной связи по напряжению (рис. 126).
Часть этого сопротивления ВД включена в цепь возбуждения
амплидина. Поэтому ток в цепи возбуждения будет созда-
ваться напряжением, снимаемым с рабочего потенциометра, и
напряжением, снимаемым с участка ВД сопротивления 10,
причем полярность этих напряжений направлена всегда на-
встречу друг другу. Вследствие этого всякое повышение на-
пряжения амплидина, возникающее под влиянием какой-либо
причины (например при увеличении скорости вращения
амплидина), вызывает увеличение падения напряжения на
участке ВД сопротивления 10, а вместе с этим — умень-
шение результирующего напряжения, приложенного к об-
мотке возбуждения, равного разности напряжений на уча-
стках АБ рабочего потенциометра и ВД сопротивления 10.
Понижение же этого напряжения вызовет уменьшение тока
в цепи возбуждения, а в связи с этим и понижение напряже-
165
ния амплидина настолько, что окончательная величина выход-
ного напряжения останется неизменной.
Однако при строгом постоянстве напряжения амплидина
скорость вращения приводного электродвигателя, как это
было указано, понижается при увеличении его нагрузки и при
соответствующем возрастании тока в якорной цепи. Поэтому
рассмотренный способ компенсации мешающих влияний на
работу приводного двигателя является неполным.
В схеме предусмотрено реле 12 увеличения скорости,
срабатывающее при нажатии кнопки повышенной скорости,
расположенной на правой рукоятке управления турелью.
Замыканием верхнего контакта реле 12 понижается сопроти-
вление цепи возбуждения (закорачивается сопротивление ГД)
и уменьшается встречное напряжение, снимаемое с сопроти-
вления 10, вследствие чего напряжение на обмотке возбужде-
ния амплидина, а следовательно, и скорость вращения привод-
ного электродвигателя увеличиваются. Нижний контакт реле 12
выключает часть шунтирующего сопротивления в цепи ком-
пенсационной обмотки б, регулируя тем самым компенсацию
реакции якоря, величина которой изменяется с изменением
тока амплидина. Изменение степени компенсации достигается
специальными реостатами 7 и 8, шунтирующими компенсацион-
ную обмотку.
Дополнительная стабилизирующая обмотка а, конденсатор 3
и сопротивление 4 служат для обеспечения плавности измене-
ния выходного напряжения амплидина при резких перемеще-
ниях движка потенциометра 9, а также для устранения воз-
можных электрических колебаний во внешней цепи ампли-
дина.
При неизменном напряжении амплидина постоянный ток
в стабилизирующую обмотку возбуждения пройти через кон-
денсатор не может. При всяком же изменении напряжения
конденсатор, перезаряжаясь, пропускает ток в успокоительную
обмотку. Ампервитки последней противодействуют основной
обмотке возбуждения при каждом изменении напряже-
ния.
Вибратор 5 состоит из зуммера и трансформатора, вто-
ричная обмотка 6 которого введена в цепь обмотки возбужде-
ния. Он питает цепь управления переменным током напряже-
ния 16 в для снятия остаточного магнетизма в амплидине.
Сопротивления 4, 7 и 8, выполненные в виде реостатов,
и 10 — в виде потенциометра, регулируются на каждой турели
индивидуально. Результаты регулировки потенциометра оцени-
ваются по проценту регулировки скорости для различных
положений движка потенциометра 9.
Эта величина выражается формулой
Ы1Ю0%
166
где п — скорость вращения приводного электродвигателя
турели с наименьшей,
a /ij—с наибольшей нагрузкой; в идеальном случае процент
регулировки скорости равен нулю.
Как указывалось выше, для поворота пулеметов в верти-
кальной плоскости применяется аналогичная схема, причем для
подъема пулеметов рукоятки управления поворачиваются от
себя, а для опускания — на себя. При этом смещается щетка
потенциометра (поз. 6 на рис. 125) и начинает работать
электродвигатель вертикального привода. Регулировка ско-
рости осуществляется так же, как и в горизонтальном при-
воде.
Кроме того, на турели имеется ряд предохранительных
устройств:
1. Предохранительные выключатели, выключающие приводы,
когда стрелок отпускает рукоятки (поз. /6 на рис. 125).
2. Концевые контакты, выключающие вертикальный привод
при достижении пулеметами крайних верхнего и нижнего
положений.
3. Профильный механизм ограничения стрельбы, размы-
кающий цепи электроспусков, когда стрелок направляет пуле-
меты на какую-нибудь часть своего самолета, и автоматически
включающий подъем пулеметов, когда возникает угроза удара
стволами о фюзеляж.
Рис. 127. Принципиальная
на турели (обозначения те
электрическая схема включения амплидина
же, что на рис. 124, особенности указаны
в тексте)
167
Рис. 128. Принципиальная схема обратной
связи по току (обозначения те же, что
на рис. 124)
4. Максимальные выключатели, размыкающие силовые
цепи при появлении в них опасных перегрузочных токов.
Принципиальная электрическая схема включения амплидина
на турели Б (рис. 127) отличается от рассмотренной схемы
наличием сопротивления 8, реле электродинамического тормо-
жения 6, рабочим потенциометром 9, отсутствием вибратора.
Кроме того, компенсационная обмотка б шунтируется только
одним реостатом 7, а реле увеличения скорости обозначено
цифрой 5.
Сопротивление 8, включенное во внешнюю цепь амплидина
последовательно с якорем приводного электродвигателя 11,
в сочетании с сопротивле-
нием обратной связи по
напряжению служит для
получения точной про-
порциональности между
величиной отклонения ру-
чек управления и скоро-
стью вращения электро-
двигателя.
Это сопротивление 8
носит название сопроти-
вления обратной связи
по току.
Как видно из схем
(рис. 127 и 128), сопро-
тивление 8 включено так-
же в цепь возбуждения
амплидина на участке ДЕ
и притом так, что возникающее на нем при протекании по
нему нагрузочного тока падение напряжения получается всегда
одного знака с основным напряжением, снимаемым с рабочего
потенциометра 9, и обратным по знаку напряжению на участке
ВД, снимаемому с сопротивления 10.
Всякое увеличение нагрузки и понижение скорости при-
водного электродвигателя вызовет увеличение тока в цепи
якоря, а следовательно, и в сопротивлении 8. Увеличение тока
вызовет соответствующее увеличение падения напряжения на
этом сопротивлении (участок ДЕ), а тем самым и увеличение
общего напряжения в цепи возбуждения амплидина. Ток
возбуждения увеличится, а следовательно, повысится и напря-
жение амплидина и притом настолько, что скорость привод-
ного электродвигателя останется неизменной. В результате
получится, что скорость вращения электродвигателя будет
зависеть исключительно лишь от перемещения ручек управле-
ния и не будет изменяться при появлении других возбуждаю-
щих причин; иначе говоря, сопротивление обратной связи по
напряжению и сопротивление обратной связи по току обеспе-
168
чивают при любой нагрузке постоянство скорости вращения
приводного электродвигателя.
Для быстрого прекращения вращения приводного'электро-
двигателя в схему введено реле 6 электродинамического тор-
можения. При срабатывании этого реле (при отпускании ручек
управления и в предельных положениях турели) нижний кон-
такт разрывает цепь якоря приводного электродвигателя и
замыкает якорную обмотку. Стабилизирующая обмотка а
амплидина через верхнюю часть сопротивления 4 и конден-
сатор 3 подключена к его выходному напряжению. При сраба-
тывании реле 6 его верхний контакт замыкает стабилизирую-
щую обмотку а на выходное напряжение амплидина через
сопротивление 4. В этом случае по стабилизирующей обмотке
идет ток, создающий поток, направленный на встречу потоку
возбуждения, чем и достигается снятие остаточного магнетизма
в амплидине.
§ 51. СЛЕДЯЩИЙ ПРИВОД
Появление в период Отечественной войны крупных само-
летов с мощными моторами и мощным вооружением привело
к постановке ряда новых задач в области электроприводных
устройств на самолетах.
Современная практика самолетного привода предъявляет
к последнему требования, связанные с выполнением тем или
иным механизмом работы в определенных, наперед заданных
или регулируемых в процессе полета пределах. Кроме того,
бо.^шое количество механизмов и агрегатов бывает рассредо-
точено по самолету и при этом возникает необходимость
дистанционного управления (т. е. управления на расстояние)
электроприводами ввиду их удаленности от членов экипажа.
В ряде случаев для указанных целей могут быть приме-
нены механические или электрические регуляторы и системы
синхронной связи, позволяющие согласовывать положение
в пространстве нескольких рабочих механизмов, а также
осуществлять централизованное дистанционное управление ими.
Однако весьма часто непосредственное управление механизмами
от перечисленных устройств оказывается трудно осуществи-
мым по причинам малой их мощности.
В этом случае применяют так называемый следящий при-
вод, задачей которого является выполнение с некоторой
(вообще высокой) степенью точности перемещений, задаваемых
ему маломощным чувствительным устройством, которое само
непосредственно функций привода нести не может.
Таким образом, следящий привод, состоящий из следящей
системы и приводного двигателя, представляет собой усили-
тельное устройство, несущее одновременно функции согласо-
вания положения приводного двигателя, т. е. управляемой
части, соположением управляющего органа.
169
Следует отметить, что следящий привод приходит в дей-
ствие за счет возникшей разницы положений между управляю-
щим и исполнительным органами, причем процесс работы его
направлен к устранению указанной разницы. Таким образом,
поворот управляющей оси на некоторый угол вызывает дви-
жение элементов следящей системы, благодаря чему непо-
средственно или через автоматическую аппаратуру включается
электродвигатель, который, выполняя заданный поворот, воз-
вращает следящую систему в равновесие (исходное положе-
ние) и вследствие этого вновь приходит в положение покоя.
Эти общие положения, относящиеся к теории работы сле-
дящего привода, могут быть окончательно уяснены из рас-
смотрения какой-либо конкретной схемы. Поэтому ниже при-
водится описание следящего привода турелей дистанционного
управления.
Необходимость дистанционного управления турелями обу-
словлена применением герметических кабин на высотных бом-
бардировщиках. Электрическая схема управления при этом
получается более сложной по сравнению со схемой непосред-
ственного управления турелью, однако турель, поскольку
в ней не предусматривается место для стрелка, получается
меньшей по габаритам.
Турель, имея невысокий внешний колпак, оказывает
сравнительно небольшое аэродинамическое сопротивление
и легко может быть расположена в местах, где обеспечивается
наибольшая зона обстрела. Эти достоинства турели дистан-
ционного управления обусловливают применение ее также
и на самолетах, где применение герметических кабин не
является обязательным.
При дистанционном управлении турелями рабочее место
для стрелка, так как оно не особенно стеснено в пространстве,
может быть сделано более удобным. Последнее вместе с отсут-
ствием влияния на стрелка шума и вибраций, создаваемых
оружием при стрельбе, значительно повышает эффективность
прицельного огня.
На самолете может быть несколько турелей, которые
дистанционно управляются со специальных постов управления,
находящихся в герметических кабинах. Каждая турель имеет
свой основной пост управления, однако рассматриваемая
система позволяет с одного поста управлять несколькими туре-
лями и передавать управление с одного прицельного поста на
другой так, что из пулеметов или пушек одной турели могут
вести огонь различные стрелки.
Работа стрелка сводится к передвижению прицела в, сто-
рону полета самолета противника таким образом, чтобы центр
кольца прицела все время совпадал с ним. При этом стволы
пулеметов и пушек автоматически следят за самолетом про-
тивника и достаточно нажать на кнопку, чтобы открыть по
нему огонь.
170
При наличии дистанционного управления турелью связь
между прицелом стрелка и оружием осуществляется не жестко,
как в турелях непосредственного управления, а при помощи
электрической передачи.
Одним из главных элементов этой передачи являются сель-
сины. По своему действию они аналогичны валу, передающему
момент, и поэтому систему сельсинов часто называют электри-
ческим валом. Такая система синхронной передачи (рис. 129)
имеет в общем случае следующие основные части:
1) ведущее (командное) устройство — сельсин-датчик;
2) линия связи;
3) ведомое (управляемое) устройство — сельсин-приемник.
Рис. 129. Схема действия сельсинов
Сельсины представляют собой электрические машины, кото-
рые обычно имеют однофазные первичные системы (статор или
ротор), присоединенные к сети. Трехфазные обмотки (статоров
или роторов) связываются между собой через кольца.
Наиболее широкое распространение получили сельсины
с трехфазной обмоткой, расположенной на статоре, и одно-
фазной — на роторе с двумя явно выраженными полюсами.
При в.ращении ротора одной машины ротор другой пово-
рачивается на такой же угол. Происходит это следующим
образом.
Однофазный переменный ток создает в роторе каждой'
машины пульсирующий магнитный поток, который индукти-
рует во вторичных обмотках три электродвижущие силы,
совпадающие по фазе, но отличающиеся одна от другой по
величине, что зависит от различного положения каждой из
трех обмоток статора машины относительно обмотки ротора.
При одинаковых положениях роторов датчика и приемника,
благодаря встречному включению статорных обмоток, вторичные
электродвижущие силы одной машины уравновешивают вторич-
ные электродвижущие сиды другой, и во вторичной цепи ток
171
отсутствует. При этом говорят, что угол рассогласования равен
нулю. Углом же рассогласования называется разность углов
поворота ротора сельсина-датчика и сельсина-приемника отно-
сительно их статорных обмоток.
Если угол рассогласования не равен нулю, т. е. оси рото-
ров датчика и приемника не будут строго параллельны, то
величины электродвижущих сил, индуктируемых в соответ-
ствующих статорных обмотках, не будут равны, в силу чего
возникнет уравнительный ток, вызывающий вращающий син-
хронизирующий момент, стремящийся свести угол рассогласо-
вания к нулю.
Существенно отметить, что благодаря наличию пульсирую-
щего поля, а не вращающегося, условия работы машин системы
в отношении величины моментов и распределения энергии при
повороте в обе стороны оказываются одинаковыми. При этом
величина момента определяется величиной угла рассогласования.
Критерием оценки сельсинной системы является чувстви-
тельность и точность самих сельсинов.
Под чувствительностью сельсинов обычно понимают началь-
ный угол рассогласования, при котором возникает синхрони-
зирующий момент, достаточный для преодоления момента
трения на валу приемного сельсина.
Под точностью обычно понимают максимальное расхожде-
ние между действительными положениями в пространстве осей
роторов датчика и приемника.
Из сказанного должно ‘быть ясно, что при помощи сельси-
нов можно осуществить передачу момента на далекое рас-
стояние и поворот ротора приемника под любым углом.
Следует еще добавить, что сельсины в авиации находят
широкое применение для дистанционной передачи показаний
различных приборов.
Познакомившись с принципом действия сельсинов, можно
теперь перейти к рассмотрению схемы следящего привода
турели, изображенной на рис. 130. Как видно из схемы, одно-
фазный ротор сельсина-датчика жестко соединен с осью при-
цела и, следовательно, поворачивается вместе с ним. Обмотка
ротора питается переменным током напряжения 115 в часто-
той 400 гц.
Ротор сельсина-приемника жестко соединен с турелью (или,
что то же самое, с приводным электродвигателем). Обмотка
ротора соединена с электронным усилителем-выпрямителем.
Переменный ток в обмотке ротора датчика создает пере-
менное магнитное поле. Под действием этого поля в обмотках
статора индуктируются электродвижущие силы. Поскольку
обмотки статора сельсина-датчика соединены с обмотками
статора сельсина-приемника, в статорных цепях будет проте-
кать ток. Этот ток в магнитной системе сельсина-приемника
создает такой же по направлению поток, что и поток в сель-
сине-датчике.
172
Рис. 130. Принципиальная схема следящего привода турели
Ротор сельсина-датчика и ротор сельсина-приемника при
согласном (т. е. параллельном) положении прицела и оружия
расположены перпендикулярно один к другому. При этом
напряжение в обмотке ротора приемника будет равно нулю,
так как витки обмотки параллельны направлению магнитного
потока и в отличие от типовой сельсинной схемы, приведен-
ной выше, обмотки ротора не получают питания от сети, т. е.
в описываемой схеме следящего привода сельсины работают
в трансформаторном режиме.
При повороте прицела (выгоде его из положения, соглас-
ного с оружием) ротор сельсина-датчика поворачивается, что
вызывает- изменение направления магнитного потока как
в сельсине-датчике, так и в сельсине-приемнике. В этом случае
витки обмотки ротора приемника уже не будут параллельны
направлению магнитного потока, а наоборот, будут пересе-
каться последним, что, в свою очередь, обусловливает появле-
ние в этой обмотке так называемого сигнального напряжения,
которое подается на вход электронного усилителя-выпрями-
теля.
Величина сигнального напряжения обмотки ротора прием-
ника пропорциональна синусу угла рассогласования:
U2 = CUt sin а,
где — напряжение на зажимах обмотки ротора сельсина-
датчика, равное 115 в;
С — коэфициент трансформации;
а — угол рассогласования.
Мгновенная полярность сигнального напряжения зависит
от направления смещения прицела относительно оружия
(полярность меняется на обратную при переходе через син-
хронное положение).
173
Далее это напряжение, усиленное и выпрямленное, подается
на обмотку возбуждения амплидина. Приводной электродви-
гатель начинает вращаться, перемещая оружие в сторону вра-
щения прицела.
Если прицел поворачивать в противоположную сторону, то
сигнальное напряжение будет противоположной полярности
(мгновенной) и оружие будет вращаться также в противопо-
ложную сторону.
Отличительной особенностью, используемой в данной схеме
сельсинной системы, является то, что ротор сельсина-приемника
не служит указателем дистанционной передачи угла поворота
задающего органа, а является источником электроэнергии для
питания цепи, управляющей приводом.
При повороте турели поворачивается ротор сельсина-при-
емника. Когда ротор займет такое положение, при котором
сигнальное напряжение будет равно нулю, турель остановится.
При этом ствол оружия будет параллелен оси прицела.
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
1. Бердичевский Б. Е. — Электрооборудование самолетов.Оборон-
гиз, 1943 г.
2. Б р у с к и н Д. Э. — Электрооборудование самолетов. ГЭИ, 1948 г.
3. Буйлов А. Я. — Основы электроаппаратостроения, т. I. ГЭИ,
1946 г.
4. Георгиев Е. Г и Фриц Ю. В. — Эксплоатация электрообору-
дования самолетов. Изд. Научно-исследовательского института ГВФ, 1945 г.
5. Дорофеев И. И. и Зефиров С. П. — Электрификация испол-
нительных механизмов. ОНТИ, 1935 г.
6. Кулебакин В. С. — Испытание электрических машин и транс-
форматоров. Энергоиздат, 1935 г.
7. Кулебакин В. С. — К теории электроинерционного стартера.
Изд. Военно-воздушной академии, 1939 г.
8. Ку ле ба к и н В. С. — Лекции по курсу „Электрификация самоле-
тов“, выпуск IV. Изд. ВВИА им. Жуковского, 1948 у.
9. Ломоносов В. Ю. и Поливанов К. М. — Электротехника,
ГЭИ, 1947 г.
10. Нагорский В. Д. — Современные электрические стартеры для
запуска авиадвигателей. Труды ВВИА им. Жуковского, 1947 г.
11. На го рс..ий В. Д.— Электрооборудование самолетов, электро-
привод. Изд. ВВИА им. Жуковского, Москва, 1948 г.
12. Пиотровский Л. М. — Электрические машины, ГЭИ, 1947 г.
13. Попов В. К. — Элементы электроавтоматики. Машгиз, 1947 г.
14. Попов В. К. иВасильев Д. В.— Основы автоматики электро-
привода. ГОНТИ, М — Л, 1938 г.
15. Попов В. С.-—Электротехника. ГЭИ, 1947 г.
16. Фролов Р. Н. — Основы электротехники сильных токов. ГОНТИ,
1932 г.
ОГЛАВЛЕНИЕ
Глава первая
Стр.
Применение электропривода на самолете
§ 1. Общие положения........................................... 3
§ 2. Развитие и применение электрического привода на самолете . . 4
§ 3. Род тока и- напряжения бортовой сети........................ 7
§ 4. Основные тактико-технические требования к электрическому
оборудованию .................................................... 9
Глава вторая
Основные сведения по устройству и механике привода
§ 5. Элементы электрического привода.......................... 11
§ 6. Основные положения механики привода.........................12
§ 7. Приведение моментов к приводному валу исполнительного меха-
низма и к валу двигателя......................................... 18
§ 8. Приведение поступательного движения к вращательному • . . . 23
§ 9. Основные характеристики электропривода..................... 24
Глава третья
Электромагниты и их характеристики
§ 10. Область применения электромагнитного привода.............. 29
§ 11. Электромагнит втяжного типа . . . •........................ —
§ 12. Электромагнит, с поворотным якорем........................ 40
Глава четвертая
Механические и электрические свойства электродвигателей
§ 13. Принцип действия электродвигателей постоянного тока .... 42
§ 14. Обратимость машин постоянного тока.................. 44
§ 15. Противоэлектродвижущая сила двигателя............... 45
§ 1 Зависимость тока в якоре электродвигателя от его нагрузки . 47
§ 17. Мощность электродвигателя и ei о коэфициент полезного дей-
ствия ........................................................... 48
§ 18. Вращающий момент-электродвигателя................... 51
§ 19. Пуск в ход электродвигателя......................... 54
§ 20. Свойства шунтового электродвигателя................. 55
§ 21. Свойства сериесного двигателя............•..............., 59
§ 22. Свойства компаундного двигателя........................... 62
175
Стр.
§ 23. Изменение направления вращения (реверс) двигателей постоян-
ного тога ...................................................... 65
§ 24. Регулирование скорости вращения двигателей постоянного
тока............................................................. 67
§ 25. Регулирование скорости вращения двигателей постоянного
тока изменением напряжения сети.................................. 71
§ 26. Специальные метопы регулирования скорости вращения само-
летных электродвигателей......................................... 74
§ 27. Электрическое торможение двигателей постоянного тока ... 77
§ 28. Применение электродвигателей постоянного тока различного
возбуждения в самолетном электроприводе.......................... 79
§ 29. Асинхронный электродвигатель............................... 80
Глава пятая
Электромеханизмы управления самолетом и мотором
§ 30. Общие соображения по выбору и компоновке электрического
привода...................................................... 90
§ 31. Электродвигатели типа МП. ................................ 93
§ 32. Редукторы....................................... . . . 97
§ 33. Тормозные устройства...................................... 98
§ 34. Контактные зстройства.................................... 100
§ 35. Электромеханизм УТ-1..................................... 102
§ 36. Электромеханизмы АП-1 и АП-З.............................. ЮЗ
§ З7. Электромеханизм УН_, .................................... 104
§ 38. Электромеханизмы УР-2 и УР-6............................. 105
-§ 39. Электромеханизм ГРЩ 1................................... 107
§ 40. Электромеханизм УФ 3 .................................... 108
§ 41. Электромёханизм УС-1..................................... 109
§ 42. Совместная работа агрегатов АП-1 и ГРЩ-1................. 111
§ 43. Аппаратура пуска, управления и защиты самолетных электро
механизмов.................................................... 114
§ 44. Электропривод шасси ................................... 1
§ 45. Электрические стартеры для запуска авиадвигателей....... 124
§ 46. Электропривод лопастей винтов изменяемого в полете шага
(ВИШ) . ...................................................... 136
§ 47. Электропривод рулей управления самолетом................ 146
Глава шестая
Электропривод для специальных целей
§ 48. Электропривод бомбардировочного вооружения............. 150
§ 49. Электропривод стрелково-пушечного вооружения........... 155
§ 50. Амплидин и его ' применение в подвижных стрелковых уста-
новках ...................................................... 158
§ 51. Следящий привод........................................ 169
Киевский Институт ГВФ
БИБЛИОТЕКА