/








































































































































































































Текст
В М. ЗОНТОВ, Б, В. КУПРИН
СИСТЕМЫ
ЭЛЕКТРОСНАБЖЕНИЯ
1ЕТАТЕЛБНЫХ АППАРАТОВ
В. М. ЗОНТОВ, Б. В. КУПРИН
СИСТЕМЫ
ЭЛЕКТРОСНАБЖЕНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Под редакцией Б. В. КУПРИНА
Утвержден Главнокомандующим
Военно-Воздушными Силами
в качестве учебника
для слушателей и курсантов
инженерных ВВУЗов ВВС
УДК 621.313:629.73 *
В учебнике излагаются основные сведения о систе-
мах электроснабжения самолетов и вертолетов, рас-
сматриваются принципы действия, характеристики и
особенности эксплуатации приводов постоянной ско-
рости, регуляторов частоты вращения и напряжения,
электромашинных и статических преобразователей рода
тока, аккумуляторных батарей, бортовых электрических
сетей, аппаратов защиты и управления. Особое вни-
мание в учебнике уделяется анализу переходных про-
цессов в системах регулирования напряжения и ча-
стоты, автоматизации распределения нагрузки между
параллельно работающими генераторами, аварийным
режимам, методам защиты, расчету надежности и пу-
тям ее повышения. Книга предназначена для слушате-
лей и курсантов ВВУЗов ВВС.
Иллюстраций — 213, таблиц — 8, библиография — 23.
ПРЕДИСЛОВИЕ
Книга является учебником по дисциплине «Системы электро-
снабжения летательных аппаратов» для слушателей ВВИА
имени Н. Е. Жуковского и курсантов высших авиационных
инженерных училищ. При его написании авторы использовали
опыт преподавания дисциплины «Системы электроснабжения
летательных аппаратов» слушателям ВВИА имени Н. Е. Жу-
ковского, 'Материалы учебников, учебных пособий и публика-
ций, приведенных в списке литературы.
Подбор материалов учебника составлен в соответствии с
программой по дисциплине. Принятый порядок изложения поз-
воляет избежать излишних повторений материала при рассмот-
рении элементов различных типов систем электроснабжения.
В книге значительное место уделено описанию сущности фи-
зических процессов в системах, особенностям методов исследо-
ваний, путям дальнейшего совершенствования и особенностям
эксплуатации элементов и систем электроснабжения.
Авторы искренне благодарны коллективу кафедры электро-
оборудования летательных аппаратов ВВИА имени Н. Е. Жу-
ковского за предложения и замечания, сделанные при написа-
нии рукописи учебника. Введение, главы 1...4, 6, 7, 10 и 12
написаны Б. В. Куприным, главы 5, 8, 9, 11, 13...16 —
В. М. Зонтовым.
Авторы выражают глубокую благодарность рецензентам —
сотрудникам кафедры электрооборудования летательных ап-
паратов Киевского ВВИАУ и профессору, доктору технических
наук И. М. Синдееву за ценные советы и замечания, сделанные
ими при рецензировании рукописи учебника.
ВВЕДЕНИЕ
Коммунистическая партия, Советский Союз делают все, что-
бы предотвратить новую мировую войну. В то же время расту-
щая военная угроза со стороны империалистических реакцион-
ных держав требует укреплять обороноспособность пашей
Родины, боевую мощь Советских Вооруженных Сил.
Наши Военно-Воздушные Силы оснащены первоклассными,
высокоэффективными летательными аппаратами, позволяющи-
ми решать широкий круг сложных боевых задач. Эти задачи
постоянно усложняются и расширяются, что обусловливает
необходимость непрерывного совершенствования летательных
аппаратов и их бортового оборудования. В свою очередь, это
приводит к росту числа и мощности бортовых приемников
электроэнергии, повышению требований к надежности их
электроснабжения электроэнергией высокого качества.
На современных тяжелых самолетах установленная мощ-
ность источников электроэнергии уже достигает 300...500 кВ-А.
Так как для работы многих приемников требуется электро-
энергия как постоянного, так и переменного тока, то на ле-
тательных аппаратах устанавливаются источники этих видов
электроэнергии. В качестве основных источников электро-
энергии используются генераторы постоянного и переменного
тока. В ряде случаев на летательных аппаратах устанавлива-
ются генераторы одного вида энергии,, а ее преобразование в
другой вид осуществляется при помощи трансформаторно-
выпрямительных устройств, электромашинных или статических
преобразователей.
Организация электроснабжения приемников самолетов и
вертолетов зависит от многих факторов (назначения и типа
летательных аппаратов, требований к надежности электро-
снабжения, к качеству электроэнергии и др.) и поэтому на
них применяются различные типы систем электроснабжения.
Системой электроснабжения называют комплекс устройств,
предназначенных для производства, передачи и распределения
электрической энергии. К таким устройствам относят: генерато-
ры, преобразователи рода тока, регуляторы напряжения и ча-
стоты, аппараты управления, защиты, контроля и сигнализации,
4
аппараты включения на параллельную работу генераторов и
равномерного распределения нагрузки между ними, совокуп-
ность устройств, обеспечивающих передачу электроэнергии от
источников к приемникам, аккумуляторные батареи и др.
Надежность функционирования систем электроснабжения в
значительной степени влияет на безопасность полетов. Это свя-
зано в первую очередь с тем/ что работа всех ответственных
агрегатов, в том числе авиадвигателей и органов управления
летательных аппаратов, невозможна без потребления электричес-
кой энергии. Поэтому вопросам повышения надежности систем
электроснабжения уделяется постоянное внимание.
Одним из методов повышения надежности электроснабже-
ния приемников является резервирование основных источников
питания. В настоящее время на самолетах и вертолетах в соот-
ветствии с существующими требованиями должны предусмат-
риваться не менее двух независимых систем (подсистем)
электроснабжения. Для приемников, без которых невозможно
обеспечить безопасность полетов, предусматривается дву-
н трехкратное резервирование питания от основных источников
и питание от специальных аварийных (резервных) источников.
На летательных аппаратах в качестве аварийных и резерв-
ных источников используют аккумуляторные батареи, а также
генераторы, приводимые во вращение от вспомогательной сило-
вой установки или от выпускаемой в воздушный поток турби-
ны (ветрянки).
Развитие систем электроснабжения тесно связано с разви-
тием бортового оборудования, автоматизацией процессов уп-
равления летательным аппаратом и его вооружением.
Впервые на самолетах электроэнергия была использована
в конце XIX века в системах зажигания авиадвигателей.
В качестве источников электроэнергии этих систем использова-
лись аккумуляторные батареи.
В начале XX века в России были построены многомоторные
бомбардировщики: «Илья Муромец», «Русский витязь» и
«Святогор».
На этих самолетах кроме систем зажигания были впервые
установлены электрические обогревательные и осветительные
приборы, а в 1911 г. — радиотелеграфные аппараты. Так как
для работы радиотелеграфных искровых аппаратов требовался
переменный ток частотой 600... 1200 Гц, а применяемые обогре-
вательные и осветительные приборы не критичны к роду тока,
то в качестве их источников питания стали применять генера-
торы переменного тока индукторного типа. Эти генераторы
мощностью 500...750 В-А с частотой вращения до 6000 об/мин
разрабатывались под руководством В. П. Вологдина и исполь-
зовались на различных типах самолетов.
5
Ж
4»
Привод генераторов осуществлялся от выпускаемой в воз-
душный поток турбины или с помощью (ременной передачи от
редуктора авиационного двигателя.
В 1919... 1920 гг. на самолетах стали применять радиотеле-
графные аппараты с использованием электронных ламп. Это
обусловило необходимость замены генераторов переменного
тока генераторами постоянного тока. Вначале их мощность со-
ставляла 200...300 Вт. За номинальный уровень напряжения
бортовой сети было принято напряжение 8 В.
Дальнейшее развитие авиации привело к росту числа и
мощности приемников электроэнергии и, следовательно, увели-
чению длины и сечения проводов бортовой электрической сети.
Поэтому в 1923... 1924 г,г. для уменьшения массы проводов элек-
трической сети напряжение генераторов повысили до 12 В, а в
1930 г. — до 24 В.
В 1925... 1926 гг. на самолетах был произведен переход на
привод генераторов от авиационных двигателей, так как ис-
пользование выпускаемых в воздушный поток турбин вызыва-
ло увеличение лобового сопротивления самолета. В это же вре-
мя на самолетах стали широко применяться электрические ме-
тоды измерения частоты вращения авиационных двигателей,
расхода топлива, температуры и др.
Для повышения надежности электропитания приемников на
каждом двигателе самолета стали устанавливать не менее од-
ного генератора и, кроме того, включать в состав системы
электроснабжения аварийный источник питания — аккумуля-
торную батарею емкостью 5, 10 или 15 А-ч.
В 1934 г. в Советском Союзе А. Н. Туполевым был создан
восьмимоторный самолет-гигант «Максим Горький», на кото-
ром впервые использовались трехфазные приемники перемен-
ного тока частотой 50 Гц, напряжением 120 В. Суммарная
установленная мощность приемников переменного и постоян-
ного тока составляла 31,5 кВт.
Для их питания под руководством профессора А. Н. Лари-
онова и при участии К- В. Рогова и С. В. Крауз были разра-
ботаны два типа электроустановок, включающих в свой .состав
двигатель внутреннего сгорания и генератор двойного тока —
постоянного и переменного. На первом из них был установлен
генератор, мощность переменного тока которого составляла
6 кВ-А, мощность постоянного тока — 5,8 кВт, а на второй —
3 кВ-А и 3 кВт. За номинальный уровень напряжения постоян-
ного тока было принято напряжение 27,5 В.
До середины тридцатых годов на самолетах основными при-
ем пика мн электроэнергии являлись осветительные и обогрева-
гслниые приборы, 1контрольно-измерительная аппаратура и си-
стемы зажигания,
fj
Мощность генераторов постоянного тока на легких самоле-
тах составляла не более 1000 Вт. Регулирование их напряжег
пия осуществлялось вибрационными регуляторами напряжения.
Интенсивное развитие электрооборудования связано с соз-
данием в Советском Союзе в 1939 г. конструктором В. l\1. Пет-
ляковым пикирующего бомбардировщика Пе-2. Н,а самолете
Пе-2 впервые, в истории авиации были широко применены ди-
станционно управляемые силовые электромеханизмы для при-
вода почти всех ответственных агрегатов и органов управления
самолета (убирающиеся шасси, управляемые закрылки, стаби-
лизатор, триммеры, створки воздушных и масляных радиаторов
и др.).
В качестве источников электрической энергии на этом само-
лете были установлены два генератора мощностью по. 1000 Вт
и две аккумуляторные батареи емкостью по 30 А-ч.
Работы по проектированию и созданию электромеханизмов,
электрических двигателей, генераторов, регулирующих и за-
щитных аппаратов самолета Пе-2 проводились под руководст-
вом А. А. Енгибаряна, а проектирование и создание его борто-
вой электрической сети — К. В. Рогова.
Переход на электрический привод органов управления са-
молета полностью себя оправдал в годы Великой Отечествен-
ной войны. В США, Англии и Германии подобное электрообо-
рудование на самолетах стало внедряться начиная с 1941...
1942 гг.
В ходе Великой Отечественной войны и особенно в после-
военный период в связи с переходом на реактивную авиацию
на самолетах стали устанавливать новые и более мощные при-
емники электроэнергии: связные и командные радиостанции,
радиолокационные станции,- радиовысотомеры, радионавигаци-
онные приборы, мощные электромеханизмы, электрифицирован-
ные пулеметные и пушечные турели, электробомбосбрасывате-
ли, электровентиляторы, электролебедки и др. Это потребовало
более мощных источников электроэнергии.
Так, например, на самолете ТУ-16 установленная мощность
четырех генераторов постоянного тока напряжением 28,5 В со-
ставляла 72 кВт. Значительное увеличение числа и мощности
приемников электроэнергии обусловило усложнение бортовой
электрической сети.
Многие приемники для своей работы требовали электро-
энергию как постоянного, так и переменного тока. Поэтому на
самолетах стали, как правило, использовать две системы
электроснабжения: постоянного тока напряжением 28,5 В и
переменного тока переменной частоты (390...920 Гц) напряже-
нием 115/200 В. Для питания приемников переменного тока
постоянной частоты 400 Гц стали применять электромашинные
преобразователи постоянного-тока в переменный, установлен-
7
ная мощность которых на тяжелых самолетах составляла 9...
12 кВ-А.
Дальнейшее развитие реактивной авиации, повышение ско-
рости и высоты полета, расширение круга ее тактических задач
потребовало установки на самолетах дополнительного обору-
дования и, следовательно, увеличения установленной мощности
источников электроэнергии, особенно переменного тока посто-
янной частоты. Поэтому в начале 60-х годов на самолетах, как
правило, основной системой электроснабжения становится си-
стема электроснабжения трехфазного переменного тока напря-
жением 1'20/208 В постоянной частоты 400 Гц. В этих системах
генераторы приводятся .во вращение от авиационных двигате-
лей через специальное промежуточное устройство — привод
постоянной скорости. Суммарная мощность генераторов стала
достигать 160...240 кВ-А.
Применение на летательных аппаратах в качестве основной
системы электроснабжения переменного тока постоянной часто-
ты по сравнению с системами электроснабжения постоянного
тока низкого напряжения позволило значительно улучшить
массотабаритные характеристики системы.
В 70-е годы в период научно-технической революции проис-
ходит дальнейшее совершенствование существующих и разра-
ботка новых систем электроснабжения.
Повышение надежности, улучшение качества электроэнер-
гии, массогабаритных и эксплуатационных характеристик си-
стем электроснабжения достигалось за счет применения бес-
контактных генераторов переменного и постоянного тока, полу-
проводниковых устройств регулирования, защиты и управления,
новых систем охлаждения, широкого дублирования и резерви-
рования основных элементов системы и т. д.
Разработка новых систем электроснабжения обусловлена
растущими требованиями к увеличению ресурса авиационного
оборудования, уменьшению эксплуатационных расходов и даль-
нейшему улучшению массогабаритных показателей.
При создании систем электроснабжения летательных аппа-
ратов большое значение имели работы советских ученых, ин-
женеров и .конструкторов.
Теоретические основы развития авиационного электрообо-
рудования созданы выдающимся советским ученым академиком
В. С., Кулсбакиным и его учениками. Большой вклад в разви-
тие современного электрооборудования летательных аппаратов
нпеслн: член-корреспондент А. Н. Ларионов, профессора А. И.
Вертинов, К. С. Бобов, Д. Э. Брускин, В. А. Винокуров, Н. Т.
Коробки, 1О. И. Конев, М. М. Красношапка, В. Т. Морозовский,
11. М. Синдеев, С. В. Страхов и др,
8
Огромное значение в разработке и создании систем электро-
снабжения и их элементов имели работы коллективов, руково-
димых А. Ф. Федосеевым, Ф. И. Голгофским, Б. Н. Калугиным,
В, Л Жарковым и др.
I (спиральный Комитет КПСС, Советское правительство,
министр обороны СССР и главнокомандующий ВВС уделяют
him тоянное внимание развитию авиации, обеспечению высокой
боеготовности, безопасности полетов. Надежность функциони-
рования систем электроснабжения и другого электрооборудова-
1П11Я в значительной степени предопределяет боевую эффектив-
ность летательных аппаратов, безопасность полетов. Это обу-
словливает необходимость непрерывного освоения и внедрения
нового оборудования, совершенствования технической эксплу-
атации и ремонта авиационной техники, неустанного повышения
боевой подготовки и профессионального мастерства летного и
инженерно-технического состава частей, соединений и объеди-
нений авиации Вооруженных Сил СССР.
Глава 1
СТРУКТУРЫ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
1.1. КЛАССИФИКАЦИЯ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ.
РЕЖИМЫ ИХ РАБОТЫ
Для функционирования большинства комплексов и систем
бортового оборудования современных летательных аппаратов
(ЛА) требуется электрическая энергия как постоянного, так
и переменного тока различных уровней напряжения. Поэтому
на ЛА устанавливаются несколько источников электроэнергии.
Для передачи электроэнергии от источников .к приемникам она
вначале подводится к шинам соответствующих центральных
распределительных устройств (ЦРУ), а далее от шин ЦРУ
энергия распределяется непосредственно к приемникам или
поступает к шинам промежуточных распределительных уст-
ройств (РУ), от которых производится ее дальнейшее распреде-
ление.
Для примера на рис. 1.1 приведена упрощенная схема си-
стемы электроснабжения переменного тока переменной часто-
ты. Здесь синхронные генераторы G приводятся во вращение
непосредственно от редукторов авиационных двигателей (АД).
Рис. 1.1. Схема двухкапальной системы электроснабжения переменного
тока переменной частоты
10
Гик как частота вращения авиационных двигателей изменяется
и широких .пределах, то, следовательно, и частота тока синхрон-
ного генератора 'изменяется в этих же пределах.
Рассматриваемая система электроснабжения состоит из
чнух раздельно работающих каналов. В случае отказа одного
lt.i каналов шины его ЦРУ автоматически переключаются на
шины ЦРУ исправного канала." Источниками питания прием-
ников постоянного и переменного тока постоянной частоты
являются выпрямительные установки (ВУ) и преобразователи
постоянного тока в переменный (П).
Особо ответственные приемники постоянного и переменно-
го тока, предназначенные для обеспечения посадки ЛА, под-
ключаются к аварийным шинам АШ_ и АПК. В системе
)лектроонабжения, схема которой приведена на рис. 1.1, ава-
рийными источниками электроэнергии служат аккумуляторная
батарея GB и преобразователь постоянного тока в переменный
II, получающий питание от аварийной шины АШ
Известно много типов систем электроснабжения, их выбор
при проектировании новых ЛА зависит от ряда факторов: на-
значения ЛА, установленной мощности и графика нагрузок,
приемников постоянного и переменного тока, требований к ка-
честву электроэнергии и т. д.
Бортовые системы электроснабжения обычно классифици-
руются по следующим признакам:
— по назначению;
— по виду источника энергии;
— по виду генерируемой электроэнергии;
— по уровню напряжения;
— по числу проводов системы распределения электроэнер-
I пи.
Исходя из назначения, системы электроснабжения подраз-
деляют на:
— основные, источники электроэнергии которых, например
генераторы каналов, питают все или большинство приемников
и течение всего времени полета ЛА;
— вспомогательные (резервные), источники электроэнергии
которых обеспечивают питание ограниченного числа приемни-
ков при неработающих авиационных двигателях на земле или
в воздухе, например, генераторы, приводимые во вращение
вспомогательной силовой установкой;
— аварийные, предназначенные для питания ограниченного
числа жизненно важных приемников при отказе основных и
резервных источников электроэнергии.
По виду источника энергии системы электроснабжения де-
лят на первичные и вторичные.
11
К первичным системам относят те, генераторы которых при-
водятся во вращение непосредственно от редуктора авиацион-
ного двигателя или при помощи привода постоянной скорости.
К вторичным системам относят те, в которых производи-
мая ими электроэнергия получается путем преобразования
энергии первичной системы.
По роду генерируемой электроэнергий системы электро-
снабжения подразделяют на системы электроснабжения посто-
янного тока, системы электроснабжения переменного тока по-
стоянной частоты и системы электроснабжения переменного
тока переменной частоты. Системы электроснабжения перемен-
ного тока, в свою очередь, разделяют на трехфазные и одно-
фазные.
По уровню напряжения, исходя из принятой шкалы номи-
нальных напряжений генераторов, системы электроснабжения
делят на системы напряжением 28,5; 37; 120; 208 Вит. д.
По числу проводов, используемых для передачи электро-
энергии в бортовой электрической сети, системы электроснаб-
жения различают-на однопроводные, двухпроводные, трех-
проводные и т. д.
Наименование системы электроснабжения ЛА обычно при-
сваивается по типу ее первичной системы.
Установленное на ЛА многочисленное оборудование, требу-
ющее для своего функционирования электрическую энергию,
по-разному влияет на боевую эффективность и безопасность по-
лета ЛА. Это позволяет дифференцировать требования к на-
дежности их электроснабжения. Поэтому согласно ГОСТу
19705—81 все приемники электроэнергии ЛА условно разбива-
ют на три группы:
— приемники 1-й категории, необходимые для завершения
полета и безопасной посадки;
— приемники 2-й категории, обеспечивающие безопасное
продолжение полета, выполнение задания и посадку;
— приемники 3-й категории, отказ которых не влияет на
безопасность полета.
Для обеспечения высокой надежности электроснабжения
приемников 1-й категории они подключаются к шинам специ-
альных распределительных устройств постоянного и перемен-
ного тока (аварийным шинам). Их схема коммутации преду-
сматривает возможность подключения к источникам как пер-
вичных (вторичных), так и аварийных систем электроснабже-
ния.
При эксплуатации систем электроснабжения возможны слу-
чаи возникновения отказов. В ряде случаев они могут привести
к тому, что система будет не в состоянии отдавать необходи-
мую мощность, вследствие чего становится необходимым от-
12
Ключопис части приемников и перехода на электропитание от
рек рппых или аварийных источников электроэнергии и т. п.
Учитывая указанную специфику работы системы электро-
гНабження ЛА, различают следующие режимы ее работы: нор-
мальный, частичный, аварийный п ненормальный.
При нормальной работе системы ее элементы исправны и
оОтч испивается электроснабжение всех приемников, необходи-
мых для выполнения полета.
К частичной работе системы относят режим ее работы в
Полете, при котором система не в состоянии отдавать необхо-
димую мощность; вследствие этого происходит отключение час-
III приемников, а питание остальных продолжается от исправ-
ных источников первичных систем электроснабжения.
Аварийный режим работы системы обусловлен отказами,
приводящими к отключению всех каналов и переходу к
1Лектроенабжению от аварийных источников электроэнергии
голько приемников 1-й .категории.
К ненормальной работе системы относят кратковременный
гг режим работы, возникающий из-за внезапных отказов в си-
стеме (короткие замыкания, отказы аппаратов управления и
регулирования, отключение части генераторов и Др.). Режим
Ненормальной работы прекращается в случае отключения от-
казавших элементов аппаратами защиты. При этом обычно
восстанавливается нормальная или частичная работа системы.
1.2. ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К СИСТЕМАМ ЭЛЕКТРОСНАБЖЕНИЯ
Гсхнические требования, предъявляемые к системам
электроснабжения, обычно подразделяют на две группы. 1\ пер-
вой группе относят требования, характерные для всех систем
пнпационного оборудования, например, указывающие на необ-
ходимость обеспечения максимальной надежности, высокой бо-
евой живучести, минимальной массы, малых эксплуатационных
расходов, безопасности обслуживания, максимальной стандар-
niiaiijHH и унификации, минимальной стоимости и т. д.
Ко второй группе требований относят те, которые определя-
ют особенности функционирования системы, ее структуру, па-
раметры качества электроэнергии и т. д.
Одним из основных документов при разработке технических
изданий на проектируемую систему электроснабжения для кон-
кретного типа ЛА является ГОСТ 19705—81.
Согласно этому ГОСТу на проектируемом ЛА разрешается
использовать следующие типы первичных и вторичных систем
)лсктроснабжения:
13
переменного трехфазного тока постоянной частоты;
— постоянного тока.
(В технически обоснованных случаях в виде исключения до-
пускается использование первичной системы электроснабжения
переменного трехфавного тока переменной частоты и вторичной
системы переменного однофазного тока постоянной частоты).
Применяемые системы должны быть соединены с .корпусом
ЛА:
— в трехфазных системах переменного тока — силовой
нейтралью;
— в системе постоянного тока — минусовым проводом;
- — в однофазной системе — одним из проводов.
(При неэлектропроводящей .конструкции ЛА допускается
прокладка нулевого, минусового, обратного или общего про-
вода).
Электроснабжение приемников должно обеспечиваться
электроэнергией высокого качества.
К параметрам, характеризующим качество электроэнергии,
относят: отклонения напряжения и частоты от номинальных
значений в установившихся и переходных режимах работы си-
стемы при воздействии внешних возмущений (нагрузки, час-
тоты вращения генераторов и т. и.), длительность переходных
режимов, модуляцию напряжения и частоты, форму кривой на-
пряжения переменного тока и пульсацию напряжения постоян-
ного тока.
Качество электроэнергии во .многом определяется степенью
неравномерности нагрузки фаз из-за неравномерного включе-
ния в сеть однофазных приемников. Поэтому однофазные при-
емники по возможности равномерно распределяют между фа-
зами источника электроэнергии. Допустимая неравномерность
нагрузки фаз при нормальной или частичной работе не должна
превышать 5% номинальной мощности канала.
Для обеспечения высоких требований к надежности электро-
снабжения приемников первичные (вторичные) системы электро-
снабжения должны состоять не менее чем из двух независимых
каналов. При этом структура системы должна быть построена
так, чтобы отказ любого из каналов не влиял на работоспособ-
ность остальных источников электрической энергии, т. е. на
электроснабжение приемников.
Выполнение этих условий требует, чтобы число основных
каналов системы электроснабжения было равно или кратно
числу авиационных двигателей ЛА.
Содержание технических требований к системам электро-
снабжения и их элементам более подробно будет изложено при
рассмотрении особенностей конструкции и характеристик соот-
ветствующих аппаратов и устройств.
14
1.3. СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
Выбор типа и структуры системы электроснабжения, как
уже отмечалось, обусловлен многими факторами и является
сложной задачей. В настоящее время на отечественных и зару-
бежных ЛА широко используются в различных сочетаниях
следующие типы первичных систем электроснабжения:
постоянного тока напряжением 28,5 В;
переменного тока напряжением 208/120 В переменной
Чистоты;
переменного тока напряжением 208/120 В постоянной
чистоты.
В свою очередь, системы электроснабжения переменного
гока постоянной частоты, исходя из принципов ее получения,
подразделяют на системы с приводами постоянной скорости и
системы типа ПСПЧ (переменная скорость — постоянная
частота).
На рис. 1.2 приведена структурная схема канала системы
электроснабжения постоянного тока напряжением 28,5 В.
Здесь генератор постоянного тока G приводится во вращение
Непосредственно от вала редуктора авиационного двигателя
(АД). Дистанционное включение генератора на шины ЦРУ
производится при помощи специального аппарата КА (диф-
ференциально-минимального реле ДМР, аппарата защиты и
управления АЗУ), который одновременно выполняет роль ап-
парата защиты от «обратного» тока и обеспечивает включение
сигнализации о работе генератора. Аппарат защиты (ЛЗП)
формирует сигнал на включение контактора гашения поля
(КГП) при превышении напряжения заданной величины
(I/ >30,5 В). При срабатывании этого контактора в цепь об-
мотки возбуждения генератора вводится резистор, ограничива-
ющий его ток возбуждения.
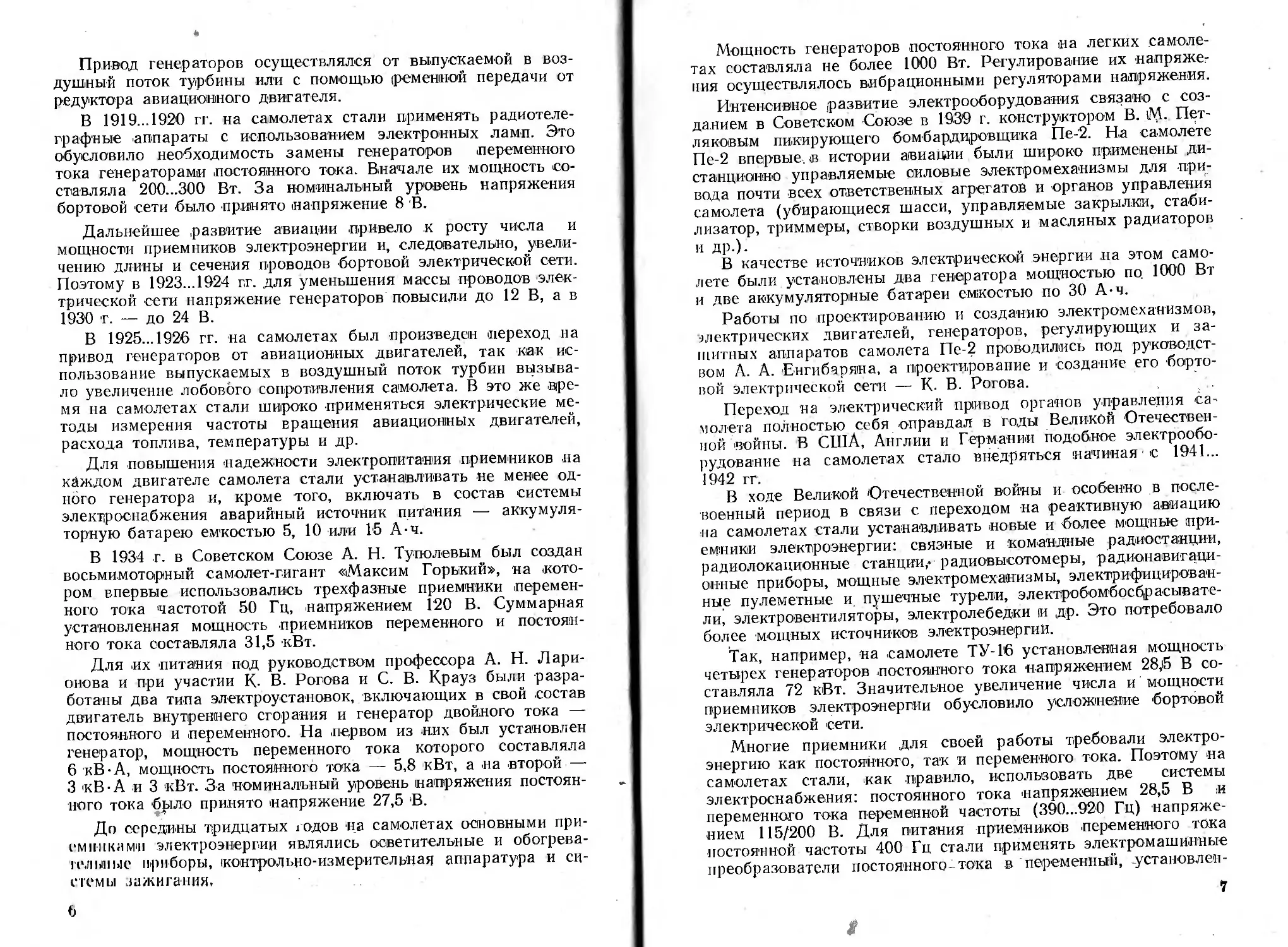
Рис. 1.2. Структурная схема канала систе-
мы электроснабжения постоянного тока
15
Стабилизация напряжения осуществляется регулятором На-
пряжения (1’11), работающим в комплекте с дифференциаль-
ным корректором напряжения (ДКН). Для улучшения дина-
мических характеристик канала в его состав включается ста-
билизирующий трансформатор (I). Плавкий предохранитель
(Т11) защищает генератор от короткого замыкания в бортовой
сети.
Системы электроснабжения постоянного тока успешно экс-
плуатируются на ряде отечественных и зарубежных ЛА. Это
обусловлено большим опытом их производства и эксплуатации.
К одному из основных недостатков таких систем относят их
относительно высокую массу, которая резко возрастает с рос-
том установленной мощности источников электроэнергии и про-
тяженности проводов электрической сети.
Применение трехфазных систем электроснабжения перемен-
ного тока напряжением 208/120 В по сравнению с системами
постоянного тока напряжением 28,5 В позволяет существенно
увеличить мощность канала, уменьшить массу электрооборудо-
вания, повысить надежность электроснабжения приемников,
снизить уровень, помех работе радиоэлектронного, приборного
оборудования и других систем.
В системах электроснабжения переменного тока переменной
частоты (см. рис. 1.1) синхронные генераторы приводятся во
вращение непосредственно от редуктора авиационных двигате-
лей. К достоинствам системы электроснабжения такого типа,
обусловившим ее использование на некоторых отечественных и
зарубежных самолетах и вертолетах, относят простоту кон-
струкции ее элементов и высокий КПД.
Основным недостатком такой системы является то, что мно-
гие приемники ЛА не могут нормально работать при литании
электроэнергией переменного тока переменной частоты. Напри-
мер, асинхронные двигатели требуют для своего питания источ-
ники электроэнергии переменного тока постоянной частоты.
Применение для этих целей вторичных источников электро-
энергии постоянной частоты существенно ухудшает массогаба-
ритные характеристики системы.
Благодаря целому ряду преимуществ по сравнению с дру-
гими типами систем, системы электроснабжения переменного
тока постоянной частоты получили широкое применение на
отечественных и зарубежных ЛА.
На рис. 1.3 приведена структурная схема канала системы-
электроснабжения переменного тока постоянной частоты. Здесь
для стабилизации частоты тока генератор G цриводится во
вращение от авиационного двигателя через специальное проме-
жуточное устройство, выходной вал которого вращается с по-
16
СТОЯПНОЙ угловой скоростью w =COnst. Поэтому эти устройства
получили 'Название .привода постоянной скорости (ППС).
Рис. 1.3. Структурная схема канала системы
электроснабжения переменного тока с приводом
постоянной скорости
При отклонении частоты тока от заданного уровня регулятор
частоты вращения (РЧ) воздействует на положение регулиру-
ющего органа ППС. Для повышения точности стабилизации
частоты регулятор РЧ снабжается 'корректором частоты (КЧ).
При изменении напряжения в сети регулятор напряжения
PH осуществляет соответствующее изменение магнитного пото-
ка синхронного генератора.
Блок защиты и управления (БЗУ) формирует сигнал на
срабатывание коммутационного аппарата (КА), отключающего
генератор от шин ЦРУ в случае возникновения аварийных ре-
жимов.
В системах электроснабжения переменного тока постоянной
частоты типа ПСПЧ генераторы приводятся во вращение не-
посредственно от редуктора •авиационного двигателя, а выра-
батываемая ими электроэнергия переменного тока переменной
частоты преобразуется в переменный ток постоянной частоты с
помощью статических преобразователей.
Основным преимуществом таких систем электроснабжения
является отсутствие в них конструктивно сложных приводов
постоянной скорости.
Системы электроснабжения типа ПСПЧ по принципу пре-
образования электроэнергии разделяются на две группы:
— системы с промежуточным звеном постоянного тока, в
которых энергия генератора сначала преобразуется в постоян-
ный ток, а далее -инвертируется в переменный ток постоянной
частоты;
— системы с непосредственной связью, в которых имеёт ме-
сто однократное преобразование энергии генератора в перемен-
ный ток постоянной частоты.
2. Изд. № 7934 17
Структурная схема канала системы электроснабжения типа
ПСПЧ с промежуточным выпрямлением электроэнергии показа-
на на рис. 1.4,н. Здесь электроэнергия переменного тока пере-
менной частоты f=var, вырабатываемая генератором 6'~, сна-
чала с помощью выпрямительного устройства ВУ преобразуется в
постоянный ток, который далее при помощи инвертора (И)
преобразуется в переменный ток постоянной частоты f = const.
К недостаткам систем ПСПЧ такого типа относят двукратность
преобразования электроэнергии, и как следствие, — невысокий
КПД.
Рис. 1.4. Структурная схема канала системы
электроснабжения переменного тока типа ПСПЧ
Лучшие энергетические и массовые характеристики имеют
системы ПСПЧ *с однократным преобразованием электроэнер-
гии. Структурная схема канала таких систем приведена на
рис. 1.4,6.
Масса статического преобразователя переменного тока од-
ной частоты ,в переменный ток другой частоты СП, получившего
название циклокОнвертора, в значительной степени зависит от
значений частоты, величины тока и числа фаз питающего ге-
нератора (см. гл. 8).
Как указывалось выше, системы электроснабжения ЛА, ис-
ходя из высоких требований к надежности электроснабжения
приемников, должны состоять не менее чем из двух независи-
мых каналов (подсистем). Их аппараты защиты и управления
осуществляют в случае отказа одного из каналов автоматичес-
кое переключение его приемников к шинам ЦРУ исправного
канала (подсистемы).
Известно много структур систем электроснабжения, в кото-
рых предусматривается взаимное резервирование как первич-
ных, таг^и вторичных источников электроэнергии. Схема одно-
го из вариантов систем электроснабжения с резервированием
первичных источников была приведена на рис. 1.1. В ряде
случаев резервирование каналов осуществляется через вторич-
18
и ыё источники электроэнергии. Для примера такого способа
резервирования на рис. 1.5 приведена структурная схема кана-
лов постоянного и переменного тока с взаимным резервирова-
нием через вторичные источники. Здесь в случае отказа одного
из каналов его приемники, например, включенные к шинам
распределительного устройства постоянного тока РУ_, будут
получать Питание от шин ЦРУ- исправного канала перемен-
ного тока через выпрямительное устройство ВУ. Схема ком-
мутации аварийных шин постоянного тока АШ_ предусматрива-
ет возможность питания 'Приемников постоянного тока 1-й ка-
тегории как от первичных, так и от вторичных и аварийных ис-
точников электроэнергии.
Рис. 1.5. Структурная схема каналов посто-
янного и переменного тока с взаимным ре-
зервированием через вторичные источники
питания
Питание приемников переменного тока 1-й категории, вклю-
ченных к аварийным шинам ALLL, осуществляется в случае
отказа .канала переменного тока от преобразователя СП.
1.4. КРИТЕРИЙ ОЦЕНКИ МАССОЭНЕРГЕТИЧЕСКИХ
ХАРАКТЕРИСТИК СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
Большое ‘ число показателей, характеризующих системы
электроснабжения (см. параграф 1.2), затрудняет проведение
сравнительных оценок различных вариантов структур систем для
рассматриваемого ЛА. Поэтому на практике ограничиваются
рядом показателей, которые наиболее полно характеризуют си-
стемы электроснабжения. К числу таких показателей обычно
относят качество электроэнергии, надежность, массогабаритные
характеристики, энергетические показатели и стоимость.
2* 19
Качество электрической Энергии определяет .эффективность
работы приемников,- и системы электроснабжения в, целом.
• " Требования *к надежности сйстейк электроснабжения пред-
полагают’ ббеспёчёние совокупности 'Требований кйк в отноше-
нии’Надежности в широком смысле (безотказность, (ремонтопри-
годность и’долговечность), так и в отнЬшенйи функциональной
эффективности, т. е. приспособленности системй к выполнений)
Своих-функций ®о; всех'режимах ее работы. > *•
Система электроснабжения, .как и любая авиационная’ си-
стема, должна иметь минимальные массу ц габариты.
К энергетическим показателям относят потери мощности в
системе и КПД ее отдельных элементов. Значимость этих
показателей следует из того, что, во-первых, работа первичной
системы электроснабжения связана с отбором мощности от ави-
ационного двигателя, во-вторых, для нормальной работы систе-
мы требуется отводить потери мощности (тепло) в ее элемен-
тах. Первое обстоятельство приводит к дополнительному увели-
чению массы авиационного двигателя и расхода топлива, а
второе — к необходимости использовать ..специальные системы
охлаждения.
Известно, что для решения оптимизационных задач необхо-
дим один критерий. Поэтому при сравнительных оценках раз-
личных вариантов систем электроснабжения возникает зада-
ча выбора такого обобщенного критерия оценки, который наи-
более полно характеризовал бы систему.
До настоящего времени обобщенного критерия сравнитель-
ной оценки систем электроснабжения пока еще нет. Для этих
целей используют совокупность частных критериев. Одним из
таких частных критериев является так называемая полетная
масса (вес).
Академик В. С. Кулебакин .показал, что для сравнительной
оценки вариантов систем электроснабжения или ихотдельных
элементов по массовым показателям необходимо учитывать не
только конструктивную массу, но также и дополнительную
массу топлива и массу оборудования, необходимого для функ-
ционирования, системы. Он предложил использовать критерий —
полетную ‘массу/'— учитывающий •массоэнер'гетические харак-
теристики оцениваемых систем. Этот критерий состоит из двух
составляющих: первой, ’ учитывающей' 'конструктивную массу
всех ее элементов,Вторую, учитывающую через массу топли-
ва- и других1 всйб’МогйЧель'нЫх устройств', ^’ёобкрдимых для ра-
боты системы электроснабжения, ее энергетические характери-
стики. *.* . .' ' ‘
- Очевидно, .что элементу-, сиедемы, . имеющие .более высокий
КПД, будут требовать для своего функционирования меньше
2ft
топлива, меньшую Массу системы охлаждения и т. д., и, Следо-
пптельно, будут иметь меньшую величину полетной массы.
В настоящее время предложен >ряд методик для:" оценки
массоэнергетических .показателей системы электроснабжения,
щщример, по полетной, взлетной, полной массам, но практи-
ческое их применение требует большого .числа исходных дан-
ных, тщательного учета изменений масс планера, силовой уста-
новки и т. д.
Поэтому при оценке нового- варианта систем электроснабже-
ния по массоэнергетическим показателям часто за критерий
принимают величину массы, на которую нужно изменить по-
лезную нагрузку ЛА по сравнению. с базовым вариантом си-
стемы при условии неизменнрсти основных его летных харак-
гер истин, . .,
Для определения этого критерия ^необходимо предваритель-
но оценить так называемые полные массы базового и оцени-
ваемого варианта системы, а также' изменение масс топлива и
конструкций остальных элементов; обусловленное 'переходом от
базового варианта к оцениваемому.
Полная масса системы представляет собой с^мму установ-
ленной массы всех элементов и эквивалентной массы топлива,
необходимой Для функционирования системы
Л7П = МУ + Л4ЭКВ) (1.1)
А т ~
где Afy, масса, всех, элементов системы с учетом- массы
вепрмогательного оборудования, необходимого
для ее установки на борту ЛА;
9К„ .^.эквивалентная' масса топлива, расходуемого на
обеспечение .функционирования рассматриваемого
варианта системы. • .
Эквивалентная масса топлива Л1ЭКВ определяется согласно
выражению • • •
М9КВ ~ (М, + А40Х)ф Мт) k„, (1-2)
где Afs — -масса топлива, расходуемого на .компенсацию-по-
терь энергии авиационного двигателя, обусловлен-
ных применением.’Оцениваемой системы;
Мох — масса топлива, расходуемого на отвод потерь
энергии в оцениваемых элементах системы;
7И,‘ — масса, топлива; необходимого для транспортировки
топлива,' расходуемого на'компенсацию потерь на
функционирование и охлаждение оборудования;
k„ — коэффициент приведения, учитывающий- 'удельный
расход топлива на транспортировку единицы мас-
сы и выработку т'-опливаво время полёта. / • *
21
*
.Масса топлива Л4В, .расходуемого в течение полета на про-
изводство энергии, в общем случае определяется двумя состав-
ляющими:
Л4Э = Л4М + Л4В. (1.3)
где Мы — масса топлива, затрачиваемого в течение полета на
создание механической энергии «а валу авиацион-
ного двигателя для обеспечения функционирования
оцениваемого оборудования;
/Ив — масса топлива, затрачиваемого в течение полета на
создание компрессором двигателя энергии сжатого
воздуха для обеспечения функционирования
эл ектр оо бо рудов а ния.
В свою очередь, масса топлива Л4М, затрачиваемая на соз-
дание механической энергии на валу двигателя, равна:
Мы=^ы-Р-(. (1.4)
где qM— часовой расход топлива на единицу отбираемой с ва-
ла авиационного двигателя механической энергии,
кг/кВт-ч;
Р — мощность оцениваемого оборудования, кВт;
t — время полета, ч.
Масса топлива Л4„, затрачиваемого на создание компрессо-
ром двигателя энергии сжатого воздуха, определяется уравне-
нием
q9-GB-t, (1.5)
где q„ — часовой расход топлива на единицу расхода воз-
духа, отбираемого от авиационного двигателя,
(кг/ч) • (кг/с);
GB •— расход отбираемого от авиационного двигателя воз-
духа, необходимого для функционирования обору-
дования мощностью Р, кг/с.
При сопоставлении вариантов систем электроснабжения в
ряде случаев определяют потери мощности в приемниках
электроэнергии. Определение этих потерь в оцениваемом
электрооборудовании ЛА производится на каждом этапе
полета.
Для i-ro этапа потери определяют по формуле
= . (1-6)
ГЧ
где Р( — активная мощность оцениваемого приемника элек-
троэнергии на 1-м этапе полета, кВт;
д, КПД рассматриваемого приемника.
Уравнения (1.1)...(Кб) позволяют определить величину по-
казателя эффективности, характеризующего массоэнергетичес-
кие характеристики оцениваемой системы.
22
Значение этого показателя эффективности (Э) определяется
следующим уравнением:
Э = Х-ХЧ Д/Иу+ДЛи. (1.7)
где ЛГ и Л1" — полные массы соответственно
базового и оцениваемого .вари-
анта систем;
ДЛ4у = Л4уО — Л4" — изменение конструктивной мас-
сы остальных элементов элек-
трооборудования ЛА, обуслов-
ленное переходом от базового
варианта к оцениваемому;
А Д4ЭКВ= -^экв- ^экв— изменение эквивалентной массы
топлива, расходуемого на произ-
водство полезной мощности,
связанное с изменением места
и способа отбора энергии при
переходе от базового варианта
системы к оцениваемому.
В случае, если замена базового варианта па новый не вли-
яет па установленную массу других элементов электрооборудо-
папия ЛА и не приводит к изменению места и способа отбора
мощности, то уравнение (1.7) упрощается и принимает вид
Э = Х —/И". (1.8)
Сравнительная оценка вариантов структур 4-канальной систе-
мы генерирования электроэнергии переменного тока мощностью
по 60 кВ-А с гидравлическими и пневматическими приводами
постоянной скорости и различными системами охлаждения по
рассматриваемому критерию показывает, что системы генери-
рования с гидравлическими приводами и жидкостным охлажде-
нием имеют для ЛА с временем полета в 8 ч полную массу на
I00...180 кг меньше по сравнению с массой других систем. Та-
ким образом, сопоставление различных вариантов систем
электроснабжения по обобщенному критерию позволяет про-
нести оценку возможности увеличения полезной нагрузки ЛА
и путей совершенствования их массоэнергетических показате-
лей.
Глава 2
ПРИВОДЫ АВИАЦИОННЫХ ГЕНЕРАТОРОВ
2.1. НЕПОСРЕДСТВЕННЫЙ ПРИВОД ГЕНЕРАТОРОВ
ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА
В первичных системах электроснабжения генераторы по-
стоянного и переменного тока переменной частоты приводятся
во вращение непосредственно от редуктора авиационного дви-
гателя. Такой способ привода генераторов по сравнению, на-
пример, с приводом генераторов от двигателя вспомогательной
силовой установки или ветродвигателей является в. настоящее
время наиболее надежным и экономичным ион широко исполь-
зуется на отечественных и зарубежных ЛА.
К основному недостатку непосредственного привода генера-
тора от авиационного двигателя относят переменную частоту
вращения выходного вала его редуктора. . ,
Частота вращения авиационных двигателей зависит от ре-
жима полета, а ее диапазон изменения для одноконтурных
турбореактивных и поршневых двигателей составляет 2...2,5,.
для. двухконтурных — 1,6....1,8, для турбовинтовых — 1,2...1,3.
Максимальная частота в'рашения авиационных генераторов,
исходя из условий работы их подшипников, в настоящее время
находится в пределах 9000... 12000 об/мин. Поэтому привод ге-
нераторов от турбореактивных двигателей осуществляется че-
рез понижающий редуктор с передаточным отношением 0,65...1,
а от поршневых двигателей через повышающий — с переда-
точным отношением 1,4...3. Широкий диапазон изменения час-
тоты вращения редуктора авиационного двигателя приводит к
изменению в больших пределах частоты тока f генератора, так
как
г_ Р-П
J 60 ’
где р — число пар полюсов генератора;
п —•‘Частота вращения генератора, об/мин.
При вращении генератора от авиационного двигателя име-
ет место пульсация его частоты вращения в течение одного
оборота вала редуктора. Пульсация частоты вращения реак-
24
пнгных двигателей обусловлена непостоянством момента сопро-
тивления при истечении горячих газов из сопла двигателя, а у
поршневых — непостоянством крутящегося момента в соответ-
ствии с тактами работы двигателя.
НаЛичие .колебаний угловой скорости вала генератора ус-
ложняет условия его работы с точки зрения вибропрочности и
ннброустойчивости. Для демпфирования колебаний валы гене-
раторов выполняются из специальной стали в виде упругого
(гибкого) цилиндрического стержня, работающего на кручение.
Гак, при увеличении частоты вращения вала генератора про-
исходит его закручивание, а при уменьшении частоты враще-
ния — раскручивание. Это уменьшает (увеличивает) величину
амплитуды ускорения вала генератора.
Амплитуды пульсаций частоты вращения газотурбинных
щигателей значительно меньше, а частоты пульсаций больше,
чем у поршневых двигателей. Поэтому применение гибкого ва-
ла генератора в приводах от газотурбинных двигателей в ос-
новном позволяет уменьшить нагрузки’на подшипники при не-
достаточно точной центровке валов генератора и привода, а
также обеспечить защиту коробки приводов от поломок при
заклинивании ротора генератора. Это обусловлено тем, что при
заклинивании якоря генератора его гибкий вал как наиболее
слабое звено в передаче срезается.
Рис. 2Л. .Схема привода гене-
ратора с применением фрикци-
онной муфты
В ряде случаев для ограничения момента, передаваемого на
над генератора, автоматического отсоединения вала генератора
от вала привода при разрушении подшипника генератора и
г. д. .применяют фрикционные или расцепные муфты.
На рис. 2.1 показана схема привода генератора 3 от редук-
тора 1 авиационного двигателя с
муфты 2. При превышении •мо-
мента на валу генератора пре-
тельной величины сжатые пру-
жиной стальные и бронзовые дис-
ки фрикционной муфты начина-
ют проскальзывать относительно
труп друга, предохраняя тем са-
мым вал генератора от срезания.
Расцепная муфта, отсоединя-
ющая генератор от привода при
разрушении подшипника, монти-
руется в корпусе генератора. Она
состоит из двух вращающихся частей: ведущей, соединенной с
налом привода, и ведомой, соединенной с валом генератора, и
неподвижной части — электромагнита с зашелкой.
В рабочем положении зубья ведомой и ведущей частей
муфт под действием пружины находятся в торцевом зацеплении
между собой; .
♦
При отказе подшипника генератора происходит смещение его
ротора относительно статора, что приводит к разрушению их
поверхностей и коротким замыканиям в рабочей обмотке гене-
ратора. Блок защиты генератора формирует сигнал на включе-
ние электромагнита муфты, выводящего ведущую и ведомые
части муфты из расцепления. Конструкция расцепной муфты
предусматривает возможность приведения ее в рабочее состоя-
ние только при остановленном двигателе.
В каналах генерирования электроэнергии постоянного тока,
когда их генераторы используются и в качестве электростар-
теров для запуска авиационного двигателя, они приводятся во
вращение через редуктор с автоматически изменяющимся пе-
редаточным отношением.
2.2. КЛАССИФИКАЦИЯ ПРИВОДОВ ПОСТОЯННОЙ СКОРОСТИ
СИНХРОННЫХ ГЕНЕРАТОРОВ
В системах электроснабжения переменного тока постоянной
частоты синхронные генераторы приводятся во вращение от
авиационных двигателей через специальное промежуточное
устройство, выходной вал которого независимо от изменения
частоты вращения входного вала вращается с постоянной уг-
ловой скоростью. Такие устройства получили название приво-
да постоянной скорости (привода постоянной частоты враще-
ния).
В настоящее время предложено большое число различных
типов приводов постоянной скорости (ППС). Они обычно клас-
сифицируются по виду промежуточной энергии, используемой -в
процессе преобразования, и по доли энергии, подвергаемой
п р еоб р а з ов ани ю.
По виду промежуточной энергии, используемой в процессе
преобразования, ППС разделяют на гидравлические, пневмати-
ческие (воздушно-турбинные), электромеханические и механи-
ческие.
По доли энергии, подвергаемой преобразованию, ППС делят
на приводы с полным преобразованием энергии (приводы с
прямым потоком энергии) и приводы с частичным преобразо-
ванием энергии (приводы дифференциального типа).
В приводах с полным преобразованием энергии вся отбира-
емая от авиационного двигателя механическая энергия предва-
рительно трансформируется в другой вид энергии, а затем эта
промежуточная энергия преобразуется в механическую. Приме-
ром такого типа привода Может служить гидравлический при-
вод, функциональная схема которого приведена на рис. 2<2.
Здесь всй‘механическая энергия 1^мех, отбираемая от АД, при
помощи гидронасоса 1 преобразуется в гидравлическую 4"r„4p,
а гидравлическая энергия посредством гидродвигателя 2, при-
водящего во вращение генератор 3, снова трансформируется в
26
механическую 1Гмех . Постоянство частоты вращения генерато-
ра осуществляется- путем регулирования производительности
। пдронасоса 1 по сигналам устройства управления 4.
Рис. 2.2. Структурная схема гидравлического при-
вода с полным преобразованием энергии
В приводах дифференциального типа основная доля меха-
нической энергии, отбираемой от авиационного двигателя, пе-
редается непосредственно на вал генератора и только ее часть
подвергается трансформации в промежуточный вид.
Приводы постоянной скорости .с частичным преобразовани-
ем энергии, отбираемой от авиационного двигателя, по срав-
нению с приводами с полным преобразованием энергии имеют
более высокий КПД и лучшие массогабаритные характеристи-
ки. Поэтому они широко используются в системах электроснаб-
жения переменноготтжггтгак- легких; так й тяжелых ЛА.
Приводы с полным преобразованием энергии находят при-
менение для привода синхронных генераторов мощности не
более 30...40 кВ-А.
Известны различные конструкции дифференциальных при-
водов. Независимо от вида используемой в них промежуточной
энергии, общим их конструктивным элементом является диф-
ференциальный механизм, т. е. устройство, позволяющее полу-
чить результирующее движение как сумму или разность со-
ставляющих движений.
Дифференциальные приводы по принципу использования
управляемого потока энергии разделяют на две группы: нере-
версивные и реверсивные.
В нереверсивных приводах (приводах с «докруткой») поток
управляемой энергии всегда передается только в одном направ-
лении и, следовательно, угловая частота вращения выходного
вала привода <« определяется выражением
01 — 4“ Ар^пр, (2-1)
где а>а — частота вращения авиационного двигателя;
шпр — частота вращения вала регулируемого промежуточ-
ного привода;
/о, znp— передаточные отношения планетарного редуктора.
Из приведенного уравнения следует, что для обеспечения
постоянства частрты вращения вала генератора при, например,
уменьшении частоты вращения авиационного двигателя <«а не-
27
обходимо увеличить частоту вращения регулируемого привода
<1>пр. В качестве примера на рис. 2.3 приведена функциональная
схема одного из приводов с «докруткой», дифференциальным
механизмом которого Является планетарный (суммирующий)
механический редуктор 1. Один из входных валов суммирую-
щего редуктора 1 жестко соединен с редуктором АД, а вто-
рой — приводится во вращение воздушной турбиной 2 через
понижающий редуктор 3. Регулирование угловой скорости тур-
бины 2 осуществляется путем изменения расхода воздуха QB,
отбираемого от компрессора АД так, чтобы частота вращения
<» синхронного генератора 5 оставалась постоянной. Сигналы
управления дроссельной, заслонкой воздушной турбины 2, обес-
печивающей регулирование ее частоты вращения шпр, формиру-
ются устройством управления 4.
Рис. 2.3. Структурная схема дифференциального
привода с «докруткой»
Энергетическая диаграмма для нереверсивного привода, ха-
рактеризующая распределение управляемого и неуправляемого
потоков энергии, отбираемой от АД, в зависимости от'его час-
тоты вращения приведена на рис. 2.4,а. Здесь с ростом часто-
ты вращения АД от шами„ до шомакс доля неуправляемого пбто-
ка энергии WH, передаваемая к генератору непосредственно че-
рез дифференциальный редуктор, от общей отбираемой от АД
Рис. 2.4. Энергетические диаграммы для нереверсивного (а) и
реверсивного (б) приводов
28
энергии W пропорционально возрастает, а доля управляемого по1
тока энергии Wy — снижается. Из рис. 2.4,а следует, что в
приводах с «докруткой» 'специальное промежуточное устрой-
ство (в рассматриваемом примере — воздушная турбина),
осуществляющее регулирование управляемого потока энергии
ОТ Вумаке ДО WyMHH, работает непрерывно.
В реверсивных приводах поток управляемой энергии мо-
жет передаваться в двух направлениях. Поэтому промежуточ-
ное устройство, осуществляющее его регулирование, должно
работать или в режиме двигателя, или в режиме генератора
(тормоза).
Угловая скорость ",вала генератора,- приводимого во враще-
ние от реверсивного привода, равна сумме или разности двух
составляющих движений
ш ± ^'пр^пр' (2-2)
Коэффициенты редукции ia и inp дифференциального редукто-
ра привода выбирают таким образом, чтобы при крейсерской
скорости полета ЛА, когда частота вращения выходного вала
редуктора авиационного двигателя ша=<искр, частота вращения
нала привода <опр = 0.
Из энергетической диаграммы для привода ,с реверсом, при-
веденной на рис. 2.4,6, следует, что промежуточное устройство
при ша<<,|акр работает в режиме двигателя и управляемый по-
ток энергии суммируется с неуправляемым WH, а при
,||а>шакр— работает в .режиме генератора (тормоза).
В случае, если ша^^аКр. что соответствует крейсерской ско-
рости полета ЛА, промежуточное устройство работает в режи-
ме холостого хода.
Целесообразность применения того или иного типа ППС за-
висит от ряда факторов: назначения и времени полета ЛА,
Мощности и места установки генератора, типа системы охлаж-
чения генератора, КПД, срока службы привода и др.
2.3. ГИДРАВЛИЧЕСКИЕ ПРИВОДЫ
Гидравлические приводы широко используются в системах
электроснабжения отечественных и зарубежных ЛА. В насто-
ящее время известно много типов таких ППС, отличающихся
между собой принятыми схемами гидромеханизмов и их конст-
рукциями. Их обычно подразделяют на две группы: гидроста-
тические и гидродинамические. Наибольшее распространение
получили гидростатические приводы с аксиально-поршневыми
гндромашинами. .Принцип действия ППС этого типа рассмот-
рим на примере гидравлического привода с полным преобразо-
ванием энергии (рис. 2.5,о). Этот привод состоит из двух одно-
типных гидромашин ГМ.1 и ГМ2. Ротор гидромашины ГМ1 же-
29
Стко связан ^редуктором авиационного двигателя АД, а ротор
гидромашины ГМ2 — с валом синхронного генератора ('СГ).
Рис. 2.5. Гидравлический привод с аксиально-плунжерными насосом и
двигателем
В рассматриваемом приводе с полным преобразованием
энергии гидромашина ГМ1 выполняет роль гидронасоса, пре-
образующего механическую энергию, отбираемую от авиацион-
ного двигателя, в гидравлическую, а гидромашина ГМ2 .—
роль гидродвигателя, преобразующего гидравлическую энергию
в механическую .при .постоянной частоте вращения его вала.
В гидравлических приводах дифференциального типа функ-
ции, выполняемые гидромашинами Г:М1 и ГМ2, зависят от ре-
жима работы ППС. Так, при частотах вращения авиационного
двигателя меньше синхронной частоты вращения генератора
(/а%<<«) гидромашина ГМ1 будет работать в режиме
гидронасоса, а гидромашина ГМ2 — в режиме двигателя. В
случае, когда частота вращения авиационного двигателя пре-
вышает синхронную частоту вращения генератора (/u<uo> ш),
гидромашина ГМ1 .работает в режиме гидро двигателя, а гидро-
машина ГМ2 — в режиме гидронасоса.
30
Из приведенной на рис. 2.,5,а схемы гидропривода видно;
Что но окружности корпуса ротора 1 гидромашины ГМ1 равно-
мерно расположены цилиндрические камеры. В этих камерах
находятся плунжеры 2 и пружины 3, которые прижимают плун-
жеры к поверхности наклонной шайбы 4. При .вращении рото-
ра гидромашины его плунжеры совершают возвратно-поступа-
тельное движение.
Камеры ротора поочередно .через дуговые отверстия непод-
Ннжиого распределительного диска 8 сообщаются с магистра-
лями низкого 6 и высокого 7 давлений. Рабочее тело (масло)
поступает в магистраль низкого давления из бака 9.
При повороте ротора гидромашины ГМ4 на 180 градусов
около половины его ка-мер заполняются маслом из магистрали
низкого давления. Плунжеры этих камер при дальнейшем по-
вороте ротора от 180 до 360 градусов и установке наклонной
шайбы 4 под углом 7Г|1 >'0 будут перемещаться вправо, вытес-
няя масло через второе дуговое отверстие распределительного
диска 8 в магистраль высокого давления 7.
Производительность гидромашины ГМ1, работающей в ре-
жиме гидронасоса, зависит от частоты вращения ее ротора,
т. е. частоты вращения «>о авиационного двигателя, а также от
угла поворота ри регулируемой наклонной шайбы, числа ка-
мер ротора и их геометрических размеров. Регулирование про-
п пюдителыности гидромашины ГМ 1 осуществляется путем
плавного изменения угла поворота наклонной шайбы. Для этого
гс шток 5 соединяется с исполнительным устройством систе-
мы управления приводом постоянной скорости. Например, в
случае уменьшения частоты вращения авиационного двигателя
подача масла в магистраль высокого давления уменьшается,
поэтому исполнительное устройство перемещает шток 5 так,
ч тобы увеличить угол поворота тгн наклонной шайбы. При этом
упеличиваются длины рабочего хода плунжеров, что приводит
к возрастанию объема выталкиваемого масла, т. е. увеличению
производительности ГМ1. Если наклонная шайба занимает
перпендикулярное положение к оси ГМ1 (тГи = 0), то плунже-
ры не могут совершать возвратно-поступательного движения и
подача масла в магистраль высокого давления отсутствует.
Если шайба 4 будет наклонена в обратную сторону, то направ-
ление подачи рабочего тела в магистралях 6 и 7 изменяется.
Конструкция гидромашины ГМ2 принципиально не отлича-
ется от конструкции гидромашины ГМ1, за исключением того,
что ее наклонная шайба 4 имеет постоянный угол наклона к
осп ротора, т. е. рл = const.
Масло, поступающее в камеры ротора гидромашины ГМ2,
соединенные через дуговое отверстие распределительного дис-
ка 8 с магистралью высокого давления 7, давит на их плунже-
ры с силой F (рис. 2.5,в).
31
Силы F, создаваемые плунжерами, обусловливают возник-
новение в месте соприкосновения плунжеров с поверхностью
наклонной шайбы сил реакции R, направленных перпендику-
лярно ее поверхности. Силу реакции R можно разложить на
две составляющие: продольную F', действующую вдоль оси
плунжера, и перпендикулярную к ней Fa. Составляющая Fa си-
лы реакции R, пак показано на рис. 2.5,6, образует вращаю-
щий момент гидромашины ГМ2.
Одной из основных характеристик ППС, необходимых для
анализа процессов в системах электроснабжения переменного
тока, является его механическая характеристика, т. е. зависи-
мость частоты вращения привода от его момента --о> = <р(М).
Уравнение механической характеристики рассматриваемого
гидропривода будем определять следующим образом. Соглас-
но рис. 2.5,6, вращающий момент М{, создаваемый одним
плунжером, соединенным с магистралью высокого давления,
равен:
Mi = Fal-Q slnipj, (2.3)
где D — диаметр окружности, на которой размещены точки
касания плунжеров и наклЬнной шайбы гидромаши-
ны при 7r4 = 0;
<pz — угол между осью ротора и центром окружности плун-
жера (рис. 2.5,6).
Выражение для вертикальной составляющей силы реакции
Fai плунжера, как это следует из рис. 2,5,в, равно:
= (2.4)
где Рв — величина давления в магистрали высокого давле-
ния;
5ПЛ — площадь поперечного сечения плунжера;
ргд — угол поворота наклонной шайбы ГД.
Подставляя значение силы Fal из уравнения (2.4) в (2.3),
имеем
AJi=PB5nfltg T„-ySin<h-. (2.5)
Суммарный момент от всех г плунжеров, если пренебречь
моментами плунжеров, соединенных в данный промежуток вре-
мени с магистралью низкого давления, так как РВ<.РВ, будет
равен:
Л1=2М. (2.6)
i= 1
Этот момент не остается постоянным, а пульсирует около
некоторого среднего значения с периодом 2r/z. При увеличении
32
числа плунжеров величина пульсации суммарного момента
уменьшается. При нечетном числе z плунжеров пульсация мо-
мента будет меньше, чем при четном, так как в момент пере-
соединения камер от магистрали высокого давления к ма-
гистрали низкого давления в работе .не участвует лишь один
плунжер.
Величина суммарного (среднего) момента гидромашины
Г М2, работающей в режиме двигателя, с учетом, что Р„^РВ,
равна:
тс
М = ~ f PBSBI^~ tg 7ГД sin • d <P = ktPB, (2.7)
2л J 2
о
, z-SM-D- tgTr„ , ,
где коэффициент, определяемый конструк-
2" тинными параметрами гидромашины
ГМ2.
Связь между величиной давления масла Рв в магистрали
высокого давления и угловой скоростью ш ротора ГМ2 найдем,
исходя из условия неразрывности потока жидкости. Согласно
этому условию, объем масла QrH, подаваемый в единицу .вре-
мени гидромашиной ГМ1, равен сумме объемов масла про-
ходящего за этот промежуток времени через гидромашину ГМ2,
и масла QyT, вытекающего из гидросистемы из-за негерметич-
ности соединений ее элементов, т. е.
Q™ = Qr, + Qyr. (2.8)
Утечка масла в гидросистеме пропорциональна давлению
QyT = A?yT-Р8, (2.9)
где kyT — коэффициент, характеризующий утечку масла в
гидросистеме.
Объем масла Qrfi, подаваемый в единицу времени гидрома-
шпной ГМ1, равен сумме объемов масла qtu, вытесняемого каж-
дым из его плунжеров, камеры которых соединены с маги-
стралью высокого давления, т. е.
Q.I. = 9ги • 2Г„. (2.10)
Объем масла 7ГН, подаваемый одним плунжером, равен:
^=5Пл-Л-а>о, (2.11)
где h — ход плунжера;
о>с— угловая скорость ротора гидромашины ГМ1, жестко
связанного с редуктором’-авиационного двигателя.
Ход поршня h равен:
A-D„,tgln» (2-12)
3. Изд. № 7034 33
где Тгн — угол поворота управляемой наклонной шайбы гидро-
машины ГМ1;
£>гн — диаметр окружности, на которой размещены точки
касания плунжеров и наклонной шайбы гидрома-
шины при ргн = 0.
Уравнение (2.10), с учетом (2.11) и (2.1.2), принимает вид
Qi-н ' шо^гн ‘ 1g Тгн = ^гн ’ 1g Тгн» (2-13)
где &гн = 5ПЛ • DrH • ггн— коэффициент, определяемый конструк-
тивными параметрами гидромашины
ГМ1.
По аналогичной формуле может быть определен объем мас-
ла, проходящий через гидромашину ГМ 2
С?гд = ^ГД ® ' 1g Тгд’ (2-14)
где ш— угловая скорость ротора гидромашины ГМ2.
Из уравнений (2.7), (2.8) и (2.9) имеем
. M = kx QrH ~ Qrj . (2.15)
/гут
Подставляя в уравнение (2.15) выражения для расходов мас-
ла QrH и <2Гд из уравнений (2.13) и (2.14) и решая его относи-
тельно ш, получим
^гншо 1g Тгн ^ут /о
10 = -7—------------------- м. (2.16)
^гд 1g Тгд ^1^гд 1g Тгд
Если обозначить
ь ъ
Д = ——-------- и , (2.17)
^гд1ёТгд Мгд1ёТгд
то механическую характеристику гидропривода с аксиально-
порщневыми гидромашинами можно записать в виде
ш = А <»и tg 7ГН - ВМ. (2.18)
Полученное выражение показывает, что характеристика ш=со(/И)
гидропривода представляет собой прямую, наклон которой оп-
ределяется коэффициентом В.
На рис. 2.6 показано семейство механических характеристик
гидропривода при ша = const и различных углах .поворота на-
клонной шайбы тгн гидромашины. При отсутствии утечки мас-
ла, что соответствует согласно.уравнениям (2.17) и (2.18) kyT=
— 0 и В = 0, механические характеристики привода располага-
ются параллельно оси абсцисс, т. е. становятся абсолютно жест-
кими.
34
Жесткость £ мехайичёсКой, Характеристики (рис. 2.6), харак-
теризующая степень изменения угловой скорости привода при
изменении момента нагрузки, в относительных единицах опре-
деляется выражением
<»() дЛ1
Л40 дш ’
(2.19)
где о>0 и Мо
-— принятые базовые
величины угловой скорости
и момента привода.
Рис. 2.6. Механические характе-
ристики гидропривода
Для гидравлических приводов с плунжерными насосами и
двигателями жесткость механических характеристик достигает
(U = 9-ю.
Как уже отмечалось, на ЛА в основном используются при-
воды дифференциального типа. Структурная схема ППС тако-
го типа приведена на рис. 2.7. Здесь вал авиационного двига-
Рис. 2.7. Структурная схема дифференциального
гидравлического привода
теля АД приводит во вращение водило 1 планетарного редукто-
ра и через понижающий редуктор 4 ротор гидромашины 5. Пла-
нетарный редуктор выполняет роль дифференциального меха-
3*
низма. Синхронный генератор 9 жестко связан с солнечной ше-
стерней 2 планетарного редуктора, а вал гидромашины 6 — с
шестерней 7, которая приводит во вращение коронную шестер-
ню 3. При крейсерской скорости полета, когда <% = кр, уст-
ройство управления 8 перемещает регулируемую наклонную
шайбу гидромашины 5 в вертикальное положение, т. е. ?гн = О
(см. рис. 2.5,а).
В этом случае плунжеры гидромашины 5 не могут совер-
шать возвратно-поступательного движения и перекачка масла
в магистралях 'низкого и высокого давлений отсутствует. Ротор
гидромашины 6 остается неподвижным и, следовательно, будут
неподвижны шестерня 7 и коронная шестерня 3 планетарного
редуктора. При этом для вращения генератора 9 используется
нерегулируемый поток энергии, отбираемый от АД, т. о. привод
работает в режиме прямой передачи с максимальным КПД.
В случае понижения частоты тока генератора из-за увеличе-
ния его нагрузки или понижения частоты вращения авиацион-
ного двигателя на выходе устройства управления 8 формирует-
ся соответствующий сигнал рассогласования и его сервопривод
поворачивает наклонную шайбу гидромашины 5 в направлении
Тгн>0. Это вызывает увеличение подачи масла из магистрали
низкого давления в магистраль высокого давления, что, в свою
очередь, обусловливает работу гидромашины 6 в режиме дви-
гателя. Гидромашина 6 через шестерню 7 вращает коронную
шестерню 3 планетарного редуктора в таком направлении, что-
бы повысить частоту вращения его выходного вала. Привод
работает в так называемом режиме докрутки.
В случае повышения частоты вращения авиационного дви-
гателя при уменьшении нагрузки генератора сервопривод уст-
ройства управления 8 поворачивает наклонную шайбу гидро-
машины 5 в противоположное направление ( тгн < '0). Это вы-
зывает изменение направления потока движения масла в маги-
стралях высокого и низкого давлений и, следовательно, ревер-
сирование угловой скорости гидромашины 6. Шестерня 7 и
коронная шестерня 3 планетарного редуктора вращаются в
противоположном направлении, понижая частоту вращения его
выходного вала. Привод работает в так называемом режиме
реверса (замедляющей передачи).
В применяемых гидравлических ППС все его агрегаты (на-
сосы, гидромашины, механические редукторы и т. д.), как пра-
вило, монтируются в одном корпусе. Установка и крепление к
корпусу ППС синхронного генератора обычно осуществляются
с помощью специального фланцевого устройства в горизонталь-
ном положении. Гидромеханические ППС выпускаются для при-
вода синхронных генераторов мощностью до 150 кВ-А. Удель-
ная масса ППС составляет 1,2...1,4 кг/кВ-А, а 'КПД — 0,8.,.0,9.
Проводимые работы по дальнейшему совершенствованию си-
стем электроснабжения переменного тока и их элементов пока-
зе
зали на необходимость использования вместо раздельных в
конструктивном отношении привода постоянной скорости и син-
хронного генератора объединенной (интегральной) в одном
корпусе 'конструкции привода и генератора. Для повышения на-
дежности и удобства эксплуатации гидравлических ППС в их
конструкцию стали включать: предохранительные муфты, элек-
тромагнитный расцепитель привода и генератора, сигнализато-
ры давления и температуры масла, датчики скорости и др.
Удельная масса интегральных приводов составляет 0,7...
0,9 кг/кВ-А. Так, например, конструктивная масса интегрального
гидромеханического привода мощностью 60 кВ-А фирмы Санд-
стренд (США) составляет' 52 кг, из них масса бесконтактного
генератора переменного тока с вращающимися выпрямителя-
ми — 20,4 кг [6]. ' ; t ,
Выигрыш в массе при интегральном исполнении привода и
генератора получен как за -счет их конструктивного объеди-
нения в один корпус, так и перехода на повышенные частоты
вращения генератора (с $000 на 12000 об/мин), применения
более экономичной масляной Системы охлаждения и использо-
вания новых электротехнических материалов с лучшими харак-
теристиками.
К недостаткам гидростатических ППС относят: сложность
конструкции с большим числом трущихся деталей и узлов;
сложность наладки и капитального ремонта, жесткие требова-
ния к герметичности системы и относительно малый диапазон
температур, при котором они могут надежно работать. Для
обеспечения рабочего диапазона температур в пределах 150...
250°С используют в качестве рабочего тела токсичные масла,
что сопряжено с большими технологическими и эксплуатацион-
ными трудностями.
Гидродинамические ППС, применяемые на ряде ЛА для
привода синхронных генераторов мощностью до 40 кВ-А, по
сравнению с гидростатическими ППС имеют более простую кон-
струкцию. Для примера на рис. 2.8 приведена конструктивная
схема одного из типов таких ППС, получивших название гидро-
лопаточных. Рабочая жидкость (керосин) через окна 3 цилинд-
ра 4 поступает на лопатки центробежного насоса 2, колесо1 ко-
торого соединено с валом авиационного двигателя АД. После
центробежного насоса рабочее тело, обладающее большой кине-
тической энергией, попадает на лопатки гидравлической турби-
ны 1, приводя во вращение ее рабочее колесо.
Вал турбины через шлицевое соединение связан с валом
синхронного генератора СГ. С валом турбины 1 через зубчатую
передачу 14 связан и центробежный тахометр 13. Грузы тахо-
метра через шток 12 управляют положением иглы клапана 11.
При работе привода его вспомогательный центробежный на-
сос 10 нагнетает рабочее тело в полость А и через жиклер 8 —
н полость Д Таким образом, на цилиндр 4 воздействуют си-
37
*
лы, создаваемые давлениями рабочего тела полостей А и Б.
Эти силы в установившемся режиме работы привода взаимно
уравновешены и цилиндр находится в неподвижном положении.
В рассматриваемой конструкции гидролопаточного привода в
качестве рабочего тела используется керосин топливной систе-
мы ЛА.
Вход
Рис. 2.8. Гидролопаточный привод
Если по какой-либо причине возросла частота вращения ге-
нератора СГ, то грузы центробежного тахометра 13 перемещают
шток 12 вверх. Это приводит к открытию клапана 11 и, следо-
вательно, уменьшению давления рабочей жидкости в полости Б.
Поэтому цилиндр 4 за счет избыточного давления начинает пе-
ремещаться вправо, тем самым уменьшая проходное сечение
окон 3, через которые поступает керосин на лопатки центро-
бежного насоса. В результате уменьшения расхода рабочей
жидкости частота вращения турбины (синхронного генератора)
уменьшается. Обратная связь в системе регулирования частоты
вращения вала привода осуществляется с помощью усеченного
конуса 5, выполненного на наружной стороне цилиндра 4, што-
ков 6 и 9 и*йоворотного рычага 7. В случае, например, увеличе-
ния частоты вращения генератора СГ, когда цилиндр 4 и его
конус 5 перемещаются вправо, уменьшается расход рабочей
жидкости к турбине 1, шток 6 обратной связи опускается вниз,
58
Это приводит к повороту рычага 7 против хода часовой стрел-
ки, перемещению штока 9 налево и частичному перекрытию иг-
лой отверстия клапана 11, что соответствует новому устойчи-
вому состоянию системы регулирования частоты.
Установка заданной величины частоты вращения привода
производится поворотом винта 15, который воздействует на по-
ложение иглы клапана 11.
Удельная масса гидролопаточных приводов составляет 0,6...
0,7 кг/кВт, КПД — 0,5...0,6. В процессе эксплуатации гидравли-
ческих приводов особое внимание уделяется контролю их гер-
метичности, проверке крепления трубопроводов и кабельных на-
конечников, удалению пыли и загрязнений и т. д.
2.4. ПНЕВМАТИЧЕСКИЕ ПРИВОДЫ
Пневматические (тур'бомеханические) приводы широко ис-
пользуются в системах электроснабжения многих ЛА. Это
обусловлено их простотой конструкции и высокой надежностью
по сравнению с другими типами приводов. В настоящее время
па ЛА используются только дифференциальные пневматические
приводы как нереверсивного, так и реверсивного типа.
На рис. 2.9 приведена принципиальная схема дифференци-
ального турбомеханического привода с «докруткой». Для вра-
Рис. 2.9. Схема нереверсивного диф-
ференциального пневматического при-
вода
тения воздушной турбины 5 используется энергия сжатого воз-
духа, отбираемого от компрессора авиационного двигателя АД.
Этот воздух поступает на вход соплового аппарата турбины,
39
где он расширяется. В результате расширения теплосодержание
воздуха уменьшается, а скорость его движения возрастает. С
•выхода соплового аппарата воздух, обладая большой кинети-
ческой энергией, поступает «а лопатки рабочего колеса турби-
ны, тде его кинетическая и тепловая энергии преобразуются в
механическую. Воздушная турбина 5 через шестерню 6 соеди-
няется с коронной шестерней 3 планетарного редуктора и при-
водит ее во вращение с угловой скоростью ®пр.
Водило 1 планетарного' редуктора соединено с валом АД и
вращается с угловой скоростью ша. Таким образом, частота
вращения ш синхронного генератора 4, соединенного с солнеч-
ной шестерней 2, определяется равенством
“ — А “а 4“ Ар “пр-
Для стабилизации частоты вращения генератора в зависи-
мости от режима полета ЛА и мощности подключаемых прием-
ников обычно применяется дроссельное управление, т. е. управ-
ление расходом воздуха QB посредством дроссельной заслонки
7, установленной на входе соплового аппарата. В случае откло-
нения частоты вращения генератора 4 от синхронной скорости,
например, в сторону ее возрастания, устройство управления 8
через сервопривод увеличивает угол поворота у дроссельной за-
слонки, тем самым уменьшая расход воздуха QB через турбину.
Для определения механической характеристики пневмати-
ческого привода воспользуемся, согласно [14], следующим вы-
ражением его момента:
М= t (2.20)
“пр
где £ад— адиабатическая работа расширения воздуха в
турбине; ?.
Q — секундный- массовый расход воздуха через турбину;
— эффективный КПД турбины.
Адиабатическая работа воздуха в турбине определяется,
согласно [14], уравнением
(2.21)
, Р
где к = —— — отношение теплоемкости воздуха при постояв-
cv ном давлении к теплоемкости воздуха при по-
стоянном объеме;
R — универсальная газовая постоянная;
Т* — температура заторможенного воздуха на входе
w в сопловой аппарат;
₽2 — давление воздуха на выходе из турбины;
Рг — давление заторможенного воздуха на входе в
сопловой аппарат турбины.
40
Для случая полета ЛА на .заданной высоте с -неизменной
скоростью, так как при этом давление и температура воздуха
на входе и выходе турбины остаются постоянными, адиабати-
ческая работа св турбине постоянна. Поэтому выражение для
момента, развиваемого турбиной, согласно уравнениям (2.20) и
(2.21), принимает вид
Мпр = *т—% (2-22)
•"пр
где k? — постоянный, для рассматриваемого режима полета
ЛА, коэффициент.
При дроссельном управлении расход воздуха через турбину
определяется углом поворота у дроссельной заслонки сопло-
вого аппарата, т. е.
Q = Q(i). (2.23)
Величина эффективного КПД турбины т;₽, входящего в урав-
нение (2.22), зависит от ее конструктивных параметров и яв-
ляется функцией частоты вращения, давления и температуры
воздуха на входе в сопловой аппарат. Она определяется отно-
сительно сложным выражением [14], но при сделанных выше
допущениях в основном зависит от угловой скорости турби-
ны (рис. 2.10) и может быть оценена следующим равенством:
"Че ~ u)np(l ^2 “пр), (2.24)
где k[ и k2 — постоянные коэффициенты.
Рис. 2.10. Зависимость КПД тур-
бины от ее частоты
вращения
Рис. i2.ll. Механические ха-
рактеристики пневматичес-
кого привода
Подставляя в уравнение (2.22) выражения для Q и из
(2.23) и (2.24), получим
M = k Q^'klU>np{l ~k2u>^ (2.25)
т «“пр
41
Отсюда выражение для механической характеристики пневма-
тического привода можно записать в 'виде
М
А ~ В ' (2-26)
Q(i)
где А = — и В = —------ — коэффициенты, зависящие от кон-
^2 krkik2 структивных параметров тур-
бины и режима полета ЛА.
На рис. 2.11 показано семейство механических характери-
стик пневматического привода при различных углах поворота
7 его дроссельной .заслонки. Эти характеристики для заданного
режима полета ЛА, как это следует из уравнения (2.26), на-
чинаются в одной точке, что указывает на трудности регулиро-
вания частоты вращения турбины -при малых моментах. Жест-
кость механических характеристик (пневматического привода
значительно меньше ('рог|, =2...4) жесткости механических ха-
рактеристик гидравлических ППС с аксиально-поршневыми
гидромашинами. Уменьшение жесткости механических харак-
теристик привода, как это будет показано в гл. 3, влечет за
собой ухудшение динамических свойств системы регулирования
частоты.
Следует отметить, что основные параметры турбомеханичес-
ких приводов постоянной скорости рассчитываются для случая
минимального перепада воздуха на входе и выходе турбины,
поэтому на крейсерском режиме работы авиационного двига-
теля их массогабаритные характеристики имеют несколько за-
вышенные значения.
Как уже отмечалось, ППС с частичным преобразованием
энергии разделяют на реверсивные и нереверсивные. Реверсив-
ные дифференциальные приводы по сравнению с нереверсивны-
ми имеют лучшие энергетические характеристики, так как,
исходя из принятого закона регулирования
ш == A “в ± Alp “пр >
у них при заданной скорости полета ЛА предусмотрен режим
“пр = 0.
Принципиальная схема .пневматического привода такого ти-
па приведена на рис. 2.12. Здесь генератор 9 приводится во
вращение через дифференциальный редуктор 8, входные валы
которого соединены с редуктором АД и валом турбины 10.
Регулятор частоты вращения 7 обеспечивает стабилизацию уг-
ловой скорости ш генератора путем (изменения угла поворота у
дроссельной заслонки 6. Включение и отключение привода
осуществляются пусковой заслонкой 3, перемещаемой серво-
поршнем 4 по командам устройства управления 5.
42
На одном- валу с турбиной 10 установлено сегнерово коле-
со 11. При малых частотах вращения «>в авиационного двига-
теля турбина 11 работает в режиме «доирутки», т. е.
№ = 4 Ша + 4р «>пр •
Если частота вращения ша авиационного двигателя возросла, а
мощность генератора Pr = const, то регулятор 7 путем умень-
шения угла открытия у дроссельной заслонки снижает <опр.
При определенном значении ч>а частота вращения турбины
ш„р должна быть равной нулю и даже 'изменить свое направле-
ние вращения, т. е.
® = 4 % — 4Р °>пр •
В этом случае турбина, вращаясь в обратную сторону, рабо-
тает в режиме тормоза и поглощает часть мощности, поступа-
ющей от редуктора авиационного двигателя.
Рг = Ш /И,, = Ма — «>ПрЛ411р.
При дальнейшем возрастании частоты вращения «>а и пол-
ностью закрытой дроссельной заслонке увеличивается тормоз-
ной момент, создаваемый турбиной. Для уменьшения этого мо-
мента сопротивления к сегнерову колесу 11 через клапан 1,
управляемый от устройства управления 5 через кулачок 2, по-
дается воздух. Сегнерово колесо начинает вращаться и созда-
ет дополнительный вращающий момент, способствующий прео-
долению колесом турбины сопротивления (воздуха. При отсут-
ствии сегнерова колеса на этом режиме частота вращения гене-
ратора будет уменьшаться.
43
*•
К достоинствам турбомеханического привода’ относят его
простоту конструкции и высокую надежность, возможность ис-
пользования для запуска авиационного двигателя и т. д. При
запуске авиационного двигателя воздух подводится к турбине
от наземного источника или отбирается от компрессора уже
запущенного двигателя.
Основным недостатком пневматического привода по сравне-
нию с .другими типами приводов является его невысокий КПД
(не превышающий 60...70%), кроме того, при отборе от авиа-
ционного двигателя соответствующего количества сжатого воз-
духа требуется больше расхода топлива, чем при отборе механи-
ческой мощности.
2.5. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРИВОДЫ
В системах электроснабжения ЛА кроме гидравлических и
пневматических приводов находят применение и электромеха-
нические (электромашинные). Большой вклад .в их создание
внес проф. М. М. Красношапка [8, 14]. В настоящее время пред-
ложены и разрабатываются различные варианты электромеха-
нических приводов'. В качестве примера на рис. 2.13 приведена
Рис. 2.13. Схема привода с электромагнит-
ной муфтой скольжения
принципиальная схема электромеханического привода с элек-
тромагнитной .муфтой скольжения. Муфта 1 состоит из двух
вращающихся частей, одна из которых -— индуктор 2 — сое-
динена с валом АД, а вторая -— якорь 3 — с синхронным гене-
ратором 4. Индуктор 2 выполнен по типу индуктора явнопо-
люсного синхронного генератора с электромагнитным воз-
буждением и является ведущей частью муфты. Якорь 3 выпол-
нен аналогично якорю асинхронного двигателя с короткозам-
кнутой обмоткой и является ведомой частью муфты. Обмотка
индуктора получает питание от источника постоянного тока. При
вращении ^индуктора в короткозамкнутой обмотке якоря будет
протекать ток. В результате взаимодействия магнитного пото-
ка, создаваемого этим током, с магнитным потоком вращающе-
гося индуктора якорь муфты начинает вращаться. При этом его
4't
частота вращения а> в зависимости от момента нагрузки отста-
ет на величину скольжения 5 от частоты вращения индуктора
Стабилизация частоты вращения синхронного генератора 4
осуществляется путем регулирования величины тока в обмотке
возбуждения индуктора 2 регулятором 5.
Указанный привод с электромагнитной муфтой скольжения
имеет жесткие механические характеристики, его КПД —
0,6...0,7.
К недостаткам таких приводов относят то, что вся энергия
потерь, пропорциональная скольжению &P = P-s, выделяется
в якоре муфты в виде тепла. Это обусловливает необходимость
ее охлаждения. Считается, что применение электромагнитных
муфт из-за сложности их систем охлаждения целесообразно
только при малых диапазонах изменения частоты вращения ве-
1ущей части муфты.
Другим примером электромеханического привода является
привод дифференциального типа с асинхронной машиной фир-
мы «Auxilex» (Франция), получившей название «Super-Oksivar»
(рис. 2.14).
Здесь один из входных ва-
лов планетарного редуктора 1
приводится во вращение от ре-
дуктора АД, а второй — от
mi югополюсной трехфазной
асинхронной машины 2 с ко-
роткозамкнутым ротором. Пи-
тание асинхронной машины,
выполняющей роль регулиру-
емого промежуточного устрой-
ства, осуществляется от син-
хронного генератора СГ через
вторичную обмотку компаун-
дирующего трансформатора Т
и полупроводниковое устрой-
ство управления 3. В рассмат-
риваемом приводе это устрой-
ство осуществляет регулиро-
вание частоты вращения <ипр
асинхронной машины 2 путем
переключения числа пар полю-
сов и регулирования напряже-
ния на ее зажимах.
Рис. 2.14. Принципиальная схема
дифференциального электромехани-
ческого привода с асинхронно# ма-
шиной
Необходимая мощность асинхронной машины Рам зависит от
45
Диапазона изменения частоты вращения авиационного двигателя
и мощности генератора
Р — Р I 1 шомин
г ам — 1 г I 1
\ макс
Электромашинный привод «Супер-'Окспвар» (Super-Oksivar)
по способу подвода энергии для ее преобразования относится к
реверсивным дифференциальным .приводам.
Асинхронная машина при малых частотах вращения АД,
когда % < о>, работает в режиме двигателя; при частоте вра-
щения АД, 'близкой к синхронной частоте вращения генератора
(«>о = ш), — в режиме тормоза. Для обеспечения работы асин-
хронной машины в режиме тормоза по ее якорным обмоткам
пропускают постоянный ток.
При частоте вращения АД, превышающей синхронную, т. е.
> ш, асинхронную машину переводят в режим генератора.
В рассматриваемом приводе в качестве коммутирующих эле-
ментов устройства управления 3, осуществляющего переключе-
ние числа пар полюсов и регулирование напряжения асинхрон-
ной машины, используются тиристоры. Применяемый в ППС
компаундирующий' трансформатор Т обеспечивает питание
асинхронной машины при коротком замыкании в сети и выпол-
няет роль фильтра, так как устройство управления на тиристо-
рах представляет собой нелинейную нагрузку импульсного ха-
рактера.
К достоинствам Приводи типа «Супер-Оксивар» относят вы-
сокую надежность, .простоту конструкции. Удельная масса при-
водов этого типа при частоте вращения синхронного генератора
12000 об/мин достигает 0,9...1,0 кг/кВт, КПД — 0,85...0,9.
2.6. МЕХАНИЧЕСКИЕ ПРИВОДЫ
Механические ППС представляют собой бесступенчатые ре-
дукторы с плавным изменением коэффициента редукции (меха-
нические вариаторы). Из известных типов таких ППС наимень-
шей удельной массой и габаритами обладают фрикционные
приводы. Они обеспечивают требуемую точность стабилизации
частоты вращения генератора при изменении в широком диа-
пазоне частоты вращения авиационного двигателя. Их удельная
масса составляет 1,3...1,5 кг/кВт, КПД — 0,75...0,85. На рис.
2.15 показана конструктивная схема фрикционного механичес-
кого привода, предложенного В. А. Светозаровым. Основными
силовыми элементами этого привода являются специальные
шкивы 2 и 4, имеющие конусно-вогнутые рабочие поверхности и
ролики 3 и 7. Шкив 2, приводимый во вращение от вала АД
через шариковое устройство 1, является ведущей частью при-
вода. Шкив 4 — ведомая часть привода — через шариковое
устройство 5 приводит во вращение вал синхронного генератора
46
С Г. Крутящие моменты от ведущей части 2 привода к его ве-
домой части 4 передаются с помощью роликов 3 и 7. Эти ро-
лики касаются рабочих поверхностей шкивов 2 и 4 в точках,
отстоящих от оси вращения на расстоянии г и R соответственно.
11оэтому при отсутствии скольжения между роликами и шки-
вами имеет место следующее соотношение частот вращения ыа
и ю входного и выходного валов привода:
R
Величина радиусов г и R точек 'касания роликов плавно регу-
лируется изменением угла у их наклона вокруг вертикальной
осп. Автоматическое поддержание постоянства частот вращения
п генератора осуществляется устройством управления 8. Следу-
ет отметить, что для поворота роликов, прижатых к поверхно-
стям шкивов, требуется значительная мощность сервопривода
устройства управления.
Рис. 2.15. Конструктивная схема механического
привода
К 'основным недостаткам механических приводов относят
малый срок службы и технологические трудности при их про-
изводстве. Поэтому они в системах электроснабжения ЛА пока
распространение не получили.
2.7. РЕГУЛЯТОРЫ ЧАСТОТЫ ВРАЩЕНИЯ ПРИВОДОВ
ПОСТОЯННОЙ СКОРОСТИ
Для поддержания частоты вращения выходного вала гид-
равлических и пневматических ППС широкое распространение
получили центробежно-гидравлические регуляторы, измеритель-
ными органами которых служат центробежные тахометры. При
изменении частоты вращения синхронных генераторов эти ре-
гуляторы перемещают или шток подвижной наклонной шайбы
47
гидронасоса гидравлических ППС или .шток дроссельной за-
слонки пневматической ППС.
Для повышения точности поддержания частоты многие ре-
гуляторы ППС снабжаются специальными корректирующими
устройствами, которые имеют по сравнению с центробежным
тахометром более чувствительные измерительные органы (резо-
нансные контуры, фазовые дискриминаторы и др.). Наличие в
.регуляторах частоты вращения ППС корректирующих устройств
позволяет обеспечить равномерное распределение активной
нагрузки в случае параллельной работы каналов (см. гл. 6).
Корректирующее устройство, реагирующее на отклонение
частоты тока генератора, иногда называют регулятором часто-
ты или точным каналом регулирования, а основной регулятор,
реагирующий на отклонение частоты вращения вала привода,—
грубым каналом регулирования.
Грубый канал регулирования обеспечивает поддержание ча-
стоты вращения ППС с погрешностью ± (2...5) %, точный ка-
нал — + (0,5...!) %.
Структурная схема системы регулирования частоты, вклю-
чающая в свой состав привод постоянной скорости и регулятор
частоты вращения, приведена на рис. 2.16. Здесь регулятор ча-
Рис. 2.16. Структурная схема систе-
мы регулирования частоты
стоты вращения 3 воздействует на орган управления .привода 1,
выходной вал которого жестко соединен с синхронным генера-
тором 2. Корректирующее устройство 4 реагирует на отклоне-
ния частоты тока генератора от заданного уровня и неравно-
мерное распределение активной нагрузки между каналами при
их параллельной работе (сигнал от ПАМ). В случае отклонения
указанных параметров от заданных значений корректирующее
устройство воздействует на основной регулятор частоты враще-
ния привода так, чтобы эти отклонения свести к минимуму.
На рис. 2.17 приведена принципиальная электроки|немэти-
ческая схема 'центробежно-гидравлического регулятора частоты
вращения" турбомеханического привода. Положение элементов
регулятора на схеме 2.17 соответствует режиму работы генера-
тора 5 при номинальной частоте вращения о>.
48
Регулирование частоты вращения выходного вала ППС осу-
ществляется поворотом дроссельной заслонки 2 воздушной тур-
бины. При изменении частоты вращения генератора, напри-
мер ее увеличении, центробежный тахометр 8 начинает переме-
щать шток гидравлического золотника 7 вправо. При этом при-
пая полость сервопоршня 1 соединяется с магистралью высоко-
го давления Рв, а его левая полость — с магистралью низ-
кого давления Рн. В этом случае поршень гидроцилиндра 1, пе-
ремещаясь влево, уменьшает угол поворота 7 дроссельной за-
слонки 2 так, чтобы уменьшить расход воздуха через турбину
н, следовательно, уменьшить ее частоту вращения.
Рис. 2.17. Схема центробежно-гидравлического регулятора
частоты вращения
Обратная связь в рассматриваемом регуляторе, необходи-
мая для повышения устойчивости процесса регулирования, осу-
ществляется с помощью усеченного конуса 3, закрепленного па
штоке сервопоршня 1. К поверхности этого конуса пружины П2
н 113 прижимают поворотный рычаг 6. Когда, например, в слу-
чае повышения частоты вращения ППС сервопоршень переме-
щается влево, то поворотный рычаг 6, воздействуя на пружи-
ны П2 и ПЗ, перемещает поршни гидравлического золотника 7
также влево. Это приводит к тому, что каждому значению на-
грузки генератора соответствует строго определенное положе-
ние сервопоршня. При этом процесс регулирования протекает
более устойчиво, но возникает статическая ошибка в регулиро-
вании.
I. Изд. № 7934
49
*
Измерительный орган И .корректирующего устройства вклю-
чен на зажимы подвозбудителя бесконтактного синхронного ге-
нератора 5 и формирует сигнал, пропорциональный отклонению
его частоты от заданного уровня —f—fHnv. Для усиления
этого сигнала используется магнитный или полупроводниковый
усилитель 10.
Усилитель управляет работой конденсаторного асинхронного
двигателя 9, который через червячный редуктор 4 и систему
пружин П1, П2 и .ПЗ воздействует на шток гидравлического зо-
лотника 7 регулятора частоты вращения.
Для равномерного распределения активной нагрузки между
каналами регулятор частоты вращения привода имеет специ-
альный блок 12, формирующий сигнал иА, пропорциональный
активной составляющей тока нагрузки генератора (см. гл. 6).
Сигнал иА усиливается усилителем 10 и поступает на рабо-
чую обмотку конденсаторного асинхронного двигателя 9. Кор-
ректирующее устройство такого типа, в котором исполнитель-
ным органом является электромашинный привод, получило наз-
вание электромеханического корректора, а электропривод н ре-
дуктор — механизма коррекции частоты (МКЧ).
В рассматриваемой схеме регулятора частоты вращения для
удобства изучения не указывались элементы защиты привода
от механических разрушений.
На рис. 2.18 приведена электрокинематическая схема систе-
Рис. 2.18. Электрокинематическая схема системы регулирования
частоты с турбомеханическим приводом
ЬО
мы регулирования частоты с турбомеханичёским приводом. На
ион схеме положение подвижных элементов регулятора соот-
Пгн гвует номинальному режиму работы ППС.
Регулирование расхода воздуха через турбину 1 осушесг-
пляется путем соответствующего поворота дроссельной заслон-
Mi I I. Угол ее поворота у зависит от величины перемещения
инока сервоцилиндра 16 регулятора скорости. В случае чрез-
мерного повышения частоты вращения турбины срабатывает
центробежный выключатель 11, контакты .которого замыкают
цель питания электромагнита 12. При срабатывании электро-
мигинта 12 закрывается аварийная дроссельная заслонка 13.
Защита ППС от механических разрушений при больших
ударных нагрузках или заклинивании генератора осуществля-
ется установленной между ними предохранительном муфтой 5,
и исключение возможности вращения турбины в обратную сто-
рону при выключенном ППС >— храповой муфтой 3.
Для стабилизации частоты тока генератора и обеспечения
равномерного распределения активной составляющей тока на-
ipyiKii в случае параллельной работы каналов используется
центробежно-гидравлический регулятор частоты вращения, ра-
ботающий в комплекте с механизмом коррекции частоты
(МКЧ).
В качестве рабочей жидкости регулятора частоты вращения
Hi1 пользуется топливо авиационного двигателя. Его подача в
регулятор производится при помощи подкачивающего насоса
(па рисунке не показан). Топливо под давлением Рг через от-
крытый электромагнитный клапан 15 поступает в левую по-
лы гь сервопоршня 16, а через входной штуцер —- в плунжер-
ный насос 6. Вращение плунжерного насоса 6 и центробежного
тпхометра 9 осуществляется через систему шестеренчатых пе-
редач от вала генератора. Выталкиваемая плунжерным насо-
сом рабочая жидкость через клапан 7 поступает в магистраль
цысокого давления. Клапан 7 обеспечивает стабилизацию дав-
ления Р2 топлива в магистрали высокого давления путем его
Перепуска на слив. При запуске двигателя и работе его до ре-
жима «малый газ» ,Г1ПС выключен, так как дроссельная за-
елопка 14 находится в закрытом положении и воздух в турби-
ну не поступает.
При достижении двигателем режима «малый газ» для за-
пуска в работу ППС выключают «Включение генератора». Если
перепад давления за первым и вторым каскадами компрессора
дпнгателя достигнет определенной величины, то контакты диф-
ференциального сигнализатора давления 17 замыкаются и
пключают электромагнитный клапан 18. Этот клапан закрыва-
ется, отделяя полость высокого давления сервопоршня 16 от
полости слива. При этом давление топлива в правой полости
герпоноршня возрастает и его шток, перемещаясь влево (угол
Г 51
7 увеличивается), открывает доступ воздуха в сопловой апла
par турбины.
При нормальном -режиме работы ППС, когда частота вра
тения генератора соответствует (номинальной величине, рыча]
маятникового механизма 8 под действием соответствующи!
центробежных сил тахометра 9 и силы пружины П1 находится
в среднем положении и частично прикрывает его окна, соедини
ющ-ие магистраль высокого давления регулятора с полостью
слива.
В случае отклонения частоты вращения генератора, напри
мер ее увеличения, муфта центробежного тахометра 9 переме
щается вниз. Это приводит к еще большему открытию оког
маятникового механизма и, следовательно, уменьшению давле
ния топлива в нижней полости (изодромного механизма 19.
Шток изодромного механизма перемещается вниз, но npi
этом объем его верхней полости увеличивается и давление топ-
лива в ней -и в правой полости сервопоршня уменьшается. Этс
обусловливает перемещение штока сервопоршн-я вправо, т. е
уменьшение угла поворота у дроссельной заслонки и уменьше-
ние расхода воздуха через турбину. Частота вращения турби-
ны уменьшается и, следовательно, уменьшается частота токг
синхронного генератора.
В данном регуляторе скорости обратная связь (гибкая) обес-
печивается демпфером Д изодромного механизма 19. Например
для рассматриваемого случая при перемещении! его штока вниз
золотник демпфера также перемещается вниз, соединяя через
жиклер полость слива с правой полостью серво-поршня 16 и -вер-
хней полостью изодромного механизма 19. Уменьшение давле-
ния топлива в этих полостях обусловливает возвращение штока
изодромного механизма под действием силы его пружины в но-
вое исходное -положение.
Механизм коррекции частоты МКЧ регулятора путем воз-
действия через пружину П1 на рычаг маятникового механизма
8 повышает точность стабилизации частоты и -обеспечивав!
равномерное 'распределение активной составляющей тока на-
грузки между параллельно работающими генераторами. Управ
ление МКЧ осуществляется сигналами, формируемыми точным
каналом регулирования.
На рис. 2.19 приведена принципиальная электрическая схе-
ма корректирующего устройства рассмотренных центробежно-
гидравлических регуляторов частоты вращения.
В качестве измерительного органа этого корректора исполь-
зуются»-два резонансных контура, (включенных по дифферен-
циальной схеме. Резонансные контуры, собранные на L—С
элементах, подключены к зажимам подвозбудителя (ПВ) бес-
контактного генератора типа ГТ через трансформатор Т. При
52
141 ком включении измерительного органа (на зажимы подвоз-
будителя) формируемый им сигнал пропорционален частоте
It,ращения генератора, а не среднему значению частоты на ши-
пах центрального распределительного устройства, которая при
переходных процессах в системе может не соответствовать ча-
стоте вращения генератора.
Рис. 2.19. Принципиальная электрическая схема корректирующе-
го устройства
I [оминальное значение частоты тока подвозбудителя в от-
>1ПЧ не от принятого номинального уровня частоты f ном = 400 Гц
иыбрано равным 800 Гц. Это обусловлено тем, что переход на
ши,тише элементов регулирующих и защитных аппаратов пе-
ременным током повышенной частоты позволяет улучшить их
мнсгогабаритные параметры.
Характеристики резонансных контуров L}—С1 и L2—C2, на-
г сроенные на резонансные частоты соответственно fpI = 740 Гц
II / (,о = 860 Гц, приведены на 'рис. 2.20. Там же приведена зави-
симость выходного сигнала С7ВЬ|Х измерительного органа от из-
менения частоты тока подвозбудителя.
Параметры резонансных контуров подбираются таким обра-
ти, что при частоте f = 800 Гц их токи й и i2 были бы равны
и, следовательно, напряжение измерительного органа U1 II ЕЫХ= 0.
11.тетройка резонансных контуров производится с помощью pe-
ine гора /?2 (см. рис. 2.Г9).
53
Для усиления выходного сигнала измерительного органа ис-
пользуются две пары последовательно включенных магнитных
усилите л ей УМ 1—УМ2.
Рис. 2.20. Выходная характеристика измерительного органа и
схема вк-л’счения рабочей обмотки двигателя корректирую-
щего устройства
В настоящее время в системах регулирования частоты авиа-
ционных синхронных генераторов наряду с электромашинными
од
Рис. 2.21. Принципиальная
схема электромагнитного
корректора
корректорами получают распростра-
нение .и электромагнитные. Их при-
менение позволяет улучшить массо-
габаритные характеристики точного
канала регулирования. Это дости-
гается тем, что дополнительное воз-
действие на шток золотника грубо-
го канала регулирования (см. рис.
2.17) осуществляется не механиз-
мом МКЧ, элементами которого яв-
ляются однофазный асинхронный
двигатель и червячный редуктор, а
электромагнитом, размещенным на
торцевой части корпуса центробеж-
ного тахометра (рис. 2.21). Величи-
на напряжения питания электромаг-
нита t/у регулируется точным ка-
налом регулятора.
МД'С, создаваемая электромагнитом, воздействует на гру-
зы центробежного тахометра, в качестве которых используются
постоянные магниты. Поэтому в электромагнитном корректоре
положение муфты тахометра, а следовательно, и штока гидрав-
лического золотника зависит как от угловой скорости генерато-
ра, так и от МДС, создаваемой электромагнитом, т. е. у =
= <?(^ «у)-
54
Глаба 3
СТАТИКА И ДИНАМИКА ПРОЦЕССОВ В СИСТЕМАХ
РЕГУЛИРОВАНИЯ ЧАСТОТЫ
3.1. ТРЕБОВАНИЯ К ТОЧНОСТИ СТАБИЛИЗАЦИИ ЧАСТОТЫ
Приемники электроэнергии переменного тока ЛА по-разно-
му реагируют на возможные отклонения частоты в системе
>лрктроснабжения. В зависимости от требуемой точности под-
держания частоты их разделяют на следующие группы:
п риемники, функционирование которых не зависит от ча-
стоты тока их источников питания, например, электрообогре-
вательные и противообледенительные устройства;
— приемники, допускающие отклонения частоты тока их
источников питания в пределах + 5%, например, асинхронные
двигатели, трансформаторно-выпрямительные блоки, радиоло-
кационное оборудование, пилотажно-навигационные приборы;
— приемники, требующие прецизионной точности стабили-
зации частоты источников питания, погрешность которой не
превышает +0,05%, например, счетно-решающие устройства,
астронавигационные системы.
Большинство приемников переменного тока могут нормаль-
но работать при отклонении частоты в пределах +5%, поэтому
указанный предел принят за стандартный для установившего-
ся значения частоты при нормальной или частичной работе си-
стемы электроснабжения (ГОСТ 19705—81). Как правило, для
тяжелых ЛА, в системах электроснабжения которых предусмот-
рена параллельная работа каналов, пределы отклонения часто-
ты от заданного значения для нормального режима работы
уменьшают до +1%.
Действующие нормы к отклонению частоты тока в системах
электроснабжения ЛА кроме требований к допускаемым откло-
нениям частоты в установившемся режиме работы предусматри-
вают и ограничения в отклонении частоты во время переходных
процессов. На рис. 3.1 приведены допустимые пределы отклоне-
ний частоты в установившихся и 'переходных режимах для
55
нормального, частичного (пределы 2 и 3) и ненормального (пре-
делы 1 и 4) режимов. Эти допустимые значения отклонения
частоты приняты при условии внезапных изменений нагрузки
от 10 до 160% номинальной мощности системы электроснабже-
ния. Для аварийного режима работы системы допустимые пре-
делы отклонения частоты определены от 360 до 440 Гц (ГОСТ
19705—81).
Рис. 3.1. Допустимые пределы отклоне-
ния частоты
Если на ЛА устанавливаются приемники электроэнергии пе-
ременного тока, требующие для своей работы прецизионной
точности поддержания частоты, то их питание осуществляется
от специального вторичного источника переменного тока, так
как общая мощность таких приемников относительно невели-
ка — не превышает 1,5...2 кВ-А.
При проектировании, разработке и эксплуатации систем ре-
гулирования частоты для обеспечения требуемого качества
электроэнергии необходимо знать влияние ее основных пара-
метров и режимов работы на точность стабилизации частоты и
характер переходного процесса в системе. Оценку этого влия-
ния на характер процессов в системе регулирования частоты
проведем путем математического описания происходящих в ней
физических процессов.
3.2 ПРИВОД ПОСТОЯННОЙ СКОРОСТИ КАК ОБЪЕКТ
РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ
В системах электроснабжения ЛА процессы регулирования
частоты и напряжения взаимосвязаны между собой и в общем
случае эти системы необходимо рассматривать как двумерные
объекты регулирования [14, 17].
£6
Возмущающее воздействие генератора на привод характе-
ризуется изменением активной мощности нагрузки
U2
Р = (3.1)
R
где U —• напряжение на зажимах .генератора;
R — активное сопротивление нагрузки.
Уравнение равновесия моментов привода постоянной ско-
рости имеет вид
4fnp = 7Wr + J-~, (3.2)
где Л4пр — момент привода постоянной скорости, приведенный
к валу генератора;
М,. — момент нагрузки, создаваемый генератором;
J — момент инерции всех вращающихся частей систе-
мы, приведенный к валу генератора;
в> — угловая скорость вала генератора (выходного ва-
ли привода).
Как уже отмечалось, момент ППС зависит от угловой ско-
рости <» его выходного вала, положения у управляющего орга-
на (угла наклона управляемой шайбы гидронасоса гидравли-
ческого привода или угла поворота дроссельной заслонки пнев-
матического привода и т. п.) и угловой скорости <о„ вала ре-
дуктора авиационного двигателя
= Ъ «>„). (3.3)
Момент нагрузки, создаваемой генератором, определяется уг-
ловой скоростью генератора ш и его активной мощностью Р
Жг = /иг(е>, Р), (3.4)
при этом
Л4Г= —. (3.5)
ш
Для упрощения дальнейших выводов уравнения привода посто-
янной скорости будем считать, что нагрузка генератора имеет
активно-индуктивный характер и представляется в виде актив-
ного и индуктивного сопротивлений, соединенных параллельно.
Тогда уравнение (3.5) с учетом уравнения (3.1) можно пред-
ставить в виде
U2
^г=4—• (3.6)
R-и
Уравнения (3.2), (3.3) и (3.6) являются нелинейными. Учиты-
вая, что в процессе регулирования частоты при данном режиме
работы системы отклонения всех изменяющихся величин от их
установившихся значений малы, заменяем эти нелинейные урав-
нения линейными, рассматривая процессы в системе в малых
приращениях относительно установившегося режима.
57
Тогда уравнения (3.2), (3.3) и (3.6), записанные в малых
отклонениях относительно установившегося режима, имеют вид
Д/Ипр=Д^г + /А^; (3.7)
at
/дМпЛ /дМпв\
ЛЛ4пр= —!р Д«> + —Ар Д7+ —— Д«,р; (3.8)
\ О <U / \ О 7 / \ О <11 а /
= + (3.9)
' dU / \ dR ) \ дш J
дМг = 2£0_. дМг = _ Д2 дМг _ U*
dU Ro юп dR ш0 /?о д ш Rc. <Og
Параметры установившегося режима записываются с ин-
дексом «О». Значения частных производных во всех выражени-
ях берутся при 7Ипр0 = Л1г0.
Уравнение (3.9) перепишем в виде
Л/И,г = —^ХДД.Д/? + (2^_г]дш (3.10)
А>0 V д<» /
Подставляя уравнения (3.8) и (3.10) в уравнение (3.7), по-
лучим
Представим полученное выражение в безразмерной форме,
а его неизвестные — в относительных единицах. Для этого каж-
дое из слагаемых рассматриваемого выражения разделим на
установившееся значение момента, равного по величине
М, = /И — W л = и° (3.11)
/И0 '►'про хИг0 Г) • ' '
ш0 ^0
В качестве базовых величин неизвестных принимаем их равно-
весные значения иа исследуемом режиме, т. е. <«0. у0, L'o и Ro.
После соответствующих преобразований имеем
Л>0 d v «>„ 1 1 dt /Ио < дМг дМ„р То - 2« + Р +
м0 \ дш Г м0 (5 7
/и0 <ьгпр (3.12)
58
Дш
где v =-----относительное изменение угловой скорости вала
шо генератора;
Ду
а = —!---относительное изменение параметра управления;
То
Д Z7
и =------относительное, изменение напряжения генератора;
Цо
&R
р =------относительное изменение активного сопротивле-
R ния нагрузки;
Д ш
= —-— относительное изменение угловой скорости вала
ша редуктора авиационного двигателя. t
Уравнение (3.12) привода постоянной скорости как объекта
регулирования в операторной форме при нулевых начальных
условиях представим в следующем виде:
(Тыр = - 2и + р + Na'>a, (3.13)
„ J ‘Ч,
где Тм =-----— постоянная времени привода;
Мо
о>0 (дМг дМ„Л - „
= 1----------------— коэффициент самовыравнивания при-
М0\ди ди) ВОдщ
То
N =--------------- коэффициент усиления привода по
Мо д параметру управления;
<о0 дЛ4П|,
Nn =-------------- коэффициент усиления, характеризу-
ЛЦ *°а ющий влияние изменения угловой
скорости входного вала привода на
величину его момента.
Из уравнения (3.13) следует, что привод постоянной скорос-
ти ио своим динамическим свойствам представляет собой апе-
риодическое звено.
Входящий в левую часть уравнения (3.13) коэффициент sM
характеризует статическую устойчивость привода. При положи-
тельном значении коэффициента самовыравнивания привода
шо / д/Иг д МПр\
:м = /МГ\“^ <hT/>U’
(3.14)
привод постоянной скорости является статически устойчивым,
т. е. после снятия возмущающего воздействия при неизменном
положении управляющего органа его частота вращения будет
стремиться к прежнему установившемуся значению. Это легко
показать графически, рассматривая зависимости моментов при-
59
вода и генератора т>т угловой скорости (рис. 3.2). Пусть жест-
„ д/И „
кость р -------механической характеристики привода больше
дш
жесткости механической характеристики генератора, т. е. обес-
печивается выполнение неравенства (3.14)
5м--^(₽лр-₽г)>0.
м0
Рис. 3.2. Зависимость момента
привода и генератора от угловой
скорости
Установившийся режим работы системы регулирования часто-
ты имеет место, когда Л4пр = Л4Г. На рис. 3.2 состояние равнове-
сия системы соответствует ко-
ординатам точки С, в которой
пересекаются кривые Л1пр(«>) и
Л4Г(«>). Если по каким-либо
причинам угловая скорость
системы возрастет па величи-
ну Д«>. то момент привода ста-
нет меньше момента генерато-
ра и привод будет тормозить-
ся до тех пор, пока его частота
вращения не станет равной wn.
При уменьшении <о момент
привода будет больше момен-
та генератора и его угловая
скорость начнет повышаться
до величины, соответствующей
положению равновесия.
Если поменять местами характеристики 7Ипр(<ь) и 7Иг(ш), то
величина коэффициента самовыравнивания sM будет отрица-
тельной. В этом случае любое отклонение угловой скорости ге-
нератора от равновесного состояния приводит к нарушению
устойчивости работы системы регулирования частоты.
3.3. УРАВНЕНИЯ ГРУБОГО И ТОЧНОГО КАНАЛОВ РЕГУЛЯТОРА
ЧАСТОТЫ ВРАЩЕНИЯ
Вывод уравнений регулятора проведем на примере центро-
бежно-гидравлического регулятора частоты вращения, принци-
пиальная кинематическая схема которого рассматривалась ра-
нее в гл. 2 (см. рис. 2.17). Для вывода указанных уравнений
необходимо выбрать положительные .направления перемещений
подвижных элементов регулятора (рис. 3.3). На этом рисунке
указаны основные элементы грубого и точного каналов регули-
рования: центробежный тахометр 8, золотник 7, сервопоршень
1, конус 3 и поворотный рычаг обратной связи 6. Сервопоршень
1 изменяет угол поворота р дроссельной заслонки 2.
60
Асинхронный Двигатель 9 через редуктор механизма коррек-
ции частоты воздействует через систему пружин (на рис. 3.3
не показана) на шток золотника 7.
Рис. 3.3. Кинематическая схема центробежно-гидравли-
ческого регулятора частоты вращения
Приняты следующие обозначения координат перемещений:
штока центробежного тахометра и поршней золотника у, вала
редуктора механизма коррекции частоты /, штока сервопоршня
z, шайбы поворотного рычага обратной связи х, а их положи-
тельные направления показаны на рис. 3.3 стрелками.
Как известно, центробежный тахометр по динамическим ха-
рактеристикам относится к колебательному звену [7]. Но при
исследовании динамики процессов в системах регулирования
частоты, учитывая малые значения постоянных времени тахо-
метра, обусловленных массой его подвижных частей и вязким
трением, ими, как правило, пренебрегают, считая при этом,
что величина перемещения штока &у центробежного тахометра
зависит от величины отклонения угловой скорости входного ва-
ла Дш, перемещения ДI шайбы вала червячного редуктора 4 и
изменения затяжки йх .пружины, вызванного действием отри-
цательной обратной связи из-за наличия в конструкции регуля-
тора конуса 3 и поворотного рычага 6.
Тогда уравнение движения центробежного тахометра с зо-
лотником в малых приращениях можно представить в виде
Дд/ = /грДш -|- kt Д / + kx Д х, (3.15)
^гП Т" ^п2 ^п! 4“ ^п2 + ^’п2
k,„ — коэффициент, характеризующий эффективность воз-
действия подвижных частей тахометра на переме-
щение его штока;
61
/?п1, k„-, — .коэффициенты, характеризующие жесткость пружин
П2 и ПЗ.
При перемещении штока золотника от нейтрального поло-
жения рабочая жидкость под давлением Ро поступает ,в одну
из' полостей серво поршня, а из, другой его полости происходит
ее слив. Если полагать, что рабочая- жидкость не сжимаема и
лоток жидкости непрерывен, то скорость 'перемещения штока
сервопоршня будет пропорциональна ширине окна, не перекры-
того золотником, т. е. золотник с сервопоршнем, по динамичес-
ким свойствам соответствует интегрирующему звену
-kt Ду, (3.16)
dt
где kt — коэффициент пропорциональности.
Знак минус в правой части уравнения (3.16) указывает, что
при движении штока золотника, например вправо, шток серво-
поршня перемещается влево (рис. 3.3).
Шток сервопоршня 1 перемещает на определенный угол у
орган управления 2 привода (дроссельную заслонку или наклон-
ную шайбу гидронасоса).
В малых отклонениях связь между перемещениями штока
сервопоршня Az и органа управления Ду можно представить
следующим соотношением:
Дг = ^2Ду, (3.17)
где kti — коэффициент пропорциональности.
В уравнении (3.15) неизвестное Дх характеризует воздей-
ствие поворотного рычага 6 устройства обратной связи регу-
лятора на положение штока золотника.
Перемещение Дх основания, па которое опирается пружина
П2, в малых отклонениях пропорционально перемещению Дг
штока сервопоршня, т. е.
Дх = /г3Дг, (3.18)
где k3 — коэффициент пропорциональности.
Решая уравнения (3.15)...(3.18) относительно угла поворота
Ду органа управления, получим уравнение грубого канала регу-
лятора частоты вращения в виде
1 \ й k
-------р + \ Ду = Дш — Ы. (3.19)
кукхкъ /------------------------kxk3
Это уравнение в приращениях может быть представлено в сле-
дующей форме:
(TQp + l)s=-k^-~k^, (3.20)
Ду
где а = —- — относительное перемещение органа управле-
То ния привода;
62
$ = —----относительное перемещение шайбы;
_ 1
7„ -----------постоянная времени грубого канала регуля-
тора частоты.вращения;
Лп Wq
/г, =------------коэффициент усиления'грубого канала рсгу-
лятора;
/г£ = ---LH------коэффициент передачи сигнала от корректм-
рующего устройства.
Таким образом, грубый канал регулятора частоты вращения
при сделанных допущениях по своим динамическим свойствам
является апериодическим звеном.
Принципиальная схема корректирующего устройства — точ-
ного канала рассматриваемого регулятора частоты вращения —
приведена на рис. 3.4 Здесь измерительным органом служат
два резонансных контура, включенных по дифференциальной
схеме. Зависимость его выходного напряжения 1/у от частоты
тока генератора, показанную на рис. 2.20,а, можно представить
в малых отклонениях в виде
Д6/у = АуА/, (3.21)
где &у — коэффициент пропорциональности;
Д7— отклонение частоты тока от номинального значения.
/7 С
Рис. 3.4. Принципиальная схема корректирующе-
го устройства регулятора частоты вращения
Сигнал Д Ut с выхода измерительного органа поступает на
один из входов магнитного усилителя (УМ). В случае парал-
лельной работы генераторов на второй вход магнитного усили-
теля подается сигнал Uu от системы равномерного распределе-
ния активной нагрузки между генераторами (см. гл. 6). Тогда
63
уравнение магнитного усилителя УМ корректора в малых от-
клонениях имеет вид
\ ka*Ua, (3.22)
где 7у — постоянная времени магнитного усилителя;
ky — коэффициент усиления усилителя по каналу регули-
рования частоты;
ka — коэффициент усиления усилителя по каналу рас-
пределения нагрузок между параллельно работаю-
щими генераторами;
Д Ua— сигнал с выхода измерителя активной мощности.
Магнитный усилитель УМ управляет работой конденсатор-
ного асинхронного двигателя М, который воздействует через
червячный редуктор Р на шток гидравлического золотника (см.
рис. 3.3).
При наличии сигнала Uy на выходе УМ вал асинхронного
двигателя начинает вращаться с угловой скоростью шд. С неко-
торым приближением можно считать, что
Дшд = k^Uy, (3.23)
где /гд — коэффициент пропорциональности.
Скорость перемещения вала редуктора Р, т. е. скорость за-
тяжки пружины гидравлического золотника, зависит от угловой
скорости шд двигателя М и коэффициента редукции редуктора.
Эту зависимость в малых отклонениях можно представить в
виде
dl
— = (3.24)
где kp — коэффициент редукции редуктора.
Решая уравнения (3.21)... (3.24) относительно Д/, получаем
уравнение 'корректора. Для упрощения последующих выкладок
пренебрежем в уравнении (3.22), вследствие малой ее величины,
постоянной времени магнитного усилителя УМ. Тогда уравне-
ние корректора принимает вид
' ^T==kykfLf + k^ua' <3-25)
/?дГ?р U t-
В относительных приращениях уравнение (3.25) точного ка-
нала регулятора частоты вращения может быть записано в
следующей форме:
= + kAua, (3.26)
€4
где 1\ = —2-----коэффициент, характеризующий время пере-
кладки шайбы корректора из одного крайне-
го положения в другое;
кА = kaUao — коэффициент, характеризующий эффектив-
ность влияния системы распределения актив-
ных нагрузок между генераторами на пере-
мещение золотника регулятора;
kui = fokyky — коэффициент, характеризующий эффектив-
ность влияния точного канала регулятора на
перемещение золотника;
Wa .
иа = ---— — относительное изменение сигнала измерителя
Uao активной мощности.
Полученные уравнения привода постоянной скорости (3.13),
грубого (3.20) и точного (3.26) каналов регулятора частоты
вращения позволяют провести анализ статических и динами-
ческих процессов в системе регулирования частоты.
3.4. АНАЛИЗ СТАТИКИ И ДИНАМИКИ ПРОЦЕССОВ
В СИСТЕМАХ РЕГУЛИРОВАНИЯ ЧАСТОТЫ
Оценку влияния основных параметров системы регулирова-
ния частоты на ее статические и динамические характеристики
проведем на примере серийной системы с центробежно-гидрав-
лическим регулятором (рис. 3.3).
Ранее для рассматриваемой системы регулирования были
получены уравнения привода постоянной скорости, грубого и
точного каналов
(Т’мРЧ yH)v = Af.c-2«+p + Afava; (3.27)
(7>+.11 3= - ~ М; (3.28)
7\Zp^k^ + kAua. (3.29)
Согласно этим уравнениям, на рис. 3.5 приведена структурная
схема рассматриваемой системы регулирования частоты.
квиа NQ\)a+p
L______П
Рис. 3.5. Структурная схема системы регулирования частоты
!>. Изд. № 7934
65
Анализ динамических характеристик системы будем прово-
дить, используя критерий Гурвица. Необходимое для этого ха-
рактеристическое уравнение найдем из условия, что
1 +-гр = о,
(3.30)
где IVp — передаточная функция разомкнутой системы.
Согласно структурной схеме, передаточную функцию для
разомкнутой системы регулирования частоты можно записать
в виде _ . i 1.1FW
U7p =
\ Ар
N
ТаР + 1
1
Тыр + SM '
(3.31)
Тогда, учитывая уравнения (3.30) и (3.31), характеристическое
уравнение этой системы принимает вид
Ти А 1\р* -I- (Ты + sM Та) 1\р* + (sM + ААД Ар + MJ* = 0. (3.32)
Для систем третьего порядка, согласно критерию Гурвица, не-
обходимыми условиями устойчивости являются требования по-
ложительности всех коэффициентов характеристического урав-
нения (3.32) и выполнение следующего неравенства;
('/„ + VJ A(s„ + А’-кЛ 1\> TuTJzNk^. (3.33)
При выводе уравнений отдельных звеньев предполагалось,
что все их коэффициенты имеют .положительное значение. По-
этому условия положительности всех коэффициентов уравнения
(3.32) имеют вид
7 м + 5ы А > 0;
(3.34)
sM + AAv>0.
(3.35)
Эти условия могут быть нарушены только при отрицательном
значении коэффициента самовыравнивания привода $м, так как
АА А -"’м
Для проверки второго условия критерия Гурвица преобразу-
ем неравенство (3.33) к виду
1 I \ / $М | ] \ 1
Л А )' I Nk„ )Л ’ А\
(3.36)
Анализ этого неравенства показывает, что увеличение постоян-
ных времени привода постоянной скорости Ты и грубого канала
регулятора частоты .вращения А ухудшает устойчивость си-
стемы, а увеличение величины коэффициента самовыравнива-
ния привода повышает ее устойчивость.
66
Из неравенства (3.36) также следует, что наличие в регуля-
юре точного канала регулирования (7\=£°о) приводит к ухуд-
шению динамических свойств системы, причем с уменьшением
времени перекладки шайбы 7"$ корректора ее устойчивость
ухудшается.
Неравенство (3.36) позволяем сделать соответствующие вы-
воды о влиянии на устойчивость системы регулирования часто-
ты и остальных ее параметров.
Постоянные времени привода, грубого и точного каналов
пневматических приводов лежат в пределах:
7’ы = 1,5...3; 7\ = 0,3...0,8; 7\ =0,1...0,3 с, а гидравлических —
/м = 0,5...0,8; Та = 0,2...0,6; 7’^ = 0,1...0,3 с. Коэффициент само-
выраввивания этих приводов — sM = 0,8... 1,5.
Испытания показывают, что время регулирования систем с
пневмомеханическими приводами достигает 3...5 с, а с гидро-
механическими -— 1...2 с.
Статическая ошибка рассматриваемой системы регулиро-
вания из-за наличия корректирующего устройства, динамичес-
кие свойства которого соответствуют интегрирующему звену,
равна нулю.
В реальных условиях из-за трения в подвижных элементах
регулятора и другая статическая ошибка достигает 0,25...0,5 %.
Если в регуляторе частоты вращения нет точного канала
(7£=оо), то, как это следует из структурной схемы, приведенной
па рис. 3,5, статическая ошибка, полагая в уравнениях звеньев
/> — 0, будет равна:
оо =----~ 1 Р + Ч v, — lit). (3.37)
Ее величина, как уже отмечалось, составляет 5...7%.
Таким образом, обеспечение устойчивости системы регули-
рования частоты достигается путем соответствующего выбора
се параметров (см. неравенство 3.36), а обеспечение необходи-
мой точности — путем использования корректирующего уст-
ройства.
Специфические условия работы привода постоянной скоро-
сн| на ЛА в ряде случаев требуют повышения запаса устойчи-
вости и точности системы регулирования частоты. Это обуслов-
лено широкими изменениями температуры окружающей среды,
большими вибрациями, влиянием упругости рабочей жидкости,
нс герметичности гидросистемы, люфтов в механических пере-
цачах. Например, увеличение сжимаемости рабочей жидкости в
। пдросистеме, зависящей от количества нерастворенного в ней
67
воздуха, способствует потере устойчивости системы. Отрица-
тельное влияние на устойчивость работы привода постоянной
скорости оказывают люфты в звеньях механических передач и
трение между скользящими поверхностями его агрегатов.
Повышение запаса устойчивости и точности процессов регу-
лпрования частоты достигается, кроме рассмотренных выше
мероприятий, включением в систему регулирования дополни-
тельных корректирующих устройств, демпферов и обратных
связей.
В процессе эксплуатации с целью проверки отсутствия внеш-
них повреждений периодически осматривают надежность креп-
ления трубопроводов, привода, регулятора и наконечников
электрических проводов, уровня масла в гидросистеме и т. д.
Проверку работоспособности системы проводят при работе
авиационного двигателя на режимах от малого газа до макси-
мального. При этом проверяют соответствие номинальным зна-
чениям как частоты, так и напряжения канала генерирования
электроэнергии.
При отказе какого-нибудь элемента системы регулирования
частоты его заменяют новым.
Глава 4
СИСТЕМЫ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
4.1. ТРЕБОВАНИЯ К ТОЧНОСТИ ПОДДЕРЖАНИЯ
И ФОРМЕ КРИВОЙ НАПРЯЖЕНИЯ
Отклонение напряжения от заданного значения, искажение
формы кривой напряжения, модуляция напряжения, небаланс
фазных напряжений отрицательно влияют на эффективность
работы многих приемников электроэнергии ЛА. В первую оче-
редь это относится к пилотажно-навигационным комплексам,
системам автоматического управления, радиоэлектронному и
специальному оборудованию.
Качество электроэнергии, генерируемой системой электро-
снабжения, зависит от многих факторов: принятой структуры
и режимов работы системы, характеристик ее отдельных эле-
ментов, мощности и характера подключаемой нагрузки и др.
Так, диапазон отклонения напряжения на зажимах прием-
ников переменного тока зависит от точности стабилизации на-
пряжения в точке регулирования, принятой структуры системы
распределения электроэнергии, равномерности распределения
нагрузки между фазами.
Неравномерное подключение к трехфазной сети однофазных
приемников обусловливает небаланс (несимметрию) фазных
напряжений.
Наличие в системах электроснабжения переменного тока
трансформаторно-выпрямительных устройств и других элемен-
тов, имеющих нелинейные вольт-амперные характеристики, при-
водит к искажению синусоидальности кривой напряжения.
Включение импульсно-периодической нагрузки оказывает
существенное влияние как на форму кривой напряжения, так и
модуляцию напряжения. Под модуляцией напряжения перемен-
ного тока понимают периодическое изменение амплитуды на-
пряжения относительно его среднего значения во время уста-
новившегося режима работы системы.
Проведенные исследования показывают, что наиболее чув-
ствительными к .влиянию формы кривой и модуляции напряже-
ния являются навигационные комплексы и системы, в состав
которых входят индукционные элементы автоматических уст-
69
ройств (сельсйнные передачи, синусно-косинусные вращающи-
еся трансформаторы, асинхронные тахогенераторы н др.).
В системах электроснабжения постоянного тока форма кри-
вой .напряжения характеризуется пульсациями напряжения.
Пульсация напряжения отрицательно влияет на работу элект-
ронных приборов и др.
Требования к параметрам качества электроэнергии, как уже
отмечалось в гл. 3, приведены в ГОСТе 19705—81.
Предельно допустимые значения отклонений напряжений при
нормальном и частичном режимах работы системы электро-
снабжения приняты при условии внезапных изменений нагруз-
ки от 10 до 160% номинальной мощности системы. На рис. 4.1
приведены допустимые пределы отклонений приведенных пере-
ходных напряжений для нормального, частичного (пределы 2
и 3) и ненормального (пределы 1 и 4) режимов в системах
электроснабжения постоянного (рис. 4.1,а) и переменного (рис.
4.1,6) тока.
Рис. 4.1. Допустимые пределы отклонений приведенных напряжений
в системах электроснабжения постоянного и переменного тока
Под приведенными переходными напряжениями понимают
одиночные прямоугольные импульсы напряжения постоянного
тока и одиночные пачки синусоидальных кривых напряжения
переменного тока с прямоугольными огибающими, которые по
своему электрическому и тепловому воздействиям на приемни-
ки эквивалентны воздействию переходных напряжений посто-
янного и переменного тока со сложными формами кривых пе-
реходного процесса.
Допустимые значения установившегося напряжения в точке
регулирования для принятых режимов работы систем электро-
снабжения постоянного Ji неременного тока указаны в табл. 4.1
70
Таблица 4.1
Допустимые пределы изменения установившегося напряжения
в точке регулирования
Режимы, работы Пределы изменения напряжения в системе
постоянного тока, В переменного тока, В
Нормальный или частичный 27...29 115...119
11енормальный 24...33 101 ...132
Аварийный 20...29 НО...122
Требования к параметрам качества электроэнергии непре-
рывно возрастают. Это объясняется тем, что улучшение пара-
метров 'качества электроэнергии повышает эффективность ра-
боты многих приемников, увеличивает их cpoiK службы, улучша-
ет массогабаритные характеристики электрооборудования. Так,
уменьшение ошибки регулирования напряжения в системах
электроснабжения переменного тока с +2 до ±1% позволит
уменьшить массу проводов электрической сети на 2...4%.
Оценка искажений формы кривой напряжения переменного
тока согласно ГОСТу 19705—81 проводится по следующим по-
казателям:
— коэффициенту искажения формы кривой 'напряжения в
установившемся режиме
100%,
где Ui и Ul — действующие значения соответственно первой и
t-й гармоник напряжения;
— отношению действующих значений i-й и первой гармоник
напряжения
Ю0%;
^1
— коэффициенту амплитуды
где U т и U— соответственно амплитудное и действующее зна-
чения напряжения;
— величине постоянной 'составляющей напряжения Uo.
Эти показатели не должны превышать соответственно
#Ф<8%. йг<5%, 1га — 1,41 + 0,15 и Т/о = 4:0,1 В.
71
Для оценки пульсаций напряжения постоянного тока, т. е.
разности между максимальным и минимальным значениями пе-
ременной составляющей напряжения в установившемся режи-
ме, используют коэффициент пульсации, равный:
Лп = ^мз;с ~---Уин 100%, (4.1)
2t/cp
где В7ыакс, В/мин и б/ср— соответственно максимальное, мини-
мальное и среднее значения напряже-
ния постоянного тока.
Коэффициент пульсаций напряжения постоянного тока не
должен превышать /гп < 7,4%.
Модуляция напряжения переменного тока оценивается коэф-
фициентом амплитудной модуляции напряжения и частотными
составляющими огибающей кривой напряжения.
Коэффициент амплитудной модуляции напряжения опреде-
ляется при установившемся режиме работы системы и задан-
ной величине .импульсно-периодической нагрузки по формуле
А,„ = U"> мин 100%,
т ном
где Um ыакс, Um мин и Um ном — максимальное, минимальное и
номинальное амплитудные значе-
ния напряжения.
Величина этого коэффициента не должна превышать 1%, а
частотные составляющие огибающей кривой напряжения долж-
ны лежать в пределах от 0,25 до 200 Гц.
Небаланс напряжений для нормального и частичного режи-
мов не должен превышать 3 В, а для аварийного — 4 В.
4.2. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ РЕГУЛИРОВАНИЯ
НАПРЯЖЕНИЯ.
КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ НАПРЯЖЕНИЯ
Напряжение на зажимах генератора зависит от его частоты
вращения, магнитного потока, величины и характера нагрузки.
Поэтому для его поддержания на требуемом уровне можно
использовать ряд способов регулирования. В системах электро-
снабжения ЛА регулирование напряжения генератора, как пра-
вило, осуществляется изменением его магнитного потока путем
изменения величины тока в обмотке возбуждения или сопро-
тивления магнитной цепи машины.
Изменение регулируемого параметра (тока возбуждения пли
тока в подмагничивающей обмотке генератора), в свою очередь,
может осуществляться по известным принципам регулирования:
ио отклонению, по возмущению и по принципу комбинирован-
72
ного регулирования. Системы регулирования напряжения ЛЛ
в основном построены по принципу регулирования ПО' откло-
нению.
На рис. 4.2 приведена структурная схема системы регулиро-
вания напряжения, построенная по принципу регулирования по
отклонению. Измерительный орган (ИО) регулятора формиру-
ет сигнал Д U, пропорциональный отклонению регулируемого
напряжения U от заданного (•эталонного) напряжения U3. Этот
сигнал после усиления усилителем (У) воздействует на ис-
полнительный орган (силовую часть) СЧ регулятора. Для
улучшения динамических характеристик системы регулирова-
ния напряжения .в схему регулятора включен элемент отрица-
тельной обратной связи (ОС).
Рис. 4.2. Структурная схема системы регулирования
напряжения
Рис. 4.3. Схема, поясняющая
принцип действия токового ком-
паундирования
Регулирование напряжения по возмущению заключается в
компенсации возмущающих воздействий на генератор. Возму-
щающими воздействиями в системах регулирования напряже-
ния ЛА являются изменения частоты вращения генератора и
тока нагрузки.
Регулирование напряжения по току нагрузки часто назы-
вают компаундированием. Различают два способа компаунди-
рования: токовое и фазовое.
При токовом компаундирова-
нии величина тока возбужде-
ния генератора пропорцио-
нальна току нагрузки, при фа-
зовом — как току нагрузки,
так и коэффициенту мощности
системы электроснабжения. На
рис. 4.3 показана схема, пояс-
няющая принцип действия то-
кового компа ундиров а ния.
Здесь обмотка возбуждения
И'в генератора переменного то-
ка подключена через выпря-
митель В к зажимам вторичной
Т. Поэтому, например, с ростом
возбуждения генератора и напряжение на его зажимах поддер-
обмотки трансформатора тока
тока нагрузки возрастает ток
73
живается на требуемом уровне. Этот способ регулирования на-
пряжения учитывает изменение только величины тока нагрузки,
но не учитывает влияние характера (коэффициента мощности)
нагрузки на реакцию якоря генератора.
При активно-индуктивной нагрузке размагничивающее дей-
ствие реакции якоря больше, чем при чисто активной нагрузке,
и для компенсации ее влияния на магнитный поток генератора
его ток .возбуждения должен быть увеличен на большую вели-
чину.
Пример системы регулирования напряжения с применением
фазового компаундирования приведен на рис. 4.4. Для умень-
шения статической ошибки регулирования при изменении cos и
нагрузки вторичные обмотки w2 компаундирующих трансфор-
маторов Т1...ТЗ включаются на опережающие фазы. При таком
включении обмоток трансформаторов ток, протекающий, напри-
мер, через вторичную обмотку Т2, равен:
^2 = ^UA + Лй »
где ^ил— ток> обусловленный напряжением фазы А;
12В— ток, обусловленный нагрузкой фазы В
Рис. 4.4. Схема, поясняющая принцип действия
фазового компаундирования и векторные диа-
граммы токов трансформатора
Исходя из условия равновесия МДС трансформатора, мож-
но считать, что /2В = — klь.
74
Тогда величина тока /2 равна:
4 = 4/л kIB >
WI
где k=—1— коэффициент трансформации трансформатора Т2.
w2
Если, согласно этому равенству, построить векторные диа-
граммы для двух случаев нагрузки, когда cos®^ cos<p2, a fBl =
то можно легко показать, что величина тока возбуждения
генератора изменяется как с изменением нагрузки, так и коэф-
фициента мощности (рис. 4.4,6 и 4.4,в).
К основным преимуществам метода регулирования по воз-
мущению по сравнению с методом регулирования по отклоне-
нию относят простоту его технической реализации, но он обес-
печивает меньшую точность стабилизации напряжения.
При комбинированном методе регулирования одновременно
используются принципы регулирования по отклонению и по воз-
мущению.
Применяемые в системах регулирования напряжения регуля-
торы принято классифицировать по двум основным .признакам,
по типу исполнительного органа (силовой части) и по способу
формирования сигнала управления.
По типу исполнительного органа, -включенного последова-
тельно с обмоткой возбуждения (управления) генератора или
его возбудителя, серийные регуляторы делят на: угольные, на
магнитных усилителях, транзисторные и тиристорные.
По способу формирования сигнала управления регуляторы
подразделяют на регуляторы непрерывного и дискретного дей-
ствия.
В регуляторах напряжения непрерывного действия сигнал
управления (ток возбуждения) генератора всегда является не-
прерывной функцией времени. Такое изменение регулируемой
величины имеет место npui включении, например, в цепь обмот-
ки возбуждения генератора регулируемого резистора с плавно
изменяющимся сопротивлением.
В регуляторах напряжения дискретного действия напряжение
на обмотке возбуждения (управления) генератора изменяется
прерывисто и представляет собой последовательность импуль-
сов, параметры которых зависят от величины отклонения на-
пряжения от заданного значения.
В зависимости от изменяемого при регулировании парамет-
ра сигнала управления регуляторы называют широтно-импульс
пымп, фазоимпульсными и т. п.
Широтно-импульсные регуляторы напряжения обеспечивают
изменение средней величины напряжения (тока) на обмотке
75
возбуждения генератора (возбудителя) за счет изменения дли-
тельности импульсов при постоянной частоте их следования и
постоянной амплитуде. Средняя величина напряжения на об-
мотке возбуждения UB при постоянной величине напряжения
питания в этом случае будет равна:
(4.2)
где U — напряжение питания;
t„ — длительность импульса;
Т — период.
Фазсимпульсный регулятор осуществляет изменение сред-
ней величины напряжения на обмотке возбуждения при пита-
нии от источника синусоидального напряжения путем измене-
ния угла открытия коммутационного аппарата 1\А (транзистора,
тиристора и др.), включенного последовательно с обмоткой воз-
буждения. Величина напряжения на обмотке возбуждения ге-
нератора при 'фазопмпульсном регулировании равна;
It
UB = ( Um sin vt-dwt— —-- (1 4~ c°s a),
К J Л
a
(4-3)
где U m — амплитуда напряжения источника питания;
a —- угол открытия коммутационного аппарата.
На рис. 4.5,а условно показана схема силовой части широт-
Рис. 4.5. Схема включения контактов исполнительного органа регулятора
и характер изменения тока в цепи возбуждения генератора
но-импульсного регулятора, где контакты (К) характеризуют
ключевой рёжи'М работы, например, транзистора. При длитель-
ном замыкании контактов К величина максимального тока воз-
буждения определяется сопротивлением обмотки возбуждения
76
гв. Минимальная величина тока возбуждения определяется сум-
марным сопротивлением обмотки возбуждения гв и добавочно-
го резистора гд при длительном размыкании К. При периоди-
ческом замыкании — размыкании контактов К ток возбужде-
ния пульсирует около некоторой средней величины /пср и мо.жет
не достигать своих крайних значений (рис. 4.5,6). Амплитуда
этих пульсаций зависит от параметров цепи возбуждения гене-
ратора, соотношения времени замкнутого и разомкнутого /п
состояния контактов К и частоты их замыкания 1/Г.
В случае отсутствия добавочного резистора гл изменение
тока возбуждения 'генератора имеет прерывистый характер. По-
этому по характеру изменения сигнала управления дискретные
регуляторы напряжения подразделяют на работающие в ре-
жиме прерывистого тока и работающие в режиме непрерывного
тока.
Обеспечение режима непрерывного тока, когда ток по об-
мотке возбуждения протекает и в период разомкнутого состо-
яния К, достигается путем включения параллельно обмотке
возбуждения генератора диода V (рис. 4.6). В этом случае ЭДС
Рис. 4.6. Схема включения диода в
цепи возбуждения генератора для
обеспечения режима непрерывного
тока
самоиндукции eL, индуктируемая в обмотке возбуждения те»,,
при размыкании контактов, обусловливает поддержание тока в
обмотке в течение паузы между импульсами напряжения. Если
при этом постоянная времени обмотки Тв больше периода сле-
дования импульсов Т, то ток в обмотке возбуждения i„ стано-
вится непрерывным во времени (рис. 4.5,6).
Включение диода параллельно обмотке возбуждения, кроме
того, обусловливает устранение всплесков напряжения между
контактами коммутатора при их размыкании и, следовательно,
улучшает условия их работы.
В режиме непрерывного тока при одинаковом среднем зна-
чении тока за период следования импульса наибольшее значе-
77
Рис. 4.7. Внешние характери-
стики генератора, работаю-
щего с регулятором напряже-
ния
Мне тока возбуждения меньше, чбм в режиме прерывистого то-
ка. Поэтому потери в регуляторе напряжения, пропорциональ-
ные квадрату коммутируемого тока, будут меньше при его ра-
боте в режиме непрерывного тока по сравнению с работой ре-
гулятора в режиме прерывистого тока.
Регуляторы напряжения в зависимости от принятой схемы и
параметров его элементов могут
быть выполнены таким образом,
что внешняя характеристика ге-
нератора с ростом нагрузки име-
ет либо падающий, либо возрас-
тающий характеры или не зави-
сит от нагрузки, т. е. параллель-
на оси абсцисс (рис. 4.7). Если
с ростом нагрузки напряжение
генератора уменьшается, то счи-
тают, что регулятор настроен на
положительный статизм (кривая
1), если напряжение возраста-
ет — на отрицательный статизм
(кривая 3), а если напряжение
остается постоянным — астати-
чески (кривая 2).
4.3. ИЗМЕРИТЕЛЬНЫЕ ОРГАНЫ РЕГУЛЯТОРОВ НАПРЯЖЕНИЯ
И СПОСОБЫ ИХ ВКЛЮЧЕНИЯ
В регуляторах напряжения, построенных по принципу регу-
лирования по отклонению на выходе измерительного органа 140
(рис. 4.2), формируется сигнал рассогласования, пропорцио-
нальный отклонению регулируемого напряжения от заданного
(эталонного) значения U'aux = f(^ — Пэ).
В качестве заданной величины в измерительных органах ре-
гуляторов используют силу пружины электромагнита, напряже-
ние пробоя стабилитрона, напряжение электромагнитных ста-
билизаторов, напряжение встроенных стабилизированных источ-
ников питания и др.
Измерительные органы с использованием силы пружины
применяются в угольных регуляторах. Наибольшее распростра-
нение в регуляторах напряжения получили измерительные ор-
ганы со стабилитронами, выполненные по мостовой схеме со
стабилитронам в одном плече (рис. 4.8,а) и со стабилитронами
в противоположных плечах (рис. 4.8,6).
При превышении регулируемого напряжения Uux величины
напряжения пробоя 7/пр стабилитрона потенциал точки «а»
78
мостовой схемы остается постоянным, а потенциал точки «б» —
изменяется пропорционально напряжению UBX.
Рис. 4.8. Мостовые схемы измерительных органов со ста-
билитронами
На рис. 4.9 показаны зависимости напряжений Uo, Ub и £7B1JX
в функции напряжения U вх для рассматриваемых мостовых из-
мерительных органов. Выходное напряжение измерительного
органа равно:
t/„. (4.4)
Рис. 4.9. .Выходные характеристики измерительных органов
При превышении Um > (7пр напряжение на стабилитроне
остается постоянным. Тогда выходное напряжение измеритель-
ного органа, схема которого приведена та рис. 4.8,а, равна:
(4.5)
Если допустить, что /?з = /?2 = R, то при сопротивлении на-
грузки измерительного органа /?„ > R из уравнения (4.5) сле-
дует
^„.х, =- U3 = -~-(Um~2U3). (4.6)
Выходное напряжение измерительного органа с двумя стабили-
тронами, собранного по схеме, показанной на рис. 4.8,6, равно:
^ВЫХ2 = RJ- = (Ц.Х - ^э) - Ua (4.7)
79
м
Или
UBm2^UBX~2Ua. (4.8)
Выражения (4.6) и (4.8) показывают, что при одинаковом
отклонении .регулируемого напряжения величина выходного
напряжения Пвых2 измерительного органа с двумя стабилитро-
нами, включенными в противоположные плечи моста, в два ра-
за больше по сравнению с напряжением UBim, измерителя,
схема которого соответствует рис. 4.8,а. Как известно, стабили-
троны, работающие в режиме пробоя, обладают положитель-
ным температурным коэффициентом, а диоды и стабилитроны,
включенные в проводящем направлении — отрицательным зна-
чением температурных 'коэффициентов. Поэтому для компенса-
ции температурных погрешностей стабилитронов измерительных
органов часто последовательно с ними включают диоЬы или
стабилитроны, работающие в проводящем направлении.
В общем случае при пс последовательно включенных ста-
билитронов, работающих в режиме пробоя, количество диодов
Яд, необходимых для температурной компенсации, выбирается
из соотношения
nck6c + Лд&од = 0, (4.9)
где Лос, А6д— соответственно температурные коэффициенты со-
противления стабилитронов и диодов.
Выбор рабочей точки, на выходной характеристике измери-
тельного органа, соответствующей номинальному уровню регу-
лируемого напряжения, зависит от способа возбуждения гене-
ратора, типа исполнительного органа регулятора и др. На рис.
4.9,о рабочий участок выходной характеристики, где 67ВЬ|Х = Ufi,
выбран на ее верхней части. Тогда в случае повышения напря-
жения генератора выше заданного уровня Uo величина выход-
ного напряжения UBm измерительного органа возрастает.
В ряде случаев в качестве источника эталонного напряже-
ния измерительных органов регуляторов используют парамет-
рический стабилизатор, получивший название электромагнитно-
го стабилизатора (рис. 4.10).
Он представляет собой специальный однофазный трансфор-
матор с несимметричным магнитопроводом, один из сердечни-
ков 'которого имеет большее сечение.
Первичная обмотка wl стабилизатора, расположенная на
сердечнике трансформатора с большим сечением, подключена
к источнику регулируемого напряжения переменного тока «—
Вторичная обмотка расположена на сердечнике, имею-
щем меньшее сечение. Параметры трансформатора выбраны так,
чтобы .при нормальном режиме работы системы регулирования
этот сердйй'нпк находился в насыщенном состоянии. На рис.
4.10,6 приведена зависимость напряжения и2 на вторичной об-
мотке w2 от выходного напряжения. Для компенсации измене-
ния напряжения и2 на сердечнике с большим сечением распо-
80
лягается компенсирующая обмотка wK, число витков которой
подобрано так, чтобы кривая изменения ее напряжения нк была
Рис. 4.10. Схема электромагнитного стабилизатора напряжения
и его выходная характеристика
параллельна рабочему участку кривой и2 (рис. 4.10,6). Тогда,
соединяя обмотки w2 и ®’к встречно-последовательно, имеем на
выходе стабилизатора практически постоянное напряжение, рав-
ное »Ц1.!Х = и2-«к = const.
В трехфазных системах электроснаб-
жения возможны случаи неравномерной
папрузки фаз, что приводит к искажению
«разных напряжений как по амплитуде,
гак п по углу сдвига между фазами. По-
этому непосредственное включение через
выпрямители измерительного органа на
«разное или линейное напряжение при
несимметричных нагрузках не’обеспечи-
вает правильное регулирование тока воз-
буждения генератора.
На практике включение .измеритель-
ного органа регулятора производят, как
правило, на среднее выпрямленное ли-
нейное или фазное напряжение, а в си-
стемах электроснабжения, в которых воз-
можна значительная несимметрия на-
пряжений, — «на среднее или максималь-
ное в данный момент времени фазное
напряжение. На рис. 4.11 приведена
принципиальная схема включения изме-
рительного органа ИО регулятора на
среднее линейное напряжение через по-
нижающий трансформатор Т и трехфаз-
п ы и цвухполупериодный выпрямитель
(В).
«. Изд. № 7934
Рис. 4.11 Схема включе-
ния измерительного ор-
гана па среднее линей-
ное напряжение
81
*
Величина напряжения V вх, контролируемого измерительным
органом, равна:
U -k-k Ua,< + Ubc ~^ Uca
ИХ - КТ Q 9
О
где кт — коэффициент трансформации трансформатора;
/гв — коэффициент выпрямления выпрямителя.
К достоинству такого включения измерительных органов от-
носят то, что контролируемое напряжение не зависит от изме-
нения частоты тока генератора.
В трехфазных системах электроснабжения возможны слу-
чаи, когда напряжения отдельных фаз превосходят допустимую
величину, а среднее напряжение трех фаз не превышает допу-
стимых пределов. Этот режим работы системы может привести
к отказу приемников, включенных на фазы, напряжения кото-
рых превышают свое предельное значение. Поэтому в таких си-
стемах измерительные органы регуляторов включают на ту
фазу, напряжение которой максимально, или на среднее напря-
жение фаз.
Принципиальная схема блока переключения измерительного
органа ИО на фазу с максимальным напряжением показана на
рис. 4.12.
Рис. 4.12. Схема блока переключения измери-
тельною органа па фазу с максимальным
напряжением
Для уменьшения пульсаций выпрямленных напряжений на
выходе выпрямителей В1...В4 включают /.С-фильтры. Парамет-
82
ры элементов блока выбраны так, чтобы в нормальном .режиме
работы канала был открыт диод 1/4 .выходной цепи трехфазно-
го однополупериодного .выпрямителя В4, а диоды У1...УЗ за-
крыты более .высоким потенциалом на их катодах. Если на-
пряжение одной из фаз, например фазы /I, стало больше на-
пряжений фаз В и С, то открывается диод УЗ, закрываются
остальные диоды и измерительный орган ИО оказывается вклю-
ченным только к фазе А, имеющей максимальное напряжение.
Кроме рассмотренных способов включения измерительного
органа регуляторов в трехфазных системах электроснабжения
исследовался и способ их включения через фильтр прямой по-
следовательности. Такой способ включения измерительного ор-
гана считается наиболее совершенным, так как режим работы
генератора определяется в основном прямой последователь-
ностью векторов фазовых магнитных потоков машины, а сле-
'Юнательно, и прямой последовательностью ее напряжений. Но
пока этот способ включения измерительных органов не нашел
практического применения, так как фильтры вносят в закон ре-
гулирования напряжения ошибки, вызванные изменениями час-
тоты тока в системе электроснабжения.
4.4. УГОЛЬНЫЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ
Угольные регуляторы находят применение в системах элект-
роснабжения постоянного и переменного тока для стабилиза-
коллекторных и контактных
пни напряжения, как правило,
генераторов.
Принцип действия регуля-
торов этого типа основан на
использовании зависимости со-
противления его угольного
столба от силы сжатия (рис.
1.13). Чем больше эта сила F,
1см меньше сопротивление
ушльного столба гс.
В серийных регуляторах
минимальное сопротивление
угольного столба находится в
пределах 0,5... 0,8 Ом, макси-
мальное сопротивление — 80...
100 Ом. Они позволяют обес-
Рис. 4.13. Зависимость сопро-
тивления угольного столба от
силы сжатия
печить необходимое изменение тока возбуждения генератора от
I до 40 А.
Угольный столб набирается из 40...70 штук угольных шайб
с отверстиями в центре. Крайние шайбы контактируют со спе-
циальными пластинами, .соединяющими угольный столб с внеш-
ней цепью.
(I*
ьз
Принципиальная Схема простейшего угольного регулятора
напряжения приведена на рис. 4.14.
Рис. 4.14. Принципиальная схема угольного
регулятора напряжения
Стабилизация .напряжения с помощью этого регулятора осу-
ществляется следующим образом. Якорь 3 регулятора нахо-
дится под воздействием трех сил:
— силы Fn, создаваемой пружинами 4;
— силы F*. создаваемой электромагнитом 5;
— силы Fc упругой деформации угольного столба.
Разность сил пружин и упругой силы столба, действующи»
на якорь, принято называть механической силой F,.,
F = F — F .
1 М * п * С •
На рис. 4.15 приведены характеристики сил, действующих
на якорь электромагнита в зависимости от его перемещения х.
Рис. 4.15. Зависимость сопротивления угольного столба
от перемещения якоря (а) и характеристики сил, дейст-
вующих на якорь электромагнита (б)
84
Пусть равновесное положение якоря соответствует его пе-
ремещению х = хо, а напряжение генератора U = l/v. Тогда, на-
пример, при повышении напряжения генератора возрастает ток
в обмотке электромагнита w3 и якорь 3 под действием силы F3
перемещается к сердечнику 5 (растет величина перемещения
якоря х).
Давление якоря на угольный столб уменьшается, его сопро-
тивление возрастает, снижается* ток возбуждения и напряже-
ние стремится к заданному значению.
Угольные регуляторы могут быть настроены астатически,
на положительный или отрицательный статизм (см. рис. 4.7).
Для угольных регуляторов напряжения их настройка опреде-
ляется соотношениями механических и электромагнитных ха-
рактеристик при перемещении якоря.
Механическая сила зависит только от положения якоря,
т. е. Ем = FM (х), а сила электромагнита — как от положения
якоря, так и от приложенного к обмотке электромагнита на-
пряжения, т. е. F, = (х, U).
Если наклон механической характеристики /\, (х) будет
Польше наклона электромагнитной F,(х), то регулятор имеет
настройку на положительный статизм (рис. 4.16). Пусть при
F3 при и»им
— F?(npu U> U
" F3 (при U^l/ц)
F3(npu U^UH)
Рис. 4.16. Механические и электромагнитные
характеристики угольного регулятора для
случая его настройки на положительный
статизм
токе нагрузки генератора I = /0 его напряжение U = Пнон, а
г = х0, FmO = F(xo, Йном). В случае уменьшения тока нагрузки,
когда /</0, напряжение генератора возрастает и нарушается
равновесие механических и электромагнитных сил (Дмо<Дэ)-
-)то приводит к перемещению якоря электромагнита в сторону
(io сердечника, т. е. уменьшению сопротивления угольного
столба и, следовательно, снижению напряжения. Новое уста-
новившееся состояние наступает при х = х%, когда LJ > U ном.
Таким образом, при настройке регулятора на положительный
статизм напряжение генератора с ростом нагрузки уменьшает-
ся (кривая 1, рис. 4.7).
85
Для астатической настройки регулятора необходимо, чтобы
на всем 'рабочем участке перемещения якоря соблюдалось ра-
венство
*) = Дм(х) •
Это достигается подбором пружин, выбором профиля выем-
ки кольца опоры пружин, изменением положения якоря и сер-
дечника регулятора относительно друг друга.
Настройка регулятора на номинальное напряжение осущест-
вляется путем 'изменения велшитны сопротивления резистора Rv,
включенного последовательно с рабочей обмоткой электромаг-
нита.
Устройства угольных регуляторов, применяемых при стаби-
лизации напряжения генераторов постоянного и переменного
тока принципиально не отличаются друг от друга. На рис. 4.17
Рис. 4.17. Конструктивная схема угольного регулятора напряжения
показан разрез угольного регулятора напряжения. С целью
лучшего отвода тепла от угольного столба 3 его помещают в
покрытую 'изоляционным лаком оксидированную дюралюмини-
евую трубку 4. Тепло от трубки 4 рассеивается с помощью ре-
бристого радиатора 5. В корпусе 1 располагаются обмотки 12
и сердечник электромагнита 13. Радиатор и корпус электромаг-
нита скрепляются друг с другом болтами 6. Якорь 2 с пружи-
ной воздействует на угольный столб, который с противополож-
ной стороны упирается в контактный винт 8. Этим винтом про-
изводится регулировка начального натяжения пружины якоря,
что разрешается делать только на заводе или в ремонтных ма-
стерских. С целью уменьшения влияния вибраций на работу
регулятора его подставка К) сочленяется с основанием 11 при
помощи специальных амортизаторов 9. На основании II кре-
пится также резистор 7.
Для повышения точности поддержания напряжения в уголь-
86
пых регуляторах предусматриваются обмотки температурной
компенсации и корректирующие обмотки. С целью повышения
устойчивости процесса (регулирования устанавливаются рези-
сторы и стабилизирующие трансформаторы, с помощью кото-
рых осуществляется соответственно жесткая и гибкая отри-
цательные обратные связи (их принцип действия будет рас-
смотрен при изучении угольного- регулятора с дифференциаль-
ным корректором напряжений).
Угольный регулятор с дифференциальным корректором на-
пряжения. Для повышения точности регулирования напряже-
ния угольным регулятором напряжения используется дефферен-
ннальный корректор напряжения. Упрощенная принципиальная
(лектричеокая схема системы стабилизации напряжения посто-
янного тока с помощью угольного регулятора напряжения с
тнфференциальным корректором напряжения представлена на
рис. 4.18.
Рис. 4.18. Схема угольного регулятора напряжения с дифференци-
альным корректором напряжения
87
*
На электромагните угольного регулятора напряжения (УРН)
имеется несколько обмоток: рабочая ш9, температурной ком-
пенсации 'Корректирующие 1 и wK2 и уравнительная wy.
Величина регулируемого напряжения устанавливается при
помощи выносного реостата /?р. резистор которого включен
в цепь питания рабочей обмотки электромагнита регулято-
ра, а резистор /?2 — в цепь делителя напряжения дифференци-
ального корректора напряжения ДКН.
Для устранения влияния изменения температуры регулято-
ра на величину регулируемого напряжения в регуляторе приме-
нены следующие методы температурной компенсации: включе-
ние в цепь рабочей обмотки электромагнита резистора R& с ма-
лым температурным коэффициентом сопротивления (сопротив-
ление резистора /?д выполнено из константановой проволоки)
и применение обмотки температурной компенсации магнито-
движущая сила (МДС) которой направлена встречно МДС,
создаваемой рабочей обмоткой &уэ.
Параметры обмоток w3 и выбраны так, чтобы их ре-
зультирующая МДС, равная
^pes3 ~ w3 ’
не зависела от изменения температуры регулятора. Так, напри-
мер, с ростом температуры окружающей среды сопротивления
обмоток w3 и выполненных чиз «медной проволоки, увеличи-
ваются. Это приводит к уменьшению их МДС, но результирую-
щая МДС электромагнита Ерс39 остается постоянной.
Корректирующие обмотки и>к1 и wK 2, имеющие одинаковые
числа витков и сопротивления, .получают питание от дифферен-
циального- корректора напряжения ДКН. Корректор настроен
таким образом, чтобы при номинальном напряжении генерато-
ра, равном 28,5 В, по корректирующим обмоткам wKl и йук2
протекали одинаковые токи.
В этом случае МДС, создаваемые корректирующими обмот-
ками, будут равны между собой, а их результирующая МДС
^рсзк ~ F^wkI ^wK2 = ’
т. е. корректирующие обмотки при заданном уровне напряже-
ния не оказывают влияния на работу регулятора.
При отклонении напряжения от номинальной величины то-
ки 71(| и Д2, протекающие по корректирующим обмоткам, стано-
вятся не равными между собой. Если ток /К1 больше, чем ток
/к2, то результирующая МДС, создаваемая корректирующими
обмотками, действует согласно с МДС рабочей обмотки w3
электромагнита, и напряжение генератора будет уменьшаться.
Если, наоборот, ток /к2 будет больше тока /к1, то Ерс3к на-
правлена встречно МДС рабочей обмотки w3 электромагнита,
что приведет к увеличению регулируемого напряжения.
88
Дифференциальный корректор напряжения включает в
свой 'Состав следующие основные элементы: измерительный ор-
ган, два магнитных усилителя, статический преобразователь по-
стоянного тока в переменный и стабилизирующий трансформа-
тор.
Рабочие обмотки магнитных усилителей УМ1 и УМ2 вклю-
чены соответственно в цепи питания корректирующих обмоток
WK1 и w„ 2 угольного регулятора. Источником их питания слу-
жит транзисторный статический преобразователь постоянного
тока в переменный. Его принцип действия рассматривается в
гл. 8. Частота тока статического преобразователя при номи-
нальном напряжении генератора равна 650 Гц. Для выпрямле-
ния переменного тока, протекающего через корректирующие об-
мотки, используются выпрямители, собранные на диодах V2...
V5 и V6...V9.
Магнитные усилители УМ1 и УМ2 работают в релейном
режиме и поэтому, если не принять специальных мер, в 'коррек-
тирующих обмотках шк1 и wK2 будут протекать пульсирующие
токи. Для обеспечения режима непрерывного тока. в этих обмот-
ках, имеющих малые индуктивные сопротивления, в их цени
питания включены индуктивные катушки L1 и L2, а параллель-
но им — диоды V 1'0 и VII.
Измерительный орган корректора, собранный на потенцио-
метре /?3 и стабилитроне VI2, формирует сигнал, пропорцио-
нальный отклонению регулируемого напряжения генератора от
его заданного значения, т. е.
= U9,
где k — коэффициент пропорциональности.
К выходу измерительного органа корректора подключены
обмотки управления wy магнитных усилителей УМ1 и УМ2.
Магнитный усилитель УМ1 имеет кроме обмотки управле-
ния wy обмотки: начального подмагничивания wH, стабилизи-
рующую а,'с и уравнительную wyp. Магнитный усилитель УМ2
имеет кроме обмотки управления щу обмотки: стабилизирую-
щую wc и уравнительную йуур.
В магнитном усилителе УМ1 МДС F создаваемая током,
протекающим .в обмотке управления шу, намагничивает сердеч-
ники дросселей, а МДС Fwn, создаваемая током, протекающим
в обмотке начального подмагничивания w„, размагничивает их
сердечники. Результирующая МДС УМ1, создаваемая обмотка-
ми Wy и ш„, при одиночной работе генератора в статическом
режиме равна:
F = F — F .
• рез л "Wy 1 •
Рабочая характеристика магп-нитного усилителя УМ1, представ-
ляющая зависимость тока/к1^^(Дрез),'Изображена на рис. 4.19,а.
89
Так как обмотка*’начального .подмагничивания шн подключена
к делителю напряжения 7?3 через резистор /?4, имеющий посто-
янное сопротивление и /?4 RWH. то можно считать, что созда-
ваемая этой обмоткой МДС остается постоянной, т. е. Fw ~
~ const.
Рис. 4.19. Рабочие характеристики магнитных уси-
лителей дифференциального корректора .УМ1 (а) и
УМ2 (б)
Из приведенной на рис. 4.19.cz рабочей характеристики УМ1
видно, что при увеличении МДС F ,создаваемой обмоткой уп-
равления wy, величина тока 7К1, протекающего в корректирую-
щей обмотке wK 1 угольного регулятора, возрастает. Это соот-
ветствует случаю повышения напряжения .на зажимах генера-
тора. В случае понижения регулируемого напряжения величи-
на тока /к1, наоборот, уменьшается.
Рабочая характеристика магнитного усилителя УМ2 пока-
зана на рис. 4.19,6. Так как .в магнитном усилителе УМ2 нет
обмотки начального подмагничивания, то при повышении на-
пряжения на зажимах генератора МДС FWy, создаваемая обмот-
кой управления wy, возрастает, что приводит к уменьшению то-
ка протекающего в корректирующей обмотке ьг>к2 угольного
регулятора.
Рассматриваемая система регулирования напряжения на-
строена так, чтобы при напряжении генератора, равном U =
— Uном. протекающие в корректирующих обмотках wK 1 и о>ч2
регулятора токи были равны между собой. Так как МДС, соз-
даваемые этими обмотками, направлены встречно, то при U =
= Цюм они не оказывают никакого влияния на работу регуля-
тора напряжения.
При увеличении напряжения на зажимах генератора, т. е.
при 17^>(/нОм, токи, протекающие в обмотках управления УМ1
90
п УМ2, возрастают. В результате этого происходит увеличение
тока /к1, протекающего в корректирующей обмотке wKl, и
уменьшение така /к2, протекающего в корректирующей обмотке
wK2. Результирующая МДС, создаваемая корректирующими
обмотками электромагнита угольного регулятора, действуя со-
гласно с МДС его рабочей обмотки шэ, приводит к снижению
напряжения на зажимах генератора.
При понижении напряжения на зажимах генератора, т. е.
Д<ЙНОМ действие дифференциального корректора также при-
ведет к увеличению результирующей МДС, создаваемой кор-
ректирующими обмотками wK 1 и юк2 электромагнита. Но эта
МДС будет направлена встречно МДС, создаваемой рабочей
обмоткой w9 электромагнита, что вызовет повышение напря-
жения генератора.
Из рассмотрения работы дифференциального корректора на-
пряжения 'следует, что он действует только при наличии откло-
нения напряжения генератора от номинального значения.
Вследствие высокого коэффициента усиления магнитных усмлн-
гелей статические ошибки регулирования напряжения неболь-
шие. При изменении нагрузки от 0 до /иом в рабочем диапазоне
изменения частоты вращения генератора напряжение генера-
тора >U = t7ll0M ± 0,5 В.
Для повышения устойчивости системы стабилизации напря
жения кроме стабилизирующего резистора /?сг и стабилизиру-
ющего трансформатора Т1 предусмотрен стабилизирующий
трансформатор Т2 в дифференциальном корректоре напряже
пня, питающий стабилизирующие обмотки wc магнитных уси-
лителей УМ1 и УМ'2. Обмотки wc включены на зажимы вто-
ричной обмотки трансформатора Т2. Первичная обмотка этого
। рансформатора включена через обмотку w3 трансформатора Т1
параллельно обмотке возбуждения генератора. При изменении
напряжения генератора происходит также изменение тока воз-
буждения, а следовательно, и тока в первичной обмотке транс-
форматора Т2. Это вызывает наведение ЭДС в его вторичной
обмотке и протекание тока в обмотках wc магнитных усилите-
лей. Например, с увеличением тока возбуждения генератора
гок в обмотке wc магнитного усилителя УМ1 протекает от на-
чала обмотки к концу, создавая МДС, действующую согласно
с МДС обмотки управления wy, и тем самым увеличивая ток
п корректирующей обмотке wK 1 регулятора напряжения. Это
препятствует резкому сжатию угольного столба. В обмотке wc
магнитного усилителя УМ2 ток при этом протекает от конца к
началу, создавая МДС, действующую согласно с МДС обмотки
управления шу, что приводит к уменьшению тока /к2, протека-
ющего в корректирующей обмотке а>к2 регулятора напряже-
ния, и уменьшению МДС, действующей навстречу МДС обмот-
ки шэ, что также препятствует резкому сжатию угольного стол-
ба и увеличению тока возбуждения генератора. Таким образом,
91
Г
стабилизирующий трансформатор уменьшает коэффициент уси-
ления дифференциального корректора в переходных процессах.
После окончания переходных процессов токи .в обмотках wc
магнитных усилителей не протекают и они не влияют на точ-
ность поддержания напряжения -в статических режимах. Анало-
гично действует стабилизирующий трансформатор Т1, вторич-
ная обмотка w3 которого включена последовательно с рабочей
обмоткой электромагнита регулятора напряжения w3.
Уравнение угольного регулятора напряжения. Вывод урав-
нения угольного регулятора напряжения будем проводить без
учета влияния на его работу стабилизирующих и корректирую-
щих устройств. Принципиальная схема такого простейшего
угольного регулятора приведена на рис. 4.1-4. Его основными
элементами являются угольный столб, якорь с пружинами и
электромагнит.
Уравнение угольного столба. Сопротивление уголь-
ного столба гс регулятора является нелинейной функцией пере-
мещения х якоря. Зависимость г = гс (х) приведена на рис.
4.15,а. Приращение сопротивления угольного столба при изме-
нении сил, действующих на якорь, равно:
Д г с = — Д г
дх
или
Дгс = АсДл, (4.Ю)
. ^Г, Л .
где кс —-------коэффициент пропорциональности, характери-
дх зующий изменение сопротивления столба при
перемещении якоря от равновесного положе-
ния.
Уравнение движения якоря электромагнита.
Перемещение якоря электромагнита х происходит под воздей-
ствием сил, действующих на якорь. Если не учитывать сил тре-
ния, которые в рабочем диапазоне перемещения якоря (Д л?раб =
= 0,1.. 0,2 мм) незначительны, то уравнение сил, действующих
на якорь, можно записать следующим образом.
(j 2 v Нх
Al 4-у- + h = F3, (4.11)
df2 dt
где M — масса подвижных частей, приведенных к якорю;
ka — коэффициент, характеризующий демпфирование при
движении якоря;
Ем — механическая сила, действующая на якорь;
Еэ — сила электромагнита, действующая па якорь.
92
Сила FM—FM(x), а сила F3 — F3 (х, I3). Учитывая уравне-
ния 'Сил FM и Fs, запишем уравнение (4.11) в малых прираще-
ниях и операторной форме
Мр? L\ А- 4- k,p А х + Дх = А л- + --3 д /э
дх дх д!э
или с учетом равенства (4.10)
(Мр- + kRp + k„~ kx)^rc = kek9l/3, (4.12)
, OF,. , dF3 , dF3
где --------,/?,= — и /д = — - — коэффициенты пропори,но-
с>х ()х д/э нальностп.
Преобразуем уравнение (4.12); .для этого разделим все его
члены на значение силы электромагнита FSJ и умножим эти
члены на перемещение х0
р2 р р 4
I I' F‘
\ 7 э() 7 эи
F\
х0']Дгс--^-ДД.
/ 7 эО
(4.13)
Введем обозначения
। /
м I F
1 э()
7 — ^лхо
'р Чо
8 _ • х„
F„
р = А г
I —
“ “ F
1 эО
J. = д л
— постоянная времени якоря;
— постоя1пная времени демпфирования регу-
лятора;
— .'коэффициент, характеризующий настройку
регулятора (при астатической настройке ре-
гулятора) kM = kx и, следовательно, 6 = 0);
— (изменение сопротивления угольного столба;
— коэффициент усиления регулятора;
— изменение тока в рабочей обмотке электро-
магнита.
Тогда вместо уравнения (4.13) получим уравнение движения
якоря в приращениях
(Л>4 Лр/’ + г)Д^-А’рЛ- (4-14)
Уравнение цепи рабочей обмотки электро-
магнита. Принимаем, что за время переходных процессов
сопротивления электрических цепей от температуры не изме-
93
ft
няются. Тогда уравнение равновесия напряжения для цепи
электромагнита будет иметь вид
лф
U = R.3l3-\-, (4.15)
dt
где R3 активное сопротивление цепи рабочей обмотки
э л ек тро м агни т а;
w3 — число витков обмотки электромагнита;
Фэ — магнитный поток, сцепленный с обмоткой электро-
магнита.
Магнитный поток
Ф9=ФЭ(*,4). (4.16)
Уравнение (4.15) в малых приращениях и операторной фор-
ме с учетом (4.16) принимает вид
о’Ф Лф
Д6Л /?эД79ф «,—9-/?Д/ч-Ь®а-^—^/Мх. (4.17)
OR Ох
Разделив члены (4.17) на сопротивление цепи электромагнита
/?9 и учитывая равенство (4.10), найдем уравнение цепи рабо-
чей обмотки электромагнита в относительных приращениях
« = (Л + T3pj3 + Тхр Д rc) R3, (4.18)
-г ^(1>а
где /э = —:-------— постоянная времени цепи обмотки элек-
Л'э тромагнита;
7. дФэ
1Х =------------- — постоянная времени дополнительного
R3kc дх демпфирования, обусловленная движе-
нием якоря.
Как показывают исследования, величина Т 3pj3 мала по
сравнению с другими членами уравнения, поэтому ею пренебре-
гаем. Окончательно уравнение рабочей цепи обмотки электро-
магнита будет следующим:
« = (Л + Тхр A re) R3. (4.19)
Подставив значение /э из (4.19) в (4.14), получим уравне-
ние угольного регулятора напряжения в следующем виде:
[7^р2 + (7'тр + /гр7'л) р + о| Д rc = kvii. (4.20)
По своим динамическим свойствам угольный регулятор эквива-
лентен инерционному звену второго порядка, его передаточная
функция имеет рид
К,
IFtp) =-------------2-------------. (4.21)
7’>2 + (7'1р + ^7х)р + а
94
При астатической настройке, когда
g __ М I OP м \ Q
f'o \ Ox dx /
передаточная функция регулятора .вырождается в последова-
тельное соединение инерционного и интегрирующих звеньев
k
, (4.22)
1 д е 7— T'jp ф- kp I х.
К основным достоинствам угольных регуляторов напряже-
ния относят простоту их конструкции, способность регулировать
относительно большие мощности управления и др.
Недостатками регуляторов этого типа являются нарушение
их настройки вследствие износа шайб угольного столба, изме-
нение тяговой характеристики пружины. В этом 'случае угольные
регуляторы могут перейти в неустойчивый режим работы —
режим «хлопков», который может привести к разрушению
угольных шайб.
К их недостаткам относят и неоднозначность механических
характеристик при перемещении якоря, обусловленных нали-
чием гистерезиса пружины и угольного столба, а также изме-
нение сил пружины и электромагнита при изменениях темпера-
гуры окружающей среды.
Использование в системах электроснабжения ЛА бескон-
тактных генераторов, являющихся более надежными по срав-
нению с коллекторными и контактными генераторами, потребо-
вало применения для совместной работы с ними бесконтактных
регуляторов напряжения — на магнитных усилителях, тири-
сторных и 'транзисторных. Следует отметить, что применение в
качестве источников электроэнергии бесконтактных генераторов
с вращающимися выпрямителями, поддержание напряжения
на зажимах которых осуществляется путем изменения тока воз-
буждения возбудителя, позволяет использовать регуляторы на-
пряжения меньшей мощности.
4.5. РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ НА МАГНИТНЫХ УСИЛИТЕЛЯХ
Магнитные усилители, благодаря ряду своих достоинств
(большая надежность, относительная простота производства,
возможность суммирования многих контролируемых парамет-
ров и др.), по сравнению с другими типами усилителей широко
используются в регулирующих и защитных аппаратах систем
электроснабжения ЛА.
a
На рис. 4.20 представлена принципиальная электрическая
схема регулятора (напряжения на магнитных усилителях, .пред-
назначенного для работы с бесконтактным генератором пере-
менного тока с вращающимися выпрямителями.
Рис. 4.20. Принципиальная электрическая схема регулятора напря-
жения па магнитных усилителях бесконтактных генераторов пере-
менного тока
Регулятор включает в свой состав выпрямительное устрой-
ство измерительного органа ВУ, измерительный орган ИО, два
каскада магнитных усилителей УМ1 и УМ2, выходной выпря-
митель В1, стабилизирующий трансформатор Т1, регулируемые
резисторы и другие элементы.
Выпрямительное устройство ВУ состоит из понижающего
трансформатора и трехфазного двухполупернодного выпрями-
теля. Выходное напряжение ВУ пропорционально среднему зна-
чению линейных напряжений генератора.
Измерительный орган ИО регулятора реагирует на откло-
нение среднего значения линейных напряжений от заданного.
Он выполнен по мостовой схеме, в двух плечах которого вклю-
чены стабилитроны VI и V2, а в двух других — резисторы R2 м
R3. Для ручной настройки уровня напряжения генератора в
цепь питания измерительного органа включен выносной рези-
96
crop /?1. Выходная характеристика измерительного органа ИО
приведена на рис. 4.9,6-
Рабочим участком этой характеристики 67ВЫХ = (t/BX) яв-
ляется ее участок 1...2.
На выходе измерительного органа включена обмотка уп-
равления wy 1 однофазного магнитного усилителя УМ1, рабо-
чая обмотка шр 1 которого включена в цепь питания обмотки
управления wy2 трехфазного магнитного усилителя УМ2. На-
грузкой трехф’азного усилителя УМ2 является обмотка возбуж-
дения wBB возбудителя бесконтактного генератора, подключен-
ная к усилителю через выпрямитель В1.
Магнитные усилители УМ! и УМ|2 выполнены для повыше-
ния их коэффициента усиления с положительной обратной
связью.
Питание цепей управления рассматриваемой системы регу-
лирования осуществляется от подвозбудителя бесконтактного
н-нератора, частота тока которого для улучшения массогаба-
рнтных характеристик аппаратов управления в отличие от стан-
дартной частоты принята равной 800 Гц.
Однофазный магнитный усилитель УМ! кроме обмотки уп-
равления wy 1 имеет уравнительную шури стабилизирующую wc
обмотки.
Трехфазный магнитный усилитель УМ2 кроме обмотки уп-
равления шу2 имеет еще обмотку смещения wCM. подключенную
к зажимам выпрямителя В2, через регулируемый резистор /?4.
Рабочие характеристики магнитных усилителей УМ1 и УМ2
приведены на рис. 4.21.
Рис. 4.21. Рабочие характеристики магнитных усилите-
лей УМ1 (а) и УМ2 (б)
При отклонении напряжения генератора от заданного зна-
чения, например его увеличении, возрастает сигнал рассогласо-
папия A U = UBX—U9 на выходе измерительного органа ИО
7 Изд. № 7934
97
to
(см. рис. 4.20). Это приводит к увеличению тока в обмотке уп-
равления wy 1 магнитного усилителя УМ1. Согласно рабочей
характеристике усилителя УМ1, представленной на рис. 4.21,а,
увеличение МДС FyI, создаваемой обмоткой управления wyl,
вызывает уменьшение тока /у2. протекающего по его рабочим
обмоткам.
В усилителе УМ2 МДС Fy2, создаваемая обмоткой управ-
ления иуу2, намагничивает его сердечники, а МДС FCM создава-
емая обмоткой смещения ®см, размагничивает их. .Поэтому при
уменьшении МДС Ду2, так как напряжение на зажимах подвоз-
будителя практически остается постоянным и Fc„ = const, умень-
шается величина тока возбуждения возбудителя /вв (рис.
4.21,6), что в конечном счете приведет к снижению напряжения
генератора до своего' заданного значения. Использование двух
магнитных усилителей вместо одного позволяет получить высо-
кий коэффициент усиления, который равен произведению коэф-
фициентов усиления последовательно включенных усилителей
при незначительном увеличении постоянной времени регулято-
ра, равной сумме постоянных времени этих усилителей. Напря-
жение генератора в статических режимах при .работе с таки-
ми регуляторами напряжения поддерживается в пределах U =
= Дном ±2%.
Для улучшения динамических характеристик регулятора
усилитель УМ1 охвачен гибкой отрицательной обратной связью
по току возбуждения возбудителя. С этой целью используется
трансформатор тока Т1, первичная обмотка которого включе-
на последовательно с обмоткой возбуждения wBB возбудителя,
а на зажимы вторичной его обмотки включена стабилизирующая
обмотка wc магнитного усилителя УМ'1. МДС, создаваемая ста-
билизирующей обмоткой wc, при повышении величины тока
возбуждения возбудителя /вв размагничивает, а при его сниже-
нии намагничивает сердечники магнитного усилителя. Так как
по обмотке wc ток протекает только во время переходных про-
цессов, то ее действие не оказывает влияние на статическую
ошибку системы регулирования напряжения.
Для подавления высокочастотных колебаний, возникающих
при переходных процессах, магнитный усилитель УМ2 снабжен
короткозамкнутой демпферной обмоткой wa.
Для обеспечения равномерного распределения реактивной
составляющей тока .нагрузки между параллельно работающими
генераторами в магнитном усилителе УМ1 предусмотрена урав-
нительная обмотка wyp, сигнал на которую подается от блока
измерения реактивной мощности (см. гл. 6).
Уравнение регулятора напряжения на магнитных усилите-
лях. Как уже отмечалось, основными элементами рассматри-
ваемого регулятора являются: выпрямительное устройство, из-
мерительный орган, магнитные усилители ш стабилизирующий
трансформатор.
98
Выпрямительное устройство и .измерительный орган по сво-
им динамическим характеристикам можно отнести к пропорци-
ональным звеньям. Тогда в малых отклонениях их 'можно пред-
ставить следующим уравнением:
«ио = , (4.23)
где ки0 — приращение напряжения на выходе измери-
тельного органа;
/?„ — коэффициент усиления измерительного орга-
на и блока питания;
и = A Ucp — приращение среднего линейного напряжения
синхронного генератора.
Магнитные усилители по своим характеристикам соответст-
вуют апериодическому звену. Так как. на вход магнитного уси-
лителя первого каскада усиления УМ1 кроме напряжения рас-
согласования А 67ср, контролируемого измерительным органом,
подводится напряжение от вторичной обмотки стабилизирую-
щего трансформатора Т1, а в случае параллельной работы ге-
нераторов — и от измерителя рассогласования их реактивной
мощности, то уравнение усилителя УМ1 для малых отклонений
имеет вид
( 7ум1 Р 4" ’) ^вых 1 = (^yl' ^ио 4" ос' ^ос 4" ур' ^ур) ’ (4.24)
где Туи1 — постоянная времени магнитного усилителя УМ1;
-ур ^уоо ^уур — коэффициенты усиления первого каскада
усиления соответственно по сигналам от измерительного орга-
на пио. обратной связи нос и 'измерителя реактивной мощности
Мур-
Знак минус, стоящий перед травой частью уравнения (4.24),
показывает, что с увеличением сигналов ии0. «ос и нур величи-
на выходного напряжения «ВЬ1Х । усилителя УМ1 уменьшается.
Магнитный усилитель УМ2 второго каскада усиления пред-
ставляют уравнением
(Т'умг/’Ф 0 ^вых 2 = ^у2‘ "вых 1 > (4.25)
где Гум2 — постоянная времени магнитного усилителя УМ2;
£у2 — коэффициент усиления второго каскада усиления.
Рабочие обмотки магнитного усилителя УМ.2 через выпрями-
тельный мост В1 включены в цепь питания обмотки возбужде-
ния возбудителя бесконтактного генератора.
Опыт моделирования процессов в системах электроснабже-
ния с регуляторами напряжения на магнитных усилителях по-
казывает, что с достаточной степенью точности два последо-
вательно включенных магнитных усилителя можно заменить
7*
99
*
одним — эквивалентным апериодическим звеном, передаточная
функция которого равна:.
ЛуЭ
= - У~ , , (4.26)
ГуэР + 1
где ^Уэ = Ру1'Ру2 — коэффициент усиления эквивалент-
ного усилителя;
Ту, — TyuJ -ф ТуМ2 — постоянная времени эквивалентного
усилителя.
4.6. ТРАНЗИСТОРНЫЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ
Транзисторные регуляторы напряжения широко используют-
ся в системах электро снабжен и я постоянного и переменного то-
ка. Транзисторы их исполнительного органа работают в режи-
ме ключа, что позволяет коммутировать большие токи в цепях
управления.
Для примера на рис. 4.22 приведена принципиальная элек-
трическая схема 'транзисторного регулятора, работающего в
комплекте с коллекторным генератором постоянного тока. Регу-
лятор состоит .из следующих блоков: измерения отклонений на-
Рис. 4.22. Принципиальная электрическая схема транзисторного
регулятора напряжения коллекторного генератора постоянного тока
100
пряжения ИО, предварительного усиления УП, усилителя мощ-
ности УМ и силовой части СЧ.
Параметры элементов измерительного органа ИО подоб-
раны так, что равновесие моста наступает при напряжении ге-
нератора, значительно меньшем его номинального значения.
Поэтому при нормальных режимах работы генератора потен-
циал точки «б» превышает потенциал точки «а» и с повышением
напряжения генератора величина сигнала рассогласования
Д L) = — U3) возрастает.
Этот непрерывный во времени сигнал усиливается усилите-
лем постоянного тока УП на транзисторах V2 и V3 со стабили-
затором тока на транзисторе V4.
Сигнал от усилителя УП поступает на вход широтно-импуль-
сного модулятора блока УМ, где он преобразуется в последо-
вательность импульсов напряжения. Длительность этих импуль-
сов определяется МДС, создаваемой обмоткой управления wy
магнитного усилителя УМ, их период повторения — частотой
тока встроенного статического инвертора СИ.
Так, например, с повышением напряжения генератора воз-
растает сигнал рассогласования Д U измерительного органа,
что приводит к увеличению тока в обмотке управления wy маг-
нитного усилителя блока УМ. Увеличение МДС, создаваемой
обмоткой управления ауу, обусловливает уменьшение длитель-
ности импульсов на резисторе /? 15, служащем нагрузкой маг-
нитного усилителя.
Эти импульсы напряжения управляют работой транзистора
V5, который, в свою очередь, управляет работой транзистора
VI силовой части (СЧ) регулятора. При уменьшении их дли-
тельности уменьшается врем# открытого состояния транзисто-
ров V5 и VI и, следовательно, уменьшается средняя величина
тока возбуждения генератора.
Включение транзистора VI осуществляется импульсом тока,
подаваемым на обмотку w5 многообмоточного трансформатора
Т1 при открытии транзистора V5. Этот ток проходит по базовой
цепи транзистора VI и частично открывает его. Через силовой
транзистор начинает протекать ток, который, проходя через то-
ковую обмотку w4 трансформатора Т1, намагничивает его сер-
дечник.
Параметры трансформатора Т1 подобраны так, что время
намагничивания сердечника больше периода следования уп-
равляющих импульсов. Поэтому при открытом состоянии тран-
зистора VI но всех обмотках трансформатора индуктируются
ЭДС взаимоиндукции. ЭДС, индуктируемая в обмотке w5, уве-
личивает величину базового тока транзистора VI, что в итоге
приводит к его лавинообразному открытию.
101
*
Для запирания транзистора VI используется ЭДС, индукти-
руемая в обмотке wl. Полярность этой ЭДС выбрана так, что
при открытии составного транзистора 1’6... V7 блока УМ про-
исходит закрытие силового транзистора VI. Включение состав-
‘>ного транзистора V6...V7 осуществляется по сигналам, форми-
руемым формирователем запирающих импульсов. В состав фор-
мирователя входят: трансформатор Т2, дифференцирующая це-
почка (конденсатор С1, резистор Д9 и выпрямитель В1) и ис-
точник постоянного напряжения смещения (диод 1/10, конден-
сатор С2 и резистор Д5).
Первичная обмотка трансформатора Т2 получает питание
от статического инвертора (СИ). В конце каждого полупериода
переменного напряжения прямоугольной формы на выходе диф-
ференцирующей цепочки — резисторе R9 — создаются импуль-
сы напряжения. Этими импульсами кратковременно открывает-
ся составной транзистор V6...V7, а остальное время он закрыт
напряжением смещения, снимаемым с конденсатора С2.
В момент закрытия силового транзистора VI начинает умень-
шаться ток в обмотке возбуждения генератора, что обусловли-
вает наведение в ней ЭДС самоиндукции. Эта ЭДС самоиндук-
ции замыкается через обмотку w9 трансформатора Т1 и диод
V9, что обеспечивает непрерывное протекание тока в обмотке
в оз б уж дени я г ен ер а тор а.
МДС, создаваемая обмоткой w9, перемагничивает сердечник
трансформатора Т1 и способствует лавинообразному процессу
закрытия силового транзистора VI -блока 1СЧ.
Принципиальная электрическая схема транзисторного регу-
лятора напряжения, предназначенного для работы с бескон-
тактными генераторами переменного тока типа ГТ, приведена
на рис. 4.23. Основными его элементами являются: измеритель-
ный орган ИО, широтно-импульсный модулятор (ШИМ), блок
предварительного усиления (УП) и силовая часть СЧ.
Конструктивно рассматриваемый транзисторный регулятор
напряжения входит в состав блока регулирования, защиты п
управления канала переменного тока. Этот блок имеет вспомо-
гательный -источник постоянного тока напряжением 5 и 12,6 В,
предназначенный для питания элементов регулятора и защиты.
Измерительный орган ИО регулятора включен на линейное
напряжение генератора через понижающий трансформатор Т
и трехфазный однополупериодный выпрямитель на диодах
V1...V3.
Нагрузкой выпрямителя является последовательно включен-
ные резисторы /?1 и R2, причем величину сопротивления рези-
стора R2 выбирают существенно больше сопротивления рези-
стора /?1.
102
Для сглаживания выпрямленного напряжения н2 генератора
параллельно резистору R2 включен конденсатор С1.
Рис. 4.23. Принципиальная электрическая схема транзисторного регулято-
ра напряжения бесколлекторного генератора постоянного тока
Выпрямленное напряжение н2, имеющее пульсирующую фор-
му, и эталонное напряжение Ua стабилитрона V4, снимаемое с
потенциометра R4, поступают на входные зажимы широтно-им-
пульсного модулятора ШИМ. В качестве ШИМ используется
операционный усилитель (ОУ), работающий в режиме компа-
ратора. Компаратор осуществляет переключение уровня выход-
ного напряжения Йк, когда непрерывно изменяющийся во вре-
мени входной сигнал и2 становится выше или ниже эталонного
U3 (рис. 4.24,а). В случае, если Uz>Ua, то выходной сигнал
компаратора равен UK мин, а если н2<Пэ, то — fJKMaKC (рис.
4.24,6).
При понижении измеряемого напряжения длительность им-
пульсов /и, формируемых компаратором, увеличивается (рис.
4.24,6). Эти импульсы при включенном выключателе ВГ цепи
возбуждения генератора открывают вспомогательные транзи-
сторы V5 и V7 блока БПУ. Для надежного запирания транзи-
стора V7 в интервалах времени между окончанием одного и
началом следующего импульсов на его базу через резистор R8
подано отрицательное напряжение смещения Uc„.
Открытие транзистора V7 приводит к открытию силового
транзистора V8 исполнительного устройства СЧ регулятора.
103
Гак 'как iipg изменении напряжения генератора .Изменяется
длительность импульсов, формируемых компаратором, то изме-
няется средняя величина тока 'возбуждения /вв возбудителя
генератора.
Рис. 4.24. Временные диаграммы напряжений,
поясняющие принцип работы транзисторного
регулятора
Например, в случае уменьшения напряжения генератора
увеличивается длительность импульсов tK компаратора и, сле-
довательно, увеличивается время открытого состояния транзи-
стора V8, что в итоге приводит к возрастанию величины регу-
лируемого напряжения.
Для обеспечения непрерывности протекания тока в обмотке
возбуждения wB1> возбудителя генератора, когда силовой тран-
зистор V8 закрыт, параллельно этой обмотке включены диоды
1/9 и V10.
Улучшение динамических характеристик регулятора дости-
гается путем применения отрицательной обратной связи ОС,
элементами .которой служат конденсатор С2, резисторы Р9,
/<Ч0 и диод V6. При открытии силового транзистора V8 кон-
денсатор С2 начинает разряжаться, понижая потенциал одного
из входов компаратора. В итоге это приводит к некоторому из-
менению длительности /и его импульсов.
В случае, если регуляторы используются в системах электро-
снабжения параллельно работающими каналами, сигнал от
измерителя реактивной мощности (ИРМ), пропорциональный
отклонению реактивной составляющей тока данного генерато-
104
ра от среднего значений реактивных составляющих токов, прй-
ходящегося на один генератор, суммируется с сигналом ИО на
резисторе 7?5.
Транзисторные регуляторы как элементы систем регулиро-
вания напряжения обладают существенно меньшим запаздыва-
нием по .сравнению с инерционностью (генераторов и по своим
динамическим свойствам могут быть отнесены к усилительным
звеньям. В связи- с этим уравнение транзисторного регулятора
напряжения обычно представляют в виде
«в=—(4.27)
где kp — коэффициент усиления регулятора.
4.7. ТИРИСТОРНЫЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ
Тиристорные регуляторы напряжения, как и транзисторные,
часто .используются в .системах электроснабжения переменного
тока с бесконтактными 'Генераторами. На рис. 4.25 приведена
структурная схема тиристорного регулятора напряжения, пред-
назначенного для работы с трехфазнымн бесконтактными тене-
раторамн переменного тока типа ГТ.
Рис. 4.25. Структурная схема тиристорного регулятора
напряжения генератора переменного тока типа ГТ
Регулируемое напряжение • и, выпрямленное выпрямителем
В, поступает на вход измерительного органа МО, на выходе ко-
торого формируется сигнал, пропорциональный разности регули-
руемого и эталонного напряжения Д U = и — иэ.
В случае параллельной работы каналов на сумматоре (С)
происходит сложение сигналов, поступающих от измерительного
органа и блока измерения реактивной мощности (ИРМ). При
одиночной работе канала сигнал от блока ИРМ равен нулю.
Результирующий сигнал управления поступает на вход
фазосдв1игающего устройства (ФСУ), осуществляющего сдвиг
фазы его выходного напряжения п(1,су на угол у по отношению
фазы напряжения подвозбудителя цпв (рис. 4.26). Величина
угла т определяется величиной сигнала управления ФСУ.
С выхода ФСУ трехфазное синусоидальное напряжение нфсу
поступает на вход формирователя импульсов (ФИ), начало
следования которых определяется углом у. Эти импульсы уп-
равляют работой усилителя мощности УМ.
105
К выходным *зажимам УМ подключена обмотка возбужде-
ния возбудителя генератора (Г).
Рис. 4.26. Кривые изменения напря-
жений подвозбудителя С||В и фазо-
сдвигающсго устройства СфСу
Принципиальная электрическая схема рассматриваемого ти-
ристорного регулятора напряжения приведена на рис. 4.27.
Измерительный орган регулятора выполнен по мостовой схеме,
плечами которого служат резисторы 7?2, /?5 и стабилитроны
V8, V9. Он включен на среднее напряжение фаз генератора
через однополупериодный выпрямитель, собранный на диодах
V10...V12. На резисторах /?3, /<4 измерительного органа проис-
ходит суммирование сигналов от ИРМ и гибкой обратной связи
по току возбуждения •возбудителя (трансформатор Т5).
Фазосдвигающее устройство включено через понижающий
трансформатор Т1 на напряжение подвозбудителя. Оно вклю-
чает в свой состав конденсаторы Cl, С2 и СЗ, двухполупериод-
ный трехфазный выпрямитель на диодах VI...V6, транзистор
V8 и резистор /?1. Транзистор V8 работает в режиме управляе
мого резистора, сопротивление которого определяется раз-
ностью потенциалов точек «а» и «б» схемы измерительного
органа.
Для пояснения принципа действия ФСУ на рис. 4.28 приве-
дена векторная диаграмма напряжений для одной из его фаз.
Положение вектора выходного напряжения £7фсу относительно
вектора напряжения йа подвозбудителя определяется величиной
активного сопротивления ФСУ. В случае, например, повышения
напряжения генератора относительно заданного уровня возрас-
тает потенциал точки «б» измерительного органа, а потенциал
его точки «а» остается постоянным. Это приводит к увеличе-
нию сопротивления транзистора V8, росту падения напряже-
ния на активном сопротивлении (Ur>Ur) и повороту вектора
ифСУ по часовой стрелке (к'^>т)-
106
Формирователь импульсов ФИ представляет собой фазочувсТ-
вптельный импульсный усилитель на транзисторах V2 и ИЗ.
Рис. 4.27. Электрическая схема тиристорною регулятора напряжения
генератора переменного тока типа ГТ
Рис. 4.28. Векторная диаграмма напряжений фазосдвигающего
устройства (а) и форма кривой падения напряжения на рези-
сторе 7?9 (б)
Так как напряжение на входе ФИ сдвинуто на угол у по отно-
шению к напряжению соответствующей фазы подвозбудителя,
107
то транзистор V2 открывается в Момёйт времени, равный <u/=f.
Характер кривой падения напряжения на резисторе R9 при
открытии транзистора V2 показан на рис. 4.28,6. Это напряже-
ние используется для управления транзистором УЗ, формиру-
ющим импульсы напряжения для открытия соответствующего
тиристора усилителя мощности УМ.
Напряжение питания транзистора УЗ сдвинуто на 180° по
отношению к напряжению питания транзистора V2. Поэтому
в один из полупериодов заряжается конденсатор С6 через мо-
мент времени, определяемый углом у, открывается транзистор
УЗ и конденсатор С6 разряжается через резистор У? 12 и диод
У23. Импульсы напряжения на резисторе /?12 включают соот-
ветствующий тиристор УМ, что в итоге приводит к необходимо-
му изменению тока возбуждения .возбудителя и, следователь-
но, поддержанию напряжения генератора на требуемом уровне.
Тиристорные регуляторы напряжения, как и транзисторные,
учитывая их высокое быстродействие, по своим динамическим
свойствам относят к усилительным звеньям.
Глава 5
СТАТИКА И ДИНАМИКА ПРОЦЕССОВ
РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
5.1. СИНХРОННЫЙ ГЕНЕРАТОР КАК ОБЪЕКТ
РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
В системах электроснабжения переменного тока ЛА приме-
няются, как правило, явнополюсные синхронные генераторы с
электромагнитным возбуждением.
В качестве примера на рис. 5.1 приведена конструктивная
схема двухполюсного синхронного генератора. На его роторе 1
размещены обмотка возбуждения 4 и короткозамкнутая демп-
ферная обмотка 5, а на статоре 2 — трехфазная обмотка яко-
ря 3.
Рис. 5.1. Конструктивная схема синхрон-
ного генератора
Рис. 5.2. Векторная диа-
грамма синхронного гене-
ратора
Магнитодвижущая сила, создаваемая обмоткой возбужде-
ния, и соответствующий ей поток возбуждения Фв направлены
вдоль оси полюса d. При вращении ротора с угловой скоростью
109
<u в машине создается вращающееся магнитное поле. В не-
подвижных фазных обмотках при этом наводятся ЭДС, обус-
ловленные .периодическим изменением их потокосцеплении.
В соответствии с законом электромагнитной 'индукции век-
тор ЭДС Ё (например, фазы Д) отстает на 90° (рис. 5.2) от
вектора потокосцепления данной фазы
ф„ = ®'-Фв ,
где w — число .витков фазной обмотки.
При активно-индуктивной нагрузке в установившемся ре-
жиме работы генератора ток I отстает по фазе от ЭДС на не-
который угол ф, определяемый параметрами генератора и на-
грузки.
Напряжение на нагрузке
£7 = /.?H = /rH+ //•%„
опережает ток по фазе на угол
<р = arctg-^-,
г„
где х„ — w L„ и ги— индуктивное и активное сопротивления на-
грузки.
Разность ЭДС и напряжения
принято называть падением напряжения в генераторе.
Падение напряжения в синхронном генераторе обусловлено:
— реакцией якоря, т. е. изменением магнитного потока ма-
шины при протекании тока якоря, вследствие чего ЭДС умень-
шается на величину Д (7ря;
— наличием магнитного потока рассеяния якоря, эквива-
лентом которого является падение напряжения jlxs на индук-
тивном сопротивлении рассеяния якоря хксо Ls (Ls— индук-
тивность рассеяния фазной обмотки);
— падением напряжения I-rs на активном сопротивлении
обмотки якоря rs.
Последней составляющей падения напряжения обычно пре-
небрегают ввиду ее малости по сравнению с составляющей,
обусловленной действием реакции якоря.
Математическое описание электромагнитных -процессов, про-
текающих в синхронном генераторе, сопряжено с серьезными
затруднениями, вызванными тем, что явнополюсный ротор (ин-
дуктор) обладает различной магнитной проводимостью по его
продольной d и поперечной q осям. Действие реакции якоря в
зависимости от взаимного положения ротора и обмоток статора
ПО
проявляется по-разному. Максимальное значение потока реак-
ции якоря при одном in том же значении МДС соответствует мо-
менту времени, когда ось ротора d совпадает с осью статорной
обмотки, а минимальное — когда эти оси перпендикулярны.
В связи с этим системы дифференциальных уравнений, опи-
сывающих электромагнитные процессы в синхронных генерато-
рах и составленных относительно фазных токов и напряжений,
содержат периодически изменяющиеся коэффициенты (индук-
тивности и взаимные индуктивности обмоток машины). Реше-
ние таких систем уравнений даже с использованием современ-
ных вычислительных средств вызывает значительные трудности.
Поэтому для упрощения анализа процессов в синхронных гене-
раторах рассматривают действие реакции якоря по продольной
и поперечной осям в отдельности.
Впервые такой метод учета реакции якоря был предложен
в 1895 г. французским электротехником А. Блонделем и получил
название метода (теории) двух реакций. Впоследствии строгое
математическое обоснование данного метода для анализа про-
цессов в машинах переменного тока предложили проф. А. А. Го-
рев (СССР) и Р. X. Парк (США).
Метод двух реакций базируется на следующих преобразо-
ваниях:
— многофазный многополюсный генератор заменяется экви-
валентной двухполюсной машиной с двумя взаимно перпенди-
кулярными обмотками якоря;
— векторы токов, напряжений и потокосцеплений (см. рис.
5.2) заменяются их проекциями на взаимно перпендикулярные
оси d и q, жестко связанные с осями ротора и вращающиеся
вместе с ним с угловой частотой тока (магнитного поля) % как,
например:
Еч-Е-
^ = 0;
67? = £7-cos(<L-<p); (5Л)
Ud — £7-sin(d> — и) и т. д.;
— проекциям падения напряжения Д на оси d и q ста-
вят в соответствие эквивалентные индуктивные сопротивления
реакции якоря по продольной xad=wLad и поперечной xai=u>Laa
осям из условия
{А Г/рЯ)? = Id • ХдД ,
(5.2)
где Lad, Laq — индуктивности обмоток якоря при таких поло-
жениях ротора, когда ось обмотки совпадает со-
ответственно с осями d и q.
Ill
При этом полная система уравнений Горева — Парка, опи-
сывающих переходные и установившиеся процессы >в генерато-
рах переменного тока при симметричной 'нагрузке, содержит
пять дифференциальных уравнений напряжений для соответству-
ющих цепей машины
Ц* = - 4 • rs ~ ;
+ (5.3)
at
U — Jl)d 'D Т — ’
at
О — / . r _L d'\pq
J — 1L*! rD T
at
и пять алгебраических уравнений потокосцеплений
~ Idl'd "к Ipd^Dd i
= IqLq + I
Фв ~ A A "A^dB IDd.ML>K > (5.4)
$Dd ~ Ipdlpd + Id^dD A^bD 5
= loq^Dq + IqMqD ’
где Ud, Uq, Id, A— текущие 'величины амплитудных значений
проекций напряжений и токов в статорных
контурах;
А> 4м> ?Dq— текущие (мгновенные) значения тока воз-
буждения и проекций токов в демпферной
обмотке;
rs, fD, rB — активные сопротивления статорных и демп-
ферной обмоток, сопротивление цепи обмот-
ки возбуждения;
I L — собственные индуктивности обмоток статора
(La, Lq), демпферной обмотки (LDd, LDq)
и обмотки возбуждения (Ав) по соответст-
вл вующим осям d и q; La = Laa+Ls; L,~Laq-\-Ls\
til — взаимные индуктивности соответствующих
статорных и роторных контуров по осям d
и q.
112
Переход от проекций токов и напряжений на оси d и q к их
физическим значениям осуществляют по формулам
С-УЧ + СД
'-V^i + q :
+ (5.5)
Для учета фазовых соотношений между током и напряже-
нием используют в соответствии с векторной диаграммой (рис.
5.2) формулы:
Ф = arctg ;
ф — ? = arctg-—. (5.6)
я
Система уравнений (5.3)... (5.6) не содержит периодических
коэффициентов, являющихся функциями угла поворота ротора
генератора, что обусловливает ее широкое использование для
исследования переходных и установившихся процессов в якор-
ных цепях синхронных (генераторов. Напряжение С7|(/1) и ток
/(/), получающиеся в результате ее решения, в соответствии с
выражениями (5.5) представляют собой огибающие мгновен-
ных значений напряжения и(/) и тока 1(f) нагрузки.
Вместе с тем полная система уравнений Горева—Парка из-за
высокого порядка дифференциальных уравнений не позволяет
наглядно отобразить свойства •синхронного .генератора как объ-
екта регулирования напряжения.
Как показывают результаты многочисленных исследований,
для анализа процессов регулирования напряжения систему урав-
нений (5.3) ...(5.6) можно существенно упростить, если учесть,
что переходные процессы в цепях якоря и демпферной обмотке
протекают значительно быстрее, чем в цепи обмотки возбуж-
дения.
В связи с изложенным при описании синхронного генератора
как объекта регулирования напряжения .будем полагать, что:
— переходные процессы в цепи якоря при изменении про-
водимости нагрузки отсутствуют, т. е.
— демпферная обмотка отсутствует;
— нагрузка генератора симметрична.
8. Изд. № 7934
113
Кроме того* будем пренебрегать активным сопротивлением
обмоток якоря и 'изменениями индуктивных 'сопротивлений 'ге-
нератора xd и xq в переходных процессах, связанных с измене-
ниями тока возбуждения.
При указанных допущениях синхронный генератор пред-
ставляется системой грех контуров, не имеющих магнитной свя-
зи между собой (рис 5.3,а): два контура переменного тока по
осям d и q (цепи статора) и контур постоянного тока (цепь об-
мотки возбуждения). 'Связь между током возбуждения и тока-
ми якоря учитывается только через ЭДС Е, действующую по
оси q.
Рис. 5.3. Электрическая схема (а) и векторная диаграмма (б)
идеализированного синхронного генератора
Векторная диаграмма такого идеализированного генератора
приведена на (рис. 5.3,6. Заметим, что углы сдвига фаз между
ЭДС, током I и напряжением U рассматриваемого генератора
при изменении тока возбуждения и, следовательно, изменении
ЭДС Е остаются постоянными, так как по принятому допуще-
нию индуктивные сопротивления хд и xq не изменяются. Таким
образом, принятые допущения позволяют рассматривать про-
цессы в якорных цепях как установившиеся.
Необходимо отметить, что такой подход к анализу процес-
сов правоверен лишь для малых изменений токов в обмотках
генератора, так как индуктивные сопротивления машины зави-
сят от степени насыщения магнитопровода.
114
Эквивалентная схема « векторная диаграмма синхронного
генератора (рис. 5.3) позволяют записать упрощенную систему
уравнений Горева—Парка в следующем виде:
—- для цепи якоря
Ц = £-/Л; (5.8)
Е = «4Brf, (5.9)
где 'К/ = — потокосцепление обмотки якоря с
ПОТОКОМ возбуждения ФВ = Ф„(/В);
.xd = <uZd; xQ = wLq — полные индуктивные сопротивления
машины;
— для цепи возбуждения
= -^-(/в^в)> (5.10)
at
где /?в = Rp + гп — общее сопротивление цепи обмотки воз-
буждения. равное сумме сопротивлений ис-
полнительного органа регулятора напряже-
ния /?р и обмотки возбуждения гв;
— для цепи нагрузки
Ud d ’ П) А/ ’ *^н ’
Цг=-Аг*» + (5.11)
где гн, — активное и индуктивное сопротивления нагрузки.
Найдем из полученной системы уравнений выражение для
напряжения генератора U, для чего решим совместно систему
уравнений (5.8) и (5.11) относительно токов Id и Iq.
Приравнивая правые части уравнений (5.8) и (5.11), запи-
шем
?d 4" ^и) ^q Э
+-хн) = 0, (5.12)
откуда получим выражения для токов ,
хп + х»
Td =---------’------------Е;
(-4, + *н) (х, + хн) + г\
Е=^----------—------------Е. (5.13)
(*й + *н) (*г + Х„) + Г2Н
8* 115
Учитывая, что /2 + — I2 и U—zj, окончательно' получим
и _ Д Ку.+^>‘+^ £ _ cEi (5.|4)
(лй + хн)Ц + хн) + г2
]А2 + Г2 У К+Хн)2 + г2
где с ==-----------------------— коэффициент, зависящий
(*</ +*н)Ц, + хв) + гн
от параметров генератора La, LQ, от угловой скорости о>, а также
от величины и характера нагрузки. Графики зависимости вели-
чины коэффициента С от полного сопротивления нагрузки z„=
= V*24- г2 для двух значений коэффициента мощности cos<p
показаны на рис. 5.4.
Таким образом, синхронный генератор как объект регули-
рования напряжения с учетом принятых допущений описывается
системой нелинейных уравнений
U = c-E;
*
^в = 4/?в + —(W- (5.15)
at
Нелинейность уравнений (5.15) относительно входящих в них
переменных /в, /?в, «>, хн, г„ обусловлена тем, что:
— коэффициент С, как это видно из уравнения (5.14), явля-
ется нелинейной функцией сопротивлений нагрузки и угловой
скорости;
— ЭДС Е и индуктивность обмотки возбуждения £в явля-
ются нелинейными функциями тока возбуждения /в (рис. 5.5)
вследствие насыщения магнитной системы генератора.
Рис. 5.4. Зависимость коэф-
фициента С от величины и
характера нагрузки
Рис. 5.5. Зависимости ЭДС
Ё и индуктивности L гене-
ратора от тока возбужде-
ния
116
Линеаризуем полученные уравнения, рассматривая отклоне-
ния переменных от некоторого установившегося режима работы
генератора, характеризующегося установившимися значениями
угловой скорости %, сопротивлений нагрузки хи0 и гн0, напря-
жения возбуждения U в0, сопротивления возбуждения /?в0 и
соответствующими значениями индуктивности Лв0 и тока воз-
буждения /в0, ЭДС Ео и напряжения Uo. Тогда в малых откло-
нениях уравнения (5.15) примут вид
... дЕ . , , / „ дс дЕ \ . , дс .
— с —— Д /в -J-1 Ей —----------f- с —-—) Д«> -f- Ео —— Д хн +
о/, \ ош д ш ! дхн
дс
+ (5.16)
д = /?в0 д /„ + /вд д R, + £в0 .
Применяя к уравнениям (5.16) преобразования Лапласа с
учетом того, что Д/в(/=0)=0, и исключив переменную Д/В(р), по-
лучим следующее уравнение:
« = — 4оРв) •--1—- + Т* + М + «2Р, (5-17)
ЛР+ 1
где и = Д£Др); «в = дШр); рв = дЩв(р); * *= Мр); х = дхн(р);
р = Дг„(р) — изображения соответствующих пере-
менных в области аргумента р пре-
образований Лапласа;
, 1 дЕ
k„ =------------с----------- — коэффициент усиления по управляю-
щие-------------щему воздействию, характеризующий
чувствительность генератора к изме-
нению напряжения возбуждения;
дс дЕ
( = Ео----Ь с ——- — коэффициент, характеризующий зави-
симость напряжения генератора от уг-
ловой скорости ш;
,, дс г- дс , ,
at = Ео--и я2=Е0-------коэффициенты, характеризующие вли-
дХи дгк яние на напряжение генератора ин-
дуктивного и активного сопротивлений
нагрузки;
Тв = —— — постоянная времени цепи возбужде-
но ния.
Конкретные выражения для коэффициентов /гв, 7, а, и еа лег-
ко получить путем дифференцирования из уравнений (5.9) и
(5.14), но они достаточно громоздки и в книге не приводятся.
117
Уравнению (5.17) соответствует структурная схема генера-
тора как объекта регулирования напряжения, приведенная на
рис. 5.6.
Рис. 5.6. Структурная схема синхронного
генератора
Анализ полученного уравнения и структурной схемы син-
хронного генератора дозволяет сделать следующие выводы.
1. По отношению к управляющему воздействию (ив — /ворв)
генератор как объект управления в системе регулирования на-
пряжения является инерционным апериодическим звеном, а по
отношению к возмущениям (изменениям угловой скорости и со-
противления нагрузки) — безынерционным звеном, так как
возмущение приложено к его выходу. Это означает, что при
ступенчатом изменении возмущения (например, сопротивления
нагрузки) напряжение мгновенно изменяется пропорционально
возмущению, а восстанавливается под воздействием регулятора
напряжения в течение определенного промежутка времени.
2. Динамические свойства генератора существенно зависят
от режима его работы. Данный вывод следует из того, что ко-
эффициенты kB, у, аъ аг и постоянная времени Тв в уравнении
(5.17) являются функциями параметров установившегося ре-
жима работы, относительно которого рассматривается движе-
ние :в приращениях.
Наиболее существенное влияние на динамические свойства
генератора 'Оказывает величина тока возбуждения, которая оп-
ределяет степень насыщения магнитопровода и, в свою очередь,
зависит от тока нагрузки и частоты вращения.
Физическую сущность зависимости динамических свойств ге-
нератора от режима его работы рассмотрим на следующих
примерах.
Пусть, например, генератор .работает в режиме холостого
хода (/ = 0) при постоянной угловой скорости %. При задан-
ном значении напряжения на его зажимах U = Uo ток возбуж-
118
денйя равен Ло (рис. 6.7,а). При увеличении тока возбужде-
ния на величину Д/„ напряжение на зажимах генератора в
новом установившемся режиме увеличится на величину Д U'.
Рис. 5.7. Нагрузочные характеристики синхронного
генератора
При наличии нагрузки (/ =f= 0) ток возбуждения /’0, необ-
ходимый для поддержания заданного значения напряжения,
становится больше и магнитопровод генератора становится бо-
лее насыщенным. В этом случае такое же приращение тока
возбуждения Д /в обусловливает изменение напряжения на
меньшую величину Д LJ" (см. рис. 5.7,а), т. е. чувствительность
генератора к изменению тока (напряжения) возбуждения с
увеличением тока нагрузки снижается. 'Соответственно этому
уменьшается коэффициент Ав (см. рис. 5.5) в уравнении (5.17),
выражение для которого можно* представить ,в виде
1 dU ~ 1 ЛЦ
Rbo dfB RB0 д а
(5.18)
Аналогичным образом коэффициент kB изменяется при
уменьшении угловой скорости генератора (рис. 5.7,6).
При увеличении тока возбуждения в рассмотренных приме-
рах, кроме того, уменьшается постоянная времени Тв, так как
вследствие насыщения магнитопровода индуктивность обмотки
возбуждения Z.B0 уменьшается (см. рис. 5.5), а коэффициенты
у, а, и а2 увеличиваются в связи с увеличением /ЭДС Ео.
Таким образом, генератор как объект регулирования напря-
жения при увеличении тока нагрузки и уменьшении частоты
вращения становится менее инерционным, мене^ чувствитель-
ным к изменению управляющего воздействия и более чувстви-
гельны'м к возмущениям (изменениям сопротивления .нагрузки и
частоты вращения).
119
Указанные свойства синхронного генератора придают спе-
цифические свойства и всей системе регулирования напряже-
ния, в состав которой он входит.
Уравнения бесконтактного синхронного генератора. В си-
стемах электроснабжения переменного тока современных ЛА
получили широкое применение бесконтактные генераторы с вра-
щающимися выпрямителями типа ГТ. Такой генератор пред-
ставляет собой каскадное соединение трех электрических ма-
шин, расположенных на одном валу (рис. 5.8) — подвозбуди-
теля, возбудителя и собственно генератора. Подвозбудитель в
такой машине используется как источник мощности для воз-
буждения возбудителя, а возбудитель — для питания обмотки
возбуждения генератора. Регулирование напряжения осущест-
вляется изменением тока (напряжения) возбуждения возбуди-
теля.
Рис. 5.8. Схема
бесконтактного генератора
типа ГТ
Уравнения динамики каждой из этих машин могут быть по-
лучены с учетом их особенностей по изложенной ранее методи-
ке из уравнений (5.8)... (5.11).
К особенностям, которые необходимо учесть при составле-
нии систем уравнений Горева—Парка и выводе уравнений ди-
намики бесконтактного генератора, относятся:
— нагрузка подвозбудителя (регулятор напряжения и об-
мотка возбуждения возбудителя) и возбудителя (обмотка воз-
буждения генератора, получающая питание через вращающийся
вместе с ротором выпрямитель) носит чисто активный характер;
— магнитный поток возбуждения подвозбудителя Фпв посто-
янный;
— сопротивление цепи обмотки возбуждения генератора
постоянное.
Вывод уравнений динамики бесконтактного синхронного ге-
нератора це входит в задачу данного учебника. Вместе с тем,
учитывая общность процессов, протекающих в возбудителе и
подвозбудителе, с процессами в основном генераторе, эти урав-
нения можно записать без вывода по аналогии с уравнением
120
(5.17). С этой целью достаточно положить в уравнении (5.17)!
для основного генератора рв = 0; для возбудителя — у = о — 0;
для подвозбудителя — («в — /в0 рв) — 0; у = 0.
С учетом изложенного уравнения динамики бесконтактного
синхронного генератора примут вид:
а) уравнение основного генератора
ь
II = ---UB + р + ajZ + а2р ; (5.19)
Твр + 1
б) уравнение возбудителя
ь
«в = ——(«вв - 4во Рвв) + Гв*; (5.20)
ТввР + 1
в) уравнение подвозбудителя ^пв = Тпв^ 4“ апвРвв f (5.21)
где и — отклонение напряжения на зажимах гене- ратора;
ив — напряжение на выходе возбудителя (на- пряжение возбуждения основного генера- тора) ;
^ПВ V — напряжение на зажимах подвозбудителя; — приращение угловой скорости;
Ъ Р — приращение реактивного и активного со- противлений нагрузки генератора;
Рвв — изменение величины сопротивления цепи возбуждения возбудителя, обусловленное
. ди «в — dUB действием регулятора напряжения PH; — коэффициент, характеризующий чувстви- тельность генератора к изменению напря-
'р В /?в жения возбуждения; — постоянная времени цепи обмотки возбуж- дения генератора;
а„ а2 — коэффициенты, характеризующие зависи- мость напряжения генератора от измене-
k вв р л/ /'вво ^'вв ния нагрузки; — коэффициент, характеризующий чувстви- тельность возбудителя к изменению тока
'Г 1-вв0 ВВ Р ''ВВ в его обмотке возбуждения; — постоянная времени цёПи обмотки воз- буждения возбудителя; 121
f
7 =----; 7в =-----7пв = —55 — коэффициенты, учитывающие
д w д ч> дм
влияние нестабильности частоты вращения
генератора на напряжения отдельных его
машин;
/вв0, ^вво — ток и сопротивление цепи возбуждения
возбудителя в том режиме работы генера-
тора, относительно .которого рассматрива-
ется движение в отклонениях.
Системе уравнений (5.19)...(5.21), представляющей собой
упрощенную математическую модель бесконтактного синхрон-
ного генератора как объекта регулирования напряжения, соот-
ветствует структурная схема, приведенная на рис. 5.9.
Рис. 5.9. Структурная схема бесконтактного генератора
Указанные ранее выводы об особенностях синхронного гене-
ратора как объекта регулирования напряжения, полученные из
анализа уравнения (5.17), полностью справедливы и в отноше-
нии бесконтактного генератора, а именно:
— генератор как объект регулирования напряжения обла-
дает инерционностью по отношению к сигналу управления и
мгновенно реагирует на изменение возмущений;
— динамические свойства генератора и отдельных состав-
ляющих его машин зависят от режима его работы (частоты вра-
щения и тока нагрузки).
5.2 АНАЛИЗ ПРОЦЕССОВ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
ГЕНЕРАТОРОВ ПЕРЕМЕННОГО ТОКА
В система^ электроснабжения ЛА имеют место как устано-
вившиеся процессы, характеризующиеся постоянством напря-
жения, тока нагрузки, частоты и т. п., так и переходные про-
цессы, обусловленные включением (отключением) приемников
122
электрической энергии и изменением режима работы авиацион-
ных двигателей. Знание характеристик этих процессов позволя-
ет предусмотреть необходимые меры по обеспечению требуемо-
го качества электроэнергии как на этапе разработки систем
электроснабжения, так и в процессе их эксплуатации.
Рассмотрим процессы регулирования напряжения перемен-
ного тока на примере системы регулирования, состоящей из
бесконтактного синхронного генератора типа ГТ и транзистор-
ного регулятора, электрическая схема которой приведена на
рис. 4.23.
С целью упрощения анализа полагаем, что при изменении
тока возбуждения возбудителя в процессе работы регулятора
напряжение подвозбудителя не изменяется (Д 67ПВ = 0). Кроме
того, пренебрегаем инерционностью транзисторного регулятора
напряжения, так как его постоянная времени Тр мала по
сравнению с постоянными времени возбудителя Твв и генера-
тора Тв.
С учетом этих допущений уравнения динамики элементов
системы регулирования напряжения (5.19)...(5.21) и (4.27)
представим в 'Следующем виде:
— уравнение генератора
ь
11 = ~ °—— М„ + р + а,у + а2р ; (5.22)
/ВР+ 1
уравнение возбудителя
ь
«„ = „— «bb + Ib*; (5.2'3)
1 ивР “Ь 1
— уравнение транзисторного регулятора напряжения
Мвв=-М> (5-24)
где ивв — отклонение напряжения на обмотке возбуждения
возбудителя от установившегося значения в исход-
ном режиме работы генератора;
/?р — коэффициент усиления регулятора напряжения.
Системе уравнений (5.22)... (5.24) соответствует структурная
схема системы регулирования напряжения, приведенная на рис.
5.10.
Рис. 5.10. Структурная схема системы регулирования
напряжения переменного тока
123
Передаточная функция рассматриваемой системы регули-
рования по управлению (отклонению напряжения генератора),
действующему на вход регулятора напряжения, имеет вид
^р^вв^в
„ , ч W(p) /с._
Ф(я) =----------=----------------------------------. (5.25)
1 + W(p) TBBTBp2 + (TBB+TB)p + \+kpkBBkB
Анализ выражения (5.25) показывает, что система регулиро-
вания напряжения устойчива при любых положительных зна-
чениях коэффициентов kp, kBB и /гв, так как корни характеристи-
ческого полинома (знаменателя передаточной функции замкну-
той системы) А(р) = ТввТвр2 + (/'„ + Твв)р + 1 -f- kpkBBHB всегда
имеют отрицательную действительную часть. Поэтому пробле-
ма обеспечения устойчивости таких систем регулирования, как
правило, не возникает.
Ошибку регулирования напряжения и = A U(p) при дейст-
вии возмущения F = { v, р, у ] представим в виде
и = фт(Р)-^ =
(Л,в/>+1)(Л,/> + 1)
(Тввр + 1)(Гвр + 1) + kpkBBkB
X 7 + Тв
k \ 1
——7— b + «iX + a2p I
TBp -Y\ / J
(5.26)
где ФР(р)— передаточная функция замкнутой системы регули-
рования по возмущению.
При ступенчатом изменении возмущения, например сопро-
тивления нагрузки, напряжение на выходе генератора мгновен-
но изменяется на величину
A U(t = 0) — и (р ->оо) = tXjX + се2р ,
а в новом установившемся режиме работы системы оно будет
отличаться от .исходного (заданного) значения на величину
статической ошибки
<1 + 1А)'' + “.х + ^ . (5.27)
) X 7?рА?вв/?в
Характер переходного процесса в системе регулирования на-
пряжениями величина статической ошибки зависят от соотноше-
ния коэффициентов усиления и постоянных времени, которые,
в свою очередь, зависят от режима работы и характера нагруз-
ки генератора.
124
Значения 'коэффициентов kB, kBB и постоянных времени Тв,
Твв определяются, как было отмечено в предыдущем парагра-
фе, состоянием магнитных систем генератора и возбудителя.
По мере насыщения магнитных цепей машины (при увели-
чении токов возбуждения) эти коэффициенты и постоянные вре-
мени уменьшаются. Поэтому при
больших значениях тока нагрузки
(в особенности реактивной нагруз-
ки) переходные процессы прибли-
жаются к апериодическому виду, а
при малых токах нагрузки — носят
колебательный характер (рис. 5.11).
Статическая ошибка регулиро-
вания напряжения от одной и
той же величины возмущения с уве-
личением предварительной нагруз-
Рис. 5Л1. Переходные про-
цессы в системе регулиро-
вания напряжения перемен-
ного тока
ки генератора увеличивается как
вследствие уменьшения коэффици-
ентов kB, kBB, так и в связи с увели-
чением коэффициентов усиления си-
стемы регулирования напряжения
по возмущениям у, тв, 7ПВ, at и а2.
Требуемая точность стабилизации напряжения генераторов
переменного тока обеспечивается соответствующим выбором ве-
личины коэффициента усиления регулятора kp. При этом следу-
ет иметь в виду, что с повышением точности системы регулиро-
вания напряжения запас ее устойчивости уменьшается. Поэтому
при увеличении коэффициента усиления регулятора напряже-
ния необходимо предусматривать и меры к повышению запаса
устойчивости системы регулирования.
5.3. ГЕНЕРАТОР ПОСТОЯННОГО ТОКА КАК ОБЪЕКТ
РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
В системах электроснабжения ЛА находят применение гене-
раторы постоянного тока трех видов:
— коллекторные генераторы и стартер-генераторы с элек-
тромагнитным возбуждением;
— бесколлекторные (вентильные) .генераторы с электромаг-
нитным возбуждением;
— бесколлекторные генераторы с возбуждением от постоян-
ных магнитов (магнитоэлектрические генераторы).
Для вывода уравнения динамики коллекторного генератора
как объекта регулирования напряжения воспользуемся его эк-
125
Бивалентной схемой, приведенной на рис. 5.12. При этом с
целью упрощения анализа будем полагать, что индуктивность
цепи якоря машины и взаимная индуктивность обмоток якоря
и возбуждения равны нулю.
Рис. 5.12. Эквивалентная схема ге-
нератора постоянного тока
При этих допущениях уравнение напряжений для цепи яко-
ря генератора имеет вид
U = с о> Ф — /?,/я,
(5.28)
где U — напряжение на зажимах генератора;
«> — угловая скорость ротора генератора;
Ф — магнитный поток в воздушном зазоре машины;
/„ — ток якоря;
/?я — внутреннее сопротивление генератора (сумма сопро-
тивлений обмотки якоря, щеток, коллектора и вы-
водов) ;
с — машинная постоянная.
Магнитный поток Ф в машине создается МДС обмотки воз-
буждения и обмотки якоря. Поэтому он является нелинейной
функцией тока возбуждения /в и тока якоря, т. е.
Ф = Ф(4, 4). (5.29)
Переходные процессы в цепи обмотки возбуждения без уче-
та ее взаимной индуктивности с обмоткой якоря описываются
уравнением
£/в = /в₽в + -~Г’ (5.30)
at
не-
где Uе — напряжение, приложенное к цепи обмотки
возбуждения;
126
RB — Rp fB — общее сопротивление цепи обмотки воз-
буждения, равное сумме сопротивлений
исполнительного органа регулятора напря-
жения /?р и обмотки возбуждения гв;
= LJB — потокосцепление обмотки возбуждения,
причем индуктивность обмотки возбужде-
ния LB вследствие насыщения магнитной
цепи генератора является функцией тока/в.
Для генератора с параллельным возбуждением (см. рис.
5.12) напряжения UB и U равны, но из методических сообра-
жений при выводе уравнения динамики генератора это равен-
ство пока учитывать не будем.
Линеаризуем уравнения (5.28)...(5.30), рассматривая измене-
ние переменных в окрестности некоторого установившегося ре-
жима работы генератора, характеризующегося постоянными
величинами напряжения Uo, угловой скорости <оо. тока якоря /я|)
и др. Для этого запишем систему уравнений (5.28)... (5.30) в
приращениях
. ,, dU , dU а , dU а ,
Д £7 =-------ДФ ч---------Дю -(--------д/.
дФ д«> д!я
Д Ф
дФ
~дГъ
Д/в+
дФ
~дГя
Д/я;
ДЦ,-/в0Д/?в + /?в0Д/в + £в0-^Д/в. (5.31)
at
Применяя к системе (5.31) преобразование Лапласа и ис-
ключив переменные ДФф) и Д/В(л)» получим следующее уравне-
ние:
ь
11 “ <~Ub ~ рв) + ~ » (5-32)
Твр + 1
где и = Д U(p)-, ив = Д Щр)\ рв = Д /?в(р); v = Д<о(/>);
j = Д /я(р) — отклонения соответствующих пе-
ременных от их значений в ис-
ходном установившемся режиме
работы генератора;
1 dU дФ сы0 дФ
kB =-------—-—- = —2--------.коэффициент, характеризующий
/?в0 дФ д/в Rn0 д/в чувствительность генератора к
изменению тока возбуждения;
Тв = — - — постоянная времени цепи обмот-
Вво ки возбуждения;
127
dU t Ф„ Еп
1 = —— = — коэффициент, характеризующий
и <0 % % зависимость напряжения генера-
тора от угловой скорости;
dU г, дФ
а. — Л/ = Яя-со>0-— — коэффициент, характеризующий
а/я д/я влияние изменений тока нагруз-
ки на напряжение генератора.
Он учитывает влияние реакции
якоря и падение напряжения на
внутреннем сопротивлении гене-
ратора.
Если в генераторе не принимаются меры борьбы с реакцией
ЙФ
якоря, то ---<0 и коэффициент а0. В частных случаях за
й/я
счет применения компенсационных обмоток, дополнительных
полюсов и других способов борьбы с реакцией якоря можно
обеспечить условия а < 0. Однако полностью компенсировать
падение напряжения в широком диапазоне изменения режимов
работы генератора не удается, поэтому коэффициент а может
принимать ка.к положительные, так и отрицательные значения.
Полученное уравнение (5.32) характеризует генератор по-
стоянного тока как объект регулирования напряжения при не-
зависимом возбуждении. Нетрудно убедиться, что по своей
структуре оно аналогично уравнению генератора переменного
тока (5.17), что в принципе и следовало ожидать, ибо электро-
магнитные процессы в генераторах постоянного и переменного
тока подобны. Отличие этих уравнений заключается только в
форме записи последних слагаемых, характеризующих влияние
нагрузки. Таким образом, по своим динамическим свойствам
генератор постоянного тока с независимым возбуждением иден-
тичен синхронному генератору, а именно:
— по отношению к управляющему воздействию ггв—7в0рп ге-
нератор является инерционным апериодическим звеном, а по от-
ношению к возмущениям (изменению угловой скорости <о и тока
нагрузки) — безынерционным звеном;
— динамические свойства генератора зависят от режима
его работы (угловой скорости о)0 и тока якоря 7я0).
Зависимость динамических свойств генератора постоянного
тока от режима его работы так же, как и синхронного генера-
тора, обусловлена изменением степени насыщения магнитной
системы машины. Так, например, при увеличении 7я0 и сниже-
нии угловой скорости % ток возбуждения 7в0 из-за действия
регулятора напряжения увеличивается, а коэффициент kB и
постоянная времени Тв уменьшаются. При уменьшении тока
нагрузки и увеличении частоты вращения генератора kB и Тв,
наоборот, увеличиваются.
128
Для генератора с параллельным возбуждением в уравнении
(5.32) необходимо принять ии = и, учитывая, что цепь обмотки
возбуждения получает питание непосредственно от генератора
(см. рис. 5.12), т. е.
k
" = в, -- (» - 4оРв) + г - • (5.33)
Тър + 1
В структурном отношении такая запись уравнения (5.33)
эквивалентна введению положительной обратной связи с выхода
генератора на его вход (в
структурной схеме генерато-
ра, приведенной на рис. 5.13,
эта связь показана штрих-
пунктиром). Отсюда следу-
ет, что генератор с парал-
лельным возбуждением как
объект регулирования на-
пряжения обладает более
высокой чувствительностью
к управляющему воздейст-
Рис. 5.13. Структурная схема гене
ратора постоянного тока с независи
мым возбуждением
вию и возмущениям, чем
генератор с независимым
возбуждением.
После несложных преоб-
разований уравнения (5.33)
получим другую форму уравнения коллекторного генератора
постоянного тока
(Твр + se) и = — /г'врв ф l)v - а(Тир + 1)у, (5.34)
где £в = Лв/в0 = ~—£(“о-— коэффициент усиления генерато-
Яв0 ра по сигналу управления (по
изменению сопротивления цепи
обмотки возбуждения);
, t. . 1 дФ
s,. = 1 — яв»= 1-----------коэффициент самовыравнивания
Rbo генератора с параллельным воз-
буждением.
Структурная схема генератора с параллельным возбужде-
нием как объекта регулирования напряжения, соответствующая
уравнению (5.34), приведена на рис. 5.14.
Коэффициент самовыравнивания se характеризует статичес-
кую устойчивость генератора.
Для того чтобы генератор как объект управления был ста-
тически устойчив, т. е. при постоянных значениях сопротивле-
ния цепи обмотки возбуждения, угловой скорости и сопротивле-
9. Изд. № 7934
129
Ния на,грузки напряжение на его зажимах оставалось постоян-
ным, необходимо обеспечить условие s;. >0.
Для холостого хода генератора это условие соответствует
дЕ
неравенству-----<ZRU). Данное неравенство всегда выполняется,
д/в
если сопротивление цепи возбуждения 7?в0 меньше некоторого
д fz
критического значения /?в0 кр =-, т. е. тогда, когда рабочая
д!в
точка N на характеристике холостого хода генератора соответ-
ствует насыщенному состоянию его магнитной цепи (рис. 5.15).
Рис. 5.14. Структурная схема генератора
постоянного тока с параллельным возбуж-
дением
Рис. 5.15. Характеристи-
ка холостого хода гене-
ратора постоянного то-
ка с параллельным воз-
буждением
Коэффициент усиления Л' и коэффициент самовыравнивания
se зависят от режима работы генератора. Их зависимости от уг-
ловой скорости % и тока нагрузки 1 генератора приведены на
рис. 5.16.
Рис 5.16. Зависимости коэффициента самовыравнивания se
и коэффициента kK\
а — от тока нагрузки; б — от угловой скорости
130
В режимах работы, близких к холостому Ходу при боль-
шой угловой окорости, генератор с параллельным возбуждением
обладает малым коэффициентом самовыравнивания и высокой
чувствительностью к 'изменению тока возбуждения. С увеличе-
нием тока нагрузки и уменьшением угловой скорости коэффи-
циент самовыравнивания генератора увеличивается, а коэф-
фициент усиления k'B — уменьшается.
В ряде случаев при анализе процессов регулирования напря-
жения в качестве возмущения вместо изменения тока якоря
удобнее использовать изменение сопротивления нагрузки. С
этой целью из уравнения напряжения на нагрузке при одиноч-
ной работе генератора
U = f.R„^IaRH (5.35)
найдем приращение тока якоря
= = (5.36)
Оно Оно Оно
применим преобразования Лапласа и подставим в уравнение
(5.34). Тогда после несложных преобразований получим
(Т'ВР + ^)м = —/гвРв + т(У’вЛ+ >)*ф а'(Твр+ 1)р, (5.37)
где р = Д/?нСр) — изменение сопротивления нагрузки;
se = se 4- ;
*'н0
а' =
/?но
Из анализа выражений для постоянной времени Т'в и коэф-
фициентов s'e, а' видно, что динамические свойства генератора
постоянного тока зависят также от степени компенсации реак-
ции якоря. В частности, компенсация реакции якоря (а -> 0)
обусловливает уменьшение постоянной времени генератора Тв,
по при этом коэффициент самовыравнивания se' снижается,
г. е. генератор как объект управления становится менее инер-
ционным и в то же время статически менее устойчивым.
Вывод уравнений бесколлекторных генераторов постоянного
тока в данном учебнике не рассматривается. Уравнения дина-
мики таких генераторов в общем виде можно получить из урав-
нений (5.17)...(5.21) или по методике, изложенной для синхрон-
ного генератора, с учетом особенностей его работы на выпрями-
тельную нагрузку.
9*
131
ft
5.4. АНАЛИЗ ПРОЦЕССОВ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
Анализ процессов регулирования напряжения генераторов
постоянного тока проведем на примере системы регулирования,
состоящей из иол лекторш ого генератора с параллельным .воз-
буждением и простейшего угольного .регулятора. Такая система
регулирования напряжения с учетом того, что Д/?в=~Л/?си соот-
ветственно рв = рс, описывается следующими уравнениями, полу-
ченными! ранее в гл. 4 и предыдущем параграфе:
а) уравнение генератора
(TBp + sp)u = — ЛвРс + т(7вр + О4 — <*(Твр + 1)у; (5.38)
б) уравнение угольного регулятора
(^г + Лр + г)Рс = лР«- (5.39)
Системе уравнений (5.38) и (5.39) соответствует структурная
схема системы регулирования, приведенная на рис. 5.17.
Рис. 5.17. Структурная схема системы регулирования
напряжения постоянного тока
Ошибка регулирования такой системы, т. е. отклонение на-
пряжения от заданного (исходного) значения Uo, при действии
возмущений р— aj выражается формулой
« * (^ + 1 ) (Г ~ ’
1+ W(p)
где WF(p)^- передаточная функция разомкнутой системы по
возмущениям;
W(p) — передаточная функция разомкнутой системы по
сигналу управления.
Из структурной схемы системы регулирования имеем
и =
(^2Р2+ Гдр + 8)(7вр + 1)
(Пр2 + 1\р + 8) (Твр + sj + kvk'B
(5.40)
(v> — “/) >
132
откуда найдем статическую ошибку
ЬЩ* ->оо) = и (р 0) = —-----------——
8 Se +
(р-«/’). (5.41)
Анализ выражения (5.41) показывает, что:
— статическая ошибка системы регулирования напряжения
зависит от настройки угольного регулятора и при астатической
настройке (8 = 0) отсутствует, так как система при 8 = 0 при-
обретает по отношению к возмущениям астатизм первого по-
рядка;
— при статической настройке регулятора (8 0) ошибка
пропорциональна величине возмущения и обратно пропорцио-
нальна коэффициенту усиления системы kp k'„;
— статическая ошибка зависит от режима работы генера-
тора, так как от него зависят коэффициенты уравнения генера-
тора kB, se, 7 и а, а также коэффициент усиления регулятора kp.
Ошибка регулирования на-
пряжения при одном и том же
изменении тока нагрузки А /н.
как это следует из внешних
характеристик генератора, при-
веденных на рис. 5.18, с уве-
личением тока /но предвари-
тельной нагрузки возрастает,
а с увеличением угловой ско-
рости 1»0 — уменьшается.
Для анализа влияния ре-
жимов работы генератора на
динамические свойства систе-.
мы регулирования воспользу-
емся выражением для ошибки
(5.40).
Рис. 5.18. Внешние характери-
стики генератора с угольным
регулятором
Прежде всего заметим, что при ступенчатом изменении воз-
мущения, например тока нагрузки, напряжение генератора, не-
медленно изменяется на величину
A U(t = 0) = и (р -> со) = — аД /я.
Восстановление напряжения происходит в течение некоторого
промежутка времени без перерегулирования, если система ре-
гулирования обладает большим запасом устойчивости, или с
перерегулированием, если запас устойчивости системы невелик.
11ереходный процесс в неустойчивой системе будет сопровож-
даться длительными незатухающими колебаниями напряжения,
которые недопустимы для систем электроснабжения ЛА.
Устойчивость системы регулирования оценим по критерию
Гаусса—Гурвица, для чего запишем характеристический поли-
133
ном системы 'регулирования из выражения (5.40) в следующем
А (Р) = (Т1 р2 + Тлр + 8) (Твр + se) + v; =
V(sJl+ TBTB)p2 + (SeTa + bTB)P + lse +
+ kpk'B. (5.42)
Для того чтобы коэффициенты этого полинома были поло-
жительны (первое условие устойчивости), достаточно, чтобы
соблюдались условия sc> 0 и 8>0, т. е. чтобы генератор и ре-
гулятор обладали статической устойчивостью.
Второе условие Раусса—Гурвица для системы третьего по-
рядка выражается в виде неравенства
(seTl + ТВТЯ) (seTa + 8 Тв) > ТВТ* (8 se + kpk'J . (5.43)
Поделив обе части неравенства (5.43) на произведение Т„ТЫ2
и раскрыв скобки, получим
т т2 т т
s2 — + se + 8-^-> kpk'
е^г е *Т2 ^Г2 Р в
7 в ‘ м 7 м
(5.44)
Анализ полученного выражения показывает, что запас устой-
чивости системы регулирования напряжения существенно за-
висит от режима работы генератора (тока нагрузки и частоты
вращения). С увеличением тока нагрузки и снижением частоты
вращения увеличивается ток возбуждения, необходимый для
поддержания напряжения на заданном уровне, и увеличивается
степень насыщения магнитной системы генератора. При этом
повышается коэффициент самовыравнивания se генератора,
снижаются его чувствительность к изменению тока возбужде-
ния kB и постоянная времени Тв. Кроме того, вследствие нели-
нейности характеристики угольного столба /?с = /?с(х) (см. рис.
4.13) уменьшается коэффициент усиления регулятора Лр. В ре-
зультате устойчивость системы ре-
гулирования повышается. Напро-
тив, при большой частоте вращения
и малых токах нагрузки система
регулирования напряжения стано-
вится менее устойчивой.
Характер переходных процессов
в системах регулирования напряже-
ния постоянного тока при ступенча-
том увеличении нагрузки показан
на рис. 5.19. При больших нагруз-
ках и малой частоте вращения ге-
нератора переходные процессы но-
сят апериодический характер (кри-
Рис. 5М1). Переходные
процессы в системе ре-
гулирования напряжения
постоянного тока
134
пая 1), а при малой нагрузке и большой частоте вращения —
колебательный (кривая 2).
Повышению устойчивости системы регулирования, как вид-
но из выражения (5.37), способствует увеличение демпфирова
ния регулятора напряжения (постоянной времени Гд), кото-
рое достигается как конструктивными, так и схемными спосо-
бами.
Запас устойчивости системы повышается также .при настрой-
ке регулятора на положительный статизм (8^>0). Однако с
увеличением коэффициента 8, характеризующего настройку
угольного регулятора, статическая ошибка системы регулиро-
вания (5.34) также увеличивается.
5.5. СПОСОБЫ ПОВЫШЕНИЯ ТОЧНОСТИ И УСТОЙЧИВОСТИ
СИСТЕМ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
Известно, что наиболее эффективными методами повышения
точности систем автоматического регулирования являются: вве-
дение в структуру системы положительных обратных связей, ис-
пользование дополнительных параллельных и последовательных
корректирующих устройств, реализация комбинированного
принципа регулирования (по отклонению и по возмущению).
Повышение их устойчивости достигается введением жест-
ких и гибких отрицательных обратных связей, а также приме-
нением форсирующих звеньев на входе системы регулирования.
Целесообразность применения н способы технической реализа-
ции тех или иных методов повышения точности и устойчивости
определяются особенностями конкретной системы регулирова-
ния.
Как показывает анализ процессов регулирования напряже-
ния переменного и постоянного тока, точность и устойчивость
их являются свойствами диалектически противоположными. Си-
стема регулирования напряжения, обладая в определенных ре-
жимах работы (например, холостой ход при большой частоте
вращения генератора) повышенной точностью, имеет малый за-
пас устойчивости и наоборот. Поэтому задача улучшения ка-
чества электрической энергии в переходных и установившихся
режимах работы систем электроснабжения должна решаться
комплексными методами с учетом особенностей этих систем.
Так, например, заданная точность систем регулирования на-
пряжения генераторов с независимым возбуждением (как пра-
вило, систем переменного тока) достаточно легко достигается
соответствующим увеличением коэффициентов усиления регу-
ляторов. В таких системах для улучшения качества переход-
ных процессов применяются различные способы повышения
устойчивости.
135
Статические «и динамические свойства систем регулирования
напряжения генераторов (постоянного тока) с параллельным
возбуждением существенно зависят от режима их работы. В
одних режимах работы такие системы нуждаются в средствах
повышения устойчивости, а в других — требуют повышения
точности.
Способы повышения точности систем регулирования напря-
жения. Положительная обратная связь как способ повышения
точности систем регулирования напряжения с угольными регу-
лятор амн достаточно просто реализуется с помощью дополни-
тельной ('Корректирующей) обмотки WK электромагнита (рис.
5.20,а).
Рис. 5.20. Схема включения корректирующей обмотки в угольных
регуляторах и ее влияние на напряжение генератора
Корректирующая обмотка включается в диагональ электри-
ческого моста, образованного угольным столбом /? с, обмоткой
возбуждения wB генератора и делителем напряжения — .потен-
циометром 7?1. При этом МДС корректирующей обмотки и
рабочей обмотки электромагнита w3 при условных положитель-
ных направлениях токов, показанных на схеме, вычитаются
F рез =
Действие корректирующей обмотки состоит в следующем.
Допустим, что при некотором значении тока нагрузки /н=/н1
мост находится в состоянии равновесия, потенциалы точек «а»
и «б» равны, что соответствует точке А на внешней характери-
стике (рис. 5.20,6). Ток 1К в корректирующей обмотке отсутст-
вует, т. е. Лрез = f3w3.
При увеличении тока нагрузки напряжение генератора U
уменьшается, что обусловливает уменьшение тока в рабочей
обмотке ш3 электромагнита регулятора, увеличение силы дав
136
ления на угольный столб и уменьшение сопротивления столба
/?с. Напряжение U восстановится, но в новом установившемся
режиме будет меньше прежнего значения Л/j на величину ста-
тической ошибки.
С уменьшением сопротивления угольного столба равновесие
электрического моста нарушается и потенциал становится
выше потенциала <рб (рис. 5.20)„. По корректирующей обмотке
начинает протекать ток, который вызовет уменьшение результи-
рующей МДС Fpe3, создаваемой двумя обмотками: w3 и wK, и
соответствующее увеличение давления на угольный столб. В ре-
зультате напряжение генератора несколько возрастет по срав-
нению с тем значением, которое было бы без корректирующей
обмотки.
При уменьшении тока нагрузки МДС обмоток складывает-
ся, напряжение уменьшается. Но в любом случае статическая
ошибка системы регулирования становится меньше, чем при
отсутствии рассмотренной связи.
Из рассмотрения механизма действия корректирующей об-
мотки следует, что она реализует местную положительную об-
ратную связь с выхода регулятора на его вход по изменению
сопротивления угольного столба. Как любая положительная
связь, эта связь, повышая точность стабилизации напряжения,
снижает запас устойчивости системы регулирования. Поэтому
действие 'корректирующей обмотки ограничивают только об-
ластью больших токов возбуждения (при больших токах на-
грузки и малых частотах вращения), где запас устойчивости
системы регулирования напряжения велик, а точность системы
без этой связи становится недостаточной. Такое ограничение
реализуется с помощью диода VI, устанавливаемого последо-
вательно с корректирующей обмоткой (см. рис. 5.20,а).
В качестве примера применения параллельного корректиру-
ющего устройства усилительного типа может служить угольный
регулятор с дифференциальным корректором напряжения,
электрическая схема которого приведена на рис. 4.18.
Собственно регулятор УРН, а именно, рабочая обмотка его
электромагнита w3, и дифференциальный корректор ДКН вос-
принимают одно и то же напряжение генератора и все его из-
менения Д U. Корректор напряжения воздействует на корректи-
рующие обмотки электромагнита шк1 и а’к2 так, что при увели-
чении напряжения результирующая МДС этих обмоток и 'МДС
обмотки wa направлены согласно. Таким образом, в структур-
ном отношении, рассматриваемый регулятор напряжения экви-
валентен схеме, приведенной на рис. 5.21, где ky и Ту— коэф-
фициент усиления и постоянная времени магнитного усилителя
дифференциального корректора напряжения.
137
Общий коэффициент усиления такого регулятора равен:
^общ=(1 +£у)&р, что обусловливает соответствующее уменьшение
статической ошибки системы регулирования напряжения по
сравнению с ошибкой при отсутствии корректора.
дкн
Рис. 5.21. Структурная схема угольного регулято-
ра с дифференциальным корректором напряже-
ния
регулирования, основанного
ректирующего устройства
с=ж=э ЦРУ
Рис. 5.22. Схема угольного регу-
лятора повышенной точности
Примером реализации метода повышения точности системы
ia введении параллельного кор-
[нтегрирующего типа, является
угольный регулятор повышенной
точности, упрощенная электриче-
ская схема которого приведена
на рис. 5.22.
Регулятор .напряжения состо-
ит из двух угольных регуляторов,
основного и дополнительного. Ос-
новной регулятор, в состав кото-
рого входят угольный столб Rc,
рабочая обмотка электромагни-
та wa. резистор температурной
компенсации Р1 и другие эле-
менты (на схеме не показаны),
выполнен по обычной схеме:
угольный столб включен после-
довательно с обмоткой возбуж-
дения генератора wB и управляет величиной тока в этой обмот-
ке в зависимости от МДС, создаваемой его рабочей обмоткой.
Основной регулятор настраивается на положительный этатизм
(8>0).
Основными элементами дополнительного регулятора явля-
ются угольный столб /?сд, рабочая обмотка щэд, выносной рези-
стор Лз. Регулятор настраивается астатически (гц =0), поэто-
му передаточная функция его как элемента системы регулиро-
вания напряжения имеет вид
^Р1 ^Р1 ~
И/ fl --- 1 1,1 te" = — = •
*W) т^+т^+o m \ v
Тд1р1~-p + ll
' 1 Д1 '
(5.45)
138
Таким образом, по своим динамическим свойствам дополни-
тельный угольный регулятор эквивалентен интегрирующему
звену.
Угольный столб дополнительного регулятора включается
параллельно рабочей обмотке основного регулятора. Поэтому
при изменении его сопротивления соответственно изменяется
ток в рабочей обмотке и сопротивление угольного столба основ-
ного регулятора. Так, например, при увеличении напряжения
генератора увеличивается ток в рабочей обмотке дополнитель-
ного регулятора и сопротивление его угольного столба /?сд. При
этом падение напряжения на угольном столбе возрастает, что
обусловливает дополнительное увеличение тока в рабочей об-
мотке w9 основного' регулятора. В результате ошибка регули-
рования напряжения, обусловленная статической настройкой
основного регулятора, будет скомпенсирована.
В структурном отношении данный регулятор эквивалентен
схеме, приведенной на рис. 5.23 Как следует из ее анализа,
астатическая настройка дополнительного угольного регулятора
придает астатизм первого порядка всей системе регулирования
напряжения.
Рис. 5.23. Структурная схема угольного регу-
лятора повышенной точности
Способы повышения устойчивости систем регулирования
напряжения. Для расширения области устойчивости систем
регулирования напряжения переменного тока с бесконтактными
генераторами на практике широко используются гибкие отри-
цательные обратные связи, реализуемые с помощью стабилизи-
рующих трансформаторов. Принцип реализации такой обрат-
ной связи рассмотрим на примере тиристорного регулятора на-
пряжения, электрическая схема которого приведена на рис.
4.27.
Стабилизирующий трансформатор Т5 представляет собой
трансформатор тока, первичная обмотка которого включена
последовательно с обмоткой возбуждения возбудителя, а вто-
ричная обмотка — последовательно с измерительным органом
регулятора.
Электродвижущая сила е, индуктируемая ibo вторичной об-
мотке трансформатора, и напряжение обратной связи//ос, прило-
женное к резистору /?4 измерительного органа регулятора на-
139
f
пряжения, пропорциональны скорости изменения тока I вв в об-
мотке возбуждения возбудителя, т. е.
«ос '= е — — М -d—"- , (5.46)
dt
где М — взаимная индуктивность обмоток трансформатора.
Для того чтобы найти выражение для (изменения тока ,в об-
мотке возбуждения возбудителя Д7ВВ, запишем в приращениях
уравнение напряжений для цепи обмотки в следующем виде:
b^ = rBBbfBB + LBB0E_!™ (5.47)
at
где гвв, £вв0 — сопротивление и индуктивность обмотки воз-
буждения возбудителя;
UBB — напряжение, приложенное к обмотке возбужде-
ния возбудителя с выхода регулятора напря-
жения.
Применяя преобразования Лапласа к уравнениям (5.46) и
(5.47), получим
и ---------I2L--и (5.48)
Тввр + 1
где < -----постоянная времени рассматриваемой цепи об-
гвв
ратной связи.
Напряжение на входе фазосдвигающего устройства (см. рис.
4.29) равно сумме выходного сигнала измерительного органа
Ullt> = A U и напряжения обратной связи нос. Поэтому с учетом
обратной связи уравнение регулятора напряжения (5.24) при-
мет вид
«вв ~~ I Г- «вв^ »
\ ТввР + 1 /
откуда после несложных преобразований -получим
(5.49)
V (TBB-kpTB)p+\
Передаточная функция W (р) разомкнутой системы
вания напряжения при этом становится равной:
„. . £р ( Гвв Р “Ь ) ) ^ВВ £в
W (р) =---------------- • -------- • -------
(TBB~kvT,)p -(- 1 ТВв/?+1 7>+1
(5.50)
регулиро-
140
Рис. 5.24. Схема включения
стабилизирующего трансфор-
матора
Из анализа полученного выражения йётрудно вйДетЬ, что .при
соответствующем выборе параметров цепи обратной связи, в
частности взаимной индуктивности М обмоток стабилизирую-
щего трансформатора Т5, обеспечивающего условие /грМ;гвв=Гвв,
порядок системы регулирования напряжения снижается на
единицу.
Таким образом, применение, стабилизирующего трансформа-
тора, реализующего гибкую отрицательную обратную связь по
току возбуждения возбудителя,
обеспечивает компенсацию за-
паздывания, вносимого возбуди-
телем, и вследствие этого — су-
щественное повышение запаса ус-
тойчивости системы регулирова-
ния напряжения.
В системах регулирования на
пряжения постоянного тока пер-
вичная обмотка стабилизирующе-
го трансформатора включается
параллельно обмотке возбужде-
ния генератора, а вторичная -—
последовательно с обмоткой элек-
тромагнита (рис. 5.24).
Электродвижущая сила е2, ин-
дуктируемая во вторичной обмот-
ке трансформатора, пропорциональна скорости изменения тока
в его первичной обмотке, т. е.
_ Л1 — , (5.52)
2 dt
где М—взаимная индуктивность обмоток трансформатора.
Если пренебречь величиной ЭДС самоиндукции в первичной
обмотке по сравнению с падением напряжения на ее активном
сопротивлении Rt, то выражение (5.52) можно представить в
виде
е2^--Тс—(5.53)
dt
М
где Тв =----постоянная времени стабилизирующего транс-
Ri
форматора.
Напряжение UB на обмотке возбуждения и напряжение ге-
нератора U связаны уравнением
U„ = U — fBRc, (5.54)
где /в — ток возбуждения генератора;
/?с — сопротивление угольного столба.
141
*
Уравнение напряжений для цепи рабочей обмоткй te), элек-
тромагнита регулятора
£/-£’2 = /.Лэ+-^ (5.55)
at
с учетом выражений (5.53) и (5.54) преобразуется к виду
и + Тс = /э/?э + 4- / 7 (5,56)
dt dt dt
Поэтому после преобразований в соответствии с уравнениями
(4.15)... (4.20) уравнение угольного регулятора напряжения
(5.39) примет вид
(Л2/7’ + ТчР + 8) рс =ЛР (и + Тс-р-и — /в0- 7’с 7-рс) (5.57)
или
1Пр2 + (Л'+ + + Tep),i, (5.58)
где Тл = kpfB°7'с— постоянная времени демпфирования, обус-
ловленная действием стабилизирующего
трансформатора.
Как видно из анализа выражения (5.58), с использованием
стабилизирующего трансформатора повышается демпфирование
угольного регулятора. Кроме того, выражение (l-j-T’cpJu ,в
правой части уравнения регулятора эквивалентно введению в
систему регулирования напряжения форсирующего звена. Все
это приводит к повышению устойчивости системы регулирова-
ния в соответствии с условием (5.44), не изменяя величину
статической ошибки.
Недостатком рассмотренной схемы включения стабилизиру-
ющего трансформатора является зависимость постоянной вре-
мени Тс от степени насыщения магнитопровода трансформато-
ра, которая изменяется при изменении напряжения на обмотке
возбуждения. Для устранения этого недостатка используют
трансформаторы с двумя первичными обмотками (см. рис.
4.18). Магнитодвижущая сила обмотки w2, по которой пропу-
скается ток якоря генератора, направлена встречно МДС об-
мотки и)1. При использовании трансформатора с двумя первич-
ными обмотками дополнительно реализуется гибкая обратная
связь по току нагрузки.
Наряду с гибкими обратными связями для повышения ус-
тойчивости систем регулирования напряжения применяются и
жесткие отрицательные обратные связи.
142
Жесткая отрицательная обратная связь в угольных регуля-
торах напряжения '.наиболее просто реализуется с помощью
стабилизирующего резистора /?ст (рис. 5.25,а), который вклю-
чается в диагональ электрического моста, образованного сопро-
тивлением температурной компенсации RT, обмоткой электро-
магнита w3, угольным столбом /?с и обмоткой возбуждения WB.
Механизм действия этой связи можно пояснить следующим
образом.
ЦРУ
Рис. 5.25. Схема включения стабилизирующего резистора и
его влияние на напряжение генератора
При повышении, например, напряжения генератора увели-
чивается ток в обмотке электромагнита и сопротивление уголь-
ного столба начинает повышаться. При этом увеличиваются
разность потенциалов между точка мп «б» и «а» и ток, протека-
ющий через резистор R„, что обусловливает дополнительное
падение напряжения на резисторе температурной 'Компенсации
Rc. В результате ток в обмотке и сила электромагнита несколь-
ко уменьшаются. Таким образом, протекание тока через рези-
стор Rct оказывает тормозящее (демпфирующее) действие на
процесс регулирования напряжения. Чем меньше величина
стабилизирующего сопротивления, тем больше протекающий по
нему ток и тем сильнее демпфирующий эффект от его примене-
ния.
В установившемся режиме работы за счет протекания тока
через стабилизирующий резистор ток в рабочей обмотке элект-
ромагнита будет отличаться от того значения, которое было бы
при отсутствии Rcr. Поэтому при введении такой связи статиче-
ская ошибка системы регулирования возрастает (рис. 5.25,6).
Для того чтобы исключить отрицательные влияния на точ-
ность системы регулирования при больших нагрузках и малых
частотах вращения генератора, когда система обладает доста-
143
точным запасом устойчивости .и без применения жесткой отри-
цательной обратной связи, действие ее ограничивают областью
малых токов возбуждения. Такое ограничение реализуется с
.помощью диода VI, который играет роль выключателя: при
малых величинах тока возбуждения генератора диод VI закрыт
и ток по резистору RCT не протекает.
Заметим, что если стабилизирующий резистор RCT в регуля-
торе (рис. 5.25) заменить конденсатором, то ток в диагонали
электрического моста между точками «а» и «б» будет протекать
только в переходных режимах работы регулятора, а ,в устано-
вившихся режимах он будет отсутствовать. Следовательно,
цепь с конденсатором будет обеспечивать в регуляторе гибкую
отрицательную обратную связь. Примером такого способа ре-
ализации гибкой отрицательной обратной связи является уголь-
ный регулятор, схема которого приведена на рис. 5.22. Здесь
с помощью 'конденсатора С охвачен обратной связью дополни-
тельный угольный регулятор. Учитывая, что дополнительный ре-
гулятор настраивается астатически (6] = 0), применение конден-
сатора с целью повышения устойчивости системы регулирования
напряжения позволяет сохранить ее астатические свойства.
Глава 6
ПАРАЛЛЕЛЬНАЯ РАБОТА КАНАЛОВ
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
6.1. ОСНОВНЫЕ ТРЕБОВАНИЯ К СИСТЕМАМ
ЭЛЕКТРОСНАБЖЕНИЯ С ПАРАЛЛЕЛЬНО РАБОТАЮЩИМИ
КАНАЛАМИ
На многомоторных ЛА для повышения надежности электро-
снабжения приемников на каждом из двигателей устанавлива-
ются по одному или несколько генераторов. В зависимости от
принятой структуры системы электроснабжения ее каналы или
включаются на параллельную работу между собой, или объ-
единяются на параллельную работу в отдельные группы (под-
системы), или работают независимо друг от друга.
Объединение каналов на параллельную работу позволяет
улучшить качество электроэнергии системы электроснабжения
при включении приемников большой мощности, обеспечить бес-
перебойность питания специального оборудования и т. д.
Организация параллельной работы каналов, особенно кана-
лов генерирования электроэнергии переменного тока, требует
расширения функций, выполняемых аппаратами регулирования,
управления и защиты, применения дополнительных устройств,
усложнения контроля и обслуживания системы электроснаб-
жения.
С целью унификации оборудования каналов на данном ЛА
применяют только каналы с однотипными приводами, генерато-
рами, регулирующими, защитными и коммутационными аппа-
ратами.
Для повышения надежности электроснабжения приемников
необходимо, чтобы нагрузка между каналами распределялась
равномерно. В противном случае максимальная величина отда-
ваемой генераторами- мощности будет меньше их общей уста-
новленной мощности. Это обусловлено тем, что с ростом на-
грузки мощность наиболее нагруженного генератора может
постигать предельной величины, превышение которой приводит
к выходу из строя этого генератора, в то время как другие па-
раллельно работающие генераторы будут нагружены не пол-
ностью.
К). Изд. № 7934
145
*
Требования к равномерному распределению нагрузки между
каналами в .системах электроснабжения переменного тока из-за
особенности параллельной работы синхронных генераторов
предусматривают необходимость равномерного распределения
как активной, так и реактивной составляющих тока нагрузки.
Процесс распределения нагрузки между каналами должен
осуществляться автоматически, без .вмешательства членов эки-
пажа. При этом, независимо от режима работы системы элект-
роснабжения, напряжение и частота отдаваемой ею электро-
энергии должны поддерживаться в заданных пределах. Вырав-
нивание нагрузок между каналами постоянного тока произво-
дится путем соответствующего регулирования токов возбужде-
ния их генераторов. Выравнивание активных и реактивных на-
грузок между каналами переменного тока осуществляется не-
зависимо друг от друга.
Для выравнивания активных нагрузок воздействуют на ре-
гуляторы частоты вращения приводов постоянной скорости, а
для выравнивания реактивных нагрузок — на регуляторы на-
пряжения генераторов.
В системах электроснабжения ЛА точность распределения
нагрузки между параллельно работающими каналами постоян-
ного тока принимают такой, чтобы мощность самого нагружен-
ного из них не превышала мощности менее нагруженного не
более 1()°/о номинальной мощности генератора, а рассогласова-
ния активных и реактивных нагрузок между каналами перемен-
ного тока — такими, чтобы они не превышали соответственно
8 и 6°/о номинальной мощности канала.
Опыт эксплуатации систем электроснабжения с параллельно
работающими каналами показывает, что для повышения на-
дежности электроснабжения приемников ЛА необходимо, чтобы:
— первичная система электроснабжения включала в свой
состав не менее двух независимых подсистем (левый и правый
борт);
— каналы генерирования электроэнергии выполнялись од-
нотипными;
— в каждой подсистеме обеспечивалось взаимное резерви-
рование каналов;
— при отказе всех каналов одной подсистемы их централь-
ные распределительные устройства подключались к централь-
ным распределительным устройствам исправных каналов дру,
гой подсистемы.
Включение каналов генерирования электроэнергии на па-
раллельную работу, как уже отмечалось, требует расширения
функций, выполняемых аппаратами защиты и управления, ис-
пользуемых в структуре одиночно работающих каналов. К та-
ким дополнительным функциям этих аппаратов относят:
— - контроль условий включения каналов на параллельную
работу;
146
— обеспечение селектИ'Вйости отключения отказавшего ка-
нала;
— обеспечение перехода на раздельную работу каналов в
случае превышения неравномерности распределения нагрузки
между генераторами заданной величины;
— защиту канала от «обратной» мощности.
6.2. УСЛОВИЯ И СПОСОБЫ ВКЛЮЧЕНИЯ КАНАЛОВ
ГЕНЕРИРОВАНИЯ ЭЛЕКТРОЭНЕРГИИ
НА ПАРАЛЛЕЛЬНУЮ РАБОТУ
Как известно, включение каналов генерирования электро-
энергии как постоянного, так и переменного тока на параллель-
ную работу, требует выполнения ряда условий.
Для систем электроснабжения постоянного тока такими ус-
ловиями являются:
— одинаковая полярность напряжений включенных на па-
раллельную работу первичных (вторичных) источников;
— превышение напряжения подключаемого источника над
напряжением бортовой сети.
Контроль выполнения указанных условий осуществляется с
помощью специальных аппаратов защиты и управления —
ДМР, АЗУ и др. (см. гл. 12).
В системах электроснабжения переменного тока процесс
включения каналов на параллельную работу осуществляется
при выполнении следующих условий:
— одинаковый порядок чередования фаз каналов;
— равенство частот канала и сети;
— равенство напряжений канала и сети;
— совпадение напряжений каналов по фазе.
Порядок чередования фаз, ’ подключаемых на параллель-
ную работу каналов, обязательно проверяется после проведе-
ния регламентных работ, так как возможны случаи ошибочного
его изменения, например, при работах со снятием генератора
с ЛА.
Максимальная величина уравнительного тока, протекающего
между генераторами в момент их включения на параллельную
работу, может достигать (10...12) /ном Амплитудное значение
уравнительного тока определяется следующим выражением:
I 2 fey (fcdI + E i2) g
—------------------------------- sin-----,
(6J)
где
fey — коэффициент, учитывающий апериодическую
составляющую ударного тока КЗ (fey =1,6...
-.1,9);
10*
147
lznd\, Л’*2 —*ЭДС за сверхПерехбДйЫмй Индуктивными со-
противлениями синхронизируемых генераторов;
х"а\' х"аг — сверхпереходные индуктивные сопротивления
генераторов;
хс — индуктивное 'сопротивление участка электричес-
кой сети, через который генераторы включают-
ся на параллельную работу;
8 — угол сдвига между ЭДС одноименных фаз ге-
нераторов.
Для уменьшения уравнительного тока, протекающего между
каналами в момент их включения на параллельную работу, при-
меняют следующие способы синхронизации:
Самосинхронизация. Частота вращения подключаемо-
го генератора в сеть близка к синхронной, а обмотка возбуж-
дения генератора отключена от источника питания. Так как
ЭДС подключаемого генератора равна нулю, то величина урав-
нительного тока будет в два раза меньше своего возможного
максимального значения. После включения генератора на па-
раллельную работу его обмотка возбуждения подключается к
источнику питания.
Техническая реализация этого способа синхронизации очень
проста, однако величина уравнительного тока достаточно вели-
ка, что может привести к недопустимым кратковременным про-
валам напряжения в сети. Поэтому способ самосинхронизации
практического применения в системах электроснабжения ЛА
пока не находит.
Грубая синхронизация. Канал генерирования элект-
роэнергии с напряжением и частотой, близкими к номинальным
значениям, подключается в сеть через дополнительное реактив-
ное сопротивление хр, ограничивающее величину уравнительно-
го тока. Его максимальная величина определяется следующим
выражением:
р 2 ky (Adl + Ed2) 8
-------------------— - sin —
После втягивания генератора в синхронизм сопротивление
хр шунтируется контактами контактора.
Этот способ нашел применение в системах электроснабже-
ния судов.
Точная с и н х р о н и з а ц и я. Подключение канал а в сеть
производится при строгом соблюдении всех условий синхрони-
зации, обеспечивающих минимальную величину уравнительного
тока. Этот способ синхронизации широко используется в систе-
мах электроснабжения ЛА.
Автоматизация включения каналов постоянного и перемен-
ного тока на параллельную работу осуществляется с помощью
11В
специальных аппаратов. Их принципы действия и особенности
работы рассматриваются в гл. 12.
6.3. МЕТОДЫ РАСПРЕДЕЛЕНИЯ НАГРУЗКИ
МЕЖДУ ПАРАЛЛЕЛЬНО РАБОТАЮЩИМИ КАНАЛАМИ
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
Внешние характеристики включаемых на параллельную ра-
боту генераторов и механические характеристики их приводов
по ряду причин несколько отличаются друг от друга. Несоот-
ветствие внешних и механических характеристик каналов обус-
ловливает неравномерное распределение нагрузки между ними.
Так, например, на рис. 6.1 приведены внешние характеристики
двух генераторов постоянного тока: Г1 и Г2. Напряжение холо-
Рис. 6.1. Внешние харак-
теристики генераторов по-
стоянного тока
Рис. 6.2. Механические ха-
рактеристики приводов с
астатической настройкой
стого хода этих генераторов равны друг другу: Ui0 = ^20 = Uo-
При включении их на параллельную работу нагрузка системы
генерирования будет равна: /н = Л -f- /2, причем Л>72. Как
следует из рис. 6.1, большая нагрузка приходится на генератор,
внешняя характеристика которого имеет меньший наклон (мень-
ший коэффициент статизма). С увеличением нагрузки неравно-
мерность токораспределения между генераторами возрастает, а
напряжение в сети уменьшается (U'<U).
При параллельной работе каналов переменного тока для
обеспечения равномерного распределения реактивной нагрузки
необходимо соответствие внешних характеристик генераторов,
а для обеспечения равномерного распределения активной на-
грузки — соответствие механических характеристик их приводов
постоянной скорости.
На рис. 6.2 показаны механические характеристики приво-
дов постоянной скорости с регуляторами частоты вращения,
149
*
имеющих до определенного предела нагрузки астатическую на-
стройку. При наличии погрешности в настройке регуляторов
частоты ©ращения, например, когда <о]0 > ю20, всю нагрузку
будет брать на себя привод первого генератора. После того,
когда его частота вращения wj понизится до уровня ш20 (на
рис. 6.2 это соответствует нагрузке Л4>М1), вступает в работу
привод второго генератора.
Для распределения нагрузки между параллельно работаю-
щими источниками электроэнергии применяют ряд методов, по-
лучивших название метода статических, метода мнимостатичес-
ких и метода астатических характеристик, метода ведущего ге-
нератора и др. В системах электроснабжения ЛА наибольшее
распространение получили методы мнимостатических и стати-
ческих характеристик. В случае отказов в системе электроснаб-
жения ЛА распределение нагрузки между каналами может про-
исходить и по методу астатической характеристики или по мето-
ду ведущего генератора.
Характер распределения нагрузки между каналами зави-
сит от настройки их регуляторов напряжения и частоты вра-
щения.
При регулировании напряжения и частоты, когда отсутству-
ют воздействия на регуляторы для перераспределения нагрузок
между каналами, закон изменения регулируемой величины х
(напряжения или частоты) в зависимости от изменения величи-
ны тока нагрузки I может быть представлен для /г-го канала
в первом приближении в виде
xk = -v*0 - skIk, (6.3)
где а\0— заданное значение регулируемой величины х для
k-ro канала;
sk — коэффициент статизма системы регулирования k-ro
канала.
В случае воздействия на регуляторы управляющих сигна-
лов с целью улучшения распределения нагрузок между генера-
торами закон изменения регулируемой величины х можно запи-
сать так:
= л'м — skfk — krfyk, (6-4)
где Iyk — величина управляющего сигнала, подаваемого на
вход /г-го регулятора;
kx — коэффициент, характеризующий степень влияния
управляющего сигнала на регулируемую величину.
При автоматизации распределения нагрузок между однотип-
ными генераторами величину управляющего сигнала /уЛ для
k-ro регулятора выбирают пропорциональной отклонению то-
ка нагрузки (его активной или реактивной составляющих) /к
iso
данного генератора от среднего значения тока (средних значе-
ний активных или 'реактивных составляющих) I ср, приходяще-
гося на один генератор, т. е.
= (6.5)
где k2— коэффициент пропорциональности;
” /
= • (6-6)
Уравнение (6.4) с учетом (6.5) принимает вид
SfJь kft (7h /ср), (6.7)
где Л* = А1А,2.
Это уравнение позволяет рассмотреть наиболее распростра-
ненные на практике методы распределения нагрузок между
параллельно работающими генераторами.
Для большей наглядности эти методы рассмотрим на при-
мере системы электроснабжения постоянного тока с п парал-
лельно работающими однотипными каналами генерирования
электроэнергии.
Метод статических характеристик. Этот метод предполага-
ет, что в системах регулирования частоты и напряжения регу-
ляторы имеют статическую настройку (5^7=0) и не требуется
введения в них каких-либо дополнительных управляющих сиг-
налов с целью улучшения распределения нагрузки между кана-
лами (^ = 0).
Так как в системе электроснабжения постоянного тока ре-
гулируемой величиной х является напряжение Д-генератора,
то, полагая в уравнении (6.7), что xk = Uk и = 0, получим
(6.8)
где Ua— заданное (начальное) значение напряжения /г-го ге-
нератора до его включения на параллельную работу.
Пренебрегая потерями .напряжения в проводах на участках
сети, соединяющих генераторы с шинами соответствующих
центральных распределительных устройств, имеем
А7, = и2 = . . . = ...=Un -U. (6.9)
В случае равенства напряжений «холостого хода» всех п гене-
раторов
t/lo^Z720 == ...=<7W= (6.10)
151
Уравнение (6.8) с учетом равенства (6.9) принимает вид '
U~Uq (6.11)
’где sk — коэффициент статизма системы регулирования fe-tro
генератора, характеризующий величину отклонения
напряжения при (изменении нагрузки.
Из уравнения (6.11) определяем ток &-го генератора
= . (6.12)
sh
Суммируя все п уравнений (6.12), получим
24 = U = (fW) iU--
Л-1
Отсюда выражение для напряжения на шинах центральных
распределительных устройств принимает вид
и^и0-------(6.13)
2—
" sk
Подставляя уравнение (6.13) в уравнение (6.12), имеем
Выражения (6.13) и (6.14) показывают, что при распределе-
нии нагрузки по методу статических характеристик токи между
каналами распределяются обратно пропорционально коэффи-
циентам статизма их внешних характеристик (рис. 6.1).
Метод мнимостатических характеристик. Для практической
реализации этого метода в конструкции регуляторов должны
быть предусмотрены специальные элементы, позволяющие осу-
ществлять воздействие на их исполнительные органы сигнала-
ми, пропорциональными по величине отклонению тока I k дан-
ного генератора от среднего значения тока нагрузки /ср, прихо-
дящегося на один генератор.
В системах электроснабжения ЛА регуляторы практически
обеспечивают точную стабилизацию регулируемого параметра.
Поэтому можно считать, что коэффициенты статизма внешних
характеристик каналов —sk = 0; k =
152
Для рассматриваемой системы электроснабжения постоян-
ного тока закон изменения регулируемой величины, согласно
уравнению (6.7), при условии, что sk = 0, имеет вид
U„=>Uha-kk(lh- Zcp). (6.15)
Это уравнение в случае одинаковой выставки регуляторов на-
пряжения, т. е. U\q= и2о=...= U„о = t/o, и пренебрежении по-
терями напряжения на участках сети генератор — шины цент-
рального распределительного устройства, когда t7i = [7i£=...
= Un = U, .принимает ,вцд
U^U0-k(fk-fcp). (6.16)
Отсюда ток lk k-ro генератора будет равен:
4 = ^=-^+4Р. (6.17)
kk
Суммируя все п уравнений (6.17), получим
3 4 = 4>бщ = (^0 — ^)S~7---1~п4р. (6.18)
Л=1 Л-1 Kk
Из уравнения (6.18) следует, что
U = U0. (6.19)
Подставляя равенство (6.19) в уравнение (6.17), имеем
4 = 4р. (6.20)
Выражения (6.19) и (6.20) показывают, что при методе мни-
мостатических характеристик в случае одинаковой начальной
выставки регуляторов обеспечивается равномерное распределе-
ние нагрузки между генераторами. Поэтому этот метод широко
используется в промышленных энергосистемах, судовых элект-
роэнергетических системах, в системах электроснабжения ЛА
и др.
Метод астатической характеристики. Его применение пред-
полагает, что один из регуляторов каналов обеспечивает аста-
тическое регулирование, а остальные — статическое. При этом,
как и при методе статических характеристик, в конструкции
применяемых регуляторов отсутствуют дополнительные эле-
менты, предназначенные для улучшения токораспределения
.между каналами.
153
Рис. 6.3. Внешние характеристи-
ки генераторов при распределении
нагрузки по методу астатической
характеристики
Для примера на рис. 6.3 приведены внешние характеристики
трех параллельно работающих генераторов с регуляторами на-
пряжения. Напряжение холостого хода первых двух 'генерато-
ров, работающих со статически настроенными регуляторами,
равны между собой, т. е. Ul0—
= U2o = а напряжение
холостого хода третьего гене-
ратора U3, регулятор которого
обеспечивает астатическое ре-
гулирование, меньше Uo. На
рис. 6.3 пунктирной кривой по-
казана результирующая внеш-
няя характеристика U =
='•? (Л + Д’) двух первых кана-
лов.
Из приведенных внешних
характеристик следует, что
при малых нагрузках, когда
L) > Сзо, энергию в сеть от-
дают только первые два гене-
ратора, напряжение которых
превышает напряжение треть-
его генератора.
С ростом тока нагрузки, когда 7оСщ > Ц + /ь вступает в
работу третий генератор с астатически настроенным регулято-
ром. При этом нагрузка двух первых генераторов остается по-
стоянной, а напряжение сети равно: U = U30 = const.
Метод астатической характеристики находит пока примене-
ние в тех системах электроснабжения, нагрузка которых изменя-
ется в небольших пределах. В этих системах всю перегрузку бе-
рет на себя генератор, работающий с астатически настроенным
регулятором.
Метод ведущего генератора. При этом методе, как и мето-
де астатической характеристики, один из регуляторов обеспечи-
вает астатическое регулирование, а остальные — статическое,
но в конструкции регуляторов имеются дополнительные эле-
менты, предназначенные для улучшения токораспределения
между генераторами. На входы этих элементов подаются сиг-
налы (kk^0), величины которых пропорциональны отклоне-
нию тока данного генератора от тока генератора, работающе-
го с астатическим регулятором. Генератор с астатическим ре-
гулятором принято называть ведущим.
Согласно выражению (6.7), закон регулирования напряже-
ния для генераторов, работающих в комплекте со статическими
регуляторалГй, можно записать в виде
и = uk = ик0 - skrk - kk (lk - /с ст) , (6.21)
где facv— ток нагрузки ведущего генератора.
154
Из последнего уравнения следует, что чем больше нагруз-
ка ведущего генератора, тем выше располагаются внешние ха-
рактеристики остальных генераторов. При одинаковой началь-
ной настройке регуляторов, когда Uw= ...= Uпй = Uo, про-
цесс распределения нагрузок можно представить состоящим из
двух этапов. На первом этапе изменение нагрузки принимает
на себя ведущий генератор. Затем, на втором этапе, вступают
в действие уравнители нагрузок, вследствие чего нагрузка на
ведущий генератор уменьшается, а на все остальные — воз-
растает.
6.4. АВТОМАТИЗАЦИЯ РАСПРЕДЕЛЕНИЯ НАГРУЗКИ
МЕЖДУ КАНАЛАМИ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
ПОСТОЯННОГО ТОКА
В системах электроснабжения ЛА, как это отмечалось в раз-
деле 6.3, равномерность распределения нагрузки между .парал-
лельно работающими каналами осуществляется по методу
мнимостатических характеристик. Согласно этому методу, на
вход каждого регулятора напряжения должны подаваться до-
полнительные управляющие сигналы /у1!, пропорциональные по
величине отклонению тока I k данного генератора от среднего
тока /ср нагрузки, т. е.
(6.22)
где k2— коэффициент пропорциональности,
а закон изменения регулируемого напряжения на зажимах k-ro
генератора имеет вид
= (6.23)
Для его реализации уравнительные цепи регуляторов вклю-
чают либо параллельно, либо последовательно.
На рис. 6.4 приведена схема включения уравнительных об-
моток wy угольных регуляторов напряжения п параллельно ра-
ботающих генераторов постоянного тока.
Здесь один из зажимов уравнительной обмотки присоеди-
няется к минусовому выводу генератора, а второй — к общей
точке (уравнительной шине).
Необходимая величина сопротивления «минусовой» цепи Рб
генератора обеспечивается или путем включения в эту цепь
специального резистора или подключением уравнительной об-
мотки регулятора к обмотке дополнительных полюсов генера-
тора.
Сопротивления «минусовых» цепей генераторов должны
быть равны между собой, так как только при этом условии и
155
одинаковых нагрузках генераторов (/i = 72 = -=/n), падения
напряжения на них одинаковы и по уравнительным обмоткам
регуляторов токи .не протекают (/уА=0).
Уравнительная шине.
Рис. 6.4. Схема включения уравнительных
обмоток Игольных регуляторов напряжения
генераторов постоянного тока
Величину сопротивления «минусовой» цепи генератора вы-
бирают из условия, чтобы падение напряжения на нем при но-
минальном токе нагрузки не превышало 0,5 В.
Покажем, что принятая схема включения уравнительных об-
моток регуляторов в случае неравномерности нагрузок между
генераторами формирует управляющие сигналы, величина ко-
торых 'Определяется уравнением (6.22).
Ток, протекающий через уравнительную обмотку /г-го регу-
лятора, равен:
(6.24)
гу
где Гу — суммарное сопротивление уравнительной обмотки и
ее соединительных проводов;
Uy — напряжение между уравнительной шиной и корпусом
ЛА.
Сумма токов /у, протекающих по уравнительным обмоткам
п регуляторов, согласно 1-му закону Кирхгофа, равна:
Эту сумму тбков представим в виде
S /yft = — (r6 2 4 - nt/y)=о.
k=l Гу \ л=1 '
(6.25)
(6.26)
156
Из уравнения (6.26) .получим, что
/? ”
24=#б4Р. (6.27)
П Л-1
Подставляя найденное значение для Uy в уравнение (6.24),
видим, что
'у*=—.(4-Лр), (6-28)
ГУ
т. е. управляющий сигнал k-ro регулятора пропорционален
отклонению тока данного генератора от среднего значения то-
ка нагрузки, приходящегося на генератор.
Процесс выравнивания нагрузок по методу мнимостатичес-
ких характеристик рассмотрим для случая параллельной ра-
боты двух .генераторов постоянного тока, снабженных уголь-
ными регуляторами напряжения (рис. 6.5).
Рис. 6.5. Схема включения двух генераторов с угольными
регуляторами напряжения на параллельную работу
Если токи Ц и Iz генераторов не будут равны между собой,
то падения напряжения на резисторах /?6. а следовательно, по-
тенциалы точек «а» и «б» будут отличаться друг от друга. Это
обусловливает протекание тока по уравнительным обмоткам wy
регуляторов.
Для выравнивания нагрузок между генераторами МДС,
создаваемая обмоткой wy .регулятора более нагруженного ге-
нератора, должна действовать согласно с МДС, создаваемой
рабочей обмоткой w3 этого регулятора. В то же время МДС,
создаваемая уравнительной обмоткой wy регулятора менее на-
груженного генератора, наоборот, действует встречно с МДС
его рабочей обмотки w3. При увеличении результирующей МДС
регулятора более нагруженного генератора сопротивление
угольного столба гс, включенного в цепь его обмотки возбужде-
157
йия, возрастает, ©то приводит к уменьшению ЭДС и, следова-
тельно, уменьшению его тока нагрузки. Обратный процесс име-
ет место в регуляторе менее нагруженного генератора, так как
при уменьшении величины результирующей МДС регулятора
еопротавлеи'ие угольного столба уменьшается, что приводит к
возрастанию тока нагрузки этого генератора.
Рассмотренный процесс распределения нагрузок между па-
раллельно работающими генераторами имеет место при усло-
вии одинаковых сопротивлений участков «минусовых» и «плю-
совых» цепей каналов генерирования электроэнергии. К сопро-
тивлениям «плюсовой» цепи R+ относят сопротивления про-
водов, болтовых соединений и переходное сопротивление кон-
тактов контактора ДМР на участке между генератором и об-
щими шинами центрального распределительного устройства.
Применяемая схема включения уравнительных обмоток ре-
гуляторов параллельно работающих каналов предусматривает
при отключении одного из них от сети необходимость отключе-
ния уравнительной обмотки его регулятора от уравнительной
шины. На рис. 6.5 это достигается контактами реле К.
В противном случае по уравнительным обмоткам wy регуля-
торов будет протекать ток в таком направлении, что в итоге
напряжение на зажимах включенных генераторов в сеть пони-
жается, а напряжение ранее отключенного генератора — повы-
шается.
Как отмечалось в гл. 5, использование в системах электро-
снабжения угольных регуляторов, работающих в комплекте с
•дифференциальными или центральными корректорами напря-
жения, повышает точность поддержания напряжения.
Применение таких регуляторов напряжения позволяет улуч-
шить и токораспределение между параллельно работающими
каналами.
Принципиальная схема включения уравнительных цепей
угольного регулятора типа РУГ и дифференциального коррек-
тора напряжения ДКН показана на рис. 6.6.
ЦРУ
Рис. 6.6. Схема включения уравнительных цепей угольных регуля-
торов и дифференциальных корректоров напряжения
158
В системах электроснабжения постоянного тока с вентиль-
ными генераторами для формирования сигналов о токах на-
грузки каналов, необходимых для организации их параллельной
работы кроме балластных резисторов R6 находят применение
и токовые датчики постоянного тока.
Применение токовых датчиков позволяет уменьшить потери
напряжения в фидере генератора, исключить гальваническую
связь фидера генератора с электрическими цепями аппаратов
управления и защиты. Принципиальная электрическая схема
токового датчика постоянного тока (ТД) приведена на рис. 6.7.
Рис. 6.7. Принципиальная схема токового
датчика постоянного тока
Дроссели имеют по одной рабочей обмотке w2 и одну об-
щую обмотку управления wl — силовой провод канала, соеди-
няющий генератор с шинами ЦРУ. Рабочие обмотки дроссе-
лей включены встречно-последовательно.
Нагрузкой датчика является понижающий трансформатор
Т, во вторичную цепь которого через выпрямитель на диодах
VI, V2 включен выходной резистор R.
Источником питания переменного тока датчика ТД служит
встроенный вспомогательный источник питания напряжением
40 В, частотой 400 Гц блока регулирования, защиты и управ-
ления.
Величина тока i2, протекающего по первичной обмотке транс-
форматора Т, пропорциональна току I в фидере генератора и
равна:
i -^-1
*2 — * •
w2
Выходные резисторы R токовых датчиков ТД параллельно
работающих каналов для распределения нагрузки между ними
по методу мнимостатических характеристик включаются по схе-
ме, аналогичной схеме включения балластных резисторов /?б
(см. рис. 6.4), а сигналы, снимаемые с них, используются для
159
воздействия на* регуляторы напряжения вентильных генера-
торов.
На рис. 6.8 приведена структурная схема одного из парал-
лельно работающих каналов с вентильным генератором посто-
янного тока Г, транзисторным регулятором напряжения PH и
токовым датчиком ТД. Здесь регулятор напряжения в отличие
от регуляторов, применяемых в одиночно работающих каналах,
принцип действия .которых рассмотрен в гл. 4, имеет дополни-
тельный блок — блок параллельной работы (БПР). Этот блок
изменяет настройку измерительного органа БИОН регулятора
напряжения.
PH
Рис. 6.8. Структурная схема
торным регулятором
канала с вентильным генератором, транзис-
напряжения и токовым датчиком
Электрическая схема включения уравнительных цепей
транзисторных регуляторов напряжения двух параллельно ра-
ботающих каналов генерирования электроэнергии показана на
рис. 6.9.
Рис. 6.9. Электрическая схема включения уравнительных цепей регуляторов
напряжения генераторов постоянного тока
160
При равномерном распределении нагрузки между генерато-
рами транзисторы VI и V2 блоков параллельной работы БПР
открыты. Это приводит к уменьшению результирующего сопро-
тивления делителя напряжения, собранного на резисторах
и /?2, измерительного органа БИОН и понижению потенциала
его точки «а».
В случае неравномерной нагрузки генераторов по выходным
резисторам R токовых датчиков ТД, благодаря их встречно-
параллельному включению, начинают протекать токи. Эти токи
в многоканальной системе электроснабжения отличаются между
собой как направлением, так и величиной, а в двухканальной
системе — направлением. Поэтому при соответствующем выбо-
ре параметров схемы регулятора на выходе токового датчика
менее нагруженного генератора формируется сигнал на закры-
тие транзисторов VI и V2 блока параллельной работы БПР.
При закрытии транзистора V2 увеличивается сопротивление
делителя напряжения и возрастает потенциал точки «а» измери-
тельного органа БИОН. В итоге регулятор напряжения менее
нагруженного генератора повышает его ЭДС до тех пор, пока
не будет достигнуто равномерное токораспределение между ка-
налами. Отключение токовых датчиков ТД при выключении ка-
нала из параллельной работы с другими каналами производит-
ся контактами реле и Д2.
6.5. ВЛИЯНИЕ НЕИДЕНТИЧНОСТИ ПАРАМЕТРОВ КАНАЛОВ
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ ПОСТОЯННОГО ТОКА
НА РАВНОМЕРНОСТЬ РАСПРЕДЕЛЕНИЯ НАГРУЗКИ
Опыт эксплуатации многоканальных систем электроснабже-
ния постоянного тока показывает, что на точность распределе-
ния нагрузки между генераторами большое влияние оказыва-
ют неравенство сопротивлений их «минусовых» R6 и «плюсо-
вых» R+ цепей, а также различная настройка регуляторов на-
пряжения, когда и\0^= О20 =# . • . ¥= Оп0.
Оценку влияния неидентичности указанных параметров про-
ведем на примере параллельной работы п однотипных генера-
торов, работающих в комплекте с угольными регуляторами на-
пряжения. Принципиальная схема включения двух из п гене-
раторов с угольными регуляторами напряжения на параллель-
ную работу была показана на рис. 6.5.
Для упрощения анализа будем считать, что
Rf>l Rg2 ’ Ro2 ~ #6, = • • • = ~ Re ;
R+i R+2 • R+2 ~ R+3 — R+n — R+ >
^10 > ^20 > ^20 = ^30 ~ ~ Uп0 ~ • (6.29)
11. Изд. № 7934
161
Согласно принятому условию, имеем
04 и /2 = /3= (6.30)
. а также
4> — (^ О 41
где /у1— ток в уравнительной цепи 1-го регулятора;
/у — ток в уравнительных цепях 2, 3,...,п регуляторов.
При астатической настройке регуляторов напряжения ре-
зультирующая .МДС их рабочих w9 и уравнительных wy обмо-
ток остается неизменной для всех установившихся режимов ра-
боты генераторов. Отсюда следует, что
Ц , г Цо
— + 4rwy = —®9;
г9 г3
w3 — L,wy = w3, k = 2, п.
r3 r3
где r9 — сопротивление цепи рабочей обмотки w9 регулятора;
Uk — напряжение на зажимах k-ro генератора.
Представим эти уравнения в виде
Ц = Д1()-а/у1: (6.31)
uk = и = Un + а/у . k = 2?П, (6.32)
где а ____L г — коэффициент, характеризующий влияние то-
ка уравнительной цепи на работу регулятора.
Согласно 2-му закону Кирхгофа, для контура /?б1 — гу —
— гу — Z?62 (рис. 6.5) имеем
^61 (Л — 41)—гу4> — гу4 - /?б (/ + 4) = 0 •
Принимая во внимание, что />4> получим
/?б1/, - ГУ4, - гу/у - /?б/ = 0. (6.33)
Для контура Г1—/?+1 — R+2 — Г2 можно записать, что
Ux + /?+14 - /?+/ - U = 0, (6.34)
где C'-Z72=t/3 = . . . = Ц,.
Общий* ток нагрузки для п параллельно работающих генера-
торов равен:
/общ = 4+ (»-!)/ (6.35)
162
Для количественной оценки неравномерности нагрузки меж-
ду генераторами В. С. Кулебакин предложил использовать так
называемый «поперечный» ток, определяемый как
п Из уравнений (6.35) и (6.36) имеем (6.36)
Г Л)бщ / . 1 ~ ‘q > п (6.37)
(6.38)
п
Решая систему уравнений (6.30)...(6.34), (6.37) и (6.38) от-
носительно поперечного тока /Q, получим
(Цо-Ь'о)-^(/?+1-7?+)--^—(/?б1-/?6)
п п г..
(6.39)
Как следует из уравнения (6.39), раазенство токов между
параллельно работающими каналами имеет место при условии
//ю=£/о, R+i^=R+ и /?6i “ R&-
Невыполнение любого из этих условий приводит к неравно-
черному распределению нагрузци между каналами.
Рассмотрим случай влияния неодинаковой предварительной
настройки регуляторов на равномерность распределения на-
грузки между генераторами, например, когда напряжение хо-
лостого хода генератора Г1 несколько превышает напряжение
холостого хода других генераторов (Rw>U0) и соблюдаются
условия R+1 = R+ и /?б| = /?б.
Для этого случая из уравнения (6.39) имеем
/„ = —------------------—-------. (6.40)
П „ о: „
Анализ этого выражения показывает, что неодинаковая на-
стройка регуляторов приводит к неравномерному распределению
нагрузки между генераторами, а при отключении их уравни-
тельных цепей (гу=оо ) эта неравномерность возрастает.
1СЗ
II
Рассмотрим, как влияет 'неравенство сопротивлений «мину-
совых» цепей генераторов на токораспределение между ними
при условии, что Uw = U'o и /?+1=/?+. Практически неравенство
/?С1 ¥= A'g может иметь место, например, при изменениях состоя-
ния контактных соединений одного из балластных резисторов.
Величина поперечного тока при неравенстве сопротивлений
«минусовых» цепей генератора и условии, что Ul0 = Uo и
R+1 = R+, согласно уравнению (6.39), равна:
^*61 ~ R&
п-\-1 гу
(6.41)
Из выражения (6.41) следует, что с ростом нагрузки и нера-
венстве сопротивлений «минусовых» цепей генераторов увели-
чивается неравенство токов между ними, но при отключении
уравнительных цепей, когда гу = °о, поперечный ток равен ну-
лю. На рис. 6.10 приведены зависимости токов генераторов от
тока нагрузки при условии, что = Vo и R+i — R+-
Ухудшение токораспределения при ts6l^Rf, обусловливает не-
обходимость во время эксплуатации систем электроснабжения
постоянного тока тщательно следить за состоянием контактных
соединений в «минусовых» цепях генераторов.
Рис. 6.10. Зависимость токов генерато-
ров от тока нагрузки при
Кб1Жб‘, /?+!=/?+ и
Неравенство сопротивлений «.плюсовых» цепей генераторов,
как показывает уравнение (6.39), может также привести к зна-
чительнее неравномерности токораспределения между ними. Но
в этом случае отключение уравнительных цепей регуляторов,
когда гу=оо, приводит к ухудшению равномерности распреде-
ления нагрузки между генераторами.
164
6.6. АВТОМАТИЗАЦИЯ РАСПРЕДЕЛЕНИЯ АКТИВНОЙ
И РЕАКТИВНОЙ НАГРУЗОК МЕЖДУ КАНАЛАМИ
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ ПЕРЕМЕННОГО ТОКА
Равномерность распределения активной и реактивной на-
грузок между параллельно .работающими .каналами осуществля-
ется по методу мнимостатически^ характеристик. Для реализа-
ции этого метода на входы регуляторов напряжения и частоты
вращения k-vo генератора необходимо подавать управляющие
сигналы, пропорциональные отклонению соответственно реак-
тивной и активной составляющих тока данного генератора от
средних значений реактивных и активных составляющих, при-
ходящихся на один генератор, т. е./afc—/oCD и 7pfc-/рср. Поэтому
регуляторы напряжения и частоты вращения снабжаются спе-
циальными датчиками, выходное напряжение которых пропор-
ционально реактивной и активной составляющим тока нагрузки
данного генератора
вых а ~ ^a^COS — k(Ja >
^Аыхр — A?pAsin <р • (6.42)
.где k„, kp — постоянные коэффициенты.
В качестве таких датчиков, как правило, используются схе-
мы фазового дискриминатора.
Одна из схем дискриминатора, формирующего сигнал, про-
порциональный величине активной составляющей тока k-vo ге-
нератора, приведена на рис. 6.11,а. Здесь первичная обмотка
Рис. 6.11. Схема дискриминатора для выделения сигнала, пропорционально-
го активной составляющей тока 1нагрузки, и его векторная диаграмма
трансформатора напряжения Т1 включена на напряжение фа-
зы А. Между средними точками вторичной обмотки трансфор-
матора Т1 (точка «6») и нагрузочными резисторами R2 и /?3
включен резистор R1. Этот резистор служит нагрузкой для
165
•
трансформатора тока Г2, включенного в цепь фазы А. Выпрям-
ленные с помощью диодов VI и V2 напряжения сравниваются
на резисторах R2 и R3.
При равенстве сопротивлений резисторов R2 и R3 выходное
напряжение дискриминатора определяется следующим выра-
жением:
^Вь,х„ = /?(/2-4), (6.43)
где R2 = R3 = R;
/2 и Д — токи, протекающие через резисторы R2 и R3.
Покажем, что величина ?7вь,Хо для рассматриваемой схемы
дискриминатора пропорциональна активной составляющей Iп
тока генератора. Предположим, что трансформаторы Т1 и Т2
не имеют потерь, величина трансформированного напряжения
фазы А на зажимах вторичной обмотки Т1 з точке «6» делится
пополам, а индуктивное сопротивление х ,р вторичной обмотки
трансформатора тока Т2 намного больше сопротивления рези-
стора /?1, т. е. хтр > R\.
Из рис. 6.11,а следует, что
= = <6-44)
где kв — коэффициент выпрямления.
Подставляя значения токов из равенств (6.44) в уравнение
(6.43), получим
^й = М1£>ЙС|-|^о|}- ('6-45)
Ток фазы А, отстающий в общем случае на угол » от напря-
жения фазы UA. через трансформатор тока Т2 создает на ре-
зисторе Л?1 падение напряжения URl. При относительно малых
значениях падения напряжения UГ>1 по сравнению с напряже-
нием на вторичной обмотке трансформатора Т1 абсолютные зна-
чения напряжений Uпс и Uc0 можно с некоторой погрешностью
заменить их проекциями (U„c> и на вектор напряжения Uan
(рис. 6.11,6). Тогда уравнение (6.45) может быть представле-
но в виде
£7ВыХ~ &в (cos “ 6— — Uri cos Й ~
ВЫХ В 2^ 1 /<1 / \ 2£ I
2k9URl cos -г , (6.46)
где kr — коэффициент трансформации трансформатора П.
166
Падение напряжения на резисторе R\ равно:
<4, = /?.-£-•
й2
(6.47)
где k2 — коэффициент трансформации трансформатора Т2.
Заменяя в выражении (6.46) напряжение Uего значени-
ем из (6.47), получим
£7ВЫХ 2kBRx cos ? kaIA cos <? , (6.48)
^2
где ka =» 2feB/?| — — постоянный коэффициент.
4
Таким образом, напряжение на выходе дискриминатора, со-
бранного по схеме рис. 6.11,а, пропорционально активной со-
ставляющей тока генератора.
На рис. 6.12,0 приведена схема дискриминатора, величина
Рис. 6.12. Схема дискриминатора для выделения сигнала, пропорционального
реактивной составляющей тока нагрузки, и его векторная диаграмма
выходного напряжения которого пропорциональна реактивной
составляющей тока генератора. Этот дискриминатор отличается
от рассмотренного выше тем, что первичная обмотка его транс-
форматора напряжения Т1 включена не на фазное, а на ли-
нейное напряжение, например Uвс, а трансформатора тока Т2
включена в цепь «свободной» фазы (фаза Л).
Из приведенной на рис. 6.12,6 векторной диаграммы для
рассматриваемого дискриминатора легко получить, что вели-
чина сигнала на его выходе пропорциональна реактивной со-
ставляющей тока генератора
£Лыхр = sin<р fepZAsin , (6.49)
где tip — постоянный коэффициент
167
Для формирования сигналов, пропорциональных отклонению
активной (реактивной) составляющей тока нагрузки k-ro гене-
ратора от среднего значения активной (реактивной) составля-
ющей тока нагрузки, .дискриминаторы и уравнительные цепи
регуляторов соединяются между собой определенным способом.
На рис. 6.13 приведен пример схемы включения уравнитель-
ных цепей регуляторов частоты вращения, обеспечивающей
практическую реализацию метода мнимостатических характери-
стик для распределения активной нагрузки между каналами.
Здесь обмотки управления wy магнитных усилителей регуля-
торов одними своими зажимами подключаются через нормаль-
но разомкнутые контакты реле Рк к уравнительной шине, а
другими — к одному из выходов дискриминатора, а именно,
измерителя активной мощности (НАМ). Другие зажимы ИАМ
электрически соединяются между собой.
Уравнительная шина
Рис. 613. Схема включения датчиков и
уравнительных цепей регуляторов частоты
вращения
Нетрудно убедиться, что при таком способе включения урав-
нительных цепей ток Iyk, протекающий по обмотке управления
магнитного усилителя k-ro регулятора, будет пропорционален
разности fak-fazp
Ток, протекающий по обмотке управления k-ro регулятора,
согласно рис. 6.13, равен:
= ---£у , (6 50)
гу
где UBmk^*kaIAcos^k,-IBk-,
Uy — напряжение на уравнительной шине;
Гу — сопротивление обмотки управления регулятора
168
Согласно 1-му закону Кирхгофа
" 1 " я
2 — S ^ВНХЛ---------Uy = 0. (6.51)
fe=l Гу Гу
Отсюда имеем
Uy = = kj„ ср (6.52)
п п '
Подставляя полученное выражение (6.52) в уравнение (6.50),
видим, что
Т] — k I k
= = (/^ _ Л _ (,6,53)
гу гу
Таким образом, приведенный способ включения датчиков и
уравнительных цепей регуляторов частоты вращения позволяет
осуществлять распределение активной нагрузки между 'канала-
ми по методу мнимостатических характеристик.
Для предотвращения снижения частоты тока в сети в слу-
чае отключения /г-то генератора обмотка управления wy его
регулятора должна быть отключена от уравнительной шины
Это осуществляется при помощи контактов реле Kk.
Включение датчиков — измерителей реактивной мощности
ИРМ и регуляторов напряжения для распределения нагрузки
между каналами по методу мнимостатических характеристик,
как правило, производят по схеме, показанной на рис. 6.14.
Здесь уравнительные обмотки юу регуляторов напряжения PH
Рис. 6.14. Схема включения датчиков и урав-
нительных цепей регуляторов напряжения
169
подключаются на зажимы соответствующих дискриминаторов
ИРМ, а их резисторы /?1 (см. рис. 6.12) соединяются между
собой последовательно.
В случае неодинакового распределения реактивной нагрузки
между каналами на выходе А-го дискриминатора появляется
сигнал, пропорциональный по величине /рср.
Для доказательства этого положения на основании 2-го
закона Кирхгофа для контура, состоящего из п .последовательно
соединенных резисторов /?1, запишем
/?,Л + Я,/2 + • . + RJn = 0, (6.54)
где Ik — ток, протекающий через резистор /?1 А-го дискрими-
натора.
Отсюда
Л + 4+ . . . +/„ = 0. (6.55)
Обозначим через / ток, протекающий по проводам, соединяю-
щим между собой резисторы 7?1.
Тогда, при выбранных на рис. 6.11 направлениях токов для
А-го дискриминатора, имеем
*
4 Л (6.56)
А,
где /?2 — коэффициент трансформации трансформатора тока Т2.
Подставляя это выражение для тока 1к в уравнение (6.55)
и решая его относительно тока I, получим
п
1 ?Ak т
Z = . (16.57)
А2 /г А2
Согласно уравнению (6.49), величина напряжения на выходе
A-iro дискриминатора равна:
^~2Wftsintp. (6.58)
Ток I к найдем, подставив в уравнение (6.50) значение тока I из
уравнения (6.57)
4 = fAk~/jicf (6.59)
Заменяя в уравнении (6.58) ток /k его значением из (6.59),
получим
~ Ар RAk ?А ср) ? ~'L ^p (^р* ср) 5 (6.60)
где Ар = 2А-в/?1—--постоянный коэффициент.
А2
170
Таким образом, величина выходного напряжения ИРМ /г-го
регулятора при последовательном соединении их .резисторов
/?1 .пропорциональна отклонению реактивной составляющей то-
ка /г-го генератора от среднего значения реактивного тока.
С целью исключения влияния неработающего генератора .на
напряжение сети, резистор /?1 его дискриминатора шунтирует-
ся контактами реле Kk (рис. 6.14).
6.7. методика исследования динамики
ПАРАЛЛЕЛЬНОЙ РАБОТЫ КАНАЛОВ
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
Оценка влияния параметров и режимов работы каналов при
их параллельной работе .на устойчивость системы электроснаб-
жения в связи с тем, что при переходных процессах одновре-
менно происходит регулирование нескольких взаимосвязанных
величин, является очень сложной задачей и требует использо-
вания специальных приемов исследования.
В. Т. Морозовский, учитывая, что системы электроснабже-
ния ЛА относятся к классу многомерных однотипных систем
автоматического регулирования (МОСАР), разработал, исхо-
дя из методов, применяемых для исследования МОСАР, мето-
дику их исследования.
Согласно этой методике, учитывая идентичность каналов и
симметричность перекрестных связей, многосвязанную систему
расчленяют на две более простые и независимые между собой
системы. В качестве выходной величины (координаты) первой
системы принимают усредненное значение напряжения (часто-
ты) всех параллельно работающих каналов, а за выходную ве-
личину второй системы берут разность между текущим значе-
нием напряжения (частоты)-и его средней величиной. Иногда
за выходную координату второй системы принимают разность
между текущим значением напряжения (частоты) и принятой
за базовую величину напряжение (частоту) /г-го канала.
Изменение выходной координаты первой системы называют
усредненным движением, а изменение выходной координаты
второй системы — относительным движением.
Действительное изменение контролируемой переменной при
исследовании МОСАР определяется как сумма усредненного и
относительного движений этой координаты.
Так, например, среднее напряжение на зажимах параллель-
но работающих п генераторов постоянного тока
1 "
«сР ==«+==---2 МО (6.61)
П ft=l
является усредненным движением, а разность
ик ~ мсР = uk~ и+ = uk- (6.62)
171
характеризует относительное движение контролируемого напря-
жения. Действительное изменение контролируемого напряжения
на зажимах /г-го генератора равно:
и//) = и+ + uk_ . (6.63)
Метод декомпозиции абсолютного движения системы на два
движения существенно упрощает исследование МОСАР, так как
усредняющее и относительное движения описываются диффе-
ренциальными уравнениями значительно более низкого .порядка,
чем весь процесс в целом.
Методику исследования динамики многоканальных систем
электроснабжения ЛА рассмотрим на примере параллельной
работы п генераторов постоянного тока, работающих в ком-
плекте с угольными регуляторами напряжения (рис. 6.15).
Рис. 6.15. Схема параллельной работы п генераторов постоянного тока
При рассмотрении этой системы электроснабжения прини-
маем следующие допущения:
— • все генераторы и регуляторы напряжения идентичны и
имеют одинаковые параметры;
— электрическая сеть симметрична относительно генерато-
ров, т. е. сопротивления «плюсовых» участков фидеров R + ге-
нераторов равны между собой;
— индуктивности уравнительных цепей регуляторов напря-
жения вследствие их малости не учитываются;
— распределение нагрузок между генераторами осуществля-
ется по методу, мнимостатических характеристик.
Для исследования динамики параллельной работы каналов
необходимо иметь уравнения генераторов и их регуляторов
напряжения. Уравнение k-ro генератора постоянного тока как
172
объекта регулирования напряжения в приращениях было полу-
чено в гл. 5 в следующем виде:
('/'вР+^.)иЛ = — <pcfc-«(7'Bp+l)/fe+l(7;p+l)vfc , (6.64)
где Д,Д nv^ — соответственно изменения напряжения, тока и
частоты вращения /?-го генератора;
Рсл — изменение сопротивления угольного столба ре-
гулятора /г-го генератора.
Уравнение угольного регулятора напряжения было получе-
но в гл. 4 для случая одиночной работы канала. При парал-
лельной работе каналов, когда по уравнительной обмотке k-ro
регулятора протекает ток, пропорциональный отклонению тока
k-ro генератора от среднего значения тока, приходящегося на
генератор
7уЛ = ^(4-/ср), (6.65)
уравнение /г-го угольного регулятора напряжения в прираще-
ниях может быть представлено в виде
(7 мР2 + 7 д/’ + 8) Рек = kpuk + ky - j^). (6.66)
Для определения тока jk /г-го генератора и разности токов
Д—/ср, входящих в уравнения (6.64) и (6.66), используем урав-
нение связи генераторов через общую нагрузку, которое позво-
ляет определить ток любого из п параллельно работающих ге-
нераторов.
Ток /г-го генератора, согласно рис. 6.15, равен:
(6.67)
где Uc — напряжение сети.
В свою очередь, напряжение сети равно:
(6.68)
где R — сопротивление нагрузки.
Подставляя уравнение (6.67) в (6.68), получим
Uc = -^-^ Uk- — Uc.
R+ R+
Отсюда следует, что
п
R
k
R+ Т Rn k -i
(6.69)
173
Так иак среднее напряжение ,на зажимах п параллельно ра-
ботающих генераторов равно:
л
ZUk
U. = ±±_
п
(6.70)
то выражение для напряжения сети принимает вид
Uc = —— U+ .
R.+Rn
Подставляя выражение (6.71) в равенство (6.67), получим
Uk R-n
(6.71)
-----------2_2.---и
R+ /?+(/?+ ±R-n)
Последнее уравнение запишем в малых .приращениях, считая
при этом, что при установившемся режиме U+ = Uo, a R=Rq
A k __ д [ J 4^0
(6.72)
Полагая в
и р = A R,
&U+---------------A/?. (6.73)
/?+ R+(R++Rvn) (R++R0n)2
уравнении (6.73), что jk = A Ik, uk^= & Uk, u+ = A U+
имеем
/?(1п
Jit-------->JJL----„+---------------р . (6.74)
/?+ /?+(я++зд (я+ + я«»)=
Это уравнение тока Л-го генератора, записанное в приращениях,
представляет собой уравнение связи генераторов через общую
нагрузку. В уравнении угольного регулятора напряжения (6.66)
его последний член A’y(/fe — /C(J показывает, что распределение
нагрузки между генераторами осуществляется по методу мнимо-
статических характеристик. Изменение среднего значения тока,
приходящегося на один генератор, определяется как
1 "
/ср = jL Jk •
п k=l
Выражение для среднего значения тока /Срс учетом уравнения
(6.74) представим в виде
1 R(,n nUn
/ср = — «+ - ........Л • «+---------—- Р • (6.76)
R+ R+(R++Ron) (R+^R0n)2
Тогда, согласно уравнениям (6.74) и (6.76), имеем
Л
/?оп
Jk Jef о (lIk W + ) •
К+
(6.75)
(6 77)
174
Подставляя в уравнения (6.64) и (6.66) выражения для токов
jk и Jk — /ср из уравнений (6.74) и (6.77) и учитывая, что
/ =
° R++Ron'
получим следующее уравнение Л-го генератора и его регулятора
напряжения при их .параллельной работе с другими каналами
I 1 I / 'Т* I 1 \ Rq^
— * Рек 4 а ' нА’ 4 1 --У------И, 4-
’ j ^+(/?++ад +-Г
+ а(Г»р+1)- + (678)
\ ) R+ 4 /?оп \ )
Т^Р1 4 7> + 8 )рск == М 4 (uk —
/ R+\
(6.79)
Из уравнений (6.78) и (6.79) следует, что на объекты регу-
лирования воздействуют усредняющий (и+ ) и синхронизирую-
щие (uk — u+) сигналы.
Система 2л таких уравнений позволяет исследовать дина-
мику параллельной работы п каналов генерирования электро-
энергии.
Как уже отмечалось выше, в соответствии с теорией много-
мерных систем автоматического регулирования [7; 14], для ис-
следования такой многоканадьной системы электроснабжения
ее представляют в виде двух одномерных систем с усредненным
и относительным движениями регулируемого параметра.
Для анализа усредненного движения считают, что в иссле-
дуемой системе отсутствуют синхронизирующие связи, т. е. в
уравнении (6.7'9) полагают, что/Д—и+—0, а напряжения гене-
раторов равны их среднему значению, т. е. uk ^=и+.
В этом случае уравнения (6.78) и (6.79) после соответству-
ющих преобразований принимают вид
R+ 4- Ron / ' е + R+ -t- Ron
= - ЧРск 4«(Твр + 1) — - р 4 т 4- I) д;
\ / + т \ /
(Г2р2+ Тйр 4 8) Рек- kpll+.
(6.80)
(6.81)
175
Сравнение коэффициентов этих уравнений с 'коэффициентами
полученных ранее уравнений (5.37) и (4.21) для генератора и
угольного регулятора напряжения одиночно работающего ка-
нала показывает, что передаточные функции разомкнутой си-
стемы регулирования для усредненного движения и одиночно
работающего канала совпадают. Это означает, что сделанные
выводы при анализе устойчивости 'одиночно работающего кана-
ла справедливы и для усредненного движения координаты и 4.
для п параллельно работающих каналов.
Для анализа относительного движения в уравнениях (6.78)
и (6.79) полагают, что в системе отсутствует усредненное дви-
жение, т. е. и + =6, а синхронизирующие сигналы «*. — и+ и на-
пряжение uk /г-го генератора заменяют значением одной и
той же переменной т. е. чк— и+=и_ и uk = и .
Тогда рассматриваемые уравнения для исследования отно-
сительного движения координат в многомерной системе прини-
мают вид
/ \ fi 7 / \
+ 3 г*р + 1 п • А—+ I + 1 \; (6-82)
\ ! R+ + RLn \ /
Пр- + ТЛр + 8 ) Рск (kv + А) «_ . (6.83)
/ \ R+'
Согласно этим уравнениям, на рис. 6.16 построена струк-
турная схема эквивалентной одноканальной системы для отно-
сительного движения. На основании структурной схемы опреде-
Г(Твр<-1)Ъ
Рис. 6.16. Структурная схема однокапалыюй системы для отно-
сительного движения
176
ляем передаточную функцию для разомкнутой системы регули-
рования
Характеристическое уравнение рассматриваемой системы най-
дем из условия, что 1 + IFp = 0.
/ Jb \
+ ч(^+— ) = о.
' к+/
(|6.85)
Отсюда условие устойчивости по
но в виде
Гурвицу может быть записа-
Сопоставление полученного условия устойчивости системы для
относительного движения с условием устойчивости для авто-
номно работающего канала (неравенство 5.37) указывает на
уменьшение запаса устойчивости, так хак правая часть нера-
ky
ненства (6.87) возросла на kB —. Таким образом, условие ус-
тойчивости одиночно работающих каналов является необходи-
мым, но не достаточным условием устойчивости системы элект-
роснабжения с параллельно работающими каналами.
Для повышения устойчивости многоканальных систем элект-
роснабжения принимают ряд дополнительных мер, например,
включение в уравнительные цепи их регуляторов вторичных
обмоток стабилизирующих трансформаторов, используемых в
качестве гибких отрицательных обратных связей в одиночно ра-
ботающих каналах.
12. Изд. Ns 7934
177
Глава 7
ЭЛЕКТРОМАШИННЫЕ ПРЕОБРАЗОВАТЕЛИ
7.1. ОБЩИЕ СВЕДЕНИЯ
В системах электроснабжения ЛА электромашинные пре-
образователи постоянного тока в переменный используются, как
правило, в качестве аварийных источников переменного тока
постоянной частоты для питания приемников 1-й категории.
Ранее, когда на ЛА в основном применялись системы электро-
снабжения постоянного и переменного тока переменной часто-
ты, электромашинные преобразователи использовались в ка-
честве основных источников переменного тока постоянной ча-
стоты.
В настоящее время наибольшее распространение получили
однофазные электромашинные преобразователи типа ПО на-
пряжением 115 В, трехфазные — типа ПТ с линейными напря-
жениями 36 и 200 В и комбинированные — типа ПТО с ли-
нейным напряжением 36 .В и однофазным 115 В.
Мощность серийных преобразователей лежит в пределах от
125 до 6000 В-А.
Конструктивно электромашинный преобразователь пред-
ставляет собой совокупность электромашинного агрегата и ко-
робки с элементами систем регулирования, управления и защи-
ты. Электромашинный .агрегат состоит из соединенных на од-
ном валу электродвигателя постоянного тока и одного или
двух (в преобразователях типа ПТО) синхронных генераторов.
Электромашинные преобразователи по сравнению с первич-
ными источниками электроэнергии имеют худшие массогабарит-
ные и энергетические характеристики. Так, например, удельная
масса преобразователей мощностью 750 и 2500 В-А соответ-
ственно равна 21 и 13 кг/кВ- А, а КПД вследствие двукратного
преобразования энергии не превышает 0,55.
В преобразователях для привода генератора применяют дви-
гатели ПЛтоянного тока независимого, параллельного или сме-
шанного возбуждения. В процессе их запуска в зависимости от
мощности преобразователя пусковые токи могут достигать со-
тен ампер, что вызывает резкое понижение напряжения в сети.
178
Для уменьшения величины «провала» напряжения преобра-
зователи мощностью более 750 В-А включаются в сеть через
пусковые резисторы. На рис. 7.1 приведена 'принципиальная схе-
ма включения в бортовую сеть такого преобразователя. При
замыкании выключателя В срабатывает контактор К1 и элект-
родвигатель преобразователя
через пусковой резистор ^.под-
ключается к бортовой сети
(первая ступень запуска). По
мере разгона двигателя .воз-
растает его противо-ЭДС, а
ток в цепи якоря уменьшается.
После того, как противо-ЭДС
двигателя достигнет 13...15 В,
срабатывает реле R3 м его
контакты замыкают цепь пи-
тания обмотки контактора К2.
11оследний своими контактами
шунтирует пусковой резистор
R п электродвигатель подклю-
чается на полное напряжение
бортовой сети (вторая ступень
запуска). Одновременно с от-
ключением пускового резисто-
ра включаются системы регу-
Рис. 7.1. Принципиальная схема
включения электромашинного преоб-
разователя
дарования частоты м напряже-
ния и после этого генератор преобразователя подключается
к соответствующим шинам РУ.
Серийные электромашинные преобразователи, как правило,
снабжаются центробежным переключателем (ЦП). Если ча-
стота вращения преобразователя в случае отказа в системе ре-
гулирования частоты превысит на 15...20% свое номинальное
значение, то замыкаются контакты ЦП. Это приводит к сраба-
тыванию реле К4. Его нормально замкнутые контакты разры-
вают цепи питания обмоток контакторов К1 и К2. Преобразова-
тель отключается от сети постоянного тока и одновременно че-
рез замыкающие контакты реле К4 подается сигнал на вклю-
чение резервного преобразователя. Контакты центробежного
переключателя ЦП после снижения частоты вращения преобра-
ювателя ниже номинальной величины возвращаются в исходное
положение.
Для повторного включения этого преобразователя необходи-
мо выключить выключатель В (при этом реле К4 снимается с
самоблокировки) и затем снова его включить (рис. 7.1). Если
причина, вызвавшая чрезмерное повышение частоты вращения
преобразователя, устранена, то он будет подключен к бортовой
сети постоянного тока.
179
1В зависимости от 'назначений, типа и мощности преобразова-
теля .поддержание его частоты вращения и напряжения пере-
менного тока в заданных пределах, определяемых требования-
ми ГОСТа 19705—81, применяются различные методы регули-
рования этих .величин.
7.2. РЕГУЛИРОВАНИЕ ЧАСТОТЫ ТОКА ЭЛЕКТРОМАШИННЫХ
ПРЕОБРАЗОВАТЕЛЕЙ
Частота тока синхронного генератора преобразователя одно-
значно определяется частотой вращения его двигателя, величи-
на которой для двигателя смешанного возбуждения равна:
’ См(Ф„+Фу) ’
где U — напряжение сети постоянного тока;
Ra —- сопротивление цепи якоря двигателя;
/я — ток якоря двигателя;
си — постоянный коэффициент;
Фп, Фу — магнитные потоки, создаваемые токами в после-
довательной и управляющей (параллельной.)
обмотках возбуждения двигателя.
Магнитный поток Фп, создаваемый током в цепи якоря,
зависит от момента нагрузки двигателя, т. е. от активной мощ-
ности подключенных <к генератору приемников. Эта часть маг-
нитного потока двигателя практически не подлежит регулиро-
ванию для изменения его частоты вращения.
Из известных методов стабилизации частоты вращения дви-
гателей постоянного тока в серийных преобразователях распро-
странение получили методы регулирования путем изменения
тока в обмотке управления (возбуждения) двигателя и путем
изменения его момента нагрузки.
На рис. 7.2 'Приведена схема системы регулирования часто-
ты тока преобразователя путем изменения тока в обмотке уп-
равления двигателя. Здесь в качестве измерительного органа
ИО регулятора используется последовательный резонансный
контур, состоящий из дросселя Др и конденсатора С1. Пара-
метры контура выбраны так, что резонанс напряжения имеет
место при частоте/рез = (440...470) Гц. Диоды VI и V2 поочеред-
но включают этот контур в цепь питания обмоток управления
wyl и wy 2 магнитного усилителя.
Магнитный усилитель кроме рабочих обмоток wp 1 и wp2 и
обмоток управления wyi и иу2 имеет еще обмотку начального
подмагничивания ьунп, демпфирующую тд и стабилизирующую
шс обмотки. Магнитодвижущая сила, создаваемая током в об-
мотке начального подмагничивания, пропорциональна напря-
жению генератора преобразователя. Так как она действует на-
ши
встречу МДС обмоток управления, включенных также на на-
пряжение генератора, то результирующая МДС этих обмоток
практически мало зависит от 'изменения напряжения генерато-
ра. Гони в обмотках wn и wc протекают только во время пере-
ходных 'процессов.
Рис. 7.2. Схема системы регулирования частоты
преобразователя с последовательным резонанс-
ным -контуром
Зависимость тока /у, протекающего в резонансном контуре,
от частоты и рабочая характеристика УМ приведены на рис.
7.3. При повышении частоты происходит увеличение тока в об-
Рис. 7.3. Зависимость тока -в резонансном контуре от частоты
и рабочая характеристика УМ
мотках управления wyl и гоу2 магнитного усилителя. Увеличе-
ние МДС Fy, как это следует из рабочей характеристики УМ,
Т81
приводит к увеличению тока /уд в обмотке управления (воз-
буждения) а?уд двигателя. Это обусловливает уменьшение его
частоты вращения и, следовательно, уменьшение частоты тока
генератора.
Демпфирующая обмотка wa предназначена для ограниче-
ния резких изменений результирующей МДС усилителя при из-
менении режима работы преобразователя. Например, с увели-
чением нагрузки преобразователя снижается его частота вра-
щения и возрастает ток в цепи якоря двигателя. При изменении
тока якоря во вторичной обмотке w2 стабилизирующего транс-
форматора Т наводится ЭДС и по демпфирующей обмотке w п
протекает ток, направление которого для рассматриваемого
случая способствует намагничиванию сердечников УМ. Таким
образом, результирующая МДС, несмотря на снижение МДС
Fy, создаваемой обмотками управления, из-за снижения часто-
ты вращения двигателя не может резко измениться. Это пре-
дупреждает резкие изменения частоты вращения двигателя.
После окончания переходных процессов ток в обмотке wa не
протекает и она не оказывает влияния на точность поддержа-
ния частоты в статических режимах. С целью обеспечения не-
обходимой величины сигнала в обмотке при изменении то-
ка в цепи якоря двигателя на сердечнике стабилизирующего
трансформатора Т располагается дополнительная обмотка w3,
включаемая через резистор R на напряжение бортовой сети.
С помощью резистора R подбирается такая степень насыщения
сердечника трансформатора Т, которая обеспечивает требуемый
уровень сигнала в обмотке w2 при изменении тока электродви-
гателя.
Короткозамкнутая обмотка аус магнитного усилителя слу-
жит для подавления колебаний МДС при резких изменениях
токов в его обмотках управления. В этом случае в обмотке wc
наводится ЭДС, которая вызывает протекание в ней тока, стре-
мящегося поддержать неизменной величину магнитного потока
в сердечниках.
К числу недостатков применяемых в регуляторах частоты
резонансных контуров относят влияние на величину их выход-
ного сигнала как изменения частоты тока, так и изменения на-
пряжения. Это можно проиллюстрировать, например, выраже-
нием для тока в контуре с последовательно соединенными 7?,
L и С-элементами
(7.2)
Улучшение характеристик измерительных органов регулято-
ров частоты ряда преобразователей достигается путем приме-
18:
нения вместо резонансных контуров более сложных чувстви-
тельных элементов, среди которых получил наибольшее распро-
странение фазочувствительный выпрямитель В. Г. Константи-
нова.
Для пояснения принципа действия этого измерительного ор-
гана вначале рассмотрим схему простейшего одноиолупериод-
ного фазочувствительного моста, приведенную на нижней части
рис. 7,4,п. Здесь контролируемое напряжение переменного то-
ка Д] подводится к первичной обмотке трансформатора Т1,
Рис. 7.4. Схема однополупериодного фазо-
чувствительного моста и его векторная
диаграмма напряжений
вторичная обмотка которого выполнена с нулевой точкой.
К выходным зажимам трансформатора Т1 через резистор и
конденсатор С подключена первичная обмотка трансформа-
тора Г2. Величина тока ik, протекающего через первичную об-
мотку трансформатора Т2, равна;
183
; _______________________________
'к . - . . ~ ~ __ >
, / / 1 \2
1/ №+/?J2 + <°Lk----------
“ \ 0>С /
(7.3)
где ki — коэффициент трансформации трансформатора Т1;
Rl, Lk— активное сопротивление и индуктивность первич-
ной обмотки трансформатора Т2.
Параметры конденсатора С и трансформатора Т2 выбраны
так, что резонанс напряжений .во внешнем контуре фазочувст-
вительного моста наступает при значении частоты, превышаю-
щей ее номинальную величину.
Резонансная частота <ор при резонансе напряжений равна:
«> =-------. При «> = «>,, ток iK во внешнем контуре измеритель-
ное
кого моста достирает наибольшего значения и находится в фазе
с напряжением С2 на зажимах вторичной обмотки трансформа-
тора Т1. При <» > <пр этот ток отстает от напряжения 02, а при
w < <ор— опережает- Й2.
Протекание тока iK во внешнем контуре моста обусловлива-
ет наведение во вторичных обмотках трансформатора Т2 ЭДС
еоп. Эта ЭДС отстает от тока iK на 90°. На рис. 7.4,6 показана
векторная диаграмма напряжений для .внутреннего контура
однополупериодного фазочувствительного моста, в цепь которо-
го включен резистор R3, для случая, когда «> < «>р.
Из приведенной диаграммы следует, что при условии равен-
ства сопротивлений резистора и первичной обмотки RL
трансформатора Т2 и «> <Г «>р вектор ЭДС еоп находится в фазе
с вектором напряжения Umn между точками т и п внутреннего
контура моста.
На рис. 7.4,а рассматриваемый измерительный орган имеет
два внутренних контура с выходными резисторами /?3 и 7?4.
В этих контурах под действием напряжений U„„ и ЭДС еоп че-
рез резисторы R3 и R4 протекают токи, которые выпрямляются
диодами VI и V2. Разница падений выпрямленных напряже-
ний на резисторах /?3 и /?4 используется в качестве выходного
сигнала Ue№l измерительного моста „
йвнх=^3-^. (7.4)
Отличие.сигналов, формируемых на резисторах R3 и R4, заклю-
чается в том, что в одном из внутренних контуров измеритель-
ного opratfa изменяют направление ЭДС еоп путем обратного
включения его вторичной обмотки трансформатора Т2
(рис. 7,4,й).
184
В этом случае средние выпрямленные напряжения на рези-
сторах R3 и R4 в зависимости от изменения частоты определя-
ются следующими выражениями:
тп ^оп)
(Uтп боп)
UR3 — 7вСОп
7^4 --- ^в^оп
U/?3 ^в тп ~ ^оп)
= тп ^оп)
При
при <и — о>р ,
При W > <0р ,
(7.5)
Рис. 7.5. Выходная характеристика
фазочувствительного моста
где kB — 'коэффициент выпрямления выпрямителя.
Поэтому цри изменении частоты синхронного генератора, на-
пример ее увеличении, падение напряжения на резисторе R3
будет уменьшаться, а на резисторе R4 — увеличиваться. При
«> = «)р напряжения UR3 = UK4 = kBeon (рис. 7.4,6).
Характер изменения падений напряжений на резисторах R3
и R4 и результирующего выходного сигнала 77Bblx=t7ff3—UR4 изме-
рительного органа от изменения частоты показан на рис. 7.5.
Выходная характеристика
77 вых = <f(UJ) рассматриваемого
фазочувствительного моста об-
ладает большой крутизной и в
точке резонансной частоты
(1> = <1>р проходит через нуль.
Резонансная частота выбрана
так, чтобы «>р > <»ном.
На рис. 7.6 'приведена схе-
ма системы регулирования ча-
стоты комбинированного пре-
образователя типа ПТО, изме-
рительным органом которого
является фазочувствительный
выпрямитель. В отличие от
рассмотренного простейшего
однополупериоднрго моста
(рис. 7.4,а) в этом измерительном органе использованы двух-
полупериодные мостовые схемы, что позволяет увеличить вдвое
его коэффициент усиления. Для обеспечения непрерывности пи-
тания измерительного органа ИО системы регулирования в слу-
чае отказа одного из синхронных генераторов используется
трансформатор Т1 с двумя первичными обмотками, одна из ко-
торых может получать питание от однофазного, а другая —
от двух фаз трехфазного генератора. Подключение соответству-
ющих обмоток трансформатора Т1 к зажимам генераторов осу-
ществляется переключающими контактами реле К4.
185
ft
Рис. 7.6. Схема транзисторного регулятора частоты вращения преобразователя ПТО
186
Выходной сигнал UDI1K = с(ш) измерительного органа посту-
пает на вход блока предварительного усиления УП.
Принципы действия входящих в регулятор частоты враще-
ния блоков предварительного усиления УП, усилителя мощнос-
ти УМ и силовой части СЧ рассматривались в гл. 4.
При закрытии силового транзистора VI в обмотке .возбуж-
дения двигателя М возникает ЭДС самоиндукции, которая
обусловливает протекание тока через обмотку трансфор-
матора Т1 и диод V9, что обеспечивает режим непрерывного
тока в обмотке возбуждения двигателя.
Процесс стабилизации частоты тока преобразователя ПТО,
например при ее увеличении, осуществляется следующим обра-
зом. В измерительном органе регулятора при увеличении часто-
ты тока возрастает потенциал точки «а» и уменьшается потен-
циал точки «б» (рис. 7.5). Это обусловливает уменьшение тока
в обмотке управления wy магнитного усилителя блока УМ, что
приводит к увеличению времени открытого состояния транзи-
стора V5 и, следовательно, транзистора VI силовой часта ре-
гулятора.
Ток возбуждения двигателя М возрастает и, следовательно,
уменьшается его частота вращения.
Рассмотренный метод регулирования частоты вращения
двигателя преобразователя путем изменения тока в его обмот-
ке возбуждения позволяет обеспечить высокую точность под-
держания частоты тока генератора, но требует применения
относительно сложной системы управления.
Более простым методом регулирования с точки зрения его
практической реализации является метод регулирования час-
тоты вращения преобразователя путем изменения нагрузки ге-
нератора. В качестве примера на рис. 7.7 приведена принцнпи-
Рис. 7.7. Принципиальная схема системы регули-
рования частоты преобразователя путем измене
ния момента его нагрузки
187
альная электрическая схема одного из вариантов такой систе-
мы регулирования частоты вращения. В электромашинном аг-
регате этого преобразователя используется синхронный генера-
тор, имеющий две обмотки возбуждения: wnr и текг.
Обмотка возбуждения дапг включена в цепь литания яко-
ря двигателя. Она создает основную часть магнитного потока
генератора, величина этой части потока пропорциональна току
якоря двигателя.
Обмотка возбуждения wKr включена через выпрямитель В и
последовательно соединенные индуктивную катушку L и кон-
денсатор С к зажимам генератора. Параметры катушки L и
конденсатора С выбраны так, чтобы резонанс напряжений в
этой цепи наступил при частоте тока в пределах 460...480 Гц.
С изменением нагрузки генератора, например при ее умень-
шении, возрастает частота вращения двигателя, т. е. частота
тока генератора. Это приводит к увеличению тока 1КГ, протека-
ющего в обмотке возбуждения йукг и, следовательно, повышению
напряжения генератора.
В свою очередь, повышение напряжения вызывает увеличе-
ние тока нагрузки, что обусловливает снижение частоты вра-
щения двигателя преобразователя.
К недостаткам рассмотренного метода регулирования отно-
сят его невысокую точность стабилизации частоты вследствие
относительно малой чувствительности регулятора.
7.3. РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ ЭЛЕКТРОМАШИННЫХ
ПРЕОБРАЗОВАТЕЛЕЙ
В качестве генераторов переменного тока электромашинных
преобразователей используются синхронные генераторы как с
электромагнитным возбуждением, так и возбуждением от по-
стоянных магнитов.
Стабилизация напряжения генераторов электромашинных
преобразователей осуществляется путем:
— изменения тока возбуждения генератора;
— подмагничивания спинки статора генератора;
— изменения частоты вращения двигателя генератора.
Для регулирования напряжения преобразователей широкое
применение получили регуляторы на магнитных усилителях,
транзисторные и угольные?
На рис. 7.8 приведена принципиальная электрическая схема
системы регулирования напряжения преобразователя типа ПТ'О,
стабилизация напряжения 'которого осуществляется путем изме-
188
нения тока в обмотке возбуждения генератора. Основными эле-
ментами системы регулирования напряжения являются: блок
питания измерительного органа ВУ, измерительный орган
ИО, магнитный усилитель УМ, угольный регулятор (УР) и
стабилизирующий трансформатор Т1.
Измерительный орган регулятора представляет собой нели-
нейный мост, в одном из плёч которого включен стабилитрон
VI. Магнитный усилитель имеет кроме рабочих обмоток wp 1
и wp2 обмотку положительной обратной связи ауос и обмотку
управления <оу.
Рис. 7.8. Принципиальная схема системы регулирования на-
пряжения преобразователя НТО
Исходя из принципа действия УМ, МДС Fy, создаваемая
обмоткой управления wy, размагничивает их сердечники. По-
этому параметры элементов измерительного моста выбраны так,
чтобы потенциал точки «а» его схемы был выше потенциала
точки «б». В этом случае повышение напряжения генератора
будет вызывать уменьшение величины Fy, а его понижение —
увеличение F у.
Нагрузкой магнитного усилителя является рабочая обмотка
электромагнита w3 угольного регулятора (УР). При отклонении
(напряжения генератора, например его повышении, уменьшается
ток в обмотке управления wy магнитного усилителя. Следстви-
189
ем этого будет увеличение тока /8, протекающего в рабочей
обмотке wa угольного регулятора (рис. 7.9).
Рис. 7.9. Рабочая характе-
ристика магнитного усили-
теля регулятора напряже-
ния
Это приведет к росту сопротив-
ления угольного столба, уменьше-
нию тока возбуждения генератора
.и снижению его напряжения, пока
оно не станет близким к номиналь-
ному.
Действие стабилизирующего
трансформатора Т1 заключается в
том, чтобы предупредить резкое из-
менение напряжения, подводимого
к рабочей обмотке электромагнита
w9 регулятора. Первичная обмотка
трансформатора включена на за-
жимы обмотки возбуждения генера-
тора, вторичная обмотка — в цепь
питания обмотки электромагнита
wa. При изменении напряжения на
обмотке возбуждения генератора во
вторичной обмотке стабилизирую-
щего трансформатора наводится
ЭДС. Эта ЭДС в случае повышения напряжения на обмотке
возбуждения генератора складывается с выходным напряже-
нием УМ, что приводит к росту тока в обмотке электромагнита
те'э п, следовательно, .возрастанию сопротивления угольного
столба регулятора. В итоге это способствует повышению устой-
чивости процесса регулирования напряжения.
Применяемые в электромашинных преобразователях тран-
зисторные регуляторы напряжения по принципу действия ана-
логичны транзисторному регулятору, работающему в комплекте
с генератором постоянного тока (см. рис. 4.22).
7.4. ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ ЭЛЕКТРОМАШИННЫХ
ПРЕОБРАЗОВАТЕЛЕЙ
В настоящее время на ЛА электромашинные преобразовате-
ли, как правило, используются в качестве аварийного источ-
ника переменного тока постоянной частоты. Поэтому уделяется
большое внимание вопросам повышения их надежности, совер-
шенствованию работ по техническому обслуживанию при под-
готовке ЛА к полетам, а также при регламентных работах.
К наиболее' характерным неисправностям, выявленным в
процессе эксплуатации преобразователей, относят:
— преобразователь при его включении в бортовую сеть
не запускается;
190
— искрение под щетками, подгорание коллектора или кон-
тактных колец;
— чрезмерное повышение частоты вращения генератора;
— напряжения генераторов не соответствуют заданным тре-
бованиям.
Возможными причинами этих неисправностей, как правило,
являются: обрывы проводов в электрических цепях или пло-
хой контакт в местах их присоединения, загрязнение коллекто-
ра или контактных колец, плохое прилегание щеток к коллек-
тору или к контактным кольцам, обрывы или короткие замыка-
ния в отдельных элементах систем регулирования напряжения
и частоты.
Применяемые в преобразователях конструкции двигателей и
генераторов, регуляторов напряжения и частоты требуют стро-
гого соблюдения правильной полярности источника питания.
Так, например, при включении двигателя смешанного возбуж-
дения в сеть с неправильной полярностью его частота враще-
ния резко возрастает, срабатывает центробежный выключатель
блока управления и защиты и преобразователь отключается от
сети.
Электромашинные преобразователи не предназначены для
включения на параллельную работу между собой или с борт-
сетью. В случае их включения на параллельную работу возника-
ют большие уравнительные токи.
В процессе эксплуатации преобразователей необходимо ре-
гулярно следить за состоянием щеточно-коллекторных и кон-
тактных узлов электрических машин и мест соединений прово-
дов силовой электрической сети, а также контролировать при
запуске преобразователя напряжение источника питания.
При наличии больших переходных сопротивлений в местах
присоединения проводов цепи питания двигателя из-за боль-
шого падения напряжения возможна неустойчивая работа пре-
образователя.
Ухудшение устойчивости работы преобразователя имеет мес-
то и при его включении к источнику питания соизмеримой мощ-
ности.
Это можно объяснить следующим образом. Как отмечалось
ранее, устойчивость процессов регулирования частоты и напря-
жения электромашинных преобразователей во многом опреде-
ляется величиной коэффициента самовыравнивания привода
(ем. гл. 3)
«>„ / дМ.. д
sM = —— --------------. (7.6)
/Ио \ д и ди /
191
Входящий в Это выражение момент Л4пр, развиваемый элек-
тродвигателем преобразователя, равен:
.. _ . _ U — с <» Ф
/Илр = сФ/я = <?Ф----------------,
(7.7)
где гд — дополнительное сопротивление в цепи литания якоря
двигателя.
Подставляя уравнение (7.20) в (7.19), получим
sM
«>0 дМг (сФ)2
Мо д <» гя -ф гд
(7-8)
Из последнего уравнения следует, что увеличение сопротив-
ления в цепи питания двигателя приводит к уменьшению коэф-
фициента sM и, следовательно, уменьшению запаса устойчиво-
сти систем регулирования частоты и напряжения преобразо-
вателя.
В случае, если при пуске преобразователя напряжение в
бортовой сети из-за большого падения напряжения в силовых
проводах станет меньше напряжения отпускания реле блока
управления, то контактор включения преобразователя в сеть
будет периодически включаться — отключаться (работает в
режиме «звонка»), что приведет к ухудшению качества элек-
троэнергии, отказу контактора.
Глава S
СТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
8.1. КЛАССИФИКАЦИЯ СТАТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
Статическими преобразователями принято называть вторич-
ные источники электроэнергии, в которых преобразование элек-
трической энергии осуществляется путем коммутации электри-
ческих цепей с помощью полупроводниковых приборов без про-
межуточного преобразования ее в механическую энергию. По
сравнению с электромашинными статические преобразователи
имеют ряд преимуществ: более высокий КПД, меньшие удель-
ная масса и трудозатраты на обслуживание, отсутствие подвиж-
ных контактов, долговечность.
В общем случае статический преобразователь представляет
собой сложное техническое устройство, объединяющее ряд функ-
циональных узлбв (рис. 8.1):
Рис. 8.1. Структурная схема статического пре-
образователя
— силовую часть (собственно преобразователь) СЧ;
— устройство управления (УУ);
— регулятор (Р);
— устройство защиты и контроля (УЗК);
— входной и выходной фильтры (Ф);
— встроенный источник питания (ВИП).
Преобразование электрической энергии и согласование
уровней входного и выходного напряжений выполняет его си-
13. Изд. № 7934
193'
лопая часть СЧ* Тип силовой части статического преобразова-
теля определяет его наименование и основные классификаци-
онные признаки.
Устройство управления реализует заданный закон преобра-
зования электрической энергии. Регулятор (напряжения, час-
тоты), фильтры, устройство защиты и контроля обеспечивают
требуемое качество электрической энергии на выходе преобра-
зователя.
Статические преобразователи принято классифицировать: по
функциональному назначению; виду электрической энергии на
входе и выходе; способу преобразования и способу коммутации
полупроводниковых приборов силовой части.
По функциональному назначению все статические преобра-
зователи подразделяются на преобразователи рода тока, пре-
образователи частоты и преобразователи уровня напряжения.
По виду электрической энергии на входе и выходе авиацион-
ные статические преобразователи подразделяют на:
— преобразователи переменного тока в постоянный (выпря-
мители или выпрямительные устройства);
— преобразователи постоянного тока в переменный (инвер-
торы) ;
— преобразователи переменного тока переменной частоты в
переменный ток постоянной частоты (циклоконверторы или ста-
тические преобразователи частоты);
— преобразователи постоянного тока одного уровня напря-
жения в постоянный ток другого уровня напряжения (конвер-
торы постоянного тока или статические умформеры).
По способу преобразования энергии они делятся на преоб-
разователи с однократным и многократным преобразованием.
По способу коммутации полупроводниковых приборов сило-
вой части различают преобразователи с естественной и искус-
ственной (принудительной) коммутацией.
Кроме того, в зависимости от наличия регуляторов, все пре-
образователи подразделяют на регулируемые (управляемые) и
нерегулируемые.
В зависимости от принятой структуры системы электроснаб-
жения статические преобразователи выполняют функции основ-
ных, резервных или аварийных источников электрической энер-
гии. Параметры качества электрической энергии на выходе ави-
ационных статических преобразователей должны соответство-
вать требованиям ГОСТа 19705—81.
8.2. ПРИНЦИПЫ РАБОТЫ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
ВЫПРЯМИТЕЛЕЙ
Основным элементом силовой части статического преобразо-
вателя переменного тока в постоянный ток является блок вен-
тилей, который обычно называют выпрямителем.
494
Для согласования уровней напряжения питания и выпрям-
ленного напряжения применяются трансформаторы Совокуп-
ность выпрямителя и трансформатора называют выпрямитель-
ным устройством (ВУ).
Все выпрямители обычно подразделяют:
— по числу фаз переменного тока — на одно- и многофаз-
ные;
— по числу полуволн выпрямленного напряжения одной
фазы —на одно- и двухполупериодные;
— по способу соединения вентилей и нагрузки — на мосто-
вые и с нулевой точкой.
Следует различать число фаз первичного источника пере-
менного тока (на входе выпрямительного устройства) т и чис-
ло фаз на входе выпрямителя тв. которые в общем случае не
совпадают. Здесь и в дальнейшем при рассмотрении характе-
ристик выпрямителей под числом фаз понимается число фаз на
входе выпрямителя.
Типовые схемы выпрямителей приведены на рис. 8.2.
В выпрямителях с нулевой точкой (рис. 8.2,а, в, г) один
из зажимов нагрузки соединяется с одной из клемм источника
переменного тока или его средней (нулевой) точкой. В мосто-
вых выпрямителях (рис. 8.2,6, д) нагрузка подключается к ди-
агоналям однофазных или многофазных электрических мостов,
образованных вентилями, и не имеет общих точек с источником
переменного тока.
В системах электроснабжения ЛЛ наибольшее применение
получили мостовые однофазные и трехфазные выпрямители.
Принцип работы выпрямителей основан на использовании
свойства односторонней проводимости вентилей — управляе-
мых и неуправляемых полупроводниковых диодов.
Вентили выпрямителей в зависимости от того, какими элек-
тродами (анодом или катодом) они подключены к источнику
переменного тока, делятся на две группы — анодную и катод-
ную.
Состояние вентилей в любой произвольный момент времени
определяют следующим образом: в данный момент времени в
анодной группе находится в состоянии проводимости (открыт)
тот из вентилей, который имеет на аноде максимальный потен-
циал, а в катодной группе — вентиль, имеющий на катоде
минимальный потенциал. Из открытого состояния в закрытое
и обратно вентили переходят в моменты времени, соответству-
ющие равенству потенциалов на электродах вентилей одной груп-
пы. Эти моменты времени называют моментами естественной
коммутации вентилей.
Указанное правило коммутации вентилей позволяет постро-
ить временную диаграмму выпрямленного напряжения для
любого, например, трехфазного двухполупериодного (мостово-
13*
|95
ft
Рис. 8.2. Типовые ‘Схемы
выпрямителей и диаграммы выпрямленного
напряжения .
19&'
го) выпрямителя, схема которого приведена на рис. 8.2,д и но-
сит название схемы А. Н. Ларионова.
В момент времени t' в анодной .группе находится в состоя-
нии проводимости (открыт) диод VI, так как е1(/,)=шах{е}, а в
катодной группе — диод V6, так как е3(7')=мп1п{<?}. Мгновенное
значение выпрямленного напряжения u'd равно разности потен-
циалов на электродах открытых'вентилей, т. е.
и'<Г= ex(t') -
В момент времени, когда ei = e2, диод VI закрывается и от-
крывается диод V2. За один период Т переменного тока каж-
дый из вентилей отв-фазного выпрямителя находится в состоя-
нии проводимости в течение времени Т]тв.
Напряжение на выходе выпрямителя при синусоидальной фор-
ме напряжения питания носит пульсирующий характер. Число
пульсаций N„ выпрямленного напряжения за один период пере-
менного тока определяется числом фаз /ни и типдм схемы вы-
прямителя
Nn = cB-mB, (8.1)
где св— характеристический коэффициент схемы выпрямле-
ния, равный 2 для мостовых выпрямителей и 1 для
выпрямителей с нулевой точкой.
Соответственно период пульсации напряжения, выраженный
через электрический угол Х„, составляет
>п = -4-. (8.2)
Mi
График выпрямленного напряжения (рис. 8.2) является оги-
бающей мгновенных значений 'фазных или линейных напряже-
ний на входе выпрямителя. Мгновенное значение выпрямленного
напряжения в течение одной пульсации при синусоидальной
форме напряжения на входе выпрямителя изменяется.по закону
«^(0= I7dm-cos^<»^---если 0 < <о/<Хп, (8.3)
где Udm — максимальное мгновенное значение выпрямленного
напряжения.
Максимальное значение выпрямленного напряжения Udtn
равно амплитуде’ фазного напряжения для выпрямителей
с нулевой точкой и амплитуде максимального из линейных на-
пряжений U лт многофазных мостовых выпрямителей.
Минимальное мгновенное значение выпрямленного напря-
жения соответствует границам каждой пульсации, т. е.
r/rfmin = ^(«m ’COS • (8.4)
£
197
9
*
Выпрямитель как источник электрической энергии постоян-
ного тока характеризуется двумя основными параметрами: ко-
эффициентом выпрямления и коэффициентом пульсации.
Коэффициентом выпрямления kB называется отношение
среднего значения (постоянной составляющей) выпрямленного
напряжения UM к действующему значению фазного напряже-
ния U на входе выпрямителя.
Среднее значение выпрямленного напряжения с учетом вы-
ражения (8.3) равно:
2n Z,,
• cos Lz- -М d<!>t =
A: J 2к J \ 2 /
о о
= rdl„.-n - sin(8.5)
к 2
поэтому коэффициент выпрямления для любого выпрямителя
определяется по формуле
1'в == К2 • sin . (8.6)
Цм « 2
Коэффициентом пульсаций kn называют отношение полураз-
ности максимального и минимального мгновенных значений вы-
прямленного напряжения к его среднему значению, т. е.
Udm — Udm cos —
г т it ll'lTl Urn pv
fa____dm Jd мин __ 2
2G‘'° • sin-n-
it 2
(8.7)
Для неуправляемого выпрямителя с учетом выражения (8.7)
коэффициент пульсации напряжения определяется по формуле
А'"=^-Т
(8-8)
Коэффициент пульсации напряжения авиационных выпрями-
тельных устройств в соответствии с требованиями ГОСТа
19705—81 не должен превышать 7,4%.
Важными параметрами выпрямителя, определяющими
класс и мощность используемых вентилей, являются величины
максимального обратного напряжения Uof)f, среднего /ии мак-
симального /Гмакс токов вентилей.
Перечисленные параметры выпрямителей для наиболее рас-
пространенных схем выпрямления сведены в табл. 8.1.
198
Таблица 8.1
Основные характеристики выпрямителей
Тип выпрямителя kB *п, п/о £4)бр Гу Вумаке Udm
Однофазный однополу- псриодный (рис. 8.2,а) 0,45 157 • 1а ^фт
Однофазный мостовой (рис. 8.2,6) 0,9 78,5 7'ф„, 2 Id 7'" Чфт
Двухфазный с нулевой точкой (рис. 8.2,в) 0,9 78,5 ~Id S 1 CM Uфщ
Грехфазнын с нулевой точкой (рте. 8.2,г) 1,17 30 з /rf 1,214/ Пфт
Трехфазный мостовой (рис. 8.2,д) 2,34 7,0 ШГфт 1 3 Id 1,0454/ 1/з(7фт
Анализ данных табл. 8.1 показывает, что ни одна из при-
веденных ехем выпрямления кроме схемы А. Н. Ларионова без
применения специальных средств для сглаживания выпрямлен-
ного напряжения не обеспечивает выполнение требований ГОСТа
19705—81 в отношении пульсаций .напряжения.
Для уменьшения пульсации напряжения в выпрямительных
устройствах применяют индуктивно-емкостные фильтры или
преобразователи числа фаз.
На ЛА наиболее широко применяются выпрямительные уст-
ройства, выполненные по схеме, приведенной на рис. 8.3 Трех-
фазный трансформатор такого выпрямительного устройства вы-
полняется с двумя группами вторичных обмоток (рис. 8.3,а).
Одна из них по отношению к первичным обмоткам соединяется
по схеме Г/У — 12, а другая — по схеме Y/Д— 11. При таком
Рис. 8.3. Принципиальная электрическая схема выпрямительного устройства
199
*
соединении обмоток на выходе трансформатора образуется ус-
ловно шестифазная система напряжений (две системы линей-
ных напряжений, сдвинутых относительно друг друга на угол
30° эл.). Выпрямленное двумя параллельно работающими
трехфазными мостовыми выпрямителями В1 и В2 напряжение
за один период переменного тока имеет 12 пульсаций с макси-
мальным значением Vdm, равным амплитуде линейного напря-
жения udm = илт =
Коэффициент пульсации напряжения такого выпрямитель-
ного устройства составляет 1,75%, а коэффициент выпрям-
ления — kB = 2,42.
8.3. РАБОТА ВЫПРЯМИТЕЛЕЙ ПОД НАГРУЗКОЙ
Характеристики выпрямителей, рассмотренные выше, были
получены без учета влияния нагрузки при условии, что вентили
в моменты естественной коммутации переходят из открытого
состояния в закрытое и обратно мгновенно, т. е. при условии
идеальной коммутации.
В реальных устройствах в цепях вентилей на стороне пере-
менного тока всегда имеются индуктивности (индуктивности
рассеяния обмоток трансформатора, индуктивность проводов
и т. п.). Поэтому вентили не могут мгновенно перейти из одно-
го состояния в другое.
В течение определенного промежутка времени, называемого
временем коммутации, существует состояние выпрямителя, ког-
да в одной и той же группе приборов (анодной или катодной)
ток одного вентиля уменьшается до нуля, а в другом — увели-
чивается. Процесс перехода вентилей из открытого состояния
в закрытое носит название длящейся коммутации или просто—
коммутации. Наличие этих процессов оказывает существенное
влияние на характеристики выпрямительных устройств.
Рассмотрим влияние процессов коммутации вентилей на
характеристики выпрямительных устройств на примере трех-
фазного мостового выпрямителя, для чего цепи переменного
тока представим в виде последовательного соединения источ-
ника синусоидальной ЭДС еь е2, е3 и индуктивности рассеяния
Ls (рис. 8.4,а).
Для простоты анализа и большей наглядности примем сле-
дующие допущения:
— диоды выпрямителя являются идеальными ключами (в
прймом направлении сопротивление диодов равно нулю, в об-
ратном — бесконечности);
а ктивные сопротивления проводов и фазных обмоток ис-
точника переменного тока равны нулю;
— ток нагрузки id в процессе коммутации диодов не из-
меняется (zd = Id = const) из-за наличия достаточно большой
индуктивности в цепи постоянного тока.
200
Примем за начало отсчета времени t = 0 момент времени,
соответствующий условию £1 = 62 (рис. 8.4,6).
Рис 8.4. Коммутация диодов в выпрямительном устройстве
Тогда
еу = fm.cos(<»/ + М;
е2 = Ет-cos (со t - -- 4- кп);
1 \ . о
е3 — Ет • cos (со t--h kn), (8.9)
3
где Хп—----период пульсации выпрямленного напряжения для
3 данной схемы выпрямления (см. табл. 8.1).
В момент времени, предшествующий t = 0, в соответствии с
правилом коммутации вентилей в открытом состоянии будут
находиться диод VI в анодной и диод V6 в катодной группах,
так как ei>e2^>e3.
При этом справедливы соотношения
А = = (8-ю)
t2 = 0;
(8.11)
udi — ei
— Udm • cos
(8.12)
где иа„г=УЗЕт ~ максимальное значение выпрямленного на-
пряжения, равное амплитуде линейного на-
пряжения источника.
201
Начиная с момента времени t = 0, диод VI должен перейти
в закрытое, а диод V2 — в открытое состояние. Но поскольку
ток в цепи диода VI из-за наличия индуктивности Ls и ток на-
грузки мгновенно измениться не могут, в течение некоторого
промежутка времени tK будут находиться в состоянии проводи-
мости оба диода одновременно.
В соответствии с первым законом Кирхгофа для этого ин-
тервала времени
h + it = /a; (8-13)
4 = 4, (8.14)
где й, 4,4 — мгновенные значения токов, протекающих через
соответствующие диоды, причем при принятом
допущении из уравнений (8.13) и (8.14) следует,
что
dil tli2
dt dt
-^-^0.
dt
(8.15)
(8.16)
По второму закону Кирхгофа для замкнутых контуров имеем
Ls-^- + ud + Ls = et - е3 : (8.17)
dt at
Ls + «й + Л = e9 - es. (8.18)
dt dt
Сложив почленно левые и правые части уравнений (8.17) и
(8.18) с учетом выражений (8.15) и (8.16), получим выражение
для мгновенного значения выпрямленного напряжения в про-
цессе коммутации в следующем виде:
tldW = ~ - <4) + (е2 - е3)] =
= — [cfdmcos (wt -F + Udmcos(iDt---—)
2 \ 2 / \ 2 / (8.19)
или после несложных преобразований в виде
нА t] = Udm • cos — • cos co t (8.20)
Cl i • UUl f-v
Из сравнения полученного выражения с выражением (8.3)
следует, что в процессе коммутации диодов выпрямленное на-
пряжение уменьшается по сравнению с напряжением при иде-
202
альной коммутации. Выпрямленное напряжение при этом из-
меняется по гармоническому закону с амплитудным значением
напряжения
Цгт-С08у.
равным минимальному значению вып-
рямленного напряжения для случая идеальной коммутации
вентилей (рис. 8.4,в).
По истечении процесса коммутации выпрямленное напряже-
ние возрастает скачком до величины
11 d2 — е2 e3 — Udm ' COS
(8.21)
Длительность процесса коммутации диодов tK определим
из условия: //Д) = 0; С этой целью, вычитая из
уравнения (8.17) уравнение (8.18) с учетом равенства (8.15),
найдем законы изменения токов коммутирующихся диодов на
интервале коммутации
dt dt 2
= — U dm sin sin ад t.
(8.22)
После интегрирования этого выражения с учетом начальных
условий t'i(0) = 1а\ /2(0) = 0 получим
/,(/) = Id- Sbs..Sin 2s_(l -cqso^); (8.23)
w Z,t 2
i„(t) = -Sin -A (1 — cos u> t) . (8.24)
u> Ls 2
Процесс коммутации диодов заканчивается, когда/J4) — 0.
Поэтому, приравнивая выражение (8.23) к нулю, получим фор-
мулу для определения угла коммутации Т = ш^к:
у = arccos /1-----——------/А. (8.25)
У Ц/mSln-^- у
Анализ формулы (8.25) показывает, что угол коммутации р,
обусловленный наличием индуктивности рассеяния Ls. зависит
от величины тока нагрузки Id и частоты переменного тока f =
= <о/2к. Угол коммутации зависит также от типа выпрямителя:
с увеличением числа фаз на входе выпрямителя при одних и
тех же параметрах нагрузки и источника переменного тока
угол коммутации увеличивается, так как уменьшается период
пульсации Хп.
203
Среднее значение выпрямленного напряжения с учетом то-
го, что его график (рис. 8.4,в) претерпевает разрыв, определим
как
м
2к
cos
-— cos I» td <» t 4-
2
d&t =
или
о
= Udm• • sin
“ it 2 2
1 + cos If
c d — L'dO _ ,
(8.26)
(8.27)
,, Г, M 4
где Uda = Udm— sin — — среднее значение выпрямленного на-
к 2 пряжения при отсутствии нагрузки,
равное напряжению идеального вы-
прямления.
Подставив в уравнение (8.26) значение cosy из выражения
(8.25), получим
Ud = Ud0-NnfLsId^Ud0- xKId, (8.28)
где xK = NnfLs — эквивалентное внутреннее сопротивление
выпрямителя, обусловленное коммутацией
вентилей.
Рис. 8.5. Внешняя характери-
стика выпрямительного устрой-
ства
Выражение (8.28) представ-
ляет собой уравнение внешней
характеристики идеализирован-
ного выпрямительного устройст-
ва, в котором учитываются толь-
ко коммутационные потери на-
пряжения (рис. 8.5, пунктирная
линия). Фактически на выходе
реальных устройств уменьшение
выпрямленного напряжения по
мере увеличения тока нагрузки
происходит также за счет паде-
ния напряжения на внутреннем
сопротивлении тр ансформ атор а,
на вентилях, силовых проводах и
т. п. Кроме того, уравнения
(8.14)...(8.28) имеют смысл лишь
204
hpti углах коммутации 0 < f< Хп, т. е. когда в процессе комму
тации участвуют одновременно только 2 вентиля одной группы.
Если же нагрузка, частота тока или индуктивность Ls настоль-
ко велики, что длительность коммутации превысит период пуль-
сации Лп, то в процессе коммутации будет участвовать большее
число вентилей и законы изменения токов и напряжений пре-
терпят изменения. С учетом этого внешняя характеристика ре-
ального выпрямительного устройства показана на рис. 8.5
сплошной линией. При малых значениях Id (участок «а») боль-
шая крутизна характеристики обусловлена в основном увеличе-
нием падения напряжения на вентилях. На участке «б» паде-
ние напряжения на вентилях практически постоянно и измене-
ние напряжения обусловлено коммутацией вентилей и падением
напряжения на активных сопротивлениях трансформатора и
проводов. На участке «в» увеличение крутизны характеристики
вызывается в основном изменением характера коммутации.
8.4. СПОСОБЫ СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ
ВЫПРЯМИТЕЛЬНЫХ УСТРОЙСТВ
Известно много способов стабилизации напряжения выпря-
мительных устройств [14, 22].
Наиболее широкое распространение получили методы ста-
билизации напряжения выпрямительных устройств, основанные
на:
— использовании управляемых выпрямителей;
— изменении напряжения питания неуправляемых выпря-
мителей.
В управляемых выпрямителях вместо диодов ис-
пользуются тиристоры (рис. 8.6). Регулирование выпрямлен-
ного напряжения при этом достигается изменением угла отпи-
рания тиристоров.
О'
о-
о-
Рис. 8.6. Управляемые мостовые выпрямители
Для управляемых выпрямителей справедливо общее прави-
ло коммутации вентилей: при подаче управляющих сигналов
в катодной группе тиристоров отпирается только тот, у которо-
205
го максимальный .потенциал анода, а в анодной — тиристор с
минимальным потенциалом катода. Угол отпирания тиристоров
а отсчитывается от моментов естественной коммутации неуп-
равляемых вентилей-диодов. Если угол отпирания тиристоров
.равен пулю, процессы в управляемых выпрямителях идентичны
процессам в неуправляемых .выпрямителях на диодах. Нулевые
углы отпирания могут быть получены при подаче на управля-
ющие электроды тиристоров постоянных потенциалов.
При активной нагрузке тиристоры остаются открытыми до
тех пор, пока напряжение между их анодами и катодами боль-
ше нуля.
Для управления трехфазным .мостовым выпрямителем при
запуске необходимо подавать управляющие импульсы через
каждые 60° одновременно на пары тиристоров (по одному из
катодной и анодной групп) в той последовательности, в которой
они должны отпираться по правилу коммутации вентилей. По-
парная подача импульсов управления целесообразна и при
нормальной работе выпрямителя. Такое управление обеспечи-
вает отпирание очередного тиристора и одного из работавших
ранее, если даже он закрыт при прерывистом режиме протека-
ния тока нагрузки. Таким образом, на каждый тиристор за один
•период питающего напряжения сигнал управления подается
дважды.
Если угол отпирания тиристоров а<60°, то напряжение на
выходе трехфазного мостового выпрямителя и ток нагрузки не-
прерывны во времени. При идеальной коммутации .выпрямлен-
ное напряжение изменяется по закону (рис. 8.7):
где ^dm=l/36/ni— максимальное значение выпрямленного на-
пряжения неуправляемого выпрямителя;
Рис. 8.7. Диаграммы напряжений трехфазного управ-
ляемого выпрямителя
206
1 ~
лп =— — продолжительность пульсации выпрямленно-
3 го напряжения.
Среднее значение выпрямленного напряжения в этом случае
равно:
t7f/ = t7d0-cosa, (8.29)
где Uм— среднее выпрямленное напряжение неуправляемого
выпрямителя.
При 60° <^а<2 120° выпрямленное напряжение становится пре-
рывистым во времени и изменяется по закону (рис. 8.7)
^•cos^Z-A-
0,
, К , ~
если а. < ш t-----<-----;
2 2
если ш t----А п>. _Л_ .
2 2
Среднее выпрямленное напряжение при этом равно:
uilm „
2к
1 — sin
(8.30)
где N „ = 6 — число пульсаций выпрямленного напряжения.
В случае активно-индуктивной 'нагрузки с большими индук-
тивностями ток нагрузки может быть непрерывным и при аД>60°.
В моменты естественной коммутации тиристоры не запираются,
и на нагрузку в определенные интервалы времени подается на-
пряжение с отрицательными мгновенными значениями до тех
пор, пока не откроется очередная пара тиристоров или ток на-
грузки не станет равным нулю. В эти интервалы энергия пере-
дается от нагрузки к источнику (инверсный режим). Для устра-
нения отрицательных значений напряжения при большой индук-
тивности нагрузку обычно шунтируют диодом VI (рис. 8.6,а).
Часто для упрощения схемы управления применяют несим-
метричные мостовые управляемые выпрямители, в которых ти-
ристоры используются только в анодной или катодной группах
приборов. В другой группе приборов устанавливаются диоды
(рис. 8.6,6). Процессы работы таких выпрямителей подобны
процессам симметричных схем выпрямления.
Напряжение на выходе несимметричного мостового выпря-
мителя равно:
ил
|/ 3 ,. 1 -г cos a
----U т , а < я.
т С)
к 2
(8.31)
Для регулирования напряжения этого выпрямителя необхо-
димо иметь только три канала управления. При угле отпирания
207
а. < 120° возможна одновременная подача .импульсов управле-
ния на все три тиристора, но отпираться при этом будет только
тот из них, 'К 'которому приложено максимальное прямое на-
пряжение.
При индуктивном характере .нагрузки схема несимметрич-
ного выпрямителя обладает обратной проводимостью через ра-
нее открытый тиристор ,и один из вентилей. Поэтому на нагруз-
ке не может быть отрицательных мгновенных значений напря-
жения.
Для изменения напряжения питания неуп-
равляемых выпрямителей с целью стабилизации вы-
прямленного напряжения обычно используют дроссели насыще-
ния или .вольтодобавочные устройства.
Дроссель насыщения в выпрямительных устройствах вклю-
чается последовательно с первичными обмотками трансформа-
тора (рис. 8.8).
Рис. 8.8. Принципиальная схема стабилизации напряжения
выпрямительного устройства с дросселем насыщения
Реактивное сопротивление дросселя насыщения (ДН) за-
висит от степени подмагничивания его сердечников постоянным
током. Параметры дросселя и ток управления рассчитываются
так, чтобы при номинальной нагрузке выпрямительного устрой-
ства сердечники были насыщены. В случае уменьшения тока
нагрузки, степень подмагничивания дросселя уменьшается и
его сопротивление увеличивается. При, этом напряжение на
первичных обмотках трансформатора Т уменьшается, что обус-
ловливает поддержание выпрямленного напряжения на задан-
ном уровне.
В рассматриваемой схеме выпрямительного устройства ста-
билизация ^напряжения осуществляется по принципу регулиро-
вания по возмущению: ток в обмотке управления дросселя про-
порционален току нагрузки. Регулирование напряжения авиа-
ционных выпрямительных устройств с учетом изменений напря-
208
жеНия питания должно осуществляться по отклонению или
комбинированным методом.
Недостатками 'рассмотренного способа .регулирования напря-
жения являются значительная масса дросселя и низкий КПД
выпрямительного устройства, особенно при малых токах на-
грузки.
В этом отношении более экономичным является способ ре-
гулирования напряжения выпрямительных устройств, основан-
ный на введении добавочной ЭДС.
В качестве стримера на рис. 8.9,а приведена схема выпрями-
тельного устройства, в котором функции вольтодобавочного ус-
тройства выполняет трансформатор Т2. Вторичные обмотки ос-
новного Т1 и дополнительного Т2 трансформаторов соединены
последовательно и согласно. При этом напряжение на входе
выпрямителя Upe3 является геометрической суммой напряже-
ний трансформаторов (рис. 8.9,6). Его величина равна:
Upe3 = Ч-ЕС2 + 247/72-cosf ,
где 8— угол сдвига фаз между векторами напряжений 1)\ и U2.
Входное напряжение трансформатора Т2 регулируется с
помощью дросселя насыщения ДН (рис. 8.9,а) или с помощью
специальных устройств — статических фазорегуляторов. При
изменении напряжения на входе Т2 соответственно изменяется
п напряжение на выходе выпрямительного устройства.
При таком способе регулирования напряжения управлению
подлежит не вся мощность, подвергаемая преобразованию в
выпрямителе, а только часть ее, что обусловливает более высо-
кий КПД выпрямительного устройства.
14. Изд. № 7934 209
8.5. СТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО ТОКА
В ПЕРЕМЕННЫЙ
Основным элементом силовой части статического преобразо-
вателя постоянного тока в переменный ток является транзи-
сторный или тиристорный инвертор.
'Мощность применяемых в настоящее время на ЛА транзи-
сторных инверторов обычно не превышает 1...2 кВ-А, что обус-
ловлено ограниченной мощностью современных транзисторов.
Тиристорные инверторы в настоящее время не имеют принципи-
альных ограничений по мощности, однако широкого практическо-
го применения на ЛА они пока не находят в связи со сложно-
стью запирания тиристоров при коммутации постоянного тока.
Полупроводниковые приборы в инверторах работают в
режиме переключения. Этот режим позволяет снизить до ми-
нимума потери энергии на инвертирование и максимально ис-
пользовать возможности полупроводниковых приборов по току
и напряжению.
Преобразователи постоянного тока в переменный по спосо-
бу управления силовой частью делят на инверторы с самовоз-
буждением (с естественной коммутацией) и инверторы с неза-
висимым возбуждением (с принудительной коммутацией). Час-
тота переключения, форма тока и напряжения на выходе инвер-
тора с самовозбуждением зависят от собственных параметров
силовой части преобразователя и нагрузки, а инверторов с не-
зависимым возбуждением — задаются устройством управления.
Примером простейшего транзисторного инвертора с само-
возбуждением является релаксационный генератор — мульти-
вибратор с трансформаторной связью (рис. 8.10,а).
Рис. 8.10. Мультивибратор с трансформаторной связью:
а — принципиальная схема; б — магнитная характеристика сердеч-
, ника; в — временные диаграммы работы
i
Сердечник трансформатора Т выполнен из пермаллоя, име-
ющего прямоугольную петлю гистерезиса (рис. 8.10,6), а его
обмотки wl...w4 соединены по схеме положительной обратной
связи по отношению к току коллектора транзисторов VI и V2.
210-
Пусть, например, в 'рассматриваемый момент времени от-
крыт транзистор VI. Тогда напряжение 'источника постоянного
тока Uа приложено к обмотке wl трансформатора, и его сер-
дечник перемагничивается (рис. 8.10,н) со скоростью
dt w^'S'
(8.32)
где В — магнитная индукция в сердечнике трансформатора;
S — площадь сечения сердечника;
Wi — число витков первичной обмотки.
В сигнальных обмотках w3, w4 и на выходе трансформатора
наводится ЭДС
с dB
е,= —-------
J J dt
(8.33)
где •wj — число витков соответствующей обмотки.
Электродвижущая сила обмотки w3 обусловливает удержа-
ние транзистора VI в открытом состоянии, а ЭДС w4 — запи-
рание транзистора V2. Такое состояние будет продолжаться до
тех пор, пока индукция в сердечнике трансформатора не до-
стигнет значения индукции насыщения -рВг (рис. 8.10,6). При
насыщении сердечника ЭДС в обмотках трансформатора ста-
новится равной нулю, транзистор VI закрывается и соответст-
венно уменьшается его коллекторный ток. Это приводит к из-
менению полярности ЭДС в сигнальных обмотках w3 и w4 и
лавинообразному процессу переключения транзисторов (откры-
тие транзистора V2 и закрытие VI). При каждом переключении
напряжение на нагрузке меняет знак на противоположный, т. е.
происходит инвертирование напряжения (рис. 8.10,в) с часто-
той
4 То] • Bs S ’
где Bs — индукция насыщения сердечника трансформатора.
Частота переключений мультивибратора определяется пара-
метрами схемы и напряжением питания UКроме того, часто-
та и напряжение на выходе мультивибратора зависят от тока
нагрузки. При определенной величине сопротивления нагрузки
может произойти срыв автоколебаний. В связи с этим мульти-
вибраторы как вторичные источники электроэнергии применя-
ются только для питания маломощных приемников с фиксиро-
ванным сопротивлением нагрузки, а также в качестве задаю-
щих генераторов в устройствах управления и др. Для получе-
ния большей выходной мощности используют транзисторные
инверторы с нулевой точкой (рис. 8.И,а) или инверторы мосто-
211
14*
його типа (рис. 8.11,6) с Независимым возбуждением. Для То-
го чтобы обеспечить заданный закон переключения транзисто-
ров, необходимо на их базы подавать импульсы тока соответ-
ствующей частоты, формы и длительности. •
Рис. 8.11. Простейшие схемы однофазных инверторов с независимым воз-
буждением:
а — с пулевой точкой; б — мостового типа
В том случае, когда нагрузка инвертора содержит индуктив-
ность, параллельно с транзисторами инвертора должны уста-
навливаться так называемые обратные диоды (рис. 8.11,6), обес-
печивающие протекание реактивного тока нагрузки при закры-
том состоянии транзисторов. Если в качестве источника пита-
ния используется выпрямитель, то для обеспечения реактивной
мощности вход инвертора должен быть зашунтирован конденса-
тором достаточно большой емкости.
Силовая часть тиристорных инверторов (рис. 8.12) выпол-
няется аналогично силовой части инверторов на транзисторах.
Основное отличие инверторов заключается в схемах управле-
ния полупроводниковыми приборами.
Рис. 8.12. Принципиальные схемы силовой части: а — одно-
фазного и б - трехфазпого тиристорных инверторов мосто-
вого типа
> ,Л Ч'" -Л»
. Тиристор при положительной разности потенциалов между
анодом и катодом отпирается подачей импульса тока на его
управляющий электрод, а для закрытия тиристора необходим
212
мо изменить направление его анодного тока. Поэтому для при-
нудительного запирания тиристоров в инверторах применяют
специальные устройства коммутации с использованием емкост-
ных или индуктивных накопителей энергии. Наибольшее при-
менение получили тиристорные коммутаторы с емкостными на-
копителями.
На рис. 8.13 приведен один и? возможных вариантов пост-
роения однофазногр мостового тиристорного инвертора с исполь-
зованием емкостного цакопителя энергии для принудительного
запирания тиристоров.
Рис. 8.13. Схема тиристорного коммутатора с
емкостным накопителем энергии
Основными силовыми элементами инвертора являются ти-
ристоры V3, V4, V9 м V10. Для управления ими используются
две пары вспомогательных тиристоров: VI, V2 и Vll, VI2, а
также коммутирующие конденсаторы С1 и С2. Диоды V5...V8
так же, как и в транзисторных инверторах, обеспечивают проте-
кание реактивного тока нагрузки при запирании основных ти-
ристоров, т.,.е. являются обратными диодами.
Импульсы управления подаются попарно на основные и вспо-
могательные тиристоры (V3 и V2, V4 и VI, V9 и V12, V10 и
VII). При отпирании одной пары тиристоров, например V3 и
V2, конденсатор С заряжается до напряжения питания Дп, а в
момент .подачи импульсов управления на другую (смежную)
пару тиристоров V4 и VI — разряжается по образующимся
короткозамкнутым цепям V3...V1 п V4...V2, обеспечивая запи-
рание открытых ранее тиристоров V3 и V2. По аналогичному
принципу осуществляется управление тиристорами V9...V12 двух
других плеч мостового инвертора.
Длительность коммутационных процессов,' связанных с осу-
ществлением принудительного запирания тиристоров ‘в инвер-
торах, по сравнению с периодом следования импульсов управле-
ния мала. Поэтому коммутирующие элементы в инверторах рас-
считываются на меньшую мощность. ' ' :•'
Частота тока на выходе и транзисторных и тиристорных ин-
верторов 'с независимым возбуждением задается сигналами уп-
равления, и не зависит от нагрузки. Поэтому проблема стабили-
213
*
займи частоты тока таких инверторов не возникает. При исполь-
зовании в задающих генераторах .кварцевых резонаторов она
может быть стабилизирована с очень высокой точностью.
Напряжение на выходе инверторов, как правило, имеет не-
синусоидальную форму, а его величина зависит от напряжения
источника питания и тока нагрузки. В связи с этим в преобра-
зователях, предназначенных для использования в системах
электроснабжения ЛА, должны быть предусмотрены специаль-
ные меры для улучшения качества электрической энергии.
8.6. СПОСОБЫ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК
СТАТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
ПОСТОЯННОГО ТОКА В ПЕРЕМЕННЫЙ
Авиационные инверторы по качеству электрической энергии
на выходе должны удовлетворять требованиям ГОСТа 19705—81.
В частности, при их построении должны быть обеспечены:
— синусоидальная форма выходного напряжения;
— стабильность выходного напряжения при изменении на-
грузки и напряжения питания;
— симметрия фазных (линейных) напряжений многофазно-
го инвертора.
Рассмотренные виды простейших инверторов не обеспечи-
вают выполнение указанных требований. Поэтому в авиацион-
ных инверторах применяется ряд мер для улучшения качества
электрической энергии.
Способы улучшения гармонического состава напряжения. На
ЛА для питания большинства приемников переменного тока тре-
буется синусоидальная форма кривой напряжения. К числу та-
ких приемников относятся электропривод, гироскопические при-
боры, инерциальные системы, сельсинные передачи и т. п. Ко-
эффициент нелинейных искажений напряжения переменного то-
ка /?Н11, определяемый по формуле
’ (8-34)
* \ *''1 /
где С7Н, U} — соответственно действующее напряжение на на-
грузке и действующее'напряжение первой гар-
моники, в соответствии с ГОСТом 19705—81,
не должен превышать 8%.
Для достижения синусоидальной формы кривой напряже-
ния инверторов, в силу ключевого характера работы силовых
элементов, обязательно применяются индуктивно-емкостные ре-
зонансные фильтры, включаемые между инвертором и нагруз-
кой. Габариты фильтров, их масса и КПД преобразователя
в целом определяются в основном- присутствием в спектре вы-
214
ходного напряжения инвертора высокочастотных гармоник,
близких к основной.
Рассмотрим, к примеру, спектральный состав напряжения на
выходе простейшего однофазного инвертора, схема которого
приведена на рис. 8.10. Напряжение на выходе инвертора име-
ет прямоугольную форму (см. рис. 8.10,в). Его спектр содер-
жит все нечетные гармоники, так как разложение в ряд Фурье
имеет вид ‘ '
4/1 1 \
п„Д) = — Um I sin ш /Ч-sin Зи> t Ч-sin 5<о t Ч~ . . . ) > (8.35)
я \ 3 5 / .
2к
где ш = — — угловая частота первой (основной) гармоники
Т' напряжения.
Действующее L7H, среднее Днср и амплитудное И т значения
такого напряжения равны; амплитудное значение первой гар-
4
моники составляет Ulm——Um. При этом коэффициент формы
к
напряжения (отношение действующего значения к среднему)
= 1, коэффициент нелинейных искажений, согласно фор-
муле (8.34), составляет А’ни = 48,4%.
Габариты фильтра и потери энергии в преобразователе при
использовании инвертора с прямоугольной формой напряжения
будут высоки. Поэтому с точки зрения уменьшения массы и
габаритов фильтра целесообразно использовать такие способы
формирования напряжения инверторов, которые позволяют пу-
тем соответствующего управления вентилями исключить или
ослабить третью, пятую и другие нижние гармоники спектра
напряжения.
Уменьшение содержания вЫсших гармоник в спектре выход-
ного напряжения инверторов достигается обычно путем широт-
но-импульсной (ШИМ) или амплитудно-импульсной (АИМ)
модуляции исходного прямоугольного напряжения. Наиболее
распространенные методы модуляции напряжения инверторов
приведены на рис. 8.14
Рис. 8.14. Способы модуляции напряжения
на выходе инверторов
215
Так, например1, при введении паузы между импульсами дли-
тельностью тп = qT (рис. 8.14,а) разложение напряжения в ряд
Фурье представляется в виде
«н(0 = — ит
к
cos q it-sin <о t -)-cos 3<? K-sin3u> / -{-
4----cos5^Tfsin5<uf 4- . . .
(8.36)
Коэффициент нелинейных искажений напряжения при таком
способе модуляции зависит от длительности паузы и выража*
ется формулой
k
*2(1 -2?)
8 cos2 q г
(8.37)
где 7 = ~ — относительная длительность паузы.
Минимальное значение 'коэффициента нелинейных искаже-
ний, равное 27%, а следовательно, и минимальное содержание
высших гармоник при таком способе модуляции напряжения
достигается при условии q = 0,13 (q^ = 23,2°). Однако с точки
зрения фильтрации напряжения более целесообразно использо-
вать паузу длительностью тп = — Т (qn= 30°), так как при этом
6
из спектра, согласно выражению (8.36), полностью исключа-
ются третья и все кратные 3 высокочастотные гармоники (табл.
8.2). В этом случае коэффициент нелинейных искажений состав-
ляет 31,2%, т. е. незначительно отличается от минимального
для данного способа модуляции, но зато техническая реализа-
ция паузы существенно упрощается.
Таблица 8.2
Содержание гармоник в спектре модулированного напряжения
Форма напря- жения Относи- тельная длитель- ность паузы ТП 9 г Содержание гармоники, о/о ^НИ» %
Ujm ит Si S п — ^155 Ч 1т U,m * U 11 т Мзт
Uyn
Прямо- угольная (рис. 8.14,а) 0,13 116 12,4 8,8 14,8 10,4 9,5 4,8 27
. i 6 111 0 20 14,2 0 9,1 7,5 31,2
Ступен- чатая (рис. 8.14,6) 95,4 0 20 14,3 0 9,1 7,7 31,5
216
Улучшение спектрального состава выходного напряжения
инверторов достигается также амплитудно-импульсной моду-
ляцией путем формирования многоступенчатой кривой. Так, на-
пример, в спектре напряжения, имеющего трехступенчатую
форму (рис. 8.14,6) с длительностью каждой ступени хст = —Т,
6
также отсутствуют гармоники,, кратные 3 (табл. 8.2). Такая
форма напряжения автоматически получается в трехфазных
инверторах мостового типа. Коэффициент нелинейных искаже-
ний составляет 31,5°/о.
Путем увеличения числа ступеней формируемой кривой на-
пряжения и вариации их длительности можно обеспечить даль-
нейшее приближение формы напряжения к синусоидальной,
однако при этом увеличивается число силовых элементов ин-
вертора и повышается сложность устройств управления.
Особенно эффективно снижает содержание высших гармо-
ник многократная коммутация силовых элементов инвертора за
половину периода выходного напряжения (рис. 8.14,в) при мо-
дуляции ширины заполняющих основную волну импульсов по
синусоидальному или приближенному к синусоидальному за-
кону. При этом можно добиться подавления целого ряда гармо-
ник. Например, при числе импульсов, равном 9, и изменении их
длительности по синусоидальному закону выходное напряже-
ние будет содержать .высшие гармоники, начиная только с де-
вятнадцатой. В этом случае необходимость применения частот-
ных фильтров отпадает.
Недостатками инверторов с многократной коммутацией яв-
ляются сложность устройств управления и повышенные дина-
мические потери в силовых полупроводниковых приборах.
Способы формирования симметричной трехфазной системы
напряжения. Для получения симметричной трехфазной систе-
мы напряжений на выходе преобразователей постоянного тока
в переменный обычно используются:
— трехфазные инверторы мостового типа;
— три однофазных инвертора, моменты переключения кото-
рых сдвинуты на угол 120 электрических градусов;
— два однофазных инвертора с преобразователем числа фаз.
Мостовые трехфазные инверторы применяются в том слу-
чае, когда нагрузка равномерно распределяется по фазам пре-
образователя. Такие инверторы обладают наименьшим количе-
ством элементов, просты в управлении и наиболее надежны.
Однако при неравномерной нагрузке фаз на выходе преобразо-
вателя появляется несимметрия фазных напряжений, для устра-
нения которой требуется применение дополнительных регули-
рующих устройств в силовой цепи на выходе преобразователя,
что снижает его КПД, надежность и ухудшает массогабаритные
217
показатели по сравнению с многофазными преобразователями
других типов.
Отмеченные недостатки мостовых инверторов легко устра-
няются в преобразователях, состоящих из трех однофазных ин-
верторов. Симметрия фазных напряжений здесь обеспечивается
относительно простыми средствами путем пофазного регулиро-
вания напряжения или соответствующего сдвига фаз за счет
управления. Однако количество силовых полупроводниковых
приборов в преобразователях такого типа вдвое больше числа
таких элементов в преобразователях, построенных на базе
трехфазного мостового инвертора.
Способ формирования трехфазной системы напряжений с
использованием преобразователей числа фаз занимает компро-
миссное положение между первыми двумя способами как по
сложности преобразователя, так и по его функциональным воз-
можностям.
Наибольшее применение получила схема преобразователя
числа фаз с использованием двух трансформаторов (схема
Скотта) с выводом силовой нейтрали (рис. 8.15,а).
Рис. 8.15. Схема преобразователя числа фаз
Напряжения U\ и Й2, приложенные к первичным обмоткам
трансформаторов Т1 и Т2, должны быть равны и сдвинуты по
фазе относительно друг друга на угол 90°. С этой целью в пре-
образователе постоянного тока в переменный используются два
идентичных инвертора, моменты переключения которых сдвину-
ты относительно друг друга по времени на 1/4 периода.
Коэффициенты трансформации трансформаторов Т1 и Т2 в
схеме Скотта соотносятся 'как 2: Т/Л3. При этом на выходе пре-
образователя числа фаз получается симметричная трехфазная
система линейных напряжений U Ас, UCB и СВА, сдвинутых меж-
ду собой на 120° (рис. 8.15,6). Симметричная система фазных
напряжений в этом случае создается выводом силовой нейтра-
ли от 1/3 числа витков вторичной обмотки трансформатора Т2.
218
В случае неравномерной нагрузки фаз неоимметрия напря-
жений устраняется соответствующим изменением угла ф за счет
управления запаздыванием моментов переключения одного ин-
вертора относительно другого.
Метод формирования трехфазной системы напряжений, ос-
нованный на использовании преобразователя числа фаз, нашел
широкое применение в авиационных транзисторных преобразо-
вателях типа ПТС.
Способы регулирования выходного напряжения. Напряже
ние на выходе нерегулируемых инверторов изменяется прямо
пропорционально изменению напряжения питания и, кроме то-
го, зависит от величины и. характера нагрузки.
Для стабилизации напряжения инверторов применяют спе-
циальные регуляторы, которые в соответствии с характером воз-
действия на форму кривой выходного напряжения можно раз-
делить на два типа:
— регуляторы, осуществляющие стабилизацию напряжения
с изменением формы кривой, т. е. стабилизирующие одно из
значений выходного напряжения (действующее, среднее или
амплитудное);
— регуляторы, осуществляющие стабилизацию одновре-
менно действующего, среднего и амплитудного значений напря-
жения без изменения формы кривой.
Регулирование напряжения с изменением формы кривой или
так называемое широтное регулирование осуществляется с по-
мощью тех же элементов, что и инвертирование по каналу уп-
равления самого инвертора, тогда как регулирование без изме-
нения формы кривой (амплитудное регулирование) требует для
своей реализации применения дополнительных силовых элемен-
тов.
Первый способ регулирования наиболее просто реализуется
путем изменения ширины импульсов выходного напряжения ин-
вертора (см. рис. 8.14, а, в), т. е. методом широтно-импульсной
модуляции (ШИМ).
Так, например, путем изменения длительности паузы тп =qT
(см. рис. 8.14,п) можно осуществить регулирование действую-
щего UH = U„yr\ — 2q или среднего £7нср = Um(\ — 2q) значений
выходного напряжения инвертора на полную глубину, т. е. от 0 до
^нмакс — Uт. Однако такой способ регулирования неизбежно
приводит к изменению формы кривой напряжения, что делает
его неприемлемым для большинства статических преобразова-
телей. Область его применения — инверторы, предназначенные
для питания устройств, не критичных к форме напряжения.
Для реализации метода регулирования напряжения без из-
менения формы кривой регулирующие устройства устанавли-
вают на входе инвертора (на стороне постоянного тока) или на
219
*
его выходе (на стороне переменного тока). Известно много спо-
собов технической реализации такого метода регулирования
напряжения [14, 22].
Например, задача регулирования напряжения инвертора без
изменения формы (кривой решается с помощью так называемых
вольтодобавочных устройств, включаемых последовательно с
инвертором на стороне постоянного тока. В большинстве случа-
ев в качестве вольтодобавочных устройств используют регули-
руемые статические умформеры, т. е. преобразователи постоян-
ного тока в постоянный ток несколько большего напряжения.
Выходное напряжение умформера выбирается компромиссно из
условий: с одной стороны, преобразования минимальной части
полной мощности инвертора и, следовательно, получения мини-
мальной массы регулятора, а с другой — наилучшего использо-
вания по напряжению вентилей инвертора.
Один из вариантов построения статического умформера при-
веден на рис. 8.16,а.
Рис. 8.16. Принцип работы статического умформера:
а — принципиальная схема; б — временные диаграммы
Умформер представляет собой сочетание транзисторного ин-
вертора, в состав которого входят транзисторы Vl, V2 и
автотрансформатор Т, с неуправляемым выпрямителем (ди-
оды V3 и V4).
При поочередной коммутации транзисторов VI и V2 в полу-
обмотках автотрансформатора наводятся ЭДС е (рис. 8.16,6),
амплитудное значение которых Е.п связано с напряжением пи-
тания U„ выражением
v Em = k.Un, (8.38)
, w, -4- w, 4- w. , , ,
где k, = —!----г=—£-------s — коэффициент трансформации.
220
В течёнйё времени ти, .когда открыт, НаПрймер, транзистор
VI, напряжение на выходе умформера равно сумме напряжения
питания U„ и ЭДС Ет, наводимой в обмотках w2 и w4. Ток в
обмотке w3 не протекает. Во время паузы тп выходное напря-
жение «вых равно напряжению 'Питания. Среднее значение на-
пряжения на выходе умформера C'B1JX при этом связано с на-
пряжением питания соотношением
С^ВЫХ
(8.39)
и зависит от длительности паузы тп.
Изменяя соответствующим образом скважность импульсов
напряжения такого вольтодобавочного устройства, можно обес-
печить требуемый закон изменения напряжения питания основ-
ного инвертора и, следовательно, обеспечить стабилизацию его
выходного напряжения с высокой точностью.
Для того чтобы пульсация напряжения умформера не ока-
зывала существенное влияние на форму напряжения основного
инвертора, частота переключений транзисторов умформера вы-
бирается на один-два порядка выше частоты первой (основной)
гармоники выходного напряжения преобразователя. При исполь-
зовании регулируемых вольтодобавочных устройств инверторы
в статических преобразователях постоянного тока в переменный
выполняются нерегулируемыми. Поэтому форма их выходного
напряжения в процессе регулирования не изменяется, что су-
щественно облегчает решение задачи формирования синусои-
дального напряжения.
Транзисторные преобразователи типа ПТС и ПОС. В насто-
ящее время на ЛА применяются транзисторные статические
преобразователи постоянного' тока напряжением 27 В в пере-
менный ток частотой 400 Гц типа ПТС (трехфазные) и ПОС
(однофазные). В системах электроснабжения ЛА они исполь-
зуются в качестве аварийных источников переменного тока.
Все преобразователи выполнены из унифицированных бло-
ков и имеют примерно одинаковые структурные схемы.
В качестве примера на рис. 8.17 приведена структурная схе-
ма трехфазного статического преобразователя типа ПТС.
Преобразователь содержит следующие функциональные
узлы:
— два аналогичных инвертора И1 и И2;
— формирователь напряжения ФН;
— статический умформер У;
— регулятор напряжения PH;
— блоки управления инверторами БУИ1 и БУИ2;
— фазосдвигающее устройство ФСУ;
— задающий генератор ЗГ.
221
Кроме того, в состав преобразователя входят устройства за-
щиты от повышения напряжения и перегрузки, резонансные
фильтры на входе и выходе преобразователя, а также встроен-
ный стабилизатор напряжения для питания элементов управле-
ния .и защиты.
Рис. 8.17. Структурная схема трехфазного статическо-
го преобразователя
В преобразователе для формирования трехфаэной системы
напряжений применяется метод, основанный на использова1нии
двух однофазных инверторов и преобразователя числа фаз.
Инверторы И1 и И2 выполнены по мостовой схеме (см. рис.
8.11,6). Напряжение на выходах обоих инверторов имеет прямо-
угольную форму с паузой длительностью тп =— Т (см. рис.
6
8.14,о), чем достигается исключение из спектра напряжения
всех гармоник, кратных 3. Такая форма напряжения обеспечи-
вается блоками управления инверторами БУИ1 и БУИ2, кото-
рые формируют прямоугольные импульсы соответствующей
формы для управления силовыми транзисторами инверторов
И1 и И2.
Формирователь напряжения (ФН) выполнен по схеме Скот-
та (см. рис. 8.15). Достоинство данной схемы состоит в том,
что она обеспечивает равенство полных .и активных мощностей
обоих инверторов при любом характере нагрузки. Требуемый
в соответствии со схемой Скотта фазовый сдвиг напряжений на
выходе инверторов (примерно 9(f) для обеспечения симметрии
треугольника напряжений обеспечивается фазосдвигающим ус-
тройством ФСУ. Фазовый сдвиг реализуется задержкой импуль-
сов управления инвертором И2 на определенное время, завися-
щее от разности линейных .напряжений UАС и UBC на выходе
преобразователя (см. рис. 8.15,6): если UAC>UBC, то ф<90°, а
если UAC^UqBC' т0 Ф 90 •
Стабилизация напряжения на выходе преобразователя при
изменении нагрузки и напряжения питания осуществляется без
искажения формы кривой с помощью статического умформера
222
У, выполняющего функции регулируемого вольтодобавочного
устройства. Умформер выполнен по схеме,' приведенной на
рис. 8.16,п. Частота пульсаций напряжения на выходе умформе-
ра составляет 9600 Гц, что практически не оказывает влияния
на форму напряжения на выходе преобразователя.
Стабилизация напряжения преобразователя осуществляется
следующим образом.
Если среднее по трем фазам значение напряжения на вы-
ходе преобразователя становится меньше заданного (например,
при снижении напряжения источника постоянного тока или уве-
личении тока нагрузки), с помощью регулятора напряжения PH
уменьшается длительность паузы тп в работе умформера и на-
пряжение на входе инвертора в соответствии с выражением
(8.39) увеличивается. В результате напряжение на выходе пре-
образователя возвращается к заданному уровню.
Использование умформера как вольтодобавоч!ного устрой-
ства позволяет осуществить защиту транзисторов инверторов
от аварийного повышения напряжения и перегрузок. При воз-
никновении неисправностей такого вида по сигналу от устрой-
ства защиты транзисторы статического умформера переводятся
в режим отсечки. В этом случае напряжение на входе инверто-
ров снижается и становится равным напряжению питания пре-
образователя.
Задающий генератор (ЗГ) (мультивибратор) вырабатывает
импульсы прямоугольной формы высокой частоты, при делении
которой образуются две последовательности импульсов фикси-
рованных частот: 4800 и 1200 Гц. Импульсы частот 4800 Гц ис-
пользуются для управления умформером, а импульсы частот
1200 Гц подаются в блоки управления инверторами БУИ1 и
БУИ2, обеспечивая стабильность частоты переменного тока на
выходе преобразователя при изменении режима его работы.
Однофазные транзисторные преобразователи типа ПОС отли-
чаются от трехфазных только тем, что в их структуре отсутству-
ет второй инвертор и вместо формирователя напряжения исполь-
зуется обычный трансформатор.
Однотипные статические преобразователи различной мощ-
ности отличаются только числом транзисторов, работающих
параллельно в умформере и в плечах мостового инвертора. В
ряде случаев преобразователи имеют специальную систему ох-
лаждения — принудительный продув воздуха с помощью встро-
енного вентилятора.
Удельная масса современных транзисторных преобразовате-
лей постоянного тока в переменный составляет не более
15 кг/кВ-А, а КПД достигает значений 0,75...0,85, причем с
увеличением номинальной мощности эти показатели преобразо-
вателей улучшаются.
223
8.7. СТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
Статические преобразователи частоты на ЛА находят наи-
более широкое применение в системах электроснабжения типа
ПСПЧ (переменная скорость — постоянная частота) в качест-
ве основных элементов, обеспечивающих преобразование пере-
менного тока переменной частоты при непосредственном приво-
де 'генератора от ротора авиационного двигателя в переменный
ток постоянной частоты 400 Гц. Статические преобразователи
выполняются, как правило, на тиристорах.
В соответствии со способом преобразования частоты разли-
чают преобразователи с промежуточным звеном постоянного
тока и преобразователи с непосредственной связью цепи на-
грузки и источника питания.
Преобразователи частоты первого типа представляют собой
совокупность выпрямителя и инвертора и иногда называются
преобразователями частоты инверторного типа. Основным
элементом этих преобразователей является инвертор, свойства-
ми которого и определяются характеристики всей системы. В
преобразователях частоты с промежуточным звеном .постоянно-
го тока используютс'я выпрямители и инверторы в основном
мостового типа, принципы построения и особенности функци-
онирования которых аналогичны принципам построения й осо-
бенностям функционирования выпрямителей и инверторов спе-
циального назначения.
Достоинства статических преобразователей частоты с про-
межуточным звеном постоянного тока — независимость частоты
и формы выходного напряжения от частоты питающего напря-
жения, небольшое число коммутирующих элементов и относи-
тельно простые схемы управления. К основным недостаткам,
ограничивающим применение преобразователей этого типа, сле-
дует отнести сравнительно низкий КПД вследствие двукратного
преобразования энергии и необходимость применения дополни-
тельных элементов для принудительной коммутации тиристоров
инвертора.
Статические преобразователи частоты с непосредственной
связью получили также название преобразователей циклокон-
верторного типа. В них отсутствует предварительное выпрямле-
ние переменного тока, что обусловливает более высокий КПД
преобразования.
В качестве примера на рис. 8.18 приведена электрическая
схема силовой части статического преобразователя частоты ци-
клоконверторного типа, осуществляющего преобразование трех-
фазного тока переменной частоты в однофазный переменный ток
постоянной частоты. Для получения трехфазной системы напря-
жений постоянной частоты необходимо соответственно три таких
устройства, соединенных выводами в звезду, а моменты их ком-
мутации должны отличаться по фазе на угол 2к/3.
224
Преобразователь содержит две группы вентилей: анодную
(V1...V3) и катодную (V4...V6), а также реактор L, ограничи-
вающий уравнительный ток между вентильными группами. Для
нормальной работы такого преобразователя необходимо, чтобы
частота тока на входе была выше в несколько раз, чем часто-
та тока на выходе. В этом случае преобразователь в любой про-
Рис. 8.18. Статический преобразователь
частоты с непосредственной связью
извольный момент времени по отношению .к нагрузке работает
как управляемый выпрямитель: для формирования положитель-
ной волны выходного напряжения импульсы управления пода-
ются поочередно на тиристоры VI... V3 анодной группы, а затем
для формирования отрицательной волны — на тиристоры V4...
V6 катодной группы. При изменении частоты тока на входе пре-
образователя импульсы управления на тиристоры должны
подаваться синхронно с частотой питающей сети в моменты
времени, соответствующие заданным углам отпирания тиристо-
ров. Углы отпирания тиристоров могут быть постоянны или из-
меняться в течение периода выходного напряжения по опреде-
ленному закону.
Рассмотрим процессы формирования выходного напряжения
преобразователя частоты, приведенного на рис. 8.18, при по-
стоянном угле я отпирания тиристоров (угол отпирания тири-
сторов отсчитывается, как и в описании управляемых выпрями-
телей, от моментов естественной коммутации вентилей).
В течение первой половины периода 7/2 выходного напря-
жения (рис. 8.19) поочередно открываются тиристоры VI... V3
анодной группы, которая работает как обычный управляемый
однополупериодный выпрямитель. Число коммутаций тиристо-
ров данной группы и соответственно числа пульсаций nn£N
выходного напряжения за половину периода определяется со-
отношением
Пп= 0 + е; 0<г<1, (8.40)
4 \ /г /
15. Изд. № 7934
225
где mi = 3 Число фаз На входе преобразователя;
' fi И /2 — частота тока соответственно на входе и выходе
ш преобразователя;
. Л' — множество натуральных чисел.
Рис. 8.19. Диаграммы напряжений и токов преобразователя часто-
ты с непосредственной связью
При индуктивном характере нагрузки по истечении полупе-
риода Т/2 подача импульсов управления на тиристоры анодной
группы прекращается, и тиристоры .переходят в инверторный
режим работы до тех пор» пока ток нагрузки i не уменьшится
до нуля.
Импульсы управления тиристорами катодной' группы должны
подаваться.после паузы длительностью т, необходимой для вос-
становления запирающих свойств тиристоров анодной группы
(обычно т < 100 нс). Далее процессы повторяются, причем при
каждом переключении групп вентилей выходное напряжение
преобразователя меняет знак с заданной частотой Д.
Как следует из равенства (8.40), частота тока Д на выходе
преобразователя
nil
2ип д mi
дискретно зависит от числа фаз и частоты f\ тока на входе
преобразователя. При постоянном числе фаз т} и переменной
частоте fs для получения постоянной частоты Д выходного на-
пряжения необходимо корректировать число пульсаций пп (чис-
ло включаемых тиристоров) в соответствии с условием
п"=ч Г—1 ’ (8-42)
2 \ /г /
вытекающий из равенства (8.41).
Как следует из условия (8.42), целочисленные значения пп
получаются лишь при некоторых фиксированных частотах f\,
кратных заданной частоте /2- В интервале между этими значе-
226
миями число коммутаций должно быть дробным, т. ё. последний
тиристор в группе должен выключаться в заданный момент
времени независимо от величины его анодного тока. Такое ус-
ловие может быть обеспечено либо принудительной коммутаци-
ей тиристоров, либо путем совместного управления тиристора-
ми обеих групп. В последнем случае в течение некоторого про-
межутка времени в открытом .состоянии будут находиться ти-
ристоры как анодной, так и катодной группы и появится урав-
нительный ток.
Напряжение основной гармоники на выходе преобразовате-
лей частоты с непосредственной связью всегда меньше величи-
ны напряжения на входе из-за наличия потерь в преобразова-
теле и фильтрации высших гармонических составляющих. Кро-
ме того, преобразователи с непосредственной связью имеют ма-
лый коэффициент мощности P/S = 0,7...0,85, который сущест-
венно уменьшается с уменьшением коэффициента мощности
нагрузки. Поэтому генератор, предназначенный для работы с
таким преобразователем, рассчитывается на 160...200% номи-
нальной мощности нагрузки.
Напряжение статических преобразователей частоты можно
регулировать путем изменения напряжения источника или из-
менением угла управления вентилей. При использовании вто-
рого способа можно осуществить пофазное регулирование на-
пряжения, обеспечивая нормальные условия работы приемни-
ков электроэнергии и при несимметричной нагрузке.
Для улучшения формы кривой выходного напряжения углы
управления тиристорами изменяют по синусоидальному или
близкому к синусоидальному (трапецеидальному, треугольному
и т. п.) законам. В мощных преобразователях частоты с непо-
средственной связью при высоких требованиях к форме выход-
ного напряжения целесообразно использовать синусоидальный
закон изменения углов управления.
Глава §
АВИАЦИОННЫЕ АККУМУЛЯТОРНЫЕ БАТАРЕИ
9.1. НАЗНАЧЕНИЕ АВИАЦИОННЫХ АККУМУЛЯТОРНЫХ
БАТАРЕЙ
Авиационные аккумуляторные 'батареи по назначению под-
разделяются 'на бортовые и аэродромные.
Бортовые аккумуляторные батареи на ЛА являются аварий-
ными источниками постоянного тока (и предназначены:
— для питания жизненно важных для ЛА приемников элек-
трической энергии при отказе в полете основных источников
до момента включения резервных источников постоянного тока
или до совершения вынужденной посадки;
— для обеспечения связи с командным пунктом при нера-
ботающих двигателях;
— • для обеспечения автономного запуска авиационных дви-
гателей на земле и в воздухе.
Кроме того,’при параллельной работе, с основными источ-
никами электрической энергии постоянного тока (генераторами
и выпрямительными устройствами) аккумуляторные батареи
выполняют роль «буферных» источников, принимая на себя
пики нагрузки в момент включения мощных приемников.
Бортовые аккумуляторные батареи с щелью сохранения их
емкости запрещается использовать для проверки оборудования
при проведении предварительной, предполетной и других видов
оперативной подготовки ЛА в условиях аэродромного базиро-
вания.
В качестве бортовых аккумуляторных батарей наиболее ши-
роко применяются батареи типа 12 САМ-28, 12 САМ-55,
12 АСАМ-23, 15 СЦС-45, 20 НКБН-25, 20 НКБН-40 и другие.
Бортовые аккумуляторные батареи на ЛА устанавливаются
в специальных отсеках, облицованных химически стойким по-
крытием и расположенных в легко доступных местах (обтека-
тели и ниши шасси, нижняя часть фюзеляжа или крыла и т. и).
Аэродромные аккумуляторные батареи предназначены для
обеспечения ЛА электроэнергией на земле при проверке борто-
вого оборудования и других работах, связанных с использова-
нием электрической энергии, а также для производства запуска
228
авиационных двигателей. Чаще всего аэродромные аккумуля-
торные батареи устанавливаются на автомобилях и работают
параллельно с генераторами постоянного тока, приводимыми
во вращение от ходового. или специального двигателя.
В качестве аэродромных аккумуляторных батарей в основ-
ном используются кислотные аккумуляторные батареи типа
12 АО-50 и 12 АСА-140.
Независимо от назначения и типа аккумуляторные батареи
представляют собой несколько последовательно соединенных
между собой аккумуляторов, которые, как правило, размеще-
ны в одном корпусе. Количество аккумуляторов в батарее ука-
зывается первыми двумя цифрами в ее наименовании.
9.2. ОБЩИЕ СВЕДЕНИЯ ОБ АККУМУЛЯТОРАХ
Аккумуляторами называются химические источники тока,
принцип работы которых основан на .использовании обратимых
электрохимических реакций.
Независимо от конструктивного исполнения аккумулятор со-
стоит из двух электродов—проводников первого рода, разделен-
ных слоем электролита—проводника второго рода. При взаимо-
действии активных веществ электродов с электролитом на од-
ном из электродов протекает окислительный, а на другом —
восстановительный процессы, в результате чего электроды при-
обретают соответственно отрицательный и положительный по-
тенциалы относительно электролита.
При замыкании внешней цепи между электродами химичес-
кая энергия активных веществ за счет протекания пространст-
венно разделенных окислительно-восстановительных процессов
преобразуется в электрическую энергию. Процесс превращения
химической энергии активных веществ аккумулятора в электри-
ческую с использованием ее во внешней цепи называется раз-
рядом.
Активные вещества аккумулятора, израсходованные в про-
цессе разряда, могут восстанавливаться (.регенерироваться) при
пропускании постоянного тока от другого источника электри-
ческой энергии в направлении, противоположном направлению
тока разряда. Процесс восстановления активных веществ ак-
кумулятора за счет энергии другого источника называется за-
рядом.
Заряд аккумулятора с последующим разрядом называемся
циклом. 1 ' 1
Совокупность активных веществ, использованных для созда-
ния аккумулятора, называется электрохимической системой. Для
обозначения электрохимической системы принято между двумя
вертикальными чертами писать химическую формулу электро-
лита, а слева и справа соответственно — химические формулы
активных веществ положительного и отрицательного электро-
229
дов, Так, например, электрохимическая система серебряно-
цинкового аккумулятора записывается следующим образом:
(+) (-)
AgO|KOH|Zn. (9.1)
Основными параметрами, характеризующими аккумуляторы
в качестве источника электроэнергии, являются: электродвижу-
щая сила; внутреннее омическое сопротивление; напряжение
(напряжение .при заряде, напряжение при разряде); полное
внутреннее сопротивление; разрядная емкость; номинальная ем-
кость; фактическая емкость; удельная емкость; удельная энер-
гия; коэффициенты отдачи по емкости и по энергии; самораз-
ряд; срок службы (ресурс).
Электродвижущая сила (ЭДС) еА аккумулятора —
это разность электродных потенциалов при разомкнутой внеш-
ней цепи, т. е.
ел = <р+ - <Р- , (9.2)
где ?+, ®_ — потенциалы положительного и отрицательного
электродов относительно электролита.
Величина ЭДС аккумулятора определяется только его элек-
трохимической системой и плотностью электролита.
Внутреннее омическое сопрот ив л е н и е -ак-
кумулятора представляет собой сумму сопротивлений
электролита, электродов, соединительных элементов и переход-
ного сопротивления электрод—электролит. Основную долю
этого сопротивления составляет сопротивление электролита, ве-
личина которого зависит от плотности электролита и его тем-
пературы (.при уменьшении плотности относительно ее нормаль-
ного значения и температуры сопротивление электролита увели-
чивается). Существует оптимальное значение плотности элект-
ролита для каждого типа аккумулятора, при которой внутрен-
нее сопротивление его минимально. Нормальное значение плот-
ности электролита обычно несколько меньше оптимального.
Для уменьшения внутреннего омического сопротивления
стремятся уменьшить расстояние между электродами и макси-
мально увеличить площадь соприкосновения электродов и элек-
тролита за счет увеличения числа электродных пластин, умень-
шения их толщины и повышения пористости активных веществ.
Напряжение UA аккумулятора отличается от его
ЭДС .на величину падения напряжения в аккумуляторе.
Падение напряжения внутри аккумулятора обусловлено
внутренним омическим сопротивлением и изменением электрод-
ных потенциалов при протекании тока, т. е. поляризацией.
Причинощлоляризации является изменение химического со-
става и плотности электролита у поверхности и в порах актив-
ной массы электродов, которое происходит в результате проте-
кания химической реакции между электролитом и активными
230
веществами электродов. Этот процесс начинается е момента
включения аккумулятора на разряд или заряд и развивается
до тех пор, пока у .поверхности электродов установится переход-
ная зона с определенным градиентом плотности электролита,
соответствующим скорости .протекания химической реакции.
Наличие переходной зоны обусловливает изменение электрод-
ных потенциалов и, как следствие, дополнительное падение на-
пряжения внутри аккумулятора (рис. 9.1). ''
Рис. .9.1. График изменения
напряжения на зажимах акку-
мулятора в процессе поляри-
зации
Рис. 9.2. График изменения
ЭДС аккумулятора в процес-
се деполяризаций'
Ширина переходной зоны и, следовательно, величина до-
полнительного падения напряжения зависят от многих факто-
ров, главными из которых являются плотность тона на единицу
площади поверхности электродов, температура и вязкость
электролита. Это падение напряжения тем больше, чем больше
тою аккумулятора, выше вязкость и ниже температура электро-
лита. .1
При размыкании внешней цепи аккумулятора плотность
электролита по всему объему постепенно выравнивается и поля-
ризация прекращается. Вследствие этого ЭДС аккумулятора
восстанавливается до величины, соответствующей средней плот-
ности электролита (рис. 9.2).
Время поляризации с момента включения аккумулятора на
заряд или разряд в зависимости от типа аккумулятора, темпе-
ратуры и плотности электролита достигает десятки минут, а
деполяризации — несколько часов.
Установившееся значение падения напряжения внутри ак-
кумулятора вследствие поляризации принято оценивать величи-
ной ЭДС поляризации еп, определить которую можно сравне-
нием ЭДС, замеренной непосредственно после отключения ак-
кумулятора. и через несколько часов, когда аккумулятор де-
231
*
поляризуется (рис. 9.2). Часто вместо термина ЭДС поляриза-
ции используют ее эквивалент — сопротивление поляризации
/?п=£п/Л где / — ток аккумулятора. В этом случае связь меж-
ду ЭДС аккумулятора и его напряжением выражают формулой
UA = eA -7-Rm, (9.3)
где /?в„=/?0+/?п— полное внутреннее сопротивление аккумуля-
тора.
Сопротивление- поляризации Rn обычно значительно больше
внутреннего омического сопротивления 7?0-
Разрядная емкость Qp — это количество электриче-
ства, которое отдает аккумулятор при его разряде до опреде-
ленного конечного напряжения, т. е.
гр
= (9.4)
о
где ip — ток разряда;
/р — время разряда.
Емкость определяется количеством активных веществ, всту-
пивших в электрохимическую реакцию, и измеряется в ампер-
часах (1 А-ч = 3600 Кл). Так, например, на производство ко-
личества электричества, равного 1 А-ч, в соответствии с зако-
ном'Фарадея, расходуется: в свинцовых (кислотных) — 11,68г;
серебряно-цинковых — 3,70 г и никель-кадмиевых аккумулято-
рах — 6,19 г активных веществ.
В процессе разряда в химической реакции участвует лишь
часть активного вещества аккумулятора. Количество активных
веществ, вступивших в реакцию, и, следовательно, емкость ак-
кумулятора зависят от режима разряда (величины тока, тем-
пературы и вязкости электролита, атмосферного давления и
др.), конструкции и технического состояния аккумулятора. С
увеличением тока разряда, уменьшением температуры и давле-
ния емкость аккумулятора уменьшается.
Зависимость емкости аккумулятора от режима разряда обус-
ловлена в основном двумя факторами: падением напряжения
внутри аккумулятора и изменением микроструктуры электродов
в процессе разряда.
При увеличении, например, разрядного тока увеличивается
падение напряжения на полном внутреннем сопротивлении, в
результате чего конечное напряжение разряда достигается рань-
ше, чем израсходуется активная масса. Кроме того,, образую-
щиеся на поверхности электродов в процессе реакции вещества,
обладая, как правило, меньшей пористостью, чем исходные, за-
трудняют доступ электролита к внутренним слоям активной
массы электродов и часть ее остается неиспользованной. Ана-
232
Рис. 9.3. Зависимости емкости
свинцовых 1, серебряно-цинко-
вых 2 и никель-кадмиевых 3
аккумуляторов от тока разряда
логичные явления имеют место при снижении температуры,
увеличении вязкости электролита. Зависимости емкости от ве-
личины разрядного тока для аккумуляторных батарей приве-
дены на рис. 9.3.
С целью снижения зависимости
емкости от тока разряда стремятся
максимально увеличить площадь
поверхности электродов за счет по-
вышения пористости активных ве-
ществ и уменьшения толщины пла-
стин. Для уменьшения вязкости
электролита в него вводят специ-
альные присадки.
Номинальная емкость
Q„ — это емкость аккумулятора,
которую он должен отдавать при
разряде номинальным током при
оговоренных в техническом описа-
нии нормальных условиях. Величи-
на номинальной емкости аккумуля-
торов и аккумуляторных батарей
указывается цифрами в конце их
наименования. Например, номинальная емкость батареи типа
20 НКБН-25 составляет 25 А-ч.
За номинальный ток разряда обычно принимают: для борто-
вых свинцовых и серебряно-ц'инковых аккумуляторных бата-
рей — ток 5-часового разряда а); для батарей аэро-
дромного обслуживания— ток 10-часового разряда <4—0.1QH™»
А); для никель-кадмиевых батарей типа 20 НКБН-25—ток 2,5-
часового разряда (10 А).
Фактическая емкость фф. Под фактической емкостью
аккумуляторов (аккумуляторных батарей) понимают емкость,
которую они отдают при разряде номинальным током в нор-
мальных условиях. Фактическая емкость аккумуляторов с те-
чением времени эксплуатации снижается и становится меньше
номинальной вследствие необратимых химических реакций, про-
текающих в аккумуляторах, и постепенного разрушения элек-
тродов.
Величина фактической емкости аккумуляторных батарей яв-
ляется одним пз основных критериев их пригодности для даль-
нейшей эксплуатации. Контроль фактической емкости батарей
осуществляется через определенные интервалы календарного
времени и осуществляется специалистами зарядных аккумуля-
торных станций при проведении контрольно-тренировочных
циклов.
233
( ii-pLpdt, (9.6)
о
*
Удельная емкость q -— это отношение емкости акку-
мулятора к его 'полной массе, т. е.
9 = -%-' 0-5)
М
Удельная энергия w — это отношение энергии, отда-
ваемой аккумулятором во внешнюю цепь .при разряде, к его
полной массе:
1
w -----
М
где zrp — напряжение па клеммах аккумулятора при разряде.
Удельная емкость и удельная энергия характеризуют массо-
энергетические показатели аккумуляторов различных электро-
химических систем, а также степень технического совершен-
ства аккумуляторов одной и той же системы.
Коэффициент^ отдачи по емкости tJq— это от-
ношение разрядной емкости ж количеству электричества, затра-
ченному на полный заряд аккумулятора, т. е.
J i3dt
о
где /3, /3 — ток и продолжительность заряда.
Коэффициент отдачи по энергии^—это отноше-
ние энергии, полученной от аккумулятора при разряде, к энер-
гии, затраченной для его полного заряда
ер
J uvipdt
^ = “7--------• (9.8)
*3
J uj3dt
о
Отдача по энергии характеризует коэффициент полезного
действия аккумулятора, как накопителя электрической энергии.
Саморазряд. Саморазрядом аккумулятора называется
самопроизвольная потеря емкости (разряд) при разомкнутой
внешней цепи. Основной причиной саморазряда является про-
текание реакций окисления электродов (главным образом, от-
рицательного) в электролите. Способствуют саморазряду по-
вышение температуры, примеси в активной массе электродов и
электролите, нестандартные компоненты электролита, загряз-
234
нение поверхности аккумулятора и т. п. Саморазряд присущ
химическим источникам тока всех электрохимических систем и
считается нормальным явлением, если он .не превышает опре-
деленное для данного типа источника значение.
Количественно саморазряд оценивается уменьшением емко-
сти за сутки
s = . (9.9)
где Qb Q2 — емкость аккумулятора до и после хранения;
т — продолжительность хранения в сутках.
Нормальный саморазряд аккумуляторов составляет не бо-
лее (0,5...1)% в сутки.
Срок службы (ресурс) характеризует надежность из-
делия. В технической документации .на аккумулятор (батарею)
указывается гарантийный ресурс, который устанавливается
предприятием-изготовителем. Срок службы бортовых аккумуля-
торных батарей исчисляется календарным временем эксплуа-
тации и хранения, аэродромных — числом циклов заряд—раз-
ряд.
9.3. УСТРОЙСТВО, ПРИНЦИП ДЕЙСТВИЯ
И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
СВИНЦОВЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ
Принцип действия свинцовых (кислотных) аккумуляторных
батарей основан на электрохимической системе
(+) (-)
PbO2]Hs.SO4|Pb, (9.10)
где РЬО2 — двуокись свинца;
H2SO4 — водный раствор серной кислоты;
РЬ — губчатый свинец.
Нормальное значение плотности электролита полностью за-
ряженного свинцового аккумулятора составляет у =1,285 г/см3.
При разряде свинцового аккумулятора на положительном и
отрицательн6|м электродах образуется сульфат свинца в соот-
ветствии с реакцией
РЬО2 4 2H2SO4 4 Pb PbSO4 4 2Н?О 4 PbSO4 - (9.11)
При заряде .протекают обратные электрохимические реакции.
На ЛА используются следующие типы свинцовых аккумуля-
торных батарей: 12 САМ-28, 12 САМ-55, 12 АСАМ-23. Буквы в
обозначении определяют вид и назначение батареи: САМ —
стартерная авиационная моноблочная; АСАМ — авиационная
стартерная с абсорбированным электролитом моноблочная.
235
Авиационная свинцовая аккумуляторная батарея (рис. 9.4)
состоит из 12 аккумуляторов, размещенных в ячейках одного
(12 САМ-28, 12 АСАМ-23) или двух (12 САМ-55) эбонитовых
моноблоков 1. Аккумуляторы в батарее соединяются последова-
тельно с помощью межэлементных .перемычек 2 методом пай-
ки. Внешние соединения батареи обеспечиваются болтовыми
выводами 3. Положительный и отрицательный выводы с целью
предотвращения перепутывания полярности соединительных
проводов имеют различные диаметры.
Для заливки электролита, а также для контроля его плот-
ности и уровня каждый аккумулятор имеет отверстие, которое
в процессе эксплуатации закрывается рабочей пробкой 4. Ра-
бочая пробка снабжена золотниковым клапаном, который пре-
дотвращает выливание электролита при эволюциях батареи.
Сверху аккумуляторная батарея закрывается эбонитовой
крышкой 5. Каждый из аккумуляторов содержит несколько че-
редующихся между собой положительных 6 и отрицательных 8
пластин. Число отрицательных пластин обычно на одну больше,
чем положительных, так как губчатый свинец имеет меньшую
плотность, чем двуокись свинца. Пластины электродов представ-
ляют собой свинцовые решетки (ламели), отверстия которых
заполняются активной массой. Для увеличения прочности и
улучшения литейных двойств к свинцу при изготовлении реше-
ток добавляют 6...8% сурьмы.
Пластины одной полярности спаиваются с гребенкой 11, об-
разуя полублоки положительных 9 и отрицательных 10 элек-
тродов. В гребенку впаивается борн 12 для токоотвода.
Пластины разноименных полярностей разделяются Сепара-
торами 7 из микропористого эбонита (мипора). Одна из сторон
сепаратора ребристая. Этой стороной сепаратор обращен к по-
ложительной пластине для лучшего отвода газов, образующих-
ся в результате химической реакции.
Блоки 13 пластин вместе с сепараторами помещаются в от-
дельные ячейки моноблока 1. Днище ячейки имеет трапеце-
идальные выступы, на которые опираются выступы положитель-
ных пластин. Отрицательные пластины устанавливаются на
специальные эбонитовые башмаки. Такое устройство аккумуля-
тора предохраняет пластины от коротких замыканий, которые
могут произойти от постепенного выпадения на дно сосуда ча-
стиц активной массы электродов. В верхней части блока плас-
тин прокладывается тонкий перфорированный винипластовый
щиток 14, предохраняющий электроды от механических воздей-
ствий при контроле уровня и плотности электролита в аккуму-
ляторе.
Сверху* ячейки закрываются эбонитовыми крышками 15 с
отверстиями для пробки и штырей борнов. Герметичность ак-
кумуляторов достигается прокладкой резины или асбестового
шнура и заливкой специальной' битумной мастикой.
236
Рнс. 9.4. Устройство свинцовой аккумуляторной батареи
237
Из уравнения электрохимических процессов (9.11) серная
кислота из электролита свинцового аккумулятора, вступая в ре-
акцию с активными веществами электродов, расходуется с об-
разованием воды. Следовательно, плотность электролита по
мере разряда аккумулятора уменьшается, а при заряде, наобо-
рот, — увеличивается. По величине плотности электролита
можно определить количество активных веществ, вступивших
в реакцию и, следовательно, оценить степень разряженности
аккумуляторов (табл. 9.1).
Изменение плотности электролита в зависимости от степени
разряженности свинцового аккумулятора обусловливает соот-
ветствующее изменение и всех его основных электрических па-
раметров — ЭДС, внутреннего сопротивления и напряжения.
Электродвижущая сила заряженного свинцового аккумуля-
тора при плотности электролита у = 1,285 г/см3 равна 2,125 В
и по мере разряда уменьшается пропорционально уменьшению
плотности электролита. Зависимость ЭДС свинцового аккуму-
лятора от плотности электролита в рабочем диапазоне 7 —
= 1,06... 1,3 г/см3 с достаточной точностью выражается эмпири-
ческой формулой .
= 0,84 + 1, В. (9.12)
Когда ЭДС достигает значения 1,82... 1,85 В, аккумулятор счи-
тается разряженным.
Внутреннее омическое сопротивление авиационных свинцо-
вых аккумуляторных батарей весьма мало и составляет тысяч-
ные доли ома, что обусловливает их хорошие стартерные
свойства.
Изменение внутреннего омического сопротивления свинцо-
вых батарей в зависимости от степени разряженности обуслов-
лено в основном изменением проводимости электролита — по
мере разряда батареи плотность электролита уменьшается, а
его удельное сопротивление р при этом возрастает (рис. 9.5).
Рис. 9.5. Зависимости удельного сопро-
тивления и температурного коэффици-
ента сопротивления электролита от
плотности
238
Удельное сопротивление электролита увеличивается вслед-
ствие снижения его температуры. Зависимость удельного сопро-
тивления электролита от температуры Т выражается формулой
Р = Ро|1-а(Г-Го)], (9.13)
где рв — удельное сопротивление электролита при температуре
7\> = 18°С, причем температурный коэффициент сопротивления
а увеличивается с,повышением плотности электролита (рис. 9.5).
К увеличению внутреннего омического сопротивления свин-
цовых батарей приводит также образование на электродах суль-
фата свинца PbSO4, обладающего меньшей проводимостью, чем
исходные вещества.
Напряжение батареи и отдельных аккумуляторов при одних
и тех же условиях разряда зависит от степени разряженности.
Значения напряжений на зажимах батареи и отдельных аккуму-
ляторов в зависимости от степени их разряженности при темпе-
ратуре электролита Т = 25°С и токе разряда, равном 2/ном, при-
ведены в табл. 9.1.
Таблица 9.1
Зависимость ЭДС, напряжения и плотности электролита
от степени разряженности свинцовых аккумуляторных батарей
Степень разряженности в % Оном Плотность электролита, приведенная к +250С ЭДС, В Напряжение, U, В при /=2/ном
аккумуля- тора еА батареи Е аккумуля- тора батареи
Полностью 1,280...1,290 2,13-2,12 25,4-25,2 2,07...2,03 25-24
заряжена
Разряжена на 25% 1,235-1,255 2,09-2,07 25,2...24,8 2,02-1,98 25-24
То же на 50% 1,185-1,225 2,06-2,02 24,8-24,0 1,88.-1,93 24...23
» 75% 1,135-1,175 2,00-1,95 24,0-23,3 1,90-1,85 23...22
Разряжена 1,050-1,080 1,92-1,90 23,0-22,5 1,80-1,70 22...21
ПОЛНОСТЬЮ
Разрядная емкость свинцовых батарей зависит от тока раз-
ряда и температуры электролита. Так, например, уменьшение
температуры электролита на Г вызывает снижение емкости при-
мерно на 1...1,5%.
После нагрева батарея способна отдать часть неиспользо-
ванной емкости. Влияние температуры на величину емкости свя-
зано в основном с изменением вязкости электролита. При пони-
239
Женин температуры вязкость электролита возрастает, скорость
его диффузии уменьшается и уменьшается коэффициент исполь-
зования активного вещества. Кроме того, возрастает полное
внутреннее сопротивление батареи вследствие поляризации. Все
это приводит к тому, что при низкой температуре быстрее дости-
гается минимально допустимое напряжение разряда и, следо-
вательно, емкость батареи снижается. Особенно сильно сказы-
вается понижение температуры при разряде (батарей больши-
ми токами. Так, например, если аккумуляторная батарея
12 САМ-28 при температуре 20°С обеспечивает четыре запуска
авиационного двигателя, то при температуре —5°С — два за-
пуска, а при температуре —15°С — только один запуск.
Учитывая большое влияние температуры на емкость, акку-
муляторные батареи на ЛА устанавливаются в утепленных кон-
тейнерах с электрическим обогревом.
Зависимость емкости свинцовых аккумуляторных батарей от
разрядного тока выражается эмпирической формулой Пейкерта
(9.14)
< \ ' р /
где Qhom — номинальная емкость батареи;
/Ном — номинальный ток разряда;
п = 1,2...1,4.
На величину емкости свинцовых аккумуляторных батарей
оказывает влияние и плотность электролита; с повышением ее
емкость .несколько увеличивается. Однако чрезмерное повыше-
ние плотности электролита более 1,285 г/см3 связано с ускорен-
ным саморазрядом, повышенной сульфатацией пластин и Дру-
гими явлениями, способствующими преждевременному выходу
аккумуляторных батарей из строя.
Отдача свинцовых батарей по емкости и энергии зависит
от полноты заряда, температуры электролита и от режима раз-
ряда. Коэффициент отдачи по емкости = 0,85...0,9; по. энер-
гии t]w = 0,65. ..0,75.
Удельная емкость бортовых свинцовых батарей составляет
примерно 1 А-ч/кг.
Саморазряд свинцовых батарей считается нормальным, ес-
ли он не превышает 1 % QHOM в сутки. Учитывая это, аккумуля-
торные батареи при хранении необходимо периодически под-
заряжать. В противном случае при длительном их хранении в
разряженном состоянии образующийся в электрохимической
реакции мелкозернистый сульфат свинца переходит в крупно-
зернистый, j. е. происходит так называемая сульфатация пла-
стин или просто сульфатация. Крупнозернистый сульфат свинца
обладает большим удельным сопротивлением и практически не
вступает в реакцию при заряде. Таким образом, сульфатация
240
пластин является вредным процессом, способствующим ухудше-
нию электрических характеристик аккумуляторных батарей и
преждевременному выходу их из строя.
Признаками сульфатации свинцовых аккумуляторов явля
ются:
- низкое напряжение на аккумуляторе при нормальном
значении ЭДС;
— повышенное напряжение в начале заряда (Д>3 В вместо
2,1...2,2 В) и пониженное против обычного в конце заряда;
— медленное повышение плотности электролита при заряде
и преждевременное появление признаков конца заряда;
— резкое снижение емкости аккумуляторных батарей по
отношению к емкости, показанной при последнем контрольном
разряде.
9.4. ПРИНЦИП ДЕЙСТВИЯ, УСТРОЙСТВО
И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
СЕРЕБРЯНО-ЦИНКОВЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ
Принцип действия серебряно-цинковых аккумуляторов ос-
нован на электрохимической системе
(+) (-)
AgO|KOH|Zn. (9.15)
Электролитом является водный раствор химически чистого
едкого калия КОН нормальной плотностью у = 1,47 г/см3 с
присадкой на 1 л раствора 20 г гидроксида лития LiOH.
В серебряно-цинковых аккумуляторах при заряде и разря-
де небольшими токами окислительно-восстановительные про-
цессы протекают в два этапа.. В процессе разряда аккумулято-
ра на первом этапе атомы серебра теряют один электрон и
окись серебра AgO восстанавливается до закиси серебра AggO:
2A gO + КОН + Zn -> Ag2O + КОН + ZnO . (9.16)
При этом ЭДС аккумулятора составляет 1,82...1,86 В. Аккуму-
лятор на первом этапе разряда отдает примерно 30% своей
емкости.
На втором этапе разряда образуется чистое серебро:
Ag,O + КОН + Zn-> 2Ag + КОН + ZnO . (9.17)
Электродвижущая сила аккумулятора составляет 1,52...1,56 В
и остается постоянной до конца разряда.
Разряд аккумуляторов и на первом, и на втором этапах
сопровождается выделением тепла, что приводит при больших
токах к интенсивному повышению температуры электролита.
1€. Изд. № 7934
241
При разряде* большими токами процессы, определяемые
уравнениями (9.16) и (9.17), протекают одновременно. Общая
электрохимическая реакция, протекающая в серебряно-цинко-
вых аккумуляторах, соответствует уравнению
AgO + КОН + Zn Z Ag + КОН + ZnO. (9.18)
Из анализа уравнений электрохимических реакций (9.16)...
(9.18) следует, что электролит серебряно-цинковых аккумуля-
торных батарей и аккумуляторов не вступает в реакцию с ве-
ществами электродов, а является 'катализатором химических ре-
акций. Следовательно, плотность электролита не зависит от
степени разряженности аккумуляторов, что обусловливает опре-
деленные трудности оценки фактического состояния серебряно-
цинковых батарей в процессе эксплуатации.
На ЛА применяются серебряно-цимковые стартерные бата-
реи типа 15 СЦС-45 (рис. 9.6), состоящие из 15 отдельных ак-
Рис. 9.6. Общий вид аккумуляторной батареи типа
15 СЦС-45Б
кумуляторов I типа СЦК-45 (буква К в наименовании аккуму-
лятора означает кратковременный режим работы). Аккумуля-
торы в два ряда размещены в металлическом контейнере 4 и
соединяются между собой с помощью перемычек 2. Токоотводы
батареи с помощью фальш-банки 6 выведены на розетку штеп-
сельного ,разъема 5. Фальш-банка снабжена также двумя шты-
рями для подключения зарядно-разрядного устройства.
Контейнер закрывается сверху откидной крышкой 3 и име-
ет окна для контроля уровня электролита во всех аккумулято-
рах.
212
Каждый аккумулятор СЦК-45 содержит 21 .положительную
и 20 отрицательных пластин (рис. 9.7). Пластины положитель-
ного электрода обернуты капроновой тканью, а отрицательно-
ю — гидратцеллюлозной пленкой (целлофаном) толщиной
25 мкм в четыре слоя, служащей сепаратором. Однополярные
пластины соединяются между собой с помощью гибких выво-
дов, которые 'припаиваются к болтовым выводам аккумулятора.
Рис. 9,7. Устройство серсбряно-цинкового аккуму-
лятора
Сосуды аккумуляторов изготовлены из полиамидной смолы.
Па сосуды наносятся линии для контроля уровня электролита.
Электродвижущая сила полностью заряженной серебряно-
цпнковой батареи составляет 27,3...27,9 В. После отдачи бата-
реей примерно i3O°/o емкости ЭДС уменьшается до 22,6...23,2 В
и в дальнейшем остается постоянной. Электродвижущая сила
батареи мало зависит от температуры электролита.
Полное внутреннее сопротивление батареи от степени раз-
ряженности практически не зависит. В процессе разряда наблю-
дается незначительное уменьшение внутреннего омического со-
противления батареи вследствие образования серебра на поло-
жительных электродах и повышения проводимости электроли-
та за счет повышения температуры. Поляризация электродов
сильно зависит от температуры электролита — с уменьшением
температуры она увеличивается.
Вследствие того, что ЭДС и внутреннее сопротивление не
зависят от степени разряженности батареи, напряжение на за-
жимах батареи также не дает оснований судить о ее фактичес-
ком состоянии.
1(>*
243
Напряжение Up на зажимах аккумуляторов при разряде
зависит от величины тока (рис. 9.8) и температуры электроли-
та. С ростом температуры электролита напряжение при разря-
де увеличивается, а при заряде — уменьшается, что обуслов-
лено уменьшением 'ЭДС
Рис. 9.8. Графики изменения на-
пряжения серебряно-цинкового
аккумулятора в процессах раз-
ряда и заряда
поляризации.
Допустимое конечное на-
пряжение разряда на серебря-
но-цинковом аккумуляторе со-
ставляет 1,0 В.
Напряжение аккумулято-
ров U3 при заряде постоян-
ным током изменяется ступен-
чато (рис. 9.8), что обусловле-
но переходом одновалентного
серебра в двухвалентное и со-
ответствующим изменением
ЭДС. В конце заряда •,начина-
ется интенсивный электролиз
воды из состава электролита
2Н..О 2112 f + О21, (9.19)
в результате чего внутреннее сопротивление аккумулятора по-
вышается. При этом напряжение увеличивается на 0,2...0,3 В,
что служит признаком конца заряда.
Емкость аккумуляторных батарей типа 15 СЦС-45 в мень-
шей степени, чем свинцовых батарей, зависит от тока заряда
(см. рис. 9.3, кривая 2), но изменение температуры электроли-
та оказывает на их разрядную емкость большое влияние: при
температуре —25°С емкость батареи составляет (10... 15) % QH0M>
и она не в состоянии разряжаться большими токами без пред-
варительного подогрева. Максимальную емкость до (1,1...1,3)
Qhom батарея отдает при температуре -j-35°C. При дальнейшем
повышении температуры емкость батареи резко снижается.
Удельная емкость серебряно-цинковых аккумуляторных ба-
тарей составляет 2,8 А-ч/кг.
Отдача серебряно-цинковых аккумуляторных батарей по ем-
кости и энергии по сравнению с другими типами батарей очень
высока: коэффициент отдачи по емкости достигает 94...97%, по
энергии — 80...85%.
Саморазряд серебряно-цинковых батарей обусловлен в ос-
новном окислением отрицательного электрода:
Zn + 2Н2О -> Zn(Ol I )2 + 112 1 . (9.20)
V* гг
С повышением температуры саморазряд увеличивается. Так,
например, при температуре электролита +20°С он составляет
(0,3...0,4) %, а при -j-75°C — свыше 25% в сутки.
Гидроксид цинка Zn(OH)2, растворяясь в электролите, при
нормальном заряде не восстанавливается. Следовательно, при
длительном хранении серебряно-цинковых аккумуляторных ба-
тарей с электролитом и в процессе эксплуатации идет необрати-
мая потеря емкости, что обусловливает ограниченный ресурс
батарей этого типа.
При перезарядах серебряно-цинковых аккумуляторов гидро-
ксид цинка, растворенный в электролите, восстанавливается на
отрицательном электроде с образованием монокристаллов цин-
ка (дендритов), растущих по мере пропускания тока заряда в
направлении положительного электрода. Рост дендритов цин-
ка обусловливает возникновение коротких замыканий между
электродами и выход аккумуляторов из строя.
9.5. ПРИНЦИП ДЕЙСТВИЯ, УСТРОЙСТВО
И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
НИКЕЛЬ-КАДМИЕВЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ
Принцип действия никель-кадмиевых аккумуляторных бата-
рей основан на электрохимической системе
(+) (-)
NiOOH | КОН | Cd. (9.21)
Активным веществом отрицательного электрода является губ-
чатый кадмий. В качестве электролита используется водный
раствор едкого калия (КОН) плотностью у =1,2 г/см3 с до-
бавлением на 1 л раствора 20 г моногидрата гидроокиси лития
МОН-НгО.
Первичным активным веществом положительного электрода
является моногидрат окиси никеля NiOOH.
При пропитке раствором электролита на положительном
электроде образуется гидроксид никеля
NiOOH + Н2О = Ni(OH)3. (9.22)
В последующих электрохимических реакциях трехвалентный
никель восстанавливается до двухвалентного в соответствии с
уравнением
2Ni(OH)3 + КОН 4- Cd X 2Ni(OH)2 + КОН + Cd(OH),. (9.23)
Отсюда следует, что электролит не вступает в реакцию с ак-
тивными веществами электродов и плотность его не зависит от
степени разряженности аккумуляторов, как и у серебряно-цин-
ковых аккумуляторных батарей.
На ЛА наиболее широкое применение получили никель-
кадмиевые аккумуляторные батареи типа 20 НКБН-25. Буквы
в наименовании батареи означают: НК — никель-кадмиевая;
245
Б — безламельйая; Н — намаз,ная (активная масса в процес-
се изготовления электродов намазывается на сетку из никеле-
вой проволоки, после чего она спекается в специальных печах).
Общий вид никель-кадмиевой аккумуляторной батареи при-
веден на рис. 9.9.
Рис. 9.9. Общий вид аккумуляторной ба-
тареи типа 20 НКБН-25
Батарея состоит из 20 аккумуляторов 1, помещенных в два
ряда в металлический контейнер 2 с крышкой 3. Между рядами
аккумуляторов устанавливается перегородка из стеклотексто-
лита. Соединение аккумуляторов в батарее осуществляется с
помощью перемычек 5. Токоотводы батареи выведены на ро-
зетку штепсельного разъема 6.
Конструкция аккумуляторов подобна конструкции СЦК-45.
Каждый из аккумуляторов содержит несколько разнополярных
пластин, чередующихся между собой и соединенных в блоки
электродов с помощью гибких проводников. В связи с тем, что
соединения №('ОН)3, Ni(iOH)2 и СсЦОНЦ имеют желеобразную
структуру, положительные пластины для защиты от разбухания
и оползания помещаются в мешочки из капроновой ткани, а
отрицательные — из щелочестойкой бумаги, являющейся се-
паратором.
Сосуды аккумуляторов изготавливаются из полиамидной
смолы. Электролит заливают через отверстие в верхней части
сосуда, которое в процессе эксплуатации батареи закрыто проб-
кой 7 (см. рис. 9.9) с резиновым клапаном. Клапан, оттариро-
ванный на избыточное давление (0,2...0,4) • 10511а, предотвращает
246
выливание электролита при эволюциях и защищает сосуд от
раздутия при больших перепадах давления. Уровень электро-
лита в аккумуляторах контролируется по меткам, нанесенным на
боковых стенках сосудов, для чего в боковых стенках контей-
нера батареи имеются окна.
Электродвижущая сила никель-кадмиевого аккумулятора
при нормальной плотности электролита у = 1,20 г/см3 состав-
ляет 1,36 В и не зависит от степени разряженности аккумуля-
тора, поскольку электролит является только катализатором
электрохимической реакции и плотность его остается постоян-
ной.
При изменении температуры электролита 8 от —10°С до
+ (35...45) °C ЭДС остается практически постоянной, но при бо-
лее высокой температуре электролита ЭДС уменьшается (рис.
9.10).
Внутреннее омическое со-
противление авиационных ни-
кель-кадмиевых аккумулятор-
ных батарей сравнимо по ве-
ли чине с сопротивлением свин-
цовых батарей, что позволяет
их использовать в стартерном
режиме.
На полное внутреннее со-
противление батарей сущест-
венное влияние оказывает тем-
пература электролита, что
обусловлено в основном по-
ляризацией аккумуляторов. С
уменьшением температуры
внутреннее сопротивление ба-
Рис. 9.10. Зависимость ЭДС ни-
кель-кадмиевого аккумулятора от
температуры электролита
тарен увеличивается.
Напряжение никель-кадмиевых батарей зависит от величи-
ны тока и температуры электролита, что обусловлено изменени-
ем внутреннего сопротивления, но от степени разряженности
батарей практически не зависит.
Таким образом, ни величина ЭДС, ни уровень напряжения
не могут служить основанием для определения степени разря-
женности аккумуляторных батарей в процессе их эксплуатации.
По напряжению можно лишь приближенно оценить состояние
никель-кадмиевой аккумуляторной батареи — считают, что она
имеет достаточный для полета запас емкости, если при разря-
де током 10 7НОМ напряжение на ее зажимах не ниже 23,5...
24,0 В.
За номинальный ток разряда никель-кадмиевых батарей
принимают ток 2,5-часового режима разряда (для батарей
20 НКБН-25 /НоЧ=ЮА).
247
Емкость никеЛыкадмиевых батарей в меньшей степени за-
висит от тока разряда, чем емкость свинцовых и серебряно-
цинковых батарей (см. рис. 9.3). Удельная емкость авиацион-
ных никель-кадмиевых батарей составляет 1,1...1,3 А-ч/кг.
• Коэффициент отдачи по емкости при нормальном заряде со-
ставляет (65...70'%), 'коэффициент отдачи по энергии — около
50%.
Саморазряд никель-кадмиевых батарей обусловлен .рядом
факторов, главным из которых является протекание окислитель-
ных процессов отрицательного электрода: химически активный
кадмий в присутствии щелочи КОН вступает в реакцию с
водой, образуя нерастворимое основание
Cd + 2Н2О -> Cd(OH)2 + Н2 f . (9.24)
Саморазряд особенно интенсивно происходит после заряда ба-
тарей: в течение первых 3...4 суток саморазряд составляет до
1,5%, а затем через 10... 15 суток снижается до 0,5% и в даль-
нейшем остается практически постоянным.
Гарантийный ресурс никель-кадмиевых батарей типа
20 НКБН-25 в настоящее время составляет 3 года. По истече-
нии гарантийного ресурса батареи этого типа эксплуатируются
по техническому состоянию до тех пор, .пока их емкость, пока-
зываемая на контрольно-тренировочном цикле, не станет мень-
ше 21 А - ч.
Основным недостатком никель-кадмиевых аккумуляторных
батарей является то, что при длительной параллельной работе
с генераторами постоянного тока и выпрямительными устрой-
ствами они могут при определенных условиях входить в режим
так называемого «теплового разгона». Сущность процесса
теплового разгона аккумуляторных батарей и меры к его пред-
отвращению рассматриваются в гл. 15.
Глава 10
АВАРИЙНЫЕ РЕЖИМЫ В СИСТЕМАХ
ЭЛЕКТРОСНАБЖЕНИЯ
10.1. ОБЩАЯ ХАРАКТЕРИСТИКА АВАРИЙНЫХ РЕЖИМОВ
Отказы отдельных элементов системы электроснабжения
могут привести к нарушению ее нормального режима работы,
вызвать тяжелые последствия как для системы электроснабже-
ния н приемников электроэнергии, так и для ЛА в целом.
Статистика отказов в системах электроснабжения показы-
вает, что они могут быть классифицированы по целому ряду
признаков: по степени влияния на работоспособность системы
на отказы, вызывающие полное или частичное нарушение ра-
ботоспособности; по времени существования на устойчивый,
временный или перемежающийся отказы; по характеру про-
явления на внезапный или постепенный отказы; по степени
влияния па качество электроэнергии и тепловой режим системы
и др.
Анализ причин отказов в системах электроснабжения ЛА
указывает, что основными из них являются: механические раз-
рушения отдельных элементов,'дефекты монтажа и конструктив-
ные недостатки, несоблюдение правил технической эксплу-
атации.
К наиболее характерным отказам элементов систем электро-
снабжения относят: механическое разрушение подшипников ге-
нераторов и приводов постоянной скорости, металлические ко-
роткие замыкания и обрывы проводов электрической сети, на-
рушение соединения контактов штепсельных разъемов, комму-
тационных аппаратов и соединительных колодок, износ тру-
щихся частей, пробой полупроводниковых приборов и конден-
саторов, смещение ползунков потенциометров и реостатов бло-
ков управления и защиты.
Постепенные отказы в отличие от внезапных носят не слу-
чайный, а закономерный характер, и поэтому их появление, как
правило, можно заранее прогнозировать и предотвратить, свое-
временно проводя профилактические и ремонтные работы.
При анализе отказов >в системах электроснабжения ЛА по
степени их влияния на качество электроэнергии, согласно ГОСТу
249
&
24898—81, отказы разделяют на следующие группы (виды), при-
водящие к чрезмерному (аварийному) повышению или пони-
жению напряжения, чрезмерному (аварийному) повышению
иди понижению частоты, недопустимому искажению формы кри-
вой напряжения переменного тока, недопустимой модуляции
напряжения и частоты, недопустимому небалансу напряжений,
недопустимой пульсации напряжения постоянного тока и др.
Для исключения возможных тяжелых последствий при воз-
никновении отказов системы электроснабжения имеют аппара-
ты защиты, предназначенные для отключения неисправных эле-
мента, канала, участка электрической сети и др.
Исходя из требований обеспечения безопасности полетов ЛА
и выполнения ими боевого задания, инженерно-технический со-
став должен знать основные причины, вызывающие отказы в
системах электроснабжения, характер их проявления, степень
влияния отказов отдельных элементов системы на надежность
питания приемников, и уметь разрабатывать мероприятия по
их предупреждению.
10.2. КОРОТКИЕ ЗАМЫКАНИЯ В СИСТЕМАХ
ЭЛЕКТРОСНАБЖЕНИЯ ПОСТОЯННОГО ТОКА.
МЕТОДИКА РАСЧЕТА ТОКОВ КОРОТКОГО ЗАМЫКАНИЯ
Коротким замыканием (КЗ) называют всякое не предусмот-
ренное условиями работы соединение между токопроводящими
элементами системы. Как правило, КЗ в системах электроснаб-
жения возникают вследствие повреждения изоляции и обрывов
проводов или нарушения электрических соединений отдельных
элементов.
При КЗ уменьшается сопротивление электрической цепи, что
обусловливает увеличение токов в участках системы по срав-
нению с токами нормального режима.
При длительном протекании больших токов КЗ через эле-
менты системы их температура возрастает, что может привести
к отказу этих элементов.
Величина токов КЗ в электрической цепи канала генериро-
вания электроэнергии зависит от режима его работы, удален-
ности места КЗ от источника литания и переходного сопротив-
ления в месте замыкания. Если величина переходного сопро-
тивления в месте замыкания по сравнению с сопротивлениями
других участков цепи мала, то КЗ называют металлическим.
Это имеет место, например, при сваривании токопроводящих
частей между собой.
Иногда’при отказах в системах электроснабжения ЛА возни-
кают перемежающиеся КЗ, которые характеризуются
кратковременным возникновением и исчезновением токов. Та-
кой характер протекания токов КЗ обусловлен переменным зна-
чением переходного сопротивления в месте замыкания. Проис-
250
ходит это потому, что при КЗ появляется электрическая дуга,
которая выжигает место замыкания токопроводящих элементов
и тем самым вызывает ликвидацию КЗ. Но вследствие вибра-
ций ЛА оголенные участки токопроводящих частей опять сопри-
касаются между собой, приводя к возникновению повторных КЗ.
Для выбора аппаратов защиты от КЗ, определения динами-
ческих усилий и тепловых нагрузок в элементах системы элек-
троснабжения необходимо знать величины их токов как в уста-
новившихся, так и переходных режимах. Аналитическое иссле-
дование переходных процессов при КЗ в электрических цепях
с электромашинными регулируемыми источниками электроэнер-
гии представляет большие трудности, так как это связано с ре-
шением нелинейных дифференциальных уравнений высокого
порядка. Поэтому при расчетах токов КЗ в системах электро-
снабжения ЛА обычно ограничиваются определением макси-
мальных значений установившегося и .переходного токов КЗ
при известной величине сопротивления до места замыкания. Мак-
симальные значения переходных токов КЗ .принято называть
ударными токами КЗ. Значения ударных и установившихся
токов КЗ зависят от режима работы капала и места замыка-
ния в системе.
Характер влияния частоты вращения п генератора, тока его
предварительной нагрузки /0 и сопротивления до места КЗ RK
на значения ударных и установившихся токов КЗ в каналах с
коллекторными генераторами приведен на рис. 10.1.
Рис. 10.1. Зависимость ударных и установившихся токов КЗ коллектор-
ного генератора от частоты его вращения (а), предварительной нагруз-
ки (б) и сопротивления до места КЗ (в)
Эти зависимости показывают, что при работе генератора по-
стоянного тока параллельного возбуждения на более высоких
частотах вращения его ударный ток КЗ будет меньше, а уста-
новившийся —- больше, чем при работе на малых частотах вра-
щения. Уменьшение ударного тока КЗ при п<2>п} обусловлено
тем, что в этом случае величина тока возбуждения генератора,
работающего с регулятором напряжения, перед моментом КЗ
251
будет меньше, а следовательно, будет и меньше запас электро-
магнитной энергии в машине. Возрастание значения установив-
шегося тока КЗ в рассматриваемом случае объясняется увели-
чением величины ЭДС генератора, создаваемой в основном его
остаточным магнитным потоком, за счет увеличения его часто-
ты вращения.
Из зависимостей токов КЗ от величины предварительной
нагрузки /о (рис. 10.1,6) следует, что в случае Toi>/o2 величи-
на ударного тока КЗ будет 'больше, так как генератор имел
больший запас электромагнитной энергии. Значения установив-
шихся токов КЗ от предварительной нагрузки практически не
зависят, так как ~ const.
Увеличение сопротивления RK приводит к уменьшению удар-
ных и увеличению установившихся токов КЗ (рис. 10.1,в). Уве-
личение установившихся токов КЗ с увеличением сопротивле-
ния цепи короткого замыкания объясняется применением в рас-
сматриваемых системах электроснабжения генераторов посто-
янного тока с параллельным возбуждением. Таким образом,
анализ влияния режимов работы канала и места возникновения
отказа показывает, что максимальные величины ударных токов
КЗ будут при работе генератора на малых частотах вращения,
максимальной величине предварительной нагрузки и КЗ на за-
жимах генератора, а наибольшие установившиеся токи КЗ име-
ют место при работе генератора на максимальных частотах
вращения и наибольшем удалении места КЗ.
Влияние на характер изменения токов КЗ в канале с бес-
контактным генератором постоянного тока его режима работы
и места КЗ в системе электроснабжения несколько отличается
от рассмотренного выше.
Рис. 10.2. Зависимость тока
КЗ от времени для канала
с бесколлекторным генера-
Это отличие в основном обусловлено
тем, что бесконтактные генераторы
имеют независимое возбуждение, in,
следовательно, при КЗ в системе
электроснабжения с этими генера-
торами значительно возрастают их
установившиеся токи короткого
замыкания.
На рис. 10.2 показана зависи-
мость тока КЗ от времени для кана-
ла с бесконтактным генератором
постоянного тока. Возрастание то-
ка КЗ в копне переходного пронес-
тором постоянного тока
са объясняется вступлением в ра-
боту регулятора напряжения.
Как уже отмечалось, вследствие
'относительной сложности аналити-
ческих методов расчета токов КЗ в
системах электроснабжения для определения максимальных зна-
чений ударных и установившихся токов КЗ, как правило, ис-
252
пользуются приближенные графоаналитические методы рас-
чета .
Широкое распространение получили методы расчета удар-
ных токов КЗ с помощью экспериментально снятых вольт-ам-
перных характеристик (метод спрямленных характеристик), а
установившихся токов КЗ — с помощью внешних характери-
стик источников постоянного.тока: генераторов и выпрямитель-
ных устройств. При этом для генераторов берут внешние ха-
рактеристики, соответствующие их максимальной частоте вра-
щения, когда установившиеся токи КЗ достигают максималь-
ной величины.
Для определения ударных токов КЗ используют вольт-ам-
перные характеристики источников, .представляющие собой за-
висимости между напряжением и током КЗ для момента вре-
мени, соответствующего максимальной величине тока КЗ. Эти
характеристики получают, как правило, экспериментальным
путем, осциллопрафируя токи КЗ 'источников при различных
сопротивлениях до места КЗ.
Так как максимальная величина ударных токов КЗ в ка-
нале зависит от его режима работы, то указанные характери-
стики, как следует из рис. 10.1, получают для случая работы
генератора при минимальной частоте вращения и максимально
допустимой предварительной нагрузке. Экспериментальные ис-
следования показали, что вольт-амперные характеристики ис-
точников, снятые при КЗ для различных сопротивлений до
места КЗ, можно аппроксимировать прямыми линиями. Это
существенно облегчает их построение, так как достаточно знать
координаты только двух точек характеристики. Вольт-амперные
характеристики генератора, выпрямительного устройства и ак-
кумуляторной батареи показаны на рис. 10.3. Для их построе-
ния необходимо иметь данные номинальных значений напряже-
Рис. 10.3. Вольт-амперные характеристики генерато-
ра (а), выпрямительного устройства и аккумулятор-
ной батареи (б)
253
f
<fe
Ния й тока и максимальные величины ударных токов КЗ источ-
ников питания.
В табл. 10.1 приведены значения ударных токов КЗ для ря-
да, источников постоянного тока: .коллекторных генераторов G,
выпрямительных устройств ВУ и аккумуляторных батарей Б.
Таблица 10.1
Значения ударных токов КЗ источников постоянного тока
Тип G л, об/мин 'уд- А Тип ВУ /уд, А Тип Б Кд, А
ГСР-12000 4000 1800 ВУ-ЗА 2100 12АСАМ-23 2600
9000' 1200 ВУ-6А 3030 12САМ-28 1800
ГСР-18000 4000 2700 ВУ-9А 4240 12САМ-55 3400
9000' 1850 ВУ-12А 8300 15СЦС-45 1600
— — — — — 20НКБН-25 2150
Методик^' расчета ударных и установившихся токов КЗ с
помощью вольт-амперных характеристик рассмотрим на при-
мере расчета токов в одноканальной системе электроснабжения.
Вначале составляется расчетная схема анализируемого уча-
стка системы, упрощенный пример которой для случая КЗ на
шинах распределительного устройства РУ1 приведен на рис.
10.4.
Рис. 10.4. Упрощенная расчетная схема
одноканальной системы электроснаб-
жения
Здесь сопротивления резисторов /?1, /?2 и /?3 характеризуют
соответственно сопротивления участков электрической сети, со-
единяющих зажимы генератора и аккумуляторной батареи (Б)
с шинами ЦРУ и РУ.
Расчет ударных токов КЗ. После составления расчетной
схемы и определения сопротивлений всех ее участков строят
приведенные к шинам ЦРУ вольт-амперные характеристики ис-
точников электроэнергии, учитывающие падение напряжения
на участках сети, соединяющих источники питания с шинами
254
ЦРУ. ДаЛеб определяют результирующую вольт-амперную ха-
рактеристику источников электроэнергии, позволяющую опреде-
лить величину ударного тока в зависимости от места КЗ. Для
упрощения указанных расчетов все характеристики строят на
одном графике (рис. 10.5). Приведенные к шинам ЦРУ вольт-
Рис. 10.5. Пример построения приведенных
вольт-амперных характеристик
амперные характеристики генератора и аккумуляторной бата-
реи получают путем вычитания из ординат вольт-амперных ха-
рактеристик источников питания (кривые Ur и £76), соответ-
ствующих ординат кривых падений напряжений на участках
электрической сети, соединяющих эти источники с шинами
ЦРУ (кривые URi и UR2). Результирующая вольт-амперная ха-
рактеристика (кривая 67г+б) определяется путем суммиро-
вания абсцисс приведенных вольт-амперных характеристик
(кривые Ur и 47б) источников электроэнергии. По точке пере-
сечения результирующей вольт-амперной характеристики (кри-
вая М-+б) и кривой падения напряжения на участке электри-
ческой сети (кривая соединяющим шины ЦРУ и РУ1,
определяют величину ударного
тока КЗ 1уд.
Расчет установившегося тока
КЗ. Для определения установив-
шегося тока КЗ берут внешнюю
характеристику генератора, сня-
тую при максимальной частоте
вращения (рис. 10.6). На этом
графике строят кривую падения
напряжения на участке электри-
ческой сети, соединяющем гене-
ратор с шипами РУ (кривая
Точка пересечения
внешней характеристики генера-
тора с кривой падения напряже-
ния на участке сети до места КЗ
определяет величину установив-
Рис. 10.6. Внешняя характери-
стика генератора и кривая па-
дения напряжения на участке
сети
255
*
шегося тока /кз в месте замыкания. В рассматриваемом при-
мере при расчетах установившегося тока КЗ полагали, что ак-
кумуляторная батарея будет полностью разряжена.
10.3. КОРОТКИЕ ЗАМЫКАНИЯ В СИСТЕМАХ
ЭЛЕКТРОСНАБЖЕНИЯ ПЕРЕМЕННОГО ТОКА.
МЕТОДИКА РАСЧЕТОВ ТОКОВ КОРОТКОГО ЗАМЫКАНИЯ
В трехфазных системах электроснабжения 'короткие замы-
кания подразделяют на: трехфазные, двухфазные, двухфазные
на корпус и однофазные (рис. 10.7).
Рис. Т0.7. Виды коротких замыкании
В ряде случаев в процессе развития аварии один вид КЗ
переходит в другой вид, например, однофазные и двухфазные
КЗ часто переходят в трехфазные, так как образовавшаяся при
повреждении электрическая дуга быстро разрушает изоляцию
оставшихся неповрежденных токопроводящих элементов.
Физические явления, происходящие в синхронном генерато-
ре при внезапном КЗ, рассмотрим на примере трехфазного сим-
метричного КЗ.
Согласно закону Ленца, в первый момент времени после
КЗ все магнитные потоки, пронизывающие обмотки фаз, воз-
буждения и демпферные, остаются неизменными, неизменной
остается и ЭДС якоря. Вследствие того, что при КЗ сопротив-
ление цепи якоря скачкообразно уменьшилось, токи в фазах
мгновенно возрастают. Эти токи увеличивают лоток реакции
якоря, размагничивающий машину.
Для обеспечения постоянства магнитных потоков, пронизы-
вающих электрические контуры машины, в них индуктируются
ЭДС, вызывающие протекание токов в этих контурах. Созда-
ваемые этими токами магнитные потоки обеспечивают в на-
чальный момент КЗ постоянство магнитных потоков машины.
Магнитные потоки, обусловленные уравнительными токами,
протекающими в обмотках возбуждения и демпферной, препят-
ствуют проникновению в индуктор магнитного потока, создава-
емого обмоткой якоря, и вытесняют его в междужелезное про-
странство. В свою очередь, при КЗ магнитный поток, создава-
256
емый обмоткой якоря, возрастает и препятствует проникновению
потока индуктора в статор, поэтому и магнитный поток индук-
тора вытесняется в междужелезное пространство машины.
Так как магнитная проводимость путей для замыкания маг-
нитных .потоков, создаваемых обмотками якоря и индуктора,
уменьшается по сравнению с проводимостью путей по стали ма-
шины при нормальном режиме ее работы, то и токи, протекаю-
щие в этих обмотках, возрастают. Максимальное значение то-
на в идеальном сверхпроводящем контуре оставалось бы неоп-
ределенно долгое время, но в реальных обмотках, обладающих
активным сопротивлением, токи с течением времени уменьша-
ются. Процесс затухания токов в контурах зависит от постоян-
ных времени соответствующих контуров генератора. Так как
переходная постоянная времени обмотки возбуждения Та зна-
чительно больше сверхпереходной постоянной времени демпфер-
ной обмотки то ток в демпферной обмотке затухает значи-
тельно скорее по сравнению со временем затухания тока в об-
мотке возбуждения.
При затухании токов в обмотках возбуждения и демпферной
уменьшаются создаваемые ими магнитные потоки и магнитный
поток якоря начинает проникать в индуктор. Это приводит к
возрастанию магнитной проводимости для пути замыкания маг-
нитного потока, создаваемого обмоткой якоря, и, следовательно,
уменьшению тока КЗ.
Поток якоря проникает сначала в контур демпферной об-
мотки, а затем — в контур обмотки возбуждения. После окон-
чания переходного режима в цепи якорной обмотки протекает
установившийся ток КЗ.
Поэтому ток внезапного КЗ представляют в виде суммы
трех составляющих:
— свободной сверхпереходной, обусловленной действием
магнитного потока, создаваемого током в демпферной обмотке;
— свободной .переходной, обусловленной действием магнит-
ного потока, создаваемого током в обмотке возбуждения;
— установившегося тока короткого замыкания.
Сумму этих трех составляющих часто называют сверхпере-
ходным током КЗ, а сумму установившегося тока КЗ и свобод-
ной переходной составляющей — переходным током КЗ.
На рис. 10.8 показаны характер изменений тока /кз в одной
из фаз генератора, тока возбуждения /в и тока 4 в демпферной
обмотке при симметричном КЗ на зажимах синхронного гене-
ратора, .предварительно работавшего в режиме холостого хода.
Сверхпереходный ток достигает своего максимального зна-
чения через промежуток времени после начала КЗ, равный
примерно половине периода (Т/2). Его максимальная величина
17. Изд. № 7934
257
№
(ударный ток КЗ) для случая КЗ на зажимах генератора
равна:
1,«-/2^ном
/уа=- „ , (10.1)
t»
где ха — сверхпереходное индуктивное сопротивление по про-
дольной оси,
и может достигать /уд = (8... 12) /ном. Следует отметить, что под
ударным током КЗ подразумевается его максимальное мгновен-
ное значение.
Рис. 10.8. Графики изменения токов
в обмотках якоря (а), возбуждения
(б) и демпферной (в) генератора
। при коротком замыкании
Для выбора аппаратов защиты (Каналов и систем распреде-
ления электроэнергий необходимо иметь данные о величинах
ударных и установившихся токов трех-, двух- и однофазных
КЗ в местах установки этих аппаратов. Известные трудности
аналитическсго определения этих токов обусловили для их рас-
чета так же, как это принято в системах электроснабжения по-
стоянного тока, использование приближенных графоаналити-
ческих методов.
258.:
Методику расчета установившихся и ударных токов при
трехфазном КЗ в заданных точках системы рассмотрим на при-
мере определения токов КЗ в двухканальной системе электро-
снабжения (рис. 10.9,а). Ее расчетная схема с данными актив-
ного г, индуктивного xd и сверхпереходного индуктивного л<”
сопротивлений синхронных генераторов, активного и индук-
тивного лл сопротивлений участков электрической сети для слу-
чая КЗ на шинах РУ 2 (точка «а») показана на рис. 10.9,6.
Для расчетов используют паспортные данные параметров син-
хронного генератора и установившихся токов трех-, двух- и
однофазного КЗ на зажимах генератора.
Рис. 10.9. Схема двухканальной системы электроснабжения перемен-
ного тока (а) и ее расчетная схема (б)
Для примера в табл. 10.2 приведены указанные .параметры
для бесконтактного генератора. ГТ40П46 и усредненные значе-
ния этих параметров для всей шкалы мощности серийно выпус-
каемых генераторов типа ГТ.
Таблица 102
Параметры бесконтактных генераторов переменного тока
Тип генератора ха хч *d ха Г /3) КЗ /(2) КЗ гкз
ГТ4ОП46 1,63 1,1 0,34 0,12 0,02 3,2 4,7 6,8
Усредненные значения параметров 1.» 1,15 0,25 0.15 С-,02 3,3 5,0 8,0
Данные генератора и сопротивления участков электрической
сети записывают, как правило, в относительных единицах, при
этом за базисные единицы принимают номинальные значения
(разных напряжения и тока.
17*
259
После составления исходной расчетной схемы (рис. 10.9,6)
приступают к ее упрощению.
Для рассматриваемого примера последовательность упроще-
ния исходной расчетной схемы показана на рис. 10.10
Pirc. 10.10. Приведенные расчетные схемы для рассматри-
ваемой системы электроснабжения
Приведенные на схемах значения эквивалентных и резуль-
тирующих индуктивных и активных сопротивлений участков
электрической сети*до места КЗ равны:
г "т ГЛ|, г2 — / t ; Гр = гэ г,13;
Л'1 ~ Х<1 + Ал| ’> х2 = xd + л'л2 : ЛР = + -ЧлЗ :
xi = х(/ + л'л1; х2 = xii + ; хр = xs + А'лз •
где индуктивное сопротивление лр используется для определе-
ния установившегося, а сопротивление хр — для определения
ударного токов КЗ. Величину установившегося тока трехфаз-
ного КЗ в расчетной точке системы вычисляют по формуле
X,/Z(3)
(10.2)
где 2;р = |/гр + Лр— полное расчетное сопротивление цепи до
места КЗ.
Значения индуктивного сопротивления по продольной оси
ха синхронного генератора и установившегося тока трехфаз-
пого КЗ на его зажимах, Входящих в формулу (10.2), 'берут
из табл. 10.2.
Ударный ток при трехфазном КЗ в расчетной точке системы
электроснабжения определяют из
гуд = ]/2Ауч'', (10.3)
где &у = 0,8 ie У а ;
260
Ти —----2— — постоянная времени обмотки статора при КЗ
2к/гр в расчетной точке;
Е
I" = —---начальное значение сверхпереходного тока КЗ;
гр
Е” — начальное значение сверхпереходной ЭДС.
Величина сверхпереходной ЭДС синхронного генератора до
начала КЗ, согласно векторной диаграмме его напряжений, при-
веденной на рис. 10.11, равна:
Д" =]/'(До cos ?)2 + (TJ0 sin + х"70)2, (10.4)
где (J® и io — напряжение и ток
генератора до на-
чала переходного
процесса.
Для упрощения расчета уста-
новившихся и сверхпсреходных
гоков при несимметричных КЗ
в системах электроснабжения ча-
сто используют эмпирические
формулы. Так, например, устано-
вившиеся токи при двух- и одно-
фазном КЗ в одноканальной си-
стеме электроснабжения опреде-
ляются по следующим форму-
лам:
Рис. 10.11. Векторная диаграм-
ма .напряжений синхронного
генератора
-Ч/ -t *2 +- -*0 + Х1с -Г * 2с -t- ЛОс
(10.6)
где Др — расчетная ЭДС генератора;
х2их0 — индуктивные сопротивления генератора то-
кам обратной и нулевой последовательности;
х1с. л2с’ хпс — индуктивные сопротивления участка сети до
места КЗ токам прямой, обратной и нулевой
поел едов ател ыности.
Величина расчетной ЭДС Др. входящей в выражения (10.5)
п (10.6), находится по спрямленной части характеристики хо-
2b I
£
Лостого хода Генератора Е = ^(/в), снятой до предельного (мак-
симального) значения тока возбуждения. В ряде случаев, учи-
тывая, что характеристики холостого хода серийных авиацион-
ных генераторов различной мощности, построенные в относи-
тельных единицах, совпадают между собой, значение расчетной
ЭДС определяют из следующего уравнения:
Др = ^ном (о,2 + 0,8 ^-макс ), (10.7)
где U„o„ — номинальное напряжение генератора;
Лмькс— предельное (максимальное) значение тока воз-
буждения;
4 ном — ток возбуждения, соответствующий номинальном)'
•напряжению С’НОм при холостом ходе и минималь-
ной частоте вращения.
Для вычисления сверхпереходных токов при несимметрич-
ных КЗ в одноканальной системе электроснабжения входящие
в выражения (10.5.) и (10.6) значения расчетной ЭДС Др и ин-
дуктивного сопротивления по продольной оси xd заменяют зна-
чениями сверхпереходной ЭДС Ео", определяемой из уравнения
(10.4), и сверхпереходного индуктивного сопротивления по про-
дольной оси x,i. Уравнения для вычисления сверхпереходных
токов при двух- и однофазном КЗ в одноканальной системе
электроснабжения имеют вид
—-----------2-------= О °-8)
xd + -Г2 + Л1с + Х2С
Я1) =---------------1-------------. (Ю.9)
'Vrf *" "Vlc +-*<)€
Сопротивления прямой и обратной последовательностей явно-
полюсных синхронных генераторов обычно принимают рав-
ными
х0 = (0,3 - 0,6)х" , (10.10)
где — сверхпереходные индуктивные сопротивления по
продольной и поперечной осям;
<М1,2-1,5)х''-
262
Для приближенных 'расчетов значений ударных токов в си-
стемах распределения электроэнергии при двух- и однофазном
КЗ принимают, что
Z(2) = 0,85^; (10.11)
za)=0,95/<^, (10.12)
где 4д' — величина ударного тока в системе при трехфазном
КЗ в расчетной точке.
10.4. АВАРИЙНЫЕ ПОВЫШЕНИЕ И СНИЖЕНИЕ
НАПРЯЖЕНИЯ В СИСТЕМАХ ЭЛЕКТРОСНАБЖЕНИЯ
ПОСТОЯННОГО ТОКА
Как уже отмечалось, для нормальной работы приемников
электроэнергии установившиеся и переходные значения напря-
жения источников питания должны соответствовать требова-
ниям ГОСТа 19705—81. Согласно этому ГОСТу, предельные
значения установившегося отклонения напряжения в точке
регулирования для случаев ненормальной и аварийной работы
системы электроснабжения постоянного тока соответственно
определены в 24...33 В и 20...29 В. Допустимые пределы откло-
нения напряжения во время переходных процессов при нормаль-
ной работе системы были приведены на рис. 4.1.
Опыт эксплуатации электрооборудования ЛА показал, что
отклонения напряжения в системе электроснабжения сверх до-
пустимых пределов приводят к отказам многих приемников
электроэнергии ЛА, что существенно ухудшает безопасность
полетов. Так, при повышении напряжения в бортовой сети рез-
ко возрастает вероятность отказов полупроводниковых прибо-
ров, применяемых в пилотажно-навигационных системах, радио-
технического и специального оборудования ЛА. Кроме того, по-
вышение напряжения в сети приводит к тепловому разгону
щелочных аккумуляторных батарей, отказам светотехнического
оборудования, чрезмерному нагреву электродвигателей и др.
При чрезмерном снижении напряжения в бортовой сети
многие приемники ЛА прекращают свое функционирование,
происходит ложное отключение коммутационных аппаратов, раз-
ряд аккумуляторных батарей и т. д.
Причинами аварийного повышения напряжения являются,
как правило, отказы в регуляторах (КЗ силовых транзисторов,
спекание угольных шайб, обрывы в цепях управления), при-
водящие к перевозбуждению генератора. Кратковременное по-
вышение напряжения имеет место при отключении приемников
большой мощности, при срабатывании аппаратов защиты от
КЗ.
263
Г
Величина п&ренапряжения в сети при одиночной работе ка-
нала в зависимости от частоты вращения генератора и нагруз-
ки в случае отказа аппаратов защиты может достигать
г/=_-(4...5)Ц1Ом.
В случае 'перевозбуждения генератора, работающего парал-
лельно с другими генераторами, 'неисправный генератор при
отсутствии защиты берет на себя всю или большую часть на-
грузки. В результате этого перевозбужденный генератор пере-
гревается и может выйти из строя.
Аварийное снижение напряжения в сети, как правило, обус-
ловлено обрывами в цепи возбуждения генератора, отказами в
регуляторе напряжения и повреждениями на участках фидера
генератора.
10.5. АВАРИЙНЫЕ ПОВЫШЕНИЕ И СНИЖЕНИЕ
НАПРЯЖЕНИЯ В СИСТЕМАХ ЭЛЕКТРОСНАБЖЕНИЯ
ПЕРЕМЕННОГО ТОКА
Опыт эксплуатации систем электроснабжения переменного
тока показывает, что, как и в системах электроснабжения по-
стоянного тока, основными причинами аварийного повышения
напряжения являются отказы в регуляторах, обрывы и КЗ в
электрических сетях. Так, например, в трехфазных системах
электроснабжения регулятор, как отмечалось в гл. 4, как пра-
вило, реагирует на среднее выпрямленное напряжение всех фаз
U _k.h Ua + Uh+Uc
С/€р КТ /VB Q >
о
где А, — 'коэффициент трансформации понижающего транс-
форматора;
kB — коэффициент выпрямления.
Поэтому, как при обрыве одной из фаз, так и при КЗ в этой
фазе снижается величина среднего выпрямленного напряжения
£/ср, регулятор напряжения увеличивает ток возбуждения ге-
нератора неисправного канала и напряжение исправных фаз
возрастает. Величина этого напряжения может при номинальной
частоте вращения генератора достигать
г/ = (1,5...1доном.'
В случае перевозбуждения генератора, работающего парал-
лельно с другими генераторами, неисправный генератор при от-
сутствии защиты берет на себя всю пли большую часть нагруз-
ки, что приводит к его перегреву.
Аварийное снижение напряжения в системе электроснабже-
ния переменного тока, как и в системе электроснабжения посто-
264
янного тока, обусловлено, как правило, обрывами в цепи воз-
буждения генератора, отказами в регуляторе и генераторе, при-
водящими к недовозбуждению генератора.
Недовозбуждение генератора при одиночной работе канала
приводит к недопустимому снижению напряжения в сети, а при
параллельной работе каналов — к неравномерному распреде-
лению реактивной нагрузки между генераторами и в ряде слу-
чаев к некоторому снижению ‘уровня напряжения в бортовой
сети.
10.6. ЧРЕЗМЕРНЫЕ ПОВЫШЕНИЕ И СНИЖЕНИЕ
ЧАСТОТЫ В СИСТЕМАХ ЭЛЕКТРОСНАБЖЕНИЯ
ПЕРЕМЕННОГО ТОКА
Эффективность работы целого ряда приемников электро-
энергии переменного тока зависит от точности поддержания ча-
стоты их источников питания. Чрезмерное отклонение частоты
тока от номинального значения отрицательно влияет на рабо-
ту асинхронных двигателей, трансформаторов, магнитных уси-
лителей и других электромагнитных аппаратов, широко исполь-
зуемых в авиационном оборудовании. Возникающие при недо-
пустимых отклонениях частоты частотные погрешности измери-
тельных органов (индуктивных и емкостных датчиков, фазо-
сдвигающих мостов, фильтров прямой и обратной последова-
тельностей и др.) снижают надежность бортовых систем, пони-
жают безопасность полетов.
Основными причинами аварийных повышения и снижения
частоты в каналах генерирования электроэнергии являются от-
казы в приводах постоянной скорости и регуляторах частоты
вращения. Эти отказы в системах электроснабжения с парал-
лельно работающими каналами приводят к выпадению генера-
торов из синхронизма, протеканию .между ними больших урав-
нительных токов и, если не принять необходимых мер по их
ликвидации, к прекращению электроснабжения приемников.
10.7. НЕСИММЕТРИЯ И ИСКАЖЕНИЕ ФОРМЫ КРИВОЙ
НАПРЯЖЕНИЯ В СИСТЕМАХ ЭЛЕКТРОСНАБЖЕНИЯ
ПЕРЕМЕННОГО ТОКА
Одно-, двухфазные КЗ, обрывы проводов в системах рас-
пределения электроэнергии, неравномерное включение однофаз-
ных приемников могут привести к значительной неепмметрии
напряжений между фазами, что оказывает отрицательное вли-
яние на работу как однофазных, так и трехфазных приемников.
Влияние отклонения напряжения от заданного уровня на
работу однофазных приемников рассматривалось в разделе 10.5.
В трехфазпых приемниках (асинхронных двигателях, транс-
форматорах, индукционных машинах и др.) несимметрия напря
265
*
жений обусловливает протекание токов прямой, обратной и ну-
левой последовательностей.
Так, например, протекание в обмотках асинхронного двига-
теля кроме тока прямой последовательности тока обратной по-
следовательности вызывает уменьшение полезного момента и
дополнительный нагрев машины. Уменьшение полезного момен-
та Л4ЛВ за счет противодействующего момента М2, создавае-
мого током обратной последовательности, определяется следу-
ющим выражением:
Al, s z\ U\
Мю 2 - s А и\оы '
(10.13)
гд е s — скольжение;
z, и ?2 — полные сопротивления прямой и обратной по-
следовательностей двигателя;
— напряжение обратной .последовательности.
Расчеты показывают, что при несимметрии напряжений в
сети, когда коэффициент обратной последовательности напря-
жения, равный &2~—достигает А2 = 0,04, мощность асин-
хропного двигателя в зависимости от его исполнения уменьша-
ется на б.-Ю0/», а при /г2 = 0,1 — на 20...50t’/o.
Искажение формы кривой напряжения обусловлено наличи-
ем на борту ЛА большого числа приемников с нелинейными
вольт-амперными характеристиками (выпрямительные устрой-
ства) и с импульсно-периодическим характером нагрузки.
Как уже отмечалось, искажение формы кривой напряжения
влияет на погрешности индукционных машин, используемых в
системах управления и синхронной связи и, кроме того, нали-
чие высших гармонических в форме кривой напряжения приво-
дит к возрастанию дополнительных потерь активной мощности
в электродвигателях, генераторах и трансформаторах. Эти по-
тери определяют по формуле
м-3
(10.14)
где /„ — ток v-й гармоники;
/?„ — активное сопротивление элемента v-й гармоники.
Таким образом, аварийные режимы в системах электроснаб-
жения, если не принять соответствующие меры, могут привести
к ухудшению качества электроэнергии или прекращению пита-
ния приемников ЛА.
266
Глава 11
ЗАЩИТА СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
11.1. НАЗНАЧЕНИЕ, ПРИНЦИПЫ ПОСТРОЕНИЯ
АППАРАТОВ ЗАЩИТЫ И ОСНОВНЫЕ ТРЕБОВАНИЯ,
ПРЕДЪЯВЛЯЕМЫЕ К НИМ
Отказы элементов систем электроснабжения, как было от-
мечено ранее, могут привести к недопустимому ухудшению ка-
чества электрической энергии, прекращению питания бортового
оборудования ЛА или пожару и, как следствие, к невыполнению
полетного задания или иным летным происшествиям.
Для того чтобы предотвратить тяжелые последствия отка-
зов, в системах электроснабжения, исходя из наиболее вероят-
ных аварийных режимов, предусматриваются различные виды
защиты.
В системах электроснабжения постоянного тока применя-
ется защита от снижения и чрезмерного (аварийного) повыше-
ния напряжения, коротких замыканий, «обратной» мощности
генераторов, неправильной полярности бортовых и аэродромных
источников.
В системах электроснабжения переменного тока предусмат-
ривается защита от повышения и снижения напряжения; повы-
шения и снижения частоты; коротких замыканий; обрывов про-
водов; несимметрии напряжений; небаланса активной, реактив-
ной или полной мощности при параллельной работе каналов ге-
нерирования; неправильного чередования фаз бортовых и аэро-
дромных источников электроэнергии; механических разрушений
подшипников генератора и т. д.
Перечисленные виды защиты реализуются, как правило, с
помощью специальных электрических аппаратов, осуществляю-
щих автоматическое отключение неисправных элементов (уча-
стков) электрической сети или каналов генерирования и изме-
нение структуры системы электроснабжения таким образом,
чтобы электрическая энергия необходимого качества поступала
ко всем приемникам или только к тем из них, от которых в
большей степени зависит безопасность полета ЛА.
267
Защита генераторов и приводов постоянной скорости от ме-
ханических перегрузок и разрушений реализуется с помощью
муфт ограничения момента, предохранительных муфт и т. п.
К аппаратам защиты, учитывая их назначение, предъявля-
ют ряд специальных требований, направленных на обеспечение
эффективности их действия и минимального ущерба от сраба-
тывания, а именно: быстродействие, селективность и необрати-
мость действия, а также независимость работы защищаемых
устройств от отказов в самих аппаратах защиты.
Требование быстродействия защиты связано с необходимо-
стью максимально возможного сокращения времени существо-
вания аварийного режима и, следовательно, уменьшения тяже-
сти его последствий. Быстродействие защиты оценивается вре-
менем ее срабатывания, т. е. промежутком времени от момента
возникновения- отказа до момента отключения неисправного
элемента системы.
Нод селективностью (избирательностью) действия аппаратов
защиты понимают их способность отключать при возникнове-
нии аварии только поврежденный участок, а также различать
аварийные режимы от нормальных переходных процессов при
коммутации нагрузки, сопровождающихся кратковременным
ухудшением качества электрической энергии. Селективность за-
щиты достигается рациональным выбором контролируемых па-
раметров, характеризующих состояние защищаемого устройст-
ва, подбором характеристик аппарата защиты и соответствую-
щим его размещением в системе.
Требование необратимости действия защиты направлено на
то, чтобы исключить повторное включение отказавшего эле-
мента в систему и, следовательно, повторение аварийного ре-
жима. Необратимость действия достигается применением эле-
ментов памяти, обеспечивающих сохранение состояния испол-
нительных органов аппарата защиты после его срабатывания.
В ряде случаев, например в предохранителях, «память» реали-
зуется за счет необратимых структурных изменений, происхо-
дящих в аппарате защиты при его срабатывании.
Требование независимости защищаемых устройств от отка-
зов в самих аппаратах защиты обусловлено тем, что при нали-
чии аппарата защиты снижается вероятность безотказной рабо-
ты защищаемого устройства
Рзу = Ру ‘Рзг
где ру — вероятность безотказной работы защищаемого уст-
ройства без аппарата защиты;
р3 —.вероятность безотказной работы аппарата защиты.
Поэтому при разработке и эксплуатации аппаратов защиты
должны предусматриваться меры к снижению вероятности лож-
ного отключения защищаемых устройств при отказах аппара-
тов защиты. Вместе с тем реализация данного требования обус-
268
лОвлИ'Вйет вероятность возникновения так называемых «скры-
тых» отказов аппаратов защиты, т. е. таких, последствия кото-
рых проявляются только после отказа защищаемых устройств.
Для предотвращения работы системы электроснабжения при
скрытых отказах в аппаратах защиты предусматривается встро-
енный .контроль.
Защита систем электроснабжения как совокупность опреде-
ленных операций по управлению ими при наличии отказов пред-
полагает решение трех основных задач: установление факта со-
бытия отказа в системе (контроль), определение места отказа
или отказавшего элемента (диагностирование) и формирование
собственно сигнала защиты, т. е. управляющего воздействия,
направленного на отключение неисправного элемента, включе-
ние резервного элемента, выдачу информации экипажу о со-
стоянии системы и т. п.
Принцип действия современных аппаратов защиты, приме-
няемых в системах электроснажбения ЛА, основан па непре
рывном контроле (измерении) одного пли нескольких парамет-
ров электрической энергии (ток, напряжение, частота и т. д.) на
защищаемом участке и других физических величин, характери-
зующих процессы его функционирования (например, температу-
ры и др.). При этом в качестве признаков отказа защищаемого
объекта используются отклонения контролируемых параметров
за допустимые пределы.
В общем случае, аппарат защиты является совокупностью
следующих функциональных элементов (рис. 11.1): датчики
сигналов (Д); элементы выдержки времени (ВВ); логическая
часть (ЛЧ); исполнительные органы (ИО), элементы памяти
(П)
Рис. 11.1. Структурная схема аппарата защиты
Датчики сигналов (чувствительные органы) осуществляют
измерение отклонений контролируемых параметров &xt(i= 1,...,
//) от заданного уровня, сравнение их с допустимыми значени-
ями отклонений Дл/доп и формирование двухуровневых (логи-
ческих) сигналов у, в соответствии с условиями
10, если < Дх/дОП;
yz(Ax) = <
II, если Axz> Дл-1ДОП.
Элементы выдержки времени обеспечивают задержку про-
хождения (или формирования) сигналов датчиков на опреде-
209
Ленный промежуток времени, зависящий, в общем случае, от
величины отклонения соответствующего контролируемого пара-
метра от заданного уровня. Выдержка времени применяется для
.исключения ложного срабатывания аппарата зашиты при нор-
мальных .переходных процессах в системе электроснабжения,
характеризующихся кратковременными изменениями контроли-
руемых параметров.
Выдержка времени, являясь в ряде случаев необходимой для
обеспечения селективности действия аппаратов защиты, сни-
жает их быстродействие. Поэтому для построения быстродейст-
вующей защиты используют такую совокупность контролируе-
мых параметров, которая позволяет однозначно распознать со-
стояние защищаемого объекта. В этом случае выдержка вре-
мени на срабатывание защиты не является функционально
необходимой.
Логическая часть аппарата защиты обеспечивает его сраба-
тывание только при определенной совокупности сигналов датчи-
ков, соответствующей состоянию отказа защищаемого объекта.
Поскольку логическая часть осуществляет логические операции
И, ИЛИ, НЕ и т. д. над сигналами, для описания принципа
ее работы, как и принципа работы всего аппарата защиты, мо-
жет использоваться аппарат булевой алгебры.
Исполнительные органы осуществляют отключение защища-
емого объекта и производят необходимые переключения в си-
стеме электроснабжения, предусмотренные принципом постро-
ения защиты.
Для того чтобы предотвратить повторное включение защи-
щаемого объекта после срабатывания защиты, используют эле-
менты памяти.
11.2. ЗАЩИТА ОТ АВАРИЙНОГО ПОВЫШЕНИЯ
И СНИЖЕНИЯ НАПРЯЖЕНИЯ
Защита от аварийного повышения напряже-
ния должна отключать неисправный капал генерирования от
шин ЦРУ, если напряжение в точке регулирования (или на ши-
нах ЦРУ) превышает допустимое значение.
Аварийное повышение напряжения в канале генерирования,
как правило, связано с отказами регулятора, приводящими к
недопустимому увеличению потока возбуждения генератора.
Длительные перенапряжения опасны как для приемников, так
и для самого генератора. Поэтому при отключении генератора
от сети его магнитное поле гасится путем ограничения тока
возбуждении* Для предотвращения ложного срабатывания за-
щиты от кратковременных повышений напряжения, связанных
с отключением мощных потребителей или ликвидацией корот-
ких замыканий в системе распределения, защита должна иметь
270
выдержку времени на срабатывание. В большинстве случаев ис-
пользуется зависимая выдержка времени: чем больше напряже-
ние, тем меньше время срабатывания защиты.
Различают два типа аппаратов защиты от повышения |Напря-
жения: аппараты защиты от перевозбуждения генераторов
(АЗП) п аппараты защиты от повышения напряжения в сети
(АЗПС)..
Аппараты защиты типа АЗП контролируют напряжение воз-
буждения генератора и отключают его от сети, если это напря-
жение превысит допустимое значение.
На рис. 11.2 показан пример построения такого аппарата
защиты. Его чувствительным органом, реагирующим на изме-
нение напряжения возбуждения генератора, является реле за-
медленного действия (РЗД), одновременно выполняющее фун-
кции элемента выдержки времени. Заданный порог срабатыва-
ния реле устанавливается с помощью подстроечного резистора
R2 и составляет 25,5...28,5 В. Исполнительным органом являет-
ся контактор К2, якорь которого в исходном (взведенном) со-
стоянии удерживается с помощью механического фиксатора.
Рис. 11.2. Аппарат защиты от перевозбуждения генера-
тора постоянного тока
В случае, когда напряжение возбуждения генератора превы-
сит порог срабатывания реле РЗД (например, по причине обрыва
рабочей обмотки угольного регулятора напряжения PH), оно
через определенный промежуток времени замкнет свои контак-
ты. Время срабатывания реле зависит от приложенного напря-
жения и составляет от 2,5 до 0,04 с за счет применения воздуш-
ного демпфера.
271
№
При замыкании контактов реле РЗД срабатывает проме-
жуточное реле К1 и затем — контактор К2. Контактор, сраба-
тывая, одной парой своих контактов размыкает цепь обмотки
возбуждения генератора а>8, другой нарой включает в образо-
вавшийся разрыв цепи добавочный резистор /?1, а третьей —
размыкает цепь уравнительной обмотки регулятора напряжения.
Ток возбуждения генератора при этом уменьшается и напря-
жение на его зажимах снижается до 8... 10 В. Отключение гене-
ратора от шины ЦРУ происходит с помощью дифференциально-
минимального реле ДМР за счет протекания обратного тока. '
После срабатывания контакты контактора К2 удерживаются
в этом состоянии пружиной, чем обеспечивается необратимость
действия защиты. Повторное .включение генератора в сеть воз-
можно только после возвращения контактора в исходное состо-
яние путем нажатия на кнопку фиксатора.
Основные достоинства аппаратов защиты типа АЗП заклю-
чаются в их простоте и высокой селективности действия при
параллельной работе каналов генерирования электроэнергии.
Однако при одиночной работе генераторов такие аппараты мо-
гут допускать длительные .перенапряжения в сети (при большой
частоте вращения и значительном, но недостаточном для сраба-
тывания аппарата токе возбуждения генератора) или ложные
срабатывания (при включении электродвигателей большой мощ-
ности). Поэтому аппараты защиты от перевозбуждения находят
наиболее широкое применение в многоканальных системах
электр осн а бжен и я.
Аппараты зашиты от повышения напряжения типа АЗПС
осуществляют контроль напряжения на шинах ЦРУ или в точке
регулирования, чем принципиально и отличаются от аппаратов
типа АЗП.
В качестве примера на рис 11.3 приведена принципиальная
Рис. 11.3. Аппарат защиты от повышения напряжения в сети
электрическая схема аппарата защиты типа АЗПС, применяе-
мого в одноканальных системах электроснабжения постоянного
тока.
272
Чувствительным органом этого аппарата защиты является
нелинейный электрический мост, образованный резисторами 7?1,
/?2 и стабилитроном VI. В диагональ моста между точками «а»
н «б» включена обмотка поляризованного реле К1. Чувствитель-
ный орган контролирует напряжение на шине ЦРУ.
Параметры электрического моста подобраны так, что когда
напряжение в сети равно номинальному значению, потенциал
точки «а» выше потенциала точки «б», контакты поляризован-
ного реле находятся в разомкнутом состоянии.
В случае, когда напряжение в сети превышает величину
Ul = (31...33) В, потенциал точки «б» становится выше потен-
циала точки «а», направление тока в обмотке реле К1 изменя-
ется на противоположное, контакты реле замыкаются.
При замыкании контактов К1 напряжение сети подается на
устройство выдержки времени, в состав
К2 и времязадающая цепочка Л?4, V3 —
R5 и С1. Выдержка времени срабаты-
вания защиты обусловливается процессом
заряда конденсатора до напряжения сра-
батывания реле К2 и зависит от величи-
ны напряжения. Вольт-секундная харак-
теристика аппарата защиты, т. е. зависи-
мость времени его срабатывания ют на-
пряжения в сети, приведена на рис. 11.4.
Если напряжение в сети не превыша-
ет величину и2 = (40...45) В, ток заря-
да конденсатора С1 (рис. 11.3) протекает
только по резистору /?4. При большем
значении напряжения пробивается стаби-
литрон V3 и ток заряда увеличивается,
что обусловливает увеличение крутизны
вольт-секундной характеристики аппа-
которого входят реле
Рис. 11.4. Вольт-се-
кундная характерис-
тика аппарата за-
щиты типа АЗПС
рата.
При срабатывании реле К2 напряжение сети подается на
отключающую обмотку о>2 двухобмоточного импульсного кон-
тактора КПП (контактор гашения поля), являющегося испол-
нительным органом аппарата защиты. При его срабатывании
в цепь обмотки возбуждения аув генератора включается доба-
вочный резистор /?6, в результате чего напряжение генератора
уменьшается и генератор так же, как в рассмотренном выше
примере, отключается от сети с помощью ДМР.
При кратковременном повышении напряжения контакты по-
ляризованного реле К1 размыкаются раньше, чем конденсатор
С1 зарядится до напряжения срабатывания реле К2, и защита
не срабатывает.
«Память» аппарата защиты после срабатывания реализует-
ся конструкцией контактора гашения поля (КГП), которая обес-
18. Изд. № 7934
273
печивает сохранение состояния контактов после снятия напря-
жения с его обмоток. Кинематическая схема такого контактора
рассматривается в гл. 12.
Для повторного включения генератора в сеть необходимо по-
дать питание на включающую обмотку контактора wl. При этом
якорь фиксатора выходит из зацепления с якорем контактора
и контакты контактора под воздействием возвратной пружины
возвращаются в исходное состояние.
Аппараты защиты типа АЗПС в системах электроснабжения
•с параллельно работающими каналами воспринимают одно и
то же напряжение. Поэтому для обеспечения селективности дей-
ствия эти аппараты дополняют специальными устройствами,
называемыми дискриминаторами, реагирующими на отклонение
тока (мощности) нагрузки данного генератора от среднего зна-
чения тока (мощности) в системе. Аппараты защиты от повы-
шения напряжения при этом отключают только тот генератор,
нагрузка которого превышает среднее значение тока нагрузки
в системе. Таким образом, условиями срабатывания аппарата
защиты от повышения напряжения в сети является равенство
1 логических функций:
а) при одиночной работе канала генерирования
(Н.1)
б) при параллельной работе каналов
js = £7f. Пр-Д/|, (11.2)
где LI t — логический сигнал о превышении 'напряжения, фор-
мируемый чувствительным органом аппарата защи-
ты в соответствии с правилом
О, если U < Z7 .
1, если и>илоп-, 1 ’
Пр— логический сигнал о включении канала на парал-
лельную работу в системе;
Д/f — логический сигнал о превышении тока нагрузки ге-
нератора, формируемый дискриминатором в соответ-
ствии с правилом
О, если / < /Ср + ДЛОП;
/ 7^7 , Л 7 d i'4)
1, если />/<•₽ +Д/лол.
В многоканальных системах электроснабжения предусматри-
вается как параллельная, так и раздельная работа каналов, по-
этому аппараты защиты каждого канала должны реализовывать
логические функции
у = У1V у2 = *Л(пр V д/f),
где Пр — инверсия сигнала Пр.
(П-5)
274
Условию (11.5) соответствует логическая схема аппарата за-
щиты от повышения напряжения, приведенная на рис. 11.5.
Здесь логический элемент А4 обеспечивает выдержку времени
срабатывания защиты, зависящую от величины напряжения.
Рис. 11.5. Логическая схема аппарата защиты
от повышения напряжения в сети
Пример защиты от повышения напряжения в сети двухка-
нальной системы электроснабжения постоянного тока приведен
на рис. 11.6.
Рис. 11.6. Защита от повышения напряжения двухканальной
системы электроснабжения постоянного тока
Чувствительным органом, реагирующим на отклонение на-
пряжения в сети от допустимого значения, является нелинейный
электрический мост, аналогичный рассмотренному на рис. 11.3.
Дискриминатором нагрузки генераторов является поляризо-
ванное реле Кб, обмотка которого включена в уравнительную
18*
275
*
цепь между балластными резисторами 7?б1 и /?в2, установлен-
ными в минусовых цепях генераторов. При равномерном распре-
делении нагрузки между генераторами подвижный контакт по-
ляризованного реле Кб находится в нейтральном положении.
В случае повышения напряжения перевозбужденный генератор,
например генератор Г1, принимает на себя большую часть на-
грузки и подвижный контакт реле Кб переключается влево, а
при перевозбуждении генератора Г2 — вправо.
Сигнал Пр формируется с помощью реле К4 и К5. При парал-
лельной работе генераторов на обмотки реле К4 и К5 пода-
ется напряжение от зажима С соответствующих аппаратов за-
щиты и управления ДМР и их контакты размыкаются. В этом
случае обмотки промежуточных реле К2 и КЗ получают пита-
ние через контакты Кб. При одиночной работе канала, напри-
мер генератора Г1, контакты реле К5 замкнуты и шунтируют
контакты реле Кб, обеспечивая тем самым питание только ре-
ле К2.
Выдержка времени, необходимая для исключения ложного
срабатывания защиты при кратковременных повышениях напря-
жения, обеспечивается включением параллельно обмоткам ре-
ле К2 и КЗ соответственно конденсаторов С1 и С2.
Так, в случае перевозбуждения генератора Г1 после замыка-
ния контактов реле К1 и Кб происходит заряд конденсатора С1
через параллельно включенные резисторы R4 и R5. Когда на-
пряжение на конденсаторе достигнет напряжения пробоя ста-
билитрона V4, реле К2 сработает, замыкая цепь выключения
контактора гашения поля (КГП).
Аппараты защиты сети переменного тока от повышения на-
пряжения не имеют принципиальных отличий от аппаратов за-
щиты сети постоянного тока. Защита трехфазных систем элек-
троснабжения должна срабатывать в случае, когда среднее на-
пряжение всех фаз превышает 123...129 В, с выдержкой време-
ни от 0,1 до 0,4 с.
В качестве примера на рис. 11.7 приведена электрическая
схема датчика аппарата защиты, реагирующего на отклонение
Рис. 11.7. Датчик повышения напряжения переменного тока
276
среднего напряжения трёх фаз переменного тока of заданного
значения.
Выпрямленное напряжение, снимаемое с резистора Д2, про-
порционально среднему значению напряжения всех фаз пере-
менного тока. Это напряжение сравнивается на входе операци-
онного усилителя А1 с опорным (эталонным) напряжением,
снимаемым со стабилитрона VI.
Если контролируемое напряжение меньше опорного, то на
выходе усилителя, используемого в .качестве компаратора, со-
храняется низкий потенциал и транзисторы V2 и V4 закрыты.
Напряжение на резисторе R7 равно нулю (сигнал t7f отсутст-
вует) .
В случае, корда контролируемое напряжение, приложенное
к входу компаратора А1, становится выше опорного, напряже-
ние на его выходе скачком изменяется до максимального зна-
чения и транзисторы открываются, формируя сигнал V f.
Одновременно при открытии транзистора V2, благодаря це-
почке обратной связи 7?8...V5, напряжение на инвертирующем
входе усилителя (опорное напряжение) уменьшается, что обус-
ловливает релейный вид характеристики датчика повышения
напряжения.
Для обеспечения селективности действия защиты от повы-
шения напряжения при параллельной работе каналов генериро-
вания переменного тока используют дискриминаторы реактив-
ной мощности, принцип работы которых аналогичен принципу
работы блоков измерения реактивной мощности, рассмотрен-
ных в гл. 6. На рис. 11.8 показан пример электрической схемы
такого дискриминатора.
Рис. 11.8. Схема дискриминатора реактивной мощности
При одиночной работе генератора Г вторичная обмотка
трансформатора тока Т2 зашунтирована контактами реле К1
(обмотка реле на схеме не показана). В этом случае по обмот-
ке поляризованного реле К2 ток не протекает и его подвижный
контакт занимает нейтральное положение.
При включении генератора на параллельную работу с дру-
гими генераторами контакты К1 размыкаются и на резисторе
/?2 формируется напряжение, пропорциональное небалансу ре-
277
активной составляющей мощности. Если небаланс реактивной
мощности превышает допустимое значение, то в зависимости от
знака небаланса поляризованное реле замыкает верхнюю или
нижнюю (по схеме) пару своих контактов, формируя соответ-
ственно логические сигналы Д /р f или А /р | .
Условием срабатывания аппаратов защиты при параллель-
ной работе является равенство 1 логической функции
y = af-np.A/pf, (п.6)
гдеД/р|=1 — когда реактивная мощность генератора больше
среднего значения реактивной мощности в систе-
ме;
Д/р | =0— в противном случае.
Защита от снижения напряжения в системе элек-
троснабжения должна отключать неисправный канал генериро-
вания от шин ЦРУ, если напряжение в точке регулирования
становится ниже допустимого значения.
Причинами снижения напряжения, как правило, являются
отказы регуляторов напряжения, приводящие к потере возбуж-
дения генераторов, а также короткие замыкания в генераторе
или его фидере и обрывы проводов. К снижению напряжения
приводят также неустраняющиеся короткие замыкания в си-
стеме распределения электрической энергии, например на ши-
нах ЦРУ. В связи с этим защиту от снижения напряжения в
ряде случаев сочетают с защитой от коротких замыканий, от
обрывов фаз, от несимметрии фазных (линейных) напряжений
и часто называют минимальной защитой.
Защита от снижения напряжения строится с использованием
таких же элементов, что и защита от повышения напряжения.
Логические части таких аппаратов реализуют логические функ-
ции вида
y = 6/;-(npVA/p+). (11-7)
При параллельной работе (Пр = 1) отключается только тот
генератор, который принимает меньшую часть нагрузки (Д/р | = 1).
Выдержка времени на срабатывание такой защиты, как пра-
вило, не зависит от величины напряжения ,и выбирается из ус-
ловия, чтобы она была больше времени срабатывания защиты
от коротких замыканий в системе распределения электрической
энергии. При ее срабатывании .генератор обычно развозбужда-
ется.
11.3. ЗАЩИТА ОТ ПОВЫШЕНИЯ И СНИЖЕНИЯ ЧАСТОТЫ
В системах электроснабжения переменного тока постоянной
частоты с приводами постоянной скорости предусматривается
защита от повышения и снижения частоты, а на ЛА, где гене-
раторы переменного тока приводятся во вращение непосредст-
венно от авиационных двигателей, — только от снижения час-
тоты.
278
ЗащНта должна необратимо отключать неисправный канал
генерирования от бортовой сети при повышении частоты свы-
ше 425+5 Гц с выдержкой времени не более 6,9 с, а при час-
тоте 465...480 Гц — без выдержки времени. При снижении час
готы до 375+5 Гц отключение также должно происходить с
выдержкой времени не более 6,9 с, а при частоте менее 335...
320 Гц — без выдержки времени. Защита от снижения часто-
ты в ряде случаев выполняется, обратимой, т. е. обеспечивает
автоматическое включение генератора в сеть при восстановле-
нии частоты.
В большинстве случаев срабатывание защиты от повышения
частоты осуществляется в соответствии с условием равенства
1 логической функции
У, = /t (Пр V № t), (П.8)
где ff— сигнал о повышении частоты;
ДР f — сигнал о превышении активной мощности данного ге-
нератора среднего значения активной мощности, при-
ходящейся на каждый генератор в системе;
Пр— сигнал о включении генератора на параллельную ра-
боту.
Защита от снижения частоты срабатывает при условии ра-
венства I фуНКЦИИ M.W4-
л=/нпрудио, (П.9)
где /1— сигнал о снижении частоты;
Д Р\ — сигнал об отрицательном небалансе активной мощ-
ности.
Логическая схема аппарата, обеспечивающего защиту как от
повышения, так и от снижения, частоты при одиночной и парал-
лельной работе каналов генерирования, приведена на 'рис. 11.9.
Рис. 11.9. Логическая схема защиты от повышения и снижения
частоты
279
Ё качеству чувствительных элементов, реагирующих на йз-
менение частоты, используются либо электрические цепи, со-
держащие дроссели, конденсаторы или резонансные L—С кон-
туры, либо полупроводниковые устройства, осуществляющие
преобразование частоты во временные интервалы.
Электрическая схема датчика частоты, основанного на ис-
пользовании резонанса напряжений, приведена на рис. 11.10.
Рис. 11.10. Электрическая схема датчика
частоты
Датчик содержит два последовательных резонансных кон-
тура, включающих в свой состав соответственно элементы С1,
L1 и С2, L2. Параметры контуров подбираются так, чтобы в
одном контуре резонанс напряжений наступал при частоте
тока/'рез, большей ее номинального значения, а в другом—при
частоте /"рез, меньшей номинального значения (рис. 11.11).
При номинальном значении ча-
стоты разность напряжений, снима-
емых с дросселей L1 и L2, равна
нулю и контакты поляризованного
реле занимают нейтральное поло-
жение.
В случае отклонения частоты
тока от ее номинального значения
равновесие этих напряжений нару-
шается. При отклонении частоты за
допустимые пределы реле К сраба-
тывает и замыкает либо одну, либо
Рис. 11.11. Характеристики ДРУГУЮ пару своих контактов, фор-
резонанещлх контуров дат- мируя соответственно сигналы f f
чика частоты или f в зависимости от знака от-
клонения.
280
Структурная схема датчика, основанного на преобразований
частоты во временные интервалы, приведена на рис. 11.12.
Рис. 11.12. Структурная схема датчика частоты на ло-
гических элементах
Принцип такого датчика частоты основан на сравнении пе-
риода синусоидального напряжения с эталонными интервалами
времени, соответствующими заданной частоте. Для иллюстра-
ции принципа работы датчика на рис. 11.13 приведены времен-
ные диаграммы процессов его функционирования.
Рис. 11.13. Временные диаграммы датчика частоты на логи-
ческих элементах
Формирователь импульсов ФИ преобразует приложенное к
его входу синусоидальное напряжение в последовательность
прямоугольных импульсов напряжения, длительность которых
Т равна половине периода переменного тока. Передним фрон-
том каждого импульса ФИ запускается одновибратор ОВ1, ко-
281
горый генерирует йри этом одйночный Импульс напряжений
фиксированной длительности Т\ = 0,5-/но’м,соответствующей но-
минальному (заданному) значению частоты /нсш. Далее импуль-
сы ФИ и ОВ1 поступают в устройство сравнения, выполненное
на логических элементах У1, У2 и А1.
Задним фронтом наиболее короткого из этих импульсов за-
пускается одновибратор ОВ2. Длительность Т2 импульса, гене-
рируемого одновибратором ОВ2, выбирается такой,, чтобы сум-
ма длительностей импульсов ОВ'1 и ОВ'2 соответствовала ниж-
ней границе, зоны допуска отклонений частоты, т. е. Ti + Т2 —
= а их разность — верхней границе, т. е. —Т2 =
= 0,5 -/макс-
На выходе логического элемента У2, реализующего опера-
цию ИЛИ, сохраняется высокий потенциал до тех пор, пока на
его входах присутствует хотя бы один из сигналов ФИ или ОВ1.
Таким образом, длительность импульса на выходе У2 равна
длительности импульса ФИ, если /<С/ном (рис. 11.13,в), и равна
длительности импульса ОВ1, если/>/ном (рис. 11.13,а,б).
Импульсы У2 и ОВ2 сравниваются между собой логическим
элементом А2 по следующему правилу. Логический сигнал на
выходе А2 равен 0, если к моменту окончания импульса ОВ2,
поступающего на его динамический вход, на потенциальном
входе присутствует высокий потенциал, поступающий с выхода
У2, и равен 1 в противном случае. Иными словами, на выходе
логического элемента А2 логический сигнал 1 появляется толь-
ко тогда, когда ( Т\-—Т | > Т2, что соответствует условиям f<
</мин или />/„акс (рис. 11.13,б,в).
Аналогичную операцию сравнения длительности импульсов
ФИ и ОВ1 выполняет логический элемент А1. Логический сиг-
нал 1 на его выходе появляется только в том случае, когда 7’<
<7’1, что соответствует, условию />/НОм (рис. 11.13,6).
При 7’>7’1 (f<{H0„) сигнал на выходе А1 равен 0.
Как следует из рассмотренного, на выходах логических эле-
ментов У4 и У5, выполняющих операцию И, а следовательно, и
на выходе датчика формируются логические сигналы:
/t = f Ф == 0, еСЛИ /мин < f \ /макс
/I К f Ф = 0» еСЛИ / /макс
/t = 0; f | = 1, если /мин > /.
В качестве дискриминаторов активной мощности в аппаратах
защиты от повышения и снижения частоты используются уст-
ройства, аналогичные блокам измерения активной мощности,
применяемым в системах регулирования частоты при параллель-
ной работе каналов генерирования электроэнергии переменного
282
тока (см. Гл. 6 ). Электрическая схема такого дискриминатора
приведена на рис. 11.14.
Рис. 11.14. Схема дискриминатора активной мощности
Падение напряжения на резисторе R2 и, следовательно, на
обмотке поляризованного реле К дискриминатора пропорцио-
нально величине небаланса активной мощности генератора. В
случае, когда небаланс мощности превышает допустимое зна-
чение, реле К, срабатывая, формирует сигналы APf или ДР¥ в за-
висимости от знака небаланса.
11.4. ЗАЩИТА КАНАЛОВ ГЕНЕРИРОВАНИЯ ЭЛЕКТРОЭНЕРГИИ
ОТ КОРОТКИХ ЗАМЫКАНИЙ
Короткие замыкания (КЗ), как было отмечено ранее, явля-
ются одним из наиболее опасных видов отказов в системах
электроснабжения. Большие значения установившихся токов КЗ
обусловливают перегрев генераторов и электрических проводов,
возникновение электрической дуги в месте КЗ, что может при-
вести к разрушению оборудования, пожару и т. п. Кроме того,
большие значения переходных (ударных) токов КЗ обусловли-
вают большие динамические нагрузки на валы и обмотки яко-
рей генераторов и, как следствие, выход их из строя. Короткие
замыкания в каналах генерирования приводят также к пере-
рывам питания бортового оборудования ЛА.
В связи с изложенным к защите каналов генерирования от
КЗ предъявляются высокие требования в отношении ее быстро-
действия и селективности. Время срабатывания защиты .при
КЗ в цепи якоря генератора или его фидере не должно .превы-
шать 80 мс с момента возникновения отказа. Выполнить такую
защиту с использованием принципов построения максимально-
токовой защиты, применяемой в системах распределения, прак-
тически невозможно, ибо по условию селективности время ее
срабатывания должно быть больше наибольшей из выдержек
времени аппаратов защиты, установленных в сети. Поэтому в
каналах генерирования электроэнергии, как правило, приме-
няют аппараты продольной дифференциальной защиты.
283
Принцип действия аппаратов Продольной дифференциальной
защиты основан на сравнении токов в начале и в конце защи-
щаемого участка (зоны защиты).
Различают два вида продольной дифференциальной защи-
ты: с циркуляцией тока и с уравновешенными напряжениями.
В качестве примера на рис. 11.15 приведена схема продоль-
ной дифференциальной защиты от КЗ однофазного генератора,
выполненной с циркуляцией тока.
Рис. 11.15. Продольная дифференциальная защита с цир-
’ куляцией тока
В начале и в конце зоны защиты устанавливаются трансфор-
маторы тока Т1 и Т2. Для построения дифференциальной защи-
ты трехфазных генераторов трансформаторы тока устанавли-
ваются в каждой фазе.' Вторичные обмотки трансформаторов
соединяются между собой так, чтобы при нормальной работе
генератора их ЭДС были направлены согласно. При таком
включении трансформаторы работают в режиме короткого за-
мыкания, по вторичным обмоткам циркулирует ток, а напряже-
ние на них практически отсутствует. Ток в обмотке реле К1
также практически равен нулю (ток небаланса обусловлен толь-
ко неидентичностью трансформаторов).
При КЗ в зоне защиты (между трансформаторами) ток в
обмотке реле резко возрастает, так как в случае одиночной ра-
боты генератора ток в первичной обмотке Т2 отсутствует, а
при параллельной работе к точке КЗ протекает ток от других
генераторов и ЭДС трансформаторов будут направлены вст-
речно. Срабатывание реле -приведет к отключению -поврежден-
ного генератора.
Такая защита не реагирует на КЗ вне зоны защиты, посколь-
ку при этом по первичным обмоткам трансформаторов протека-
ет один и тот же ток, как и при нормальной работе генератора.
Основным недостатком дифференциальной защиты с цирку-
ляцией токй5‘является то, что обрывы проводов между трансфор-
маторами, которые прокладываются вдоль всего защищаемого
участка, приводят к ее ложному срабатыванию.
284
Схёма продольной дифференциальной защиты с уравнове'
шейными напряжениями приведена на рис. 11.16.
Рис. 11.16. Продольная дифференциальная защита с урав-
новешенными напряжениями
Трансформаторы тока, как и в рассмотренном примере, уста-
навливаются на концах защищаемого участка в каждой фазе.
Однако вторичные обмотки трансформаторов соединяются так,
чтобы при нормальной работе генератора и КЗ вне зоны защи-
ты их ЭДС были направлены встречно. При этом ток в обмот-
ках практически отсутствует и на резисторе /?1 падение напря-
жения равно нулю.
В случае КЗ в зоне защиты равновесие ЭДС нарушается и
их геометрическая разность будет приложена к резистору /?1.
При этом транзистор V2 открывается, обеспечивая формирова-
ние сигнала Ккз на отключение неисправного генератора.
К достоинствам аппаратов дифференциальной защиты сурав-
новешенными напряжениями относят то, что при обрывах сое-
динительных проводов срабатывание защиты не происходит.
Наряду с аппаратами дифференциальной защиты в каналах
генерирования электроэнергии переменного и постоянного то-
ка применяют минимальную и максимальную виды защит.
Минимальная защита каналов генерирования основана на
том, что при КЗ напряжение на зажимах генератора снижается
ниже допустимого значения. Она строится на таких же принци-
пах и с использованием таких же элементов, что и защита от
снижения напряжения.
Максимальная защита генераторов обеспечивает их отклю-
чение от сети при длительных перегрузках и выполняется по
принципу тепловой защиты. С этой целью в отдельных местах
генератора, наиболее подверженных нагреву (лобовые части
обмоток якоря, пазы статора, подшипники и т. д.), устанавли-
вают датчики температуры — терморезисторы или термопары.
По сигналу этих датчиков и осуществляется защита генератора
в случае его Перегрева.
285
11.5. ЗАЩИТА ОТ НЕСИММЕТРИИ НАПРЯЖЕНИИ, ОБРЫВА
И ОБРАТНОГО ЧЕРЕДОВАНИЯ ФАЗ
В соответствии с требованиями ГОСТа 19705—81 к качеству
электроэнергии переменного трехфазного тока угол сдвига меж-
ду векторами напряжений любых соседних фаз должен нахо-
диться в пределах 116...124°. Небаланс напряжений при нерав-
номерной нагрузке фаз основных источников переменного трех-
фазного тока 115/200 В не должен превышать 3 В. В тех слу-
чаях, когда несимметрии напряжений превышает указанные
пределы, защита отключает неисправный генератор от системы
распределения без выдержки времени. Включение в бортовую
сеть ЛА источника с обратным чередованием фаз не допуска-
ется.
Защита от несимметрии напряжений и обратного чередова-
ния фаз в большинстве случаев строится с использованием
фильтров прямой и обратной последовательностей.
Применение фильтров основано на том, что любая несиммет-
ричная система вектрров напряжений может быть представлена
тремя симметричными системами напряжений прямой, обрат-
ной и нулевой последовательностей. При этом амплитудное
(действующее, среднее) значение напряжения обратной после-
довательности характеризует степень несимметрии исходной
системы векторов.
Примером простейшего фильтра обратной последовательно-
сти, применяемого в аппаратах защиты от несимметрии напря-
жений и обратного чередования фаз, является индуктивно ак-
тивный фильтр, схема которого приведена на рис. 11.17.
Параметры элементов фильтра /?ь R2, L подбираются так,
чтобы обеспечивались условия
/?, = 2/?2; —
Ri + R2 УЗ’
где ш — 2я/— угловая частота переменного тока.
В этом случае ток /.протекающий в фильтре, отстает от при-
ложенного линейного напряжения /7всна угол сдвига фаз, рав-
ный 30°.
При симметричной системе напряжений прямой последова-
тельности напряжение на выходе фильтра /7ВЫХ, снимаемое меж-
ду клеммой 1 и нулевым проводом, равно нулю (рис. 11.18,а),
т. е. для токов прямой последовательности фильтр является
«пробкой».
286
Для токов обратной последовательности (рис. 11.18,6) фильтр
является идеальным проводником — 'напряжение на выхо-
де фильтра (между точками 1 и 0) равно фазному напряжению
обратной последовательности С/г-
Рис. 11.17. Схема фильтра обрат-
ной последовательности
Рис. 11.18. Векторные диаграм-
мы фильтра обратной после-
довательности при прямом
(а) и обратном (б) чередова-
нии фаз
Исполнительное устройство аппарата защиты, воспринима-
ющее сигнал фильтра, при определенной величине этого напря-
жения, соответствующей допустимой несимметрии фазных на-
пряжений, срабатывает, обеспечивая отключение неисправного
источника от системы распределения. Аналогично строится за-
щита (блокировка) от обратного чередования фаз, но в этом слу-
чае сигнал фильтра обратной последовательности используется
для формирования «запрета» на включение источника в сеть.
В ряде случаев в аппаратах защиты от несимметрии фазных
напряжений реализуется непосредственное измерение разности
фазных или линейных напряжений. В качестве примера на рис.
11,19 приведена схема такого измерительного органа.
На входы измерительного органа со вторичных обмоток
трансформаторов ТГ...ТЗ подводятся напряжения, пропорцио-
нальные линейным напряжениям трехфазного тока. Каждое из
этих напряжений выпрямляется и сглаживается фильтрами, со-
стоящими из резисторов 7?1...7?3 и конденсаторов С1...СЗ. При
287
этом конденсаторы С1...СЗ заряжаются до напряжения, пропор-
ционального соответствующему линейному напряжению на вхо-
де 'измерительного органа.
Рис. 14.19. Датчик несимметрия линейных напряжений
В случае симметрии входных напряжений потенциалы то-
чек а, b и с одинаковы, ток по резисторам /?4 и /?5 не протека-
ет и транзисторы V14, V15 закрыты. Сигнал на выходе изме-
рительного органа отсутствует (t/Bblx = 0).
При неравенстве входных напряжений через резисторы /?4,
и диоды V7...V12 будет протекать ток, обусловленный раз-
ностью потенциалов на обкладках конденсаторов С1...СЗ. Если
разность линейных напряжений превышает допустимые преде-
лы, определяемые напряжением пробоя стабилитрона V13,
транзисторы V14 и V15 открываются и на выходе измерителя
появляется сигнал, свидетельствующий о возникновении несим-
метрии напряжений.
• 11.6. КОМБИНИРОВАННЫЕ АППАРАТЫ ЗАЩИТЫ И УПРАВЛЕНИЯ
В настоящее время в системах электроснабжения ЛА все
более широкое применение находят комбинированные аппара-
ты. Такие аппараты выполняют как функции многих видов за-
щиты, так и функции управления, например: осуществляют ав-
томатическое включение (выключение) основных источников
электрической энергии при их раздельной и параллельной рабо-
те, обеспечивают автоматическое включение резервных (аварий-
ных) источников электроэнергии при отказе основных, автома-
тическое подключение аэродромных источников и т. д.
Возможность такой интеграции аппаратов защиты и управ-
ления обусловлена тем, что и управление, и защита каналов
генерирования электрической энергии осуществляются одними
288
I
и теми же исполнительными органами, обеспечивающими ком-
мутацию цепей нагрузки, цепей возбуждения генераторов и уп-
равления приводами постоянной скорости, а для получения не-
обходимой информации о состоянии канала генерирования
электроэнергии как объекта управления и защиты и в том, и в
другом случае используются однотипные датчики. В свою оче-
редь, интеграция элементов защиты и управления в одном кор-
пусе является целесообразной, поскольку при этом достигается
существенное уменьшение массы каналов генерирования за счет
сокращения числа функциональных элементов и конструкцион-
ных деталей, а также повышение степени унификации элемен-
тов и, как следствие, повышение безотказности.
Современные комбинированные аппараты защиты и управ-
ления стали объединять и элементы систем регулирования на-
пряжения и частоты.
Комбинированные аппараты, применяемые в настоящее вре-
мя на ЛА, получили названия БЗУ (блок защиты и управле-
ния), КЗУ (коробка защиты и управления), БРЗ (блок регули-
рования и защиты) и БРЗУ (блок регулирования, защиты и уп-
равления) .
В качестве примера на рис. 11.20 приведена структурная ло-
гическая схема комбинированного аппарата типа КЗУ, приме-
Рис. 11.20. Логическая схема комбинированного аппарата
типа КЗУ
няемого в одноканальных системах электроснабжения перемен-
ного тока постоянной частоты.
Аппарат обеспечивает:
а) автоматическое включение генератора в сеть (сигнал Кг)
при условиях:
— авиационный двигатель запущен и разрешен отбор мощ-
ности на привод генератора (xn= 1);
19. Изд. № 7934 289
Г
*
— напряжение на зажимах генератора и частота тока на-
ходятся в пределах допуска (U \ = 0; U | = 0; /1=0; /| = 0);
— аэродромный источник переменного тока отключен
(Г, = 0);
— выключатель дистанционного управления генератором
находится в положении «Включено» (Вг — 1);
б) автоматическое необратимое отключение генератора от
сети (Гг= 0), его развозбуждение (Ув= 1) и выключение при-
вода постоянной скорости (^ппс= 1) при:
- — повышении (£71 = 1) или снижении (Щ = 1) напряжения;
— повышении частоты (/1= О;
— несимметрии фазных напряжений (£721= 1);
в) автоматическое отключение генераторов от сети при сни-
жении частоты (/4 = 1) и автоматическое его включение при
последующем восстановлении частоты до заданного значения
(Л= 0);
г) автоматическое включение резервного источника (пре-
образователя) при отключении генератора, если его выключа-
тель включен (Вп'= 1);
д) блокировку включения аэродромного источника электри-
ческой энергии (Кв) при обратном чередовании фаз (£72о1= 1);
е) сигнализацию о состоянии генератора (хс).
Защита от повышения напряжения (£7f) осуществляется с
зависимой .выдержкой времени, остальные виды защиты — с не-
зависимой выдержкой.
На рис. 11.21 приведена схема соединений блока защиты и
управления типа БЗУ с основными элементами канала генери-
рования в двухканальной системе электроснабжения перемен-
ного тока постоянной частоты. В комплект канала генерирования
входят:
— бесконтактный синхронный генератор ГТ;
— привод постоянной скорости ППС;
— тиристорный регулятор напряжения БРН-Т;
— датчик частоты вращения вала привода (тахогенератор)
ДЧВ;
— блок коррекции частоты вращения привода БКЧ;
— электромагнитная муфта расцепления вала ППС и вала
генератора ЭМР;
— блок трансформаторов тока БТТ;
— контактор включения генератора на шины одиночной ра-
боты КН;
— койтактор включения генератора на шины параллельной
работы' КПР;
— элементы ручного дистанционного управления и сигнали-
зации.
290
Рис. 11.21. Схема соединений блока БЗУ в двухканальной системе электроснабжения переменного тока
19'
*
291
Такой комбинированный аппарат защиты и управления обес-
печивает выполнение следующих функций:
а) выдачу сигнала Вг на включение возбуждения генера-
тора, если выключатель ГЕН—ТОКА находится в положении
«Вкл.» или «Контроль», уровень сигнала от датчика частоты
вращения вала привода постоянной скорости и соответствует
частоте тока генератора f= (380...420) Гц+10 Гц и разрешен
отбор мощности от авиационного двигателя (пал > +ПМНн);
б) выдачу сигнала kH на включение контактора нагрузки
(КН) при достижении фазного (среднего по трем фазам) на-
пряжения генератора 104+3 В, если на шинах ЦРУ1 отсут-
ствует напряжение (отключены параллельный канал генериро-
вания и аэродромный источник переменного тока);
в) -выдачу сигнала /fj на увеличение или уменьшение часто-
ты вращения генератора для его -синхронизации при разомкну-
том состоянии контактов контактора -параллельной работы
(КПР);
г) выдачу сигнала knp на включение контактора КПР при
отсутствии второго канала генерирования или при выполнении
следующих условий: включен выключатель ПАР АЛЛ. РАБОТА;
разность частот синхронизируемых каналов не превышает 2,5...
3,5 Гц; угол сдвига фаз одноименных напряжений синхронизи-
руемых каналов составляет 25...35 электрических градусов; кон-
тактор КН включен;
д) необратимое отключение возбуждения генератора, кон-
тактора одиночной работы КН и снятие сигнала с контактора
параллельной работы КПР при следующих видах отказов:
— короткое замыкание в зоне, охваченной дифференциаль-
ной продольной защитой, с выдержкой времени 4,0 ±0,6 с;
— повышение частоты -более 4'20...430 Гц или ее снижение до
380...370 Гц и менее с выдержкой времени 4,0±0,6 с;
— аварийное повышение частоты до 465...480 Гц или ее сни-
жение до 335...3'20 Гц без выдержки времени;
— снижение среднего по трем фазам напряжения генерато-
ра до 104±3 В и менее с выдержкой времени 6,0 ±0,9 с;
— -повышение фазного напряжения более 130+3 В с вы-
держкой времени 0,5±0,15 с;
— н-есимм-етрия линейных напряжений более 20...40 В с вы-
держкой времени 4,0 ±0,6 с;
е) необратимое отключение контактора параллельной рабо-
ты с выдержкой времени 6,0±0,9 -с при разности полного тока
нагрузки параллельно работающих генераторов более 10%/ном;
ж) выдачу -сигнала /ff на импульсную электромагнитную
муфту расцепления (Э1М.Р) без выдержки времени при частоте
тока выше 465...480 Гц;
з) автоматический контроль всех защит при очередном
включении генератора, при переводе выключателя ГЕН—ТОКА
292
в положение «Контроль», а также по сигналу от бортовой нлй
наземной автоматизированной системы контроля (АСК).
Защита и управление по частоте работают в комплекте с дат-
чиком частоты вращения (ДЧВ), устанавливаемым в приводе
постоянной скорости до муфты расцепления.
Функции управления каналом генерирования, всех видов за-
щит и контроля в блоке БЗУ осуществляются с помощью ин-
тегральных микросхем, что обеспечивает небольшие габариты
и конструктивную массу аппарата.
На комбинированные аппараты, применяемые в системах
электроснабжения постоянного тока современных ЛА, обычно
возлагаются функции регулирования напряжения, защиты от
коротких замыканий и перегрузок, от аварийного повышения
напряжения. Функции управления и другие виды защиты (от
снижения напряжения, от обратной мощности, от обрывов и
т. л.) обычно выполняются аппаратами дифференциально-мини-
мальной защиты и управления типа ДМР (АЗУ).
Примером такого комбинированного аппарата является блок
регулирования и защиты (БРЗ), электрическая схема которого
приведена на рис. 11.22. Блок в своем составе содержит тран-
зисторный регулятор напряжения (РНТ), блок защиты от повы-
шения напряжения (БЗПН) и блок защиты от коротких замы-
каний (БЗКЗ). Блок БРЗ обеспечивает стабилизацию напря-
жения постоянного тока в диапазоне 28±0,5 В при изменении
тока нагрузки и частоты вращения генератора, а также автома-
тическое отключение генератора от сети путем его развозбуж-
дения при повышении напряжения более 30,5 В с зависимой
выдержкой времени и при коротком замыкании в генераторе
или его фидере без выдержки времени.
Транзисторный регулятор напряжения РНТ функциональных
связей с элементами защиты генератора не имеет. Принцип его
работы и принципиальная электрическая схема (рис. 4.22) рас-
смотрены в гл. 4.
Защита от коротких замыканий работает только в случае
параллельной работы генератора с аккумуляторной батареей.
При ее срабатывании с целью уменьшения установившегося зна-
чения тока короткого замыкания, обусловленного остаточной
ЭДС генератора, направление тока в обмотке возбуждения из-
меняется на противоположное. Защита от повышения напряже-
ния осуществляется как при параллельной, так и при автономной
работе генератора.
Исполнительными органами защиты являются контакторы
К.1 и К.2, осуществляющие коммутацию цепей обмотки возбуж-
дения генератора. Отключение генератора от сети при сраба-
тывании защиты от повышения напряжения и коротких замы-
каний производится с помощью ДМР.
Блок защиты от повышения напряжения БЗПН осуществля-
ет контроль напряжения в точке регулирования (клемма «ГЕН»
293
Рис. 11.22. Электрическая схема элементов защиты блока БРЗ
294
ДМР). ЧувствйтёльньШ эЛёМёйтоМ этбг'о блока Является тран-
зистор V2, переход база—эмиттер которого включен на напря-
жение генератора через стабилитрон VI.
В случае повышения напряжения более 30,5+0,5 В стабили-
трон VI пробивается и транзистор V2 переходит в открытое
состояние. При этом закрывается транзистор V4 и конденсатор
С1 начинает заряжаться через резистор 7?5 и диод V6. По мере
заряда конденсатора однопереходный транзистор V7 скачком
переходит в зону повышенной проводимости цепи эмиттер-
база. Тогда с .конденсатора СТ через открытый транзистор V7
подается импульс тока на открытие транзистора V8. При от-
крытии транзистора V8 кратковременно, на время заряда кон-
денсатора С2 открываются транзисторы V10 и VII, вызывая
срабатывание импульсного контактора К1. При этом цепь об-
мотки возбуждения генератора размыкается, напряжение гене-
ратора снижается и генератор отключается от шин ЦРУ диф-
ференциально-минимальным реле за счет протекания «обрат-
ного» тока от аккумуляторной батареи к генератору.
Выдержка времени на срабатывание защиты обеспечивается
временем заряда С1 до порога срабатывания транзистора V7.
Это время тем .меньше, чем выше напряжение генератора.
Чувствительным элементом блока БЗКЗ является транзи-
стор V2, к переходу эмиттер—.база которого подается сигнал,
пропорциональный току генератора. Этот сигнал снимается с
обмотки дополнительных полюсов генератора шдп, как с шунта.
В случае короткого замыкания в генераторе или его фидере
на корпус ток аккумуляторной батареи, проходящий к точке
КЗ, вызывает размыкание контактов ДМР и отключение точки
КЗ от сети. При этом через замкнувшиеся контакты вспомога-
тельного реле К напряжение сети подается на блок БЗКЗ, обес-
печивая его питание.
Ток короткого замыкания генератора, протекая по обмотке
дополнительных полюсов даДГ|, создает падение напряжения на
ней, достаточное для закрытия транзистора V2 БЗКЗ. При этом
открываются тиристор V3 и транзистор V4. При открытии
транзистора V4 с его коллектора положительный потенциал
подается на базу транзистора V8 блока БЗПН, вызывая его
открытие и срабатывание контактора К1. Контактор К1 одной
парой размыкающих контактов разрывает цепь обмотки воз-
буждения между зажимами У и Ш, а другой — расшунтирует
переход база—эмиттер транзистора V5 блока БЗКЗ. Транзи-
стор открывается и обеспечивает срабатывание контактора К2.
Контактор, срабатывая, производит переключение обмотки
возбуждения так, что зажим « + Ш» соединяется с минусовым
зажимом генератора «У», а «—Ш» — с зажимом «+» генератора.
В результате такого переключения к обмотке возбуждения при-
295
$
клаДывается обратное по знаку напряжение, обусловленное ос-
таточной ЭДС машины, с целью ограничения тока короткого
замыкания генератора.
Для приведения аппарата защиты в исходное состояние не-
обходимо нажать кнопку Кн «Взвод». При нажатии на кнопку
через одну шару ее контактов подается «—» к выключающей об-
мотке контактора К1, а через вторую пару контактов замыка-
ется цепь разряда конденсатора С1 блока БЗКЗ. Конденсатор,
разряжаясь через открытый тиристор V3, вызывает его закры-
тие. При закрытии тиристора обмотка контактора К2 обесточи-
вается и его .контакты возвращаются в исходное состояние,
подключая обмотку возбуждения генератора wB к регулятору
напряжения.
Благодаря развитию полупроводниковой техники и микро-
электроники комбинированные аппараты в настоящее время
становятся единственной 'формой конструктивного исполнения
элементов управления, защиты и регулирования систем электро-
снабжения ЛА.
Глава 12
АППАРАТЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
СИСТЕМАМИ ЭЛЕКТРОСНАБЖЕНИЯ
12.1. ОБЩИЕ СВЕДЕНИЯ О КОММУТАЦИОННЫХ АППАРАТАХ
В бортовых системах ЛА для включения, отключения или пе-
реключения электрических цепей применяют различные типы
коммутационных аппаратов. Их разделяют по ряду признаков:
способу приведения в действие, принципу действия, роду тока,
способу замыкания цепи и др.
По способу приведения в действие коммутационные аппара-
ты различают на аппараты ручного действия (выключатели,
переключатели, кнопки управления и др.), дистанционного дей-
ствия (реле, контакторы) и .аппараты, фиксирующие положение
подвижных частей оборудования (концевые и программные вы-
ключатели); по принципу действия — электромагнитные, маг-
нитоэлектрические, полупроводниковые, тепловые и др.; по спо-
собу замыкания электрической цепи — контактные и бескон-
тактные.
Для дистанционного включения, выключения и переключе-
ния электрических цепей, т. е. управления на значительном рас-
стоянии от места их включения, широкое распространение по-
лучили электром1агнитные реле и контакторы. Конструктивно
они выполняются по единой схеме. Но, как правило, в реле ис-
пользуют электромагниты клапанного, а в контакторах — втяж-
ного типа.
Реле и контакторы принято различать между собой по вели-
чине коммутируемого тока. К реле относят аппараты, предназ-
наченные для коммутации токов нагрузки до 10 А, к контакто-
рам — 10 и более ампер.
В процессе работы реле и контакторов их контакты при за-
мыкании многократно подвергаются ударным воздействиям.
При размыкании контактов между ними возникает электричес-
кая дуга, разрушающая поверхность контактов.
Опыт эксплуатации коммутационных аппаратов показал, что
принятая конструкция и условия работы контактной системы,
величина переходного сопротивления между подвижным и не-
подвижным контактами во многом определяют надежность ре-
ле и контакторов.
297
Применяемые материалы контактов коммутацйойНЫх аппа-
ратов должны иметь высокую механическую прочность, высо-
кую электропроводность и теплопроводность, устойчивость про-
тив коррозии и эрозии.
Контакты авиационных контакторов выполняются из металло-
керамики (композиции серебра и окиси меди 'или серебра и
окиси кадмия). Контакты реле обычно выполняются из серебра,
вольфрама, молибдена или их сплавов.
Величина переходного сопротивления между контактами ре-
ле и контакторов может быть определена по следующей эмпи-
рической формуле:
----— Ом,
(100FJ*
(12-1)
где а — коэффициент, зависящий от материала контактов и
чистоты обработки контактной поверхности;
f\ — сила контактного давления в ньютонах;
b — коэффициент, характеризующий форму контактов.
Значения коэффициента а для контактов, выполненных из
серебра или металлокерамики, лежат в пределах 0,008...0,016.
Значение коэффициента b для контактов с плоской поверхно-
стью равно 1, а для контактов со сферической поверхностью —
0,7
Размеры контактов должны обеспечить отвод выделяющегося
тепла. Температура их нагрева не должна превышать для сере-
бряных контактов 120...150°С, а металлокерамических — 225...
275°С.
Рис. >12.1. Электрокинематическая схема контактора
(5), его тяговая и механическая характеристики (б)
На рис. 12.1,0 приведена электрокинематическая схема кон-
тактора с электромагнитом втяжного типа. При протекании
298
йерез катушку T тока возникает магнитный поток, замыкаю-
щийся через сердечник 6 и якорь 4. Якорь втягивается, увлекая
подвижные контакты 2 и сжимая возвратную пружину 5. Для
создания необходимого давления между контактами и предот-
вращения дребезга контактов в момент их соприкосновения на
оси якоря 4 размещается буферная (демпферная) пружина 1.
После отключения электромагнита от источника питания под
воздействием пружины 5 якорь возвращается в исходное поло-
жение.
Масса и габаритные размеры контакторов и реле в значи-
тельной мере определяются тяговой и механической характери-
стиками электромагнита и пружины.
Очевидно, что сила тяги электромагнита должна на всем
диапазоне хода якоря 8 превышать противодействующую ей си-
лу, создаваемую возвратной и демпферной пружинами.
Для примера на рис. 12.1,6 приведены тяговая характеристи-
ка электромагнита (кривая 1), снятая при постоянном напря-
жении бортовой сети, и механические характеристики возврат-
ной (кривая 2), возвратной и демпферной пружин (кривая 3).
Воздушный зазор 8 = 80 соответствует разомкнутому состо-
янию контактов контактора. При включении контактора к ис-
точнику питания его якорь начинает перемещаться, воздушный
зазор 6 уменьшается и, когда 8 = Зр происходит замыкание
контактов.
Демпферная пружина для обеспечения необходимого контак-
тного давления в момент соприкосновения контактов предвари-
тельно сжата, что характеризуется участком «аЬ» кривой 3.
При дальнейшем перемещении якорь 4 преодолевает совмест-
ное противодействие возвратной 5 и демпферной 1 пружин,
обеспечивая тем самым необходимое контактное давление.
Из приведенных на рис.'12.1,6 тяговой и механических ха-
рактеристик следует, что при включенном контакторе, когда ве-
личина воздушного зазора 8=8МИН, сила электромагнита F3 су-
щественно превышает результирующую силу Fnp, создаваемую
возвратной и демпферной пружинами. Если осуществить в мо-
мент включения кратковременное повышение МДС, создавае-
мой электромагнитом, то становится возможным уменьшить мас-
су контактора. Форсировка МДС электромагнита производится
в первый момент времени, когда между якорем и сердечником
имеет место большой воздушный зазор.
В авиационных контакторах форсировка МДС, создаваемой
электромагнитом, как правило, осуществляется либо путем ис-
пользования двухобмоточного электромагнита, либо путем
включения в цепь питания обмотки электромагнита дополни-
тельного резистора. На рис. 12.2,а приведена принципиальная
электрическая схема двухобмоточиого контактора. В момент
включения контактора движение якоря осуществляется за счет
МДС, создаваемой включающей обмоткой ювкл с малым омичес-
299
%
кйм сопротивлением. В конце Хода якоря его Шток размыкает
вспомогательные контакты 2К и последовательно с обмоткой
Рис. 12.2. Электрическая схема двухобмоточ-
ного контактора, его тяговая и механическая
характеристики
к»в1£л включается удерживающая обмотка о)уд с большим оми-
ческим сопротивлением. Это приводит к уменьшению величины
тока, протекающего в электромагните, а необходимая МДС Fa
создается двумя обмотками: ®'вкл и юуд. Тяговая (кривая 1) и
механическая (кривая 2) характеристики двухобмоточного кон-
тактора показаны на рис. 12.2,6.
Примером форсирования 'МДС электромагнита путем вклю-
чения в цепь его питания добавочного резистора модсет слу-
жить схема включения контактора дифференциально-минималь-
ного реле ДМР (см. рис. Г2.8), назначение и особенности рабо-
ты которого будут рассмотрены ниже.
Здесь последовательно с обмоткой контактора КЗ включен
резистор R, который зашунтирован размыкающими контакта-
ми вспомогательного реле КЗ. Поэтому в промежутках времени
от момента включения контактора до момента замыкания его
контактов по обмотке электромагнита протекает большой ток.
После срабатывания контактора К5 включается реле КЗ, что
приводит к увеличению сопротивления в цепи питания электро-
магнита и уменьшению его тока до расчетной величины.
Среди многих разновидностей конструкций электромагнит-
ных контактеров особое место занимают импульсные контакто-
ры (контакторы с механическим фиксированием якоря в край-
них положениях), потребляющие электроэнергию только в мо-
менты их включения и выключения.
300
Конструктивно импульсный контактор имеет два электро-
магнита с включающей ауокл и отключающей wOTK обмотками
(рис. 12.3).
Рис. 12.3. Электрокинематическая схема
контактора с защелкой
При нажатии на кнопку 6 через размыкающие контакты 2
напряжение питания подается на включающую обмотку wHKJI
электромагнита 4. Его якорь перемещается вверх до тех пор,
пока сердечник электромагнита 3, выполняющий роль электро-
механической защелки, под действием пружины 1 не войдет в
паз якоря 4. При этом происходит размыкание и замыкание
контактов контактора. Его 'размыкающие контакты 2 прерыва-
ют цепь питания обмотки давкл, а замыкающие 7 — готовят
цепь питания отключающей обмотки шОтк.
Для отключения контактора необходимо подать напряжение
источника питания на обмотку wOTK через замыкающие контак-
ты 7. Импульсные контакторы находят применение, например,
в аппаратах защиты для гашения магнитного поля коллектор-
ных генераторов постоянного тока.
К основным техническим параметрам, характеризующим
работу электромагнитных контакторов и реле, относят: величи-
ну коммутируемого тока; падение напряжения на контактах,
характеризующее величину переходного сопротивления контак-
„ Д£7
тов /?,<=----; напряжение на обмотке электромагнита; на-
Люм
пряжение срабатывания Ucp; напряжение отпускания (7ОТП; вре-
мя срабатывания tcp и время отпускания (отп.
Правильный выбор этих параметров коммутационных ап-
паратов играет большую роль при эксплуатации систем электро-
оборудования ЛА, особенно в случае возникновения аварийных
режимов. Так, быстродействие аппаратов защиты и беспере-
бойность электроснабжения приемников во многом зависят от
301
времени включения и отпускания контакторов и реле, напря-
жений их срабатывания и отпускания.
Время срабатывания реле и контакторов обычно разделяют
па время трогания якоря с места /тр и время движения якоря
£дв, считая, что
4р = ^ + ^в- (12.2)
Для определения времени трогания /гр запишем, что
£7 = /?эг + £9-^, (12.3)
и *
где U — напряжение источника питания;
и R3— индуктивность и активное сопротивление элек-
тромагнита;
i — ток в цепи электромагнита.
Решая уравнение (12.3), имеем
i = ^(l-e" V), (12.4)
где Тэ=— —постоянная времени электромагнита.
На рис. 12.4 приведены графики изменения тока электро-
магнита при его включении в сеть. При достижении тока зна-
Рис. 12.4. Зависимость тока элек-
тромагнита двухобмоточного кон-
тактора от времени
чения /тр, когда МДС электромагнита становится больше про-
тиводействующей силы возвратной пружины, начинается дви-
жение якоря. Поэтому, полагая в уравнении (12.4), что при
i — l-tV время t = £тр, получим
<12-6>
Выражение (12.5) показывает, что время трогания с уменьше-
нием величины напряжения источника питания возрастает.
302
Величина тока трогания двухобмоточных контакторов (рис.
12.2) обычно составляет
/тр = (5...7)
U
R\ 4-
где 7?1, — сопротивление обмоток электромагнита.
Большая величина тока трогания, если не будет движения
якоря, может привести к нагреву и разрушению обмотки элект-
ромагнита.
Время движения якоря приближенно определяют по фор-
муле
(126)
где т — масса подвижных частей контактора;
8— величина воздушного зазора;
F9— сила, создаваемая электромагнитом;
Fnp— сила, создаваемая пружинами.
Для авиационных реле и контакторов время срабатывания
при номинальном напряжении составляет /ср = 0,01...0,04 с.
Большое значение при выборе типа реле и 'контактора име-
ет величина их коэффициента возврата, характеризующего от-
ношение напряжения отпускания 1/отп к напряжению срабаты-
вания С/ср
*-=7Г- (12.7)
{-'Ср
где/7ср=/?э>/тр— напряжение срабатывания реле (контактора).
Коэффициент возврата применяемых 'авиационных реле и
контакторов лежит в пределах 0,1...04.
При размыкании электрических цепей между контактами
коммутационных аппаратов образуется электрическая дуга, ко-
торая приводит к ускоренному разрушению контактов. Условия
искрообразования между контактами зависят от многих фак-
торов: величины воздушного зазора между контактами, ско-
рости их размыкания, рода разрываемого тока, давления и
влажности окружающего воздуха, параметров потребителей
электроэнергии и др. Так, с увеличением воздушного зазора
между контактами условия горения дуги ухудшаются. Поэтому
часто авиационные контакторы выполняются с контактной си-
стемой, имеющей два и более мест разрывов электрической це-
пи (см. рис. 12.1).
Условия работы контакторов коммутационных аппаратов,
используемых в электрических цепях переменного тока, сущест-
венно облегчаются по сравнению с условиями работы коммута-
ционных аппаратов постоянного тока. Это обусловлено тем, что
при переменном напряжении источника питания (« = Um sin ш t)
303
•
Во время размыкания контактов ток в цепи снижается до нуля,
процесс термической ионизации прекращается, что способствует
быстрому гашению электрической дуги.
С ростом высоты полета ЛА условия гашения электрической
дуги из-за уменьшения электрической прочности воздуха ухуд-
шаются.
Большое влияние на искрообразование между контактами
коммутационных аппаратов оказывает величина индуктивного
сопротивления отключаемой нагрузки, так как возникающая
при разрыве таких электрических цепей ЭДС самоиндукции пре-
пятствует гашению дуги.
В ряде случаев для уменьшения искрообразования между
контактами коммутационных аппаратов дополнительно исполь-
зуют: включение параллельно их контактам конденсатора (рис.
12.5,д), шунтирование индуктивных нагрузок диодом (рис.
12.5,6), магнитное «дутье», т. е. искусственное увеличение дли-
ны дуги путем воздействия на нее магнитным полем постоян-
ных магнитов, дугогасительные камеры и др.
Рис. 12.5. Схема включения конденсатора С
и диода V для уменьшения искрообразования
между контактами
Количество реле и контакторов, установленных в системах
электрооборудования современных ЛА, достигает нескольких
тысяч. Поэтому к их надежности предъявляются высокие тре-
бования.
Анализ причин отказов реле и контакторов показывает, что
большинство из них связано с нарушением нормального кон-
такта между соприкасающимися поверхностями подвижных и
неподвижных контактов. Это обусловлено многими факторами,
основными из которых являются замерзание контактов и обра-
зование токонепроводящих .пленок на их поверхности. Замер-
зание контактов коммутационных аппаратов как дистанционно-
го, так и ручного управления объясняется тем, что при резком
пониженпиттемпературы окружающей среды температура .воз-
духа во внутренней полости реле не может быстро измениться
и возникают условия для конденсации воды на поверхности
контактов. Образование токонепроводящих пленок .происходит
304
из-за обгорания и окисления контактов при возникновении
электрической дуги во время их размыкания. Это приводит <
возникновению различных химических соединений. Продукты
этих химических реакций, ооаждаясь на поверхности контактов
в виде пленок (очагов), вызывают их «загрязнение», вследствие
чего увеличивается переходное сопротивление контактов.
Проведенные исследования показали, что токонепроводящие
пленки на контактах авиационных реле и контакторах явля-
ются нестойкими к механическим и тепловым воздействиям. Ис-
ходя из этого, в ряде случаев при подготовке ЛА к полету ре-
комендуют производить «сухую» коммутацию, т. е. включение
2...3 раза реле без нагрузки. При этом происходит механическое
разрушение токонепроводящей пленки.
В настоящее время повышение надежности коммутационных
аппаратов достигается путем дальнейшего совершенствования
конструкции реле и контакторов обычного исполнения, разработ-
ки специальных реле с герметизацией их контактов, создания
бесконтактных коммутационных аппаратов и др.
В системах автоматического управления находят все боль-
шее применение различные конструкции магнитоуправляемых
контактов (МУК) или герконов (герметизированные контакты),
имеющих по сравнению с обычными реле высокую надежность
и большое быстродействие. Механическая износостойкость кон-
тактов МУК достигает 10“ коммутационных циклов, время сра-
батывания /ср = 0,5...2 мс. На рис. 12.6 приведена конструктив-
Рис. 12.6. Конструктивная схема
магнитоуправляемого контакта
ная схема МУК с мостовой магнитной цепью. Его неподвиж-
ные 2 и подвижные 3 контакты монтируются в герметической
стеклянной колбе 4, заполненной инертным газом (аргон, гелий,
неон и др.). Поверхности пластин в зоне контактирования по-
крываются тонким слоем благородного металла. К наружным
концам контактов присоединяются провода цепей управления.
Па магнитопроводе 5 размещается катушка электромагнита 6
и постоянный магнит 1.
20. Изд. № 7934 305
*
Пластины контактов, выполненные из ферромагнитных спла-
вов, играют одновременно роль магнитопровода и возвратной
пружины. В нормальном положении контакты МУК разомкну-
ты. При протекании в катушке электромагнита тока пластины
намагничиваются, что приводит к их деформации и замыканию
соответствующей пары контактов. Замыкание верхних или
нижних контактов определяется направлением тока в катушке
электромагнита. При отключении электромагнита силы упру-
гости пластин возвращают пружины в исходное положение.
МУК используются для коммутации электрических цепей мощ-
ностью до 20 Вт. Примером применения МУК в системах
электроснабжения ЛА могут служить датчики направления то-
ка (см. гл. 12.2).
Новые принципы исполнения коммутационных аппаратов с
помощью полупроводниковых приборов позволяют существен-
но улучшить их технические характеристики. Вопросам соз-
дания бесконтактных коммутационных аппаратов уделяется
большое внимание. Показано, что их применение в системах
электроснабжения ЛА для коммутации электрических цепей
целесообразно только при условии одновременной защиты ком-
мутируемой цепи от КЗ и ограничении переходных токов. Это
обусловлено тем, что при перегрузках по току надежность тран-
зисторов и тиристоров резко понижается. Бесконтактные ком-
мутационные и защитные аппараты наиболее эффективно реа-
лизуются на основе транзисторных ключей из-за их полной
ул р а вл яемо сти.
Считают, что применение таких бесконтактных аппаратов
позволит коммутировать нагрузку за 3...5 мкс и ограничивать
величину тока короткого замыкания на любом заданном уров-
не, так что аварийные режимы не будут вызывать заметных из-
менений напряжения сети.
12.2. УПРАВЛЕНИЕ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ
ПОСТОЯННОГО ТОКА
Генераторы, выпрямительные устройства и аккумуляторные
батареи систем электроснабжения постоянного тока подключа-
ются к соответствующим шинам распределительных устройств
(ЦРУ и РУ) только после выполнения ряда условий. К числу
основных из них относят: соблюдение правильной полярности
подключаемого в сеть источника электроэнергии и превышение
напряжения включаемого генератора над напряжением сети.
Автоматическое отключение указанных источников произво-
дится также при возникновении определенных условий: КЗ и
обрывы Проводов на участке питательной сети, снижения напря-
жения генератора ниже определенного уровня и др.
Контроль за выполнением необходимых условий автомати-
ческого включения и отключения источников в сеть осуществля-
306
ется либо специальными аппаратами управления и защиты, ко-
торые непосредственно коммутируют силовые электрические це-
пи, либо этот контроль производится общим аппаратом защиты
и управления канала.
В каналах с коллекторными генераторами для их подклю-
чения к шинам ЦРУ широко используются так называемые диф-
ференциально-минимальные реле’ (ДМР).
ДМР обеспечивает:
— автоматическое подключение •генератора к шинам ЦРУ
при условии, что его напряжение превышает напряжение сети
на 0,2...1,0 В. В случае отсутствия напряжения в сети ДМР под-
ключает генератор к ЦРУ, когда суммарное сопротивление вк-
люченных приемников не превышает 100 Ом;
— автоматическое отключение генератора от шин ЦРУ при
протекании «обратного» тока от сети в пределах 25...50 А;
— автоматическое отключение генератора от шин ЦРУ в
случае обрыва проводов на участке генератор—ДМР;
— невозможность подключения генератора с неправильной
полярностью к сети;
— сигнализацию членам экипажа при отключении генера-
тора.
В настоящее время с генератором мощностью 12 кВт вклю-
чают ДМР — 400 Т, а с генератором мощностью 18 кВт -—
ДМР — 600 Т. Эти аппараты выполняются по одной и той же
электрической схеме.
Основными элементами каждого из них являются: управля-
ющее реле (дифференциальное реле), контактор и вспомога-
тельное реле. Дифференциальное реле является поляризованным.
Его конструктивная схема представлена на рис. 12.7. Между
/ 2 3 Ц
Рис. 12.7. Конструктивная схема управляющего
реле ДМР
двумя стальными магнитопроводами 2 установлено три посто-
янных магнита 5 (на рис. 12.7 показан один). На пластинах 2
укреплены полюсные наконечники (башмаки) 3, между кото-
рыми расположен якорь 6. Якорь выполнен в виде стальной
20*
307
пластины, способной поворачиваться вокруг оси 0. Если .по
дифференциальной обмотке пропускать ток в направлении,
указанном стрелкой, то якорь намагнитится так, что северный
полюс у него будет справа, а южный — слева (магнитный по-
ток замыкается по цепи, показанной пунктирной линией). В ре-
зультате якорь повернется против хода часовой стрелки и кон-
такты РП замкнутся. При обратном направлении тона в после-
довательной обмотке wn полярность магнитного потока в якоре
изменится и он повернется по ходу часовой стрелки. Контакты
РП разомкнутся. Так как противодействующая пружина у яко-
ря 6 поляризованного реле отсутствует, то он поворачивается
только при протекании тока в обмотках йуя и ц>п в том или
ином направлении. Поляризованное реле имеет два регулиро-
вочных винта: 1 и 4. С помощью винта 1 устанавливается ве-
личина разности напряжений генератора и бортовой сети, при
которой замыкаются контакты РП, а с помощью винта 4 регу-
лируется величина обратного тока, протекающего по обмотке
wn, при которой эти контакты размыкаются.
Принцип действия ДМР рассмотрим по схеме, приведенной
на рис. 12.8. Считаем, что напряжение генератора соответству-
Рис. 12.8. Схема дифференциально-минимального реле ДМР
ет его номинальному уровню и контакт Кб управляющего ре-
ле разомкнут. При замыкании выключателя В замыкается цепь
питания вспомогательного реле К1. Так как напряжение сраба-
тывания реле К1 составляет 12...14 В, то оно срабатывает и
своими замыкающими контактами 1К1 подключает обмотку
реле К2 и дифференциальную обмотку цуд управляющего реле
Кб на фрзность напряжений генератора и сети &U=U—UC.
Замыкающие контакты 2К1 реле К1 готовят цепь вклю-
чения контактора Кб.
Если разность Д U контролируемых напряжений будет пре-
вышать 12...16 В, то реле К2 срабатывает и своими размыкаю-
308
Щимй контактами разрывает цепь Питания дифференциальной
обмотки и»д. предотвращая тем самым возможный ее перегрев.
Контакты реле К2 замыкаются, когда ДП<5 В.
Пока по обмотке адд управляющего реле протекает ток от
corn к генератору, МДС этой обмотки намагничивает якорь 6
таким образом, чтобы южный полюс якоря находился справа
от .пластины, а северный — слева. В этом случае контакт Кб
управляющего реле остается разбмкнутым (рис. 12.7).
После того, как напряжение генератора U станет больше
напряжения сети [7С, изменится направление тока, протекающе-
го по дифференциальной обмотке wa, и, как следствие этого, из-
менится полярность намагничивания якоря 6. Когда разность
напряжений ДС'>0,2...1,0 В, якорь 6 повернется против хода
часовой стрелки и замкнутся контакты Кб поляризованного
реле. Так как ранее контакты 2К1 реле К1 были замкнуты, то
при замыкании контактов Кб срабатывает контактор Кб, под-
ключающий генератор в сеть.
После срабатывания контактора Кб включаются реле КЗ
н К4.
Реле КЗ включает последовательно с обмоткой контактора
Кб резистор R.
Реле К4, срабатывая, своими контактами 2К4 отключает
сигнальную лампу Л, а контактами 1К4 переключает зажимы
дифференциальной обмотки &уд управляющего реле от точки
«а» к точке «б» фидера генератора. Таким образом, обмотка
и/д оказывается включенной параллельно участку провода ге-
нератор—ДМР. В случае его обрыва, так как генератор пере-
ходит в режим холостого хода, потенциал точки <«б» становится
выше потенциала точки «а». Тогда по дифференциальной об-
мотке будет протекать ток в том же направлении, которое
соответствует режиму, когда U'<UC. Это приводит к размыка-
нию контактов РП управляющего реле и отключению генератора
от сети.
Если по каким-либо причинам напряжение генератора ста-
нет меньше напряжения сети и величина «обратного» тока в
фидере генератора, равного:
_UC-ET
R. ’
где Ет — ЭДС генератора;
/?я — общее сопротивление цепи якоря,
достигнет 25...50 А, то МДС, создаваемая токовой обмоткой w„,
перебрасывает якорь реле Кб в исходное положение- Это приво-
дит к прекращению питания обмотки контактора Кб и отключе-
нию генератора от шин ЦРУ.
К недостаткам аппарата ДМР, выявленным в процессе экс-
плуатации систем электроснабжения ЛА, относят возможность
309
е
его работы в режиме «звонка» В случае КЗ в системе распреде-
ления электроэнергии и неоднозначность начального состояния
контактов его управляющего реле РП при включении генера-
тора в сеть.
Переход ДМР в режим «звонка» объясняется тем, что при
КЗ в системе напряжение генератора понижается и может
стать меньше напряжения отпускания его контактора. В этом
случае ДМР отключает генератор от шин ЦРУ. Напряжение
генератора возрастает до номинального уровня, происходит пов-
торное включение ДМР в бортовую сеть, где имеет место КЗ.
Опять происходит резкое понижение напряжения генератора,
отключение ДМР и т. д.
На ряде ЛА для дистанционного включения коллекторных
генераторов в сеть вместо ДМР применяют аналогичные по
функциональному назначению аппараты защиты и управления,
получившие название АЗУ.
Принципиальная электрическая схема АЗУ представлена на
рис. 12.9. В состав аппарата входят: контактор Кб, два поляри-
Рис. 12.9. Схема аппарата защиты и управления АЗУ
зованных реле К1 и К2, реле включения КЗ, сигнальное реле
К4 и ограничительный резистор R. w
Поляризованное реле К1 имеет две обмотки: токовую (по-
следовательную) wn и дифференциальную (напряжения)
а поляризованное реле К2 — только одну токовую обмотку wn.
Пороги срабатывания поляризованных реле устанавливаются с
помощью соответствующих регулировочных винтов.
Для включения генератора в сеть включают- выключатель
В. Это приводит к срабатыванию реле КЗ, которое своими за-
мыкающими контактами готовит цепь включения контактора
310
К5 и подключает дифференциальную обмотку шя поляризоВйй-
ного реле КД через диод V на разность напряжений генератора
и сети.
Если напряжение генератора превышает на 0,2... 1,0 В на-
пряжение сети, то замыкаются контакты поляризованного реле
К1 и срабатывает контактор К5, подключая генератор в сеть.
При замыкании подвижного контакта контактора Кб включа-
ется реле К4, которое своими • переключающими контактами
обеспечивает сигнализацию о работе генератора и управляет
отключением приемников большой мощности (зажимы Л и С).
При определенном токе нагрузки за счет МДС, создавае-
мой токовой обмоткой w„ замыкаются контакты поляризован-
ного реле К2, обеспечивая дополнительную сигнализацию (за-
жим Д) о достижении тока генератора заданного значения.
В случае, когда напряжение генератора станет меньше на-
пряжения сети, а также при КЗ в фидере генератора, ток в об-
мотке wn поляризованного реле К1 изменяет свое направление
и при достижении «обратного» тока (15...35) А реле К1 размы-
кает свои контакты в цепи питания обмотки контактора К5. Это
приводит к отключению генератора от шин ЦРУ.
При отключении генератора выключателем В отключаются
реле КЗ, К4 и контактор К5, но контакты поляризованного ре-
ле К1 продолжают оставаться в замкнутом состоянии. Поэтому
по его дифференциальной обмотке гад через размыкающие кон-
такты реле КЗ и К4 и ограничительный резистор Д начинает
протекать от сети ток. Под действием МДС, создаваемой этим
током, контакты поляризованного реле К1 возвращаются в ис-
ходное (разомкнутое) состояние.
Таким образом, независимо от способа отключения генера-
тора, контакты поляризованного реле при последующем вклю-
чении АЗУ всегда находятся в разомкнутом состоянии.
В каналах с бесколлекторными генераторами отпадает необ-
ходимость защиты от «обратного» тока. Такие (генераторы мо-
гут быть включены в сеть с помощью электромагнитных кон-
такторов К (рис. 12.10,а). Но в этом случае при КЗ в фидере
генератора будет протекать «обратный» ток. Для отключения
канала при КЗ в его фидере от бортовой сети в ряде случаев
используют датчик направления тока ДНТ (рис. 12.10,а), уста-
новленный в конце фидера генератора. Датчик представляет
собой поляризованное реле, состоящее из магнитоуправляемо-
го контакта (геркона) и постоянного магнита. Пластмассовый
цилиндрический корпус датчика, в котором размещены геркон
и постоянный магнит, имеет специальные приливы для его
крепления к токоведущей шине. В датчике ДНТ корпус 4 гер-
кона размещается между токоведущей шиной 2 и постоянным
магнитом 3. Поэтому даже в случае отключения генератора от
311
Шин ЦРУ контакты геркона за счет воздействия на нйх Маг-
нитного поля .постоянных магнитов будут находиться в замкну-
том положении.
Рис. 12.10. Схема включения датчика направления тока (а) и по-
ложение его контактов при нормальной работе канала (б) и про-
текании «обратного» тока (в)
При протекании тока по фидеру в направлении от генератора
в сеть контакты 1 датчика продолжают находиться в замкнутом
состоянии, так как направления магнитного поля токоведущей
шины 2 и магнитного поля постоянного магнита 3 совпадают
(рис. 12.10,6).
В случае короткого замыкания в фидере, например в точке
«а», направление тока в токоведущей шине 2 изменяется на об
ратное, создаваемый им магнитный поток будет направлен вст-
речно магнитному потоку постоянного магнита 3. Параметры
датчика выбраны так, что при достижении «обратного» тока
350...450 А происходит компенсация этих магнитных потоков и
под действием пружинящих сил пластин контакты МУК раз-
мыкаются (рис. 12.10,в).
Включение аэродромного источника постоянного тока в бор-
товую сеть ЛА осуществляется с помощью специальных разъ-
ема РАП и устройства включения (рис. 12.11).
Разъем РАП, кроме двух силовых штырей, имеет третий до-
полнительный, несколько укороченный штырь. После того, как
плюсовой и минусовой силовые штыри войдут в гнезда разъ-
ема и обеспечивается надежный их контакт, происходит вклю-
чение в разъем укороченного вспомогательного штыря.
Независимо от полярности аэродромного источника сраба-
тывает реУГе К1, его размыкающие контакты разрывают цепи
питания обмоток контакторов К2 и КЗ включения бортовых
аккумуляторных батарей Б1 и Б2 в сеть.
312
Одновременно замыкающие контакты реле К1 замыкают
цепь литания контактора К4, подключающего аэродромный ис-
Рис. 12.11. Схема включения аэродромного источника посто-
янного тока в бортовую сеть
точник к бортовой сети. В случае подключения аэродромного
источника с неправильной полярностью, сработает поляризо-
ванное реле Кб, размыкающие контакты которого разрывают
цепь питания контактора К4, и подключение аэродромного
источника не произойдет.
Для избежания ошибочного подключения бортовых аккуму-
ляторных батарей с неправильной полярностью в сеть исполь-
зуются специальные конструкции контейнеров.
12.3. УПРАВЛЕНИЕ КАНАЛАМИ ГЕНЕРИРОВАНИЯ
ЭЛЕКТРОЭНЕРГИИ ПЕРЕМЕННОГО ТОКА
Включение каналов генерирования электроэнергии и аэро-
дромных источников переменного тока в бортовую сеть ЛА про-
изводится .при выполнении определенных условий. Контроль
выполнения этих условий осуществляется с помощью специаль-
ных блоков (коробок) защиты и управления (БЗУ, КЗУ,
БРЗУ), выполняющих функции как управления, так и защиты
системы электроснабжения и ее элементов.
Для улучшения массогабаритных характеристик и повыше-
ния надежности этих блоков, формирование ими команд уп-
равления осуществляется, как правило, по данным тех же
датчиков, которые используются в аппаратах защиты.
Применение в качестве элементной базы аппаратов защи-
ты и управления интегральных схем позволяет существенно
расширить их логические возможности и повысить эффектив-
ность работы.
К предварительным условиям, выполнение которых необхо-
димо до включения канала в сеть, например для одноканаль-
313
ной системы электроснабжения переменного тока с пйеймоМехй-
ническим приводом, относят:
— включение электромагнита воздушной заслонки пневмо-
механического привода постоянной скорости (рис. 2.12);
— - достижение частоты вращения генератора пределов, со-
ответствующих частоте тока не ниже 385+5 Гц и не выше
415+5 Гц;
— включение возбуждения генератора и достижение его
напряжения выше 111±3 В, но ниже 126+3 В;
— отсутствие в канале неисправностей, обнаруженных уст-
ройством встроенного контроля;
— отключение аэродромного источника переменного тока
и др.
В свою очередь, каждое из этих условий может быть выпол-
нено только после завершения определенных операций.
Условия формирования команд управления для включения
коммутационного аппарата, являющегося исполнительным орга-
ном какого-либо устройства, обычно представляют в виде логи-
ческой формулы
у = <?(%!, х2, ..., х,„ t), (12.8)
где х{, t={l, п}—логические переменные, соответствующие тому
или иному частному условию и принимающие
значения 1, если данное событие истинно, и
значение 0, если событие ложно;
t — время.
Так, для возбуждения бесконтактного генератора типа ГТ
его обмотка возбуждения возбудителя подключается к выпря-
мителю подвозбудителя контактами реле Квг.
Условия срабатывания реле КцГ выражаются следующей ло-
гической функцией:
ВГ = ВКн-пТ -Н-7Т-Л-0, (12.9)
где ВКН — включен выключатель канала;
п | — отсутствует сигнал о снижении частоты вращения
авиационного двигателя;
Н— отсутствуют неисправности в канале;
f [ — частота тока генератора выше нижнего порога от-
ключения; *
/1 — частота тока генератора ниже верхнего порога от-
ключения;
О — проведено обнуление, т. е. все триггеры и схемы
памяти аппарата находятся в исходном состоянии.
Сигнал П неисправности Н канала генерирования электро-
энергии формируется при условии отключения аэродромного
источника питания РАП, завершения обнуления 0 и наличия
314
tie менее одного йз трех сигналов датчиков: короткого замыкя
ния (КЗ), чрезмерного повышения частоты fff (свыше 465...
480 Гц) и блока задержки t.
Эти условия характеризуются следующей формулой:
Н = РАП-0(КЗ V/W0> (12.10)
где РАП — отключена розетка аэродромного питания;
КЗ — имеется сигнал от датчика короткого замыкания.
Выходной сигнал t 'блока задержки поступает в логическую
часть аппарата при условии реализации логической функции
вида
/ = [£Г.(1М Wt V/; V/t)F, (12.11)
где Вт — включен выключатель возбуждения генератора;
U | и U f — сигналы от датчиков снижения и повышения на-
пряжения;
f | и f | — сигналы от датчиков снижения и повышения час-
тоты;
t — время задержки поступления сигнала t, формиру-
емого реле времени.
12.4. СИНХРОНИЗАЦИЯ КАНАЛОВ ГЕНЕРИРОВАНИЯ
ЭЛЕКТРОЭНЕРГИИ ПЕРЕМЕННОГО ТОКА
ДЛЯ ПАРАЛЛЕЛЬНОЙ РАБОТЫ
Для исключения возможного режима короткого замыкания и
уменьшения величины уравнительного тока при включении ге-
нераторов .переменного тока на параллельную работу необходи-
мо выполнение ряда условий. Эти условия рассматривались в
разделе 6.2.
Аппараты, с помощью которых осуществляется формирование
сигнала для включения каналов переменного тока на парал-
лельную работу, получили название синхронизаторов.
Синхронизаторы разделяются на активные и пассивные. Ак-
тивные синхронизаторы вначале формируют сигналы, воздей-
ствующие на регуляторы частоты и напряжения с целью вы-
полнения условий синхронизации, и после этого выдают сигнал
на включение канала в сеть.
Пассивные синхронизаторы не воздействуют на регуляторы,
а «ожидают» момента совпадения фаз ЭДС и частот включа-
емых генераторов и при их совпадении выдают сигнал на вклю-
чение каналов на параллельную работу.
Применяемая схема коммутации каналов генерирования
электроэнергии переменного тока ЛА предусматривает их раз-
315
дельную и параллельную работу (рис. 12.12). Генератор!.! ка«
налов вначале подключаются к шинам соответствующих ЦРУ,
Рис. 12.12. Схема включения
каналов на параллельную
работу
а после срабатывания контакторов
присоединения КЗ и К4 включаются
на параллельную работу через ши-
ны «параллельной работы».
На рис. 12.13 приведена принци-
пиальная электрическая схема пас-
сивного синхронизатора, исполни-
тельный орган которого реле К2 за-
мыкает цепь питания контактора
присоединения КЗ (см. рис. 12.12).
Измерительным органом синхрони-
затора является реле К1, включен-
ное через выпрямительный мост В
на разность напряжений одноимен-
ных фаз синхронизируемых генера-
торов. Разность одноименных фазо-
вых напряжений генераторов, вклю-
работу, называют напряжением
чаемых на параллельную
биения »б
Рис 12.13. Принципиальная электрическая схема
пассивного синхронизатора
«б == «л! ~ 11А2 = sinwjZ — (7m2sin«>21. (12.12)
При условии равенства амплитудных значений напряжений
Umi—Um7 = Uт генераторов Г1 и Г2 имеем
и6 = t/m(sin — sin w2Z) = 2Umcos <u* ">г / sin 0)21. (12.13)
Огибающую амплитудных значений напряжения биения назы-
вают напряжением скольжения. Оно определяется выражением
Ms = 2£/msin—--—t = 26/msin—(12.14)
л т /71 2 ' ' '
где %— —«>2 — угловая частота скольжения.
316
Выражение (12.14), характеризующее закон изменения на-
пряжения скольжения, запишем в виде
о
«S = 217msin-, (12.15)
где rj — tosi — угол сдвига фаз между ЭДС синхронизируемых
генераторов.
Значение напряжения скольжения us определяет величину
уравнительного тока в момент включения каналов на парал-
лельную работу. При 8 = 0 уравнительный ток в системе от-
сутствует. Следовательно, правильный выбор момента подачи
импульса на включение контактора присоединения Кпр обеспе-
чивает значительное уменьшение величины уравнительного то-
ка, тем самым исключая возможность недопустимого колеба-
ния напряжения в системе электроснабжения.
Из уравнения (12.14) следует, что чем меньше разность ча-
стот вращения генераторов, тем меньше частота напряжения
биения. На рис. 12.14 показаны зависимости выпрямленного на-
Рис. 12.14. Зависимости напряжения биения от
пряжения биения для двух значений угловых скоростей враще-
ния. При достижении напряжения биения us величины напря-
жения срабатывания С/ср реле К1, т. е. us — UCf, включается
реле К1 и конденсатор С через диод V начинает заряжаться.
Когда выпрямленное напряжение биения уменьшится до напря-
жения отпускания С7ОТП реле К1, его контакты возвращаются в
исходное состояние и прекращается заряд конденсатора С.
Как видно из приведенных на рис. 12.15 зависимостей, вре-
мя заряда tc конденсатора С с уменьшением угловой скорости
скольжения «>v возрастает.
При замыкании в момент времени, когда us = (7ОТП, размыка-
ющих контактов реле К1 (см. рис. 12.13) конденсатор С разря-
жается через обмотку реле К2. Если время заряда tc конденса-
тора было достаточным для накопления энергии, необходимой
317
*
для срабатывания реле К2, то оно срабатывает и замыкает
цепь питания контактора присоединения Кпр, включаемого в
сеть генератора.
В случае, когда время от момента отпускания реле К1 до
момента, соответствующего S~0, будет равно суммарному вре-
мени срабатывания реле Р2 и контактора присоединения Кпр, то
уравнительный ток между подключаемыми каналами отсутст-
вует. Синхронизаторы, формирующие сигнал подключения ка-
нала в сеть до момента, когда 5^0, называют синхронизатора-
ми с постоянным углом опережения.
В ряде случаев для уменьшения величины уравнительного
тока пассивные синхронизаторы выполняются с постоянным вре-
менем опережения. Для этой цели они снабжаются дополни-
тельными устройствами, реагирующими на изменение угловой
скорости скольжения.
К одному из недостатков синхронизаторов пассивного типа
относят возможность включения каналов на параллельную ра-
боту при больших частотах скольжения. Поэтому для подклю-
чения каналов генерирования электроэнергии ЛА на параллель-
ную работу разработаны и получают распространение активные
синхронизаторы.
Для примера на рис. 12.15 приведена функциональная схема
активного синхронизатора блока БЗУ, управляющего моментом
Рис. 12.15. Функциональная схема активного синхронизатора
включения канала в сеть и осуществляющего воздействие на
регулятор частоты вращения привода с целью уменьшения
угла сдвига фаз между ЭДС подключаемого генератора и на-
пряжение^ сети.
Синхронизатор состоит из двух частей: собственно синхро-
низатора, формирующего сигнал на включение генератора в
сеть, и уравнителя частот, воздействующего на регулятор ча-
стоты вращения привода.
318
Основными элементами собственно синхронизатора являют-
ся: однофазные трансформаторы Т1 и Т2, выпрямитель В1,
формирователь импульсов ФИ1, реле времени РВ1 и РВ2, блок
логической части ЛЧ1 и усилитель У1.
Уравнитель частот включает в свой состав: трансформаторы
ТЗ и Т4, выпрямитель В2, формирователь импульсов ФИ2,
блок логической части ЛЧ2, усилители У2 и УЗ.
Собственно синхронизатор реагирует на разность напряже-
ний одноименных фаз, включенных на параллельную работу
генераторов. Поэтому первичные обмотки понижающих транс-
форматоров Т1 и Т2 подключены к одноименным фазам гене-
раторов Г1 и Г2, а вторичные обмотки соединены таким обра-
зом, чтобы на вход выпрямителя В1 было подано напряжение
биения us, равное:
us = «Л1 — ЫЛ2 = ит\ sin - Um2 sin <o2Z.
Для упрощения записи уравнений считаем, что коэффици-
ент трансформации feTP однофазных трансформаторов равен
единице, т. е. &тр = 1. При совпадении напряжений генераторов
по фазе напряжение биения становится равным нулю («я = 0).
В этот момент времени контактор присоединения Кпр подклю-
чаемого канала должен включить генератор к шинам парал-
лельной работы.
В случае несовпадения частоты вращения генераторов Г1 и
Г2 уравнитель частот синхронизатора воздействует на регуля-
тор привода постоянной скорости подключаемого генератора в
сеть. Для того чтобы это воздействие несколько упреждало мо-
мент включения контактора Кпр. первичные обмотки трансфор-
маторов ТЗ и Т4 уравнителя частот подключены к разноимен-
ным фазам генераторов Г1 и Г2, а их вторичные обмотки со-
единены так, чтобы результирующее напряжение иу было про-
порционально сумме фазных напряжений
/ 2«\
«у = wH2 = ^miSinl^ + y J + t/ffl2sin®2^ (12.16)
Так как регуляторы напряжений генераторов практически обес-
печивают равенство их напряжений,?. e.Umi=^Um2=Um^TO урав-
нение (12.16) можно представить в виде
+ sin<o2^
/а), — СО, к\ /(Di -|“(09 77
= 2Um cos f—t +3 )-sin I——7
(e>. /co, -j- a>9 it\
(12.17)
319
Последнее уравнение показывает, что величина напряжения
иу будет равна нулю, когда угол сдвига фаз между контроли-
руемыми фазными напряжениями генераторов достигнет я/6.
Рис. 12.16. Электрическая схема формирователя импульсов
синхронизатора
Ot
и9и
при C=Cf
Рис. 12.17. Временные диаграммы
выходного напряжения формиро-
вателя импульсов
Таким образом, уравнитель частот формирует управляющие
сигналы с некоторым упреждением по отношению к сигналу,
выдаваемому собственно синхронизатором.
320
Формирование команды собственно синхронизатором «а
включение контактора присоединения Кпр производится следу-
ющим образом. Согласно рис. 12.15, напряжение биения и„, вы-
прямленное выпрямителем В1, поступает на вход формирователя
импульсов ФИ1. Основными элементами формирователя им-
пульсов, электрическая схема которого приведена на рис. 12.16,
являются два дифференциальных 'усилителя. Первый усилитель
выполнен на транзисторах VI...V2, второй — на транзисторах
V3...V4. Выходными каскадами этих усилителей являются тран-
зисторы V5 и V6.
Когда выпрямленное напряжение биения us становится
больше эталонного напряжения U4 = 5 В, транзистор VI за-
крывается, а транзисторы V2 и V5 первого усилителя откры-
ваются. В этом случае напряжение на транзисторе V5 практи-
чески равно нулю. Когда напряжение биения us становится
меньше эталонного £73(на рис. 12.17 это соответствует моменту
времени на интервале т, = /2—?j), транзистор VI открывается,
а транзисторы V2 и V5 закрываются.
В интервале времени т2=^з—h напряжение биения us вновь
становится больше эталонного U3, происходит открытие транзи-
стора V5 и т. д.
Для уменьшения величины уравнительного тока включение
генераторов на параллельную работу необходимо производить в
интервале времени т,. Это время должно быть несколько боль-
ше суммарного времени срабатывания контактора присоедине-
ния КПр и времени срабатывания всех элементов, включенных
в его цепь управления, т. е. ’1^>*рВр
Интервал времени т2=^3—/2 должен превышать некоторую
величину трв2, определяемую максимально допустимой угловой
2«
скоростью скольжения ш5макс, т. е. т2 >-----. На практике
°\макс
значения трв1 и трв2 подбирают, исходя из условий, чтобы угол
сдвига между фазовыми напряжениями генераторов не превы-
шал 30°, а разность их частот была менее 3,5 Гц.
В рассматриваемом синхронизаторе интервалы времени трв1
и трв2 устанавливаются с помощью реле времени РВ1 и РВ2
(см. рис. 12.15).
Выходной сигнал и$„ формирователя импульсов ФИ сни-
мается с делителя напряжения, собранного на резисторах 7?3...
R4 (см. рис. 12.16). Для исключения формирования команды на
включение генератора при большой угловой скорости скольже-
ния о>,=<»,—ш2 в схему формирователя импульсов на вход вто-
рого усилителя включен конденсатор С.
При открытии транзистора V5 первого усилителя, когда на-
пряжение биения превышает эталонное напряжение UB, кон-
денсатор С через резистор R2 и диод V7 заряжается от источ-
ника напряжением 12,6 В. Так как сопротивление резистора R2
21. Изд. № 7934 321
*
значительно меньше сопротивления резистора /?1, то одновре-
менно с открытием транзистора V5 закрывается транзистор V3
и открываются транзисторы V4 и V6 второго усилителя. При
этом на выходе формирователя импульсов появляется напря-
жение, величина которого принимается за логическую «1» (рис.
12.17).
На интервале времени = t2—tu когда напряжение биения
становится меньше эталонного напряжения, закрывается тран-
зистор V5, конденсатор разряжается через резистор /?1, а тран-
зистор УЗ продолжает находиться в закрытом состоянии. После
разряда конденсатора С открывается транзистор УЗ, а транзи-
сторы У4 и Уб закрываются. Поэтому на выходе формировате-
ля напряжение снижается до нуля, что соответствует логичес-
кому «О».
При большой разности частот, включаемых на параллельную
работу генераторов, интервал времени Tj становится меньше
времени разряда конденсатора С и с выхода формирователя
импульсов в логическую часть синхронизатора и на вход реле
времени РВ1 будет подаваться сигнал логической «1».
Реле времени синхронизатора выполнено по мостовой схеме
(рис. 12.18), плечами которой являются конденсаторы Cl, С2
и резисторы /?1, /?2.
Рис. 12.L8. Принципиальная электрическая схема
реле времени •
В диагональ моста включен нуль-орган на транзисторах
VI и V2. Нуль-орган, имеющий .за счет положительной обрат-
ной связи через‘резистор /?3 и конденсатор СЗ релейную харак-
теристику». управляет включением транзистора УЗ. Если тран-
зистор УЗ открыт, то выходной сигнал (7рв реле времени, сни-
маемый с делителя напряжения на резисторах R4 и /?5, соот-
ветствует логической «1», а при его закрытии — логическому
«О».
322
Время выдержки реле РВ определяется емкостью кондеи
саторов Cl, С2 и сопротивлением резистора /?8. Конденсаторы
С1 и С2 заряжаются до напряжений, определяемых сопротив-
лениями резисторов /?6, R7.
Когда напряжение биения их превышает эталонное напря-
жение U3 (см. рис. 12.17), формирователь импульсов формиру-
ет логическую «1». Этот сигнал,-поступая на вход реле време-
ни, открывает транзистор V4 (рис. 12.18). Такое состояние реле
времени принимается за исходное. При этом конденсаторы за-
ряжаются до заданного уровня напряжений, а так как сопро-
тивление резистора R7 в несколько раз меньше сопротивления
резистора /?6, то транзисторы VI, V2 и V3 закрыты и сигнал
с выхода реле времени соответствует логическому «О».
Когда us < U3 и разность частот генераторов не превыша-
ет 2,5...3,5 Гц, на вход реле времени поступает сигнал логичес-
кого «О».
Этот сигнал закрывает транзистор V4, но транзисторы VI,
V2 и V3 продолжают находиться в исходном состоянии до тех
пор, пока не произойдет разряд конденсатора СТ и заряд кон-
денсатора С2 через резистор /?8.
Срабатывание реле времени, т. е. открытие транзисторов
VI ...V3, происходит в момент, когда напряжение на базе тран-
зистора VI будет превышать напряжение на его эмиттере.
В этом случае сигнал с выхода реле времени соответствует
логической «1». Если длительность сигнала логического «О»,
поступившего на базу транзистора V4, будет меньше времени
разряда—заряда конденсаторов С1 и С2, то реле времени не
сработает и на его выходе остается сигнал, соответствующий
логическому «О».
Формирование команды на. включение контактора присое-
динения Кпр, т. е. анализ выполнения условий синхронизации,
проводится в логической части ЛЧ1 синхронизатора. Если вре-
мя срабатывания реле РВ1 и РВ2 соответственно меньше интер-
валов времени т, и т2 (см. рис. 12.17), т. е. ^<5, и трв2<42, то
это свидетельствует о выполнении условий синхронизации.
Сигналы о состоянии реле времени РВ1 и РВ2 поступают в
логическую часть ЛЧ2 уравнителя частот. Если хотя бы одно
из условий трв1 < т, и трв2<^тг2 не выполняется, то уравнитель
частот начинает воздействовать на регулятор частоты вращения
привода. Уравнитель частот формирует сигнал на повышение
частоты вращения подключаемого генератора в сеть, если его
частота меньше частоты сети (/\<Аг), и на понижение если
Анализ этих условий по сигналам от формирователей им-
пульсов ФИ1 и ФИ2 и реле времени РВ1 и РВ2 проводится в
логической части Л42 уравнителя частот.
Формирователь импульсов ФИ2 выполнен аналогично фор-
мирователю ФИ1 (см. рис. 12.16), но его выходные сигналы,
21*
323
f
согласно уравнениям (12.13) и (12.17), сдвинуты относительно
друг друга на «/6.
На рис. 12.19 показаны временные диаграммы сигналов, по-
ступающих в логическую пасть уравнителя частот. На интер-
вале времени т/ = t2'—1\, когда напряжение «у=Ид1+«в2 мень-
ше эталонного Ua, выходное напряжение формирователя им-
Рис. 12.19. Временные диаграммы напряжений формирователя
импульсов
пульсов ФИ2 соответствует логическому «О», а на участке
т2' = £3'—1% это напряжение соответствует логической «1» (рис.
12.19). Из уравнения (12.17) следует, что при U3 = 2t/msinте/6,
если момент времени t2 (рис. 12.19,а) предшествует моменту
времени tz (рис. 12.19,6), то имеет место случай, когда частота
подключаемого генератора больше частоты сети (Л>/г); если
момент времени наступает позже момента /г', то
В зависимости от знака отклонения частоты подключаемого
генератора от частоты сети уравнитель синхронизатора фор-
мирует команду на повышение (/f) или понижение (f\) частоты
вращения привода постоянной скорости. Эти сигналы после со-
ответствующего усиления усилителями У2 или УЗ поступают в
его регулятор частоты вращения.
В случае выполнения условий синхронизации активный син-
хронизатор выдает команду на срабатывание контактора при-
соединения Кпр, подключающего генератор на параллельную
работу с ранее включенным в сеть генератором.
Глава 13
СИСТЕМЫ РАСПРЕДЕЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ
ЭНЕРГИИ
13.1. КЛАССИФИКАЦИЯ СИСТЕМ РАСПРЕДЕЛЕНИЯ
ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И ОСНОВНЫЕ ТРЕБОВАНИЯ,
ПРЕДЪЯВЛЯЕМЫЕ К НИМ
Совокупность устройств, передающих электрическую энер-
гию от системы генерирования к приемникам, ‘называется систе-
мой распределения.
Система распределения электрической энергии обеспечивает
поддержание на зажимах приемников электроэнергии заданно-
го качества, производство необходимых коммутаций, резерви-
рование электропитания приемников и их защиту при отказах
в системе.
На ЛА электрическая энергия от источников вначале подво-
дится к шинам центральных распределительных устройств
(ЦРУ), а затем в зависимости от принятой структуры системы
электроснабжения поступает либо непосредственно к фидерам
приемников, либо к шинам промежуточных распределительных
устройств (РУ), от которых производится ее дальнейшее рас-
пределение.
РУ конструктивно выполняются в виде панелей и щитков,
имеющих закрытый корпус. В них размещаются токоведущие
элементы (распределительные шины), коммутационные и за-
щитные аппараты. РУ соединяются между собой и с приемни-
ками электроэнергии силовыми электрическими проводами.
В состав системы распределения электрической энергии кро-
ме проводов и распределительных устройств входят: монтажно-
установочное оборудование, приборы контроля качества элек-
трической энергии, а также устройства защиты приемников от
воздействия электрических помех, статического электричества
и внешних электромагнитных полей (фильтры, металлизация,
экраны и т. п.).
Системы распределения электрической энергии принято под-
разделять в зависимости от способа подключения источников
(каналов генерирования) к шинам ЦРУ на централизованные,
децентрализованные, раздельные и смешанные.
325
В централизованных системах распределения все источни-
ки электроэнергии .подключаются к шинам одного ЦРУ и рабо-
тают параллельно на общую нагрузку (рис. 13.1,о). К преиму-
Рис. 13.1. Схемы включения генераторов в системах распределения:
а — централизованной; б — децентрализованной ив — раздельной
ществам такого способа подключения относят возможность
обеспечения беспрерывного питания приемников электрической
энергии при отказах (отключении) части источников, лучшие
условия работы мощных потребителей и др. Основной недоста-
ток централизованных систем распределения — низкая живу-
честь: при КЗ на шинах ЦРУ прекращается питание всех при-
емников.
В децентрализованных системах распределения источники
по одному или группами подключаются к нескольким ЦРУ, от
которых осуществляется питание соответствующих групп при-
емников. ЦРУ между собой соединяются проводами через ап-
параты защиты (рис. 13.1,6), в результате чего источники элек-
трической энергии так же, как и в централизованных системах,
работают параллельно на общую нагрузку.
При КЗ на шинах какого-либо ЦРУ сохраняется питание
всех приемников за исключением тех, которые подключены к
неисправному распределительному устройству.
В раздельных системах распределения каждый источник
обеспечивает питанием свое ЦРУ и соответствующую группу
приемников. Для повышения надежности электропитания в та-
ких системах распределения предусматрйвается взаимное ре-
зервирование — при отказе (отключении) какого-либо источ-
ника его ЦРУ автоматически подключается к исправному ис-
точнику (рис. 13.1,в).
В смешанных системах распределения используются комби-
нации рассмотренных выше способов подключения источников
электрической энергии к шинам ЦРУ.
На современных ЛА в системах электроснабжения постояв-,
него тока находят применение все перечисленные типы систем
326
распределения, а в системах НереМёййбго тока — преимущест-
венно раздельные системы распределения.
Провода и шины системы распределения образуют распре-
делительную электрическую сеть. Кроме (проводов электричес-
кой сети на ЛА прокладывается большое число электрических
проводов так называемой информационной сети, которые пред-
назначены для передачи электрических сигналов между агре-
гатами, системами и комплексами, бортового оборудования. Все
электрические провода с установленной в их цепях коммутаци-
онной и защитной аппаратурой объединяют общим наименова-
нием — бортовая электрическая сеть (БЭС).
Электрические распределительные сети классифицируют по
назначению, по конфигурации и по техническому исполнению.
По назначению распределительные сети ЛА делят на пер-
вичные и вторичные. Первичная распределительная сеть связы-
вает РУ между собой и ЦРУ. Ко вторичной распределительной
сети относят цепи питания всех приемников электрической энер-
гии от РУ или ЦРУ.
По конфигурации распределительные сети делят на ради-
альные, магистральные и смешанные, а также на разомкнутые
и замкнутые.
В радиальных сетях все РУ соединяются непосредственно
с ЦРУ (рис. 13.2,п). В таких сетях легко достигается селектив-
Рис. 13.2. Разомкнутые электрические сети:
а — радиальная; б — магистральная
ность действия защиты, резервирование и автоматизация кон-
троля их состояния. Простота монтажа и эксплуатации спо-
собствует их широкому применению на легких ЛА.
В магистральных электрических сетях РУ соединяются меж-
ду собой и с ЦРУ последовательно (рис. 13.2,6). В таких се-
тях труднее обеспечить селективность действия защиты и резер-
вирование; изменение нагрузки одного РУ оказывает влияние
на величину напряжения на шинах всех остальных РУ; напря-
жение на шинах РУ уменьшается по мере удаления их от ЦРУ.
Безотказность магистральных сетей ниже, чем радиальных,
поскольку отказы одного РУ влияют на работу всех остальных.
327
Тем не менее магистральные распределительные сети находят
применение па тяжелых ЛА, так .как при большой протяжен-
ности проводов они легче радиальных.
В смешанных сетях применяется как последовательное, так
п параллельное соединение РУ с ЦРУ.
Разомкнутой сетью называется электрическая сеть, в кото-
рой каждое РУ получает питание только от одного РУ или
ЦРУ (рис. 13.2). Замкнутой сетью называется сеть, в которой
РУ при нормальной работе системы электроснабжения получа-
ют питание по меньшей (мере от двух других РУ или ЦРУ (рис.
13.3). Замкнутые сети по сравнению с разомкнутыми облада-
W/ F1 F2 г РУ' F9
F3 -Ю
ЦРУ2р5 F6 -P^Ff/
F7 F8 PM F12
Рис. 13.3. Замкнутые электрические сети:
а — радиальная; б — магистральная
ют более высокой живучестью, так как при повреждении (об-
рыве или КЗ) любой линии между РУ и наличии селективной
защиты питание приемников электроэнергии не нарушается.
Техническое исполнение электрической сети характеризуется
способом использования проводящего корпуса ЛА: в трехфаз-
ных трехпроводных сетях корпус ЛА является силовой ней-
тралью, в однопроводных сетях однофазного переменного тока
и. постоянного тока — одним из проводов. Использование ме-
таллического корпуса ЛА в качестве одного из проводов позво-
ляет уменьшить потери напряжения и существенно снизить мас-
су сети (на 35...40®/о в однопроводных сетях по сравнению с
Двухпроводной).
Система распределения электрической энергии на ЛА долж-
на обеспечивать удовлетворение следующих основных техниче-
ских требований, обусловленных ее назначением:
• — живучесть, т. е. способность обеспечить бесперебойное
питание приемников при наличии отказов (повреждений);
— минимальные потери электрической энергии при переда-
че ее от источников к приемникам;
— миним'альная масса при заданном качестве электрической
энергии на зажимах приемников;
— безопасность в обслуживании.
328
Требование Живучести диктуется высокой вероятностью По-
вреждения электрической сети ЛА при его боевых поврежде-
ниях, поскольку электрическая сеть охватывает все отсеки пла-
нера и силовых установок. Живучесть системы распределения
электроэнергии обеспечивается выбором рациональной конфи-
гурации распределительной сети, резервированием наиболее
ответственных участков и эффективной защитой от аварийных
режимов работы (обрывов, КЗ и перегрузок).
Потери электрической энергии в системе распределения об-
условлены конечным значением проводимости электрических
проводов и потому неизбежны. Однако эти потери не должны
приводить к недопустимому ухудшению качества электричес-
кой энергии на зажимах приемников при изменении нагрузки
в системе электроснабжения и при производстве коммутаций,
предусматриваемых на случаи отказов отдельных элементов си-
стемы распределения и направленных на повышение ее живу-
чести.
Требование минимальной массы электрической сети нахо-
дится в противоречии с первыми двумя требованиями: при од-
ной и той же конфигурации масса сети тем меньше, чем мень-
ше сечение проводов, но при этом увеличиваются потери на-
пряжения.
Максимальное удовлетворение всех требований, предъявля-
емых к электрическим сетям, возможно только на основе их
оптимального (в смысле минимума конструктивной или взлет-
ной массы) проектирования.
13.2. БОРТОВЫЕ ЭЛЕКТРИЧЕСКИЕ ПРОВОДА
К проводам, применяемым ’на ЛА, предъявляют высокие тре-
бования в отношении их электрических свойств, механической
прочности, теплостойкости и стойкости к воздействиям топлива,
масла и т. п.
Для монтажа электрических сетей ЛА используются изоли-
рованные бортовые многожильные медные и алюминиевые
провода (табл. 13.1) марок БПВЛ (А), БИН, ПТ Л (А), БПДО
(У), БИФ (Н), которые выпускаются сечением ют 0,2 до 95 мм2
в соответствии со шкалой стандартных сечений. Провода сече-
нием более 95 мм2 на ЛА не применяются из-за трудности их
монтажа. Минимальное сечение проводов ограничивается ус-
ловиями механической прочности и составляет: 35 мм2 для алю-
миниевых проводов марок БПВЛА и ПТЛА, 0,35 мм2 для мед-
ных бортовых проводов всех марок и 0,2 мм2 для упрочненных
проводов марок БПДОУ и БИФ.Н. Повышенная прочность про-
водов марки БПДОУ достигается применением бронзовых жил,
а проводов марки БИФН — никелированием медных жил.
329
Таблицй 13.1
Диапазон сечений и тип изоляции бортОвЫх электрических проводов
Марка провода Сечение проводов, мм2 Тип изоляции Допусти- мая темпе- ратура, °,С
БПВЛ БПВЛА 0.35...95 35, 50, 70, 95 Пластикат поливинилхлорид- ный, оплетка из хлопчатобу- мажной пряжи, покрытая ла- ком 70 70
БИН 0.35...70 Обмотка пленкой фторопла- ета-4, оплетка из стеклянных нитей, покрытая суспензией фторопласта-4 250
ПТЛ-200 (250) ПТЛА 0,35.-70 4...70 Фторопласт-4, оплетка из стек- ловолокна, покрытая лаком 200 (250)
БПДО БПДОУ 0,35.„95 0,2; 0,35; 0,5 Полиэтилен фторопласт 105
БИФ БИФН 0,20...2,5* 0,2;' 0,35; 0,5 Полиамидная пленка с фторо- пластовым покрытием, под- вергнувшаяся термообработке 200
В тех случаях, когда по условиям механической прочности
медные провода могут быть заменены алюминиевыми, достига-
ется существенный выигрыш в массе, так как при одних и тех
же условиях работы, равной длине и одинаковом омическом
сопротивлении массы медных mcu и алюминиевых тм проводов
относятся как
Wcu___Рсц * Ku 2
^Л| рА1‘ТЛ1
(13.1)
где ₽, у—соответственно удельное электрическое сопротивление и
плотность материала проводов (рси = 1,75-10~8Ом• м;
pAi= 2,9- Ю~8Ом-м; уси = 8,9-10э кг-м’3; 7*1= 2,7 кг»
•м~8).
Для удобства монтажа электрические провода группируются
в жгуты, которые прокладываются на ЛА в, специальных коро-
бах открытого или закрытого исполнения, а в отсеках авиаци-
онных двигателей — в специальных бронированных рукавах
(трубах). Технологические разъемы проводов и жгутов выпол-
няются с помощью монтажных колодок, индивидуальных и
штепсельных разъемов и других соединителей.
Концы приводов заделываются в наконечники и разъемы
методом пайки или путем обжима. Для пайки медных прово-
дов применяются легкоплавкие оловянисто-свинцовые припои
330
Тйпа ПОС, серебряные припои типа ПСР и флюсы, не содержа-
щие кислот. Алюминиевые провода заделываются в наконеч-
ники в основном путем обжима с применением специальной
пасты (50% цинкового порошка и 50% вазелина), предотвра-
щающей их окисление.
Для облегчения поиска неисправностей в процессе эксплуа-
тации и войскового ремонта все провода имеют цветовую и бук-
венно-цифровую маркировку.
Цвет изоляции проводов отражает их принадлежность к оп-
ределенным видам оборудования ЛА: красный (розовый) — во-
оружение; синий (голубой) — радиооборудование; белый (на-
туральный) — электрооборудование постоянного тока; жел-
тый (оранжевый) — электрооборудование переменного тока;
зеленый — экспериментальное оборудование.
Буквенно-цифровая маркировка проводов включает в себя:
порядковый чертежный номер фидерной электрической схемы;
буквенный знак, начиная с буквы А русского алфавита, указы-
вающий на принадлежность фидера к определенному аппара-
ту защиты; цифровой знак, указывающий порядковый номер
провода соответствующего фидера. Маркировочные обозначения
должны наноситься несмываемой краской на изоляцию или на
бирку из изоляционного материала на концах проводов и по
всей длине провода с интервалом не более 150 мм.
При маркировке фазных проводов трехфазного тока уста-
навливаются цветные бирки: А •— красного, В — желтого, С —
синего цвета, нулевой провод — белая бирка с черным отличи-
тельным пояском. Аналогично окрашиваются распределитель-
ные шины переменного тока.
Для алюминиевых проводов бирки изготавливаются с крас-
ным отличительным пояском шириной не менее 5 мм на конце
бирки, противоположном месту заделки провода.
Тип и сечение проводов для отдельных участков и всей элек-
трической сети в целом выбираются по допустимой плотности
тока и допустимому падению напряжения в них.
Плотность тока в электрических проводах ограничивается
из-за их нагрева, который обусловлен потерями электрической
энергии на их активном сопротивлении.
Предельно допустимую плотность тока/дОП для заданного се-
чения провода s определяют по формуле
' Т _ Т W2
доп^ , (13.2)
\ pVs /
где 7ДОП — допустимая для данного типа провода температура;
То — температура окружающей среды;
а— коэффициент теплопередачи с поверхности провода
в окружающую среду, который зависит от условий
331
Прокладки провода (одиночно йлй в жгуте), влаж-
ности воздуха, его плотности и др.;
р— удельное электрическое сопротивление материала
жилы провода;
k — коэффициент, равный отношению диаметра провода
с изоляцией к. диаметру токопроводящей жилы.
Анализ выражения (13.2) показывает, что допустимая плот-
ность тока в проводах одного и того же типа увеличивается с
уменьшением сечения провода и не зависит от его длины. Уве-
личение допустимой плотности тока объясняется тем, что при
уменьшении площади сечения провода площадь его наружной
поверхности уменьшается в .меньшей степени, чем объем, и
эффективность охлаждения провода повышается.
Используя это свойство с целью уменьшения массы электри-
ческой сети, в некоторых случаях вместо одного провода про-
кладывают несколько проводов меньшего сечения.
На практике допустимое по условиям нагрева сечение про-
водов не рассчитывают, поскольку оценить интенсивность их
охлаждения и учесть нагрев от соседних проводов или агрега-
тов для реальных условий эксплуатации практически невоз-
можно.
Сечения проводов выбирают по специальным таблицам, раз-
рабатываемым экспериментально в условиях, близких к экс-
плуатационным. В. таких таблицах приводятся допустимые зна-
чения тока нагрузки при трех характерных режимах работы:
1) внутри фюзеляжа .при температуре + (20...30)°C и высоте
полета до 20 км; 2) в герметичной кабине при 20°С; 3) в отсеке
авиационного двигателя при + (20...50)°С. Максимальные допу-
стимые значения тока нагрузки относятся к первому режиму
работы, минимальные — к третьему.
Допустимое падение напряжения на проводах системы рас-
пределения устанавливается, исходя из точности стабилизации
напряжения в точке регулирования и требований к точности
стабилизации напряжения на зажимах приемника электричес-
кой энергии, как
^^доп~^мин ^Лиин лоп> (13.3)
где 1/мИН — минимальное значение напряжения в точке регу-
лирования;
£/мии доп — минимально допустимое напряжение на зажи-
мах приемника.
В электрических сетях постоянного тока падение напряже-
ния на проводах обусловлено лишь их омическим сопротивле-
нием R — р - . Поэтому сечение провода выбирают по шкале
стандартных сечений, исходя из условия
s>----------------/, (13.4)
р (Д 47ДОП — Д t7K)
332
где Л UK — сумма падений напряжения на переходных сопро-
тивлениях контактных соединений, коммутационной
и защитной аппаратуры, а также других элемен-
тов, установленных в цепи питания рассматривае-
мого приемника электрической энергии.
В электрических сетях переменного тока при .расчете про-
водов по допустимому падению, напряжения, в общем случае,
следует учитывать не только их активное сопротивление г, но
и индуктивное xL.
Активное сопротивление проводов переменному току умень-
шается обратно пропорционально сечению, но всегда несколько
больше омического вследствие поверхностного эффекта. При
частоте тока 4'00 Гц это отличие становится существенным для
медных проводов сечением более 25 мм2. У алюминиевых про-
водов поверхностный эффект проявляется слабее и его можно
не учитывать. Так, например, если у медных проводов сечением
95 мм2 отношение активного сопротивления к омическому сос-
тавляет 1,32, то у алюминиевых проводов того же сечения оно
равно 1,06.
Индуктивное сопротивление проводов в отличие от активного
с увеличением сечения возрастает и для проводов больших се-
чений становится преобладающим (рис. 13.4).
Падение напряжения на проводе Д(/=/(г+/хЛ) обусловливает
сдвиг по фазе напряжений в начале и в конце провода (рис.
13.5).
Рис. 13.4. Зависимость соотно-
шения активного г и индуктив-
ного лу сопротивлений прово-
дов от их сечений 5
Рис. 13.5. Векторная диаграмма
тока и напряжений в проводе
При расчетах электрических сетей важно знать не полное
падение напряжения Д(7, а потерю напряжения Дб/П —£7(—U2,
т. е. разность абсолютных значений напряжений в начале и в конце
провода, которая приближенно может быть вычислена по фор-
муле
333
’Д£7П ^ /•(r-costpa + sin ®2), (13.5)
где <?2 — угол сдвига фаз между напряжением и током в конце
линии.
С учетом этого сечение проводов разомкнутой радиальной
электрической сети переменного тока рассчитывают в такой по-
следовательности :
— определяют допустимое значение потери напряжения
только на активном сопротивлении провода, ориентировочно вы-
брав его сечение, чтобы задать значение xL, по формуле
Л t/доп = С/доп — ДХ ~xL 'I'sin (13.6)
— определяют предварительное сечение провода
Р' Д U доп
где I — длина провода;
р — его удельное омическое сопротивление;
— для ближайшего стандартного сечения провода s>s' на-
ходят его активное сопротивление г, уточняют значения xL,tdJion
(13.6) и s' (13.7) и так до тех пор, пока сечение провода не бу-
дет удовлетворять условию
д^к + /•(>• cos <р2+ ^-sin^X Шдоп. (13.8)
После расчета проводов по допустимому падению напряже-
ния производят их проверку по допустимой плотности тока.
Для расчета сечений проводов более сложных электрических
сетей (замкнутых радиальных и магистральных), а также для
оптимизации электрических сетей по совокупности нескольких
критериев (масса, надежность, стоимость и т. п.) используют
методы математического программирования.
13.3. ЗАЩИТА СИСТЕМ РАСПРЕДЕЛЕНИЯ
_______ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
Аппараты защиты системы распределения электроэнергии
предназначены для отключения ее отдельных участков (эле-
ментов) при возникновении в них коротких замыканий и недо-
пустимых перегрузок. Тип аппарата защит,ы подбирают по ве-
личине и характеру нагрузки защищаемого участка.
По характеру нагрузки в системах распределения различа-
ют две группы электрических цепей:
— цепи, в которых при нормальных режимах работы пере-
грузки быть не могут. К ним относятся вторичные распредели-
тельные сетиг-обеспечивающие питание световых и нагреватель-
ных устройств, приборы и т. п. В таких сетях аппарат защиты
должен немедленно срабатывать в случае, когда ток превыша-
ет заданное значение тока нагрузки;
334
— цепи, в .которых возможны и вполне допустимы кратко-
временные перегрузки. К ним относятся вторичные распредели-
тельные сети, предназначенные для питания электропривода,
и первичные распределительные сети. Аппараты защиты, уста-
навливаемые в таких сетях, должны реагировать на короткие
замыкания немедленно, а на перегрузку — с определенной вы-
держкой времени для того, чтобы максимально использовать
перегрузочные возможности защищаемого объекта.
В системах распределения электроэнергии применяют ап-
параты максимально-токовой и дифференциально-токовой за-
щиты.
Максимально-токовая защита срабатывает в случае, когда
ток защищаемого участка электрической сети превышает допу-
стимое значение. В системах распределения электроэнергии на
ЛА максимально-токовая защита реализуется предохранителя-
ми и тепловыми (биметаллическими) автоматами.
Основной характеристикой, на основании которой выбирают
аппараты максимально-токовой защиты и оценивают эффек-
тивность их действия, является ампер-секундная характеристи-
ка — зависимость времени срабатывания /ср от величины тока.
Ампер-секундная характеристика аппарата защиты должна со-
ответствовать перегрузочной характеристике защищаемого объ-
екта, т. е. зависимости допустимого значения тока нагрузки
от времени.
Время срабатывания предохранителей и тепловых автома-
тов защиты, если не учитывать время горения дуги в месте раз-
рыва электрической цепи, определяется временем нагрева чув-
ствительного элемента до некоторого критического значения
температуры Ткр— плавления (предохранитель) или деформа-
ции (тепловой автомат).
Процесс нагрева чувствительного элемента при протекании
по нему тока / описывается уравнением баланса тепла вида
PR —ст — +а5(Г-То), (13.9)
dt
гД; R — активное сопротивление чувствительного элемента;
с — теплоемкость чувствительного элемента;
m,S — его масса и площадь наружной поверхности;
а — коэффициент теплопередачи в окружающую среду;
Т — температура чувствительного элемента;
То — температура окружающей среды.
Из решения данного уравнения найдем закон изменения тем-
пературы чувствительного элемента
Т = То
PR
aS
1 — exp
(13.10)
335
Тогда время срабатывания аппарата максимально-токовой за-
щиты определится как
ст 1
ЛР = -Д1п------. (13.11)
aS _7)
jip ' КР о'
Из анализа выражения (13.11) следует, что предохранители
и тепловые автоматы обладают зависимыми ампер-секундными
характеристиками, поскольку время их срабатывания уменьша-
ется с увеличением тока. Требуемый закон изменения времени
срабатывания таких аппаратов реализуется соответствующим
выбором параметров с, т, S, а, Гкр, которые зависят от матери-
ала и размеров чувствительного элемента и конструктивного ис-
полнения аппарата защиты.
Минимальное значение тока, при котором срабатывает ап-
парат максимально-токовой защиты, называют критическим.
Этот ток определяют при условии /ср->оо как
/кр= ]/а|(Гкр-Т0) . (13.12)
Из анализа приведенного выражения следует, что критиче-
ский ток /кр и, следовательно, время срабатывания /ср аппара-
тов максимально-токовой защиты изменяются в зависимости от
температуры окружающей среды То и условий охлаждения (а).
В связи с этим номинальное значение тока аппарата защиты
Лом (т- е. такое максимальное расчетное значение тока, при ко-
тором аппарат защиты должен работать длительно без сраба-
тывания) для типовых условий применения устанавливается
меньше критического в 1,2... 1,7 раза. Номинальный ток аппара-
тов максимально-токовой защиты указывается цифрами в их
наименовании, например, ТП-600, ПМ-2, АЗРГ-50 и т. д.
В системах электроснабжения ЛА применяют предохрани-
тели типа ПВ, СП, ТП, ИП и ПМ.
Неинерционные (плавкие) стеклянные предохранители типа
СП выпускают на токи до 40 А, ПВ — до 80 А. Чувствительный
элемент (плавкая вставка) таких предохранителей представ-
ляет собой медную, серебряную или цинковую проволоку, на-
тянутую между двумя латунными колпачками. Критический и
номинальный токи предохранителей находятся в соотношении:
для ПВ /кр= 1,25 7НОМ, для СП /кр = (1,21... 1,37)/ном.
Тугоплавкие неинерционные предохранители типа ТП вы-
пускаются наетоки (200...900) А, чем и отличаются по назначе-
нию от плавких. Плавкая вставка такого предохранителя пред-
ставляет собой медную пластину, помещенную в асбоцементный
корпус. Для тугоплавких предохранителей 7кр = (1.5... 1,7) /ном.
336
Инерционный предохранитель типа ИП (рис. 13.6) имеет
две плавкие вставки — малоинерционную тугоплавкую и инер-
ционную легкоплавкую. Инерционным чувствительным элемен-
том предохранителя является образованный пайкой узел из ла-
тунной вставки 1, скоб 3, натянутой пружины 5 и медной пла-
стины 4. При небольшой перегрузке тепло от нагревательного
Рис. 13.6. Инерционный предохра-
нитель
элемента 6 постепенно передается через медную пластину 5 к
месту спая, вызывая плавление легкоплавкого припоя 2. Ско-
бы при этом освобождаются и под воздействием пружины раз-
рывают электрическую цепь. При большой перегрузке или ко-
ротких замыканиях плавится нагревательный элемент 6 или
латунная вставка 1.
Ампер-секундная характеристика инерционного предохрани-
теля (рис. 13.7,а) состоит из двух участков: кривая 1 соответст-
вует инерционной части аппарата защиты, кривая П — туго-
плавкому нагревательному элементу и латунной вставке.
Рис. 13.7. Ампер-секундиые характеристики
инерционного предохранителя:
а — теоретическая; б — реальная
Предохранители типа ИП выпускаются на токи от
250 А; /кр = (1,2... 1,4) /НОм.
5 ДО
22. Изд. № 7934
337
Малоинерционные предохранители типа ПМ по своей конст-
рукции близки к предохранителям типа ИП и выпускаются на
токи от 2 до 150 А. Такие предохранители снабжаются индика-
торами срабатывания, что существенно упрощает их контроль в
процессе эксплуатации.
Предохранители просты по конструкции, имеют малые габа-
риты и стоимость, что обусловливает их широкое применение
для защиты электрических сетей. Их основными недостатками
являются одноразовость действия, а также большой разброс
значений критического тока и времени срабатывания предохра-
нителей одного и того же типа и номинала. В связи с разбро-
сом этих параметров ампер-секундная характеристика предо-
хранителя представляет собой не сплошную линию, а зону воз-
можных значений времени срабатывания при изменении тока
(рис. 13.7,6).
Тепловые (биметаллические) автоматы объединяют в одной
конструкции выключатель и устройство защиты.
На ЛА в цепях постоянного тока 27 В используются негер-
метичные автоматы типа АЗР и АЗС, унифицированные герме-
тичные автоматы типа АЗК, АЗРГ, АЗСГ, а в цепях перемен-
ного тока 200 В — автоматы АЗФ1 (однофазные) и АЗФЗ (трех-
фазные).
При автоматическом срабатывании повторное включение
автоматов типа АЗР (Г), АЗФ1 и АЗФЗ становится возможным
лишь после охлаждения их чувствительных элементов. Кинема-
тическая схема такого автомата приведена на рис. 13.8.
Во.взведенном состоянии собачка 3 входит в зацепление с
рычагом 4 и удерживается в этом состоянии пружиной 5. Од-
новременно пружина, воздействуя на рычаг 8, удерживает кон-
такты 9 в замкнутом состоянии.
При перегрузке ток, протекая по биметаллической пластине
7, вызывает ее нагрев. Биметаллическая пластина при этом де-
формируется и нажимает на рычаг 4, который поворачивается
и освобождает собачку 3. Пружина 5 начинает разжиматься, по-
ворачивая собачку вокруг оси 2. При этом давление пружины
5 на контакты уменьшается и они размыкаются под воздейст-
вием пружины 6.
Для повторного включения необходимо, чтобы собачка 3 при
повороте рукоятки 1 опиралась на рычаг 4. Это становится воз-
можным лишь тогда, когда биметаллическая пластина остынет
и возвратится в исходное положение.
Автоматы защиты типа АЗК имеют подобную кинематику,
но снабжены кнопочным управлением.
Кинематическая схема автоматов защиты типа АЗС и
АЗСГ (риег 13.9) обеспечивает возможность принудительного
удержания контактов 7, 8 в замкнутом состоянии с помощью
рукоятки 5 даже при нагретом состоянии биметаллической пла-
стины 10. Такие автоматы устанавливаются в цепях питания
338
электромеханизмов привода жизненно важных для ЛА агре-
гатов (механизации крыла, выпуска и уборки шасси, топлив-
Рис. 13.8. Кинематическая схема
автомата защиты со свободным
расцеплением:
1 — ручка; 2 — ось; 3 — собач-
ка; 4 — рычаг; 5, 6 — пружины;
7 — биметаллическая пластина:
8 — рычаг; 9 — контакты
Рис. 13.9. Кинематическая схема ав-
томата защиты без свободного рас-
цепления:
1 — защелка; 2 — каретка; 3 —
вилка; 4 — поршень; 5 — ручка-
6, 9 — пружины; 7, 8 — контакты;
10 — биметаллическая пластина;
11 — зуб
ной, противопожарной систем и т. п.), допускающих длитель-
ные перегрузки и расположенных в безопасных в пожарном от-
ношении отсеках.
Биметаллические автоматы обладают относительно боль-
шой тепловой инерцией и в ряДе случаев не обеспечивают эф-
фективную защиту от коротких замыканий. Для повышения
быстродействия при КЗ автоматы типа АЗСГ и АЗРГ на токи
20...50 А дополняются электромагнитным расцепителем, сраба-
тывающим при больших токах. Ампер-секундная характеристи-
ка таких автоматов имеет отсечку по току.
Электромагнитный расцепитель автомата типа АЗРГ (рис.
13.10) состоит из обмотки, в качестве которой служит виток
шины 17, Я1рма 14, якоря 16 и регулировочного винта (толкателя')
15. При больших токах за счет МДС, создаваемой обмоткой,
якорь 16 притягивается к ярму 14 и через упор 12 выводит за-
щелку 10 из зацепления с собачкой 4, разъединяя таким обра-
зом контакты 2.
Для защиты цепей с номинальным током более 50 А ис-
пользуют автоматы с независимой ампер-секундной характери-
стикой. В таких автоматах биметаллическая пластина отсутст-
вует, отсечка по току осуществляется электромагнитным рас-
цепителем, подобным описанному.
22*
339
Предохранители и биметаллические автоматы обеспечивают
высокую селективность защиты радиальных электрических се-
Рис. 13.10. Конструкция автомата защиты типа АЗРГ:
1 — корпус; 2 — контакты; .3 — скоба; 4 —
собачка; 5 — крышка; 6 — ручка; 7 — уплот-
нитель; 8 — палец; 9 — стакан; 10 — защелка;
11 — пружина; 12 — упор; 13 — температурный
компенсатор; 14 — ярмо; 15 •— регулировочный
винт; 16 — якорь; 17 — шина; 1,8 — биметалли-
ческая пластина; 19 — основная пружина
тей. Для обеспечения селективности действия номинальный ток
аппарата максима льно-токовой
Рис. 13.11. Схема расщеплен-
ного участка электрической
сети
•проводов (рис. 13.11) в соответствии с номинальными значе-
защиты должен быть равным
или несколько большим номи-
нального тока защищаемого
объекта, а его ампер-секунд-
ная характеристика должна
располагаться возможно бли-
же к перегрузочной характери-
стике защищаемого объекта.
В расщепленных участках
электрической сети аппараты
защиты устанавливаются на
концах участка в каждом из
340
пнями их токов нагрузки. При коротком замыкании, например
в точке «а», предохранители F1 и F2 плавятся, изолируя пов-
режденный провод от сети. Остальные предохранители не пла-
вятся, так как их токи при этом меньше.
Селективность максимально-токовой защиты магистральных
сетей обеспечивается подбором ампер-секундных характеристик
последовательно соединенных аппаратор защиты: чем ближе
аппарат защиты расположен к источнику электроэнергии, тем
больше должны быть время его срабатывания и номинальный
ток. Так, например, в случаях, когда защита магистрали осу-
ществляется однотипными аппаратами, ’для обеспечения ее се-
лективности номинальные токи соседних аппаратов защиты
должны отличаться не менее чем в два раза. Это в ряде случа-
ев затрудняет построение защиты и, кроме того, приводит к
длительным перерывам питания потребителей при коротких за-
мыканиях в системе распределения.
В замкнутых сетях аппараты максимально-токовой защиты
не могут обеспечить селективное отключение участков с корот-
кими замыканиями, так как при этом токи в исправных участ-
ках могут значительно превосходить допустимые значения и
вызвать срабатывание установленных в них аппаратов защиты.
Указанных недостатков лишены аппараты дифференциально-
токовой защиты.
f
Глава 14
СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ ТИПОВЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
14.1. СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ ЛЕГКИХ
И СРЕДНИХ САМОЛЕТОВ
На легких ЛА (истребителях, истребителях-бомбардировщи-
ках, самолетах огневой поддержки сухопутных войск). устанав-
ливается, как правило, один газотурбинный двигатель, реже —
два. Привод генераторов осуществляется либо непосредствен-
но от коробок приводов авиационных двигателей, либо от общей
коробки самолетных агрегатов (КСА).
На ЛА устанавливаются, как правило, две независимые
первичные системы электроснабжения: переменного трехфазно-
го тока 200/115 В постоянной частоты 400 Гц и постоянного
тока 28,5 В.
ЦРУ!
F7
ЦРУ2
~3$208 В
^FB-FfO
Рис. 14.1. Структурная схема системы электроснабжения истребителя
Пример схемы системы электроснабжения истребителя при-
веден на рис. 14.1.
342
Система электроснабжения постоянного тока вКЛЮчаеД в
свой состав коллекторный или бесконтактный генератор Г,
блок регулирования и защиты (БРЗ), аппарат дифференциаль-
но-минимальной защиты и управления типа АЗУ и радиальную
первичную распределительную сеть. В качестве аварийного ис-
точника постоянного тока используются аккумуляторные ба-
тареи Б.
В канале генерирования электроэнергии постоянного тока
предусматриваются защиты от аварийного повышения напряже-
ния, коротких замыканий и «обратного» тока. При отказе (от-
ключении) канала генерирования постоянного тока питание при-
емников осуществляется от аккумуляторной батареи Б. Так как
аккумуляторная батарея подключена к шинам ЦРУ постоян-
ного тока, то предусматривается отключение части приемников
(третьей и второй категорий) с помощью специального реле.
Защита системы распределения и приемников от коротких
замыканий и перегрузок осуществляется с помощью предохра-
нителей и автоматов защиты типа АЗР, АЗК, АЗС. Для повы-
шения надежности бортовой распределительной сети предусмот-
рено резервное питание наиболее ответственных РУ, монтаж
центральных участков сети расщепленными проводами и др.
(рис. 14.1).
В состав системы электроснабжения переменного тока вхо-
дят бесконтактный синхронный генератор Дс приводом посто-
янной скорости и регулятором частоты вращения ППС, регулято-
ром напряжения PH и блоком защиты и управления БЗУ, а
также радиальная первичная распределительная сеть. Питание
приемников переменного трехфазного тока напряжением 36 В
осуществляется от понижающего трансформатора Т.
Блок БЗУ осуществляет защиту от коротких замыканий, по-
вышения и снижения напряжения и частоты, обрывов фаз и не-
симметрии фазных напряжений генератора. В системе распре-
деления защита от коротких замыканий обеспечивается с по-
мощью предохранителей и автоматов защиты типа АЗФ1, АЗФЗ.
Распределительные устройства приемников первой категории,
кроме того, защищаются от снижения напряжения и обрывов
фаз с помощью специальных аппаратов типа БЗТ (блок защи-
ты трансформаторов). При отказе в системе БЗТ осуществля-
ет переключение защищаемого РУ на питание от аварийного
источника переменного тока (электромашинного преобразова-
теля типа ПТО, работающего в режиме ненагруженного ре-
зерва).
На земле при неработающих авиационных двигателях пи-
тание бортового оборудования осуществляется от наземных ис-
точников через розетки аэродромного питания постоянного
РАП1 и переменного РАП2 тока.
На отдельных типах легких и средних ЛА с двумя двигате-
лями на каждом из них, в ряде случаев устанавливается по
343
одному генераъОру постоянного и переменного тока. Соответст-
венно на ЛА используются две двухканальные системы элект-
роснабжения постоянного и переменного тока постоянной ча-
стоты.
Генераторы постоянного тока в таких системах электроснаб-
жения подключаются к соответствующим ЦРУ и работают па-
раллельно. Поэтому в системах регулирования напряжения и
аппаратах защиты предусматриваются специальные элементы
(уравнительные соединения, селекторы и т. п.), обеспечиваю-
щие равномерное распределение нагрузок и селективность за-
щиты каналов генерирования.
В системах электроснабжения переменного тока этих ЛА па-
раллельная работа каналов генерирования не предусматрива-
ется. Генераторы работают раздельно, каждый на свою группу
приемников, подключенных к независимым подсистемам рас-
пределения электроэнергии левого и правого бортов. При отка-
зе (отключении) одного из генераторов его нагрузка автома-
тически подключается к исправному генератору, для чего меж-
ду ЦРУ левого и правого бортов предусматриваются цепи ре-
зервного питания.
14.2. СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ ТЯЖЕЛЫХ САМОЛЕТОВ
На тяжелых ЛА (самолетах дальней и военно-транспортной
авиации) с двумя и более турбореактивными двигателями уста-
навливаются многоканальные системы электроснабжения пере-
менного тока постоянной частоты. Первичные системы электро-
снабжения постоянного тока на этих ЛА применяются только
в тех случаях, когда общая мощность приемников электричес-
кой энергии постоянного тока близка к общей мощности при-
емников переменного тока.
Пример схемы многоканальной системы электроснабжения
переменного тока постоянной частоты самолета ВТА приведен
на рис. 14.2. Система состоит из четырех однотипных каналов
генерирования по числу авиационных двигателей и четырех ос-
новных вторичных источников постоянного тока — выпрямитель-
ных устройств (ВУ). И в первичной и во вторичной системах
электроснабжения принята попарно параллельная работа ис-
точников электрической энергии. Резервными источниками яв-
ляются генераторы вспомогательной силовой установки (ВСУ).
В качестве аварийных источников электроэнергии используются
4 аккумуляторные батареи типа 20 НКБН-25 и электромашин-
ные преобразователи типа ПО и ПТ (на рис. 14.2 не показаны).
Приводы постоянной скорости ППС снабжены электроме-
ханическими -корректорами частоты, что обеспечивает относи-
тельную погрешность стабилизации частоты не более (1...2)°/о.
Блоки регулирования, защиты и управления БЗУ наряду с
регулированием напряжения, регулированием частоты и тради*
344
Рис. 14.2. Структурная схема системы электроснабжения самолета военно-транспортной авиации
34S
Ционйыми видамй защиты обеспечивают сйнхронйзаЦию кана-
лов генерирования и равномерное распределение активной и
реактивной мощности.
Включение каналов генерирования электроэнергии на па-
раллельную работу осуществляется контакторами К5, К8 и
Кб, К7. При этом в системе электроснабжения образуются две
независимые подсистемы левого и правого борта. Мощность од-
ной подсистемы достаточна для питания всех установленных на
самолете приемников электрической энергии.
При отказе одного из параллельно работающих каналов в
любой подсистеме предусматривается автоматическое объеди-
нение обеих подсистем с помощью блока коммутации шин
(БКШ). В этом случае в параллельной работе участвуют три
оставшихся исправными канала генерирования.
В случае отказа двух каналов генерирования объединение
подсистем на параллельную работу не происходит. При этом
обеспечивается нормальное питание всех приемников электри-
ческой энергии.
При отказе (отключении) трех каналов генерирования в си-
стеме электроснабжения наступает частичный режим работы.
В этом случае питание приемников электроэнергии неисправной
подсистемы осуществляется от генератора вспомогательной си-
ловой установки ВСУ.
Приемники первой и часть приемников второй категорий,
подключенные к распределительным устройствам РУ1 и РУ2,
могут получать питание как от левого, так и правого бортов.
Автоматическое переключение питания этих распределительных
устройств осуществляют блоки переключения питания (БПП).
Аварийный режим работы системы электроснабжения в свя-
зи с большой кратностью резервирования питания относится
к редким событиям. Он наступает при отказе всех основных и
резервного каналов генерирования и обеспечивается электро-
машинными преобразователями типа ПО и ПТ (на схеме не
показаны). Преобразователь ПО используется и для обеспече-
ния радиосвязи на земле при неработающих двигателях.
В каждой подсистеме постоянного тока приемники электро-
энергии получают питание от двух выпрямительных устройств
ВУ, которые постоянно включены на параллельную работу с
аккумуляторными батареями Б. При этом дифференциально-
минимальные реле ДМР используются для включения ВУ под
нагрузку и для их защиты от обратной мощности при коротких
замыканиях диодов выпрямителей.
Режимы „работы системы электроснабжения постоянного то-
ка (нормальный, частичный, аварийный) аналогичны соответ-
ствующим режимам работы первичной системы электроснабже-
ния.
446
При нормальной работе системы электроснабжения постоян-
ного тока подсистемы левого и правого борта можно при необ-
ходимости объединить вручную с помощью контактора К10.
При включении генератора постоянного тока ВСУ или аэро-
дромного источника постоянного тока объединение подсистем
осуществляется автоматически.
Питание наиболее важ«ьщ приемников электрической энер-
гии, подключенных к распределительным устройствам РУ5 и
РУ6, осуществляется одновременно от левой и правой подсистем
постоянного тока через разделительные диоды V1...V4. Благо-
даря наличию диодов, достигается беспрерывность питания при-
емников при переключениях в системе электроснабжения, обус-
ловленных отказами ВУ и переводом питания от аэродромных
источников электроэнергии к бортовым.
Многократное резервирование источников электрической
энергии и резервирование питания наиболее важных приемни-
ков в рассмотренной системе электроснабжения обеспечивает
выполнение высоких требований к ее надежности и качеству
электрической энергии, характерных для тяжелых ЛА.
14.3. СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ ВЕРТОЛЕТОВ
•
На вертолетах отбор мощности для привода генераторов,
как правило, осуществляется от вала главного редуктора несу-
щего винта, частота вращения которого стабилизируется с вы-
сокой точностью. В связи с этим синхронные генераторы приво-
дятся во вращение непосредственно от редуктора двигателя без
применения приводов постоянной скорости. Учитывая данное
обстоятельство, на вертолетах применяют преимущественно пер-
вичные системы электроснабжения переменного тока. Первич-
ные системы электроснабжения постоянного тока на вертолетах
применяются тогда, когда запуск двигателей осуществляется
от электростартера.
Структурная схема типовой системы электроснабжения вер-
толета приведена на рис. 14.3.
Первичная система электроснабжения содержит два неза-
висимых канала генерирования электроэнергии переменного то-
ка, каждый из которых включает в свой состав бесконтактный
синхронный генератор Г, регулятор напряжения PH, блок за-
щиты и управления БЗУ, блок трансформаторов тока БТТ.
В связи с тем, что генераторы вращаются синхронно от од-
ного и того же вала редуктора Р, то в системе электроснабже-
ния предусмотрена их параллельная работа.
Объединение каналов на параллельную работу осуществля-
ется вручную или автоматически по сигналам БЗУ с помощью
контактора параллельной работы (КНР). Для равномерного
распределения мощности между генераторами в регуляторы
напряжения подаются сигналы, пропорциональные разности
347
348
полных токов 'Нагрузки. Эти сигналы поступают от блоков
трансформаторов тока обоих каналов генерирования, которые
соединяются между собой по дифференциальной схеме.
Блоки защиты и управления обеспечивают автоматическое
включение генераторов в сеть, а также защиту соответствую-
щего канала генерирования от снижения частоты, аварийного
повышения и снижения напряжения, обрывов фаз и всех видов
коротких замыканий. Защита от аварийного повышения частоты
переменного тока на вертолетах не предусматривается в связи
с тем, что при непосредственном приводе генераторов от редук-
тора несущего винта такой вид аварии невозможен.
Для питания приемников трехфазного тока напряжением
36 В и однофазных приемников 115 В используются соответст-
венно понижающие трансформаторы ТЗ и Т4, Т1 и Т2, из кото-
рых один является основным, а другой резервным. Переключе-
ние питания приемников при коротких замыканиях, обрывах
фаз или снижении напряжения основного трансформатора на
резервный осуществляется с помощью автомата переключе-
ния преобразователя (АПП).
Для получения постоянного тока напряжением 27 В в систе-
ме электроснабжения используются выпрямительные устрой-
ства ВУ1 и ВУ2. При нормальной работе системы электроснаб-
жения ВУ объединяются на параллельную работу ’через РУ7.
Характерной особенностью рассматриваемой системы элект-
роснабжения является высокая степень резервирования пита-
ния распределительных устройств, обеспечивающая хорошие
эксплуатационно-технические характеристики системы.
Так, например, при отказе основного однофазного транс-
форматора Т1 все приемники переменного тока 115 В получают
питание от резервного трансформатора, а при его отказе — от
аварийного источника — электромашинного преобразователя
типа ПО.
Аналогично осуществляется питание и приемников трехфаз-
ного переменного тока напряжением 36 В.
При отказе одного из ВУ его приемники автоматически пе-
реключаются на питание от исправного ВУ с помощью контак-
торов К5 или Кб. В случае отказа обоих ВУ аккумуляторные
батареи Б обеспечивают питание приемников, подключенных к
РУ7. При этом ДМР, срабатывая при обратном токе, изолиру-
ют РУ7 от остальных приемников постоянного тока. Парал-
лельно с аккумуляторными батареями может работать также
стартер-генератор СТГ, который включается после запуска
вспомогательной силовой установки.
14.4. ОСОБЕННОСТИ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
ЗАРУБЕЖНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
На современных ЛА ВВС стран НАТО устанавливаются пре-
имущественно первичные системы электроснабжения перемен-
349
кого тока постоянной частоты с приводами постоянной скорости.
На отдельных типах самолетов применяются системы перемен-
ного тока типа ПСПЧ. Первичные системы электроснабжения
постоянного тока применяются лишь на легких самолетах вспо-
могательной авиации [6,17].
Первичные и вторичные системы электроснабжения самоле-
тов США, Великобритании, Франции и других стран обычно
разделяются на две и более независимые подсистемы (левый
и правый борт). В случае отказа одной из подсистем ее прием-
ники автоматически подключаются к шинам исправной подси-
стемы.
В качестве первичных источников электрической энергии в
основном используются бесконтактные синхронные трехфазные
генераторы с вращающимися выпрямителями (подобные отече-
ственным генераторам серии ГТ) мощностью 16, 30, 40, 60, 90,
120 и 150 кВ-A. Генераторы, как правило, имеют масляно-рас-
пылительную систему охлаждения.
Из известных типов приводов постоянной скорости на само-
летах США и Великобритании наибольшее распространение по-
лучили гидромеханические ППС с плунжерными гидромашина-
ми производства США, а на французских самолетах, кроме
того, — электромеханические ППС типа «Оксивар» и «Супер-
Окспвар». На многих военных и гражданских самолетах при-
меняются генераторы и приводы объединенной конструкции.
Во вторичных системах электроснабжения постоянного тока
в качестве основных источников электроэнергии используются
нерегулируемые выпрямительные устройства мощностью до
6 кВт.
В качестве аварийных источников электроэнергии широко
применяются никель-кадмиевые аккумуляторные батареи и
статические инверторы. На ряде ЛА США в качестве аварийных
источников используются маломощные синхронные генераторы
с приводом от выпускаемых в воздушный поток турбин.
Установленная мощность первичных источников электроэнер-
гии на зарубежных самолетах в основном находится в пределах
от 40 до 240 кВ-А. Максимальную установленную мощность
1200 кВ-А имеет система электроснабжения тяжелого самоле-
та Е-4В фирмы Боинг, предназначенного для использования в
качестве воздушного командного пункта.
Система электроснабжения самолета Е-4В состоит из 8 ка-
налов генерирования мощностью по 150 кВ- А каждый. Две
ВСУ мощностью по 90 кВ-А используются в качестве pesepiB-
ных источников электроэнергии.
В нормальном режиме работы системы электроснабжения
питание преемников осуществляется от четырех групп попарно
работающих генераторов. При выходе из строя одного из гене-
раторов этих групп на параллельную работу включаются три
оставшиеся исправными генератора одного борта.
350
Аппараты регулирования, защиты и управления систем элек-
троснабжения выполняются, как правило, на базе полупровод-
никовых приборов и интегральных микросхем малой и средней
степени интеграции.
Качество электрической энергии систем электроснабжения за-
рубежных ЛА находится в основном на уровне требований,
аналогичных требованиям, предъявляемым ГОСТом 19705—81.
14.5. ВЛИЯНИЕ НАДЕЖНОСТИ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ ЛА
НА БЕЗОПАСНОСТЬ ПОЛЕТОВ
Система электроснабжения современного ЛА является одной
из наиболее важных бортовых систем. Ее отказы, обусловлива-
ющие нарушение питания комплексов и систем бортового обо-
рудования, приводят, как правило, к возникновению особых си-
туаций, снижающих уровень безопасности полета ЛА.
Так, например, отказы систем электроснабжения, при кото-
рых возникает необходимость отключения приемников электро-
энергии третьей категории, приводят к усложнению условий
полета. Это не требует немедленного изменения плана полета,
но характеризуется необходимостью повышенного внимания
экипажа ЛА к состоянию других элементов системы электро-
снабжения.
Отказы питания части приемников второй категории, необ-
ходимых для выполнения полетного задания, как правило, при-
водят к необходимости изменения плана, профиля или режима
полета.
Состояния системы электроснабжения, при которых сохра-
няется питание только приемников первой категории, обеспечи-
вающих безопасность полета и необходимых для совершения
посадки, приводят к аварийной ситуации. Для завершения по-
лета без летного происшествия в такой ситуации требуется вы-
сокое профессиональное мастерство членов экипажа.
Вероятность возникновения особых ситуаций за время поле-
та по существующим требованиям к уровню безопасности по-
лета не должна превышать: 10~s —для усложненных условий
полета; 10~4—для сложной ситуации; 10~6 —для аварийной
ситуации и 10-7—для ситуации, при которой все приемники
электрической энергии не обеспечиваются питанием.
Вероятность возникновения той или иной особой ситуации
P(Soc,l) за время полета т по причине отказов системы элект-
роснабжения определяется по формуле полной вероятности
п
A50C,f)=S p(SJ,x).p(Soc,i/Sjy (14.1)
где р (Sj, т) — вероятность того, что в течение полета в систе-
ме электроснабжения произойдет отказ вида
Sj из п возможных видов ее отказов;
351
/
piSocilSj)— условная .вероятность того, что при отказе вида
Sf возникает особая ситуация вида 5ОС. , (ус-
ложненные условия полета, сложная ситуация
и т- п.).
Вероятности событий отказов системы электроснабжения
p(Sj, т) определяются расчетным путем на основании статисти-
ческих данных об отказах авиационной техники, находящейся
в эксплуатации, или путем расчета показателей безотказности
проектируемой системы по интенсивностям отказов составляю-
щих ее элементов.
Условные вероятности возникновения особых ситуаций уста-
навливаются на основании экспертного анализа возможных по-
следствий того или иного вида отказа в системе. В простейшем
случае они могут приниматься равными 1 или 0 в зависимости
от того, несет или не несет в себе данный вид отказа потенци-
альную опасность возникновения рассматриваемой ситуации.
Учитывая большое влияние систем электроснабжения на
безопасность полета, к структуре системы электроснабжения
ЛА предъявляют ряд специальных требований, направленных
на обеспечение высокого уровня ее надежности:
— единичные отказы любых элементов системы электро-
снабжения не должны приводить к отказам всех первичных
или всех вторичных источников электроэнергии;
— • при отказе одного из двух или трех основных источников
электроэнергии, установленных на борту ЛА, или при отказе
двух из четырех и более источников должно сохраняться или
автоматически восстанавливаться питание всех приемников
первой и второй категорий; допускается отключение приемни-
ков третьей категории;
— при отказе всех основных источников питание приемни-
ков первой категории должно сохраняться или автоматически
восстанавливаться после включения аварийного источника
электрической энергии;
— аварийная система электроснабжения должна обеспечи-
вать питанием только приемники первой категории. Время пи-
тания от аварийной системы электроснабжения оговаривается
специальными требованиями на данный тип ЛА.
14.6. МЕТОДЫ РАСЧЕТА ПОКАЗАТЕЛЕЙ'° БЕЗОТКАЗНОСТИ
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
Безотказностью какой-либо системы (агрегата, блока, эле-
мента), как известно, называется свойство сохранять свою ра-
ботоспособность в определенных условиях эксплуатации.
СистемВ'’бчитается работоспособной, если она удовлетворяет
всем техническим требованиям, предъявляемым к .ее основным
характеристикам и параметрам. Событие, заключающееся в
том, что система теряет работоспособность, называется отказом.
352
При анализе безотказности систем электроснабжения ЛА
под отказами подразумевают прекращение подачи электричес-
кой энергии к тем или иным распределительным устройствам,
а также такие состояния системы электроснабжения, при кото-
рых показатели качества производимой электрической энергии
выходят за пределы установленных допусков.
Характерной особенностью 'систем электроснабжения по
сравнению с другими сложными системами является наличие
широко развитой защиты, которая отключает отказавшие эле-
менты. Система электроснабжения при этом продолжает функ-
ционировать, но на другом, более низком, уровне. При отказе
отдельных элементов система способна выполнять свои функ-
ции частично, т. е. обеспечивать электрической энергией требу-
емого качества не все, а только часть приемников, например,
приемники первой и второй категорий.
Соответственно этому для систем электроснабжения ЛА за-
дается несколько уровней выполнения функций, устанавливае-
мых на основании анализа возможных последствий прекраще-
ния питания той или иной группы (категории) приемников
электрической энергии:
а) уровень (нормальная работа) — система электро-
снабжения обеспечивает все приемники электрической энерги-
ей требуемого качества;
б) уровень Ai (частичная работа) — система обеспечивает
питание приемников первой и второй категорий; характер отка-
зов в системе таков, что возникает необходимость отключения
приемников третьей категории;
в) уровень А2 (аварийная работа) — система обеспечивает
питанием только приемники первой категории.
Анализ безотказности систем электроснабжения проводят
для каждого из заданных уровней функционирования отдельно.
Поскольку отказы элементов, а следовательно, и состояния
системы являются случайными событиями, в качестве количе-
ственных показателей ее безотказности используют вероятнос-
ти выполнения функций на каждом из заданных уровней —
p(A0,t), p(At,t), p(A2,t). Для их вычисления используют фор-
мулу полной вероятности
п
p(Aj, p(Af/St), (14.2)
1-0
где {SJ — полная совокупность состояний системы, вклю-
чающая исправное состояние Sn и п работо-
способных п неработоспособных состояний и
п
удовлетворяющая условию Sp(5;, 0=1;
/=0
23. Изд. № 7934 353
9
p(Aj/Si) — условная вероятность выполнения функций
на /-м уровне системой, находящейся в состо-
янии St;
t — расчетное время.
Условные вероятности p(AilSt) принимаются равными 1,
если система в состоянии S, выполняет заданные функции, и
равными 0 — в противном случае. Таким образом, полные ве-
роятности p{Aj,t) в выражении (14.2) представляют собой
сумму .вероятностей только тех состояний системы электроснаб-
жения, которые соответствуют рассматриваемому уровню функ-
ционирования.
Расчеты вероятностей р (5f, t) нахождения системы элект-
роснабжения в состоянии Sz, i = 0,...,n, базируются на следую-
щих основных положениях и допущениях.
1. Перед каждым полетом комплексом работ по выявлению
и устранению неисправностей обеспечивается исправное состо-
яние системы. Поэтому расчет показателей безотказности про-
изводится на время одного полета т.
2. В полете возникают главным образом внезапные отказы;
постепенные отказй, обусловленные старением и износом эле-
ментов, возникают очень редко. Поток отказов элементов си-
стемы является простейшим стационарным потоком.
Вероятность того, что за время полета т не произойдет со-
бытие отказа элемента, для простейшего стационарного потока
определяется выражением
р (г) = е-^ - 1 - Ь + (кх)2, (14.3)
где X — интенсивность отказов, ч-1.
3. Отказы функциональных блоков и элементов системы
электроснабжения классифицируются по видам в соответствии
с их влиянием на качество электрической энергии: повышение
(снижение) напряжения или частоты, короткое замыкание,
автоколебания напряжения (частоты) и т. п.
Отказы аппаратов защиты в зависимости от их влияния на
функционирование системы электроснабжения подразделяют на
две группы: отказы, приводящие к ложному срабатыванию за-
щиты и отключению исправных участков (элементов) системы
электроснабжения, и отказы, не изменяющие состояние систе-
мы до тех пор, пока не произойдет отказ защищаемого участ-
ка (так называемые «скрытые» отказы). Скрытые отказы при
последующих отказах защищаемых участков (элементов) при-
водят к аварийным режимам работы системы.
4. Элементам, из которых состоят функциональные блоки
системы, присущи два вида несовместных отказов: обрыв и ко-
роткое замыкание.
За исходные данные для расчета безотказности системы
электроснабжения на этапе ее проектирования принимают ин-
354
тенсивностн видов отказов функциональных блоков, которые
определяют путем обработки статистических данных об их от-
казах в процессе эксплуатации, а для вновь разрабатываемых
изделий — посредством расчета по интенсивностям отказов со-
ставляющих их элементов.
Для упрощения расчета систему электроснабжения разделя-
ют на систему генерирования (преобразования) и систему рас-
пределения электрической энергии, рассматривая их состояния
как независимые случайные события.
Для определения вероятностей p(St. т) нахождения систе-
мы электроснабжения в одном из множества состояний {S,}
используют в основном два метода расчета: табличный метод и
метод расчета безотказности, основанный на использовании ка-
нонического уравнения надежности.
Табличный метод расчета показателей безотказности СЭС
базируется на представлении процесса изменения во времени
состояний системы как случайного марковского процесса и при-
меняется главным образом для расчета безотказности кана-
лов генерирования (преобразования) электроэнергии.
Случайный процесс называется марковским, если для каж-
дого момента времени t0 вероятность любого состояния в бу-
дущем (t>t0) зависит только от ее состояния в настоящее вре-
мя и не зависит от того, когда и каким образом система
пришла в это состояние.
В качестве математической модели надежности системы при
этом принимают модель непрерывного случайного процесса с
дискретными состояниями. Графической иллюстрацией такого
процесса является направленный граф состояний канала гене-
рирования электроэнергии (рис. 14.4).
Рис. 14.4. Граф состояний канала генерирования
электроэнергии
В мцмент времени /=0 (в начале полета) канал генериро-
вания находится в исправном состоянии So с вероятностью
23*
355
<1
p(S0, t = 0) = 1. Отказ любого элемента канала генерирований
выводит его из исправного состояния, поэтому [17]:
^iP(So.t}^-\op{S(s,t\ (14.4)
N
где — сумма интенсивностей всех видов отказов фун-
'=’ кциональных блоков, входящих в состав канала
генерирования.
Отсюда вероятность нахождения канала в исправном состо-
янии за расчетное время -г составит
p(50,x) = e-v^1 .... доТ + ^(ЛоТ)2. (145)
При отказе вида х, какого-либо блока канал ге-
нерирования переходит из исправного состояния 50 в одно из
трех групп состояний:
a) k состояний отказа вида «канал отключен» 5о™л, если
по данному xt виду отказа в канале предусмотрена защита и
опа исправна или происходит отказ аппарата защиты вида
«ложное срабатывание». При этом вероятность возникновения
других видов отказов в канале становится равной нулю, посколь-
ку канал генерирования выключается из системы электроснаб-
жения и прекращает свою работу. Такие состояния системы,
когда переход ее в другие состояния становится невозможным,
в теории марковских процессов называют тупиковыми. Вероят-
ности перехода в такие состояния описываются уравнениями
вида
d
. t) = \p(S0, .;k, (14.6)
откуда
X, / \
р(50Тл, т) = 1 - Х; Ц1 - ), (14.7)
где Xz — интенсивность отказа вида xt;
б) т состояний отказа вида «авария» SoL если защита по
данному xt виду отказа не предусмотрена. Такие состояния
канала также относят к тупиковым, так как при их возникно-
вении экипаж ЛА обязан вручную отключить неисправный ка-
нал генерирования от сети или перейти на питание от аварий-
ных (резервных) источников электрической энергии. Вероят-
ности состояний вида «авария» определяются по формулам,
аналогичным (14.7);
356
в) / состояний скрытых отказов вида , если происходит
отказ защиты, не приводящий к отключению канала. Вероят-
ности переходов такого рода описываются уравнениями вида
d
, t) = \р (So/) - (Ло- Х() р (S&Kp, /); (14.8)
I = 1,. •I;
p(So^p, т) = — Лот). (14.9)
При возникновении второго отказа вида Xj (j ¥= i) канал ге-
нерирования из состояния SoiP также может перейти в одно
из трех групп состояний: «канал отключен» — £°/кл, «ава-
рия» — Sj или состояние с двумя скрытыми отказами S/J1’
и т. д.
Для этих состояний справедливы уравнения
d
, t) = l]P(^p, t)- j = 1k - 1;
d
Ttp{S^t)^]P^,ty, j-\............I- (14.10)
d
t) = \sp(SW>, t) - (Ao - X, - X,) p[S$p, t).
Обычно вероятностью последовательного возникновения трех
и более отказов пренебрегают ввиду их малости и ограничива-
ются рассмотрением тупиковых состояний с двумя видами от-
казов. Вероятности таких состояний, например состояний вида
Г»ОТКЛ 1
5/; , вычисляют по формуле
P(S^\^ = ^J^ (14.11)
полученной из решения уравнений (14.10).
Для удобства расчета анализ переходов канала генериро-
вания из одного состояния в другое производят с использова-
нием таблиц вида табл. 14.1.
Таблица 14.1
Таблица состояний канала генерирования электроэнергии
Состоя- ние ка- нала Виды отказов
*1 х2 •^т *т+1 *771+2 ... Хдг
1 2 3 ... 7П+1 т+2 т+3 ... АН-1
•$о ОСК(> °0т Откл. Авт. ... Откл.
оскр °О1 — ... t/t Авт. ... Откл.
оСКр S3P оСКр >|2 — Откл. Авт. ... Л
357
В столбцах «Виды отказов» такой таблицы перечисляются
все возможные виды отказов функциональных блоков. В первой
строке таблицы в столбце 1 указывается исправное состояние
канала So, а в последующих столбцах — состояния, в которые
переходит канал при отказе соответствующего вида. После за-
полнения первой строки в столбце 1 перечисляются все работо-
способные состояния .канала с одним скрытым отказом. Затем
последовательно заполняют строки и столбцы таблицы состоя-
ниями, в которые переходит канал генерирования прн возник-
новении в нем второго отказа.
Состояния канала, помеченные в табл. 14.2 одинаковыми
символами, объединяются по видам. Вероятности видов отка-
зов канала определяются как сумма вероятностей состояний,
имеющих одно и то же обозначение, причем вероятности состо-
яний, находящихся в первой строке, определяются по
формулам (14.7) и (14.9), а состояний в других строках —
по формуле (14.11).
Например, в соответствии с табл. 14.2 вероятность того, что
канал генерирования будет отключен, равна:
/ Ло \
р(откл, т) = (Xffl+1 + Ъу)" 11-+
1 1 (14.12)
+ 2 ^лгх2+ 2 ^•\п-н'^Не-
вероятность того, что в канале генерирования возникнут
автоколебания, определится по формуле
р(авт, т) = Хт+2-х(1 — -у+ 2 Хт+2-(Н + ХтН2 + - (14.13)
Вероятности аварийного повышения напряжения U 4 и час-
тоты ft соответственно равны:
(14.14)
p(/t,x) = £Wx24--. (14.15)
Вероятность неработоспособного состояния канала генери-
рования QkH) определяется как сумма веррятностей всех тупи-
ковых состояний. В рассматриваемом примере искомая вероят-
ность равна:
QK (т> =/?(откл,т) + /2 (авт, -г) + p(U t ,т) + p(f 4 ,-t). (14.16)
Наработка канала генерирования до отказа определяется в
этом случае^по формуле
(14.17)
358
И, наконец, вероятность Того, Что Канал генерирования будет
находиться в работоспособном состоянии (вероятность безот-
казной работы), определяют по формуле
pK^) = jP(Spa6,T) = l-QK(«c). (14.18)
Очевидно, что вероятность безотказной работы, вычисленная
по формуле (14.18), больше вероятности исправного состояния
канала p(S0, -с) из выражения (14.5), так как в число работо-
способных состояний канала кроме исправного входят состоя-
ния с одним и двумя скрытыми отказами.
Метод расчета на основе канонического уравнения надеж-
ности целесообразно использовать для оценки безотказности
систем генерирования (преобразования) электроэнергии, состо-
ящих из п однотипных каналов, или для оценки безотказности
систем распределения.
Для системы, состоящей из п функциональных блоков, каж-
дый из которых подвержен k видам отказов, каноническое урав-
нение надежности имеет вид
п
п lA-h) + Чп (*) + <7й(т) +...+ = 1, (14.19)
i-i
где Р/(т)— вероятность безотказной работы г-го блока;
<7/;(т)— вероятность отказа г-го блока /-го вида, удовлетво-
ряющая условию
Al-O + fti (-t) + ...<7/fe('c) = I-
Преобразуя произведение, стоящее в левой части уравнения
(14.19), в сумму, получим
п
п \Pi (т) + ?л (т) ’+ • •. + Як (*) ] =
п п я~1 п
=П pt (т) + Qi ,(т) • П pt (т) +... + рп (т). п qlk (т) + П qlh( =
1=1 l-Ч i-1 i = l
= p (So, -t) + P (Sj, T) + ... +/? (SN, -t). (14.20)
Каждое слагаемое в выражении (14.20) соответствует зна-
чению вероятности определенного состояния рассматриваемой
системы, характеризующегося вполне определенным сочетанием
состояний входящих в нее функциональных блоков. Используя
выражение (14.20) в формуле полной вероятности (14.2), легко
определить искомые вероятности выполнения системой задан-
ных функций.
Глава 15
ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ И ВОЙСКОВОГО
РЕМОНТА СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
15.1. ОБЩИЕ ПОЛОЖЕНИЯ
Системы электроснабжения и их отдельные элементы экс-
плуатируются по назначенному (техническому) ресурсу, кото-
рый, как правило, совпадает с назначенным (техническим) или
межремонтным ресурсом ЛА. В соответствии с принятой пла-
ново-предупредительной системой организации эксплуатации ;в
системах электроснабжения проводятся регламентные работы и
другие виды профилактических работ. Они выполняются в еди-
ные для всего ЛА сроки через строго определенное число часов
налета ЛА или через определенный промежуток календарного
времени.
Конкретное содержание, объем и периодичность работ по
эксплуатации систем электроснабжения определяется Единым
регламентом технической эксплуатации на данный тип ЛА, дей-
ствующими Указаниями главного инженера ВВС и другими
документами, регламентирующими деятельность инженерно-
авиационной службы (ИАС).
Техника, получившая мелкие и незначительные поврежде-
ния, подлежит войсковому ремонту, который' выполняется на
местах базирования части или месте вынужденной посадки в
основном силами и средствами ИАС части.
Ответственность за организацию и качество эксплуатации и
войскового ремонта систем электроснабжения в части несет
инженер по авиационному оборудованию.
Высокое качество эксплуатации авиационной техники явля-
ется необходимым условием поддержания, ее надежности, по-
стоянной готовности и безопасности полетов.
15.2. ХАРАКТЕРНЫЕ НЕИСПРАВНОСТИ СИСТЕМ
ЭЛЕКТРОСНАБЖЕНИЯ И МЕРЫ ПО ИХ ПРЕДУПРЕЖДЕНИЮ
Опыт эксплуатации современных ЛА показывает, что число
отказов в системах электроснабжения не превышает 8% от об-
щего числа отказов и неисправностей всего авиационного обо-
рудования.
360
Наибольшее число неисправностей в системах генерирований
электрической энергии приходится на коллекторные электричес-
кие машины — генераторы постоянного тока и электрические
преобразователи (X=sO, 1 • 10~3...0,3-1(ТО4, ч-1).
Так, например, около 48% неисправностей систем генериро-
вания переменного тока, обнаруженных на земле, и свыше по-
ловины отказов и неисправностей, обнаруженных в полете, при-
ходится на электромашинные преобразователи.
Наиболее характерными неисправностями преобразователей
являются; износ и разрушение щеток генераторов и двигателей
(30%), износ и разрушение подшипников (21%), износ кол-
лектора (11,5%).
В связи с этим, коллекторным электрическим машинам в
процессе эксплуатации систем электроснабжения уделяется осо-
бое внимание.
Щетки, высота которых оказывается меньше предельно до-
пустимой для данной электрической машины, а также щетки,
имеющие сколы рабочей поверхности, заменяются новыми. Но-
вые щетки должны быть притерты к коллектору (контактным
кольцам) мелкой шлифовальной бумагой.
Коллектор машины должен быть чистым, не иметь задиров.
Выработка коллектора должна быть равномерной по всей ши-
рине щеток.
Очистка коллектора от грязи и нагара производится ве-
тошью, смоченной в бензине. Неудаляющийся нагар и задиры
коллекторных пластин устраняются мелкой шлифовальной бу-
магой. Выработка коллектора контролируется с помощью мик-
рометра. Электрические машины, у которых выработка коллек-
тора превышает допустимую величину, направляются в ремонт.
Контроль подшипников коллекторных машин производится
при снятых щетках. При исправных подшипниках ротор маши-
ны должен проворачиваться легко, без шума и не иметь ради-
ального люфта.
Радиальный люфт подшипников обусловливает при работе
электрической машины биение ротора, которое может быть за-
фиксировано с помощью датчика вибрации или иными метода-
ми. Так, например, экспериментально установлено, что при воз-
никновении вибрации электрической машины возрастают в 4...
10 раз амплитуды отдельных гармонических составляющих
в спектре напряжения генератора.
Основным видом неисправностей бесконтактных генераторов
переменного и постоянного тока являются износ н разрушение
подшипников. Контроль состояния подшипниковых узлов этих
генераторов осуществляется теми же методами, которые исполь-
зуются при контроле коллекторных электрических машин.
Одной из мер по поддержанию надежности авиационных ге-
нераторов является строгое соблюдение правил их монтажа.
При установке генератора на авиационный двигатель крепеж-
361
/
иый буртик генератора стыкуется с ответным буртиком редук-
тора и они охватываются двумя половинками стяжного хомута.
Нумерованные концы половинок хомута должны при этом на-
ходиться с одной стороны, а зазоры между ними должны быть
одинаковыми с обеих сторон. Это предупреждает в процессе
эксплуатации генератора возникновение трещин и поломок его
стяжных хомутов, а также появление дополнительных нагрузок
на подшипники.
Характерными неисправностями угольных регуляторов на-
пряжения являются постепенное изменение параметров регуля-
тора, спекание угольного столба, обусловленные стиранием
угольных шайб, нарушением контакта в местах пайки прово-
дов обмоток электромагнита, контактов резистора температур-
ной компенсации, стабилизирующего резистора и т. п. Техни-
ческий ресурс современных угольных регуляторов составляет
300... 1000 ч.
В процессе эксплуатации бесконтактных регуляторов напря-
жения и частоты наблюдаются в основном неисправности, обус-
ловленные внезапными отказами их элементов, которые, как
правило, обнаруживаются при проверке работоспособности си-
стемы электроснабжения.
В связи с высокой надежностью бесконтактных регуляторов
техническое их обслуживание сводится к внешнему осмотру и
проверке работоспособности в составе системы электроснабже-
ния. По мере надобности изменяют уставов подстроечных (вы-
носных) резисторов для изменения заданного напряжения.
Анализ отказов и неисправностей аппаратов защиты и уп-
равления показывает, что до 25% их общего числа составляют
отказы вида ложное срабатывание. По своему влиянию на бе-
зопасность полетов ЛА такие отказы в системах электроснаб-
жения являются одной из основных причин предпосылок к лет-
ным происшествиям.
С целью предупреждения отказов аппаратов защиты и уп-
равления осуществляют систематический их контроль с помощью
специальных поверочных установок.
Количество отказов элементов системы распределения элек-
троэнергии от общего числа отказов и неисправностей системы
электроснабжения составляет 40—50%. Это объясняется тем,
что общее число элементов системы распределения и, в особен-
ности, вторичной распределительной сети вблико по сравнению
с числом других элементов системы электроснабжения. Наи-
большее число отказов и неисправностей связано с отказами
предохранителей, реле, контакторов и выключателей.
Характерными отказами предохранителей типов СП, ИП,
ПМ являются^. обрыв цепи — 40%, нарушение прочности креп-
ления колпачков — 52%. Основные причины возникновения
отказов — вибрация в местах установки предохранителей и
производственные дефекты. Профилактика отказов этих эле-
362
Ментов заключается в тщательном осмотре при выполнении
регламентных работ, целевых осмотрах и других мероприятиях.
Коммутационные аппараты (реле, контакторы и т. д.) раз-
борке, регулировке и ремонту в части не подлежат. При заме-
не отказавших коммутационных аппаратов необходимо устанав-
ливать аппараты с аналогичными номинальными данными.”
. -У
15.3. ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ БОРТОВЫХ
АВИАЦИОННЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ
Бортовые аккумуляторные батареи требуют особого внима-
ния в процессе эксплуатации систем электроснабжения ЛА, так
как от их технического состояния в значительной степени зави-
сит боеготовность и безопасность полетов ЛА.
Все виды работ по аккумуляторным батареям должны быть
направлены на поддержание постоянной их готовности к приме-
нению и сохранение ресурса и проводиться в соответствии с
инструкциями по эксплуатации, утвержденными главным ин-
женером ВВС.
Особенности эксплуатации свинцовых (кислотных) аккуму-
ляторных батарей. Для приготовления электролита свинцовых
аккумуляторных батарей разрешается применять только дистил-
лированную воду и серную кислоту, отвечающую требованиям
ГОСТа 667—53. Плотность электролита должна точно соот-
ветствовать техническим условиям на данный тип батареи. По-
вышенная плотность электролита способствует ускоренному
разрушению решеток электродов и сульфатации пластин. Дове-
дение уровня электролита в процессе эксплуатации до требуе-
мого производится только доливкой дистиллированной воды.
Не допускается глубокий разряд, при котором конечное на-
пряжение на аккумуляторах понижается ниже 1,7 В, что мо-
жет привести к переполюсовке (изменению полярности элек-
тродов) отдельных аккумуляторов.
К эксплуатации в полете допускаются аккумуляторные ба-
тареи, имеющие запас емкости не менее 75% номинальной.
Свинцовые аккумуляторные батареи должны не реже одного
раза в месяц подвергаться подзаряду и один раз в три меся-
ца — контрольно-тренировочному циклу.
Контрольно-тренировочные циклы (КТЦ), т. е. глубокие за-
ряды с последующими разрядами номинальным током, прово-
дятся с целью контроля емкости аккумуляторных батарей в те-
чение всего времени их эксплуатации. Соблюдение сроков вы-
полнения КТЦ, подзаряда, ввод в строй новых и восстановле-
ние аккумуляторных батарей возлагаются на специалистов за-
рядных аккумуляторных станций (ЗАС).
Разряженная свинцовая батарея во избежание сульфатации
пластин должна быть снята с ЛА и доставлена на ЗАС для
подзаряда не позднее чем через 8 ч после разряда.
263
Состояние батареи (степень разряженности) определяется
по напряжению па всей батарее или на отдельных аккумулято-
рах при подключении на 2...3 с нагрузки, соответствующей 2 /н,
и по плотности электролита (см. табл. 9.1).
Плотность электролита измеряется денсиметром, а напря-
жение и ЭДС на отдельных аккумуляторах — специальным ак-
кумуляторным пробником (пробником Румянцева).
Заряд аккумуляторных батарей обычно осуществляется в
две ступени с перерывом для охлаждения на 2...3 ч до появле-
ния признаков конца заряда. На первой ступени заряд ведется
током, равным номинальному току заряда; на второй ступени
ток заряда уменьшают в два раза.
Признаками конца заряда являются: обильное газовыделе-
ние (кипение электролита) из всех аккумуляторов, постоянст-
во плотности электролита и напряжения.
Аккумуляторные батареи, находящиеся в эксплуатации, ре-
комендуется хранить при температуре 5...30°С в заряженном со-
стоянии с электролитом. В этом случае срок их хранения не
должен превышать 6 мес. при условии ежемесячного подзаряда.
В разряженном состоянии без электролита батареи допуска-
ется хранить не более 3 мес.
При низких температурах на стоянке ЛА аккумуляторные
батареи необходимо снимать и хранить в специальных обогре-
ваемых контейнерах или в помещениях (кроме самолетов, на-
ходящихся в боевой готовности).
Особенности эксплуатации никель-кадмиевых аккумулятор-
ных батарей. Для приготовления электролита никель-кадмие-
вых аккумуляторов используется таблетизированный едкий ка-
лий КОН и гидроксид лития LiOH, отвечающие требованиям
ГОСТа 8595—75. Доведение уровня электролита в процессе
эксплуатации до метки на сосуде аккумулятора производится
летом доливкой дистиллированной воды, зимой — электролита
плотностью у = 1,19...1,21 г/см3.
Повышенный уровень электролита в аккумуляторах, а так-
же хранение батарей с неплотно завернутыми пробками способ-
ствуют образованию прн соединении электролита с воздухом
так называемых ползучих солей КСОз, которые, оседая на элек-
тродах, уменьшают коэффициент использования активной мас-
сы и ухудшают электрические характеристики батарей. Приз-
наком солеобразования является белый налет вокруг пробок
и на поверхности сосудов. Для предотвращения засоления ак-
кумуляторов периодически производят замену электролита с
промывкой аккумуляторов дистиллированной водой.
Батареи ^цпа 20 НКБН-25 разрешается устанавливать на
ЛА, если нх емкость на последнем КТЦ была не менее 21 А-ч.
В течение гарантийного ресурса никель-кадмиевые аккуму-
ляторные батареи должны проходить КТЦ через каждые три
364
месяца, а по истечении гарантийного ресурса — ежемесячно.
Соответственно замена электролита должна проводиться через
6 и 3 месяца. КТЦ проводится также в случае, если в проме-
жутке между циклами ЭДС батареи снижается до 26 В.
Контрольный разряд для новых батарей осуществляется
номинальным током до напряжения 23 В, а для батарей, вы-
работавших гарантийный ресурс — до напряжения 20 В.
Глубокие разряды никель-кадмиевых батарей до напряже-
ния ниже допустимого уровня уменьшают их срок службы.
Нормальный заряд никель-кадмиевых батарей осуществля-
ется в две ступени: током /н в течение 3 ч и током /н/2 — 2 ч.
После заряда батарею оставляют в наклонном положении на
время не менее 6 ч для удаления пузырьков газа. Заряд сопро-
вождается незначительным выделением тепла (как правило,
температура батарей при нормальном заряде не превышает 35...
40°С). Никель-кадмиевые батареи не имеют четко выраженных
признаков конца заряда. В связи с этим батарея считается за-
ряженной, если она получила количество электричества, равное
(160... 165)% %.
После глубокого разряда и при вводе в строй новых батарей
производится их усиленный заряд: током 7Н в течение 4 ч и
током 7н/2—2 ч с перерывом 6 ч. Температура электролита в
аккумуляторах при усиленном заряде батарен не должна пре-
вышать 45°С. При длительном перезаряде батарен типа
20 НКБН-25 способны входить в режим так называемого «теп-
лового разгона». Под «тепловым разгоном» аккумуляторов и
аккумуляторных батарей понимают процесс самоускоряющегося
их нагрева при параллельной работе с источником постоянного
напряжения. Это явление присуще практически всем электро-
химическим системам, однако, в большей степени, понятие
«тепловой разгон» относят к щелочным, особенно, к никель-
кадмиевым аккумуляторам. Последствием теплового разгона
может явиться разрушение и даже возгорание аккумуляторных
батарей. Поэтому под термином «тепловой разгон» в эксплуа-
тации часто подразумевают его наиболее опасные для ЛА по-
следствия — возгорание батарей в полете.
Нагрев никель-кадмиевых аккумуляторных батарей при за-
ряде так же, как и батарей других электрохимических систем,
связывают в основном с реакцией электролиза воды из соста-
ва электролита
2Н2О -> 2Н2 f + О2 f , (15.1)
которая протекает наряду с основной электрохимической реак-
цией (9.23).
В начале заряда (до получения батарей 30...40% емкости)
доля электрической энергии, расходуемой от источника тока на
электролиз воды, мала (не более 5...7%) и нагрев аккумулятор-
ной батареи незначительный. В конце заряда на электролиз во-
365
9
*
ды расходуется до 95% всей мощности, идущей на заряд. В
связи с этим к концу заряда темп разогрева батареи повыша-
ется.
При превышении температуры некоторого критического зна-
чения (для никель-кадмиевых батарей типа 20 НКБН-25 такая
температура составляет 65...70°С) начинают заметно уменьшать-
ся ЭДС аккумуляторов (см. рис. 9.10) и поляризация батареи.
С повышением температуры, как известно, уменьшается и оми-
ческое сопротивление электролита. В результате при постоян-
ном напряжении в сети увеличивается ток заряда
г _ Uc - Е
Яо+/?п
где Б'с — напряжение бортовой сети ЛА; Е, Ео, Яп — соответ-
ственно ЭДС, внутреннее (омическое) сопротивление и сопро-
тивление поляризации батареи.
Увеличение тока заряда, в свою очередь, приводит к уско-
рению электролиза воды, более интенсивному выделению тепла
и т. д. Нагреву батареи способствует также реакция окисления
Cd в верхней части отрицательного электрода над поверхностью
электролита кислородом, выделяющимся в процессе реакции
электролиза. Совокупность всех факторов приводит к тому, что
процесс нагрева аккумуляторной батареи все более и более ус-
коряется, переходя при определенных условиях в лавинообраз-
ный процесс до начала кипения электролита.
К числу неблагоприятных условий, способствующих разви-
тию «теплового разгона», относят повышенное напряжение сети,
старение батареи, пониженный уровень электролита в аккуму-
ляторах, высокая температура окружающей среды .и др.
Признаками того, что аккумуляторная батарея входила в
режим теплового разгона, являются: выкипание электролита
(уровень электролита существенно ниже допустимого, оставша-
яся часть электролита имеет темный цвет), наличие следов мест-
ного перегрева выводов н межэлементных перемычек, местная
деформация сосудов отдельных аккумуляторов.
Плохое состояние сепараторов батарей, находящихся в экс-
плуатации длительное время, может служить причиной появле-
ния очагов короткого замьщания между электродами и, как
следствие, оплавления сосудов отдельных аккумуляторов и да-
же воспламенения батареи.
На рис. 15.1 приведена временная диаграмма процесса теп-
лового разгона аккумуляторной батареи типа 20 НКБН-25, за-
кончившегося воспламенением батареи. Диаграмма получена в
лабораторйых условиях при параллельной работе нормально
заряженной батареи с генератором постоянного тока при напря-
жении Uc = 29 В. На диаграмме видны пять характерных уча-
стков: 1 — дозаряд (ток / уменьшается, температура электро-
лита 8 остается практически постоянной); 2 — начальная ста-
366
дия теплового разгона; 3 — собственно тепловой разгон; 4 —
кипение электролита и 5 — разрушение батареи. Разрушение
батареи сопровождается периодическим возникновением очагов
короткого замыкания внутри аккумуляторов, что обусловливает
резкие колебания тока.
Рис. 15.1. Диаграмма теплового разгона
аккумуляторной батареи
Для предотвращения отказов бортовых аккумуляторных ба-
тарей и упрощения их технического обслуживания на ряде ЛА
используют бортовые устройства для заряда и контроля состо-
яния батарей. Такие устройства применяют для батарей всех
электрохимических систем, но главным образом для никель-кад-
миевых батарей, которые особенно чувствительны к изменению
тока в режиме заряда прн постоянном напряжении и склонны
к входу в режим теплового разгона.
В настоящее время на ряде зарубежных ЛА бортовые заряд-
ные устройства выполняют в .виде так называемых интеграль-
ных бортовых аккумуляторных систем, состоящих из аккумуля-
торной батареи, зарядного устройства (управляемого выпрями-
теля), системы управления зарядом, устройства переключения
на режим разряда и системы автоматического контроля состо-
яния батареи, выполненных в виде единого конструктивного бло-
ка. Использование такой аппаратуры позволяет повысить на-
дежность батареи, уменьшить время ее заряда после автоном-
ного запуска авиадвигателей и снизить трудоемкость обслужи-
вания [6].
Никель-кадмиевые аккумуляторные батареи можно хранить
в любом состоянии. Способ хранения не оказывает заметного
влияния на срок их службы.
Аккумуляторные батареи типа 20 НКБН-25 допускается экс-
плуатировать при температуре электролита не ниже —10°С.
Особенности эксплуатации серебряно-цинковых аккумуля-
торных батарей. Наибольшую опасность для серебряно-цинко-
вых аккумуляторов представляет перезаряд. Частые перезаряды
367
*
батарей вследствие образования дендритов цинка на отрица-
тельных электродах аккумуляторов приводят -к появлению оча-
гов короткого замыкания между пластинами и преждевремен-
ному выходу аккумуляторов из строя.
Перезаряд батарей опасен и по другой причине. Выделяю-
щийся при этом вследствие электролиза воды кислород интен-
сивно разрушает целлофановую пленку сепараторов, что явля-
ется одной из причин внутренних коротких замыканий.
Для предотвращения перезаряда серебряно-цинковых бата-
рей их заряд на ЗАС ведут до тех пор, пока напряжение на од-
ном из аккумуляторов не достигнет 2,05...2,10 В, после чего за-
ряженный аккумулятор выключают из батареи с помощью меж-
элементных перемычек. Затем заряд продолжают до появления
признаков конца заряда любого из оставшихся аккумуляторов.
Ток заряда составляет 5 А.
Аккумуляторные батареи на ЛА устанавливаются не рань-
ше чем через 24 ч после окончания их заряда. В течение этого
времени при наличии очагов короткого замыкания ЭДС акку-
муляторов снизится, что позволяет выявить неисправные акку-
муляторы при поэлементном контроле перед установкой батареи
на ЛА. При этом ЭДС аккумуляторов не должна быть меньше
1,82 В.
На самолет устанавливаются батареи, которые при послед-
нем контрольном разряде отдавали емкость не менее 40 А-ч.
Для серебряно-цинковых батарей КТЦ проводится не реже 1 ра-
за в 3 месяца.
Поскольку ни плотность электролита, ни ЭДС, ни напряже-
ние не позволяют определить степень разряженности серебряно-
цинковых аккумуляторных батарей, то контроль их емкости на
ЛА осуществляется с помощью интегрирующих счетчиков ампер-
часов. Основными элементами интегрирующего счетчика ампер-
часов ИСА (рис. 15.2) являются: двигатель постоянного тока с
Рис. 15.2. Схема интегрирующего счет-
чика ампер-часов
возбуждением от постоянных магнитов, многоступенчатый пла-
нетарный редуктор и указатель емкости. Напряжение, подава-
емое на якорь двигателя, снимается с шунта, устанавливаемого
368
в цепь аккумуляторной батареи. При таком способе включения
угловая скорость ротора двигателя пропорциональна величине
тока заряда (разряда) батареи, а угол поворота стрелки при-
бора — зарядной (разрядной) емкости.
Действительно, угловая скорость ротора двигателя равна:
<6 = ----Еч. м
сФ (сФ)2
(15.2)
где /?ш — сопротивление шунта;
/б— ток батареи;
Ф 1— магнитный поток постоянных магнитов;
Л1С — момент сопротивления на валу;
с — машинная постоянная;
/?я— сопротивление якорной цепи машины.
Угол поворота стрелки прибора за время t составляет
r t r t
a = .[ЛМт, (15.3)
рсФб p (сф)2 о
где kp— передаточное отношение редуктора.
В выражении (15.3) первое слагаемое пропорционально ем-
кости батареи, а второе — составляет основную инструменталь-
ную погрешность счетчика, которая зависит от момента сопро-
тивления и времени полета. С целью снижения погрешности
счетчика предусматривается применение серебряных проводни-
ков, серебряных щеток, подшипников особой конструкции и др.
Интегрирующие счетчики ампер-часов позволяют определить
оставшуюся после полета емкость аккумуляторной батареи, су-
дить о ее состоянии и возможности использования для следу-
ющего полета.
15.4. МЕТОДЫ КОНТРОЛЯ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
Контроль технического состояния систем электроснабжения
является одним из основных видов работ при их технической
эксплуатации и осуществляется на всех этапах подготовки ЛА
к полетам, в процессе выполнения работ, ремонта и т. д. Основ-
ное содержание всех видов контроля систем электроснабжения
составляет диагностика, т. е. установление их состояния в те-
кущий момент времени.
Различают визуальный и инструментальный виды контроля
систем электроснабжения.
При визуальном контроле путем внешнего осмотра прове-
ряются состояние агрегатов и блоков системы, надежность их
крепления, состояние изоляционных и защитных покрытий элек-
трических проводов и жгутов, надежность электрических контак-
тов в местах болтовых соединений и т. д.
24. Изд. № 7934 369
/
м
Инструментальный контроль в отличие от визуального осу-
ществляется с применением технических средств контроля (из-
мерительных приборов, поверочных установок и др.) и, в свою
очередь, подразделяется на контроль работоспособности и кон-
троль с поиском неисправностей.
Контроль работоспособности системы электроснабжения
предполагает наряду с проверкой функционирования системы
проверку ее параметров и характеристик на соответствие требо-
ваниям, оговоренным в инструкции и регламенте технической
эксплуатации.
Под контролем с поиском неисправности понимается процесс
отыскания места возникновения неисправности.
Следует отметить, что все виды контроля направлены на до-
стижение единой цели — дать объективную оценку техническо-
го состояния объекта контроля.
В зависимости от вида работ по эксплуатации авиационной
техники, целей контроля и его обеспеченности техническими
средствами в системах электроснабжения применяются мето-
ды как поэлементного, так и комплексного контроля.
Поэлементный контроль агрегатов и блоков системы элект-
роснабжения осуществляется с помощью специальных повероч-
ных установок и может проводиться как в составе системы, так
и вне ее
Сущность поэлементного контроля агрегата (блока) в со-
ставе системы заключается в измерении электрических сигна-
лов в специально предусмотренных для этой цели контрольных
точках агрегата (блока) и сравнении их с заданными значе-
ниями, соответствующими определенному режиму работы си-
стемы электроснабжения. Такому виду контроля подвергаются
главным образом аппараты регулирования, защиты и управле-
ния, а также преобразователи электрической энергии.
Совокупность сигналов, используемых для поэлементного
контроля, устанавливается индивидуально для каждого агре-
гата (блока) при его разработке. Эта совокупность сигналов
должна удовлетворять следующим требованиям:
— должна быть достаточной для распознавания работоспо-
собного и неработоспособных состояний объекта контроля;
— должна быть минимальной для обеспечения простоты
контрольно-поверочной установки и сокращения времени кон-
троля.
Способ формирования контрольных сигналов должен обеспе-
чивать проведение контроля без расстыковки элементов системы.
Так, например, для поэлементного контроля дифференциаль-
ного корректора напряжения (ДКН) угольного регулятора (см.
рис. 4.18)’’предусмотрен дополнительный штепсельный разъем,
на контакты которого выведены выходные сигналы магнитных
усилителей УМ1 и УМ2. Контроль корректора с помощью по-
верочной установки сводится к замеру постоянной составляю-
370
щей напряжения на корректирующих обмотках угольного регу-
лятора при номинальном значении напряжения на зажимах ге-
нератора 28,5 В. Напряжение между клеммами 2 и 1, 3 и 1
должно быть в пределах 3,5...9 В, а между контактами 2 и 3 —
от 0 до ±2 В. Если величины этих напряжений превышают ус-
тановленные значения, корректор считается неисправным и на-
правляется в ремонт.
Нарушение настройки угольного регулятора и спекание
угольных шайб наиболее просто оценивается с помощью высоко-
омных телефонов, включенных параллельно угольному столбу.
При нормальной работе регулятора в телефонах прослушивает-
ся звук высокого тона, изменяющийся при включении нагрузки
генератора. Выключение нагрузки сопровождается одиночным
щелчком или несколькими щелчками в течение 1...2 с и повы-
шением тона звучания.
Если в телефонах прослушивается продолжительный (более
2 с) треск, то настройка такого регулятора нарушена и близка
к режиму неустойчивой его работы (режиму хлопков). Хрип в
телефонах свидетельствует о неисправности угольного столба.
Поэлементный контроль агрегата (блока) вне системы пред-
полагает отстыковку его от системы и проверку всех парамет-
ров и характеристик на соответствие техническим требованиям.
При этом сама система или ее параметры имитируются различ-
ными физическими аналогами. Такому контролю могут подвер-
гаться все элементы системы электроснабжения.
Так, например, в установке для проверки угольных регуля-
торов напряжения аналогом генератора постоянного тока явля-
ется магнитный усилитель УМ (рис. 15.3). Такое техническое
Рис. 15.3. Электрическая схема установки для проверки
угольных регуляторов напряжения
решение обусловлено подобием статических и динамических
характеристик генератора и магнитного усилителя. Это следу-
ет из рассмотрения характеристики холостого хода генератора
24* 371
(рис. 15.4,а) и рабочей характеристики магнитного
усилителя U„ = (рис. 15.4,6), а также дифференциальных
и рабочие характеристики магнитного усилителя
уравнений, описывающих процессы изменения тока в <их обмот-
ках возбуждения и управления соответственно.
Действительно:
а) для цепи обмотки возбуждения генератора из уравнения
(5.12) имеем
div .
Te~dl + tB^ R? (15’4)
где 7'в = — — постоянная времени генератора;
RB
RB — сопротивление цепи обмотки возбуждения;
UB, 4 — напряжение и ток возбуждения генератора;
б) для цепи обмотки управления магнитного усилителя
di.. LL
T^dT + i^^'
где Тму — постоянная времени магнитного усилителя;
Ry — сопротивление цепи обмотки управления;
£/у, iy— напряжение н ток управления.
Для того чтобы условия работы регулятора напряжения с
моделью были такими же, как и при его-работе с генератором,
необходимо обеспечить равенство постоянных времени Тыу. Тв,
а также соответствие характеристик £ = /:(/„) и UH =
Изменение тока нагрузки генератора при этом достаточно
точно имитируется изменением тока в обмотке подмагничива-
ния магнитного усилителя.
Периодический контроль угольных регуляторов с помощью
поверочной установки позволяет выявить тенденции к измене-
нию' его параметров и осуществить прогноз технического состо-
яния регулятора на предстоящий период эксплуатации.
S72
Аналогичные установки с моделью объекта регулирования
могут быть созданы и для контроля состояния других регулято-
ров.
Поэлементный контроль агрегатов (блоков) с расстыковкой
системы электроснабжения связан с большими затратами вре-
мени на его выполнение. Поэтому такой метод контроля при-
меняется главным образом при проведении целевых осмотров,
регламентных работ, перед установкой на ЛА новых изделий
и т. п.
Комплексный контроль работоспособности систем электро-
снабжения является основным видом контроля при проведении
всех видов подготовок ЛА к полетам и в процессе самого поле-
та. Он осуществляется по показаниям бортовых контрольно-из-
мерительных приборов и сигнальных табло, с помощью назем-
ных и бортовых автоматических (автоматизированных) систем
контроля комплексов бортового оборудования (АСК), а также
по записям регистраторов полетных данных.
На сигнальных табло и в записях регистраторов полетных
данных обычно отображается обобщенная информация о состо-
янии источников электрической энергии, например, вида «Отказ
генератора переменного тока». Одновременно при возникнове-
нии отказов с помощью речевых и световых информаторов эки-
пажу сообщается инструкция, например, «Отказ генератора
№ 2. Включи контактор объединения шин на щитке управле-
ния генераторами». В качестве источников такой информации
для оценки состояния систем электроснабжения используются
датчики положения исполнительных органов аппаратов защи-
ты и управления.
Для контроля работоспособности систем электроснабжения
в комплексе всего оборудования современных ЛА находят ши-
рокое применение автоматические и автоматизированные систе-
ты контроля, основанные на использовании диагностических
тестов.
Под диагностическим тестом понимается специальное нор-
мированное воздействие на объект контроля, направленное на
определение местоположения и характера неисправности. Сущ-
ность контроля с использованием диагностического теста иллю-
стрируется на примере системы регулирования напряжения (рис.
15.5).
Основным элементом рассматриваемой системы является ус-
тройство встроенного контроля, которое состоит из двух час-
тей: генератора стимулирующих сигналов (ГСС) и анализато-
ра параметров.
По команде АСК или оператора ГСС подает на вход регу-
лятора напряжения PH стандартный сигнал Дб7зад, изменяющий
уровень заданного (эталонного) напряжения в измерительном
органе регулятора ЙО, например, в сторону его уменьшения.
Одновременно выдаются сигнал на запуск анализатора пара-
373
Метров й сигнал запрета на срабатывание исполнительного ор-
гана аппарата защиты (АЗ)-
От оператора Результат контроля
или РСК
Рис. 15.5. Схема контроля канала генерирования электро-
энергии
Изменение заданного напряжения системой регулирования
воспринимается как повышение напряжения и она отрабатыва-
ет это возмущение, уменьшая уровень напряжения на зажимах
генератора Г. Измененные параметры переходного и установив-
шегося процессов (перерегулирование, время регулирования,
статическая ошибка и т. п) оцениваются с помощью анализа-
тора параметров по принципу «Годен — не годен», а резуль-
таты анализа выдаются в АСК в виде обобщенной информации
о состоянии канала генерирования.
Аналогичные принципы используются для автоматического
контроля систем регулирования частоты, устройств защиты и
управления и т. п.
Недостаток рассмотренного способа контроля состоит в не-
обходимости применения в каждом контролируемом агрегате
дополнительных устройств, которые по сложности в ряде слу-
чаев не уступают объекту контроля. Поэтому наиболее рацио-
нальным решением задач автоматического контроля состояния
системы электроснабжения в комплексе всего оборудования ЛА
является применение бортовых АСК, выполненных на базе
ЦВМ. Такие АСК должны обеспечивать в полете постоянный
контроль работоспособности, а на оперативных видах подго-
товки ЛА к полетам и после полета — контроль с поиском не-
исправности вплоть до сменного блока.
При использовании в перспективных системах электроснаб-
жения микропроцессорных вычислительных устройств, на кото-
рые возлагаются функции регулирования, защиты, управления
и контроля, наряду с диагностированием может быть решена и
задача ирбТлозирования технического состояния системы, что
позволит перейти к более прогрессивному методу эксплуата-
ции — эксплуатации по состоянию.
374
iS.S. ОСОБЕННОСТИ ЙОЙСКОВОГО РЕМОНТА
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
Под войсковым ремонтом понимают процесс восстановления
авиационной техники, получившей повреждения, который орга-
низуется на местах базирования войсковых частей и местах вы-
нужденных посадок ЛА. Основной задачей войскового ремонта
является приведение авиационной техники в боеготовное состо-
яние в минимально возможные сроки.
Войсковой ремонт системы электроснабжения организуется
в Комплексе работ по восстановлению всего ЛА и выполняется
непосредственно на планере при минимально необходимом объ-
еме демонтажных работ. Для его выполнения привлекаются на-
иболее подготовленные специалисты по электрооборудованию,
входящие в состав бригад войскового ремонта.
Процесс восстановления систем электроснабжения в вой-
сковых условиях имеет особенности. Во-первых, для восстанов-
ления их элементов допускается применять методы, средства и
технологические операции, отличающиеся от методов, средств
и технологических операций, применяемых в условиях авиаре-
монтных предприятий. Критерием их применимости являются:
возможность сокращения времени на выполнение операций ре-
монта, возможность выполнения операций ремонта силами тех-
нического экипажа в полевых условиях при ограниченном дос-
тупе к местам повреждений, возможность использования для
ремонта систем электроснабжения исправных элементов и де-
талей второй категории, а также их заменителей.
Во-вторых, система электроснабжения после ремонта долж-
на обладать уровнем надежности, соответствующим целям вос-
становления ЛА, т. е. иметь запас ресурса, необходимый для
выполнения заданных функций в течение определенного време-
ни (например, для эвакуации' с места вынужденной посадки
путем перелета к месту капитального или среднего ремонта).
Войсковой ремонт системы электроснабжения, в общем слу-
чае, разделяют на ремонт агрегатов (блоков) и ремонт электри-
ческих проводов и жгутов.
Ремонт поврежденных агрегатов (блоков) производится,
как правило, в ТЭЧ полка по технологиям, разрабатываемым
предприятиями-изготовителями данных изделий. При этом в
зависимости от цели и условий выполнения ремонта допускает-
ся не производить восстановление агрегатов, имеющих незначи-
тельные повреждения: повреждения корпуса и крышек агрега-
тов (блоков) с диаметром до 30 мм, если они не затрагивают
места крепления расположенных внутри элементов и сохраня-
ется зазор не менее 5 мм между корпусом и токопроводящими
элементами; нарушения одной из четырех точек крепления, а
также другие повреждения, не нарушающие работоспособность
данного агрегата (блока).
375
Йемонт электрических проводов й жгутов является наиболее
трудоемким процессом восстановления систем электроснабже-
ния. В зависимости от характера и объема повреждений трудо-
затраты на их ремонт могут составлять до 8О...85°/о общего
объема трудозатрат на восстановление системы электроснабже-
ния, а время на его выполнение — до 50% времени восстанов-
ления всего ЛА. Значительная часть этого времени расходуется
на .выявление неисправностей и уточнение объема ущерба, пору-
ченного в результате повреждения, а также на контроль пра-
вильности монтажа проводов после восстановления. Это обус-
ловлено тем, что повреждения электрических проводов охваты-
вают, как правило, более обширные области, чем повреждения
планера, и требуют выполнения дополнительных демонтажных
работ для обеспечения доступа к месту повреждения. I
Ремонт электрических проводов и жгутов агрегатным мето\
дом (методом замены) связан с большими трудозатратами и'
поэтому применяется только в тех случаях, когда другие мето-
ды не эффективны. Более широкое применение получили инди-
видуальные методы ремонта, направленные не на замену, а на
восстановление поврежденных участков проводов (жгутов).
Монтаж восстановленных элементов систем электроснабже-
ния должен производиться только после проверки качества ре-
монта. Это обусловлено тем, что выявление некачественного ре-
монта элемента на этапе общей проверки работоспособности
системы вынуждает производить повторно весь цикл демонтаж-
но-монтажных работ.
Проверка работоспособности системы электроснабжения пос-
ле ремонта производится в три этапа. В первую очередь про-
верке подвергаются цепи и фидеры, в которых устранялись пов-
реждения. Проверка производится последовательным включе-
нием под ток агрегатов и систем оборудования, в электричес-
кие схемы которых входят отремонтированные элементы. Далее
проверяются электрические цепи, провода которых располага-
ются в непосредственной близости от мест устранения повреж-
дений.
Лишь после этого выполняется проверка работоспособности
всего комплекса оборудования и вооружения в соответствии с
требованиями Единого регламента технической эксплуатации на
данный тип летательного аппарата.
Г л a-в а 16
ПЕРСПЕКТИВЫ РАЗВИТИЯ СИСТЕМ
ЭЛЕКТРОСНАБЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
16.1. ОСНОВНЫЕ ТЕНДЕНЦИИ РАЗВИТИЯ
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
Исторический опыт и анализ современного состояния систем
электроснабжения отечественных и зарубежных ЛА показыва-
ют, что процесс их развития неразрывно связан с процессом со-
вершенствования самих летательных аппаратов и комплексов :их
бортового оборудования. Расширение круга задач, решаемых
современными летательными аппаратами ВВС, повышение их
летно-технпческих, тактических и эксплуатационных качеств,
переход на цифровые методы решения задач пилотирования,
навигации и прицеливания, рост числа и мощности приемников
электрической энергии — все это обусловливает непрерывное
увеличение установленной мощности систем электроснабжения
и повышение требований, предъявляемых к их массоэнергети-
ческим, эксплуатационно-техническим характеристикам и ка-
честву электрической энергии.
Так, например, за последние 15...20 лет суммарная мощ-
ность приемников электрической энергии, устанавливаемых на
летательных аппаратах ВВС’ увеличилась примерно вдвое. Со-
ответственно этому изменилась мощность источников электри-
ческой энергии. Преобладающим типом первичных систем элек-
троснабжения современных ЛА стали системы переменного тока
постоянной частоты с приводами постоянной скорости. Установ-
ленная мощность систем электроснабжения отдельных самоле-
тов уже приближается к 1 МВ-А, при этом единичная мощность
основных источников электрической энергии достигает 120...
150 кВ-А.
В будущем в связи с появлением новых систем бортового
оборудования и вооружения ЛА не исключается возможность
применения источников электрической энергии с единичной
мощностью 1 МВт и более. Существенное (в 3—4 раза) увели-
чение установленной мощности систем электроснабжения мож-
но также ожидать вследствие отказа от использования на ЛА
энергии гидравлических систем и создания на этой основе так
называемых «полностью электрифицированных самолетов».
377
В настоящее £ремя для привода органов управления ЛА, ме-
ханизации крыла, взлетно-посадочных устройств и в других слу-
чаях, когда требуются большие усилия, применяются гидравли-
ческие агрегаты, которые при большой мощности обладают
меньшей удельной массой и более высоким быстродействием
по* сравнению с электрическими [17].
Вместе с тем гидравлические системы не отвечают непре-
рывно возрастающим требованиям к безопасности полета ЛА в
связи с присущими им недостатками: низкая живучесть, значи-
тельная масса магистральных трубопроводов, трудоемкость
в эксплуатации и низкая контролепригодность.
На полностью электрифицированных ЛА для этих целей
предполагается в качестве одного из вариантов использовать
комбинированные электрогидравлические агрегаты интеграль-
ного исполнения, объединяющие в одной конструкции исполни-
тельный гидромеханизм, гидронасос, электрический двигатель
для его привода и автономную гидравлическую систему. При-
менение таких агрегатов будет способствовать полной автома-
тизации оборудования ЛА, повышению его эксплуатационной
технологичности, надежности и живучести, а также обеспечит
некоторое снижение массы. Вместе с тем большая мощность
таких агрегатов обусловит переход на качественно новый уро-
вень установленной мощности систем электроснабжения, кото-
рый потребует нового подхода к вопросам организации работы
источников электрической энергии, обеспечения электромагнит-
ной совместимости приемников и поставит ряд новых задач,
не свойственных системам электроснабжения современных ЛА.
К числу таких задач можно отнести, например, задачу обеспе-
чения требуемого качества электрической энергии при пуске аг-
регатов, мощность которых становится соизмеримой с мощ-
ностью источников. Для обеспечения больших пусковых токов
в таких случаях в ряде проектов полностью электрифицирован-
ного самолета предлагается использовать электромеханические
накопители энергии (электрические агрегаты с вращающимися
маховиками).
Анализ тенденций развития систем электроснабжения оте-
чественных и зарубежных ЛА показывает, что в ближайшие
годы основными типами систем электроснабжения по-прежнему
будут системы трехфазного переменного тока постоянной часто-
ты 400 Гц напряжением 200/115 В с приводами постоянной
скорости. Для самолетов с установленной мощностью 400...
500 кВ-А и более возможен переход на повышенное напряже-
ние 400/230 В, что позволит использовать провода меньшего се-
чения и соответственно снизить массу системы распределения
электрической энергии.
Источниками электрической энергии в таких системах бу-
дут бесконтактные синхронные генераторы с интенсивными (ма-
сляно-распылительными) системами охлаждения, объединенные
37»
в одной конструкции с приводами постоянной скорости. Прин-
ципиально не исключается возможность охлаждения генератора
топливом авиационных .двигателей..
В настоящее время основу интегральных приводов состав-
ляют дифференциальные приводы постоянной скорости гидро-
статического типа с плунжерными гидравлическими машинами.
Удельная масса лучших образцов таких приводов при номиналь-
ной мощности 90...150 кВ-A составляет 0,55...0,'6 кг/кВ-А, сред-
няя наработка до отказа достигает 10... 12 тыс. часов, что прак-
тически соответствует их предельным возможностям. В связи
с этим рассматривается возможность более широкого использо-
вания дифференциальных электромеханических и гидродинами-
ческих (гидролопаточных) приводов постоянной скорости инте-
грального исполнения.
Среди перспективных систем электроснабжения наибольшее
развитие в ближайшие годы, вероятно, получат системы элект-
роснабжения переменного тока типа ПСПЧ со статическими
преобразователями частоты циклоконверторнюго типа.
Одним из основных достоинств сцстем электроснабжения пе-
ременного тока типа ПСПЧ является отсутствие в их структу-
ре конструктивно сложного привода постоянной скорости. Од-
нако пока они имеют несколько худшие массогабаритные ха-
рактеристики по сравнению с интегральными приводами-гене-
раторами. Ожидается в ближайшее время за счет применения
новых конструктивных материалов и деталей, новых полупро-
водниковых приборов, повышения частоты вращения генерато-
ров и других мер снижение удельной массы таких источников
электроэнергии до уровня 0,9...0,6 кг/кВ-А при КПД 78...80%.
Их применение на ЛА позволит:
— уменьшить трудозатраты на эксплуатацию и повысить
надежность систем электроснабжения;
- повысить точность стабилизации напряжения и частоты;
— уменьшить время переходных процессов регулирования
напряжения.
Кроме того, такие типы источников электрической энергии
позволяют снять ограничения по мощности однофазных прием-
ников благодаря возможности пофазного регулирования на-
пряжения.
Большие возможности сокращения массы систем электро-
снабжения дает применение постоянного тока повышенного на-
пряжения 270 В в качестве основного вида электрической энер-
гии, прежде всего, за счет уменьшения массы проводов систе-
мы распределения.
Первые попытки применения систем электроснабжения посто-
янного тока напряжением 120 В предпринимались в 1948...
1952 гг. Переход на питание приемников постоянного тока на
повышенное напряжение уже тогда позволил получить умень-
шение массы оборудования. Однако из-за низкой надежности
379
ЩетоЧно-колЛекторных Генераторов й двигателей постоянного
тока, больших токов коротких замыканий, возникновения элек-
трической дуги между контактами коммутационной аппаратуры
и ряда других причин такие системы дальнейшего развития не
получили.
Большие достижения современной электромеханики и полу-
проводниковой техники позволили возобновить работы по соз-
данию систем электроснабжения постоянного тока повышен-
ного напряжения, но уже на новом, более высоком, уровне.
Создание бесконтактных генераторов постоянного тока напря-
жением до 300 В и мощностью до >60 кВт уже в настоящее
время не вызывает особых технических трудностей. Ведутся
успешные работы по созданию бесконтактных двигателей посто-
янного тока. Конструктивно они представляют собой синхрон-
ные двигатели с возбуждением от постоянных магнитов из
редко-земельных металлов, обмотки статора которых получают
энергию через полупроводниковый коммутатор (многофазный
инвертор), позволяющий регулировать частоту вращения рото-
ра двигателя в необходимых пределах или стабилизировать ее
с высокой точностью. Успешно может быть решена и проблема
коммутации больших' значений постоянного тока высокого на-
пряжения путем применения бесконтактных или гибридных
коммутационных аппаратов. Таким образом, решение вопроса
применения СЭС постоянного тока повышенного напряжения
зависит в настоящее время не столько от технических возмож-
ностей создания таких систем, сколько от ряда технических и
экономических проблем, связанных с необходимостью перевода
значительной части бортового оборудования ЛА на питание
постоянным током повышенного напряжения.
В последние годы наблюдается тенденция к полному перево-
ду аппаратов регулирования, защиты и управления на исполь-
зование полупроводниковых приборов и интегральных микро-
схем, к интеграции ее элементов в одном корпусе. Благодаря
этому, достигнуты существенные результаты как в повышении
качества электрической энергии, так и в снижении массы ка-
налов генерирования.
Современные транзисторные и тиристорные регуляторы по
быстродействию и точности уже приближаются к тем предель-
ным возможностям, которые могут быть достигнуты при реали-
зации принципа регулирования по отклонению регуляторами
аналогового типа. Дальнейшее повышение качества процессов
регулирования напряжения и частоты тока требует перехода на
новые принципы управления и новые схемные решения. Непре-
рывно возрастающие требования к качеству электрической
энергии и, властности, к бесперебойности питания приемников
обусловливают необходимость нового подхода и к проблеме за-
щиты от аварийных режимов и, прежде всего, к проблеме за-
щиты систем распределения электроэнергии. Обеспечить вы-
азо
полнение этих требований традиционными аппаратами защиты
невозможно, так как использование выдержек времени для
обеспечения селективности действия защиты (прежде всего, мак-
симально-токовой защиты сетей) само по себе предполагает
длительные перерывы в питании приемников электрической
энергии.
В связи с этим в последнее время у нас в стране и за рубе-
жом начаты и успешно реализуются работы по созданию си-
стем электроснабжения с цифровыми вычислительными устрой-
ствами в контуре управления и защиты, позволяющие карди-
нально решить указанные проблемы повышения качества элек-
трической энергии и проблему надежности СЭС.
Большое внимание уделяется дальнейшему .повышению на-
дежности и снижению массы систем распределения электричес-
кой энергии, совершенствованию систем управления при-
емниками электрической энергии. Снижение массы систем рас-
пределения электрической энергии достигается как выбором
оптимальной конфигурации электрических сетей, так и приме-
нением новых типов монтажных проводов, допускающих боль-
шие значения плотности тока, более совершенной коммутацион-
ной и защитной аппаратуры.
Кроме проводов, предназначенных для передачи электричес-
кой энергии к приемникам, на ЛА имеется большое число про-
водов малых сечений, по которым передаются электрические
сигналы дистанционного управления потребителями, сигналы
многочисленных датчиков, осуществляется обмен информацией
между системами бортового оборудования ЛА и т. п. Масса
проводов такой информационной сети составляет до 70...80%
от массы всех проводов бортовой электрической сети ЛА.
Для уменьшения количества и массы этих проводов в на-
стоящее время разрабатывают специальные мультиплексные
(телемеханические) информационные системы, в которых пере-
дача команд управления приемниками электрической энергии,
сигналов датчиков и измерительных систем, а также обмен дан-
ными между системами и комплексами оборудования ЛА осу-
ществляется в кодовой форме по ограниченному числу прово-
дов или других физических каналов связи.
16.2. ОСОБЕННОСТИ ПОСТРОЕНИЯ
СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ С ЦИФРОВЫМИ
ВЫЧИСЛИТЕЛЬНЫМИ УСТРОЙСТВАМИ В КОНТУРЕ УПРАВЛЕНИЯ
Большие достижения современной микроэлектроники и вы-
числительной техники и, в частности, в области создания мало-
габаритных микропроцессорных устройств, быстродействующих
аналого-цифровых и цифроаналоговых преобразователей обус-
ловили возможность применения цифровых вычислительных уст-
ройств и в системах электроснабжения ЛА.
381
Проведенные исследования показывают, что применение ци-
фровых вычислительных устройств в контуре управления си-
стем электроснабжения позволяет решить на принципиально
новом уровне такие проблемы, как повышение качества про-
цессов регулирования напряжения и частоты тока, обеспечение
безынерционной защиты каналов и систем распределения элек-
троэнергии и др.
Так, например, при использовании цифровых методов регу-
лирования напряжения и частоты становится возможной реали-
зация оптимальных законов управления генераторами и приво-
дами постоянной скорости, которые в силу нелинейности и вы-
сокой сложности не могут быть реализованы обычными анало-
говыми средствами. При этом достигается сокращение длитель-
ности переходных процессов при коммутации нагрузки до 0,02...
0,1 с и полное устранение перерегулирования напряжения в ши-
роком диапазоне изменения режимов работы каналов систем
электроснабжения.
Применение цифровых вычислительных устройств, кроме то-
го, позволяет осуществить постоянный автоматический контроль
систем электроснабжения и диагностирование технического со-
стояния их основных элементов и На этой основе перейти к бо-
лее прогрессивному методу эксплуатации — эксплуатации по
состоянию.
Как объект цифрового управления система электроснабже-
ния современного ЛА по сравнению с другими системами бор-
тового оборудования обладает такими особенностями, как высо-
кая скорость протекания электромагнитных процессов, большой
объем информации, необходимой для решения задач регулиро-
вания и защиты, а также пространственная разобщенность ос-
новных ее элементов. Все это накладывает определенные огра-
ничения на структуру цифровой вычислительной системы, обус-
ловливает высокие требования к ее быстродействию и емкости
оперативных и постоянных запоминающих устройств.
Анализ возможных принципов построения систем электро-
снабжения с цифровыми вычислительными устройствами в кон-
туре управления показывает, что наиболее рационально задачи
регулирования, защиты от аварийных режимов, управления и
автоматического контроля могут быть решены при использова-
нии многопроцессорной вычислительной системы иерархичес-
кой структуры.
В качестве примера на рис. 16.1 приведен один из возмож-
ных вариантов двухуровневой иерархической структуры цифро-
вой системы управления двухканальной системы электроснаб-
жения.
В такой Системе на верхнем уровне иерархии предполагает-
ся наличие центрального микропроцессорного устройства
(ЦВУ), состоящего из двух взаимно резервируемых микропро-
цессорных вычислительных устройств (МВУ). Нижний уровень
382
иерархии управления обеспечивается микропроцессорными уп-
равляющими устройствами МУУ1 и МУУ2 в каждом канале
-Системный) Тканая сбязи
Система раса ревеления . ’
Рис. 16.1. Структурная схема системы электро-
снабжения с цифровым управлением
КГ1 и КГ2. Вычислительные устройства верхнего и нижнего
уровня между собой и другими вычислительными системами
ЛА объединяются единым системным каналом связи.
Для управления приемниками электрической энергии (ПЭЭ),
а также для сбора и передачи информации о их состоянии при-
меняется мультиплексный канал связи.
На вычислительные устройства нижнего уровня иерархии
(микропроцессорные управляющие устройства МУУ1 и МУУ2)
в рассматриваемой системе возлагается решение задач опера-
383
Тивного управления каналами генерирования электрической
энергии, а именно:
— обеспечение требуемого качества электрической энергии
при нормальном режиме работы;
— защита от аварийных режимов работы;
— контроль технического состояния канала генерирования,
а в случае его отказа и диагностирование.
К задачам, решаемым центральным вычислительным устрой-
ством, относят:
— управление каналами генерирования при раздельной и
параллельной работе;
— селективную защиту систем распределения электрической
энергии;
— контроль и диагностирование технического состояния си-
стемы распределения и системы электроснабжения в целом;
• — управление приемниками электрической энергии при всех
режимах работы и полетных ситуациях;
— реконфигурацию структуры системы распределения в со-
ответствии с ее техническим состоянием и полетной ситуацией.
Кроме того, на вычислительные устройства верхнего уровня
иерархии могут быть возложены задачи прогнозирования тех-
нического состояния основных элементов системы электроснаб-
жения.
Для реализации указанных функций во всех линиях, связы-
вающих РУ между собой и с приемниками электрической энер- -
гии, вместо традиционных аппаратов защиты и контакторов
устанавливаются полупроводниковые аппараты защиты и кон-
троля. Такие аппараты должны обеспечивать:
— коммутацию электрических цепей;
— формирование сигналов о перегрузке защищаемой цепи в
случае превышения тока нагрузки допустимого значения;
— выдачу информации о состоянии цепи в виде двоичных
сигналов «включено—выключено»;
— возможность проведения контроля своего технического
состояния.
В необходимых случаях они могут выполнять функции регу-
ляторов мощности для обеспечения программного управления
током нагрузки при включении и выключении мощных прием-
ников электрической энергии. ПримененЙе таких регуляторов
мощности, ограничивающих скорости изменения тока нагрузки,
позволит существенно повысить качество переходных процессов
в системах регулирования напряжения и частоты и в сочетании
с оптимальными законами регулирования обеспечить в принци-
пе полную ^инвариантность (невозмущаемость) этих систем к
коммутации нагрузки.
В связи с тем, что число аппаратов защиты и контроля
(АЗК) велико и соответственно велик объем информации о
состоянии системы распределения и приемников электроэнер-
384
гии, .связь АЗК'с ЦВУ и кабинным пультом управления само-
летным оборудованием осуществляется в адресно-цифровой фор-
ме с использованием мультиплексной системы, в состав которой
входят микроконтроллер (МК), мультиплексный канал связи
и терминальные устройства (ТУ) в каждом распределительном
устройстве.
Несмотря на то, что при таком, построении системы электро-
снабжения центральное вычислительное устройство обрабаты-
вает большой объем информации, требуемая частота и длитель-
ность решения задач верхнего уровня достаточно малы. В свя-
зи с этим считают, что ЦВУ может быть использовано и для
решения задач управления другими системами бортового обо-
рудования.
Значительно более жесткие требования предъявляются к вы-
числительным устройствам, используемым для оперативного уп-
равления каналами. Задачи регулирования напряжения и час-
тоты тока отличаются высокой сложностью, должны решаться
непрерывно, в реальном времени, при высокой скорости проте-
кания электромагнитных процессов в канале.
Один из возможных вариантов построения микропроцессор-
ного управляющего устройства (МУУ) канала системы электро-
снабжения переменного тока постоянной частоты с приводом
постоянной скорости приведен на рис. 16.2.
Рис. 16.2 Структура микропроцессорного управляющего устрой-
ства
В состав МУУ входят микропроцессорное вычислительное
устройство (МВУ) и блок связи с объектом (БСО). Входными
сигналами БСО являются текущие значения угловой скорости
25. Изд. № 7934
385
<•>, тока возбуждения возбудителя iB„, напряжения генератора ин,
тока нагрузки tH, а также совокупность дискретных сигналов
(команд) управления каналом Блок связи с объектом
обеспечивает нормирование (приведение к одному уровню) ана-
логовых и дискретных сигналов, преобразование их в код, фор-
мирование временных интервалов, характеризующих фазовые
соотношения напряжений и токов, а также формирование непре-
рывных во времени управляющих воздействийик/, ивв и т. д. по
сигналам, поступающим в цифровой форме от микропроцес-
сора.
Характеристики блока связи с объектом и, в'частности, бы-
стродействие и погрешность преобразования аналоговых вели-
чин в код во многом предопределяют структуру цифровой си-
стемы регулирования и ее эффективность. Например, для ре-
ализации прямого цифрового регулирования с учетом сущест-
вующих требований к качеству электрической энергии необходи-
мо, чтобы погрешность измерения и преобразования частоты и
напряжения не превышала ±0,5%, дискретность (периодич-
ность) измерения токов и напряжений составляла не более 0,5 мс,
а дискретность измерения частоты — не более 1,5...2,0 мс.
При этом тактовая частота микропроцессорного вычислитель-
ного устройства должна составлять примерно 2 МГц. Для ре-
ализации более высоких требований к качеству электроэнергии
потребное быстродействие БСО и МВУ возрастает. В случае,
когда микропроцессорное управляющее устройство использу-
ется в качестве корректора напряжения и частоты для грубого
(обычного) регулятора, потребное быстродействие БСО и МВУ
существенно меньше.
Анализ современных средств вычислительной техники пока-
зывает, что они способны обеспечить как коррекцию, так и
прямое регулирование напряжения и частоты.
16.3. ОСНОВНЫЕ ЗАДАЧИ И ПРИНЦИПЫ
МУЛЬТИПЛЕКСИРОВАНИЯ СИСТЕМ
ЭЛЕКТРОСНАБЖЕНИЯ летательных АППАРАТОВ
Передача команд и сигналов от датчиков информации (вы-
ключателей, сигнализаторов, логических устройств, датчиков
измерительных систем и приборов и др.) к ее приемникам (ре-
ле, контакторам, сигнальным лампам, приборам, системам и
т. п.) на современных ЛА осуществляется по индивидуальным
проводам. Такой способ организации информационной сети до
недавнего времени, когда поток информации был относительно
невелик,, был единственно целесообразным.
В настоящее время количество датчиков информации на ЛА
исчисляетс'ч уже многими сотнями единиц и существует тенден-
ция к его увеличению в. связи с непрерывным усложнением
комплексов ббртового оборудования и расширением выполня-
емых ими функций.
386
В связи с изложенным все более остро проявляются недо-
статки существующего способа передачи информации.
Во-первых, это значительная масса проводов, которая на
тяжелых ЛА достигает 1000...2000 кг. Уменьшить массу инфор-
мационной сети путем простого уменьшения сечения проводов
невозможно по условиям их механической прочности.
Во-вторых, наличие на борту ЛА сложной сети проводов и
жгутов обусловливает большие трудозатраты на их изготовле-
ние, монтаж, проверку правильности монтажа, эксплуатацию и
особенно на восстановление при боевых повреждениях.
В-третьих, большое число проводов, обеспечивающих внеш-
ние коммуникации бортовых систем и комплексов, является в
известной степени тормозом для дальнейшей их микроминиатю-
ризации — масса соединительных кабелей некоторых систем
уже сейчас превышает массу функциональных блоков.
В-четвертых, изменение состава бортового оборудования по
бюллетеням промышленности, неизбежное в течение срока служ-
бы ЛА, связано с большим объемом работ в бортовой электри-
ческой сети по сопряжению с другими системами и комплек-
сами.
Наиболее рациональным путем устранения указанных не-
достатков информационной сети ЛА является переход на
мультиплексные (телемеханические) способы передачи и обме-
на информации между элементами и системами бортового обо-
рудования.
Применительно к системам электроснабжения ЛА на
мультиплексную систему передачи информации возлагаются
задачи:
— передачи команд управления приемниками электрической
энергии;
— сбора информации о состоянии элементов систем рас-
пределения;
— передачи сигналов управления и защиты систем распре-
деления.
В общем случае мультиплексная система включает в свой
состав (см. рис. 16.1) микроконтроллер (МК), канал связи и
ряд периферийных терминальных устройств (ТУ). Центральное
вычислительное устройство ЦВУ цифровой системы электро-
снабжения также имеет узел сопряжения с мультиплексным
каналом связи.
Передача команд от ЦВУ или пульта управления самолет-
ным оборудованием ПУ СО, а также сигналов от аппаратов
защиты и контроля (АЗК) к ЦВУ осуществляется в адресно-
цифровой или адресно-распределительной форме в зависимости
от степени важности информации. Так, например, передача
команд управления конкретным исполнительным устройством
должна осуществляться в адресно-цифровой форме. Примерная
структура информационных слов показана на рис. 16.3,а. Ин-
25* 387
формационное слово состоит из группы синхронизирующих им-
пульсов (СИ), адреса терминального устройства (АТ), адреса
СИ СС пт ИИ СС ШК к СС
СИ СС ИТ СС
ИС
0)
К СС
Рис. 16.3. Структура информационных слов при а—
адресно-цифровом и б — адресно-распределительном
способах передачи информации
исполнительного устройства (АИ), шифра команды (ШК)', им-
пульсов контроля (К), например контроля на четность, и слу-
жебных слов (СС). Служебные слова или отдельные импуль-
сы используются для обозначения типа информационного сло-
ва, приоритета, конца слова и т. п. Длина информационных
слов в мультиплексных системах обычно находится в пределах
от 16 до 3'2 бит (2...4 байта).
Для передачи сигналов контроля о состоянии исполнитель-
ных устройств могут использоваться информационные слова в
адресно-распределительной форме (рис. 16.3,6). Такое слово
содержит вместо адреса исполнительного устройства и шифра
команды серию импульсов информационных сигналов (ИС).
Каждый разряд этой серии несет информацию о состоянии
только одного, строго определенного объекта, относящегося к
ТУ с данным адресом АТ. Использование адресно-распредели-
тельной формы информационных слов позволяет сократить вре-
мя передачи информации и соответственно повысить частоту
опроса. Однако при этом достоверность информации, содержа-
щейся в слове, снижается из-за влияния помех.
Для реализации цифровых методов передачи информации
каждое терминальное устройство (ТУ) должно содержать узел
приема и передачи информации, кодирующее и декодирующее
устройства, узлы сопряжения с датчиками сигналов и исполни-
тельными устройствами.
В целях унификации все основные узлы цифровой системы
управления должны строиться на единой Элементной базе, т. е.
на базе микропроцессорных устройств.
На микроконтроллер МК мультиплексного канала связи воз-
лагаются задачи формирования команд управления от пульта
ПУ СО и ответных сигналов, координации обмена и передачи
информации между ЦВУ и ТУ в соответствии с ее приорите-
том, а также тактирования и синхронизации всех элементов,
участвующих в процессе обмена информацией.
В качестве мультиплексного канала связи могут использо-
ваться экранированные двух- или многожильные высокочастот-
388
like кабели или волоконно-оптические кабельные линии, объ-
единяющие все ТУ, центральное вычислительное устройство
ЦВУ и микроконтроллер МК.
Исследования показывают, что, несмотря на сложность,
мультиплексные системы позволяют существенно повысить на-
дежность информационной сети ЛА благодаря возможности
многократного резервирования основных элементов.
Применение мультиплексные систем передачи информации
обеспечивает ряд существенных преимуществ по сравнению с
обычными (проводными) системами, а именно:
• — высокую ремонтопригодность и эксплуатационную тех-
нологичность благодаря унификации типовых элементов;
— гибкость информационной системы к изменениям струк-
туры и состава бортового оборудования, которая обеспечивается
простыми программными методами;
— высокую степень приспособленности к сопряжению с
цифровыми управляющими и вычислительными системами.
Первые опыты применения мультиплексных систем на ряде
зарубежных ЛА (А-10, В-1, VC-10 и др.) и расчеты показывают,
что при числе объектов управления 500 и более на тяжелых
самолетах мультиплексирование обеспечивает снижение массы
информационной сети от 15 до 70% при повышении надежности
систем управления [17].
Комплексное применение мультиплексных систем и цифро-
вых вычислительных устройств в контуре управления систем
электроснабжения ЛА позволяет решать ряд принципиально
новых задач по повышению качества электрической энергии и
надежности электроснабжения приемников.
ЛИТЕРАТУРА
1. Авиационная электротехника. /Под. ред. Доброленского Ю. П. —
М.: В ВИА, 1985.
2. Важное А. И. Переходные процессы в машинах переменного то-
ка. — Л.: Энергия, 1980, 256 с.
3. Веников В. А. Переходные электромеханические процессы в
электрических системах. — М.: Высшая школа, 1978, 415 с.
4. Власов Г. Д. Проектирование систем электроснабжения летатель-
ных аппаратов. — М.: Машиностроение, 1967.
5. Да со ян М. А. Химические источники тока. — Л.: Энергия, 1969,
586 с.
6. Г а л т е е в Ф. Ф., Куприн Б. В. Современные системы электро-
снабжения самолетов. Итоги науки и техники. Электрооборудование транс-
порта. Т. 4. — М.: ВИНИТИ, 1977, 96 с.
7. Кочетков Ю. А. Основы автоматики авиационного оборудова-
ния. — М.: ВВИА, 1975, 455 с.
8. К р а сио ш а пк а М. М., Евсеев П. П., Онечким В. А.,
Ставровский Б. А. Электроэнергетические системы летательных аппара-
тов. — КВИАВУ, 1969, 430 с.
9. Кривенцев В. И. Оптимизация плотности тока для распредели-
тельных сетей подвижных объектов. — М.: Электричество, 1978, № 3, с. 7—
12.
10. Кулебакин В. С., Морозовский В. Т., Синдеев И. М.
Электроснабжение самолетов. — М.: Оборонгиз, 1956, 479 с.
11. 1К у п р и н Б. В., Р у н о в К- Д-, Син дее>в И. М. Системы электро-
снабжения летательных аппаратов. — М.: ВВИА, 1975, 317 с.
12. М и з ю р и и С. Р. Синхронные электрические машины летательных
аппаратов. — М.: МАИ, 1972, 179 с.
13. Моин В. С., Лаптев Н. Н. Стабилизированные транзисторные
преобразователи. — М.: Энергия, 1972, 512 с.
14. Морозовский В. Т., Синдеев И. М., Рунов К- Д. Системы
электроснабжения летательных аппаратов. — М.: Машиностроение, 1973,
420 с,
15. Основы электрооборудования летательных аппаратов, /Под ред. Брус*
кина Д. Э. Кн. I и II. — М.: Высшая школа, 1978, 582 с.
16, Панасюк Г. И., Привалов Г. В„ Попов И. А, Авиационные
Электрические машины. — М,: ВВИА, 1985, 499 с.
17, Синдеев И. М. Электроснабжение летательных аппаратов, **- М,:
Транспорт, 1682”, 272 с.
18. Романов В. В., Кащев Ю. М. Химические источники тока. —М<:
Советское радио, 1978, 263 с,
390
19. Румянцев Е. А., О сов ск ий Ё. fl., Сергеев Н ft. Инже-
нерно-авиационная служба и эксплуатация авиационного оборудования. — М.:
ВВИА, 1977, 420 с.
20. Ф е д о с е е в А. Ф. Современное состояние и перспективы развития
электрооборудования самолетов. — Автоматика и электромеханика. — М.:
Наука, 1973, с. 61...72.
21. Федоров А. А., Каменева В. В. Основы электроснабжения
промышленных предприятии. — М.: Энергия, 1979, 407 с.
22. Ч и ж е н к о И. М., Р у д е н к.о В. С., С е н ь к о В. И. Основы пре-
образовательной техники. — Киев: Высшая школа, 1980, 460 с.
23. Электроснабжение летательных аппаратов. /Под ред. Коровина
Н. Т. — М.: Машиностроение, 1975, 536 с.
*
ОГЛАВЛЕНИЕ
Предисловие ...............................................3
Введение .......................................................... 4
Глава 1. Структуры систем электроснабжения летательных аппаратов 10
1.1. Классификация систем электроснабжения. Режимы их работы 19
1.2. Основные технические требования, предъявляемые к систе-
мам электроснабжения..........................................13
1.3. Структурные схемы систем электроснабжения . . . .15
1.4. Критерий оценки массоэнергетических характеристик систем
электроснабжения .............................................19
Глава 2. Приводы авиационных генераторов............................24
2.1. Непосредственный привод генераторов постоянного и пере-
менного тока..................................................24
2.2. Классификация приводов постоянной скорости синхрон-
ных генераторов ..............................................26
2.3. Гидравлические приводы...................................29
2.4. Пневматические приводы...................................39
2.5. Электромеханические приводы..............................44
2.6. Механические приводы ........ 46
2.7. Регуляторы частоты вращения приводов постоянной скорости 47
Глава 3. Статика и динамика процессов в системах регулирования
частоты ............................................................55
3.1. Требования к точности стабилизации частоты .... 55
3.2. Привод постоянной скорости как объект регулирования час-
тоты вращения.................................................56
3.3. Уравнения грубого и точшого каналов регулятора частоты
вращения .................................................60
3.4. Анализ статики и динамики процессов в системах регулиро-
вания частоты...........................».....................65
Глава 4. Системы регулирования напряжения ...... 69
4.1. Требования к точности поддержания и форме кривой напря-
жения . . . ..........................69
4.2. Принципы построения Систем регулирования напряжения.
Классификация регуляторов напряжения..........................72
4.3. Измерительные органы регуляторов напряжения И способы
Их включения ........... 78
392
4.4. Угольные регуляторы напряжения...........................83
4.5. Регуляторы напряжения на магнитных усилителях . . 95
4.6. Транзисторные регуляторы напряжения ... 100
4.7. Тиристорные регуляторы напряжения ..... 105
Глава 5. Статика и динамика процессов регулирования напряжения 10!)
5Л. Синхронный генератор как объект регулирования напряжения 109
5.2. Анализ процессов регулирования напряжения генераторов
переменного тока..............................................122
5.3. Генератор постоянного тока как объект регулировании на-
пряжения ... .....................125
5.4. Анализ процессов регулирования напряжения генераторов
постоянного тока .............................................132
5.5. Способы повышения точности и устойчивости систем регу-
лирования напряжения..........................................135
Глава 6. Параллельная работа каналов систем электроснабжения 145
6.1. Основные требования к системам электроснабжения с парал-
лельно работающими каналами...................................145
6.2 Условия и способы включения каналов генерирования элек-
троэнергии на параллельную работу.............................147
6.3, Методы распределения нагрузки между параллельно рабо-
тающими каналами систем электроснабжения .... 149
6.4. Автоматизация распределения нагрузки между каналами
систем электроснабжения постоянного тока . . . .155
6.5. Влияние неидентичности параметров каналов систем электро-
снабжения постоянного тока на равномерность распределения
нагрузки .....................................................161
6 6 Автоматизация .распределения активной и реактивной нагру-
зок между каналами систем электроснабжения переменного
тока .........................................................165
6.7. Методика исследования динамики параллельной работы ка-
налов систем электроснабжения.................................171
Глава 7. Электромашиииые преобразователи .... 178
7Л. Общие сведения...........................................178
7.2. Регулирование частоты тока электромашинных преобразо-
вателей ..................................................180
7.3. Регулирование напряжения электромашинных преобразова-
телей ....................................................188
7 4. Особенности эксплуатации электромашинных преобразовате-
лей ......................................................190
Глава 8. Статические преобразователи электрической энергии . 193
8.1. Классификация статических преобразователей . . 193
8.2. Принципы работы и основные характеристики выпрямителей 194
8.3. Работа выпрямителей под нагрузкой.......................200
8.4. Способы стабилизации напряжения выпрямительных уст-
ройств ...........................................205
393
*
8.5. Статические преобразователи постоянного тока в перемен-
ный "..........................................................2Ю
8.6. Способы улучшения характеристик статических преобразо-
вателей постоянного тока в переменный.........................214
8.7. Статические преобразователи частоты . . 224
Глава 9. Авиационные аккумуляторные батареи . 228
9.1. Назначение авиационных аккумуляторных батарей . . - 228
9.2. Общие сведения об аккумуляторах.........................229
9.3. Устройство, принцип действия и основные характеристики
свинцовых аккумуляторных батарей . .... 235
9.4. Принцип действия, устройство и основные характеристики
серебряно-цинковых аккумуляторных батарей .... 241
9.5. Принцип действия, устройство и основные характеристики
никель-кадмиевых аккумуляторных батарей .... 245
Глава 10. Аварийные режимы в системах электроснабжения . . . 249
10.1. Общая характеристика аварийных режимов . 249
10.2. Короткие замыкания в системах электроснабжения посто-
янного тока. Методика расчета токов короткого замыкания 250
10.3. Ко|юткие замыкания в системах электроснабжения перемен-
ного тока. Методика расчетов токов короткого замыкания 256
10.4. Аварийные повышение и снижение напряжения в системах
электроснабжения постоянного тока.............................263
10.5. Аварийные повышение и снижение напряжения в системах
электроснабжения переменного тока ...... 264
10.6. Чрезмерные повышение и снижение частоты в системах
электроснабжения переменного тока.............................265
10.7. Несимметрии и искажение формы кривой напряжения в
системах электроснабжения переменного тока .... 265
Глава 11. Защита систем электроснабжения летательных аппаратов 267
11.1. Назначение, принципы построения аппаратов защиты и ос-
новные требования, предъявляемые к ним .... 267
11.2. Защита от аварийного повышения и снижения напряжения 270
11.3. Защита от повышения и снижении частоты .... 278
11.4. Защита каналов генерирования электроэнергии от коротких
замыканий.....................................................283
&
11.5. Защита от несимметрии напряжений, обрыва и обратного
чередования фаз...............................................286
11.6. Комбинированные аппараты защиты и управления . . 288
Глава 12. Аппараты дистанционного управления системами электро-
снабжения ..........................................................297
12.1. СУбщие сведения о коммутационных аппаратах . . 297
12.2. Управление источниками электроэнергии постоянного тока 30G
12.3. Управление каналами генерирования электроэнергии пере-
менного тока..................................................313
394
12.4. Синхронизация канадок генернриипнии тлгК1р<инер| пн пере
менного тока для (inpnjijieJii.iiofl работы......................316
Глава 13. Системы распределения алектричоской «нор1ии , , 325
13.1. Классификация систем рнспределгнин эджтрнчеекоП энергии
и основные требования, iipcJi'iiiin^iticM не к ним . 325
13.2. Бортовые электрические прополи .............................329
13.3. Защита систем распределении электрической энергии 334
Глава 14. Системы электроснабжения типопых летательных янипрпгои 342
14.1. Системы электроснабжения легких и ергдних енмолетон 342
14.2. Системы электроснабжения тяжелых СПМОЛСТОц . , 344
14.3. Системы электроснабжения нерголотип .... 347
14.4. Особенности систем электроснпПже1111и зарубежных лети
тельных аппаратов ...............................................349
14.5. Влияние надежности систем электроснабжении Л Л пн бе i
опасность полетов................................................351
14.6. Методы расчета показателей безоткатности снегом электро
снабжения .......................................................352
Глава 15. Особенности эксплуатации и пойСКОВого ре Molli а систем
электроснабжения летательных аппаратов , . 3(>0
15.1 Общие положения.............................................360
15.2. Характерные неисправности систем алектроспабженпя и
меры но их предупреждению........................................360
15.3. Особенности эксплуатации бортовых miiiamioilliux лкпуму-
ляториых батарей.................................................363
15.4. Методы контроля систем электроснабжении . 369
15.5. Особенности войскового ремонта систем мектриснабженпи 375
Глава 16. Перспективы развития систем влектроснабжения летатель-
ных аппаратов..........................................................377
16.1. Основные тенденции развития систем електргюпабжепия . 377
16.2. Особенности построения систем элсктросппОжсипн с цифро
выми вычислительными устройствами и контуре управления 381
16.3. Основные задачи и принципы мультиплексировании систем
электроснабжения летательных пина рпгнп .... 386
390
Литература
Виктор Михайлович Зонтов,
Борис (Васильевич Куприн
СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Технический редактор В. Н. Лебедева Корректор 3. П. Бонич
Сдано в набор 6.01.1988 г. Подписано в печать 19.09.1988 г.
Г-420477 Изд. № 7934 Зак. № 688
Формат 60X90716 24,75 п. л. 24,75 усл. п. л. 22,6 уч.дгзд. л.
(Для внутриведомственной продажи цена 1 руб. 10 коп.)
Типография (ВВИА имени Н. Е. Жуковского