/









































































































































































































































































































































Похожие



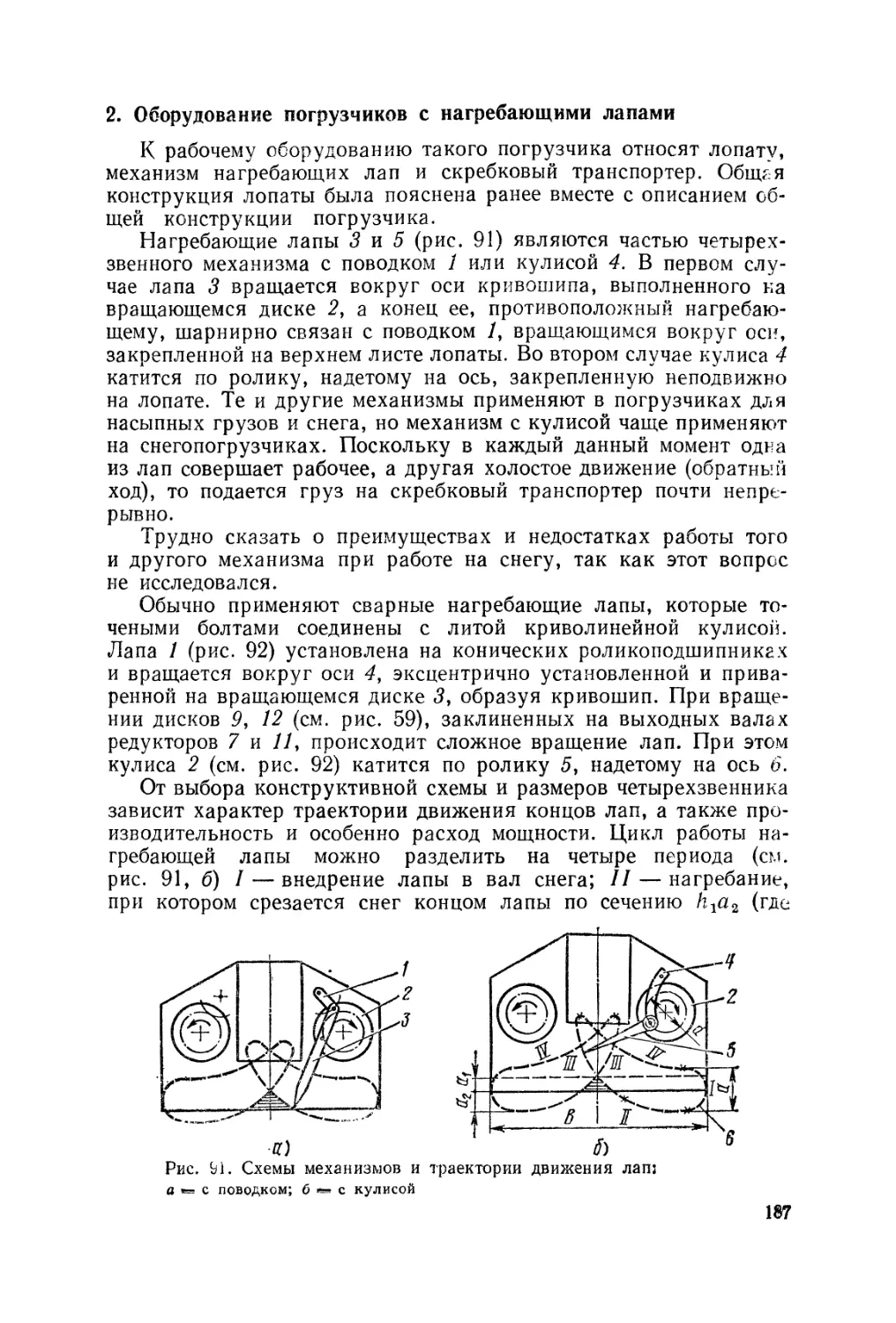
Текст
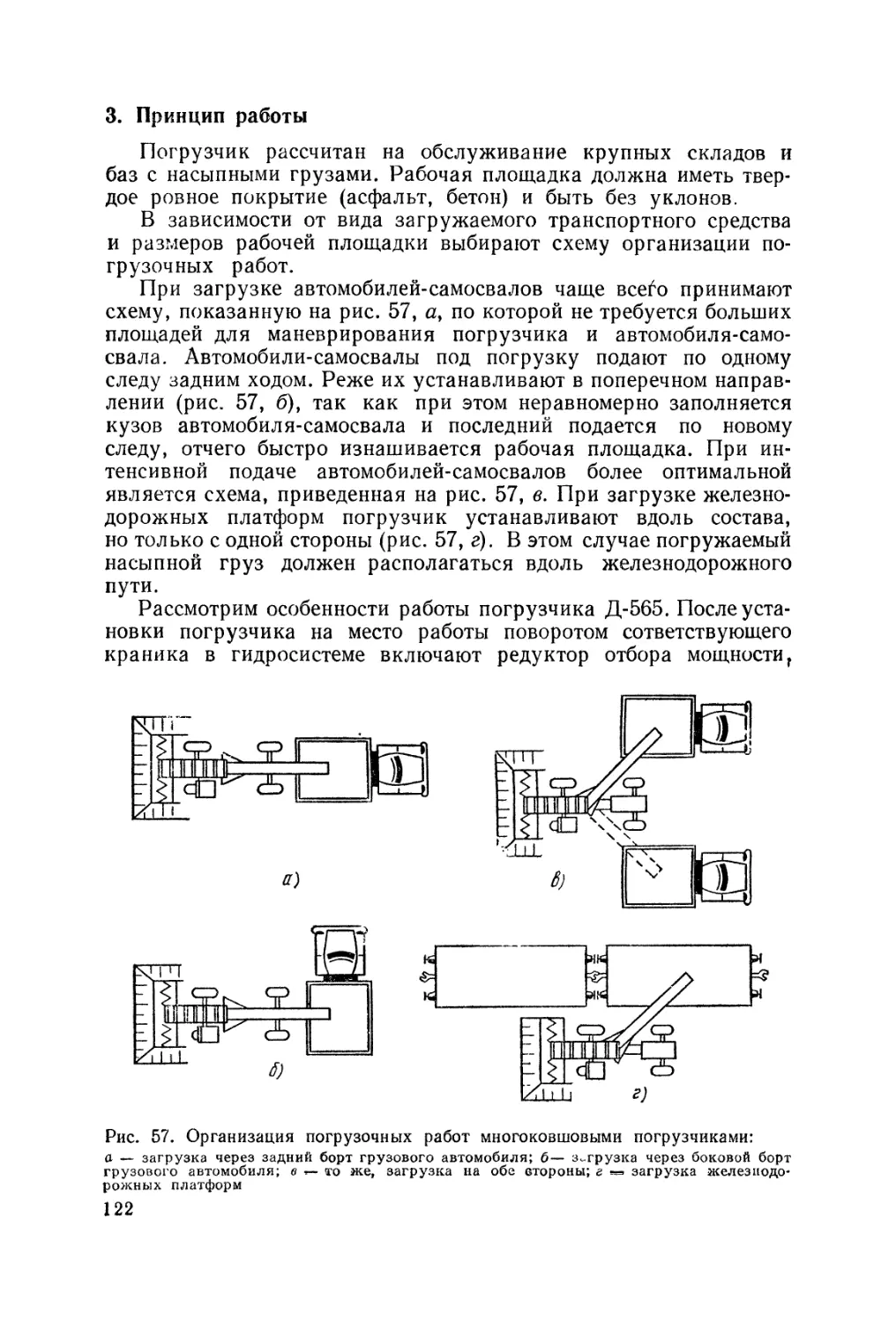
А. Ф. Базанов,
Г. В. Забегалов
САМОХОДНЫЕ
ПОГРУЗЧИКИ
Второе издание,
переработанное и дополненное
Москва
«МАШИНОСТРОЕНИЕ» 1979
ББК 39.9
Б17
УДК 621.869.4
Редактор А. Г. ФИЛИН
Рецензент Л. А. ГОБЕРМАН
Базаиов А. Ф., Забегалов Г. В.
Б17 Самоходные погрузчики.—2-е изд., перераб. и доп.—
М.: Машиностроение, 1979. — 146 с, ил,
В пер.: 1 р. 70 к.
В книге приведены классификация, назначение и область применения совре-»
менных самоходных одно- и многоковшовых погрузчиков, автопогрузчиков и
снегопогрузчиков (с нагребающими лапами), рассмотрены технические
характеристики, принцип действия и принципиальные конструкции, приведены расчеты
по определению мощности привода, производительности и устойчивости
погрузчиков.
По сравнению е первым изданием (1955 г.) материал книги обновлен,- в нем
обобщены вопросы теории, конструирования и расчета погрузчиков всех видов.
Книга рассчитана на инженерно-технических работников, занятых кон«
струированием и эксплуатацией погрузчиков. Может быть полезна < тудектам
машиностроительных вузов
■-"- М1030~
© Издательство «Машиностроение», 1979 р.
ВВЕДЕНИЕ
Производство погрузчиков в СССР развилось главным образом
после Великой Отечественной войны. Созданные в короткое время
принципиально новые по конструкции подъемно-транспортные
машины позволяют механизировать основные погрузочно-разгру-
зочные работы с насыпными и штучными грузами. К таким
машинам прежде всего относятся одноковшовые и вилочные
погрузчики.
Одноковшовые погрузчики создавались сначала на базе
гусеничных тракторов. Затем для них использовали колесные
тракторы, сперва с одним, а затем с двумя ведущими мостами. В
настоящее время их выпускают на базе колесных тракторов и тракторов-
тягачей, а средние и тяжелые погрузчики, как правило, выполняют
на собственном колесном шасси с шарнирно-сочлененной рамой.
В качестве шасси для погрузчиков реже используют гусеничные
тракторы, что объясняется их малой приспособленностью для
режима фронтальных работ, а также общей тенденцией замены
гусеничного хода машин на колесный для увеличения мобильности
и проходимости по дорогам с твердым покрытием.
В настоящее время при погрузке насыпных грузов из штабелей,
а при большом объеме ковша даже при экскавационных работах
на грунтах до III категории экскаваторы заменяют
одноковшовыми погрузчиками. Погрузчики производительнее и дешевле,
чем экскаваторы: при одной и той же мощности двигателя у них
имеется ковш большего объема и отсутствует поворотная
платформа.
Автопогрузчики с грузоподъемником типа «нюрнбергских
ножниц» впервые появились в 30-х годах во Франции [1 ].
Дальнейшее распространение получили погрузчики с рамным
грузоподъемником фирм «Росс» (Англия) и «Хайстер» (США).
В СССР производство первого автопогрузчика грузоподъемностью
3 т, спроектированного одним из авторов данной книги, было
освоено в 1947 г. Серийное же производство автопогрузчиков
отечественной конструкции было налажено в 1950 г. В настоящее
1* 3
время грузоподъемность автопогрузчиков доведена до 10 т, а
уникальных образцов за рубежом даже до 30 т.
Автопогрузчики успешно применяют для погрузки и выгрузки
штучных грузов в разных отраслях народного хозяйства. С
установкой нейтрализаторов отработавших газов их стали применять
в трюмах морских судов, на межцеховом транспорте и в закрытых
складах для штабелирования грузов. При большой мобильности
и хорошей проходимости по сухим дорогам с естественным
покрытием они хорошо приспособлены для работы на рассредоточенных
объектах.
Многоковшовые погрузчики впервые созданы в 30-х годах
фирмой «Хейс» (США). В СССР многоковшовые погрузчики
выпускают серийно с 1948 г. Их применяют только на больших
складах с насыпными грузами, а на мелких объектах заменяют
более мобильными и дешевыми одноковшовыми погрузчиками.
ri,C использованием принципа действия нагребающих лап наша
Промышленность выпускает снегопогрузчики для уборки снега
щ улицах. Для них принцип волочения снега более приемлем,
\}§м волочение абразивных насыпных грузов по стальной
наклонной плоскости.
. В настоящее время вполне установились принципиальные
конструкции выпускаемых погрузчиков. При создании новых
образцов у погрузчиков совершенствуют только конструкции отдельных
узлов, особенно трансмиссий, а также изменяют внешний вид.
Сейчас отмечается общая тенденция к применению
гидродинамических и гидрообъемных (с мотор-колесами) трансмиссий не
только для одноковшовых погрузчиков, но также и для
автопогрузчиков.
Для проектирования погрузчиков наряду с заводскими созданы
специализированные конструкторские бюро, например Львовское
головное специальное конструкторское бюро (ГСКБ)
автопогрузчиков — по одноковшовым погрузчикам, где подготовлены
квалифицированные кадры конструкторов и исследователей. Создан
большой расчетный материал, который мало освещен в
литературе.
Авторы книги, имеющие прямое отношение к созданию
погрузчиков, взяли на себя труд обобщить накопленный материал по
освоению этих машин.
РАЗДЕЛ ПЕРВЫЙ
КОНСТРУКЦИИ ПОГРУЗЧИКОВ
Глава 1
ОБЩИЕ ДАННЫЕ ПО ПОГРУЗЧИКАМ
1. Классификация и конструктивные схемы
Погрузчиками называют подъемно-транспортные машины,
применяемые для захвата свободно лежащих штучных или для
зачерпывания насыпных грузов, подъема и перемещения их со склада
в транспортные средства или из последних на склад. По виду
перегружаемых грузов их можно разделить на погрузчики для
штучных и погрузчики для насыпных грузов. Главным
классификационным признаком является вид основного захватного
погрузочного органа, конструкция которого зависит от способа захвата
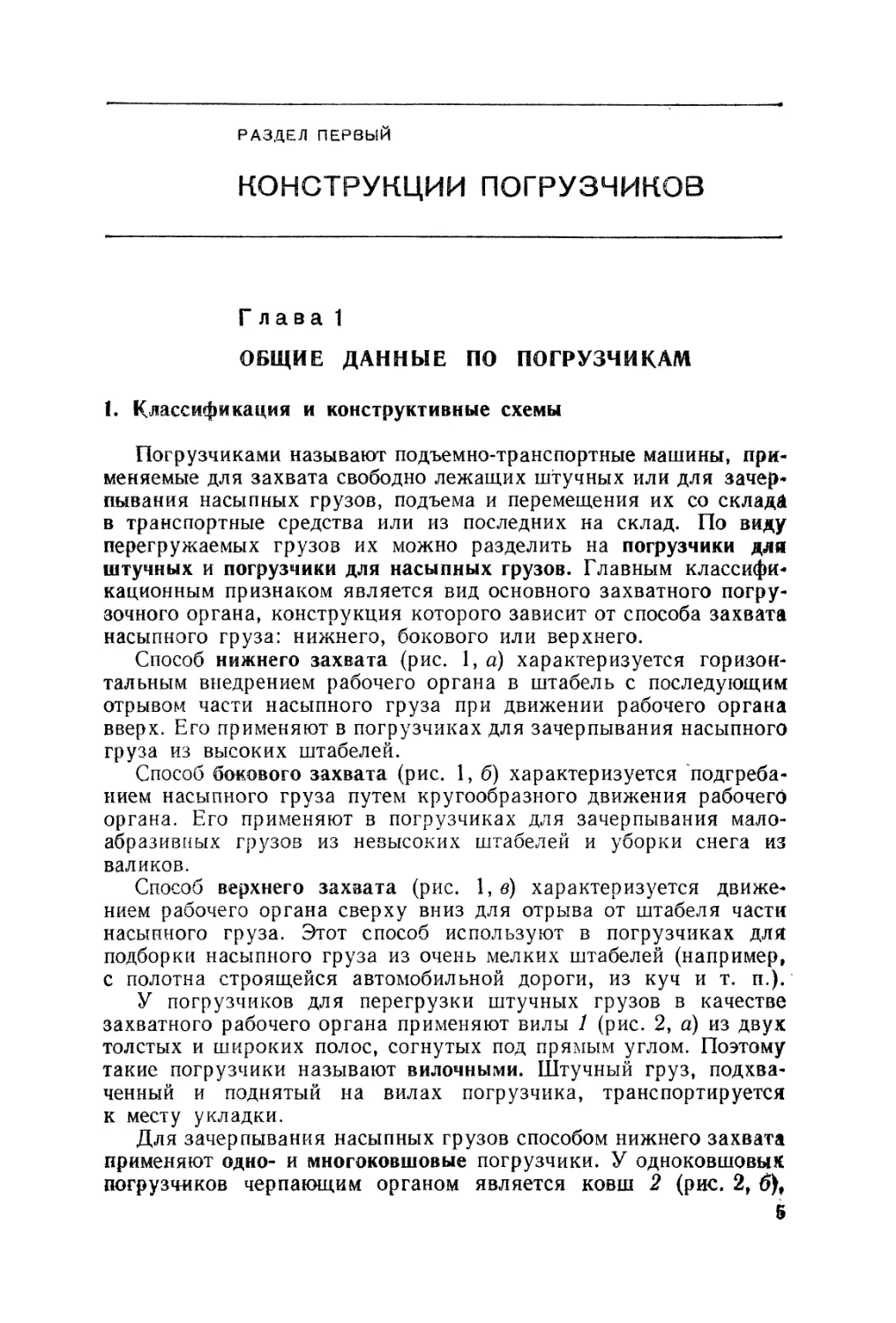
насыпного груза: нижнего, бокового или верхнего.
Способ нижнего захвата (рис. 1, а) характеризуется
горизонтальным внедрением рабочего органа в штабель с последующим
отрывом части насыпного груза при движении рабочего органа
вверх. Его применяют в погрузчиках для зачерпывания насыпного
груза из высоких штабелей.
Способ бокового захвата (рис. 1, б) характеризуется
подгребанием насыпного груза путем кругообразного движения рабочего
органа. Его применяют в погрузчиках для зачерпывания мало-
абразивных грузов из невысоких штабелей и уборки снега из
валиков.
Способ верхнего захвата (рис. 1,в) характеризуется движе*
нием рабочего органа сверху вниз для отрыва от штабеля части
насыпного груза. Этот способ используют в погрузчиках для
подборки насыпного груза из очень мелких штабелей (например,
с полотна строящейся автомобильной дороги, из куч и т. п.).
У погрузчиков для перегрузки штучных грузов в качестве
захватного рабочего органа применяют вилы 1 (рис. 2, а) из двух
толстых и широких полос, согнутых под прямым углом. Поэтому
такие погрузчики называют вилочными. Штучный груз,
подхваченный и поднятый на вилах погрузчика, транспортируется
к месту укладки.
Для зачерпывания насыпных грузов способом нижнего захвата
применяют одно- и многоковшовые погрузчики. У одноковшовый
погрузчиков черпающим органом является ковш 2 (рис. 2, б),
5
а) б) В)
Рис. 1. Способы захвата насыпного груза из штабеля рабочими
органами погрузчиков:
а — нижний захват (вид на штабель сбоку); б — боковой захват (вид на
штабель сверху); в ■«- верхний захват (вид на штабель сбоку)
шарнирно подвешенный на подъемной стреле. С движением всего
погрузчика в сторону штабеля ковш заполняют насыпным грузом,
поднимают и с передвижением всего погрузчика транспортируют
,к месту разгрузки. У многоковшовых погрузчиков черпающими
органами являются ковши цепного элеватора 3 (рис. 2, в) и ковши,
размещенные на вращающейся около трубчатой стрелы трубе 4
(рис. 2, г) или на вращающемся колесе 5 (рис. 2, д). Последние
два погрузчика называют роторными погрузчиками. У
многоковшовых и роторных погрузчиков ковши с насыпным грузом
поднимаются и разгружаются на ленточный конвейер, с помощью
которого прямо или через другой конвейер груз подается в
транспортные средства.
Для зачерпывания насыпного груза способом верхнего захвата
применяют скребковые погрузчики, у которых рабочим органом
является короткий скребковый конвейер 6 (рис. 2, ё). Насыпной
груз нагребают скребками на ленточный конвейер для загрузки
автомобилей-самосвалов.
По способу бокового захвата различают погрузчики с парными
нагребающими лапами 7 (рис. 2, ж) или рифлеными дисками 11
(рис. 2, з). Погрузчики с тем или другим рабочим органом в
принципе могут иметь одинаковое самоходное шасси на гусеничном
или колесном ходу.
Рычажный механизм подгребающих лап 7 (см. рис. 2, ж)
является частью механизма четырехзвенника. Каждая лапа
примерно в середине имеет шарнир, вертикальная ось которого
эксцентрично расположена на вращающемся диске 8. Лапы совершают
качательные движения в плоскости наклонной приемной плиты 9,
называемой лопатой. С движением погрузчика в сторону штабеля
лопата врезается в основание штабеля, нагребающие лапы
отрывают часть насыпного груза из штабеля, перемещают ее по верху
лопаты на скребковый конвейер 10 для подачи груза в
транспортные средства.
. В механизме нагребания с рифлеными дисками 11 (см. рис. 2, з)
каждый из них эксцентрично посажен относительно оси
вращающихся дисков 12. При вращеции последних з.разные стороны,
.7-.
i
и
tfflt
ж
Rr
Щ
■w
r\rv—
Рис. 2. Конструктивные схемы погрузчиков:
а — вилочного; 6 «— одноковшового; s *— многоковшового; г, д ^ роторных; q
нового; ж в» с нагребающими лапами; а = с подгребающими дисками
скреб-»
как показано стрелками на рис. 2, з% рифленые диски нагребают
насыпной груз на скребковый конвейер.
По характеру рабочего процесса погрузчики бывают
периодического (цикличного) и непрерывного действия; по виду ходового
оборудования — гусеничные или колесные; по виду привода,—
с двигателем внутреннего сгорания или электрическим.
Погрузчики, выполняемые по приведенным конструктивным
схемам, можно отнести к строительным погрузчикам. Однако
некоторые из них не получили широкого распространения в
народном хозяйстве, поэтому не все рассматриваются в книге.
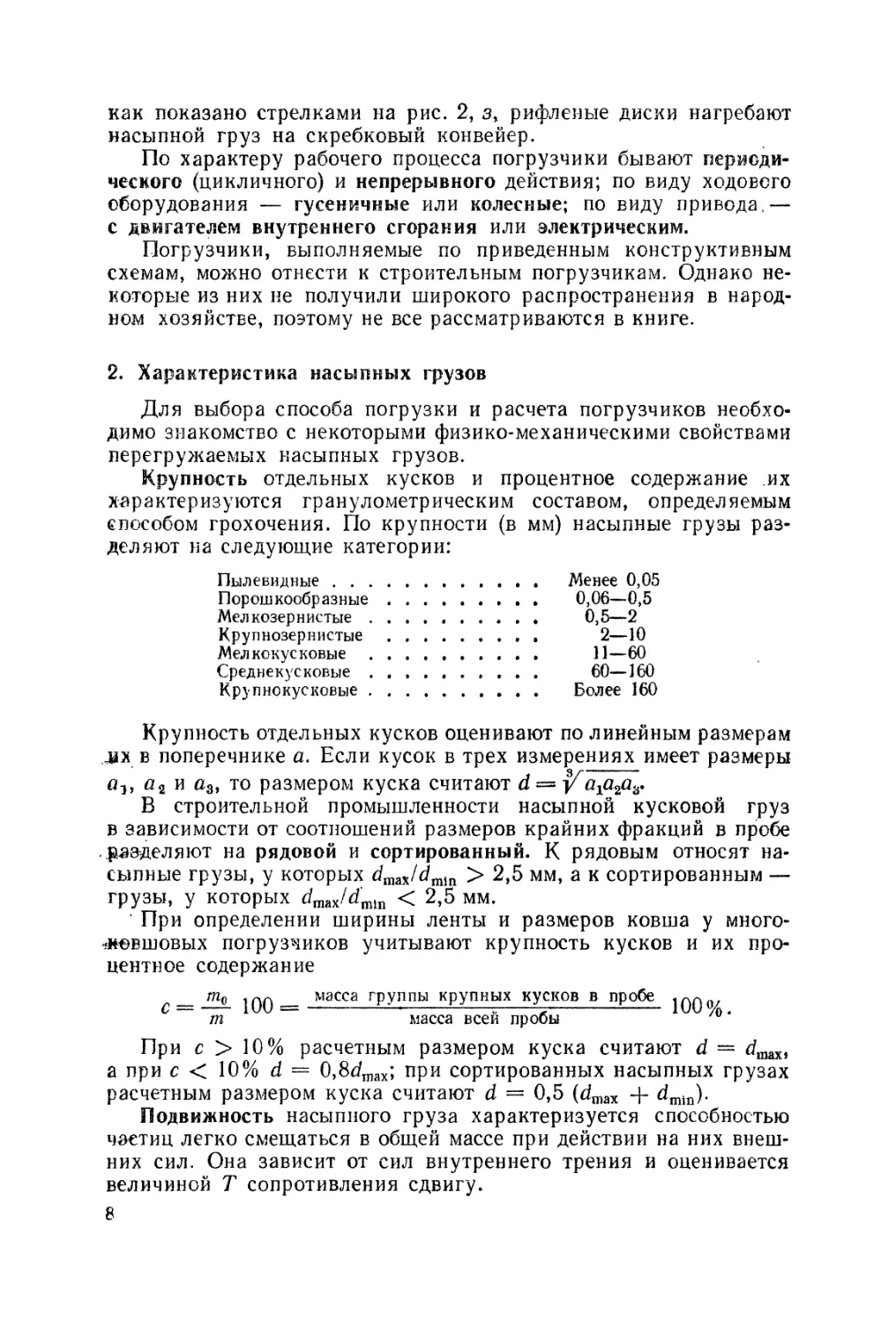
2. Характеристика насыпных грузов
Для выбора способа погрузки и расчета погрузчиков
необходимо знакомство с некоторыми физико-механическими свойствами
перегружаемых насыпных грузов.
Крупность отдельных кусков и процентное содержание их
характеризуются гранулометрическим составогл, определяемым
способом грохочения. По крупности (в мм) насыпные грузы
разделяют на следующие категории:
Пылевидные Менее 0,05
Порошкообразные 0,06—0,5
Мелкозернистые ♦ 0,5—2
Крупнозернистые 2—10
Мел ко кусковые .......... 11—60
Среднекусковые 60—160
Крупнокусковые Более 160
Крупность отдельных кусков оценивают по линейным размерам
jxb поперечнике а. Если кусок в трех измерениях имеет размеры
я3, а% и #3, то размером куска считают d = ^а\ага&
В строительной промышленности насыпной кусковой груз
в зависимости от соотношений размеров крайних фракций в пробе
^разделяют на рядовой и сортированный. К рядовым относят
насыпные грузы, у которых dmax/dmn > 2,5 мм, а к сортированным —
грузы, у которых dmjdmm < 2,5 мм.
При определении ширины ленты и размеров ковша у много-
*»<евшовых погрузчиков учитывают крупность кусков и их
процентное содержание
__ mo inn масса группы крупных кусков в пробе 1ППп/
т масса всей пробы
При с > 10% расчетным размером куска считают d = #шах,
а при с < 10% d = 0,8dmax; при сортированных насыпных грузах
расчетным размером куска считают d = 0,5 (dmax -f- dmn).
Подвижность насыпного груза характеризуется способностью
частиц легко смещаться в общей массе при действии на них
внешних сил. Она зависит от сил внутреннего трения и оценивается
величиной Т сопротивления сдвигу.
8
Согласно уравнению предельного равновесия сыпучего тела
сдвигу величина
где N — сила давления слоя материала; / — коэффициент
внутреннего трения, / = tg ф (ф — угол внутреннего трения, град);
С —- сила сцепления, приходящаяся на единицу площади сдвига;
F — площадь, по которой происходит сдвиг.
Угол ф внутреннего трения с некоторым допущением
связывают с углом наклона образующей к горизонтальной плоскости
в конусах (штабелях) из насыпного груза, т. е. с углом
естественного откоса в покое рх и в движении р2. Для насыпных грузов,
у которых сцепление отсутствует, принимают ф ^ р2; для
строительных материалов и снега р2 ^ 0,7р1в
При транспортировании и хранении насыпных грузов пр-и-
ходится учитывать коэффициент внешнего трения их в состояниях
покоя и относительного движения по стали, дереву, резине и
бетону. Эти коэффициенты находятся в некоторой зависимости
между собой. Приближенно считают, что коэффициент трения
по стали в состоянии покоя /с я** 0,75tg ф, по дереву /д ^ 0,8tg ф,
по резине /р я^ 0,85tg ф, по бетону /б <^ tg ф и в состоянии
относи/ 07/ / / fr / %
р /р ,g ф у /б g ф
тельного движения /с ^ 0,7/с, /д ^ 0,7/д, frp ^ 0,7/р и
0,7/б.
Таблица I
Характеристика транспортируемых материалов
Материал
Объемная
масса р,
т/м3
Коэффициент f
внутреннего
трения
Угол естественного
откоса, град
движении
Коэффи*
циент fe
трения
по стали
в лекее
Крупный песок . . .
Гравий
Щебень из прочных
пород
Щебень из пород
средней плотности . . . , ,
Сухая мел кокусковая
глина . .
Шлак:
котельный . . . .
гранулированный
Портландцемент . . .
Сухая растительная
земля
Снег
1,4—1,9
1,5—1,7
1,6—2,0
1,3—1,6
1,0—1,4
1,0-1,2
1,0—1/2
0,9—1,4
1,2-1,5
0,1—0,5*
0,80
0,65
0,65
0,75
1,15
0,85
0,65
1,0
0,19—
0,03
* Зависит от времени слеживания н температуры окружающего воздуха. Значения /*
рх и р2 приведены при интервале гсмлератур (—10)—( —30)°С; при —4° С они уменьшаются
примерно на 30%, а при —3е С снова увеличиваются на 30% против указанных [15].
0,6—0,9
0,5—1,0
0,8—1,0
0,8—1,0
0,5—0,8
0,6—1,2
0,6-0,8
0,5—0,9
0,6-0,9
0,3—0,5
45
45
45
45
50
50
45
43
45
19—45
30
30
35
35
35
40
35
38
30
16-36
В табл. 1 приведены коэффициент f внутреннего трения и углы
Pi и р2 естественного откоса для разных насыпных грузов.
Объемная масса характеризуется массой единицы объема
насыпного груза и выражается в т/м3. После зачерпывания ковшом
объемная масса у насыпного груза уменьшается, поэтому для
определения производительности погрузчика в единицах непере-
лопаченного насыпного груза (по обмеру штабеля) в расчет вводят
коэффициент разрыхления /Ср ^ 1,1 -5-1,15.
Абразивностью называют способность частиц насыпного груза
быстро изнашивать (истирать) поверхности рабочих органов.
Глава 2
ВИЛОЧНЫЕ ПОГРУЗЧИКИ
1. Определение, классификация, назначение
Вилочными погрузчиками называют самоходные подъемно-
транспортные машины с вертикальным телескопическим
грузоподъемником и подвешенными на нем грузовыми вилами /
(см. рис. 2, а).
В конструкции вилочных автопогрузчиков сочетаются
механизм вертикального гидравлического подъемника с транспортной
самоходной машиной на пневматическом ходу или массивных
шинах. Поднимают и опускают груз с помощью грузоподъемника.
Он может быть установлен спереди или сбоку самоходного шасси;
в первом случае вилочные погрузчики называют фронтальными,
а во втором — боковыми. Те и другие бывают с приводом от
двигателя внутреннего сгорания или электрическими (на постоянном
токе с питанием от электробатарей); первые называют
автопогрузчиками, а вторые — электрическими вилочными погрузчиками.
Вилочные погрузчики своими колесами опираются на
дорожное покрытие теоретически в трех или четырех точках, поэтому
их часто называют трехопорными (трехколесными) или четырех-
опорными (четырехколесными). Трехопорную ходовую схему
применяют у электропогрузчиков грузоподъемностью менее 1 т
при небольших скоростях движения, когда при малых проездах
у складов или в вагоне разворачиваться погрузчик должен
буквально на месте. Для этого третье — заднее колесо делают часто
не только управляемым, но и приводным. При больших нагрузках
на колеса, сравнительно высоких скоростях движения и
повышенных требованиях к устойчивости с поднятым грузом применяют
только четырехколесные автопогрузчики.
Автопогрузчики в основном предназначены для выполнения
подъемно-транспортных работ с тарно-штучными грузами: при
загрузке и разгрузке грузовых автомобилей, железнодорожных
платформ, морских судов (работа в трюмах), самолетов; при работе
ю
на грузовых дворах железнодорожных станций, а также на
территории морских и речных портов, в открытых, а с применением
нейтрализаторов для отработавших газов, устанавливаемых в
глушителе, и закрытых складах, а также цехах заводов и фабрик.
Кроме того, их используют на монтаже промышленного
оборудования и для выполнения вспомогательных работ в строительстве,
а в некоторых случаях для погрузки насыпных грузов при работе
с ковшом. Дальность транспортирования грузов может доходить
до 500 м, а иногда и больше, если это целесообразно. Они могут
работать на горизонтальных площадках (с уклоном не более 2°)
с твердым дорожным покрытием (асфальтобетонное, цементобетон-
ное и булыжное), а также с естественным уплотненным покрытием
(при хорошем отводе поверхностных сточных вод) и температуре
^окружающего воздуха ^40° С. В пределах рабочей площадки,
а также на расстоянии транспортирования груза по условиям
безопасности скорость движения с грузом может доходить до
10 км/ч, а при перегонах без груза — до 30—35 км/ч. Возможный
преодолеваемый ими уклон не менее 8° на длине до 40 м»
2. Конструкция фронтальных автопогрузчиков
В настоящее время отечественной промышленностью выйу-
•скаются автопогрузчики грузоподъемностью 1—10 т. Поскольку
.они не предназначены для перегрузки каких-либо специфически
особых штучных грузов и рассчитаны для работы с любыми по
форме грузами, то их относят к автопогрузчикам общего
назначения. По грузоподъемности автопогрузчики можно разделить
на три группы: легкие (1—2 т), средние (3,2—5 т) и тяжелые
(до 10т). Независимо от грузоподъемности их выполняют по обЬдей
конструктивной схеме.
Согласно ГОСТ 16215—70 все автопогрузчики могут
выпускаться в первом исполнении, а автопогрузчики
грузоподъемностью 3,2 и 5 т также во втором исполнении, х^втопогрузчики
первого исполнения рассчитаны на максимальное использование
в их трансмиссии готовых автомобильных агрегатов, а во втором
исполнении — на применение оригинальных агрегатов, чтобы
уменьшить габаритные размеры автопогрузчиков в плане и
особенно внешний радиус поворота при прочих равных параметрах.
В дальнейшем автопогрузчики в первом исполнении будем условна
называть обычными, а во втором исполнении малогабаритными.
Те и другие предназначены для работы на площадках с твердым
дорожным покрытием, а первые, кроме того, и на площадках
с сухим уплотненным естественным покрытием.
Каждый автопогрузчик (рис. 3 и 4) можно разделить на две
конструктивно обособленные части: на самоходное шасси и
грузоподъемник 3 (см. рис. 3). Самоходное шасси имеет много общего
q шасси других погрузчиков, а грузоподъемник является
оригинальной конструкцией, присущей только вилочным погрузчикам.
II
Рис. 3. Фронтальный автопогрузчик
грузоподъемностью 3,2—5 т:
/ *- груаовые вилы; 2 — подъемная каретка; 3 —
грузоподъемник; 4 — кабина; 5 — рулевое управление;
6 — рычаг управления механизмом обратного хода;
7 — рычаг стояночного тормоза; 8 — тормозная педаль;
9 — педаль управления подачей топлиЕа; 10 — рычаг
переключения передач; // — сиденье; 12 — рычаг
гидрораспределителя; 13 — двигатель внутреннего сгорания;
14 — противовес; 15 — задняя подвеска; 16 —- рама;
17 — гидроусилитель рулевого управления; 18 —
продольная рулевая тяга; 19 — гидравлический цилиндр
наклона; 20 — передний ведущий мост
13
ш%$ш$%ш%ш#$^^
Рис. 4. Фронтальный автопогрузчик грузоподъемностью 3,2—5 т:
i » масляный бак; 2 — гидрораспределитель; £ —vаккумуляторная -батарея; 4 «- топливный бак; 5 -*& педаль выключеная сцепления
По назначению грузоподъемник вместе с укрепленными на нем
грузовыми вилами / является рабочим оборудованием
автопогрузчика. Грузоподъемник применяют обычно телескопический с
жесткими направляющими, состоящими большей частью из
наружной и внутренней (выдвижной) рам. Наружную раму
устанавливают шарнирно на раму 16 самоходного шасси с помощью литых
стальных кронштейнов. В наружной раме может ходить
выдвижная рама, а в последней — подъемная каретка 2 с грузовыми
вилами 1. Для удобства подхвата штучного груза вилами
грузоподъемник можно наклонять вперед на угол а и для безопасного
движения автопогрузчика с грузом — отклонять назад на угол (5.
Подъем груза на вилах и наклон грузоподъемника выполняют
с помощью гидропривода. Для подъема выдвижной рамы вместе
с подвешенной к ней на одной или двух грузовых цепях подъемной
каретке с вилами устанавливают вертикально в середине
грузоподъемника гидроцилиндр одностороннего действия, а для наклона
грузоподъемника — два гидроцилиндра 19 двухстороннего
действия. Корпус последних шарнирно опирается на раму 16 шасси,
а штоки шарнирно связаны с наружной рамой грузоподъемника.
Для гидропривода грузоподъемника устанавливают чаще всего
шестеренный насос.
Автопогрузчики поднимают груз с постоянной скоростью,
которую регулируют с помощью гидроклапанов, устанавливаемых
на пути подвода рабочей жидкости к цилиндру подъема. На более
тяжелых автопогрузчиках применяют иногда переменную
скорость подъема: при подъеме легких грузов — более высокую, чем
при подъеме тяжелых грузов. Опускаются груз и негруженые вилы
под действием сил тяжести груза, выдвижной рамы, плунжера
и подъемной каретки с вилами.
Кроме грузовых вил автопогрузчики имеют также сменное
рабочее оборудование, чтобы лучше их использовать, исходя
из местных условий применения.
Раму 16 (см. рис. 3) у самоходного шасси выполняют чаще
всего в виде несущего кузова. Спереди она жестко опирается на
ведущий мост 20, а сзади на управляемый (неприводной) мост
через горизонтальный шкворень, установленный вдоль оси
погрузчика. Таким образом, задняя подвеска 15 является балан-
сирной.
У всех автопогрузчиков применяют только один ведущий
(передний) мост, заимствованный у грузового автомобиля. Он
обеспечивает нужное тяговое усилие автопогрузчику. В удачных
конструкциях автопогрузчиков на него приходится 45% массы
негруженого автопогрузчика. Когда на вилах имеется груз,
задняя подвеска автопогрузчика разгружается. Для ведущего
моста автопогрузчика применяют двойные колеса (мост имеет
четыре пневматические шины), а для задней подвески —
одинарные колеса. Таким образом, автопогрузчики выполнены по
колесной схеме 4X2.
14
12 3 f SB
*Рис. 5. Кинематическая схема автопогрузчика
Для облегчения поворота управляемых колес у автопогрузчи-
kqb грузоподъемностью свыше 1 т применяют гидроусилители 17
рулевого управления, заимствованные у грузовых автомобилей.
Для гидроусилителя устанавливают отдельный и чаще
шестеренный насос.
В качестве привода применяют двигатели внутреннего
сгорания (карбюраторные или дизельные), всегда устанавливаемые
сзади. Такое расположение двигателя позволяет получить более
удобное размещение трансмиссии, а также использовать массу
двигателя в качестве противовеса. Для улучшения охлаждения
двигателя крыльчатку вентилятора ставят обратной стороной.
Крутящий момент от коленчатого вала двигателя 7 (рис. 5)
к валу ведущего моста 1 передают через сухую однодисковую
муфту 6 сцепления, трехступенчатую коробку 5 передач,
заимствованную у грузового автомобиля, но без передачи заднего хода, и
валы 2 и 4 карданных передач, а к заднему мосту 13 через вал 8
карданной передачи. За коробкой передач устанавливают механизм 3
обратного хода, имеющий одну передачу. Таким образом, скорости
движения автопогрузчика вперед и назад примерно одинаковые,
что позволяет автопогрузчику выполнять челночные движения,
улучшающие его маневренность и уменьшающие рабочий цикл.
На выходном валу механизма обратного хода устанавливают
стояночный тормоз 14 барабанного типа, заимствованный у
грузового автомобиля.
Мощность для привода двух шестеренных насосов 11 и 12
отбирается от переднего конца коленчатого вала двигателя через
редуктор 9 с сохранением храповика 10 для пуска двигателя.
Насосы предназначены для объемного гидропривода
грузоподъемника (подъема груза и наклона рамы) и гидроусилителя рулевого
управления..
15
По такой конструктивной схеме сейчас выпускают
автопогрузчики 4013 грузоподъемностью 3,2 т и 4014 грузоподъемностью 5 т
(см. рис. 3 и табл. 2).
Применив специальные ведущие мосты и коробки передач от
автомобиля, выпустили автопогрузчики указанных грузоподъем-
ностей в так называемом малогабаритном исполнении. У них
коробка передач и ведущий мост выполнены в одном блоке, отчего
значительно сокращена колесная база и ширина колеи. Так были
созданы опытные образцы малогабаритных автопогрузчиков 4023
и 4025 (см. табл. 2), у которых с уменьшением габаритных
размеров в плане внешний радиус поворота стал примерно на 20—
25% меньше, чем у обычных автопогрузчиков. Поэтому стало
возможно маневрирование малогабаритных автопогрузчиков на
меньшие рабочих площадках, что особенно важно для работы в
открытых, а при установке нейтрализатора отработавших газов также
в закрытых складах и трюмах судов. С применением таких
автопогрузчиков может быть увеличен полезный объем складов путем
уменьшения ширины проездов.
Таким образом, для работы в народном хозяйстве
малогабаритные автопогрузчики более перспективны, чем обычные.
Конструкция их отработана для серийного производства. Им присвоены
марки 4093 и 4095. Они имеют такие же грузоподъемники по
конструкции и размерам, а также внешний вид, как у
автопогрузчиков" 4013 и 4014.
На автопогрузчиках 4093 и 4095 могут быть как механическая,
так и гидромеханическая трансмиссии, которые выполняют
взаимозаменяемыми. Механическая трансмиссия (рис. 6)
оригинальной конструкции. Коробку 2 передач непосредственно соединяют
с редуктором ведущего моста /. В одном блоке с коробкой передач
выполняют также редуктор 5, который служит трансмиссией для
привода насосов 3 и 4 гидропривода соответственно
грузоподъемника и усилителя руля. Отбор мощности на насосы от заднего
конца коленчатого вала двигателя позволяет уменьшить длину
погрузчика, а главное, сократить коммуникации между насосами
и грузоподъемником. Для того чтобы обеспечить независимую
работу насосов, мощность для них отбирается от маховика 8
двигателя через специальную проставку (в обход муфты 7
сцепления), зубчатую муфту 6 и пустотелый входной вал редуктора 5.
Коробка передач обеспечивает три скорости движения вперед
и две назад. Реверсирование передач и их переключение
происходит с помощью зубчатых муфт.
На рисунке приведена также схема рулевого управления
с гидроусилителем руля типа Н-375, у которого гидроцилиндр 12
выполнен отдельно от рулевого механизма с золотниковым
устройством 13 и установлен шарнирно на балке управляемого моста,
Шток цилиндра соединен непосредственно с маятниковым
рычагом 10 рулевой трапеции у заднего моста 9, свободно качающегося
около горизонтальной оси балансира //,
16
^ Рис 6, Кинематическая схема малогабаритных автопогрузчике» с механической трансмиссией
Ч 5
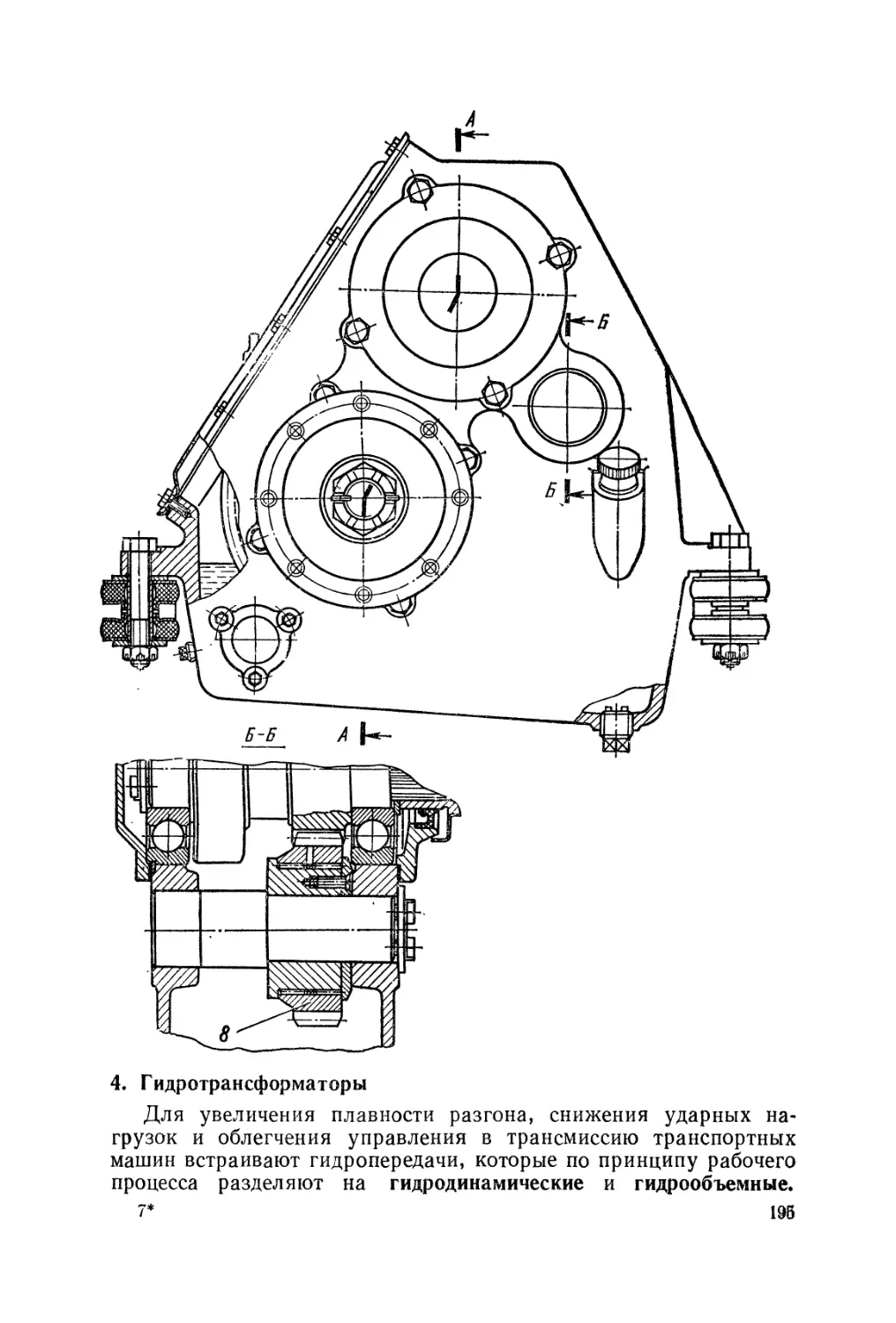
Рис. 7. Кинематическая схема обычных автопогрузчиков с гидромеханической
трансмиссией
С уменьшением колесной базы увеличиваются реакции на
мосты, поэтому на малогабаритных автопогрузчиках приходится
ставить шины больших размеров. Однако с увеличением нагрузок
на мосты ^проходимость по естественным дорожным покрытиям
у таких автопогрузчиков будет несколько хуже, чем у обычных.
Механические трансмиссии у всех интенсивно загруженных
автопогрузчиков грузоподъемностью более 2 т могут быть
заменены на гидромеханические. Для обычных автопогрузчиков
грузоподъемностью 3,2—Ют с применением автомобильных ведущих
мостов и коробок передач гидромеханическая трансмиссия может
быть выполнена по схеме, показанной на рис. 7. Здесь
двухступенчатую коробку 1 передач выполняют в одном блоке с
трансформатором 3. Реверсирование движения автопогрузчика происходит
с помощью многодисковой фрикционной муфты 2, работающей
в масле. Переключается муфта злектрогидравлически (через
педали), а выключается с помощью сжатых цилиндрических
пружин. Для простоты конструкции передачи переключаются
с помощью зубчатой муфты 5, вместо которой может быть
установлена также фрикционная многодисковая муфта.
Приведенная схема трансмиссии приемлема для обычных
автопогрузчиков с одним, а для автопогрузчиков высокой
проходимости с двумя ведущими мостами. В последнем случае коробку
передач соединяют с раздаточной коробкой 9.
Применяют трансформатор ЛГ-340 от автобуса, но специальной
модификации. Насосное колесо трансформатора с валом двигателя
соединено с помощью упругой (эластичной) муфты 4, состоящей
из пакета тонких дисков углеродистой стали общей-толщиной
-18
около 1,5 мм. Концы валов турбинного колеса и двигателя 5
сцентрированы в ступице муфты с помощью сферического
шарикоподшипника. Поскольку конструкцией трансформатора не
предусмотрены встроенные в него шестеренные насосы для
обслуживания трансформатора, то насос 6 для циркуляции охлаждающей
жидкости через радиатор и насос 7 для подпитки трансформатора
и управления муфтой 2 приводятся в работу через шестерни
в коробке / передач.
Основные шестеренные насосы для привода грузоподъемника
и гидроусилителя руля на рисунке не показаны. Их привод
предполагается от переднего конца коленчатого вала двигателя (как
показано на схеме рис. 4). Конструктивно более совершенна
схема гидромеханической трансмиссии (рис. 8), разработанной
для малогабаритных автопогрузчиков 4093 и 4095. Как и в
механической трансмиссии, здесь ведущий мост 1У коробку передач 4
и редуктор 6 для привода насосов 2 (грузоподъемника), 3 (руля)
и 5 (подпитки гидротрансформатора) выполняют также
моноблоком, к которому еще добавляют турботрансформатор 7.
Коробка передач двухступенчатая, реверс автопогрузчика
переключается через две отдельные многодисковые муфты,
работающие в масле. Трансформатор ЛГ-340 приводится от двигателя 9
через упругую стальную муфту 8. Все насосы приводятся от
насосного колеса трансформатора через редуктор.
В трансмиссии предусмотрен механизм для автоматического
переключения передач с первой на вторую и обратно. Для этого
шестерня 14 связана с выходным валом коробки передач и
центробежным регулятором. В зависимости от частоты вращения
выходного вала регулятор перемещает золотник, который подает масло
в цилиндры, установленные для управления фрикционной муфтой.
На рис. 8 показана также схема установки гидрробъемного
руля как возможного варианта. Вместо него может быть применен
гидроусилитель руля, показанный на схеме (см.рис. 6). При
установке гидрообъемного руля нарушается механическая связь
между рулевым колесом 12 и гидроцилиндром 11. В этом случае
рулевое колесо только механически связано с клапаном 13
управления рулем, поэтому здесь нельзя применять гидравлические
устройства для ограничения угловой скорости поворота
управляемых колес заднего моста 10 при больших оборотах вала
двигателя.
Согласно ГОСТ 16215—70 максимальная высота подъема
вилочных погрузчиков составляет 2000, 2800, 3200, 4500 мм. Кроме
того, у автопогрузчиков, имеющих высоту подъема 2000 и 2800 мм,
грузоподъемники обеспечивают свободный подъем груза на высоту
не менее 200 мм, при которой высота автопогрузчика сохраняется
такой же, как и при опущенных на землю вилах. Это очень важно
для прохода автопогрузчиков с приподнятым грузом через
невысокие дверные проемы цехов и закрытых складов, а для
небольших (грузоподъемностью 1—2 т) малогабаритных автопогруз-
19
Рис. 8. Кинематическая схема малогабаритных автопогрузчиков с гидромеханической трансмиссией
чиков также для прохода через двери крытых вагонов (высота
двери 2150 мм). У некоторых зарубежных автопогрузчиков
свободный подъем груза еще больше, иногда до половины высоты
подъема груза.
Гидропривод грузоподъемника и усилителя рулевого
управления автопогрузчиков грузоподъемностью 2—5 т выполняют
в основном по единой схеме (рис. 9). Для создания давления в
гидросистеме усилителя рулевого управления и грузоподъемника
установлены гидроаккумулятор 2, два отдельных шестеренных
насоса 28 и 31 с концевыми запорными устройствами 29 и 32.
Масло заливают в бак 36 через сетчатый фильтр 35,
установленный в горловине (тонкость очистки до 125 мкм). Кроме того,
установлены сетчатые фильтры 21 и 33 (тонкость очистки до 65 мкм)
на напорной линии у гидроусилителя рулевого управления и на
сливной линии привода грузоподъемника. При засорении
фильтров установлены перепускные клапаны 22 и 34, причем первый
связан с электроконтактным реле 20 (при засорении фильтра на
пульте управления зажигается контрольная лампочка).
Для управления подъемом груза, наклоном грузоподъемника
и сменного рабочего оборудования устанавливают
гидрораспределитель П1, который состоит большей частью из трех секций
с золотниками 7, 13 и 14, предохранительного клапана 18
(отрегулированного на давление —130 кгс/см2 при рабочем давлении
в системе 100 кгс/см2) и неуправляемого обратного клапана 17.
Давление в системе определяют по манометру 19, включаемому
вентилем 30. Число секций у гидрораспределителя может быть
и больше, если этого требует установленное сменное оборудование.
Золотник 14 служит для управления подъемным цилиндром 15,
золотник 13 для управления цилиндрами наклона 6 и 9, золотник 7
для управления цилиндром сменного рабочего оборудования.
Гидрораспределитель 2 (см. рис. 4) устанавливают справа от
сиденья (сзади или спереди) с удобным расположением рычагов для
управления правой рукой.
Кроме основных цилиндров в гидросистему могут быть
включены цилиндры сменного оборудования, например цилиндр 5
(см. рис. 9) поворота ковша или вместо него два цилиндра 1
поворотных боковых захватов с гидроаккумулятором 2. Эти цилиндры
могут быть включены в гидросистему с помощью концевых
запорных устройств 3 и 4.
В гидролинию, идущую от золотника 14 гидрораспределителя
к цилиндру подъема, встраивают блок Б1 клапанов с
управляемым обратным клапаном (гидрозамком) 10, клапаном 11
регулирования скорости спуска груза и демпфером 12. Кроме того, в эту
же гидролинию встраивают напорный золотник 16. Блок Б1,
клапанов служит регулятором скорости спуска вил с грузом и без
груза (с помощью клапана 11) и гидрозамком при обрыве шланга,
подводящего масло к цилиндру подъема. С помощью
управляемого клапана 10 при обрыве шланга поднятый груз спускают
21
£о
I
С")
\
\Г
I
О
с
Н
о
а
22
с открытием клапана вручную. Напорный золотник 16 служит для
создания командного давления для открытия гидрозамка при
заданной скорости спуска грузовых вил.
При установке в систему блока Б1 клапанов и напорного
золотника устанавливается постоянная скорость спуска вил
независимо от нагрузки на них.
В систему трубопроводов у цилиндров 6 и 9 встроены
неуправляемые (с постоянным живым сечением) дроссели 8 для
уменьшения скорости наклона грузоподъемника.
Для получения постоянной скорости поворота управляемых
колес при разной частоте вращения вала двигателя в систему
подвода масла к цилиндру 27 гидроусилителя рулевого
управления от автомобиля ЗИЛ-130 встроены блок Б2 клапанов и
золотник 26. В блоке установлены два клапана, из которых клапан 23
ограничивает расход подаваемого в цилиндр масла, чтобы избежать
очень легкого поворота колес при большой подаче насоса, возни-
каемой при большей частоте вращения вала двигателя, а
клапан 25 ограничивает повышение давления сверх допустимого.
Установленный в блоке Б2 клапанов управляемый дроссель 24
создает нужный перепад давления в системе (под действием
перепада масло перепускается на слив).
Расположение рычагов и педалей для управления в основном
такое же, как у грузового автомобиля. Педаль 9 (рис. 10)
управления муфтой сцепления расположена слева, а педали 8 управления
тормозами и 7 подачей топлива — справа от рулевой колонки 10.
Также справа от сиденья расположены рычаги управления: 2 —
коробкой передач, 3, 4 и 5 — гидрораспределителем и 6 —
стояночным тормозом. При установке гидрораспределителя спереди
от сиденья рычаги для управления им выносят вперед. Рычаг /
управления реверсом чаще всего расположен под рулевым колесом
(на рис. 4 он показан справа от рулевой колонки), а иногда также
слева располагают и рычаг стояночного тормоза, чтобы
равномерно загрузить обе руки
водителя при работе. На
щитке // находятся
приборы: уровня топлива,
температуры воды, давления
масла, скорости хода и
амперметр. На погрузчиках
применяют однопроводную
электропроводку с минусом
на массу, напряжением 12
В. Кроме основных фар и
подфарников на кабине
установлены еще две фары для
освещения рабочей площадки,
сзади автопогрузчика —
сигнальный фонарь стоянки,
23
Рис. 10. Пульт управления
стоп-сигнал и указатели поворотов. Сзади противовеса
установлено буксирное устройство, часто утопленное в отливке
противовеса, чтобы уменьшить длину погрузчика.
Для защиты водителя от непогоды и случайного падения груза,
поднятого на вилах, на всех отечественных погрузчиках
грузоподъемностью свыше 2 т, а у зарубежных свыше 3 т установлена
кабина. Она выполнена металлической, сварной, двухдверной
и часто двухместной — для размещения водителя и напарника или
стажера. При работе в южных широтах ее можно снять и заменить
тентом, но с защитной решеткой для водителя на случай падения
поднятого на вилах груза. Кабина выполнена с учетом
эргономических условий и с обводами, отвечающими современным требо-
Мниям эстетики. Она вентилируется через опускающиеся стекла
у дверей и люк в крыше; иногда в кабине устанавливают
вентилятор. На лобовом и заднем стеклах установлены приводные
стеклоочистители, а спереди — противосолнечные козырьки.
. В настоящее время уделяют серьезное внимание внешней
форме и окраске автопогрузчиков. Все четыре его архитектурных
объема (грузоподъемник, шасси, капот и кабину) стараются
выполнить в едином стиле с учетом современных тенденций
перехода от закругленных к плоским формам машины. Для окраски
применяют красный, оранжевый или желтый цвет, чтобы машина
выделялась в потоке автомобилей при перегоне и работе.
Легкие автопогрузчики (грузоподъемностью 1 и 2 т)
выполняют также по рассмотренной выше конструктивной схеме. Они
отличаются только размерами, а от автопогрузчиков
грузоподъемностью 3,5—5 т также и внешним видом из-за отсутствия кабин.
При малых общих размерах в плане вместо кабин у них только
навес 6 (рис. 11) с решеткой вверху, сваренной из труб и
устанавливаемой для защиты водителя на случай падения поднятого
на вилах груза. На навес натягивают тент для защиты от солнца
•и осадков.
Примером легких автопогрузчиков может служить
конструкция автопогрузчика 4022-01 (см. табл. 2) грузоподъемностью 2 т.
Для того чтобы не затемнять общего вида, на рисунке не показаны
в плане кузов, противовес и навес. При малой колесной базе
ведущий мост 1 (рис. 12), коробку 2 передач вместе с механизмом
обратного хода соединяют в один блок. Для уменьшения длины
автопогрузчика привод насосов 4 и 6, применяемых для работы
грузоподъемника и руля, переносят от двигателя 8 назад. Для
того чтобы привод был независимым, редуктор 5 устанавливают
между двигателем и коробкой передач, соединяя один конец вала
редуктора с валом двигателя упругой муфтой 7, а другой — с
выходным валом коробки передач муфтой сцепления 3.
Конструкция грузоподъемника такая же, как у
автопогрузчиков грузоподъемностью 3,2—5 т.
Заднюю подшеску выполняют также балансирной. Для
уменьшения ширины небольших автопогрузчиков передний мост у них
24
Jr , j.
22 21
Рис. 11. Фронтальный автопогрузчик грузоподъемностью 1 т:
1 —- грузовые вилы; 2 «** подъемная каретка; 3 *=» цилиндры наклона грузоподъемниказ
4 — грузоподъемник; 5 — рулевое колесо; 6 — навес; 7 — двигатель; 8 — противовеса
9 — буксирное устройство; 10 — задняя подвеска; 11 — передний мост; 12 — масляные
бак; 13, 14, 16, 21 — рычаги управления гидрораспределителем, стояночным тормозом^
короОкой передач и механизмом обратного хода; 15, 22 — педали сцепления и тормозаЗ
17, 18 ^~ насосы; 19 *- аккумуляторная батарея; 20 ™ топливный бак
Рис. 12. Кинематическая схема автопогрузчика грузоподъемностью 2 т
опирают иногда на две пневмошины. У легких автопогрузчиков
применяют гидроусилители 9 руля или непосредственно
гидрообъемный руль.
Дальнейшее совершенствование автопогрузчиков
грузоподъемностью 1 и 2 т в основном проводится в части улучшения
конструкции трансмиссии. Например, для первого — только
механической по типу рис. 6, а для второго — механической по этому
же типу и гидромеханической по типу рис. 8, но только с ручным
управлением фрикционными дисковыми муфтами.
При общем назначении легкие по грузоподъемности (1—2 т)
автопогрузчики могут работать в более узких проездах открытых,
а с установкой нейтрализаторов отработавших газов и закрытых
складов. Они могут конкурировать с электрическими вилочными
погрузчиками при работе в портах, крытых железнодорожных
вагонах (автопогрузчики грузоподъемностью 1 т), в условиях
цехов при небольшой дальности перевозок (не более 200 м).
Поэтому скорости передвижения их не превышают 10—15 км/ч.
Нейтрализатор отработавших газов, устанавливаемый на
погрузчиках, состоит из корпуса 6 (рис. 13), в который вставлены
два решетчатых цилиндра: внутренний 5 и внешний 4, сваренные
из гофрированной и жароупорной листовой стали Х18Н9Т. В
кольцевое пространство между цилиндрами — реактор 7 — через
отверстие (на рисунке не показано) засыпают шарики катализатора.
В качестве катализатора используют окись алюминия как основу,
пропитанную солями палладия или платины, из которых изгото-
26
\ v
v\
rv—■*
\
/
\
nr
\
)
7
\
>
/
1
Рис. 13. Нейтрализатор отработавших газов
вляют мелкие шарики. Отработавшие газы через трубу 1 поступают
в смесительную камеру 2 эжектора, куда через сетчатый фильтр 3
подсасывается из атмосферы воздух, необходимый для полного
сгорания продуктов отработавших газов. Смесь газов из камеры 2
эжектора поступает в сопло 8У в котором газы, расширяясь, легко
проходят через слой катализатора в реакторе 7.
При установке нейтрализатора должна быть обеспечена
пожарная безопасность (нагрев корпуса доходит до 450° С). Если при
.'смене катализатора решетки еще не прогорели, то шарики
катализатора меняют.
Для работы в пожароопасных условиях в
целлюлозно-бумажной и деревообрабатывающей и во взрывоопасных условиях
в химической и газовой промышленности за рубежом применяют
специальные автопогрузчики грузоподъемностью 1—2 т. По
конструкции они не отличаются от обычных: пуск дизеля у них
происходит не от электро-, а от пневмостартера 7 (рис. 14), т. е. с
помощью сжатого воздуха. Отработавшие газы охлаждаются и
очищаются водой. Температура отработавших газов снижается с
помощью водяного глушителя и водяного охлаждения выпускной
трубы. Отработавшие газы проходят через бак 12 из нержавеющей
стали с вертикальными перегородками и слой воды, залитой в бак.
Они несколько раз меняют свое направление в баке и
выбрасываются в атмосферу, проходя через более тесное лабиринтное
уплотнение 13.
В последнее время стали применять автопогрузчики с пуском
дизеля от гидравлического стартера. Давление в пусковой системе
обеспечивается ручным насосом и гидроаккумулятором.
В настоящее время промышленность выпускает
автопогрузчики 4008 и 4028 грузоподъемностью 10 т. Более совершенной
конструкцией является автопогрузчик 4028, созданный с учетом
результатов эксплуатации автопогрузчика 4008. Эти
автопогрузчики пользуются большим спросом у нас и за рубежом.
Автопогрузчик 4028 выполнен по общей конструктивной
схеме, но в отличие от автопогрузчиков грузоподъемностью 3,2
27
IS
Рис. 14. Пусковая система двигателя в противопожарном исполнении:
i — ресивер для сжатого воздуха; 2 — в л агоот делитель; 3 — отбор воздуха для нака*
чивания шин; 4 — запорный клапан с' манометром; 5 — панель управления пневмо-
стартером; 6 — рычаг для включения компрессора; 7 — пневмостартер; 8, 9 — выпускной
и впускной трубопроводы; 10 — воздушный фильтр; // — компрессор; 12 — водяной
бак с перегородками; 13 — съемное лабиринтное уплотнение; 14, 15 *«• патрубки для
подачи воды в бак слива из отстойника; 16 — отстойник
и 5 т цилиндры наклона грузоподъемника 6 (рис. 15) у него
расположены сверху над кабиной, сзади которой на раме шасси
установлены для них мощные опоры.
Двигатель 10, а также коробка 15 передач заимствованы у
автомобили ЗИЛ-130, а механизм обратного хода установлен
специальной конструкции.
В отличие от автопогрузчиков грузоподъемностью 3,2 и 5 т
у автопогрузчика 4028 в коробке передач сохранена передача
заднего хода. Коробкой передач и механизмом обратного хода
управляют посредством качающихся рычагов 9 и 7,
расположенных по правую сторону от водителя, причем рычаг 7 установлен
на кронштейне рамы шасси.
На автопогрузчике установлен грузоподъемник с подъемом
груза на высоту 4,5 м. В основном принята типовая
гидравлическая схема (см. рис. 9), но с отличием для механизма подъема.
У данного автопогрузчика кроме постоянной скорости спуска
груза и негруженных вил может быть применена
дифференциальная схема включения цилиндра подъема, которая позволяет
получить разные скорости подъема и спуска груза в зависимости
от массы последнего. Поэтому при большой высоте подъема и
спуска удается значительно сократить время цикла.
Автопогрузчики грузоподъемностью 10 т широко используют
также на разгрузке различных грузов из железнодорожных полу-
Техническая характеристика фронтальных автопогрузчиков
Таблица 2
Показатели
Грузоподъемность на вилах, т
Расстояние от центра тяжести
(ц. т.) груза до оси передних
колес, мм
Расстояние от ц. т. груза до
передней спинки вил, мм . .
Грузовой момент, тс*м
Высота подъема, мм . , . .
Свободный подъем только при
высоте подъема, равной или
больше 2800 мм, мм
Угол наклона
грузоподъемника, град:
вперед
назад
Размеры вил, мм:
длина
ширина
толщина
Развод вил в плане
(снаружи), мм:
наибольший ..♦..,
наименьший
4020
1,0
852
500
0,852
1800; 2800
200
3
10
750
90
40
870
180
4022
2,0
1075
600
2,15
2800
200
3
10
900
150
40
1050
300
4022-01
2,0
1035
600
2,07
2800
250
3
12
1000
150
40
990
310
4013
3,2
ИЗО
600
4,616
2800;
4500
300
3
12
1100
150
50
1200
300
4023
3,2
ИЗО
600
4,616
2800;
4500
300
3
12
1100
150
50
1200
300
4014
5,0
1240
600
5,815
2800;
4500
240
3
12
1100
150
60
1240
300
4025
5,0
1163
600
5,8
2800;
4500
300
3
12
1100
150
60
1240
300
4028
10,0
ИЗО
750
11,3
4500
350
3
12
1580
200
80
1970
1045
Прюдолжение табл. 2
Показатели
Скорость, м/мин:
подъема груза
спуска без груза ....
Скорость передвижения без
груза, км/ч
Габаритные размеры
автопогрузчика, мм:
длина
ширина
высота
Наибольший радиус
поворота, мм
Наибольшая ширина проез-
аов, мм:
при штабелировании с
поворотом на 90° ....
пересекающихся под углом
90°
Колея, мм:
передних колес
задних колес
База, мм
Дорожный просвет, мм . .
4020
17,3
15,6
2590
965
1500
1630
2980
1780
790
740
1000
100
4022
16
20
3220
1400
2100
2100
3960
2240
1050
950
1350
108
4022-01
30
25,5
3422
1400
2255
2150
3985
2350
1050
950
1500
—
4013
18
22
35
4820
2165
3500
3500
—
1690
1480
2000
180
4023
18
22
35
4050
1780
2522
2740
4660
2860
1274
1200
1920
180
4014
18
20
35
5100
2330
2430
3700
5660
3880
1790
1480
2300
190
4025
18
22
35
4430
1760
2535
3060
5025
3100
1274
1420
2100
170
4028
10
13
35
6505
2600
3750
4780
7220
4550
1920
2120
2950
240
Продолжение т^ал. 2
Показатели
4020
4022
4022-01
4013
4023
4014
4025
4028
Размер шин:
передних
задних
Масса автопогрузчика без
груза в заправленном состоянии, кг
Распределение массы по осям,
кг:
на переднюю ось
на заднюю ось
Масса автопогрузчика с
грузом, кг
Масса, приходящаяся на
передний мост, кг
Мощность, л. с
Передаточные числа коробки
передач
Передаточные числа
механизма обратного хода
(вперед/назад)
160X254
120X228
2020
830
1190
3095
2685
18 (при
3000
об/мин)
8,061; 3,721
6,00Е-13
160X254
3160
1190
1970
235
4760
3500
1610
1890
5500
4770
45 (при
4500
об/мин)
2,8; 1,71; 0,84
1,945/1,02
200—20
240—381
(8,25—15)
4800
2150
2650
240—381
(8,25—15)
7,00—12
5400
2610
2790
8650
240—508
(8,25—20)
215—381
6100
2600
3400
240—381
{8,25—15)
240—381
(8,25—15)
6850
3050
3800
7800
70 (при 2800 об/мин)
6,48; 3,09; 1,7; 1,0
1,76/1,43
320—508
320—508
13340
6560
6820
130 (при
3200
об/мин)
7,44; 4,1;
2,29;
1,47; 1,0
1,6/2,0
1Э 18
17
1$
п
п
е
СП
26 25
Рис. 15. Фронтальный автопогрузчик грузоподъемностью 10 т:
1 <— грузовые вилы; 2 — подъемная каретка; 3 — грузоподъемник; 4 — педаль тормоза; 5 ?=» рычаг стояночного тормоза; 6 «~ цилиндры
для наклона грузоподъемника; 7', 9 — рычаги управления механизмом обратного хода и коробкой передач; 8 — вертикальные опоры
для цилиндров наклона; 10 — двигатель; 11 ~ противовес; 12 — привод насосов; 13 — горизонтальный шкворень; 14 — передняя
подвеска; 15 — коробка передач; 16 — гидроусилитель рулевого управления; 17 — механизм обратного хода; 18 — стояночный тормоз; 19 —•
передний мост; 20, 26 — педали управления подачей топлива, газа и сцеплением; 21 *-* гидрораспределитель; 22 --— масляный бак; 23 <=*
аккумуляторная батарея; 24 — ресивер для воздуха; 25 ■=- топливный бак
вагонов и для разгрузки-погрузки грузов в портах. Несмотря на
большие габаритные размеры и массу автопогрузчика, его успешно
используют для работы в трюмах (исключая твиндеки) морских
судов.
Техническая характеристика выпускаемых и осваиваемых
нашей промышленностью автопогрузчиков приведена в табл. 2
3. Фронтальные автопогрузчики высокой проходимости
Наряду с обычными фронтальными автопогрузчиками общего
назначения для народного хозяйства требуются также
автопогрузчики высокой проходимости для работы на площадках, имеющих
грунтовые покрытия, или в условиях бездорожья. Например, для
обслуживания небольших проходных железнодорожных станций,
предприятий «Сельхозтехники», совхозов и колхозов, а также для
работы в полевых условиях.
Такие автопогрузчики применяют за рубежом. Так, например,
фирма «Росс» (Англия) выпускает автопогрузчики
грузоподъемностью 6000—50 000 английских фунтов (2,72—22,69 т). Наиболее
распространены автопогрузчики грузоподъемностью 6000—8000
английских фунтов (2,72—3,63 т) [1 а. ф. = 0,453 кг].
Автопогрузчики имеют передний и задний ведущие мосты,
широкопрофильные шины, гидродинамическую трансмиссию и
передвижной (вдоль погрузчика) гидроподъемник. Чтобы
исключить разворот на площадках с грунтовым покрытием,
автопогрузчики оборудованы дублированным управлением и двумя
сиденьями, установленными одно против другого. С переменой
направления движения водитель пересаживается с одного сиденья на
другое.
Для удобства подхвата вилами груза на неспланированной
площадке грузоподъемник может отклоняться вперед от вертикали
на 10° и назад на 16° (рис. 16). После подхвата на вилы груз
немного приподнимают и грузоподъемник с грузом передвигают
вдоль автопогрузчика назад на расстояние 1270 мм. Таким
образом, перераспределяется нагрузка у груженого автопогрузчика
по мостам: нагрузка на каждый мост не превышает 40—60%
общей массы автопогрузчика. Кроме того, для улучшения
мобильности уменьшают длину автопогрузчика.
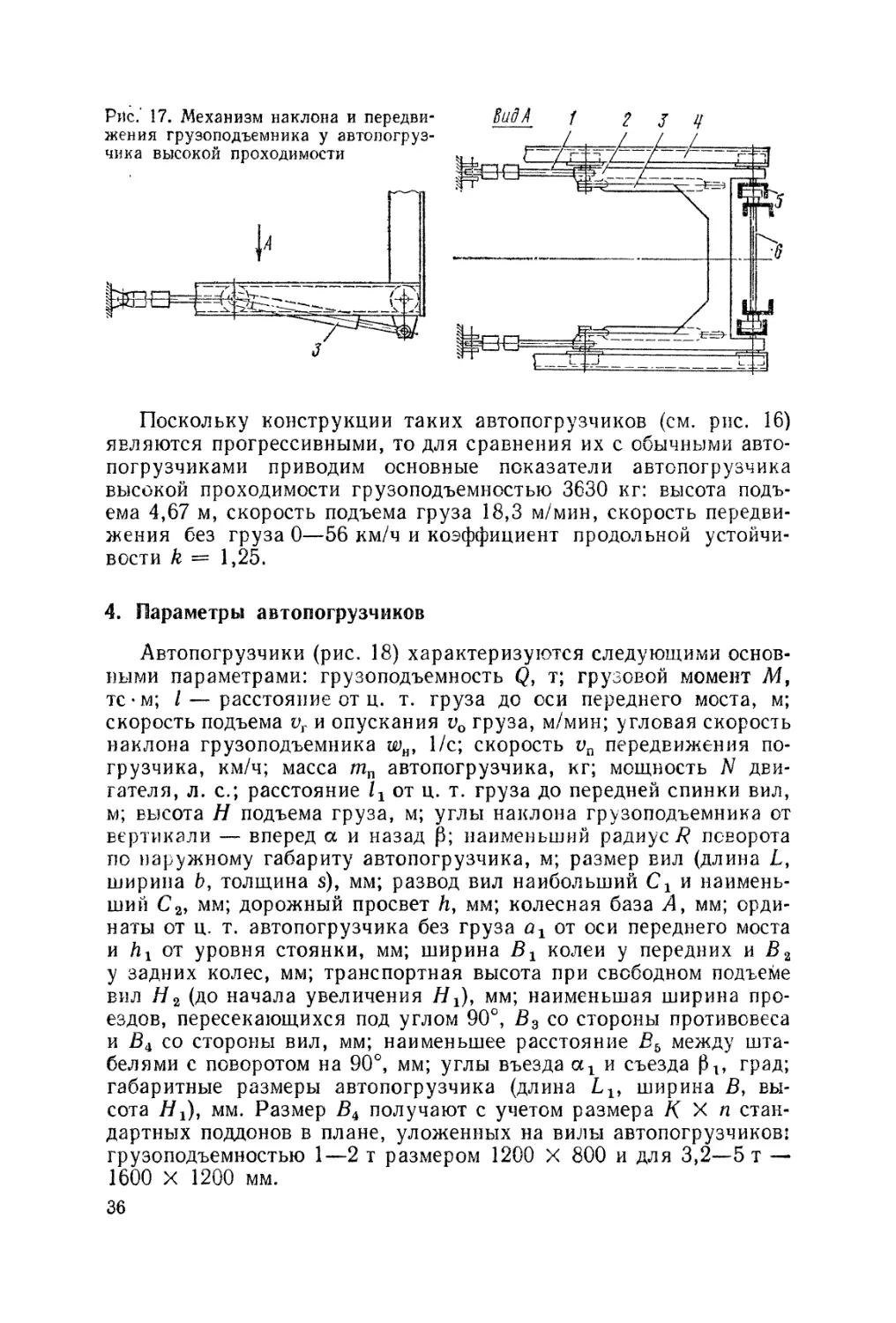
Наружная рама 5 (рис. 17) грузоподъехмника через ось 6 шар-
нирно опирается на тележку 2, которая с помощью двух
гидроцилиндров / может перекатываться на катках по лонжеронам 4
основной рамы автопогрузчика. Для транспортного положения
автопогрузчика без груза, чтобы уменьшить высоту его,
грузоподъемник наклоняют назад с помощью двух гидроцилиндров 3.
Задняя подвеска автопогрузчика выполнена балансирной
с очень большим вертикальным ходом колес (510 мм) для прохода
через дорожные препятствия. Автопогрузчики имеют большой
дорожный просвет.
34
1В* 10
Рис. 16. Автопогрузчик высокой проходимости
2*
39
Рис' 17. Механизм наклона и передви'
жения грузоподъемника у
автопогрузчика высокой проходимости
f 2 J Ц
Поскольку конструкции таких автопогрузчиков (см. рис. 16)
являются прогрессивными, то для сравнения их с обычными
автопогрузчиками приводим основные показатели автопогрузчика
высокой проходимости грузоподъемностью 3630 кг: высота
подъема 4,67 м, скорость подъема груза 18,3 м/мин, скорость
передвижения без груза 0—56 км/ч и коэффициент продольной
устойчивости k = 1,25.
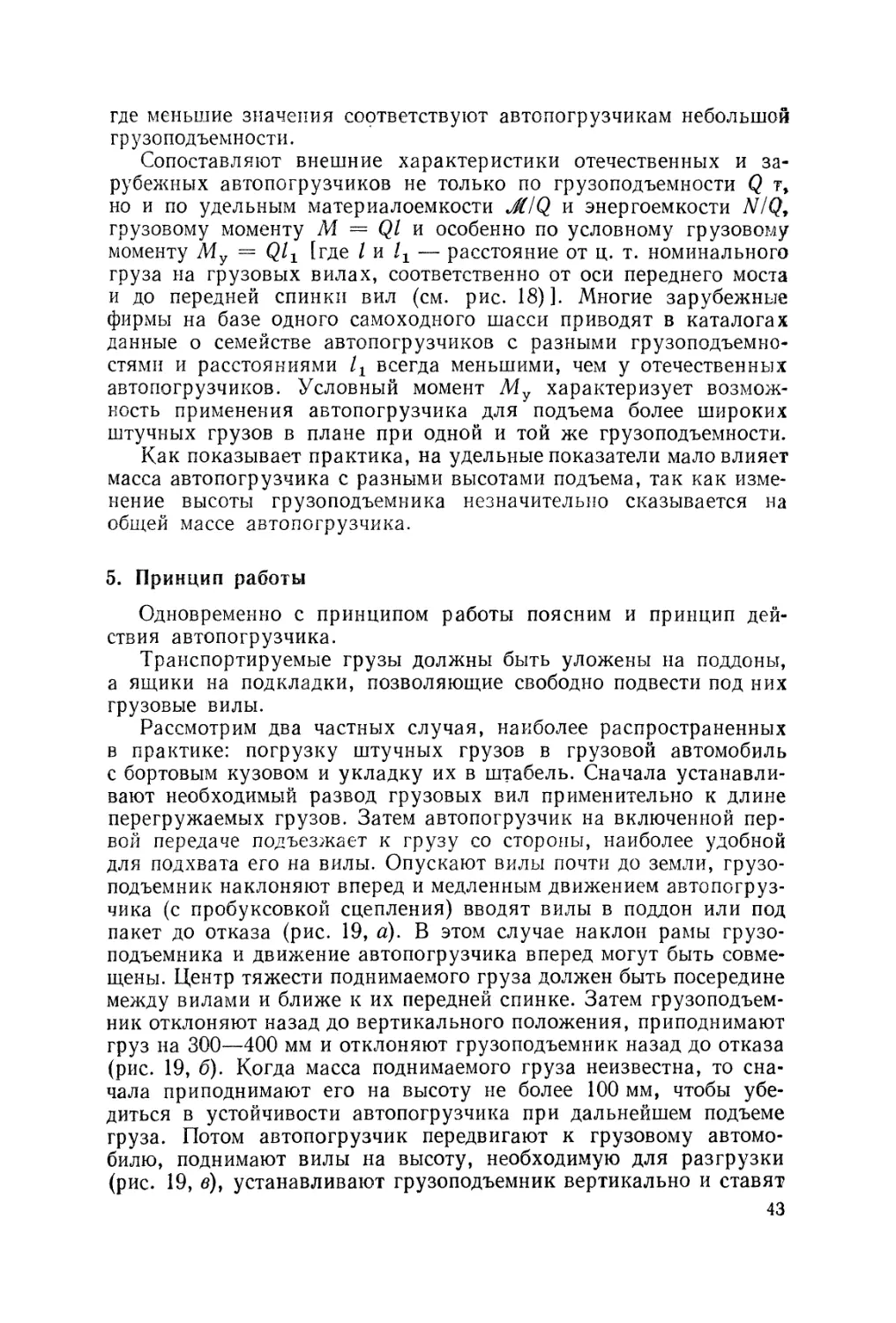
4. Параметры автопогрузчиков
Автопогрузчики (рис, 18) характеризуются следующими
основными параметрами: грузоподъемность Q, т; грузовой момент М,
тс-м; / — расстояние от ц. т. груза до оси переднего моста, м;
скорость подъема vT и опускания vo груза, м/мин; угловая скорость
наклона грузоподъемника wH, 1/с; скорость vn передвижения
погрузчика, км/ч; масса тп автопогрузчика, кг; мощность N
двигателя, л. с; расстояние 1г от ц. т. груза до передней спинки вил,
м; высота Н подъема груза, м; углы наклона грузоподъемника от
вертикали — вперед а и назад J3; наименьший радиус/? поворота
по наружному габариту автопогрузчика, м; размер вил (длина L,
ширина Ь, толщина s), мм; развод вил наибольший Сх и
наименьший С2, мм; дорожный просвет А, мм; колесная база А, мм;
ординаты от ц. т. автопогрузчика без груза а1 от оси переднего моста
и hx от уровня стоянки, мм; ширина Вх колеи у передних и В2
у задних колес, мм; транспортная высота при свободном подъеме
вил Я2 (до начала увеличения Нг)у мм; наименьшая ширина
проездов, пересекающихся под углом 90°, Въ со стороны противовеса
и J34 со стороны вил, мм; наименьшее расстояние Вь между
штабелями с поворотом на 90°, мм; углы въезда ах и съезда (Jx, град;
габаритные размеры автопогрузчика (длина Lly ширина В,
высота /fj), мм. Размер J54 получают с учетом размера К X п
стандартных поддонов в плане, уложенных на вилы автопогрузчиков:
грузоподъемностью 1—2 т размером 1200 X 800 и для 3,2—5 т —
1600 X 1200 мм.
36
Отдельные параметры и размеры, а также сочетание их
характеризуют размеры площадей для применения автопогрузчиков
и их условия, производительность, устойчивость, проходимость,
транспортабельность и т. д. Кроме того, автопогрузчики
характеризуются эргономическими показателями, а также
энергоемкостью и материалоемкостью.
В мировой практике грузоподъемность автопогрузчиков общего
назначения принята в пределах 0,5—15 т и специализированных
доходит до 30 т, а иногда и более. Большинством европейских
стран она стандартизирована по 10-му ряду нормальных
чисел.
Грузоподъемность автопогрузчиков по ГОСТ 16215—70 (СССР)
и NFH 96-401—71 (Франция) принята в пределах 1—Ют,
причем для отечественных автопогрузчиков в малогабаритном
исполнении она составляет 1—5 т и обычном 5—10 т; по DIN 15133—69
(ФРГ) грузоподъемность принята в пределах 0,4—16 т. В
стандартах Франции и ФРГ она относится ко всем вилочным погрузчикам,
т. е. без разделения их по виду привода на электро- и
автопогрузчики. В БДС 8886—71 (НРБ), как и в ГОСТ 20805—75 (СССР),
грузоподъемность относится только к электрическим вилочным
погрузчикам и составляет 1—5 т.
Не располагая данными стандартов, принятых в США и
Англии, по проспектам большинства их фирм можно сказать,
что грузоподъемность универсальных вилочных погрузчиков без
разделения их по виду привода составляет 1000—20 000
английских фунтов (1 а. ф. = 0,453 кг) с интерзалами через 1000—
2000 а. ф.
Длину грузовых вил L (см. рис. 18) и расстояние 1г от ц. т.
груза до передней стенки вил берут в зависимости от массы и
ширины в плане поднимаемого груза. Согласно указанным
значениям устанавливают и размеры поддонов для укладки на них
мелких штучных грузов. По отечественному стандарту для
автопогрузчиков грузоподъемностью 1—2 т приняты L = 800 мм
и 1г = 500 мм, для 3,2—5 т L = 1000 мм и 1Х = 600 мм, для 10 т
L = 1500 и /jl = 600 мм.
Примерно такие же значения L и 1г приняты в стандарте
ФРГ, но без указаний значений 1Х для грузоподъемностей 10—
16 т. В стандарте Франции длина вил принята в пределах 750—
2000 мм (14 размеров).
Длину вил у американских и английских вилочных
погрузчиков берут примерно такой, как это принято у нас, но с указанием
меньшего значения lv Последнюю особенно уменьшают, когда
на базе одного шасси выпускают семейство погрузчиков с
увеличенной грузоподъемностью.
Сечение вил стандартами не нормировано, но их ширину Ь
берут большей, чем толщину s, чтобы облегчить подхват груза
на вилы и снизить деформацию смятия вилами деревянной тары
и поддонов.
37
Рис. 18. Основные эксплуатационные параметры автопогрузчиков
39
Максимальную высоту подъема груза у автопогрузчиков,
предназначенных в основном для работы на открытых складах и
площадках, берут больше, чем у электрических вилочных
погрузчиков. С выходом нового стандарта принятые для выпускаемых
у нас автопогрузчиков максимальные высоты подъема изменятся.
Так, например, для малогабаритных автопогрузчиков
грузоподъемностью 1 и 2 т она должна быть 2800 мм, а для
малогабаритных и обычных автопогрузчиков грузоподъемностью 3,2—10 т —
3300 мм. При этом для малогабаритных автопогрузчиков
грузоподъемностью 1—5 т должен быть предусмотрен свободный подъем
груза на высоту не менее 200 мм. В стандартах Франции и ФРГ
для всех вилочных погрузчиков независимо от их
грузоподъемности максимальная высота Н подъема груза принята 3300 мм.
В США и Англии большинство фирм, выпускающих вилочные
погрузчики, принимают высоту подъема 1829 (6'), 2743 (9'), 3688
(1'2') и 4267 мм (14') и реже промежуточные высоты 2440 (8') и
3050 мм (10') (в скобках указана высота в футах).
При одной и той же грузоподъемности, но разных высотах
подъема общим у автопогрузчиков является самоходное шасси,
а переменным — грузоподъемники.
Скорость vr подъема груза у автопогрузчиков принимают
в пределах 10—30 м/мин. Для легких автопогрузчиков и при
больших высотах подъема, чтобы уменьшить время цикла, она
иногда больше, чем для тяжелых. У электропогрузчиков ома
значительно меньше (около 10 м/мин) и ограничивается емкостью
электробатареи, рассчитанной на шестичасовую работу. Скорость
подъема вил без груза примерно на 20% выше, чем с грузом.
Скорости спуска с грузом или без груза, если их не регулируют
специальной аппаратурой, встроенной в гидросистему подъемного
цилиндра, мало отличаются одна от другой. Это объясняется тем,
что сопротивление сливу рабочей жидкости из подъемного
цилиндра мешает ускорять спуск груза. У более современных
машин, например у автопогрузчиков 4013 и 4015, скоррсти спуска
бил одинаковы независимо от нагрузки на вилах вследствие
встроенного в гидросистему блока клапанов, а у автопогрузчика
4028 разные: больше при малой нагрузке, чем при большой, что
достигается устройством гидрообъемного привода.
Углы наклона грузоподъемника составляют: вперед а = 2,5 -ь
+ 10°, назад (J = 8 -=- 15°. Для увеличения коэффициента
грузовой устойчивости угол а берут наименьшим. В отечественной
практике берут а = 3° и р = 12°: первый достаточен для подхвата
груза, а второй — для безопасного движения с приподнятым на
вилах грузом и грузоподъемником, отклоненным назад до
отказа.
Скорость наклона вперед и назад грузоподъемника с грузом
больше, чем скорость наклона без груза. Угловая скорость
наклона лежит в пределах 0,035—0,1 1/с. Время наклона
грузоподъемника на угол а — 3° в среднем составляет 1,5—2 с, а на
40
угол р — 12° 3—4 с. Часто скорость наклона уменьшают до 0,2—•
0,3 1/с путем установки дросселей 8 (см. рис. 9) постоянного
расхода в трубопроводы цилиндров наклона.
Скорости передвижения автопогрузчиков с грузом по твердому
покрытию [естественному (сухому грунту) и искусственному
(асфальтобетону и цементобетону)] принимают в пределах 10—
20 км/ч и без груза 30—35 км/ч. У автопогрузчиков на грузо-
шинах они на 50—60% меньше указанных, что объясняется
меньшей прочностью грузошин и небольшой дальностью перевозок,
на которых приходится работать. В первом случае дальность
перевозок ограничивается 500 м (при больших расстояниях
выгодно возить груз на автомобилях), а во втором случае дальность
редко превышает 200 м (работа на складах, в цехах, портахг на
железнодорожных станциях и т. д.). Наименьшие скорости (3—
5 км/ч) принимают при подхвате груза на вилы и при
маневрировании с грузом.
Задний угол съезда аг у всех автопогрузчиков находится в
пределах 24—25°.
Сравнивая содержание стандартов на автопогрузчики, можно
отметить, что иностранные стандарты менее подробны. В них
не указаны скорости, габаритные размеры и масса, т. е. все это
относится к компетенции конструктора.
У автопогрузчиков с механической трансмиссией применяют
три, а с гидромеханической —две скорости, одинаковые для
движения вперед и назад, чтобы сократить время цикла при
маневрировании.
Наряду с основными параметрами (грузоподъемностью Q
и грузовым моментом М) весьма важное значение имеет
наименьший радиус R поворота.Он определяет ширину проездов в
прямом и перекрещивающемся направлениях и, следовательно, влияет
на полезную площадь складов. Радиус R зависит от многих
конструктивных факторов: колесной базы Л, ширины колеи и самого
автопогрузчика, принятой колесной схемы, а при четырехопорной
схеме — углов поворота колес р2 и Рз (см- Рис- 18) и т. п. Колесная
база не является прямым эксплуатационным размером, хотя
и указывается в технических характеристиках автопогрузчиков.
Оптимальный размер ее является как бы показателем
совершенства компоновки автопогрузчика. Наряду с внешним радиусом R
поворота она влияет также на распределение массы
автопогрузчика по осям, массу противовеса, усилие на рулевом колесе,
проходимость автопогрузчика и т. п. К сожалению, нет
аналитических зависимостей для выбора оптимального размера колесной
базы.
Для автопогрузчиков принимают четырехколесную опорную
схему с задней балансирной подвеской с большими углами
поворота задних управляемых колес, которые доходят до f>2 ^ 75Q
и рз ^ 49°, чтобы уменьшить радиус R поворота. Ширину
проездов Вг — ВА получают графически, причем зазоры по габарит-
41
ным размерам автопогрузчика в плане принимают везде
минимальными (около 100 мм).
У вилочных автопогрузчиков, как и у кранов, строят кривую
грузоподъемности (см. рис. 18), которую получают с учетом
грузового момента М. На расстоянии 1Л от передней спинки вил она
горизонтальна, а ближе к концу грузовых вил падает
Анализируя статистические данные, можно отметить некоторые
зависимости между отдельными параметрами, которые могут быть
использованы для предварительного проектирования
автопогрузчиков. Так, например, получена линейная зависимость между
мощностью N (в л. с.) двигателя внутреннего сгорания и
грузоподъемностью Q (в т). Откладывая на графике значение Q по оси
абсцисс, а значение N по оси ординат, получим мощность
N (в л. с.) для автопогрузчиков грузоподъемностью 1—10 т:
где 20 — свободный член, найден графически и соответствует
условной мощности автопогрузчика, у которого грузоподъемность
равна нулю.
Наиболее строгая закономерность наблюдается в соотношении
материалоемкости автопогрузчика JL (в т), откладываемой по оси
ординат, и грузоподъемности Q (в т), откладываемой по оси
абсцисс. Для тех же автопогрузчиков
т,
и для электропогрузчиков (с кислотной аккумуляторной
батареей)
T13Q+1 т.
Удельная энергоемкость у автопогрузчиков, отнесенная к их
массе,
~2Г ^ Ю Л. С./Т.
ч/Я,
Графически найдена также зависимость колесной базы А
(в см) от грузоподъемности Q (в т), откладываемой по оси абсцисс.
Для автопогрузчиков грузоподъемностью 1—10 т колесная база
Л = 17Q+ 125 см.
Ориентировочно можно определить ширину К колеи (в см)
в зависимости от колесной базы А (в см). Как известно, ширину
колеи транспортных машин берут меньше колесной базы, чтобы
получить устойчивое движение машины, а у вилочных
автопогрузчиков, кроме того, получить достаточную поперечную грузовую
устойчивость. При ширине колеи посередине двойных колес
у ведущего моста соотношение между колесной базой и шириной
колеи в среднем для автопогрузчиков составляет
Л 1 9 ^_ 1 ъ
42
где меньшие значения соответствуют автопогрузчикам небольшой
гр узоподъемности.
Сопоставляют внешние характеристики отечественных и
зарубежных автопогрузчиков не только по грузоподъемности Q т,
но и по удельным материалоемкости MIQ и энергоемкости N/Q9
грузовому моменту М = QI и особенно по условному грузовому
моменту Му = Ql± [где / и 1г — расстояние от ц. т. номинального
груза на грузовых вилах, соответственно от оси переднего моста
и до передней спинки вил (см. рис. 18)]. Многие зарубежные
фирмы на базе одного самоходного шасси приводят в каталогах
данные о семействе автопогрузчиков с разными грузоподъемно-
стями и расстояниями 1Х всегда меньшими, чем у отечественных
автопогрузчиков. Условный момент Му характеризует
возможность применения автопогрузчика для подъема более широких
штучных грузов в плане при одной и той же грузоподъемности.
Как показывает практика, на удельные показатели мало влияет
масса автопогрузчика с разными высотами подъема, так как
изменение высоты грузоподъемника незначительно сказывается на
общей массе автопогрузчика.
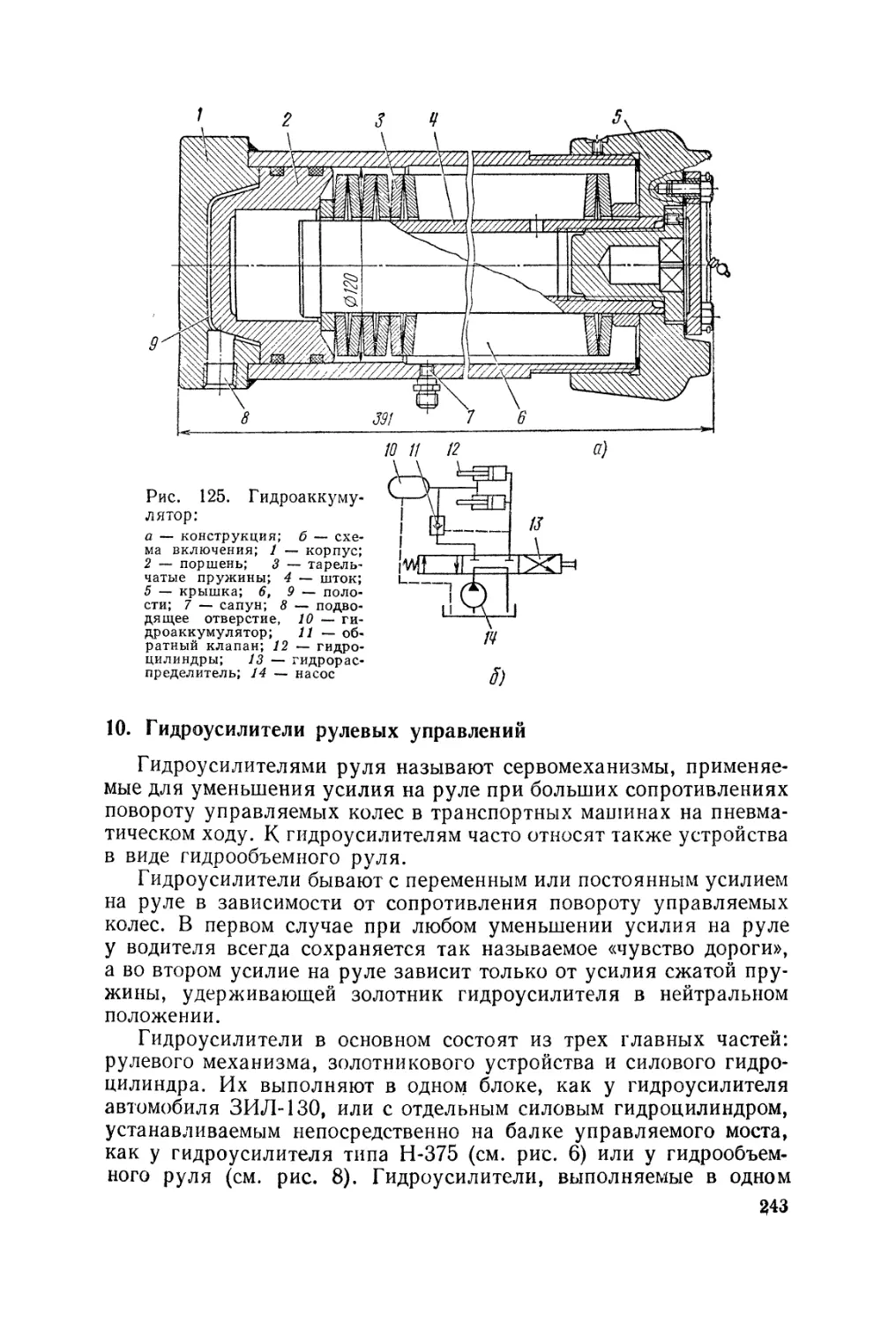
5. Принцип работы
Одновременно с принципом работы поясним и принцип
действия автопогрузчика.
Транспортируемые грузы должны быть уложены на поддоны,
а ящики на подкладки, позволяющие свободно подвести под них
грузовые вилы.
Рассмотрим два частных случая, наиболее распространенных
в практике: погрузку штучных грузов в грузовой автомобиль
с бортовым кузовом и укладку их в штабель. Сначала
устанавливают необходимый развод грузовых вил применительно к длине
перегружаемых грузов. Затем автопогрузчик на включенной
первой передаче подъезжает к грузу со стороны, наиболее удобной
для подхвата его на вилы. Опускают вилы почти до земли,
грузоподъемник наклоняют вперед и медленным движением
автопогрузчика (с пробуксовкой сцепления) вводят вилы в поддон или под
пакет до отказа (рис. 19, а). В этом случае наклон рамы
грузоподъемника и движение автопогрузчика вперед могут быть
совмещены. Центр тяжести поднимаемого груза должен быть посередине
между вилами и ближе к их передней спинке. Затем
грузоподъемник отклоняют назад до вертикального положения, приподнимают
груз на 300—400 мм и отклоняют грузоподъемник назад до отказа
(рис. 19, б). Когда масса поднимаемого груза неизвестна, то
сначала приподнимают его на высоту не более 100 мм, чтобы
убедиться в устойчивости автопогрузчика при дальнейшем подъеме
груза. Потом автопогрузчик передвигают к грузовому
автомобилю, поднимают вилы на высоту, необходимую для разгрузки
(рис. 19, в), устанавливают грузоподъемник вертикально и ставят
43
д) в)
Рис. 19. Последовательность работы автопогрузчика при
разгрузке грузового автомобиля или штабелировании штучных
грузов:
а — подхват груза ка вилы; б ««* транспортное положение; з —
укладка груза на автомобиль; г — положение перед укладкой
груза в штабель; д .«*- укладка груза в штабель и подхват груза;
е г-» спуск груза для транспортного положения
груз на пол кузова автомобиля. Затем автопогрузчик задним
ходом отодвигается от автомобиля.
Автомобиль разгружают в обратной последовательности. При
вертикальном положении грузоподъемника вилы поднимают на
нужную высоту, наклоняют грузоподъемник вперед и вводят вилы
под груз. После этого груз немного приподнимают,
грузоподъемник отклоняют назад, и автопогрузчик отодвигается задним ходом,
чтобы можно было груз опустить вниз в транспортное положение
автопогрузчика (см. рис. 19, б).
При штабелировании грузов поступают сначала так же, как
и при загрузке автомобиля (см. рис. 19, а и б). При подходе к
штабелю грузоподъемник устанавливают в вертикальное положение
(рис. 19, г) и груз поднимают вверх.Далее автопогрузчик медленно
передвигают вперед и вводят груз внутрь штабеля. Затем при
малой частоте вращения коленчатого вала двигателя отклоняют
грузоподъемник вперед (рис. 19, д) и груз опускают на штабель.
После этого автопогрузчик отодвигается задним ходом, пока вилы
44
ие выйдут из-под груза, отклоняют грузоподъемник назад и
опускают вилы вниз для транспортного положения, как показано
на рис. 19, б, но без груза.
Для захвата груза из штабеля автопогрузчик подъезжает
вплотную к штабелю, поднимает вилы на нужную высоту,
грузоподъемник наклоняется вперед, и при медленном движении
автопогрузчика вперед вводятся вилы в поддон или под груз до упора
последнего в переднюю спинку вил (см. рис. 19, д). Затем
грузоподъемник отклоняют назад до отказа и медленно отодвигают
автопогрузчик, пока в^лы не выйдут из штабеля (рис. 19, г).
Затем груз опускают вниз в транспортное положение
автопогрузчика (см. рис. 19, б).
В предельных положениях подъема (спуска) груза и наклона
грузоподъемника немедленно снижают частоту вращения
коленчатого вала двигателя и рычаги управления ставят в нейтральное
положение. При спуске груза двигатель работает в режиме
холостого хода, так как скорость спуска не зависит от частоты
вращения коленчатого вала двигателя,
6. Определение производительности
Техническая производительность (за 1 ч чистой работы^
автопогрузчика (в т/ч)
где Q — номинальная (паспортная) грузоподъемность, т; Ктр —
коэффициент использования автопогрузчика по грузоподъемности;
Г — время цикла, мин; время цикла состоит из суммы времени,
затрачиваемого на выполнение элементов операций.
Коэффициент использования по грузоподъемности определяют
по формуле
где шср — средняя масса перегружаемых грузов, т.
Коэффициент Кгр может меняться в зависимости от смен; он
зависит от массовости перегружаемых однотипных грузов.
Приводим методику определения времени цикла, не претендуя на
полный учет его и ие имея в виду при этом определенный вид
работы (штабелирование или погрузка-разгрузка транспортных
средств). Для примера приводим время цикла при
штабелировании груза на высоту 2,8 м при дальности перевозки 100 м.
Считаем, что время цикла (в с) состоит из 11 операций, тогда
где t1 — время наклона грузоподъемника сначала вперед для
заводки вил под груз, а затем назад на полный угол после
предварительного подъема груза приблизительно на 300 мм для транс-
45
портного положения автопогрузчика, ориентировочно для
средних условий tx я^ 10 ~- 15 с; t2 — время для разворота
автопогрузчика на 180°, с, практически t2 = 10 ~- 15 с; t3 — время для
передвижения автопогрузчика с грузом, с, t3 = 3,6L/vn (L —
дальность перевозки, м; vn — скорость передвижения с грузом,
км/ч, по условиям охраны труда ее берут не более 10 км/ч); f4 —
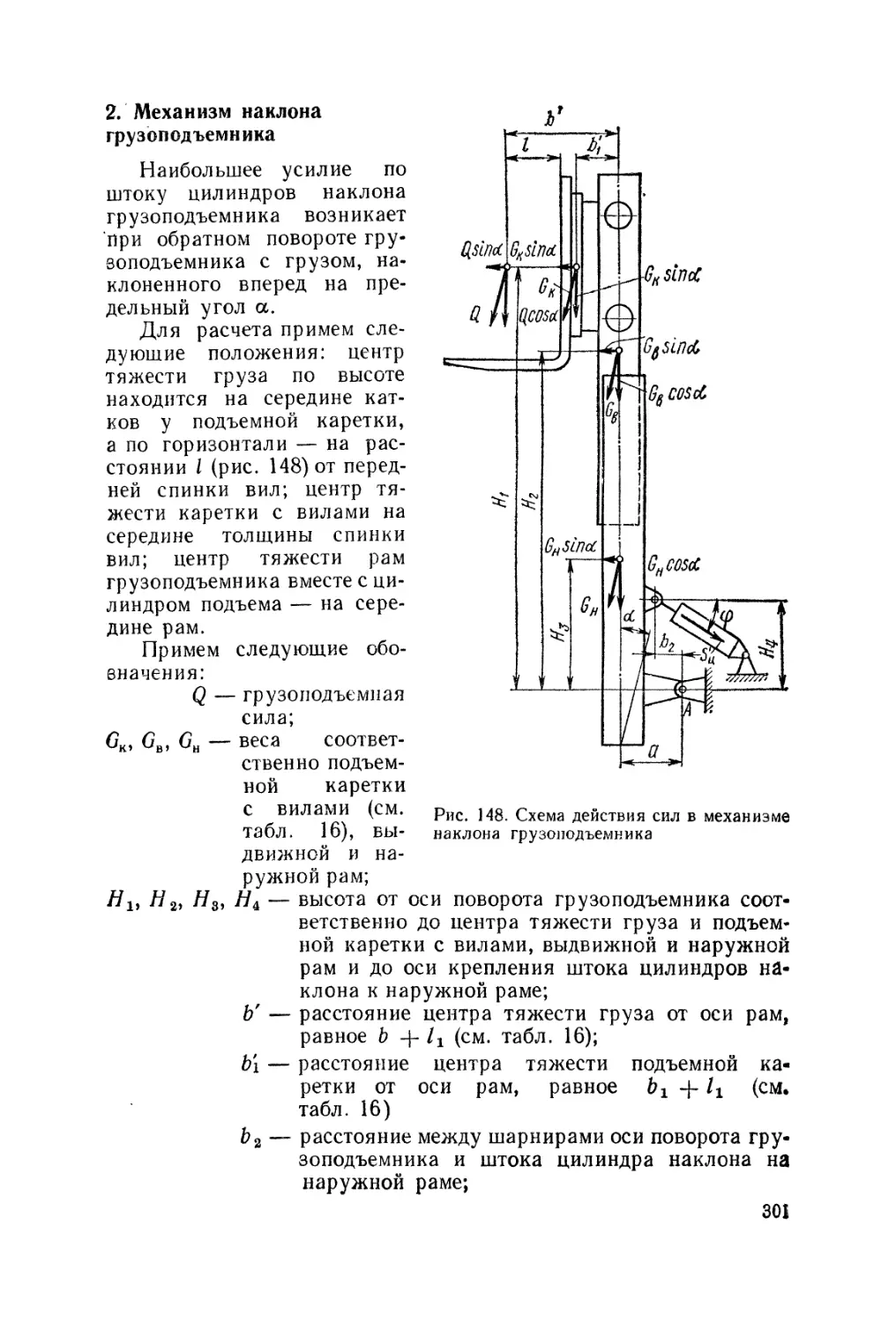
время для установки грузоподъемника в вертикальное положение
с грузом на вилах, с, *4 ^ 3 с; /5 — время подъема вил, с, tb =
= (Н — 0,3) 60/vr (H — высота подъема груза, м; 0,3 —
транспортная высота подъема, которая была учтена при определении
времени tly м; vr — скорость подъема груза, м/мин); t6 — время
для укладки груза в штабель, с, te ^ 8 с; t7 — время наклона
грузоподъемника назад без груза, с, t7 ^ 3 с; t8 — время спуска
вил без груза, с; t9 — время для разворота автопогрузчика на 180°
без груза, практически tQ = 10 -т- 15 с; t10 — время обратного
холостого хода автопогрузчика, с, его определяют так же, как
и время to\ t±1 — суммарное время для переключения рычагов,
практически t1± ^ 6-н8 с.
Время t8 определяют по формуле, в которой вместо скорости
подъема vr подставляют скорость опускания vo. Если последняя
неизвестна, то берут вместо нее ип. При этом ошибка будет
небольшой при сравнительно небольших высотах подъема.
Как видно, не все элементы цикла определяют расчетом;
многие берут по практическим данным. При штабелировании
груза на высоту 2,8 м и транспортном плече 100 м время цикла
в среднем составляет 2,5 мин.
Для определения эксплуатационной производительности
необходимо учитывать режим использования автопогрузчика по
времени в течение смены в конкретных производственных условиях
и правильной организации работ.
Эксплуатационную сменную производительность (в т)
автопогрузчика определяют по формуле
j-j rj rs Z' O^ is ps-
11 экс. см ZJJTi\3 —- j, ЛГрАэ>
где z — продолжительность смены, ч, при пятидневной рабочей
неделе z — 8,2 ч; К3 — коэффициент использования
автопогрузчика по времени, в течение смены он может изменяться в
зависимости от технологии и организации работ в пределах 0,4—0,8.
Годовую эксплуатационную производительность определяют
с учетом сменности, числа рабочих дней в году (около 272 дней
при числе выходных дней около 59), простоев из-за планово-
предупредительного ремонта (—24 дня).
7. Боковые автопогрузчики
Фронтальные автопогрузчики мало пригодны для работы
с длинномерными грузами: профильным прокатом, трубами,
железобетонными изделиями (сваями, панелями перекрытий, риге-
46
лями) и т. п., так как для этого требуется большая ширина
проезда.
Боковые автопогрузчики отличаются от фронтальных в
основном тем, что у них грузоподъемник расположен сбоку (справа
или слева) самоходного шасси и имеет возможность перемещаться
поперек последнего.
Грузоподъемник выдвигают для подхвата грузовыми вилами
длинномерных грузов, уложенных на стеллажах или земле
параллельно продольной оси автопогрузчика. Затем грузоподъемнин
вдвигают обратно с укладкой подхваченного груза на верх кузова
автопогрузчика, как на платформу для горизонтального
перемещения всего автопогрузчика вместе с грузом к месту укладки
последнего.
В 60-х годах в СССР были освоены боковые автопогрузчики
4063 и 4065 грузоподъемностью соответственно 3,2 и 5 т. Позже
был освоен автопогрузчик 4070 грузоподъемностью 10 т и на одном
из заводов транспортного машиностроения электрический
вилочный погрузчик ЭП-303 грузоподъемностью 3,2 т.
Боковые автопогрузчики отдельных видов могут отличаться
один от другого только лишь конструкцией трансмиссий для
передвижения самого автопогрузчика и грузоподъемника.
Конструкция боковых автопогрузчиков имеет много общего с
конструкцией фронтальных в части применения мостов и
грузоподъемника.
8. Конструкция боковых автопогрузчиков
Рама шасси 10 (рис. 20) представляет собой сварной кузов
из стального проката. Из-за проема в середине, необходимого
для поперечного хода грузоподъемника 3 с помощью
гидроцилиндров ], она по своей форме напоминает опрокинутый набок
письменный стол с двумя тумбами. Сверху кузова уложен деревянный
настил 8 для укладки на него перегружаемых длинномерных
грузов. К боковым стенкам рамы прикреплены гидравлические
домкраты 6, обеспечивающие устойчивость автопогрузчика при
выдвижении каретки 5 с грузом и подъема его с помощью
гидроцилиндра 2.
У боковых и фронтальных автопогрузчиков применяется также
четырехопорная колесная схема, при которой кузов сзади жестко
опирается на ведущий мост 7 с болтовым креплением, а спереди
шарнирно на балку переднего и в то же время управляемого
моста 4 с балансирной подвеской.
Двигатель 9 установлен сзади в кузове и с левой стороны от
проема, радиатором вперед или назад. У автопогрузчиков 4063
и 4065 одинаковой конструкции он установлен радиатором назад
и применена механическая трансмиссия, выполненная по схеме
рис. 21. После двигателя 7 установлена коробка 8 передач от
автомобиля, как у фронтальных автопогрузчиков грузоподъем-
47
Рис. 21. Кинематическая схема бокового
автопогрузчика 4065
ностью 3,2 и 5 т, но с сохранением передачи заднего хода.
Поскольку двигатель расположен над ведущим мостом, то после
коробки передач установлен промежуточный редуктор 10, а после
него понижающий редуктор 3 (передаточное число у редукторов
1,36), и от него через карданный вал движение передается на
задний мост 1. Элементы трансмиссии связаны между собой через
валы 2 и 9 карданных передач. Такая схема принята, чтобы
обеспечить физическую возможность разместить трансмиссию на
сравнительно небольшой площади. Поэтому пришлось прибегнуть
к обратному размещению карданных валов. Насосы 5 и 6
приводятся от переднего конца коленчатого вала через однопарный
шестеренчатый редуктор 4.
У некоторых зарубежных автопогрузчиков и на
автопогрузчике 4070 двигатель установлен радиатором назад, что при
больших размерах автопогрузчиков позволило применить более
простую кинематическую схему по сравнению со схемой, приведенной
на рис. 21. В этом случае исключается промежуточный редуктор
и крутящий момент к ведущему мосту передается от коробки
передач через карданную передачу и понижающий редуктор. У
некоторых зарубежных автопогрузчиков вместо шестеренчатого
редуктора, как, например, у автопогрузчиков фирмы «Лансере
Машинери» (Англия), устанавливают многорядну1о цепную
передачу, работающую в масляном картере. Трансмиссия получается
еще более простой, но сама цепная передача более тяжелой, так как
крутящий момент на выходе из коробки передач сильно
увеличивается.
На автопогрузчиках 4063 и 4065 установлены двигатель,
коробка передач и ведущий мост от автомобиля ГАЗ-51. Телеско-
49
Рис. 22. Механизм выдвижения грузоподъемника автопогрузчиков 4063 и 4065
пические грузоподъемники у них принципиально не отличаются
от грузоподъемников, принятых у фронтальных автопогрузчиков,
и только нижний конец наружной рамы их не имеет шарнира
на раме шасси, а опирается на тележку 9 (рис. 22) с рельсовым
ходом, необходимым для поперечного движения
грузоподъемника 1. Подъемная каретка с вилами также подвешена на двух
грузовых цепях, одним концом перекинутым через ролики на
перекладине выдвижной рамы, а другими концами закрепленными
на корпусе гидроцилиндра подъема; с выдвижением плунжера
цилиндра вверх поднимаются также выдвижная рама и каретка
с грузовыми вилами 3,
В то время, когда создавались и осваивались отечественные
боковые погрузчики, не было еще специальных профилей для
рам грузоподъемника, поэтому грузоподъемники выполнены из
обычного фасонного проката (из швеллеров и двутавров) с каче-
50
нием основных катков желобчатого профиля по полоскам из
полукруглой (сегментной) стали, приваренных к наклонным
полкам основных профилей. В результате направляющие у
автопогрузчиков 4070 получились очень тяжелыми (см. нижнюю
проекцию на рис. 23).
Рамы ходовых тележек 9 (см. рис. 22) выполнены из двух
коротких горизонтальных швеллеров, приваренных встык к
вертикальным швеллерам наружной рамы грузоподъемника.
Приваренные сбоку к рамам толстые полосы 4 служат для крепления
осей катков. Грузоподъемник через четыре катка 5 с ребордами
опирается на направляющие (рельсы) 6, приваренные к раме 8
шасси. Одна пара катков, со стороны вил, воспринимает
вертикальное, направленное вниз давление, а другая пара —
вертикальное отрывающее усилие. Горизонтально грузойодъемник
движется с помощью двух наклонно расположенных
гидроцилиндров 7 двустороннего действия. Корпуса их опираются на
специальные стойки у рамы шасси, а концы штоков шарнирно
прикреплены к наружной раме грузоподъемника. У
автопогрузчиков 4063 и 4065 ход выдвижения грузовых вил принят 1280 мм,
обычно он на 80—100 мм меньше, чем ход поршней у цилиндров.
Ход тележек в концах ограничен упором поршня в крышки
цилиндров. С применением наклонных цилиндров получилась
неблагоприятная раскладка сил для передвижения.
У автопогрузчика 4070 применена более совершенная схема
механизма выдвижения с одним гидроцилиндром при выдвижении
грузовых вил на 1875 мм. Здесь установлен цепной полиспаст
обратного действия, в котором усилие по штоку цилиндров
увеличивается, а ход штока уменьшается вдвое. При больших нагрузках
грузоподъемник опирается на раму шасси через тележку из восьми
катков 8 (рис. 23), которые попарно установлены на четыре
траверсные тележки 9. Катки перекатываются по направляющим
(рельсам) Л из прочных угольников, приваренных горизонтально
к раме шасси подлине проема. К швеллерам наружной рамы
грузоподъемника под прямым углом встык приварена рама тележки
с толстыми вертикальными полосами для крепления осей траверс-
пых тележек 9. Для получения полиспаста обратного действия
с одной стороны проема за его вертикальной стенкой установлены
две втулочно-роликовые цепи 2 и 49 огибающие ролики траверсы 3,
Один конец цепи 2 закреплен на раме шасси в точке В, а другой
конец после огибания ролика на траверсе и звездочки / на валике
12 закреплен неподвижно на наружной раме грузоподъемника
в точке Д. Один конец цепи 4 закреплен на раме шасси в точке Г,
а другой конец после огибания ролика у траверсы и ролика 6
закреплен также на раме 10 грузоподъемника в точке Д.
Траверса 3 соединена со штоком гидроцилиндра 5, шарнирно
установленного на раме шасси.
Чтобы избежать движения катков тележки с перекосом,
указанную цепную передачу с помощью общего валика 12 жестко
51
6 7
Рис. 23. Механизм выдвижения грузоподъемника автопогрузчика 4070
связывают с цепной передачей, установленной с другой стороны
проема. В одном конце она огибает звездочку, посаженную на
валик 12, как и звездочку 1У на другом конце она огибает холостой
ролик, установленный на раме шасси, как и ролик 6. Нижняя
ветвь ее в одном месте также жестко закреплена на наружной
раме грузоподъемника, как и цепь 2 в точке Д. Таким образом,
она является закольцованной.
Для обеспечения устойчивости погрузчиков при подхвате
вилами груза в конце проема и справа на раме шасси
устанавливают два гидравлических домкрата 2 (см. рис. 22) или 7
(см. рис. 23), представляющие собой гидравлические поршневые
цилиндры двойного действия, управляемые из кабины. Перед
началом выполнения погрузочно-разгрузочных операций концы
домкратов должны быть опущены на рабочую площадку, а на время
движения автопогрузчика подняты вверх. Чтобы исключить
движение автопогрузчика с опущенными домкратами,
предусмотрена гидравлическая блокировка, которая не дает включать
муфту сцепления, если домкраты не подняты вверх. Кроме того,
на щитке приборов имеется сигнальная лампа, которая зажигается
при опущенных домкратах.
Подъемная каретка опирается на выдвижную раму
грузоподъемника: вверху восемью желобчатыми катками 5 (рис. 24),
внизу четырьмя плоскими катками 8 и в середине восемью
плоскими боковыми катками 7.
Для удобства подхвата вилами штучного груза у
автопогрузчика 4070 предусмотрен наклон вил. Для этого на подъемной
каретке 6 установлены два поршневых гидроцилиндра 2
двустороннего действия (диаметр 100 мм, ход 130 мм), штоки которых
шарнирно связаны с рычагами 3. На конце рычагов установлены
ролики 4, на которые опираются грузовые вилы /. Меняя
положение роликов 4, можно менять наклон вил к горизонту: вверх на 6°
и вниз на 3°.
Поскольку гидравлические домкраты не типичны для
погрузчиков других конструкций, описание их конструкции приводим
здесь, а не в разделе гидропривода.
Гидравлические домкраты являются разновидностью
поршневых цилиндров двойного действия, шток 4 (рис. 25) которых
оканчивается шаровой заточкой для опирания гидравлического
домкрата 14 на поверхность дороги через литой башмак 9. Для
безопасности в работе в головке цилиндра установлен
гидравлический замок 15, который исключает утечки масла из цилиндра,
проседание опор и гарантирует безопасность работы при обрыве
гидравлических трубопроводов.
Перед установкой автопогрузчика на домкраты включают
соответствующий золотник 13 гидрораспределителя, масло через
отверстия Д и В поступает под давлением в поршневую полость
цилиндра, отчего открывается шариковый клапан 11. Поршень 2
перемещается вниз, вытесняя масло из штоковой полости на слив
53
Рис. 24. Грузовая каретка с механизмом наклона вил
А-А
Рис. 25. Гидравлический домкрат:
а — конструкция; 6 -^ гидравлическая схема включения; / — трубка; 2 — поршень;
3 — корпус цилиндра; 4 — шток; 5 — ограничительная втулка; 6 « направляющая
опора; 7 — крышка; 5 — чехол; 9 — опорный башмак; 10 — поршенек гидравлического
замка; 11 — шариковый клапан; 12 — пружина; 13 — золотник гидрораспределителя;
14 е- гидравлические домкраты; 15 — гидравлический замок
через отверстие Б. При втягивании штока переключается золотник
гидрораспределителя и масло через отверстие Б подается в што-
ковую полость и одновременно через канал Г к поршеньку 10
гидравлического замка. Вследствие этого шариковый клапан //
будет находиться под двусторонним давлением: от внешней
нагрузки на домкрат, передаваемой поршнем, и от давления масла,
находящегося в поршневой полости, так как выход масла на слив
перекрыт клапаном 11. Поскольку площадь сечения поршенька 10
у гидравлического замка больше, чем у клапана 11, то
последний отжимается поршеньком 10\ поэтому при нагнетании масла
55
ТаблицаЗ
Техническая характеристика боковых автопогрузчиков (см. рис. 20)
Показатели
4065
4070
Номинальная грузоподъемность Q, «
Расстояние 1Х от передней спинки
вил до ц. т. груза, мм
Высота Н подъема, мм . « . . .
Выдвижение 5 вил, и
Скорость vF подъема груза, м/мин
Размеры вил, мм:
длина * ♦ . . ,
ширина ............
толщина
Ширина С\ вил в плане снаружи, мм
Размеры грузовой платформы, мм:
длина L2
ширина В4
высота #3 °т земли
Углы наклона подъемной каретки
от горизонтали (вверхХвниз), град
База А, мм
Дорожный просвет Д, мм ....
Размер шин
Ширина колеи, мм;
передних
задних
Расстояние С от передней «ленки
до оси передних колес, мм . . .
Скорос1ь передвижения без груза,
км/ч
Преодолеваемый уклон ари
движении с грузом, град
Наименьший радиус R поворота, мм
Ширина В3 перекрещивающихся
вод прямым углом проездов, мм . .
Углы поворота колес, град:
внутреннего р2
наружного рз .
Углы свеса кузова, град:
спереди а^
сзади а2
Двигатель:
мощность, л. с
частота вращения коленчатого
вала, об/мин
Габаритные размеры
автопогрузчика, мм;
длина L$
ширина В ..........
высота Hf при опущенных вилах
высота #2 при наибольшем
подъеме
3,2
600
4500
1285
12,3
1100
150
50
900
4500
1200
1120
2340
200
240—381
(8,25—15)
1620
1714
5
4175
3740
64
43
13
70
2500
4500
2000
3200
5470
600
4000
1285
13
1100
150
60
900
4765
1200
1200
2550
250
240—508
(8,25—20)
1585
1650
730
5
4400
65
46
42
18
70
2500
4800
2000
3270
5270
10
950
4000
1875
10,5
1800
200
100
1120
5450
1820
1400
6X3
3140
245
320—508
(12,00—20)
1940
4920
810
35
5
6400
4650
50
37
20
150
3100
5 540
2 800.
3 515
5 515
56
Проолжение табл. 3
Показатели
Масса без груза, кг
Распределение массы по осям, кг:
без груза на переднюю ось . .
без груза на заднюю ось . . ,'
с грузом на переднюю ось , , .
с грузом на заднюю ось ....
Распределение массы на стороны, кг:
без груза на правую сторону
без груза на левую сторону . .
с грузом на правую сторону . .
с грузом на левую сторону . . .
4063
5100
1920
3180
3420
4880
1350
3750
4300
4000
4065
5870
2370
3500
4870
6000
1930
3940
5635
5235
4070
13 950
4 800
9 150
9 850
14 100
4 650
9 300
12 350
11 600
в штоковую полость через отверстие Б шариковый клапан 11
всегда открыт, и масло из поршневой полости через отверстие Д
поступает на слив.
При разрыве гидравлических трубопроводов, случайной
остановке насоса или когда гидравлические домкраты находятся под
нагрузкой при золотнике гидрораспределителя в нейтральном
положении аварии не будет. В это время поршенек 10
гидравлического замка не будет подавать масло под шариковый клапан'//,
который будет закрыт под давлением масла со стороны отверстия В
от масс поднятого груза и самого автопогрузчика.
Гидравлическая схема боковых автопогрузчиков мало
отличается от схемы, принятой для фронтальных автопогрузчиков,
В данном случае цилиндры 6 и 9 с дросселями 8 (см. рис. 9)
заменены цилиндрами гидравлических домкратов с управлением ими
через золотник /3 (см. рис, 25, б). Вместо цилиндров /, 5 (см,
рис. 9) и узлов 2, 3 и 4 установлены гидроцилиндры поперечного
перемещения грузоподъемника с управлением через золотник 7.
В систему трубопроводов для этих цилиндров встроен перепускной
клапан. При установке пары гидроцилиндров для наклона вил,
как это принято у автопогрузчика 4070, для их управления
потребуется еще золотник, т. е. в этом случае придется применить
четырехзолотниковый гидрораспределитель.
У всех приведенных боковых автопогрузчиков ножные тормоза
установлены на все колеса. Рулевое управление имеет
гидроусилитель. Гидравлическая схема привода гидроусилителя рулевого
управления аналогична схеме, приведенной на рис. 9.
Управляют автопогрузчиком из кабины, расположенной
спереди и смещенной влево от середины. Расположение рычагов
управления примерно такое же, как у фронтальных автопогрузчиков.
Применена втулочно-роликовая цепь для передачи вращения от
рулевого колеса на червяк гидроусилителя рулевого управления.
57
Отечественные боковые автопогрузчики (табл. 3) имеют более
высокий коэффициент поперечной грузовой устойчивости (не
менее 1,4), чем зарубежные.
9. Принцип работы
Длина платформы у автопогрузчиков мало зависит от длины
перегружаемых грузов и их массы. Для автопогрузчиков
грузоподъемностью 3,2—10 т она не более 5 м. С учетом переднего
и заднего свесов груза с платформы (примерно по 1—1,5 м) боковые
автопогрузчики могут перевозить грузы длиной до 8 м, а иногда
и более, что отвечает средним длинам проката труб и круглого
и пиленого леса. При более длинном прокате (швеллера и
двутавра) его лучше не транспортировать с помощью автопогрузчика,
а только перегружать на грузовые автомобили с прицепами-
роспусками.
Для эффективной работы необходимо, чтобы длинномерные
грузы были уложены на стеллажи (рис. 26, а) или на землю на
подкладках (рис. 26, б). Общий уклон рабочей площадки должен
быть не более 2°.
Рис. 26. Схемы работы бокового автопогрузчика:
а, б — подхват вилами груза со стеллажа и с земли; в, г <
чнка вдоль и поперек укладки длинномерных грузов
68
маневрирование автопогруз-
В принципе работа на боковых автопогрузчиках сводится
к следующему. Автопогрузчик подъезжает к грузу со стороны,
удобной для подхвата его на вилы, чтобы ц. т. груза был ближе
к передней спинке вил и к середине подъемной каретки.
Допускаемое расстояние 1± берут в зависимости от грузоподъемности
и такое же, как у фронтальных автопогрузчиков. После этого
опускают гидравлические домкраты (внешние опоры) на землю
и колеса автопогрузчика затормаживают стояночным тормозом.
Затем медленным поперечным движением грузоподъемника
подводят вилы под груз до упора его в переднюю спинку вил.
Медленно поднимая груз на высоту 100—150 мм, убеждаются, что
груз чем-либо не зажат, и далее поднимают его вверх на 100—
150 мм выше площадки платформы автопогрузчика.
Чтобы поднятые длинномерные грузы уложить на платформу
ближе к ее середине, грузоподъемник перемещают поперек
автопогрузчика. Затем опускают груз и закрепляют его на платформе
деревянными клиньями или брусками. После этого грузовые вилы
опускают вниз и медленным передвижением рычага
гидрораспределителя поднимают гидравлические домкраты в транспортное
положение. При этом следят за проседанием их, чтобы груз не
рассыпался с платформы.
Дальше автопогрузчик передвигают в нужном направлении,
соблюдая необходимую осторожность. Скорость передвижения
автопогрузчика с грузом не должна превышать 10 км/ч, а в
стесненных условиях при наличии людей еще меньше.
Разгружают длинномерные грузы с платформы автопогрузчика
в обратной последовательности. При подъезде его к месту укладки
гидравлические домкраты опускают в рабочее положение,
включают стояночный тормоз, приподнимают груз на 100—150 мм
выше платформы, а при штабелировании — на требуемую высоту
и медленным поперечным движением грузоподъемника перемещают
груз с платформы к месту укладки. Затем опускают груз на место,
поднимают гидравлические домкраты, перемещают
грузоподъемник в начальное крайнее положение, выключают стояночный
тормоз и передвигают автопогрузчик в нужном направлении.
Опытные водители иногда пользуются гидравлическим
домкратом для предварительного бокового наклона автопогрузчика,
чтобы удобнее было подвести грузовые вилы под груз, лежащий
на подкладках на земле, т. е. заменяют операцию наклона
грузоподъемника вперед, как это принято у фронтальных
автопогрузчиков. После того как вилы подведены под груз, домкратами
выравнивают горизонтальное положение автопогрузчика, прежде
чем переместить грузоподъемник с грузом на середину
автопогрузчика. Необходимые размеры площади для
маневрирования автопогрузчиков 4063 и 4065 на складе с грузами длиной
около 6 м приведены на рис. 28, в, г.
Производительность боковых автопогрузчиков определяют
так же, как фронтальных.
69
Глава 3
ОДНОКОВШОВЫЕ ПОГРУЗЧИКИ]
1. Определение, назначение и классификация
Одноковшовыми погрузчиками называют самоходные подъемно-
транспортные машины, у которых основным рабочим органом
служит ковш, установленный на конце подъемной стрелы.
Зачерпывают насыпной груз ковшом, опущенным вниз, при движении
погрузчика вперед в сторону штабеля. Разгружают погрузчик
после перемещения его к загружаемому транспортному средству
и подъема ковша вверх.
Одноковшовые погрузчики в основном предназначены для
погрузки на транспортные средства (автомобили-самосвалы и
полувагоны) сыпучих и кусковых грузов и прежде всего
заполнителей (песка, гравия, щебня), а также грунта, строительного
мусора, каменного угля, кокса и др.
При установке специальных ковшей (на погрузчиках
грузоподъемностью свыше 1,5 т) их также применяют для перегрузки
скальных пород, разработки и погрузки гравийно-песчаных
материалов в карьерах, а при больших i рузоподъемностях — и
материковых грунтов I—II категории.
Когда вместо ковша устанавливают разное сменное
оборудование, погрузчики выполняют ряд вспомогательных работ:
монтажных, зачистных, планировочных, снегоуборочных и др.
Одноковшовые погрузчики можно классифицировать по
следующим основным признакам.
По грузоподъемности погрузчики разделяют на четыре класса:
легкие (грузоподъемностью 0,5—2 т), средние (2—4 т), тяжелые
(4—10 т) и большегрузные (свыше 10 т). Небольшие погрузчики
(грузоподъемностью до 0,5 т) относят иногда к малогабаритным.
По виду базового шасси погрузчики изготовляют на специальном
шасси или тракторах и тягачах. По виду ходового оборудования
они бывают на колесном или гусеничном ходах. По направлению
разгрузчики ковша относительно стороны разрабатываемого
штабеля погрузчики бывают с передней (фронтальные погрузчики),
боковой (полуповоротные погрузчики) и задней (перекидные)
разгрузчики.
По виду применяемого оборудования погрузчики разделяют на
универсальные и специализированные; в первом случае кроме
ковша применяют сменное оборудование других видов; во второе
случае вместо ковша применяют оборудование определенного
вида.
Погрузчики, предназначенные для перегрузки ковшом
строительных насыпных грузов, относят к строительным.
Одноковшовое погрузчики являются машинами
периодического действия; наполнение ковша насыпным грузом, перемещение
погрузчика с грузом и без груза, а также разгрузку ковша
выполняют раздельно.
В мировой практике наиболее распространены фронтальные
погрузчики на специальном шасси. Они отличаются наибольшей
простотой конструкции, универсальностью применения сменного
оборудования, унификацией конструктивного исполнения
независимо от типоразмера машины, уменьшенной трудоемкостью
изготовления и др. К недостаткам их относится обязательный
поворот погрузчика с ковшом для загрузки транспортного
средства.
Основным погрузочным оборудованием погрузчика является
ковш. У погрузчиков грузоподъемностью свыше 1 — 1,5 т
применяют три одинаковых по форме, но разных по объему ковша
для зачерпывания насыпных грузов: легких (с объемной массой
до 1,4 т/м3), средних (1,5—1,8 т/м?) и тяжелых (1,9—2,5 т/м8).
Основным является ковш для зачерпывания средних по плотности
насыпных грузов.
Для того чтобы расширить область применения погрузчиков
в зависимости от их типоразмера и вида ходового оборудования,
взамен основных ковшей применяют сменное оборудование. По
назначению его можно разделить на четыре основные группы:
землеройно-погрузочное, грузоподъемное, снегоуборочные и
вспомогательное. Погрузчики с таким оборудованием не заменяют
специализированные машины, а позволяют механизировать
различные работы, когда при малых объемах их применение
специализированных машин сложно и нерентабельно.
Зегуизеройно-псгрузочное оборудование (рис. 27, а) состоит из
основного ковша 1, увеличенного или уменьшенного ковшей 2
с зубьями (для тяжелых материалов и экскавации грунтов I
и 11 категории), скелетного ковша 4 (для зачерпывания скальных
пород), двухчелюстного ковша 3, ковша 5 с боковой разгрузкой,
ковша 6 с увеличенной высотой разгрузки, ковша 7 с
принудительной разгрузкой (для загрузки высоких транспортных средств
и бункеров). Кроме того, к этому оборудованию относят
бульдозерный отвал 8, оборудование 9 обратной лопаты экскаватора,
грейфер 10.
Грузоподъемное оборудование (рис. 27, б) состоит из
грузовых вил 11, крановой безблочной стрелы 12, челюстного захвата
13 для лесоматериалов, монтажно-поворотного захвата 14 для
установки столбов и свай, вил 15 для навоза и силоса.
Снегоуборочное оборудование (рис. 27, в) состоит из
плужного 16 и шнекороторного (с автономным двигателем внутреннего
сгорания) 17 снегоочислителей.
Вспомогательное оборудование (рис. 27, г) состоит из
кустореза 18, корчевателя 19, бункера-дозатора 20 и асфальтовзламы-
вателя 21.
Для установки сменного оборудования на погрузчик требуется
не более 10—30 мин.
61
Рис. 27. Виды сменного рабочего оборудования погрузчиков
Крг*ме перечисленного, на погрузчик спереди, сзади и сбоку
можно устанавливать оборудование со своими механизмами для
управления, которое обычно называют съемным. К нему относят
бульдозерное — неповоротное и универсальное, рыхлительное,
экскавационное, толкающее, лебедочное, крановое, трубоукладоч-
ное, траншеекопательное и др. Для агрегатирования и управления
съемным навесным оборудованием на погрузчике обычно
предусмотрены специальные привязочные места и выводы гидросистем.
Наиболее распространенными видами съемного навесного
оборудования являются рыхлитель и лебедка, устанавливаемые сзади
погрузчика.
Основной областью применения одноковшовых погрузчиков
является строительство, где используют до 70% машин. Примерно
15% погрузчиков занято в горнодобывающей промышленности,
остальную часть применяют на железнодорожном транспорте,
в лесной промышленности, сельском хозяйстве и других отраслях
народного хозяйства.
В зависимости от применения сменного оборудования
перечисленных групп и видов с помощью одноковшовых погрузчиков
выполняют большой комплекс работ (табл. 4).
Погрузочно-разгрузочные работы могут выполняться на
разных уровнях рабочей площадки: на горизонтальной площадке
при разгрузке в транспортное средство (рис. 28, а) и в бункер
62
Таблица 4
Выполняемые работы и применяемое сменное оборудование
Выполняемые работы, группа оборудования
Оборудование
Погрузочные работы
Погрузка в транспортные средства, перемещение
на расстояние и штабелирование гравийно-песча-
ных грузов:
средних с объемной массой 1,6
тяжелых с объемной массой до 2,2 т/м9
легких с объемной массой до 1,4 т/м3
Перемещение бетонной смеси и растворов
Ковши: основной, двух-
челюстной (из мелких
штабелей), с боковой
разгрузкой (для гусеничных
погрузчиков), с
принудительной разгрузкой и
увеличенной высотой
разгрузки
Уменьшенный и
скелетный ковши
Увеличенный ковш
Ковши, бункер-доза-
юр
Земляные работы
Землеройно-погрузочное оборудование
Послойная разработка и отсыпка грунтов I—
II категории
Отрывка траншей, котлованов и каналов
оросительных систем
Отсыпка дамб, образование отвалов грунта и
пустой породы
Обратная засыпка грунта в котлованы,
траншеи, пазухи фундаментов
Планировочные работы и отделка поверхности
Планировочные работы и отделка поверхности
Ковши: основной,
уменьшенный с зубьями,
двухчелюстной, с
принудительной разгрузкой
бульдозерный отвал; эк-
скавационное
оборудование (обратная лопата)
и грейфер
Ковши: различного
объема, двухчелюстной,
с принудительной
разгрузкой; бульдозерный
Уборка строительного мусора и работы по благо- То же
устройству
Монтажно-демонтажные работы
Грузоподъемное оборудование
Строительство малоэтажных зданий,
животноводческих комплексов и укладка фундаментов
Монтаж перекрытий
Установка и съем технологического
оборудования
Грузоподъемный крюк,
вилы, челюстной захват
63
Продолжение табл. 4
выполняемые работы, группа оборудования
Оборудование
Погрузочно-разгрузочные работы
Грузоподъемное оборудование
Погрузка и разгрузка транспортных средств;
со штучными грузами
с технологическим оборудованием
со строительными конструкциями
с длинномерными грузами
(лесоматериалами, столбами, сваями)
Уборка навоза и силоса
Снегоуборочные работы
Снегоуборочное оборудование
Уборка снега со смещением его в сторону
Уборка снега с догрузкой в кузова автомобилей-
самосвалов
Подготовительные работы
То же, а также
поворотный захват для столбов и
свай, вилы для навоза и
силоса
Плужный и шнеко
роторный снегоочистители
Увеличенный ковш
Вспомога тельное обор у дование
По расчистке территории для строительства
зданий, дорог и аэродромов:
срезка кустарника и валка небольших деревьев
корчевание и штабелирование пней
вскрытие асфальтобетонного покрытия,
рыхление смерзшихся сверху грунтов и грунтов III
категории
Уплотнение оснований и пазух у фундаментов
Кусторез
Корчеватель-собиратель
Асфальтовзламыватель
Виброуплотнитель
над конвейером на бетонных заводах полигонного типа и асфальто-
смесительных установках (рис. 28, б); при штабелировании и
образовании отвалов (рис. 28, в)\ при загрузке транспортных
средств в горных условиях (рис. 28, г); при питании дробильно-
соргировочных установок (рис. 28, д).
Дальность перевозок составляет не более 50 м, а радиус
рабочей площадки, на которой маневрирует погрузчик, в
зависимости от его типоразмера и системы поворота колес от 3 до 15 м.
При выборе емкости ковша обычно считают, что число ковшей
с грузом при погрузке в транспортное средство, исключая
полувагоны, должно быть два-три, редко пять.
Штабелирование насыпных грузов и образование отвалов
производят при перемещении погрузчика по пандусу на вершину
штабеля, а затем после перемещения его к противоположному
64
Рис. 28. Погрузочно-разгрузочные работы:
а> г — загрузка транспортных средств; б — погрузка в воронку ленточного транс-»
портера или бункера; в — штабелирование и образование отвалов;, д «■ загрузка
дробильно-сортировочных установок
3 А, Ф. Базанов, F, В. Забегалов о
концу ковш разгружают, и погрузчик задним ходом
передвигается в исходное положение. На вершине штабеля создается
горизонтальная площадка, ширина которой на 1—1,5 м больше
ширины погрузчика.
2. Фронтальные погрузчики на специальном шасси
Для ознакомления с принципиальным устройством
одноковшового погрузчика возьмем за основу конструкцию погрузчика
на специальном шасси (рис. 29).
На раме 12 погрузчика установлена сварная конструкция
П-образной формы, называемая порталом 10. Он служит опорой
для стрелы 2 и для корпусов двух гидроцилиндров 5 и 6,
применяемых для поворота ковша / и подъема стрелы. Ковш шарнирно
установлен на конце стрелы. Стрела и ковш имеют угловое
перемещение в вертикальной плоскости под действием указанных
цилиндров; штоки цилиндров 6 шарнирно связаны
непосредственно со стрелой, а штоки цилиндров 5 — с ковшом через
рычажную систему 3. Стрелу 2 с ковшом, рычажным механизмом и
цилиндрами относят к навесному погрузочному оборудованию
погрузчика. О положениях рабочего органа судят по указателю 4.
Следует отметить, что из большинства кинематических схем
рычажного механизма, применяемых в мировой практике для
подъема стрелы и поворота ковша, наиболее оптимальной является
схема перекрестного типа. Она обеспечивает лучшие технико-
эксплуатационные показатели, поэтому принята для большинства
отечественных погрузчиков. В результате применения рычага
первого рода с опорой на стреле обеспечивается наибольшее
усилие в начале поворота ковша в штабеле насыпного груза.
Подъем стрелы и поворот ковша под нагрузкой происходят при работе
гидроцилиндров поршневыми полостями.
Кинематика движения стрелы и ковша, а также принцип
работы фронтального погрузчика сводится к следующему. Перед
началом зачерпывания насыпного груза из штабеля стрелу с
ковшом опускают вниз (положение / ковша), затем при движении
погрузчика вперед ковш врезают в насыпной материал,
зачерпывают его, запрокидывая ковш назад (положение //). Когда эти
операции выполняют раздельно, то такой способ зачерпывания
называют раздельным; если с движением погрузчика вперед
одновременно запрокидывается и ковш, то такой способ зачерпывания
называют совмещенным. На время транспортного положения
погрузчика стрелу с ковшом приподнимают на 200—300 мм от
уровня земли (положение ///). Для загрузки транспортного
средства стрелу с ковшом поднимают на нужную отметку (до
положения IV), а затем ковш на стреле поворачивают для разгрузки
(положение V).
Далее ковш на стреле поворачивают в положение /У, стрелу
с ковшом опускают до положения ///, а после обратного
66
движения погрузчика стрелу с ковшом отекают в
положение //, ковш поворачивают в положение /, и цикл работы повто-
ряется.
Для привода погрузчиков применяют дизельный двигатель 7,
который устанавливают сзади. При таком расположении двигателя
его масса используется в качестве противовеса, а также
упрощается установка трансмиссии для привода колес и улучшается
обзорность.
Как правило, для всех фронтальных погрузчиков на
специальном шасси применяют гидродинамическую трансмиссию для
привода мостов 9 и 11. Двигатель вращает насосное колесо, а
турбинное колесо трансформатора через механическую коробку передач,
раздаточную коробку и карданные валы приводит ведущие мосты.
Конструктивно трансмиссия может быть выполнена
моноблочной или агрегатно-блочной. В первом случае
гидротрансформатор, коробка передач и раздаточная коробка объединены в один
блок, а во втором — основные узлы могут быть выполнены
раздельно, например гидротрансформатор, коробка передач с
раздаточными коробками. Передача движения между механизмами
происходит через карданные валы. Первую схему компоновки
применяют на сравнительно небольших погрузчиках, когда
недостаточно места для размещения трансмиссии.
Коробки передач могут быть вальными (с постоянным
включением шестерен) или планетарными переключением передач
у вальных коробок смешанным способом (гидрообъемным и
ручным) и у планетарных — только гидрообъемным. Наиболее
распространены двух- и четырехдиапазонные коробки передач (с
общим переключением передач на транспортные и рабочие скорости
передвижения).
Рабочие скорости передвижения погрузчиков выбирают
равными от 0 до 8—12 км/ч; транспортная скорость движения с не-
подрессоренной ходовой часть составляет 25—50 км/ч. Рабочие
скорости заднего хода обычно на 20—25% выше скоростей
движения вперед.
Как правило, погрузчики имеют оба ведущих моста
(применяется колесная схема 4X4), чтобы получить наибольшую силу тяги
по сцеплению, причем задний мост делают отключаемым на время
перегонов. Мосты закрепляют на рамах шасси жестко (без рессор)
с помощью стремянок или болтов с разгрузкой их штифтами от
среза.
Мосты чаще всего имеют встроенную, автоматически
действующую блокировку дифференциала для обеспечения необходимой
силы тяги при врезании ковша. Для увеличения силы тяги
погрузчика в трансмиссию после главной передачи в колеса у мостов
встраивают редукторы планетарного типа, отчего увеличивается
передаточное отношение.
Наиболее широко применяют конструкции погрузчиков двух
типов: жесткой и шарнирно-сочлененной рамами.
3* 67
68
Рис. 29. Фронтальный погрузчик с жесткой рамой
У погрузчиков с жесткой рамой управляемым является задний
мост (рис. 30, а), имеющий балансирную подвеску. В этом случае
улучшаются условия для размещения погрузочного оборудования
над передним мостом. Недостатком применения заднего
управляемого моста является движение передних и задних колес по
разным колеям.
Передний управляемый мост (рис. 30, б) применяют только
в погрузчиках, когда базовым шасси является колесный трактор
общего или сельскохозяйственного назначения. В этом случае
увеличиваются нагрузки на управляемый мост, особенно в момент
вывешивания, и усложняется конструкция погрузочного
оборудования, которое пропускается выше колес в обход пространства,
необходимого для их поворота.
Погрузчики с жесткой рамой могут быть с двумя управляемыми
мостами (рис. 30, в), колеса которых могут поворачиваться как
в разные стороны, так и в одном направлении. В первом случае
погрузчик может поворачиваться (см. рис. 16), во втором—двигаться
в сторону, позволяя достичь большой точности подхода к
транспортному средству и повысить проходимость погрузчика в
стесненных условиях. У таких погрузчиков ведущие мосты могут
быть унифицированы, а
погрузочное оборудование
размещаться выше или
между поворотными
колесами. Однако при этом
усложняется механизм
рулевого управления,
поэтому погрузчики с таким
поворотом применяют
редко.
Средние и тяжелые
погрузчики выпускают с шар-
нирно-сочлеиенными
рамами. Поворачивается
погрузчик путем
взаимного перемещения полу-
рам относительно
вертикального шарнира,
располагаемого в середине
или со смещением вперед
относительно середины
шасси (рис. 30, г). Угол
поворота одной полурамы
относительно другой берут
в пределах 35—45°. С
увеличением угла поворота
ухудшается устойчивость
погрузчика. Такая кон-
Рис 30. Схемы поворота одноковшовых
погрузчиков:
а — с задним управляемым мостом; б — с
передним управляемым мостом; в — с двумя
управляемыми мостами; г — с одношарнирными
сочлененными рамами; д *— с двухшарнирными
сочлененными рамами; е •«■ с бортовым поворотом
70
струкция получает в последнее время наибольшее распространение
в результате высоких маневровых качеств погрузчика (значительно
сокращается радиус поворота), обеспечения точности подхода
к транспортным средствам, упрощения и унификации конструкции
ведущих мостов, возможности создания конструктивно
подобных погрузчиков независимо от типоразмера. Недостатками
этого способа поворота являются конструктивное усложнение
рамы и снижение устойчивости при наибольшем угле
складывания полурам. Для улучшения устойчивости иногда используют
двухшарнирные сочленеиые рамы (рис. 30, д).
Небольшие малогабаритные погрузчики применяют иногда
с бортовым поворотом (рис. 30, е), которые разворачиваются по
кривой при заторможенных колесах с одной стороны и на месте,
когда колеса одной и другой стороны вращаются в разные
стороны. При такой системе поворота быстро изнашиваются шины.
На погрузчиках применяют широкопрофильные и высокой
проходимости камерные и бескамерные шины. Последние
применяют для тяжелых и большегрузных погрузчиков. Чтобы
уменьшить быстрый износ шин при маневрировании на скользских
основаниях, для предохранения протектора шины иногда
применяют защитные цепи.
Основные тормоза барабанного или дискового типа с
пневматическим управлением размещены во всех колесах. Тормоза
барабанного типа бывают колодочными, как у автомобилей, или
пневмокамерными (у тяжелых и большегрузных погрузчиков).
Стояночный тормоз применяют барабанного типа. Его
устанавливают на выходном валу раздаточной коробки со стороны неот-
ключаемого моста.
Наиболее прогрессивной является гидрообъемная
трансмиссия, так как она менее металлоемка и обеспечивает лучшие
КПД и тяговые показатели машины. В настоящее время
объемный гидропривод применяют в погрузчиках с мощностью
двигателя до 100—130 л. с. Дальнейшее применение его сдерживается
созданием насосов с большими подачей и давлением. Реже
применяют дизель-электрический привод для передвижения погрузчика
с мотор-колесами (исключаются мосты, коробки передач и
гидротрансформаторы).
Для получения более пологой характеристики электропривода
для его питания применяют постоянный ток. В частном случае
привод мотор-колес устанавливают по схеме, приведенной на
рис. 31, а. Дизельный двигатель / приводит генераторы 4
постоянного тока и 2 переменного тока; первый приводит электродвигатели
у ходовых колес, а второй — короткозамкнутые электродвигатели
3 для привода насосов. Электропривод колес устраивают с
внешним расположением электродвигателя (рис. 31, б) или внутри
колеса (рис. 31, в).
Дизель-электрический привод применяют преимущественно
на большегрузных погрузчиках с шарнирно-сочленеными ра-
71
Рис. 31. Схема электропривода колес, системы поворота и гидрооборудования:
а — дизель-электрического; б — колеса с внешним расположением электродвигателя;
в — с внутренним расположением электродвигателя; 1 — дизельный дви! атель; 2, 4 —.
генераторы переменного и постоянного тока; 3 — электродвигатели переменного тока;
5 •*** мотор-колеса; 6 -* пульт управления; 7,8 — электропередачи; 9 —- редуктор;
30 *=» рама погрузчика
мами, задним расположением дизель-генераторной установки
вдоль или поперек машины.
Независимо от вида основного привода и типоразмера
погрузчика для подъема стрелы, поворота ковша, рулевого
управления и других механизмов применяют объемный гидропривод
с шестеренными, аксиальными и роторно-поршневыми насосами
и реже лопастными (пластинчатыми) насосами на рабочее давление
ЮО—160, а в последнее время до 250 кгс/см2. Для осуществления
поступательных движений механизмов применяют гидроцилиндры
и вращательных — гидромоторы.
Управляют движением через цилиндрические золотники у
гидрораспределителей, переключаемых вручную, а
большегрузных погрузчиков — через гидравлический сервопривод.
Для объемного гидропривода погрузочного оборудования на
одноковшовых погрузчиках в общем виде может быть принята
типовая схема (рис. 32). Золотники гидрораспределителя 6 после
включения принудительно (пружиной) возвращаются в
нейтральное положение. Золотники А к Б, с помощью которых управляют
соответственно цилиндрами 9 поворота ковша и 11 подъема стрелы,
фиксируют запрокинутое положение ковша и подъема стрелы.
Последняя имеет «плавающее» положение (конец стрелы свободно
скользит по земле), что очень важно и для работы с отвалом
бульдозера, устанавливаемым вместо ковша. Для автоматической
остановки в крайних положениях ковша и стрелы применяют
гидровыключатели 5, 10, а чтобы ограничить скорость опускания стрелы,
установлен дроссель 12 с обратным клапаном. Между штоко-
72
/7
Рис. 32. Оптимальная схема гидропривода погрузочного оборудования
одноковшового погрузчика:
А—Г —- золотники; 1 — масляный бак; 2 — запорный кран; 3 — гидронасос; 4 —*
напорная магистраль; 5 — манометр; 6 — секционный гидрораспределитель; 7 —*
гидрозямок; 8, 10 — гидро~ыключатель; 9 — гидроцилиндры поворота ковша; 11 —>
гидрсцилиндры подъема стрелы 12 — дроссель с обратным клапаном; 13 —
пружинный j идроамортизалэр; 14 — ги„роцилиндры двухчелюстного ковша; 15 —
перепускной клапан; 16 — гидррцилиидры прижимных лап захвата; 17 — управляемый
обратный клапан; 18 — гидроцилиндр поворота ковша или люльки захвата; 19 —•
быстроразъемнья муфта; 20 — гидроцилиндры рыхлителя; 21 — сливная магистраль;
22 — фильтр; 23 — термометр
выми полостями цилиндров 9 и 11 и сливными трубопроводами
установлены гидрозамки 7 для подпитки этих полостей из сливной
магистрали 21 при спуске стрелы и разгрузке ковша.
С помощью золотника В управляют цилиндрами 14,
устанавливаемыми для смыкания двухчелюстного ковша, или цилиндрами
16 зажима монтажно-поворотного устройства. Золотником ; Г
управляют цилиндрами 20 подъема и опускания рыхлителя или
цилиндром 18 поворота монтажно-поворотного устройства.
Для ограничения давления в штоковой полости цилиндров 14
при нагружени ковша, когда золотник В находится в нейтральном
положении, устанавливают перепускной клапан 15.
73
Чтобы предотвратить падение груза при обрыве шланга или
случайной остановке насоса, на трубопроводах цилиндров 16
и 18 для монтажно-поворотного устройства, а также для
рыхлителя установлены управляемые обратные клапаны 17 (гидрозамки),
запирающие рабочие полости цилиндров от сливной
магистрали 21.
Для погрузчиков на гусеничном ходу иногда параллельно
цилиндрам 11 устанавливают пружинный гидроамортизатор 13
для снижения динамических давлений в гидросистеме. Для
гашения энергии колебания в подводящем трубопроводе амортизатора
устанавливают дроссель 12 с обратным клапаном.
Чтобы обеспечить достаточную устойчивость погрузчика с
поднятым ковшом в дополнение к массе двигателя иногда
устанавливают противовес 8 (см рис. 29), который часто служит облицовкой
радиатора с окнами для вентиляции двигателя. Некоторые фирмы
для улучшения распределения массы погрузчика по осям
применяют заполнение шин на 75% их объема летом водой, а зимой
водным раствором хлористого кальция (0,65 кг на 1 л) и гашеной
извести (0,026 кг на 1 л).
На погрузчиках применяют съемную кабину, устанавливаемую
на раму шасси на болтах или амортизаторах. При проектировании
обращают внимание на внешнюю форму погрузчиков. Все три
архитектурных ее объема (шасси, капот и кабину) стараются
привести по композиции к одному ансамблю с тенденцией перехода
к плоским формам. Для окраски применяют красный, оранжевый
или желтый цвет.
По конструкции фронтальные погрузчики могут быть с
жесткой и шарнирно-сочлененной рамой, а также с бортовым
поворотом колес.
Конструкция фронтального погрузчика с жесткой рамой.
В качестве образца рассмотрим конструкцию погрузчика ТО-6Б
(Д-561Б) грузоподъемностью 1,8 т (с основным ковшом объемом
1 м3). Как правило, у таких погрузчиков рама шасси опирается
спереди жестко на передний мост 11 (см. рис. 29) и сзади через
балансириую подвеску на управляемый мост 9.
Таким образом, применяется трехопорная схема,
обеспечивающая постоянство сцепления колес с дорогой при качении колес
по ее неровностям. Оба моста применяют ведущими, из которых
задний с управляемыми колесами.
Трансмиссия выполнена по схеме, приведенной на рис. 33.
Здесь от двигателя / через редуктор 2 приводятся два
шестеренных насоса (один для привода рабочего оборудования, а другой
для гидроусилителя рулевого управления), а также через
карданный вал гидротрансформатора 5, который объединен с коробкой 4
передач. Затем крутящий момент двигателя через раздаточную
коробку 8 и карданные валы передается на ведущие мосты 7 и 9.
Для улучшения условий труда водителя в систему рулевого
управления встроен гидроусилитель.
74
3 Ц 5
Рис. 33. Кинематическая схема фронтального погрузчика с жесткой рамойз
1 — двигатель; 2 — редуктор; 3 — гидротрансформатор; 4 — коробка передач; 5-*
фрикционные дисковые муфты; 6 — шлицевая муфта; 7, 9 •— мосты передний и задний
(управляемый); 8 — раздаточная коробка
На погрузчиках устанавливают отапливаемую и
вентилируемую кабину. Расположение рычагов и приборов управления
в кабине показано на рис. 34. Здесь, как и на автомобилях, педали
13 управления подачей топлива и 12 колесными тормозами
установлены под правую ногу. Кроме того, имеется еще педаль 4
тормоза. При нажиме ногой на педаль 12 обычно притормаживают
погрузчик при включенной передаче, а при нажатии на педаль 4
тормозят погрузчик с автоматическим отключением трансмиссии.
Рычаг 7 переключения реверса и рычаг 6 переключения
передач расположены на рулевой колонке (на других погрузчиках
они могут быть установлены и по-другому). Управление
гидрораспределителем (золотниками для включения рабочего
оборудования) расположено по правую сторону кабины. Наряду с
обычными приборами и контрольными лампами, какие применяют на
грузовых автомобилях, на щитке 8 контрольно-измерительных
приборов или нижней панели пополнительно установлены
приборы контроля температуры и давления масла в гидространсфор-
маторе и коробке передач. Напряжение в сети освещения и
электроприборов 12 В (минус на массу).
75
Рис. 34. Размещение органов управления и приборов в кабине
погрузчика:
Jf — рукоятка очистки фильтра; 2 — рукоятка управления жалюзи радиатора*
3 — рычаг стояночного тормоза; 4, 12 — педали тормоза; 5 — ножной
переключатель света; 6 — рычаг переключения передач; 7 — рычаг переключения реверса;
8 — щиток контрольно-измерительных приборов; 9 — рулевое колесо; 10 —
вентилятор; // — рычаг ручного управления подачей топлива в системе питания
двигателя; 13 — педаль управления подачей топлива в системе питания двига»
теля; 14, 15 — рычаги отключения заднего моста и переключения транспортного
диапазона коробки передач; 16, 17 — рукоятки управления ковшом и стрелой;
18 — выключатель массы; 19 — управление отоплением кабины; 20 =«■ виденье
водителя
Спереди погрузчика основные фары и два подфарника сзади —
два фонаря. Иногда для освещения места работы дополнительно
устанавливают фары на крыше кабины.
Сиденье мягкое, регулируемое по высоте и по длине. На
больших погрузчиках устанавливают два сиденья.
В настоящее время осваивают выпуск погрузчиков грузопод-
емностью от 2 т более прогрессивной конструкции с шарнирно-
сочлененными рамами.
Фронтальные погрузчики с шарнирно-сочлененными рамами.
В качестве образца рассмотрим конструкцию погрузчика,
приведенного на рис. 35. Погрузчики бывают на специальном шасеи,
76
колесных тракторах, тягачах и характеризуются в основном
наличием у шасси двух полурам 5 и 7, поворачивающихся вокруг
вертикальной оси, с шарнирами 6 вверху и 11 внизу. Шарниры
воспринимают горизонтальную пару сил от смещения ц. т.
погрузчика относительно вертикальной оси и от толкающих усилий при
движении погрузчика, а верхний шарнир, кроме того,
воспринимает еще и вертикальные силы.
Наиболее распространены погрузчики с двухсекционными
шарнирко-сочленениыми рамами с одним вертикальным
шарниром. Известны конструкции погрузчиков с трехсекционными
рамами и двумя вертикальными шарнирами, улучшающие
устойчивость.
Полурамы сварной пространственной конструкции, на одном
конце на продольной оси верху и внизу приверены расточенные
гнезда под корпуса стандартных шарнирных подшипников.
Обе рамы соединены двумя вертикальными шкворнями в
шарнирах 6 и 11. Полу рамы около оси шкворней поворачиваются с по-
Рис. 35. Фронтальный погрузчик с шарнирно-сочлененной рамой и кабиной на
полураме двигателя:
1 — ковш, 2 — стрела; 3 — рычажный механизм; 4t 12, 14 *» гидроцилиндры для
поворота ковша, подъема стрелы и поворота полурам; 5, 7 *-» передняя и задняя полу*
рамы; 6,11 — шарнир поворота полурам; 8 — двигатель; 9t 13 — задний и передний
мосты; 10 «» карданная передача; 15, 16 -я» площадки для обслуживания
77
1 г
18 17 16 15 П 13 12 11 Ю 3
Рис. 36. Компоновка фронтального погрузчика с шарнирно-сочлененной
рамой и кабиной на грузовой полураме:
/ — двигатель; 2 — топливные баки; 3 — насосы гидропривода рулевого
управления и рабочего оборудования; 4 — карданная передача; 5 — грузовая полурама; 6 —«
стрела; 7, 11 — гидроцилиндры ковша и стрелы; 8 — рычажный механизм
управления; 9 — рабочий орган; 10, 16 — передний и задний ьедущие мосты; 12 —
гидроцилиндры поворота погрузчика; 13 — шарнир поворота полурам; 14 — коробка
передач, 15 — гидротрансформатор; 17 — противовес, 18 — моторная полурама
мощью двух гидроцилиндров 14, управляемых по следящей
системе при повороте рулевого колеса. Поэтому здесь не требуется
установка управляемого моста. Задний мост имеет балансирную
подвеску. Мост может качаться в вертикальной плоскости на 9—
10° вверх и вниз.
Кабину погрузчика размещают на задней (моторной) или
передней грузовой полурамах. При установке кабины на моторной
полураме упрощается система управления основными узлами и
агрегатами погрузчика, за исключением гидропривода для
погрузочного оборудования, но ухудшаются условия работы
водителя.
Конструкция механизма погрузочного оборудования,
трансмиссия привода колес такие же, как у погрузчиков с жесткой
рамой. Чаще всего гидротрансформатор 15 (рис. 36) со всеми
насосами (для привода рабочего механизма, поворота рам и
обслуживания самого гидротрансформатора) устанавливают сразу за
двигателем. Коробку 14 передач объединяют с раздаточной
коробкой. В более тяжелых погрузчиках устанавливают четырех-
или трехступенчатые планетарные коробки передач с реверсом.
На большегрузных погрузчиках, когда мощность привода
очень велика и значительно превышает мощности выпускаемых
78
у
\
у
// Ю
Рис. 37. Фронтальный погрузчик с бортовым поворотом:
а ■= общий бид; б =— кинематическая схема
79
дизельных двигателей (свыше 500 л. с), устанавливают два
двигателя с компаундным расположением их сзади на
полураме.
Фронтальные погрузчики с бортовым поворотом колес.
Принципиальная конструкция специального шасси у них совершенно
отлична от описанных выше. Эти погрузчики имеют все
управляемые колеса, с помощью которых обеспечивается бортовой
поворот погрузчика вокруг центра тяжести (см. рис. 30, г). Такие
погрузчки применяют для выполнения разнообразных и малых
по объему работ в стесненных условиях.
При малых размерах погрузчика по высоте ось стрелы /
(рис. 37, а) расположена на стойке 2, Сиденье размещено между
лонжеронами стрелы.
Для передвижения погрузчика применен объемный
гидропривод. Левые и правые колеса попарно приводятся от двух
отдельных гидромоторов 7 (рис. 37, б) и 11 через бортовые редукторы 8
и 10. Гидромоторы (регулируемые, аксиальные, роторно-поршне-
вого типа) работают под действием масла, подаваемого под
давлением насосами 6 и 12 (шестеренными или
аксиально-поршневого типа). Для привода насосов установлен двигатель. Крутящий
момент от него к насосам передается через центробежную муфту 4
и распределительный редуктор 5. Центробежная муфта состоит
из диска, закрепленного на валу двигателя, и двух полукруглых
колодок с наклепанными на них фрикционными накладками.
Колодки шарнирно установлены на диске и сжимаются двумя
пружинами. После пуска двигателя 5, когда частота вращения
его коленчатого вала будет соответствовать номинальным
оборотом, колодки у центробежной муфты заклинятся в ободе,
посаженном па входном валу редуктора, и насосы будут
работать.
Кроме этих двух насосов устанавливают также насос для
гидропривода погрузочного оборудования 9 (ковша) (гидропривод па
рисунке ке показан). Правые и левые колеса могут вращаться
в одну сторону, — вперед и назад, или одна сторона их может
быть остановлена (для поворота погрузчика около середины базы
по колее колес), или вращаться в разные стороны (для поворота
погрузчика на месте около центра его тяжести).
3. Полуповоротные погрузчик*!
К полуповоротным относят одноковшовые погрузчики, у
которых погрузочное оборудование может разгружаться в
транспортное средство, устанавливаемое сбоку. Разгружается
оборудование не путем маневрирования погрузчика на рабочей площадке,
а путем поворота в плане на 90° в обе стороны специальной
платформы, на которой установлено оборудование погрузчика. В
результате значительно сокращаются размеры рабочей площадки
80
Рис. 38. Пол у поворотный
погрузчик:
а — общий вид; б —
кинематическая схема механической
трансмиссии
и цикл работы погрузчика. Такие погрузчки имеют небольшую
грузоподъемность (0,75—2 т), ковш объем соответственно 0,35—
1,2 м3 и мощность двигателя до 180 л. с.
Полуповоротные погрузчики выпускают в двух основных
вариантах: одноковшовом и грейферном. В первом варианте стрелу
погрузчика оборудуют основным ковшом, и работа строится по
принципу одноковшовой машины. Во втором варианте основным
оборудованием является гидравлический грейфер. Грейфер состоит
из двух челюстей, закрепленных на траверсе и шарнирно
связанных с четырьмя тягами, которые прикреплены с основанию
гидроцилиндра грефера. Шток гидроцилиндра соединен с
проушиной траверсы. Челюсти сварены из листа с усилительными
накладками на режущих кромках, снабженных зубьями. Грейфер
подвешивают к гуську погрузчика на серьге, для ограничения
качаний его устанавливают цепи.
Полуповоротные погрузчики обоих вариантов имеют сменное
оборудование: крюк, челюстные захваты, вилы, бульдозерный
отвал, экскавационное оборудование и др.
Спереди шасси 1 (рис. 38, а) над передним мостом установлена
поворотная платформа 4, на которой шарнирно закреплена стрела 5
с рычажным механизмом 6 и ковшом 7. Для подъема однобалоч-
ной стрелы имеется один, а для двухбалочной — два
телескопических цилиндра 2 одностороннего или двустороннего действия,
а для поворота ковша — один цилиндр 3 двустороннего действия.
Сварная поворотная платформа 4 опирается на раму шасси через
двухрядное шариковое опорно-поворотное устройство.
Поворачивается платформа на 90° в обе стороны с помощью двух
цилиндров двухстороннего действия. В крайних положениях
поворота платформы установлены резиновые буфера.
Для того чтобы предохранить стрелу от поломок, а также чтобы
избежать избыточного давления в цилиндре при подъеме стрелы
перед врезанием ковша в штабель насыпного груза, конец стрелы
упирают в раму шасси.
В полуповоротных погрузчиках применяют механическую и
гидромеханическую трансмиссии. В механической трансмиссии
(рис. 38, б) используют автомобильные узлы и агрегаты. От
двигателя 9 через муфту 10 сцепления крутящий момент передается
через механизм 11 обратного хода и коробку 12 передач. Затем
посредством карданных передач 13 и раздаточной коробки 14,
а также ведущих мостов 15 и 16 он передается на колеса
погрузчика. Задний мост 16 отключается во время транспортного
передвижения. Поскольку на передний мост 15 приходится большая
нагрузка во время движения и копания, его оборудуют шинами
увеличенных размеров. Гидронасос 8 привода погрузочного
оборудования устанавливают перед двигателем.
Гидромеханическая трансмиссия полуповоротных погрузчиков
выполняется аналогично принципиальной схеме погрузчиков
фронтального типа (см. рис. 33).
82
4. Погрузчики на колесных тракторах
Одноковшовые погрузчики, выпускаемые на колесных
тракторах, имеют съемное или постоянно установленное погрузочное
оборудование. В первом случае трактор можно использовать не
только для устройства на нем погрузчика, но и по своему прямому
назначению; во втором случае трактор используют как постоянную
базовую машину погрузчика. Таким образом, для первого случая
требуется создание навесного оборудования в виде быстросъем-
ного блока.
Погрузчики с быстросъемным оборудованием на колесных
тракторах. Образцом такой конструкции может служить
погрузчик типа ТО-19 (рис. 39) грузоподъемностью 0,5 т с ковшом 1
объемом 0,28 м3.
Съемное погрузочное оборудование смонтировано на общей
раме 10. Съемное оборудование (ковш i, стрелу 2 с рычажным
механизмом 3 и гидроцилиндрами 4 поворота ковша и 5 стрелы в
собранном виде) устанавливают на площадке, опирая его на ковш
и две складные опоры-стойки 9. Для навески трактор передвигают
своим ходом, чтобы передний шкворень рамы вошел в подрамник
трактора. После этого раму связывают с опорными балками 8,
которые через опорные кронштейны 7 крепят болтами к раме
трактора; затем навешивают противовес 6.
Демонтируют оборудование с трактора с обратном порядке.
Погрузчики с постоянно установленным оборудованием на
колесных тракторах. Образцом может служить конструкция
погрузчика ТО-11 (Д-660) грузоподъемностью 4 т с основным
ковшом объемом 2 м3, который создан на базе трактора К-702 с шар-
нирно-сочлененной рамой.
Трактор имеет реверсивное управление, поэтому может с
одинаковой скоростью двигаться вперед и назад. На грузовую раму
Ш 3 8 7
Рис, 39, Погрузчик с быстросъемным оборудованием на колесном тракторе
83
Рис. 40. Фронтальный погрузчик на шасси колесного трактора К-702
7'£Шу^///^
85
трактора 6 (рис. 40) устанавливают портал 5, который служит
опорой для стрелы 3, рычажного механизма 2, гидроцилиндров 4
подъема стрелы 3 и поворота ковша 1. В остальном конструкция
погрузчика мало отличается от погрузчика с шарнирно-сочле-
ненными рамами на специальном шасси (см. рис. 35).
Управляют поворотом рам с помощью двух гидроцилиндров.
5. Погрузчики на гусеничных тракторах
В качестве базовой машины для устройства погрузчика
используют тракторы с эластично-балансирной ходовой частью и с
жесткими многоопорными гусеницами. Последние применяют на более
мощных тракторах. Различают фронтальные и перекидные
гусеничные погрузчики.
Для агрегатирования с фронтальным погрузчиком применяют
погрузочные модификации гусеничных тракторов. У трактора
увеличивают ширину колеи, чтобы были зазоры для размещения
лонжеронов стрелы между звеньями гусениц и рамой трактора.
В связи с этим удлиняют полуоси и ступицы ведущих звездочек,
а также устанавливают специальные проставки между рамами и
раскосами гусеничных тележек.
Для того чтобы увеличить продольную устойчивость
погрузчика, гусеницы у трактора удлиняют; спереди устанавливают
дополнительные опорные катки. Взамен балансирной рессоры
устанавливают поперечную балку, на которую опирается рама
трактора.
На гусеничные тележки и поперечную балку трактора 1
опирается портал 2 (рис. 41), который является основной опорой для
стрелы 4, рычажного механизма 5 и цилиндров 7 подъема стрелы 4
и 3 поворота ковша 6. Портал выполняют сварным П-образной
формы в поперечном сечении, чтобы обойти капот у двигателя.
Стойки портала лежат спереди на поперечной балке, а сзади на
опорных площадках гусеничных рам. Снизу и сзади стойки
портала соединены между собой жесткими связями.
Конструктивная схема основного погрузочного оборудования
такая же, как у колесных фронтальных погрузчиков. Для
привода погрузочного оборудования устанавливают насос,
гидрораспределитель, масляный бак и трубопроводы с разными приборами.
Стрелу применяют с двумя лонжеронами и чаще коробчатого
сечения в передней части ее лонжероны связаны поперечной балкой.
В местах охвата радиатора стрелой лонжероны ее при
возникновении случайных поперечных сил могут скользить по
направляющим, приваренным с боков к лобовине, установленной для
защиты радиатора. При перегонах погрузчика стрелу закрепляют
на откидных кронштейнах, приваренных к лобовине.
Фронтальные тракторные погрузчики особенно эффективны
на погрузке тяжелых насыпных грузов, так как у них большой
коэффициент сцепления гусениц с грунтом. Основные недостатки
86
Рис. 41. Фронтальный погрузчик на
гусеничном тракторе
Рис. 42. Тракторный погрузчик с задней разгрузкой ковша
87
Таблица'5
Техническая характеристика отечественных одноковшовых фронтальных пневмоколесных погрузчиков
Показатели
Грузоподъемность, т „ . . .
Объем основного ковша, м3
Ширина ковша, мм ....
Максимальная высота
разгрузки, мм
Вылет ковша при
максимальных высоте и угле разгрузки, мм
Наибольший угол разгрузки
ковша в верхнем положении,
град
Тип и модель базовой машины
Мощность двигателя, л. с.
Частота врашения
коленчатого вала, об/мин
Тип трансмиссии
Наибольшие скорости
движения по передачам, км/ч:
вперед ••••♦
ТО-19
0,5
0,28
1400
2635
665
52
Универсальный
трактор
Т-40А,
Т-40АМ
40—50
1600
Механическая
7(1,62—
26,68)
ТО-15
0,8
0,4
1800
2050
900
52
Промышленный
трактор
Т-50АП
50
1800
3,4—30,0
ТО-6Б
1,8
1,0
2336
2300
1000
53
ТО-17
2
1,0
2330
2700
930
52
ТО-18
3
1,5
2440
2750
1046
50
Специальное шасси
75
1700
7; 12,8;
18,5; 29,0
90
1750
130
1700
Гидромеханическая
6,42; 11,46;
37,9
3 (7,0—42)
то-п
4
2,0
2800
3200
1225
55
Промышленный
трактор
К-702
212
1700
4 (9,5—44,2)
ТО-8
5
2,7
3100
3350
1340
50
Тягач ■
МоАЗ-542А
240
2160
Механическая
0—40
назад , . .
Тип й подвеска мостов:
заднего
переднего , ,
Размеры шин:
передних колес , . . . ,
задних колес
Система рулевого управления
Габаритные размеры в
транспортном положении, мм:
длина ,
ширина ,
высота по кабине . . , ,
Масса в заправленном
состоянии, кг . , , .
5,28
Неповоротный с
жестким
креплением
Управляемый с ба-
лансирной
подвеской
210—508
800—965
С
передними
управляемыми
колесами и
гидроусилителем
5170
1930
2370
3909
6,27
8,1; 21,2
Управляемый с
балансир ной подвеской
Неповоротный с
жестким креп
лением
8.00—20
12.00—38
Неповоротный с
жесткой
подвеской
15.00—20
15.00—20
С задними
управляемыми колесами и гидро
усилителем
5540
2160
2410
4130
5660
2336
2700
7500
До 20,6
7,2; 25,2
Неповоротный с
балансир ной подвеской
До 44
Неповоротный с
жесткой
подвеской
Неповоротный с жестким
креплением
15.00—20
15.00—20
16.00—24
16.00—24
720—635
720—635
Шарнирно-сочлененная с
гидравлическим управлением
6054
2330
3000
8500
6 950
2 440
3 145
10 700
8 330
2 880
3 535
16 340
0—40
Управляемый с ба-
лансирной
подвеской
Неповоротный с
жесткой
подвеской
26.50—25
26.50—25
С задними
управляемыми
колесами и
гидроусилителем
8 000
3 130
3 250
19 900
Техническая характеристика строительных одноковшовых погрузчиков на шасси гусеничных тракторов
Таблица б
Показатели
Тип погрузчика
Грузоподъемность, т . . . .
Объем основного ковша, м3
Ширина ковша, мм ....
Максимальная высота
разгрузки, мм
Вылет ковша при
максимальных высоте и угле разгрузки, мм
Наибольший угол разгрузки
ковша в верхнем положении,
гоал . ....
Базовый трактор
Мощность двигателя, л. с.
Частота вращения
коленчатого вала, об/мин
Д-442
ТО-2
ТО-7
Универсальный с фронтальной
грузкой
1,5
1,0
2200
2700
960
45
ДТ-55А-С2
54
1300
1,5
0,8
2066
3150
540
41
ДТ-55А-С4
54
1300
2
1,0
2048
2700
720
50
ДТ-75Б-С2
75
1700
ТО-12,
ТО-20
раз-
3
1,5
2340
2440
940
50
ТП-4
86
1700
ТО-1
Перекидной
4
2,8
2400
2560
3400
45
Т-100МГП
108
1050
ТО-10
ТО-5
Универсальный с
фронтальной разгрузкой
4
2,0
2900
3080
1110
50
Т-130ПГ
140
1070
5
2,5
3032
3070
790
58
Д-804ПГ
180
1150
Продолжение табл. б
Показатели
Число передач (скорость
движения, км/ч):
передним ходом . • ♦ . .
задним ходом
Колея, мм ••♦•.,.
Дорожный просвет, мм . .
Ширина гусеницы, мм ...
Габаритные размеры в
транспортном положении, мм:
длина „
ширина
высота •,••.„,»..
Масса ъ заправленном
состоянии, кг
Д-442
4 (3,6—6,28)
2,4
Гусеничная
2700
1435
260
533
5410
2265
2220
8865
ТО-2
5 (3,59—
7,92)
2,4
ТО-7
6 (3,34—
10,15)
4,41
с эластично-балансирной
подвеской
2700
1435
270
400
6150
2066
2570
7950
2365
1570
326
—
5715
2048
2034
9475
ТО-12,
ТО-20
4 (3,73—
8,79)
4 (4,07—
6,11)
Жесткая
2470
1720
385
400
5 930
2 340
2'572
12 565
ТО-1
5 (2,36—
10,15)
9 (2,8—7,61)
Полужесткая
2810
1880
310
500
6 620
3 055
3 400
17 800
то-ю
6 (3,84—
10,65)
4(3,11 —
8,63)
ТО-5
5 (2,74—
12,5)
3,08; 7,8с
Жесткая
3020
2290
400
400
6 860
2 875
3 034
20 500
2800
2500
510
700
7 450
3 140
3 025
23 885
Та б л и ц а 7
Техническая характеристика полуповоротных погрузчиков,
выпускаемых странами—членами СЭВ
Показатели
Грузоподъемность, т . .
Объем ковша, м3 . . . .
Наибольшая высота
разгрузки, мм
Фронтальный вылет
стрелы при максимальной
высоте подъема, мм
Глубина копания ниже
опорной плоскости, мм . .
Мощность двигателя, л. с.
Частота вращения
коленчатого вала двигателя,
об/мин
Число передач (скорость
движения погрузчика,
км/ч):
вперед
на чад -♦....,.
База, мм
Колея» мм:
передних колес . . .
задних колес . . . .
Дорожный просвет, мм
Размеры шин высокого
давления;
передних колес . . .
задних клее ....
Габаритные размеры в
транспортном положении,
;!лила
ширина.•..,..
высота »
Масса в заправленном
состоянии, кг
ТО-ЗА
(СССР)
0,7
0,4
2960
380
2030
50
1600
4 (2,49—15,91)
4 (2,84—18,7)
2500
1840
1590
260
320—508
(12 00—20)
240—508
(8.25—20)
6820
. 2190
2950
6500
ХОН-53
(ЧССР)
1,2
0,5
2480
1610
—
58
2200
4 (3,36—22,0)
2200
1710
1850
350
14,00—24
240—508
(8.25—20)
6300
2230
2780
7200
ФРАК-В1
(ВНР) ,
1
0,5
2920
1280
2570
60
1650
6 (4,95—34,0)
6,15; 14,2
2875
1800
1830
390
14.00—24
8.25—24
4400
2270
3620
6650
Примечание. Данные для погрузчиков ТО-ЗА и ФРАК-BE приведены с
учетом грейфера^ а для ХОН-53 — ковша.
92
их — необходимость разворота на гусеницах в каждом цикле при
загрузке транспортных средств, плохой доступ к двигателю для
обслуживания из-за установки портала и недостаточный обзор
для водителя из кабины.
Отечественная промышленность выпускает перекидной
тракторный погрузчик ТО-1 (T-I57) с задней разгрузкой ковша
грузоподъемностью 4 т, с ковшом объемом 2,8 м3. Для него применяют
трактор общего назначения, сохраняя шарнир гусеничных, рам
на полуосях и балансирную рессору.
Иа каждой гусеничной тележке трактора 1 с внутренней и
наружной сторон приварены опорные площадки 8 (рис. 42) для
шарнирного крепления ковшовой рамы 2 П-образной формы,
рычагов 6 и 3 поворота ковша и гидроцилиндров 5 подъема
стрелы.
При зачерпывании груза ковш, 4 объединенный с разгрузочным
лотком, опускают вниз и движением погрузчика вперед врезаются
в штабель насыпного груза. После этого ковш поднимают и
разгружают в транспортное средство, установленное сзади
погрузчика со стороны буфера 7.
К достоинствам погрузчика следует отнести то, что для него
не требуется маневрирование по рабочей площадке. К
недостаткам — расход мощности двигателя на излишний подъем ковша;
быстрое разрушение кузова транспортных средств от действия
кинетической энергии падающего в кузов груза; невозможность
установки сменного оборудования, кроме бульдозерного отвала.
Технические характеристики одноковшовых погрузчиков
приведены в табл. 5—7.
6. Параметры
Технико-эксплуатационные показатели и производительность
погрузчиков определяют по параметрам (рис. 43) и основным
размерам их. К ним относят грузоподъемность Q, т; объем V ковша,
м3; высоту Яр разгрузки ковша, м; вылет L ковша, м; заглубление
W ковша, мм; углы у3 запрокидывания и гр разгрузки ковша,
град; скорости v.n. c подъема и vOt c опускания стрелы, м/мин;
скорости v3t K запрокидывания и vOtK опрокидывания ковша,
м/мин; выглубляющее усилие NB ковша, кгс; подъемное усилие
стрелы Nn и напорное усилие Тн, кгс; мощность N двигателя,
л. с; массу погрузчика mn, т; скорости vp рабочего хода, vx
холостого хода и vT транспортную, км/ч; базу А, ширину Вг колеи,
мм; дорожный просвет /г, мм; радиусы Rt продольной и /?2 поперч-
ной проходимости, мм; углы а въезда и р съезда, углы ап, ау
продольной и у боковой устойчивости, град; габаритные размеры
(длину Lly ширину В, высоту #х), м. Габаритные размеры
характеризуют условия применения и хранения погрузчика.
Кроме того, погрузчики характеризуются эргономическими
показателями, а также энергоемкостью и материалоемкостью.
93
Ю
Рис. 43. Основные технико-эксплуатационные параметры одноковшовых
погрузчиков:
а — колесного; б — гусеничного; / — положение копания рабочего органа; // —
запрокинутое положение; /// — транспортное положение (угол въезда а = 20°); IV — макси*
малыши вылет; V — запрокинутое положение при максимальном подъеме стрелы; VI ™*
положение разгру^к рабочего органа
Рассмотрим основные из перечисленных параметров.
Главным параметром является грузоподъемность, в
соответствии с которой выпускают обычно типоразмерные ряды
погрузчиков. В СССР колесные и гусеничные погрузчики строят с учетом
рекомендаций СЭВ по типоразмерному ряду, указанному в табл 8.
Некоторые зарубежные фирмы строят типоразмерные ряды
погрузчиков исходя из объема основного ковша. Однако этот
принцип построения типоразмерных рядов затрудняет оценку
эксплуатационных параметров и определение грузоподъемности
при работе с другим сменным оборудованием.
94
2
\
* ? *
У/JM
b
/
ft
У/
з
У///Л
/
Рис. 44. Схема ковша с задним козырьком:
1 — номинальный объем ковша; // — объем «шапки»; / •*==»
режущая кромка; 2 — вершина заднего козырька; 3 «* вер-»
шина призмы материала
За грузоподъемность принимают массу насыпного груза,
приложенную в центре тяжести боковой поверхности основного ковша.
Различают грузоподъемности номинальную и максимальную.
Первая соответствует допустимой массе груза в основном
ковше, при которой возможна работа погрузчика в соответствии
с его назначением; вторая — наибольшей массе груза в том же
ковше, который может быть поднят погрузочным оборудованием
на максимальную высоту.
В зависимости от номинальной грузоподъемности определяют
объем ковшей для зачерпывания легких, средних и тяжелых по
объемной массе насыпных грузов, а также грузоподъемность
другого сменного оборудования. Объем ковша, предназначенного
для зачерпывания средних по плотности грузов, считается
основным. Объем основного ковша бывает номинальный Vu и с «шапкой»
груза Vm.
Номинальный объем основного ковша — объем, заключенный
между боковыми стенками и поперечным профилем ковша,
ограниченным контурами ковша и линией, соединяющей режущую
кромку и вершину заднего козырька (рис. 44, линия 1—2).
Тогда с учетом скоса материала в зоне боковых стенок под
уклоном 1 : 2 номинальный объем ковша по его геометрическим
размерам
где F — площадь поперечного профиля ковша, ограниченная его
контурами и линией точек 1 и 2, м; В — внутренняя ширина ковша,
щ а — высота заднего козырька, м; Ъ — ширина зева ковша, м.
Под объемом ковша с шапкой материала понимают
номинальный объем и призму материала, боковые поверхности которой
в продольном и поперечном положении располагаются под уклоном
1 :2.
95
Рекомендуемый типоразмерный ряд одноковшовых погрузчиков
Номинальная
грузоподъемность, т . . . .
Обозначения
типоразмеров:
колесных
гусеничных . . . .
Класс базовой машины
(специ ал ь ное ш асе и,
трактор, тягач;,
тс
Рекомендуемая
мощность двигателя, л. с,
не менее
0,63
ПК-063
0,6
30
1,0
ПК-1
0,9
50
1,5
ПК-1,5
ПГ-1,5
1,4
65
40
Объем ковша с шапкой материала
где VH — номинальный объем ковша, м3; Ь — ширина зева, м;
В — внутренняя ширина ковша, м; В — внутренняя ширина ковша,
м; а — высота заднего козырька, м; с — расстояние от вершины
шапки до линии, соединяющей режущую кромку и основание
козырька, м.
По приведенным формулам определяют номинальные объемы
и объемы с шапкой ковшей всех типов (уменьшенного,
увеличенного, двухчелюстного и др.).
Проходимость характеризуется распределением нагрузок Ra
и /?3 из мосты для колесных погрузчиков, положением центра
тяжести, давлениями qn и q3 на опорную поверхность для
гусеничных машин, радиусами Rt продольной и R2 поперечной
проходимости, дорожным просветом /г, углами въезда а и съезда |$.
' Для колесных погрузчиков в порожнем состоянии на задний
мост должно приходиться не менее 55—65% общей массы
погрузчика, а в груженом состоянии не менее 25%.
Для гусеничных погрузчиков в груженом состоянии при
наибольшем вылете ковша смещение центра тяжести допускается на
расстояние не менее */з опорной длины гусениц от ребра
опрокидывания погрузчика для распределения давления на грунт по
треугольнику.
Углы а въезда и (5 съезда принимают не менее 20°. Углом въезда
ограничивается транспортное положение погрузчика с
оборудованием.
Маневренность погрузчика определяется радиусами поворота
и горизонтальной проходимостью, уплати поворота колес или
96
Таблица8
ПГ-4
130
10
100
ПК-б
ПГ-6
10
200
15
150
10
ПК-Ю
ПГ-10
15
350
25
230
значений ряда не должны превышать ±10%
15
ПК-15
ПГ-15
25
530
35
400
25
ПК-25
35
750
40
ПК-40
50
1200
складывания полурам (на рис. 43 эти параметры не показаны).
Радиус горизонтальной проходимости определяют от центра
поворота до окружности, описываемой дальней точкой ковша при
наименьшем радиусе поворота.
Координаты центра тяжести погрузчика по длине, ширине и
высоте определяют для основных положений рабочего
оборудования: нижнего //, транспортного ///, максимального вылета
IV, наибольшего подъема V (см. рис. 43).
Параметры базовых шасси являются исходными для выбора
и расчета параметров погрузочного оборудования при
агрегатировании с колесными и гусеничными тракторами, тягачами. Можно
по заданным показателям погрузочного оборудования определить
параметры базового шасси, что используется при создании
специального шасси.
Для оценки конструктивного и технологического
совершенства погрузчиков рассматривают их удельные показатели, которые
в основном характеризуются двумя параметрами — удельной
материалоемкостью и энергоемкостью. Первая характеризует
правильность выбора основных параметров и комплектующих изделий
для данного класса погрузчиков, а вторая позволяет оценить
эксплуатационные возможности погрузчика по скоростям
движения и выполнения рабочих операций, а также динамические
качества погрузчика и др.
7. Принцип работы
Принципы работы одноковшовых погрузчиков различаются
в зависимости от режимов его использования, типа и конструкции
погрузочного оборудования. Одноковшовые погрузчики работают
в следующих основных режимах: погрузочно-разгрузочном,
4 А. Ф. Базанов, Г. В. Забегадов 97
погрузочно-транспортном, землеройно-транспортном, строительно-
монтажном и специальном.
Погрузочно-разгрузочный режим работы погрузчиков
характеризуется разработкой материалов или взятием грузов из
штабеля с погрузкой в транспортные средства при небольшой
дальности перевозок, а также выгрузкой преимущественно штучных
и тарных грузов, строительных конструкций из транспортных
средств и их штабелированием.
В погрузочно-транспортном режиме погрузчики способны
разрабатывать материалы или брать грузы, перемещать их
собственным ходом на расстояние 0,5—1 км и разгружать в необходимых
условиях.
В подобных режимах с помощью погрузчиков загружают
транспортные средства на одном и в различных уровнях и дробильно-
сортировочные агрегаты, штабелируют материалы или образуют
отвалы строительных материалов и грунтов, заполняют бункера
конвейеров, а также питают передвижные бетонные заводы и
асфальтосмесительные установки.
При землеройнс-тракспортном режиме используют
погрузчики для послойной разработки грунтов без предварительной
подготовки, отрывки котлованов для различных сооружений и
зданий, силосных ям, колодцев, а также для обратной засыпки грунта
в котлованы, трацшеи, пазухи фундаментов с последующей
планировкой площадки и отделкой рабочей поверхности.
При строительно-монтажном режиме погрузчики применяют
с грузоподъемным оборудованием (крановой безблочной стрелой,
челюстным захватом и т. п.) при возведении фундаментов зданий,
подстанций, малоэтажных объектов и комплексов,
преимущественно в сельском строительстве.
Специальные режимы погрузчиков определяются спецификой
работы со сменным оборудованием (кусторезом, корчевателем и
т. п.), отличаются большим разнообразием, и в настоящей
работе их не рассматривают.
Рассмотрим работу погрузчика по элементам рабочего цикла.
Погрузочно-разгрузочный и погрузочно-транспортный режимы
по принципу работы машины или основным элементам рабочего
цикла сходны. Различаются лишь дальности перевозок, которые
при первом режиме минимальны (8 —20 м в зависимости от
типоразмера погрузчика и транспортного средства), а при втором
режиме могут достигать 1 км.
Работа погрузчика при этих режимах состоит из следующих
основных этапов: наполнения ковша или взятия груза, рабочего
хода, разгрузки ковша и холостого хода.
Наполнение ковша материалом из штабеля или карьера
происходит путем последовательного сочетания поступательного или
напорного движения погрузчика и действия погрузочного
оборудования. В зависимости от сочетания движений погрузчика и
рабочего оборудования ковш может наполняться различными
98
В)
.0 к'0'%о
9)
Рис. 45. Способы наполнения ковшей одноковшовых погрузчиков:
с —многоступенчатый (скорости vH напора и vn подъема стрелы реализуются пооче.
редно); б — экскавационный (скорости vH напора и vn подъема стрелы включаются
последовательно); в — раздельный (скорости vH напора и v3 запрокидывания ковша
действуют раздельно); г — совмещенный (скорости vH напора и v3 запрокидывания
ковша реализуются совместно; д —. комбинированный (сочетание раздельного и совме»
щенного способов); е «-* послойный (действует только скорость vu напора)
способами, выбор которых определяется конструкцией
погрузочного оборудования и тяговыми возможностями (или типом
трансмиссии) погрузчика.
Различают пять основных способов разработки материала
из штабеля или наполнения ковша: многоступенчатый,
экскавационный, раздельный, совмещенный, комбинированный,
послойный.
Многоступенчатый способ наполнения ковша (рис. 45, а)
представляет собой несколько однократных последовательных
внедрений, сочетающихся с подъемом оборудования. Этот способ
применяют на погрузчиках с недостаточной мощностью
двигателя и механической трансмиссией, не имеющих механизмов
управления или поворота ковша и оборудованных только
механизмами подъема стрелы. Погрузчик при максимальной подаче
топлива в системе питания двигателя внедряется в штабель до момента,
когда частота вращения коленчатого вала падет до минимальной.
Затем для предотвращения остановки двигателя водитель
выключает муфту сцепления, включает механизм подъема стрелы и под-
4* 99
нимает ковш из штабеля на некоторую высоту. Подобные элементы-
движения повторяются многократно до наибольшего наполнения
ковша.
При многоступенчатом способе значительно увеличивается
время наполнения ковша, повышается утомляемость водителя
и из-за повышенного действия динамических нагрузок и
преждевременного износа фрикционных элементов муфты сцепления
снижается долговечность погрузчика. Однако этот способ еще
применяют на погрузчиках с задней разгрузкой и при разработке
тяжелых грунтов или крупнокусковых материалов.
Экскавационный способ (рис. 45, б) осуществляется
предварительным внедрением ковша (до V4 длины днища) с последующим
подъемом оборудования без дальнейшего поступательного пере-
мещения погрузчика и запрокидывания ковша. Этот способ
применяют преимущественно при разработке песчано-графийных
карьеров для равномерной выработки массива по высоте. Подрыв
его снизу не допускается по технике безопасности, так как может
привести к опасным обвалам материала. Толщина стружки
материала регламентирована в этом случае силовыми
возможностями подъемного механизма погрузочного оборудования.
Раздельный способ (рис. 45, в) — однократное внедрение ковша
в материал до упора в заднюю стенку поступательным движением
погрузчика с последующим запрокидыванием ковша. В процессе
наполнения ковша возникают наибольшие нагрузки в
трансмиссии, ходовой части и рабочем оборудовании погрузчика;
кроме этого, ковш наполняется недостаточно хорошо
(коэффициент наполнения меньше 1). Этот способ возникает при
недостаточной квалификации водителя или при работе на легких
материалах (шлаке, опилках и др.).
Возможна модификация раздельного способа, когда для
облегчения внедрения ковша в материал и более глубокого
проникновения его в штабель механизмом поворота осуществляются
последовательные противоположные качания рабочего органа
относительно стрелы. Однако этот способ приводит к значительным
динамическим перегрузкам гидропривода рабочего оборудования
и при работе на тяжелых или крупнокусковых материалах
применяется редко.
Совмещенный способ (рис. 45, г) — одновременное
запрокидывание ковша в процессе поступательного движения погрузчика.
Ковш предварительно внедряется в штабель (на глубину, равную
1/2—1/3 длины днища), затем при одновременном напорном
движении погрузчика начинается запрокидывание ковша. Этот
способ возможен при оптимальном подборе скорости внедрения
и скорости поворота ковша. Скорость запрокидывания ковша
должна быть равна или в 1,2 раза больше напорной скорости
движения погрузчика.
Наибольший коэффициент наполнения достигается при
наличии гидрообъемной, гидромеханической или электромехани-
100
ческой трансмиссии, когда скорость напорного движения
погрузчика автомотически снижается при увеличении внешней нагрузки.
При мгновенном уменьшении скорости поступательного
движения ковш выглубляется из зоны уплотненного ядра и
облегчается дальнейшее внедрение его в материал.
Совмещенный способ обеспечивает максимальный коэффициент?
наполнения ковша при наименьшем времени выполнения
операции, является наиболее прогрессивным и широко рекомендуется
для современных конструкций погрузчиков.
Комбинированный способ (рис. 45, д) — сочетание
совмещенного и раздельного способов наполнения ковша (участки АВ
и CD — совмещенное наполнение, ВС, — раздельное
запрокидывание ковша).
Этот способ используют при разработке штабеля совмещенным
движением в момент буксования ходовой части при недостаточном
сцеплении с рабочей площадкой или при недостаточной мощности
двигателя и механической трансмиссии погрузчика.
Комбинированный способ, однако, обеспечивает хорошее наполнение ковша
(коэффициент наполнения больше 1,2).
Описанные способы применяют не только для наполнения
основного ковша, но и для всех видов сменного ковшового
оборудования. При работе погрузчика грузоподъемным оборудованием
процесс взятия или крепления грузов существенно не отличается
от способов, применяемых для автогрузчиков и кранов, поэтому
подробно в настоящем разделе не рассматривается.
После наполнения ковша выполняется рабочий ход
погрузчика.
Рабочий ход — поступательное движение груженого
погрузчика на разгрузку в назначенное место. Для получения
наибольшей производительности погрузчик движется с максимальной
скоростью. При работе в погрузочно-разгрузочном режиме
рабочий ход совмещают обычно с подъемом стрелы на высоту,
равную высоте бортов кузовов транспортных средств.
При погрузочно-транспортном режиме рабочее оборудование
устанавливают в транспортное положение, когда угол въезда
погрузчика равен 20° и погрузчик перемещается к месту разгрузки
материала. Стрелу в этом случае поднимают на соответствующую
высоту в конце фазы рабочего хода.
Разгрузка ковша — поворот рабочего органа или его деталей,
обеспечивающих возможность его опорожнения от материала.
Холостой ход погрузчика — движение от места разгрузки
ковша к штабелю материала. Скорость холостого хода может
|быть равна рабочей или транспортной скорости при перемещении
погрузчика на большие расстояния. Во время холостого хода
устанавливают ковш в положение копания и опускают стрелу
в нижнее рабочее положение.
При погрузочно-разгрузочном режиме в зависимости от вида
погрузочного оборудования, условий работы и установки транс-
101
портного средства погрузчики грузят материал в транспортные
средства различными способами: челночным, поворотным и
смещенным.
Полуповоротный погрузчик (рис. 46) совершает возвратно-
поступательные движения рабочего и холостого хода, параллельно
которым установлено транспортное средство. При подходе к нему
водитель погрузчика поворачивает на 90° рабочее оборудование,
выставляет его над кузовом транспортного средства и разгружает
ковш.
Транспортные средства могут располагаться по обеим
сторонам погрузчика. Челночный способ является для погрузчиков
данного типа наиболее оптимальным, так как исключаются
угловое маневрирование и потери рабочего времени, уменьшаются
нагрузки в рулевом механизме и утомляемость водителя.
Поворотный способ погрузки транспортных средств
является менее прогрессивным по сравнению с предыдущим способом.
Однако такая необходимость возникает, когда условия работы
или подъездные пути расположены таким образом, что
транспортное средство можно установить к месту разработки материалов
под углом более 90°.
Смещенный способ является модификацией челночного
способа погрузки. В процессе работы по этому методу погрузчик
смещается путем поворотного движения параллельно
разработки.
Для одноковшовых фронтальных погрузчиков основными
способами погрузки материала в транспортные средства являются
поворотные способы (рис. 47, а—г). При этих способах погрузчик
во время рабочего и холостых ходов выполняет угловое
маневрирование при движении от штабеля к транспортному средству
с подъемом ковша. Рабочий и холостой ходы состоят в этом случае
из возвратно-поступательных движений, выполняемых на равных
расстояниях.
Наиболее рациональной схемой организации по этому способу
является схема (рис. 47, а) с углом установки транспортного
средства по отношению к штабелю, равном 30—60°. Наибольшей
производительности по этой схеме достигают колесные погрузчики
с шарнирно-сочлененной рамой.
При челночном способе (рис. 47, д) погрузчик с нормальным
ковшом смещается дальше транспортного средства, который
ватем подъезжает под поднятый ковш, после чего материал
разгружается в кузов транспортного средства. Челночный способ
применяют для колесных погрузчиков с управляемыми колесами,
так как в этом случае более точно и равномерно загружаются
транспортные средства. Кроме того, этот способ выгоден для
гусеничных фронтальных погрузчиков и для всех погрузчиков, когда
транспортное средство полностью загружается погрузчиком за один
рабочий цикл. Этот же способ используют также при работе
погрузчика, оборудованного ковшом с боковой разгрузкой (рис. 47, е).
102
F
Рис. 46. Основные схемы расположения полу поворотных погрузчиков при
различных способах погрузки и углах установки транспортного средства
к штабелю:
и ~- челночном способе, а «= 90°; б -^ поворотном способе, 90° <а < 180°; в *=*
чо же, а = 180 ; е — смещенном способе; / « штабель материала; 2 «* погрузчик;
3 »- транспортное средство; 4 « откос
103
UbliliLIililililililililil
ч»Щ1
///7777777/.
ж)
Рис. 47. Основные схемы
расположения одноковшовых фронтальных
погрузчиков при различных способах
погрузки и углах установки
транспортного средства к штабелю:
а — поворотном способе, а < 90°; б —*
то же, а = 90°; в — то же, 90° < а < 18О°з
г — то же, а = 180°; д — челюстном сш>«
собе с нормальным ковшом; е —
челночном способе с ковшом боковой разгрузки^
ж — смещенном способе; 1 — штабель или
карьер материала; 2 — погрузчик; 3 «*
транспортное средство; 4 •» откос
JD4
Смещенный способ (рис. 47, ж) применяют для фронтальных
погрузчиков в стесненных условиях.
У перекидных погрузчиков способы погрузки материала в
транспортные средства такие же: поворотные (рис. 48, а, б), челночный
(рис. 48, в) и смещенный (рис. 48, г). Наиболее рациональным
является челночный способ погрузки, который обеспечивает
наибольшую производительность погрузчика по сравнению со
Есеми типами одноковшовых погрузчиков.
При землеройно-транспортном режиме работы процесс
наполнения ковшей различных типов или бульдозерного отвала
отличается от способов погрузки, описанных выше, так как в этом
случае применяют послойную разработку материковых грунтов
1.1,1
■ Ul.l.l.l.t.l l.l.lil hi.lililililiL
I
пТмп
777777777771 \t
£L
u_
4
!
г)
Рис. 48. Основные схемы расположения перекидных
погрузчиков при различных способах погрузки и углах
установки транспортных средств к штабелю:
а «=> поворотном способе, а = 90°, 6 — то же, 90° <а < 18O°J
в «• челночном способе; г —« смещенном способе; / — штабель
материала; 2 «=» погрузчик; 3 -» транспортное средство; 4 -=»
откос
105
или материалов, обратную засыпку грунтами траншей,
котлованов и другие работы.
При послойном способе наполнения (см. рис. 45, е) рабочий
орган погрузочным механизмом заглубляют в грунт на
определенную глубину и затем поступательным движением погрузчика
срезают стружку, которая поступает во внутреннее пространство
рабочего органа. Наполненный грунтом ковш запрокидывают,
и грунт перемещается к месту разгрузки или штабелирования
описанными ранее способами.
При работе с бульдозерным отвалом материал передвигается
к месту штабелирования отвалом с постоянным подрезанием
грунта.
Особо следует отметить, что выполнение землеройно-транспорт-
ных работ с ковшовым оборудованием более эффективно, чем
передвижение грунта отвалом. Это объясняется тем, что рабочий и
холостой ходы погрузчика с ковшовым оборудованием
осуществляются с большей скоростью при меньшем времени и с большей
производительностью.
Строительно-монтажный режим с грузоподъемным
оборудованием не имеет отличительной специфики по сравнению с методами
работы грузоподъемных машин в строительстве.
8. Определение производительности
Производительность одноковшовых погрузчиков представляет
собой количество перегруженных материалов или грузов в
единицу времени. В зависимости от этих факторов различают
теоретическую, техничекую и эксплуатационную производительность.
Теоретическая производительность — наибольшая, и
определяют ее расчетным способом для осредненных условий.
Теоретическая производительность (в т/ч) для ковшового
оборудования
для грузоподъемного оборудования
где VK — номинальный объем ковша, м3; рр — объемная масса
разрабатываемого материала, т/м3, для нормального ковша
принимают рр = 1,6 т/м3; фр — расчетный коэффициент наполнения
ковша, фр = 1,25; Гц — время рабочего цикла, с; Кр —
коэффициент разрыхления материала, при разработке материковых
материалов Кр = 1,25, насыпных Кр = 1,1; Q —
грузоподъемность погрузчиков с оборудованием данного вида, т.
Продолжительность рабочего цикла погрузчика определяется
исходя из основных этапов его: наполнения ковша или взятия
106
груза, рабочего хода (отъезда к транспортному средству с
одновременным подъемом стрелы), маневрирования транспортного
средства, опорожнения рабочего органа, холостого хода (обратный
отъезд к штабелю грузов с одновременным опусканием стрелы
и установкой ковша в положение копания).
Время рабочего цикла
где /н — время наполнения ковша или захвата груза, с; tp —
время рабочего хода, с; tT — время маневрирования транспорта,
с; t0 — время опорожнения рабочего органа, с; tx — время
холостого хода, с; tn — суммарное время переключения передач
в коробке передач и гидрораспределителя, 5 с < tn < 15 с.
Время наполнения ковша (вс)
'н = *. + <.= (3,6 £ к„+15-
где tB — время первоначального внедрения в штабель, с; t3 —
время поворота ковша из положения копания (установленного
под углом 5—7°) до полного запрокидывания или подъема стрелы,
с; 1К — глубина внедрения ковша в материал, м; vp — рабочая
скорость внедрения, км/ч; kv — коэффициент, учитывающий
буксование колес ходовой части, гидротрансформатора и другие
явления, kv = 1,5; D — внутренний диаметр гидроцилиндра
поворота ковша (при совмещенном, раздельном и комбинированном
способах наполнения) или подъема (при ступенчатом и экскава-
ционном способах), см; h — длина хода гидроцилиндра поворота
или подъема в процессе наполнения, см; Лт.г—теоретическая
подача гидропривода, л/мин; г\об — объемный КПД гидропривода,
Лоб ~ 0>92 -ьО,95; /с3 — коэффициент, учитывающий снижение
частоты вращения коленчатого вала двигателя в процессе
внедрения и др., к3 > 2; п — число напорных движений в процессе
внедрения, для экскавационного, раздельного, совмещенного и
комбинированного способов п = 1.
При работе с грузоподъемным оборудованием время взятия
или зачаливания груза колеблется в пределах 5—25 с в
зависимости от их расположения и габаритных размеров.
Время выполнения рабочего хода (в с):
при челночном способе
^З»6"^;
при поворотном способе
где Sp — расстояние рабочего хода, м; vx — скорость движения
погрузчика при холостом ходе, км/ч; vp — скорость рабочего
хода, км/ч.
107
В том случае, если время подъема стрелы на высоту разгрузки
больше продолжительности отхода машины, время рабочего хода
KD\h
/р = 15 -jj —- /с3,
где Dc — внутренний диаметр гидроцилиндров подъема стрелы,
см; h — ход гидроцилиндров подъема, см; Ят#н — подача
гидравлических насосов, л/мин; цоб — объемный КПД насосов, г)об =*
= 0,92 —0,95; /с3 — коэффициент снижения частоты вращения
коленчатого вала двигателя при отходе, /с3 > 1,25.
Время маневрирования транспортного средства при
челночной работе фронтальных погрузчиков (в с)
При погрузке поворотным способом фронтальными
погрузчиками, а также при погрузке челночным способом
полуповоротными и перекидными погрузчиками tT = 0.
Время опорожнения ковша (в с) находится для
распространенных механизмов перекрестного типа по формуле
где DK, dK и hK — соответственно внутренний диаметр, диаметр
штока и ход гидроцилиндра поворота ковша, см.
При работе с грузоподъемным оборудованием t0 принимают
5—12 с.
Время холостого хода (в с) обычно определяется расстоянием
перемещения погрузчика и скоростью его движения; опускание
стрелы и установка ковша в положение копания совмещаются
с поступательным движением. Тогда при челночном способе
при поворотном способе
где Sx — расстояние холостого хода погрузчика, м; vx и vp —
скорости движения соответственно при холостом и рабочем
ходах, км/ч.
Время переключения передач в коробке передач, управления
распределителем и рулевым управлением принимается на
практике в пределах 5—15 с; при гидромеханической,
электромеханической и гидрообъемной трансмиссиях и гидрофицированном
управлении рекомендуются меньшие значения; при механической
трансмиссии и механическом рулевом управлении — большие.
108
Техническая производительность (в т/ч) с учетом влияния
конструктивных и технологических факторов, физических свойств
разрабатываемых материалов, массы поднимаемого груза и
коэффициента условий работы для погрузчика с ковшом
оборудованием
1,2—1
1,2—1
1,6—1
1,7—1
1.8—1
,4
,5
,8
,8
,95
ФР
1,3—1,5
1,2—1,3
1,2—1,4
1—1,1
0,7—0,8
/7Т = 3600 т /ст,
где кт — коэффициент, учитывающий условия работы, кт =*
= 0,85 -0,9.
При этом объемную массу рр и коэффициент наполнения ковша
Фр рекомендуют принимать в зависимости от конкретно
перерабатываемого материла.
Уголь, шлак
Насыпной грунт
Влажный песок
Гравий, щебень размером до 50 мм . .
Крупный щебень, камень, битый кирпич
Грунт естественного залегания II
категории 1,3—1,6 lsl—1,3
Техническая производительность (в т/ч) погрузчика с
грузоподъемным оборудованием
/7Т = 3600 -^ кт, !
* ц
где m — масса груза, поднимаемого за цикл, т; кт —
коэффициент, учитывающий условия работы, кт = 0,85 -f-0,9.
Эксплуатационная производительность учитывает реальную
выработку погрузчика с учетом эксплуатационных и
организационных факторов, времени работы в смену и простоев
погрузчика.
Эксплуатационная производительность (в т/смену)
П9 =
9
где Тс — время работы за смену с учетом технического
обслуживания и подготовки погрузчика к работе, Тс = 6,82; ки —
коэффициент использования погрузчика в течение смены с учетом
подачи автотранспорта, подготовки площадки, междусменной пере*
дачи машины и др., ки = 0,5—0,8; при правильной организации
работ /си = 0,75 ~-0,8.
Сравнивая эксплуатационную среднечасовую
производительность при работе в погрузочно-транспортном режиме колесным
и гусеничных погрузчиков, видим, что в зависимости от дальнос!И
перевозок материала (не более 800 м) производительность колесный
погрузчиков на малой дальности (рис. 49, а) несущественно
отличается от производительности гусеничных погрузчиков
109
Лэ,Т/Ч
bill)
iinn
Чии
y/7/7
dUU
?пп
1ПП
IUU
w
Ют
^6т
' 5t4t
У,3т
/0 2558400 200 WO 800 W 2550WO 200
a) Sn>M 5) S">M
Рис. 49. Расчетные зависимости эксплуатационной среднечасовой
производительности Пэ, ч от дальности 5П перевозок погрузчиками грузоподъемностью
1—15 т:
а — для колесных погрузчиков; б — для гусеничных погрузчиков
(рис. 49, б). Однако при увеличении дальности перевозок путем
повышения скоростей движения производительность колесных
погрузчиков существенно увеличивается и более проявляются
их скоростные и динамические качества.
Время выполнения работы (число смен) по переработке
материалов погрузчиков с ковшовым оборудованием в зависимости
от объема и типоразмера погрузчика
где V — объем штабеля, подлежащего переработке, м3; Гц —
среднее время рабочего цикла, определяемого в зависимости
от дальности перевозок, ч; Кр — коэффициент разрыхления,
/Ср = 1,25; Тс — продолжительность работы погрузчика в смену,
Тс = 6,82 ч; VK — номинальный объем ковша, м3; фр —
коэффициент наполнения (см. стр. 109); /си — коэффициент использования
погрузчика и равномерности подачи транспортных средств, /си =
= 0,65-0,8.
Число погрузчиков в зависимости от годовой
производительности предприятия
где Пг — годовая производительность предприятия, т; Гц —
среднее время рабочего цикла в погрузочно-разгрузочном или погру-
ПО
зочно-транспортном режиме, ч; кн = 1,15 — коэффициент
неравномерности работ; пс — число смен работы погрузчиков за
сутки; яд — число дней работы предприятия за год; Q —
номинальная грузоподъемность применяемых погрузчиков, т.
При расчете производительности погрузчиков со сменным
оборудованием учитывается специфика и технология выполнения
работ.
Глава 4
МНОГОКОВШОВЫЕ ПОГРУЗЧИКИ
1. Определение, назначение и применение
Многоковшовые погрузчики предназчачены для зачерпывания
насыпного груза ковшовым элеватором, установленным спереди
самоходного шасси. Их применяют на базисных складах для
перегрузки в основном песка, гравия, щебня, каменного угля и
других грузов из штабеля в транспортные средства, а также на
ленточные транспортеры на заводах железобетонных изделий. Кроме
того, их используют для штабелирования насыпного груза из
куч, отсыпаемых автомобилями-самосвалами; разгрузки
железнодорожных платформ с насыпным грузом, когда погрузчик
передвигается по верху платформы (с установкой специальных
переходных мостиков между соседними платформами); в дорожном
строительстве, когда погрузчик тянет за собой асфальтобетонный
смеситель, загружая его песком и щебнем, подбираемыми ковшами
с дороги; для погрузки снега из валов на автомобили-самосвалы.
По условиям более легкого зачерпывания и обеспечения
необходимой прочности ковшового элеватора они более
приспособлены для перегрузки зернистых и мелкокусковых грузов с
включениями отдельных кусков размером не более 70 мм.
В последнее время многоковшовые погрузчики на небольших
складах стали вытесняться одноковшовыми как более дешевыми
и мобильными, но на базисных складах они с успехом заменяют
одноковшовые экскаваторы.
2. Конструкция
В настоящее время установилась вполне определенная
принципиальная конструктивная схема, по которой проектируют все
многоковшовые погрузчики. На самоходном шасси 5 (рис. 50)
спереди рядом с кабиной 4 установлен наклонно ковшовый
элеватор 2, а под разгрузочной головкой элеватора поднимаемый
цилиндром 9 ленточный транспортер 1. Насыпной груз
зачерпывается из штабеля ковшами при движении погрузчика вперед,
поднимается элеватором наверх и разгружается в лоток транспор-
111
112
Рис. 50. Многоковшовый погрузчик:
Й --. ленточный транспортер; 2 — ковшовый элеватор; 3 *— опорная стойка для элеватора; 4 — кабина; 5 — гидроцилиндры для подъема
элеватора. 6, 7 ?— ведущие мосты; 8 — шасси; 9 — цилиндры для подъема транспортера; 10 — канаты для подвески транспортера; 11 =
уравнительный блок; 12 « масляный бак; 13 — винтовые питатели; 14 — топливный бак
тера, а из последнего в транспортное средство, установленное
сзади или сбоку погрузчика.
Для того чтобы обеспечить необходимое наполнение
элеватора при небольшом движении погрузчика вперед, насыпной груз
подгребается к ковшам двумя винтовыми питателями 13.
Питатели имеют винты с правой и левой спиралями и установлены
внизу с обеих сторон ковшового элеватора. Питатели очищают
также путь от насыпного груза на ширине захвата В для
движения погрузчика вперед во время зачерпывания груза.
Рама элеватора опирается на раму шасси верхним концом шар-
нирно через стойку 3 в точке J5, а нижним через два гидроцилиндра
5 двустороннего действия. Раму элеватора с помощью
гидроцилиндров можно поворачивать относительно шарнира £, чтобы
в транспортном положении она могла быть установлена под углом
40° к горизонту. Таким образом, увеличивается устойчивость
погрузчика при движении своим ходом на уклоне пути.
Рама самоходного шасси 5, сваренная из фасонного и
листового проката, опирается на два ведущих автомобильных моста:
передний 7 жестко (без рессор) и задний (управляемый) 6 через
балансирную подвеску. Таким образом, погрузчик имеет
колесную схему 4X4. Для увеличения передаточного числа
трансмиссии в колеса ведущих мостов встроены ступичные редукторы.
Два ведущих моста обеспечивают нужную силу тяги при
передвижении погрузчика в сторону штабеля насыпного груза во время его
зачерпывания ковшами. При перегонах задний мост погрузчика
может быть отключен муфтой, установленной на выходном валу
раздаточной коробки 3 (рис. 51) и переключаемой с помощью
Рис. 51. Кинематическая схема самоходного шасси многоковшового погрузчика
114
пневмоцилиндра, как это принято у погрузчика Д-565.
Рассмотрим основные узлы этого погрузчика.
Крутящий момент на ведущие мосты / и 8 передается от
дизеля 2 через однодисковую автомобильную муфту сцепления,
коробку передач 4 и раздаточную коробку 3. Транспортные
скорости получают путем переключения передач в коробке, а рабочие
скорости через гидроходоуменьшитель, состоящий из аксильно-
плунжерного насоса 7 марки ПМ-5 и понижающего редуктора 6.
В результате получают бесступенчатое регулирование рабочих
скоростей в больших пределах.
Следует отметить оригинальную конструкцию перехода на
рабочие скорости через гидроходоуменьшитель, что обеспечивает
плавное реверсирование погрузчика при движении его во время
черпания ковшами груза из штабеля. Водитель быстро и вовремя
может давать задний ход погрузчику, чтобы избежать завала
элеватора насыпным грузом, и снова быстро давать передний ход,
не останавливая погрузчик. В погрузчиках других конструкций
это обеспечивается фрикционным переключением реверсивного
механизма в коробке передач.
18
6)
Рис. 52. Коробка передач многоковшового погрузчика:
а — основная конструкция; б — разрез по валу на привод от ходоуменьшителя; 1 *» вал
отбора мощности; 2 — пневмоцилиндр; 3 -— блок шестерен; 4 — зубчатая муфта; 5 —
шестерня заднего хода; 6—масляный насос; 7 — входной вал; 8 — передняя шестерня
промежуточного вала; 9 — промежуточный вал с шестерней; 10 —■ входной вал; // —
блок шестерен первой и второй передач; 12—шестерня третьей передачи; 13 — задняя
шестерня промежуточного вала; 14, /5—зубчатые полуавтоматы для включения вала
отбора мощности; 16 •«• промежуточная шестерня; 17 о» вал для привода от ходоумень*
шителя; 18 ^ шестерня включения ходоуменьшителя
115
Рис. 53. Гидравлическая схема многоковшового погрузчика
Рабочие механизмы погрузчика приводятся в действие через
карданную передачу 5 от выходного вала коробки передач.
Основные тормоза погрузчика пневматические и смонтированы
в колесах ведущих мостов, а стояночный тормоз барабанного типа
установлен на промежуточном валу раздаточной коробки 3.
Колесными тормозами управляют через педаль, действуя на
тормозной кран, а стояночным тормозом — через рычаг,
размещенный в кабине.
Рулевое управление автомобильное без усилителя.
Коробка передач — трехступенчатая, механическая.
Вращение от коленчатого вала двигателя получает вал 7 (рис. 52), на
шлицах которого посажена зубчатая муфта 4, При сцеплении
ее с блоком 3 шестерен погрузчик начинает двигаться вперед,
а при сцеплении с шестерней 5 — назад. Рабочие скорости
движения получают после включения ходоуменьшителя, что
достигается путем сцепления шестерни 18 с блоком 3 шестерен.
К рабочим механизмам крутящий момент от коленчатого вала
двигателем передается после включения зубчатой полумуфты 14
с помощью пневмоиилиндра 2, управляемого краном из каСины.
При этом коутящий момент передается через вал 7 на вал /.
Для привода аксильно-плуижерных насосов 1 (рис. 53)
ходоуменьшителя и 4 ленточного транспортера, а также гидроцилин-
116
дров 3 подъема элеватора, 2 подъема и 7 поворота транспортера
в плане установлены шестеренные насосы 5 и 6 с рабочим
давлением до 110 кгс/см2, а для транспортера до 130 кгс/см2. Насосы
приводятся в движение от основного двигателя через редуктор
отбора мощности.
Принципиальную конструкцию многоковшового погрузчика
определяет не конструкция самоходного шасси, а устройства
механизмов для зачерпывания, подъема и загрузки насыпного груза
в транспортные средства. В последнее время многоковшовые
погрузчики у нас и за рубежом изготовляют только на пневмоко-
лесном ходу, чтобы упростить и удешевить их производство.
Конструкция рабочих механизмов этих погрузчиков является
стабильной независимо от типоразмера и марки погрузчика.
Рис. 54. Кинематическая схема привода:
а «*• ленточного транспортера; б -** элеватора; 1,8 — верхний и нижний валы элева«
тора* 2 ■=* редуктор; 3 — аксиально-плунжерный насоо привода ленточного-
транспортера1; 4 а» приводной барабан; 5 » цепная передача; 6, 7 «-« карданные передачи; 9 -**
редуктор отбора мощности; Ю «■ шестеренные насосы; II *« дисковая муфта
предельного момента
117
Рис. 55. Редуктор отбора мощности
Некоторое различие наблюдается лишь в конструкции отдельных
узлов.
Верхний вал / (рис. 54) элеватора приводится в движение от
выходного вала коробки передач через карданную передачу 7,
далее через редуктор 9 отбора мощности, вертикальный
карданный вал 6 и редуктор 2. С помощью последнего приводится в
движение верхний вал ) элеватора.
Таким образом через выходной вал 1 (рис. 55) редуктора
производится отбор мощности на привод элеватора и насосов 2.
Оригинальным устройством у редуктора является дисковая
фрикционная муфта предельного момента 11 (см. рис. 54). Диски 7
(рис. 55) муфты постоянно сжаты давлением воздуха в тормозной
камере диафрагмой 5 через шток 4 и тарелку 6, При случайной
перегрузке ковшей от заваленных в штабеле камней или
металлических деталей муфта пробуксовывает и зубчатое колесо 8
проворачивается относительно вала 9. Для быстрого отхода диафрагмы 5
установлена пружина 3. Сжатый воздух в камере поступает
181
от компрессора. Предохранительный клапан для муфты
отрегулирован на давление воздуха 3,5 кгс/см2.
Признано, что фрикционные муфты из-за непостоянства
коэффициента трения трущейся пары плохо работают как муфты
предельного момента. При длительном неподвижном контакте
фрикционных пар возникают явления, похожие на адгезию, и
фрикционные пары как-будто приклеиваются одна к другой. Муфта
размещена далеко от места возможной перегрузки, следовательно,
детали, установленные до муфты, мало предохраняются от
поломок.
Для надежной работы муфты может быть рекомендована
ежедневная пробная пробуксовка муфты при сниженном давлении
воздуха в камере, чтобы можно было сокращать время контакта
фрикционных дисков. В свое время, когда верхний вал элеватора
у многоковшовых погрузчиков и траншейных экскаваторов
приводился в движение через цепную передачу, в качестве муфт
предельного момента успешно применяли ролико-кулачковые
муфты [11.
Транспортер приводится в движение от
аксиально-плунжерного насоса 2 (рис. 56) через закрытую цепную передачу /.
Нижним концом транспортер шарнирно опирается на раму
погрузчика через вертлюг 4 и может быть повернут в плане на 72,5° в ту
и другую сторону с помощью гидроцилиндра 6 двустороннего
действия, корпус которого закреплен на раме шасси. Шток его
соединен с криволинейным рычагом 5, который в свою очередь шарнирно
соединен с вертлюгом 4, вращающимся около неподвижного
стакана 3. При продольном положении транспортера относительно
погрузчика ось его должна совпадать с осью XX. Ниже
приведена техническая характеристика погрузчика Д-565 (обозначения
см. на рис. 50).
Геометрический объем ковшей, л , 30
Шаг ковшей, мм . • . 380
Скорость ковшовой цепи, м/с 0,76
Ширина захвата В, мм 2450
Техническая производительность (при
коэффициенте заполнения ковшей 0,75), м3/ч .... 160
Ленточный транспортер:
длина по осям барабанов, м 6,5
ширина ленты, мм 650
скорость ленты, м/с 2—2,75
угол поворота в горизонтальной плоскости
(вправо и влево), град 60
высота разгрузки Нъ мм 2600—3500
полезный вылет вдоль и поперек
погрузчика /, мм 2280/4670
Мощность дизельного двигателя при
1700 об/мин, л. с 55—60
Скорости передвижения, км/ч:
рабочие (вперед и назад) 0—0,198; 0—0,434j
0—0,725
транспортные (вперед) 5,98; 12,7; 21,1
транспортные (назад) , . 7,8; 15,95; 27,2
119
Колесная база А мм . . . . • ' 3050
Колесная схема 4X4
Колея, мм:
передних колес В2 1840
задних колес В9 1870
Дорожный просвет, мм ♦ , 265
Масса машины, кг:
конструктивная . . . . 7500
в заправленном состоянии 7700
Распределение массы по осям, кп
на переднюю ♦ . . . 5400
на заднюю 2300
Тормозной путь (при скорости 21 км/ч), м 4
Габаритные размеры в рабочем положении, мм:
длина Lx 8800
ширина Bi ...» 2735
высота Их 3780
Длина погрузчика в транспортном
положении, мм 8650
Рис. 66. Механизм привода и поворота транспортера
120
За рубежом многоковшовые погрузчики выпускают по такой
же конструктивной схеме, но только на колесном ходу, с
разгрузочным ленточным транспортером с приводом от дизельного
двигателя и реже от электродвигателей переменного тока с питанием
от сети. Замена гусеничного хода на колесный позволяет на 20—
25% снизить массу погрузчиков, а также упростить и удешевить
их производство.
В европейских странах (Чехословакии, ГДР, ФРГ) выпускают
небольшие погрузчики, но с электрическим приводом. Поскольку
погрузчики предназначены для обслуживания базисных складов,
то для них не столь важно наличие большого числа скоростей
для передвижения, и применение электродвигателей вполне
приемлемо.
В США выпускают погрузчики производительностью 90—
200 м3/ч в основном с приводом от дизеля, причем на большие
погрузчики вместо основного элеватора для зачерпывания насыпных
грузов устанавливают элеватор для уборки снега из валиков на
улицах. Производительность таких снегопогрузчиков примерно
в 3—4 раза выше, чем при работе по зачерпыванию насыпных
грузов, что достигается применением ковшей большего объема
(путем увеличения ширины примерно на 30% и профиля ковшей)
при одних и тех же скоростях движения цепей. Для того чтобы
уменьшить габаритные размеры снегопогрузчиков для работы
в условиях города, вместо ленточного транспортера применяют
короткий лоток с углом наклона к горизонту 35°. Автомобили
загружают снегом через задний борт.
Многоковшовые погрузчики характеризуются определенными
параметрами и размерами (см. рис. 50). К ним относят объем i
ковша, л; скорость v ковшовой цепи, м/с; техническую
производительность /7Т, м3/ч; скорость передвижения vw км/ч; мощность
N двигателя, л. с; массу тп погрузчика, кг; шаг / ковшей, мм;
высоту Н подъема транспортера, м; полезный вылет /
транспортера вдоль и поперек погрузчика, мм; ширину В захвата, мм;
колесную базу А, мм; ширину В2 и В3 колеи у передних и задних
колес, мм; высоту О подъема элеватора в транспортном положении,
мм; дорожный просвет Л, мм; внешний радиус R поворота по
углу отвала, мм; габаритные размеры погрузчика (длину Llt
ширину Въ высоту Нг), мм; углы а въезда и |3 съезда, град.
Чтобы обеспечить гравитационную разгрузку ковшей,
скорость ковшовой цепи берут не более 0,8 м/с. При больших
скоростях насыпной груз будет распыливаться и просыпаться, а также
возникнут большие динамические нагрузки у ковшовых цепей.
Скорость передвижения погрузчика берут не более 30 км/ч.
На перегонах погрузчик своим ходом передвигается только
с поднятым элеватором и транспортером, опущенным на стойку.
Уклон дороги при движении погрузчика вперед не должен
превышать 3°, при больших дорожных подъемах и перегонах
погрузчик перевозят автомобилями на прицепах-трайлерах.
121
3. Принцип работы
Погрузчик рассчитан на обслуживание крупных складов и
баз с насыпными грузами. Рабочая площадка должна иметь
твердое ровное покрытие (асфальт, бетон) и быть без уклонов.
В зависимости от вида загружаемого транспортного средства
и размеров рабочей площадки выбирают схему организации
погрузочных работ.
При загрузке автомобилей-самосвалов чаще scefo принимают
схему, показанную на рис. 57, а, по которой не требуется больших
площадей для маневрирования погрузчика и
автомобиля-самосвала. Автомобили-самосвалы под погрузку подают по одному
следу задним ходом. Реже их устанавливают в поперечном
направлении (рис. 57, б), так как при этом неравномерно заполняется
кузов автомобиля-самосвала и последний подается по новому
следу, отчего быстро изнашивается рабочая площадка. При
интенсивной подаче автомобилей-самосвалов более оптимальной
является схема, приведенная на рис. 57, в. При загрузке
железнодорожных платформ погрузчик устанавливают вдоль состава,
но только с одной стороны (рис. 57, г). В этом случае погружаемый
насыпной груз должен располагаться вдоль железнодорожного
пути.
Рассмотрим особенности работы погрузчика Д-565. После
установки погрузчика на место работы поворотом сответствующего
краника в гидросистеме включают редуктор отбора мощности г
Рис. 57. Организация погрузочных работ многоковшовыми погрузчиками:
а — загрузка через задний борт грузового автомобиля; 6— з-грузка через боковой борт
грузового автомобиля; в ~- то же, загрузка на обе стороны; г » загрузка
железнодорожных платформ
122
ленточный транспортер поднимают на 150 мм над стойкой или на
нужную высоту и поворачивают в необходимую сторону. Далее
опускают элеватор вниз и устанавливают его с зазором 1—1,5 см
между нижней кромкой отвала и основанием груза. При подборе
его прямо с земли необходимо следить за тем, чтобы отвал не
работал как бульдозер. Включают элеватор в работу так: левым
рычагом коробки передач ходоуменьшитель, а правым — первую
передачу. Рукояткой гидрораспределителя включают насос ходо-
уменьшителя и плавно поворачивают лимб регулируемого
дросселя. Рабочие скорости изменяют переключением передач в
коробке и поворотом лимба дросселя (нуль на лимбе соответствует
максимальной рабочей скорости).
Выбор рабочих скоростей и многоковшовых погрузчиков для
работы элеватора в основном зависит от высоты насыпного груза:
при небольшой высоте приходится работать на третьей рабочей
передаче. При угрозе завала ковшей насыпным грузом сразу
рукояткой распределителя дают задний ход. Не рекомендуется
применять многоковшовые погрузчики для добычи песка в
карьерах, так как возможная работа подкопом приводит к аварии.
Рабочая площадка должна быть хорошо спланирована и
горизонтальной. Угол наклона ее в сторону элеватора не должен
превышать 1°.
4. Определение производительности
Производительность определяют по основным параметрам:
объему i ковша, л; скорости v ковшовой цепи, м/с; шагу /
ковшей, м; а также коэффициенту г заполнения ковшей.
Коэффициент заполнения ковшей зависит от
физико-механических свойств насыпного груза, а также от его высоты. Для
разных насыпных грузов г = 0,75 -f- 0,9. Практически его можно
принять средним для всех грузов г ^ 0,8.
Техническая (объемная) производительность (в м3/ч)
погрузчика при номинальной частоте вращения коленчатого вала
двигателя
где i/t — производительность элеватора на единицу длины, л/м;
Кр — коэффициент разрыхления насыпного груза в ковше, Кр «*
~ 1,1 -г- 1,15.
Глава б
ПОГРУЗЧИКИ С НАГРЕБАЮЩИМИ ЛАПАМИ
1. Определение и назначение
Погрузчики с нагребающими лапами являются самоходными
машинами, которые работают способом бокового захвата
насыпного груза. В качестве рабочего захватного органа они
оборудованы парой нагребающих лап, совершающих сложное
вращательное движение около своих вертикальных осей, расположенных
на конце клиновидной приемной рамы, называемой лопатой. При
движении погрузчика вперед конец лопаты врезается в насыпной
груз, лапы нагребают его на лопату и перемещают вверх на
скребковый транспортер для загрузки в транспортные средства.
Пожалуй ни в какой другой машине кроме одноковшового
экскаватора не повторена так хорошо кинематика движений
рук человека, как в погрузчиках с нагребающими лапами.
Поскольку работа погрузчиков с нагребающими лапами
связана с большим износом трущихся поверхностей у рабочих
органов из-за больших сил трения при перемещении груза способом
волочения, то эти погрузчики предпочтительнее применять для
перегрузки малоабразивных грузов, например снега.
При очень малой рабочей высоте их применяют также в горном
деле для погрузки каменного угля под землей, а также на земле
для погрузки угля, кокса, а иногда щебня из штабелей и при
подборе их с железнодорожных путей после разгрузки полувагонов
прямо на пути.
2. Конструкция
В снегопогрузчиках наиболее удачно использован принцип
действия нагребающих лап при уборке снега из валов на
улицах. При низком коэффициенте трения снега по стали почти не
изнашивается верхний настил у лопаты от волочения по нему
порций снега после отрыва их лапами из валиков. Кроме того,
такое волочение требует очень малого расхода энергии.
Отечественная промышленость выпускает снегопогрузчик
только одного типоразмера — марки Д-566. При недостаточном
их числе для народного хозяйства снегопогрузчики выпускают
также сами потребители. Все снегопогрузчики примерно одной
производительности. Однако конструкция погрузчиков,
выпускаемых местной промышленностью, более простая.
Снегопогрузчики Д-566 выпускают на базе общего
самоходного шасси, применяемого для многоковшового погрузчика Д-565.
Здесь также максимально соблюдена агрегатность установки
оборудования снегопогрузчика на самоходном шасси с ведущими мо-
124
стами 10 п 13 (рис. 58). В основном оборудование состоит из
приемной плиты, часто по своей форме в плане называемой лопатой 7,,
и скребкового транспортера 7, объединенных в один общий
агрегат. Нижняя часть транспортера имеет общую раму с лопатой,
а верхняя часть выполнена отдельно. Обе части шарнирно опирают
на общий горизонтальный шкворень в точке £, который
установлен в стойках 4, опертых на лонжероны рамы шасси. Поэтому
верхний конец транспортера / и лопату 7 при помощи
гидроцилиндров 2 и 5 двойного действия можно раздельно поднимать и
опускать. Нижний конец лопаты может быть опущен ниже уровня
земли на 100 и поднят вверх на 700 мм для транспортного
положения погрузчика. Верхний конец транспортера может быть
поднят на 740 мм, что обеспечивает высоту разгрузки снега с
транспортера в преда л ах 2460—3600 мм от земли.
Приемная часть лопаты выполнена более широкой, чем
верхняя. Ширина лопаты диктуегся шириной основания валов снега
(1—2,5 м). С боков рама лопаты окантована двумя широкими
полосами, которые выше становятся желобом 3 транспортера. Сверху
рама покрыта стальным листом толщиной около 6 мм. В середине
листа сделаны люк для скребкового транспортера и два отверстия
для вращающихся дисков /5, на которых эксцентрично
установлены оси для вращания нагребающих лап 14. Передний конец
лопаты оканчивается ножом §, состоящим из четырех отдельных
сменных полос. Для врезания в слежавшийся вал из снега и
наледи на дорожном покрытии ножи заострены под углом 30q»
Лопату устанавливают на раме шасси с уклоном вперед,
чтобы при работе ее нож 8 во время движения врезался в
основание вала из снега. Угол наклона лопаты определяется
конструктивно и примерно соответствует а = 20 -г- 25°. Под лопатой
расположена трансмиссия 9 для привода нагребающих лап и
скребкового транспортера.
G уметом неровностей дорожного покрытия и наличия наледи
на нем зааор между острием ножа и покрытием перед работой
регулируют установкой двух полозков 6.
С установкой оборудования снегопогрузчика на самоходное
шасси четырехвальную раздаточную коробку 3 (см. рис. 51),
применяемую для передачи мощности к обоим ведущим мостам
у многоковшового погрузчика Д-565, заменяют трехвальной
(рис. 59, я), чтобы увеличить транспортные и уменьшить рабочие
скорости снегопогрузчика. Для снегопогрузчика устанавливают
карданную передачу 5 (рис. 59), с помощью которой выходной вал
коробки передач соединяют с промежуточным валом трехвальной
раздаточной коробки, а концы валов ведущих мостов 1 (см. рис. 51)
и 8 соответственно соединяют с раздаточной коробкой через
карданные передачи 4 (см. рис. 59;.
Скребковый транспортер и нагребающие лапы приводятся
в движение от дизельного двигателя 3 (см. рис. 51) через коробку 4
передач, редуктор / (см. рис. 59) отбора мощности, главный ре-
125
126
Рис. 58. Снегопогрузчик Д-566:
■ =- "
ынь
Рис. 59. Кинематические схемы привода оборудования
снегопогрузчика Д-506:
а — раздаточной коробки; 6 — нагребающих лап и
скребкового транспортера
дуктор 7 и редуктор //. Для этого редуктор / отбора мощности
соединяют карданной передачей 3 с выходным валом коробки
передач 5 (см. рис. 51).
Оба редуктора 7 и 11 для привода нагребающих лап 9 и 13
имеют общий вал, на середине которого установлена ведущая
звездочка скребкового транспортера 10. На выходных валах у
редукторов 7 к 11 заклинены вращающиеся диски 8 и 12, на которых
закреплены кривошипы с посаженными на них нагребающими
лапами 9 и 13.
Редуктор / отбора мощности снегопогрузчика снабжен такой
же дисковой муфтой 2 предельного момента, как и
многоковшовый погрузчик, но с меньшим числом дисков. Муфту настраивают
128
на передачу крутящего момента, ограничиваемого давлением
воздуха в тормозной камере до 3,5 кгс/см2.
Ниже приведена техническая характеристика рабочего
оборудования снегопогрузчика Д-566 (обозначения см. на рис. 58).
Нагребающие лапы:
число 2
длина /л, мм 825
наибольшая высота /гл, мм 325
число колебаний в 1 мин (при частоте
вращения коленчатого вала двигателя
1700 об/мин) 51,5
Ширина В захвата лопаты, мм 2640
Техническая производительность:
объемная, м3/ч 300
массовая, т/ч 90
Скребковый транспортер:
скорость цепи, м/с 0,7
ширина Ъ желоба, мм 660
глубина hi желоба, мм 200
высота Н разгрузки, мм 2460/3600
полезный вылет /, мм 2000
По сравнению со снегопогрузчиками 2С-3, С-10 и С-4
снегопогрузчик Д-566 имеет ряд эксплуатационных преимуществ, к
которым прежде всего нужно отнести наличие гидроходоуменьшителя
(рабочие скорости могут меняться на ходу и в широких
пределах); оба моста ведущие со ступенчатыми редукторами
(увеличение силы тяги двигателя), что важно при работе снегопогрузчика
на уклонах (табл. 9).
Погрузчики с нагребающими лапами характеризуются
основными параметрами и размерами. К ним относят число п ходов
лапы в 1 мин; скорость vT цепи у скребкового транспортера, м/мин;
скорость vn передвижения погрузчика, км/ч; мощность привода N,
л, с; массу тп погрузчика, кг; длину 1Д и высоту hn лапы, мм;
диаметр d эксцентриситета шарнира лапы на вращающемся диске
(см. рис. 58), м; ширину В захвата у лопаты, м; высоту Н разгрузки,
мм; полезный вылет / у транспортера, мм; колесную базу Л, мм;
ширину В 2 колеи, мм; углы а выезда и р съезда град; внешний
радиус R поворота по углу лопаты, мм; габаритные размеры
погрузчика — длину Ll9 ширину Bv высоту #!, м.
По условиям безопасности движения наибольшая
транспортная скорость не должна превышать 30 км/ч. Преодолеваемый
уклон и проходимость принимают такими, как у грузовых
автомобилей,
3. Принцип работы и определение производительности
Перед началом работы снегопогрузчик устанавливают с торца
вала из снега, вынимают упор у лопаты и опускают последнюю
вниз. Исходя из неровностей дорожного покрытия с учетом
наледи, регулируют зазор между ножом лопаты и дорожным покры-
5 А. Ф. Базанов, Г. В. Забегалов 129
Т абл и ца 9
Техническая характеристика снегопогрузчиков
Показатели
Базовое шасси ♦ • .
Колесная схема . . ♦
Ведущий мост ....
База, мм
Ширина захвата, мм
Рабочие скорости, км/ч:
на первой передаче
» второй передаче
» третьей передаче
» четвертой
передаче
Наибольшая
транспортная скорость, км/ч
Число колебаний лап
в 1 мин
Скорость цепи
транспортера, м/с
Техническая
производительность, м3/ч . . .
Масса погрузчика в
транспортном
положении, кг .......
Распределение массы
по осям, кг:
на переднюю . . .
на заднюю
Габаритные размеры в
транспортном
положении, мм:
длина «••••*
ширина ......
высота
2С-3
Автомобиль
ЗИЛ-150
4X2
Передний
4000
2600
0,4
0,8
1,3
2,5
25
59
1,29
350
7 500
5 250
2 250
10 300
2 780
2 550
С-4
Свое
4X2
Задний
2500
2350
0,3
0,6
1,1
1,9
25
42
0,94
250
4900
2215
2685
8660
2490
2626
С-Ю
Автомобиль
ГАЗ-53А
4X2
Задний
3000
2500
0,3—0,4
0,6—0,85
1,13—
2,55
1,9
40
47,5
0,96
360
7680
1810
5870
8400
2530
2700
Т-105
Автомобиль
ЗИЛ-150
4X2
Передний
3400
2600
0,6
1,0
1,8
3,5
25
45
1,1
300
7 590
5 590
2 000
10 100
2 750
2 680
Д-460
Д-566
Свое
4X4
Передний и
задний
3050
2640
0,217
0,49
1,05
1,76
20
51,5
1,1
250
6865
4765
4700
9200
2810
3200
0,69
1,51
2,5
35
51,5
0,7
300
6200
4500
1700
9320
2850
3240
тием и соответственно устанавливают полозки. Так же как и при
работе многоковшового погрузчика (см. рис. 57, я), сзади
снегопогрузчика устанавливают автомобиль-самосвал. При движении
снегопогрузчика вперед с нагребанием лапами снега на лопату
автомобиль-самосвал движется задним ходом вслед за
снегопогрузчиком. Работа снегопогрузчика возможна на продольном
уклоне пути до 7°.
Не рекомендуется работать с пробуксовкой сцепления и
муфты предельного момента. Необходимо следить, чтобы между
лапами и боковыми листами лопаты не попадали крупные куски
льда, камни и др. На время перегона погрузчика лопату подни-
130
мают вверх, а при более длинных перегонах (более 1 км) лопату
ставят на упоры, освобождая гидроцилиндры. В этом случае
скребковый транспортер опускают на стойки.
Производительность снегопогрузчика определяется работой
нагребающих лап, которую очень трудно выразить аналитически,
так как объем зачерпываемого снега очень неопределенный,
поскольку он зависит от размеров вала убираемого снега, подачи
снегопогрузчика вперед за один ход лапы и частоты вращения
коленчатого вала двигателя.
При номинальной частоте вращения коленчатого вала
двигателя и работе пары нагребающих лап техническая (объемная)
производительность (в м3/ч)
т
где п — число ходов лапы в 1 мин; е — коэффициент подбора
снега (считаем, что 30% снега, захваченного лапами, ссыпается
обратно), е я^ 0,7; V — объем снега, перемещаемый одной лапой
за один ход, м3; V = 0,55 -0,5аЛл [В— ширина захвата у
лопаты, м; а — расстояние между горизонтальными участками
траектории Jjgnbi в период нагребания и обратного хода, можно
принять k*=d(d — диаметр эксцентриситета шарнира лапы на
вращающемся диске),м; кл — высота лапы в средней ее части, м].
Для обеспечения наибольшей производительности
необходимо иметь достаточный объем снега, подаваемый лапами за один
ход. Как показывает практика, производительность,
указываемую в каталогах фирм, можно достигнуть при вале снега с
поперечным сечением в виде равнобедренной трапеции с основанием,
равным 2—2,5 м, и высотой, равной 0,4—0,5 м, и углом
естественного относа снега в покое р1?^40ч-45о.
РАЗДЕЛ ВТОРОЙ
УЗЛЫ И ЭЛЕМЕНТЫ ПОГРУЗЧИКОВ
Глава 6
РАБОЧЕЕ ОБОРУДОВАНИЕ
АВТОПОГРУЗЧИКОВ
1. Грузоподъемники и основное рабочее оборудование
Грузоподъемник у вилочного погрузчика является второй его
составной частью после шасси. С его помощью захватывают,
поднимают и укладывают грузы. Независимо от типоразмера
автопогрузчики грузоподъемники выполняют по одной и той же
конструктивной схеме. Они могут отличаться один от другого
применением разных стальных профилей для рам и другими
небольшими конструктивными особенностями.
Основой конструкции грузоподъемника являются две
вертикальные рамы, из которых одна, наружная (рис. 60), опирается
внизу шарнирно на раму шасси, а другая размещается на катках
в наружной и является выдвижной. Такое телескопическое
соединение рам может быть одинарным или двойным: в первом
случае грузоподъемник считают двухрамным, а во втором — трех-
рамным, т. е. в выдвижной раме может размещаться другая
выдвижная рама. Вопрос применения двух- или трехрамного
грузоподъемника в основном зависит от высоты дверных проемов,
через которые должен проходить автопогрузчик. Рамы применяют
плоскостные П-образной формы: наружная рама 8 с перекладиной
внизу, а выдвижная 7 с перекладиной вверху.
Между рамами размещен гидроцилиндр 16 подъема
одностороннего действия, опирающийся корпусом шарнирио через
шаровую пяту 15 на перекладину наружной рамы и закрепленный
на ней болтами через пружины 14. Конец плунжера
гидроцилиндра упирается непосредственно в перекладину выдвижной
рамы через шаровую головку болта 19 или же только после
некоторого свободного хода 0,5 Я2, как показано на рис. 60. В
последнем случае грузоподъемники считаются грузоподъемниками
со свободным подъемом груза, которые применяют в
автопогрузчиках с высотой подъема до 2,8 м.
В направляющих выдвижной рамы перемещается вверх и в. из
подъемная каретка 13 с вилами 3. Каретка подвешена на двух
грузовых цепях 4, один конец которых перекинут через ролики 20,
установленные на перекладине выдвижной рамы, или на цапфах
траверсы 18. Другой конец цепей закреплен иногда на дополни-
132
тельной верхней перекладине наружной рамы и чаще всего на
корпусе гидроцилиндра за уши 17. Последнее крепление наиболее
предпочтительно, так как создает меньшие поперечные силы,
действующие на плунжер гидроцилиндра. Ролики 20 посажены
на осях через пару роликоподшипников каждый. На небольших
автопогрузчиках (грузоподъемностью 1—2 т) применяют одну
грузовую цепь для подвеса подъемной каретки, что улучшает
обзорность водителю, так как цепь располагается за цилиндром
подъема.
Конструкция механизма свободного хода в принципе везде
одинакова, разница только в устройстве скользящей верхней
опоры для плунжера. Во всех случаях на конце плунжера
устанавливают траверсу 18 с двумя направляющими роликами 20
для грузовых цепей. В данной конструкции механизма свободного
хода скользящая опора для верха плунжера устроена в прорезях
двух направляющих щек 21, закрепленных болтами на
перекладине выдвижной рамы. В начале подъема груза поперечина
траверсы 18 через специальные ролики опирается на направляющие
(см. рис. 60). При большом ходе выдвижной рамы чаще всего
применяют телескопическое трубчатое подвижное соединение ее с
плунжером гидроцилиндра.
В грузоподъемниках всегда применяют цепной полиспаст
обратного действия, когда усилие, развиваемое плунжером
гидроцилиндра подъема без учета КПД, равно 2 QH, где QH —
грузоподъемная сила, возникающая при подъеме номинального груза
и приложенная на середине грузовых вил 3. Скорости движения
подъемной каретки и плунжера сначала различны; каретка
поднимается в 2 раза быстрее чем плунжер, пока своим верхом не
упрется в перекладину выдвижной рамы, после чего скорости
подъема груза и плунжера становятся одинаковыми.
Выдвижная рама входит в наружной раме на четырех основных
катках 9. Одна пара катков установлена на цапфах, приваренных
внизу к выдвижной раме, а другая — на цапфах, приваренных
вверху к наружной раме, у которой одна полка вверху срезана
(см. разрез А—А на рис. 60). Подъемная каретка также ходит
в выдвижной раме на четырех катках 1 я 5.
Для восприятия случайных поперечных сил, когда
автопогрузчик движется по дороге или рабочей площадке с поперечным
уклоном, выдвижная рама сбоку опирается на наружную раму
через боковые катки 10, которые перекатываются по стенке
наружной рамы. Большой частью их устанавливают в середине
основных катков. Однако такое расположение боковых катков
конструктивно ограничивает их диаметр, что ведет к большим
контактным напряжениям. Основные катки, выполненные из
чугуна СЧ 35—56, устанавливают на роликовых и реже на
игольчатых подшипниках качения, как у катка 9. Из-за стесненности
места установки боковые катки, тоже чугунные, выполняют
только на подшипниках скольжения (бронза по стали). Оси боко-
133
А-А
Рис. 60. Грузоподъемник вилочного погрузчика
еых катков с квадратными концами закладывают в прорези
основных катков, как у подъемных кареток.
Основная рама грузоподъемника через приваренные к
наружной раме цапфы 12 шарнирно опирается на стальные литые
кронштейны 2, приваренные к раме шасси. В качестве шарнира
устанавливают стандартные шарнирные подшипники 11 или
вкладыши из бронзы.
Для наклона грузоподъемника вперед на угол а для подхвата
груза на вилы и назад на угол Р для транспортного положения
автопогрузчика устанавливают два гидроцилиндра 6
двустороннего действия поршневого типа. Конструкция их шарниров на
раме шасси и на наружной раме грузоподъемника принята такой
134
же, как у опоры грузоподъемника, т. е. с применением шарнирных
подшипников 11.
Опорные цапфы 12 могут быть приварены сбоку на оси
симметрии наружной рамы, как показано на рис. 60, или же смещены
назад и выполнены из двух приваренных косынок с опорой через
оси на кронштейны у рамы шасси. В первом случае наружная
рама разгружается от внецентренного сжатия, однако
необходима установка опорных кронштейнов с большой консолью и»
следовательно, мощная заделка их на раме шасси.
135
Рис. 61. Профили рам грузоподъемников:
а — прессованные, б — сварные, J, Ь — стержни
ных рам; 2, 4 ~- стержни выдвижных рам
наруж-
У автопогрузчиков грузоподъемностью 0,6—5 т направляющие
для рам грузоподъемника выполнены из специальных
прессованных профилей (рис. 61, а) размерами, приведенными в табл. 10.
Направляющие изготовляют из высокопрочной
низколегированной стали ЮХСНД, применяемой для металлоконструкций кранов,
но с более высокими механическими свойствами (ав =
= 8000 кгс/см2 и ат = 5500 кгс/см2). Наиболее оптимальными
профилями признаны швеллерный — для наружной и
двутавровый — для выдвижной рам. Для автопогрузчиков грузоподъем-
Таблица 10
Профили для направляющих рам
(обозначения см. на рис. 61)
и.
ЬЖ
t-C (С S
U С тс Сг
н
в
b
грузоподъемн иков
d d:0,8
r + 2
'х-
см8
wx,
CM3
F,
см2
Масса
1 М, KF
0,6
1
2
3
5
100
120
140
146
172
80
98
ПО
ПО
130
40
42
50
55
65
Швеллерный
10
10
13
15
18
10
И
15
18
21
профиль
4
205
393
735
990
—
41
55,5
106
135,5
220
16
19,04
29,3
36,3
50
Двутавровый профиль
12,55
14,9
23,0
28,5
39,25
0,6
1
2
3
5
100
120
140
146
172
80
98
ПО
ПО
130
62
70
75
83
90
8
9
12
12
15
10
11
15
18
21
4
273
560
1020
1125
2448 -
56
93
146
1.54
285
18,8
24,2
35,7
38,35
57,3
14,75
19,0
28,0
30,0
45,0
136
ностью 10 т,- например, для автопогрузчика 4028, по
технологическим соображениям для обеих рам принят одинаковый
двутавровый сварной профиль из стали Ст5 (рис. 61, б).
Основные катки входят в профиль направляющих с зазором
0,5—0,75 мм. При износе направляющих и катков этот зазор
увеличивается, в связи с чем увеличиваются также динамические
нагрузки (при движении автопогрузчика по разбитой мостовой
коэффициент динамичности доходит до 2,5).
Подъем, спуск или остановка поднятого груза в нужном
положении производятся с переключением золотника 14 (см.
рис. 9) гидрораспределителя, с помощью которого управляют
гидроцилиндром подъема. Ход плунжера и выдвижной рамы
вверх и, следовательно, подъем каретки с грузом на вилах
происходят под действием масла, подаваемого насосом под давлением
под плунжер гидроцилиндра, а спуск груза и всех поднятых
элементов грузоподъемника под действием сил их тяжести. Они
создают давление на плунжер сверху, и масло из цилиндра
выжимается по тому же трубопроводу на слив в бак. Скорости спуска
груза зависят от опускаемых грузов и грузоподъемника. Для
сокращения времени цикла и безопасной работы важно уменьшение
скорости спуска груза и, наоборот, увеличение скорости спуска
порожних вил. Поэтому в магистраль, подводящую масло к
гидроцилиндру, встраивают блок Б1 клапанов и напорный
золотник, как, например, у автопогрузчиков, разработанных
Львовским ГСКБ.
У больших автопогрузчиков (грузоподъемностью свыше 5 т),
когда разность между массами номинального и малого грузов
очень велика, наряду с обычной применяют также
дифференциальную схему включения цилиндра подъема, действующую
автоматически, что достигается с помощью установки
гидроаппаратуры. Применение последней позволяет получить более высокие
скорости подъема и спуска малых по массе грузов.
Основная подъемная каретка грузоподъемника может быть
с жестким или шарнирным креплением грузовых вил на ней.
Подъемную каретку с жестким креплением грузовых вил
применяют на авто- и электропогрузчиках грузоподъемностью 0,5—
5 т. Они имеют унифицированную переднюю плиту 2 (рис. 62)
для крепления вил. К плите приварены опоры 4 для катков /
и концевые крепления 3 для подвеса каретки к грузовым цепям.
Применение массивных плит большой толщины вызвано
уменьшением опрокидывающего момента от груза, а практически
уменьшением расстояния от центра тяжести поднимаемого груза до
оси переднего моста.
Ниже приведены размеры плит подъемных кареток
(обозначения см, на рис. 62).
Грузоподъемность
автопогрузчиков, т 0,5 1 2 3,2 5
L 900 900 1000 1200 1250
137
h
d
bi
с
/
h
. . . . 400
.... 20
.... 15
.... 8
. . . . 65
65
400
25
20
8
65
65
400
30
25
12
80
80
500
40
25
12
80
80
600
50
35
16
80
80
На верхней кромке плиты размечены углубления,
предназначенные для фиксации на каретке грузовых вил. Иногда разметку
отверстий применяют свою.
При подъеме или спуске груза каретка на основных катках 1
перекатывается по полкам выдвижной рамы грузоподъемника.
Катки устанавливают на цапфах 8 через конические
роликоподшипники 5, а на автопогрузчиках небольшой грузоподъемности
через шариковые или игольчатые подшипники. Цапфы
приваривают к опорам катков.
{ ИИ И iiiJ Hi ЦП Hil НИ 111! HijJlil
Рис. 62. Подъемная каретка
В середине основных катков расположены боковые катки 7
с запрессованными в них бронзовыми втулками. Боковые катки
вращаются на осях 6. Концы осей выполнены квадратными, чтобы
оси можно было закладывать в щели цапф 8. Боковые катки
воспринимают случайные поперечные силы, возникаемые при
работе автопогрузчика на наклонной рабочей площадке или
передвижке его по дорогам с поперечными уклонами.
Основные катки каретки перекатываются в направляющих
выдвижной рамы грузоподъемника с зазором около 1 мм. Зазор Б
между боковыми катками и стенкой у рамы принимают в пределах
0,5—1 мм. Регулируют его при установке оси 6 бокового катка
в зависимости от того, какой стороной квадрата ось опирается
на опору (на сторонах квадрата имеются метки). По мере
увеличения зазоров во время эксплуатации их регулируют указанным
путем. При установке конических роликоподшипников натяг В
принимают равным 0,1—0,15 мм и регулируют прокладками.
После регулировки головки у винтов, которыми крепят крышку 9
к основному катку, раскернивают.
Для удобства работы в стесненных условиях (складах,
трюмах морских судов и железнодорожных вагонах) иногда на
основную подъемную каретку устанавливают дополнительные каретки:
поворотную в плане и с поперечным перемещением груза. Обе
каретки состоят из двух плит, из которых одна прикреплена
крюками и болтами к основной подъемной каретке. Плита у
поворотной каретки с помощью гидроцилиндра поворачивается около
вертикального шкворня на 25° в ту и другую стороны и служит
для подвеса на ней грузовых вил. Другая плита у поперечной
каретки с помощью гидроцилиндра может перемещаться вправо
и влево на 75—200 мм. На ней также закреплены грузовые вилы.
Подъемную каретку с шарнирным подъемом грузовых вил
применяют на автопогрузчиках грузоподъемностью свыше 5 т,
когда нецелесообразно применять плиту большой толщины.
Раму / (рис. 63) таких подъемных кареток, например, для
автопогрузчика грузоподъемностью 10 т сваривают из полосовой стали.
Грузовые вилы у них подвешены на двух горизонтальных
шкворнях 3. Здесь основные катки 2 посажены на опоры через
роликоподшипники 4. Для регулировки зазора между торцами этих
катков и стенкой рамы грузоподъемника устанавливают стальные
прокладки б, подкладываемые под квадрат осей 5.
Грузовые вилы 2 (рис. 64) являются основным рабочим
оборудованием, которое устанавливают жестко или шарнирно на
подъемные каретки. Для удобства установки вил к верхнему
торцу приваривают скобы 4У а для жесткого крепления вил на
плите крюки 5, обработанные хвостовики которых перед
приваркой вставляют в просверленные в спинке вил отверстия.
Для фиксации вил на каретке верхний крюк снабжен стопором 6,
стержень которого входит в углубление на верхней кромке плиты
у каретки (см. рис. 62).
139
i
A-A
ft
i i
i i
J
! I
L I
Bud 5
IrSp"lI С
Рис. 63. Подъемная каретка для автопогрузчика грузоподъемностью 10 т:
1 — рама каретки; 2 — основной каток; 3 -* горизонтальный шкворень; 4 ^ ро«
яикоподшипники: 5 *=» ось бокового катка; 6 — регулировочные прокладки
Рис. 64. Грузовые
вилы с удлинителем
6)
Рис. 65. Грузовые вилы, подвешенные на шкворне;
а ^ конструкция; б *— эпюра нагрузок
Для автопогрузчика грузоподъемностью 10 т, а в зарубежной
практике иногда и для автопогрузчика меньшей
грузоподъемности применяют грузовые вилы (рис. 65) со свободным
подвешиванием на горизонтальных шкворнях 3 (см. рис. 63). Чтобы они
не скользили на шкворнях во время движения автопогрузчика,
Таблица 11
Параметры грузовых вил и удлинителей (обозначения см. на рис. 64 и 65)
Параметр
Расстояние от передней
спинки бил до центра
тяжести груза, мм:
при вилах /j
при удлинителях /( . .
Длина от передней
спинки, мм:
вил L
удлинителя V ....
размеры вил, мм:
высота Н
сечение bXS
расстояние h между
крюками, мм
зев у крюков Ь . . .
радиусы гиба R—Ri . .
Размеры удлинителя, мм:
ширина Ь'
высота s'
Масса, кг:
вил
удлинителя
Грузоподъемность, т
0,5/0,27
500
800
730
1600
5
100x25
402
16
12,5
136
55
25
15
1/0,57
500
800
800
1600
50
100x36
402
21
18
140
65
36
25
на вилах Q/на удлинителях Qt)
2/1,10
600
1100
1000
2000
620
150x40
402
26
20
200
65
73
45
3/1,67
600
1100
1100
2200
760
150x50
502
26
25
200
75
103
60
5/2,70
600
1100
1100
2200
860
150x60
602
26
35
200
85
140
70
141
на верхнем конце их делают шлицы, в которые входят зубья
так называемой «гребенки», устанавливаемой под верхней
поперечиной подъемной каретки. Зуб вводят в шлиц, поворачивая
вверх примерно на 90° с одновременным горизонтальным
движением его по шкворню.
Параметры вил у нас нормализованы (см. рис. 64, 65 и табл.
11) и мало отличаются от размеров зарубежных вил.
Грузовые вилы отковывают из прочной стали, например стали
50Г, с термообработкой только угла у них (по 300 мм вверх и вниз)
до твердости НВ 250—295.
Для более легких, но громоздких грузов (кипы хлопка,
текстиля, шлаковаты и др.)» когда масса груза меньше номинальной
грузоподъемности и центр тяжести его значительно смещен к
концу вил, применяют специальные удлинители 1 (см. рис. 64).
Их накладывают на вилы и прикрепляют к последним с помощью
болтов 3. Удлинители изготовляют из углеродистой стали (Ст5).
2. Сменное рабочее оборудование
При производстве автопогрузчиков применяют сменное
оборудование. Остановимся на главных видах его.
Ковши (рис. 66) на автопогрузчиках бывают обычные идвух-
челюстные. Их применяют для зачерпывания сравнительно легких
насыпных грузов: гранулированного шлака, сухих песка и
перелопаченного грунта, а главным образом, каменного угля при
обслуживании котельных. Работа автопогрузчиков с ковшами имеет
вспомогательное значение, когда применение специальных
одноковшовых погрузчиков при небольших объемах работ
нерентабельно. Автопогрузчики с обычным ковшом не могут эффективно
работать, так как при одном ведущем мосте у них мал напор
для врезания ковша в штабель насыпного груза. Для увеличения
напора для ковша приходится использовать энергию движения
автопогрузчика — врезать ковш с разгона на первой передаче
примерно на длине 5—6 м. За это время водитель не успевает
выключить сцепление, и инерционные силы от маховика и
трансмиссии постепенно скручивают полуоси ведущего моста.
Форма обычных ковшей для автопогрузчиков довольно
многообразна. Учитывая, что работа ковшей у автопогрузчиков
примерно такая же, как у одноковшовых погрузчиков, целесообразно
воспользоваться для них формой ковшей, хорошо отработанной
у последних. Например, зная ширину В ковша, глубину его L
можно принять приблизительно равной 0,5 б, радиус R
закругления днища приблизительно 0,4 L, угол а наклона боковых
стенок около 55° (для уменьшения призм волочения насыпного
груза перед боковыми режущими кромками) и центральный угол
<V ^ 55 -60°.
Можно рекомендовать также примерно и конструкцию кузова
ковша с сохранением общей рамы 4 для ковша, принятой на авто-
142
Ш0/1750
S)
Рис. 66. Ковши:
а —- обычный; б — двухчелюстной (в числителе даны размеры ковша объемом 1,4 ма, в
г-Наменателе -— объемом 1,8 м3)
погрузчиках. Нижнюю режущую кромку / (козырек) у кузова
можно принять из полосовой стали (сталь 50Г) шириной 80—
120 мм и толщиной 20—30 мм в зависимости от объема ковша.
С боков козырек загибают на 80—100 мм вверх и сваривают с
менее тонкими боковыми козырьками 2 из той же стали. Режущую
кромку у всех козырьков заостряют на 30—40°. К боковым
стенкам кузова приваривают цапфы для установки кузова на опоры
у рамы 4 через шарнирные подшипники. Гидроцилиндр 5 для
поворота кузова ковша подвешивают вверху к раме 4, а шток
соединяют шарнирно с двумя косынками, приваренными к кузову.
С помощью гидроцилиндра кузов может быть повернут
(запрокинут) на угол —40° вверх и вниз от горизонтали.
Раму 4 ковша, как и грузовые вилы, устанавливают на
основной подъемной каретке на двух крюках, а внизу прикрепляют
двумя болтами.
Поскольку при работе автопогрузчика с ковшом трудно
совмещать операции врезания и запрокидывания кузова, то здесь
применяют только способ раздельного зачерпывания. При этом
ковш с днищем, наклоненным на угол 3—5°, сначала врезают в
основание штабеля, а затем кузов поворачивают (запрокидывают)
назад.
Для того, чтобы колеса автопогрузчика катились по
расчищенному пути при работе с ковшом, ширину ковша стремятся брать
примерно на 100 мм больше ширины следа колес переднего моста.
Такое требование более выполнимо в одноковшовых погрузчиках
с двумя ведущими мостами, нежели в автопогрузчиках с одним,
довольно широким при сдвоенных пневмошинах ведущим мостом.
Поэтому работу автопогрузчика с ковшом ограничивают
зачерпыванием малообразивных и легких по объемной массе насыпных
грузов. Часто ширина ковша меньше ширины следа колес.
В литературе отсутствуют данные о значении сопротивлений
врезанию ковша в насыпные грузы. При проектировании
одноковшовых погрузчиков полученную силу тяги по сцеплению,
отнесенную к 1 см ширины режущей кромки ковша, сравнивают
со статистическими данными. К сожалению, такие данные
применительно к работе автопогрузчиков с ковшами отсутствуют.
Поскольку длина режущей кромки или ширина ковша зависят
от сопротивления зачерпыванию, а допустимое значение
последнего от силы тяги автопогрузчика по сцеплению колес с дорогой,
то расчетное сопротивление зачерпыванию не должно превышать
NB = tf^gcp, где т1 — масса автопогрузчика, приходящаяся на
ведущий мост; <р ^ 0,7 — коэффициент сцепления колес с
дорогой. При этом ширина ковша (в см) В = mxgtylpk, где р —
сопротивление зачерпыванию, отнесенное к длине режущей кромки,
кгс/см (рис. 67); k — коэффициент, учитывающий дополнительное
сопротивление от крупности или влажности насыпных грузов.
Значение р зависит от вида насыпного груза и времени его
слеживания, а также от вида сопротивлений при врезании ре-
144
жущих кромок ковша; сдвига р,кгс/см
боковых и нижней призм ' "~
40
30
10
1,7 1,9
Lb>m
Рис. 67. Зависимость сопротивления
ковша зачерпыванию от глубины врезания
в штабель насыпных грузов:
1,2 — мелкокусковых гравия и щебня; 3 «■»
сухих песка и неслежавшегося грунта; 4 ~*
мелкокускового котельного шлака; 5 —
мелкокускового каменного угля
нижней призм
волочения, перемещения
вверх и вниз груза в ковше,
внешнего трения стенок
о груз, внутреннего трения
частиц груза, а также от £0
формы ковша, заострения
режущих кромок, наличия
зубьев и т. п. Усредненные
данные сопротивления полу- о,3 0,5 0J 0,9 1,1 //
чены авторами
экспериментально применительно к
работе ковшей одноковшовых
погрузчиков при врезании
ковша в основание штабеля
высотой не менее 1 м (при
высоких штабелях
сопротивление зачерпыванию
снижается) и угле естественного откоса груза в покое, равном
40—45".
При мелкокусковых грузах в формулу подставляют k = 1,
при среднекусковых, например щебне, k — 1,25 и гравии k =
= 1,1 -=-1,15; при влажных песке и грунте k = 1,2-*-1,25.
Глубину врезания ковша можно принять при раздельном
зачерпывании LB ^ L (см. рис. 66, а) и совмещенном LB & 0,3 L.
Выглубляющее усилие, на которое рассчитывают гидроцилиндр
для запрокидывания (поворота) кузова ковша, можно принять
NB « 0,5/V
Расчетные данные показывают, что объем ковша для
автопогрузчика грузоподъемностью 3,2 т при зачерпывании сухого песка
должен быть снижен на 25—30%, что ранее было сделано на
серийно выпускаемых автопогрузчиках грузоподъемностью
3,2-5 т.
Двухчелюстной ковш (см. рис. 66, б) также устанавливают
на подъемной каретке. Ковш с поднятой вверх подвижной
челюстью предварительно врезают в штабель насыпного груза на
глубину 0,5—0,6 м движением автопогрузчика вперед. Затем с
помощью двух гидроцилиндров 8 подвижную челюсть 6 прижимают
к нижней 7, загребая груз в ковш. Коэффициент заполнения ковша
насыпными грузами равен 0,7—0,8. При врезании такого ковша
на сравнительно небольшую глубину в штабель насыпного груза
сопротивление врезанию у него меньше, чем у основного ковша.
Недостатком такого ковша является его малая эффективность
при зачерпывании насыпного груза из низких штабелей.
Двухчелюстные ковши изготовляют только для
автопогрузчиков грузоподъемностью 3,2 и 5 т соответственно с ковшами
грузоподъемностью 2300 и 3500 кг и объемом 1,4 и 1,8 м3.
145
Рис. 68. Стрела-укосина
Стрелу-укосину применяют вместо вил на автопогрузчиках
для погрузочно-разгрузочных работ с разными штучными
грузами фасонной конфигурации (электродвигателями, отливками,
матрицами, контейнерами и т. д.), которые трудно перегружать
с помощью грузовых вил. Кроме того, ее применяют при
ремонтных работах и монтаже разного оборудования.
Стрела 1 (рис. 68), как вариант, представляет собой сварную
конструкцию коробчатого сечения, на которую с помощью
траверсы 4 и серег 2 навешена грузовая подвеска с крюком 3,
поворачивающимся в плане на 360°. Для фиксации грузовой подвески
на стреле применяют (как вариант) палец 5, который вставляют
в трубки 6, вваренные в горизонтальные пояса стрелы в местах
установленной грузоподъемности, отмеченной краской. Стрелу
своими верхними крюками навешивают на плиту подъемной
каретки, а внизу прикрепляют к ней двумя болтами.
Грузоподъемность стрелы на минимальном вылете Атп равна
номинальной грузоподъемности автопогрузчика на грузовых
вилах, а на максимальном вылете Атах она определяется исходя
из устойчивости автопогрузчика с запасом не менее 50%.
Клещевой захват применяют на автопогрузчиках
грузоподъемностью 3,2 и 5 т для погрузочно-разгрузочных работ и
штабелирования лесных материалов — дров и пакетов досок. К раме 3
(рис. 69, б) захвата на шарнире О подвешена плита 7 с вилами /
и лапа 2. Рама захвата закреплена на подъемной каретке
грузоподъемника вверху с помощью двух крюков 5, а внизу двумя
болтами, как это принято для крепления ковша (см. рис. 66, а).
146
Рис. 69. Клещевой захват для лесоматериалов:
а — кинематическая схема; б — конструкция; в — гидравлическая схема (в числителе
даны размеры захватов для автопогрузчиков грузоподъемностью 3,2 т, в знаменателе «*
грузоподъемностью б т)
С помощью двух гидроцилиндров 4 (см. рис. 69, б)
двустороннего действия плиту 7 с вилами 1 можно поворачивать около
шарнира О вниз на угол а ^ 35° (см. рис. 69, а) при захвате
груза и вверх на угол (5 ^^ 60° для транспортирования его. Лапу 2
(см. рис. 69, б) можно поворачивать около того же шарнира вверх
при загрузке-разгрузке захвата с помощью цилиндра 6
двустороннего действия. Поворот плиты 7 с вилами / при полностью
поднятой вверх лапе 2 обеспечивают переключением перепускного
клапана 8 (рис. 69, в), встроенного в гидравлическую систему.
Ниже приведена краткая характеристика захватов для
автопогрузчиков грузоподъемностью 3,2/5 т.
Грузоподъемность, кг 1800/3000
Расстояние по наружной стенке вил, мм 850/1160
Площадь поперечного сечения (в свету) при верхней
лапе, опущенной вниз, F, ма 0,5/1,0
Масса захватов, кг 500/650
147
Рис. 70. Универсальный захват для
цилиндрических грузов:
конструкция; б — гидравлическая
а
схема
Универсальный захват для цилиндрических грузов применяют
для транспортирования и штабелирования автопогрузчиком
цилиндрических по форме грузов: рулонов бумаги, бочек, машинного
оборудования в виде барабанов и т. п. С его помощью изделие
защемляется между лапами и может кантоваться в вертикальной
плоскости для штабелирования груза вертикально или
горизонтально.
Зажимают груз лапами 1 и 9 (рис. 70), шарнирно посаженными
на концах подвижного верхнего 2 и неподвижного нижнего
рычага S, благодаря действию гидроцилиндра 3 двустороннего
действия, шток которого шарнирно связан с концом рычага 2,
а корпус цилиндра с рамой 4. Опорой верхнего рычага на раме
служит точка О, а опорами для нижнего — одна из двух точек Ох
и закладной штырь 7. В зависимости от диаметра захватываемого
груза нижний рычаг переставляют, меняя точку его опоры.
Кантуют груз (поворачивают захват в вертикальной плоскости)
с помощью гидроцилиндра 10 двустороннего действия, корпус
которого опирается через шарнир на плиту 6, а шток соединен
с ползуном 11, скользящим на своих концевых опорах по
горизонтальной и цилиндрической направляющим. С движением штока
перемещается ползун, а с ним перемещается также укрепленная
на ползуне зубчатая рейка 12У которая поворачивает шестерню 5.
Таким образом, поворачивается захват в вертикальной плоскости
на угол 135° в ту и другую стороны.
148
Через пустотелую цапфу пропущены шланги для подвода
рабочей жидкости (масла) к цилиндру зажима груза.
Чтобы избежать выпадения зажатого лапами груза при разрыве
шланга, подводящего масло, к цилиндру зажима груза, в
гидравлическую систему его встроен обратный клапан 13.
Ниже приведена характеристика захватов автопогрузчиков.
Грузоподъемность:
автопогрузчиков, т ........ 0,5 1 2 3,2
захватов, кг 375 750 1500 2400
Расстояние до центра тяжести груза от
передней стенки плиты каретки, мм , . 480 600 840 1035
Диаметр захватываемого груза, мм:
наибольший 600 800 1100 1400
наименьший 200 400 600 800
Масса, кг 170 270 400 900
Кроме описанного рабочего оборудования имеется много
разных захватных приспособлений, применение которых вместо
грузовых вил значительно расширяет область использования
автопогрузчиков. Остановимся коротко на принципиальной
конструкции их без приведения размеров.
Поворотная каретка в вертикальной плоскости или кантователь
(рис. 71, а) предназначена для транспортирования
металлической стружки, скрапа, битого стекла и других отходов
производства, собранных в металлические короба и ящики. Иногда ее
применяют также для перевозки жидких грузов с опрокидыванием
тары в нужном месте. В этом случае к дну емкостей прикрепляют
скобы, в которые входят грузовые вилы.
Для автопогрузчиков грузоподъемностью 0,5—5 т
отечественная промышленность выпускает такие каретки нормализованными
с поворотом влево и вправо на угол 135° от вертикали. Они
устроены по типу универсального захвата для цилиндрических грузов
(см. рис. 70). Грузовые вилы прикрепляют болтами к такому же
вертикальному листу, который служит основанием для рамы
захвата.
Штыревой захват (рис. 71, б) предназначен для
транспортирования и складирования кольцеобразных по форме грузов
(автомобильных шин, бухт проволоки и обручного железа, кабельных
барабанов, отливок и т. п.). Стержень штыря выполняют из трубы,
которую приваривают к плите и устанавливают на подъемной
каретке.
Многоштыревой захват (рис. 71, в) предназначен для захвата
и транспортирования в горизонтальном положении бочек,
рулонов, мешков и т. п. Такой же примерно конструкции применяют
многоштыревой захват для группового транспортирования и
укладки в штабель коротких трубчатых изделий: керамических,
бетонных и асбоцементных труб (для телефонной сети) и т. п.
В отверстия их просовывают штыри.
149
в)
Специализированные захваты для бочек (рис. 71, г) применяют
для транспортирования и штабелирования их в горизонтальном
или вертикальном положениях. Бочки защемляют между лапами
захвата и, если нужно, кантуют в вертикальной плоскости на
угол более 90°. Для этого установлены два гидроцилиндра
двустороннего действия, причем шток кантующего цилиндра шар-
нирно связан с зубчатой рейкой, сцепленной с шестерней канту*
ющего механизма.
150
Рис. 71. Сменные захватные приспособления:
а — поворотная каретка; б — штыревой захват; в «*• многоштыревой захват; г — захват
для бочек; д >— боковой захват; е — сталкиватель; jw *=- захват для .железобетонных
труб; a » грейфер; и «• захват для кирпичей
Захват отечественной промышленностью не изготовляется.
Боковые неповоротные захваты (рис. 71, д) применяют для
транспортирования в горизонтальном положении и укладки
в штабель грузов в мягкой упаковке: хлопка, войлока,
шлаковаты, концов, кип из сена и т. п. Грузы зажимают между
горизонтальными лапами с помощью двух гидроцилиндров
двустороннего действия.
Для автопогрузчиков грузоподъемностью 0,5—5 т захваты,
выпускаемые отечественной промышленностью, нормализованы,
подъемное усилие захватов уменьшается примерно на 30%. На базе
этих захватов могут поставляться захваты для ящиков и для од-
ной-двух бочек. Для зажима таких грузов применяют шарнирные
лапы Независимо от конструкции лап их, с грузом или без груза,
можно смещать вправо или влево для точной укладки в штабель
или захвата груза из штабеля.
Сталкиватели (рис. 71, е) применяют при бесподдонном
транспортировании и штабелировании грузов, упакованных в тюки,
151
кипы и пакеты. С ними работают при грузовых вилах с
удлинителем или без него, а иногда и со стальным листом, положенным
на грузовые вилы, для более эффективной работы стшшивателя.
Сталкиватель устроен по типу «нюрнбергских ножниц», их
устанавливают горизонтально и закрепляют на спинке вил.
Спереди он оканчивается вертикально установленной решеткой,
необходимой для упора в сталкиваемый груз. При подх ате
груза на вилы сталкиватель сжат, а для сталкивания груза с вил
его выдвигают с помощью гидроцилиндра двустороннего действия.
Сталкиватели изготовляют для автопогрузчиков
грузоподъемностью 0,5—3,2 т.
Захваты для железобетонных труб (рис. 71, ж) применяют для
транспортирования и укладки секций труб для канализации. На
подъемной каретке закрепляют траверсу из двух швеллеров,
среди которых в конце на шарнире устанавливают поворотные
скобы-крюки, которые заводят в отверстия трубы. Отечественная
промышленность захват не выпускает.
Грейферы (рис. 71, з) применяют для погрузки из невысоких
штабелей насыпных грузов: каменного угля, песка, грунта,
формовочной земли, удобрения и т. п. Их подвешивают к стреле-
укосине, устанавливаемой на подъемной каретке. Сжатие и
раскрытие челюстей производят с помощью двух гидроцилиидров
двустороннего действия.
Захваты для кирпича (рис. 71, и) применяют для посадки
кирпича-сырца в туннельные печи на газовом топливе для обжига
и высадки из них кирпича после обжига, а также для погрузки-
разгрузки кирпича сплошным пакетом без поддонов при доставке
грузовыми автомобилями на стройку.
На время транспортирования подставные кирпичи у пакета
зажимаются прорезиненными шинами (отрезками шлангов),
утопленными сбоку вил и заглушёнными спереди. Воздух в шины
нагнетается компрессором. При транспортировании на обычных
вилах легких и с высоким центром тяжести грузов применяют
вилочный захват с верхним прижимом груза. Отечественная
промышленность изготовляет прижимы для автопогрузчиков
грузоподъемностью 0,5—5 т.
На отечественных тяжелых автопогрузчиках 4008 и 4028
применяют специализированное сменное рабочее оборудование
в виде грузового крюка 2 (рис. 72), клещевого захвата 3 и ковша-
грейфера 4. При большом объеме захватов для работы требуется
больший вылет, чем тот, который получается у обычного
автопогрузчика при наклоне рамы грузоподъемника вперед на полный
угол. Из-за этого устанавливают стрелу /, которая посередине
шарнирно опирается на подъемную каретку 6 через стойку 5,
а сзади конец стрелы шарнирно связывают жесткими тягами 7
(вожжами) с рамой шасси.
Грузоподъемность автопогрузчика при увеличенном вылете
груза и работе с крюком уменьшается вдвое (5 т). Автопогрузчик
152
Рис. 72. Автопогрузчик
грузоподъемностью 10 т
со сменным рабочим
оборудованием
крюком успешно применяют для разгрузки-загрузки
железнодорожных полувагонов. Применяя восьмимиллиметровый ветве-
вой строп, одновременно поднимают два железнодорожных
контейнера массой по 2,5 т каждый, стоящие в первом и втором рядах
на железнодорожной платформе.
Автопогрузчик с челюстным захватом в виде грейфера
используют для разгрузки полувагонов с круглым лесом (с торцовой
площадью захваченного груза до 0,82 м2). Захват имеет поворотное
устройство, позволяющее транспортировать пачку леса,
расположенную вдоль оси погрузчика (уменьшается необходимая ширина
проезда). На базе челюстного захвата создать грейферный ковш
(скелет захвата обшит стальными листами) объемом 2,3 м3 для
насыпных грузов с объемной плотностью до 2 т/и3. Коэффициент
заполнения ковша составляет: на щебне до 0,8, песке и каменном
угле до 1. С помощью ковша загружаются железнодорожные
полувагоны и платформы насыпными грузами. Движение челюстей
у захватов производится с помощью гидроцилиндра, корпус
которого на тягах подвешен к стреле а конец штока шарнирно
соединен с челюстями захватов и является опорой для вращения
последних.
3. Поддоны
Работа на автопогрузчиках с грузовыми вилами наиболее
эффективна при перегрузке штучных грузов, сформированных в
пакеты в таре и без тары, на специальных поддонах, которые могут
быть плоскими (рис. 73, а—г), стоечными (рис. 73, е) или
ящичного (рис. 73, д, ж, з) типа. Применение поддонов позволяет
улучшить также организацию хранения грузов на складах при
штабельном или стеллажном способах укладки.
Поддоны стоечного и ящичного типов позволяют применять
многоярусную укладку их, заменяя на складах стеллажи.
Плоские поддоны двух- (рис. 73, а) и чепгырехзаходные
(рис. 73, б) (для ввода вил с двух или четырех сторон); одно-
(рис. 73, б) и двухнастильные (рис. 73, а)\ с выступами или
без выступов с узкой стороны. Их изготовляют деревянными (на
винтах), металлическими (штампованными и сварными из
стальных листов или алюминиевыми—клепаными) или из пластмассы.
Размеры и номинальная грузоподъемность плоских поддонов
определены ГОСТ 9078—74. Поддоны грузоподъемностью 1 т
и размером в плане 800X1200 мм используют при смешанных
железнодорожно-автомобильных перевозках, а поддоны
грузоподъемностью 2 т, размером 1200 X 1600 мм для перевозок
преимущественно водным путем. Имеются также поддоны
грузоподъемностью 3,2 т, которые применяются реже из-за малой
долговечности.
Для международных перевозок применяют четырехзаходные
поддоны размерами 1000X1200, 800x1200 и 800x1000 мм, ко-
154
е)
Рис. 73. Поддоны:
с, г — плоские двухзаходные без колец и с кольцами; б — плоский четырехзаходный||
в —- плоский штампосварной; д — ящичный из проволоки; е» ж — ящичный и стоеч*
вый; з в- ящичный складной; и г— способы укладки Груза на поддоны
торые должны выдерживать нагрузку 1 тс и быть рассчитаны
на равномерно распределенную нагрузку 4 тс при укладке
штабеля в четыре яруса. Поддоны, применяемые также для
перемещения кранами (рис. 73, г) с кольцами для подхвата поддона,
стропами в углах, должны быть проверены на прочность для этого
случая. Для уменьшения сжимающих поддон усилий между
стропами вверху может быть установлена траверса в виде рамки.
В США, Англии, ФРГ и Голландии для перевозок
пакетированного груза железнодорожным транспортом принят поддон
размером 1000X1200 мм. Для морских перевозок применяют
поддоны 1200X1800 и 1200x1500 мм.
В отличие от плоских стоечные и ящичные поддоны
(ГОСТ 9570—73) снабжены стойками (рис. 73, ж) или съемными
бортами (рис. 73, ё). Размеры поддонов 835 X1240X(920 или
1150) и 1040x1240x1150 мм. Их выполняют металлическими или
деревянно-металлическими (деревянные борта, армированные
металлом); металлические выполняют из листов и фасонного
проката или сетчатыми. Иногда выполняют их складными
(рис. 73, з).
Укладка грузов на плоских поддонах может быть различной
(рис. 73, и).
Глава 7
РАБОЧЕЕ ОБОРУДОВАНИЕ
ОДНОКОВШОВЫХ ПОГРУЗЧИКОВ
1. Конструкция погрузочного оборудования
Погрузочное оборудование одноковшовых погрузчиков бывает
полуповоротного, комбинированного, перекидного и
фронтального типов. Полуповоротное оборудование характеризуется
угловой разгрузкой ковша в секторе =t:90Q по отношению к направлению
разработки материала. Погрузочное оборудование
комбинированного типа позволяет переднюю и заднюю разгрузку ковша.
Вследствие конструктивной сложности погрузчики с оборудованием
комбинированного типа применяют ограниченно. При
перекидном оборудовании материал загружается перед погрузчиком,
а разгружается сзади. Фронтальное оборудование,
обеспечивающее разгрузку ковша со стороны разработки материала,
отличается наибольшей конструктивной простотой, вследствие чего
получило широкое распространение. При оборудовании
фронтального погрузчика ковшом с боковой разгрузкой возможна
разгрузка материала на сторону по ходу движения машины.
.В современных конструкциях фронтального погрузочного
оборудования исключительное применение имеет
гидравлическое управление, обеспечивающее простоту привода, высокие
156
силовые параметры и долговечность. Гидропривод подъема и
опускания рабочего органа обычно осуществляется
непосредственным действием гидроцилиндров на стрелу. Технологические
движения рабочего органа для наполнения и разгрузки
осуществляются гидравлически с помощью поворотных механизмов.
^Поворотные механизмы отличаются большим разнообразием
кинематических схем и конструктивных исполнений.
Погрузочные механизмы можно классифицировать по
направлению действия ковшовых гидроцилиндров, системе слежения
и числу рычажных ступеней.
По направлению действия ковшовых гидроцилиндров при
выполнении основного движения рабочего органа —
запрокидывания—поворотные механизмы подразделяют на поршневой и
штоковый (табл. 12).
В процессе подъема стрелы различают механические и
гидравлические системы сохранения уровня ковша. При механической
системе сохранение уровня ковша достигается кинематически
с помощью рычажного механизма. Гидравлическая система
слежения имеет автоматический клапан, гидроцилиндр или другие
устройства, обеспечивающие порционную подачу жидкости в
соответствующую полость гидроцилиндров ковша и сохранение его
уровня при подъеме.
По характеру действия гидроцилиндров на рабочий орган
механизмы бывают безрычажные и рычажные. В безрычажных
механизмах гидроцилиндры управления прикреплены к стреле
и действуют непосредственно на рабочий орган. В рычажных
механизмах ковшовые гидроцилиндры установлены на раме
портала, и усилия на рабочий орган передаются через рычажный
механизм.
Рычажные механизмы могут быть одноступенчатые и
многоступенчатые. Одноступенчатые механизмы имеют в кинематиче-
ческой схеме по одному шарнирно-рычажному четырехзвеинику,
установленному между гидроцилиндрами управления и рабочим
органом. В многоступенчатых системах использовано несколько
передаточных четырехзвенников, преобразующих усилие
гидроцилиндров управления. Одноступенчатые и многоступенчатые
механизмы могут также отличаться расположением рычажных
четырехзвенников, гидроцилиндров и конструктивным
исполнением элементов оборудования.
Наиболее применимы для погрузочного оборудования
одноковшовых погрузчиков одноступенчатые поворотные механизмы
с механической системой слежения. При этом применяют два
основных вида оборудования: с перекрестным (I-A-1) и параллело-
граммным (П-А-1) рычажными механизмами (см. табл. 12).
Погрузочное оборудование с перекрестным поворотным
механизмом наиболее оптимально потому, что самая тяжелая
операция — запрокидывание ковша при наполнении — выполняется
поршневой полостью гидроцилиндров поворота при наибольшем
157
Таблица 12
Классификация поворотных механизмов погрузочного оборудования
Вид
поворотного
механизма
Система
слежения
и управления
рабочим
органом
Безрычажная
система
механизмов
Рычажная система механизмов
Одноступенчатая
Многоступенчатая
Поршневой (I)
Механическая (А)
Гидравлическая (Б)
V
Ц#
Поршневой (II)
Механическая (А)
Гидравлическая (Б)
Рис. 74. Погрузочное
оборудование одноковшового
погрузчика
усилии; разгрузка рабочего органа — штоковой полостью с
наименьшим временем. Кроме этого, у перекрестного механизма
наименьшее число шарниров и рычагов, а также лучший выглубля-
ющий эффект, разгружающий стреловые гидроцилиндры при
появлении внешних нагрузок на рабочем органе; он хорошо
скомпонован и виден с пульта управления. При недостаточном зазоре
между рамой и ходовой частью применяют параллелограммный
механизм с расположением рычажной системы сверху стрелы.
Рассмотрим подробнее конструкции разгрузочного
оборудования с перекрестным поворотным механизмом. Рабочий орган /
(рис. 74) шарнирно установлен на стреле 4. Поворачивается он
относительно стрелы посредством механизма, состоящего из
159
тяги 2 и коромысла 3, на которое действует ковшовый
гидроцилиндр. Шарнирные соединения элементов выполнены на
шарнирных подшипниках 5 или подшипниках скольжения.
Основным силовым элементом погрузочного оборудования
является стрела.
Стрела служит для передачи рабочему органу напорных
движений погрузчика, а также подъемных и заглубляющих усилий.
Кроме этого, она поднимает для разгрузки рабочий орган с грузом
на определенную высоту.
Стрелы погрузчиков выполняют однобалочной и двухбалочной
конструкции. Однобалочные стрелы применяют в основном на
легких пневмоколесных погрузчиках фронтального и
полуповоротного типов. Конструктивно их выполняют в виде хребтовых
балок коробчатого сечения, которые по концам для крепления
к порталу и рабочему органу имеют развитые кронштейны с
отверстиями для шарнирного соединения, располагаемыми на
расстоянии, в 2—3 раза превышающем ширину балки стрелы.
Поворотные механизмы располагают на хребтовой балке или, как
делают на зарубежных погрузчиках некоторых типов, применяют
гидравлическую систему слежения за уровнем ковша.
Стрелы однобалочных конструкций отличаются сложностью
и большей металлоемкостью по сравнению со стрелами двухбалоч-
ных конструкций.
Двухбалочные стрелы (рис. 75) имеют два симметричных
продольных лонжерона /, которые расположены на определенном
расстоянии один от другого и передают нагрузки от рабочего
органа непосредственно порталу. Чем больше расстояние между
лонжеронами, тем стрела больше приспособлена к восприятию
несимметричных нагрузок и в меньшей степени подвергается
действию моментов кручения.
Лонжероны стрелы коробчатого сечения изготовляют из
листового материала. Стрела со сварными коробчатыми лонжеронами
обладает меньшей металлоемкостью при равной прочности, чем
стрела из листового материала, однако она сложней в
изготовлении. Конструктивно каждый коробчатый лонжерон выполнен
из наружной 5 и внутренней 6 боковин, к которым сверху и снизу
приварены нижний 4 и верхний 2 пояса. Но учитывая, что
наибольшие напряжения возникают в углах коробчатого сечения,
прочность подобной стрелы существенно зависит от качества
угловых сварочных швов. Наиболее целесообразно изготовлять
коробчатые лонжероны из двух штампованных листовых боковин,
сваренных между собой по оси лонжерона.
В современных конструкциях погрузчиков в настоящее время
широко применяют листовые лонжероны. Однако их применение
ограничивается толщиной листового проката (60—70 мм).
В средней части или ближе к рабочему органу лонжероны
связаны между собой поперечной балкой 7 прямоугольного или
круглого сечения. В большегрузных погрузчиках для облегче-
160
9 8 7
Рис. 75. Двухбалочная стрела
ния монтажно-демонтажных работ по смене рабочих органов
применяют двухбалочные стрелы без поперечной связи. В этом
случае жесткость стрелы достигается за счет рабочего органа,
для связи с которым лонжероны имеют втулки увеличенной длины.
Для прочности связи поперечную балку соединяют с наружными
и внутренними боковинами лонжеронов или усиливают местными
накладками, чтобы уменьшить концентрации напряжения в этой
зоне.
На концах стрелы приварены стаканы для устройства в них
шарниров, из которых одни 3 служат для крепления стрелы с
порталом и другие 9 — для установки на стреле ковша. Внутрь
каждого стакана запрессовывают шарнирные подшипники (типа
ШС) или цилиндрические сменные втулки, устанавливаемые
с двух сторон. Твердость рабочих поверхностей сменных втулок
должна быть равной HRC 40—45; твердость пальцев принимают
в пределах HRC 50—55. При подобном соотношении твердостей
в процессе эксплуатации будут изнашиваться втулки, замена
которых не представляет особых трудностей.
Кроме этого, стрела оборудована проушинами для шарнирного
крепления поворотных механизмов и стреловых гидроцилиндров.
Стрела погрузчика со стороны рабочего органа на двух
лонжеронах имеет лыжи 8 для передачи части нагрузки непосредственно
на грунт при выглублении ковша. Однако в последнее время их
6 А. Ф. Базанов, Г. В. Забегалов 161
Вид Б
Рис. 76. Конструкции поворотных механизмов:
а *- перекрестного; б *=* параллелограммного
сохраняют преимущественно на гусеничных погрузчиках. На
стрелах колесных погрузчиков лыжи устанавливают редко.
При этом поднимают шарнир крепления ковша к стреле над
опорной поверхностью на 150—300 мм в зависимости от
типоразмера погрузчика, в результате чего повышается наполняемость
ковша путем более глубокого проникновения его в штабель
материала.
Поворотные механизмы управления рабочим органом
выполняют сварной конструкции.
Обычно для уменьшения массы и удобства конструктивного
исполнения погрузочное оборудование имеет два симметричных
поворотных механизма, которые расположены снаружи или
внутри стрелы. Внутреннее размещение механизма
предпочтительнее (см. рис. 74), так как в этом случае увеличивается расстояние
между лонжеронами стрелы и механизм защищен стрелой от
внешних повреждений.
На легких колесных погрузчиках часто устанавливают один
ковшовый гидроцилиндр, который по диаметру унифицирован
со стреловыми гидроцилиндрами. В этом случае конструкция
коромысла усложняется, верхний рычаг соединяют с
гидроцилиндром и два нижних рычага —с шарнирным креплением
поворотных тяг.
Конструктивное исполнение поворотных механизмов зависит
от принятой кинематической схемы его.
Перекрестный поворотный механизм (рис. 76, а) выполняют
в виде коромысла 3, который свободно качается на пальце 7,
162
закрепленном на стреле. Коромысло изготовляют преимущественно
из толстолистового проката. Верхним и нижним плечам
коромысла придают форму балок равного сечения. Верхнее плечо
коромысла пальцем 6 соединено с ковшовым гидроцилиндром,
нижнее — пальцем 8 с тягой 2. Верхняя и нижняя головки
могут быть выполнены в виде вилок, созданных с помощью одного
дополнительного кронштейна 5 или двух кронштейнов (см. рис, 75),
привариваемых к телу коромысла. Тягу перекрестного механизма
обычно выполняют прямоугольного профиля из листового
металла.
Параллелограммный механизм (см. рис. 76, б) располагают
обычно в плоскости продольных лонжеронов стрелы. Для этого
качающийся рычаг выполняют из двух щек 9 (наружной и
внутренней), которые охватывают тело лонжерона стрелы с двух
сторон.
Щеки между собой связаны поперечной обечайкой 10.
Нижней головкой рычаг с помощью пальца 4 прикреплен к лонжерону
стрелы, средним шарниром 6 прикреплен к гидроцилиндру
поворота, верхним шарниром 8 связан с тягой 2. Другим своим
концом посредством пальца / тяга прикреплена к рабочему органу.
Рабочие поверхности шарниров поворотных механизмов
делают калеными или с применением шарнирных подшипников.
В последних конструкциях погрузчиков широко применяют
уплотнения шарнирных соединений стрелы и поворотных
механизмов специальными манжетами (см. рис. 75) или круглыми
резиновыми кольцами, установленными в сменных втулках.
Уплотнения предохраняют шарнирные соединения от попадания
абразивных материалов и увеличивают их срок службы.
2. Сменное рабочее оборудование
Обычно одноковшовые погрузчики предназначены для работы
с основным ковшом, что предопределяет компоновку,
конструкцию и параметры машины.
Сменным называют рабочее оборудование, которое навешивают
на стрелу взамен основного ковша для расширения области
применения погрузчика и повышения эффективности его
использования. Погрузчики, имеющие комплект рабочих органов и
приспособленные для работы с ним, считают универсальными.
Известная в настоящее время номенклатура сменных рабочих
органов, разрабатываемых в отечественной и зарубежной
практике очень велика (см. рис. 27). Однако наиболее широко
применяют сменное оборудование нескольких видов (табл. 13).
Кроме сменного рабочего оборудования гусеничные и
колесные погрузчики грузоподъемностью 4—40 т агрегатируют
рыхлители заднего расположения.
Сменное рабочее оборудование приспособлено к существующей
конструкции погрузчика с учетом его грузоподъемности и осо-
6* 163
Таблица 13
Рекомендуемая номенклатура сменного рабочего оборудования
для одноковшовых погрузчиков по типоразмерам
Сменное
рабочее
обору довение
ПК-0,63
+
—
+
—
—
4-
—
4-
4-
—
—
4-
—
+
+
+
ч-
+
+
+
+
+
ПК-2
ч-
ч-
—
+
ч-
ч-
ч-
ПГ-2
+
+
+
.4-
4-
4-
пк-з
ч-
ч-
—
ч-
4-
ч-
4-
пг-з
+
+
+
•+
+
ч-
ik
+
+
+
+
ч-
ПГ-4
+
+
+
+
+
+
ik
+
+
—
+
+
+
ч-
ПГ-6
ч-
Ч-
ч-
4-
4-
4-
4-
i
4-
+
—
—
—
-
—
ПГ-10
+
ч-
—
-
—
—
ч-
—
—
—
—
ПГ-15
+
—
—
—
—
ПК-25
+
—
—
—
—
—
Основной
ковш,
увеличенный и
уменьшенный,
скальный, с
принудительной
разгрузкой
Двухчелю-
стной ковш
Ковш с
боковой
разгрузкой
Грузовые
вилы
Крановая
безблочная
Челюстной
захват для
лесоматериалов и
длиномер-
ных грузор
Монтажно-
поворотный
захват
Примечание. ПК — условное обозначение колесного погрузчика; ПГ —
гусеничного; цифры в марках 0,63...40 обозначают грузоподъемность погрузчика в тоннах.
бенности исполнения погрузочного механизма; пэльцы
шарниров стрелы выполняют одинаковыми, что позволяет быстро
заменять одно оборудование другим без применения
грузоподъемных средств одним-двумя рабочими в течение 10—30 мин в
зависимости от типоразмера погрузчика. Существуют устройства
для быстрой замены рабочего оборудования, навешиваемого
на стрелу на промежуточной рамке, которая позволяет
монтировать и демонтировать оборудование с пульта управления
погрузчика; их применяют на погрузчиках малогабаритных и
легких типоразмеров.
Заводы-изготовители поставляют сменное рабочее
оборудование по особым заказам потребителей.
Рассмотрим подробнее конструкции наиболее
распространенного и перспективного сменного рабочего оборудования.
164
Ковши различных объемов разрабатывают для погрузчиков
с целью лучшей их загрузки по грузоподъемности и повышения
производительности при разработке материалов различной
объемной массы. Основной ковш (рис. 77, а) применяют при
разработке сыпучих и кусковых строительных материалов (песка,
щебня, гравия и др.) с объемной массой 1,4—1,8 т/м3 и
материковых грунтов I—II категории. Ковш (рис. 77, б) увеличенного
объема предназначен для погрузки легких материалов (опилок,
шлака, каменного угля и др.) с объемной массой до 1,4 т/м3.
Ковш (рис. 77, в) уменьшенного объема используют при
разработке тяжелых материалов и полезных ископаемых с объемной
массой 1,9—2,5 т/м3, а также слежавшихся и смерзшихся
материалов. Для выполнения работ на погрузке полезных
ископаемых объемной массой свыше 2,5 т/м3 в зависимости от кусковато-
сти применяют скальные ковши меньшего объема и повышенной
прочности.
Основной, увеличенный и уменьшенный ковши конструктивно
подобны, различаются лишь формой профиля и шириной. Для
11 \0
Рис. 77. Ковши различного объема:
а а» основной, б «м уведиченнвгй; в *» уменьшенный
165
наибольшей унификации ковшей одного типоразмера создают
ковши с использованием одинаковых деталей. Основной и
уменьшенный ковши стремятся унифицировать по профилю и его
деталям (боковым стенкам, ножам, ребрам жесткости, зубьям и др.);
различаются они шириной ковша. Основной и увеличенный ковши
имеют одинаковую ширину и унифицированные режущие кромки,
нижнюю и верхнюю балки.
Профиль ковша образуется основным листом <?, который имеет
плоскую заборную часть, закругленное днище, переходящую
в заднюю стенку, и козырек 4. С двух сторон к основному листу
приварены боковые листы 6. Основной лист и боковые листы
армированы передней 10 и боковыми 5 режущими кромками из
износостойкой стали. Передняя режущая кромка может быть
прямоугольной, треугольной и трапецеидальной формы.
Треугольная и трапецеидальная режущие кромки применяют на
уменьшенных и скальных ковшах. Сзади ковша по всей ширине
расположены нижняя 9 и верхняя 3 поперечные балки. Их
изготовляют из уголка, прямоугольного или специального профиля.
Нижняя балка обычно имеет более прочное сечение, так как
через нее в основном передается напорное усилие погрузчика.
Нижняя и верхняя балки соединены вертикальными ребрами,
в которых смонтированы шарнир 1 крепления ковша к стреле
и шарнир 2 крепления поворотной тяги. Снизу заборная часть
основного листа усилена продольными накладками,
устанавливаемыми между режущей кромкой и нижней балкой. Для
основного и уменьшенного ковшей иногда устанавливают ребра 7
жесткости внутри ковша, выполняемые из уголкового профиля.
Защитный козырек 4 целесообразно выполнять в виде
пространственной конструкции, увеличивающей его прочность.
Заднюю стенку для большей жесткости усиливают вертикальными
листовыми ребрами, связывающими верхнюю балку с козырьком.
Основной и уменьшенный ковши оборудуют зубьями 2/,
которые могут быть приварены к режущей кромке или
установлены на болтах. Наиболее прогрессивным констру ктивным
решением является применение сборных зубьев.
Основание зуба специальной формы приваривают к режущей
кромке, В передней части на него надевают съемный наконечник,
который фиксируют быстросъемным поперечным пальцем или
чекой. Напорные усилия передаются наконечнику
непосредственно через основание, на котором он плотно установлен. Палец
или чека фиксируют наконечник в заданном положении. Палец
и чеку делают разрезными, отдельные половинки которых
соединяют резиновой прокладкой. Вследствие специальной формы их
и упругости резиновых прокладок палец или чека надежно
удерживаются в гнезде основания.
Использование сборных зубьев на погрузчиках позволяет
применять наконечники различной формы в зависимости от условий
назначения и решить вопрос их быстрой замены при износе*
166
Двухчелюстный ковш является универсальным и может быть
использован для погрузки сыпучих материалов с объемной массой
1,4—1,8 т/м3 и послойной разработки материковых грунтов,
включая грунт II категории. Он сочетает в себе четыре рабочих
органа: ковш, неповоротный бульдозер, скрепер и грейфер.
Двухчелюстной ковш (рис. 78) состоит из бульдозерного
отвала 7 и подвижной челюсти 5. Бульдозерный отвал шарнирами /
прикреплен к стреле, а шарнирами 2 к поворотному механизму
ковша. Основной лист 10 отвала, с тыльной стороны усиленный
продольным грутым листом 9, внизу переходит в подножевую
плиту. К подножевой плите на болтах прикреплены съемные
ножи 12 с двусторонней режущей кромкой. В верхней части лист 10
переходит в отражательный козырек. С боков он усилен
боковыми стенками //, в которых размещены шарниры 6 для
установки подвижной челюсти. По краям листа 10 вертикальными
ребрами образованы два кармана, в которых расположены
гидроцилиндры 8 двойного действия для управления челюстью.
Подвижная челюсть подвешена на отвале на двух шарнирах 6.
Она имеет две боковые стенки 16 с выходящими консолями для
крепления гидроцилиндров; внизу стенки связаны днищем 15,
которое обычно делают двойным. Спереди стенки 16 снабжены
боковыми режущими кромками 19.
Днище по всей ширине армировано передней 18 и задней 14
режущими кромками. Боковые стенки по треугольному контуру
усилены боковыми накладками. На передней режущей кромке 18
болтами прикреплены съемные зубья 17. Сзади с двух сторон
приварены зубчатые накладки 13 для удержания челюстью балок
или деревьев при очистке площадок от строительного мусора.
Для управления гидроцилиндрами на ковше имеется разводка 3
трубопроводов. Полости гидроцилиндров 8 соединены между собой
перепускным клапаном 4, который срабатывает тогда, когда
по недосмотру водителя ковш внедряется в грунт с неполностью
закрытой челюстью.
Двухчелюстным ковшом с раскрытыми челюстями можно
проводить землеройно-транспортные и планировочные работы
бульдозерным отвалом (рис. 79, а). Ковш с закрытой подвижной
челюстью может быть использован как обычный ковш с
разработкой материала передней кромкой (рис. 79, б). При этом
материал может разгружаться поворотом всего ковша или раскрытием
челюсти. В последнем случае увеличивается высота разгрузки.
Раскрыв челюсти и откинув подвижную челюсть до отказа
вперед, можно выполнять грейферные работы (рис. 79, в) по
подбору куч материала, разрушенных кирпичных кладок,
балок и др. В таком положении ковш опускают на материал, затем
одновременно включают гидроцилиндры запрокидывания ковша
и замыкания подвижной челюсти.
Для выполнения скреперных операций по послойной
разработке грунта или материала подвижную челюсть слегка приоткры.
167
17 16 15 Я' 13
Рис. 78. Двухчелюстной ковш
12
368
Рис. 79, Схема выполнения работ двухчелюстным ковшом:
а — бульдозерных; б ^ погрузочных; в —= грейферных; г •=- скреперных
вают (рис. 79, г). Слой грунта, срезаемый ножом бульдозера,
поступает в ковш до полного его наполнения. Затем подвижную
челюсть замыкают и грунт транспортируют к месту отсыпки.
Разгружать грунт можно в транспортное средство или послойно
при частично раскрытой челюсти и заднем ходе погрузчика.
Основными работами, эффективно выполняемыми двухчелюстным
ковшом, являются погрузочные и бульдозерные; грейферные и
скреперные работы носят вспомогательный характер.
Ковш с боковой разгрузкой применяют для разработки
сыпучих и кусковых строительных материалов с объемной массой 1,4—
1,8 т/м3 и устанавливают преимущественно на гусеничные
погрузчики для исключения их маневрирования при разгрузке
и сохранения покрытия рабочей площадки.
На промежуточной раме / (рис. 80) шарнирно установлен
ковш 2, который поворачивается для разгрузки одним
гидроцилиндром 6. Рамка выполнена из проката прямоугольной формы.
Сзади к ней приварены вертикальные стойки, в которых
имеются шарниры для прикрепления к погрузочному оборудованию
погрузчика. С правой стороны по ходу движения погрузчика
размещают боковой шарнир поворота ковша. Ковш имеет плоскую
заборную часть, закругленное днище и заднюю стенку,
переходящую в козырек.
Спереди заборной части и боковой стенки ковш оборудован
режущими кромками. Передняя режущая кромка связана с
задней поперечной балкой полосовыми обечайками. К©вш имеет
одну боковую стенку; со стороны разгрузки днище ковша
выполнено в форме вытянутого лотка. Поэтому ковш с боковой
разгрузкой несимметрично расположен относительно продольной
оси погрузчика.
Для удержания ковша при внедрении в материал он
оборудован фиксатором. Фиксатор 3 выполнен в виде крюка
специальной формы, который удерживает ковш за скобу и автоматически
устанавливается пружиной 4 в запертое положение. Для вывода
крюка фиксатора из зацепления использован дополнительный
гидроцилиндр 5 одностороннего действия, который соединен
с поршневой полостью гидроцилинра поворота и автоматически
169
•я
о
I
о
I
о
а
срабатывает при повороте
ковша на разгрузку Угол
поворота ковша при
разгрузке составляет 50—60°.
Применение ковша с
боковой разгрузкой
увеличивает производительность
погрузчика на 10—15% в
результате сокращения времени
цикла и путей
маневрирования.
Ковш с принудительной
разгрузкой является
универсальным рабочим органом,
предназначенным не только
для разработки сыпучих,
липких и связных
материалов, но и для выполнения
бульдозерных работ (рис. 81).
Ковш состоит из корпуса /,
выталкивателя 2,
гидроцилиндров 3 управления и
рычажных механизмов 4.
Корпус ковша состоит из
двойного днища 5,
внутренняя сторона которого имеет
специальную форму, двух
боковых стенок 6,
соединенных в верхней части
поперечной балкой 5. Сзади днище
ковша и поперечная балка
связаны вертикальными
стойками, в которых
размещаются шарнир 9 крепления
корпуса к стреле и
шарнир 10 поворотного
механизма, а также
гидроцилиндры 3 с рычажными
механизмами 4.
Выталкиватель подвешен
в корпусе на шарнирах,
которые прикреплены к
верхней поперечной балке.
Выталкиватель изготовлен из
стального листа, который
в верхней и нижней части
усилен продольными
балками. В нижней балке
170
выталкивателя на шарнирах 11 закреплены три подгребающих
ножа 7, которые улучшают очистку ковша, компенсируют
возможные неточности изготовления и местные деформации днища.
Два двухзвенных рычажных механизма расположены на
расстоянии один от другого. Каждый механизм одной стороны
прикреплен шарнирно на корпусе, другой — на выталкивателе.
На рычаг, связанный с выталкивателем, действует гидроцилиндр
управления, другой конец которого шарнирно закреплен на
корпусе.
При крайнем заднем положении (положении /) выталкивателя
образуется ковш, приспособленный для выполнения
погрузочных работ. Наполняется ковш обычными способами: внедрением
его в материал с одновременным запрокидыванием. После
подъема на необходимую высоту ковш опрокидывают (до угла 8р =;
= 5° к горизонту) и выдвижением выталкивателя материал
выгружают.
При выдвинутом положении (положении //) выталкивателя
на уровне земли возможно выполнение ковшом бульдозерных
работ; при этом рычажные механизмы, кинематически
установленные враспор, передают внешние нагрузки непосредственно
корпусу ковша, разгружая гидроцилиндры управления.
Применение на погрузчике ковша с принудительной
разгрузкой позволяет увеличивать высоту разгрузки (на Д#) и вылет
(на AL), а также угол запрокидывания рабочего органа (на 5—
10°) по сравнению с основным ковшом; кроме этого, повышается
производительность погрузчика на 10—12% путем лучшего
наполнения ковша и сокращения времени рабочего цикла.
Грузовые вилы устанавливают на погрузчик для выполнения
погрузочно-разгрузочных и транспортных работ с тарными и
штучными грузами.
Рамка 1 (рис. 82) вил изготовлена из двух поперечных
брусьев прямоугольного сечения, связанных по краям листовыми
щеками и вертикальными стойками, в которых устроены шарниры
крепления ее к погрузочному механизму машины. Кроме этого,
внутри рамки между брусьями установлены дополнительные
стойки. Неподвижные оси 3 одной стороны крепят к
дополнительным стойкам, другой — к наружным щекам. От поперечного
смещения оси фиксируют оседержателями. На осях шарнирно
устанавливают вилы 4, которые спинкой упираются в нижний
брус.
Для работы с грузами различных габаритных размеров вилы
имеют различные положения (расстояние между вилами меняют
от Опт Д° Стах)> которые фиксируют чекой 2. Известны и другие
конструкции бесступенчатой фиксации вил. Возможна установка
верхнего прижима грузов, которым управляют отдельным
гидроцилиндром двустороннего действия.
Крановую безблочную стрелу применяют на погрузчике для
выполнения погрузочных и строительно-монтажных работ.
171
Рис. 81. Ковш с принудительной разгрузкой:
а ~~ конструкция; б — схема установки на погрузчике; / ■» исходное положение выталкивателя; // — положение пг>и разгрузке
72Л5Ф 5 Б А-А
Рис. 82. Грузовые вилы
К поперечной трубе (рис. 83) по краям приварены проушины 3
для крепления к стреле и поворотным механизмам. В средней
части трубы установлена консольная балка / равного сечения
в вертикальном и горизонтальном направлениях. На конце балки
прикреплена неподвижно серьга 2, на которой свободно
подвешена подвижная стремянка с траверсой. На траверсе установлен
упорный шарикоподшипник, на котором через шайбу и гайку
подвешен грузовой крюк. При подобной повеске крюк может
вращаться на 360°.
Челюстной захват используют на погрузке и штабелировании
деловой древесины и хлыстов на лесных складах, а также при
174
Рис. 83. Крановая безблочная стрела
перемещении труб, строительных конструкций на объектах
различного назначения.
Челюстной захват (рис. 84) конструктивно выполнен в виде
двух клыков 6, соединенных между собой нижней 1 и верхней 2
поперечинами. В верхней части клыков размещены шарниры 4,
на которых установлен подвижный прижим 5 специальной формы.
Управляют прижимом одним или двумя гидроцилиндрами 3
двустороннего действия, шарнирно установленными на нижней
поперечине.
В зависимости от назначения захвата форму клыков и
прижимов можно изменять: для круглых бревен и хлыстов применяют
округленные клыки; для пиломатериалов и строительных
конструкций — прямоугольные.
Монтажно-поворотный захват предназначен для захвата,
транспортирования и установки в вертикальном положении с
опусканием в заготовленную яму столбов и опор сетей энергоснабжения,
связи и освещения, доставки со складов и подачи копровым
установкам свай, разгрузки и складирования длинномерных
изделий и конструкций различной формы.
175
Рама 1 (рис. 85) захвата выполнена в виде двух L-образных
стоек для крепления к стреле и поворотным механизмам. В
передней части стойки имеют объемную поперечную связь; снаружи
в нижней части стоек расположены две горизонтальные проушины,
в которые устанавливают палец для избирательного бокового
поворота на шарнирах 3 и 5 люльки 2 на левую или правую
сторону.
Металлоконструкция люльки 2 состоит из двух грузовых
вилок, связанных нижней и задней поперечными связями,
обеспечивающими пространственную жесткость ее. В верхней части
каждой вилки шарнирно закреплена лапа 7 с прижимной
площадкой 6, устанавливаемой, на пальце. Каждая лапа управляется
гидроцилиндром 8 двустороннего действия, который прижимает
изделия во время транспортирования и вертикальной установки.
Лапы не имеют жесткой связи между собой, что, способствует
лучшему удержанию изделий различной формы. На лапах и их
176
Рис. 84, Челюстной захват
стойках установлены сменные фрикционные накладки 10 (дерево,
резина или пластмасса) для лучшего удержания изделий во всех
положениях. Для предотвращения падения изделий при
нарушении герметичности подводящих трубопроводов и ослабления лап
при утечках жидкости в распределителе в поршневые полости
гидроцилиндров прижимных лап установлены гидрозамки 9;
кроме этого, поршень этих гидроцилиндров на штоках
целесообразно устанавливать через тарельчатые пружины.
Боковой поворот каждой люльки относительно рамы
осуществляется посредством гидроцилиндра 4 двустороннего действия
в левую или правую сторону по ходу погрузчика с центром
вращения, смещенным относительно продольной оси погрузчика.
Угол поворота люльки в каждую сторону составляет 100—110°.
Для возможности избирательного поворота люльки головку
штока гидроцилиндра переставляют вручную в левый или правый
шарнир. Для этого гидроцилиндр установлен на центральном
шарнире, через который подводится в полости рабочая жидкость.
Для безопасности проведения работ и в связи с
несимметричностью приложения нагрузок грузоподъемность монтажно-по-
воротного захвата следует принимать на 25—35% ниже
номинальной грузоподъемности погрузчика.
177
Вид А
6 7
Рис. 85. Монтажно-поворотный захват
Часовая производительность погрузчика с этим захватом на
установке столбов линии электропередачи при 85-метровом
переходе между опорами составляет 12—15 опор.
На погрузчиках часто применяют рыхлитель, который
устанавливают не на стрелу, а на заднюю часть рамы погрузчика.
Глава 8
КОНСТРУКЦИИ РАМ И ПОРТАЛОВ;
ОДНОКОВШОВЫХ ПОГРУЗЧИКОВ
1. Конструкции рам
В зависимости от типа применяемого базового шасси
погрузчики имеют различные конструктивные исполнения рам и
порталов для агрегатирования погрузочного оборудования.
У одноковшовых погрузчиков различают два основных типа
рамных конструкций: цельносварную раму и съемный портал.
Цельносварную раму применяют для специальных шасси и гу-
178
a
A-A
Б-5
Рис. 86. Полурамы шасси погрузчика:
/ — грузовая (передняя); // — моторная чзадняя); / — шарнир стрелового цилиндра;
2 — опоры для переднего моста; 3 — шарнир ковшового гидроцилиндра; 4 — шарнир
для крепления стрелы 5,6 — верхняя и нижняя опоры вертикального шарнира; 7 —«
кронштейн для крепления кабины; 8 — кронштейны для крепления балансирной
подвески заднего моста; 9 — буфер; 10 — опоры для радиатора; 11 — опоры для
двигателя; 12 — кронштейн для коробки передач; 13 — проушины крепления ^идроцилиндра
для складывания полурам, 14, 18 — шарнирные подшипники; 15 —=- радиально-упорные
подшипники; 16, 17 — вертикальные шкворни
сеничных тракторов, когда базовые шасси специально компонуют
для работы с погрузочным оборудованием. В цельносварной раме
наиболее полно учтены требования и конструктивные особенности
установки основных агрегатов, что позволяет путем более
продуманного конструирования лучше распределить напряжения
в металлоконструкции и обеспечить меньшую ее металлоемкость.
Рассмотрим конструкцию рамы специального шасси для
погрузчика с шарнирно-сочлененной системой поворота.
Цельносварная рама (рис» 86) для монтажа рабочего оборудования в этом
179
случае выполнена в виде двух полурам: грузовой / и шарнирно
соединенной с ней с задней // полурамой.
Грузовую полураму изготовляют из листового проката и
гнутого профиля различной формы. В передней части грузовой
полурамы расположены опоры 2 для крепления переднего моста,
связанные поперечной балкой.
В соответствии с размерной схемой, обусловленной
кинематикой рабочего оборудования, располагают шарниры крепления
стрелового 1 и ковшового 3 гидроцилиндров, а также стрелы,
кронштейны которых приварены к вертикальной стенке. Стенка
сверху и снизу укреплена поперечинами, которые диагональными
и продольными связями приварены к передней балке, образуя
единую металлоконструкцию. Сзади стенка усилена листом,
к которому прикреплены два кронштейна для шарнирного
соединения полурам. Шарниры полурам имеют общую вертикальную
ось и располагаются одна от другой на расстоянии не менее 500 мм.
Конструкции шарнирных соединений полурам выполняют
различным способом. В конструкции, представленной на рис. 86,
верхнее шарнирное соединение обеспечивает передачу
вертикальных и горизонтальных усилий, для чего устанавливаются два
радиально-упорных 15 и один шарнирный подшипник 14. На
вертикальном шкворне 17 нижнего шарнира размещен только
шарнирный подшипник 18, который компенсирует неточности
изготовления и обеспечивает передачу в основном горизонтальных
нагрузок. В некоторых конструкциях погрузчиков в шарнирном
соединении, передающем вертикально-горизонтальные усилия, на
шкворне устанавливают два конических подшипника.
Другое шарнирное соединение имеет шарнирный подшипник
или цилиндрическую втулку.
Полураму для двигателя изготовляют из продольных
лонжеронов, соединенных поперечными связями спереди в зоне
крепления моста и буфером сзади. На полураме имеются опорные
кронштейны для установки двигателя и его агрегатов, коробки
передач, кабины, узлов управления, баков и др.
Цельносварная жесткая рама специальных шасси погрузчиков
с поворотными колесами для маневрирования отличается от
описанной отсутствием вертикального поворотного шарнира и тем,
что продольные лонжероны из швеллера или гнутого профиля
листового проката расположены по всей длине погрузчика.
Лонжероны шасси сзади соединены буфером, в средней части —
поперечными связями для балансирного крепления заднего
ведущего моста, а спереди — рамой для крепления погрузочного
механизма.
Особый интерес представляет конструкция цельносварной рамы
шасси гусеничного погрузчика. В этом случае вертикальные
стойки 2 и 8 (рис. 87) определенного профиля рамы, выполненные
из толстолистовой стали, соединены в средней части стенкой,
а сзади ведущим мостом. В нижней части они связаны поперечной
180
10
Рис. 87. Конструкция рамы гусеничного погрузчика:
/ — задний мост, L, 8 — стойка портала, 3 «~ место крепления стрелового гидроци*
линдра; 4,5 — шарниры крепления стрелы и ковшового гидроцилиндра; 6 —•>
поперечная балка; 7 — опора для креплен \я коробки передач; 9 «- кронштейн для крепления
двигателя; 10 — защитный лист; 11 — поперечная балка; 12 «■ задний опорный
кронштейн для крепления гусеничной тележки
балкой 11 и силовым кожухом 10 для защиты картера двигателя.
Сзади рамы имеются кронштейны для установки кабины и
рабочего места водителя; на внутренних поверхностях предусмотрены
кронштейны 7 и 9 для крепления двигателя, агрегатов
трансмиссии и других узлов. Шарнирные отверстия для установки
стреловых 3 и поворотных 5 гидроцилиндров и стрелы 4 размещены
на раме в зоне задней стенки и укреплены местными усиливающими
элементами.
Таким образом, образована единая монолитная конструкция
рамы, которая обеспечивает необходимую прочность и
жесткость. К поперечной балке 11 и кронштейнам 12 заднего моста 1
жестко прикреплены гусеничные тележки.
2. Конструкция порталов
Порталами называют сварные основания, применяемые для
шарнирного соединения с ними стрел вместе с гидроцилиндрами
для подъема последних и поворота ковшей. Основания устана-
181
Рис. 88. Портал для гусеничного погрузчика:
1 — передняя опора; 2, 3 —шарниры для крепления ковшового гидроцилиндра и егрелт;
4 — шарнир для етрелового гидроцилиндра; 5 » шарнир крепления портала; 6 ** лист?
7 — поперечная балка; 8 «** лонжероны рамш трактора; 9 *» силовая стойка; 10 -^ задняя
опора
вливают и крепят на рамах самоходных шасси и тракторов.
По конструкции они сложнее у тракторных погрузчиков, когда
горизонтальная связь между правой и левой стойками их
(поперечная балка) должна проходить выше капота двигателя.
Поэтому такие основания и получили названия порталов.
Рассмотрим типовую наиболее часто применяемую
конструкцию портала (рис. 88). На раме трактора или поперечной балке
связи гусеничных тележек размещены передние опоры /, к
которым на болтах прикреплен портал. Заднюю опору 10 для
разгрузки рамы от крутящих моментов целесообразно выполнять
шарнирной. Однако известны конструкции порталов, которые
и спереди и сзади прикреплены к базовому шасси на болтах.
Конструкция портала состоит из двух силовых стоек 9,
которые в зоне крепления стрелы связаны поперечной балкой 7.
Каждая стойка портала выполнена из наружного и внутреннего
листов, связанных между собой по периметру поясами.
Стойки обычно в средней части имеют вырезы для лучшего
доступа к агрегатам погрузчика и для облегчения
металлоконструкции. Форма поперечной балки может быть специальной,
круглой и прямоугольной. Наиболее оптимальной является
поперечная балка круглого сечения, выполненная из трубы.
Снаружи стоек к внешним листам приварены отдельные кронштейны
или листы 6, в которые вварены цилиндрические втулки,
образующие шарниры 2, 4 и 3 для крепления стрелы и гидроци-
182
линдров ковша и стрелы. В подобной конструкции портала детали
погрузочного механизма расположены снаружи стоек.
Широко распространены конструкции съемных порталов со
стойками незамкнутого типа. В этом случае погрузочный
механизм с гидроцилиндрами размещен между наружными и
внутренним листами стоек, которые связаны поясами только снизу и сзади.
Портал подобного типа применен на гусеничных погрузчиках
при размещении его на тележках между рамой трактора и
гусеницами. При конструировании съемного портала следует
стремиться к увеличению расстояния между его опорами и установка
его возможно ближе к движителям (на рамах гусеничных
тележек) для разгрузки основной рамы базового шасси от тяговых
и вертикальных усилий.
Наиболее целесообразно применение в конструкциях
цельносварных рам и съемных порталов литых стальных проушин для
крепления деталей погрузочного оборудования, что повышает
прочность соединений и уменьшает металлоемкость по сравнению
с элементами, сваренными из листовых деталей. Для повышения
точности расположения шарнирных соединений целесообразно
растачивать отверстия рам и порталов после их сварки.
Съемный портал используют, когда погрузочное оборудование
навешивают на гусеничный и колесный трактор или тягач общего
назначения. В этом случае базовые шасси имеют привязочные
места, к которым крепят портал. Поэтому его конструкцию
приспосабливают к конструкции базового шасси.
Глава 9
РАБОЧЕЕ ОБОРУДОВАНИЕ
МНОГОКОВШОВЫХ ПОГРУЗЧИКОВ
И ПОГРУЗЧИКОВ С НАГРЕБАЮЩИМИ
ЛАПАМИ
1. Оборудование многоковшовых погрузчиков
К рабочему оборудованию многоковшового погрузчика
относят элеватор с подгребающими винтовыми питателями и
ленточный транспортер.
Элеватор применяют цепным с ковшами 2 (рис. 89), которые
закреплены болтами на звеньях двух пластинчатых втулочно-
роликовых цепей 3 (у погрузчика Д-565 применены втулочные
цепи). Цепи вверху охватывают звездочки, установленные на
приводном валу, а внизу — звездочки, установленные на валу 11,
который является также приводным валом винтовых питателей.
Раму элеватора выполняют обычно сварной из двух балок
с массивной поперечиной внизу (см. рис. 50), предназначенной
для крепления к ней отвала 10 (см. рис. 89, б) и создания опор
183
S) 11 Ю
Рис. 89. Элеватор:
а ш> опора вала винтового питателя; б — общая конструкция; в -»■ деталь
винтового питателя; 1 *— винтовой питатель; 2 — ковши; 3 — цепь; 4 —
поддерживающие ролики; 5 »- рама; 6 — приводной вал; 7 — натяжное устройство;
8 — разгрузочная головка; 9 «-* лоток; 10 — отвал; 11 *-* ва-i привода
винтового питателя; 12 «- ножи; 13 — спираль винта
для общего пустотелого вала винтовых питателей (рис. 89, а).
Раму элеватора устанавливают на шасси под углом
приблизительно 60е к горизонту.
Верхняя ветвь цепей с ковшами опирается на два
поддерживающих ролика 4, а нижняя провисает свободно (по параболе).
Стрела провеса ее зависит от предварительного натяжения
цепей, создаваемого с помощью натяжного винтового
устройства 7.
Для разгрузки насыпного груза из ковшей в приемный лоток
транспортера вверху устанавливают разгрузочную головку 8.
Чтобы избежать случайного падения груза из ковшей на шасси,
внизу под элеватором ставят лоток 9, по которому
просыпавшийся груз сваливается под ковши.
Отвал 10 предназначен для подгребания насыпного груза и
одновременно служит как бы стенкой желоба, по которому
лопастями винтовых питателей подгребается насыпной груз к
ковшам. Боковые стенки ограничивают ширину расчищаемой
винтовыми питателями полосы, т. е ширину В захвата (см. рис. 50)»
184 .
В нижней части отвала закреплены сменные двусторонние ножи.
При износе одной из режущих кромок нож может быть
перевернут.
Спирали 13 винта питателей изготовлены из стальной полосы,
они приварены к трубчатому валу через промежуточные стойки,
к спиралям на болтах прикреплены сменные ножи 12 из
износоустойчивой стали. В других конструкциях погрузчиков
применяют двойные спирали, между которыми с помощью болтов
зажимают сменные ножи. При этом соединение получается более
надежным и долговечным.
Ковши для погрузчиков не нормализованы, и каждая фирма
принимает свой профиль ковша. Практика показывает, что
наиболее распространен профиль, близкий к профилю ковшей
с цилиндрическим днищем, которые приняты у обычных
стандартных ковшовых элеваторов. Так, например, хорошо показали
себя в работе в смысле заполнения и опорожнения ковши
погрузчика Т-61 (рис. 90, а). Эти ковши объемом 11 дм3 были
применены в дальнейшем на погрузчиках Т-61Б и Т-166. Для
уменьшения сопротивления зачерпыванию кусковых грузов их
снабжали сменной пилообразной режущей кромкой (гребенкой) из
износоустойчивой стали.
Ковши погрузчика Д-565 (рис. 90, б), имея хорошую форму,
конструктивно выполнены менее удачно, чем ковши погрузчика
Т-61. У них нет сменной режущей кромки, а смещенные вперед
толстые приварные кронштейны для крепления ковшей к цепям
и вдобавок еще загнутые сбоку на режущую кромку значительно
увеличивают сопротивление зачерпыванию.
При выборе формы ковша учитывают рабочее положение его
на раме элеватора, чтобы обрез боковых стенок у ковша был
горизонтальным, когда рама элеватора находится в рабочем
положении. Таким образом, при наклоне рамы к горизонту на 60°
обрез боковых стенок должен быть наклоненным к раме
элеватора не менее, чем на 30°.
На ленточном транспортере установлена прорезиненная
тканевая лента шириной 650 мм и длиной между осями барабанов
5500 мм. По своей конструкции этот транспортер мало отличается
от коротких стационарных транспортеров. Приводной барабан
применяют обрезиненным. Верхние роликоопоры желобчатого
типа — трехроликовые, а нижние — однороликовые, плоские из
стальных труб. Все ролики установлены на шарикоподшипниках.
Рама транспортера сварная. Транспортер нижним концом
опирается шарнирно на раму шасси, а верхним подвешен к головке
элеватора на стальном канате 10 (см. рис. 50) через
уравнительный блок 11. Для обеспечения разной высоты разгрузки
(в пределах 2,5—3,5 м от земли) установлен один
гидроцилиндр 9 двустороннего действия. В прежних конструкциях
погрузчиков транспортер поднимали с помощью ручной ле-
С €ДКИ.
185
а)
t=3S0
flv
Рис. 90. Ковши и крепление их на цепях:
а «». погрузчика Т-61; б » погрузчика Д-565
186
2. Оборудование погрузчиков с нагребающими лапами
К рабочему оборудованию такого погрузчика относят лопату,
механизм нагребающих лап и скребковый транспортер. Общ^я
конструкция лопаты была пояснена ранее вместе с описанием
общей конструкции погрузчика.
Нагребающие лапы 3 и 5 (рис. 91) являются частью четырех-
звенного механизма с поводком 1 или кулисой 4. В первом
случае лапа 3 вращается вокруг оси кривошипа, выполненного ка
вращающемся диске 2, а конец ее, противоположный
нагребающему, шарнирно связан с поводком 1, вращающимся вокруг оси,
закрепленной на верхнем листе лопаты. Во втором случае кулиса 4
катится по ролику, надетому на ось, закрепленную неподвижно
на лопате. Те и другие механизмы применяют в погрузчиках для
насыпных грузов и снега, но механизм с кулисой чаще применяют
на снегопогрузчиках. Поскольку в каждый данный момент одна
из лап совершает рабочее, а другая холостое движение (обратный
ход), то подается груз на скребковый транспортер почти
непрерывно.
Трудно сказать о преимуществах и недостатках работы того
и другого механизма при работе на снегу, так как этот вопрос
не исследовался.
Обычно применяют сварные нагребающие лапы, которые
точеными болтами соединены с литой криволинейной кулисой.
Лапа / (рис. 92) установлена на конических роликоподшипниках
и вращается вокруг оси 4, эксцентрично установленной и
приваренной на вращающемся диске <?, образуя кривошип. При
вращении дисков 9, 12 (см. рис. 59), заклиненных на выходных валах
редукторов 7 и //, происходит сложное вращение лап. При этом
кулиса 2 (см. рис. 92) катится по ролику 5, надетому на ось 6.
От выбора конструктивной схемы и размеров четырехзвенника
зависит характер траектории движения концов лап, а также
производительность и особенно расход мощности. Цикл работы
нагребающей лапы можно разделить на четыре периода (см.
рис. 91, б) I — внедрение лапы в вал снега; // — нагревание,
при котором срезается снег концом лапы по сечению кга2 (где
•п)
Рис. 9i. Схемы механизмов и траектории движения лап:
а ■= с поводком; б *= с кулисой
187
в-в
г-г
Подернуто
Рис. 92, Механизм левой нагребающей лапы с кулисой
hx — высота лапы по ее концу, как показано на рис. 92) и
перемещается поперек лопаты; /// — волочение снега вверх по
лопате к люку скребкового транспортера; IV — холостое (обратное)
движение лапы.
На участке / траектории ход конца лапы составляет а = d,
где d — диаметр кривошипа лапы на диске 2 (см. рис. 91, а).
Диаметр d диска берут приблизительно равным 0,6Б, где В —
ширина лопаты, принимают В > 2,5 м, чтобы она была не менее
ширины основания вала снега, собираемого на улицах.
Глубина врезания конца лапы в вал снега составляет около
0,7а. Конец лапы при врезании обычно выходит за носок лопаты
на а2 — (0,4-г-0,5) а, поэтому конец лапы внизу срезан под
углом (см. рис. 92), чтобы он был параллелен покрытию дороги.
Носок лопаты в основание валика снега врезается на глубину
ах *& 0,1-5-0,15 м (см. рис. 91, б). Это примерные значения, уточ-
188
еяют их графически при расчерчивании траектории движения
конца лап, определении размеров ее, радиуса кривошипа, а
также размера лопаты.
Радиус кривошипа лапы важен не только для определения
производительности погрузчика, но также и для ограничения
размера смерзшихся кусков снега, захватываемых лапами. Обычно
их размер dmax я^ (1 -И,25) а.
Длину лапы /л берут равной около 2d, что примерно
соответствует /л я^ (0,3^-0,35) В (см. рис. 92), а число ходов лапы в
1 мин не более /2^^45-^-60, чтобы ограничить знакопеременные
ускорения.
Основные требования к форме траектории движения концов
лап следующие: для уменьшения сопротивления при
зачерпывании снега характер кривой участка // должен быть ближе к
прямой; мертвая зона, заштрихованная на рис. 91, б, должна быть
минимальной; лапы должны перекрывать продольную ось
лопаты и заходить за начало люка для скребкового транспортера;
чтобы сократить время холостого хода, скорость движения конца
лапы должна быть больше, чем на двух участках, но не более
4 м/с для уменьшения ускорений на переходных участках
кривой; для того чтобы уменьшить обратное сбрасывание лапой
снега при холостом ходу, расстояние между верхней и нижней
кривой должно быть достаточно большим.
Скребковый транспортер состоит из желоба 1 (рис. 93),
тяговой цепи 3 с прикрепленными к ней скребками 2, двух
концевых цепных звездочек, из которых одна (внизу) приводная, а
другая направляющая, установленная на оси шарнира Б (см.
рис. 58) для поворота заднего конца транспортера и лопаты.
Ь*660
Рис. 93. Элементы скребкового транспортера
189
Ведущая ветвь цепи со скребками расположена на дне желоба /
(см. рис. 93), состоящего из пяти (три вверху и две внизу)
соединенных между собой секций. Вдоль верхних секций посередине
приварена направляющая для цепи транспортера. Цепь натянута
между конечными звездочками с помощью винтового устройства
(см. рис. 58), чтобы она и скребки не терлись о днище желоба.
Скребки у транспортера штампованные (на рис. 93 показан
сварной скребок от погрузчика Т-105). При вытягивании цепи ее
заменяют, так как нельзя выбрасывать звенья цепи, некратные
двенадцати, т. е. нарушать шаг скребков, чтобы обеспечить
попадание их во впадины на звездочках.
Глава 10
ПРИВОД
1. Двигатели
Под приводом понимают систему, состоящую из двигателя,
как источника энергии, и трансмиссии для передачи движения
к рабочему механизму. На погрузчиках в качестве привода чаще
всего применяют дизельные двигатели с пуском от
электростартера, реже карбюраторные двигатели. На некоторых
одноковшовых погрузчиках применяют дизель-электрический
привод по схеме дизельный двигатель — генератор
постоянного тока—электродвигатели, установленные в колесах (мотор-
колеса).
Работа погрузчиков всегда связана с наличием частых и
резких толчков при переменной и относительной небольшой
скорости движения с отношением максимальной загрузки к средней
в пределах 1,5—2 и числом включения в 1 ч до 120.
Тяжелая работа двигателей на вилочных и одноковшовых
погрузчиках относится только к условиям передвижения,
механизмы же подъема при гидравлической трансмиссии потребляют
не более 20—30% всей мощности двигателя.
Двигатели применяют четырехтактные, четырех-, шести или
восьмицилиндровые, с рядным или V-образным расположением
цилиндров, частотой вращения коленчатого вала до 2200 об/мин,
мощностью 30—550 л. с, с расходом топлива 0,16—0,13 кг на
1 л. с/ч.
Двигатели могут работать при нагрузке, значительно
превышающей номинальную нагрузку, и поэтому можно регулировать
частоту вращения коленчатого вала в весьма широких пределах
(до 40% номинальной).
Обычно выбирают двигатели по их внешней характеристике
(рис. 94), которая выражает изменение максимальной
эффективности мощности по частоте вращения коленчатого вала при пол-
190
йог
110
wo
90
80
70
60
50
W
JO
кгсм
JO
26
22
J
WOO №Q 1800 Z№ 2600 3000
ф 71, Off/HUH
600 1000 1200 1600 2000 A
5) n, об/мин
Рис. 94. Внешняя характеристика двигателей внутреннего
сгорания:
а — карбюраторного; б — дизельного
ной подаче топлива. Линиями АВ показана регуляторная ветвь
характеристик двигателей; в точке В показан переход на нее с без-
регуляторной ветви, а в точке А переход двигателя на режим
холостого хода.
Для того чтобы обеспечить устойчивую работу погрузчика при
соблюдении необходимой скорости движения и преодолении
случайных нагрузок, расчетную мощность двигателя берут на 10—
15% больше максимальной.
Двигатель, устанавливаемый на погрузчиках, должен иметь
запас крутящего момента, который выражается коэффициентом k
(отношением максимального крутящего момента Мтах к
крутящему моменту, соответствующему максимальной эффективной
мощности двигателя Mno ), т. е.
Коэффициент k запаса крутящего момента показывает,
в какой степени у двигателя при полной нагрузке может
увеличиваться крутящий момент в пределах рабочей частоты
вращения коленчатого вала и, следовательно, в какой степени
он может справляться с увеличением нагрузки без коробки
передач.
У дизельных двигателей в результате высоких степеней
сжатия (12—18) более высокий КПД (ц = 0,25—0,37), чем у
карбюраторных двигателей (ц = 0,18-7-0,25). Экономия топлива
у дизельных двигателей по сравнению с карбюраторными дви-
191
гателями доходит примерно до 50% по массе и до 45% по
стоимости.
На тяжелых одноковшовых погрузчиках применяют
дизельные двигатели, которые могут работать на дизельном топливе
и на сжиженном газе. Для облегчения пуска дизельных двигателей
в холодное время года их оборудуют смесительной предкамерой
с непосредственным впрыском топлива и системой подогрева
охлаждающей жидкости отработавшими газами. Воздух в двигатели
засасывается после одно- и двухступенчатой очистки, которую
применяют в зависимости от мощности. Предварительно на всех
дизельных двигателях применяют центробежную очистку, а
потом с фильтрами.
Дизельные двигатели более тихоходные, чем карбюраторные,
в результате чего устанавливают трансмиссии с меньшим
передаточным числом. Отработавшие газы их менее токсичны. Моторесурс
у дизельных двигателей примерно в 1,5 раза больше, чем у
карбюраторных двигателей. К отрицательным качествам дизельных
двигателей можно отнести более жесткую характеристику, чем
у карбюраторных двигателей, т. е. частота вращения
коленчатого вала мало меняется от нагрузки; большую трудоемкость
в изготовлении и более высокую удельную массу.
2. Муфты сцепления
Сцеплением называют дисковые фрикционные муфты,
применяемые в механических трансмиссиях транспортных машин
для отключения двигателей внутреннего сгорания от
трансмиссий при их пуске или перемене передач в трансмиссии.
Обычно сцепление заимствуют от автомобилей вместе с
двигателем. Так, например, на автопогрузчиках грузоподъемностью
3,2—5 т применяют сцепление грузового автомобиля ГАЗ-53А.
Такое сцепление хорошо работает на многоковшовых погрузчиках
и хуже на одноковшовых и автопогрузчиках. У них среднее число
включений в 1 ч примерно в 10 раз больше, чем у автомобиля,
работающего в черте города. Тепло, выделяемое при переключении
сцепления и особенно при пробуксовках во время подхвата груза
на вилы, не успевает передаваться в окружающую среду из-за
малой массы металлических дисков. Даже переход на двухдисковое
сцепление (давление на фрикционные диски снижается до 1 —
1,5 кгс/см2, т. е. вдвое) и увеличение диаметра дисков не
позволяют получить удовлетворительный тепловой баланс при работе
сцепления. Поэтому сцепление быстро отказывает в работе
(фрикционный материал горит).
3. Коробки передач
Коробки передач служат для ступенчатого изменения скорости
вращения ходовых колес и силы тяги, передаваемой колесами
транспортной машине при движении впеоед и назад. С примене-
192
нием их отпадает надобность в установке двигателя с большим
запасом мощности для разгона машины, преодоления сопротивлений
при больших подъемах дороги, а также улучшается экономичность
и динамические качества двигателя.
По способу передачи энергии от двигателя к ведущим мостам
коробки передач бывают механические или гидромеханические;
по конструкции с неподвижными или с подвижными осями валов
(планетарные). Коробки передач с неподвижными осями в свою
очередь бывают с переключением шестерен на валах или с
соединением их с валами с помощью шлицевых муфт, когда шестерни,
чаще косозубые, находятся все время в зацеплении.
Бывают конструкции коробок смешанного переключения
передач.
Планетарные коробки передач обеспечивают повышенную
механическую надежность трансмиссии из-за более равномерного
распределения окружных усилий между несколькими
сателлитами. Они имеют малые массу и габаритные размеры, но требуют
более высокого класса исполнения, нежели коробки передач
с неподвижными валами.
* Для снижения стоимости производства автопогрузчиков часто
для них применяют коробки передач грузовых автомобилей. Для
реверсирования устанавливают специальный механизм обратного
хода. На автопогрузчиках грузоподъемностью 3 и 5 т
применяют коробку передач автомобиля ГАЗ-53А, а на
автопогрузчик грузоподъемностью 10 т коробку передач автомобиля
ЗИЛ-131.
Из коробки передач исключают шестерню заднего хода.
В автопогрузчике 4028 используют коробку передач автомобиля
без изменения.
По условиям эксплуатации у автопогрузчиков передачи
заднего хода являются так же рабочими, как и передние, чтобы
исключить частые развороты автопогрузчика во время работы.
Поэтому за коробкой передач устанавливают механизм обратного
хода, с помощью которого получают примерно одинаковые
скорости движения автопогрузчика вперед и назад.
Механизм обратного хода является одноходовой коробкой
передач, взаимозаменяемой для автопогрузчиков
грузоподъемностью 3 и 5 т и отдельной для автопогрузчиков
грузоподъемностью 10 т. В связи со сложностью конструкции их выпускают
с разными передаточными числами вперед и назад; так, например,
в первом случае вперед 1,43 и назад 1,76, во втором случае вперед
1,6 и назад 2,0.
По конструкции механизмы обратного хода мало отличаются
один от другого. Передачи с переднего на задний ход
переключаются одной рукояткой управления через промежуточный
рычаг 6 (рис. 95), вилку 7 и скользящую промежуточную шестерню.2.
При переключении на передний ход шестерню 2 сцепляют с
ведущей шестерней 3, а при переключении на задний ход ее сцеп-
7 А. Ф. Базанов, Г. В. Забегалов 193
Рис. 95. Механизм обратного хода автопогрузчика 4028:
1,5 — входной и выходной валы; 2-^-4 — шестерни; 6 «- промежуточный
рычаг; 7 ^- вилка; 8 =» промежуточная шестерня
ляют с промежуточной шестерней <§, которая постоянно сцеплена
с ведущей шестерней 4. Корпус механизма обратного хода, как
и коробки передач, устанавливают на раме автопогрузчика с
использованием резиновых втулок (амортизаторов).
В зарубежной практике на автопогрузчиках часто применяют
коробки передач специальной конструкции, изготовляемые на
базе автомобильных деталей. Передачи вперед и назад берут
две-три, переключаемые одним рычагом. Таким образом, отпадает
надобность в установке другого рычага и карданного вала между
коробками, что позволяет уменьшить колесную базу, если она
у погрузчика не ограничивается продольной устойчивостью или
нагрузкой на мосты.
194
4. Гидротрансформаторы
Для увеличения плавности разгона, снижения ударных
нагрузок и облегчения управления в трансмиссию транспортных
машин встраивают гидропередачи, которые по принципу рабочего
процесса разделяют на гидродинамические и гидрообъемные.
7* 196
У первых основное значение имеет скорость перемещения
рабочей жидкости (машинного масла) в магистрали ее циркуляции.
У вторых скорость протекания жидкости не имеет существенного
значения, так как энергия передается статическим напором,
создаваемым объемным насосом и реализуемым в таком же
двигателе (обратимом насосе) или рабочих гидроцилиндрах. Поэтому
такие гидропередачи часто называют объемными.
Гидродинамические передачи бывают с гидромуфтой или
гидротрансформатором; в первом случае мощность от
коленчатого вала двигателя к ведомому валу передается с изменением
угловой скорости последнего, но при постоянном крутящем
моменте; во втором — с изменением не только скорости ведомого
вала, но и передаваемого крутящего момента. В настоящее время
чаще применяют гидродинамические передачи, состоящие из
механической коробки передач и гидротрансформатора.
Поскольку режимы работы гидротрансформатора часто
сравнивают с режимом работы гидромуфты, то коротко остановимся на
конструкции и работе последней.
Гидромуфта состоит из двух рабочих колес — насосного и
турбинного, вращающихся в общем корпусе, в котором между
колесами циркулирует рабочая жидкость (машинное масло). Насосное
колесо соединено жестко с коленчатым валом двигателя, а
турбинное с валом трансмиссии. Оба колеса имеют радиально
направленные лопатки. Насосное колесо, вращаясь, увлекает своими
лопатками поток жидкости, который действует на лопатки турбинного
колеса и увлекает за собой последнее. Поскольку связь между
колесами проходит только через поток жидкости, турбинное
колесо всегда вращается с проскальзыванием относительно насос-
него. Поэтому КПД гидромуфты равен 0,95—0,97.
Гидромуфта обеспечивает пуск двигателя и остановку машины
без отключения трансмиссии; непрерывное и плавное изменение
скорости выходного вала от 0 до max и от max до 0 соответственно
с уменьшением или увеличением внешней нагрузки.
Гидротрансформатор конструктивно отличается от
гидромуфты тем, что у него кроме насосного 7 (рис. 96, а) и турбинного 5
колес установлено еще одно 4, а иногда и несколько неподвижных
колес, называемых реакторами. Кроме того, лопатки у колес
расположены не радиально, а наклонно. Назначение реактора —
создавать реактивный момент ;И3, добавляющийся к моменту УИ2,
передаваемому валом турбинного колеса. В результате суммарный
момент, передаваемый выходным валом, будет больше момента Мх,
передаваемого валом насосного колеса. Тогда для простейшего
гидротрансформатора уравнение моментов будет иметь вид
Насосное колесо жестко соединяется с маховиком 6, а
турбинное— с приводным валом 1.
Насосное колесо, вращаясь, увлекает своими лопатками поток
196
(УбеличШ)
Рис. 96. Схемы гидротрансформатора:
а — конструктивная; б — развертки лопаток; ии иг —
окружные (переносные) скорости насосного и турбинного колес; Н —*
насосное колесо; Т — турбинное колесо; Р — реактор
рабочей жидкости (машинного масла типа ВНИИНП-1 или
веретенного АУ, ГОСТ 1642—75) в круге циркуляции, а вместе с
жидкостью и турбинное колесо, сообщая ему кинетическую энергию.
В круге циркуляции все время закручивается поток жидкости '(на
рис. 96 показано стрелками). Жидкость, отбрасываемая лопатками
турбинного колеса, попадает на лопатки неподвижного реактора,
который стремится повернуться в сторону, противоположную
вращению рабочих колес, сотому препятствует муфта свободного хода;
ее ролики 3 заклинивают корпус реактора на неподвижной части 2,
которой часто служит ступица шестерни понижающей передачи
коробки передач, конструктивно объединенной с
гидротрансформатором.
Лопатки реактора изменяют направление и увеличивают
скорость потока жидкости, проходящей через реактор от турбинного
к насосному колесу. Чем медленнее вращается турбинное колесо,
тем больше лопатки реактора изменяют направление потока
жидкости и тем больший реактивный момент М3 передается от реактора
к турбинному колесу. У гидротрансформатора при работе все время
меняется угол атаки струи жидкости на лопатке турбинного ко-
197
леса, а также угол входа струи p3i на лопатку реактора (рис. 96, б).
С увеличением внешней нагрузки углы (321 входа и (322 выхода
струи увеличиваются, поэтому лопатки больше изменяют
направление потока жидкости (в индексах у |3 первые цифры 1, 2 и 3
относятся соответственно к насосному турбинному и реактивному
колесам, а вторые цифры 2 и 3 — к входу струи жидкости на лопатки
и выходу ее с лопатки).
С изменением внешней нагрузки гидротрансформатор
автоматически меняет свой режим работы: уменьшает частоту вращения
при увеличении нагрузки и увеличивает при уменьшении ее.
Машина может плавно трогаться с места и подниматься в гору без
остановки двигателя. Однако момент М2 по сравнению с
моментом Мх увеличивается в определенных пределах. Наибольшее
силовое передаточное их отношение, называемое коэффициентом
трансформации,
м
Это теоретически наибольший коэффициент трансформации, он
соответствует моменту стонорения турбинного колеса.
Практически его берут несколько меньшим.
Кинематическое передаточное отношение не совпадает с
силовым, т. е.
i = ^«2,5ч-3,
где пг и п2 — частота вращения насосного и турбинного колес.
В расчетах принимают значительно меньшие его значения.
Поэтому за гидротрансформатором приходится устанавливать
коробку передач, чтобы увеличивать и изменять передаточное
отношение трансмиссии. КПД гидротрансформатора является
отношением мощности N2 (в кВт), передаваемых турбинным колесом
к мощности Nlf передаваемой насосным колесом. Поскольку
Мх = 975^L и м 975 ^-,
то КПД трансформатора
Турбинное колесо всегда работает со скольжением относительно
насосного. Его частота вращения значительно уменьшается с
увеличением внешней нагрузки, а также на холостом ходу.
Скольжение служит причиной внутреннего трения в потоке жидкости,
создающего нагрев. Приходится устанавливать радиатор для
охлаждения и насос для перекачки жидкости через радиатор
КПД является переменной величиной, что видно из
безразмерной характеристики гидротрансформатора (рис. 97, а).
Наибольшему значению КПД 0,84—0,85 в рабочей зоне соответствует / ==
- 0,4-5-0,8 и К = 1,3-1,6.
/
/
г
ч
/
>
/
/
ч
Ч
л(
к
"*ч
S,
80
ВО
40
20
I
\
\
/
г
s
/
L
V
/
ч
Ям.
л4
so
80
О 0,2 0,¥ 0,6 0,8 П
S)
О 0,2 0,1 0,6 0,8 II
а)
Рис. 97. Сравнительные безразмерные характеристики
гидротрансформаторов:
а — «непрозрачного»; б >*- «прозрачного» '
Чтобы повысить КПД на холостом ходу, когда частота вращения
турбинного колеса по значению близка к частоте вращения
насосного колеса, гидротрансформатор переводят на режим работы
гидромуфты. С увеличением частоты вращения турбинного колеса
уменьшается угол атаки струи жидкости на его лопатке, а вместе
с тем и угол входа струи (331 (см. рис. 96, б). При этом поток
жидкости, отбрасываемый лопатками турбинного колеса, начинает
ударяться в лопатки реактора с противоположной стороны, отчего,
колесо реактора стремится к вращению в одну сторону с рабочими
колесами. Тогда муфта свободного хода расклинивается, и
гидротрансформатор начинает работать как гидромуфта с КПД, равным
0,95—0,97. Гидротрансформаторы, которые могут работать в
режиме гидромуфты, называют комплексными.
Режим работы гидротрансформатора может влиять или не
влиять на режим работы двигателя, поэтому гидротрансформаторы
разделяют на «прозрачные» и «непрозрачные». У первых с
изменением внешней нагрузки на валу турбинного колеса меняется также
режим работы двигателя (меняется частота вращения коленчатого
вала), а у вторых он не меняется, и частота вращения коленчатого
вала двигателя зависит только от заданного положения
дроссельной заслонки (карбюраторный двигатель) или рейки топливного
насоса (дизельный двигатель).
Характеристика гидротрансформатора в основном определяется
зависимостями
где Кх — коэффициент момента; Хг = M1/(pD5nl), где р —
объемная масса жидкости, заливаемой в гидротрансформатор (при 90°С
р ^ 830~-850 кг/м3); D — активный диаметр рабочей полости
гидротрансформатора (см. рис. 96).
Приведенные параметры определяют с помощью так
называемых безразмерных характеристик (см. рис. 97). Они показывают
L99
изменение коэффициентов момента Хъ трансформации К и tj,
откладываемых по оси ординат в зависимости от изменения
передаточного отношения / на входе лопаток турбинного
колеса,.откладываемого по оси абсцисс.
При построении безразмерных характеристик момент Мг
заменяют коэффициентом К19 которым выражают момент на валу
геометрически подобного трансформатора с активным диаметром
D = 1 м при числе оборотов пг = 1 в 1 мин и плотности масла
р =. 1 кг/см3.
Отношение максимального значения Ях к значению кх при К =
*= 1 определяет степень прозрачности гидротрансформатора
rj
При /7 > 2 гидротрансформатор относят к прозрачным, а при
Л —. 1 -~1,2 — к непрозрачным.
Как видно из рис. 97, значение коэффициента Кг примерно
постоянно у непрозрачного гидротрансформатора и переменно
у прозрачного в зависимости от изменения /. У обоих
гидротрансформаторов КПД резко повышается с увеличением передаточного
отношения.
Нагрузочные свойства гидротрансформатора характеризуются
значениями коэффициента входного момента (рис. 98): Я1п)ах —
максимального; Л1#о при i = 0; Х1#м при i = iM, а также
коэффициентом прозрачности
Здесь iM соответствует передаточному отношению, при котором
гидротрансформатор переходит на режим работы гидромуфты.
Обычно преобразующие
свойства
гидротрансформатора характеризуются
передаточными отношениями
Рис. 98. Безразмерная характеристика
комплексного «непрозрачного»
гидротрансформатора
где Ко — коэффициент
трансформации (при / = 0); /* —
передаточное отношение,-
соответствующее
максимальному значению КПД (tj* л=*
«=* 90%); К — коэффициент
гидротрансформации при tj*.
Поскольку КПД
гидротрансформатора изменяется
f больших пределах, то очень
важно, чтобы в рабочей зоне
(при i = 0,4^-0,85) он был наибольшим. В начале рабочей
Зоны у\ ^ 80% и в конце т]^85%, т. е. в начале перехода
гидротрансформатора на режим работы гидромуфты (точка С, см.
рис. 98).
Переход гидротрансформатора на режим работы гидромуфты
осуществляется свободно или принудительно с блокировкой
турбинного колеса 3 (рис. 99) и насосного колеса 5 с помощью
специальной фрикционной дисковой муфты 2.
С увеличением частоты вращения турбинного колеса до
частоты вращения насосного колеса рычажная передача,
действующая от центробежного регулятора, включает муфту 2.
При применении двух колес 4 и 12 реактора их устанавливают
на отдельных муфтах свободного хода и с лопатками,
расположенными под разными углами. В результате удается улучшить
преобразующие свойства гидротрансформатора, т. е. уменьшить
углы атаки при малых передаточных отношениях (i = О-ьО,5), и
осуществить переход с режима работы гидротрансформатора на
режим работы гидромуфты при КПД ц ^ 0,87 ч-88% (точка D, см.
рис. 98), т. е. избежать провала кривой КПД в точке С (см.
пунктирную кривую). Таким образом, удлиняется рабочая зона
значений КПД и уменьшается число диапазонов в коробке передач.
Прозрачные гидротрансформаторы в основном применяют на
автомобилях и автобусах. Они позволяют лучше использовать
мощность двигателя и уменьшать шум последнего при трогании
с места (снижается частота вращения коленчатого вала двигателя
в начале разгона).
На погрузчиках применяют большей частью непрозрачные
гидротрансформаторы без принудительной блокировки турбинного
и насосного колес и чаще с одним реактором, т. е. более простей
конструкции, так как транспортный режим работы у погрузчиков
не является решающим, как у автомобилей. При частых разво-ро*.
тах погрузчика на рабочей площадке и малых скоростях
применение упрощенных конструкций гидротрансформаторов вполне
оправдано. ;
На отечественных погрузчиках применяют в разных
модификациях, но без принудительной блокировки колес четырехколесный
гидротрансформатор, разработанный на основе конструкции
гидротрансформатора ЛГ-340 (см. рис. 99).
Ниже приведена характеристика четырехколесного
гидротрансформатора.
Активный диаметр, мм 340
Мощность, л. с. до 115
Крутящий момент, кгом 30
Частота вращения, об/мин 3200
КПД 0,86
Коэффициент трансформации 3,1
У него исключают дисковую фрикционную муфту 2,
предназначенную для принудительной блокировки от центробежного регу-
"201
S 6
8 9 10
Рис, 99. I идротрансформатор ЛГ-340;
/ — крышка; 2 *=■ фрикционная дисковая муфта для блокировки насосного и
турбинного колес; 3 «- турбинное колесо; 4 — первое и второе колесо реактора;
5 — насосное колесо; 6 -™ неподвижный вал реактора; 7 <=- неподвижная втулка;
8, 9 — бронзовые упорные шайбы; 10 -* ступица насосного колеса; 11 « вал тур-
бинного колеса
лятора насосного и турбинного колес, чтобы повысить КПД гидро-
1 рансформатора на холостом ходу (при i = 0 — 0,5). Вал
гидротрансформатора центрируют с валом двигателя с помощью заточки
у крышки 1. Насосное колесо соединяют с маховиком через пальцы
с резиновыми втулками, как у обычных втулочно-пальцевых муфт.
202
Возможны и другие приемы соединения указанных деталей в
зависимости от местных условий.
Для предотвращения кавитации потока жидкости в круг
циркуляции гидротрансформатора для подпитки подается жидкость
установленным для этого шестеренным насосом. Создаваемое
давление в круге циркуляции зависит от размеров
гидротрансформатора. Например, у гидротрансформатора ЛГ-340 оно составляет
3,5—4,5 кгс/см2, а расход 30 л/мин. Для охлаждения жидкости
применяют отдельный насос, с помощью которого создается
циркуляция жидкости через радиатор. Оба насоса чаще всего
встраивают в гидротрансформатор и приводят в движение от насосного
колеса гидротрансформатора.
5. Гидромеханические трансмиссии
Современные одноковшовые погрузчики и часть
автопогрузчиков выпускают только с гидромеханическими
полуавтоматическими трансмиссиями. Такие трансмиссии состоят из
гидротрансформатора и механической коробки передач с двумя-четырьмя
ступенями вперед и назад. С учетом кинематического,
передаточного отношения гидротрансформатора число ступеней в коробке
передач берут на одну меньше, чем в механических трансмиссиях.
Гидромеханические трансмиссии выполняют моноблочными или
агрегатно-блочными. В первом случае двигатель,
гидротрансформатор, коробка передач и раздаточные коробки (одна или две)
объединены в одном блоке. Такую схему компоновки применяют .на
более легких погрузчиках с ограниченным пространством для
размещения привода с трансмиссией. Во втором случае основные узлы
трансмиссии выполняют блоками: двигатель с
гидротрансформатором, коробку передач с раздаточными коробками,
гидротрансформатор с коробкой передач вместе или отдельно с раздаточными
коробками. Отдельные блоки соединяют в трансмиссию с помощью
карданных валов передач.
Сравнивая оба способа компоновки гидромеханической
трансмиссии, можно отметить, что при моноблочном исполнении
упрощается сборка погрузчика, а при агрегатно-блочном упрощается
ремонт.
. В качестве примера установки гидромеханической трансмиссии
с коробкой передач с неподвижными осями на автопогрузчиках
приводим конструкцию трансмиссии, разработанную Львовским
ГСКБ для погрузчика 4075 высокой проходимости
грузоподъемностью 5 т.
Применена двухступенчатая коробка (рис. 100) передач с
неподвижными осями с постоянным зацеплением шестерен. Она
смонтирована на корпусе гидротрансформатора ЛГ-340. Поскольку
гидротрансформатор не объединен в один блок с насосами, то в
коробке передач расположена трансмиссия для привода двух
шестеренных насосов 6 и 7 (см. рис. 7), предназначенных для подпитки
203
6 7 8 9 10 It 12 13 П
" Л_\
ж.
Рис. 100. Механическая коробка передач с гидротрансформатором:
а — общая конструкция; б—г — схемы переключения золотника соответственно на
передний и задний ход и в нейтральное положение; / — шлицевая муфта; 2 — выходной
вал; 3 — барабан стояночного тормоза; 4, 22 — шестерни второй и первой передач;
6 — шпонка для крепления ведущей части фрикционной муфты на валу турбинного
колеса; 6, 14 — шестерни переднего и заднего кода; 7 — корпус для фрикционных муфт;
8 — кольцо управления золотником; 9, 11 — поршни для переключения фрикционных
муфт; 10 — периферийный золотник; 12, 13 — ведущие и ведомые диски фрикционных
муфт; 15 — вал турбинного колеса; 16 — шестерня привода насосов; 17 — 19 — насос*
ное, турбинное, реакторные колеса; 20 — вал насосного колеса; 21 «- муфты свобод*
ного хода реакторов
204
жидкостью и циркуляции ее через радиатор охлаждения. Насосы
приводятся в действие от насосного колеса трансформатора через
шестерню 16 (см. рис. 100).
Переключают передачи вручную при помощи шлицевой муфты,
а реверс с помощью двух дисковых фрикционных муфт,
работающих в масле. Ведущие и ведомые диски у муфт стальные, причем
последние с плакировкой из металлокерамики на медной основе.
Муфты включаются усилиями, создаваемыми поршнями 9 и 11,
когда под них в цилиндры подается жидкость под давлением от
насоса, установленного для подпитки гидротрансформатора, а
выключаются усилием сжатых цилиндрических пружин. Через
полость, образуемую специальной выточкой на валу 15 туроинного
колеса, уплотненную резиновыми манжетами, и далее через
каналы /—/// в валу масло подается к.периферийному золотнику 10.
Золотником управляют с помощью двух электромагнитов 8 и 10
(рис. 101), которые через вилку передвигают кольцо 8 (см. рис. 100)
вправо или влево по корпусу фрикционных муфт. Цепь
электромагнитов питается от контакта AM (см. рис.101) замка зажигания
через предохранитель 4 и выключатель 6, Выключатели 5 и 7
установлены на ножном переключателе направления хода,
имеющем три положения: вперед, назад и нейтральное. Педаль
переключения хода устанавливают под правой ногой, чтобы переключать
можно было только при отпущенной педали подачи топлива.
С включением левой фрикционной муфты промежуточный вал
будет вращаться в одну сторону с валом турбинного колеса, что
соответствует заднему ходу погрузчика, а с включением правой
муфты будет обеспечен передний ход. Пускать двигатель можно
при включенной передаче в коробке передач. Чтобы избежать
произвольного движения погрузчика при работающем двигателе,
дистанционное включение стартером блокируют с переключателем
направления хода в нейтральном положении.
Рис. 101. Электросхема
управления коробкой
передач:
1 — датчик давления в
главной масляной магистрали;
2 — щиток приборов; 3 —
датчик температуры масла;
4 — биметаллический
предохранитель; 5,7 —
выключатели переключения хода;
6 — выключатель
автоматической нейтрали; 8, 10 —
электромагниты для
включения переднего и заднего
ходов; 9, 12 — сигнальные
фонари; 11 — кремниевый диод
i 11
205
Для трогания погрузчика с места включают первую (в тяжелых
условиях работы) или вторую передачи. Потом ножным
переключателем устанавливают нужное направление для движения
погрузчика. При отпускании педали подачи топлива погрузчик
останавливается, так как выключатель 6 разрывает цепь питания
электромагнитов и фрикционные муфты выключаются. Установка
золотника управления на периферии корпуса муфт обеспечивает
быстрое опорожнение рабочих полостей цилиндров под действием
центробежных сил.
При применении одного ведущего моста у погрузчика левый
конец выходного вала 2 (см. рис. 100, а) коробки передач
соединяют с задним концом ведущего моста. На этом же валу
устанавливают барабан 3 стояночного тормоза. При двух ведущих мостах
оба конца вала 2 соединяют карданными передачами с ведущими
мостами, если последние имеют одинаковые параметры и размеры.
При разных параметрах движение на другой мост передается через
раздаточную коробку 9 (см. рис. 7).
Более совершенной является конструкция гидромеханической
трансмиссии для малогабаритных автопогрузчиков
грузоподъемностью 1—5 т (см. рис. 8). В которой для переключения передач
применена также дисковая фрикционная муфта, а насосы
(основные и для трансформатора) приводятся в движение от заднего
конца вала двигателя. Управление муфтами
электрогидравлическое, как в трансмиссии (см. рис. 100), а у легких автопогрузчиков
(1—2 т) ручное (через рычаг, установленный с правой стороны от
рулевой колонки).
У средних по размерам одноковшовых погрузчиков
устанавливают гидромеханическую трансмиссию с коробкой передач с
неподвижными осями в моноблочном исполнении,
гидротрансформатором или отдельно от него. Примером может служить трансмиссия,
погрузчика ТО-6Б (Д-561Б). Коробка передач (рис. 102)
четырехступенчатая, двухдиапазонная (с переключением на транспортные
и рабочие скорости). Кинематическая схема ее была приведена
ранее (см. рис. 28). В отличие от автопогрузчиков для работы
одноковшовых погрузчиков требуется большее число рабочих скоростей
(обычно три-четыре).
Входной вал 13 (см. рис. 102) коробки передач одновременно
является валом турбинного колеса гидротрансформатора. На нем
установлены три фрикционные дисковые муфты 7, 9 и И,
применяемые для переключения передач. Передачи с транспортного
диапазона на рабочий и наоборот переключают шлицевой муфтой 15
вручную через рычаг 14. Переключение передач в пределах
каждого диапазона производится без изменения частоты вращения
коленчатого вала двигателя. При крайнем левом положении муфты
15 включаются передачи переднего хода. Фрикционной муфтой 11
включается первая передача, муфтой 9 вторая передача и муфтой 7
первая передача заднего хода. При крайнем правом положении
муфты 15 фрикционными муфтами 11, 7 и 9 включаются соответ-
206
*_твенно третья и четвертая передачи переднего хода и вторая
заднего хода.
Шестерни 4, 10 и 12 свободно (на шарикоподшипниках)
посажены на вал 13.
Устройство и работа фрикционных дисковых муфт такие же,
как и в трансмиссии, описанной выше (см. рис. 100). Для того чтобы
избежать большого давления на поршни для включения муфт при
большой частоте вращения коленчатого вала двигателя, подпорш-
, невые полости сообщаются с картером коробки передач через
установленные для этого клапаны-жиклеры 8. Они способствуют также
быстрому опорожнению подпоршневых полостей от жидкости при
выключении муфт.
Коробка передач обеспечивает передаточные числа переднего
хода 4,98; 2,66; 1,48; 0,816 и заднего 3,62; 1,44.
Для передачи движения к ведущим и разным по параметрам
мостам к коробке передач снизу прикреплены две раздаточные
коробки, сцепляемые с зубчатым колесом 16. В одной из них
установлена кулачковая муфта для отключения заднего (управляемого)
моста во время перегона погрузчика. На выходном конце вала раз-
• даточной коробки для передачи движения на передний мост
установлен барабан стояночного тормоза.
Гидравлическая система трансмиссии состоит из двух насосов
(для подпитки и охлаждения трансформатора), регулятора
давления, подпорного клапана, трех золотников для управления
(переключения реверса, передач и принудительного нейтрального
положения), фильтров, масляного бака, радиатора и системы
трубопроводов.
Оба насоса 1 установлены спереди на корпусе коробки
передач и приводятся от насосного колеса гидротрансформатора.
Насос, предназначенный для подпитки гидротрансформатора,
используют также для системы гидравлического управления
фрикционными муфтами.
Регулятор 6 (рис. 103) давления предназначен для разделения
потока жидкости в главной магистрали и поддержания в ней
заданного давления. Один поток жидкости направляется к золотнику
нейтрального положения и далее к фрикционным муфтам, а другой
(основной) на подпитку гидротрансформатора. Когда двигатель не
работает, то главная магистраль 8 запирается между кромками 3 и
4 золотника. При работающем двигателе кромка 3 под создавшимся
давлением на торце 7 приоткрывает полость 2 подпитки
гидротрансформатора. С увеличением частоты вращения коленчатого вала
двигателя кромкой 3 золотника все больше открывается щель на
подпитку, сохраняя при этом заданное давление в магистрали 8,
соединенной с цилиндрами включения фрикционных муфт. С
повышением давления в магистрали 8 сверх допустимого
золотник клапана перемещается до начала открытия золотника 5
сливной магистрали 9, соединенной с картером коробки
передач.
207
1
Рис. 102. Коробка передач с гидротрансформатором
одноковшового погрузчика
Подпорный клапан 13 предназначен для регулирования
давления подпитки гидротрансформатора, а также предохранения его и
радиатора 19 от поломок при резком увеличении давления.
Принцип работы этого клапана такой же, как и регулятора
давления. Он поддерживает давление в гидротрансформаторе через
магистраль /5, равное 1,5—2,5 кгс/см2. Открытие щели кромкой //
у клапана для слива жидкости в систему охлаждения зависит от
подачи насоса. Как и в регуляторе давления, кромкой золотника 12
открывается сливная магистраль 14 в корпус коробки передач.
В золотниковой коробке для управления фрикционными
муфтами имеются три цилиндрических золотника: 16 для
переключения передач, 17 реверса и 18 нейтрального положения
(разобщительный клапан). Конструкция коробки не позволяет включение
сразу двух или всех фрикционных муфт и, следовательно, несколь-
208
13 П 15
ких передач. Золотник нейтрального положения дает возможность
работать с навесным оборудованием на заторможенном погрузчике
при любой частоте вращения коленчатого вала двигателя при
ручной (фиксированной) подаче топлива. В отличие от двух первых
золотников он имеет пружину для возврата в нейтральное
положение.
Золотниковая 6 и клапанная 5 (см. рис. 102) коробки
установлены сверху коробки передач. Два золотника в коробке 5
управляются вручную, а третий — золотник нейтрального положения —
левой педалью тормоза.
В гидравлической системе предусмотрены фильтры очистки
жидкости двух типов: фильтр 21 (см. рис. 103) марки 0,12Г-41-14,
210
,19
,20
Рис. 103. Гидравлическая схема
гидромеханической трансмиссии погрузчика
ТО-6Б
задерживающий частицы размером до 0,12 мм, и сетчатые фильтры
в масляном баке 20.
Вал 2 (см. рис. 102) насосного колеса гидротрансформатора с по-,
мощью карданной передачи соединяют с валом 2 (рис. 104)
редуктора отбора мощности, прикрепленного к картеру двигателя.
Другой конец вала редуктора с помощью зубчатой муфты 4 соединен
с зубчатым венцом маховика. При небольшом уширении зубчатого
венца такая конструкция отбора мощности может быть применена
и при двигателях с пуском от стартера (у погрузчика Д-561Б
основной двигатель пускается от вспомогательного двигателя).
От вала 2 редуктора приводятся в работу два шестеренных
насоса 1 и 3, один из которых предназначен для создания давления
211
Рис. 104. Редуктор отбора мощности для привода
гидротрансформатора погрузчика ТО-6Б
в-объемном гидроприводе рабочего оборудования, а другой — в
системе гидроусилителя рулевого управления.
У зарубежных одноковшовых погрузчиков чаще всего
насосное колесо трансформатора соединено с коленчатым валом
двигателя с помощью упругой стальной муфты. При
гидротрансформаторах производства этой же фирмы или выполняемых
по заказу другими фирмами привод всех насосов выполняют
в одном блоке с трансформатором. В этом случае трансмиссия
агрегатно-блочного исполнения, т. е. коробка передач
установлена отдельно, и входной вал ее соединен карданным валом с валом
турбинного колеса. При одинаковых параметрах и размерах
ведущих мостов раздаточная коробка объединена с коробкой передач.
Планетарные коробки передач применяют с ленточными и
дисковыми тормозами для переключения передач. Первые значи-
212
телыю проще по конструкции, и их применяют на небольших
автопогрузчиках, например фирмы «Конвейенс» (Англия) с
трехколесным гидротрансформатором «Брокхауз» (Англия). Блок
гидротрансформатора и коробки передач (рис. 105) закреплен на картере
маховика двигателя, коленчатый вал / которого соединен болтами
с насосным колесом 3. Вал 2 турбинного колеса оканчивается
солнечным колесом 13 планетарной передачи заднего хода.
Сателлиты 6 вращаются на осях, закрепленных на водиле 5, являющемся
одновременно зубчатым венцом планетарной передачи переднего
хода и тормозным шкивом передачи заднего хода. Сателлиты 9
вращаются на осях, закрепленных на водиле 7, которое также служит
зубчатым венцом передачи заднего хода. Зубчатый венец 7 водила
соединен заклепками с промежуточным валом И, а солнечное
колесо передачи переднего хода соединено с тормозным шкивом 10.
Движение к ведущему мосту передается через вал 12.
Передачи включаются с помощью нормально замкнутых
ленточных тормозов 4 и 8, которые замыкаются цилиндрическими
пружинами 16 и размыкаются с помощью гидроцилиндров /7,
управляемых через золотники 14. Шестеренные насосы 15 для
подпитки и охлаждения установлены в картере гидротрансформатора
и приводятся от насосного колеса через отдельные зубчатые
передачи. Поскольку увеличение числа ленточных тормозов у корооки
передач конструктивно затруднено, то, не считая кинематического
передаточного отношения самого гидротрансформатора, коробка
обеспечивает одну ступень передач вперед и назад. Таким образом,
трансмиссия работает при низких КПД гидротрансформатора, что
может быть допустимо только для легкого автопогрузчика
(грузоподъемностью до 2 т).
На больших одноковшовых погрузчиках устанавливают
планетарные коробки передач с переключением передач с помощью
таких же по конструкции дисковых тормозов, как и дисковые
фрикционные муфты. Так, например, фирма «Катерпиллер» применяет
унифицированные гидромеханические трансмиссии с
гидротрансформаторами их же производства для ряда погрузчиков с ковшами
объемом 1,17—6,41 м3 и соответственно мощностью дизельного
двигателя '80—550 л. с. Трансмиссии моноблочного исполнений,
когда двигатель, гидротрансформатор и коробка передач
исполнены в одном блоке, применяют для сравнительно легких
погрузчиков (объем ковша 1,17—1,28 м3) и агрегатно-блочного—для
больших. Причем в первом случае применяют коробки передач
с входным и выходным расположенными валами с
противоположных сторон, во втором (рис. 106) — с входным и выходным 1
валами, расположенными с одной стороны, т. е. со стороны
двигателя. Здесь раздаточная коробка прифланцовывается со стороны
выходного вала 1 (рис. 107).
Коробки передач (см. рис. 106) применяют трехрядные.
Направлением движения у них управляют одной фрикционной
муфтой 2 (вперед) и дисковым тормозом 3 (назад). С помощью дисковых
2t3
to 11
S)
Рис. 105. Планетарная коробка
передач с ленточными тормозами:
а — конструкция; б, в — кинематические
схемы переключения передач на задний и
передний ход; a — схема управления
ленточными тормозами
16"
Рис. 106. Планетарная коробка передач одноковшовых погрузчиков фирмы
«Катерпиллер» (США)
тормозов 4, 5 и 6 включают соответственно вторую, третью и
первую передачи. Раздаточная коробка (см. рис. 107) у них является
двухступенчатой. На промежуточном валу ее установлен
стояночный и в то же время аварийный нормально замкнутый тормоз 6.
Фрикционные диски этого тормоза постоянно сжаты
цилиндрическими пружинами. При наличии давления масла в системе
управления трансмиссией он находится в расторможенном положении.
При аварийной остановке двигателя или неисправности
управления трансмиссией, а также при стоянке погрузчика он
автоматически затормаживается.
Для управления гидромеханической трансмиссией применяют
гидравлическую систему, которую используют одновременно для
сервоуправления коробкой передач (муфтой и тормозами),
охлаждения гидротрансформатора и смазки. Реверсом и тормозами
управляют одной рукояткой, с помощью которой переключают два
цилиндрических золотника у гидрораспределителя (для
переключения реверса и переключения передач).
215
Рис. 107. Раздаточная
коробка:
/ — входной вал; 2 — вход*
ной вал-шестерня норобии
передач; 3 — выходной вол
коробки передач; 4, 5 —.
фланцы соединения
карданными валами с передним й
вадним мостами; б -*
стояночный (аварийный)
тормоз
Давление в системе управления доходит до 24,2 кгс/см2 и
создается двухсекционным насосом: одну секцию используют для
ёмазки, другую для подачи жидкости (масла) в редукционный
клапан, гидротрансформатора, который пропускает часть жидкости
в круг циркуляции гидротрансформатора под давлением 5—6
кгс/см2. Из гидротрансформатора жидкость сливается в бак и ча-
216
стично пропускается через редукционный клапан под меньшим
давлением в радиатор и к регулировочному клапану. Вследствие
регулирования давления в пределах 17—24,2 кгс/см2 обеспечивается
плавность включения муфты и тормозов у коробки передач.
Регулировочный клапан является также предохранительным. С
помощью его отключают трансмиссию при нажатий на левую педаль
тормоза, а также при падении давления от насоса и остановке
двигателя.
С установкой гидромеханической трансмиссии скорость
передвижения погрузчика регулируют педалью управления
дроссельной заслонкой карбюраторного двигателя или положением рейки
топливного насоса у дизельного двигателя. Реверсируют одной
педалью или одним рычагом без вспомогательных движений,
связанных с торможением погрузчика и выключением общего
сцепления (здесь оно отсутствует). Разгоняют погрузчик без
переключения передач, так как отсутствует жесткая связь между двигателем
и ведущими мостами, что обеспечивает надежность всей
трансмиссии. При подхвате груза вилами или зачерпывании насыпного
груза ковшом необходимые низкие скорости движения погрузчика
не связаны с ускоренным износом деталей.
Установка гидромеханической трансмисии позволяет упростить
управление погрузчиком и тем самым облегчить работу водителя
(он меньше устает в конце смены, так как число переключений
передач сокращается примерно втрое, нежели с механической
трансмиссией; может сосредоточить свое внимание на проведении
рабочих операций); увеличить производительность повышением
маневренности погрузчика; уменьшить динамические нагрузки на
трансмиссию и двигатель, особенно при работе с ковшом (увеличивается
долговечность погрузчика путем плавного перехода с одного
режима на другой); увеличить проходимость при движении по
плохим дорогам из-за автоматического изменения силового
передаточного числа в зависимости от сопротивления движению; исключить
сцепление как одно из слабых мест механической трансмиссии
для погрузчиков.
Применение гидромеханической трансмиссии особенно
благоприятно сказывается при движении по неустроенным дорогам,
например при движении автопогрузчиков высокой проходимости.
В результате наличия «ползучих» скоростей движения колеса
автопогрузчика не зарываются в неплотном грунте.
К отрицательным качествам гидромеханической трансмиссии
следует отнести сравнительно низкий КПД гидротрансформатора;
высокую стоимость и большую массу трансмиссии. Однако при
низком КПД удельный расход топлива, отнесенный к
производительности погрузчика не превышает 10—12% по сравнению с
расходом при эксплуатации погрузчика с механической трансмиссией,
так как погрузчик с гидротрансформатором в основном работает
.на оптимальном режиме двигателя.
. 217
6. Гидрообъемные трансмиссии
* В гидрообъемных трансмиссиях действие гидропривода
основано на перемещении практически несжимаемой жидкости и
преобразовании сил по закону Паскаля. Вначале транспортирования
механическая энергия от приводного двигателя с помощью насоса
преобразуется в гидравлическую и в конце гидродвигателем снова
преобразуется в механическую.
В настоящее время объемный гидропривод получил широкое
применение в разных машинах при замене отдельных
механических трансмиссий, в частности на погрузчиках в механизмах
подъема, поворота ковша, наклона грузоподъемника и т. п. При
объемном гидроприводе значительно упрощается компоновка
погрузчика, снижается его металлоемкость и облегчается управление.
Однако применение объемного гидропривода в механизмах
передвижения самих транспортных машин встречает известные
трудности. К ним в первую очередь нужно отнести создание
специального оборудования с большим давлением в системе (250—
320 кгс/см2) при весьма высокой производительности регулируемых
аксиальнопоршневых насосов и гидродвигателей, особенно при
четырех ведущих колесах. Например, для погрузчиков при
двигателе в 130 л. с. и скорости передвижения 40 км/ч требуется насос
с подачей не менее 4000—5000 л/мин. Известно, что наша
промышленность и многие зарубежные фирмы заняты созданием
объемного гидропривода для транспортных тягачей и одноковшовых
погрузчиков. При этом считают, что данные машины должны
создаваться с мотор-колесами, т. е. когда гидродвигатели разме^
щаются в приводных колесах.
5 Имеются в эксплуатации опытные образцы одноковшовых
погрузчиков мощностью 30—140 л. с. с таким приводом ходовых
трансмиссий фирм «Интернейшнл Харвестер», «Аллис-Чалмерс»,
«Форд», «Кейс», «Катерпиллер» и др. (США), а также фирм ФРГ,
Франции и Англии.
Применение мотор-колес позволяет создать машины с
бесступенчатой реверсивной передачей с достаточно высоким КПД
гидропередачи (около 0,7) и более легким переходом на автоматизацию
работы машин. При этом отпадает надобность в мостах, коробках
передач, сцеплениях и карданных валах.
Известны случаи применения гидрообъемных трансмиссий
также в автопогрузчиках. Так, например, фирма «Таумото Корп».
(США) применяет гидрообъемную трансмиссию с давлением
140 кгс/см2 по принципиальной схеме двигатель внутреннего
сгорания — насосы—распределитель—гидродвигатели. Для привода
колес у ведущего моста устанавливают два гидродвигателя,
располагаемых вдоль погрузчика между колесами. От
гидродвигателей движение к оси каждого колеса передается через однопарный
конический редуктор со спиральными зубьями. Наименьшие
скорости движения автопогрузчика не зависят от частоты вращения
218
коленчатого вала основного двигателя. Управляют трансмиссией
вручную через одноплунжерный гидрораспределитель. Очевидно,
для этого используют обычные насос,гидродвигатели и аппаратуру,
поэтому гидрообъемная трансмиссия применена только для не
большого автопогрузчика. Наряду с указанным исключением элементов
механической трансмиссии повышается экономичность и срок
службы основного двигателя, так как отпадает надобность в фор-
сировке и перегрузке его. При бесступенчатой передаче
улучшается маневренность автопогрузчика в тесных проездах и
обеспечивается более точный подход для подхвата груза вилами.
Глава 11
ЭЛЕМЕНТЫ ОБЪЕМНОГО ГИДРОПРИВОДА
К Общие данные
Объемный гидропривод применяют с открытой и закрытой
(герметизированной) гидросистемами. Как известно, в первой полость
масляного бака сообщается с атмосферой через его заливную
горловину, во второй линии слива и сам бак находятся под избыточным
давлением, создаваемым специально установленной для этого пнев-
мосистемой.
Обе гидросистемы имеют как положительные, так и
отрицательные качества. Первая — более простая для исполнения и позволяет
применение баков с плоскими тонкими (не расчетными) стенками
любой формы. Она не исключает подсоса воздуха и воды из
окружающей среды через соединения и линии всасывания от бака до
насоса в результате вакуума. Кроме того, при бурном
перемешивании рабочей жидкости при сливе с влажным воздухом в баке
возможно дополнительное попадание воздуха и влаги в
гидросистему. Вторая гидросистема герметична, а поэтому обеспечивает
большую плавность работы исполнительных цилиндров, больший
срок службы рабочей жидкости и уменьшает степень замасливания
внутренних полостей гидросистемы. Вместе с тем она требует
применения бака, рассчитанного на избыточное давление, установки
дополнительного устройства для создания противодавления,
а также затрат энергии для преодоления последнего. Первую
гидросистему применяют на всех, а вторую только на тяжелых
одноковшовых погрузчиках.
С помощью объемного гидропривода поднимают грузовые
вилы и наклоняют грузоподъемник на автопогрузчиках; поднимают
стрелу с ковшом, поворачивают ковш на загрузку и разгрузку —
в одноковшовых; поднимают элеватор, транспортер и поворачивают
последний — на многоковшовых погрузчиках и т. д.
Основными преимуществами объемного гидропривода являются
малые габаритные размеры и малая масса (не превышает 0,2—0,3 кг
на 1 кВт отдаваемой мощности).; любое, независимое от других
узлов, размещение на погрузчике; простое преобразование
вращательного движения в поступательное и, следовательно, упрощение
кинематики рабочего оборудования; снижение динамических
нагрузок при пуске и остановке; бесступенчатое регулирование
скорости исполнительного механизма; простая защита рабочего
оборудования от перегрузки; простота и легкость управления;
надежность и долговечность трансмиссии и легкость
автоматизации.
Остановимся на основных элементах объемного гидропривода,
примерно общих для разных погрузчиков.
2. Рабочая жидкость
В системах объемного гидропривода в качестве рабочей
жидкости применяют минеральные масла, выбирают которые в
зависимости от внешних температурных условий, а также химических и
физических свойств их.
Основными требованиями к жидкостям в гидроприводах
являются: устойчивая вязкость в пределах температур, при которых
должен работать погрузчик; морозостойкость и пригодность к
использованию в летних и зимних условиях; хорошая смазочная
способность с высокой прочностью масляной пленки; низкая
кислотность в состоянии поставки и стабильность, т. е. устойчивость
против окисления (полимеризации)в пределах рабочих температур,
а также устойчивость против механических воздействий;
антикоррозионное^ по отношению к металлам в гидропередачах и
нейтральность к материалу уплотнительных манжет и гибких шлангов;
однородность; отсутствие механических примесей и воды;
хорошая деэмульсирующая способность; низкая стоимость.
, Многие из указанных требований не учитываются какими-либо
числовыми показателями и относятся просто к практическим
пожеланиям.
Подвижность рабочей жидкости оценивается кинематической
вязкостью, которую измеряют стоксом (Ст), равным 1 см2/с.
В. практике получила распространение единица в 100 раз меньшая
стокса — сантистокс (сСт). Обычно данные по вязкости указываются
при 50 и 100° С.
Вязкость жидкости может меняться в зависимости от разных
факторов: температурных условий (климатических и от нагрева
в гидросистеме), с понижением температуры она увеличивается,
а с повышением —уменьшается; давления—с повышением
давления она увеличивается; полимеризации, т. е. способности атомов
химических элементов образовывать молекулы разной сложности
при неизменном количественном составе вещества (понижение
вязкости и смолообразование на стенках насосов, стенках
исполнительных цилиндров и т. д.); попадания воды в гидросистему эмуль-
сация жидкости и т. д. При этом самым важным является измене-
220
ние вязкости в холодное время года, когда масло становится
густым и при очень низкой температуре теряет свою подвижность.
Как показывает практика, температура застывания жидкости на
15—20° ниже температуры, указываемой в ГОСТе. Предельную
подвижность жидкости проверяют с помощью стандартной пробирки:
при наклоне ее с маслом на угол 45° уровень масла не должен
меняться в течение 1 мин.
От вязкости зависят: расход мощности для привода насоса
(повышается с повышением вязкости и наоборот); герметичность
уплотнений (при вязкой жидкости меньше утечки через уплотнения);
повышение температуры в системе (чем выше вязкость, тем больше
трение между молекулами масла); работа трения и износ деталей
(чем выше вязкость, тем толще пленка жидкости, тем меньше
неровности у трущихся деталей и, следовательно, тем меньше
выделение тепла в зоне трения).
Повышение температуры в гидросистеме зависит от
климатических условий; энергии, которую потребляет насос; вида течения
жидкости, т. е. ламинарного или турбулентного (вихревого)
потока, при котором жидкость нагревается больше; сопротивления
трубопроводов (большая длина, большое число колен); низкого
механического КПД насоса; близкого расположения гидросистемы
к источнику нагрева (например, к двигателю внутреннего
сгорания); недостаточного объема бака как резервуара для охлаждения
жидкости; состояния внутренней поверхности трубопроводов (чем
стенки глаже, тем меньше трение жидкости о стенки); наличия
воздуха в системе, например в жидкости в состоянии поставки ее
находится нерастворенный воздух 2—10% объема жидкости, а также
около 11% растворенного воздуха. Кроме того, воздух
засасывается в систему при неплотных соединениях всасывающего
трубопровода и в уплотнениях насоса в результате вакуума перед и
в рабочей камере насоса (разрежение при всасывании из бака
доходит до 70 мм рт. ст. и выше). Дополнительно выделяется воздух
из жидкости в рабочей камере насоса (абсолютное давление в ней
ниже, чем у всасывающего штуцера), где воздух расширяется, так
как поступает в камеру при несколько повышенном давлении. При
давлении в гидросистеме пузырьки воздуха сжимаются, выделяя
тепло, количество которого зависит от частого дросселирования
и количества воздуха в системе.
Свойство жидкости вызывать коррозию характеризуется
кислотным числом, поэтому не применяют жидкости с кислотным числом
выше 0,35.
Полимеризация жидкости происходит более интенсивно при
наличии в ней воздуха, с повышением температуры в
гидросистеме и при наличии катализаторов. Последние не участвуют в
химических соединениях с жидкостью, но способствуют образованию
полимеров. К катализаторам относят атмосферную пыль, грязь,
ржавчину, краски и металлы (бронзу, латунь, медь). На степень
катализации меньше всего влияют изделия из цинка или стальные,
221
покрытые цинком. Затем по степени возрастания катализации идут
изделия из свинца, стали и алюминия.
Для уменьшения полимеризации ограничивают температуру
нагрева жидкости в системе не выше температуры окружающего
воздуха летом (65° С).
Эмульсия жидкости происходит от попадания воды в
гидросистему вместе с влажным воздухом, а в основном через
неплотности всасывающих трубопроводов (особенно при попадании на
соединения воды из радиатора, дождя или снега) вследствие
вакуума в трубопроводе и в полости всасывания у насоса. Жидкости
хороших сортов должны быстро отделять воду и воздух во
избежание преждевременного вспенивания жидкости и преждевременного
износа деталей гидропривода при форсированной работе.
Неспокойный ход поршней в цилиндрах и шум в насосе наблюдаются при
наличии кавитации при большой скорости в длинных
трубопроводах и разрыве потока во всасывающем трубопроводе.
Полимеризация и эмульсация жидкости вызывают образование
смол и мыл на внутренних поверхностях гидросистемы. Поэтому
один раз в год насос и всю систему тщательно промывают бензином.
Для заправки систем объемного гидропривода наиболее
приемлемы и доступны жидкости (масла) на парафиновой основе(табл. 14),
Рекомендуемые масла для заливки гидросистем
Таблица 14
Температурные
условия
Летом 0—
(+40)°С
Весной и
осенью от (+20)—
(—20)°С
Зимой (—20)—
(—40)°С
0—(_40)°С
Рекомендуемые масла
Индустриальное 20
(ГОСТ 20799—75)
Веретенное АУ
(ГОСТ 1642—75) или
индустриальное 12 (ГОСТ 20799—75)
АМГ-10 (ГОСТ 6794—75)
Трансформаторное
(ГОСТ 982—68)
Вязкость
при 50° С, °Е
2,6—3,3
2,9—3,2
2—2,3
1,9—2,3
1,9
Не более
1,8
Температура
застывания,
не выше °С
—20
—15
—35
—30
—70
—45
В последнее время появились масла наиболее улучшенных
сортов для заливки гидросистем, но которые получить труднее, так
как выпускают их в ограниченном количестве. Например, для
работы при положительных температурах на открытом воздухе масло
МГ-30 по ТУ 38-1-01-50—70 или ИС-30; для работы при
отрицательных температурах масло ВМГЗ по ТУ 38-1-196—68.
3. Трубопроводы и арматура
В качестве трубопроводов на погрузчиках применяют трубы и
гибкие рукава высокого и низкого давления. Для напорных линий
применяют стальные цельнотянутые трубы, выполненные из сталей
222
10 или 20, а для линий управления и подключения приборов в
стесненных условиях — медные трубы (ГОСТ 11383—75). Для
гидросистем низкого давления (15—20 кгс/см2) применяют стальные
сварные трубы (ГОСТ 10704—76, 10706—-76, 10707—73), а иногда
трубы, изготовленные из полимерных материалов.
Гибкие рукава применяют там, где исполнительные цилиндры
имеют подвижность или по условиям расположения механизмов
гидропривода невозможно выполнить проводку из стальных труб
вследствие многократных и разносторонних перегибов
трубопровода. Резинотканевые рукава (ГОСТ 10362—76) применяют для
систем с давлением не выше 16 кгс/см2. При более высоких
давлениях применяют рукава высокого давления по нормали
машиностроения МН 73-64 внутреннего диаметра 6—38 мм для давления
105—280 кгс/см2 и с неразъемными наконечниками. Рукава
высокого давления состоят из внутреннего резинового слоя,
хлопчатобумажных и металлических оплеток из высокопрочной
проволоки, промежуточных резиновых слоев и наружного резинового
слоя.
Основными требованиями к гибким рукавам являются
достаточная мехгническая прочность; стойкость материала к химическому
воздействию жидкости; хорошие морозостойкость и гибкость
(минимальный радиус изгиба должен быть не менее шести наружных
диаметров с изменением наружного диаметра рукава не более 10%).
На морозостойкость испытывают отрезки рукава длиной 300—
400 мм с охлаждением в холодильной камере при —30° С в течение
4 ч и изгибе рукава на 180° вокруг стержня, равного 10 наружным
диаметрам.
Рукава высокого давления армируют концевыми креплениям?!.
Сначала на конец рукава 4 (рис. 108, а) навертывают муфту <?,
а затем в рукав ввертывают ниппель 2 с предварительно надетой на
него накидной гайкой 1. Чтобы не повредить конец рукава при
навертывании муфты и ниппеля, последние выполнены с
полукруглой резьбой, а рукав смазан пастой (100 вес. ч. графита
смешивают со 150 ч. машинного масла). Наружный торец у ниппеля
выполнен шаровым или конусным с центральным углом в 60°. Детали
/ 2
5 В
15 II 14
Рис. 108. Соединения трубопроводов:
а ■=• концевое; 6 **> промежуточное (разъемное)
223
а) 6)
Рис. 109. Шарнирное радиальное соединение с уплотнениями:
а — манжетным; б — кольцевым
концевых креплений изготовлены из стали, а затем покрыты
цинком или кадмием (толщина слоя 0,01 мм).
Для промежуточных креплений стальных трубопроводов к
рукавам высокого давления, а также для быстрого соединения
трубопроводов съемных рабочих приспособлений с магистралью
установлены иногда специальные муфты. В корпус 7 (рис. 108, б),
который с помощью накидной гайки 5 соединен с трубопроводом,
вставлен корпус 12, соединенный также с рукавом высокого
давления. В корпусах 7 и 12, соединенных накидной гайкой 10,
установлены шариковые клапаны 9 и 11 с пружинами 8 и крестовинами
6 и 13. Соединения уплотнены резиновыми кольцами 14 и медными
шайбами 15. При разъединении муфт шариковые клапаны
автоматически перекрывают отверстия в корпусах.
Для подвижного соединения жестких трубопроводов
применены радиальные (телескопические и поворотные) соединения
(коллекторы), в которых подвижный штуцер 5 (рис. 109, а) может
поворачиваться в неподвижном штуцере 2. В качестве уплотнения
между ними применены резиновые манжеты 3 или кольца 7
(рис. 109, б). От осевого смещения подвижного штуцера служат
стопоры 1 и 4 в виде колец из спиральных пружин или пружинные
кольца 6.
4. Насосы
На погрузчиках применяют шестеренные и аксиальные ротор-
но-поршневые насосы, причем последние при некоторых
конструктивных изменениях используют в качестве гидродвигателей.
Шестеренные насосы наиболее простые, дешевые и надежные
в эксплуатации. В литом алюминиевом или чугунном
обработанном корпусе / (рис. ПО) установлены обойма-подшипник 8 и
поджимная обойма 7 из алюминистой бронзы. В обойме-подшипнике
размещены цапфы ведущей 2 и ведомой 3 шестерен. Поджимная
обойма образует цилиндрическую поверхность камеры нагнетания,
224
А-А
Рис. ПО. Шестеренный насос
Радиальные зазоры между поджимной обоймой и зубьями
шестерен, а также осевые зазоры между платиками 5 с манжетом 6 и
торцом шестерен выбирают с использованием давления жидкости.
Насос закрыт крышкой 4 с уплотняющим кольцом. При вращении
шестерен жидкость во впадинах переносится из полости
всасывания в полость нагнетания и затем выдавливается зубьями шестерен,
вступающими в зацепление. Насосы бывают правого и левого
вращений, если смотреть с торца насоса со стороны приводного вала.
Подачу насосов (в см3/мин) с шестернями равных размеров
определяют при допущении, что насос за каждый оборот подает
количество жидкости, равное сумме впадин (камер) обеих шестерен за
вычетом объемов радиальных зазоров в зацеплении и что обоймы
впадин и зубьев равны между собой. Тогда
Пн = 2nzm2bn,
где z — число зубьев ведущей шестерни; т — модуль
зацепления; Ь — ширина шестерни, см; п — частота вращения ведущей
шестерни, об/мин.
Промышленность выпускает насосы НШ-10, НШ-32, НШ-46 и
НШ-50, НШ-98, НШ-250 с теоретической подачей масла за один
оборот вала соответственно 10, 32, 47, 50, 98 и 250 см3 при
наибольшем давлении 135 кгс/см2 при 1100—1900 об/мин и
объемным КПД до 0,94.
В практике изготовляют насосы подачей до 960 л/мин,
давлением до 250 кгс/см2, объемным КПД до 0,95 и механическим КПД—
до 0,97. Давление и объемный КПД зависят от радиальных и
осевых зазоров в камере нагнетания, что связано с культурой
производства насосов. Рабочее давление в отечественных установках
гидропривода с шестеренными насосами принято равным 100 кгс/см2
и в ближайшее время будет повышено до 160 кгс/см2.
8 А. Ф. Базанов? F. В. Забегалов
225
7. 2, Jv К «* £. 7.
Рис. 111. Аксиальный роторно-поршневой насос
Аксиальные роторно-поршневые насосы состоят из нескольких
(6—7) цилиндров с поршнями 5 и шатунами 4 (рис. Ill),
расположенных по кругу (подобно револьверному барабану) в одном
блоке 6. Приводной вал У, вращающийся в корпусе 2, оканчивается
диском, в который упираются своими шаровыми шарнирами
шатуны 4. Ось 3 блока 6 цилиндров наклонена относительно оси вала 1
на угол у = 10-7-12°, который определяет ход поршней 5. Блок
цилиндров вращается вокруг своей оси, и отверстия в торце у
цилиндров сообщаются с полостями всасывания или нагнетания через
два серпообразных окна 5, выполненных в
опорно-распределительном диске 7. Полости соединены с трубопроводами нагнетания и
слива через два отверстия 9.
Насосы бывают регулируемые и нерегулируемые. Путем
изменения угла 7 может меняться ход h поршней, а с ними и подача
насоса, так как h = D tg уУ meD — диаметр окружности, на
которой расположены центры цилиндров. В практике большое
распространение получили нерегулируемые насосы, как более простые по
конструкции.
Следует отметить, что только с применением роторно-поршне-
вых насосов создают большие давления в гидрообъемном приводе
(у отечественных экскаваторов 250—320 кгс/см2).
При определении подачи (в см3/мин) допускают, что оси
шатунов и поршней совпадают, шатуны перемещаются параллельно
самим себе, а центры их внешних шарниров описывают окружность
вокруг оси блока цилиндров. Средняя подача насоса (в см3/мин)
где d — диаметр, см; z — число цилиндров; D — диаметр
окружности по центрам цилиндров, см; п — частота вращения вала,
об/мин.
На принципе работы аксиального роторно-поршневого насоса
устроены обратимые гидродвигатели, у которых угол у наклона
226
Рис. 112. Нерегулируемый аксиальный роторнопоршневой
насос-гидродвигатель НПА-64
блока цилиндров берут равным 30°. Отечественная
промышленность выпускает нерегулируемый насос-гидродвигатель НПА-64,
применяемый на экскаваторах, кранах и многоковшовых
погрузчиках.
Блок 4 (рис. 112) цилиндров через универсальный шарнир 3
вращается от приводного вала /. Шатуны 2 у поршней 9 своими
шаровыми головками упираются в торец диска у вала 1. С помощью
пружины 8 блок 4 цилиндров прижимается к распределительному
диску 7, а последний к крышке 6. Жидкость подводится и
отводится через окна 5, расположенные в крышке 6.
Подача насоса гидродвигателя за один оборот вала составляет
64 см3 или 96 л/мии при давлении 70 кгс/см2 и 1500 об/мин,
объемный КПД равен 0,98.
Угловая скорость вала у насоса гидродвигателя регулируется
по принципу дросселирования поступающей в насос жидкости
с помощью применения разных клапанов.
Б. Баки и фильтры для рабочей жидкости
Баки являются промежуточной емкостью для охлаждения и
пополнения возможных утечек рабочей жидкости в гидросистемах.
Объем бака (в л) берут в зависимости от минутной подачи Пн
включаемых одновременно насосов (в л/мин), примерно равной (1—
1,6) /7Н. Баки с наименьшим объемом применяют в многоковшовых
погрузчиках и погрузчиках с нагребающими лапами, где
гидропривод мало загружен. Баки устанавливают в местах с хорошей
8* 227
Рис. 113. Бак с фильтром тонкой очистки для рабочей жидкости
естественной вентиляцией, подальше от двигателя и на уровне
не ниже насосов.
Как показала практика, проверка баков расчетом на нагрев
с рекомендуемыми в литературе [15] коэффициентами
теплоотдачи не приводит к реальным результатам из-за весьма
неопределенных местных условий для естественного обдува.
Обычно форма бака параллелепипед шириной В по торцу
и высотой Н с отношением В : Н не менее 0,5. Высоту уровня
масла принимают равной 0,8 Н. Длина бака является свободным
размером.
Стенки бака гладкие, а иногда и ребристые для лучшей
теплоотдачи. Баки выполнены сварными из гладких листов стали СтЗ
или из двух штампованных частей 4 (рис. 113) с отбортовкой по
контуру. На сливной линии вне бака или внутри его
устанавливают магистральные фильтры тонкой очистки жидкости, а в
заливной горловине у бака фильтр 7 грубой очистки жидкости.
Фильтры тонкой очистки устанавливают в баке на линии слива
в стаканах из труб. Жидкость поступает в отверстия в стаканах,
проходя через фильтрующие элементы 6. Из бака жидкость
засасывается насосом через запорный вентиль 2, в котором установлен
клапан 3 для закрытия выходного отверстия на случай
разъединения отводящего трубопровода от бака (клапан вывертывают до
отказа). При засорении фильтрующих элементов 6 повышается
228
давление в слие-ной магистрали, отчего срабатывает
предохранительный клапан S, и жидкость сливается в бак без фильтрации. На
случай выпуска жидкости из бака установлена пробка 1 с магнитом
для улавливания металлических частиц. Для контроля уровня
жидкости в баке устанавливают щуп 5, а чтобы избежать
избыточного давления в баке — сапун 9.
Баки размещены ближе к насосам и выше их (приблизительно
на 0,5 м), чтобы всасывающая магистраль и сами насосы были
всегда заполнены жидкостью.
Для фильтров тонкой очистки применяют инвентарные
фильтрующие элементы, изготовленные из латунной сетки с
отверстиями 40 и 63 мкм.
Примером конструкции может служить магистральный фильтр
(рис. 114). В корпусе 6 фильтра установлен цилиндр 7 с надетыми
на него фильтрующими элементами 4, представляющими собой
1
{ |
j |
i
S)
Рис. 114. Фильтр тонкой очистки:
а » конструкция; б — скема включения
полые чечевицы, изготовленные из сетчатых шайб, армированных
латунными кольцами по краям. Для них применяют латунную
сетку (6400 отверстий на 1 см2 с тонкостью очистки 63 мкм).
Фильтрующие элементы поджаты пружиной 2. На случай засорения
фильтра установлен предохранительный клапан <?, поджимаемый
пружиной 5 к седлу 1. При засорении фильтра клапан
открывается под давлением 2,5 кгс/см2, и жидкость проходит на слив из
корпуса без фильтрации.
6. Гидроцилиндры
Гидроцилиндры являются гидродвигателями с
возвратно-поступательным движением поршня или плунжера. Они бывают одно-
и двустороннего действия, причем первые из них поршневой или
плунжерной, а вторые — поршневой конструкции. Диаметры
цилиндра и штока (плунжера) нормализованы многими проектными
организациями, и цилиндры отличаются один от другого
небольшими конструктивными особенностями.
Цилиндры двустороннего действия в основном применяют в
механизмах наклона грузоподъемника у автопогрузчика или
поворота ковша в одноковшовых погрузчиках и т. д., когда возвратно-
поступательное движение поршня происходит под давлением
рабочей жидкости. Как правило, корпус самого цилиндра изготовлен
из цельнотянутой стальной трубы. По концам ее приварены фланцы
для крепления к цилиндру крышек на болтах, а в более
современных конструкциях крышки приварены прямо к трубе.
Имеется много цилиндров двустороннего действия разных
конструкций, но наиболее прогрессивной из них является
конструкция, приведенная на рис. 115. К корпусу 1 цилиндра с одного конца
приварена глухая крышка с ухом, а с другого конца вставлена
крышка 7, закрепленная с помощью гайки 9. В крышку 7 вставлена
направляющая втулка 8 для штока 2. Поршень 5 уплотнен двумя
манжетами 4 с распором манжетодержателями 3, а шток —
манжетой 10, поджатым фланцем 11. Кроме того, на шток надет грязе-
съемник 12. Конец штока оканчивается проушиной 13.
Для того чтобы обеспечить плавную остановку механизма
в конце хода, в крышке 7 имеется расточка под демпфер 6. Для
защиты подвижного соединения от пыли и грязи на конец цилиндра
и штока надевают иногда брезентовый чехол.
Чтобы избежать изгиба штока при возможных перекосах
цилиндра, он установлен на место через шаровые шарниры, для
чего в проушины вставлены шарнирные подшипники.
В механизмах подъема, когда груз, грузовые вилы и стрела
опускаются под действием силы тяжести поднятых масс,
применяют цилиндры одностороннего действия плунжерной или
поршневой конструкции.
В автопогрузчиках с нерегулируемой или постоянной
скоростью подъема груза применяют цилиндры подъема только плун-
230
жерной конструкции.
Плунжер 1 (рис. 116, а)
в основном представляет
собой обработанную
снаружи и заглушённую
(сваркой) с обоих концов
трубу. Корпус 8 цилиндра
изготовлен из трубы,
обработанной только по
концам. Снизу к ней
приварено днище с шаровой
заточкой, а сверху
отрезок более толстой трубы,
которую растачивают,
чтобы поместить в ней
направляющую втулку 6 из
чугуна, разъемное кольцо
5 для крепления втулки
и сальник 3 из манжет
воротникового типа с
поджимными пружинами 4 и
резиновым грязесъемни-
ком 2. Кроме того, для
частого выпуска воздуха,
попавшего в жидкость,
в верхней части цилиндра
установлена пробка 7.
К верхней части плунжера
приварена проушина для
установки траверсы с
перекинутыми через нее
грузовыми цепями. Ход
плунжера обычно
большой; он равен половине
высоты подъема вил у
автопогрузчиков. Ход в
крайних положениях плунжера
или поршня
ограничивается упором их в
крышки, если водитель не
успеет переключить золотник гидрораспределителя в
нейтральное положение.
У небольших автопогрузчиков при большой высоте подъема
груза, чтобы снизить их габаритную высоту, прибегают к
применению цилиндров телескопического типа плунжерной конструкции.
Например, у автопогрузчика 4015 (рис. 117, а) в механизме
грузоподъемника применен двухступенчатый цилиндр подъема.
Наружный цилиндр 5 (ход 709 мм) надет на внутренний цилиндр 8
23 1
Рис. 115. Гидроцилиндр двустороннего
действия поршневой конструкции
Рис. 116. Гидроцилиндры механизма подъема автопогрузчиков:
а « плунжерный; 6 = поршневой
(ход 605 мм), который в свою очередь надет на плунжер 7. Для
выпуска воздуха из цилиндра 5 вверху его ввернута пробка 6.
Цилиндры изготовлены из труб. Направлением для внутреннего
цилиндра служат чугунные втулки 2 и 4, между которые
поставлена распорная втулка 3. Такое же устройство примерно и для
наружного цилиндра. К внутреннему цилиндру внизу приварен
фланец 9 для крепления к нему концов подъемных цепей, а к плун-
232
Рис. 117. Гидроцилиндры
телескопического типа одностороннего
действия:
а — автопогрузчиков; б
вых погрузчиков
' ОДЙОИОВШ©*
жеру 7 фланец 11 для крепления цилиндра болтами через
пружины 10 к наружной раме грузоподъемника. Фланец опирается
на раму через шаровую пяту /, а верхний торец наружного
цилиндра 5 упирается в поперечину выдвижной рамы
грузоподъемника. Шаровая пята 1 при закреплении плунжера 7 болтами
через пружины 10 к нижней поперечине наружной (невыдвижной)
рамы грузоподъемника исключает влияние перекоса выдвижной
рамы на конструкцию цилиндра.
При осуществлении постоянной и дифференциальной скоростей
подъема груза на тяжелых автопогрузчиках типа 4028 применяют
цилиндр подъема поршневой конструкции одностороннего
действия (см. рис. 116, б). Здесь поршень 12 надет на трубчатый
шток 11, снизу открытый, а сверху заглушённый головкой 14.
233
В штоке установлены демпфер 10 и поршень 13 демпфера. Полость
А между поршнем 13 и головкой 14 через специальный клапан
заправляется газообразным техническим азотом под давлением
40 кгс/см2, ограничиваемым предохранительным клапаном 9.
Перед заправкой азотом в полость А заливают около 200 см3
веретенного масла.
Другой оригинальной конструкцией является цилиндр
(рис 117, б) телескопического типа, применяемый для подъема
стрелы одноковшового погрузчика с боковой разгрузкой ковша.
В корпусе цилиндра 16 установлен цилиндр 17 (0 143, ход 349 мм),
а в нем внутренний цилиндр 18 (0 118, ход 319 мм) и в последнем
плунжер 19 (0 97 мм). Упругое направление цилиндров
обеспечивается вверху чугунными кольцами 14 и 15, а внизу — чугунными
разрезными кольцами 20, выполненными по типу поршневых
колец. Ход цилиндров ограничивают разрезными стальными
кольцами 21. Уплотнения 13 и 15 применены воротникового типа.
Концы цилиндра оканчиваются шаровыми заточками 12 и 22, через
которые цилиндр устанавливают на раме шасси и снизу на стреле.
7. Гидрораспределители
Гидрораспределители являются устройствами для управления
механизмами объемного гидропривода. По конструкции они
бывают золотниковые, клапанные и крановые На погрузчиках
больше применяют первые с цилиндрическими золотниками, как
наиболее совершенные по конструкции и долговечные. Для
управления несколькими цилиндрами их применяют моноблочными или
секционными. Моноблочные более компактны, но сложны в
отливке.
По числу подключенных каналов золотниковые
гидрораспределители бывают двух-, трех- и четырехходовыми; двухходовые
(рис. 118, а) имеют два канала (напор, рабочий отвод) и служат
только для перекрытия потока рабочей жидкости; в трехходовых
(рис. 118, б) имеется три канала (напор, слив, рабочий отвод), они
предназначены для управления цилиндрами одностороннего дей-
Ра5очии
отдод
Напор
Напор
X
\Сли6
Напор
Слиб
х
г)
X
д)
п
а) 5) 8)
Рис. 118. Условные схемы распределительных устройств:
а «-. двухходовые; б — трехходовые; в «-. четырехходовые; г &=• трехпозиционные;
д а» четырехпозидионные
234
ствия; в четырехходовых (рис. 118, в) имеется четыре канала
(напор, слив, два рабочих отвода). Они служат для управления
цилиндрами двустороннего действия.
По числу положений (позиций) гидрораспределители
разделяют на двух-, трех- и четырехпозиционные; у двухпозиционныя
имеется только два фиксированных положения; у трехпозицион-
ных (рис. 118, г) три (два рабочих и одно нейтральное положение);
у четырехпозиционных (рис. 118, д) четыре (два рабочих, одно
нейтральное и плавающее положение).
В настоящее время наиболее распространены
гидрораспределители секционного типа, составленные из нескольких секций:
двух боковых, из которых одна напорная 1 (рис. 119), сливной 4
и рабочих секций 3. Число последних зависит от числа одиночных
и парных цилиндров. Как правило, для автопогрузчиков, не считая
сменного рабочего оборудования, требуется два золотника (для
подъема груза и наклона грузоподъемника), так же и для
одноковшового погрузчика (для подъема стрелы и поворота ковша).
Секции сначала обрабатывают снаружи отдельно, а затем,
проложив металлические прокладки между секциями, крепят их при
помощи болтов, и только потом растачивают и шлифуют отверстия
под золотники. Последние изготовляют из углеродистой стали
(сталь 45); обтачивают, обрабатывают, шлифуют, а иногда и
хромируют.
При сборке гидрораспределителей секции с отверстиями
разбивают на группы и путем индивидуального подбора добиваются
плотного скольжения золотников в гнездах с диаметральным
зазором в пределах 0,004—0,01 мм.
Некоторые авторы ошибочно считают, что в секционных
гидрораспределителях удобно добавлять и уменьшать число рабочих
секций. После разборки гидрораспределителя искажается
геометрия отверстия под золотник, которую не удается исправить при
повторной сборке даже с применением динамометрического ключа.
На зарубежных погрузчиках применяют
гидрораспределители, которые выполнены по параллельной схеме и могут
работать как трех- и четырехпозиционные гидрораспределители
(см. рис. 119).
В нейтральном положении золотники удерживаются в корпусе
с помощью пружин 7. При наличии проточек на золотниках они
разгружены от осевых усилий, поэтому усилие переключения их
в основном зависит от силы сжатой пружины. Плавность
включения и выключения гидросистемы обеспечивается фасками,
выполненными на поясках золотников.
Жидкость от насоса поступает в полость Е гидрораспределителя,
которая при нейтральном положении золотника сообщается со
сливной полостью В через прямоточный канал Ж. С полостью В
сообщаются также сливные каналы Г и Д для слива жидкости из
цилиндров. При переключении какого-либо из золотников
прямоточный канал закрывается и жидкость поступает в полость цилин-
235
А-А
i 1 x-~r п 1
/Т\\\ Рис. 119. Гидрораспределитель фирмы Виккерс
W1 (США)
-^ А
дров только через обратный клапан 5, расположенный в напорной
секции. Он препятствует перетечке жидкости из переключаемых
полостей цилиндров на слив через прямоточный канал Д.
Когда золотники находятся в нейтральном положении, насос
разгружен и преодолевает только сопротивления в сливной
магистрали, фильтре, баке и т. д., что в общей сложности не превышает
давления 1—1,5 кгс/см2.
Для управления цилиндров двустороннего действия золотник,
например, 2 перемещают влево, прямоточный канал Ж
перекрывается крайним пояском золотника, а два других пояска
открывают каналы, соединенные с полостями цилиндров. Жидкость
поступает в полость цилиндров под поршень, а из другой полости
цилиндров перепускается в бак. При перемещении золотника в
обратную сторону от нейтрального положения жидкость, а с ней и
поршень движутся в обратном направлении. При управлении
цилиндром одностороннего действия с перемещением золотника
вправо запирается канал слива и открывается канал, соединенный
с подпоршневой полостью цилиндра, и тогда груз поднимается.
С движением золотника от нейтрального положения влево подпор-
шневая полость соединяется со сливом, отчего груз опускается.
В напорной секции также расположен предохранительный
клапан 6, который обычно регулируют на давление, превышающее
рабочее на 25—30%.
Следует отметить, что в объемном гидроприводе
предохранительный клапан не является предохранительным в прямом смысле
слова, а скорее перепускным. Обычно водитель в крайних
положениях рабочего оборудования редко допускает упор поршня или
плунжера в крышки у цилиндров. При упоре клапан начинает
срабатывать и сигнализирует водителю об этом.
Другой распространенной конструкцией на отечественных
погрузчиках является гидрораспределитель конструкции ВНИИ-
Стройдормаша 111]. Конструктивно он (рис. 120) отличается от
описанного гидрораспределителя тем, что золотники 3 (на рисунке
показан один золотник) перемещаются в гильзах 2,
запрессованных в корпус секции 1, а в напорной секции 7 расположен
предохранительный клапан двойного действия, состоящий из клапана 4
и переливного золотника 8.
Масло от насоса поступает в полость б. При нейтральном
положении золотника 3 полость а соединена с полостью д дренажа через
канал г. Из-за перепада давления на демпфере 6 на переливной
золотник действует усилие, большее чем усилие сжатой пружины 5,
поэтому переливной золотник передвинется влево и соединит
полость б со сливной полостью е. В отличие от описанной выше
конструкции гидрораспределителя здесь переливной золотник
соединен не со сливной магистралью, а с дренажем, в котором давление
масла не превышает 0,5 кгс/см2.
С передвижкой золотника в рабочее положение канал г
управления переливным золотником соединяется каналами жил
237
Рис. 120. Гидрораспределитель конструкции ВНИИСтройдормаша
с напорной полостью и или к цилиндра, а противоположная
полость соединяется со сливом. В этом случае со стороны полости а
на переливной золотник действует суммарное усилие от давления
в напорной магистрали и от затяжки пружины 5. Для перемещения
переливного золотника давление на него со стороны полости б
должно быть на 4—5 кгс/см2 выше, чем в напорных магистралях
и и к. Такое же давление будет действовать на регулирующий
конец золотника 3 независимо от внешней нагрузки. Вследствие
принятого перепада давления достигается регулирование скорости
поршней у цилиндров при пуске в широких пределах и
уменьшается расход энергии на привод насоса.
Наряду с рассмотренными конструкциями
гидрораспределителей в отечественной практике распространены также
гидрораспределители конструкции Московского завода тракторных
гидроагрегатов, применяемые в основном на тракторах и многоковшовых
238
погрузчиках. Конструкция их более проста, а принцип работы
такой же, поэтому они здесь не рассмотрены.
Гидрораспределитель устанавливают на погрузчике спереди
кабины в вертикальном или горизонтальном положении. Усилие
на рукоятке управления применяют не более 1—2 кгс.
В тех случаях когда число основных секций с золотниками
недостаточно для работы со сменным оборудованием, прибегают
к управлению одним золотником двух цилиндров. Например,
в конструкции, разработанной для этого Львовским ГСКБ
автопогрузчиков, устанавливают специально разработанный двухпо-
зиционный кран (рис. 121). Полости его аи б соединяют с полостями
цилиндра /, а полости еигс полостями цилиндра //. Кроме того,
полость д соединяется с зоной напора, а полость е с зоной слива
у гидрораспределителя. При правом крайнем положении
золотника 3 в работу вступает цилиндр /, а при крайнем левом
положении золотника — цилиндр //. Золотник 3 перемещается вследст-
Рис. 121. Кран для управления двумя цилиндрами с помощью одного
золотника гидрораспределителя
239
вне включения электромагнита / при напряжении 12 В, который
преодолевает усилие затянутой пружины 2 Таким образом, один
золотник гидрораспределителя управляет работой двух цилиндров.
8. Клапаны для регулирования потока рабочей жидкости
Для регулирования потока рабочей жидкости кроме
гидрораспределителей применяют предохранительные и обратные клапаны,
а также дроссели, напорные золотники и т. д.
Дроссели применяют для уменьшения скорости спуска груза и
наклона рамы грузоподъемника вперед и назад (на
автопогрузчиках), скорости спуска стрелы и поворота ковша (на одноковшовых
погрузчиках).
С помощью дросселей сокращается расход рабочей жидкости
в магистрали путем уменьшения проходного отверстия. Дроссели
бывают управляемые (регулируемые) и неуправляемые. У первых
проходное отверстие выполняют переменным, а у вторых —
постоянным.
Жидкость поступает в корпус регулируемого дросселя через
отверстие 5 (рис. 122, а). Далее через пустотелый золотник 3
щель 4 в золотнике она проходит в маслоотводящее отверстие 6.
С поворотом золотника через рукоятку можно изменить проходное
отверстие щели и менять поток жидкости, проходящий через
отверстие 4 дросселя. Золотник жестко связан с лимбом /, поэтому
при его повороте на шкале 2 указывается скорость спуска груза,
С поворотом рукоятки по часовой стрелке скорость спуска
груза увеличивается, а при повороте против часовой стрелки
уменьшается. Скорость подъема груза регулируется только
изменением частоты вращения коленчатого вала двигателя.
Дроссель может быть установлен на напорной (регулирование
на входе) или сливной (регулирование на выходе) магистралях.
На напорной магистрали перед дросселем устанавливают
предохранительный клапан, поэтому часть рабочей жидкости проходит
А -А
1 2
а)
Рис. 122. Дроссели:
а шш регулируемый; б «• нерегулируемый
240,
5)
через дроссель в гидроцилиндр, а другая через предохранительный
клапан на слив. Иногда регулируемые дроссели объединяют вместе
с предохранительным клапаном.
Неуправляемые дроссели (рис. 122, б) являются штуцерами
с небольшим сквозным отверстием диаметром d == 1 мм и более.
Диаметр проходного отверстия определяют при испытаниях.
Метод регулирования скорости движения штоков или
плунжеров у гидроцилиндров с помощью дросселирования является
очень простым, но связан с потерей напора, большим снижением
КПД гидропривода и быстрым «износом» жидкости из-за
полимеризации ее при лишнем нагреве.
Напорные золотники предназначены для предохранения
гидросистем от чрезмерного давления. Их встраивают в магистраль
спуска груза или стрелы после гидрораспределителя. Зона 6
(рис. 123) высокого давления у золотника находится под
давлением, создаваемым насосом, а зона 2 соединена со сливом.
Нормально золотник / разгружен; камера 7 соединена с зоной 6У а
камеры 4 и 5 соединены с зоной 2. Золотник 1 с помощью пружины 3
настраивается на определенное допустимое давление. С
превышением давления в зоне 6 увеличивается давление и в зоне //. Так
как зона // соединена каналами <§, 9, 10 с зоной 6, то золотник
отойдет вправо. При этом камера 7 соединится с зоной2. Таким образом,
при включении золотника гидрораспределителя на спуск груза или
стрелы снижается давление в магистрали от насоса до нужного,
а с ним и скорость спуска груза или стрелы.
Управляемые обратные клапаны (рис. 124) применяют для
предотвращения самопроизвольного опускания поднятых рабочих
органов при нарушении герметичности трубопроводов. Рабочая
жидкость под давлением проходит прямо через канал /, открывает
основной 6, преодолевая при этом усилие сжатой пружины 7, и
/ 2
J
Рис. 123. Напорный золотник:
/ — золотник; 2г 6г И «=* зоны; 3 *т пружина; 4Ь 5S 7 » камеры; 8-^
10 т» каналы
241
2
I—
Рис. 124. Управляемый обратный клапан
поступает в канал 3. Проход жидкости обратно становится
возможным после подачи давления для управления под поршенек 5 через
канал 4. Поршенек сдвигается вправо и толкателем открывает
разгрузочный клапан S, размещенный в основном клапане 6.
При этом часть рабочей жидкости через канал 2 проходит в
дренаж. Для того, чтобы уменьшить необходимое давление для
управления обратные клапаны выполняют с предварительной
разгрузкой.
9. Гидроаккумуляторы
Гидроаккумуляторы предназначены для создания достаточных
сил трения между концами захватов сменного рабочего
оборудования и зажатого ими штучного груза на время
транспортирования при отключенном насосе. Силы трения создаются пружинами,
предварительно сжатыми в гидроцилиндре путем давления
жидкости на поршень при неотключенном насосе.
Гидроаккумулятор представляет собой гидроцилиндр
(рис. 125, а), у которого на шток 4 надеты тарельчатые пружины 3.
Жидкость от насоса под давлением поступает в подпоршневую
полость 9, отчего поршень стремится отойти вправо и сжимает
тарельчатые пружины. Чтобы не было противодавления воздуха
в штоковой полости, на цилиндре устанавливают сапун 7. Таким
образом, при выключенном насосе поддерживается давление в
полостях у цилиндров рабочего оборудования путем силы сжатых
пружин.
Гидроаккумуляторы рассчитаны на среднее давление в
напорной магистрали. Например, гидроаккумулятор ГА-6, показанный
на рис. 125, должен работать в диапазоне давлений 30—50 кгс/см2,
при этом объем полости 9 увеличивается на 250 см8, а при рабочем
давлении 100 кгс/см2 до 370 см3. Схема включения приведена на
рис. 125, б.
242
Ю 1/ 12
Рис. 125.
Гидроаккумулятор:
а — конструкция; б —
схема включения; / — корпус;
2 — поршень; 3 —
тарельчатые пружины; 4 — шток;
5 — крышка; 6,9 —
полости; 7 — сапун; 8 —
подводящее отверстие, 10 —
гидроаккумулятор; 11 —
обратный клапан; 12 —
гидроцилиндры; 13 —
гидрораспределитель; 14 — насос
5)
10. Гидроусилители рулевых управлений
Гидроусилителями руля называют сервомеханизмы,
применяемые для уменьшения усилия на руле при больших сопротивлениях
повороту управляемых колес в транспортных машинах на
пневматическом ходу. К гидроусилителям часто относят также устройства
в виде гидрообъемного руля.
Гидроусилители бывают с переменным или постоянным усилием
на руле в зависимости от сопротивления повороту управляемых
колес. В первом случае при любом уменьшении усилия на руле
у водителя всегда сохраняется так называемое «чувство дороги»,
а во втором усилие на руле зависит только от усилия сжатой
пружины, удерживающей золотник гидроусилителя в нейтральном
положении.
Гидроусилители в основном состоят из трех главных частей:
рулевого механизма, золотникового устройства и силового
гидроцилиндра. Их выполняют в одном блоке, как у гидроусилителя
автомобиля ЗИЛ-130, или с отдельным силовым гидроцилиндром,
устанавливаемым непосредственно на балке управляемого моста,
как у гидроусилителя типа Н-375 (см. рис. 6) или у гидрообъем,
ного руля (см. рис. 8). Гидроусилители, выполняемые в одном
блоке, встраивают в систему рулевых тяг и соединяют с рулевым
колесом, а у гидроусилителей с отдельным силовым цилиндром
рулевое колесо соединяют непосредственно с золотниковым
устройством.
Гидроусилители не только снижают усилие для поворота руля,
но и смягчают удары, возникающие на управляемых колесах из-за
неровностей дороги, а также повышают безопасность движения,
сохраняя контроль за направлением движения машин при разрыве
шины.
У выпускаемых автопогрузчиков грузоподъемностью 1—5 т
наиболее распространенным является гидроусилитель,
заимствованный от автомобиля ЗИЛ-130. Рулевой механизм его состоит из
винта 2 (рис. 126), гайки 3, рейки-поршня /, зубчатого сектора и
золотникового устройства в сборе. Передаточное отношение
рулевого механизма 20 : 1. Согласно принятой классификации рулевых
механизмов в автомобилестроении здесь использован принцип
комбинированного рулевого механизма. Винт и гайка имеют винтовую
нарезку, образуя вместе винтовой канал, в котором при повороте
рулевого колеса перекатываются шарики 5 (31 шт.), отчего трение
скольжения между винтом и гайкой заменяется трением качения.
В паз у гайки 3 вставлена трубка 4 (желобок), образующая петлю,
по которой шарики, выкатываясь при повороте винта с одного
конца гайки, возвращаются к ее другому концу. Такая
конструкция позволяет увеличить КПД винтовой пары до 0,7—0,75. Гайка
вставлена в рейку-поршень и закреплена в нем с помощью
установочного винта. Цилиндр 13 является одновременно и картером
рулевого управления. Для уплотнения поршня в цилиндре
применены чугунные поршневые кольца 12.
Зубья рейки-поршня и секторы выполнены переменной
толщины, чтобы можно было выбирать люфт между ними путем
смещения валика 15 рулевой сошки с помощью винта 16. Картер
рулевого управления прикреплен болтами к раме погрузчика, конец
винта с валом рулевой колонки соединен с помощью карданного
вала, а рулевая сошка 14 с рулевыми тягами.
На крышке цилиндра закреплен корпус 8 клапана. К нему
сверху подведены шланги высокого давления от насоса и обратно
от клапана на слив в бак, Внутри корпуса клапана установлен
золотник 9, длина его между шарикоподшипниками 6 больше
длины отверстия под него в клапане управления. Поэтому золотник
и винт могут перемещаться в осевом направлении на 1 мм вправо
и влево. В среднее (нейтральное) положение они возвращаются под
действием шести пружин 11 и реактивных плунжеров 10,
находящихся под давлением масла в напорной магистрали.
При повороте винта 2 в ту или другую сторону создается
сопротивление повороту колес, а с ним и сила, стремящаяся сдвинуть
винт в осевом направлении. Если она больше предварительного
сжатия пружин //, то винт перемещается и сдвигает золотник 9,
отчего одна полость гидроусилителя сообщается с линией нагне-
244
А-А
Рис. 126. Гидроусилитель рулевого управления для погрузчиков, грузоподъемностью до 5 т
тания, а другая со сливом. Жидкость, поступающая от насоса
в цилиндр, давит на поршень-рейку, отчего создается
дополнительное к ручному усилие на секторе валика 15 сошки для поворота
колес.
Поскольку золотник 9 является четырехкромочным и с
отрицательным перекрытием каналов, т. е. с зазором, то в нейтральном
положении его жидкость при работающем насосе свободно
циркулирует из линии нагнетания на слив с небольшим давлением
порядка 5 кгс/см2. Эту жидкость под давлением часто используют
для подпитки насоса, применяемого в гидроприводе
грузоподъемника, через специально установленный на линии всасывания
эжектор.
Давление в рабочей полости цилиндра увеличивается с
повышением сопротивления повороту колес. Чем больше сопротивление
и выше давление в рабочей полости цилиндра, тем больше усилие,
с которым золотник стремится вернуться в среднее положение, и
тем больше возникает усилие на рулевом колесе. Таким образом,
с облегчением усилия повороту рулевого колеса у водителя
создается также чувство дороги. Наименьшее усилие на рулевом
колесе, соответствующее началу работы гидроусилителя, примерно
равно 2 и наибольшее — около 10 кгс.
На случай отказа насоса шариковый клапан 7 соединит
напорную линию со сливом, и рулевое управление будет работать без
усилителя.
В последнее время появились гидроусилители Н-375 с
переменным усилием на руле. Они оборудованы таким же золотниковым
устройством, как у гидроусилителя автомобиля ЗИЛ-130, но их
выполняют с отдельным гидроцилиндром, устанавливаемым шар-
нирно на балке управляемого моста (см. рис. 6). При этом шток
цилиндра соединен с маятниковым рычагом у рулевой трапеции.
К достоинствам гидроусилителя Н-375 следует отнести
уменьшение числа тяг и рычагов от рулевой колонки до маятникового
рычага, а самое главное — возможность применения одного и
того же рулевого механизма с разными гидроцилиндрами для
машин разных грузоподъемностей.
На автопогрузчиках и одноковшовых погрузчиках
грузоподъемностью более 5 т сейчас применяют гидроусилители с постоянным
усилием на руле от сопротивления колес повороту. У них
гидроцилиндр конструктивно объединен также с золотниковым
механизмом. Сам цилиндр 6 (рис. 127) зажат между крышкой 4 и
корпусом 8 золотника с помощью четырех стяжных шпилек. На конец
штока 3 навернуты головка 2 для крепления штока к раме шасси
через шаровой палец / и соединенную с ним специальную тягу.
К корпусу 8 золотника прикреплен стакан 13, в котором
установлена скользящая втулка 11, а в ней, между двух вкладышей 15
через пружины 10 и 14, зажат шаровой палец 12. Последний через
продольную рулевую тягу соединен с рулевой сошкой. С
перемещением тяги смещается также вдоль оси гидроусилителя сколь-
246
7 8 9 10 11 12 13 П
Рис. 127, Гидроусилитель рулевого управления для погрузчиков грузоподъемностью свыше 5 т
зящая втулка вправо и влево примерно на 2,5 мм, а вместе с ней
смещается и золотник 9 в гильзе 7. Последний перекрывает один
и открывает другие окна в гильзе, отчего жидкость поступает
в поршневую или штоковые полости у цилиндра, который
перемещается относительно поршня в ту или другую сторону.
Водитель, поворачивая рулевое колесо, преодолевает только
усилие сжатой пружины 10 (приблизительно 2,5—3,5 кгс), а не
сопротивление колес повороту. Таким образом, при таком
гидроусилителе водитель при повороте рулевого колеса лишен чувства
дороги.
При нарушении нормальной работы любого гидроусилителя
водитель должен прилагать максимальное усилие к рулевому
колесу. При этом с перемещением цилиндра жидкость будет
вытесняться поршнем 5 из одной полости в другую через аварийный
шариковый клапан. Излишек жидкости, создающийся из-за
разницы объемов полостей в цилиндре, будет выливаться через
сливной канал.
Для гидроусилителя устанавливают свой шестеренный насос,
например насос НШ-32 для гидроусилителя ЗИЛ-130 с подачей
15 л/мин при 600 об/мин. Насос приводится от основного
двигателя; с учетом частоты вращения коленчатого вала последнего
устанавливают передаточное число трансмиссии для привода
насоса. При переменной частоте вращения меняется подача
насоса, а с нею и скорость поворота управляемых колес. Для
соблюдения постоянства скорости поворота вместе с гидроусилителем
применяют специальный блок клапанов Б2.
При установке гидрообъемного руля обеспечивается только
гидравлическая, а не силовая связь между рулевым и
управляемыми колесами (см. рис. 8). Рулевое колесо объединено с
золотниковым устройством, а гидроцилиндр, как и гидроусилитель Н-375,
шарнирно устанавливают на балке управляемого моста. С
применением гидрообъемиого руля усилие на рулевом колесе всегда
постоянно и не связано с сопротивлением повороту управляемых
колес, что является основным недостатком этого руля. К
преимуществам его надо отнести отсутствие рулевых тяг и сошки, что очень
важно для погрузчиков с задним управляемым мостом, и
возможность поворота управляемых колес при неработающем двигателе.
Последнее достигается в результате установки дополнительного
гидрообъемного механизма в виде ручного насоса-дозатора с
гидрораспределителем. Этот механизм при надобности через
специальную муфту соединяют с рулевым колесом; при поворотах
последнего создается давление в одной из полостей гидроцилиндра и
достаточное усилие для медленного поворота колес.
11. Особенности гидропривода автопогрузчиков
Примерная схема гидропривода автопогрузчиков была
приведена на рис. 9, а основная конструкция стандартной и
нормализованной гидроаппаратуры описана в начале настоящей главы.
248
В дополнение к этому рассмотрим принципиальную конструкцию
гидроустройств, применяемых на автопогрузчиках. К ним
относятся блоки Б1 и Б2 клапанов, а также золотниковый
гидрораспределитель.
Блок Б1 клапанов применяют на автопогрузчиках грузоподъ-
емкостью до 5 т для получения одних и тех же примерно
постоянных скоростей подъема-спуска груза независимо от массы
последнего.
Блок клапанов в основном состоит из управляемого клапана 4
(рис. 128, а) (гидрозамка), клапана 12 для регулирования скорости
спуска груза и демпфера 9 для плавности спуска груза. Гидрозамок
предназначен для того, чтобы предотвратить самоспуск вил с
грузом или без груза при обрыве шланга, подводящего к
гидроцилиндру подъема рабочую жидкость. В магистраль перед блоком
клапанов встроен напорный золотник 16 (см. рис. 128, б) для
создания определенного (командного) давления в трубопроводе,
которым он связан с блоком клапанов. Только при заданном давлении
может открыться клапан 12 (см. рис. 128, а) для регулирования
спуска груза.
Скорости подъема-спуска груза в зависимости от условий
работы могут быть изменены водителем. Для этого на пути от
насоса до блока Б1 клапанов встраивают управляемый дроссель 17
(рис. 128, б).
Блок клапанов прикреплен болтами к корпусу гидроцилиндра
подъема внизу, куда подходит трубопровод, подводящий рабочую
жидкость.
С включением золотника гидрораспределителя на подъем груза
рабочая жидкость через штуцер 1 (рис. 128, а) поступает в зону 2
гидрозамка, отжимает клапан 4 и через зону 11 проходит в
гидроцилиндр подъема. При этом будет выдвигаться плунжер
цилиндра и подъемная каретка с вилами будет подниматься.
С переключением золотника распределителя в нейтральное
положение поднятые вилы с грузом или без него будут
удерживаться в неподвижном положении, так как зона 11 у блока
клапанов и плунжер гидроцилиндра будут находиться под давлением.
В это время клапаны 4 и 12 будут закрыты сжатыми пружинами
7 и 14.
С переключением золотника распределителя на спуск вил
включается в работу напорный золотник (см. рис. 123). Жидкость
от насоса по трубопроводу поступает в зону 6 и по каналам 8, 9 к 10
подается в зону Л. При заданном командном давлении, на которое
сжата пружина 5, шток золотника отойдет вправо и соединит
зону 2 через трубопровод с зоной 10 (см. рис. 128, а) у блока
клапанов. При этом клапан 12 отойдет вправо, соединит зону 11 с
зоной 2, и жидкость из цилиндра пойдет на слив в бак через штуцер /.
Постоянство скорости спуска груза независимо от его массы
обеспечивается тем, что напорный золотник создает постоянную
величину открытия клапана 12. При увеличении скорости спуска
249
// 12 /S
Рис. 128. Блок Б1 клапанов:
а •«« конструкция; С «» схема включения; 1 — штуцер; 2, 10, 11 — зоны; 3 — седло клапана; 4 — управляемый
клапан; б — пружинное кольцо; 6 — стержень для -ручного отвода клапана; 7 — пружины; 8 — колпачок; 9 —
демпфер; 12 — клапан для регулирования скорости спуска груза; 13 — гильза с седлом клапяна; 14 — пружина;
15, 21 — сетчатые фильтры; 16 — напорный золотник; 17 — управляемый дроссель, 18 — гидроцилиндр подьема;
19 — обратный клапан; 20 — золотник гидрораспределителя; 22 — шестеренный насос
груза давление в зоне 11 у блока клапанов повысится, а с ним
увеличится и скорость прохождения жидкости через зазор между
седлом клапана у гильзы 13 и самим клапаном 12, а также в зоне 11.
С увеличением скорости спуска груза повышается также и
противодавление в зоне 2, что вызывает некоторое смещение клапана 12
влево, отчего скорость спуска груза уменьшится до заданной.
Таким образом, будет соблюдаться постоянство скоростей спуска
независимо от нагрузки.
При обрыве шланга, подводящего жидкость к цилиндру
подъема, давление в зоне 2 упадет до нуля, клапан 4 под действием
пружины 7 будет прижат к седлу 3 клапана, а клапан 12 перекроет
отверстие для выхода масла из зоны 11 в зону 2, и груз будет
удерживаться в поднятом положении. При такой аварийной ситуации
груз можно спускать с отжимом клапана 4 от его седла 3 вручную.
Для этого отвертывают колпачок 8 и отверткой вывертывают
немного стержень 6. Клапан 4 посажен на стержень 6 с большой
свободой и закреплен на стержне с помощью пружинного кольца 5.
Золотниковый гидрораспределитель применяют для получения
дифференциальной скорости подъема-спуска груза у
автопогрузчиков грузоподъемностью свыше 5 т, когда приходится поднимать
грузы с большой разницей
масс. Поэтому для
уменьшения времени цикла
целесообразно увеличивать
скорость подъема-спуска
малых грузов и порожних
грузовых вил.
Для получения
дифференциальной схемы
применяют гидроцилиндр
поршневой конструкции по
типу гидроцилиндра (см.
рис. 116, б), на котором
внизу вместе с блоком Б1
клапанов установлен
также золотниковый
гидрораспределитель.
Переключение с
подъема на спуск и остановка
груза осуществляются
с помощью общего
гидрораспределителя, а
переключение с режима малой
на режим подъема-спуска
большой, т. е. номинальной
грузоподъемности, с
помощью золотникового гид- Рис 129# золотниковый гидрораспределитель
рораспределителя. В КОр- и схема установки его
251
пусе 5 (рис. 129) его расположен золотник 4 и клапан 8 с
каналом 9 для отвода в сливную полость 7 утечек через шариковый
обратный клапан /. Рабочая жидкость нагнетается в полость 6
клапана.
При включении общего гидрораспределителя на подъем груза
штоковая полость 3 (рис. 129) гидроцилиндра соединена со сливом,
и жидкость, подаваемая насосом через гидрораспределитель,
направляется в поршневую полость 2. Происходит подъем груза. При
грузе с меньшей массой давление жидкости в системе понижается,
и происходит автоматическое переключение подъемного механизма
для работы по дифференциальной схеме [2]. Жидкость
одновременно будет нагнетаться в поршневую полость 2 и штоковую 3
(обе полости будут соединены вместе). Тогда усилие подъема,
создаваемое цилиндром, будет равно давлению в системе,
умноженному на площадь сечения штока, а скорость подъема будет
определяться исходя из объема штока, заполняемого жидкостью. При
этом усилие подъема будет меньше, а скорость больше, чем при
прямом включении.
При подъеме предельного (расчетного) по массе груза давление
жидкости будет увеличиваться до предела, на который настроен
шариковый клапан 1. С открытием его клапан 8 с золотником 4
переместятся вправо и откроют магистраль для перепуска
жидкости на слив в бак. В крайнем правом положении золотника 8
штоковая полость цилиндра подъема сообщается со сливом, и гидро-
распределитель автоматически переключается на режим обычного
(прямого) включения.
Груз в режиме малой грузоподъемности (по дифференциальной
схеме) спускается при перетекании жидкости из поршневой
полости в штоковую, а ее излишек перепускается на слив в бак.
Таким образом, увеличивается скорость спуска груза с малой
массой' и негруженных вил.
Отношение поднимаемых масс груза, скоростей их подъема и
площадей сечения штока и поршня у цилиндра [2]
где ты, тп — массы номинального и предельного при режиме
малой грузоподъемности груза; D, d — диаметры цилиндра и штока
(см. рис. 116, б) у автопогрузчика 4028 соответственно 180 и 110 мм;
vHi vn — номинальные и предельные скорости подъема при режиме
малой грузоподъемности груза; rjn, r|o#n — механический КПД
цилиндра и объемный КПД насоса при подъеме груза тп; р п —
давление в цилиндре при подъеме груза тп; рн> т|н, v\OtH — те же
параметры, но при номинальном грузе ти.
Расчетное давление в системе при подъеме предельно.малого
груза можно принимать рп — ра. С применением
дифференциальной схемы удается получить увеличение скорости подъема
252
небольших грузов в 2,6 раза и увеличить производительность
автопогрузчика примерно на 30%.
Блок Б2 клапанов применяют для обеспечения постоянной
скорости поворота управляемых колес у автопогрузчиков при
установке гидроусилителей руля. Обычно подачу насоса для
гидроусилителей рассчитывают примерно на среднюю частоту вращения
вала двигателя. С увеличением частоты вращения подача насоса,
а также скорость поворота управляемых колес увеличиваются,
что создает водителю тяжелые условия работы.
Чтобы обеспечить постоянную скорость поворота
управляемых колес независимо от подачи насоса, в блоке клапанов
установлен регулируемый дроссель / (рис. 130), ограничивающий
поступление количества жидкости в гидроусилитель руля. При
этом избыток жидкости, подаваемой насосом через перепускной
клапан 6, сливается в бак. Например, в автопогрузчиках
грузоподъемностью 3 и 5 т при установке гидроусилителя руля от
автомобиля ЗИЛ-130 дроссель настраивают на расход жидкости
12—13 л/мин. В блоке клапанов установлен также
предохранительный (шариковый) клапан 5, настраиваемый на давление 65—
70 кгс/см2.
Блок клапанов встраивают в напорную магистраль от насоса.
Из блока клапанов в гидроусилитель жидкость поступает через
полости 8 и 2, соединенные между собой каналом, в который
встроен дроссель /. Размер проходного отверстия последнего
подбирают такой, чтобы жидкость из полости 8 свободно поступала
в гидроусилитель через полость 2. С увеличением частоты
вращения коленчатого вала двигателя количество жидкости,
подаваемой насосом, и перепад давления перед перепускным клапаном 6
увеличиваются, отчего перепускной клапан сместится вправо,
соединит полости 8 и 7, минуя гидроусилитель, и излишек жидкости
пойдет на слив в бак. С повышением давления в полости 2
откроется предохранительный клапан 5 и полость 2 соединится с
полостью 7. Таким образом, скорость поворота управляемых колес
L-X—
„—J-J
Рис. 130. Блок Б2 клапанов
253
становится неизменной независимо от частоты вращения
коленчатого вала двигателя. Клапаны 5 и 6 регулируются с помощью
прокладок 4 и 3, а дроссель 1 с помощью винта 9.
Схема соединения блока Б2 клапанов и гидрораспределителя
П1 приведена на рис. 9. Насосом 28 масло подается в напорную
линию через сетчатый фильтр 21, конструкция которого
приведена на рис. 114. При засорении фильтра жидкость проходит
через перепускной клапан 22 (см. рис. 9), связанный с
электроконтактным реле 20 давления, которое дает сигнал на пульт
управления (зажигается красная лампочка).
12. Особенности гидропривода одноковшовых погрузчиков
Гидропривод рабочего оборудования одноковшовых
погрузчиков имеет некоторые особенности в зависимости от типоразмера
погрузчика, конструкции поворотного механизма, ходовой части
погрузчика и др.
По типовой схеме гидросистемы управления рабочим
оборудованием (см. рис. 32) рекомендуется создавать гидропривод
наиболее распространенных погрузчиков на колесном и гусеничном
ходу с поворотными механизмами, имеющими механические
системы сохранения уровня рабочего органа в процессе подъема
стрелы и исполнительные гидроцилиндры двустороннего
действия. Обычно гидропривод подобных погрузчиков отличается
числом секций распределителя. В наиболее простых погрузчиках
применяют двухсекционные распределители на две группы
исполнительных гидроцилиндров для управления стрелой и ковшом,
В универсальных погрузчиках, оборудуемых рабочими органами
с гидроприводом (двухчелюстным ковшом, с боковой разгрузкой,
с принудительной разгрузкой, челюстным захватом и т. п.),
а также рыхлителями, используют трех- и четырехсекциониые
распределители. Наиболее широко распространены погрузчики с трех-
секционным распределителем.
С увеличением типоразмера погрузчика и, следовательно,
повышением расхода гидропривода изменяется система
управления основным распределителем. Вместо ручного управления
вводят электрическое или гидравлическое сервоуправление.
Электрическое сервоуправление предусматривает
переключение золотников распределителя с помощью магнитных
соленоидов, а гидравлическое сервоуправление осуществляется с помощью
дополнительной гидросистемы небольшой производительности.
На тяжелых, одноковшовых погрузчиках (i рузоподъемность
Юти более) применяют герметизированные гидросистемы с
насосами постоянной подачи (рис. 131). Противодавление в баке
принимают равным 1—2 кгс/см2, создают с помощью
устанавливаемой для этого пневмосистемы и ограничивают настройкой
специального предохранительного клапана.
Использование герметизированных систем значительно
улучшает условия работы гидронасосов, так как снижается степень
254
Рис. 131. Принципиальная схема привода погрузочного оборудования с гидро-
сервоуправлением
загрязнения рабочей жидкости, ликвидируются кавитационные
режимы во всасывающей магистрали, повышается частота
вращения гидронасосов и их подача.
Основной гидронасос 17 и гидронасос 13 сервопривода
отделены от бака запорными клапанами 15 на случай ремонта.
Основной гидронасос (или несколько гидронасосов) по
нагнетательной магистрали подает давление в главной распределитель,
имеющий на тяжелых погрузчиках преимущественно два
золотника управления стрелой 6 с помощью стреловых гидроцилиндров 3
и управления ковшом 7 посредством гидроцилиндров 4. Возможно
применение и трехсекционного распределителя при оборудовании
тяжелых погрузчиков рыхлителями.
Для упрощения конструкции и системы сервопривода
золотники главного распределителя имеют три положения: подъем,
нейтральное и опускание.
Управляют золотниками б, 7 главного распределителя с
помощью золотника 8 распределителя сервоуправления для ковша
и золотника 11 для стрелы, которыми управляют вручную.
Основной и сервоуправляющий распределители могут быть
конструктивно объединены в одном блоке. Для уменьшения
потерь в гидросистеме чаще главный распределитель устанавливают
255
в непосредственной близости от гидронасоса или гидроцилиндров,
а распределитель сервоуправления в кабине водителя.
Главный и сервоуправляющий распределители оборудованы
независимыми предохранительными клапанами 12 и 18.
Предохранительный клапан 12 системы сервоуправления регулируют,
как правило, на меньшее давление.
Обе гидросистемы снабжены полнопоточными фильтрами 16,
19, которые устанавливают снаружи или внутри бака. Фильтр
основной гидросистемы обычно выполняет грубую очистку
жидкости с отделением частиц размером 40—50 мкм; фильтр системы
сервоуправления, имея размеры ячеек 5—10 мкм, выполняет
тонкую очистку жидкости. В связи с тем, что основной и
сервоуправляющий насосы питания из одного бака, вся жидкость
постепенно проходит через фильтр тонкой очистки. Температура
жидкости в баке измеряется дистанционным термометром 14. Для
сохранения постоянной скорости опускания стрелы в поршневой
магистрали стреловых гидроцилиндров установлен дроссель L
Скорости срабатывания исполнительных гидроцилиндров в
подобных гидросистемах регулируют путем изменения частоты
вращения коленчатого вала двигателя погрузчика
соответственно подачей гидронасосов.
Для облегчения условий работы водителей в гидроприводе
одноковшовых погрузчиков применяют автоматические
устройства для остановки стрелы на определенной высоте, уровень
которой и ковша в положении копания может регулироваться.
Для этой цели на ковшовых и стреловых гидроцилиндрах или
непосредственно на портале установлены гидровыключатели
2 и 5, связанные с фиксаторами на золотниках
сервоуправления или основном распределителе.
Автоматические устройства работают следующим образом.
При включении золотника 11 сервоуправления стрелой на подъем
он удерживается в этом положении фиксатором 10, переключающим
соответствующую секцию главного распределителя.
Гидронасос соединен с поршневыми полостями стреловых
гидроцилиндров и выполняет подъем стрелы до того положения, пока упор,
связанный со штоком, не упрется в гидровыключатель 2.
Поршень гидровыключателя перемещается, и часть жидкости по
соединяющей магистрали выталкивается в фиксатор 10.
Фиксация золотника сервоуправления снимается, усилием
пружин он переводится в нейтральное положение, в результате
чего секция главного распределителя возвращается в нейтральное
положение. Стреловые гидроцилиндры и насос разъединяют,
и их движение и подъем стрелы прекращаются. Изменяя
положение упора на штоке или чаще на стреле, можно менять высоту
автоматической остановки стрелы.
Аналогичным образом автоматически устанавливается ковш
в положение копания. После разгрузки водитель включает
золотник 8 на запрокидывание ковша, который удерживается во
256
включенном состоянии фиксатором 9. Затем золотник главного
распределителя перемещается, насос подает давление в
поршневую полость поворотных гидроцилиндров, ковш
запрокидывается до того момента, пока упор не воздействует на
гидровыключатель. Перемещение поршня гидровыключателя действует
на фиксатор 9, золотники распределителей возвращаются в
нейтральное положение, и движение ковша прекращается — он
останавливается в положении копания.
Распространенная конструкция гидровыключателя и
связанного с ним шарикового фиксатора золотника распределителя
приведена на рис. 132. '
/Т/Г
18 17 18 15 П
20 19 18 17 18 15 П М
Рис. 132. Гидровыключатель и фиксатор золотника распредели- '
теля
А, Ф. Балашов, Г. В. Забегалов
257
Корпус 6 гидровыключателя имеет резервуар для жидкости и
цилиндрический канал толкателя / и компенсатора 8 с пружинами
7 я 9. Болт 10 удерживает толкатель от проворачивания вокруг
своей оси и ограничивает его ход. На конце толкателя установлен
ролик, который движется по направляющей штанге, связанной
со штоком гидроцилиндра. Толкатель с обеих сторон имеет
уплотнения 2. Каналом 3 резервуар соединен с рабочей полостью.
Контрольная пробка 4 служит для ухода за соединительным
каналом 3, сапун 5 для связи резервуара с атмосферой.
Когда ролик находит на упор на направляющей штанге, он
поднимает толкатель на определенный ход. В процессе движения
толкатель перекрывает соединительный канал 3 и порцию
жидкости, находящуюся в рабочей полости, под определенным
давлением выталкивает по магистрали 11 в распределитель.
Возможные излишки жидкости заставляют компенсатор 8
переместиться на ход, обусловленный характеристикой пружины 7.
При возвращении толкателя в исходное положение рабочая
полость через канал 3 соединяется с резервуаром, и давление в ней
падает.
Шариковый фиксатор смонтирован на хвостовике 18
золотника 20. К корпусу 21 распределителя прикреплен на болтах
стакан 12. В средней части стакана установлено ограничительное
кольцо 17, в которое опирается ограничитель с конусной
проточкой.
Внутри стакана размещен поршень 14, который пружиной 13
постоянно подпирается в одном направлении. Со стороны
ограничителя поршень имеет конусную проточку, в которой по всей
длине окружности хвостовика распределителя располагают
шарики 16. Ограничитель и поршень имеют кольцевые уплотнения /5,
предотвращающие утечки жидкости из системы.
При включении золотника распределителя в определенном
положении шарики западают в кольцевую проточку хвостовика
и удерживаются в таком положении пружиной 13 посредством
поршня 14.
При подаче порции жидкости из гидровыключателя поршень
перемещается в направление пружины, и освобождается
пространство, в которое запали шарики. Усилием пружины 19
золотник возвращается в нейтральное положение, и движение
поршней соответствующей группы исполнительных гидроцилиндров
прекращается.
Привод погрузочного оборудования с гидравлическим
слежением за сохранением уровня ковша в процессе движения стрелы
имеет некоторые особенности.
Наиболее распространена система с компенсационным
гидроцилиндром, обеспечивающая наибольшую надежность по
сравнению с клапанным порционером, регулирующим подачу жидкости
в поворотные гидроцилиндры при перемещениях стрелы.
Гидравлическая система привода подобного погрузочного оборудования от-
"258
11
12 13 14 15 16 17
Рис. 133. Схема гидропривода погрузочного оборудования с сохранением уровня
ковша при подъеме:
1—3 — золотники распределителя для управления челюстями двухчелюстного ковша,
подъема стрелы и поворота ковша; 4 — бак; 5 — фильтр; 6 — термометр; 7 — манометр;
8, 9 — запорные краны; 10 — насос; 11 — запорные устройства; 12 —
предохранительный клапан; 13, 14, 16 — гидроцилиндры для смыкания челюстей двухчелюстного ковша
поворота ковша и подъема стрелы; 15, 17 — автоматические остановы; 18 —
компенсационный гидроцилиндр; 19 — дроссель с обратным клапаном
личается от рассмотренных наличием компенсационного
гидроцилиндра (рис. 133).
Компенсационный гидроцилиндр 18 шарнирно связан со
стрелой и включен параллельно с гидроцилиндром 14 ковша.
При подъеме или опускании стрелы (в нейтральном положении
золотника управления ковшом) жидкость из соответствующей
полости компенсационного гидроцилиндра вытесняется в
поворотные гидроцилиндры, штоки которых перемещаются,
сохраняя определенный уровень рабочего органа. Возможны и другие
варианты установки подключения компенсационного
гидроцилиндра.
Подобные схемы управления ковшом и рабочим оборудованием
применяют на малогабаритных и легких одноковшовых
погрузчиках. !
Отличительной особенностью гидропривода гусеничных
погрузчиков является подключение в поршневые полости стреловых
гидроцилиндров амортизаторов. Устанавливают их для снижение
динамических перегрузок в гидросистеме и гусеничном ходе при
9* - 259
перемещении погрузчиков с жесткой гусеничной ходовой частью
по неровной рабочей площадке.
В конструкции погрузчиков применяют газовые и пружинные
амортизаторы. В газовых амортизаторах рабочая жидкость
отделена от замкнутого объема газа (преимущественно азота),
находящегося под определенным давлением, поршнем или
подвижной диафрагмой. С повышением давления в гидросистеме
поршень или диафрагма перемещаются, сжимая газ и
компенсируя гидравлические перегрузки. Основным недостатком
подобных амортизаторов является изменение характеристик его при
утечках газа и необходимость постоянной проверки и подзарядки
газовой полости до определенного давления.
Наибольшее распространение получили пружинные двухпо-
лостные амортизаторы. Конструктивно двухполостной
амортизатор 13 (см. рис. 32) выполняют в виде гидроцилиндров
двустороннего действия, шток которого действует на пружину. Рабочие
полости амортизатора соответственно связаны со штоковой и
поршневой полостями стреловых гидроцилиндров.
Глава 12
ХОДОВАЯ ЧАСТЬ
1. Общие данные
Погрузчики общего назначения на специальном шасси
выпускают только на пневмоколесном ходу. У автопогрузчиков
общего назначения применяют только один ведущий передний
мост, а у одно- и многоковшовых погрузчиков — оба ведущих
моста, чтобы увеличить сцепление к^лес с поверхностью дороги
при врезании ковшей в штабель насыпного груза. На время
перегонов, когда не требуется этого, обычно задний мост
выключают.
2. Ведущие мосты
Для погрузчиков применяют, как правило, ведущие мосты
грузовых автомобилей, для автопогрузчиков — мосты бортовых
грузовых автомобилей, а для других погрузчиков, и особенно
одноковшовых, — от автомобилей-тягачей.
На автопогрузчиках небольшой грузоподъемности применяют
автомобильные мосты, уменьшая у них ширину колеи колес путем
укорочения кожухов и полуосей. На автопогрузчиках
грузоподъемностью 1—2 т применяют мосты, собираемые из
автомобильных деталей и монтируемые с корпусами коробок передач
(из-за отсутствия пространства для установки карданной
передачи между ними).
260
При большой нагрузке на ведущий мост автопогрузчика
(грузоподъемностью свыше 2 т) он опирается на четыре (по колесной
схеме 4X2), а у небольших автопогрузчиков только на два колеса
с пневматическими шинами.
Положительной стороной применения на автопогрузчике
четырех колес с пневматическими шинами для одного ведущего моста
является страховка его с поднятым грузом от аварии при проколе
одной шины.
Чтобы обеспечить большие силы тяги на колесах и
меньшие скорости движения в ведущих мостах одно-и многоковшовые
погрузчиков, устанавливают бортовые редукторы планетарного
типа, а иногда и двухступенчатые главные передачи. Например,
к одноковшовых погрузчиков типа ТО-6Б и многоковшовых типа
Д-565 устанавливают ведущие мосты (рис. 134) с планетарными
редукторами, у которых коронная шестерня 3 жестко соединен^
с балкой 1 моста через ступицу 2. Водило 6 болтами соединено
со ступицей 8 колеса, солнечная шестерня 4 посажена на
шлицах полуоси 5. Главная передача 12 двухступенчатая.
Дифференциал 13 такой же конструкции, как у грузовых
автомобилей.
У большинства зарубежных одноковшовых погрузчиков
применяют ведущие мосты с одноступенчатой конической главной
передачей и дифференциалом конического или спирального
типов. На концах балки ведущего моста установлены ступицы
с тормозными дисками (у легких погрузчиков) или барабаны (у
средних и тяжелых погрузчиков) и ступенчатые планетарные редукторы.
Коронные шестерни последних закреплены на стаканах с помощью
шлицев. Три сателлитные шестерни обкатываются относительна
коронной и плавающей солнечной шестерен. Водило
планетарного редуктора связано с колесным ободом.
У зарубежных погрузчиков ведущие мосты большей частью
унифицированы. Задний (управляемый мост отличается от
переднего только конструкцией балки — применена балансирная
подвеска.
Ведущие передние мосты у всех погрузчиков прикреплены
к раме шасси без рессор жестко на болтах, иногда с разгрузкой
от перерезывающих сил штифтами, для чего на корпусе мостов
предусмотрены платики.
Ведущий задний управляемый мост у погрузчиков отличается
от переднего тем, что его балка имеет два шарнира для
поворота колес. Балка / (рис. 135) моста с помощью фланцев наглухо
соединена с поворотным кулаком 2, который своими цапфами —
верхней 10 и нижней 6 — через радиальные подшипники 4f 12
и осевой подшипник 5 опирается на корпус 7, прикрепленный к
ступице 8 колеса. Полуось 9 выполнена вместе с ведущей вилкой
шарнира, которая входит во внутреннюю полость шаровой опоры 3
у поворотного кулака 2. К корпусу 7 на болтах прикреплен
рычаг 11 рулевой трапеции.
261
12
Рис. 134. Ведущий передний мост ковшового погрузчика:
1 — балка моста; 2 — ступица; 3 — коронная шестерня; 4 — солнечная шестерня; 5 — полуось; 6 —• водило; 7 —
сателлиты; 8 — ступица колеса; 9 — тормозной барабан; 10 -я. тормозная камера; 11 — ведущий вал главной передачи; 12 —
главная передача; 13 — дифференциал
Рис. 135. Ведущий задний
(управляемый) мост
ковшового погрузчика
Ведущие мосты у всех погрузчиков оборудованы колодочными,
а передние мосты иногда дисковыми тормозами; у
автопогрузчиков (грузоподъемностью до 5 т) — колодочными с ножным
гидравлическим приводом, а у больших — с пневматическим приводом;
у одноковшовых погрузчиков применяют колодочные тормоза
с пневматическим приводом. На тяжелых одноковшовых
погрузчиках, например фирмы Катерпиллер (с ковшами объемом 4 м3
и более), устанавливают тормоза с пневмогидравлическим
приводом. Эти тормоза устроены так же, как и пневмокамерные муфты
у механизмов реверса одноковшовых экскаваторов. Торможение
получается при пуске сжатого воздуха в кольцевую пневмока-
меру 3 (рис. 136), которая прижимает кольцо из фрикционных на-
263
Рис. 136. Ступенчатые редукторы с пневмокамерньши тормозами
кладок к внутренней поверхности тормозного шкива L После
прекращения торможения фрикционные накладки отжимаются с
помощью плоских пружин 2. В результате получается равномерное
и резко сниженное давление на тормозные накладки, отчего
уменьшается износ последних.
У всех одноковшовых погрузчиков с гидротрансформатором
применяют левую и правую педали тормоза. При нажиме ногой
на левую педаль погрузчика тормозится с автоматическим
отключением коробки передач, а при нажиме на правую педаль
погрузчик притормаживают или затормаживают без отключения
трансмиссии. Педали сблокированы между собой, поэтому торможение
погрузчика возможно и при одновременном нажиме ногами
на обе педали.
264
Как известно, дифферинциал на автомобилях позволяет
получить свободное вращение ведущих колес с различными угловыми
скоростями при движении автомобиля на поворотах и
неровностях дороги. Отрицательным качеством дифференциала является
возможность заноса, а иногда и остановки погрузчика из-за потери
сцепления одного из ведущих колес с дорогой при движении
машины в прямом направлении. Такое явление наблюдается
при качении одного из ведущих колес по грязи, глине, наледи,
и особенно, когда оно попадает в большую выбоину. При наличии
дифференциала нагруженное колесо может остановиться, а
буксующее вращаться с удвоенной скоростью.
Отрицательные качества обычного дифференциала не столь
существенны для автопогрузчиков, работающих с вилами, чем
для одноковшовых погрузчиков при врезании ковша в штабель
насыпного груза. Поэтому у одноковшовых, особенно больших
погрузчиков, применяют блокировку дифференциала, которая
может быть принудительной (механической, гидравлической,
электромагнитной) или автоматической. Блокировка заключается
в жестком соединении одной из полуосей с главной передачей.
В этом случае при буксовке одного из ведущих колес вся сила
тяги передается другим колесом.
Для облегчения работы водителя в последнее время
появилась тенденция замены у тягачей и погрузчиков обычного
дифференциала так называемым дифференциалом свободного
вращения с автоматической блокировкой колес. Существует много
разных конструкций механизмов блокировки, по сути дела не
меняющих общего принципа блокировки. Примером может служить
дифференциал, установленный на тракторах К-700 и К-702.
Работа этого дифференциала сводится к следующему.
Вращаются полуоси от шестерни главной передачи через ступицу /
(рис. 137, а), ведущую муфту 5 и ведомые полумуфты 2 и ступицу 6.
Сцепляются муфты между собой с помощью зубьев, нарезанных
7 9 8 9
Ю
Рис. 137. Самоблскируемый дифференциал трактора К-702:
а *— общая конструкция; б — схема выключения ведомой полумуфты; в «^ схема выклю»
чения зубьев (у колец ведущей и ведомой полумуфт
265
на их торцах. У ведомых полумуфт имеются два ряда торцовых
зубьев — наружный и внутренний; первый из них сцепляется
с зубьями ведущей муфты 5, а второй, трапециевидного профиля
служит для отключения одной из полумуфт от ведущей муфты.
Кольца 3 ведомых полумуфт 2 в результате зубьями
трапециевидного профиля сцепляются с кольцом 4 и постоянно прижимаются
к ведущей муфте пружинами 7.
При прямолинейном движении трактора крутящий момент
через ведущую муфту передается одинаково к полуосям.
При повороте забегающее колесо трактора, например правое
(см. рис. 137, а), стремится вращаться быстрее, чем ему позволяет
главная передача, и ведомая полумуфта 2 этого колеса, опираясь
своими трапециевидными зубьями на зубья кольца 3, сжимает
пружину и выходит из зацепления с ведущей муфтой (см. рис.
137, б). Одновременно с этим выходит из зацепления с кольцом 4
сидящее на ведомой полумуфте кольцо 3 (рис. (137, в), которое
после поворота на небольшой угол упрется в шпонку 8. В этом
положении торцы зубьев кольца 4 установятся против торцов
зубьев кольца 3 и будут удерживать ведомую полумуфту 2 от
включения (см. рис. 137, б).
На протяжении всего поворота крутящий момент на колеса
трактора передается только через ось внутреннего колеса. С
выходом трактора из поворота, т. е. при незначительном
отставании отключенного колеса, вследствие усилия сжатой пружины
автоматически включается полумуфта 2 с ведущей муфтой 5.
Шины применяют с протекторами: для автопогрузчика типа
дорожный, а для ковшовых погрузчиков типа косая елка или типа Е.
В последнее время на погрузчиках наибольшее применение
получают бескамерные шины в основном из-за безопасности при
авариях, так как при прорыве протектора давление в них падает
более медленно. Как показывает практика, погрузчики больше
простаивают от повреждения камер, чем при проколе
бескамерных шин. Выбирают шины согласно нормам при
максимальной реакции на колесах и угловой скорости.
3. Управляемые мосты
Управляемые задние мосты у автопогрузчиков являются
неприводные. Подвеску их к раме шасси выполняют балансирной.
Задние колеса / (рис. 138) с помощью поворотных кулаков 2
и наклонных шкворней 3 опирают на концы горизонтальной
кованой балки 4, на которую в середине через ось 6 и стойку 5
шарнирно опирается задний конец рамы шасси. Ось 6 приварена
к балке и может поворачиваться в подшипниках скольжения
относительно стойки 5, приваренной к раме шасси. Таким образом,
балка с колесами может свободно качаться на центральном
шарнире в вертикальной плоскости при качении колес по неровной
дороге и на поперечных уклонах. Угол качания балансира от
266
Рис. 138. Управляемый мост автопогрузчика грузоподъемностью 3—5 т
вертикали доходит до 10°, что обеспечивает свободное качение
колес в вертикальной плоскости до 150—200 мм, а иногда и более.
В крайних положениях он ограничивается упорами 9 в раму
шасси.
Над балкой установлена разрезная рулевая трапеция с
угловыми рычагами 11> тягами 12, маятниковым рычагом 13 и
продольной рулевой тягой 8, конец которой соединен с рулевой
сошкой. Максимальный угол поворота левого и правого управляемых
колес при переднем ходе доходит до 76°; он ограничивается
контактом конца балки 7 с упором 10.
Углы установки колес примерно такие же, как у грузового
автомобиля: продольный наклон шкворня 0°, поперечный 4—10Qt
развал колес и схождение по ободам 0 it 0,5 мм.
Значительно сложнее устроена балансирная подвеска с
установкой приводного и в то же время управляемого моста у одно- и
267
Рис. 139. Установка управляемого (ведущего) моста
многоковшовых погрузчиков. Здесь, как ^правило, вместо попереч*
ной балки применяют сварную раму 3 (рис. 139) с приваренными
к ней литыми кронштейнами 5, к которым прикреплена балка
заднего моста болтами 7, причем справа к нему непосредственно,
а слева через подпятник 2. Для разгрузки болтов от
горизонтальных усилий устанавливают цилиндрические штифты 6. Рама шасси
/ погрузчика шарнирно опирается на середину рамы 3 через два
горизонтальных шкворня 4, около которых на подшипниках
скольжения может качаться рама 3 при качении колес по неровностям
дороги. Управляют рулевой трапецией и поворачивают колеса
примерно так же, как и у автопогрузчиков.
4, Тормоза
На погрузчиках, как и на грузовых автомобилях, установлены
основные тормоза в колесах и стояночный тормоз на валу между
коробкой передач или механизмом обратного хода (у
автопогрузчиков) и ведущим мостом.
Колесные тормоза предназначены для остановки погрузчика
в нужном месте или при возникновении препятствий во время
движения; стояночный тормоз — для удержания остановленного
погрузчика на месте от самопроизвольного движения на уклоне или
при ветре.
Колесные тормоза, применяемые на погрузчиках, могут быть
барабанного и дискового типов — колодочными, а барабанного
типа также и пневмокамерными (по типу пневмокамерных
фрикционных муфт, применяемых в механизме реверса одноковшовых
экскаваторов).
У автопогрузчиков грузоподъемностью до 5 т применяют ко*
лодочные тормоза с гидравлическим, а при большой
грузоподъемности с пневматическим приводом. Тормоза барабанного типа
с пневматическим приводом применяют на легких и средних
одноковшовых погрузчиках. На одноковшовых погрузчиках средней
и большой грузоподъемности устанавливают тормоза барабанного
типа с пневматическими камерами и дисковые (колодочные)
с пневматическим приводом.
Наиболее распространены колодочные тормоза барабанного
типа с пневматическим приводом. Они состоят из колодок 1
(рис. 140, а) с фрикционными накладками, размещенными в
тормозном барабане 4 колеса. Колодки к стенке барабана при
торможении прижимаются при повороте разжимного кулака 6, на конец
которого на шлицах посажен регулировочный рычаг 11.
Поворачивается рычаг под действием тормозной камеры 3, установленной
на кронштейне 5. При нажатии ногой на педаль тормоза сжатый
до 5—6 кгс/см2 воздух из воздушного баллона по шлангу 9
(рис. 140, б) поступает в полость тормозной камеры между ее
крышкой и резиновой диафрагмой 7, отчего диафрагма со штоком 8
отходит вправо и поворачивает регулировочный рычаг 11,
269
5)
Рис. 140. Колесный колодочный тормоз с пневматическим приводом:
а -в* общая конструкция; б — механизм привода для затормаживания
Растормаживаются колеса при отпускании педали тормоза,
когда полость тормозной камеры сообщена с атмосферой, и
диафрагма 7 со штоком под действием пружин 10 отойдет влево, а
рычаг // с тормозным кулаком 6 повернутся в исходное положение.
Тогда тормозные колодки под действием на них сжатой пружины 2
отойдут от внутренней стенки барабана.
Регулируют тормоза поворотом валика 13, на котором посажен
червяк 12, сцепляющийся с червячным колесом 14, посаженным
на конец валика разжимного кулака 6.
270
Рис. 141. Колодочные тормоза:
а ^- с пневматическим приводом; б ■>
! с гидравлическим приводом
Тормоз с гидравлическим управлением отличается от
рассмотренного тем, что у него вместо разжимного кулака 1 (рис. 141)
между концами колодок установлен гидроцилиндр 2.
Стояночные тормоза на погрузчиках применяют колодочные —
барабанного типа и дисковые. Последние применяют на средних
и тяжелых одноковшовых погрузчиках, когда стояночный тормоз
одновременно является и аварийным, поэтому они являются
нормально замкнутыми тормозами (затормаживание пружинами, а рас-
тормаживание с помощью гидропневматического привода).
Конструкция колодочного тормоза барабанного типа по
существу не отличается от конструкции тормоза с пневматическим
управлением (см. рис. 140, а), у которого разжимной кулак
поворачивается с помощью ручного привода. Для этого в кабине
водителя установлен ручной рычаг с фиксатором. Усилие от него к
разжимному кулаку передается через рычажную передачу.
Допускаемый ход рычага принимают не более 220 мм.
5. Рулевое управление
Общие данные. Рулевое управление применяют для
осуществления разворотов и обеспечения движения транспортных
машин в нужном направлении.
Как было отмечено ранее, у всех погрузчиков, исключая
вилочные с электрическим приводом, применяют четырехопорную
колесную схему с разным расположением управляемых колео
и с тремя способами управления ими: е бортовым поворотом (у
небольших одноковшовых погрузчиков), с поворотными колесами
и с поворотом шарнирно-сочлененных рам.
По принципу действия рулевое управление разделено на
механическое (с ручным или сервоприводом) и гидравлическое.
271
Последнее бывает простого или следящего действия. В
погрузчиках с бортовым поворотом не требуется установки специального
рулевого механизма, кроме рулевой колонки, а конструкция
рулевых механизмов для погрузчиков с поворотными колесами
и с шарнирно-сочлененными рамами нуждается в пояснении.
Рулевое управление с поворотными колесами применяют на
специальных шасси самоходных погрузчиков с жесткой рамой.
Оно состоит из рулевого механизма и привода; с помощью первого
преобразуют поворот рулевого колеса в угловое перемещение
рулевой сошки, а с помощью второго связывают сошку с
поворотными цапфами управляемых колес. Его осуществляют с установкой
рулевой трапеции, одной стороной которой является балка
управляемого моста. Рулевая трапеция может быть цельной или
расчлененной (разрезной). Последняя чаще применяется при
балансир ной подвеске управляемых колес.
На автопогрузчиках грузоподъемностью до 1 т и на
многоковшовых погрузчиках, у которых допускают большое усилие для
поворота рулевого колеса, поскольку они не требуют большей
маневренности (работают на складских базах), применяют
рулевое управление с ручным приводом. Конструкция его в
принципе не отличается от конструкции рулевого управления
автомобиля.
Обычно поперечную тягу у рулевой трапеции шарнирно
связывают через рычажную передачу с рулевым колесом. Например,
при разрезной трапеции эта связь осуществляется через угловые
рычаги 11 (см. рис. 138), тяги 12, маятниковый рычаг 13,
продольную тягу 8, рулевую сошку и рулевую колонку. В конструкции
механического рулевого управления многоковшового погрузчика
Д-565 и снегопогрузчика Д-566 (рис. 142) вместо одной
продольной установлены две рулевые тяги 5 и 7, необходимые для
увеличения передаточного отношения у рулевого механизма 6. Чтобы
избежать также большой реакции на руки водителя при повороте
колес, в рулевой механизм встраивают червячную пару. На
грузовых автомобилях и погрузчиках чаще всего применяют пару
глобоидальный червяк — ролик; с червяком 2 сцепляется двух
или трехгребневый ролик/, вращающийся на оси, установленной
в кривошипе8, в свою очередь связанном с валом4 рулевой сошки 3.
При передаче червяк—ролик ее КПД в прямом направлении
составляет около 0,65, а в обратном около 0,5.
У погрузчиков грузоподъемностью свыше 1 т возникают
большие усилия на рулевом колесе, которые нельзя уменьшить путем
установки механизма с большим передаточным числом.
Погрузчики и особенно автопогрузчики должны обладать большей
маневренностью с весьма частыми разворотами. Поэтому стремятся
у них снизить усилие на рулевом колесе и число поворотов
рулевого колеса при повороте колес из одного крайнего положения
в другое. Как и у автомобилей, у погрузчиков допускают число
поворотов рулевого колеса не более 5. Это обеспечивает возмож-
272
5-5 повернуто
Рис. 142. Механическое рулевое
управление:
1 — ролик; 2 — червяк: 3 — рулевая
сошка; 4 — вал сошки; 5, 7 —
продольные тяги; Ь — рулевая колонка;
8 s— кривошип; 9 — картер Q
ность водителю повернуть управляемые колеса из одного крайнего
положения в другое в узких проездах при допустимой скорости
разворота погрузчика.
На автопогрузчиках грузоподъемностью свыше 1 т и
одноковшовых (на специальном шасси с общей рамой) применяют
рулевое управление с сервоприводом. В систему рулевого
управления встраивают гидроусилитель руля или применяют
гидрообъемный руль.
В автопогрузчиках грузоподъемностью до 5 т (рис. 143, а)
в настоящее время применяют гидроусилитель руля от автомашины
ЗИЛ-130 (см. рис. 126) с усилием зависимым, а для более тяжелых
автопогрузчиков и одноковшовых погрузчиков (рис. 143, б)
гидроусилитель с усилием независимым (см. рис. 127) на руле от
сопротивления повороту управляемых колес.
В связи с освоением гидроусилителей Н-375, очевидно, они
в ближайшее время получают широкое распространение также
и на погрузчиках. На автопогрузчиках большой грузоподъемности
и одноковшовых погрузчиках (рис. 143, б) применяют
гидроусилитель, у которого усилие лля поворота рулевого колеса постоянное,
значение его зависит от усилия затянутой пружины в усилителе.
27$
б)
Рис. 143. Рулевое управление с гидроусилителем:
а — автопогрузчика; б «- одноковшового погрузчика
В конструкции рулевого управления (см. рис. 143, а) рулевое
колесо 7, колонка 2 карданным валом 3 соединены с валом
усилителя 4, закрепленным на раме шасси. Рулевая сошка 5 соединена
с продольной тягой 6, соединенной с маятниковым рычагом 13
(см. рис. 138) расчлененной трапеции.
В конструкции рулевого управления одноковшового
погрузчика (см. рис. 143, б) гидроусилитель 9 подвешен своим штоком
274
Рис. 144. Конструктивная схема поворота шарнирно-сочлененных рам:
а — при неповернутых рамах; б — при повернутой задней полураме; 1 — насос; 2 — фильтр; 3 — масляный бак; 4 —
предохранительный клапан; 5 — плунжеры; 6 — золотник; 7 — червяк; 8 — червячный сектор; 9 — распределитель с редуктором;
10 — рулевая сошка; 11 — запорные клапаны; 12 — толкатель; 13, 16 — гидроцилиндры; 14 -= следящее устройство; 15 -г*
перепускные клапаны; 17$ 18 — передняя и задняя полурамы; 19 ■*= вертикальный шкворень
к раме шасси. Рулевое колесо 7, установленное на колонке 5,
через рулевой механизм, рулевую сошку 11 и тягу 10 связано
с шаровым пальцем золотника гидроусилителя. Корпус
гидроусилителя с помощью углового рычага 13 шарнирно соединен с
продольной тягой 12 рулевой трапеции.
Рулевое управление с поворотом шаргшрно-сочлекенкых рам
применяют на одноковшовых погрузчиках большей
грузоподъемности, на специальном шасси, тягачах и тракторах К-700 и
К-702. Оно имеет гидропривод, осуществляемый с помощью
двух цилиндров. Принципиальная его схема следующая.
•На передний полураме 17 (см. рис. 144, а) установлены два
гидроцилиндра 13 и 16 двустороннего действия, штоки которых
шарнирно связаны с задней полурамой 18. Обычно четыре пружины
через плунжеры5 удерживают золотник в нейтральном положении.
Полости между плунжерами 5 сообщаются с нагнетательной
магистралью. При повороте рулевого колеса поток жидкости от
насоса 1 через распределитель 9 направляется в противоположные
полости гидроцилиндров, в результате чего шток одного из
цилиндров выдвигается, а у другого втягивается. Таким образом,
получают взаимный поворот полурам в плане около шкворня 19.
При вращении рулевого колеса происходит обкатывание
червяка 7 около неподвижного червячного сектора <§, что вызывает
осевое смещение золотника 6, в связи с этим и подачу жидкости под
давлением в соответствующие полости цилиндров 13 и 16.
Чтобы обеспечить трактору стабильное движение, в клапанной
коробке размещены запорные клапаны //, которые не позволяют
поршню перемещаться от внешних сил, действующих на
полурамы трактора. С нагнетанием в одну из полостей цилиндра
жидкость отжимает запорный клапан 11, проходит в цилиндр, отчего
повышается давление в нагнетательной полости, и толкатель 12,
перемещаясь, открывает запорный клапан другой полости для
выхода жидкости на слив.
Следящее устройство 14 связывает рулевую сошку 10 с задней
полурамой 18. При вращении рулевого колеса следящее
устройство, действия на рулевую сошку 10, стремится возвратить
золотник в нейтральное положение. При остановке рулевого колеса
угловое перемещение полурам прекращается. Угол поворота
полурам в одну сторону составляет а — 35° (см. рис. 144, б).
Усилие на рулевом колесе при повороте равно примерно 6 кгс.
С увеличением сопротивления колес повороту давление в системе
повышается и несколько увеличивается усилие на рулевом
колесе (до 12 кгс), что создает у водителя чувство дороги.
Поворот полурам возможен также при неподвижном
погрузчике, так как колеса его с противоположных сторон свободно
перекатываются вследствие наличия дифференциалов у мостов.
При отказе двигателя применяют аварийный насос,
вращаемый от ходовой части, или буксируют погрузчик на жесткой
стяжке.
276
РАЗДЕЛ ТРЕТИЙ
ОСНОВНЫЕ РАСЧЕТЫ
Глава 13
ОБЩИЕ РАСЧЕТЫ МЕХАНИЗМОВ И УЗЛОВ
1. Зубчатые передачи
Для расчета зубчатых пар коробок передач погрузчиков ниже
приведены рекомендации по выбору материалов и основных
нагрузок. Они также могут быть использованы для проверки
передач готовых ведущих мостов, получаемых от автомобильной
промышленности.
Для коробок передач чаще всего используют легированные
стали 20Х, 18ХГТ, 18Х2НЧВА, 20ХНЗА, 20ХГР, ЗОХГТ и др.
Зубья передач из них подвергают цементации на глубину 0,7—
1,3 мм и закалке до твердости HRC 53—65, что обеспечивает
хорошую ударную вязкость при пластических свойствах
сердцевины. Иногда применяют также стали 35Х и 40Х с цианированием'
на глубину 0,17—0,25 мм, объемной закалкой в масле и отпуском
при твердости основания зубьев до HRC 49—59. Стали марок
35, 40, 45, 50 и 50Г в нормализованном и улучшенном состоянии
(НВ <■ 350) применяют в редукторах для привода насосов.
Для улучшения использования металла применяют косо-
зубые передачи с наименьшим приведенным числом зубьев 12—
14, углом наклона зубьев на делительном цилиндре р = 20-f^
-т-30°(для скользящих шестерен не более 22°). Чаще всего
применяют высотную коррекцию зубьев методом сдвига инструмента,
когда коэффициенты сдвига для парных шестерен равны, но
противоположны по знаку.
Предварительно рассчитывают передачи по номинальным на-,
пряжениям изгиба зубьев и на контактную прочность в полюсе
зацепления. Номинальные напряжения определяют при
максимальных моментах Mt на валу передач, получаемых из условия
сцепления колес с грунтом при коэффициенте сцепления ф =
= 0,7-4-0,75. Для этого исходным является момент на первичном
валу коробки передач
где Ga — вертикальная реакция на ведущие мосты погрузчика
с поднятым номинальным грузом, кгс; гк — радиус качения ко-
27Г
лес, см; iY и rjj— передаточное число и КПД трансмиссии на
первой передаче.
В расчетах потери момента в зацеплении каждой пары и
карданного вала принимают равными 2%.
При применении гидромеханической передачи каждую пару
шестерен рассчитывают по своему моменту
М\ = \xMiky\TUr\i,
где \х — коэффициент, снижающий нагруженность
гидромеханических трансмиссий по сравнению с механическими, \х я^ 0,75;
k,— наибольший коэффициент трансформации; riT — наибольший
КПД трансформатора; it и п, — передаточное число и КПД
трансмиссии на расчетных передачах.
Номинальные напряжения аи изгиба зубьев в их основании
при коэффициенте концентрации напряжений в основании
зубьев ko = 1,5 и коэффициенте степени перекрытия в торцовом
сечении в^2 определяют по известной формуле.
При ka = 1,5, es = 2 и шаге зубьев в нормальном сечении
tH = птп (в см) модуль шестерни в нормальном сечении зуба
(в см)
где ty — коэффициент длины зуба; z — приведенное число зубьев;
у — коэффициент формы зуба с учетом эквивалентного числа
зубьев; [0JH — допускаемое напряжение на изгиб.
Обычно для всех шестерен в коробке принимают коэффициент
длины зуба г|? = 6/тн — 6ч-7,5, и только для последней пары
на выходе ty = 7,5-f-8,5. Ширину b шестерни берут больше,
чем у колеса, примерно на 2,25тн,
Для легированных сталей с цементацией и углеродистых
сталей с отжигом, нормализацией и улучшением (при НВ < 350)
допускаемое напряжение на изгиб (в кгс/см2)
где ат — предел текучести; п — коэффициент запаса прочности,
Хотя яри статическом нагружении концентрацию
напряжений не учитывают, но в эту формулу введен коэффициент kc,
поскольку он вошел в формулу для определения аи.
Зубья проверяют также на контактную прочность в полюсе
зацепления, при этом используют известную формулу для
определения контактных напряжений
где Рн—сила, приложенная по нормали к профилю зуба, кгс;
Е — модуль упругости первого рода, кгс/см2, Е ■•= 2,1 -106; Ьр —
278
рабочая ширина зуба, см; рх и р2 — радиусы кривизны профиля
зубьев соотвегственно для шестерни и колеса, см.
Для косозубых шестерен (в кгс)
Р = Рд = Mi
н cos a cos p r0 cos p '
где Рд — усилие, передаваемое зубьями на радиусе основной
окружности, кгс; ее — угол зацепления; /*о — радиус основной
окружности, см.
Выражая г0, рх и р2 через межцентровое расстояние А и
передаточное число i, получим наибольшее возможное
кратковременное контактное напряжение
85,8
bpi sin 2as l JnOB'
где as — угол зацепления коррегированных передач в торцовом
сечении; 1о]пов — допускаемое контактное напряжение.
Допускаемое напряжение для сталей при НВ < 350 [<?]пов ^
& Зат и при НВ > 350 [а]пОВ & 300 кгс/см2.
Известно, что существует связь между длительным пределом
выносливости при контакте и твердостью поверхности зубьев,
т. е. апов = СЬНВ и апов = CR HRCy где Св и CR переходные
коэффициенты, зависящие от материала и термообработки зубьев;
для сталей с НВ <: 350 Св ^ 25, для сталей цементованных
с HRC 55—63 CR = 220ч-310 (верхний предел относится к зубьям
из высоколегированных, а нижний, из углеродистых сталей),
а для сталей с объемной или поверхностной закалкой при HRC
40—55 CR = 240. Таким образом, находят [ст]пОв.
Кроме того, зубья подвергают поверочному расчету на
выносливость при контакте и изгибе с учетом переменных нагрузок
за весь срок службы. Время работы передач до капитального
ремонта можно принять равным 5000 ч (к примеру, для самосвалов
учитывают пробег 120 тыс. км). На основании данных довольно
приближенно, с возможной коррекцией отдельных величин, можно
рекомендовать распределение указанных часов на
маневрирование по табл. 15. Поскольку погрузчики не всегда передвигаются
с номинальным грузом, то для средних условий работы в расчете
массу груза можно снизить на 25%. Преодолеваемые подъем
и пусковые пиковые нагрузки не учитывают.
Таким образом, определяют число циклов нагружений передач
при движении погрузчика с грузом и без груза. Исходным для
расчета при этом является самый наибольший реальный
крутящий момент на валу рассчитываемой шестерни. Известно, что при
проверке зубьев на усталость при постоянной нагрузке базовое
число циклов нагружений принимают N6 = 107. Эквивалентное
ему число нагружений при переменных (ступенчатых) нагрузках
^э == —т \M-vtM Км + M\t\Пх -f- М 2/2^2 -f- • •
э '
279
где Мк — максимальный момент, передаваемый валом
рассчитываемой шестерни в течение 1м ч за весь срок службы передачи
при пм об/мин; Мг, М2, ♦ ♦♦» Mq — передаваемые меньшие
моменты в течение времени tu t2, ..., tq при соответственно пъ
n2i ..., пд, об/мин.
Таблица 15
Время работы шестерен в коробке передач, % от полного срока службы
Тип погрузчиков
Автопогрузчики
Передний ход ....
Задний ход
Одноковшовые
погрузчики
Передний ход ....
включен один мост
включены оба моста
Задний ход
включен один мост
включены оба моста
Многоковшовые
погрузчики
Транспортные ско-
ГТИ.
вперед
назад
Рабочие скорости*
вперед .......
назад
Время
работы, %
60
40
65
35
7
3
50
40
Время включения хода по ступеням
передач, %
I
10
5
5
5
5
15
5
30
30
30
и ш
55
65
10
20
10
40
15
70
50
70
40
30
15
30
10
20
80
20
IV
10
5
Зубья на контактную прочность при переменных нагрузках
проверяют, пользуяь формулой для определения /?0, в которую
вместо Mt подставляют Мк. При этом допускаемые напряжения
сжатия
[<*]пов = К [в]пов ,
где [о ]пОВ — допускаемое контактное напряжение при
постоянной (неизменной) нагрузке; kp — коэффициент режима нагрузки
при расчете на контактную прочность.
Коэффициентом режима нагрузки учитывают приведение кон*
тактных напряжений от переменных нагрузок к постоянной
нагрузке
280
Для сталей с поверхностью зубьев твердостью ИВ < 350
при N9 > N6 следует принимать fep = 1, так как согласно кривой
выносливости длительный предел выносливости соответствует
базовому числу нагружений N6 = 107.
Зубья на усталость от изгиба при нагружений в одну сторону
(пульсирующий цикл) проверяют по допускаемому напряжению
М(Т-
nk
1 к'
где а_х — предел выносливости; п — коэффициент запаса проч-
иости, п && 2,2; k'p — коэффициент режима нагрузки при изгибе;
Р — у
9/5-106
Эквивалентное число циклов нагружений для этого случая
определяют так же, как для контактной прочности, но здесь
вместо М\ подставляют М%, и все остальные моменты берут
Ми Мъ ..., M*q. Напряжения определяют по формуле для ай,
в которую подставляют Рд, определенное по максимальному
моменту МК9 и сравнивают аи с пределом выносливости [а]и.
Коробки передач можно рассчитать по методике НАМИ с
коррективами применительно к погрузчикам [8].
Редукторы для привода насовов можно рассчитать по
формулам для определения аи и /?о, но по расчетному моменту с учетом
наибольших подачи насоса и давления настройки
предохранительного клапана.
2. Гидросистема
Расчет гидросистемы сводится к определению потерь
давления от трения рабочей жидкости о стенки трубопроводов, а также
от местных сопротивлений в линиях напорных, слива и
всасывания при рабочих телшературах нагрева гидросистемы до 50—
70° С.
Общие потери давления (в кгс/см2) в указанных линиях для
каждой группы гидроцилиндров можно выразить формулой
где Дрн, Арс и Д/7Ц — потери давления соответственно в
напорной и сливной линиях, а также от трения в гидроцилиндре (при
КПД ^ 0,96).
Потери давления в напорной линии
Ари = ДРнл -f АРсЛу
потери давления в сливной линии
Арс == Дрсд + Дрф.
281
Здесь АрнЛ и Д/?сЛ — потери давления от трения рабочей
жидкости о стенки соответственно в напорной и сливной линиях;
А/?р и Арф — местные потери давления соответственно в
гидрораспределителе и фильтре.
Потери давления в гидрораспределителе зависят от диаметра
условного прохода, расхода жидкости и от конструкции
распределителя. Для гидрораспределителей плунжерного типа Р при
давлении до 160 кгс/см2, диаметрах условного прохода 16—32 мм
и расходе жидкости 60—320 л/мин потери Д/?р составляют 3,2—
8 кгс/см2 (уточняются по справочникам), потери давления в
сетчатом фильтре Д/7ф «^ 1-f-1,5 кгс/см2.
Потери давления на прямолинейных и криволинейных
участках трубопроводов резко зависят от режима движения жидкости
(ламинарного или турбулентного), определяемого числом
Рейнольде а
где d — внутренний диаметр трубопровода, мм; v — средняя
скорость движения жидкости, м/с; v — коэффициент кинематической
вязкости.
Для одной и той же рабочей жидкости (масла) последний
зависит от температуры нагрева. Например, при 18° Cv= 80, при
60° С v - 50 и 80° С v = 20.
Потери давления (в кгс/см2) на трение (без местных потерь)
в прямых или с плавными закруглениями стальных трубах при
ламинарном режиме, обозначенные ранее как Д/?нЛ и Д/?сл,
определяют по общей формуле
л о v/7/
где П — подача, л/мин; / — длина спрямленной трубы, м;
d — внутренний диаметр трубы, мм.
Потери давления (в кгс/см2) во всасывающих трубопроводах
с учетом потерь на входе
где К — коэффициент сопротивления трению; £вх — коэффициент
сопротивления на входе в трубу; р — плотность масла, кг/м3;
g — ускорение свободного падения.
Коэффициент сопротивления для гидравлически гладкой трубы
в диапазоне 2300 < Re < 8000 можно принимать К я^ 0,04.
Кроме того, в открытых (незамкнутых) гидросистемах нужно
учитывать также потерю давления на подъем рабочей жидкости
на высоту всасывания насосом.
Потери давления Д/?2 в гибких рукавах (шлангах),
обозначенные ранее как Д/?нл и Д/?сл, определяют по предыдущей формуле
с учетом соответствующих коэффициентов местного сопротивления.
282
Основные потери определяются утечками в насосах и
распределителе. Утечки через поршневые уплотнения можно не учитывать.
Тогда общий объемный КПД
Лоб — 11об.н+ 'Поб.р*
где т)об,н — объемный КПД насоса (берут по технической
характеристике насосов); т)об. р — объемный КПД распределителя,
Т1об.р = 1 — А^/Я; Д<7 — утечки через распределитель, см3/мин,
Aq'& 60.
Ниже приведены основные коэффициенты местных
сопротивлений Е.
Распределители 2—4
Обратные запорные клапаны 2—3
Самозапирающиеся соединительные муфты 1—1,5
Выход жидкости из трубопровода в бак:
для ламинарного режима 2
для турбулентного режима 1
Вход в гидроцилиндры, фильтры, аккумуляторы 0,8—0,9
Выход из бака в трубопровод:
при трубопроводе заподлицо со стенкой .... 0,05
при трубопроводе, выдвинутом в бак 1
Штуцеры, переходники, муфты 0,1—0,15
Плавные колена под углом 90° (радиус изгиба равен
3—5 диаметрам трубопровода) 0,12—0,15
Поворотные соединения с одним поворотом потока
на 90° 2
Сварные или штампованные угольники 2
Тройники с одинаковыми диаметрами каналов:
под углом 90°
поток складывается 0,5—0,7
поток расходится 1,5—2
под углом 45°
поток складывается . 0,05
поток расходится * 0,15
Время срабатывания (в с) группы цилиндров при работе
поршневой полостью
и при работе штоковой полостью
/-0 0Д71 (
здесь D и 4 — диаметры поршня и штока, см; г — число
исполнительных цилиндров механизма.
Сетчатые фильтры (см. рис. 115) рассчитывают на фильтрацию
всего потока жидкости, создаваемого насосом. Площадь
фильтрующей сетки (в см2)
Ш
где /7Ф — поток, пропускаемый через фильтр, л/мин; \i —
коэффициент динамической вязкости фильтруемой жидкости, Я;
а — коэффициент пропорциональности (пропускной способности),
отнесенный к единице площади фильтрующей поверхности при
перепаде давления 1 кгс/см^ и динамической вязкости, равной
единице, л/см2, для указанной сетки а ^ б; Дрф — перепад давления
в фильтре, кгс/см2.
Площадь (в см2) фильтрующих элементов из сетки
f з,14(Р«-<Р) „
/Ф = § *•
где D и d — наружный и внутренний диаметры сетки, см; п —
число дисков в фильтре.
Трубопроводы. Внутренний диаметр трубопровода (в мм)
где Я — расход жидкости через трубопровод, л/мин;
lv]—допускаемая скорость потока, м/с.
Чтобы избежать разрыва потока, допускаемые скорости (в м/с)
в трубопроводах различной длины принимают:
во всасывающих трубопроводах
до 3 м 1,5
свыше 3 м 1,2
в нагнетательных трубопроводах
до 3 м 7,0
свыше 3 м 5,0
в сливных трубопроводах 1,5
Стальной трубопровод рассчитывают на продольный разрыв
где рк — давление, на которое рассчитан предохранительный
клапан, кгс/см2; d, s — наружный диаметр и толщина стенки
трубопровода, см: [Ор]—допускаемое напряжение трубопровода
на разрыв (по окружности), равное 30—35% временного
сопротивления.
Рукава высокого и низкого давления на прочность не
рассчитывают, а выбирают по существующим отраслевым нормалям.
Гидроцилиндры рассчитывают по внешней нагрузке на шток
или плунжер. Диаметр (в см) гидроцилиндра при работе бесшто-
ковой полостью
-, ^ 2, (2)
г (р - 2j Ар) ццга
где z — число гидроцилиндров, работающих одновременно; р —
рабочее давление в системе, кгс/см2; Jj&p — потери давления
(суммарное сопротивление) в напорной линии от насоса до ци-
284
линдра, кгс/см2; ц я^ 0,96 — механический КПД гидроцилиндра;
т)п ^ 0,98 — КПД пары шарнирных подшипников с густой
смазкой.
Обычно падение давления в магистрали J] Ар рассчитывают.
Для проектного расчета погрузчиков согласно данным
испытаний падение давления 2 Ар в магистрали можно принимать
равным около 0,12/?.
При работе штоковой полости диаметр определяют по разности
площадей поршня и штока. При длинных штоках (плунжерах),
когда / : d > 25 (где / — длина штока, см, измеряемая от средней
плоскости поршня до оси цапфы у шарнира, ad — диаметр в см),
штоки (плунжеры) проверяют на продольный изгиб по условной
критической силе (в кгс):
где / — площадь поперечного сечения штока, см2; Е — модуль
упругости, кгс/см2, Е = 2,1'106; г — радиус сечения штока, см;
ft — коэффициент, учитывающий характер заделки штока
(плунжера).
Для штоков (оба конца на шарнирах) ft = 1,0 и плунжеров
у гидроцилиндров подъема автопогрузчиков (один конец заделан,
а другой свободен) ft== 2,0.
Стенки гидроцилиндра проверяют на разрыв по формуле
S^l]/ Mp-Mi+ii) -1
где [cr]p— допускаемое напряжение стали на разрыв (для
углеродистой в пределах 1100—1200 и легированной 1200—1500),
кгс/см2; рк — давление, на которое настроен предохранительный
клапан, кгс/см2; \х ^ 0,3 — коэффициент Пуассона для стали.
Приведенный расчет гидроцилиндра штоковой конструкции
применим также для гидроцилиндров плунжерной конструкции.
В этом случае при большом соотношении между диаметром и
длиной можно не рассчитывать плунжер на продольной изгиб.
Гидрораспределители (см. рис. 121) выбирают по расходу
согласно отраслевым нормалям. Диаметр плунжера определяют
по формуле (1), в которой для уменьшения размеров
гидрораспределителя скорость потока допускают в 1,5—2 раза большей,
чем в напорном трубопроводе.
3. Корпуса ведущих и управляемых мостов
Готовые мосты выбирают по ширине колеи, нагрузкам на
колесо, передаваемому крутящему моменту полуосями и др. Детали
вновь создаваемых мостов рассчитывают по методам, известным
в литературе.
285
кт'
a)
о. Занос
Рис. 145. Схемы расчета мостов:
а — переднего (ведущего), б — заднего (управляемого)
Ведущий мост. Независимо от вида погрузчика может быть
предложена общая методика расчета корпуса ведущего
(неуправляемого) моста, разработанная Львовским ГСКБ автопогрузчиков.
Мост проверяют при трех случаях нагружения: переезд
погрузчика с грузом или с наполненным ковшом через неровности
дороги; передача колесами максимального тягового усилия;
торможение груженого погрузчика.
В первом случае балку моста проверяют на изгиб от
вертикальных реакций, приходящихся на правое или левое ведущие
колеса (рис. 145, а):
R'n = R'a =
где Gi — вес нагруженного погрузчика, приходящиейся на
передний ведущий мост; у — принимаемый коэффициент увеличения
статической нагрузки при переезде через неровности пути, у ^ 2.
Во втором случае балку проверяют на изгиб в горизонтальной
и вертикальной плоскостях от передаваемых усилий одним
колесом:
тяговых — горизонтальным
Г - Г -
■*п — i л —
и вертикальными реакциями на колеса
#;, = /?i = 0,5Gb
где УИД — максимальный момент двигателя, кгс-м; i — общее
передаточное отношение; ц — общий КПД передач; ер —
коэффициент сцепления с грунтом, ср = 0,7; гк — радиус качения
колеса, м.
В третьем случае на изгиб так же, как и во втором случае,
но только с учетом сил, возникаемых в колесах при торможении.
В горизонтальной плоскости от тормозных сил, направленных,
как и силы Т'и и Тл, но направленных в другую сторону:
286
где К — коэффициент, учитывающий перераспределение нагрузки
по тормозам, К ^^ 1,34; ф — коэффициент сцепления с грунтом,
Ф = 0,7.
Указанные силы, приложенные к колесу, вызовут изгибающие
моменты в балке моста (см. рис. 145, а) с эпюрами в виде трапеции.
Наибольшие изгибающие моменты будут на участке А—Л, т. е.
между точками, где опирается рама шасси на ведущий мост.
Напряжения определяют с учетом моментов сопротивлений моста.
Очевидно, они будут наибольшими при расчете по второму и
третьему случаям.
Неприводной управляемый мост рассчитывают при ненагру-
женном погрузчике. Балку моста проверяют на прочность при
трех случаях нагружения: переезд погрузчика через неровности
дороги; занос погрузчика; упирание колес в препятствие.
В первом случае балку моста рассчитывают на изгиб от
действия на мост вертикальных реакций на правое или левое колеса.
Вертикальные реакции по колесам (см. рис. 145, б)
где G2 — вес погрузчика без груза, приходящийся на балку
заднего управляемого моста; у — коэффициент увеличения
статической нагрузки при переезде через препятствия, у «=* 2.
Изгибающий момент в сечениях балки
где lt — расстояние от оси расчетного сечения до середины колеса.
Во втором случае балку моста на изгиб рассчитывают в
горизонтальной и вертикальной плоскостях от реакций по колесам.
Принимая направление заноса, как показано на рис. 145, б,
вертикальные реакции на левое и правое колеса
Ъ = 0,5С2 (1 + ^-), R"a = 0,5G2 (I - »gL)
и продольные реакции по колесам при заносе
К — ^лф, R'n = ^?пф,
где ф — коэффициент сцепления шины с дорогой при случайных
боковых препятствиях, мешающих заносу, ф = 1; п — высота
оси балансира от земли; В — ширина колеи.
Изгибающие моменты в левой и правой частях балки
где lt — расстояние расчетного сечения от середины колес; h{ —
высота центра тяжести расчетного сечения от земли.
В третьем случае балку на изгиб рассчитывают в
горизонтальной и вертикальной плоскостях и на кручение от реакции по
колесам:
от вертикальных реакций
д; = к = o,5G2
и тяговых усилий
т" — т" - М*1ц
1 л — * п — 27 *
Силы Тл и Гп приложены горизонтально к оси колеса на
высоте а от оси балансира. На рис. 145, б они условно показаны
приложенными к колесу снизу. Силы Rn или /?п, а также Гл
или Гп изгибают балку в вертикальной и горизонтальной
плоскостях, а последние силы (та или другая) еще создают крутящий
момент Мкр = ТЛ а, где а — расстояние между осями колеса и
балансира.
Ось балансира 6 (см. рис. 138) рассчитывают на изгиб в
вертикальной плоскости (первый случай) от суммарной реакции R =
= /(д G2, где /<д «* 2 — коэффициент динамичности, а также
проверяют на изгиб в горизонтальной плоскости от действия пары
сил (см, рис. 135, б), вызываемой моментом от силы Т"п (второй
случай) на плече В/2, где В — ширина колеи.
Поворотный кулак 2 (см. рис. 138) рассчитывают на изгиб от
сил, вызываемых при переезде колес через препятствие (первый
случай) и заносом (второй случай).
Приведенный методом расчета в основном сохраняется и
для задней подвески, когда применяют приводной и в то же время
управляемый мост. Здесь более сложным является расчет рамы 3
(см. рис. 139), устанавливаемой в качестве промежуточной опоры
для моста, т. е. вместо несущей балки. Ее рассчитывают как
рамную конструкцию с учетом приведенных нагрузок.
4. Тормоза
Расчет колесных тормозов для погрузчиков сводится к
проверке их, поскольку их берут готовыми от грузовых
автомобилей или тягачей.
Независимо от вида управления расчет тормозов сводится
к следующему.
При торможении обе колодки создают неодинаковые
тормозные силы, поэтому и разные тормозные моменты. Момент (в кгс»см)
в первом случае
до
Xl CT —
и во втором случае
м |иР2 (а + с) п%
где \i — коэффициент трения фрикционной накладки по
чугунному тормозному барабану, jx = 0,3; Pl = Р2 — усилия,
действующие на концы колодок при торможении, создаваемые при
распоре разжимным кулаком или штоком колесного тормозного
цилиндра; г — радиус тормозного барабана, см; а% с, ($1э (J2 —
величины, указанные на рис. 141; т, т'— геометрические
величины.
При одинаковых углах охвата для левой и правой колодок
т = cos Pi — cos (52 — |ы (sin p2 — sin (\);
%' = cos рх — cos (32 -f ju (sin p2 — sin (5Х).
Общий момент, развиваемый одним тормозом,
MT=M%i+ МХг.
Для соблюдения нормального износа фрикционных накладок
давление между ними и тормозным барабаном принимают не
более 20 кгс/см2.
Необходимый тормозной момент, отнесенный к оси колес
погрузчика, как и у грузового автомобиля, когда тормоза
установлены в колесах обоих ведущих мостов, может быть определен
по эффективности торможения с максимальным замедлением /так
[71:
где R — вертикальная реакция на колесо в статическом
положении; G — вес погрузчика; g — ускорение свободного падения;
h — высота центра тяжести погрузчика; А — колесная база
погрузчика; гк — радиус качения колеса.
Положительный знак принимают для передних колес,
отрицательный — для задних.
Отношение суммарного тормозного усилия к весу погрузчика
с грузом и без груза, смотря для какого режима работы
определяют путь торможения, будет соответствовать у = -—-,
Суммарное тормозное усилие, развиваемое всеми колесными
тормозами,
где Мх — суммарный тормозной момент; гк — радиус качения
колеса
Если найденное Рх не может быть реализовано из-за
недостаточного сцепления шин с дорогой, то его определяют по формуле
Рх = фС
Для идеального случая коэффициент сцепления ф при качении
колес по дороге с сухим асфальтобетонным или цементо-бетонным
покрытием составляет 0,7, Так же могут быть определены пути
торможения при движении погрузчика на дорогах со скользким
покрытием.
. В условиях движения погрузчика по дороге с сухим твердым
дорожным покрытием (ф = 0,7) тормозные пути, например для
погрузчика грузоподъемностью 5 т, составляют: при движении
без груза при скорости 30 км/ч около 10 м, при движении с грузом
10 А. Ф. Вазанов, Г. В. Забегалов 289
с допускаемой (предельной) скоростью при маневрировании
10 км/ч около 5 м.
При установке тормозов в колесах только ведущего мосга,
как иногда бывает у автопогрузчиков, в формуле (3) число 2
в знаменателе не учитывают.
Максимальные замедления для погрузчиков не установлены.
По аналогии с грузовыми автомобилями (G > 9 т) и
автобусами для погрузчиков без груза можно принять максимальное
замедление 5 м/с2 при скорости движения погрузчика без груза
до 50 км/ч (движение по дороге с твердым покрытием при
коэффициенте сцепления шины с дорогой ф = 0,7). Для сравнения
приводим данные, рекомендованные комиссией СЭВ для
электрических вилочных погрузчиков, по которым допускается
максимальное замедление 4 м/с2 при скорости движения свыше 30 км/ч.
Наибольшие допустимые рабочие скорости движения с грузом
у погрузчиков принимают 10 км/ч, а при погрузке и разгрузке
еще меньше. С учетом устойчивости погрузчиков максимальное
замедление можно принять не более 1,5 м/с2, как для
электропогрузчиков (по рекомендации СЭВ).
Силы Рх и Р2> возникающие на концах колодок при пневмо-
управлении (см. рис. 141, а), определяют, исходя из крутящего
момента около оси разжимного рычага 1:
M=*Ph,
где Р — усилие по штоку, кгс; h — плечо у рычага, см.
Усилие по штоку
P = pF,
где р — давление воздуха в тормозной камере, кгс/см2; F —
площадь диафрагмы у камеры, см2.
Усилие по штоку меняется и зависит от хода его, т. е. от
изменения давления воздуха в тормозной камере. Учитывая это,
в расчете принимают среднее давление в камере порядка
5,5 кгс/см2, тогда
р _ р _ 2^
*\ — '2 — ~~7~~>
где / — плечо пары сил (см. рис. 141, а), см.
При применении гидравлического привода (см. рис. 141, б)
силы Рг и Р2 создаются штоками колесного тормозного цилиндра
от давления на поршни тормозной жидкости, перепускаемой из
главного тормозного цилиндра при нажиме через педаль тормоза
на шток последнего. При этом
где Рп — наибольшее расчетное усилие нажима на педаль, Рп =*
= 75 кгс; I — общее передаточное число привода, i = ix /2 (1г
и (2 — передаточные числа соответственно рычажной и
гидравлической передач).
290
При выборе размеров рычажной передачи максимальный ход
педали берут не больше 180 мм. При нормально отрегулированном
управлении используется 50—60% хода торможения.
Передаточное число гидравлической части привода
где d и D — диаметры соответственно главного и колесных
тормозных цилиндров.
Длина тормозного пути в м (по Н. А. Бухарину)
Sx = SXt + 5^ + SX2 + SXs =
где STl, Sxlt SX2, 5Тз — длина тормозных путей, проходимых
погрузчиком соответственно за время реакции водителя, время
запаздывания тормозного привода, время нарастания кривой
замедления и при включенных тормозах, м; vx — скорость в начале
торможения, км/ч; tx — время реакции водителя, с (можно в
расчете не учитывать); А/х — время запаздывания тормозного
привода, с, Ktx я^ 0,05; t2 — время нарастания кривой замедления, с,
*,» 0,2.
Расчет стояночного тормоза сводится к проверке принятого
готового тормоза.
Тормозной момент, создаваемый обеими колодками,
м _ (Pi + Р2) У (а + с) pQ
Шх ccosp! — cosp2
где значения входящих величин те же, что и в расчете
пневматического тормоза (см. рис. 141, а).
Силы, приложенные к концу колодок, определяют, исходя из
крутящего момента, возникаемого на оси разжимного кулака.
Принимая Рх -\-Р2 = 2М/1, крутящий момент на оси
разжимного кулака
м =
где р — наибольшее усилие на рычаге, создаваемое водителем
и равное приблизительно 50 кгс; L — плечо приложения силы
на рычаге; i — передаточное число рычажной передачи; ц —
КПД передачи.
Поскольку тормоз устанавливают на ведущем (входном) валу
главной передачи, то полученный тормозной момент, приведенный
к оси колес,
где i0 и г) 0 — передаточное число и КПД главной передачи.
10* 291
• Стояночный тормоз должен обеспечивать торможение
автопогрузчика и одноковшового погрузчика на уклоне в 16%
или при угле наклона а = 9°5\
Составляющая от массы груженого погрузчика Рукл =
«= т sin a, a крутящий момент от нее на оси колес Мунл =
= ^укл rK sin a.
Должно соблюдаться требование Мк £> Мукл. Кроме того,
при отказе основных (колесных) тормозов стояночный тормоз
должен затормаживать погрузчик с замедлением не менее 2 м/с2,
что для погрузчика массой 5 т ориентировочно соответствует пути
торможения около 6 м при движении со скоростью до 15 км/ч.
5. Рулевое управление
Рассчитывают рулевое управление с поворотными колесами
при наличии гидроусилителя. Сначала определяют
сопротивления повороту колес, потом усилие на рулевом колесе без
применения и с применением гидроусилителя, а затем необходимые
параметры насоса для гидроусилителя.
Для расчета примем конструкцию управления с рулевым
механизмом 1 (рис. 146), состоящим из пары червяк—ролик от
грузового автомобиля. Рулевая сошка 2 тягой 3 соединена шарнирно
с золотником гидроусилителя 5, а шток последнего тягой 4 соеди*
иен с рамой шасси.
Рис. 146. Схема расчета
рулевого управления с
гидроусилителем для
погрузчиков
грузоподъемностью свыше 5 т
С установкой управляемого моста сзади погрузчика
наибольшее усилие на рулевом колесе возникает при повороте колес на
месте и негруженого погрузчика. С поворотом колеса возникают
моменты сопротивления: М.х качению колеса, М2 скольжению
отпечатка шины по опорной поверхности и М3 стабилизации
управляемых колес. Последним можно пренебречь при определении
наибольшей силы /5гтах- Момент сопротивления качению колеса
М± = GJay
где GK — реакция на заднее колесо, для примера примем равной
2150 кгс; / — коэффициент сопротивления качению, f = 0,015;
а — плечо обкатки, см, а = 8.
При действии поперечной силы контактный отпечаток шины
в результате ее боковой упругости поворачивается относительно
колеса, и равнодействующая реакция Y = GKcp будет смещена
назад на расстояние к 17]. Его можно принять равным половине
расстояния от центра отпечатка до его конца
где г — свободный радиус колеса, для примера примем 41,7 см;
гк — радиус качения колеса, см.
Принимая гк = 0,96г, то
где ф — коэффициент трения шины о дорогу, <р = 0,7.
Тогда
g кгс,
где r\L — КПД шарниров рулевого привода, rj, ^ 0,8.
Наибольшее усилие, которое нужно приложить к рулевому
колесу,
Р, шак = М -^- = 22 600 24,23,5,о,68,о>8 - 73.8 кгс,
где R — радиус рулевого колеса, см, R = 24; г'^ — передаточное
число рулевого привода, i© = 23,5; цп — прямой КПД рулевого
привода, г)п = 0,8; & — передаточное число рулевого привода.
Согласно размерам плеч, приведенным на рис, 146,
_ 32 18,6 2,2
tft) - 18 4 26,3 "" U'°5'
В систему управления встроен гидроусилитель с параметрами:
рабочее давление р = 70 кгс/см2, диаметры поршня и штока
293
6,75 и 2,5 см. Тогда сила на рулевом колесе, создаваемая
усилителем,
р _ J^ik _ 70.30,8.18 _ g
где F — площадь поршня за вычетом площадки штока, см2,
F = 30,8; /с — плечо сошки, см, /с = 18.
Усилие на рулевом колесе, которое должен приложить
водитель при наличии гидроусилителя,
Р = Рг max - ^у = 73,8 - 68,6 = 5,2 КГС.
Исходя из равенства хода поршня и скорости перемещения
рулевого колеса в минуту
об — АЯН __
-р
получим необходимую подачу насоса
п __nsF 90-1,2-35,8
4jD л/мин>
п _
"ы ~~ 1000 (т}об— АЯН) "" 1000(0,9 — 0,05)
где А/7Н — утечки через золотник, АЛН я^ 0,05 /7Н; s — ход
винтовой канавки, см, s= 1,2; п — наибольшая и
кратковременная частота вращения рулевого колеса, об/мин, п = 90;
F — площадь поршня в бесштоковой полости, см2, F = 35,8;
Ооб — объемный КПД насоса, г\об ^ 0,9.
Глава 14
РАСЧЕТ МЕХАНИЗМОВ
И УЗЛОВ АВТОПОГРУЗЧИКОВ
1. Механизм подъема
Сопротивления подъему груза определить очень сложно, так
как для проектного расчета неизвестны веса элементов
грузоподъемника, поднимаемые вместе с грузом, и сопротивления
качению катков по направляющим. В этом случае все
сопротивления подъему иногда оценивают общим (условным) КПД д' =
= 0,5-н0,7 и усилие плунжера цилиндра подъема (в кгс)
где i — кратность цепного полиспаста грузоподъемника, i = 2;
QH — грузоподъемная сила.
Такой расчет не отражает действительных потерь на
сопротивление. Как показывает эксплуатация автопогрузчика
грузоподъемностью 5 т, при подъме груза в пределах 0,2—5 т такой
общий (условный) КПД меняется и составляет соответственно
(ц' = 0,2ч-0,78, так как с уменьшением веса поднимаемого груза
294
Таблица 16
Данные для предварительного расчета цилиндра механизма подъема
(буквенные обозначения см. на рис. 147)
Расчетные данные
Размеры вил (LXbXs)
Расстояния, см:
от передней спинки
вил до центра
груза /.,
от центра груза до
плоскости
грузовых цепей b . . . .
от середины спинки
вил до плоскости
грузовых цепей Ьх
от оси цилиндра
(середины выдвижной
рамы) до плоскости
грузовых цепей /,
от оси цилиндра до
задней плоскости
грузовых цепей /2
между верхними и
нижними основными
катками у каретки
по вертикали а . . .
Диаметр основных
катков DK .
Масса каретки с
вилами шк
Масса выдвижной
рамы с плунжером
цилиндра и траверсой,
отнесенная к 1 м высоты
грузоподъемника,
поднимаемых вместе с грузом, /и,
кг/м
0,5
73Х 10Х
Х2,5
50
54
5
6
4
37
8
120
40
1,°
80Х 10Х
Х3,6
50
55
5,5
6,5
4,5
40
9,8
150
60
Грузоподъемность, ч
2,0
100Х
Х15Х4
60
66
6
7
5,5
47,5
11
280
70
3,2
110Х
Х15Х6
60
67,5
6,5
12
10
60
И
500
120
г
5,0
иох
Х15Х6
60
69
8,5
12,5
10,2
70
13
660
135
10
158Х
Х20Х8
75
89
12
17,5
14,5
95
18
1180
300
295
2S
Рис. 147. Схема действия сил в механизме подъема
автопогрузчика
вес выдвижных элементов грузоподъемника остается постоянным.
Вводимый в расчет КПД не учитывает также изменения веса
грузоподъемника при разных его высотах.
Более справедливо проектный, а тем более поверочный расчеты
вести с учетом всех сопротивлений подъему груза. Для
проектного расчета можно пользоваться данными, приведенными
в табл. 16. В поверочном расчете плечи приложенных нагрузок и
выдвигаемых элементов могут быть уточнены.
Наибольшее усилие подъема определяют при вертикальном
положении грузоподъемника, максимально поднятых вилах с
номинальным грузом, когда погрузчик стоит на уклоне с боковым
креном до р = 3° (рис. 147). Примем следующие обозначения
силы (в кгс) и линейные размеры (в см):
GK> GB — веса соответственно каретки с вилами и выдвижной
рамы с плунжером цилиндра подъема и траверсы
роликами;
296
S — усилие натяжения в одной ветви грузовых цепей;
Н — высота подъема груза;
/ — расстояние от центра номинального груза до
переднего фаса вил;
а, ах — расстояния по вертикали соответственно между
основными катками каретки и верхним катком
наружной и нижним катком выдвижной рамы;
с — расстояние по вертикали между нижним катком
каретки и верхним катком наружной рам;
DK, dK — наружный и внутренний диаметры основных катков
(внутренний считается по беговой дорожке
внутреннего кольца шарикоподшипника);
Dm d'* — наружный и внутренний диаметры боковых катков;
W\ — сопротивление подъему груза и подъемной каретки
с вилами;
W2 — сопротивление подъему выдвижной рамы с плун-
. жером, траверсой и грузовыми цепями;
Ws — сопротивление качению основных катков по
направляющим; ,
W4 — сопротивление качению бововых катков по
направляющим.
Необходимое усилие подъема по плунжеру (в кгс)
Сопротивления подъему груза, подъемной каретки с вилами,
выдвижной рамы с плунжером, траверсой и грузовыми цепями
W 4- W = 2 (°г + бк) г G^
1 "Г 2 ад2 "Г % >
гДе Т11» ТЬ — механические КПД цепной передачи (грузовые цепи
перекинуты через ролики траверсы) и цилиндра, ?и^0,98,
;г)2 я^ 0,96.
Масса выдвижной рамы с плунжером (в кг)
тв = т/в, (А)
где т — масса выдвижной рамы с плунжером цилиндра и
траверсой, отнесенная к 1 м высоты грузоподъемника, кг/м (для
проектного расчета можно брать по табл. 16); 1В — длина выдвижной
рамы, м, 1В = 0,5// + аг + DK.
При максимально поднятых вилах расстояние по вертикали
между основными катками наружной и внутренней рам обычно
принимают аг = а. Более правильно принимать аг £> а, чтобы
уменьшить нагрузки на катки рам при наклоне
грузоподъемника с поднятым грузом вперед и от внецентренного крепления
концов подъемных цепей на корпусе цилиндра подъема. При
аг = а реакции по основным каткам наружной RH и внутренней
297
RB рам можно принять равными и такими, как у подъемной
каретки, т. е.
где 6, Ьг — плечи приложения сил QH и GK относительно оси
передней ветви грузовых цепей.
Кроме указанных реакций по основным каткам у рам
возникают реакции R'H и R'B, вызываемые парой сил 2F от внецентрен-
ного закрепления концов грузовых цепей на корпусе цилиндра
подъема относительно оси плунжера на плече /2. Можно принять
также RfH = R'B.
Тогда сопротивление, вызываемое качением основных катков
по направляющим,
w = 2ш (RK + flH)
Общий коэффициент сопротивления качению катков
w
(5)
где f — коэффициент трения второго рода (плечо трения качения),
см, / ^? 0,04; \i — условный коэффициент трения, учитывающий
качение шариков (роликов) по дорожке внутреннего кольца
подшипника, [х = 0,015.
Пара сил
2Si
где S — усилие в одной ветви грузовых цепей, кгс; Нг — высота
от шарового шарнира цилиндра подъема на нижней поперечине
наружной рамы до оси роликов траверсы или выдвижной рамы,
через которые перекинуты грузовые цепи, см.
Для проектного расчета ориентировочно можно принять
Hl ^^ H -\- а,
где Н — наибольшая высота подъема, см.
При креплении концов грузовых цепей на специальной верхней
поперечине у наружной рамы пара сил 2F будет больше при малых
высотах подъема, но тогда будут меньше реакции по каткам /?н
и RB из-за большей av Поэтому исходным положением для
расчета принят случай подъема груза на полную высоту.
Усилие в одной ветви грузовой цепи
4%
Зная пару сил 2/\ можно определить реакцию по верхнему
катку наружной рамы
298
где h — расстояние от оси нижнего катка выдвижной рамы до
оси роликов для грузовых цепей на траверсе или верхней
поперечине выдвижной рамы, h = Я/2 -f- a.
При подъеме груза возникают большие сопротивления от
реакций по боковым каткам каретки и наружной и внутренней рам,
когда погрузчик стоит на площадке с боковым креном до р = 3°.
Принимается, что боковые катки размещены в центре основных
катков, т. е. как бы врезаны в них. Поэтому при малых
соотношениях наружного диаметра катка D'K и оси его d'K сопротивления
качению их по направляющим очень значительны.
Сопротивление подъему груза при качении боковых катков
где Хк, ХНУ Хв — реакции по боковым каткам соответственно
каретки, наружной и внутренней рам; w± — общий коэффициент
сопротивления качению боковых катков.
Реакции по боковым каткам
Хк = 0,5 (QH + GK) sin p (7)
и реакции по боковым каткам наружной и выдвижной рам
Хо = (Q. + GK) sinp °'5a+; + a* + Gb(°^-Wi) sinP; (8)
Хв - (Q. + GK) sin ftЩ±± + O.<P,H,-»»-«) sinft (9)
где с — расстояние по высоте между нижним катком каретки
и верхним у наружной рамы, см; тг — расстояние от оси
основного катка до конца выдвижной рамы, см. Можно принять с =*
= 0,5 Н — а и т1 ^ 6 см.
Общий коэффициент сопротивления качению боковых катков
K;
где D'K — наружный диаметр бокового катка, см; D'K я^ 0,5D
d'K — диаметр оси катка, см, d'K я^ 0,6£>к', \i — коэффициент трения
скольжения, jx = 0,1.
Гидроцилиндр для подъема груза. Диаметр плунжера
определяют по формуле (2), в которой принимают z = 1 и не учитывают
КПД шарнирных подшипников т)п. Ход плунжера принимают
равным половине максимальной высоты подъема груза, т. е. 0,5Я.
Подбор насоса. По заданной номинальной скорости подъема
груза 1>г = 20 -ь 30 м/мин, диаметру плунжера D (в мм)
определяют потребный расход рабочей жидкости Q = VjD2/l216i
(в л/мин), где vr — номинальная скорость подъема груза, м/мин;
i — кратность цепного полиспаста, i = 2.
Поскольку при работе автопогрузчика исключается совмещение
операций подъема и наклона грузоподъемника с грузом, то насос
выбирают с учетом только работы механизма подъема.
299
По необходимой подаче выбирают насос с подачей Яя при
^ об/мин, несколько большей чем необходимо. Скорость подъема
груза (в м/мин) при этом насосе
1275<77„
D
Частота вращения вала насоса (в об/мин) для необходимой
подачи насоса Я (в л/мин)
yr max
При этом необходимая частота вращения вала двигателя
(в об/мин)
где Пдтах — наибольшая частота вращения вала двигателя.
Мощность (в л. с), необходимая для привода насоса,
450rj*)o6
(10)
где г), у|об — соответственно механический и объемный КПД
насоса, г\ ^ 0,96, г)об ^ 0,9; р — рабочее давление, кгс/см2.
Необходимое передаточное отношение редуктора для привода
насоса
р «шах
Грузовые вилы рассчитывают на сложное сопротивление
изгибу и растяжению (см. рис. 66, а). Опасным считают сечение
А — А. Согласно рекомендации СЭВ принимают, что в этом
сечении вилы растягиваются силой Р = 0,66/CflQH и изгибаются
моментом М = 0,66QH/, где QH — номинальная грузоподъемная сила
и /Сд = 1,2 — коэффициент динамичности. Напряжение
где F и W — сечение и момент сопротивления вил.
Допускаемое напряжение
И = -у <**,
где ат — предел текучести материала.
Следует отметить очень высокие требования СЭВ,
предъявляемые к расчету вил. Получается, что 2/3 всей массы поднимаемого
груза приложено к носку одного зуба, что вряд ли может
встретиться на практике.
Проверяют также крюк 5 (см. рис. 64) на срез в заделке и
шкворень 3 (см. рис. 63) на изгиб от силы Р.
300
ь'
2. Механизм наклона
гру зоподъемн ика
Наибольшее усилие по
штоку цилиндров наклона
грузоподъемника возникает
при обратном повороте
грузоподъемника с грузом,
наклоненного вперед на
предельный угол а.
Для расчета примем
следующие положения: центр
тяжести груза по высоте
находится на середине
катков у подъемной каретки,
а по горизонтали — на
расстоянии / (рис. 148) от
передней спинки вил; центр
тяжести каретки с вилами на
середине толщины спинки
вил; центр тяжести рам
грузоподъемника вместе с
цилиндром подъема — на
середине рам.
Примем следующие
обозначения:
Q — грузоподъемная
сила;
бк> GB, Сн — веса
соответственно
подъемной каретки
с вилами (см.
табл. 16),
выдвижной и
наружной рам;
Н1у Н2, #3, ^4 — высота от оси поворота грузоподъемника
соответственно до центра тяжести груза и
подъемной каретки с вилами, выдвижной и наружной
рам и до оси крепления штока цилиндров на*
клона к наружной раме;
Ъ' — расстояние центра тяжести груза от оси рам,
равное Ь + 1г (см. табл. 16);
Ь\ — расстояние центра тяжести подъемной
каретки от оси рам, равное Ьг + 1г {си.
табл. 16)
Ь2 — расстояние между шарнирами оси поворота
грузоподъемника и штока цилиндра наклона на
наружной раме;
301
л
%Sl/JcC
Hcosut
1
.<
1ПсС
л
J
(
Г-
1
1
„япсС
GfSinA
Ss cosd
6MC0ScC
Рис. 148. Схема действия сил в механизме
наклона грузоподъемника
а — расстояние по горизонтали от середины рам
до центра поворота грузоподъемника;
S^ — усилие по штокам цилиндров;
Ф — угол наклона цилиндра с учетом угла наклона
грузоподъемника вперед на угол а.
Для проектного расчета можно вес GK подъемной каретки
с вилами взять из табл. 16, вес GB внутренней рамы с выдвижными
элементами определить по формуле (4), а вес наружной рамы
с корпусом цилиндра подъема принять GH ^ 1,1GB.
Составим уравнение моментов около шарнира А (см. рис. 148)
Q sin а#! + GK sin аНг + GB sin aH2 + GH sin aH6 +
+ Q cos a (a + b') + GK cos a (a + b{) + (GB + GH) cos aa +
+ 5ц sin фй2 — Su cos фЯ4 = 0.
Решая это уравнение относительно S'u> получим суммарное
усилие по штокам цилиндров наклона.
Гидроцилиндры для наклона грузоподъемника. Размеры их
определяют по формуле (2) при двух цилиндрах и суммарном
усилии по штокам Su.
Поскольку для привода гидроцилиндров наклона применяют
тот же шестеренный насос, что и для гидроцилиндров подъема,
то в трубопроводы для гидроцилиндров наклона встраивают
нерегулируемые дроссели (см. рис. 122, б), чтобы уменьшить
скорость наклона грузоподъемника.
3. Механизм выдвижения грузоподъемника
Расчет по существу сводится к определению усилия
выдвижения и диаметра цилиндров при следующих условиях:
на вилах поднят номинальный груз на высоту около 2 м для
укладки на платформу погрузчика;
преодолеваемый угол подъема при движении тележки a = 5Q
(на случай просадки гидравлических домкратов);
для упрощения расчета центр тяжести грузоподъемника с
тележкой расположен над осью передних катков у тележки;
усилие по штоку цилиндра не должно вызывать перекоса у
колес тележки при качении их по направляющим (рельсам).
Для расчета примем схему механизма выдвижения с одним
цилиндром (рис. 149), соответствующую конструкции (см. рис. 23).
Цилиндр 3 (см. рис. 149) установлен на раме шасси с одной
стороны проема для грузоподъемника, а чтобы избежать перекоса
колес у тележки 4, две цепные звездочки 1 заклинены на общем
валике и расположены по обеим сторонам проема. Концы цепей
закреплены в точке Б на раме грузоподъемника с двух сторон.
Реакции по задним и передним каткам
302
Рис. 149. Схема действия сил в
механизме выдвижения грузоподъемника
Реакции по каткам могут незначительно измениться из-за
места крепления тяговых цепей к раме грузоподъемника в точке Б%
т. е. выше осей катков тележки. Эти изменения трудно
определимы при взаимно связанных силах, поэтому их не учитывают.
Сопротивление качению тележки на подъем
V «(£>(/?!+ ^008 а+ (/?! + /?,) sin а,
где w — общий коэффициент сопротивления;
/Ci — коэффициент, учитывающий трение реборд катков о
направляющие, К\ = 1,4.
Остальные составляющие те же, что в формуле (5).
Гидроцилиндры для выдвижения грузоподъемника. Их размеры
определяют по формуле (2) при одном—двух цилиндрах и
суммарном усилии по штокам (в кгс)
5 = —
ц— ^ >
где i — кратность цепного полиспаста, i = 2; г\ — КПД цепных
блоков, г\ & 0,98.
Поскольку используют насос, установленный для работы
механизма подъема груза, т. е. большей подачи, чем нужно для этого
случая, то для обеспечения скорости выдвижения около 20 м/мин
в систему трубопроводов цилиндра выдвижения встраиваются
нерегулируемые дроссели (см. рис. 122, б).
4. Рамы грузоподъемника
В основу расчета рам грузоподъемника на прочность положена
методика, разработанная Львовским ГСКБ автопогрузчиков. В
расчете рамы рассматривают как стержневые конструкции, По-
303
Рис. 150. Схема действия сил в узлах грузоподъемника
скольку в дальнейшем допускается, что сечение направляющих
стержней у рам свободно депланируют при стесненном кручении,
то их нельзя считать рамными конструкциями при незадела иных
стержнях. По конструкции и характеру нагрузки расчет их как
рамных конструкций был бы более оправдан от нагрузок,
приложенных в плоскости рам, где действуют только случайные
и небольшие силы от боковых катков, когда автопогрузчик
находится на поперечном уклоне.
Для расчета принимают следующие, невыгодные в смысле
нагрузок на направляющие грузоподъемника положения:
автопогрузчик с поднятым на максимальную высоту номинальным
грузом на вилах работает на рабочей площадке с поперечным
уклоном Р == 3°; нагрузка на один зуб вил на 30% больше, чем
на другой (принимается коэффициент перегрузки /Сп = 1,3);
учитывается коэффициент динамичности /Сд = 1,3, отнесенный
к массе груза (на практике динамические нагрузки доходят до
50% статических нагрузок).
Поскольку угол наклона вперед рам грузоподъемника не
превышает 3°, то для простоты расчета можно считать
грузоподъемник вертикальным.
Для расчета примем схему приложения нагрузок на
грузоподъемник, приведенную на рис. 150 применительно к
конструкции (см. рис. 61). Хотя выдвижная рама конструктивно смещена
немного вперед относительно наружной рамы, считаем, что их
оси симметрии совмещены и нижняя опора грузоподъемника
расположена на этой оси, т. е. в точке С. Задние концы грузовых
цепей закреплены на корпусе цилиндра подъема. Центры основных
и боковых катков конструктивно совмещены.
При другом расположении опоры грузоподъемника, креплении
задних концов грузовых цепей на наружной раме и смещении
центров боковых катков относительно основных катков принятая
расчетная схема может измениться.
Для большей ясности в расчете считаем полезным привести
некоторые данные, полученные Львовским ГСКБ автопогрузчиков
при расчете грузоподъемника для автопогрузчика 4025
грузоподъемностью 5 т с высотой подъема 2,8 м.
Определение усилий и реакций для обеих рам. Согласно
расчетной схеме (см. рис. 150) примем следующие обозначения (силы
в кгс, плечи в см):
Q — грузоподъемная сила;
GK, GB> Ga — веса соответственно каретки с вилами,
выдвижной и наружной рам;
Rk. в» ^к.н — реакции по верхним и нижним каткам
каретки;
/?8, RH — реакции по каткам выдвижной и наружной
рам;
0,5Si — усилие по штоку цилиндра наклона;
S — усилие натяжения в одной ветки грузовых
цепей;
2F — пара сил, приложенная к оси роликов
траверсы и нижнему шаровому шарниру
цилиндра подъема на поперечине наружной
рамы;
Н — высота подъема груза;
3G5
#ь h — расстояния от оси роликов у траверсы
соответственно до нижнего шарового шарнира
у цилиндра подъема и до оси основных катков
выдвижной рамы;
&, Ьг — плечи приложения центра тяжести груза
и каретки с вилами до плоскости подвеса
грузовых цепей;
Lu L2> £з» L4, L5 — плечи приложения относительно шарнира С
соответственно центров тяжести груза,
каретки с вилами, внутренней и наружной
рам, а также усилия по штоку цилиндра
наклона (центры тяжести внутренней и
наружной рам вместе с поднимаемыми и
неподвижными элементами цилиндра подъема
принимаются на середине рам);
/, /2 — расстояния от оси плунжера цилиндра
подъема (от оси выдвижной рамы) до плоскости
подвеса грузовых цепей;
К — свободный ход каретки в начале подъема;
т — конструктивные значения конца выдвижной
рамы от оси катка, равные приблизительно.
6,5, см;
а — расстояние по вертикали между основными
катками каретки;
ах — минимальное расстояние по вертикали между
основными катками наружной и выдвижной
рам (при полной высоте подъема груза);
с — расстояние по вертикали между нижними
основными катками каретки и верхними
катками наружной рамы.
Усилия S натяжения грузовых цепей можно принять
одинаковыми при установке на конце плунжера траверсы и без нее
(при высотах подъема свыше 2,8 м), если натяжение цепей строго
выверено.
Центр тяжести груза и каретки с вилами принят на середине
катков у каретки.
Для проектного расчета вес GK, а также плечи Ь, Ьи 1Ъ /2
могут быть взяты из табл. 16. Тогда плечи Lx === Ь + 1Х и L2 =*
При определении нагрузок от боковых катков принимается,
что центр тяжести груза смещен в сторону более нагруженных
(левых) стержней направляющих на / «^ 15 см.
Усилие по одной грузовой цепи S = 0,5 (/(AQ + Ок) кгс,
а усилие (в кгс) по плунжеру цилиндра подъема (без
сопротивления в катках и без учета КПД цилиндра)
Реакции (в кгс) по основным каткам каретки со стороны
наиболее нагруженного вертикального стержня
Реакции по основным каткам выдвижной рамы
nKRQ (0,5a + с + dt) + GB (0,5/B - т) .
_
_
F(h-ai) + KnKAQ (0,5a + с) + GB (0,5/B - т)
Здесь сила F вызывается внецентренным приложением
нагрузки по отношению к оси плунжера от крепления задних концов
цепей к корпусу цилиндра подъема. Ее можно определить по
формуле (6).
Реакцию (в кгс) от цилиндра наклона находят из уравнения
моментов всех сил относительно шарнира С
где г] — КПД шарнирных подшипников с густой смазкой, ц =
= 0,98.
Составляющие реакции на опоре Хс и Yc находят из условия
равновесия относительно шарнира С:
2ХС—
Откуда суммарная реакция на наружную раму
грузоподъемника
В плоскости рам на боковые катки действуют реакции, возни-
каемые от поперечного уклона рабочей площадки. Они могут
быть определены: на катки каретки по формуле (7), а на катки
наружной и выдвижной рам по формулам (8) и (9). Для данного
случая в этих формулах масса груза должна быть умножена на
коэффициент /Сд динамичности.
Расчетная схема действия сил на основные катки рам
приведена на рис. 151. Вертикальные стержни рассчитывают на
поперечный изгиб, стесненное (изгибное) кручение и местный отгиб
полок у направляющих. Последние две деформации вызываются
поперечными нагрузками на основные катки, не проходящими
через центр изгиба.
При обычном кручении, например, цилиндрических стержней,
рассчитываемых по формуле Оен-Венана, возникают только
касательные напряжения, одинаковые для всех сечений. При кручении
же стержней некруглых, профильных (тонкостенных) сечения не
только поворачиваются при кручении, но и искривляются в своей
307
Рис. 151. Схемы приложения сил и скручивающих моментов:
а *« на выдвижную раму; б » на наружную раму
плоскости или, как говорят, сечения депланируют. По длине
стержня депланация сечений может быть одинаковой, если для
этого нет препятствий (нет заделки концов направляющих или
добавления на длине скручивающих усилий и т. д.). В последнем
случае сечения депланируют по-разному, и кроме небольших
касательных tw возникают также значительные по величине
(вторичные) нормальные о^ напряжения. Природа и характер этих
напряжений подробно описаны в литературе [6].
При стесненном кручении стержней система внутренних
нормальных усилий обычно приводится к двум парам с плечом h
и моментом М, направленным в противоположные стороны.
Здесь h не следует смешивать с обозначением, приведенным на
рис. 150. Совокупность таких пар, лежащих в параллельных
плоскостях, называют бипарами. Значение их оценивается
моментом второго порядка, называемым бимоментом В = Mh кгс-см2.
В отличие от обычного крутящего момента он представляет собой
обобщенную уравновешенную силу, статически эквивалентную
нулю.
G уменьшением депланации сечения увеличивается степень
стесненности депланации и бимомент увеличивается. При чистом
кручении, когда все сечения депланируют одинаково, бимомент
равен нулю.
Характеристики сечений направляющих. Для выдвижной рамы
сечение направляющих двутаврового (рис. 152, а) и для наружной
швеллерного (рис. 152, б) профилей. Предварительно рассмотрим
308
со
I
ж
а)
Рис. 152. Характеристики сечений:
а — двутавра; б — швеллера; / — основные размеры; // — раз»
меры для расчета на стесненное кручение; /// — направление
координатных осей и главных секториальных координат
геометрические и секториальные характеристики принятых
сечений. Для принятого двутаврового профиля площадь поперечного
сечения F = 57,3 см2. Координаты центра тяжести совпадают
с центром симметрии, т. е. Хц#т = 0 и Y^T = 0. Осевые моменты
инерции относительно осей X и Y соответственно составляют 1Х
и 1У. Момент сопротивления относительно оси X для точек /, 2%
9 и 10 (см. рис. 152, а, /) будет Wxt a для точек 3, 4, 5, 6, 8, 7,
11 и 12 — W'x\ относительно оси Y для точек 2, 3, /, 6, 8, 9, 10
к 11 — Wy.
Момент инерции кручения /к определяют из суммы моментов
инерции вертикальной стенки /кс и полок 2/кп. Для большей
ясности приводим данные их в цифрах:
L = /кс + 2/кп = 15,2 + 2-23,9 = 64 см4;
/кс = oci&t == 2,68-1,544= 15,2 см4;
/кп = a2b\= 1,223- 2,144 = 23,9 см\
399
где ах и а 2 — коэффициенты пропорциональности, учитывающие
влияние ширины полки на момент инерции. Их определяют, как
для прямоугольника, при Нг1Ьх = 13/1,5 = 8,65 (по Беляеву [4]
табл. 17, случай 6) ах = 2,68 и при В/Ь2 = 9/2,1 = 4,28 (там же,
случай 5) а2 = 1,223.
Момент сопротивления кручению
W7
где IKi/WKi — отношение соответствующих моментов, вычисленных
для той из частей сечения, для которой это отношение достигает
максимума. В общем виде WKt = §ib].
Моменты сопротивления стенки и полки
WliC = $ф\ = 2,68-1,543 = 9,8 см3
и
WKn = f>2bl= 1,223-2,13- 11,3 см3,
где рх и р2 — коэффициенты, определяемые по тем же показателям,
что и коэффициенты ах и а2.
Из соотношения моментов инерции и сопротивления
/кс 15,2 - г- /кп 23,9 л it
— =1,00 И = = А1Э
видно, что последнее будет наибольшим. Тогда расчетный момент
сопротивления кручению
^=-т^кг=2^ = 30-1см3-
Для расчета на стесненное кручение необходимо знать секто-
риальные площади и характеристики сечения. Согласно
существующим гипотезам при разных углах закручивания соседних
сечений продольные волокна стержня испытывают
соответствующие продольные деформации, которые и определяют депланацию
сечений [6]. Депланация, т. е. перемещение точек сечения вдоль
стержня, следует по закону секториальной площади, а не прямой
линии, например, для двутавра (см. рис. 152, а, ///).
Депланация для любой точки сечения в общем виде может быть
выражена формулой
и = — 64
где 6' — относительный угол закручивания; со — секториальная
площадь.
Секториальная площадь считается положительной, если
радиус-вектор вращается по часовой стрелке.
Для двутаврового профиля суммарная секториальная
площадь со (см. рис. 152, а, ///) состоит из суммы отдельных секто-
риальных площадей, имеющих форму прямоугольных
треугольников с вершинами, расположенными на оси Y сечения. Из этой
310
фигуры понятно расположение главных секториальных координат
и принятое расположение координатных осей. При определений
секториальных координат для двутаврового симметричного
профиля можно считать, что центр изгиба лежит в точке пересечения
стенки с полкой (точка М на рис. 152, а, //), т. е. напряжения <?ш
возникают только от изгиба полок, так как секториальные
координаты для всех точек стенки равны нулю.
Секториальные координаты при начале отсчета от центра
тяжести сечения, например наибольшая для точек /, 2, 3 и 4,
равны удвоенной площади треугольника (см. рис. 152, а, ///)
В h Bh ол 2
©Iе — ту= —Т^ ~34 см-
Знак минус принят с учетом поворота радиуса-вектора против
часовой стрелки от начала координат, т. е. из положения AM
в положение А1 (см. рис. 152, а, //). Такие же значения ординат
будут и для других трех точек со2> <0з» &&• Поскольку для данного
сечения отношение В/1Ш = const, т. е. имеет вполне определенное
значение, то эпюра со секториальных координат (см.
рис. 152, а, ///) является также графиком напряжений а^.
Согласно принятым обозначениям (см. рис. 152, а, / и //)
главный секториальный момент инерции
= ^5 ** 14 50° СМ •
Упругая изгибно-крутильная характеристика
где G — модуль сдвига, кгс/см2, G = 8-Ю5; Е — модуль
упругости первого рода, кгс/см2, £ = 2,l-106; I — общая длина
стержня, см.
Применительно к принятым обозначениям для выдвижной
рамы / = /в; величина k пропорциональна длине / стержня и
зависит от отношения жесткости G/K при чистом кручении к секто-
риальной жесткости EI^c повышением нормальных напряжений огш
в поперечном сечении.
Так же как и лля сечения профиля у направляющих
выдвижной рамы, находим такие же характеристики для профиля
наружной рамы.
Площадь сечения (см. рис. 152, б, /) F = 50,8 см2,
координаты центра тяжести Хц. т = 2,17 см4 и Уц. т == 0, осевые моменты
инерции 1Х = 1878 см4 и 1У = 166,4 см4. Моменты сопротивления
относительно оси X: для точек /, 2, 5 и 6 Wx == 218 см3 и для
точек 5, 4, 7 и 8 W'x = 289 см3, а относительно оси Y Wy = 38,4 см3.
ЗН
Моменты инерции и сопротивления кручению определяют
так же, как для двутаврового профиля с использованием
коэффициентов alt а2, рх, р2 по Беляеву:
4 - /ко + 2/кп = 31+2-10,4 - 51,8 см4;
/кв = «1*1 «2,956.1,8 —31 см4;
/кп==а2б2 = 0,537-2,14 =10,4 см4.
Момент сопротивления кручению стенки и полки
И7К. с« pjbj = 2,956-1,833 = 17,2 см3;
1FK. п = р2Ь| = 0,567 - 2,13 == 5,25 см3.
Из соотношения моментов инерции и сопротивления для
стенок и полок
3»! = 1 8 и /к-п
= 1 8 и = iM = 1 98
17,2 1)О №к.л 5,25 1)УО
получим
W7 — /к = 51'8 == 26 2 см3
Для расчета на стесненное кручение принято сечение (см.
рис. 152, б, //) с направлением координатных осей и главных
секториальных координат (см. рис. 152, а, ///). Поскольку
сечение стержня является несимметричным, то центр изгиба А
располагается за пределами контура сечения и лежит на оси АХ.
Поэтому продольная сила, проходящая через центр тяжести
этих сечений, вызывает в тонкостенном стержне также и кручение,
а с ним дополнительные довольно большие нормальные и
незначительные касательные напряжения. Он также является центром
кручения или мгновенным центром вращения сечения, так как
сечения будут поворачиваться не вокруг центральной оси стержня,
а вокруг оси, проходящей через центр изгиба сечений, смещенной
на некоторое расстояние d от оси стенки (см. рис. 152, б, //).
Расстояние от середины стенки до центра изгиба
i Ь 5,6 г. пп
d2fi2 см
где Fc - 15,Ы,8 = 27,2 см2, Fn = 5,6-2,1 - 11,8 см2.
Эпюры со главных секториальных координат приведены на
рис. 152, б, ///. Значения их
для точки 1
dh 2,0215,1 1С о 2
G)x = — (03 = 2~ = ^ = — 15,3 СМ2,
для точки 2
щ = — щ = _ 0,5/1 (6 — d) = — 0,5• 15,1 (5,6 - 2,02) = — 27 см2.
312
Главный секториальный момент инерции
12
5,69-15,12-2,1 2-27,2 + 3.11,8
~~ 12 6-11,8 + 27,2
Упругая изгибно-крутильная характеристика
6380 см4.
8-106-51,8
2,1-106 6380
: /-0,056,
(12}
где входящие в эту формулу величины, за исключением /, /к
и /to, те же, что для определения изгибно-крутильной
характеристики двутаврового профиля. Применительно к принятым
обозначениям для наружной рамы / = /н.
Направляющие выдвижной рамы рассчитывают на изгиб и
стесненное кручение в предположении, что они работают в
отдельности как простые балки, опирающиеся в точках, где приложены
силы /?в и RKtB (рис. 153, а), со свободными концами А и В.
Рассчитаем наиболее нагруженную направляющую (левую). Начало
координат принимаем на нижнем краю направляющей. Тогда
приложенные силы можно пронумеровать так: Rt = /?в, 7?2 ==s
= /?н, Rs = /?к#н, /?4 = ^?к. в» ^б = ^- Соответственно примем
координаты точек приложения этих сил: гг = т, 22 *= /n + alf
г3 = т + «! + с, г4 = /п + г, г5 = т + г + п.
Изгибающие моменты в четырех точках
M{z)^^Ri{z-zi)bi(z\ (13)
где z — расстояние между принятыми опорами (длина
скручиваемого стержня для последующего расчета на стесненное кручение);
y^^^JJZIJ^U
_£ X" ;i«
*щщ
ц
IF
a) S)
Рис. 153. Схемы расчета рам грузоподъемника на общий изгиб и стесненное
кручение:
а « выдвижной; 6 *= наружной
313
R{, zt соответствуют указанным силам и их координатам для
каждого расчетного случая: 6,- — коэффициенты, учитывающие
расположение расчетного сечения относительно начала координат
для i-ii точки; 6; = 0, если z > zit и 6i = 1, если z < г,.
Выражение М (z) в этой формуле и далее является не
произведением М на г, а показывает, что момент относится к
соответствующей длине z изгибаемого и скручиваемого стержня.
Нормальные напряжения от изгиба
где М (z) — изгибающий момент в сечении; Wt — момент
сопротивления изгибу для f-й точки.
Наибольшие изгибающий момент и напряжение будут под
катком, где приложена сила /?н. Согласно методике Львовского
ГСКБ автопогрузчиков в точках 1 и 2 сечения (см. рис. 152, а, /)
напряжения со знаком минус и в точках 9 и 10 со знаком плюс
составляют 770 кгс/см2. Если еще учесть напряжения изгиба
направляющей в плоскости рам грузоподъемника от реакции Хк
(см. рис. 150) на боковых катках, то они будут еще больше.
В результате того, что приведенные силы, передаваемые через
основные катки на направляющие выдвижной и наружной рам,
эксцентрично расположены относительно оси Y—Y сечения
направляющих, т. е. на расстоянии /к и 1'в (см. рис. 150, сечение
А—Л), которые сравнительно невелики (около 3 см у выдвижной
рамы грузоподъемника автопогрузчика 4025), они вызывают
скручивающие моменты Mt:
от верхнего и нижнего катка каретки
АЛ Г> I ,
от катка наружной и внутренней рам
Мн - RJ'B\
Мв - RJI
Эти моменты вызывают не обычное, а стесненное кручение
у направляющей.
Для расчета на стесненное кручение примем также, что
направляющие работают как простые балки, опирающиеся в точках
со свободными концами Л и В, в которых угол закручивания равен
нулю. Кроме того, допускаем, что верхняя и средняя поперечины
у выдвижной рамы имеют малую жесткость на изгиб из плоскости
рамы по сравнению с жесткостью на кручение направляющей.
Допускаем, что они не препятствуют закручиванию
направляющей и не ограничивают депланацию сечений ее и что в месте
крепления поперечины к направляющей угол закручивания
последней равен нулю.
314
Положительным направлением крутящего момента считаем
против часовой стрелки, если смотреть с конца вектора Z.
Приведенные скручивающие моменты на длине z и с учетом
плеч г — zt создают бимоменты В (z) для сечений z в пяти точках
скручиваемого стержня. Для определения бимоментов (в кгссм2)
воспользуемся общей формулой, полученной из трудов В. 3.
Власова [61:
В(г)~ ysh^-zQo-^Mc-Lsh^-iz-zdbf, (15)
где / — длина стержня направляющей у выдвижной рамы, см,
/ = /в; k — изгибно-крутильная характеристика, определена
формулой (11), k = /B0,041; sh — гиперболический синус; z —
расстояние между принятыми опорами (длина скручиваемого
стержня); Во — относительный угол закручивания; М1 —
крутящий момент в рассматриваемом сечении; zt — координата точки
приложения i-ro крутящего момента. Остальные значения те же,
что в формуле (12). Выражение В (z) в этой формуле является
не произведением В на 2, а показывает, что момент относится
к соответствующей длине z изгибаемого и скручиваемого стержня.
Относительный угол закручивания
Наибольшее значение бимомента В (z) будет также под катком
наружной рамы, т. е. там, где приложена сила Rn (см. рис. 153, а).
Нормальные напряжения от стесненного кручения
., (17)
где о); — секториальная площадь в i-й точке сечения (для
принятого двутаврового профиля); 1& — секториальный момент
инерции.
Для определения аш по точкам 7, б, 2, 3, 8, 9, 10 и 11 (см.
рис. 152, а, /) в последнюю формулу подставлять вместо cof. сек-
ториальную координату со = 34 см2, а для точек 4, 5, 12 и 7
координату со', полученную из эпюры в виде треугольника (см.
рис. 152, а, III).
Суммарные нормальные напряжения от изгиба и стесненного
кручения будут наибольшими под нижним катком каретки, т. е.
в точке приложения силы RKtH (см. рис. 153, а). Согласно
методике Львовского ГСКБ автопогрузчиков в точке 2 сечения
(см. рис. 152, а, /) они составляют около 1000 кгс/см- со знаком
минус.
Вторичные касательные напряжения от стесненного
кручения тш возникают на обушках двутаврового профиля с распре-
316
делением по эпюре с внешним криволинейным очертанием и
наибольшей высотой эпюры на середине. Эти напряжения составляют
менее 1 % суммарных нормальных напряжений, поэтому в расчете
их не учитывают.
Направляющие наружной рамы рассчитывают на изгиб и
стесненное кручение с такими же принципиальными допущениями,
как и при расчете направляющей выдвижной рамы. Допускаем
также, что нижняя и верхняя поперечины не мешают депланации
сечения, угол закручивания направляющей в месте крепления
нижней поперечины равен нулю.
Расчетная схема одной из направляющих с направлением
приложенных нагрузок, а также начало координат осей приведены
на рис. 153, б. Принимаем, что начало координат совпадает с
верхним краем направляющих. Таким образом, Rt = RH, R2 = RB,
Rs = 0,55ц cos ф, R± = Хс, /?5 = F и соответственно координаты
точек приложения этих сил zl = m, г2 = т + al9 z3 = т +
+ #i + 1\у zA = w + z> гь = 'з- Здесь RH, RQ — реакции по
каткам наружной и внутренней рам; 0,55ц cos <p — составляющая
усилия по цилиндру наклона; Хс — составляющая реакции на
опоре грузоподъемника.
Эти силы были определены ранее. Составляющая 0,5Sa sin ф
эксцентрично приложена к оси направляющей на плече /ц> а Кс
на плече /с. Эти плечи являются расстоянием от оси Y профиля
наружной рамы соответственно до оси цилиндра наклона и опоры
грузоподъемника на раме шасси.
Изгибающие моменты определяются по формуле (13), но с
добавлением моментов от внецентренно приложенных к
направляющей сил 0,5Su sin ф и Yc:
. 4
Af (г) = S Rc (z - zd bt (г) + 0,5Su sin Ф/Цб3 (г) - Гс/С64 (г).
Напряжения изгиба определяют по формуле (14). Наибольший
изгибающий момент будет на участке 2—3 и соответственно
наибольшие напряжения изгиба. Согласно методике Львовского
ГСКБ автопогрузчиков напряжения в точках /, 2, 5, 6
сечения (см. рис 152, б, //) составляют 975 кгс/м2, причем в
точках / и 2 со знаком минус.
Направляющую рассчитывают также на стесненное кручение,
так как приведенные силы на расчетной схеме вызывают
кручение, поскольку они приложены с эксцентриситетом относительно
продольной оси направляющей. Возникают следующие крутящие
моменты М{:
Поскольку направляющая принята швеллерного профиля, то
эксцентриситет приложения сил для этого случая определяется
относительно продольной оси, проходящей через центр изгиба А
(см. рис. 152, б, //), который находится от середины толщины
316
вертикальной полки на расстоянии d (см. определение секториаль-
тшх координат для швеллерного профиля). Таким образом,
эксцентриситет приложения сил
/н = /н + хе + d — bu
где /н — плечо приложения силы от середины основного катка
(см. рис. 150, разрез А—А); хс — расстояние от оси у сечения
до наружной стенки у вертикальной полки (см. рис. 152, б, /);
Ъх — толщина вертикальной стенки.
Очевидно, эксцентриситеты приложения сил 0,55ц cos ср и Хс
(см. рис. 153, б) должны быть уменьшены с учетом смещения
продольной оси, около которой проходит закручивание
направляющей.
Бимоменты В (г) и относительный угол закручивания
определяем по формулам (15) и (16), в которых вместо / и /в подставляем
длину направляющей /н, длину скручиваемого стержня z, изгибно-
крутильную характеристику k = /н 0,056, Mt и zt.
Нормальные напряжения от стесненного кручения определяем
по формуле (17), в которую подставляем главный секториальный
момент инерции /w = 6380 см4 и секториальные координаты (Oj =
•= 15,3 см2 (см. рис. 152, б, ///) для определения напряжений
в точках /, 3 и (о2 = 27 см2 в точках 2 и 4 сечения, поскольку
швеллерный профиль является несимметричным.
Наибольшие суммарные напряжения от общего изгиба и
стесненного кручения возникают в месте соединения штока цилиндра
с наружной рамой. В точках J и 6 сечения (см. рис. 152, б, /)
по методике Львовского ГСКБ автопогрузчиков напряжения
составляют 1540 кгс/см2, со знаком минус в точке /.
Местные и суммарные напряжения в направляющих. В местах
контакта катков с направляющими в полках и их стенке
возникают значительные местные напряжения изгиба, определение
которых представляет известные трудности. Применительно к
работе направляющих для вилочных погрузчиков вопросы отгиба
полок были теоретически и экспериментально исследованы
коллективом Львовского ГСКБ автопогрузчиков под руководством
канд. техн. наук Ю. Г. Розенталя. В результате этого была
создана методика расчета полок на изгиб и разработаны таблицы для
определения напряжений в полках.
Направляющие рассматривают как тонкостенные стойки
сочлененной призматической конструкции, составленные из
длинных и узких прямоугольных полос — пластинок 1 (рис,п 154, а),
усиленных продольными ребрами жесткости 2 прямоугольного
сечения. Полосы можно рассматривать как изотропные пластинки
бесконечной длины, напряженно-деформированное состояние
которых описывается общими линейными уравнениями теории
изгиба тонких плит. Для того чтобы выделить местный изгиб из
общего напряженного состояния, принято допущение, что
параллельные полосы, т. е. полки 3 и 4 (рис. 154, бив) профиля не де*
317
а)
Рис. 154. Схемы расчета направляющих на местный изгиб:
а — сечение, расчлененное на элементы из полос пластинок; б, в — на местный изгиб
полок для двутаврового и швеллерного профилей
формируются в своей плоскости и работают только на поперечный
изгиб и что линия пересечения срединных плоскостей (ребер
профиля) неподвижно закреплена в пространстве. К полкам 3 и 4
на достаточном расстоянии от поперечных опор и закреплений
приложена произвольная и сосредоточенная нагрузка Р (усилия
по основным каткам), а ребро жесткости 2 (стенка) свободно от
нагрузки.
Расчетные схемы с основными размерами и положительное
направление координат XYZ для рассматриваемых профилей
приведены на рис. 154, б, в. Под действием сил Р от основных
катков происходит местный изгиб направляющих. Сила Р на
плече г, равном расстоянию от точки приложения силы до
середины стенки, создает изгибающие моменты: Мх — продольный
в полке, Му — поперечный в полке и Mz — поперечный в стенке.
Определение указанных моментов связано с большими
предварительными расчетами. Задача определения их легко решается
с помощью таблиц 17—20, содержание которых в сокращенном
виде нами заимствовано из методики расчета Львовского ГСКБ
автопогрузчиков. Таблицы построены для дискретных значений
исходных параметров, предполагается несмещаемость линий
сопряжения полок и стенки в бесконечно длинных стержнях типа
швеллер-двутавр. Для каждого конкретного случая в качестве
расчетных данных принимают из таблиц близкие значения
параметров.
В них приведены значения безразмерных величин -^ Мк%
~ Му и у М2,
подсчитанные для максимальных значений
местного поперечного изгибающего момента на линии сопряжений
полок со стенкой у профилей направляющих. Значения
безразмерных величин определены для параметров \i, DjD2f р, Р и rj.
Здесь [г — коэффициент Пуассона для стали, [л = 0,3; Dt — же-
S18
Значения безразмерных величин — (Mx)i=o при максимальном
поперечном изгибающем моменте для полок двутаврового профиля
(см. рис. 154, б)
Таблица 17
р
1
0,5
Р
1
0,5
—
1,44
1
0,5
—
1,44
1
0,5
1
1
Y1
1
1
6
—
0
6
—
0
Соотношение толщины полки и толщины стенки hxjkt
0 | 0,734
1.0
1,145
Соотношение жесткости полки и жесткости стенки
Dt/D2
0
44
со
0,098
0,0S8
0,098
0,5
со
0,120
0,120
0,116
со
0,022
0 0215
0,018
1,0
44
со
0,130
0,129
0,125
44
со
0,032
0,03
0,026
1,5
44
со
0,136
0,134
0,13
со
0,057
0,038
0,031
Соотношение толщины полки и толщины стенки h1/h3
1,357
1,442 | 1,587
Соотношение жесткости полки и жесткости стенки
DJD*
2,5
44
со
0,142
0,141
0,136
со
0,044
0,042
0,039
3,0
со
0,144
0,143
0,138
со
0,046
0,044
0,04
4,0
44
со
0,147
0,146
0,141
со
0,045
0,047
0,043
319
Таблица 18
Значения безразмерных величин
=-
o
iq
При максимальном поперечном изгибающем моменте
и стенки двутаврового профиля (см. рис. 154, б)
Ь
0
0
0
6
0
0
0
•
1,44
1
0,5
Э
1,44
1
0,5
Р
1
0,75
0,5
1
0,75
0,5
1
0,75
0,5
Р
1
0,75
0,5
1
0,75
0,5
1
0,75
для
полок
Соотношение толщины полки и толщины стенки h
0
0,794
1 '.«
Соотношение жесткости полки и жесткости стенки
0
4ч
—0,509
—0,428
—0,370
—0,509
—0,428
—0,370
—0,509
—0,428
—0,370
0,794
>;
—0,425
—0,354
—0,300
—0,427
—0,355
—0,301
—0,432
—0,362
—0,305
±»\
0,084
0,074
0,070
0,082
0,072
0,069
0,077
0,066
0,065
—0,341
—0,280
—0,230
—0,345
—0,283
—0,230
—0,354
—0,294
—0,240
OJDt
1.0
тЧ
—0,389
—0,323
—0,272
—0,392
0,325
—0,273
—0,400
—0,335
—0,280
>;
0,12С
0,105
0,092
0,117
0,103
0,094
0,109
0,093
0,090
Соотношение толщины полки и толщины стенки h
1,145
}
4-K
—0,269
—0,218
-0,175
—0,274
0,222
—0,177
—0,291
—0,242
—0,190
1,357
Соотношение жесткости полки и жесткости стенки 1
1.5
>;
—0,369
—0,306
—0,257
—0,372
—0,308
—0,252
—0,382
—0,318
—0,266
0,139
0,122
0,113
| 0,137
| 0,120
1 0,111
| 0,127
| 0,110
| 0,104
—0,288
—0,183
—0,144
—0,234
—0,138
—0,148
:>i/o2 «.
2.5
i
М*у
—0,345
-о,:
—0,
—0,,
—0,
-0,'
—0,254 | —0,
—0,209
—0,161
—0,,
Ю6
240
349
288
242
359
300
-0,250
1 '"
0,104
0,142
0,130
0,160
0,140
0,128
0,150
0,128
0,120
—0,18
—0,143
—0,11
—0,188
—0,149
—0,114
—0,279
-0,172
—0,129
320
Продолжение табл. IB
d
0
0
0
а
1,44
1
0,5
р
1
0,75
0,5
1
0,75
0,5
1
0,75
0,5
Соотношение толщины полки и толщины стенки fit/fit
1,442 | 1,587
Соотношение жесткости полки и жесткости стенки DxIDt
3,0
±»;
—0,337
—0,279
—0,235
—0,341
—0,283
—0,237
—0,352
—0,293
—0,244
0,172
0,149
0,135
0,168
0,145
0,133
0,157
0,134
0,126
—0,165
—0,130
0,100
—0,172
—0,137
—0,104
—0,194
—0,159
—0,118
4,0
—0,231
—0,270
—0,228
—0,330
—0,274
—0,230
—0,341
—0,285
—0,237
0,188
0,158
0,142
0,179
0,154
0,140
0,168
0,143
0,133
!ГМг
—0,145
—0,112
—0,085
—0,151
—0,119
—0,090
—0,172
—0,141
—0,104
Значения безразмерных величин —^-
Таблица 19
)go
при максимальном
поперечном изгибающем моменте для нагруженной полки швеллерного
профиля (см. рис. 154, в)
Р
1
0,5
•
—
1,44
1
0,5
° 1
Соотношение толщины
0,794
1
1,26 |
Соотношение жесткости
0
СО
0,098
0,098
0,098
0,5
СО
0,126
0,125
0,121
1
со
0,142
0,140
0,134
2
со
0,161
0,159
0,151
полки и
1,442
[ТОЛКИ И
3
СО
0,173
0,170
0,161
толщины стенки h^/h^
1,565
1,71
1,817
2
жесткости стенки Dt/Dt
3,835
со
0,179
0,176
0,167
5
СО
0,186
0,183
0,174
6
СО
0,190
0,187
0,178
8
СО
0,196
0,193
0,184
11 А. Ф. Базанов, Г. В. Забегалов
321
Таблица 20
Значения безразмерных величин—р- (M«)t__g = •" -5- (М^-л
rv=o с=3
при максимальном поперечном изгибающем моменте для нагруженной полки
и стенки швеллерного профиля на линии их сопряжения (см. рис. 154, в)
э
1,44
0,6
Р
1
0,75
0,5
i
0,75
о.б
1
0,75
0,5
Соотношение
0
0,794
1
толщины полки
1,26
Соотношение жесткост*
0
— 0,509
— 0,428
— 0,370
— 0,509
— 0,428
— 0,370
— 0,509
— 0,4.8
0,370
0,5
— 0,403
— 0,334
— 0,279
— 0,404
— 0,334
— 0,280
— 0,408
— 0,344
— 0,2 86
1
— 0,341
— 0,280
— 0,230
— 0,345
— 0,283
— 0,232
— 0,354
— 0,296
— 0,240
2
— 0,269
-*0,218
— 0,175
— 0,274
— 0,222
— 0,177
— 0,291
— 0,242
— 0,190
1,442
I ПОЛКИ
3
— 0,228
— 0,183
— 0,144
— 0,234
— 0,188
— 0,148
— 0,254
— 0,209
— 0,161
и толщины стенки hx/h2
1,565
1.71
1,817
2
и жесткости стенки £>i/D2
3,835
— 0,205
— 0,163
— 0,127
— 0,211
— 0,169
— 0,131
— 0,232
— 0,191
— 0,145
5
-*0,180
— 0,143
— 0,110
— 0.Г8
— 0,149
— 0,П4
— 0,209
— 0,172
— 0,129
6
^•0,165
•^0,130
— 0,100
— 0,173
— 0,137
— 0,104
— 0,194
— 0,159
— 0,118
8
-^0,143
*-0,112
~ 0,085
-0,151
~0,П9
— 0,090
— 0,172
— 0,141
— 0,104
сткость полки на изгиб (цилиндрическая жесткость);
Dx — ЕН\1[\2 (1 — (х2)]; D2 — жесткость стенки на изгиб,
D2 = Ehl/[\2 (I — (lx2)]; E — модуль упругости на растяжение,
кгс/см2, Е = 2,1 • 106; h19 h2 — толщина соответственно полки
и стенки, см.
Параметры, по которым определяют безразмерные величины
р
("Б" м\ взяты из таблиц:
р==
о ___ И к^ hi hi Z>3
где ht — толщина полки hx или стенки /i2, значения которых
подставляют в зависимости от хода расчета.
Кроме величин и размерных координат XYZ в таблицах
учитывают также безразмерные координаты, отнесенные к ширине
полки профиля:
£ = — • п = — • t = —
b b к b
В табл. 17—20 значения безразмерных величин — М\ и -р Mi
относятся к нагруженной и ненагруженной полкам профиля,
322
а -р- М\ к стенке профиля при местном изгибе направляющих.
В таблицах безразмерные величины -р- М* относятся к сечению
профилей направляющих при допущении жесткого защемления
полос в углах по П. Ф. Папковичу [12]. Они приводятся для
сравнения с данными, полученными при принятом нами допущении.
Для определения безразмерных величин — М{ для выдвижной
рамы двутаврового профиля (см. рис. 154, б) из таблиц примем
b = 4,5; 2# = 15,1; г = 2,85; hx = 2,1; й8 = 1,5, (в см), а также
р = rib — 0,633 (в таблицах ближайшие значения 0,5—0,75);
Р = Н/Ь = 1,68 (в таблицах 1,44); б = htlb = 0; hx/h2 = 1,4.
Тогда безразмерные величины
4" (AQti-i = 0,144 (см. табл. 17); (18)
-—0,13 (см. табл. 18); (19)
,)тМ) =0,3-0,13 = 0,039. (20)
Значение — (Мх)ц==о определяют по взятому из табл. 18
значению — (Му)т\=а, умноженному на коэффициент Пуассона
fx - 0,3.
Напряжение местного изгиба
о; = тг-; (21) ^ = -^; (22) °'г = -^г-- (23)
Наибольшие напряжения от местного изгиба о'х будут на
свободном краю нагруженной полки выдвижной рамы согласно
формуле (21) при RH = 2950 кгс (см. рис. 153, а):
, г, Шх 6-0,144 D С7Л , 2
(a*)n=ie —ф- = 21» ^ ^ 579 кгс/см •
Несколько меньшие напряжения будут в заделке полки (на
пересечении осей полки и стенки):
\i{о'у)ц=й = [г-^ = 0,3 2[а i?H^ 157 кгс/см2.
^ 2[
В стенке (сг^)^ «* 1023 кгс/см2.
Таким же путем определяют напряжения местного изгиба для
наружной рамы швеллерного профиля с учетом таких же
параметров и размеров профиля (см. рис. 154, в): b = 5,6; А2 = 1»#;
р = 0,5; р = 1,34 (по таблицам берут 1,44); hjh^ =1,17 (по
таблицам берут 1,26). Для швеллерного профиля, как и для дву-
11* 323
таврового, находят безразмерные величины, приведенные в
формулах (18)-—(20); они будут равны 0,161—0,175 и 0,0525.
Наибольшие напряжения местного изгиба возникают под
катком внутренней рамы (сила RB) (см. рис. 153, б). Пользуясь
формулами (21)—(23), получаем напряжения местного изгиба для
корытного профиля (в кгс/см2)
= 648; (а^о = 210; (о'у)ц=0 = 705; (ai)t=3 - 960.
, Суммарные нормальные напряжения (в кгс/см2) в любой точке
профиля
* = *.+ *« + *,<-£в". (24)
где аи — напряжения общего изгиба; о^ — нормальные
напряжения от стесненного кручения; ох — напряжения местного
изгиба; (7Т — предел текучести стали.
Все напряжения берут со своим знаком. Весьма важно
соблюдение правила знаков, чтобы не впасть в ошибку, отчего
напряжения могут оказаться больше допустимых.
Наибольшие суммарные напряжения при максимально
выдвинутой вверх раме берут в сечении под катком наружной рамы,
т. е. в точке приложения силы RH (см. рис. 153, а). По сечению
направляющей оси распределены неравномерно. Согласно
принятому обозначению точек в сечении (см. рис. 152, а, /) считаем,
что точки /, 2, 3 и 6 расположены на лицевой стороне, а точки 5,
9, 10 и 11 на задней стороне направляющей и что точки /, 6, 8
и 9 расположены со стороны внутренней (относительно оси
грузоподъемника) выдвижной рамы. Тогда согласно методике
Львовского ГСКБ автопогрузчиков суммарные нормальные напряжения
под катком наружной рамы для этих восьми точек 1—11
соответственно составят: —530; —1000; —725; —253; 253; 530; 1585;
142 кгс/см2.
Нужно отметить, что местный изгиб направляющих влияет на
перераспределение напряжений в них под катками. Так,
например, с учетом только напряжений от изгиба и стесненного кручения
в точке // напряжение составляет 725 вместо 142 кгс/см2,
полученного с учетом местного изгиба.
Аналогичным путем по формуле (24) определяют суммарные
йапряжения в направляющих наружной рамы. Согласно
распределению точек в сечении (см. рис. 152, б, /) считаем, что точки /,
2, 3 и 4 расположены на лицевой стороне рамы, наибольшие
суммарные напряжения будут в сечении под катком выдвижной рамы
от реакции /?в (см. рис. 153, б). Для точек 1—8 они соответственно
составят: —1540; —634; —1300; —400; 423; 2187; 658;
612 кгс/см2. Следует отметить, что местный изгиб под катком
не влияет на напряжения в направляющей в месте прикрепления
к ней штока цилиндра наклона. С учетом общего изгиба и
стесненного кручения здесь напряжения по тем же точкам сечения
324
составляют: —1540; —655; —1300; —420; 660; 1540;
1303; 418 кгс/см2. С учетом местного изгиба под катком
выдвижной рамы происходит резкое перераспределение напряжений
в точках 6 и 7 сечения (см. рис. 152, б, /), в которых напряжения
от общего изгиба и стесненного кручения соответственно
составляют 1540 и 1310 кгс/см2. Как видно, наибольшие общие
напряжения будут в точке б, равные 2187 кгс/см2.
Расчет поперечин рам. Выдвижная рама имеет верхнюю и
нижнюю поперечины. Первую выполняют швеллерного, а
вторую прямоугольного (из листа) сечения. Их считают, как балки,
на изгиб и обычное кручение. Наружная рама имеет нижнюю
и верхнюю поперечины. Первая состоит из вертикально
приваренного листа и горизонтальной короткой косынки с вертикальными
ребрами, приваренными к вертикальному кругу. Косынка сверху
имеет шаровую выточку и является опорой для цилиндра подъема.
Опору считают на изгиб, как прямоугольную пластину, жестко
защемленную по одному краю, свободную по нагруженному
краю и свободно опертую по концам на вертикальные ребра.
Верхнюю поперечину берут швеллерного сечения, и если на ней
не закрепляют концы подъемных цепей, то сечение ее берут
конструктивно, т. е. не рассчитывают.
Г лава 15
РАСЧЕТ МЕХАНИЗМОВ
И УЗЛОВ ОДНОКОВШОВЫХ ПОГРУЗЧИКОВ
1. Основные параметры погрузчиков
Исходными данными для расчетов механизмов и узлов
одноковшовых погрузчиков являются параметры специальных
колесных шасси, а также гусеничных и колесных тракторов и тягачей.
Выбор параметров базовых шасси и рекомендации по расчету их
основных узлов рассмотрены в технической
литературе [3, 16].
Расчетные рекомендации по параметрам и прочности,
содержащиеся в настоящей главе, относятся к фронтальным
погрузчикам с наиболее распространенным перекрестным поворотным
механизмом погрузочного оборудования. Однако основные
методические положения и расчетные зависимости могут быть
применены для одноковшовых погрузчиков других типов.
Параметры одноковшовых погрузчиков рассчитывают с
основным ковшом. Основные параметры были приведены ранее. Для
погрузчиков грузоподъемностью 2—10 т некоторые параметры
(высоту и вылет разгрузки, углы запрокидывания и разгрузки)
определены ГОСТ 12568—67.
Номинальную грузоподъемную силу для одноковшовых
погрузчиков строительного типа принимают равной 50% опрокиды-
325
а
Рис. 155. Схема сил для определения грузоподъемности
одноковшового погрузчика
вающей нагрузки (для колесных погрузчиков) и 35% (для
гусеничных погрузчиков). Для погрузчиков других типов ее значение
может устанавливаться нагрузками на ходовую часть или
гидроприводом погрузочного оборудования.
Номинальную грузоподъемную силу строительных
одноковшовых погрузчиков, агрегатируемых на спецшасси, тракторах
и тягачах, рекомендуется принимать в осответствии с типоразмер-
ным рядом (табл. 8).
Для погрузчиков, агрегатируемых на тракторах общего
назначения, номинальную грузоподъемную силу (рис. 155) определяют
на основе допускаемых нагрузок на ходовую часть базового
трактора
{P
где к — коэффициент запаса устойчивости; для колесных
погрузчиков к = 0,5, для гусеничных погрузчиков к = 0,35; Р —
допускаемая вертикальная нагрузка на передний мост колесного
погрузчика или на гусеницы при рабочей скорости 3—4 км/ч;
Go — вес погрузочного оборудования; хт — горизонтальная
координата центра тяжести базового шасси; аи Ь — координаты центра
тяжести соответственно оборудования и груза в ковше.
Конструктивный вес погрузочного оборудования определяют
по весу базового шасси GT соотношением
где /са — безразмерный коэффициент, для колесных погрузчиков
kq = 0,35 ч- 0>45, для гусеничных погрузчиков к0 = 0,25 -~ 0,35;
меньшие значения коэффициента принимают для более легких
погрузчиков и при применении в конструкции низколегированных
и качественных сталей, большие — для тяжелых погрузчиков.
326
Размеры а и Ь уточняют по результатам предварительной
проработки погрузочного оборудования и его привязки к
базовому шасси. Расстояние а находят в пределах (0,7—1) А для
гусеничных и (0,6—0,95) А для колесных погрузчиков, где А —
продольная база трактора или тягача.
Для оценки рациональности использования веса базового
шасси и совершенства ходовой части полученную номинальную
грузоподъемную силу следует сравнивать по коэффициенту
удельной грузоподъемности
Для гусеничных погрузчиков рекомендуют [q] = 0,2 + 0,25,
а для колесных погрузчиков [q] — 0,25 -ь 0,35.
Для обеспечения работы погрузчиков в различных
эксплуатационных условиях максимальная грузоподъемная сила
превышает номинальную. Она используется при перегрузках
погрузчиков в результате значительного отклонения объемной массы
материалов от среднего расчетного значения из-за различия их
природных свойств, крупности, влажности, условий залегания
и др.
Максимальную грузоподъемную силу определяют после выбора
и расчета давления предохранительного клапана гидравлического
привода.
Номинальный объем основного ковша определяют по
грузоподъемности погрузочного оборудования.
Объем ковша (в м3)
V _-
где Q — грузоподъемность; рср — объемная масса материала,
рср =1,6 т/м3; е — расчетный коэффициент наполнения ковша,
е - 1,25.
Коэффициент наполнения выбирают с учетом того, что в
эксплуатационных условиях ковш наполняется материалом с
«шапкой», объем которой в оптимальных условиях составляет 25%
его номинального объема.
Высоту разгрузки ковша выбирают в зависимости от
типоразмера погрузчика, а также транспортных средств, для работы
с которыми он предназначен. При этом необходимо учитывать,
что наибольшее число рабочих циклов, которые обеспечивают
полную загрузку транспортных средств, не должно быть больше
пяти.
Высоту разгрузки рекомендуется определять соотношением
Н = hT + -§- 5т,
где /ir — наибольшая высота бортов транспортных средств,
с которыми может работать погрузчик; Вт — ширина кузова
327
транспортного средства строительных одноковшовых
погрузчиков.
Вылет ковша при наибольшей высоте подъема стрелы
подсчитывают в зависимости от согласуемых транспортных средств по
выражению
где Вт — ширина кузова транспортного средства наибольшего
типоразмера, с которым предназначен работать погрузчик; АЬ —
безопасное расстояние между погрузчиком и транспортным
средством при разгрузке материала (не менее 150—200 мм).
Заглубление рабочего органа при заднем угле наклона ковша
к горизонту на 5—7° необходимо для погрузчиков при разработке
материковых грунтов, отрывке траншей, котлованов и др.
Глубину опускания выбирают в зависимости от типоразмера
погрузчика в пределах 200—500 мм. Большие значения принимают для
больших типоразмеров погрузчиков.
Углы запрокидывания и разгрузки ковша регламентированы
ГОСТ 12568—67 для строительных погрузчиков
грузоподъемностью 2—10 т. Для погрузчиков остальных типоразмеров
рекомендуется выбирать углы запрокидывания в пределах 40—48°,
угол разгрузки 50°.
Напорное усилие погрузчика определяют по тяговой
характеристике базового шасси с учетом догрузки его массой, равной
погрузочному оборудованию. При отсутствии этих данных
напорное усилие на рабочей передаче определяют из условия работы
погрузчика на горизонтальной площадке без учета сопротивления
воздуха
2707Удтах
'* = —щ— Лтр — Gf,
где Л/дтах — наибольшая эффективная мощность двигателя, л. с;
vT — теоретическая скорость движения базового шасси на
рабочей передаче, км/ч; г)тр — КПД трансмиссии; для механической
трансмиссии г)тр = 0,86, для гидромеханической цтр л* 0,67; G —
вес погрузчика, кгс; / — коэффициент сопротивления качению
погрузчика, для колесных погрузчиков / ^ 0,03, для гусеничных
/ « 0,08.
Максимальное напорное усилие с учетом увеличения
крутящего момента по внешней характеристике двигателя и увеличения
буксования определяется соотношением
т — рТ *
1 шах — c-'hj ф >
где е — коэффициент перегрузки двигателя, е = 1,1 -г* 1,15;
бр — расчетное буксование движителей, для колесных
погрузчиков принимают бр = 0,2, для гусеничных бр = 0,07.
328
Рис. 156. Схема сил для расчета выглубляющего и
напорного усилия по устойчивости
Наибольшее напорное усилие проверяют по сцепному весу
погрузчика т г '
* max сц === ^Ф»
где G — эксплуатационный вес погрузчика; <р — коэффициент
сцепления движителей.
Коэффициент сцепления зависит от типа ходовой части
базового шасси, рисунка почвозацепов протектора шин, давления в них
и ряда других факторов. Для расчетов напорных усилий
погрузчиков в зависимости от базового шасси следует принимать следу-
ющие коэффициенты сцепления: для колесного шасси (трактора,
тягача) ф — 0,7, для гусеничного ф = 0,9.
Выглубляющее усилие NB, развиваемое гидроцилиндрами
поворота рабочего органа, должно превосходить грузоподъемную
силу погрузчика для возможности наполнения ковша при тяжелых
материалах и грунтах. Из практики установлено, что для
погрузчиков с опорными лыжами на стреле выглубляющее усилие
Если стрела не имеет опорных лыж, то выглубляющее усилие
определяют по устойчивости погрузчика в нижнем положении
оборудования
дг __ GrxT-Gob
где хт, b, I — плечи соответствующих сил (рис. 156).
В тех случаях, когда погрузчик не вывешивается,
выглубляющее усилие определяют по допускаемой нагрузке на передний
(со стороны оборудования) мост или направляющие колеса
гусеничного шасси
329
где Р — допускаемая нагрузка на ходовую часть при скорости
движения, равной нулю, кгс; GQ — вес рабочего оборудования,
кгс; GT — вес базового шасси, кгс; А — продольная база, м;
а, хТУ I — плечи соответствующих сил, м.
Подъемное усилие Naf развиваемое гидроцилиндрами стрелы
для каждого погрузчика, определяют по их устойчивости. Для
предварительных расчетов рекомендуемое подъемное усилие
ориентировочно может быть определено соотношением
#„ = (1,8 ч-2,3) QH.
При ограничении подъемного усилия устойчивостью или
допустимыми нагрузками на ходовую часть базового шасси его
значение равно выглубляющему усилию.
Удельные напорное и выглубляющее усилия на режущей кромке
ковша характеризуют возможность разработки погрузчиком
материалов с различными физическими свойствами. Удельное
напорное усилие на кромке ковша
где Гшах — наибольшее напорное усилие, кгс; В — ширина
ковша, см.
Удельное выглубляющее усилие на кромке ковша
где NB — наибольшее выглубляющее усилие, определяемое по
гидроцилиндрам поворота ковша.
Для современных конструкций одноковшовых погрузчиков
при разработке материалов основным ковшом в зависимости от
типоразмеров и типа ходовой части приведены значения удельных
напорных и выглубляющих усилий.
Грузоподъемность, т .... До 3 4—6 Св. 6
Удельное усилие,
кгс/см:
напорное . . 25—40/15—30 40—60/25—40 Св. 60/Св. 40
выглубляющее 20—35 25—40 Св. 40
Примечание. В числителе приведены данные при гусеничном
коде, в знаменателе mm при колесном коде.
По сравнению с основным ковшом данные для ковшей
увеличенного объема могут быть уменьшены ориентировочно в 1,5 раза;
для уменьшенных ковшей значения qa и qB следует увеличивать
на 30—40%.
Рекомендуемые qti и qB превосходят несущую способность
насыпных материалов и материковых грунтов, в результате чего
строительные погрузчики могут быть использованы не только
330
для выполнения погрузочных, а также и для землеройно-транс-
портных работ.
Скорости рабочего и холостого хода — скорости
поступательного движения погрузчика соответственно вперед и назад.
Скорость рабочего хода погрузчиков выбирают в пределах 2,5—
4 км/ч. Превышение указанных скоростей приводит к увеличению
динамических нагрузок, повышению времени наполнения ковша,
утомляемости водителя и, следовательно, снижению эффективности
и производительности погрузчика. Применение меньших рабочих
скоростей нецелесообразно, так как это ведет к снижению
производительности.
При гидромеханической трансмиссии передаточное отношение
рабочей передачи выбирают с таким расчетом, чтобы скорость
движения погрузчика при работе трансмиссии в режиме
гидромуфты составляла 6,5—8 км/ч, а при оптимальных режимах
гидротрансформатора (в зоне наибольших значений КПД) рабочая
скорость должна быть 3—4 км/ч.
Теоретическая скорость (в км/ч) определяется выражением
где п — частота вращения коленчатого вала двигателя, об/мин;
i — общее передаточное число трансмиссии на определенной
передаче; гк — радиус окружности ведущих колес или звездочек, м.
Для колесного погрузчика радиус определяют по погрузочной
характеристике шины или по выражению
г -■ 2d+D с
'К ~ 2 '
где d — ширина шины, м; D — диаметр обода, м; е —
коэффициент деформации шины, для шин низкого давления 8 = 0,93 ^
-г- 0,935, для шин высокого давления е = 0,945 -ь 0,95.
Для гусеничного погрузчика радиус
Г* — "ST /зв>
где zK — число зубьев ведущей звездочки; /зв — длина звена
гусеницы, м.
Скорость холостого хода vx при полнореверсивной схеме
трансмиссии принимают на 25—30% выше рабочей скорости
движения.
Действительная скорость погрузчика (в км/ч) в процессе
внедрения
где kv — коэффициент снижения частоты вращения коленчатого
вала двигателя, kv = 0,7 -~ 0,8; бр — расчетное буксование.
Скорости поворота ковша — средние линейные скорости
поворота ковша относительно стрелы, отнесенные к режущей кромке.
Среднюю линейную скорость запрокидывания о3.к ковша для
погрузчиков, рабочие органы которых наполняются совмещенным
способом, рекомендуют определять по скорости поступательного
движения погрузчика.
По данным экспериментальных исследований совмещенного
процесса разработки материала, рекомендуется соотношение
скоростей запрокидывания и внедрения выбирать в определенных
пределах.
Тогда
где у — коэффициент совмещения, у = 1,0 -ь 1,2.
Угловая скорость поворота ковша может быть определена
по формуле
Юз-к^-^ рад/с,
где R — радиус поворота ковша (расстояние между осью шарнира
поворота ковша и острием режущей кромки).
Скорость опрокидывания ковша vOt к для погрузчиков с
гидроприводом является производной от скорости v^K. Она
определяется параметрами гидроцилиндра поворота ковша при
постоянной подаче гидронасосов и конструкцией рычажного
механизма погрузчика.
Если рабочая операция (наполнение ковша) выполняется
поршневой полостью гидроцилиндров поворота ковша, скорость
опрокидывания рабочего органа на 30—35% больше скорости о3. к:
В поворотных механизмах со штоковой рабочей полостью
скорость опрокидывания меньше скорости v3t K и определяется
соотношением
»<».««= (0,74 ч-0,77) »,.к.
Скорости движения стрелы — средние линейные скорости
подъема и опускания стрелы, отнесенные к шарниру крепления
рабочего органа. Скорость подъема стрелы (в м/с) выбирают из
такого расчета, чтобы подъем груза был завершен к моменту
окончания операции отхода погрузчика на разгрузку:
где Sn — длина пути шарнира крепления ковша при подъеме
стрелы, м; 5Д — оптимальная длина пути рабочего хода
погрузчика, м; vx — скорость холостого хода погрузчика, м/с.
Оптимальное соотношение путей составляет 5П/5Д = (0,5 -н
~- 0,56), что обеспечивает наибольшую производительность
погрузчика при работе в погрузочно-разгрузочном режиме. Поэтому
справедливо выражение ипс =*■ (0,5 -ь 0,56)vK. Большие коэффи-
332
циенты при определении .скорости следует принимать для
погрузчиков меньших типоразмеров, и наоборот. , i
Скорость опускания выбирают по скорости подъема с таким
расчетом, чтобы в полости опускания гидроцилиндров стрелы
не образовывался вакуум:
Эксплуатационный вес погрузчика — вес базового шасси и
погрузочного оборудования
где GT — вес базового шасси; Со — вес погрузочного
оборудования; kq — вес топлива, смазки, рабочей жидкости и инструмента.
Распределение нагрузок по мостам характеризуется
положением центра тяжести погрузчика с грузом и без него.
Для характеристики погрузчиков рекомендуется определять
их центр давления и распределения нагрузки по осям для
порожнего погрузчика и с грузом в ковше, равном номинальной
грузоподъемности при следующих положениях рабочего оборудования:
при транспортном (при угле въезда 20°) и максимальном вылете
ковша (см. рис. 43).
Для колесных погрузчиков определяют распределение
нагрузок по мостам в статическом состоянии.
Для погрузчика с нагрузкой (рис. 157):
на передний мост (со стороны погрузочного оборудования)
на задний мост
xr
а
Рис. 157. Схема расположения сил при расчетах
нагрузок на мосты колесного погрузчика
333
При определении
нагрузок на мосты в
порожнем состоянии QH = 0.
Нагрузки на мосты
характеризуются
коэффициентом распределения
нагрузок
Для сохранения
управляемости и снижения го-
лопирования в
транспортном положении
оборудования коэффициенты
распределения нагрузок для
порожнего погрузчика
кр = 0,62 ~ 0,82, для
груженого погрузчика /ср г=
- 2,3 ~ 4,0.
Центр давления порожнего гусеничного погрузчика (рис. 158)
условно лежит против его центра тяжести; для груженого
погрузчика центр давления смещается в направлении груза в ковше.
Смещение центра давления для груженого погрузчика
Gxn + QHa
Рис, 158. Схема сил, действующих на
гусеничный погрузчик при определении центра
давления и удельных давлений на опорную
поверхность
Плечо центра давления для груженого погрузчика
относительно оси опорных направляющих колес не должно превышать
Статическое давление ходовой части на опорную поверхность
характеризует возможность работы погрузчика на различных
дорожных покрытиях и его проходимость. Среднее статическое
давление колесного погрузчика на опорную поверхность
ориентировочно может быть принято равным внутреннему давлению
воздуха в шинах. Для гусеничных погрузчиков давление по длине
гусеницы при жесткой подвеске ходовой части распределяется
по закону прямоугольной трапеции или треугольника. Центр
тяжести этих фигур лежит против центра давления погрузчика.
Расчетные опоры давлений гусеничной ходовой части
определяют по удельным нагрузкам под передним и задним опорными
катками. Для жесткой ходовой части условное давление под
передним катком
334
а под задним катком
где q0 — среднее статическое давление; хг — положение центра
давления погрузчика; ст — расстояние от звездочки до оси
опорного катка; Lx — расстояние между осями опорных катков;
1ЭВ — шаг гусеничной цепи.
Среднее статическое давление
g
где Ъ — ширина гусениц.
При определении давлений порожнего погрузчика QH == 0.
2. Параметры рабочих органов
Основной ковш. Номинальный объем ковша определяют по
грузоподъемности погрузчика. Внутреннюю ширину ковша
принимают больше наружной ширины следа базового шасси или
габаритной ширины его ходовой части
где Вх — колея ходовой части шасси, м; / — ширина шины или
гусеницы, м; ДЬ — свободный размер, м, АЬ *^ 0,05 ^0,1.
Расстояние между осью шарнира ковша на стреле и режущей
кромкой (рис. 159), называемое радиусом поворота,
Г
где ан — номинальный объем ковша, м3; Во — внутренняя
ширина ковша, м; Яд — относительная длина днища ковша, Яд ==
= 1,4 -г- 1,5; Я3 — относительная расчетная длина задней стенки,
^э = 1,1 .л. 1,2; Як — относительная высота козырька, Як = 0,12 -ь
^ 0,14; Хг — относительный радиус сопряжения днища с задней
стенкой, %г — 0,35 ~ 0,4; уг — угол между плоскостью козырька
и продолжением плоскости задней стенки, град; у0 — угол между
задней стенкой и днищем ковша, град.
Оптимальные предельные значения безразмерных
относительных величин Я принимают по результатам экспериментально-
теоретических исследований разработки основным ковшом
сыпучих материалов с углом естественного откоса рг **& 45°.
По расчетному радиусу поворота и оптимальным значениям
относительных характеристик определяют основные размеры
ковша:
длину днища (в м) — расстояние от передней кромки ковша
до точки пересечения с направлением задней стенки /д = Хд/?0 =*
- (1,4 + 1,5) До;
335
Рис. 159. Размеры профиля основного ковша
длину задней стенки — расстояние от верхнего края задней
стенки (основание козырька) до точки пересечения с линией днища
ковша /3 = (1,1 **- 1,2) Ro;
высоту козырька /к = (0,12 + 0,14) Ro;
радиус сопряжения г0 = (0,35 ^ 0,4) Ro;
высоту шарнира крепления к стреле кш = (0,06 -ь 0,12) Ro;
ширину зева ковша Ъ = /3 tg Yo-
Угловые размеры ковша рекомендуют выбирать в следующих
пределах:
угол раствора между днищем и задней стенкой у = 48 -ь 52°;
угол наклона боковых стенок относительно днища а = 50 +
* 60°;
угол заострения режущих кромок б0 = 25 + 40°;
угол между задней стенкой и козырьком Yi = 5 + 10°.
При выборе угла Yi необходимо руководствоваться условием,
чтобы между режущей кромкой, боковой стенкой и козырьком
сохранялся угол 90°.
Из практики конструирования установлено, что толщина
основного листа ковша (в мм)
Меньшие значения коэффициента следует применять для
погрузчиков больших типоразмеров, и наоборот.
Зубья целесообразно устанавливать на ковш при разработке
среднекусковых материалов. При использовании ковша на
сыпучих строительных материалах (песке, шебне) применять зубья
336
нерационально, так как увеличиваются затраты мощности на
сопротивление внедрению. Поэтому зубья основного ковша
должны быть съемные и крепиться при помощи болтов.
Размеры зубьев определяют из условия прочности. Шаг
расстановки принимают равным 2,5—3 ширины зубьев.
Уменьшенный ковш. Номинальный объем ковша (в м3)
V = Q
где Q — номинальная грузоподъемность; рт — средняя объемная
масса тяжелых материалов, рт = 2,2 т/м3; е — средний
коэффициент наполнения, е = 1,25.
Ширину ковша рекомендуют выбирать по внутреннему следу
колес или гусениц погрузчика для увеличения удельных
напорных усилий на режущей кромке, т. е.
где В — колея ходовой части погрузчика, b — ширина
протектора шины или гусеницы.
Увеличенный ковш. Объем ковша (в м3) определяют по
грузоподъемности погрузчика
где Q — номинальная грузоподъемность; рл — средняя объемная
масса легких материалов, рл = 1,2 т/м3; е—средний
коэффициент наполнения ковша, е = 1,25.
Внутреннюю ширину ковша ByQ принимают обычно равной
ширине основного ковша. Параметры ковша вычисляют по
расчетному радиусу поворота на основании формул и соотношений,
указанных для основного ковша.
Двухчелюстной ковш в сомкнутом положении челюсти имеет
номинальный объем (в м3)
Д^ pi '
где Q — номинальная грузоподъемность погрузчика; тд — масса
двухчелюстного ковша; т0 — масса основного ковша; р —
расчетная объемная масса, р = 1,6 т/м3; е — средний коэффициент
наполнения ковша, е = 1,25.
Для предварительных расчетов масс ковшей по
грузоподъемности Q рекомендуют пользоваться соотношениями т„ = (0,45 &
* 0,5) Q; то = (0,3 + 0,35) Q.
Таким образом, объем ковша
V п
А" ре
где /сд — коэффициент снижения грузоподъемности путем
увеличения массы двухчелюстного ковша, кд = 0,85.
337
a) S)
Рис. 160. Двухчелюстной ковш:
а — общий вид; б » бульдозерный отвал; 1 *т подвижная челюсть; 2 *^*
гидроцилиндры поворота челюсти; 3 « неподвижная челюсть (бульдозерный отвал)
Внутреннюю ширину двухчелюстного ковша BR принимают
равной ширине основного ковша.
Далее определяют профиль бульдозерного отвала (рис. 160, б).
Высота отвала (в мм)
где Тн — номинальное напорное усилие погрузчика, тс.
Высота козырька
Ah —(0,1 н-0,15) Я.
Радиус кривизны /?д принимают обычно равным высоте отвала.
Высоту шарнира крепления к стреле выбирают в пределах
Нш = (0,10 - 0,20) /?д.
Угол 7о резания — угол между передней плоскостью и
горизонталью при вертикальном положении отвала — должен
находиться в пределах 50—55°. Угол е0 наклона — угол между
горизонталью и линией, соединяющей режущую кромку и верхнюю
кромку отвала, — принимают в пределах 75—80°. Угол |50
опрокидывания — угол между горизонталью и касательной линией
к верхней кромке отвала — рекомендуется в пределах 70—75°.
Угол |JK установки козырька должен быть в пределах 90—100°.
Нижнюю часть отвала армируют съемной режущей кромкой
из износостойкого материала, ширину d которой принимают
в зависимости от высоты Я отвала в пределах (0,1—0,15) Н.
Элементы профиля подвижной челюсти выбирают в сомкнутом
положении челюсти на основании формул и рекомендаций для
параметров основного ковша по условному радиусу /?д
(см. рис. 156, а). При этом необходимо учитывать некоторые
конструктивные отличия двухчелюстного ковша. Днище его делают
338
Рис. 161. Челюстной захват:
1 — подвижная челюсть; 2 —
гидроцилиндры поворота челюсти; 3 ш* гру*
вовые вилы
полукруглым с передней и
задней режущими кромками. Угол
подъема днища двухчелюстного
ковша от передней к задней
режущей кромке в положении
копания принимают равным 4—7°.
Для жесткости подвижной
челюсти днище делают двойным.
Угол раскрытия подвижной
челюсти должен быть 110—120°.
Диаметр гидроцилиндров управления
подвижной челюстью
целесообразно унифицировать с диаметром
гидроцил'мндров поворота ковша.
После выбора основных
параметров для ковшей каждого типа
определяют их действительные номинальный объем и объем с
шапкой по формулам, приведенным в гл. 3. Действительный
номинальный объем необходимо сравнить с объемом, вычисленным
с учетом грузоподъемности погрузчика, которые должны
совпадать.
Основные размеры челюстного захвата зависят от
грузоподъемности Q погрузчика в тоннах 'рис. 161).
Радиус R вылета вил от оси подвески (в мм) определяют по
соотношению (340—360) Q, высоту hm подвески шарнира (в мм)
принимают в пределах (80—150) Q, а радиус г 'в мм) кривизны
вил (180—220) Q.
Координаты шарнира крепления подвижного прижима (в мм)
определяют по формулам h = (200 ~ 250) Q и L = (150 ~ 200) Q.
Угол поворота подвижного прижима должен быть не менее
100—110°. Наружную ширину захвата принимают равной колее
или внутреннему следу колес или гусениц базового шасси.
Площадь поперечного сечения захвата и размеры подвижного прижима
выбирают с таким расчетом, чтобы при погрузке лесоматериалов
круглого сечения длиной 6 м он загружался до номинальной
грузоподъемности оборудования.
В полностью сомкнутом положении подвижного прижима
должен надежно удерживаться груз диаметром d = 250 ~ 500 мм
в зависимости от типоразмера погрузчика. Диаметр гидроцилиндра
управления прижимом унифицирован с поворотными
гидроцилиндрами.
Крановая безблочная стрела имеет крюк, который
подвешивают на стреле погрузчика с помощью сварной объемной
рамы (рис. 162). Подвеска крюка должна обеспечивать его
вращение вокруг вертикальной оси.
Для выполнения такелажных и монтажных работ вылет крюка
рекомендуют принимать равным 1,3—1,5 вылета груза основного
ковша.
339
Рис. 162. Крановая безблочная стрела!
3 *- крюк; 2 -^ серьга; 8 «- рамка
Грузоподъемная сила крановой стрелы зависит от принятого
вылета (см. рис. 155)
Qk — п т тд——»
где п — коэффициент запаса, для колесных погрузчиков п = 0,5,
для гусеничных погрузчиков п = 0,35; GT и Со — вес
соответственно базового шасси и погрузочного оборудования; л:т, b — плечи
действия соответствующих сил; ак — вылет крюка относительно
оси передних или направляющих колес.
Грузовые вилы имеют ту же конструкцию и размеры, что и
автопогрузчики. Габаритную ширину грузовых вил
рекомендуется принимать в пределах колеи базового шасси. Расстояние
между вилами должно быть переменным в пределах ширины
рабочего органа для возможности работы с грузами различной
ширины. Основные размеры вил рекомендуют принимать в
соответствии с табл. 11.
3. Размеры погрузочного оборудования
Размеры погрузочного оборудования выбирают по параметрам
погрузчика и основного ковша с учетом компоновки базового
шасси. Предварительно выбирают точку подвеса и длину стрелы
(рис. 163). Координаты точки С подвеса стрелы определяют
в основном, исходя из конструктивных особенностей и компоновки
базового шасси.
Высоту Нс и расстояние до наиболее выступающей передней
части погрузчика /в принимают с таким расчетом, чтобы
обеспечивалась наилучшая видимость с пульта управления водителя.
При этом шарнир следует располагать возможно выше и дальше
от передней части погрузчика.
Ориентировочно высота шарнира подвески стрелы от опорной
поверхности
где %с — относительная высота шарнира подвески стрелы, &с f=
= 1,5 *■ 2,0; Ro — радиус поворота основного ковша.
340
Рис, 163, Схема для определения длины стрелы
Длину стрелы определяют, исходя из параметров
погрузочного оборудования и основного ковша:
/0 - V(L - RQ cos б + /в)2 + (Я + Ro sin в - Яс)2,
где L — фронтальный вылет кромки ковша при наибольшей
высоте и угле разгрузки; Ro — радиус поворота ковша; /в —
расстояние от оси шарнира подвески стрелы до наиболее
выступающей части базового шасси; Я — высота разгрузки ковша; Яс —
высота шарнира подвески стрелы от опорной поверхности; е —
угол наклона радиуса поворота ковша, е = ер + arcsin hJRQ\
ер — наибольший угол разгрузки ковша; hm — высота подвески
шарнира ковша.
Фронтальный вылет L, высоту разгрузки Яр, угол ер разгрузки
ковша принимают для строительных одноковшовых погрузчиков
по ГОСТ 12568—67; для погрузчиков, не предусмотренных
ГОСТами, параметры выбирают в соответствии с рекомендациями,
приведенными в гл. 3. Угол фс поворота стрелы колеблется в
пределах 85—90°. После расчета длины стрелы выбирают размеры
рычажных систем поворотных механизмов.
Рассмотрим основные соотношения и порядок построения
кинематической схемы для наиболее распространенных поворотных
механизмов с перекрестной рычажной системой. Учитывая, что
погрузочное оборудование имеет, как правило, два идентичных
механизма, рассчитывают размеры и строят кинематическую схему
для одного из них.
По опыту проектирования ориентировочно размеры элементов
рычажной системы принимают в зависимости от длины 10 стрелы
по следующим соотношениям (рис. 164): 1Ш = (0,48 -s- 0,5) /0;
а = (0,11 ~ 0,12) /о; Ь = (0,22 * 0,24) /0; с = (0,27 * 0,29) /0;
Р = (0,13 н-0,14)/а.
341
Рис. 164. Построение кинематической схемы
рычажного механизма погрузочного оборудования
^//^^^
Длину тяги определяют в процессе графического построения
механизма.
Построение кинематической схемы рычажной системы
рекомендуется проводить в следующей последовательности. Весь
сектор движения стрелы от нижнего до верхнего положения
разбивают на пять равных частей или выделяют положение
максимального вылета и полученные секторы делят пополам. В нижнем
положении ковш устанавливают под рекомендуемым углом
запрокидывания. В верхнем положении стрелы он располагается
под наибольшим углом разгрузки ер > 50°.
Угол между направлением радиуса поворота и линией AD
выбирают с таким расчетом, чтобы в положении разгрузки между
точкой .45 и линией B^D'b было плечо Д.
Размер этого плеча определяют конструктивно
Д = 1-|-^+(30ч-40 мм)^(0,125ч-0,135)Ro мм,
где / — ширина тяги; г — наружный радиус втулки шарнира
крепления ковша к стреле.
На основании опыта проектирования угол между радиусом
поворота и линией, соединяющей шарниры, выбирают в пределах
110—125°.
В положении разгрузки определяют длину поворотной тяги
d = В£>'ъ - ВЪЕ'Ъ
- с.
Для каждого промежуточного положения стрелы изображают
линию AtDt параллельно отрезку AXD^ что означает
поступательное движение запрокинутого ковша в процессе подъема. Затем
342
согласно принятым размерам элементов рычажного механизма
определяют положения точек С, верхней части коромысла.
Подбирая окружность, проходящую через все точки Ciy
находят координаты х и у точки F, крепления гидроцилиндров поворота
относительно шарнира поворота стрелы.
При очерчивании окружности допускают, чтобы точки Сй
оказались внутри ее, что обеспечит большее запрокидывание
ковша в промежуточных положениях стрелы по сравнению с
нижним. При этом следует учитывать, что возможно постоянное
запрокидывание ковша в процессе подъема. Допускаемая разница
углов запрокидывания в крайних положениях стрелы составляет
15°. Полученный радиус окружности /imax является наибольшим
размером гидроцилиндра ковша с выдвинутым штоком.
Для определения хода гидроцилиндра ковша проводят
окружность из того же центра, проходящую через точку С£,
соответствующую положению разгрузки ковша. Тогда ход
гидроцилиндра поворота
Затем верхнюю точку крепления коромысла устанавливают
в промежуточных положениях стрелы на максимальной и
минимальной окружностях гидроцилиндра поворота и с учетом
принятых размеров рычажного механизма. Получают действительные
положения линий AtDt для разгруженного и запрокинутого
ковша. Ковш в положении разгрузки на любой высоте должен
иметь угол не менее 45°.
Если получаемые углы разгрузки меньше указанных значений,
необходимо уменьшить расстояние AD и 1Ш и повторить
построение в указанной последовательности.
Точки крепления гидроцилиндра стрелы определяют
конструктивно.
Ход гидроцилиндра стрелы (см. рис. 163)
hc = 2тп [cos (ф0 + ф) — cos ф0],
где ф — угол поворота стрелы, ф = 85 -*- 90°; ф0 — начальный
угол; т, п — размеры подъемного механизма.
Углы рабочих органов аналитически проверяют после
построения кинематической схемы погрузочного оборудования.
Аналитически определяют углы запрокидывания и разгрузки рабочих
органов для принятых промежуточных положений стрелы. На
рис. 165 представлен механизм в промежуточном положении
и даны условные обозначения.
Расчет проводят в определенной последовательности.
Первоначально определяют угол BOF
А = а + т it \|),
где а = const ит = const, \|) — угол поворота стрелы от
горизонтали. При подъеме стрелы выше горизонтали ф берут со знаком
плюс, при движении ниже — со знаком минус.
343
Рис. 165. Размерная схема для аналитической проверки углов различных поло*
(жений рабочих органов
Затем находят расстояние BF:
BF^
Угол между линиями CF и СВ
Здесь при выдвинутом штоке гидроцилиндра ковша принимают
максимальное значение Л; при втянутом положении штока —
минимальное значение h.
Д&лее находят угол Ф:
<ч . / h sin 6' \ . / / sin Д\
•& = arcsin ( k~) "" arcsln (—k~~ ) •
Тогда угол ф между линиями А В и Б£ равен
ф — тЭ> — ^^^тЭ. — т — g ПрИ % __ const и 6 == const.
Углы т и б определяют по принятым размерам стрелы.
Затем определяют расстояние АЕ
АЕ =
Тогда угол р равен
т2 — 2cm cos <p.
Затем находят угол наклона линии AD к стреле
/с sin
- arcsln
344
Зная углы наклона линии AD по отношению к стреле, а также
постоянный угол наклона ее к днищу, определяют фактические
углы запрокидывания и разгрузки ковша для любого положения
погрузочного оборудования.
4. Определение параметров и выбор гидропривода
Гидравлическая система привода рабочего оборудования
одноковшовых погрузчиков состоит из гидронасосов (одного или
более), гидрораспределителя, исполнительных гидроцилиндров,
бака для рабочей жидкости с фильтром, дросселей, магистралей,
гидроамортизатора (для гусеничных погрузчиков с жесткой
ходовой частью), системы автоматического управления
гидроцилиндрами, контрольного манометра и термометра (см. рис. 27).
Исходными данными для расчета параметров гидропривода
погрузочного оборудования кроме принятой схемы
гидравлической системы являются усилия на штоках и скорость движения
поршней исполнительных гидроцилиндров, давление
предохранительного клапана.
Усилия на штоках гидроцилиндров определяют в условиях
установившихся режимов работы гидропривода по наибольшему
выглубляющему NB и подъемному Nn усилиям, приложенным
на режущей кромке ковша в положении внедрения с учетом массы
рабочего органа и оборудования в целом. Тогда усилия на штоке
гидроцилиндра механизма поворота ковша определяют в
соответствии с кинематикой погрузочного оборудования по
формуле (рис. 166)
с и ^в*п + GKiK
где k — коэффициент запаса, учитывающий потери на трение
в шарнирах рычажной системы, гидроцилиндрах, потери давления
Рис. 166. Силовая схема для определения усилий в гидроциливдрах рабочего
оборудования
345
в гидросистеме, k — 1,25; NB —выглубляющее усилие; GK — вес
ковша; гк — число гидроцилиндров механизмов поворота ковша;
хп — мгновенное передаточное отношение механизма
погрузочного оборудования при усилии NB; iK — то же, при весе ковша GK.
Мгновенные передаточные отношения механизма находят для
положения внедрения ковша по формулам
/ — А. А / — JiL А
где /6, ..., /Х1 — плечи силовых элементов механизма.
Усилия на штоке гидроцилиндра механизма подъема стрелы
вычисляют по подъемному усилию с учетом кинематической схемы
рычажной системы и привода. В расчетах обязательно учитывают
действие на стрелу механизма управления ковша.
Для кинематики, изображенной на рис. 166, усилие в одном
гидроцилиндре механизма подъема стрелы
где k — коэффициент запаса, учитывающий потери в механизме
оборудования, гидроцилиндрах и других механизмах, k = 1,25;
Nn — подъемное усилие; Go — вес подвижной части погрузочного
оборудования; 5к — усилие гидроцилиндра механизма поворота
ковша без учета коэффициента запаса; zK — число гидроцилиндров
механизма поворота ковша; zc — число гидроцилиндров
механизма подъема стрелы; /3, /4, /5» ho — плечи соответствующих сил.
Скорости движения поршней в гидроцилиндрах механизмов
поворота ковша и подъема стрелы определяют на основании
рекомендуемых оптимальных линейных скоростей движения (см.
гл. 14). Средняя скорость поршней гидроцилиндров поворота
ковша (в м/с) для положения внедрения
_ v3K _
V
где kv — коэффициент снижения рабочей скорости в процессе
внедрения, kv = 0,5; у — коэффициент совмещения, у = 1,0 -ь
ч- 1,2; уд — скорость движения погрузчика, км/ч; iK —
мгновенное передаточное отношение механизма управления ковшом в
положении внедрения.
Средняя скорость движения поршней в гидроцилиндрах
механизмов подъема стрелы
^ = 57,3^.0-^-,
гДе vn. с — средняя линейная скорость подъема стрелы,
отнесенная к шарниру рабочего органа; S — ход поршня
гидроцилиндра подъема стрелы, м; R — длина стрелы, м; а — угол
поворота стрелы, град.
346
Ход поршней в гидроцилиндрах механизмов поворота ковша кл
и подъема стрелы hc определяют по кинематической схеме
погрузочного оборудования, округлив их значения по
соответствующим нормалям.
Диаметры исполнительных гидроцилиндров погрузочного
механизма рассчитывают по усилиям SK и 5С, действующим по
штокам при реализации соответственно выглубляющих и подъемных
усилий на кромке ковша при наибольшем давлении, равном
давлению настройки предохранительного клапана.
При работе гидроцилиндра поршневой полостью внутренний
его диаметр (в см)
где Sm — усилие на штоке (для ковша SK и стрелы Sc), кгс; рк —
давление, на которое настроен предохранительный клапан,
кгс/см?; т), г|п — механические КПД соответственно
гидроцилиндра и пары шарнирных подшипников, rj ^ 0,96 и т)п = 0,98.
При рабочем давлении в системе до 160 кгс/см2 диаметры
гидроцилиндров выбирают по отраслевым нормалям ОН 790-64
и ОН 22-176-69 Министерства строительного, дорожного и
коммунального машиностроения.
Подачу и мощность насоса определяют по параметрам
механизма подъема стрелы, у которого диаметр гидроцилиндров и
скорость подъема наибольшие.
Подача насоса
где z — число гидроцилиндров; D — внутренний диаметр
гидроцилиндра стрелы, см; vc — скорость движения стрелы, см/мин;
D — объемный КПД насоса, цоб ^ 0,9.
Если полученная расчетная подача меньше подачи насоса,
установленного на базовом шасси, то определяют фактические
скорости движения поршней в гидроцилиндрах механизма подъема
стрелы и поворота ковша и сравнивают их с допустимыми. Если
полученная расчетная подача больше подачи насоса, то
устанавливают дополнительный гидронасос на базовом шасси по
рабочему объему q, равному теоретическому объему жидкости,
подаваемой за один оборот вала насоса. Рабочий объем
дополнительного насоса
Q-Q6.m
гДе (?б. ш — подача насоса базового шасси; п№ — частота вращения
вала дополнительного насоса, об/мин.
При создании специального шасси подачу гидронасосов
принимают равной Q.
347
Рис. 167. Расчетная схема для определения рабочего
давления и максимальной грузоподъемности погрузчика
Мощность для привода насосов определяют по формуле (10).
По подаче насоса, номинальному проходу и давлению
предохранительного клапана выбирают гидрораспределитель.
Диаметр трубопроводов определяют по формуле (1). Для
предотвращения кавитации во всасывающей магистрали диаметр
трубопровода проверяют на неразрывность струи жидкости при
всасывании. При этом должно быть соблюдено условие
где р — плотность рабочей жидкости, р ^=* 850, кг/м3; h — высота
всасывания, м; 2£ — сумма местных сопротивлений (см. гл. 13);
vB — скорость потока в трубопроводе, м/с; g — ускорение
свободного падения.
Исходя из указанных соображений, высоту всасывания берут
минимальной, и чаще всего бак для рабочей жидкости
устанавливают на одном уровне с насосом.
Рабочее давление в гидросистеме — наибольшее давление,
действующее в процессе подъема ковша с грузом, масса которого
равна номинальной грузоподъемности. Для погрузочного
оборудования наиболее распространенных схем максимальное давление
возникает в верхнем крайнем положении ковша, когда
гидроцилиндры подъема стрелы имеют наименьшее плечо.
Усилие (рис. 167), возникающее в гидроцилиндрах подъема
стрелы, определяют в соответствии с кинематической схемой по
формуле
S =
34a
где QH — номинальная грузоподъемная сила оборудования; <30 —
вес рабочего оборудования без портала; GK — вес основного ковша;
iK — мгновенное передаточное отношение в принятом положении
рычажной системы; 11У /2> h> h — плечи действия
соответствующих сил.
Тогда рабочее давление на выходе гидронасосов
где Dc — диаметр гидроцилиндра подъема стрелы; zc — число
гидроцилиндров подъема стрелы; цг — гидравлический КПД.
Причем должно быть соблюдено условие р < 0,85рк, где рк—
давление предохранительного клапана.
Максимальную грузоподъемную силу определяют для
наименьшего плеча гидроцилиндров стрелы по давлению
предохранительного клапана из условия равновесия
кгс/4г)г - GJ, - GKiKl3
где рк—давление предохранительного клапана;
Dc—внутренний диаметр гидроцилиндров подъема стрелы; zc—число
гидроцилиндров подъема стрелы; цг — гидравлический КПД
гидропривода на участке насос — гидроцилиндры подъема стрелы;
Go — вес погрузочного оборудования; GK — вес основного ковша;
iK — мгновенное передаточное отношение силы при действии
веса GK; ll9 /2, /3, U — плечи действия сил (см. рис. 167).
Время срабатывания (в с) определяют по следующим формулам
для каждой группы исполнительных гидроцилиндров в
зависимости от рабочей полости:
поршневой
/ -— 0 0471 °2Sz •
"т. нЛоб
ШТОКОВОЙ
где D, 5, z — соответственно диаметр, ход и число
гидроцилиндров; d — диаметр штока; /7Т#Н — теоретическая подача
гидронасосов; rjo6 — объемный КПД гидронасосов.
5. Внешние нагрузки и основные расчетные схемы
Одноковшовые погрузчики рассчитывают на прочность по
нагрузкам, возникающим в процессе внедрения основного ковша
в штабель насыпного груза раздельным или совмещенным
способами, при которых полностью реализуются наибольшие напорные
усилия и усилия поворота ковша. По своему характеру нагрузки
349
бывают статическими и динамическими, возникающими в период
разгона и замедления во время рабочего цикла.
Внешние нагрузки могут быть основными, случайными
(максимальными) и аварийными. Основные нагрузки возникают в
нормальных условиях работы, для которых предназначен погрузчик.
По ним целесообразно рассчитывать долговечность и надежность
узлов погрузчика. Случайные нагрузки возникают эпизодически
при неблагоприятном сочетании внешних сил во время работы.
Например, при труднопреодолимых препятствиях в процессе
внедрения ковша, зачерпывании крупнокусковых грузов и т. п.
Эти нагрузки учитывают в расчетах на прочность узлов
оборудования. Аварийные нагрузки возникают при грубых нарушениях
условий эксплуатации. Вероятность возникновения их мала,
и в расчетах их не учитывают.
Погрузочное оборудование и базовое шасси рассчитывают
на прочность по внешним нагрузкам, условно приложенным
к режущей кромке основного ковша при неблагоприятном
сочетании горизонтальных и вертикальных сил, возникающих при
сопротивлениях во время работы. Принимается, что погрузчик работает
на горизонтальной площадке, ковш перед внедрением находится
внизу и днище у него наклонено под углом 5° к опорной
площадке.
Основными расчетными схемами для прочностных расчетов
являются (рис. 168).
Первая схема. Удар в труднопреодолимое препятствие краем
ковша при внедрении погрузчика, движущегося по
горизонтальной поверхности при запертых гидроцилиндрах рабочего
оборудования (рис. 168, а).
Вторая схема. Внедрение краем ковша в массу материала
с вывешиванием погрузчика ковшовыми гидроцилиндрами
относительно передних колес (или направляющих колес гусеничного
погрузчика) на горизонтальной площадке (рис 168, б).
Третья схема. Заглубление краем ковша при движении вперед
и вывешивания погрузчика на режущей кромке и задних колесах
машины (или ведущих колес гусеничного погрузчика) стреловыми
гидроцилиндрами на горизонтальной площадке (рис. 168, в).
Для упрощения боковую составляющую внешних нагрузок
в расчет не вводят. При симметричности наиболее
распространенных конструкций погрузчиков и схем их работы, частота
появления боковой составляющей и ее значения сравнительно невелики.
Внешние силы для каждого расчетного случая следует
принимать с учетом следующих обстоятельств.
Первая расчетная схема соответствует моменту удара в
препятствие в начальном этапе внедрения ковша в штабель материала
или при выполнении бульдозерных работ. Внешняя нагрузка
воспринимается крайним зубом ковша, и сила Rx действует
по оси его. Горизонтальное усилие определяется силой тяги,
массой машины и скоростью движения. Условно можно считать,
350
Рис. 168. Положения погрузчика и нагрузки на ковш:
а ■** при опирании погрузчика на оба моста; б — при вывешенном
ваднем мосту; в « при вывешенном переднем мосту
что она складывается из силы тяги трактора и дополнительного
динамического усилия
Rx в Rxc -J- /?ЛД,
где Rxc — наибольшая сила тяги базового шасси; RXR —
динамическое усилие, Кхд = 7Н < Gq> (Тн — сила тяги по двигателю
или трансмиссии; G — вес базового шасси и погрузочного
оборудования; ф — коэффициент сцепления, для гусеничных
погрузчиков целесообразно ф принимать равным 0,9; для колесных
погрузчиков ф == 0,7).
Динамическое усилие (в кгс)
^де 1>д— скорость движения погрузчика, см/с; С — приведенная
жесткость, кгс/см; m — приведенная масса погрузчика с учетом
поступательных и вращающихся масс двигателя и трансмиссии
(по системе единиц МКГСС), кгсс2/см.
Приведенная жесткость определяется жесткостями
погрузочного оборудования и препятствий, с которыми возможно столкно-
351
вение режущей кромки ковша в процессе внедрения.
жесткость
где Ct — жесткость погрузочного оборудования, кгс/см; Св —
жесткость препятствий, кгс/см.
Жесткость для наиболее распространенного погрузочного
оборудования можно ориентировочно определять по формуле
где k = 0,1 — коэффициент жесткости оборудования на единицу
веса погрузчика.
Жесткость наиболее вероятных препятствий определяется их
материалом и связью с грунтом. Значения жесткости препятствий
рекомендуется принимать в соответствии с табл. 21.
Таблица 21
Показатели жесткости распространенных препятствии и их
удельные показатели (по А. А. Белоконеву)
Препятствие
Кирпичная кладка глубиной до
80 см, d = 45 см, F = 2700 см? . .
Железобетонный столб глубиной
120 см, d = 20 см, F = 400 см2. . .
Сосновый столб, зарытый на
глубине 100 см, d = 20 см
Жесткость
связи
препятствия
с грунтом
Cit кгс/см
10 500
11 000
6 500
Удельный коэффициент
жесткости преград
~, кгс/см»
4,0
27,5
20,7
-j-f кгс/см8
233
550
325
Приведенная масса погрузчика т учитывает поступательно
движущиеся массы, массу вращающихся частей трансмиссии
й массу ходовой части.
Учитывая, что основное влияние на приведенную массу имеет
маховик двигателя, рекомендуют
приближенно по формуле
определять ее (в кгс-с2/см)
а г м ^2 ^«тр»
S гк
где G — вес погрузчика, кгс; g — ускорение свободного падения;
ku — коэффициент влияния маховых масс трансмиссии и ходовой
части, kM = 1,3; /дв —момент инерции вращающихся масс
двигателя, кгс-с2-см; ia — передаточное отношение трансмиссии на
рабочей передаче; гк — радиус качения звездочки или колеса, см;
т]тр — КПД трансмиссии.
352
Моменты инерции двигателей принимают по их техническим
характеристикам. Значения моментов инерции для некоторых
наиболее употребляемых двигателей приведены ниже
Двигатель Д-75 Д-108 Д-130 Д-180
Момент инерции, кгс-с2.см 0,356 1,025 0.850 0,794
Мощность, л. с 75 108 140 180
Частота вращения
коленчатого вала, об/мин .... 1500 1050 1070 1050
Вторая расчетная схема. Вертикальная и горизонтальная
силы приложены по оси зуба или на режущей кромке на
расстоянии V4 ширины основного ковша, установленного в положении
внедрения.
Вертикальную силу определяют по устойчивости погрузчика
для случая, когда стрела не опирается башмаками на грунт и равна
выглубляющему усилию по ковшовым гидроцилиндрам (см.
рис. 168, б)
где GT — вес базового шасси; Go — вес погрузочного оборудования;
Ь, /, хт — плечи действия соответствующих сил.
Горизонтальную внешнюю нагрузку определяют по
наибольшей силе тяги с учетом сцепного веса погрузчика и догрузки
вертикальной силой в момент вывешивания
Третья расчетная схема. Вертикальные и горизонтальные
силы действуют на расстоянии V4 ширины ковша.
В качестве вертикальной силы принимают усилие отпора,
создаваемое при вывешивании базового шасси на задних колесах
(или ведущих колесах гусениц и на зубьях ковша, который
установлен в положении внедрения). Передние шины или
направляющие колеса гусениц не касаются опорной поверхности.
Вертикальное усилие определяют из условия равновесия
(см. рис. 168, в)
l^ A
где А — продольная база ходовой части; хт, b, I — плечи
действия соответствующих сил.
Горизонтальную силу определяют по сцеплению или
двигателю с учетом разгрузки погрузчика
Для второй и третьей расчетных схем значение горизонтальной
внешней силы не должно превышать наибольшего тягового усилия
А. Ф. Базанов* Г. В. Забегалов 353
по двигателю или трансмиссии; значение коэффициента сцепления
колес или гусениц с дорожным покрытием ср принимают для
колесных погрузчиков равным 0,7, а для гусеничных
погрузчиков 0,9.
При определении основных нагрузок при расчете на
надежность и долговечность рекомендуется рассматривать режим
совмещенного способа наполнения ковша щебеночным материалом
средней фракции (диаметр кусков 20—40 мм). Внешние нагрузки
действуют симметрично в середине ширины ковша согласно второй
расчетной схеме. Внешнюю вертикальную нагрузку Ry можно
принимать равной 0,5^.
Горизонтальную внешнюю нагрузку целесообразно определять
с учетом отбора мощности для гидропривода поворота ковша,
сопротивления перекатыванию, действия динамических нагрузок
в процессе замедления при внедрении в штабель с углом а уклона
рабочей площадки, равным 5°. При этом усилие от штабеля,
действующее на ковш, условно принимают направленным нормально
к рабочей площадке и равным номинальной грузоподъемной
силе QH погрузчика.
Тогда
где 8 — коэффициент перегрузки двигателя, е = 1,1 -г- 1,15; Ти —
номинальное тяговое усилие с учетом потерь на буксование колес
(20%) или гусениц (8%), кгс; qn — объемная постоянная
гидронасосов, см3/об; р — рабочее давление в гидронасосе, кгс/см2;
iT — передаточное отношение трансмиссии на рабочей передаче;
TiT — КПД трансмиссии; гк — радиус качения колеса или
звездочки, см; т|н — КПД механизма привода насосов; G — вес
погрузчика, кгс; а — угол наклона площадки при внедрении в забой,
a = 5°; QH — номинальная грузоподъемная сила, кгс; / —
сопротивление перекатыванию; m — приведенная масса поступательных
и вращающихся частей погрузчика, кгс-с2/см; А, — коэффициент
неустановившегося режима работы двигателя для диапазона
перегрузки; / —замедление погрузчика при внедрении ковша
в материал, см/с2.
Замедление погрузчика зависит от физико-механических
свойств материала, интенсивности увеличения сопротивления
при внедрении, характеристики двигателя и трансмиссии. Для
предварительных расчетов значение замедления при внедрении
можно принимать в пределах / = 25 -f- 35 см/с2. Для точных
расчетов целесообразно пользоваться зависимостями, данными
в литературе [16].
354
6. Расчет основных узлов и деталей
погрузочного оборудования
Основные узлы и детали погрузочного оборудования
рассчитывают по внешним нагрузкам для трех основных расчетных схем:
при ударе ковша краем, при внедрении ковша краем с
вывешиванием на передних колесах или направляющих колесах гусениц
и при заглублении ковша краем с вывешиванием на режущей
кромке и задних колесах или ведущих колесах (см. рис. 168).
Для каждой схемы на основе силового анализа системы
определяют усилия, действующие на ковш, стрелу, тяги, коромысло
и портал. Усилия определяют по законам механики для
определенного положения погрузочного механизма в статическом
состоянии. При этом ковш устанавливают в положение внедрения
под углом 5° к опорной площадке, лыжи стрелы, если они имеются,
не касаются рабочей поверхности площадки или штабеля.
Первоначально определяют реактивные усилия от внешних сил
в ковшовом и стреловом гидроцилиндрах. При этом учитывают,
что гидроцилиндры поворота ковша подъема стрелы соединены
параллельно и воспринимают одинаковые усилия.
Из условия равновесия определяют усилия в гидроцилиндре
поворота ковша (см. рис. 166)
где iKmy, iKtXy iK — мгновенные передаточные отношения
соответственно внешних сил Ry и Rx, а также веса ковша GK; zK — число
гидроцилиндров ковша.
Мгновенные передаточные отношения определяют на основании
плеч погрузочного механизма
1к'У ~ /7 I, ' К'Х ~~ h /9 '
Усилие в гидроцилиндре стрелы (см. рис. 166)
где Go — вес погрузочного оборудования; 13, /4, /6, /10, 1^ — плечи
действия соответствующих сил; zK — число гидроцилиндров
подъема стрелы.
Усилие в каждой тяге находят из условия равновесия ковша
относительно стрелы (см. рис. 166)
/7
355
Знак плюс для силы Ry принимают при выглублении ковша
из материала в процессе его разработки, знак минус при
заглублении ковша в грунт.
Расчет ковша, имеющего объемную металлоконструкцию,
представляет большие трудности. Его выполняют в настоящее
время приближенно путем разбивки ковша на отдельные элементы
(режущую кромку, задний брус, козырек и др.) и приложения
к ним соответствующих внешних нагрузок. Конструкции ковшей
и их прочность, а также износостойкость режущих элементов
в настоящее время определяют методом стендовой и
эксплуатационной проверки.
Поворотные механизмы (коромысла и тяги, пальцы
шарнирных соединений) рассчитывают по максимальному усилию SK
в гидроцилиндрах поворота ковшей.
Коромысла рассчитывают на изгиб с кручением с учетом их
конструкции и возможного смещения действия усилия
гидроцилиндра. Для перекрестной рычажной системы опасным
сечением коромысла является сечение в области центрального
шарнира. Нормальные напряжения изгиба и касательные напряжения
кручения определяют в зависимости от размеров коромысла,
действующих моментов, моментов сопротивления изгибу и
кручению.
Поворотные тяги рассчитывают на растяжение по
максимальному усилию гидроцилиндра при запрокидывании ковша и на
сжатие при вывешивании погрузчика на режущей кромке ковша
и задних колесах или ведущих колесах гусениц погрузчика.
Напряжения сжатия рассчитывают с учетом влияния
устойчивости тяги от продольного изгиба. Оптимальным сечением
поворотной :яги является круглое или трубчатое. Однако при
ограниченных размерах зазоров между рамой и ходовой частью
поворотные тяги принимают прямоугольного сечения со
значительным превышением высоты над шириной (не менее 1 : 4).
Пальцы и втулки шарнирных соединений рассчитывают на
изгиб и смятие по действующим в шарнирах усилиям.
Для расчетов деталей поворотных механизмов необходимо
использовать соответствующие формулы сопротивления
материалов [8].
Расчет стрелы является наиболее трудоемким, так как
применяемые конструкции двухбалочных стрел являются статически
неопределимыми системами. Однобалочные стрелы рассчитывают
как статически определимые балки.
Нагрузки на стрелу со стороны рабочего органа при
несимметричном приложении внешних сил и веса определяют по законам
равновесия с учетом размеров ковша и стрелы. При этом ковш
условно рассматривают как балку, лежащую на двух опорах
в местах соединения с лонжеронами стрелы, а поворотные
механизмы воспринимают одинаковые усилия с учетом параллельного
соединения гидроцилиндров (рис. 169).
356
Рис. 169. Схема сил, действующих на стрелу
Усилия NAx> НАу, НВх, НВд находят из условия равновесия
ковша, a Fx и Fy по воздействию коромысел с учетом веса
поворотного механизма, приходящегося на стрелу. Составляющие усилия
стреловых гидроцилиндров находят по суммарным силам,
действующим на стрелу.
Распространенные конструкции двухбалочных стрел с одной
поперечной связью рассматривают как единожды статически,
неопределимые системы.
Пространственную силовую систему нагрузок стрелы приводят
к двум плоскостным схемам действия сил и соответствующих
моментов в плоскостях ху и xz (рис. 170). Значения изгибающих
моментов и поперечных сил, а также крутящих моментов
определяют в каждой плоскости. Разрезая поперечную связь стрелы
и условно заменяя взаимное воздействие единичными силами,
раскрывают неопределенность системы решением канонических
уравнений [5].
Рис, 170. Схемы расчета стрелы:
о-в плоскости xz; б — в плоскости ху
12 А. Ф. БазаноВ| Г. В. Забегалов
357
Затем строят эпюры изгибающих и крутящих моментов,
поперечных сил и для определенных сечений на основе моментов
сопротивлений рассчитывают напряжения в двух взаимно
перпендикулярных плоскостях. Опасными сечениями для стрелы
являются сечения: /—/ в зоне крепления подъемных
гидроцилиндров, //—// в месте установки коромысел, ///—/// в зоне
присоединений поперечной связи и IV—IV в середине поперечной
связи. Кроме этого, целесообразно проверить напряжения в зоне
шарнира стрелы в месте крепления ее к порталу.
Наибольшие нормальные напряжения для прямоугольных
сечений балок стрелы действуют в углах и определяют сложением
их значений в двух взаимно перпендикулярных плоскостях.
Затем для этих точек с учетом действующих касательных
напряжений по третьей теории прочности определяют
приведенные напряжения, которые сравнивают с пределами текучести
применяемых марок стали.
В последнее время в основных ведущих организациях
напряжения стрелы рассчитывают на ЭВМ по специальным программам.
Для этого в правой прямоугольной системе координат располагают
стержневую схему стрелы с приложением нагрузок, определяют
жесткость стержневых систем при действующих деформациях
^растяжение, сжатие, кручение, изгиб), главные центральные
оси инерции поперечного сечения каждого лонжерона в
пространстве и принимают внешние нагрузки, направления и координаты
их приложения.
Потом эти данные вводят в программу и рассчитывают
напряжения на ЭВМ.
Портал рассчитывают по реактивным усилиям, действующим
от стрелы, ковшовых и стреловых гидроцилиндров. Учитывая
конструктивную сложность порталов и цельных полурам, обычно
рассчитывают каждую стойку отдельно с учетом несимметричного
приложения внешних нагрузок. Максимально упрощая расчетную
схему, определяют нормальные и тангенциальные напряжения,
по значениям которых находят приведенные напряжения в
опасных сечениях. Прочностный расчет элементов оборудования
целесообразно выполнять по предельному состоянию.
Полученные значения приведенных напряжений в
металлоконструкциях погрузочного оборудования рекомендуется
сравнивать с пределом текучести материалов ат по наименьшему
коэффициенту безопасности
где сгпр — приведенное напряжение в сечении
металлоконструкции, испытывающей сложное напряженное состояние.
В металлоконструкциях погрузочного оборудования
применяют углеродистые и низколегированные стали (10ХСНД,
15ХСНД, 09Г2, 14Г2).
358
Минимальные допустимые коэффициенты безопасности для
расчета металлоконструкций дорожно-строительных машин и,
в частности, для рабочего оборудования погрузчиков следует
принимать с учетом рекомендаций, содержащихся в технической
литературе [16].
Нижние значения nmin берут при высокой точности
применяемых расчетных схем, расчете максимальных напряжений,
постоянстве механических свойств используемых материалов,
надлежащем соблюдении технологических норм изготовления и
обеспечении контроля качества сварных швов и соединений.
Глава 16
РАСЧЕТ МНОГОКОВШОВЫХ ПОГРУЗЧИКОВ
1. Ленточный транспортер
Мощность привода транспортера (в л. с.)
м _ lQmgHvT . 10mgLrwvT . 20m1gLrwvT
Mi~ 75 h 75 h 75 ,
где т — масса насыпного груза, отнесенная к 1 м длины
транспортера, кг/м; Я, Lr — высота и расстояние перемещения
транспортером насыпного груза по горизонтали, м; vT — скорость
транспортера м/с; w — общий коэффициент сопротивления
движению ленты, w ^ 0,055; тх — масса движущихся частей (ленты,
роликоопор и барабанов), отнесенная к 1 м длины транспортера,
кг/м.
В членах этой формулы учтены расходы мощности на подъем
насыпного груза транспортером вверх, на перемещение груза
по горизонтали и на холостой ход самого транспортера.
Здесь высота Н получается за счет возможного предельного
угла подъема транспортера от горизонтали.
Массу движущихся частей, отнесенную к 1 м длины
транспортера, определяют как сумму масс их, деленную на длину
транспортера (в кг/м)
Для проектного расчета массу движущихся частей (в кг/м)
можно определять по эмпирической формуле
т1 = ЗОВ,
где В — ширина ленты, м.
Производительность транспортера (в т/ч) берут на 10% больше
производительности элеватора. Поскольку
П = 3,6/ni;T, (26)
12* 359
то масса насыпного груза (в кг/м), отнесенная к 1 м длины
транспортера,
(27)
Подставив ее в формулу (25) и преобразуя ее, получим
расчетную формулу
270
270
(28)
Лента. С установкой стандартных верхних роликоопор
площадь поперечного сечения насыпного груза на ленте представляет
собой сумму площадей треугольника и равнобедренной трапеции
(рис. 171). Катеты треугольника наклонены к горизонту под
углом р3 естественного откоса груза в движении. С учетом
встряхивания груза при проходе ленты через роликоопоры этот угол
примерно в 2 раза меньше угла р2 естественного откоса насыпного
груза в покое. Для заполнителей принимают р3 ^ 0,5, р2 ^ 30°.
Стороны трапеции наклонены к горизонту на угол а = 20°.
Учитывая соотношение ширины Во насыпного груза на ленте к
ширине В самой ленты как BJB = 0,85, а также угол наклона
транспортера к горизонту р = 15°, при котором принимается обратное
скатывание насыпного груза вниз в объеме 3%, найдем ширину
ленты (в м)
В = 0,05
где П — производительность транспортера, т/ч; vT — скорость
движения ленты, м/с; р — объемная масса, т/м3 (см. табл. 1).
Для расчета на прочность ленты определим передаваемое
окружное усилие и натяжение на концах ее. Окружное усилие
на приводном барабане (в кгс)
Р =
Усилие на набегающем и сбегающем концах ленты (в кгс)
Рис. 171. Схема расчета ленты транспортера
360
где а — угол обхвата барабана лентой, рад; \\> — коэффициент
трения резиновой ленты по барабану, который берут по
следующим данным!
Барабан Стальной Обрези-
(чугунный) ненный
Коэффициент ц при
различных условиях:
очень влажных .... 0,1 0,15
влажных 0,2 0,25
Для упрощения конструкции транспортера угол обхвата
лентой барабана берут равным 180°, если силы трения между
барабаном и лентой достаточны для передачи окружного усилия
от барабана на ленту. В этом случае должно соблюдаться
равенство Р = 5Н — Sc. При большом несоответствии необходимо
увеличить угол обхвата до 220° путем установки отклоняющего
барабана.
Необходимое число прокладок в ленте (в шт.)
где п — запас прочности для ленты, п = 10; В — ширина
ленты, см, /Ср — разрушающая нагрузка по основе одной тканевой
прокладки на 1 см ширины ленты, кгс/см (прокладки для лент
шириной до 500 мм берут из бельтинга Б-820 при Кр = 61 и для
более широких лент из бельтингов ОПБ и ОПБ 12 при Кр = 130).
Принимая толщину резиновых обкладок верхней бх = 4 -~-5
и нижней б 2 = 1,5 мм, а также толщину прокладки б «* 1,5 мм
и число прокладок t, получим толщину ленты (в мм)
Принимая плотность прорезиненной ленты равной около
1100 кг/м3, получим массу ленты, отнесенную к 1 м длины ее
(в кг/м),
где В — ширина ленты, м.
Барабаны изготовляют сварными из стали. Обечайку
выполняют из вальцованной листовой стали, поверхность обтачивают
после сварки. Диаметр приводного и натяжного барабанов
определяют по эмпирической формуле
где i — число тканевых прокладок в ленте. Полученный размер
округляют до стандартного.
Длину барабанов принимают равной
L = B+ 100 мм,
где В — ширина ленты.
361
Винтовое натяжное устройство. Расчетное усилие натяжения
(в кгс)
K=lO(m^m1)g9
где т — масса насыпного груза на ленте, отнесенная к 1 м длины
ее, кг/м.
Ход натяжного устройства (в м)
S = (0,01 -г- 0,015) L,
где L — длина транспортера по осям барабанов, м.
2. Ковшовый элеватор
Мощность привода ковшового элеватора можно определить,
пользуясь формулами (25), (28). Масса насыпного груза в ковше,
отнесенная к шагу ковшей (в кг/м),
где i — объем ковша, л; t — шаг ковша, м; г — коэффициент
заполнения ковша, при зачерпывании гравийно-песчаных грузов
можно принять равным 0,8; р — объемная масса насыпного
груза, кг/л.
Подставляя значение т в формулу (26), получим
производительность элеватора (в т/ч)
Тогда объем ковша, отнесенный к шагу ковшей (в л/м),
* - П
t
где vK — скорость ковшовых
цепей, м/с.
Вместо расстояния
перемещения в формулу (28)
подставим (рис. 172)
L - Н
Г~ tg p "
Учтем также в ней работу А
(в кгс-м), затрачиваемую на
зачерпывание насыпного груза
ковшами, и, произведя
преобразования, получим формулу
для определения мощности
привода элеватора (в л. с.)
7,2m.iWvK
Рис. 172. Схема ковшового элеватора
362
ПА
270*
Заменяя в ней tg p на 1/ctg (5, получим
)^, (29)
где П — заданная производительность элеватора, т/ч; Н —
полная высота подъема (см. рис. 172), м; w я^ 0,1 — общий
коэффициент сопротивления движению; (3 — угол наклона элеватора
к горизонту, град; т1 — масса ковшей с цепями, отнесенная
к 1 м длины транспортера, кг/м; Лзач — работа, затрачиваемая
на зачерпывание 1 кг насыпного груза, кгс-м/кг.
Масса ковшей с цепями (в кг/м), отнесенная к 1 м длины
транспортера,
т = тк | 2пг
где тк — масса ковша, кг; тц—масса цепи, отнесенная к 1 м
длины ее, кг/м.
По опытным данным, работа Азач (в кгс-м), затрачиваемая
на зачерпывание массы мелкокускового насыпного груза в 1 кг
в среднем составляет:
для гравия и песка 3,5—5
для котельного шлака 3—3,5
для гранитного щебня 5—8
В формуле (29) первым членом в скобках, с учетом общего
множителя определяют мощность, идущую на подъем насыпного
груза, вторым — на перемещение его по горизонтали, третьим —
на холостой ход элеватора и четвертым — на зачерпывание
насыпного груза ковшами.
Кроме статической учитывают также динамическую мощность,
затрачиваемую на ускорение движения цепной передачи с
ковшами, заполненными насыпным грузом, по формуле (по А. О. Спи-
ваковскому)
дг я2 (т + 2/Пх) Lvs
/Уз" 2,75г2/ц ~'
где L — расстояние между центрами звездочек по наклону (см.
рис. 172), м; vK — скорость ковшовых цепей, м/с; z— число
зубьев приводной звездочки; /ц — шаг цепи, м.
Ковши. По заданной производительности погрузчика
определяем объем ковша. Чтобы обеспечить наилучшее заполнение
ковшей, вылет его I (см. рис. 91, б) проверяют на возможность
укладки в один ряд не менее двух крупных кусков груза размером
атах = 60 ч- 75 мм по формуле
a.
max*
где I — коэффициент, учитывающий % группы крупных кусков
в ковше (см. гл. 2); его берут с учетом соотношения с == tnjm(sl
363
(m0, mQ1 — массы соответственно всей пробы и группы крупных
кусков в пробе). При с < 10 берут g = 2; с = 11 -~- 25; I = 2,5;
с = 26 -±- 50; g = 3,25 и далее g = 4,5.
Цепь элеватора рассчитывают по суммарному натяжению,
получаемому при обходе по контуру ее или, как говорят, «по
точкам».
Обычно применяют стандартные пластинчатые втулочно-роли-
ковые типа ВР и реже пластинчатые втулочные цепи как менее
долговечные. Шаг цепи выбирают в пределах 120—200 мм, чтобы
диаметр звездочек при числе зубьев 8—10 был бы конструктивно
приемлем и кратным шагу ковшей.
При расположении приводных звездочек у элеватора внизу,
наименьшее натяжение у цепей будет в точке 1 (см. рис. 172).
Для того чтобы цепи не «полоскались», их предварительно
натягивают с помощью винтового устройства, расположенного вверху
у элеватора. Расчетное усилие (в кгс) предварительного натяжения
определяют условно, исходя из окружного усилия на приводной
звездочке,
где N2 — мощность привода элеватора, л. с; vK — скорость
ковшовых цепей, м/с.
Скорость vK цепи берут не более 0,8 м/с, чтобы избежать
больших динамических нагрузок на цепи при знакопеременных
ускорениях, вызываемых набеганием звеньев цепи на зубья и сбега-
нием их с зубьев приводных звездочек.
Расчетное усилие ScyM натяжения цепей примерно берут не
менее 0,4Р.
Таким образом, на набегающие или сбегающие ветви цепей
приходится предварительное натяжение S' = 0,5ScyM. Расчетное
усилие ScyM должно быть не менее силы тяжести цепей с
порожними ковшами, т. е.
где L — расстояние между звездочками по наклону (см. рис. 172), м;
Дш — диаметр цепной звездочки, м.
Максимальное натяжение (в кгс) цепей будет в точке 3 (см.
места перегиба цепей на звездочках, обозначенные цифрами),
которое определим по формуле
где W2/s — сила, затрачиваемая на преодоление сопротивления
подъему рабочих ветвей с заполненными ковшами, кгс; S2 —
натяжение цепей в точке 2, кгс.
Сила
Wm = S'±L(m + mi) (sin p + w± cos p) g,
3G4
где р — угол наклона элеватора к горизонту, град; w — общий
коэффициент сопротивления качению ветви цепей с гружеными
ковшами по направляющим роликам; dID «* 0,3 — отношение
диаметра цапфы по канавке внутреннего кольца
шарикоподшипника к диаметру ролика.
Натяжение цепей в точке 2
где Wt/2 — сила, затрачиваемая на преодоление сопротивления
движению цепей на криволинейном участке /—2\ Waa4 — сила,
затрачиваемая на преодоление сопротивления зачерпыванию
ковшами насыпного груза; WB — сила, затрачиваемая на преодоление
сопротивления вращению подгребающих винтов.
Сила (в кгс)
где di/D3B — отношение диаметра натяжного вала по дну канавки
внутреннего кольца шарикоподшипника к диаметру звездочки,
di/A,B^0,15; m2 — масса нижнегэ вала элеватора со
звездочками, кг: dB — диаметр втулки у втулочно-роликовой цепи или
диаметр пальца у втулочной цепи, см; \i — приведенный
коэффициент трения в шарикоподшипниках, \i ^ 0,015; \хх —
коэффициент трения в шарнирах цепи, [л^^ОДб.
В последней формуле более справедливо натяжение уменьшить
на вес цепей с ковшами на участке 2—3.
Сопротивление (в кгс)
**зач ==
где т — масса насыпного груза на ленте, отнесенная к 1 м длины
ее, кг/м; Лзач — работа, затрачиваемая на зачерпывание 1 кг
насыпного груза, кгс-м/кг.
Сопротивление (в кгс)
где Dcp — средний диаметр винта по ленточной спирали, м; Рср —
окружное усилие, приложенное на среднем радиусе ленточной
спирали у обоих подгребающих винтов, кгс, Ргр = 75NJvB (iV4 —
мощность для привода подгребающих винтов, л. с; vB — окружная
скорость по среднему диаметру ленточной спирали).
Кроме статических сил цепи испытываю динамические
усилия, возникаемые от знакопеременных ускорений.
Согласно существующим методам расчета динамические
усилия в ветвях цепей (в кгс)
где М — масса цепей с ковшами и насыпным грузом, М = (т +
+ тх) L; / — ускорение, с которым звенья цепи набегают на
365
зубья звездочек, м/с2, / = л2£ц/180° (*ц— шаг цепей, м; п —
частота вращения ведущей звездочки, об/мин, п = 60yK/3,14D3B).
При определении динамических нагрузок в цепях принято
допущение, что последние являются абсолютно жесткими. С
учетом упругости цепей динамические нагрузки будут несколько
меньше. К сожалению, метод расчета с учетом упругости цепей
в технической литературе не освещен.
Полное натяжение цепей в точке 4 (см. рис. 172)
О ! С
— °8Т °дин*
Запас прочности цепи (ковши висят на двух цепях), чтобы
избежать быстрой вытяжки цепей,
у ^* раз ^ 1 г\
где Рраз — разрушающая нагрузка у стандартной цепи.
Ход винтовой вытяжки h > 2£ц.
3. Винтовой питатель
Мощность привода винтовых питателей (в л. с.) определяют
по формуле, полученной из преобразования формулы (28),
1 4~ 270
где П — производительность ковшового элеватора, т/ч; Lr —
расстояние перемещения одним (правым или левым) винтом, м;
w — коэффициент общего сопротивления движению насыпного
груза, w «^ 5; kx — коэффициент, учитывающий вращательное
движение винта, kx = 0,2; k2 — коэффициент, учитывающий
сопротивление в подшипниках от осевого давления винта, k2 ^ 1,1;
т± — масса подгребающего винта, отнесенная к 1 мего длины, кг/м;
vn — поступательная скорость движения насыпного груза, м/с,
vn= Sn/60 (n — частота вращения винта, об/мин; S — шаг винта, м).
Для проектного расчета массу винта (в кг/м), отнесенную
к 1 м длины его, можно определить по эмпирической формуле
тх = 80Д
где D — наружный диаметр винта, м.
Наружный диаметр винта (в м)
3/
Я
2,47/сшф'
где П — производительность погрузчика, равная
производительности ковшового элеватора, т/ч; к — отношение шага винта к его
диаметру; п — частота вращения винта или нижнего вала
элеватора, об/мин; г — коэффициент заполнения желоба (отношение
торцовой площади круга винта по внешнему диаметру к площади
366
сегмента с учетом глубины погружения винта в насыпной груз);
р — объемная масса насыпного груза (см. табл. 1), т/и3.
Коэффициент заполнения желоба является условной
величиной, так как желоб создается с одной стороны отвалом, а с
другой — лежащим на земле насыпным грузом. Коэффициент е
берут в пределах 0,125—0,2.
Отношение шага 5 винта к диаметру
а иногда и меньше, когда при широких ковшах и наибольшей
ширине захвата остается мало места для размещения спирали
у винта. Например, у погрузчика Д-565 к = 0,35.
4. Рабочие скорости для перемещения груза
и общая мощность привода
Рабочие скорости для перемещения груза погрузчиком
определяют, исходя из нормального заполнения ковшей при
зачерпывании. Очевидно, наибольшая скорость будет необходима при
малой высоте штабеля. При ширине захвата В (в м) и минимально
допустимой высоте штабеля h = 0,1 м необходимая рабочая
скорость на третьей передаче (в км/ч)
п
1/111 1000ЯЛ '
где П — заданная производительность погрузчика, м3/ч.
При больших высотах штабеля рабочие скорости передвижения
берут меньше. Примерно vu = (0,5 ч- 0,6) vm и v{ = (0,25 ч-
-т- 0,3) vm. Более точно выбираются скорости во время работы
путем изменения частоты вращения коленчатого вала двигателя.
Скорости обратного хода берут примерно такими.
Мощность двигателя. Во время зачерпывания ковшами
насыпного груза необходимо также учесть силу, затрачиваемую на
преодоление сопротивления, возникаемого от подгребания
насыпного груза отвалом (в кгс),
W = /СР5А, (30)
где Кр — коэффициент сопротивления резанию, кгс/м2; В —
ширина захвата, м; h — толщина срезаемого слоя («стружки»), м,
Коэффициент сопротивления резанию берем такой, как при
расчете экскаваторов. Для перелопаченных гравийно-песчаных
материалов можно брать Кр = 1500 кгс/'м2.
367
Тогда мощность (в л. с.)
270тц '
где vm — рабочая скорость на третьей передаче, км/ч; гц — КПД
ходовой трансмиссии, т)^ я« 0,8.
Мощность на лередвижение самого погрузчика,
затрачиваемая ва время зачерпывания ковшами насыпного груза (в л. с.)
(31)
где G — вес всего погрузчика, кгс; / — коэффициент
сопротивления качению колес; а — угол подъема пути, преодолеваемый
погрузчиком, град; vm — рабочая скорость на третьей передаче,
км/ч; 6 — коэффициент, учитывающий влияние сил инерции
маховика у двигателя и ходовых колес при разгоне, б «=* 2,5;
/ — среднее ускорение при разгоне, м/с2, /' = 0,15 ч- 0,25; g —
ускорение свободного падения, м/с2.
При движении погрузчика по горизонтальной рабочей
площадке уклон пути не учитывается» поэтому cos а и второй член
в формуле пропадают. Последним членом в скобках учитывают
сопротивления от сил инерции при начале движения погрузчика
после остановки во время работы. Необходимая мощность
двигателя с учетом мощностей, затрачиваемых на привод отдельных
механизмов погрузчика,
л.;с,
где г)а— КПД трансмиссии для привода механизмов самого
погрузчика от двигателя, k^.^ — коэффициент неучтенных потерь
мощности, &н#п ^ 1,2.
Мощность двигателя при движении погрузчика при скоростях
передвижения определяется отдельно.
Тяговое усилие на колесах при движении погрузчика на
третьей рабочей и на первой транспортной скоростях проверяют
по сцеплению колес с дорогой, оно должно быть
Т > Gq>, (32)
где G — вес всего погрузчика (при двух ведущих мостах) или
масса, приходящаяся на ведущий мост, когда другой мост только
управляемый, кгс; ф — коэффициент сцепления колес с дорогой
(грунтовое неровное покрытие), ср ^ 0,5*
Г лава 17
РАСЧЕТ ПОГРУЗЧИКОВ
С НАГРЕБАЮЩИМИ ЛАПАМИ
1. Механизм нагревания
Мощность привода погрузчиков с нагребающими лапами
определяется довольно сложно и почти не освещена в технической
литературе. Во время нагребания конец лапы врезается в вал снега,
срезает его по сечению hxa% (см. рис. 91 и 92), перемещает снег
поперек и вдоль лопаты с подъемом до люка для скребкового
транспортера. Кроме того, срезается снег на дороге ножом лопаты-
при движении погрузчика.
Для определения мощности привода лап воспользуемся
формулой (25), из которой исключим член, учитывающий расход
мощности на холостой ход транспортера, и введем в нее член,
учитывающий мощность, затрачиваемую на сопротивления при
зачерпывании лапами снега из вала. При этом примем следующие
допущения:
работа парных лап создает непрерывность потока снега,
поступающего на скребковый транспортер;
скорость перемещения снега вверх по лопате равна
окружной скорости лапы на среднем радиусе ее относительно центра
перемещаемого валика из снега, примерно равном г = 10 — 0,15 м,
(см. рис. 92).
Массу снега, отнесенную к 1 м длины транспортера,
определим по формуле (27), в которую подставим скорость (в м/с)
.— 2зтг/г
где п — число ходов лапы в 1 мин.
Производительность погрузчика по массе получают
умножением заданной объемной производительности на объемную массу
снега р ^ 0,4 т/м? (см. табл. 1).
После соответствующих подстановок формула (29) для расчета
мощности (в л. с.) для нагребания снега примет вид
г/с;-г 270л '
где Я, Lr — расстояния соответственно по высоте и горизонтали
от кромки ножа до начала люка в верхнем листе лопаты
скребкового транспортера, м; с учетом волочения снега поперек лопаты Lr
рекомендуется удвоить; /с — коэффициент трения снега по стали
для общих условий (см. табл. 1), /с <^ 0,08; Лзач — работа,
затрачиваемая на зачерпывание 1 кг массы снега, кгс-м/кг, Лзач =
= 0,8 -~- 1,0 кгс-м/кг; ц — КПД механизма четырехзвенника,
И ^ 0,95.
369
В полученной формуле первым ее членом учитывают мощность,
затрачиваемую на подъем снега с дороги до люка для скребкового
транспортера, вторым — на волочение снега и третьим — на
зачерпывание.
Ширина лопаты и размеры лап были определены ранее
(см. гл. 9).
2. Скребковый транспортер
Желоб. Сечение желоба определяют по производительности
снегопогрузчика, увеличенной на 10%, чтобы он успевал убирать
снег, подаваемый лапами. Площадь поперечного сечения желоба
(в м2)
1 1 Г7
F =
3600ут '
где П — производительность снегопогрузчика, м3/ч; vT —
скорость цепи у скребкового транспортера, м/с.
Соотношение сторон желоба выбирают конструктивно.
Например, у погрузчика Д-566 ширина желоба 0,66 м и глубина
0,2 м (см. рис. 94).
Элементы транспортера. Практика показывает, что для
движения сплошного потока снега в желобе шаг скребков должен быть
не более 0,6—0,8 м, а высота скребка не менее половины высоты
желоба. Скребки крепят к втулочно-роликовой цепи болтами
(см. рис. 94). Цепь рассчитывают по методике, применяемой для
расчета ковшового элеватора многоковшового погрузчика.
Мощность привода N2 можно определить по формуле (28),
в которой во втором члене для условий волочения снега общий
коэффициент w сопротивления необходимо заменить на
коэффициент /с внешнего трения снега по стали (для средних условий
/с ^ 0,08) и w & 0,03 м/с.
Масса цепи со скребками, отнесенная к I м длины цепи
(в кг/м),
тс ,
t
тде тс — масса скребка, кг; t — шаг скребков, м; тц—масса
депи, отнесенная к I м длины ее, кг/м.
3. Рабочие скорости для перемещения груза
и обща* мощность привода
Рабочие скорости для перемещения погрузчиком
определяют, исходя из нормального количества снега, нагребаемого
лапами. Очевидно, при разных сечениях складируемого вала из
снега рабочие скорости принимают разными, наименьшая будет
при высоком вале снега, как было сказано выше.
.370
При движении погрузчика на первой рабочей скорости за один
ход лап подача снегопогрузчика вперед (в м)
где V — объем снега, перемещаемый одной лапой (см. гл. 5), м3;
Ft — площадь поперечного сечения вала из снега, м2.
Принимая сечение снежного вала, складируемого обычно на
дороге, в виде равнобедренной трапеции с основанием 2,5, высотой
0,4 м и углами естественного откоса в покое рх = 45° получим
необходимую на третьей передаче рабочую скорость
где п — число ходов лапы в 1 мин.
Рабочую скорость на второй передаче определяем, исходя
из постоянной производительности снегопогрузчика при подаче
S2 = 2SX и F2 = 0,5F1 и на третьей передаче So = 3SX и F3 =
- 0,25/V
Следует отметить, что фактические данные о подаче у разных
отечественных снегопогрузчиков примерно на 30% выше
полученных расчетом с принятыми допущениями. Наименьшее
расхождение получается для снегопогрузчика С-10,
Ниже приведены значения подачи снегопогрузчиков вперед
(в мм) за 1 ход лап при работе на рабочих передачах.
Погрузчики С-4 2С-3 Т-105 Д-566 С-10
Подача погрузчика
вперед на рабочих
передачах:
первой 195 153 200 195 120
второй 400 295 273 490 250
третьей 750 370 670 815 450
Мощность привода. Во время зачерпывания снега лапами
возникают еще и другие сопротивления, вызывающие дополнительный
расход мощности. Так, например, при врезании ножа^ лопаты
в основание вала из снега возникает сопротивление,
определяемое по формуле (30).
Коэффициент сопротивления резанию зависит от объемной
массы снега и температуры окружающего воздуха. Для объемной
массы снега 0,2—0,5 т/м3 и температуры (+2)—(—20)° С этот
коэффициент Кр соответственно равен 160—2000 кгс/м2 [15].
При более низкой температуре он мало повышается. Для средних
условий можно принять /Ср ^ 1000 кгс/м2 и h = 0,15 м.
Кроме того, при опирании лопаты о поверхность дороги через
нож или полозки, когда подъемные гидроцилиндры выключены,
для преодоления сопротивления скольжению лопаты необходима
сила (в кгс)
371
где (х — коэффициент трения скольжения по заснеженной дороге,
для средних условий [л^0,15; вл — вес лопаты, отнесенный
к ее концу, кг.
Тогда дополнительная мощность для преодоления
сопротивления (в л. с.)
Д
где Vin — рабочая скорость на третьей передаче, км/ч; г\1 — общий
КПД трансмиссии шасси, ijc\1 я^ 0,8.
Мощность Af4 на передвижение самого погрузчика во время
зачерпывания снега лапами может быть определена по формуле
(31), в которой коэффициент / сопротивления качению по снежной
дороге может быть принят равным 0,025—0,03, угол подъема
пути а *^ 7°.
Необходимая мощность двигателя с учетом расхода ее н&
отдельные операции (в л. с.)
гДе ^н.п — коэффициент неучтенных потерь мощности, кНгП ^ 1,2;
г\2 — КПД трансмиссии для привода механизмов погрузчика.
Сила тяги сцепления может быть проверена по формуле (32),
в которой коэффициент сцепления колес с заснеженной дорогой
018
Глава 18
ТЯГОВЫЙ РАСЧЕТ ПОГРУЗЧИКОВ
1. Общие положения
В тяговом расчете определяют зависимость силы тяги,
развиваемой на колесах, от скорости движения погрузчика. Силу тяги
подсчитывают с учетом крутящего момента двигателя, а скорость
движения погрузчика с учетом угловой скорости коленчатого
вала.
Такая характеристика погрузчика представляет собой
графическое изображение зависимостей вида
#„ = /(»); Г = Ф(о),
где NM — тяговая мощность; NM = Tv\ T — сила тяги, Т =
= Рк — Pf (Рк —сила тяги на колесах; Pf — сила сопротивления
качению).
Тяговые характеристики определяют для движения
погрузчика с грузом и без груза, с включенными передним и двумя
ведущими мостами, с движением вперед и назад.
372
2. Тяговая характеристика погрузчика
с механической трансмиссией
Для сокращения объема расчетов и более ясного пояснения
приводим в прикладном изложении тяговый расчет погрузчика
без груза с одним включенным передним мостом, как для основного
расчетного случая.
Погрузчик имеет следующие данные: пгп — масса погрузчика,кг,
тп = 7150 кг; Gx — нагрузка на передний (ведущий) мост, кгс,
Gx — 3450 кгс; t'i, in, ini, Hv — передаточные числа в коробке
передач соответственно 6,48; 3,09; 1,71; 1,0; /г. п — передаточное
число главной передачи переднего моста, /г. п = 6,45; ir. к —
передаточное число раздаточной коробки, tr.K — 1,53; А —
колесная база, мм, А = 2550 мм; hg — высота центра тяжести
погрузчика, мм, hg = 1010 мм; а, Ъ — расстояния центра тяжести
соответственно от переднего и заднего мостов, а = 1320, Ъ = 1230 мм;
а — максимальный угол подъема пути, град, а = 10°; гк —
радиус качения передних колес без груза, см, гк = 54,3 см.
На погрузчике установлен двигатель мощностью 115 л. с.
с максимальными частотой вращения коленчатого вала 3200 об/мин
и крутящим моментом 29,1 кгс-м.
Для исследования тяговых качеств погрузчика обычно
составляют уравнение тягового баланса, когда необходимая сила
тяги Тк на колесах погрузчика в каждый заданный момент должна
быть равна сумме внешних сил, которые должен преодолевать
погрузчик, т. е.
TK = Pf + Pn + PB + PK9
где Pf, Рю РЪУ Ри — силы сопротивления соответственно качению
колес, подъему пути, воздуху при движении и разгону, кгс.
В то же время в зависимости от частоты вращения коленчатого
вала двигателя, согласно внешней характеристике последнего
{см. рис. 105, а), сила тяги на колесах (в кгс)
где Л1Д, А/д, пд — соответственно крутящий момент, эффективная
мощность и частота вращения коленчатого вала двигателя
согласно характеристике; i — передаточное число трансмиссии;
Tj — КПД механической трансмиссии.
Заменяя в уравнении тягового баланса силы их значениями
и исключая силу Рв как незначительную при сравнительно
небольших скоростях движения, формулу можно переписать в таком
виде: Г
где / — коэффициент сопротивления качению колес; g —
ускорение свободного падения; б — коэффициент учета вращающихся
масс; ; — поступательное ускорение погрузчика, м/с2.
373
Расчетные значения коэффициентов сопротивления качению
в зависимости от вида дорожного покрытия принимаем, как
указано в табл. 22.
Коэффициенты сопротивления качению / и сцепления
колес с дорогой ф
Т абл ица~22
Дорожное покрытие
Цементобетонное и
асфальтобетонное (сухое)
Грунтовое (сухое, плотное) ....
Грунтовое (неровное, грязное) . .
Песчаное (сухое)
Песчаное (влажное)
Снежная дорога
Лед
f
0,014—0,022
0,03—0,06
0,05—0,1
0,15—0,3
0,08—0,1
0,025—0,03
0,018—0,02
ф
0,6—0,8
0,4—0,6
0,3—0,4
0,6—0,8
0,5—0,65
0,15—0,25
0,1—0,15
При движении погрузчика на подъем перпендикулярно дороге
действует не полная масса погрузчика, а только часть ее тп, п =
= cos а, которая уменьшается при увеличении угла подъема. Тогда
общая сила сопротивления дороги
P*^Pf + Pn = mn. nSf + "ing sin a = mng (f cos a + sin a) =
где i|)
Тогда
— коэффициент дороги (табл. 23), i|) = f cos a + sin a.
б/.
Таблица 23
Параметры, принятые для числового расчета,
при sin 10°= 0,1736
Покрытие дороги
Лед
Ровный сухой плотный
грунт
Влажный песок . . .
Цементобетонное и
асфальтобетонное ....
Сухой песок ....
ф
0,1
0,5
0,57
0,65
0,7
f
0,019
0,045
0,09
0,016
0,25
= / -f sin 10°
0,1926
0,2186
0,2636
0,1896
0,4236
0,0456
0,191
0,221
0,246
0,26
374
Для определения коэффициента влияния вращающихся масс
на общую массу погрузчика необходимо знать момент инерции
маховика двигателя и всех колес. Влиянием вращающихся масс
трансмиссии, которое незначительно, можно пренебречь. Если
необходимые для этого данные отсутствуют, то коэффициент
влияния вращающихся масс
б =1,03 +а/1,
где а — коэффициент для погрузчиков, а = 0,04 ч- 0,05; iK —
передаточное число коробки передач с учетом включенной
ступени.
Поступательное ускорение погрузчика можно брать в пределах
0,15—0,25 м/с2.
Скорость движения погрузчика (в км/ч)
Va = 0,377 -Ь пл.
Пользуясь внешней характеристикой выбранного двигателя
(см. рис. 94, а), определим Мд, Мд, пд и Тк при частоте вращения
коленчатого вала двигателя в интервале 1000—3200 об/мин (через
каждые 200 оборотов). Результаты подсчетов приведены в табл. 24
(для сокращения таблицы интервалы частоты вращения
увеличены вдвое).
Таблица 24
Сводные данные скоростей движения, силы тяги и
динамических факторов на разных передачах
Яд, об/мин . .
Мд, л. с. ...
Мд, КГС-М . .
Уо, км/ч, при
различных
передачах:
первой . . .
второй . . .
третьей . , .
четвертой . .
Рк, кгс, при
различных передачах:
первой . . .
второй . . .
третьей . . .
четвертой . .
D = Рт1пгп при
различных
передачах: '•
первой . . .
второй . . .
третьей . . .
четвертой . .
1000
35
25,3
3,2
6,7
12,1
20,8
2420
1140
630
367
0,338
0,159
0,0882
0,0514
1400
53
27,2
4,48
9,38
16,9
29,2
2600
1225
678
395
0,363
0,172
0,0949
0,0552
1800
71
28,7
5,76
12
21,8
37,5
2740
1290
715
416
0,383
0,181
0,1000
0,0533
2200
89
29,1
7,04
14,75
26,6
45,8
2780
1310
725
422
0,389
0,183
0,1015
0,059
2600
103
28,5
8,32
17,4
31,5
54,1
2720
1280
710
413
0,38
0,179
0,0994
0,0579
3000
112
26,8
9,6
20,1
36,3
62,5
2560
1200
668
388
0,358
0,158
0,0935
0,0544
3200
115
25,8
10,25
21,5
38,7
66,6
2470
1160
643
374
0,344
0,162
0,0900
0,0524
375
3. Динамическая тяговая характеристика
Для сравнительной оценки тяговых качеств погрузчика
используют так называемый динамический фактор. Он представляет
собой силу тяги, развиваемую погрузчиком на ведущих колесах,
уменьшенную на силу сопротивления движению воздуха и
отнесенную к полной массе погрузчика. Для нашего случая
динамический фактор (в кгс/кг)
Как видно из формулы, при равномерном движении D = \|).
Зависимость динамического фактора от скорости движения
на каждой передаче называют динамической характеристикой.
Динамический фактор в зависимости от силы тяги при
движении на разных передачах по горизонтальному пути (в кгс/кг)
Для нашего случая данные расчета приведены в табл. 24.
Как известно, преодолеваемое сопротивление дороги
ограничивается буксованием ведущих колес, поэтому динамический
фактор ограничивается также силой тяги 7\ Тогда
Ар = Zr > где Г = ОхШзф,
здесь Gx — нагрузка на ведущий мост; тв — коэффициент
перераспределения нагрузки по осям погрузчика при движении
передним ходом.
Для нашего случая
Л cos a
т
где А — колесная база; h — высота центра тяжести погрузчика.
При включении одного заднего моста в знаменателе знак
меняется на минус а при включении обоих мостов:
для переднего моста
/ cos а (Ь — (ph)
тв = 5
и для заднего моста
„ cos а (а + фй)
/пп = ,
где а, Ь — расстояния центра тяжести погрузчика соответственно
от осей переднего и заднего мостов.
Значения тъ и Т для нашего случая в зависимости от
коэффициента сцепления приведены ниже.
Ф
тв
Т
0,1
0,946
326
0,5
0,822
1420
0,57
0,805
1580
0,65
0,784
1760
0,7
0,772
1860
376
в
0,5
ОМ
0,3
од
0,2
[передача
И передача
0,1
0,№б
u iO 20 JO UO 50 6Q
Рис. 173. Динамическая тяговая характеристика погрузчика
Ш передача
(f*0,25)
<b*f+sunHr(f°0,0!9)
(f'-O,OW)
ТЩМЩГ
Ш&на
По данным расчета динамического фактора D (табл. 24)
строится график (рис. 173), на который также наносят значения D^
при движении погрузчика по разным дорожным покрытиям.
График динамического фактора позволяет определить
максимальную скорость движения по дороге с известным
коэффициентом ф сцепления, максимальный преодолеваемый подъем при
заданном коэффициенте / сопротивления качению,
ускорение /.
Определим максимальные скорости движения погрузчика по
горизонтальной дороге. Введем следующие обозначения: D/maXf
D* — динамический фактор на i-й передаче соответственно при
максимальном крутящем моменте двигателя и при максимальной
частоте вращения коленчатого вала последнего.
Возможны случаи: погрузчик двигаться не будет, / > Лф;
погрузчик не может двигаться на t-й передаче, Dt max < f < £>ф;
Наибольшая скорость движения погрузчика определяется
максимальной частотой вращения коленчатого вала двигателя и
ступенью передачи f < D* и / < £>ф; скорость погрузчика
определяют пересечением динамической характеристики с прямой
(СМ. РИС. 173), D*t < f < Dfmax.
Поскольку при движении по горизонтальному пути а = О
р D = jf, следовательно, максимальные скорости погрузчика
Определяют пересечением кривых динамического фактора с пря-
13 А. Ф. Базаяов, 1\ В. Забегалов 377
ост
£
?
8-
с
а:
с
в-
1
CQ
Я
ГО
£
1С
о
ic
рузчи
и.
О
с
с
о
№
ё
с:
л"
«Ж
о
5
*з
U
В
к
се
с
X
тс
&
cf
©•
1
6Ш
max
«Г
8
«^
к
оро
Покрытие д
к
С/
tr
Си
его
болыи
is
д
hr
Ю
О
5
>>>
со
S
S
и.
ИЛЫ Т
о
нз
3
5
наибе
к
ю
ело
S
»—• ■^ С4)
о со
г-* 00 Ь-
ОрО Г 01
,0456
,197
,221
1ЧО О О
о
о4 о" о"
00 СО
о о
<м о
5 ^!§
0 0 О
^ СО О
СО CD О
со г-^. %н
^ф OCSJ
^ч О ?>-
(М CSJ 1—1
О О О
о" о" о*
о w
• о. • Я •
•a -si
Лед . .
Грунтовая
а . . . .
Влажный
Цементобе
ьто
ое, асфал
00^
т-. О
о о
СО О
,246
,26
ОО
CD h-
о*4 о"
28'
о '
S |
о
со
1
ъ>
ют
О (М
о" о"
♦
о
онное . , .
Сухой пес
ь
мой значений ?,
отложенных на графике в том же
масштабе. Поэтому
максимальная скорость при
движении по ровному
плотному и сухому грунту, а
также по дорогам с цемен-
тобетонным и
асфальтобетонным покрытиями
определяется максимальной
частотой вращения
коленчатого вала двигателя
(см. табл. 24).
Максимальный подъем,
преодолеваемый
погрузчиком, определяем из
условий максимальной
силы тяги на колесах,
ограничения угла подъема
по сцеплению.
В первом случае из
уравнения D ~ / cos a +
+ sin а следует, что при
малых углах (cos a =
= 1) sin a = Df, откуда
sin ctmax = £>max — /. На
графике значения sin a
определяют как разность
ординат между значением
динамического фактира D
и /, приведенных в табл. 24.
По этим данным находят
максимальные углы
преодолеваемого подъема на
разных передачах.
Во втором случае углы
подъема можно
определить по формуле sin amax ==
= D<p — f. Значения
ординат берут из табл. 24
или графика динамической
характеристики.
Результаты подсчета
максимального угла подъема
приведены в табл. 25.
Таким же путем
выполняют и другие тяговые
расчеты погрузчиков.
378
4. Определение передаточных чисел
в механической коробке передач
Как и в автомобилях, передаточное число для первой передачи
в коробке передач погрузчиков
j __ "Фтах Гктп
1
где г|)тах — максимальный коэффициент сопротивления дороги,
для автопогрузчиков и одноковшовых погрузчиков a[}max = 0,3 -*-
ч- 0,35; гк — радиус качения ведущих колес, м; Л1тах —
максимальный крутящий момент двигателя, кгс-м; ir%n — передаточное
число главной передачи; rj — КПД всей трансмиссии.
Полученное значение проверяют по сцеплению ведущих колео
Mmax i\h. пЦ
где Gx — нагрузка на ведущий мост.
Передаточное число второй передачи берут для
трехступенчатой коробки /n = i/"i'i, для четырехступенчатой i\\Vi\\
передаточное число третьей передачи для трехступенчатой коробки /ш = 1,
для четырехступенчатой коробки im = Yh и 4v ^ !•
5. Тяговая характеристика погрузчика
с гидромеханической трансмиссией
Более сложным является тяговый расчет погрузчика с
гидромеханической передачей, где сначала графоаналитическим
способом определяют силу тяги в зависимости от скорости движения
погрузчика, а потом уже выполняют сам тяговый расчет.
Одновременно с построением тяговых характеристик определяют число
передач коробки передач и передаточное отношение их.
Приводим принципиальное построение тяговых характеристик
в общем виде.
Для упрощения расчета и выявления основных
закономерностей при построении тяговых характеристик будем рассматривать
только зависимость Т = ф (v). Полагаем, что буксование колес
отсутствует и КПД механической передачи является постоянным
независимо от включенной передачи коробки передач. Вначале
не будем учитывать также сопротивление колес качению. Все
указанные допущения можно путем несложных коррективов
учесть впоследствии.
Как известно, в гидромеханической передаче преобразуется
момент Мг двигателя в момент М2 на выходном валу передачи
в функции двух аргументов — частоты вращения пг коленчатого
вала двигателя и частоты вращения п% ведомого вала. Такую
функциональную связь рассмотрим применительно к
«непрозрачному» гидротрансформатору.
13* 379
Поскольку момент на ведомом валу гидромеханической
передачи в силу тяги преобразуется с помощью механических передач,
аналитическое выражение М2 и Т отличается только постоянным
коэффициентом с. Действительно,
Т = сМ2, где с = ~i7^L >
здесь it — передаточное число выбранной передачи коробки
передач; 71м — КПД механической передачи (постоянное по условию).
При построении тяговой характеристики считают, что
двигатель все время работает на максимальной мощности, при которой
моментная характеристика двигателя в точке В (см. рис. 95, а)
переходит с регуляторной ветви на безрегуляторную.
Желательно, чтобы двигатель в процессе перемещения погрузчика был
бы нагружен моментом, соответствующим этой мощности, т. е.
М — ^лдия
1 VI л ' г •
где Яд — частота вращения коленчатого вала двигателя в точке
перехода с регуляторной характеристики на безрегуляторную
(см. рис. 95).
Как известно, мощность, реализуемая на ведущих колесах,
отличается от мощности двигателя и равна
Нужно учитывать также, что в гидромеханической трансмиссии
момент на валу двигателя равен моменту на входном валу
трансформатора, т. е. Мд = М19 а пх = пА.
Для построения тяговой характеристики гидромеханической
трансмиссии необходимо знать общую моментную характеристику
выбранного гидротрансформатора, выражающую зависимость
моментов от п2 или от передаточного числа и В общем виде
принимаем ее такой, как приведено на рис. 174, а. На ее поле обычно
откладывают абсолютные значения моментов Мг = f (i) и М2 =
= / (/), полученные при пг = const и г\*. С небольшим
искажением моменты на рисунке показаны линейными. Кроме моментов
характеристика содержит также вычисленные на их основании
зависимости КПД
где К — коэффициент трансформации момента.
Буквенные обозначения, отмеченные на рисунке звездочкой,
соответствуют значениям, получаемым при максимальном КПД
(г)*) гидротрансформатора.
Следует напомнить, что в принципе гидромеханическая
трансмиссия может быть применена без механической коробки передач,
но благодаря низкому КПД гидротрансформатора при небольшой
380
/Г,
MfCOUSt
а) 6)
Рис. 174. Внешние характеристики «непрозрачного*
гидротрансформатора:
а — некомплексного; б —» комплексного
частоте вращения ведомого вала экономически нецелесообразно
применять такую трансмиссию на погрузчиках. Чтобы повысить
экономичность трансмиссии, обеспечивают турбинному колесу
большую частоту вращения, при которой КПД
гидротрансформатора является наибольшим, а чтобы уменьшить частоту вращения
выходного вала гидромеханической трансмиссии, устанавливают
после гидротрансформатора механическую коробку передач. Как
и на автомобилях, коэффициент трансформации принимают
соответствующим КПД r|mln == 0,8, определяющим силовой режим
гидромеханической трансмиссии. Он позволяет уменьшить
диапазон механической коробки передач, работающей вместе
с гидротрансформатором (под диапазоном коробки передач
понимают отношение передаточного числа низшей передачи
к высшей).
Поскольку максимальное значение КПД г)* гидромеханической
трансмиссии соответствует вполне определенному моменту М2
(см. рис. 174, а) на ведомом валу трансформатора, то точки Г*
тяговой характеристики должны лежать на кривой постоянной
мощности
Т* — ^Д m
Пользуясь графиком внешней характеристики «непрозрачного»
гидротрансформатора при работе его в пределах высокого КПД,
строят тяговую характеристику гидромеханической трансмиссии
381
Рис. 175. Тяговая характеристика
гидромеханической трансмиссии
/? гидромеханической
передам
шн/ч
пснрузчика. При этом следует учитывать изменение передаточного
отношения, которое известно из внешней характеристики
гидромеханической трансмиссии (см. рис. 174, а).
При построении тяговой характеристики (рис. 175) на
горизонтальную ось наносят точку Аъ соответствующую
максимальной скорости vAi на первой передаче. На отрезке ОАХ строят
кривую КПД аналогично приведенной (см. рис. 174, а). На оси
симметрии этой кривой (см. рис. 175) наносят точку,
соответствующую ординате момента М2 на выходном валу коробки
передач при г}*, соединяют эти точки прямой и продолжают ее до
пересечения с осью ординат.
Для линейных зависимостей, приведенных на рис. 175, точка
Вг будет соответствовать ординате тяговой силы Тт на первой
передаче. Максимальная скорость на этой передаче
VAl
где iT, fMb iTt n — передаточные числа соответственно
гидротрансформатора, механической коробки на первой передаче и главной
передачи.
Сила тяги при включении первой передачи в коробке передач
1 ы
382
Аналогичным путем строят тяговые характеристики для других
передач коробки передач.
Точки, соответствующие переключению передач в коробке,
назначают в расчете поддерживать наиболее высокий КПД во
время работы погрузчика. Этими точками в данном случае могут
служить // и ///. Им соответствуют скорости t>IImin и 1>шт1п.
Максимальную скорость движения t;IIImax обычно назначают
из условия нагрева гидромеханической трансмиссии, который
определяется минимально допустимым по этой причине КПД
гидротрансформатора (на рисунке он обозначен Timin).
Точки Вi9 Вц и Вщ в данном случае для трех передач лежат
на гиперболе, по закону которой изменяется мощность на
выходном валу гидротрансформатора N2 » Л/дТ)мг|*.
Как видно из графика, гидромеханическая трансмиссия
деформирует характеристику двигателя, только небольшие
заштрихованные участки характеристики не охватываются кривой. Они
значительно меньше, чем при трансмиссии g механической
коробкой передач без гидротрансформатора. Переходы с одной передачи
на другую при гидромеханической трансмиссии получаются
исключительно плавными.
Таким же путем строят тяговую характеристику для
комплексного гидротрансформатора. Пользуясь графиком внешней
характеристики (см. рис. 99), строят упрощенный график (см.
рис. 174, б). Здесь с переходом режима работы
гидротрансформатора с одним реактором на режим работы гидромуфты правая
ветвь кривой КПД кончается в точке С, что соответствует примерно
КПД г) ^ 85%. При этом ординаты ССг пересекаются g линией
момента Л12тш, передаваемого выходным валом
гидротрансформатора, когда J Af 21 ^ I ^IiI и М1 + М2 = 0. Момент УИ3
начинает резко снижаться по кривой, и при i = 1 УИ2 будет
равно нулю.
При построении тяговой характеристики по типу
характеристики, приведенной на рис. 175, на оси абсцисс наносят график
комплексного гидротрансформатора (см. рис. 174, б) и линию
момента М2 проводят из точки Сх через точку на оси симметрии
кривой КПД, соответствующей моменту Af| при г)*. Изменение
момента М2 после точки Сг не создает затруднений для построения
тяговой характеристики, так как оно выходит из необходимой
зоны для построения кривой.
При гидротрансформаторе с двумя реакторами начинают
построение не из точки С, а из точки D, откуда ведут
вертикальную линию до пересечения с горизонталью,
соответствующей M2mln.
После выявления значений параметров гидромеханической
трансмиссии строят тяговые динамические характеристики
погрузчика, пользуясь способом, приведенным для погрузчика с
механической коробкой передач.
Глава 19
РАСЧЕТ УСТОЙЧИВОСТИ ПОГРУЗЧИКОВ
1. Общие положения
У автопогрузчиков как машин с высоким расположением
центра тяжести с поднятым грузом расчет устойчивости ведут
по методике, принятой для стреловых кранов. Критерием
устойчивости является допускаемый коэффициент k = Му/М0, где Му
и Мо — удерживающий и опрокидывающий моменты относительно
грани опрокидывания. У одноковшовых погрузчиков критерием
устойчивости является допустимый угол склона поверхности, на
котором погрузчик может находиться без опрокидывания (в
равновесии) под действием внешних сил.
Различают первичное и полное опрокидывание погрузчика;
первичное опрокидывание — обратимый процесс, состоящий
в отрыве одной или нескольких опор колесного погрузчика или */з
опорной длины гусеничного погрузчика от рабочей поверхности;
при снятии внешних нагрузок (разгрузке ковша и др.) погрузчик
возвращается в рабочее положение.
Опрокидывается погрузчик по грани, иногда выходящей за
опорный контур. Форма и размеры опорного контура зависят
от типа и конструкции ходовой части, принятой системы поворота
погрузчика, а также от места расположения погрузочного
оборудования на погрузчике (рис. 176).
Погрузчик с жесткой подвеской колес и бортовой системой
поворота имеет прямоугольный опорный контур (рис. 176, я),
образованный соединением точек Л, В, С и D, являющихся
центрами пятен контакта каждого колеса. Условно считают, что эти
точки находятся на пересечении проекций линий колеи ходовой
части и осей мостов погрузчика. Опорный контур подобного
погрузчика лежит в плоскости рабочей поверхности и является
наиболее оптимальным.
Для погрузчиков с задним балансирным мостом, поворотными
колесами и рабочим оборудованием, устанавливаемым на раме,
опорный контур имеет треугольную форму (рис. 176, б) с
вершиной, расположенной на оси качания моста. При этом основание
треугольного опорного контура лежит по оси переднего моста
в плоскости рабочей поверхности, а вершина поднята на высоту
оси качания моста.
При использовании переднего балансирного моста
(традиционная схема трактора) опорный контур имеет также треугольную
форму. Однако расположение вершины его зависит от места
установки погрузочного оборудования. При креплении оборудования
на переднем мосту опорный контур располагается вершиной назад
(рис. 176, в), при установке погрузчика на раме или заднем мосту
опорный контур вершиной вытянут в направлении переднего
384
Рис. 176. Опорные контуры погрузчиков;
а—е — пневмоколесных; ж, в •— гусеничных* /—/ — направление линии склона при
определении боковой устойчивости; 11 —JJ *=* направление линии склона при расчетах
продольной устойчивости
моста (рис. 176, г). В связи со значительным смещением общего
центра тяжести вперед при монтаже погрузочного оборудования
на базовом шасси и появлении груза в ковше схема, приведенная
на рис. 176, в, обеспечивает лучшие параметры устойчивости
и является более предпочтительной.
Колесные погрузчики с шарнирно-сочлененной системой
поворота имеют треугольный опорный контур, деформирующийся
при увеличении угла складывания полурам. При этом форма его
зависит от подвески ходовой части. При использовании схемы
ходовой части с задним балансирным мостом и установке
оборудования на передней полураме (рис. 176, д) в соосном положении
форма и расположение опорного контура аналогичны схеме,
приведенной на рис. 176, б. При взаимном повороте полурам
опорный контур с сохранением размеров и положения основания
вытягивается таким образом, что вершина его находится на
пересечении продольной оси погрузчика и оси балансирного
моста А ВО.
385
При балансирной подвеске передней полурамы и соосном
положении погрузчика опорный контур аналогичен схеме,
показанной на рис. 176, <?. При складывании полурам опорный
контур получают соединением точек контакта передних колес
с осью АВО.
В связи с особенностью конструкции для шарнирно-сочленен-
ных погрузчиков рассматривают устойчивость задней полурамы,
опорные контуры для которой имеют идентичные треугольники
CDE в соосном положении и деформирующиеся при повороте
в форме фигуры CD' E.
Для гусеничных погрузчиков наиболее характерно применение
жесткой ходовой части, которая обеспечивает прямоугольный
опорный контур устойчивости (рис. 176, ж). В отдельных случаях
для погрузчиков используют гусеничную ходовую часть теле-
жечного типа с передней балансирной балкой, которая образует
треугольный опорный контур с вершиной, направленной в
сторону рабочего оборудования (рис. 176, з). Рабочее оборудование
при данной конструктивной схеме крепится на раме погрузчика.
Треугольный опорный контур гусеничных погрузчиков
обеспечивает худшие параметры устойчивости по сравнению с
прямоугольным при жесткой ходовой части.
2. Устойчивость одноковшовых погрузчиков
Для одноковшовых погрузчиков определяют собственную и
грузовую устойчивость, т. е. без груза и с грузом в ковше при
полностью заправленном погрузчике и с водителем на своем
рабочем месте. Расчет устойчивости рассматривают при трех
положениях стрелы: в транспортном на максимальном вылете ковша
и наибольшем подъеме (см. рис. 43), когда погрузчик стоит на
месте.
Продольную устойчивость колесных и гусеничных
одноковшовых погрузчиков рассчитывают одинаково относительно передней
и задней оси опрокидывания. Погрузчик располагают так, чтобы
его продольная ось была перпендикулярна линии наибольшего
склона (//—// см. на рис. 176).
Тогда продольная статическая устойчивость характеризуется
предельными углами подъема ап и уклона ау, на которых может
стоять заторможенный погрузчик под действием силы тяжести,
не опрокидываясь (рис. 177).
Вертикальная плоскость, проведенная через центр тяжести
при расположении погрузчика под уклон, проходит через точки А
и В контакта передних или Л' и В' направляющих колес; при
установке на подъеме она проходит через точки С и D контакта
задних колес или С и D' задних опорных катков гусеничного
хода.
Зная положения центров тяжести порожнего и груженого
погрузчика для трех основных положений стрелы, определяют?
386
Рис, 177. Схемы одноковшовых погрузчиков:
а « колесного; б *= гусеничного; / « на уклоне; 2 « на подъеме
предельные углы продольной статической устойчивости на подъем
по формулам:
для колесного погрузчика
и для гусеничного погрузчика
-?
Предельные углы продольной устойчивости под уклон
составят
для колесного погрузчика
ау = arctg
387
и для гусеничного погрузчика
где х9 хПУ h — соответствующие координаты центров тяжести;
1Т — продольная база; ст — межосевое расстояние от ведущей
звездочки до заднего опорного катка, ст = О при опорных задних
звездочках.
Для колесных погрузчиков при определении предельных
углов продольной устойчивости деформации шин не учитывают,
что идет в запас. Для гусеничных погрузчиков с поднятыми
ведущими звездочками полученные углы характеризуют первичную
устойчивость, так как при наклоне назад погрузчик обопрется
на задние наклонные ветви гусеничных цепей.
Для погрузчиков с шарнирно-сочлененными рамами кроме
соосного положения определяют углы продольной устойчивости
при максимальном угле складывания полурам (рис. 178). Для
этого первоначально определяют положения центров тяжести
передней (грузовой) и задней (моторной) частей погрузчика; затем
находят координаты центра тяжести для соосного положения
полурам погрузчика (точка О) для трех положений стрелы
(транспортного, максимального вылета и наибольшего подъема).
Тогда горизонтальная координата центра тяжести погрузчика
от передней оси
где Glt G2 — веса соответственно грузовой и моторной частей
погрузчика; L — продольная база; хг и х% — расстояния от осей
ведущих мостов до центров тяжести грузовой и моторной частей
погрузчика.
Вертикальная координата центра тяжести погрузчика
находится
(L+Xx + Xt) ~ ь
где hly ft2 — вертикальные координаты соответственно грузоврй
и моторной частей погрузчика; х — горизонтальная координата
центра тяжести от передней оси.
Затем определяют положения центров тяжести (точка О') для
полностью повернутых на угол р полурам погрузчика.
Расстояние между центрами (между точками k и /) тяжести
грузовой и моторной частей погрузчика в плане
kV = V{LX + xtf + (L2 + лг2)2 - 2 (Ьг + xx)(L2 + хг) cos (180 - р),
где Llt L2 — расстояние от центра поворота соответственно
до передней и задней осей; хъ хг — координаты от осей ведущих
мостов до центров тяжести грузовой и моторной частей погрузчика.
388
Рис. 178, Схемы расчета одноковшового колесного погрузчика с шар-
нирно-сочлененной рамой
Тогда расстояния
+О2
on uv
Минимальные расстояния от общего центра тяжести до
передней оси опрокидывания х* и до задней хъ составят (обозначения
см. на рис. 178)
х'=.х — • х —х —
Вертикальная координата центра тяжести погрузчика при
сложенном положении полурам
где h1 и /ц — вертикальные координаты грузовой и моторной
частей погрузчика; kV, O'V — расстояния (см. рис. 178).
Тогда предельные углы продольной устойчивости шарнирно-
сочлененного погрузчика под уклон:
для соосного положения полурам
— nrH-tf G2(L + x1 + x2)2- хг (Сп + G2)(L + *i + x2) .
ayarcig
y-arcig Ga(L+
(/ii + /i)[L
X (Gx + G2) + /Ц (L + Xi + x2) (Gx + G2)
для повернутого положения полурам
xrkP'kV
Предельные углы продольной устойчивости шарнирно-сочле-
ненного погрузчика в статическом состоянии на подъеме:
для соосного положения
_ x)
где х — горизонтальная координата центра тяжести от перед-
ней оси;
для сложенного положения полурам
x2-slf-kl'
ап = arctg
V ,s0> •
Полученные предельные углы статической продольной
устойчивости на подъеме и уклоне сравнивают с наибольшими углами
подъездных путей и рабочих площадок.
При оценке собственной устойчивости колесных и гусеничных
погрузчиков должны проверяться углы подъема и уклона при
транспортном положении стрелы без груза в ковше
где /сб = 1,5 — коэффициент безопасности, учитывающий влияние
динамических нагрузок (торможение на уклоне, наезд на
препятствия и др.); [<2д] — наибольший угол уклона подъездных путей,
град, [ад] - 25^
При расчете грузовой устойчивости погрузчиков на
наибольшем вылете и максимальном подъеме стрелы должно соблюдаться
условие
390
Рис. 179. Расчетные схемы определения боковой устойчивости погрузчиков?
а «в колесного; б «= гусеничного
где ау, Р, ап. г — предельные углы статической продольной
устойчивости с грузом в ковше на уклоне и подъеме соответственно;
кб — коэффициент безопасности, к6 = 2,0; ар — допустимый угол
рабочей площадки, град, ар = 5°.
Боковую устойчивость погрузчиков рассчитывают в
соответствии с типом и конструкцией ходовой части и принятым опорным
контуром по предельным углам в боковом направлении. При этом
погрузчик располагают на наклонной поверхности таким образом,
чтобы боковые грани опорного контура были перпендикулярны
основной линии склона / — / (см. рис. 176).
Общий центр тяжести погрузчика может быть смещен в
поперечном направлении относительно продольной оси ее. Поэтому
углы боковой устойчивости необходимо определять только в
направлении смещения центра тяжести, так как они будут
наименьшими. Тогда боковая статическая устойчивость определяется
предельными углами у склона, на которых колесный или
гусеничный погрузчик, установленный боком, сохраняет равновесие
под действием силы тяжести (рис. 179). Вертикальная плоскость,
проведенная через центр тяжести, проходит через боковую грань
контура опрокидывания.
Для колесных погрузчиков с поворотными колесами и жесткой
рамой и гусеничных погрузчиков с балансирной балкой
предельные углы боковой статической устойчивости для порожнего
и груженого состояния и трех положений стрелы (см. рис. 179, а)
= arctg -г = arctg
/В
\2
891
где В — ширина колеи погрузчика; е — боковое смещение центра
тяжести относительно плоскости продольной оси погрузчик-!;
х — координата центра тяжести от оси передних колес в
продольном направлении; h — высота центра тяжести; в — угол
треугольного опорного контура, образованный его боковыми
сторонами.
Для колесных и гусеничных погрузчиков с жесткой ходовой
частью предельные углы боковой статической устойчивости
находят в соответствии со схемой, представленной на рис. 179, по
формулам:
для колесных погрузчиков (грань опрокидывания FF
проходит по колее ходовой части)
для гусеничных погрузчиков (грань опрокидывания ЕЕ про-,
ходит по наружному обрезу гусениц)
V-arctg
где В — ширина колеи ходовой части; Ь — ширина гусеницы;
е — боковое смещение центра тяжести от плоскости продольной
оси погрузчика; h — высота центра тяжести.
Наименьшие углы боковой статической устойчивости бывают
при наибольшем подъеме стрелы с грузом в ковше ушш.
Для колесных погрузчиков с шарнирно-сочлененной рамой
при определении углов боковой устойчивости в статическом
состоянии рассматривается устойчивость частей погрузчика,
соединенных горизонтальным балансиром. В расчетах углов боковой
устойчивости существенное значение имеет положение
горизонтального шарнира для обеспечения трехточечной подвески ходовой
части. Наиболее широко в конструкциях шарнирно-сочлененных
одноковшовых погрузчиков применяется схема с балансирной
подвеской заднего моста, который может качаться относительно
рамы погрузчика в поперечной плоскости на угол rt:8—12Q.
Рассмотрим последовательность определения угла боковой
устойчивости для шарнирно-сочлененных погрузчиков с
балансирной подвеской заднего моста при угле р складывания грузовой
и моторной полурам погрузчика (рис. 180).
В принятой схеме в точке К расположен центр тяжести грузо-
эой части погрузчика, в точке D — моторной части; в точке С —
Общий центр тяжести погрузчика, а в точке S подвешен балан-
сирно задний мост погрузчика.
Для расчета боковой устойчивости рассматривают воздействие
на передний мост погрузчика в точке Р. Первоначально
определяют геометрические размеры элементов, указанных на схеме.
892
Bt'dr
P1
S-6
с
Рис. 180. Схема расчета
боковой устойчивости
одноковшового колесного
погрузчика с шарнирно-
сочлененной рамой
Наименьшее расстояние между центрами тяжести грузовой и
моторной частей погрузчика
KD =
tf + (L2 - x2f -
(L2 + x2) cos (180° - P).
Тогда расстояние до общего центра тяжести от центра тяжести
грузовой части погрузчика в плоскости, проходящей через центр
тяжести грузовой и моторной частей,
__ Gj-KD
— i 7^""
где Gu G2 — веса соответственно грузовой и моторной (без балан-
сирного моста) частей погрузчика.
Из веса моторной части погрузчика исключают вес заднего
балансирного моста, так как он не оказывает существенного
393
стабилизирующего действия и составляет около 10—13% веса
всего погрузчика, что повышает устойчивость погрузчика.
Затем находим угол со между плоскостью, проходящей через
центры тяжести грузовой и моторной частей погрузчика, и
плоскостью, проведенной через ось симметрии моторной части,
со = arcsin (Il/ + Xl) sin (180е - р).
Вспомогательный угол 0 = 180° — со.
Расстояние от общего центра тяжести до центра балансирной
подвески
CS = VCD2 + х\ - 2CDx2 cos G,
где CD = KD — КС.
Далее определяют углы S и \|>:
I = arcsin CDcsjn 9 , *
Перпендикуляр OF, опущенный из центра поворота полурам
иа линию, проходящую через центр балансирной подвески, и
общий центр тяжести
OF = I2sinS.
Тогда расстояние FS = L2 cos £.
Затем в треугольнике NPM определяют расстояния
N0=T5r$; MN = N0 — L1; MP=* MNig<p.
Далее в треугольнике FON находят сторону NF — OF ctg ф
и в треугольнике SCW сторону NS = NF + FS = О/7-ctg \|) +
+ L2 cos t
Расстояние от общего центра тяжести С до точки Р пересечения
оси переднего моста с проекцией плоскости, проходящей через
центр балансирной подвески и общий центр тяжести погрузчика,
cos
Высотная координата общего центра тяжести может быть
выражена формулой (см. сеч. А—А на рис. 180)
где Л1? Л2 — высотные координаты соответственно грузовой и
моторной частей погрузчика.
Далее определяют высоту точки приложения составляющей Gfj
силы Go, приведенной к оси переднего моста в плоскости,
проходящей через центр S балансирной подвески и общий центр Си
тяжести (сеч. Б—J5),
394
Тогда углы боковой устойчивости при опрокидывании в
правую и левую стороны находят по формулам (вид Г на рис. 180)
(В — 2е) ,
7Л = arctg у щ ; ; уп = arctg
где е = MN tg \|?.
Наименьший из полученных углов устойчивости сравнивается
с наибольшим возможным по условиям эксплуатации погрузчика
углом наклона рабочей площадки.
Для безопасной эксплуатации погрузчика должно соблюдаться
равенство
Vmln ^ г„ 1
/eg н
где кб — коэффициент безопасности, учитывающий
одновременность действия статических и динамических нагрузок, торможение
погрузчика и оборудования, переезд препятствий и др., кб =*
= 2,0; [ар] —допустимый угол наклона рабочей площадки, град,
Чем больше превышение полученных углов продольной и
боковой устойчивости по сравнению с допускаемыми, тем безопаснее
работа погрузчика, который в меньшей степени реагирует на
динамические воздействия, возникающие при наезде на неровности
и местные препятствия, торможении и поворотах на уклонах.
3. Устойчивость автопогрузчиков
Вилочные погрузчики проверяют на продольную и поперечную
устойчивость согласно требованиям СЭВ.
При расчете принимают номинальный груз с формой куба,
у которого сторона равна удвоенному расстоянию от центра
тяжести груза до спинки грузовых вил. В наклонном положении
погрузчик должен удерживаться основным тормозом.
Продольную устойчивость рассчитывают в пяти разных
случаях.
Первый случай. Автопогрузчик с поднятым на полную высоту
номинальным грузом и отклонением вперед до отказа
грузоподъемником стоит на горизонтальной площадке. При расчете следует
учитывать дополнительный наклон грузоподъемника вперед из-за
просадки переднего моста и упругой деформации элементов
конструкции (рис. 181, а). Такой случай встречается при
штабелировании груза и считается самым тяжелым для устойчивости.
При расчете приняты обозначения:
QH — грузоподъемная сила;
Сц G2 — веса соответственно номинального груза,
автопогрузчика без грузоподъемника и
вертикально установленного грузоподъемника, кгс;
395
О, О и 02 — центры тяжести соответственно груза,
автопогрузчика без грузоподъемника и вертикально
установленного грузоподъемника;
С — ось поворота рамы грузоподъемника;
О', Ог — центры тяжести груза и грузоподъемника,
отклоненных вперед на угол |3 = рх -f- |J2;
Pi»P2^20 — углы наклона соответственно грузоподъемника
вперед до отказа и из-за проседания шин
вместе с упругой деформацией конструкции;
#1, #2» #2, U 1\
h, hl9 h2 — вылеты центров тяжести от оси передних колес
и их высоты от земли;
ас, hc — координаты оси поворота грузоподъемника
относительно оси передних колес.
Вылеты центра тяжести грузоподъемника и груза от оси перед-
них колес при наклоне можно определить по формулам
V =. ас + О'С cos (у — р),
где
О'С = 0С
О'2С - О2С = /(a2~«c
и углы наклона к горизонту линий ОС и О2С
Коэффициент грузовой устойчивости
к — щ; >• 1,1.
Второй случай. Автопогрузчик с поднятым на полную высоту
номинальным грузом и нормально установленным к основанию
автопогрузчика грузоподъемником стоит на наклонной площадке
(см. рис. 181, б).
Согласно рекомендациям СЭВ уклон площадки принимают
равным 4% (а = 2° 16') для автопогрузчиков грузоподъемностью
до 5 т и 3,5% (а = 2°) — свыше 5 т.
Соответственно принятым на рисунке обозначениям
коэффициент грузовой устойчивости
^2 (02 — ^2 tg a) ^ , t
Коэффициент грузовой устойчивости в этом случае,
рекомендованном СЭВ, может быть меньше, чем в первом случае.
Третий случай. Автопогрузчик с грузом при увеличенной его
массе на 10%, т. е. при 1,1Q, поднятым от земли на высоту h =*
= 300 мм, и отклоненным назад грузоподъемником до отказа
396
рис, 181. Схемы продольной устойчивости вилочных погрузчиков с под-
Ьятым грузом:
0 ** при штабелировании; б « на уклоне
Рис. 182. Схемы продольной устойчивости вилочных
погрузчиков с опущенным грузом: а — на горизонтальной
площадке; б — на наклонной площадке
движется с максимальной скоростью и затормаживается с
замедлением j = 1,5 м/с2 (рис. 182, а).
При расчете приняты обозначения;
О, О2 — центры тяжести соответственно груза и
грузоподъемника, когда груз поднят на 300 мм при
вертикально установленном грузоподъемнике;
Ох — центр тяжести автопогрузчика без
грузоподъемника;
О", О2 — центры тяжести соответственно груза и
грузоподъемника, когда груз поднят на 300 мм и
грузоподъемник отклонен назад на угол (3 = рх — р2»
Pi» Р2 ^ 2° — углы наклона соответственно грузоподъемника
назад и от проседания шин вместе с упругой
398
деформацией конструкции, град;
С — ось поворота рамы грузоподъемника;
av a2, al> I, /",
Л, /г", hv hi — вылеты центров тяжести от оси передних колес
и их высоты от земли.
Значения величин Q, Qlt G2, aQ, hQ такие же, как и в первом
случае.
Вылеты о|, V1 и высоты h\ и h" определяют по формулам
а$ - aQ + OIC cos (72 + Р); Г = а0 + OX cos (у + р)(
/й = ft0 + О2С sin (72 + P)l W = К + OX cos (7 + p),
где
00
02C « /(fl, - a,? + (/i2 - /гс)2}
углы наклона к горизонту
Коэффициент устойчивости
где F, Ft, F2 — силы инерции соответственно груза, автопогруз*
чика без грузоподъемника и грузоподъемника, определяемые
по общей формуле
^jV = Q или Л^ = Gx и iV = G2; / — замедление, м/с2; g —
ускорение свободного падения).
Четвертый случай. Автопогрузчик с номинальным грузом,
поднятым от земли на h = 300 мм и отклоненным назад грузо-
цодъемником стоит на площадке с уклоном 18%, т. е. наклоненной
под углом а = 10Q 12' (см. рис. 182, б).
При тех же обозначениях, что и в третьем случае, получим
коэффициент устойчивости
Ci(fl
Q d" + h" tg a) ^ i,i.
Пятый случай. Автопогрузчик без груза с вилами, поднятыми
на 300 мм от земли, и отклоненным назад до отказа грузоподъем-
399
L
осум
V
С
Ьсум
Ю 5)
Рис. 183. Схемы устойчивости вилочных погрузчиков:
а « без груза в транспортном положении с поворотом^ 6 •*> о грузом
ником съезжает с уклона на максимальной скорости и при резком
повороте.
Гранью возможного опрокидывания является линия ВС%
проходящая через шарнир балансира управляемого моста и опору
крайнего колеса ведущего моста (рис. 183, а).
Согласно требованиям СЭВ площадка должна иметь уклон
15 + 1,09ип%, но не более 50% для автопогрузчиков
грузоподъемностью до 5 т и не более 40% при грузоподъемности от 5
до 10 т. Угол наклона площадки
a-arctg(15+l,09ig,
где vn — максимальная скорость автопогрузчика без груза, км/ч.
Возможное перемещение в плане центров тяжести
автопогрузчика без грузоподъемника и одного грузоподъемника из-за
наклона площадки на угол а
h = fti tg a; b2 = hi tg а,
где hly hi — соответственно высота от земли центра тяжести
автопогрузчика без грузоподъемника и с отклоненным назад
грузоподъемником (см. рис. 182, б).
При весе Gx автопогрузчика без грузоподъемника и G2 с
грузоподъемником (см. третий случай продольной устойчивости)
получим суммарно высоту центра тяжести автопогрузчика с
грузоподъемником, отклоненным назад,
"сум
и соответственно расстояние от оси передних колес до центра
тяжести автопогрузчика
400
CVM /"■ I /"■ У
\J\ -j- O2
где a2 и я2 — ординаты центров тяжести от оси передних колес
для автопогрузчика без грузоподъемника и одного
грузоподъемника (см. рис. 182, б).
Смещение центра тяжести всего автопогрузчика в плане от его
продольной оси при наклоне опорной площадки на угол се
(см. рис. 183, а) Ьсуы = Лсум tga. Оно не должно выходить за
линию ВС опрокидывания.
Поперечную устойчивость автопогрузчика рассчитывают при
штабелировании. Автопогрузчик с поднятым номинальным грузом
на полную высоту и отклоненным назад грузоподъемником щ
угол Р = рх — Р2 стоит на поперечном уклоне с углом а. Гранью
возможного опрокидывания является линия ВСУ проходящая
через шарнир балансира управляемого моста и опору крайнего
колеса ведущего моста (см. рис. 183, б). Здесь h — высота
шарнира управляемого моста от земли; X, Y — координаты центра
тяжести автопогрузчика; G — вес погрузчика с номинальным
грузом без управляемого (балансирного) моста. Значения L и А В
такие же, как на рис. 182, а; углы рг и р2 такие же, как в третьем
случае продольной устойчивости.
Опрокидывание автопогрузчика начнется, когда вектор веса О
будет пересекать грань опрокидывания ВС. Согласно требова*
ниям СЭВ автопогрузчик должен сохранять устойчивость при
поперечном уклоне, равном 6%, т. е. при угле a = 3° 26'".
Согласно обозначениям на рис. 183, б
EF
где EF — плечо опрокидывания; OF — высота от центра тяжести
до основания погрузчика; OF — у — FD.
Из подобия треугольников CMN и FMD получим
При CN
Значение
=* h
EF
получим
определяют
FD
CN
FD
ПО
EF
L
h
— X
L #
L — х
П L
формуле
= CF
sin 8,
где CF = CM-FM, а / +
Угол б определится из уравнения
CF '[
401
4. Устойчивость многоковшовых погрузчиков
и погрузчиков с нагребающими лапами
Статическую устойчивость многоковшовых погрузчиков и
погрузчиков с нагребающими лапами проверяют так же, как у
одноковшовых погрузчиков: у многоковшовых, когда погрузчик с
поднятым элеватором стоит на продольном уклоне в сторону
элеватора, допустимый угол а склона поверхности, на котором
погрузчик может находиться на пределе опрокидывания,
принимают не более 4°; у погрузчиков с нагребающими лапами —
когда погрузчик с поднятой лопатой стоит на продольном уклоне
в сторону лопаты, допустимый угол а склона принимают не
более 8°.
СПИСОК ЛИТЕРАТУРЫ
1. Базанов А. Ф. Самоходные погрузчики. М., Машгиз, 1955. 424 с.
2. Баран М. И., Коваль Я. В. Повышение производительности
грузоподъемных механизмов с гидроприводом. Труды Львовского ГСКБ автопогрузчиков.
М., НИИАвтопром, 1970, с. 15—19.
3. Барский Н. Б. Конструирование и расчет тракторов. М., Машгиз, 1962.
376 с.
4. Беляев Н. М. Сопротивление материалов. М., Физматгиз, 1962. 322 с.
5. Бычков Д. В. Формулы и графики для расчета рам. М., Госстройиздат,
1957. 194 с.
6. Власов В. 3. Тонкостенные упругие стержни. М., Физматгиз, 1959. 568 с.
7. Гольд Б. В. Конструирование и расчет автомобиля. 2-е изд., перераб.
и доп. М., Машгиз, 1962. 463 с.
8. Дымшиц И. И. Коробки передач/Под ред. А. А. Липгарта. М., Машгиз,
1960. 360 с.
9. Колесные тягачи и шасси строительных и дорожных машин/Д. И. Плеш-
ков, Н. П. Альгин, Э. Г. Ронинсон и др. Под ред. Д. И. Плешкова. М.,
Машиностроение, 1966. 184 с.
10. Методика расчета одноковшовых погрузчиков М., ЦНИИТЭстроймаш,
1970. 115 с.
11. Одноковшовые экскаваторы и самоходные краны с гидравлическим
приводом/И. Л. Беркман, А. А. Буланов, А. В. Раннев и др. Под ред. И. Л. Берк-
мана. М., Машиностроение, 1971. с. 304.
12. Папкович П. Ф. Труды по строительной механике. Т. 3, М., Судпромгиз,
1962. 638 с.
13. Погрузочные машины для сыпучих и кусковых материалов/К. С. Гур-
ков, Э. Б. Кальницкий, А. Д. Костылев и др. М., Машиностроение, 1962. 288 с.
14. Погрузочно-разгрузочные машины и складское оборудование
промышленных предприятий. Под общ. ред. Я. Л. Немеца. М., Машиностроение, 1970.
526 с.
15. Справочник конструктора дорожных машин/Под ред. И. П. Бородачева.
2-е изд., перераб. и доп. М., Машиностроение, 1973. 504 с.
16. Холодов А. И. Основы динамики землеройно-транспортных машин.
М.г Машиностроениег 1968. 156 с.
ОГЛАВЛЕНИЕ
Введение 3
Раздел первый. КОНСТРУКЦИИ ПОГРУЗЧИКОВ 5
Глава 1. Общие данные по погрузчикам (А. Ф. Базанов) 5
1. Классификация и конструктивные схемы 5
2. Характеристика насыпных грузов 8
Глава 2. Вилочные погрузчики (А. Ф. Базанов) 10
1. Определение, классификация, назначение 10
2. Конструкция фронтальных автопогрузчиков ...♦♦..,,♦ 11
3. Фронтальные автопогрузчики высокой проходимости 34
4. Параметры автопогрузчиков 36
5. Принцип работы , 43
6. Определение производительности 45
7. Боковые автопогрузчики . , 4б
8. Конструкция боковых автопогрузчиков 4.7
9. Принцип работы 58
Глава 3. Одноковшовые погрузчики (Г. В. Забегалов) 60
1. Определение, назначение и классификация , , 60
2. Фронтальные погрузчики на специальном шасси 66
3. Пол у поворотные погрузчики , . . , 80
4. Погрузчики на колесных тракторах , 83
5. Погрузчики на гусеничных тракторах 86
6. Параметры , 93
7. Принцип работы 97
8. Определение производительности 106
Глава 4. Многоковшовые погрузчики (А. Ф. Базанов) 111
1. Определение, назначение и применение 111
2. Конструкция , 111
3. Принцип работы , , , 122
4. Определение производительности 123
Глава 5. Погрузчики с нагребающими лапами (А. Ф. Базанов) , , , 124
1. Определение и назначение • • ♦ 124
2. Конструкция • •••••» 124
3. Принцип работы и определение производительности ь 129
Раздел второй. УЗЛЫ И ЭЛЕМЕНТЫ ПОГРУЗЧИКОВ 132
Глава 6. Рабочее оборудование автопогрузчиков (А. Ф. Базанов) 132
1. Грузоподъемники и основное рабочее оборудование 132
2. Сменное рабочее оборудование , 142
3. Поддоны % # 154
Глава 7. Рабочее оборудование одноковшовых погрузчиков (Г. В.
Забегалов) 156
1. Конструкция погрузочного оборудования , 156
2. Сменное рабочее оборудование ..♦•••♦♦♦♦♦ , 163
404
Глава 8. Конструкции рам и порталов одноковшовых погрузчиков
(Г. В. Забегалов) 178
1. Конструкции рам , 178
2. Конструкция порталов 181
Глава 9. Рабочее оборудование многоковшовых погрузчиков и
погрузчиков с нагребающими лапами (А. Ф. Базанов) . . , , 183
1. Оборудование многоковшовых погрузчиков 183
2. Оборудование погрузчиков с нагребающими лапами 187
Глава 10. Привод (А. Ф. Базанов) 190
1. Двигатели 190
2. Муфты сцепления 192
3. Коробки передач 192
4. Гидротрансформаторы , 195
5. Гидромеханические трансмиссии 203
6. Гидрообъемные трансмиссии 218
Глава 11. Элементы объемного гидропривода (А. Ф. Базанов) , , , 219
1. Общие данные 219
2. Рабочая жидкость 220
3. Трубопроводы и арматура 222
4. Насосы 224
б. Баки и фильтры для рабочей жидкости 227
6. Гидроцилиндры 230
7. Гидрораспределители ,♦.,»...♦ 234
8. Клапаны для регулирования потока рабочей жидкости 240
9. Гидроаккумуляторы '.,... 242
10. Гидроусилители рулевых управлений , , , , 243
11. Особенности гидропривода автопогрузчиков 248
12. Особенности гидропривода одноковшовых погрузчиков (Г. В.
Забегалов) 254
Глава 12. Ходовая часть (А. Ф. Базанов) 260
1. Общие данные . . , 260
2. Ведущие мосты 260
3. Управляемые мосты 266
4. Тормоза 269
б. Рулевое управление 271
Раздел третий. ОСНОВНЫЕ РАСЧЕТЫ 277
Глава 13. Общие расчеты механизмов и узлов (А. Ф. Базанов) . . , 277
1. Зубчатые передачи 277
2. Гидросистема 281
3. Корпуса ведущих и управляемых мостов 285
4. Тормоза 288
5. Рулевое управление 292
Глава 14. Расчет механизмов и узлов автопогрузчиков (А. Ф. Базанов) 294
1. Механизм подъема 294
2. Механизм наклона грузоподъемника , 301
3. Механизм выдвижения грузоподъемника , , 302
4. Рамы грузоподъемника 303
Глава 15. Расчет механизмов и узлов одноковшовых погрузчиков
(Г. В. Забегалов) 325
1. Основные параметры погрузчиков 325
2. Параметры рабочих органов 335
3. Размеры погрузочного оборудования 340
4. Определение параметров и выбор гидропривода 345
5. Внешние нагрузки и основные расчетные схемы 349
6. Расчет основных узлов и деталей погрузочного оборудования 355
Глава 16. Расчет многоковшовых погрузчиков (А. Ф. Базанов) . . . 359
1. Ленточный транспортер 359
2. Ковшовый элеватор , 862
405
3. Винтовой питатель 366
4. Рабочие скорости для перемещения груза и общая мощность
привода 367
Глава 17. Расчет погрузчиков с нагребающими лапами (А. Ф. Базанов) 369
1. Механизм нагребания 369
2. Скребковый транспортер 370
3. Рабочие скорости для перемещения груза и общая мощность
привода 370
Глава 18. Тяговый расчет погрузчиков (А. Ф. Базанов) 372
1. Общие положения 372
2. Тяговая характеристика погрузчика с механической трансмиссией 373
3. Динамическая тяговая характеристика 376
4. Определение передаточных чисел в механической коробке передач 379
5. Тяговая характеристика погрузчика с гидромеханической
трансмиссией 379
Глава 19. Расчет устойчивости погрузчиков 384
1. Общие положения (Г. В. Забегалов) 384
2. Устойчивость одноковшовых погрузчиков (Г. В. Забегалов) , , . 386
3. Устойчивость автопогрузчиков (А. Ф. Базанов) 395
4. Устойчивость многоковшовых погрузчиков и погрузчиков с
нагребающими лапами (А. Ф. Базанов) 402
Список литературы , , , 403
ИБ № 1029
Александр Федорович БАЗАНОВ
Георгий Васильевич ЗАБЕГАЛОВ
САМОХОДНЫЕ ПОГРУЗЧИКИ
Редактор В. В. Фролова
Технический редактор И. И. Раченкова
Корректор А, М. Усачева
Переплет художника В. В. Воронина
Сдано в набор 29.11.78. Подписано в печать 26.04.79. Т-06393. Формат 60x90Vil*
Бумага типографская № I. Гарнитура литературная. Печать высокая.
Усл. печ. л. 25,5. Уч.-изд. л. 26,55. Тираж 20 000 экз. Заказ 1204. Цена 1 р. 70 к.
Издательство «Машиностроение», 107885, Москва, ГСП-6, 1-й Басманный пер., 3
Ленинградская типография № 6 Ленинградского
производственного объединения «Техническая книга»
Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли,
193114, г. Ленинград, С*144| ул. Моисеенко, 10
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
НОВЫЕ КНИГИ
по подъемно-транспортные машинам
Выпуск 1979 года
Башенные краны/Л. А. Невзоров, А. А. Зарецкий,
Л. М. В о л и н и др. 20 л., ил. 1 р. 40 к.
Боровских Ю. И., Бусыгин Б. П. Электрооборудование
подъемно-транспортных машин. Учебник для техникумов. 2-е изд.,
перераб. и доп. 10 л., ил. 35 к.
Борохович А. И., Бариев Н. В., Дьяченко С. Н.
Грузоподъемные установки с ленточным тяговым органом. 15 л., ил. 95 к.
Д у б о в с к и й К. Н. Справочник машиниста башенных кранов.
2-е изд., перераб. и доп. 14 л., ил. 85 к.
Егоров К. А. Справочник механизатора
погрузочно-разгрузочных и транспортных работ. 25 л., ил. 1 р. 30 к.
Зенков Р. Л., Ивашков И. И., К о л о б о в Л. Н.
Машины непрерывного транспорта. Учебник для вузов. 19 л., ил. 1 р.
Зерцалов А. И. Краны с жестким подвесом груза. 13 л.,
ил. 60 к.
Контейнерный трубопроводный пневмотранспорт/А. М.
Александров, В. Е. А г л и ц к и й, П. В. К о в а н о в и др. 18 л.,
ил. 1 р. 30 к.
Концевой Е. М., Розеншейн Б. М. Ремонт крановых
металлоконструкций. 14 л., ил. 70 к.
Парницкий А. Б., ШабашовА. П., Л ы с я к о в А. Г,,
Мостовые краны общего назначения. 5-е изд., перераб. и доп. 20 л.,
ил. 1 р. 40 к.
СмолдыревА. Е., ТантлевскийА, В.
Пневматический транспорт штучных грузов. И л., ил. 60 к.
Электропривод и автоматизация управления строительными
башенными кранами/И. И. Петров, А. П. Богословский,
Е. М. Л е в з н е р, А, Г. Я У р е. 14 л,, ил, 70 к.
Своевременно заказывайте и приобретайте
новые книги издательства «Машиностроение»
в магазинах, распространяющих
техническую литературу!