/



















































































































































































































































































































































































Текст
И. С ЕФРЕМОВ
А. П. ПРОЛЫГИН
Ю. М. АНДРЕЕВ
А. Б. МИНДЛИН
ТЕОРИЯ И РАСЧЕТ
ТЯГОВОГО ПРИВОДА
ЭЛЕКТРОМОБИЛЕЙ
Под редакцией
проф. И.С.Ефремова
Допуи/ено
Министерством высшего и среднего
специального образования СССР
в качеап ie учебного пособия
для студентов вузов,
обучающихся по спе1)иа..ьностям
„Городской э гектрический транспорт"
и „Электрическая тяга
и автоматизация
тяговых устройств"
jnOJi
МОСКВА
ВЫСШАЯ ШКОЛА
1984
И. С ЕФРЕМОВ
А. П. ПРОЛЫГИН
Ю. М. АНДРЕЕВ
А. Б. МИНДЛИН
ТЕОРИЯ И РАСЧЕТ
ТЯГОВОГО ПРИВОДА
ЭЛЕКТРОМОБИЛЕЙ
Под редакцией
проф. И.С.Ефремова
Допущено
Министерством высшего и среднего
специального образования СССР
в качестве учебного пособия
для студентов вузов,
обучающихся по специальностям
„Городской электрический транспорт "
и „Электрически ч тяга
и автоматизация
тяговых устройств'
expert22 для http://rutracker.org
ф
МОСКВА
•ВЫСШАЯ ШКОЛА-
1984
Б БК 39.359
Е92
УДК 629.113.6
Рецензе нты:
Кафедра городского электрического транспорта
Харьковского института инженеров коммунального хозяйства (зав. кафедрой —
канд. техн, наук, доц. Э. И. Карпушин); проф. Н. А. Ротанов (Всесоюзный заочный
институт железнодорожного транспорта).
Ефремов И. С., Пролыгин А. П., Андреев Ю. /И., Миндлин А. Б.
Е92 Теория и расчет тягового привода электромобилей* Учеб, по-
собие для вузов по спец. «Городской электрический транспорт»
и «Электрическая тяга п автоматизация тяговых устройств»/
Под ред. И. С. Ефремова.— М.: Высш, школа, 1984,— 383 с., ил.
В пер.:1 р. 20 к.
В книге i>a«.vM.iT|Mni,iKnx>i отдельные «грсгаты снловоП цепи преобразования к пере-
дачи -л|оргп11, их ciioiicrna н характеристики, контуры регулирования и системы тягового
ирииоди 'iJicinpoMofiiuicri. Приведены описания систем пршюдов конкретных типов совре-
менных члектроыобнлеб и даны примеры проектирования таких систем. Большое количе-
ство расчетных примирен. гра<1>икоп и схем способствует более легкому восприятию изла-
< .тсмого Материала
2302030000-304 КБ_3__ц
001 (01)—84
ББК 39.359
612.1
© Издательство «Высшая школа», 1984
expert22 для http://rutracker.org
ПРЕДИСЛОВИЕ
Цель учебного пособия — дать студентам основы знаний в области
тягового электрического оборудования электромобилей. В понятие
«электромобиль» впервые в учебной л тературе включены все основ-
ные безрельсовые транспортные средства с электрическим приводом
ведущих колес и автономной энергоустановкой.
Высокие темпы развития и внедрения электрической тяги в совре-
менный автомобильный транспорт, начиная с освоения сравнительно
небольших автомобилей городского типа и кончая автомобилями особо
большой грузоподъемности (до 180 т), вызвали необходимость обобще-
ния накопленного теоретического и практического материала, озна-
комления с ним широкого круга читателей, в первую очередь студен-
тов вузов, изучающих электрическую тягу, а также проектировщиков,
конструкторов, производственников и эксплуатационников. Пробле-
мой создания, производства, развития и эксплуатации электромоби-
лей занимаются также многие автомобилисты, которые могут полу-
чить в предлагаемой книге полезные сведения. Уровень изложения
материала предполагает знакомство читателей с электрическими ма-
шинами и аппаратами, основами автоматизированного тягового элек-
трического привода и его применения в пневмоколесном транспорте с
автономным источником энергии
Задача создания, освоения и внедрения электромобилей включает
в себя выбор источника электроэнергии, разработку наиболее приемле-
мой системы тягового электропривода, автоматизацию процессов регу-
лпрования взаимодействия первичного двигателя с генератором или
электрохимического источника энергии с тяговыми электродвигателя-
ми, расчет основных тяговых и тормозных характеристик и показате-
лей электромобилей в целом.
При подготовке книги к изданию учтены замечания н советы рецен-
зентов: кафедры городского электрического транспорта Харьковского
института инженеров коммунального хозяйства и заведующего ка-
федрой электрической тяги Всесоюзного заочного института инжене-
ров железнодорожного-транспорта д-ра техн наук, проф. /7. А. Рота-
нова, которым авторы выражают большую признательность.
Авторы понимают, что их работа, в которой, по существу, впервые
сделана попытка рассмотреть проблему тягового электрического обо-
рудования электромобилей в целом, не лишена недостатков, и с бла-
годарностью примут все замечания читателей, которые следует направ-
лять по адресу: l0t430Москва, ГСП-4, Недлинная ул., д. 29114, изда-
тельство «Высшая школа».
Авторы
ВВЕДЕНИЕ
За последние десятилетия электрическая тяга интенсивно внед-
ряется на пневмоколесиые (безрельсовые) транспортные средства.
Создание пневмоколесных машин — электромобилей, оборудованных
электрическим приводом ведущих колес (ПВК) и автономной энерге-
тической установкой (ЭУ), вызвано следующими основными причи-
нами. Значительное расширение масштабов и увеличение объемов
добычи полезных ископаемых открытым способом, интенсификация
грузоперевозок в труднодоступных районах Западной и Восточной
Сибири, Крайнего Севера, Средней Азии, не имеющих развнтой сети
железных дорог и дорог с твердым покрытием, ускорение темпов стро-
ительства крупных энергетических комплексов, магистральных нефте-
газопроводов, дорожной сети государственного значения потребовали
разработки высокопроизводительных автосамосвалов особо большой
грузоподъемности (75—180 т и более), полноприводных автомобилей
высокой проходимости, мощных строительно-дорожных и других
специальных машин Одновременно бурный рост городского пасса-
жирского и грузового автотранспорта привел к необходимости раз-
работки машин, не загрязняющих воздушные бассейны городов вы-
хлопными газами двигателей внутреннего сгорания, имеющих низкий
уровень шума и прогрессивные конструктивные решения, обеспе-
чивающие повышенную вместимость и комфорт салонов (автобусы,
маршрутные такси).
Если большегрузные карьерные автосамосвалы, полноприводные
автопоезда, строительно-дорожные машины, предусматривающие при-
менение энергоустановок единичной мощностью свыше 500—600 кВт,
весьма сложно выполнить на базе известных механических и гидроме-
ханических передач (трансмиссий), что в первую очередь и предопре-
делило их перевод на электрическую тягу, то создание городских
электромобилей с электрохимическими ЭУ обусловлено важностью
комплексного решения проблем совершенствования транспортного
хозяйства и улучшения чистоты воздушных бассейнов быстро расту-
щих городов.
XXVI съезд КПСС в Основных направлениях экономического и со-
циального развития СССР на 1981 —1985 годы и на период до 1990 го-
да указал, что необходимо освоить выпуск новых высокоэффективных
автосамосвалов особо большой грузоподъемности, создать конструкции
и начать производство малотоннажных грузовых электромобилей с эф-
фективными источниками тока для внутригородских перевозок.
Успешному внедрению на пневмоколесный транспорт тягового
электропривода в значительной степени способствовали научно-тех-
4 expert?2 для http://rutracker. org
иическне достижения в области электромашиностроения, аппаратостро-
ения, силовой полупроводниковой и микроэлектроники, а также в со-
вершенствован пи традиционных и разработке новых источников энер-
гии, позволившие практически реализовать его принципиальные пре-
имущества перед механическими и гидромеханическими передачами:
полное использование свободной (отводимой на тягу) мощности ЭУ
с возможностью автоматического выбора режима наибольшей экономич-
ности; плавное регулирование тягового усилия во всем диапазоне ско-
ростей движения; упрощение м облегчение работы водителя в связи
с исключением операций переключения передач.
При выполнении ПВК по типу «мотор-колесо», когда в едином аг-
регате конструктивно объединены тяговый электродвигатель (ТЭД),
механическая передача, соединяющая ТЭД с колесным движителем, и
собственно движитель, тягоеый электропривод обеспечивает дополни-
тельные преимущества: максимально упрощается кинематическая схе-
ма привода ведущих колес, так как не требуется коробки перемены
передач, муфт сцеиления (фрикционов), карданных валов с дифферен-
циалами и сопутствующих им других механических узлов; сущест-
венно упрощаются компоновочные решения ходовой части машины;
улучшаются тягово-сцепные свойства за счет раздельного регулируе-
мого распределения энергии ЭУ между ведущими колесами; облегча-
ется создание шарнирно сочлененных машин, а также появляется
возможность выполнения полноприводных многозвенных автопоездов
с питанием активных звеньев от одной ЭУ. устанавливаемой на ли-
дере.
Парк современных электромобилей состоит из пневмоколесных ма-
шин различного класса и назначения грузоподъемностью 0,3—180 т
н более, в том числе грузового и пассажирского городского, карьерно-
го, внедорожного транспорта и т. д.
Расширение типажа электромобилей потребовало разработки в
внедрения ЭУ, имеющих принципиально различные формы запасания
и физические процессы преобразования того пли иного вида энергии
в электрическую для питания ТЭД ПВК и наиболее полно отвечающих
назначению и условиям эксплуатации электромобилей данного типа;
последнее относится к реализации кинематических схем н конструк-
тивных исполнений ПВК.
Наблюдаемый резкий рост потребности в электромобилях, предна-
значенных для работы во многих областях народного хозяйства, обус-
ловливает непрерывное увеличение числа специалистов, занятых ре-
шением комплекса вопросов создания и освоения производства элек-
тромобилей, их отдельных агрегатов и систем.
Одна нз наиболее сложных научно-технических задач — это раз-
работка собственно тягового электропривода, преобразующего энер-
гию и передающую ее ведущим колесам в соответствии с требуемой тя-
говой характеристикой и технологическими циклами транспортных
операций, от параметров которого во многом зависят эксплуатацион-
ные и технико-экономические показатели электромобиля.
Краткий анализ типажа электромобилей, получивших доминирую-
щее распространение, их условий эксплуатации, выполняемых ими
5
основных технологических операций (прежде всего транспортных) по-
казывает:
электромобили в зависимости от назначения эксплуатируются в
существенно различных условиях — от дорог с твердым покрытием до
полного бездорожья (пересеченная местность), когда момент сопротив-
ления вращению ведущих колес изменяется по случайному закону
и имеет резкопеременный характер. Режимы тягового привода не зада-
ны в функции времени, так как зависят от условий работы электромо-
биля, например чередования режимов разгона, поворота, подъема в го-
ру, торможения;
определяющие требования к конструктивному исполнению ПВК,
типу ЭУ, системе автоматического регулирования (САР) и приводу
в целом различны и диктуются в основном внешними факторами, обус-
ловленными назначением электромобиля, например соображениями
динамики, экономики, проходимостью и др., нередко носящими про-
тиворечивый характер (получение наивысших энергетических показа-
телей привода при минимальных массе и размерах его силовых агре-
гатов);
быстрое развитие и совершенствование тягового привода электро-
мобилей предопределяет все новые области их применения со своими
специфическими условиями эксплуатации, диктующими, в свою оче-
редь, новые требования к электромобилю и его приводу (ЭУ, ПВК, САР).
Можно с уверенностью прогнозировать, что в ближайшие десяти-
летня подобный тип машин будет внедряться в практику транспортных
и других операций при прокладке нефтегазопроводов, строительстве
шоссейных и железнодорожных магистралей, возведении ирригацион-
ных сооружений в пустынных и заболоченных районах, на мелиоратив-
ных работах, лесоразработках, аэродромных комплексах, сельском
хозяйстве и др. Однако выбор тягового привода для того или иного
электромобиля и его проектирование обусловлены и определяются не
только полнотой учета требований, диктуемых внешними факторами,
но и свойствами самих приводов — мощностью, типом и параметрами
ЭУ, спецификой физических процессов преобразования и передачи
энергии в силовой цепи, регулировочными свойствами ТЭД, конструк-
тивными модификациями ПВК и др.
Автономность тягового привода электромобилей, когда мощность
ЭУ соизмерима с мощностью потребителей — электродвигателей ПВК,
требует комплексной, взаимосвязанной оценки и расчета параметров
основных агрегатов и контуров регулирования, четкого согласования
характеристик элементов силовой цепи преобразования и передачи
энергии.
В научно-технической литературе теория тягового привода элек-
тромобилей разработана неполно; она включает главным образом
решения частных, локальных вопросов. В то же время особенности
электромобилей разных классов в назначения, их условий эксплуата-
ции и режимов работы, многообразие сочетаний в силовых цепях воз-
можных типов ЭУ и ТЭД ПВК и, как следствие, существенно различ-
ные свойства приводов в целом ставят свои научно-технические зада-
чи, обусловливая их решение специальными методами, адекватными
6
этим задачам. Поэтому актуальность и своевременность разработки
теоретической базы тягового привода электромобилей как нового и
быстро развивающегося направления в электрической тяге определя-
ется, с одной стороны, нуждами освоения его промышленного выпуска
с одновременным совершенствованием оборудования, повышением на-
дежности и ресурса, с другой — необходимостью обоснования единых
критериев для возможности сопоставления и сравнительной оценки
приводов с различными типами ЭУ и ПВК применительно к конкрет-
ному классу электромобилей, их оптимизации и принятия перспектив-
ных направлений развития.
Глава
первая
--СОВРЕМЕННЫЕ
-X ЭЛЕКТРОМОБИЛИ
5\ И ИХ СИСТЕМЫ тягового
j ) ПРИВОДА
§ 1.1. Основные признаки, характе-
ризующие электромобиль и его систему
тягового привода
Современным электромобиль — это пневмоколесное транспортное
средство с электрическим приводом ведущих колес п автономной энер-
гоустановкой. Исторически электромобили как машины с тяговым эле-
ктроприводом появились раньше автомобилей, однако терминология
применительно к таким транспортным средствам окончательно не ус-
тановлена; существуют различные мнения и относительно самого по-
нятия «электромобиль». Например, наиболее часто под электромоби-
лем по немецкой и американской терминологии подразумеваются
транспортные средства, у которых электрический привод ведущих ко-
лес питается от автономных (возимых на машине) энергоустановок на
основе электрохимических тяговых аккумуляторных батарей (ТАБ).
Примером электропривода такого электромобиля является система,
где тяговый электродвигатель передает вращающий момент группово-
му приводу ведущих колес типа «мотор-ось» (рис. 1.1). В некоторых
случаях термин «электромобиль» применяют для характеристики
транспортных средств, имеющих ПВК с одновременным питанием от
ТАБ и контактной сети.
Иногда электромобилями называют транспортные средства с ком-
бинированными приводами, имеющими два (и более) потока энергии от
энергоустановки к ведущим колесам, при этом одни поток, как пра-
вило, трансформируется механическим приводом, а другой — по ка-
налу ЭУ — ТЭД с целью расширения диапазона регулирования тяго-
вого усилия и улучшения других показателей (рис. 1.2—1.4). Схему,
представленную на рис. 1.2, можно использовать для активизации
колес прицепа или полуприцепа при прохождении тяжелых участков
пути (электропривод периодического действия). Здесь двигатель внут-
реннего сгорания ДВС через редуктор вращает дифференциальный
механизм ведущей оси и генератор тягового электропривода. Вал ге-
нератора соединяется с валом редуктора муфтой. В схеме, представ-
ленной на рис. 1.3, в режимах трогания и разгона машины механиче-
ский и электрический приводы работают или совместно (суммируются
механическая энергия, передаваемая через вал ТЭД, и электрическая
энергия ТАБ), или последовательно (работает только электрический
привод, а вал ДВС отсоединен муфтой от вала ТЭД; в режиме устано-
8
Рис. 1.1 схема транспор гной
машины с электрохимической
энергоуста новкон:
1 — дифференциальный механизм
ведущей оси: 2 — карданный вал;
3 — ТЭД; 4 — ТАБ
Рис. I 2. Схема транспорi ной машины с
механическим приводом н электроприво-
дом периодического действия:
1 — Дифференциальный механизм ведущей оси:
2 — ТЭД; 3 — карданный вал: 1 — раздаточ-
ный редуктор, 5 — ДВС; 6 — муфта. 7 — тя-
говый генератор
вившейся скорости действует механический привод). Мощность ДВС
можно также снизить или вообще исключить ДВС из работы привода
в режимах трогания и разгона, используя лишь электрическую энер-
гию ТАБ (рис. 1.4), вследствие чего уменьшается расход топлива и
количество выхлопных газов. Кроме того, в этих схемах имеется воз-
можность подзаряда аккумуляторной батареи.
Совместная или последовательная работа механического н электри-
ческого приводов представлена графиками на рис. 1.5.
Рассматривая приведенные схемы, иллюстрирующие различное тол-
кование понятия «электромобиль», нетрудно показать, что только на
рис. I.I представлен привод, в котором ТЭД ПВК является основным
и единственным агрегатом, обеспечивающим режим тяги. При этом
принцип работы данного привода не изменится от того, будет исполь-
зоваться ТАБ или другая автономная энергоустановка для питания
ТЭД. например сочетание ДВС с генератором или источник энергии
иной физической природы с выходом на постоянном (переменном) то-
ке. На остальных схемах (см. рис. 1.2—
1.5) сочетаются различные типы приво-
дов — механического и электрическо-
го. Принципиально возможны и дру-
гие комбинации приводов (трансмис-
сий) — механического и гидравличе-
ского, электрического и гидравличе-
ского п др.
Отмеченное подтверждает важность
и своевременность установления оп-
ределяющих признаков современного
электромобиля и его тягового привода,
без чего практически невозможно вы-
работать единый подход для выявле-
ния н классификации электромобилей
и сравнительного исследования их
приводов. Одновременно это позволит
Рис. [.3. Схема транспортной маши-
ны с механическим приводом и до-
полнительным электроприводом для
режимов трогания и разгона*
/ — дифференциальный механизм педу-
щеП оси; 2 — карданный вал. я — муф-
та; 4 — ТЭД; 5 - ДВС; б — ТАБ; 7 —
блок управления
9
Рис. 1.4. Схемы транспортной машины с механическим приводом и элек-
троприводом, имеющим комбинированную энергоустановку:
а — / — Дифференциальный механизм ведущей осн; 2 —- ТЭД; 3 — карданный
вал; > —блок управления; 5 — раздаточный редуктор; 6 — ДВС; 7 — муфта;
й — тяговый генератор; •> — ТА Б; б — 1 — ДВС; 2 — передача с дифферен-
циальным механизмом; 3 — ТЭД: 4 — блок управления. 5 — ТАЕ; 6 — тя-
говый генератор; 7 — привод тягового генератора
Рис. 1.5. Зависимости мощностей механического привода Рмех п и электропри-
вода Рэл и скорости движения машины v от времени t в течение транспорт-
ного цикла при совместной (а) и последовательной (б) работах
обосновать и сформулировать функциональное назначение агрегатов
силовой цепи (главным образом ЭУ и ПВК) с последующей разработ-
кой обобщенной структуры, наиболее полно отвечающей применению
как различных типов электроприводов ведущих колес, так и авто-
номных источников вне зависимости от форм запасания, хранения и
преобразования в них энергии.
Анализ результатов последних исследований в области автономной
электрической тяги, а также отечественных и зарубежных публикаций
показывает, что в качестве исходной правомерно принять структуру
тягового привода (рис. 1.6), которая характеризует современный элек-
тромобиль следующими главными признаками:
имеет место только электрический привод ведущих колес, включаю-
щий тяговый электродвигатель (электродвигатели) ТЭД и механиче-
скую передачу П, связывающую ПВК с пневмоколесным движителем.
Входными параметрами ПВК являются электрические параметры
ТЭД, а выходными — момент Мп, угловая скорость &>п, зависящие
соответственно от момента сопротивления Л4С и скорости движения
электромобиля и;
используется автономная энергоустановка для питания электро-
двигателей ПВК. Энергия на выходе ЭУ — электрическая вне зависи-
ю
мости от вида запасенной энер-
гии и способа ее преобразова-
ния. Для ЭУ на основе преоб-
разователей энергии топлива
ее выходное напряжение зави-
сит от тока нагрузки (Узу (/эу),
а для ЭУ с аккумуляторами
(накопителями) энергии — от
тока нагрузки и времени не-
прерывной работы Оэу (/эу, t);
применяется (как правило)
аппаратура регулирования
АР, обеспечивающая совмест-
ную работу ЭУ и ТЭД ПВК
Рис. 1.6. Базовая структура системы тягово-
го привода электромобиля:
АР — аппаратура регулирования: П — механи-
ческая передача; Кд — ведущее колесо; l/gy,
7Зу — напряжение и гОк энергоустановки-. н
Юд, Л1д и Од. Л!„ н <oJ£ — вращающие моменты и
угловые скорости выходного нала меч ап и ческой
передачи, электродвигателя и колеса
при выполнении различных транспортных режимов.
Таким образом, современный электромобиль имеет систему тяго-
вого привода (СТПЭ), представляющую собой совокупность источника
энергии различной физической природы с выходом на постоянном или
переменном токе и электропривода ведущих колес, конструктивно
оформленного в виде мотор-осей (мотор-колес), совместная работа ко-
торых, определяемая аппаратурой регулирования, направлена на реа-
лизацию заданных тяговых н тормозных свойств электромобиля с тре-
буемыми технико-экономическими показателями.
С учетом отмеченных выше положений современное понятие «элек-
тромобиль» охватывает широкий тнпаж пневмо колесных транспортных
средств различного назначения н грузоподъемности, оборудованных
СТПЭ. Введение понятия СТПЭ предопределяет возможность обобще-
ния уже имеющихся частных теоретических положений и практических
решений, а также, что особенно важно, разработку обоснованной, бази-
рующейся на едином подходе стройной системы взглядов и понятий при-
менительно к различным типам пневмоколесных транспортных средств
с электроприводом ведущих колес и автономной энергоустановкой.
Значительное расширение типажа электромобилей, рост нх грузо-
подъемности и проходимости (см. введение) потребовали не только
резкого повышения единичной мощности ЭУ, но и создания ЭУ со
специальными свойствами и параметрами, что обусловило на совре-
менном этапе использование помимо электрохимических преобразова-
телей и источников энергии различных инерционных, теплоэлектри-
ческих агрегатов и даже комбинированных энергоустановок.
Применение конкретной ЭУ в СТПЭ во многом обусловливает тех-
нико-экономические показатели электромобиля н его эксплуатацион-
ные свойства п в значительной степени зависит от состояния и разви-
тия как сырьевого, так и промышленного потенциала, определяющего
перспективу массового выпуска энергоустановок данного типа. Одна-
ко использование той или иной энергоустановки не вносит принци-
пиальных различий в структуру и не изменяет особенностей работы
СТПЭ по сравнению с другими типами передач транспортных средств,
а лишь обусловливает специфику согласования параметров электродви-
гателей ПВК и выходных параметров ЭУ.
и
Все последующие решения теоретических п практических задач от-
носятся к СТПЭ, определяемым структурой рис. 1.6. В§ 1.3 показано,
что данная структура может быть принята в качестве базовой для раз-
работки обобщенной структуры СТПЭ применительно не только к су-
ществующим, ио и перспективным типам электромобилей.
§ 1.2. Типы современных
электромобилей
В зависимости от назначения, условии эксплуатации, характера
технологических циклов рабогы электромобили и присущие им систе-
мы тягового привода имеют ряд существенных особенностей, обуслов-
ливающих (с учетом сложившихся областей применения) деление
электромобилей на городские, карьерные, землеройно-транспортные,
внутризаводские и повышенной проходимости.
Городские электромобили (ГЭМ). Они предназначены для пасса-
жирских и грузовых перевозок; грузоподъемность легковых и грузо-
вых ГЭМ составляет, как правило, 0,3—3,0 т, электробусов — до 8 т
(из расчета перевозки 70—100 пассажиров). ГЭМ эксплуатируют на
дорогах с усовершенствованным покрытием (брусчатка, асфальт, бе-
тон), имеющим полный коэффициент сопротивления движению ф —
= 0,014 0,016. Одно из основных требований к ГЭМ — обеспечение
высоких тягово-дннамнческих свойств н средних скоростей v — 30 4-
60 км/ч, что диктуется особенностями их транспортных циклов,
для которых характерны частые вынужденные остановки (в среднем
через 1,0—2,5 км), интенсивный разгон после грогания и выдерживание
установленной скорости потока автомобилей в условиях регулируемого
уличного движения. Другое существенное требование к ГЭМ — необ-
ходимость применения нетоксичных и обладающих низким уровнем
шума энергоустановок. Эти требования и определили в настоящее вре-
мя использование на ГЭМ главным образом электрохимических акку-
муляторов, а в перспективе — электрохимических источников с не-
посредственным преобразованием энергии топлива в электрическую
(батареи топливных элементов). Из-за ограниченного запаса энергии
существующих типов ТАБ предпринимаются попытки внедрить на не-
которые экспериментальные образны электромобилей комбинирован-
ные энергоустановки, состоящие, как правило, из ТАБ и теплоэлек-
трических (например, дизель-генераторных) преобразователей; ЭУ по-
добного типа можно рассматривать в качестве переходного варианта,
позволяющего резко увеличить пробег ГЭМ и одновременно значитель-
но снизить количество вредных выхлопных газов от ДВС.
Анализ основных направлений по созданию отечественных и зару-
бежных ГЭМ н их систем тягового привода показывает, что разработка
СТПЭ с нетоксичными ЭУ в случае применения электрохимических
ТАБ и топливных элементов требует решения ряда фундаментальных
проблем перспективной энергетики как в научно-теоретическом плане,
так и в плане технологического переоснащения ряда производств в
соответствующих отраслях промышленности. Кроме того, оценивая
тенденции развития ГЭМ за рубежом, необходимо отметить, что до не-
12 expert22 для http://rutracker.org
давнего времени фирмы вели работы по созданию ГЭМ в основном в
рамках обособленных программ, финансируемых отдельными органи-
зациями (например, почтовыми ведомствам», коммунальными и транс-
портными компаниями крупных городов и т. д.). Дальнейшее обостре-
ние энергетических п экологических проблем в промышленно разви-
тых капиталистических странах, а также сложность самого перехода
от традиционного автотранспорта на машины с электрической тягой
объективно обусловил» появление в этих странах государственных
национальных программ развития городского электромобнлестроення.
Несмотря на специфику, общей для программ развития и широкого
внедрения ГЭМ является концентрация усилии и средств на совер-
шенствование существующих ТАБ и разработку новых с лучшими энер-
гетическими, стоимостными показателями и низкой материалоемкостью,
организацию городской сети станции обслуживания с комплексом спе-
циального обор удов а ни я, обес печивающи м быстрый подз ар яд к л и смену
ТАБ. Однако поиск и создание новых перспективных электрохи-
мических источников энергии продолжают оставаться главной научно-
технической задачей, нерешенность которой сдерживает массовый вы-
пуск ГЭМ.
На современном этане разработано свыше 100 моделей городских
электромобилей, многие из них выпускают серийно. Основной объем
научно-исследовательских и опытно-конструкторских работ прихо-
дится на создание легковых ГЭМ двух модификаций — малогабарит-
ных двух- в четырехместных с собственной массой 0,5—0,9 т, запасом
хода 60—80 км, максимальной скоростью 40—80 км/ч и четырех-и пя-
тиместных с собственной массой 1,2—2,0 г, запасом хода 120—150 км,
а также развозных электромобилей-фургонов грузоподъемностью 0,2—
1,5 т. В последнее время в ряде стран (США, ФРГ, Франции, Японии)
проходят опытную эксплуатацию электробусы с полной массой до 16 т,
запасом хода 80—150 км и вместимостью 20—70 пассажиров.
В приводах ведущих колес зарубежных ГЭМ обычно применяют
ТЭД постоянного тока [1], что объясняется двумя факторами: 1) у
электрохимических ЭУ выходное напряжение постоянного тока; 2) си-
стемы регулирования для таких ТЭД весьма просты и надежны.
В большинстве стран, выпускающих ГЭМ, используют электродвигатели
последовательного, реже смешанного возбуждения. Имеются примеры
установки ГЭД независимого возбуждения (например, в ФРГ), а так-
же экспериментальных образцов асинхронных, вентильных, униполяр-
ных ТЭД и др.
Конструктивно привод ведущих колес городских электромобилей
выполняют, как правило, по типу «мотор-ось», в том числе и у грузовых
ГЭМ. Разрабатывается мотор-колесный привод, прежде всего для элек-
тробусов, что позволяет отказаться от ведущих мостов с дифференциа-
лами, улучшить компоновку салона, повысить вместимость и комфор-
табельность.
Основные показатели зарубежных ГЭМ приведены в табл. 1.1.
В Советском Союзе изготовлены опытные образцы городского лег-
кового электромобиля и развозного электромобиля — фургона; в ПВК
применены электродвигатели постоянного и переменного тока соответ-
13
Таблица 1.1
Тип электромобиля
Полная масса, кг
г рузоподьем-
ность, кг
I вместимость,
чел.»
Скорость
максимальна я,
км/«
Запас х-’да
{при поми-
нал ь вой СКО-
РОСТИ/, !<?!
Тип аккумуляторос
Уровень
разработки
Легковые электромобили
«Ситикар», США; «Целле-1000», 500—1500 (2—4) 40—80 50—100 Свинцово- Опытные
Италия; «Дайхацу-Коге», Япония кислотные образцы,
«Электрик Виикл ассосиэйшн», промышлен-
США; «Энфилд-8000», Англия ные партии
«Трансформер-1» EFP, ТЕСН-1. 2300—2700 (4—5) 90—120 100—190 Свпнцово - кислот - Мелкие про-
США ные, свинцово- мышленные
кобальтовые партии
Электромобили-фургоны
«Америкен-моторс», «Батроник Трак», СШ А;« Тойо- Коге», «Ниссан Мотор», 1300—3000 250—1780 60—90 50—80 Свинцово- То же
Япония; «Сайлент Кариер», «Лукас», Англия; «Фольксваген», ФРГ кислотные
Электробусы
«Электробус-20», «Отис Элевейтор», 6000—8000 (20—30) 60 40—60 То же »
США
«Мицубиси мотор», EV5, Япония 13 500—14 000 (70) 60—70 80—140 Опытные
«Нешнл бас компани», Англия; 10 500+9500 ’ (40—70) 60—70 100 образцы То же
МАИ, ФРГ 16 000+5190 *
expert22 для http://rutracker.org
Продолжение табл. 1.1
Электромобили с экспериментальными энергоустановками
Легковой, Аргоннекая национальная лаборатория, США 1135 80—88 240 Л ити й-сул ьфид- железные Эксперимента- льный образец
Грузовой, «Крайслер,» США; «Клорайд Текникл», Англия 6250 1780 64 160 Натрий-серные То же
Легковой, «Энерджи дивелопмент ассосиэйшн», США 110 330 Хлорно-цинковые »
Легковой, EV1H, Япония 1467 (4) 96 260 (40) Комбинированные железо-воздуш- ные, свинцово- кислотные
Легковой, EV1N, Япония 1427 (4) 101 259 (40) Никель-железные »
Легковой, EV2N, Япония 1467 (4) 83 455 (40) Комбинированные цивк-воздуш- ные, свинцово- кислотные
Легковой, EV2P, Япония 1480 (4) 85 243 (40; Свинцово- кислотные
Грузовой, EV3P, Япония 1538 300 (2) 78 205 То же »
Грузовой. EV4H, Япония 3595 1000(2) 90 496 Комбинированные шшк-воздуш ные, свинцово- кислотные »
Грузовой, EV4P, Япония 3620 1000 (2) 87 302 Свинцово- кислотные »
* Масса аккумуляторного прицепа.
expert22 для http://rutracker.org
ственно с импульсным н частотным управлением, а в качестве ЭУ пс-
полыюваны свп«ново-кислотные, ннкел ь-железные и никель-цппко-
сые аккумуляторы. Ведутся интенсивные работы по созданию новых
эффективных электрохимических источников энергии, систем приво-
да с «зеинхроиными, вентильными и другими прогрессивными для ПВК
тяговыми электродвигателями, комплексно отрабатываются надежные
малогабаритные элементы для системы управления приводом
Основные показатели опытных образцов разрабатываемых отечест-
венным ГЭМ приведены в табл 1.2.
Таким образом, можно отметить следующие тенденции в развитии
ГЭМ и систем их тягового привода:
серийно выпускаются с аккумуляторными ЭУ легковые ГЭМ —
малогабаритные двух- и четырехместные с массой 0,5—0,9 т и запасом
хода 60 80 км н четырех-и пятиместные с массой 1,2—2,0 т и запасом
хода 120—150 км; в ограниченных количествах изготовляют электро-
бусы с полной массой до 16 т вместимостью 20—70 пассажиров; для
внутригородских перевозок создают грузовые ГЭМ небольшой грузо-
подъемности;
СТПЭ, применяемые на ГЭМ, преимущественно постоянного тока
с групповым приводом типа «мотор-ось» и ТЭД мощностью до 100—
120 кВт (электробусы);
главные направления совершенствования СТПЭ — это разработка
более энергоемких (с одновременным снижением стоимости) электрохи-
мических источников энергии, внедрение частотно-управляемых ТЭД
переменного тока и совершенствование тиристорно-импульсного регу-
лирования ТЭД постоянного тока.
Карьерные электромобили (КЭМ). Они появились в связи со зна-
чительным увеличением объема добычи полезных ископаемых откры-
тым способом, что потребовало резкого повышения производительности
на транспортных операциях по вывозу горной массы. Их используют
также на строительстве крупных гндрокомплексов и иных работах,
связанных с перемещением на короткие расстояния больших грузов.
В последние годы преимущественно распространены карьерные элек-
тромобили (самосвалы и самосвальные автопоезда) особо большой гру-
Та блица 1.2
Тип грузово- го электромо- биля Полная масса, кг Г рузопод ъем - кость, кг Скорость максималь- ная. км/ч Запас хода (при номи- нальной ско- рости), км Тип аккумуляторов
У-131 3000 500 70 70 (50) Свинцово-кис- лотные
УАЗ-451М 3000 500 60 60 (45) То же
РАФ-22038 3000 630 75 65 (50) »
РАФ-22037 3200 630 60 60(45) Ннкель-желез- ные
Ер A3-3732 2900 725 60 (50) То же
НАМИ 3150 1000 65 (85) Никель-цинко- вые
16
зоподъемнести (75—180 т и более) Потребная мощность энергоуста-
новки 600- 1500 кВт, что предопределило использование па них
теилоэлектрпческих ЭУ, главным образом днзель-гемеритзр-
ПЫХ 111
Эксплуатационные условия применения КЭМ обусловлены техноло-
гической схемой транспортирования горной массы, а также организа-
цией погрузочно-разгрузочных работ.
Необходимо выделить следующие составляющие одного трапе порт-
ного цикла карьерных электромобилей: погрузочные операция (ожи-
дание, маневрирование под погрузку, собственно погрузка); движение
с грузом в забое по временным дорогам, подъем по постоянным трассам
к месту разгрузки после выезда из карьера; разгрузочные операции
(ожидание, маневрирование под разгрузку, разгрузка); движение в за-
бой. Карьерные электромобили работают, как правило, на дорогах
с уклонами до 10—12 % и улучшенным покрытием, имеющим полный
коэффициент сопротивления движению ф ~ 0,18 4- 0,26. Современные
КЭМ характеризуются удельной мощностью дизелей 3,8—5,2 кВт/т
(полной массы); их длительное относительное тяговое усилие или дина-
мический фактор (отношение суммарной силы тяги к массе груженого
электромобиля) составляет в среднем 6,5 %, а при пуске — до 20
22 %; скорость движения в длительном режиме 15—25 км/ч, а макси-
мальные эксплуатационные скорости 40—50 км/ч. В качестве служеб-
ного применяют электрическое торможение с поглощением энергии в
резисторах, удельная мощность которых 6,5—7,0 кВт/т.
В ряде случаев КЭМ эксплуатируются при перевозке горной массы
на трассах с положительным уклоном (грузовой поток сверху вниз),
что предъявляет повышенные требования к параметрам устройств элект-
рического торможения. Отечественная и зарубежная практика соз-
дания и эксплуатации карьерных электромобилей-самосвалов предоп-
ределила следующие тенденции развития КЭМ: планомерное повыше-
ние грузоподъемности от 75—77 до 150—180 т и более при сохранении
классической колесной формулы 4 х 2; применение быстроходных
(1500—2100 об/мин) дизелей мощностью 700—1800 кВт, крупногаба-
ритных бескамерных шин и редукторов мотор-колес с передаточным
отношением 21,5—36,0; использование СТПЭ постоянного тока при
грузоподъемности до 110 т и переменно-постоя иного тока при большей
грузоподъемности.
Важно подчеркнуть, что быстроходные дизели, тяговое электрообо-
рудование, шины, редукторы мотор-колес и другие агрегаты и узлы
созданы специально для КЭМ с учетом специфики компоновочных ре-
шений, транспортных циклов работы и условий эксплуатации. При
этом зарубежные фирмы широко унифицируют электрооборудование,
варьируя для моделей близкой грузоподъемности мощностью, отводи-
мой на тягу, размерностью шин и передаточным отношением редукто-
ра мотор-колеса. Подобная унификация позволяет быстро переходить
к выпуску КЭМ нужной грузоподъемности (по требованию эксплуа-
тирующих горнодобывающих компаний) без перестройки производства.
Технические данные некоторых выпускаемых и проектируемых моде-
лей зарубежных КЭМ приведены в табл. 1.3.
Карьерные электромобили грузоподъемностью свыше 180 т с колес-
ной формулой 4 X 2 в настоящее время не выпускают из-за сложности
компоновки таких машин, создания быстроходных дизелей мощно-
стью 2200—2500 кВт, шии соответствующей размерности, тягового
электрооборудования и др. Поэтому некоторые зарубежные фирмы,
разрабатывая экспериментальные образцы электромобилей грузоподъ-
емностью 200—300 т, вынуждены увеличивать число ведущих колес
и применять тихоходные тепловозные дизель-генераторные установки.
Например, фирма «Терекс» (США) изготовила КЭМ грузоподъемностью
316 т с колесной формулой 6X4, использовав тепловозный дизель
мощностью 2470 кВт при 900 об/мин с генератором AR10 и четыре
электродвигателя широкого назначения D79. Другая американская
фирма («Викон — Мэрион») изготовила КЭМ грузоподъемностью
227 т с колесной формулой 8x6, иа котором установлены дизель
мощностью 2200 кВт при 1100 об/мин, генератор GTA-11 и шесть тя-
говых электродвигателей GE-772 (последние предназначены для ма-
шин грузоподъемностью 77—118 т). Подобные производные модели
(применительно к КЭМ с колесной формулой 4x2) носят главным
образом поисково-исследовательский и рекламный характер, и сведе-
ний, подтверждающих их серийное производство, не имеется. Нельзя
не учитывать, что внедрение 200—300-тоиных карьерных электромо-
билей на предприятиях горнодобывающей промышленности требует
одновременного применения более высокопроизводительных (сравни-
Таблица 1.3
Наименование Модели зарубежных КЭМ. (фирма-изготовитель)
М-85. М-1 СО, М-120, М-30 («Юнит риг», США). I20C («Вабко». США), 2771, УЗО («Дэрт», США), НД-120 («Комацу». Японии M-J3. М-36 («Юнит риг»); 150В. I70C («Бабко»); ‘>40 («Дарт»), R-I7H 1 «Юклид») М-200 («Юнит М 201 («Юнит РИГ»!
Грузоподъемность, i 77. 91 1£)9, 118, 120 13G, 154 180 180
Дизель мощность, кВт 730—880 1175 1810 1740
частота вращения, об/мин 1900—2100 1900 900 1500
Обозначение шнн 21,00—49; 24,00—49; 33,00—51. 40.00—57 40,00—57
Система тягового при- вода 27,00—49; 30,00—51; 33,00—51 Постоянного, перемен- но- постоянного тока 36,00—51 Переменнс -постоянно го тока
Генератор GТ-603; GTA-18, СТА-15 AR-5 GTA-15E
Тяговый электродви- гатель TDK-6620A GE-772, TDK-8911 А GE-776 D-79 GE-777
Передаточное отноше- ние редуктора мо- тор -колеса Стадия разработки 23,0; 28,85, 29,97 Орнниос пр 28, 85 оизводство 44, 56 Опытные образцы
18
тельио с существующими) погрузочно-разгрузочных комплексов, спе-
циальных дорог и др
В настоящее время отечественная промышленность полностью освои-
ла выпуск карьерных электромобилей БелАЗ-549 грузоподъемностью
75 т, внедряется в производство и эксплуатацию БелАЗ-7519 грузо-
подъемностью НО т, введены в опытную эксплуатацию образны элек-
тромобиля БелАЗ-7521 грузоподъемностью 180 т. Перечисленные мо-
дели имеют колесную формулу 4x2 (табл. 1.4). На основе КЭМ
Бел АЗ-549 разработана и серийно изготовляется производная модель —
углевоз БелАЗ-7420-9590 грузоподъемностью 120 т с колесной фор-
мулой 6X4.
Обобщая данные табл. 1.4, можно резюмировать: В СССР, как п за
рубежом, базовые модели КЭМ имеют колесную формулу 4 X 2; пре-
дусматривается использование трех типоразмеров теплоэлектрических
ЭУ на основе быстроходных (1500 об/мин), 6-8- и 12-цилкадровых
дизелей типа ДМ21; применяются СТПЭ постоянного тока на КЭМ
грузоподъемностью до ПО т и переменно-постоянного тока на моделях
большей грузоподъемности.
Основные задачи дальнейшего совершенствования систем тягового
привода КЭМ:
разработка и оптимизация унифицированных (по схемным реше-
ниям, конструктивному исполнению тяговых электрических машин,
блоков и узлов, использованию прогрессивной элементной базы и др.)
СТПЭ постоянного н переменно-постоянного тока для КЭМ соответ-
ств ующеГ। грузе подъемн ости;
разработка (на базе последних научно-технических достижений
в области силовой полупроводниковой и микроэлектроники) перспек-
тивных СТПЭ переменного тока с использованием бесколлекторных
ТЭД, обладающих повышенной эксплуатационной надежностью и по-
ниженным расходом остродефицитных электротехнических материалов.
Таблица ].4
Наименование Модели отечественных КЭМ
бел АЗ-549 БелАЗ-7519 БелАЗ-7521
Грузоподъемность, i 75 НО 180
Дизель: марка 6ДМ21 8ДМ21 12ДМ21
мощность, кВт 775 955 1540
частота вращения, об/мин 1500 1500 1500
Обозначение шин 27,00—49 33,00—51 40,00—57
Система тягового привода Постоянного тока Переменно-по-
Генератор ГПА-600 ГПА-600 стояиного тока ГСА-1250
Тяговый электродвигатель ДК-717А ДК-722 ДК-724
Передаточное отношение редук- тора мотор-колеса 21,5 29,84 21,5
Стадия разработки Серийное Выпуск пер вой Испытания
произведет- промышлен- опытных
ВО ной партии образцов
19
Зем лерой но-транс портные электромобили (ЗТЭМ). Они предназ-
начены для выполнения широкого круга операций при разработке
(копании, резании), перемещении и транспортировании грунта В за-
висимости от эксплуатационных режимов ЗТЭМ можно условно под-
разделить на две группы (2] с технологическим циклом, включающим:
1) резание и набор грунта, а также перевозку грунта на определен-
ное расстояние с возвращением в забой порожняком (копающие погруз-
чики, одно- и двухковпювые скреперы);
2) резание и режимы перемещения пли разравнивания грунта
(бульдозеры, автогрейдеры, планировщики).
В связи с различным характером выполняемых операции работа
ЗТЭМ и, следовательно, их СТПЭ имеет ряд особенностей по сравне-
нию с ГЭМ п кэм.
Основная технологическая операция — разработка грунта — яв-
ляется определяющей для ЗТЭМ и пх СТПЭ и представляет собой сило-
вой процесс, характеризующийся максимальными тяговыми усилиями
и малой скоростью движения (2—8 км/ч). При резания (копании),
когда, например, грунт имеет твердые включения, ЗТЭМ нередко
работают в так называемом режиме «на упор», что предъявляет повы-
шенные требования к устройствам и аппаратуре автоматического огра-
ничения тягового усилия и защиты оборудования от перегрузок. Пере-
мещение грунта, осуществляемое обычно волоком по поверхности раз-
рабатываемого участка, также требует значительных тяговых усилий,
близких в отдельных случаях к усилиям в режиме резания. Короткие
дистанции перемещения грунта в стесненных условиях предопределяют
(для сокращения времени рабочего цикла) возвращение машины в за-
бой задним ходом.
В режиме перевозки грунта у ЗТЭМ первой группы (например, у
скреперов) тяговое усилие ниже, чем при копании, п соответствует
усилиям, развиваемым ПВК карьерных электромобилей, а скорость
движения составляет 10—25 км/ч с использованием полной мощности
ЭУ. Максимальная скорость возвращения порожней машины в забой
и холостого перегона при изменении объектов работы может быть 40—
50 км/ч
При работе ЗТЭМ непрерывно чередуются режимы макси-
мального гигового усилим и максимальной скорости Для обеспечения
наибольшей производительности целесообразно переходить от одного
режима к другому без разрыва потока энергии в СТПЭ. Динамические
нагрузки, действующие на привод и узлы таких электромобилей, долж-
ны быть не больше допустимых Отсюда возникает требование об уп-
равляемой динамике, для практической реализации которой необходи-
мо существенное усложнение САР.
Землеройные электромобили работают вне дорог и на ограниченных
площадка \ и перемещаются по криволинейным траекториям с малыми
радиусами niHMipora; п\ движители, взаимодействуя с неровными де-
формируемыми ]1онер\|[(нтямп. имеют существенно различные угло-
вые скорости, что затрудняет niiniMiiJauiiio электромобиля по какому-
либо одному определенному критерию (максимальному тяговому уси-
лию, мощности, КПД и т. д.).
ЙО
В качестве примера одной из отечественных моделей ЗТЭМ можно
привести скрепер ДЗ-67 с объемом ковша 25 м3, колесной формулой
4 х 4Г грузоподъемностью 45 т и полной массой 110 т. Скрепер обору-
дован ЭУ, состоящей из дизеля марки М-301 мощностью 630 кВт, час-
тотой вращения 1500 об/мин, сочлененного с генератором ГПА-600А
постоя иного тока мощностью 600 кВт; в качестве тяговых используют
электродвигатели ДК-714 мощностью 120 кВт [21.
Из зарубежных образцов ЗТЭМ можно назвать колесный копающий
погрузчик с объемом ковша 16,8 м3 модели £-1200 фирмы «Ле Турно»
(США), предназначенный для работы в комплексе с КЭМ.
Следует отметить, что мощностные показатели ЭУ и ТЭД современ-
ных ЗТЭМ близки аналогичным показателям КЭМ Но указанные осо-
бенности условий работы ЗТЭМ требуют в рабочем диапазоне более
глубокого регулирования как тягового усилия, так и скорости. Агре-
гаты тягового привода ЗТЭМ наиболее часто (сравнительно с СТПЭ
других типов электромобилей) подвержены воздействию случайных
резко переменных нагрузок и значительное время (для некоторых
ЗТЭМ практически непрерывно) работают в переходных режимах.
Перспективное направление развития систем тягового привода
ЗТЭМ — повышение единичной мощности ЭУ, главным образом с
целью увеличения грузоподъемности (объема ковша) и максимальной
силы тяги, а также разработка САР. обеспечивающих устойчивую и
надежную работу агрегатов СТПЭ (прежде всего ТЭД) в переходных
режимах с высокими энергетическими показателями.
Внутризаводские электромобили (ВЭМ). Они предназначены для
перевозки грузов в пределах предприятий, штабелирования, погрузки
и разгрузки материалов и изделий, т. е. для выполнения транспортных
н технологических операций.
По функциональным и конструктивным особенностям ВЭМ подраз-
деляются на:
электропогрузчики грузоподъемностью до 4,5 т — для погрузки,
разгрузки и транспортирования изделий на расстояние до 150 м;
электроштабелеры, имеющие аналогичное с электропогрузчиками
назначение и отличающиеся от последних конструкцией технологиче-
ского оборудования и меньшими расстояниями транспортирования (до
50 м);
электротележкн (электрокары) грузоподъемностью до Ют — для
транспортирования изделий на расстояние до 500—1000 м;
электротя1 ачи—для буксирования прицепных неактивных теле-
жек на расстояние более 200 м при значительных грузопотоках.
В настоящее время ВЭМ оборудуются, как правило, СТПЭ постоян-
ного тока с аккумуляторными ЭУ на основе электрохимических ТАБ
и работают только на транспортных линиях с усовершенствованным
покрытием (нередко ВЭМ называют «напольный транспорт»). Следует
также отметить, что у всех моделей электропогрузчиков и электрошта-
белеров расход энергии на технологические операции (подъем, опуска-
ние груза н т. п.) соизмерим, а иногда и превышает расход энергии
на транспортные операции — последнее важно учитывать в процессе
проектирования их СТПЭ.
21
Дальнейшее развитие ВЭМ, как и городских электромобилей, за-
ключается в создании электрохимических источников энергии большей
удельной емкости, совершенствовании систем импульсного регулирова-
ния тяговыми электродвигателями ПВК постоянного тока и внедрения
электродвигателей переменного тока с частотным управлением.
Электромобили повышенной проходимости (ЭМПП). Потребность
в ЭМПП специального назначения появилась сравнительно недавно
в связи с интенсивным освоением труднодоступных районов (пустынь,
севера европейской и азиатской частей нашей страны, Аляски ит. д.),
богатых нефтью, газом и другими полезными ископаемыми. Увеличи-
вающийся с каждым годом объем строительства нефтегазопроводов,
линий электропередач и различных промышленных объектов требует
соответствующего роста грузооборота. Однако практически полное
отсутствие в данных районах автомобильных и железнодорожных транс-
портных коммуникаций значительно усложняет перевозку оборудова-
ния (прежде всего труб большого диаметра, негабаритных конструкций и
др.), создает дополнительные трудности в их промышленном развитии.
Конструктивно ЭМПП представляют собой или многоколесные пол-
ноприводные шасси с индивидуальным электроприводом ведущих ко-
лес, обычно дополняемые активными полуприцепами, или многозвен-
ные автопоезда, состоящие из лидера с энергоустановкой и активных
звеньев (грузовых платформ), что обеспечивает повышенную проходи-
мость в условиях бездорожья (песчаный грунт, снежная целина, бо-
лотистый наст и т. п.)_ В США изготовлено несколько образцов много-
звенных электромобилей, предназначенных для перевозки материалов
и оборудования в такие районы. Они состоят из головного тягача
(лидера), платформ с ЭУ н прнцепиых грузовых модулей с мотор-ко-
лесамн. Общее количество звеньев достигает 13, а число ведущих ко-
лес — 52. Система управления поворотом обеспечивает точное следо-
вание всех мотор-колес прицепов по колее передних мотор-колес лиде-
ра, а система автоматического регулирования СТПЭ обусловливает
автономную работу активных звеньев в функции текущих моментов со-
противления движению каждого из них для исключения разрыва
сцепиых механизмов и выдерживания заданного расстояния между
звеньями.
При мощностях ЭУ одного порядка с энергоустановками КЭМ н
ЗТЭМ (800—1000 кВт н более) СТПЭ электромобилей повышенной про-
ходимости имеют ряд особенностей:
одна или несколько ЭУ питают значительное количество (как пра-
вило, более четырех) электродвигателей ПВК, нагрузка которых в один
и тот же момент времени может существенно отличаться;
мотор-колеса конструктивно выполняют, как правило, закрытого
типа, что предопределяется необходимостью преодоления заболочен-
ных участков, снежной целины, небольших водных преград и т. л.,
характерных для эксплуатации ЭМПП в условиях бездорожья. В свою
очередь, это выдвигает требование минимизации массы и размеров
электродвигателей ПВК;
сложные многосвязные системы автоматического регулирования
СТПЭ реализуют работу всех электродвигателей ПВК в функции те-
22
кущпх значений момента сопротивления их вращению с одновремен-
ным управлением скоростью движения каждого активного звена в об-
щей сцепке многозвенного автопоезда.
Электромобили повышенной проходимости — новое и перспектив-
ное направление в создании автономных транспортных средств с
СТПЭ.
Из всех рассмотренных выше групп электромобилей, имеющих
функционально различное назначение, наиболее быстрыми темпами
как в нашей стране, так н за рубежом развиваются КЭМ и ГЭМ.
Таким образом, актуальность решения проблем перевода автоном-
ного ппевмоколесного транспорта на электрическую тягу обусловле-
на многими энергетическими и экологическими факторами, а также
задачами дальнейшего повышения эффективности и экономичности
транспортных операций на открытых горных разработках, строитель-
стве гидротехнических сооружений, при освоении природных ресурсов
труднодоступных районов и т. д. Несмотря на разнообразие электро-
мобилей и различия в их условиях эксплуатации, все они имеют
СТПЭ одной базовой структуры, включающей энергоустановку, при-
вод ведущих колес и аппаратуру регулирования
Выбор СТПЭ для того или иного электромобиля н ее проектирова-
ние, как показано ниже, обусловлен и определяется не только требо-
ваниями, диктуемыми внешними факторами, но и свойствами самих
СТПЭ — мощностными показателями и родом тока, типом и парамет-
рами ЭУ, особенностями пополнения запаса энергии, спецификой фи-
зических процессов преобразования и передачи энергии в силовой це-
пи, регулировочными свойствами электродвигателей ПВК, конструк-
тивными модификациями ПВК и др.
§ 1.3. Основные типы энергоустановок
и приводов ведущих колес
С позиций обеспечения требуемых тягово-динамических, эксплуа-
тационных и технико-экономических параметров электромобилей соз-
дание собственно СТПЭ необходимо рассматривать как решение много-
факторной задачи, а основные связи, подлежащие исследованию,
можно представить следующей логической цепью: условия эксплуата-
ции и транспортные режимы работы тягово-динамические и техни-
ко-экономические показатели электромобилей СТПЭ -> энергети-
ческие и ресурсные показатели тягового электрооборудования. (Сим-
вол означает взаимовлияние факторов.)
Подобный подход при исследовании СПТЭ и нх структур подразу-
мевает классификацию ЭУ и ПВК по определяющим (наиболее харак-
терным с позиций СТПЭ) признакам с последующей выработкой об-
общенных критериев оценки н выявление сопоставимых параметров
основных элементов системы тягового привода электромобилей.
Развивая определение СТПЭ, данное в § 1.1, укажем, что под энер-
гоустановкой понимается совокупность устройств (агрегатов), обеспе-
чивающих хранение и полный цикл преобразования энергии любой
физической природы в электрическую для питания ПВК. Привод
23
ведущих колес, включающий ТЭД и механическую передачу, осуществ-
ляет управляемое преобразование электрической энергии в механи-
ческую в соответствии с выбранными режимами работы электромо-
биля.
Энергоустановки электромобилей. Как подчеркивалось ранее, ти-
пы используемых энергоустановок весьма разнообразны и существен-
но отличаются процессами преобразования и способом пополнения энер-
гии. Для последующего анализа п систематизации целесообразно клас-
сифицировать ЭУ но количеству типов источников (преобразователей),
применяемых в конкретной СТПЭ, а также по принципу действия уст-
ройств, преобразующих тот или иной вид энергии в электрическую.
В первом случае энергоустановки можно подразделить на однотипные
и комбинированные
В однотипных ЭУ запасенная на электромобиле энергия
преобразуется в электрическую только одним способом (за счет одно-
го процесса), например с помощью теплоэлектрического агрегата, со-
стоящего из дизеля и сочлененного с ним генератора (осуществляется
двойное преобразование химической энергии топлива), нли топлив-
ных элементов, обеспечивающих непосредственное преобразование хи-
мической энергии топлива в электрическую.
В комбинированных энергоустановках (КЭУ) сочетают-
ся два типа источника с целью дополнения положительных свойств
каждого из них в конкретных режимах работы СТПЭ. Обычно это со-
четание источника большой энергоемкости, обеспечивающего длитель-
ный режим работы ПВК, я источника с повышенными мощностными
характеристиками, предназначенного для работы в кратковременных
форсированных режимах нагружения ПВК.
В свою очередь, однотипные ЭУ можно подразделить на две основ-
ные группы:
а) ЭУ с использованием химической энергии топлива — топливные
энергоустановки (ТЭУ), основными определяющими признаками кото-
рых ЯВЛЯЮТСЯ:
получение электрической энергии для питания ПВК с помощью пре-
образовательных устройств (теплоэлектрические агрегаты, батареи
топливных элементов и т. п.);
независимость выходных параметров ТЭУ от времени непрерывной
работы при некотором неизменном режиме ПВК и постоянном расходе
топлива. Это время в ряде случаев ограничивается лишь допустимыми
значениями превышения температуры электрооборудования СТПЭ,
поскольку периодичность и продолжительность дозаправки электромо-
биля топливом невелики и могут не приниматься во внимание;
невозможность рекуперации израсходованной энергии;
6) ЭУ с аккумулированием энергии (АЭУ), основными определяю-
щими признаками которых являются:
запасание энергии для питания ПВК в различного рода накопите-
лях (аккумуляторах) — электрохимических, инерционных * и т. п.;
* Инерционные аккумуляторы используются для сочленения с электромашин-
ными генераторами, вырабатывающими электроэнергию.
24
Рис. 1.7 Классификация энергоустановок электромобилей:
ТД —- тепловой двигатель; Г — электромашин и ый генератор; ИЛ — инерционный аккуму-
лятор (маховик); ФЭП — фотоэлектрический преобразователь солнечной энергии; ГТД —
газотурбинный двигатель; БМВЭ — батарея металло-воздушных элементов; БТЭ — бата-
рея топливных элементов
время, требующееся для пополнения запаса энергии в АЭУ и соиз-
меримое с временем рабочего цикла электромобиля;
снижение электрической мощности по мере расходования энергии,
отдаваемой аккумуляторными ЭУ, что ограничивает пробег электромо-
биля; зависимость интенсивности изменения выходных параметров
ЭУ при непрерывной работе от режима ПВК;
возможность рекуперации израсходованной энергии.
Полная классификация энергоустановок представлена на рнс. 1.7 (1 ].
Принимая во внимание приведенную классификацию, рассмотрим
подробнее однотипные энергоустановки, которые могут применяться
в СТПЭ.
Энергоустановки с использованием химической энергии топлива
базируются или на теплоэлектрических машинных агрегатах (двойное
преобразование энергии), или на электрохимических генераторах,
объединяемых в батареи топливных элементов.
В современных СТПЭ наиболее распространены теплоэлектрпче-
ские энергоустановки, состоящие из теплового двигателя (ТД) и со-
члененного с ним генератора (Г). Энергоустановки этого типа обеспе-
чивают широкий диапазон плавного регулирования напряжения на
expert22 для http://rutracker.orQ
25
выходе генератора в общем случае за счет управления его возбуждени-
ем и изменения частоты вращения ТД.
В качестве тепловых двигателей применяют дизельные и карбюра-
торные ДВС, газотурбинные двигатели (ГТД), а также двигатели Вен-
келя, Стирлинга, Ранкина и др. Но на электромобилях, выпускаемых
промышленностью в настоящее время, используют главным образом
дизельные ДВС, характерные модели которых приведены в табл. 1.5
(отечественные) и 1.6 (зарубежные).
В зависимости от мощности ТЭУ, частоты вращения ТД и других
факторов используют тяговые генераторы постоянного тока или син-
хронные генераторы различных модификаций. В СТПЭ энергия от син-
хронного генератора для питания ТЭД постоянного тока передается
через неуправляемый выпрямитель, функционально представляющий
собой конечный преобразовательный элемент энергоустановки. Прин-
ципиально могут иметь место системы с управляемыми выпрямителями.
Разработка новых типов ТЭУ с непосредственным преобразовате-
лем химической энергии топлива в электрическую обусловлена в пер-
вую очередь задачами повышения их КПД. Перспективными с этих
позиций являются однотипные ЭУ на базе низкотемпературных топ-
ливных элементов (ТЭ), обладающих следующими преимуществами:
сравнительно высоким КПД, достигающим в выполненных образцах
ТЭ значений 0,6—0,7, бесшумностью в работе, почти полным отсут-
ствием токсичных продуктов в процессе преобразования одного вида
энергии в другой, простотой дозаправки топливом (в некоторых слу-
чаях и окислителем), практически не отличающейся от традиционных
способов заправки электромобилей с теплоэлектрическими ЭУ.
Таблица 1.5
Тип дизеля Мощность дизеля, кВт
б настоя- в перспективе при мощности одного цилиндра
126 кВт 147 кВт
6-цилиндровый 6ДМ21 8-цилиндровый 8ДМ21 12-цилиндровый 12ДМ21 Примечание. Частота вращения дизелей (5 775 955 )0 об/мин 1025 1540 Таб; 880 1175 1760 1ИЦа 1.6
Тип дизеля, фирма-изготовитель Частота вращения, об/мин Мощность дизеля, кВт
без фор- сировки с форси- ровкой
ilvi дизель* * 12РаУу20с}<<Альстом Атлантика»** • Данные из каталоюв фирмы «Дженерад • • Данные из каталогов фирмы «Альстом 1900 1900 1500 1500 Электрик». Атл антик». 735 975 1135 1695 880 1175 1200
26-
В настоящее время ТЭУ с батареями низкотемпературных ТЭ не
получили широкого применения, так как обладают высокой стоимо-
стью, низкими массогабаритнымп показателями, сложностью эксплу-
атации. Более перспективными являются водородно-воздушные ТЭ,
для которых основной нерешенной проблемой остается хранение и за-
пасание в энергоустановке водорода. При решении этих вопросов ис-
следуются возможности использования химических соединений, ад-
сорбирующих водород при низком давлении, в частности гидридов
и интерметаллов, а также перспектива внедрения па электромобили
батарей метаноло-воздушных ТЭ, несмотря на то что они имеют бо-
лее низкие, чем предыдущие топливные элементы, показатели.
Значения удельной мощности некоторых типов ТЭ приведены в
табл. 1.7.
В ЭУ с накопителями энергии применяют два типа источников:
электрохимические аккумуляторы и инерционные аккумуляторы (ма-
ховики) в совокупности с электромашиннымп преобразователями по-
стоянного или переменного тока. Практическое использование как в
отечественном, так и в зарубежном электромобилестроеним получили
электрохимические аккумуляторные батареи, главным образом свин-
цово-кислотные ТАБ; в нашей стране достаточно широко используют
и ннкель-железные ТАБ.
Зарубежные свинцово-кислотные ТАБ имеют сравнительно боль-
шой срок службы и остаются пока единственными серийно выпускае-
мыми источниками для создания АЭУ городских электромобилей, не-
смотря на их низкую удельную энергоемкость (22—30 Вт ч/кг). Не-
достаточную удельную энергоемкость и мощность этих ТАБ стремятся
повысить, в частности, применением более тонких пластин в аккуму-
ляторных элементах, добиваясь увеличения рассматриваемых показа-
телей до значений 35—40 Вт • ч/кг и 70—J00 Вт/кг при сохранении
того же объема и массы, но срок службы аккумуляторов в этом случае
существенно сокращается.
Для повышения энергетических показателей современных кислот-
ных я щелочных ТАБ их снабжают дополнительными устройствами
газоотвода и автоматического поддержания уровня электролита, а
также системами контроля и регулирования теплоотдачи, степени за-
раженности н др. Однако ограниченные возможности упомянутых ТАБ
обусловливают необходимость создания новых перспективных элек-
трохимических аккумуляторных ЭУ со значительно лучшими характе-
ристиками (удельной энергоемко-
стью не ниже200—250 Вт • ч/кг).
Средн ряда новых электрохи-
мических аккумуляторов, разра-
батываемых для ЭУ электромоби-
лей, необходимо отметить литий-
серные, натрий-серные высоко-
температурные ТАБ, хлорно-
цииковые, никель-цинковые
ТАБ, работающие при нор-
мальной температуре. Приме-
та б л и ца 1.7
Тип топливного элемента Удельная МОЩНОСТЬ, Вт/кг
Водородно-и гидразино-кис-
.породные Водородно-и гидразино-воз- 650—870
душные 450—650
Метано л о-кме лор одные 270—320
Метаноло-воздушные 200—230
27
некие в таких ТАБ высокоактивных, несовместимых с водными
растворами электродов (литиевых, натриевых п др.) предопределило
использование электролитов на основе органических растворителей,
расплавленных солен и даже твердых электролитов. Например, ли-
тий-серные ТАБ имеют положительные электроды из сульфида желе-
за и отрицательные из литий-алюминиевого сплава; рабочая темпера-
тура электролита, представляющего собой расплавленную смесь солей
хлористого лития и хлористого калия, составляет 400—450 °C. Поэ-
тому энергоустановку заключают в особый, обычно вакуумированный
кожух и снабжают специальными подогревателями для поддержания
необходимой температуры при длительном нерабочем состоянии, а
также системой воздушного охлаждения. Подобную ЭУ с литий-сер-
ными аккумуляторами, согласно зарубежном информации, разраба-
тывает Аргоннская национальная лаборатория (США) для двухмест-
ного легкового электромобиля с прогнозируемым запасом хода поряд-
ка 240 км. Однако приведенные данные свидетельствуют о том, что в
настоящее время новые типы электрохимических аккумуляторов не
могут еще использоваться для ЭУ при массовом производстве электро-
мобилей вследствие трудностей технического и технологического ха-
рактера. Параметры некоторых современных и перспективных ТАБ
представлены в табл. 1.8.
Инерционные аккумуляторы с электромашниными преобразовате-
лями в качестве однотипных АЭУ практически не используются. Дан-
Таблица 1.8
Типы аккумуляторов Рабочая темпера- тура, сС Напряже- ние на элементе, В У Дельная энергоем- кость, Вт-ч/кг Удельная мощность, Вт/К1 Срои службы (ЧИСЛО НИК- ЛОЮ)
Применяемые в на- стоящее время: СВИН ЦОВО-КИС JJOT- иые 40—50 2,06 20—40 50—100 300
никель -желез ные 0—40 1.40 40—60 30—45 150—250 50—100 1000 1500
никель-кадмиевые 40—60 1,30 45—60 20—50 100—200 200—500 2000 1000
Перспективные: хлорно- цинковые 60 2.1 65—150 110—115 60 100—155 100—150 500—2000
натрий-серные 300—350 1.8—2,1 40—80 200—300 150 150—200 200 1000
литий-сульфидже- лезные никель-цинковые 350—450 1.8—2,3 1,7 75—80 150 40—70 70—90 50 150—200 100—200 200—300 230 1000 200 700
Примечание. В числителе даны значения параметрон достигнутого уровня, и знаменателе —
ожидаемого.
28
Рис. 1.8. Классификация приводов ведущих колес электромобилей
ное направление не вышло из стадии поисковых работ, и нецелесооб-
разность дальнейшего подробного рассмотрения инерционных акку-
муляторов очевидна.
Приводы ведущих колес электромобилей. Привод ведущих колес
включает электродвигатель постоянного или переменного тока и ме-
ханическую передачу, связывающую электродвигатель с колесным
движителем.
На современном этапе развития СТПЭ распространены индивиду-
альный (мотор-колесо) и групповой (мотор-ось) ПВК, которые, в
свою очередь, могут иметь механическую передачу с постоянным или
переменным передаточным отношением. Типаж электродвигателей
ПВК достаточно разнообразен, но в серийно выпускаемых электромоби-
лях, как правило, применяются ТЭД постоянного тока последователь-
ного возбуждения (компенсированные и некомпенсированные), реже
ТЭД независимого возбуждения, в основном мощностью до 100 кВт.
Разрабатываются СПТЭ, у которых ПВК оборудованы тяговыми асин-
хронными и вентильными двигателями. Классификация приводов ве-
дущих колес приведена на рис. 1.8.
Важно подчеркнуть, что при налички в ПВК электродвигателей
переменного тока в силовую цепь ЭУ—ПВК включаются статические
(вентильные) преобразователи (ВП), управляющие в общем случае
амплитудой и частотой напряжения питания ТЭД независимо от рода
тока на выходе ЭУ. Статические преобразователи (выпрямители), как
отмечалось выше, устанавливаются также в системах, когда ЭУ —
с выходом на переменном токе (например, энергоустановка «ДВС —
синхронный генератор»), а ПВК снабжен ТЭД постоянного тока.
Выбор того или иного сочетания ЭУ и ПВК обусловлен рядом фак-
торов и может быть осуществлен только по результатам анализа струк-
expert22 для http:// rutra eke г. о rq 29
турных схем силовой цепи преобразования и передачи энергии СТПЭ
с различными типами энергоустановок и приводов ведущих колес, а
также после установления связей между их выходными и входными
параметрами.
§ 1.4. Обобщенные структуры СТПЭ
Основные функциональные связи, имеющие место в СПТЭ соглас-
но рис. 1.6, а также приведенные на рис. 1.7 и 1.8 классификации ЭУ
н ПВК дают возможность перейти к построению и анализу конкретных
структур СТПЭ на базе обобщенной структуры (рис. 1.9). В соответ-
ствии с данной структурной схемой, независимо от способа запасания
и процессов преобразования энергии, СТПЭ электромобиля включает
в себя энергоустановку ЭУ, привод ведущих колес ПВК, и систему
автоматического регулирования агрегатов силовой цепи САР. Пос-
ледняя объединяет соответствующие контуры регулирования ЭУ и
ПВК или регуляторы энергоустановки РЭУ н привода ведущих колес
РП. Органы управления электромобилем ОУЭ формируют сигналы
управления ayi и ссуг. поступающие в регуляторы, а выходные сигна-
лы Zl (t) и Z2 (/) последних являются управляющими воздействиями
для ЭУ и ПВК. Между регуляторами могут быть введены межконтур-
ные обратные связи МС.
Электрическая мощность на выходе энергоустановки Рэу (0, про-
порциональная напряжению 1/эу и току /эу, обеспечивает работу элек-
тродвигателя ПВК, а необходимая мощность иа ведущем колесе (/),
реализуемая иа тягу, определяется механической мощностью Рп (f) на
выходе привода ведущих колес, зависящей, в свою очередь, от текущих
значений момента Л4П, угловой скорости и момента сопротивления
движению Л4С.
В общем случае от энерго-
установки получает питание
привод технологических меха-
низмов ПТМ. Регулятор при-
вода технологических меха-
низмов РИТМ может иметь
связи с САР (сигнал ссуз (/)),
что обусловлено назначением
электромобиля и его режима-
ми работы. Потребная для
функционирования исполни-
тельного механизма ИМ мощ-
1Г t.. ность ₽п™ W» определяемая
——~Ч Гр*}/; текущими значениями момента
п?гм() Mwa и скорости перемещения
бим> зависит от момента сопро-
тивления движению механиз-
ма Мсм (О-
Рис. 1.9. Обобщенная структурная схема основании обобщенной
СТПЭ структурной схемы реализа-
80
ция суммарного запаса энергии Ле вЭУ, приведенного к одному ТЭД
и одному ИМ, может быть записана выражением
dAv
~аГ
7РП (/) “> Р« (0 = Ч (t) <ок (0 Мс (0 <о|( (0;
Рэу(1){
Ритм (0 Рим (0 = Мим (0 бим (0 Мс.м (0 бим (0-
Символ в этом и последующих выражениях означает равновесие
моментов в установившемся режиме.
Технологический привод в дальнейшем не рассматривается, так
как является предметом отдельного изучения; целесообразность учета
работы ПТМ диктуется лишь соображениями расхода энергии, влия-
ющего на энергетический баланс СТПЭ главным образом с АЭУ.
Применительно к СТПЭ при установившемся движении электромо-
биля в тяговом режиме процесс реализации энергии в силовой цепи
СТПЭ можно записать в виде
dAJdt == Рэу (0 - Рк (t) = Mti U) <ок (0 Мс (0 <ой (0,
где Рэу (0 — Uav (t) /эу (0 — мощность, потребляемая ПВК; Ра (t) —
= Мд (0 <од (t) г]пвк — мощность на выходе ПВК; т]пвк — КПД меха-
нической передачи ПВК; MRt <од — соответственно момент на валу и
угловая скорость ТЭД; Рь (t) = (0 (0 — мощность на ведущем
колесе.
Когда dAs/dt = const и момент Мс изменяется на ДМС, то возму-
щающее воздействие от ведущего колеса передается иа остальные
агрегаты силовой цепи СТПЭ:
ДМС (0 ДМК (0 -> ДМП (0 -> ДМд (0 — Д/эу (0;
это вызывает изменение регулируемых параметров соответственно на
Д<ок1 Д<оп, Дод, Д£/эу- Следовательно, внешнее возмущение, действую-
щее на исполнительный орган, определяет основные внешние возму-
щения, действующие на остальные агрегаты силовой цепи, обусловли-
вая взаимную зависимость всех регулируемых параметров. В силу этого
каждую из основных подсистем снабжают своим автономным контуром
(системой) автоматического (или неавтоматического) регулирования.
Регулирование автономными контурами соответствующих силовых
агрегатов позволяет в итоге реализовать заданный режим управления
объекта регулирования — ТЭД привода ведущих колес электромо-
биля.
Система регулирования СТПЭ, включающая автономные контуры
и межконтурные обратные связи (нли программные устройства), обес-
печивает работу агрегатов силовой цепи как в функции управляющих
воздействий Zt (0, Z2 (0, так и любых внешних возмущений (0,
i/2 (0, Мс (0 (рис. 1.9). Главная обратная связь в С АР может осуществ-
ляться либо по угловой скорости тягового электродвигателя ПВК,
либо по одному нз промежуточных параметров, от которых непосред-
ственно зависят (0д и соответствующая ей угловая скорость <ок ведущих
колес электромобиля.
В свою очередь, управляющие воздействия Zx и Z2 контуров регу-
лирования являются функциями ряда параметров, определяемых как
типом ЭУ (например, расход энергии dA^dt, ток возбуждения электро-
31
Рис. 1.10. Структурная схема СТПЭ с топливной энергоустановкой, имеющей
теллоэлектр нческим п реобразователь:
Муд. 6)ТД 11 ^ТД— вращающиЛ момент, угловая скорость и мощность теплового дви-
гателя; t/вд. /£п и Рвд — напряжение, ток н мощность вентильного преобразовате-
ля: Ра — мощность электродвигателя
машинного преобразователя /в.г, коэффициент схемы соединения топ-
ливных элементов или аккумуляторных батарей), так и типом тягового
электродвигателя и передаточным отношением ПВК (ток возбуждения
/в.д, передаточное отношение редукторов ПВК гп).
Наличие системы регулирования дает возможность воздействовать
начальным управляющим сигналом от водителя электромобиля (или
задающего устройства) на входные параметры практически любого из
агрегатов силовой цепи с последующим автоматическим регулирова-
нием всех остальных параметров.
Базируясь на обобщенной структуре (рис. 1.9), рассмотрим неко-
торые характерные особенности структурных схем СТПЭ с различными
типами ЭУ и ПВК.
На рис. 1.10 представлена структура СТПЭ с ТЭУ с двойным пре-
образованием энергии, осуществляемым в теплоэлектрических агре-
гатах. Тепловой .двигатель ТД, работающий с удельным расходом
топлива, сочленен с генератором Г, который питает ТЭД\ электродви-
гатель через односкоростную (многоскоростную) передачу Л связан с
ведущим колесом электромобиля. Соответствующие контуры регули-
рования теплового двигателя РТД, генератора РГ, электродвигате-
ля РД и переключатель передачи привода ПЛ (когда имеет место мно-
госкоростной редуктор) обеспечивают работу СТПЭ в функции сигналов
органов управления и при воздействии внешних возмущений —
это предопределяет необходимость введения в САР межкоитурных об-
ратных связей МС.
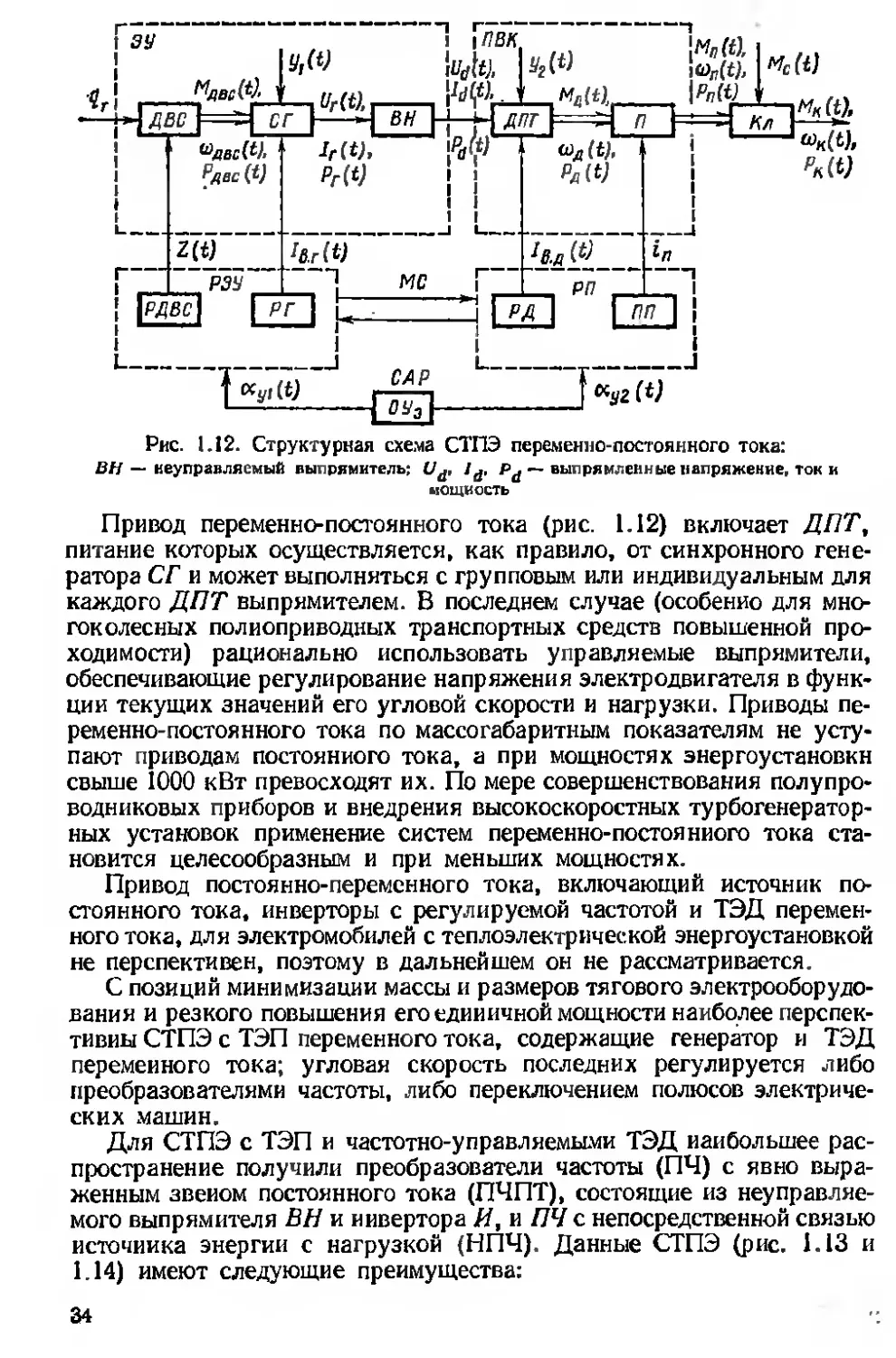
Рассмотрим более подробно системы тягового привода электромо-
билей, ЭУ которых включает ДВС и генератор, т. е. теплоэлектриче-
ский преобразователь (ТЭП). СТПЭ с ТЭП можно выполнить на посто-
янном, постоянно-переменном, переменно-постоянном или переменном
токе в соответствии с ролом тока генераторов и тяговых электродвига-
телей ПВК. Тот или иной привод выбирают, исходя из требований
32
Рис- 1.11. Структурная схема СТПЭ постоянного тока с ТЭП:
ВС' “ДВС 11 ^ДВС вращающий момент, углоя.я скорость и мощность диктате-
ня внутреннего сгорания; 1/г. /г и Рг— напряжение, ток и мощность генератора;
РДВС — регулятор двигателя внутреннего сгорания
предъявляемых к электромобилю, а также на основе технико-экономи-
ческих исследований, которые должны учитывать уровень завершен-
ности разработки тягового электрооборудования и организацию его
промышленного выпуска. При этом следует дополнительно принимать
во внимание такие важные факторы, как, например, простота техниче-
ского воплощения, унификация, сроки внедрения и др. Отметим также,
что, во-первых, для любой системы тягового привода электромобилей
с ТЭП можно использовать один и тот же двигатель внутреннего сго-
рания (в настоящее время, как правило, дизель), в то время как со-
члененные с ним генераторы могут иметь весьма различные конструк-
тивные и электромагнитные параметры. Во-вторых, только в СТПЭ
с ТЭП постоянного тока и переменного тока с полюсно-переключаемы-
ми машинами имеет место непосредственное подключение ТЭД к зажи-
мам генератора; в остальных случаях в силовую электрическую цепь
вводят вентильные преобразовательные устройства ВП.
Привод постоянного тока, содержащий генератор Г ПТ и электро-
двигатели ДПТ постоянного тока (рис. 1.11), в настоящее время полу-
чил наибольшее распространение иа существующих отечественных и
зарубежных электромобилях. Результаты исследований, проведенных
рядом научно-исследовательских и проектно-конструкторских орга-
низаций, а также опыт ведущих зарубежных фирм подтверждают перс-
пективность СТПЭ с ТЭП постоянного тока для некоторых классов
электромобилей и в последующие годы. Однако присущие приводам
постоянного тока недостатки (значительная масса и размеры силового
электрооборудования, повышенные расходы на обслуживание и ре-
монт тяговых электрических машин из-за наличия щеточно-коллектор-
иого узла и пр.) вызывают в ряде случаев необходимость применения
других типов СТПЭ с ТЭП.
£ «—158
33
Рис. 1.12. Структурная схема СТПЭ переменно-постоянного тока:
ВЦ — неуправляемый выпрямитель; U&, !&, Р^— выпрямленные напряжение, ток и
МОЩНОСТЬ
Привод переменно-постоянного тока (рис. 1.12) включает ДПТ,
питание которых осуществляется, как правило, от синхронного гене-
ратора С Г и может выполняться с групповым или индивидуальным для
каждого ДПТ выпрямителем. В последнем случае (особенно для мно-
гоколесных полноприводных транспортных средств повышенной про-
ходимости) рационально использовать управляемые выпрямители,
обеспечивающие регулирование напряжения электродвигателя в функ-
ции текущих значений его угловой скорости и нагрузки. Приводы пе-
ременно-постоянного тока по массогабаритным показателям не усту-
пают приводам постоянного тока, а при мощностях энергоустановки
свыше 1000 кВт превосходят их. По мере совершенствования полупро-
водниковых приборов и внедрения высокоскоростных турбогенератор-
ных установок применение систем переменно-постоянного тока ста-
новится целесообразным и при меньших мощностях.
Привод постоянно-переменного тока, включающий источник по-
стоянного тока, инверторы с регулируемой частотой и ТЭД перемен-
ного тока, для электромобилей с теплоэлектрической энергоустановкой
не перспективен, поэтому в дальнейшем он не рассматривается.
С позиций минимизации массы и размеров тягового электрооборудо-
вания и резкого повышения его единичной мощности наиболее перспек-
тивны СТПЭ с ТЭП переменного тока, содержащие генератор и ТЭД
переменного тока; угловая скорость последних регулируется либо
преобразователями частоты, либо переключением полюсов электриче-
ских .машин.
Для СТПЭ с ТЭП и частотно-управляемыми ТЭД наибольшее рас-
пространение получили преобразователи частоты (ПЧ) с явно выра-
женным звеном постоянного тока (ПЧПТ), состоящие из неуправляе-
мого выпрямителя ВН и инвертора Я, и ПЧ с непосредственной связью
источника энергии с нагрузкой (НПЧ). Данные СТПЭ (рис. 1.13 и
1.14) имеют следующие преимущества:
34
Рис. 1.13. Структурная схема СТПЭ переменного тока с ПЧПТ:
СУ И — система управления инвертором; i д — частота тока статора ТЭД; Р|Д — мощность,
потребляемая ТЭД
Рис. 1.14. Структурная схема СТПЭ переменного тока с НПЧ:
СУПЧ — система управления НПЧ: Ut и /1 — напряжение и ток статора электро-
двигателя
тяговые СГ и частотно-управляемые ТЭД (в качестве последних
могут применяться асинхронные, синхронные и другие электродвигате-
ли) обычно рассчитываются на повышенную максимальную угловую
скорость, которая ограничивается в основном механической проч-
ностью ротора и работоспособностью подшипниковых узлов; это дает
возможность значительно снизить удельные объем и массу тяговых
электрических машин (ТЭМ);
ТЭМ переменного тока могут выполняться бесконтактными, что по-
вышает их эксплуатационную надежность и снижает трудоемкость об-
служивания.
Системы тягового привода электромобиля с полюсно-переключае-
мыми ТЭМ обеспечивают сравнительно небольшой диапазон регулиро-
вания угловой скорости ТЭД даже с учетом изменения скорости ДВС.
Кроме того, ТЭД переменного тока в приводах, ПВК которых конст-
35
Рис. 1.15. Структурная схема СТПЭ с топливными элементами:
₽БТЭ — мощность БТЭ
руктивно выполнены по типу «мотор-колесо», требуют индивидуаль-
ного регулирования частоты питающего напряжения во избежание зна-
чительного расхождения нагрузок как при прямолинейном движении,
так и при повороте. Однако требуемое регулирование практически не-
возможно, когда используются полюсно-переключаемые машины. По
этим причинам применение приводов с такими ТЭМ на безрельсовом
транспорте существенно ограничено, они могут оказаться целесообраз-
ными лишь для некоторых специальных электромобилей с мотор-осями.
Структурная схема СТПЭ с непосредственным преобразователем
химической энергии — батареей топливных элементов (БТЭ) — пред-
ставлена на рис. 1.15. Особенностью данной структуры (в сравнении
с рассмотренной выше) является то, что ТЭУ может иметь запасы жид-
кого окислителя с удельным расходом ^ок, а регулятор РЭУ помимо
основных функций дозирования расхода топлива и окислителя в соот-
ветствии с режимами транспортной работы электромобиля, переклю-
чает блоки топливных элементов для изменения соотношения между
напряжением £7Бтэ и током /бтэ на выходе БТЭ.
Управление электродвигателями ПВК осуществляется в этих схемах
импульсными преобразователями (регуляторами) постоянного напря-
жения ИППЩ включаемыми в силовую цепь преобразования и пере-
дачи энергии.
В СТПЭ с АЭУ в настоящее время наибольшее распространение,
особенно для ГЭМ, получили системы с электрохимическими аккуму-
ляторами — кислотными, щелочными и др., реже используют СТПЭ
с механическими накопителями — инерционными аккумуляторами
(ИА), сочлененными с электромашинными генераторами.
В СТПЭ с ТАБ (рнс. 1.16) регулятор РЭУ осуществляет функции
переключателя схемы соединения аккумуляторов; в СТПЭ с ИА
(рис. 1.17) маховик раскручивается внешним источником во время ос-
тановки электромобиля, однако могут быть и системы, использующие
энергию электрического торможения для раскручивания маховика с ге-
нератором, работающим в режиме электродвигателя.
36
Z(t)‘
У,Ч)
-ЧпМ,'------'ЬМ
Prtc(i) рвМ
ПВК
В« I ...
Г Мд(П. ________
1 тал
Ыд(ь),
W)
in
MC
1
САР
ДУЭ
]м„(и
1 “nW.
\pn(t)
мсМ
। “«W.
Кл I—
----1 Рк(1)
________J
_1 Kyz(t)
Рис 1.16. Структурная схема СТПЭ с электрохимической аккумуляторной ба-
тареей:
^ТЛБ* ^ТЛБ 11 ₽ТА6 — напряжение, ток и мощность тяговой аккумуляторной батареи
Pin-. 1.17. Структурная схема СТПЭ с инерционным аккумулятором ИА:
Л1цд. "'ПЛ 11 /,НЛ — вращающий момент, угловая скорость и мощность инерционного
аккумулятора
l^L.
Приводы ведущих колес систем тягового привода с АЭУ структур-
но аналогичны ПВК в СТПЭ с ТЭУ. Их можно выполнять с группо-
вым пли индивидуальным ПВК с применением тех же типов тяговых
ш*ктрод|шгателей. Поэтому принципиальные отличия СТПЭ с ТЭУ
и с АЭУ обусловлены спецификой внутренних свойств и внешних ха-
рактеристик собственно энергоустановок (см. гл. 2).
К некоторым электромобилям предъявляются весьма противоречивые
эксплуатационные требования в части повышенной динамики разгона,
исключения загрязнения окружающей среды продуктами сгорания
топлива, увеличения дальности пробега без восстановления рас-
ходуемой энергии н др. (см. § 1.2). Полностью удовлетворить эти тре-
бования за счет какого-либо одного типа энергоустановки в ряде
случаев крайне трудно. Ограниченные возможности однотипных ЭУ
преодолевают объединением двух различных источников энергии с не-
обходимыми свойствами в общую комбинированную установку. Обыч-
37
Рис. 1.18. Структурная схема СТПЭ постоянного тока с комбинирован ной энер-
гоустановкой:
ПАБ — переключатель схемы соединения аккумуляторов: Рвн.Эар — мощность внешнего
источника заряда ТАБ
ио это сочетание источников, один из которых при разгоне электромо-
биля способен кратковременно развивать максимальную мощность
(пусковой источник), а другой обеспечивает длительный расход энер-
гии в режиме движения с установившейся скоростью (тяговый источ-
ник). Второй источник можно также использовать для пополнения (вос-
становления) запаса энергии первого. При этом возможны два основ-
ных сочетания: 1) оба источника — ТАБ различных типов; 2) пуско-
вой источник — ТАБ, тяговый — теплоэлектрический преобразователь.
В качестве примера на рис. 1.18 представлена структурная схема
СТПЭ, имеющей КЭУ со вторым сочетанием источников. Электрохи-
мическая ТАБ развивает за время Тп пуска и разгона электромобиля
требуемую максимальную мощность Ртдь (/). Мощность Рр (i), необхо-
димая в длительном режиме работы электромобиля, вырабатывается
ТЭП. Напряжения С/таби (Jt обоих источников (и, естественно, их
мощности) суммируются в блоке БС и подводятся к зажимам тягового
электродвигателя ПВК- Система регулирования обеспечивает также
подзаряд ТАБ за счет избыточной мощности теплоэлектрическо-
го агрегата. Одновременно блок БС может (при необходимости) вы-
полнять функции ВП (ИППН).
§ 1.5. Схемы подключения приводов
ведущих колес к энергоустановкам
Силовую цель СТПЭ постоянного и переменно-постоянного тока можно выпол-
нять с переключениями в схеме при переходе из одного режима в другой, а также
с неизменной схемой подключения ТЭД ПВК к ЭУ Последнее в большинстве слу-
чаев предпочтительнее, так как в процессе переключений в силовой цепи могут
38
быть большие броски тока и резкие изменения тягового усилия; кроме того, схема
СТПЭ упрощается, ибо отсутствует дополнительная коммутационная аппаратура.
ТЭД постоянного тока соединяют последовательно, параллельно или параллель-
но-последовательно (в параллельные группы с последовательно включенными элек-
тродвигателями в каждой группе).
Последовательное соединение всех ТЭД обеспечивает им одинаковую нагрузку
по току, но имеет н ряд недостатков. Остановимся на двух наиболее существенных.
Во-первых, напряжение между последовательно соединенными ТЭД распреде-
ляется пропорционально их угловой скорости. Поэтому в случае потери спепления
с грунтом одним из мотор-колес, которое нередко наблюдается, например, в гололед
или при движении по мокрому глинистому грунту, напряжение на зажимах ТЭД
этого колеса резко возрастает, что может привести к режиму «разносного» буксова-
ния. В результате полное напряжение ЭУ подводится к одному электродвигателю,
вращающий момент ТЭД остальных колес спадает практически до нуля, а электро-
двигатель буксующего колеса выходит из строя. Применение устройств защиты,
предотвращающих буксование мотор-колес, значительно усложняет СТПЭ.
Во-вторых, последовательное соединение пк тяговых электродвигателей преду-
сматривает выполнение энергоустановки с номинальным напряжением UaV№ в лк
раз большим номинального напряжения UR н ТЭД. Если для СТПЭ с ТЭП напря-
жение t/д н достигает 500—700 В, то для электромобилей даже с двумя ведущими
колесами необходимо выбирать Ura в пределах 1000—1500 В. Создать ГПТ большой
мощности для КЭМ с С/Г н = 1500 В при частоте вращения лгн = 1500 об/мин за-
труднительно по условиям коммутации и требуемой надежности. Снижение напряже-
ния t/д н вдвое означает удвоение тока ТЭД, что потребует удлинения коллектора
в полтора раза и более — последнее существенно уменьшит надежность, повысит
расход коллекторной меди и усложнит размещение электродвигателя в мотор-колесе.
Здесь и далее индекс «н» означает номинальное значение параметра.
В СТПЭ переменно-постоянного тока при использовании синхронных генера-
торов ограничения по генератору снимаются. Если применить СГ с Пф раздельными
трехфазными статорными обмотками, то можно обеспечить работу силовой цепи,
выполненной по схеме «ТЭД — выпрямитель — ... — ТЭД — выпрямитель» («ф
раз), где каждый выпрямитель подключен к отдельной обмотке СГ. Такая схема
обладает большим достоинством — осуществляется поддержание равенства враща-
ющих моментов ТЭД (так называемый электрический дифференциал), а потенциаль-
ные условия на коллекторах электродвигателей в рабочих режимах практически
не отличаются от условий в схеме с их параллельным соединением.
В схеме параллельного соединения ТЭД при буксовании одного колеса тяговые
усилия на остальных колесах сохраняются или даже несколько увеличиваются.
Отключение неисправного электродвигателя в этом случае осуществляется наиболее
просто. Недостатки параллельного соединения — большое число коммутационных
аппаратов, особенно для ТЭД последовательного возбуждения со ступенчатым регу-
лированием тока /в д, н неравномерное распределение нагрузок между электродви-
гателями.
Параллельно-последовательное соединение ТЭД по сравнению с параллельным
дает возможность уменьшить количество коммутационных аппаратов, но опасность
«разносного» буксования выше. Одиако если электромобиль имеет четное число
пар мотор-колес, то последовательное соединение двигателя переднего колеса одного
борта с двигателем заднего колеса другого борта позволяет уменьшить вероятность
возникновения указанного режима, ибо одновременная потеря сцепления с грун-
том несоосных колес разных бортов практически исключена. Нетрудно убедиться,
что в подобных схемах нагрузки между ТЭД распределяются более равномерно,
чем при параллельном соединении, и, кроме того, снижается неравномерность распре-
деления нагрузок в режиме поворота электромобиля, так как в каждой последова-
тельной цепи включены электродвигатели колес внутреннего и наружного по отно-
шению к центру поворота бортов
Выбор рациональной для конкретного электромобиля схемы подсоединения
ТЭД к ЭУ не является однозначным; должны приниматься во внимание как внутрен-
ние свойства агрегатов силовой цепи СТПЭ, так и внешние факторы — колесная
формула, условия эксплуатации и др. Практика отечественного и зарубженого
Влектромобилестроения показывает, что для КЭМ, у которых от одной ЭУ получают
39
Рис. 1.19. Схемы силовой цепи СТПЭ постоянного (с электрохимичес-
кими аккмуляторами) и переменно-постоянного токов:
а — с общим ВП'. б ~ с групповыми ВП; в — с индивидуальными ВП
Рис. 1.20- Схемы силовой цепи СТПЭ переменного тока.
питание два или четыре ТЭД. предпочтительным оказывается их параллельное со-
единение; для электромобилей с большим числом ыотор-кслес и малым радиусом пово-
рота можно рекомендовать параллельно-последовательное соединение ТЭД, чтобы
разница угловых скоростей внутренних и наружных колес в режиме поворота не
оказывала значительного воздействия на распределение нагрузок между электродви-
гателями.
Систему тягового привода электромобиля переменно-постоянного тока можно
выполнять с общим, групповыми или индивидуальными ВП (т. е. ВЫ или ВУ).
Схема подключения ТЭД к ЭУ влияет и на выбор общего, групповых или
индивидуальных ВП (т. е. ВН, ВУ, ИППН) в СТПЭ переменно-постоянного тока
с ТЭП, а также в СТПЭ постоянного тока с БТЭ и ТАБ (рис. 1.19). Для всех упомя-
нутых СТПЭ предпочтительно иметь в силовой цепи такое число ВП, чтобы коли-
чество вентилей в их плечах было минимальным.
Обоснование рационального количества выпрямителей в СТПЭ переменного
тока с ГТЧПТ (рис. 1.20) предполагает учет факторов, отмеченных выше.
40
§ 1.6. Предпосылки реализации
заданной тяговой характеристики
электромобиля
При создании СТПЭ первоочередными задачами являются установ-
ление связи эксплуатационных показателей и заданной тяговой харак-
теристики электромобиля с параметрами и характеристиками ЭУ и
ТЭД ПВК, составляющих основу силовой цепи преобразования и пере-
дачи энергии, а также обоснование выбора номинальных данных, рас-
четной мощности, диапазона регулирования напряжения, магнитного
потока и других величин.
Обобщенные структуры СТПЭ облегчают переход к рассмотрению
уравнений связи между входными и выходными параметрами ПВК и
ЭУ, а также к определению требуемых характеристик силового элек-
трооборудования, обеспечивающих выполнение тяговой характерис-
тики F (vj, с одновременным учетом их влияния на энергетические и
технико-экономические показатели электромобиля.
Главные эксплуатационные показатели электромобиля, оказываю-
щие влияние на выбор параметров агрегатов СТПЭ,— это полная мас-
са груженого электромобиля G^rp (кг), свободная (отводимая на тя-
гу) мощность энергоустановки Рзу (Вт), количество ведущих колес т^,
длительная (или номинальная) суммарная сила тяги Д (Н) при ско-
рости ии (м/с), максимальные сила тяги Гмакс(Н) и скорость vwaKC (м/с).
Перечисленные величины, обычно указываемые в задании на разработ-
ку СТПЭ, устанавливаются либо по результатам анализа планируе-
мых технологических циклов транспортной работы проектируемого
электромобиля, условий его эксплуатации и обобщенных технико-эко-
номических расчетов, либо подтверждаются опытом промышленного
использования подобных (или близких по назначению) транспортных
средств.
Предельную зависимость F (v) электромобиля рассчитывают по
формуле
Г^РэунШ/Щ (1-1)
где Це — КПД силовой цепи преобразования и передачи энергии, вклю-
чая КПД движителя.
Согласно зависимости F (и), определяют требуемые кратности мак-
симальной скорости движения электромобиля Д.. = Гмакс/Ц, и макси-
мальной силы тяги kp ~ FMmc/F„t а также тяговую характеристику од-
ного колеса (и), где F*= Flm* (главным образом для конструктивной
модификации ПВК в виде мотор-колес) Обычно диапазоны измене-
ния тяговых усилий и скоростей достаточно большие и в зависимости
от типа электромобиля могут достигать значений kp= 3 4, k0 = 3 4-
4- 6. Соответственно изменяются при in = const момент на валу и
угловая скорость ТЭД ПВК-
Следовательно, все возможные режимы работы ЭУ и ПВК огра-
ничены следующими параметрами предельной зависимости F (v): мак-
симальной Гмакс и номинальной FK силами тяги, номинальной мощ-
ностью Рэуч, максимальной скоростью цмякг при некоторой силе тяги
Гмин. За номинальное значение силы тяги FK принимают такое, которое
4J
обеспечивает электромобилю с полной расчетной массой СЭл.гр задан-
ную скорость ин на усредненном, наиболее часто встречающемся профи-
ле пути. Отметим, что параметр используют только при проекти-
ровании транспортных средств с электрическим приводом ведущих
колес, поскольку именно FK предопределяет выбор номниальиого мо-
мента ТЭД и возможность длительной работы электродвигателей (по
условиям нагр'зания).
В свою очередь, реализация зависимостей F (и) обеспечивается со-
ответствующим регулированием угловой скорости од н момента Мп
на валу электродвигателей ПВК в широких пределах вверх и вниз
от номинальных значений. Так как кратность максимальной скорости
kv равна кратности максимальной угловой скорости — сОдмакс/к’дн»
кратность максимальной силы тяги kp равна кратности максимального
момента /?л/ = Л1дыакс/Л1ди, то — 3 -5- 6, а пусковой момент может
доходить до (3 -=- 4) Л4дИ. При этом ТЭД, ВП и ЭУ имеют, как пра-
вило, соизмеримые установленные мощности.
Тяговая характеристика электромобиля в общем виде может быть
выражена функцией
Fv* — const, (1.2)
где х — коэффициент жесткости.
При работе СТПЭ, направленной на обеспечение заданного диапа-
зона изменения тягового усилия F н скорости движения н, значения
коэффициента х, как правило, ие остаются постоянными и зависят от
многих причин. Не анализируя каждый из возможных факторов (та-
кой анализ проводится в последующих главах), необходимо отметить,
что большое влияние на значение коэффициента х и, следовательно,
на формирование зависимости F (v) оказывают помимо регулировочных
свойств н показателей ТЭД ПВК параметры и внешняя характеристи-
ка энергоустановок. Например, при питании ТЭД от ТЭП основные
ограничения на значение коэффициента х накладываются со стороны
дизеля, имеющего существенно низкую перегрузочную способность,
что предопределяет регулирование на выходе генератора постоянства
отбираемой мощности. В случае применения АЭУ превалирующее вли-
яние имеют не мощностные Рэу(//эу, /зу), а энергетические соотноше-
ния Лэу(С/эу. /эу, /). Степень воздействия иа коэффициент х парамет-
ров КЭУ обусловлена свойствами и внешними характеристиками каж-
дой из входящих в нее однотипных ЭУ, а также совместной или последо-
вательной их работой на соответствующих участках зависимости F (г).
Значения коэффициента х определяются способами взаимосвяз-
ного регулирования ЭУ и ТЭД (управление напряжением на выходе
ЭУ, переключение групп источников и преобразователей энергии,
управление магнитным потоком ТЭД и др.), принятыми для реализации
конкретных участков кривой F (о). Можно использовать многоскорост-
иые передачи ПВК («„ = var) н другие схемно-конструктивные модифи-
кации узлов (агрегатов), входящих в СТПЭ и дополнительно влияю-
щих на Тяговую характеристику.
Таким образом, выполнение заданной зависимости F (и) электро-
мобиля обусловлено свойствами и параметрами практически всех
42
агрегатов силовой цепи преобразования и передачи энергии, а также
принятыми способами их регулирования. Поэтому одной из первооче-
редных задач создания СТПЭ является установление связей между па-
раметрами ТЭД ПВК и параметрами остальных агрегатов (главным об-
разом ЭУ) с последующим обоснованием н выбором их номинальных
данных, расчетом характеристик, определением способов регулирова-
ния, обеспечивающих реализацию зависимости М„ (сод) н в конечном
итоге F (и).
§ 1.7. Зависимости между входными
и выходными параметрами силовых
агрегатов СТПЭ
Предварительно уточним некоторые вопросы методологического
подхода к расчету характеристик ТЭД, ВП и ЭУ в СТПЭ электромоби-
лей, вытекающие из поставленных выше задач.
До настоящего времени проектирование тяговых приводов постоян-
ного тока нередко проводится по сложившейся традиции в направле-
нии от ЭУ к элек^эдвигателям ПВК- Такой подход, заимствованный
из практики разр*жугки электропередач тепловозов, в некоторых науч-
но-технических публикациях рекомендуется для проектирования но-
вых типов СТПЭ, в частности переменно-постоянного и переменного
тока. Наличие в силовой цепи указанных приводов вентильных пре-
образователей значительно снижает эффективность применения данно-
го подхода из-за необходимости использования громоздкого и трудо-
емкого метода последовательных приближений при расчете характе-
ристик ЭУ, ВП и ТЭД и усложняет оптимизацию СТПЭ.
В некоторых случаях, когда невозможно задать тяговую характе-
ристику F (о) электромобиля, приведенную к одному ведущему колесу,
а по условиям унификации или другим причинам выбор энергоустанов-
ки осуществлен, т. е. задана свободная мсщиостьЭУ, отводимая на тя-
гу, проектирование «от ЭУ к ТЭД» является единственно возможным.
В настоящее время накоплен достаточный статистический материал
и опыт разработки СТПЭ для электромобилей различного класса и на-
значения, что позволяет по результатам анализа планируемых техноло-
гических циклов и условий эксплуатации электромс ля уже в на-
чальной стадии его создания наметить наиболее рациональную зави-
симость F (о), на базе которой о сновать общие требования к сило-
вому электрооборудованию СТПЭ. В этом случае целесообразно вести
проектирование «от ТЭД к ЭУ», т- е. определить необходимые харак-
теристики ТЭД, ВП и ЭУ, исходные данные для их расчета или вы-
бора, а также наметить энергетические и техннко-экономическне пока-
затели. Такое проектироваиие, основанное иа непосредственном уче-
те назначения и заданных эксплуатационных показателей электромо-
биля, методологически более оправдано. Кроме того, в процессе раз-
работки СТПЭ (ocoi iho приводов переменно-постоянного и перемен-
ного тока) это позволяет свести к минимуму количество вариантов рас-
четов и исключить ряд неопределенностей, затрудш щих обеспечение
тр угемой тяговой характеристики.
43
На основании вышеизложенного предельную механическую ха-
рактеристику /Ид (юд) ТЭД с регулятором (последняя является зако-
ном регулирования тягового электродвигателя) находят непосредствен-
но по зависимости F (и), а электромагнитный момент М (Н м) и уг-
ловую скорость 0)д (с-4) — из соотношений
М = /?кГ/(тк/пЯмсх'Чпвкт1к); U-3)
шд = 1я1»//?в1 (1.4)
гд? /?к — радиус качения колеса, м; i]MCx — КПД, учитывающий только
механические потери в ТЭД; — КПД, учитывающий потери на про-
скальзывание колеса и смятие шии.
В соответствии с kv и kp зависимости F (v) также однозначно опре-
деляются (при io ~ const) кратностями максимальной угловой скорости
и максимального пускового момента км. Ниже показано, что пара-
метры регулирования kw и км непосредственно влияют на расчетную
мощность и габариты не только ТЭД, ио и ВП и ЭУ.
Пользуясь известными соотношениями, зависимость М (<од) мож-
но преобразовать в UR (/д). У различных типов ТЭД зависимости
f/д (/J идентичны. Для двигателей постоянного тока (ДПТ)
/д М/(/гФд); Ед=ЬздФд; Ua = Ед + /ДЕ/?Д, (1.5)
где k — конструктивный коэффициент двигателя; Фд— магнитный по-
ток, Вб; Ед—противо-ЭДС ДПТ, В;2/?д—суммарное сопротивле-
ние цепи якоря, Ом.
Для асинхронных короткозамкнутых двигателей (АД)
/д = Л1/(6Фяа» %); Еа = — s); 1
Ч,=е, + 1А. I (1'6)
где фд — угол сдвига фаз между первыми гармоническими составляю-
щими тока и напряжения; s — относительное скольжение; 2Д — комп-
лексное сопротивление обмотки статора, Ом.
Для вентильных двигателей (ВД), выполненных на основе синхрон-
ного двигателя с инвертором,
1а = /И/(*ФДСО5 <рд); Ед = kta^kf, 1
ид = Ед+1А, 1 * '
где fep—коэффициент, зависящий от угла опережения инвертора Р;
ZR — комплексное сопротивление обмоток статора (для иеявиополюс-
ной машины Za — гв + /хс; для явнополюсной машины Za = га /хв);
га — активное сопротивление обмотки статора, Ом; хс, хя — синхрон-
ные индуктивные сопротивления неявнополюсной и явнополюсной ма-
шин, Ом.
Определив зависимость Ua (/д) (в СТПЭ переменно-постоянного и
переменного тока ее можно рассматривать как характеристику
t/вл (/вп) на выходе ВП), переходят к внешней характеристике ЭУ с
регулятором t/эу (/эу). которую оиа должна иметь в соответствии с
заданной тяговой характеристикой электромобиля. Для наиболее об-
щего случая (в силовую цепь включены ВП)
Еэу — nJJjJku’t lav = (1.8)
44
Рис. 1.21. Тяговая характе-
ристика F (и) электромобиля
с СТПЭ, имеющей тсплоэлект-
рический преобразователь
Рис. 1.22 Механическая ха-
рактеристика Л4((0д) тягового
электродвигателя в СТПЭ с
тенлоэлсктрнческим преобра-
зователем
где Ль/, kt — соответственно передаточные коэффициенты ВП по напря-
жению и току (при подключении ТЭД непосредственно к зажимам
ЭУ ku — kt — 1); «к — число последовательно соединенных ТЭД.
Выражения связи (1.3) — (1.8) характеристик агрегатов силовой
wiiii СТПЭ с тяговой характеристикой позволяют определить пара-
мо гры ТЭД (а также ВП и ЭУ), соответствующие наиболее важным
параметрам зависимости F (и). Покажем это на примере СТПЭ постоян-
ного тока с теплоэлектрическим преобразователем.
Пл рис. 1.21 представлена тяговая характеристика F (и) электро-
моыыг.!, состоящая из трех участков, соответствующих постоянству
|||'н.| гиги (линия ZB), постоянству мощности на зажимах ГПТ в ин-
И']|налс скоростей движения от vb до ом^Кс (линия BCD) и максимальной
i'hoporrii Умакс (пунктирная линия DL). Точка С соответствует номиналь-
ным силе тяги и скорости. На рис. 1.22 приведена механическая харак-
К'рпггпка ТЭД с регулятором, а на рис. 1.23 — зависимость UR (/д),
ii.itijieiiiti.fi* по зависимости F (v) согласно (1.3) — (1.5).
Принимаем координаты точки С зависимости (/„ (/д) в качестве
in лишил иных знамен ini напряжения и тока (Uac = 1/д.н, /дс = /дн).
hn/i.a для режимов работы ДПТ, соответствующих точкам В и D,
UllB = f/д .МИН £д цШдВ,Фдв, -р ЛмД^д.и/ФдВ»!
DrD = Dr .макс — Ед н<°дВ*ФдВ. + Л4 мин*Дб^д.ц/Фд£)*,
I 'U ••п/u : б)дв/<йд.ц^ I^rD* ~ ^rD^r., — максА>)д.н == ФдД* —
Ф.л •!•,(„, Фдр, = Фдв/Фд.н, Мшн* — Л4мИН/Л4и; ыаВ и ФдВ —угло-
iitni <hii|>nrn> и магнитный поток ДПТ в режиме, соответствующем
тчие В швнсимости М (шд) на рнс. 1.22; (одр, Фдр — то же, для
пннн) I). Л4.1,1н — значение момента ДПТ в точке Ь; Д(7д.н = /д.„2/?д —
пи угри шее падение напряжения ДПТ в номинальном режиме.
1дес1. я далее индекс «*» соответствует относительному значению
itnp.iMerpa, т. е. отношению текущего значения к номинальному, отме-
ченному индексом «и».
1‘;нделпн обе части выражений (1.9) на Ua.u и учитывая, что Ea.ti =
-1 к Л(/д.ц, получим
£/д.МШ1* — DR.mKkIDд.н = (1 — Дб^д.н/В'д.н) ОдВ*ФдВ* ~р
} (1.9)
expert22 для http://rutracker.org
45
+ (ЫФдв.) (Д1/д ЛЛ „); (1.10)
^д.макс» “ ^д.макс/^д.н =
= (1 --А£7Д1Н/(/д.н) &й)фд£)» +
+ (Л4МИНф/ФдО.) (Д^н/С/дД (1.11)
Анализ выражений (1.10) и (1.11) от-
носительно параметров км и дает возмож-
ность оценить приемлемые способы управ-
ления ДПТ для реализации закона регули-
рования М (<0д) и, следовательно, тяговой
характеристики F (и).
Управление электродвигателем в диа-
пазоне угловых скоростей юд < сод,н осу-
Рис. 1.23. Зависимость ^д(/д)
тягового электродвигателя в
СТПЭ с теплоэлектрическим
преобразователем
ществляется за счет снижения напряжения, подводимого к его за-
жимам. Одновременно, как правило, увеличивают ток возбуждения,
а значит, и магнитный поток, значение которого ограничивается в
основном степенью насыщения ДПТ и не превышает Фдэ. — 1,2 4-
4- 1,3. Получение максимальных скоростей достигается уменьше-
нием потока и поддержанием постоянства напряжения (7Д
URti, при этохм значение ФдО. лимитируется прежде всего потен-
циально-коммутационными условиями на коллекторе ДПТ. При чрез-
мерном снижении магнитного потока ТЭД напряжение между сосед-
ними коллекторными пластинами максимально и реактивная ЭДС мо-
жет превысить предельно допустимые значения. Обычно минимальное
значение магнитного потока Фдв. — 0,254-0,3. Если ka = 44-6, то
напряжение на зажимах ДПТ повышают до £/д.макс* = 1,44-1,5. В об-
щем случае соотношение между параметрами Фдо. и (/д,макс. опреде-
ляется заданной кратностью максимальной угловой скорости, сооб-
ражениями экономичности и требованиями минимизации массы и раз-
меров ТЭД и ЭУ.
Сказанное выше справедливо и для ТЭД переменного тока с той
лишь разницей, что у АД напряжение (/д.Макс* устанавливается с уче-
тохм обеспечения необходимой перегрузочной способности X > 1 на
угловых скоростях, близких к максимальным.
Регулирование угловой скорости и напряжения в широком диапа-
зоне вверх и вниз от номинальных значений обусловливает соответ-
ствующий подход к выбору расчетной мощности тягового электрообо-
рудования. Значения /д.макс и £/д.Мвкс, соответствующие точкахм В и D
зависимости UR (/д), характерны для СТПЭ с любым типом энергоуста-
новки. Так, расчетная мощность ТЭД определяется его номинальной
мощностью РДн, которая находится по хмехаиической характеристике
М (<од) согласно заданному длительному режиму работы электромоби-
ля, и кратностью максимальной угловой скорости
F д.расч = РЛЛ-кь.~М
макс, (1.12)
ГДе Рд.н — Мд.ц(1)д^н— Л^н^Д-н*
В процессе проектирования (или выбора) ТЭД необходимо учиты-
вать значение максимального тока нагрузки /д.макс* = /д.«кс//дн =>
— й^/Фдв* и влияние высших гармонических и субгармонических
46
составляющих напряжения и тока, имеющих место в приводах с ВП
и ухудшающих выходные параметры электродвигателя, особенно при
УГЛОВЫХ СКОрОСТЯХ (Од > (0д,и.
Расчетная мощность Рвпрасч вентильного преобразователя зависит
от предельных значений напряжения и тока, которые можно найти из
характеристики l/вп (/вп). Для схем, когда от одного преобразовате-
ля питается т* двигателей, расчетная мощность ВП пропорциональна
количеству ведущих колес, максимальным напряжению и току ТЭД:
РвПрасч s== /ИкРд.ц1/д.макс*^д.макс*« (1.13)
Расчетную мощность Рэурасч энергоустановки выбирают из условия
реализации требуемой мощности в длительном режиме с учетом при-
нятого закона регулирования напряжения на ее зажимах. При этом
ЭУ должна кратковременно выдерживать токи нагрузки /эушкс» Так
как наибольшее длительное значение тока имеет место в номинальном
режиме, то расчетная мощность Рэурасч пропорциональна максималь-
ному напряжению f/эумакс*. Согласно (1.8) запишем выражения, поз-
воляющие рассчитать максимальные значения напряжения и тока ЭУ:
6/эУмакс. == б^ЭУыакс/^ЭУн = ^д.макс»/^ОВ»; 1
. . .. . .. f (1-14)
<ЭУмакс» — • ЭУ макс/• ЭУ н — /д-мако/Д/В», }
где ItuD- e kudkvn, Ьв* — kielki»\ kuD> kt в — соответственно переда-
точные коэффициенты ВП по напряжению и току, определяемые его
работой в точках D н В зависимости С/д(/д) или 17вп(/вп).
Тогда
^ЭУрасч = РэУцб^эУ макс* — РэУи^д.макс*/(&7О*Хо), (1.15)
Где Хи — коэффициент мощности преобразовательной нагрузки «ВП —
ТЭД» в режиме, соответствующем точке D зависимости UR (/д).
II СТПЭ постоянного тока X = I.
Дли электрохимических источников энергии (ТАБ, БТЭ) Рэурасч =
— Рю,,, так как £/ДМакс* = 1, ku — 1, X = 1.
Таким образом, рассмотренные уравнения связи между основными
нпрпм1Трами ТЭД, ВП и ЭУ позволяют определить величины ka, км,
/дмакс». расчетные мощности агрегатов силовой цепи и дру-
I не параметры, обусловленные режимами работы СТПЭ электромоби-
лий Указинные величины существенно влияют на энергетические и
IvAinihii экономические показатели, а также на выбор конструктивно-
hi iiriiiмпкчшя, номинальных данных и внутренних параметров ТЭД,
ИИ и ЭУ. Одна из основных задач при этом состоит в обосновании ра-
циональных методов нх выбора и согласования, выявления путей опти-
мизации агрегатов для получения заданных (или желательных) энерге-
ТНЧ1Ч-1ШХ и технико-экономических показателей как СТПЭ, так и элек-
тромобиля.
47
§ 1.8. Особенности согласования
параметров и характеристик
агрегатов силовой цепи в СТПЭ
с вентильными преобразователями
Из анализа уравнений (1.8), (1.14) и (1.15) следует, что наличие в силовой цепи
СТПЭ вентильных преобразователей усложняет согласование параметров и харак-
теристик ТЭД ПВК с соответствующими парамеграми и характеристиками ЭУ.
Поэтому весьма важно определить степень влияния коммутационных процессов,
вызванных работой ВП, на энергетические показатели СТПЭ (в первую очередь на
расчетную мощность ЭУ, коэффициент мощности преобразовательной нагрузки,
КПД и механическую характеристику ТЭД).
Вентильные преобразователи устанавливают в приводах постоянно-перемен-
ного, переменно-постоянного и переменного токов (см. § 1.4). Однако в отечественной
и зарубежной практике электромобилестроения системы постоянно-переменного тока
практически нс применяют, а системы переменного-постоя иного и переменного тока,
как правило, выполняют с использованием энергоустановок с синхронными генера-
торами (например, теплоэлектрические преобразователи ДВС—СГ, аккумуляторные
ЭУ типа инерционного накопителя-маховика, связанного с СГ). Таким образом,
в настоящее время правомерно и целесообразно рассматривать работу ВП в таких
СТПЭ, которые имеют структуры с силовыми цепями, включающими последователь-
ное соединение СГ, ВП и ТЭД.
Квазиустановившиеся режимы работы СГ и ТЭД в приводах с ВП» характери-
зующиеся периодическим чередованием процессов коммутации тока в фазах тяговых
электрических машин, в которых происходит естественное изменение токов и напря-
жений, обусловлены только параметрами самих ТЭМ, схемой силовой части ВП и
принятым законом формирования его выходного напряжения. Поэтому при опреде-
лении КПД и коэффициента мощности необходимо оперировать гармоническим со-
ставом токов и напряжений, кривые мгновенных значений которых рассчитывают
с учетом их реального изменения под влиянием процессов коммутации. В то же
время электромеханические характеристики рационально рассчитывать по дейст-
вующим значениям основных гармонических токов и напряжений, полученных
разложением типовых кривых, построенных без учета процессов коммутации или
с упрощенным учетом этих процессов Кроме того, совокупность указанных выше
Дикторов решающим образом влияет на передаточные коэффициенты преобразова-
теля /?/ и kVt посредством которых связаны значения тока и напряжения на зажимах
СГ и ТЭД, и на коэффициент мощности преобразовательной нагрузки X, от которого
зависит расчетная мощность СГ.
Рассмотрим некоторые основные вопросы расчета коэффициентов kf, ky и X
для основных типов ВП, применяемых в СТПЭ.
В СТПЭ переменно-постоянного тока энергия от СГ к ДПТ передается через
управляемые (ВУ) или неуправляемые (ВН) выпрямители. Известно, что электро-
магнитные процессы в ВН полностью идентичны процессам, протекающим в ВУ,
если в последних угол регулирования Ор = 0. Поэтому здесь и в дальнейшем будем
рассматривать работу ВН как частный случай работы ВУ
Электромагнитные процессы в ВУ, возникающие при периодических коммута-
циях вентилей, аналитически описываются уравнениями» где аргументами иссле-
дуемых функций — входных и выходных токов и напряжений — являются угол
включения а = ар + (ар — угол задержки естественного включения) и угол
коммутации вентилей у. Если ар — независимая переменная» задаваемая системой
управления, то щ и у — функции тока нагрузки и параметров цепи коммутации
(ЭДС и индуктивных сопротивлений ТЭМ) Выражения для расчета входных и
выходных токов и напряжений ВУ. питающихся от источника «бесконечной» мощ-
ности см. в [3]. С определенными допущениями, несущественно влияющими на точ-
ность результатов, эти выражения применимы и для соответствующих расчетов
в автономных системах СГ—ВУ—ДПТ, т. е. в СТПЭ переменно-постоянного тока.
При этом удобно представлять ДПТ в виде нагрузки с эквивалентным переменным
соп роти вл ен ием.
В теории выпрямителей известны режимы прерывистых токов нагрузки, когда
В У включен на источник с противо-ЭДС. В ПВК с ДПТ смешанного или независи-
48
мого возбуждения подобные режимы могут иметь место только при малых токах
электродвигателя и угловых скоростях, близких к максимальным, если его проти-
во-ЭДС превысит мгновенное значение фазной ЭДС генератора в момент подачи
управляющего сигнала на коммутируемый вентиль. Последний откроется с некото-
рым запаздыванием е — arcsin {EjErn)t где Егт — амплитудное значение фазной
ЭДС синхронного генератора Так как СТПЭ имеют замкнутые системы регулирова-
ния и, как правило, максимальная угловая скорость достигается посредством умень-
шения магнитного потока ДПТ, то рассматриваемый режим маловероятен, а его
влияние на работу ВУ в дальнейшем не учитывается.
Рассмотрим СТПЭ переменного тока с двумя типами преобразователей частоты
(ПЧПТ и III 14). Преобразователь частоты со звеном постоянного тока можно пред-
ставить в виде последовательной цепи ВН—Ф—ЛИ (Ф — индуктивно-емкостный
фильтр; ЛИ — автономный инвертор); его передаточные коэффициенты kv и kt равны
произведению соответствующих коэффициентов ВН и АИ. Если в приводе напряже-
ние регулируется не на зажимах генератора, а управлением ВП, необходимо рассма-
тривать системы ВУ -Ф—АИ. Наличие фильтра в звене постоянного тока, через
коюрый замыкается реактивная энергия ТЭД, позволяет пренебречь влиянием
электромагнитных процессов в звене Ф—АИ—ТЭД на работу выпрямителя и счи-
тать выпрямленные ток и напряжение ВН идеально сглаженными. Таким образом,
систему СГ—ВН—Ф—ЛИ—ТЭД можно рассматривать, как последовательное сое-
динение звеньев СГ—ВН и Ф—АИ—ТЭД, из которых последнее обладает детекти-
рующими свойствами. Если представить звено Ф—АИ—ТЭД в виде нагрузки
с эквивалентным переменным сопротивлением, то напряжение и ток СГ будут опре-
деляться передаточными коэффициентами ВН (аналогично тому, как и в СТПЭ
переменно-постоянного тока). Представление звена Ф—АИ—ТЭД эквивалентной
нагрузкой выпрямителя, в свою очередь, связано с вычислением передаточных коэф*
фициентов по току и напряжению инвертора, зависящих от длительности открытого
состояния тиристора (угла 6Т) и угла коммутации у; соответствующие коэффициенты
фильтра из рассмотрения целесообразно исключить, ибо они практически не зави-
сят от нагрузки в близки к единице.
Инверторную часть ПЧПТ можно выполнить на основе автономных инверторов
тока (АИТ) или напряжения (АИН). Например, для тяговых приводов с коротко-
замкнутыми АД предпочтительны АИН с компенсацией реактивной мощности дви-
гателя за счес обмена энергией между фазами и возврата ее в звено постоянного
тока с помощью диодного обратного моста (см гл. 6). Такие инверторы работают
обычно с углами = 120, 150, 180°, их передаточный коэффициент по напряжению
практически постоянен во всем диапазоне изменения частоты и нагрузки, а пере-
даточный коэффициент по току обратно пропорционален коэффициенту мощности
АД. Следовательно, для приводов с инверторами напряжения и асинхронными
двигателями представление звена Ф—АИН—АД в виде эквивалентной нагрузки
с переменным сопротивлением правомерно.
Преобразователи частоты с непосредственной связью, применяемые с СТПЭ,
могут иметь разные схемы силовой части и системы управления: 18-вентильные
нулевые, 36-вентильные с искусственной или естественнной коммутацией, с программ-
ным управлением или управлением с постоянным углом 0Ср. Однако процессы,
протекающие в них и влияющие на передаточные коэффициенты ky и ft, во всем
диапазоне изменения частоты и нагрузки, обусловлены одними и теми же факто-
рами.
Наиболее полно перечисленным требованиям по сравнительной простоте, на-
дежности и устойчивости функционирования в широком диапазоне регулирования
частоты напряжения при возможных значительных изменениях нагрузки удовлетво-
ряет 36-вентильный НПЧ с естественной коммутацией и раздельным питанием фаз
АД. Преобразователь частоты этого типа может быть представлен для каждой фязы
АД системой двух ВУ, один из которых фюрмирует положительную, другой — отри-
цательную полуволны фазного напряжения. Кривая этого напряжения состоит из
полуволн фазных ЭДС генератора, число которых пропорционально отношению
ft- lh’ где /г и Д — частоты тока статора СГ и АД. В отличие от ВУ в НПЧ наряду
с выпрямительным режимом, характеризуемым углами а и 1>в. имеет место инвертор-
ный режим с углом коммутации уи и углом опережения включения вентилей р.
Длительность инверторного режима и, следовательно, значения углов 0 и уи зави-
сят от коэффициента мощности двигателя. Тяговый АД работает в СТПЭ, как
49
Основная из них — снижение отдаваемой в силовую цепь СТПЭ мощ-
ности в процессе работы ТЭД ПВК, причем изменение выходных пара-
метров ТАБ является нелинейной функцией режимов нагрузки элек-
тродвигателей. Последнее значительно усложняет расчет тяговых ха-
рактеристик СТПЭ.
Применение того или иного типа ЭУ обусловливает и соответствую-
щий выбор определяющего критерия, позволяющего наиболее полно
отразить специфические особенности и возможности используемой
энергоустановки и в известной степени уровень ее технического совер-
шенства.
Уравнение мощностного баланса источников энергии и ее потре-
бителей в СТПЭ имеет вид
кЭУ «к
У Рэя = X ДД'Пд'Пк) + АРстПЭ + Д.о, (2.1)
где fey — количество ЭУ на электромобиле; Рэу — мощность единич-
ной ЭУ; ДРстпэ — суммарные потери в СТПЭ; Рв.о—мощность, рас-
ходуемая иа вспомогательные нужды электромобиля и привода.
Современные электромобили имеют, как правило, одну ЭУ. Тогда
из (2.1) при fey = 1 получим мощность ЭУ, отводимую на тягу;
Рэу св = гп^Ра/(^д^к) + АДзтпэ- (2.2)
Например, для привода постоянного тока с ТЭП выражение (2.2)
принимает вид
ег
Рев = V Pr/rlr = m„PK/iiz, (2.3)
1
где qr— количество генераторов, приводимых во вращение ДВС; Рг —
мощность тягового генератора.
Энергетическая реализация соотношения (2.3) может быть следую-
щей: qr — тк—-каждый ТЭД питается от отдельного генератора; qc ~
= wK/(2fe.K) — каждый генератор питает kY к пар ТЭД (fe 14 = 1, 2, 3,...;
fe.K тк/2); = 1 — один генератор питает все ТЭД, т. е.
Да = Л/1]г = (2.4)
Внешняя характеристика ЭУ в общем виде может быть записана
системой уравнений
(/эу — (/эуо(/эу. О —dUav (/эу, 0;
dUsy (/эу, 0 = Э(/эу (0/^/эу 4- Я/Эу (/эу)/д(.
Введение переменных /эу и t в систему уравнений (2.5) позволяет
учитывать взаимовлияние режимов нагружения ЭУ и изменение на-
чального уровня запасенной энергии. Особенности пополнения, пре-
образования и расхода энергии в конкретной ЭУ требуют применения
тех или иных граничных условий для членов в правых частях урав-
нений (2.5).
52 expert22 для http: //rutracker. orq
(2.5)
§ 2.2. Топливные энергоустановки
Для ТЭУ система уравнения (2.5) имеет вид
С^эу|(/эу> /) = const; dU&v (/эу)/д/ = 0; di/эу (0/д/эу e const; 1
lay Е I /эу м ин; /ЭУ макс]» / Е Инач> /кон|» J
где /нач, /кон— моменты времени начала и окончания работыПВК при
питании от ЭУ; символ «Е» означает интервал изменения параметров.
Предельная внешняя характеристика ТЭП обусловлена главным
образом удельным расходом топлива, перегрузочной способностью
ДВС и параметрами генератора. Вследствие низкой перегрузочной спо-
собности ДВС зависимость Ur (/г) близка к характеристике постоян-
ства мощности, т. е.
Ртэп (<?т макс) = Рг = Url,. const, (2.7)
где Ртэп — выходная мощность ТЭП; при наличии генератора перемен-
ного тока в (2.7) следует учитывать число фаз генератора mt и коэф-
фициент мощности Хг-
На рис. 2.1 представлены предельная (Рт = Ргм) и частичная (Рг =
•- Рп) внешние характеристики ТЭП, а на рис. 2.2 — зависимости
Р, (/г). Предельная характеристика соответствует удельному расходу
топлива qT= «/т.макс, а частичная qT= qTI < </т.макс- Здесь и далее пара-
метры предельной характеристики имеют индекс «пред», а частичной —
индекс «/». Характеристики, соответствующие реализации частичной
мощности ДВС, обеспечиваются как изменением подачи топлива, так
и регулированием тока возбуждения генератора /в.г. Значения /г МРКС1,
/-мши, 1/г.максц /Л'.ммн/ могут быть меньше или равны значениям
/|.микс. пред./г.мин. пред, /Л*,макс.пред, /^г.мин.пред, ЧТО обусловлено ЛИШЬ
принятой системой автоматического регулирования СТПЭ.
Систему уравнений (2.6) для ТЭП можно записать в виде
L/rlJ (/г> 0 = const; dUT (lr)/dt = 0; dUr — const; 1
/р E l/г.мин» /('.MitKcJ; / E l/нач; /кон|. J
Функциональная связь между параметрами (Уг, /г, I предельной
нш-пшей характеристики ТЭП представлена в трехмерном пространст-
йс < опояиий на рис. 2.3 поверхностью Дка.,ВначОнач£иач£коиОконВконЛКом-
11<|НерХПОСТЬ ^4|нич/^1нач/^1нач/'1начТ1кс,н/?1кон/^|кОн^1кон ХарактеризуетCOOT-
ичгтнующие связи параметров частичных внешних характеристик.
В ЭУ с электрохимическими генераторами, состоящими, например,
in Па гарей топливных элементов (БТЭ), внешняя характеристика
Цн»(/ь!э> qT) имеет падающий характер, причем значение динами-
‘icruoio сопротивления обусловливается удельным расходом реаген-
tnh (пшлива qT и окислителя qOKt если это ие кислород воздуха) и реа-
Л1нусмой мощностью иа ведущих колесах. В рабочем днапазоие тока
UHipviKii /втэ Е Г/бтэмин; /ьтэмакс) внешняя характеристика ЭУ этого
НИШ может быть аппроксимирована уравнением
t/бТЭ = 1/б1Ээ(9т) — Грт/втэ, (2.9)
НИ t/hi-iu (</т) — напряжение ЭУ при /К|Э = 0; гвт — коэффициент жест-
Hiniii нш-ишей характеристики ЭУ, определяемый динамическим
53
Рис. 2.1. Семейства внешних характе-
ристик электромашин кого генератора
с регулятором:
?гм > ^ri
Рис. 2.2. Характеристики Р, (/г)
энергоустановки с теплоэлектриче-
ским преобразователем
Рис. 2.3. Пространство состояний
энергоустановки с теплоэлектриче-
ским преобразователем
Рис. 2.4. Внешние характеристики энергоус-
тановки с топливными элементами
сопротивлением и соответствующий удельному расходу топлива qT.
Указанные характеристики представлены на рис. 2.4 кривыми DxBi
(предельная qr~ qVMaKC) и D2B2 (частичная qt= qTi < ?т.макс).
Чтобы исключить превышение допустимой нагрузки на единичный
элемент БТЭ и вместе с тем обеспечить необходимый диапазон изме-
нения тока /Бтэ, применяют последовательно-параллельное переклю-
чение элементов или их групп. Тогда если ЭУ содержит всего п эле-
ментов, то внешние характеристики DlB1 и D2B2 (рис. 2.4) соответ-
ствуют их последовательному соединению: (/бтэ = ^бтэдо (/бтэ,<7т)> а
характеристики D3B3 (предельная, qr = ?т.макс) и D4B4 (частичная,
Я-г < <7т.макс) — параллельному соединению элементов в т ветвей с
п/т последовательно включенными элементами в каждой ветви: (/Етэ ~
= (/втэ(п/т) ((бтэ» <7т)- В этом случае внешние характеристики ЭУ, со-
стоящей из топливных элементов (/Бтэ ((бтэ. q7> л» т)> записываются
уравнениями:
54
Рис 2.5. Характеристики РБТЭ (/БТЭ)
•нсргоустановки с топливными элемен-
тами
для кривых DjBj и D2B2
£/бТЭ = иБТЭ(л) — nUтэа (/бТЭ, 9т) — ''ст /БТЭ; /БТЭ = /ТЭ Е
Е[/тЭмИИ; /тЭмаксК
(/бТЭ = ^БТЭ(п) Е [0; nUdT мин]; /бТЭ = /тЭ макс;
для кривых DaB3 и D4Bt
иЕГо = О'втэш/т! = (/тэо (/бТЭ, 9т) — "S" ' /вТЭ?
tu I'L Ut -рэ
/бтэ = m/тэЕ [ам/тэ мни, т/тэ макс]>
(/бтэ = (/БТЭ(п/т) Е 0; Г/тэ мни (9т) ; /бтэ = m/тэ макс,
(2.10)
(2.11)
нт //|Э, /тэ—напряжение и ток единичного элемента при удельном
pm*ходе топлива qT.
Iтли переключение осуществляется во время работы, то предель-
iirtii п частичная внешние характеристики изображаются кривыми
И d2b2q2b4a.
Па рис. 2.5 представлены зависимости РБтэ (/бтэ) энергоустановки
। |1»1|.’|11ниыми элементами. Здесь кривые NtMlt N2M2 соответствуют
*Н|1л1иг|1пстикам ОрВр D2B2 на рис. 2.4; прямые MtM2 и /И3М4 суть
н| ртпркчшя мощности в функции qT, п, т. При переключении элемен-
нin i последовательного на параллельное соединение кривые
Д', (рис. 2.5) соответствуют внешним характери-
i*lliHiiM О2В20.2В% (см. рис. 2.4).
Фуиицпопальная связь в БТЭ между параметрами (/бтэ, /бтэ, /
МИ <‘.пушев qt~ q^мai^v. и qr < 9т.Макс изображается поверхностями
ЛЦЧ^Н|и,|/^||1гч|//|кин^1кон24кон И Днач^2нач//2нач//2конБ2кон^кои Н ТреХМерНОМ
ИНН1‘1|м11|гт11с состояний (рис. 2.6). Для этих связей также справедли-
М НИННОП1ГШ1Я (2.6).
55
Таким образом, независимо от вида преобразований энергии в ТЭУ
их внешние характеристики (7эу (/эу) и зависимости Рэу (/эу) варь-
ируют только с изменением параметров управления, а именно: qTt
/ЕГ— в ТЭП, qT (пли т/ок), п, т — в БТЭ; в интервале токов нагрузки
/эу’ЕЮ; /эумйкс! в течение времени t £ [^Иач1 Асоя! нее ограничения внеш-
них характеристик остаются неизменными, т. е. они инвариантны ко-
личеству запасенной или израсходованной энергии.
§ 2.3. Аккумуляторные
энергоустановки
К электрохимическим аккумуляторным батареям в СТПЭ предъяв-
ляют ряд требований. Они должны быть взрыво- и пожаробезопасны-
ми, простыми в обслуживании, механически прочными, высоко-
надежными, иметь минимальные массогабаритные и стоимостные
показатели, высокий срок службы и хранения, малое внутреннее
сопротивление, широкий диапазон рабочих температур, высокую
удельную энергоемкость, минимальный саморазряд, высокий КПД
заряда и разряда, минимум токсичных газовыделеннй и др.
Тяговые аккумуляторные батареи — весьма сложная электрохимическая си-
стема с непрерывно меняющимися параметрами. За период разряда аккумуляторов
в них происходит распад исходных и образование новых химических соединений,
перераспределение плотностей электролита, газовыделение и т. д. Поэтому пара-
метры ТАБ могут изменяться в функции времени, режима разряда, температу-
ры и пр.
В условиях эксплуатации в СТПЭ ТАБ работают в неустаповившихся прерывис-
тых режимах разряда (а при наличии рекуперативного торможения — и кратко-
временных подзарядов) с изменяющимся значением разрядного (зарядного) тока.
В связи с этим аналитические выражения, связывающие параметры ТАБ (ток, вре-
мя разряда, емкость, напряжение батареи и др.), найти весьма сложно; их можно
получить только для конкретных типов аккумуляторов и определенных режимов и
условий их работы в неудобной для практического применения форме. Поэтому для
ТАБ целесообразно пользоваться схемой замещения и графическими зависимостями.
Наиболее общей является схема замещения ТАБ, показанная на рис. 2.7, а,
где £тЛБ — ЭДС ТАБ, изменяющаяся в функции степени разряжеиности аккуму-
ляторов Qp; /?0 — активное сопротивление ТАБ, зависящее от степени разряжен-
ности Qp аккумуляторов и температуры электролита t; — собственная индук-
тивность ТАБ, имеющая тенденцию к снижению при высокочастотных импульсных
режимах разряда вследствие поверхностного эффекта; , RtnCm — цепи,
характеризующие ЭДС поляризации аккумуляторов и ее изменение (значение ЭДС
зависит от степени разряжеиности ТАБ и температуры электролита, а характер
и скорость ее изменения — от тока Rv — сопротивление, характеризующее
процесс саморазряда аккумуляторов и зависящее от времени разряда, температуры
электролита и срока службы аккумуляторов. Пользоваться такой схемой весьма
Трудно, но на ее основании можно определить расчетную схему замещения батареи
для каждого характерного режима разряда.
Электродвижущаяся сила ТАБ большинства известных электрохимических
аккумуляторов не зависит от температуры электролита и окружающей среды и за
время полного разряда батареи снижается на 10—15 % от начальной величины.
Так как при проектировании СТПЭ можно установить, какое значение Е^л^ (макси-
мальное, минимальное и пр.) является определяющим для выбора параметров
электрооборудования тягового привода, то за ЭДС батареи следует принять ее фик-
сированное значение, соответствующее расчетному режиму. Это положение отно-
сился также к внутреннему активному сопротивлению /?0.
56
Значением RD в ряде случаев
можно пренебречь ввиду его малое- 0,
ти (0.7 - 10”3—3 - 10"3 Ом на эле-
мент). Однако, если сопротивление
нагрузки соизмеримо или меньше
Rv, этот параметр необходимо учи- .
тывать, так как он в большой мере О/
обусловливает КПД разряда и зари 0
да аккумуляторов. Для всех типов —
ТАБ сопротивление Rv увеличивает-
ся с возрастанием степени разря-
женное™ батареи и снижением тем-
пературы электролита.
В импульсном режиме ТАБ
пульсация ее выходного напряже-
ния определяет полное внутреннее к
сопротивление, модуль которого
'ТАБ — И>?|лБ+^ЖАТАБ— & jg)
Рис. 2.7. Схемы замещения тяговых аккуму-
ляторных батарей:
“ *СТАб)8*
где ₽ТАБ, Хдтлб и *СТАБ актив-
ное, индуктивное и емкостное со-
противления ТАБ.
Индуктивное сопротивление обусловлено геометрией ТАБ и пространственной
ориентацией токопроводящих элементов, образующих контуры с индуктивностью
0,2—1 мкГн на один элемент Емкостное сопротивление определяется процессами
поляризации электролита. Падение напряжения на сопротивлении JR,, V Ri
называется ЭДС поляризации, составляющей 3—10 % от ^таб- Время полного
установления ЭДС поляризации достигает нескольких десятков секунд. Однако
практически при токах ТАБ свыше 200 А уже через 1 с отклонение ЭДС поляриза-
ции от установившегося значения не превышает 3—5 %.
Следует учитывать явление непрерывного саморазряда ТАБ, происходящего
вследствие выделения кислорода на положительном электроде и из-за конечного
значения сопротивления изоляции. За первые сутки хранения в заряженном состоя-
нии при температуре окружающей среды 20 °C за счет саморазряда запасенная энер-
гия ТАБ уменьшается приблизительно на 5 %. При дальнейшем хранении скорость
саморазряда падает.
Таким образом, зная значения и диапазоны изменения параметров общей схемы
замещения ТАБ и допуская степень разряженности к температуру электролита по-
стоянными для каждого характерного режима, можно выбрать расчетную схему
замещения (рис. 2.7, б—г). Так, при непрерывном токе ТАБ с неизменным или плав-
но меняющимся значением целесообразно пользоваться схемой рис. 2.7. б, при им-
пульсном режиме — схемой рис. 2.7, в. Импульсное регулирование напряжения
батареи и включение на ее выходе сглаживающего фильтра позволяет добиться плав-
ного изменения тока ТАБ, соизмеримого с временем установления ЭДС поляри-
зации, что дает возможность применить схему рис. 2.7, а.
Для ТАБ наиболее важными являются внешние характеристики
^таб(/таб) при различных значениях степени заряженности Q (рис. 2.8).
Эти характеристики конкретного типа ТАБ нс зависят от режима
разряда. Энергия, отдаваемая ТАБ, напротив, обусловлена режимами
разряда. Отношение полезной энергии Атабпол, отданной батареей за
премя ее полного разряда, к начальному запасу энергии Атабн.н есть
КПД разряда ТАБ:
“ЧТАБ р = АтАБ полМтАБ нач — 1 ААтаб/АтаБ нач» (2-13)
где ДАтаб— потери энергии на внутреннем сопротивлении батареи.
57
Рис. 2.8. Внешние характеристики
ТАБ типа 72ЭЖНТ-160У2;
------- — разрядные; — — — — ре-
куперации
Рис. 2.9. Зависимости мощности о?
тока ТАБ типа 72ЭЖНТ-160У2 при
различной степени разряженности
Полезная мощность батареи /Ааб является функцией разрядного
тока и формы его кривой, степени разряжен ности, температуры элек-
тролита и определяется выражением
/Алб = £табАаб — ЯтабАаб. (2.14)
На рис. 2.9 представлены зависимости Ртаб(Ааб) при различной
степени заряженности для ТАБ типа 72ЭЖНТ-160У2. Дифференци-
руя (2.14) и приравнивая результат нулю, получим предельный мак-
симальный пусковой ток, соответствующий наибольшей мощности /Ааб,
которая обусловливает динамические показатели электромобиля:
Ааб такс £тАБ мни/(2/АаБ макс)* (2.15)
Так как по мере разряда батареи уменьшается ЭДС и возрастает
внутреннее сопротивление, то максимальный пусковой ток следует вы-
числять для Q = 20 ~ 25 %. Например, для батареи указанного типа
максимальный пусковой ток не должен превышать 420 А.
Для внешних характеристик АЭУ с электрохимическими аккумуля-
торами система уравнений (2.5) имеет в правой части члены, прин-
ципиально отличные от (2.6):
O'tabu (Алб, 0 = var; сХАаб (Ааб)/Л =/* 0; = var; 1
Ааб С [ Ааб мин* А AD макс К / £(/нач! /кон]* )
Таким образом, при изменении разрядного тока /таб € 1Ааб миН;
/тльмакс] в течение времени /€(/иач; /кон] внешние характеристики ТАБ
представляют собой функцию двух переменных, т. е. 1Ааб(Ааб» /).
Если заданы максимальный ток /тавмшс и минимально допустимое
для данного типа ТАБ напряжение разряда (Ааб мин, то можно найти
и фактическое время /кон = /кон, соответствующее этому режиму. Про-
странство состояний ТАБ на рис. 2.10 ограничено плоскостями
г;ц, 7'SBhoh^kohQ» /?нач^ьач57\ ПрОХОДЯЩИМИ Через
линии, соответствующие значениям Ааб = Ькб мнн, Ааб = /таб макс»
5В
ГАВ мин
СОСТОЯНИЙ
^ТЛБ = t/тАБ мин, / — /нач, И ТЗКЖС
поверх ностью ВкачВцач В.. он^кон^кон.
Каждое сечение этой поверхности
плосткостями, параллельными
D.^TQD^on, определяет изменение
напряжения разряда во времени при GA
некоторых токах /так ~ const.
Запас энергии, обеспечивающий s
Поз подзарядки ТАБ работу ПВК в iTMNa№
течение времени t б [/нач*, /кон] при из- !
мсиепии разрядного тока /tab € ’w 0/
€ I/ ТАБ мин ; /таб макс], определяется
в пространстве состояний объемом, Рис. 2.1 . .
который ограничен перечислен- энергоустановки с электрохимическими
* 1 г аккумуляторами
нымн плоскостями и поверхностью 3 J
/Ли1чВШ1чВкоиЦ<онЙон- Энергию определяют по формуле
ЛтАБ = j «ТАБ (О 1ТАБ (0 dt. (2.17)
При /тд б = const
ЛТАБ = /TAB j ^ТАБ (0 dt.
I 1оеколысу зависимость O'tab (/tab, 0 описывает семейство кривых
разряда ТАБ, ее мощность есть функция не только тока нагрузки, но
п временная функция, обусловленная степенью разряжеиности, кото-
рую можно оценить но отдаваемой энергии или по емкости ТАБ.
Внешняя характеристика ТАБ в момент времени t = описывает-
ся урявпеипямп
//1Л I, t/-| ЛЬШ — г Di (ti) 1TAB,
^ТЛБО/ « С/'ГЛБН -I- Gtf (О /тАБ1й t б 14ач; А<он],
(2.18)
где c/TABot—условное напряжение ТАБ при линейной аппроксимации
внешней характеристики и нулевом токе;
Риг. 2.11. Внешние характеристики энергоуста-
поики с электрохимическими аккумуляторами и
вииисимости их напряжения от времени разряда
ГА!(О = -^-(О-№Эф-
°'ТАБ
фициент жесткости внешней
характеристики, соответст-
вующий полному внутренне-
му динамическому сопротив-
лению ТАБ в момент време-
ни ti, 1/табн, /таб и — на-
пряжение и ток разряда в
точке УкрИВОЙРмач^РцонОкон
и кривой VN на развер-
нутых координатных плос-
костях (/таб# и (7таб^/таб
59
(рис. 2.11). Значение rai в этот момент определяется при построении
разрядных кривых 1/таб(0. соответствующих токам Лаьилкс = const и
Лав мни = const (кривые Dh:i4VD^hDkoh и ВИ8ЧЛ^В'к0и). Координаты точек
V м N внешней характеристики ТАБ в момент времени tt можно най-
ти, если провести в пространстве состояний (рис. 2.10) через точку
t = lt -= const плоскость, параллельную осям координат (Лаб и Лаб.
например плоскость Dm4Bn!WST.
§ 2.4. Комбинированные
энергоустановки
Внешняя характеристика комбинированной энергоустановки с пер-
вым сочетанием источников энергии (см. гл. 1), когда используют два
различных типа ТАБ, обусловлена их свойствами и представляет собой
нелинейную функцию нагрузки ТЭД и времени работы привода в ре-
жимах тяги и рекуперативного торможения. Поэтому определяющим
критерием при оценке СТПЭ с подобной энергоустановкой остается
обеспечение максимального пробега электромобиля при наиболее ра-
циональном использовании запасенной энергии. В КЭУ со вторым соче-
танием источников, где пусковой источник — ТАБ, а тяговый — теп-
лоэлектрический преобразователь, аккумуляторная батарея работает
непродолжительное время, имеет сравнительно небольшой запас энер-
гии и обеспечивает в основном требуемую динамику разгона электро-
мобиля, а его общий пробег за транспортный цикл осуществляется за
счет энергии ТЭП, у которого способы пополнения запаса энергии (топ-
лива) и влияние режимов иа внешние характеристики не являются оп-
ределяющими показателями.. Иначе: внешние характеристики КЭУ
обусловлены как типом применяемых источников и их режимами в те-
чение транспортного цикла электромобиля, так и соответствующим
сочетанием свойств и характеристик каждого из них.
Внешние характеристики двух указанных типов КЭУ приведены иа
рис. 2.12 и 2.13 (для упрощения характеристики ТАБ показаны
линейными). Аналитически их можно записать уравнениями ви-
да (2.5):
Uavi ~ (Лум (Луь М — dU ЭУ} (Луц (Д;
dUsw\ (/эуь (i) = Я/эу, (1г)1д1эу 4- 0(Лу1 (/эу1)/Л;
(7эУ2 = (^ЭУ02(/эУ2, (г) —^эу2(/эУ2, /2)1
dUsV2 (Луг, (а) = <51/эУ2 (^ЗУ + 011эУ2 (/эуг)/д(;
л Т" 4 = ^ц>
(2.19)
где индексами 1 и 2 обозначены параметры соответственно пускового
и тягового источников КЭУ; Тц — время транспортного цикла.
На рис. 2.12 и 2.13 внешние характеристики ТАБ и КЭУ показаны
для начала (нач и конца /КОн цикла. В рабочем интервале токов /кэ^ б
б[/кэу«ии; /кэумакс] характеристики пускового источника А|В]кг1ЧО|нач
и А1В1кон£)1кон; тяговых источников: аккумулятора А£В2Иа.:Ь2нач и
А2В2кон^2кон, теплоэлектрического преобразователя A2B2D2. При выборе
ьо
Рис. 2.12. Внешние характеристики
(7эу (/эу) комбинированной энергоус-
тановки, состоящей из двух ТАБ раз-
личных типов и зависимости Рэу (/ду)
Рис. 2.13. Внешние характеристики
(7Эу (/ЭУ) комбинированной энергоус-
тановки, использующей в качестве пу-
скового источника ТАБ, а в качестве
тягового источника ТЭП. и зависимости
?ЗУ <^эу)
пускового источника следует обеспечивать выполнение условия
/эу Пиакс > /кэу ыа»с'» ЗЭПЭС ПО ТОКу (/эу 1макс—/кЭУмакс) ДОЛЖСН быТЬ
таким, чтобы при пуске электромобиля на зажимах КЭУ было необ-
ходимое напряжение 1/кэу, соответствующее ординатам точек В^ач
и В1.2КОН (рис. 2.12 и 2.13). Тогда внешние характеристики КЭУ
СуТЬ крИВЫе А1£1,2начСцач/^2нач> ^1В](2дочСцач^2 ® МОМСНТ /доч И КрИВЬЮ
^1^1,2иоиСКон/^2кон. Л1В1,9цонСКон D2B МОМеИТ /Кон-
На рис. 2.12 и 2.13 приведены
также зависимости Рэу(/эу)> со-
ответствующие началу и концу
транспортного цикла.
В СТПЭ с КЭУ источники
энергии могут питать ТЭД сов-
местно или последовательно. При
совместной работе (рис. 2.14, а)
один из источников энергии (здесь
ТЭП) функционирует непрерыв-
но при постоянной мощности ге-
нератора Рг. Требуемая в тече-
ние времени Т„ пуска и разгона
максимальная мощность Ркэу мак<
достигается суммированием мощ-
ности Рг и разрядной мощности
Рис. 2.14. Зависимости мощности ис- •£
точников энергии КЭУ и скорости дви-
жения электромобиля от времени в те-
чение транспортного цикла при сов-
местной (а) и последовательной (б) ра-
боте источников
61
аккумуляторной батареи РТЛБ (0,
обеспечивая энергию А„, расхо-
дуемую на разгон электромобиля
до установившейся скорости
v (0 — Пуст e const. По оконча-
нии разгона в момент времени
t = 0 ТАБ отключают; поддер-
жание постоянной скорости дви-
жения в течение времени ТуС7
осуществляется за счет части
мощности генератора Рг.уст, обус-
ловливая расход энергии Ауст.
В момент t = tz электромобиль
переводят в режим выбега в тече-
ние времени Тв. Далее за время
7Т идет процесс торможения.
Энергия Азар, которую дает гене-
Рис. 2.15. Пространство состояний комби-
нированной энергоустановки
ратор, расходуется на подзаряд
батареи: за время Туст — за счет мощности Рг.зар = Рг—Рг.уст, аза
время Тъ + Тт -Г То — за счет мощности Рг.
При последовательной работе источников (рис. 2.14, б) в течение
времени Тп работает только ТАБ и при достижении скорости иуст вклю-
чают второй источник, а батарею отключают. Мощность Рг за время
Туст расходуется как на поддержание заданной скорости, так и на под-
заряд ТАБ, а за время Тв-Ь Ту-\- То —только на восстановление запа-
са энергии батареи.
В зависимости от типов применяемых в КЭУ пускового и тягового
источников, а также от того, работают ли эти источники иа ПВК сов-
местно или последовательно, правые части первых четырех уравнений
системы (2.19) в соответствующих интервалах /эу1 € Пэуши»;/эУ1«акс1»
4 € (бнач> 0кон1 И /эУ2 б 1^ЭУ2мин« ЛэУ2макс1» 4 С 1^2нвч1 ПрИНИМЗЮТ
вид, определяемый системами (2.6) и (2.16), что обусловит, в свою
очередь, сочетание поверхностей при интерпретации рабочего состоя-
ния КЭУ в трехмерном пространстве Например, когда пусковой (ТАБ)
и тяговый (ТЭП) источники работают совместно, то для предельной
внешней характеристики КЭУ связь между параметрами (?эу, /эу, t
СООТВеТСТВуеТ поверхности £нцч/41ачСшчПН11Ч/,нач/'КСН£)кСИСК0Н/?|(О11<$К0!1
(рис. 2.15). Здесь отрезки Амач£нач= AKOHSK0H соответствуют напряже-
нию //тАБмин-
§ 2.5. Энергетические и мощностные
параметры энергоустановок
Определим основные энергетические соотношения в силовых цепях
СТПЭ с учетом транспортных режимов работы электромобилей, обору-
дованных различными типами ЭУ.
Все возможные режимы движения допустимо условно разделить на
две группы, одна из которых характеризуется циклическими, т. е.
периодически повторяющимися, режимами, присущими ЗТЭМ, КЭМ,
62
Р, V
р
гЗУмакс
тц2
Рис. 2.16. Зависимости Р (t) и v(t) для элект-
ромобилей при движении с периодически по-
вторяющимися транспортными циклами
(2.20)
(2.21)
большинству ГЭМ, а вторая —
апериодическими, т.е. случай-
ными сочетаниями режимов,
описываемых вероятностными
законами распределения и
присущих главным образом
ЭМПП и в меньшей степени
ВЭМ. Однако, независимо от
назначения электромобиля и
условий его эксплуатации в
течение общего времени Тц
транспортной работы (цикла)
система тягового привода реа-
лизует следующие режимы
(рис. 2.16) [11:
я) движение с расходова-
нием ьныселшш в ЭУ энергии (режимы пуска, разгона и устаиовив-
пк'Лси скорости). Режим пуска и разгона характеризуется затратами
•шгргии Л„ за время Тп = 64-4 для придания электромобилю ускоре-
нии tlvul/(ll до выхода па установившуюся скорость оует. Указанный
npomvr можно онпса п. следующими зависимостями:
/1„ -Ли(2/\||, 0;
-- М/’к и |(Лл ,|„ (I -I- т), dvnlldtt -ф],
|дс Х/*,.,,— суммарная мощность на ведущих колесах в режиме пуска;
О',Л||. масса груженого электромобиля; (1 -|- у) — коэффициент инер-
ции вращающихся масс.
Режим установившейся скорости &уст при расходе энергии Дуст за
пргмя Туач = tt~ t2 характеризуется уравнениями
Ауст ~ Ауст (SPк.уст» 0»
^Рц.уст = К УСТ |СЭЛГр, (1 4“ у)» Ф],
। де ХРп ¥1, — суммарная мощность иа ведущих колесах в устаиовив-
цн мся режиме;
п) движение без реализации ПВК запасенной энергии. Данному
||1чкнму соответствует естественное замедление электромобиля в про-
цессе выбега за время Тъ— t2~- t3
= Ю.Я.Г». (1 + V). Я>]; (2.22)
и) движение с управляемым замедлением dv^ldi за время Тт = 4 4-
I 4, которое обеспечивается регулируемым поглощением кинети-
Mwiiuh энергии электромобиля As— G3n rpi?Til2, где vTi—скорость дви-
жения в тормозном режиме, либо в механических тормозных устрой-
е'ГИйх, либо в электрических устройствах (электрическое торможение,
(Жущгг гнлнемое переводом ТЭД в генераторный режим и рассеиванием
Ий Mirpi ип в резисторах, подключаемых к зажимам электродвигате-
ль либо, если СТПЭ имеет АЭУ, за счет рекуперативного торможе-
63
электромобилей (а) и электромобилей повышен-
ной проходимости (б)
ния с возвратом части энер-
гии в накопители (аккуму-
ляторы).
В качестве примера на
рис. 2.17, а, б приведены
усредненные графики ос-
новных режимов работы
КЭМ и ЭМПП. Следует от-
метить, что зависимости
РЭУ (О, (/) И о (О
(рис. 2.16) достаточно пол-
но характеризуют транс-
портный цикл ГЭМ, в част-
ности электробусов.
Влияние всего комплек-
са факторов на энергетиче-
ские показатели СТПЭ мож-
но учитывать введением в
рассмотрение эксплуатаци-
онного (или энергетическо-
го) КПД г|эк, под которым
понимается отношение по-
лезной энергии Лтр, реали-
зованной ПВК для преодоления электромобилем сил сопротивления
движению, к общему расходу энергии Av за транспортный цикл [1]:
Ч» = Е 4р/Е 4 = 1 - Е 4. (2.23)
где АЛ = АЛэу + АЛпвк — суммарный расход энергии на компенсацию
потерь в ЭУ (АЛЭу) и ПВК (ДЛпвк) за нц траиспортых циклов.
Значение полезной энергии за транспортный цикл, равное Дтр =
= Ап + Луст, вычисляют с учетом (2.20) и (2.21).
Составляющие А„, ДЛэу, ДЛпвк и соответствующий им КПД т]эк
изменяются в зависимости от расчетного цикла, типа ЭУ и схемы пе-
редачи энергии на ведущие колеса. Для СТПЭ с теплоэлектрическим
преобразователем (см. рис. 1.10) общая потенциальная энергия, за-
пасенная в топливе с теплотворной способностью gT и обеспечивающая
работу электромобиля в течение одного транспортного цикла,
4 = gTGr, (2.24)
где GT — масса топлива;
суммарный расход энергии на компенсацию потерь в ДВС ДРдвс
и генераторе 2ДРГ
Пц 7n+fvci
ЕДЛЭу = п„ f (ДРдвс + SAPr)df, (2.25)
1 о
суммарный расход энергии на компенсацию потерь в ПВК
’*14 ^.Ц
S Д^ПВК = Пи\ (ДРсАР + ^Д^а + ДТ’м.п)^, (2.26)
64
где ДРсар, 2ДРд, ^Р'-.п — соответственно потери мощности в САР,
ТЭД и механических передачах (редукторах) ПВК.
Для СТПЭ с батареей топливных элементов (см. рис. 1.15) общая
потенциальная энергия, запасенная в виде топлива и окислителя,
А, = g-A 4- Йсжбок. (2.27)
где gOK, GOK — окислительная способность и масса окислителя;
суммарный расход энергии на компенсацию потерь ДРвтэ в БТс
} । ДАэу — j ДРбтэй/. (2.28)
’ fi
Затраты энергии на компенсацию потерь в ПВК рассчитывают со-
гласно (2.26)
Для СТПЭ с электрохимической ТАБ (см. рис. 1.16) энерп»
ТАБ, определяемая по ее заряду в течение времени i3ap мощиостьк
РтЛБ чар С КПД Т]ТАБ чар,
АтАБ чар “ РтАЬ «ар^зярЛТАБ чар» (2.29’_
суммарный расход энергии на компенсацию потерь прн разряде
ТАБ за время Тп разгона и 7уст установившегося движения
"ц Гп+^УС-
Xj ДАтАН = Иц J ДРтАБ^- (2.30
1 о
Энергию на компенсацию потерь в ПВК рассчитывают согласие
(2.26).
Для СТПЭ с КЭУ (см. рис. 1.18) потенциальная энергия
А, = gTGT 4“ РтАБ зар^зарЦТАБ зар» (2.31
суммарный расход энергии на компенсацию потерь в КЭУ
ХДАкэ^ = Цц Н (Дрдвс 4- 2>&Pf)di + f (ДРдВСкар + Рг.зар)^ 4"
+ ( ДРтавЛ + । ДЛ'АБ j , (2.32
где ДР две и ЛРдвс зар — потери мощности в ДВС при работе на тяг)
и подзаряд ТАБ (см. рис. 2.14,6); £ДРР, Л-.зар — то же, в генераторе
ДРтаб, ДРтАБаар —то же, в ТАБ;
суммарный расход энергии на компенсацию потерь в ПВК
пц
X ДАпвк == «ц (ДАсар 4- ДАд 4- ДАМ.П), (2.33
где суммарные потери в САР
ЛАар = J APpidf + f ДРсгЛ + ( ДРР1,2Й; (2.34
U 0 о
8 4’158 6Е
Рис. 2.18. Удельные мощностные и
энергетические показатели энергоуста-
новок ГЭМ
перистики: ! — грузенас-
; 3 — ГЭМ гакск; 3 —
разъездной электромобиль
ДРр1, ДРра, ДРр1.2 — потери мощ-
ности в САР, когда работает со-
ответственно только первый ис-
точник (теплоэлектрический аг-
регат), только второй источник
(электрохимическая ТАБ) и обес-
печивается подзаряд второго ис-
точника первым;
потери энергии в ТЭД
ДЛд = J 2ДРд(1)йГ + J ЕДЛетй/, (2.35)
где 2ДРЛ(1), X ДРД(2) — потери мощности в ТЭД при работе только от
первого и только от второго источников;
потери энергии в механической передаче ПВК
ДДи.п — j ДРм.п!^
Используя приведенные
выше выражения, можно
найти значения эксплуата-
ционного КПД T]SI< для
СТПЭ электромобилей раз-
личного класса и назначе-
ния с конкретными расчет-
ными циклами транспорт-
ной работы и определить
j A₽„.„2dZ.
(2.36)
Рис. 2.19- Диаграмма РэУуд X
X (?эууд) Для энергоустановок
карьерных электромобилей:
66
expert22 для http://rutracker.org
удельные параметры ЭУ, имеющих неадекватные формы запасания и
преобразования энергии.
Если пренебречь расходом энергии на вспомогательные нужды,
то соответственно удельные (на единицу массы) мощность и энер-
гия ЭУ
РЭУ уд = (2.37)
*7ЭУ уд ~ ^ц^тр/С^ЭуТ^эк)» (2.38)
где Ggy — масса энергоустановки.
Результаты расчета удельных мощностных и энергетических по-
казателей ЭУ по уравнениям (2.37) и (2.38) с учетом (2.23) — (2.36)
для ГЭМ и КЭМ представлены на диаграммах, выполненных в лога-
рифмическом масштабе (рис. 2.18 и 2.19) [1]. С целью обеспечения тя-
говых характеристик ГЭМ общего назначения и запаса хода 300 -
350 км удельная энергоемкость их ЭУ должна быть не менее 200 Вт X
X ч/кг, а максимальная удельная мощность — не ниже 200 Вт/кг.
Для сопоставления приведены требуемые удельные характеристики
ГЭМ (кривые 4—10) [4, 5] и удельные характеристики источников
энергии, рассматриваемые как перспективные для ЭУ транспортных
средств (рис. 2.19).
Глава
третья
фш (да
ТЯГОВЫЕ ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ ПОСТОЯННОГО ТОКА
§ 3.1. Особенности выбора основных
параметров тяговых электрических
машин постоянного тока
Выбор основных параметров тяговых электрических машин (ТЭМ) —
одна из наиболее сложных задач, возникающих в процессе создания
привода новых типов электромобилей, особенно на начальном этапе
разработки. Для предварительной компоновки мотор-колеса, оцен-
ки технико-экономических показателей проектируемой СТПЭ и само-
го электромобиля необходимо иметь данные о главных размерах, мас-
се и КГЩ ТЭД. а если в качестве ЭУ используется ТЭП — подобные
данные и электромаш инного генератора. Эти показатели электрических
машин определяются неоднозначно и зависят от номинальной мощно-
сти, k^, ku, Гд.ыакс*. электромагнитных нагрузок, геометрии зубцового
слоя, а у ТЭМ постоянного тока — от потенциально-коммутационных
условий на коллекторе и др.
Важная особенность выбора параметров ТЭМ — необходимость ми-
нимизации размеров и массы с одновременным обеспечением достаточно
высоких энергетических показателей. Однако эти требования весьма
противоречивы. Например, увеличение степени использования актив-
ных материалов и перехода на повышенные значения превышения тем-
пературы обмоток ТЭМ приводят к снижению их размеров и массы.
Но вместе с тем падает КПД, вследствие чего уменьшаются реализуе-
мая на тягу мощность и производительность электромобиля. Изменение
ряда параметров (в первую очередь Гд,Ми1<с.) неодинаково влияет на
размеры и массу ТЭД и генераторов. Если размеры генератора мини-
мальны, когда С/д.макс. = 1, и растут с увеличением максимального
напряжения, то для заданного k№ размеры ТЭД наибольшие при низ-
ких значениях илмвкс^.
Приведенные примеры показывают, что выбор желательных (или
требуемых) параметров и показателей ТЭМ с применением известных
методов, предусматривающих их детальный электромагнитный расчег,
связан с проработкой значительного числа вариантов. Основная труд-
ность заключается в том, что на начальном этапе проектирования
обычно неизвестно значение передаточного отношения in механической
передачи (редуктора) ПВК, которое варьируется в широких пределах
в зависимости от класса электромобиля и его назначения. В свою оче-
редь, передаточное отношение редуктора связано с параметрами ТЭД
68
Сказанное выше обусловливает необходимость выработки несколь-
ко иного по отношению к общепринятому подхода и использования
методики, позволяющем с достаточной для инженерных расчетов точ-
ностью определять значения главных размеров, массы, КГЩ электри-
ческих машин в СТПЭ на основе обобщенных конструктивных пока-
зателей ТЭМ, а также учитывать взаимосвязь между их параметрами,
установленную теорией и практикой гягового электромашинострое-
ния Найденные таким образом данные могут являться исходными для
последующего рабочего проектирования ТЭД и генераторов.
Рассматриваемый подход наиболее целесообразен применительно
к ТЭДА постоянного тока, ибо именно для них он в достаточной степе-
ни универсален, т. е. может быть использован как для ДПТ, так и
для ГПТ и апробирован при проектировании следующих ТЭМ, ис-
пользуемых в электромобилях:
ДПТ мощностью 20—800 кВт с простой петлевой или волновой (с
одновитковыми секциями) обмоткой якоря, четырехполюсные (до
400 кВт) и шестиполюсные (более 400 кВт), £/д.мг1Кс^ 1000 В;
ГПТ мощностью 400—800 кВт с простой петлевой обмоткой якоря,
шестиполюсные, с частотой вращения 1500—2100 об/мин, предназна-
ченные для безредукторного сочленения с дизелями, £Д.макс<^ 1000 В.
Основываясь на закономерностях, присущих вообще электрическим
машинам постоянного тока, рассматриваемую далее методику с некоторы-
ми уточнениями можно использовать для машин, мощность, напряжение,
частота вращения которых изменяются в весьма широком диапазоне.
Размеры, масса и КПД ТЭМ — функции главных размеров якоря,
т. е. диаметра DK и длины /я. Излагая вопросы, связанные с их нахож-
дением, будем иметь в виду, что тяговые электродвигатели и генерато-
ры проектируются как предельно использованные электрические ма-
шины с целью снижения их размеров и массы. При этом наибольшее
значение реализуемой ТЭМ мощности ограничено допустимой линейной
скоростью якоря оя.доп, допустимыми значениями максимального на-
пряжения между соседними коллекторными пластинами Г/К.ДО11 и реак-
тивной ЭДС коммутации Дгдеп, а также предельными или близкими к
ним значениями электромагнитных нагрузок. В свою очередь, величи-
ну М<.доп устанавливают по условиям стойкости ДПТ к образованию
кругового огня, а предельные электромагнитные нагрузки — по до-
пустимому превышению температуры обмотки якоря и потенциально-
коммутационным условиям на коллекторе.
В расчете считаем известными о1!ДОп, l/кдои, £р.д<№* кратность макси-
мальной угловой скорости /г<,>, номинальную Рдл, и расчетную Рд,рзСЧ
мощности ДПТ, мощности при юд = Юд.мякс в режиме тяги Pt и элек-
трического торможения Plt>, которые должен обеспечить электродвига-
тель. Действительно, ka, PRM, Рс определяются параметрами заданной
тяговой характеристики электромобиля (см. рис. 1.21): если ПВК
проектируются с постоянным передаточным отношением in = const, то
(3.1)
(3.2)
(3.3)
Л<» == kt. = tUctoH;
= F.M’lnBK’lJ;
Ру — ^?мин^ми1с/(^1ПВК’^к)'
69
Расчетная мощность электродвигателя также определяется эксплу-
атационными показателями электромобиля. Из (1.12), (3.1) и (3.2)
Рд-рвсч = /ЧЛ'нМЧПВКПЭ == ^макЛЧпВКЧк)- (3-4)
С другой стороны, мощность Рд.расч связана с главными размерами
якоря и электромагнитными нагрузками соотношением
Рд.расч = ССп_пЛ(1£сиЦн.максЦ^я^я» (3»5)
где «пл — коэффициент полюсного перекрытия; Ль, В^— линейная на-
грузка якоря и магнитная индукция в воздушном зазоре в номиналь-
ном режиме; обмане — линейная скорость якоря при максимальной уг-
ловой скорости.
Мощность Рп вычисляют в процессе тяговых расчетов. Макси-
мальная мощность Pv (Pv < Рд.н). соответствующая <Одлакс.
РV ~ ССПл^1ц^6нПя.максЯОя/я/Йсй. (3.6)
При одной и той же расчетной мощности ДПТ их размеры и масса
могут быть различными в зависимости от степени использования ак-
тивных материалов электрической машины; чем эта степень выше, тем
меньше размеры и масса электродвигателя при равной расчетной мощ-
ности. Этот показатель можно охарактеризовать коэффициентом ис-
пользования активной поверхности якоря
Кя ~ Л<Хп.пДнЙЛц£>я.махс- (3-7)
Из (3.6) и (3.7) получим
РдрАСЧ — KtPftfr (3-8)
Наиболее напряженным по потенциально-коммутационным ус-
ловиям является режим ДПТ с реализацией требуемого значения мощ-
ности при юд макс, когда реактивная ЭДС и максимальное напряжение
между коллекторными пластинами достигают наибольших значений.
В данном случае их рассчитывают по формулам
£р = (р/с) ВДи»» • 10е); (3.9)
Ц = 2Z„Be„A„t)„.mKC (р/с) Фсс., (3.10)
где wc — число витков в секции обмотки якоря; р — число пар полю-
сов; а — число пар параллельных ветвей (2а = 2р у простой петле-
вой обмотки, 2а = 2 у простой волновой обмотки); XX — проводи-
мость потока рассеяния на единицу длины активной части якоря; kK —
коэффициент искажения поля за счет реакции якоря (k„ = 1,0 4- 1.1
у ДПТ с компенсационной обмоткой, Ли~ 2 у некомпенсированных
ДПТ).
Для высокоиспользованных ДПТ принимают предельно допусти-
мые значения С/К.доп = 35 4- 40 В; ЕРЛ1)11 = 7,5 4- 8,5 В; Оя.доп = 65 4-
4- 70 м/с. Последнее обусловлено тем, что допустимая линейная ско-
рость на поверхности коллектора обычно не превышает 50—55 м/с,
а отношение диаметра коллектора к диаметру якоря, как правило,
составляет 0,82—0,85.
Совместное решение (3.5), (3.6), (3.9) и (3.10) дает трансцендент-
ное уравнение относительно DB, которое с учетом Ер ~ Ер.дсп,
70
имеет вид
Ща,
Рис. 3.1. Зависимости фд(©я)
Къ (DH) тягового ДПТ
— wj^lpla-p ' *311'
Ниже показано, что Ди и Ди зависят
от Ся, вследствие чего уравнение (3.11)
рационально решать графоаналитиче-
ским методом. 11редставим (3.11) следую-
щим образом (61:
4>л = (па,,„)!ДД„/|шЛ£Мр/а)Т. (3-12)
(3.13)
Точка пересечения кривых фд (Е)я) и
(D„) обусловливает искомый диаметр
якоря ДПТ.
Функции фд (£я), £д (DJ и коэффици-
ент определяемый формулой (3.7),
назовем обобщенными конструктивными
показателями ДПТ. Их отличительная
особенность заключается в том, что, с од-
ной стороны, в (3.7), (3.12), (3.13) входят
внутренние параметры ДПТ, а с дру-
гой — параметры, связанные с эксплуатационными показателями элект-
ромобиля.
На рис. 3.1 представлены зависимости фд(£)я) и Кя(£я) тягового
ДПТ с Лм = 3,5; 17д.макС* = 1,4; = 65 м/с: £РДОП = 8,5В:
<Ун.доп = 35 В; 2р = 4; 2с = 2р; kv = 2.
Более полно зависимости фд(£я) и Кя(£я) для различных значе-
ний Л<0, (7д.макс., ^ялакс и предельного превышения температуры меди
обмотки якоря над температурой окружающей среды ©м^1Пред приведе-
ны в [7].
Таким образом, принимая известными параметры kb>, Рц^ы», Pv
(или Р-Го), обсуловленные требуемой тяговой или тормозной характе-
ристикой электромобиля, задаваясь величиной 0М «.пред и вычислив по
(3.13) функцию £A(Dn), наносим полученные значения £д(£)я) на кри-
вую зависимости $ (Ля) (рис. 3.1), тем самым графически определяя ис-
комый диаметр якоря ДПТ. Далее, округлив его до ближайшего стан-
дартного значения, по графику (0Я) находим показатель Кя, аза-
тем по (3.8) — длину якоря:
1я — Рц.рясЛ^(яОя).
(3.14)
В соответствии с рекомендациями [21 целесообразно обеспечить
выполнение условия
₽' = 1В/СЯ< I.I0-MJ5, (3.15)
Выполнение электрических машин с меньшим диаметром и большей
длиной, т. е. большим коэффициентом [У по сравнению с (3.15),
71
снижает коммутационную устойчивость и ухудшает потенциальные
условия на коллекторе. Очевидно, что если в режиме электрического
торможения при с/я.ыакс требуется реализация мощности > Pv,
то в (3.13) вместо Р„ необходимо подставить значение Рте.
Зная диаметр якоря, можно определить допустимую максимальную
и номинальную угловые скорости ДПТ, максимальную и номинальную
частоты вращения и по (1.4) — передаточное отношение редуктора
ПВК:
^д.макс = 2ця_ЛОГ(/£)я^ (3.16)
Ыд.н — е)д макс/^со» (3.17)
Кд.макс == 60сйд.макс/(2зх): (3.18)
Дд.н == Лд.макс/^й>^ (3.19)
= Рк^Д-мвкс/Циакс- (3.20)
Длину и наружный диаметр корпуса рассчитывают по формулам,
полученным на основе анализа соотношений между главными разме-
рами ДПТ электромобилей, тепловозов и подвижного состава город-
ского электротранспорта:
lK=l,7(l« + rf)/p); (3.21)
DK^1.6DS, (3.22)
где /я и DK — длина и диаметр якоря, м.
Массу ДПТ (кг), имеющих круглую станину с числом полюсов
2р = 4, 2р — 6, а также 1/д.макс = 750 4- 1000 В, вычисляют по эмпи-
рической формуле, полученной на основе обобщения искомых парамет-
ров серийно выпускаемых ТЭМ постоянного гока для электромобилей:
Gn = 162 — 78,5/(D, -I 1,32)1 (D„Z„/P)'A 103 (3.23)
Следовательно, ие производя детального электромагнитного рас-
чета ДПТ, при известных главных размерах якоря находим близкие
к минимальным размеры и массу электродвигателя, его максимальную
и номинальную угловые скорости и передаточное отношение /п, позво-
ляющие выбрать кинематическую схему и конструкцию ПВК.
Уточним некоторые особенности расчета аналогичных параметров
ГПТ. Размеры и масса ГПТ зависят от Р,.расч, угловой скорости со-
члененного с ним ДВС и кратности максимального тока.
В отлнчие от ДПТ у генератора наибольшая реактивная ЭДС £р
имеет место в режиме отсечки по току (участок АВ предельной внеш-
ней характеристики на рис. 2.1), а наибольшее значение напряжения
UK — в точке D. Поэтому у ГПТ допускаются более высокие значения
чем у электродвигателей: £p^011 = 12 ~ 14 В. Для данных режимов
Ер = 2/яДншс1/я.ма«с (р/с) ХХ/г.макс • 10-6; (3.24)
14 = 2/вВ/111АгиЕ)я „акс (p/а) Uг.макс- (3.25)
Номинальная и расчегная мощности ГПТ, выраженные через па-
раметры собственно генератора,
Рг.н = я.маКсяОя/я == КЯОЙ/Я; (3.26)
Рг.расч ” ОС1|.г1Х|ДбнГ,н.максГсТ)я/я/Уг_макс,. (3.27)
72
Совместно решая (3.24) — (3.27),
получим обобщенные конструктив-
ные показатели ГПТ для графоана-
литического определения главных
размеров его якоря [7]:
фг = (лап.п)2 Л1!Ввн/[и7сАг„ХХ(р/а)2);
(3.28)
t,r = 4 Г*г.расч^глг^i .макс* X
X 10 /(£р допСк ДОП£^). (3.29)
по которым D„ и 1Я находят спосо-
бом, аналогичным приведенному
для ДПТ.
На рис. 3.2 представлены расчет-
ные зависимости фг (Оя) и Ля (Оя)
ТЯГОВЫХ ГПТ С Г7г.макс. = 1/д.макс* =
Оя.макс 60 М/С, £р.доп = 12 В:
1/Кдоп = 30 В; 2/р — 6; 2о = 2р;
Л« = 1.5; 0' = 0,65.
Длину и наружный диаметр кор-
пуса ГПТ вычисляют по эмпириче-
ским зависимостям
Z,^2,l(Z„ + 0,9D,/p); (3.30)
D„ = (1,50 4- 1,55) D„. (3.31)
Массу ГПТ рассчитывают по
(3.23) либо по формуле
Рис. 3.2. Зависимости фг (Пя) и Кя (£>я)
тягового ГПТ
Gr = Йг (Рг. J7r_Ma«e.7»>r „Л (3.32)
где ^.= (0,94 4- 0,68) 103 (большее значение kp относится к сущест-
вующим электротехническим материалам, меньшее — к перспектив-
ным); Рг.н — номинальная мощность генератора. кВт; сог.н — номи-
нальная угловая скорость, с-1.
Из (3.32) следует, что для уменьшения массы ГПТ целесообразно
повышать номинальную угловую скорость генератора сог.н. По усло-
виям рациональной компоновки энергетической установки ее жела-
тельно выбирать равной номинальной угловой скорости ДВС для их
безредукторного сочленения. Принимая данный принцип компоновки
определяющим, важно учитывать ограничения, накладываемые на
ыг.н с возрастанием мощности ГПТ в связи с возможным ухудшением
коммутации:
(<о, Л1)макс < (1 .з 1,4) тргм. (з.зз)
Приведенная выше последовательность нахождения главных разме-
ров якоря и массогабаритных показателей ТЭМ постоянного тока обус-
ловливает необходимость оперировать обобщенными конструктивными
показателями ф (Ья), £ (Оя) и Кк (DB). Принципиально возможно их
73
приближенные значения получить на основе данных выпускаемых
ТЭМ различной мощности. Однако такой подход не позволяет прово-
дить вариантные расчеты дли определения рациональных значений
параметров и показателей конкретных ТЭМ при различных значениях
Цд_макс*> /д.макс*» ©м. я. пред И Др.
§ 3.2. Расчет электромагнитных
нагрузок и КПД электрических машин
предельной мощности
Тяговые электрические машины постоянного тока, выполненные
с предельными допустимыми значениями Ан, оя.макс. на-
зывают машинами предельной мощности. Для таких ТЭМ кроме
обобщенных конструктивных показателей должны быть рассмотрены за-
висимости, связывающие энергетические показатели ДПТ и ГПТ с их
параметрами, с учетом принятых предельных значений превышения
температуры меди обмоток якоря над температурой окружающей сре-
ды, устанавливаемых в соответствии с классом нагревостойкости изо-
ляции. Кроме того, при определении допустимых значений электромаг-
нитных нагрузок (линейной нагрузки якоря и магнитной индукции
в воздушном зазоре) следует исходить из того, что геометрия зубцового
слоя якоря должна быть оптимальной или близкой к ней и позволять
реализовывать максимально возможную мощность, ограничиваемую
У к доп И £р.ДОП-
В последующем будем иметь в виду, что конструктивно якорь ТЭМ,
как правило, выполняют с двухслойной обмоткой, расположенной в
открытых прямоугольных пазах, и что охлаждение ТЭМ воздушное,
а вентиляция — параллельная, независимая.
Запишем основные уравнения для определения электромагнитных
нагрузок и уточним пределы изменения ряда параметров, влияющих
на выбор А„ и Вц»:
А„ = V(AJJ.. 200/l„ (1 — а (0,95 - 2Л„ „/D„ - ); (3.34)
Bs„ = kcB2„l (0,95 — 2Л„ B/D„ — 6„/t'), (3.35)
где {A— тепловая нагрузка якоря в номинальном режиме; Jn н —
номинальная плотность тока в обмотке якоря, А/мм2; hn — высота про-
водника в пазу, см; &из — толщина корпусной изоляции по ширине
паза на две стороны, см; hn.n — высота паза якоря, см; £— пазовый
коэффициент; — зубцовое деление по окружности якоря, см; kc —
коэффициент, учитывающий заполнение пакета якоря сталью; Ва1 —
магнитная индукция в ножке зубца в номинальном режиме, Тл (для
ДПТ магнитную индукцию принимают равной максимальному зна-
чению Ягмакс — 2,2 2,3 Тл; дальнейшее повышение В2мвкс нерацио-
нально во избежание роста потерь в стали). Для ГПТ индукция В2Н =
:= Дгмакс/ В г .макс* •
Толщина корпусной изоляции &из зависит от ее типа и максималь-
ного напряжения ТЭМ. В частности, при Т'д.макс = 750 4- 1000 В для
корпусной изоляции обычных типов (слюдинит, стеклолеита) Ьил =
74
I — no данным l8]; 2 — усредненная
зависимость для ряда тяговых ДПТ;
3— оптимальные значения
! — усредненная зависимость
для ряда тяговых ДПТ; 2 — по
данным Г8): 3 — оптимальные
значения
— 0,20 — 0,25 см, а для изоляции на основе полиимидных пленок
Ьиз — 0,10 4- 0,12 см.
Высота проводника в пазу при двухслойной обмотке
hn — 0,5 (hn,n — Ькл) — (Ьич 4- Ьиз), (3.36)
где bw — высота клина для крепления обмотки, см; й,3 0,02 0,03 —
толщина изоляции собственно проводника на две стороны, см.
Высота клипа в зависимости от диаметра якоря выбирается равной
0.4—0,6 см. Меньшее значение Ькл соответствует Оя = 0,25 -=- 0,30 м.
Пазовый коэффициент, равный отношению ширины зубца в ножке
к активной ширине зубцового деления по дну пазов, значительно влии-
ет на произведение АнВсн*
£ = (/3-Ьп.я)/(Гв-&а. (3.37)
где t3 — зубцовое деление по дну пазов; Ьп.я — ширина паза;
Ьиз 4-0,05г (3.38)
— полная толщина изоляции по ширине паза.
Максимум произведения имеет место при £ = 0,667; откло-
нение 4нв«н от максимального значения незначительно при | = 0,5 4-
-i- 0,8. В частности, у существующих ТЭМ | = 0,6 4- 0,64.
Зубцовое деление по окружности якоря
V = nDJZ, (3.39)
где Z — число пазов якоря, можно
нпйти, пользуясь графиками рис. 3.3—
3,5, Однако в связи с тем, что глуби-
пн паза и зубцовое деление якоря для
дниного значения диаметра изме-
няются в широких пределах (до 30—
4(1 %), целесообразно определить экс-
тремальные значения указанных пара-
метров Лпл1л и ta, обеспечивающих мак-
симум 1\п.
Рис. 3.5. Усредненные зависимости
числа пазов (/) и глубины паза (2)
якоря ГПТ при 2р = 6
75
Рис. 3.6. Изменение коэффициента использования активной поверхнос-
ти якоря при отклонении глубины паза (а) и зубцового деления (б)
от оптимального значения
Коэффициент полюсного перекрытия
осип = 1 — 10/rf7(nDe). (3.40)
Подставив (3.34), (3.35) в (3.7), из уравнений dKJdhn.v = О
и dKJdt' = 0, где пя.макс = им.д<»., получим
- 6Н. + Г С + (0.95£>„ - 2Л„ „ ,)/₽
4(0,95-2/.,,.,.,™ •
=___________<>.2Б1УИ,___________________
• 0,238Ря-2Л„„э + 3 +0,5tKJ
Индекс «э» здесь и в дальнейшем означает экстремальное значение
параметра.
Решая систему уравнений (3.41), можно найти зависимости Zs =»
— nDjt* и йп.ял от Пя (кривые 3 на рис. 3.3 и 3.4 для 2р = 4;
Ьк-, — 0,25 см; Ьия = 0,03 см).
Экстремальные значения Z и hn.K при проектировании ДПТ обычно
не используются Поэтому, вычисляя предельные электромагнитные
нагрузки ДПТ, целесообразно принимать значения Z и ЛГ1.я, определяе-
мые усредненными зависимостями (рис. 3.3 и 3.4), так как коэффициент
использования активной поверхности якоря незначительно отличается
от экстремального, если ftn.«= (0,8 4- 1,2)ЛП.Я., и t'— (0,8 4- 1,6) ts
(рис. 3.6).
Реактивная ЭДС, существенно влияющая на процессы коммутации,
зависит от проводимости потока рассеяния:
'.ыл 2.5 • 10»
ьп.« + '» +
(3.42)
где
Ьпя = V «1 - 2Лп.я/Пя) (1 - 0 — 0,05В} + ^из; (3.43)
/выл=1,4т — длина вылета лобовой части; т—полюсное деление;
р0 — магнитная проницаемость воздуха.
Кроме параметра XX реактивная ЭДС обусловлена также значе-
нием напряжения С'Д_МЕИС., которое может быть выбрано из следую-
щих соображений. Анализ формул [см. (1.5) — (1.7)1 показывает.
76
что угловая скорость ТЭД пропорциональна ЭДС и обратно пропор-
циональна магнитному потоку. Поэтому при неизменной схеме сило-
вой цепи СТПЭ, т. е. отсутствии переключении схемы соединения ЭУ
и ТЭД в тяговом режиме движения электромобиля (что имеет место
в большинстве СТПЭ), параметр kt0 при потоке возбуждения Фя. =
= const определяется максимальным значением ЭДС или (приближен-
но) напряжения (7д.макс.» а если £7Д = const — значением <DAt)e =
— Фдр/Фд.ц. На практике регулирование приводов с неизменной схе-
мой силовой цепи осуществляется как изменением напряжения 0/Дш,
так и магнитного потока Фд.:
kn = С/ЛмакС./ФдО.. (3-44)
Обычно <Рдо» 0,25 4- 0,30. Поэтому наибольшее значение мак-
симального напряжения
^д-макс. = (0.25 4- 0,30) k^. (3.45)
Оценку теплового состояния якоря ТЭМ и выбор на этой основе
допустимого значения удельной тепловой нагрузки якоря (Л/Я)н или
линейной нагрузки Лн в длительном режиме ДПТ см. в [8]. При этом
рассчитывают среднее значение превышения температуры меди обмот-
ки якоря над температурой окружающей среды:
емя = ем.я + ©„, (3.4б)
где GL.b — превышение температуры меди обмотки якоря над темпера-
турой охлаждающего воздуха; GB — среднее превышение температу-
ры охлаждающего воздуха иад температурой окружающей среды.
Превышение температуры
ем.я = [ДРм.я(1 +at/<1/43)+A^o(l— аЛ«Аи41/(«Ла), (3.47)
где АРм.я и АРС — потери в меди обмотки и стали якоря, Вт; — коэф-
фициент теплопередачи, Вт/(°С - см2); Ка — удельная теплопровод-
ность изоляции обмотки якоря, Вт/(°С ♦ см2); Klt К&, Кз — постоянные
коэффициенты, характеризующие поверхность теплоотдачи якоря:
К1 = (/' 4- К2 = 0.5тГ/(р7я);
Кд — (/я ф- 0,5т) 0,5ж1квИтКВн/и;
GJD* — 80, (3.49)
где /Пкан, ^каи = 1,5-г 3 см — число и диаметр вентиляционных ка-
налов в стальном пакете якоря; р' и т — расчетный периметр паза для
клинового крепления обмотки якоря и полюсное деление:
р’ = 1 .ЗЗЬП „ + 2/гп.я; т = згРя/(2р). (3.50)
Число каналов в каждом ряду (/Дкян/Пкан). где пКМ|— число рядов
вентиляционных каналов (пкан = 1 или 2, реже 3, в зависимости от
D„), определяют из условия, чтобы шаг их внешнего ряда составлял
(2.5 4- 3,0) d^.
Удельная теплопроводность изоляции К^з зависит от ее эффектив-
ной толщины bt и теплопроводности материала А:
= A/bt. (3.51)
77
Расчетное значение А, учитывающее воздушные промежутки меж-
ду слоями изоляции, зазоры между катушками якоря и стенками паза,
существенно ниже коэффициента теплопроводиостн собственно мате-
риала изоляции [8]. Для применяемых изоляционных материалов в
среднем можно принять расчетное значение А = 0,0013, для перспек-
тивных А — 0,0018 Вт/(6С см).
Коэффициент теплопередачи av является функцией, эквивалент-
ной скорости ve охлаждающего воздуха:
ао«0,002 + 0,28 - 10Л»в. (3.52)
В свою очередь, скорость ив зависит от линейной скорости якоря:
«в = Ии» + 34,4 [ОЛЙ - Ж (3.53)
где QB — количество охлаждающего воздуха, м8/с; —внутренний
диаметр стального пакета, м.
По данным ТЭМ различных конструкций установлены эмпириче-
ские зависимости соответственно для ДПТ и ГПТ:
0,286Ся; (3.54)
Dri = (0,45 4- 0,60) Da. (3.55)
Количество охлаждающего воздуха (м3/мин) рассчитывают с уче-
том значения 0В:
Qs = 3OSAP/(yBCB0B), (3.56)
где SAP — суммарные потери машины; Св— теплоемкость воздуха,
Дж/(кг • °C); ув= 1,2 — плотность воздуха, кг/м3.
Среднее значение превышения температуры охлаждающего возду-
ха ©в зависит от степени вентилированности машины Квеят. характери-
зующейся количеством воздуха иа 1 кВт потерь в длительном режи-
ме; у ТЭМ с независимой вентиляцией рациональное значение /Сент =
= (4 4- 5) 106 м3/Дж. В этом случае 0В == 10 4- 12 °C. Дальнейшее по-
вышение степени вентилированности машины нецелесообразно, так
как требуемый расход мощности иа вентиляцию при небольшом уве-
личении тока резко возрастает.
Сумма потерь в ТЭМ складывается из потерь в меди АРМ, стали
АРС, добавочных АРдоб, механических АРмех, переходных на коллек-
торе АРП и вентиляционных АРвент-
SAP = АРМ + АРС + АРдоб + АРмех + АРП + АРвент. (3.57)
У ДПТ с независимой вентиляцией вентиляционные потери не учи-
тываются. Отдельные составляющие потерь ДПТ определяют по сле-
дующим формулам:
АРМ = АРМ.В + АРм.доп + АРм.к.о -|- АРм.в; (3.58)
АРС = 2,7 (СгРг + Ос.ярс.я); (3.59)
АРдОб = АдобАРс; (3.60)
АРыех = 0|002Рд.ноя/ия.н -J- 1,6оя/д/7щ; (3.61)
АРП = А(7Щ/Д; (3.62)
АРвент = 0,03а3я, (3.63)
78
где ДРу.доп, АРМ.КЛ), ЛРЫ.В — потери соответственно в меди обмотки
дополнительных полюсов, в меди компенсационной обмотки и в меди
обмотки возбуждения; Gz, Gc,„ — массы стали зубцов и сердечника
якоря:
Gz == 7ЛП.Я/Я | л (D„ — Лпд) — Zbn.«J; (3.64)
Gc.„ = 22/, |(0,5О„ - /i„.,)“ - 0.25D?]; (3.65)
рг, рс.я — удельные потери в стали зубцов и сердечнике якоря:
рг = ((0,044/2л)юдр + (5,6/4л2)(о)др/100)2| (3-66)
Ре. = [(0,044/2л) Одр + (5,6/4л2) (Шдр/100)г| (3.67)
кцос — коэффициент добавочных потерь:
/гшг,~0,2 + 0,1/^.; (3.68)
— плотность тока под щеткой (JUVI1 = 10 4- 12 А/мм2); А(7Щ = 2,5 —
падение напряжения в щеточном контакте, В.
Магнитная индукция в зубце якоря на расстоянии 1/8 высоты от
основания и в спинке якоря соответственно
Вк = В6нап.пт/(£)й — Dt — 2/1п.я — 1,33nKaHdKaH). (3.70)
Составляющие потерь в меди ДПТ:
АРм.м«рм.я(Л/я)нлРя(/я + 1,3т); (3.71)
АРм.доп 4рм.Доп&допР (AJдоп)н t (С "Т 0,2т); (3.72)
АРм.к.о 2рм.к.ор (AJя)н vK,oT (/я -j- 1 1т); (3.73)
АРм.в 552 2phl.np(A«/B)H ^ш^у.мин^нас.н^п.пТ (ZH СС^пТ) t/д.макс»» (3.74)
где рм — удельное сопротивление меди обмоток при ожидаемой темпе-
ратуре; 7Я.Н, /дои.н, Л.н—плотность тока в обмотках якоря, допол-
нительных полюсов и обмотке возбуждения в номинальном режиме,
А™ = 3,0 4- 3,5 А/мм2, JB.n — 3,3 -j- 3,5 А/мм2 (для изоляции клас-
са Н); АД011—постоянный коэффициент; vK.o — степень компенсации
компенсационной обмоткой реакции якоря; йу.МИн — коэффициент
устойчивости ДПТ при работе с наименьшей степенью возбуждения;
^нас.н — коэффициент насыщения магнитной цепи ДПТ в номинальном
режиме. У ДПТ без компенсационной обмотки £доп = 1,25; —
= 0,8 -j- 0,9; у ДПТ с компенсационной обмоткой kROn = 0,65; ky MMI =
= 0,5 4- 0,6; vx.o = 0,85 -j- 1,10. Коэффициент насыщения ДПТ с нор-
мальным воздушным зазором может быть принят равным двум.
Чтобы найти механические потери в номинальном режиме, необхо-
димо знать номинальный ток якоря, который предварительно вычис-
ляют по формуле
/д.н « 1,18арк.миншсА„, (3.75)
W Рк.мин = (4,5 ~ 5,0) 10“3— минимальное по условию выполнимости
коллектора значение коллекторного деления, м.
79
" Рис. 3.8. Схема алгоритма расчета
Оя.н = Ря.макс/ясо = Vn.Ron/kw (3.76) показателей и номинальных данных
„ „ „ „ ТЭМ постоянного тока
Удельное сопротивление меди об-
мотки якоря
Рм.яв = Рм-я! (235 -р 6м.V ^норм)/(235 -р ^норм)| (3.77)
где рм.яе — удельное сопротивление меди обмотки якоря при превы-
шении ее температуры 0М.Я иад нормированной температурой окружаю-
щей среды fHDpM (например, 20 или 40 °C); рм.я/ — то же, при температу-
ре ^норм-
КПД электродвигателя и генератора
Лд-н = Рд-н/^д-н + 2ЛРд.н) = (14- 2ЛРД.Н/РД.Н)-1, (3.78)
Пг.и = Рг.к/(Рг я + 2ДРГ.Й) = (1+ 2ДРг.н/Рг.нГ1. (3.79)
В качестве примера на рис. 3.7 представлены кривые изменения
КПД ДПТ и ГПТ при различных предельных превышениях температу-
ры обмотки якоря, полученные для тех же условий, что и зависимости
иа рис. 3.1 и 3.2.
Приведенные формулы позволяют, оперируя числовыми значениями
ряда указанных коэффициентов и применяя соотношения (3.15) —
(3.23), (3.30) — (3.33), иа основе выбранного значения DK определить
массогабаритные и энергетические показатели ТЭМ, при которых
UK, Ed и 6м.я не превышают предельных значений и обеспечивается
80
реализация необходимой мощности ТЭМ, а также кратности макси-
мальной угловой скорости для ДПТ и максимального пускового тока
для ГПТ.
На рис. 3.8 представлена схема алгоритма 17], дающая возмож-
ность при использовании указанных формул с помощью ЭВМ опреде-
лить показатели и номинальные данные ДПТ. Ниже дается расшиф-
ровка символов схемы алгоритма, каждый из которых обозначен циф-
рой:
1 — пуск,
2 - ввод исходных данных: Pv (или PTV. если PTV > Pv), оя доп, С/кдол,
^р.доп> ^Я» Рмакс’ Д₽'< ₽мин> ^гмакс’ {^гв>макс’ ДВгн- (Вгн)мин- ^и>
пкан» ^кан’ ^доб.н> йшм \з« <^я)и.нач' 1^я)н.кон' ^Рм я Энач> ^Рм.н.н»
(Рм.ИнКоН* Рм.ДОП.Н’ Рм.К О.Н’ Рмин’ 7ДОП.Н’ ’^ь.н» ^дол» Vk.«* ^у.мин* ^насл» ^д©»К-ин*
Рк.мин’ wc, ^щ.ц» бц, 0В. Д, ^НОрМ, (®м.я.пред)нач’ м. я. пред’ (®м.я.пред)кон*
щ, ДЛПЯ; ввод аналитических зависимостей усредненных функций Ёп Я(ОЯ), Z(DH);
3 Р - — РМакс #ги : ^гн^мякс* ®д©» 1®д©Эмня« vti макс ^я.догъ
4 — вычисление /я по (3.15):
5 — определение Z, вычисление I' по (3.39), аП Г| по (3.40), О,- по (3.54),
<я^.«иткан) по 0.50), *Vi, (3-76Ь юдмаис no (ЗЛ6), <одн по <3.17);
6 — определение/1П Я, вычисление йп я по (3.43);
7 — вычисление ббн по (3.35), (/к по (3.10);
8-^<</к.доп;
9 — Вгн : = (бгн)маис — Д5гн;
10 — вычисление ДРС „ по (3.59), ДРдоб по (3.60), Лп по (3.36);
11 (И7Я)Ь : — (71./я)н нач;
12—вычисление Лн по (3.34);
14 — вычисление ДР„ „ „ (3.71), ДРидап.я по (3.72), ДР„ по (3.73): 1/д „акм
по (3.45), ДР„ВВ по (3.74), /д„ (3.75), ДР„ех.„ по (3.61); ДР„„ по (3.62),
(1ДР)„ по (3.57), Q„ по (3.56), ов н по (3.53), а„„ (3.52), р' по (3.50), т по (3.50),
Кц К2, /<я по (3.48), bt по (3.38), Лиз по (3.51), я ь по (3.47), 6М я н| по (3.43)
Рм.я.к1 по (З-77):
15 ®м.я.пред * = (бм.я.пред^нач;
16 — рм я н < рм и и! ’
I7 Рм.я.н • = Рм.я.н "Г АРм.я.Н’
18 Рм.я.н > Рм.я.н1*
1® “ Рм.я.н : ~ Рм.я.н ^Рм.я.н’
20 6m.h.hJ < ®м.я.пред‘
21 — (^я)н : = (^7я)и Д (Л^н)и;
22 ®м.я.н1 > ®м.я.пред;
23 - (717я)и : = (А/Я)н - Д (Л7Я)Н;
24 — вычисление (2Л)И по (3.42), Ер по (3.9);
25-Ер<Ердоп;
26-Лп.и:=йГ1Я-Дйп.я;
27-йпя1>0.85/1п.я;
28 - ₽' : = Р’ - Др';
29 — вычисление PvX по (3.6);
30-Ри]<Ри;
81
31 — 6м.я.пред ®м.я.пред“Г ^®м.я.пред;
32 б.ч.я.пред < {®м.я.пред)кон;
33 — вычисление «ддикс по (3.18), по (3.19), 1П по (3.20), /к (3.21), £),< по
(3.22), Од по (3.23), m по (3.78);
34-вывод на печать 'я. Z, f. апп, Dh oflH, шд.в, %.макс, Лд.н, пДЛ1акс, in,
^п.я» ^п.я’ ^0н' ^К» Дгн1 А^с.н» Л^доб.н’ ^п> (Л</Я)н. ^н, Рм.я.н’ ^мли' ^Аи.доп.н*
^м.к.о.н» АРм.в.н» ^д.макс«* ^д.н» ^«ех.н» ^^п.н» ^вент.н» Qu< °ц.в* т«
®м.я.н* Ер‘ ^1- ®м.я.пред' Чд»
35 — заданные условия не выполняются;
36 — останов.
Согласно схеме, вначале для определенного типа электроизоляцион-
ного материала и заданного значения DK устанавливают параметры зуб-
цового слоя якоря Г, йп.я и Ьп.я. Затем с учетом ограничения (7К Ц<ЛОИ
выбирают индукцию в воздушном зазоре, определяют потери в стали
и добавочные. Для различных значений удельной тепловой нагрузки
якоря рассматривают другие составляющие потерь электродвигателя,
количество охлаждающего воздуха, его эквивалентную скорость, коэф-
фициент теплопередачи якоря и, наконец, превышение температуры
меди обмотки якоря ©м.в.н. Далее 0МЛ.. сравнивают с предельным зна-
чением 0м.я.пред.
Значения (Л 7Я)И изменяют до тех пор, пока не будет обеспечено
равенство Ом.я.н = ©м.г.пред. Чтобы получить удельное сопротивление
меди обмотки якоря рм.ян в соответствии с 6М.Я.Н, в схеме алгоритма
предусматривают внутренний цикл порм,я,н. Установив значения (ЛУЯ)Н
и Лн для ©м.я.н — ®м.я.пред. проверяют ограничение по Ер. Если
Ер.доп, то вычисляют мощность, которая может быть реализована
при выбранных размерах якоря, максимальную и номинальную час-
тоты вращения, длину и диаметр корпуса, массу и КПД ДПТ, а также
передаточное отношение ПВК, затем необходимые данные выводят на
печать. Если Ер> Ер доп» то переходят на меньшие значения глубины
паза (до 0,85 первоначальной величины). Если реактивная ЭДС оста-
ется выше допустимой, то переходят к начальной глубине паза Лп.яь
уменьшают длину якоря и расчет начиная с п. 7 повторяют. Вычис-
ления производят до тех пор, пока не будут удовлетворены условия
0М.Я.Н = ©м.я.пред н Ер.доп. В случае невыполнения указанных ус-
ловий необходимо перейти на следующий шаг Д0м.я.Пред я повторить
расчет сп. 15. Когда достигнуто превышение температуры (0м.я.Пред)кон,
а заданные условия не выполняются — это означает, что при выбран-
ных D„, н параметрах изоляции невозможно реализовать требуе-
мую мощность.
Схема алгоритма расчета на ЭВМ аналогичных данных тяговых
ГПТ практически аналогична схеме, показанной на рис. 3.8.
Рассмотренный алгоритм при внесении некоторых дополнений дает
возможность не только определять номинальные данные и показатели
ТЭД постоянного тока, но и выполнять варианты расчетов с вычисле-
нием зависимостей ф (£)я) и Кя (£)я) для различных значений ka,
(/д-макс*, Оя-доп, вм.я.пред и других параметров, с помощью которых оп-
ределяют диаметр якоря проектируемой электрической машины.
82
§ 3.3 Совместный расчет массо-
габаритных и энергетических
показателей тяговых электрических
машин постоянного тока
В настоящее время существует различный подход к оптимизации массогабарит-
ных п энергетических показателей ТЭМ электромобилей. В зависимости от класса
электромобиля, его назначения, условий эксплуатации, компоновочных решений
и других особенностей на первый план выдвигают обязательное выполнение какого-
либо одного или нескольких наиболее важных требований. Например, для много-
колесных полноприводных электромобилей повышенной проходимости нередко
ставится задача получения минимальных размеров и массы тягового электрооборудо-
вания (особенно ТЭД мотор-колес) при приемлемом значении КПД тягового электро-
привода. В других случаях оговариваются пределы рациональных значений массо-
габаритных, стоимостных и энергетических показателей СТПЭ электромобиля,
устанавливаемых по результатам анализа существующих аналогов или прототипов
и тенденций к их совершенствованию
При создании тягового электрооборудования для новых типов электромобилей
разработчики вынуждены оптимизировать ТЭМ по минимуму суммарных приведен-
ных затрат с использованием обобщенных данных по дорожно-эксплуатационным
условиям В реальности конкретная трасса движения электромобиля может не сов-
падать с усредненной. Например, по мере выработки глубина карьера и, следова-
тельно, технологическая трасса перевозки горной массы изменяются, что приводит
к отклонению действительной эффективности от расчетной. В этих случаях необхо-
димость обеспечения заданной эффективности предопределяет использование опти-
мизированных для усредненной трассы ТЭМ в реальных дорожных условиях с изме-
нением передаточного отношения редуктора ПВК. диаметра и грузоподъемности
шины и др.
Таким образом, любой из принципов оптимизации тягового электропривода
требует взаимосвязанного выбора параметров и показателей ТЭМ (в приводе постоян-
ного тока с ТЭП — ДПТ и ГПТ) и в первую очередь установления рациональных
значений максимального напряжения, при котором достигается минимум суммар-
ной массы ТЭД и генераторов, нахождения превышения температуры обмоток яко-
ря, влияющих на КПД.
Проиллюстрируем сказанное на примере оценки изменения массы ДПТ мотор-
колес и тягового ГПТ в функции Ua ы'акс, и 0МЯ пред для КЭМ грузоподъемностью
Рис. 3.9. Зависимости массы ТЭМ от относи-
тельного значения максимального напряже-
ния
Рис. 3.10. Зависимости массы и
КПД ТЭМ от превышения темпе-
ратуры меди обмотки якоря
83
75 т (масса груженого электромобиля 135 т) с колесной формулой 4 X 2 и мощностью
ДВС, отводимой на тягу, 735 кВт; Рд н = 250 кВт; = 3,65; Ргм — 560 кВт.
Минимальный магнитный поток ДПТ при максимальной угловой скорости,
ограничиваемый допустимыми значениями и fp, составляв! 0,3; из
(3.45) 1/дмг1КСЖ > /гиФд£>, tss 1,1. Последующее рассмотрение характерно ик прове-
дем в диапазоне (7Лмакс,. = 1,1 1,5
На рис. 3.9 представлены зависимости массы генератора , ДПТ мотор-колсса
Сд и суммарной массы силового электрооборудования Сэ от 0М п пред и UR макс*-
Кривые Сэ ((7д макс.) позволяют найти рациональное значение максимального на-
пряжения бд МНКСФ = 1,35-4- 1,40, при котором достигается минимум суммарной
массы ТЭМ. Несмотря на то что с возрастанием (/Лмаксв от 1,0 до 1.4 масса ГПТ
увеличивается на 35 %, снижение массы каждого из двух ДПТ на 13 % обеспечивает
уменьшение суммарной массы ТЭМ на 4—5%.
На рис. 3.10 показаны зависимости, дающие возможность оценить изменение
массы и КПД ДПТ и ГПТ в функции япред для Ь/дмакс< “1.4 Из рисунка
видно, что переход в процессе проектирования ДПТ с вм.я.пред = 120 °C иа
®м я пред = 160 °C приводит к снижению массы двигателя на 16 %, но тогда его
КПД уменьшается на 1,8%. Для тягового ГПТ аналогичный переход позволяет сни-
зить массу на 13,2 % с одновременным уменьшением КПД на 1.1 %. В связи с этим
важно определить оптимальное значение 6м.я.пред-
Экстремальные значения параметров электрических машин КЭМ грузоподъем-
ностью 75 т соответствуют 1УД<МИКСФ — 1,30-4- 1,35 и 6м_я.пред ~ 130 -4- 140 °C.
Таким образом, изложенный здесь метод оптимизационного расчета ТЭМ по-
стоянного тока электромобилей позволяет установить рациональные значения макси-
мального напряжения и допустимых превышений температуры меди обмотки якоря,
от которых существенно зависят масса, размеры и КПД тяговых электрических
машин постоянного тока.
§ 3.4. Задачи регулирования тяговых
электродвигателей постоянного тока
Создание систем тягового привода электромобилей с высокими
энергетическими показателями наряду с приведенными выше соображе-
ниями по выбору параметров ТЭМ неразрывно связано с их рациональ-
ным управлением.
Как подчеркивалось ранее, механическая характеристика М (сод),
или в системе относительных единиц (юд.), где Л4* == М/Мн, юд.=
= о)д/(Од.и, обеспечивающая выполнение тяговой характеристики F (v),
является законом регулирования ДПТ (это относится к ТЭД любого
типа). Установление рационального управления электродвигателем
в СТПЭ предусматривает определение зависимостей (Уд. (сод*), Фд, (шд.)
или (Уд. (/д-), Фд. (/«_•), необходимых для формирования предельных
и частичных характеристик М* (сод.) и наиболее полно отвечающих
весьма противоречивым требованиям — минимуму массы и размеров
ЭУ и ДПТ, максимуму их КПД и др. В свою очередь, получение иско-
мых зависимостей обусловливает взаимосвязанное управление напря-
жением (Уд*, подводимым к ДПТ, и его током возбуждения /в.д» =
= /в.д//вд.н (магнитным потоком Фд.), при этом принципиально воз-
можны следующие варианты; одновременно с увеличением напряже-
ния в функции (йд. снижают /вд.; ток /вд. снижают, когда (Уд« до-
стигает своего наибольшего значения L/Am8kc*. и в дальнейшем поддер-
живается постоянным.
84
У ДПТ с одной последовательной обмоткой возбуждения изменение
/в.д, н, следовательно. Фя. достигается или шунтированием обмотки
(ее части), или включением на зажимы обмотки регулятора. Электро-
двигатели смешанного возбуждения обычно выполняют с таким соот-
ношением МДС последовательной и независимой обмоток, которое
обеспечивает требуемое значение ka исключительно за счет измене-
ния тока (магнитного потока) независимой обмотки — это дает воз-
можность ограничиться одним, нередко реверсивным, регулятором
сравнительно небольшой мощности. Очевидно, что наиболее просто
управление Фд. осуществляется в ДПТ независимого возбуждения.
С целью исключения промежуточных выкладок в расчетах упомя-
нутых ранее зависимостей будем оперировать только конечным пара-
метром — магнитным потоком, при этом необходимо разграничивать
направленное изменение Фд. от естественного за счет увеличения (сни-
жения) тока якоря /д. в последовательных обмотках.
Отметим существенное отличие регулирования ДПТ в СТПЭ с раз-
личными типами ЭУ, связанное с выполнением одного из основных
требований к СТПЭ — равенства (с учетом КПД агрегатов силовой це-
пи) мощностей ЭУ и ТЭД. Последнее предусматривает выбор парамет-
ров ЭУ в соответствии с соотношениями
/эун = АПк/д.н/пк; (3.80)
^эун = лкйд.н, (3.81)
а относительное значение максимального напряжения ДПТ
(^д.макс* — ^ЭУмакс- = (^ЭУмчкс/(^ЭУн. (3.82)
Если исходить из необходимости выполнения этих условий, то,
например, в СТПЭ с ТАБ без переключения групп аккумуляторных
батарей управление напряжением на выходе ТАБ (входе ДПТ) воз-
можно лишь вниз от номинального значения, так как L/эумакс» =
= ^дМакс*—' 1. Тогда максимальная угловая скорость <0дмакс должна
реализовываться при (/д.и, а номинальная (Од.н — при UR<Z 4/д.ц. Воз-
можно и другое решение, когда ДПТ проектируется на максимальное
напряжение, соответствующее номинальному напряжению ТАБ; но
в обоих случаях недоиспользуется установленная мощность силового
электрооборудования: в первом случае — ДПТ, во втором — ТАБ.
Применительно к СТПЭ с ТЭП выражения (3.80) — (3.82) справед-
ливы. Важная задача для систем привода с такими ЭУ — выбор ра-
ционального соотношения между и Фд«., обеспечивающего
заданную кратность максимальной скорости ka в соответствии с (3.45).
Критерием выбора нужных значений 1/д.макс* и Фдо. может служить
и минимум суммарной массы ТЭМ, и минимум потерь в них.
Установим рациональные варианты регулирования ДПТ, в том
числе и по минимуму потерь, а также пределы отклонений (7Д, от экс-
тремальных значений, когда потери в ТЭМ практически не отличаются
ог минимальных.
Последующее изложение проведем для наиболее распространенных
систем привода — СТПЭ с ТЭП, имея в виду плавное управление воз-
буждением ДПТ и обязательное выполнение условия Рг. = —
“ const (см. § 2.2).
85
§ 3.5. Управление напряжением
и магнитным потоком
Как показано выше, выполнение заданной механической характе-
ристики М* (<Од.) требует согласованного управления напряжением
и магнитным потоком в функции угловой скорости ДПТ или его тока
нагрузки.
Предельная механическая характеристика (см. рис. 1.22) имеет два
участка, соответствующих режимам работы ДПТ при М* — Л1мг1,4С*
или (/я. = /д.Макс,) и Р\л*= 1. Процесс трогания с макси-
мальным моментом (максимальным током нагрузки) заканчивается,
когда электродвигатель начинает реализовывать полную мощность,
отводимую на тягу (точка В на графиках, см. рис. 1.22 и 1.23). Даль-
нейший рост угловой скорости с постоянством реализуемой мощности
Р|Д» = 1 ограничен значением шд» = <од.макс» (точка D на упомянутых
графиках) при некотором моменте М* — Л4М1)Н.. Если требуемая крат-
ность А(0 имеет значительную величину 4 ~ 6, то условие Р1Д* = 1
может выдерживаться до сод < соЛмакс*.
Определим искомые зависимости £7Д. (сод,), Фд, (®д*) для ДПТ
последовательного возбуждения; затем отметим особенности управле-
ния напряжением и потоком у ДПТ смешанного и независимого воз-
буждения.
Напряжение на коллекторе
= ER + /д (2/?д + ₽вЯовп) + (3.83)
где рв — коэффициент регулирования возбуждения; Ровгг — сопротив-
ление последовательной обмотки.
Пренебрегая значением Д£/щ и переходя к относительным величи-
нам, получим
1/д. = оЛ>дА0л. + (6» + ^/«., (3-84)
ГДе <2Н — Ед.н/^д.н» “ 7д.н2Рд/(7Д1И; сн ~ ^д.н^ОВП/^д.н-
В интервале скоростей 0 свдв. (режим = Л4макс,) ко-
эффициент рв = 1, а напряжение и магнитный поток
(Уд, = анфдв*о)дв» -|- (Ьн -|- cj /дв«; Фд. = Фд. (7дв*) = Фдв«> (3.85)
ГДе /дВ* = /д.макс**
В интервале <одй, сод. 1 регулирование ДПТ осуществляет-
ся при постоянстве потребляемой мощности Pu* = 1 и коэффициенте
= 1. Ток в этом режиме зависит от угловой скорости, т. е. /д. =
— h- (®д.), напряжение — обратно пропорционально току, а магнит-
ный поток определяется по нагрузочным характеристикам
ия. = 1//д4 Фд. = ФД1. (/д,). (3.86)
Регулирование электродвигателя иа скоростях сод. > 1 (с учетом
Р1д- — 1) может производиться двумя способами:
1) повышением напряжения до значения 1/д.макс« с одновременным
уменьшением коэффициента рв от единицы до Рв.мин по расчетной про-
грамме, где Рв.мин обусловливает значение Фд, — Фд.мин- В этом слу-
чае для интервала 1 < соДФ о)д.макс. получим
Фд. = Фд. фв. /д.); <4. = 1/4*1 рв = рв (W- (3.87)
86
Таблица 3.1
Интервал угловых скоростей Требования, об- условленные за- данной механи- ческой характе- ристикой ДПТ последовательного возбуждения ДПТ смешанного возбуждения ДПТ независимого возбуждения
зависимости изменения параметров вари- ант уп- рав- ления зависимости изменения параметров вари- ант уп- рав- ления зависимости изменения параметров вари- ант рав- ления
° < “л* ШдВ* I 11 S II С II s ’ 5 » Фп =: Ф ; Д ♦ д.м акс. пред♦’ ₽в= 1; ^д.= СиФд.макс.пред*®д» ~*- “Ь (^н 4“ сн) ^д.макс.пред* 1 Ф = Ф ; д* д.макс.пред»* Рв“ 1» ^в.д.пред* 1’ ^д* ~ сиФд. макс, пред* X Од* -|- (Ьн + _1_ с \ / * в/ д.макс.пред* 4 Ф — Ф д* д.макс.пред*’ ^в.д* в.д.макс.пред* ^д.= — ®н^д.макс.пред* ~г (^н 1” ^н) д.макс.пред» 7
“дЛ> < “д. < 1 ₽.Д. = 1 е с s « S® II s' ’’ >5 2 Ф = Ф и . 1 ); д* д* ' д*» в.д*'* Рв ~ 1* ^в.д.пред* “ 1’ ^=^Д. 5 аГ* Q ь * с *11 II «-.S II й S <i i s 11 5 • 8
^д.макс* ^д.^1 se <= 3я II 5 и е 11 5” \ tT* Л33 J3 ’ h*" 3 Фд» = Фд. ^Д.» ^В.Д.)’ ₽а= 1’-/в.д. = Ув.д.^д.); ^д. = ‘"а. 6 ф Ф (J )- Дд*ив.д*/’ ^в.д* ^в.д* ^д*^’ 9
/Л1 е /Л 5- г • и /Л е5 II || и «£ & 5 => е 10 Фд, = Фд» Уд«- УВ.Д.)> 1 У в.д. пред 1 ’ ^Д.= ’//д. 12 ф ф - Д* д.маКс.псеД* ’ в.д* ^в.д.макс.пред*’ ^.= 1У/Д. 14
Z8 /л|е / /л i »е о * * /л Р!л. = 1 ф = ф (и R* п* '^д.макс пред*’ ^д* ~ ^д.макс.пред* 11 ф == ф (U j\* r* '''д.ыакс.пред* юДж); ₽в=1; ^д* ' ^д.макс.пред* 13 Фд* = Фд* ^д.макс.пред* ’ «Дж); = и д* д.макс.пред* 15
ex pert 2 2 для http: //rutracker. о rq
2) увеличением напряжения до максимального при 0В = 1 с после-
дующим поддержанием б/дж = б/д.маКс. и снижением коэффициента 0В
до 0В.МИН также по расчетной программе. Определение зависимостей
17д. (©д*) и фд. (сод.) упрощается, если диапазон скоростей соА. > I раз-
бить на интервалы 1 <©Д.^©Д1» и содь сод. ©д.макс*> где содь со-
ответствует режиму ДПТ с С/д. = С/д.Макс. и рв = 1. В интервалах 1 <
<Z ©д» ©Д1. и содз, (Од. 1 можно применить один и тот же ва-
риант управления электродвигателей (табл. 3.1). Это дает основание
распространить (3.86) на весь интервал скоростей одв. ©д. ©Д1.. В
следующем интервале ©д1, <од. ©д.Макс*, пренебрегая изменением со-
противления цепи обмотки последовательного возбуждения, получим
Фд ~ |С/д.ыакс* * (&ц -}- сн)|/(пио}д,С/д.макс,); С/д» = С/д,макс». (3.88)
Первое уравнение системы (3.88) получено из (3.84) с учетом ра-
венства /д. = 1/С7д..
Таким образом, для каждого интервала угловых скоростей, соот-
ветствующих тяговой характеристике электромобиля, регулирование
ДПТ зависит от принятых условий Л4# = Л4макс*, Рщ. = 1» С/д, —
= С/д MahtT и способов их реализации.
Аналогично рассмотренному выше устанавливают зависимости из-
менения напряжения и магнитного потока электродвигателей смешан-
ного и независимого возбуждения. Отметим лишь, что для таких ДПТ
в режиме пуска (интервал ©д» ©дв») целесообразно принимать маг-
нитный поток Фдв. равным 1,0—1,1, в то время как у ДПТ последова-
тельного возбуждения поток Фдд* может достигать значений 1,2—1,3.
Связано это с тем, что рабочая точка высокоиспользоваиных электро-
двигателей находится на колене кривой намагничивания и получение
больших значений Фд. вызывает значительный рост намагничивающе-
го тока и увеличение мощности регулятора возбуждения.
В табл. 3.1 систематизированы зависимости изменения магнитного
потока, напряжения и других параметров ДПТ последовательного,
смешанного и независимого возбуждения. Обозначение «пред» в
индексах ряда параметров здесь и далее соответствует предельным ха-
рактеристикам. Из таблицы следует, что независимо от системы воз-
буждения ДПТ весь диапазон угловых скоростей в соответствии с ха-
рактеристикой М* (сод,) реализуется сочетанием трех вариантов управ-
ления, соответственно 1, 2, 3; 4, 5, 6; 7, 8, 9 или 1, 10, 11; 4, 12, 13;
7, 14. 15. Пусковые (перегрузочные) режимы электродвигателей обес-
печиваются с полным магнитным потоком (0Й — 1), а получение ско-
ростей, превышающих номинальную, достигается увеличением напря-
жения (б/д. > 1) и уменьшением магнитного потока.
В § 3.10 показано, какие сочетания вариантов управления являют-
ся предпочтительными при проектировании СТПЭ.
§ 3.6. Ограничения по условиям
возникновения кругового огня
и условиям коммутации
Выбор наибольшего значения кратности максимального напряжения б/д макспред.
зависит от конструктивного исполнения ДПТ и ограничивается, как указано
ранее, допустимыми значениями максимального напряжения б/к доп между сосед-
8В
ними коллекторными пластинами по условиям стойкости электродвигателя к обра-
зованию кругового огня и реактивной ЭДС коммутации Ердоп.
В процессе выбора вариантов управления при вычислении UK и £р удобнее
пользоваться более простыми формулами, чем (3.9) и (3.10). Для ДПТ без компенса-
ционной обмотки [8]
Ук = Л'(1 + В^„.//гд>)1'д.. (3.89)
где Л'— 2рУд н/{ап ПК); Bi — 0,45Л7д к/(4пр£д н); К —число коллекторных пла-
стин; Вдв = ГД/£ДН— относительное значение МДС возбуждения.
Для ДПТ с компенсационной обмоткой
I/. = Л' (1 + BJaJFд.) 1/д., (3.90)
где Вй = 0,165 [K/(aZ) -|- Z?t.pl Z — число пазов якоря; fenp — число
эффективных проводников в пазу компенсационной обмотки.
Реактивная ЭДС коммутации (8|
£р=*р'д.шд.- (3.91)
где /ер = /Я2Х/УЯ/Д нпд н/(60а); N„ — число проводников обмотки якоря.
Найдем выражение для расчета 1/дмакс пред„ электродвигателя последователь-
ного возбуждения без компенсационной обмотки. Коэффициент регулирования воз-
буждения [9|
₽0 = ^,/(Шд./г„ас.и). (3.92)
где Л’нас.и — коэффициент насыщения магнитной! системы, характеризующий отно-
шение номинальной МДС высокоиспользованного электродвигателя с насыщенной
магнитной системой к МДС такого же электродвигателя при ненасыщенной магнит-
ной системе, которая обеспечивает последнему равный по значению магнитный
поток.
Кроме того, по определению,
Рв ^в.д^Д ~ ^в.д.»^д» ~ (3.93)
™е '».д —ток возбуждения ДПТ; /вд. = (вд//вд.„.
Заменив в (3.89) на €/к в0„, а Уд. на Кд.„а„с.прсд.. с учетом (3.92) и (3.93)
получим
Чд-макслред, =S«4.„,„/2-T) (1 + К1 4 (А )2 Дх^нас.ц^а/^к.доп • (3.94)
Из (3.91) реактивная ЭДС коммутации
ЕР = Ар<од,Р1д,/(/дж. (3.95)
Тогда по условиям коммутации при максимальной скорости
Цц.макс.пред» ^Ao^Vu^p-flOir (3.96)
В дальнейших расчетах выбираем значение ^д.макс.пред»’ удовлетворяющее
условиям (3.94) и (3.96). Для ДПТ смешанного и независимого возбуждения можно
получить соотношение, аналогичное (3.94), если использовать аналитическое выра-
жение кривой намагничивания, однако последнее приводит к громоздким вычисле-
ниям. Поэтому при определении напряжения С/д<1 ограниченного допустимым зна-
чением 1/н, согласно (3.10) и (3.44) строим зависимость (£д макс„), зада-
ваясь различными значениями ^я.макс*, например от 1,0 до 1,6. Далее находим так
якоря /д, = Р1д„/(/д макс,, по (3.88)—магнитный поток, по нагрузочным харак-
теристикам электродвигателя — МДС, а затем, используя (3.89), напряжение
UK Практика применения ДПТ с компенсационной обмоткой показывает, что для
1ШХ в тяговом режиме движения электромобиля напряжение не превышает
tПроизведения Л'(/д макс Г]редл, которое меньше (7К ДОП, в связи с чем выбор зна-
чений С'д.мике пред, ограничен только условием (3.96).
1 89
§ 3.7. Расчет предельных
характеристик
электродвигателей постоянного тока
Рассчитаем предельные (Р1Д, = 1) характеристики ДПТ с система-
ми возбуждения различного типа, использовав зависимости изменения
магнитного потока и напряжения в функции (од« (см. табл. 3.1). Ис-
ходные выражения для вычисления основных параметров запишем
в системе относительных единиц.
Напряжение на коллекторе определяют согласно (3.84). Мощность,
потребляемая двигателем,
(3.97)
КПД рассчитывают по (3.78). Мощность на валу
Р— Р R/Pд.и = Р 1Д»Т]д/Т]д,Н- (3.98)
Электромагнитный момент
= Фд,/д». (3.99)
Момент на валу
Мд. = Мд/Мд.и » Рд./©д». (3.100)
Электродвигатели последовательного возбуждения. При варианте
управления 1 магнитный поток Фд.маКс.пред. определяем по нагрузоч-
ным характеристикам Фд» (Рд»), где Рд» = 7В.Д* = /д»; напряжение на-
ходим из (3.84). Мощность, потребляемая ДПТ, и его электромагнит-
ный момент соответственно
Р1.д.пред* = пред Дд-макс. пред»! (3.101)
= Л^макс.лред» " Фд.макс.предмакс.пред*. (3.102)
Характеристики ^((Од.) и мощность Рд. рассчитывают по (3.78) и
(3.98).
В соответствующем интервале угловых скоростей ток изменяется
В функции (0Д4 ОТ /д.макс.пред» ДО /д. = 1 (варИЗНТ 2) ИЛИ ДО /д. =
= 1/(/д.макс.пред» (вариант 10). Задаваясь рядом значений тока якоря
в указанном диапазоне, находят МД С Гд. =* ₽в/д. == /д», так как рь
= 1 (₽п — коэффициент регулирования возбуждения ДПТ). Используя
полученные значения Рд», по нагрузочным характеристикам определя-
ют магнитный поток Фд„ Далее находят напряжение (7Д, = 1//д*.
Угловую скорость для каждого значения тока вычисляют, решая
(3.84) относительно сод. и заменяя /д. на 1/(7дв:
Ид. = [J4 - №. + с„)1/№.ФдЛд.). (3.103)
Чтобы обеспечить работу ДПТ в соответствии с вариантом управле-
ния 3, необходимо предварительно задаться функциональной зависи-
мостью рв (/д.). Одним из наиболее простых для схемной реализа-
ции решений является линейная зависимость Рв (7д.), показанная иа
рис. 3.11. Тогда
₽в = -Д,-—1111-- (/«. - /д ««..пред.) + Рв.мин.пред- (3.104)
• *д.мин.пред»
90
В свою очередь, из (3.92) и (3.97) следует
Рв.мин.пред = (4-макс.пред»/(4)^нао.„У, (3.105)
(д.мин-пред» — 1/^д.макс.пред*- (3.106)
В случае нелинейной зависимости рв </д,)
коэффициент рв можно определять, напри-
мер, с помощью кусочно-линейной аппрокси-
мации; однако подобного вида зависимости
Рис. 3.11. Характеристика
₽в (/д.) электродвигателя
последовательного возбужде-
ния при варианте управле-
ния 3:
ВЕ — коэффициент регулирова-
ния возбуждения ДПТ
скорость— по (3.103).
Рв (43 в системах управления возбужде-
нием практически ие применяют.
Далее, задаваясь рядом значений тока яко-
ря ОТ /д. — 1 ДО /д.мин.пред», ИЭХОДИМ ЗавИСИ-
мость ГДФ (4.) = 4*₽в(4*)» а по нагрузочным
характеристикам—магнитный поток фд„ (/д,).
Напряжение Од. вычисляют по формуле
(3.97), учитывая, что Р\д.« 1, а угловую
Для варианта управления 3 можно задаться не зависимостью
₽B(4*J ai например, линейной функцией (7Д, (соДФ), для которой при
сод» = 1 напряжение 14» = 1, а при о)д. = юд.макс* напряжение 1/ц» =
~ (Д.макс.пред- Тогда
<4» — ((^д.макс.пред* — 1)к»-1)/(4-1) + 1. (3.107)
Выражение (3.107) позволяет рассчитать зависимость Фд» (сод»)
по формуле
фд. = [t/д. - (Ь„ + сЛЛсЛ.Шд.), (3.108)
полученной из (3.103).
Используя нагрузочные характеристики, определяют Fa, (сод«),
по (3.97)—зависимость 4* (шд*)» а из выражения
₽, (“д.) = Тд. (“д.)/4. (“д.) (3.109)
получим ₽в(свд.).
Для варианта управления 11 выбирают напряжение Од, ===
®= (^д.макс.пред« с учетом (3.94) и (3.96); магнитный поток вычисляют по
(3.108); в соответствии с (3.106) 4* “ 7д,мин.пред». Коэффициент рь
Находим, используя (3.109), функцию Fa, (сод.) — из нагрузочных ха-
рактеристик.
Электродвигатели смешанного возбуждения. Характеристики ДПТ
При вариантах управления 4, 5 и 12 рассчитывают так же, как у элек-
тродвигателей последовательного возбуждения для вариантов 1, 2 и 10.
Обеспечить работу ДПТ в соответствии с вариантом управления 6
можно, если предварительно задаться зависимостью /в.д. (/д.); при-
нимая ее линейной (см. рис. 3.15, а), получим
4.д.пред» = (4» 4-мин.пред•)/(! ~~ 4.мкн. пред»)- (3.110)
МДС Fa электродвигателя смешанного возбуждения есть сумма
П.С Fa и Гд независимой и последовательной обмоток возбуждения,
е. Рд == Fji + Fs.
91
} (3.112)
Так как Рд» = FJF^nt Fa, = FJF’a.tl = 1п,а.„ F'a, = F"n/Fa„ —
= РвЛи *= (Р.. = О, ТО
Ед* — B.AFд, 4- B4Fд. = B.JГ1,д» -J- В4/д«, (3.111)
где В3 = Ед.н/Ед.н, В4 = F^h/Fд.н.
Функциональная зависимость (3.110) требует предварительного
выбора соотношения МДС независимой и последовательной обмоток
(выбора коэффициентов В3 и В4), обеспечивающего заданную крат-
ность k(() ПрИ /д.д» ~~ 0, FД4/£/д,макс.прсд» И ^к.доп- ОбЫЧНО
^д.н = (0,4 -г- 0,5) Рд.н [3]. Значение коэффициента В4 можно получить
из системы уравнений
®д.макс* = It/д.макс.пред*— (^н 4“ Сн)]/(ОнФд.мин.пред*0|’д.макс.пред*)»
Фд. мин .пред»- = FF д.мин.пред» = НВ$1д.мин.лред*-
Первое уравнение системы (3.112) получено из (3.103). Коэффи-
циент h представляет собой тангенс угла наклона линейной части кри-
вой намагничивания ДПТ и связан с коэффициентом насыщения маг-
нитной системы двигателя зависимостью
А = ^нас.цфд.н//’д.н- (3.113)
При использовании кривой намагничивания Фд„ (FA,), построенной
В ОТПОСИТеЛЬНЫХ еДИНИЦаХ, Й= &нас.н- Из (3.112) В4»{7д.макс.пред,/(аиХ
X ЙШд_макс,).
Далее характеристики ДПТ для варианта управления 6 рассчиты-
вают аналогично расчету характеристик электродвигателя последова-
тельного возбуждения для варианта 3. Для варианта управления 13
магнитный поток находят согласно уравнению (3.88), а ток обмотки
независимого возбуждения — на основании (3.111):
/в.д» = (Fa —BJ ц»)1В3 = (Ед». BjUa.макс, пред* )/Д(. (3.114)
где значения Ед. берут из кривой намагничивания.
Электродвигатели независимого возбуждения. Необходимость фор-
сирования магнитного потока ТЭД в пусковом режиме обусловлена
требованием обеспечения достаточно высокого значения пускового
момента при относительно небольших перегрузках электродвигателя
по току. Если указанное требование для СТПЭ с ДПТ независимого
возбуждения не является определяющим, то для вариантов управле
ния 7, 8 и 14 целесообразно выбирать /в.д* — 1, откуда Фд.пред* = 1-
Если /в.д макс.пред* ?> 1, то схема регулятора возбуждения существенно
усложняется, ибо надо отслеживать функциональную зависимость
/ю д, (7Д,) ие только в интервале /д.пРед. < 1 при варианте управления 9
(см. рис. 3.16, г), но и в интервале/д.пред. > 1 Остальные характерце
тики ДПТ для варианта 7 рассчитывают аналогично характеристикам
электродвигателя последовательного возбуждения для варианта 1.
Для вариантов 8 и 14, решая (3.84) и (3.97), получим с учетом ся = 0
Ед* —
92
Так как Фд, = 1, то решение этого квадратного уравнения имеет
вид
Ur* — 4- И(о^д»)2/^ 4- Ьн. (3.115)
Чтобы обеспечить работу ДПТ по варианту 9, задаемся линейной
зависимостью /„.л. (/д*) (см. рис. 3.16» а). Тогда
/ — ^“•Д.мив.предо’ ,. / х I г /о »1 кх
'в.д.пред« — > , \* а. <д.мин.пред*/ “Г < в. д.мин. пред* ю- ни)
ц.мин.пред*
Ток /в.д.мш1.пред* найдем по кривой нахмагиичивания, определив пред-
варительно из (3.88) магнитный поток:
Фд.мии.пред* — ((/'д.маис.пред« д.макс, пред») (3.117)
Далее характеристики ДПТ для варианта 9 рассчитывают анало-
гично характеристикам электродвигателя последовательного возбуж-
дения для варианта 3.
Определение характеристик ДПТ, соответствующих варианту 15,
начинают с нахождения магнитного потока по (3.108), затем опреде-
ляют ток возбуждения используя нагрузочные характеристики.
§ 3.8. Расчет частичных характеристик
электродвигателей постоянного тока
Частичные характеристики ДПТ в двигательном режиме должны обеспечить
реализацию частичных тяговых характеристик электромобиля. Наиболее часто за-
дается семейство тяговых характеристик, позволяющих получить максимальную
скорость движения электромобиля при мощности ЭУ от РЭУсв мйн до РЭУсв н. Если
используется частичная мощность ЭУ, параметры ДПТ являются как функцией
^1д* < 0. так и шд*- Поэтому при расчете частичных характеристик электро-
двигателей необходимо для каждого значения Р1ДШ = Р1к1* определять значения
максимального (пускового) тока и максимального напряжения ^д.ыакс,.
Воспользуемся предельной зависимостью ^д.Пред* ^«.пред») “ кривой ABCDL
на рис. 1.23- На рис. 3.12, а> б представлены частичные характеристики (7Д„ (/д»>.
расположенные внутри области, ограниченной кривой ABCDL и осями координат.
Характеристики рис. 3.12, а могут быть получены при поддержании номиналь-
ных угловых скоростей ДВС и генератора, так как если их снижать, то напряжение
1/д. = UR макс пред» будет обеспечиваться за счет существенного длительного фор-
сирования магнитного потока генератора сверх максимального значения, что недо-
пустимо. Характеристики (рис. 3.12, б) можно получить как при неизменной, так
и при переменной угловой скорости генератора.
Проанализируем вариант формирования частичных характеристик в соответст-
вии с рис. 3.12, б. Значения пусковых токов /д.макй» и максимальных напряжений
^д.макс/*’ когда < Ъ определим графически с помощью лучей ОВ и OD, про-
веденных из начала координат в точки В и D предельной характеристики Уд.пред*
^д.пред*1‘ Т°чки пересечения луча ОВ с кривой BtCiDt дают значения /д.макс|<
и ^д.Мини ПРИ мощности P1;jf< < 1. а точки пересечения луча OD с этой же кри-
вой— значения /д.мкн<» и ^д.Макс»*- Выявим соотношения между указанными
параметрами. Мощность, потребляемая ДПТ,
^д-пред* 1 ' ^д.макс.пред*^д.мив.пред* ^д.мин пред*^д.мако.пред*1 (3.11b)
^1д/* = ^д.мя«с.1л^д мин Z* ~ ^д.мин.й/д.макс/%’ (3.119)
93
a) I)
Рис. 3.12. Семейства зависимостей £/д< (/д#) ДПТ постоянного тока при неизмен-
ной угловой скорости ДВС (о) и поясняющих принцип формирования частичных
характеристик (б)
Из подобия треугольников ОАВ и OAtBi, OLD и OL^Di соответственно
'д.мии.пред*'/д.макс.пред*
^д.макс.пред* ^д.мик.пре;
(3.120)
ц.МякСл***Л ЫИН/*‘
Разделив (3.119) иа (3.118), получим
^1д£* ^д.мин£*^д.макс^*^^д.ыин.пред* ^д.макс.пред*)
^д.макс1*^д.ммнГ*^^д.макс.пред*^д.ммн.пред*)
Используя (3-120)—(3.123), получим:
(3.121)
(3.122)
(3.123)
(3.124)
(3.125)
'д.макс.пред* V '№*
(3.126)
!»<•
(3.127)
Рассмотрим расчет частичных характеристик ДПТ с системами возбуждения
разного типа в соответствии с вариантами управления (см. табл. 3.1).
Электродвигатели последовательного возбуждения. Для варианта управле-
ния 1 магнитный поток ДПТ определяется током /д,макс|» согласно (3-125). Выра-
жение для вычисления напряжения находим из (3.84) и (3.125):
Ци — °н0>д.*%/* + (&и + св) /д.макс.пред* • (3.128)
где Рцц» —значения мощности, соответствующие точкам В( на рис. 3.12, б;
фд.макс£* находим по кривой Фд, (Т д>) из условия Гд, = 1д,макс£..
Электромагнитный момент ДПТ для участков А(В{ (или, что то же, интерва-
ла угловых скоростей О <од, шдВ^)
^макс<* = Фд.макс1*^д-макс1*"
Для варианта уравнения 2 граничная угловая скорость соответствующая
переходу из режима с постоянством момента к режиму с постоянством мощности.
94
на основании (3.84), (3.97) и (3.125) определяется выражением
ш-н, = Р,д!" ~ №" + Св) 'W4- = 1/рГГх
1 ^д.макс.пред*
Сн®д.мякс4*^д.макс Пред.
Проведем на графике (рис. 3.12, б) луч ОС и выведем зависимости тока /д£< и
напряжения (7дг* от мощности PiM. соответствующие точке С£, которая опреде-
ляет верхнюю граничную угловую скорость ДПТ для варианта 2. Отметим, что
₽|д, — I, /ц„ — /ЛНФ = 1, (/ц, = URM9 ==» I в точке С. С учетом принятых обо-
значений
^1я.пред* ~ 1 " н*/д.н*’ (3.129)
₽u<. = £7Li.<n.- (3.130)
Из подобия треугольников ОСН и OCfHi
UkmJIjvb* ~ = 1* (3.13В
Разделив (3.130) на (3.129), получим
₽1д<. ~ Bi*!п.н»^д.н»)* (3.132)
С учетом (3.131) и (3.132) ₽1д£, = откуда
(д/* ~ ^Д.Н* ~ V Р.ДМ * (3.133)
На основании (3.131)
t'r.i. = (3.134)
Определив значения тока /д[ж и задавшись рядом значений тока якоря от
^д.макс** А° ^дй’ Рассчйтасм частичные характеристики ДПТ для варианта управ-
ления 2 по методике нахождения предельных характеристик в этом же варианте.
Расчет частичных характеристик для варианта управления 10 аналогичен рас-
смотренному, за тем исключением, что верхняя граничная угловая скорость ДПТ
соответствует току 1^ = ₽1Д,где ЧДЖ1. вычисляют по (3.126).
При варианте управления 3 коэффициент регулировани возбуждения меняется
В соответствии с формулой, аналогичной (3.104):
^д,ммнГ*)^^д{» ^д.мтЯ*Л“ Рв.мнн" (3.135)
Покажем, что РБ мьн определяется из (3.105) и не зависит от мощности
Угловая скорость ДПТ
%• =
где £д„ = ^д/Влн-
Когда соДФ ~ й>д,максв. в соответствии с (91 магнитный поток Фд, ~ ®n.WHIi» =
~ ^д.ми11»Рв.ми|Лийс.11‘ Тогда
®д.мякс« = ^д.макс£*^^д.мин1*Рв.мян^нас.н)’
На основании выражения для %_макс. и с учетом (3.126) и (3.127)
(Рв.мин = ^д.максг»/^д.минГ»^ияс.н®д.мяис*) = д.маислред*^д.мнн пред*^н8С-н®д.мякс»1-
!1ля варианта управления 11 £/д<макс,. = ^л.мй,м:.пред. VР1д1« гогда магн1|Т’
ный поток в интервале од1в ыд, “д.макс. 112 основании (3.97), (3.108), (3.12(>1
95
Рнс. 3.13. Характеристики Фд, (шд<) и
URt (<од„) электродвигателя ДК-717А
и (3.127)
®д|* ~ ®д.пред- • (3.136)
Когда мощность Р|Дв < 1, ограни-
чен ия по (/к и £р отсутствуют Дейст-
вительно, значения UK и Ер, соответст-
вующие ыд макС1>, согласно (3.89), (3.91),
(3.126) и (3.127),
дк = /'(1 + £1/₽в.мив1Х
^д.макс, пред» R7 ^*1д£» • (3.137)
Др = ^рЮд.макс» ^д.макслч>ед*
(3.138)
Из (3.137) и (3.138) следует, что с
уменьшением мощности и при неизмен-
ной угловой скорости ®д маис, напряжение UK и ЭДС £р снижаются. Нетрудно пока-
зать, что ограничения по UK и £р при ₽1Д, < 1 отсутствуют также для ДПТ сме-
шанного и независимого возбуждения.
Электродвигатели смешанного возбуждения. Частичные характеристики для
вариантов управления 4, 5, 6, 12 и 13 рассчитывают аналогично характеристикам
ДПТ последовательного возбуждения для вариантов 1, 2, 3, 10 и 11, за тем исключе-
нием, что при вариантах 4 и 5 принимают = /в.д.пред» = 1. при варианте 6
ток /в>дЛ, вычисляют по формуле, аналогичной (3.110):
^в.д£» ^д.мин.пред МО ^д.мин пред*) )•
Когда необходимо найти характеристики электродвигателя при управлении
по варианту 13, используются нагрузочные характеристики и формулы (3 114) и
(3.136).
Электродвигатели независимого возбуждения. Вариант 7 ДПТ независимого
возбуждения может осуществляться двумя способами: ~ д пред» = 1 и
/вд/, — ‘Pjflf»- Второй способ предпочтительнее, гак как позволяет регулировать
пусковой момент в более широких пределах при одном и том же диапазоне изменения
мощности. Например, при /ДЫЕг1С прм. = 2 и ₽1Д. = 0,25 =- 1,0 для / = 1
получим Фд, = 1. M„raic, =1-5-2, а для /„д1. = Р,д1. получим Фд, -
= 0,3 -5- 1,0, Ммакс„ == 0.3 -±- 2,0. Далее частичные характеристики рассчитывают
по второму способу Тогда для варианта 7 поток Фд.максг»* определяемый значе-
нием /в изменяется в функции ₽1д/ф. Значение ФдмакСг* находят по нагру-
зочным характеристикам, а напряжение —из (3-128).
Рис. 3.14- Характеристики электродвигателя ДК-717А:
а — М, (<од,): п — Пд 1(ид,к « - Вв (ид*)
Уб
Рис. 3.15. Характеристики электродвигателя ДК-2ЮАЗ:
а — Фд. «Од»). С/д. (©д,). UK б — Мл (<од.); в — /в д, <©п.), пй «од»):
й“^В.Д* ^Д»)
Для вариантов 8 и 14 ток возбуждения и магнитный поток определяют так же,
как и для варианта 7. а напряжение — по формуле
= “н®Д(.“д./2 + Р'(°в<1’Д(.ид.)г/4 +*Н₽1Д(. .
которая является решением уравнений (3.84) и (3.97).
Угловую скорость, разграничивающую режимы ДПТ с управлением по вариан*
там 8 и 9, можно найти по формуле, полученной из (3.84), (3.97) и (3.133):
(О = = 1-^н гр—
С«Фд.максй4и« "нФд.максС*
Управление по варианту 9 характеризуется изменением тока возбуждения со-
гласно выражению, аналогичному (3.116):
I — * ^вл.минС* .. . . । . ,
в-Д^* ___/ ^д» 'д.минй ‘ "г *в.д.минС*1*
/Д£. 'д.мин/»
Ток /вл-миш» Рассчитывают, используя формулу
<1) , —
Д.ЫНИ1» ~
t ___h
^д.макс.пред* ря
ан®д.макс* ^д.макс.пред»
КР1дй 1
4 4-158
expert22 для http://rutracker.org
97
«-Фд. «о„.). t/д. (Шд.). 1/„(Од.); 6-М. «Од.);
я вл» <®Д*> 11 Чд (®Д*)' ' “ Ав.Д»
полученную из (3.84), (3.97) и (3.126), и нагрузочные характеристики электродви-
гателя.
Частичные характеристики при варианте 15 рассчитывают аналогично расчету
характеристик ДПТ последовательного возбуждения, работающих по варианту 11.
В заключение отметим, что при вариантах 4 и 7 характеристика Л4макС(, (<оДФ)
ДПТ смешанного и независимого возбуждения определяется, как и для электродви-
гателей последовательного возбуждения. Характеристики т] (ь>дш), Рд„ (®ДФ) для
всех вариантов управления и Л4Ф (^д») Для вариантов, кроме 1, 4 и 7, электродвига-
телей с системами возбуждения различного типа определяют по (3.78), (3.97) и (3.99).
В качестве примера на рис. 3.13—3.16 приведены рассчитанные по изложенной
методике предельные и частичные характеристики (для значений Р1Дф = 1,0; 0,70;
0,35) тяговых электродвигателей постоянного тока ДК-717А с последовательным
возбуждением, ДК-210АЗ со смешанным возбуждением и ДК-718Б с независимым
возбуждением.
Данные электродвигателей: ДК-717А (с компенсационной обмоткой);
рлм = ™ “Bf: UR.K = 750 В: 1ЯЯ = 400 А; = 840 об/мин; п„ „„с =
= 2850 об/мин; 2р ~ 4; ДК-210АЗ: Рд н = 100 кВт; = 550 В; 1Д к —
= 200 А; пд>н = 1560 об/мин; пд>макс =° 3900 об/мин; 2р = 4; ДК-718Б:
98
= 38 кВТ; UR.„ = 276 В; 'д.к = 155 А: "и = 1350 об/тя!: "л.™« =
= 5400 об/мин; 2р = 4.
В табл. 3.2 приведены некоторые параметры ДПТ, используемые при расчете
характеристик, и расчетные коэффициенты. Характеристики электродвигателя
ДК-717А определены в соответствии с сочетанием вариантов управления 1—10—11,
электродвигателя ДК-210АЗ — сочетанием вариантов 4—5-6 и электродвигателя
ДК-718Б — сочетанием 7—8—9.
При расчете характеристик ДПТ использовали универсальные кривые намаг-
ничивания [8] (рис. 3.17). Кривая / относится к электродвигателям со средним на-
сыщением магнитной системы (магнитная индукция в зубцах Вгн == 1,7 н-1.8 Тл)
Таблица 3.2
Параметры ДГП Тип электродвигателя
ДК-717А ДК-2ЮАЗ ДК-718Б
Суммарное сопротивление якорной цепи Х/?д при 0,102
температуре 115 °C, Ом Номинальные потери, Вт: в меди обмотки якоря ДРм.я.н 0,195 0,115
16550 7830 1945
в стали ДРс в 3000 1620 1140
механические ДРМех.н Номинальный ток обмотки независимого возбуж- 1500 1200 570
дения /в. д. и, А Число витков обмотки: — 2,7 9,0
независимого возбуждения к'овн — 930 276
последовательного возбуждения WQBri Номинальная МДС, А: 23 12 —
обмотки независимого возбуждения Гдн — 2510 2480
обмотки последовательного возбуждения R 9200 2400 —
суммарная Гд.н 9200 4910 2480
Максимальный предельный ток якоря /д. макс, пред, А Максимальная предельная МДС, А: обмотки независимого возбуждения р' ‘ д.макс.пред обмотки последовательного возбуждения 900 440 310
— 2510 2480
^д.макс.пред Относительное значение максимального предельного магнитного потока Фд.макс пред* 20700 5280 —
Число коллекторных пластин К 1,20 1,23 1,0
Число пар параллельных ветвей обмотки якоря а 270 175 135
Коэффициент полюсного перекрытия ап. п 2 1 1
Число пазов якоря Z 0,66 0,63 0,63
Число эффективных проводников в пазу компен- сационной обмотки &пр 54 — —
Коэффициент насыщения магнитной системы дви- гателя в номинальном режиме kBac. и 4 — —
Коэффициенты: 2,04 1,31 1,71
А' 12,35 20,0 12,95
Bi — 0,40 0,477
в2 0,0466 — —
в, — 0,51 —
В, 0,49 —
Он 0,925 0,925 0,925
bn 4- Сн 0,075 0,075 —
ь.. — — 0,075
Лр 1,810 1,335 0,90
99
в‘
и воздушным зазором й = 0,0Юя; кривая 2 —
к ДПТ с повышенным насыщением магнитной си-
стемы (#ZH = 2,0 -ь 2,2 Тл) и зазором й =
= 0,01 Dh, кривая 3 — к ДПТ со средним насы-
щением магнитной системы (Вгн = 1,7-»- 2,0 Тл)
и зазором 6=0,015 Оя. Кривые 1, 2иЗсоот-
ветствуют кривым намагничивания электродви-
гателей ДК-718Б, ДК-717А и ДК-210АЗ.
ДПТ перечисленных типов некритичны к
реактивной ЭДС коммутации. Электродвигатели
ДК-210АЗ в ДК-718Б не реализуют полный
Рис. 3.17. Универсальные кривые диапазон регулирования угловой скорости при
намагничивания мощности ₽1д, = 1, так как, когда <од, <
< ид-««кс.' напряжение > UK доп (см. рис.
3.15, а, 3.16, а). Полный диапазон угловых скоростей с точки зрения удовлетво-
рительных потенциальных условий на коллекторе может быть реализован при
< 1-
§ 3.9. Расчет характеристик
генератороа постоянного тока
Приводы постоянного тока общепромышленного назначения, вы-
полненные по схеме Г—-Д, получили широкое распространение. В ли-
тературе, посвященной подобным приводам, рассмотрены различные
аспекты проектирования и работы электрических машин, в том числе
и генераторов постоянного тока. Поэтому в данный параграф включены
только те вопросы, которые определяются спецификой регулирования
ГПТ в системах тягового привода электромобилей.
Регулирование выходных параметров ГПТ следует осуществлять
в соответствии с выбранным сочетанием вариантов управления ДПТ
лрн условии полного использования предельной или частичной свобод-
ной мощности ДВС.
Практика показывает, что характеристики ГПТ наиболее удобно
представлять как зависимости его параметров от тока якоря =
= /Лгн.
Рассчитаем характеристики для следующих параметров: напря-
жения на зажимах генератора Сг« = UrIUv^ полезной мощности
РГФ = Рг/Ргн= Рщ*; коэффициента полезного действия т]г; потребляе-
мой мощности Р]Г, = Pir/Pir.e; тока возбуждения /в.г- = /В.г/Д.г.н-
Зависимости параметров ДПТ рассматриваем при условии под-
держания в рабочем диапазоне угловых скоростей постоянства мощ-
ности Лд., потребляемой электродвигателями. Поэтому характерис-
тики ГПТ необходимо получить для Рг, ~ ткР\,лмР\ц»1Рг — const.
Исходные выражения для расчета:
1. Напряжение на зажимах ГПТ
Ur = Ег — /ГЕЯГ - ДПЩ = ЕГМЕГ. — /г.н/г*2/?Р — = UT „ +
+ Егл (Ег* — 1) + 1г.н Ur- — 1),
где£г — ЭДС генератора; Ег, = EfIETM\ — суммарное сопротив-
ление цепи якоря; Д£щ—падение напряжения в щеточном контакте.
106
Рис. 3.18. Характеристики генератора
ГПА-600 постоянного тока в тяговом
режиме движения электромобиля
Рис. 3.19. Нагрузочные
характеристики генерато-
ра ГПА-600
Пренебрегая значением Л17щ и переходя к относительным величи-
нам, получим
t7r. = 1 + аН1Г (Ег. — 1) — дн.г (7г. — 1) « ая.гВг. - Wr*, (3.139)
где ДНеГ = £г.в/^Г.Н» ^Н.Г = ^Г.н27^г/(Л>.н1 1 - (^Н.Г + Ьг.н) 5=2 0.
2. Полезная мощность и КПД генератора
Рг* = иг Jr* - Р1П.; (3.140)
РГ.Й+“^г- (3J4I)
где ХЛРр — суммарные потери ГПТ, определяемые из (3.57).
3. Потребляемая мощность
Р1г. = Рг*Цг.н/Чг- (3.142)
Расчет характеристик ГПТ упрощается в связи с тем, что его внеш-
няя характеристика UV9 (7Г.) определяется зависимостью 17д. (7Д.)
электродвигателя, если рассматривать схему параллельного подклю-
чения ДПТ к генератору. Тогда
(/г. = (7Д.Н[/Д./(7Г,Й; (3.143)
1г, = Л1к/д.н/д*//г.н. (3. 1 44)
Таким образом, по известной зависимости (7Д, (7ДФ), используя
(3.143) и (3.144), находим Ur.(Ir.), по (3.140) — (3.142) — Рг*(Л.),
?1г(М) и Р1г. (1Т.).
По формуле
Фг. (Ur, + frH.r/r*)/(aH.r«r.), (3.145)
полученной из (3.139) с учетом Ег» = Фг*<ог», находим Фг»(/г*), где
Юг* = wJwr.H — угловая скорость ГПТ.
Используя нагрузочные характеристики генератора Фг* (Fr*), получим
зависимость^* (7 г.) = 7В,Г,. (7Г*)» где Ггя = FvlFrM — МДС возбуждения
101
Характеристики генератора при частичных мощностях рассчитыва-
ют также но приведенной методике Если угловые скорости ГПТ из-
меняются в соответствии с управлением ДВС по липин наибольшей
экономичности (см. гл. 8), то в (3.145) следует подставлять текущие
значения со,-..
В качестве примера на рнс. 3.18 приведены характеристики тяго-
вого генератора постоянного тока ГПА-600, питающего два парал-
лельно включенных электродвигателя ДК-717А, работающих с номи-
нальной мощностью при сочетании вариантов управления!—10—11.
Данные генератора: Ргм = 630 кВт; Ulu = 650 В; U, Mau(- = 800 В;
Zrjl = 970A; /г.ыакс = 2400А; Л,г.п == 120 А; /I,.,, = 1500 об/мин, 2р =
= 6; XRr = 0,0234 Ом; АРМ.И = 13,0 кВт; АРС11 = 6,07 кВт;
АРмех.н =--12,1 КВТ.
На рис. 3.19 представлены нагрузочные характеристики генера-
тора.
§ 3.10. Управление тяговыми
электрическими машинами
постоянного
тока по минимуму потерь
Кроме рассмотренных принципов управления тяговыми ДПТ и
ГПТ (см. § 3.4, 3.5, 3.7, 3.9) в СТПЭ могут быть реализованы и дру-
гие. Действительно, расчеты и экспериментальные данные показывают,
что при заданном ka в зависимости от значения параметров рв, (7ДМ1И<С+
и программы изменения Рв в функции (или /д*) потери ТЭМ бу-
дут различными. В связи с этим необходимо установить напряжение
^дмлкс* н такие программы управления магнитным потоком, которые
обеспечивают регулирование ДПТ по минимуму потерь, а также най-
ти рациональные отклонения от экстремальных значений ил„ и
р,. для оценки возможности упрощения оптимального регулирования
применительно к каждому интервалу угловых скоростей согласно ха-
рактеристике /И* (Шд«).
Для сравнительного анализа и выбора целесообразных способов
регулирования ДПТ введем коэффициент потерь мощности в приводе
Ке — отношение суммы текущих потерь в ТЭМ при данном варианте
управления электродвигателем к суммарным потерям в ТЭМ в номи-
нальном режиме [71:
Кх = (2ДРГ + mKSAPa)/(SAP...lt + mKSAPH „), (3.146)
где SAPr, 2АРД и SAPr.H, 2АРД н — текущие и номинальные потери
в ГПТ и ДПТ.
По аналогии с (3.146), коэффициенты потерь в ДПТ и ГПТ
Ада = 2АРЦ/2АРД.Н; (3.147)
Kez = SAPr/SAPr.H. (3.148)
С учетом (3.147) и (3.148) отношение (3.146) запишем в виде
Kz^aaK^ + arKrzt (3.149)
102
где ад, пг — постоянные коэффициенты, зависящие от номинальных
потерь ТЭМ и количества ТЭД мотор-колес;
св = тк2 ДР^/РДР, + тк2А₽„.„); (3.150)
ar = ЖРГЯ/(.2&РГМ + т„2ДРд„). (3.151)
Из (3.78) и (3.79)
2Д7,д.н = (1 - Т1д.н) = (1 -- Т]д.и) (3.152)
2ДРгд> = (1 — Т|г.>1) Рг.н/Цг.п = (1 — Т|г.н) -Р1Г.Д. (3.153)
Аналогичные соотношения справедливы и для текущих потерь в
ТЭМ:
2ДРд = (1-^₽,д; (3.154)
2ДРГ = (1— т)г)РЛг- (3-155)
В режиме постоянства мощности, подставляя (3.152) н (3.154) в
(3.147), а (3.153)и (3.155) в (3.148) и учитывая, что Pr. — Pia,, получим
Афг = (1 —11д)₽1д./(1 —W: (3.156)
= [Z? V Рк- (3-157)
1 Чг.н Чг
Если решить обратную задачу — найти зависимость КПД от коэф-
фициента потерь, то
Чд ~ 1 — 1Аде0 —(3.158)
Ъ - {1 + !tfrs(l -~ПГ.П)1АЕ1Д.Т]Г.И)}-1. (3.159;
КПД силовой цепи СТПЭ
= ПдЧг = — Кд2(1 — Лд-н)]/[Р1Д* + КгЕ (1 —Т]Г.н)Л']г.н]. (3.160)
Таким образом, по (3.158) — (3.160) устанавливается связь меж-
ду КПД и коэффициентами потерь в ТЭМ. Зная изменения значений
Кдв и Кгх в рассматриваемом интервале угловых скоростей при том
или ином варианте управления ДПТ, можно оценить изменение КПД
ТЭМ и привода б целом.
Чтобы определить условия оптимального (по минимуму потерь)
регулирования тягового ДПТ, выведем формулу для расчета Кдв
с учетом потерь в меди, стали, механических и добавочных. Переход-
ными потерями па коллекторе пренебрегаем ввиду их малости. От-
дельные составляющие суммарных потерь выразим в функции одного
параметра — напряжения (7Д*.
Согласно (3.57),
2ДРд = ДРм.д 4- ДРс.д + ДРдоб.д + ДРыех.д» (3.161)
Суммарные потери в меди электродвигателя
ДРм.д - ДРвм.я + ДРм.в, (3.162)
где ДРхм.я — потери в меди цепи якоря (в обмотках якоря, дополнн-
н-льиых полюсов и компенсационной); ДРм.в—потери в меди обмот-
U1! возбуждения.
103
Если АА’гмя и A/’mi. выразить через их значения в номинальном
режиме, то
АРМ.д = АРхм.Я.И^Д* -р АР'щ.в.н/в.д*. (3.163)
Магнитный поток Фд. является нелинейной функцией тока возбуж-
дения
(3.164)
где ku — переменный коэффициент, определяемый как тангенс угла на-
клона прямой, проходящей через начало координат и точку на кри-
вой намагничивания Фд* (Еп«). соответствующую рассматриваемому
режиму работы ДПТ.
В номинальном режиме коэффициент /гм = 1; по мере снижения
тока возбуждения он увеличивается, достигая наибольшего значе-
ния Дрмакс = ft на прямолинейном участке кривой намагничивания (см.
§ 3.7).
Так как Фд. «£7д./<ия,, то из (3.164)
^п.д» — 6/д,/(/г|дО>д*). (3.165)
Подставив (3.165) в (3.163), получим
АРц.д — АР£м.я.„/д* -р АРМ.В.И [6^д./(/?д,(0д*)]а. (3.166)
Потери в стали в соответствии с [81
АРд.д = АРС дцФдеСйд» — ДРс д.в6/д»(1)д, *. (3.167)
Согласно (3.60), АРдоб.д = /гд<,бАРс.д, тогда АРДОб.л = АРс.д.»Лдоб X
X Если учесть выражение (3.70) для /^об, то
АВдо© д = АРс.«.и (ftflod 4- /гДобЛ) '5, (3.168)
где йдОб1 — 0,667; /?ДОб2 = 0,333.
Механические потери в электродвигателе
А^мех.д ~ &Рмех.д.йЮд». (3.169)
Решая (3.156), (3.161) — (3.169), после преобразований получим
формулу коэффициента относительных потерь ДПТ:
Кдх — /д» -р [Оа/^рЫд,)-|- (а3 -р a3kao6i)/b)^]Lfa^ -р
-р Са^добгР^дДйд* -р СдСОд., (3.170)
где Qj ~ АРим я.й/21АРд и* Qi ~ &Рм и.нДлАРд.и» &з — A^cjuh/SAPди»
а4 = АРмех.й/ХАРд.,, — отношение составляющих потерь в номинальном
режиме ДПТ к суммарным номинальным потерям.
В [7] показано, что коэффициенты — а4 у ДПТ существенно раз-
личной мощности отличаются весьма незначительно. Это подтверж-
дается также материалами анвлиза изготовленных серийных и опыт-
пых образцов ТЭД мощностью 36—360 кВт. Поэтому в сравнительных
расчетах, если параметры ДПТ еще окончательно не установлены,
можно пользоваться усредненными значениями коэффициентов — а4,
например у электродвигателей последовательного возбуждения с не-
зависимой вентиляцией 0,57 4- 0,60; «2= 0,17 4- 0,21; ц,== 0,08 4-
4- 0,10; 0*= 0,05 4- 0,06.
104
Выражение (3.170) позволяет решать две задачи. С одной стороны,
с его помощью нетрудно оценить изменение суммарных потерь при
тех или иных вариантах управления электродвигателем; с другой сто-
роны, что представляется более важным,— надо определить зависи-
мости напряжения и магнитного потока, обеспечивающие минималь-
ные потери в ДПТ в широком диапазоне угловой скорости. Для на-
хождения оптимальных программ управления напряжением и магнит-
ным потоком согласно (3.170) достаточно определить минимум коэф-
фициента потерь с последующим расчетом зависимостей (7Д_ ((од.)
и Фд. (сод.) Экстремальное значение напряжения 171
|/ а2 (Ли<0ц.) 2 + (ая + а^доС|) %,°
(3.171)
Магнитный поток Фд,э. и ток возбуждения /в.д.э» при регулировании
напряжения по (3.171)
Фд.8®/в.д.э»—^д э»/(^цФд*)- (3.172)
Значения Фд,э. и £/д.э* определяют при совместном рассмотрении
кривых Лц(/П.д*) и /вд.(сол.); первую строят с помощью характери-
стики намагничивания Фд. (/вд»), а серию вторых для тех же значе-
ний кц рассчитывают по (3.172).
Подставив (3.171) в (3.170), получим
КдДэ = 2Р1Д. -р (Оз -разЛдобОЛ^д. 1 ~Р (гЛдобг^д^д» 4-
+ • (3.173)
КПД, соответствующий регулированию электродвигателя по ми-
нимуму потерь, определим из (3.158) и (3.173):
~ 1 (1 ^д.н) 12|/ ^Л^йЯ^^д.) -р (Са + °з&доб1)ЛйдД _р
Р ®ч^лоб27^1д»Ь)д* “р Од/^ц.Ыд. |. (3.174)
Численный анализ выражения (3.174) показывает, что значение
КПД электродвигателя в режиме минимальных потерь практически
не зависит от мощности Р]Д..
Ранее отмечалась важность оценки пределов отклонения напря-
жения £/д. от его экстремального значения С/д.э„ когда потери в элек-
тродвигателе незначительно отличаются от минимальных. Ниже при-
водится один из возможных вариантов решения данной задачи. Пусть
режим ДПТ характеризуется напряжением t/д» при некоторой ско-
рости (од., коэффициентом относительных потерь Кдх и отношением
(/д»/4/ц-Э» = £д.
Подставляя в (3.170), получим
КдХ = —g ^1д* -р (са -p Яз&доб1)/(0д»] -p Ца^добгТ^д. X
X (Од» -р ц^(0д.. (3.175)
105
Из (3.173) и (3.175) с достаточной точностью
имеем
Ki = + Г)/(2^)- (3.176)
При мощности Ад/. < 1 напряжение и ко-
эффициент регулирования возбуждения
6/д.зЬ ~ 1/д.э» Plp.i» » (3.177)
(U—tU-r/W. (3.178)
Рис. 3.20. Зависимость На рис. 3.20 показан график К? (Ея) в со-
(U ответствии с (3.176) (для упрощения он рассчи-
тан при условии kp, = const). Из графика видно,
что выбор значений Ua,, в том числе и 1/д.МИКс-» находящихся в пре-
делах (0,85ч-1)URэ., практически не влияет на возрастание потерь
в ДПТ по отношению к номинальным.
В качестве примера на рис. 3.21 и 3.22 представлены характерис-
тики С/д.э» ((Од*), р1(.э (фд.), Кдгэ (Юд.) ДПТ последовательного воз-
буждения типа ДК-717А, у которого at — 0,60; = 0,17; as = 0,10;
о4 = 0,05. Из графиков, показанных на рис. 3.21 и 3.22, следует:
для реализации электродвигателем скорости (опмак., = 4 в режиме
Р1д. = 1 требуются напряжение иа,-яЫ.^ = 1.7 и коэффициент pBS,==
- 0,4;
если электродвигатель регулировать согласно UR^ ((од.), то нанн-
большему по условиям насыщения магнитной цепи значению магнит-
ного потока Фд, = 1,25 соответствует угловая скорость ыд. = 1,2,
являющаяся нижней границей, с которой может быть начато управ-
ление с минимальными потерями; верхняя граница скорости зависит
от потенциальных ограничений на коллекторе; в частности, скорость
(0д. = 4 реализуется, так как напряжение (7д.эмякс. = 1,7 для электро-
двигателя типа ДК-717А допустимо
Абстрагируясь от потенциальных
ограничений, для электродвигателя рас
сматриваемого типа рассчитаем коэффи-
циент Клх и отдельные составляющие по-
терь при управлении ДПТ согласно зави-
симости
= (3.179)
предлагаемой в ряде работ.
Сравнение значений вычислен-
ных с использованием (3.171) и (3.179),
показывает (рис. 3.22), что в интервале
угловых скоростей 1 юд. 3 измене-
ния суммарных потерь практически оди-
наковы для того и другого вариантов
управления, хотя достигается это за счет
различного соотношения их составляю-
щих. При (Од. > 3 регулирование по
Рис. 3.21. Изменения экстремаль-
ных значений напряжения и ко-
эффициента регулирования воз-
буждения ДПТ в зависимости
от угловой скорости;
/ - Р1д. = 1.<у. 2 - Р1д, = 0.76
106
(3.171) предпочтительнее, так как суммар-
ные потери в электродвигателе и расчетная
мощность ГПТ меньше.
Можно получить более точные резуль-
таты расчета, если значения 6/д.э, и Фд_э.
определять на ЭВМ ПО], представив реаль-
ную характеристику намагничивания элект-
родвигателя экспоненциальной кривой:
Ф„. = г, (г, - /пд.) (1 - (3.180)
где2ь г2, zs — постоянные экспоненты, зави-
сящие от параметров ДПТ
С другой стороны,
4,. = »4.
фд. = [14~(Ь„ + ^Р|д.1/(аЛ.тд.). (3.181)
В этом случае после нахождения из (3.180) и (3.181) для заданных
значений Pin., С/дс и сод, тока возбуждения и магнитного потока элек-
тродвигателя определяют минимум следующей функции, полученной
из (3.165) и (3.170):
Кд2 — (с1^Гд*/^д*) -|~ Сй/В.д» + ]Н3 + °з (^доб! +
“Г РдобйР 1д*/6^д»)| ФдДОд. -j- ПдСОд..
(3.182)
Рассмотрим вариант управления ДПТ по минимуму превышения
температуры меди обмотки якоря 0М.Я согласно (3.46).
Значения 0М Я и ©D зависят соответственно от потерь в якоре и
суммарных потерь в электродвигателе:
о — VAD l+OkAiMus | 1 —СОЛаАиэ Г ^д* /„ I
им.я - 2^д.н \а0 + — [ (Сз +
р2 Ъ
+ ЛзЛдоб») 4- «з^добг •—у5~ иI (3.183)
од; JJ
е. = KBsAPjai^++-^+^ )(4 +
I ия. \ °д. J
Р2 I
+ °;Лдоб2 h п4(1)д. I, (3.184)
%• 1
где а0 и К„ — постоянные для данного электродвигателя коэффи-
циенты.
Чтобы установить связь между 6/д. и сод, при минимуме 0М.Я, при*
равняем нулю производную ^0М_Я/Э£/Д.:
ж»», ае;я , аев п
диа, “ видл + ~v-
107
После преобразований получим
4 / Р?д. 1Д„(1+<хЛ|А„з)/(аЛ8)+«»°11
Чд м. = Т/ 1_К|Л,№яз Р2 + °Лоб1 , „ ( Р» , "« |-СЛ..С|\ •
Г ък, + «Ц *М. I
(3.185)
С достаточной точностью уравнение (3.185) можно записать в виде
ид.,е. = V ajbrfgnKe (Од + ЦЛюа)) (3- ,86>
где Кс — коэффициент, учитывающий увеличение нагревания обмотки
из-за потерь в стали и добавочных потерь; с изменением сод, от 1 до 4
коэффициент Кс линейно уменьшается от 0,45 до 0,30.
На рис. 3.23 представлены кривые, характеризующие тепловое
состояние якоря электродвигателя типа ДК-717А при различных ва-
риантах управления (по минимуму потерь и минимуму превышения
температуры меди обмотки якоря). Анализ показывает: если регули-
ровать напряжение ДПТ согласно (3.171), то значения 0М.Я практи-
чески не отличаются от минимальных.
Изменение 0МЯ по отношению к минимуму, когда напряжение от-
клоняется в ту или иную сторону от напряжения, рассчитываемого по
(3.171), определяют зависимостью
емя/0«.яа = (1 +^4)W).
Таким образом, в интервале скоростей 2 сод, 4 при соответ-
ствующем выборе напряжения ДПТ могут быть обеспечены значения
я ~ (0,35 -- 0,50) Ом.я.з и одновременно получены достаточно вы-
сокие энергетические показатели
Остановимся на вопросах регулирования ГПТ по минимуму по-
терь. Выражение для расчета коэффициента Кгх относительных потерь
генератора соответствует (3.170), так как уравнения отдельных со-
ставляющих потерь ГПТ аналогичны:
Кп = + (ьз + ЬЛоа.г1)/с£5] и*. + Ь, X
X + Ь4Шг., (3.187)
где Ьх — Ь4— отношения составляющих потерь в номинальном режиме
к суммарным номинальным потерям генератора; bt — Ьл соответствуют
коэффициентам — <з4 в (3.170); Aw гь Лдобг2 — постоянные, учитыва-
ющие изменение добавочных потерь ГПТ.
Значения определяют кривой намагничивания генератора; в
частности, с увеличением U, от 1,0 до 1,3 коэффициент Лдг изменяет-
ся в пределах 1,0—0,85.
Приравнивая нулю производную и решая полученное
уравнение относительно (Д*, имеем
(7г э ~ yf bjPи»/[bs (A?wr(i)r») 2 + (Ья -|~ bskBO6i) тгл 1 , (3.188)
108
согласно которому осуществляется управ-
ление генератором по минимуму потерь.
Анализируя (3.188) при wr, — const и
kiXI = const, можно установить, что для за-
данного уровня мощности у ГПТ существует
единственное значение напряжения, когда
потери минимальны. Например, у генера-
тора ГПА-600, имеющего расчетные коэф
фицпенты относительных потерь Ьу= 0,389;
62= 0,0313; Ь3= 0,1165; fe4= 0,307, в режи-
ме Pir. = 1, <0|* — 1, = 0,85 экстремаль-
ное значение напряжения согласно (3.188)
UI3. = 1.15, у генератора ГПА-800 мощ-
ностью 800 кВт £/гэ. = 1,25.
На рис. 3.24 показаны зависимости
Кгх (14*) для генераторов ГПА-600 и
ГПА-800. Из кривых видно, что минимум
потерь (Krs = KrSs) имеет место соответст-
венно при напряжениях t/r9, = 1,18 и 1,28,
что ненамного отличается от значений Ur.s»,
рассчитанных для режима номинальных
угловой скорости и мощности ГПТ.
Величина Кгз/КгХэ в случае отклонения
напряжения генератора от экстремал ьио-
Рис. 3.23. Характеристики
теплового состояния якоря
электродвигателя ДК-717А
при различных вариантах
управления:
/-ыд. =2; i — =3: з—
= 4; 4 — линия нянмень
шнх значений превышения темпе-
ратуры: э — линия, соответствую-
щая регулированию по минимуму
потерь в ДПТ; б— линии, соот-
ветствующая минимуму потерь
в системе ГПТ — дм ДПТ
Рис. 3.24. Зависимости
КгХ (Ц-*) Для генераторов
типов ГПЛ-6О0 (/) и ГПА-
800 (2]
го определяется уравнением, аналогичным
(3.176).
При регулировании ГПТ по минимуму
превышения температуры меди обмотки яко-
ря отметим следующее: наименьшее значе-
ние ©м.„., отличается от 0м.и.г в длительном
режиме в 1,1—1,2 раза вследствие незначи-
тельного изменения суммарных потерь в
якоре ГПТ в процессе регулирования t/r..
Установим рациональный вариант уп-
равления, удовлетворяющий условию мини-
мума потерь в ГПТ и ДПТ при их совмест-
ной работе.
В Первом Приближении МОЖНО ПРИНЯТЬ feno6.rl = 6доб1» &доб.г2 = kupGZ-
Поэтому. учитывая Рг. = Р|Д», Ur* — Uл* ~ РщЛл*, 1Г* ~ /д.и исполь-
зуя уравнения (3.149), (3.170), (3.187), запишем выражение для коэф-
фициента относительных потерь системы ГПТ — ДПТ в виде [7)
Кх —— (Сд°1 + ^А) 4- Ur* [Од |яг/(&цД)д.) 4- о,, + с^Лоб1/11)д’, ] 4-
4~ Ц- [Ья/(^йг®г*) 4" (Ьа 4- Ьъ^поб1)/(^г’*1 4'Р|д» (ОдОз^доба/ь^д» 4-
+ ОгМдоб2/(0г?) -Г 4- Ог^СОг..
(3.189)
109
Приравнивая нулю производную dKyJdURa и решая уравнение от-
носительно 1/д.» после преобразований получим
^Д.эЕ» =
(дд«1 + ДА)
а8&ДО01'
fc8 + *3*доб|
<е
(3.190)
Магнитный поток ДПТ в таком режиме
Фд.эХ* — (Дд.эЕ* — (Ьн -р ^•н)^Э1д*]/(в|^д»^д.эХ*)- (3.191)
Как следует из (3.190) и (3.191), для заданных уровней Р\к, — const
и <о,. = const каждому значению скорости ДПТ соответствует опре-
деленное сочетание напряжения и магнитного потока, при котором бу-
дут иметь место минимальные потерн в системе ГПТ - ДПТ. Так
как в эти выражения входят коэффициенты с» и ат, зависящие от тк,
то возможно анализировать влияние числа ДПТ в приводе электромо-
биля на б/д.эх».
Решение (3.189) и (3.190) дает уравнение для определения опти-
мального значения коэффициента суммарных потерь ТЭМ тягового
Рис. 3.25. Зависимости 1/ДЭе, Рв_э,
КдХэ- Кг*. шд> ПР« ₽1д. = ’
в системе ГПА-600 — два ДК-717А
Рис. 3.26. Зависимости UR э.. ₽n s. Кд£э,
КгХэ, Я£э от <вд* при Р1д. = 1 в системе
ГПА-800 — четыре ДК-717А
ПО
expert22 для http://rutracker.org
Рис. 3.27. Зависимости парамет-
ров ДПТ от тока якоря при
₽1д.= |:
' - S - IW 3 ~ рв1: -) -
Рв2
Рис. 3.28. Зависимости (<од*) и
Рь (°д.1 Для ~ । ПРН различ-
ных вариантах управления:
1 — регулирование по минимуму по-
терь; 2 — регулирование при сочетании
вариантов 10 и 11
электропривода
= 2Р1д. (ОдО, + 6zrbjJ х
+ С.л. ( + °Л^°Ю ') + W>«- + (3-192)
Выражение (3.176) распространяется и на систему ГПТ —ДПТ.
В этом случае здесь £ = £д = URjUn^—
Необходимое с целью обеспечения минимума суммарных потерь в
ТЭМ изменение UA э, и рвэ для СТПЭ карьерных электромобилей пока-
зано на рнс. 3.25 и 3.26; одновременно представлены зависимости
Кгй* и Ке-, от <1>д.. Вследствие повышения доли потерь ДПТ в
суммарных потерях ТЭМ в четырехдвигательном приводе напряжение
1/дма.<с. увеличивается до 1,45 по сравнению cUnMilKC. = 1,35 в двух-
двигательном приводе.
Используя ЭВМ, можно получить более точные результаты; в этом
случае определяют минимум Кх и рассчитывают и /Се-
Если управлять электродвигателем по минимуму потерь в ТЭМ,
превышение температуры меди обмотки якоря составит (0,62 4-
0,47) Ом... э. что на 15—25 % выше значений вМЛ1, когда регулирова-
ние ДПТ осуществляется по (3.171) (см. рис. 3.23).
Иногда при частых перегрузках по току тяговых ДПТ электромо-
биля н если требуется повышенная эксплуатационная надежность,
управление согласно (3.171) может оказаться предпочтительным по
сравнению с (3.190), несмотря на некоторое увеличение суммарной
массы ТЭМ и уменьшение КПД
Ранее указано, что целесообразно задават1>ся линейной зависи-
мостью рн (7Д.), однако на рис. 3.27 рв> (Д.) — кривая 2 — сущест-
венно нелинейна; это весьма затрудняет практическую реализацию
указанной зависимости в системе автоматического регулирования
СТПЭ. Как правило, стремятся использовать линейные зависимости
₽в (/д.) (кривые 3 и 4).
111
Кривая 3 является одной из возможных реализаций управления
ДПТ в соответствии с сочетанием вариантов управления 2 н 3, а кри-
вая 4 — вариантов 10 и 11 (см. табл. 3.1). Потерн в ТЭМ при исполь-
зовании обеих линейных зависимостей 0D (/д.) практически не отли-
чаются от значении потерь при оптимальном регулировании — кривая
2. Теоретически потерн, наиболее близкие к минимальным, обеспе-
чивает характеристика риз (^д+)- На рис. 3.28 показаны зависимости
б/д» (сод*) и pD ((Од.), когда электродвигатель типа ДК-717А регулируется
по минимуму потерь и в соответствии с вариантами управления 10 и 11.
Таким образом, для упрощения САР достаточно выбрать характе-
ристику Рв(/д.) линейной и чтобы она располагалась в пределах зо-
ны abc (см. рис 3.27).
Учитывая изложенное выше, в качестве рациональных вариантов
управления тяговыми ДПТ последовательного возбуждения рекомен-
дуется сочетание вариантов 1—10—11 (см. табл. 3.1). Напряжение
Пд.макс, при этом выбирается согласно (3.190). Такое регулирование
напряжения тягового электродвигателя не только обеспечит высокие
значения КПД СТПЭ в целом, но и даст возможность получить близкие
к минимальным значения размеров и массы тяговых электрических
машин. Кроме того, подобное управление можно осуществить с по-
мощью сравнительно простой системы автоматического регулирования
привода.
Для тяговых ДПТ, имеющих смешанное возбуждение, рациональ-
ным является сочетание вариантов 4—12—13, а для ДПТ независи-
мого возбуждения — 7—14—15.
§ 3.11. Машины постоянного тока
в режиме электрического торможения
электромобиля
СТПЭ должна обеспечивать не только тяговые, ио и тормозные ха-
рактеристики электромобиля — зависимости тормозного усилия В на
ведущих колесах от скорости движения v. В режиме электрического
торможения необходимо осуществлять торможение на горизонтальных
участках пути и иа уклонах, а также подтормаживание, т. е. движение
на затяжных спусках с постоянной скоростью; этого требует реализа-
ция в СТПЭ механически устойчивых тормозных характеристик, при
которых сумма тормозного усилия В и основного сопротивления дви-
жению Wo возрастает с увеличением скорости.
Семейства тормозных характеристик, обеспечивающих различные
тормозные режимы, приведены на рис. 3.29. Кривая OACD является
предельной тормозной характеристикой Частичные характеристики,
показанные на рис. 3.29, а (лучи, выходящие из начала координат),
соответствуют условию устойчивости; частичные характеристики, по-
казанные па рис. 3.29, б (прямые, параллельные оси ординат), соответ-
ствуют режиму подтормаживания с постоянной скоростью.
Максимальное тормозное усилие должно удовлетворять неравенст-
ву Вмакс ВСц, где Всц — усилие, предельное по сцеплению ведущих
колес с грунтом.
112
"маю "макс
Рис. 3.29. Семейства тормозных характеристик
В (о) электромобиля
Электрическое тормо-
жение электромобилей осу-
ществляется переводом
ТЭД в генераторный ре-
жим. При этом энергия,
генерируемая тяговыми
электродвигателями, рас-
сеивается в тормозных ре-
зисторах (резисторное тор-
можение). При наличии в
СТПЭ аккумуляторной энергоустановки может применяться рекупе-
ративное торможение
Если все или группа параллельно соединенных ДПТ при электри-
ческом торможении работают на общий тормозной резистор, то име-
ет место взаимное влияние тяговых электродвигателей друг на дру-
га, которое может вызвать существенную неравномерность распреде-
ления нагрузок между ними и даже переход одного или нескольких
электродвигателей обратно в тяговый режим. Поэтому здесь рассмат-
ривается схема подключения якоря каждого ДПТ или группы пк
последовательно соединенных тяговых электродвигателей к отдельно-
му тормозному резистору.
Поле тормозных характеристик электромобиля В (о) (см. рис. 3.29)
реализуется полем характеристик Мт. (сод.) электродвигателей
(рис. 3.30). Индекс «т» соответствует режиму электрического торможения,
которое можно получить двумя способами: 1) за счет изменения сопро-
тивления тормозных резисторов; 2) за счет регулирования тока воз-
буждения ДПТ. Первый способ требует дополнительной коммутацион-
ной аппаратуры или импульсного регулятора сопротивления резисто-
ров и в настоящее время практически не применяется. Второй способ
предусматривает неизменное сопротивление тормозных резисторов
(/?т = const) в процессе торможения н работу ДПТ как генераторов
независимого возбуждения. На некоторых типах электромобилей
(главным образом КЭМ) зависимость (сод*) формируют при /?т =
~ const, а на малых скоростях движения для увеличения эффектив-
ности торможения выполняют 1—3 ступени переключения тормозного
резистора.
Тормозные характеристики (сод>) реализуются лишь с учетом
ограничений по максимальному магнитному потоку ДПТ, максималь-
ной мощности иа его
зажимах Рдл.мякс. (мак-
симальным току и напря
жению) и по коммутаци-
онно-потенциальным ус-
ловиям на коллекторе.
Значение сопротивле-
ния тормозного резисто-
ра рассчитывают, ис-
ходя из допустимых зна-
чений напряжения
113
Рис. 3.31. Характеристики первого
вида электродвигателя ДК-717А в
режиме резисторного торможения:
а — Мт. б — Фд. (<0д.); е —
(<0д.); 1 — ограничение
•» макс*; Ограничение
по Рд.т.макс' 5— ограничение по
ST и S‘T‘ — ограничении по сцеплешпо
е)
0,8 1,2 1,6 Гд„
Рис. 3.32. Характеристики второго
вида электродвигателя ДК-717А в
режиме резисторного торможения:
а — Мг* (<йд«). 5 — Фд. (<од,).
а—/в д. (<йд.); / — ограничение
по Ф'д.макс»’ 2— ограничение
По ^д.т макс: 5 — ограничение по
^дтмакс» тока /д.т.макс- В свою очередь, /д.т.макс определяется длитель-
ностью и частотой повторения режима торможения В некоторых слу-
чаях, когда от СТПЭ ие требуется обеспечения максимальных тормоз-
ных усилий, RT можно выбирать, нвпример, для предельной характе-
ристики Мт, (<од.) иа условия получения наибольшей мощности на
зажимах ДПТ при (од. = Ыдмагс. с учетом ограничений по U* и £р:
= (3.193)
Расчет механических тормозных характеристик электродвигате-
лей. Частичные характеристики Мг. (<од.) первого вида (рис. 3.30, л),
представляющие собой прямые, выходящие из начала координат, име-
ют место при неизменном для каждой из характеристик магнитном
потоке. Ток якоря ДПТ
/д.т* « сн.т£д.т./(Ят + = «и,т<1>д*«)я./(Ят + ЕЯд), (3.194)
114
вида электродвигателя ДК-210АЗ в
режиме резисторного торможения:
а - Мт. (сд,): 6 - Фд» ).
> — ограничение по Фд.макс» ~ 1.^3-
2 — ограничение по ₽д.т.макс:
3— ограничение по UK
где /дт. --- ^дт/flj.n» -- £ди/7д.Н»
Ед.Т* := £дт/£дц-
Электромагнитный момент из (3.99)
и (3.194)
Мт : Фд./д Т* = Си 1Фд*Ь>Д*/(/?Т +
4-2/^- (3.195)
При Фдг = <Dft.waKc.
Мт» = Мт пред» =
= «и тФд.макс^д./^т + МЫ (3-196)
Выражение (3.195) является урав-
нением частичных механических тор-
мозных характеристик Мт1-. (сод.), а
(3.196) — уравнением предельной ха-
рактеристики Мт пред» (сод«), соответст-
вующей ограничению по максимально-
му току возбуждения и насыщению
магнитной системы ДПТ Предельная
механическая тормозная характерис-
тика показана линией О// на
рис. 3.31—3.33.
Предельную завис! шесть Мт пред» х
X (<ид»), обусловленную ограничени-
ем по максимальной мощности, находим согласно выражению
Мт пред» ~ ^д.т.мвкс»!д.т.макс»Л'Эд», (3.197)
где £д.т.
макс» — (^7д.т.макс 4- ^д.т.максХ/?д)/£д,н.
Зависимость Мт. (сод,), найденная но (3.197), показана кривой HL
(рис. 3.31, а; 3.32, а и 3.33, а). Магнитный поток, соответствующий
ограничению по максимальной мощности Рд.т.ыакс»
Фд» = М„//д.гкакс. (3.198)
Выведем аналитическое выражение предельной механической тор-
мозной характеристики, учитывающее ограничение по реактивной
ЭДС Ток якоря в соответствии с (3.91)
/дт. = ММд*)- (3-199)
Решая (3.194) н (3.199), получим
Ф„. = ((/< + ВДл)/«„ т (£„/£„) (ItoJ.). (3.200)
Тогда из (3.99), (3.199) и (3.200)
Мт. = l(R. + ££д)/О. т| (£?М) (1/<). (3.201)
Характеристика /Итпред. (юд.). вычисленная по (3.201) при Ev=
= ^рдон. показана кривой!М. (см. рис. 3.31, а и 3.32, а).
Ограничение по (7К учтем следующим образом. У некомпенсиро-
ванного ДПТ выражение (3.89) в режиме его работы генератором
115
записывается в виде
U = А' (1 +В1/ДТ./ГД.) £п.„- (3,202)
Электродвигатели постоянного тока с компенсационной обмоткой
некритичны к б'к.доп, как указано ранее
Решение (3.194) и (3.202) дает уравнение
[feT (Фд.(од.)2]//> + /1'Фд.<од. — <4 = 0, (3.203)
где Ьг = + ЗДдЬ
Из (3.203) получаем
ш к <л-%.)»+4^лв/гд;
Д’ 2Шд.
Задаваясь различными значениями МДС £д., по нагрузочным
характеристикам ДПТ определим магнитный поток Фд,, а по (3.204) —
соответствующую угловую скорость (Од. Полученные значения Фд.
и (Од. подставим в (3.196) и построим зависимость Мт, ((од»), учитыва-
ющую ограничение по потенциальным условиям на коллекторе. Эта
зависимость показана кривой LM иа рис. 3.33, а.
Из двух указанных характеристик Мт.пред» (юд*) с ограничениями
по Ер и UK в качестве предельной в интервале угловых скоростей 3
(од. (Од.макс* необходимо выбрать зависимость, удовлетворяющую
ограничениям как по коммутационным, так и потенциальным усло-
виям на коллекторе. Ранее отмечалось, что для ДПТ без компенсацион-
ной обмотки ограничение по максимальному напряжению между
соседними коллекторными пластинами является определяющим и
именно оно лимитирует значения предельного момента. У электродви-
гателей с компенсационной обмоткой момент Л4Т. ограничен реактив-
ной ЭДС коммутации.
Из графиков рис 3.31, а, 3.32, а и 3.33, а следует, что предельная
механическая тормозная характеристика Мт,пред. (<°д«) содержит че-
тыре участка. Линия ST, соответствующая ограничению по сцеплению
ведущих колес электромобиля с грунтом, располагается выше точки
Н Для электромобилей сравнительно небольшой грузоподъемности,
в частности ГЭМ, в отличие от КЭМ может оказаться, что ограничение
по сцеплению требует формирования предельной характеристики
Мт.пред. (сод«)» состоящей из пяти участков (OS', S'T’, T'L, LM, MD)
(см. рис. 3.31, а). Ниже рассматривается Л4т.пред. ((оДФ), состоящая
только из четырех участков, соответствующих постоянству магнитно-
го потока Фд. = Фдмакс. (линия ОН). ограничению по максимальной
мощности на зажимах двигателя Рдт.макс. (кривая НЕ), ограничению
по коммутационно-потенциальным условиям иа коллекторе ЕР.Д(Н1 или
Мсдоп (кривая LM) и ограничению по угловой скорости (од. = (од,мвкС.
(линия MD).
Управление электродвигателями при резисторном торможении. Как
и в двигательном режиме, реализация тормозной характеристики
Мт, ((од») осуществляется посредством задания соответствующих ва-
риантов управления.
116
Характеристики ДПТ, работающих в режиме генератора незави-
симого возбуждения па тормозной резистор с неизменным сопротив-
лением, определяются двумя переменными: угловой скоростью (од.
в магнитным потоком Фд,- Характеристики Фд» ((од.) или Фд. (/дт,.)
являются основными в режиме резисторного торможения. Установим
варианты управления ДПТ в генерагорном режиме, позволяющие
сформировать требуемые предельные и частичные механические тор-
мозные характеристики электродвигателя и, следовательно, тормоз-
ные характеристики электромобиля.
Из графиков, показанных на рис. 3.31 и 3.33, видно, что формиро-
вание Мт.пред» (юд.) обеспечивается следующими вариантами: в ин-
тервале угловых скоростей 0 (од. 1 при /вд. = /я.дмакс* — под-
держанием значения магнитного потока Фд. = Фд.Макс*1 в интервале
скоростей 1 (Од. 3 при /в.дс = /юд. ((од.) или /вд. = /яд. (/дт.) и
Рдт. = рдт макс. — регулированием магнитного потока Фд, = Фд. (<од,)
или Фд. = ФЛ. (/д_т.); в интервале скоростей 3 (од* (од.маКс* при
^тл.д»:=^в.р,» (ыд.) ИЛИ /вд» = /яд» ((дт») И — £р.доп (ИЛИ UK = Du. доп)
регулированием магнитного потока Фд. — Фд. (сод.) или Фд. —
= Фд. (/дт.).
Рассмотрим механические тормозные характеристики ДПТ первого
вида (см. рис. 3.30, а). В интервале угловых скоростей 1 од.^3
характеристики Фдлред* (<°д.) с ограничением по мощности Рд,т.МЯКс.
находим по формуле Фд. — А4т.//дл маке- Затем по нагрузочным ха-
рактеристикам определяем МДС Гд. = /вД. для каждого значения по-
тока Фд.. Предельные характеристики Фд. ((од.) и /в.д, (сод.) с уче-
том ограничений по максимальной мощности электродвигателя пока-
заны кривой ВС (см. рис. 3.31, б, в)
В интервале 3 (од. (од,макс. характеристику Фд.преД. ((од.)
с ограничением по ЭДС коммутации Ер рассчитывают согласно (3.200).
Далее, используя нагрузочные характеристики, получают зависи-
мость /вд. (Фд.) (кривая CD, рис. 3.31, в)
Расчет предельной характеристики Фд. ((од.) с учетом ограничения
по (кривая CD. рис. 3.33, б) выполняют, задаваясь различными
значениями МДС = /„.д. и определяя по кривой намагничивания
поток, а по (3.204) — угловую скорость.
Частичные характеристики Фд. ((од#) и /вд» ((од.) первого вида
представляют собой прямые, параллельные оси абсцисс и лежащие
внутри области, ограниченной осями координат и кривой A BCD К
иа рис. 3.31, б, в. 3.33, б.
Рассмотрим механические тормозные характеристики ДПТ второ-
го вида (см рис. 3.30, б). Предельная зависимость Л4т.((Од*) анало-
гична характеристике первого вида и показана кривой 0HLMD
(см. рис. 3.32, а). Так как частичные характеристики второго вида соот-
ветствуют значениям (од. = const, то в данном случае целесообразно
оперировать семейством зависимостей Фд. (/дт,). Частичные характе-
ристики Фд. (/Дт*) рассчитывают по формуле, полученной из (3.194):
Фд. = К*т + т! (1 /(Од.) /д.т*, (3.205)
где сод. = const.
117
Рис 3.34. Зависимость
/п (/г т,) генератора
ПТЛ-600 в режиме элек-
тр ич еского торможения
электромобил я
скорости (Од. = const
Выражение (3.205) является уравнением
прямой, поэтому частичные характеристики
Ф«- (4.т.) представляют собой лучи, выходя-
щие из начала координат; каждый из лучей
соответствует определенной угловой скорости
(Од. = const (см. рис 3.32, б)
Предельную характеристику Фд, (/д,т.) Це-
лесообразно рассчитывать графоаналитичес-
ким методом. Для этого сначала ограничивают
магнитный поток значением Фд.макс»- Далее на
графике зависимости Фц, (/дт.) проводят ор-
динату = /д.т.мвкс— Затем, используя
(3.200) или (3.204), определяют значения Фд.,
соответствующие ограничениям по Ер или UK
в интервале 3 (од. ц>д.мвКс* Для каждой
На оси ординат откладывают значения Фд.
и проводят прямые, параллельные оси абсцисс, до пересечения с луча-
ми Геометрическое место точек пересечения лучей с прямыми дает
предельную по £р или UK характеристику Фд» (/дл.) — кривую CD
на рис. 3.32, б. Последнюю с помощью кривой намагничивания легко
перестроить в характеристики /рд. (/д.т«) (см. рис 3.32, в).
В качестве примера иа рис. 3.31—3.33 приведены характеристики
элскгродвигателей ДК-717А и ДК-210АЗ в режиме генераторов неза-
висимого возбуждения при нагрузке на тормозной резистор с неиз-
менным сопротивлением, рассчитанные при С/к^р,, = 37 В и £р.дОп ==
= 8 В. Для электродвигателя ДК-717А принято (7д.т.макс = 550 В;
/д.тмакС — 600 A; Rr — 0,915 Ом; для электродвигателя ДК-210АЗ
^дтмакс ~ 550 В; /д.т.макс = 300 A; RT = 1,833 Ом. Для электродвига-
теля с независимым возбуждением характеристики Л4Т. (ыд.) и
Фд. (Фд.) аналогичны зависимостям двигателя смешанного возбужде-
ния на рис. 3.33.
Генераторы постоянного тока в режиме электрического торможения электро-
мобили. Рассмотрим особенности управления ГПТ при работе СТПЭ в режиме
электрического торможения, точнее в режиме резисторного торможения ДПТ. Если
применяют электродвигатели смешанного и независимого возбуждения, ГПТ в режиме
торможения электромобиля отключают. В СТПЭ с электродвигателями последо-
вательного возбуждения генератор является источником напряжения возбуждения
ДПТ. Для таких схем наиболее распространен способ, при котором ГПР регулиру-
ется в соответствии с требуемыми характеристиками /г т, (шДЛ) — /п (юдJ
'ri. С'дт.) = I'.J
Ток якоря генератора в режиме торможения и его напряжение
A.Tv = ^гЛн=^в.Ди/мЛ^ "г. = [(«ОВП + «ДОб)/^к1 /г.т„
(3.206)
где RqB|i — сопротивление обмотки возбуждения ДПТ; /?доб — сопротивление
добавочного резистора, включенного последовательно с обмоткой возбуждения ДПТ.
Генератор постоянного тока для СТПЭ выполняют на достаточно высокое но-
минальное напряжение, вследствие чего при отсутствии тока возбуждения имеет
место ЭДС, обусловленная остаточным магнитным потоком. Так как сопротивление
обмотки последовательного возбуждения ДПТ невелико, то остаточное напряжение
ГПТ создает у электродвигателей значительный магнитный поток. Поэтому для
Пв
обеспечения управления магнитным потоком ДПТ в режиме резисторного торможе-
ния напряжение С1ГЛ должно быть значительно выше остаточного, что обусловли-
вает необходимость включения добавочного резистора.
Дальнейший расчет характеристик ГПТ при электрическом тормо-
жении сводится к нахождению зависимостей Фг. (/г.т*) и /вг. йг.т*)
(/вгв = /и.г//п.г.( — гок возбуждения генератора) с использованием
(3.145) и нагрузочных характеристик Так как от генератора в дан-
ном случае потребляется незначительная мощность, то его угловую
скорость желательно поддерживать близкой к угловой скорости холос-
того хода ДВС
На рис. 3.34 приведена зависимость (/гт.) генератора ГПА-
600. соответствующая предельной характеристике /вд. ((од.) электро-
двигателя ДК-717Д (см. рис 3.31, в). Сопротивление обмотки последо-
вательного возбуждения электродвигателя /?овп =0,0223 Ом; сопротив-
ление /?до-> принято равным 1,2 Ом, а угловая скорость генератора
(ог. = 1
Если электрическое торможение электромобиля требуется осу-
ществлять с поддержанием постоянной скорости движения, то харак-
теристики генератора целесообразно рассчитывать в функции тока
якоря электродвигателя. Тогда зависимости /||Г* (/дт.) будут иметь
вид, аналогичный кривым, показанным иа рис. 3.32, в.
ТЯГОВЫЕ АСИНХРОННЫЕ
ЭЛ ЕКТРОДВ И ГАТ ЕЛ И
§ 4.1. Варианты частотного
управления
гиговыми асинхронными
электродвигателями
Требования, предъявляемые к тяговым асинхронным электродви-
гателям (АД) по минимизации массы и размеров, обеспечению высокого
КГЩ и необходимых значений и /?м, аналогичны требованиям, предъ-
являемым к тяговым ДПТ. Однако частотное управление АД, обуслов-
ленное широким диапазоном регулирования их угловой скорости,
предопределяет необходимость рассмотрения ряда вопросов, прису-
щих только АД.
Характеристики АД при частотном управлении определяются тре-
мя переменными: частотой напряжения питания Д или ее относитель-
ным значением Д* — действующим значением напряжения
или относительным напряжением — UJUiv и частотой скольже-
ния Д или параметром абсолютного скольжения Д. ~ fjfiu
В [11, 12] указывается на важность задачи выбора способа частот-
ного управления АД. под которым понимают соотношения между
напряжением и частотой Д, обеспечивающие соответствие харак-
теристик электродвигателя характеристикам статической нагрузки.
Если рассматривается частотное управление АД общепромышленных
приводов, то, как правило, исследуют только функцию Uu (М [11,
12]. Опыт разработки СТПЭ с асинхронными электродвигателями под-
тверждает обязательность совместного анализа зависимостей (Д,)
и Д» (Д.), обеспечивающих выполнение заданной тяговой характе-
ристики электромобиля F (и).
При выборе рациональных законов изменения Ui, и ДФ, наилуч-
шим образом удовлетворяющих работе АД в СТПЭ, остановимся на
существующих критериях оптимальности В [111 указано, что имеют
место требования оптимальности к конструкции электродвигателя и к
взаимосвязанному управлению его параметрами Uu и Д*. а также
к собственно электродвигателю и к электроприводу в целом. Следует
различать аналитический оптимум от технического. «Аналитическое
исследование оптимального режима как некоторого экстремума может
привести к сложным точным функциям многих переменных, реализа-
ция которых потребовала бы настолько сложных средств автомати-
120
ки и вычислительной техники, что они съели бы всю достигнутую оп-
тимальность ».
В процессе анализа способов частотного управлений в качестве
критериев оптимальности принимают минимум тока, минимум потерь,
максимум произведений КПД на коэффициент мощности, минимум
годовых приведенных затрат и др. Одиако при этом рассматривают
АД в общепромышленном электроприводе при регулировании частоты
вниз от номинальной п питании от сети «бесконечной» мощности Для
тяговых АД требуется иной подход к выбору критериев, так как дли-
тельный режим их работы соответствует интервалу частот (угловых
скоростей), существенно превышающих номинальную (7гю » fJM8KC, —
= 3 -г 4 и более), а питание осуществляется от источника соизмери-
мой мощности, что обусловливает необходимость учета показателей
тягового адектропривода.
У АД общепромышленных приводов оперируют минимумом суммы
электрических потерь и потерь в стали, в то время как у тяговых
АД значительную долю потерь в рабочем диапазоне частот составля-
ют механические потери. Поэтому в СТПЭ целесообразно анализиро-
вать управление АД по максимуму полного КПДт]дмакс электродвига-
теля или даже по максимуму КПД Чэыаке силового электрооборудова-
ния привода. Регулирование АД по минимуму тока требует более
сложной экстремальной системы, а получаемый при этом выигрыш в
энергетических показателях в сравнении с предыдущим незначителен.
Управление с максимальным коэффициентом мощности cos <рд.мякс в
общепромышленных электроприводах диктуется необходимостью ми-
нимизации затратна электрооборудование, устанавливаемое для повы-
шения cos <р питающей сети (синхронные компенсаторы и др.). В СТПЭ
управление АД по cos <рдмакс во всем частотном диапазоне предопреде-
ляет использование агрегатов силовой цепи с меньшей расчетной мощ-
ностью.
Таким образом» на основании изложенного, а также учитывая ва-
рианты частотного управления АД, рассматриваемые обычно в лите-
ратуре, целесообразно остановиться на следующих вариантах:
1) поддержание постоянства магнитного потока (Фд = const);
2) управление по «оптимальному закону»
фд. = /Л«7; (4.1)
3) поддержание постоянства напряжения ((7Х — const);
4) управление по максимуму КПД электродвигателя (чд = Чд-макс);
5) управление по максимуму коэффициента мощности электродвига-
теля (cos <рд = собфд.макс);
6) управление по максимуму КПД силового электрооборудования
ПрИВОДа (t], — Т]э макс)-
Предварительно следует установить интервалы частот, в которых
можно реализовать варианты 1—3; пределы применимости вариантов
управления 4—6 определяют по результатам анализа характеристик
электродви гател ей.
* Булгаков А. А. Частотное управление асинхронными электродвигателями.
М., Наука, 1966, с. 87.
expert?2 для http://rutracker.org
121
Поддержание постоянства магнитного потока АД (Фд == const)
предусматривает регулирование ЭДС пропорционально частоте
/i (El - fi), т. е.
- С/jEin = /и-
Поэтому магнитный поток
= E'Jh*,
откуда
Е}„ —
Так как при частотах ft. > 0,5 <Д. Е^, то
(Л.~ФД.Ъ.-
(4.2)
(4.3)
(4.4)
(4.5)
Для предельной характеристики, когда мощность, потребляемая
электродвигателем, Р1Д» = 1, магнитный поток целесообразно поддер-
живать номинальным Фд, = 1. Тогда из (4.5)
(4.6)
Если ftMaKc. » А, = 3 4- 4, то реализация заданной максимальной
скорости потребует трех-четырехкратного повышения напряжения
сверх номинального и тем самым такого же возрастания расчетной
мощности силовых агрегатов СТПЭ (ЭУ и ПЧ). Напряжение 17|Ыакс*
обычно составляет 1,4—1,5. Следовательно, управление электродви-
гателями с Фд» = 1 практически осуществляется в интервале частот
fiMin* fi* fiu* = 1.4 4- 1,5, где ftMIIH. —минимальная частота, с ко-
торой начинается пуск АД (значение fi^m* ие должно превышать кри-
тического скольжения асинхронного двигателя); fw» — частота, при
которой электродвигатель переводится в режим с поддержанием по-
стоянства напряжения
Как и для ДПТ, предельная механическая характеристика
М. ((Од.) асинхронного электродвигателя имеет зоны, соответствую-
щие поддержанию постоянства максимального пускового момента (или
тока) в интервале частот ft. fie* и поддержанию постоянства
номинальной мощности для частот ft. > fie* (fie* — частота, при кото-
рой электродвигатель переводится в режим работы с Р1Д. = 1). Поэто-
му интервал частот ftMIIH. ^fi*^fiu*, целесообразный для варианта 1
управления АД, можно разделить па два характерных участка:
Амин. fl* fix* И flB* fl* f\v*
Регулирование на втором участке рационально осуществлять,
когда Фд. == 1, так как в границах этого участка находится номиналь-
ный режим АД с Ur~ Ui„ и Л— Л1И. При пуске (участок /1МЮН. — ftB.)
возможно как управление сФд. = 1, так и форсирование магнитного
потока до значеииий Фд. 1,25. В последим случае плавный перевод
электродвигателя из режима с форсированным потоком в режим с по-
минальным требует усложнения системы автоматического регулирова-
ния СТПЭ.
Необходимость осуществления пуска АД с номинальным или фор-
сированным потоком в конечном счете оценивается в процессе сравни-
тельного анализа энергетических показателей и влияния указанных
режимов на расчетную мощность, массу и размеры силового электро-
122
оборудования СТПЭ. Однако исследованиями установлено, что если
поддерживать Фд< = 1 во всем интервале Д.^Дс., помимо упроще-
ния САР имеют место сравнительно высокие значения коэффициента
мощности АД, особенно на пусковом участке частот. Последнее бла-
гоприятно сказывается иа гармоническом составе напряжения и тока
электродвигателя.
Управление АД по «оптимальному закону» (4.1) выполняется в ин-
тервале частоа Д, 1, так как при Д, < 1, где момент при пуске мо-
жет достигать двух- и трехкратного значения по отношению к номина-
лу, потребовалось бы резкое возрастание магнитного потока. Одиако
рабочую точку номинального режима высокоиспользованных электро-
двигателей выбирают на колене кривой намагничивания, поэтому зна-
чения Фд. >1,25 получить практически невозможно.
Вариант управления 3 выполняется при Д*> 1, ибо с понижением
частоты поддержание напряжения == 1 обусловливает значительное
возрастание намагничивающего тока, что приводит к существенному
увеличению электромагнитных потерь и ухудшению температурного
режима АД. Вместе с тем управление по этому варианту должно пре-
дусматривать выбор такого значения U\. (когда частота Д. = До.),
которое обеспечивало бы заданную перегрузочную способность АД
При максимальной угловой скорости <Од.Макс-
Покажем, что выбор предельного значения £Дмакс* — const при уп-
равлении электродвигателем по варианту 3 зависит от его конструк-
тивного исполнения, диапазона регулирования частоты (кратности
максимальной угловой скорости k^) и запаса статической и динами-
ческой устойчивости АД на максимальной частоте.
Рассмотрим, как изменяется в интервале частот Дц. Д* fiNaKC«
перегрузочная способность 1 электродвигателя по моменту, представ-
ляющая собой отношение критического (опрокидывающего) момента
ЛД к электромагнитному:
Х = Л4Й/М (4.7)
Электромагнитный и критический моменты АД
pmAJ? г? 1
М = ---г-------,----------; (4.8)
W. • (r1+r2/s)a + (*,+^)2/?.
.. . Р"чи'1 1
= ± .—--------г- , (4 о\
W. ±,1+Гг?+(^+^4.
где р — число пар полюсов; число фаз статора; s — относитель
пое скольжение; г1ж хг — активное и индуктивное сопротивления обмот-
ки фази статора; г/, х^— приведенные активное и индуктивное сопро-
тивления фазы ротора (хъ xj соответствуют номинальной частоте,
знак «4-» относится к двигательному, а знак «—» — к генераторному
режиму АД).
Пренебрегая в (4.8) для зоны рабочих скольжений членами знаме-
ннтеля cshc s2 вследствие их малости, а также значением q по
сравнению с (хх+ Хг)Д. в (4.9), преобразуем эти уравнения к виду
М s^> (4.10|
123
MK ± н/| 4л/; (х, + х2) ]. (*. 11)
Так как s == fjfx = то в двигательном режиме АД
h rji«l[2 (Xj + х;) М « r^[2 (Xj + Jfc)l(l/k.). (4.12)
В номинальном режиме fs. = A.,- = sH и
Ч = rs/[2 (xt + х') sj. (4.13)
Переходя к относительному моменту, из (4.10) получим
= (4.14)
В свою очередь»
MJi. = Psm. = (4.15)
где Р9М —электромагнитная мощность АД. Примем, что для предель-
ной характеристики Рэи. »Р1д.= 1- Тогда, используя (4.14) и (4.15),
получим
А. = (4.16)
Решая (4.12) и (4.16), находим
>- = {г'г/12^ + xj)]) [L'f./W,.)], (4.17)
а в интервале частот ftu. — Л„„кс„ где Ui. = (Амане., согласно (4.13)
и (4.17),
(Амане* = (4.18)
Если выбран запас устойчивости на максимальной частоте Хы (ин-
декс D относится к значению параметра на частоте ftMaKc.)» то для его
обеспечения при любом варианте управления напряжение АД должно
удовлетворять условию
1М8КС* > . (4.19)
Тяговые АД следует выполнять с повышенной номинальной пере-
грузочной способностью по сравнению с нерегулируемыми электродви-
гателями, у которых Хн 2.
Для тяговых асинхронных электродвигателей Хо можно выбирать
несколько большим единицы- Однако это предъявляет дополнитель-
ные требования к системе автоматического регулирования в части рез-
кого снижения динамических ошибок- Поэтому для электродвигателей
в СТПЭ следует принимать Kd= 1,25 4- 1,5, тогда при наиболее час-
то встречающихся значениях/1Макс. = 44-6 и (Амане* = 1>25 1.5
согласно (4.19) Хн = 2,7 4,8.
Необходимо отметить, что каждый вариант управления тяговыми
АД применим на конкретном участке частотного диапазона, а харак-
теристику М. ((од.) целесообразно реализовывать сочетанием тех или
иных вариантов в последовательных интервалах частот. Для обосно-
вания рационального регулирования необходимо выполнить расчет и
сравнительную оценку характеристик двигателей при различных ва-
риантах управления.
124
S q.z. Регулирование параметра
абсолютного скольжения
При частотном управлении АД следует осуществлять взаимосвя-
занное регулирование хотя бы двух из трех определяющих его режим
параметров Д», Д. и U\».
Известны два основных способа управления угловой скоростью
АД — непосредственное регулирование частоты fi, при ее изменении,
например, в функции отклонения тока статора электродвигателя (или
его мощности) от заданного значения, и косвенное, при котором /s,
задается принудительно, а Л. формируется как сумма /$• и измеренной
частоты вращения /. = сод»
Рассмотрим, каким образом следует регулировать Д. (ft. ) при вы-
бранном варианте управления для реализации механической харак-
теристики электродвигателя и, следовательно, тяговой характеристи-
ки электромобиля.
Наиболее просто регулировать ft., поддерживая постоянство его
значения во всем частотном диапазоне. Если принять fs, — fm»r то
при Л.<Лв. невозможно обеспечить УИ. > 1,5. Действительно, счи-
тая 1/1» из (4.14) получим
Ч. = Ф^Мгя. (4.20)
Отсюда видно, что, когда Фд.мам> = 1,25, момент ^„,^*«1,5.
Кроме того, при fs. ~ sH не выполняется условие поддержания посто-
янства мощности для так как если использовать (4.14), то
Pin, Рэм» = Aftft, = а для (71. = (71макс. = const мощность
Р1Д.~ 1/ft,. Поэтому, чтобы поддержать PiR» = const при fs, = sK,
(7i,/f[. = const, т. e. (ft, = Vfi, (это соответствует закону оптималь-
ного частотного управления для случая постоянной мощности). По-
добное регулирование требует увеличения расчетной мощности ЭУ
и ПЧ.
Если принять fs, — Лмакс*» где ДМакс* выбрано по условию реализа-
ции максимального пускового момента, то во всех остальных режимах
АД будут иметь место большие перегрузки по току, во избежание че-
го необходим значительный запас силового электрооборудования
СТПЭ по расчетной мощности.
Таким образом, поддержание постоянства параметра абсолютного
скольжения не удовлетворяет условиям работы тяговых АД во всем
частотном диапазоне.
Чтобы обеспечить требуемый момент /Имакс. и реализацию номи-
нальной мощности электродвигателя при изменении частоты ft. вверх
и вниз от номинального значения, необходимо регулировать fS9 в функ-
ции ft*. В частности, для варианта управления 3 в интервале ft.
где Ui, ~ 1/iMaKc. — const, из (4.16)
fs* ~ (4-21)
Для варианта управления 1 в интервале частот — fw*9 где
Фд.пред» = К ИЗ '4.20)
4. = /s./sH. (4.22)
I
125
Умножая обе части уравнения (4.22) на А*, получим =»
— Pi. = I = Тогда
M = (4.23)
Наконец, в зоне пусковых частот, где /И. = /Имакс. = const, в со-
ответствии с (4.20)
fs* ~~ Л4щакс*8и. (4.24)
Таким образом, для вариантов управления 1 и 3 поддержание по-
стоянства мощности АД при регулировании частоты вверх и вниз от
номинального значения требует соответствующего увеличения пара-
метра абсолютного скольжения.
Выражения (4.21), (4.23) и (4.24) дают только качественную оцен-
ку изменения /s.. Уточненный расчет зависимостей А» (Л.) для рас-
смотренных вариантов управления приведен ниже
§ 4.3. Зависимости изменения
напряжения и параметра абсолютного
скольжения
Основные соотношения. Рассмотрение вопросов управления тяговыми АД
проведем, используя их статические характеристики, т. е. зависимости параметров
АД (fs*« Ц*» А»’ Чд. С08<₽д) от частоты в заданном диапазоне
частот и нагрузок, обеспечивающие требуемые тяговые характеристики электромо-
биля.
Основные соотношения при частотном управлении тяговыми АД запишем,
исходя из идеализированной Т -образной схемы замещения АД (рис. 4.1). При рас-
смотрении схемы приняты следующие допущения:
напряжение питания обмотки статора симметричное синусоиальное, т. е. иска-
жения формы кривой выходного напряжения ПЧ не учитываются и расчет произво-
дится по основным гармоникам напряжения и тока;
активное сопротивление цепи намагничивания считается равным нулю,
активные сопротивления обмоток статора и ротора не зависят от частоты, т. е.
не учитывается явление вытеснения тока;
индуктивные сопротивления обмоток статора, ротора и цепи намагничивания
пропорциональны частоте;
распределение магнитного потока по дуге воздушного зазора синусоидальное.
Расчетные формулы, приведенные в [111, справедливы как дли электродвигателя,
так и для системы ПЧ—АД. В последнем случае в формулах под напряжением Vi
понимается внутренняя ЭДС ПЧ, а значения rt и xt следует увеличить, учитывая
соответствующие сопротивления силовой части ПЧ.
Преобразуем указанные формулы таким образом, чтобы полученные с их по-
мощью зависимости и выводы о рациональности применения тех или иных вариан-
тов управления были справедливы для тяговых АД в широкой интервале измене_-
ния номинальных мощностей, напряжений
г, j*i fi» rt fi*/ fs* и частот. Для этого будем оперировать
соотношениями между внутренними пара-
метрами электродвигателей, а не их аб-
солютными значениями. Введем коэффици-
енты рассеяния статора и ротора
т, « xjx,;, т2 = х2/х(), (4.24')
а также коэффициенты
Рис 4.1 Идеализированная Т-образ-
ная схема замещения одной фазы АД Й1 = rilxn’ (4.25)
126
где лп — индуктивнее сопротивление пепи намагничивания электродвигателя при
номинальной частоте.
Полное сопротивление сризы электродвигателя (рис. 4.1)
= Zt + ZoZg/CZo 4- Z^), (4.26)
где
— ri 4 — ixdi»* ^2 — Г2А*Д5* 4“ i*aA* (4.27)
— полные сопротивления обмотки фазы статора, пепи намагничивания и приведенное
полное сопротивление фазы ротора
С учетом (4.24*) и (4.25)
— хо (*4 Ь ^2 — x<i 4~ JTsA*)* (4.28)
Тогда
Zg — *о| 4* /г1А< 4~
/ft* C^ah./Zs* 4^/т2/ь) 1
</7Х4-Н14-т2)Л.
Преобразуем последнее выражение и выделим вещественную и мнимую части:
+ (1 4- ?ч)2 4- rfJiJ/sJ
МА*)8 + (14-т2р
+ /Л, (14- Tt) х(|
(Ms Js 4- (14- ts)s - (1 4- т2)/( 14- *i)
m.)2 4 (i 4- т2)2
Обозначив
(ri2//s.)24-(14-T2)2 = D1 (4.29)
и приняв отношение (1 4- 1^/(1 4- <i) = А получим
Zs = хо [(^iDj 4- s*)/Hi 4- /А* (1 4" ъ) (^*1 — ОДМ — rs 4- ixa> (4.30)
где
гэ— х0 (djDj 4-4гА»^А»)^«*
^ = *<^(14-^) (Cj-i)/ci:
Z3 fg 4- *э = ^/Узi
(4 31)
г. = г^н; «* = Wxs.H;
= • У* ~ УзИУьм •
rB и *з — активное и индуктивное сопротивления фазы электродвигателя; уэ — пол-
ная проводимость фазы электродвигателя.
Ток фазы статора
/, = ^/2,; /,.= /,//,„ = (4.32)
Коэффициент мощности АД
cos фд = гй'э- (4.33)
Активная мощность, потребляемая АД,
Р1д = mtUAIt cos фл; Pt ц. = Р1д/Р1д н = г. (Ul (4.34)
ЭДС, индуцируемая в обмотках статора,
Е. = U, ~ I.Z, = и1н171Ф - A^.Zj/Z. == U1Hl/u (Z3 - Zt)/Zs.
По схеме замещения Za — Zt = Z'2Z0/(Z'2 -|- Zo).
127
Подставив из (4.27) и (4.28) значения 7^ и 7.л в последнее выражение, после
преобразований получим
Zs - Z, = I/2[D,-(1+t2)]/D, = /1. /(2/Dt)\(dslfs,r+ (1+ т2)= - (1 + т2)].
Так как т2 1, то
(I + тер <= (1 + Tj; Zs - Z, = «у,.//„)/(2/D,)0’5.
Поэтому Е, = (rf2l'll,W|.f|.ss//„) J/2/D, :
E|. = 'i/ci„ = s..^l.S.Zi./(/s.Dii6). (4.35)
где D„ = D,/D,„ = D1/|(<yS„)B I- (I + T2)»].
Магнитный поток в воздушном зазоре
Фд = №/Н.441“А>61)Н<ЛУэ4ет) /2/57 •
где иц, Лоб1 — число витков и обмоточный коэффициент обмотки статора;
®д* = Фд^Фд.н = $ЛА*£*/(/5*®1* ) (4.36)
С учетом введенных обозначений выражения (4.8) и (4.9) для электромагнитного
и критического моментов принимают вид
Л(=^-------------i(4.37)
ймЛ (d1+d2f1./fs.)4-(Ti + T11)V?.
м = М и*. (<ь + <у«„)» + (ч + т2)8 .
• ТС (di+ <!,/,./(„)’+ (т1+т2)«(?.*
, Р"1!17! 1
Мк = rfc —7----=------------ .
41“Л ± di + Vd? + (Ti + T2)=ff.
Перегрузочная способность АД по моменту
_ ЛЬ _ 1 f.. (<Ji + ‘Wi.//»), + fa + tJ7?.
М * 2d. fl. idjH /’dfd fT, Ч-т2)Ч?.
Потери в меди обмотки статора АД
Л₽М.Л = тЛ7? = Ч’иЛ
(4.38)
(4.39)
(4.40)
(4.41)
Для получения формулы потерь в меди обмотки ротора выведем выражение
для приведенного тока ротора /2.
На основании схемы замещения электродвигателя
*2 — к —' *о« = *<£о» (4.42)
где /0 — намагничивающий ток.
Решая уравнения (4.42), получим
’2 = 4“ (4.43)
где — полное приведенное сопротивление фазы ротора АД.
Подставив в (4.43) значения Z3 и Z2 из (4.27) и (4.28), находим модуль приве-
денного тока ротора:
4 = /№-5 - /1Н(У1.£/,О7°’5 = 44 , (4.44)
где ^2н — Лн^и'5; ^2* —
128
Тогда потери в меди обмотки ротора АД
«Л,д5 = ">Л Й2 = ">Л = APv.tf,, VJ^.riD,. - ДР^Л/О,.. (4.45)
Основные потери в стали АРСД ~ В^Г}’3. где Вс — магнитная индукция в стали:
£С^ФД=ЕЛ1^£/1Я1.
С учетом последнего выражения
Л₽, .я = ДРе.вл,У?./и •’ (4.46)
Механические потери электродвигателя
ДР»ох д = ДРиехли^д.!, <= ДРмех.д J1. (4.47)
В (4.47) принято, что действительная часто!а вращения электродвигателя равна
синхронной. Относительная ошибка, обусловленная этим допущением, сравнительно
мала и незначительно влияет па механические потери.
Коэффициент полезного действия АД
Чд = 1 — -ДРС „ К"1 + ««/f,.) Л. + + »Ji. 1/(Р1д.„ Р1в.). (4.48)
где £ДРд— суммарные потери электродвигателя; аг = ДРМ д111/2Дрд н; =
Л P«WS6P0 = ДРд.д.к/^ДРд.»; = Др„ех.д н/ЕЛРд... — СОСГаВЛМЯШ»
потерь ЛЛ п долях суммарных потерь в номинальном режиме.
Параметр абсолютного скольжения при различных вариантах
управления. Для каждого из перечисленных в §4.1 вариантов управле-
ния тяговыми АД выведем уточненные аналитические выражения за-
висимостей (7|, и fs* от/]., которые совместное механической характе-
ристикой электродвигателя М, (Д.) позволят рассчитать статические
характеристики остальных параметров АД, необходимые при сравни-
тельном анализе вариантов управления и выборе рационального
варианта.
Для варианта управления 1, когда поддерживается ФЛ. = const в
интервале частот fi. =^/гв-> решая (4.32) и (4.36) и исключай
(7ь, получим Фд» — Sh/ib./Gs./??;5), откуда в двигательном режиме АД
А* — |/^Фд» -J- D}„ (/|в» Фд.)/(1 -J- т2)2/Фд«. (4.49)
Из (4.49) видно, что для предельной характеристики, когда Фд. =
= 1, параметр абсолютного скольжения является величиной посто-
янной: __________________________
h. = S„ v 1 +
так как в режиме пуска Ав. = const.
Покажем, что момент АД в этом режиме также является величиной
постоянной. С этой целью выражение электромагнитного момента за-
пишем в виде
м = РИ.Д? ______________1 ,
2пЬ s *
м fr^)- + (4P
* * (г> + (4/
С I I.W 119
Заменив Et, на Фд+fu, получим
, = УгЫ‘ + (*i)* = <Рд. <^ + (та)2 * 4
* S" A. (r?s)s + (4f,.)2 s"f«. (djfs,r + tl
(4.50)
Тогда для данного варианта, где ФДФ — 1 и fs. — const, имеем
/И* = const.
Выражение для расчета напряжения из (4.36)
U,. = ®o.A.£>?;6/(s„g,). (4.51)
В интервале частот/1 в» fiu»t где при управлении электро-
двигателем по варианту 1 поддерживается постоянство мощности,
из (4.34) и (4.36) получим
Фд. = V(4.52)
Решение (4.52) относительно параметра абсолютного скольжения
дает выражение
f — - datl* у
2d1(l+T2)« х
X |*-.[ . (..S3)
Значения /$*, соответствующие знаку «—» перед радикалом, не
рассматриваются, так как относятся к генераторному режиму АД. Вы-
ражение для расчета напряжения из (4.34)
(7|Ф = Z# ]ГР^ (4.54)
Частоту Дв*, при которой АД выходит на режим поддержания по-
стоянства мощности Р1ДФ, определяют из (4.49) и (4.52):
0 +Tg)dx$H Р1д. (р«н т + ЦцЛв»
da<S>"
(4.55)
Для управления по «оптимальному закону» (вариант 2). обозначив
— Н и решив (4.34) и (4.35), получим
f = d‘f,~ X
241(1+т2)" Х
Х(±|/ 1+4(1+-У»—"--------------W,./W----------------1 (4.56)
При £/,. = const (вариант 3) из (4.34)
А. = — O.SsJl (g + Tg2 — 4<?Л )/й, (4.57)
где g = d, (SdjDj — l)/s„; q = Ds {d,jsj l)2; h .= (1 + t2)2 (Da —
— 2£>Л) + D2 - .M; Ds = Dt + (1 + tb)£ -
1/э.и “ 1/р^Гэл-p Хэ.н » Гэ.н = Tj -J- Г2/(^1н8н)> x3j- ~ xo 0 “F
4- Ti) (1 - 1/Ah).
130
Так как (4.57) является решением квадратного уравнения, то в
зависимости от знака дискриминанта может быть различное число
действительных значений fs,: 1) дискриминант больше нуля — име-
ются два действительных и различных значения; 2) дискриминант
равен нулю — существует одно действительное значение; 3) дискри-
минант меньше нуля имеются два комплексных значения.
В первом случае меньшее по модулю значение fs„ соответствует
области статической устойчивости в двигательном режиме АД, а боль-
шее по модулю — области статической устойчивости в генераторном
режиме АД. Во втором случае параметр абсолютного скольжения ра-
вен критическому и имеет место одно из следующих сочетаний парамет-
ров Ад», А* и l/j*: если заданы Р]д* и Д», напряжение мини-
мально возможное; если заданы А« и {/[,, мощность PiK, максимально
возможная; если заданы PlR» и = const, частота А* максималь-
новозможная В третьем случае режим работы двигателя физически не-
осуществим. Это может произойти, когда задано такое значение (Л
или Лд., которое АД ие обеспечивает при двух других заданных пара-
метрах (соответственно Р|Д, и А* или (Ад* и А.).
Минимально необходимое напряжение (Лмакс* для варианта управ-
ления 3 можно получить, приравняв дискриминант уравнения (4.57)
нулю. Тогда
1Лшисс» ^^СО5<Рд.н X
X I 2 |т2 (1 |- т2) (2 т2) f 1максФ + А] Рi£*Ad2/(DiHsH) 4- djj .
(4.58)
Окончательный выбор значения Самаке* = const определяется ус-
ловием (4.58) совместно с (4.19).
Если 1ЛмаКС* > 1, to АД переводится к управлению с неизменным
напряжением при частоте Получить аналитическое выражение
для вычисления Аи. весьма сложно. Поэтому частота Аи* определяется
графически как абсцисса точки пересечения зависимостей U\* (/ь)
для вариантов управления I и 3 или 2 и 3.
При управлении электродвигателем по максимуму КПД т]д или
максимуму коэффициента мощности cos <рд из уравнений дх[я/д{^ = О
и д (cos q>j)/dfs* — 0 можно получить уравнения зависимости fs, (А.),
обеспечивающие экстремальные значения функций т)д (А,) и cos <рд(А<)
электродвигателя. Однако это приводит к громоздким математическим
расчетам. Рассмотрим более простой способ.
Эквивалентные сопротивления АД, входящие в выражение для
КПД (4.48) и коэффициента мощности (4.33), являются функциями
А* и fs.t а также функциями коэффициента Dlt зависящего, в свою
очередь, от А»- Следовательно, если производные т]д и <рд по£\ прирав-
нять к нулю и далее из полученных уравнений найти зависимости
Hi (АД то последние будут соответствовать экстремальным значениям
КПД и коэффициента мощности. Тогда параметр абсолютного сколь-
жения из (4.29)
h. (/,.) = d2/VDi(A.)-(l +Tj« . (4.59)
131
Зависимость £), (ft.) определяется следующим образом. Для управ-
ления электродвигателем по максимуму КПД из (4.48) получаем
d^IdD, = — (1/г,) ад.’-'г;\DeHD„Di) + D„1 — tiJJuJD] —
— D„ + a, + a.Di„/D1), (4.60)
ГДе d4= -A‘ + ^a
tp, - I) n-(/>,- 1>Р,Д., Db=rr+
+ (1 + 2т£) |(£>, - 1)/(ОхО7)|£ fl ; Dv = DMDiD7yt D, = d, b
DB = D,/(2D1()-DB; DB = d2ffs„
Приравняв правую часть выражения (4.60) к нулю,
получим после преобразований трансцендентное урав-
нение
z
J
Рис. 4.2. Схема
алгоритма рас-
чета характерис-
тик АД при
управлении по
максимуму КПД
или коэффици-
ента МОЩНОСТИ
где
У1 — Уг = 0.
(4.61)
{/, = оЛ+ О„];
j/j — asDitJDi -|- De (flj -Ь
Аналогично, для варианта управления электродви-
гателем по максимуму коэффициента мощности из (4.33)
d (cos уд) = _ 1 4-2та Dx —1
0Pf й DtD,
| (4.62)
1(D,1) = 0
—
DfD3
Учитывая, что согласно (4.29) Dt> 1, получим
трансцендентное уравнение 1 — (Ох— l)DxDe = 0> ко-
торое приводится к виду (4.61). Тогда
Уу-D^, (4.63)
Нетрудно показать, что коэффициенты Dlt DA—DB,
а также функции ул и у2 определяются лишь двумя
переменными — частотой ft. и параметром абсолютного
скольжения ft.. Следовательно, решение трансцендент-
ного уравнения (4.61) дает однозначные зависимости
ft* (Л*), а максимальные значения КПД и коэффициен-
та мощности АД достигаются для каждой конкретной
частоты ft. регулированием напряжения (ft* по (4.54)
в соответствии с изменением ft. и Р1Д..
Уравнение (4.61) решают методом последователь-
ного приближения. Варьируя величину Dt начиная
с некоторого минимального значении D|Min„ несколько
превышающего (1 + t2)s, находят такое ее значение
при различных частотах ft., при котором yt — у2 с за-
данной точностью £, зависищей от выбранного шага
А£)х изменения Dt. Определив таким образом зависи-
мость Dt (ft.)» а по (4.59) - ft. (ft.), рассчитывают ста-
тические характеристики остальных параметров АД.
132
Решение (4.61) и последующие расчеты целесообразно проводить
с помощью ЭВМ. Схема алгоритма представлена на рис. 4.2. Ниже при-
ведена расшифровка ее символов, каждый из которых обозначен
цифрой:
1 — пуск;
2 — ввод исходных данных, в том числе массива Q [/] для 0. I..т}:
ввод /1 = 0;
3 —вводО1ыия, ADj, £ Df: = D1M1I„;
4 — /: «/+ 1;
5 — вычисление по (4.62) или (4.63);
6 —£/i/£/2> 1 + &
7 — Dt : = Dt — ADf;
8 —1—&
9 — Cj : = D, + AD^
10 — вычисление /s„ по (4.59), по (4.54), по (4.32), cos ц>л по (4.63),
Од, по (4.36), /И* по (4.39), К по (4.40), чд по (4.48);
11 — вывод на печать;
12 — / < tn'
13 — останов.
Для управления АД по максимуму КПД силового электрооборудо-
вания СТПЭ (варианту 6) т]9 — т]э.мвкс, как и для вариантов 4 и 5, ана-
литическое выражение зависимости /s, (Дф) иайти крайне затрудни-
Таблица 4.1
Номер ва- риан- та Вариант управленья Интервал частот Зависимости изменения напряженья и параметра абсолютного скольже- ния
1 Фд# — const / 1ммн« /1 * f 1В* Ц. = *£/, <Л.> м. ®д.): ^s* = ^амакс’
2 ФЛ. = ГК • СП.СЛ., Ц =Фи2(/1.. fst. fs» = Va2 (Л*» Фд»’ Р1д»У
3 1/,, — const 1СЛ«^/|макс* 1 Я1 s!
4 Чд ~ Чдлшкс hu* ^/|* ^Лмакс* ^1*“₽1д*)5
Г> C0SVfl-CO5(pnM hl/» )1макс«
6 ^3 hu» /1. / 1млкс* Ц» ~ф£/6^1»’ ^S*’ |д*)«' /з* - VsC Cl*)-
133
тельно. Задача определения оптимальных значений решается на ЭВМ
методом перебора. В качестве примера в § 5.6 рассмотрен расчет ха-
рактеристик АД при управлении по варианту 6 применительно к
СТПЭ, содержащей синхронный генератор, преобразователи частоты,
имеющие явно выраженное звено постоянного тока и состоящие из не-
управляемых выпрямителем и автономных инверторов напряжения, и
тяговые АД.
В табл. 4.1 систематизированы рассмотренные варианты управле-
ния тяговыми АД. Зависимости изменения напряжения и параметра
абсолютного скольжения приводятся в общем виде.
§ 4.4. Рациональное регулирование
тяговых асинхронных
электродвигателей
Для обоснования рационального регулирования проведем сравни-
тельную оценку предельных характеристик АД для вариантов управ-
ления 1—6.
Соотношения между внутренними параметрами тяговых АД с раз-
личными номинальными значениями напряжения и мощности изменя-
ются в весьма узких пределах. В связи с этим статические характе-
ристики (зависимости Д., Ц*. Фд., /i., М*. 1, г]д, cos <рд от А») боль-
шинства электродвигателей, рассчитанные по приведенным формулам,
имеют универсальный характер. На рис. 4.3, а—э представлены эти
характеристики тягового АД типа ДК-720 для вариантов управле-
ния 1—6.
Данные электродвигателя: Рдн = 40,5 кВт; €/1к = 200 В; /1н =86 A; /jH =
= 50 Гц; /1макс =200 Гц; пд„ = 1470 об/мин; пдмакс == 5880 об/мин; sH =
= 0,0212; Л4н = 260Н-м; р = 2; mj=3; чД|) = 0,89; cos <рдн = 0,88; Хн =»
= 2,79; г, = 0,096 Ом; °*052 Ом; *1 = *2 " С-2 Ом’ хо = 5»7 Ом; °1 =“
= 0,455; аг = 0,185; а3 = 0,220; с4 — 0,140; ЛРД н = 4900 Вт. Значение макси-
мального напряжения АД принимается 171максв = 1,15, что при /1макс, == 4 обеспе-
чивает значение Яд= 1,25. Для пускового режима выбирается Амане* ~ А5.
Оценим варианты управления с позиций основных требований к
СТПЭ.
Отметим, что необходимость поддержания Р\^ = const в интерва-
ле частот требует регулирования параметра абсо-
лютного скольжения по сложным зависимостям, за исключением ва-
рианта 2 (рис. 4.3, а).
Условию минимизации размеров и массы силового электрообору-
дования наилучшим образом удовлетворяет вариант 3, при котором
напряжение ГАмакс. и расчетная мощность ЭУ и ПЧ имеют наименьшее
значение (рис. 4.3, б). Варианты управления 4—6 хуже, так как на-
пряжение £/1Макс«> требуемое для реализации заданной максимальной
частоты Дмакс*» на 30—40 % выше. Поэтому использование оптималь-
ного закона частотного управления (вариант 2) ограничено из-за чрез-
мерных значений напряжения при Анакс* > 2.
134
<?) ж;
Рис. 4.3. Характеристики электродвигателя ДК-720:
a-fs, (/к); б-»-®д. (/1.); г-Л.(/1.);
б—М, е — К ж — т1д(/1.): ’ — cos <рд (fltJ
Важный показатель для тяговых АД — степень использования ак-
тивной стали н меди обмоток. Из анализа кривых (рис. 4.3, в) следует,
что регулирование по варианту 5 обусловливает сравнительно низкое
использование стали, ибо магнитный поток в большей части частотного
диапазона значительно меньше, чем при других вариантах. Основным
же недостатком варианта 5, препятствующим его применению в СТПЭ,
является существенное сужение диапазона рабочих частот, в котором
возможна длительная работа АД с током (1,6 <С Л. 4,0,
рис. 4.3, г).
Все рассматриваемые варианты управления позволяют реализо-
вать соответствующий участок заданной характеристики ЛД (/]♦),
приведеииой на рис. 4.3, д. Однако зависимости X (/1Ф), отражающие
механическую устойчивость АД, резко отличаются. Наименьший за-
пас устойчивости имеет место, если регулировать по варианту 5
(рис.4.3, е).
При сравнительной оценке вариантов частотного управления од-
ним из наиболее важных критериев являются энергетические показа-
тели. В интервале частот, соответствующем длительному режиму ра-
боты АД, значения КПД для всех вариантов, кроме 5, практически сов-
падают (рис. 4.3, ж). Существенное различие наблюдается в характере
изменения коэффициента мощности (рис. 4.3, з), но его значения ос-
таются в допустимых пределах.
Эта краткая опенка еще раз подтверждает положение о нерацио-
нальности использования какого-либо одного варианта управления,
даже если он дает возможность получения экстремальных значений
искомого параметра на рабочем участке тяговой характеристики. Та-
ким образом, регулирование тяговых АД рационально:
при сочетании вариантов 1 и 3: в интервале ЛМИ1и — fw» поддержи-
вается постоянным магнитный поток электродвигателя (вариант 1) и
далее до /iwaKC- — напряжение (вариант 3);
при сочетании вариантов 1 и 6: в интервале /ьшн* — /щ* применяют
вариант 1 и далее до Дмакс*_ вариант 6(/1Т], — частота, соответствую-
щая выходу АД на управление по t]s.MaKC, которую определяют как точ-
ку пересечения кривой / или ее продолжение с кривой 6 (рис. 4.3, б).
Каждое из сочетаний имеет как преимущества, так и недостатки.
Например, первое обусловливает меиьшую расчетную мощность сило-
вого электрооборудования, а его реализация обеспечивается сравни-
тельно простой системой автоматического регулирования. Второе со-
четание обеспечивает более высокие значения КПД t]s и cos <рд в ин-
тервале Д. > Поэтому выбор нужного сочетания уточняется в
процессе проектирования конкретного СТПЭ.
В заключение отметим, что расчет характеристик АД выполнен
в предположении синусоидальности напряжения t/j., которое, как
указано ранее, может содержать и высшие и субгармонические со-
ставляющие. Однако пренебрежение гармоническими составляющими
можно допустить, когда проводится качественный анализ и сравни-
тельная оценка характеристик электродвигателей при различных ва-
риантах частотного управления.
136
§ 4.5. Расчет частичных
характеристик
Возможны три основных способа взаимосвязанного регулирования параметров
Л*' А* 11 ^1» в зависимости от того, на какой из них воздействует начальный (от
водителя электромобиля) сигнал управления:
I) на параметр который меняется, например, в функции сигнала управле-
ния (непосредственное регулирование частоты Д.). Напряжение Ц. регулируется
в соответствии с принятым сочетанием вариантов управления. Параметр абсолют-
ного скольжения fst меняется естественным образом в зависимости от нагрузки;
2) на параметр fs,, когда частота формируется, например, как сумма измерен-
ной частоты вращения Ц = f/fa, где f = ptiyfifi, и заданного параметра (регу-
лирование при непосредственном воздействии на параметр /s,). а напряжение
17[, меняется согласно принятым вариантам управления;
3) на параметр когда частота регулируется, например, в функции откло-
нения мощности от заданного значения, а пара-
метр f s, меняется естественным образом с нагруз-
кой, или когда /,. = (/,.) + /, (рогули-
рован ие при непосредственном воздействии
па параметр <71е).
Как показано ниже, первый способ не обес-
печивает получение характеристик постоянства
полной и частичных мощностей, что требуется в
СТПЭ с теплоэлектрическими преобразователя-
ми, и применим для электромобилей с электро-
химическими ЭУ или при наличии электрома-
шнкного генератора, если необходимо поддержи-
вать постоянную скорость движения электромо-
биля. Второй способ регулирования частоты
обеспечивает возможность формирования ха-
рактеристик Р1д, — const лишь в ограниченном
шггервале частот, соответствующем варианту
управления 2, в то время как при третьем спосо-
бе эти характеристики имеют место во всем рабо-
чем диапазоне изменения частоты
Рассмотрим, каким образом при сочетании
вариантов управления 1—3 следует регулиро-
вать магнитный поток и напряжение для под-
держания Pj = const на частичных характе-
ристиках. Подобные характеристики тяговых АД
в двигательном режиме, как и характеристики
ДПТ, должны реализовывать частичные тяговые
хи р актер нети ки электромобиля.
Если частота /,» регулируется в функции
отклонения мощности от заданного значения, то
киждой частичной характеристике должны соот-
№*1с1Вовать свои значения Фд, < I в интервале
ч,к">' < /1. < /ш. " <
*' ™ частотах^. > /117.
При формировании зависимостей Р|ДФ (/[ф)=
const целесообразно поставить дополнитель-
ное требование — получение для каждого за-
дан.чемого уровня мощности Р|Дф < 1 наиболь-
ших значений cosipfl (fl9) и X(/u).
тик электродвигателя ДК-720:
в —ЛЬ 1/1.1
137
Анализ формул (4.49), (4.53) и (4.57) показывает, что данное условие мож-
но осуществить, если в интервалах частот f)B. — v fm* — ^ЫВкс» Регули-
ровать соответственно поток и напряжение согласно выражениям
®д. = "1. = <4М>
а в режиме пуска (/1кш„ «
®д. = УУд. ' Л* ~ Лвпред. У ^1д* • (4.65)
При этом во всем частотном диапазоне fs* = /4пред. (/]») и не зависит от мощ-
ности, a cos ч>д = cos Ч’д.пред (/|.). = ^-пред (ЛЛ* "Таким образом, если параметр
абсолютного скольжения имеет для каждой частоты предельное значение /5пред. X
X (fi,), тяговые АД в интервале /|мии,— flt/# потребляют мощность, пропорцио-
нальную квадрату магнитного потока, а на частотах fIw > — квадрату отно-
шения П[,/1/1макс пред,-
В качестве примера на рис. 4.4, а—в приведены характеристики электродвига-
теля ДК-720 для значений мощности Р|д< — 0,5; 0,825 и 1.0 при сочетании вариан-
тов управления 1—3
Если частота скольжения электродвигателя задается параметрически и остается
неизменной для любого значения мощности, т. е. ~ /впред* (А*)» а частота
11. = /«пред. 0,.) + /.. то зависимости соафдУ,.) = со5фдп[>ад (/,.) и Х([1Ф) =
= 1пред (/,.) обеспечиваются автоматически, а каждой частичной характеристике
Р[д, = const должны соответствовать свои значения Фд, <1 и Ц,< (/1пред>,
регулируемые по (4.64) с помощью САР.
Условие (4.64) можно распространить на первый способ управления частотой
/|# (непосредственное регулирование fj9 по сигналу водителя электромобиля) с
целью получения максимальных значений коэффициента мощности и перегрузочной
способности АД для частичных мощностей. Другим возможным вариантом при дан-
ном способе частотного управления, где ие формируются характеристики Р1ДШ =
— const, является регулирование только напряжения. Тогда каждому значению
частичной мощности соответствует Фдш == 1 и < ^Апред»’ т- е' Режим пУс*а
осуществляется с полным потоком; частота flt/, обусловливается напряжением
§ 4.6. Влияние гармонических
составляющих питающего напряжения
иа характеристики
электродвигателей
Приведенные в § 4.4 статические характеристики рассчитаны при питании
тяговых АД от источника с синусоидальной формой кривой напряжения. В действи-
тельности АД в СТПЭ получают питание от вентильных преобразователей частоты,
форма выходного напряжения которых отличается, как правило, от синусоидальной.
Рассмотрим влияние несинусоидальных напряжения питания на формирование
тяговых характеристик АД, определяемых средними значениями момента, и измене-
ние КПД электродвигателей, который вависит главным образом от действующих
значений токов.
При анализе используем метод «гармонических двигателей», основанный на
разложении кривой питающего напряжения в ряд Фурье с последующим расчетом
влияния каждой составляющей на гармонический двигатель, имеющий схему заме-
щения, соответствующую номеру гармоники. Характеристики АД можно определить
как сумму характеристик всех гармонических двигателей при тех же допущениях,
что и в § 4.3. Метод гармонических двигателей предполагает, что каждая гармониче-
ская составляющая напряжения создает в воздушном зазоре АД круговое магнитное
поле, направление и частота вращения которого определяются номером гармоники.
138
Выходное напряжение преобразователей частоты является периодической функ-
цией, симметричной относительно временной оси. Поэтому в обгцем случае напряже-
ние содержит только нечетные гармонические» а четные отсутствуют, например
в широко распространенных шестиплечных трехфазных инверторах.
В идеальных ПЧ с непосредственной связью также отсутствуют четные гармони-
ческие выходного напряжения Однако в реальном НПЧ дискретность частоты на-
пряжения на его выходе обусловливает различного рода несимметрию выходного
напряжения, например неравенство длительности полуперподов фазного напря-
жения; последнее вызывает наличие четных гармонических. Кроме того, если отноше-
ние частот входного и выходного напряжений преобразователя является дробной
величиной, то кривая выходного напряжения содержит субгармонические состав-
ляющие.
Основная (первая) и высшие гармонические выходного напряжения ПЧ опре-
деляют наличие первой и высших гармонических тока двигателя. Высшие гармоники
тока — временные гармонические. Они создают высшие пространственные гармони-
ческие магнитного поля, которые образуют либо вращающиеся, либо пульсирующие
роля. Рассмотрим только основные гармонические поля, созданные v-ми гармониче-
скими тока, т. е. гармонические поля с номером V, так как амплитуды гармонических
поля более высокого порядка, созданные той же v-й гармонической тока, пренебре-
жимо малы.
Относительная частота основной гармонической вращающегося магнитного
подя от v-й гармонической тока
flv. = Л-Л|., = vMl„ = (4.66)
Скольжение ротора в поле v-й гармонической
sv~fsvJf\w (4.67)
С другой стороны,
«V = (± nlv —Пд)/± nlv = [± vn2 — ni (I — s)]/± vnf = 1 T (1 — s)/v, (4.68)
где nlv — частота вращения v-й гармонической поля, созданного v-й гармонической
тока статора; — частота вращения ротора АД; «j — частота вращения первой
гармонической поля.
В выражении (4.68) знак •—» относится к полю прямого вращения, а «+» —
к полю обратного вращения.
Из (4.66) — (4.68) имеем
U = v/ь Т (I - s) = ft. (V Ф 1) ± (4.69)
С учетом (4.66), (4.67) и (4.69) формулы для расчета характеристик гармони-
ческих двигателей, полученные на основании их схем замещения, имеют следую-
1ЦИЙ пил: Dlv = «!,/)„.)“ + (1 + т,)’; ч (d,D,v + <«lv./f„.)/Dlv; =
- (1 + Ъ) (1 - 1/D1V); А,. = + 7ZSB.
В системе относительных единив
“ ulv>ulK- (4.70)
'1V. = 'Л = = Л. (Ц,./'Л.) (Z./^v.), (4.71)
где Ц-v Я liv — v-e гармонические составляющие напряжения и тока статора;
cos фд, = гт,\/ r%v + : (4.72)
м =_^L______________№+ад8 + (ч + ч£_____________.
т I™ ?„№+<У,^да)*+(г, + ч)*ф.
<ЛРМ.Л1 + = (Ц,./2„.Г (&₽„„„ + AP„.a2uD,„/D1v); (4.74)
139
Выражения для действующих значений фазного напряжения и тока электро-
двигателя в относительных единицах получим из (4 70) и (4.71):
Л. = )/ •
(47(5)
(4-77)
Среднее значение электромагнитного момента АД равно сумме моментов гармо-
нических двигателей» т. е.
(4.78)
При питании АД синусоидальным напряжением его коэффициент мощ-
ности
cos ч>д =
где Р1Д{1) — активная мощность, потребляемая АД и определяемая синусоидаль-
ными напряжением и током; /цц —синусоидальный ток.
Тогда в случае несинусоидального напряжения питания, действующее значе-
ние которого равно Ult коэффициент мощности электродвигателя
v v
~ У । = У fyn/WAA 005 =
1 I
V
= <4-79)
1
где Р1Д, 5Д — активная я полная мощности, потребляемые электродвигателем и
определяемые несинусоидальными напряжением и током с действующими значе-
ниями 1/ь Ii. kw и klv — коэффициенты, учитывающие содержание v-x гармони-
ческих в спектрах напряжения и тока статора АД:
= у lvf [/ s <4 =
(4.80)
(4.81)
В качестве примера рассмотрим влияние высших 'армонических питающего
напряжения на тяговые характеристики и энергетические показатели АД, работаю-
щего от автономного инвертора напряжения.
Напомним, что в спектре выходного напряжения инвертора четные гармониче-
ские отсутствуют. Для исключения влияния третьей и кратных ей гармонических
фазного напряжения электродвигатели включают по схеме «звезда». Таким образом,
надо учитывать гармонические начиная с пятой.
Для пятой и более высоких гармонических значением /s, в (4.69) можно пре-
небречь. Тогда абсолютное скольжение ротора в поле, образованном v-й гармониче-
ской тока,
fsv.^ A. <V=FI>- <4-82>
Анализируя (4.71), можно показать, что ток статора гармонического электро-
двигателя быстро убывает с возрастанием номера гармонической составляющей.
140
Моменты A4V,, создаваемые взаимодействием высших гармонических магнит-
ного поля и активного тока ротора, также малы. Это объясняется тем. что токи рото-
ра от высших гармонических поля невелики и носят в основном реактивный характер.
Расчеты показывают, что при v > 5 моменты ~ (0,02 ч- 0,05) Мо-
менты могут быть добавочными (так называемые паразитные асинхронные мо-
менты). возникающими при взаимодействии токов и магнитных потоков одной гар-
монической, и пульсирующими, возникающими при взаимодействии токов и потоков
различных гармонических (главным образом потоков первой с токами высших гар-
монических) В зависимости от направления вращения поля v-fi гармонической
добавочные моменты складываются с пли вычитаются; по этой причине их
суммарное воздействие на моменты, а значит, и ня гяговые характеристики АД
можно не учитывать.
Пульсирующие моменты проявляются в виде пульсаций угловой скорости ро-
тора в пределах одного оборота; пульсации ощутимы при низких частотах и не-
большом моменте инерции вращающихся масс. Однако для тяговых электродвига-
телей, имеющих на валу значительные приведенные моменты инерции движущихся
масс электромобиля, пульсации угловой скорости («шагание» электродвигателя)
в значительной степени сглаживаются. Среднее значение пульсирующего момента
равно нулю, и поэтому пульсирующие моменты не влияют па формирование 1яговой
характеристики.
Коэффициент мощности для каждой из высших гармонических составляющих
мал. Но они сами оказывают влияние па коэффициент мощности АД в соответствии
с (4.79). Для одинаковых чается и нагрузок коэффициент мощности электродвига-
теля Хд при его пи гании несипусопдальным напряжением в общем случае отличает-
ся от коэффициента мощности со-, <рд при синусоидальной форме кривой напряжения.
Когда действующие значения несинусоидального и синусоидального напряжений
равны, Хд может быть больше или меньше cosq>fl, что обусловлено гармоническим
составом напряжения Действительно, из (4.79)
v
1<п = *И11*«1)с“Ч’д11 + ^Mvccs»l[V (4-63)
Так как cos <рд > АМ)Д(1} со8фд(ц, го Хд соз<рд в зависимости от значения
второго слагаемого в правой части (4.83) Необходимость учета этой величины опре-
деляется в каждом конкретном случае.
Высшие гармонические тока увеличивают действующее значение тока статора
и ротора, вследствие чего создаются добавочные потери в стали (существенно мень-
шие, чем добавочные потери в меди). Добавочные потери в стали от вихревых токов
в первом приближении’пропорциональны квадрату действующего значения напря-
жения. а потери на гистерезис определяются максимальным значением индукции
и с повышением коэффициента ku уменьшаются
Добавочные потери в меди и стали от высших гармонических снижают КПД
электродвигателя на 1—5% (в некоторых случаях до 15 %) в зависимости от пара-
метров АД и значений коэффициентов ku и fy.
В качестве примера в табл. 4.2 приведены данные расчета предельных характе-
ристик /1в (/|„), Хд(/]Д и 1]д (/|Д тягового АД ДК-720 при его питании от ПЧПТ
(см. рис. 6.1), а гармонический состав его выходного напряжения рассмотрен в
S 6.4.
Для расчета параметров габл. 4.2 использованы значения коэффициентов
£wv(/i») при v = 1, 5, 7, 11, 13 и 17 (табл. 4.3). Коэффициенты получены с по-
мощью их зависимостей от со5фд(1] (см рис. 6-6) и характеристики cos <рд|| (/,j
для первой гармонической несинусоидального напряжения. Здесь принимается, что
характеристика cos (/1Ф) аналогична зависимости cos <рд (/],), рассчитанной
для сочетания вариантов управления /—3 и питания АД синусоидальным напря-
жением (см. рис. 4.3, з).
Для каждой высшей гармонической (v= 5, 7, 11, 13 и J7) согласно (4.80) на-
пряжение
= W7!* ~ (4.84)
где соответствует характеристике 1/ь (/ь) для вариантов 1—3 (см. рис. 4.3, б).
141
Таблица 4.2
Параметр h.
0,05 0.3 0,6 0,8 1.0 1.15 1.5 2.0 2.4 2.75 3,0 3.5 4.0
1,50 1,50 1,50 1,20 1,0 0,930 0,860 0,820 0,810 0,790 0.780 0,770 0,760
Л. 1.52 1,52 1,515 1,210 1,03 0,956 0,885 0,844 0,827 0.812 0,791 0.775 0,764
C°s <РД(1) 0,970 0,920 0.895 0,890 0,875 0,840 0,865 0,875 0,870 0.868 0.863 0,857 0.843
ХД(1> Хд 0.923 0.861 0,814 0,811 0.791 0.748 0,801 0.805 0,816 0,802 0,801 0,799 0,749
0,948 0,873 0,817 0.816 0.795 0.751 0,802 0,806 0,817 0,804 0,803 ода 0.752
— 0,815 0,875 0.893 0,90 0.905 0.911 0,910 0,908 0,907 0,905 0,895 0,887
Чд — 0,812 0.871 0,889 0,896 0,902 0,904 0504 0507 0,906 0,904 0,894 0,886
Таблица 4.3
Параметр
0.05 0,3 0.6 0.8 1.0 1.15 1.5 2.1’ 2.4 2,75 3,0 3,5 4,0
cos 4^(11 0.970 1.920 0,895 0,890 0,875 0,840 ода ода 0.870 ода 0,863 0.857 0,843
ь Ku(l} 0.953 0.943 0,944 0.945 0.946 0,953 0.948 0,946 0,947 0,948 0,949 0,949 0.952
b кщ51 0,0571 0,130 0,148 0,150 0,162 0.183 0,171 0,162 0,164 0,167 0,170 0,174 0,184
^C4(7) 0,1168 0,155 0,156 0,155 0.154 0,145 0,153 0,154 0.154 0,153 0,152 0,149 0,146
^«(11) 0,158 0.178 0,155 0.154 0,140 0.110 0.124 0,140 0,132 0,127 0,123 0,123 0,112
^«(13) 0,1358 0,045 0,025 0,024 0,018 0,040 0,0186 0,018 0,020 0.025 0,028 0,030 0.033
kullT> 0.0746 0,026 0.028 0,029 0,038 0,045 0,0434 0.038 0,040 0,041 0,042 0,043 0,044
Остальные параметры llv„ cosфд„, (ДР.Л1 тЛРМЛ2)„, ЛРС.Д„, /.д, 4JV
вычисляют соответственно по (4.71), (4.72), (4.74), (4.75), (4.77), (4.79), (4.81).
КПД электродвигателя, учитывающий потери от высших гармонических,
й^ех.а + Е «й₽м.Д1 + ЛР«.Д2>Т + Л₽е.«ь1
Чд—1-----------------!--—р-------------------------(4.85)
Чл
где Л₽мехд — механические потери [определяются по (4.47)j.
Для сравнения в табл. 4.2 введены значения параметров Чдцу cos<pfllI),
соответствующие предельным характеристикам электродвигателя ДК-720 при ва-
риантах управления 1—Ъ (см. рис. 4,3, а, ж, з).
Из табл. 4.2 следует, что во всем диапазоне регулирования частоты пара-
метры /), и Хд и Хд(1>, г]д и 11дц весьма мало отличаются по абсолютным
значениям, т. е. высшие гармонические составляющие напряжения, начиная с
пятой при питании электродвигателя от автономного инвертора, выполнен-
ного по схеме рис. 6.1 и имеющего рассмотренный гармонический состав выходного
напряжения, почти не влияки на энергетические показатели АД.
Значения момента и характеристика Aflw (/,.) также несущественно
отличаются от расчетной характеристики ЛД (/1е), что подтверждает выводы,
сделанные ранее об отсутствии заметного влияния высших гармонических на тя-
говые свойства АД. В противоположность этому субгармонические составляющие
питающего напряжения электродвигателей значительно влияют на тяговые харак-
теристики-
Субгармонические составляющие образуются при работе АД от преобразова-
телей частоты с непосредственной связью и обусловлены отклонениями теоретически
предсказываемой периодичности распределения полуволн входного напряжения
преобразователя по полупериодам выходного. Кроме того, как указано ранее, они
появляются в случае, когда отношение частот входного и выходного напряжения
НПЧ — дробная величина.
Частота субгармонических составляющих меньше частоты первой гармониче-
ской и варьируется от /[V, = 0 до = fu. Непосредственный учет их влияния
на механические характеристики электродвигателей осложняется тем, что субгар-
монические фазного напряжения в отличие от первой и высших гармонических обра-
зуют несимметричные трехфазные системы. Разложение несимметричной трехфаз-
ной системы напряжений каждой субгармонической на симметричные системы и
анализ суммарного влияния последних показывает, что наличие субгармонических
в кривой напряжения питания тягового АД приводит к некоторому снижению мак-
симального (критического) момента и соответствующему уменьшению перегрузоч-
ной способности. Так, при = 3,2 значение X падает приблизительно на 25 %
по сравнению со случаем питания электродвигателя синусоидальным напряжением.
Поэтому при формировании тяговых характеристик электродвигателей, работающих
от НПЧ, необходимо проверять запас статической устойчивости с учетом влияния
на механические характеристики субгармонических составляющих и принимать
меры для компенсации уменьшения максимального момента, особенно в верхней
части частотного диапазона.
§ 4.7. Тяговые асинхронные
электродвигатели
в режиме электрического
торможения электромобиля
Электрическое торможение электромобиля, СТПЭ которого содер-
жит тяговые частотно-регулируемые короткозамкнутые АД, осущест-
вляют за счет их перевода в режим с частотой вращения ротора Д,
большей и отрицательным параметром абсолютного скольжения,
143
= (4.86)
При этом асинхронная машина (AM) развивает тормозной момент
Л1Т в режимах противовключения и динамического торможения или
генераторном режиме. Последний характеризуется рассеиванием за-
пасенной в тяговых электродвигателях энергии в тормозных резисто-
рах (резисторное торможение) или рекуперацией ее в энергоустановку
электромобиля (рекуперативное торможение).
При наличии в силовой цепи СТПЭ преобразователя частоты со
звеном постоянного тока осуществить каждый из перечисленных спо-
собов электрического торможения, за исключением рекуперативного,
удается сравнительно просто. Действительно, торможение противо-
включением достигается бесконтактным реверсированием АД посред-
ством изменения порядка чередования следования фаз напряжения
за счет изменения порядка следования фаз управляющих импуль-
сов силовых вентилей автономного инвертора, формируемых систе-
мой управления ПЧПТ.
Режим динамического торможения обеспечивается подачей постоян-
ного тока в две (или три) фазы AM от выпрямителя ПЧПТ через два
(или три) постоянно включенных вентиля инвертора и одновременным
отключением управляющих импульсов со всех главных и вспомога-
тельных (коммутирующих) вентилей инвертора.
Резисторное торможение достигается подключением тормозных
резисторов к зажимам AM либо во входную или промежуточные цепи
ПЧ. Для рекуперативного торможения необходимо наличие управля-
емого выпрямителя или НПЧ в силовой цепи СТПЭ.
При осуществлении противовключения и динамического торможе-
ния кинетическая энергия движущихся масс электромобиля выделя-
ется в виде теплоты в AM. Это ограничивает длительность использо-
вания асинхронной машины в таких режимах. Кроме того, в широком
диапазоне частот тормозной момент, развиваемый AM в этих двух ре-
жимах, невелик даже при больших токовых перегрузках. Поэтому,
несмотря на то что указанные способы торможения не требуют уста-
новки дополнительных приемников энергии, их нельзя рассматривать
в качестве основных для электрического торможения электромобиля
с АД, ибо они не обеспечивают его необходимую интенсивность и дли-
тельность. Отсюда ясно, что наиболее эффективным для СТПЭ с асин-
хронными электродвигателями является резисторное торможение.
Независимо от точки подключения тормозных резисторов в сило-
вой цепи привода выделяемая в них мощность определяется уравне-
нием [131
Рц — PavR + Р ыл, (4.87)
где Рэул» Рам — активные мощности, поступающие в тормозные резис-
торы от энергоустановки и AM.
Тормозной момент обусловлен мощностью РАм и потерями мощ-
ности в AM. Мощность Рэуп не создает тормозного момента, но загру-
жает тормозные резисторы, что приводит к увеличению их установ-
ленной мощности н непроизводительному расходу энергии ЭУ. Поэтому
Рис. 4.5. Г-сбразная схема замещения для
одной фазы асинхронной машины:
— коэффициент
1 система автоматического регу-
, лирования СТПЭ с частотно-
управляемыми АД при резис-
торном торможении наряду с
основной функцией —форми-
рованием заданной тормозной
характеристики электромоби-
ля - должна обеспечивать ми-
нимальное потребление мощ-
ности от ЭУ.
В данном случае ЭУ явля-
ется главным образом источ
ником реактивной мощности,
создающей магнитный поток, обусловливающий намагничивающий ток
тормозящейся AM.
Указанное свойство САР можно характеризовать коэффициентом
[131
Кэу/? = Рэу1{!Рыл, (4.88)
представляющим собой относительное потребление активной мощнос-
ти от ЭУ при резисторном торможении. Из (4.87) и (4.88)
Р/? = (1 + Кэуя) Рам- (4.89)
Вводя коэффициент относительной загрузки тормозных резис-
торов
Кя = 1 + Аэуя (4.90)
н решая (4.89) и (4.90), получим
Рк = KrPam- (4.91)
Расчет статических характеристик AM в генераторном режиме про-
водим на основе Г-образной схемы замещения асинхронной машины.
При малом потреблении энергии от ЭУ в рассматриваемом режиме
не существует ограничения по мощности ЭУ. Кроме того, тормозной
режим электромобиля является эпизодическим. Поэтому если для тя-
гового режима параметры АД определяются по достаточно сложным
формулам, полученным с использованием Т-образной схемы замеще-
ния электродвигателя, то применение Г-образной схемы упрощает
расчетные формулы. Такая схема для одной фазы AM с тормозным ре-
зистором, включенным на зажимы фазной обмотки, показана на рис. 4.5.
При ее использовании примем те же допущения, что и для Т-об-
разной схемы.
После подстановки в уравнение мощностного баланса (4.91) пара-
метров схемы замещения, учитывая (4.24) и (4.25), а также положи-
тельные направления токов, получим [13]
I ' V ЛР И
145
где —отношение действующего значения основной гармонической
составляющей напряжения UWl к действующему значению напряжения
L\ с учетом всех гармонических, определяемое по (4.80); Y, ДРамт—
суммарные потери мощности AM от высших гармонических состав-
ляющих питающего напряжения. Как правило, этими потерями мож-
но пренебречь по сравнению с входной мощностью AM. Тогда» прини-
мая = 0, находим из (4.92) коэффициент относительной за-
5
грузки тормозных резисторов:
Kr = — [fe,;{I1/?T —!---------------------------^-J-Г' • (4.93)
[ °Л И, +<W,.//S.)S +(1, + оЛ)*£ J
а из (4.90) — относительное потребление активной мощности от ЭУ:
Кэу/?= 1- (4.94)
Оба коэффициента не зависят от напряжения AM и определяются
параметрами ее схемы замещения, сопротивлением RT, частотой Д,
и параметром абсолютного скольжения Д». Поэтому в случае резис-
торного торможения AM поддержание относительного потребления ак-
тивной мощности ЭУ на заданном уровне и, в частности, при Кэул = О
возможно только при регулировании в процессе торможения сопротив-
ления R4 тормозных резисторов или параметра Д. в функции Д.«
Зависимость /?т (К/?, Д-. Д.) получим из (4.93):
Если Кэу« = 0, Kr = I. то
RT = — [ftrfn—!----------------------------------------1 1 (496)
j (dI+o1de/u//s,)s + (b + ®i‘ts)2^i* J
На практике осуществление плавного регулирования сопротивле-
ния RT требует существенного усложнения схемы, например шунтиро-
вания тормозных резисторов тиристорными ключами. Предпоч-
тительнее способ торможения с автоматическим регулированием
параметра абсолютного скольжения при неизменном или дискретно
изменяемом значении /?, в соответствии с выражением, полученным
из (4.93):
fs. -------------------------т 1 ------- (4.97)
ОА + ±
Формула (4.97) дает два значения Д» в зависимости от знака перед
радикалом. Знак «-)-» обусловливает меньшее по модулю значение
скольжения, соответствующее рабочей точке в области статической
устойчивости естественной механической характеристики AM. При
знаке «—» скольжение имеет большее по модулю значение и рабочая
точка находится в неустойчивой («закритической») области. Первое
146
значение А* обеспечивает лучшие энергетические показатели, вслед-
ствие чего именно его и необходимо использовать гтрн резисторном
торможении.
Оно физически осуществимо при условии, если дискриминант в
(4.97) больше или равен нулю, откуда
ог (т, + игт2) А- (4.98)
Из (4.98) следует, что когда RT = const, = const (Кэул -
= const), торможение возможно лишь в интервале частот А*^ Апредт»,
где
Апгед т* = (Т] + Uj-r,)]. (4.99)
Повышение частоты подводимого к AM напряжения сверх Апреля*
вызывает увеличение относительного потребления мощности от ЭУ.
Предельная частота в режиме резисторного торможения при задан-
ном Кэуп обусловлена параметрами AM и сопротивлением RT, пра-
вильный выбор которого позволяет осуществить торможение во всем
диапазоне частот. Это значение R4 вычисляют из (4.99) заменой Апредт*
на Амакс-- Полученное сопротивление является минимально допусти-
мым Rт мин, которое обеспечивает торможение с Aj? ~ const во всем
частотном диапазоне, если параметр абсолютного скольжения регули-
руется согласно (4.97)'
^?т.мин “ 2О]Хд (Tj -f- OjT2) Амакс»/(А/?&41))- (4.100)
Для Аэуд = 0 (или Kr == 1), когда в тормозные резисторы актив-
ная мощность от ЭУ не поступает,
^т.ммн^ 2opCo(Ti П1Т2) f 1макс*/^«(1)-
Решение (4.97) н (4.100) дает более простую зависимость fs, (А*),
когда RT является минимально допустимым:
dl + (Т1 + °1г2) Амане* + V/1макс. “ /?• )
Если в (4.100) вместо Амане* подставлять текущее значение частоты
А. (А. < Амике), изменяющейся в процессе торможения, можно полу-
чить зависимость предельного значения RT (R4 ЯтПред), соответству-
ющего максимальной тормозной мощности при регулировании А*
согласно (4.97):
Ятлрел = (Т1 + Ott2) А./ООг^и),) (4.102)
или для Ки — 1
Кт.1фЫ= йс^ХрСс, +о1т2)Л./Й(1).
Подставив (4.102) в (4.97), получим зависимость А* (А*) для RT —
fs* = — Uidju/ldi J- (Tj + Uj-cJ A*l- (4.103)
Таким образом, при выборе минимально допустимого сопротивле-
ния тормозного резистора /?т.мнн по (4.100) и регулировании скольже-
ния согласно (4.101) резисторное торможение AM осуществимо во
всем частотном диапазоне.
147
' 2 3 f,„
ts#
P,/2
0,08
0,01/
0
Рис. 4.6- Характеристика
В качестве основного критерия при полу-
чении приведенных выше соотношений, в том
числе необходимой зависимости Д* (/]»), выбра-
но ограниченное потребление мощности тор-
мозными резисторами от ЭУ в режиме гене-
раторного торможения, когда рабочая точка
находится на устойчивой ветви естественной
механической характеристики AM. Иначе го-
воря, здесь принято во внимание только огра-
ничение по критическому моменту асинхрон-
ной машины. Однако тормозные характерис-
тики Мт, (fi*) следует рассчитывать также с
учетом ограничений по максимальным значе-
ниям магнитного потока = Фд.макс» и на-
пряжения U], = СЛыакс* (обычно задаваемым
двигательным режимом AM). Здесь Л4Т< ==
= /Ит/Мн, Мт — электромагнитный момент AM
в генераторном режиме.
Аналогично (4.37), выражение электромаг-
нитного момента получено на основании
Г-образной схемы замещения:
х fs. (d, + cmW,.#,.)* + (Т, 4 о,тг)2 '
(4.104)
Решая (4.95) н (4.104), получим
д] = рт^ ____________________________
т Wi + Mafb/M
(4.105)
Пренебрегая величиной dj по сравнению с
в знаменателе, преобразуем (4.105)
к виду
Рис. 4.7. Семейства харак- Л1т=к (UiJfi*)’,
термстик Л4ТФ (/1в) элект-
родвигателя ДК-720: (4.106)
ро7о -° ™- м„ = \ртД;„/(2л/, .М,Ля«Х(.>)] (Г?./Л.)_
ные характеристики
Предельную характеристику Л4тпред. (/ь) вычисляют по формуле
М,, пред» — [ОТпред./Д.]- (4.108)
Частичные характеристики Мт» (fi*), соответствующие частичным
тормозным характеристикам электромобиля В (и) первого вида
148
(см. рис. 3.29, а}, формируются за счет регу-
лирования напряжения (Д. при той же за-
висимости Д, (Д.) (рис. 4.6), описываемой
выражением (4.97), что н для /ИТ.(1]К>Д,: (АД
Частичные характеристики Л4Т. (А*) пер-
вого вида представляют собой лучи, вы-
ходящие из начала координат и опреде-
ляемые выражением
Мт, =(4.109)
где ftT — тангенс угла наклона характе-
ристики к оси абсцисс (рис. 4.7. а).
Формулу для расчета частичных ха-
рактеристик напряжения U\, (Д.) полу-
чим из (4.107) и (4.109):
Рис. 4.8. Семейство характерис-
тик (/1в) первого вида для
электродвигателя ДК-720 при
резисторном торможении:
характеристики
и,. ft.. (4.110)
Частичные характеристики (Ju (А*) при Кц = const и Rr = const,
как и характеристики /Ит. (А*) первого вида, представляют собой пря-
мые, выходящие из начала координат.
Таким образом, предельная зависимость Мглред. (А*) первого ви-
да реализуется поддержанием предельных значений напряжения
6^1прсд* (А») и регулированием параметра абсолютного скольжения
по (4.97). Частичные характеристики Мт, (А*) формируются измене-
нием t/|w (Лт, А.) по (4.110) и Д* (fi,) по (4.97).
Иногда для упрощения системы автоматического регулирования
СТПЭ напряжение U\, в функции ft, на частичных характеристиках в
режиме резисторного торможения AM регулируется так же, как и в
двигательном режиме (см. рис. 4.4, а). Тогда частичные характеристи-
ки /И„ (Ас) будут подобны предельной /ИтпреДв (А.) (рис. 4.7), что
обеспечивает механически устойчивые тормозные характеристики элек-
тромобиля только в ограниченном интервале его скоростей движения.
Тормозные характеристики (Д.) второго вида (рис. 4.7, б) мож-
но получить, задавая требуемое значение fn,= const и регулируя напря-
жение от минимума до предельного значения, соответствующего данной
частоте. Параметр абсолютного скольжения fs, устанавливается ес-
тественным образом в функции момента М?,.
Прн Rt = /?т.миь характеристики Л4те (Л.) и Ui* (А*) не зависят
от Rp (или Кэуц), так как произведение RrRt, входящее в (4.107),
(4.108) и (4.110), согласно (4.100) является постоянной величиной.
На рис. 4.6 приведена зависимость fs, (fi,), рассчитанная по (4.101)
для AM типа ДК-720, параметры которой указаны в § 4.4. Сопротив-
ление (Ом) тормозного резистора /?т.юш = 3,686/Кя с учетом того, что
для прямоугольно-ступенчатой формы выходного напряжения авто-
номного инвертора, рассмотренной в § 6.4, Л„(1, = 0,995. На рис. 4.7
представлены характеристики Мт, (А*) первого и второго вида, рас-
считанные при изменении напряжения 1АПред,(А*), соответствующем
сочетанию вариантов управления электродвигателем 1 н 3. На рнс. 4.8
показаны зависимости Йь (А*) первого вида.
149
Проанализируем свойства резисторного торможения в зоне малых
частот ft*. При одинаковой в двигательном и генераторном режимах
AM характеристике tftnp<«i.(ft*) зависимости ft. (ft.) в этих режимах
существенно различны. Действительно, если RT — const, то для ft,
Ли* в (4.97) KrR-AiA^c) сгг (тх+ и ft, снижается про-
порционально частоте ft.. В то же время для двигательного режима
в рассматриваемом интервале частот, как это следует из (4.23), пара-
метр абсолютного скольжения возрастает с уменьшением ft, (сравни
кривые на рис. 4.3, а и 4.6 в интервале Лв. ft. fiu»)-
Так как d/ft. т2, то из (4.50)
М,пред. = Фд.прсд.А. 1гЙ + (Т251Г)2|/(\<Й). (4.111)
Для варианта управления 1 Фд.пред* = 1, поэтому Л4т.пред, ft,.
Следовательно, тормозной момент в зоне ft. fty. уменьшается про-
порционально ft,; если же принять, что предельная тормозная мощ-
ность равна произведению Л4т.пРед*Л*, то она снижается пропорцио-
нально квадрату частоты ft,. Сказанное является доказательством ма-
лой эффективности резисторного торможения в зоне низких частот и
даже невозможности обеспечить в ряде случаев полную остановку
электромобиля.
Для увеличения эффективности резисторного торможения при ма-
лых скоростях движения электромобиля, если поддерживается неиз-
менным сопротивление R4, следует форсировать параметр абсолютно-
го скольжения до значения, соответствующего максимальному пуско-
вому току AM в двигательном режиме. Другим возможным вариантом,
способным осуществить полную остановку электромобиля, является
переход от резисторного к динамическому торможению.
Формулы данной главы получены с допущением о линейности кри-
вой намагничивания электродвигателей. В то же время работа тягового
АД характеризуется широким диапазоном изменения частоты и на-
грузки, вследствие чего состояние его магнитной системы изменяется
от глубокого насыщения, соответствующего режиму пуска, до ненасы-
щенного при максимальной частоте. В ряде работ указывается на не-
обходимость учета насыщения частотно-регулируемых АД и предла-
гаются для этого различные способы, хотя при этом не приводится
качественное или количественное исследование влияния насыщения
АД на его параметры (ток, момент, перегрузочную способность, КПД,
коэффициент мощности). Однако расчет характеристик тяговых АД
в двигательном режиме, особенно если его выполняют для сравнительно-
го анализа и выбора рациональных вариантов частотного управления, с
достаточной точностью можно проводить без учета насыщения магнит-
ной системы электродвигателей, существенно упростив этот расчет.
В (131 отмечается, что для ненасыщенной AM относительное пот-
ребление активной мощности от ЭУ при резисторном торможении не
зависит от напряжения Фактически же при использовании реаль-
ной машины такая зависимость существует: с возрастанием напряже-
ния 1ft увеличивается Kqvr- Поэтому приточных расчетах тормозных
характеристик AM целесообразно учитывать насыщение ее магнитной
системы. Для оценочных расчетов ее можно не учитывать.
150
§ 4.8. Внутренние параметры тяговых
асинхронных электродвигателей
Для реализации требуемых тяговых свойств электромобиля долж-
на быть сформирована механическая характеристика АД (см. рис. 1.23
и 4.7) Помимо пуска и номинального режима важным является режим
работы электродвигателя в точке D, соответствующий максимальным
значениями частоты f|MaKc. и напряжения П]Макс*. Значение UiwaKC. за-
висит от выбранного закона его регулирования и определяется глав-
ным образом двумя факторами: необходимостью обеспечения устойчи-
вой работы АД при максимальной частоте, т. е, выполнения условия
1. и поддержания достаточно высокого коэффициента модности
во всем рабочем диапазоне частот отДн до Дмакс-
Согласно (4.19), квадрат напряжения 14макс* пропорционален
Лмакс* н и обратно пропорционален В свою очередь, на основании
(4.60) является функцией активных и индуктивных сопротивлений
и номинального скольжения. Параметр cos <Рдд также зависит от этих
параметров. Таким образом, значения t/1MaKc-» ^d и cos <рдо, характе-
ризующие работу тягового АД на максимальной частоте, могут яв-
ляться критериями при выборе активных и индуктивных сопротивле-
ний электродвигателя, его номинальных скольжения и перегрузочной
способности Кроме того, 6'1Макс*. и cos фдо определяют технико-
экономические показатели СТПЭ, так как ими обусловлены расчет-
ная мощность, размеры и стоимость электрических машин в ПЧ
(см. гл. 7), поэтому вопросы выбора внутренних параметров представ-
ляют интерес с позиций не только обеспечения работоспособности
АД во всем частотном диапазоне, ио и оптимизации тягового электро-
оборудования СТПЭ в целом.
Представим выражения, по которым вычисляются и cos
в удобном для последующих операций виде. Принимая тх= т2,
(тдЧ т4)Лмакс* и вводя обозначения tt= 2xz/d2, d3 = djd2t из (4.40)
получим
1 (Лмакс* + ddspj* -h (^ЛмакоАо*)2 .
2f I макс* Ao*
(4.112)
После преобразований из (4.29) — (4.31) и (4.33) получим
Решая (4.112) и (4.113) относительно параметра абсолютного сколь-
жения Ал*, соответственно находим:
fsD* = /1макс* X
х ^р(Р1м.кс. +d3)-d3l± r^D(<,/i„mc.+d3)-dJ-[(>if,MaKe.)i! + 41
lAf imbxv •)’ + 4s (4.114)
___________________Ao* — ________________________
< Лмакс* (f 1макс*1£ ^Гдо)2 ^^2 (Амане* Фдс) (ААмакс* фдо)’
2 (ААмакс. - tg <₽до;
(4.115)
L5J
Значения /S£>., полученные по (4.114) и (4.115), следует брать со
знаком «—» перед радикалом, как обеспечивающие работу на устой-
чивой ветви естественных механических характеристик АД.
Численный анализ (4.114) и (4.115) для ряда асинхронных электро-
двигателей серии 4А и тяговых электродвигателей типов ДК-715А
и ДК-720 позволяет определять по упрощенным формулам:
А©* = с©/М (4-116)
fsD» ~ ^2Амакс*Аб Фд©» (4.117)
где О© = X© — |/ Хд —Т .
Соотношения между индуктивными сопротивления xlf xs и
в функции /1макс. получим из решения (4.116) и (4.117):
Tj = Tg = О.Бод tg фд£)//]макс*- (4.118)
В номинальном режиме
Tg = 0,5oHtg(pfl.K, (4.119)
где
Св = К — — 1 -
Значение перегрузочной способности Хн определим из (4.118) н
(4.119):
= 1/iMtKc. + (ECn)2l/(2/1„EKl.t:ac), (4.120)
где e = tg<p,lD/tg<pfi.„.
Один из путей снижения размеров и массы проектируемого электро-
двигателя — обеспечение перегрузочной способности Хд, минимально
допустимой по условиям статической устойчивости. Если искажения
формы кривой питающего напряжения АД несущественны, например
при работе с некоторыми классами АИН (см. § 4.6), достаточно при-
нять Ко — 1,15 4- 1,35. В приводах с НПЧ имеют место субгармони-
ческие составляющие (см. § 4.6), значительно ухудшающие механиче-
скую характеристику АД с возрастанием Д*. Так как обычно тяговые
АД проектируют в предположении синусоидальности питающего на-
пряжения, то следует выбирать Ко = 1,5.
Параметр tg входящий в (4.118) — (4.120), определяется ко-
эффициентом мощности cos фдо, который, в свою очередь, зависит от
6/|макс* и Амане*• Для /1макс. = 3 4- 6 обеспечиваются приемлемые
технико-экономические показатели СТПЭ, если коэффициент мощ-
ности cos фдо = 0,85 4- 0,65; для снижения расчетной мощности тя-
гового электрооборудования целесообразно выбирать повышенные
значения cos Напомним, что cos фя.н = 0,88 4- 0.92. т е. варьи-
руется в весьма узких пределах.
Принимая усредненные значения Хо — 1,25 (или 1,5) и cos <рДЛ =
= 0,9, запишем применительно к электродвигателям, работающим от
АИН и НПЧ:
Хн ДИН ~ (Амане* Н-1g2 фд©)/(2/1макг- 1g фд©); (4.121)
X, нпч — (fiмакс* 4-0,576 tg2 фдр)/(1,52/]Макс» 1£фд©). (4.122)
152
Расчет Z„ электродвигателя, предназначенного для СТПЭ с АПН и
НПЧ, предпочтительнее проводить по (4.122): применение АД с таким
значением Хн удовлетворяет условиям его работы от НПЧ, а в приво-
дах с АЙН позволяет перейти к меньшему значению С6мак«- Если же
при данном габарите размещение электродвигателя в ПВК затруд-
нительно, го следует использовать формулу (4.121). Последнее требует
в приводах с НПЧ увеличения максимального напряжения; это ведет
к возрастанию размеров и массы агрегатов силовой цепи СТПЭ.
Номинальное скольжение электродвигателя = fSJi, получим из
(4.114), заменив Лд значением а Амакс*— соответственно Л. = 1:
--------------------------- 1^« (А Т — ^а! V Р-н (А + — (*?"+
s“___________________________________________ 11
Аналогичные подстановки в (4.117) позволяют найти параметр
^2 = ».,1ё<Рд.-- (4.124)
Коэффициент d3 можно вычислить нз соотношения потерь в меди
обмоток статора АРМД) я ротора АРм.д2 в номинальном режиме.
Так как ДРм.д111/ДРм.д2н = /n1r1/|1(/lm1r2(Zi)®l»da/cosB<j)fl.Hf то
= COS2 ^рд.цА/5мл1н/А/)и.д2н e COS2 (4.125)
153
Отношение потерь зависит от схемы вентиляции тяговых АД. Наи-
более часто применяют последовательную вентиляцию, что опреде-
ляется условиями размещения электродвигателя в ПВК электромо-
биля При подобной схеме atloz= 2 2,5 (81 и в предварительных
расчетах можно принять da = 2. Для параллельной схемы вентиляции
С(/й2— 1,2 4- 1,6 и, следовательно, cL,» 1.
Параметр 4, входящий в (4.123), варьируется в пределах 7—10 (у
АД общепромышленных приводов — 5 4- 15).
На рис. 4.9—4.10 приведены номограммы, рассчитанные по (4.118),
(4.121) — (4.124). На этапе проектирования СТПЭ они позволяют
весьма просто и с достаточной точностью определить основные соот-
ношения между активными и индуктивными сопротивлениями тяго-
вого АД, а также параметры и 5Н, обеспечивающие устойчивую
работу электродвигателя с высокими энергетическими показателями
в диапазоне частот от номинальной до максимальной.
Найденное из номограмм (рис. 4.9, а, 6} значение при необходи-
мости уточняют на соответствие напряжению Сг1ыикс., наиболее полно
отвечающему требованиям, предъявляемым к технико-экономическим
показателям СТПЭ конкретного типа электромобиля:
= К (4.126)
где (Амане* — напряжение, вычисленное по (4.19) с учетом Амане*»
и Исходя из значения X, по номограммам выбираются пара-
метры тягового АД: т1э тв, dx, d2 и sH.
expert22 для http://rutracker.org
ТЯГОВЫЕ СИНХРОННЫЕ
ГЕНЕРАТОРЫ
§ 5.1. Особенности расчета парамет-
ров и характеристик синхронных
генераторов в системах тягового
привода электромобилей
Рассмотренные ранее особенности работы СГ в СТПЭ определяют
специфический подход к выбору их номинальных данных и внутрен-
них параметров, а также к расчету статических характеристик. Сне
цнфичность решения этих вопросов связана главным образом с элек-
тромагнитными процессами, периодически возникающими в СГ из-за
коммутации вентилей преобразователей напряжения (или частоты),
включенных в силовой цепи СТПЭ между СГ и ТЭД
Как и в СТПЭ постоянного тока, в системах привода переменного
и переменно-постоянного тока для получения высоких технико-экоио-
мических показателей требуется согласование внутренних параметров
и номинальных значений токов н напряжений СГ и ТЭД. Напря-
жения и токи генератора и электродвигателей связаны между собой
передаточными коэффициентами вентильного преобразователя ku и fa,
являющимися функциями углов включения а и коммутации у, харак-
теризующих переходные процессы в преобразователях (см. гл. 1).
Последние, в свою очередь, зависят от внутренних параметров генера-
тора и электродвигателя.
Основываясь на материалах, посвященных анализу электромагнит-
ных процессов в системах, содержащих ВП, например (3J, можно рас-
считывать параметры и характеристики ТЭМ, в частности тяговых СГ.
В теории синхронных машин известен ряд диаграмм ЭДС и МДС,
применяемых для расчета тока возбуждения и отражающих работу
СГ на симметричную нагрузку с синусоидальным напряжением и то-
ком. Диаграммы СГ, работающего на ВП, значительно отличаются от
указанных. Действительно, при питании преобразователей от сети
бесконечной мощности коммутационные процессы ВП практически не
влияют на амплитуду н форму кривой ЭДС сети. Если же ВП питает-
ся от автономного источника энергии, в частности от СГ соизмеримой
мощности, то внутренние падения напряжения, обусловленные гармо-
ническими составляющими МДС реакции статора и ротора, соизмери-
мые с ЭДС, заметно искажают форму ее кривой. Это явление приводит
к существенным погрешностям, если использовать традиционные
диаграммы ЭДС и МДС СГ, и затрудняет применеине в инженерных
155
расчетах характеристик системы СГ — ВП общей теории выпрямителей,
основанной на попущении синусоидальности ЭДС источника энергии-
При анализе коммутационных процессов вводят вместо ЭДС генера-
тора, действующей за индуктивным сопротивлением рассеяния, неко-
торую «неискаженную» ЭДС Ег, действующую за эквивалентным
индуктивным сопротивлением цепи коммутации лг, что позволяет ис-
пользовать формулы теории выпрямителей для расчета автономной си-
стемы СГ — ВП. Такой подход обеспечивает достаточную точность ре-
зультатов.
Сопротивление цепи коммутации СГ с успокоительной обмоткой и
без успокоительной обмотки соответственно
Хг, = (Xd + х2)/2; хг2 = (Xd + xz)/2,
где Xd — составляющая сверхпереходного индуктивного сопротивле-
ния по продольной оси; х2— индуктивное сопротивление обратной
последовательности (для СГ с успокоительной обмоткой х2 ~J/ xax'd,
без успокоительной обмотки ха= |/ хаХ^: хс — составляющая сверх-
переходного индуктивного сопротивления по поперечной оси; Хч —
составляющая переходного индуктивного сопротивления по продоль-
ной оси; х^ — составляющая синхронного индуктивного сопротивле-
ния по поперечной оси). Эти выражения справедливы для мосто-
вых ВП.
Для нулевых схем соответственно
хн = {хч 4- х2 *ог)/2; хГ2 = (ха + Х2 + Хо, )/2,
где хОг — индуктивное сопротивление нулевой последовательности.
В качестве номинальных фазных напряжения и тока СГ выбирают
их основные гармонические. При известных данных ТЭД параметры
£/Г(1)н и ^г(1)и рассчитывают с помощью передаточных коэффициентов
ВП &ин и kfK\ действующие значения напряжения и тока по всей кри-
вой с учетом высших гармонических — с помощью коэффициентов
/?«(!> и определяющих содержание основной гармонической в
кривых напряжения и тока. Величины ky, ki, кцц — функции
параметров цепи коммутации ВП. Нахождение этих параметров —
одна из главных задач исследования электромагнитных процессов в
электромашинно-вентильных системах Индуктивное сопротивление
нагрузки (или эквивалентное сопротивление ТЭД) практически не
влияет на коммутационные процессы ВП, воздействуя лишь на ампли-
туду пульсаций выпрямленного тока. Активное сопротивление фазы
СГ также не влияет на характер коммутационных процессов, если соот-
ношение между активным и индуктивным сопротивлениями меньше
0,1 (что обычно для тяговых СГ). Поэтому можно считать, что углы
а и -у, а следовательно, и kyHr kllit Аг(])н зависят от индуктивных
сопротивлений фазы СГ, определяющих сопротивление цепи комму-
тации хг, и активного сопротивления нагрузки (или эквивалентного
активного сопротивления электродвигателя) в номинальном режиме.
156
При известном сопротивлении нагрузки ВП сопротивление хг вы-
бирают в ходе проектирования СТПЭ Действительно, обусловливая
значения £7Г(1)И, /гщи и номинальный коэффициент мощности, сопро-
тивление х, тем самым влияет на расчетную мощность СГ и, следова-
тельно, на его массу, размеры и стоимость.
Представляет практический интерес выбор индуктивного сопротив-
ления взаимной индукции хв СГ (для явнополюсного генератора ин-
дуктивных сопротивлений взаимной индукции по продольной хва и
поперечной xOlJ осям), от которого непосредственно зависит перегру-
зочная способность машины. Индуктивное сопротивление хв для тя-
гового СГ нужно рассчитывать по условиям пускового режима ТЭД,
в котором ток СГ может оказаться равным или даже превышать ток
симметричного короткого замыкания при номинальном токе возбуж-
дения. Для обеспечения надежного пуска ТЭД на выводах СГ необ-
ходимо иметь напряжение большее, чем остаточная ЭДС генератора.
Такой режим работы СГ требует форсирования тока возбуждения ге-
нератора тем большего, чем больше значение хо.
Для проектирования тяговых генераторов и СТПЭ в целом сущест-
венным является расчет характеристик СГ — внешних, нагрузочных
и регулировочных, а также специфических •— зависимостей мощности,
напряжения и тока статора, тока возбуждения» коэффициента мощнос-
ти и КПД от частоты вращения (или частоты тока) ТЭД. Обычно при-
меняемые характеристики позволяют оценивать возможность исполь-
зования данного типа СГ в приводе того или иного электромобиля, в
то время как характеристики генератора в функции частоты вращения
ТЭД иллюстрируют энергетику СГ во всем диапазоне регулирования
электродвигателей и являются в ряде случаев основой для разработки
регулятора возбуждения тягового генератора.
В настоящее время существуют методы расчета характеристик сис-
темы СГ — ВП, позволяющие построить характеристики генератора,
выбранного по свободной мощности ДВС. Рассмотрим методы расчета
характеристик СГ при задании тяговой характеристики F {и) электро-
мобиля
Индуктивные сопротивления генератора и главным образом сопро-
тивление цепи коммутации хг обусловливают снижение выходного на-
пряжения ВП за счет коммутационных процессов и появление искаже-
ний в кривой этого напряжения. Кроме того, в системе СГ — НПЧ
имеет место неравномерность токовой загрузки фаз генератора. Поло-
жительные и отрицательные полуволны тока в каждой фазе генерато-
ра также могут быть неравными.
Сказанное предопределяет основное требование к тяговым СГ —
переходное и сверхпереходное индуктивные сопротивления, от кото-
рых зависит хг, должны быть существенно меньше, чем у генераторов
общепромышленного применения.
Другое важное требование — это необходимость обеспечения зна-
чительных токовых перегрузок в режиме пуска. Параметры генерато-
ра следует выбирать так, чтобы при перегрузке (режим, соответству-
ющий точке В внешней характеристики на рис. 2.1) на зажимах СГ
было напряжение £7Гмин, заданное рациональными вариантами
157
управления ТЭД. Очевидно, что перегрузочная способность тяго-
гых СГ по току должна быть существенно выше, чем у общепромыш-
ленных генераторов.
Проведем сравнительный анализ различных типов и конструктив-
ных исполнений СГ для определения возможности их применения в
качестве гиговых, учитывая как общие, так и специфические тре-
бования к тяговому силовому электрооборудованию СТПЭ.
§ 5.2. Выбор типа и конструктивного
исполнения тяговых синхронных
генераторов
Требование высокой эксплуатационной надежности, предъявляемое как к СТПЭ
в целом, так и к ее отдельным агрегатам, предопределяет выбор в качестве тяговых
генераторов бесконтактных электрических машин.
Синхронные генераторы, в том числе бесконтактные, можно классифицировать
по различным признакам: по направлению магнитного потока возбуждения — с
радиальным или радиально-аксиальным направлением потока; по конструкции
ротора — явнополюсные, неявнополюсные, с когтеобразными полюсами и индуктор-
ные; по пути замыкания магнитного потока — с внутризамкнутым или внешнезам-
кнутым потоком; по полярности потока — с переменным потоком в воздушном за-
зоре, с пульсирующим или постоянным потоком в зубцах ротора; по размещению
обмотки возбуждения — на роторе или на неподвижной части генератора.
К генераторам с радиальным направлением магнитного потока относятся явно-
полюсные и неявнополюсные СГ, а с радиально-аксиальным направлением потока —
генераторы с внешнезамкнутым и когтеобразные с внутризамкнутым потоками.
Машины с внутризамкнутым потоком не требую г проведения главного потока
через щиты, которые, так же как и корпус, могут быть выполнены из легкого немаг-
нитного сплава.
У явнополюсных и неявнополюсных генераторов обмотка возбуждения разме-
щается на роторе, у индукторных генераторов —- на неподвижной части машины,
у когтеобразных — либо на роторе, либо на неподвижной части. При наличии обмот-
ки возбуждения на роторе бесконтактные генераторы выполняют в одном корпусе
с возбудителем, представляющим собой СГ обращенного типа, обмотка возбуждения
которого размещена на неподвижной части основного генератора, а статорная
обмотка — на его валу. Напряжение возбудителя через вращающиеся вместе с
валом полупроводниковые диоды подается на обмотку возбуждения основного
генератора.
Индукторные генераторы могут выполняться как с внутризамкнутым, так и
с внешнезамкнутым магнитным потоком, а генераторы остальных исполнений —
только с внутризамкнутым потоком.
Явнополюсные и неявнополюсные генераторы работают с переменным магнит-
ным потоком в воздушном зазоре, индукторные генераторы — с пульсирующим
или постоянным потоком в зубцах ротора; когтеобразные генераторы могут иметь
как переменный, так и пульсирующий поток в зависимости от того, где размещена
обмотка возбуждения — на роторе или на неподвижной части.
Достоинства генераторов с обмоткой возбуждения на неподвижной части: про-
стота и надежность конструкции из-за отсутствия возбудителя на вращающейся части;
возможность увеличения линейной скорости ротора. Для индукторных генераторов,
например, допустимая линейная скорость ротора до 250 м/с, в то время как у явно-
полюсных генераторов она равна 130—160 м/с, у неявнополюсных — 180 м/с (14].
Вследствие большой допустимой линейной скорости ротора достигается значитель-
ное повышение частоты вращения индукторных генераторов и тем самым снижение
их размеров и массы.
Основные недостатки генераторов с обмоткой возбуждения на неподвижной
части машины следующие: амплитуда переменной составляющей магнитного потока,
определяющая напряжение генератора, не превышает 30—40 % потока возбужде-
ния, что приводит к худшему использованию активных материалов по сравнению
158
с генераторами, имеющими обмотку возбуждения на роторе. При одних и тех же
размерах активной части статора, равных электромагнитных нагрузках и одина-
ковых частотах вращения мощность генератора с обмоткой возбуждения на непо-
движной части ниже в два раза и более, чем у генераторов с обмоткой возбуждения на
роторе. В случае равенства мощностей генераторы первого исполнения имеют
существенно большие размеры и массу. Так как индуктивное сопротивление рассея-
ния статорной обмотки и сопротивление взаимоиндукции по продольной оси весь-
ма велики, то у этих генераторов наблюдается резко падающая внешняя характерис-
тика Конструктивные особенности магнитной системы генераторов данного испол-
нения не дают возможности получить достаточно малые значения переходного и
сверхпереходного индуктивных сопротивлений х‘й и x'j.
Кроме того, в индукторных генераторах имеется постоянная сосгавляющая
индукции в зазоре, которая не наводит ЭДС в обмотке статора. С увеличением тока
нагрузки растет поток продольной размагничивающей реакции якоря. Так как по
величине этот поток одного порядка с основной гармонической, то влияние реакции
якоря по продольной оси в индукторном генераторе на его внешнюю характеристи-
ку сказывается более резко, чем в генераторах с вращающимся электромагнитным
полем. Если форсирование тока возбуждения в СГ других типов позволяет компен-
сировать реакцию якоря без значительного роста основного магнитного потока
в режиме кратковременных токовых перегрузок, то в индукторных генераторах это
невозможно, ибо форсирование тока возбуждения одновременно с компенсацией
реакции якоря приводит к резкому увеличению постоянной составляющей индук-
ции в зазоре, насыщению зубцовой зоны и снижению напряжения генератора Ука-
занное объясняется тем, что поток через пазы ротора нарастает линейно при увели-
чении тока возбуждения, а поток через зубцы ротора зависит от размеров зубцов
и их насыщения Сравнительно узкий зубец статора быстро насыщается, переменная
составляющая потока в воздушном зазоре и ЭДС генератора уменьшаются.
У генераторов с когтеобразными полюсами поток полюсов независимо от разме-
щения обмотки возбуждения является лишь частью общего потока машины в отли-
чие от явнополюсного СГ, где каждая пара полюсов образует независимую элемен-
тарную машину со своей МДС. Магнитное поле генератора проходит в роторе более
длинный путь, вследствие чего увеличивается падение магнитного потенциала в маг-
нитопроводе. Расположение обмотки возбуждения в отдалении от активного слоя
машины и появление из-за этого значительных поверхностей, находящихся под
большой; разностью магнитных потенциалов, приводит к возрастанию потоков рас-
сеяния. Перечисленные недостатки ограничивают применение в СТПЭ индукторных
генераторов и в меньшей степени когтеобразных генераторов с обмоткой возбужде-
ния на неподвижной части.
Достоинства явнополюсных в неявнополюсных СГ — радиальная магнитная
система с кратчайшим путем замыкания магнитного потока, что обеспечивает меньшие
размеры магнитной системы по сравнению с машинами, имеющими радиально-акси-
альное направление потока. Однако наличие обмотки возбуждения на роторе не дает
возможности создать высокоскоростные явнополюсные и неявнополюсные генера-
торы.
Рассмотренные достоинства и недостатки различных типов и конструктивных
исполнений СГ показывают, что наиболее целесообразно применение в СТПЭ тяго-
вых генераторов с обмоткой возбуждения на роторе. В некоторых случаях, напри-
мер если не предъявляются жесткие требования к значению индуктивного сопро-
тивления цепи коммутации генератора, при сравнительно небольшой кратности
максимального тока может оказаться рациональным применение высокоскоростных
индукторных генераторов.
§ 5.3. Векторная диаграмма ЭДС и
МДС тяговых синхронных генераторов
Выбор параметров тягового СГ и расчет его характеристик прово
дятся с помощью векторных диаграмм ЭДС и МДС, в основе которых
лежит неискаженная ЭДС генератора, работающего, на ВП. Эту ЭДС
• 159
Рис. 5.1. Векторные диаграммы ЭДС r
МДС неявнополюсного тягового СГ
можно найти как векторную сумму:
Er. ~ Ur(i) + 1|(])/*а + /1Г(1)ХГ, (5.1)
где го — активное сопротивление
обмотки статора СГ.
Обычно га намного меньше ин-
дуктивного сопротивления цепи
коммутации, поэтому в дальнейшем
значением го пренебрегаем.
На векторной диаграмменеягно-
полюсного СГ (рис. 5.1), построен-
ной по (5.1), вектор Ео представля-
ет собой ЭДС холостого хода СГ,
а вектор Ес— ЭДС реакции якоря
генератора при работе на преоб-
разовательную нагрузку:
Ео = Е„ — Е, = /1гп, (хг — х,.), <5.2)
где хс—синхронное индуктивное сопротивление обмотки статора
Прн построении треугольника МДС возможны два подхода, когда:
I) результирующая МДС соответствует ЭДС Ей, действующей за
индуктивным сопротивлением рассеяния обмотки статора xs Тогда
МДС возбуждения FB определяется как геометрическая сумма МДС
Fp и МДС реакции якоря Fa, соответствующей ЭДС:
Ед = Ео Ед = (хс Хс).
2) результирующая МДС соответствует неискаженной ЭДС Е,, а
МДС возбуждения является геометрической суммой результирующей
МДС и МДС реакции якоря Fa, соответствующей ЭДС Еа [см. (5.2)1.
Первый подход используется в методе расчета характеристик тя-
гового СГ при задании свободной мощности ДВС и здесь не рассматрива-
ется. Второй случай является основой метода расчета характеристик
СГ при заданной зависимости F (ц) электромобиля.
Векторные диаграммы ЭДС и МДС на рис. 5.1 строят следующим
образом. По оси ординат откладывают вектор напряжения Dr(t), из
начала координат под углом <рг — вектор тока 1Г(и- Из конца вектора
Ur(ij перпендикулярно направлению вектора тока проводят вектор
1Г(1)ХГ; соединяя начало координат с концом этого вектора, получают
вектор Е,. На продолжении вектора Ir(lj х, откладывают вектор
1г{1) — хг). -Линия, проведенная из начала координат к концу по-
следнего, является вектором Ео- Радиусом, равным Ег, проводят дугу
ab до пересечения с осью ординат, из точки Ь — прямую Ьс, парал-
лельную оси абсцисс, до пересечения с кривой намагничивания 1 ге-
нератора Из точки с опускают перпендикуляр cd на ось абсцисс, ко-
торый отсекает на оси отрезок, определяющий результирующую МДС
Fp, необходимую для обеспечения найденного значения Ег Под углом
90° к Ег проводит линию и на ней дугой, равной Fp, отсекают вектор
Ер. Аналогично, проводя дугу радиусом £0 до пересечения с осью ор-
динат и далее, как показано на рис. 5.1» получают на оси абсцисс
160
отрезок, определяющий МДС возбуждения FB, необходимую дли осу-
ществления заданного режима СГ. Дугой, равной FB, отсекают на ли-
нии, перпендикулярной Е„, вектор FB. Линии, соединяющая концы
векторов Fp и FB, есть вектор реакции якоря Ffl.
Принципы построении диаграмм ЭДС и МДС справедливы также
и для явнополюсиых генераторов с той разницей, что вместо ЭДС Еа
и МДС Fo имеют место их составляющие по продольной и поперечной
осям.
Построение диаграмм ЭДС и МДССГ, работающего па преобразова-
тельную нагрузку, свизано с определением векторов неискаженной
ЭДС и основных гармонических наприжения и тока (рис. 5.1).
Из 131 известно, что как модули перечисленных векторов, так
их направление (углы <р, и <ре на рис. 5.1, отсчитываемые от вектора
основной гармонической тока) представляют собой функции углов
включения а и коммутации вентилей у, а также параметров нагрузки
(выпрямленных напряжения и тока эквивалентного выпрямителя и
диапазонов их регулирования) Способы вычисления углов <р, и <рв1
необходимых для построения диаграмм ЭДС и МДС тягового СГ,
рассматриваются ниже в процессе анализа различных аспектов рабо-
ты СГ на ВП в силовой цепи СТПЭ.
§ 5. 4. Связь выходных параметров
тяговых синхронных генераторов
с параметрами преобразовательной
нагрузки
Для упрощения расчета характеристик тнгового СГ, работающего
в СТПЭ с ВП, целесообразно рассматривать работу генератора на эк-
вивалентную нагрузку с переменным сопротивлением через управля-
емый выпрямитель. Тогда можно использовать выражения (1.8),
учитывая только основные гармонические напряжения и тока. Эти
выражения для СТПЭ с ВН, В У или НПЧ примут вид
t'r(i) = nJJJknu ~ UJbwK h{iy == *Пк/д/(лкЛв;) = V^bt,
где feet/. &в/ — передаточные коэффициенты эквивалентного выпрями-
теля по напряжению и току;
kbu = kvl = 1Ji r(Ih (5.3)
t/d, /d — выпрямленные напряжение и ток эквивалентного В У
В системе относительных единиц, где в качестве базовых приняты
номинальные значения параметров,
— ^Г{1)/(7Г(1)Н = (ЛьАшн/Лвц; = Д(1)//г(1)в = /rf-Лв/в/^В/,
(5.4)
где Uа* ~ UjUdut id* — ijidn-
Если в СТПЭ используются ПЧПТ, состоящие из ВН и АН, то
Ur(l) = djutilku = U д(1)/(^ИцЛво) = UJkbu*
irii) = mJдц)/(йц/^в/) = ijkvh
в 4-1БВ
161
где А’и, ki — передаточные коэффициенты эквивалентного ПЧПТ по
напряжению и току:
ku = knukisu ~ ~ ЛщЛв/ == ^г1Уд(ц/^г(1)» (5.5)
Лип* Лш — передаточные коэффициенты эквивалентного АИ:
ЛцЬ — ^д(Г)ЯЛь = «н/дИ)//^ (5.6)
£/д(1), Лио — основные гармонические напряжения и тока АД нли ВД.
В системе относительных единив
C4ii>* = UimjJiun/ku — (7д(!)*/ги1Л|Лвсн/(^иоЛвс'); |
Действующие значения фазного напряжения и тока СГ по всей
кривой (с учетом высших гармонических) связаны с основными гар-
моническими напряжения и тока с помощью коэффициентов
fe<!> = uril)/ur = 1/rU)/]/ + 2 UK = 1/1/ 1 + 2 (14JIW ;
= Л-(1Дг = ^rtll + 2/rv = 1/|/ 1+2 (/rv//r(l>)2 .
(5.8)
где UrVf lrv—действующие значения высших гармонических состав-
ляющих напряжения и тока СГ: v — их порядковый номер.
Напряжение и ток генератора являются периодическими функция-
ми, симметричными относительно временной оси, поэтому кривые
напряжения и тока содержат только нечетные гармонические и сум-
мирование в (5.8) производится начиная с v = 3.
В системах СГ — ВП необходимо использовать вместо коэффициен-
та мощности генератора коэффициент мощности преобразовательной
нагрузки Хг, приведенный к его ЭДС и учитывающий искажения фор-
мы кривых напряжения и тока генератора»
Хг = PtJSret (5.9)
где Рге — активная мощность СГ, приведенная к неискаженной фазной
ЭДС и обусловленная этой ЭДС и основной гармонической тока!
Pre = mFE p/rth cos <pr; (5.10)
Src— полная мощность генератора, приведенная к его ЭДС и опреде-
ляемая ЭДС и действующим значением фазного тока по всей кривой
(с учетом высших гармонических):
Sre = тРЕг1г = П1г£'17г11)/Л1(1); (5.11)
<ре — угол сдвига фаз между векторами основной гармонической тока
и неискаженной ЭДС (рис. 5.1).
Подставив (5.10) я (5.11) в (5.9), получим
Хг = cos фАп* (5.12)
Из треугольника ЭДС (рис. 5.1) следует, что в случае пренебреже-
ния активным сопротивлением обмотки статора
cos фе = cos 4>SU г(1)/Д, (5.13)
162
где <pr — угол сдвига фаз между векторами основных гармонических
тока и напряжения СГ.
Из (5.10) и (5.13)
Рге = fnt л, cos <рг = Рг{1), (5.14)
где РГ(1) — активная мощность СГ, обусловленная основными гармо-
ническими напряжения н тока.
Подставим (5.11) и (5.14) в (5.9). Тогда
7.г = Л(1)/5,« = Ц/(’1Л«) = ЦЛЛвоЛ’МПгЕ/ги)), (515)
где Ра — активная мощность выпрямителя на стороне постоянного
тока; т]в — КПД выпрямителя.
Передаточные коэффициенты ВП и j, — функции углов а и у,
зависящих от напряжения и тока нагрузки, поэтому расчет этих коэф-
фициентов сводится к определению данных углов.
В применяемых обычно в СТПЭ трехфазных одиомостовых ВП в
области от холостого хода до короткого замыкания существует несколь-
ко режимов, различающихся количеством одновременно проводящих
вентилей:
режим 2—3 — попеременно проводят два (во внекоммутационный
период) или три (в интервале коммутации) вентиля. По мере увели-
чения тока нагрузки длительность интервала проводимости трех вен-
тилей возрастает за счет сокращения длительности интервала прово-
димости двух вентилей;
режим 3 — длительность интервала проводимости распространяет-
ся иа весь интервал повторяемости, т. е. одновременно проводят ток
три вентиля;
режим 3—4 — попеременно проводят три или четыре вентиля. При
дальнейшем возрастании тока нагрузки длительность интервала про-
водимости четырех вентилей увеличивается, а длительность интерва-
ла проводимости трех вентилей соответственно сокращается.
Режим 3—4 продолжается до короткого замыкания ВП иа стороне
постоянного тока. При полном коротком замыкании в преобразовате-
ле одновременно проводят по четыре вентиля. Этот режим равнозна-
чен симметричному короткому замыканию на выводах СГ.
Для ВН в режиме 2—3 угол включения сс = сс0 = 0, гдесс0— угол
задержки естественного включения вентилей, а угол коммутации у
с увеличением тока нагрузки (при Ег — const) возрастает от нуля до
л/3, в режиме 3 угол у — л/3, а угол а ~ увеличивается до л/6;
в режиме 3—4 а = а0= зх/6, а у увеличивается от л/3 до 2л/3. Для
ВУ, работающих с углами регулирования сср < л/6, в режиме 2—3
угол а = ар, а в режиме 3 угол а возрастает от Ор до л/6. Для ВП
с Ор = л/6 4- л/3 режим 3 отсутствует и после режима 2—3 наступает
режим 3—4 при у = л/3. Для ВПс <Хр > л/3 во всем диапазоне нагру-
зок будет иметь место только режим 2—3.
Уравнения внешней характеристики ВП (см. 131) для режимов
2—3 и 3
L/d == [3 J/6 /(2л)] Er ]cos а + cos (а + у)]; ]
г— f (5.16)
h = (И 6 /2) (£/хг) [cos а — cos (а 4- у)]; ]
163
Рис. 5.3. Зависимости угла О от относитель-
ного изменения эквивалентной проводимости
нагрузки (о) и от индуктивного сопротивления
цепи коммутации (б)
для режима 3—4
UA = 19 К2 /(2л) J Е9 [cos (а — л/6) + cos (а + у 4 зт/6)]; |
,_________ > (5.17)
1а = (И^/2) (Ег/хг) [cos (а — л/6) — cos (а 4- у 4 зт/6)[. |
В [3] получены формулы для определения амплитудных значений
основных и высших гармонических составляющих на входе ВП, пита-
ющегося от сети бесконечной мощности. Замена действительной ЭДС
СГ неискаженной позволяет использовать эти формулы для нахожде-
ния гармонических составляющих напряжения и тока генератора. Ес-
ли принять, что вентили ВП идеальные, а мгновенное значение тока
на выходе выпрямителя равно среднему значению, то для СГ, работаю-
щего на некомпенсированный выпрямитель,
t/ril> = Vi^r, Ми — (3/(2л)[ vsE,/xr, (5.18)
где £>! == J/1 — (3/эт) (Fg — Fj cos 2ф) 4 [ 3v2/(2«)]2 ; vs — У 4F^ x
X Fl sin2 ф + (F2 — Fj)2; F2 = у; ф = a 4 y/2; Ft = sin у (режи-
мы 2—3 н 3); = sin (у 4 л/3) (режим 3—4).
Решая (5.16) — (5.18), получим передаточные коэффициенты ВУ
по напряжению и току:
kou jjti/Vi, (5.19)
Лв/ — /г^«» (5,20)
где в режимах 2—3 и 3
l! = 1,17: fi — cos а + cos (а 4 у); /2 == 2,56; /2 = cos а — cos (а 4 у);
в режиме 3—4
Д = 2,05; Д = cos (а — л/6) 4 cos (а 4 Y 4- л/6);
/а = 1148; /8 = cos (а — л/6) — cos (а ф у + л/6).
164
Действующие значения высших гармонических составляющих на-
пряжения и тока СГ
t'rv — irvXrvi 4v = (3 1^2 /Л) Jtnv^2vErIXrVt (Б. 21)
где х™ = vxp — индуктивное сопротивление цепи коммутации токам
высших гармонических;
в режимах 2—3 и 3
Jmv = 1; Fiv = [sin (v Ч 1) y/2]/(v + 1); F2v = [sin (v — 1) y/2]/(v — 1);
в режиме 3—4
Jmv = (2/J/3) cos (wi/6); F]V = [sin (v + 1) (y/2 + n/6)]/(v + 1);
F2v = [sin (v — 1) (y/2 + л/6)]/(т — 1);
Vzv = К4FivFlvsin2 ф + (F2v — Flv)2 .
Подставляя (5.18) и (5.21) в (5.8), получим
^(D — 1 + 0,912 £ J" ;
= }/ 1 ~b 4 (JtnyV2v/^>Vy}‘
(5.22)
Расчет коэффициента Xp также сводится к определению углов а
и -у. Пренебрегая потерями в выпрямителе (чв = 1), для режимов 2—3 и
3 из (5.15), (5.16) и (5.18) получим
Хг = (sin у sin (2а + у)] kli}}/vs; (5.23)
для режима 3—4 из (5.15), (5.17) и (5.18) —
Хг = (sin (у + л/3) sin (2а + у)) &(11/и8. (5.24)
Для различных значений углов а и у коэффициенты knu, &в/, Ладц»
^(1) и Целесообразно находить по их зависимостям от угла О =
~ а + у (рис. 5.2). Эти зависимости рассчитывают при ар = 0 по фор-
мулам (5.19), (5.20), (5.22) — (5.24) следующим образом. Вначале
задаются углом а = 0 и варьируют значение у от 0 до л/6 (угол •& =
= у). При у = л/3 коэффициенты определяют для значений угла а
от 0 до л/6 (угол Ф ~ a J- л/3). Наконец, в режиме 3 угол а = л/6
и варьируют значение у от л/3 до 2л/3 (О = л/6 + у).
Рассмотрим способ определения углов а и у, когда заданы парамет-
ры нагрузки.
Режим 3—4 выпрямителя соответствует кратковременным пуско-
вым режимам ТЭД. Параметр хг, (см. (5.30)1 тяговых СГ не превышает
0,5—0,6. Анализ показывает, что для таких значений хг», а также
кратностей пускового тока, равных 2—3, номинальной нагрузке и,
следовательно, длительной работе ТЭМ соответствует режим 2—3. По-
этому уравнения для номинальных значений выпрямленных напря-
жения и тока аналогичны (5.16):
t/dn = [3 Кб /(2л) [ Ег.„ |cosaH + cos (a„ + у,)];
4м = (Р 6/2) Erti [cos aH — cos (a„ + Ун)]/хг.
(5.25)
165
Рис 5 4. Зависимости коэффициен-
Н тов d в d от >гла °
рис 5.5. Зависимости углов <Гг ”
qv от О
уг,%. 'P4J
Разлепив уравнения систем (5 16) и (5.17) на соответствующие урав-
нения (5 25), ’запишем выражения для внешних характеристик ВУ в
системе относительных единиц.
режимы 2—3 и 3
£r cos к cos (а -р Т) .
"da = cosa„ - cos (ан 4 Тн)
£г coset со$(а + т) .
~Ё~ ciisap cos (ан 4- уи) ’
режим 3-4
- L, ci I cus (а-t-у ч- л 6) ,
Ua. - ОЬ(ан Vh)
I -(а 16) — со< (а т4-я/6)
7 ’ | -cnUaH Тн)
(5.26)
(5.27)
Решая уравнен *6) и (5.27) относительно углов а и у
и обозначая тя рем шов 2—3 и 3
tg(y2)t •- (T„'2»t~(« т„'2); (5.28)
для режима 3—4 —
tg(T.2-hsi 5)t| , ?)tg(a„ рт„'2). (5.29)
На рис. 5.3. а приведен , . , мости О (£/*) при P<1J’
личных значениях угла »• п гля О
В номинальном режиме (У it =- 1, / 1) углы с^. = ан ссР
и ти зависят только oi индуктивною conpoiin ления цепи комму ia-
цим. Из (5 18) для относительного ^..ачения пирометра rr. on редел не-
НОТО ПС паспортным данным тягового СГ имеем
*'- Х'1 1 (3 (2 .| (о ,/0.,,),
где Пы = J 1 — (3/п) (F* _ F,„ cos 2<| „) + (3/(2л) v.„]2 ;
Ил =| 4F, F2 sin2 I] ,, У (F,, ___________F.,,) ' ;
f = Sin т"; f2“ = К'. тГ„ - а„ + у„/2.
166
(5.30)
Па рпс. 5.3. б представлена зависимость О„ (г,.) при а 0 по
строенная посредством решения (5.30) Если известны .шраме,ры ге
нерагора (А,.) н нагрузки („,). го определяю! й (рис. 5.3. .), <го i О
Фис 5,3 о) и коэффициенты кы, bт, X, 1см 5
Такоп ено. об нахождения перечисленных коэффициентов при а 6
иыес! однозначный характер: зависимости о, (0) н v, №)пер секаюгся
только в одной точке (рис. 5.4).
Для построения векторных диаграмм ЭДС п МДС и опредетенпя
юка возбуждения СГ кроме коэффициентов km и *в,. пс^ва.яющих
вычислить Сго) н >г(|)» необходимо найти также значения углов сдви-
Id£ )3 ^ме>К'П^ векторами 1гН) и Ur(i)) и Че (между векторами 1П1>
Из (5.13) и (5.13) найдем
cos срг = (cos <pe)/Dlt (5.31)
где ift — угол, определяемый формулой (см. [31)
tg = (F2 — Fxcos 2^)/(Ft sin 2ф). (5.32)
Зависимости углов <рр и <ре от О при сср — 0 представлены на
рис. 5.5.
§ 5.5. Емкостная компенсация
при работе синхронного генератора
иа преобразовательную нагрузку
Одно из основных требований, предъявляемых к СТПЭ,— обеспе-
чение двух- и трехкратного по отношению к номинальному значению
тока ТЭМ в режиме пуска, что обусловливает весьма низкое значение
Хг за счет увеличения угла коммутации вентилей ВП, вызванного
сравнительно большими сопротивлениями хг. Кроме того, при глубо-
ком регулировании ВП существенно искажается форма кривой на-
пряжения СГ, вследствие чего также резко снижается коэффициент
мощности. Поэтому, чтобы полностью использовать мощность ДВС,
необходимо увеличить расчетную мощность СГ Однако для электро-
мобилей подобный путь не всегда оправдан, так как приводит к воз-
растанию размеров и массы генератора.
Более эффективное повышение коэффициента мощности достигает-
ся применением ВП с искусственной опережающей коммутацией. Та-
кие устройства выполняют с реактивными элементами сравнительно
небольшой мощности, но требуют увеличения количества управля-
емых вентилей и значительного усложнения системы управления ВП.
Другой способ повышения коэффициента мощности — емкостная ком-
пенсация реактивной мощности при фазовом управлении ВП с естест-
венной отстающей коммутацией. При этом не требую гея дополниге.1ь
ные вентили, хотя установленная мощность конденсаторов ол .
чем в первом случае. Этот способ для СТПЭ представляется '
емлемыы, тем более что конденсаторы на электромо и. 1
легче, чем генератор увеличенных размеров, механич ien*npei-
НЫЙ г ДВС. Схема системы СГ ВП с емкостной faureucawiu^
ставлена на рис. 5.6, где С1 - СЗ- комиснснр) ющие коиденезгорь.
167
Рис. 5.7. Эквивалентная схема
системы СГ — компе1гспрсВа11.
нын ВП
ния комиенспру ющего конденсатора
и реактора
атор _ вентильный ---
Р емкостной номпенсашюи
£/ — £<? — реакторы, ограничиваю-
щие скорость нарастания тока через вен-
тали при коммутации и снижающие взаимное влияние ВП, работаю-
щих в параллель от одного СГ
На рис 5 7 приведена эквивалентная схема системы L1 — компен-
сированный ВП, где \си al реактивные сопротивления компенси-
рующего конденсатора и реактора. Если при работе на некомпен-
сированный ВП генератор можно представить в виде симметричной
неискаженной ЭДСЕГ, действующей за сопротивлением \г, то в рассмат-
риваемой схеме конденсаторы образуют два контура: для коммутации
тока в фазах СГ и для коммутации тока в вентилях. Последняя из-за
наличия конденсаторов осуществляется независимо от коммутации
тока в фазах СГ Роль коммутирующей ЭДС в схеме выполняют на-
пряжения конденсаторов В этом случае источник синусоидальной
ЭДС переносится на зажимы конденсаторов.
Действительно, для высших гармонических сопротивление
весьма велико, а мало. Поэтому высшие гармонические гасятся в
основном на сопротивлении реактора, напряжение на конденсаторе
близко к синуои'] льномi В соответствии с (5.23) и (5.24) коэффи-
циент мощности х, «и д „fTin у памп а и у, которые непосредст-
венно зависят от лг Вс. i (стп этого в формулах индуктивное сопро-
тивление цепи коммутации аиенть сопротивлением реак-
тора xL — 2л/, „Д, где индукц вн ib р. ктора
ЧП а , (di di)wn;
(5.33)
«рмакс—угол регулирования вентилей ВУ в режиме с минимальным
выпрямленным напряжение (A dt)m -допустимое значение скорос-
ти нарастания тока через вентили
гг>и^пя£таНа^1ТИ Кс' с"тедУет определить максимальную мощность СГ
ыой степенТю^™ МГ'еНС"1>0Ван11Ь'*' • а латем- задавшись необхо-
сируюшнх к™».» Г|енсации, вычислить расчетную мощность компен-
CI ’работающего С,ЭТ0р0в " сопротивление л< Активная мощность
rpj-зка rSro° “’чпена.роваиныи ВУ. максимальна, если №
иерекомпенсаиии Ш еМ"°1 гны" хаРактеР с небольшой степенью
егоХшяя хапактХ’ *^™тся ток возбуждения СГ и
емой следхюшим гглт?*СТИКа С1ановнтся более пологой), определи
юшением для расчетной мощности компенсирУ”
168
ющих конденсаторов:
Qc = QreMaKC + (0,10 0,15) Рг(ц, (5 34J
где Q,eMaKC —максимальное значение реактивной мощности СГ па,ю
тающего на некомпенсированный ВУ, приведенной к ЭДС генепатопа
Анализ показывает, что коэффициент мощности Хг имеет напмснь
шее значение Хг в режиме, соответствующем точке В характерис-
тики (см. рис. 2.1). Именно для этого режима следует находить О
Реактивная мощность СГ в точке приложения неискаженной ™ДС
= 1 Pre . (5.35)
С учетом (5.9) из (5.35) получим
QreMaKC ^5ГРМак, j 1 —Хг мин • (5.36)
Емкостное сопротивление компенсирующего конденсатора, приве-
денное к «звезде» (см. рис. 5.6),
хс/3 = 1/(2л/, ,,С) — mrU2r.nB/Qc = ЗтДк/Qc, (5.37)
где С — суммарная емкость конденсаторной батареи для тг фаз СГ;
t/глв — линейное напряжение СГ в режиме, соответствующем точке
В (см. рис. 2.1).
В СТПЭ должна быть предусмотрена возможность отключения ком-
пенсирующих конденсаторов в режимах, когда нагрузка СГ близка
к активной, чтобы предотвратить перегрузку генератора но току. На-
личие компенсирующих конденсаторов может вызвать синхронное или
асинхронное самовозбуждение СГ. Синхронное самовозбуждение, за-
ключающееся в возникновении медленных колебаний напряжения и
тока генератора, устраняется автоматическим регулированием воз-
буждения. Чтобы предотвратить асинхронное самовозбуждение (ес-
ли активное сопротивление фазы СГ незначительно по сравнению с его
индуктивным сопротивлением по поперечной оси х0), необходимо вы-
полнение условия
Qc < Рг «/[(*,. + XL.) COS фг.н],
ГДе — Х[УХ$» = Xql\ (1)нДА-(1)н*
Резонансные явления на высших гармониках в контуре СГ — С
исключаются при выполнении условия
Qc > А'РГ н/[(,гг. 4- xL.) cos фг №ш],
где А‘— коэффициент запаса, учитывающий нестабильность парамет-
ров резонансного контура (,4'> 1); тмин—порядковый номер сам* и
низкой гармонической для принятой схемы Bi (для трехфазнои мо
стовой схемы vMI!M = 5).
к 5.6. Метод расчета характеристик
синхронного генератора при заданной
тяговой характеристике электромобиля
Графоаналитический метод РасчетД,. Х^^яс™систгой отноеи-
ристикп тягового СГ удобно определять, ’ - }131|р,ются завн-
тельных единиц, особенно в тех случаях, когда анализ
Рис 5.8. Векторные диаграммы ЭДС it
VI ТС еявнопаиосного генератора в си-
стеме относительных еингип
гармонических напряжения 47Г(1)н
н тока возбуждения /Орн^
симостн генератора при различных
вариантах управления ТЭД НЛ||
сравниваются характеристики СГ
разных типов в процессе проекти-
рования СТПЭ. В этой системе в
качестве базисных величин обычно
принимают номинальные значения
фазного напряжения и тока и 311а.
чение тока или .МДС возбуждения
при ЭДС холосгого хода Еп = 4/г(||В1
определяемое по кривой намагничи-
вания генератора. Для тяговых СГ
базисными величинами являются
номинальные значения основных
и ток /П1)В, МДС возбуждения Fptl
- Uft.kbUtvkBU
Ui-kvtJku',
(5.38)
(5.39)
где Ua* h* —
В соответствии с данной системой векторные диаграммы ЭДС и
МДС имеют вил, представленный на рис. 5.8. Согласно диаграммам,
относитетыюе значение неискаженной ЭДС
Д. £,ЛГ' ] L'o>. -г /нц.А'?, + 2£/п!>./•(!н*г- sin <рг . (5.40)
Относите JbHoe значение МДС возбуждения, определяемое по кри-
вой намагничивания / ссютве ственнодля неявнополюсного и явнопо-
люсного СГ
Fe,=FJFp, — | Fp. F' (ас — хг.)2 + 2FP.Fq. (.<.—хг.) sin <ре ;
_____________________ (5.41)
J Ff,. > /а, . .— a । 2k FP.F,. (vd.—Л'г.) sin <p, ,(5.42)
где rp. Fp Fp н относите льное значение результирующей МДС;
Fo,- Fa Fpv относительное значение МДС реакции якоря; ka ~
== 0,8 4- 0,9 - Коэффициент пршм -
дения реакции якоря к МДС г<
суждения, обусловленный к Ди-
циентвми приведения поля и«> про
дольной и поперечной осям; д..
= А'<Л(|)п Xrf. — A-d/rU)H t/r(I)ll
относительные значения си ихрон-
ного индуктивного сопротивления
неявнополюсного И ЯВНОПОЛЮСНОГО
Ток возбуждения сии кронного ге-
нераюра /, = FJw„ где и’и-чис-
170
0,5 1,0 1,5 2,0 2,5 1е*
Рис. 5.9. Кривые намагничивания СГ:
1 — универсальная для тяговых СГ; - ГХ
аналитическая. 3 — универсальная ДЛЯ ь
общего назначения
до витков обмотки возбуждения, те/ _ р
логично, ГОК статора где !' г'•('«• = Мт.,' Дна-
статора; /го,. =F„.. Поэтому'из’<5 40 ! (чд'ч?0 М1тков обмотки
неявнополюсиого и явнополюсного СГ соответствеин|С"еД'еТ' ЧТ0 Л1Я
' = ’ /7 + ; (5.43)
= р И г. + (ха. -(/ ~Лг > .
, _ г и г ^.44)
где /вр» — 'п₽//врп — гр , так как /вр = р /w
В номинальном режиме, когда F — г mF ₽
для неявнополюсного и явиополюсиого СГ " г »• соответственно
= 1„ „П. р. = 1 ll„ „. + (хс. - хг.)! + 2/„ „ (х„ _ х,.) sin |(; ,
___________________________________________________ (5 45)
/в и. = ... + (*<'. — Хг.)2 + 2k,.1в.р (хй. — X,.) S1H <( ,. (5.46)
Относительное изменение тока возбуждения
^1 = ~ /в.//вн.. (5.47)
При расчете токи /в р. и 1 в.р н. определяют по кривой намагничивания
1 генератора (см. (рис, 5,8)) ДЛЯ значений £,. по (5.40) и £г„. =
= 1 1 + >:!. + 2хг. sin <f,
Кривая намагничивания (характеристика холостого хода СГ) есть
зависимость Eq. (/в»), где Eq. = £п/£/гЩн— относительное значение
ЭДС холостого хода генератора.
Аналитический метод расчета характеристик СГ. Если в процессе
проектирования требуется проведение сравнительного анализа ТЭМ
(КПД и коэффициента мощности) при различных вариантах управле-
ния ТЭД, то характеристики тяговых СГ целесообразно определять
аналитическим методом. Зависимости параметров генератора рассчи-
тывают последовательно при всех рассматриваемых вариантах управ-
ления ТЭД, заданных в виде соответствующих функции Ua.
h. (год.), J/* (<"д.) ДЛЯ ДПТ и I/,. (Л.), /|. (Л-). J/* (/-) для ДД- ПР"
расчете тока возбуждения используют аналитическое выражение уни-
версальной кривой намагничивания 1 (рис. 5.9), представляющей со и
ДЛЯ ряда тяговых СГ различной мощности и конструктивного iicnai-
нения некоторую усредненную зависимость Фг. ('..). гае
ФГФГ„ — относительное значение результиру ющето магнита
тока генератора (Фг, £г.). Эту характеристику удобно предста
° в,,де (Г. 48)
/вр. = Л’®-.
гае Л — переменный коэффициент, зависящий г n0( lvlf)iu.
Зависимость Л' (Фг.) .можно найти на Э .’ ПОгрешвосги
тельного приближения, в процессе которое f Б (5.45) для
вычислении тока подставляя различные значения ( '
каждого Фг.. На основании выполнен-
ных расчетов
Н* = (Ф.. — k')* + k", (5.49)
где k', 1г — постоянные коэффициенту
Наименьшую погрешность получим
при k 1.1 и k"= 1,0- Тогда из (5.48)
и (5.49)
/Б,р. = (№• — U)2 + И Ф?*- (5.50)
Сравнение полученной по (5.50)
кривой 2 (рис. 5.9) с универсальной
кривой 1 показывает, что в интервале
значений Ф,. - 0,9 4- 1,1 погрешнее*
ти составляют менее 1 °о, а в интер-
вале Фг* >1,1 они не превышают 3 %.
Когда Фг. < 0.9, погрешность возрас-
тает, достигая 12,3 % при Фг. = 0,5,
что, однако, допустимо, ибо при работе
СТПЭс номинальной мощностью ТЭМ
магнитный поток СГ всегда больше
Фг. — 0,75. Если необходимо рассчи-
тывать характеристики СГ при частич-
ных мощностях, выражение (5.50) мож-
но скорректировать, уточнив рассмот-
ренным выше способом коэффициенты
k' и k' для значении магнитного пото-
ка Фг. в пределах 0,2—0,9
На рис. 5.9 для сравнения пред-
Рис. 5 ш с я м ставлена универсальная кривая намаг-
•’3 ЭВМ j HimiiBti ни я 3 синхронного генератора
„ обще!*? назначения, которая в боль-
шей чаши диап » тш / , зн- и rt ц>но отличается как от универ-
сальной (крив. » /). । к и । j иг. । по (5-50), поэтому рекомен-
д\е<ся пользоваться крл I
КПД генератора
1ХР
(5.51)
S.SPr. SAPr/*6Pr..'.
гж\ДР,-суммарные ишери геие|«гц1а. SAP,. - SAPJSAPr
пряжен В.!И 'MOUiHOC,b' IS 1«вие« денсгвующнип значениями иа-
||р|.ления и той» с уч-то,. ,!Ь|СШ11К ’с “
нееви"ы5допорас‘“!га' в суммарных потерях следует учшывагь
тельного анализа" ЛотерьвСГ-Работающем на ВП.Дли cpaBim-
тах КПД геиеоягооч In"™’ >‘'РаЕ-1е|"1я ТЭД достаточно в расче-
ннчеекнми ДР Р . ,еДа®ать только основными потерями (мехз-
ротора Др„ Л^г' в "W! обмоток статора ДРип 11
нической тока стэтопя т‘" Ы'М НС11екаже»ной ЭДС и основной гармо-
ни статора. Тогда е учетом того, что частоты тока и вра-
172
щеиия постоянны и равны номинальным, а Фг. = £„, находим
где Ь, = Ь2 ЬРн.„иЛЛРг.„, ь3 = Ы>С,.„12Ы>,„ ь _
= ДРмех-г.п/д-APi составляющие потерь СГ в долях суммарных
потерь в номинальном режиме.
Алгоритм расчета характеристик СГ. На основании изложенного
выше материала составлен алгоритм и схема алгоритма (рис. 5.10)
расчета на ЭВЛ1 характеристик тягового СГ, работающего на ВУ.
Алгоритм имеет следующий вид:
I — пуск;
2 — июк xr„ Ь„ Ьа, t,„ О„ <zp„, т„„,кс, Е-, е";
3 — вычисление: 1/г|1).: = 1. : = 1. kr. = I. у„.„акс = л/3,И„: = а у„: =
= 0;
4 — вычисление: п|н, и2н (7.30), уг = 2я/3хг,п11(, »2=и2н, a — у^у^
5 — сравнение: 1
6 — сравнение: a < I — е";
7 — сравнение: ун С т„ макс:
8 — вычисление; уи: = ум -J- Ауп;
9 — вычисление: по (5.19), ЛШн по (5.20); по {5.22), Хгнпо
(5.23), <fftl по (5.32), <рг|| по (5.3]). Е и. по (5.40), /БН. по (5.45), (5.46),
’К.и го <5-51):
10 — ввод: ia. Id. <0д. Id. ctpfd, 0 = 0, 1......0; e: = 0;
1! — вычисление. y« (ij — /(?. (i)/C/d. [d; r = i + 1;
12 — вычисление: a. = ctp, у no (7.28);
13 — сравнение у л/3; „ _
14 — вычисление: по (7.19), по (7.20); Ли(|>1 по (э.22), Хг(э.23);
С/г11(„ /г(|). по (5.4), <ге по (5.32). (Рг по (5.31), £,. по (5.40), по (5.43).
(5.44), kf по (5.47), q, по (5.51),
15 — вывод на печати шда, 1/г(1)ф, 7е„ Хг, cos<fr, qr;
10 — сравнение. i <1;
17 — сравнение у > л/3;
18 — вычисчение: у = д 3, а по (5.28), ал = о. ар [ч,
19 — сравнение an sg 71 6;
20 — вычисление; сс0 л/6, у по (5.29);
21 — сравнение у 2л 3;
22 — останов.
В п. 2 вводят относительное значение индуктивного <®пР™|Вле‘
ния цепи коммутации и относительные потери генератора. ,
методом постедовате.чьного приближения вычисляют yio^ у, у
того, что номинальный режим СГ соответствует Р™1™) “ е1‘а; я0.
комое значение угла у,, определяют при а - (/, ‘^„/остальные
пустимых отклонений е иг). Далее по щ J 1ету Парамет-
параметры СГ в номинальном режиме и пере к) вводят массивы
Ров генератора в неномпнатьных ";ово1-, скорости ТЭД.
значении напряжения и тока на выходе В» У электромобиля,
определяемые при задании тяговой характеристики зле р
Характеристики синхронного генератора при рациональном управ-
лении тяговыми электродвигателями. Если требуетея рассчитать ха-
рактеристики СГ для различных вариантов управления ТЭД, в п. 10
алгоритма, приведенного выше, вводят двумерные массивы 1/, /],
Л. li. /I, гце/ — 0, 1, ...» т — порядковый номер варианта управле-
ния. Характеристики при управлении по максимуму КПД тягового
силового электрооборудования СТПЭ рассчитывают иначе. Метод рас-
чета проиллюстрируем на примере СТПЭ, содержащем СГ, ПЧПТ и
АД (схему ПЧПТ см рис. 6.1).
Управление по максимуму КПД 1]э мяхс соответствует варианту
6 (см. § 4 1). Здесь для каждого значения частоты /|. иа ЭВМ методом
перебора определяют оптимальное значение параметра абсолют» го
скольжения / , при KOTOpOMI], = Ц,макс.
Вычисляют параметры номинального режима асинхронного дви-
м та" £>1п ’ Z’“ по Н-31), л„ по (4.40), cos >r„„ по
!кт. п л" 'г !, 4 ’’ авт°н°иного инвертора напряжения —0д„ по
( ) , „ по (6.8), „ по (6 6), kIU„ по (6,9), 1]ц„ по (6.10); неуправля-
емо ° выпрямит. | , . по (5.19), „о (5.20), Т„ по (5.28), чв„ по
*6 ПО ктпТ0Г геи'Р|Гора к»:№. fe.il(5.22), Хг.. по (5.23),
oTpS™' Гемши Г-1'' " "° (5’51); = Пг.ПвиЛ.ыЧд».
иия перечнетеиных7т “ "Н°‘ ’ "нтеРБала частот Л-> 3|,аче’
Фд. поР(4.36 Т, пс 4 )8, ( ' Я 7* ' " "° (4'54)- "° (4 32)-
ВН (2- 3, ЗиЗ 4) ЗЬЬ 1 га" п0 (5-4) при всех режимах
СТ-160 4См1я1’ваппТнг7'1'’‘‘!' 1™и'аиктеР'кт,,,'11тягового СГт||па
рис. 4.3, сн з> Хины г5 РаВЛГ П,Я '-6АД г"па Ж'720 <см-
> Данные генератора- Рг„ - 160 кВт- U, ““ "
н •= 130 А; 7Г1,
40( ч об чип; р
п.92>. с«,; /г
0,280 Ои,
= 230 В;
400 ' Гц; «г... =
- 6; тг = 3; н...
0 7; I 0,282 Ом;
гн 13 кВт; di-0,23;
" 0,06; ds 0,21; Ь: 0,50.
гпп РИС' 512 приведены зависимости
ли/ *'3 для вариантов управления
П—6). Характеристики хг п0‘
казанные на рпс. 5.11, 6, соответствуют
\р,
Ачп”С,‘Р0ЕаШ,Ь"’ (/> ” некомпена>рованныГ| (//) выи-
§ 5.7. Внутренние параметры imonux
синхронных генераторов
Энергетич» к.к показатели и характеристики тяговых СГ в ™я
чителытои степени обусловливаются внутренне ли параметрами х и
х„ (или ха. для явнополюсных машин). Энергетические показатяи
генератора тем выше, чем меньше значения этих сопротивлений. От-
нано их чрезмерное снижение может привести к неприемлемому дчя
проектируемой СГГ1Э увеличению массы, размеров и стоимости СГ
Определим, в каких границах следует выбирать значения хг и г '
(ПЛИ Xrf.).
Диапазоны регулирования напряжения и тока статора тягового СГ
обусловлены их значениями в точках В и D (см. рис. 2.1). В соот-
ветствии с этим режимы работы генератора характеризуются макси-
мальным током /)(1)ыакс. ~ h пмаке//г(1)п, минимальным напряжением
= t/t(i)M»ni/t/r(thi, минимальным длительным током =
== /г(1)мнн//г(1)и 11 максимальным длительным напряжением С/гарм-. =
“ Г4-(|)ма«7£Л(1)н- Первые два параметра относятся к кратковременному
режиму.
На участке BD внешней характеристики СГ работает с постоянной
(с точностью до КПД ВП) номинальной мощностью, поэтому
^г(1)мвкс* СОь if, _M/(COS (5.52)
^г(1)макс« — COS <Pr n/(COS <ргВ^/г(1)мии*)> (5.53)
где cos <frD и cos (fra — косинус угла <р генератора в точках D и В
внешней характеристики СГ.
Значения ^/Г(1>макс., /г(1^акс, фгн» ФгО и фг* являются исходными
для проектирования тягового СГ. Полученные в ходе расчета генера-
тора индуктивные сопротивления дг. и vc. (или ха.) должны обеспечи-
вать работу системы СГ — ВП с максимальным и минимальным на-
пряжением и rohoxt и указанными коэффициентами мощности, поэтому
необходимо установить связь между исходными данными и внутренни-
ми параметрами генератора, а также с режимами работы эквивалент-
ного выпрямителя.
Определим возможные сочетания режимов проектируемого СГ
(точки В, С и D) с режимами ВУ. Наилу чшпм по энергетическим пока-
зателям является генератор, вся внешняя характеристика которого
находилась бы в пределах режимов 2—3 и 3 выпрямителя, так как в
интервале углов в = 0 4- л 2 (см. рис. 5.2) коэффициенты и А.п)
близки к единице. Если СГ работает на ВУ, этого можно достичь за
счет задания достаточно малых значении угла регулирования % (в
пределах до л/6) и кратности тока /гптако. когда угол у не прев
тает л/3.
Однако на практике значение /г(пмакс- таково, что Даже
= 0 пуск СТПЭ осуществляется в режиме 3—4. на границе
(т. е. при постоянной работе четырех вентилей) имеет место
175
при ар
которого
короткое
V Лит СГ Так как в режиме, соответствующем точке В
замыкание все* генератора должно быть определенное на-
(см. рис. 2.1/, на - вающее заданный пусковой момент ТЭД,
пряжение L й потоку (линия АВ, см. рис. 2.1) и четырех-
™ Ре^ныйГпежим ВП не должны совпадать. Это значит, что для всех
ЮНп» ВП максима тьный угол коммутации должен быть меньше 2п/3.
топов ВП максимальны у j обеспечивающих у„, значение
определяется'согласно (5.29) и (5.30) соответствующим выбором
1ндуктивного сопротивления ,гг.. Отметим, что угол ТмйКС = я.З можно
получить лишь при малых лг„ что вызывает увеличение размеров и
массы генератора.
Если энергетические показатели СГ в пусковом режиме несущест-
венны, то cos «J r„ и cos <Гго характеризуют экономичность генератора
и привода в целом, поэтому необходимо обеспечивать достаточно вы-
сокпе значения этих показателей. о
Из (5.18) и (5.31) видно, что cos <рг представляет собой функцию
угла © (см. рис. 5.5). В номинальном режиме коэффициент мощности
обусловлен углом йя, который согласно (5.30) зависит от хт». При мак-
симальном напряжении угол Фв, а значит, и cos <рГ£> определяются не
только сопротивлением лГФ, но и в соответствии с (5.28) проводимостью
нагрузки у*. связанной через передаточные коэффициенты ВП с крат-
ностями тока и напряжения СГ. Влияние лг- на КПД в длительном ре-
жиме аналогично, поскольку как основные, так и дополнительные
потери СГ есть функции коэффициентов k^u, kuil)9
Специфика работы СГ в СТПЭ ограничивает не только значение
хг., но п необходимое значение синхронного индуктивного сопротив-
ления дс. (или Пуск генератора, соответствующий троганию элек-
тромобцдя, является хотя и кратковременным, но рабочим режимом,
который может иметь часто повторяющийся (в городских электромо-
билях) или периодический (в карьерных электромобилях) характер,
десь, как и в остальных режимах, следует обеспечивать работу СГ
е допустимыми превышениями температуры, что особенно важно, ибо
рассматриваемый режим СГ осуществляется посредством форсирова-
ния 5Г° ТОка В03^*пеи,1Н- Согласно (5.47), коэффициент фирсирова-
лением ' /имакг в существенной степени обусловлен сопротив-
юшемИвмакс—ток возбуждения в режиме, соответству-
именно чтим Jn ^Р^1НЗНЛ «и^иней характеристики СГ определяется
ток Симметы!imntMeipOM: ЧСМ Ск11Ьи1с v«’ меньше установившийся
СГ общего и „У К0Р0ТК0П) *амыкзнця. Этот ток при обычных (для
- 12 лишь 1 Г1ТТ2 = 1,4 - 2.1 их,. = 0,6 -
как для тяговыхСГ ток ,,евы,яае1 номинальный ток, в то время
ся обеспечить напряжение’? * L 3’ В пусковом режиме требует-
ЧТО даже ДЛЯ ГРИППАх Сг«)мив., поэтому становится очевидным,
НИЯ при указанны Рд м т С характеристикой намагничпва-
возбужлення Рк™/’.. " Не00ход,,мо значительное увеличение тока
с точки зрения нагпепя "Хронных машин, особенно неявно полюсных,
форсирование возбмжчр.аХадИтся ВТЯ1Келых условиях, вследствие чего
« синхрон"! = 1’20^
индуктивное сопротивление должно выбираться ыеиь-
ШИМ, чем для СГ общего назначения. Однако чрезмерное снижение
А'с. и (при больших /Г(|)макс«) приводит к возрастанию размеров
и массы.
Ниже излагается вывод расчетных соотношений, позволяющих
найти предельные значения параметров хг. и хс. (или х4.) СГ, рабо-
тающего в СТПЭ на преобразовательную нагрузку.
Связь номинального коэффициента мощности СГ с индуктивным
сопротивлением цепи коммутации. Напомним, что в соответствии с
(5.30) сопротивление хг* зависит от углов ан и уя. Критериями выбо-
ра этих углов являются значения номинального коэффициента мощ-
ности СГ по основным гармоническим напряжения и тока cos фг н
и коэффициента мощности преобразовательной нагрузки ХГ11, графи-
ки зависимостей которых от угла для ар = 0, представленные на
рис. 5.13, вычислены по (5.23) и (5.31). Если рассчитанное в ходе про-
ектирования СГ значение хг, отличается от полученного из диаграмм,
показанных на рис. 5.3, б и 5.14, то по этим диаграммам следует про-
верить значение углавк. Если Он< л/2, оцениваем, насколько расчет-
ные значения cos фг и и Хг н отличаются от заданных. Если же при рас-
четном хг. угол л/2 или расчетные cos срг..<, 7Г.Н существенно
отличаются от заданных, необходимо повторить электромагнитный рас-
чет СГ с соответствующей коррекцией сопротивления хг.
Выбор индуктивного сопротивления цепи коммутации по условиям
пускового режима СГ. Ранее указано, что при пуске СГ работа ВП
в четырехвентильном режиме исключается, т. е. угол умакс должен
быть меньше 2я/3.
Из векторной диаграммы ЭДС (см. рис. 5.1) находим
SIU грев — (/п |)максХ, + С/гЩмии 51П фгВ)/Дв>
откуда после преобразований
sin2 <РгВ + 2хг. COS2 <PeBSin фгв/г(1)макс»/^г(1)*шн* +
+ (Xr. COS фвв/г(Пмакс«/^Ш)мнн.)а VeB
Решая это уравнение, получим
sin <ргв == sin фгД I 1 — СО8фев/ц1)макс./£/г{|)мин.)2
— Хг. COS2 фев/ ПI )макс» г(I -
Из (5.54) видно, что работа (
криминант больше нуля При-
равняв дискриминант нулю.
Рис 5.13. Зависимости
cos <рг Ъ И хг н от угла
Рис 5.14- Зависимости хг.
177
Ur(l)HUH
hlUHOKC
Рис. 5.15 Векторные диаграммы ЭДС и
МДС при работе неявнополюсиого тя-
гового СГ d различных режимах
lf(i)m№xr
Уг(1)мако
на идем максимально возможное
значение индуктивного сопротив-
ления вепп коммутации:
Хг» = 4/г(1)мм11*/(/г(1)м«кс» COS фей);
при заданных параметрах на-
грузки
хг, = кк1в1(^ци^\пУь* cos фгц),
(5.55)
а при заданных для проектирова-
ния СГ исходных данных с учетом
(5.31) н (5.53)
Xr, = COS фг h/(COS фгвЛ(1)макс^Щ/1).
(5.56)
Для предварительно принятого cos фгв из рис. 5.5 определяем угол
Ок, из рис. 5.2 и 5.4 находимknuot кин и ^ть- Полученные коэффициен-
ты подставляем в (5.55) и вычисляем Л'г». Значения лу, и cos <ргц кор-
ректируются ио приемлемому для СТПЭ costprn (см. рве. 5.3, б и
5 13). На рис. 5.14 представлена вычисленная по (5.55) зависимость
лг. (<//<•) пр11 различных 1гц. соответствующих определенным cos фг«.
Если оперируем выражением (5.56), когда заданы /г<1>мнкс» и cos<h w
то согласно предварительно принятому cos <ргп находим Г']/* (см.
рщ . 5 4 и 5 5). Далее сравниваем вычисленное по (5.56) значение лг-
с найденным по рис. 5.3, 6 и 5.5 для заданного cos q>rM; если разница
превышает 5 %, то значение cos <р „ следует корректировать.
Выбор синхронного индуктивного сопротивления СГ. В окрестно-
сти точки Я внешней характеристики (см. рис. 2.1) магнитная система
тягового СГ мрякшческн не насыщена, поэтому вначале для упрощения
рассмотрим ненасыщенную немвнопо-иосную .машину. Па основании
векторной дншрачмы рис 5.15 запишем уравнения ЭДС СГ в номи-
нальном в пусковом режима'
Ео »=
Е«Л=- 1Л,1>мц । .пцмж. Ve slu ‘Г*/’- ’
<jk как для ненасыщенного < Г относительное изменение тока воз-
Суждения равно соответствующему и ок нению г)ДС. то коэффициент
форсирования гика нозбужжения
17В
2(Л,
АЛ <1„
tun/
Решая (5.57) и (5.58)
(5.58)
откуда
sin 4r.„ + ( (;)| Sin tf + p; . (5 59)
где с учетом (5.53) p = (^m„, tg <,rB/tg .₽, „)/(Д1№с.
Рг — («/макс —^г(Пм1иг)/(/Г(|)маке. — ^/маш).
В § 5.1 отмечена важность выбора индуктивного сопротивления
взаимной индукции генератора хс,, составляющего значительную
долю сопротивления хс. и определяющего главные размеры и массу
машины.
Согласно диаграмме (рис. 5.15), МДС возбуждения ненасыщенно-
го неявноиолюсного генератора в номинальном режиме
^ви = I» | 1 + ха* + 2xG. sin ф€ц , (5.60)
где хо. — xa/r(i)ii/L/|(]}H.
Соответственно для пускового режима
ЕвВ ~ FpB ) 1 _Г (Хд.Рсмаке-/РрВ-)” “Ь 2Хс* Sin феВрсмакс«/РрВ» . (5.61)
Разделив (5.61) па (5.60). получим
^/мнкс 1 FкВ Fв II ~ X
у I Г 1 + ('пП^кс. *т№ + 2Z. (Рмжсехо. Sin W*b
I 1 + + 2*0. sm 4ei,
откуда _______________
Xa. = Рз sin ф,.н + I (p3sin фен)2 + P? , (562)
гДе Рз — (^/макк ---------fefi/гШмакс* SIH фев/Sin фг||)/(/Г(1)макс» &/макс)» Pi —
= (^/мзке ’ ^б)^(^г(1)мак«.» ^/маи)> ~ РрВ/Ррн-
Параметр k6 в соответствии с принятыми допущениями (см. § 5.3)
можно записать как отношение неискаженных ЭДС. определяемых
по векторной диаграмме (рис. 5.15);
Zto = Егв!Ег.п\ |
Ег.» = 6/г(|)ц 4- /<(|)цХг 4- 26/Г(1)н/г(1)гХг51п фу । (5.63)
£rfl = 4- /г(1)миксХ( 4- 26/Г(||м,|ц/г<ПмаксЛг sin ФгВ-
Решая (5.63). после преобразований получим
(5 64)
Из треугольников ЭДС, для номинального и пусковое режимов
(рис. 5.15) имеем
sin ф, = sin № „ + <M; sinO„ = cosy. ,л 1 (5 65)
sim(1.e = sin(<f.fi + «в); sin 0в cos4.itr../,n...... <£
Вирзжения (5.59), (5.62), (5.64) » (5.65) дт» /5 59) n
метров vt. и vc. весьма громоздки. Исследован» e <)}........iri, H\
(5.62) мепщами численного анализа позволяет аппрок
более простыми выражениями:
>•„ = Л' tg -7— -Чгг + в"sin фгв:
*г(1)макс»
= Л-tg -7-----+ В"' sin
*г(П«жкс-
(5.66)
где КОЭффИЦИСНТЬ! = + 0,25/г(1)маке« 1. Л — frfwaiic 4-
+ 0,1/г1|)иакс. — 1; В" = 0,5 (А'/мак. — 1)/(7г(||макс. V 3): В'" =
= 0,15 (k,„3KC — 1,05 + /г(|)ма.,е.) (6 — /г|1)чш.. )/(/.< I )>.а,<с. 3).
Выражения (5.66) дают возможность определить ориентировочное
значение индуктивного сопротивления цепи коммутации из условия
обеспечения допустимого значения /</„акс при заданных параметрах
пускового режима:
хг. = хс. - *«. = (А - Л") tg ----------л 4 _ - + (В" — В'") sin <ргВ. (5.67)
zr(l)MaKc« 1
Вычисляемые по (5.66) и (5.67) сопротивления, а также найденное
в предыдущих параграфах сопротивление Л'г< можно представить как
их ненасыщенные значения для СГ с нелинейной характеристикой
намагничивания. Для явнополюсных СГ (5.66) дают ненасыщенные
значения параметров по продольной оси (ха, и Насыщенные зна-
чения этих параметров для номинального режима генератора лнас. =
= -Ч ^нисл. где Хца«, а» — насыщенное и ненасыщенное значения
параметра; кнвс н 1,2 ~ 1,4 — коэффициент насыщения СГ в номи-
нальном режиме по универсатьной кривой намагничивания (см-
рис. 5.9).
Резюмируя изложенное в данном параграфе, можно сделать вы-
вод; I) решающим условием выбора индуктивного сопротивления \г*
является обеспечение при psCoie как на ВН, так и на ВУ значений
Углов t>H л 2 и й/ < 5т 6, 2) максимальное значение коэффициента
форсирования тока возбуждения уточняют по (5.67) в соответ-
ствии саг., 3) параметры лс. и <а, шли V/> н определяют из (5.66)
по скорректированном) значению к
ВЕНТИЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
В СИСТЕМАХ ТЯГОВОГО
ПРИВОДА ЭЛЕКТРОМОБИЛЕЙ
§ 6.1. Требования, предъявляемые
к вентильным преобразователям
Вентильный преобразователь — один из основных агрегатов тяго-
вого силового электрооборудования СТПЭ и в значительной степени
определяет ее технико-экономические показатели. Основное влияние
на эти показатели оказывает схема силовой части ВП.
В научно-технической литературе достаточно подробно рассмотрены
как теория работы различных типов ВП с анализом схемных решений,
так и вопросы их проектирования. Поэтом) здесь основное внимание
обращено на краткий сравнительный анализ существ) ющих ВП с точ-
ки зрения их применения в тяговых электроприводах электромобилей
и разобраны те особенности и режимы работы, которые определяются
местом ВП в силовой цепи СТПЭ.
Вентильные преобразователи, включенные н систему ЭУ—ВП—ТЭД
электромобилей, предназначены для преобразования переменного на-
пряжения (или тока) в постоянное (выпрямители), постоянного напря-
жения (или тока) в переменное (инверторы), переменного напряжения
одной частоты в переменное напряжение регулируемой частоты (преоб-
разователи частоты) и нерегулир)емого постоянного напряжения в ре-
гулируемое (импульсные преобразователи постоянного напряжения).
Кроме требований, предъявляемых к СТПЭ в целом, ВП должны
удовлетворять ряду требований. обусловленных их совместной работой
с другими силовыми агрегатами. К ним относятся раздельное плавное
регулирование амплитуды и частоты выходного напряжения в за-
данном диапазоне частоты вращения и нагрузки ТЭД; высокое быстро-
действие каналов управления амплитудой и частотой выходного напря-
жения и достаточная стабильность передаточных коэффициентов этих
каналов; минимальное содержание высших гармонических и о •
гармонических составляющих в выходном напряжении |цди ток .
стабильность гармонического состава выходного напряжения (идя
иа) в рабочем диапазоне изменения амплитуды и частоты изпряж •
тока и коэффициента мощности ТЭД, о< *щеспияние пар -
работы неск тьких ВП от одной ЭД ; возможность ^Р^РУ3*1
току н напря кенгю для обеспечения ПУЙ? Т'1 Днерагора с .
холостого хода; осуществление работы ТЭД в Р* ,Неогии в лсточ-
грузкой на тормозной резистор или с рекупердшю P
ник питания.
ifii
ВП с выходам на переменном токе должны дополнительно обеспечп-
кяты маню несимметрню по фазам выходного напряжения (или T0Kaj.
Хен реактивной энерпшй между ВП и ТЭД. между ЭУ н ТЭД 11л'й
между Фазами электродвигателя; бесконтактное реверсирование ТЭД;
отсутствие самовозбуждения ТЭД. которое может вызвать автоколеба-
ния в системе.
При работе ВП от СГ формы кривых напряжения и тока генератора
должны иметь минимальные искажения, а потребление реактивной
мощности от генератора должно быть наименьшим.
Собственно ВП должен обеспечивать: высокий КПД во всем диапа-
зоне изменения своих выходных параметров и нагрузки; высокий коэф-
фициент мощности; минимальную установленную мощность силовых
вентилей и других элементов силовой части; надежную коммутацию
силовых вентилей; их работу с достаточными коэффициентами запа-
са по напряжению, току и скоростям изменения напряжения и тока;
гарантированную быстродействующую защиту ВП от перегрузок,
коротких замыканий, перенапряжений на элементах, срывов инверти-
рования; низкий уровень радиопомех; простоту, высокую надежность,
помехозащищенность, термостабильность и минимальный разброс па-
раметров систем управления ВП.
Естественно, что одновременно удовлетворить все перечисленные
требования практически крайне сложно, так как для ряда известных
схем ВП некоторые из них являются взаимоисключающими. При вы-
боре схемы ВП по возможности следует учитывать основные требо-
вания, обеспечивающие надежную работу СТПЭ в целом с высокими
энергетически ми показател ями.
§ 6.2. Классификация вентильных
преобразователей
В®НТИЛЫ1Ы* преобразовйгелн, используемые в СТПЭ, можно классифицировать
по различным признакам
трехфмны£ШТ'^Н жлятся по ЧИСЛУ *а3 источника питания — на однофазные и
(мостовые)^* иключения — на однотактные (нулевые) и двухтактные
наптХмтР нутаций в кривой выпрямленного напряжения за период питающего
пТн^и7₽шТ°'’ ДВУХ’ трех 1 четыРех- « шестЬфазными пульсациями;
янем) „ «e'qXX"’ ’,Пр,мяви* <с КП-шрКмым вылрянленныы вапрнже-
ногоГна1ш«ж™пяТ£;’Д„ЧТ:10Г“ 1ПЧ1 ' ,1Е‘ - “Чк«а«ияа и без регуларопапня выход-
нее „о 1"'д- а”131' “«ТУ*» с источником энергии или. ««-
пГомежуХ^м Р3^Г^;'Г<> 'Ч'^Разоннинн входного напряжения - на ПЧ с
•еточнк^нХо. “,,BWO <НЧПТ), ПЧ с непосредственной связью
вого тока повышенной частоты;Ы‘ НПЧ* “ °Ч ' ’'₽омсжУ™ным звеном перемен-
н cMeumS^KoS™™™ T"piK™P,lB — "в ПЧ с естественной, принудительной
пенсХя,’”Йэво^т™^.РС“К1™"':'й ТЭД—на ПЧ. в которых ком-
МОЩНОСТИ в источник ннтшннстстгп, *рнденсаи5Ров- я ПЧ с возвратом реактивной
другими фазами. ИЯ И ^^Р^^иным потреблением реактивной мощности
пульсации сглажньаХгяаХл^™Ие не₽егУлиРУемой частоты выпрямляется. *го
фильтром и выпрямленное напряжение преобразуется
182
автономным вивер ором <All) в напряжение регулируемой чагааш» и
ПЧПТ выполняют только с принудительной коммутапией к™ 11 СРТОРЫ
„ой мощности ТЭД здесь обеспечивается как^“ помощью Л.пеИсат?"Я ₽ИМ№
оба UO«1 f «активной мощностью между фазами. Измёненте ™Р' ™к 11 с
ПЧПТ за счет самого преобразователя можно осущитантъ S "‘"Т"™™"
значением напряжения на входе АИ и. во-втор ,ix. прн^овмешенён >прммяя
ровання амплитуды и частоты напряжения в инверторе Щ ™ кш1и РегУ-™-
В перг га случае к входу ЛИ подключается управляемый выпрямитеть IRV,
с фазовым регулированием либо неупр л «гаый выпрямитель (ВН) енмпгёьенкга
преобразователем постоянного напряжения (ИППН)-так наз1ваёмое ё,м„™
ное регулирование напряжения». Управление выходным наряжением падёдавЪм
АН реализуется следующими способами: широтным регулированием (ШР) иишопю
импульсным регулированием (ШИР) и широтно-импульсной (одно и шпёномп-
ной) модуляцией (ШИМ). Способ ШР состоит в изменении длительности проводя-
щего состояния тиристоров АИ с фиксированными моментами их включения Пои
регулировании этой длительности от л до 0 амплитуда основной гармонической
составляющей выходного напряжения изменяется от максимального значения до
нуля. Когда используют способы ШИР и ШИМ, полуволны выходного напряжения
формируются из двухполярных или однополярных импульсов с регулируемой скваж-
ностью или длительностью. При этом изменяется амплитуда основной гармониче-
ской выходного напряжения. Способ ШИР отличается от способа ШИМ тем, что при
способе ШИР заданная скважность однополярных импульсов остается неизменной
(в установившемся процессе) в течение полупериода (периода) выходного напряже-
ния, а у способа ШИМ скважность однополярных млн длтетьность двухполярных
импульсов непрерывно меняется по определенному закону.
Основной частью ПЧПТ наряду с выпрямителем является автономны» инвер-
тор (АИ). Это инвертор, работающий на нагрузку, не содержащую источников ак-
тивной энергии той же частоты, что и выходная частота инвертора. Частота, ампли-
туда и форма кривой выходного напряжения АИ определяются режимом его работы
или по крайней мере инвертор оказывает значительное влияние на перечисленные
параметры. В отличие от АИ инвертор, ведомым сетью (зависимый), отдает энергию
в сеть переменного напряжения, в которой уже имеются источники активной энер-
гии со значительно большей мощностью по сравнению с отдаваемой инвертором,
и той же частоты, что и выходная частота инвертора. Режим работы зависимого
инвертора не влияет на параметры выходного напряжения, они целиком обусловлены
сетью, в которую инвертор отдает энергию. В СТПЭ используются только АИ Хотя
в некоторых случаях возможны режимы работы АИ с естественной коммутацией,
в основном для них характерны принудительная коммутация и внешнее (не зависи-
мое ни от источника питания, ни от сети) управление тиристорами.
Автономный инвертор — это, по существу, переключатель, поочередно подклю-
чающий фазы нагрузки на стороне переменного напряжения к положительному
отрицательному полюсам источника постоянного напряжения. Частота переключен!
определяет частоту выходного напряжения АП В зависимости от режима р
источника питания и особенностей протекания электромагнитных процес
делят на инверторы напряжения (АИН) и инверторы тока (АИ1). Прг>₽клю-
В АИТ форма кривой выходного тока обусловлена только поряжом ”^е™а.
чения его тиристоров, а форма кривой выходного напряжения nfL‘,₽JL«T&abHo
грузки. АИТ питаете» от источника тока, «ля создан» которого птозедаатеда
с выпрямителем включается реактор очень большой МНДУК™ пепеключения его
кривой выходного напряжения обусловлена только поряд дин должны полу-
тиристор в форма кривой тока — паРа^Я?,“пёёГоаботё АИН ва ТЭД втоб-
чать питание от источника напряжения (ЭДС) При Р электродвига-
ходнмо осуществлять обмен реактивной энергией Ф ijCTBV ДИН (инвер-
теля, для чего встречно-параллельно переключающ>ву1|мпиь (обратный
торному мосту) подключается так называемый обр
Мост). /по числу плеч инвер-
Автономные'инверторы делятся: по схеме HpeoepaaOBawiM ^чные (мостовые н
тора, фазности ‘инвертированного напряжения) процесса коммутация
немостовые) и трехплечные; пойнтеру я
с Одно- и двухступенчатой коммутацией, по способ) КОММутир>юшмх конден«.ато-
«пофазной коммутацией; по способу подключения - У
гов _ на параллельные, последовательные, последовательно-параллельные и с отде-
лрнными от нагрузки конденсаторами;
леняыу„от „pi устройств искусственной (принудительно») коммутации—с
vcTBoficTBOM CKWCTBI . коммутации (УПК) в nJ,C4<! (™Лиы1Дуалы1ая
^OWVT un ). С ода J ИК в каждой фазе, с общим S- ПК для группы тиристоров _
анодной ван катодной (групповая коммутация), с общим У И К для всех главных
типпсторов инвертора (общая коммутация);
1 по способу выключения тиристоров — с индивидуальным выключением тирис-
торов с одновременным выключением тиристоров анодной или катодной групп,
с одновременным выключением всех главных тиристоров;
по длительности проводящего состояния тиристоров—с длительностью 120,
180 и произвольной (в пределах полупериода частоты выходного напряжения)
длительностью. фиксированной пли изменяемой в течение полупериода по некоторому
закону
При одноступенчатой коммутации гок. протекающий через тиристор перед его
выключением, переводится на включающийся тиристор другой фазы или включаю-
щийся тиристор собственной фазы, а выключение одного и включение другого тирис-
тора происходят одновременно. Дву хс1уиенчатая коммутация ^осуществляется с
помощью вспомогательного коммутирующего тиристора. Рабочий тиристор выклю-
чается с помощью коммутирующего. При этом образуется контур, изменяющий по-
лярность напряжения на выключаемом тиристоре. Следующий рабочий тиристор
включается независимо от процесса коммутации в выключаемом тиристоре, ио обыч-
но по окончании этого процесса
В АИ с междуфазовой коммутацией при выключении каждого рабочего тирис-
тора включается следующий ио порядку работы тиристор другой фазы, но этой же
группы (анодном или катодной). В инверторах с пофазной коммутацией УИК попе-
ременно выключают тиристоры двух плеч, относящихся к одной фазе, независимо
от процессов в других фазах.
Преобразователи частоты с непосредственной связью источника питания и цепи
нагрузки (НПЧ) могут выполняться как с естественной, так и с принудительной
коммутацией Кцчпепсцция реакт пеной мощности ТЭД в НПЧ обеспечивается за
счет обмена реактивной мощностью между фазами и возврата ее в источник питания.
Они делятся по схеме подключения к источнику питания — на мостовые и нулевые;
по схеме си ижои -меги - нн перекрестные и встречно-параллельные (протнвовклю-
ченные). ш, ext*. < гниения фгз нагрузки - на потенциально связанные в много-
фл nn.it < хемы и ж |1С1Генипз.тьно разделенными фазами нагрузки; по принципу управ-
леи|"' Т111'11с *Р“МИ ,1Ри1’”“,в1'1К1чеиных групп —с совместным и раздельным управ-
из НПЧ с при их дни
ИС1ОЧЦЦК.1 питания и
nnn/'iV »»w.. ня хг.тз вк печения тиристора в течение полупериода выход-
пни '* ||”,*Л1,,1Я ннгым треугольным, синусоидальным. трапецеидлль-
11 4,1 HH:J4 '' “" «ь ночения
межут чиым звеном переменного тока состоят
и преобразующего трехфазное напряжение
•• напряжение повышенной частоты, и НПЧ
.«пилю напряжение повышенной частоты в
напряжение pci у щру 1 ч« i,
Имиучьсшде npti№| ,,
по полярное ГН Вычидши нжприжсп,
ходиыми имиулье.пщ) tl реы
НИИ. обеспечив пощие i>u*epciiuiM*>
сами),
(.явного напряжения (П1И1Н) делятся:
Ия керевереннные (с однополярными иы-
ittMviieiiHcv ноздрностн выходного илпряже-
1 1 I (с anvXHO.IHpilIdXfll выходными импуль-
но -с широтным (U1P). частот-
mAapS“pV „ 1.',Ш нотистотн. (111ЧР) |и, у „,рот „ним.
чагой коммуT.miieB, «то процесс. комму гашш — с одно- м Цвухсту1ЮЙ'
тРа,,"4мХо^ реакторно-емкостной.
дельные и^ледова к"'1И,,ист<‘Ра 1,0 отношению к нагрузке — на парал-
лельной коммутацней?°'К1,НЯ ЭДС — с г.арал тельной и последова-
184
по способу подключения УИК — на чапмг«о .
с цепью рабочего тиристора, либо с цепью нагрузки'Л,стЛ’Р'1Х JllK гаяза™ -’ибо
огделено от этих целей; ' и иезависнмые, у которых УИК
по числу фаз — на однофазные и многофазные.
§ 6.3. Сравнительная оценка схем
вентильных преобразователей
Целесообразность применения рассмотренных выше типов ВП в СТПЭ оппете
^рГвеД ".ппХ'ТбЛ " ,'a“<U,“0 "°™° ™Й И3 Ш”‘ Удовлетворяет треГ “ S;
Основными признаки, обусловливающими выбор схем ВП для СТПЭ являются
проскиа, надежность и минимальное количество элементов силовой части
Процессы в выпрямителях управляемых я неуправляемых, свойства и метоны
их проектирования весьма подробно освещены в литературе по преобразовательн й
технике, поэтому здесь они нс рассматриваются Отметим только, что известные
преимущества предопределили использование в СТПЭ трехфазных мостовых ВН
и В У.
В настоящее время из 114 с искусственной коммутацией предпочтение отдается
Г1ЧГП, так как они содержат меньшее количество элементов силовой части и имеют
значительно более простые системы управления, чем НПЧ Преобразователи с про-
межуточным звеном переменного тока из-за сложности и необходимости двойного
преобразования частоты в системах тягового привода не применяются Поэтому
в дальнейшем из всех типов преобразователей частоты анализируются только ПЧПТ
с искусственной коммутацией и НПЧ с естественной коммутацией.
Так как преобразователи частоты используют главным образом в СТПЭ, постро-
енных по схеме СГ—ПЧ'—АД, го наиболее просто регулировать напряжение тяго-
вых АД посредством изменения напряжения СГ вне зависимости от типа ПЧ Поэтому
преобразователи частоты в СТПЭ выполняют функцию только регулирования час-
тоты тока статора двигателей, встедствне чего как для ПЧПТ. так и для НПЧ огра-
ничимся в основном анализом схем преобразователей без управления выходным на-
пряжением за счет самого ПЧ.
К достоинствам НПЧ следует отнести относительную простоту схемы силовой
части, его сравнительно малые размеры и массу. Однако максимальная выходная
частота /1М<И1С. НПЧ при ее плавном регулировании и трехфазном источнике пита-
ния не может быть выше 30—35 ?о частоты тока СГ (см. § 6.5). В связи с этим в СТПЭ
требуется применять высокочастотные СГ для повышения верхнего предела час-
тоты /|в.
ПЧПТ лишен указанного недостатка и имеет более простую систему управле-
ния Значение максимальной выходной частоты ПЧПТ ограничено только динами-
ческими параметрами тиристоров Но двойное преобразование энергии — выпрямле*
нне и инвертирование — увеличивает количество элементов силовой части и тем
самым размеры и массу и снижает КПД. Кроме того, недостатком ПЧПТ является
необходимость использования фильтровых и коммутирующих конденсаторов значи-
тельной емкости.
Отсутствие достаточного опыта создания электромобилей с тяговым приводом
переменного тока не дает оснований сделать окончательное заключение о рациональ
ности применения того или иного типа ПЧ. В настоящее время проводятся широки
исследования СТПЭ как с НПЧ, так и с ПЧПТ.
Выбор схем автономных инверторов. В ПЧПТ применяют аБ™БО ’ ,.,т ,
торы тока (АПТ) и напряжения (АНН) Достоинства преобразователя с АШ(.р
наличии отделенных от нагрузки коммутирующих конденсагор „ мяг... ПЧПТ;
конденсаторного фильтра на входе инвертора, что снижает рзз>еР Лпмнитель-
возможность рекуперации активной энергии в »’cto™‘ik ni। ДНедостаТок
него зависимого инвертора; малое количество си. овы ® возникающие
преобразователя с АНТ - недопустимо бфыпиеJiepena4„ тскз на м.
при работе на АД при скачках выходного тока (при ючастоту значениями
грузке) Для их уменьшения лриходшея ограничиват' • я Обеспечивающие
50-100 Гц и применять достаточно сложные схемные решения, сю
165
гтпчх- В источник питания накопленной в нагрузке реактивной энергии
„О„1|ЧКК11Х ТЭД. ря. охающего с „оминал,1|ым моментом
2КХ в два раза больше при иптания or А1П, чем от Л1III
V хг мы U1H сложнее 1. содержа г больше, количество силовых элементов. Оа,1;1ко
напряжение на выходе MIH npanrunecnj нс зависит от Лжами ЛД „ определяете,
= входвыч напряжением Главное пре,.мхществ Al 1Н - ограничение ма№1|.
выходной частоп,. только линачичеснихш параметр.™,, тиристоров
Рассмотрим основные схемы АИН. В п ., р а л л е л ь и >. х Ми| коммугиру.
ЮШИЙ конденсатор подключей параллельно выключаемому тиристору и в юченке
всего пли большей части периода выходного напряжения оказывается подсоединви-
ним параллельно нагрузке. Такие инверторы имеют недостаточно жесткую внешнюю
характеристику и создают возможность вознпкновеюш конденсаторного самововбуж-
дения АД, вызывающего автоколебания в цепи АПН—АД. Для уменьшения вероят-
ности возникновения автоколебании параллельные АПН часго выполняют с дио-
дами отсекающими коммутирующие конденсаторы от нагрузки. В п ©следова-
тель ных АНН коммутирующие конденсаторы соединены последовательное
нагрузкой, что исключает возможность срыва инвертирования при перегрузках и
коротких замыканиях Подобные АПН обладают жесткой внешней характеристикой.
Недостаткок последовательных инверторов, ограничивающим их применение в диа-
пазоне частот ниже 1000 Гц, являются значительные размеры коммутирующих
конденсаторов. Последовательно-параллельные АИН неперспек-
тивны для СТПЭ из-за недостатков, присущих параллельным и последовательным
инверторам.
АМН перечисленных типов выполняют в основном с одноступенчатой коммута-
цией и с компенсацией реактивной мощности нагрузки с помощью конденсаторов.
> АПН с возвратом реактивной мощности нагрузки через диодный обратный мост
ш- «.тетки предшествующей группы инверторов в значительной мере отсутствуют,
тае кик комадчтчруюшне конденсаторы здесь предназначены главным образом для
выключении nipi торов, а реактивные токи нагрузки циркулируют между фазами.
T.'Kiie UIII выгн |НЙЮТ с одно- и двухступенчатой коммутацией и с отделенными от
натрулш коидепсаtop.iMM Очи более перспективны для использования в СТПЭ,
чем к льные шны ШН. так как не требуют применения междуфазовой коммута-
ции при км >р.-й выключение тиристора обусловливает одновременное включение
7И1М| (*'• ' • т । ран «енпе моментами включения и выключения тиристоров
осуществляет •? ч во времени закону, что создает возможность регулиро-
вамии •’« пры < «егп. i, таяния тиристора в течение пол у пер иода выход-
- f **' п°вмюдеии\ю установленную мощность тиристоров и
АНН с двухступенчатой коммутацией имеют
’ 14 * 1 ‘ступенчатой коммутацией более полное
вз'шмногсГ ПР' " п н 1 х и в фазах нагрузки и отсутствие их
|юдежп\« г ‘ "* ' H‘fагельпых тиристор!>н, что обеспечивает
пряжения к и> . а шли гуды и частот..’ »а-
“"о ,агда
кость; минпм^ыня “и?пю« '"Г "“ЧиСГО1’ “ високля Перегрузочная способ-
реакторов; пр<ст«та ш и «Лг '' коммутирующих конденсаторов и
печение длит! чьнеч'тиип ч Р "'° Э,’к"|1а "«-Р^чючения тиристоров п оОес-
ляет сохранять ней, Р f „ ННН>’ r',dD,,U4 тиристоров 180, что позво-
тор.,; noiuwKuoer, а т, " ,,l;i--hl)io «хгагм выходного напряжения иньер-
6ы „рнмедепня oiK.no .юишх "н[";ртора аварийных перегр).,к.,х
"ИКЯЮ^™™ Г 7! ,к ‘“ “скуалвитой коммутации „
лта всех главных гяристопови "Р'л; очг“т'льни'1“ являются АПН с общ,™ MIK
общей коммутацией ммктотитып"Л"|"1л5'а-|ЫШ!'1 “х выключением Инверторы <-
коичу1НрУющето \х n,>i,.-rna .3J ° “логократым за период испольэомяиея
РУЮЩ11Х Йвде,каюров Мин» ы.Ти"1 ' Ста1ЮМР|в' МОЩНОСТЬ ье»,м}ти-
печпвает наименьший еплп..м/‘.Ь 11 "витальное выключение тиристоров обсс-
Нвобхолихккто “х Кою в,7Ч";,,,"“1№Х выходного ...тряженда
СГ гвуслоативаетпримепение вАПН -ихол"ого напряжении в СТПЭ с
Al 1Н вспомог..тельных источников иодзаряда комму
186
тирующих конденсаторов, наличие которых обеспечивает надежную коммутацию
тиристоров даже при малых входных напряжениях.
Таким образом, для СТПЭ целесообразно применять АПН с компенсацией реак-
тивной мощности АД за счет обмена энергией между фазами и возврата ее в звено
постоянного тока с помощью диодного обратного моста, с двухступенчатой емкостной
коммутацией, общим устройством искусственной коммутации, индивидуальным
выктючгннсм тиристоров и вспомогатетьным источником поднаряда коммутирующих
конденсаторов Схема силовой части ПЧПТ, содержащего подобный АНН и неуправ-
ляемый выпрямитель В! на диодах Д/—Дб, приведена на рис. 6.1. АНН выполнен
по грехфазной мостовой схеме Он состоит из инверторного моста ИМ, имеющего
тесте главных тиристоров Т1—Тб, коммутирующего моста А'1 на тиристорах
Т7—Т/2, подключающих тиристоров TI3 я Т14, коммутирующего конденсатора
Ск. коммутирующего реактора LK. зарядного моста 3'1 на тиристорах Т15—Т18,
обратного моста Hlf на диодах Д7—Д12. Зарядный мост питается от вспомогатель-
ного источника подзаряда, обеспечивающего заряд конденсатора Ск до напряжения,
достаточного для надежной коммутации главных тиристоров независимо от вход
него напряжения АПН Вспомогательный источник подзаряжает конденсагор Ск
во «неком му тапиоинын интервал, компенсируя потери его энергии в процессе ком-
мутации и подзерживая на нем требуемое напряжение. Мощность, потребляемая
источником подзаряда, незначительна, так как она расходуется лишь на компенса-
цию активных потерь в контуре коммутации
На входе АПН включен' конденсатор Сф. предназначенный для сглаживания
пульсации выпрямленного напряжения, компенсации реактивной энергии АД при
Низких значениях его коэффициента мощности, защиты от перенапряжений я ком-
пенсации индуктивности источника питания инвертора
Преобразование выпрямленного напряжения в трехфазное напряжение рt -.
руемой частоты осуществляется инверторным мостом. Обратный .
замыкание реактивной составляющей фазного тока АД. При ппоисхозит
яначеппнт к.»Н»тпе«га мощности АД обмен реактивной энергией вровемдпт
только между его фазами.
187
Рис. 6 2. Нулевая (а) и мостовая (б) схемы преобразователя частоты с непосредст-
венной связно
Принудительно главные тиристоры вык-ючаются коммутирующей цепью
5* ~ к П₽И Р®4’яде конденсатора Ск. Г, ...юр £к затягивает процесс разряда
конденсатора на время, необходимое л «я i.^^uoro восстановления запирающих
СВОИС1В тиристоров.
"l'*-™-ч"» главных гиршторон определяйся протриы®»
.П~Т14' "«ере»., гк иоЛмкЛях пДь-триге.Ы10>’зарям»-
в частот» ыто. " к,>нда'"тпР " главным гиря, горам/ Указанная программа
Кратко гттяИОГО ,ia,lPfiiKei»i« ннкс, гора мдаютси его системой управления.
регтХХ, L“''“/'е “Л'ре ИЧ|1Т. ппходпое „анряжепге которого
кия напряжении с гслюшю Пп пи" Дл,™"(™и>| аыплигуднио рсгулиропл-
тора любою типа им оЩ11° 1 явля,отся возможность использования для нигер
IX ЗОВ р<™Х7 " D> 4 ВХОДНОГО напряжении от входного, ЮНРОК.Щ
ДОР Wrefi"XZ nn?JHaKO ЭТ°7 СПОСо6 практически не применяют
НИЯ преобразователя .< ^оС'^азо,,1‘ния снижения КПД н < \шественного усложя*
с рекуперацией энсогии пР2^т 1ОГ°’ прелитсгвует рабою преобразоватсл
ния используют главным -S7 Ч|,нк ПИ1а,,ия- Поэтому для амплитудного регулпр^па-
риннеит мош^тГ выпрямители, несмотря на низкий
'1'И1ьтриц„п выпрямленного нялряж-*"^
вин частотой связано сп сч*™” ? псмощ,'к' инвертора при одновременном упрз₽л
сложной программой переключения тиристоров инвертор3’
188
("Ч в “5та“
гармонических напряжений и потери в ТЭД вследствиеамплитуды высших
быть рекомендован для СТПЭ. Если напряжением сппяв^т способ не может
Ц1ПМ. высшие гармонические имеют большие номераУи₽зг счрт 5™собам” ШИР -1™1
Е^?₽я₽“^—0 ,,а— ™ -• “—.'ТО.:
Выбор схем преобразователя частоты с Непосредственной н„ м
рациональным яыиется применение в СТПЭ трехфазно-трехфазных’ схем НПЧ
так как обычно используются трехфазные СГ и АД. м ч'
У НПЧ. выполненных по нулевой (18-вентилыюй) схеме (рис 6.2 о) более
простая система управления, чем у НПЧ с мостовой (36-вентильной) cxewS
(piic.6.2. б), н несколько более высоким коэффициент мощности. Нулевые схемы тае
ют общую рочку, а мостовые требуют гальванического разделения фаз нагрузки <т е
раздельного мигания «фаз АД) из-за опасности коротких замыканий фаз СГ через
одновременно коммутируемые тиристоры, соответствующие различным фазам элект-
родвигателя. В этом случае трехфазвый мостовой НПЧ со стороны нагрузки можно
рассматриватв как три однофазных преобразователи. Если НПЧ выполнен по нуле-
вой схеме, фазы АД соединяются в потенциально связанную систему.
Мостовые схемы обеспечивают более высокую частоту основной' гармонической
пульсаций выходного напряжения преобразователя и симметричную форму кривой
тока СГ, вследствие чего исключается подмагничивание генератора постоянной со-
ставляющей тока. При одном и том же напряжении СГ и одинаковых по классу и до-
пустимому току тиристорах мостовая схема по сравнению с нулевой дает возмож-
ность увеличить фазный ток АД в 1,73 раза, повысить содержание основной гармо-
нической в выходном напряжении фазы НПЧ в 1,27 раза и несколько улучшить
использование тиристоров. Раздельное питание фаз электродвигателя от НПЧ
с мостовой схемой позволяет реализовать до 60—70% мощности АД, когда одна
фаза преобразователя выйдет из строя. Мостовая схема обеспечивает в два раза
большую выходную мощность, чем нулевая.
Конкретный выбор той или иной схемы НПЧ определяется возможностью исклю-
чения последовательного или параллельного соединения тиристоров в плече пре-
образователя и зависит в основном от его мощности.
В НПЧ применяют главным образом схемы силовой части с встречно-параллель-
ным включением вентильных групп. Для таких преобразователей используют сов-
местное и раздельное управление тиристорами. При совместном управлении в течение
каждого полупериода выходного напряжения тиристоры одной из противовклю-
ченных групп фазы Н ПЧ работают в выпрямительном, а другой группы — в инвер-
торном режиме. Частота следования управляющих импульсов определяется частотой
напряжения и числом фаз источника литания, а цикличность перевода групп из ре-
жима в режим — требуемой выходной частотой тока статора АД.
Преимуществами совместного управления являются отсутствие режима пре-
рывистых токов, т. е. отсутствие перерыва в работе преобразователя при цикличе-
ском переходе от одной пентильной группы к другой и автоматически!! пе₽е™^
выпрямительного режима к инверторному, когда осуществляется работа на и р
ку с любым коэффициентом мощности. Однако мгновенные значения напряжении
вентильных групп такого НПЧ различны, вследствие чего во VCTa-
минуя нагрузку, протекает уравнительный ток. что вы^^}етобпаз0БаТеляПо
S"pXrr^~
C“XHp^=^a-uu„ энрисиорэин
полу периода выходного напряжения подают работает вторая группа ти-
рон проводят ток. В течение следующего полупР Ргруппы я включением
ристоров. а первая отключается. -Между отклю _ временем восстановления
Другой должен быть временной интервал, опрелi.обусловливается только го-
запцрзющпх свойств тиристоров. Ток через ™Р'‘^Р стадения раздельного у прав-
ком АД, а уравнительные токи отсутствуют. Д* ) т е. в системе управления
леиия необходимо контролировать токи в гру
„„я, быть пред смотрены датчик» куля тока АД. «№Г[(„
-рмвр^мгетем х „Гту-ьсов одно» гр>ппы тиристоров при ра6„^
. кированиеп TC,.1LM1 в моменты перехода тока вагрузк» *
ш£» дрхгой я 1сдам«ет систему управления НПЧ по сравнение с npe’Jg
« - наличие датчиков у о lnpJB.« ,„е. Ненадежная работа датчика щдС
ра « ,телем. короткому замыканшо. ток которого ограничивается л«"
тока колет привсу»» г
сопротивлением U. ¥1даМештем тиристорами прошвовключенных 1р.
Система ея»ь „.КТ11ВВЯ, так как отсутствие .оМтарами1|1’
НПЧ “ ““Хбуишаяся меньшая мощность СГ являются реш.,тощим» ф;,Ио.
щ,,х реакторов 1т трео> надаыга1 работы датчиков нуля тока.
рами Д.1Я СПИ при У л0_п11 ча<:т„ преобразователя и заданных параметрол
Д™, Е“*Т„м выжаното > апряжения и форма его криво» обусловлены зако-
нагрузки аммитуда вы ш| 1сторов в течение полупериода напряжения т1а
ном реализуется с помощью двух иапряткеншт: модулируемое
ё частота которого равна или кратна частоте /г напряжения СГ. и моту..,тру,ощ„0
° Хяюшетося с частотой тока статора двигателя. Оба напряжения формируют,
ёо.с“"е управления НПЧ В » не, г „х равенства, когда разность ис - иу меняй
caS знаё с отрицательного на положительны», система управления создает импульс,
включающий соответствующий тиристор. „ ,
МшуиФУЮщее напряжение может быть ступенчатой, треу юльноп. симметрич-
ной. синусоидальной и прямоугольной Йормы, а модулируемое напряжение — сину-
соидальным пли пилообразным.
Угол включения тиристоров изменяется в течение полупериода выходного нап-
ряжения преобразователя, тан же как и модулирующее напряжение, но при прямо-
угольном напряжении угол включения неизменным. Поэтому форма кривой выход-
ного напряжения НПЧ (напряжения питания электродвигателя), зависящая от угла
включения тиристоров, обусловлена Йормой модулирующего напряжения.
Закон изменения угла включения тиристоров должен быть выбран таким обра-
зом, чтобы обеспечить наибольшую амплитуду основной гармонической выходного
напряжения НПЧ, минимальное содержание высших гармонических, отсутствие
гармонических, кратных трем, наименьшее изменение гармонического состава
выходною напряжения преобразоватетя при изменении его частоты и ыннималь-
нгю загрузку СГ рек г и иным током. Анализируя перечисленные формы кривой
модулирующего напряжения, можно сделать следующие выводы независимо
от формы кривой м< • 1нру«’ го напряжения I) наибольшая амплитуда основной
гармонической выходи л напряжения НПЧ имеет место в случае прямоугольного
модулирующего иапу ж», пня при п« -хоте к трапецеидальной форме кривой напря-
жения hv амплитуд, основной п»р« омическом уменьшается, а при треугольной
форме — достигает чини*-., :> < ми приемлемыми с точки зрения содержания
высших гармонических я. тяюпя ц"“ ’чдалвиая, тралш>спдалы1ая и треугольная
формы кривой напряжении п, пря юяьная форма обусловливает значительны»
пропет гормон мчегкнх. крапм* i я крни и выходном напряжения НПЧ;
3) B(i всех случаях • -.мн» . цгя ь, ио прямоугольному закону,
СГ Дополнительно .рхв.стся , ,!• roMlM ;Ч1О> принимая ВО Внимание
соизмеримать мощности 1 и СГ ь 1tft лпя СТПЭ весьма важным) чак
как per\ тиров и л< уг.1 вк я п-pin-io|, в в течение in пуперпсда выходною
напряжения НПЧ iipuaww * \ сличению и ла сдвига фшз между напряжением и
током тег(ритора.
В настоящее время г«т един ю мненг.а о том, какая Норм.» кривой моду.’»UPJ10’
wпи напРяже”вя> 3 значит и г той икон изменения угла включения iirpiio»rP0,!
пит для ТЯ1ОВО1О привода электромобилей являются наиболее раштоиалы|и>,|,‘
Предпочки ле ЬЮЖС7 гЫ1Ь (|>, оутсльш и ферме криком модулирУ’0Ш,?10
напряжения, т. е работе НПЧ t пег-мен пых: ir.-то в^ючад.ия тиристоров, при vc.k>
"|/С ,,Я В1‘ХСЛ€ разошлем установлен йильтр гармонических. М)а11‘*’Д
р м. кроме указанных преимуществ эют закон тчзлизустся более простой
Р<юторовЬ1СИРЯ НПЧ’ Так как Не Tp*’CveT Р^'Ф^ня угла включения т»
гЧ\ЯЫ.бОр импУЛЬСных прсобрадоватыгей постоянного напряжения. В
иа... ВЫ^ОДОМ на постоянном токе, гели в состав энергоустановки не входит эле i
• чный генератор, ее напряжение не нохтается преднамеренному плавному Р -
i&0
лнрованию (хотя и изменяется по различным поичпнтл п,„ -
возможным способом плавного регулирования 1.апрР,™™н)ТЭЛ » 7 едтст,п"'<'
является импульсный. Вследствие того что среднее ЭД х системах
НИЯ ИППН определяется коэффициентом заполнения к, kJ кпад""0 1М1’р’1Же'
параметром управления. Коэффициент заполнения ” К он «является
где 'н — длительность (ширина) импульса- — пишм
инн преобразователя. к К Р,1®д и частота коммутз-
11ри шпротном регулировании (ШР) изменение Хи осуществляется посредством
изменения /„ с поддержанием ТК = const f — rn„a riL. посредством
регул пропя..... (41.P) („ = const оере„ет„.,ж;Лы“(| ХХГХ"
ulli. При пгаротпо-частотаом рсгулмровап.и. (ШЧР) •ипооргмн.но изчтяют
тельность импульса (Г„ = var), период и частота коммутации (Т,, = var t =s «чп
Последним метод возможен и с const, так как при переменной частоте KJni£
тапни изменяется соотношение между 30нам|1 прерывистых и непрерывных м
в пределах которых механические характеристики ТЭД имеют разную жестисть’
Из грех перечисленных методов регулирования выходною напряжения ИППН
чаще всего применяют UP, для которого в наибольшей степени проявляются досто-
инства дискретных способов управления угловой скоростью ТЭД Кроме того
использование постоянной частоты коммутации облегчает условия работы и подав-
ления пульсаций, повышает точность расчета основных узлов преобразователя
включающего значительное количество реактивных элементов.
В отличие от ШР при частотно-импульсном регулирования минимальное зна-
чение коэффициента заполнения Ан 1Я)|й соответствующее минимальной частоте
коммутации, не может быть равным нулю, так как tK = const. Для получения ма-
лых А„ необходимо резко уменьшать частоту коммутации, что в связи с необходи-
мостью ограничить зону прерывистых токов и пульсации требует увеличения разме-
ров и массы реактивных элементов. Однако в преобразователях с ЧИР схемы сило-
вой части и управления могут быть более простыми, чем с ШР, если, например, для
отключения главных тиристоров применять неуправляемые колебательные контуры.
Иногда это преимущество ЧИР оказывается решающим.
Известно множество схем силовой части ИППН. Эти преобразователи отличает-
ся принятым принципом формирования выходного напряжения (однополяр, ого
или двухполярного) и способом регулирования его среднего значения. Однако не
менее важным отличительным признаком является способ коммутации тока. т. е.
включения и выключения ТЭД. Очевидно, что этот способ определяется прежде всего
типом управляемых вентилей, на которых выполнена силовая часть преобразова-
теля. ИППН с полностью управляемыми полупроводниковыми вентилями по ряду
показателей существенно отличаются от преобразователей на обычных тиристорах
Однако в настоящее время полностью управляемых вентилей с параметрами, соот-
ветствующими мощностям ТЭД электромобилей, нет. Поэтому здесь рассматриваются
ИППН, выполняемые только на обычных тиристорах.
Большую часть современных тиристорных ИППН в нереверсивном варианте
(с однополярными импульсами выходного напряжения) выполняют по схеме с одним
переключающим тиристором и шунтирующим нагрузку диодом. а~ в рев р
варианте (с двухполярными выходными импульсами)по мостовой схеме. «. р
Metiuieii четыре силовых тиристора и шунтирующие их диоды . чь.ч..ий
Недостаток реверсивных ИППН заключается в том, что * у больше
тока электродвигателя при одинаковом коэффициенте за™‘ обустовлн-
чш г н^реверсчпном преобразователе ^ппн’иТоб-отке якоря ТЭД Так при
вают существенные потери в тиристорах ИППН и в _ TjipilCT(1pax гтревы
одинаковом коэффициенте заполнения потери на п Р добавочные потери
шают потерт, в нереверсивном ИППН более чем P^’ci^om преобразова-
в цели якоря электродвигателя превосходят потер р Р
теле в четыре раза. «п^пепенвный ИППН —ТЭД»
Худшие энергетические показатели снсте‘ й что реверсирование
ограничивают применение этих преобразовал- , пелейно-коитакторными си-
направлепия вращения ТЭТ может ОСУШ^ППН гпевевененого или нереверсивного)
«темами управления. Поэтому выбор г,,па проектирования в зависим<Х1и от
Для СТПЭ должен производиться в процессе ее пр к
тг^юп„й. класс электромобиля. „ те»„„№.
„ижывчкких олноступеичатой еиюствой коммутацией для вык.,ю«ж
в преобразовать постоянно включенные колебательные цепи. п *
нпя ™Р"скр“ "„Т11ППН в 1С-конт,ре возникает колебательный нрещ.’
ииючеяи» тиристор- пастора становится равным нулю, и тиристор внклж
wr« вр™"ия™’Хыы’напрнженнем ИППН с одностуне^чаЛ £££
чае™’ ппименяют частотно-импульсное регулирование. Присущие ему недостатки
тайней применяю! таких преобразователен.
чаете тиристорных ИППН вынолняют с двухступенчатой емкостной
„ Лташе “ коиттнрт-ющи мои подключают к силовой части преобразователя
™шню всимогателышх тиристоров в определенные моменты времени, „ ток
с помощью вак™ ки)отм,е время переводится на вспомогательный тирисп®
з1«! возможно управлять выходным напряжением за счет как ШР, так ,, ЧИР
R ИППН с пиисторво-смкостной коммутацией конденсатор заряжается через
что существенно ухудшает внерпетичесхие показатели и сужает диапазон
Sor В преобразователях с реакторно-коидстсаторпоп коммутацией могут воз-
нимть значительные перенапряжения на полупроводниковых приборах; трапсфор-
ыатооно-конденсаторная коммутация требует вспомогательного источника питания
достаточно большой мощности Исходя из сказанного предпочтительной для СТПЭ
является емкостная коммутация с колебательными цепями перезаряда коммутирую-
щего конденсатора
В преобразователях с параллельной коммутацией импульсная коммутирующая
ЭДС вводятся параллельно выключаемому тиристору или параллельно нагрузке.
Форма импульсов выходного напряжения таких ИППН зависит от структуры и
параметров коммутирующих цепей. Эта форма отличается от прямоугольной Внеш-
ние характеристики преобразователей с параллельной коммутацией имеют нелиней-
ность и недостаточную жесткость, у них сравнительно низкая возможная частота
коммутации Диапазон регулирования среднего значения выходного напряжения
здесь’ограничен снизу и сверху и зависит от выбранной частоты коммутации ИППН
с параллельной коммутацией рекомендуются для нереверсивных схем, так как ре-
версивные преобразователи имеют сложные системы управления Выполняют их
с зависимыми УИК. у которых контур заряда коммутирующего конденсатора обра-
зуется при включении главного тиристора
В преобразователях с постедовательной коммутацией импульсную коммути-
рующую ЭДС вводят последовательно с выключаемым главным тиристором Выпол-
няют их с независимыми УИК. в которых контур заряда коммутирующего конден-
сатора образуется при включении дополнительного тиристора Форма импульсов
выходного напряжения и его среднее значение мало зависят от параметров коммути-
рующих цепей. Но в состав этих цепей входят реакторы или трансформаторы, что
является существенным недостатком ИППН с последовательной коммутацией
Недостатки преобразователей с параллельной коммутацией в значительной
степени устраняются при ускорении процесса nt резаряда коммутирующего конден-
сатора посредством дополнительной цепи включающейся при выключении главного
тиристора, например его шунтированием последовательно соединенными тиристором
и реактором.
Если по мощности ТЭД требуется несколько параллельных цепей тиристоров,
то при частотно-импульсном регулировании целесообразно использовать многофаз-
ную схему преобразователя Число тиристоров и мощность элементов коммутирую-
щего контура, в частности количество конденсаторов в одно и многофазной схемах,
одвняково- В многофазном преобразователе пропорционально числу
тг«я » иг™3** часгота пульсаций, что значительно снижает амплитуду пульсаций
(Ьиитпе и ДН."Ке ПИ^!!Я У 8 такж<“ амплитуду пульсаций напряжения на
выммого фильтров ИППН10 "гаВОЛЯ<и '“«'ЬШИТП массу и размеры входного
В -к иХ,,»0‘’.ИаЧаЛЬНОЫ 1ОК' ТЭД ” т-фазви-! схеме амплитуда импульсов
завершается ri «пЛ»”* ШИрИИа во столько же раз больше Поэтому если пуск ТЭД
вателе noin₽fwr°aOM ' авт°матическую характеристику, то в m-фазном преобразо-
“ з Л В т ра3 м“,ша" частага коммутации гтп,
импульсных можио сделать вывод о рациональности применения в СТПЭ
импульсных преобразователей постоянного напряжения с широтным регулнрова-
192
,,„™ выходного капрялсипя. пара даухс^певчаго» га» пщ own
UBriic пооЛатЩЫю,, цепью перезаряда котмхтару1И11(то ьовжкатоёа
мым контуром его заряда и дополнительным контспт. I ,к”'
псрезгряда. Схема такого ИППН приведена на рис. 6.21УР ’ 1х,'°₽Я1ои1,'м
§ 6.4. Преобразователи частоты
со звеном постоянного тока
Гармоническим состав выходного напряжения ПЧПТ Гармо-
нический состав выходного напряжения ПЧПТ в значительной
степени зависит от длительности 6Т проводящего состояния ти-
ристоров инверторного моста. В трехфазных мостовых АИН наи-
более часто применяют управление с углами 6Т = 120, 150 и 180°
Преимущество АИН, работающих с 0г = 180е,— постоянство
гармонического состава выходного напряжения независимо от харак-
юра нагрузки, ибо в данном случае последняя всегда связана с источ-
ником постоянного входного напряжения инвертора. Форма выход-
ного напряжения АИН будет оставаться неизменной и при 0т < 180°.
если коэффициент мощности нагрузки по основной гармонической
cos ч?ди) меньше или равен его граничному значению cos фа<|)гр
(рис. 6.3).
Для углов 0т = 120 и 150° облегчаются условия выключения глав-
ных тиристоров, так как создается естественная пауза длительностью
60 или 30° между моментами выключения предшествующего я вклю-
чения следующего по порядку работы тиристоров ИМ При 0т — 180°
за счет худших условий выключения главных тиристоров могут воз-
никать сквозные короткие замыкания АИН, во избежание которых
приходится усложнять устройство защиты или систему управления
АПН.
Режим с углом 0т = 150° рекомендуется для значительного умень-
шения содержания пятой и седьмой гармонических составляющих
в кривой выходного напряжения. Отношение
— £A(i)/l(l) COS<Pfl(t} (С/|/1С03фд) — &u(l)&i(!) COSIfafivCOS
достигает при 6Т = 149,2° наибольшего зна-
чения, т. е. в этом случае выходная актив-
ная мощность АИН по основным гармони-
ческим напряжения и тока максимальна при
той же потребляемой им от выпрямителя
мощности по всем гармоническим: Р\а =
Р« =
Таким образом, управление инвертором
с0т = 150° обеспечивает работу АИН с энер-
гетическими показателями, близкими к
оптимальным. Поэтому подобное управле-
ние предпочтительнее по сравнению с 0Т =
= 120 и 180°
Запишем аналитические выражения, по-
зволяющие рассчитать гармонический ©о-
став кривом выходного напряжения АНН,
Рис. 63. Зависимость угюв
И 6д ОТ C()S Чд(!)гр
4-158
Рис. 6.4. Кривая фа него пап ряже
нпя на активно-индуктивной наг-
рузке АНН и ее разложение в гар-
монический ряд-
f — С',; 2----— V. V *п АО
s~~^rud S ±-cos»^-.lrW.
‘-----S -j-eossx
1S4
когда ISO” " on работает
на активно-индуктивную нагрузку
Форма кривой фазного напряжении на
выходе инвертора приведена на рис. 6.4
Там же показано ее разложение на от-
дельные составляющие с различными
амплитудами и длительностями Здесь
0д = я — 0т — длительность проводя-
щего состояния диодов обратного мос-
та в течение полупернода выходного
напряжения ПЧПТ
Разложив каждую составляющую
фазною напряжения на выходе АИН
в гармонический ряди просуммировав
ряды, получим
и, = r((1+cos-T-)x
X sin М — cosk _®L±®5_[sin h (6 —
_JL_jk) + 4sin^(e-
sinfcB— (1 + 3sin2fc-^-
— 4 sin1 k ' | cos I/ Вт^6д si» k x
(0_A^q. <6.2)
где fc==2p+l, p = 0, 1, 2, ... —
натуральный ряд чисел; 2л/3 0T я*
О С ©л < л/3
Анализ (6 2) показывает, что в фаз-
ном напряжении на выходе инвертора
отсутствуют третья н кратные ей гар-
монические. После преобразовании из
(6.2) имеем;
и, = — (7„ у — Av Sin (v6 + 4’vl
1 n ® V
где v — 6р ± 1;
А = | Sin2 v + sill2 v -------------2 Sin v A. sin V -b- COS ;
v = arcsin | -gi - (sin vii. — sin slljj.
Действующее значение напряжения v-й гармонической
х| sin2 v-!b-+sin2v-^- —2sinv-b-sin-v A_cosvA+&,_
(6.3)
Напряжение на выходе АНН
U, = (UJ3) /(п + 30, + 30^/(2л). (6.4)
Решая совместно (6.3) и (6.4), получим
-L3 J Ain2 V А- + sin2 V А. _ 2 sin v -%- sin v A- cos v-6r+e°
) (л -I зе, - зе„)/(2л1 '
(6.5)
Из (6.5) следует, что при выбранном значении угла 0Т коэффици-
ент kuv зависит от угла 0Д. В свою очередь, угол 0Д является функ-
цией cos фд или cos фд{1). Если, например, коэффициент мощности
АД по основной гармонической равен граничному значению, то угол
0д определяется на основании графика рис. 6-4. Для этого случая
по (6.5) рассчитаны зависимости k,IV
or cos фд(!) (рис. 6.5).
Формы кривой выходного нап-
ряжения АИН при работе на ак-
тивно-индуктивную и двигатель-
ную нагрузки несколько отличают-
ся вследствие действия противо-
ЭДС двигателя. Однако экспери-
ментальные исследования показали,
что полученные выше расчетные
соотношения, определяющие гармо-
нический состав кривой напряже-
ния на статической активно-индук-
тивной нагрузке инвертора, с доста-
точной для инженерией практики
точностью можно распространить
на режим работы Al IH с двигатель-
ной нагрузкой.
7*
° 0,60 № сЗо 0,95 азрл(1{
Рис 6.5. Зависимости коэффициентов
и ^(1) от cos Ч’Ж»
и»
exp er t2 2 для http: / / rutra cker.org
Речельтаты расчетов гармонического состава кривой выходного на-
«П.«Х АНН были использованы в §4.6 для учета влияния высших
??рХ' ческил иа энергетические показатели и тяговые характеристи-
** Выведем формулы для расчета передаточных коэффициентов АИЦ
„о напряжению и току. Передаточный коэффициент инвертора по на-
пряженно из (6.4)
*Ilt. = U,/Ud = )/(л + зе, + 3в„)/(2л)/3. (6.6)
Если, как принято в §4.6, считать, что характеристика cos Чд(„ (/,.)
аналогична зависимости cos <рд (М, рассчитанной по (4.33) для вы-
бранного сочетания вариантов управления АД, то, зная коэффициент
мощности пр» каждом значении можно, используя график, изо
браженный на рис. 6.3, найти угол 6Л. Зависимость 0Д (cos <рш1()
аппроксимируется выражением
0„ = (— 0,254 + 1'0,064 + 0,61 (1 — cos <рд|„) )/0,306. (6.7)
Длительность проводящего состояния тиристоров инверторного
моста „ _
е, = л — ел; е, < 5л/б. (6.8)
Ток статора АД /, =>/а((Р 2mKcos<pfl). Тогда передаточный коэф-
фмцнент инвентора по току
Аи< = = 1/0^2 cos q>n).
КПД инвертора
чи=РнЛРч + ДР») = (1 + aPh/p,j_| = (1 + гд^/д^зр.д)]-',
где ДРн — потери в инверторе; &U, — падение напряжения на тири-
сторе инверторного моста.
Так как /d = ltm,ikiu, то
2 тк/,„А</,
3 Рщ- ~Р,
(6.9)
1|П —
КПД выпрямителя
(6.Ю)
2W<i
) =
'1а
(6.11)
Se ^рям^ХгаХа-ТЛак^'"о, Итао"РВЖеННЯ "а Л"’
2 ДОд fr||P
3 О,„ ~Uf
ванием. В СТПэ"'Х^и*т<>^г^.аП*>НЖе,,,,Я с 1|1нР<>тн0'Нмпульсным регулиро-
иие напряжения двТЖ^ГГД ?.У и тяговыми АД регулирова-
инвертора с ШИР или ШИМ (см Тб з{>аЗН° ос>ществлять посредством
19G ' ''
Рис. 6.6 Диаграмма выходных линейного и
фазного напряжении (о) и алгоритмы пере-
ключения силовых тиристоров одной фазы (б.
в) при кпм = 4
Яри ШИР кривая выход- о)
него (линейного) напряжения t/„,o
инвертора за полупериод (пе-
риод) представляет собой по
следовател ыюст ь однопол я р-
ных импульсов с регулируе-
мой длительностью. Общее
ЧИСЛО импульсов Л'л „ в кривой
этого напряжения за период
может составлять 2, 4, 8, 12 и
1 д.; с увеличением /<лм гар
ионический состав выходного
напряжения улучшается. Од-
нако такое управление обус-
ловливает значительные пуль-
сации угловой скорости АД
при глубоком регулировании
частоты. Поэтому в случае не-
обходимости регулирования
амплитуды и частоты напря-
жения в широких пределах с
малыми пульсациями скорос-
ти АД требуется изменение ге
режима инвертора: в области
низких частот необходимо
формировать выходное напря-
жение с большим числом им-
пульсов, чтобы предотвратить
неравномерное вращение АД; в верхней части частотного диапазона
следует уменьшать 7С.Ц с целью снижения коммутационных потерь энер-
гии в инверторе и повышения коэффициента использования напряже-
ния ЭУ.
Для получения высоких динамических свойств системы АИН — АД
инвертор с ШИР должен обеспечивать независимость формы кривой
выходного напряжения от режима работы АД. Это достигается приме-
нением соответствующей программы управления силовыми тиристора-
ми инвертора (алгоритма переключения). Для выходного линейного
напряжения с К.лм = 4 (рис. 6.6, а) из числа известных алгоритмов
переключения можно указать на два алгоритма (рис. 6.6, б, в). Досто-
инством указанных алгоритмов является наличие равномерной за-
грузки по току вентилей инвертора. Кроме того, они позволяют до-
статочно просто осуществлять переходы к режимам формирования на-
пряжения с большим числом Л'л и и обратно и могут быть получены
прн сравнительно простой системе управления (СУ) инвертором. Оба
алгоритма переключения реализуются в АИН с пофазной коммута-
цией, что дает возможность несколько снизить массогабарнтные пока-
затели АИН.
На рис. 6.7, о, б приведены алгоритмы переключения силовых ти-
ристоров инвертора, кривая выходного напряжения которого форми-
197
Рис. 6.7. Диаграмма выходных линейного
и фазного напряжений и алгоритмы пере-
ключения силовых тиристоров одной фазы:
а — для Кяи = 8' б — для Кл н = 12
rj л * 1 4- отп аогп
ритмы построены на основе ал
ритма переключения, показан»0'
ГО на рис. 6.6, в, >1 отл„ча1 °-
ОТ исходного числом nepeKfll0(.
ний силовых тиристоров АПН
в интервалах 60—120° и 240-2
300°, что и позволяет досталоЧ|1о
просто решать задачу перехода
от одного режима формирования
кривой напряжения к друщц1у
Перечисленные алгоритмы
переключения обеспечивают ре-
гулирование выходного напря-
жения АИН и независимость
формы кривой этого напряжения
от параметров нагрузки во всем
частотном диапазоне вследствие
неизменности структуры силовой
части инвертора. Это достигав ня
за счет двусторонней проводи-
мости всех плеч инверторною
моста в любой момент времени,
для чего в момент выключения
силового тиристора какой-либо
фазы включается тиристор прот н-
воположного плеча той же фазы: на интервале желаемой паузы в кривой
напряжения все три фазы оказываются замкнутыми накоротко через
три вентильных птеча одной группы (анодном или катодной), что и
позволяет регулировать
напряжение инвертора не-
зависимо от параметров на-
грузки.
Граничные значения
частот 10, 25 и 50 Гц. соот-
ветствующие переходам oi
Ki и = 12 к и 8, затем
от 8 к 4 и, наконец, от 4
к 2, выбраны с учетом пу ль-
саций момента на валу АД
и ограничения пульсации
угловой скорости до 5—8
:ю отношению к ее среднему
значению, а также с у четом
коммутационных потерь в
инверторе. Значения дли- _
кльностей импульсов при
переходах задаются таки-
ми, чтобы обеспечить неиз-
198
ТБ
ДБ
Т2
Р||С- б К. Схема автономного и и вер торг' напряже-
ния с широтно-импульсным peiy.inpoBd,,,ieM
. _ И
# л
менное значение основной гармонической выхотного напряжения ЛИП
и тем самым исключить броски тока во всей системе при таких пере-
ходах.
Схема трехфазного АИН с ШИР приведена на рис. 6.8 1161. Инвер
торный мост выполнен на тиристорах Т1~Тб, обратный мост — на дно
дах Д1—Д6 Каждое из грех фазных устройств коммутации состоит
из коммутирующего LC-контура, подключенного к искусственно со-
зданной средней точке источника питания через два встречно-паралле-
льно включенных коммутирующих тиристора Тк, а также тиристоров
Тп1—Та6 и резисторов Ral—R^e, предназначенных для пот-
заряда коммутирующих конденсаторов.
В процессе перезаряда коммутирующих конденсаторов часть их
энергии возвращается в цепь источника питания, поэтому в инверторе
нег последовательного накопления энергии. По этой причине макси
малыюе напряжение {/скмак<. на конденсаторах в рассматриваемо!!
схеме невелико и близко к напряжению источника питания С7п. Мак-
симальное напряжение на коммутирующих тиристорах составляет
1,5£/п. Вследствие сказанного коммутирующие конденсаторы и комму-
тирующие тиристоры в данной схеме выбирают на пониженные рабо-
чие напряжения.
Система управления АИН обеспечивает автоматический переход
от одних значений Кли к другим по поддиапазонам. Прн этом СУ
выполнена так, чтобы исключить изменения напряжения на выходе
инвертора в моменты перехода при достижении определенных значе-
ний частоты.
§ 6.5. Преобразователи частоты
с непосредственной связью
Зависимость между входной и выходной частотами НПЧ.
Трехфазный мостовой НПЧ содержит три однофазных прео-
бразователя, каждый из которых состоит из двух противовклю-
ченных управляемых выпрямителей (см. рис. 6.3). Группа ти-
ристоров, присоединенных к фазе нагрузки катодами (катодная
группа), образует положительную полуволну выходного напряжения
НПЧ, а группа тиристоров, присоединенная к фазе нагрузки анодами
(анодная группа), — отрицательную полуволну. Каждая полуволна
формируется из отрезков синусоид напряжения питания, сдвинутых
относительно друг друга (для мостовой схемы) на угол л!тг или по
времени на 0,5/дг^г, где шг и fv — число фаз и частота напряжения СГ.
Количество таких отрезков N может быть только целым числом,
вследствие чего частота выходного напряжения НПЧ является диск-
рет ной величиной.
Длительность полуволны выходного напряжения
L = лЛ'/m, + (л — л/тг). (6.12)
Слагаемое (л — п/тг) определяется свойствами тиристора, кото-
рый не может прекратить работу, пока протекающих через него ток
не снизится до нуля.
199
гами НПЧ д fr _ 2л (2L). 16.13)
№(,13)еучегом (6 >2) мучаем
"°- (6.14)
„ „«c-гота /1 зависит от минимельяого значения /V
Чакималы вяч бходнмостью л0 .учения симметричного 0Ых ’
когороеопрел unq Если число фаз АД rti, — 3, то минимальное
„ого ^пР»жеш,я Hmt трехфазно-трехфазного НПЧ из (6. Ц) иол°у!
значение Л - Л * « а1Ижен11е/,„г11С, например, до /1М„ - 0;Л
пёиводат к Сл ичению содержания основной гармонической в крнво£
выгодного напряжения преобразователя на 10-15 », а содержание
субгармонических составляющих значительно уменьшается. Из § 4.6
следует что наличие субгармонических в кривой выходного напряже-
ния НПЧ приводит к снижению перегрузочной способности тяго-
вых АД.
Экспериментальные исследования, проведенные для определения
рационального соотношения Дмзкс/г при сохранении достаточного
запаса статической устойчивости АД в верхней области частотного ди-
апазона и приемлемого гармонического состава выходного напряжения
НПЧ, показывают, что в СТПЭ это соотношение допустимо в пределах
(0.30-0.35)/г.
Подавление высших гармонических в кривой выходного напряже-
ния НПЧ. Прямоугольный закон изменения модулирующего напря-
жения, т. е. прямоугольная форма выходного напряжения НПЧ
(см. §6.3), приводит к появлению в фазном на'Пряжении АД высших
гармонических, кратных трем. Амплитуда третьей гармонической
приблизительно равна амплитуде основной, так как в случае раздель-
ного питания фаз АД сопротивление токам гармонических составаяю-
кратных тРем* весьма мало. Эти гармонические составляющие
токовую ^агрузку^СГ ПСТерИ И нагРев АД, а также дополнительную
нспа1ьзовэтьНпиС°ДерЛ<ан11Я гаРмониче<-‘Ы1Х, кратных )рем. можно
ющей фазе АД через ^орог‘’110JK ючаетсл '< соответству-
обмоточнын тр с замьн- - " С<ЛОЙ однг,'1,аз,,ы" T₽CV
соызвздюги Запишем 1...............................™
имеющего кривую прямоуголен”16ф" * ВЬ|ХОЯНОГО напряжшг
u[t) = ±Ur ‘
с замкнутым магиитопроводом и одинако-
оз»:от:;з трансформатора включает) со-
с одним из фаз АД (рис. 6.9, и)
ультра практически исключает
'ретью и кратные ей 1 ар мои и чес кие
“ ---- 1Я НПЧ,
Фурье:
использовав ряд
-pn^+y^^SIn(2f)+1)W|(i) J
где (J ___амп J
него «апряженнн^нпЧ).^^1^01^0 напРяжения СГ (амплитуда
200
(6.15)
выхоД-
Plic, 6.9 Фильтр гармонических coci явля-
ющих, кратных трем.
а схема включения трансформатора фильт-
ра б — схема замещения трансформатора
фильтра для напряжения гармонических со-
ставляющих. кратных трем-
Рис. 6.10. Временные диаграммы напря-
жений НПЧ с фильтром гармонических
составляющих, кратных трем:
а, б. в — выходное напряжение на фазах
преобразователя: г — напряжение на об-
мотках трансформатора фильтра; д — нап-
ряжение на фазе АЛ
Примем, что на выходе НПЧ формируется симметричная система
напряжений, т. е. постоянная составляющая и четные гармонические
отсутствуют. Тогда фазные напряжения будут одинаковы по величине
п по форме и сдвинуты относительно друг друга на 1201 основной гар-
монической (рис. 6. 10, а—s), т е.
4 I
(О = u,„ sin «к,/ + у sin (2р + 1) <ui,„i
о=1
ив W = и„, sin (u>n,)Z + 120 ) + V 2р *11 sin (2р -|- 1) X
0=1
X(W + 120)
(6 16)
</с(0 = l^siii (о>|<|)^— 120 )+ V । sin (2р + 1) х
X 120)
Для гармонических, кратных трем, соответствующих р = 1, 4,
7, W, .... произведение номера гармонической на 120 дает целое
число периодов, т. е. их напряжения синфазны и образуют систему
нулевой последовательности
На обмотках трансформатора происходит сложение мгновенных
значений фазных напряжений, в результате которых напряжения гар-
монических, образующие системы прямой и обратной последователь-
ности, в сумме равны нулю. А напряжения гармонических, кратны к
201
„X систему нулевой последовательности. приклад,,,,,,.
бю) "',ее' +
ВпнтерватеО^йи» 3„ачснин фазных напряже^
+ W “ „^’жХе Фазы В имеет противоположную полир,1ОС7Ь
равны, но наир П.|н<ен11ям фаз Л и С
по отношению к иапряже л/3 2я 3 имеем „л (f)
Аналогично, для «у
+ «и(/) + «с<Л _,„я,("пРЯмоугмьного напряжения, приложенного
Таким образом, ® ₽ меняется через угол л/3 При этом су„.
к обмоткам трансфер и рже11НОе ко всем трем обмоткам тра|1с.
парное напряжение утрСенной частоты и равно по ампл11
форматора.- при »У » напряжении на каждой отдельной
'^огкГсос авчяет’//„ /3. Отсюда следует, что по отношению к наир,,.
X- гармонических составляющих, кратных трем, обмотки тра„.
Sматова включены последовательно (рис 6.9, б). Очевидно, если
* ть напряжения ад (0, ш (I), «с V). записанные системой урав.
нений (6.16). то
н1р (0=4 U" [sin 3“""' + i Sin 3 (2р + 1 >
(6.17)
Выражение (6.17) совпадает с (6.15) для напряжения прямоугольной
формы, но напряжение на обмотках трансформатора имеет утроенную
частоту по отношению к основной гармоническом
При наличии идеального фильтра кривая напряжения ut (/) на
фазе АД определяется разностью выходного фазного напряжения НПЧ
и падения напряжения на обмотке трансформатора фильтра и имеет
форму ступенчато-прямоугольной синусоиды с максимальной ампли-
тудой 4£7П1 3 и амплитудой первой ступеньки 2(7т/3 (рис. 6.10, д).
Выражение (6.17) позволяет перейти к расчету параметров транс-
форматора, сопротивление которого для токов гармонических состав-
ляющих, кратных трем, весьма велико. Масса и размеры трансформа-
тора физьтра определяются проходной мощностью Slipox. Так как об-
мотки трансформаций включены последовательно с фазами АД и по
обмоткам протекает фазный ток /,. то
S = 0,5m,/,(/, (6.18)
став^якя'п'|1х~.Д™СТВ1,0Шее значен,|е напряжения гармонических со-
ставляющих, кратных трем, г
форматом О’3 Евед₽н в свази с гем, что все обмотки транс-
1. е. поРогношению 'к"г₽В,1Ч1ШМ11’ d втоР,|чные обмотки отсутствуют,
трансформатор все™ аВмон,,ческ1,м составляющим, кратным трем.
К^вйХз и* 6 юТ На Хй'ОСТОМ ход>'
середь, при прЛоутоадтй аПря'кс,|,1е > равно t/,/3; в свою
фазного напряженно Ф°Р-че кривой действующее значение
чению Um. Тогда для т ,>ЧчВ11Га2?1Л Равно амплитудному зпа-
= 0,57,//„. Д Д т‘ Эйз (6.18) потучим 5лрох 0.5ЛО, =
202
Помимо своего основного назначения — подавления гармони-
ческих, кратных трем, фильтр улучшает энергетические показатели
цепи НПЧ—АД за счет некоторого подавления остальных высших
гармонических вследствие падения напряжения на индуктивном со-
противлении рассеяния обмоток трансформатора, которое возрастает
пропорционально номеру гармонической.
Передаточные коэффициенты НПЧ по напряжению и току. Рассмот-
рим особенности расчета передаточных коэффициентов НПЧ по напря-
жению и току (см. § 1.8) более подробно.
Так как рабочий процесс во всех силовых вентильных мостах
преобразователя происходит одинаково, можно ограничиться исследо-
ванием только мостов ВУ1 и В.У2, формирующих положительную
и отрицательную полуволны фазного напряжения АД (рис. 6.11). Пусть
в момент 0 = 0Л (рнс. 6.12; 0 = 2л/,Д мост ВУ1 включается в вы-
прямительный режим, а мост ВУ2 выключен. В этот момент фаза
Л Y электродвигателя оказывается подключенной к выводам а и с СГ
(работают тиристоры 77 и Т2), так как мгновенное значение его линей-
ной ЭДС еас больше, чем еаЬ и еьс. Фазное напряжение АД изменя-
ется по кривой еас во всем интервале 02—0L = л/6 4- ах, где —
= ар| -И а01 — угол включения первого коммутируемого вентиля
ТЗ, аР1 и eq,! — соответствующие углы регулирования и естественной
задержки включения. В интервале 6Э—02 ~ Твь где уВ|—угол
первой коммутации, происходит переброс тока с вентиля Т1 на вентиль
ТЗ;-в этом интервале напряжение/^ изменяется в соответствии с полу-
суммой ЭДС е3 и еь коммутируемых фаз генератора. По окончании
интервала y„t в промежутке 04 — 03 = л/6 + сс2, где а2 — угол вклю-
чения второго коммутируемого вентиля Т4, напряжение ut вновь
изменяется по кривой линейной ЭДС генератора еьс- В интервале
03 — 04 = происходит вторая коммутация (совместная работа
тиристоров Т2 и Т4). Далее вненоммута-
0 0 0 1 i । l'caL-’V- i i |В92 i Ы- ! 1 1 Д’ фазе АX зле-тро- двигатеря Рис. 6.11. Схема фазы пре- образователя частоты с непо- средственной связью ционные н коммутационные интервалы iH— !1 J.g-'jxji 8 •> ✓ Рнс. 12. Временная диаграмма фазного напря- жения н тока АД, питающегося через НПЧ
203
лгл оежима ’X>cia ВЛ 1 пос)едовате ,ьн. черед к
выпрямительнок> Р«*_ частоте у до поступ.1ен„я
с периодичностью Ц, реж„м, когда начинается измене,,’,,’
о переводе “,апряжения АД. Очевидно, что этот сигнал, ф ®
полярном „рвения НПЧ, поступает в момент, КоГдРа
мпруемыи С'|С^ * ’ ода фазного напряжения и, соотп гствует ,ре.
длительность J э1ектродвигателя /,. Так как рассматривается
буемои частоте ток ' |(ей ,о включенная до прихода указ-,,,
НПЧ с «^«^^ГпХтжает работать н „осле его Lot £
ного сигн^а пар ,мост„ в течение процесса перевода Ву/
даНГ,ппя’штельного в инверторный режим составляет О, = 4п 3 _
„з выпрямительного^ включения последнего вентиля
« яыппяАштельном режиме ВУГ, Рт = ₽Р, + ₽о, — включения
яеХо коммутируемого вентиля в инверторном режиме ВУГ, рр|
В -хгты регулирования и естественного опережения включения.
Во всем этом интервале напряжение ut изменяется по кривой линейной
ЭДССГ Датее внекоммутационные и коммутационные интервалы пос-
„едоватезьно сменяют друг друга (также с периодичностью 0„ =
= л 3) до тех пор, пока ток фазы АД не станет равным нулю (при () =
= 6. на рис. 6.12). Через некоторый промежуток Д6п, соизмеримый
с временем восстановления запирающих свойств тиристоров и необхо-
димым для обеспечения надежного выключения всех вентилей ВУ/,
начинается выпрямительный режим моста ВУ2> и процесс повторяется.
Из сказанного, а также из рис. 6.12 следует, что в зависимости от соот-
ношения частот fr h в течение полупериода фазного напряжения (или
фазного тока) АД имеют место (Л7В — 2) коммутации в выпрямитель-
ном режиме одного моста и (У„ — 1) коммутация в инверторном
режиме др} того. Здесь ¥в и .V,, — число коммутаций в выпрямитель-
ном и инверторном в одном интервале повторяемости. В процессе пе-
рехода от одной коммутации к другой напряжение АД определяется
линейной ЭДС генератора, и в течение коммутационного процесса —
полусуммой его фазных ЭДС Если углы сср/ и £р; (t = I, 2, А/в;
/ ~ Ч) — постоянные ичн переменные в зависимости от вида
модуляции кривой то углы Тв(, уи/, aCl, как правило, перемен-
ные, определяемые мгновенным значением фазного тока двигателя
в рассматриваемом интервале.
Так как полупериод фазного напряжения и тока АД составляется
из /Vn интервалов повториемостн 0п, можно записать
Л'п = ± ДАТ, (6.19)
допа1и®иие до ближайшего целочисленного значения A?r.
АП ЧТ° = Л” ,Vf,# Это позв<мяет кривую напряжения
устприпм , аК КУСОЧНО‘ непрерывную функцию, удовлетворяющую
кяжппгг, |'оши» которую можно описать соответствующими для
аналитичРгииыКаММУТаиИ0ИЫ0Г0 11 коммутационного интервалов
рией кпнвгл, И. выРа/Еениями- Пренебрегая возможной несиммет-
составин vn *<?тносительноос,1а6сш1сс(при дробных значениях fjfd^
тельного ^нотупНИЯ н?пРЯуНення по интервалам для каждого положи-
204
Инверторный режим моста В .У 2. В первом впеьом-
мутационном интервале
6^6^2л/3 —р,; гц == )'6Er sin 0; (6.20)
в интернате первой коммутации
2л/3 — р, < В < 2л/3 — р, — у„,; »
ч, = (fz6/2) EJsin В + sin (В —л/3)); |
во втором внекоммуташюнном интервале (если полагать •’л/З —
— Р> — Т..1 = Зп/2 — рг)
Зл/2 - р2 < В < 2л/3 - р2 + у.,; | 9 т
н, — I 6£rsin(B — л/3); J
в интервале второй коммутации
Зл/2-р_2^0<Зл/2-рг+у„1; >
и, = (J 6/2) Er (sin (0 — л/3) + sin (0 + л/3)])
и т. д.; с учетом интервала повторяемости 6„ = л/3 получим для ин-
тервала последней коммутации в инверторном режиме
+ 1) g Pv(l—1 0 (/VM h 1) —--------। i)i
«> = V Е- {sin [е - W,, ~ »-у] +sin (б - W. -£-)}.
В интервале окончания инверторного режима моста ВУ2 и начала
выпрямительного режима моста ВУ1
(А71, 4- 1) -у — PvH—1 + Tn(jvu—jj 6 (А7И + 2)-у 4- ctj •
«] = J 6Ersin(0 — ‘Уи'у’!
(6.26)
Выпрямительный режим моста ВУ2. В интервале
первой коммутации
W, + 2)-у+«1<е< + 2) 4 + “> + т”,:
«I = -У- £г {sin [в — (А'„ + 1) -у] +sin (о — 1V. -§-)},
в интервале меж.ту первой и второй коммутациями
(N„ + 2) -у + а. + )V> < е (N., + 3) -у + «3;
U1 = l 6£,sin[e-(.V„ + l)4]
(6.26)
(6.27)
205
воней, для интервала последней коммутации в выпрями-
вУ1
те.,вчпм режиме
(Л'„-2)|+<
(6.28)
и В последнем внекомму тати,ином интервале (перевод моста Ду/
в инверторный режим)
(Л'„ — 2) -у + амв-2 + Тв|Л'„-э < 0 < %. -3- ;
г я I (6 29)
и, = | 6£rsin[e — (N„ — 3)^.
Определим действующее значение фазного напряжения АД, поль-
зуясь известной формулой 1 (2/7\) J u\(t)dt, =
Подставим в эту формулу выражение
Лн-| Ло—2
щ (0) == V k,Er sin (0 + ф,) + У ktEr sin (0 -f- ф,);
приведем частоту Д (или Тх) к частоте ЭДС генератора и на осно-
вании (6 20) —(6 29). получим
С, v'Et-.
лЛг
(6.30)
---------------, ,------ , „ „ ,,| ) 6'2 Е зависимости от
фазовые сдвиги рассматриваемого i-ro или i-го участков
ОГО Ir.nr.r, , ... 1 3 _____
где kt, k, — коэффициенты, равные | 6 uni
mois'3?!! 91а3110Г0 напряжения относительно конца интервала предылу-
тя,™„ r''v^T£iluln в инверторном режиме и начала предыдущей комму-
тации в выпрямительном режиме моста НПЧ
1 ешая интегралы в выражении (6.30), находим
-__________ n' = J 3
«os(2pf
т- sin
)2т»—cos(2а
Vb') + S'n(^- +V».)}].
(6.31)
Очевидно, что даже в случае прямоугольной модуляции, когда
сср — const и рр const, выражение (6.31) весьма сложно использо-
пять при ана use и расчетах, так как а,, 0f, у,„. у,„ перемет пы В- е-
дем для практических инженерных расчетов в чес. о этих переменных
углов некоторые усредненные значения ас,„ 0ср, у„„ = Т1С = т
определяемые действующим значением фазного тока АД. Кроме того
Д 1Я прямоугольной модуляции кривой и, примем 0СР = a. v ’
Тогда, учитывая, что 20,„ - т„ = 2аС1> + Тср, получим
~ 1 j 2уСр — cos (аср + у,:„) X
Х [3 sin (“Г ~ v") + sin Рт + V.p)]| (6.32)
Действующее значение фазного напряжения СГ согласно приня-
тым здесь попущениям определяется по приведенным в [3] форму-
лам
Ur = v”E^ 1
„ ।г?—гг------------------——— I (б.зз)
v = I 1------2л cos(2acp 4-ТсР) sin ТерJ .
Следовательно, передаточный коэффициент НПЧ по напряжению
/?нпчо = UjUr = v'/v. (6.34)
В «идеальной» системе СГ—НПЧ—АД углы осо4 = 0о/ - Тв» =
== Уи( = 0 и при ар = О, |3Р = О
=Гз । (6-35)
В звено НПЧ — АД часго включается фильтр гармонических со-
ставляющих, кратных трем. В этом случае /?нпчо = где —
передаточный коэффициент фильтра по напряжению. Эксперименталь-
ные исследования показывают, что напряжение на выходе фильтра
(Л при /х < /1„ приблизительно иа 5,5 °с, а при Д > Дн на 4.5 ° о мень-
ше вычисляемого по (6.30) и (6.32) значения В зоне малых частот
(/ /1н) напряжение на выходе НПЧ практически прямоугольное
и его действующее значение равно амплитудному. На выходе фильтра
(на фазе АД) напряжение (Л имеет вид прямоугольной двухступенча-
той синусоиды (рис. 6.10) и равно
^;=] (636)
Пр^'^прямоугольной модуляции форма кривой «, близка к прямо-
УГОЛЬНОЙ. „ /с о п •• пр-
Сравним результаты расчета *нлчс, выполненного по (6.34) и не
редаточного коэффициента по напряжению (с уче
207
;20 я,гРаА
ltd 60 во ЮО
Рис 6.13. Зависимости А*нпч1> ” ОТ
}гла $
Ир.ктприые ля..И« - *НПЧЬ <°> Р«««™
ные о (С 35). сплошная линия - *BU <®>
Более
ских) эквивалентного выпрями-
теля
кви = ^ви^м(1), (6.37)
где кви ** кщц определяют по
(5.19) и (5.8) или по графикам (см
рис. 5.2).
Для конечного, достаточно
большого значения например
д/п = 600 (что ДЛЯ /гн == 40U Гц
соответствует пусковой частоте
тока АД К = 2 Гц), коэффициен-
ты &нпчи ч кви практически сов-
падают и равны 2,34; расхожде-
ние между ними увеличивается
с возрастанием тока нагрузки,
т. е. угла О = а + у, не дости-
гая, однако, 4 % (рис. 6.13).
Бо1ее существенное расхождение появляется с уменьшением УУП;
например, ее.™ 7V„ = 24, что для = 400 Гц соответствует
- 50 Гц указанное расхождение составляет 7,5 о, а для N - 6
н = 200 Гц) — около 18 %. Характер зависимости <4 (/J ги-
перболический, с отсечкой по максимальному' напряжению, а угол
О для НПЧ не превышает 90° (как правило, ссг, = 0» у < 60 ). Поэто-
му расхождения между значениями А’нпчг и кви в фу нкции эквива-
лентной проводимости АД у3 ~ вполне приемлемы в инже-
нерных расчетах.
Вывод аналитического выражения переда-
точного коэффициента НПЧ по току. В преобра-
зователе с гальваническим разделением фаз нагрузки и фильтром гар-
монических» кратных трем, кривая фазного тока АД близка к синусо-
идальной. Например, при прямоугольной модуляции выходного
напряжения преобразователя их кривая фазного тока электродвигателя
в точности повторяет ступенчато-синусоидальную форму кривой фаз-
ного напряжения «ь если cos <рд г» 1. Естественно, с уменьшением ко-
эффициента мощности форма кривой тока все более приближается
к экспоненциально-синусоидальной, но тем не менее остается близкой
к синусоиде. Поэтому действующее значение тока /. можно опреде-
лить через его амплитуду' /1СТ:
/j = । (44'- - уг • <6-38)
тпп^ппг1В С00тветствии с° сказанным принять, что токи в фазах элек-
нгр* ж ™Я син^СоиДальпы. то мгновенное значение суммарного тока
всех фаз равно 1
= h,,, II sin61 +1 sin (е - 2п, 3) | +| sin (0 + 2.лЗ) | ] = 2/„„ (6.39)
токГ'сг <пябгС ЧаС1°Т™ ' Это 1кмва™ет установить, что с «позиции»
Р та генератора на эквивалентный выпрямитель, среднее
206
1Л
Рис. 6.14 Временная диаграмма фазного тока
АД. питающегося через НПЧ при прямоуголь-
ной модуляции
значение тока которого также
равно 2/im, полностью иден-
тична, поэтому действующее
значение тока СГ можно вы-
числять по (5.18).
Такой вывод справедлив,
если cosi^ — 1. Однако в ре-
альных условиях коэффици-
ент мощности АД в процессе
ре1улпрования отличается от
единицы, что приводи! к по-
явлению инверторного режи-
ма вентильных мостов НПЧ.
В этом режиме в фазах гене-
ратора происходит не сложе-
ние токов всех трех фаз АД.
а вычитание тока инвертирую-
щей фазы из суммы двух дру-
гих (рис. 6.14), поэтому сред-
нее значение тока фазы СГ снижается на
н в
2/1,Г| sin = —ЛГ!1(1 —соч<рд), (6.40)
1 о
где Од 2лД/, а выпрямленный ток эквивалентного выпрямителя ста-
новится равным
4 = 2/1„, — Д/г = 2/1,„-® (1 _cosi(B)/1т =
= 2/,„ф — ф (1 — cos<pB)j. (6.41)
Тогда из (5.16), (5.18), (6.38) и (6.41) находим выражение переда-
точного коэффициента НПЧ по току:
АнПЧ' = ЛДГ — 1 3 f 1-----|-(1 — СО5<рд)| 1 X
. (J_____3 12 + СОЗ (аср + тср>| sin уср — уср [ I 4-2 cos <хср cos (аср 4- тср)) («
Х| 2л |cosacp-cos(«cp-|-Tcp)F |
(6.42)
Выражение (6.42) получено при условии отсутствия обычных в кри-
вой тока СГ постоянных и субгармонических составляющих, причиной
которых является несимметричность полупериодов напряжения АД
(по длительности). Эта неснм.метрия возникает из-за необходимости
плавного регулирования частоты АД во всем частотном диапазоне,
что достигается лишь за счет определенного для каждого значения /t
сочетания чисет Л'л в положительном и отрицательном полупериодах
напряжения ut. Точная количественная оценка погрешности коэффи-
циента Лнпч/ представляег сложную, еще не решенную задачу.
.. „ „ сравнению значении *нпчт по (6 42) и ft0,
Прежде чем nepei>T"!; P Tin, следующее. При замене ВЦ 31;.
- feAu п0 ‘5-’ "ш етем ТЭД одновременно заменяется эквц
«.валентны*- вьТЙ„ТгТПЭс НПЧ н АД электродвигатель замени,
кнпюн нагрузкой- А ° но.11Ндуктнвной нагрузкой с проводимостью
екя эквивалентно..а1'™Хц„ента мощности Тогда в процессе рас.
и сохранением его> НПЧ получим результаты в cos%pa3
чета уг. ов о (см- р№- при том же активном сопротивлении
Mf !ьше. чем ДТП е "Р & зо°).
нагрузки (в 1СИ^сп1 передаточного коэффициента по току
Так как график завис 5 2), то параметр А-цпч/ для эквива-
ОТ б есть прямая линня ‘ п на. ен cos <рд- Поэтому расхождение
л н"П>оваиного НПЧ про^ноза11исетьвв11деЕ/ = t =
коэффициенте в/ = fahm — передаточный коэффициент
Х1лрятцСгетж работающего на нагрузку с той же проводимостью tJi,
h° Ес” «“сравнить значение йнпч/, рассчитанное согласно (6.41)
и .6 42) с kBI из (5.8) п (5.20), то получаемое расхождение ?/ = 1 -
> Г Н nW I — cos в итоге реальная погрешность в on-
р^^ередаточного ээй-.ци.нтз НПЧ по току, заменяемого
эквивалентным выпрямителем при одновременном эквнвалентнрова-
Н1Ш АД, получается равной А, = (1 — (?/-£./)! 100 ~ 4,7 "о. Для углов
б < 30 харачтер зависимости О (у*) существенно меняется (см.
рис. 5.3, с), вследствие чего погрешность А/ еще леньше.
Таким образом, замена НПЧ эквивалентным ВУ с точки зрения
передаточных коэффициентов по напряжению и току представляется
вполне правомерной, что значительно способствует упрощению рас-
чета си.товои пени СТПЭ в претелах принятой в инженерной практике
точности
§ 6.6 Импульсные преобразователи
постоянного напряжения
Особенности работы СТПЭ с влектрохимическимм аккумуляторами.
Основная сфера применения СТПЭ с электрохимическими ЭУ это
городские электромобили (ГЭМ). Главное условие внедрения ГЭМ
(см. гл. 1} обеспечен не заданного среднесуточного пробега при высо-
ких динамических показателях, позволяющих эксплуатировать их
в общем транспортном потоке.
При выборе типа и схемы С \Р рассматривав дых СТПЭ нужно учн-
,.^та следУ*°ЩИе характерные особенности: низкий уровень наиря-
oow оольшой пусковой тон электродвигателя,
пазон । <мгас.л,', тРебУеМ011 динамикой электромобиля; широкий диа-
в зависимости " *,апРяжен,,я тяговой аккум* гяторной батареи (ТАБ)
ров- наличие <гГ™°В "агр>’зк|111 степени разряжешюсти аккумулято-
ченне внгтпеинрго ™нои 111д> -тпвиости и относительно высокое зиа-
ность Й41ОТ ТЭД,иТспавГ0 сопрот“влен11я батареи; малая пндуктив-
Д сравнительно оольшое сопротивление его цепи.
210
От ТАБ в режиме пуска ТЭД потребляются токи, в 10—15 ра»
превышающие нормальный (пятичасовой) разрядный ток аккуму ^то-
ров. В этом случае возникают значительные потери энергии на внутрен-
нем сопротивлении ТЛБ, вызывающие ее чрезмерный нагрев и интен-
сивное испарение электролита.
Радикальным средством повышения коэффициента использования
запасенной на электромобиле энергии и снижения нагрева ТАБ яв-
ляется применение импульсного преобразователя постоянного на-
пряжения, тем более что это практически единственно возможное
средство регулирования напряжения ТЭД, так как ступенчатое управ-
ление напряжением посредством переключения секций ТАБ с парал-
лельного на последовательное соединение имеет ряд существенных, недо-
статков. К ним относятся наличие большого количества коммутаци-
онных аппаратов, значительные колебания силы тяги электромобиля
при переключениях секций, невозможность осуществления электри-
ческого торможения, а также сложность компоновки, установки и
съема батареи.
В связи с перечисленными особенностями СТПЭ с электрохимнче-
скойЭУ при построении в анализе ИППН необходимо учитывать сле-
дующие факторы: возникновение добавочных потерь энергии в ТАБ,
обусловленных импульсным (прерывистым) характером потребляе-
мого тока; перенапряжения на ТАБ при импульсном режиме ее раз-
ряда, вызванные наличием собственной индуктивности батареи; ог-
раничение максимального пускового тока ТЭД мощностью ТАБ,
предпочтительность пуска электромобиля с пониженными значения-
ми пускового тока ТЭД для уменьшения потерь в батарее; зависи-
мость величины пульсации тока ТЭД от коэффициента заполнения
импульсов преобразователя, частоты коммутации, постоянной време-
ни цепи ТЭД, значения ЭДС, внутреннего активного сопротивления,
степени разряженности ТАБ и пускового тока ТЭД; существенно ма-
лая постоянная времени цепи ТЭД, обусловленная малом индуктив-
ностью его обмоток; невозможность обеспечения надежной коммута-
ции токов ТЭД при использовании только напряжения ТАБ без весь-
ма большой емкости коммутирующего конденсатора ИППН.
Фильтр для сглаживания пульсаций тока. Даже при использова-
нии ИППН потерн энергии в ТАБ составляют до 30 °о общего расхода
энергии батареи, а ее температура может превысить допустимую. Та-
кие значительные потери н перегрев батареи вызваны добавочными по-
терями в ней за счет импульсного характера разрядного тока. Эго,
как отмечено ранее, приводит к снижению срока службы и надежно-
сти ТАБ, а также к интенсивному испарению электролита. Последнее
определяет значительное увеличение длительности зарядки аккумуля-
торов, так как время, необходимое для остывания электролита и его
пополнения, составляет более половины всего времени зарядки. При-
нудительное охлаждение ТАБ обусловливает дополнительный расход
энергии и увеличение массогабаритных показателей электрооборудо-
вания СТПЭ. Устранить отмеченные негативные явления можно вклю-
чением между ТАБ и ИППН фильтра, сглаживающего пульсации тока
ТЭД.
2(1
Оценим эффективность применения СТПЭ с фильтром путем сравне-
нии ее с системен вез фильтра по затратам энергии ТАБ за В,)СЧ11|
„ женпя электр «Оби тя по условному перегону и по потерям энергии
в 'мой батарее 1171 При анализе принимаем, что полное внутрен-
не coup этивление ТАБ постоянно и равно активному сопротивлению
батареи при степени разряженное™ 50 о; ток ТЭД за перво | коммута-
ш„ изменяется линейно пульсации тока ТАБ при наличии фц..|Ьт.
ра нет
Пс тын расход энергии ТАБ за время движения электромобиля
опредетяется как сумма энергии затраченной на его движение,
потерь энергии в СТПЭ ДАсгпэ И в самой батарее ДА1аб:
,4гтг. — Ал, + ДАстпэ + ААглв. (6.43)
В свою опереть, потери энергии в СТПЭ
А4стпэ = | (АРиппп + -АР + АР„.П)<Я, (6.44)
где 1Д, — время движения автосэбиля; ДРиппн, —АР, АР„.„ — потери
мощности соответственно в ИППН, ТЭД и механических передачах
ПВК.
Потерн энергии на внутреннем ак гпвном сопротивлении РТАе ба-
тареи с учетом принятых допущений
ААттг. = Рт|* | 1ттб(/)Л, (6.45)
о
где , — время унижения электромобиля по условному перегону-
<т4ь— ток батареи.
Тяговые р .счеты позволяют построить кривую движения электро-
“Обнтя. Разделив эту кривую на характерные участки, можно для каж-
дого такого тчагка найти состав тчющие выражения (6.43):
ААтть == А41ДБ т- ДДТХГ . д 1ГАБ = /?гль j Ту.АЕ(у)+
О
+ РтАБ J ТтавЮЙ+ «ГДБ ( 1т ТЬ (/)<«; (6.16)
Ада + А.1С1ПЭ = (Ада 4- ДАтпэ) + ( 1А, + ДАстпэ) -
-(AptR - ДАстпэ - ДАтаб) = j кТАБ (тТАБ) |ТАБ (/),ц +
гавт °
+ f “>-.c(<,e)T. 0С)Л_ j WAb(/TAb)iTAB(OdZ + /?TA» J т|ав(/)Л.
где 1рек — энергия, возвращае-
мая в батарею за время рекупе-
ративного торможения; величи-
ны с одним штрихом соответст-
вуют участку пуска кривой дви-
жения электромобиля до выхода
на автоматическую характерис-
тику ТЭД за интервал времени
U — /п, с двумя штрихами —
участку пуска по автоматической
характеристике ТЭД за интервал
времени /п — бит» с тремя штри-
хами — участку рекуперативно-
го торможения за интервал вре-
мени /аВт — /т-
При импульсном регулирова-
Рнс. С. 15. Кривые тока ТАБ за период
коммутации для СТПЭ без фильтра (/) и
с фильтром (2)
£ЛД— размах пузьсацнЛ тока ТЭД
нии напряжения ТЭД выражение (6.46) примет вид
*п Г 'к
ДЛ1 ТБ = ЯтАБ J f
О to
«тлвЮЛ <# + J d(0<tt +
-Г ^ТАБ J
С НТ
.0 I
(6.48)
На рис. 6.15 показаны формы кривых тока ТАБ за период комму та-
нин для СТПЭ без фильтра и с фильтром.
Известно, что потери в батарее определяются действующим зна-
чением тока /таб за период коммутации, которое при импульсном
регулировании в режимах пуска до выхода на автоматическую харак-
теристику и рекуперативного торможения согласно рис. 6.15 равно
/tab = I /д.п/'-и = 4l.n I /«и
Учитывая последнее выражение, вычисляя внутренние интегралы
в (6.48), переходя в интервалах времени 0 — /п, /авт — 4 к другой
переменной интегрирования Х„ и заменяя реальную кривую тока ТЭД
в интервале времени /п — /авт на сумму квадратов тока и соответствх -
ющих интервалов времени потребления тока, получим для СТПЭ без
фильтра
^Лт\Б = ЯтабТ'п/д.п.ср I-----ЁГ ( 7Д п*р ) ] i +
+ Ятаб V ItfAti 4- КтабЛ^л-тхр^ + ( /д/ср J
(6.49)
213
Д1Я СТПЭ С фильтром
,1 11,4-=ЛгАвТ„Дп.ег .(
(6 50)
+ Ктав7’,/Ь.«. f
„ т 117- _ время движения электромобиля соответственно
где Д. " *’ щпгческую характеристику ТЭД, при работе по
до выхода на аэтома рекуперативном торможении; I „
этой "“чение пускового и тормозного тока ТЭД; /„ _
Д.т — средав тока ТЭД за интервал времени Д/(.
‘^Тпел^нь х условиях движения электромобиля коэффициент за-
за время автоматического пуска изменяется от Х11М1„, 0
„мнения за г^- ме рекуперативного торможения коэффициент
заполнения изменяется от Х„„™ ДО единицы. Интегрируя (6.49) „
(6.50), получим:
Д4пг. = 4 ^тавД пер [1 + ~12~( / Л ) I +
+ /?ТАЬ V /д Д/, + ~2~ Rlf^a т Ср i
'•И Mill]
ДЯтА D ф Я?А б/д п ср'
(6.51)
(6.52)
и
+ — ^ГАБ^дт ср^т (Хи мин V
Выражения (6 50) и (6.52) справедливы для емкостного фильтра.
Если рассматривается £С-фильтр, то в них вместо /?таб следует
включать /?г\б v R<p, где /?ф — активное сопротивление добавоч-
ного реактора.
Сравнение (6.51) и (6 52) в реальных диапазонах изменения коэффи-
циента заполнения показывает, что за время пуска электромобиля
до выхода на автоматическую характеристику ТЭД потери в батарее
яри наличии фильтра снижаются приблизительно на 33 °© по сравне-
нию с системой без фильтра; то же относится и к режиму рекуператив-
ного торможения.
Приведенный анализ показывает высокую эффективность исполь-
з°вания сглаживающего фильтра в СТПЭ. Однако для правильной онен-
Уг эФФект,,вности необходимо рассматривать абсолютное значение
м<я,п 'тчперГ"" нетолько за время Т„ и Тт, но и с учетом времени
висяшга " по авто',атичес|'ой характеристике, т. е. в режиме, не ва-
ля Оу. ипа снстемь1 регулирования напряжения электродвигате-
ле можно учесть введением в анализ параметра
7’’ = (^ + 7г)(Т„ + 7’а.,
(6.53)
2.Ц
характеризующего кривую движения электромо-
биля (171
Установим, как изменяется полезная энергия,
отбираемая от ТАБ, относительно общего расхода
энергии батареи на условном перегоне при вклю-
чении в силовую цепь СТПЭ сглаживающего
фильтра. Огметим, что абсолютное значение по-
терь энергии в ТАБ зависит от типа аккумуля-
торов. характеризуемых отношением Ятаб'Етчб;
для однотипных батарей величина А (тлы Ьдь
= const, если /я — const. Современные ТАБ с
£тдь = 100 В имеют /?ТА6 = 0,06 0,2 Ом.
На рис. 6.16 приведены зависимости
= (ДЛтаб — ЛЛтабф)/-Атаб = f (Т*). (6.54)
гл о,б о.в 1 ’
Рис. 6.16. Увеличение-
полезной энергии, от-
бираемой от ТХБ, от-
носительно общего рас-
хода энергии батареи
при установке сглажи-
вающего фильтра:
/?ТАБ-еТАБ- ЧДЛОО;
2~ /?ТА6еТЛБ =°д 10°:
«-«ТАБ ЕТАБ=ОО6’ИЮ
Эти кривые показывают, на сколько относи-
тельно общего расхода энергии ТАБ увеличива-
ется полезная энергия, отбираемая от батареи,
при включении сглаживающего фильтра на вхо-
де ИППН-
Изложенная оценка эффективности примене-
ния сглаживающего фильтра на входе ИППН,
как отмечалось, проведена при допущении отсут-
ствия пульсаций тока ТАБ и потерь в фильтре, т. е. для идеального
фильтра. Без существенных погрешностей полученные результаты
можно распространить на систему с реальным фильтром, когда пуль-
сации тока ТАБ не превышают 1 °о от значения пускового тока электро-
двигателя и потери энергии в фильтре малы по сравнению с экономией
энергии. Анализ показывает, что установка фильтра целесообразна,
если длина пробега электромобиля при этом увеличивается не менее
чем на 2—3 °о с учетом возрастания его массы за счет фильтра и потерь
энергии в последнем.
Значительного улучшения массогабаритных показателей фильтра
и снижения потерь энергии в нем при заданных параметрах сглажива-
ния тока и напряжения ТАБ можно добиться повышением частоты ра-
боты фильтра /ф. Для ТАБ со сглаживающим фильтром, работающей
на ИППН, целесообразно оперировать расчетной схемой замещения
(см. рис. 2.7, г). Поэтому индуктивность фильтра £ф должна учиты-
вать собственную индуктивность батареи
Аф = Ьтаб + (6.55)
где £Доб.р — индуктивность добавочного реактора.
При допущении постоянства за период коммутации напряжения
батареи и тока ТЭД емкость конденсатора фильтра Сф определяется
выражением [17]
Сф=/д/(8/фДиТАБмакс), (656)
где А(7ТдБ макс — максимальное значение пульсации напряжения ба-
тареи.
215
р»с 6 17 Зашспмкш гранич-
ной частоты иодаутяияя от пара-
негра Г*;
Г—ЛтЛБ fTAfi ’-= KW'M.
Г- «ЫБ £ГАБ “ °|<|"4
Г-КгАБ £ИВ -=<С0Ч1
Анализ квази} становившихся процес_
сов в фильтре при тех же допущения»
показывает,что заданные параметры сгла-
живания можно получить без включения
добавочного реактора, ухудшающего адс.
«габаритные и энергетические показа-
тели фильтра Тогда рациональная час-
тота работы фпльтрн 1171
. (64/.7’Т,б^А/|ЛБ нлкс//д) , (6.57)
где А/тлв н«кс^7д максимальное значе-
ние относительной пульсации тока ТАБ
Так как нет необходимости пр?ДЪПв;
лить жесткие тргбоваиия к пульсации
напряжения ТАБ, емкость конденсатора
фильтра можно выбрать по условию обес-
печения требуемой пульсации тока ТАБ
и нз соображений удобства компоновки
блока фильтра. Однако следует иметь
в виду, что снижение напряжения на
конденсаторе фильтра может привести
к уменьшению напряжения, до которого
конденсатор ИППН.
заряжается коммутирующий
При пониженных частотах коммутации и определенных кривых
движения электромобиля (значениях параметра Г*) может оказаться,
что потери энергии в ИППН и фильтре и затраты на транспортировку
I фильтра станут соизмеримыми с экономией энергии от использования
| фитьтра. В этих условиях следует найти граничные значения частот
। коммутации ИППН, при которых дополнительные затраты энергии
от установки фильтра не превышают ее экономию. Считаем, что ис-
' пользование фильтра целесообразно вплоть до равенства между эти-
I мн составляющими энергии, так как и в данном случае улучшается
| тепловой режим ТАБ, за счет чего у величивается ее срок службы
| и повышается надежность. Кроме того, если в каком-либо режиме тем-
। тература ТАБ превышает допустимую, включение фильтра необходн-
I мо даже при увеличении потерь энергии.
। На рис. 6J7 представлены зависимости, по которым определяют
граничные значения частот коммутации длн батарей с различным
отношением /?тю£таб применительно к электромобилю с пара-
I метрами (см. § 9.4).
ч«Л'^л1ИВН0СТЬ ^^"«юго торможения на элекгромоби-
' нзть \^1чТ,1ВИОСТЬ ^екУпеРативного торможения принято оцени-
питания 4,1 ^пр16'1 К0Л|,чества энерпш, потребляемой от источника
1 меняя. 4 пУеиа и возвращаемой в него за время тормо-
зовному перегощ^паггчп"1 За врсмя дв,|лен,1я электромобиля по ус-
“«р >!^.в%даЖге^ТмГласно (643)-(6 46) и (6 47)- Пара‘
ляемьго в тяговот пагоёт» с,,т от времени торможения, опреде-
Р е е, и от тока 7peri ТАБ в рассматриваемом
| 216
режиме:
А** “ i
«ТАБ (/рек)
/реи (Щ О dt»
(6.58)
где Tv™ времЯ РекУ,1еРа11,виОго
торможения электромобиля.
Зависимость «так от i-jAB оп-
ределяет нелинейность функции
Ус (у). Чтобы найти /рек (о), за-
пишем уравнения
/реД/тАБ = /^д/д.т; (6.59)
£/тДВ = ЕтЛБ + /рекЯтАБ! (6.60)
(6.61)
где /рек — среднее значение тока рекуперации.
Решая (6.59) — (6.61), получим
1 4лб-ЦКтдб/д.т (АФдР-Г,. зрд)-етаб
2/?таб
(6.62)
Строго говоря, в импульсной системе рекуперативного торможения
на значение /рек оказывают определенное влияние коммутационные
процессы в ИППН, тем более заметное, чем выше частота коммутации.
Однако, как показал анализ, в реальном диапазоне частот коммута-
ции (до 2000 Гц) и при отношении времени перезаряда коммутирую-
щего конденсатора ИППН к период)7 коммутации, не превышающем
0,2, учет переходных процессов в преобразователе дает результаты,
отличающиеся не более чем на 3 °о от вычисленных по (6.62). Поэтому
на практике можно пользоваться именно этой формулой. Зависимо-
сти /рек (и) для /дт — const применительно к ТАБ и ТЭД. исполь-
зованных в СТПЭ (см. гл. 10), представлены на рис. 6.18.
Выражение (6-58) с учетом (6.60) принимает вид
грек грен
Лрек = £тАГ> | <рек (V, t) tit + /?ТАБ j /рек (»» 0 =
и 0
= £таБ V (/„е ДО + «ТЛЕ V (7=ек<ДО. №63)
о о
где /рек, — среднее значение тока рекуперации в течение времени
А/,.
Среднюю скорость движения электромобиля в режиме торможения,
соответствующую данному отрезку времени А/г, определяют на ос-
новании тягового расчета, а для каждой vt по (6.62) вычисляют /реко
Следует отметить, что в (6.63) первое слагаемое характеризует
часть энергии, идущей на восстановление емкости ТАБ, а второе сла-
гаемое — потери рекуперирующей энергии на внутреннем сопротив-
лении батареи.
217
Рис 6 19. Зависимости П)ль-
сациитокз ТЭД от коэффици-
ента заполнения ИППН при
= const и различных зна-
чениях падения напряжения
на ТАБ (100 % соответствует
максимальной пульсации то-
ка ТЭД, работающего от иде-
ально» батареи: Дудв=
= const, ЯТДБ = 0):
Т 1Я перегонов длиной 300, 500 и 1000 м
„рнненнтельно к ГЭМ, рассмотренному в
J, ю найдены согласно (6.63) значения
полезной энергия реку нуацин, идущей па
восстановление емкости ТАБ Эта значения
составляют соответственно 14,5; 9 и 7 %
от энергии, затраченной в пусковом ре-
ЖИМе. о
Влияние параметров СТПЭ на пульса-
ции тока ТЭД. Напряжение ТАБ сосглажн-
вающим фильтром
С/тАБ в ^ТАБ ^-i/дср^ТАБ» (6.64)
/ — U* = 0,25 (рекуперативное
торможение); 2— V* = О; 3 —
— V— 0.5 (пуск); * — V* = I
(пуск)
где /дхр — среднее значение тока ТЭД.
Здесь н далее верхний знак соответствует
режиму пуска, ннжний — режиму реку-
перативного торможения
Анализ квазиустановившихся процессов
в цепи ТЭД при допущении постоянства
ЭДС и сопротивления ТАБ и индуктивности
ТЭД за период коммутации дает с учетом
(6.64) выражение для определения размаха
пульсаций тока двигателя [ 1 /]
£тлб(1Т?^/*)|1 - e~A,'<T-^lfl -еЛи ,мт^1
1 (Tvf )
£Яа|1— е Ub’j
где t/* =/дсрЯтлв м; — отношение, характеризующее падение
напряжения на активном сопротивлении батареи и зависящее от
протекающего через нее тока, параметров и степени разряжеиности
ТЭД; тг — постоянная времени цепи ТЭД
Дифференцируя (6.65) по коэффициенту запотнения при /н = const
и приравнивая результат нулю, получим трансцендентное уравнение
—~ (1 т х„и*) 11 — =
Ту/к
= —1— (1 :р *) [ 1 — е~х“ ,Т*Ц е-1*"-1’ +
тг/и
+ У11 — е~’“ [ 1 — (6.66)
решение которого дает значение коэффициента заполнения Хи, соответ-
ствующее максимальной пульсации тока ТЭД.
Из графиков, показанных на рнс. 6.19, следует, что пульсация
тока Л/д ТЭД снижается с увеличением падения напряжения на ТАБ,
определяемого потребляемым током, и возрастает с увеличением паде-
ния напряжения на батарее, обусловленного током рекуперации;
реальная ТАБ имеет максимум пульсации тока ТЭД с коэффициен-
тами заполнения Хн> сличающимися от 0,5;
218
значсшн. «п -и» г» пульсация тока ТЭД максимальна,
зависит от падения напряжения на ТАБ;
пульсация тока ТЭД достигает наибольшего значения в режиме
рекуперативного торможения с максимальным тормозным током электро-
двигателя при наибольшей степени разряженности ТАБ
Такое состояние батареи соответствует 15—20 % ее номинальной
емкости; дальнейший разряд ТАБ определяет движение электромоби-
ля с существенно пониженными скоростями, когда рекуперация осу-
ществляется с максимальными коэффициентами заполнения.
Отметим, что если уставка тока ТЭД в режиме торможения ниже
уставки пускового тока, то именно в этом режиме при наибольшей сте-
пени зараженности батареи следует определять наибольшую пульса-
цию тока.
Использование в расчетах реальных параметров СТПЭ показывает,
что в диапазоне частот коммутации выше 600 Гц можно принять допу-
щение о линейном изменении тока ТЭД за период коммутации; тогда
погрешность не превышает 2 %. Это допущение позволяет (6.65) и
(6-66) привести к виду
А/д = Егав (1 А.,6*) (1 - XB)/(LflfK); (6.67)
XL « |1У =р 1 =р 1 1—U* + (U*)2]/(3(/*); (6.68)
Л/дwkc = [Етгь(1 =F Хи6*)XL (1 - M}/(£Jlt). (6.69)
Пульсации тока ТЭД вызывают в нем добавочные пульсационные
потери, ухудшают коммутацию и повышают температуру коллектора.
Если амплитуда пульсаций не превышает 10 % среднего значения тока,
то заметного ухудшения условий работы электродвигателя не наблю-
дается .
Электродвигатели, применяемые на ГЭЧ с электрохимическими
ккумуляторамн, имеют малую постоянную времени якорной цепи
(tv 3 -г- 7 мс), определяемую малой индуктивностью при пульсиру-
ющем токе (Тд 150 ~ 300 мкГн) и относительно высоким активным
сопротивлением этой цепи. Расчеты по (6.65) — (6.69) при реальных
параметрах ТЭД и ТАБ показывают, что для обеспечения приемлемой
пульсации тока ТЭД необходимо либо увеличивать частоту коммута-
ции, либо включать в цепь электродвигателя дополнительный реактор.
Последнее вызывает увеличение массы электрооборудования и доба-
вочные потерн энергии. Поэтому целесообразно повышать частоту ком-
мутации ИППН.
Минимальное значение частоты /к обусловлено допустимой ампли-
тудой пульсации тока ТЭД и вычисляется по формуле 1171
/,„ = [£таб « ,Л„ (1 Т (1 - X;,)J/(0,2L,/n ср). J6.7OI
Верхний предел частоты коммутации определяется временем выклю-
чения тиристоров, используемых в ИППН, и заданным диапазоном
коэффициента заполнения. При современном уровне развития полу-
проводниковой техники и Аи 0,2 4- 1,0 максимальная частота ком-
мутации не превышает 2000 Гц.
21У
,,„.ть f 11 /„„„с необходим!, c j четом Ca
Окончательно ф',льтра „ Может оказаться, что ча„^
шюнальноб часто»,р °зонгДастот /„.Если ц < С не 1есообраз.
,4 находится вне J коммутации равной /„„„.Если /
» принять рабочро Чаь ь^тпрветоры - меньшим временем БЫ1?П10.
>/;„„е.«ед.^т "₽ времени выключения исчерпан, то искать ком-
чения, а если запас но ре , величенпем массы и габаритов ф|1ЛЬтр
.рошксное Р шеня|ДБ и,ц перело ить к комбинированным системам
„ потерь ччертни в ;оич^|1рх1ОШ11М реактором в цепи главного
управления, например
’"^пХацтонГая способность ИППН. Низкий уровень напряжения
К „ ППТЧШ1Я в СТПЭ с ТАБ при больших пусковых токах элек-
”"°в”“атетёй . широкий диа. аз >н изменения напряжения батареи
от Нагрузки и степени разряженное™ акку мулято-
пов об "л^пвают невозможность о у надежном коммута-
и-ш to коммхтирхющ.го кандеиситора 1П11Н весьма большой емко-
<п Кроме тэте увеличение емкости до значения, обеспечивающего
гомихиашио* акспхгальиых токов при минимальном напряжении ТАБ,
требхет уменьшения индуктивности реактора перезаряда д я сохране-
ния ' обходимой частоты коммутации, что прьводн- к снижению до-
бротнистп конт)ра перезаряда и напряжения на коммутирующем кон-
денсаторе ниже уровня напряжения ТАБ. В связи с этим в СТПЭ
с электрохимической ЭУ подход к обеспечению коммутационной спо-
собности имеет специфические особенности Под коммутационной спо-
собностью понимается запасание конденсатором энергии, достаточной
для коммутации заданного мгновенного значения тока.
Общепринятая методика определения емкости коммутирующего
конденсатора при минимальном напряжении источника питания, ког-
да напряжение ТАБ при глубокой степени разряженностп в режиме
пуска может состав 7ять 30—40 В, приводит к существенному увеличе-
нию массы и размеров узла коммутации и в конечном итоге — к зна-
чительному снижению частоты коммутации (до 100—200 Гц) при макси-
ма 1ьном напряжении батареи, ибо в этих условиях только в таком
интервале частот можно получить приемлемый диапазон изменения
коэффициента заполнения ИППН. В свою очередь, снижение частоты
вызывает ух)дшение массогабаритных показателей фильтра и по-
вышение амплитуды пульсации тока ТЭЦ. до 80—90%.
ребуемую коммутационную способность можно обеспечить регу-
лированием напряжения на конденсаторе посредством его дозаряди.
инташ^^04 Д° напРя>кеН11Я’ превышающего напряжение источника
ств7яютгяОыл,ЯМ движения ПУСК и торможение электромобиля осуще-
„ичными от nJ," п'° С '',а|'сн:“а1’«ьп-11 уставка! ш тока ТЭД, но и от-
гатора в соответс1винТ?М.\хСЛеС' )бр:,зно из'’енять напряжение конден-
ТАБ. Ллчя1,«1 с коммутируемым током и с учетом напряжения
экономичную и надёжнТ^1Юи'еГ0 ’'о1'т'енсат0Ра позволяет получить
емкости rfjvciou^ • Л,и> гащ"° тока Е ИППН пр I минимально!!
«ре, Г,р£ '1ЬИЫ напряжение! иа этом конденса-
J «.торос ограничено допустимо» напряжением на тирис.орах
с
Рис. 6.20 Принципиальная схема (п) и схемы за
мешения (б) и (в) процесса регулируемого дом-
ряда коммутирующего конденсатора
преобразователя, макси-
мальной реактивной мощ-
ностью применяемых кон-
денсаторов и уровнем их
изоляции.
При определении ком-
мутационной способности
нужно учитывать потери
энергии в контуре предва-
рительного перезаряда Ск—
__ £n — Т4 (см- рис. 6.21),
приводящие к снижению
напряжения на конденсато-
ре. На основании рассмот-
рения переходного процес-
са в контуре напряжение на
конденсаторе (с учетом того, что перезаряд происходит в течение по-
ловины периода собственных колебаний контура) определяется урав-
нением 117]
г/ II -—яя о > —('„я 2)1 С
и с = " ", (6 71)
где 1/сктч = Uck !<= ii « — гr/(2-Ln) — коэффициент затухания колебаний
в контуре Шп = 1 1/(£гС,) — г^/(46^ — угловая частота собственных
колебаний контура; гп — активное сопротивление контура перезаря-
да на частоте перезаряда; Ск — емкость коммутирующего конден-
сатора; £п — индуктивность перезарядного реактора.
Принимая (Уск.кач = С/скдоп, где Uc к.доп—допустимое на-
пряжение на конденсаторе, представим уравнение коммутационной
способности конденсатора в виде
Ск ,.„„7/ск.Д0„С (Г"Л'2” С" L" = (/дер + 0.5Д/д макс) /выкд, (6.72)
где /ДСр — среднее значение максимального пускового (тормозного)
тока ТЭД; /вьжл — время выключения главного тиристора ИППН.
В (6.72) входит максимальный размах пульсаций ТЭД, вычисля-
емый при частотах Д > 600 Гц по (6.69) и Д < 600 Гц по (6.65) н
(6.66). Решение трансцендентного уравнения (6.72) дает минимальное
значение емкости коммутирующего конденсатора.
Допустимое напряжение на конденсаторе следует определять, ис-
ходя главным образом из экономических соображений, выбирая класс
тиристоров ИППН по напряжению.
Дозаряд можно выполнять различными способами. Сравнительная
оценка этих способов показывает, что предпочтение целесообразно
отдать способу с использованием тиристора То в цепи обратного вен
тиля (рис. 6.20, <7), задержка на включение которого определяет дозаряд
конденсатора Ск, осуществляемый за счет энергии, накопленной в ин-
дуктивности ТЭД. Для ограничения скорости нарастания тока через
Г5 н снижения коммутационных потерь при его включении в цепи
тиристора установлен насыщающийся реактор Llt влияние которо)
. Г при существующих параметрах ло„„
„мряд коиажсатрр- - учитывать, тан как, например пр,У"Ро-
нГ"- TI - ™авный
₽ мжла’сатора „ /„Нс 6.20)
тиристор ,р ' ,,,,„я1пующего конденсатора можно па-.„„„
Процесс *заРяла Время задержки на включение тирь,с А,,ть
на два этапа: дМЗрМ ₽ 1!асыщеи1.я реактора L! (р„с. 6
(р„с. 6.20. й) л“ар™т на^наться с момента когда напряжен • °’'
Процесс ^РХтя напряжения питания пли более высокого ypu'"s
„ечдостиг.то уровни« . ^коренного перезаряда.
уравнение, описывающее процесс доз
BCV^^6.Ma-«eeTB.M[171
d!uc,/‘«2 + ai^)d4cJdt + отвис,. = «х^тав,
т =Z.v/^/? — постоянная времени цепи Т.->Д;
"V/тнвнос’ть якорной цепи н^ктродвигателя,
венная тс.товая частота контура (рис. 6.20, О).
Решая уравнение (6.73) с учетом начальных условии nCK|,„d=s
= 0^>£т*в, 7,М = /«— получим
—1Д2тт||| 61ЧД1
ПС. = ^ТАБ + С I)”ЙС>
X sin wt + (UH ,„ — £таб) cos со/ j
Ток ТЭТ определяется выражением 1171
г
df
где »х =
(д макг COS ('ll
(6.7'3)
_.fyMMapilai]
» собет”
Цич ~ f ТАБ^
2тесо
(6.74)
— Е таб) +
f3 4tKc Сч — ^ТАБ1
2<ит. +
(6 75)
где 4 максимальное значение тока ТЭД за период коммутации;
I (О — ] <Bvl/0Tv).
прпм^п™ nolte3affl1» чт0 влиянием потерь в активном сопротивлении
дозаг)ялдемл^?ВИГаТе^Я ПРН нахожЛенн11 длительности процесса
дозапятя / о пренебречь. Поэтому, полагая, что этап тиристорною
дизаряда заканчивается при l)r I) 4- П ГЛ Н —
1 напряжение типигтппиг™ „ Uc,< Vhj4 Д03’ гд€ дсм
Р рного дозаряда конденсатора, для /Д03| получаем
Этап ло«п 'Ж,.1=(1'В1»ага,"<^-^Св//дмжс) (6 76)
Ракге₽изуетаЯур^^е”“™ра С« от Реактора L1 (рис. 6.20, в) ха-
£таб = Lidijdt + 4
"с" = £тлб + wsdB/dt;
(6.77)
(6.78)
222
«П - «г /и; (6.79)
= CKduCh.dt, ^6 йи)
где w — число витков реактора; s - сечение его мапштопровода; В —
„ллукиия и магнитопроводе реактора; ic — ток конденсатора; Г
ток намагничивания реактора.
Па основании (6.77) — (6.80) составим общее дифференциальное
уравнение процесса:
dHJdt* + (1 /т2) dia/dl 4- с>£1д = /и<о1. (6.81)
С учетом начальных условий «с |/=о = Став 4-(А д<м, i |t=0-
=/д1,ач решим уравнение (6.81) Тогда
А — Л1 4~ (/д нзч — A) COS —
(^Тйи -г- /д.на«Х/?д) р CjLz sin €•)£<, (6.82)
где /д.нач — начальное значение тока ТЭД на втором этапе дозаряда,
получаемое решением (6.75) и (6.76). Решая (6.79), (6 80) и (6.82),
определим напряжение:
«Ск = £таб 4- (/д н.1ч — ДО I LdCK sin оз>4 4-
4- (^тдчз 4- /пияч^/?л) cos. (6.83)
Подставляя (6.83) в (6.78) и интегрируя обе части полученного урав-
нения, имеем
fis 'доз?
ws I’ dB = \ 1(/ди„ — /M)Ki-z/CKsin<i>zf +
-В, О
4- (Ut 4- /д иачХКд) COS <DX/] dt, (6.84)
где Bs — индукция насыщения магннтопровода реактора; Вг — оста-
точная индукция.
В результате интегрирования получаем
li'sAB = (/д.нач — /ц) В у ( I COS О) е/доз2) т
+ (Uт доч 4- А Н1Ч2/?а) I LtCKsin<i)x/ao32. (6 85)
Решая трансцендентное уравнение (6.85), можно определять дли-
тельность реакторного дозаряда /ДО32, а подставив ее значение в
(6.83)— напряжение на коммутирующем конденсаторе по окончании
его дозаряда.
Принимая на втором этапе дозаряда in = /Днэч = const и прене-
брегая током намагничивания /и, получим упрощенные выражения
Длительности реакторного дозаряда
иг=(1/А.„а,Ш (С„ит.до,)г + 2/д „,даДВСк - CJJ, „оз] (6.86)
и конечного напряжения на конденсаторе
1/ск = £тль + ] С; до. + 2/a„34U'sAB.Ck . (6 871
223
Рнс. €.21. Упрощенная схема ИППН
Пол у чей ные выр алени я позвол я юг
учесть влияние параметров пени дуза.
ряда на напряжение 1'сь при определе-
нии алгоритма управления тиристором
Т5, обеспечивающего требуемую ком-
мутационную способность, а также
влияние этой цепи на другие парамег*
ры к характеристики ИППН
Определение параметров ИППН ио
условию обеспечения плавности пуска
электромобиля. Одним нз основных
требований, предъявляемых к ГЭМ,
является обеспечение плавности пуска
и ограничение динамических воздейст-
вий, уменьшающих срок службы меха-
нических узлов СТПЭ и снижающих
комфортабельность перевозок Нор-
мативными документами установлено,
что начальное ускорение городских транспортных средств не должно
превышать определенного значения
Для ГЭМ с импульсным регулированием напряжения ТЭД началь-
ное ускорение определяется начальным пусковым i<jk«jm д шпателя,
зависящим от минимальной длительности импульса напряжения.
Последняя обусловлена минимально необходимым временем переза-
ряда коммутирующего конденсатора. Использование цепей ускорен-
ного перезаряда позволяет в значительной мере стабилизировать ми-
нимальную ширину импульса, т. е. ослабить ее зависимость от тока
ТЭД при неизменной частоте коммутации пли в допустимом интервале
ее изменения
Рассмотрим работу ИППН, схема которого приведена иа рис. 6.21,
а схемы замещения для различных интервалов времени в течение пе
ис. 6.22. ихемы замещения ИППН для различных интервалов времени в
течение периода коммутации'
то7аПТцХм ТЭДМиТпеп«^пипгНЙ€‘1СаТОра ТОКОМ ТЭД; 6 ~ пеР«*РЯД конденса-
тм««йл " реактора; в — тиристорный дозаряд; ,? — реак-
гяавныйи гасящий тиристоры*тГ* тивк Чере3 цепь обРат«°го вентиля; Tt и Т2 -
зарядный тиристор; Т5 - ЖстовГ;чЖ70р Ус*°Ренйого перезаряда; Т4 - пере-
у нрнстор дозаряда коммутирующего конденсатора С*. tn —
перезарядный реактор; Сф - конденсатор фильтра *
224
рпода коммутации и а рис. 6.22
При составлении схем за.мсшенлн
при и mi ы следу ющие дои yuvim я.
пульсации входного напряжения
преобразователя полноет ью сгла-
Я<нвак»гся входным фильтром,
падение напряжения на тиристо-
рах в проводящем состоянии, вре-
мя нх включения и выключения
п обратный ток тиристоров рав-
ны нулю. Диаграммы Напряже-
ния «eV н тока /д за период комму-
тации представлены на рис. 6.23.
Эквивалентная схема (рис
6.22, о) соответствует включенно-
му состоянию тиристора Т2 в ин-
тервале времени /0 — tv. На этом
этапе происходит перезаряд кон-
денсатора Ch по цепи ТЭД током
/д Длительность этапа /П| ©пре-
дел яетс я временем вы к л ючен и я
главного тиристора Т1. Процес-
сы в схеме описываются уравне-
нием (6.73). В начальный момент
перезаряда /0 напряжение кон-
денсатора равно значению С/ДОз,
которое было в результате доза-
рядаза предыдущий период ком-
Рнс. 6.23 Диаграммы напряжения i«q. на
коммутирующем конденсаторе и юка »д
ТЭД за период коммутации
мутации
«Ск L=(i = — (£таб + £/*»)$ n" ’ к п
Если при I = /0 начальный ток электродвигателя /3=/до. го с
учетом начальных условий решение (6.73) имеет вид
= £тдь + е-^>
Г -¥/•
х sin со/ — [Етаг. 4- (£таб 4* ^доэ)е
Мгновенное значение тока
<„ = С |шСк [Етаб + (Етаб + е
+
£ТАБ + (ЕтАБ + Цдта)е
_J'^]sinw(+O><:°sl'1/L
2Ту4игСк I
J (6.89)
В
1 153
expert22 для http://rutracker.org
225
смени б - Ч (этаП (’"С' Г122’ Л) №w,|eiib,
В „„тервале вр» ' дальнейший перезаряд koi,.wik.
риторы Г2. W“ "РцёпьТЭДп перезарядны,, реактор Пр(1ц£а
С одновр»,енио 4 Рр ?ппсделяются ураинениими (6.77), |Ь.Н|)) ,,
Й='я + ХП' (6.91)
гяе.1- 7Д?\ктИб'адн(6.91) ш>лучимл1иН>еренш1а.ты|<)енеод„оро,
nit'jw«третьего порядка для >д. Допуская в реальных ИППН
ное уравнение тре, f6pcra„ „ед,,чинами второго порядка малости
.?, '?ГОГО тнйеришналыюго уравнения с учетом начальных условий
ИЗ Л VI г . имеем
ис». |fe'. = , ’ л
i = ТтлвСйд + (Ат, - /ЧлвСКд) е ' (U,:. sin %(. (6.92)
Решение (6.77), (6.80). (6.90) и (6.91) относительно «с- дает диффе-
...- —’ г.гхгте.-т./п^ ОТКуДЗ
(6.93)
реиниальвое однородное уравнение третьего порядка,
„с> S= l/r«iCOS<o„f + /а, sin ''ir]^(wriCK).
Время перезаряда конденсатора С„ составляет
(„. = (2,'<а„) arctg (—I/cKiC.Wn//,,).
(6.94)
Интервалу времени /2 — Z4 соответствует схема замещения, пока-
занная на рис. 6.22, 6. В течение этого времени конденсатор Съ за-
ряжается по пени ТЭД (после выключения тиристора ТЗ) до Будь и
дшырижается на заданную величину Здесь также справедливо урав-
нение (673). которое при начальных условиях
ua £
’ h ° имеет решение
^1ЛБ “Г ^'ск1е
2т v<n
X
'») cos wi I. (6.95)
Чтобы\па^т Ч ” где ио. находим но (6.ч5).
и избежать вы'|,к'и,|,,Е’ ЛтатЖ,пости рассматриваемого этапа
интервал ( - / "11Я T’)3Hcllc,l>t’"™<>io уравнения (6.М5), разобьем
схемой зам^шени» » 5'1'лив,1Ы’[ интервала /2 - /3 и - 6 с одной
С (6 73). За время , Минаковым характером процессов в соответствии
ния источника питон,,Я’П?'''СХВД"Т зарял конденсатора С, до напряло-
иряжения питания. То; ° ” ВРСМЯ Ч - Ч - оно дозаряд свыше
из которого определяют „ 4Л ~ s справедливо выражение (6- • ь
= Став И допущении^ ТеЛЬНОСТЬ этапа "₽“ подстановке -
ушенпи Об Отсутствии потерь в „епн ТЭД:
<щ = ~~-arctg J£l*b + l,'L") шуб'ь (6 9б)
£ / .
226
M’ bill Hl!
В момент l - t-tuc^ =- Ucv.> <a = /д,- Может сгказажся. чт-> и.
I' tAi- в момент l ~t, за счет дозаряда в предыдущий период кпм-
Myiamni Это означает отсутствие этапа /„< и /и = 7Л_, UCh-, = Uc~:
С» течение этапов l:i — /4 п /4 —происходит дозаряд кондеи-
сатира С(1 согласно процессу. рассмотренному выше. По окончании
дозаряди ток ТЭД замыкается через тиристор Т5 (рис. 6 22. д) н изме-
няется ио уравнению
<a“4se“f’s. 16.97)
№ > = Gl--.
5 читывал квазистаниоиарность процессов в цепи ТЭД, ток гд в кон-
це периода коммутации принимаем равным его значению в начале
периода, т. е
/Д|, =/д,г-,7к-х'п'Ч. (6 ад
1—С ~ Jul “г ^п-' Э" т G»»i “г С"*--
Средиее значение тока ТЭД за период коммутации определится как
сумма средних значений на каждом расчетном интервале времени.
Приведенные формулы используют для расчета зависимостей сред-
него значения начального пускового тока ТЭД от частоты коммутации
при различных уровнях дозаряда коммутирующего конденсатора и
разных задержках времени на включение тиристора ТЗ ускоренного
перезаряда (рис. 6.24) п от напряжения дозаряда при фиксированных
значениях частоты коммутации (рис. 6.25). Эти зависимости получены
для электромобиля и СТПЭ, параметры которых указаны в гл. 9 и 10.
Среднее значение начального пускового тока ТЭД
..' ~2л₽к6эд (G^^J 0^
/днечиср'-l/ ,Л1и.)д
8» 227
Ряс. 6.26 Зависимости относительной
амплип-ды пульсаций начального тока
ТЭД от частоты коммутации
где Сэл —собственная масса элект-
ромобиля. т; U’thp — удельное ос-
новное сопротивление движению в
момент трогания электромобиля,
кг/т; (1 + Y) — коэффициент инер-
ции вращающихся масс; о|1ач _
требуемое начальное ускорение,
д _ тангенс угла наклона линейной
части кривой намагничивания ТЭД
(см. § 3.7).
Вычислив по (6.99) начальный
пусковой ток ТЭД и зная напряже-
ние (7ДОЗ, время би, определяемое ти-
пом применяемых в ИППН тиристо-
ров по кривым (см. рис. 6.24) находим частоту коммутации /к. Началь-
ное’значение А, может оказаться существенно меньше, чем частота,
полученная с учетом допустимой пульсации тока ТЭД и рациональ-
ной частоты работы фильтра. При такой ситуации необходимо пуск
электромобиля осуществлять с пониженной частотой коммутации
с последующим плавным ее нарастанием до номинального значения.
Процесс нарастания частоты при этом должен закончиться до включе-
ния главного тиристора Т1 (см. рис. 6.21) Однако уменьшение [к
ограничено повышением пульсаций тока ТЭД или необходимостью
установки добавочного реактора в цепи электродвигателя для сохране-
ния допустимого уровня пульсаций его тока, равного 10 %. Выраже-
ние для расчета амплитуды пульсаций начального тока ТЭД в процен-
тах от максимального пускового тока получим нз (6.65) при подстанов-
ке Xj, " МИН == /к.иич2/п;
Етлв (1 - U4. „М (' - х
Д.МЙКС П ср 2/д п
[__И (Tv/K идЧ|
где —суммарное время перезаряда и дозаряда коммутирующего
конденсатора.
На рис. 6.26 приведены вычисленные по (6.100) зависимости от-
носительной амплитуды пульсаций начального тока ТЭД для СТПЭ,
рассмотренной в гл. 10. Результаты анализа показывают, что диапа-
зон допустимых (по уровню пульсаций токи ТЭД) начальных частот
коммутации достаточно широкий и может обеспечить требуемое на*
чальное ускорение.
Влияние режима прерывистого тока ТЭД на работу СТПЭ. В усло-
виях постоянства среднего значения тока ТЭД в режиме пуска (до вы-
хода на автоматическую характеристику электродвигателя) пелесо-
ооразно или непосредственно поддерживать уровень напряжения
^тпв°рМуТИрУт51пМ коидеисат°ре неизменным и соответствующим
nn«nt«„„T0Ka ТЭД, или обеспечивать на конденсаторе необходимое
Р ние напряжения 1/до# относительно напряжения питания.
Рис. 6.27. Номограмма для опреде-
ления критической кратности на-
пряжения дозаряда коммутирую-
щего конденсатора
Рис. 6.28. Зависимости критической
кратности напряжения дозаряда от
ЭДС ТАБ
иными словами — кратность напряжения дозаряда
^-доз = &доз/^ТАБ» (6. 10!)
Кроме перечисленных ранее ограничений параметр kp^ имеет пре-
дел по условиям возникновения установившегося режима прерывисто-
го тока ТЭД, при котором ток в каждый период коммутации спадает
до нуля. Он может возникнуть, если энергии, запасенной в индуктив-
ности ТЭД, недостаточно для дозаряда конденсатора до треб^-емого
по коммутационной способности уровня. Указанные условия можно
определить, исходя из уравнения энергетического баланса
Ск£тАБ/2 4- Еу (/д.макс)2/2 = Ск (Етлв 4" ^7доз)2/2 +
4* (/д]/яоз1 -р ^д2^доз2 + Л^пауз) + Тх (7дмнв)2/2, (6.102)
где СлЕт^!2 — энергия, запасенная в конденсаторе за время его пе-
резаряда; (/д.ыакс)2/2 — энергия, запасенная в индуктивностях
обмоток ТЭД за время перезаряда; Ск (£тдб 4- L^fiO3)2/2 энергия,
накопленная в конденсаторе к концу дозаряда; -г
4~ ^доэ'» 4- /дз/лауэ)“ энергия, затрачиваемая на компенсацию по-
терь; /дь /д2> /д3 — действующие значения тока ТЭД, соответствен-
но в течение тиристорного дозаряда, реакторного дозаряда и в течение
времени паузы между импульсами, при которой ток электродвигате-
ля захмыкается через тиристор дозаряда Т5 (см. рис. 6.21) в цепи
обратного вентиля; Lx (4мик)2/2 ~ запас энергии, оставшийся в
индуктивностях ТЭД к концу периода коммутации.
229
Рис 6.29 Зависимости Крц.
гической кратное!и напряже-
ния дозаряда oi времени за-
держки подключения конту-
ра ускоренного перезаряда
hOMM VTH р УЮШеГО КО!|ДсНс«1 i < »-
ра (о) и от индуктивности пе-
резарядного реактора (о)
Наличие последнего слагаемого в (6.102) означает, что ток за пе-
риод коммутации не снизился до па ля и следующий период начнется
с некоторого значения /дШ1Н.
Если /ЯАНш = 0 И левая часть (6.102) меньше правой, это соответ-
ствует режиму прерывистого тока, который снижает надежность ком-
мутации, ухудшает плавность пуска и динамику электромобиля.
Чтобы перейти к режиму непрерывного тика, следует увеличить
ток ТЭД до значения
д Мик, " £1АЬ
- | iCt, L.J А-... 4- 2) - XR. -i- (6.103)
Выражение (6.103) получено из (6.102) при /ДМ1,„ «Он равенстве
левом и нр.-1В(1П ч.п’тси
На рис 6 27 приведена номограмма. рассчитанная на основании
(6 88) — (6 98) к (6 ЮЗ) для С_ -- 50 мкФ. £„ = 10 мкГи, охр \
>. uni 2j | Св/..,{ = 0,1’5 и цолволяющая найти критическую крат-
not гь напряжения дозаряда. ш приводящую мри данных параметрах
СТПЭ к режиму лрерыниеиЯм кта На рис. 6.28—6.29 построены
зависимости крик-часы ..!!;-чев«-ч / а,, от £1Ль,/„i и U показыва-
ющие, что ограничена критической i.p.iniucin напряжения дозаряда
может заметно снизить *р>4т'кп;Е1к»сгь применения тиристорного доза-
ряда. Поэтому, если гребуемую коммутационную способность не уда-
ется обеспечить в пределах, не превышающих критическое значение
^До5, следует в начале пуска снизить кратность дозаряда ниже кри-
тической на время, достаточное для выхода ПППН из режима преры-
вистого тока, обеспечив cocubcivibxющую зщсржку времени подачи
импульсов управления иа главный тиристор, с тем чтобы напряжение
успело достичь требуемо! о по условиям коммутации уровня Вос-
становление необходимой кратности дозаряда осуществляется по мере
выхода ИППН на режим непрерывного тока ТЭД. Здесь возможно
как плавное, так и пороговое нарастание в зависимости от
величины ее снижения при пуске.
Очевидно, что, так как Ejab уменьшается за время полного разряда,
критическое значение Адоз следует определять, когда ЭДС соответ-
ствует допустимой степени разряженности ТАБ.
230
Работа импульсного прсоб-
ра зова г ел я пост оя н н ого на -
пряжения. На ]Нк б.ЗОириве-
H'HJ > М’Ма пени • Прсоьр;к,<|ва-
iv.li. ДП1 <• о.шофа «ним
IICpVHvpCHBllbiM ИНИН г ши
pt иным pvi ул и ]л Hinn нем ьы-
\(>lhi>i<i напряжения, смкист-
noil коммутацией, нрезварн-
И ЛЫ1ЫМ перезарядом вне цепи
г< )Ка I ЭД, \ екорепным тпрпс-
гирпыи перезарядом п дозаря-
ди »м >-чм у 1 нрующеги кондеи
сагора 117|. Насыщающиеся
реаки»ры L2—L4 обеспечива-
ют задержку нарастания к.жа
на время включения тиристо-
ров с целью снижения комму-
тационных потерь в тирис-
торах.
В схеме предусмотрен пред-
варительный заряд конденса-
тора до напряжения батареи
Рис 6 30. Электрпческля t\»w iivpt-
вере и вн ми ИППН—ДПЪ.
L2 •— L4 — |1лсыщ.>юик!«.^я реакторы. ,7К/ -- /А Л
*• Г К/ — ТМ — октант. ры, работв гг.^и-
че тягл и торможения
через нормально замкнутые блок-контакты силовых контакторов
г7Л7 п ГА/. Этот заряд необходим по следующим причинам. Если
осуществлять пуск с разряженным конденсатором, он будет пер-
воначально заряжаться сравнительно долго через цепь ТЭД. име-
ющую значительную индуктивность. Следствием этого является
необходимость снижения начальной частоты коммутации, так как
до тех пор, пока Уск не достигнет значения Етав. перезаряд-
ный тиристор Т4 должен оставаться выключенным во избежание
срыва регулирования. Рекуперативное торможение без предваритель-
ного заряда конденсатора Ск может также привести к срыву регули-
рования в момент первой коммутации тока ТЭД, которую Должен
обеспечивать коммутирующий конденсатор после нарастания тока
электродвигателя в контуре самовозбуждения.
13 начальный момент пуска при включении контакторов ЛА7—ЛА’З
при подаче управляющего импульса включаются тиристоры Т1 и Т4
и образуется колебательный контур Ск — £n — Т4 перезаряда комму-
тирующего конденсатора вне цепи тока ТЭД. В результате Сь приоб-
ретает полярность, необходимую для выключения главного тиристора
Т1. Через половину периода коммутации подается импульс управле-
ния на гасящий тиристор Т2. После его включения ТЭД оказывается
подключенным к ТАБ на время перезаряда конденсатора Ск через
цепь ТЭД. С некоторой задержкой относительно импульса управле-
ния тиристором Т2, определяемой временем выключения главного
тиристора Г/, подается управляющий импульс на тиристор ТЗ. об-
разующий дополнительную цепь ускоренного перезаряда конденсато-
ра. Прн увеличении напряжения Усх до дальнейший доза ряд
231
фд/#77
Д2
конденсатора происходит за счет чИ
Гип. накопленной в пнд\К111Вно
ТЭД. Дозаряд прерывается включе!?
ем тиристора Т5, управляющий ,,
пульс на который подается цр„ д 'м‘
жени» напряжением U,.. значения д"
статочного для коммутации тока гла»'
ного тиристора. После включения ти'
ристора Т5 тиристор Т2 выключается
так как к нему прикладывается
____.zn.-.L-.t гл так _____
I г"
Рис 6.31. Сима силовой частя ре-
версивкого мостового ИППН раз.
„ость напряжении Ua » ^тлЫ потребление тока от ТАБ нрекращает.
fa ток ТЭД замыкается через тиристор Т5 за счет энергии, зана-
сенной в индуктивности цени электродвигателя. Далее процессы но-
В,°Рея™ рекуперативною торможения (включены контакторы ТК!~
ТКЯ осуществляется подачей импульса управления на тиристор 77,
который включаясь, закорачивает ТЭД и образует контур его само-
возбуждения. Когда ток достигнет определенного значения, включает-
ся тиристор Т4, происходит перезаряд коммутирующего конденсато-
ра, а при последующем включении тиристора Т2 — коммутация
тока главного тиристора После окончания перезаряда и дозаряда кон-
денсатора через включенный тиристор Т5 энергия рекуперируется
в ТАБ. Далее процессы повторяются
Поддержание заданного значения пускового (тормозного) тока
ТЭД осуществляется автоматически широтно-импульсным изменением
коэффициента заполнения
Некоторые особенности работы реверсивных ИППН. Реверсивные ИППН
с двухполярными выходными импульсами выполняются по мостовой схеме, силовая
часть которой содержит четыре тиристора и шунтирующие их диоды, осуществляющие
безразрывную коммутацию (рис «э’ЗП. При симметричной коммутации нагрузка
постоянно подключена к источнику питания, в процессе регулирования изменяется
только полярность включения источника Симметричная коммутация обеспечивает
поочередное включение нечетных (ГД ТЗ) и четных (Т2, Т4) тиристоров. При вы-
ключения очередной пары тиристоров, например Т1 и ТЗ. энергия, запасенная в ТЭД,
представляющем индуктивно-активную нагрузку, возвращается в источник питания
через обратные диоды Д2 и Д4 Форма напряжения на нагрузке имеет вид двух-
полярных импульсов без паузы (рис 6.32) Изменяя коэффициент заполнения Аи —
_ Кт МОЖно Регулировать среднее значение выходного напряжения преобразо-
вателя и его знак.
угдоипй^^^^т^п0 TKPliCTOPbi и диоды «идеальные» и пренебречь изменением
ти'внпстк й ТЭД за период коммутации, то активное сопротивление и пЯД) *
ную Хг fHu В течение временн Т'к неизменны. При этом схему, приведен-
S Л™0 замен,т‘ «""валентной схемой (ряс. 6.33) (181 В ней ист»
формы с амплитуипй Напряж-ения Аает импулъсы напряжения прямоуголь
Длительностью пллл« равнои_напряжению источника питания 1/п. пеР,,ОДОртпС£
'и” отрицательной TK-t.-^
Для интервала времен^ Д I -аГрав-’'ния токов » напряжений
ремени от / — 0 д0 t ~ /и справедливо уравнение
(Цт — £д)/2/?д — (д x^dijjdt-.
Для интервала от t = t по . __ т
«и до г— Гк — уравнение
(С/п -ф £д)/ЭДд ~ <д _|_ x^dijijdt.
(C.IW)
(6.105)
232
рис 6 32. Диаграмма
выходного напряже-
ния реверсивного
ИППН
Рис <i.33. Эквива-
лентная схем.» цепи
"MociGBrut ИППН —
ТЭД-
I-’iir «> И bi и р-"ь. 1 I.
HGI’U TDh«l p.-RvpC И |Ш'.Г<1
ИППН
Решая (6.104) и
первого интервала
(6 105) и
учитывая, что ia |f=0 = 1д । получим для
'и=£Ъг£'1-^"’1’+'«,0>е“"’^
для второго интервала
'» = ---Д£д 11 - + in (<„)
“ОД
где
. = U„ (2g~l7K~fw)<T- - е~У^ - 1) _ £д
•Д ЕЯд (I --^Гк'Т1) »?Д ’
'к " - 2е-'»'Ч + 1) £д
Д £R.,(l-e-VE)
(б. кю)
(6.107)
(6.108)
(6.109)
Очевидно, что £д (0) есть минимальное ча период коммутации значение тока
ТЭД, а 1д (/„) — его максимальное значение. В промежутках между этими значе-
ниями ток электродвигателя изменяется по экспоненциальному закону (рис. 6.34).
Величины 1д (0) и »д (tn) могут принимать как положительные, так и отрицатель-
ные значения в зависимости от параметров схемы и коэффициента заполнения лн.
Выражения (6 106) и (6.107) громоздки и неудобны для анализа. С целью их
упрощения представим напряжение (Уэ в виде ряда Фурье:
. . VT / л 2nvt . D '2nvl \
и3 = (Уср 4- V лх sin -у— “ Bv cos *
где
uCF=-^( 'j \ """j: <6J10)
к \ ~ТК1- -V2+r»<
После преобразований из (6-НО) (6-П2) получим.
L?cp = ^'п (2^и — 0.
233
(6.115)
(6 1П5)
С^"№ значение^ = |L,n (й п _ „ _ £д|/Я?я
^.1ХР ‘ср
roilfil аналогично уравнению як^Р’™ ,1е™’ *ЭД, упривл
Выражение (6. 6J а принЯть U — Vn (2^и ~ 0 Поэтому vevailll4ec;
пл-тояниым напряжением . СПОсобах управления одинаковы
кне каряктерипякн.^^^ e Q (J 9Лектродвнгатель pafioiacr « режиме i.i-Kj 1к.ра.
Когда tH « ННЬ1М1, за счет пульсаций потерями энергии
гирного ,ОРМОЖ^"”Й .Д ' зрения представляет собой интерес нахождент дайст.
Хмяншента использования M№rp<w„r„-
Х.™Лер« ^'действующее значение v-й гармоничной тока
,, — амплитуду v-й гармонической напряжения иэ. через /Д¥
№»,« нем "коря № v-й гармонической, получим
/д, = У,./()'5г„).
'д. через
полное сопро-
(6. H7)
l\. = ]Л л;. + ej; 16.118)
Z,v = «Д 1 +|(2лтт,),Т„|а. (6.119)
Из (6.118) с учетом (6.114) и (6.115) после преобразований имеем
t\, = 4Ь'Я sin лvXt,/(л v). (6.120)
В (18} показано, что для обеспечения приемлемого значения коэффициента
использования ТЭД необходимо выбрать Тл одного порядка с постоянной времени
Тг или даже менее Ту. Поэтому (6.119) можно упростить.
ZJV»2nvr£/TK. (6.121)
Нспользув (6 117), (6.120) и (6-121). найдем отношение
/Д¥/1> j, = !. ,/(Цuzav) = (1 /Vй) (Sin л vX„/sin лЛ„). (6.122)
Анализ (6.122) показывает, что при люзых А.и (О Ам |) справедливо соот-
ношение
Ws«h<l/V- 16 и’3)
Отношение тепловых потерь, обусловленных соответствующими гармоничес-
кими тока, очевидно, удов ютвсряег неравенству
1''..3v'X.;,,11=/i;Xll,<l/va. (6.124)
Выражение (6.124) показывзе.«, что при определении коэффициента использова-
по Т0КУ без значительной погрешности можно пренебречь всеми гармони-
ческими составляющими тока, кроме основной.
Значение /д(1) рассчитываем в соответствии с (6.117), (6.120) и (6.121)-
lail) = 2 sin г1?.н/(л2тЕХ/?д), (6-
Зная средне,- значение тока электродвигателя /... и вычислив иа (6.126) основ-
ую гармоническую тока, наловим коэффициент использования ТЭД:
= '«.cp'K'lcp + '«(l)- 16,120
ОПТИМАЛЬНЫМ ВЫЬОР
ПЛРАМ1 IPOB СИЛОВЫХ
AIPEEAIOB С.1К.ЦМ 1Я1ОВО1О
ПРИВОДА ЭЛЕКТРОМОБИЛИ И
§ 7.1. Основные по.юженмя
комплексною метола отнимигании
Улучшение техн и ко-эколоми чески х показателен 1.ТПЭ плавным
обра «тм размер*щ. мж сы иск>им.к-1 в силовое> тсктр*ии<рслипания)
связано г рлз|м<ю1к<)н ж-к .див он гимн j., кин гиговых злеклрнчсскнх
машин ПЭМ) и ВП Он гимн ищ,я ТЭМ зго. в смш и,, злдача
непосредственно ц.\ грабитчнков. ни ее можно выполнять в Полной
мере лишь в том случае, если оптимизационные расчеты основаны иа
рационально 1'-ыбр<шных исходных данных, отражающих особенности
работы ГЭМ в системе тягового привода электромобиля н требования
к ТЭМ и СП1Э Практика проектирования СТПЭ показывает, что
именно нахождение номинальных данных и внутренних параметров
ТЭМ наиболее сложно: при любом направлении яр 1ектировання СТПЭ
(от ЭУ к ТЭД н.ти от ТЭД к ЭУ) требуется разрешить ряд неопределен-
ностей Кратно рассмо]рим процесс выбора номинальных данных
ТЭМ на примере СТПЭ с ТЭП
По заданных) значениям свободной мощности и угловой скорости
ДВС (проектирование от ДВС к ТЭД) можно выбрать в широком ин-
тервале номинальное напряжение тягового генератора, а при нали-
чии редуктора между валами ДВС и генератора — и номинальную
угловую скорость. Каждому из сочетаний номинальных данных гене-
ратора может соответствовать множество сочетаний параметров ТЭД
(номинальных напряжения, части гы тока, перетру точкой способности,
максимальных напряжений и гока), а следовательно, и соответству-
ющее количество вариантов значений расчетной мощности генератора
и ВП. а также вариантов количества и класса вентилей в плечах мостов
ВП. Таким образом. общее количество рассматриваемых в процессе
проектирования вариантов сочетаний параметров генератора, ВП н
ТЭД
/V с nv = Л’ Л впА д, (7.1)
где .Vr. А’вп. А\—соответственно число вариантов номинальных
данных генератора, ВП и ТЭД. В частности, Лвп — число вариантов
сочетания максимальных значений напряжения и тока электродвига-
теля. определяемых вариантом управления ТЭД.
В процессе сравнительного анализа расчетных данных генератора
и электродвигателей при различных вариантах управления ;
но выбирают номинальные данные ТЭМ. которые в действительности
235
mWkh от оптимальных. так как из множества /V
могут быть весьма Л еть Л„ш1, некоторую часть вариаиг,,/
ва практике да р к двс |]роцесс ВЫО1)ра 1И>л„„ИЛЬ|щ •
"Р" К Хогичен. В этом случае, если аадан редуктор цщ-
Ланны. V „ л 4)1 ’ получим однозначную механичс скую .характеристику
lev (1.3) И ( ) Однако этой характеристике может Стюгве,.
ТЭД с реп-™“Р да1|Гателей с различным помппалы.ым нанр,,^.
СТ вовать рИ»е 1 нН0Г0 тока - также и с различной нерсгрузд.
ннем.адля 1сЩ с„чае каждому варианту ТЭД соответ-
”°ктст пр^Хески только одпи’вариаит генератора, тем не менее вы-
ствхет практи затруднен, особенно при наличии ВП,
хотя°ойщее число рассматриваемых вариантов
Мстпэ = Л’виА^д. (7.2)
т. е. в 7V,. раз меньше, чем при проектировании в направлении от ДВС
* Естественно, что оптимизация СТПЭ подразумевает и выбор оп-
тимальных данных ВП.
Из сказанного следует, что определение исходных данных для
расчета {пли выбора) ТЭМ представляет собой весьма трудоемкую за-
дачу, выполнить которую можно только при наличии соответствую-
щего метода. В настоящей главе рассматривается метод комплексной
оптимизации силового электрооборудования СТПЭ. Данная задача
является многомерно»!, поэтому ее нельзя представить как поиск эк-
стремума некоторой целевой функции (что является основой известных
опт пмизашюнных методов). Оптимизировать силовое электрооборудова-
ние— значит найти i а кое сочетание номинальных данных и парамет-
ров. при котором техннк««-экономические показатели СТПЭ и электро-
мобиля н целом находятся в допустимых пределах в обеспечивается
заданная тяговая характеристика Г (о).
Оптимизируемые параметры силового электрооборудования. В ка-
честве оптимизируемых принимаю гея параметры, непосредствен но или
косвенно влияющие ил технико-экономические показатели СТПЭ и обус-
ловливающие надежную и эффекшвнхю работу агрегатов енлоиого
электрооборудования во всем диапазоне нагрузок и скоростей движе-
ния электромобиля
К оптимизируемым параметрам СГ огиоенгся номинальная частота
тока и индуктивное сопротивление цени коммутации; к оптимизируй*
мым параметрам АД- -перегрузочная способное гь и часто га тока
статора в номинальном режиме Размещение ГЭД всех типов в Ilbix
электромобиля предъявляет жесткие требования к их габаритным раз-
мерам. Поэтому диаметр и длина корпуса ТЭД также являются опгн-
мязируемыми параметрами.
Перечисленные величины суть функции главных размер»» тэ '
' "Уег0 -}иаметра статора D, или диаметра якоря D« и Л.™‘1Ь1 :'к'
магнит ?СТИ ‘ ,ИИ ДЛИИЫ якоря 1Я), числа пар полосой р и эле1'^„|,
в вХп,Х иаг₽Узок (линейной нагрузки А и магнитной НИДУК“"
в свои?™»™ заз°Ре в«) Главные размеры электрической майя
редь, обусловлены числом пар полюсов, максимальной у
236
ВОЙ скоростью.
ИОЛЮСд,
формул. иршюдимых и мекщиках
IIpi лессе О1НИМЧ uijioi
(IpC.KT.Il’.’ICHbl функциями П
меры и связанные е ними массу и спшмтчь машин мож пос определенной
тачное 1ЫО вырази и, чире: укдишпыс аргумент.
Оптимизируемые параметры 1ЭМ в зиач тельной степени зависят
также ог максимальною напряжения и кратности максималь-
Метод расчета парамс|рических зависимостей- Расчетные данные
электрической млишпы и ее [.данные ра гаеры, внутренние параметры,
а также геометрия lu'mottoii юны (еоитношсиия размеров зубцов п па-
зов ротора н ста гора и 1лпиы *ффек питою вимуппюго Зазора) свя-
заны между conoii сис<ем<>п коэффициентов 1141. хараыерцзу'кмцпх
расход активных материалов, распределение потерь, условия нагрева
и охлаждения машины н др В широком диапазоне мощностей они
изменяются в сравнительно небольших пределах к для упрощения
параметрических зависимое leii могут быть исключены из рассмотре-
ния, например, в 1191. Параметрические зависимости силового элек-
трооборудования СТПЭ. являющиеся основой комплексного метода
оптимизации, представляют собой функции оптимизируемых показа-
телей от искомых поминальных данных и внутренних параметров.
В ряде работ исследуются зависимости относительных изменений глав-
ных размеров и массы оптимизируемых общепромышленных и судовых
электрических .машин по сравнению с аналогичными параметрами
некоторой «базовой» машины Однако, если в 1191 в качестве базовых
приняты серийные машины той же мощности, го для оптпхшзашюнныч
расчетов СТПЭ целесообразно принимать ТЭМ реальной базовой < ГПЭ
любой мощности
Для обобщения мею.1.1 параметрические зависимости ВП следуем
также приводигь к исследуемым параметрам базовою ВП
При определении массы и стоимости ВП учитываем следующие
Особенноегп: рассматриваем только трехфазлые мостовые схемы, как
наиболее распространенные; включаем в параметрические зависимос-
ти фильтрующие. коммутирующие, компенсирующие и другие элсмеи
ты силовой части, анализ методов расчета которых показывает, чти
и здесь возможно приведение их массы и стоимости к мзовым всл
чи нам
Таким образом, обеспечивается единство подхода к °"т'™?ст'Г1Э
ным расчетам всех агрегатов силового электрооборудо а
что позволяет существенно >простить пх выполнение..
Критерии оптимальности. Выбор критериев о.п .тал >пи И, 4
проектировании СТПЭ представляет еооои З‘ ?' о 3KC„.1va.
симости от класса и назначения электромобиля i ус.
237
„ ячестве критериев могут выступать различные ieMlllia)
тапни в качесг. пр|1юда или самого элсктром.э«о-
"нХе универсальным критерием оптимальности >,в.1>и.г,.ч
Н „чХиых затрат, связанных через расчетную моЩ1111стл>
„ум приведенных затра.ован[1я Техн,1Ч<?ск„п ур(Я<е„„ > Мас-
ГТПЭ характеризуется удельной массой и удельной стоим.*и.',0
агрегатов, так и всего тягового электргкЛ.руд.,,,,,,,,/^
Це'Коомезтнх критериев необходимо учитывать крнп-рш, ИМИ0Д1
сти электрических машин выбранного тнна и коиструкц,,,,. Уч..,,,,™
Хтруьтввной выполнимости ТЭМ отражаются введением .„р,,"1
Хй по максимальной линейно.! (или угловой) скорости и коэфф,,ц,1е11.
TV заполнения паза (или межполюсного иросгранства) ро
характеризующих механическую прочность и сюиеиь использования
активного объема ГЭМ- Необходимо также учитывать ограничения
диаметра и длины корпуса ТЭД. связанные е компоновкой
электромобиля.
Допущения и ограничения, принятые при выводе и анализе пара-
метрических зависимостей. Исходя из специфики работы электричес-
кихмашин вСТПЭэлектромобиля и особенностей их р ючета при выводе
параметрических зависимостей ТЭМ приняты неизменными следующие
величины. КПД п коэффициент мощности элек грических машин в номи-
нальном режиме; произведение максимальных длительных значений эле-
ктромагнитных нагрузок Лмаксвбмако максимальные длительные плот-
ности тока J в обмотках статора н ротора; коэффициент геометрии по-
люса ₽r = т/Z, It -= nDt' (2р) — расчетное полюсное деление!; дли-
на эффективного воздушного зазора 6' (для АД) и отношение 2§'IDi
(для ДПТ. ГПТ и СГ); максимальное напряжение между соседними
коллекторными пластинами и реактивная ЭДС, равные допустимым
значениям Мля машин постоянного тока).
Допущения постоянства перечисленных величин, кроме произведе-
являются общепринятыми и нашли обоснование
Произведение Л»<аь<ДбМЛчс можно представить как энергию, запасен-
ную в единице объема ротора. которая обратно пропорциональна ма-
шинной постоянной Арнольда Сд. Допущение Ача(хС Вб1М.1К1. = const
основано на том, что в широком диапазоне изменения мощности ТЭМ
постоянная Арнольда изменяется незначительно. Если же выбирать
в качестве базовой машину, -мощность которой одного порядка с проек-
тируемой, изменением Сх вообще можно пренебречь.
трмп₽п^ВОе С0СТояние электрической машины зависит от превышения
и пи пи1.Л^Ы'-ее обМоток> которое определяется произведен нем /ы
чтп л °И нагРУЗКой» если плотность тока неизменна. Известно,
этом тХрВеЛ,,ЧНВаетсй с п°вышением мощности ТЭМ. Однако при
(«а единицу п°ЗРЭСТает Й НаРУ*ный Диаметр ротора, в итоге удельны
Шение трмп ° еРХноста Ритора) потери растут незначительно и лреяы*
УрХХТ;РЫ °бма™ остаетсяРпрРиблизительно на кензменж-м
Уровне. УЧитЫвая также> что при не3а£нсимой системе ве|1Т11ляниь
238
всегда cyuieciByei нтможтять обеспечить mm..-,»,.
jmpvy удельного (IW I Uit о..т.т.л ....... . ’ PJ и,,‘ПШ\ю
50 10 ’
ч*’дующем
11iiio < базовой.
Вывод мярамецшчцьнх 5J»,llvlU)<ll |г1| В1| р
цш\ loiiymciiiui. общи
'’’•’J*' Ч1О ’ 1ЦЧ ,!Меют cTpvhBBiiuv
схемы iil.ioBoii пени, идентичные с проектируемыми. То же <>тшк1тя
к KojictpyKuiiii элскчричы ких машин.
§ 7.2. Вывод соотношений между
параметрами тяювых электрических
машин
В гл. 3 достаточно подробно рассмотрены вопросы оптимизации
электрических машин шк-тояиного тока Здесь же ограничимся изло-
жением метода оптимизации СТПЭ переменного тока на примере при-
вода v ТЭП
Параметрические зависимости тяговых асинхронных двигателей.
Расчетная мощность тяговых АЛ определяется максимальными ыи-
телънымн значениями электромагнитных нагрузок Эти значения
у ТЭД соответствуют номинальном\ режиму, т. е. 4ЧЛпС = ,4Я и В.ъ ,< —
— BftH. Так как указанные электромагнитные нагрузки при шинных
коэффициентах мощности и КПД обусловливают значение Рл,г, можем
записать.
Рд.рн-ч - AJ3 «ШМд. ~ <7 3)
где «[ди — синхронная угловая скорость АД в номинальном режиме
С другой стороны, согласии (1.1*2),
Рд,... = РдЛо- »7 4»
Относительное изменение расчетной мощности из (7.3) п (7-4)
/>; io')2 ,7 5>
Рдр«.=РлЛ- ’7'6>
Здесь н далее индекс «*> над символом означает относительное
изменение параметра г е отношение параметра проектируемого элекфс
Оборудования к параметру пазового, отмеченного пндек "
как АиВ^ = const, 0, = лОг/(2р/,) = const, то 4.Д,. « I. М4Р О -
1 g = а7р* (77>
Поэтому С учетом (7.5) н (7 7) /ж (Di)3 “ Статора
ветственно относительное изменение в нутре
239
„ длины активной части АД
л-'t • Д и ТА ' ’ у-,
____________ (7.8)
L* = ./Ра н/(Л>|Рмжс)
(7.9)
Масса АД приблизительно равна сумме масс активной и киНструк.
тивных частей:
г. Cl — соответственно массы активной Част
Где Ода» Од.щ, ’•'Д.к “•>
Ш“н«ХХ?измХПие массы электродвигателя
бд = Ga/Ga ( « (Gfi Au« + Од щбд ШЛ. + Од иОд к б)/6дЛ ==
= йдабд;, 4" А’д.щбд.щ 4- Йд.ьбдк,
где G1. = СлЛ..е; См-АЛл ОД11 = Сдк/Сд1,б;
= Gr а ^Д-Щ = ^Д Щ-б/Сд б; «Д к — ид.ь б/Од б — ДОЛИ НЭССЫ
ной части, щитов и корпуса в общей массе газовой машины
В 119] проанализирована связь между массой отдельных
АД общего назначения и их главными размерами и получены расчет-
ные выражения. Распространив их на тяговые АД, запишем относи-
тельные изменения массы активной части, щитов и корпуса АД:
gl=(d:)!o g;„, = (оау5-. g;„ = (d;)''4;, {7.ii}
(7.10)
*«., =
3KTJJ8-
частей
где D, = Da/Duc — относительное изменение наружного диаметра ста-
тора, который при заданном внутреннем диаметре зависит от высоты
паза hn и высоты ярма статора AJS. В соответствии с [14] DC = D,+
+ 2(ftnl + Л„) = D(y- у = 1 и- 2 (ftn, + h^lDt и
Da = D,y*. (7.12)
где
У* = У'Ул = 1 + к, (а, — 1) + k, (а, — 1);
Йг = Сгб/( 1 + йгс, + й,б);
fc, = а,е/(1 + а1С + а,6);
= 2hr,„‘D,: а, = %1,,/D,;
= и,1а№- а. = а,/а,б; hn, = Оп1/6л|.
Здесь Q,„ - сечение паза статора в свету; Ь„, — ширина паза (для
трапецеидального паза его ширину берут по средней высоте зубца).
твяии.И1ИС Па3а стато₽а определяется количеством и сечением эффек-
проводников в пазу и коэффициентов заполнения паза медь
чин получим В "роиессе оптимизации АД этот коэффициент неизмен-
G"i /|нАг/п,
паралл№иш°вЙ?ей!ТИВНЫХ Г1РОВОДН‘1КОВ в ПазУ "агора; а - ч'к№
240
Ширина игла
где / - пазив.,ш „ии п„ внутренне» окрул„1л.Т1. стат™
пазов статора на пил mi и фа3у 11X1,1 статора, цф< - чщ ю
G учетам полученных соотношений из (7 13) имеем
- Л„Л,т„../(О.а|-. Ди (7 ,)(
Высоту ярма статора рассчитывают по значении,
в ней основного маспнтвого потока ф._ соответствующего резХ"”
лостого хода. Так как Ф„ --= li,L> I In > режим). \о-
Д„ можно считать пропорииона.аы'юй нндук.ни, в воздушном X'Z'
то при постоянном кочффиниенте заполнения пакета сталью
Л. ~ф„.'(В/.1~0,/л <7 15»
Из {7.13)—(7.15) получим
а — AM’D.. а = 1/р* {7 |f)V
Значение линеинои нагрузки Аи определим из условия постоянства
коэффициента мощности Известно, что коэффициент мощности АД
зависит от отношения намагничивающего тока /(1 к полному току ста-
тора. /он//1н — b'Bw'TA,,, откуда при cos <ря „ = const, = const,
& = const
А* = ДдА( = p»/D,* (7.17)
Решая (7.12), (7.13), (7.16) и (7 17), находим
D, = D'ty = D, |1 + к, | I^p’/ID; )s - 11 + /г, (1/p* - I)}. (7 18)
Подставим (7.9), (7.11) и (7.17) в (7.10), Тогда
о; = п i9>
Диаметр корпуса/) л — Da (1 -+- 2AU/Da), где Дк — односторонняя
толщина корпуса.
Выражение в скобках для АД изменяется незначительно — приолн-
зительно от 1,2 до 1,1 при увеличении мощности от 20 до 600 кВт, по-
этому относительное изменение диаметра корпуса DK = DK-DKU мож-
но приравнять относительному изменению наружного диаметра ста
d.; = d; <7Щ'
тора:
Длина
корпуса
где /йыд к
^ВЫ’г “И 1 ,‘1’
л — „ пина вылета лобовой части обмотки статора и зазор
1 йвыя ДЛ1 к„ д _ толшнна подшипникового щита.
МеХ>ан“л^ в кругЛЬВ СК°бКа' ГГ""" (/ ®
Сотласно 1141. Известно^ ™ ~
этому с учетом lt = т/Рг А-'111113 К0РПУса * 4
аильное изменение
i = vLx===/;|i+Mi (7-22)
где k =il -г 1/(0Жб1 Л)Г‘-
Получим зависимость перегрузочной способности электродвига-
теля от варьируемых параметров. В соответствии с (4.13) и учитывая,
чт0 г х2 — Хкэ — приведенное индуктивное сопротивление ко-
роткого замыкания, получим
Лн г2/(хк ,sH). <7.23)
Номинальное скольжение при изменении номинальной частоты то-
ка и мощности АД примем постоянным и рассмотрим характер изме-
нения параметров г.. п Сопротивление
г • = rjsT.lZ* = (г -1 -J- г -ег) (7.24)
где «Х4 — число витков обмотки фазы статора; Z2 — число зубцов ро-
тора; гсг, Г.ег—сопротивления стержня и коротк ©замыкающего сег-
мента обмотки ротора: г= р/ст/<7ст> ?см == р^ссг/<7ссг» (ст, ^cei длина
стержня и длина зубцового деления на роторе, qlT, qcer — сечение
стержня и короткозамыкающего сегмента; р — удельное сопротивле-
ние материала обмотки ротора
Пользуясь приведенными в |14| выражениями, находим
' !.о ~DJZV | (7 25)
где /2н — номинальный ток в обмотке ротора.
Подставив (7.25) в i7.24), получим г, ==p[i + (p/Za)2| (шг/р) X
х или так как </л’2£)- 1,
Г - <^,П./р1(С'„</Ран). (7-26)
В свою очередь, к*, — .4,Д./Тогда из (7.26}
6 — uLA?/'» (6',Н/РЦ н)2 (7.27)
Индуктивное сопротивление корей кого замыкания
хк . ~ -г £>,«) /
где S/.j, — суммарные проводимости потока рассеяния обмоток
статора и ротора. Величина (2А, : ЗЛ.) не зависит от частоты, поэто-
му
Хк.з - ~ I, (и1нАД/Рл «Г (/1н/р). (7.28)
Решая (7.23). (7.27) и (7.28), находим Лн или для
относительного изменения перегрузочной способности, имея в виду
К Х„/Хнл = (1/fU (7.29)
В соответствии с (4.19) максимальное напряжение электродвигате-
ля, необходимое для обеспечения надежной работы АД при макенмаль-
242
ной частоте,
— К= Vk^D/K, . (?>ЫЙ
При любом заданном значении перегрузочная способность^
равна минимально допустимой по условиям устойчивой
тродвигателя и по соображениям минимизации массы и размеров по-
этому можем считать Хо = %D6 = const, к» = 1, Тогда относительное
изменение максимального напряжения
Ulmm.IUlv,KZ£, = (U^/U^) (UlKS!Ulu„z.t) = ]/О.; , (7 31)
i де /г<ц = kfjtlkffjf,.
Стоимость электродвигателя Св принимаем пропорциональной сто-
имости активных материалов Сда, которая определяется массой Ga.a
активной части АД Ся ~ Сял — бд.а.
Относительное изменение стоимости АД
с; = Сд/Са.б = с; а = (Da> А*. (7.32)
Выведем выражения параметрических зависимостей массы GK и сто-
имости редуктора ПВК.
В табл. 7.1 приведены значения массы GK планетарных редукторов
мотор-колес для различных значений мощности ТЭД Рд.и и переда-
точного отношения <п. Величина Ак == (GK — Gj/fan — 4) характе-
ризует изменение массы редуктора на единицу передаточного отноше-
ния. Тогда часть массы редуктора, определяемая только мощностью
Рд н и не зависящая от 1„ (или, иначе, масса редуктора с in — 1),
G^P GK ArAi-
Расчет показывает, что GKp = GkP — GKP. В то же время составля-
ющая массы редуктора AKtn обусловлена как мощностью электродви-
гателя, так и передаточным отношением редуктора. Тогда масса пла-
нетарного редуктора (кг) мотор-колеса определяется как сумма этих
двух составляющих: GK = GKP -f- AKr„.
Используя данные табл. 7.1, зависимости СкрУдя) и (“ля/
можно аппроксимировать выражениями GKp — 0,2Ра'н; Аи = 0,0186Рда,
откуда масса (кг)
GK = 0,2Р^ + 0,0186PttH4,
где —номинальная мощность ТЭД, кВт.
Табле»» ?-!
Рдл|. кВт 4 ск. кг л GK. кг '4p-£4p-c«'’-"
70 14,96 80 22,4 89 137 1,21 1 72 61,9 91.8
90 17,58 122 26,3 2^29 119,7
114 145 185 237 300 17,58 19,20 21,25 26,60 26,60 160 217 305 457 618 26,3 28.8 31,9 40,0 40,0 238 330 496 693 2,19 2.35 2,91 5,60 175,0 255.0 379,6 469,0
а&
глею,.,, - номинальная vr„
Так как <„ — j " если принять и>„ „ = const, отнпг... ловая
^Д’^д^о^гношен^ редуктора °е
= /„//„ т = “ы»= «7ш,д „,е. (7
Тогда относительное изменение массы редуктора с учетом
Gi= бк/бьс ='Л» 1(7’д») + (1//„ — 1)<о,д„]. р
= 0,2/>^,‘6/G„.s. ' '
На основании данных табл. 7.1 коэффициент t = 0,67.
Тте определения стоимости редукторов ПВК использовались
прейскурантные данные ряда типов планетарных редукторов с Л™
1Р 661 °04 рассчитанных на передачу мощности 5.5—100 кВ7
В результате обработки этих данных по методу наименьших квадрат^
ПОЛУЧИМ формулу
С. = l,44GK;
Ск = С„/Ск о — G.
где С„ _ стоимость редуктора, руб.
Представляют интерес выражения для расчета суммарных массы
6Д „ и стоимости Сд к блока «тяговый электродвигатель —
ПВК7
(7.35)
(7.36)
редуктор
G,, = 6Д 4- G„; Сд . — Сд Ск.
Относительные изменения этих параметров
Сдь =ба../Од„ с, = (/<-, ,.Ga 4- б^)/(/гя.к 4- I);
Ст. = Сд|.,Сд.кб = (/д„Сд 4“ Сд)/(/д.К + 1),
где 7Д к = Сдд 'б.1Л „ = С^СЛ 6.
Чтобы найти числовое значение Ау.,,, используем соотношение
0д ~ Л1 или G, = Од(Л, „/Рц „ 6) ". (7.39)
В качестве базового припираем тяговый асинхронный электродви-
гатель типа ДК-720, имеющий Рзм6 = 40,5 кВт и ОдЛ = 230 кг.
Подставив значения базовых величин в (7.39), получим для АД Gn в
= 14,33 Рд';н.
Определим по данным табл 7.1 зависимости 6Л (Ря.н), (Рд.н) и
иИгдн), затем рассчитаем зависимости
*ж«(₽«) = -&-(Рм), *дк(Рди)= Д^(РД„) и *ДК(РДВ),
С“
ГЛ6 Л» = (*ДК + А£.к)/2.
«(5^Р0,01)рИ₽УЯ функцию *л«(рдв) прямой линией, имеем **«>=’
Коэффициент
(7.37)
(7.38)
гд.к См1>6д.б/(свШ6к б) = ЙдкСдщ/СкН),
244
редуктора ПВК.
что стоимость
1 соответствии
генераторов.
Длительными
(7.40)
(7.41)
(7.43)
где <’д,|, и <„<п — стоимость единицы массы дп ..
Анализ данных серийно выпускаемых АД "ока " еТ
единицы их массы можно принять г — , каз™аег. '
с (7.35) с... = 1.4 руб/кт. Р л,1> ру6/кг- в
Параметрические зависимости тяговых
Расчетная мощность СГ определяется максимальны™
значениями мектромагнитных нагрузок, £2тому
^грасч ^максВбмакс^(^/г н/р.
Кроме того, согласно (1.14),
Рграсч = Р гнС/гмакс..
Относительное изменение расчетной мощности
Рг рзсч - Рг расч/Pi расч.б ^максВбчакс (А )2 l'i f.Jp' = Рг„(/г„ш., (7.42)
где fr к = /г Лг Кб) Рг „ = Рг „/Рг , 6;
_ ur рг.,_6
l’r«a«<6. Уг„ Рги.кс.5
В соответствии с допущениями Л^В'^т = 1, D'/p*Z‘ = 1. Тогда
из (7.42)/[Н (D,)3 — Т’г.кТ/г.макс. (р*)2. откуда относительное изменение
внутреннего диаметра статора СГ
о; = Крг.«77г ».«с. (₽*М „ . (7.44)
Рассмотрим подробнее параметр Так как напряжения
СГ и ТЭД связаны посредством передаточного коэффициента вентиль-
кого преобразователя ky, то
//* _ ^Д-макс kVn Ццнб kUD6 feOD6. |7 .«
С/г макс» — . г- tt- ---------— Ь'дмакс.—Т-----. V
rVD ицм кЦъ.Ь Ча.мВксб *UD»
где kuDr ~ kvDlky^ kuD&. = kuD6!kuK.6 — передаточные коэффициенты
ВП по напряжению в режиме, соответствующем точке D на рис. 2.1.
Номинальный режим СГ может соответствовать режимам 2—3 или
3 (см §5.4) вентильного преобразователя. Когда напряжение достигает
максимального значения, обычно имеет место режим 2—3, в котором
угол 0 не превышает 90е Изменением ky можно пренебречь
(см. рис. 5.2), поэтому отношение kyybJkyD. близко ^к еданнвд. Эго
ПОЗВОЛЯет С ДОСТаТОЧНОЙ ТОЧНОСТЬЮ ПрИНЯТЬ Urjtatet
и в дальнейшем оперировать параметром Г7дыакс*> та1?кВ5ЛГО
непосредственно из параметрических зависимостей 1ЭД. Vraer ,
что то же самое можно сказать и об относительных изменена
на.пьных напряжений, т. е. ££н = (/г.н/^г.н.б — ^д«-
На основании изложенного (7.44) принимает вид
Di ~ Рг к^л.макс* (р-Мы-
Относительное изменение длины активной части СГ
(7.4®
(.,4П
l’t ~ |/" /г.**)"
„ „.ov D' опоеделяют выражениями (7.12) — (7.16).
®в™дят из следующих соображений. Принимая в процессе оmSf
Л на °? и постоянными, целесообразно сох0Яь И‘
кпутизну внешней характеристики СГ о, следовательно, относнтЦ^
,яР>,о"е№Х единицах) значение индуктивного сопротивления взаимной
1НЛУКШШ ЛЫ. (или Ха.) неизменным!.. Выразив последнее через адек®
Магнитные нагрузки в номинальном режиме, найдем („р„ 26'/D, 1
= const)
roJ. = FajFa., ~ = const,
OTKVда. учитывая, что = ^«о«с “ &ы = ®«макс/<7,..„а1(с., получим
А„ = У P^/U,.макс*.
Используя (7.46), из (7.12) - (7.16) имеем
Di = D’nf - D] jl + *zl
(7.48)
_____p*
(D^U‘
(7.49)
Относительное изменение массы генератора вычисляют по форму-
лам, аналогичным (7.10) и (7.11):
С.' = ~~ = (О j-“ (kr.J, + krM КD," + krxlil У D'a), (7.50)
ГДе /?-.а —Gi.abiG, 6» /'rm — С|дц.б/Огб» kr.u — Grji б/Сг.б-
Получим зависимость индуктивного сопротивления цепи коммута-
ции (в долевых единицах) от варьируемых параметров. Можно пока-
зать, что Аг 1\.» где rs« —индуктивное сопротивление рассеяния.
Л-. - (/. .„//>) (ti-r/Zj) I. (lr XXlt (7.51)
где fc'j ~ДвО,//,.н A„D,(J: „;РГ . — число витков обмотки статора;
Z] — число зубцов статора
Число пазов иа полюс и фазу Zj pq^.
Суммарная проводимость рассеяния обмотки статора =*
= Хпг + 4л1 1л|, где Л|1Ь ?.л1 и — проводимости рассеяния
пазового, лобового и в воздушном зазоре.
Проводимость пазовою рассеяния (для наиболее распространен*
кого прямоугольно! о паза с гатора СГ) приблизительно про порциона ль*
на отношению высоты паза к его ширине:
7-ni = >.,1|/Л.,1г, = h„,/brt = A'„rfgi,ilD'i.
Проводимость лобового рассеяния нрн диаметральном шаге обмопя
а.чг const пропорциональна числу пазов на полюсифазу, т*
ПроводимостьФрассеяния в воздушном зазоре при достаточно
алом зазоре 6 обратно пропорциональна ширине паза статора:
>ч>1 = ^-ai/7-eic = l/bni = p*q'/fiID'i.
246
Относи тельное изменение суммарной проводимости рассеяния
(EX,)* = = kX„ + feX + kXs, =
= (М., 4- MJ/p’ 4- ЭД p'q'v/D',
где /,, _ Knic/^Xic. = Aj,ie/SK16; Рб == Хб|б/2х1с — составляющие проводи-
мости «нового СГ отнесенные к суммарной проводимости^рассеяния
Окончательно из (7.51) получаем рчссеяиия.
х,. - х, ./х, = k„ (p4U'r V(U‘rm./p>) -J. k„ +
+ Иp*f' (7.52)
Относительное изменение стоимости СГ, по аналогии с (7.32),
С’ = Сг/Сг t> = G*fa = (D'a)2 С. (7.53)
В некоторых типах электромобилей ДВС сочленяется с высокоско-
ростным СГ с помощью повышающего редуктора. Получим выражения
параметрических зависимостей его массы Gp и стоимости Ср. Обра-
ботки по методу наименьших квадратов прейскурантных данных ряда
типов цилиндрических одноступенчатых редукторов с моментом на вы-
ходном валу до 500 Н • м и передаточным отношением ip = 1,25 4-
4- 4,75 дала возможность получить формулы для массы (кг) и стоимости
(Руб):
Gp- 10 + 0,07/Ир1р; (7.54)
Ср = 0,466р (7.55)
Чтобы выразить (7.54) в системе относительных единиц, используем
приближенную формулу 6Р ~ 0,07 Mpip. Погрешность, обусловлен-
ная подобным приближением, невелика. Кроме того, так как в процес-
се оптимизации анализируются не абсолютные значения, а только
относительные изменения параметров, тем более правомерно опери-
ровать приближенным выражением.
Если учесть, что в энергоустановке, состоящей из ДВС и СГ, при-
меняется повышающий редуктор, т. е. гр = б)двси/®г.н < I. то (7.54)
принимает вид 6Р = 0,07 .MrH/ip, где Мг н - номинальный момент
на валу СГ, Н - м. Так как
ЛШЛ..), Р-56*
этих пар»-
Т<> Принимая ЯЩдвсн"= const и ч™ = const. получим Относите’ г
ные изменения массы и стоимости редуктора:
=ср/сР.ь=с;=ср/сР л=р;... <7И)
метров = + 0^/(k + |);
с;.р = С, ,,/С == (Л с: 4- С>(4.я + о.
где йг.Р = бгл/брл; ir e = С,.с1Сгб.
(7.58)
(7.59)
„ ггнгэпвое значение k, р, определим по (7 544 _
Чтобы наип - задаваясь различными з,ап?Четсч
(7.56) ®«“=₽Xt₽ Массы СГ получаем, используя ухред“я««
Л.» Д'1Я “J" нс1," (на единицу расчетной мощности) ыассь, Яное
зна’енн•. в . д) в диапазоне Рг« — ЮО -У 1000 кВт коэфф,,,®' °5
=5,85 при >к... = 0-94. Принимаем Ту, = 5,75™ ЦИет
Г 'Коэффициент ,
1гр = сг ,,СГ 6l(Cp,i,GP о) — (<<<1)/ср,п) 6, р,
_ стоимость единицы массы СГ п редуктора.
ГДС Лиа "изданных серийно выпускаемых СГ показывает, что сто.,мость
единицы их массы можно принять “ ₽У°*£• В соответствии
с <7.55) гй„ = 0.46 руб'кг Тогда из (7 ЬО) _ 25.
(7.60)
§ 7.3. Параметрические зависимости
вентильных преобразователей
Существенную долю .массы и стоимости оборудования СТПЭ состав-
ляют масса и стоимость ВП, которые складываются из массы и стоимос-
ти вентильных мостов и устройств фильтра, коммутации и компенса-
ции (конденсаторов и реакторов) Конструктивные узлы ВП считаем
входящими в соответствующие устройства. Прежде чем перейти к под-
робному анализу характера изменения этих показателей при варьиро-
вании параметров ТЭМ, остановимся на некоторых общих вопросах
нх расчета для различных типов преобразователей.
Наибольшее распространение в СТПЭ имеют трехфазные мостовые
схемы преобразователей, обладающие высокими энергетическими по-
казателями (лучшее использование мощности источника питания ВП,
меньший коэффициент пульсации выпрямленного напряжения) Здесь
для различных структур СТПЭ рассматриваются трехфазные мостовые
выпрямители, НПЧ (см. рис 6.2, б) и основные узлы ПЧПТ
(см. рпс. 6.1) — инверторный, обратный и коммутирующий мосты.
В зависимости от схемы СТПЭ количество преобразователей и от-
дельных узлов может существенно отличаться даже в пределах од-
ного типа тягового электропривода, поэтому в расчетах массы и стои-
мости ВП в их узлов необходимо ввести структурный коэффициент,
учитывающий изменение общего количества преобразователей СТПЭ.
Выпрямители. Масса и стоимость выпрямителей определяются со-
ответствующими суммарными показателями вентилей, включенных
в последовательные и параллельные звенья в плечах вентильных мос
тов
Число последовательно включенных вентилей в плече мосте
Фвен ~ У а .мякс/^-ЛЛно), и.
а число параллельных ветвей в плече для трехфазного мостового
прямителя н
г, . ^ВРН д.м«нс/(3/прДН#
Допустимое значение обратного напряжения и чР н8.
грузки вентиРЯ-М'1еНН0ГО тока тентиля’. ft"U. ft“' - коэффнииен
рузки вентилем по напряжению и току.
248
1^:1 aosc
(7.61)
17 62)
Введем^ для удобства дальнейшего анализа параметр (
гд 1М. - 50 А Класе вентиля по напряжению ₽
<7вен ~ (Уд/100.
Из приведенных выражений для О,, т t
« «<вен. / вев. Гвен. <7вен
(Лсмакс = lOO^o^Q^;
Лтмакс = 150k„it„aTm>.
Произведение левых частей этих уравнений представляет собой
расчетную мощность выпрямителя (В А) РВДьтавляет сооои
Рц р.с, = Иамт1лт„ = 15 - (7.63)
Анализ закономерностей изменения массы н стоимости вентилей
серийно выпускаемых отечественной промышленностью, позволяет
применить следующие эмпирические формулы, связывающие массу
6ВЫ| и стоимость С„е„ вентиля (с учетом охлаждающего радиатора)
с классом вентилей по напряжению и допустимым током: GBe„ =
= G5„(i„„. Cr(11 --=u.„(1 b8(JgEeH), где G60 — масса вентиля при
(«» 1; а9а, (?50 коэффициенты, определяющие стоимость вентиля
ПрН /псы ~ 1 И Унеи ~ -
Масса и стоимость вентильного моста выпрямителя, состоящего
из mn.t плеч, соответственно
Gb = ^ПЛ^5(^вен7'венФвеит (7.64)
Св ~ ГМпл0&0(1 “Ь Т^венфвев- (7.65)
Учитывая выражение для расчетной мощности выпрямителя и вводя
структурный коэффициент 1FC, характеризующий число однотипных
выпрямителей в СТПЭ, получим параметрические зависимости общей
массы и стоимости всех неуправляемых выпрямителей привода элек-
тромобиля:
Свн — ткСвй7с = 'n, mrnG5riU''c7lBpac.,/(15 • (7-66)
Син = ШкСвй7с = тк/Ппл^50 (1 4” 680^вев) W’cT’b расч/(15 X
X 10ЧЛ/?»«Л»), С-67)
где U7C = 1/тк — структурный коэффициент; т« — число алектро-
двигателей, питающихся параллельно от одного
Относительные изменения массы и стоимости ВН ипвппо-
с принятыми допущениями неизменности структуры^ _
цессе оптимизации (mK = const, mm = const с
Свн = Gbh/Gbhc = Рврасч/<7»«:
Свн = Свн/Свн а = <СвГ = Pa=.o/(W^«)-
Где Р'пр.с = pBpac’'^Bp.™6j- отн^тмьн“ пиент.
мощности выпрямителя, о пере с , 7П.
.. I W+‘,в-' ’ »
(7.68)
(7.69)
изменение расчетное
„ „ — отпоен «^ьны,- поит.,,,,,,
^.“’"УХвмныу классов значение /1, сос1.ш.т.,е, 0,825) ‘ Ыи
fM.HTH.iHJ различал . и, ,-’1-п -
Расспотрим. как определяются^. ,, ы) "</.65)след
„ем массы н стоимости вентильного мое,а „мее, £4* П|,„ "Ует
выпора обратного напряжения вентиля „о .млнспм.-,л,,„<п,у |1а ™
„„к, ТЭД, а допустимого среднего значения ,ок., - по мак *
НОМУ ТОКУ электродвигателя (с учетом применяемых 11а П„ак"ь
коэффициентов запаса по напряжению и току. ,треде. ,яе,,ых /fli( ([ е
В X случае для реального диапазона мощностей ТЭД электрод
c.meii (ДО 500 кВт) имеем (?„,. = 1: '™-,. — 1 Из (7.61) „ (7.62) )ю
ц,1: ~ 1 00^’uC7) — Д <чт«с*/( 1 00/?,п/)-!
/Й(ЕН = /д.ыаксЛ 150A’tl/) = /д нЛ.мл!м «»/( ISOfeu/).
Так как /д„акс. КПД н коэффициент мощности электродвигателя
согласно принятым допущениям неизменны, то
Qneii Un.tfJ Э.макс» (7.71)
^вен = GiJa.waiic» = 7Д н = Ра.и/£/д.а. (7.72)
Относительное изменение расчетном мощности
Р& г- Pb\m 'Pli 4W ~ ^7.1 мэкс^д.чакс — ^д.ц^7д.макс*7дЛ1 = £7дмакСфРдв>
IIojciaBiiM — (7.73) в (7.68) и (7.69). Тогда (7.73)
Gbh ~ Рд.н/Оц.н, (7-74)
GlsH == 1 -р /i(j ((-7д н£7д.ыакс* * !)• (7.75)
Д чя управ ыемого выпрямителя (ВУ)
G'rV GBe|Ii 4- Gy; (7-76)
c;ss - СУР1„ 4 Cy, (7.77)
где(?вемь Свет — масса и стоимость вешплен выпрямителя; Gy, Су —
масса и стоимость епщемы управления (изменяются дискретно при
переходе от одного отрезка шкалы мощностей к следующему).
Примем, что Gy, Су пропорциональны расчетной мощности выпря-
мителя. При выборе оакшого ВУ. имеющего мощность одного порядка
^проектируемым, погрепшоегь, вносимая этим допущением, невелика.
G. -Gv/0v6 = Phr)aC4. (7.7S)
Для управляемого выпрямителя GM„ = Св, С„„ = О,; Св и Св
да₽с то'ЮТ г? тл64) И 65>- Тогда масса и стоимость всех ВУ приво-
да с учетом (7.68) и (7.69)
Сву = тйВ7с (GL + Су) = ^U7CP-ргеч (Све/9;е„ + Gy.e); (7.7^
Сву = т^(Св + Су) = ткВ7сРВрасч + Су.«). (7.80)
\ ^веи^веи /
250
Огш.сительиые измене,и,я массы „ СТО11мсет„ ву
Иц,)‘
р*
Врвсч
Z’ ____ vBy
В!* ~ Сву,'. ™ ^ВТасч
’ рас>< I -
JX-1
I ^Врасч
-----^1»
Аеси^вев /J
где = '"„М'Аот.б/бвуб /ген = П1к117сС,еи б/СВу О
Подставив (7.70) - (7.73) в (7.81) и (7.82)', получим
/эву 7/а ма1(с.Рл н 11 knefJ( —-—--. — |
Л’ г.»
с „у = -р----- =. рв
сВУб
(7.81)
(7.82)
— ^Врясч
(7.83)
Cfiv —-Сдмакс»Рд
макс»
1 + hfi (^д.н^д.мжс — 1)
V* Р*
д.макс»г д.н
Преобразователи частоты с непосредственной связью. Расчет си-
ловых вентильных мостов НПЧ практически не отличается от анало-
гичных расчетов выпрямителя. Масса и стоимость НПЧ
Снпч = Свен 4~ Су 4- Ср ф = Св 4* Су 4“ Ср.ф;
Снпч = Свен 4- Су 4“ Ср.ф = Св 4~ Су 4* Ср,ф.
где Ср.ф и Ср.ф — масса и стоимость реактора фильтра третьей и крат-
ных трем гармонических составляющих. Практика показывает, что
Ср.ф и СРф пропорциональны расчетной мощности преобразователя
Рнпчрзсч = Рврасч. Масса и стоимость всех НПЧ привода
Снпч = tnK (Св + Gy 4- бр.ф) — ту
С вс0
СНПЧ == тк (Св + Су 4~ Ср ф) — /ЛкРврасч
;----г г ‘'р.цг-о !•
?neir вея /
Здесь структурный коэффициент Wc отсутствует, ибо обычно
в СТПЭ применяют индивидуальные для каждого АД преобразователи.
Относительные изменения массы и стоимости НПЧ
„• °НПЧ _ О'
C/НПЧ = ~с---------- ^д-макс»1*
°НПЧб
Снпч г НПЧ — Сд.мак«*Рд.н
сНПЧб
—1
1 4~ ^б(^д.н^д-вике*
^Д.М8КС«^*Л
(7Ж
№
частоты с явно выраженным звеном посте»
Прт-Г^^зовате.1ен имекшн.' некомпенсированные вы
J,J.>a 01'^з°ва’сеД;ос1Ь всех ПЧПТ привода
тетк. 6 1): Р бИ‘
бпчп' = С,
С[\ЧП1 — Сче»
’пен
(7.87)
(7.88)
(7.89)
(7.90)
(7.91)
(7.92)
г, - mJKcUBM + " т "км,;
Миен к
с„г = «г„1ГсСв.м + (С>|.м + Со.м 4- скм);
Сфи1 = /п„1Р’с6сф + (Ge,. + Gt..):
Сф.. = иЛ сСст + (С* + СсД
г,е Св„ Сим, Со» " бкм-масса выпрямительного (ВМ), ивер
Horo lUM). обратного (ОМ) п ьомыутпр)юшего (КМ) мостов; Сф«,
Ct Gr и Gu — масса реактивных элементов, конденсаторов фильт-
Дфконденсаторов и реакторов устройства коммутации; Свн, ^им, Сом,
Скм Сфк, ССф, Сек. Си -стоимость перечисленных узлов.
Расчет ПЧПТ, как и других рассмотренных типов преобразователей,
сводится к определению класса и числа вентилей, индуктивности реак-
тора и емкоегп конденсатора УИК, а также емкости конденсатора
фильтра. С целью определения зависимостей массы и стоимости ПЧПТ
при варьировании его входных и выходных параметров (напряжения
и частоты тока) методику расчета преобразователя в большей ее части
удобно представить в системе относительных единиц, аналогично ис-
пользованной для ТЭМ, ВН, ВУ и НПЧ.
Класс и число последовательно включенных вентилей в плечах
выпрямительного, инверторного и обратного мостов (см. рис. 6.1) за-
висят от максимального выпрямленного напряжения, которое, в свою
очередь, связано и максимальным напряжением электродвигателя че-
рез передаточный коэффициент инвертора по напряжению /?ии* Число
параллельных ветвей в плечах ВМ, ИМ и ОМ обусловлено максималь-
ными значениями их выходных токов: для ИМ н ОМ — соответственно
активной и реактивной составляющими тока АД, для ВМ — выпрям-
леи^*?г0 тока» связанного с током /гмакс посредством передаточного
коэффициента инвертора по току kw. Коэффициенты kuu и ^и/ за-
висят от коэффициента .мощности электродвигателя (см. § б-**)-
днако тяговые АД при рациональных вариантах управления и при-
нудительном задании параметра абсолютного скольжения работаю^
с Достаточно высокими значениями коэффициента мощности (см.§4’*£
ска~° в процессе оптимизации перем™®»
иые инвеРТ0Ра можно считать постоянными, a относит
е изменения расчетной мощности ВМ ИМ и ОМ — равными меЖДУ
№ (7 731 п "РВДе;'ЯеМЬ,МИ "РпизьеДением чТО
»,ительного>е^аВЛЯег собой ^вра«. Поэтому масса н стоимость в ?
* верторного н обратного мостов всех ПЧПТ привод*
252
учетом (7 68) » (7.69)
О = (G,1M + Go„) = +
(7.93)
C IT- m..Vl'cCB,y + m„ (Сим + Сом) = (U7cCBM(s+ C„M + CGM).
’еен’вен
(7.94)
Класс и число вентилей коммутирующего моста, а также параметры
устройств коммутации и фильтра ограничиваются максимальными зна-
чениями напряжения t/скмакс на конденсаторе Ск, необходимого
для падежной коммутации тиристоров КМ, и предкоммутационного то-
ка тиристоров 1К Манс (иначе, разрядного тока коммутирующего
конденсатора через коммутирующий реактор), т. е. расчетная мощность
коммутирующего моста
^КМрзсч ~ максун.макс» (7.95)
Ркмрасч ~ ^КМрасч/^КМрасч G = VСк.макс Аммане, (7.96)
ГДе (7ск.манс = ^Ск.макс/^Ск.макс.б» ^к.макс = ^к.мажДк.макс б»
Численный анализ выражений, по которым рассчитывают Ссх.мзкс
и /«.макс преобразователей, предназначенных для работы на реальные
тяговые АД, приводит к выводу, что
^КМрасч ~ ^Врасч- (7.97)
Тогда массу Скм и стоимость Скм вентилей коммутирующего моста
находят по (7.68) н (7.69).
Суммарная масса н стоимость вентильных мостов, входящих во все
преобразователи СТПЭ, с учетом (7.93), (7.94) и (7.97)
GBeH = (ткРвРасч/<7в и) (^«Двмб + Симе + бомб + бкмб); (7.98)
Свен = (/^кРврасчО/?векСен) (ЙДСвМб + Сцмб + Сомб + СкМб) (1 + /цен),
(7.99)
/век = (I — ^с) СвмбТ^сСвмб -4* Симс + Соме + СкМб)-
Перейдем к определению массы и стоимости реактивных элементов.
Исходными являются формулы
Ссф = gc*Qc& Gck — SckQck, Glk = (7.100)
Ссф = ^Сфбсф; Сек = CckQck’, CLk = QkQlk» (7.101)
где Qca Qck. QL^ — удельные (на единицу мощности) массы конден-
саторов фильтра, коммутирующих конденсаторов и реакторов, гсф,
сек, ськ — их удельные стоимости;
<2с<ь — 12л^г нСф(Д(7<г)8;
Qck — 2л/[НСк£7ск .мякс»
Q£k = 2л/ щЬк1к мако
(7.102)
(7.103)
(7.104)
253
реактивных элементов: \С
RHiiTMiMjeniioro напряжения:
Ct =Н, III. ..>|U, ...... V.;)-;
С. (2 л/ ,,.„.Э.
г, Ue„ ,,,„.. (2л/ „/.....1-
Решая (7 91), (7 92)- '71,1и> “ <7 ,07)- '"’Ч"1''
ма„ь1 „ стоимости реактивных элементов всех
СТПЭ:
Макс11мальцпе
<7-105)
(7 Юб)
(7 107)
выражения оГ1Ц1ей
"Pconpa3fJRaTeq
G* чакс/к мзкс ( е'г ~Г ЙСк Н~ gi н j ; (7
Сф в — Шк(/си.малсА< макс ( с^г у & ССФ 4“ С^‘> + с£-к j - (7.109)
Отношение
Сск.макс/7к макс ~ %Lk 2&f 1а^ц- (7.110)
Учитывая (7.95) — (7.97) и (7.110), из (7-108) п (7.109) имеем
бф ч ткРвРасч оРврасч [ Wс ~~~ £Сф + §Ск + gtKj '» (7.1 П)
Q .. 1П. Рв^ч.С-Рв^сч ( И7с сСф + сСк -ь С/.,А . (7.112)
’ ' Th I
Почные масса и стоимость всех ПЧПТ в приводе электромобиля
согласна (7 й7), 17 88k (7.98). (7.99), (7.111) и (7.112)
п- I и’сДВМб + СИМб + СОМс + СКМб ,
-- "'.^Бр-сч ( -------------;-------------------- 4-
^вен
- /Ч,м. .- ' п?. ge.,. + gc. + gL,) + Gs,6j; (7.113)
Спчт = я? Рврк.,! -j-™- (1 -т ZPfl|}(№cCBM.- -T Симс + Сомб +
-г Ск ud -J- Pr,r, .-« - | IT.- ос* -T t’c;. + Отк j -T Cy.cj '> (7414)
СПЧГП = 6ПЧГ1Т''6'ПЧПЬ. Рвгэ.:ч 11 + А’веи (Свен/^Ьгасч ~' V +
(Оф.1...‘Р,'!гяс„ — 1)) Р1151
Спчт = Спчпт/Спчи-,- = РВр.,„(1 + (С„„/Рвр«ч—» +
+ Us (Сф к/fbpac» — 1)1, (71*6)
где t„„ = 6вея.6/0пчптб; А’Ф.К = Сф.к «/бпчпто; 4е>, = Срен.б/Спчптс; 1ф-“
g;bh = G„„/Gb„0; = 6ф.к/6ф.к.с; Со*.» = С..»/С.«»6
с* к — Сф.к/Сф^.б,
254
Ik, основ,-ж,,,, 17 OS), (7.09). (7.11|) „ (7 П2) иа,Ъем.
G». = Ct, a, PB „ v' <x,
мы'п ння Uck.
(ТЛГП
(7.118)
»л^ . . !,poпорцпопальны, соответственно
. ,*м.. Коэффициенты пропорциональности в процессе
oiiiir.iii i.iiiiiii параметров ЛД меняются в небольших пределах. Поэтому
" < </ I Ш) индуктивное сопротивление коммутирующего реактора г„ 4
' I * 1.4 1Ит ,
V, — _^ам./;с 1 л макс? ^длакс
*о .- П,.а„с -77^7
Величины 77лЛ|акс и /д,мак. можно представить как
Уц -.ик. '-= (СА »ДА.ц fi) (U ; чаАС /ип мак<.-.б«> = Вц я^я.макс*;
А -лиг = (/д ц// i в ft) (/ -. чгкс*^ 1 -икс ft.) = А.нА макс- = /д к
(7.П9)
(7.120)
(7.121)
(согласно принятому допущению, значение /лэдке. постоянно).
Решая (7 119) — (7 121), имеем
%1м — Uд д.макс»//д н = (t/д к)2 t/д.макс./Рд н- (7.122)
Относительное (в долевых единицах) значение индуктивного сопро-
тивления цепи коммутации СГ (см. (5.30)1 хг. = xvlTJJUr» —
= дг£г.11'(/гн, откуда
xr = xUA «/$,„; (7.123)
хг =xi.(u;=хг, ((/;.h)s/p;«= xr. {u^p:и, a.124>
ибо s™ ~ Sr.H/Sr.Hj6 = p; и == Pr «/Рг „ 6 = Ur Ж.» вследствие приня-
того допущения постоянства коэффициента мощности и КПД;
/г н = /г н/7г н.С» = н/(^Ын^Шя)-
Рапее \ казано, что const (см. рис. 5.2),. следова-
тельно, к Тогда Так как (Л, =
и 1г _ [я т0 р’ н = Рд н Таким образом, для ПЧПТ с не-
компенсированными выпрямителями
6цчл I = ия.макс.Рц.ч [ 1 + 7гвев (, и’кс. 1) ^’К Самаке. J
L ЯИ ° (7.125)
9 9 | I 1+^6 ((^д н^/д-макс» ~~
Спчпт == 1/д.макс^д.в 1 + *веи I ^дыакс^ЯЛ •»
25S
n..nU|.v MWICIIMOCPI массы и стоимости ПЧПТ с компенгнп
Вы>:гчЧ<те.'ч'Ш Для всех преобразователен иривода Рован-
о.нп. = Gf... it G„.. - '",G< + mr(.,L -L ,,j C^
С||ЧП1 “ Gpe. 7 Ч'ф, + “ ГЧГ( , 4- /llltCVt )
r]e о.. оЛ и Cc, CL - массы н стоимости Лчпе11сиру1Ощег0 ’
сатира в гокоограничивающего реактора. '«и-
Относительные изменения массы п стоимости
где^с = Gc<-. Сочите: kL = (чи/бичтс; 1с = Ссб/Спчпте.; Il ~ С£б/СПчптб;
Сс =» G, бел, и г — Gl Glc. С. • = Сс!Ссб\ Cl ~ ClJCla. Alaccw и стои-
мости конденсатора и гокоограничивающего реактора
Gc^gcQc; GL=gLQL,
ccQc.
Cl == Q Ql,
(7.131)
(7.132)
где §r, gL и e,-_ — \де пятые (на единицу мощности) массы и стоимос-
ти компенс<трппшегг. конденсатора и токоограничивающего реактора;
Qc, Ql — расчетные мощности указанных реактивных элементов:
Мс - -'л/ C^U iV.c = щг(/Л1акС/(хс/3); (7 133)
Q.- -= ел/ /?’./ = tnrl; ^XL, (7.134)
где а'с/3 — емкостное сс/ир.янвлеинс компенсирующего конденсатора,
приведенное к «звезде?5, ы. - hhj\ мивное сопротивление токоогранп-
чивающего реактора В свою очередь. vc ~ аг, xl Тогда
Qc РЬ расч ^г.макс< . (7.135)
'г i LI г I ’
и 'г- « макс»
Q,-~U. Г. Р„ / (7.136)
'О v ч-нм *•/[! рчсч'Г макг '
Из (7.131) и (7 132) с учетом (7.135) и (7.136) получим в системе
относительных единиц;
оа =
р'
В расч tj*
^д-млкс»
G; — Рв ргеч^д.н»
Сс = Gc', Cl = Cl*
(7.137)
(7.138)
256
§ 7.4. Комплексный анализ
параметрических зависимостей
_ Параметрические зависимости систем тягового привода злектромо-
оилеи. Выбор типа и структурной схемы СТПЭ , определение ее э<Ь-
фемивности основываются наряду с другими технико-экономическими
показателями на анализе массы и стоимости проектируемого электро-
обор)дованпя. Зависимость массы и стоимости тягового силового элек-
трооборудования определяется как сумма соответствующих показа-
телен отдельных агрегатов,-
GT ~ Gr Свп
Ст = Сг + Свп -г ткСд;
GT = GT/GT6 ~ kfGr + &ВпС*ВП + йдбя;
Ст = C-jCt б — ZrCr + /впСвп т /дСд,
(7.141)
(7.142»
где kr — Gt-С'Стс» А'вп = Свп б/Ст.о; — я^Сд-б/Ст ci ?Г“Сг.с/Сте;
/Ш1 = Свп с./Ст б; /д = ткСд.6/Ст 0— соответственно доли массы и стои-
мости ТЭМ и ВП в общей массе и стоимости силового электрооборудо-
вания базовой СТПЭ. Если при проектировании необходимо учитывать
ti механические узлы (редукторы ПВК и редуктор тягового генерато-
ра). создаваемые в связи с заменой традиционных систем транспорт-
ных приводов (механических, гидромеханических и др.) электрически-
ми, то (7 141) и (7.142) принимают вид
с; = Лгс;.р + ЛвпСвп + «; с; = Zrc; „ + /впСвп + IA-
где k, = Gr „.<№ 6; *д = m«G, „ о/бт.в; 1Г = СГ.^С,А
1Д = гп^Сд.к б/Стб-
Важными технико-экономическими
ризующпмн ее экономичность, являются уд
9 -1 г,-
равные для силового электрооборудапагшя
g, = От,(т«Ад..). g. - g/g-я - С;/Р, (7 | j
с, = СтЦт.Р_, „); с, ^ст1с,,^С,1Р,.. (7).
Удельные масса н сюммоегь агрегате силовон цепи нредставля
собой массу и стоимость, отнесенные к полезной мощности:
для тяговых электродвигателей
ga = бд/Ра »й Sn ~ &/£до — G&IP& и'» (7.1<
с. = Са/Р,.„-, с, = <,/С-,о = с;/р, {7.1,
для блока «тяговый электродвигатель — редуктор ПВК»
gar = G^JP,M; gn* ~ = СД1,/РДН;
Сд I, — Сд ! /Рд IO Са Ь = Од к/Гд |. <, — Сд К/Рд.н1
для тяговых генераторов
g, = G../P, g, = fir/g. Г, = G /Р,’.„; (7.1-
с, = Cr/Pr.„; & = гг/с, в = С,7Р.’„; (7 1
для блока «тяговый генератор — редуктор»
gr р = G, р/Рг.н; gr р = gr ₽/gr р * = G^P’r н;
С j. = С р/Рг.н» Сг । = Сг р/Сг р.15 == Ср р{Р, н»
для вентильных преобразователей
gbit «= Свп/Р|Лк = 0вгП11н/Рдн; £вп — £вп/£впб = Свп/Рд.и; (7.14
<ВП ~ Свц/Р1^.й — CiK|i|Q н/Рд н> С’вп *= Свп/СВ[1>, = Спп/Рдн. (7.15
Удельные массу и стоимость силового электрооборудования в l
лом можно определить по соответствующим показателям агрегат
силовой иепп-
д*! — с\/(»|«((нЧд J + £вп/>]д« £д;
gr gilgI < 1g 'Г g ш I .-.gBi+ g. cg'^/gr б, (7.1Е
Ч ~ |=ХПнин»1х1.1 + П»п/»1лн +
Ст ~ CT/L-rt (/,• 4“ С ви <'СЦ(, 4" ^а.лГд)/Ст.о, (7.15
Статические характеристики систем тягового привода. Статическ
характеристики СТПЭ представляют собой графическое изображен
параметрических зависимостей тягового силового электрооборудоваиг
Использование семейства статических характеристик облегчает и уск
ряет процесс оптимизации параметров агрегатов с позиций обеспеч
ния наилучших технико-экономических показателей СТПЭ. Эти х
рактеристики подразделяют на следующие группы:
1) характеристики ТЭД • зависимости наружного диаметра
длины корпуса, массы и стоимости, номинальной перегрузочной спосо
|Ности н кратности максимального напряжения от номинальной част
ты вращения или частоты тока статора при варьировании номииалык
мощности и кратности максимальной частоты вращения;
258
2) характеристики тяговых генераторов - зависимое™ массы и
сгонмостн и (для С1) индуктивного сопротивления цепи коммутации
о, .юмияалыюи частоты вращения или частоты тока статора при варь-
ировании номинальной мощности и максимального напряжения I,
3) харак»ерпстнкн основных типов ВП (ВЫ ВУ НПЧ и ПЧПТ?—
зависимости массы и ci он мости от расчетных данных и кратности мак-
симального напряжения ТЭМ (t/.IMahC. и £Л-ма14С4;
4) характеристики СТПЭ — зависимости общей массы и стоимости
1Я10ВОЮ силового электрооборудования от расчетных данных ТЭМ и
иараметровб/дмакс. и kbi
Во все перечисленные группы входят также зависимости удельных
значений массы м стоимости от указанных аргументов.
Приведенные в табл. 7.2 значения коэффициентов показывают, что
они изменяются несущественно в широком диапазоне мощностей ТЭМ.
Поэтому можно считать полученные параметрические зависимости уни-
версальными .
По преобразователям частоты для СТПЭ не имеется возможности
привести подобную таблицу со статическими коэффициентами вслед-
ствие недостаточности данных. Одиако и здесь, основываясь на форме
выражений параметрических зависимостей ВП, в том числе и ПЧ,
имеются основания предполагать, что статические характеристики
ВП также будут универсальны
При расчете статических характеристик приняты следующие значения постоян-
ных коэффициентов для различных типов реальных ВП для СТПЭ с тяговыми элект-
родвигателями мощностью 40—200 кВт: неуправляемые выпрямители — feeei( = 1.0;
/иен = 1.0; управляемые выпрямители — £вен = 0,9; /вен = 0,8; ПЧ с иепосред-
Таблица 7.
Тип ТЭМ Мощ- ность ТЭМ. кВт hm *1 fcn «л
ДК-720 40 0,565 0,109 0,326 0,200 0.180 — - -
ДК-712А 50 0,595 0.И5 0,290 0,175 0,126
ДК-715А Усреднен- 200 0,510 0,140 0,350 0.2Ю 0,152
ное зна- чение
коэффи- циента — 0,550 0,120 0,330 0,200 0,150 —
СТ-125/8 СТ-160/400 125 160 0,485 0,485 0,130 0,135 0.385 0.380 0,0865 0.0860 0,0840 0,0825 0,470 0,545 0,377 0.373 0,1330 0,0816
САМ- 220/400 ГСА-800 Усреднен- 220 800 0,465 0.475 0,120 0,120 0,415 0,405 0.0860 0,0920 0,0825 0.1240 0,500 0,442 0,392 0,406 0,1070 0,1220
ное зна- чение коэффи- циента 0,475 0,125 0,400 0,090 0,100 0Ж 0,306 ол»о
259
9’
Рис. 7.1. Ззвлеимпеги удельной ммсы
(d) fi удельной cioiiMoini (<»> леи и хром-
него элсктротинтлп-ля от отшкикмь-
ного изменения ном шильной час юты
Рш 7.2. JattiKUMociit Aiftnieip.i и
ДЛИНЫ (м) ««iptiye.l АДО1 О1ПОС1|1СЛЬЙО«
го изменгния номинальной члетпгы
HIAIHH.1 I.JIOli '<.( 1.«ГЫ
Рнс. 7.4. Зависимости пе-
регр узоч noil с пособностм
АД ог относительного из-
менении поминальной час-
тоты
Рис. 7.5. Зависимости
удельной массы («) и
удельной стоимости (б)
синхронного генератора
от относительного измене-
ния номинальной частоты
ciHcuu.iii сшиыл — A(>C|| ... Q g.
.... -'o'73; °f Г1Ч(;Т47С “.“""""'"ровашч™,, выпрв.
(i. iiciipoB.niiiHMii пьшрямителямг — k = । ’ 0,25: ПЧПТ с ком-
= ^1о;ТЛ'6.Гад3: Ч.к =
Lifi (.истом тяговою привоза ч-и-ктп^./г
„ме|...Ц|К- тяговые ЛД. кг -= 0.25' к ' = о £, "Т ' ФОРМУЛОЙ 1 X 4
I» 0.1 ' ВП 'Л' ‘«-“"Л 'г 0.15; lBn=(l,7Sl
=- "=^ —=-=
янетнс числа пар полюсов (способ р = const) Р ₽ 1
В качестве иллюстрации иа рис. 7.1-710 представлены стати-
чеекис характеристики силовых агрегатов, а также зависимости массы
II стоимости всего силового электрооборудования СТПЭ. выполненной
по схеме: CI — два некомпенсированных ВН — четыре АНН — четыре
АД. Сплошные линии на графиках соответствуют р = const, пунктир-
ные — лн = const. ’ ‘
Критерии конструктивной выполнимости тяговых электрических
машин. Прежде чем перейти непосредственно к рассмотрению после-
довательности операций при выборе оптимальных параметров ТЭМ,
остановимся более подробно на отмеченных ранее ограничениях по
их конструктивному выполнению
Сложная задача, решаемая в процес-
се электромагнитного расчета электри-
ческих машин,— это размещение обмоток
п особенно обмоток ротора. Критерием
оптимальности размещения обмотки на
роторе является коэффициент заполне-
ния пазового (для неявнополюсных) и
меж пол юс лого (для явнополюсных ма-
шин) пространства медью обмотки
Оптимальное значение коэффициента
находится в очень узких пределах.
Варьирование номинальной частотытока
ТЭМ как при р = const, так и при пи ~
= const (для РК = const) вызывает су-
щественное изменение внутреннего ди-
аметра статора, что приводит к ухудше-
нию использования пазового пространст-
ва пли вообще к невозможности разме-
щения обмотки на роторе. Плохое ис-
пользование пазового пространства обу-
словливает снижение КПД, ухудшение
динамических параметров и удорожание
Рис. 7.6. Зависимости индуктив-
ного сопротивления цели комму-
тации СГ от относительного из-
менения номинальной частоты
291
маищн из-за повышен, 10го
расхода нз<и,яи,1он|
терн азов Ла'
Анализ форму..,, ,
ленных в |.ч Н|, пова1 <-
е>, -но ори задаи1юм зазо»
н при неизменном коэфф,,
unenie геомегрш, зазора
соот вез ственно F
~ pP^JD>
ku.. — рВ.-пЮ^.
Принимая в процессе
оптимизации = СОЩ|
получим с учетом (7 ж’
(7.17), (7 44) и (7.48) огпа-
Рис 7 7 Зависимости удельной массы (о) п удель-
ной’ стоимости (61 неуправляемого выпрямителя
от относительного изменения номинального нап-
ряжения электродвигателя
ипченмя, накладываемые на номинальное значение частоты вращения
ТЭМ по условию размещения обмотки ротора:
fi'n „ = Рл «._____ (7. 1 53)
Я< II ~ Уц JUKI.. РI I | Р*^д М8КС»- (7.154)
Механическая прочность ротора электрической машины определен-
ной конструкции обусловлена его линейной скоростью vfl. Из ((41 до-
пустимые значения линейной скорости
(7.155)
где А? — наружный .шамегр |к»тора, пуг — угонная частота враще-
ния (максимальное значение частоты вращения при внезапном сбро-
се нагрузки).
862
ОТ отнк„гг,"°™'““ I® Bi' ми НПЧ
S:aSS
«ощкост,, там X.
Tan
(7.156)
(7.157)
^Д уг “ Пд.уг. Мд.уг б ----- Ид яАй»
Пг.ут ~ Пг.уГ/Пг.уГ.б = Пгн.
ХЭК Оймакс ~ ^адоп» ТО
^цд.!«акс 5=5 Ь’ад.макс/^цд.мако.б ~ Df^Tl^ ^ktu
^сг.мвкс = DuTlr.e ~ 1 •
где == £^/D*6.
При допущениях постоянства воздушного зазора АД и КОЭФФ^'
циента геометрии воздушного зазора 2&!Di остальных типов ТЭМ
Dr. == Di, тогда ограничения, накладываемые на оптимальное значе-
ние частоты вращения ТЭМ, по условию механической прочности ротора
я;.=(о;й-: <7.158,
263
R инном с ичзе значения А определяю! не по форм).1ач (7
,-441 л'ш выражении, > ч11Тыан«Ш1л joiijcniMyro линейную скД
пость ротора. Выведем sin выражения
* Расчетная мощность АД
РдрЗСЧ ~ А||В.'И^^Л'‘«1'’1КС,
JS^HT^Soe" пзмеиен!.е раечотнол .мощности
Pl PJC4 = ЯНВ^Я^ С ^«11 «*<
.Учитывая примятые допущения, имеем
о. = । рл11р^:,. {7160)
Расчетная мощность СГ
Рг ра^ч 'ГиисВ^ -.Шч Г? Z,trji V3KC,
где У,}Г маке ~ А/?г н!
В-.Р&.-Ч — Av..ihcB^hcDJ,Va> мжс = и^г -икс»,
откуда ______________
Д = I Р .Р*и‘ 'w- (7.161)
Полсгявкс <7 КдП в <7 15<s) n |7 161) в (7.159), получим
и, „ = 1 А-., | Рд ,,/^/г^)~1; (7.162)
ч„ - ) Р У.Ц11»Г’ (7.163)
Опреде-iMii гщтп-uj n,Hi?e сочетание выходных параметров ТЭМ,
одн<твре»}еяп*' ._tvs еопянчцее обоим критериальным ограничениям
конетруктнвдсч: £{?-.1Н!».япгтЯл.П!, для чего решим совместно уравнения
(7 153Г (7 162) ч i7 <7 Н результате получим:
(7-164)
р --fp .} it (7.165)
откуда при р = const lp:- ~ I) дл,-, АД в СГ
(7 166)
и: w „) ' (7-167)
при п„ = const (rt„ = 1) для АД п СГ
= (Р'мГ (рД-'Д <7168)
= (Р,' „Г"'- (р,)"1’. (71б9)
Оптимизация параметров силовых агрегатов графоаналитическим
методом. Под оптимизацией параметров силовых агрегатов ',ягоВ^1?
электрооборудования, как указано в § 7.1, понимается поиск оп
мального сочетания внутренних и выходных параметров, при котор
264
n(,txue n.mii треоуемые темгако-экоиомические и энергетические
„..киыи-пк.ТПЭ Эт»! ikwk осуществляете» посредством сов^но
ГО .»,,. !!!-.!, читпиеских характеристик ТЭМ и ВП и привода ввдлм
С учегом оспоппых .. дополните.тьиых критериев оптактьносп!
Ill pill 7 1, 7._, 7..>. а также из |19| следует, что иаилучшие тех-
„пио екоиомичеекие показатели ТЭМ достигаются увеличением нХ
на. 1ыюи частоты вращения при постоянстве числа пар полюсов Одна-
к<« пеооходиио учитывать, что такой способ повышения частоты воз-
можен юлько до тех пор, пока это не приводит к принципиальному
и темен «по конструкции узлов машины, несущих механическую на-
грузку (подшипниковые узлы, обмотки ротора); в противном случае
приходится кардинально изменять узлы для повышения их механи-
ческой прочности, в результате чего масса и стоимость вновь начина-
ют расти, поэтому оптимизацию параметров ТЭМ целесообразно
проводить сначала при р — const, повышая частоту вращения до пре-
дельной, не приводящей к изменению конструкции машины, и далее,
если это окажется необходимым, варьировать число пар полюсов при
п„ = const.
Рассмотрим последовательность анализа статических характеристик
тягового силового электрооборудования на примере СТПЭ переменно-
го тока, выполненной по схемеСГ—ПЧПТ—АД (преобразователь с не-
компенсированными выпрямителями). Основным исполнительным ме-
ханизмом СТПЭ является электродвигатель ПВК. Жесткие требо-
вания предъявляются именно к его габаритным размерам, поэтому
анализ целесообразно начинать со статических характеристик АД. В пер-
вую очередь рассматриваются зависимости l/д.макс» (fin) (см. рис. 7.3).
Если заданные значения fej, и Рд.н удовлетворяют условию (7.166),
то, выбрав предварительно на рис. 7.3 значение t/д.макс определя-
ем частоту и далее по рис. 7.2 проверяем, насколько полученные
при этом значения О* и £ отличаются от заданных требованиями ком-
поновки АД в ПВК. Если отклонения недопустимы, то следует кор-
ректировать параметр f)K по рис. 7.2 и далее—. £4.макс» (см. рис. 7.3),
из рис. 7.4 находим Ан, а по рис. 7.1 — gR и сд.
После определения параметров АД переходим к выбору парамет-
ров СГ. Согласно принятому допущению постоянства коэффициента
мощности СГ, значение ль (см. гл. 5) не может существенно отличать
ся от единицы. Из этого условия, характеризующего “вместаую
работу СГ с ВП. а также по критериальному выражению (7-167)
рис 7.6 находим номинальную частоту генератора fr.,.. Далее по
рис. 7.5 определяем удельную массу и стоимость у -
Задаваясь поминальным напряжением АД, по Рд.» и
рис. 7.8 находим £пчпт Н Спчпт или, наоборот, при ВЫ’Р аз0Ва.
ченнп стоимости ПЧПТ находим Т7ЯЫ. и®° с™'рд°стПЭ.
теля является существенной долей стои”°в 1 ассы и стоимости
Подставив полученные удельные зв ' иу!0 массу и стон-
АН, СГ. ПЧПТ в (7.151) И (7.152), опреде™им^ьсовга.
мость всего силового электрооборудов 2б5
,,.,v значений gi I' г." c пх значениями, полученными
лешге расчетных э> «аиное совпаленпе с выбранной гсм!иТ‘
фяческям П>^'’-Г^„ТСЙ проверить, насколько приемлемыми являй?0
',:,ееГ’™ые0’значен.Яп стоимости СТПЭ. Если же сов"^
ил- абсолютные значения массы и стоимости Пр,1Во"°
нХе иемь., следует переходить к другим напряжениям
IZL.. повторяя весь процесс до получения Удовлетворяв,^
Ре3Ес^же заданные £ » № удовлетворяют (7.166). э, „ Па
метры стытет корректировать. В случае невозможности такой
пе, ™ов“'в приемлемых пределах необходимо переходить к Спо£
6v л = const Когда не удается удовлетворить начальным условиям
то речь может идти лишь о большем пли меньшем приближении к
оптимальному варианту.
Здесь рассмотрен вариант оптимизации параметров АД „ СГ при
n == const. Однако возможны и Другие варианты: АД оптимизируется
при р„ = const, а СГ — при Пг.н — const; АД при Щц ~ const
а СГ — прнд. - const; АД и СГ оптимизируются при п = const. Не-
зависимо от варианта оптимизации параметров ТЭМ последователь-
ность анализа статических характеристик та же, что и при р == const.
Необходимо подчеркнуть, что статические характеристики тягово-
го электрооборудования можно использовать не только для оптими-
зации параметров при проектировании СТПЭ, но и для решения
частных задач, касающихся отдельно ТЭМ, ВП или только некоторых
их параметров.
§ 7.5. Оптимальный выбор параметров
тягового силового электрообору-
дования с помощью ЭВМ
Процесс оптимизации параметров силовых агрегатов СТПЭ с ис-
пользованием их статических характеристик (графоаналитический
метод) часто становится весьма трудоемким; могут потребоваться
многократные последовательные приближения с коррекцией предва-
рительно выбираемых параметров. Поэтому целесообразно выбор пара-
метров тягового электрооборудования СТПЭ осуществлять с помощью
ЭВМ, применяя аналитические выражения параметрических зависи-
мостей с учетом критериальных уравнений, полученных в данной гла-
ве. Схема алгоритма расчетов на ЭВМ применительно к СТПЭ, выпол-
ненной по варианту СГ—ПЧПТ с компенсированными выпрямителя-
ми — ад, приведена на рис. 7.11. Алгоритм имеет следующий вид;
1 — пуск;
ввод, k^, ₽д.а. DK, £>*р г*2, п’и1 nja2. бпчпт. Спчлт
r.HiJr н2, GT. Сг. е', е";
3 — вычисление: р* == |;
4 - вычисление: (ф „о (7.166), а = (Г)-/^;
5 — сравнение: а > 1 -ре';
Ь—сравнение: а < 1 — е";
266
7-сравнение: ₽‘.и<₽;в2;
8 - вычисление: Р' = р^ + др-
9 — сравнение: < k’a2;
10 - вычисление: 5‘: = + д*^
II-сравнение: Р^>РдкС.
12—вычисление: Р'- = р' _ д₽* •
ди- ГДН 'ЛГд.а>
13 — сравнение.- > ft^(;
14 — вычисление: k^-_ - ft* - &ft^;
15 - вычисление: (D')' по (7.20). Ь = Ю')‘/О’-
16 — сравнение: b > 1 4- е';
17 — сравнение: Ь < 1 — е";
18 — сравнение: nJ,, < n,",j2:
19 — вычисление nJB: = nJH Ди,„;
20 — сравнение. > п,и1;
21 — вычисление: о^: ~ о'н — Дл^„;
22 — вычисление: l’ по (7.22). по (7.29), <7'^. по (7.31). О* по (7.10), С’
ло(7.32); и —система (7.139), (7.140); g*ao (7.145), е*ло (7.146), ggn по
(7.149), cgn по (7.150);
expert22 для http;//rutracker. org
И?
и _ мч<.-ле»|«. ^ » = ^ »• L!' ~ : lr " “ - система (7.SS)_
(' 167)- YIU' - »
24 — вычисление: c — tcr макс*' г маки
25 _ сравнение: с > I -г ® •
2(5 — сравнение: c<Z 1 6 •
27 — сравнение: /гв>/гв1’
2Ь — вычисление: fr н- = /г н ‘г.н»
2Q— сравнение /гн</г.н2’
30 — вычисление: fr_H: = /г.н“Г г.н*
31 — вычисление: (А/Г1ЫакС.)' п0 <7'52)’
3.,_ вычисление GJ по (7.50) Сг по (7.53), по (7.147). с; по
(7.148), ft по (7.J5I), 4 по (7.152), (б/по (7.143), (Ст)' по (7.144), d =
= (G*)7G’t Л = (G’)7C“;
33 —Сравнение: t?> 1 rf. ll > 1 + f -
34 — вычисление: Zt‘H = РдВ/^[В; Л7'нло ^5-5^’ Л7п ПО {5,5^’ “ *1/А,и.б* ^/м ==
= V*/»6’ ?н='Л ^гмакс. "О (7’45). COS фр |( по (5.31),
ХГ|| по (5 23), Рг и = Ur ,/г н, * * » • • *
35 — вывод па печать:^, РдН, п1я, /]я, DK. 1К, 771макС4, Gfi, СД1 GJh, xrt,
₽д-сд. ЙВП« гВП'7гн- "гя' Gr'Cr’ вг. СГ’ St, Ст- (G7) , (CJ , /ш, Ur н, бг ыа|И.#1
СО5фг.н. >гл- РГИ’
36— ввод (см. л. 2);
37 — вычисление: — 1;
38 — вычисление: /Ju = p*. /\н по (7.168), (Г*)' по (7.20), <51 = (Г*)7О*;
39 — сравнение. > I с',
40 — сравнение. < I — е
41 — сравнение Pr (| < Р ((1,
42 — вычисление- Рд в , - Р' а 4- АР” |{:
43 — сравнение. :
44 — вычисление. X;f •- А*, -- - Ай ‘;
45 — сравнение: 7?я,1>Р*н(,
46 — вычисление. Рди Рз.ч~
47 — сравнение: А” > ;
48 — вычисление- й’3:
«-вычисмие. /,;=₽*. z; (7.22), 7,;(7.2<>|. по (7.31), G* по Р W).
с„ "° Р.32); Г,'в в хг',—einieja (7.139). (7.140), по (7.145), с" по (7.146),
бвп по (7.149), Cgn по (7 150),
50—вычисление: Р* = р' /у* — iг и (lY у—сис-
тема (7.52), (7.169); ‘‘ М°КС’ Ь’акс* ’ 'г н “ Р » /г.н и (Ц-лакс^
5|—вычисление, с, ~ и)* упр
52-сравнение; q > ! l_^cJ
— сравнение: с, < [ ~ g°;
“сравнение; ^н>^я|;
-вычисление: ^.и; =/г'н - Д/;
— сравнение: /;н</г\2;
3 S 3 8
268
67 — вычисление. н; — f* ц _j_ .
S8 — оычпслппЙ lU‘ к1а11с.)' по (7.52):
50слеп,4 с; „о (7.50), С? по (7.53) g’
(7 148). g, по (7.1511, q „о (7.152). (G‘)' по (7.143), (С*)'
= (G^'/Oj, Л, = (Cj'zc;:
по (7.147). с* по
по (7.144). di«
60 — сравнение: d, > 14-8'. /ij > I -f- е’,
flГ /Г",с’tr^-7,-^°"°- (5'5)- "°(5’5)’k'u-=k^k^ k'i« =
'hi Чиб» r.H 17]./«(;«. 'r» —^гмакс. no <7-45), COSm, H no (5 31)
X,.„ no (5.23), Pr\ = l/r- r„;
62 — вывод на печать- k* P~ . n, f. D" Г 1’ if r' /*• t,*
- • ’ * , .°” «’ A«‘ GR‘ Сд. Цн,
Br> сд> #ВП» сВП- ftM* n'к> C*« Сг- £г> с‘> ёт' ст> Gr> С’ 1‘ и* „ и'
„ « ' 1 1 * 1н’ г .Я’ ^г.макс*’
c°s Ф, „Л,,. рг„:
63 — он гимизация невозможна;
64 — останов
Кратко поясним некоторые пункты алгоритма. Вводом в п.2 ми-
ппмальпых п максимальных значений относительных изменений пара-
метрон (обозначены дополнительными индексами 1 и 2) в алгоритме
заложена возможность широкого варьирования исходных данный
для выбора и согласования параметров силового электрооборудования
вверх и вниз от некоторых их усредненных значений (обозначены без
дополнительных индексов). В п. 2 вводятся также показатели е' и е”,
представляющие собой допустимое расхождение между значениями
параметров в сторону увеличения (е') и уменьшения (в*), вычисляемых
в последующих пунктах алгоритма. Значения е' и е", обусловленные
требованиями к силовым агрегатам в проектируемой СТПЭ, для каж-
дого параметра различны, но в частном случае (например, иа этапе
эскизного проектирования) могут приниматься одинаковыми, в том
числе е’ = е”, в пределах требуемой точности. Шаги ДРд.а, Д£т,
Дп^н, Д/Г‘н рекомендуется принимать одинаковыми, так как варьиру-
ются относительные изменения параметров. Достаточная точность
достигается, если Д 0,05.
Объективно существует такое положение, когда после перебора
всех возможных значений относительного изменения параметров в пре-
делах указанных в п. 2 максимумов и минимумов требуемая точность
е' и в" не достигается (т. е- параметры тягового силового электрообо-
рудования проектируемой СТПЭ принципиально не поддаются опти-
мизации). В этом случае иа печать выводятся все промежуточные и ко-
нечные результаты, наиболее близкие к оптимальным.
Глава
восьмая
СИСТЕМЫ автоматического
РЕГУЛИРОВАНИЯ СТПЭ
§ 8 1. Требования, предъявляемые
ь системам автоматического
регулирования
Система автоматического регулировании (САР) тягового привода
электромобиля предназначена для распределения энергии, вырабаты-
ваемой ЭУ, между ТЭД ПВК в соответствии с их предельными и час-
тичными характеристиками, обеспечивающими заданный режим дви-
жения электромобиля Для выполнения этой главной функции к САР
предъявляются, как правило, следующие основные требования:
обеспечение режимов работы СТПЭ (пуска, разгона до установившей-
ся скорости, поддержания установившейся скорости движения, элек-
трического тир пожени я. выбега и ар.) в зависимости от назначения
электромобиля и ею транспортных циклов, формирование характерис-
тик силового электрооборудования СТПЭ с минимально допустимыми
ошибками; реализация выбранных вариантов управления ТЭД в тя-
говом я тормозном режиме, обеспечение требуемых показателей
качества переходных npo’ieccos; необходимое распределение нагрузок
между ТЭД при прамошценном движении и повороте электромобиля;
согласование режимов работы ПВК и ЭУ для наиболее экономичного
использования последней; зашита .л реннов СТПЭ от превышения пре-
дельно допустимых значений параметров
К системам автоматического регулирования могут предъявляться
дополнительные требования, обусловленные спецификой построения
силовых цепей, свойствами энергоустановок и тяговых электрических
машин, конструктивными особеншктям» ПВК и др
Первоначальными управ тающими воздействиями (от водителя
электромобиля) в САР приняты О. и В, - угловые перемещения пе-
далей аппаратов управления электроприводом соответственно в тяго-
вом ( ГГ) и тормозном (ATM) режимах, отсчитываемые от нейтрали,
нейтральным положением педалей (углы 81(1 и 0тО) считается такое.
AuL*?TOpOM отсУтствУет воздействие на них водителя электромобиля.
указаннь,х удалей на автомобилях с механическими нли
лячм «о. Ч” (гидромеханическими) трансмиссиями являются п
дачи ппивЛ ТОш?,ва и тормоза Нажатие водителем гой или иной л
го сигналя1 « формированию на входе САР задающего электрическ»'
'««нала ис (илИ
270
Oc.nieuuocTi. ра.юты силового электрооборудования СТПЭ зактю-
часто, в том. что с,довременному регулированию подлежат пески и,ко
(„С менее .не х) параметров, связанных межд собой опрете.. еннычн
(|,ункШ.она.1ы1ымн .анисом ....-и Необходимость управлении не”
колькпмп фн.ичеснимп величинами как объекта регОировавия - тя
г.ню.о элект|юдвигати.тя. так и других силовых агрегатов обустовлн-
„;к, применение многоконтурной САР, объединяющей автономные
контуры (нодс11стех<ы) автоматического регулирования, в первую оче-
редь » и ПВК Поэтому прежде чем рассматривать САР тягового
электропривода в целом, изложим принципы работы отдельных копту-
ров регулирования, 3
§ 8.2 Регулирование угловой скорости
электродвигателей постоянного тока
Управление магнитным потоком электродвигателей. Обеспечение
заданного диапазона изменения угловой скорости й>я. ДПТ требует
наряду с регулированием напряжения ил% управления магнитным
потоком, осуществляемого контуром регулирования Фь. у ДПТ с сис-
темой возбуждения любого типа (см. гл 3). Данный контур должен
обеспечивать формирование характеристик /вя. и fJB в функции Юд.
или тока якоря /д, как для предельной, так и для частичных мощнос-
тей в соответствии с выбранным сочетанием вариантов управления
(см табл, 3.1) Анализ указанных характеристик показывает, что ес-
ли задаться линейными зависимостями /в д, и от /д«, то эти же пара-
метры в функции Ыд. изменяются нелинейно (что затрудняет их реа-
лизацию автономным контуром), и. наоборот, выполняя зависимости
/нЯ< и Рк от <од линейными, получим нелинейные зависимости этих
величин в функции /я,. Принципиального отличия, в функции какого
из двух параметров (соа. или /д*) следует регулировать магнитный по-
ток, не существует
В качестве примера остановимся на формировании зависимостей
/пя (/а«) А-ля сочетания вариантов управления 4—5—6 электродви-
гателей смешанного возбуждения при питании от ТЭП с электромашин-
иым генератором. Структурная схема контура регулирования маг-
нитного потока приведена на рис. 8.1. поииа „г,
В тяговом режиме движения электромобиля по мере увеличения уг-
ловой скорости ДПТ ток якоря уменьшается. При достижении зи
ния = I для Р,„. = 1 Н 4. = КК7. иа частичных мощностях
контур начинает уменьшать
ток 7Вй. (см. § 3.8).
Текущие значения тока
якоря контролируются дат-
чиком тока (ДТ). сигнал ко-
торого поступает иа вход
Функционального преобра-
зователя Ф/7ф, формирую-
щего требуемые зависимос-
ти 4Д. (/д.) (см. рис. 3.22)
—I I,
m—
Влт чи
им
вания ДИ потоком
271
Pile 8.2. Стрктурнзя С«МЛ ЯМ.ЧС8 ФП [I
ракгер.и.ыа з««» <>"„= "•
,. одновременно выполняющего функции У сплите. 1я_ Сигнал фщ „од.
№д”ся К обмотке независимого возбуждения (ОВН),
Передаточный коэффициент функционального преооразователя
7п д Л, а _ ;».дн ;"Я- ,о ,
*ф=1’,, - с,Л, ’ (°-В
где t/д г, кдт — выходной сигнал и передаточный коэффициент дат-
чика тока
Если Л3. = 1, то из (8.1) с учетом (ЗЛО) получим
Л>дн 11 ^а.чин пред* \
«ф = ~Т~/ о —7 ' / ’
R3. И1 'л мин.лред»! д«
Реализация режимов работы ДПТ на частичных мощностях требу-
ет корректировки передаточного коэффициента Афв функции мощнос-
ти
** = (8-2)
Указанная корректировка осуществляется посредством подачи
иа ФПф выходного сигнала l\t датчика мощности ДМ, потребляемой
двигателем от генератора.
По аналогии с ib.2i согласно сочетаниям вариантов управления
1—’2-—3 и 7—8—9 соответственно для электродвигателей последова-
тельного и независимого возбуждения имеем:
= Ail— I ^1^25-------Д=-( 1 _ +
дт A.W у I’ Р,г. 1 /д, У
(8.3)
‘Ф = -К
В.Д мин*
д.мнн пред. |,г' Р}
р.д мнн<
(8.4)
(Я 6щ°д\М0 подчеРкнУть, что практически выполнить зависимости
На пиг я9КоНтУРе Регулирования крайне сложно.
оппрпРЧа£ПрН/?^Наг.стРУКтУРная ^ема ФПф с коэффициентом
Р ым (8-2)- Подобная схема необходима, если САРд°лИ<'
272
на обеспечивать полный
дпапязон изменения ско-
рости движения электромо-
биля на частичных мошнос-
1Я\ и плавное регулирова-
ние магнитного потока
Д f 1Т 5' п ра вл ей ис током
п« > и"i\ /к де и и я эл ск т род bi j ra-
le, шй niiui> по предельной
\арак юр истине ненамного
упрощает схему Если ог-
каааП’ся от плавного регу-
лирования магнитного по-
Г..К» и перейти к сгупеичагому, можно значительно упростить схемное
решение v
На рис .8.3 представлена структурная схема контура регулирова-
„„я угловой скорости ДПТ смешанного возбуждения со сТупенчетым
изменением магнитного потока в тяговом режиме. Контур выполнен
па усилителях Л I и У2, работающих в релейном режиме' Количество
усилителен соо1ветствует числу ступеней. Так как регулирование
потока Д! II в этой схеме производится в функции тока L то при
определенном значении тока сигнал Uai открывает У1 и его выходной
сигнал воздействует на перекзючающее устройство 77/, шунтирующее
обмотку последовательного возбуждения ОВП электродвигателя ре-
зистором, уменьшая тем самым ток возбуждения. При дальнейшем сни-
жении тока /а (увеличении скорости движения электромобиля) включа-
ется вторая ступень — срабатывает усилитель У2 и с помощью переклю-
чающегося устройства П2 осуществляется шунтирование резистором
обмотки независимого возбуждения ОВН или реверсирование тока
в ней.
Контур рис. 8.3 можно использовать в СТПЭ как с ДВС, так н с
ТАБ. Однако при наличии ДВС, чтобы обеспечить работоспособность
САР при различных со две, в схеме вводится коррекция по задающе-
му сигналу Uc с выхода нелинейного функционального преобразова-
теля ФП. Чем меньше годвс, тем при меньшем значении тока 1Р вклю-
чаются ступени уменьшения магнитного потока ДПТ, формируя от-
резки DL частичных внешних характеристик генератора (см. рис. 2.1).
Диалогичные схемы применяются для ДПТ последовательного воз-
буждения, где ОВП имеют две или больше ступеней, на которых пере-
ключающее устройство шунтирует обмотку резисторами с разным со-
противлением. пгч_ п г ТАБ
Управление с обратиой связью по току ДПТ. Для vrnoBfia
одним из наиболее целесообразных принципов регулиров Vtdvk-
скорости ДПТ является управление током алектродвиг .С Р»
туркая схема контура для ДПТ последовательного возбуждения р д
ставлена иа рис. 8.4. пЛяителем педали
В тяговом режиме электромобиля при на .. который подво-
'ITT угол Й, преобразуется в задающий сиг nwTO1111.
Дится к системе управления СУ импульсного р Р
иого напряжения. Д_1Я ,
р< гя Зиминых значении гони
/я электродвигателя ввегепа
жесгкая i.ipimn тельная ог)ра,.
пая связь но гоку с передаточ-
ным коэффициентом
f\i । = Уд =
= У
П «4 Сто\-ктурнзя схема контура регу
Хван» Апт e’U™, гяяэью по т,„4 =
_ сигнал обратной связи, вырабатываемы,, ДТ п поступаю-
,т6, на суммирующий мемепт встреч,Ю задающему сигналу
Сигим управления на входе СА является алгеоранчесной еуадюй
сигналов U, и ЦЬ
Uc> = — <Л , = U.- — z . ’"'-Л
(8.6)
На основании структурной схемы, представленио!, на рнс. у 4
используя аппарат теории автоматического регулирования, имеем
1ПГ1Н______ I / ____________Л||11-
~~ I-Г ^НПЛН^’д < р 1 • +
(Ус==
(8.7)
где kc\, Л1ППН — передаточные коэффициенты СУ и ИППН. ftlip =
= Ас.\А’иллн — передаточный коэффицнен! прямой цепи регулирования
тока. Аг.,5 = А-пгАд 7»1кЛн — передаточный коэффициент разомкну-
той цепи регулирования тока ДПТ
Таким образом, в подобной реализации контур управления ДПТ
можно рассматривать как систему автоматического регулирования
по отклонению гика иг заданного значения.
Если принять, что вм всем скоростном диапазоне электродвигатель
работает только с ec-rcci венным регулированием магнитного потока,
то угловая скорость ДПТ определится выражением
о»,. -- /г, \Ац1|пн^дпт^г\-/сояя, (8.8)
где йдт = <’)д /д — переда гичнып коэффициент ДПТ.
Подставив (8 6) в (8.8), подучим
1<>л. = А-пгЛдгп (С —k-, т;п,./Q itlя J.
§ 8.3. Прямая цепь передачи
управляющего воздействия в СТПЭ
с асинхронными электродвигателями
В общем случае можно построить значительное количество сгрук*
турных схем САР для СТПЭ с частотно-управляемыми короткозамкну-
тыми АД, отличающихся выполнением связей и звеньев, т. е. комби-
нацией устройств регулирования. Поэтому конкретизируем задачу
и проведем исследование только тех систем, в которых сигнал у правде-
иия воздействует на один из входных параметров асинхронного электро-
^ЙТеЛЯ н (см- гл- 4) Однако это воздействие должно
средственно или косвенно проводить к регулированию частоты/i*»
274
OvtviHM, ч-ft. практически любая CAP CTm
.......... вариантов управтеин» Anбе™ч“вающая
nol|Kuiii..c>eii приводится водной из снеток!. ЛД‘ Г больших
денчииим иа параметры /,. ft или (7 с 1кпосРеаствениым во»
С/, каждып о < них имеет строго определеннаtfi nulnno. »*•>/*•,
(ем т.Л Например.
cone,'.,,,,,'., вириа.иов управа",и',*АД а у Т„ОТ °’ "Р™'-'™п
„рнжеип,,. неооуодимого дли компенсации потерь АД в режткмини"
ш,.|Ь,н>|, установившемся скорости движения порожнего электромо-
" '”, ,'!,о ’ П5 о 0оп"?‘ УЧа"К! Пу™ с сопротивлением
качению ‘МП о— IJ.IJ2H (сухой асфальт, бетон)
11;,р.п,сг|^абсо.-„о™„го сколЩя ft. изменяется в отношении
/.м.,ес /"> - - НА .л.--обусловливается расчетными пара-
меграми АД. а Д-.111Н. - моментом холостого хода электродвига-
теля. Частота имеет наиболее широкий диапазон изменения в функ-
ции управляющего сигнала. Например, для тяговых АД с максималь-
ной частотой h микс. = 200 Гц, Дмаис.//1ми11, = 75 э- 100, где f,MaKC.
определяется максимальным расчетным значением частоты АД,/|мкн. —
критическим скольжением АД, обычно/UlIIH, > 1,5 -i- 2 Гц.
Так как для любых систем регулирования углы 0С и 0Т нажатия
педалей АТГ и ATM не превышают 40—42°, то для плавного трогания
и перехода от одной установившейся скорости на другую необходимо,
чтобы приращение регулируемого параметра (Д/i., АД., Д1А.) на еди-
ницу угла нажатия педали не превышало некоторого наперед заданно-
го значения, определяемого приведенным к валу АД моментом инерции
движущихся масс электромобиля и скоростью нарастания момента
Л1* в функции первоначально задаваемого параметра. Тяговый элек-
тродвигатель не может мгновенно изменить свою угловую скорость
при резком изменении ft» и приросте электромагнитного момента. Это,
в свою очередь, предъявляет дополнительные требования к САР СТПЭ
Напомним, что эксплуатация электромобилей, в частности ГЭМ
и КЭМ, происходит с достаточно частыми сменами режимов 1ЭД;
электродвигатели практически непрерывно работают в неродных
режимах изменения <од. как в функции сигналов ’
и в функции момента сопротивления вращению, о у с
рожпыми условиями и другими случайными Факто^^^
но, от качества переходных процессов, от того, нас стики
живаются в динамике расчетные статические Р й а энергети-
М, cos <рд. ,Ь от ft. н др.), зависят ™Говые свойства, внер
ческие показатели и надежность с i др к0ТОрЫе диктуются
Уточним требования, предъявляемы частотно-управляемыми
спецификой переходных процессов в в0 вНИмание при по-
тяговыми АД н которые необходимо р сравнительного
.строении систем. Одновременно покажем,
достаточно учитывать лишь электромеханические пере-
^известно, переход АД от одной угловой скорости на другую
jjH&f числе и пуск электродвигателя) включает в себя электромагнит-
процесс, смазанный с изменением параметров Д* и £/1ш, и электро-
Шиканический — собственно ускорение (или замедление) ротора.
Строгий расчет динамических характеристик требует учета элек-
тромагнитных переходных процессов в системе. Однако точное реше-
ййе уравнений движения и описание процессов при частотном управ-
ления встречают значительные трудности по ряду причин: нелиней-
ность дифференциальных уравнений АД, момент которого является
функцией нескольких взаимозависимых переменных: дискретность и
нелинейность процессов коммутации тока в ПЧ; сложность аналити-
ческого описания процессов одновременного регулирования частоты
и амплитуды напряжения и др.
Некоторые вопросы динамики частотного управления примени-
тельно к общепромышленным электроприводам изложены в 111, 121,
где подтверждается, что с целью проведения качественной оценки при-
водов с АД можно ограничиться исследованием л ишь электромеханичес-
ких переходных процессов. Условия, достаточные для учета только
этих процессов, определяются в первую очередь специфическими
особенностями системы тягового привода электромобилей и ее
Первое из них заключается в том, что с ротором АД связаны зна-
чительные инерционные массы электромобиля, поэтому электромагнит-
ное процессы в электродвигателе, протекающие существенно быстрее
электромеханических, не оказывают заметного влияния на изменение
то угловой скорости.
Второе условие — обеспечение для СТПЭ пуска, перехода с одной
'становившейся скорости на другую и торможения только в так на-
ываемом «мягком» режиме АД (111, в котором он всегда работает
а устойчивой ветвн механической характеристики Такой режим
яговых АД в переходных процессах также предопределяется боль-
шим моментом инерции, приведенным к его валу.
Угловая скорость АД есть функция и параметра нагрузки
. (см. гл. 4). В процессе изменения Д, электромагнитный момент ЛД,
азвиваемый АД, затрачивается ие только и а преодоление статическо-
) момента сопротивления вращению, но н динамического, пропорцио-
зльного угловому ускорению ротора двигателя. Основной фактор,
)ределяющнй характер и качество переходного процесса,— скорость
вменения частоты Д. (ускорение или замедление вращающегося по
j dfajdt).
В динамических режимах параметр абсолютного скольжения Д.
! превышает своего критического значения Дк> только в том случае,
»гда угловое ускорение ротора следует за скоростью изменения
стоты тока статора, прн этом dfcjdt = const и отставание fs» ~ “
/♦. где f — 2рлд/60, зависит от статического момента,
Орости изменения частоты df\Jdt и приведенного к валу двигателя
йвента инерции J&.
в
Переходные процессы в СТПЭ с АД не ограничив»™.. ________'
областью, где dj.Jdt = const. Чем больше значения J™h Й,
тем продолжительнее время регулирования при df, Idt = 5», V
Если момент М„ определяемый недостаточен ыи обе-пе-
ченпя требуемого ускорения ротора АД, следящего за нзмеХи^
роста вращающегося поля, то режим «мягкого» управления иТоуХ
ется и наступает «жесткий» режим [11], характеризующийся
АД в «закрнтическои» области. Таким образом, ^ж^ткий» режим X
никает при высоком темпе изменения частоты, когда ротор ТЭП ПВК
электромобиля в силу инерционности не успевает за практически без-
ынерционным вращающимся магнитным полем.
Подобный режим управления АД в СТПЭ неприемлем, так как
ои сопровождается повышенными потерями вследствие значительных
токовых перегрузок.
Граничным между «мягким» и «жестким» режимами является крити-
ческий, когда fs. == Ан*, АД = Мк», и АД находится на границе
устойчивости.
Наконец, третье достаточное условие, предопределяющее воз-
можность рассмотрения только электромеханических переходных
процессов, — это обеспечение необходимой динамической точности
поддержания системой регулирования принятого закона изменения
UiJfi*. Действительно, при увеличении или снижении Л. соотноше-
ние между напряжением и частотой оказывает самое непосредственное
влияние на характер и качество переходного процесса, так как от этого
соотношения зависит вращающий момент При известных расчетных
значениях dfxJdt н М* точность формирования характеристики
1/ь (Л.) в переходных процессах обусловливает работу АД на устой-
чивой ветви его механической характеристики. Скорости изменения
параметров /ь и М» взаимосвязаны во времени и не могут рассматри-
ваться в отрыве одна от другой.
Выполнение перечисленных условий позволяет учитывать в пере-
ходных режимах частотного управления АД только электромеханичес-
кие постоянные времени.
Если в САР с непосредственным воздействием на напряжение (Д.
передача управляющего сигнала от водителя электромобиля на тяговые
АД в СТПЭ с электромашинным генератором происходит посред-
ством возбуждения последнего, т. е. через звенья, имеющие постоян-
ные времени переходных процессов, соизмеримые с электромеханике-
кой постоянной времени электродвигателя, то в системах с непосредст-
венным воздействием на I/,. в СТПЭ с ТАБ н на и /.. в при
с ЭУ других типов звенья прямой цепи передачи упрлмяющегоси
нала практически безынерционны по сравнению с Д.Iд
торого приведен момент инерции движущихся
В свою очередь, системы с непосредственным в-"“е“
абсолютного скольжения выгодно ьн0 в03можное зада-
ственным регулированием Л. тем’чт п6язательное наличие в систе-
ваемое значение Д„[Лд. не превышает положительной обратной
мах с непосредственным воздействием на Д. ^аниеЛ. „ соот-
связи по угловой скорости АД обеспеч Ре У
о s ч Стоуктурная схема прямой пени передачи управляющею воз-
йети..» прт ХеХадатвеняоМрт^яРД»»»'-" «а™™ из.,ряжения
вет(.тв„„ с изменением скорости движения элеОЦюбпля при „зме.
нении вращающего момента на ведущих колесах Иначе: скорость
нарастания (или снижения) часюты coi.тасована с ускорением
^Особенность систем с непосредственным регулированием частоты
f — принципиальная необходимость охвата прямой цепи передачи
управляемого воздействия жесткой отрицательной обратной связью п0
такому параметру, время изменения которого соизмеримо с временем
нарастания (спада) частоты А*» а его значение зависит от значения мо-
мента па валу АД. Возможны и другие решения, когда в прямую цепь
регулирования вводятся корректирующие звенья, учитывающие
инерционность элем родвигателя. Например, для АД с /1Макс. = 200 Гц
приращен не частоты на Г \гла 6С составляет Дм^е/Ос-макс 5 Гц/град,
Следовательно, при трогания, когда ыд — 0, а также в движении за счет
значительной электромеханической постоянной времени Тэм даже ма-
лое изменение угла 6, (па 1—2 ) приводит к фактическому заданию
А. > /с«е, что недопустимо
Рассмотрим более подробно основные структурные схемы прямых
цепей передачи vправдяюшего воздействия в системах с частотно-управ-
ляемыми АД.
Непосредственное управление частотой напряжения питания.
Структурная схема прямой цепи регулирования приведена на рис. 8.5.
В тяговом режиме сигнал Uc создается АТ Г и подается на вход
задающего генератора частоты ЗГ, преобразующего сигнал (7С в после-
довательность импульсов; частота их следования Д пропорциональна
1Д. Эти импульсы поступают на вход системы управления ПЧ (АИ
или НПЧ). К силовой части ПЧ подводится напряжение ЭУ. На
выходе ПЧ имеем напряжение частоты А»:
Л. =•• ^3»A*n4fC,c//jH = A’np/t/c,
где fenp/ = ferfenq/fiH — передаточный коэффициент прямой цепи
регулирования частоты А»; k-w, km, — передаточные коэффициенты
звеньев ЗГ и ПЧ по сигналу управления.
ппго,аПрЯЙе11НС частОть! А. подводится к обмоткам статора АД,
р деляя режим его работы; при этом параметр абсолютного сколь-
жения устанавливается в соответствии с нагрузкой.
«Нл«оК °™еЧалось Ранее, звенья АТГ, ЗГ и ПЧ практически безынер-
ционны по сравнению с АД:
= т Ат, + Тзг + Tmi«. 7»м. (8-9)
278
где Г.„, - приводен,im постоянная времени ппя.^с
Viip:>i-.1>IK4IU-Ii> вочлеиеюпи на частоту/, т Р_№<1'1 иепи передачи
шло времени 1MUH ,\ТГ. ЗГ и ПЧ (по сигна^’ ’ 11°™яи-
-г"1........'"’"ТГ -
^ко.и^уч;.тив^:.?^г^
РПС1|!ЧССК<)|О уравнения цепи АТГ—ЗГ—ПЧ PF ' “°АНых хаРакте-
'л77', ЗГ „ //'/ яв.то.отс,, пиерЩ1оннымГзвеЛн^™ДР™™. ™
(„оеледисе подтверждается практикой их реализации), то понщом
xapciKt^pHcni'iecKOro уравнения имеет вид пи.пщом
(р) = Т& -р 4- Tavfp 4-1,
г» т!= 7ТГ +Г?пч; Ti = T'^T'r+T^'rmi + т^ттЛ Tnil^
Однако значения Тмг, Тзг и ТПч,, как правило, ие превышают со-
тых долей секунды, поэтому постоянными времени при второй и тре-
тьей производных можно пренебречь.
В дальнейшем для предварительной качественной оценки систем
с точки зрения переходных процессов будем оперировать только по-
стоянными времени при первых производных характеристических
уравнениях звеньев и контуров. Это допустимо, если заранее известны
ориентировочные значения постоянных времени.
Из анализа (8.9) следует, что резкое нажатие водителем педали
АТ Г приводит к такой скорости нарастания частоты Д., которую АД
реализовать не может: при достижении Д. > Дк. электродвигатель мо-
жет опрокинуться. Охват прямой цепи регулирования обратной
связью по угловой скорости о)д вследствие того, что 'Гпр/<^ТЭМ, также
не исключает опасности возникновения аварийного режима.
Для предотвращения «жесткого» режима управления в цепь пере-
дачи управляющего воздействия необходимо ввести динамическое
звено ДЗ с передаточным коэффициентом бдз и постоянной времени
Тдз ~ Лм или задатчик интенсивности ЗИ.
В качестве примера рассмотрим вариант, когда в прямую цепь
управления частотой ft. включено ДЗ с переходной характеристи
инерционного звена первого порядка, а момент сопротивления с
< М„. Тогда структурную схему (рис 8.5). исключая. АД, »»»
представить в форме преобразования Лапласа системой ур
7/(3) _ __2_—— (7c(s); L = fc3ri/J(s); f.-W.W.
1 4- 7 я3«
где U3 — напряжение на входе ЗГ; s — оператор
Из этой системы находим
1 *зг*пч; и /а
Примем 7дз = 0. Если перейтик^ори™(j“
воздействуя на САР единичной сту п0 При !-*$, где Ф
~ 1 (Z — ф) и продифференцировав ft. (
PiK 8.6. Переходная характеристи-
ка динамического звена.
. и = И-.~
любое вещественное число, то полуЧИи
df,. «I /гзгЛ’пч/ ./
------7----dF 11 Ч’)1 ==
df,.
-dT^™-
Следовательно, наличие ДЗ в Пря.
мой цепи передачи управляющего воз-
действия есть необходимое условие для
выполнения САР своих функций при
данном способе управления частотой
Д.. Нижний предел Тдз можно найти
подать сигнал (7С (/) типа единичного
... г8 10) если на вход системы I .- 'о' ' —wu
"качка изображение которого по Лапласу l/s. Нетрудно показать,
что в этом случае оригинал выражения (8.10) является решением одно-
родного дифференциального уравнения
, 1 /Z(U/) -о
dt'2 Тдз dt
при начальных условиях Д. = О, (0) = ЛзгЛпч//<Аи7дз).
Действительно, на основании формул преобразования Лапласа
почленное изображение (8.11) имеет вид
Р + -7^ SV>- (s) = *' <°> + (°) + zj? f'-
а с учетом начальных условий —
р . ' sa.(sl.
' 'дз 1 Ли *дз
и полностью совпадает с (8.10) при Uc (s) — 1/s. Решая (8.11), полу-
чим
(8.И)
А. (О = (^1*пч,.'Л„) (1 -<Г'/!дз):
dfi.(l)(dt — (Азг^ич|'(ЛнТдз)]е_,'Гдз.
Максимальное значение производной d/i,/dZ при / -»- О
dfi.ldt |дас г- ^згА’лчЛ/|1|Тдз).
Нетрудно показать, что
dfi.ldt |юет = (AJ„ _ Mc);(klsTm)
где М. — критический момент АД, /г(, — коэффициент линейной ап-
проксимации момента при работе АД на устойчиво!, части механиче-
ской характеристики (см (8.78) и (8.79)1; ДЛ-1„,КС — максимальный
избыточный момент.
ПпнЛВл™ последних уравнений Тдз > *зг
КИХ постоянная времени Тм может изменяться в широ-
ределах по многим причинам и в первую очередь вследствие
280
Рис. 8.7 Структурная схеыа дииамичс-ско-
го звена
V. V и Т'. Г ~ передатчиц коэЛЛишмчеты
из
Щ rJJfC
Рис. 8.8. Статическая характеристика
задатчика интенсивности:
/ — допускаемое значение сигнала U3 при
£/^_ 2 _ допускаемое значение сигнала
и' при £Л.> </'; 3- значение сигнала
при Of: Ч- допускаемое значение
сигнала £/э1- при t/w;
изменения нагрузки на ведущее
колесо Если рассчитать ДЗ с
учетом максимальной нагрузки,
ухудшаются динамические пока-
за (елп порожнего электромоби-
ля; если уменьшить Тщ, то звено
ДЗ ис сможет воспрепятствовать
опрокидыванию АД при измене-
нии частоты, когда Tw примет максимальное значение Т-, Отиякп
во всех случаях целесообразно выполнять ДЗ с переходной характе
рнстпкон, подобном переходной характеристике апериодического звена
второго порядка (рис. 8.6), у которого начальный участок кривой U (А
обеспечивает требуемую плавность трогания электромобиля или’пе-
рехода с одной установившейся скорости на другую. На основании
структурной схемы ДЗ (рис. 8.7) имеем:
Тдз = Г + Т =& k3rkn4fkfiT^(/ (uA<'Mn^c);
Т^ТТ'.
Задатчик интенсивности в наиболее простом виде может быть реали-
зован как звено, на один из входов которого подается сигнал (7С, а на
другой — сигнал (701, пропорциональный скорости движения электро-
мобиля. Сигнал £/.„ от датчика угловой скорости ДУС выполняет роль
уставки, относительно которой изменяется уровень сигнала (7С, под-
водимого от АТ Г к ЗГ (см. рис. 8 5). В качестве примера на этом ри-
сунке пунктирной линией показана цепь передачи от ДУС на вход
задатчика интенсивности ЗИ, который включен в прямую цепь переда-
чи управляющего воздействия. Статическая характеристика такого
ЗИ приведена на рис. 8.8. Задатчи-
ки интенсивности могут быть реа-
лизованы и другими способами.
Следует отметить важность вы-
полнения цепей и звеньев, передаю-
щих сигналы, пропорциональные
ыд, а значит, и скорости движения
v, с минимальными постоянными
времени, иначе будут ухудшаться
динамические показатели электро-
мобиля. Подробнее ЗИ рассмотрен
в §8.4.
Краткое рассмотрение прямой
цепи передачи управляющего воз-
действия при непосредственном ре-
гулировании А. показывает, что,
хотя и нет принципиальной необхо-
димости установки датчиков угло-
вой скорости АД, такая система
обладает^серьезными недосзатк^ми.
геляе^ге
281
о
, схема прямой а® управления uacrmoi, при
РК 8.9. Структур™’ “ИИ на параметр абсолютного и«а«,л„,
непосредственном
трт„ных процессов. Для обеспечения приемлемых показа-
1,ейТкачеПстег*всистему необходимо вводить достаточно сложные кор_
PeKvSX хадакте^ свойство систем с непосредственным управ.
„.^частотой L Анализ схемы, представленной на рис 8.5, по-
бывает что „ри данном способе управления частотой, когда она
задается вне зависимости от момента сопротивления и не регулирует-
ся в Хиии мощности, нет возможности формировать характерней,.
“ постоянства предельной и частичных мощностей (как это требуется,
например в СТПЭ с ТЭП, имеющим электромашинныи генератор),
т еипрИ 0с = const стабилизируются частота/], и скорость и электро-
мобиля, а мощность Р|3., потребляемая для реализации данной ско-
рости. зависит от значений момента сопротивления. Такой способ
управления частотой предопределяет необходимость ограничения мощ-
ности Р]д. = 1
Управление частотой ft при непосредственном воздействии на па-
раметр абсолютного скольжения. Структурная схема прямой цепи
регулирования приведена на рис. 8.9. Сигнал U, для задания опре-
деленной угловой скорости ЛД формируется звеном АТ Г На вход
задающего генератора частоты скольжения ЗГ$ поступает сигнал
Uc — Uc — Uf, где Ь\ вырабатывается функциональным преобра-
зователем ФГГ. обеспечивающим формирование зависимости
/»п₽еД. (/i.). Взаимодействие сигналов U,. и U, показано на графике,
представленном на рис. 8.10
Задающий генератор ЗГ, гем. рис 8.9) преобразует сигнал Uc
в последовательность импульсов с пропорциональной LT частотой
следования fs. В сумматоре частот СЧ происходит сложение частоты
импульсов с частотой Г выходных импульсов ДУ С- f =®
~ «дусЮд, где ^дус — передаточный коэффициент ДУС.
= ксч <>' - h подается на вход системы
Е 4V ы7(АИ “лн НПЧ) К оптовой части ПЧ подводится напря-
жение ж. Напряжение на выходе ПЧ имеет частоту
= Т7 ^С-Ч^пч, (кзг,ис 4- АдусЮд) =
fin ^^оч^пч/!/. 4- —р— ~ + ft
*сч. *аг. — передаточные коэффициенты СЧ и ЗГ,.
282
(8.12)
В свою очередь, параметр абсо-
лютного скольжения определяется
выражением
/. "= -ру *я Л’сч/гпчЛ^с —
— Лт-гиЛлю^а), (8.13}
где &MI. — передаточный коэффи-
циент звена Ф/7 .
В момент ipoiainin, когда с? —О,
ую I 0. -= . при этом /| J
-. / «гф-.1- < /«.. Если поддержи-
н;иь 0с — 0<: чек-, то АД будет рабо-
та гь с моментом /М(1{1адД/ь)
В переходных режимах обратная
связь обеспечивает автоматическое
Рис. 8.10. Зависимости U'c и О’, от /( -
’ “ 'с. пред <*!•»•" бибг.ред.
Х‘СЧ4ПЧ|) !(„.X
х </(.)/(*3rs *СЧ*ПЧ»' - л- <Мы
слежение скорости изменения частоты dft./Лза ускорением ротора АД
реализующего избыточный момент, необходимый для разгона (торможе-
ния) двигателя, а характеристика звена ФЛ> такова, что всегда М <
< ,ИК.. Таким образом, рассматриваемая схема обеспечивает рабо-
ту АД на устойчивой ветви механической характеристики.
Достоинством рассматриваемого способа формирования Д. является
главным образом возможность обеспечить устойчивую работу АД
с высокими динамическими показателями качества. Угловая скорость
ТЭД и характер ее изменения определяются только моментом сопро-
тивления движению и параметрами электромобиля и практически не
зависят ст динамики звеньев прямой цепи передачи управляющего
воздействия, что имеет место в системе с непосредственным регулирова-
нием Недостатки данной системы — необходимость установки дат-
чиков угловой скорости АД с линейной характеристикой в широком диа-
пазоне, а также разработки для каждого типа АД функциональных
преобразователей ФП<» формирующих нелинейную зависимость
А. (Л.).
Управление частотой /т, прн непосредственном воздействии на
напряжение <7|в. Структурные схемы прямой цели регулирования при-
ведены на рис. 8.11 и 8.12. Если первая схема пригодна для СТПЭ с ЭУ
^5
Рис 8 11 Структурная схема прямой цепи У"Р^^£ействин в> мпряже-
связью по угловой скорости при непосред
Н" '•
а, ... си cvMMaT^P частей Д»
а‘ ъ ~ -ааДающмн генератор, СЧ — куммог^х
о ";S!2 Сгргтряая схема прямой цепи управ™™ частотоП с
р^ой евязь,оР'по мошнести лрп „епоср^егпеппом врздеиств.,,, „а на„ряже.
любого типа, то вторая — только при наличии в СТПЭ теплоэлектрцчес.
К0ЗадТщ.и?Э™Я£-'с создается, как и для предыдущих систем,
чзеном 4 ГС и поступает нз входы регулятора РЭЛ или РСГ, форм»»-
пгюшнх’зависимость М- « соответствии с высланным сочетанием
вариантов управления АД. Если в САР (см. рис 8.11) в качестве ЭУ
применены электрохимические аккумуляторы, то регулирование на-
пряжения осуществляется посредством ПЧ и сигнал Uc подается
на вход СУ преобразователя
В САР (см. рис. 8-11) регулируется частота д» введением положи-
тельной обратной связи по угловой скорости АД Функциональный
преобразователь ФП, формирует характеристику Anpww (/(*) (см.
рис S luj. только вместо сигнала £/с.макс к звену Ф/7, подводится опор-
ное напряжение l'tl.
На вход системы управления ПЧ подается сигнал /э, пропорцио-
нальный сумме измеренной частоты вращения ротора и задаваемой
параметрически частоты /. Частота выходного напряжения ПЧ
определяется (8.12) и ib.lSj при замене в (8.13) Uc на Uo.
Данный способ регулирования частоты Д, имеет все отмеченные
выше преимущества л. кроме того, выгодно отличается от предыдущих
систем возможностью получения наибольших значений коэффициента
мощности и перегрузочной споо юности электродвигателей во всем диа-
пазоне изменения частоты /) . в том числе и на частичных мощностях.
Эта возможность определяется тем. что абсолютное скольжение Д» за-
дается параметрически и не имеет непосредственной связи с органом
управления водителя электромобиля
В САР (рис. 8.12) частота является функцией отклонения мощ-
ности Р{Д. от заданного значения Сигналы, пропорциональные на-
пряжению Ur и суммарному активному току тк/|а всех электро-
двигателей/ поступают на вход датчика .мощности ДМ. Сигналы UK н
с сравниваются на входе задающего генератора частоты ЗГ,
преобразующего их разность (Uc) в последовательность импульсов
С,’1едования /э. пропорциональной Uc. Сигнал f3 пода-
пи t од системы управления ПЧ. Частота выходного напряжения
^^М1/Ан)&пчЛзг*4.
Так как выходной сигнал ДМ
У» = &дмЩкР1д = /гДмткР)д нр1д, — /?дМР1Д+,
284
Сдаточный коэффициент датчика
fi.- Д *пчЛ3г(£4-АдмР,а.). (8.14)
Скольжение АД в этой системе устанавливается в соответствии с на
грузкой электродвигателя. ештвин с на-
Соотношение между постоянной времени прямой цепи передачи
управляющего воздействия и электромеханической постоянной вр"
мени АД определяется неравенством (8.9). Поэтому для согласования
Inpf II В прямую цепь необходимо вводить динамическое звено
показанное на схеме рис. 8.12 пунктиром. Управление частотой Л
в рассматриваемой системе обеспечивает работу на устойчивой ветви
механп ческой характеристики АД.
Системы автоматического регулирования (рис. 8.12), а также при
наличии СГ (см. рис. 8.11) работают при сог = сог.и. Когда требуется
обеспечить режим наибольшей экономичности ДВС на частичных мощ-
ностях, что соответствует сор = var, применяют схему, представлен-
ную на рис. 8.13. Здесь ППТ — педаль подачи топлива ДВС', ФП3 —
функционально-преобразовательное звено, формирующее характе-
ристику наибольшей экономичности, т. е. зависимость Рдвс («две)
при максимальных значениях КПД. Функцию задающего сигнала
выполняет 17э. Разностный сигнал U3 — Vu подается либо иа вход
РЭУ (см. рис. 8.11), либо на вход ЗГ (см. рис. 8.12).
Анализируя структурные схемы прямых цепей передачи управ-
ляющего воздействия и варианты частотного управления АД, можно
предварительно обосновать выбор способа регулирования частоты и
осуществить переход к построению контуров и САР СТПЭ в
Приведенные структурные схемы не охватывают всего ми0’^° J *
зия возможных схемных решений прямых цепей передачи У Р ’
ющего воздействия от водителя на параметры сило®° ’йыть при.
РУдования СТПЭ. Однако любая нз частных схем может
ведена к одной из схем, показанных на рис. » • »
«ли к их комбинации. ясннхпоииых электро-
Структурные схемы контура регулирован аснар ес1па
Двигателей в режиме электрического тормошен к
* 285
Рас. 8.14- Структурная ““янврикя>«>'е'
SXaS₽3 --- “мью
ТР — тормозной резистор
Рис 8.J5. Статическая
характеристика усили-
теля в режиме резис-
торного торможения
асинхронной машины
Рис. 8.16 Статичес-
кая характеристи-
ка усилителя в ре-
жиме рекуперят ив-
нвгл гор'1 ежей ИЯ
аси,1Хр1‘киои маши-
CAP С обратной связью по уг.
ливой скорости АД и парамет-
рическим заданием скольже-
ния ооу ело вливают предпоч-
TineiwiocTb их применения
не только в тяговом режиме,
но н в режиме электрического
торможения.
На рис. 8.14 представлена
структурная схема контура
регулирования АД, осу-
ществляющего ограничение в
режиме торможения потреб-
ляемой от ЭУ активной мощ-
ности 120]. В данной схеме
сумматор частот работает в
режиме вычитания f3 — f — fSt
обеспечивая выполнение усло-
вия (4.86). Задающий генера-
тор частоты скольжения 3FS
задает параметр абсолютного
скольжения в функции откло-
нения активной составляющей
тока /эул от выбранного зна-
чения Ток /эуа измеряется
датчиком активного тока ДТ3.
Сигнал Сил при определен-
ном напряжении пропорцио-
нален активной мощности
Рэу/?, потребляемой тормоз-
ным резистором от энергоус-
I ановкп
•. е при возрастании входно-
Частота Д. пропорциональна /~у„.
го тока увеличивается параметр абсолютного скольжения, что приво-
дит к перераспределению мощное га Рр, выделяемой в тормозных ре-
зисторах, а именно к уменьшению Р^ур и увеличению мощности Рмл,
генерируемой AM |см. (4.87)1. Поэтому одновременно с регулирова-
нием мощности AM ограничивается активная мощность, потребляемая
от ЭУ. Для более точного поддержания соотношения указанных
мощностей сигнал ДТа подается на ЗГ\ через усилитель У, выпол-
ненный в виде сумматора двух сигналов: Ua, и опорного Vo от источ-
ника регулируемого напряжения ИРН. ’ Здесь L7S = Лу(С/д.т—
где -коэффициент усиления. Если U„. < (Л, то {/„ = 0 и от’
рицательное скольжение AM задается лишь когда ток 7эув
чеки я, при котором (/л, становится большего (рис. 8.15).
№Kvnt.n±30BaTb Рассмотреинук> схему (см. рис. 8.14) в режиме
НЯКЭТ ня т™ ТОРЫ0ЖенИЯ, полярность СИГНЭЛОВ Ue И Uss н
О > I/, (рисВ™°р)0ЖНУю и напряжение U, ~ (Уда — ₽
S8S
Частота выходного напряжения ПЧ
—Й3гч1/Ч) =
= 7[~ *сч^пч»*дусд»л — Азн6сч6пч*1Л = /* — f s.; (8.15)
/s» = -“- Лзг<ЛсчЛпЧ|А, (ka,/эу — и,}. (8,щ
В случае перевода СЧ из режима вычитания в режим суммирования
час tot / и Л контур осуществляет регулирование тока (или мощности),
ниiреблнемой от ЭУ асинхронным электродвигателем в тяговом ре-
жиме
В СП1Э с СГ, ПЧПТ и емкостным фильтром на входе ннвергора
можно полностью исключить потребление активной мощности от ЭУ
в режиме генераторного торможения AM, если использовать особен-
ность ПЧПТ с емкостным фильтром — выполнять в этом режиме функ-
цию компенсации реактивной энергии тормозящейся AM за счет до-
полнительных копт урок для се замыкания: через диоды и тиристоры АИ
междх -разами AM и через емкостный фильтр на входе АИ Данный
способ основан на явлении самовозбуждения AM, в частности с помо-
щью конденсаторов, известного из принципа работы AM в режиме
конденсаторного или конденсаторно-рекуперативного торможения.
Структурная схема контура регулирования AM, в котором параметр
абсолютного скольжения изменяется в функции отклонения напряже-
ния или магнитного потока AM от заданного значения, приведена
на рис. 8.17 121) Напряжение Ux определяется не возбуждением СГ,
а скольжением AM
При нажатии педали ATM
сумматор частот переводится
в режим вычитания, а возбуж-
дение С Г снижается до мини-
мума. 11нтенси вность тормо-
женпя определяется задаю-
щим сигналом Ur: при увели-
чении UT параметр Д* возрас-
тает. Сигналы датчиков напря-
жения ДН и магнитного пото-
ка ДП асинхронной машины
через функциональный преоб-
разователь ФГД, обусловли-
вающий определенную зави-
симость между напряжением
U\. и частотой Аф, поступают
на элемент сравнения навстре-
чу сигналу L4 При переходе к
тормозному режиму (7, == О,
частота Д. и момент Мт ми-
нимальны. Увеличение угла
приводит к возрастанию L4,
, „.еньшается Когда Л сгаиовятся равным нулю, Сг
/... L',.. Я т™Д'„?'ыпм„ше.и| в С этого момента значение вь,прям.
отсекается диод* определяется ЭДС Е1 асинхронной машины’
лепного напряжения i й рассеивается в тормозных резисторах Тр
Активная мош"0^ межлу фазами AM через вентили
а реактивная энер««» г -
АЦ и емкостный фильтр озну(О ыощность ...следовательно
Значение U, «пред • , = №„st гормозион эффект уМеиь
l/1" ‘''“^мя^ение'У, (или <««1 уменьшается, что npIieojJ11T
шается. то ш о6ратной связи t/on; сигнал 47, и параметр
» снижению сигни-' «(г напряжение 4/, дос.шло прежне-
всйраегают^о^РО^ ве,„,ч, n Vq с 10ЧПОС1ыо
го значения, “У другой стороны, если Рм при данных З1.а-
^^т'ХТ ипевыс1.т то У. начинает увеличиваться, однако
иГ'может превысить установленного максимального значения,
ЗГ обеспечивает практически безынерционное снижение
ча^тХ скмь^ения до нуля следовательно, напряжения (/„ д0
минимума определяемого напряжением иг
Изменяя Ur. можно регулировать уровни напряжения [/,. =
= const или магнитного потока Фд. = const для реализации частич-
ных II Предельной тормозных характеристик AM.
Частоту напряженля питания AM можно вычислить по формуле
(8.15), если заменить £А на От, а параметр абсолютного скольжения —
по формуле
/s . = Лзг А'.Ч^ПЧ/ (^Т — ^ФПС'^д н^Л),
где А’фпн — передаточный коэффициент ФПц.
Выбор параметров контура регулирования частоты АД с обратной
связью по угловой скорости и принудительным заданием скольжения.
Отмеченные ранее преимущества способа регулирования частоты Д,
с обратной связно ио угловой скорости о«д и принудительным заданием
параметра абсолютного скольжения реализуются только прн высокой
точности задания нзмереиим /й. и алгебраического суммирования
/♦ и Д,. Применение аналоговых хстройств для контура регулирова-
ния частоты АД ненейесойбразно, так как их погрешности близки к
измеряемым и суммируемым величинам Действительно, частота вра-
щения роюра суммируется с частотой скольжения, которая доходит до
долей процента от первой. Гкмрешность измерений ДУС в 1—2 %
может привести к изменению режима АД Например, если задан
параметр абсолютного скольжения = 0,£)4, а измеренная частота
вращения f* = 4,0, то при погрешности ДУС минус 1 % асинхронный
-ед г&0ДВИГ“ТеЛЬ Вместо Двигательного режима с = Д 4- М =
4,04 перейдет в режим свободного выбега с ft> = 4.0, т. е. частота
car Равна частоте вращения ротора Д, а фактическое значение
Иг«-г.Пп^г0'1ЬЖе1,"Я станет Равиым нулю. Если отрицательная погреш-
ап молу<лю больше заданного параметра абсолютного сколь-
Ийо Фактани^^ двигательн°го режима перейдет в генераторный.
ачение частоты /8.будет отрицательным. Исходя из
288
(8.17)
vha'ianiHjio, ч акне узлы конту-
ра ре г у. п t рова н и я ча сто гы АД,
как < , i Ч, необходимо вы-
полнять в i.ii.’ic дискретных
устройств, а фхнкцпоналкные
f । реобр азова j е;п । и звдающи е
гепераюры час’нлы — в виде
Д1Н кре! и*|-анало1 овых или
;Н1л. Ю1 и-Д11СКреЛ1ЫХ. При по-
добном исполнении узлов па-
раметры Л*.А*. К. нротюрцно-
нальиы чаи ютам следования
и м । г у. । ьсов соответствующи х
сто налов
Однако дискретное сумми-
рование двух равномерных
лос/(едовател ыюстен импуль-
сов существенно различных
частот вызывает нарушение
равномерности следования вы-
ходных импульсов СЧ, подво-
димых к системе управления
ПЧ Этот недостаток опреде-
ляется тем, что между импуль-
сами частоты f через проме-
жутки времени / = /?сч#пч,»7&
и
S)
U—w j *
Рис. 8.18. Диаграмма работы сумматора час-
тот:
® „<1ос',еА°ваТельиос'гь входных импульсов час-
1о1 частей "^Довательность входных нмпуль-
сов частоты fy в — последовательность выходных
импульсов в сумматоре без деления частоты; г,
о. е последовательность выходных импульсов
в сумматоре при йсч = к,, йсч = ч* ИСц =
появляются импульсы частоты fs.
казанная нестабильность обусловливает неравенство интервалов
приводимости отдельных вентилей ПЧПТ или полу периодов выход-
ного напряжения НПЧ. Неравенство интервалов проводимости вы-
зывает увеличение тока, который должен быть скоммутироваи при пе-
реключении вентилей автономного инвертора, что может привести
к его опрокидыванию Неравенство полупериодов выходного напряже-
ния вызывает появление постоянной составляющей или субгармони-
ческих составляющих, являющихся причиной увеличения потерь
АД, уменьшения его вращающего момента и снижения запаса устой-
чивости, что особенно важно в интервале частот > fiu*-
В связи с изложенным рассмотрим работу дискретного СЧ дня оп-
ределения степени неравномерности временных интервалов следова-
ния выходных импульсов и ее зависимости от параметров сумматора
частоты
В общем случае на входы СЧ от двух источников поступают импуль-
сы с различными частотами следования f (большей f6 и меньшем /м).
При одновременном поступлении импульсов на оба входа одяи_из них
задерживается с помощью мультивибратора (М3) на время /мз —- /мз,
гае /мз - частота М3. Поэтому минимальное время между двумя
выходными импульсами СЧ 4™ = (мз- Максимальный Р/мз
между выходными импульсами - 1'/6 (рис- «
Должна быть выше максимального значения большей частоты /б»«=
289'
10 4- J5S
- r пва с лишним раза, чтобы исключить пропуск.» „
по крайней мере в два /КЦ|1ЯХ еу..маторов частот
2 ® - '00 Ги. /хм -- 50 t 100 кГц. ~
ви-шо’ ЧТО коэффициент неравномерности временных интервалов
,пвания импульсов сумматора часп>ты , - Л,а..< зависит от г
и пои L- = 10 кГц. /« = 50 кГц находится в пределах от $
ю 5 Для сглаживания этой неравномерности в СЧ производится „е
ление частоты в Ifa раз (!/Лсч - Целое число)
В СЧ без деления частоты импульсы частоты /м на выходе суммато
оа всегда располагаются внутри интервалов между импульсами часто-
ты k с периодом 4 = !//., В СЧ с делением частоты в интервал
выходными импульсами может попасть различное, отличающееся
на единицу количество импульсов часто™ так как дискретные
делители частоты основаны из счете импульсов При i/kC4 "> 2
время между двумя выходными импульсами СЧ равно алгебраической
сумме целого числа временных интервалов I, = 1//е и случайной
величины Л/ </,- Очевидно, что Д/= 0, если импульс частоты
/„ не является переключающим для делителя. Количество ццтер.
валов между переключениями делителя определяется отношением
4'/Леч <1, + 4)1. Так как максимальное и минимальное время между
выходными импульсами СЧ обусловлено целым числом интервалов /
то
= 1 (77=^7 + Л1Р‘ =f (/„/fc+l)»c4 +Л*]т ' (818)
= [и,- 6«сч~ Л'Р’ = I <Wfe + 1)*сч ~Ле]Те ’ <8'19)
где А, и Д2 — слагаемое il вычитаемое для получения целого числа
в квадратных скобках; Л, -г Д2 == 1.
Из (8.18) и (8.19} можно сделать вывод, что интервалы следования
импульсов на выходе СЧ могут отличаться не более чем на время
|/мцкс /мин — /j ~ 1 ff.-
Таблица 8.1
fs. га <м. Гч _ при
’Л 7» 7».
100 50 75 1.50 1.50 1,20 1,25 МО 1.11
500 50 100 1,33 1,33 1.142 1.167 1,072 1.077
1000 50 100 1,33 1,33 1,142 1.142 1,067 1,072
КХ». 10000 50 100 1,33 1,33 1,142 1,142 1,067 1,067
290
В табл 8.1 Приведены значения коэффициента неравномерности
временных интервалов следования импульсов СЧ для различных
коэффициентов /ген, рассчитанные по (8.18) и (8.19)
Пэ габлипы следует, что при f6/fM 5 коэффициент £ практически
завися I только oi передаточного коэффициента сумматора и увели-
чиваемся с ростом Атч
Для наиболее полного использования силового электрооборудова-
ния СТПЭ необходимо, чтобы информация о частоте скольжения при-
сутствовала в каждом нолунерноде выходного напряжения ПЧ В ином
случае АД работает в резкоперсменном режиме: один полунернод, ког-
да импульс Е имеет место, например в тяговом режиме; другой по-
лупериод, когда импульс /, отсутствует, например в режиме выбега
Чюбы ........ о скольжении присутствовала в каждом перио-
де фливио напряжения АД, на каждые 1/(/?сч^пч/) — 1 импульсов
частопд /с [в данном случае частоты //(/геч^пч/)! должен приходиться
ХО'1 я бы одни импутьс tiaciouj здесь ЛМсч^пч»). т е.
« <*г.Лич.|- I
(8.20)
Соответственно необходимость наличия хотя бы одного импульса
fs в пол у пер и оде напряжения ПЧ гребу е г выполнения условия
(8-21)
1/<2АсЧАПЧ}> —
Если импульс частоты приходится на М полупериодов частоты
Д, то (8.21) принимает вид
А______________1________
f |l/(2feC4fen4/)-l|W
ИЛИ 1 l/(2feC4^n4fJ — 1 А Так как Ш ь = (1 - S)/S, (8.22) (8.23)
то из (8.22) и (8.23) найдем
1 1 —S (8.24)
l/(2fec4fc5]4f) 1 *
для JV = 1 (8.24) преобразуется в выражение
1 (8.25)
— l/(2fcf ч&глп) — 1 s
откуда
(8.26)
£сч s/(2fcn4/)*
разном выходе ПЧ мз 1/(ЬЫ
и /, формируется т. периодов выходного напряжения.
... . . (8.27)
291
При
частот f
(8.26) запишется в виде
kc^ s/(2mi«n4/)-
Если условие (8.27) не ь— .
в отдельных полупериодах, а может быть,
10’
Tik ecui предположить, что в периоде частоты
будет стсутет№“« • частоты то внутри этого периода
h имеет цесто ов распределяется иеривпомерпо Полупер,юд,
ZXZ™ скольжения, хве.чичивдется. а другой пато-период
уменьшается на величину
ДГ
(8.28)
Тогда длительность каждого иолупериода
Г,,,, = (I//, + *Л/2; Г.,.-, = (И/. - Л7'/2- (8.29)
Таким образом, мгновенное распределение частот внутри периода
7, составит
Г,,,, _ I.-/, + А7~ = _ (- -'ч-ч'-пч,
Tl(.,t 1'7) - -'Г~ 1 —2лсч*пч/
„ полупериод Ти„ соответствует работе АД с /, = 2fo. а полупериод
Т,Г) - работе с f, = С. где — заданное значение частоты сколь-
(8.30)
Пз анализа выражений (4.21) а (4.23) следует, что при рациональ-
ном сочетании вариантов управления 1—-3 тяговыми АД минимальное
значение относительного скольжения s имеет место в интервале час-
тот /|. > hu*. т. е.
илп с учеи»м || 19)
Из решения (8.27) н (8.32)
= sJU"^ (8.31)
5цЛн/(/и1Экс'^о). (8.32)
получим
ill Ли
Лмсныпенпе /сеч ограничивается предельной частотой элементов
СЧ, обусловленной высокими гребиваниямн к помехозащищенности
электронных уз-юв СП1Э с уменьшенном Леч возрастает количество
элементов сумматора п ешьк^чея сто надежность. Кроме того, повы-
шение частоты /мамЛЛ.чл-ьи ) бы/ывзо! увеличение размеров ДУС,
которые лимнтирукися необходимое«ыо встраивать АД с датчиком
в ПВК. Так, одну из конструкции ДУ(. выполняют в виде диска с зуб-
цами , закрепленного на вал у ул ек i родвп i a j ел я, электромагнит кого
элемента, установленного неподвижно относительно статора АД, п уси-
лителя, формирующего выходные импульсы ДУС с частотой следова-
ния, пропорциональной частоте вращения ротора / Число зубцов
диска, в значительном степени спредеiяющее его размеры, пропорци-
онально ^«/(ЛсчЛпч/).
С целью повышения КПД тяговые АД целесообразно выполнять
с пониженным номинальным скольжением. При этом жесткость ес-
тественных механических характеристик электродвигателей повыша-
САР стп^Кк РегУлиРовочиые свойства АД ие ухудшаются, так как
пйгти^и / Ф°РмиРУет мягкие искусственные механические характе-
зя сиото о СМ. РИС Увеличение правой части неравенства (8.33)
озрастания Лн или уменьшения Ло нецелесообразно, так как
292
Рис. 8.19. Структурная схема контура ре-
гулирования АД с обратной связью по
угловой скорости и принудительным зада-
нием скольжения, но без сумматора час-
тот в большей части частотного диапазона
Рис. 8.20. Зависимости пара-
метров АД от частоты /|в.
1 — fs </i>. Формируемая звенья-
ми ФП$ и 3TS; 2 - (/,) лрн
неработающем ЗГ8; 3 — / (f,)
для режима генераторного тор-
можения
первое приводит к увеличению размеров
АД, а второе — к снижению запаса ус-
тойчивости.
С учетом сказанного (is (8.33) видно, что требования обеспечения
равномерности временных интервалов следования выходных импуль-
сов сумматора частот п сравнительно малого номинального скольже-
ния противоречивы. При проектировании СТПЭ необходимо учиты-
вать оба указанных фактора.
Заданной равномерности временных интервалов следования им-
пульсов СЧ можно добиться уменьшением коэффициента &сч за счет
применения интегральных микросхем и малогабаритного высокочас-
тотного ДУС асинхронного электродвигателя, а также исключением
суммирования частот в диапазоне Д > far С этой целью можно при-
менить контур регулирования АД (рис. 8.19).
В схеме, изображенной на рис. 8.11, число выходных импульсов
ДУС за один оборот вала АД и частота их следования соответственно
равны
2дус = р/(*сч*пч/); <8’3^
/дУС = 7дусПд|'6О = рпв/(60^сч^пч/) = ГА^сч^пчЭ- (8,35)
Для варианта управления 3 согласно (4.21) относительное сколь-
жение в двигательном режиме АД — постоянная величина. Вы рем
в схеме (рис. 8.19) число выходных импульсов ДУС за один ооорот
вала электродвигателя равным
Р = • (8.36)
ДУС (1—5)*СЧ^ПЧ/ 1—5
Частота выходных импульсов ДУС
s ^дусяд -^дусял 1 * _—= - J . *— (8.37)
/дус = = -V • -ПГ7 = 1 -s ‘сч‘п"'
293
„ выходных импульсов ДУС (рис. 8.19) П1_
ш,иУХасу^частоты в₽эшен,|Я f"сосгаБ-—’ ч~ ско?ь:
жения А-В свою очередь,
.. гдусА'сч'пч/ '
l-s ‘ ' 18-38)
Так как / = А. то А изменяется лпн<но в функции частоты f,
‘"'’ГЫ Л^'/.о^нкцнональнь’н преобразователь Ф1\ „ задаюци|.
генератор ЗГ, формируют характеристику fs (fj. показанную На
р„с. 8.20-ЗависимостьА + А от А соответствует кривот,
на рис 4.3, и, ибо в зоне А > Аи частота А Он/ - ВыхОДНЬ1е
импутьсыДУС в этом интервале частот (см. рис. 8.19) поступают через
СЧ в'систещ управления ПЧ, но суммирование частот исключается
В двигательном режиме АД переключатель II (см. рис. 8.19) цахо.
дится в положении Л а в режиме генераторного торможения перево-
днтся в положение 2. ~
Прежде чем рассмотреть работу схемы, показанной на рис. 8.(9,
в тормозном режиме электромобиля, остановимся на расчете пара-
метра абсолютного скольжения
Решая (4.14) и (4.107), получим
A
где
(8.39)
Н.
(8.40)
рт^пи'}п
Выражение (М ЗУ) определяет приближенную (линейную) зависи-
мость Д, (/«.), окшчную от расе читанной по точной формуле (4.97)
и показанной на рлс I 15. Ошако последнюю затруднительно реали-
зовать. Поэтому схема, изображенная на рис 8.19, формирует линей-
ную характерна и к \ (/,), сюказдннхю на рис. 8.20 (прямая 5).
В этом случае число выходных и хин тьсов ДУС за один оборот вала
АД должно обесиечивап-. относи(ельное скольжение sT ~ = const:
£дтс — р/((1 ’ -М А’дч^пчИ»
где Лдч — передаточный коэффициент делителя частоты (ДЧ).
Частота выходных импульсов ДУС
гДУСяД _ I____________/ _ / — ;s
fc0 ^‘ДЧ/сцч1 ' Ьч ” Z‘A4fen4/
fs ^ДЧ^ПЧГ -р~ пя f.
(8.41)
/дус =
(8.42)
(8-43)
вы В ^стеме обусловлено необходимостью совместного
щим выбопо/^2яВИВ И что обеспечивается соответствую-
числом Ппи им ВДНИЙ *сч и /?дч; параметр 2дуС должен быть целым
в небольших _03“сти обеспечения указанных условий следует
ределах варьировать s и s, от их расчетных значении
294
(S - s, - НОдним из i,aii(Kec простых схемных
Х.Х,с.й"Т"' "дч яплпет™ “учаГ|-когм '
1//гач — ~
где z«4 — целое число.
Из (8.36), (8.41) и (8.44) имеем:
(8.44)
/?сч — ——
ГПЧ
/гдч = JL 4±±
m4 I 4- S1
Z’ — тчР 1
/?ПЧ/ $ + st
(8.45)
(8.4b)
(8.47)
Выражение (8.47) используют при проектировании ДУС.
Таким образом, при работе АД в контуре регулирования с обрат-
ион связью но угловой скорости И принудительным заданием частоты
скольжения (см. рнс. 8.19) реализуется сочетание вариантов управле-
ния 1—3; в двигательном (интервал частот ft fw) и в генераторном
режимах суммирование частот f и Д исключается.
§ 8.4. Контуры регулирования частоты
тяговых асинхронных
электродвигателей
Приведенные на рис. 8.5, 8.9, 8.11 и 8.12 структурные схемы управ-
ления параметром /ь можно рассматривать в качестве контуров ре-
гулирования частоты для отдельно взятого ПЧ. Эти контуры сов-
местно с соответствующими контурами регулирования напряжения
Ui, обеспечивают работу одного тягового АД во всех режимах.
В реальном исполнении электромобили с моторжолесамп могут
иметь только четное количество ТЭД, т. е. K пар мотор-колес, где
feM.)4 — 1,2, ...» тк/2, которые при наличии СТПЭ не связаны между
собой кинематически, но сохраняют механическую связь через дорож-
ное покрытие и электрическую связь между ТЭД, если они питаются
от одной ЭУ Поэтому ТЭД могут работать с неодинаковой нагрузкой
из-за различных моментов conpoiявления движению колес вслед-
ствие изменения микропрофиля пути и их различных угловых ско-
ростей при повороте электромобиля. Кроме того, неравномерное рас-
пределение нагрузок вызвано от-
клонениями механических характе-
ристик электродвигателей от рас-
чета ы х вел едстви е т ехн ол оги ческ и х
и конструктивных допусков иа их
параметры н различия угловых ско-
ростей в результате неравенства ра-
диусов качения мотор-колес, обус-
ловленного, напрнмер, износом шнн
Рис «21- Структурная схема силовой
цепи СТПЭ переменного тока ДЛЯ со-
осной пары тяговых АД
295
Рис. 8.22. Структурная схема контура регулирования частоты с динамическим
эвеном при непосредственном воздействии на параметр
и неодинаковым давлением в баллонах. Сказанное требует для каждого
тягового АД индивидуального управления частотой Д. в функции мо-
мента сопротивления.
Напомним, что в электромобиле с любым количеством ТЭД уста-
новлен один орган управления — аппарат управления электроприво-
дом в тяговом режиме электромобиля (АТГ), который вырабатывает
задающий сигнал Uct подводимый к прямым цепям передачи управля-
ющего воздействия всех ПЧ. В связи с этим в СТПЭ контур регули-
рования частоты целесообразно анализировать при работе соосной
пары ведущих колес (рис. 8.21).
Контур регулирования частоты для пары тяговых АД должен обес-
печивать: 1) управление частотой Д. каждого АД (АД} и АД2)
в функции заданной мощности и нагрузки на его валу; 2) формиро-
вание некоторого оптимального задающего сигнала, управляющего
напряжением U\., с учетом возможной значительной разницы угло-
вых скоростей двигателей и реализуемой ими мощности
Структурные схемы контура регулирования частоты для двух соос-
ных АД с использованием прямой цепи (см. рис. 8.5) приведены
на рис. 8.22, 8.23.
Контур регулирования с динамическим звеном (рис. 8.22) не обес-
печивает работу соосной пары тяговых АД без корректирующих цепей,
так как не может управлять частотами fmi и в функции заданной
мощности н реальной нагрузки каждого электродвигателя В этом
Рис 8.23 Структурная схема контура регулирования частоты с задатчиком ин-
тенсивности при непосредственном воздействии на параметр
296
легко убедиться, сравнив режи„и . „
обусловленных сигналом и „ , мы «Д при '
Для способа непосредст^ип^уп"?^"- * М™ ,ИЬ *
ванных требований предав^™управления чаего^й <
реннин сигнала f, иа входе ПЧ ’'иЛИМ®ДЬдо«,™2‘; ywt ука'
составляющей тока/,, соогветёт априМеР. в завнсиЫ1Лтель"0й"°Р-
дую прямую цепь сигнала п„., Ву1Ощего АД-Однах^» ОТ 8"ТИто*
щей тока, меняет не толыго™^^“<^Да Е “аж-
но и принцип задания в по’Ук у₽у *'’тпалает надобно W
который прежде од„оэ™А°6ном “сПолнении^о±в?ь » ОД.
является теперь функцией алгебряя,^^™'" сигналом *
И t/о.с.д/ ( 1а), где Uo.c.m формируется ПрпкСУММЫ СИгЙЭЛОВ U (I \
ной связи по току АД. Систем» Цепыо отрицательной
свойства и подробно рассмотрена в «^7°б,’егает ««ершенно но₽выё
Прежде чем перейти к койтуру
на входе задатчик интенсивное™Е .’й"" чате™. имеющему
задатчиков интенсивности (ЗИ) ’’ ост8ио“«мся на работе
на входе ЗИ определяется значением еТЛ° уроаень ™нй'.
шать значение Ua. так как U изменяется » о существенно превы-
с тем схема ЗИ позволяет иметь такое nre^^"™" С U“- В™сте
над У», которое обеспечивает работу АП^. УРоеня сигнала U,
f,. (fi.1 как в переходном, так и в устаноттюГвдельними значениями
свойство ЗИ в диапазоне частот f. >> f Мся Режиме- Последнее
соотношения: * ',в> пРеДставим в виде такого
&U3 пред = Ua — (7 =---Ьв г .
=----!>И_f _ feni'C%.„
^ЗГ^ПЧ/ " I — SH /«аусклред» (Л»Н,
так как (0д = <од н(од. = ф. ~<оа.н/() — $и).
По (8.48) и характеристике fTOe0.(f,.) находим зависимость
задатчика интенсивности.
В режиме пуска, когда ыд — 0, звено ЗИ разрешает прохождение
сигнала UCt не превышающего уставку Uv„ (см. рис. 8.8), равную
Uvct ~ flufsmCK пред*/(^зг^пч/).
Выделим некоторые характерные процессы регулирования />.,
| осуществляемые контуром при изменении нагрузки АД для двух
возможных вариантов соотношения сигналов: Uc( — и Uti > U^.
1 Задалимся следующими начальными условиями: Мс. = const,f,. (/«•)«
I ~ |?пред» (fl/») И Uс ~ COnst
Если ис1 = и31 и момент сопротивления начнет уменьшиься,
то исходное значение Л» (fи») и потребляемая АД мощность также
1 уменьшаются с изменением нагрузки, а угловая скорость практически
I остается постоянной тгг1л F
| С возрастанием Мс. происходит некоторое повышение свер^
предельного значения /,„ред. tfu.) и уменьшение w“n Jb[)0L и
= const, то изменение сигнала 1/,„ приводит к 7, -
1 Одновременному уменьшению первоначально
(8.48)
U, (W
частота/> начинает снижаться. Для СТПЭ, где необходимо поддержи-
вать постоянство мощности, необходимым условием работы контура в
части динамической точности поддержания постоянства Р1д. в функции
Л4С. (О является отсутствие инерционных звеньев цепи формирования
сигналов Ua, U3 и параметра /ь. Допустимый предел увеличения час-
тоты /s. определяется заданной ошибкой регулирования Д/1э, с
(0,6 -Г- 0,8) /«к* (/1*) /«пред* (fl»)-
Для соотношения сигналов Uct > U3I в случае изменения Л4С,
при тех же начальных условиях частота /1ф и параметр абсолютного
скольжения /s. будут изменяться следующим образом. С уменьшением
Мс» частота /1. возрастает. Если при этом новое установившееся зна-
чение сигнала Uai остается меньше f/ci, то АД переходит на режим
работы по предельной характеристике М* (/и), и /s, (/«.) — /5преДв (/и*)-
Когда АД может увеличивать угловую скорость сверх заданной сигна-
лом Ucit то U3l = и а и /s. (fu.) < /«пред, (/и*) — электродвигатель
реализует частичную мощность, а значения /и и <ов (в пределах
изменения /«,) остаются неизменными.
С увеличением /Ис. частота ft* снижается. Таким образом, в систе-
ме с непосредственным управлением ft* и ЗИ тяговые АД работают
с постоянной угловой скоростью, определяемой сигналом Uet если
Afc*ft. Р1Л» = 1; характеристики постоянства мощности Ад* =
= const не формируются.
Рассматривая схему, показанную на рис. 8.23, и учитывая послед-
ний вывод, можно установить, что данный коитур не обеспечивает из-
менения частоты ft. каждого АД в функции частичной мощности и
нагрузки. Иными словами, процесс регулирования частоты в зависи-
мости от нагрузки недостаточно гибок, так как частота ft* начинает
уменьшаться только при реализации электродвигателем мощности
Ад* = 1, т. е. прн — const снижение частоты происходит по пре-
дельной характеристике.
Остановимся на особенностях регулирования частоты для дву
соосных АД при использовании прямой цепи (см. рис. 8.9). Структур
идя схема контура приведена на рис. 8.24 и включает идентичные ко
гал воздействует на парамет Т
Рассмотрим работу контура „
интервале Д. < ftv, ( ?Р|в
Предположим. чт0 механически»
характеристики АД1 и АП9 /
рве 8.22, 8.23) идентичны: Л1И1, С=
= Мст., радиусы качения обоих
колес одинаковы: Ц, = То*
да разгон электродвигателей будет
происходить до частоты fj, (кри-
вая У), когда ЛГС. = Мс., Если (£<
< 1/с.макс, то АД разгоняются до
частоты Д, (кривая 2). Установив*
шиися режим характеризуется соот-
ношениями (/; < д. (fa =
— fsnpen- (ft.), fi. < fi., М, = Мс.. Следовательно, установившееся
значение угловой скорости АД равновесного режима М. = М?^
- const определяется задающим сигналом 1/с,а параметр абсолютного
скольжения остается практически постоянным и зависит только
от /Ис,.
Рте. 8.25. Зависимое,» и ко»,
туре регулирования частоты:
1" Гвпред. <fl.> при Uc » ис макс;
2ВД «c
Подобные рассуждения справедливы также для случая, когда из-
меняется установившаяся скорость движения. Допустим, режим элек-
тромобиля характеризуется следующими параметрами: Uc — 4/с.махс,
М* = Мс*, fs* ~ Дпред. (А.), V ~ <1)д ~ f|.. Чтобы СНИЗИТЬ СКОроСТЬ,
водитель отпускает педаль и переводит АД иа работу со значениями
fs* (fi*)t соответствующими кривой 2. Реализуемая двигателем мощ-
ность и его момент падают. По мере снижения частоты fi. сигнал
Vs достигает значения, при котором Uc — Us — (Велаке — Us) ~
~ fs* (fl.) == Апред. (fl.), И наступает новый равновесный режим
Uc <Z (/смаке М* — М:*, fs. (fl.) — fsnpefl. (fl*). fl* < fl*-
Наконец, если при тех же исходных данных момент Мс* увеличил-
ся до Л1с., ТО АД перейдет на новый режим с частотой ft- < fi-
ll скольжением fsnpcft. (ft.) > Апред. (f|.)-
Из рассмотренных соотношений следует, что в системе с
родственным воздействием на параметр fs. и “братвой °
угловой скорости АД значение f„ в
ловлево моментом /Ис. и не зависит от 1/с. Чаш-a ft. . моменте
но, скорость движения в электромобиля при = const,
противления изменяются только в ФУ« « даановившийся режим
то с увеличением (или умен. шеиием) " ренастройк11 коиту-
Mt = Мс. достигается за счет автоматическом "ере
ра на работу с новыми значениями устанОвить, что АД пе-
Аналнзируя график (рис. 8- Ь ^емЬй им момент At., оире-
реходит к частотам fi. ГШ;. и f больше
деляемый зависимостью А* (/!.)• ggj
Рис. fi.26. Структурная схема контура регулирования частоты при непосредст-
венном воздействии на параметр 1/|,‘
/ и 2 — каналы АТГ
На рнс. 8.26 представлена структурная схема контура регулиро-
вания частоты с использованием прямой цепи (см. рис. 8.12) В отли-
чие от предыдущих она не требует дат чиков угловой скорости и наи-
более целесообразна при <ог \аг.
Первое требование к одновременному регулированию частоты двух
и более АД этой схемой выполняется, так как контур каждого ПЧ
(ПЧ1 и ПЧ2) управляет параметром Д в функции отклонения мощно-
сти от заданного сигналом Йс значения В свою очередь, потребляемая
электродвигателем мощность при частоте Д,- — const определяется
моментом Л1с. Если Lc const, то на зажимах электродвигателей
поддерживается постоянство Р,д.. Следовательно, увеличение (или
уменьшение) Ис. одного из АД автоматически приводит к снижению
(возрастанию) его частоты Д..
Краткий анализ контуров регулирования (см рис. 8.23. 8.24 и
8.26) показывает, что каждым из них можно принять за основу для
последующей разработки системы частотного управления угловой
скоростью АД конкретной СТПЭ. Применение той или иной САР оп-
ределяется прежде всего эксплуатационными требованиями, предъяв-
ляемыми к электромобилю. Если в системах построенных иа основе
схемы, показанной на рис. 8.23, при изменении ЛГ, поддерживается
постоянство частоты и угловой скорости АД. то в остальных —
постоянство мощности Р1д». а частота /|. изменяется в зависимости
от А4С.. Это принципиальное отличие, и оно должно обязательно при-
ниматься во внимание.
§ 8.5. Контуры регулирования
генератора постоянного тока
В общем случае контур регулирования ГПТ должен обеспечивать:
формирование характеристики UR, (<од.) с заданной точностью; фор-
мирование (в соответствии с сигналом управления) харакзерлстик
300
1 и 2 — каналы АТГ
постоянства потребляемой от ДВС полной или частичной м™„
на всем р.б .чем диапазоне угловой скорости и наго? ? «ошиьсти
по характер!. тике наибольшей экономичности „р рталвд,,
тачных мощностей для ш._ и да. = полупи" во всем
диапазоне регулирования напряжения Ur. заданных показатДеи ка
чества. 1СИ ка
Для данного контура объектом регулирования является ГПТ
регулируемым параметром его напряжение U
Требования, предъяв гаемые к контуру ГПТ. вытекают из необхо-
димости реализации определенных сочетаний вариантов управления
ДПТ Контур может выполнять все или некоторые функции в зависи-
мости от требований, предъявляемых к СТПЭ. и принятой схемы сило-
вой цепи.
Одно из условии реализации характеристик (7„. (ыл.) — возмож-
ность алгебраического суммирования иа входе ГПТ задающего сигна-
ла с сигналами обратных связей и воздействием суммарного сигнала
управления на обмотку возбуждения возбудителя генератора (ВГ)
для изменения тока /г.г. Обычно звено, которое производит алгебра-
ическое суммирование задающего сигнала с сигналами обратных свя-
зей. передающих информацию о действительных значениях регули-
руемых параметров ДПТ (Г/д., /„. и др.), одновременно выполняет за-
дачи предварительного усилителя (ПУ).
Обратная связь по мощности генератора. Контур ГПТ должен обес-
печивать получение характеристик (7Г. (/г.), соответствующих
UR. (со..). Для н.х выполнения напряжение И„ можно регулировать,
например, в функции отклонения мощности ГПТ от заданного значения.
Структурная схема контура ГПТ, основанная на указанно 1 'Р“"
Цнпе, получившем наибольшее распространение в С
на рис. 8.27. аТг «пи В
В тяговом режиме при нажатии водителем к /уу”
преобразуется в задающий сигнал <'с, которыг генеПатора Р, =
Для контроля заданных значении “°^' я связь по мощнос-
= Щк7>,д вводится жесткая отрицательная обратная
ти с передаточным коэффициентом Q
_ .** - (в-4-"
Л дм = t Гг / 1„~ и|кР|д,»А11-
/ПкЦхн'д»- .ДТЧИКОМ МОЩНОСТИ
Сигнал обратной связи U„. вырабатываем задающему
ДА1, поступает на суммирующий эпеме
сигналу. На вход Д.И подаются сигналы, пропорциональные наппя-
жению и току ГПТ; выходной сигнал ДМ пропорционален действн
тельному значению мощности Рг.
Снгнал управления на входе ПУ есть алгебраическая сумма U
и UM, т. е. 0
Uy = L'c — 4-4 = и С — *дмт,ЛлЛ. = Ur — k дм,; >, „Р„ =
= 44—*дмЛ.. (8.50)
где *дм — kDMP,„ = кдкт^Р,^. (8.51)
Запишем выражение для Рг. на основании схемы (рис. 8.27):
Pr. = Ur.lr. = --. U =____________________U = и
1 Г *ПУ*ВГ^гАдД1 1 4- *пр*дм С 1 + feoai С*
(8.52)
где *пу. А’вг, kr — передаточные коэффициенты ПУ, ВГ и ГПТ; А-Пр ==
= Лпу^вг^г—передаточный коэффициент прямом цепи регулирова-
ния мощности; А’раз = ЛП[Лдм — передаточный коэффициент разом-
кнутой цепи регулирования мощности ГПТ
Статическая ошибка регулирования АРГ., определяющая точность
поддержания мощности ГПТ, не должна превышать заданную АРГ3.:
АР, • = ТгД— К АР. л., (8.53)
' f яра •
где Y — суммарное возмущающее воздействие на ГПТ.
От глубины жесткой отрицательной обратной связи зависят зна-
чение статической ошибки АРГ. и динамика процесса регулирования.
Из (8.53) следует, что для уменьшения статической ошибки необходимо
увеличивать А’д.м» однако poci составляющей А’дмРг. в (8.50), действу-
ющей встречно сигналу Uc, требует соответствующего повышения пе-
редаточного коэффициента ЛАтГ звена АТГ, так как в ином случае гене-
ратор не обеспечит максимальной мощности. Но увеличение А’лтг при-
водит к росту суммарного передаточного коэффициента прямой цепи
регулирования, равного А’атгА’пР/(1 + Лраз). », следовательно, к умень-
шению запаса устойчивости системы. Поэтому, задаваясь значением
APst, необходимо учитывать оба указанных фактора
В соответствии с (8.52) на зажимах ГПТ формируются характери-
стики постоянства мощности в координатах </r, f, (см. рис 2.1).
Сигнал Uc определяет уровень задаваемой мощности Рг- Если
Uc = СА.ыакс. МОЩНОСТЬ Г1 IT раВНЗ предельной; если П( < (Аликс,
то обеспечиваются частичные характеристики генератора При этом
автоматически формируются предельные и частичные характеристики
£/д. </д«) тяговых электродвигателей (см. рис 3.12)
Контур по схеме, показанной на рис. 8.27 осуществляет регулирова-
ние ГПТ для ы, = ыГ|1 = const Если требуется обеспечить работу
ДВС по характеристикам наибольшей экономичности в режимах ча-
стичных нагрузок, используются системы с <о, var. Структурную
схему такой системы (рис. 8.28) можно рассматривать как частный слу-
чай контура, представленного на рис. 8.27- В ней функцию задающе-
302
Рис. 8.28. С|руктурная c™»-_
ШП» С перст,™^;; углойй-^р—
дуса
ФП формирующим характеристику наибольшёГэта™™к ДВС
При подобном исполнении контура регул„ровани“гптХще.ть
воздействует на педаль по ачи топлива Г! ПТ, изменяя peLVpaS
ДВС и связанного с ним генератора. работы
Датчики мощности. Ограничения по току 7Г., мощности /> и на-
пряжен шо Ur. в контуре регулировании ГПТ осуществляют различ-
ными способами, например с помощью ДМ, структурная схема кото-
рого приведена на рис. 8.29 Такой ДМ имеет функциональный пре-
образователь ФПП, обеспечивающий перемножение двух величин, и
звенья выделения максимального сигнала ЗМЫ и ЗЛО. На один
вход каждого из этих звеньев подают сигнал Ut, определяющий
уровень заданной мощности и соответственно значения /дмакс/.,
1/д.ыищ., t/дмакс.., /дмищ. (см. рис. 3.12, б). На второй вход
ЗЛ1С7 поступает сигнал U' UT. = 1/д., а на вход ЗМС2 — сиг-
нал U" ~~ /г. = /д.
В зависимости от соотношения 1/с, V и U” в контуре регулирова-
ния ГПТ имеют место режимы поддержания постоянства тока, мощно-
сти и напряжения генератора. Рассмотрим эти режимы при условии
IL = const. .
Если U' < Uc < V", т. е. Ur. = Уд* < и М Щ*
> Z. „ то на входе ФП„ действуют сигналы бзма - б“
// —, й" ~ / Выходной сигнал 1/„ датчика мощности про-
порционален значению тока, и в контуре ГПТ осуществляется жесткая
отрицательная обратная связь потоку помержпва
Frnn H'~> U U">UC. когда ов.< од..ки.
, УI к входу ФП„ подводятся сигилы
II /д.м,„ < /д. < /д--. На выходе ДМ сигнал U
пропорционзлен^носж и на зажимах генератора поддерживается
Pr, const.
Frnu чтосоот-
ветствует t/r. > ^вма,<7ьп
/ / /ЛМ|.ш., на входе ф//"
действуют сигналы мэмо .,
~ иг. .. иЖ = ис. Сигнал и
пропорционален нап₽яж“'“' "
контур обеспечивает иодд ₽
Ur. - const. При нажатии педали
Un
и'~иг*
UsHti
Изнс2
3MC2
Рис 8 29. Структурная схема датчика
1 МОЩНОСТИ
ЗМС1
303
рис Я 30. Внешняя характерис-
тик контура регулирования
ГПТ с селективным у зло»
АТГ ю отказа Uc — ^смлм. » работа ДМ
определяет поддержан не предельных зна-
чений /г манс-преД* • ?г пред- • У г мио. пред..
Таким образом, в поденной реализа-
ции контур регулирования ГПТ можно
рассматривать как систем} автоматичес-
кого регулирования по отклонению тока,
мощности или напряжения, когда откло-
нения этих параметров от заданного зна-
чения под влиянием любых внешних воз-
мущений приводят к изменению сигнала
управления Ц,. направленному на ком-
пенсацию возникшей ошибки.
Нз частичных мощностях .значения
t/д мнш », /д мэкс» - ♦ w * * Al мнш* ДОЛ ж-
ВЫ регулироваться согласно (3.124) — (3.127). Для реализации
этих условии делесообразно_е1>гнал Ю подаваемый на ДМ. изме-
нять пропорционально I Р... С этой целью можно например, вы-
полнить звено АТГ с двумя каналами 1 и 2 (рис. 8.—/). один из ко-
торых с линейной зависимостью Uc (0С) создает сигнал, поступающий
на ПУ. а другой — с квадратичной зависимостью Uc (0С) подводится
к З.МС1 и 5.WC1*. При А, ~ Ос чзкс значения выходных сигналов ка-
налов 1 и _ одинаковы и соответствуют Рщ* — 1.
В схеме, показанной на рис. 8.28. корректировать сигнал U3 в
функции | Р|Д. для использования в качестве уставок в ЗМС1 и ЗМС2
нецелесообразно, таг как эго требует изменения передаточных коэф-
фициентов конпри pel улировалпя напряжения ГПТ в зависимости
от переменной хглов»»;» скорости шг.
Рассмотренная схема ДМ реализуется на практике, например в ви-
де множительного устройства Однако чаще применяется так называе-
мый «селективный узел* 1Э1. В этом устройстве функциональный пре-
образователь (ФП) осуществляв» не перемножение, а сложение сигна-
лов V ~ UT. и б'" — /г -
Ц,- А\?/. -• W4,
(8.54)
где /?дл и 6ДН — передаточные коэффициенты датчика тока и датчика
напряжения ГПТ.
Так как при регулировании с бб = const сигнал обратной связи
Г« ~ const, а (8.54) при фиксированном задающем сигнале явля-
ется уравнением прямой, то внешняя характеристика генератора фор-
мируется из прямолинейных отрезков различного наклона (рнс. 8.30).
ыоором соответствующих внутренних параметров селективного узла
можно добиться необходимого приближения прямой АВ к вертикаль-
ной, DL к горизонтальной линиям. Диодно-потенцпометрпческнй
селективным узел [22/ дает возможность на участке BJD постоянства
гклй400™ оЧИТЬ кУсочно-линейную аппроксимацию гилерболиче-
в гл const. Более подробно селективный узел описан
ВД4
Кроме рассмотренных контуров регулирования генераторов с об-
ратно! । связью по мощности,в О ПЭ используют контуры, выполненные
как разомкнутые системы, оез обратной связи по регулируемому пара-
метр}- Падающий характер внешних характеристик U (lF), прибли-
жающихся к гиперболическим, обусловлен специфическим включе-
нием «.бмоток возбуждения возбудителя (см. гл. 9).
§ 8.6. Контуры регулирования
синхронного генератора
Требования, предъявляемые к контуру СГ. аналогичны требованиям,
изложенным в § 8.5. Дтя данного контура объектом регулирования
является СГ, регулируемым параметром — его напряжение Ur._
Управление напряжением в системе с непосредственным воз-
действием на частоту Структурная схема контура СГ, обеспечива-
ющая формирование требуемых характеристик, определяется как
зависимостями (/ь), обусловленными выбранным сочетанием ва-
риантов управления тяговыми АД, так и принятым способом управ-
ления частотой fj.
Структурная схема контура приведена на рис. 8.31. Задающий сиг-
нал Uh поступающий на суммирующий элемент ПУ, изменяется
в функции частоты Д. и в некотором масштабе повторяет зависимость
Ui. (fi.) (см. рис. 4.3, б) с учетом передаточных коэффициентов по на-
пряжению ВСГ. СГ и ПЧ. Если для получения напряжения V, ис-
пользовать импульсы частоты f3 с выхода ЗГ (см. рис. 8.5), то
C'f = Лн^чд/ь/Лпчд (8.55)
где Лчд — передаточный коэффициент частотного дискриминатора
ЧД пли другого звена, преобразующего импульсный сигнал в анало-
говый, значение которого пропорционально частоте следования им-
пульсов.
Характерная особенность всех способов управления параметров
fi. в контурах регулирования частоты двух (и более) АД необхо-
димость формирования такого задающего сигнала на входе PCI,
рг- в системе с непосредог-
Рис. 8.31. Структурная схема контура Рег>’л1‘Р^Н“ г ;
венным воздействием на частоту /1Ф
_ — обратная егязь
который в максимальной степени обеспечивает использование уст
отделенной мощности силового электрооборудования СТПЭ при Воа’
можном существенном отличии от В системе додж»*
быть предусмотрено устройство, вырабатывающее в зависимости п°
поступающей на его вход информации о частоте и нагрузке каждое
электродвигателя некоторый оптимальный сигнал, осуществляющий
управление СГ. Одиако подобное решение значительно усложняет САР
Проще выбирать в качестве задающего меньший нз сингалов / pj
применение для возбуждения генератора минимального сигнала3, вы-
деляемого звеном МИН в контуре регулирования частоты соосных* АД*
нельзя считать полностью оправданным, так как электродвигатель*
имеющий большую частоту, остается недогруженным.
Для контроля заданных значений Ur. введем жесткую отрицатель-
ную обратную связь по напряжению, осуществляемую датчиком на.
пряжения (ДН) с передаточным коэффициентом Лж.о.с. Тогда на выхо-
де ПУ в установившемся режиме действует сигнал управления
— L’f (Л») — Ux о.с (Гг.) = (f iK/^ri4f) кчд/ы — cUr нЬ'ГЛ =
= (/tu/kniif) — kw o.J7r., (8.56)
г де Лж о с == а о < Г г.к -
Значения этого сигнала на всем диапазоне регулирования Urt
должны обеспечивать на зажимах СГ зависимость Гг.яРеД* (Д.): Г*
I’ — ЛП>АВСГ*г Ли f *ПР Лн , ,
<>г.пред — 7, i ж «, ГТ Т ^ЧДГг*=-]- т—-т--------------(8.57)
/,ПУ I т-ЛвсгКг^к.ое "ПЧ/ 1 + *раз «ПЧ/
где Лвсг — переда точный коэффициент ВСГ: Лраз == Лпр6ж.о.с — пе-
редаточный коэффициент разомкнутой цепи регулирования UTa.
При движении электромобиля с постоянной скоростью и изменении
(Л. за счет внешних возмущений необходимо поддерживать требуе-
мое значение напряжения СГ в пределах заданной абсолютной ста-
тической ошибки
ДЦ. = — Y < АС/,... (8.58)
* ftPa<
Глубина жесткой отрицательной обратной связи по во многом
определяет значение статической ошибки, выбор &чд и динамику про-
цесса регулирования. Из (8.58) видно, что для уменьшения статиче-
ской ошибки необходимо увеличивать &ж.ос. Однако возрастание со-
ставляющей ^ж.о.с^г», действующей встречно сигналу Uf, требует
соответствующего увеличения Лчд, так как в ином случае генератор
не обеспечит значения б^-макс преД. = 1Ль>акслРед*^лчо при частоте
(здесь Лпчг/ — передаточный коэффициент ПЧ по напряжению):
17у -J- i7r макс.пред*^ж.е с , Щ 4“ I макс, пред* t.
k4a =------------------------Апч'= '
Увеличение Лчд приводит к возрастанию передаточного козффипмен-
та прямой цепи регулирования по напряжению^ ^прс/ = ^зг пр
X £лчо, а следовательно, к снижению запаса устойчивости систе
алс
Га^ыхУ'ой^Х^аа,еННеМ Л1У- находимо учитывать оба ука-
иия по отклонению.' ^ор™ро"этье^апакТ°Ма™Че<:Кы0 РегУлиРова'
и другими способами, напримец с помгт^“Р™™^ ur.(fi.) можно
мы pel улировання ио отклонений г пл и™ ™ *° ко,1биниРованной снеге-
Га=у тТк7нТ“кГсЙГНИеМ т~та-
вл=™кГ ™г
ляется нама.нпчивающнм током. для обеспечения ™ебу1
мых значении последнего используем изложенный ранее принцип
формирования и,. (ft.) без введения жесткой отрицательной обратной
связи по напряжению Зто достигается выбором ЛЧд из условия под-
держания магнитного потока электродвигателя Ф„. = 1 для претва-
рптелыю рассчитанной зависимости tM (ft.) при /1а%==0.
При наличии в контуре СГ жесткой положительной обратной связи
по активному току можно возбуждать генератор в функции
этого тока с поддержанием Фд, -- 1 независимо от нагрузки. Такой
контур регулирования СГ в интервале частот АМЙК. — hu* действует
как система автоматического слежения за частотой ft. с компенсацией
основного внешнего возмущения, а электродвигатели при полной и ча-
стичных мощностях работают с номинальным магнитным потоком.
Передаточный коэффициент Лд , датчика активной составляющей
тока, обеспечивающего положительную обратную связь, можно найти
нз соотношения
t = mJ yJZJkwu, (8.59)
где Ut — сигнал положительной обратной связи, действующий сог-
ласно с сигналом Vf; Ze — суммарное сопротивление цепи нагрузки
фазы генератора. Если принять передаточный коэффициент ПЧ по
току Апч/ постоянным, из (8.59) имеем
^д.т " Ula) — (8.60)
Погрешность, вносимая этим допущением, ликвидируется введе-
нием соответствующих корректирующих звеньев.
Статическая ошибка регулирования напряжения СГ сйус^вледа
не только возмущением по току нагрузки, но и другими воз. У®
ми воздействиями, например изменением угловой “®Р° „|танцЯ
ра в системе с <or=«rH. нестабильностью '«.я^пшання
функционально-преобразовательных и уснл
тура и т д.:
ду.^д^.^ + д^.^-............................. (861)
где Д^. -суммарная^^лировнш.яогслучайннханешннх
возмущений различной физическом приро гг т охватываться
Если ошибка М'.
жесткой отрицательной обратной связью по на р
в этом случае определяется ошибкой Д1М.
&Ur. 04) 4-
307
Регулирование напряжения Ur, по отклонению с одновременной
компенсацией основного возмущения (осуществление принципа ин-
вариантности контура по отношению к основному возмущению) поз-
воляет значительно уменьшить ошибку по сравнению с (8,58);
AZ/r* — AUr. = kr(Y — У {)/(] + /?раЭ). (8,62)
где У} — возмущающее воздействие от тока нагрузки.
Полной инвариантности в такой системе можно достичь, если ре-
гулировать напряжение в зависимости от момента на валу АД
Так как установка датчиков момента весьма затруднительна, можно
использовать его косвенное измерение, например за счет информации
о токе нагрузки. Однако в этом случае связь по возмущению заменя-
ется компаундирующей обратной связью по току /!а, которая изменя-
ет структуру САР по отклонению и ее устойчивость, что должно учи-
тываться при разработке СТПЭ.
Целесообразность компаундирования генератора определяется ре-
жимами ТЭМ на конкретном электромобиле. В частности, осуществле-
ние принципа инвариантности по отношению к Мс. можно рекомендо-
вать для СТПЭ ЗТЭМ и ЭМПП, работающих на пересеченной местно-
сти, где часто возникают резкие и значительные изменения момента
сопротивления вращению ведущих колес.
Наличие в прямой цепи регулирования частоты Д., сигнал которой
является задающим для возбуждения генератора, динамического зве-
на (ДЗ) или задатчика интенсивности (ЗИ) обусловливает необходи-
мость согласования как статических передаточных коэффициентов,
так и постоянных времени Тпр/ и Tnvu- Покажем это на следующем
примере Практически всегда
ГПр/ = Тдтг ~г Т'зг + Т'пч, < Tnpz/ ^Трсг 4- Тег 4- Тпчо< Ты, (8.63;
где Тпро — приведенная постоянная времени цепи напряжения ит»;
Tpct, Тег, Тццу—постоянные времени РСГ, СГ ч ПЧ (по напря-
жению) при первой производной.
Введем в цепь АТГ—ЗГ (см рис. 8.5) динамическое звено с посто-
янной времени 7дз Тм. Тогда Т1|р/ станет больше Гпрс- Если в ка-
честве задающего сигнала Uj использовать 1УГ то напряжение (/]. (г)
будет нарастать быстрее, чем Л» (О-
h. (О = /.<п>. <‘1 + <8-64)
где fno), — начальное значение частоты. о
Если в качестве сигнала Ut использовать любой из сигналов, и<
ющих место в прямой цепи после динамического звена (С3, /3 или
то Ui, (/) будет отставать от изменения Л- (0
И в том и в другом случае получить соответствие значения i*
текущим значениям fu не представляется возможным, г. е. в 1 Р
ных режимах не будет обеспечено поддержание постоя нет
него потока. „ пргмли*
Напомним, что охват контура жесткой обратной связь йпЗйз-
руемому параметру изменяет постоянную времени при каждо и*
колкой в 1А1 Т М»-)- где знак минус относится к положить
ЭЮ
ной, а знак плюс — к отрицательной связи. Тогда
Тщ,и = Тчд + Ти + 7цчи,
(8.65)
где Ту — (Трет + Тсг)/{ 1 4- knpk
времени прямой цепи передачи
жен не (Л*; Тчд, Тпчо. Трсг.
РСГ и СГ.
ж.о.с)7 7при — приведенная постоянная
управляющего воздействия на иапря-
7Сг — постоянные времени ЧД, ПЧ,
Если в прямую цепь регулирования частоты введен задатчик
„„генсивиости. то согласовывать Т„р, и TnpV нет необходимости
ибо скорость нарастания (спада) сигнала Д (или 17,) будет определять,
ся постоянной времени Тм > Тпй
Покажем, что наличие ЗИ (см. рис. 8.5) исключает управление СГ
сигналом Uc. Действительно, в условиях эксплуатации электромоби-
ля момент сопротивления может принимать значения, при которых
тяговые АД, реализуя полную мощность, имеют угловую скорость <о ,
пропорциональную сигналу О 3 <2 Uc В этом случае, если использо-
вать сигнал Uc для формирования Uy (fb), напряжение £/г* не будет
согласовано с реальными значениями частоты fle.
Если в цепь АТГ—ЗГ (см. рис. 8.5) включено ДЗ и для возбуждения
СГ применяется сигнал Uc, товпепъ сигнала </у (рис, 8.31) также
необходимо вводить ДЗ с таким расчетом, чтобы время окончания пе-
реходных процессов изменения (Л. и Д. совпадало при условии обес-
печения принятых вариантов управления электродвигателями. Когда
генератор возбуждают сигналами U* или требуется ускорение пере-
ходных процессов регулирования Ur., что достигается как охватом кон-
тура гибкими обратными связями, так и включением в прямую цепь
контура СГ форсирующих звеньев.
Частичные характеристики (/г. (fi.), определяемые зависимостями
1Д. (Л.) при Р|Д* < 1, можно получить различными способами. Если
потребовать осуществления работы АД на каждой частичной характе-
ристике с предельными коэффициентом мощности cos <Рд.пред (fi.)
и перегрузочной способностью Хпред (fj.), то магнитный поток и напря-
жение ТЭД необходимо регулировать в соответствии с (4.64). Тогда
на всем частотном диапазоне напряжение
l/,.tf..) = l/)np.«.V..)VP1I.; (8-66)
Ur* (fl*) = U\прец* (ft*)/Р^. (8.67)
«пчо
С учетом (8.57) имеем
и.. =[7г.„рея./Р^= (8М
н 1 г- «раз кпр|
Регулирование согласно (8.68) можно выполнить, “ремножа"
сигналы и, и 1/₽ (см. рис. 8.31). Сигнал Up вырабатывает» фуикци
опальным преобразователем ФПр, на одни нз ?*одо вуюЩ1,й
пает сигнал 17„ а на другой - сигнал уставки U,„.^^соответствующий
Р,„. = 1. Уставка в звене ФЛ₽ предназначена мявь»иючо1ия^«та
выделения сигнала Up. если ТЭД потребляют предельную мощность
и на зажимах АД нужно иметь напряжение шр*д* и«* •
369
Статическая характеристика Up (t/M) нелинейна, т. е. передаточ-
ный коэффициент кфр = UplU^ изменяется в зависимости ст мощ-
ности. Поэтому согласование сигналов Up и Ut проведем с учетом сле-
дующих соображений.
Зададимся мощностью I и рассчитаем по (8.66) характе-
ристику Uivt (Д«). При частоте Д,-. сигнал Up на суммирующем
элементе ПУ должен быть
£/,. = -Цг^-U"• < (8.69)
"пр пр '
С другой стороны, Ufi UfUpi, и Pi == Uu!Uf = U riJUr.ape^.
Тогда для данного уровня мощности
ki<t>pi ~ UPtlUUri,/(Ur (8.70)
Частичные характеристики можно сформировать не только за счет
звена ФПа, но и иными способами, например посредством изменения
коэффициента Ачд в зависимости от Up, для чего этот сигнал вводится
в ЧД. Опуская промежуточные преобразования, приведем выражение
для k$p, определяющее его значение при воздействии на ЧД:
где коэффициент Ср зависит от параметров ЧД и места ввода Up в
схему.
Цепи передачи сигнала Up к ЧД и ФПп показаны на рис. 8.31
пунктирными линиями. Если АД в интервале частот /ГМНн* — /ш.
работает с полным магнитным потоком вне зависимости от реализуе-
мой мощности, то на частичных мощностях нужно изменять только
£71макс- Для этого, например, можно в звено ЧД вводить сигнал
Uu для отсечки максимального значения Uf обратно пропорционально
Р\а,, г. е. сигнал UM обусловливает предельный уровень сигнала Uf.
В данной системе, где водитель электромобиля управляет непо-
средственно частотой /ь. контур регулирования СГ не дает возможнос-
ти формировать характеристик» постоянства мощности, что является
одним из главных структурных недостатков такой САР.
В связи с этим осуществим только ограничение предельной мощно-
сти Р[Л,, для чего реализуем обратную связь по мощности, вводя сиг-
нал l/рпред в прямую цепь регулирования Д». Здесь возможны два ва-
рианта работы системы.
Если имеется ЗИ, то он косвенно выполняет функции ограничения
мощности. Действительно, сигнал (7W (см. § 8.4) задает вне зависимо-
сти от значения Uc разрешаемый уровень сигнала U3, пропорциональ-
но которому изменяется частота Д*. При этом максимальное значение
®д зависит от предельной мощности, потребляемой АД, и момента со-
противления А4С,. Тогда сигнал от ФПР можно использовать в аварий-
ных режимах, например при отказе обратной связи по <од, и его следует
подавать на ЗИ согласно с 14» для снижения частоты /1Ф, а значит,
я автоматического ограничения мощности Р1д.,
aw
Рассмотрим вариант с ДЗ в прямой пип. г,
ставим. ЧТО ФПр имеет второй канал с пед.^троваиия п
к'Фр, который выделяет сигнал (?р * * ™«ы« коэффициент™
<7р„р« на вход ЗГ встречно сигналу и,,точаст£Л 1' Если подавать
питься. пока разностный сигнал не станеткачииа« умень-
Ур,7 (8.72)
где Uус, — кЯ1лткР11и1 — сигнал установки
Равновесное состояние будет иметь м.™ "'
Сигнал l/рмин. вводить в прямую цепь по пз* Новом зиаче1™ fi..
как резко возрастает динамическая ошибка ™^™MeCOo6pa3K0'так
Ствие большой постоянной времени Гдз Рассогласования вслед-
Так кап UP,V д подается на вход ЗГ и изменение t » л.
„ала рассогласования мощностей происходит npaKT^XZiZ
то коэффициент ktP и чувствительность датчика мощное™ eLT
ходить из условия снижения частоты на ДА < 0 05^1“ Т УеТ
вышения предельной мощности приблизительто на 5%! У 1К’
кфР = - , Up^a,
6дм(р|д. — 1> Ьдм^Нпч;
(8.73)
Если задаться значением k$P из условия Д|(. > 0,05s*. то в систе-
ме могут возникнуть колебательные процессы и обеспечить устойчи-
вую работу крайне трудно. В то же время реализация звеньев цепи
ограничения мощности при &fitL 0,05sh достаточно сложна ибо
требует устройств с высокой разрешающей способностью.
В переходных режимах заданная динамическая точность и показа*
тели качества процесса регулирования обеспечиваются применением
гибких обратных связей и корректирующих звеньев Их необходимость
можно установить предварительно на этапе динамического расчета
сишемы
Для много контур ной системы с перекрестными обратными связями,
нелинейными звеньями и случайным характером нагрузки динамиче-
ский расчет представляет собой хотя и решаемую, но трудоемкую
задачу. Методы л математический аппарат теории автоматического ре-
гулирования, используемые для динамического расчета, подробно из-
ложены в литературе. Здесь же охарактеризуем лишь некоторые об-
щие положения, которые необходимо помнить при рассмотрении пере-
ходных режимов систем регулирования СТПЭ.
Передаточную функцию контура регулирования СГ можно записать
в виде
Ur. (0 5npW _ - (8.74)
В7рсг (р) = 1 + W|ip (р| 1FM.C и
Тогда
<7Г. (О =
%>(Р> „ /л_5^Щ|Учд (Р) №зг W х
+ ^(р>»дЩрГ~ 1 + v-^ 5)
X (р) ®'лп W) М0. 31)
rue Wnp(p), №ж.®.с(р)» ^чд(р), Т^згСр), ^дз(р), П^лтг (р)—переда-
точные функции соответственно прямой цепи, цепи жесткой отри-
цательной обратной связи, ЧД, ЗГ, ДЗ и АТГ.
Из (8.75) следует, что наличие в цепи передачи сигнала управления
значительной постоянной времени, входящей в В7д3 (р), обеспечи-
вает плавное изменений ut (t) и Urt (t), если I{ — const. Реально ток
генератора изменяется в широких пределах. При 0С — const характер
колебания (/) определяется в основном изменением тока нагрузки
Отрицательная обратная связь, предназначенная для измерения
возникающей ошибки между (7Г.Э, и действительным значением
Ur, (/), передает эти колебания на вход ПУ.
При частичных мощностях в задающий сигнал щ {1} вводится
up (7) = 1ГдМ (р) U/фр (р> Р|д. (/). (8.7б)
Для контура регулирования СГ этот сигнал в цепи управления явля-
ется дополнительным, изменяющимся по случайному закону
Таким образом, на входе СГ действует суммарный сигнал и (/),
изменение которого во времени обусловлено рядом причин и прежде
всего вариацией нагрузки АД. поэтому генератор практически рабо-
тает r переходных режимах Это предъявляет жесткие требования
к обеспечению устойчивой работы системы и получению заданной дина-
мической точности параметров и /ь при их одновременном регу-
лировании; если их не соблюдать, го наряду с возрастанием потерь
резко снижается коэффициент использования установленной мощнос-
ти ДВС.
Еще раз подчеркнем, что для СТПЭ, в которых ДВС и тяговые АД
имеют равную (с учетом потерь) мощность, всегда целесообразно уп-
равлять частотой /|. в функции мощности н нагрузки электродвигате-
лей, а не ограничивать потребляемую ими мощность воздействием
иа параметр /р.так как подобное ограничение вызывает в САР склон-
ность к колебательным процессам и значительно снижает запас устой-
чивости. Сказанное характерно для САР с контуром, изображенным
на рис. 8.31, что и является его основным недостатком.
Управление напряжением в системе с непосредственным воз-
действием на параметр абсолютного скольжения. Если САР обеспе-
чивает работу тяговых АД в мягком режиме, то момент можно выра-
зить линейным уравнением
= (8.77)
где kfi — коэффициент линейной аппроксимации момента при работе
АД на устойчивой ветви механической характеристики.
В интервале частот Дмин- —/ю. для варианта управления 1 и мо-
ментов М (1,2 -г- 1,25) Л1И можно с достаточной для инженерных
расчетов точностью принять
k/s = MJsH, (8-78)
а при М > 1.25Л1„
kfs = (8-79>
Прн варианте управления 3 механическую характеристику АД так-
же можно аппроксимировать прямой, но будет изменяться в за-
откуда
(8.83)
ВИСИМОСТИ от л., причем с увеличением
грешность линейного приближения Ча™>ты от « ,
Из (4.15) получим MJ, Увеличивается 'ш-лоЛ«*«.по-
Р,„.. Тогда с учетом (8.77) то,иостыо До потерь р
₽,“ ~
. лх п (8-80)
т. е. для каждого значения частоты f, пяпо (8.81)
женив А. пропорционален мощное™' ₽амет₽ “бсолтного сколь
М~₽и..
Поэтому в случае непосредственного ч <882>
„ рис 8.10 конкретное значение сигнала 7) Ь соглвсио § 8.3
АД с зависимостью А. (/,.), соответствующе» XL<^™чивает работу
мощности ре Деленному уровню
выполнение которого
поддерживать Р1д. = const. Исп^^ХуЗ™™
Р}Я. = U2,f,./(sJu).
Из (8.83) с учетом (8.82) имеем
U'- ~ V f’- (8.84)
Таким образом, формирование характеристик постоянства мощ-
иостн в данном системе обеспечивается регулированием Е (/ )
в функции сигнала Uc и изменением напряжения СГ по закону С*г, 1
~ | /в//?пчо» который следует осуществлять в интервале частот I
< А - < Л * । <см- Рис 4.3» б). Если принять указанное условие, таври
/1. <' и /ь > Ли режим Р1Д» = const не выполняется. Поэтому
в системе с непосредственным воздействием иа параметр абсолютного
скольжения /». формировать характеристики постоянства мощности
нецелесообразно Контур регулирования СГ должен обеспечивать
либо предельную зависимость (7г,пред. (Л*)» либо предельную н час-
тичные зависимости в функции сигнала Vc (или f3). Согласования по-
стоянных времени канала регулирования напряжения (Д. и прямой
цепи передачи управляющего воздействия практически не требуется.
Последнее объясняется тем. что скорость изменения частоты Л* оп-
ределяется постоянной времени Тт, которая всегда больше nPv-
Управление возбуждением СГ можно осуществить, как ** в *4*
дущей системе, с помощью звена выделения минимальн г
1,3 Ащ» н /з(2) с последующей подачей меиыпего на вход Ч на
Контур регулирования СГ при непосредственном Л наюсред.
напряжение Г,.. Реализация “РаКт^НгСТн™„., ';„ возбуждения СГ
стенном воздействий сигнала (/^отАП на 7 ееспоСобо8.
имеет ряд существенных отличий от рис. 8.31) является
Если задающим сигналом на в/оде PU ( частоты /1.,
сигнал U,. формируемый звеном ЧД в зави g мгнал (jh
то в контурах регулирования СГ (см. рис. •
Рио. 8.32. Структурная схема контура регулирования СГ в системе с непосредствен,
ным воздействием на напряжение н согласующим звеном:
1ч 2 — каналы АТГ
как показано ниже, может только корректировать или контролировать
задаваемое напряжение.
Наибольшее распространение получили два способа формирования
характеристики £/Гж (/,.) при непосредственном воздействии иа пара-
метр U^‘. 1) напряжение 4/ГФ регулируется в функции отклонения от
заданного значения посредством сравнения сигналов Uc и [Uf, 2)
напряжение Ur. регулируется в функции отклонения от заданного зна-
чения посредством сравнения сигналов £/и и (7М .
При первом способе (рис. 8.32) иа суммирующий элемент ПУ по-
дается сигнал Ut, а также сигналы обратных связей £/жд>,с и Uf,
последний формируется ЧД и согласующим звеном СЗ?
Uf = kea (Uуст — Uf) = kca (UVCT — &чд?1нЛ«/Апч;)» (8.85)
где ксз — передаточный коэффициент согласующего звена.
В (8.85) напряжение уставки Uyer выбирают из условия получения
напряжения достаточного для пуска АД при 60 = 0о,мако
и Мл = MMaKCJipeB>. В установившемся режиме сигнал на входе ПУ
Uv = Ua — U\ — Ur,kw. (8.86)
На всем диапазоне регулирования сигнал Uv должен обеспечить
зависимость Ur.npe^ (fa). В соответствии со схемой (рис. 8.32)
и о учетом (8.85) получаем
^г.пред» — t /Т (Ч- ^о.макс ~~ kc3>UyGS). (8.87)
’ + «раз \ *ПЧ/
Когда при пуске частота А* =» 0, формула (8.87) принимает вид
^р.пред* ~ knpUа.мив/О + &раэ)> (8.88)
где t/ajWB = (l/e.MaKC-fec3^yoT)-сигнал, обусловливающий U^. при
*Из (вЛЗ^следует, что для расширения зоны регулирования малых
угловых скоростей АД при М* < Л4мвк..пред* можно выполн
рассматриваемый контур так? когда U» будет изменяться от нуля до
ЭИ
16ВСГ
14-
Рис. 8.33. Структурная
схема контура регулиро-
вания СГ в системе с не
посредственным воздейст-
вием на напряжение 1)|а
без согласующего звена
Us мин в интервале угла нажатия педали 0сО_
—Ос.макс (т- В- з.мии~~ ^с.м»кс t/с.мии), С0ГЛЗ-
суюшее звено аннулируется, а управление
возбуждением СГ осуществляется в основном
сигналом Ut, подаваемым от ЧД на суммирую-
щий элемент ПУ согласное Uc. Коэффициент
Цс. входящий сомножителем в передаточ-
ный коэффициент разомкнутой цепи регули-
рования, должен иметь то же значение, что
и р (8.87). В такой реализации контура СГ
(рис. 8.33) сигнал Uc выполняет функции на-
чального сигнала управления возбуждением
генератора в режимах пуска и перехода с одного установившегося уров-
ня потребляемой мощности на другой. С уменьшением U. (или полным
его снятием) раз возбуждение СГ происходит за счет глубокой отри-
цательной обратной связи по напряжению t/r. с коэффициентом Не-
сказанное выше дает основание рассматривать управляющее воз-
действие 17с на входе регулятора синхронного генератора (РСГ)
в качестве сигнала, задающего уровень мощности
Остановимся на способах формирования частичных характеристик
Ur. (fi.) с учетом соответствия Р)д» ~ (7С. Если принять, что Ut.
регулируется по (8.66), то целесообразно зависимость UK от 0С вы-
полнить в виде Uc ~ )/0~ с подачей сигнала Uc на суммирующий
элемент ПУ. В этом случае звено АТГ можег иметь два канала
(см. § 8.5), одни из которых имеет Uc ~ 0С и управляет частотой,
а второй обеспечивает квадратичную, т. е. пропорциональную
зависимость 1/с (0С) на входе РСГ.
Регулирование напряжения t/r., осуществляемое контурами, по-
казанными на рис. 8.32 и 8.33, согласуется с любым из способов уп-
равления частотой ft. (см. рис. 8.11 н 8.12). Отметим некоторые особен-
ности совместной работы указанных контуров.
В схеме (см. рис. 8.11) задаются предельные значения параметра
абсолютного скольжения АД, a f\. — fsnpea. (fi*) + U- Характе-
ристики fsnpefl. (fi.) и ^Юред* (fi.) (последняя имеет место при Uc =
= ^с.ыакс) Обеспечивают Р|д, = 1. На частичных мощностях значе-
ния fs. также предельные, поэтому, когда <Z АД работает
с cos Од.лред (/1.) и Х-пред (fi.) вне зависимости от принятого закона
формирования частичных характеристик Uc. (М-
Итак, основными достоинствами совместной работы контуров на
рис. 8.32 или 8.33 с контуром на рис. 8.11 является достаточно высокие
динамические показатели качества процессов регулирования, полу-
чение предельных значений коэффициента мощности и перегрузочной
способности АД, обеспечение характеристик постоянства мощности,
уровень которой обусловливается сигналом Uc.
В схеме, показанной на рис. 8.12, параметр/,, изменяется в Функ-
ции отклонения мощности от заданного сигналом Uc '
т. е /, - (17 — U) Тот же сигнал U, является начальным для
управления возбуждением СГ. В установившемся режиме, когда
3)5
expert22 для http://rcitracker.org
Г, в <u CrnvuTvonaa схема контура регулирования СГ для формирования ха.
Рис. 8.34. СтИк >₽ р1Ктгркт1Х постоянства мощности
И I == const угловая скорость О>Д. С ТОЧНОСТЬЮ ДО СКОЛЬЖе-
иия А. соответствует частоте Одновременно на входе РСГ действу,
ет задающий сигнал U'„ скорректированный сигналом V, и на
зажимах АД имеем напряжение I/,. = U-.Апчс/, определяемое дан-
ной частотой и реализуемой мощностью Таким образом, совместная
работа контуров регулирования напряжения С/г* и частоты обес-
печивает поддержание постоянства мощности.
Для согласования значений (Д. (() и Д, (/) в переходных режи-
мах может потребляться включение в контур СГ динамического звена
ДЗГ (см. рис. 8.32) с постоянной времени Тд3, которая рассчитывается
ИЗ условия Тпр4/ T„ft ГДв Гпру — 7дз + Ту + ТЪчо; Tq; = Тдз -|-
+ 7зг 4- Тли/- Необходимость применения динамических звеньев
является основным недостатком системы.
Второй способ получения характеристики (4. (fu) в функции
отклонения мощности от заданного значения можно рассматривать
как следствие первого, когда Р\л. — const. Структурная схема кон-
тура СГ для данного способа приведена на рис. 8.34.
На входе ПУ сигнал управления Uy = Uc — U„ — UQ — Ьд^Р^-
Перенесем точку отбора сигнала обратной связи на зажимы СГ.
Тогда
. Р
Ц- “ ^4 — ^дм ’т*р” бпчо&пч/^пч^г* =* Ц, — ^дм^пчр^г.» (8.89)
где kmp Апчс/^пч/^пч — передаточный коэффициент ПЧ по мощно-
сти; Лпч == cos (рд/cos <рр.
На основании схемы (рис. 8.34) имеем
Л.=С4./г.а. = ——-------------и„. (8.90)
1 + ^щЛдм^ПЧР
В соответствии с (8.90) на зажимах СГ формируются характеристи-
ки постоянства мощности в координатах Ц-., 7ГФ, аналогичные харак-
теристикам, показанным на рис. 2.1. Ограничения по току и напряже-
нию можно осуществить, например, с помощью датчика мощности
(СМ. § О.&).
Так как обратная связь контура СГ учитывает передаточный коэф-
Ф циент лПЧр, то на зажимах АД характеристики £/и (/1#) подобны
**«• Vw).
Регулирование мощности по схеме на рис. 8.34 с одновременным
управлением частотой /1е по схеме на рис. 8.12 не формирует зависи-
те
функш1оиальнЭя ’связь между напряжен^частот
и Arp'-** 41»/’ ., . *• «и) получаются автоматически*
час. нчные кривы: U>. (),.) определяются мощностью Р,“ ynS.
которой задает сигнал Uc. »«•’ Уровень
Таким образом» способ регулирования L?r. (/. ) в функции
и„я мощное™ ОТ заданного значения совместим только сХа^еинем
частотой по схеме, представленной на рис 8.11, В контуреСГ (рис я 3»
не нужна жесткая отрицательная обратная связь по напряжет^
(|,л.| положительная обратная связь по току нагрузки), так
пнрУ’емым параметром является мощность. р у
Остановимся на регулировании характеристики (A (L \ ппи
к>, = саг. Роль сигнала {/ в схемах (см. рис. 8.П н 8.12)'вылиняет
сигнал (/э(см* рис. о.1 )• Далее управление частотой и напряжением оп-
ределяется совместной работой контуров, показанных на рис. 8.12- 8 32
и 8.33. а также на рис. 8.11; 8.34. Новпервом случае корректировать
сигнал U, на входе РСГ пропорционально /р,д. нецелесообразно,
ибо fecr и fer, входящие в статический передаточный коэффициент кон-
тура, пр.1 вариации угловой скорости <ог изменяются. Одновременное
экономическое регулирование ДВС и электрических агрегатов сило-
вой цепи СТПЭ требует значительного усложнения схем регуляторов.
рассмотренные схемы контуров регулирования СГ не исчерпывают,
естественно, всех i озможных вариантов выполнения как отдельных
звеньев, так и возможных структур для реализации законов и спосо-
бов управления напряжением 17 г,.
Формирование характеристик Ur, (Д»), Рг» = const, обеспечение
временной связи между значениями (I) и 17|. (/), а также другие
необходимые задачи могут решаться иными, ие приведенными в данной
главе методами и схемами. Так, межконтурная связь параметров
и Ur.x осуществляемая частотным дискриминатором посредством ин-
тегрирования импульсов напряжения, частота следования f, которых
пропорциональна /1е, может быть выполнена датчиком магнитного по-
тока АД; его сигнал 4/Ф - Фд. (Wft. сравнивается со значениями
(Д = fen4t/LZr*. Аналогичные примеры можно привести для способов
получения частотных характеристик U\, (/>•) == б\пред« (/>♦) V и*»
схемных решений ДЗ, ЗИ и др.
Однако с целью сравнительного анализа систем при вы орестру
туры для последующей реализации принятых законов управтени
напряжением Ur. схемы на рис. 8.31—8.34 даны по' *
с однотипными звеньями и одинаковым подходом к Р коИту-
регулирования Показаны наиболее целесообразные “ снгналов
ров частоты и напряжения, а также точки отбор конкретной
Управления, коррекции и обратных c№”^' '^’1ulo проводить
схемы. Сравнительный анализ контуров СГ нер
в отрыве от систем регулирования СТПЭ в целом.
SIT
§ 8.7. Принципы работы и структурные
схемы некоторых систем
автоматического регулирования
тягового привода электромобилей
Система автоматического регулирования СТПЭ постоянного тока.
В качестве примера на рис. 8.35 приведена структурная схема САР
тягового привода электромобиля с колесной формулой 4X2. Силовая
^епь включает ГПТ и два ДПТ (ДПТ/ и Д/7Т2) смешанного возбуж-
пения имеющих идентичные контуры регулирования магнитного по-
тока в тяговом и тормозном режимах. Согласование работы контуров
регулирования напряжения и магнитного потока обеспечивается за
счет введения корректирующей обратной связи по мощности (сигнал
Пи, подаваемый на ФП&/ и ФП®2}-
Для пуска ТЭД водитель нажимает педаль АТГ В соответствии
с сигналом Йс возбуждается ГПТ, напряжение 0, подводится к зажи-
мам ДПТ/ и ДПТ2 Магнитный поток электродвигателей определяет-
ся током обмоток последовательного и независимого возбуждения.
Датчики тока ДТ/, ДТ2 и напряжения Д/У, включенные в цепь
генератора, вырабатывают сигналы, пропорциональные току и напря-
жению ПГТ. Используя сигналы датчиков ДТ/, ДТ2 н ДН, датчик
мощности ДМ формирует сигнал 1)ы, поступающий на суммирующий
элемент ПУ встречно Uc.
На зажимах генератора характеристика (/₽) имеет вид, показан-
ный на рис 8.30
Установившееся значение угловой скорости электродвигателей
и соответственно скорость движения электромобиля определяются
Рис 8.35. Структурная схема системы регулирования СТПЭ постоянного тока:
/ и £ — кенялы АТГ; ОД/ и О £32 — оОмогки возбуждения
заданным уровнем мощности, зависящим от угла ес, и моментом со-
поотивлення движению. Здесь возможны два случая-
1 I) если установившееся значение тока каждого электродвигателя
больше /д'*, го контуры регулирования магнитного потока поддер-
живают постоянство тока возбуждения („д.; k
*2) если /д- < ^д'-- то контур начинает уменьшать магнитный
поток
Для торможения электромобиля водитель нажимает педаль ATM.
[3 начальный момент в СТПЭ происходят автоматические переключения
подготавливающие силовое электрооборудование к работе в режиме
электрического торможения; разрываются цепи питаиня ДПТ1
и ДПТ2 от генератора, отключаются обмотан последовательного воз-
буждения, а функции звеньев Ф/7ф/ н ФГ1^2 передаются звеньями
<W7J и ФП-,2. статические характеристики которых соответствуют
кривой ABCDO на графике (см. рис. 3.32, в).
Электродвигатели начинают работать генераторами независимого
возбуждения с нагрузкой на индивидуальные тормозные резисторы
ТР1 и ТР2.
Тормозное усилие регулируется в зависимости от сигнала l/iT =
„ (7Т — где иус.т — сигнал уставкн.
Пр» = ^т.макс формируется предельная зависимость
/ (/Д1.). Если угловая скорость электродвигателей неизменна
/задастся Ux С (Д.мы<с» то соответственно будет снижаться тормозное
усилие за счет уменьшения предельного значения /в.д» (линия АВ,
см. рис. 3.32, в).
Изменение направления движения электромобиля (реверсирование)
достигается переключением полярности напряжения питания обмоток
возбуждения ДПТ.
Система автоматического регулирования СТПЭ с обратной связью
по току АД. При непосредственном управлении частотой АД помимо
включения в прямую цепь передачи управляющего воздействия звень-
ев ДЗ и ЗИ можно замкнуть контур регулирования частоты жесткой
отрицательной обратной связью по параметру, время изменения ко-
торого соизмеримо с временем нарастания (спада) частоты ft. и от
которого зависит момент АД (см. § 8.3). Одним из таких параметров
является ток статора электродвигателя.
Структурная схема САР применительно к СТПЭ с постоянной уг-
ловой скоростью СГ приведена на рис. 8-36. Система включает контур
регулирования частоты, состоящий из двух идентичных контуро
ПЧ1, ПЧ2, и контур регулирования напряжения. -««««л.
Рассмотрим, как формируется частота ft. в тяговом ре и i р
мобиля (двигательном режиме АД).
Сигнал управления 1Л на входе ЗГ
и, = ис - Уо.с.д/ = Uc - W. (8,9 *
откуда
. Мм, „ (8-92>
Л» "
31»
Рис. Й.36. Структурная схема системы регулирования с обратной связью по току Ад
где Лдт — передаточный коэффициент датчика ДТд активной состав-
ляющей тока статора АД в двигательном режиме.
Значение коэффициента kn рассчитывают из условия обеспече-
ния частоты /}пуск* /«пуск.пред®, когда 0с Ос.ыакс» а условием фор-
мирования предельной характеристики Uc (Д*) является реализа-
ция всего диапазона регулирования частоты АД при /, (ft.)
С Лпред (/{•) Иначе говоря, задающий сигнал Uc необходимо огра-
ничивать в функции частоты в соответствии с характеристикой
/пред- (/i.) Это можно осуществить с помощью функционального
преобразователя ФПЛ, имеющего передаточный коэффициент /?ф.д,
на вход которого поступает импульсный сигнал с частотой следования
/з мил ~
Звено Ф/7Д обеспечивает работу двух контуров регулирования ПЧ
(в общем случае — контуров всех ПЧ). Частота /З.мин является мень-
шей из f3{i) и /3(2{ и выделяется звеном меньшей частоты МИН.
Формирование характеристики Ф/7Д в функции меньшей нз частот
fi, вызвано необходимостью согласования зависимостей Uc (Д.) и
^п»ред(/1.) для исключения перегрузки АД.
Выходной сигнал £/ф.д подводится к суммирующему элементу АТГ,
где вычитается из напряжения уставки 1/уст. Тогда сигнал на входе
^С.пред (/]•) — Г/уСТ(7ф.д (/1,) — 7/уст — JL |И ~ ^ф.дАо (8.93)
Где Uуст ~ ТЛ.пуск.пред-
320
Зависимость U.„p„ (),.)
получим:
строят следующим образом. Из (8.91)
^С(А*) = ^+^
j^n.+Wx; (8.96)
t/g rpe„tf|.) = U, + t/„.c.„.npe„, (/,.) = f,. + Ад.т/1прц (/,.). (8.97)
Первое слагаемое в правой части уравнения (8.97), соответству-
ющее статической характеристике ЗГ,
U3 ~ Ан/и/(&зг&пч/). (8.98)
в координатах 17с, Д, изображается прямой, выходящей из
начала координат (рис. 8.37). Второе слагаемое показано кривой
о с.д пред/ (А*) = kn тЛпред (ft,). Тогда зависимость (Л-пред (/1.) будет
определяться согласно (8.97) суммой ординат кривых £73 (fa.)
и с д пред/(/»•) Выражение для статической характеристики ФПа
на основании (8.93) и (8.97) запишется в виде
^Ф-Д (fl*) ~ £7с.пуск.пред с. пред (А») "
= (^с.пуск.пред — Лн/1*/(^ЗГ^ПЧ/) — бдтЛпреД (А*К (8.99)
Учет зависимости /InpeA (А*) в характеристике ФПа обеспечивается
выбором его передаточного коэффициента Лф.д (fi.).
Изложенный принцип формирования характеристики с/с.пред vi*‘
можно интерпретировать, вводя понятие о заданном токе /18 электро-
двигателя. Действительно, осуществление обратной связи по току
Л дает возможность записать сигнал Uc так:
' (ft*)= т^1з (fi*)»
1>с.дасд(А-) =
11 г-пв
(8.100)
(8.101)
321
Из (8.92), (8.95) и <8 101) получим
= *зг»пчАл. (/]ч _ Л) = kc г оД/11 (8.102)
где *я*пчАЛ1» - коэффициент обратной связи по 10ку
статора АД в двигательном режиме, АЛ — *i отклонение
тока статора от заданного значения Иначе говоря,
Л. = Ло.с.д I “S—~ Лз.гред (t Л । • (8-103)
( °с макс I
На основании {8.102) и (8.103) можно утверждать, что в рассматри-
ваемой системе частога регулируется в функции отклонения тока ста-
тора АД от заданного значения Тогда зависимости Uc.ppeD (Д*),
и>с.я.пРедт (/ы) приведенные на рис. 8.37, в другом масштабе можно
представить как Л<.1(ред (А.). А/1 (/u), /inpe, (Д,)
В соответствии с (8.98) — (8.102) аналитическое выражение для
расчета статической характеристики Ф/7Д при выбранном коэффици-
енте ka.T запишется уравнением
^ф.д (/|о) ~ ^д.т (Лпуск пред “ д 7(пред (Л*)1> (8.104)
где Лпред (А•! =/шЛпред» (/].). Расчетная характеристика /1г1редФ (/1ж)
электродвигателя ДК-720 приведена на рис. 4.3. а.
В тормозном режиме электромобиля (генераторном режиме АД)
на входе ЗГ сигнал управления
U. = — UT 4- t/o.o.T/ = — UT + Vir. (8.105)
откуда
Л. = *3’*т' (— V. + М>т). (8. 106)
где kj — передаточный коэффициент датчика ДТт активной состав-
ляющей тока статора Лт асинхронного электродвигателя в генератор-
ном режиме.
Изменение знаков в (8.105) и (8.106) по сравнению с (8.91) и (8.92)
объясняется тем, что в тормозном режиме с увеличением задающего
сигнала UT частота Д. должна снижаться, т е. полярность выходных
сигналов ATM и ДТТ противоположна полярности сигналов АТГ
Сигнал Ut формируется функциональным преобразователем ФП„
имеющим передаточный коэффициент Лф1, и звеном ATM Сигналы на
входе и выходе ATM
^т.пред(/и) = t/yor.T — tAb.rtfl») = t^vcT.T — /и|^ф.тЛ*/^ПЧЬ (8.107)
l/TQ,4= Ы------------------(8.108)
°т.макс \ ЛГТЧ( /
здесь 1/уст.т = UT при == о.
Из (8.106) и (8.108) получим
Л. = -‘зЛ’чГ + М1т)1 (8.109)
*“ I т макс fl
322
8 на основании (8.105) и (8.106)
(А*) — ~~ f шА-Л^зг^пч/) 4- йтАт;
(8.110)
8/1.пред (fl*) = •— АнА»/(^ЗГ^ПЧ/) +
+ А?тЛт.пред (А*)- (8.111)
В соответствии с (8.111) зависимость
8/т.пРед (fi*) на рис. 8.38 является раз
ностъю ординат характеристик t/o.v.7 Лред/
(А») и Ua (А*); последняя определяется
выражением (8.98).
Статическая характеристика ФЛТ со-
гласно (8.107) и (8.111) запишется урав-
нением
Рис. 8.38. Зависимости £/,.
^о.ст.предР ^т.пред от А*
^Ф»(А*) — t/yci.i 4- /in/iЛ^ЗГ^ПчО — Ми.пред(А*)- (8.112)
Оперируя понятием о заданном токе /|7Э электродвигателя в гене-
раторном режиме но аналогии с (8.103),
А* = ^о.с.т j д -1]т з.пред (А*) 4" 71т] — ^о.с.тААт, (8.113)
I ит.макс J
где kOCT — ^зг^пч/^Аи — коэффициент обратной связи по току
статора АД в генераторном режиме; Д/)т = (—/|ТЭ 4- /1т) — откло-
нение тока статора АД от заданного значения.
Таким образом, в тяговом и тормозном режимах электромобиля
частота А* регулируется в функции огклонения тока статора электро-
двигателя от заданного значения.
Статическая характеристика ФГ^ аналитически запишется урав-
нением
77ф.т(А*) —- kr [Ат.пуск.пред 4" А*/^о.с.т “7|т>пред (А*)1- (8.114)
Когда в тяговом режиме необходимо уменьшить скорость движения,
водитель несколько отпускает педаль АТГ, сигнал Uc падает и часто-
та /1« в соответствии с (8.103) снижается.
Инерционность АД значительно превышает инерционность цепи
АТГ—ЗГ—ПЧ, поэтому в начальный момент угловая скорость не
меняется и снижение частоты А» приводит к соответствующему умень-
шению А*; одновременно падает ток Д. Здесь возможны два случая:
1. Если при новом значении 0с = 0с справедливо уравнение
ДК- = Д4г~‘-— (°C — <0 — л'Л = >°- (8“5’
I "с.макс J
то под действием момента Мс. > электромобиль начинает притор-
маживаться до нового установившегося значения скорости, определя-
емого 6с и Л4СФ.
2. Если значение 0с таково, что в (8.115) параметр абсолютного
скольжения Д. < 0, то АД переходят в генераторный режим. Юк
/ меняет фазу, и сигнал С/».е^ начинает действовать согласно с [/
так как датчики тока выполняются фазочувствительными. Однако
тормозные резисторы не подключены к силовой цепи (это происходит
только когда нажимается педаль ATM), а в СП с 1141 IT электродви-
гатели в генераторном режиме работают на холостом ходу. При на-
личии НПЧ, допускающих двусторонним обмен энергией, практически
вся энергия АД в подобном режиме поглощается генератором. Анало-
гичный процесс происходит при полном отпускании педали АТГ.
Для исключения генераторного режима АД при снижении ско-
рости посредством уменьшения 6L необходимо с изменением фазы тока
изменять передаточный коэффициент обратной связи, чтобы ток был
минимальным. Когда 0С = 0, из (8 103) имеем
/1* = —^о.с.дЛ (8.1 16)
Здесь «—» в (8 116) указывает на изменение фазы тока /Р Датчик
тока ДТд отключается от суммирующего элемента ПУ, и начинает
функционировать датчик тока Д1\, передаточный коэффициент которого
согласно (8.113) /?т = /)н/1*/(ЛзгА|ч//|Т) выбирают из условия Л^/(хх.
При непосредственном регулировании частоты /1 весьма вероят-
на значительная неравномерность нагрузки тяговых АД. Однако если
регулируется индивидуально для каждого электродвигателя
в функции отклонения тока от заданного значения, что имеет место
в данной системе, в режиме прямолинейного движения электромо-
биля различие в значениях токов АД определяется ошибкой регулиро-
вания
Изменение направления движения электромобиля (реверсирование)
осуществляется водителем посредством воздействия на реверсор хода
<РХ), сигнал которого Upy поступает на звено реверсирования дви-
жения (ЗРД). Последнее вырабатывает сигнал Ц>.д, подводимый
к системам управления СУ1 и СУ2 преобразователями частоты только
в том случае, когда скорость движения электромобиля близка к нулю.
При подаче О'ря на СУ преобразователи частоты изменяют порядок
чередования фаз напряжения питания АД, которые начинают вра-
щаться в противоположную сторону.
Звено реверсирования движения должно получать информацию
о скорости движения непосредственно от ведущих колес, напри мер
от ДУС, спидометра и г. п. В данной системе может использоваться
коитур регулирования СГ по схеме, изображенной на рис 8 31 Так
как САР не поддерживает постоянства мощности, то необходимость
в обратной связи по мощности отпадает Напряжение регулируется
по двум вариантам: 1) (Л.) - £/П|р...о. (/,.); 2) (Д (/„) =
= . с . {71пред. (/,.). Если применять второй вариант, несколь-
VC.MfiKC
ко повышается коэффициент мощности АД. В схеме, показанной на
рис. 8.36, принят первый вариант, как более простой.
Достоинства рассмотренной САР — отсутствие датчиков угловой
скорости АД, простота выравнивания их нагрузок, а также автомати-
ческое ограничение предельной мощности Pia, без обратной связи
по мощности. Недостатки — невозможность поддержания постоянства
324
мощности на частичных характеристиках и сложность погучения
высоких показателен качества процесса регулирования '
Система автоматического регулирования СТПЭ с оараметриче-
“ГтельнТк СТП? С™ Голь™ АД- Структурная схема САр'нргше-
ннтельно к СТПЭ с переменной угловой скоростью СГ приведена
на рис. 8.39. Система включает контур регулирования частоты <осю-
ящин из двух идентичных контуров ПЧ1 и 1142. и контур регудпро-
ваиия напряжения. р р
Контуры ПЧ базируются на схеме, рассмотренной на рис. 8.П.
Для осуществления тягового и тормозного режимов в контур введены
звенья ФГЦ1, ФП 2 и ФП„. Контур СГ выполнен с обратной связью
по мощности и обеспечением наибольшей экономичности ДВС в тяго-
вом режиме, а в тормозном режиме — с обратной связью по магнит-
ному потоку или напряжению тяговых АД.
В тяговом режиме в интервале пусковых частот АД j< f1B. маг-
нитный поток электродвигателей ограничивается посредством сигна-
ла звена токовой отсечки (ЭТО), направленного встречно сигналу U
в суммирующем элементе ПУ. Сигнал (Л, действует, когда ток наи-
более нагруженного электродвигателя (сигнал U" с выхода звена
выделения максимального сигнала ЗМС1) превысит расчетное значе-
ние пускового тока АД. Уставка на отсечку формируется звеном ФП3
в соответстсгвпи с (4.65) (см. рис. 4.4, 6).
В процессе разгона электромобиля при достижении скорости ов
(см. рис. 1.21) СТПЭ при ft. — flB. переводится в режим постоянства
мощности и токи АД уменьшаются; сигнал I/" становится меньше
уставки, а сигнал итл снижается до нуля. Дальнейшие процессы
в системе аналогичны процессам в контурах, рассмотренным ранее.
Для перевода электромобиля в тормозной режим водитель нажи-
мает педаль ЛТА1. С нажатием педали к силовой цепи СТПЭ подключа-
ются тормозные резисторы ТР1 и ТР2\ одновременно отключаются
звенья ДЛ1, Ф/7$Д ФД52, Ф/7э, включаются звенья ФП„, ЗМС2
и ЗМСЗ; сумматоры частот переводятся в режим вычитания, при ко-
тором А = /' — fi Тогда fl. = — А. и АД переходят в генера-
торный режим
Статическая характеристика звена ФП^ соответствует зависимос-
ти fs. (ft.) (рис. 8.20, кривая 3).
Отметим, что и в схеме, показанной на рис. 8.39, и во всех других
схемах СТПЭ переменного и постоянного тока, если нажата педаль
ATM, при нажатии педали АТГ блокировка предотвращает перевод
системы в тяговый режим. Поэтому в схеме, показанной на рис. - ,
при нажатии педали ATM двигатель внутреннего сгорания переводит-
ся в режим, соответствующий торможению электромобиля, т. е.
кий к холостому ходу, так как СГ работает с отдачей небольшой мощ-
ности, расходуемой на обеспечение AM намагничивающим (/'
Тормозное усилие регулируется изменением напряжена С,,
(см. рис. 4.4, а). Выбор предельной или частичных xaPa*"4®5L,
словлен сигналом (7Т. ' КонтурСГв режиме
пряжение U„ в отличие от регулирования мощно ® ™ уетсяРЗБеиом
Сигнал отрицательной обратной связи £/зм<з Ф°Р Р
Рис. 8.39. Структурная схема системы регулирования с параметрическим .заданием частоты скольжения
ЗМС2. выделяющим наибольший из двух сигналов — W датчика на-
пряжения ДН и V" звена ЗМСЗ, которое, в свою очередь, выделяет
максимальный из сигналов t/ф датчиков магнитного потока ДП1
и ДП2. Контур СГ в интервале частот fw, поддерживает посто-
янство потока АД, а при А» 2> Аи» — постоянство напряжения U^.
Изменение направления движения электромобиля осуществляется
с помощью тех же звеньев, что и в системе, представленной на рис. 8.36.
Так как контур частоты имеет датчики угловой скорости каждого АД.
то на ЗРД подаются сигналы этих датчиков. Реверсирование разреша-
ется, когда угловые скорости электродвигателей <од(1) и год(21 близки
к нулю
Основные преимущества и недостатки системы были указаны ранее,
при рассмотрении отдельных контуров. Поэтому отметим главные дсь
стоинства — обеспечение устойчивой работы и высокие показатели
качества процессов регулирования напряжения и частоты в переход-
ных режимах, а также формирование характеристик постоянства
мощности.
§ 8.8. Особенности выполнения
систем автоматического
регулирования СТПЭ
Выше изложены основные принципы построения САР СТПЭ по-
стоянного и переменного тока. Для облегчения рассмотрения и сравни-
тельного анализа систем использованы по возможности однотипные
звенья, а также сигналы управления и обратных связей. Цель, постав-
ленная в данной главе,-— показать переход от принятых сочетаний
вариантов управления ТЭД к структурным схемам, звенья которых,
объединенные определенными логическими связями, обеспечивают
процессы преобразования и распределения энергии от ЭУ в ПВК
в соответствии с принятыми вариантами управления ТЭД.
Каждая приведенная схема представляет собой возможный вари-
ант контура или системы регулирования. Основываясь на таких схемах,
можно построить множество систем, отличающихся теми или другими
решениями отдельных звеньев, узлов, контуров, наличием жестких и
гибких обратных связен и корректирующих устройств, введение ко-
торых диктуется как спецификой СТПЭ, так и требованиями к энер-
гетическим показателям, простоте выполнения, надежности, структур-
ной устойчивости, динамическим показателям качества переходных
процессов и др Сказанное в наибольшей степени относится к
САР СТПЭ переменного тока с частотно-управляемыми тяговыми АД.
Особенность режимов частотного управления — их зависимость
от параметров агрегатов силовой цепи АД, ПЧ, ЭУ- Несмотря иа об-
щие свойства, эти параметры сугубо индивидуальны для каждого
конкретного агрегата, что предопределяет использование в САР нестан-
дартных звеньев п датчиков, таких, как ЧД, ФПЭ, ФП$, ДаСпдр.
Отметим однозначную связь между выбором законов и возмож-
ностями средств автоматики для их выполнения. Необходимо с доста-
точной осторожностью относиться к принятию оптимальных законов,
например управлению по максимуму КПД привода, минимуму
327
потерь ТЭД, по наибольшей экономичности ДВС нт. п., так как слож-
ность систем регулирования в этих случаях и, как следствие, их по-
ниженная надежность зачастую превалируют над эффектом, получен-
ным от оптимизации. Любой принцип оптимизации может быть принят
лишь в результате всестороннего технико-экономического анализа.
Нередко применение более простых законов и вариантов управления
обеспечивает не только заданную тяговую характеристику электро-
мобиля и удовлетворительные энергетические показатели, но и возмож-
ность их практического воплощения с помощью надежных устройств
с минимальными затратами.
Основные трудности в техническом выполнении рассмотренных
САР СТПЭ переменного тока состоят в измерении и преобразовании
контролируемых параметров — тока, напряжения, магнитного потока,
частоты напряжения питания, частоты скольжения и момента АД.
Ток и напряжение в различных точках силовой цепи имеют кривые
нестабильной формы, отличающейся от синусоидальной Представля-
ет сложность выделение активной составляющей тока АД (если в си-
ловой цепи нет ПЧПТ), необходимой для осуществления обратной связи
при регулировании по основному возмущению. Получение сигнала,
пропорционального /]Л, требует применения фазочувствительных вы-
прямителей, учитывающих угол сдвига фаз между основными гармо-
ническими кривых напряжения в тока двигателей.
Дополнительные трудности выдвигает наличие двух (и более) ТЭД
ведущих колес, каждый из которых регулируется в функции задава-
емой мощности и нагрузки, изменяющейся по случайному закону.
Поэтому в схемы вводят звенья выделения минимальных и максималь-
ных сигналов.
Особая группа звеньев (например, ФПД) предназначена для обес-
печения работы силовой цепи СТПЭ при равенстве (с учетом КПД
силовых агрегатов) мощностей ЭУ и ТЭД ПВК-
Может оказаться необходимым включение в схемы и других, не
указанных в данной главе устройств автоматики, применение которых
обусловлено специфическими требованиями к регулируемым параме-
трам отдельных агрегатов, соображениями защиты от перегрузки и
многими другими, в конечном итоге определяемыми условиями эксплу-
атации электромобилей.
expert22 для http://rutracker.org
Глава
девятая
СИСТЕМЫ ТЯГОВОГО ПРИВОДА
НЕКОТОРЫХ МОДЕЛЕЙ
ЭЛ ЕКТРОМОБИЛ Ей
§ 9.1. Система тягового привода
карьерного электромобиля
БелАЗ-549
1 КЭМ МОД<У'И Бе-"А3-549 грузоподъемностью 75 т
с СТПЭ постоянного тока приведены в §10.1. На рис 9.1 представлена
электрическая схема силовой цепи СТПЭ в тяговом режиме
Привод работает следующим образом. Дизель приводит во враще-
н||е ®“бУдитель ВГ и тяговый генератор Г, от которого питаются
два ДПТ мотор-колес Ml, М2 смешанного возбуждения, подключае-
мые к генератору параллельно электропневматическими контактора-
ми ЛК1, ЛК2. Обмотка возбуждения тягового генератора питается
от возбудителя, также представляющего собой ГПТ. Каждый ДПТ
имеет последовательную (основную) обмотку возбуждения К1—КК1,
К2—КК2 и обмотку независимого возбуждения (на рис 9.1 не показа-
на).
Направление движения электромобиля изменяется посредством
переключения реверсоров хода РХ1, РХ2, при этом направление то-
ка в обмотках последовательного и независимого возбуждения меня-
ется на противоположное
Регулирование магнитного потока ТЭД производится автоматически
в функции тока якоря в две ступени. На первой ступени поток умень-
шается шунтированием обмоток последовательного возбуждения элек-
тродвигателем резисторами Дш с помощью контакторов KLH, а на второй
ступени — реверсированием тока обмоток независимого возбуждения.
Управление СТПЭ осуществляется контроллерами с помощью пе-
далей хода (ПХ) и торможения (ПТ). Педаль хода помимо контроллера
связана с регулятором двигателя внутреннего сгорания (РДВС).
В зависимости от положения ПХ устанавливается определенная угло-
вая скорость дизеля, обусловливающая выбор предельной или час-
тичной характеристики тягового генератора ГПА-600 (рис. 9.2), ар-
мируемых САР. В зоне средних токов и напряжений (зоне BD)
мощность ГПТ, соответствующая его прямолинейной внешней харак-
теристике, превысит мощность дизеля, что приведет к перегрузке по-
следнего. В итоге устанавливается предельная внешняя характерно
тика, достаточно близкая к кривой постоянства мощности Дизеля.
На рис. 9.3 показана предельная тяговая характеристика КЭМ.
Структурная схема САР в тяговом режиме электромобиля пред-
ставлена на рис. 9.4. При нажатии водителем ПХ с увеличением угла
329
Рис. 9.1. Электрическая схема сило-
вой цепи СТПЭ карьерного электро-
мобиля БелАЗ-549 в тяговом режиме
Рис. 9.2. Внешние характеристики тя-
гового генератора ГПА-600
6С растет угловая скорость дизеля и приводимых им электрических
машин. Напряжение вспомогательного синхронного генератора t/cr,
пропорциональное ь>диз, подается на функциональный преобразова-
тель ФП1, формирующий задающий сигнал 17С| Контур регулиро-
вания ГПТ выполнен с жесткой отрицательной обратной связью по
напряжению и току генератора, осуществляе-
мой селективным узлом СлУ, состоящим из
ДН, ДТ и функционального преобразователя
ФП2, формирующего сигнал UM 1см (8.54)1
и осуществляющего отсечки по току, напря-
жению и мощности генератора (см. рис 9 2).
Сигнал обратной связи t/M поступает на сум-
Рве. 9.3. Предельная тяговая характеристика карьерно-
го электромобиля БелАЗ-549:
i а Я — включение первой и второй ступеней управления
магнитным потоком
азо
пх
Рис 9.5. Предельная скоростная ха-
рактеристика тягового ^ектродвига-
теля ДК-717А при ступенчатом управ
ленин магнитным потоком-
- выключение первой и второй cTjne-
7 №»»’“ ™₽‘«п"
ступеней
Рис. 9.4 Структурная схема системы регулирования СТПЭ карьерного электромо-
биля БелАЗ-459 в тяговом режиме
мирующий элемент усилителя У/ встречно задающему сигналу. Сиг-
нал управления на входе У/ равен Уу = £/с1 — L/M. Таким образом.
t/c( определяет уровень мощностей дизеля и тягового генератора.
Для обеспечения плавности трогания КЕМ л перехода с одной
установившейся скорости движения на другую Ф/7/ выполнен с не-
линейной характеристикой Ucl ~ о)дК3. Такая зависимость при ма-
лых 6С дает небольшие значения Щ, вследствие чего в силовой цепи
СТПЭ отсутствуют резкие броски тока и имеет место достаточно плав-
ное трогание КЭМ с места.
Контур регулирования угловой
скорости тяговых ДПТ смешанного
возбуждения выполнен со ступенча-
тым управлением магнитным пото-
ком (см рис 8.3). Отметим, что при
включении второй ступени, когда
срабатывает усилитель УЗ, пере-
ключающее устройство П‘2 реверси-
рует ток обмоток независимого воз-
буждения 0ВН1 и 0ВН2
Значения токов , при которых
включаются ступени уменьшения
магнитного потока тяговых ДПТ.
выбраны с учетом обеспечения ми-
нимума скачков тягового усилия и
реализации полной мощности дизе-
ля в интервале скоростей движения
КЭМ ниже 40 км/ч
Чтобы обеспечить работосптеоб-
ность контура регулирования ДП1
331
Рис 9 6 Электрическая схема силовой цепи СТПЭ карьерного
электрсв1обиля БелХЗ-549 в тормозном режиме
при различных значениях «)я,13, введена коррекция по задающему си-
гналу Uci с выхода нелинейного звена ФПЗ, входной сигнал которого
пропорционален шД(.э. Чем меньше угловая скорость дизеля, тем
при меньшем значении тока /г включаются ступени уменьшения’ маг-
нитного потока, 1|чфмнрхя отрезки А(В{ частичных внешних харак-
теристик тяговою генератора (см. рис. 9.2).
На рис 9 5 приведена скоростная характеристика ТЭД типа
ДК-717А при ступенчатом управлении магнитным потоком.
Для предотвращения превышения максимальной скорости движе-
ния КЭМ предусмотрено пороговое звено ограничения скорости
ЭОС, работающее oi Д&С (см рис 9 4) При достижении скорости
пМ8кс выходной сигнал воздействует ни релей ио-контакторную аппара-
туру СТПЭ: выключаются линейные контакторы и независимо от поло-
}КеНИ о Д]едалев хода и торможения собирается тормозная схема
(рис. 9.6), соответствующая первой позиции тормозного контроллера.
Карьерный электромобиль оборудован гремя независимыми друг
от друга системами тормоз эв: электрической системой, механическим
Т ™ С пневматическим приводом и механическим стояночным
pttq С РУЧНЫМ приводом. Электрическое торможение прнменя-
ния Чг.1пСН°?НОеСЛ^>ке^ноетоРможение в интервале скоростей движе-
оостм иымг^МйЧ САотоРмаживаннем пневматическим приводом при ско-
Спетрма КМ Ч’ когда ЭЛектрическое торможение малоэффективно,
работает гюпЯГ0В0ГО пРив°Да электромобиля в тормозном режиме
мозной ко^!ИЦИ%<?1раЗОМ- При нажатии ПТ связанный с ней тор-
сначала к вык'™?’ пеРеводится в первую позицию, что приводи
к выключению контакторов ЛД7 ЛК.2 и контроллера хода.
335
а затем к включению тормозных
контакторов ТК1. ТК2. Образуют-
ся два контура, каждый состоит
из якоря ДПТ „ резисторов Р
и /<с В цепи обмоток независимо-
го возбуждения электродвигателей
включается добавочный резистор
На первой позиции КТ формирует
ся тормозная характеристика КЭМ
позволяющая осуществлять пг,д-
тормаживанпе на небольших укло-
нах (прямая I, рис. 9.7) На второй
позиции КТ часть добавочного ре-
зистора в пенях обмогок незави-
симого возбуждения ТЭД замы-
кается, на третьей позиции зако-
рачивается еще чаоь указанного
резистора Тормозное усилие у не-
личпвается (прямые 2 и 5. рис 9 7) Вторая и третья позиции пред-
назначены для подтормаживания КЭМ при движении на уклонах
и относительного плавного увеличения тормозного усилия пои ос-
тановочном торможении Таким образом, когда формируются час-
тичные тормозные характеристики, возбуждение ТЭД осуществляется
только с помощью обмен ок независимого возбуждения. Предельная
тормозная характеристика (кривая 4, рис 9 7) обеспечивается на чет-
вертой позиции КТ при одновременном использовании обмоток неза-
висимого и последовательного возбуждения. Последние подключа-
ются контактором ТКЗ через резисторы Рс к зажимам тягового гене-
ратора.
Для увеличения эффективности торможения при реализации пре-
дельной тормозной характеристики используется схема с противовоз-
бужденнем и стабилизирующим резистором Rc Когда ток якоря ТЭД
достаточно большой, падение напряжения на Rc, направленное встреч-
но по отношению к напряжению генератора Urt велико и превышает
Ur. Эю препятствует прохождению тока /в.д через обмотки последо-
вательного возбуждения ТЭД. Снижение скорости движения КЭМ
вызывает уменьшение тока якоря электродвигателей и падения на-
пряжения на Rc, которое становится меньше UT\ появляется ток через
обмогкв последовательного возбуждения. ЭДС, ток якоря ТЭД и тор-
мозное усилие растут Таким образом, схема с противовозбуждением
и стабилизирующим резистором осуществляет автоматическое регули-
рование возбуждения ТЭД в режиме электрического торможени
за ciei отрицательной обратной связи по току якоря.
С целью снижения коммутационной нагрузки“
электрического торможения ограничен скорость д оеализована
и только первая тормозная характеристика м
П₽,^е:з^Х^и&вляеМыхк,ле^ри;=^—
КЭМ,- возможность его использования при различных у
333
Ряс. 9 8. Структурная схема системы регулирования СТПЭ карьерного
электромобиля БелАЗ-549 в тормозном режиме
скоростях дизеля. Здесь возникает задача стабилизации напряжения
тягового генератора на четвертой тормозной позиции. В СТПЭ для вы-
ло 1 нения такой стабилизации предусмотрено соответствующее Вклю-
чение обмотки возбуждения возбудителя ОВВ, при котором его ток
возбуждения изменяется в функции <оД|13.
Структурная схема САР в тормозном режиме приведена на рис. 9.8.
При нажатии ПТ собирается тормозная схема, ПХ при отпускании
устанавливается в нейтральном положении, а дизель переводится в ре-
жим холостого хода с = 700 об/мин
Коммутации добавочных резисторов в цепях обмоток независимого
возбуждения 0ВН1 и 0ВН2 осуществляются контакторами, которые
на схеме условно показаны в виде переключающего устройства 773.
Поддержание постоянства напряжения Ur на четвертой позиции
КТ независимо от шД1М осуществляется с помощью жесткой отрица-
тельной обратной связи в контуре ГПТ по угловой скорости дизеля
Диз Напряжение вспомогательного синхронного генератора бег.
пропорциональное а>д,|3, выпрямляется выпрямителем В. Его выход-
ной сигнал Ud вычитается в суммирующем элементе СЭ из сигнала
уставки 6/yLT Выход СЭ подключен к ОВВ. Поэтому ток возбуждения
возбудителя /вВг пропорционален Исэ == У усг — Са Чем больше
тем больше 1/а и меньше /Ввг- Таким образом обеспечиваются
обратно пропорциональная зависимость 7вВг от <оди1 и поддержание
постоянства Ur
Ранее указано, что режим горможения электромобиля для сниже-
ния коммутационной нагрузки ТЭД ограничен скоростью движения
40 км/ч. В случае превышения этого значения скорости по сигналу
ДУС срабатывает пороговое звено ограничения скорости в тормозном
режиме ЗОСТ. Независимо от положения ПТ его выходной сигнал
вызывает соответствующие переключения н КТ переводится наi пер-
вую позицию. Более подробно СТПЭ КЭМ модели БелАЗ-549 см.
в гл. 10.
834
§ 9.2. Система тягового привода
карьерных электромобилей М-85,
М-100 и М-120
Основные данные КЭМ моделей М-85 М юл и м too „
«сетью 77 41 и inq т « гтп-ГгД ' И М-120 грузоподъем-
ностью f/,yi и Оте СТПЭ постоянного тока см в гл. I На нис 0 9
представлена электрическая схема силовой цепи СТПЭ в тяговом
режиме
Генератор Г, возбуждаемый возбудителем В Г питае1- пВй пт
мотор-колес Ml. М2 последовательного возбуждения, которые под-
клюгаготся к зажимам генератора в параллель силовыми контактора-
ми ЛК!. ЛК2 к
Направление вращения ТЭД изменяется реверсированием направ-
ления тока обмоток возбуждений Kl—KKI, К2—КК2 электродвига-
телей с помощью реверсоров PXt и РХ2
У электромобиля М-120 магии 1ный поток ТЭД уменьшается сна-
чала при скорости 22 км/ч (контакторы КЦ11! и KUJ2I параллельно
обмоткам возбуждения подключают резисторы, соответственно RM1!
и Рш21), затем при скорости 27 км'ч срабатывает вторая ступень (кон-
такторы КШ12 и К1Н22 подключают резисторы Rw 12 и Яш22) Схемы
силовой пени КЭМ моделей М-85 и М-100 отличаются только наличием
одной ступени уменьшения потока.
Прежде чем перейти к рассмотрению структурных схем САР СТПЭ
электромобилей моделей М-85. М-100и М-120, необходимо остановиться
на следующем моменте
Контур, формирующий внешние характеристики тягового генера-
тора, выполнен как разомкнутая система, без обратной связи по регу-
лируемому параметру Падающий характер зависимостей t/r(/r)>
приближающихся к гиперболическим, обусловлен специфическим
включением четырех обмоток возбуждения возбудителя (рис 9.10).
Обмотка независимого возбуждения ОВВ1 питается от бортовой акку-
муляторной батареи АкБ. Последовательно с этой обмоткой вклю-
чен регулируемый резистор R1, изменение сопротивления которого
меняет положение начальной точки N внешней характеристики 2 тя-
гового генератора (рис. 9.11). Чем больше сопротивление незакорочеи-
нон части резистора R1, тем ближе к началу координат расположена
точка А МДС возбудителя, определяемая только ОВВ1, соответству-
ет на осях абсцисс нагрузочных характеристик тягового генератора
точкам N (рис. 9.12) и A, N, С (рис. 9.13). На рис. 9.11—9.13 кривые
1 определяются режимом постоянства мощности дизеля, кривые 2
формируются системой регулирования; естественные нагрузочные ха-
рактеристики ГПТ: 3 — /г - 0, 4 — /г = 1000 А, 5 - /г - 1500 А,
6 — 1Г = 2500 А.
Обмотки ОВВ2 и ОВВЗ, соединенные последовательно и подклю-
ченные к зажимам тягового генератора, обеспечивают самовозбужде-
ние возбудителя в тяговом режиме. МДС этих обмоток определяет на-
клон кривых NS, АВ, CD (рис. 9.13). Регулирование разнстора
R5, включенного последовательно в цепь этих обмоток (см. рнс. V.IU),
Рис. 9.11. Внешние характеристики тяго-
вого генератора постоянного тока GT Ьио
Рис 9.12- Нагрузочные
характеристики тяго-
вого генератора GT-603
336
Рис 9 13. Влияние изменения со-
противления резистора в цепи обмот-
ки независимого возбуждения воз-
будителя на нагрузочную характе-
ристику тягового генератора, фор-
мируемую системой регулирования
\ 2 при увеличении RS
2 при уменьшении R5
Tn
Рис. 9.14. Влияние изменения
сопротивления резистора в цели
обмоток самовозбуждения возбу-
дителя на нагрузочную характе-
ристику тягового генератора,
формируемую системой регули-
рования
позволяет менять наклон указанных кривых (рис. 9.14). Наконец,
обмотка ОВВ4 питается от самого возбудителя.
При включении СТПЭ напряжение U, близко к нулю, поэтому
МДС обмоток ОВВ2 и ОВВЗ равны нулю. Падение напряжения Uw
на резисторе R4 (см. рис 9.10) меньше напряжения иа опорных
диодах Д/ — ДЗ, и ток через обмотку ОВВ4 не протекает. По мере
увеличения Ur возрастает ток через обмотки ОВВЗ н ОВВЗ, что,
в свою очередь, вызывает увеличение напряжения Ubt на зажимах
возбудителя, тока возбуждения генератора /В.Р и его МДС Ff. На-
пряжение Um все еще остается меньше 47О, тока в обмотке 0ВВ4
нет. Результирующая МДС возбудителя обусловлена суммарным дей-
ствием МДС обмоток ОВВ1—ОВВЗ.
При дальнейшем увеличении Ur возрастает (7вг. падение напря-
жения на резисторе R4 становится больше опорного напряжения и
Рис. 9.15. Влияние изменения
сопротивления резистора в
Цепи обмотки ОВВ4 возбуди-
теля на нагрузочную харак-
теристику тягового генерато-
ра, формируемую системой
регулирования
Рис. 9-16 Влияние изменения
сопротивления резистора R4 (см.
рис 9. Ю) на нагрузочную харак-
теристику тягоного генератора.
Хируемую СИСТЕМОЙ регул».
рования
337
Рис 9.17 Влияние частоты вращения дизеля на нагрузочную
характеристику тягового генератора, формируемую системой ре-
гулирования:
а "диз = 00 об/мин» б — пдиз = 2050 об/мин; о — ядиа =
== 2000 об мин. •’ — Чдиз = 1S00 об/мин
через обмотку OBВ4 начинает протекать ток Это соответствует точке
S на кривых 2 (см. рис. 9.11—9.17). Их участки SF формируются
под действием МДС возбудителя, обусловленной суммой МДС всех
его четырех обмоток возбуждения. Наклон участков 5Л\ DN, SN
зависит от сопротивления резистора R5 (рис 9.14), а наклон участков
SF, SG, SH — от сопротивления резистора R4 (рис. 9 15) Изменение
сопротивления резистора R4 позволяет смешать точку начала работы
обмотки ОВВ4 (рис 9.16).
Таким образом, посредством соответствующих регулировок в це-
пях обмоток возбуждения возбудителя можно получить различную
форму нагрузочных, а следовательно, и внешних характеристик тяго-
вого генератора, ибо нагрузочные характеристики достаточно просто
перестроить в координатах Uit /,
Заштрихованная область на рис. 9,12 и области, расположенные
на рис. 9.13 9.16 справа от кривой 1, соответствуют мощности, превы-
шающей номинальную свободную мощность дизеля Поэтому, если
рабочие точки характеристики генератора, формируемой САР (кривая
2), расположены в указанных областях, го угловые скорости дизеля,
генератора и возбудителя, напряжения Ur, 17 вг» а также МДС этих
электрических машин снизятся (рис. 9.17, а—г). Из рисунков
видно, что при снижении угловой скорости мощность, которую
может реализовать дизель, понижается; однако мощность, обу-
словленная кривыми 2, уменьшается быстрее. Это означает» что
да
если начальная регулировка обеспечивает положение кривой 2 тя
предельной характеристики слева от кривой I, то для каждой частич-
ной характеристики, получаемой за счет изменения подачи топлива
дизелю, т. е. уменьшения к>„н1, мощность, которую он может реали-
зовать, будет больше мощности, соответствующей кривой 9
Для внешней характеристики сказанное значит, что в координатах
UГ (Л-) <см- Рис- 9-1 0 кривая 2 должна располагаться под кривой I
и максимально приближаться к ней для наиболее полного использо-
вания мощности дизеля.
На рис 9.18 представлена структурная схема САР КЭМ модели
М-120 для тягового режима.
Здесь, как и на рис. 9.4, положение/7Х определяет угловые ско-
рости <0д1|Э, ыг и ювг и заданный уровень мощности. Включение обмо-
ток возбуждения возбудителя на рис 9.18 показано упрощенно в виде
регулятора возбудителя РВГ, на который поступают опорное напря-
жение U„ и напряжение (7Г Тяговые двигатели приводят ДУС1
и ДУС2, сигналы ко горы х подаются на датчики скорости движения
ДСД1 и ДСД2 электромобиля Основными элементами ДСД являются
триггеры; в их выходные цепи включены катушки реле. Каждый триг-
гер срабатывает при определенном значении скорости движения КЭМ,
воздействуя на релей но-контакторную аппаратуру для выполнения той
или иной операции. Датчик ДСД1 при скорости 5,5 км/ч включает
устройство, препятствующее реверсированию движения электромо-
биля; когда скорость достигает 22 км/ч, по сигналу датчика включа-
ется первая ступень уменьшения магнитного потока ТЭД; наконец,
если скорость превышает максимально допустимое значение, СТПЭ
переводится в режим электрического торможения. Датчик ДСД2
при V = 27 км/ч включает вторую ступень уменьшения потока, а в
тормозном режиме, когда скорость становится ниже 16,7 км/ч, осу-
ществляет переход к интенсивному торможению Сказанное относится
к КЭМ модели М-120. У электромобилей М-85 и М-100 грузоподъем-
ностью 77 и 91 г снижение потока ТЭД выполняется только одной сту-
пенью, а у КЭМ первой модели еще и нет режима интенсивного тормо-
жения. Поэтому в САР этих КЭМ
для формирования сигнал овпере-
кл мнений в силовой цепи в функ-
ции скорости движения достаточ-
но одного ДУС н одного ДСД.
пх
16ВГ
овпг
и0
Р„е. 9.18. Структурах™ режиме
™ Р-^„С™ Ка₽ЬеР“<’Г0
339
Рис. 9-19. Электрическая схема силовой цепи СТПЭ карьерных электромо-
билей М-100 и М-120 в тормозном режиме
На рис. 9.19 приведена электрическая схема силовой цепи карьер-
ных электромобилей М-100 и М-120 в тормозном режиме. При перехо-
де к тормозному режиму контакторы JIK1, ЛК2 отключают ТЭД от
генератора, а тормозные контакторы ТКК ТК2 замыкают якоря
ТЭД на тормозные резисторы /?т/, Rr2. Обмотки возбуждения электро-
двигателей через добавочные резисторы /?добЛ /?ДОб2 подключаются
контакторами ТКЗ, TR4 к зажимам генератора. В связи с тем что
в этом режиме генератор используется только как источник питания
обмоток возбуждения ТЭД, имеющих весьма малое сопротивление,
напряжение Ur должно быть достаточно низким Для этого контакто-
ром ТК7 включается дополнительная обмотка возбуждения генера-
тора ОВГ1, МДС которой направлена встречно по отношению к МДС
основной обмоткн ОВГ\ при этом напряжение Ut уменьшается Кроме
того, направление тока в обмотке ОВВ4 меняется на противоположное,
т. е. она включается встречно по отношению к обмотке 0ВВ1 Пере-
численные меры помогают предотвратить нежелательные перенапря-
жения в силовой цепи при переходе от тягового к тормозному режиму.
Для ограничения тормозного гока ТЭД реверсируются также обмот-
ки ОВВ2 н ОВВЗ.
На рнс. 9.20 н 9.21 показаны характеристики гягового электродви-
гателя типа GE-772H в режиме генераторного торможения. Из кривых,
представленных на рис. 9.20, видно, что ток якоря электродвигателей
/Дл зависит от тока возбуждения /вд и частоты их вращения лд,
определяемой, в свою очередь, скоростью движения КЭМ в процессе
торможения. Каждая кривая соответствует постоянству частоты вра-
щения электродвигателя па или скорости v. Если скорость движения
увеличивается, ток возбуждения ТЭД автоматически уменьшается,
чтобы ток якоря не превысил предельно допустимого значения 700 А.
840
Рис. 9.20 Характеристики тягового
электродвигателя GE-772 Н в ре.
жиме генераторного торможения'
Когда СТПЭ переводится в режим электрического торможения, на-
пример при v = 48 км/ч (рис. 9.21), ток якоря ТЭД быстро возрастает
от нуля до 700 А, а затем ограничивается с помощью САР.
В СТПЭ предусмотрен режим интенсивного торможения при ско-
рости ниже 16,7 км/ч, осуществляемый посредством ступенчатого уве-
личения тока ТЭД при замыкании части тормозных резисторов RTi,
R 2 контакторами 77(5, 77(6. На рис. 9.22 приведены зависимости,
характеризующие тормозные свойства нагруженного (91 т груза)
н порожнего (61 т) электромобиля
модели М-100. Кривые соответству-
ют коэффициенту сопротивления ка-
чению, равному нулю. В реальных
условиях их необходимо корректи-
ровать, прибавляя I % уклона при
изменении коэффициента сопротив-
ления качению, равного 0,216 Н/т.
Графики на рис. 9.22 можно по-
яснить так. Пусть, например, гру-
женый электромобиль спускается
по трассе с уклоном 12 %. В режиме
нормального электрического тормо-
жения он будет иметь устойчивую
скорость движения 26 км/ч. Или
иначе : устойчивая скорость
12,87 км/ч обеспечивается в случае
нормального торможения прн спус-
ке по трассе с уклоном 6 %, а если
торможение интенсивное — прн
спуске по трассе с уклоном 12 %.
. _ нормальное и интенсивное тормо-
кого КЭМ
341
Рис. 9.23. Структурная схема системы регулирования СТПЭ карьерного
электромобиля М-120 в тормозном режиме
Схема силовой цепи КЭМ модели М-85 подобна схеме, приведенной
на рис. 9.19, но режим интенсивного торможения отсутствует (нет тор-
мозных контакторов ТК5 и TR6).
Структурная схема САР привода электромобиля М-120 для режима
электрического торможения показана на рис. 9.23. Система работает
следующим образом. При нажатии водителем ПТ собирается тормоз-
ная схема силовой щяш. С педалью торможения ПТ механически свя-
зан движок регулируемого резистора Rit включенного последователь-
но с обмоткой 0ВВ1. Чем больше угол U,, тем меньше сопротивление
этого резистора и больше гоки возбуждения ВГ и ТЭД, а значит, и
тормозное усилие. Таким образом, этот резистор регулирует интен-
сивность торможения и Еыио.тняет функцию ATM
В момент перевода СТПЭ в режим торможения угловая скорость
(о4113 равна ними на ишой или ниже ее — в зависимости от положения
ПХ перед торможением, во, в.» всяком случае, больше угловой ско-
рости холостою хода После иаж.пмм ПТ шзель с помощью РДВС
автоматически переводится па режим холостого хода с лДнЛ —
= 1400 обмин. Однако в прош-ссг перехода к этой частоге вращения
токи ТЭД могут превзойти vmvtin мое значение Л тя предотвращения
такого аварийного состояния pcr-epv«pyei<*4 пж в обмопсе ОВВ2.
Цепь, состоящая из поеледов:не н>но ан- пшенных обмотки 0ВВ2,
опорных диодов и регулируем и>< резнсюра. ноik. помается параллель-
но части тормозного резне юра ГР2. Когда /г, досчитает предель-
ного значения 700 А, диоды открывал)гея и через ОВВ2 идет ток, раз-
магничивающий возбудитель Токи ,, /, - - /„ а и /я уменьшаются.
С целью ограничения тока /я предельным значением при холостом
ходе дизеля реверсируется обмотка ОВВЗ. Один ее зажим подключа-
ют к точке соединения резистора с реверсором РХ1
(см. рнс. 9.19), а другой — к точке соединения 0ВВ2с RT2. Падение на-
пряжения на части резистора Rs2 от тормозного тока ДПТ2 сравни-
вается с падением напряжения на резисторе /?Диб2 от тока /в.д*
342
Последовательно с обмоткой ОВВЗ включен ли™
через нее в направлении от 2 к Р 2 Как Д’ пРопУска|°ший ток
ГЛ1*14 ~
Переключающее устройство ПЗ по сигнал;, пгпо
резпсторов. "КТеН~У Т<~нию- закорачивая чае^^оХ"
§ 9.3. Система тягового привода
карьерного электромобиля М-200
И1С У.2D предо I а ил ен di
't характеристики бло- A, I—1якЛ
нхронный генератор \Г)
- силовой выпрями- I ы .1
тм
М2
ЛЯ 2
7К2
ГХ4
РХ2
rvpsra силовой цепи
Рис. 9.24 М-200 в ТВ-
СТПЭкарьерни»^ рда„е
Основные данные КЭМ модели М-200 грузоподъемностью 180 т
с СТПЭ переменно-постоянного тока см в гл. 1. В СТПЭ напряжение
трехфазного СГ выпрямляется неуправляемым мостовым выпрями-
телем, встроенным в корпус генератора. Поэтому с целью упрощения
на рассматриваемых далее схемах блок СГ—ВН заменен генератором
постоянного тока.
Электрическая схема силовой цепи СТПЭ в тяговом режиме электро-
мобиля приведена на рис. 9.24. Силовая часть СТПЭ работает анало-
гично системам, схемы которых показаны на рис. 9.1 и 9.9, за тем
исключением, что у ТЭД нет искусственного уменьшения магнитного
потока, а широкий диапазон регулирования и угловой скорости обеспе-
чивается за счет большого значения максимального напряжения генера-
тора, ДОСТИГаЮЩеГО £7г,макс» =
--= 1,6. Реверсирование движе-
ния КЭМ разрешается только
при скорости его движения,
меньшей 1,25 км/ч.
На рис 9.25 представлены
внешние
ка «cut
AR-5 — силовой выпрями-
тел ь»
Структурная схема САР
для тягового режима СТПЭ
приведена на рис. 9 26 Систе-
ма работает следующим обра-
зом. После пуска дизеля на-
жатием ПХ возбудитель пер-
воначально возбуждается
вследствие остаточного намаг-
ничивания. По мере увеличе-
ния угловых скоростей дизеля,
тягового генератора и возбу-
дителя, представляющего со-
бой трехфазный СГ, напряже-
ние Uиг возрастает. Это напря-
343
Рис. 9.25 Внешние характеристики блока
«синхронный генератор AR5 — силовой вы-
прямитель»:
/ к ? — характеристики, формируемые САР: 3 —
предельная зависимость, соответствующая посто-
янству мощности дизеля
жение выпрямляется полууп-
равляемым трехфазным мосто-
вым выпрямителем ВУ и пода-
ется на обмотку возбуждения
генератора ОВГ\ 1/Вг выпрям-
ляемся также трехфазным мос-
товым неуправляемым выпря-
мителем ВН1. Выпрямленное
напряжение Uai подается иа
стабилизатор напряжения Сг
питающий ОВВ.
Контур тягового генерато-
ра представляет собой замкну-
тую САР с жесткой отрица-
тельной обратной связью по
напряжению и току генерато-
ра. Педаль хода механически
связана с движком регулируемого резистора Д3, положение которого
определяет заданный уровень мощности; поэтому указанный резистор
выполняет функцию АТГ, преобразуя угол 6С в электрический сигнал
LC, Последний поступает на устройство задержки времени УЗд, кото-
рое замедляет возрастание Uc при резком нажатин ПХ. Увеличение Ц.
на выходе УЗд от нуля до максимума, соответствующее 0С = 0с.макс»
происходит за 14 с. Подобное устройство позволяет плавно доводить
угловую скорость дизеля до установившегося значения и не дать ему
заглохнуть при резком повышении нагрузки.
Сигнал с выхода УЗд подается на регулятор нагрузки PH г, вы-
полненный в виде регулируемого резистора, движок которого переме-
щается гидравлическим механизмом регулятора ДВС. Этот регулятор
является всережнмным, обеспечивающим с точностью до статической
ошибки поддержание постоянства Юднзпри вариациях нагрузки в до-
статочно широких пределах.
344
Сигнал U'c алгебраически суммируется ~
СЭ с сигналом обратной связи и., формируем^’Ж^
сигнал Uy = Uc — иы подается на систему vnn Уг,₽авл1||ощий
угол включения тиристоров и в конечном счяТ/ЛеИИВп ®У-
В качестве датчиков тока ДТ „ напряжения^ ЛН «,"
используют трансформаторы тока, вютюченньё в а ’ вх“£яи»'* » ДМ,
ные в звезду, и трансформатор напряжения к™ Ы СГ и соед«нен-
сформаторов тока и напряжения подютюче™ Т™Ые Обмо™ т₽а«-
мостовых выпрямителей, соединенных последоватьт₽!хфаэных
грузку, на которой суммируются сигналы ПТ и ПН с “а °бщую “а‘
грузки снимается сигнал обратной связи ЗвенТяГчё™" 3106 1,а’
ляют собой три однополуиериодных магнитных усХёля
мотки управления, включенные последовательно Н ихо6’
разности напряжения уставки Гу„ (напряжения ,сигнал
74 В) и сигнала (7„. В цепь обмоток управления включенРтржзистор
выполняющий функции резистора с регулируемым сопротивлён"ем
Изменяет значение этого сопротивления задающий сигнал U' полки
димыи к базе транзистора. Таким образом, в обмотках управления маг-
нптных усилителен осуществляется сравнение задающего сигнала
с сигналом отрицательной обратной связи по току и напряжению ге-
нератора. Магнитные усилители работают в релейном режиме. В зави-
симости от значения сигнала рассогласования (7у меняется частота
следования выходных импульсов магнитных усилителей. Эти импульсы
открывают тиристоры ВУ. ’ J
Индикация скорости движения КЭМ осуществляется магнитными
датчиками ДСД1—ДСД4У установленными иа тяговых электродвига-
телях (по два датчика на одном электродвигателе). Каждый датчик
срабатывает при определенном значении скорости и включает соот-
ветствующее реле: при и = 1,25 км/ч срабатывает ДСД1 и включа-
ется антиреверснвное реле; при v ~ 45 км/ч — ДСД2 и включается
реле, переводящее СТПЭ в режим электрического торможения; при
v == 16,9 км/ч и v ~ 10,5 км/ч срабатывают соответственно ДСДЗ
и ДСД4 и включаются тормозные контакторы ТК4 и ТК5 с целью
увеличения интенсивности торможения электромобиля.
Электрическая схема силовой цепи С1ПЭ в тормозном режиме
КЭМ Модели М-200 приведена на рис. 9.27 Работа СТПЭ по этой
схеме на начальной стадии процесса торможения существенно отл и
ется от работы привода по схемам, показанным на Рнс' ' ’
Тяговый СГ по сравнению с ГПТ имеет большое остаточное
Поэтому при переводе СТПЭ в тормозной режим ®** - сг—В,
контактор КЗ, замыкающий накоротко выходные з вя га,,_
ЧТО ускоряет гашение поля СГ за счет замыканв^
зывающего значительную МДС продольной р разы ы к fl-
быстро размагничивает магнитную СИСТ^“У ц 3 i йс после вклю-
ются контакторы ЛК1, ЛК2. Приблизите^ ТК2 п ТКЗ,
чеки я КЗ срабатывают контакторы ПОКа3анной на рис. 9.19,
после чего КЗ отключается. Как и в сх » цимозной резистор,
якорь каждого ТЭД замыкается на отдельный и
345
состоящий нз двух последовательно соединенных секций RJ1—R 1%
н Rr21—Rr22. Обмотки возбуждения электродвигателей К/—
н K2—KR2 подключены последовательно к выходу силового выпря-
мителя. Таким образом, управление процессом торможения осуществля-
ется посредством регулирования напряжения СГ Когда начинает про-
текать ток по тормозным контурам ТЭД, включается электродвигатель
М3, приводящий во вращение вентилятор охлаждения тормозных
резисторов.
На рис. 9.28 приведены зависимости, характеризующие тормозные
свойства порожнего (кривая /) и нагруженного (кривая 2) электромо-
биля М-200. Этн зависимости соответствуют коэффициенту сопротив-
ления качения, равному нулю, и корректируются они так же, как
н кривые, показанные на рис. 9.22.
В процессе торможения максимальное тормозное усилие достига-
ется при скорости движения КЭМ v *= 21,7 км/ч. Дальнейшее сниже-
ние скорости сопровождается поддержанием постоянства тока воз-
буждения ТЭД, вто время как их угловые скорости и токи /д., умеиь-
шаются. Вследствие этого падает тормозное усилие. Когда скорость
достигает значения 16,9 км/ч, включается тормозной контактор 77(5
закорачивающий половины тормозных резисторов RTI2 и RT22 (см’
рис. 9.27). Сопротивление закороченной части этих резисторов состав-
ляет 25 % общего сопротивления тормозного контура каждого ТЭД.
Токи /а, н моменты Мт тяговых электродвигателей увеличиваются
до максимума при v = 13,7 км/ч. Далее скорость снижается до
10,5 км/ч, когда включается тормозной контактор TR4, после чего
замыкаются накоротко резисторы Rr12 и Rr22 и половины резисторов
Rrll и Rr21. Тормозное усилие вновь увеличивается до максимума
при скорости 8 км/ч и затем уменьшается до нуля при остановке
электромобиля.
На рис. 9.29 представлена струк-
турная схема САР тормозного режима
СТПЭ. Педаль тормоза ПТ Воздейст-
вие 9.27. Электрическая схема силовой
целя СТПЭ карьерного электромобиля
М-200 в тормозном режиме
Рис, 9.28. Зависимости, характери-
зующие тормозные свойства карьер-
ного электромобиля М-200
346
вуе, на ATM. задающим интенсивность торможения. Он выполнен в
виде регулируемого резистора. Сигман U, с выхода ATM через уст
роиетво задержки времени поступает на регулятор нагрузкиР//г При
нажатии //7 дизель автоматически переходит на холостой ход с пднз =
— S8U об/мин независимо от положения ПХ. Так как в режиме элек-
трического торможения загрузка дизеля невелика, то положение движ-
ка РНг во время работы не меняется. Передаточный коэффициент
звена РНг равен единице. Выходной сигнал регулятора нагрузки 6'т
поступает иа СЭ и алгебраически суммируется с сигналом Uu.
В режиме тяги сигнал Иы пропорционален сумме тока и напряже-
ния <енератора. В режиме электрического торможения нагрузкой тя-
говою генератора являются обмотки возбуждения ТЭД, имеющие
весьма низкое сопротивление. Поэтому напряжение на зажимах гене-
ратора мало Отсюда ясно, что при суммировании малого сигнала,
пропорционального (7,, с большим, пропорциональным /г, первым
можно Пренебречь и считать, что звено ДЛ1 осуществляет жесткую
отри нательную обратную связь по току тягового генератора или, что
то же, по суммарному току возбуждения ТЭД. Таким образом, САР
поддерживает постоя исто тока возбуждения и магнитного потока
При (Г = 0Т_ ток возбуждения и поток электродвигателеймакси
мачьнь, и формируется предельная тормознат' Х
ка.х ОА, ВС. DE зависимостей (см, рис. 9.28)Частичные^Р“
характеристики представляют собой “Ря^® с пределытой
чами, выходящими из начаОграничению ио макснмаль-
зависимостью Участки с(’eooieeiu у £ятыянС = const,
ион мощности на зажимах ТЭД-^’e^JR то Л
в связи с тем ЧТО £«, = а £дл
= (Acu/DJ2//.?, = const.
347
Из последнего выражения видно, что £Дт = const, так как в схе-
ме используются тормозные резисторы с неизменным сопротивлением
На основании сказанного можно сделать вывод тормозной юк и тор!
мозная мощность ТЭД на участках EG (см. рис. 9.28) — постоянные
величины
Итак, при переходе в режим электрического торможения иа доста-
точно высокой скорости ток якоря ТЭД резко возрастает до значения
определяемого точкой (см. рис. 9.28) и зависящего от положения
ПТ. Если точка S( расположена на прямой HG, то процесс дальней-
шего торможения проходит с поддержанием постоянства тока возбуж-
дения ТЭД (в соответствии с прямой S(0) Если точка S, находится
на кривой EG, то после точки G торможение идет с поддержанием по-
стоянства предельного тормозного тока или максимальной тормоз-
ной мощности по кривой GSlt а затем по прямой S{0 Наконец
когда 0т = бтмаьс (ПТ нажата до упора), а также заданы пределы
ная тормозная мощность и ток возбуждения (магнитный поток)
ТЭД, рабочая точка перемещается по прямой HG, кривой GE,
определяемой Рд.т.макс, н прямой АО, обеспечивающей /в,д == const.
Этот процесс осуществляется следующим образом. Когда ток ТЭД
достигает предельно допустимого значения, равного 1070 А (что соот-
ветствует общей тормозной мощности двух электродвигателей
2080 кВт), начинает действовать вибрационный регулятор ВР, ка-
тушка которого включена в диагональ резистор но-диодного моста,
присоединенного параллельно части тормозных резисторов Rrlt
и R.,21 »см. рис. 9.27). Падение напряжения на этих резисторах, про-
порциональное тормозному току, является источником питания ка-
тушки ВР Контакты ВР шунтируют вход транзистора в звене УЗд,
уменьшая тем самым задающий сигнал О\ на входе СЭ и, как след-
ствие этого, гок возбуждения генератора, токи возбуждения н токи
якоря ТЭД. При снижении тормозного тока ВР отключается, что вы-
зывав! увеличение возбуждения тягового генератора. Подобное регу-
лирующее действие ограничивает ток через тормозные резисторы при-
близительно на уровне 1070 А независимо от положения педали тор-
можения
Вибрационный регулятор имеет еще дополнительную функцию, осу-
ществляя гибкую обратную связь и обеспечивая плавное замедленное
нарастание тормозного усилия, чтобы предотвратить его резкие броски.
Переключающие устройства ГН и П2 по сигналам датчиков «.ко-
роста движения электромобиля, соответственно ДСДЗ и ДСД4, зако-
рачивают части тормозных резисторов, вследствие чего увеличивается
тормозное усилие в зоне средних и малых скоростей (см. рис 9.28).
§ 9.4. Система тягового привода
городского электромобиля ЭМ-0466
Основные данные ГЭМ модели ЭМ-0466 грузоподъемностью 0,5 т
с СТПЭ постоянного тока см. в гл. 10.
Электрическая схема силовой цепи СТПЭ представлена на
рис. 6.30, а структурная схема САР — на рис. 9.30.
848
Городск°й электромобиль
оборудован системой тягового
одаодвига.ельного привода с
ДПТ последовательного воз-
буждения; тяговый электро-
двигатель через механический
дифференциал приводит во
вращение ведущую ось элек-
тромобиля Система работает
следующим образом. Прина- Рис 9 30 с
жатни водителем ЛХ на угол, тр^вакт СТПЭ [,и»-
соответя-вующий маневровой айгбб м«тг™сл,„я
ПОЗИЦИИ, замыкаются Контакт».!
ЛК1. ТК2, TKS) и ТЭД подключХТтА^Пы^’ № 1"™
увеличении угла 0с до положения, соответствующегоя?льне”тем
задающий сигнал воздействует на систему уиравХия ИППН
тате чего частота коммутации f. плавно ^Xt™ZXo
значения При достижении номинальной частоты I,!разрХетЩТо а
ча управляющих импульсов на главный тиристор 77 (см рцС г чт ..
плавно задается уставка тока ТЭД Далее происходят процессы
описанные в § 6.6 н •
В системе можно осуществлять регулирование с любой частотой
fK в диапазоне 400—2000 Гц
Если ПХ нажата до упора (6С — 6смвкс), обеспечивается уско-
ренный пуск ТЭД с максимальной уставкой его тока до выхода на
естественную характеристику электродвигателя посредством измене-
ния коэффициента заполнения ZB.
Режим рекуперативного торможения осуществляется нажатием
ПТУ при этом включаются контакторы TXi, 7X2, ТКЗ. После за-
мыкания контактов контактора ТК1 частота коммутации увеличивает-
ся до номинальной, включается главный тиристор Т1, который закора-
чивает ТЭД, образуя контур его самозбуждения.
В САР применена жесткая отрицательная обратная связь по сред-
нему значению тока ТЭД, позволяющая поддерживать заданное зна-
чение дока как в тяговом, так и в тормозном режимах. ПР^У™отрена
возможность изменения уставок тока электродвигателя
Д° “-некие направления Д—™ Х=" »
лу и,, а звена реверсирования д воздействует на переключа-
метра Сп близок к нулю. Сигнал рп\ ,еняется полярность напря-
ющее устройство П. спомощыо подобно Clfe
жения на зажимах якоря электродвигателя.
ГЭМ модели ЭМ-0466 см. в гл. 16.
expert22 для http://rutracker.org
ПРИМЕРЫ ПРОЕКТИРОВАНИЯ
СИСТЕМ ТЯГОВОГО ПРИВОДА
ЭЛЕКТРОМОБИЛЕЙ
§ 10.1. Система тягового привода
карьерного автомобиля
БелАЗ-549
Выбор основных показателей ТЭМ. Исходные данные для проектирования
СТПЭ:
Грузоподъемность Gr, т ................................. 75
Масса порожнего КЭМ Gw, т.............................. 73
Масса груженою КЭМ GM гр, т............................ 148
Колесная формула....................................... 4X2
Статический радиус качения ведущего колеса Як, м . . . 1,31
Передаточное отношение редуктора мотор-колеса /п • • 21>5
КПД редуктора мотор-колеса Чибн ... 0,93
Свободная (отводимая на тягу) мощность дизеля Рсв н,
кВт . . - . ... 700
Номинальная частота вращения вала дизеля лд1|3 н, об/мин. 1500
Максимальная скорость движения КЭМ *'макс. км/ч 60
Род тока тягового привода ................. . постоянный
Система тягового привода электромобиля должна обеспечивать следующие ос-
новные режимы движения КЭМ' длительное движение груженого КЭМ со скоростью
19 км/ч и реализацией динамического фактора D — 6,5%: движение груженого
КЭМ в течение 30 с, О.л = 15 %.
При скорости, меныией 40 км/ч. должна полностью использоваться мощность
Рсв.ц, а при максимальной скорости — не менее 0.5 Рсви- В режиме электрического
торможения необходимо обеспечивать остановочное торможение груженого КЭМ,
а также длительное подтормаживание (движение на затяжных спусках с уклоном 5 %
с постоянной скоростью) н подтормаживание в течение 1,5 мин со скоростью 20—
30 км/ч груженого КЭМ на у клона л не более 8 %.
Динамический фактор электромобиля (%) определяется соотношением
10(Ь(9,«16.лгр), (10.1)
откуда
F = 9,816WI , „0^/100 . (10.2)
Здесь F сила тяги, Н\ бэл гр — масса груженого электромобиля, кг.
^Примем длительный режим движения КЭМ за номинальный. Тогда скорость
®н — 19 км/ч, номинальная сила тяги fн = 9,81 . 148 - 10э 6,5/100= 94 372 Н.
поминальный момент на валу ТЭД в соответствии с (1.3) МдИ =
^к^нЛ'ИкЧГЧпвк’Пк) Пренебрегая потерями на смятие шнм и проскальзывание ко-
лес (t)K = 1), получим
== 1»31 . 94 372/(2 • 21,5 - 0,93) == 3090 Н м.
350
Согласно (1,41. угловая скорость и частота вращения ТЭД
“д-н “ 'п»и/Як — 21,5 • 19/(1,31 3,6) = 86,62 с'1;
%.. = бом^лгя) = 60 . 86.62Д2л) = 828 об/мяи
Номинальная мощность ТЭД
Рц.и ” м „ - 3090.86,62 = 267,7 . 10» Вт
:х -ххд’хх-—
= »/„ = 3,16. Ограничения по условия„
вий" коммутации О„„о„Ерд(1п = 300 В». Тяговый злектролТтаХ выполит е
компенсационной обмоткой (feM = ц „ превышением температуры меди обмотки яко-
ря над температурок окружающей среды е„в = 120 °C. Р Д оомоткк яко
Согласно (1.121, расчетная мощность ТЭД**11
₽драс.. = Рд А = 270 10= • 3,16 = 853 • 10= Вт.
Из (3.13) получим функцию
Сл == 4 • 853.540/(3000д) = 6,14 • 109/D*
Принимая предварительно б/дмйкс, = 1,1 и задаваясь различными значениями
диаметра якоря Оя, на поле функций фд (Ой), аналогичных графикам, показанным
на рис. 3.1, ио рассчитанных для ДПТ с ft^ = 3,2; <\лдасе = 1,1 nfep« встроим
зависимость Гд (Ря). Точка пересечения графика этой функции с зависимостью
фд(Оя), соответствующей ©м н Пред — 120 °C. определяет искомый диаметр якоря Ds
и коэффициент Кя. В данном случае Оя — 0,455 ы, Кя = 49 10Б Вт/м*. Тогда, ис-
пользуя (3.14), (3.19), (3.21) — (3.23). получим /я = 0.388 м: «ДЛ48КС = 2616 об/мин;
(к = i,05 м; О1( = 0,728.
Поскольку полученное значение Оя нестандартное, необходимо рассматривать
два возможных варианта со стандартными значениями диаметра якоря: D„ ~ 0,493
н 0,423 м. Естественно, что при выборе одного из указанных значений изменяются
рассчитанные выше параметры и показатели ТЭД.
Найдем основные данные тягового ГПТ. Номинальная мощность генератора
₽3=(1,0'5'1’1)'"“₽«»/',1"' ПР"™Ыае” РГ.«" '•05т»РГ.Ли П₽И ПД.К=0-913
мощность Рг н — 630 кВт. Расчетная мощность ГПТ согласно (1.15) ₽,.pat(J —
= р и —Р и = 630 • 1,1 «700 кВт.
'r.tr । макс* /г.нмд.макс* _ „ _ ,
Выбираем шестиполюсный генератор, имеющим 2а — 6 и ограииченияпо кол-
лектору Е доп</кдоп= 360 В2. Значение максимального (пускового) тока 1ЭД
/ =s£„ = D /О = 0,15/0,065 —2,3 (ЮЗ)
1 ц.мамс прел* р ^элмам'^элл
Принимаем / макс пред* =* 2’25' Тогда максимальный "Усковой ток генератора
д.мякс.пред _ Из (3 получим функиИ1О
г.маке пред* д-макс пред» м
£г = 4 • 700 • 630 • 2,25/(3600д) = И,025 Ю=/О’.
По графикам, аналогичным зависимостям (см. рис. 3.2), но С
'-макс. = ’.25. нзхолпм О, = 0,64 м. Ближайшее стандартное значение диаметра
яко^я О„ = 0,66 м, ДЛЯ которого К. = 62,5 • № Вт/м«. Считая, что ой.до„- 60 м,с,
при ka — I в соответствии с (3.16) — (3.19) имеем
= 60омо„/(^-№.60/(П. 0,66)= .737 об/мия.
351
- „ — ism об/мия (для чизеля марки 8ДМ21), принимаем
Поскольку пт в > ЯДВСн — ‘ v
лг,-«Ява. = '500<,6/“ия Тог”'
„ = 60 - 1500/1737 = 51.8 м/с;
Ч, Н.М = "« до/’"- “
. л- ,, к, -52.5- 10* .51,8/60 = 45.3- 10" Вт/м»
Кя — * ягя иакс'^я доп
Истми>М3.14), (3.30) - <3-321. получаем I, = 0.234 м: <„ = 1.12 м; DK =
“ О'в’тЙлСг|(Г1 приведены рассчитанные выше основные данные сиговых ДПТ и ГПТ
и данные применяемых в КЭЛ1 тяговых электродвигатели, ДК-717А и генератора
ГП'р»с«т „редели,ой „иешией характеристики тягового генератора. Предельную
„ .„„„ктгаистику 0, <Л > тягового ГПТ ргссчптывают, исходя из условия
пХХтва гоободной поминальной мошпоста дизели ₽„ „, еоотаетгтвуюшеГ, его
Таблица 10.1
Тяговый ДПТ Тяговый ГПТ
Параметры и показатели ТЭМ расчетное зна- чение значение для электродвига- теля ДК-717А расчетное зна- чение значение для генератора ГПА-600
Диаметр якоря, м Длина якоря, м Длина корпуса, м Диаметр корпуса, м Масса, кг 0,455 0,388 1,050 0,728 2078 0,423 0,450 0,985 0,740 1900 0,660 0,234 1,120 0,990 2520 0,660 0,250 0,955 0,980 2480
Мощность номинальная, кВт Момент на валу, Н м: 270 274 3120 630 630
номинальный .3090 — —
максимальный 6953 9565 — —
Напряжение, В: номинальное __ 750 — 650
максимальное — 800 — 800
Ток. А: 970
номинальный — 400 —
максимальный — 1200 — 2400
Частота вращения, об/мин- 1500
номинальная 828 840 1500
максимальная 261 Г. 2850 — —-
Напряжение обмотки незавп-
симого возбуждения нслвг- нальное, В 24 50
Ток обмотки независимом»
возбуждения номиналь- ный, А ... 120
Число витков обмотки:
независимого возбужде-
иия на полюс 40 92
последовательного воз- буждения на полюс 20
Сопротивление обмоток при
НО °C, Ом:
цепи якоря независимого возбужде- — 0,08 — 0,0173
НИЯ последовательного воз- — 0,422 — 0,388
бужденнния — 0,0223 —
352
номинальной частоте вращения ппнэ к.
иг/г/Пг = Рсен
(10 4)
Зависимость (/г) генератора ГПА-600 приведена на п«г Ч <я а
-° "°-4’ ™
С обозначениями (см. рис. 9.1 и 3.12, б) ток /₽ '4’ = ® соответствии
— ~ 2 - 2 2S 40(1 — 1Япл л •’.макс.пред ^к'д.маке пред
№'лм.кс.пред.'д„ 2 400— 1800 А. Выбираем напряжемте
^г.макс-пред 800 В. Значения сока /г Мнн пред в точке О и напряжения V
, точке В приняли из условия максимального использования мощности днзыя nZ
уклоном 6—8%' 900 А’ <о0,ВЕТСТ,,'|0,ш,х Движению груженого КЭМ го трасс/с
Определение параметров цепи возбуждения тягового генератора. В соответствий с
номинальными данными тягового ГПТ (см. табл. 10-1) U = 50 В, / « 120 А
Такие параметры может обеспечить генератор постоянного тока ДК-913Б с неза-
висимым возбуждением, выбранный в качестве возбудителя.
Данные возбудителя ДК-913Б:
Мощность номинальная, кВт ........................
Напряжение номинальное. В......................... ’ *
Ток номинальный, А ...............................
Частота вращения номинальная, об/мин..................
Ток возбуждения номинальный, А........................
Сопротивление обмоток, Ом:
якоря при 70 ®С.......................................
возбуждения ........................................
Число витков обмотки возбуждения......................
6
50
120
2120
3.3
0,0072
14,5
400
Для расчета параметров цепи возбуждения тягового ГПТ учтем, что параллельно
его обмотке возбуждения Н—НН (см. рис. 9.1) подключен разрядный резистор с со-
противлением /?р = 7,60 Ом. Тогда ток якоря возбудителя
/Вг “ о + МУ 4 г «* 0 + 0,388/7,6) /ъ г «= 1,051/в г. (10.5)
где 7В г — ток возбуждения тягового ГПТ; /?в г — сопротивление его обмотки воз-
буждения.
ЭДС возбудителя и тягового генератора
^ВГ “ АЛг + W?BF + Л(/ш =
= (/?в г -Ь 1,051/?БГ) /в г 4- Д1/щ = 0,396/в г 4- Д(/т;
Ег = (Jr 4- /гЪКг + ДС/щ.
(10.6)
ПО 7)
где RBr - сопротивление цепи якоря ВГ; ZRr - суммарное сопротивление кепи
якоря генератора; ЛКЩ = 2.5 - падение напряжения под щетками, В.
Диапазон изменения тока возбуждения возбудителя И! & пред
ной внешней характеристики ГПТ, сформированной Iгсшурои р«У™Р°”
ределяется значениями напряжения и тока в точках fi в Г. Для точки В (см. рис. H.ZJ
имеем 1!,в = 300 В, 1гВ = 1800 А.
ЭДС и магнитный поток генератора
£г = 300 + 1800 • 0,0173 + 2,5 = 334 В:
£,&-"гА=а1,'.="-' = 0'222 В^“ик)-
Q . и« магнитного потока, равного 60Е/(2лйп) (см. (1.5)], бу-
Здесь и далее вместо значения магннттли _ ’ ‘ тпом £/«.
дем оперировать пропорциональным п У Р „ наХ0дИМ ток возбуж-
Используя нагрузочные характеристики 1Ш (рис. w. ),
дения генератора 1&г = 44 А.
12 4-15В
353
рис. 10.2. Нагрузочные характеристики
возбудителя Д К-91 ЗБ
ЭДС и магнитный поток возбудителя
(Евг)в =0.396 44 + 2,5 = 19,9 В; (£вг/лвг)д = 19,9/2120 = 0,0094 ВДоб/мии).
По нагрузочным характеристикам возбудителя (рис. 10.2) определяем его МДС
(Гвг)в ~ 310 А. Тогда ток возбуждения возбудителя
в вг^я^'вВГ = 81%оо = 0,775 А. (10.8)
Для точки D напряжение t'rD=800 В, ток /г£) = 800 A; ErD == 800-}- 800Х
X 0,0173 + 2,5 = 816 В; EfblnrD 8W/IS0„ = 0,544 ВДоб/мии); /ь rD = 100 А;
£вго = 0,396 - 100 + 2,5 = 42.1 В; (£вг/лвг)о = 42,1/2120 = 0.0199 ВДоб/мии);
(^Вг)1Э ~ (^вВГМ ~
Таким образом, тик возбуждении возбхдшеля при переходе от режима ГПТ, со-
ответствующего точке В на рис. 9.2, к режиму точки D должен изменяться от 0,775
до 2,2 А.
Выбор параметров магнитного усилителя. В качестве элемента сравнения и уси-
лителя У1 контура регулирований тягового генератора (см. рис. 9.4) применяют маг-
нитный усилитель /МУ/ с внутренней положительной обратной связью, нагрузкой
которого является обмотка возбуждения возбудителя. Выбираем магнитный усили-
тель типа УМТК-18.81, используя дне ею обмотки управления. 1Н—1К (задающая)
и 2Я—2К (управляющая). В случае необходимое гп можно использовать обмотку
ЗН—W (стабилизирующую). Задающая обмотка 0.3 питается от вспомогательного
синхронного генератора СГ, напряжение которого определяется частотой вращения
дизеля (см. рис. 9.4). Управляющая об.моткл ОУ питается от селективного узла СлУ.
Стабилизирующая обмотка подключается к выходу корректирующего устройства,
обеспечивающего улучшение качества переходных процессов и устойчивую работу
СТПЭ в различных режимах движения КЭМ
Результирующая МДС МУ1 равна разности МДС задающей и управляющей об-
моток:
F МУре< e f МУ 03 ~ * МУ ОУ. (
Данные магнитного усилителя УМТК-18.81:
Мощность выходная номинальная, Вт 500
Напряжение выходное номинальное, В . . ............. 161
Ток нагрузки номинальный А ............. 3 1
Сопротивление нагрузки номинальное^ Ом ' ' ' ' 1 \ 1 52
354
Напряжение питания номинальное (Уп В
Частота питающего напряжения, номинальная'/' Гц..........
Количество последовательно соединенных рабочих обмоток 'на
одном магнитопроводе .
Число витков рабочей обмотки * .............
Сопротивление рабочей обмотки при 20 °C Ом................
Коэффициент регулирования (отношение среднего значения тока
короткого замыкания к среднему значению тока холостого xonal
Коэффициент кратности тока нагрузки (отношение номинального
тока нагрузки к 1,5-кратному значению тока холостого хода)
МДС управления номинальная, А
Обмотки управления
Ток управления, мА:
IH—IK
2H—2K
зн—зк
4H-4K
220
400
2
280
0,56
386
30
. 3,15
5H—5K
6H—6K
номинальный . .
длительный ..................
Число витков ............. . . .
Сопротивление обмотки при 20 °C, Ом
Коэффициент усиления по мощности
Постоянная времени, с
5
125
660
58
420-103
0.83
5
160
660
62
384-103
0,76
10
120
330
33
176-103
0,305
Ранее указано, что уровень мощности тягового генератора (выбор частичной
внешней характеристики, см. рис. 9.2) определяется частотой вращения дизеля. Дат-
чиком параметра лднз является вспомогательным синхронный генератор, выприм-
ле««ое напряжение которого питает задающую обмотку МУ1 (рис. 10.3). Таким об-
разом, ток задающей обмотки /Оз непосредственно связан с пдич.
Для обеспечения наиболее
экономичных режимов работы
дизеля яри лдиз < пдиз „ (ори
частичных мощностях), предот-
вращении значительных ударных
нагрузок в редукторах мотор-ко-
лес при пуске КЭМ и обеспече-
ния плавности его трогания за
висимость /оз («диэ) целесооб-
разно выполнять нелинейной.
Это достигается включением кон-
денсаторов С1—СЗ на входе вып-
рямительного моста ВМ2-
Даже без включения указан-
ных конденсаторов форма кривой
тока СГ, работающего на выпря-
митель, иесниусоидальна. При
включении конденсаторов на сто-
роне переменного тока В М2, кро-
ме того, меняются фаза и амп-
литуда напряжения СГ. Перечис-
ленные Факторы значительно ус-
ложняют расчет параметров цепи
управляющей обмотки.
Примем, что форма кривом
переменного тока синусоидальна,
и, исходя нз этого условия, прове-
дем приближенный расчет. Вып-
рямленное напряжение моста
влг>
ud2= 1,35 |/3[(/сг-
— ^СГ^Я/сг^Л — ^ОЗ^ОЗ'
(10.10)
Рис io 3. Схема включения магнитного усилите-
ля МУ1 в СТПЭ карьерного Электромобиля
355.
12*
n
К'.'
Ml 30vBЛ ^\ ! —Г
356
Определение параметров селек-
тивного узла. В качестве датчиков
напряжения в тока тягового ГПТ
применены трансформаторы посто-
янного напряжения (ТПН) и тока
(ТОТ), выполненные в виде насы-
щающихся реакторов с подмагничи-
ванием. По схеме н процессу работы
ТПН н ТПТ отличаются от транс-
форматоров переменного тока. Если
у последних энергия передается из
первичной обмотки во вторичную, в
ТПН и ТПТ энер|ия для питания
нагрузки поступает от отдельного
источника во вторичной (рабочей)
цепи. Характеристика намагничива-
ния магнитопроводов ТПН и ТПТ
должна быть достаточно близка к
прямоугольной, в то время как для
трансформаторов переменного тока
это необязательно. Однако, несмотря
на отличия, как те, так и другие
трансформаторы работают на одном
принципе уравновешивания МДС
первичной и вторичной обмоток, что
обеспечивает пропорциональность
токов первичной и вторичной цепей.
По конструктивному и схемно-
му решению ТПН и ТПТ близки к
магнитным усилителям, ио у ТПТ мощность цепи измеряемого тока (цепи управления)
во много раз превышает мощность рабочей цепи. Это обусловливает безынершюнность
ТПТ и прямоугольность формы кривой его рабочего тока, что не свойственно маг-
нитным усилителям, хотя и весьма важно для САР.
На рис. 10.6 показана часть схемы контура регулирования ГПТ с селективным
узлом, состоящим из выпрямительных мостов ВМЗ, ВМ4, трансформаторов ТПН,
ТПТ II резисторов «до6ТПН. Я1я- «6 “ Кдосоу
Для СТПЭ карьерного электромобиля БелАЗ-549 применимы трансформатор
постоянного напряжения ТПН-2А и трансформатор постоянного тока ТГГГ-4А. Транс-
форматоры выполнены на двух тороидальных магнитопроводах, рабочие обмотки ко-
торых (обмотки переменного тока) включают встречно. В ТПН обмотка управления
охватывает рабочие обмотки и намотана на иих сверху. В ТПТ роль обмотки управ-
ления выполняют силовые кабели, продетые через окно магнитопровода. Токн на-
грузки трансформаторов выпрямляются мостами ВМЗ и ВМ4.
Данные трансформаторов постоянного напряжения и тока:
Трансформаторы ..........................
Напряжение измеряемое максимальное, В .
Ток управления измеряемый максимальный, А
Действующее значение напряжения питания
рабочей цепи, В . ..................
Частота напряжения питания, Гц ..........
Ток рабочей цепи длительный, А...........
Сопротивление цепи нагрузки, Ом ......
Количество рабочих обмоток ...»..........
Число витков:
рабочей обмотки
обмотки управления .............. - •
Сопротивление при 20 °C. Ом:
рабочей обмотки ................., •
обмотки управления ..................
Коэффициент трансформации.............* '
ТПН-2А ТПН-4А
750 —
— 6600
50 130
400 400
1,32 2,30
20 Ю
2 2
465 1800
266 1
0,58 4,37
0,86 —
— 0,556.10“3
357
Рассмотрим упрощенную схе-
му селективного узла (рис. 10.7).
Из схемы видно, что селектив-
ный узел представляет собой два
источника с большим внутрен-
ним сопротивлением (источники
тока), работающих на индивиду-
альные нагрузки jRt т или
а также на общую Нагрузку -—
цепь управляющей обмотки маг-
нитного усилителя.
При включении питания на
элементы контура регулирования
ГПТ силовая цепь СТПЭ уже
Рис. Ю.7 Упрощенная схема селективного узла:
Awi- «ОУ’- *ОУЗ - «дапротйвлеяня обмоток управ-
ления магиягкых усилителей ЛУЛ МУЛ МУЗ
замкнута Поэтому при возникновении ЭДС £г появляется ток 8 силовой цени. В мо-
мент трогания электромобиля, когда £г = 0. ток /г быстро возрастает при сравнитель-
но небольшом напряжении Ur, равном падению напряжения в цепи якоря ТЭД и
подводящих проводах. За счет увеличения тока /г трансформатор ТН1 насыщается
В ток в его рабочих обмотках растет.
Напряжение Ur мало, вследствие чего подмагничивание трансформатора Ultl
незначительно, и ток в его рабочих обмотках невелик Поэтому падение напряжения
на сопротивлении /?тт существенно больше, чем на сопротивлении /?тк- Потенциал
точки о больше потенциала точки б. Ток ТПТ через мост ВМ4 проходит в обмотку
управления ОУ магнитного усилителя МУН, этот ток тем больше, чем больше ток /г
(см рис. 10.3). Мост В М3 препятствует прохождению тока от ТПТ к ТПН. При воз-
растании тока в обмотке ОУ МНС размагничивает МУ/ и ток возбуждения
тягового генератора уменьшается. Происходит ограничение пускового тока.
По мере разгона электромобиля увеличивается ЭДС ТЭД, что должно^ вызывать
уменьшение тока в силовой цепи ГПТ—ДПТ. Однако САР за счет обратной связи по
току' Л стремится поддерживать этот ток неизменным. Благодаря высокой крутизне
характеристики МУ/ (см. рис. 10.5) ток /г при переходе от режима, соответствующе-
го точке А, к режиму точки В незначительно уменьшается (на рис. 9.2 это уменьшение
ие показано), что сопровождается некоторым снижением ^муОу повышением
^МУрез- Л»ВГ’ г и Uc, напряжение U, возрастает настолько, чтобы уравновесить
увеличение Ед. Параметры элементов селективного узла выбирают таким образом,
что в режиме, соответствующем точке В, когда напряжение Ur становится равным
Пг мин. падение напряжения на сопротивлении RT возрастает и потенциал точки б
достигает потенциала точки а (рис. 10.7). Начиная с этого момента мосты ВМЗ и ВМ4
работают совместно. Ток в управляющей обмотке Л4У7 равен сумме токов от транс-
форматоров ТПТ и ТПН. Если учесть, что изменение тока Д/у рез = /у резВ—
— ^y.pesD Достаточно мало, а выбор МДС FмуОЗ или тока /q3 осуществлен исходя из
условия ГМУоз > AFМУрез’ то для участка BD характеристики ГПТ (см. рис. 9.2)
справедливо соотношение РМУоУ » ^муОз const или /оу const. Следова-
тельно, здесь происходит перераспределение составляющих тока от ТПТ и ТПН в
общем токе /фу так, что последний изменяется весьма незначительно. В этом случае
контур регулирования осуществляет режим ГПТ, соответствующий линии BD.
При (J, с'г.макс потенциал точки б больше потенциала точки а и обмотка
ГПТП(лянии ОГ^см °р ^92) соответствуег РежНмУ ограничения напряжения
Регулирование возбуждения тягового генератора, когда п < пяиэ „, осущест-
°5азом- ИиЛтом частичные внешние характеристики AfBiDiLt
дельного чиа«ен™₽Им°°Ла<2И та* как ток задающей обмотки меньше пре-
дельного значения, и подобны предельной характеристике.
шеи ^паннрни^4™я «значений сопротивлений резисторов селективного узла запи-
®“УРаВ|1€Н^’ связывающие ток в управляющей обмотке МУ/ с напряжением Ur
ASDL\23\ $ Ра’ Ра3лиЧнык участков его внешней характеристики
Уравнения соответственно для участков АВ. BD и DL:
/r*TnT = Л» II + («оу -г «добоу)/«т.т + («оу + «доюу)/«в1: (Ш.14)
'г"тт + СМтпн - 'оу II + («оу + R^oyj/R,, +
+ («оу + «„а»И,н + («оу + «доСОУ»«61;
£4*ТПН = 'оу 11 + («ОУ + «добОУ V«T „ + («ОУ + Ra„6oy>'«d.
где *тпт и Лтпн — коэффициенты трансформации ТПТ и ТПН; « ^оу и
противления добавочного разистора в цели обмотки ОУ и баллХого i
.. ГГГ' „ ” V -------*---*41 «1 Ilin можно получить и
нения МДС первичной и вторичной обмоток. Соответственно для ТПТ и ТПН
110.15)
110.16)
«б — со-
ЗНмпс'Я ‘"‘М"|!|Ие1|т"“ трансформации ТПтТтПН
ЧЯ ЛШС пеовичиой И НТППЫинпи гАчптгш ___-____ч-гтп Jr
/г^уТПТ = «ГПТ^рТПТ» 'тпт = /гтг,уТПт/“'рТПТ’
^тпт = ^тптЯг = “Утт/^ртп-р (ЮЛ7)
/уТПВЩуТПН = 'тпн^ртпн: ^уТПН = ^г/(«оутпн + «добтпн)-
Так как «оутпн «добТПН» то ^уШНв ^г/«яобТПН Тогда
“УшН^г/ЯдобТПН = ^ТПН^рТПН’ ;тпн = ^rWyrnH/CWp тпн«довтпнК
ftTDH = GnH/^r == ^ТПН^%ТПнКдсбТПн)- <1°. 18)
Здесь И’утпт’ шуТПН чиСЛа витков обмоток управления ТПТ и ТПН;
«оутпн —сопротивление обмотки управлении ТПН; «ДОбтпн — добавочное сопро-
тивление в цепи обмотки управления ТПН; wpjn-j-, ®ртпн —числа витков рабо-
чих обмоток ТПН и ТПТ; /тпт, ^ТПН— выходные токи ТПТ и ТПН
Учитывая, что параметры схемы (рис. 10.7) в режиме, соответствующем точке В,
должны удовлетворять выражениям (10.11) и (10.15), а в режиме точки D — выраже-
ниям (10.15) и (10.16), запишем следующую систему уравнений:
( «ОУ + «добОУ «ОУ «добОУ 1
1 + ят т + Re
(, «Оу-г «добру , «ОУ ~Г «добру
+ «тл + «тл
«ОУ + «добОУ
«б ;
/ «ОУ + «добру , ^ОУ «добру \ .
^гО^ТПН= ^ОУ« ( 1 ' ₽тЛ «б /
/ «ОУ + «добОУ . Roy + *добОУ__|
^гО^ТПТ + ^гоЧпН ^ОУО R~ «т.н
«ОУ «добОУ \
+ ъ )'
I
(10 19)
Считая иэвестиымн значения параметров /гВ. /гО. UrB- Цо- 'w R°y
и feTnT и решая (10.19), получим
'гв'оуо/<оУв~ ,гР «ТПТ. I'0-20’
*тпн — иг£> —
359
(10.24)
(10.25)
Введем обозначения
У, = (ЯоУ + ^добОУ^т т “
=я (10.21)
г2 => (₽ОУ + ₽ДОбОУ )/₽™ “
= ^ТпН^гВ^ОУВ' (,0- 22)
У3 = (Коу 4" ^добОУ^б ~
*тпт (W7C»® ~ ^D^OyD) - 1-
(10.23)
У уз н известном значении номиналы-
При вычисленных значениях *тп№ „^„„„ого тока с помощью урав-
него сопротивления Ямгртпт тр „„„Хопов в схеме селективного узла,
нения, учитывающего соединение резне
1Л„РТПТ = + 1ЛК“’+ ^°У’ +
,,.и + R „„цепи обмотки управления МИ
можно рассчитать “Хворое соп^иплекие в цепи обмотки управления ТПН
И 32ТСМ 'т.н 2’б"
Ядостпн = ®утпв«шр-тн*тпн>-
Таким образом, используя значения /гВ = 1800 А; ?гВ = 800 А; С/гВ=300 В.
1/гО = 800 В; 1ОУВ = 0.054 А: /оуо = 0,053 А; /?Оу - 66 Ом’ ^яагртпт •
= 0.556 • ИГ*. на основании (10.20) - (10.25) имеем 1^=1,063- 10 •
Ятт = 22,1 Ом; /?т1( = 31,4 Ом; Ян --20.2 Ом; Кдобтпн =538 Ом, Ядобоу —
= 127,3 Ом. „ „ „
Расчет частичных внешних характеристик тягового генератора, найдем зави-
симоиь игИ (Пд.,1 = (лд„) прн /, = О или, что то же самое. А'г.„аК1, («дм)
обусловливающую выбор частичной внешней характеристики, формируемой конту-
ром регулирования тягового ГПТ. Предварительно рассчитаем серию характеристик
Лоз («дна) для различных значений £ = const. Тогда функцию ^г.маКс/ (Лдиз)‘
можно построить по координатам точек пересечения кривой /q3 (лциэ) с кривыми
Лоз («ди») следующим образом.
Задаваясь значениями £г, для каждого из них по (10.16) определяем /©у и при
нескольких значениях пдиз находим Е-!пт. По кривой намагничивания ГПТ
(см. рис. 10.1) определяем ток возбуждения /bji пи (10.6) — ЭДС возбудителя £вг.
далее находим его магнитный поток (£вг'пвг), помня что явг « «В| илдяз/ЛдЯзл-
Исиользуя нагрузочные характеристики возбудителя (см. рис. 10.2), получаем зна-
чения МДС возбуждения возбудителя ВдВ, „ ток его возбуждения по (10.8).
По характеристикам магнитного усилителя (см. рис 10.5) определяем ток /„ _и. а
по (10-13) — ток ZlO3. у v
На графике (см. рис. 10.4) нанесена серия зависимостей /,т (п ). Ис коорди-
иатвм точек их^пересечения с/оз (Пдиз) „„ рис. 10 в п,‘“рое"“ эавис„мосте
г.макс/ пдяз г.макс/(пДиз)- В соответствии с графиком (рис. 10.8) на поле внеш-
нях (см. рис. 9.2) точками А, отмечены значения
/'“итюямям л^троить семейство характеристик А,В,D(t, для каждого значения
«даз/1 проводим прямую LrDt с ординатой (i == л = по
Несения с лучом OD Из точки г "“"’ паРаллельнУю ми а6сиисс’ Я®
пересечения с лучом ОВ, а из точки‘в р од““ "Рямую 0(8,. параллельную DB, Д°
ствующую току К „ , = / 2 ВоГм'оТ. рямую В<А- яяраллельиую ВА и соответ-
внешних хаоактепиДте / ‘‘ Возможеи " Другой метод построения частичных
внешних характеристик-с помощью аналитических выражений
360
Уравнение участков BZD, можно
представить в виде
ur = ar- irDl) (urBi - _
-',D.) +'Ло,-. (10.26)
Тогда
'.D. = Л Z>f7.-Dl/U,D; (10.27)
иЧЛсД/» (10.28)
игв, = U,BV,DllUrD. (10.29)
Найдем значения /гОм UrB. Ре-
шая совместно (10.14) и (10.15), а так-
же (10.15) и (10.16), получим для точек
В, и D(
п _ kini
"rBi — "7-----Г2Г-;
*ТПН 1 + 1
япмо?‘9- Внешняя характеристика дизеля
и механическая характеристика
тягового генератора ГПА-600
7
+ Y, >гВ‘ = Нв1,вр (10.30)
urD,= L+Ll+Zst .
a /!тпн Г, 'rDi — йо'гО(. (10.31)
Для предельной внешней характеристики
игв = (10.32)
Л-d ~ (10.33)
Отметим, что (10.30) и (10.31) являются уравнениями лучей ОВ и OD (см. рис. 9.2).
Таким образом» для расчета частичных характеристик в интервале токов тягового
генератора от /г = О дс^ /гС£ напряжение UtD ~ £/г,Максе- находим по графику, по-
казанному на рис. 10.8, а в интервале от /г = /г£)< до frBl напряжение^ (/г/.) вы-
числяем по (10.26) с учетом (10.27) — (10.33). Полученные указанным методом час-
тичные характеристики ГПТ см. на рис. 9.2.
Построение предельной внешней характеристики тягового генератора при сов-
местной работе дизеля с ГПТ. Рассмотрение кривых Ur (/г) при Рсв и = const и ABDL
(см. рис. 9.2) показывает, что в определенных интервалах изменения тока /г по линии
BD требуется реализация мощности дизеля, превышающей мощность РС8 н. Эго при-
водит к снижению его частоты вращения и, следовательно, отдаваемой мощности.
При совместной работе с генератором частота вращения пднз зависит оттока /г_
Для каждого значения /г = const вращающий момент Л4дн3 и частота вращения пдиз
(а значит, и мощность дизеля, реализуемая на тягу) определяются как координаты
точки пересечения внешней характеристики дизеля /Ицяз (лднз) с механической ха-
рактер нети кой генератора /Иг (Лг), где лг = ядаз. Уравнение механической харак-
теристики ГПТ имеет вид
Л1Г = <Л/г/(ЧгШд,„). (10.34)
где = 2ллдиз/60 — угловая скорость дизеля.
Исходя из сказанного внешнюю характеристику Ц-(М при совместной работе
дизеля с ГПТ определяем следующим образом. Задаемся рядом значении тока /г —
== const. Для каждого из них, пользуясь графиком (рис. 10.8) и формулами (10.-8) -
(10.33). рассчитываем по (10.34) зависимость Мг (лдиз) и наносим ее на поле внешней
характеристики дизеля марки 8ДМ21 (рис. 10.9). По координатам точки-их пересе-
чения находим мощность Рсв, а затем согласно (10.41 — напряжение Ur. Получив та-
ким методом для каждого /г значение Ur, строим характеристику Ur (/г). Для С ТПЭ
карьерного электромобиля БелАЗ-549 она практически С0ВЛада^с^ХТноР нХль
постоянства номинальной свободной мощности дизеля в связи с относительно небелы
361
той перегрузкой ГПТ по току и достаточно высо-
кой крутизной зависимости <лдцД-
Из графиков (см. рис. 9.2) видно, что при
частоте вращения Пдпз 1460 об/мин дизель не
перегружается « контур регулирования формиру-
ет внешние .характеристики тягового 1 ПТ вида
AiBfD.L,.
Расчет тяговых характеристик КЭМ. В СТПЭ
карьерного электромобиля предусмотрим работу
ТЭД с полным магнитным потоком и двумя сту-
пенями уменьшения потока, что дает возможность
обеспечить заданный диапазон скорости движе-
ния При коэффициенте регулирования возбуж-
дения рв = 1 обмотки последовательного и не-
зависимого возбуждения ТЭД включаются
согласно, так что результирующая МДС возбуж-
дения
Ад = Ад + = 'оБНю01»1 + £Мдк’0ВП’
(10.35)
где F'a и FR — МДС обмоток последовательного и
независимого возбуждения; /овн — ток обмотки
независимого возбуждения; к’оеП’ К*ОВН — ч,,сла витков ОВП п ОВН.
На первой ступени ОВП шунтируется резистором. Принимаем Рр = 0,5. Тогда
Тя — 0.5/д1*’оВп 4“ ^овнк’овн- (10.36)
На второй ступени обмотка независимого возбуждения включается встречно об-
мотке последовательного возбуждения
Ад 0.5/ди?овп — /овнк'овн- (10.37)
При этом полагаем /©В1| “ const. гак как ОВН получает питание от аккумуля-
торной батареи Расчет тяговых характерно гик выполняется в такой последователь-
ности. Для каждого /д — const и /,- «= const из рис. 9.2 находим U, = (Ул. Далее,
зная Ffl, по нагрузочной характеристике электродвигателя ДК-717А (рис. 10.10)
определяем ER!na и затем частоту вращения электродвигателя:
«Д = (С'д — — Л/Л|Э/(£д/Пд). (10 38)
Далее согласно (1 4) вычисляем скорость движения КЭМ:
о — 2лпд/?н ЧбОг„ (10 39)
КПД ТЭД в соответствии с (3.78), а также момент на его валу и суммарную силу
тяги на ведущих колесах КЭМ.
Л1Я ^//,./, 1)дсгд (10.40)
6 = »«к'п»1ивкЛЦ-/?« (10.41)
Параметры элементов контура регулирования магнитного потока ТЭД целесо-
образно выбирать так, чтобы ступени включались при тиках, близких к выходу ге-
нератора, в режим отсечки по напряжению (точки см. рис. 9.2). Тогда для предель-
ной характеристики ступени управлении потоком будут включаться при 7Г = 800 А.
Выбираем ток отключения ступеней /г = 1000 А.
Указанным выше методом рассчитаны зависимости, приведенные на рис. 9.3, 9.5.
Выбор параметров элементов контура управления магнитным потоком ТЭД-
Контур регулирования осуществляет автоматическое управление магнитным потоком
ТЭД. Принцип построения контура и выбор параметров его элементов обусловлены
необходимостью удовлетворения следующих требований:
включения и отключения ступеней уменьшения потока в заданных точках внеш-
ней характеристики тягового генератора, определяемых сведением к минимуму р®3"
363
Рис. 10 11. Зависимости выход-
ного тока магнитного усилителя
ТУМ-AKI-11 от его результцру-
ющеГ( МДС:
"днз= 1500 об/мин, U = 230 В.
Гц; лдиэ = п’оо об'ыин.
ип= J69 В. /п= 308 Гц
и частнч-
частотах
к,,х изменений тягового усилия u
ST« S?
момента ек.щотшня^от^Гюте |1егут|1»м™я
пени; " “""Точения каждой сту-
управления потоком на предельной
них характеристиках (при различны,
вращении дизеля); различных
РУЮщен saaaiiHjSnEnoBaSba11™’ гаранти’
тываипя „ри включении и отключении “* Сраб!”
=я
На первой ступени срабатывает пеле Pl /см
рнс. 10.1-1 я подает напряжение на втягивающую
“TXTтактора кш-Игй
резисторы параллельно обмоткам последова-
тельного возбуждения ТЭД (см. рнс. 9.1). На вто-
рой ступени дополнительно включается реле Р2
(см. рис. 10.12), переключающее с помощью кон-
такторов обмозки независимого возбуждения ТЭД
так, что их МДС вычитаются из МДС обмоток
последовательного возбуждения, в то время как
при полном потоке и на первой ступени эти об-
мотки включены согласно. При увеличении на-
грузки возможен обратный переход на полный
поток ТЭД. Последовательность включения н
выключения ступеней обусловлена функциониро-
ванием двух реле времени.
В соответствии со схемой (см. рис. 9.4) функцию усилителей У2 и УЗ в конутре
регулирования ТЭД карьерного электромобиля выполняют магнитные усилители
МУ2 и МУЗ. Применяем магнитные усилители ТУМ-AKI-ll, используя у них по
четыре обмотки управления: 03 — задающая обмотка (ЗН—ЗК), питающаяся от вспо-
могательного СГ через выпрямитель ВМ7 и конденсаторы С4—С6 я создающая от-
рицательную МДС (см. рис. 10.12), ОУ —• управляющая обмотка (/Я—/А'Л получа-
ющая питание от селективного узла (см. рис. 10.7) и создающая положительную Л1ДС;
ООС — обмотка внешней положительной обратной связи (6Н—6К). подключенная к
выходу магнитного усилителя, ОБ — блокирующая обмотка управления (7/7—7А)»
питающаяся от аккумуляторной батареи и создающая в МУ2 положительную, а в
МУЗ — отрицательную МДС. Результирующая МДС магнитных усилителей
ГмУрчэ = ГМУОЗ — ГмУОУ — ГмуоОС± ГМУОБ ,,0-42)
При неизменной частоте вращения дизеля FHy ооз“ const- а ^му оу увеличи-
вается по мере снижения тока /г. Значение FMy оос зависит от пехотного состояния
контура. г. е. если магнитный усилитель закрыт (его выходное
нулю), то FMy оос >'ала- а открыт. 10 fму оос наибольшая. Таким
образом, при включении ступени управления ш™итн™ Тнадёжио^/ержимети
Ленин положительной обратной связи магннтнныи усилитель надежно удерживается
в открытом состоянии. к,ппарл*зння магнитных усилителей
Начало работы блокирующих обмоток y"pa““™ ап реле времени На-
определяется последовательностью вкл nafiorat?1 блокирующая обмотка второй
пример. при полном -"“"XSZcro'UW ”
ступени МУЗ. исключающая B03MO*“^vlt1bl< пЛе Р/ и Р2. Данные
Нагрузкой .МУ2 н МУЗ являются катушки реле
усилителя ТУМ- Л К1 -1Г
.Мощность выходная поминальная Вт
Напряжение выходное номинальное. В .
магнитного
53
363
Количество последовательно соединенные н
одном магнитолроводе - ’ '
Число витков рабочей обмотки • - - •
Сопротивление рабочей обмотки при*20 С.
Коэффициент кратности тока нагрузки
МДС управления номинальная, л - -
Обмотки управления ..........
Ток управления^ мА:
номинальный ..................
длительный ...................
ЧИСЛО ВИТКОВ..............ллоХ А * л е
Сопротивление обмотки при 20 С, Ом о,о
3H—SK
....... 0,39
.........348
...... 220
..... 400
обмоток на
..... 2
...... 960
....... 8.35
....... 20
....... 12,5
6Н—6К, 7Н—7К
19
130
650
44,7
12
65
1050
120
На рис. 10.11 приведены характеристики /выхму (^МУрез) магнитного усилителя
ТУЛ1-АК1-Н. Здесь /вь,хму — выходной ток усилителя. Зависимости имеют релей-
ный характер, обусловленный наличием внешней положительной обратной связи.
При проектировании устройства автоматического управления магнитным пото-
ком примем, что задающие обмотки МУ2 п МУЗ питаются от вспомогательного СГ
по такой же схеме, что и задающая обмотка МУ1 (см. рис. 10.3). Общая упрощенная
схема такого устройства показана на рис. 10.12.
Необходимо отметить, что рабочие обмотки МУ1, МУ2, МУЗ, ТПН и ТПТ пи-
таются от вспомогательного СГ через трансформатор, обмотка возбуждения СГ —
от аккумуляторной батареи через нерегулируемый резистор. При таком включении
обмотки возбуждения отношение ^сг//сг при различных частотах вращения п
остается практически постоянным. Это оз*
качает, что при работеСТПЭ на частичных
мощностях магнитный поток в магнитопро-
водах ТПН, ТПТ н магнитных усилителей
не будет превышать допустимый.
Определим параметры цепи задающих
обмоток магнитных усилителей МУ2 и
МУЗ. Принимаем ток задающей обмотки
при пдиз ~ "диз.и равным 65 % длительно-
го тока, |. е. 0,0435 А; активное
сопротивление /?С-фильтра /?$ = 56 Ом,
емкость конденсатора в каждой фазе на
входе выпрямительного моста ВМ7 С —
== 1 мкФ. Тогда из (10.11) получим
КрегОЗ= 120 Ом- Зависимость l'Q3 (Лдиз)
вычислим по формуле, аналогичной (10.12):
/оз = 0,675 (0,04«диз + 2)/(236 +
-г 1,089 - 10«/пдиз). (10.43)
Рис. J0.13. Зависимости тока управля-
ющей обмотки магнитных усилителей
МУ2 и МУЗ от тока тягового генера-
тора:
1 и 2 ~ зависимости /оу (лдиэ) при вклю-
чении и выключении ступеней уменьшения
магнитного потока ТЭД
Расчетную кривую /q3 Сяднз^ см- на Рис- Ю.4. Если пренебречь падением на-
пряжения на сопротивлениях управляющих обмоток МУ2 и МУЗ (см. рис. 10.7), так
как эти сопротивления малы по сравнению с /?ОУ1, ДдобОУ и /?б, то ток обмоток мож-
но рассчитать по формуле
fOV — ^ТПН = ^ТПН — ^jRt в ~ АТПН^г — У/оу. (10.44)
В свою очередь, из (10.16) получаем
/оу ~^тпн^г/П + Уя + Ys). (10.45)
Напряжение Ur для участков DfLi внешней характеристики тягового ГПТ на-
ходим по графику (см. рис. 10.8), а для участков B[Dt — по (10.26). Зависимости
/фу (/г) представлены на рис. 10.13.
Определим параметры цепи обмоток обратной связи МУ2 и МУЗ. На основании
(10.42) ток этих обмоток
1ОС>С ~ С^МУ 03 — МУ рез “ f МУ ОуМ^ООС ~
~ UОЗЮОЗ — МУ рез ~ Лэу^ОуУ^ООС» < 461
где Wqqq, Wq3, Wqv — числа витков обмоток ООС, 03 и 0У. Так как обратная связь
имеет место лишь при открытых магнитных усилителях, то следует выбирать значе-
ние тока /оу, соответствующее выключению ступеней управления потоком ТЭД.
Согласно рис. 10.13, для предельной характеристики току выключения ступеней /г =
= 1000 А соответствует ток /оу = 0,46 А- По характеристике магнитного усилителя
(см. рис. 10.11) находим /'мурез в А- Тогда
/оос =» (0,0435 • 1050 — 12 - 0,46 - 60)/650 = 0.0091 А.
Сопротивление регулировочных резисторов в цепях обмоток обратной связи
Кри- ООС = (UHW вых в — 'otxfioocll'ooc =
= (136 — 0,0091 • 44.7)/0,0091 = 14 600 Ом, (10.47)
где 0,,v — номинальное выходное напряжение МУ2 и МУЗ; Rooc — сопро-
(Vi j вых.к
тивление обмотки ООС.
365
к пели блокирующих обмоток
Сопротивление добавочных резисторов в пел
ЯдооОБ г (( АВ — 'оБда«Об« ОБ дл
= (27 — 0,13 • 44.7J/0.13 = ЮЗ Ом. (10.48)
тдо U.R—напряжение бортовой аккумуляторной батареи; 'оВдв " «ОБ - Дли-
тельный ток и сопротивление обмотки ОБ. Принимаем Л„оСОБ - -20 Ом.
Нагрузкой МУ2 « МУЗ. как указано ранее, являются обмотки катушек реле Р.
Выбираем реле типа РЭВ-821 с номинальным током катушки - С, 18 А и сопро-
шипением катушки Яр = 610 Ом. Сопротивление добавочное., реш.тора в пей., ка.
тушки реле и резистора Rp (см. рис. 10.12)
Р = .-Л - «₽ = l36A,S - 610 = 140 ОМ:
Rp [(Яр -г Ra06 р) Я.МУ И1/(Я₽ + ^доб Р ^МУ t3 —
= [(610 + 140) 3501/(6104- 140—350) = 655 Ом.
(10,49)
(10.50)
где /?мун — номинальное сопротивление нагрузки Л1У2 и МУЗ. Принимаем Rp =
= 820 Ом.
Зависимости /оу (ЛД1|31- соответствующие включению ч отключению ступеней,
вычисляем следующим образом. Для каждого значения лдиз по (10.43)
Ток /оос принимаем равным
^ООС ~ Ах)С предггдпз/Лдиз н.
Результирующую МДС определяем по графикам (см. рис. 10.11),
(10.46): для включения и выключения tryпеней
'.оу „„I.Woy:
находим /q3.
(10.51)
по
а ток /оу —
(10.52)
*’’* ' ’'одЦ»: '.лгу’оо. - |1ечьц-,у. (10.53)
значГш|я7оХе/1,В|,,С,'? " *Н кз Р««. Ю.13 Они позволяют найти
значения тока /г, при кигорих припои о-• i-.--i-.rt. .w ...
тичных характеристиках ад4Ч"“- «1»»ым1и*|е|1иеступенеииачас-
Расчет тормозных \араыерис1ць к ЭЙ К
кого электромобиля БелДЗ-544 in.-p р„кгс, схема СТПЭ карьер-
характеристик. каждая из коггц,.;.’' -’яу. '".Г’'1:.''' <!’”1‘'“,1>и«ыние четырех тормозных
контроллера Л'Т (см. раи. 1 пилон позиции тормозного
Сопротивление гормоши><. ш.,,..„ „ , о
электрическом торможении (сч рй.' ./и ’ ' •» Цель якоря ТЭД при
НИЙ напряжения и и ика / i-к-м, исЧ,,дя Н1 ;ии(устимых значе-
Ri
Ток согласно (3.91)
(10.54)
При скорости Р---40 кч,
= 86.62 с-‘; ток /дм .-= 400 Д.
дол ® ? В. Тогда /д т _
максимальным значением £'
желне между соседним» кол.тем0|'
Максимальное напряжение 1ЭД
Г VAb... ~ Z?-
(10-55)
- >r.lOH.0S скиросп. .. -
коэф^ициеш < - 1 41 Л с ’ WAH
-733 д п р *'bl ,ем тло-’1 3-2). Выбираем
. И 'кт=735 А. Задаваясь
vh >.» ШЛП 4deM ,п (3.9U) максимальное напря-
-«Зетинами -лем родвигатсля порядка 30 В.
366
= 950 - "SU -0.08 _2 5 = 8)(.в
(10.56)
Из (10.54) получаем
Rc + Кт = 896/650 ] ,38 Ом,
где Rc — сопротивление стабилизирующего резистора
Напомпим. что возбуждение ТЭД при реализации первых трех тормозных ха-
рактеристик осуществляется только за счет обуоток независимого возбуждения.' Для
обеспечения четвертой характеристики подключаются обмотки последовательного
возбуждения, питаемые от тягового генератора. Из схемы (см. рис. 9.6) видно что
здесь образуютсяi следующие контуры: для тока генератора, равного 0,5/г, — цепь
якоря ПИ - обмотка последовательного возбуждения ТЭД — стабилизирующий
резистор; для тормозного тока электродвигателя — цепь якоря ТЭД — тормозной
резистор — стабилизирующий резистор. Указанные контуры можно описать урав-
нениями
'дл = l^r г ~ 0-5/, т C&Rr -и ROBn /?с) _ Дб/щ]//?с: (Ю.57)
£д.т /дл (Rf _ Rc т —/?д) Ч- 9,5/, TRC -j- Д(/щ, (10.58)
где #овп — сопротивление обмотки последовательного возбуждения ТЭД.
Пели задаться определенном МДС «Я1 оного генератора при /дТ1И1(с и^дтмакс.
то, рассчитав магнитный поток и результирующую МДС ТЭД, выбрав МДС обмотки
независимого возбуждения, можно найш «ок. магнитный поток и ЭДС ГПТ. После
этого из (10.57) или (10.58) м.ожно вычислить Rc. Однако проще задаться значением
Rc- Практика показывает, что наиболее целесообразным для формирования предель-
ной тормозной характеристики является соотношение Rc — (0,15 0,20) RT. При-
нимаем Яс — 0,24 Ом Тогда RT = 1,14 Ом.
Для подтормаживания КЭМ при движения вниз по трассе с заданным уклоном,
как показывает тормозной расчет, СТПЭ в режиме электрического торможения долж-
на обеспечить при скорости 40 км/ч (пд = 1740 об/мин) суммарное тормозное усилие
В да 40 - 103 Н. Оно определяется выражением
в = /"«/(^ЦаЧпеж)- ,|(,59>
В первом приближении считаем т)д = Чдн- Поэтому
Едт/цт = вш]д11пвк/тк = 40 - 10э - 40 - 0,913 0,93/(2 • 3,6) = 188 700 В - А.
(10.60)
Когда возбуждение ТЭД осуществляется только за счет ОВН, уравнение тормоз-
ного контура имеет вид
/д г = (Ед т - Д1/щ)/(₽т -Ь Rc + ~Ra) = (£дт -2,5)/(1,14- 0,24 ф- 0,08) =
= (£дт —2,5)/1,46. (10.61)
Решая совместно (10.60) и (10.61), имеем £дт = 525 В, /д.т = 360 А. Магнит-
ный поток ТЭД в этом режиме Еа/яд — 525/1740 г» 0,3 В/(об/мин).
По нагрузочной характеристике ТЭД (см. рис. 10.10) находим его МДС, создава-
емую обмоткой независимого возбуждения; Гд = 1560 А. Ток возбуждения /qbh ~
= = 1560/40 = 39 А.
При питании этой обмотки от бортовой аккумуляторной батареи сопротивление
добавочного ре<истора в цепи ОВН
евн - <Л«."овН - «овн = “ °-™ = °;27 Ом
При формировании третьей тормозной характеристики FR = const, Ел1пл —
= const Fn'i«= const. При постоянстве магнитного потока тормозная характерис-
тика ппедставляет собой прямую линию, выходящую из начала координат (ем. $ ).
Легко увидеть, что в соответствии с (10.59) зависимость В (v) на третьей позиции тор-
мозного контроллера — прямая линия (см. рис. 9.7). - 0,.
Для подтормажнвлния КЭМ при спуске по трассе с уклоном порядка 5 ,0 при
скорости у = 40 км/ч требуется тормозное усилие В — 15 • ГО Н. Выполняя рас-
367
Pnc. JO. 14. Зависимости тока
возбуждения возбудителя от час-
тоты’ вращения дизеля в режиме
электрического торможения
КЭМ;
PQ расчетная, JRS — сформиро-
ванная системой регулирования
четы, аналогичные приведенным для третьей тор-
мозной характеристики, получим Ед т 320 В;
/ «220 А; £д/пд= 0.184 В.^об/мин); FR =
— 900 А; /овн — 22,5 A; /?до0оВн = °<78 Ом.
Вторая тормозная характеристика занимает про-
межуточное положение при F'R = 1300 А,
ЯдобОВН = О’41
Прежде чем перейти «расчету четверти тор-
мозной характеристики, еще раз отметим, что для
обеспечен и я неза виси мости э гой ха ра ктср «ст и ки
от частоты вращения дизеля необходимо стаби-
лизировать ЭДС тягового генератора иа четвер-
той позиции тормозного контроллера Определим
значение этой ЭДС для режима £дт макс и
/дтмане. Магнитный лоток ТЭД Ёд/лд —
= 950/1740 = 0,546 ВДобЛмпп).
МДС электродвигателя 3540 Л. Если
принять, что ОВН работает в этом случае с до-
бавочным резистором, имеющим максимальное
сопротивление и Гд — 1540 А. то МДС и ток об-
мотки последовательного возбуждения
Гд = Гд -- Гд = 3540 — 1540 = 2000 А;
7овп ~ ^д/и’оВ11 ~ 2000/20 ~ 100 А — 0,5/г г.
Тогда из (10.57) ЭДС тягового ГПТ
£*г т = /д -г-О.о/, т (2XRr "г" АО'щ —
== 650 - 0,24 J-100 (2 - 0,0173 - 0.0223 0,24) -р 2.5 = 188 В. (10,62)
Для расчета предельной (чствергои) тормозной характеристики задаемся рядом
значений тока /дт от Одо гка!.г- При каждом /дг ~ const, используя выражение,
полученное из (10.57), находил ток ПП.
/г т = (£г т — /д,/<.. — ?Д/,Ч) 10,5 (2^?г /?иг,п -г fldj- (Ю-63)
Далее по (10.58) вычисляем £., t М .Н /•.. ?:игр1чнып ноток Ед/лд. частоту
вращения пд, скорость движения из* очей л-. <К* 59) — горхюзное усилие В. Пре-
дельная тормозная характеристика hjjibeji’ioii. •».iei-.c‘<' Л-ли БелАЗ-549 показана
кривой 4 (см. рис. 9.7).
Определение параметров цепи возбуждения «отиудшеля в режиме электриче-
ского торможения. Стабилизацию ЭДС im»Liuii: ।ei.ip.iобеспечим зд счет соот-
ветствующего выбора зависимости тика возбуждении ломл штелч <jt частоты враще-
ния дизеля.
Задаваясь рядом значений пдиз ит n , 7l>f> ,Л, „ и< -- isoij об/мнн, для
каждого ВЭНЯХ находим п£г = 1,413 я С~<я, ,(де £. 18|1 Н); /ц,- по рис. 10.1
при токе /г= 200 Л, полученном согласий (|6.(,:с| 1Я 1-^ 1 = 650 А;
Г <1Л£1 С I г- А I А Г.МаКс
^вг нз вГ'лВГ;'»< вг 1Ю P’iv- М-2 и. нижней, / |1Вг?^’вКГ. Расчет-
ная зависимость (пдиз) показана кривой FQ н.» рис ID 14. Аппроксимируем ука-
занную зависимость прямой линией ылксимальцо щщб.тнжениин к требуемой PQ
на частотах вращения дизеля, близких к нД1м ч ык как именно в этой зоне значе-
ни® пдиз осуществляется режим электрического 1<|рмижецця КЭМ.
Для формирования характеристики осуществим питание обмотки возбужде-
ния ВГ на четвертой позиции тормозного контроллера oi бортовой аккумуляторной
батареи, включив в цепь обмотки стабилизирующий резистор /?../ через который
повременно проходит выпрямленный ток вспомогагсльпого СГ (рис/ 10 15).
Рис-10 (5. Схема включения обует-
ки возбуждения возбудигетя в
ляме мектричккого торможу.,,,!,,
КЭМ
и
г^ггч ^опР°ТИВл®’МЯ резпСТ0р0в р / п
опрело.™,., „а и Rc2
^7 1 RcJ) -I- /оВГЛс/; (10.64)
'Л/ + /„№ lftci+R.Br),
-......
нТир™"енпе>,0ТК'’ ВОЗб>,й!®«"н аозбудХля’
Цга - 1.35Ц Г/|И11 = 1>35 (0.04пда, J- 2).
(10.66)
Исключая „з (10.64) „ (,0.05, гок
и
RJ ll'«~'eKr.(Ry( + Rc2)prlB&RcI. (,007)
Для точки R „а графике (см. рИс. (о ,4) ток , . . . ,R ,
С/Л, = 40.5 В; для точки S ток I ' = о- и 2 ™ „г/
ставив эти данные в (10.67) вмее'Г ° 83,7 В‘ !1од'
40,5 = [(RcZ л. ад/Яс/| (27 _ ) (8 + + !
83,7 = 27(RC74-RC-W. | 110.68)
Решая систему уравнений (10.68), получим Rcl = 4,25 Ом; Rc2= 8.95 Ом.
§ 10.2. Система тягового привода
переменного тока для электромобиля
повышенной проходимости
В процессе проектирования СТПЭ существенное значение имеет согласование
параметров тяговых генераторов и электродвигателем, главным образом при налички
вентильных преобразователей в силовой цепи. Эго особенно важно для СТПЭ пере-
менного тока с преобразователями частоты. Правильный выбор номинальных данных
ТЭМ, а также диапазонов регулирования напряжения и частоты позволяет макси-
мально использовать расчетную мощность ТЭМ, выбираемых из ряда существующих,
или составить оптимальные задания на их разработку.
На примере СТПЭ переменного тока, не останавливаясь на расчете агрегатов,
узлов и элементов, сосредоточим внимание на выборе основных параметров 7 ЭМ м их
СОГ.'ЫСОВЛНШ)
СТПЭ, имеющая преобразователи частоты со звеном постоянного тока. Найдем
Основные показатели СТПЭ, имеющей схему (ем. рис. 1.20. *> для электромобиля по-
вышенной проходимости с колесной формулой 4 X 4 и свободной мощностью двига-
теля внутреннего сгорания Рсвв= 200 кВт. приняв в качестве базового следующее
электрооборудование: асинхронный двигатель ДК-7Д) (₽д.и ~~ №5 кВт,
= 200 В; <7,Л1а„б.= 1,15: о = S0 Гщ *ш8 ° г-79;..МЙ "ни»;
с _ == G pro' кВт), синхронный генератор СТ-(60 400 {Рг н б — 160 кВт t г иЛ
~ °2.чо в: и 1.15; Й 6 = *х> Г“1 -'г 6. = 0-38; Д = ,4-’ "*г ‘г 6 ~
= КО руб,'кВт). ПЧПТ с удельными массой епчпто ~ 3-85 кг кВт "стаап'ы0
с ' = ’О 4 суб кВг; удельные показатели всего силового электрооборудования
С1'пЭ — g'6'= 14,7 кг/кВт, стб “ 38.6 руб.кВт. полные масса истоммосто этого
оборудования <7гб — 3350 кг. Стб ..аксИматьной»товойскоростибаао-
Пусто „ом,.Т Т^^приэтомудовХ.вориет»
вого и проектируемого АД равны ГдИ , w
3t>9
v„ome <7.166), то выбор параметров АД провод...,, по статическим характерна
тикач? ДЛЯ Р e const „ „ . с нях-ппим Г
П-1 кривым на рис. 7.3 задаемся предварительно С/,макс. ~ 1.5» находим /,и
- 1.6. Ш рис. 7.2 имеем О’ -- 0.81 < = 0.64. Если принять, что допустимое откло.
некие диаметра корпуса 0,9-1,0, го согласно рис. 7.2. о уточняем частоту _ 1,1.
Тогда С* = 0,9, < = 0,9 я соответственно U*Ma,^ — 1.2; - 0,7b (см. ряс. 7.4);
из рис. 7.1 получаем g = 0,85; сд — 0,80.
,, п" - п* и //’ — (Г, (см- гл. 7). При полученных
Можно принять Ргя — гRJJ и vr MakC< !макс* 1
значениях ₽г'„ = 1.0 и “ '-2 У“™'« <7-|67> "е ™'™“яега- ?°ЭТ™У ко-
минатьяую частоту проектируемого СГ находим иа основа.,пи (7.169): 1Г н = ₽• =
= = 1/1.** = °-61' Дл" ^г.макс = *-2 " fr ,< = О-6' „а
рис. 7.6 определяем хгл = 1,32.
В соответствии с рис. 7.5 имеем значения удельной массы и стоимости £* = 1,5;
с’= 1,54. Задаваясь г^чпт = наход|п’ 1,0 Р,,с- 7 8’ 6 Ul» а ит “ *-°. а из
рис. 7.8,а £пчш•= I'5- Так,,м образо*1’ получены следующие данные- для асин-
хронного электродвигателя Рдн — 1.0; 171н = 1,0; t/lMdhe. “ 1,2; Ли ~ Мё *
— 0,9; /* = 0,9; Л* = 0,76; g* = 0,85; с’ = 0,80; для синхронного генератора:
р‘я = 1,0; U*rM = 1,0; У*гЖ. = 1,2; /*м = 0.61; л ’. = 1.32: g* = 1,50: с* ~ 1.54;
для ПЧПТ £пчпт — 1,5; спчлт = 1,0
Учитывая параметры базовых ТЭМ, получим следующие данные проектируемых
машин’ для асинхронного э.тсюродпигателя Рд н = 40.5 кВт; £/)н = 200 В; £/1ыаксж =
= 1.38, /(н == 55 Гц; Лм — 2,12; ga — 5,1 кг.кВт;ся = 4,8 руб/кВт; для синхронного
генераюра Рг н = 160 кВ г, ь — 230 В; £'г мзкс„ ~ 1,38, /р н == 240 Гц; vre =
— 0,50, gt ~ 6,45 кг кВт; — 13.25 руб'кВт.
Пренебрегая потерями в пре<»бр.<чог?леле частоты, принимаем в первом прибли-
жен ни КПД |)уП = I. Кроме тчго, считаем. что КПД проектируемого электродви-
гателя равен КПД балиюго, г. е i], — ц,,., = 0.84. Тогда согласно (7.151) и (7.152)
удельные масса и стоимость еиливогм эчекгрообору.-ювзвнм составят gT — 18.0 кг/кВт;
ст~ 41,6 руб/кВт. Их отло<игс »ьныс
ёт = g»/gT6 = 18,0'14,7 == },_е: : , .= 4|,6;38,Ь = 1,1
Масса и стоимость силового i.ichipuuCjopy.vOBxihim > »оотвегствнн с (7.143) и
(7.144)
°’ = £t'₽a...gt<. 1.27 1.11 • 2.Й0 iw.,.’. f.r.
с» — ст₽а в6\.с “ 1.1 1,1) -о25<1 1.875 руб.
Общие масса и стоимость оборудования просии|чсм..й < ТГ1Э включающие по-
казатели аппаратуры управлении и кпомогапмьсих ^юктриче.-кик ’машки, Сгтпэ »
да 1,1 Gr 3150 кг; Сстгю — 1,25СТ — 814)0 руб
Если полученные зиачекии GCT„, „ с,.тгц № roor№rc результатам
п^варительиыхтехнико экономически' расчетов, необходимо задаться новым зва-
1макс* Р Р 4 т вплоть до получения приемлемых показателей.
31И™"ИЯ ‘Ьпэ " Сст[1Э удовлетворительны, го по условиям обеспечения
совместной работы ТЭМ с ВП следует поовепитк . .,иРн-
ные номинальные данные СГ и АД провеРить. насколько согласуются получен
Пользуясь методом проектирования СПТЭ nr тан ...и па-
раметровСГ и АД в качестве исходных принимаем Д “ ЭУ' Пр" “иасованпв №
йоге электродвигателя. Финимаем «слученные показатели асинхрон
870
(10.69)
(10.70)
(10.71)
вентилях силовых мостов ВП.
Номинальные напрЯжецие и дп
... Д"е®Н“"мж>мСг.«.6вж.
г.н -
'г«= т“'>'</№1«нАв/н);
',,, = Л’««/<т^.нЧдяС051{в„).
глс 1ШОП _ суммарное падение напряжения на
«> соответствии с (6.9)
*»'" = 1/П'^ с“ %.„» = 1Д/2 0.881 =. 0,806.
= 1 И.СоЙмно’ТбЬ)" имеем Г” У~ °' =
находим угон fl W ’ ’ ° ’МИт”г. “ °-М<“- Р»с.5.3 о)
I "lZ п " СЖДОКатеяь№ W- Р»с. 5.2). коэфф™™ 6„., =
~ — 1.34. Принимая i(/Bri= 10 В. „а (10.69)-(10.71) получки ’
и'гм = 200/(0,464 • 2,25) + 10 = 200 В;
'г.в = < • 40.5 - 10»/(3 • 200 0.89.0,88 • 0,806 • 1,34) = 320 А.
Ток 7ГВ незначительно отличается от Гг,/<т1Ц „с-л >), ,,) ^ 3-,0 А.
в то время как Ц ./6.’г н = 200/230 = 0,87. Такая существенная разница объяс-
няется тем, что оптимизация СГ приводилась при сохранении его коэффициента мощ-
ности на уровне базового значения cos <fr и = 0,7. Это значение у базового генератора
было^занижено с целью получения дополнительного ресурса по мощности. Для 0н =
~ 55 реальное значение cos' <ргя — 0,95 (см. рис. 5.И, б). Отсюда следует, что для
обеспечения нормальной работы четырех АД с суммарной мощностью 162 кВт, когда
относительное значение максимального напряжения равно 1,38, требуется генератор
практически той же расчетной мощности, что « в базовой СТПЭ с б'|Макс> = 1,15
Действительно,
Гг.расч.б = н.б/, н б^1макс б. = 3 • 230 • 330 . 1.15 - 10-3 = 262 кВ - А;
Рг расч = т^‘г Л Л'|макс. = 3 • 200 • 320 • 1,38 - 10“3 = 265 кВ - А
Отметим, что Рг pacq — mrUr H/r Bt/[MaKC, = 3 • 230 • 330 • 1,38 • 10~4 =
= 314 кВ - А.
На основании сказанного в качестве номинальных выбираем значения UT н,
/г м и cos' <рг н. Отсюда номинальная мощность Рг н = тгит н/г нсоз <р, в — 3 .ч
X 200 • 320 • 0,95 • 10“3 = 182 кВт.
Получив основные исходные данные для проектирования _щли выбора)
определим некоторые внутренние параметры АД. При kw — — 4 « -н *• -
ходим cos <гд£) = 0.78; Ч = тй = 0,06 (см. рис. 4,9, а), а в соответствии с обычными
для АД с последовательной вентиляцией значениями 6— 8 12е.’’' ''к
^иОч^^^,П^а₽ОаХТе»
= И00 кВт. В качестве базового принимаемL ющ!е4Г)У р 1Рр/ . = 1 4;
асинхронный двигатель ДК-715А (Рд.й б = 200 кВт. U б -
Л.,.8 = Гц; к.м = 41 = з 28, £я,6 = 7 Л . . - „ с =
генерагор ГСА-бОО (Рг.„.с - 800 кВт; L/rJ1.6 - 230 В и ( м J ”1Ж.
= 400 Гц; V6. = 0,0416; £г,б ’ 2.5 кг/кВт; ггЛ-5 В ^>;Н" „„ №казатеМ
сон £НПЧ6 “ 1-88 кг/кВт И СТОИМОСТЬЮ ^НПЧб 17-8 PJ ’ J
371
_ __ то кг/кВт’ с к — 29,6 руб/кВт; полные масса
’Т"Л0 к “'с^З Л-'
. С,.б - 9»0 • с м Дм onst |см. р
Пусть Рд н = 1,1». КЫ *’v' К
f* = n* = 1/1 153 = 0,658.
,1в я ’ я и = 0 94-А*== 1,2, а по рис. 7.1 и7.2# = 1 04-
Из рис. 7.3 И 7.4 имеем (У|макС, - лн . _ , L п* __ '
• _ . т. />• _ । оз- 1.32. Далее, полагая Ргм — 1,15 и vr макСФ — 0.94,
геве₽атора-Соглгаю (7J69)’ п₽“ "ОСТО!",СТЮ часта-
ты вращения (лги — 1)
t‘„ _ Р; = вд^.г-= '/(о.^= - "> “ °-9
По рис. 7.5 — 7.6 находим g" = 1.03; cr = 1,02; хг. = 0,8. Принимая снпч
= 1 0. по рис. 7.9 определяем U’t„ = Ц‘„ = О.9 и gHn4 = 1,1 Таким образом,
проектируемые ТЭМ будут иметь следующие параметры: для асинхронных Элек-
тродвнгателей Р =230 кВт; UlK— 360 В, ^,маке. 1,*2, Т,н ц, кн —.
_ 3,94; g„ = 7,28 кг/кВт; сд = 7,56 руб/кВт; для синхронного генератора Рг и „
= 920 кВг; 1)‘, = 210 В; 1/г №с. = 1.32; fT= 360 Гн; хг. =0.0333; gr =
= 2,58 кг/кВт: сг = 5,1 руб/кВт.
В соответствии с выводом, приведенным в § 6,5, /1макС == (0,30 0,35) /г; по-
лученное соотношение номинальных частот СГ и АД при ha = 4 удовлетворяет ука-
занному услоаию.
На основании (7.151) и (7.152) имеем g* = 1,04; с’—1,02. Используя
(7.143) и (7.144), получим бт= 11480 кг; Ст=27750 руб; 0СТпэ = 12600 кг;
Сет ПЭ —34700 руб
Согласование параметров СГ н АД проводим таким же методом, как и для
СТПЭ, содержащей ПЧПТ- Угол Он = 12°; коэффициенты kBUf) = 2,33; =
= 1,245; cos 0,99. На основании (10.69) — (10.71), принимая для НПЧ
llHU» ~ ^Шн ~ 1 • имеем'
иг.н ~ 360/2,334- 10» 160 В; /г н = 4 230 ♦ 108/(3 - 160 - 0,89.0,88 • 1,245) =
=--- 1965 А;
Т’г.я « з . 160 • 19в5.0,99 . КГ3 = 934 кВт;
^грасч “ 934 • 1.32-0.99 ., 1250 кВ . А
cos а= Д825; Ст" =В?2 = 0.0325Ш <
0,014 -- 0,012. * ‘° 0,0125; d, = 0.007 0,006; “
§ 10.3. Система тягового привода
„ городского электромобиля 3AV0466
Исходные данные чля ппп»>1.
<= для проемироиания СТПЭ [171
Грузоподъемность, кг
Масса порожнего ГЭМ кг ’ ‘ ’ ....................
Масса груженого ГЭМ.' кг .................
Статический радиус к«ш«»<ыа LT .
Передаточное отношение редукЙТе КМеса> м • - ’ - ’ '
«wrop-ось» . . Р ^^ора механической передачи „1па
КПД механической передачи ................
.^Итаем тяг°вые и тормозные •J-’ .................’
500
1800
2300
0,32
5,7
0,96
WKW0 д“^р»ст»кн электромобиля. зависимой
872 электромобиля (Н/кг) от скорой
1016 Электромемын^,,,
*apmep№IBIa, „
двигателя ЗДТ.81
в>„ = (170 + 0.053а2) 10—3- (10.72)
Если принять максимальную скорость городского электромобиля v ~ 70 км/ч,
то мощность, расходуемая на передвижение.
= G3Jirwov 2300 - 0,43 • 70/3,6 = 19 400 Вт.
Номинальная мощность ТЭД
Рд н = SPk/Ппвк = 19 400/0.96 = 20200 Вт
Используя в качестве тягового электродвигатель ЗДТ.81 последовательного
возбуждения, имеющий следующие параметры. Рдн = 22 кВт: Мдн =60 Н- м;
Л«Д мЯ« = 250 Н • м; </д „ - ПО В; 1ам = 230' А; /,= 090 А; я„ -=
— 3600 об/мнн; чд макс = 5500 об/мин; Е/?а =0,014 Ом; /?0Вц = 0,00925 Ом
(значения сопротивления указаны при температуре l)0cQ; Lv — 200 мкГн. На
рис. 10.16 приведены электромеханические характеристики ЗДТ.81,
В СТПЭ использована ТАБ типа 72ЭЖНТ-16ОУ2 с номинальной емкостью
160 А ч, начальной ЭДС 100 В. внутренним активным сопротивлением 0,08 Ом при
Qp = 50 °о и индуктивностью 50 мкГи. Внешние характеристики ТАБ см. на рис. 2.8.
Напомним, что в рассматриваемом тяговом электроприводе импульсное регули-
рование ТЭД осуществляется только в режимах пуска и рекуперативного торможе-
ния. При работе ТЭД на автоматической характеристике коэффициент заполнения
= I. Поэтому тяговые характеристики ГЭМ рассчитываются с учетом сказанного.
Используя скоростную характеристику ТЭД, по (10.39) вычисляем зависимость
v' Un) при номинальном напряжении. Далее находим зависимость v (/д) с учетом
внешних характеристик ТАБ:
^ТАБ—7д(2/?д~Г ^ОВП}
"“ {,1д •
(10.73)
373
с„лг тяги на ведших колесах для ряда значений /д вычисляем ио формуле
Г = -„ЧпвКЛ|«^-“'«Смг. (Ю.74)
а \ н F ИЛ получим тяговые характеристики ГЭМ
На основании зависимостей v (/«) и Л (/д1 п m
для ..™ "iYs™/" i"'"*'” с₽'и’е™
пускового ускорения городского электромобиля а„ 1.5 м I I-
f„.c=0„.el(>+fl»"+“W' = 2300"’06- 1.5+ 0.17) =4000 Н. (Ю.75)
Проверим максимальную силу тяги на ограничение по сцеплению: Р„„с<Ссцф,
где Gc„= 1380-масса сцепления ГЭМ, кг; ф = 0,65 - коэффициент сцепления;
Ссцф = 9,81 • 1380 • 0,65 = 8800 Н > Г„окс.
Необходимо отметить, что силе тяги FJ]ahc = 4000 Н соответствует ток электро-
двигателя / к = 630 А. Однако для экономичного использования аккумулятор-
ной батаоиГ 72ЭЖНТ-160У2 ее максимальный пусковой ток не Должен превышать
420 А (см. рис. 2.9), что соответствует ^Макс ~ 2500 Н 11 °п 5=5 ®’^ ы с ‘ Дчнжеиие
ГЭМ с fMai<c = 2500 ч- 4000 Н (/д.макс = 420 -ч- 630 А) следует допускать лишь в
крайних случаях.
Прежде чем перейти к расчету тормозных характеристик I ЭМ. кратко остано-
вимся на некоторых вопросах импульсного регулирования пр» рекуперативном тор-
можении. Если СТПЭ имеет нереверсивный ИППН с однополярными выходными им-
пульсами, то среднее значение тока рекуперации
(10.76)
'рек — 'nay <'д.т'‘ ~ ’Д т ~ ‘ ' Д.т-
Тогда из (6.59) и (10.76) получим
Уд.г ~ ~Хи) ^ТАБ-
Скорость движении ГЭМ н режиме рекуперативного торможения
« -“((! — ?.») (/TAli , /дл -(• /?овцЧ 2л^к'(£п^Фд)-
(10.77)
(10.78)
Для запирания ИППН ки+рфицпснт заполнения не может быть меньше некото-
рого значении Л|1М||(1, <»6(>ciie>iHfi.TiuuitTo н.псжное выключение главных тиристоров.
Поэтому максимальную скорое гь элемримибиля. с которой возможно осуществление
рекуперативного торможения при л - const, определяют выражением
°макс СШ Аи МН1,1 ('jal ’ К . - A'o,tn)j 2л#к/(1яАФд). (10.79)
napJPp0UeCC реи-шрлвалня рсь\перативном торможений заканчи-
я, когда а Ац.макс ~ 41,1 cooTBavfBVvi ьфоншму замыканию ТЭД через
пость£1м котоп-Р”С'6301' Г1'ж’-и'"в/« 1 “(Н-'.ТН). получим минимальную ско-
рость, при которой прекращаек-я <н.мчл эцер'пи в Т.\Б.
1,К..и‘='д., (-Я-. : «C,W|l-’.rW. (Ю.80)
3-4 км/ч. > до пол-
том накоротко ТЭД е уменьшением д„ „„я‘тока?” S'"'" "ршмж:1е1ся "Р" замк"У’
Тормозные характернетнки ГЭМ н нежимо пЛ-м.,-»
определим по fij,8)
В (I М(/ТАВ/ат,(,11>1|п )+ 0
Решая (10.78) и (10.81). ,юлу.,„м
’ЪЯпвк
(10.61)
~Г Ковп)
(Ю.82)
374
В процессе расчета тормозных характеристик В (»> по пл ям
тывать ограничения, указанные в § 3.11. а также условие & (10^2/ нсобхоД,й’° учи-
ющее устойчивую работу ИППН Только ппи «г™ дл < UTAb' пб€с”ечива'
накопление энерг,,,, в индуктивностях и 1.ослИующаХми«ТтАБ"тл‘,ОД"'‘<!СК<,е
импульса („ Должна быть достаточной для накален™ 3неп^,иАБ' bHUCTb
конденсаторе Ск с целью надежного запирания главного ь коммутирующем
Если а режиме торможении (/„, стаиовнтсХльшиТ ” Т' (“’ Р"С- 6-30’-
ток возбуждении ТЭД при том же X якоря. ПриииХ! ““Г,
согласно (10.79) и (10 80) имеем соответственной^ = 6™Л и о ° = 4 км/ч’
сКоросгеи ииакс ~Ь’.жи Тормозное усилие определяется выражением
(Ю^2). ‘ормознаи характеристика ГЭМ для Q = 0 % представлена на рис 10 17
Выберем параметры некоторых элемент » ИППН. Определим емкобгь кошен
сатора фильтра Сф на входе ИППН (см. рис. 6.30). Решая (6.66) и (6.57)%муч™
Сф = (/Д/Л1/ТЛБ „а„)г /-1ЛЬЛ/ТЛЬ макс/( д. (10.83)
Задаваясь ЛДТДБиакс = 3>s в н принимая Л/ТЛ6макА= 0,01 (см. §6.6),
имеем для /д — 420 А
Сф = (420/2.5)2 . 50 10”6. 0,01 « 14 . 10~3 Ф.
Тогда согласно (6.57) частота работы фильтра
/ф = (64 - 50 - Ю”6 14 - 10” • 0,О1Г0-5= 1500 Гц.
На основании графика (cv рис. 6.19) находим Хиг=0,5 и С*~/дТсрх
X ^таб^тлб ~ 42<’ 0,08/100 = 0,34 Нижний предел частоты коммутации оо
(6.70)
/к мин = 100 °*5(1 “°’5 ‘ °>34)(1 ~°-5)/(0,2.200 • 10”’’ • 420) = 1235 Га.
Использование в ИППН силовых тирнсгоров с небольшим временем выключе-
ния (<выкл — 20 ~ 30 мкс) позволяет обеспечить }клюкс — 2000 Гн. Так как /к чин <
< /ф < ?в макс’ то кюжн0 ПР»ИЯТЬ /к = 1600 Ги*
Емкость коммутирующего конденсатора ____________
/ I I ^ТЛБ макс ^доз \ I
Ск= 2<оыклАср- ртдВчив у'аср /зтивк — 7ДЛ.Р /|
где УТ1К =55-напряжение ГАБ при максимальном пусковом токе в.тя>Q
= 50«Гв'.'Утлб ».-= 150-то *е- ДЛ" «=100%- В; 'ж—’630-"
ыальлый ток главного тиристора ИППН. А.
Принимая 1/дм = 75 В. имеем
Ск = 50. K)-.420(l/|56--(«06Sr-4W’ 1О'6Ф’
Берет, Си = 50 мкФ. Индуктивность перезарядного реактора (ем. рве. 6.30)
/II ^-и.„ \‘ ___в I 150 У 75 1 — 4 . iq-6 Гв.
ta = CK =50-
\ 'я.* макс хер можно выполнит
Расчет параметров
чным методикам, применяемым в
СПИСОК СОКРАЩЕНИИ
Л'1
ли
хни
Mil
ЛкЬ
\.н
АТГ
Д1М
лэу
пс
ыэ
в
БГ
БД
БМ
ВН
вп
ВР
БСГ
БУ
ВЭМ
гпт
ГТД
ГЭМ
д
две
дз
Дчз
ДМ
дн
дп
ДПТ
ДСД
дт
ДТ.
ДТ,
ДУС
ДУСд
дч
ЗГ
ЗГ,
ЗИ
зм
змс
Зое
Зост
__тяговый асинхронный короткозамкнутый двигатель;
— автономный инвертор;
— автономный инвертор напряжения;
— автономный инвертор тока;
— аккумуляторная батарея;
— асинхронная машина;
— аппарат управления электроприводом в тяговом режиме электромо-
биля;
— аппарат управления электропрнвдоом в тормозном режиме электро-
мобиля;
— аккумуляторная энергоустановка;
— блок суммирования;
— батарея топливных элементов;
— выпрямитель;
— возбудитель генератора постоянного тока;
— вентильный двигатель;
— выпрямительный мост;
— неуправляемый выпрямитель,
— вентильный преобразователь;
— вибрационный регулятор;
— возбудитель синхронного генератора;
— управляемый выпрямитель;
— внутризаводской электромобиль;
— электромашинный генератор;
— генератор постоянного тока;
— газотурбинный двигатель
— городской электромобиль;
— электродвигатель
— двигатель внутреннего сгорания;
— динамическое звено;
— дизель;
— датчик мощности;
— датчик напряжения;
— датчик магнитного потока;
— 'тяговый двигатель постоянного тока;
— датчик скорости движения электромобиля;
— датчик тока;
— датчик активной составляющей асинхронного двигателя, работающий
в тяговом режиме электромобиля;
— датчик активной составляющей тока асинхронной машины, работаю-
щей в режиме электрического торможения электромобиля;
— датчик угловой скорости;
— датчик угловой скорости двигателя внутреннего сгорания;
— делитель частоты;
— задающий генератор частоты;
— задающий генератор частоты скольжения;
— задатчик интенсивности;
— зарядный мост инвертора;
— звено выделения максимального сигнала;
— звено ограничения скорости;
звено ограничения скорости в тормозном режиме электромобиля;
expert22 для http: //rutracker. orq
379
ЭРЛ — звено реверсирования движения;
ЗТО —звено токовой отсечки;
ЗТЭМ — землеройно-транспортный электромобиль;
И — инвертор;
ИА —инерционный аккумулятор;
ИМ —инверторный мост; исполнительный механизм;
ИППН —импульсный преобразователь постоянного напряжения;
ИРН — источник регулируемого напряжения;
К — контактор;
Кл —ведущее колесо электромобиля;
КЛI — комму тирующий мост и нвер тор а;
КТ —контроллер тормозной;
КШ —контактор шунтирующий
КЭМ — карьерный электромобиль;
КЭУ —комбинированная энергоустановка;
ЛК ~ линейный контактор;
М —электродвигатель постоянного тока;
М3 —мультивибратор задержки;
МИН — звено выделения минимального сигнала;
МС — межкоитурная связь;
МУ —магнитный усилитель;
НПЧ — преобразователь частоты с непосредственной связью;
ОБ —блокирующая обмотка управления магнитного усилителя;
ОВ —обмотка возбуждения;
ОВВ —обмотка возбуждения возбудителя;
ОВГ —обмотка возбуждения генепатора;
ОВН — обмотка независимого возбуждения;
ОВП — обмотка последовательного возбуждения;
ОЗ — задающая обмотка управления магнитного усилителя;
ОМ — обратный мост инвертора;
ООС — обмотка внешней положительной обратной связи магнитного усили-
теля;
ОУ —управляющая обмотка магнитного усилителя;
ОУа — орган управления электромобилем;
П — механическая передача: переключающее устройство;
ПАБ — переключатель схемы соединения аккумуляторов;
ПВК —привод ведущих колес электро мобиля:
ПП —переключатель механической передачи;
ППТ —педаль подачи топлива двигателю внутреннего сгорания;
ПТ — педаль торможения;
ПТМ —привод технологического механизма.
ПУ —предварительный усилитель;
ПХ — педаль хода;
ПЧ — преобразователь частоты;
ПЧПТ —преобразователь частоты с явно выраженным звеном постоянного
тока;
Р — реле;
РВВ — регулятор тока возбуждения возбудителя;
РВГ — регулятор тока возбуждения генератора:
РГ —регулятор генератора;
РД —регулятор тягового электродвигателя;
РДВС —регулятор двигателя внутреннего сгорания;
РНг — регулятор нагрузки;
РП —регулятор привода ведущих колес;
РИТМ —регулятор привода технологического механизма;
РСГ —регулятор синхронного генератора;
РТД — регулятор теплового двигателя;
РХ —реверсор хода;
РЭУ —регулятор энергоустановки;
САР —система автоматического регулирования;
СГ —синхронный генератор;
СЗ —согласующее звено;
СлУ Си Ст СТПЭ СУ — селективный узел- — спидометр; — стабилизатор напряжения- - мегома 7нХен,^™Ма'ЭЛ'КТ1,™о6''л^
СУП СУПЧ СЧ СЭ ТЛБ тд тк ТПН тпт ТР Тр ТЭ ТЭД ТЭМ ТЭП ТЭУ У УЗд УИК ф ФП ФПд система управления’ тшертором- «я.гою- преобразователем часто™ с непосредственной — сумматор частот; — суммирующий элемент- — тяговая аккумуляторная батарея- — первичный тепловой двигатель- ’ тормозной контактор; ~ 1£!"С1Орматор постоянного напряжения- трансформатор постоянного тока- — тормозной резистор; — трансформатор; — топливный элемент- тяговый электродвигатель; тяговая электрическая машина-, — теплоэлектрический преобразователь- топливная энергоустановка; — усилитель; — устройство задержки времени; устройство искусственной коммутации: — фильтр; — функциональный преобразователь; — функционально-преобразовательное звено, обеспечивающее формиро- вание требуемой зависимости тока в функции частоты для системы с обратной связью по току асинхронных электродвигателей в тяговом
ФПдл режиме; — функционально-преобразовательное звено, осуществляющее операцию деления;
ФПп — функционально-преобразовательное звено, осуществляющее операцию
ФПт перемножения двух величин; — функционально-преобразовательное звено, формирующее требуемую зависимость тока возбуждения электродвигателя постоянного тока в тормозном режиме; функционально-преобразовательное звено, обе- спечивающее формирование требуемой зависимости тока в функции частоты для системы с обратной связью по току асинхронных элек- тродвигателей в тормозном режиме;
ФПЭ — функционально-преобразовательное звено, обеспечивающее работу двигателя внутреннего сгорания в соответствии с характеристикой наибольшей экономичности;
ФПр — функционально-преобразовательное звено, осуществляющее опера- рацию извлечения квадратного корня;
ФП8 — функционально-преобразовательное звено, обеспечивающее требуемую зависимость параметра абсолютного скольжения от частоты асинхрон-
Фпв» ного электродвигателя в тяговом режиме; -зфаГ„ХТ„Тпрда
ФПф зависимость тока возбуждения электродвигателя постоянного тока в тяговом режиме;
чд ЧИР ШИМ ШИР ШЧР эмпп ЭУ - — частотный дискриминатор; — частотно-импульсное регулирование, — широтно-импульсная модуляция, — широтно-импульсное регулирование; — широтно-частотное регулирование; — электромобиль повышенной проходимости, -г- энергоустановка
UJ JlrtDvt —
Стр.
Предисловие - ..................... ...
тягового привода • ..........
| Й ко- к аиергоустанов™
§ 1.6. Предпосылки реализации заданной тяговоп характеристики электро-
§ 1.7. Зависимости между входными п выходными параметрами силовых аг-
регатов СТПЭ..................................................
§ 1.8. Особенности согласования параметров и характеристик агрегатов си-
ловой цепи в СТПЭ с вентильными преобразователями . . ....
Глава 2. Характеристики энергоустановок электромобилей...................
§ 2.1. Основные свойства энергоустановок ... ...............
§ 2.2. Топливные энергоустановки ............. ........................
§ 2.3. Аккумуляторные энергоустановки .................................
§ 2.4. Комбинированные энергоустановки . ..............................
§ 2.5. Энергетические и мощностные параметры энергоустановок...........
Глава 3. ~
§ 3.1.
ТЯГОВОГО привода
Тяговые электрические машины постоянного тока ...................
Особенности выбора основных параметров тяговых электрических ма-
шин постоянного тока ............. ... ....
§ 3.2. Расчет электромагнитных нагрузок и КПД электрических машин пре-
дельной мощности ......................................................
§ 3.3. Совместный расчет массогабаритных и энергетических показателей
тяговых электрических машин постоянного тока .........
§ 3.4. Задачи регулирования тяговых электродвигателей постоянного тока
§ 3.5. Управление напряжением п магнитным потоком ...
§ 3.6. Ограничения по условиям возникновения кругового огня и условиям
коммутации
§ 3.7. Расчет предельных характеристик электродвигателей постоянного
тока.....................
§ 3-8. Расчет частичных характеристик электродвигателей постоянного тока
§ 3.9. Расчет характеристик генераторов постоянного тока ..............
§ 3.10. Управление тяговыми электрическими машинами постоянного тока
по минимуму потерь
§ 3.11. _Машины постоянного тока в режиме электрического торможения элек-
тромобиля ........
Глава 4. Тяговые асинхронные электродвигатели ’ ’ . . ’
§ 4.1. Варианты частотного управления тяговыми асинхронными электро-
двигателями ........................... г
! 5егУ лиР°вание параметра абсолютного скольжения ' ’ ' ' . ’ .
* 4 3" жеииТМ0СТИ н3менения напРЯжения и параметра абсолютного сколь-
1 ! г- Р‘™°налы,°« регулирование тяговых асинхронных алектродвигателей
f 4.5. Расчет частичных характеристик
3
3
8
8
12
23
30
38
41
43
48
51
51
53
56
60
62
68
68
74
83
84
86
88
90
93
100
102
112
120
120
125
126
134
137
expert22 для http: //rutracker.orq
§ 4.6. Влияние гармонических составляющих
рактернстики электродвигателей
§ 4.7. Тяговые асинхронные электродвигатели г -----
моженяя электромобиля
§ 4.8 Внутренние параметры тяговых асинхронных
Глава 5 Тяговые синхронные генераторы - . .
§ 5.1. Особенности расчета параметров я характепиг™.'...............-
а к 9 R'с V ™ст™ах тягового привода 3,XpoJoS Р°""‘“ Ге™ра'
§ 5'2- рЕ:Х * И КОНСтРукт"вного —синхронных гене.
I П. is
метрами преобразовательной нагрузки ₽ генераторов с пара-
§ 5.5. Емкостная компенсация при работе синхронного'геиератера m 161
разовательиую нагрузку на преоб-
§5.6. Метод расчета характеристик синхронного генератора при зааа'ипоВ
тяговой характеристике электромобиля Р ₽ Р заданной
§ 5.7 Внутренние параметры тяговых синхронных генераторов
Глава 6 Вентильные преобразователи в системах тягового привоза мыто,и
§ 6.1. Требования, предъявляемые к вентильным преобразователям’ ’
§ 6.2. Классификация вентильных преобразователей
§ 6.3. Сравнительная оценка схем вентильных преобразователей
§6.4. Преобразователи частоты со звеном постоянного тока
§ 6.5. Преобразователи частоты с непосредственной связью ....
§ 6.6. Импульсные преобразователи постоянного напряжения ..............
Глава 7 Оптимальный выбор параметров силовых агрегатов систем тягового
§7.1.
§ 7.2.
§ 7.3.
§7.4.
§ 7.5.
Глава 8 Системы автоматического регулирования СТПЭ . . . .
§8.1. Требования, предъявляемые к системам автоматического регулирования 270
§ 8.2. Регулирование угловой скорости электродвигателей постоянного тока 271
§ 8.3. Прямая цепь передачи управляющего воздействия в СТПЭ с асинхрон-
ными электродвигателями ..... ............ • ™
§ 8.4. Контуры регулирования частоты тяговых асинхронных электродвигате-
лей....................................................................
§ 8.5. Контуры регулирования генератора постоянного тока ..............™
§ 8.6. Контуры регулирования синхронного генератора . -
§87 Принципы работы и структурные схемы некоторых систем автом т
ского регулирования тягового привода электромобилей - я
§ 8.8. Особенности выполнения систем автоматического р У Р
Глава 9. Системы тягового привода некоторых моделе”Ллек7₽^'?^^д
§ 9.1. Система тягового мЙ^М-КЮ а
§ 9.2. Система тягового привода карьерных электромобиле» .
привода карьерного электромобиля М-Я» •
Р — городского электромобиля
- тягового -И*"
питающего напряжения на ха
в режиме электрического тор-
...электродвигателей ’ ’
Стр.
138
143
151
155
155
158
167
169
175
181
181
182
185
193
199
210
привода электромобилей ......................................... 235
Основные положения комплексного метода оптимизаций 235
Вывод соотношений между параметрами тяговых электрических машин 239
Параметрические зависимости вентильных преобразователей 248
Комплексный анализ параметрических зависимостей . 257
Оптимальный выбор параметров тягового силового электрооборудова-
ния с помощью ЭВМ
266
270
318
М-100 и
М-120 , . - -
Система тягового _
Система тягового привода
§ 9.3.
Глава^сПпримеры проектирования т"™“™^мя‘‘бмАЗ-549 . .
§ 10.1. Система тягового привода карьерного эае!<т|Х> м№рОт61им „„
6 10.2. Система тягового привода перемеи ........... . . . .
вишенной проходимости — э К [ 0.,сбила ЭМ-0466 •
§ 10.3 Система тягового привода городского р....................
Литература . .............* " ' ’..........................
Предметный указатель ................
Ц U Ю Ы W W W W W Ш W I
офоссай «В Ш'
expert22 для http: //rutracker.org