/










































Текст
МИНИСТЕРСТВО ВЫСШЕГО И СРЕДНЕГО
СПЕЦИАЛЬНОГО ОБРАЗОВАНИЯ СССР
.МОСКОВСКИЙ
ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ
АВТОМОБИЛЬНО-ДОРОЖНЫЙ ИНСТИТУТ
Г. И. ГЛАДОВ, В. В. ПАВЛОВ
ТЯГОВО-ДИНАМИЧЕСКИЙ
РАСЧЕТ
ТРАНСПОРТНЫХ СРЕДСТВ
МОСКВА 1984
МИНИСТЕРСТВО
ВЫСШЕГО И СРЕДНЕГО СПЕЦИАЛЬНОГО ОБРАЗОВАНИЯ СССР
МОСКОВСКИЙ
ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ
АВТОМОБИЛЬНО-ДОРОЖНЫЙ ИНСТИТУТ
Г .И.Гладов, В.В.Павлов
ТЯГОВО-ДИНАМЙЧЕСКИИ РАСЧЕТ
ТРАНСПОРТНЫХ СРЕДСТВ
Учебное пособие
Утверждено в качестве
учебного пособия
редсоветом НАДИ
москва 1984
УДК 629.113/114(075)
Гладов 1.И., Павлов В.В. Тягово-динамический расчет
транспортных средств /ГЛАДИ.-М., 1984.- Н? с.
Рецензенты: канд. техн.наук
А.М.Петренко
А. В.'Гитов
канд. техн.наук
В учебном пособии рассмотрена методика тягово-динамическо-
го расчета, приведены алгоритмы тяговых расчетов прямолинейного
движения и приемистости транспортных средств с различными типами
трансмиссий (механической и гидромеханической) и движителями
(колесными, гусеничным и водоходным). Кроме того, изложена метсди*
ка тягового расчета криволинейного движения гусеничных транспорт-
ных средств на примере машин, оборудованных двухступенчатым пла-
нетарным механизмом поворота и двухпоточной гидромеханической
трансмиссией.
Алгоритмы решения задач тягово-динамических расчетов состав-
лены для реализации в ЕС ЭВМ (предполагается, что читатель имеет
навык программирования на алгоритмическом языке ФОРТРАН).
Пособие предназначено для студентов КМФ МАДИ, выполняющих
курсовой или дипломный проект по транспортным средствам. Оно мо-
жет оказаться полезным также для аспирантов и инженерно-техни-
ческих работников соответствующего профиля.
(CJ Московский автомобильно-дорожный институт,1964
ВВЕДЕНИЕ
Настоящее пособие, соответствующее программе itypca "Тран-
спортные средства” по специальности 0540, посвящено методике тя-
гово-динамических расчетов. Пособие расширяет и дополняет лек-
ционный материал [I] , в нем рассматриваются поверочные расче-
ты с использованием единиц измерений, рекомендованных стандар-
том СТ СЭВ 1052-78 (по Международной системе единиц измерения).
Задачей поверочного тягово-динамического расчета является
оценка тяговых и динамических качеств транспортных средств с за-
данными конструктивными параметрами для определенных условий
эксплуатации (грунтового фона). Тяговые качества транспортных
средств в прямолинейном движении оцениваются на основании опре-
деления сопротивлений движению, преодолеваемых при различных
скоростях, или максимальной скорости движения при данном сопро-
тивлении. Тяговые качества машин при повороте оцениваются по
удельной силе тяги, потребной для совершения равномерного криво-
линейного движения с определенным радиусом в заданных условиях.
Оценка динамических качеств транспортных средств для заданных до-
рожных условий сводится к определению их параметров приемистости.
Для построения тяговой характеристики транспортного средст-
ва необходимо знать параметры двигателя (максимальную эффектив-
ную мощность, частоту вращения вала двигателя в режиме макси-
мальной мощности и максимального момента /2/,), массу машины
и прицепа (полуприцепа), передаточные числа трансмиссии, радиус
ведущего колеса (звездочки) и дорожные условия.
Кроме того, необходимо знать другие параметры (приведенный
момент инерции двигателя, коэффициент запаса сцепления или фрик-
циона, габаритные размеры и т.п.), определяемые по аналогии с
существующими транспортными средствами или известные из справоч-
ной литературы. Основные параметры гусеничных транспортных средств
приведены в приложениях данного пособия, а для колесных машин их
можно найти в [7] .
Главы I и 2, кроме п.1.6, написаны Г.И.Гладовым и В.В.Пав-
ловым; глава 3 написана В.Е.Павловым; глава 4 - Г.И.Гладовым,
В.В.Павловым и В.В.Кувшиновым; п.1.6, написан Ю.Саломатиным.
I. ТЯГОВО-ДИНАМИЧЕСКИЕ РАСЧЕТЫ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
ТРАНСПОРТНЫХ СРЕДСТВ С МЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ
Порядок проведения поверочного тягово-динамического рас-
чета (построение тяговой или динамической характеристик) изло-
жен в [l] . Однако при расчетах все необходимые для расчета
исходные данные задаются необязательно. Поэтому ниже приведены
методические рекомендации по определению неизвестных данных.
I.I. Построение внешней скоростной характеристики
поршневого двигателя внутреннего сгорания и
определение свободной мощности
Внешняя скоростная характеристика в тех случаях, если она
не дана, а известны лишь значение максимальной эффективной мощ-
ности/^^в кВт и частота вращения Пу в мин- , соответст-
вующая этой мощности, определяется по эмпирической зависимости
с(^)
- у ' J- • J- /
гДе Л/& ~ текущая мощность;
/7 - текущая частота вращения коленчатого вала;
£2,3,С - экспериментальные коэффициенты.
Для бензиновых двигателей и четырехтактных дизелей с кор-
ректором обычно принимают С 3 - С 1,0. Для четырехтакт-
ных дизелей без корректора ZZ = 0,53; 3 = 1,56; С = 1,09.
Для двухтактных дизелей £2 “ 0,87; 3 “ 1ДЭ; С 1,0.
Прежде чем выбирать значения коэффициентов £2 , 3 , С
для дизельных двигателей в выражении (I.I), целесообразно оце-
нить коэффициент приспособляемости двигателя • определяе-
мый в учебных целях по формуле
// TS /La/ (Т 2)
где //гтал максимальный крутящий момент двигателя (берется
по паспортным данным из справочной литературы), Н*м.
Величины /1„ , Л/рта1 подставляются в формулу (1.2) соот-
4
ветственно в мин”^ и кВт. Если величина К пр лежит в диапазоне
1,05...1,1 (округляем до десятых долей), то считаем, что дизель
без корректора, а если 1,1 - принимаем, что корректор
топлива имеется.
Следует, однако, знать, что для некоторых двигателей без
корректора величина может доходить до 1,15.
Внешнюю скоростную характеристику строят в диапазонах
/2/я^.../2Л/ для дизеля или /?/»/«..для карбюраторного дви-
гателя. При построении расчетные точки берутся с интервалом
200...700 мин“1 так, чтобы их было не менее пяти. Причем в рас-
четные точки должны быть включены значения /2д/ и flpt .
Как известно, существует нижний предел частоты враще-
ния коленчатого вала fl min , начиная с которого двигатель мо-
жет устойчиво' работать во всем диапазоне изменения нагрузок.
Можно принять для карбюраторных двигателей с fl м3: 3000 мин-^
значение flmi/i= 30® мин-^, а с fl/v> 3000 мин-^/7/п4г = 500 мин-^,
для дизелей с Пм & 2100 мин-^ принимают fl/nin^ 500 мин-^, а
при /Тм > 2100 значение fl min можно выбирать равным 700...
800 мин’^.
Максимальная частота вращения коленчатого вада карбюратор-
ного двигателя принимается равной fl/пал (1,1...1,2)/7Лг , для
дизеля fl /пах ^fl# .
Свободная мощность двигателя /1^ подсчитывается по формуле
Ng — Ne ~ Nму ,
(ЕЗ)
где /Vму - мощность потерь в моторной установке, кВт.
После подсчета Ng необходимо вычислить момент двигателя
в Нм по формуле . . ,
Ng. ял ;
гд» fl подставляется в мин , а /Уд- в кВт.
После подсчета Ng и Мд на графике внешней скоростной
характерстики [I] наносим зависимости (п.) , Мд (Л-) и
Ng (И) в одинаковых масштабах. ___________
С изменением частота вращения “вала. двигателя мощность, ват-
(1.4)
рачнваемая на потери в моторной установке, подсчитывается:
при вентиляторной системе охлаждения
Мп у d. Ng/nax ( /2м) } (1*5)
5
при эжекционной системе охлаждения
— d Л/етал (1.6)
При вентиляторной системе охлаждения d. = 0,05_____0,20,
а при эжекционной системе охлаждения с£ = 0,04____0,15.
Большие значения коэффициента d берутся для специальных
колесных или гусеничных машин, у которых двигатель сравнительно
плохо обдувается набегающим потоком воздуха, меньшие - для
обычных транспортных машин (с передним расположением двигателя).
Предельное значение коэффициента Ct целесообразно назна-
чать, исходя из данных по аналогичному транспортному средству.
1.2. Определение сопротивления движению и потребного
коэффициента сцепления транспортного средства с
дорогой
Сопротивление движению
При заданном для расчетов коэффициенте сопротивления дви-
жению ( Ч2 для тягача и У' для прицепа) находим приведенный
коэффициент сопротивления движению автопоезда:
Ы . _ + оу
TnfiuS ~ Q -4- G' ' ’ (1.7)
- полный вес, приходящийся на движители машины и
прицепа (полуприцепа) соответственно, кН.
где
где /72 ,
При этом
/72 - соответствующие массы машины или прицепа (по-
луприцепа), т;
- ускорение свободного падения тела, м.с-^.
V7 « Уг/ЛТоС * JСП оС » (1.8)
М7' * J*ZZZ с£ » (Т.9)
- коэффициенты сопротивления качению машины и
прицепа (полуприцепа);
оС - угол наклона местности при движении транспорт-
ного средства на подъем.
Для одиночной машины коэффициент сопротивления дороги оп-
6
ределяется по формуле (1.8). При одинаковом типе движителей у
тягача и прицепного звена принимают, что ₽ У* . Тогда
« У •
Потребный коэффициент сцепления
Потребный коэффициент сцепления Lfl движителей транспортно-
го средства с поверхностью дороги при движении на подъем опреде-
ляется из условия равенства силы тяги по сцеплению внешнему соп-
ротивлению. Эта задача обычно решается без учета сопротивления
воздуха, т.е. внешнее сопротивление движению определяется вели-
чинами сопротивлений качению транспортного средства и прицепных
звеньев, а также составляющими действующих на них скатывающих
сил.
I.2.I. Неполноприводный автомобиль с неактивным
прицепом или с полуприцепом
+ ~~ л (1Л0)
где Сгсц - сцепной вес машины, т.е. вес, приходящийся на ве-
дущий мост (мосты) автомобиля, кН.
1.2.2. Полноприводный автомобиль или гусеничная
машина с прицепом
<-Р= (J+ . <1.ш
1.2.3. Полноприводный автомобиль или гусеничная
машина с неактивным полуприцепом
. <М2)
где Qc - нагрузка на седло, кН.
1.2.4. Полноприводный автомобиль или гусеничной машина
с активным полуприцепом или прицепом
В этом случае потребный коэффициент сцепления -определяется
только суммой составляющих указанных в скобках формул (1.10)-
(I.I2).
1.2.В. Одиночная колесная неполноприводная майина
V-f/ * tfd} -%-'* >
где С?сц - сцепной вес, т.е. вес, приходящийся на ведущие оси.
IZ
1.2.6. Гусеничная или колесная полноприводная машина
= У" -*• h р сК, .
Из приведенных выше выражений видно, что активизация колес
транспортного средства и полуприцепов (прицепов) существенно
уменьшает величину потребного коэффициента сцепления, т.е. усло-
вие реализации силы тяги по сцеплению улучшается.
1.3. Определение сопротивления воздуха
движению транспортного средства
Для практических расчетов при определении силы сопротивле-
ния воздуха Kg можно воспользоваться формулой
о КГУ? НГ3
Kg - - > (I.13)
где Ко - коэффициент обтекаемости, Н»с*у^ ;
- площадь лобового сопротивления, м^;
V/ - скорость транспортного средства на Z -й передаче, км/ч.
Площадь лобового сопротивления с достаточной степенью точ-
ности можно подсчитать.по формуле
А = А В Н , (1Л4)
где в . н - колея и габаритная высота машины, м.
Для грузовых автомобилей с кузовом-платформой Д «0,8,
для автомобилей в тентом или кузовом-фургоном Д « О.,9, для гу-
сеничных машин принимают А «1,0.
При движении автопоезда основное сопротивление воздуха ис-
пытывает тягач с первым прицепом (полуприцепом), но наличие до-
полнительных прицепов (полуприцепов) увеличивает завихрение,
поэтому коэффициент обтекаемости берется равным К ‘ «(1,2...I,3)Xi
т.е. на 20...30% выше, чем для одиночной машины. Тогда силы
сопротивления воздуха
-K'F'V* .
с, с <1Л6’
где обычно принимают г « г
Значения коэффициентов и К приведены в приложениях
настоящего пособия.
8
1.4. Динамическая характеристика колесных и
гусеничных транспортных средств
При построении динамической характеристики транспортного
средства с известными конструктивными параметрами необходимо
знать внешнюю скоростную характеристику двигателя и определить
зависимость п.1.1).
Радиус колеса для автомобилей подсчитывается по форму-
ле (3.3) [l] или берется из литературы [?]
Для получения динамической характеристики тягача или поез-
да следует определить значения динамического фактора JD4 и
соответствующие этим значениям скорости движения на / -й пе-
редаче .
Скорость транспортного средства (колесного или гусеничного)
на t -й передаче
где /2 ~ текущая частота вращения коленчатого вала двигателя,
мин“1;
- общее передаточное число трансмиссии на L -й пере-
даче (определяется с учетом передаточных чисел всех
механизмов трансмиссии по кинематической схеме);
2^ - радиус ведущего колеса, м.
Для гусеничных транспортных средств, если Zr не задан,
скорость можно также подсчитать по формуле
<1-1”
где Z - число траков гусеницы, перематываемых за один обо-
рот ведущего колеса;
zS- - шаг гусеницы, м.
Для определения скорости V2 весь диапазон изменения час-
тоты вращения коленчатого вала двигателя от минимального значе-
ния до максимального разбивает через определенные интервалы
(300. ..800 мин“1), подучая расчетные точки: /2«Z?7/2y ' fig’...
Птах . которые при вычислении скорости движения машины
(поезда) подставляют в формулы (I.I6) или (I.I7).
9
4г
Di
Далое определяют удельную силу тяги на ведущем колесе на
Z -й передаче.
Одиночное транспортное средство
Для колесных транспортных средств удельная сила тяги по дви-
гателю и динамический фактор JJ L на L -й передаче опреде-
ляются по выражениям: л
Cr Vi ’ (I.18)
г
где Л/g - свободная мощность двигателя, кВт;
Cr - полный вес транспортного средства, кН;
\/с - скорость на L -й передаче, м/с;
- КЦД трансмиссии на Z -й передаче.
р - Гл' *7^ у”3
С кард ? (I.I9)
где 2цгт - КЦЦ пары цилиндрических шестерен (^4^= 0,98);
*/т - КЦД пары конических гестерен ( = 0,97);
Сглгд - КЕД карданной передачи (ж 1,0);
ZZ, - число пар цилиндрических шестерен, участвующих в пе-
редаче момента от двигателя к ведущему колесу на
L -й передаче;
ZZjg - то же для конических шестерен;
/2 g - число карданных шарниров.
Формулу (I.I9) можно с некоторым допущением распространить
и на планетарные шестеренчатые механизмы, полагая, что потери
мощности в переносном движении отсутствуют, а учитываются толь-
ко потери в относительном движении, когда отдельные звенья пла-
нетарного механизма вращаются относительно водила. В этом случае
при мысленной остановке водила определяют общий КЦЦ планетарно-
го механизма , принимая, что пара шестерен с внешним за-
цеплением имеет КЦЦ 0,97, а с внутренним •= 0,99, т.е.
КЦЦ одной пары £- 0,99.0,97 = 0,96.
Для гусеничных транспортных средств вначале определяют
удельную силу тяги на ведущем колесе , затем с учетом КГЩ
гусеничного движителя подсчитывают значение Jffi на I -й
передаче. Величинуна L -й передаче определяют по формуле
(I.I8), подставляя ее в формулу вместо , а КЦД - по эмпири-
ческому выражению
IO
, «-а»
где V/ подставляется в км/ч, а коэффициенты /Z? , ZZ, ,П.г
зависят от конструкции гусеничного движителя и предварительного
натяжения гусениц.
Для гусениц с открытыми металлическими шарнирами (ОМШ) при
нормальном предварительном натяжении при расчетах обычно прини-
мают И.а = 0,05, й-( = 0,025 и - 0,000003. Для гусениц с
резино-металлическими шарнирами, у которых потери в шарнирах
несколько меньше, чем в ОМШ, по данным доц. Балдина В.А., эти
коэффициенты можно принять равными: С2О •« 0,04...0, 05,Z7z =
= 0,012...0,015, ая = 0,0000012...0,0000015.
Если тип шарниров гусеницы не оговорен, то для проведения
тягового расчета им задаются.
При этом
(I.2I)
Динамический фактор определяется по формуле
Д = > (1.22)
где-Л^ - сила сопротивления воздуха, кН.
Все расчеты рекомендуется сводить в таблицы. Пример оформ-
ления результатов подсчета динамического фактора и скорости
движения для гусеничного транспортного средства приведен в
табл.1.1.
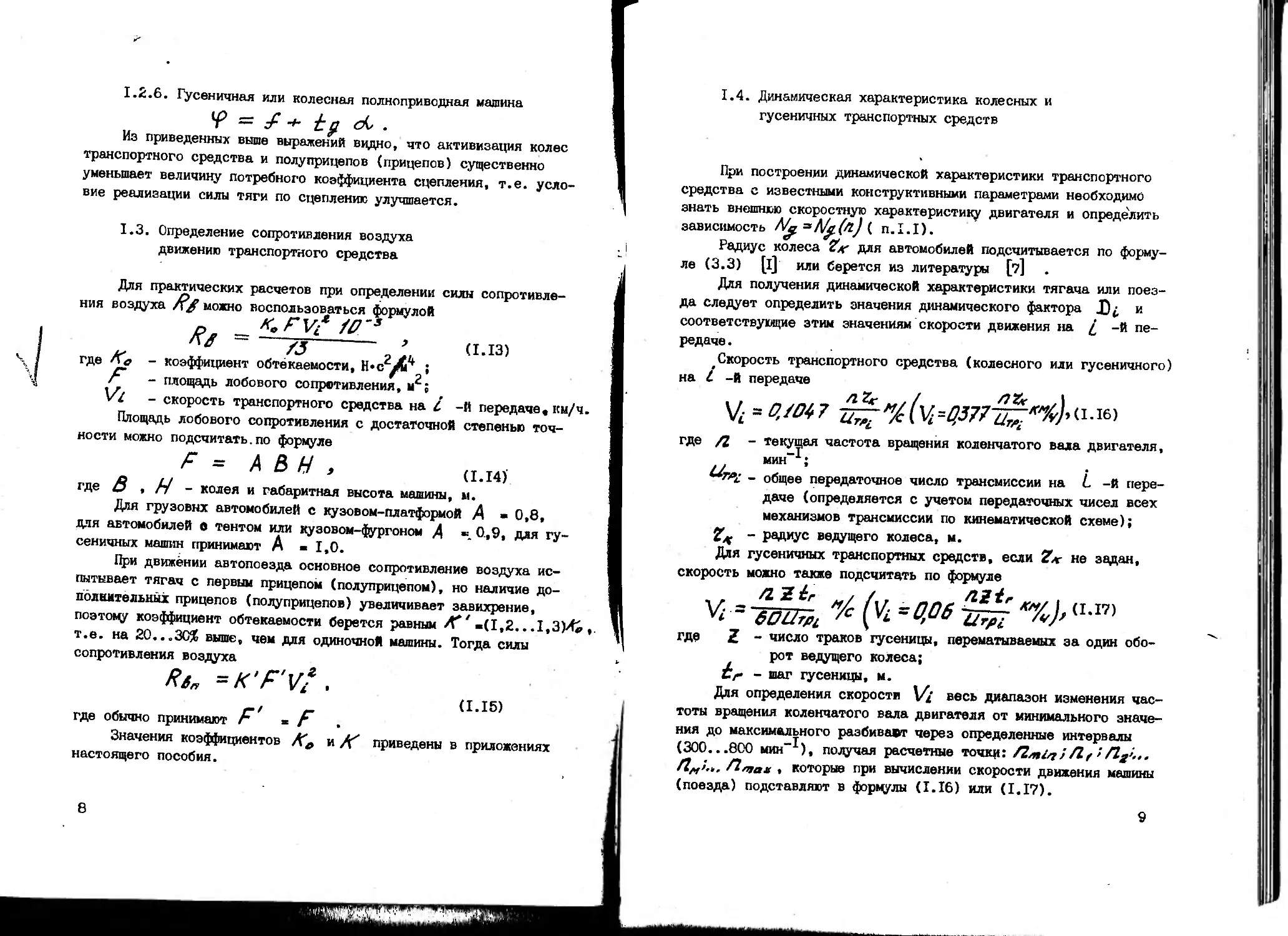
В результате расчетов необходимо построить график динами-
ческой характеристики, т.е. зависимость jD; =Д'Д£), слева от
которого в том же масштабе строят зависимости у = и
V = ЧЩ, определяемые в каждом конкретном случае по выра-
жениям (1.7)-(1.12).
Колесные автопоезда и
гусеничные поезда
Порядок расчета такой же, как и выше, но при расчетах
удельной силы тяги ftfai > удельной силы тяги на ведущем коле-
се (для гусеничных транспортных средств) и динамического
фактора Х)л i используются формулы
Таблица I.I
Частота вращения коленчатого вала двигателя на рас- четных режимах /2 , мин“1 500 850 ПОО 1400 1700
Значения свободной мощности на расчет- ных режимах Л4,кВт 77,44 136,86 170,68 195,33 198,72
V .км/ч 2,50 4,20 5,46 6,95 8,45
I передача С3р 0,648 0,91 0,680 0,913 0.653 0,911 0,588 0,907 0,492 0,9
0,59 0,620 0,595 0,531 0,443
V .км/ч Б,50 9,42 12,30 15,60 18,80
/Лг 0,300 0,310 0,298 0,267 0,226
П передача 2)=^- 0,87 0,261 0,87 0,270 0,86 0,256 0,86 0,23 0,84 0,190
V .км/ч 8,30 14,10 18,30 23,20 28.20
Ш передача 0,205 0,82 0,214 0.83 0,205 0,825 0,186 0,805 0.157 0,775
0,168 0.178 0,169 0,150 0,122
V .км/ч 12,20 20,80 26,90 34,20 41,40
1Упередача /л- 0,139 0,77 0,144 0,77 0Д39 0,76 0,129 0,76 0,106 0,66
0,107 ОДП 0,106 0,094 0,07
V .км/ч 17,10 29,00 37,50 47,80 58,00
У передача /л 0,098 0,69 0,103 0,6? 0,098 0,66 0,0895 0,60 0,077 0,50
0,068 0,069 0,065 0,0537 0,0358
' Ввиду незначительной величины скорости движения на всех пере-
дачах при определении динамического фактора в данном случае
• сопротивлением воздуха пренебрегаю! из-за его малости.
12
где 6-
<^4 ~ ’
- вес прицепа (полуприцепа), кН;
- скорость, м/с.
(1.23)
Для
_ ^4
= Jtyi " (У-fQ1.
(1.24)
гусеничных поездов вначале необходимо подсчитать
(1.25)
а затем (считая, что для реальных скоростей движения гусеничного
поезда величина Лк,., близка к нулю) можно определить величину/. :
(1.26)
Пример. В качестве примера для исходных данных (табл.
1.2) определим динамическую характеристику одиночной гусеничной
машины. В данном примере и в дальнейшем приводятся таблицы по тя-
говоцу расчету колесных и гусеничных машин.
Таблица 1.2
Наименование Обозначение Значение
I 2 3
Марка машины Тип движителя Масса в снаряженном сос- тоянии, г Грузоподъемность, т Полная масса,т Габаритные размеры,мм: - длина - ширина - высота Колея, м Тип двигателя (Указывается марка машины; М н в (Указывается марка двигателя) Гусеничный 13,0 3,0 16,0 6200 2700 23GQ 2200 4-тактжЛ дизельный с корректором и вен- тиляторной системой охлаждения
Продолжение табл.1.2
I 2 3
Мощность эффективная, кВт Частота вращения коленчатого эала двигателя притмаксималь- ной мощности, мин крутящий момент эффективный, Ч.м Частота вращения коленчатого вала двигателя при максиыаль-т ном крутящем моменте, мин"-1- Приведенный момент инерции, л КГ-Ы Тип трансмиссии Коэффициент запаса фрикциона Передаточные числа КП I передача П передача Ш передача 1Упередача Задний ход Передаточное число главной передачи Передаточное число бортового редуктора Диаметр начальной окружности ведущего колеса, мм Дорожные условия (коэффициент сопротивления качении* /пах М?/пах /7- м fi ll/r/}£ Urn Lisp 300 1700 1650 850 4,8 механическая 1,6 3,93 1,76 1,18 0,575 4,05 1,0 5,54 575 0,05
Вначале с помощью формулы (I.I) определяется внешняя ско-
ростная характеристика двигателя, а результаты расчетов сводят-
ся в табл.1.3.
Таблица 1.3
Параметры Размерность П, па Z? /«ал
мин” I 500 850 1100 1400 1700
Л/е кВт 106 188 240 282 300
Mfy кВт 0,78 2,05 8,1 16,6 30
кВт 106,22 185,95 231,9 265,4 270
Н.м 2029 2089 2013 1810 1517
14'
Расчет ведется для одного потока мощности от двигателя к
ведущему колесу машины.
Находятся передаточные числа трансмиссии на Z -й передаче
по формуле dm dee .
Затем по кинематической схеме трансмиссии подсчитываем ко-
личество пар цилиндрических шестерен (с внутренним и внешним за-
цеплением) и конических пар, работающих на данной передаче, а
затем КГЩ трансмиссии по формуле (I.I9).
Пусть для нашего случая на I передаче имеем: П, = 3,/?% =1,
/2j = 0. Тогда = 0,912, а дляП,...,У передач 2Ге> = 0,95
V2f = I, /23 = 0).
Результаты расчетов сводятся в табл.1.4.
Таблица 1.4
Параметры Передачи
I П Ш 1У У
Сб/сЛс 3.93 1,76 1,18 0,8 0,575
dm 1,0
de г 5,54
dm; 21.8 9/75 6.54 1 4.43 ЗЛ8
0, 912 0,95
Скорость движения машины в км/ч вычисляется по формуле
(I.I6), где 2л- - 0,5 jZZ/^ = 0,2875м.
Для I передачи
Для П передачи
Для Ш передачи
0 28 7S
\£ = £377= = 00466/2 ки/ч-
Vv= О,О/1//2 КМ/Ч.
Vfe' ~ 0,0166 /2 км/ч.
- и т.д.
Удельная сила тяги на ведущем колесе в данном случае опре-
деляется таким образом:
4^ 0ff/2^n
для I передачи 16,D-9,81Vx Ц ?
151
Рис. I.I.Динамическая характеристика транспортного
средства
16
для П, Ш, 1У, У передач
0.02/8 •
Далее подсчитывается КОД гусеничного движителя по формуле
(1.20). '
Удельная сила тяги и динамический фактор 2)/ находят-
ся соответственно по формулам (I.2I) и (1.22). Вследствие того,
что скорость движения машины на всех передачах не превышает
60 км/ч мало, сопротивлением воздуха принебрегаем, т.е.
-О/ = •
Результаты расчетов сводятся в таблицу и строятся графики
(рис.1.1).
Левее оси ординат динамической характеристики (рис.1.1)
строятся графики функций У и Значения
и подсчитываются соответственно для коэффициентов сопро-
тивления качению </ и по методике, изложенной в п.1.2.
1.5. Построение характеристики приемистости
транспортных средств
В качестве основной характеристики приемистости примем
время разгона. Рассмотрим разгон гусеничной и колесной машины
с прицепом.
Интенсивность разгона транспортного средства зависит от
конструктивных параметров машины и прицепа, дорожных условий и
приемов управления.
Разгон на каждой передаче, в том числе и при трогании с
места, имеет два этапа. I-й этап-с момента включения фрикциона
(сцепления) до момента окончания его буксования, 2-й - с момента
окончания буксования фрикциона (сцепления) до максимальной ско-
рости на данной передаче.
После достижения максимальной скорости на данной передаче
производится переключение передачи на следующую ступень. В этот
момент машина движетая по инерции и происходит снижение скорости.
Процесс замедления продолжается до момента включения фрикциона
(сцепления) при включенной следующей передаче.
17
Условно этот этап называют 3-м этапом разгона.
1-й этап разгона
Для определения времени разгона на I-м этапе сделаем сле-
дующие допущения:
полное включение фрикциона (сцепления) происходит мгновенно;
момент трения полностью включенного фрикциона (сцепления)
в процессе буксования - величина постоянная;
внешние условия в процессе разгона постоянны;
в момент включения фрикциона (сцепления) двигатель работа-
ет с полной отдачей топлива.
Автопоезд и ли гусеничный поезд
Из дифференциального уравнения движения поезда как системы
[l] с учетом допущений ускорение при разгоне поезда на 1-м
этапе определится выражением
/ м/с2, (1.27)
Оле с
- максимальное значение динамического фактора поезда
на I -й передаче;
- коэффициент запаса фрикциона (сцепления);
£ - нормальное ускорение свободного падения, м/с^;
- коэффициент сопротивления движению при «. 0°
(п.1.2);
{fn<) - коэффициент приведенной массы тягача с прицепом,
учитывающий суммарную кинетическую энергию вращаю-
щихся деталей тягача и прицепа.
л _ &>Cr + <S'G' .т
9 <1,28)
где Оо - коэффициент приведенной массы тягача, учитывающий
только кинетическую энергию вращающихся деталей
тягача;
. - коэффициент приведенной массы прицепа. Если тя-
(J гач и прицеп (полуприцеп) с одинаковыми движителя-
ми (с колесным или гусеничным), то о~<^.
Продолжительность 1-го этапа разгона при трогании с места
определится равенством
/ _ ________________ с
tf ' ° ’ 0.29)
18
IB""'-н-
где Сс).
- начальная угловая скорость ведущих деталей в момент
включения фрикциона (сцепления), с ,
- угловое замедление ведущих деталей фрикциона (сцеп-
ления), С~2;
- угловое ускорение ведомых деталей фрикциона (сцепле-
ния), с. .
Угловая скорость ведущих деталей
деляется по формуле
фрикциона (сцепления) опре-
с"1
. . , _ - — л , (1.30)
30 _х
где /2^ - частота вращения коленчатого вала, мин , соответст-
вующая максимальной мощности двигателя.
Считаем, что угловое ускорение ведомых деталей фрикциона
(сцепления) пропорционально линейному ускорению поезда, т.е.
• г
X,
ci
(I.3I)
где - передаточное число трансмиссии на 4 -й передаче;
2К - радиус ведущего колеса, м.
Угловое замедление ведущих деталей фрикциона (сцепления)
[A -2
’ <1-32>
где/^р^дц.- максимальный крутящий момент двигателя, Н.м;
- приведенный к маховику момент инерции всех движущих-
ся деталей двигателя и ведущих деталей фрикциона
(сцепления), кг.м^;
- коэффициент запаса фрикциона (сцепления).
Поскольку , то 9"^ Ca/lfi. на всех
передачах.
Скорость машины в конце 1-го этапа при трогании с места на
данной передаче
\/f - X, VL/й (Vf = ЗбХ,£< км/ч )
(1.33)
2-й этап разгона
Принимаем, что за время 2-го этапа разгона
(сбпрдтавлвйиё дороги) остаются без изменения.
Ускорение поезда на 2-м этапе
Х?= ~ м/с2 .
внешние условия
(1.34) го
где Drr - динамический фактор поезда на данной передаче;
оСу - коэффициент приведенной массы тягача и прицепа, учи-
тывающий суммарную кинетическую энергию вращающихся
деталей тягача и прйцеиа.
« д’ G- +
t d" = & + (1*35)
где с/ - коэффициент приведенной массы тягача.
Приближенно коэффициент д для машин с механической транс-
миссией и коробкой передач (КП) можно подсчитать по формуле
сГ = / * CL + &ZZ г/»4 , (1.36)
где 3 - коэффициенты, равные;
для колесных машин ZZ = 0,03...О,05,
3 = 0,001...0,002;
для гусеничных машин 2Z = 0,2...0,4,
/7 == 0,002...0,006.
Постоянную часть формулы (1.36) обычно обозначают через
коэффициент Зо , т.е. 3g = I + XZ .
Коэффициент учета вращающихся масс для свободно буксируемо-
го (не с активными колесами) колесного прицепа (3‘ = I.03...I.06,
а для гусеничного 3 = 1,1...1,3. Чаще всего при расчетах коэф-
фициент учета вращающихся масс прицепа принимают равным 3=0о
Большее значение указанных коэффициентов следует принимать
для тяжелых колесных и гусеничных машин с колесами увеличенного
диаметра, с более массивными гусеничными цепями и с более мощным
двигателем. Однако, в конечном счете, все зависит от конструктив-
ного выполнения тех узлов и механизмов, которые оказывают наибо-
лее существенное влияние на величину коэффициентов CL и S в
формуле (1.36), а именно: двигателя с маховиком, ведущих деталей
сцепления (главного фрикциона), механизмов поворота, колес или
гусениц.
Ускорение поезда на 2-м этапе будет величиной переменной,
так как зависит от скорости движения на данной передаче.
Поэтому для определения зависимости V£— на 2-м этале ис-
пользуется приближенный способ, при котором считают
в определенных диапазонах изменения скорости движения поезда.
Диапазон изменения скорости от \/f (скорость поезда на данной
ДО
передаче) до \fnax разбивают на несколько интервалов (обычно на
три), в пределах которых принимают динамический фактор постоян-
ным. z
I-й интервал: от V/ до Dn - Dwp ~ сO^ft
2-й интервал: от Vх до V', -й? -Dn'cp —const.
3-й интервал: от y/z до D„ зD'"c/ = const.
Средний динамический фактор в этих интервалах определяют
графическим путем по равенству площадей на кривой ~^(V)
таким образом, чтобы площадки сверху и снизу от горизонтальной
прямой линии Dnep были одинаковы (рис.1.1).
Ускорение поезда при разгоне в интервале от до V
(1.37)
Время разгона
. чг 36 X г
с/ (1.38)
Таким же способом определяют среднее ускорение Х^ при раз-
гоне от V до V и Х'£ при разгоне от \/ до V/r?ax и соответствую-
щие значения времени и i. "'z
Полное время, разгона на 2-м этапе
4 = 4'*<*<"'•
(1.39)
. 3-й этап разгона
Во время 3-го этапа разгона условия принимаются такими же,
как и на первых двух этапах ( Vх = Const ). Выключение фрикцио-
на (сцепления) в начале 3-го этапа принимается мгновенным. Дви-
жение поезда происходит по инерции, замедленно.
Замедление поезда на 3-м: этапе
<1-40)’
гдВ-О^ подсчитывается по формуле (1.28).
При нейтральном положении рычага переключения передач от-
сутствует кинематическая связь между ведущими колесами и валом
двигателя.
Скорость в конце 3-го этапа
4 , V^-^Xr^M/4)f(I.4I)
21-
где - максимальная скорость на данной передаче;
— продолжительность 3—го этапа, с (табл.6 прилЭ.
I-й этап разгона на каждой
следующей передаче отличается от 1-го
этапа при трогании с места тем, что ведомые детали фрикциона
имеют скорость вращения, пропорциональную скорости движения тя-
гача (поезда) в конце 3-го этапа на предыдущей передаче, т.е.
пропорционально скорости Vj .
Таким образом, угловая скорость ведомых деталей фрикциона
Vs -1 х
? 3.62ft ’ /, <1-42)
где ~ передаточное число трансмиссии на следующей пере-
даче ;
2л- - радиус ведущего колеса, м.
В этом случае время разгона на I-м этапе
t, - ’ (I-43’
скорость в конце 1-го этапаОпределяется по формуле
• (1,44)
2-й и 3-й этапы разгона на последующих передачах подсчиты-
ваются так же, как это было показано выше.
Одиночное транспортное
средство
При движении машины (колесной или гусеничной) без прицепа
разгон будет происходить более интенсивно. .
Ускорение машины на I-м этапе разгона равно
Y) ' м/с2 , (1.45)
т.е. ускорение одиночного транспортного средства на I-м этапе
будет больше, чем при движении с прицепом, поскольку при этом
динамический фактор на той же передаче будет больше/Х^^^
Продолжительность 1-го этапа при трогании с места подсчитывает-
ся по формуле (1.29). При этом надо иметь в виду,что угловое
ускорение ведомых деталей фрикциона (сцепления) rfy*, для оди-
ночной машины, как это видно из формулы (I.3I), будет больше,
так как больше X
22
Угловое замедление ведущих деталей фрикциона (сцепления) ос-
тается без изменения, поскольку на ведущие детали действует тот
же момент сопротивления, равный моменту трения фрикциона. Угло-
вое замедление подсчитывается по формуле (1.32).
Ускорение машины на 2-м этапе будет также больше, чем ус-
корение поезда, и равно
X?= (Cd - v7/ м/с2 . (1.46)
Построение зависимости производят так же, как и
для поезда, пользуясь формулой (1.33).
Замедление на 3-м этапе К, при условии равенства значений
коэффициентов сопротивления качению для тягача и прицепа равно
Xj = • (1.47)
В формулах (1.45)-(1.47) величину коэффициента У прини- _
мают равной J , так как при оС = 0 это следует из формулы (1.8).
Далее расчеты производятся по методике, аналогичной мето-
дике для автопоездов или поездов с гусеничным тягачом. Только в
формуле (1.37) вместо величин JDnep и Ч?гри£ соответствен-
но используют cf ,-D ср и Все результаты расчетов
целесообразно свести в таблицы.
1.6. Особенности тягово-динамического расчета
плавающих машин
В настоящее время в связи с интенсивным развитием, ряда от-
раслей народного хозяйства увеличилось значение и масштабы ис-
пользования плавающих машин. Наиболее широкое применение они на-
ходят в лесной промышленности, в геологических изысканиях « при
разведке месторождений и промышленном освоении северных и вос-
точных районов страны, богатых нефтью, газом и другими природ-
ными ресурсами.
Значительное место принадлежит плавающим машинам в деле ме-
ханизации трудоемких процессов в промышленном рыбоводстве и ос-
воении продовольственных ресурсов шельфа морей, омывающих вое- _
23
точные берега нашей страны. Продовольственной программой СССР,
одобренной майским (1982г.) Пленумом ЦК КПСС, предусмотрено быст-
рое развитие этих отраслей аграрно-промышленного комплекса стра-
-ны.
Для работы плавающих машин характерны частые изменения режи-
ма движения, т.е. величины и направления скорости, передач в
трансмиссии, нагрузки двигателя, включение и выключение сухопут-
ного (гусеничного, колесного) и водоходного движителей. Это свя-
зано с особенностями технологических процессов, которые выпол-
няются плавающими машинами, а также с входом в воду, разгоном,
торможением и маневрированием на плаву, движением по мелководью
с преодолением уклонов дна и выходом из воды.
Динамические свойства плавающих машин при движении по суше
и по мелководью оценивают обычно с помощью тяговой или динами-
ческой характеристики. Расчет динамической характеристики пла-
вающей машины при движении на суше не отличается от расчетов,
рассмотренных выше. В то же время движение плавающей машины по
мелководью имеет существенные особенности, которые не позволяют
использовать для расчетов обычную динамическую характеристику.
Рассмотрим методику построения динамической характеристики
плавающей машины на мелководье, уделяя основное внимание только
ее отличиям от обычного случая движения по суше.
Движение плавающих машин по мелководью является одним из
характерных режимов в эксплуатации. При этом плавающая машина
одновременно взаимодействует с водой и с грунтом дна. Движущая
сила образуется при совместной работе сухопутного и водоходного
движителей. Силы сопротивления движению возникают при взаимо-
действии сухопутного движителя с грунтом, из-за уклона профиля
дна или берега, а также при обтекании водой корпуса и элементов
ходовой части машины (сопротивлением воздуха можно пренебречь
ввиду небольших скоростей).
Рассматриваемый режим отражает особенности входа в воду,
выхода на берег и движения по мелководным участкам, когда осад-
ка по движителям превышает глубину воды. Сформулируем кратко эти
особенности, которые необходимо учитывать при построении динами-
ческой характеристики.
I. Сопротивление воды зависит от глубины, так как изменяет-
ся погруженный объем корпуса и влияет близость дна.
24
7JF
2. Тяговые характеристики сухопутного и водоходного движи-
телей в воде зависят, во-первых, от глубины их погружения в во-
ду, т.е. глубины воды, и, во-вторых, от взаимного влияния движи-
телей, которое приводит к потерям суммарной тяги по сравнению с
раздельной работой.
3. Тяга сухопутного движителя при взаимодействии с грун-
том зависит от глубины воды, так как изменяется сила плавучести
и нормальная реакция грунта. При изменении свойств подводного
грунта на пути машины закономерности изменения глубины колеи,
сцепления и сопротивления качению будут отличаться от аналогич-
ного случая на суше, где нормальная реакция грунта постоянна и
равна весу машины. Например, при уменьшении несущей способности
грунта на суше глубина колеи увеличивается так, что установится
новый равновесный режим движения при постоянной вертикальной
нагрузке на движитель. В случае же движения по мелководью глу-
бина колеи, нормальная реакция грунта, сцепление и сопротивление
качению будут определяться как изменением свойств грунта, так и
характеристикой подвески и зависимостью силы плавучести от осад-
ки машины в воде. Это значительно усложняет расчет сил взаимо-
действия сухопутного движителя с грунтом.
4. На совместную работу сухопутного и водоходного движите-
лей определяющее влияние оказывает схема трансмиссии, которая
определяет способ распределения мощности двигателя по движи-
телям.
5. В рассматриваемом случае движения плавающей машины вви-
ду значительного изменения сцепного веса на различных глубинах
воды необходимо учитывать возможность буксования сухопутного
движителя.
Общий подход к построению динамической характеристики ос-
тается тем же, что и в случае движения машины по суше. Он зак-
лючается в том, что все факторы, влияющие на движение машины,
разделяются на две группы. В первую" группу входят конструктив-
ные факторы (характеристики машины в целом, двигателя, транс-
миссии, движителя) и силы, однозначно связанные со скоростью
движения. Во вторую группу входят парамегры-условий движения.
Так как факторы первой группы учитывают в динамической характе-
ристике машины, то возможные режимы движения (скорость, ускоре-
ние, свободная сила тяги, преодолеваемые уклоны) находятся в
25
зависимости только от факторов второй группы - условий движения.
В этом заключается удобство динамической характеристики при
оценке тягово-динамических свойств машин .
В случае движения плавающей машины по мелководью в первую
группу факторов дополнительно войдут: сопротивление воды, зат-
раты мощности на вращение сухопутного движителя в воде и на ра-
боту водоходного движителя, силы тяги обоих движителей в воде.
' Динамическая характеристика плавающей машины может быть
построена для определенной глубины воды. Изменение глубины во-
ды приводит к целому семейству характеристик.
Динамический фактор выражается формулой
D ~ (Т+ P&-R)/N(1.48)
где 7” - тяга сухопутного движителя при взаимодействии с
грунтом;
'ос - тяга движителей (водоходного и сухопутного) при
совместной работе в воде;
К - сопротивление воды;
Л/ - нормальная реакция грунта.
Тяга Т при движении без буксования, когда она определяет-
ся по двигателю, равна
, (149)
где - свободный момент двигателя;
ZZC - передаточное отношение трансмиссии от двигателя до
сухопутного движителя;
- момент сопротивления вращению сухопутного движителя
в воде с учетом потерь в трансмиссии;
/У/ - момент водоходного движителя;
- передаточное отношение и КЦД трансмиссии между во-
доходным и сухопутным движителями;
2” г? - динамический радиус (радиус ведущей эведдочки).
Отсутствию буксования отвечает уравнение связи частоты
вращения коленчатого вала двигателя со скоростью движения^
V - 2 , (1.50)
26
где Zzr - радиус качения (радиус ведущей звездочки).
На рис.1.2 приведен пример динамической характеристики ко-
лесной плавающей машины. Сплошные линии -Дг , Dsr , Dm
соответствуют динамическому фактору на I, П и Hi передачах на
большей глубине, штриховые линии - на меньшей. На большей глуби-
не нормальная реакция грунта составляет 40%, а на меньшей - 70%
веса машины. Кривые динамического фактора построены при отсутст-
вии буксования, когда соблюдается условие (1.50) и тяга Pgc од-
нозначно связана со скоростью. При буксовании эти связи наруша-
ются и динамическмя характеристика будет иной.
Рис.1.2. Динамическая характеристика плавающей машины
на горизонтальном участке:
-------------------- глубина воды 1,04м;
-------------------- глубина воды 0,82м
27
На рис.1.2 кривые ,Т)\о представляют наибольший воз-
можный динамический фактор при полном использовании сцепных воз-
можностей с грунтом, соответственно, для меньшей и большей глу-
бин.
где cf, Ч’ - коэффициенты сопротивления качению и сцепления.
Если трансмиссия машины такова, что постоянно на всех
передачах, то величина JD не зависит от включенной передачи
(на рис.1.2 приведен именно этот вариант).
Для рассматриваемых глубин из-за меньшего сопро-
ивления воды на меньшей глубине.
Начало буксования соответствует точкам на пере-
сечении кривых £ с соответствующими кривыми динами-
ческого фактора. Причем эти точки лежат на одной вертикали с
точками пересечения кривых удельной силы тяги Т/Л/ и горизонта-
ли . Из рис.1.2 следует, что на большей глубине буксование
будет во всем диапазоне скоростей на I передаче и при У>
на П передаче. На меньшей глубине буксование возможно только на
I передаче при V* Vsve .
Построение динамической характеристики в случае буксования
рассмотрим на примере движения машины на большей глубине на П
передаче. Плавающая машина при этом может двигаться с любой
скоростью из диапазона С<\/< с постоянной частотой вра-
щения вала двигателя Я-е+о , соответствующей скорости .
Так как тяга^> связана с величиной прямой зависимостью, т.е
возрастает с увеличением > то наибольший динамический фак-
тор при буксовании в диапазоне 27* V* Vg*e будет при наиболь-.
шей возможной частоте вращения, в данных условиях - при .
Таким образом, динамическая характеристика машины на боль-
шей глубине на П передаче представляет собой кривую, состоящую
из двух участков: при движении с буксованием - 3 Б^о и без бук-
сования Динамическая характеристика на I передаче будет
одинакова с характеристикой на П передаче, построенной для час-
тоты вращения движителей, соответствующей скорости \fmcux •
Из приведенных на рис.1.2 динамических характеристик следу-
ет, что на обеих глубинах плавающая машина развивает максималь-
ную скорость на второй передаче (см. абсциссы точек пересечейия
28
кривых Dff с горизонталью / ). Причем в данном примере эти ско-
рости оказались равными.
Ускорение X машины при отсутствии буксования рассчитыва-
ют с учетом инерции воды по формуле
х = (1.52)
где - определяют по кривой Г (рис. 1.2);
сГ - коэффициент учета вращающихся масс;
- масса машины;
%н - присоединенная масса воды.
При буксовании динамический фактор определяется по кривой
Вб^о , плавающая машина при этом движется с постоянной часто-
той вращения движителей. Ускорение в этом случае определяется
по формуле
Хд = (Da ~ (Л2 ★Я,,). (1.53)
Динамическая характеристика плавающей машины позволяет так-
же оценивать преодолеваемые уклоны дна и берега. Особенность
состоит в том, что динамическая характеристика при буксовании
зависит от продольного уклона , в отличие от случая движе-
ния без буксования.
Поэтому участок динамической характеристики для уклона ,
отвечающий движению без буксования, будет частью кривой
(рис.1.2). Участок же динамической характеристики, соответствую-
щий буксованию, изменится. Для того чтобы построить этот учас-
ток, необходимо прежде найти точку начала буксования на уклоне
об . Для этого на рис.1.3 слева дополнительно построена зави-
симость (Ifкривая Л М . Определение точки начала бук-
сования и соответствующей скорости для уклона об
(точка Т на рис.1.3) ясно из построения. Динамический фактор
при буксовании строится аналогично рассмотренному случаю при
об = 0. Аналогом кривой является кривая начинающаяся
в точке Д' и проходящая через точку Динамическая характе-
ристика для уклона об изобразится кривой состоящей иэ
участка без буксования Б^о Г и участка с буксованием((Бес+о .
Для удобства на рис.1.3 слева построена также зависимость
потребного динамического фактора для преодоления
уклона _ кривая /7Б .
29
Рис.1.3. Динамическая характеристика плавающей машины
на продольном уклоне. Схема определения
преодолеваемого уклона дна или берега
Из рис.1.3 следует, что плавающая машина преодолевает наи-
большие уклоны при движении с малой скоростью и с буксованием,
так как динамический фактор при этом наибольший. Преодолеваемый
уклон определяют из соотношений
(i-P + ft* = Tj /Л\ <> > I
7(1.54)
Первое уравнение связывает величину уклона с£ и наибольшую
скорость V£^, , при которой еще возможно буксование.
Определив Vg^ и частоту вращения сухопутного движителя
fl get • соответствующую этой скорости, можно построить динами-
ческую характеристику' в эоне буксования при \/< Vg^ .
Второе уравнение выражает условие равенства динамического
фактора при малой скорости движения потребному для преодоления
уклона оС . Здесь A Л ggi, )- дополнитель-
ная величина, обусловленная совместной работой сухопутного и
водоходного движителей в воде при частотах вращения соответствен-
но Я get. и в швартовом режиме (отрезок на рис. 1.3).
30
Для упрощения расчета преодолеваемого уклона можно считать
Д В постоянной величиной, соответствующей, например, определен-
ной скорости Vget, . В этом случае преодолеваемый уклон находят
как проекцию точки пересечения кривых /7Е и Д М • Последняя
отстоит по вертикали от кривой ДМ на расстояние A В
Уравнения (1.54) позволяют определять не только преодолева-
емый уклон берега или дна, но и величину дополнительной тяги,
необходимой для преодоления заданного уклона.
2. ТЯГОВО-ДИНАМИЧЕСКИЕ РАСЧЕТЫ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ
ТРАНСПОРТНЫХ СРЕДСТВ С ГИДРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ
2.1. Подсчет коэффициента вращающихся масс трансмиссии
У машин с гидромеханической трансмиссией (ГИТ) между двига-
телем и, как правило, автоматической КП стоит гидротрансформатор.
Таким образом, между двигателем и ведущими колесами отсутствует
жесткая кинематическая связь.
В этом случае выражение для подсчета коэффициента вра-
щающихся масс имеет вцц,
, (2.D
где £Z - яоэффициент, имеющий тот же смысл, что и в форму-
ле (1.36) ;
С = 0,001...О,005;
- коэффициент трансформации (силовое передаточное
число гидротрансформатора);
/1# ^г~ соответственно частота вращения насосного и тур-
бинного колеса, мин-^;
- передаточное число механической части трансмиссии.
Для вычисления коэффициента О в случае машин с ГМТ или
для построения графика (f необходимо для каждого зна-
чения определить производную C(/7„/&Slr . При втом строят гра-
фик /2* »и методом графического дифференцирования на-
ходят производную dn„/dnr.
31
На машине с непрозрачным гидротрансформатором (например,
МАЗ) при постоянной подаче топлива в цилиндры коленчатый вал
двигателя вращается с неизменной угловой скоростью и вращающие-
ся массы двигателя и насосного колеса не влияют на характер раз-
гона машины. В этом случае коэффициент cf следует подсчитывать
по формуле (2.1), имея ввиду, что &/2„/&.Лт= 0 .
По опытным данным для машины с прозрачным трансформатором
(ЗИЛ) выражение Кг(1П.н/С1Л г можно принимать равным примерно
0,6 при изменении 4^*z=/2r//?v ст 0 до значения, соответствующе-
го 4$ » 1,0, если прозрачность гидротрансформатора 1,5 2,5.
Для значений больших, чем при 4^ Е 1,0, т.е. при переходе
гидротрансформатора на режим гидромуфты, выражение стре-
мится к единице. г
Отметим, что на высших передачах в КП, на которых обычно
производят разгон машины, третье слагаемое формулы (2.1), даже
при изменении сомножителя t меняется весьма незначи-
тельно, так как Сс/т*>; - величина малая. Поэтому можно принимать
значение коэффициента сГ равным его постоянной составляющей,
т.е. ($=/+££ .
2.2. Особенности определения КПД планетарных коробок
передач
В планетарной передаче энергия передается двумя потоками:
переносным движением, когда вся система вращается вместе с во-
дилом, и относительным движением, когда имеет место вращение от-
дельных звеньев механизма внутри системы относительно водила.
При передаче энергии переносным движением имеются потери
только в подшипниках, которыми можно пренебречь. Таким образом,
чем большая мощность передается этим потоком, тем выше КПД пе-
редачи.
Относительное движение сопровождается работой (вращением)
шестерен. Потери на трение в полюсах зацепления шестерен значи-
тельно больше потерь в подшипниках. Следовательно, чем меньше
энергии передается этим путем, тем выше КПД передачи.
Кинематические схемы планетарных коробок передач полнопри-
водных многоосных автомобилей МАЗ и ЗИЛ с гидромеханической
32
трансмиссией (ГМТ) приведены на рис.2.1 и 2.2.
Таблица 2.1
Ступени Что включено Передаточное число КПД
Ф1 ф2 ф3
I 4 3,2 0,98.0,98= 0,96
П 4 1,8 0,98.0,98= г 0,96
ш 4 1,0 1,0
Таблица 2.2
Ступенг Что включено Передаточные числа код
ф1 Т1 ф2 Т2 ^3 ф3
а б а б общее
I 4 4 4 2;55 2,73 6,97 0,98^=0,96
П 4 4 4 1,47 2,73 4,02 0,98.0.983= 0.92 _
Ш 4 4 + 1,0 2,73 2,73 0,98.0.98^= 0,94
1У 4- * 4 0,98.0,98= 0.96
У 4- + 4 0,98.0.98Z= о;$4
У1 4 4 1,0
Упрощенно КПД планетарной передачи можно подсчитать, опре-
деляя его только как КОД механизма при остановленном водиле
(учитываются потери при относительном движении):
Ь _ >'’2/ >7^
^/7/7 “ £fA’yrp 9 (2.2)
где - количество полюсов соответственно с внешним и
внутренним зацеплением.
КОД цилиндрической пары шестерен с внешним зацеплением при-
нимается 0,97...О,99, с внутренним - 0,98...0,99.
Вообще говоря, при таком способе КОД планетарной передачи
получается несколько заниженным. Для точного его определения
пользуются методом проф. М.А.Крейнеса [l]
33
Рис. 2.1. Двухрядная ПКП тягача МАЗ (8x8) с ГМТ
Рис. 2.2. ПКП "а" и дополнительная коробка "б"
гягача ЗИЛ (8x8) с ГМТ :
*1,2 3 ~ 1о₽моза « Фу 2 5 ~ фрикционы
Для примера вычислим по формуле (2.2) КПД планетарных коро-
бок передач тягачей МАЗ и ЗИЛ на различных передачах, условно
приняв а 0,98. Результаты расчетов приведены в
табл.2.1 и 2.2.
Формулой (2.2) можно пользоваться также и для подсчета КПД
других планетарных передач, имеющихся в трансмиссиях колесных и
гусеничных машин (колесных и бортовых редкуторов, планетарных
механизмов поворота при передаче мощности двумя потоками).
2.3. Тягово-экономическая характеристика транспортного
средства
Гидродинамический трансформатор при использовании его пре-
образующих свойств в широком диапазоне имеет неэкономичные участ-
ки работы. Поэтому кроме тяговых качеств необходимо знать и оце-
нивать его экономические свойства, в общем виде выражаемые коэф-
фициентом полезного действия трансформатора. В связи с этим для
оценки тяговых качеств тягачей с ГМТ вэамен тягово-динамической
составляется тягово-экономическая характеристика тягача, т.е.
зависимости динамического фактора D и КЦД гидротрансформатора
от скорости движения машины. Это позволяет выделить зоны
неэкономичной работы гидротрансформатора, в которых движение тя-
гача будет сопровождаться повышенным расходом топлива и значи-
тельным выделением тепла в системе охлаждения гидротрансформато-
ра.
При наличии необходимых данных тяговый расчет производится
следующим образом.
Свободная мощность в случае установки промежуточного редук-
тора между двигателем и гидротрансформатором приводится к валу
насосного колеса по формуле
л (2.3)
где - мощность, определяемая по формуле (1.3);
- КПД согласующего редуктора.
Тогда момент двигателя , приведенный к валу насосного
колеса гидропередачи, можно подсчитать по формуле (1.4)^ куда
необходимо подставить значения/!^ и /2^ .
55
Если между двигателем и гидротрансформатором установлен по-
вышающий промежуточный редуктор, то/2X определяется по формуле
, = у-
' О-р ’ (2.4)
где /2 - частота вращения вала двигателя, мин~^;
XZ47 - передаточное число согласующего редуктора.
После подсчета крутящего момента двигателя, приведенного к
валу насосного колеса, и частоты вращения этого колеса строят
график '(Причем в формулу (2.4) подставляют
расчетные значения частоты вращения коленчатого вала, взятые
через определенный интервал (см.п.1.1).
Из теории гидродинамических передач известно, что момент на
насосном колесе в Н*м равен
Мн = Di > (2.5)
где % - удельный вес рабочей жидкости гидропередачи, Н/мэ;
- коэффициент входного момента, мин2/м;
Da. - активный диаметр гидропередачи, м.
Момент //г в Н.м на валу турбинного колеса
7% = %ЛТП&„ ’ (2.6)
где Лг - коэффициент выходного момента, мин^/ы.
Условия совместной работы двигателя и гидротрансформатора
при полной подаче горючего и установившемся режиме могут быть
выражены равенством
ЛУ = м„
или
УЛ, Щ)‘о'=ХЛ„п!! D1, в„
откуда коэффициент двигателя можно подсчитать по выра-
жению
~ (2,е)
Расчет проводят в следующей последовательности.
Для данного значения частоты вращения /2 вала двигателя в
диапазоне от /?до /~2/Г1ах определяем /2^ , Л/д и /У
а затем строим характеристику двигателя, пользуясь формулой
36
ХЛ.1П*-.!ЫО_
йл* w <a.s>
Результаты расчетов рекомендуется сводить в таблицы.
Пример. Имеем ПЛТ с дизельным 4-тактным двигателем, макси-
мальная эффективная мощность которого Л>е„ах= 265 кВт при =
=2100 мин . Двигатель имеет корректор подачи топлива, поэтому
в формуле (I.I) коэффициенты Я = 3 = С =1. После определе-
ния потерь в моторной установке по формуле (2.3) подсчиты-
ваем свободную мощность, приведенную к валу насосного колеса.
Пусть имеется согласующий редуктор (повышающий), установленный
между валом двигателя и насосом гидропередачи, состоящий из
двух пар шестерен, т.е. ь # - 0,9Ег = 0,96. Передаточное число
редуктора ££?= 0,875, а-Да = 0,015м.
Таблица 2.3
Параметры Размерность Численное значение
/2 г/Л* — 0 0,2 0,4 0,6 0,8
/0* Н«мин2/м4 125 135 133 131 105
Н«мин2/м4 425 351 246 177 105
- 3,4 2,6 1,85 1,35 1,0
Тогда на основании формул (2.3) - (2.4), (2.9), а также
(1.4), в которые подставляем значения и ZZ g , получим ре-
зультаты вычислений и сведем в табл. 2.4. Так как на машине
установлен дизельный двигатель, то Л л/ .
Характеристика гидропередачи приведена в табл. 2.3.
Таблица 2.4
Параметр Размерность — 7* ' Численные значения.
/2 мин-1 500 900 1300 1700 2100
кВт 74,30 138,40 191,40 225,20 225,0
л/7? кВт 71,33 132,86 183,74 216,19 216,0
Л# мин-* 571,43 1028,57 1485,71 1942,86 2400,0
Н-М 1192,0 1233,48 1180,9Е 1062,59 859,44
Н‘ЦИН2/м4 2433,65 777,27 356,68 187,67 99,47
По данным табл.2.3 и 2.4 строим график совместной работа
двигателя и гидропередачи (рис.2,3), причем зависимость
37
Рис. 2.3. График совместной работы двигателя
гидропередачи
56
и характеристика гидропередачи строятся в одном масштабе.
Динамический фактор машины
Прежде чем определить динамический фактор транспортного
средства, подсчитывают передаточное число механической части
трансмиссии Z/^.и КПД 12^. (от турбинного колеса гидропередачи
до ведущего колеса машины), а также радиус ведущего колеса. На-
пример, для шин 16.00-20 радиус ведущего колеса (при Я - 0,92
[l] ) равен ,
4(4+2 5« 25,4(20+20$)
=J --------------= 002' ——------------aMtf-
С'Л 2000 v ' 2000 '
На графике значенийот 0 Д°
максимума (на рис.2.3, например, до 0,8) через интервалы 0,1...
0,2 проводим горизонтальные линии до пересечения с графиком
опуская перпендликулярные линии на ось абсцисс,
находим значения /Z „=/2^ . Поднимая перпендикулярные линий
вверх при данных /2# = /Ту , определяем величину момента
Затем подсчитываем следующие параметры:
частоту вращения в мин-1 турбинного колеса
22г - л
где /2'„я /2 g (берем из графика на рис.2.3);
момент на турбинном колесе в Н.м
(2.10)
/У? > (2.II)
где берется из графика;
скорость движения в км/ч тягача на L -й передаче
(2Л2)
где %* - расчетный радиус ведущего колеса, м;
/2Г - частота вращения турбинного колеса гидропередачи,мин-?
Сила тяги по двигателю в кН на ведущим колесах на Z -й
передаче для гусеничной или колесной машины с IYT определяется
по формуле
р = Mrj Ur/н . (2.13)
/ООО 2 *
Затем для одиночной гусеничной малины с ПГТ определяют
39
удельную силу тяги на ведущем колесе на 4 -й передаче по фор-
муле
ж ’ (2.14)
где Сг - вес машины, кН,
а удельную силу тяги по двигателю - по формуле (I.2I).
Для гусеничного поезда по формуле (2.61) вначале определя-
ем гг , а затем по формуле (1.26) находим величину
(если не учитываем сопротивления воздуха).
Для автопоезда с ГЫТ удельная сила тяги по двигателю вычис-
ляется по формуле
’ <гл6’
а динамический фактор - по формуле (1.24).
Вместе с определением зависимости динамического фактора от
скорости движения машины вычисляют КПД гидротрансформатора
2 л* ' (2Лб)
Зная скорости движения машины на различных передачах, вы-
численные для каждого значения отношения (Z2r//2^.)j , при из-
менении величины последнего от нуля до максимума, и коэффициен-
ты трансформации, соответствующие каждому задаваемому значению
отношения {Лг/Лм} j , можно легко определить зависимость
График этой функции строится совместно с графиком
функции Z)x /(VJ или Dn ( V) .
Динамическая характеристика дополняется левее от Ьси ординат
графиками /) и Ч^= , выполненными в том же
масштабе, что и динамический фактор (п.1.2).
Используя зависимость определяем на тяговой
характеристике рабочий диапазон, считая рабочим диапазоном гид-
ропередачи интервалы скорости, где Ъ" 0,75. Кратковремен-
ная работа гидропередачи возможна и на меньших скоростях вне
рабочего диапазона, но длительная работа при этом приводит к
перегреву рабочей жидкости гидротрансформатора.
Конструкции некоторых гидромеханических трансмиссий пре-
дусматривают блокировку гидротрансформатора на одной или двух
высших передачах коробки при помощи фрикциона, соединяющего на-
40
Таблица 2.5
| 0,825 105 2400 105 1330 16,2 ( 54,0 j 0,144 j 29,0 29,6 0,079 52,0 ! 17,4 1 1 0,0465 1 8 О
о о IkoJ «г ю о СО ”Ф ”Ф СО ьч z> СМ Ь4 13,3 70,6 0,188 ! 23,9 ! 38,6 0,103 42,8 22,8 0,061 : 0,81
9‘0 I 131 2260 180 2020 II,I 82,0 0,219 19,8 45,0 0,120 35,5 26,5 0,071 ! 0,82 1
0,5 132 2245 210 2020 9,18 94,5 0,252 16,4 51,75 0,138 29,4 30,5 0,0812 0,80
о 135 2230 250 2330 7,27 III,5 0,297 13,0 61,0 0,163 23,4 35,9 0,096 о
0,3 139 2200 305 2740 5,38 132,0 0,352 ‘9,65 72,1 0,193 17,31 42,6 0,114 0,67
см о 140 о о со ю ьч СО со СМ СО ° ф О - СП Ю О СО - ’ф * (Оно 00 CJ <О 00 о 11,5 48,2 0,129 0,5
о 133 ООО 1,82 176,0 0,470 3,24 96,5 0,258 5,81 56,9 0,152 н о
о 124 О ID О О со 1О о о» • нч о 0 105,0 0,281 0 62,0 0,165 о
\ £ * кН ’т* я Я^ W V V .км/ч & .кН Z)S^ 4^ с Н8‘ Ь/О‘ Д с*
BhBtfedei I BhBireden П jhBtfedeu Ш
41
сосное колесо с колесом турбины. Б этом случае гидропередача
вращается как одно целое и КПД ее равен единице. При блокировке
трансмиссия будет чисто механической. Динамический фактор и ско-
рость движения тягача (поезда) при этом определяются так же, как
и для машины с механической трансмиссией. При эксплуатации ма-
шины на хороших дорогах целесообразно переходить на блокировку
гидропередачи после достижения скорости, при которой значение
динамического фактора имеет одно и то же значение как при рабо-
те гидропередачи, так и при блокировке последней.
Все расчеты сводим в таблицу, которая, например, для конк-
ретной машины с ГМТ имеет следующий вид (табл.2.5).
Пусть конструкция рассмотренной вше гидромеханической
трансмиссии предусматривает блокировку насосного и турбинного
колеса на Ш передаче. В этом случае «1,0, Пусть также =0,75ц
aZZ^“I0,8.
Подставив в формулу (2.12) значения/?^, получим выражение
для определения скорости машины в км/ч
= V377 Уёв 71 * ’
Сила тяги по двигателю в кН на ведущих колесах машины под-
считывается по формуле .
_ 3, 6Aj
гдеД/^ подставляется в кВт, а ~ в кц/ч.
Динамический фактор определяется по форцуле (1.24) без уче-
та сопротивления воздуха, так как при блокировке гидротрансфор-
матора скорость движения данной машины немного более 60 км/ч.
Результаты расчетов при =0,91 сведем в табл.2.6.
Таблица 2.6
Частота вращения вала дви- гателя на расчетных режи- мах, /2'jf. . мин-1- 572 1030 1485 1943 1400
Значения свободной мощнос- ти на расчетных режимах,кВт 103,78 193,57 270,11 316,48 315,74
Ш передача (блокировка) Vfz* » км/ч tye , кН 15,0 23,3 0,062 27,0 24,4 0,065 38,9 23,3 0,062 50,9 20,7 0,055 62,9 16,9 0,045
42
2.4. Характеристика приемистости транспортного
средства с ГМТ
При разгоне машины с места в гидропередаче происходит уве-
личение как частоты врал(ения насосного колеса, так и колеса тур-
бины, и одновременно с этим изменяется и скорость циркуляции
рабочей жидкости. Передаточное число между двигателем и ведущи-
ми колесами при этом непрерывно изменяется, и, следовательно,
непрерывно должен изменяться и коэффициент приведенной массы,
увеличивающий кинетическую энергию вращающихся масс двигателя,
промежуточного редуктора и насоса. Учесть все эти явления
представляется весьма сложной задачей. Экспериментальные и тео-
ретические исследования показывают, что параметры приемистости
могут быть получены расчетом при раде допущений, упрощающих
расчет и обеспечивающих достаточно близко совпадение расчетных
результатов с опытными данными.
I. Принимаем, что при разгоне насосного колеса турбина
остается неподвижной до тех пор, пока насосное колесо не дости-
гает частоты вращения /2^as Время разгона маши-
ны при изменении частоты вращения насосного колеса от
до учитывать не будем.
2. Не будем учитывать расход мощности на изменение кинети-
ческой энергии насосного колеса и рабочей жидкости при измене-
нии частоты вращения от/2^°/2^ при^^яО до частоты вращения,
соответствующей максимальной частоте вращения коленчатого вала
двигателя, поскольку они незначительно отличаются друг от дру-
га.
3. Падением скорости машины при переключении передачи пре-
небрегаем ввиду относительно малого значения времени переключе-
ния.
о
Тогда ускорение одиночной машины в м/с
X — ~ У) ’
где cf - коэффициент, учитывающий кинетическую енергию вра-
щающихся масс машины с ГМТ, вычисляемый по форцуле
(2.1).
43
Ускорение поеядаа определяется по формуле
X = ~ > (2.18)
где сСг ~ коэффициент, учитывающий суммарную кинетическую
энергию вращающихся масс прицепа (полуприцепа) и
гидромеханической трансмиссии тягача в их относи-
тельном движении.
Коэффициент сС можно определить по формуле (1.28).
Поскольку динамический фактор для машины с П(Т изменяется
на каждой передаче в достаточно широких пределах, необходимо при
подсчете времени разгона разбивать динамическую характеристику
на возможно большее количество участков. На каждом участке ди-,
намический фактор можно принять постоянным и равным для одиноч-
ной машины D^g , , jDc^, и т.д., для поезда
Dnef> и Т.д.
Ускорение в этом случае будет также постоянным в каждом ин-
тервале изменения скорости движения машины (поезда). При подсче-
те ускорений для одиночной машины или поезда в соответствующие
формулы (2.17) и (2.18) подставляем значения динамических факто-
ров Dy И т.д. или £5^ ,2?/^ и т.д.
Время разгона в с в каждом интервале изменяется, скорость
подсчитывается по формуле
„ bi* -& ’ , кл”
где д v ~ интервал изменения скорости, км/ч;
X - ускорение машины в данном интервале, м/с^.
Пример; При определении характеристики приемистости
колесной машины с ГМТ используем результаты и данные предыдуще-
го примера.
Ускорение в м/с при разгоне машины на каждой передаче опре-
деляется по формуле (2.17), где, например, для гравийного шоссе
¥ «0,03. При этом коэффициент учета вращающихся масс сГ под-
считывается по формуле (2.1) с учетом того, что гидротрансфор-
матор непрозрачный. Таким образом, на всех передачах О «1,03.
Для I передачи
Для П передачи А (-4-с/?д ~ J .
Для Ш передачи z .
* /,#3 (^й ~Я#з)
Динамическую характеристику на I передаче от V » 0 до
Vl/гтал Р^биваем на семь участков, на П передаче от
на три участка, на Ш передаче от \^тал до V^exHa три участка.
Продолжительность разгона на каждом участке определяется
по формуле (2.19). Результаты расчетов сводятся в табл.2.7, а
также строится график V= / (£ ) .
Таблица 2.7
Пере- дача Учас- ток Средний динами- ческий фактор 1Уср Среднее ускорен. на уч-ке Х>/с2 Интер- вал ско- рости, л1/км/ч Продол- жительн. этапа, а/,с Конечн. скорость на уч-ке Vi-, км/ч Время от начала движения £, ° '
I 0,492 4,4 1,82 0,145 1,82 Ю.Й5
2 0,411 3,63 2,81 0,222 5,38 0,337
3 0,325 . 2,81 1,89 0,187 7,27 10,524
I 4 0,275 2,33 1,89 0,228 9,18 0,752
5 0,235 1,954 1,84 0,273 ИД 1,025
6 0,203 1,65 2,4 0,37 13,3 1,395
7 0,166 1,30 2,8 0,62 16,2 2,015
I 0,132 0,97 13,6 1,03 19,8 3,45
П 2 0,112 0,78 4,1 1,46 23,9 4,505
3 0,091 0,58 5,1 2,44 29,0 6,945
ш I 2 3 0,075 0,065 0,05 0,43 0,334 0,19 6,3 7,5 9,2 4,24 6,22 13,4 35,5 42,8 52,0 11,145 17,365 30,765
45
3. ТЯГОВЫЙ РАСЧЕТ ПОВОРОТА ГУСЕНИЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Рассмотрим поверочный тяговый расчет одиночной гусеничной
машины.
Как и для тягового расчета прямолинейного движения машины,
считаем, что двигатель работает с полной подачей топлива в ци-
линдры,».е. по внешней характеристике, что характеризует макси-
мальные тяговые возможности машины.
Сравнительная (или предварительная) оценка тяговых качеств
различных гусеничных машин при повороте на плоскости может
быть произведена по тяговым характеристикам поворота, подсчитан-
ным без учета влияния центробежных сил. В качестве типичных
грунтовых условий обычно принимают дернистый суглинистый грунт
при относительной влажности не более 8%, для которого *
= 0,06...0,07, a jn. » о,8 [б] .
3.1. Цусеничная машина с двухступенчатым планетарным
механизмом поворота
Двухступенчатый планетарный механизм поворота (ПМП) широко
применяется в конструкциях различных гусеничных машин.
Рис. 3.1. Кинематическая схема 2-ступенчатого ПМП:
- остановочные тормоза; - тормоза
поворота; *7} - блокировочные фрикционы
46
На рис.3.1 индекс "Iй относится к отстающему в процессе
поворота борту машины, а индекс "2" - к забегающему.
При прямолинейном движении машины включены фрикционы ф,
и • все т°Рмоэа выкачены. Планетарные ряды механизма по-
ворота сблокированы.Механизм вращается как одно целое со ско-
ростью вращения, определяемой включением той или иной передачи
в корои«с передач (КП). Если включить тормоза Т, и 7^ , то
обеспечивается пониженная передача с передаточным числом
// _ (3.1)
где A'-/Cf — Afg - характеристика планетарного ряда (передаточ-
ное число в относительном движении).
ПМП обеспечивает два расчетных радиуса поворота, когда ме-
ханизм поворота является механизмом с одной степенью свободы и
потери в тормозных элементах ПМП отсутствуют. Первый расчетный
радиус обеспечивается включением 7#, и равен 2^, - 0,5'3 (3 -
колея машины), а второй - включением 7”. и равен 2^ = (О.Ь+Л'УЗ.
При этом поворот возможен как при включенном фрикционе за-
бегающего борта машины, так и при Включенном тормозе поворота Tjj.
Расчетный радиус 2/у обеспечивается также и при движении
малины на пониженной передаче включением тормоза ~Taf ,
Все остальные радиусы поворота, реализуемые при пробуксов-
ке тормозов ПМП, являются кинематически не фиксируемыми и зави-
сят как от свойств грунта, так и от характера буксования фрик-
ционных элементов механизма поворота. В этом случае ПМП являет-
ся механизмом с двумя степенями свободы.
Для всех случаев поворота фрикцион отстающего борта
должен быть выключен.
Возможно также осуществление поворота с так называемым
"свободным" радиусом 7С> когда отстающая гусеница отключается
от трансмиссии и не тормозится, т.е. когда ПМП также будет ме-
ханизмом с двумя степенями свободы.
Тяговые качества гусеничных машин при повороте оценивают
на основании рассмотрения мощностного баланса по тяговой харак-
теристике. Тяговой характеристикой поворота [б] называют сов-
местный график потребной удельной силы тяги при повороте
= и удельной силы тяги по двигателю ^д=^д (V) .
47
Тяговые качества гусеничной машинычпри повороте оценивают
путем сопоставления значений У/х и pg для данного режима дви-
жения.
Порядок построения динамической характеристики
был рассмотрен в п.1.4. В настоящем параграфе рассмотрим мето-
дику построения тяговой характеристики поворота, т.е. зависи-
мости (У).
В общем случае мощность двигателя потребная для по-
ворота машины с данным радиусом, складывается из мощности //о,
затрачиваемой на преодоление внешних сопротивлений и на буксо-
вание (юз) гусениц, мощности , расходуемой на трение в
трансмиссии и гусеничном движителе, а также мощности , зат-
рачиваемой на трение в буксующих тормозных элементах механизмов
поворота. Подробно мощностной баланс изложен в [б] . .
Условие обеспечения равномерного поворота записывается
следующим образом:
Рассмотрим два способа управления механизмом поворота.
Поворот с использованием То,
В этом случае работа НМЛ аналогична другому типу механиз-
ма поворота - бортовому фрикциону (БФ). .
Случай "а". При полностью затянутом тормозе То, от
двигателя к отстающей гусенице мощность не подводится, а посту-
пает только на забегающую гусеницу, где создается .сила тяги Р^.
На отстающей гусенице создается сила торможения £,*0.
В этом случае мощность в кВт, потребная для поворота, рав-
на
, <з-з>
где О’ - вес машины, кН;
- скорость прямолинейного движения машины, опреде-
ляемая режимом работы двигателя и кинематикой
трансмиссии, м/с;
Рг - МВД трансмиссии к движителя ,
48-
Удельная сила тяги забегающей гусеницы
где сг - коэффициент сопротивления качению машины;
- коэффициент сопротивления повороту;
- соответственно длина опорной поверхности гусеницы и
колея машины.
Коэффициент сопротивления повороту определяется по формуле
проф. А.0.Никитина
/И в ----- (3.5)
где Zr - теоретический радиус поворота, м (т.е. радиус, оп-
ределяемый соотношением скоростей гусениц и не за-
висящий от изменения режима работы двигателя и внеш-
них условий движения).
Из формулы (3.5) следует, что при Zr = 0,5 /3 коэффициент
es„ 2V , _ <з.в>
где индексы "КП", "БП", "ГД" соответственно относятся к коробке
передач, бортовой передаче и гусеничному движителю.
Порядок определения составляющих формул (3.6) изложен ранее.
Потребная удельная сила тяги , следовательно, зависит
от радиуса поворота и равна s •
Случай "б".Если тормоз Tfff затянут не полностью, то
на отстающей гусенице будет так же, как и на забегающей, созда-
ваться сила тяги, т.е. // > 0 .
Тогда Л/^„ =jG\/e2'r' О.?)
" Z -С (3-8)
« У = «4 * У, ,
где удельная сила тяги Л определяется следующим выражением:
’ (3.9)
ИЗ которого ВИДНО, ЧТО >0 ( ИЛИ & У О ) в том
случав, когда второе слагаемое будет больше первого.
Поворот с использованием
Рассмотрим поворот с радиусом, меньшим радиуса свободного
поворота Zc , т.е. прит^*^.
В этом случае наблюдается рекуперация мощности с отстающей
гусеницей на забегающую.
Uo ) и-vff tr , (3.10)
где Aw коэффициент, учитывающий потери на трение
в механизмах при рекуперации мощности с
отстающей гусеницы на забегающую (-
КПД планетарного ряда отстающего борта).
В выражении (3.10) величины , 2Г и
соответственно определяются по формулам (3.1), (3.4), (3.6) и
(3.9).
у — т -A f7
~ f2 ~ (З.П)
Порядок пос т р оения тяговой
характеристики поворота
Задаемся значением теоретического радиуса поворота %г. По
формуле (3.5) определяем , а по формулам (3.4) и (3.9) -
величины и •’z .
Потребная удельная сила тяги при использовании тормоза 7ё/ .
л - , т.е. определяется также по формуле (3.4), а при ис-
пользовании тормоза 7л - по формуле (З.П).
При расчетах величины 2 г и %принимаются постоянными.
В табл.3.1 и на рис.3.1 приведены результаты вычислений при сле-
дующих параметрах: = 0,8; А? * 0,655; « 1,5[^>ка»»0,8
и - 0,07.
Данные для построения динамической характеристики (\/J
берутся из табл.$.1.
Максимальный радиус поворота при котором/^ « 0,
соответствует повороту со свободным радиусом, т.е. когда У^, =0.
Как следует из формул (3.9) и (3.5), для данных условий
ж 50,976^ , т.е. примерно 512?.
На основании условия (3.2) из графика (рис.3.1) можно заклю-
чить, что равномерный поворот с расчетным радиусом ж 3 В воз-
можен на 1 и П передачах.
На Ш передаче поворот с радиусом возможен только со
скоростью (рис.3.1).
Двухступенчатый ПМП по сравнению с БФ обеспечивает лучшее
использование мощности двигателя при повороте с радиусами
Таблица 2.1
Параметр Радиус поворота машины
(тормоз) 0,5В 1,5В 3,0В 4,5В 10 В 20 В 30 В 51 В
Л 0,8 0,695 0,582 0,477 0,330 0,204 0,147 0,093
0,335 0,296 0,253 0,214 0,159 0,П1 0,090 0,070
0,265 0,226 0,183 0,144 0,089 0,041 0,020 0
Л (Tf) - - 0,167 0,146 0,117 0,092 0,081 0,070
Q5 \
Z>Z
• УЗ
n<f 02
J2
0,1 —
4(т,) 1
?Т ЗОВ 201 <0В 40^ 20 10 То 50 V, *%
Рис. 3.1. Тяговая характеристика поворота
гусеничной пашины
50
51
r > ’ *5°лее высокую скорость движения и улучшает управ-
ляемость машины, так как имеется два расчетных радиуса поворота.
3.2. Гусеничная машина с двухпоточной гидромеханической
трансмиссией
В ГМТ отсутствует жесткая кинематическая связь между дви-
гателем и ведущими колесами машины. Каждому скоростному переда-
точному числу гидропередачи соответствует свой режим работы дви-
гателя. Эти особенности необходимо учитывать при построении
тяговой характеристики поворота гусеничных машин.
Существует множество схем, отличающихся расположением
гидропередачи в ШТ [б] . .
Основным достоинством схемы (рис.3.2) ГМТ "Кросс-Драйв"
(США) с параллельным включением гидропередачи является то, что
даже при прямолинейном движении через гидропередачу проходит
не вся мощность от двигателя, а лишь ее часть. Это повышает
общий КОД трансмиссии.
От вала насоса в данном ГМТ мощность поступает на каждый
из двух суммирующих планетарных рядов двумя потоками: на эпи-
циклическую шестерню через гидропередачу и планетарную КП, а
на солнечную-через дополнительный привод с простым дифференциа-
лом. Ведущим элементом КП является вал турбинного колеса гид-
ропередачи, соединенный с валом солнечных шестерен, разнесен-
ных по бортам планетарной КП. КП имеет две передачи переднего
хода (дде ступени) и одну передачу заднего хода, включаемые
тормозами и фрикционом:
1-я передача включается тормозом Tt (;
2-я - фрикционом Ф ), а задний ход - тормозом Tj.x..
(рис.3.3).
Таким образом, при включении Tf обеспечивается замедленная
передача, а при использовании - ускоренная.
Дополнительный привод к солнечным шестерням суммирующих
планетарных рядов состоит из дифференциала I, валов 2,3 и четы-
рех пар цилиндрических шестерен (рис.3.3).
При прямолинейном движении солнечные шестерни суммирующих
планетарных рядов за счет дополнительного привода вращаются в
К
Рис.3.2. Кинематическая схема ВГГ: I - гидропередача;
2 - КП; 3,4-механическая передача
ту же сторону, что и эпициклы. Если машина неподвижна, то при
работающем двигателе турбинное и насосное колеса гидропередачи
имеют обратные направления вращения ( ZZ^Z7). При включении
заднего хода изменяется направление вращения эпициклических
шестерен указанных рядов, а солнечные шестерни вращаются в
прежнем направлении, т.е. возникает поток циркулирующей мощ-
ности.
Тормоза 7"3 , 7^, (рис.3.3) являются остановочными и связа-
ны с водилами, соединенными через бортовые передачи с ведущими
колесами гусениц.
При повороте машины используются дисковые тормоза 7j- или
Рис.3.8. Потоки мощности при прямолинейней движении машины
с ГМТ "Кроос-Драйв"
55
Рис.3.4.Потоки мощности при повороте машины: 1,2 - сумми-
рующие планетарные ряды
При повороте с > например, влево, тормозится правая
-шестерня простого цилиндрического дифференциала.
Скорость вращения солнечной шестерни планетарного ряда I
(рис.3.4) при этом уменьшается, а солнечной шестерни ряда 2
увеличивается. Поскольку совпадение направлений вращения эпицик-
лических и солнечных шестерен в рядах I и 2 сохраняется прежним,
т.е. как и в прямолинейном движении машины, то, следовательно,
скорость водила ряда 2 возрастет , а ряда I - уменьшится. Вмес-
те с этим изменятся соответствующим образом скорости забегаю-
щей и отстающей гусениц. Таким образом, механизм поворота отно-
сится к дифференциальному типу.
При повороте, совершаемом с пробуксовкой управляемого фрик-
ционного элемента ( , Tg ) механизма поворота, число сте-
пеней свободы будет больше двух [б] , в отличие от ПМП. Это
влияет на методику расчетов.
Удельная сила тяги зависит от режимов совместной работы
двигателя и гидропередачи и, таким образом, от скорости движе-
ния машины с ГМТ.
Поворот машины с 2$- < происходит с рекуперацией мощности
с отстающей гусеницы на забегающую.
Для оценки тяговых качеств при повороте, как и в гл.2 настоя-
щего пособия, необходимо построить график совместной работы дви-
гателя и гидропередачи (рис.3.5). С целью упрощения расчетов
Ы
считаем, что КПД в элементах механической части трансмиссии по-
стоянен.
Полный момент двигателя необходимый для обеспечения
поворота машины, равен
/V'оиф т- /Vv
М ../Л ”_____________, (3.12)
9 L/f %,
где - момент, подведенный к дифференциалу механизма пово-
рота;
- момент на насосном колесе гидротрансформатора;
- соответственно передаточное число и КПД входного
редуктора (от двигателя до насосного колеса).
Ускоренная передача
Выражая значение через момент на турбинном колесе /%,
после преобразований можем получить следующее уравнение:
' w ., „ г‘ 1 ‘d. _
2
где - передаточное число дополнительного привода от сол-
нечных шестерен дифференциала до солнечных шестерен
суммирующего планетарного механизма (ПМ).
Остальные индексы в обозначениях параметров рассмотрены
ранее, причем 2? s. 2^ . Вес машины О подставляет-
ся в Н.
Левая часть уравнения определяется характеристикой двигате- -
ля и обозначается, как и в п.2.3, через jfdf, а правую, опре-
деляемую характеристиками насосного и турбинного колес гщдрсие-
редачи, обозначим через .
На рис,3.5 в качестве примера построены графики для кенит—
ретной машины с ГМТ по исходным данным табл.3.2 и З.З.Харая^
теристика подсчитана по формуле (3.14),. Частота, вращаясь
двигателя /2^.= 2800 мин-^.
55
Рис. 3.5. График совместной работы двигателя и гидропередачи
при повороте машины на ускоренной передаче
u‘f0 }< (зля.
Таблица 3.2
1 Параметры Размерность Численные значения
Ц~Лт//2м ХЛг-М* it -0,2 106 520 0 125 495 0,2 138 380 0,35 145 300 0,5 140 230 0,65 130 165 0,8 120 130 0,95 100 100
Таблица 3.3
Параметры Размерность Численные значения
мин“^ 1800 2000 2200 2400 2600 2800
* Н.м 2100 2080 2050 1980 1880 1750
Мт'0* Н.мин^/м^ 543 437 357 291 238 194
При расчетах по формулам (3.14) и (3.15) величинами КПД от-
дельных механизмов ГМТ задаются, принимая их постоянными. Напри-
мер, ^£/г ж 0,97» ^им 0,99; » 0,96; 0,98; » 0,94.
Внешние условия (коэффициенты Л и JftmaA принимаются, как в
п.3.1.
Величину/^ можно принять постоянной (п.3.1) или опреде-
лять в функции скорости, как это показано в гл.4.
Совместное рассмотрение зависимостей, определяемых выраже-
ниями (3.14)-(3.15), позволяет найти режимы совместной работы
двигателя и гидропередачи при повороте гусеничной машины с дан-
ной П4Т.
Для каждого из выбранных значений передаточного отношения
U2=Пг//2м гидропередачи графическим путем определяют соответ-
ствующие значения КЛr'fO* (по графику характеристики гидропере-
дачи) и соответствующую частоту вращения вала двигателя (по
аналогии с п.2.3). Момент на валу двигателя, т.е. зависимость
Пд) • определяется по аналогии с п.1.1 для заданных зна-
чений частоты вращения .
По полученным значениям & Л г и /2g определяют удельную
силу тяги и соответствующую скорость центра масс машины:
при повороте:
57
м/с ,
где ~ передаточное число трансмиссии.
Для ускоренной передачи это передаточное число
(3.16)
равно
(3.17)
а удельная сила тяги равна
(3.18)
где вес машины (г подставляется в а радиус ведущего колеса
2л- - в
м.
На основании выражений (3.16) и (3.18) строят зависимость
При повороте машины потребная удельная сила тяги ^тп = Jr
и определяется,по формуле
Л? = 4 7 0.19)
где величины 4 и 4 подсчитываются по выражениям (3.4) и (3.9)
в зависимости от радиуса поворота 25-.
Рассматривая совместно зависимости v^rn*
характеристику поворота машины,
передача
строят тяговую
Замедленная
На том же графике тяговой характеристики поворота наносят
зависимость 4"(Vc ) для замедленной передачи.
Здесь используются следующие выражения:
(3.20)
Uiffc /Л * Kir
Uj Um £/г
^rfiJ иг
*//J Um ^/7 ^/rrv
727';
(3.21)
(3.22)
(3.23)
/г— UrfOtytf
5b
Зависимость zfrr - здесь, естественно, остается
прежней.
Расчетный режим пово р’о т а
Как сказано выше, мы рассматривали поворот машины с про-
буксовкой тормозных элементов дополнительного привода. При их
полном включении поворот машины будет происходить с расчетным
радиусом , определяемым для ускоренной (индекс " у ’) и за-
медленной передач (индекс " з ") соответственно по формулам:
> (3.24)
(3.25)
Подставляя значения этих радиусов (для данных значений Цг )
в формулы (3.4), (3.5)^ (3.9,), (3.19), определяем удельную си-
лу тяги /Г/тр , потребную для поворота.
Поскольку при равномерном повороте ^тлр -Лг , Для рассмот-
ренных выше режимов движения можно подсчитать угловую скорость
коленчатого вала двигателя по (формулам:
(3.26)
. (3.27)
Тогда, используя полученные выше выражения,
рость центра масс машины на расчетном режиме
определяют ско-
и наносят за-
висимостьЛ-^^/Ц^на график тяговой характеристики поворот**
Если кривая /rnp=if(VcpJ проходит выше кривой^ ,
то это значит, что поворот на данной скорости возможен лишь с
пробуксовкой фрикционных элементов дополнительного привода,,
поскольку турбинное колесо гидропередачи не обеспечивает такой
высокой потребной силы тяги.
Пользуясь известными соотношениями [б] , можно также
построить зависимость критических по заносу радиусов поворота
машины для данной скорости, а также подсчитать действующую в
этот момент на машину поперечную силу.
59
4. ОСОБЕННОСТИ ПРИМЕНЕНИЯ ЭЦВМ ДОЯ ТЯГОВЫХ РАСЧЕТОВ
Выполнение тяговых расчетов транспортных средств возможно
также и с применением ЭЦВМ. В [4] приведены особенности постро-
ения алгоритма задачи тягово-динамического расчета прямолинейно-
го движения колесных и гусеничных машин, а также блок-схема ал-
горитма и методика решения при помощи ЭЦВМ на алгоритмическом
языке АЛГОЛ-СО.
В настоящее время большее распространение получает алгоритми-
ческий язык ФОРТРАН, являющийся одним из языков высокого уровня
и предназначенный для составления прикладных вычислительных
программ [2,3] .
4.1. Тягово-динамический расчет прямолинейного
движения колесных и гусеничных машин. Общие
понятия о программировании на ФОРТРАНЕ
Расчет проводится в последовательности, указанной в гл.1 и
2. При этом следует иметь в виду, что методика составления прог-
раммы тягово-динамического расчета машины с механической транс-
миссией аналогична методике составления‘такой программы для
машин с гидромеханической трансмиссией. Отличия в программе оп-
ределяются особенностями математической модели тяговр-динами-
ческого расчета транспортных средств с механической трансмис-
сией, в частности, учетом коэффициента запаса сцепления, времени
на переключение передач, КПД гусеничного движителя и проч.
Для гусеничной машины необходимо учитывать также передаточ-
ное число и КПД механизма поворота, бортовой передачи и т.п.
Программирование требует замены переменных и констант урав-
нений специальными сочетаниями символов, называемыми идентифика-
торами. В качестве идентификаторов в ФОРТРАН-программе использу-
ют любое сочетание прописных букв латинского алфавита и арабских
цифр. Причем идентификатор должен обязательно начинаться с буквы.
Число символов (букв и цифр), входящих в состав каждого иденти-
фикатора, не должно превышать шести.
ФОРТРАН использует общепринятую математическую символику.
Алгебраическая формула и оператор ФОРТРАНа для вычисления значе-
60
ния арифметического выражения выгладят практически одинаково.
ФОРТРАН-программа представляет собой заданную программис-
том последовательность операторов, а иногда и комментариев.Каж-
дый оператор и комментарий занимает строку. ФОРТРАН-программа
пишется на специальных бланках. В каждой строке имеется 80 пози-
ций, соответствующих 80 колонкам перфокарты. Поле операторов
занимает в строке позиции с 7 по 72-ю. Позиция 6 содержит сим-
вол, разделяющий поле метки (позиции I...5) и поле оператора,
обычно это пробел. Если одной строки для оператора на бланке
недостаточно, то его продолжают на других строках, но в этом
случае в 6-й позиции записывают любой символ (из перечисленных
выше), отличный от пробела или нуля.
В операторах допускаются пробелы, которые пользователь
(программист) может размещать по своему усмотрению, улучшая наг-
лядность записываемой программы.
Как уже упоминалось, авторы рассчитывают, что у читателя
имеется определенный навык программирования на языке Ф0РТРАН-1У
для системы ДОС ЕС. Для читателей, программирующих на других ал-
горитмических языках, полезной будет рекомендованная литература
по программированию на ФОРТРАНе [2,3] являющаяся, по мнению
авторов, вполне достаточной для составления ФОРТРАН-программы
тяговых расчетов транспортных средств.
Поэтому в настоящей главе будут рассмотрены лишь основные
особенности ФОРТРАН-программ , реализующих алгоритмы расчетов,
методика выполнения которых изложена в предыдущих главах.
Пример. Построение тягово-динамической характеристики
колесного шасси 8x8 с механической трансмиссией.
Полноприводный автомобиль имеет два 4-тактных карбюратор-
ных двигателя внутреннего сгорания, развивающих совместно эф-
фективную мощность 255 кВт. Полный вес автомобиля с гру-
зом G * 200 кН. Расчет проводят согласно блок-схеме (рис.4.1).
61
62
65
В табл. 4.1 приведены условные обозначения параметров, ис-
пользуемых при расчетах в приведенной блок-схеме (рис.4.1).
Таблица 4.1
* к Величина Единица измере- ния
Обозначение Наименование
в расчет- ной зави- симости (№ формул) В програм- ме
I 2 3 4
/?, (I-I9) Z?/ (1.19) /Zj (I.19] Ur/>i /2 (I.I) (i.i) /44 (1.3) (1.4) Vi ci.и) (1.18) (1.13) A- Дхгд/ A^f/пал 2> d A by p/(,) рзы АКР£Ю AI0l" All u"J ANf(,) AA/3"' A^5Mt AAtfv Vм p ('J RS™ z> АЛ/4 AAA2 R Df 3/ Число пар цилиндрических шестерен Число пар конических шестерён Число карданных шарниров КПД трансмиссии Передаточное число трансмиссии на L -й передаче Передаточное число КП на Z -й передаче Текущее значение частоты вращения коленчатого вала Текущее значение эффективной мощности двигателя Мощность, затрачиваемая на по- тери в моторной установке ( Свободная мощность двигателя Свободный крутящий момент двигателя Скорость машины на / -й передаче Сила тяги по двигателю Сила сопротивления воздуха Динамический фактор Потери в моторной установке в режиме максимальной мощности Максимальная аффективная мощ- ность двигателя Радиус ведущего колеса Диаметр обода колеса Ширина профиля шины мин“* кВт- кВт кВт Н.м км/ч кН кН кВт кВт м дюйм дюйм
64
Продолжение табл. 4.1
I 2 3 4 .
a (i.i) 6 (i.i) с (i.i) (i.i) ^"(1.19) Л-/т(1.19) &4у(1.19) Z//77 Uxfi Ко (I.I3) В (I.I4) Н (I.I4) А В С L7/ АКРЫ AKP-D2 AKPD3 AI2 AI5 АК2 В2 И G- Экспериментальный коэффициент Экспериментальный коэффициент Экспериментальный коэффициент Частота вращения вала двигателя в режиме максимальной мощности КПД пары цилиндрических шестерен КПД пары конических шестерен КПД карданной передачи Передаточное число главной передачи Передаточное число колесного редуктора Коэффициент обтекаемости Колея машины Габаритная высота машины Полный вес машины с грузом • мин-1 Н.с^.м-4 м м кН
Г /*7 />/... РЗ, AKPD,AI$,AIf, ЦАР/, AJV3, AN5, AM, V, Р, Я/, D - наименования массивов
Следует иметь в виду, что в блок-схеме (рис.4.1) не указана
последовательность расчетов по построению зависимостей
и У) , формулы для которых приведены в п.1.2.
В рассмотренном примере J - номер передачи (для данной
машины от I до 5). Алгоритм расчета предполагает, что на каждой
передаче для текущих значений частоты вращения коленчатого ва-
ла двигателя (в данном примере взято 9 значений, так как Л* »9)
определяются значения скорости движения V(У, К) , силы тяги
Kj • силы сопротивления воздуха Rf ( У К} и динами-
ческого фактора О(У,К) . Для этой цели применена процедура
цикла в цикле.
Результаты расчетов выводятся на печать в виде цифрового
материала и используются для построения графика тяговой (дина-
мической) характеристики, т.е. зависимости Z) ( К) от
Для определения характеристики приемистости составляется от-
дельная ФОРТРАН-программа, в которой используются результаты про-
веденного тягового расчета и построения графика динамической ха-
рактеристики, а также вводятся другие необходимые данные.
Для гусеничной машины, как уже упоминалось, при определении
Р (% Я/ необходимо учитывать КПД гусеничного движителя.
Рассмотрим теперь фрагмент программы для ЕС ЭВМ, учитываю-
щий особенности расчета при наличии ГМТ.
Характеристика гидропередачи вводится в программу, напри-
мер, с использованием операторов
PPAD ((() Г О О, ОН, АК
/ ГОДНА Т (3(9 Г 52/)) ,
т.е. вводят по 9 значений перечисленных параметров.
Условные обозначения параметров приведены в табл.4.2.
Далее в программе подсчитываются параметры внешней скорост-
ной характеристики двигателя, определяются КПД и передаточные
числа механической части трансмиссии, потери мощности в моторной,
установке, мощность, приведенная к насосному колесу гидропереда-
чи, а также соответствующий момент двигателя. Здесь также мо-
гут быть подсчитаны скорость машины и динамический фактор при
блокировке гидропередачи, т.е. когда трансмиссия будет чисто
механической.
Далее расчеты ведут по алгоритму, показанному на; рис.4.2.
В блоке 10 подсчитываются текущие значения скорости движе-
ния машины соответственно на первой, второй и третьей передачах
при соответствующей частоте вращения турбинного колеса по фор-
муле (2.12), где радиус колеса вводится в исходных данных. Пе-
редаточные числа трансмиссии подсчитываются предварительно.
В блоке II определяются текущие значения силы тяги на С ~й
передаче по формуле (2.13), а в блоке 12 - соответствующие зна-
чения динамического фактора машины.
По полученным данным машинного счета строятся графики внеш-
ней, характеристики двигателя и динамического фактора колесной
или гусеничной машины с ГМТ (причем для последней необходимо
учесть КПД гусеничного двигателя).
66
\ Нет
т.*9)----—
Да |
G-D(I) ~ СгН(1)
Я, — AND(I) « C/(G-D(I)**(£./3.)) |
Г , - - t
з—
1
ц - ANH(l) ® AOD(l)
—j -
5~) •AMD(I)
6— А Л/ т(1)^АА/Н(1)^ PO6-(I)
I
7— от/т;« &на)^ а к a)
1 ...
6—
1 —
9— GKP2(T) PO& .
4 ~Z
10 C^Z)S СК-2 СГ), CK3(IJ
4
CTj(I), CT2(I), ст за) I
1
DFf(l), ПР2(1), DP3(1)
Печать результатов вычислений
Рис. 4.2. Фрагмент программы длц ЭВИ
67
Таблица 4.2
Величина Единица
Обозначение Наиыенование изме- I рения
в расчет- ной зави- симости в программе
I 2 3 4
^•/47* С D г'\ Характеристика двигателя Н.мин^/м4
GH Характеристика насоса Н.мин^/м4
//; AMD "J Момент двигателя, приведенный
< г к насосноцу колесу Н.м
— С Эмпирический коэффициент, под- бираемый для данной гидропере- дачи с целью аналитического
определения частоты вращения вала двигателя *“
A A/D "J Выражение,аппроксимирующее ха- рактеристику двигателя с уче- том гидропередачи
D& Т ЗА Активный диаметр гидропередачи 5
возведенный в 5-ю степень м°
А МН ('} Частота вращения насосного ко-
леса, равная частоте вращения -1
вала двигателя мин
M„=Mj АМН (fJ Момент на насосном колесе. Н.м
равный моменту двигателя
Dr АМТ Частота вращения турбинного -I
колеса гидропередачи 1 мин
КЯг/^ Ст Т ' Характеристика турбины гидро- передачи 4.мин^/м4
К» АК*1'} Коэффициент трансформации * гидропередачи —
Мт АМТ1" Момент на турбинном колесе гидропередачи Н,м
% г GKPD<" КОД гидротрансформатора -
Vi СМ/...СМ3 CjKO]pOO'J.*i> дьижений МИШИНЫ на. / -и передаче км/ч
Ъ СТ/...СТЗ Сила тяги по двигателю на £ -й передаче кН
Dj DF1...DF3 Динамический фактор машины на i -й передаче -
TVGD. GH, AMD, AMD, АЛ/И, АМН, АМТ, GT, АК,
АМТ, &KPD, CKf...CK3,CT1...CT3,DFt..DF3-
наименования массивов
Далее следует провести расчет характеристик приемистости
транспортного средства, т.е. построить график разгона. Програм-
му этого расчета составить самостоятельно на основе знаний и на-
выков, приобретенных в результате работы по составлению програм-
мы тягового расчета.
Можно также запрограммировать порядок подсчета зависимостей
• Для этого в программе необходимо
иметь оператор цикла, означающий, что для указанных значений
углов подъема следует определить коэффициент сопротивления доро-
ги и коэффициент сцепления при заданных значениях коэффициентов
сопротивления качению. В исходных данных программы вводятся зна-
чения углов подъема оС , например,
REAL *1 Т16/</.3223,0.3463, /./744, /./,
где Т46 обозначает угол подъема оС.
Далее в цикле для заданных четырех значений параметра Т46
производят подсчет коэффициентов i-P и 4х дЛя полноприводного
тягача по следующему алгоритму;
DO /2 R^/,4
Г4 3= Т4 7* (COS (Г43(//)+SIRfT46(K)))
Г 37 * T4ff/cos (T46(XJJ
Л WRITE (З/п) Т46(Х), Г49, Т57
m FORMA T (Fx, 3E77.7)
Здесь T47 соответствует заданному коэффициенту 3 в форму-
ле (1.8), Т49 - коэффициенту Ч^ • а ТЫ - » Л и /77 - соот-
ветствующие метки.
4.2. Тяговый расчет поворота гусеничной машины
Рассмотрим особенности составления программы тягового рас-
чета поворота гусеничной машины с механизмом поворота типа
"Кросс-Драйв" [6] .
Поскольку поворот машины возможен либо на ускоренной, либо
на замедленной передачах, управление вычислительным процессом: к
печать для каждого из упомянутых вариантов может осуществляться,
69
например, с использованием операторов: '
IF(К-2 ) т Л, m2, /п 3
у??/ ШРГТЕ (3, т 3)
/пЗ Р02МАТ (/30Х; УМОРЕННАЯ ПЕРЕДАЧА*)
G-О то
/п2 W2ZTE (3,/тгЗ}
/пЗ РОЯМAT’ЗАМЕДЛЕННАЯ ПЕРЕДАЧА}
sn4................................
/тг./72 3 - метки (любые числа, записанные в по-
зициях I...5 перфокарт),. Л' - символ передачи (Д'» I - ускорен-
ная, а 3 » 2 - замедл-^ая передача).
Наибольшую слитность вызывает аналитическое определение ха-
рактеристик ft jig • <4, и частоты вращения Лр (рис. 3.5).
Для подсчета величин ЗЯг и ЗЛ^ при заданных отношениях
/I г//2* в первом приближении возможно применение линейной или
кусочно-линейНой аппроксимации теоретических зависимостей. 8то
позволяет использовать не графическое, а аналитическое решение
для определения соответствующей частоты вращения вала двигате-
ля /2g , что для данных значений fZ* и Ur* позволяет, в
свою очередь, на основании формулы (3.15) легко подсчитать ско-
рость центра масс машины.
Задача решается в следующей последовательности.
По формулам (3.13) и (3.19) определяются характеристики
ЕЛ^/О^ РАЯ двух начальных значений OMD}J}ia 0302лТ(У) »
где первый параметр соответствует моменту Mg , а второй - час-
тоте вращения . Пусть, например, по линейному участку харак-
теристики двигателя ЗЛ^ (рис.З. 5) имеем: 0МР(У}^ I960 Н.м,
0М2)(2}^ 1880 Н.м, 0302/^(7}^ 2400 мин-1 2600 мин-1.
Тогда можем подсчитать угол наклона (CI6) зависимости 3Ag~3(Hg):
причем величины G£,DP(7) v.(r4DP(2) определяются по формулам
(3.14) и (3.20).
После этого для подсчета текущих значений ЗЛг и /2g при
заданном в программе цикле по I от I до 7 (т.е. из табл.3.2
для расчетов условно взяты только семь положительных значений
1/г ~-Пг/Пм) можно использовать следующий алгоритм:
70
(rf& = G-L6P(2j-((&fG-P(/J-&f0P(2))/U(raBf(?))* UGOM(I)
0BOR*(6fDP(fJ-G£G)/cS6 * DBOPA/ff) •
If (ffQ.2. AAfD. oeOf.Lf. СВОЛОЧУ?)
* O&OA = OgOPO(/)- (&f& - CfDP(0)*(OBOg^(/)-0BO)/
* (&2GP(/J- &p.DP(Sj)
1Р(ОВОЛ.&£.ОВМАХ)ОВОЛ = OS MAX
Основные параметры обозначены в табл.4.3, а знак 9< пишет-
ся в 6-й позиции на бланке ФОРТРАН-программы.
Характеристика ХЛг для Л » I (ускоренная передача)
подсчитывается по выражению
Gf£P(?) = C2A/(j) + &£ Т(У) * 2. /Off ,
а для К = 2 (замедленная передача):
Of G-Pflj * Of А/(0)*(G-f T(tf)*2)*(РАММ)*СРМ/С& .
Здесь для О ж 1,2 задают в исходных данных значения (г2О(У)
и 02 T(IJ , т.е. и а коэффициент^7 опреде-
ляют предварительно по формуле
С9~ РАМ* UD * СОООР*С&01£*(/. -свес).
Рассмотрим также еще один сложный момент по определению
коэффициента !(а(СЯ£С) , используемого в формуле (3.18).
Для начального счета можно задать коэффициент С2£С=С££С0*0.?1
Задаются также, например, коэффициенты: PARf=2. 5 , 48 ,
Cfa)OP*0. Ofi, CO DIP* ft. ff8, СВР=0.0? , CPM -0.05 M
другие. Для ввода их в программу наиболее просто воспользовать-
ся оператором DATA [2] .
После определения к Vc по формуле (3.15) можно под-
считать КПД гусеничного движителя и на основании эмпиричес-
кой зависимости с использованием алгоритма
<Г/7= (VC**my*0.2/4B+/
С СО = 0 05* * СТ?
С 2в = СОР *СВР* СРМ
С ЯСС - С /в * * 2.
71
В программе целесообразно также предусмотреть возможность
подсчета критического по заносу радиуса поворота машины и соот-
ветствующей поперечной силы, действующей на машину и вызывающей
ее боковой занос:
ЯМР= ~6. /666 +SQPT&./666**2+2. 7/e3*VC*Vc/(8*fSMAX))
Здесь коэффициент сопротивления повороту CS6/AX принят равным
0,8.
Таблица 4.3
Величина —-
Обозначение Наименование единица измерении
в расчет- ной зави- симости в программе
I 2 3 4
Характеристика гидропередачи 4.мин^/м4
Ц-^Лг/Ъ Относительная частота —
рдея Частота вращения дала двига- теля машины МИН--'-
Я#/Нал O3/VAX Максимальная частота вращения _т
вала двигателя мин
Д' РА Я К Характеристика, планетарного ряда —
^7 UJ& Передаточное число дополни-
С&Я0Р тельного привода —
КПД дополнительного привода -
C&-DIP КПД дифференциала -
СЯ£С КПД контура-рекуперации 1 мощности *
CSP КПД бортовой передачи —
СРЛ? КПД планетарного механизма -
Ус VC Скорость движения центра масс машины м/с
с&я КПД гусеничного движителя -
РО/СР Критический радиус поворота (относительный параметр; -
72
Продолжение табл.4.3
I 2 3 4 ‘
CJMAK Максимальное значение коэффициента сопротивления повороту —
— •» i/ Поперечная сила, приложенная к машине при повороте кН
& & Вес машины кН
(/) U(?0S f наименование массива
Рис. 4.3. Тяговая характеристика поворота
гусеничной машины с ГМТ массой 44,5т:
. - ускоренная передача;
________________ _ _ - замедленная передача
Do результатам расчета на ЭЦВМ строят графики'£-j£r&cJ
и s /г„ ( V.) , на основании которых можно оценить тяговые
качества машины в процессе криволинейного движения для заданных
грунтовых условий (рис.4.3).
?3
ПРИЛОЖЕНИЕ
Таблица I
Приведенный момент инерции двигателя, кгьг
гт-с ГАЗ-71 АТ-П АТ-Л ГТ-Т ГТ-ТС мт-л АТС-59 АТ-Т
0.451 1.080 1.280 1.860 3.830 2.450 5,690 6,080
ГАЗ-69 УАЗ-450 ГАЗ-51 ГАЗ-53 ГАЗ-66 ЗИЛ-130 ЗИЛ-131 ЗИЛ-164 ЗИЛ-157 УРАЛ- -375 УРАЛ- -377 МАЗ-502 МАЗ-529 КрАЗ-214 МАЗ-504
0.314 _М51_ 0.441 0.608 I.I43 0,657 1,729 2,453
Таблица 2
Коэффициент запаса сцепления (фрикциона)
| ГТ-С АТ-П АТ-Л ГТ-Т МТ-Л АТС-59 АТ-Т
1 2.07 2.25 2.25 2,4 2.4 2.0 2.0
ГАЗ-69 УАЗ-450Д ГАЗ-51П ГАЗ-53А ГАЗ-66 ЗИЛ-164 ЗИЛ-130
1.28 1.39 1.78 2.15 2.15 2.1 • 2.1
ЗИЛ-157 ЗИЛ-131 МАЗ-504 МАЗ-502 -502А УРАЛ- .-375 МАЗ-529 КрАЗ-214
joA 2.16 2.16 2x2 — 2.16 - -
Таблица 3
Параметры аэродинамического сопротивления
Тип транспортного средства $ Площадь лобового сопротивления, м^ Коэффициент обте- каемости, Н.с^/м4
I 2 3
Автомобили; легковые или грузовые малой грузоподъемности типа ГАЗ-69; грузовые Одиночные с кузовом-платформой; грузовые одиночные с кузовом-фургоном; 1.6...2,6 3,0...5,3 3,5...8,0 0,30...0,34 0,55. ..О-,60 0,38...0,45
74
Продолжение табл.З
Г I 2 3
автопоезд двухэвенный с кузовами-платформой; 4,0...5,3 0,60.1..0,75
автопоезд двухзвенный с кузовом-фургоном 7,0...8,0 0,58..,0,60
Гусеничные машины - 0,50...0,70
Таблица 4
Коэффициент сопротивления качению
Тип дороги и ее состояние Гусеничные машины (без учета потерь в движителе) Колесные машины
Асфальтовое шоссе 0...0.02 0,015...0,025
Грунтовая дорога:
- сухая 0,03...0,04 0,025...0,04
- после дождя 0,09...0,12 0,05...0,15
Песок 0,12...0,17 0,1...0,3
Снег 0,17...0,22 0,07...0,10
Луговина 0,05...0,07 -
Таблица 5
Коэффициент сцепления
Тип дороги и ее состояние Гусеничные машины Колесные машины
Асфальт или бетон; - сухой и чистый - влажный и грязный Грунтовая дорога: - сухая - грязная Песок Пахота Залежь (луговина) Снег 0,8 0,8...1,0 0,4...0,5 0,4...0,8 0,7...0,9 0,8...0,9 0,2...0,8 0,7...0,8 0,35...0,45 0,5...0,6 0,3...0,4' 0,6...0.7 0,6...0,7 0,2...0,4
75
Таблица 6
Время переключения передач
Тип коробки передач и способ переключения Время переключения передачи, с
Планетарная Свальная) КП
передвижные каретки 2...3
зубчатые (кулачковые)' муфты 2...2,5
то же, с синхронизаторами 1,5...2
Планетарная КП
тормоза и фрикционная муфта 0,3...0,4
[автоматизированный привод 0,2...0,3
Таблица 7
Краткая техническая характеристика гусеничных
транспортных тягачей
Марка машины АТ-Л ГТ-С АТ-П МТ-Л
I 2 3 4 5 .
Грузоподъемность, кг 2000 1000 1200 2500
Общая масса буксируемого прицепа (полуприцепа|кг 6000 3700 3700 6500
Собственная масса в сна- ряженном состоянии,Кг 6300 3650 5300 6500
Полная масса машины,кг 8525 4000 , 6725 II600
Габаритные размеры: длина, мм 5313 4900 4450 6364
ширина, мм 2214 2435 2500 2050
высота, мм 2200 I960 1845 2013
Длина опорной поверх- ности гусеницы, мм 3050 3350 2670 3700
Колея, мм 1900 2050 2040 2500
Дорожный просвет, мм 350 400 330 405
Марка двигателя 1AS-204K ГАЗ-47 •ЗИЛ-123Ф ЯМЗ-238В
Тип системы охлажде- ния Рк С*1*4 ' ,в 5 Н Т И J I Я Т О р 1 1 а я
76
Продолжение табл. 7
I 2 3 4 ’ 5
Максимальная мощность, кВт при об/мин Максимальный крутяший момент, Н.м при об/миь Тип трансмиссии Тип фрикциона Передаточные числа КП нормального jзамед- ленного) ряда I П Ш I 1У У У1 Задний ход Передаточное число • ^ередаточное число Диаметр ведущего Колеса, мм 95,6 200Й 500 пои 54,4 зато 200,7 80,9 того 303,5 176,6 ZITO 883
IbUU 1200 1PUU
механическая
Однодисковый,оухой 2-дисковый сухой
7,86(-) 3,15(5,258) ,845(2,412) 1,27(1,515) 0,86(0,948) 5,56(3,58) 0,92 5,5 526 6,4 3,09 1,69 1,0 7,82 1,9 4,22 516 6,24 3,32 1,90 1,0 0,75 6,7 1,6_ 5,44 610 8,9(~) 2,955(4,425) 1,72(2,12) 1,04(1,18) 0,758(0,828) 0,577(0,616) 5,65(3,455) 1,0 6,0 540
Таблица 8
Краткая техническая характеристика гусеничных тягачей
Марка машины ГТ-ТС АТС-59 АТ-Т ПТС-2
I 2 3 4 5
Грузоподъемность, кг Общая масса буксируемого - 3000 5000 12000
прицепа (полуприцепа),кг Собственная масса в сна- (6000) 14000 25000 — •
ряженном состоянии, кг 8100 13000 20000 24200
Полная масса машины (при нагрузке на седло), кг Габаритные размеры: 10900 (2500) I6I50 25300 36350
Длина, мм; 6340 6280 7043 1199©
77
Продолжение табл. 8
I 2 3 4 5
ширина, мм 3140 2780 3154 3300
высота, мм 2160 2500 3000 1 3170
Длина опорной поверхности
гусениц, мм 4047 3315 3836 5180
Колея, мм 2600 2200 2640 2760
Дорожный просвет, мм 450 425 425 400
Марка двигателя В-6А А-650 A-40I В-46-5
Тип двигателя дизельный 4-тактный
Тип системы эжекционная вентиля-) эжекцион-
торная ная
Максимальная мощность. 147,2 220,8 305,4 522,6
кВт при об/мин 1800" 1700 16UU 2000
Максимальный крутящий 932 1519 1962 2943
момент, Н.м при об/мин юьо 1000 1000 1300
!':’ип трансмиссии' м е х а ь и ч е с кая
Тип фрикциона 2-дисковый,сухой Многодисковый,
сухой
Передаточные числа КП
нормального (замедлен-
ного) ряда
I 6,24(-) 3,93 4,69 4,06 -
П 2,44(4,0) 1,76 2,19 1,89
Ш 1,425(1,846: 1,18 1,56 • 1,353
1У Р,959(1,33) 0,8 - 1,12 0,966
У 3,695(0,75) 0,575 0,71 0,614
Задний ход 4,835(2,72) 4,05 4,69 ' 3,951
Передаточное число ГП 0,844 i,o£S* 1,0 —
Передаточное число БП 6,0 5,54\ 6,7В 5,706
Диаметр ведущего
колеса, мм 554 575 587 550
Характеристика гидротрансформатора
Ж с? 0,328 0,466
0,95 6б‘0 ОН 34 0,99 49 0,971 i | 50 I 0,947
0,9 о §> р> 80 0,99 75 0.976 196‘0 06
0,845 240 1,01 114 0,98 106 0,96 • ।
со о • г • । I 1 120 0,969
0,8 ; 270 122 1,055 117 1,036 127 1,025
0,6 370 1,38 139 1,45 133 1,445 149 1,42 • .. «
* О Ю з 2- 147 1,8 138 2,04 & °. 1—f СМ-
г‘о 480 2,2 145 2,55 127 3,047 157 2,78
о 500 2,6 133 3,5 е^9Ч ОН 1 Ю Г* 1-1 СО
XII ч %"? Л'г ,4 *
Трансфор- матор, тип ЗИЛ, | прозрачны} маз, непроз- рачный
79
ЛИТЕРАТУРА
I. Талу К.А., Нежинцев А.И. Теория, конструирование и расчет
транспортных средств: Конспект лакцмМ. Ч.1/МАДИ.-М., 1978.-
104с.
2. Айнберг В.Д., Геронимус Ю.В. Основы программирования для
Единой системы ЭВМ.- М.: Машиностроение, 1980.- 336с.
3. Чернов Э.А. Программирование на ФОРТРАНЕ / МАДИ.- М., 1981.-
56с.
4. Гладов Г.И., Коняев А.Е., Павлов В.В. Методические указания
по тягово-динамическому расчету колесных и гусеничных машин.
В двух частях / МАДИ.- М., 1978-1979. 4.1 - 1978.- 64с.,
4.2 - 1979.-32с.
5. Никитин А.О. Тяговый расчет поворота гусеничной машины /
МАДИ.- М., 1970.- 79с.
6. Сергеев Л.В., Кадобнов В.В. Гидромеханические трансмиссии
быстроходных гусеничных машин.- Ц.: Машиностроение, 1980.-
200с.
7. Краткий автомобильный справочник.- 9-е издание., переработ.
и доп.-М.: Транспорт, 1962.-464с.
81
ОГЛАВЛЕНИЕ
Введение..........................'.................. 5
I. Тягово-динамические расчеты прямолинейного
движения транспортных средств с механической
трансмиссией ..................................... 4
I.I. Построение внешней скоростной характеристики
поршневого двигателя внутреннего сгорания и
определение свободной мощности ................... 4
1.2. Определение сопротивления движению и потребного
коэффициента сцепления транспортного средства
с дорогой ........................................ 6
1.3. Определение сопротивления воздуха движению
транспортного средства ........................... 8
1.4. Динамическая характеристика колесных и гусеничных
транспортных средств ............................ 9
1.5. Построение характеристики приемистости
транспортных средств.............................. 17
1.6. Особенности тягово-динамического расчета
плавающих машин ............................. 23
2. Тягово- динамические расчеты прямолинейного движения
транспортных средств с гидромеханической трансмиссией.. Я
2.1. Подсчет коэффициента вращающихся масс трансмиссии.. 31
2.2. Особенности определения КЦЦ планетарных коробок
передач ......................................... 32
2.3. Тягово-экономическая характеристика
транспортного средства................................. 55
2.4. -Характеристика приемистости транспортного
средства с ГИГ...........1......*...................... 45
3. Тяговый расчет поворота гусеничных транспортных
средств .г.. ............................................ 46
3.1. Гусеничная машина с двухступенчатым планетар*»*
механизмом поворота................ 46
3.2. Гусеничная машина с двухпоточной гидромехани-
ческой трансмиссией ..............•......... 52
81
4. Особенности применения ЭЦВМ для типовых расчетов.... 60
4.1. Тягово-динамический расчет прямолинейного
двикения колесных и гусеничных мамин .
Общие понятия о программировании на ФОРТРАНЕ.,-, 60
4.2. Тяговый расчет поворота гуоеничной машины ..... 69
Приложение .......................................... 74
Литература ............................................. 80
Геннадий Иванович ГЛАДОВ,
Владимир Викторович ПАВЛОВ
ТЯГОВО-ДИНАМИЧЕСКИЙ РАСЧЕТ ТРАНСПОРТНЫХ СРЕДСТВ
Редактор Е.А.Вернинская
Подписано в печать Л-72743 от 27.03.64г.
Формат 60x90/16 .Уч.-жад.л. 4 Усл. прч.л.5
Тираж 300 экз. Заказ 587 Цена 16 ков
Ротапринт ПАДИ, Ленинградский пр., 64