/













































































































































































































































Текст
ТЕОРИИ КОРАБЛЯ
В. Л. ФУКЕЛЬМАН
ОСНОВЫ ТЕОРИИ
КОРАБЛЯ
Издание второе, переработанное и дополненное
Учебник для судостроительных техникумов
ИЗДАТЕЛЬСТВО «СУДОСТРОЕНИЕ» ЛЕНИНГРАД • 1977
УДК 629.12 : 532.322
Ф 94
Учебник предназначен для учащихся судостроительных и судомеханических техникумов по специальности «Судокорпусостроеиие» и написан в соответствии с программой курса «Основы теории корабля», утвержденной Управлением кадров и учебных заведений МСП СССР.
В учебнике рассмотрены главные положения гидромеханики, теория мореходных качеств водоизмещающих судов, судов с гидродинамическими принципами поддержания, основы теории подводной лодки, приведены схемы расчета мореходных качеств судов. В конце каждого параграфа помещены вопросы и задачи для самопроверки усвоения материала и его закрепления (ответы даны в конце книги). С этой же целью после названия параграфов указывается материал, который следует повторить, прежде чем приступить к изучению данного параграфа.
Во втором издании отражены новые взгляды на некоторые проблемы теории корабля, появившиеся после первого издания учебника (1971 г.); больше внимания уделено физической сущности явлений, практическому применению теории; учтены новые требования Регистра СССР к мореходным качествам судов.
Книга может быть также полезной курсантам мореходных училищ и студентам институтов.
Рецензент Ю. С. Белова
Научный редактор канд. техн, наук Б. А. Бискуп
31805—054
048(01)—77
© Издательство «Судостроение», 1977 г.
ВВЕДЕНИЕ
Теория корабля — это наука, которая с помощью законов теоретической гидромеханики изучает равновесие (статику) и движение (динамику) судна.
В статике изучается равновесие плавающего судна: его плавучесть — способность сохранять вертикальное равновесие в заданном положении относительно поверхности воды; остойчивость — способность судна противостоять внешним силам, нарушающим его равновесие, и возвращаться в исходное положение после прекращения действия этих сил; непотопляемость — способность оставаться на плаву после затопления части отсеков и сохранять остойчивость, достаточную хотя бы для ограниченного использования судна по назначению.
Динамика рассматривает законы движения плавающего судна и технические средства, обеспечивающие его движение. Поэтому в динамике исследуются: качка — колебания судна около положения равновесия под действием ветра и волн; управляемость — способность двигаться по заданному курсу или изменять направление движения под воздействием органов управления (руля); ходкость— способность судна развивать заданную скорость при наименьшей затрате мощности. Поскольку ходкость обеспечивается выбором соответствующих обводов корпуса и применением различного рода движителей, при изучении ходкости особое внимание уделяется таким разделам теории корабля, как сопротивление среды движению судна и судовые движители. Теория сопротивления среды движению судна — это наука о законах взаимодействия жидкости и движущегося судна; теория судовых движителей изучает способы и средства создания силы, преодолевающей сопротивление воды движению судна.
Теория корабля является одним из прикладных разделов гидромеханики.
3
Гидромеханика — это наука, изучающая движение и равновесие жидкостей, а также взаимодействие между жидкостями и твердыми телами, полностью или частично погруженными в жидкость. Гидромеханика подразделяется на гидростатику и гидродинамику.
Гидростатика изучает условия и закономерности равновесия жидкостей под действием приложенных к ннм сил, а также воздействие покоящихся жидкостей на погруженные в них тела н на стенки сосуда.
Гидродинамика исследует движение жидкостей и их воздействие на обтекаемые ими твердые тела.
Своими первыми достижениями гидромеханика обязана Архимеду, который за 250 лет до нашей эры открыл свой знаменитый закон и положил начало учению о плавучести и остойчивости тела в жидкости.
Исследования Архимеда продолжили Стевин (1548—1620), Галилей (1564—1642) и Паскаль (1623—1662). Существенные работы в области исследования сопротивления среды движению тел принадлежат Леонардо да Винчи (1452—1519), Галилею и Гюйгенсу-(1629—1695). Родоначальником теоретических методов изучения сопротивления среды является Ньютон (1642—1727). Члены Петербургской Академии наук Даниил Бернулли (1700—1782) и Леонард Эйлер (1707—1783), а также французский ученый Далам-бер (1717—1783) сделали фундаментальные открытия, без которых дальнейшее развитие гидромеханики было бы невозможно. Особое место в развитии гидромеханики XX века занимают работы русских ученых Н. Е. Жуковского (1847—1921), С. А. Чаплыгина (1869—1942), их учеников и последователей: Н. Е. Ко-чина, М. В. Келдыша, М. А. Лаврентьева, Л. И. Седова, К. К. Фе-дяевского, Л. Н. Сретенского и др.
К XVIII веку относится начало развития теории корабля как самостоятельной науки. В 1746 г. французский ученый Бугер, а в 1749 г. член Петербургской Академии наук Леонард Эйлер издали первые труды по теории корабля. Во второй половине XVIII века и в первой половине XIX века были разработаны методы вычисления элементов плавучести н остойчивости корабля и установлен практический способ определения его центра тяжести. Большой вклад в развитие теории корабля внесли русские ученые XIX века П. Я. Гамалея, С. О. Бурачек, М. М. Окунев, И. П. Алымов и другие. И в дальнейшем отечественные ученые играли ведущую роль в развитии этой науки.
Основоположником современной теории корабля является А. Н. Крылов (1863—1945), который расширил и углубил знания по всем разделам теории корабля. Впервые в ее истории он воплотил ряд теоретических исследований в схемы инженерных расчетов, тесно связал науку с конкретными проблемами практики „судостроения. Отечественные ученые являются авторами методов расчета остойчивости и инициаторами ее нормирования. Основоположниками теории непотопляемости судов стали С. О. Макаров
4
и А. Н. Крылов. Важнейшие работы в этой области были выполнены И. Г. Бубновым, В. Г. Власовым, В. В. Семеновым-Тян-Шанским. Большое значение для развития теории ходкости имели труды Д. И. Менделеева, Б. Н. Юрьева, В. П. Ветчинкина, В. Л. Поздюнина, А. М. Басина, Г. Е. Павленко и др. Основополагающие работы по теории качки принадлежат А. Н. Крылову, М. Д. Хаскинду, С. Н. Благовещенскому, А. И. Вознесенскому, Г. А. Фирсову и др.
XXV съезд КПСС поставил перед советскими судостроителями большие задачи. В 10-й пятилетке морской и речной флот СССР пополнится высокопроизводительными специализированными судами различных классов и назначения общим тоннажем 5 млн. тонн. Однако это будет не только и не столько количественный, сколько качественный рост флота. В частности, суда будут обладать более высокими мореходными качествами: т. е. улучшится их плавучесть, остойчивость, управляемость и ходкость. Именно этн качества являются предметом изучения теории корабля — науки, глубокое знание которой необходимо всем, кто будет создавать и эксплуатировать суда.
Раздел первый
ОСНОВЫ ГИДРОМЕХАНИКИ
Глава I
ГИДРОСТАТИКА
§ 1. Свойства жидкости
Вещества в природе могут находиться в одном из четырех состояний: твердом, жидком, газообразном и плазменном. Основным свойством жидкостей и газов, отличающим их от твердых тел, является текучесть, которая обусловлена большой подвижностью молекул этих веществ н способностью последних испытывать сколь угодно большие неупругие деформации под действием весьма малых сил.
Текучесть жидкостей и газов определяет другое их важное отличительное свойство — сплошность, т. е. способность жидкостей и газов заполнять занимаемый ими объем целиком, без каких-либо пустот. Строго говоря, жидкости и газы, как физические тела, состоят из отдельных молекул и имеют дискретную 1 структуру. Однако в гидромеханике дискретностью структуры жидкостей и газов пренебрегают, поскольку размеры изучаемых потоков, а также размеры твердых тел, обтекание которых исследуется, во много раз превышают межмолекулярные расстояния. В среде, обладающей свойством сплошности, механические характеристики (масса, давление, скорость, ускорение) изменяются плавно и непрерывно, зависят от координат точек рассматриваемого объема жидкости или газа. Непрерывность изменения механических характеристик по объему облегчает математическое исследование законов гидромеханики.
Одним из основных физических свойств жидкостей н газов, оказывающих существенное влияние на закономерности их движения, является сжимаемость — способность жидкости или газа изменять занимаемый ими объем под действием приложенного внешнего давления. В зависимости от степени сжимаемости различают капельные жидкости и собственно газы.
1 Дискретная — от лат. discretus — раздельная, прерывная.
6
Характерная особенность капельных жидкостей — наличие зна« чительных сил молекулярного взаимодействия. Особенно интенсивно эти силы проявляются на границе жидкости в виде так называемых сил поверхностного натяжения, определяющих способность капельных жидкостей создавать свободную поверхность, т. е. поверхность раздела между жидкостью и газом (если жидкость помещена в сосуд). Силы поверхностного натяжения обусловливают также способность малых свободных объемов капельной жидкости образовывать капли, в связи с чем такие жидкости и называют капельными. Благодаря действию сил молекулярного взаимодействия и сил поверхностного натяжения внутри капельной жидкости возникают значительные сжимающие давления, вследствие чего достигнуть еще большего сжатия жидкости путем приложения внешнего давления почти невозможно. Поэтому капельная жидкость практически несжимаема. Характерным представителем капельной жидкости является вода. Достаточно сказать, что при увеличении давления на 9,81 • 104 Па (1 атм) объем воды уменьшается только на 1/20 000 своего первоначального значения.
В отличие от капельных жидкостей газы обладают гораздо большей сжимаемостью. Однако в гидромеханических процессах, в частности при обтекании твердых тел, сжимаемость газов начинает проявляться при относительно больших скоростях обтекания (порядка 70—75 м/с). При меньших скоростях различие в законах движения капельной жидкости н газа практически отсутствует. Указанное свойство широко используется, в экспериментальной гидромеханике: например, модельные испытания объектов, движущихся в воде, заменяют испытанием их в потоке воздуха в аэродинамических трубах.
Важнейшими физическими характеристиками жидкостей, широко используемыми в гидромеханике, являются плотность, удельный вес и вязкость.
Плотностью р называется количество массы т, находящееся в единице объема V:
т ,1ч
Р = у (1)
Масса тела является скалярной (ненаправленной) величиной, характеризующей инерционные н гравитационные свойства тела. Она измеряется в килограммах (кг) и тоннах (т). Следовательно, и плотность — величина скалярная, измеряемая в килограммах (тоннах) на кубический метр (кг/м3).
Удельным весом называется векторная (направленная) величина, представляющая собой отношение веса тела к его объему. Напомним, что весом тела Р называется векторная величина, представляющая собой силу, с которой тело под действием силы тяжести 1 воздействует на опору или нить подвеса. Сила тяжести и вес
1 Силой тяжести называют векторную величину, с которой тело притягивается к Земле.
7
тела измеряются в ньютонах (Н). Следовательно, удельный вес измеряется в ньютонах на кубический метр (Н/м3).
Удельный вес жидкости у равен произведению' ее плотности на ускорение свободного падения g:
V = Pg- (2)
Значения плотности и удельного веса воды в различных водных бассейнах приведены в табл. 1. В расчетах принимают плотность морской воды р = 1020 кг/м3.
Вязкостью называется свойство жидкости оказывать сопротивление перемещению ее слоев. При относительном движении слоев в жидкости возникают касательные силы, препятствующие их сме-
щенню и называемые силами внутреннего трения. В отличие от твердых тел в жидкости при относительном покое слоев силы внутреннего трения равны нулю.
Характеристиками вязкости жидкости являются коэффициент динамической вязкости т] (измеряемый в Па с) и коэффициент кинематической вязкости v (измеряемый в м2/с):
Л v = —.
Р
Рис. 1
Вязкость жидкости в основном определяется силами межмолекулярного взаимодействия и увеличивается с понижением температуры (рис. 1).
Таблица 1
Плотность н удельный вес воды в различных водных бассейнах
Водный бассейн Р. т/мэ ?. кН/м3 Водный бассейн Р. т/м3 ?. кН/м3
Моря: Азовское Балтийское Баренцево Белое Берингово Каспийское Охотское Северное 1.006 1.011 1.028 1,019 1.023 1.025 1.025 1.026 9.87 9.92 10,08 10,00 10.04 10.06 10.06 10.06 Моря: Средиземное Черное Японское Океаны: Атлантический ТнхнЙ Реки 1.028 1.014 1,024 1.024 1.026 1.00 10.08 9.95 10.04 10,04 10,06 9,81
В ряде задач гидромеханики вязкость жидкости не играет большой роли, поэтому для упрощения решения этих задач ввели понятие об идеальной жидкости, т. е. жидкости, лишенной сил внутреннего трения (невязкой жидкости).
8
1. В каком бассейне плотность воды больше — в Балтийском море или в Тихом океане?
2. Как изменяется v воды в процессе ее нагревания?
3. Каков удельный вес жидкости, если ее масса т = 500 кг, а объем V = 0,6 м3?
§ 2. Гидростатическое давление (§ 1)
Действующие в жидкости силы могут быть сосредоточенными или распределенными. Поскольку сосредоточенные силы вызывают разрыв жидкости, в гидромеханике рассматривают только распределенные силы.
На каждую частицу 1 жидкости действуют поверхностные и массовые силы. Поверхностные силы — это силы взаимодействия
частиц жидкости между собой или со стенками сосуда. Внутри жидкости эти силы уравновешиваются. Массовые силы действуют на каждую частицу
AS
Рис. 2
жидкости независимо от наличия рядом с ней других частиц. К массовым силам относятся силы тяжести и инерции. Массовые силы пропорциональны массе объема жидкости.
Рассечем некоторый объем покоящейся жидкости на две части и отбросим одну из них, заменив ее поверхностными силами ДР, действующими на элементарные площадки AS (рис. 2). В пределе уменьшения площадки получим давление в данной точке покоящейся жидкости
Это давление называется гидростатическим и измеряется в паскалях (Па). Столб воды высотой 10 м создает в основании гидростатическое давление, равное 9,81 • 104 Па.
1 Частицей жидкости называется такой ее объем, который несоизмеримо меньше всего объема жидкости или находящегося в ней тела, но и несоизмеримо больше молекулы или пути ее свободного пробега.
9
Запомним два основных свойства гидростатического давления: 1) гидростатическое давление всегда действует по нормали к любой рассматриваемой площадке внутри жидкости; 2) оно не зависит от ориентации рассматриваемой площадки.
Первое свойство вытекает из следующего рассуждения. Если бы гидростатическое давление р было ориентировано в пространстве произвольно, как показано на рис. 2, то касательная составляющая Т вызывала бы сдвиг площадки, так как у жидкости, находящейся в покое, силы вязкости равны нулю.
Для доказательства второго свойства выделим в жидкости элементарный тетраэдр (рис. 3), на грани которого действуют силы ДРХ, АРу, АРг и ДР. Обозначим углы между силой ДР н осями координат х, у, z соответственно а, 0, у, гидростатическое давление на грани тетраэдра рх, ру, pz и р, грань АОВ — через Д5Х и грань АВС — через Д5. Так как тетраэдр находится в равновесии, сумма проекций всех сил на ось Ох равна нулю, т. е.
ДРх—ДР cos а = 0. (5)
Разделив обе части выражения (5) на Д5Х и сделав простые преобразования, получим ДРХ АР ASX ASX
(6)
cos а
Но ASx/cosa = AS, следовательно, АРХ АР ASX - AS
В пределе уменьшения граней тетраэдра
Нт ^=Пт АР д$х-о ASX as-о AS илн гидростатические давления
Рх=Р-
(7)
(8)
(9)
Подобным образом можно доказать, что ру = р и рг = р. Следовательно, рх = ру = рг = р, т. е. гидростатическое давление в данной точке жидкости не зависит от направления площадки, на которую оно действует.
4. Как направлены по отношению к обшивке судна силы давления воды на борт?
5. Уровень пресной воды в цистерне составляет б м. Какое давление при этом создается на днище цистерны?
§ 3. Закон Паскаля (§ 2)
В жидкости удельным весом у, помещенной в сосуд, мысленно выделим вертикальный цилиндр с площадями оснований S, высотой и весом y/i„S, приложенным в его центре тяжести G (рис. 4). Давление на единицу площади ннжнего основания цилиндра равно рх, давление на единицу площади верхнего основания — р2. По
10
скольку цилиндр находится в равновесии, сумма проекций всех действующих сил на его ось равна нулю:
PiS—p2S—у/1ц5 = 0 (10)
или после простейших преобразований
Pi = P2 + A- (И)
Уравнение (11) является основным уравнением гидростатики. Давление называют полным гидростатическим давлением. Если площадь верхнего основания цилиндра совпадает с площадью свободной поверхности жидкости, то
Р1 = Ра + А. (12)
где ра — атмосферное давление.
Величина уйц представляет собой разность между полным гидростатическим и атмосферным давлениями и называется избыточным, или манометрическим, давлением.
Если на поверхности жидкости в сосуде создать давление р0, то полное гидростатическое давление будет
Р1 = Ро + А- (13)
Величина уйц зависит только от веса столба жидкости высотой Лц. Поэтому, на сколько изменится давление р0, на столько же изменится и полное гидростатическое давление рг в любой точке жидкости. Отсюда следует основной закон гидростатики, известный как закон Паскаля: внешнее давление, производимое на пограничную поверхность жидкости, находящейся в равновесии в замкнутом сосуде, передается одинаково всем ее частицам, увеличивая ранее существовавшее в данной точке давление на величину этого давления. Работа всех гидравлических установок, действующих на основе передачи давления внутри жидкости, объясняется законом Паскаля. Одной из таких установок является гидравлический пресс, который широко используется в судостроении для гибки деталей судового корпуса.
6. При затоплении отсека на какой из листов поперечной переборки действует большее давление — на верхний или на нижний?
7. Сосуд заполнен жидкостью. В верхнюю часть сосуда введена открытая с двух сторон трубка. Как изменится давление жидкости в сосуде, если уровень жидкости в трубке будет доходить до ее верха?
8. С какой силой действует вода на пластину днища судна, плавающего в Баренцевом море, если его осадка Т = 6,5 м, а размеры пластины 0,8 X X 2,5 м?
§ 4. Закон Архимеда (§ 3)
Пусть в жидкость удельным весом у полностью погружен цилиндр. Площади оснований цилиндра S, высота Лц, глубина погружения площади верхнего основания цилиндра hn (рис. 5). На площадь
11
Рнс. 5
верхнего основания цилиндра действует сила Рг — — (ра + уЛп) S, где ра — атмосферное давление на поверхности жидкости. Знак минус обусловлен тем, что сила действует вниз. На площадь нижнего основания действует сила Р2 = paS + у (Лп + ^ц) 5. Силы, действующие на боковую поверхность цилиндра, взаимно уравновешиваются. Алгебраическая сумма сил, действующих на цилиндр, будет
= = (14)
где V = huS — объем цилиндра; yV — вес жидкости в объеме цилиндра. Равнодействующая сил D направлена вертикально вверх и называется гидростатической подъемной силой или силой поддержания. Значение силы поддержания не зависит от материала погруженного тела и глубины погружения, но зависит от объема тела и удельного веса жидкости, в которую тело погружено. Поскольку элементарные силы поддержания приложены к каждому элементу объема погруженного тела, равнодействующая сил поддержания проходит через центр тяжести вытесненного телом объема жидкости. Все эти рассуждения могут быть распространены на тела произвольной формы.
Теперь мы можем сформулировать закон Архимеда: на погруженное в жидкость тело действует сила, проходящая через центр тяжести его объема и направленная вертикально вверх, равная весу жидкости в объеме погруженного тела (или его погруженной части). Закон Архимеда — основной закон плавучести. В теории корабля он нашел самое широкое применение.
9. В каком из двух водных бассейнов осадка прямоугольного понтона больше: в реке илн в Черном море?
10. Подводная лодка перешла в подводное положение и продолжает погружаться. Изменяется ли при этом действующая на нее сила поддержания? (Изменением объема лодки и плотности воды пренебречь.)
II. Прямоугольный понтон размером L = 8,0 м; В = 4,0 м; Т = 1,2 м перевели из реки Южный Буг в Черное море. Какой после этого будет осадка понтона?
Глава II
ГИДРОДИНАМИКА
§ 5. Характеристики потока жидкости (§1,2)
Путь движения частицы жидкости называется траекторией. В каждый момент времени скорость движения частицы изображается вектором. Если провести некоторую кривую так, чтобы в данный
12
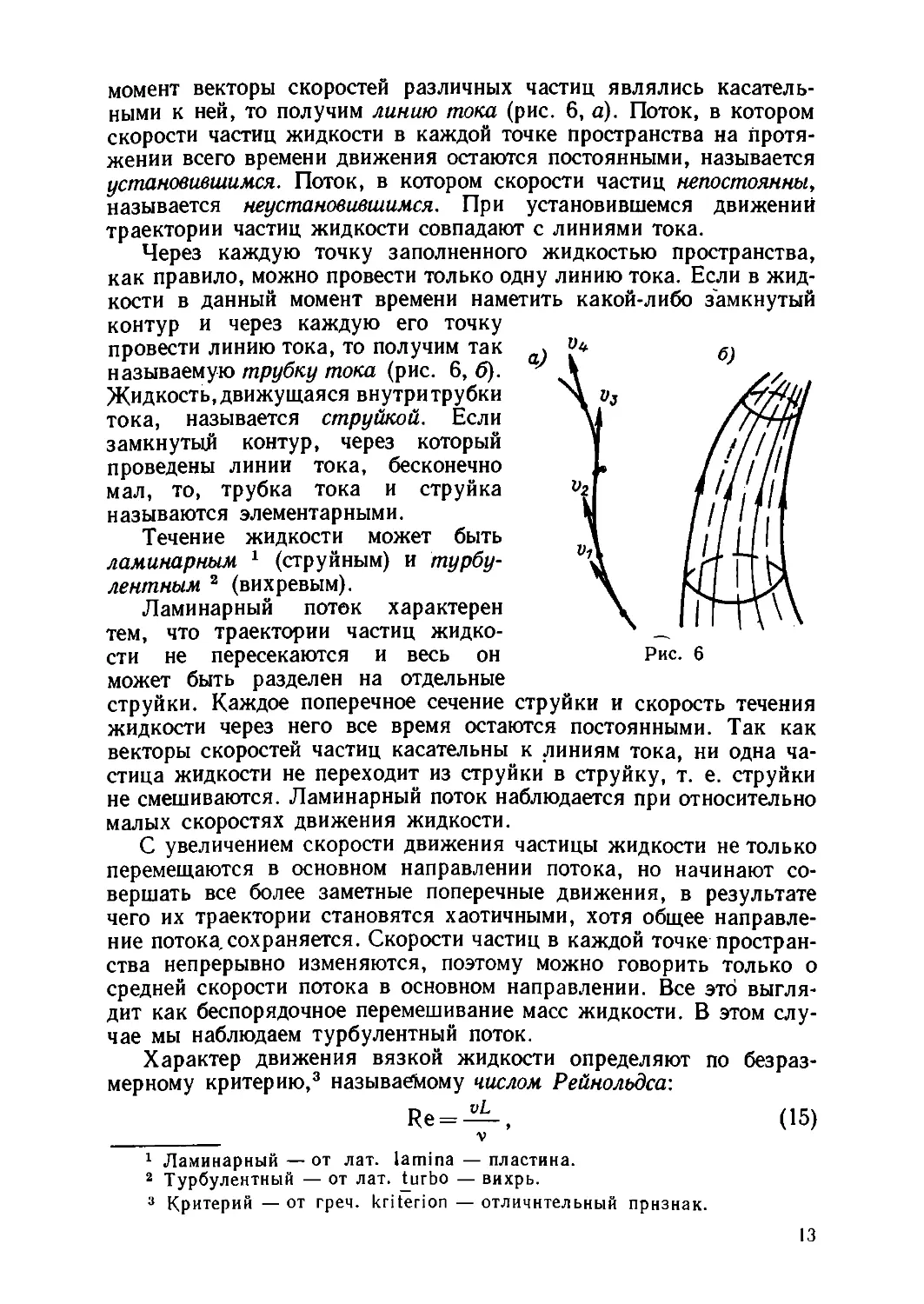
момент векторы скоростей различных частиц являлись касательными к ней, то получим линию тока (рис. 6, а). Поток, в котором скорости частиц жидкости в каждой точке пространства на протяжении всего времени движения остаются постоянными, называется установившимся. Поток, в котором скорости частиц непостоянны, называется неустановившимся. При установившемся движений траектории частиц жидкости совпадают с линиями тока.
Через каждую точку заполненного жидкостью пространства, как правило, можно провести только одну линию тока. Если в жидкости в данный момент времени наметить какой-либо замкнутый контур и через каждую его точку провести линию тока, то получим так называемую трубку тока (рис. 6, б). Жидкость, движущаяся внутри трубки тока, называется струйкой. Если замкнутый контур, через который проведены линии тока, бесконечно мал, то, трубка тока и струйка называются элементарными.
Течение жидкости может быть ламинарным 1 (струйным) и турбулентным 2 (вихревым).
Ламинарный поток характерен тем, что траектории частиц жидкости не пересекаются и весь он может быть разделен на отдельные
струйки. Каждое поперечное сечение струйки и скорость течения жидкости через него все время остаются постоянными. Так как векторы скоростей частиц касательны к линиям тока, ни одна частица жидкости не переходит из струйки в струйку, т. е. струйки не смешиваются. Ламинарный поток наблюдается при относительно малых скоростях движения жидкости.
С увеличением скорости движения частицы жидкости не только перемещаются в основном направлении потока, но начинают совершать все более заметные поперечные движения, в результате чего их траектории становятся хаотичными, хотя общее направление потока,сохраняется. Скорости частиц в каждой точке пространства непрерывно изменяются, поэтому можно говорить только о средней скорости потока в основном направлении. Все это выглядит как беспорядочное перемешивание масс жидкости. В этом случае мы наблюдаем турбулентный поток.
Характер движения вязкой жидкости определяют по безразмерному критерию,3 называемому числом Рейнольдса:
Re = —, (15)
__________ V
1 Ламинарный — от лат. lamina — пластина.
2 Турбулентный — от лат. turbo — вихрь.
3 Критерий — от греч. kriterion — отличительный признак.
13
где v — скорость жидкости, м/с; L—длина обтекаемого тела, м; v — коэффициент кинематической вязкости, м2/с.
Ламинарное течение жидкости обладает малой устойчивостью и, как мы уже говорили, наблюдается только при относительно небольших скоростях движения, т. е. при малых значениях числа Рейнольдса. Как только поток достигает определенной скорости, соответствующей так называемому критическому значению числа Рейнольдса (ReKP), ламинарное течение теряет устойчивость, разрушается и переходит в турбулентное. Турбулентный режим течения сохраняется при всех значениях числа Рейнольдса, превышающих критическое.
12. Как влияет температура воды на значение числа Рейнольдса?
13. Буксир выводит пассажирский лайнер из порта. При обтекании какого из судов число Рейнольдса больше?
14. Определите число Рейнольдса при обтекании судна длиной L =' = 120 м, движущегося со скоростью v — 18 уз. Температура воды 277 К.
§ 6. Уравнение Бернулли (§ 3, 5)
Гидродинамическим давлением р называется давление в данной точке потока. Опустим в поток открытую с двух сторон трубку
(рис. 7). Под действием
гидродинамического давления жидкость в трубке поднимается на высоту hp. Высота столба жидкости, на площадь поверхности которого действует атмосферное давление, а на площадь основания — давление р, называется пьезометрической 1 высотой. Поскольку атмосферное давление действует на площадь поверхности жидкости и на струйку, оно уравновешивается. Поэтому гидродинамическое давление будет равно весу столба жидкости:
Р = А>- (16)
Следовательно, гидродинамическое давление в данной точке потока характеризуется пьезометрической высотой р/у.
Рассмотрим выделенный сечениями / и // элемент струйки идеальной жидкости, находящейся в установившемся движении (рис. 8, а). Площади этих сечений обозначим соответственно через Д/7! и ДГ2, а возвышении их центров тяжести над плоскостью сравнения х—х через и z2. Расстояние от центра тяжести площади сечения струйки до плоскости сравнения называется высотой положения центра тяжести площади сечения. На элемент струйки действуют силы тяжести, гидродинамические давления рг и р2, давление соседних струек р3.
Пьеза — от греч. piezo — давлю.
14
Через промежуток времени Д/ элемент струйки займет положение III—IV. Так как при этом объем элемента струйки не изменился,
^F1^S1 = ^F^S3 = V, (17)
где V — объем жидкости между сечениями I—III и II—IV. Масса жидкости в этом объеме т = pV или т — yV/g.
Обозначив скорость жидкости в площади сечения / через а в площади сечения II через v2, найдем кинетическую энергию жидкости в площади этих сечений: E1 = mv*/2 и Е2 = т^/2. Приращение кинетической энергии
Рис. 8
Приращение кинетической энергии равно работе всех сил, действующих на элемент струйки:
ДЕ = Л. (19)
В свою очередь,
Л = Лх + Л2 + Л3, (20)
где Л j — работа сил тяжести:
г2); (21)
Л2 — работа гидродинамических давлений рг и р2:
Л2 = р1ДГ1Д51 р2ДР2Д52 = У (рг—р2); (22)
Л3 — работа давлений соседних струек.
Так как силы р3 стремятся сжать струйку, а площадь ее сече-, ния постоянна, то Л3 = 0.
Таким образом,
Л = ?V(z1 —z2) + V (Pi — Рг). (23)
15
Имея в виду формулы (18), (19) и (23), получим
-1К(^-^) = тУ(г1-г2) + У(Р1-р2). (24)
После простых преобразований имеем 2 2
•s+7+Zi=i+v+z- <25)
Если подобным образом рассматривать дальнейшее смещение элемента струйки, то можно записать
^~ + — + г = const. (26)
2g У
Это и есть уравнение Бернулли для струйки идеальной жидкости, которое формулируется следующим образом: сумма скоростного напора, пьезометрической высоты и высоты положения центра тяжести площади сечения струйки на протяжении всей линии тока остается величиной постоянной. Действительно, скорость свободного падения v частицы с высоты h равна V"2gh. Отсюда h = = v2/2g. Следовательно, первый член уравнения Бернулли — это высота, с которой должна падать частица жидкости, чтобы в данной площади сечения иметь скорость о, т. е. скоростной напор. Второй член уравнения — это пьезометрическая высота. Третий член уравнения представляет собой высоту положения центра тяжести площади сечения струйки. Таким образом, геометрический смысл уравнения Бернулли для идеальной жидкости состоит в том, что сумма трех высот, называемая полным напором, есть величина постоянная. Если в нескольких площадях сечений отложить суммы трех указанных высот (рис. 8, б) и через их вершины провести так называемую напорную плоскость О—О, то она окажется параллельной плоскости сравнения х—х.
С физической точки зрения первый член уравнения Бернулли представляет собой удельную кинетическую энергию, второй член— удельную потенциальную энергию давления и третий член — удельную потенциальную энергию положения частицы жидкости. Постоянство суммы трех удельных энергий подтверждает закон сохранения энергии.
При движении реальной жидкости вследствие ее вязкости происходят потери энергии (т. е. напора) на трение Лт. Поэтому, согласно уравнению Бернулли, для струйки реальной жидкости сумма четырех высот есть величина постоянная:
^ + ~ 4-2-1-/^ = const. (27)'
В направлении течения вязкой жидкости потери на трение растут, а энергия движущейся жидкости, т. е. сумма первых трех членов уравнения Бернулли, уменьшается.
16
Уравнение Бернулли широко используется для решения многих практических задач: при расчетах трубопроводов, насосов, водомерных устройств, эжекторов, для объяснения некоторых явлений обтекания тел жидкостью и т. д.
15. Из двух горизонтальных трубопроводов разных диаметров в единицу времени вытекает равное количество воды. В каком из них вода испытывает большее гидродинамическое давление?
16. В широкой части горизонтальной трубы вода течет со скоростью 12 см/с при давлении 15,7-10* Па. В узкой части трубы давление равно 12,75-104 Па. Какова скорость течения воды в узкой части трубы? (Вязкостью воды пренебречь.)
§ 7. Обтекание тел жидкостью (§1,5, 6)
При изучении взаимодействия жидкости с движущимся в ней твердым телом часто пользуются следующим приемом: считают, что тело неподвижно, а жидкость обтекает его со скоростью, равной
Рис. 9
по значению и противоположной по направлению скорости тела. Такое движение называется обращенным. Использование этого приема не влияет на значение и направление действующих на тело гидродинамических сил.
Рассмотрим в обращенном движении физическую картину обтекания жидкостью тела, форма которого соответствует форме корпуса судна.
Набегающие на тело струи жидкости искривляются (рис. 9, а) тем больше, чем ближе они расположены к телу. Вследствие этого гидродинамическое давление на тело распределяется так, как показано на рис. 9, б: в оконечностях площади сечений струек наибольшие, скорости наименьшие, а давления наибольшие. По мере приближения к середине тела площади сечений струек уменьшаются, скорости частиц жидкости увеличиваются, а давление падает. В районе максимальной толщины тела скорости частиц больше скорости набегающего потока, в результате чего здесь появляется зона разрежения, т. е. здесь избыточное давление отрицательно.
17
Вследствие вязкости жидкости частицы последней, расположенные непосредственно у тела, как бы прилипают к его поверхности, т. е. скорость их равна нулю. По мере удаления от тела скорости частиц быстро растут и на каком-то расстоянии достигают скорости набегающего потока. Мысленно соединив все точки, где скорости частиц равны 99,5% скорости набегающего потока, получим некоторую расположенную вдоль длины и осадки тела поверхность, ограничивающую прилегающий к телу так называемый пограничный слой жидкости. Следовательно, пограничным слоем называется расположенная вблизи поверхности тела часть потока, в которой скорости движения частиц жидкости возрастают от нуля до 99,5% скорости набегающего потока. Толщина погра-
ничного слоя от носа к корме увеличивается. Поскольку толщина пограничного слоя по сравнению с длиной обтекаемого тела мала и в нем происходит интенсивное нарастание скоростей в направлении от поверхности тела, в пограничном слое возникают значительные силы вязкости.
Граница пограничною слоя
Попутный потоп
Рис. 10
В зависимости от характера движения жидкости в пограничном слое различают ламинарный и турбулентный пограничный слой.
Если в передней части пограничного слоя, где числа Рейнольдса малы, поток ламинарный, а дальше в корму — турбулентный, то такой пограничный слой называют смешанным. Законы движения жидкости в ламинарном, турбулентном и смешанном пограничных слоях различны, а характер движения жидкости в пограничном слое влияет на перераспределение давления вдоль поверхности тела и на сопротивление жидкости движущемуся в ней телу. При турбулентном пограничном слое это сопротивление больше, чем при ламинарном (если форма тела и его скорость одинаковы). Поэтому стремятся к ламинаризации пограничного слоя. В непосредственной близости от тела скорости частиц малы, а тело мешает поперечному смещению этих частиц, поэтому у поверхности тела, обтекаемого турбулентным пограничным слоем, имеется узкая область с ламинарным течением жидкости, которая называется ламинарным подслоем.
Ламинарный и смешанный пограничные слои иногда возникают при обтекании моделей судов, а суда обтекаются турбулентным пограничным слоем с ламинарным подслоем.
В пограничном слое давление соответствует распределению давления во внешнем потоке. Поскольку по мере продвижения частиц от средней части обтекаемого тела к корме давление возрастает,
18
частицы движутся со все убывающей скоростью (рис. 10). В точке А, называемой точкой отрыва пограничного слоя, скорость частиц равна нулю ие только иа самой поверхности тела, ио и вблизи него. Вследствие повышенного давления в корме образуется обратный поток жидкости, оттесняющий пограничный слой от поверхности обтекаемого тела. В результате образуются вихревые шнуры, которые покидают тело. Этот процесс сопровождается уменьшением давления за телом. Положение точки отрыва пограничного слоя по длине тела и интенсивность вихревых шнуров зависят от формы тела. Тело, обтекаемое без отрыва пограничного слоя, называется хорошо обтекаемым, в случае отрыва пограничного слоя — плохо обтекаемым. Покинувшие пограничный слой частицы движутся со скоростью, которая меньше скорости набегающего на тело потока, в результате чего за телом образуется так называемый гидродинамический след.
Твердые тела по своей природе, а также вследствие специфических условий службы шероховаты. Характер шероховатости оказывает влияние на обтекание тела жидкостью. Поверхность тела, на которой бугорки не превышают '74 толщины ламинарного подслоя, называется технически гладкой. Если высота бугорков больше 1/i толщины ламинарного подслоя и они расположены по всей поверхности, то такую шероховатость называют общей (в отличие от местной). Выраженное в процентах отношение площади, покрытой бугорками, ко всей площади тела называется плотностью распределения бугорков по поверхности тела. Общая шероховатость, при которой бугорки примерно одинаковых размеров расположены по поверхности равномерным слоем, называется правильной шероховатостью; шероховатость, характеризуемая неравномерным слоем бугорков,— неправильной.
При обтекании технически гладкой поверхности ламинарный подслой не турбулизуется и обтекание бугорков происходит без дополнительного вихреобразования. В тех случаях, когда поверхность шероховата, каждый бугорок представляет собой плохо обтекаемое тело. Вследствие этого частицы обтекающей их жидкости резко изменяют свои траектории, жидкость завихряется, причем в кормовой части каждого бугорка происходит срыв вихрей. При местной шероховатости образующиеся за бугорками вихри больше, чем при общей правильной шероховатости; кроме того, каждая неровность создает свой вихревой поток, который не перекрывает соседние неровности, расположенные дальше в корму тела.
Пусть обтекаемое потоком тело находится вблизи поверхности жидкости. Поскольку в оконечностях тела гидродинамическое давление повышено, здесь происходит подъем жидкости, а в средней части, где давление понижено,— опускание. Подъем и опускание жидкости имеет динамический характер, поэтому частицы жидкости по инерции перемещаются на большее расстояние, чем следует для уравновешивания давления. Затем поднявшиеся частицы под
19
действием собственного веса, а опустившиеся — под давлением окружающей жидкости начинают двигаться в обратном направлении. Так возникают возмущения, дающие начало волновому движению жидкости.
При обтекании судна водой образуются две группы волн: носовая и кормовая (рис. 11). Каждая из них состоит из поперечных и расходящихся волн. Высота носовых волн больше, чем кормовых.
Расходящиеся волны представляют ряд гребней, смещенных друг относительно друга так, что мысленная линия, соединяющая середины их длин, составляет с диаметральной плоскостью угол а = 18ч-20о, а гребни — угол 0 = 36-т-40°. Вследствие инерции воды первая носовая расходящаяся волна зарождается не у самого форштевня, а несколько дальше в сторону кормы. Первая кормовая расходящаяся волна
зарождается перед ахтер-штевнем. Расходящиеся волны создаются и распространяются независимо друг от друга. С удалением от корпуса высота волн уменьшается. Поперечные волны перпендикулярны диаметральной плоскости судна. Они зарождаются в тех же местах, где
и расходящиеся волны. По мере удаления от штевней протяженность поперечных волн увеличивается, но не выходит за границу, образованную расходящимися волнами. Запас энергии всех поперечных волн одинаков, поэтому чем больше протяженность волны, тем меньше ее высота. Поперечные волны распространяются в направлении потока, в результате чего носовые волны накладываются на кормовые. Это наложение волн называется интерференцией.1 Если при этом гребни волн совпадают, т. е. высота волн увеличивается, то интерференция называется неблагоприятной, если же совпадают вершины одних волн и подошвы других, т. е. поверхность воды сглаживается, то такая интерференция называется благоприятной. Результат интерференции волн зависит от их длины, а последняя — от скорости движения потока, так как длина волны определяется по формуле X. = 2nv2lg, rjaft v — скорость потока или судна, м/с; g — ускорение свободного падения, м/с2. Скорость, при которой происходит благоприятная интерференция, называется благоприятной; скорость, соответствующая неблагоприятной интерференции, называется неблагоприятной. Размеры поперечных волн про
1 Интерференция — от лат. inter — взаимно, между собой и ferio —
ударяю, поражаю.
20
порциональны квадрату скорости, поэтому чем больше скорость судна, тем они заметнее.
17. У одного тела, находящегося в потоке жидкости, корма тупая, у другого — острая. За каким из этих тел вихреобразование больше?
18. Чему равна плотность распределения бугорков, если шероховатость поверхности правильная?
19. Вычислите длину поперечной волны, если скорость судна v = 15 уз.
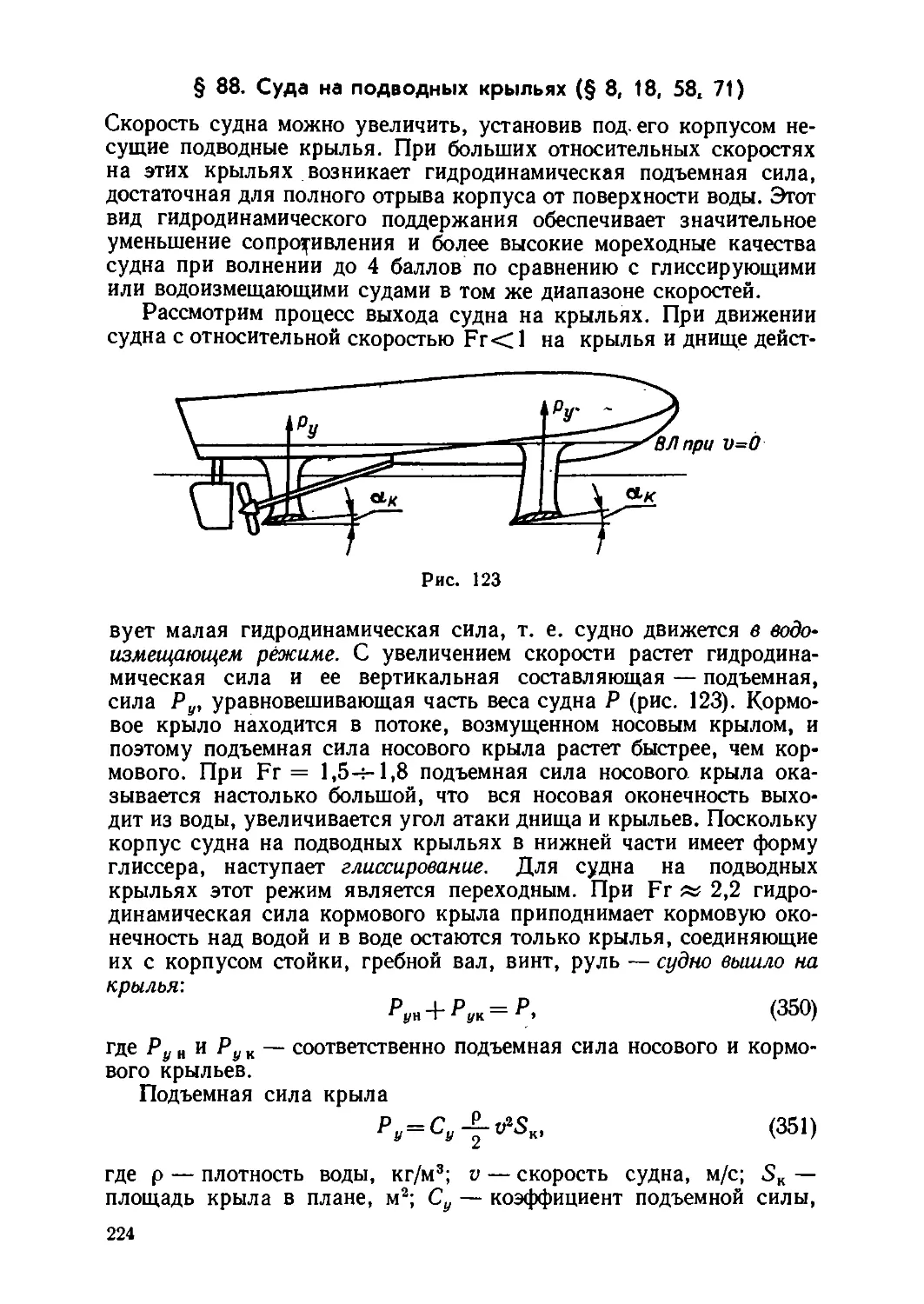
§ 8. Основы теории крыла (§ 6)
Крылом называется тело удлиненной формы, находящееся в потоке воды или воздуха и испытывающее действие подъемной силы, во много раз превосходящей сопротивление. Принцип действия крыла используется в судовых
рулях, крыльевых системах судов на подводных крыльях, гребных винтах и т. д.
Рассмотрим геометрические характеристики крыла (рис. 12). Профилем крыла является его поперечное сечение. Профиль может быть симметричным (рис. 12, а) или несимметричным (рис. 12, б, в). Расстояние между наиболее удаленными точками передней и задней кромок профиля называется длиной хорды профиля Ьк. Если длина хорды профиля в любом поперечном сечении крыла одинакова, то крыло называют цилиндрическим. Длина образующей крыла называется его размахом SK является произведение длины хо
Рнс. 12
/к. Площадью крыла в плане эды профиля на размах
«к
(28)
Отношение размаха крыла к длине хорды его профиля представляет собой удлинение крыла 1к:
= (29)
В теоретических исследованиях часто рассматривают случай так называемого крыла бесконечного размаха (1к -> оо). Изучая гидродинамические характеристики такого крыла, можно ограничиться рассмотрением обтекания только его профиля, так как картина обтекания крыла при Хк ->-_оо во всех его поперечных сечениях одинакова. В реальных условиях, как правило, имеют дело с крыльями конечного размаха (Хк < оо), у которых картина обтекания профилей различна вдоль размаха; отдельно выделяют крылья малого удлинения (1к<2), характеризующиеся особой сложностью обтекания.
21
Максимальная толщина профиля tK — это расстояние между наиболее удаленными точками профиля, измеренное по перпендикуляру к его хорде. Выраженное в процентах отношение максимальной толщины профиля к длине его хорды называется относительной толщиной профиля:
6К = —-100%. (30)
Ьк
Относительная толщина профиля судовых рулей 6К — 5ч-20%, лопастей гребных винтов в различных сечениях 6К = 2ч-20%;
Рис. 13
подводных крыльев 6К = Зч-7%. Если 6К< 10%, то профиль является тонким. При 6К> 10% профиль считается толстым.
Углом атаки ак называется угол, составленный хордой профиля и направлением потока перед крылом. Поток, набегающий на крыло под углом атаки ак, встречает крыло в точке А (рис. 13, а). Здесь поток раздваивается: часть его обтекает крыло сверху, часть— снизу. В точке В оба потока сливаются в один. Путь частиц, движущихся над крылом, за определенное время должен быть больше пути частиц, обтекающих крыло снизу, поэтому скорость над крылом будет больше, а давление меньше, чем под крылом. Именно этим обусловлено появление аэро- иди гидродинамической силы Р, которая зависит от угла атаки и растет с увеличением площади крыла в плане и скорости потока. Сила Р проходит через точку С, называемую центром давления. Измеренное вдоль хорды профиля расстояние от передней кромки крыла до точки С называется абсциссой центра давления хр. При изменении угла атаки в диапазоне
22
значений, при которых крылья используются по своему назначению, абсцисса центра давления изменяется в небольших пределах:
хр = (0,2ч- 0,25) Ьк. - (31)
Силу Р можно разложить на составляющие Ру и Рх. Сила Ру называется подъемной силой. Она действует перпендикулярно направлению набегающего потока. Сила Рх является силой лобового сопротивления. Она направлена параллельно скорости набегающего потока. Силу Р можно разложить также на нормальную силу PN, направленную перпендикулярно хорде крыла, и тангенциальную силу Рт, направленную вдоль хорды профиля крыла. Можно установить зависимость между составляющими силы Р:
Pw = P1,cosaK + PxsinaK; (32)
Рт — Рх cos aK — Ру sin aK. (33)
Момент силы PN относительно передней кромки крыла
М = PNXp. (34)
Заметим, что 70—75% подъемной силы создается за счет понижения давления над крылом, остальная часть — за счет повышения давления под крылом. Отношение Ру1Рх, т. е. число, показывающее во сколько раз подъемная сила больше лобового сопротивления, называется аэро- или гидродинамическим качеством крыла. У хороших крыльев оно достигает 20—25. Угол атаки, при котором аэродинамическое качество крыла наибольшее, называется оптимальным 1 углом атаки. Обычно он составляет 4—8°.
С увеличением угла атаки до некоторого критического значения акр подъемная сила растет. При больших углах атаки происходит резкий отрыв пограничного слоя, сопровождающийся интенсивным вихреобразованием за крылом (рис. 13, б), что приводит к уменьшению подъемной силы и увеличению лобового сопротивления.
Рассмотрим физическую картину обтекания крыла конечного размаха.
Частицы среды, обтекающие такое крыло, стремятся перейти из области повышенного давления в область пониженного. В результате этого частицы среды (жидкости, воздуха) перетекают через края крыла снизу вверх и движутся по поверхности крыла по диагонали: под крылом от середины к краям и над крылом — от краев к середине (рис. 13, в). При таком перетекании давление над крылом несколько увеличивается, т. е. подъемная сила уменьшается, а за крылом образуется вихревая пелена. Последняя действует на натекающий поток таким образом, что он вблизи крыла отклоняется от своего направления, вследствие чего истинный угол атаки а(- (рис. 13, г) становится меньше угла ак, образованного направлением хорды профиля и направлением набегающего потока вдали от крыла, где влияние вихревой пелены отсутствует.
1 Оптимальный — от лат. optimus — наилучшнй.
23
Направление подъемной силы всегда перпендикулярно направлению истинного набегающего потока. Обращаясь к рис. 13, г, видим, что в рассматриваемом случае эффективная подъемная сила Ру, направленная перпендикулярно направлению потока вдали от крыла, будет меньше подъемной силы Ру\ кроме того, появляется сила Pz, увеличивающая сопротивление движению крыла. Сила Р{ называется индуктивным сопротивлением.
Таким образом, конечность размаха крыла в целом неблагоприятно сказывается на его аэро- или гидродинамическом качестве.
Чем больше гидродинамическое удлинение крыла, тем слабее влияние перетекания частиц среды. Можно несколько уменьшить перетекание частиц, установив концевые шайбы — прилегающие
к концам крыла пластины, размеры которых будут превышать профиль крыла.
Теоретическим путем определить силы, действующие на крыло, не всегда просто. Поэтому модели крыльев испытывают в аэродинамической трубе. Схема одной из них показана на рис. 14. Она представляет собой замкнутую трубу с вентилятором, работающим от автономного источника энергии (генератора и электродвигателя). Для выравнивания потока по углам установлены направляющие лопатки, а перед суживающейся частью — решетка и мелкая сетка. Поток набегает на модель, помещенную в рабочей части трубы. Модель соединена рычагами с аэродинамическими весами, фиксирующими силы, действующие на модель крыла. Затем полученные данные по соответствующим методикам пересчитывают на натуру. Было установлено, что если скорость газа не превышает 0,2 скорости звука (70 —75 м/с), то формулы гидромеханики для жидкости и газа оказываются одинаковыми. Поэтому в аэродинамической трубе можно испытывать не только воздушные, но и подводные крылья.
24
Результаты испытаний моделей крыльев в аэродинамических трубах представляют в виде безразмерных коэффициентов. Такими коэффициентами являются:
коэффициент подъемной силы
Су = —; (35)
коэффициент лобового сопротивления
Сх = —
2
коэффициент центра давления
Ср = ^, (37)
Ок
где Ру — подъемная сила, Н; Рх — сила лобового сопротивления, Н; р — плотность воздуха, кг/м3; v — скорость потока, м/с; SK — площадь крыла в плане, м2; хр — абсцисса центра давления, м; Ьк — длина хорды профиля, м.
Удобство представления результатов испытаний моделей крыльев в виде безразмерных коэффициентов заключается в том, что эти коэффициенты определяют гидродинамические характеристики крыльев, работающих при за-
(36)
Рнс. 15
данном значении угла атаки, неза-
висимо от их масштаба, скорости движения и среды, в которой
находится крыло (воздушная среда или вода). Таким образом, ре-
зультаты испытаний моделей крыльев, проведенных в аэродинамической трубе, легко могут быть пересчитаны на натурные условия.
Графики коэффициентов для крыльев определенных профилей, удлинений и относительных толщин были составлены по результатам экспериментов (рис. 15). Подобрав необходимый график, проектировщик определяет по нему коэффициенты Сх, Су, Ср в зависимости от расчетного угла атаки ак; по формулам (35), (36), (37) вычисляет силы Рх, Ру и абсциссу х„, а затем по формулам (32), (33), (34) — силы PN, Рх и момент М.
20. Возникает ли подъемная сила, если угол атаки крыла равен нулю? Если крыло находится в покое относительно воздуха?
21. Как изменится подъемная сила, если поток под крылом притормозить? Если скорость потока над крылом увеличить?
22. Известно, что /к = 4,92 м; 6К = 4,0 м; ак = 15°; 6К = 20%; v = = 9 м/с; р = 1020 кг/м3. Определите силы и момент, действующие на крыло.
25
Раздел второй
СТАТИКА КОРАБЛЯ
Глава III
ПРИБЛИЖЕННЫЕ ВЫЧИСЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ КОРАБЛЯ
§ 9. Общие правила приближенных вычислений
Выполняя расчеты по теории корабля, широко пользуются приближенными вычислениями, поскольку при измерениях, счете и выполнении математических операций неизбежны погрешности.
Общие правила приближенных вычислений сводятся к следующему.
Точность исходных данных и результата вычисления должна соответствовать практической потребности. Мерой точности какого-либо результата служит величина относительной погрешности. Модуль разности истинного значения данной точной величины и приближенного ее значения называется абсолютной погрешностью этого приближенного значения. Относительная погрешность какого-либо приближенного значения — это выраженное в процентах отношение абсолютной погрешности к самому значению величины. В расчетах по теории корабля относительная погрешность допускается в пределах до 0,5—1%.
Значащими цифрами числа называют все цифры его десятичной записи, кроме нулей, стоящих перед первой цифрой, отличной от нуля, и нулей, стоящих в конце числа вместо неизвестных или отброшенных цифр.
Если абсолютная погрешность приближенного числа не превышает половины единицы последнего разряда, то все значащие цифры данного числа называются точными. Например, если | а | = 0,058, а абсолютная погрешность равна 0,0003, то все цифры данного числа точные. Точное число 28,003, округленное до сотых долей, дает 28,00. Здесь оба нуля являются точными цифрами, так как в точном числе нет ни десятых, ни сотых долей. Если абсолютная погрешность приближенного числа больше половины единицы последнего разряда этого числа, то все цифры приближенного числа, начиная с этого разряда, называются сомнительными. Например, при |а| = 64,2.последняя цифра 2 сомнительна; при | Ь\ = 34,426 и абсолютной погрешности 0,008 последние цифры (2 и 6) сомни-26
тельны. В приближенном числе, как правило, сохраняют только одну сомнительную цифру, а остальные отбрасывают.
При выполнении расчетов по теории корабля числа округляют таким образом, чтобы они содержали три или четыре значащие цифры. Поэтому все цифры, стоящие справа от третьей или четвертой значащей цифры, отбрасываются или, если это нужно для сохранения разрядов, заменяются нулями. Если первая из отбрасываемых цифр больше или равна 5, то последнюю сохраняемую значащую цифру увеличивают на единицу. Например, число 346 732 округляется до 346 700, а число 645 163 до 645 200.
Существует стандартная форма записи приближенных чисел. Например, |а| = 481,3; | b | = 0,004 3; |с| = 640 000 в стандартной форме записываются так: |а| = 4,813-102; | Ь| = 4,3-10-3; |с| = 6,4-105.
В теории корабля строгий учет погрешности, как правило, не нужен, поэтому следует пользоваться правилами верных цифр, которые дают возможность без громоздких исследований определить, как проводить вычисления,, чтобы получить результат нужной точности. Эти правила состоят в следующем.
При сложении и вычитании приближенных чисел в результате младшим сохраняемым десятичным разрядом должен быть тот, который соответствует наименее точному из слагаемых. Например: 3,5 + 4,28 + 5,342 = 13,1.
При умножении и делении в результате следует сохранять столько значащих цифр, сколько имеется в приближенном сомножителе (делимом или делителе) с наименьшим числом значащих цифр. Например, произведение 34,6-0,32 = 11.
При возведении в квадрат и куб в результате нужно сохранять столько значащих цифр, сколько их имеет основание степени. Например, 8,942 = 79,9; 1,533 = 3,38.
Извлекая квадратный и кубический корень, в результате необходимо оставить столько значащих цифр, сколько их имеет приближенное значение подкоренного числа. Например,
]/56Л = 7,51; {/^21 = 1,61.
Если какое-нибудь число имеет больше десятичных знаков (при сложении и вычитании) или больше значащих цифр (при умножении, делении, возведении в степень, извлечении корня), чем другие, то его предварительно следует округлить, сохранив одну «запасную» цифру.
Вычисляя по формулам, во всех промежуточных результатах нужно сохранять на одну цифру больше, чем было указано выше, но в конечном результате эту «запасную» цифру отбрасывать.
23. Почему в приближенных числах значащих цифр должно быть не более трех-четырех?
24. Округлите число 345 624.
25. Просуммируйте числа 7,156; 48,75; 8,144.
27
§ 10. Правило трапеций (§ 9)
В статике корабля часто требуется определить элементы погруженного объема корпуса: площади, ограниченные шпангоутами и ватерлиниями теоретического чертежа, объемное водоизмещение, статические моменты площадей и объемов и т. д. Расчетные формулы для определения этих элементов содержат, как будет показано ь
ниже, определенные интегралы вида f ydx. Поскольку обводы а
корпуса корабля, как правило, не поддаются точному аналитиче-
скому описанию, вычисление указанных интегралов производится методами приближенного численного интегрирования. Среди этих методов одним из наиболее употребительных является правило трапеций.
На рис. 16 изображена площадь, которую необходимо вычислить. Длину основания площади делим на ряд равных отрезков величиной I. В точках деления проводим ординаты кривой и соединяем их концы отрезками прямых линий. Получим ряд трапеций, сумма площадей которых приближенно равна искомой площади:
L
S = f ydx = Si + S2 + . . . + Sn; (38)
о
I; (39)
2 2 2 v
28
S=((*+F,+M--(40)
Для удобства дальнейших вычислений в правой части формулы (40) прибавляем и вычитаем полусумму крайних ординат. В результате получим
3=1^У0 + У1 + У2+- • • + + (41)
Полусумма крайних ординат называется поправкой, а все выражение в скобках — исправленной суммой. Следовательно, по правилу трапеций площадь равна произведению исправленной суммы равноотстоящих ординат на расстояние между ними. Вычисление площади по правилу трапеции выполняется в форме табл. 2.
Таблица 2
Вычисление площади по правилу трапеции
Номер ординаты Ординаты
0 2 3 п. — 1 п. Уо У1 Уг Уп-1 Уп
Сумма ?У
. Поправка Лу _ Уо + Уп - 2
Исправленная сумма
Площадь S = lK
Точность вычисления площади, как и объем работы, растет с увеличением числа ординат. Учитывая практическую целесообразность, при вычислении, например, площадей ватерлиний длину судна делят на 20 равных частей, а при вычислении площадей шпангоутов осадку судна делят на 4—10 равных частей.
Иногда подынтегральная функция имеет резкую местную выпуклость или вогнутость (рис. 17, а). Для того чтобы не снижать точность ответа, вводят промежуточные ординаты.
Если подынтегральная функция примыкает к основанию площади между двумя ординатами (рис. 17, б), то из точки А необходимо провести прямую АВ так, чтобы заштрихованные площадки были примерно равными, соединить точки А и О прямой и из точки В провести прямую 7^ параллельно АО до пересечения с крайней ординатой. Отрезок является отрицательной исправленной
29
ординатой (—yQ), и его длину со знаком минус заносят в таблицу для вычисления площади. Справедливость указанных построений и рассуждений может быть доказана простыми геометрическими выкладками.
Часто ограничивающая площадь кривая примыкает к основанию площади настолько круто, что замена участка кривой отрезком прямой АО резко снизила бы точность результата (рис. 17, в). В этом случае из точки А проводят прямую Л Д’ так, чтобы заштрихованные площадки были примерно равны. Таким образом получают трапецию OFAK, равновеликую площади OF ADO. Ордината ОК является исправленной и заносится в таблицу как крайняя.
Особенности вычисления площадей шпангоутов и ватерлиний состоят в следующем. Расстояние между ординатами по длине
Рис. 17
равно практической шпации AL = L/20, расстояние между ординатами по осадке ДТ = Т/п, где п — принятое число равноотстоящих ватерлиний. На теоретическом чертеже ватерлинии на проекции «полуширота» и шпангоуты на проекции «корпус» изображены только одной ветвью, поэтому, чтобы получить полные площади шпангоутов и ватерлиний, результат их вычисления удваивают, т. е.
S = 2AL2« и © = 2ДТК, (42)
где S — площадь ватерлинии; о — площадь шпангоута.
При заполнении табл. 2 нужно иметь в виду следующее:-если кривая (шпангоут или ватерлиния) примыкает к следу диаметральной плоскости (ДП) в точке ее деления на равные отрезки и имеет на крайнем участке форму, близкую к прямой линии, то ордината в точке примыкания равна нулю. Если на крайнем участке кривая резко отличается от прямой, а также если кривая примыкает к следу диаметральной плоскости между точками деления его на равные отрезки, то должны быть введены исправленные ординаты, как описано выше;
если исправленная или равная нулю ордината измеряется не по крайнему перпендикуляру, восставленному в точке деления
30
следа ДП на равные отрезки, то ординаты, расположенные от измеренной ближе к оконечностям (или к основной плоскости), не существуют и в таблице отмечаются прочерками. При вычислении поправки прочерки не учитываются.
26. Какой вид должна иметь подынтегральная функция, чтобы результат вычисления: а) был больше действительной площади; б) был меньше действительной площади?
27. Вычислите площадь шпангоута, если ординаты одного борта равны: 3,45; 5,00; 5,90; 6,60; 7,50; 8,75; 9,95 м. ЛТ = 1,5 м.
28. Ординаты шпангоута одного борта равны: — 1,4; 5,0; 7,1; 8,4; 10,2 м. ЛГ = 4,0 м. Вычислите площадь шпангоута.
§11. Правило Чебышева (§ 9, 10)
Другим наиболее распространенным методом приближенного численного интегрирования является правило П. Л. Чебышева.
Отнесем вычисляемую площадь к системе координат так, чтобы ось ординат делила основание площади пополам, а ось абсцисс совпадала с ним (рис. 18). Чебышевские ординаты расставим симметрично относительно оси ординат и их абсциссы определим по формуле
*.= ±*гу, (43)
где L — длина основания площади; kt — коэффициент (значения для семи и девяти ординат приведены в табл. 3).
Чебышевские коэффициенты k[
Таблица 3
Число ординат к. k3 ka k, ft.
7 ±0,884 ±0,530 ±0,324 0
9 ±0,912 ±0,601 ±0,529 ±0,168 0
Искомая площадь вычисляется по формуле
S-~(^l+^2+- • • + ^п-1 + ^п) = ~2|/’ (44)
где у — измеренные на чертеже ординаты, п — число чебышевских ординат.
Следовательно, по правилу Чебышева площадь равна произведению суммы чебышевских ординат на частное от деления длины основания площади на число ординат. Расчет производится в табличной форме (табл. 4).
31
При равном числе ординат правило Чебышева обеспечивает большую точность результата, чем правило трапеции, но требует специальных построений, тогда как равноотстоящие ординаты имеются на теоретическом чертеже. Кроме того, правило Чебышева не дает в отличие от правила трапеции наглядного представления о величине погрешности.
Таблица 4
Вычисление площади по правилу Чебышева
Номер ординаты Ординаты
1 2 п — 1 п У1 Уг Уп-\ Уп
Сумма ^у
Площадь п
Рис. 18
29. Данная площадь вычисляется при семи, а затем при девяти ординатах. В каком случае ответ будет точнее?
30. Может ли при каком-либо числе чебышевских ординат коэффициент ki быть больше единицы?
31. Вычислите площадь по правилу Чебышева, если длина основания площади L = 180 м, а чебышевские ординаты равны: 3,6; 5,4; 9,2; 9,2; 8,4; 7,2; 5,0; 4,6; 2,8 м.
§ 12. Интегральные кривые (§ 10)
Пусть кривая / (рис. 19), выражающая зависимость у = f (х), представляет собой в данном случае основную кривую. Кривая I! называется интегральной кривой, если каждая ее ордината в определенном масштабе равна площади, ограниченной основной кривой от начала координат до этой ординаты.
Ординаты интегральной кривой вычисляются при помощи интеграла с переменным верхним пределом вида
I 21
^i = f f(x)dx-, K2 = f f(x)dx и т. д. (45)
о о
Ординаты интегральной кривой могут быть вычислены по правилу трапеций. По рис. 19 легко установить, что
Ко = О; (46)
у1=^±±1/; (47)
32
У2 = 1 + I = А [(^ + У1) + (у1 +1/8)1; (48)
2 2 *
V Уо + У1, , У1+У2, , Уп-1+Уп
Y" = —2 +—~ ' + •+ 2 '-
-|[(%+», ) + (»,+%) + • + (».-,+».)]• И9)
Вычисление ординат интегральной кривой ведется в табличной форме (табл. 5).
Таблица 5
Вычисление ординат интегральной кривой
Номер ординаты Ординаты Сумма (2) попарно Сумма (3) сверху 11 >4
I 2 3 4 Б
0 Уо 0
1 V1 Уо + У1 (Уо + У1) Yi
2 Уг У1 + У» (Уо + Vi) + (У1 + У г) (Уо + У1) + (У1 + Уа) + (Уа + У») Уг
3 У» Уа + Уа Y,
п Уп У п-1 + Уп (Уо + У1) + (У1 + Уг) + (Уг + У») + • • • + + (У„_! + У„) Уп
2 В. Л. Фукельмаи
33
Теория интегралов с переменным верхним пределом указывает на ряд свойств интегральных кривых. Обратим внимание на два важных для нас свойства:
максимум или минимум основной кривой соответствует точке перегиба интегральной кривой;
точкам пересечения основной кривой с осью абсцисс соответствует максимум или минимум интегральной кривой.
В теории корабля очень часто приходится иметь дело с интегральными кривыми. Например, кривая шпангоута — основная кривая, а кривая, выражающая зависимость между площадью погруженной части шпангоута и соответствующей осадкой,— интегральная; кривая зависимости площадей ватерлиний от осадки — основная кривая, а кривая, определяющая зависимость объема подводной части от осадки,— интегральная кривая.
32. Максимум одной кривой А (х = 12, у = 16). Точка пересечения другой кривой с осью абсцисс В (х = 9, у = 0). Является ли одна из кривых основной, а другая — интегральной?
33. Ординаты основной кривой равны 1,5; 2,8; 3,1; 3,3; 3,4; 3,4 м. I = = 1,2 м. Вычислите ординаты интегральной кривой, если 1 см — 1 м*.
§ 13. Вычисление объема тела (§ 10, 12)
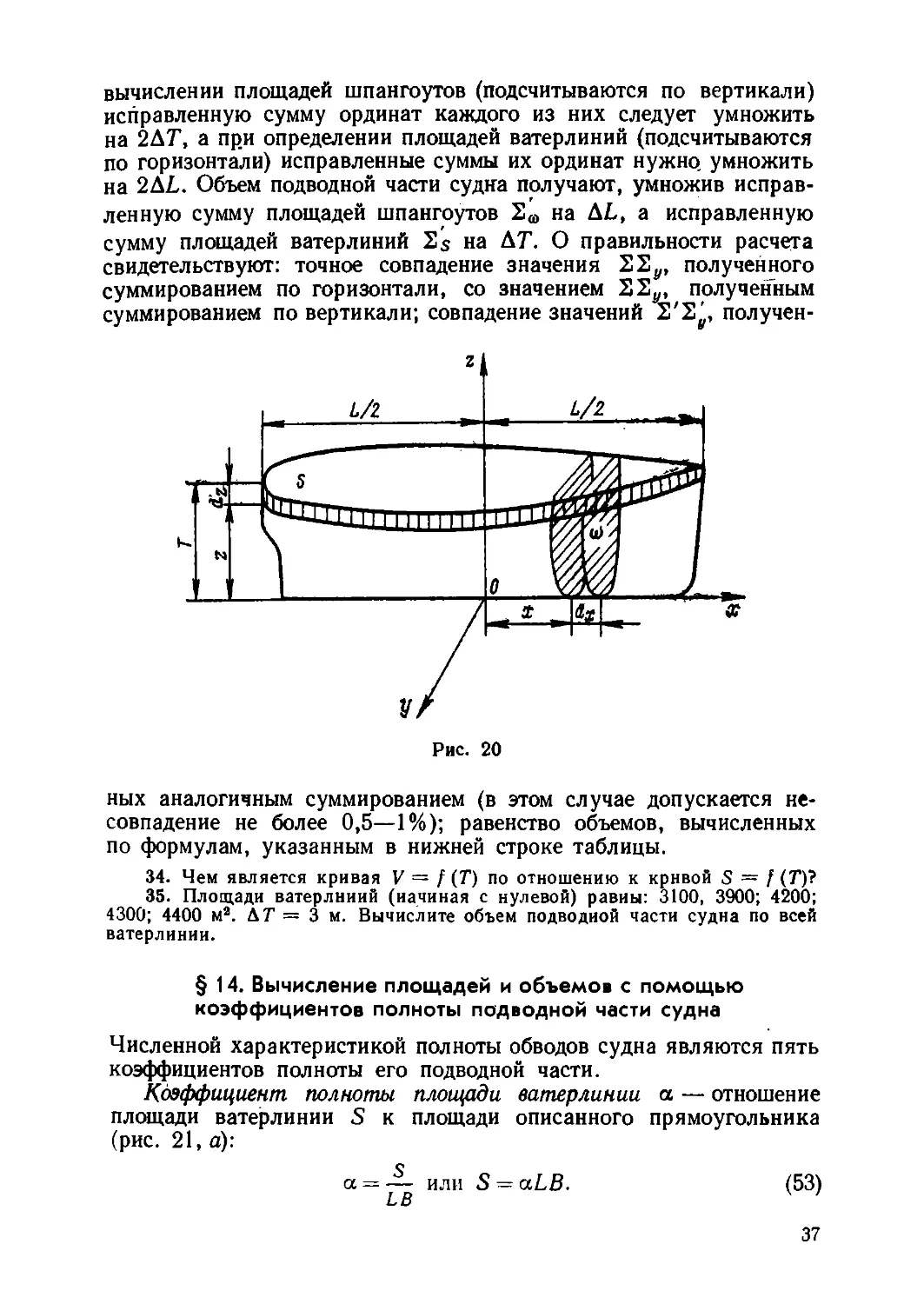
Объем подводной части судна, как и любого тела, можно получить путем его сечения рядом равноотстоящих плоскостей шпангоутов или ватерлиний (рис. 20). Тогда при принятой системе координат
L/2 Г
V= j adx или V = f Sdz. (50)
—1/2 О
Вычисляя выражение (50) по правилу трапеций, получим
у=дл(%+®1+®2+... + ®п_1+®п--5^^^) = длХ; (51)
V = AT(S0 + S, + S2 +. . , + Sn_1 + Sn-^±^) = AT2s, (52)
где Д£ = L/20; ДТ = Т/п.
Следовательно, по правилу трапеций объем подводной части судна равен произведению исправленной суммы площадей шпангоутов (или ватерлиний) на расстояние между ними. Вычисление объема подводной части судна по формулам (51) и (52) производится в табличной форме (табл. 6).
Расчет объема подводной части судна по каждую теоретическую ватерлинию (когда площади их известны) может быть выполнен по форме табл. 7, аналогичной табл. 5. Действительно, цри осадке по первую ватерлинию
у, = + дт,
2
34
Таблица 6
Вычисление объема подводной части судна
Номер площади Площади
0 I 2 • л (или N) ©о (или $0) ©! (или Si) ©а (или 5 ц) ©п (или Sjv)
Сумма Sa (или Ss)
Поправка ©о + ©n ( So + Sn\ 2 \ 2 /
Исправленная сумма S® (или Ss)
Объем V = (или V = ATSg)
Таблица 7
Вычисление объема подводной части судна по площади ватерлиний
Номер ватерлинии Площади ватерлиний Сумма (2) попарно Сумма (3) сверху V = (4) 2
1 2 3 4 5
0 «0 0
1 Si So + Si (So + Si) Vi
II Sii Si + Sii (So + Si) + (Si + Sn) va
• • • •
по вторую
Уг — 1($о + Si) + (Si + S2)l
и т. д.
Часто объем подводной части судна приходится вычислять до определенной ватерлинии по теоретическому чертежу, когда площади шпангоутов и ватерлиний еще не известны. В этом случае расчет ведется в табличной форме (табл. 8). Поскольку ординаты измеряются на теоретическом чертеже от ДП на один борт, при
2* 35
Таблица 8
Вычисление объема подводной части судна по ординатам теоретического чертежа
Номер ватерлинии Номер шпангоутов Сумма ординат по ВЛ Поправка Исправленная сумма Площадь ватерлиний
0 1 19 20
0 I гвл 20 21 2ГВЛ 20 2i 2ГВЛ Ч со 'м 'рГ 'м“ < < <3 мет . . . еч II II II © • ГМ ! з I U «О
Сумма ординат по шпангоутам 20 Si 2i» 2 20 2s
Поправка
Исправленная сумма 2о s; 219 2 20 х'х' У 2S
Площади шпангоутов <о0 = 2ДТ20 co, = 2ДТХ, «Ojg = 2Д7'21д w20 = ^ATSjo 2® 20>
Объем V = ALS; =
вычислении площадей шпангоутов (подсчитываются по вертикали) исправленную сумму ординат каждого из них следует умножить на 2ДТ, а пр.и определении площадей ватерлиний (подсчитываются по горизонтали) исправленные суммы их ординат нужно, умножить на 2ДЛ. Объем подводной части судна получают, умножив исправленную сумму площадей шпангоутов 2О на ДЬ, а исправленную сумму площадей ватерлиний 2s на ДТ. О правильности расчета свидетельствуют: точное совпадение значения 22^, полученного суммированием по горизонтали, со значением 22^, полученным суммированием по вертикали; совпадение значений 2'2^, получен-
ных аналогичным суммированием (в этом случае допускается несовпадение не более 0,5—1%); равенство объемов, вычисленных по формулам, указанным в нижней строке таблицы.
34. Чем является кривая V = f (Т) по отношению к кривой S = f (Г)?
35. Площади ватерлиний (начиная с нулевой) равны: 3100, 3900; 4200; 4300; 4400 м2. Л Г = 3 м. Вычислите объем подводной части судна по всей ватерлинии.
§ 14. Вычисление площадей и объемов с помощью коэффициентов полноты подводной части судна
Численной характеристикой полноты обводов судна являются пять коэффициентов полноты его подводной части.
Коэффициент, полноты площади ватерлинии а — отношение площади ватерлинии S к площади описанного прямоугольника (рис. 21, а):
Q
а = — или S = aLB. (53)
LB
37
Рис. 21
Коэффициент полноты
шение площади мидель-шпангоута со моугольника (рис. 21 ,6):
площади мидель-шпангоута р — отно-
к площади описанного пря-
(О
р = -— или (0й = рвт. (54)
38
Коэффициент полноты водоизмещения (общей полноты) S — отношение объема подводной части судна V к объему описанного параллелепипеда (рис. 21, в):
д = или V = SLBT. (55)
Коэффициент продольной полноты <р — отношение объема подводной части судна к объему цилиндра, площадь основания которого равна площади мидель-шпангоута, а высота — длине судна (рис. 21, г):
m V SLBT 6
<р =---=-------=—. (56)
PLBT р > ' ’
Коэффициент вертикальной полноты % — отношение объема подводной части судна к объему цилиндра, площадь основания которого равна площади ватерлинии, а высота — осадке судна (рис. 21,5):
= V____6LBT _ _6_
х— ST ~ aLBT ~ а
(57)
Таблица 9
Вычисление коэффициентов полноты подводной части судна
Номер ватерлинии L В Т S V
1 2 3 4 5 6 7
I II гвл
Продолжение табл. 9
Номер ватерлинии г, <6> а = (23) (3-4) _ (2-3-4) _ (|0> ф = (9) х = ж_ (8)
I 8 9 10 11 12
I II гвл
С изменением осадки изменяются значения всех величин, входящих в формулы (53) — (57), а следовательно, и значения коэффициентов полноты подводной части судна. Поэтому эти коэффици
39
енты рассчитывают при осадках по все ватерлинии. Расчет производят в табличной форме (табл. 9), куда заносят фактические значения всех характеристик судна при данной осадке.
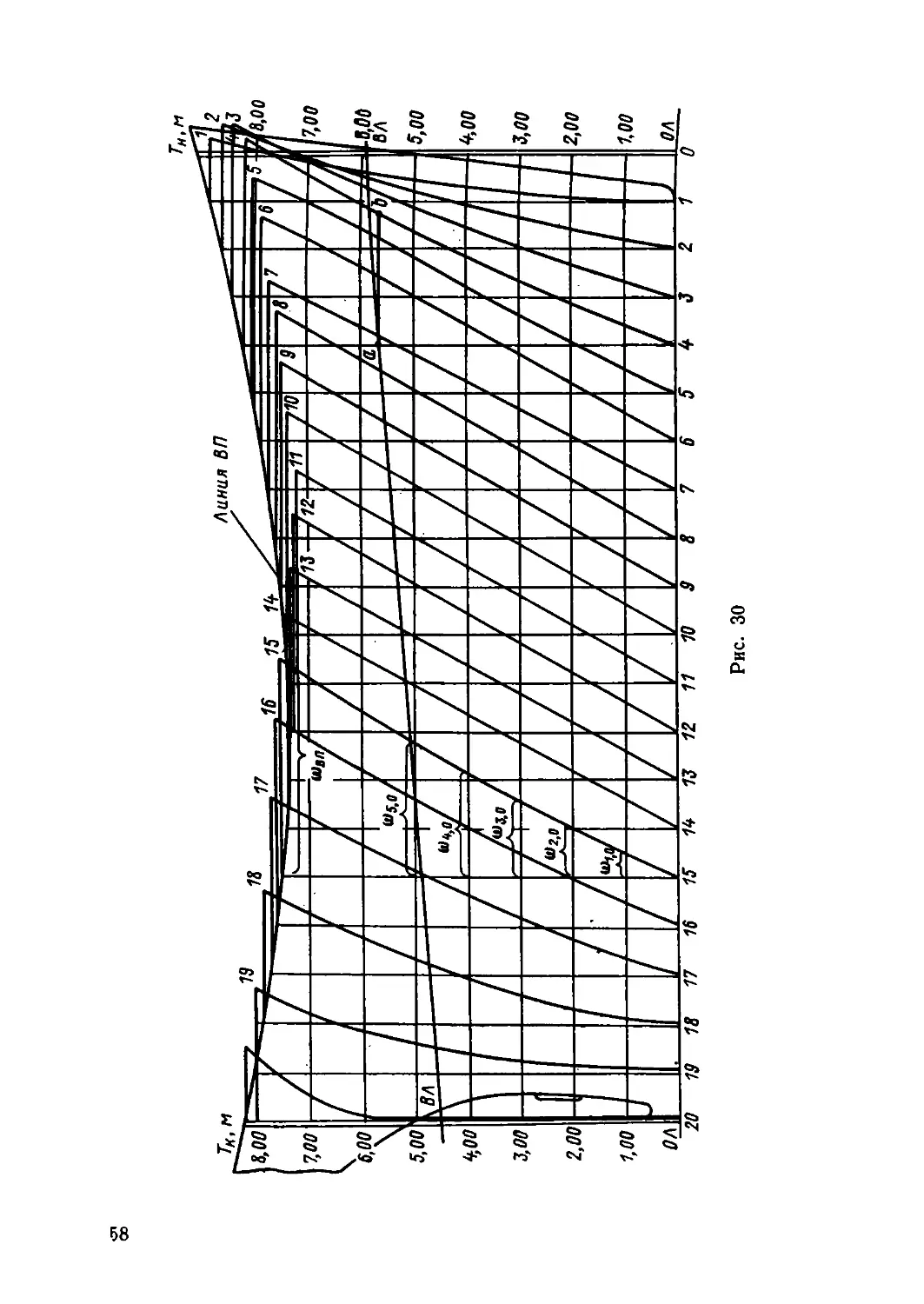
Так как осадок может быть бесчисленное множество, то для быстрого определения коэффициентов полноты при любой осадке строят их график (рис. 22). Для этого вычерчивают прямоугольник произвольных размеров и на его основании строят шкалу (в см).
На левой вертикальной стороне прямо-
угольника строят в масштабе шкалу осадок судна (в м), которую делят на равные части по количеству теоретических ватерлиний и через точки деления проводят горизонтальные линии — ватерлинии. По каждой ватерлинии слева направо в некотором масштабе откладывают значения коэффициентов полноты, вычисленные в графах 8—12 табл. 9. Одноименные точки соединяют кривыми, снабжая их надписями типа «pi см —О,Г».
Если требуется определить значения коэффициентов полноты при данной осадке, то ее отмечают на вертикальной
шкале, измеряют расстояние (в см) от левой стороны прямоугольника до кривых коэффициентов и умно
жают эти расстояния на масштаб кривых.
Примерные значения коэффициентов полноты подводной части
судов различных классов при нормальной загрузке приведены в табл. 10.
Таблица 10
Коэффициенты полноты подводной части судов различных классов
Класс судна Коэффициенты
а в
Морские суда
Пассажирский 0,73—0,85 0,89—0,95 0,55—0,65
Грузопассажирский 0,70—0,87 0,90—0,96 0,60—0,75
Танкер 0,80—0,85 0,85—0,98 0,70—0,80
Сухогруз 0,80—0,86 0,80—0,98 0,70—0,80
Ледокол 0,70—0,75 0,80—0,85 0,52—0,55
Морской буксир 0,68—0,85 0,75—0,84 0,40—0,60
Траулер 0,72—0,81 0,73—0,88 0,50—0,60
Речные суда
Пассажирский 0,78—0,87 0,98—0,99 0,70-0,89
Буксир 0,81—0,91 0,90—0,99 0,65—0,85
Баржа 0,84—0,88 0,96—0,99 0,80—0,90
40
36. Каково максимально возможное значение коэффициентов полноты подводной части судна? Какова при этом его форма?
37. Возможны лн обводы судна с коэффициентами полноты 6 = 0,75 н Р = 0,73?
38. Известно: L = 175,3 м; В = 25 м; BIT = 2,4; 6 = 0,73. Каков объем подводной части судна?
§ 15. Статические моменты площадей и объемов и координаты их центров тяжести (§ 10, 13)
Статическим моментом площади относительно какой-либо оси называется произведение этой площади на расстояние от ее центра тяжести до этой оси. Статический момент площади вычисляют как
сумму произведений площадей элементарных площадок на расстояния от их центров тяжести до данной оси.
Нам задана некоторая площадь (рис. 23). Следует вычислить ее статические моменты относительно осей координат. Разобьем эту площадь на ряд участков шириной dx таким образом, чтобы каждый из них по длине можно было считать элементарным. Тогда статический момент элементарной площадки относительно оси х будет равен произведению ее пло-
щади ydx на расстояние от ее центра тяжести до этой оси у/2, т. е.
dMx = ydx = -у- y*dx.
(58)
Статический момент всей площади относительно оси х определяется интегрированием выражения (58) по переменной х в преде-1
лах от 0 до L, т. е. Л4Х =— J y^dx. Применяя правило трапеций, 2 о
получим
(2 2 \
«/?+«/?+• ••+Уп-^4£±)’ (59)
где Дх = L/n, если участок интегрирования L разделен на п равных частей.
Статический момент элементарной площадки относительно оси у равен произведению ее площади ydx на расстояние полоски от этой оси, равное х, т. е.
[dMy = ydxx. (60)
Статический момент всей площади относительно оси у определяется интегрированием выражения (60) по переменной х в
41
пределах от 0 до L:
= xydx.
(61)
Для вычисления момента Му воспользуемся правилом трапеций, имея при этом в виду, что для i-ro значения переменной х справедливо приближенное соотношение х( = i&x. После выполнения несложных преобразований получим
Му & Дх» (оУо + Ij/i + 2t/a + + ш/п-Оу° + , (62)
где Дх = L/n, если участок интегрирования L разделен на п равных частей.
При вычислении статических моментов площадей ватерлиний нужно иметь в виду, что: Дх = &L’, ось абсцисс х на проекции «полуширота» совпадает с ДП, относительно которой обводы симметричны, т. е. ось Ох проходит через центр тяжести площади; ось ординат у на проекции «полуширота» совпадает с мидель-шпангоутом, поэтому абсциссы носовой части площади имеют знак плюс, а кормовой — минус; поскольку ординаты измеряются на один борт, результат вычисления должен быть удвоен. Учитывая это,
(63)
Aftf = 2AL2^10i/o + 9i/1-f-. . . + 1 у9-f-Oz/10 —
-h/u— . .-9^-Ю^о--1ОУ°~1ОУ20-)- (64)
Из определения статического момента следует, что абсцисса центра тяжести площади xs может быть вычислена по формуле
xs = A4j,: S.
(65)
Вычисление статических моментов площадей ватерлиний и абсцисс их центров тяжести производится в табличной форме (табл. 11). Количество таблиц равно числу ватерлиний, построенных на теоретическом чертеже.
Чтобы быстро определить значение xs при каждой данной осадке, строят график (рис. 24). Принцип его построения и использования такой же, как и графика коэффициентов полноты подводной части судна. При одних осадках xs может иметь знак плюс, а при других — минус. Поэтому вертикальную линию отсчета (на рисунке показана знаком миделя) проводят так, чтобы положительные зна-
42
Таблица 11
Вычисление^, Му, х§
Номер шпангоута Множители плеч Ординаты Произведение (2)-(3>
1 2 3 4
0 1 к 9 10 11 19 20 10 9 1 0 —1 — 9 —10 Уо У1 У» •Ую Уи У1» Уы 10 Уо $У1 1 Уо 0 Ум —1 Уи —0 ylt —Ю У20
Сумма *у 2 iv
Поправка У о + У го 2 10уо— 10у2О 2
Исправленная сумма 2;
3=2Д£2^, Му = 2Д L*Z'ly-f xs = My’.t
чения можно было откладывать вправо от нее, а отрицательные — влево. Кривая снабжается надписью типа «xs 1 см — 1 м».
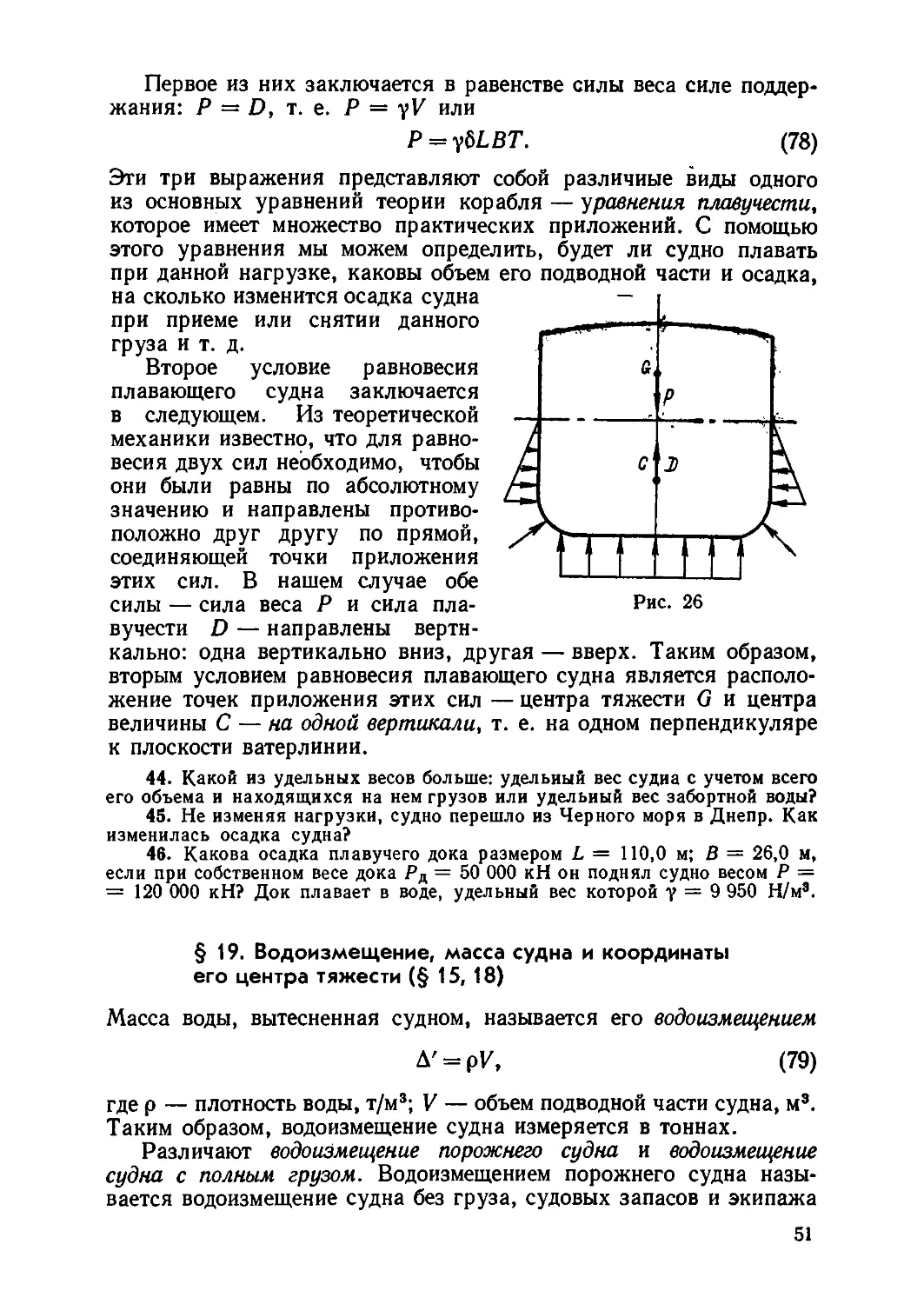
Для вычисления статического момента объема подводной части судна относительно основной плоскости МхОу и статического момента того же объема относительно мидель-шпангоута МуОг объем следует рассечь рядом равноотстоящих плоскостей ватерлиний. Тогда получим
= £ Safe; (66)
= f Sxsdz. (67)
Поскольку обводы корпуса судна по отношению к диаметральной плоскости симметричны, статический момент объема подводной части относительно диаметральной плоскости МхОг равен нулю.
43
Координаты центра тяжести объема подводной части судна хс, ус, гс определяются как частное от деления статических моментов объемов относительно плоскостей проекций на объем подводной части судна:
Мцог у 2ИхО£ = _0_ = 0; гс = ^-, (68)
С у у у ’ С У ' '
следовательно,
1 / 1г
хс = — Sxsdz и zc = — J Szdz.
(69)
Здесь z переменная осадка, V — объем подводной части судна при той же осадке. Вычисление координат хс и zc по все ватерлинии теоретического чертежа ведется в табличной форме (табл. 12 и 13).
Таблица 12
Вычисление абсциссы центра тяжести подводного объема судна
Номер ватерлинии г» Сумма (2) попарно Сумма (3) сверху МуОг = ^ ДГ 2 Объем V МУОг V = ф (6)
1 2 3 4 5 6 7
0 I II
Таблица 13
Вычисление аппликаты центра тяжести подводного объема судна
Номер ва>] терлнннн Площади 1 ватерлиний со Сумма (3) попарно Сумма (4) сверху АГ» МхОу = (5> — Объем V , _ МхОу _ (6) С” V (7)
1 2 3 4 5 6 7 8
0 I 11
44
Поскольку осадок может быть бесчисленное множество, для быстрого определения координат центра тяжести подводного объема строят их график (рис. 24). Абсциссы центра тяжести подводного объема могут быть положительными или отрицательными, поэтому их откладывают с учетом знака от условной линии отсчета (обозначенной на рисунке знаком миделя). Кривые xs и хс строятся в одинаковом масштабе, и если они пересекаются, то в точке пересечения кривая хс должна иметь максимум или минимум.
39. Обводы ватерлинии в кормовой части полнее, чем в носовой. Какой знак имеет величина xg? ____
40. Осадка судна Т = 6 м. Правильно лн выполнено вычисление, если ZC = 4,8 м?
41. Вычислите площадь ватерлниин морского буксира, ее статический момент и абсциссу центра тяжести, если L = 34 м, а ординаты на одни борт равны: 0; 0,85; 1,60; 2,30; 2,90; 3,36; 3,75; 3,80; 3,80; 3,80; 3,80; 3,80; 3,80; 3,80; 3,65; 3,40; 3,00; 2,50; 1,80; 0,85; 0 м.
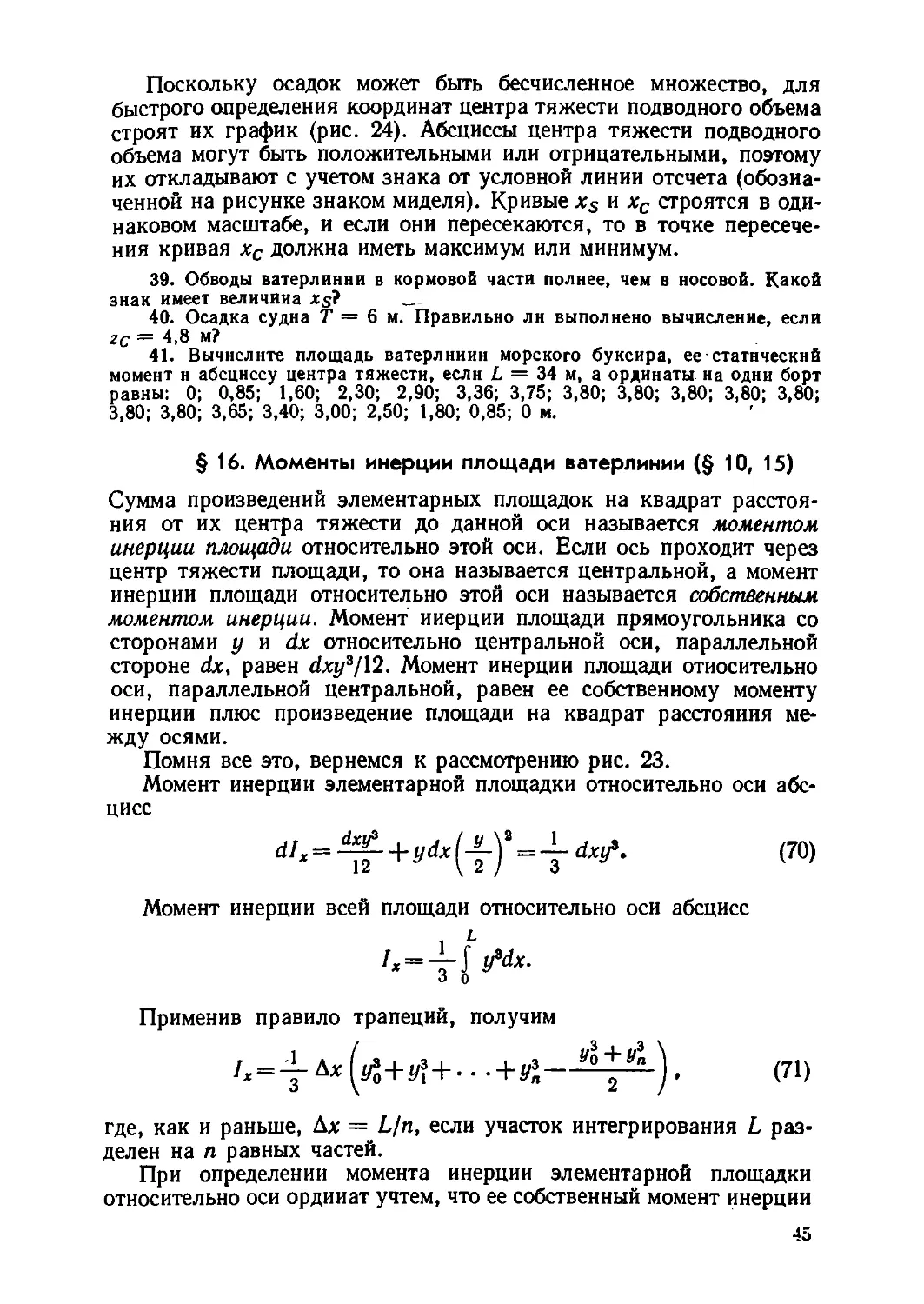
§ 16. Моменты инерции площади ватерлинии (§ 10, 15)
Сумма произведений элементарных площадок на квадрат расстояния от их центра тяжести до данной оси называется моментом инерции площади относительно этой оси. Если ось проходит через центр тяжести площади, то она называется центральной, а момент инерции площади относительно этой оси называется собственным моментом инерции. Момент инерции площади прямоугольника со сторонами у и dx относительно центральной оси, параллельной стороне dx, равен dxi/s/12. Момент инерции площади относительно оси, параллельной центральной, равен ее собственному моменту инерции плюс произведение площади на квадрат расстояния между осями.
Помня все это, вернемся к рассмотрению рис. 23.
Момент инерции элементарной площадки относительно оси абсцисс
Момент инерции всей площади относительно оси абсцисс
3 о
Применив правило трапеций, получим
• -+^—(7i) □ \ z j
где, как и раньше, Ах = L/n, если участок интегрирования L разделен на п равных частей.
При определении момента инерции элементарной площадки относительно оси ординат учтем, что ее собственный момент инерции
45
пренебрежимо мал по сравнению с произведением ее площади на квадрат расстояния между осями. Тогда окажется, что
dlu = ydx-x2. (72)
Момент инерции всей площади относительно оси ординат
L
= $ V^dx. (73)
Зная из предыдущего, что xt = /Дх и используя правило трапеций, получим
Дх»(о4+14 + 24 + - . . + (74)
Применяя формулы (71), (74) для вычисления моментов инерции площади ватерлинии, следует учитывать, что: ординаты измеряются
от ди на один оорт, поэтому результат должен быть удвоен; на проекции «полуширота» ось абсцисс совпадает с ДП, а ось ординат — с мидель-шпангоутом; расстояние между ординатами равно теоретической шпации AL. Следовательно, моменты инерции площади ватерлинии будут
9 Ч2
;х = — f y3dx —
3 -L/2
9 /
= |0о + 01 + - • • + У2О —
О \
Уо + Уго . (75)
2 / ’
104 + 94 + • • • + 14 + 04о +
+ 141+- • • + 10а//2о-10ауо^102-^-
(76)
Как правило, центр тяжести площади ватерлинии не лежит в плоскости мидель-шпангоута. Следовательно, собственный момент инерции площади ватерлинии относительно поперечной оси Is определяется по формуле
= (77)
Вычисление моментов инерции площади каждой равноотстоящей ватерлинии ведется в табличной форме (табл. 14).
46
Таблица 14
Вычисление моментов инерции площади ватерлинии
Номер шпангоута Множители плеч (2)’ Ординаты (4)э (3)-(4)
1 2 3 4 5 6
0 10 100 Уо У3о 100 у0
1 9 81 У1 У3 81 Уг
2 8 64 Уг • Уг Ыуг
9 1 1 • Уг У39 1 Уо
10 0 0 Уго Ую Of/io
11 —1 1 Уп • Ун 1 Уп
19 —9 81 Уго У39 81 Ую
20 —10 100 Уго Уго 100 У 20
Сумма 2у ^у ^Ру
Поправка
Исправленная сумма 2У К’ ^Ру
S = 2ALS,'; 1х = У Л 4- 3 r /„ = 2Д£32:3{,; Zs =1у -Sx2s
Результаты вычисления моментов инерции площадей ватерлиний при любой осадке представляются в виде графика (рис. 25).
42. Шпангоуты ледокола с увеличением осадки сначала расширяются, а-затем имеют завал к ДП. Какой внд имеет график моментов инерции площадей ватерлиний?
43. Плавучий док погрузился так, что над поверхностью воды остались только его башни. Длина дока L = 100,0 м. Ширина башен Вс = 5,0 м. Расстояние от ДП дока до башни I = 18,0 м. Вычислите момент инерции площади ватерлинии дока в этом положении относительно ДП.
47
□о
Таблица 15
Вычисление элементов ватерлинии
Номер шпангоута Множители плеч. Ординаты J/. м Произведение (2)*(3). м Произведение (2)-(4). м Кубы ординат <3>». м’ ' 2-ВЛ = 133,78 “ ВВЛ = 20,6 “ твл = 3,12 “
Н о с о в а а оконечность Отстояние точки притыкания ВЛ к ДП от крайнего шпангоута ( х„ - 4.81 к; mH = -^. = 0,69)
1 2 3 4 5 6
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 10 9 8 7 6 5 4 3 2 1 0 —1 —2 —3 —4 1.06 2.78 4,84 6.94 8,54 9,43 9,88 10.14 10,26 10.30 10.28 10,17 9,87 9,22 9,54 22,24 33,88; 41.64 42,70 37,72 29,64 20,28 10,26 0 —10,28 -20,34 —29.61 —36.88 85,9 177,9 237,2 249,8 213,5 150,9 88.9 40.6 10,3 0 10,3 40,7 88,8 147,5 21 из 334 623 839 964 1043 1080 1093 1086 1052 962 784 Содержание строк Множители Ординаты у, м Произведение (2)-(3). м Произведение (2)-(4), м Кубы ординат (3)». м’
2 3 4 5 6
Крайний шпангоут 1,06 9,54 85.9 1
Точка притыкания 9,69 0,03 0,29 2.8 0
Суммы S 1,09 3,83 88.7 1
Произведение mH S 0,75 6,78 61,2 1
Обозначение I П III IV
Кормовая оконечность Отстояние точки притыкания ВЛ к ДП от крайнего- шпангоута хк = 2,97 м; тк •• = 0.4г)
-1 03 ет > Исправленные суммы Поправка Суммы 15 16 17 18 19 20 21
2 Eg Ч- (IV) + (VHI) M M сл -+ + < N3 •u - + + < 2 £3+ (I) + (V)
J. J. 1 1 1 1 1 м о io ® м о сл
136.61 96*0 137,57 8,20 6,82 5.03 2.95 0.86
1.42 0.90 2.32 -41,00 —40,92 -35,21 —23,60 —7,74
22 033 4 932.3 6.17 274,35 2420.0 77,8 2497,8 205,0 245,5 246,5 188,8 69,7
H*" 11 -1“ ly= AL’(B) i (g)«7 v = sw (O II > 11 016 - О 551 317 127 26 1
51 400 (01'8*1691 § 1920 Обозначение Произведение тк 2 Суммы 2 Точка притыкания Крайний шпангоут - Содержание строк,
ft II Co 11 : «С 1 Co h co^ и и Co *9 И (0 11 Ми
03 h to w h Co —9.42 1 со N3 Множители
< О &> 16*0 0,05 0.86 W Ординаты у, м
0,697 1691.8-10» 0.06-10s 0,16
< -3*45 , 1 ьо 1 О -7,74 Произведение (2)-(3), м
Д T > i7V 7 V VII 31.1 74,1 69.7 сл Произведение (2)*(4), м
0.78 343.0 49,00 7.00 1ПЛ О в- о - а» Кубы ординат (3)’. м’
§ 17. Сводная таблица вычисления элементов площади ватерлинии
Сводная таблица (табл. 15) дает возможность выполнить расчеты в более компактной форме и с меньшими затратами времени, чем при использовании раздельных таблиц. В сводной таблице расчет ведется по уже известным нам формулам, поэтому в методе расчета разобраться нетрудно.
Ватерлиния на проекции «полуширота» делится на три части: носовую — от точки притыкания ватерлинии к ДП в носу до ближайшего шпангоута; кормовую — от точки притыкания ватерлинии к ДП в корме до ближайшего шпангоута и среднюю часть — между крайними шпангоутами. Расстояния от точек притыкания до ближайших шпангоутов обозначаются соответственно хи и хк, а их доли от шпации — через тк = xJ&L и тк = xJkL. Например, произведение суммы ординат крайнего шпангоута и в точке притыкания иа т„ является площадью носовой части ватерлинии, выраженной в долях от AL. Поэтому для получения полной площади ватерлинии удвоенную исправленную сумму ординат средней части нужно суммировать с произведением сумм ординат в оконеч^ ностях на тя и тк (эти произведения не удваиваются, так как в оконечностях взята сумма ординат, а не полусумма) и результат умножить на AL. Подобным образом вычисляют остальные элементы площади ватерлинии.
Глава IV
ПЛАВУЧЕСТЬ
§ 18. Уравнение плавучести (§ 2, 4)
Плавучестью называется способность судна сохранять вертикальное равновесие в заданном положении относительно поверхности воды. Пусть судно, плавающее в невозмущенной воде без хода, находится под действием сил собственного веса и давления воды (рис. 26). Равнодействующая силы тяжести, равная весу судна Р, проходит через его центр тяжести G и направлена вертикально вниз. Равнодействующая вертикальных составляющих сил давления воды называется силой поддержания D. Согласно закону Архимеда, она направлена вертикально вверх и проходит через центр тяжести подводного объема судна, называемый центром величины С. Сила поддержания равна весу воды в объеме подводной части судна, т. е. D = у V, где у — удельный вес забортной воды, V — объем подводной части судна. Таким образом, вес и сила поддержания направлены в противоположные стороны. "
Плавающее судно будет находиться в положении равновесия при соблюдении двух условий.
50
Первое из них заключается в равенстве силы веса силе поддержания: Р = D, т. е. Р = yV или
P = ybLBT. (78)
Эти три выражения представляют собой различные виды одного из основных уравнений теории корабля — уравнения плавучести, которое имеет множество практических приложений. С помощью этого уравнения мы можем определить, будет ли судно плавать при данной нагрузке, каковы объем его подводной части и осадка,
на сколько изменится осадка судна при приеме или снятии данного груза и т. д.
Второе условие равновесия плавающего судна заключается в следующем. Из теоретической механики известно, что для равновесия двух сил необходимо, чтобы они были равны по абсолютному значению и направлены противоположно друг другу по прямой, соединяющей точки приложения этих сил. В нашем случае обе силы — сила веса Р и сила пла-
вучести D — направлены верти-
кально: одна вертикально вниз, другая — вверх. Таким образом,
вторым условием равновесия плавающего судна является расположение точек приложения этих сил — центра тяжести G и центра величины С — на одной вертикали, т. е. на одном перпендикуляре к плоскости ватерлинии.
44. Какой из удельных весов больше: удельный вес судна с учетом всего его объема и находящихся на нем грузов или удельный вес забортной воды?
45. Не изменяя нагрузки, судно перешло из Черного моря в Днепр. Как изменилась осадка судна?
46. Какова осадка плавучего дока размером L = 110,0 м; В = 26,0 м, если при собственном весе дока РЛ — 50 000 кН он поднял судно весом Р = = 120 000 кН? Док плавает в воде, удельный вес которой у = 9 950 Н/м3.
§ 19. Водоизмещение, масса судна и координаты его центра тяжести (§ 15, 18)
Масса воды, вытесненная судном, называется его водоизмещением
Д' = рУ, (79)
где р — плотность воды, т/м3; V — объем подводной части судна, м3.
Таким образом, водоизмещение судна измеряется в тоннах.
Различают водоизмещение порожнего судна и водоизмещение судна с полным грузом. Водоизмещением порожнего судна называется водоизмещение судна без груза, судовых запасов и экипажа
51
Расчет весо
Шифр для механизированного подсчета Обозначение Наименование разделов, групп, подгрупп и статей нагруакн Масса р, т
1 2 • 3 4
„ Сумма 24 = рс
с багажом. Водоизмещение судна с полным грузом — это водоизмещение судна, загруженного по грузовую марку,1 т. е. водоизмещение при наличии всех предусмотренных проектом грузов, судовых запасов и экипажа с багажом.
Грузоподъемностью судна называется масса помещенного на него груза, обусловленная размерами и конструкцией судна. Предельная грузоподъемность судна, при которой его осадка соответствует установленной грузовой марке, называется дедвейтом (рлл). Иными словами, дедвейт представляет собой сумму всех переменных грузов, т. е. тех, которые могут изменять свою массу от рейса к рейсу или даже в течение одного рейса. Дедвейт можно также представить как разность водоизмещений судна с полным грузом и порожнего судна.
Отношение дедвейта к водоизмещению судна называется коэффициентом утилизации (т. е. использования) водоизмещения по дедвейту:
ПДВ=-^- (80)
Коэффициент т]дв в определенной мере характеризует экономические показатели грузового судна.
Предельная масса груза, которую судно, погруженное по грузовую марку, может принять при имеющихся на нем запасах и экипаже (соответственно району и сезону плавания), называется чистой грузоподъемностью (рГП).
1 Грузовая марка — знак на борту, ограничивающий загрузку судна. При полном грузе ватерлиния находится на уровне грузовой марки. Подробнее см. § 25.
52
Таблица 16
вой нагрузки
Плечо Моменты
X V 2 туОг=рх тхОг-РУ тхОу=Рг
5 6 7 8 9 10
= MyQZ Sy = MxOz SJ0 = Мхоу
Отношение чистой грузоподъемности к водоизмещению судна называется коэффициентом утилизации водоизмещения по чистой грузоподъемности'.
Пгп = -^7-- (81)
Водоизмещение судна входит в число исходных данных при его проектировании. Масса судна должна быть равна его водоизмещению, поэтому при проектировании производится расчет весовой нагрузки. Чтобы определить массу судна, необходимо просуммировать массы всех составляющих нагрузки. Для этого используются чертежи, в которых, как известно, указана масса деталей и конструкций.
Все составляющие нагрузки объединяются в разделы, группы, подгруппы и статьи, каждая из которых имеет свое буквенное или цифровое обозначение, а также шифр для механизированного подсчета. Кроме того, при эскизном и техническом проектировании в нагрузку вводится запас водоизмещения, равный 2—5% водоизмещения судна с полным грузом. Этот запас обусловлен неучтенными массами, просчетами и отступлениями фактических масс конструкций от теоретических масс, подсчитанных по чертежам и по данным контрагентов.
Нагрузка, составленная в стадиях эскизного и технического проекта, называется проектной нагрузкой. Она является обязательной для всех участников проектирования и используется для контроля нагрузки при выпуске рабочих чертежей и сопоставления с исполнительной нагрузкой, разрабатываемой в стадии рабочего проектирования. В исполнительной нагрузке запас водоизмещения корректируется исходя из гарантированного водоизмещения и результатов расчета масс по рабочим чертежам. Исполнительная нагрузка является документом, служащим для кон-
53
троля нагрузки при постройке судна и сопоставления с отчетной нагрузкой, зафиксированной после постройки судна.
Контроль за соблюдением весовой дисциплины при проектировании возлагается на сектор нагрузки проектной организации. На заводе все, что предназначено для установки на судно, проверяется органами весового контроля ОТ К: бюро весового контроля и контрольно-весовыми пунктами. Они заполняют специальную весовую техническую документацию. Продукция и материалы, масса которых не соответствует техническим условиям или требованиям, не могут быть установлены на судне.
Расчет нагрузки и координат центра тяжести судна ведется в табличной форме (табл. 16). В таблицу, кроме шифра, обозначения и наименования элементов нагрузки, заносят их массу (графа 4) и координаты их центров тяжести (графы 5—7). Умножив соответствующие массы на координаты их центров тяжести (т. е. плечи), в графах 8—10 получают статические моменты масс этих элементов относительно плоскостей проекций (миделя, ДП, основной плоскости). Произведя алгебраическое суммирование статических моментов (в графах 8—10 по вертикали), получают статические моменты массы судна относительно плоскостей проекций МуОг, МхОг, МхОу. Разделив эти моменты на массу судна рс, определяют координаты его центра тяжести:
MyOz Mx0z So Mx0y Slo /оо\
XG~—-----УО~—------------ZG-----------------— • (O^)
Pc 2*4 Pc S4 Pc S4
47. Применив высокопрочные стали и легкие сплавы, удалось уменьшить массу корпуса и механизмов н за этот счет увеличить массу транспортных грузов. Как при этом изменились г|дв и т]гп?
48. Судно, плавающее в Балтийском море, имеет характеристики: L = = 145,3 м; В = 21,2 м; Т = 9,5 м; 6 = 0,78; рдв = 18 500 т; рГП = 15 495 т. Вычислите цдв и цГп-
49. Известно, что у судна с D = 147 150 кН статические моменты массы Myoz = 7410 т-м; Мхог = 18 т м; Мхоу = 91 500 тм. Вычислите координаты центра тяжести судна.
§ 20. Строевые (§ 10, 13—15)
Плавная кривая, ординаты которой в масштабе представляют площади смоченных частей соответствующих шпангоутов, называется строевой по шпангоутам (рис. 27).
Строевая по шпангоутам обладает следующими свойствами: любая ордината строевой по шпангоутам представляет собой в масштабе площадь соответствующего шпангоута;
площадь строевой по шпангоутам в масштабе представляет собой объем подводной части судна;
форма строевой по шпангоутам наглядно показывает распределение объема подводной части судна по его длине;
абсцисса центра тяжести строевой по шпангоутам в масштабе представляет абсциссу центра величины судна;
54
коэффициент полноты строевой по шпангоутам равен коэффициенту продольной полноты судна.
Строевая по шпангоутам используется при решении ряда задач теории корабля и его прочности.
Плавная кривая, абсциссы которой в масштабе представляют площади соответствующих ватерлиний, называется строевой по ватерлиниям (рис. 28). Обычно строевая по ватерлиниям вычерчивается на той же сетке, что и кривые коэффициентов полноты подводной части судна и другие кривые элементов его плавучести.
Строевая по ватерлиниям обладает следующими свойствами: любая абсцисса строевой по ватерлиниям представляет собой в масштабе площадь соответствующей ватерлинии;
площадь строевой по ватерлиниям в масштабе представляет собой объем подводной части судна;
форма строевой по ватерлинии дает наглядное представление о распределении объема подводной части судна по его осадке;
ордината центра тяжести строевой по ватерлиниям в масштабе представляет аппликату центра величины судна;
коэффициент полноты строевой по ватерлиниям равен коэффициенту вертикальной полноты судна.
Чаще всего строевую по ватерлиниям используют для определения площади ватерлинии при заданной осадке, в расчетах качки И т. д.
50. Судно плавает в пресной воде. При одинаковом"масштабе по длине вычерчены строевая по шпангоутам (1 см®—1 м’) и кривая распределения массы по длине (1 см® — 1 т). Равны ли площади, ограниченные этими кривыми?
51. Вычислите площадь строевой по шпангоутам, абсциссу ее центра тяжести, коэффициент полноты, объем подводной части, абсциссу центра величины и коэффициент продольной полноты судна, если при масштабе ординат строевой 1 мм — 0,5 м® и масштабе длины 1 : 100 ординаты равны: 0; 4,8; 13,2; 26,3; 28,8; 37,2; 45,0; 51,6; 57,8; 59,6; 61,4; 61,2; 59,0; 54,6; 47,8; 39,8; 31,8; 19,4; 11,2; 0; 0 мм (длина основания строевой L = 600 мм).
52. Абсциссы строевой по ватерлиниям равны: 0; 152,0; 185,0; 202,0; 209,0; 212,0; 215 мм. Расстояние между ватерлиниями Д7’ = 20 мм. Вычер-
55
тите строевую по ватерлиниям и определите: площадь ватерлинии при осадке Т = 4,5 м, площадь строевой, ординату ее центра тяжести, коэффициент ее полноты, объем подводной части судна, аппликату центра величины и коэффициент вертикальной полноты судна. Масштабы строевой: площадей 1 мм — 5 ма и осадки 1 : 50.
§ 21. Грузовой размер и грузовая шкала (§ 12, 18, 20)
Плавная кривая, абсциссы которой в масштабе представляют водоизмещение судна при данной осадке, называется грузовым размером (рис. 29, а).
Поскольку объем подводной части судна определяется форму-2
лой V =f Sdz, грузовой размер является интегральной кривой о
по отношению к строевой по ватерлиниям и его абсциссы вычисляются по форме табл. 7. При определении объема подводной части судна с учетом объема наружной обшивки и выступающих частей следует помнить, что вычисленные по теоретическому чертежу объем и абсциссы грузового размера необходимо увеличить на 1—2%. Если полученные таким образом абсциссы умножить на плотность забортной воды р, отложить новые абсциссы и их концы соединить плавной кривой, то получим грузовой размер — кривую, выражающую зависимость водоизмещения Д' от осадки судна Т.
Приняв, что судно сидит в воде без крена и дифферента, с помощью грузового размера можно решить ряд задач.
Для определения объема подводной части и водоизмещения судна нужно отложить на шкале осадок заданную осадку Т, из-56
мерить соответствующую ей абсциссу и умножить последнюю на масштаб. Осадку судна при заданном объеме подводной части или водоизмещении находят аналогичным образом.
Пусть судно имело осадку 7\ В результате приема (или снятия) некоторого груза она изменилась на величину ДТ. Используя грузовой размер, требуется определить груз р. Для решения этой задачи на шкале осадок от заданной осадки Т откладываем в соответствующую сторону значение ДТ и находим водоизмещение Д2 при осадке Т + ДТ. Масса груза р = Д2— Дь В обратном порядке определяется изменение осадки при приеме или снятии груза р, если известно водоизмещение Др
При эксплуатации судна удобнее пользоваться не грузовым размером, а грузовой шкалой (рис. 29, б), которая выражает зависимость между осадкой судна, его водоизмещением и дедвейтом. Основой для построения грузовой шкалы служит грузовой размер (рис. 29, а). Шкала осадок (в м) переносится непосредственно с этого графика. По грузовому размеру определяют осадку судна и на шкале водоизмещения против этих осадок пишут значения водоизмещения. Допустим, водоизмещение порожнего судна Дп = = 20 000 т. Против этой цифры на соседней шкале «Дедвейт» ставят нуль. Остальные значения на шкалу «Дедвейт» переносят со шкалы «Водоизмещение», вычтя предварительно 20 000 т.
Грузовой шкалой пользуются следующим образом: на шкале осадок отмечают заданную осадку и к отмеченной точке горизонтально прикладывают линейку: точки пересечения линейки со шкалами указывают искомые водоизмещение и дедвейт.
53. По грузовому размеру определяется изменение осадки после снятия груза. В какую сторону от точки следует откладывать значение груза р?
54. Почему при иепрямостенных обводах судна отрезки шкалы «Дедвейт» между 2-Ю4 ... 3-104 т и между 3104 . . . 4-Ю4 т неодинаковы?
55. Используя приведенную в тексте грузовую шкалу, определите водоизмещение и дедвейт судна при осадке Т = 4,5 м.
§ 22. Масштаб Бонжана (§ 12, 13, 15)
Масштабом Бонжана (рис. 30) называется совокупность кривых, абсциссы которых в масштабе представляют собой площади данного шпангоута при соответствующей осадке. Масштаб Бонжана упрощает вычисление смоченных площадей шпангоутов и объема подводной части судна при его дифференте или волнообразной ватерлинии, если судно не имеет крена.
Сетка масштаба Бонжана подобна сетке проекции «бок» теоретического чертежа, но для большей компактности ее масштаб по длине уменьшают, а по высоте в несколько раз увеличивают, что повышает точность измерения осадок. Затем на сетку с проекции «бок» теоретического чертежа, учитывая разницу масштабов, переносят линии штевней, палубы и киля. У носового и кормового перпендикуляров строят шкалы осадок (в м) от киля до палубы.
57
<л 00
Рис. 30
Площади шпангоутов при данной осадке вычисляют по формуле
<0 = 2^ ydz, (83)
где у — ординаты шпангоутов; 2 — коэффициент, введенный в связи с тем, что ординаты снимают от ДП на один борт.
Таким образом, кривые площадей шпангоутов являются интегральными кривыми по отношению к кривым обводов шпангоутов, поэтому их ординаты могут быть вычислены по схеме, показанной в табл. 5 (причем, в связи с наличием коэффициента 2 в графе 5, значения, указанные в графе 4, умножают не на ДТ/2, а на ДТ). Площади шпангоутов над верхней равноотстоящей ватерлинией вычисляют как удвоенные площади трапеций с нижними основаниями — ординатами шпангоутов по грузовой ватерлинии t/гвл» верхними основаниями — ординатами шпангоутов по верхней палубе //вп и высотой — расстояниями от грузовой ватерлинии до линии палубы, измеренными у борта (рис. 31). Полные площади шпангоутов до верхней палубы со могут быть вычислены в табличной форме (табл. 17).
Вычисленные площади шпангоутов в масштабе площадей откладывают от линий данных шпангоутов по соответствующим
ватерлиниям, а полные площади шпангоутов — по горизонтали от точек пересечения соответствующих шпангоутов с линией Верхней палубы вправо. Полученные точки соединяют плавными кривыми.
Масштабом Бонжана пользуются следующим образом. По известным осадкам судна носом и кормой на масштабе Бонжана прочерчивают ватерлинию ВЛ. Площадь шпангоута получают как произведение ординаты кривой площади данного шпангоута по эту ватерлинию (горизонтальное расстояние ab от точки пересечения прямой шпангоута с наклонной ватерлинией до кривой площади этого же шпангоута) на масштаб площадей (см. рис. 30). Зная площади всех шпангоутов, в табличной форме (табл. 18) вычисляют объем подводной части судна и абсциссу центра величины.
56. Сколько различных масштабов используется при построении масштаба Бонжана?
57. Ординаты шпангоута от нулевой до грузовой ватерлинии равны: 1,7; 2,8; 3,1; 3,3; 3,4; 3,5; 3,6 м. Осадка судна Т = 5,4 м. Постройте кривую площадей данного шпангоута и по ней определите его площадь при Т = =4,1 м.
58. При осадке носом Т„ = 4,3 м и кормой Тк = 6,4 м абсциссы кривых площадей по масштабу Бонжана равны: 0; 2,0; 7,0; 13,0; 17,0; 19,0; 20,0; 22,0; 23,0; 24,0; 24,0; 24,0; 24,0; 24,0; 24,0; 24,0; 24,0; 20,0; 14,0; 6,5; 2,0 мм. Масштаб площадей 1 мм — 10 м2. Длина судна L = 160 м. Вычислите объем подводной части судна и абсциссу центра величины.
59
Таблица 17
Вычисление полных площадей шпангоутов до верхней палубы
Номер шпангоута “до ГВЛ »ГВЛ »вп (3) + (4) hm ш (5) • (6) Полные площади шпангоутов ® (2) + (7)
1 2 3 4 6 6 7 8
0 1 2 3
• До ГВЛ. •* Над ГВЛ.
Таблица 18
Вычисление объемного водоизмещения н абсциссы центра величины судна с использованием масштаба Бонжана
Номер шпангоута Множители плеч Площади шпангоутов Произведение (2)-(3)
1 2 3 4
0 10 <00 ЮШд
1 9 <01 9(0]
2 8 (|)2 8<оа
9 1 <Й8 1<0а
10 0 «10 0«1о
11 —1 «11 —1<оп
19 —9 «10
20 -10 «20 —10(0 jo
Сумма
Поправка
Исправленная сумма 2з г;
V = ALS;; МрОг=Д^;; хс = М,Ог:У
60
§ 23. Изменение средней осадки судна при приеме или расходовании малого груза (§ 18—21)
Малым называется такой груз, при приеме или расходовании которого в пределах изменения осадки обводы судна можно считать прямостенными, т. е. борта вертикальными. Из этого следует, что площади ватерлиний до и после приема или расходования малого груза одинаковы. Малым можно считать груз, не превышающий 10 % водоизмещени я.
Будем исходить из того, что прием или расходование малого груза не вызывает наклонения судна. Это возможно в том случае, если центр тяжести площади ватерлинии и центр тяжести груза лежат на одной вертикали (рис. 32). Тогда
Р = РУ» (84)
где р — масса принятого груза, т; р — плотность воды, т/м3; v — изменение объема подводной части судна вследствие приема груза, м3.
Поскольку в пределах изменения осадки судна его обводы можно считать прямостенными,
где S — площадь Следовательно, и = 5ДТ, (85) ватерлинии, м2; ДТ — изменение осадки, м. р= рЗДТ, (86)
откуда ДТ- Д . (87)
При расходовании груза осадка уменьшается, т. е. ДТ имеет знак минус.
Таким образом, при приеме или расходовании малого груза изменение осадки прямо пропорционально количеству этого груза и обратно пропорционально площади ватерлинии и плотности забортной воды.
61
Для практических расчетов удобно знать массу груза р1сы, прием или расходование которого вызывает изменение осадки на 1 см. Полагаем, что в формуле (87) ДТ = 1 см = 1/100 м. Тогда
1 Pi см (88)
юо— pS
или
(89)
Число тонн, изменяющих осадку на 1 см, пропорционально площади ватерлинии, а последняя зависит от осадки перед приемом или расходованием груза. Для того чтобы легко и быстро определить число тонн, вызывающих изменение осадки, на 1 см при любой начальной осадке, строят так называемую «кривую числа тонн на 1 см осадки» (рис. 33). Абсциссы этой кривой в масштабе указывают число тонн груза, вызывающих изменение осадки на 1 см при соответствующей начальной осадке. Изменение осадки (в см) при приеме или расходовании малого груза массой р определяют по формуле
= (90)
"1см
Изменение средней осадки при приеме или расходовании большого груза (без крена и дифферента судна) определяют по грузовому размеру или по грузовой шкале. При этом считают, что водоизмещение судна изменилось на количество принятого или израсходованного груза.
59. На судно принят некоторый малый груз р. Каким будет фактическое изменение осадки, т. е. будет ли она больше, меньше или равна подсчитанной по формуле (87)?
60. Известно, что L = 95 м; В = 13,6 м; а = 0,8. Возникла необходимость уменьшить осадку судна на 10 см. Какое количество груза следует снять, если судно плавает в реке?
61. Площади ватерлиний судна равны: 0; 680; 880; 1020; 1080; 1100 м®. Осадка по последнюю ватерлинию Т = 7,5 м. Судно плавает в Балтийском море. Постройте «кривую числа тонн на 1 см осадки»; определите массу груза, изменяющего осадку судна на 1 см и изменение осадки при приеме 118,3 т груза. Начальная осадка 5,4 м.
§ 24. Изменение средней осадки судна при изменении солености воды (§ 14, 18)
В процессе эксплуатации судно переходит из одного водного бассейна в другой. При этом изменяется соленость и удельный вес забортной воды, а следовательно, осадка судна.
62
При плавании в воде удельным весом у сила поддержания
D-yV. (91)
Если судно, це меняя нагрузки, перейдет в воду с удельным весом у и то
D = y1V1. (92)
Из уравнения (91) и (92)
V = —; Vi = —, (93)
У
откуда можно найти изменение объема подводной части судна
и = Ух—У = — —О = P(V-Vi).. (94)
у yY1
Считаем, что в пределах изменения осадки обводы судна прямо-чины. Тогда
и = 5-ДТ. (95)
Сравнив выражение (94) с (95), получим
= (%)
S УУ1 v ’
а поскольку
D = ybLBT и S = aLB, (97)
то
Д7’=ХТ-И1. (98)
71
Если судно переходит из воды с большим удельным весом в воду с меньшим удельным весом (у>уг), то ДТ имеет знак плюс, т. е. осадка судна увеличивается; если судно переходит из воды с меньшим удельным весом в воду с большим удельным весом (у<71), то ДТ имеет знак минус, т. е. осадка судна уменьшается.
62. Как влияет увеличение коэффициента х на изменение средней осадки при переходе судна нз одного водного бассейна в другой?
63. Судно с характеристиками L = 150 м; В = 24 м; Т = 8,5 м; 6 = = 0,75; а — 0,82 без изменения нагрузки должно перейти из Азовского моря в Атлантический океан. Какой будет его новая «садка? '
§ 25. Запас плавучести и грузовая марка (§ 18)
Дополнительное количество груза, которое судно может принять до того, как потеряет способность держаться на воде, называется запасом плавучести. Это количество груза пропорционально объему непроницаемой надводной части корпуса. Поэтому мерой запаса плавучести является объем непроницаемой надводной части судна
63
от ватерлинии до верхней палубы, имеющей водонепроницаемые закрытия. При увеличении массы судна его осадка будет расти, но судно останется на плаву до тех пор, пока не будет израсходован весь запас плавучести. Следовательно, величина запаса плавучести играет решающую роль в обеспечении безопасности мореплавания.
Аварийная статистика свидетельствует, что запас плавучести речных судов должен быть не менее 10—15% объема подводной части судна, танкеров 10—25%, сухогрузов '
30—50%, ледоколов 80— 90% и пассажирских судов 80—100% указанного объема. Напомним, что при крене, даже без увеличения массы судна, его запас плавучести резко уменьшается (рис. 34).
Величина запаса плавучести находится в прямой зависимости от высоты непроницаемого надводного борта, обычно рассчитываемой относительно самой верхней непрерывной не защищенной от
воздействия моря палубы, имеющей постоянные средства закрытия всех отверстий (ниже этой палубы все отверстия в бортах судна снабжены постоянными средствами для водонепроницаемого закрытия). Эта палуба называется палубой надводного борта.
«Правила о грузовой марке морских судов» Регистра СССР лимитируют минимальный надводный борт при плавании в морской воде летом — так называемый минимальный летний надводный
борт, который задается в функции от длины судна. На основании формул и таблиц Регистра СССР в его значение вводятся поправки,
64
учитывающие отклонения геометрических характеристик данного судна от характеристик, принятых Регистром при расчете значений минимального летнего надводного борта. Суда, у которых фактический надводный борт больше минимального, называют судами с избыточным надводным бортом. Чтобы гарантировать необходимый надводный борт, на бортах судна в миделевой части наносится грузовая марка, состоящая из палубной линии, знака — кольца и марок (рис. 35).
Палубной линией называется горизонтальная линия длиной 300 мм и шириной 25 мм, наносимая на середине длины судна с каждого борта так, чтобы ее верхняя кромка совпадала с линией пересечения продолженной наружу верхней поверхности палубы надводного борта с наружной поверхностью бортовой обшивки судна. Ниже верхней кромки палубной линии на расстоянии, равном значению летнего надводного борта, проводится горизонтальная черта кольца и на том же уровне — линия предельной нагрузки судна летом, т. е. летняя грузовая марка Л. Буквой 3 обозначена зимняя грузовая марка, буквами ЗСА — зимняя грузовая марка для Северной Атлантики, Т — тропическая марка. Буквой П обозначена грузовая марка для пресной воды летом и буквами ТП — тропическая марка для пресной воды.
Ни в коем случае не разрешается загружать судно больше, чем по верхнюю кромку марки нагрузки для данных условий плавания и сезона года.
64. В каком случае запас плавучести судна больше: при осадке по летнюю марку или по зимнюю?
65. Увеличится или уменьшится минимальный надводный борт, если седловатость палубы принять больше стандартной?
66. Вычислите предельные значения запаса плавучести сухогрузного судна размером L = 160,0 м; В = 24,5 м; Т = 10,0 м; о = 0,75.
Глава V
НАЧАЛЬНАЯ ОСТОЙЧИВОСТЬ
§ 26. Общие положения (§ 18)
Остойчивостью называется способность судна, отклоненного внешним моментом от положения равновесия, возвращаться в исходное положение равновесия после устранения момента, вызвавшего отклонение. Остойчивость является свойством равновесия судна, его характеристикой.
Пусть кренящий момент А4кр вызвал крен судна на правый борт (рис. 36, а). При этом положение центра тяжести судна G не изменилось, а центр величины вследствие изменения формы объема подводной части судна переместился в точку Сх. Вес судна и сила поддержания образуют некоторый момент, направленный против кренящего момента. Этот момент называют восстанавливающим моментом Л4е. Аналогичным образом под действием диффе-
3 В. Л. Фукельман 65
рентующего 1 момента Л4Д создается восстанавливающий момент (рис. 36, б).
Под действием кренящего или дифферентующего момента судно наклоняется до тех пор, пока увеличивающийся вместе с углом наклонения восстанавливающий момент не уравновесит этот кренящий или дифферентующий момент. Под действием двух равных и противоположна направленных моментов судно будет плавать, имея некоторой угол наклонения. Как только действие кренящего
Рис. 36
или дифферентующего момента прекратится, восстанавливающий момент вернет судно в первоначальное положение равновесия. Следовательно, остойчивость судна объясняется действием восстанавливающего момента.
В зависимости от того, в какой плоскости действует наклоняющий и восстанавливающий моменты, различают поперечную и продольную остойчивость.
Различают малые и большие углы наклонения. Малыми для низкобортных судов являются углы до начала входа палубы в воду или до начала оголения днища, а для высокобортных судов — углы до 15°. При малых и больших углах наклонения восстанавливающий момент определяют различными способами, поэтому для простоты рассуждений вводится понятие о начальной остойчивости и остойчивости на больших углах крена. Остойчивость на больших углах дифферента не изучается, так как практически суда на большие углы не дифферентуются.
Кренящий момент может действовать статически или динамически. В первом случае остойчивость характеризуется восстанавливающим моментом, а во втором — его работой (потенциальной
1 Дифферент — разность осадок носом и кормой. Дифферентующий момент — момент, наклоняющий судно в продольной плоскости.
66
энергией). В соответствии с этим различают статическую и динамическую остойчивость судна.
67. Судно плавало с креном. Затем кренящий момент уменьшился. Что произойдет с судном: вернется лн оно в прямое положение, останется плавать с тем же углом крена или последний уменьшится?
§ 27. Теорема Эйлера
Наклонения судна, при которых объем его подводной части остается неизменным, называются равнообъемными. Ватерлинии, соответствующие равнообъемным наклонениям, также называются
Рис. 37
равнообъемными. Согласно теореме Эйлера, при равнообъемном наклонении плавающего судна на малый угол его равнообъемные ватерлинии пересекаются по прямой, проходящей через их общий центр тяжести
Обозначим объем выходящего клина через и, а объем входящего — через v (рис. 37, а). Объем элементарного по длине судна выходящего клина (рис. 37, б) будет
du = SBOBdx = 4"tgQdx = 4"tgQdx- (") & i
Интегрируя объемы элементарных выходящих клиньев по длине судна, получаем
1 L/2
« = 4tge f У^х (100)
2 —LI2 *
и аналогичным образом для входящих клиньев
1 Ll2
u = -i-tg0 f y2dx. (101)
2 — LI?.
3*
67
Поскольку наклонения равнообъемные, то и = V, т. е. . L/2 L/2
± tge_£2^=^-tg0 _^2dx (102)
или . L/2 L/2
V f = f fidx. (103)
2 -L/2 2 -L/2
Сравнивая формулу (103) с формулами и выводами § 15, видим, что левая часть равенства (103) представляет собой статический момент выходящей части площади ватерлинии ВЛ относительно линии пересечения ватерлиний (на рис. 37, а она проектируется в точку О), а правая часть равенства — статический момент входящей части площади ватерлинии ВЛ относительно той же линии.
Следовательно, линия пересечения ватерлиний проходит через ц^нтр тяжести площади первоначальной ватерлинии ВЛ.
. L/2 L/2
Нетрудно также доказать, что — f yldx = — f ytdx, т. e., - . 2 —L/2 2 -L/2
что линия пересечения ватерлиний проходит через центр тяжести площади ватерлинии В^Л^ (та же точка О).
Аналогичные рассуждения при рассмотрении продольных наклонений приводят к заключению, что последние также происходят вокруг оси, проходящей через центр тяжести площади начальной ватерлинии. Зная абсциссу центра тяжести площади этой ватерлинии xs, можно определить изменение осадок носом и кормой при данном угле дифферента.
68. Абсцисса центра тяжести площади ватерлинии xs = 0,95 м. Судно сидит в воде с дифферентом на корму. Какой нз клиньев длиннее—входящий или выходящий?
69. Судно длиной 114 м имеет дифферент на нос 2°. Определите изменение осадок носом н кормой по сравнению с посадкой на ровный киль, если = = 1,2 м.
§ 28. Условие остойчивости судна (§ 18, 26)
Как видно из рис. 36, при наклонениях судна центр величины смещается в сторону наклонения, описывая кривую CClt которая называется кривой центров величины. Центр кривизны кривой центров величины ССГ называется метацентром.1 (Метацентр может быть также представлен как точка пересечения двух линий действия сил поддержания при малых углах крена или дифферента.) Различают поперечный метацентр т — при крене и продольный метацентр М — при дифференте. Поскольку кривая центров величины при дифференте более полога, чем при крене, продольный метацентр М лежит намного выше поперечного метацентра т.
1 Метацентр — от греческого meta — после и лат. centrum — центр. Метацентр обычно находится выше (после) центра величины н центра тяжести судна.
68
На рис. 38 изображены различные случаи взаимного расположения центра величины С, центра тяжести G и поперечного метацентра т.
В первом случае до наклонения центр тяжести лежит ниже центра величины и метацентра (рис. 38, а). При крене центр ве-
личины перемещается в точку Сг. Вес судна Р и сила поддержания D образуют восстанавливающий момент 0). При таком расположении характерных точек судно безусловно остойчиво. Отметим, что у надводных судов (кроме килевых яхт) такое низкое положение центра тяжести практически недостижимо.
Если перед наклонением судна его центр тяжести лежит выше центра величины и ниже метацентра (рис. 38, б), то после наклонения судна пара сил PhD также создадут восстанавливающий момент (Л4е>0), т. е. судно будет остойчиво.
69
Возможен случай, когда при начальном положении судна центр тяжести и метацентр лежат в одной точке (рис. 38, в). После наклонения судна силы PhD действуют по одной прямой, восстанавливающий момент не создается (Л40 = 0). Следовательно, в этом случае судно неостойчиво.
Если центр тяжести судна до наклонения лежит выше метацентра (рис. 38, г), то пара сил PhD образуют не восстанавливающий, а кренящий момент (Л1е<;0). Судно неостойчиво.
Таким образом мы видим, что положительный восстанавливающий момент (т. е. направленный против кренящего момента) возникает тогда, когда центр тяжести лежит ниже метацентра. В этом состоит условие остойчивости судна. Поэтому у судов, обладающих остойчивостью, центр тяжести лежит между центром величины и метацентром.
70. Почему судно не обладает остойчивостью, если его центр тяжести совпадает с метацентром?
71. Аппликата центра тяжести судна zq = 5,6 м, аппликата метацентра гт = 6,4 м. В результате перемещения груза вверх произошло изменение аппликаты центра тяжести на расстояние Azq = 0,9 м. Остойчиво ли судно?
§ 29. Метацентрическая формула остойчивости (§ 26, 28)
Расстояния от центра величины до поперечного и продольного метацентров называются соответственно поперечным г и продольным R метацентрическими радиусами (рис. 39). Метацентрические радиусы являются радиусами кривизны небольших участков кривых центра величины при крене или дифференте и всегда положительны. Расстояния от центра тяжести судна до поперечного или продольного метацентра называются соответственно поперечной h и продольной Н метацентрическими высотами. Если центр тяжести судна лежит ниже метацентра, то метацентрическая высота — величина положительная, если выше метацентра — отрицательная. Плечо восстанавливающего момента GK называется плечом статической остойчивости I.
Из рис. 39, а следует, что восстанавливающий момент определяется соотношением
Af0 = DGK = D/, (104)
где D — сила поддержания, кН.
Из треугольника GmK видно, что I — h sin 0. Следовательно,
Л40 — D/isin 0. (105)
Формула (105) называется метацентрической формулой остойчивости при крене.
Метацентрическая высота (см. рис. 39, а)
h = r-\-zc—za, (106)
где г — метацентрический радиус; zc и za — аппликаты соответственно центра величины и центра тяжести.
70
Из того же рисунка следует, что h = г—а, где а — расстояние от центра величины до центра тяжести. Тогда
Мв- D(r—a)sinO. (107)
Мы исходим из того, что метацентр при крене не перемещается. Это возможно при условии, если кривая центра величины — часть окружности. Для надводных судов это условие соблюдается только в пределах малых углов крена, поэтому метацентрическую формулу остойчивости можно использовать только при малых углах крена:
Поскольку в формулах (105), (107) угол крена считается малым, можно приравнять его синус самому углу (в рад), откуда
A4e = D/i0=D(r—а)0. (108)
Рис. 39
Таким образом, восстанавливающий момент при малых углах крена линейно зависит от их значений.
Произведение Dh, называемое коэффициентом поперечной остойчивости, является мерой поперечной остойчивости судна, поскольку от его значения зависит восстанавливающий момент, т. е. способность сопротивляться действию момента внешних сил. Однако коэффициент поперечной остойчивости зависит от размеров судов и, следовательно, может иметь множество значений. В связи с этим мерой остойчивости принято считать метацентрическую высоту, которая, хотя и недостаточно полно характеризует сопротивляемость судна кренящему моменту, мало зависит от размеров судна и поэтому лежит в сравнительно узких пределах (табл. 19).
С точки зрения улучшения остойчивости судна желательно, чтобы метацентрическая высота имела максимальное значение. Но чем больше метацентрическая высота, тем резче бортовая качка. Поэтому поперечная метацентрическая высота должна быть не
71
Таблица 19
Метацентрические высоты судов некоторых классов
Класс судна h, м Класс судна h, м
Нефте рудовоз Рудовоз Танкер Сухогрузное судно 3,2—3,8 0,8—3,1 1,4—1,6 0,3-1,0 Китобойное судно Рефрижераторное судно Китобаза Траулер 0,6—0,9 0,5—0,7 0,3—1,8 0,2—1,2
больше той, которая при соблюдении хорошей морской практики необходима для обеспечения безопасности плавания судна данного типа и назначения.
Метацентрическая высота данного судна при определенном водоизмещении зависит от положения центра тяжести по высоте, которое в свою очередь зависит от расположения грузов. Чем ниже центр тяжести судна, тем больше метацентрическая высота, плечо статической остойчивости и восстанавливающий момент, а следовательно, и остойчивость судна. С повышением центра тяжести судна его остойчивость уменьшается. Таким образом, правильное распределение грузов по высоте — один из основных путей улучшения остойчивости судна.
Из рис. 39, б следует, что при продольных наклонениях судна
Л4ф — DH sin ip = D (R—a)sini|>. (109)
Произведение DH называется коэффициентом продольной остойчивости.
Продольная метацентрическая высота
H = R + zc-zg. (НО)
Поскольку продольный метацентрический радиус R во много раз больше поперечного метацентрического радиуса г, продольная метацентрическая высота И во много раз больше поперечной h. Обычно Н примерно равна длине судна, а значение h в несколько раз меньше его ширины. Следовательно, если поперечная остойчивость судна обеспечена, то его продольная остойчивость безусловно обеспечена.
72. Какова'размерность коэффициентов поперечной и продольной остойчивости?
73. Характеристики судна: L— ПО м; В — 17,8 м; Т — 7,2 м; 6 = 0,8; zq = 7,4 м; гт = 8,3 м. Судно плавает в Беринговом море. Вычислите его коэффициент поперечной остойчивости.
74. Каково значение кренящего момента, если судно накренилось на 10°? D = 100 000 кН; h = 0,95 м.
72
§ 30. Момент, кренящий судно на 1°. Момент, дифферентующий судно на 1 см (§ 26, 29) Некоторые практические расчеты удобно выполнять, если известны момент, кренящий судно на 1°, и момент, дифферентующий судно на 1 см. I
Для судна, плавающего с креном, кренящий момент равен восстанавливающему, поэтому
MKp — Dhe. (Ill)
Пусть 0 = Г — 1/57,3. Тогда момент, кренящий судно на 1°, 4- = ^. <112>
и / | V а угол крена в градусах при произвольном кренящем моменте 0° = ^. (ИЗ)
Л!,,
Рассуждая аналогичным образом, получим
Ma = DHty. (114)
Из треугольника АВЕ (см. рис. 39, б) видно, что ф = d'jL, где d' — дифферент. Следовательно, д L
Полагая d' = 1 см = 1/100 м, получим, что момент, дифферентующий судно на 1 см, DH Мл гм =-----------------------------,
1 см 100L
а дифферент (в см) при произвольном дифферентующем моменте
= (117)
All см
75. Два судна имеют одинаковые коэффициенты продольной остойчивости, но длина первого судна меньше второго. К какому из судов нужно приложить больший момент для получения одинакового дифферента?
76. Известно, что L = 162 м; В = 25,5 м; Т = 10,2 м; 6 = 0,78; zm = = 11,2 м; гд = 10,4 м; у = 9920 Н/м®. Определите момент, кренящий судно на 1°, и крен судна при Л4Кр = 22 750 кНм.
(115)
(П6)
§ 31. Определение метацентрических радиусов (§ 16, 26)
Из курса теоретической механики известно, что если одно из тел» входящих в систему, перемещается в каком-либо направлении, то центр тяжести всей системы перемещается в том же направлении, а расстояние перемещения центра тяжести системы во столько раз меньше расстояния перемещения центра тяжести тела, во сколько раз масса тела меньше массы системы.
73
Применим эту теорему к судну. Предположим, что объем v переместился из положения в положение ЛОЛ^ (рис. 40), а центр тяжести его перешел из точки g в точку gv Тогда
Рис. 40
Рассматривая элемент- судна длиной dx, легко определить, что его объем dv равен произведению площади треугольника BOBt на dx, т. е.
dv=^~Y у2 tgQ dx = -^-y^dx. (121)
Перемещение центра тяжести этого элемента (сохраним для этого перемещения обозначение gglt принятое ранее для перемещения центра тяжести клина)
g&=4 У- (122)
О
Перемножив выражения (121) и (122) и проинтегрировав результат по длине судна, получим
2 L/2
ggi^0-=- f У*х. (123)
3 -1/2
Сравнив выражения (123) и (71), видим, что
££1У = 0/Х, (124)
74
где Ix — момент инерции площади ватерлинии относительно продольной оси, проходящей через ее центр тяжести.
Из формул (124) и (120) получим
= (125)
Из треугольника СтСх (см. рис. 40) следует, что
CC^rQ. (126)
Сопоставив формулу (126) с (125), видим, что
г = А. (127)
Увеличивая ширину судна и полноту ватерлинии при данном
его водоизмещении, мы увеличиваем речный метацентрический радиус. Чем больше значение г при данном положении центра величины и центра тяжести, тем больше поперечная метацентрическая высота и остойчивость судна. Таким образом, увеличение ширины судна — еще один путь увеличения его остойчивости (см. стр. 70 и 72).
Если повторить вывод для случая продольных наклонений судна, то получим
(128)
1Х, а следовательно, и попе-
где Is — момент инерции площади ватерлинии относительно поперечной оси, проходящей через ее центр тяжести.
Таблица 20 Вычисление метацентрических радиусов
Номер ватерлинии V 1х ls г - (3): (2) R - (4): (2)
1 2 3 4 5. 6
I
II
гвл
Используя формулы (127) и (128), вычисляют метацентрические радиусы судна при осадках по все равноотстоящие ватерлинии. Вычисление ведется в табличной форме (табл. 20), причем данные для заполнения графы 2 выписываются из табл. 7, а данные для
75
заполнения граф 3 и 4 — из табл. 14. Чтобы быстро определить метацентрические радиусы при любой осадке, по данным табл. 19 строят кривые метацентрических радиусов (рис. 41).
77. Вычислите поперечный метацентрический радиус судна размером L = 100 мм; В = 16 м; Т = 6,5 м; 6 = 0,8, если 1Х — 20 800 м4.
78. Вычислите момент инерции площади ватерлинии того же судна относительно поперечной оси, проходящей через ее центр тяжести, если R — = 95 м.
Рис. 42
§ 32. Остойчивость формы и остойчивость веса (§ 16, 29, 31)
Учитывая, что Л4е = DI, где I — плечо статической остойчивости, запишем формулу (107) в виде
Dl = D(r—a) sin 0, (129)
или
Dl = Dr sin 0—Da sin 0. (130)
Величина DI характеризует статическую остойчивость. Член
уравнения Dr sin 0 = sin 0 = ylx sin 0 и при плавании судна в данном бассейне зависит только от 1Х, т. е. от размеров и формы судна. Поэтому член Dr sin 0 называют моментом остойчивости формы. Член Da sin 0 для данного судна зависит от а; т. е. от расположения грузов на судне, поэтому член Da sin 0 называют моментом остойчивости веса.
Восстанавливающий момент тем больше, чем больше момент остойчивости формы и чем меньше момент остойчивости веса.
Разделим обе части формулы (130) на силу поддержания D. Тогда
/ = rsin0—asin0. (131)
Величина г sin 0 называется плечом остойчивости формы /ф, а величина a sin 0 — плечом остойчивости веса 1В, т. е.
/ = /ф-/в. (132)
Геометрический смысл плеч статической остойчивости, остойчивости формы и остойчивости веса показан на рис. 42. Из рисунка видно, что изменение положения центра тяжести судна не влияет на величину плеча остойчивости формы. При перемещении груза и, как следствие, центра тяжести судна вверх плечо остойчивости веса увеличивается, поэтому плечо статической остойчивости, метацентрическая высота, а значит, и остойчивость уменьшаются. При перемещении груза вниз остойчивость судна увеличивается. Чем больше момент инерции площади ватерлинии, тем больше метацентрический радиус и плечо остойчивости формы, т. е. тем выше
76
лежит метацентр и тем больше при данном положении центра тяжести плечо статической остойчивости и остойчивость судна.
79. Остойчиво ли судно, если момент остойчивости веса больше момента остойчивости формы?
80. Вычислите плечо статической остойчивости судна при крене 10°, если известно, что L = 125 м; В = 18 м; Т = 7,2 м; 6 = 0,78; гс = 3,9 м; zq = 6,8 м; 1Х = 56 880 м*.
§ 33. Изменение начальной остойчивости и посадки судна при перемещении груза (§ 26, 27, 29, 32)
Достройка судна на плаву, его ремонт и эксплуатация неизбежно связаны с перемещением грузов на судне. Это перемещение в общем случае может быть разложено на вертикальное, вызывающее изменение остойчивости, поперечно-горизонтальное и продольногоризонтальное, вызывающие изменение посадки судна.
Согласно теореме из механики, запишем (рис. 43, а)
A?g _ Р kzp к' ’
где Дгс — изменение аппликаты центра тяжести судна; Дгр — расстояние перемещения груза массой р; Д' — водоизмещение судна.
Вертикальное перемещение груза не влияет на осадку и положение поперечного и продольного метацентров. Поэтому
ДЛ = кН = — Дге, (134)
или
ДЛ=ДЯ =—^-Дгр. (135)
При перемещении груза по вертикали вниз величина Дгр имеет знак минус. Следовательно, при перемещении груза по вертикали вверх метацентрическая высота и остойчивость судна уменьшаются, а при перемещении груза по вертикали вниз — увеличиваются. Влияние перемещения груза на остойчивость тем больше, чем больше расстояние перемещения и вес груза и чем меньше водоизмещение судна.
Восстанавливающие моменты после перемещения груза определяются по формулам
M6 = D(h + ДЛ) sin 0; 1
Мф = D(H+ кН) sini|>. J (136)
В результате поперечно-горизонтального перемещения груза весом р (в кН) возникает кренящий момент (рис. 43, б)
Мкр —pkypcosQ. (137)
77
Судно кренится до тех пор, пока кренящий момент не будет равен восстанавливающему. Имея в виду формулы (105) и (138), запишем
pAt/pcos0 = DftsinO, (138)
откуда
tgO = ^- (139)
Un
Рис. 43
Рассуждая аналогичным образом (рис. 43, в), получим
= (140)
При практических расчетах масса перемещаемого груза р и водоизмещение судна Д' известны, поэтому формулы (139) и (140) можно записать в виде
tg0 = 'TT’; = (Ш)
1л П 1л П
где р и Д' выражены в тоннах.
Таким образом, изменение крена и дифферента судна будет тем больше, чем больше груз и расстояние, на которое он перемещается, 78
и чем меньше коэффициент остойчивости. Следует помнить, что если груз перемещается одновременно и в горизонтальной, и в вертикальной плоскостях, то в формулы (141) необходимо ввести новые значения метацентрических высот.
Согласно рис. 43, в, изменение осадок носом и кормой составляет
= — (-у + tgi|>.
(142)
(143)
Отсюда дифферент судна
d'= ДТН—ДТК = L tgi|>.
(144)
81. Почему иа рис. 43, в начальная и последующая ватерлинии пересекаются по линии, отстоящей от миделя на расстоянии x$f
82. Почему в формуле (142) катет входящего клина равен (L/2) — х$, тогда как его длина больше половины длины судна?
83. На судне водоизмещением Л' = 5100 т груз массой р = 30,58 т переместили так, что Лхр = 40 м; Дур = 7 м; Дгр = 4 м. Вычислите изменение остойчивости и посйдки судна, если L = 90 м; х$ = — 0,4 м; h = 0,6 м; Н = 80 м.
§ 34. Изменение начальной остойчивости при приеме или расходовании малого груза (§ 28, 29, 31)
В процессе постройки, эксплуатации и ремонта судна на него принимают, расходуют или снимают различные грузы, вследствие чего происходит изменение посадки и остойчивости судна. Определение этих изменений необходимо для решения многих практических задач.
Предположим, что на судно принят малый груз, который не вызвал крена или дифферента судна, но привел к смещению его центра тяжести на расстояние Дгс и к изменению осадки на ДГ. В результате этого центр величины сместился на расстояние Дгс, а метацентрический радиус изменился на величину Дг. Чтобы определить влияние приема груза на остойчивость судна, необходимо найти изменение метацентрической высоты:
ДЛ = Дгс 4- Дг — Дге. (145)
Составим уравнение моментов объемов относительно горизонтальной плоскости, в которой лежал центр величины до приема груза р в точку с аппликатой zp (рис. 44). Обозначим объем добавочного слоя v. Тогда
(V4-u) bzc = v(T -)
АТ 2
(146)
79
откуда
Дгс
= _L_(7’+ *1-V + »\ 2
zcj >
или
Лгс
= —(т d + p\
ат 2
2с
(147)
(148)
Поскольку на судно принят малый груз р, в пределах изменения осадки обводы судна можно считать прямостенными, а моменты инерции площадей ватерлиний до приема груза 1Х и после его приема 1Х1 равными. Тогда изме-
нение метацентрического радиуса будет
Л I х IX Р
\г=г,—г=------------ =-----— Г.
1 V + и V D+p
(149)
Составим уравнение моментов весов относительно горизонтальной плоскости, в которой лежал центр тяжести судна до приема груза:
(D 4- р) \zG = р (zp—ze), (150) откуда
(151)
Подставим Дгс, Дг и Дгв из выражений (148), (149), (151) в (145):
ДА
= —р— (т + ——
О+р\ 2
гс—r + zfi—гр •
(152)
Так как — гс—г + гс= — h, то
ДЛ = —— (т D +р\
АТ 2
h—гр
(153)
Аналогичным образом найдем
\Н = — d+p\
ьт
2
Я-гр)-
(154)
Величина Т + ДТ/2—zp по сравнению с величиной Н пренебрежимо мала, поэтому можно считать, что
ДЯ =------^—Н. (155)
D +р V ’
80
Новый коэффициент продольной остойчивости (D + р)Нх « DH, поэтому
Д(О//)«0. (156)
Определим изменение коэффициента поперечной остойчивости: Д (D/i) = [(D + р) hx—Dh] =
= ph1 = p(h + ^h) = p[T + ^—zpy, (157)
Из формулы (153) следует, что при приеме или расходовании груза р изменение поперечной метацентрической высоты Д/i. равно нулю, если Т + bTI2—h—zp = 0, т. е. если zp = Т + ДТ/2—h или (пренебрегая сравнительно малой величиной ДТ/2) zp = T—h. Таким образом, если при приеме или расходовании груза центр его тяжести будет лежать ниже начальной ватерлинии на величину h, то метацентрическая высота судна не изменится.
Горизонтальная плоскость, проведенная ниже начальной ватерлинии на величину h, называется предельной плоскостью для метацентрической высоты. При приеме груза с центром тяжести ниже этой предельной плоскости метацентрическая высота увеличится (гр<Т—h и Д/г имеет знак плюс), а при приеме груза с центром тяжести выше этой предельной плоскости метацентрическая высота уменьшится (гр>Т—h и Д/г имеет знак минус). При снятии груза наблюдается обратная картина.
Согласно формуле (157), при приеме или расходовании груза изменение коэффициента остойчивости Д (Dh) равно нулю, если zp — Т + Д772, или (пренебрегая сравнительно малой величиной &Т/2) гр — Т. Отсюда следует, что начальная ватерлиния является одновременно предельной плоскостью для коэффициента поперечной остойчивости.
Таким образом, если груз устанавливается ниже нижней из предельных плоскостей, то коэффициент остойчивости и метацентрическая высота увеличиваются, а если груз размещают выше верхней из предельных плоскостей — эти величины уменьшаются; нри приеме груза с центром тяжести между предельными плоскостями метацентрическая высота уменьшается, а коэффициент остойчивости увеличивается. При снятии груза картина будет обратная. Такое противоречие в изменении двух характеристик остойчивости Dh и h объясняется одновременным изменением метацентрической высоты и силы поддержания.
При приеме груза в любую точку судна или расходовании груза из любой его точки необходимо определить изменение посадки и остойчивости. Для этого решают две задачи:
определяют изменение метацентрической высоты вследствие приема или расходования груза без крена или дифферента, учитывая аппликату этого груза. Попутно определяют изменение средней осадки;
определяют изменение посадки судна в результате перемещения центра тяжести груза в горизонтальной плоскости в точку его
81
действительного расположения (см. § 33), учитывая при этом новые значения метацентрической высоты и осадки.
В зимнее время происходит обледенение судов, часто несимметричное, что равнозначно приему груза с высоко расположенным центром тяжести. Поэтому обледенение может вызывать опасное уменьшение остойчивости и изменение посадки судна. Регистром СССР разработаны методика учета влияния обледенения на остойчивость и требования к остойчивости судов, подвергающихся обледенению.
84. Можно ли путем принятия груза увеличить продольную метацентрическую высоту?
85. На судно с характеристиками L = 142 м; В = 21 м; Г = 9,2 м; 6 = = 0,71; а = 0,75; х$ = — 1,2; h = 0,8 м; Н = ПО м, плавающее в воде удельном весом у = 9950 Н/м*, принят груз массой р = 50,98 т в точку с координатами хр = 45 м; ур = 2 м; гр = 14 м. Определите изменение коэффициента поперечной остойчивости и посадки судна.
§ 35. Влияние подвешенного груза на остойчивость (§ 29, 33)
Пусть на судне имеется подвешенный груз р. При крене судна на угол 0 центр тяжести этого груза перемещается из точки А в точку Б (рис. 45), в результате чего образуется дополнительный кренящий момент, который уменьшает восстанавливающий момент:
Mq = Dh sin 0—pl„ sin 0 = D (ft — — ^)sin0, (158)
где ln — длина подвеса.
Новая метацентрическая высота
ft1 = ft—^i = ft+Aft. (159)
Тогда изменение метацентрической высоты под действием подвешенного груза будет
Aft=—-Eh.. (160)
Выражая массу подвешенного груза и водоизмещение в тоннах, получим
A/t=_2(L. (161)
Поскольку приращение метацентрической высоты отрицательное, подвешенный груз будет уменьшать остойчивость и тем больше, чем больше масса груза и длина подвеса и чем меньше водоизмещение судна. Сравнив выражение (161) с формулой (135), видим, что подвешенный груз влияет на остойчивость так же, как если бы он был перемещен в точку подвеса и там закреплен.
82
Принятый на судно перекатывающийся груз влияет на остойчивость так же, как и подвешенный груз. В этом случае точкой «подвеса» является центр кривизны кривой, описываемой центром тяжести груза. Как правило, эта кривая пологая, поэтому точка «подвеса» расположена высоко, «длина подвеса» велика, вследствие чего перекатывающийся груз весьма существенно уменьшает остойчивость судна.
86. Чем объяснить одинаковое изменение метацентрической высоты судна при перемещении груза по вертикали на расстояние Дгр и при подвесе его на инти длиной 1П = — Дгр?
87. Какое изменение метацентрической высоты вызывает груз массой р = 15,29 т, подвешенный на нити длиной 1„ = 6,5 м, если характеристики судна: L = 57 м; В.= 13,8 м; Т = 1,5 м; 6 = 0,78? Судно плавает в Азовском море.
§ 36. Влияние жидкого груза на остойчивость (§ 31, 35)
В цистерну помещена жидкость, имеющая свободную поверхность (рис. 46). При крене эта поверхность остается горизонтальной, т. е. смещается относительно судна. В результате изменения формы объема жидкости в цистерне ее центр тяжести перемещается из точки А в точку Б и появляется кренящий момент /пкр, подобный тому, который возникает при наличии подвешенного груз». В связи с этим для определения изменения метацентрической высоты можно воспользоваться формулой (161) с учетом следующих замечаний: масса груза р равна произведению плотности жидкого груза рх на ёго объем v; центр тяжести жидкого груза является центром величины заполненного объема цистерны, описываемая им кривая— кривой центра величины, а центр ее кривизны (точка О) — метацентром цистерны. Таким образом, длина «подвеса» жидкого груза — это метацентрический радиус цистерны гц. Тогда
д/1=_-Р11!Г1. (162)
д
Как известно, гц = ix/v, где 1Х — момент инерции свободной поверхности жидкого груза относительно продольной оси, проходящей через ее центр тяжести. Следовательно,
ЛЛ =----(163)
оД' Д'
Теперь мы можем утверждать, что свободная поверхность жидкости уменьшает остойчивость судна (Д/i имеет знак минус). Главную роль в ухудшении остойчивости играет величина ixt которая зависит от размеров и формы свободной поверхности жидкости. Поскольку 1Х = (/оЬо)/12 (где /0—длина свободной поверхности жидкого груза, а Ьо — ее ширина), изменение остойчивости пропорционально кубу ширины отсека с жидким грузом. Таким образом, для судна не столько опасно увеличение количества жидкого груза, как увеличение площади и, особенно, ширины ее свободной поверхности.
83
переборок (рис. 47, а), то
Шир
Рис. 46
Для того чтобы уменьшить влияние свободной поверхности жидкости на остойчивость судна, отсеки для жидкого груза разделяют продольными переборками. Если отсек не имеет продольных
ix = —; если отсек разделить продольной переборкой на две равные части (рис. 47, б), то ix = 2l0(b0/2)3 1оьо .
= ------- = ---- сСЛИ UlCcK Udo"
12 412
делить переборками на три равные части (рис. 47, в), то 1Х = 3/0 (^о/З)3 Следовательно
12 9-12
при делении отсека продольными переборками на п равных частей величина ix уменьшается в п? раз. Поправка к метацентрической высоте, вызванная приемом или состоит из двух слагаемых:
(164)
груза,
Д/г = Д/гл + Д/г2,
расходованием жидкого
где Д/ц — поправка, обусловленная приемом или расходованием твердого груза р (масса и положение центра тяжести твердого и
жидкого груза одинаковы), определяемая по выражению (153); Д/г2 — поправка на влияние свободной поверхности жидкости, определяемая по выражению (163) исходя из нового водоизмещения Д' + р или Д'—р.
84
Поправка A/ix может быть положительной или отрицательной, а поправка Д/12 — только отрицательной. В отдельных случаях положительное значение Д/ц оказывается больше отрицательного значения Д/12. Тогда Д/г имеет знак плюс, т. е. в целом наличие жидкого груза, даже со свободной поверхностью, увеличивает остойчивость судна. Тем_не менее при приеме жидкого груза со свободной поверхностью его влияние на остойчивость всегда должно быть внимательно проанализировано. Регистром СССР разработана подробная инструкция по учету влияния свободных поверхностей жидких грузов на остойчивость судна.
Из сказанного следует, что при эксплуатации судна нужно придерживаться следующих основных правил:
цистерны с жидким грузом по возможности «запрессовывать», т. е. загружать полностью;
жидкий груз расходовать сначала из верхних цистерн, а затем из нижних (принимать в обратном порядке);
принимать или расходовать жидкий груз данного вида нужно сначала из одной цистерны (полностью), а затем из следующей. Принимать или расходовать жидкий груз из нескольких цистерн одновременно опасно;
в море не принимать жидкий груз в цистерны, если нет уверенности, что такой прием в сочетании с другими факторами не приведет к опасному уменьшению остойчивости.
88. Как следует располагать на судне цистерны для жидкого груза со свободной поверхностью: длинной стороной вдоль судна или поперек его?
89. Характеристики судна: L = 160 м; В = 24 м; Т = 10 м; 6 = 0,65; а = 0,72; h = 0,9 м. Судно плавает в Черном море. Какой будет метацентрическая высота после приема 135 м3 жидкого груза плотностью рх = = 900 кг/м3, если жидкий груз имеет свободную поверхность, а размеры цистерны 1а = 10 м; bQ = 6 м. Аппликата центра тяжести жидкого груза гр = = 3,8 м. ,
§ 37. Влияние сыпучего груза на остойчивость (§ 33, 35, 36)
К сыпучим грузам относятся зерно, рудные концентраты и другие грузы, угол естественного откоса которых составляет 35° и менее.
Пусть отсек судна заполнен не целиком, т. е. имеется свободная поверхность сыпучего груза. Опасное действие сыпучего груза начинается с того момента, когда крен судна 0 достигает определенного для данного груза угла ас и груз начинает смещаться. Вследствие качки и вибрации корпуса угол ас значительно меньше угла естественного откоса данного груза. Если 0>ас, то груз смещается в сторону наклонения таким образом, что его поверхность образует с горизонталью тот же угол ас. За счет этого перемещения создается дополнительный кренящий момент и дополнительный крен, а восстанавливающий момент и остойчивость судна уменьшаются. После прекращения действия внешнего кренящего момента судно не вернется в прямое положение и будет плавать с некоторым остаточным креном в сторону пересыпания груза.
85
При последующих наклонениях, сопровождающихся пересыпанием груза, дополнительный кренящий момент и остаточный крен будут нарастать, что может привести к опрокидыванию судна.
Некоторые сыпучие грузы, обладающие повышенной влажностью, под действием качки и вибрации уплотняются, а влага выступает наверх. Под ней образуется легкоподвижный пульпообразный слой. Большие свободные поверхности жидкости резко снижают остойчивость судна, а из-за наличия пульпообразного слоя остаточный крен быстро нарастает.
Учитывая особую опасность сыпучих грузов, Регистр СССР предъявляет ряд дополнительных требований к остойчивости судов, перевозящих такие грузы. Кроме того, Регистр СССР разработал обязательные инструктивные указания по обеспечению безопасности плавания судов с сыпучими грузами. В основе этих указаний лежит стремление воспрепятствовать смещению груза.
90. Оказывает ли сыпучий груз специфическое влияние на остойчивость при крене меньшем угла ас?
91. Сила поддержания судна D = 9000 кН, метацентрическая высота h = 0,8 м. На судно действует кренящий момент Л1Кр = 1250 кН м. Произойдет ли сдвиг сыпучего груза, если ас = 8°?
§ 38. Удифферентовка судна (§ 29, 33, 34)
Удифферентовкой называется процесс устранения дифферента судна или придания ему дифферента. Расчет такого распределения составляющих нагрузки судна, при котором оно имело бы определенный дифферент или при котором дифферент был бы устранен, называется расчетом удифферентовки. Расчет удифферентовки — часто решаемая задача при проектировании, постройке и эксплуатации судна. Удифферентовать судно можно путем перемещения груза в продольно-горизонтальном направлении либо путем приема или снятия балласта.
При удифферентовке за счет продольно-горизонтального перемещения груза заданными являются необходимые изменения осадок носом и кормой; с помощью формул (141) — (144) определяется груз р или его перемещение Лхр (в зависимости от того, какая из этих величин известна).
При удифферентовке путем приема балласта малой массы р изменение осадок оконечностей равно алгебраической сумме изменений их осадок при приеме или снятии груза без дифферента [формула (87)1 или при перемещении груза в продольно-горизонтальном направлении в ту точку, в которую действительно принимается или с которой снимается груз [выражения (141) — (144)1. С учетом этих данных, нетрудно узнать, какой груз необходимо принять на судно или снять с него:
Р =--------: <165)
1 (т~ XS)(XP-XS)
7? 4
86
р =----------. L ^Тк--------------, (166)
pS Д'Я
где хр — абсцисса центра тяжести груза.
Если на судно принимается большой груз в виде водяного балласта, то можно подобрать цистерны, при заполнении которых создается момент относительно миделя, равный по значению и противоположный по знаку известному моменту веса судна относительно миделя.
92. Известно, что L = 60 м; В = 9,5 м; Т = 4,0 м; 6 = 0,46; а = 0,7; Н = 40 м; = — 0,8 м; р = 1,011 т/м3. Какой массы груз с абсциссой его центра тяжести Хр = 16 м следует принять на судно, чтобы его осадка носом увеличилась на 1,2 м?
§ 39. Опыт кренования (§ 22, 33, 34, 36)
При проектировании судна положение его центра тяжести определяют расчетным путем, допускающим определенные неточности. Кроме того, в процессе постройки судна происходит некоторое перераспределение масс. В силу этих обстоятельств положение центра тяжести готового судна может отличаться от проектного, что повлияет на посадку и остойчивость судна.
Определение аппликаты центра тяжести готового судна производится с помощью опыта кренования, в основу которого положено поперечно-горизонтальное перемещение груза. Груз определенной массы р, называемый крен-балластом, перемещают в поперечногоризонтальном направлении на расстояние Дур при известном водоизмещении судна Д' и определяют угол крена 0. По формуле (141) определяют метацентрическую высоту
h = P^ (167)
A'tgO
где р — масса крен-балласта, т.
Согласно Правилам Регистра СССР, опыту кренования подвергаются все головные суда строящихся серий, а затем каждое пятое судно серии; суда серийной постройки с твердым балластом; суда несерийной постройки; суда после капитального ремонта, переоборудования или укладки балласта, а также суда, остойчивость которых неизвестна или вызывает сомнения.
Кренование должно производиться по возможности при водоизмещении порожнего судна, при скорости ветра не более 3 м/с и спокойном состоянии поверхности воды. Швартовые должны быть потравлены, сходни убраны; судно не должно касаться причала, других судов или грунта. Предметы снабжения и запасные части устанавливают на штатные места; все, что может смещаться,
87
закрепляют; цистерны для жидкости (кроме расходных) опорож* няют или заполняют до верха, а воду в котлах поднимают до рабочего уровня; трюмы и машинно-котельное отделение осушают и убирают. Начальный крен судна не должен превышать 30'. Следует удостовериться, что все грузы и предметы учтены, все излишние и недостающие грузы, их масса и координаты центров тяжести занесены в специальные таблицы.
В качестве крен-балласта можно использовать чугунные чушки, колосники, болванки, мешки с песком и т. д. Масса каждой штуки балласта определяется взвешиванием. Общая масса крен-балласта должна быть достаточной для получения наклонения в 1—3°. Балласт размещают на верхней палубе у бортов, разделив его на четыре приблизительно равных по массе группы симметрично относительно центра тяжести площади действующей ватерлинии.
Чаще всего угол крена при перемещении крен-балласта определяют при помощи двух-трех веское, установленных в разных местах по длине судна (рис. 48). Длина нити веска 1,5—6,0 м (в зависимости от размеров судна). На одном конце веска имеется груз с крылаткой, опущенный в ванну с вязкой жидкостью. Вблизи нижнего конца каждого веска укреплена линейка с делениями, которая служит для
определения отклонения отвеса при перемещении крен-балласта. Тангенс угла крена
tgO = -^-,
(168)
где k — отсчетное отклонение веска; Хо — длина нити веска, из" меренная от точки подвеса до линейки.
К началу опыта по маркам углублений и по тщательно измеренному надводному борту должны быть определены осадки оконечностей как среднее арифметическое замеров с обоих бортов. Затем, зная осадки носом и кормой, по масштабу Бонжана или по кривым теоретических элементов определяют объем подводной части судна и водоизмещение.
Порядок перемещения крен-балласта представлен на рис. 49, где черными квадратами показано положение крен-балласта при каждом из восьми наблюдений, включая начальное. Массу крен-балласта данной группы, расстояние между его центрами тяжести до и после перемещения, а также отклонения нити веское при каждом перемещении крен-балласта заносят в специальную таблицу. Угол крена принимается как среднее арифметическое показаний веское при данном перемещении.
88
Закончив все перемещения крен-балласта, по формуле (167) определяют метацентрическую высоту при каждом перемещении и находят ее среднее значение. Относительная погрешность определения метацентрической высоты не должна превышать 7—8%,
и ее следует вычитать при определении расчетного значения метацентрической высоты. В расчетное значение метацентрической высоты с помощью формулы (153) вводят поправки, вызванные снятием излишних грузов и приемом недостающих.
89
Координаты центра тяжести судна определяют следующим образом:
zo = zm—А;
ха = х'с—(za—zc)tg^,
(169)
(170)
где xG, zG — искомые координаты центра тяжести судна; хс, гс — координаты центра величины, рассчитанные по масштабу Бонжана; гт = zc + г — аппликата метацентра; h — определенная из опыта метацентрическая высота; ф — угол дифферента при креновании.
При опыте кренования вместо весков можно использовать инклино-граф (рис. 50). Он состоит из станины с осью, на которую надет барабан с бумажной лентой, приводимый во вращение часовым механизмом. Не связанное с барабаном записывающее устройство имеет тяжелый груз, поэтому перо не меняет своего положения в пространстве. Когда судно начнет колебаться, а барабан вращаться, перо прочертит на ленте зигзагообразную линию. График, на котором сделана запись колебаний судна, называется инкли-нограммой (рис. 51).
Во время опыта (который подготовляется и проводится так же,
Рис. 50 как при использовании веское)
должно .быть не менее двух инкли-нографов, подготовленных согласно приложенной к ним инструкции. Инклинографы устанавливают вблизи диаметральной плоскости в разных помещениях на столах, надежно соединенных с корпусом и находящихся не далее 1/4 длины судна от миделя. Ось барабана должна быть направлена поперек судна.
После перемещения крен-балласта очередной группы малые колебания судна будут записаны на инклинограмме в виде зигзагообразной линии. При перемещении крен-балласта следующей группы судно накренится и снова будет совершать малые колебания. На графике это отобразится в виде длинной, уходящей в сторону линии и новой зигзагообразной линии. Если провести среднюю для каждого зигзага линию, то расстояние между соседними линиями, деленное на масштаб углов, принимается за измеренное дацным инклинографом приращение угла крена. Истинное приращение угла крена при данном перемещении крен-балласта равно среднему арифметическому показаний всех инклинографов.
90
Поскольку в расчет вводится приращение угла крена в радианах, метацентрическую высоту определяют по формуле
/г = 57,3—Аур . <171)
Д'0
При правильном ведении опыта углы крена, обусловленные перемещением групп крен-балласта, приблизительно совпадают, а соседние линии зигзагов взаимно параллельны.
Рис. 51
Относительная погрешность определения метацентрической высоты в случае использования инклинографов может составлять 4,5—8,5%.
93. Какое требование лежит в основе правил подготовки судна к кренованию?
94. Как влияет увеличеине длины нити веска на количество необходимого крен-балласта?
95. Опыт кренования показал, что при перемещении крен-балласта массой р = 40 т на расстояние Дрр = 16 м угол крена судна 0 составил 4°18'. Известно, что Д' = 8960 т, момент инерции площади ватерлинии относительно ДП 1Х = 52 000 м4; хс = 4 м; zq = 5,4 м, угол дифферента ф = = 0°24'. Вычислите координаты центра тяжести судна, если кренование производится на реке.
Глава VI
СТАТИЧЕСКАЯ И ДИНАМИЧЕСКАЯ ОСТОЙЧИВОСТЬ ПРИ БОЛЬШИХ УГЛАХ КРЕНА
§ 40. Общие положения (§ 28, 29)
Восстанавливающий момент при малых углах крена определяется при помощи метацентрической формулы остойчивости. Эта формула была выведена в предположении, что метацентр — точка
91
постоянная. Действительно, при равнообъемных наклонениях на малые углы моменты инерции площадей ватерлиний в начальном и последующем положениях судна практически не изменяются, а следовательно, не изменяются и метацентрические радиусы. При этом кривая центра величины представляет собой часть окружности, центром которой служит начальный метацентр.
Во время эксплуатации крен судов нередко достигает больших значений. При этом оказывается, что моменты инерции равнообъемных ватерлиний до и после наклонения судна и метацентрические радиусы резко отличаются друг от друга, кривая центра величины перестает быть частью окружности — для каждого ее участка существует свой центр кривизны, т. е. свой метацентр.
Таким образом, при больших углах крена метацентр смещается, поэтому метацентрическая формула остойчивости, используемая для определения восстанавливающего момента, становится неприменимой. В связи с этим возникла необходимость создать методы расчета остойчивости на больших углах крена. В отечественной практике широко используются методы А. Н. Крылова, А. Ф. Матросова, Крылова—Дарньи и др.
96. Почему при малых углах креиа метацентрические радиусы те же, что и при прямом положении судна?
§ 41. Координаты центра величины и метацентра (§ 18, 29, 31)
Пусть при крене 9 ватерлиния В1Л1 (рис. 52, а) равнообъемная, центр величины лежит в точке Сх с координатами у и г. При увеличении крена на угол dQ равнообъемной будет также ватерлиния ВгЛг, а центр величины будет находиться в точке С2 с координатами у + dy и г + dz. Поскольку угол dQ мал, кривая CjC2 представляет собой часть окружности радиуса г с центром в точке т. Поскольку длина дуги С^С2, мала можно считать, что она совпадает с касательной, к ней в точке Cv Но касательная к кривой центра величины параллельна соответствующей ватерлинии, т. е. отрезок СХС2 параллелен ватерлинии В^Ц.
Проекции кривой CjC2 на оси координат будут
d«/ = CiC2cos9 = rcos9d9; (172)
dz = CjC2 sin 0 = r sin 9d9. (173)
Интегрируя выражения (172) и (173) в пределах от 0 до 9 и учитывая, что при 0 = 0 аппликата центра величины z — zc, получаем формулы для координат центра величины при крене судна
92
на угол 9:
е
y = Jrcos9d9; (174)
о
рис. 52, б следует, что координаты метацентра
Из
= resin9; (176)
zm = z + ze cos 9,
(177)
где re — метацентрический радиус судна при данном угле крена.
§ 42. Плечо статической остойчивости (§ 29, 32)
При равнообъемных наклонениях судна на большие углы сила поддержания D постоянна и восстанавливающий момент М6 = DI зависит от плеча статической остойчивости I. Поэтому выведем формулу для вычисления плеча статической остойчивости при больших углах крена. При крене судна на большой угол 9 (рис. 53) метацентр находится в точке mlf отрезок GK представляет собой плечо статической остойчивости I, а координатами точки — центра величины после наклонения судна — являются у и г.
Выполним вспомогательные построения (на рисунке показаны пунктиром): СА || GK, CF || OY; GB I СЛ; CjF I CF-, FE I СА, CtN I FE. Из рисунка видно, что
l = GK = BA=CA—CB.
(178)
93
В свою очередь.
СА = СЕ + ЕА.
(179)
Поэтому
l = GK = CE + EA—CB, (180)
а так как ЕА = NC 1( то
l = GK = CE + NC1—СВ. (181)
Входящие в эту формулу величины можно представить так:
Рис. 53
кроме координат центра
тяжести судна.
СЕ = у cos 9;
NCY = (г—zc) sin 0;
СВ = a sin 9,
(182)
следовательно,
I = у cos 9 +(г—гс) sin9—a sin 9,
(183)
где у, z — координаты центра величины, вычисляемые по формулам (174), (175); zc — аппликата центра величины при прямом положении судна. Величина а может быть вычислена, если величины известна аппликата центра
97. Чему равно плечо остойчивости формы при больших углах креиа?
98. Запишите выражение дли плеча остойчивости веса при больших углах крена.
§ 43. Построение чебышевского корпуса (§11)
Расчет остойчивости на больших углах крена начинается с построения так называемого чебышевского корпуса (рис. 54), т. е. корпуса, на котором изображают 9—12 шпангоутов, выбирая расстояния между ними согласно правилу Чебышева.
Чебышевский корпус вычерчивается следующим образом. На проекциях теоретического чертежа «бок» и «полуширота» расставляют симметрично относительно миделя чебышевские шпангоуты (определение абсцисс шпангоутов см. в § 11) и вычерчивают сетку, как для корпуса теоретического чертежа, но в более крупном масштабе. Обводы шпангоутов до верхней палубы строят, измеряя ординаты на теоретическом чертеже проекции «полуширота» по каждому данному чебышевскому шпангоуту. Снятые ординаты 94
с учетом масштаба откладывают от ДП на сетке чебышевского корпуса по соответствующим ватерлиниям на правый и левый борт. Полученные точки соединяют плавной кривой. Нужно учитывать седловатость палубы и погибь бимсов.
Рис. 54
Бимс миделевого шпангоута строят следующим образом (рис. 55). Из точки О пересечения ДП с линией высоты борта вычерчивают полуокружность радиусом В : 50 (где В — ширина судна) и делят
ее на столько равных частей, сколько имеется промежутков между батоксами. Затем из точек деления опускают перпендикуляры на продолжения батоксов. Основания перпендикуляров соединяют плавной кривой. Бимсы остальных шпангоутов параллельны ми-делевому.
95
§ 44. Расчет остойчивости по методу Крылова—Дарньи (§ 26, 29, 32, 41, 42)
При больших углах крена ватерлинии, проведенные через точку пересечения следов ДП и ГВЛ .(рис. 56), обычно отсекают объем подводной части судна, не равный первоначальному. Но вес судна при наклонениях не изменяется, поэтому фактически при крене на большой угол судно будет сидеть не по ватерлинию BiJIi, а по параллельную ей ватерлинию ВхЛх. В этом случае ватерлиния В\Л1 называется вспомогательной, а ватерлиния ВгЛг — равнообъемной; объем между ними называется поправочным слоем, а расстояние между ватерлиниями ВхЛг и В1Л1 — толщиной поправочного слоя 8.
Рис. 57
На чебышевском корпусе (рис. 57) через точку пересечения диаметральной плоскости с ГВЛ (если расчет ведется для осадки по ГВЛ) проводят пунктиром вспомогательную ватерлинию под углом 10° к горизонту. От точки О по этой ватерлинии для всех шпангоутов измеряют входящие а и выходящие b ординаты (рис. 58). При этом придерживаются следующих правил. Ординаты измеряют по вспомогательной ватерлинии от центра тяжести ее площади (точка О). Правила измерения и определения знаков ординат ясны из рис. 58. Если вспомогательная ватерлиния пересекает шпангоут в четырех точках, то ординаты а и b равны алгебраической сумме ординат соответственно ах и а2, и Истинные значения измеренных ординат заносят в табл. 21 и вычисляют площадь вспомогательной ватерлинии S10O, ординату ее центра тяжести т]10, и метацентрический радиус судна r1QO. Формулы для определения этих величин даны в таблице. В их основе лежат ранее выведенные формулы с учетом применения правила Чебышева, а также положение о том, что ватерлиния при больших углах крена несим-96
метрична относительно линии пересечения вспомогательных ватерлиний.
Толщина поправочного слоя определяется по формуле
е =.-1-1) ДО, (184)
где ДО — угол (в рад) между двумя соседними вспомогательными ватерлиниями.
Дальнейшие построения покажем на рис. 57. От точки О по ГВЛ откладывают т]10о/2, причем^если т]|0о>0, то ее откладывают вправо от точки О, а если i]ioo<- —то влев0- Через полученную точку под углом 10° к горизонтали проводят равнообъемную ватерлинию (сплошная линия). Затем, придерживаясь того, же правила знаков, от точки О по вспомогательной ватерлинии, отвечающей крену в 10°, откладывают т]10о и полученную точку проектируют
4 В. Л. Фукельмаи
97
Таблица 21
Вычисление Si, ц,, 4
Номер чебышевского шпангоута Угол крена, град
Входящий клан Выходящий клин
а а1 а* ь & Ь>
1 2
Сумма 2а 2 а» 2а» 2Ь 2 6» 2 Ь3
с L /v । 1 2 а» — 2 6» S/ = — (2 а+ 2 b)\ г]; = —: ; п 2 2а + 26 1 L 1 5,т)? "-3 п у у‘
на равнообъемную ватерлинию (точка Ох на продольной оси, проходящей через центр тяжести 10-градусной равнообъемной ватерлинии). Через точку Ог проводят вспомогательную ватерлинию под углом 20° к горизонтали, от точки Ох измеряют входящие и выходящие ординаты, заносят их в таблицу и вычисляют S^, т12оо»г2оо*
От точки Оц соблюдая правило знаков, по 10-градусной равно-объемной ватерлинии откладывают 1^0/2 и через полученную точку проводят 20-градусную равнообъемную ватерлинию. Затем от той же точки Oj по 20-градусной вспомогательной ватерлинии откладывают значение и полученную точку проектируют на 20-градусную равнообъемную ватерлинию, получая точку О2. Через точку О2 проводят вспомогательную ватерлинию под углом 30° к горизонтали и т. д. Таким образом производят построения и вычисления до угла крена в 90°.
Из изложенного видно, что в методе Крылова—Дарньи каждая последующая вспомогательная ватерлиния проводится через центр тяжести действующей. Поскольку толщина поправочного слоя мала, при использовании этого метода вводят предположение о том, что центры тяжести вспомогательной и равнообъемной ватерлиний лежат на одном перпендикуляре к их плоскостям, а Моменты инерции этих ватерлиний равны. Далее либо вычисляют координаты центра величины и метацентра, а также плечи статической 98
и динамической1 остойчивости (табл. 22, 23), приняв за основу формулы § 41 и 42, либо строят полярную диаграмму.
Полярную диаграмму (рис. 59) строят следующим образом.
В результате выполненных построений и вычислений в табл. 21
построений и вычислений в табл. 21 нам известны метацентрические радиусы при всех кратных 10° углах крена от 0 до 90°. Проводим вертикальную линию и отмечаем на ней чины, при Центр величины при углах
Озо
ТПзо
окружности
радиусом
2
к
Ядо
tj
Одд Kso тп^о
ТПю .0-ю
тПго Ого
К 90
О 70
Я до
»50
Сдо
“до
*зо
ОдО
N30
Ого
N10
’10
^so Oso
Одо Oso
Neo
N?o
Рис. 59
положение центра вели-центра тяжести и метацентра прямом положении судна, небольших крена перемещается по дуге ri + г<+ю
с
поэтому от точки С на вертикальной линии откладываем отрезок СО10 = г° и из полученной точки О10 радиусом СО10 описы-
1 Плечом динамической остойчивости называется изменение вертикального расстояния между центром величины и центром тяжести. Подробнее см. $ 49.
4*
99
8
Вычисление координат центра величины и метацентра
Таблица 22
е° ге cos 0 Сумма (3) попарно Сумма (4) сверху У £=0.0873-(5) rgSin 0 Сумма (7) попарно Сумма (8) сверху гс = 0.0873-(9) »т-(6)-(7) zm = (10) + (3)
1 2 3 4 5 6 7 8 9 10 11 12
0 10 90 • I 1рн hi «тервале уг лов наклс нения df - 10°. выраэнЕ d f>: 2 в р аднавах» и меем d 0: 2 = 5 : 57,3 = 0,0873
Таблица 23
Вычисление плеч статической и динамической остойчивости
О ф cos 0 у cos 6 (2)(3) и N 1 N sin 0 Ф с "и 1 А a sin 9 1 = U) + (8)- -(9) у sin 0 (2)-(7) (Z — cos 0 (8)-(3) 1 — cos 0 а (1 — cos 0) d = (ll)-i — (12) -(14)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0 10 90 1
ваем участок дуги. Через точку О10 под углом 10° к вертикали проводим прямую до пересечения с дугой в точке С10, являющейся центром величины при крене 10°. Прямая С10О10 определяет направление силы поддержания при крене 10°. По прямой О10С10 от точки С10 откладываем г10 (получаем положение метацентра т10 при крене 10°) и С10О20 = —— (получаем точку О20). Из точки
О20 радиусом С10О20 описываем участок дуги. Через точку О20 проводим прямую под углом 20° к вертикали до пересечения с дугой в точке С20. От точки С20 по направлению С20О20 откладываем гао (получая положение метацентра /п20 при крене 20°) и С20О30 = _ 'го + 'зо (получаем точку О30).
Таким образом продолжают построения вплоть до угла крена 90°.
Кривая ССiqC2о • • - G99
представляет собой кривую центра величины при больших углах крена, а кривая mm10m20. . . m90 —кривую перемещения метацентра при больших углах крена, называемую метацентрической оберткой.
Из центра тяжести судна G опускают перпендикуляры на
направления сил поддержания, получая в их основаниях точки К10, К20, • • • . К»о--Эти перпендикуляры и являются плечами статической остойчивости I при соответствующих углах крена. Кривая СКюКм • • • Коо называется полярной диаграммой статической остойчивости.
Опустив из точки С перпендикуляры на направления сил поддержания, получаем точки Rl0, /?20, . . . , /?90. Эти перпендикуляры являются плечами остойчивости формы, а кривая С/?10/?20 . . . . . . Т?90 называется кривой плеч остойчивости формы.
От точек К10, К20, • • • , К»о по линиям действия сил поддержания откладываем вниз величину а, получая точки N l0, Ni0, . . . , N»o- Отрезки C10N10, C20W20, . . . , C90W90 представляют собой плечи динамической остойчивости d при соответствующих углах крена. Кривая CNloN2o называется полярной диаграммой динамической остойчивости.
После выполнения расчетов в табл. 23 или построения полярной диаграммы легко определить плечи статической остойчивости при" углах крена, кратных 10°, и построить диаграммы статической и динамической остойчивости в прямоугольной системе координат (рис. 60). Для этого в соответствующих точках оси абсцисс восставляют перпендикуляры и на них откладывают снятые с полярной
101
диаграммы отрезки GK10, G/(20, . . . , GK»0 и C10N10, Ci0Ni0, :. . , C90N90 или откладывают в масштабе значения плеч, вычисленные в графах 12 и 14 табл. 23. Одноименные точки соединяют плавными кривыми, называемыми диаграммами статической и динамической остойчивости. По этим диаграммам можно решить ряд задач по остойчивости судна.
99. Докажите, что при выполненных на рис. 57 построениях толщина 1 да поправочного слоя е = — tiAB.
§ 45. Диаграмма статической остойчивости (§ 26, 29, 32, 44)
Диаграмма статической остойчивости выражает зависимость между плечами статической остойчивости и углами крена или восстанавливающими моментами и углами крена. Диаграмма статической остойчивости обладает следующими свойствами.
1. Согласно построению положительные плечи статической остойчивости и восстанавливающие моменты расположены над осью абсцисс, а отрицательные — под осью абсцисс. Следовательно, при всех углах крена, соответствующих расположению кривой над осью абсцисс, наклоненное и предоставленное самому себе судно вернется в первоначальное положение равновесия, т. е. будет остойчиво. Наоборот, при углах крена, соответствующих расположению кривой под осью абсцисс, судно неостойчиво. Точка пересечения кривой с осью абсцисс соответствует углу крена, при котором судно теряет остойчивость. Этот угол называется углом заката диаграммы (0„).
2. Близкая к началу координат часть диаграммы статической остойчивости представляет собой прямую линию. При малых углах крена диаграмма соответствует метацентрической формуле остойчивости
Me=D/i0 = D/; (185)
Z = /i0. (186)
3. Касательная к диаграмме в начале координат отсекает отрезок на перпендикуляре к оси абсцисс, восставленном в точке 0 = = 57,3° (1 рад). Этот отрезок в масштабе плеч статической остойчивости равен начальной метацентрической высоте h. Произведем указанные построения (рис. 61). Из рисунка и выражения (186) следует, что
tga = 4- = -T = ft- <187>
и и
Из треугольника ОАВ
АВ АВ
0В~ 1
102
Сравнив выражение (187) с (188), видим, что АВ = h.
4. Часть площади диаграммы статической остойчивости, расположенная слева от данной ординаты, представляет в масштабе работу восстанавливающего момента при выпрямлении судна от угла крена, соответствующего этой ординате, до прямого положения, или работу наклонения судна из прямого положения до этого угла крена. Для доказательства выделим элементарную площадь, ограниченную диаграммой статической остойчивости (рис. 61) и равную произведению восстанавливающего момента Ме на угловой путь dW (df)' берется со знаком минус, так как угол крена при выпрямлении судна уменьшается). Но произведение момента на угловой путь есть не что иное, как работа, затраченная на выпрямление судна от угла крена 02 до 03. Просуммировав такие элемен-
тарные площади от угла крена 02 до прямого положения судна, получим
о 0
Soce = - J Mod& = J Med0' = 7BOCCT. (189)
5. При крене, соответствующем восходящей ветви диаграммы статической остойчивости, судно находится в устойчивом положении равновесия, а при крене, соответствующем нисходящей ветви,— в неустойчивом. Пусть на судно действует постоянный кренящий момент Мкр. Под его действием судно может находиться в равновесии при углах крена 0Х и 02, так как здесь кренящий и восстанавливающие моменты равны (рис. 62). Если судно, имеющее крен 0Х, отклонить дополнительными моментами до углов 03 и 04, а затем снять эти дополнительные моменты и сравнить значения кренящих и восстанавливающих моментов, то окажется, что судно будет возвращаться к углу крена 0Х. Если отклонить судно от угла крена 02, то оно из положения 05 перейдет в положение 0Х, а из положения 0в ввиду увеличения угла крена не вернется в положение 02. Следовательно, в положении 0Х равновесие судна устойчивое, а в положении 02 — неустойчивое.
103
Пользуясь диаграммой статической остойчивости, можно графически решить следующие задачи:
при известном кренящем моменте определить вызываемый им угол крена. Судно будет иметь такой угол крена, при котором кренящий момент уравновесится восстанавливающим. На шкале моментов откладываем известный кренящий момент (см. рис. 61) и определяем, при каком угле крена досстанавливающий и кренящий моменты численно равны между собой. Для этого из отмеченной на шкале моментов точки Мкр1 проводим линию, параллельную оси абсцисс, до пересечения с кривой. Из точки пересечения опускаем перпендикуляр на ось абсцисс, основание которого укажет искомый угол крена 0Х;
при известном угле крена определить кренящий момент, вызвавший наклонение судна. Эта задача обратна предыдущей;
определить наибольший кренящий момент, под действием которого судно не теряет остойчивости. Таким наибольшим кренящим моментом будет момент, равный наибольшему восстанавливающему моменту. Проводим горизонтальную касательную к кривой статической остойчивости — точка ее пересечения со шкалой соответствует искомому моменту (см. рис. 61);
определить наибольший угол крена, до которого судно может безопасно наклоняться под действием постоянного кренящего момента. Этот угол 0т соответствует наибольшему восстанавливающему моменту. Проводим горизонтальную касательную к кривой статической остойчивости и из точки касания опускаем перпендикуляр на ось абсцисс. Основание этого перпендикуляра укажет искомый угол крена (см. рис..61);
определить угол крена-, при котором судно теряет остойчивость, т. е. определить угол заката диаграммы 0О;
определить начальную метацентрическую высоту. Решение приведено в описании третьего свойства диаграммы (см. п. 3);
по виду диаграммы статической остойчивости дать характеристику остойчивости судна. Характерные типы диаграмм статической остойчивости приведены на рис. 63. Как видим, типы 1кП
104
принадлежат судам с положительной начальной остойчивостью, а тип 111 — с отрицательной. У низкобортных сравнительно широких судов метацентрическая высота достаточно велика, поэтому близкая к началу координат часть диаграммы статической остойчивости круто поднимается вверх (тип /). У высокобортных прямостенных судов со сравнительно малой метацентрической высотой близкая к началу координат часть диаграммы статической остойчивости медленно поднимается вверх и обращена выпуклостью вниз. С увеличением углов крена благодаря наличию высоких бортов значительно возрастают моменты инерции наклонных ватерлиний, а вместе с ними и плечи статической остойчивости. Поэтому диаграмма статической остойчивости оказывается обращенной выпуклостью вверх. В этом случае мы наблюдаем S-образную форму диаграммы (тип //). Диаграмма статической остойчивости судов
Рис. 64
с отрицательной метацентрической высотой (тип III) сначала уходит вниз, в область отрицательных ординат, а затем приобретает ту или иную форму в зависимости от характера обводов судна и абсолютного значения метацентрической высоты. Суда могут иметь диаграмму типа 111 при неправильном распределении грузов. Иногда ее имеют лесовозы и контейнеровозы с большим количеством груза на палубе. Такое судно плавает с начальным креном 01, соответствующим углу пересечения диаграммы с осью абсцисс. Устранить это явление можно, перераспределив груз по высоте или приняв дополнительный груз и разместив его так, чтобы центр тяжести судна существенно понизился;
при постоянном динамически приложенном кренящем моменте 1 определить вызванный им угол крена. Под влиянием этого момента судно будет крениться до тех пор, пока работа кренящего момента не уравновесится работой восстанавливающего момента. На шкале моментов отложим значение кренящего момента и проведем прямую, параллельную оси абсцисс (рис. 64, а). Проведем ординату СЕ так, чтобы площадь ОАВ была равна площади BCD. Тогда точка Е
1 Динамическим называется такой момент, который еще до начала воздействия на судно имеет определенное значение.
105
укажет на оси абсцисс искомый угол крена. Действительно, работа кренящего момента выражается площадью OADE, а восстанавливающего — OBCDE. Следовательно, крен судна должен прекратиться, когда эти площади станут равными. Участок OBDE этих площадей общий, поэтому наклонение судна прекратится при угле крена, соответствующем равенству площадей ОАВ и BCD-,
определить наибольший динамически приложенный кренящий момент, под действием которого судно еще не потеряет остойчивость. Проведем прямую кренящего момента так, чтобы площадь ОАВ (рис. 64, б) была равна всей площади диаграммы статической остойчивости, расположенной над линией момента. Этот момент называется минимальным опрокидывающим моментом Мс. При любом большем динамическом кренящем моменте работа этого момента больше работы восстанавливающего момента, а это означает, что судно потеряет остойчивость. Иначе говоря, судно не потеряет остойчивость до угла крена, при котором площадь ОАВ будет меньше площади BCN. Таким образом, площадь BCN представляет собой так называемый запас динамической остойчивости. Если Л4кр = 0, то запас динамической остойчивости выражается всей площадью диаграммы статической остойчивости, расположенной над осью абсцисс. Отсюда следует, что остойчивость судна на больших углах крена при динамическом действии кренящего момента зависит от площади диаграммы статической остойчивости, которая, в свою очередь, зависит не только от значения восстанавливающих моментов при различных углах крена, но и от положения по длине диаграммы наибольшего восстанавливающего момента и угла заката диаграммы. Плечо минимального опрокидывающего момента называется минимальным опрокидывающим плечом (1С = Л4С: D). Угол крена, достигнутый судном под действием минимального опрокидывающего момента, называется углом опрокидывания 0опр.
100. Как влияет увеличение высоты надводного борта на остойчивость судна при больших углах крена?
101. У судна, имеющего D = 182 500 кН, плечи статической остойчивости при углах крена, кратных 10° (от 0 до 70°), равны: 0; 0,3; 0,46; 0,43; 0,32; 0,21; 0,09; —0,04 м. Вычертите диаграмму статической остойчивости и определите: а) углы крена при статическом и динамическом действии кренящего момента Л4кр = 40 050 кН-м; б) момент, вызвавший крен 0 = 5°; в) угол 0т; г) значение Л4С; Д) плечо /с. Потеряет ли судно остойчивость при действии статического кренящего момента Л4кр = 88 300 кН-м? На сколько нужно уменьшить этот момент, чтобы под его действием судно не теряло остойчивость? Потеряет ли судно остойчивость при приложении к нему динамического кренящего момента в 73 580 кН-м?
§ 46. Изменение диаграммы статической остойчивости при перемещении груза (§ 31, 33)
Неизбежное в процессе эксплуатации судна перемещение грузов вызывает изменение плеч статической остойчивости при больших углах крена, а следовательно, и изменение восстанавливающих 106
моментов (поскольку D = const), т. е. происходит изменение остойчивости судна.
Пусть на судне груз р перемещен по вертикали на расстояние Azp, а в поперечно-горизонтальном направлении — на расстояние Дур. В результате этого центр тяжести судна переместился из точки G в точку Gx (рис. 65). Приращение координат центра тяжести судна Ai/0 и Az0 определяем на основании теоремы о перемещении центра тяжести системы тел:
Д№ = -^; Аг0=Ц>, (190)
Д' д
где р и Д' — соответственно масса груза и водоизмещение судна. Выполним вспомогательные построения, показанные на рис. 65
пунктиром. Легко заметить, что изменение плеча статической остойчивости А/ при крене на угол 0 равно:
Д/ = it—l = G.Kt—GK = —GE = — — (GB + BE).
(191)
Ho
GB = &za sin 0 и BE = Ay0 cos 0,
(192) следовательно,
AZ =— (Azosin0 +Ai/ocos0).
(193)
По формуле (193) вычисляют изменение плеч статической остойчивости при всех углах крена, кратных 10°, и вводят поправку в диаграмму: откладывают AZ в масштабе при соответствующих углах крена вниз от кривой, если AZ имеет знак минус, и вверх от кривой, если AZ имеет знак плюс. Соединив отмеченные точки плавной кривой, получают диаграмму статической остойчивости
судна, центр тяжести которого лежит в точке Gx. По этой диаграмме можно решить рассмотренные выше задачи остойчивости
судна.
102. Угол крена 0 = 45(>. При каком условии плечи статической остойчивости до и после перемещения груза будут одинаковыми?
103. Сила поддержания D = 98 100 кН. Плечи статической остойчивости при углах крена, кратных 10° (от 0 до 60°), равны: 0; 0,41; 0,53; 0,47; 0 31-0,14 — 0,3 м. Груз массой р = 120 т переместили по вертикали вверх иа расстояние Д?р = 3,2 м и в поперечно-горизонтальном направлении на расстояние Дур = 4,5 м. Как при этом измениются: наибольший статический кренящий момент, который может выдержать судно, не теряя остойчивости статический угол креиа при действии момента Л4Кр = 39 240 кН м и угол заката диаграммы?
107
§ 47. Изменение диаграммы статической остойчивости при приеме или расходовании малого груза, не вызывающем крена (§ 32, 34)
При приеме или расходовании малого груза изменение плеч статической остойчивости определяется расчетом. Как известно, вследствие изменения осадки изменяется метацентрический радиус и плечо остойчивости формы на величину Д/ф; изменяется также положение центра тяжести судна, а следовательно, и плечо остойчивости веса на величину Д/в. Таким образом,
Д/ = Д/ф-Д/в,' (194)
или после преобразований
Д/ = ——[(? + ——Zp'jsine—/1. (195)
Д' + р L\ 2 /
При расходовании груза Д/ имеет знак, обратный полученному по формуле (195). Зная изменения плеч статической остойчивости при различных углах крена, вносят поправки в диаграмму статической остойчивости, как это делалось для случая перемещения груза.
104. Характеристика судна: L = 109 м; В — 16,4 м; Т = 5,53 м; 6 = = 0,74; а = 0,81. При крене 0 = 30° плечо статической остойчивости I = = 0,15 м. Удельный вес забортной воды у = 9 920 Н/м8. Вычислите плечо статической остойчивости после приема груза массой р = 40 т с аппликатой его центра тяжести гр = 1,8 м.
§ 48. Интерполяционные кривые плеч остойчивости формы (§ 32, 44, 47)
При приеме или расходовании большого груза формулу (195) для расчета плеч статической остойчивости применять нельзя, так как в пределах изменения осадки обводы судна не прямостенны. В этом случае строят и используют интерполяционные кривые плеч остойчивости формы.
Кривые для данного судна строятся следующим образом. Выполняют расчеты остойчивости на больших углах крена при осадках, соответствующих водоизмещению судна с полным грузом и водоизмещению порожнего судна, а также при трех промежуточных осадках. Для каждого случая осадки при всех углах крена, кратных 10°, вычисляют плечи остойчивости формы (табл. 24). Затем в прямоугольной системе координат у оси абсцисс строят шкалу объемных водоизмещений и у оси ординат — шкалу плеч остойчивости формы (рис. 66). На оси абсцисс отмечают точку, соответствующую водоизмещению порожнего судна, в этой точке восставляют перпендикуляр к оси и в принятом масштабе откладывают значения плеч остойчивости формы при данном водоизмещении судна и углах крена, кратных 10°. Аналогичные операции повто
108
I.
Рис. 66
90°, строят новую диаграмму
ряют для всех расчетных водоизмещений. Одноименные точки сое-диняют плавными кривыми.
Интерполяционные кривые используют следующим образом. Пусть требуется построить диаграмму статической остойчивости при водоизмещении Vx, соответствующем приему или расходованию большого груза. На оси абсцисс отмечают водоизмещение Vx и в этой точке восставляют перпендикуляр к оси. Вдоль перпендикуляра от оси абсцисс измеряют плечи остойчивости формы при всех углах крена, кратных 10°, и заносят их в табл. 25, в которой вычисляют плечи статической остойчивости. В табл. 24 и 25 значение а должно соответствовать данному водоизмещению и данному случаю распределения грузов. Зная плечи статической остойчивости при крене 10, 20 . . статической остойчивости.
в
Таблица 24
Вычисление плеч остойчивости формы
е° 1 sin е lB = a sin е 'ф = ' + 'в
0 10
90
Таблица 25
Вычисление плеч статической остойчивости
е° 'ф sin е lB = a sin е 1 = 1-1 ф в
0 10 90
109
106. Плечи остойчивости формы судна данного водоизмещения .при углах крена, кратных 10° (от 0 до 80°), равны: 0; 0,30; 0,54; 0,90; 0,88; 0,66; 0,44; 0,2; —0,04 м. zQ = 2,88 м; гс = 1,75. Вычислите плечи статической остойчивости для построения диаграммы статической остойчивости.
§ 49. Диаграмма динамической остойчивости (§ 12, 26, 44, 45)
При плавании судна кренящий момент зачастую действует динами-
чески (порыв ветра, удары волн и т. п.). Поскольку динамический
кренящий момент до приложения к судну уже имел определенное
значение, а восстанавливающий момент вначале был равен нулю и возрастал постепенно, судно в процессе наклонения получило некоторую угловую скорость. Как известно, наклонение судна прекращается при равенстве работ кренящего и восстанавливающего моментов. Образовавшийся при этом угол крена называется динамическим. Динамическая остойчивость характеризуется работой, затраченной на наклонение судна из начального положения до данного угла крена.
Судно находится под действием вертикальных сил: веса и поддержания. После наклонения судна взаимное расположение точек приложения этих сил (центра тя
жести и центра величины) изменяется. Работа Т, затраченная на наклонение судна, зависит от
изменения вертикального расстояния d между центром величины и центром тяжести и определяется следующим образом:
T=Dd.
(196)
Изменение вертикального расстояния между центром величины и центром тяжести называется плечом динамической остойчивости d.
Чтобы определить плечо динамической остойчивости (рис. 67), выполним вспомогательные построения, показанные на рисунке пунктиром:
d = KC1—KN = KCl—a-, (197)
KCV = KM + QP~ PF. (198)
С другой стороны,
КМ = GE = a cos 0; QP = t/sin 0;
PF = (z-— zc) cos 0, (199)
110
следовательно,
d = t/sinO—(г—zc)cpsQ—а(1—cos0). (200)
Диаграммой динамической остойчивости называется кривая, выражающая зависимость между углами крена и работой, затраченной на наклонение судна до этих углов крена (см. рнс. 60). Диаграмму динамической остойчивости строят так же, как диаграмму статической остойчивости, а значения плеч d либо берут из табл. 23, либо снимают с полярной диаграммы (см. рис. 59, отрезки типа CN). Диаграмма динамической остойчивости является интегральной кривой относительно диаграммы статической остойчивости.
При помощи диаграммы динамической остойчивости можно решить следующие задачи:
определить динамический угол крена, когда на судно действует постоянный динамически приложенный кренящий момент. В точке, соответствующей углу крена в 1 рад (57,3°), восставляют перпендикуляр к оси абсцисс (рис. 68), откладывают на нем в масштабе значение кренящего момента, соединяют полученную точку с началом координат прямой линией ОА. Искомый угол крена 0j соответствует точке пересечения диаграммы с прямой ОА, поскольку диаграмма является графиком работы восстанавливающего момента, а прямая ОА — графиком кренящего момента постоянной величины (Т = Л4кр0 и если 0 = 1 рад, то Т = Л4кр);
при известном динамическом угле крена определить динамически приложенный кренящий момент постоянной величины, вызвавшей этот крен. Задача обратна предыдущей;
определить минимальный опрокидывающий момент Ма н угол опрокидывания 0опр. Из начала координат проводят прямую ОС
111
(рис. 68), касательную к диаграмме динамической остойчивости. Эта касательная отсечет на перпендикуляре к оси абсцисс (восставленном в точке 57,3°) отрезок, который в масштабе работы численно равен минимальному опрокидывающему моменту Мс. Точка касания соответствует углу опрокидывания 0опр. При действии большего динамического кренящего момента его работа не будет уравновешена работой восстанавливающего момента и судно опрокинется. Минимальное опрокидывающее плечо на диаграмме динамической остойчивости определяется так же, как и величина Л1с, но измеряют его, пользуясь шкалой плеч.
106. Какова графическая зависимость между диаграммами статической и динамической остойчивости?
107. При угле крена 0 = 50° координаты центра величины у = 1,5 м, z = 4,1 м. Аппликата центра величины судна в прямом положении гс = = 3,5 м и центра тяжести гв = 4,6 м. Вычислите плечо динамической остойчивости.
108. Плечи динамической остойчивости судна, имеющего D = 95 160 кН, при углах крена, кратных 10° (отО до 70°), равны: 0; 0,044; 0,17; 0,349; 0,554; 0,590; 0,550; 0,490 м. Постройте диаграмму динамической остойчивости и определите: а) угол крена при динамическом действии Л1Кр = 34 340 кН-м; б) динамический кренящий момент, вызвавший крен 0 = 35°; в) минимальный опрокидывающий момент Л4С; г) минимальное опрокидывающее плечо /с; д) угол опрокидывания 0Опр.
§ 50. Понятие об остойчивости судна на попутном волнении (§ 31)
Ветер деформирует спокойную поверхность воды, в результате чего создаются небольшие гребни и ложбнны. При этом одни частицы занимают более высокое, а другие — более низкое положение, чем при спокойном состоянии свободной поверхности моря. Эти частицы стремятся вернуться к положению равновесия: одни под действием своего веса опускаются, другие под действием упругих сил окружающей воды поднимаются. По инерции частицы проходят положение равновесия, после чего начинается их движение в противоположную сторойу. Эти возмущения распространяются по поверхности воды, т. е. образуются ветровые волны. Характеристики волн зависят от скорости ветра, его направления и времени действия. Вследствие того что в разных точках пространства скорость ветра иная и в данной точке она изменяется с течением времени, характеристики волн, возникающих в данном месте, все время меняются. Такое волнение называется нерегулярным. Волнение, прн котором все волны одинаковы, называется регулярным. Примером регулярного волнения является зыбь, т. е. медленно затухающее волнение после прекращения действия ветра.
Под действием опускающихся частиц воды соседние частицы выдавливаются вверх и в сторону. Ветер также способствует горизонтальному перемещению частиц. Собственная масса частиц заставляет их двигаться вниз. В итоге частицы совершают движение по вертикальным круговым орбитам, радиусы которых с уве-
112
лнчением глубины уменьшаются. Поэтому на некоторой глубине волны затухают.
Характеристиками ветровых волн являются (рис. 69):
волновой профиль — кривая, полученная в результате сечения взволнованной поверхности моря вертикальной плоскостью в заданном направлении. Если эта плоскость перпендикулярна волне, то профиль волны близок к синусоиде;
гребень волны — часть волны, расположенная выше среднего волнового уровня;
вершина волны — наивысшая точка гребня волны;
подошва волны — наинизшая точка ложбины волны, т. е. части волны, расположенной ниже среднего волнового уровня;
длина волны X — горизонтальное расстояние между вершинами двух смежных гребней на волновом профиле, проведенном в генеральном направлении распространения волн, т. е. вершина
в среднем направлении рас- -
пространения волн, опреде- 7^
ленном по многим волнам;---------1---------------------- __
высота волны Н — пре- -т'
вышение вершины волны __________________л. Повошва в
над соседней подошвой на волновом профиле, проведен- Рис. 69
ном в генеральном направлении распространения волн. Обычно высота волны в 15—25 раз меньше ее длины;
угол волновой поверхности а, т. е. угол между горизонтальной прямой и касательной к волновому профилю в некоторой его точке. Угол а зависит от отношения Н/К и для данной волны изменяется вдоль ее профиля. Наибольший угол волновой поверхности агаах = = пН/Ь. и обычно составляет 9—12°;
период волны х — интервал времени между прохождением двух смежных вершин волн через фиксированную вертикаль:
т=|/Л2^Х = 0,8/Х. (201)
скорость волны с — скорость перемещения гребня волны в направлении ее распространения, определенная за короткий интервал времени порядка периода волны. Определяется отношением длины волны к ее периоду:
с = -—~ — 1,25/X; (202)
Следует иметь в виду, что при волнении перемещается («бежит») профиль волны, состоящий в каждый момент времени из разных частиц. Сами же частицы, как уже говорилось, вращаются по вертикальным круговым орбитам, причем центром орбиты каждой частицы является точка, в которой находится частица в спокойной
ИЗ
воде. Радиусы орбит поверхностных частиц равны полувысоте (амплитуде) волны;
частота волны а — число волн, проходящих через данную точку пространства за время 2 л с:
о = = (203)
Пусть судно движется со скоростью и, равной скорости попутной волны с. Это значит, что профиль волны у судна будет постоянным, т. е. для находящегося на судне наблюдателя судно относительно волны будет неподвижным. Такое предположение дает возможность считать задачу об остойчивости судна на попутном волнении статической. В худшем с точки зрения остойчивости случае длина волны равна длине судна и оно миделевой частью находится на вершине волны. При этом окажется, что в оконечностях, где шпангоуты к килю резко сужаются, действующая ватерлиния будет значительно острее, чем при плавании на спокойной воде, а в средней части она будет такой же, как на тихой воде, поскольку здесь в пределах изменения высоты смоченной поверхности корпуса обводы практически прямостенны. При такой форме действующей ватерлинии резко уменьшается момент инерции площади относительно продольной оси, проходящей через ее центр тяжести 1Х. Поскольку объем подводной части судна V в этом случае постоянный, при данных условиях уменьшаются метацентрический радиус и метацентрическая высота h, т. е. уменьшается остойчивость судна. Отсюда практический вывод: если судно плавает на попутном волнении и судоводитель замечает, что скорость судна равна скорости волны, он должен немедленно изменить скорость судна.
109. Докажите, что скорость судна, при которой возможно уменьшение остойчивости на попутной волне, v = 1,25 'ИL.'
ПО. v = с; L = %. Миделевая часть судна находится на подошве волны. Как при этом изменяется поперечная остойчивость судна?
111. Судно способно развивать скорость v = 22,5 уз. Может ли уменьшиться на попутном волнении в океане (с ноября по март) его поперечная остойчивость, если в это время период волны т = 13 с?
§ 51. Нормы остойчивости Регистра СССР (§ 45, 49)
Нормы остойчивости Регистра СССР,1 обязательные для всех во-доизмещающих судов длиной 20 м и более, призваны обеспечить безопасность мореплавания при различных условиях эксплуатации судна. Они основываются на современной теории корабля и на многолетнем изучении и обобщении причин аварий и гибели судов из-за потери остойчивости. Нормы остойчивости касаются только поперечных наклонений судна. Они позволяют установить действующий на судно кренящий момент и углы крена, которые можно
1 Регистр СССР. «Правила классификации и постройки морских судов». Т. I, ч. 4-я, 1974. В дальнейшем будем называть их «Правила».
114
допустить без ухудшения безопасности или специфических условий эксплуатации судна данного назначения. Углы крена, получаемые судном под действием определенного (согласно требованиям Регистра СССР) кренящего момента, должны быть меньше допустимых.
Согласно Нормам остойчивости, судно обладает достаточной остойчивостью, если при худшем с точки зрения остойчивости варианте нагрузки соблюдены следующие условия: 1) судно, не опрокидываясь, противостоит одновременному действию динамически приложенного давления ветра и бортовой качки; 2) численные параметры диаграммы статической остойчивости на тихой воде с учетом обледенения не ниже определенного значения; 3) остойчивость удовлетворяет дополнительным требованиям к судам данного назначения.
Основным критерием остойчивости является так называемый критерий погоды. Согласно ему, динамически приложенный кренящий момент от давления ветра Мо должен быть меньше минимального определенного с учетом качки опрокидывающего момента Мс или равен ему:
Ма Мс или К = — > 1,00. (204)
м0
Динамически приложенный кренящий момент от действия ветра Мо зависит от площади парусности, условного расчетного давления ветра pv на площадь парусности и плеча парусности г — возвышения центра тяжести площади парусности над действующей ватерлинией при прямом положении судна на спокойной воде.
Площадью парусности называется площадь проекции надводной части судна на диаметральную плоскость в прямом ее положении. В площадь парусности засчитывают проекции на ДП всех сплошных стенок и поверхностей корпуса, надстроек и рубок судна, мачт, вентиляторов, шлюпок, палубных механизмов, всех тентов, которые могут оказаться натянутыми при штормовой погоде, а также проекции боковых поверхностей предусмотренных проектом палубных грузов. Парусность несплошных поверхностей лееров, рангоута (кроме мачт), такелажа и разных мелких предметов учитывают, увеличивая на 5% суммарную площадь парусности, вычисленную для осадки Tmtn, и на 10% статический момент этой площади относительно действующей ватерлинии (с учетом обледенения соответственно на 7,5—10% и 15—20% в зависимости от норм обледенения), либо умножая их габаритные размеры на коэффициенты заполнения, значения которых задаются Правилами (стр. 307—308). Площадь парусности отдельно расположенных на палубе конструкций круглого сечения (трубы, вентиляторы, мачты и т. д.) должна быть умножена на коэффициент обтекания, равный 0,6 (для остальных элементов равен 1,0). Если проекции отдельных элементов площади парусности полностью или частично перекрывают одна другую, то в расчет следует вводить площадь
115
только одной из перекрывающих проекций (с более высоким коэффициентом обтекания).
Чтобы упростить вычисление площади парусности, ее разбивают на простые элементы 1—14, как это показано на рис. 70, а. Прн расчете, выполняемом в табличной форме (табл. 26), определяются: площадь парусности Ао; ее статические моменты относительно миделя и действующей ватерлинии Л^ствл (как сумма произведений каждого элемента площади на расстояние от ее центра тяжести до миделя х,- и действующей ватерлинии zz); координаты центра тяжести площади парусности х и г (как частное от деления статических моментов на площадь парусности).
Условное расчетное давление ветра pv (в Па) принимается по таблице Регистра СССР в зависимости от района плавания судна и плеча парусности (стр. 313, табл. 2, 1.2.2).
Поскольку ветер действует динамически, наклонению судна препятствует сила инерции Fn (рис. 70, б), приложенная в его центре тяжести. Но центр тяжести судна лежит близко от ватерлинии, поэтому без существенной ошибки можно считать, что динамически приложенный кренящий момент от действия ветра (в Н м)
М0=р„А^. (205)
Момент Ме можно определить по диаграмме статической или динамической остойчивости. Для этого по формулам и таблицам Регистра СООР (т. I, стр. 313—314) определяют амплитуду качки 0Г, т. е. угол наибольшего отклонения ДП от вертикали.
При использовании диаграммы динамической остойчивости (рис. 71, а) поступают следующим образом: вправо от начала ко-' ординат откладывают амплитуду качки 0Л и на диаграмме динамической остойчивости фиксируют соответствующую точку А'. Через точку А' проводят прямую, параллельную оси абсцисс, и на ней от точки А' откладывают отрезок А'А, равный двойной амплитуде качки (А'А = 29г). Точка А является исходной. Из этой точки проводят касательную АС к диаграмме динамической остойчивости. От точки А параллельно оси абсцисс откладывают отре-
116
Вычисление влементов парусности
Таблица 26
Номер элемента парусности Площадь по чертежу» ма Коэффициенты Площадь элементов парусности. м1 <2)(3)-(4) Плечи Статические моменты
заполнения обтекания м 2i- “ (5)-(6) (5)-(7)
1 2 3 4 5 6 7 8 9
1 <1 ву1
2 <2 вуа
Л avn avn
— — — — = Ло — — М ® 11 £ п н set 2»= Л*ствл
28 Мствл _ s»
Ло 2g Ло
118
збк АВ = 57,3°= 1 рад. В точке В восставляют перпендикуляр до пересечения с касательной в точке Е. Отрезок BE равен в масштабе минимальному опрокидывающему моменту Мс.
Прн определенном угле крена в воде могут оказаться отверстия, которые, согласно требованиям Регистра СССР, считаются открытыми. Этот угол крена называется углом -заливания 6/. При углах крена, больших угла заливания, диаграммы статической и динамической остойчивости недействительны, т. е. они обрываются при угле заливания. Если значение угла Of таково, что касательную к диаграмме из точки А провести невозможно, проводят прямую AF через точку обрыва диаграммы (рнс. 71, б). Отрезок BE в масштабе представляет собой момент Л4С.
Используя диаграмму статической остойчивости (рис. 71, в), минимальный опрокидывающий момент определяют из условия равенства работ опрокидывающего и восстанавливающего моментов с учетом энергии качки. Для этого продолжают диаграмму статической остойчивости в область отрицательных абсцисс на участке, равном 0Г, н проводят прямую МК параллельно оси абсцисс так, чтобы площади и S2 были равны друг другу. Ордината ОМ в масштабе моментов представляет собой момент Мс. Минимальный опрокидывающий момент Ме с учетом угла заливания по диаграмме статической остойчивости определяется так же, но прямую МК выбирают такой, чтобы площадь была равна площади S2 только до угла заливания 0f (рис. 71, г).
Проверка остойчивости по критерию погоды производится прн различных вариантах нагрузки, оговоренных Регистром СССР в зависимости от назначения судна.
К диаграмме статической остойчивости судна Регистр СССР предъявляет следующие основные требования: максимальное плечо диаграммы /тах должно быть не менее 0,25 м для судов длиной не более 80 м и не менее 0,2 м для судов длиной более 105 м при угле крена 0т > 30°. Для промежуточных длин значение /тах определяется линейной интерполяцией. Угол заката диаграммы должен быть не менее 60°. Исправленная с учетом влияния свободных поверхностей жидкости начальная метацентрическая высота при всех вариантах нагрузки должна быть положительной.
Дополнительные требования к остойчивости судов различного назначения изложены в Правилах (ч. 4-я, разд. 3). Эти требования учитывают особенности условий эксплуатации судов, обеспечивая при всех вариантах нагрузки их достаточную остойчивость.
Хотя суда спроектированы так, что их остойчивость соответствует Нормам Регистра СССР, прн недостаточном знании качеств судна- или неправильных действиях судоводителя оно может потерять остойчивость, опрокинуться и затонуть. Для того чтобы оказать капитану помощь в поддержании достаточной остойчивости судна во время эксплуатации в соответствии с требованиями Регистра СССР, а также обеспечить ее в случаях, когда судно вынужденно оказывается в условиях, более тяжелых, чем предусмот
119
рено Правилами, проектирующие организации создают документ, называемый «Информация об остойчивости судна».
Информация, составляемая на основании ряда материалов, в частности материалов опыта кренования, содержит четыре части: общую характеристику остойчивости судна и рекомендации по ее поддержанию; сведения об остойчивости по типовым случаям нагрузки; материалы для самостоятельной расчетной оценки остойчивости судна и сопоставления ее с допустимой Правилами; различные материалы для более точного определения показателей остойчивости и посадки судна. Материал «Информации» должен быть изложен просто и наглядно, чтобы в сложной ситуации капитан мог получить без большой затраты труда рекомендации о том, как ему следует поступить для сохранения достаточной остойчивости судна.
112. Как зависит Мс судна при дайной загрузке от 0Г?
113. Характеристика судна: L = 120 м; В = 18 м; Т = 8,5 м; 6 = 0,78; Л = 0,8 м. Удельный объем забортной воды у = 9 920 Н/м2. Суммарная габаритная площадь скуловых килей Ак = 80 м2; площадь парусности Ао = = 800 м2; аппликата центра парусности z = 6,5 м; плечи динамической остойчивости равны (от 0 до 70°): 0; 0,03; 0,10; 0,24; 0,40; 0,52; 0,58; 0,53 м. Угол заливания 0; = 40°. Дайте заключение о достаточной остойчивости по критерию погоды и характеристикам диаграммы статической остойчивости, воспользовавшись таблицами Регистра СССР.
§ 52. Особенности остойчивости катамаранов (§ 7, 26)
У двухкорпусных судов — катамаранов — различают диаметральные плоскости корпусов и диаметральную плоскость судна (рис. 72). Ширина катамарана по грузовую ватерлинию В — расстояние, измеренное в плоскости ГВЛ по наружной обшивке внешних бортов в самом широком месте судна. Расстояние между ДП корпусов называется конструктивной шириной катамарана Во. Шириной корпуса Вк по ГВЛ называется расстояние между точками пересечения плоскости ГВЛ с обшивкой, измеренное в самом широком месте ГВЛ одного корпуса. Просвет между уровнем спокойной воды и нижней поверхностью мостика катамарана представляет собой вертикальный клиренс /Св, а кратчайшее расстояние между внутренними бортами корпусов — поперечный клиренс Объем подводной части катамарана равен сумме объемов подводной части двух его корпусов (V = 2УК). Полнота обводов катамаранов характеризуется коэффициентами полноты подводной части одного корпуса.
Из рис. 73 видно, что для катамарана, как и для однокорпусного судна, метацентрическая формула остойчивости имеет вид
Me = DhsinQ = D (г—a)sin0. (206)
При крене центр величины судна перемещается на большое расстояние, кривая центра величины ССГ полога, а центр ее кри-
120
визны, т. е. поперечный метацентр, располагается высоко. Действительно, метацентрический радиус катамарана
где 1Х — момент инерции площадей сительно ДП судна:
4 = 2[/жк+з(М]
ватерлиний корпусов отнс-(208)
инерции площади ватерлинии
Здесь 1Х к — собственный момент одного корпуса; В0/2 — расстояние между диаметральными плоскостями корпуса и судна; S = aLBK — площадь ватерлинии корпуса.
Пренебрегая величиной 1ХК (она составляет не более 1— 3% значения 1Х), имеем
Ix = 2aLBK f= - £ВкВ° . \ 2 / 2
(209)
Поскольку V = 26LBKT, то, учитывая выражения (207) и (209), запишем
а£ВкВо аВ^
Г ~ 2-2bLBKT ~ 46Т '
(2Ю)
121
Следовательно, поперечный метацентрический радиус пропорционален квадрату конструктивной ширины катамарана Во. Катамараны, как правило, имеют высокий надводный борт (вертикальный клиренс морских катамаранов нередко больше осадки), поэтому их центр тяжести лежит высоко. Однако благодаря большому поперечному метацентрическому радиусу метацентрическая высота катамарана намного больше, чем у однокорпусного судна и достигает 10—13 м. Отсюда повышенная по сравнению с однокорпусными судами начальная поперечная остойчивость катамарана.
Восстанавливающий момент катамарана
Ale = Drsin0 —DasinO. (211)
Так как D = 2y6LBKT, то
аВп
Me = 2y6LBKT —-sin0 — DasinO, (212)
4оТ
или, имея в виду, что S = aLBK,
Me =-^- SBjjSinO—Da sin 0. (213)
Первый член правой части выражения (213) представляет собой остойчивость формы, второй — остойчивость веса. Остойчивость формы, как и метацентрический радиус, пропорциональна квадрату конструктивной ширины катамарана Во. Поэтому разнос корпусов является одной из основных характеристик остойчивости катамарана.
Продольный метацентрический радиус катамарана может быть вычислен по формуле
— 14бт ’ откуда
— = 0,285 f—У. (215)
г \Во /
Легко подсчитать, что при (L/Bo)<2 отношение (/?/г)<1, т. е. продольная остойчивость ниже поперечной, чего не может быть у однокорпусных судов. Если (L/Bo)>2, то, хотя продольная остойчивость катамарана и больше поперечной, при действии дифферентующего момента определенного значения катамаран дифферен-туется на значительно больший угол, чем однокорпусное судно. Отсюда следует, что продольная остойчивость катамаранов должна тщательно проверяться расчетным путем.
Диаграмма поперечной статической остойчивости катамарана характеризуется большими плечами статической остойчивости и углами заката, чем диаграмма однокорпусного судна.
122
Глава VII
НЕПОТОПЛЯЕМОСТЬ
§ 53. Общие положения (§ 23, 25, 34, 36)
Непотопляемостью называется способность судна оставаться на плаву после затопления части отсеков и сохранять остойчивость, достаточную хотя бы для ограниченного использования судна по назначению.
При затоплении отсека увеличивается средняя осадка судна, появляются крен и дифферент, уменьшается остойчивость. Судно может опрокинуться и затонуть. Сохранить непотопляемость судна — это значит сохранить его плавучесть и остойчивость настолько, чтобы после затопления отсека оно было способно хотя бы в какой-то мере выполнять свои функции. Поэтому, решая проблему непотопляемости, прежде всего рассматривают плавучесть и остойчивость поврежденного судна. При этом в основе принимаемых решений лежит требование о том, чтобы судно теряло остойчивость только после потери плавучести, т. е. чтобы оно тонуло, не опрокидываясь.
Непотопляемость обеспечивается рядом конструктивных, организационно-технических мероприятий и борьбой экипажа за непотопляемость судна.’ Рассмотрим основные конструктивные мероприятия.
Важнейший вопрос — выбор такой высоты непроницаемого надводного борта, при которой обеспечивался бы достаточный запас плавучести и остойчивости.
Другой не менее важный путь обеспечения непотопляемости — деление корпуса на отсеки прочными водонепроницаемыми переборками. Выбор числа переборок на судне, т. е. объема отсеков, определяется многими факторами. Разбивка судна на отсеки производится с учетом возможных повреждений и влияния затопления каждого из отсеков на крен, дифферент и остойчивость судна. Так, объем любого отсека или их группы (если предполагается сохранить непотопляемость судна при затоплении группы отсеков) должен быть меньше запаса плавучести, а уменьшение остойчивости при затоплении отсека или группы отсеков не должно сопровождаться опрокидыванием судна. Иногда отсеки, ограниченные поперечными переборками, делят продольными водонепроницаемыми переборками. Наличие этих переборок в подводной части может вызвать недопустимой крен после затопления отсека, однако, с другой стороны, при отсутствии этих переборок остойчивость можёт опасно уменьшиться из-за большой площади свободной поверхности воды. В связи с этим продольные водонепроницаемые переборки в подводной части судна следует устанавливать только после тщательного анализа их влияния на непотопляемость.
123
В надводной части продольные переборки препятствуют распространению попавшей на палубу воды.т. е. препятствуют уменьшению остойчивости, поэтому их установка здесь, как правило, желательна.
Значительная роль в обеспечении непотопляемости принадлежит целости и непроницаемости надводного борта: если надводный борт оказывается проницаемым, то уменьшается запас плавучести и остойчивости, поскольку это равносильно уменьшению высоты надводного борта.
Поскольку при крене, дифференте или ударах волн вода через проницаемое отверстие в надводном борту может попасть на нижележащую палубу и, распространившись по ней,— в отсеки подводной части корпуса, надводную его часть разделяют на отсеки в соответствии с делением подводной части. В этом случае водонепроницаемые переборки устанавливают по вертикали от днища до верхней палубы, а в палубах делают надежные водонепроницаемые закрытия.
Производительность водоотливной системы, как правило, оказывается недостаточной для удаления воды, поступающей через пробоину. Водоотливные системы устанавливают на судах главным образом для удаления воды из затопленных отсеков, когда пробоины уже заделаны.
После затопления отсека, ширина которого меньше ширины судна, последнее получает крен, вызывающий резкое уменьшение запаса плавучести. Поэтому создают систему затопления отсеков, которая давала бы возможность при сохранении достаточной остойчивости спрямить судно и тем самым улучшить использование запаса плавучести.
Суда оборудуют измерительной аппаратурой и вычислительной техникой для оперативного решения задач непотопляемости в аварийной ситуации.
К организационно-техническим мероприятиям обеспечения непотопляемости относятся: поддержание в процессе эксплуатации судна непроницаемости наружной обшивки, палуб, переборок и сохранения герметичности закрытий; соблюдение инструкций об использовании закрытий в море; поддержание необходимого запаса плавучести и достаточной остойчивости; содержание средств борьбы за непотопляемость в полной готовности к действию.
Борьба экипажа за непотопляемость состоит в быстрых и точных действиях, согласно разработанным инструкциям и наставлениям.
Основой для разработки всех перечисленных мероприятий является теория непотопляемости судов. Она дает методы расчета непотопляемости судов и устанавливает требования к их непотопляемости.
114. Чем опасна пробоина в надводной части судна?
115. Судно сидело без крена. Почему после затопления отсека, простирающегося от борта до борта, судно не накренится?
124
§ 54. Методы расчета непотопляемости (§ 23, 34—36)
Все отсеки в зависимости от характера их затопления делятся на три категории:
I категория — отсеки, заполненные до палубы. Количество воды в отсеке и положение ее центра тяжести не зависит от посадки судна;
II категория — отсеки, заполненные частично и с забортной водой не сообщающиеся. Количество воды в отсеке не зависят от посадки судна, но при наклонениях судна ее центр тяжести меняет свое положение;
III категория —отсеки, заполненные частично и сообщающиеся с забортной водой. Уровень воды в отсеке всегда совпадает с уровнем воды в море, поэтому количество воды в отсеке и положение центра тяжести ее зависят от посадки судна.
Существуют два равноценных метода расчета непотопляемости: метод приема груза и метод постоянного водоизмещения.
Сущность первого состоит в том, что влившуюся в отсек воду считают принятым грузом с центром тяжести в центре тяжести затопленного объема отсека. Расчет изменения посадки и остойчивости ведется по выведенным ранее формулам. Так, если затоплен отсек I категории, то изменение средней осадки вычисляют по формуле (87); изменение остойчивости — по формулам (153) и (154), углы крена, дифферента и дифферент — по формулам (141) — (144). Если затоплен отсек II категории, то расчет отличается от предыдущего случая лишь тем, что изменение остойчивости определяется как сумма изменений, вычисленных по формулам (153) и (163).
Сущность метода постоянного водоизмещения состоит в том, что затопленный отсек и влившуюся в него воду считают не принадлежащими судну. Так, при затоплении отсека III категории принимают, что объем подводной части судна при осадке по ватерлинию, которую судно имело до затопления отсека, уменьшился на объем затопленного отсека, а вес судна остался прежним. Таким образом происходит изменение осадки, при котором объем добавочного слоя равен объему исключенного отсека, а объем подводной части и водоизмещение сохраняются постоянными.
116. При каких обстоятельствах может произойти затопление отсеков I и II категорий?
117. Почему при расчете непотопляемости методом постоянного водоизмещения вес судна считается неизменным?
§ 55. Расчет непотопляемости методом постоянного водоизмещения при затоплении единичного отсека (§ 16, 23, 29, 31)
Пусть затоплен отсек III категории. При этом произошло изменение характеристик плавучести и остойчивости судна.
1. Изменение средней осадки. Ватерлиния, определяющая посадку судна до аварии, называется начальной. Ее
125
площадь обозначим So. Площадь ватерлинии в затопленном отсеке обозначим $ и назовем потерянной площадью ватерлинии. Площадь поврежденной ватерлинии, т. е. ватерлинии судна после исключения затопленного отсека, будет So—s.
Объем подводной части поврежденного отсека
о = -£-, (216)
где р — масса влившейся в отсек воды, т; р — ее плотность, кг/м3. Поскольку в пределах изменения осадки обводы судна можно считать прямостенными, объем добавочного погрузившегося объема, равного объему подводной части исключенного отсека, может быть вычислен по формуле
о = (80—s) AT,
(217) где AT — изменение средней осадки судна после затопления отсека: АТ = —^—= р- .
So — s р ($0— s)
(218)
2. Изменение координат центра тяжести еле затопления 5сти площади ватерлинии
до затопления отсека; xs — его абсцисса; Fx — центр тяжести площади поврежденной ватерлинии; /1( Ьг — его координаты; I, b — координаты центра тяжести потерянной площади ватерлинии (рис. 74).
Составим уравнение моментов площадей относительно оси абсцисс
(So—s)b1 = So-O—sb, (219)
откуда
&i=----, (220)
□ о — 5
и уравнение моментов площадей относительно оси ординат
(So—sjl^SoXs— si, (221)
откуда
/1 = —^-s~sZ • (222)
So — s
3. И з м e н e н и е координат центра величины после затопления отсека. Обозначим: координаты 126
площади ватерлинии по отсека. Обозначим: F — центр тяж.
центра величины до затопления отсека хс, ус, гс и после затопления отсека хС1, уС1, гС1; координаты центра тяжести затопленного объема отсека (точки Л) х, у, z. В"пределах изменения осадки об-' воды судна можно считать прямостенными, поэтому координатами дт центра тяжести добавочного объема (точки В) будут llt blt Т + —
(рис. 75).
Составим уравнения моментов объемов относительно плоскостей проекций:
(223)
(224)
Vxci = Vxc—vx + vli,
Vycl = V-0—vy+vbL‘,
Отсюда координаты нового центра величины будут xci = хс —(.х —/1)» (226)
f228)
Изменение координат центра величины после затопления отсека
^хс = ха—хс~—(229)
^Ус = У а—Ус = —(У—bi)> (23°)
Дгс = гс1 — гс = (г- . (231)
127
4. И з м е н е н и е поперечного метацентрического радиуса после затопления отсека. Метацентрический радиус после затопления отсека определяется по формуле
(232)
Здесь 1Х1 — момент инерции площади поврежденной ватерлинии относительно продольной оси, проходящей через ее центр тяжести (оси FiXi, рис. 74):
'я = b2, (233)
где ix — собственный момент инерции потерянной площади ватерлинии относительно продольной оси; ix + sb2 — момент инерции
той же площади относительно оси Ох; 1Х — момент инерции площади начальной ватерлинии относительно продольной оси, проходящей через ее центр тяжести; 1Х — (ix + sb2) — момент инерции площади поврежденной ватерлинии относительно оси Ох. Следовательно,
Г1 = г + дг==
_1л *x + sfr2+ (S 6o~s) frl
V V
(234)
Поскольку величина (So—s) Ь? по сравнению с предыдущими членами пренебрежимо мала, то
Дг =—^ + s<. (235)
5. Изменение поперечной метацентрической высоты. Изменение метацентрической высоты АЛ = = Ar + Azc—Azc, но в данном случае вес судна и положение центра тяжести постоянны, т. е. Azc = 0. Следовательно,
АЛ = Ar + Azc. (236)
6. Угол крена после затопления отсека. После наклонения судна сила поддержания проходит через точку (рис. 76). Прикладывая в точке С силу D, направленную вертикально вниз, и тем самым уравновешивая силу поддержания, которая до аварии была приложена в этой точке, получим
Л4кр= D\yc cos 0.
128
Восстанавливающий момент определяется по формуле
Me = D(h+ Д/г) sin 0. (238)
Поскольку судно плавает с креном, Л4кр = Мв н DAz/ccos0 = D(/i + Д/г) sin 0 (239)
или
tg0 = -7T7T- (240)
Л + ДА
7. Изменение продольного метацентрического радиуса. На основании рассуждений,’ аналогичных тем, которые были приведены в п. 4, получаем
(241)
где 1у1 — момент инерции площади поврежденной ватерлинии относительно поперечной оси, проходящей через ее центр тяжести:
Лд = /5-[^ + «(/-х5)2]-(5о-5)(^-^)2. (242)
Величина (So—s) (/х—х$)2 по сравнению с предыдущими членами мала, поэтому, пренебрегая ею, получаем
= + Ч>+5^-хз)а (243)
или
А/? = — ty + s(/ — *s)a (244)
8. Изменение продольной метацентрической высоты после затопления отсека. На основании рассуждений, аналогичных тем, которые были приведены в п. 5, получаем
ДЯ=Дгс + А/?. (245)
9. Угол дифферента после затопления отсека. На основании рассуждений, аналогичных тем, которые были приведены в п. 6 (рис. 77), запишем
tgip
Д*с
И + дя ’
(246)
10. Дифферент судна после затопления отсека. Из рис. 77 видно, что
ДТН = ДТ + [4- + (-Ы tg ф = ДТ + (4 _ / \ tg|; LA \ * /
дтк = д Т— [ ± _ Z1)] tg ф = д т - (А + tg ф,
5
В. JJ. Фукельман
(247)
(248)
129
откуда дифферент
d' = Тв—Тк = (Т + ДТ„)-(Т + ДТК) = ДТИ-ДТК. (249)
Имея в виду выражения (247) и (248), получим
d' = L tg ф. (250)
При затоплении отсеков I и II категорий расчет непотопляемости может быть произведен с помощью выведенных выше формул для отсека III категории. В этом случае в них принимают: для отсека I категории s = I = b = = ix = L = 0; для отсека II категории s = I = b = = 0 и fj = xs.
При выводе формул данного параграфа мы сделали некоторые допущения: считали судно и затопленный отсек прямостенными, использовали метацентрическую формулу остойчивости, справедливую только при малых углах наклонения. Поэтому выведенные формулы действительны только при затоплении небольших отсеков (когда появляются малые углы наклонения судна) и могут быть использованы только для расчета непотопляемости в первом приближении. Более точный расчет изменения элементов посадки и остойчивости производится специальными способами, среди которых в первую очередь следует назвать способы А. Н. Крылова, В. Г. Власова, Д. В. Дорогостайского, Ю. А. Шиманского.
118. Характеристики судна: L = 140 м; В = 20,6 м; Т — 9,0 м; 6 = = 0,71; а = 0,8; хс — 1,2 м; xs = — 0,3 м; h — 0,9 м; И — 120 м. Затоплен отсек III категории размером /0 = 9 м; 60 = 4 м. Координаты центра тяжести площади ватерлинии в затопленном отсеке I = 45 м; b = 8,3 м. Координаты центра тяжести объема затопленной части отсека х = 45 м; у =• = 8,3 м; z = 4,8 м. Рассчитайте изменение посадки и остойчивости судна.
130
§ 56. Кривая предельных длин отсеков (§ 12, 15, 20, 22)
При помощи построенной для каждого данного судна кривой предельных длин отсеков определяют места установки поперечных водонепроницаемых переборок, обеспечивающих такую посадку поврежденного судна, которая отвечает требованиям Регистра СССР.
Для того чтобы построить кривую предельных длин отсеков, на масштабе Бонжана наносят предельную линию погружения (рнс. 78), т. е. линию, проходящую по борту на расстоянии не менее 76 мм ниже пересечения борта с наружной поверхностью настила палубы переборок — самой верхней палубы, до которой до-
водят поперечные водонепроницаемые переборки. Аварийная ватерлиния, т. е. ватерлиния поврежденного судна после затопления одного -или нескольких отсеков, не может проходить выше касательной к предельной линии погружения. Затем прочерчивают горизонтальную линию 1—I, касательную к предельной линии погружения. От точек пересечения этой ватерлинии с носовым и кормовым перпендикулярами откладывают вниз по этим перпендикулярам отрезок Г, определяемый в зависимости от отношения TfH, где Т — осадка по ватерлинию деления судна на отсеки (т. е. по ватерлинию неповрежденного судна, применительно к которой в соответствии с Правилами Регистра СССР производится разделение судна водонепроницаемыми переборками); Н — высота борта:
Т/Н . 0,5 0,6 0,7 0,8 0,9
l'/Н . 0,85 0,70 0,55 0,40 0,25
Отрезок /' делят на три равные части и через полученные точки на носовом и кормовом перпендикулярах проводят еще шесть Bas’ 131
терлииий, касательных к предельной линии погружения. Для каждой из семи касательных к предельной линии погружения ватерлиний измеряют площади шпангоутов, а затем вычисляют объемные водоизмещения V£ и статические моменты водоизмещения относительно плоскости миделя М{. Вычисление ведется в табличной форме (типа табл. 17).
Определяют объем и положение по длине судна такого отсека, затопление которого вызовет посадку судна по одну из семи ватерлиний, касательных к предельной линии погружения:
v. = V£- У». (251)
где v(- — объем затопленного отсека, м3; Vo — объемное водоизмещение судна по ватерлинию деления судна на отсеки, м3.
Далее имеем
Mt-Mo + ViXt, (252)
где Мо —статический момент водоизмещения при осадке по ватер-
линию деления судна на отсеки, м3; v£x£ — статический момент объема затопленного отсека относительно плоскости миделя, м4; х{ — абсцисса центра тяжести объема затопленного отсека, м.
Следовательно, Mi —
Таким образом получают семь значений v( и х£.
Вычерчивают строевую по
шпангоутам при осадке судна по предельную линию погружения (рис. 79, кривая /) и ее интегральную кривую II (последнюю можно строить и с носа, н с кормы). Определяют предельные длины отсеков, имея в виду, что разность ординат интегральной кривой представляет собой объем • затопленного отсека, а разность абсцисс — его длину. На оси абсцисс интегральной кривой в масштабе откладывают семь вычисленных ранее значений х; и в отмеченных точках проводят ординаты, на которых располагают (в масштабе ординат интегральной кривой) отрезки vt таким образом, чтобы было соблюдено равенство площадок типа ОАВ и OCD. (Можно доказать, что при этом условии центр тяжести объема'отсека будет иметь абсциссу х£.) Отрезки типа FD в масштабе представляют собой предельные длины отсеков /£.
Строят кривую предельных длин отсеков (рис. 80). На отрезке горизонтальной прямой, представляющем в определенном масштабе длину судна, откладывают от миделя отрезки х£, соответствующие абсциссам середин предельных длин отсеков. В полученных точках
132
проводят ординаты, на которых откладывают в масштабе соответствующие предельные длины отсеков и эти точки соединяют плавной кривой. Из конечных точек основания графика проводят прямые под углом 0 = arctg 2 « 63° к оси абсцисс до пересечения с кривой. Эти прямые ограничивают кривую предельных длин отсеков с учетом того, что в оконечностях половина длины отсека не может быть больше расстояния от его середины до оконечности.
До сих пор мы считали, что объем влившейся в судно воды равен теоретическому объему отсека. Фактически объем влившейся в отсек воды всегда меньше его теоретического объема. Чтобы учесть это обстоятельство, вводят понятие о коэффициенте проницаемости отсека |л<1, под которым понимается отношение объема воды, который может влиться в'отсек, к теоретическому объему отсека.
Рис. 80
Значения коэффициентов проницаемости отсеков различного назначения устанавливает Регистр СССР (Правила классификации и постройки морских судов. Т. I, 1974, стр. 373—375).
Поскольку в. отсек вливается меньше воды, чем полагали при выполнении расчета, длина отсека может быть больше той, которая была определена. Поэтому ординаты ранее построенной кривой должны быть разделены на коэффициенты проницаемости отсеков, расположенных на данном отрезке длины судна. Таким образом получают кривую предельных длин отсеков с учетом коэффициента проницаемости. При затоплении отсека с центром в рассматриваемой точке длины судна и длиной, равной соответствующей предельной длине с учетом коэффициента проницаемости, аварийная ватерлиния касается предельной линии погружения, если до затопления отсека судно имело осадку по ватерлинию деления судна на отсеки.
При помощи кривой предельных длин отсеков проверяют расположение поперечных водонепроницаемых переборок, которые предварительно определили исходя из конструктивных и эксплуатационных соображений. Для этой цели из точек пересечения линий переборок с основанием проводят прямые параллельно линиям,
133
ограничивающим концы кривой (пунктирные линии на рис. 80). Если точки пересечения этих прямых располагаются ниже кривой предельных длин, то длина отсека не превышает предельную. В противном случае расстояние между переборками следует уменьшить.
При делении судна на отсеки необходимо учитывать его размеры, район и характер эксплуатации, число людей иа борту. Эти обстоятельства ^учитывают так называемым фактором деления F (F 1), определяемым Правилами Регистра СССР. Умножив предельную длину отсека на фактор деления, получают допустимую длину отсека. Фактическое расстояние между поперечными переборками судна не должно быть более допустимой длины отсека.
Если фактор деления F< 1, то строят кривую допустимых длин отсеков и с ее помощью проверяют расположение переборок точно так же, как с помощью кривой предельных длин.
119. .Для какого помещения коэффициент проницаемости больше: для трюма, занятого лесным грузоц, или порожнего, трюма?
120. Сухогруз и пассажирское судно равной длины эксплуатируются в одном районе. У какого судна фактор деления больше?
121. Площади шпангоутов по предельную линию погружения равны: 0; 4,8; 13,2; 21,2; 28,8; 37,2; 45,0; 51,6; 57,0; 60,0; 61,4; 61,2; 59,0; 54,6; 47,8; 39,8; 29,0; 19,4; 11,2; 3,0; 0 м2. Длина судна L — 60 м. Абсцисса центра тяжести затопленного отсека xi = 4,5 м и объем его и(- = 400 м3. Определите допустимую длину отсека, если ц = 0,85 и F = 0,7. Чертежи выполните в масштабе: длина 1 см — 3 м; площадь 1 мм — 1 м2; объем 1 мм — 10 м3.
§ 57. Правила обеспечения непотопляемости судов (§ 56)
Характеристики непотопляемости нормируются Регистром СССР (Правила классификации и постройки морских судов. Т. I, ч. 5-я, 1974).
Расстояние между поперечными водонепроницаемыми переборками не должно превышать допустимую длину отсека, определенную по кривой предельных длин отсеков с учетом коэффициентов проницаемости и фактора деления. Прн этом грузовая ватерлиния деления судна на отсеки не должна быть выше ватерлинии, соответствующей минимальному надводному борту в соленой воде.
Независимо от выполнения требований к делению судна на отсеки, при проектировании необходимо выполнить расчеты посадки и остойчивости судна с затопленными отсеками. Для этого надо знать, какие цистерны, выгородки и переборки могут быть разрушены, т. е. каковы предполагаемые размеры разрушений. В Регистре СССР даны правила определения размеров возможных повреждений корпуса.
Судно признается удовлетворяющим требованиям к посадке в поврежденном состоянии, если расчеты показывают, что аварийная ватерлиния нн в одной точке не пересекает предельную линию
134
погружения при затоплении: а) одного любого отсека судна, имеющего фактор деления более 0,5; б) двух любых смежных отсеков судна, имеющего фактор деления от 0,5 до 0,34; в) трех любых смежных отсеков судна, имеющего фактор деления 0,33 и менее. Расчет посадки поврежденного судна производится для таких возможных в процессе эксплуатации состояний нагрузки (без учета обледенения), при которых надводный борт, поврежденного судна с учетом действительного исходного дифферента оказывается наименьшим.
Требования к остойчивости поврежденного судна считаются выполненными, если расчеты для случая затопления указанного выше числа отсеков, зависящего от фактора деления, покажут, что: а) начальная метацентрическая высота судна в конечной стадии затопления, определенная методом постоянного водоизмещения, до принятия мер по ее увеличению составляет не менее 0,05 м (для положения статического равновесия при симметричном затоплении и для ненакрененного положения при несимметричном затоплении); б) угол крена в конечной стадии несимметричного затопления до принятия мер по спрямлению судна не превышает 15°, а после принятия мер по его спрямлению не превышает 7° для пассажирских и 12° — для иепассажирских судов; в) аварийная ватерлиния до и в процессе спрямления проходит, по крайней мере, на 300 мм ниже отверстий в переборках, палубах и бортах, через которые возможно дальнейшее поступление воды и распространение ее по судну; г) аварийная ватерлиния после затопления или после спрямления судна (когда оно производится) проходит ниже предельной линии погружения; д) диаграмма статической остойчивости поврежденного судна имеет достаточную площадь участков с положительными плечами, максимальное плечо статической остойчивости не менее 0,1 м, а протяженность диаграммы с положительными плечами не менее 30° при симметричном и 20° — при несимметричном затоплении. Проверка остойчивости поврежденного судна производится для наихудших случаев посадки и остойчивости судна, а также разменов и расположения пробоин.
Регистр СССР устанавливает ряд конструктивных мер обеспечения непотопляемости судна, касающихся устройства двойного дна, прочности водонепроницаемых переборок, отверстий в переборках и палубах и их закрытий, отверстий в наружной обшивке ниже предельной линии погружения, устройства трубопроводов.
В период проектирования судна разрабатывается документ, содержащий информацию об аварийной остойчивости и посадке судна. Пользуясь ею, капитан в случае аварии имеет возможность оценить состояние поврежденного судна и принять необходимые меры.
Следует помнить, что судно, обладавшее по проекту достаточной непотопляемостью, при аварии может погибнуть, если во время его постройки вопросам обеспечения непотопляемости не было уделено должного внимания. Поэтому в период постройки судна все
135
отсеки корпуса должны тщательно проверяться на водонепроницаемость. После проверки отсека на водонепроницаемость в его ограничивающих поверхностях запрещается прорезать какие-либо отверстия. Если все же появится необходимость приварить деталь или вырезать и заделать отверстия в бортах, переборках и палубах, то ближайшие участки конструкций обязательно подвергают повторной проверке на непроницаемость. Крышки люков, иллюминаторы, водонепроницаемые двери, горловины и тому подобные детали должны быть тщательно проверены на легкость закрытия и водонепроницаемость. В процессе достройки судна необходимо тщательно следить за состоянием забортной арматуры и закрытием отверстий, расположенных ниже ватерлинии.
136
Раздел третий ДИНАМИКА КОРАБЛЯ
Глава VIII СОПРОТИВЛЕНИЕ СРЕДЫ ДВИЖЕНИЮ СУДНА
§ 58. Общие понятия (§ 7)
Теория сопротивления среды движению судна изучает законы взаимодействия среды и движущегося судна. Поскольку судно движется на границе двух сред — воды и воздуха, возникают препятствующие этому движению гидродинамические силы (сопротивление воды) и аэродинамические силы (сопротивление воздуха). Знание теории сопротивления среды движению судна позволяет проектировать суда с минимальным при заданных условиях сопротивлением и на этой основе либо повысить скорость судна без увеличения мощности главных двигателей, либо, не уменьшая скорости, понизить мощность главных двигателей. Очевидно, что в обоих случаях улучшаются технико-экономические показатели судна'.
Вследствие вязкости воды между корпусом движущегося судна и ближайшими к корпусу слоями воды возникают силы трения. Равнодействующая этих сил, направленная против движения судна, называется сопротивлением трения RT.
Вязкость воды влияет также на распределение гидродинамических давлений вдоль корпуса. Равнодействующая этих давлений, направленная против движения судна, называется сопротивлением формы /?ф, так как значение этой величины зависит от формы судна. Если судно имеет плохо обтекаемую форму, то в его кормовой части происходит отрыв пограничного слоя, сопровождающийся-вихреоб-разованием и понижением давления за кормой. Как следствие этих явлений появляется еще одна равнодействующая, также направленная против движения судна. Именно этим объясняется увеличение сопротивления формы плохо обтекаемых судов по сравнению с хорошо обтекаемыми. Работа, затраченная на преодоление сопротивления формы, превращается в кинетическую энергию вихревого движения жидкости.
Поскольку причиной •^•возникновения сопротивления трения и сопротивления формы является вязкость воды, их нередко объединяют под общим названием вязкостного сопротивления Rs = = RT + 7?ф.
137
Движение судна по свободной поверхности воды или вблизи нее связано с волнообразованием, вызывающим перераспределение давления воды на корпус: с носа оно оказывается больше,.чем с кормы. Появляющаяся в результате этого равнодействующая, направленная против движения судна, называется волновым сопротивлением RB. Работа, затраченная на его преодоление, переходит в энергию возникающих волн.
Судно имеет ряд выступающих частей (рули, скуловые кили, кронштейны гребного вала), которые создают дополнительные сопротивления трения, формы и (если они расположены близко к поверхности воды) волновое сопротивление. Выступающие части, влияя на характер обтекания корпуса, могут изменять его сопротивление. Сопротивление выступающих частей /?в., не разделяют на составляющие, а определяют как единое целое.
Наконец, при движении судно испытывает также воздействие воздушной среды. Сопротивление воздуха /?возд — воздушное сопротивление трения и формы — рассматривают как единое целое.
Таким образом, полное сопротивление движению судна складывается нз следующих составляющих:
R — ^т + ^ф + ^в + ^в. ч + ^возд- (254)
В практике проектирования судов из общего сопротивления воды движению корпуса (без выступающих частей) выделяют сопротивление трения, которое определяют расчетным путем. Сопротивление формы и волновое сопротивление образуют так называемое остаточное сопротивление Ra = + RB. Оно определяется пу-
тем испытания модели судна в опытовом бассейне, т. е. экспериментальным путем. Сопротивление выступающих частей и воздуха также определяют опытным путем.
Значения всех составляющих сопротивления зависят от главных размерений судна и их соотношений, от формы обводов судна, формы и размеров палубных сооружений и скорости судна.
Мерой быстроходности судна является его относительная скорость — так называемое число Фруда Fr:
(255)
где v — скорость судна, м/с; g — ускорение свободного падения, м/с2; L— длина судна, м.
В зависимости от числа Фруда суда делятся на тихоходные (Fr<0,22), среднескоростные (Fr = 0,23-?-0,35) и быстроходные (Fr>0,35). При Fr<0,35 сопротивление трения составляет более половины полного сопротивления. С увеличением шероховатости наружной обшнвки удельное значение сопротивления трения растет. В общей доле остаточного сопротивления значение сопротивления формы при всех относительных скоростях сравнительно
г- У
Fr = r— , V&L
138
невелико, но все же оно заметнее при небольших относительных скоростях и полных обводах судна. Волновое сопротивление растет с увеличением числа Фруда и начинает играть существенную роль в полном сопротивлении при Fr>0,15. Сопротивление воздуха относительно невелико и составляет 1,5—10% полного сопротивления.
122. Чему равно волновое сопротивление подводной лодки, идущей на большой глубине?
123. Чему было бы равно RT и /?ф судна, если бы оно двигалось в идеальной жидкости?
124. Полное сопротивление движению судна R = 5 500 Н; RT = 3 500 Н; RB. ч = 400 Н; Rbo3a ~ 350 Н. Вычислите Ro.
§ 59. Сопротивление трения (§ 1, 5, 7, 14, 58)
Сопротивление трения можно представить как сумму сопротивления, обусловленного кривизной и шероховатостью судовой поверхности, и сопротивления трення технически гладкой эквивалентной пластины, т. е. пластины, длина и площадь которой равны соответственно длине судна и площади его смоченной поверхности.
Ввиду наличия продольной и поперечной кривизны корпуса судна картина его обтекания несколько отличается от обтекания пластины: сопротивление трения технически гладкого корпуса увеличивается по сравнению с сопротивлением пластины на 2—8%. Наружная обшивка судна по своей природе не является технически гладкой. Кроме того, шероховатость наружной обшивки увеличивают места соединения листов, волнистости от сварки, коррозионные разрушения и обрастание морскими организмами. Все это приводит к увеличению сопротивления движению судна.
Сопротивление трения Rt (в Н) можно определить по формуле
/?T = (£r+ACK + AQ-|-vU (256)
где £т — безразмерный коэффициент сопротивления трения технически гладкой пластины; Д£к и Д£ш — надбавки на кривизну и шероховатость поверхности корпуса; р — плотность воды, кг/м3; v — скорость судна, м/с; Q — площадь смоченной поверхности корпуса, м2.
Пограничный слой, образующийся при обтекании корпуса судна потоком воды, является турбулентным практически по всей длине судна. Входящий в формулу (256) коэффициент сопротивления трения технически гладкой лластины £т при турбулентном обтекании зависит от числа Рейнольдса Re = vL/v, где v — скорость судна, м/с; L — его длина, м; v — кинематический коэффициент вязкости воды, м2/с. Значения коэффициента £т приведены в табл. 27.
139
Таблица 27
Значения коэффициента £т
Re IO-5 Ет -ю3 Re-10—6 Ц-- io3 Re-10-7 Ст.
1,00 7,16 1,00 4,45 1,00 3,00
2,00 6,15 2,00 3,94 2,00 2,69
3,00 5,65 3,00 3,66 3,00 2,53
4,00 5,34 4,00 3,50 4,00 2,43
5,00 5,11 5,00 3,37 5,00 2,35
6,00 4,93 6,00 3,26 6,00 2,29
7,00 4,78 7,00 3,18 7,00 2,24
8,00 4,66 8,00 3,11 8,00 2,20
9,00 4,56 9,00 3,05 9,00 2,16
П родолжение
Re-IO-8 Ц- 1 о3 Re-10—9 Et-io3
1,00 2,13 1,00 1,57
2,00 1,94 2,00 1,44
3,00 1,83 3,00 1,37
4,00 1,77 4,00 1,33
5,00 1,71 5,00 1,29
6,00 1,67 6,00 1,27
7,00 1,64 7,00 1,25
8,00 1,62 8,00 1,23
9,00 1,60 9,00 1,21
Поскольку надбавка на кривизну, как правило, составляет малую часть £т, в приближенных расчетах часто полагают Д£к « О и условно относят увеличение сопротивления трения из-за кривизны корпуса к остаточному сопротивлению. Численные значения надбавки к коэффициенту сопротивления трення, обусловленной влиянием шероховатости наружной поверхности корпуса, составляют Д£ш= (0,3-0,6)1(Г3.
Площадь смоченной поверхности судна может быть определена по теоретическому чертежу или с помощью эмпирических формул, например с помощью формулы
Q = L(1,36Т + 1,136В), (257)
где L, Т, В — главные размерения судна; 6 — коэффициент полноты водоизмещения.
С увеличением длины судна резко возрастает площадь смоченной поверхности, а вместе с ней сопротивление трения. Тихоходные суда, у которых сопротивление треция составляет главную часть сопротивления движению судна, нужно проектировать с малым отношением L/B.
140
Для уменьшения сопротивления трения необходимо:
1. При постройке судна не допускать, а в случае появления устранять волнистость наружной обшивки.
2. При подготовке к окраске тщательно удалять ржавчину и окадину, так как они могут явиться причиной местного разрушения краски и возникновения усиленной коррозии.
3. Краску применять только мелкой зернистости, не засоренную инородными телами. Краска должна обладать хорошими антикоррозионными свойствами и включать ядохимикаты, предотвращающие обрастание подводной части корпуса водорослями и ракушками.
4. Вырезы в корпусе закрывать решетками или крышками, а отдельные выступы располагать так, чтобы они находились в области гидродинамической тени, т. е. в области вихревого потока, созданного выступом, расположенным впереди.
5. Периодически очищать подводную поверхность от водорослей и ракушек. Очистку производить равномерно, не оставляя неочищенных мест. Особенно тщательно очищать носовую оконечность судна.
125. Как изменится коэффициент сопротивления трения, если длина судна, его скорость, а также температура забортной воды увеличатся?
126. Характеристики морского судна: L = 80 м; В = 13 м; Т = 5 м; 6 = 0,75; и = 12 м/с. Температура забортной воды 277 К; Л?ш= 0,3-10“3* Вычислите RT.
§ 60. Сопротивление формы (§ 7, 58)
Сопротивление формы определяют по формуле
= (258)
где /?ф — сопротивление формы, Н; — безразмерный коэффициент сопротивления формы.
Коэффициент сопротивления формы может быть вычислен по приближенной формуле Э. Э. Папмеля
£ф = 0,09 , (259)
где LK — длина кормового заострения, которая у судов без цилиндрической вставки измеряется от миделя до ахтерштевня, у судов с цилиндрической вставкой — от ее конца до ахтерштевня; (0g — площадь смоченной поверхности миделя.
Более точное значение сопротивления формы получают путем испытания модели судна.
Сопротивление формы можно уменьшить в процессе проектирования, выбрав определенные соотношения главных размерений и соответствующие обводы судна, а именно: отношение
141
длину кормового заострения LK > 4,1 р , и выполнив примыкание кормовых ветвей ватерлиний к диаметральной плоскости в подводной части под возможно меньшими углами. Кроме того, пазы секций и листов наружной обшивки в подводной части следует располагать вдоль линий тока.
127. Характеристики судна без цилиндрической вставки L = 85 м; В = 14,2 м; Т = 5,4 м; 6 = 0,72; 0 = 0,98; v = 16 уз. Вычислите Яф.
§ 61. Волновое сопротивление (§ 7, 14, 58)
Волновое сопротивление (в Н) может быть вычислено по формуле Яв = £в-р2Й, - (260)
где £в — безразмерный коэффициент волнового сопротивления, зависящий от числа Фруда.
Коэффициент £в определяют
с помощью графика, составленного по результатам модельных испытаний данного судна. Один из таких графиков представлен на рис. 81. Наличие бугров и впадин на кривой, объясняется тем, что при одних числах Фруда интерференция волн благоприятная, а при других — неблагоприятная.
Волновое сопротивление можно
уменьшить, если при проектировании
судна придерживаться следующих правил: задаться возможно большими значениями L/В и коэффициента продольной пол
Рис. 82
ноты; правильно выбрать {размеры и расположение^ цилиндрической вставки, поскольку она влияет на интерференцик/волн;’иосовым ветвям ватерлиний придать выпуклую форму при 'Fr<0,2, S-образную при Fr — 0,25-г-0,35, с небольшой выпуклостью при Fr = = 0,35-г-0,4 и прямую при Fr>0,4; при определенных числах Фруда применить интерферирующие устройства, т. е. устройства,
142
создающие дополнительные волновые системы, благоприятно влияющие на интерференцию волн: носовые бульбы (рис. 82, а), носовые подводные крылья (рис. 82, б) и бортовые були (рис. 82, в); выбрать длину судна и скорость такими, чтобы интерференция волн была благоприятной.
128. Воспользовавшись графиком (рис. 81), построенным для судна длиной L — 100 м, установите, при какой скорости коэффициент волнового сопротивления меньше: при v = 21,9 уз или о = 19,4 уз?
129. Характеристики судна: L = 126 м; В = 20 м; Т = 8 м; 6 = 0,76; v = 15 уз; £в = 1,1 • КГ*3. По приближенной формуле вычислите волновое сопротивление.
§ 62. Сопротивление выступающих частей (§ 7)
По характеру сопротивления движению судна выступающие части делят на короткие и длинные. Главную часть сопротивления коротких выступающих частей составляет сопротивление формы, а длинных выступающих частей (брусковых и боковых килей, рулей и т. д.) — сопротивление трения, особенно если эти части расположены вдоль линий тока.
Сопротивление выступающих частей можно определить по формуле
Явч^вч-^й, (261)
где RB. ч — сопротивление выступающих частей, Н; £в. ч — безразмерный коэффициент, среднее значение которого для двухвинтовых судов составляет 0,25-10“3, а для одновинтовых (0,05 . . . . . . 0,1) -10“3-
Сопротивление выступающих частей необходимо всемерно уменьшать. Для этого следует проектировать суда с минимальным количеством выступающих частей, придавать выступающим частям хорошо обтекаемую форму, добиваться минимального нарушения плавности обводов корпуса и располагать выступающие части по направлениям линий тока. Последние определяются следующим образом: в местах предполагаемой установки выступающих частей на модели укрепляют небольшие флюгера, которые при буксировке модели в бассейне разворачиваются вдоль линий тока. Их положение фотографируется через окна в стенках бассейна. Соблюдение этого правила особенно важно при наличии длинных выступающих частей.
130. Вычислите сопротивление выступающих частей двухвинтового морского судна с характеристиками: L = 102 м; В = 16 м; Т = 7 м; 6 = 0,75; v = 9,2 м/с.
§ 63. Сопротивление воздуха (§ 7)
На хорошо обтекаемую надводную часть основного корпуса приходится не более 30% воздушного сопротивления, в то время как на долю надстроек, рубок и других палубных сооружений падает до 70—75% воздушного сопротивления.
143
Сопротивление воздуха (в Н) при направлении ветра вдоль диаметральной плоскости может быть определено по формуле
Явозд = С (v ± ивозд)2 SH. к, (262)
ГД? Рвозд — плотность воздуха, равная 1,23 кг/м3; v — скорость судна, м/с; овозд — скорость ветра, м/с (при встречном ветре принимается знак плюс, при попутном — минус); SH, к — площадь проекции на плоскость миделя надводной части корпуса, надстроек и всех палубных сооружений, м2; С — безразмерный коэффициент сопротивления воздуха (в зависимости от класса судна С = = 0,4ч-1,3).
При сильном попутном ветре 7?ВОЗД имеет знак минус. Это не означает, что сильный попутный ветер всегда дает выигрыш в скорости, так как поднимаемое им волнение может значительно увеличить сопротивление воды. Сопротивление воздуха достигает наибольшего значения при угле от 25 до 40° между диаметральной плоскостью и относительной скоростью ветра: оно может быть больше вычисленного по формуле (262) на 30—40%.
Более точное значение сопротивления воздуха определяют, продувая модели надводной части корпуса с надстройками и другими палубными сооружениями в аэродинамической трубе.
Сопротивление воздуха следует уменьшать с помощью следующих мероприятий: развивать палубные сооружения только в пределах необходимого; придавать надстройкам и палубным сооружениям обтекаемую форму; объединять мелкие раздельные надстройки; располагать все палубные сооружения таким образом, чтобы меньшие из них находились в области вихреобразования больших.
131. Почему прн действии ветра под углом к ДП сопротивление воздуха больше, чем при его действии вдоль ДП?
132. Вычислите сопротивление воздуха, если известно, что v — 13 уз при встречном ветре; оВОзд = 12 м/с; SH. к = 180 м2; С = 0,82.
§ 64. Особенности сопротивления воды на мелководье и в каналах (§ 7, 58—61)
Мелководным называется такой фарватер, глубина которого оказывает влияние на сопротивление воды движению судна. Характеристикой глубоководности фарватера является зависящее от скорости судна отношение его глубины к осадке судна.
Влияние мелководья на сопротивление воды обусловлено двумя основными факторами: увеличением местных скоростей потока под днищем вследствие уменьшения сечения потока и изменением характера волнообразования.
Вследствие того что местные скорости потока под днищем в условиях мелководья больше, чем на глубокой воде, наблюдаются следующие явления. С ростом скорости увеличиваются сопротив
144
ления трения и формы. Давление на днище уменьшается, в результате чего происходит «подсос» судна, т. е. увеличиваются осадка судна, площадь смоченной поверхности и сопротивления трения и формы. Кроме того, при «подсосе» в воду входит более полная часть кормовой оконечности, отчего увеличивается вихреобразование за кормой, а следовательно, еще больше возрастает сопротивление формы.
Изменение характера волнообразования на мелководье заключается в следующем. Корабельные волны распространяются в направлении дна фарватера, постепенно затухая. На глубокой воде волны затухают, не достигнув дна, а на мелководье волны достигают дна, не успев затухнуть. Сохранившийся запас энергии частиц воды расходуется на увеличение размеров волн и угла между ними и диаметральной плоскостью судна. Начинается перераспределение давления воды на корпус, при котором направленная против движения судна составляющая увеличивается, т. е. растет волновое сопротивление.
Различают четыре стадии влияния мелководья на характер волнообразования и величину волнового сопротивления.
I стадия. При сравнительно небольших скоростях судна, когда и (0,3 0,4), волновое сопротивление на глубокой
воде и на мелководье практически одинаково, так как корабельные волны невелики и успевают затухнуть, не достигнув дна даже на мелководье. В этом случае местные увеличения скоростей под днищем также незначительны.
II стадия. Скорость судна больше, чем в I стадии, но v<.VgH$. С ростом скорости судна увеличивается угол между гребнями расходящихся волн, растут высота волн и волновое сопротивление.
III с т И д и я. Скорость судна и = Угол, составленный гребнями расходящихся волн и диаметральной плоскостью судна, достигает 90°. При этом расходящиеся волны образуют одиночную поперечную волну с резко очерченным профилем, которая целиком располагается над уровнем спокойной воды. Эта волна движется со скоростью судна. Поскольку в этой стадии волновое сопротивление наибольшее, скорость цкр = К^Яф называется критической скоростью.
IV стадия. »>vKp' Одиночная поперечная волна разрушается, угол между гребнями расходящихся волн и диаметральной плоскостью судна постепенно уменьшается, а вместе с ним уменьшается и волновое сопротивление. При некоторой скорости сопротивление воды на мелководье становится меньше, чем на глубокой воде. Следует, однако, отметить, что если фарватер глубиной Яф = 50 м для данного судна соответствует мелководью, то критическая скорость цкр = ]/"9,81-50 = 22,14 м/с = 43 уз. Поэтому суда, особенно крупные, редко достигают критической скорости
115
и их сопротивление воды на мелководье, как правило, больше, чем на глубокой воде.
Каналом называется водный бассейн, стенки которого оказывают влияние на сопротивление воды движению судна.
Характеристиками, определяющими движение судна в канале, являются отношения: глубины канала к осадке судна, ширины зеркала воды к ширине судна, площади живого сечения канала к площади миделя судна, а также формы сечения канала и обводов судна, состояние ложа канала. В зависимости от этих характеристик канал может быть мелководным или глубоководным.
При движении судна по мелководному каналу постоянного сечения происходят явления, аналогичные тем, которые возникают при движении судна на мелководье, но усиленные влиянием стенок канала. Так, чем меньше живое сечение канала, тем меньше критическая скорость и больше высота одиночной волны и сопротивление (в условиях критической скорости). После того как скорость превысит критическую и поперечная волна разрушится, волновое и общее сопротивление в канале начнет падать более резко, чем на мелководье.
Когда судно движется по каналу, при некоторой скорости возникает обратный поток воды,-'направленный в корму. Скорость этого потока тем больше, чем меньше живое сечение канала и чем больше скорость судна. Появление обратного потока сопровождается уменьшением глубины потока возле судна. В связи с этим несколько увеличиваются сопротивления треиия и формы и потери на трение обратного потока о ложе канала, причем тем больше, чем больше неровности ложа. Кроме того, возникает опасность повреждения судна вследствие его приближения ко дну канала. При преодолении этих дополнительных сопротивлений происходит изменение уровня свободной поверхности: у носа судна он оказывается выше, а у кормы — ниже, в результате чего судно получает дифферент на корму и у него появляется так называемое сопротивление дифферента. Минимальный уровень свободной поверхности достигается при критической скорости. При закритических скоростях уровень свободной поверхности с увеличением скорости судна повышается; сначала он превосходит уровень спокойной воды, а затем снова понижается и достигает уровня невозмущенной воды.
Учитывая все вышеизложенное, а также отрицательное влияние обратного потока на состояние ложа канала, можно сделать вывод о том, что скорость движения судна в канале должна быть намного меньше критической.
Теоретически учесть все факторы, влияющие на сопротивле-' ние движению судна на мелководье и в канале, очень трудно. Существует ряд методов приближенной оценки сопротивления, основанных на результате модельных испытаний. Наиболее надежным остается определение сопротивления движению путем испытания модели данного судна в бассейне, имитирующем мелководье или канал.
146
133. С какой скоростью должно двигаться судно по фарватеру глубиной Нф = 15 м, чтобы сопротивление воды на мелководье не превышало сопротивления на глубокой воде? Судно не может развить скорость, равную критической.
134. Скорость судна v = 35 уз. Глубина мелководного фарватера Яф = = 65 м. Каким будет сопротивление воды движению судна по сравнению с сопротивлением на глубокой воде?
§ 65. Влияние ветрового волнения (§ 59—61)
ПЛавание судна на волнении связано с дополнительной затратой мощности, что объясняется рядом причин. Набегая на судно, ветровые волны действуют на него как на тело, препятствующее их распространению; волны вызывают качку судна, при которой изменяется характер обтекания судна и снижается к. п. д. гребного винта из-за неравномерности его нагрузки; поверхностное ветровое течение изменяет скорость воды относительно судна; волны сбивают судно с курса.
Изменение сопротивления трения и формы при плавании судна на волнении, вызванное периодическим изменением площади смоченной поверхности, мало влияет на скорость судна. Главной причиной потери скорости на волнении является дополнительное сопротивление волновой природы.
Теоретическое определение добавочного сопротивления на ветровом волнении связано с трудностями. Тем не менее исследование движения модели судна на регулярном волнении показывает, что сопротивление движению судна на волнении зависит от соотношения между длиной судна и длиной волны, от ее высоты, от угла между направлением движения судна и направлением бега волн и, наконец, от амплитуд килевой качки. Максимальная потеря скорости на волнении имеет место при наибольших амплитудах килевой качки судна, что наблюдается при явлении резонанса, т. е. при совпадении частот волн и свободных колебаний судна. Опытным путем установлено, что потеря скорости'на ветровом волнении достигает 40—50%, а в отдельных случаях скорость падает до нуля.
Поскольку главную роль в потере скорости на волнении играет килевая качка, необходимо выбирать такой курс относительно волн и такие скорости судна, которые соответствовали бы умеренной качке.
§ 66. Испытание модели судна (§ 58, 59, 64)
Современное состояние теории сопротивления среды движению судна требует подтверждения результатов расчетов испытанием модели судна в специальном опытовом бассейне. Другая цель испытаний — выбор таких соотношений главных размерений и обводов проектируемого судна, которые, обеспечивая в необходимой мере все другие мореходные и эксплуатационные качества, создавали бы минимальное сопротивление воды. Наконец, научные
147
исследования в области теории сопротивления воды движению судна также невозможны без испытаний моделей.
Испытание модели в опытовом бассейне состоит в том, что модель буксируют с заданной скоростью, измеряя сопротивление воды ее движению. Затем, руководствуясь определенной методикой, пересчитывают сопротивление движению модели на натурное судно. Зная сопротивление воды движению судна, определяют мощность главных двигателей, которая обеспечит движение судна с запроектированной скоростью.
Существует несколько типов опытовых бассейнов. Бассейн с самоходной тележкой (рис. 83) представляет собой канал, заполнен-
Рис. 83
ный водой. Его длина может достигать 1000 м, ширина около 20 м, глубина воды 10—12 м. Вдоль длинных сторон бассейна проложены рельсы, по которым движется самоходная тележка. Модель соединена с тележкой через динамометр. Показание динамометра равно сопротивлению воды движению модели при данной скорости.
Бассейн с падающим грузом (рис. 84) меньше бассейна с самоходной тележкой: его длина 25—40 м, ширина 2,5—3 м, глубина воды 1,5—3 м. Модель прикрепляется к буксировочному тросу, который приводится в движение свободно падающим грузом. Движение модели заканчивается, как только прекращается падение груза. Сопротивление воды движению модели равно весу груза за вычетом потерь на трение в системе.
Существуют квадратные бассейны, где испытывают радиоуправляемые модели (рис. 85), а также круглые бассейны. Основное на
118
значение таких бассейнов — исследование управляемости судов и поведения их на волнении.
Волнение в бассейне создают с помощью волнопродукторов. Один из распространенных типов волнопродуктора представляет собой колеблющееся цилиндрическое тело, расположенное у стенки бассейна. Для успокоения волн, образовавшихся при буксировке модели, служат волногасители — расположенные вдоль стенок бассейна наклонные плоскости с большим количеством отверстий: часть воды, попавшей на волногаситель, проливается сквозь отверстия и волна разрушается.
В последнее время все более широко применяются гидролотки— установки, в которых неподвижно закрепленная модель судна обтекается набегающим на нее потоком жидкости.
Рнс. 84
Иногда сопротивление воды движению судна определяют путем испытания самоходной модели в опытовом бассейне или в специально оборудованном открытом водоеме. На модели устанавливается двигатель, способный создавать стабильную тягу, равную сопротивлению воды.
Длина модели, обычно равная 2—8 м, ограничивается только размерами бассейна, поскольку надежность результатов опыта будет тем выше, чем больше будет размер модели.
Модель изготовляют из дерева, либо из сплава парафина с воском, либо из того же сплава со скельтоном (скелетом). Деревянные модели прочны, но тяжелы, их обработка относительно сложна, материал используется один раз. Модели из парафина изготовлять проще, материал можно использовать неоднократно. Такие модели легки, но недостаточно прочны, однако наличие скельтона устраняет этот недостаток.
149
Чтобы обеспечить турбулизацию потока, обтекающего модель, ее поверхность менаду 1-м и 2-м шпангоутами насекают, а по обводам этих шпангоутов прикрепляют проволочки диаметром 1,5—2 мм. Очевидно, что чем больше модель, тем легче обеспечить требуемую турбулизацию потока.
Вес модели без балласта не должен превышать 50—70% водоизмещения при испытаниях. Перед опытом соответствующей балластировкой добиваются необходимой посадки модели.
Достоверность результатов опытов может быть обеспечена только при соблюдении подобия потоков жидкости и гидродинамических сил, действующих во время движения судна и модели. Различают три вида подобия: геометрическое, кинематическое и динамическое.
Рис. 85
Геометрическое подобие потоков, обтекающих модель и судно, соблюдается, если модель геометрически подобна судну, т. е. если все размеры модели меньше соответствующих размеров судна в одно и то же число раз и если в случае плавания натурного судна в ограниченном потоке соблюдено геометрическое подобие границ потока;
L В Т _ 1^“® KS /й k?
— -“ -- ~ f- ' ~ --- — Q __ __
i-M Вы Ты рЛ<0Цм К$м Кйм VVm
где индексом «м» обозначены величины, относящиеся к модели; X — линейный масштаб.
Кинематическое подобие потоков соблюдается, если скорости в их сходственных точках пропорциональны.
Динамическое подобие потоков соблюдается, если при обтекании геометрически подобных тел картины течения потоков одина-150
ковы, а гидродинамические силы, действующие в соответствующих точках, параллельны и пропорциональны.
Полное подобие явлений при движении модели в бассейне и при плавании судна возможно только при равенстве чисел Фруда (для подобия явлений волнообразования) и чисел Рейнольдса (для подобия явлений трения). Но в одинаковой среде, обтекающей судно и модель, добиться одновременного равенства обоих чисел для судна и модели невозможно. Поэтому при моделировании ограничиваются подобием по числам Фруда, а сопротивление трения судна и модели определяют расчетным путем. Таким образом, для судна и модели должно быть соблюдено равенство
Fr = FrM
или
V Vm
Отсюда скорость буксировки модели
(265)
(266)
Следовательно, скорость буксировки модели в бассейне меньше скорости судна в число раз, равное корню квадратному из линейного масштаба.
При буксировке модели в бассейне определяют сопротивление воды движению модели Ru (без выступающих частей). Затем по формуле вычисляют сопротивление трения модели
«т.м=^.м-|-У«йм- (267)
Вычтя из сопротивления воды движению модели сопротивление трения, получают остаточное сопротивление модели
«о.м = ^м~«т.м- (268)
В теории подобия доказывается, что при равенстве чисел Фруда у судна и модели остаточное сопротивление судна
R0 = R0.^3- (269)
По формуле вычисляют сопротивление трения судна
₽т = (^+ Д£ш) v2Q. (270)
Сопротивление воды движению судна (без выступающих частей) Яводы=Ят + Яо- (271)
Сопротивление выступающих частей и воздуха определяют путем обдува в аэродинамической трубе модели выступающих частей и надводной части корпуса со всеми палубными сооружениями.
151
Для этой цели используют две модели надводных частей судна со всеми палубными сооружениями, соединенные по ватерлиниям. Полученный результат делят пополам.
Натурные буксировочные испытания выполняют для проверки значения полного сопротивления, определенного при проектировании судна. Испытания проводят на тихой воде при отсутствии течения и на достаточно глубоководном участке акватории. Чтобы избежать влияния струи от буксировщика, испытуемое судно обычно буксируют двумя идущими параллельно судами, причем длина буксирных тросов должна быть не менее 3-4 длин буксируемого судна. Судно буксируется без движителей, а при наличии последних им необходимо обеспечить возможность свободно вращаться в воде. Судно буксируется с заданной скоростью, а его сопротивление движению фиксируется динамометрами.
135. Почему в формуле (267) отсутствует надбавка на шероховатость Д£ш?
136. Почему для определения сопротивления воздуха делают двойную модель надводной части корпуса и всех палубных сооружений?
137. Характеристики судна: L = 100 м; В = 16 м; Т = 6 м; 6 = 0,7, о=10 м/с. Линейный масштаб А, = 25. Температура воды в море 277 К, в бассейне 287 К. Определите скорость буксировки модели и сопротивление воды движению модели (без выступающих частей); RK = 41,5 Н. Пересчитайте сопротивление модели на натурное судно (Д£ш= 0,3-10—3).
§ 67. Определение мощности главных двигателей (§ 58)
Для того чтобы судно могло двигаться с заданной скоростью, его главные двигатели должны развивать определенную мощность, которую судовой движитель преобразует в силу, равную и противоположно направленную сопротивлению, т. е. в силу, движущую судно.
Мощность, затрачиваемая непосредственно на преодоление сопротивления на тихой воде, называется буксировочной, или эффективной, мощностью N3 (в кВт):
М9= —,
1000
(272)
(273)
где R — полное сопротивление движению судна, Н; v — скорость судна, м/с; 1000 — коэффициент для перевода ваттов в киловатты.
Подведенная к движителю мощность Np больше эффективной, поскольку существуют потери на движителе:
д/ — _ Rv
р n 1000Т) ’
где г] = 0,Зн-0,7 — к. п. д. движителя с учетом влияния корпуса.
Мощность двигателя Ne больше мощности, подведенной к движителю, так как имеются потери на трение вала в подшипниках, учитываемые к. п. д. валопровода т)в = 0,96-4-0,98, и потери мощ-152
ности на трение в редукторе, учитываемые к. п. д. редуктора Пред = 0,94 - 0,98.
Следовательно,
__ Np________________Rv
^в^ред Ю001]Т)вТ)ред
(274)
Индикаторная мощность двигателя N[ больше мощности Ne, так как потери мощности происходят и внутри двигателя, учитываемые механическим к. п. д. двигателя т)м = 0,75 — 0,95. Таким образом, индикаторная мощность
Ne _ Rv
Ю00т)1]вт)редТ)м
(275)
Произведение всех перечисленных к. п. д. представляет собой полный к. п. д. установки двигатель—движитель. Чем совершеннее установка, тем выше ее полный к. п. д.
В первой стадии проектирования эффективную мощность можно приближенно определить с помощью формулы адмиралтейских коэффициентов
d2W
N> = — ’ (276)
где D — сила поддержания судна, Н; v — его скорость, уз; С — так называемый адмиралтейский коэффициент.
В каталоге судов находят судно-прототип, характеристики которого в наибольшей степени приближаются к таким же характеристикам проектируемого судна. Желательно, чтобы числа Фруда также были одинаковыми для обоих судов. Пользуясь формулой (276), вычисляют адмиралтейский коэффициент для судна-прототипа
D%3
(277)
и принимают его для проектируемого судна, поскольку изменение водоизмещения и скорости проектируемого судна по сравнению с прототипом невелико и мало влияет на значение С. Далее по формуле (276) определяют в первом приближении эффективную мощность главных двигателей проектируемого судна.
138. При скорости судна у = 20 уз полное сопротивление движению судна R = 66,8 кН. Определите значения /Уэ, Np, Ne, N[, приняв г) = 0,65, т)в = 0,98, г)ред = 0,97, т)м = 0,94.
139. Пользуясь формулой адмиралтейских коэффициентов определите в первом приближении эффективную мощность главных двигателей проектируемого судна с заданными D = 123 000 кН и скоростью у = 14 уз. У судна-прототнпа D = 128 000 кН, скорость у = 13,5 уз, /Уэ = 5890 кВт.
153
Глава IX
ОБЩИЕ СВЕДЕНИЯ О СУДОВЫХ ДВИЖИТЕЛЯХ
§ 68. Понятие о движителях (§ 58)
Судовым движителем называется устройство, создающее необходимую для движения судна движущую силу — полезную тягу — путем преобразования энергии двигателя или другого источника энергии. Эта сила при установившемся движении по значению равна силе сопротивления движению судна, а по направлению противоположна ей. Чем совершеннее движитель, тем эффективнее используется мощность главного двигателя, поэтому теория и методы расчета движителей имеют большое практическое значение.
Используемые в настоящее время на судах движители по принципу действия делятся на активные и реактивные (последние бывают гидравлическими и воздушными). Активным движителем является парус. Гидрореактивными называются движители, которые создают движущую силу за счет реакции отбрасываемых назад масс воды. К таким движителям относятся гребное колесо, гребной винт, крыльчатый и водометный движители. К воздушно-реактивным движителям относится воздушный винт.
Парус (рис. 86) создает движущую силу за счет энергии ветра. Проекция на диаметральную плоскость подъемной силы паруса Ру представляет собой движущую силу F, а ее проекция на плоскость миделя — силу дрейфа Т. Если скорость ветра изобразить вектором и, скорость ветра относительно судна — вектором <о, то вектор v по значению будет равным скорости судна, а по направлению — противоположным ей. В настоящее время парус используется на учебных, спортивных и малых промысловых судах. В связи с тем что парусные суда не загрязняют внешнюю среду и для движения не требуют затраты энергии двигателя, делаются попытки возродить использование парусов на крупных судах на основе современных достижений науки и техники.
Гребные колеса (рис. 87) представляют собой частично погруженные судовые движители с горизонтальной осью вращения, рас-154
положенной поперек судна, и поворотными лопастями (плицами). Плицы делают поворотными вокруг их осей для ослабления удара
при входе в воду и уменьшения подъема воды при выходе плицы на поверхность. При вращении колеса находящиеся в воде лопасти .отбрасывают воду назад, создают упор и через вал передают его корпусу, в результате чего судно движется. Коэффициент полезного действия гребных колес ниже, чем у гребных вицтов. В то же время их стоимость во много раз больше. Колеса увеличивают габаритную ширину судна, а главное — они малоэффективны на волнении. Поэтому их устанавливают лишь на сравнительно крупных речных буксирных и грузопассажирских судах, имеющий ог-
раниченную осадку и плавающих на мелководье.
Гребной винт (рис. 88) является наиболее распространен-
НапраВление
Рис. 88
ным движителем современных морских судов, а также судов, плавающих по глубоким рекам и озерам. Широкое применение гребных винтов объясняется их высоким к. п. д. (т]р = 0,6 и-0,75), сравнительно низкой стоимостью изготовления, относительно малой массой, простотой обслуживания и надежностью работы. Упор гребного винта создается за счет реакции массы воды, отбрасываемой при вращении винта лопастями, образованными винтовыми поверхностями. Лопасти гребного винта располагаются на ступице радиально на равных угловых расстояниях друг от друга. Винт насаживается на конус гребного вала и надежно соединяется с ним. В настоящее время наиболее часто применяют винты, лопасти которых составляют одно целое со ступицей (цельнолитые). Находят применение винты со съемными лопастями и винты с поворотными лопастями — винты регулируемого шага (ВРШ). Материалом для изготовления гребных винтов служат бронзы, латуни, стали.
Гребные винты размещают преимущественно за кормой судна на достаточной глубине под ватерлинией. На мелкосидящих судах иногда применяются полупогруженные винты. Если на судне устанавливается один винт, то его размещают в диаметральной плоскости; два винта располагают симметрично относительно диаметраль
155
ной плоскости. Большее число гребных винтов на судах устанавливается редко. Повышение к. п. д. гребных винтов производится путем рационального подбора винтовой поверхности, улучшения качества обработки лопастей, использования наивыгоднейшей формы кормовых обводов судов, применения обтекаемых судовых рулей и установки специальных направляющих устройств (контр-пропелледрв, направляющих насадок и т. д.).
Крыльчатый движитель (рис. 89, а) представляет собой механизм с вертикальной осью вращения и четырьмя-восемью лопастями,
Рис. 89
смонтированными так, что из корпуса выступают только лопасти. Движитель приводится во вращение главным двигателем, а лопасти могут поворачиваться вокруг своих продольных осей на некоторый угол при помощи эксцентрикового устройства. Лопасти имеют крыловидное сечение (рис. 89, б). Они движутся вместе с судном со скоростью vp и вращаются одновременно вокруг оси движителя с линейной скоростью о. Суммарная скорость движения каждой лопасти v равна геометрической сумме скоростей vp и <о. В результате на лопасть, как на крыло, действует подъемная сила Ру, проекция которой на направление движения (сила F) представляет собой упор лопает^, а момент силы Т относительно оси движителя является моментом, препятствующим вращению лопасти. Упор лопасти изменяется в зависимости от ее углового положения: в траверзном положении ее упор равен нулю. Сумма сил F, действующих на все лопасти, представляет собой полный упор, создаваемый
156
движителем. Изменяя при помощи эксцентрикового устройства положение лопастей, можно изменять направление упора, т. е. движение судна, и даже переходить с переднего хода на задний ход.
Крыльчатый движитель имеет сложную конструкцию, стоимость его изготовления велика, масса в несколько раз превышает массу гребного винта. Его можно разместить только в корме специальной формы. Лопасти крыльчатого движителя легко повреждаются, при килевой качке движитель работает плохо, гидродинамический к. п. д. крыльчатого движителя ниже, чем у гребных винтов. Значительными являются также потери мощности в механизме привода лопастей. Вследствие этого крыльчатые движители имеют ограниченное применение. Их целесообразно устанавливать на судах, для которых особо важны маневренные качества (портовые буксиры, паромы и т. д.).
Водометный движитель (рис. 90) состоит из рабочего органа (осевого или центробежного насоса), а также приемного и отливного трубопровода. Отливной трубопровод Выведен в корму и заканчивается поворотной насадкой. Приемное отверстие закрыто решетками, предохраняющими движитель от засорения и повреждения. Насос засасывает воду из-под днища судна, придает ей дополнительную скорость и отбрасывает назад, причем выброс может осуществляться под воду (подводный), в атмсоферу (надводный) или происходить на границе воды и атмосферы (полуподводный). Реакция воды является упором движителя, который воспринимается либо лопастями (рис. 90, а), либо непосредственно корпусом (рис. 90, б). Поворачивая насадку, которой заканчивается отливной трубопровод, можно менять направление выброса воды, а следовательно, и направление движения судна. Коэффициент полезного действия водометного движителя мал (около 0,3), вода в трубах увеличивает массу судна. Однако водометный движитель хорошо защищен, и оборудованные им суда обладают повышенной маневренностью. Водометный движитель целесообразно устанав
157
ливать на судах, плавающих по малым рекам и в условиях засоренного фарватера.
140. Почему гребные винты располагают симметрично относительно диаметральной плоскости?
§ 69. Геометрия гребного винта (§ 8)
Пусть на поверхности цилиндра описана винтовая линия (рис. 91). Расстояние между двумя ближайшими точками винтовой линии, лежащими на одной образующей, называется шагом винтовой линии И. Если развернуть винтовую линию на плоскость, то полу-
Рис. 91
чим прямоугольный треугольник АВС — шаговый треугольник. Угол р этого треугольника называется шаговым углом. Если шаг постоянный, то развернутая на плоскость винтовая линия будет прямой, если шаг непостоянный—то кривой (линии AFB или уНСВ). Постоянный шаг винтовой линии и шаговый угол связаны зависимостью
tf = 2nfltgp. (278)
Представим себе два цилиндра разных диаметров, имеющих общую ось. На поверхности обоих цилиндров опишем две винтовые линии равного шага И так, чтобы начальные точки винтовых линий а и b лежали на одной горизонтальной прямой. Пусть некоторый отрезок ab, перпендикулярный оси цилиндров, перемещается по винтовым линиям. При этом отрезок ab опишет винтовую поверхность. Выбираем на оси цилиндра точку о и двумя радиусами
158
ос и od отсекаем часть винтовой поверхности fcde, которая и будет образующей поверхностью лопасти винта. Подобным образом получают образующие поверхностей остальных лопастей. Шаг винтовой линии И в этом случае является шагом, гребного винта.
Гребные винты в зависимости от направления вращения бывают правые и левые: если гребной винт удаляющегося от наблюдателя судна вращается по часовой стрелке, то он называется винтом правого вращения, если винт вращается против часовой стрелки, то он называется винтом левого вращения.
Диаметр большего цилиндра, к которому примыкает винтовая поверхность, называется диаметром винта D. Диаметр меньшего цилйндра, который ограничивает ступицу, называется средним диаметром ступицы d0. Обычно
d0 = (0,17-5- 0,22) D. (279)
Толщина стенок ступицы
Sc « 0,25do. - (280)
Длина ступицы на 2—3% должна превышать- наибольшую ширину контура боковой проекции лопастй винта._ Форма ступицы удобообтекаемая, т. е. близкая к усеченному конусу.
Разность радиусов винта R и ступицы г называется длиной лопасти I
l = R—r, (281)
а отношение площади одной спрямленной лопасти Ал к ее длине — средней шириной лопасти Ьср
ЬСР = -^- (282)
’Кромка лопасти, примыкающая к ступице (рис. 92), называется корнем (6), а противоположная — краем (3). Кромку лопасти, обращенную в сторону движения судна, называют входящей (4), а противоположную ей кромку —выходящей (2). Угол а (см. рис. 91), составленный касательными к входящей и выходящей кромкам у корня лопасти, называется центральным углом лопасти. Расстояние между наиболее удаленными точками входящей и выходящей кромок лопасти, измеренное вдоль оси винта, является аксиальной длиной лопасти /а. '
Поверхность лопасти, обращенная в сторону создаваемого гребным винтом упора, называется засасывающей (5); противоположная поверхность лопасти — нагнетающей (/, рис. 92).
Сечения лопасти соосными цилиндрами имеют крыловидные профили, характеризующиеся шириной профиля b и его максимальной толщиной ет. Относительная толщина профиля бк = = ejb изменяется в пределах бк = 10-5-20% у корня лопасти и бк = 2-5-5% у ее края.
159
Отношение шага Н к диаметр-у винта D представляет собой ша говое отношение
и
D
(283)
Проекция контура лопасти на плоскость (рис. 93), перпендикулярную оси вращения винта, называется контуром нормальной проекции лопасти (/), а ограниченная им площадь — площадью нормальной проекции лопасти. Проекция контура лопасти на плоскость, параллельную оси винта, является боковой проекцией ло
пасти. По нормальной проекции лопасти строят развернутую и спрямленную поверхности лопасти. Если рассечь образующую
Рис. 92
Рис. 93
винтовую поверхность лопасти боковыми поверхностями нескольких соосных с гребным винтом цилиндров радиусами rlt г2, . . . , г5 и полученные отрезки винтовой линии повернуть вокруг точек 0lt 02, . . . , 05 так, чтобы точки Сх и CIt С2 и С2 и т. д. совместились с плоскостью чертежа, а затем концы дуг, т. е. точки А\, Az, A3, . . . , А2, Ai, соединить плавной кривой, то получим контур, ограничивающий развернутую поверхность лопасти (2). Если отрезки дуг Л1О1Л2, А2О2А2 и т. д. спрямить на касательные к ним в точках 0г, 02, . . . , 04 и соединить полученные точки В\[, В2, . . . , В2, В\ плавной кривой, то получим контур, ограничивающий спрямленную поверхность лопасти (5).
Площадь круга, диаметр которого равен диаметру винта, называется площадью диска винта Ad. Отношение спрямленной пло-
160
щади всех лопастей к площади диска винта называется дисковым отношением 0:
(284>
где z — число лопастей данного винта; А — спрямленная площадь всех лопастей.
Дисковое отношение гребных винтов изменяется в пределах 0 = 0,3ч-1,2.
141. Вычислите дисковое отношение четырехлопастного винта, если средняя ширина лопасти Ьср = 1,61 м, длина лопасти I = 2,16 м, диаметр винта D = 5,2 м.
142. Диаметр винта D = 4,8; шаговый угол 0 = 25° на радиусе R =
= —; площадь спрямленной поверхности лопасти А„ = 3,2 м1; число ло-2
пастей z=3. Вычислите шаг, шаговое отношение и дисковое отношение винта.'
§ 70. Характеристики гребного винта и его взаимодействие с корпусом (§ 7, 8, 68, 69)
Если бы гребной винт вращался в неподвижной твердой среде, то за один оборот он продвинулся бы в направлении движения судна на расстояние шага И. Поскольку в действительности окружающая винт водная среда обладает свойством текучести и не может служить твердой опорой его лопастям, путь, проходимый винтом за один оборот h, оказывается меньше шага И. Таким образом, поступательная скорость винта vp (в м/с)
vp = hn, (285)
где п — частота вращения винта, об/с. Отсюда
/1 = -^- (286)
п
Путь h, проходимый винтом в направлении его оси за один оборот, называется абсолютной поступью винта.
Разность между шагом И и абсолютной поступью винта h называется абсолютным скольжением гребного винта sa: у
вЛ = Н—h = (287)
п
Реактивное действие воды на винт тем больше, чем интенсивнее он отбрасывает воду назад, т. е. чем меньше путь h и больше абсолютное скольжение sa. Отношение абсолютной поступи винта h к его диаметру D называется относительной поступью гребного винта Хр:
%р = — р D nD
6 В, Л. Фукельман
161
Иначе говоря, относительная поступь винта показывает, какую часть диаметра винта составляет его абсолютная поступь.
Отношение абсолютного скольжения гребного винта к его шагу называется относительным скольжением винта s0:
S___5а _ Н — Ур/п _ । _______ Ур __ ।Хр
° И ~ Н ~ пН~ HID
(289)
Вырежем двумя соосными с винтом цилиндрами радиусами г и г + dr элемент лопасти. Развернув боковую поверхность этих цилиндров, получим элемент лопасти, подобный крылу. На этот элемент (рис. 94) набегает поток со скоростью у,-, которая представляет собой геометрическую сумму трех векторов; вектора, равного по значению и противоположного по направлению поступательной скорости винта ур; вектора, равного по значению и противоположного по направлению окружной скорости элемента 2пгп и вектора
вызванной скорости ш. Последняя обусловлена отбрасыванием вода назад и закручиванием потока работающим винтом.
На элементе лопасти, как на крыле, возникает подъемная сила dPy, направленная перпендикулярно скорости v(, и лобовое сопротивление dPx, направленное вдоль этой скорости. Проектируя dPx и dPy на направление поступательного движения винта и окружной скорости движения элемента, получаем элементарный упор dP и элементарную касательную силу dT. Возникающий на элементе момент dM определяется формулой
dM=dTr. (290)
Если известны значения dP и dM для различных элементов лопасти, то, проинтегрировав их по длине лопасти и умножив на число лопастей, можно определить упор Р и вращающий момент М гребного винта. Коэффициент полезного действия винта определяется формулой
где Pvp — полезная мощность винта; М-2пп— мощность, затраченная на его вращение.
162
Упор, момент и к. п. д. винта являются гидродинамическими характеристиками гребного винта. Все они зависят от его относительной поступи Кр = vplnD. График, выражающий функциональную зависимость гидродинамических характеристик винта от относительной поступи, называется кривыми действия винта. Он включает кривые безразмерных коэффициентов упора Kt и момента К2, а также кривую т]р (рис. 95). Коэффициенты и К2 определяются формулами
Кг=——;
1 pn«D4
к2 = -^—,
(292)
где р — плотность воды, кг/м3.
Если выразить упор и момент ражение (291), то получим
г, (293)
р К2 nD 2л v '
или, учитывая, что vplnD = %р,
<294>
С помощью этой формулы по известным значениям и К2 рассчитывают к. п. д. винта при различных значениях Хр.
Относительная поступь определяет режим работы гребного винта. Когда судно находится на швартовах, = 0, следовательно, %р = 0. При vp = 0 угрл наибольший и значения упора и
Рис. 95
атаки ак, как видно нз рис. 94, момента, или коэффициентов
и /<2, оказываются максимальными. В этом случае к. п. д. равен нулю, так как судно не движется. Этот режим называется швар-
товным.
С ростом Хр значения Кх и К2 убывают и при некотором значении %р = Xj коэффициент обращается в нуль; при %р = %2>%1 обращается в нуль коэффициент К2. Соответствующие этим значениям относительной поступи режимы работы винта называются режимами нулевого упора и нулевого момента. При режиме нулевого упора равнодействующая подъемной силы и лобового сопротивления направлена перпендикулярно скорости vp, а при режиме нулевого момента — вдоль скорости vp в сторону, противоположную движению судна.'
Абсолютная поступь винта при режиме нулевого упора называется шагом нулевого упора и обозначается Н^.
(295)
6
163
Абсолютная поступь при режиме нулевого момента (шаг нулевого момента Нг)
H2 = k2D. (296)
При режиме нулевого упора к. п. д. винта
П„ = -^- = -^- = 0. (297)
р М-2яп М-2лп '
При некотором значении относительной поступи Л.р<Л.1 к. п. д. винта достигает наибольшего значения. Это значение поступи,
как правило, близко к расчетному режиму работы винта при обычных условиях эксплуатации судна.
Итак, при 0<Л.р<%1 коэффициенты и К, положительны и винт работает как движитель, создавая упор за счет использования вращающего момента, развиваемого двигателем. При Л.р>%2 винт тормозит движение судна (/С\<:0), но так как К2<0, винт может отдавать некоторую мощность, работая как водяная турбина. Наконец, при %1<A.p<%2 винт, тормозя движение судна для поддержания своего вращения требует затраты мощности (Ка>0), которая полностью расходуется на преодоление гидродинамического сопротивления. В этом случае винт не является ни движителем, ни турбиной: он как бы «парализован» (термин Ф. А. Брикса).
Кривые действия гребного винта строятся по результатам испытаний моделей и могут быть использованы для всех геометрически подобных винтов.
Из рассмотрения кривых действия винта при различных отношениях Н/D и A/Ad следует, что геометрические элементы винта 164
оказывают существенное влияние на его гидродинамические характеристики. Так, с увеличением шагового отношения (рис. 96) растут коэффициент упора и максимальное значение к. п. д. винта. При этом, чем больше Н/D, тем при больших значениях %р достигается максимум к. п. д. винта. С увеличением дискового отношения растет коэффициент упора (рис. 97), но по мере увеличения %р влияние A/Ad становится все меньше. Одновременно уменьшается к. п. д. винта вследствие возрастания площади лопастей и сопротивления трения. Увеличение дискового отношения на 0,1 соответствует уменьшению к. п. д. примерно на 1%.
Иногда лопастям винта придают незначительный наклон в корму на угол Р' = 6-г-12°, что несколько ослабляет интенсивность ходовой вибрации судна, вызываемой работающим гребным винтом.
Отношение диаметра ступицы d0 к диаметру винта D называется относительным диаметром ступицы. При dJD = 0,17-4-0,22 размер диаметра ступицы практически не влияет на к. п. д. винта, но при больших значениях относительного диаметра ступицы к. п. д. винта уменьшается. Шероховатость лопасти значительно уменьшает к. п. д. винта вследствие возрастания сопротивления его движению.
Расчет гребных винтов производится с помощью теоретических методов гидромеханики или специальных диаграмм, построенных по результатам испытаний серий моделей винтов. Разработаны
J65
специальные серии винтов, предназначенных для применения на транспортных судах, быстроходных судах, судах вспомогательного флота и т. д.
&
fe
Для каждой серии винтов с определенным числом лопастей и значением дискового отношения строят две расчетные диаграммы. В качестве примера на рис. 98 показан комплект диаграмм для одной серии винтов (г — 3 и 0 = 0,5).
166
Методика построения диаграмм состоит в следующем (см. рис. 95). Сначала строят кривые коэффициента упора Кг и к. п. д. т)р в функции относительной поступи %р при заданном шаговом отношении. Затем, задавшись некоторыми значениями т)р, проецируют их на кривую Ki- Ту же операцию повторяют для ос-, тальных винтов данной серии, но с другими шаговыми отношениями. Соединяют плавными кривыми все точки с данным значением т)р на кривых Ki = f (%р) и получают сводную диаграмму кривых действия серии винтов с различным шаговым отношением.
Верхняя диаграмма (рис. 98) построена в осях Ki—Ьр. Ее называют корпусной, поскольку она используется в случае, когда исходным для расчета является буксировочное сопротивление корпуса судна, а искомой — мощность главного двигателя, обеспечивающая заданную скорость. Нижняя диаграмма построена в осях /<2—и называется машинной, так как по ней, зная мощность главного двигателя, можно определить скорость судна.
Пусть заданы частота вращения п, диаметр винта D, скорость поступательного движения винта vp, а также требуемый упор Р или мощность на винте Np. Зная эти величины, вычисляют Кр, коэффициент упора Ki или коэффициент момента /С2. В соответствующих точках на осях корпусной (если вычислен коэффициент Ki) или машинной (если вычислен коэффициент Кг) диаграммы восставляют перпендикуляры к осям до взаимного пересечения и по положению точки пересечения относительно кривых определяют шаговое отношение и к. п. д. винта. Это, однако, не значит, что данный к. п. д. является максимально возможным, поскольку не проработаны различные варианты изменения частоты вращения и диаметра винта. Поэтому задачи на проектирование винта, как правило, имеют другую форму.
Задача 1. Известны диаметр винта D, м; упор винта Р, Н; поступательная скорость винта vp, м/с; плотность воды р, кг/м3. Необходимо найти частоту вращения винта, при которой достигается наибольший к. п. д. винта и соответствующее отношение H/D.
Согласно выражениям (288) и (292), частота вращения вин-
V Р
та соответственно будет п = и п = ---— . Приравняв
правые части этих выражений, видим, что Ki — —~— . Здесь _______________ (*d)3
' • /” Р
Kd = Dvp |/ — так называемый коэффициент упора — диа-
метра, который можно вычислить, используя исходные данные задачи.
На корпусной диаграмме зависимость Ki от Kd представляет собой геометрическое место точек, лежащих на семействе парабол второй степени, отличающихся величиной Kd- На этих параболах
1в7
отмечены точки, соответствующие наибольшему к. п. д. винта Они соединены кривой kdom-
Для определения оптимальной частоты вращения в'инта нужно вычислить значение Kd и на корпусной диаграмме найти точку пересечения соответствующей параболы Kd с кривой Kd опт- Положение этой точки на поле диаграммы позволяет найти значения относительной поступи Хр, коэффициента упора Ki, к. п. д. т]р при оптимальной частоте вращения.
Задача 2. Исходными данными являются: п — частота вращения гребного винта, об/мин; упор винта Р, Н; vp — поступательная скорость винта, м/с; плотность воды р, кг/м3. Требуется определить оптимальный диаметр гребного винта.
4 р~
Согласно выражениям (292) и (288), диамет^винта D = 1/ ----
г pn^Ki
и D — -р— соответственно. Приравнивая правые части этих Хрп
X4
выражений, нетрудно определить, что Ki = —7— , где коэффи-• «Г
циент Кп — -^=- -у- называется коэффициентом упора — ча-
стоты вращения. Для его вычисления достаточно исходных данных задачи.
На корпусной диаграмме в районе пересечения с кривой Кп опт, отвечающей наибольшим значениям к. п. д. винта, наносят короткие отрезки парабол четвертой степени, соответствующих постоянным значениям коэффициента упора—частоты вращения. Зная коэффициент Кп, по положению на поле диаграммы точки пересечения параболы Кп = const с кривой Кп опт можно найти значения относительной поступи %р, коэффициента упора К» к. п. д. т)р и шагового отношения HID, соответствующие оптимальному диаметру винта DonT.
Те же задачи можно решить, используя машинную диаграмму. При этом необходимо иметь значения вспомогательных коэффициентов Kd = 0,274Dvp и Кп — ^'^2^- \/~где N — мощ-
V Np У п у Np
ность, кВт, подведенная к движителю. Принцип построения расчетных формул коэффициентов и кривых тот же, что и при построении корпусной диаграммы. Расчет элементов гребного винта ведется в табличной форме (табл. 28).
До сих пор мы рассматривали изолированный винт, без учета влияния корпуса. Между тем при движении судна за его кормой возникает попутный поток — течение жидкости в сторону движения судна, в результате чего скорость потока в диске винта уменьшается. Иными словами, аксиальная скорость потока в диске винта цр, равная его поступательной скорости, оказывается меньше 168
Таблица 28
Задачи, решаемые с использованием диаграмм Ki и Кг
Заданные величины Коэффициенты Тип диаграммы Искомые величины
Vp, Р; D Корпусная лопт» Лр>
vp-, Р; п x' - vp 1 / p . у ~~p Корпусная D • п • Н Ь'опт» ЧР»
vp; Р; D; п h = — > K1 = P nD pDW Корпусная н Пр;-
Vp\ Np-, D Kd = 0,2,7 4 vpD 1/ F /Vp Машинная И ПОПТ> Лр»
Vp-, Np-, n г» 0,523vp -| /~ P&p *• 7 л Машинная ^ОПТ> Лр»
Vp', Np; D; n Vp . „ ll,93jyp Art у i\4 nD pD»ft3 Машинная а=| о а р-
скорости судна v на величину средней скорости попутного потока Ди vp = v— Дц. (298)
Отношение средней скорости попутного потока к поступательной скорости судна называется коэффициентом попутного потока ф;
ф = — • (299)
v
Таким образом, скорость vp определяется соотношением vp = = (1—ф) V. У быстроходных судов с острыми обводами ф = = 0-г-0,05; у судов с полными образованиями ф = 0,35ч-0,40 и более.
Скорость попутного потока в различных точках диска винта неодинакова, поэтому при вращении винта нагрузка на лопасти изменяется, причем в один и тот же момент каждая лопасть оказывается нагруженной по-разному. Именно это явление служит одной из причин вибрации.
Работающий гребной винт несколько увеличивает сопротивление воды движению судна: винт подсасывает воду, отчего скорость потока у кормы увеличивается, а давление уменьшается. В результате этого появляется дополнительная сила, действующая на корпус в направлении, противоположном движению судна. Это дополнительное сопротивление называется силой засасывания \Р. Таким образом, полезная тяга (движущая сила) винта Ре определяется по формуле
Р, = Р—ДР, (300)
где Р — упор винта.
Отношение силы засасывания к упору винта называется коэффициентом засасывания t:
_ Р-Р, х Ре
Р Р Р
Тогда можно написать
Р,=(1-0Р или р l — t
Следовательно, чем больше коэффициент засасывания, тем больше должен быть упор винта, необходимый для создания данной полезной тяги. Коэффициент засасывания колеблется в пределах t = 0,05 ч-0,27 в зависимости от формы кормовых обводов, размера зазора между корпусом и винтом, числа винтов и режима их работы. С учетом влияния попутного потока и засасывания пропульсивный коэффициент, характеризующий совершенство гидро
(301)
(302)
(303)
170
динамического комплекса движитель—корпус судна, определяется выражением
П = = (304)
М 2пп М • 2пп 1 — "ф
Правая часть формулы (304), строго говоря, является приближенной, так как она не учитывает влияния неравномерности натекающего потока на упор и момент гребного винта. Первый сомножитель представляет собой к. п. д. изолированного винта по
I _£ V
[см. формулу (291)]. Второй сомножитель -------называется ко-
1 —
эффициентом влияния корпуса t]K. Таким образом, для пропульсивного коэффициента справедливо соотношение
П = (305)
Коэффициент влияния корпуса колеблется в пределах т]к = = 0,93ч-1,1.
143. Движитель работает в режиме иа швартовах. Чему равно абсолютное скольжение sa?
144. Какова действительная поступательная скорость винта, если при диаметре D = 3,4 м и п = 120 об/мин относительная поступь Хр = 0,8?
145. Пользуясь рис. 95, вычислите полезную тягу, момент и к. п. д. гребного винта морского судна, если известно, что D = 3,0 м; п = 180 об/мии; Хр = 0,4; = 0,2; t = 0,15.
§ 71. Кавитация (§ 8, 69, 70)
Кавитацией называется образование у поверхности тела разрывов сплошности потока в виде полостей, заполненных паром и газами. Причиной кавитации являются большая скорость потока и понижение давления до некоторого критического предела.
Кавитация гребных винтов возникает следующим образом. При определенной частоте вращения гребного винта скорость обтекания лопасти становится настолько большой, что давление на ее засасывающей стороне понижается до давления насыщенных паров при данной температуре воды и начинается «холодное кипение», т. е. вода закипает и из нее выделяются растворенные в ней газы. Пары и газы оттесняют воду от лопасти и образуют на ее засасывающей стороне кавитационные каверны, т. е. полости, заполненные парами воды и газом (рис. 99).
Различают две стадии кавитации. Первая характерна тем, что каверны захватывают только часть засасывающей поверхности вблизи входящей кромки, где скорости частиц наибольшие (рис. 100, а). На этой стадии кавитации гидродинамические характеристики винта изменяются незначительно. Отрицательную роль здесь играют пары воды, которые, переходя из области каверны в область более высоких давлений, конденсируются в пределах лопасти. Процесс конденсации пара и захлопывания кавитационных пузырьков происходит с большой скоростью и сопровождается возникновением гидравлических ударов, причем местные давления
171
достигают больших значений. В результате в металле лопасти появляются эрозионные разрушения. Эго явление называется кавитационной эрозией.
Рис. 99
На второй стадии (рис. 100, б) кавитационные каверны захватывают всю засасывающую сторону лопасти и замыкаются в потоке за гребным винтом. На „> Кайерны gy этой стадии кавитации кавита-
Йционной эрозии не происходит, ~ так как пары конденсируются
— за пределами лопасти, но уве-
[ личивающаяся частота вращения
- //у--винта не приводит к уменьше-
~~gy нию давления на засасывающей
— — стороне лопасти, отчего подъем-
____________ ная сила лопасти и упор винта Направление движения судна практически не растут. В резуль-
тате поток встречает не хорошо обтекаемый профиль лопасти, а значительно хуже обтекаемый «профиль», состоящий из профиля лопасти и каверны, что вызывает увеличение вращающего момента, приложенного к винту, и уменьшение к. п. д. движителя.
Нужно также иметь в виду, что захлопывание кавитационных пузырьков сопровождается нежелательным шумом. Кроме того, кавитация увеличивает неравномерность загрузки лопастей, что является одной из причин вибрации судна.
172
В настоящее время не существует винтов, свободных от кавитации при любых частотах вращения, но разработан ряд мер, обеспечивающих отдаление начала кавитации. С этой целью применяют профили с более равномерным распределением давления по лопасти, увеличивают дисковое отношение, уменьшают относительную толщину лопасти, повышают давление на засасывающей стороне лопасти за счет максимального погружения оси винта и т. п. Все это позволило создать винты, не кавитирующие при значительных частотах вращения.
146. В чем состоит .вред кавитации?
§ 72. Проектирование гребного винта (§ 69—71)
Расчет гребного винта состоит в определении элементов оптимального винта, т. е. винта, обеспечивающего наибольшую скорость судна или тягу на буксировочном гаке при полном использовании
мощности главных двигателей. Если из-за конструктивных особенностей кормы судна установка винта оптимального диаметра оказывается невозможной, то производится расчет винта ограниченного диаметра.
Исходными данными для расчета гребного винта являются: тип судна, его главные размерения L, В, Т, коэффициенты полноты а,.р, б, объем подводной части V, глубина погружения оси винта hB, график зависимости сопротивления среды и эффективной мощности от скорости
Рис. 101
судна (рис. 101), построенный на основании буксировочных испытаний модели или выполненный по формулам, приведенным выше. Кроме того, должны быть заданы характеристики энергетической установки: мощность двигателя Ne, частота вращения п', число гребных винтов гр, тип передачи мощности на вал (механическая, гидравлическая или электрическая), к. п. д. вало-
провода т]в и редуктора т)ред.
Порядок расчета (в первом приближении) гребного винта, обеспечивающего наибольшую скорость судна при полном использовании мощности энергетической установки, следующий.
1. Определяют характеристики взаимодействия винта с корпусом: коэффициенты попутного потока ф и засасывания t; коэффициент ij, учитывающий влияние неравномерности попутного потока на упор винта; коэффициент i2, учитывающий влияние неравно
173
мерности попутного потока на момент; коэффициент влияния руля на к. п. д. винта /.
Указанные коэффициенты получают либо в результате испытаний модели, либо с помощью диаграмм и графиков. Для морских транспортных судов в первом приближении эти коэффициенты можно принять по следующим формулам: ф — 0,5 б — 0,05; t — — 0,7 ф + 0,06; = i2 — J — 1,0.
2. Диаметр винта D в первом приближении принимают в зависимости от осадки судна кормой Тк, пользуясь соотношениями: D = 0,75 Тк при одновальной установке, D — 0,65 Тк при двухвальной установке.
3. Выбирают число лопастей гребного винта. Если коэффициенты Кп =• 1»0 или Kd = vpD у/~>2,0, то при-
нимают z — 3.
Если К„<1,0 и Krf<2,0, то принимают z — 4. Четырехлопастные винты по сравнению с трехлопастными обладают меньшей вибрацией при работе в неравномерном потоке за кормой судна, поэтому на одновальных судах, для которых характерна значительная неравномерность потока в месте расположения огребного винта, устанавливают, как правило, четырехлопастные винты независимо от значения коэффициентов и Kd.
4. Определяют дисковое отношение исходя из условия достаточной прочности и хороших гидродинамических качеств лопасти. Оно должно быть не менее
6mln = 0,375
х 3 /-----777
С г \ । / шР D 6к max/ г 98 100
(306)
где бктах = 0,08-7-0,1 — предельное значение относительной толщины лопасти на радиусе г — (0,6н-0,7) R\ z — число лопастей; С — эмпирический коэффициент, значения которого, зависящие от материала винта, равны 0,115; 0,065; 0,060; 0,0550 соответственно для серого чугуна, углеродистой стали, латуни, нержавеющей и легированной стали; tn' — эмпирический коэффициент, учитывающий наибольшую возможную нагрузку на лопасть, обусловленную условиями работы гребных винтов судов различного назначения: для ледоколов tn' — 2,0; при работе винта в битом льду tn' — 1,75; для буксиров tn' — 1,50 и для грузовых и пассажирских судов tn' — 1,15.
5. Принимают значение дискового отношения 0, указанное на одной из диаграмм для расчета гребного винта при данном числе лопастей [указанное на диаграмме значение должно быть ближайшим большим числом по сравнению с 0min, полученным по формуле (306)].
6. Производят расчет элементов гребного винта оптимального
174
диаметра и определяют наибольшую достижимую скорость судна (табл. 29). По данным этой таблицы строят график зависимости Ntt DonI, H/Dom от скорости судна (рис. 102). Из графика видно, что при мощности главного двигателя Ne — 13 200 кВт ее полному использованию соответствует Don, = 6,34 м; H/Doni = 0,648 и максимально достижимая скорость v = 16,8 уз.
Таблица 29
Расчет гребного винта оптимального диаметра
Ne = ; n= ; i|) = ; t= ; z = ; 0 =
Расчетные величины Единицы Значения расчетных величин
(задаемся) Pt= Rlzp=f (у) vp = 0,515 (1 —т|>) v p = Рг/(1 -1) G = ПРИ ^л = ^лопт Пр = /«) при ^п = ^попт = при < = <опт X. ППвПред Уз кВт Н м/с Н кВт -
7. Проверяют гребной винт на кавитацию. Считают, что винт не кавитирует, если принятое при расчете дисковое отношение, больше минимально допустимого, определяемого по формуле
0mln=l,27pf^(n£))a, Ps
(307)
где ps — 101 000 + т[hB——j—pd—абсолютное гидростатическое давление у концов лопасти, уменьшенное на давление насыщенных паров pd (последнее равно 590; 1230; 1700; 2350 Па при температуре воды соответственно 273; 283; 288 и 293 К); Кс — кавитационная характеристика, определяемая по графику Шенхера (рис. 103); f — 1,5-т-1,6 — эмпирический коэффициент запаса;
175
h„ — заглубление оси гребного винта, м; у — удельный вес воды, Н/м3. Если 0< 0mtn, т. е. винт кавитирует, дисковое отношение увеличивают и производят расчет винта во втором приближении.
8. Проверяют винт на прочность, пользуясь формулами, приведенными в литературе по расчету гребных винтов.
Рассмотрим процесс выполнения теоретического чертежа гребного винта на примере построения чертежа лопасти гребного винта серии, разработанной Троостом. Гребные винты этой серии имеют несимметричный, саблевидный контур с небольшим отклонением в сторону, противоположную направлению вращения (рис. 104). Построение спрямленной поверхности лопасти ведется следующим образом. Проводят ось лопасти и на ней от оси винта отклады
вают ряд радиусов г, соответствующих в данном примере значениям r/R = 0,3; 0,5; 0,7; 0,8; 0,95. В отмеченных точках восставляют
Рис. 102
Рис. 103
перпендикуляры к осн лопасти, на которых от этой оси откладывают вправо ординаты входящей части лопасти xlt влево — ординаты выходящей части х2,~ а также ординаты линии наибольших толщин х0 — вправо со знаком плюс и влево со знаком минус (рис. 105). Эти ординаты вычисляют в табличной форме (табл. 30), причем наибольшую ширину лопасти Ьт при заданном дисковом отношении 0 и относительном диаметре ступицы d0/D определяют из найденной по графику (рис. 105) наибольшей относительной ширины лопасти bmz]D. Получив точки входящей и выходящей кромок, соединяют их плавной кривой, ограничивающей спрямленную поверхность лопасти, затем соединяют плавной "кривой точки наибольших толщин лопасти и получают линию наибольших толщин.
На расстояниях от оси винта, равных принятым радиусам г, строят сечения лопасти (см. рис. 104). Необходимые для этого величины рассчитывают в табличной форме (табл. 31 и 32), где ун и dH,— соответственно подъем и диаметр закругления входящей кромки, /из — подъем и радиус закругления выходящей кромки. 176
Контур Оокодои проекции попасти
Осо ступицы
Рис. 104
Вычисление элемеи
Г R Г Выходящая кромка Линия наибольших толщин
^т лг9, мм »т Хо, ММ
0,3 0,5 0,7 0,8 0,95 33,0 41,0 46,5 48,0 40,5 22,5 22,5 8,5 —1,0 —15,0
Вычисление подъема и диаметра
Г R мм Ординаты сеченнй (в процентах от длины входящей части лопасти)
20 40 60 80
^т у, мм % Чгп у, мм -V-. % Ут у, мм % Ут у, мм
0,3 0,5 0,7 0,8 0,95 98,0 97,6 97,3 96,4 95,8 93,2 92,0 88,4 85,6 85,0 84,7 81,6 74,2 70,5 69,5 70,5 64,0 52,0 48,3 48,2
Вычисление подъема и диаметра
г R Ь» мм Ординаты сечений (в процентах от длины выходящей части лопасти)
20 40 60 80
К Ут у, мм Ут у, мм -У-. % Ут у, мм % Ут у, мм
0,3 0,5 0,7 0,8 0,95 97,0 96,8 96,8 97,0 97,6 86,8 85,6 84,9 85,4 88,0 71,0 68,0 66,6 67,2 71,6 49,4 43,0 41,4 43,0 48,0
178
тов лопасти виита
Таблица 30
Входящая кромка Выходящая часть лопасти Ьг = ха + х„. мм Входящая часть лопасти bt « х, — Х& мм Ширина лопасти b = хх + х3, мм
> % Хр мм
52,5 57,5 51,0 41,5 12,5
Таблица 31 закругления входящей кромки лопасти
Ун ——. % Ут Ун- мм % Ут dH» мм Наибольшая толщина лопасти, Ут- мм
36,0 25,5 37,8 29,0 22,0 20,5 20,0
закругления выходящей кромки
Таблица 32
» % Ут t, мм 3 . % Ут 3, мм Наибольшая толщина лопасти р . мм т
14,5 13,0 12,5 14,3 15,7 18,8
179
180
Наибольшая толщина лопасти в данном сечении получена умножением ширины лопасти в этом сечении на ее относительную толщину, которая у корня лопасти равна 10—20% и у ее края 2—5%. При этом толщина концевых кромок лопастей винтов судов без ледовых усилений и с ледовыми усилениями категории Л4 должна быть не менее 0,0035 D, а лопастей винтов с ледовыми усилениями категорий УЛ, Л1, Л2 и ЛЗ — не менее 0,005 D, гдеБ> — диаметр винта,^м. Толщины лопастей между корнем и краем распределяются по линейному закону.
Из центра винта Ог по перпендикуляру к оси лопасти и в сторону, противоположную направлению вращения винта, откладывают в масштабе чертежа отрезок величиной Н/2л, и из полученной точки проводят лучи через точки Лх, Л2 . . . . К сечениям ло-пасти со стороны входящей и выходящей кромок проводят две касательные — параллельную и перпендикулярную соответствующему лучу, и получают отрезки а, Ь, а', Ь'. Отрезки а и а' представляют собой спрямленные длины входящей и выходящей частей сечений в нормальной проекции, а отрезки b и Ь' — в боковой проекции.
Нормальную проекцию лопасти строят следующим образом. Проводят ось лопасти н отмечают центр винта О2, из которого вычерчивают дуги радиусами г. На каждой дуге от оси лопасти откладывают вправо соответствующие отрезки а и влево — отрезки а'. Полученные точки Б1( Б2 . . . Бг, 51 соединяют плавной кривой, ограничивающей нормальную проекцию лопасти.
Строят боковую проекцию лопасти. Для этого вычерчивают сечение ступицы и через ее центр под углом 0' к вертикали проводят образующую нагнетающей стороны лопасти. От точек пересечения образующей с горизонталями, проведенными на радиусах г (т. е. от точек Ai, Л 2 . . .), откладывают соответствующие значения ут и полученные точки соединяют плавной кривой, получая сечение лопасти по линии максимальных толщин. Из точек А\ Ач . . . опускают перпендикуляры на горизонтальные линии, проведенные из точек Б1( Б2 . . . Б2, Бь От перпендикуляров по этим горизонтальным линиям откладывают вправо отрезки Ь, влево отрезки Ь' и получают точки Вь В2 . . . В2, Bi; соединяя эти точки плавной кривой, получают контур боковой проекции лопасти.
§ 73. Понятие о винтах регулируемого шага (§ 69, 70)
Каждому значению частоты вращения гребного винта, спроектированного для заданного судна, соответствует вполне определенное значение потребляемой мощности. Гребной винт считается спроектированным правильно, если при максимальном значении частоты вращения потребляемая им мощность равна полной мощности двигателя, а скорость судна равна проектной. Говорят, что
181
в этом случае гребной винт соответствует двигателю. Соответствие гребного винта двигателю обеспечивается в первую очередь надлежащим выбором шагового отношения.
Полное соответствие гребного винта двигателю возможно только для определенного значения буксировочного сопротивления при заданной скорости судна. В процессе эксплуатации судна возможны случаи, когда буксировочное сопротивление при одном и том же значении скорости изменяется в широких пределах. Например, у промысловых судов (траулеров) эксплуатационными режимами являются свободный ход и ход с тралом. Буксировочное сопротивление траулера в режиме свободного хода значительно меньше, чем в тральном режиме. Если шаговое отношение гребного винта определено для трального режима, то на свободном ходу винт не будет потреблять полной мощности двигателя. Но увеличить частоту вращения винта и скорость судна невозможно, так как двигатель не способен к дальнейшему увеличению частоты вращения. В этом случае винт называется гидродинамически «легким». Возможны случаи, когда при той же скорости судна сопротивление движению увеличивается (например, из-за обрастания подводной поверхности). При этом судно не достигает проектной скорости, так как мощность двигателя оказывается недостаточной. В этом случае винт называется гидродинамически «тяжелым».
Винты регулируемого шага (ВРШ) снабжены специальным механизмом, который по желанию судоводителя разворачивает лопасти вокруг их осей на некоторый угол. При повороте лопастей изменяется шаг винта Н и шаговое отношение Н/D, в результате чего изменяется упор и момент винта. Таким образом добиваются соответствия винта главному двигателю при всех режимах плавания. В случае необходимости лопасти ВРШ можно развернуть так, чтобы при работающем главном двигателе упор винта и скорость судна были равны нулю или упор изменил свое направление, т. е. ВРШ дает возможность без остановки или реверса двигателя останавливать судно или переходить на -задний ход. Поворот лопастей ВРШ осуществляется с помощью приводного механизма, расположенного в машинном отделении, и связанного с ним через полый вал механизма поворота лопастей, находящегося внутри ступицы винта.
Винты регулируемого шага (ВРШ) имеют ряд преимуществ по сравнению с винтами фиксированного шага (ВФШ). Они позволяют: использовать всю мощность главных двигателей при всех режимах плавания судна; обеспечить любой малый передний или задний ход, включая полную остановку судна при работающем главном двигателе, т. е. улучшить маневренность; изменить ход с переднего на задний без реверса двигателя, т. е. увеличить его моторесурс; упростить управление судном за счет дистанционного управления всеми операциями по маневрированию непосредственно из рулевой, рубки; сократить расход топлива на 10—15% путем выбора наиболее экономичного режима работы гребного винта и двигателя; ис
182
пользовать более легкие нереверсивные двигатели. Преимущества ВРШ обеспечивают им широкое применение, особенно на судах с частым изменением режимов плавания.
К недостаткам’ВРШ следует отнести снижение к. п. д. на 1—3% по сравнению с ВФШ; большую стоимость изготовления и меньшую надежность из-за сложности конструкции.
147. Винт китобойного судна рассчитан для свободного хода. Каким будет вннт при буксировке китовой туши — гидродинамически «легким» или «тяжелым»?
148. Какое положение должны занимать лопасти ВРШ, чтобы при работающем двигателе скорость судна была равна нулю?
§ 74. Насадки (§ 8)
Насадка является одним из средств повышения эффективности работы движительного комплекса (рис. 106, а). Она представляет собой соединенный с корпусом (неповоротная насадка) или с баллером (поворотная насадка) пустотелый усеченный конус, обращенный меньшим диаметром в сторону движения судна. Продольные сечения насадки имеют крыловидный профиль, выпуклая сторона которого обращена внутрь насадки, а передняя закругленная кромка — в сторону носа судна. Насадку устанавливают так, чтобы ее ось совпадала с осью винта, а плоскость диска винта — с наиболее узким поперечным сечением насадки. Диаметр этого сечения должен быть на 8—10 мм больше диаметра виита.
Геометрическими элементами насадки являются:
коэффициент раствора ан = 1,2 ч-1,5— отношение площади входного сечения насадки к площади наиболее узкого ее сечения;
коэффициент расширения 0Н = 1,0ч-1,15 — отношение площади выходного отверстия насадки к площади наиболее узкого ее сечения;
относительная длина lHIDn mIn = 0,55 ч- 0,7 — отношение длины насадки к ее наименьшему внутреннему диаметру;
относительный зазор a/D = 0,005ч-0,10 — отношение зазора между кромкой лопасти винта и внутренней поверхностью насадки к диаметру винта.
Важной гидродинамической характеристикой насадки является р
коэффициент иагруэки по тяге движителя о, =------—, где Р, —
— 2
тяга движителя, или, что то же, суммарная осевая сила, возникающая как непосредственно на гребном виите, так и на расположенных вблизи него твердых телах, Н; р — плотность воды, кг/м3; v — скорость судна, м/с; F — площадь гидравлического сечения насадки, м2.
Гребной винт расположен в наиболее узком сечении насадки, поэтому средняя скорость течения жидкости через гидравлическое
183
сечение движителя увеличивается, в результате, чего увеличивается и к. п. д. винта.
Насадка увеличивает упор движительного комплекса. Физиче-
ская картина этого явления следующая. У краев лопастей работающего винта поток приобретает скос (рис. 106, б), размер которого зависит от степени^ сужения потока. Каждый элемент сечения насадки работает как элемент крыла, для которого угол а является углом атаки. На этот элемент действует гидродинамическая сила Д/?. Составляющие этой силы — подъемная сила ДУ перпендикулярна направлению средней скорости обтекания, а сила лобового сопротивления ДХ направлена вдоль этой скорости. Проекция
подъемной силы на направление движения ДР] больше проекции лобового сопротивления на то же направление ДР2. Равнодействующая сил ДРхиДР2дает составляющую упора элемента насадки. Сумма таких со-
Рис. 106
ставляющих представляет собой упор насадки, который складывается с упором винта.
Насадка уменьшает потери, связанные с перетеканием воды через края нагнетающей стороны лопасти работающего винта, где давление больше, на засасывающую сторону, где давление меньше, а также уменьшает потери, связанные с закручиванием потока. Этому способствует малость зазора между лопастью и насадкой и экранирующее действие внутренней поверхности последней.
Эффективность действия насадки растет с увеличением коэффициента нагрузки, поэтому насадками оборудуют буксиры, траулеры и тому подобные суда. Например, вследствие помещения винта в насадку тяга на буксирном гаке может увеличиться на 40—50%, а к. п. д. движительного комплекса на 20—30%. Хотя с увеличением скорости и уменьшением коэффициента нагрузки эффектив
184
ность действия иасадки, вообще говоря, уменьшается, тем не менее при малом коэффициенте раствора насадка может дать выигрыш в скорости и на транспортных судах морского флота, если их скорость не превышает 18—20 уз. При дальнейшем увеличении скорости судна насадка начинает кавитировать и гидродинамическая эффективность движительного комплекса уменьшается. Вот почему установка насадок на быстроходных судах нецелесообразна. В ряде случаев насадка предохраняет винт от повреждения.
К недостаткам насадки следует отнести ее отрицательное влияние на поворотливость судна.
Глава X
УПРАВЛЯЕМОСТЬ
§ 75. Общие положения (§ 8, 68)
Управляемость судна определяется двумя качествами: поворотли-востью и устойчивостью на курсе. Поворотливостью называется способность судна изменять направление движения при перекладке руля. Устойчивость на курсе — это способность судна двигаться по заданной траектории несмотря на действие возмущающих сил (ветра, волнения, течения).
Различают автоматическую и эксплуатационную устойчивость судна на курсе. Суда не обладают автоматической устойчивостью на курсе, т. е. способностью после прекращения действия возмущающих сил точно восстанавливать принятое направление движения без применения рулевого органа. Судно должно обладать эксплуатационной устойчивостью на курсе, т. е. способностью с помощью рулевого органа восстанавливать принятое направление движения после того, как возмущающие силы перестанут действовать.
Способность судна самопроизвольно изменять направление движения называется рыскливостью. Это свойство прямо противоположно устойчивости на курсе и является нежелательным.
Хотя поворотливость и устойчивость на курсе в процессе судовождения обеспечиваются действием одного и того же рулевого органа, эти свойства в известной мере противоречивы. Поэтому при проектировании судна в зависимости от его назначения отдают предпочтение либо поворотливости, либо устойчивости на курсе, но в такой степени, чтобы другое свойство находилось в пределах эксплуатационных норм. Например, при проектировании океанских судов предпочтение отдают устойчивости на курсе, а при проектировании буксиров — поворотливости.
Рулевые органы благодаря возникающим на йих гидродинамическим силам создают момент, поворачивающий судно вокруг вертикальной оси, проходящей через его центр тяжести.
185
Наиболее часто в качестве рулевого органа служит руль, устанавливаемый за винтом в потоке воды.
Все большее распространение получает так называемый активный руль (рис. 107, а). В него вмонтирован электродвигатель 1,
Рис. 107
вращающий вспомогательный гребной винт 2, диаметр которого составляет 20—25% диаметра основного гребного винта. Вспомогательный винт расположен в насадке 3. При переложенном активном руле этот винт создает упор Рв. в таким образом, что его составляющая Р” оказывается направленной вдоль ДП, а составляю
186
щая Р' — перпендикулярно ДП, т. е. винт увеличивает момент, поворачивающий судно. Судно, оборудованное активным рулем, может поворачиваться на месте и двигаться с некоторой скоростью в случае аварии главного двигателя или движителя. К недостаткам активного руля следует отнести сложность и высокую стоимость устройства, а также дополнительную затрату мощности; поэтому активный руль целесообразно устанавливать на судах, нуждающихся в повышенной управляемости.
Другим видом рулевого органа является поворотная насадка 4 на гребной винт, соединенная через баллер 6 с рулевой машиной (рис. 107, б). Такая насадка, поворачиваясь, изменяет направление потока, идущего от винта. При этом сила Р", движущая судно вперед, оказывается меньше упора винта, но появляется составляющая Р', которая создает момент, поворачивающий судно. Кроме того, на насадке, как на кольцевом крыле, возникает подъемная сила. Составляющая этой силй, направленная перпендикулярно диаметральной плоскости, создает момент, способствующий повороту судна. Центр давления насадки лежит в нос от оси баллера, поэтому создается момент, стремящийся самопроизвольно изменить угол перекладки насадки. Для уменьшения этого момента в хвостовой части насадки устанавливают стабилизатор 5 в виде жестко соединенного с ней вертикального крыла симметричного профиля, размах которого равен диаметру выходного отверстия насадки. Установка поворотной насадки целесообразна на судах, относительно тихоходных и требующих повышенной управляемости.
Эффективным средством улучшения характеристик управляемости судна при движении малым ходом (маневрирование в портах, проход узкостей, швартовные операции) являются подруливающие устройства. Подруливающее устройство, показанное на рис. 107,в, представляет собой горизонтальную сквозную трубу 7, установленную в носовой (а нередко и в кормовой) части судна. Внутри трубы имеется гребной винт 9, приводимый во вращение электродвигателем 8. При работе гребного винта возникает сила РП, направленная перпендикулярно диаметральной плоскости и создающая момент, поворачивающий судно. Реверсируя электродвигателем винта, можно менять направление поворота судна. Подруливающее устройство, показанное на рис. 107, г, отличается тем, что ось винта направлена вертикально, а направление выброса воды регулируется заслонками 10. С увеличением скорости судна эффективность действия подруливающего устройства уменьшается.
В качестве рулевых органов могут также использоваться крыльчатый движитель, поворотная винтовая колонка и др.
Форма подводной части корпуса оказывает существенное влияние на управляемость судна. С ростом отношения L/В и Т/L, с увеличением площади кормового дейдвуда, носового подреза и дифферента на корму поворотливость судна ухудшается. Изменение коэффициента полноты мидель-шпангоута р мало влияет на поворот-
187
ливость. С увеличением отношения В/Т, коэффициента полноты 6, полноты кормы и дифферента на нос поворотливость заметно улучшается. С увеличением площади руля, а также при расположении руля в струе от винта поворотливость при больших углах перекладки руля улучшается, а при малых — ухудшается. Кроме того, управляемость судна сильно зависит от условий эксплуатации (ветер, волнение, течение, ограниченность фарватера и т. д.) и квалификации рулевого.
Управляемость — очень важное мореходное качество судна. Недостаточная управляемость судна увеличивает время рейса, расход топлива, затрудняет работу рулевого и является одной из причин столкновения судов. Судно, полностью потерявшее управляемость, считается терпящим бедствие. Теория управляемости позволяет рассчитать силы, действующие на руль и корпус при криволинейном движении судна, определить элементы управляемости, разработать критерии оценки управляемости в различных условиях эксплуатации судна.
149. Целесообразно ли применение поворотных насадок на пассажирских лайнерах?
§ 76. Работа судового руля (§ 8, 75)
Судовой руль является вертикально поставленным крылом симметричного профиля конечного размаха или малого удлинения (Хк = 0,5-г-3,0), находящимся в потоке воды. Если рассматривать руль изолированно от судна, то к нему в полной мере относятся все положения, приведенные в § 8.
Для перекладки руля к его баллеру необходимо приложить момент, равный моменту силы PN относительно оси баллера. Этот момент должен быть возможно меньше, так как в этом случае для перекладки руля требуется минимальная затрата мощности рулевой машины. Вместе с тем желательно, чтобы сила PN была возможно больше. Для уменьшения момента на баллере нужно придать рулю такую форму, при которой центр давления С располагался бы возможно ближе к оси баллера.
Существуют три типа рулей: обыкновенный (рис. 108, а), полу-балансирный (рис. 108, б) и балансирный (рис. 108, в). Наличие балансирной части пера, т. е. части, расположенной впереди оси баллера, приближает центр давления к оси баллера тем больше, чем больше коэффициент компенсации руля, под которым понимают отношение площади балансирной части ко всей площади пера руля. Полубалансирные и балансирные рули усложняют конструкцию ахтерштевня и кормы, а также технологию постройки судна. Поэтому эти типы рулей целесообразно использовать только на быстроходных судах большого водоизмещения, когда момент на баллере достаточно велик.
Корпус и гребной винт оказывают влияние на гидродинамические характеристики руля. Попутный поток корпуса уменьшает 188
скорость обтекания руля, а следовательно, и действующие на него силы. Гребной винт, увеличивая скорость обтекания руля, способствует повышению его эффективности. Вместе с тем закрученный винтом поток обтекает руль не вдоль диаметральной плоскости, а под некоторым углом, что равносильно изменению угла перекладки руля.
Руль находится в кормовом подзоре, и между верхней частью руля и корпусом имеется некоторый зазор. Чем меньше этот зазор, тем меньше перетекание воды через верхнюю кромку руля со стороны зоны повышенного давления (т. е. с того борта, на который переложен руль) на сторону пониженного давления и тем больше
Рис. 108
в)
Х3<Х2
подъемная сила руля. Но обводы судна таковы, что с увеличением угла перекладки руля зазор быстро увеличивается и одновременно уменьшается влияние корпуса на гидродинамические силы, действующие на руль.
При движении судна с переложенным рулем задним ходом корпус подтормаживает поток, отчего уменьшается скорость набегания воды на руль. На заднем ходу гребной винт находится за рулем, поэтому закручивание потока, отбрасываемого в противоположную рулю сторону, на характеристики руля не влияет. Засасывание воды винтом увеличивает скорость натекания воды на перо руля.
Влияние корпуса и винта на характеристики руля определяют по специальным формулам. Силы, действующие на руль на переднем и заднем ходу, рассчитывают по одной и той же методике с помощью графиков зависимости коэффициентов подъемной силы Су, лобового сопротивления Сх и центра давления Ср от угла перекладки руля, построенных для заднего хода.
Существенное влияние на характеристики руля быстроходных судов при больших углах перекладки оказывает кавитация. На i 189
ее первой стадии каверны захватывают полосу вдоль передней кромки руля со стороны, противоположной его перекладке. При этом происходит перераспределение давлений вдоль хорды профиля, в результате чего центр давления смещается к кормовой части пера руля. Поскольку значения действующих на перо сил остаются прежними, момент на баллере руля увеличивается. Кроме того, появляются кавитационные разрушения металла пера руля. На второй стадии кавитации, когда каверны захватывают всю заднюю сторону пера руля, кавитационных разрушений не происходит, центр давления приближается к оси руля, но действующие на руль силы уменьшаются, т. е. уменьшается полезное действия руля. Начало кавитации можно отдалить, уменьшив относительное удлинение и относительную толщину профиля или выбрав профиль, у которого сечение наибольшей толщины отстоит от передней кромки на 1/3 длины его хорды.
150. Будет лн удобен в эксплуатации руль с центром давления на оси баллера?
151. Какая форма подводной части кормы оказывает большее влияние на гидродинамические характеристики руля: полная или острая?
§ 77. Циркуляция судна (§ 8, 71)
Если на судне, следующем прямолинейным курсом, начать перекладывать руль на борт на определенный угол, то центр тяжести судна начнет описывать кривую, называемую^ циркуляцией (рис. 109). В зависимости от характера сил, действующих на судно, различают три периода циркуляции: маневренный, эволюционный и установившийся.
Маневренный период циркуляции соответствует времени перекладки руля. В этом периоде появляются силы и моменты, стремящиеся изменить прямолинейный характер движения судна, но им противодействуют только силы инерции судна и забортной воды. Вследствие этого, а также из-за краткости периода (10—20 с) движение судна остается практически прямолинейным.
Эволюционный период длится от конца перекладки руля до поворота судна на 90—150°. Во время эволюционного периода характер действия сил наиболее сложен. Так как возникающие на руле и корпусе силы и моменты еще не уравновесились, циркуляция в эволюционном периоде имеет вид вытянутой плавной кривой.
Установившийся период циркуляции длится от конца эволюционного периода до изменения угла перекладки руля. В этот период наступает равновесие всех действующих на судно сил и моментов, а циркуляционная кривая превращается в окружность.
Различают следующие элементы циркуляции:
диаметр установившийся циркуляции D^, т. е. диаметр окружности, описываемой центром тяжести судна в период установившегося движения. Обычно величину £>а выражают в длинах судна L. 190
Когда руль находится в крайнем положении, £)ц = (3-=-6) L. Чем
поворотливее судно, тем меньше диаметр циркуляции;
тактический диаметр циркуляции £>т — расстояние между положениями диаметральной плоскости в мдмент перекладки руля и после поворота на 180°; DT = (0,9-=-1,2)
выдвиг, или поступь, циркуляции — расстояние между положениями центра тяжести судна в начальный момент перекладки руля и после поворота на 90°; 1г = (0,6-=-1,2) £)ц;
обратное смещение 12 — максимальное расстояние, на которое
смещается центр тяжести судна в сторону, противоположную перекладке руля; /2 = (О-г-0,1) £>ц;
прямое смещение 13 — расстояние между диаметральной плоскостью судна в начальный момент перекладки руля и его центром тяжести после поворота на 90°; /3 =
= (0,5-т-0,6) £)ц;
угол дрейфа £ — угол между вектором скорости центра тяжести и диаметральной плоскостью судна;
угол курса — угол между положением диаметральной плоскости судна в рассматриваемый момент времени и в момент начала перекладки руля;
угол скорости, или угол траектории, ср, т. е. угол между векторами скорости в рассматриваемый момент времени и в начале перекладки руля;
скорость судна на циркуляции иц — линейная скорость центра тяжести судна;
угловая скорость <о, т. е. скорость вращения судна вокруг вертикальной
оси;
период циркуляции Тц — время, затраченное судном на поворот на 360е; Тц = —.
рц
Рассмотрим развитие сил и моментов, действующих на судно, движущееся с переложенным на борт рулем. (Угол перекладки руля считаем постоянным.) В процессе перекладки руля на нем возникает подъемная сила Ру, направленная перпендикулярно диаметральной плоскости судна. В соответствии с правилом ме
ханики приложим в центре тяжести судна две противоположно направленные силы Ру и Ру, равные и параллельные силе Ру (рис. 110, а). Момент пары сил Ру и Ру стремится повернуть судно в сторону перекладки руля, а сила Ру — сместить судно в поперечном направлении в сторону, противоположную перекладке руля.
191
Действие силы Ру и момента уравновешивается инерцией судна и окружающей воды, поэтому судно некоторое время продолжает двигаться прямолинейно. Этот этап соответствует маневренному периоду циркуляции.
В начале эволюционного периода циркуляции сила Ру преодолевает силу инерции — судно начинает медленно смещаться в сторону, противоположную перекладке руля, и одновременно, под действием упора винта, продолжает двигаться вперед. Суммарное действие этих сил искривляет циркуляцию и вызывает обратное
Рис. 110
смещение судна. Поперечная составляющая скорости обусловливает появление угла дрейфа 0. Теперь корпус представляет собой крыло, у которого площадь ватерлинии — профиль, осадка — размах и угол дрейфа — угол атаки. На корпус-крыло действует гидродинамическая сила Р, составляющие которой Рук и Рхк (рис. 110, б). Центр давления корпуса-крыла (точка N) лежит в нос от центра тяжести судна. Сила Рхк, являясь лобовым сопротивлением, уменьшает линейную скорость судна по сравнению со скоростью в момент выхода на циркуляцию. Момент силы Рук относительно центра тяжести судна увеличивает угол дрейфа 0, что влечет за собой увеличение силы Р и ее составляющих Рук и Рхк. Сила Рхк становится настолько большой, что скорость судна уменьшается на 25—50Л6 по сравнению со скоростью на прямом курсе. Увеличиваясь, сила Рук в какой-то момент становится равной силе Ру, уравновешивает ее, и обратное смещение судна прекращается.
192
угол
тяжести
На криволинейном участке циркуляции появляется центробежная сила Q, приложенная в центре тяжести судна и направленная по радиусу от центра циркуляции, т. е. перпендикулярно касательной к циркуляции. Силы Q и Рук создают пару сил, момент которой поворачивает судно в сторону перекладки руля. Поскольку одновременно действует сила, толкающая судно вперед, центр его тяжести описывает кривую, обращенную выпуклостью от центра циркуляции.
На циркуляции углы дрейфа и линейные скорости различных точек судна с приближением к корме увеличиваются. Постепенно центр давления крыла^корпуса смещается ближе к корме, и момент силы Рук относительно центра тяжести судна, создающий дрейфа, уменьшается. Наступает мгновение, когда угол дрейфа перестает увеличиваться. При этом действующие силы и моменты уравновешиваются — эволюционный период циркуляции закончился и начинается период установившегося движения1 Под действием уравновесившихся сил и упора винта, уменьшенного на лобовое сопротивление, центр тяжести судна будет перемещаться по окружности до изменения угла перекладки руля.
Во время маневренного периода циркуляции сила Ру прило
жена в центре давлйния пера руля, а сила Ру — в центре судна, т. е. силы приложены в разных горизонтальных плоскостях (рис. 110, в). Момент этой пары Мкр х кренит судно в сторону перекладки руля. Во время эволюционного периода циркуляции появляется центробежная сила Q й сила сопротивления воды боковому смещению W; проекции этих сил на плоскость миделя Q' и W образуют пару сил. Ее момент Мкр2 намного больше момента Мкр1, поэтому судно сначала выравнивает крен, полученный в первый момент перекладки руля, а затем кренится на борт, противоположный перекладке руля. С креном наружу циркуляции судно движется до возвращения руля в диаметральную плоскость.
Теперь представим, что судно движется задним ходом с переложенным на борт рулем (рис. 111). На руль действует подъемная сила Ру, направленная перпендикулярно диаметральной плоскости судна в сторону перекладки руля. Приложим в центре тяжести судна две противоположно направленные Силы Ру и Ру, равные и параллельные силе Ру. Силы Ру и Ру создают момент Mlt который поворачивает судно в сторону, противоположную перекладке руля. В результате уменьшаются угол атаки и эффективность действия руля. Сила Ру заставляет судно дрейфовать в сторону пере-
1 */2 7 в. Л. Фукельман
193
кладки руля. На криволинейном участке циркуляции действующая на крыло-корпус гидродинамическая сила Р^ приложена в корму от центра тяжести судна. Момент М2, созданный силами Р^ и центробежной силой Q, препятствует повороту судна. Таким образом, при заднем ходе поворот судна обеспечивается моментом, равным разности, моментов М j и М 2, а не их сумме, как при переднем ходе. Следовательцо, управляемость судна на заднем ходу хуже, чем на переднем.
152. Выразите угол курса через известные углы дрейфа и скорости.
153. Длина судна L = ПО м, скорость на прямом курсе v = 15 уз, диаметр циркуляции Оц = 5 L, скорость иа циркуляции равна 80% скорости на прямом курсе. Вычислите период циркуляции.
2/(V
(308)
§ 78. Расчет элементов циркуляции и их опытная проверка (§ 75, 77)
Диаметр установившейся циркуляции может быть определен по формуле Шенхера
D„---------------,
СУЪ Sk cos 0Сц
где V — объем подводной части судна, м3; XSK — суммарная площадь погруженных частей рулей, м2; ак — угол перекладки руля, град; Су — коэффициент подъемной силы:
г 0,08ак
1,1
1+г Лк
(Хк = ^к/5к — гидродинамическое удлинение руля; /к — высота погруженной части пера руля, м); К. — эмпирический коэффициент, зависящий от отношения V/(S0L) (So — площадь смоченной части ДП судна, м2):
V/S0L............. 0,07 0,08 0,09 0,10 0,11 0,12
/С................ 0,845 0,670 0,550 0,460 0,400 0,370
Если число Фруда меньше 0,25—0,3, то диаметр циркуляции не зависит от скорости судна при выходе на циркуляцию. При больших числах Фруда диаметр циркуляции увеличивается пропорционально росту последних.
Судно на циркуляции движется с углом дрейфа и имеет переложенный на борт руль, поэтому сопротивление воды движению на установившейся циркуляции больше, а скорость судна меньше, чем на прямом курсе. Если относительный радиус циркуляции (Р t= DJ2L), то скорость судна на циркуляции иц может быть определена по формуле
vFp ^ = ~------,
R2 + 1,9
где v — скорость судна на прямом курсе перед выходом на циркуляцию, м/с.
(309)
194
Под действием центробежной силы и силы сопротивления воды боковому смещению судна оно получает крен наружу циркуляции (влиянием момента Л4кр г из-за его сравнительной малости без существенной ошибки можно пренебречь). Центробежная сила (в кН)
Д v2„ .
= (310)
Кц
где Д' — водоизмещение судна, т; оц — скорость судна на циркуляции, м/с; Рц — радиус циркуляции, м.
Проекция центробежной силы на плоскость миделя (рис. 112, а)
Д
Q'=QcosP = —— cosp. (311)
Я а.
Рис. 112
Плечо кренящей пары (рис. 112, б)
^кр = zg—Zuz> (312(
где zw — аппликата точки приложения силы сопротивления воды боковому смещению судна.
Кренящий момент на установившейся циркуляции
Д v2
Мкр2= —— cos P(zc zw). (313)
Кц
Учитывая обычные значения входящих в формулу (313) величин и считая, что zw = Т/2, Регистр СССР рекомендует следующую формулу для определения кренящего момента на установившейся циркуляции (в Н-м)
Мкр2 = 0,233 (zg-v)’ <314)
причем следует принимать уц = 0,8 v.
Судно будет накреняться до тех пор, пока кренящий и восстанавливающий моменты не уравновесятся, т. е. Л4кр 2 = Мв. Угол
1 V2 7*
195
крена на установившейся циркуляции не выходит за пределы малых значений, поэтому можно принять
Afe = DAsinO. (315)
После простых преобразований получаем
0,0238^--^)
sm 6 = ------И . (316)
hL
С увеличением угла перекладки руля уменьшается диаметр установившейся циркуляции и увеличивается угол крена. Увеличение скорости на циркуляции вызывает незначительное увеличение диаметра циркуляции и резкое увеличение угла крена. Следует также помнить, что в начале эволюционного периода угол крена на циркуляций имеет динамический характер и его значение гораздо больше получаемого по формуле (316). Поэтому перекладка руля на большие углы при значительной скорости судна может привести к возникновению опасных углов крена и, как следствие, к сдвигу грузов, заливанию отсеков через вошедшие в воду отверстия и даже к опрокидыванию судна, если оно недостаточно остойчиво.
Согласно нормам Регистра СССР, например для пассажирских судов, угол крена на установившейся циркуляции не должен превышать 3/« угла заливания или угла, при котором палуба надводного борта входит в воду или скула выходит из воды (смотря по тому, какой угол меньше), но в любом случае угол крена не должен превышать 12°.
Определенные расчетным путем диаметр установившейся циркуляции и угол крена на циркуляции нуждаются в опытной проверке; которую осуществляют во время ходовых испытаний судна.
Диаметр циркуляции определяется при наибольших углах перекладки руля поочередно на оба борта, когда волнение моря не превышает 3 баллов. При этом пользуются одним из следующих способов.
Судно идет курсом параллельно линии, соединяющей вехи А и F (рис. 113, а). Когда наблюдатель на судне окажется в створе вех С и F, он фиксирует угол и перекладывает руль на борт. Когда наблюдатель снова окажется в створе тех же вех, он фиксирует угол аг и приводит руль в диаметральную плоскость. Из A MAF и ANAF, следует, что
DT — NM = FM—FN = XF(ctga2—ctga^. (317)
Другой способ состоит в том, что в момент перекладки руля замечают по компасу курс судна и с кормы внутрь циркуляции сбрасывают вешку (рис. 113,6). После изменения курса на 180° с кормы сбрасывают вторую вешку. Затем судно идет малым ходом параллельно линии вешек, и, когда корма оказывается на уровне первой вешки, с носа сбрасывают деревянную чурку. Как 196
только корма оказывается на уровне чурки, с носа сбрасывают вторую чурку и т. д. Таким образом устанавливают количество длин судна, укладывающихся в диаметре циркуляции. Этот способ, выполнимый лишь при хорошей видимости, прост, но обеспечивает точность измерения ие более 0.5L.
Гораздо ббльшую точность обеспечивают радиолокационные методы измерения циркуляции.
Рис. 113
1. Судно движется с переложенным на борт рулем. Судовая радиолокационная станция замеряет расстояние до ориентира на берегу (рис. 113, в). Когда курс судна изменится на 360°, определяют диаметр циркуляции как разность наибольшего и наименьшего расстояний до ориентира.
2. Судно движется с переложенным рулем, а его радиостанция подает сигналы. Две береговые радиостанции пеленгуют судно (рис. 113, г) и наносят его положения на карту. Когда судно изменит курс на 360°, по карте рассчитывают диаметр циркуляции.
Угол крена на циркуляции определяют, например, следующим образом. На палубе устанавливают нивелир, оптическая ось
197
которого лежит в плоскости шпангоута и наведена на линию видимого горизонта. После выхода судна на установившуюся циркуляцию визир направляют на линию видимого горизонта. Угол, на который при этом поворачивают оптическую трубу в плоскости шпангоута, и является углом крена на установившейся циркуляции. Замеры производят через каждые 20—30° в процессе поворота судна, причем принимается среднее значение угла крена.
154. Характеристики судна: L = 125 м; В = 19 м; Т = 9 м; 6 = 0,72; га = 9,3 м; h = 0,9 м; SK = 22,5 м2; А.к = 1,8. Вычислите диаметр установившейся циркуляции, скорость и угол крена на циркуляции, если скорость на прямом курсе v = 9,2 м/с и угол перекладки руля ак = 10°.
155. При опытном определении оказалось, что а2 = 47° и = 62°. Расстояние между вехами равно одной миле. Вычислите тактический диаметр циркуляции.
§ 79. Устойчивость судна на курсе (§ 75, 77)
На судно, движущееся с зафиксированным в определенном положении рулем, действуют возмущающие силы в виде ветра, волнения, течения и т. п. Корпус судна, отклоненный от прямого курса при переднем ходе, обтекается как
\ Дф 1 крыло малого удлинения с уг-
-------L— лом атаки, равным углу дрейфа.
----- ? Поэтому точка приложения равно-действующей возмущающих сил лежит в нос от центра тяжести уЛ----------------судна и создает относительно него
момент, который выводит судно \ у из режима установившегося дви-
' жения. Так, морские волны откло-
рис Ц4 няют диаметральную плоскость
от принятого направления движения тем больше, чем интенсивнее волнение. Ветер, действуя на надводную часть судна, вызывает крен и изменяет элементы движения судна в горизонтальной плоскости: разворачивает судно, смещает его по ветру, искажает траекторию движения судна. Момент возмущающих сил относительно вертикальной оси, проходящей через центр тяжести судна, называется моментом рыскания.
Пусть судно движется прямолинейно (рис. 114). Момент рыскания отклоняет судно от принятого направления движения 1, т. е. изменяет угол курса на величину Дф. Судно не обладает автоматической устойчивостью движения по углу курса, т. е. после прекращения действия возмущающих сил оно самопроизвольно не вернется на прежний курс. Если бы судно, не обладая автоматической устойчивостью движения по углу курса, обладало бы автоматической устойчивостью по другим элементам движения, например по углу дрейфа, скорости и т. д., то, изменив направление движения, оно продолжало бы двигаться прямолинейно по направлению 2. Если же судно не обладает автоматической устойчивостью движе-198
ния по названным элементам, то оно самопроизвольно начинает двигаться по криволинейной траектории 3, близкой к окружности большого радиуса.
Для того чтобы удержать судно на заданном курсе, нужно перекладывать руль на противоположный смещению судна борт; при этом момент, создаваемый действующей на руль силой, должен быть равен моменту рыскания и противоположен ему по направлению. Необходимый угол перекладки руля определяют по так называемой балансировочной характеристике движения судна, т. е. по графику, выражающему зависимость между углами дрейфа и углами перекладки руля. Балансировочная характеристика строится для каждого данного судна на основании специального расчета или экспериментальных данных. Если требуемый угол перекладки руля будет меньше максимально допустимого (30—35°), то судно можно привести к прежнему режиму движения; если этот угол будет больше, то судно станет неуправляемым.
Во время ходовых испытаний проверяется эксплуатационная устойчивость на курсе при ветре 2—3 балла. Во время движения судна заданным курсом регистрируют частоту и углы перекладки руля, необходимые для удержания судна на данном курсе. Если руль приходится перекладывать не чаще 4—6 раз в минуту на углы до 2—3°, то эксплуатационная устойчивость на курсе считается достаточной. Проверяют также возможность управления судном при ветре 6—7 баллов. Судно движется относительно волн с курсовыми углами 0; 45; 90; 135 и 180°, находясь на каждом курсе в течение 10—15 мин. При этом регистрируют характеристики рыскания: углы рыскания, т. е. углы между диаметральной плоскостью судна и заданным курсом; размахи рыскания — отклонения судна от крайнего положения на один борт до крайнего положения на другой борт; периоды рыскания — время, затраченное на один размах, а также необходимые углы перекладки руля. Характеристики рыскания, так же, как ветер и волнение, имеют нерегулярный характер и в настоящее время расчетом еще не определяются. Поэтому полученные прн испытании характеристики рыскания и необходимые углы перекладки руля сравнивают с теми же величинами нормально эксплуатирующихся судов данного класса и на этом основании дают заключение о возможности управления судном.
Глава XI
КАЧКА СУДНА
§ 80. Общие положения (§ 18, 26)
Различают качку бортовую, килевую и вертикальную. При бортовой качке судно колеблется около продольной оси, проходящей через его центр тяжести; при килевой качке — около поперечной 199
оси, проходящей через ту же точку; при вертикальной качке — относительно ватерлинии статического равновесия. Обычно эти виды качки сочетаются в определенных комбинациях. Так, вследствие неравенства объемов входящих и выходящих из воды клиньев при бортовой и килевой качке в некоторые моменты вес судна не равен силе поддержания, отчего происходит изменение осадки, т. е. бортовая и килевая качка сопровождаются вертикальной качкой. Поскольку при вертикальной качке центр тяжести входящего или выходящего объема, как правило, не лежит на одной вертикали с центром тяжести судна, вертикальная качка сопровождается килевой.
Различают качку судна на тихой воде и на волнении. Элементы качки на волнении в значительной мере зависят от характеристик качки на тихой воде.
Основными характеристиками любого вида качки являются:
амплитуда качки — наибольший угол крена (при бортовой качке) или дифферента (при килевой качке); при вертикальной качке — расстояние (в м) между ватерлиниями статического равновесия и в крайнем верхнем или нижнем положении судна. Амплитуда качки, которую стремятся всегда уменьшить, зависит от начального отклонения судна от положения равновесия, начальной скорости колебания, действия внешних сил (ветра, волн) и от формы обводов судна;
размах качки — сумма двух следующих друг за другом амплитуд. При килевой качке размах равен сумме двух последовательных наибольших углов дифферента на нос и на корму;
полное колебание — сумма двух последовательных размахов. При килевой качке полное колебание — наибольшее наклонение судна на нос, затем на корму и снова на нос;
период качки Т — время (в с), в течение которого судно совершает одно полное Колебание. Желательны максимальные значения периодов качки;
частота качки <о — число полных колебаний судна, совершаемых за время 2л с:
9тт
(318)
На судне при качке действуют следующие силы и моменты, практически не зависящие друг от друга: восстанавливающие, демпфирующие 1 (гидродинамические неинерционной природы), гидродинамические инерционные и возмущающие.
Восстанавливающими называются гидростатические силы и моменты, стремящиеся вернуть судно в положение равновесия. При бортовой и килевой качке—это восстанавливающий момент, созданный весом судна и силой поддержания; при вертикальной качке— это разность силы поддержания в мгновенном (отклоненном от рав
1 Демпфер — от нем. Dampfer — глушитель, успокоитель.
200
новесия) положении судна и его веса. Восстанавливающие силы и моменты, обусловленные изменением формы и объема подводной части корпуса, при малых отклонениях судна от положения равновесия пропорциональны его линейным и угловым перемещениям.
Демпфирующими называются силы сопротивления воды колебаниям судна. Эти силы характеризуют непрерывное рассеивание энергии качающегося судна на образование волн и вихрей, а также на преодоление вязкостного трения. Демпфирующие силы и моменты растут с увеличением скорости колебаний судна. При малых колебаниях их считают пропорциональными скорости (угловой при бортовой и килевой качке, линейной — при вертикальной).
Гидродинамические инерционные силы обязаны своим возникновением окружающим частицам воды, которым качающееся судно сообщает некоторое ускорение. Эти силы пропорциональны ускорениям качки. При определении характеристик качки их учитывают, прибавляя к массе судна некоторую условную величину, называемую присоединенной массой, а к моментам инерции массы судна — условные величины, называемые присоединенными моментами инерции. Следует иметь в виду, что присоединенная масса не равна массе жидкости, приводимой в движение качающимся судном, и не представляет собой массы, «прилипшей» к судну и движущейся вместе с ним. Термин «присоединенная» имеет чисто формальный смысл и связан с тем, что для учета гидродинамических инерционных сил в уравнениях качки к массе судна должна быть прибавлена (присоединена) некоторая величина, имеющая размерность массы. То же самое относится и к присоединенным моментам инерции.
Возмущающие силы, обусловленные волнением,— это силы, вызывающие качку, т. е. сообщающие судну необходимую для качки энергию.
Отклоненное от положения равновесия и предоставленное самому себе судно совершает колебания, которые называются свободными нли собственными. Демпфирующие силы и моменты быстро гасят эти колебания. Колебания судна под действием возмущающих сил называются вынужденными.
Качка — явление отрицательное. Она уменьшает скорость судна, ухудшает управляемость, приводит к заливанию оконечностей и забрызгиванию, что ухудшае+ мореходность и способствует обледенению, нарушает нормальные режимы работы механизмов и приборов, вызывает у людей морскую болезнь, может быть причиной сдвига грузов, срыва механизмов с фундаментов, местных и общих разрушений корпуса.
Теория качки изучает явления, связанные с качкой, ее характеристики в различных условиях, дает обоснования по созданию средств успокоения качки до безопасных пределов. <
156. Как изменяются размахн качки по времени прн свободных колебаниях судна?
157. Период бортовой качки Те = 14 с. Вычислите частоту качки.
201
§ 81. Качка судна на тихой воде (§ 80)
Пусть под действием некоторого кренящего момента плавающее на тихой воде судно накренилось на правый борт. Кренящий и восстанавливающий моменты равны друг другу, угловая скорость и демпфирующий момент равны нулю. Как только кренящий момент перестанет действовать, восстанавливающий момент начнет возвращать судно в прямое положение. Хотя при этом восстанавливающий момент уменьшается, из-за непрерывности его действия скорость спрямления судна будет нарастать, а демпфирующий момент увеличиваться. Когда диаметральная плоскость судна окажется вертикальной, угловая скорость и демпфирующий момент будут максимальными, а восстанавливающий момент равным нулю. Момент сил инерции во много раз больше демпфирующего момента, поэтому по инерции судно проходит прямое положение и кренится на левый борт со все убывающей угловой скоростью. Причиной уменьшения угловой скорости является действие быстро увеличивающегося восстанавливающего момента и убывающего демпфирующего. Когда восстанавливающий момент будет максимальным, а угловая скорость и демпфирующий момент будут равны нулю, судно окажется в крайнем наклонном положении на левый борт. После этого начнется движение судна в противоположную сторону. Под влиянием демпфирующего момента каждое последующее свободное наклонение будет меньше предыдущего и колебания судна постепенно затухнут.
Процесс килевой качки аналогичен рассмотренному.
Если в какой-то момент вес судна становится меньше силы поддержания (например, вследствнемгновенногоснятия большого груза), то оно начинает всплывать, причем из-за непрерывности действия избытка силы поддержания над весом скорость всплытия будет нарастать и достигнет максимума при равенстве веса судна и силы поддержания. По ннерцин судно пройдет это положение н будет двигаться дальше с убывающей скоростью, так как сила поддержания убывает. Когда судно достигнет крайнего верхнего положения, вес судна окажется больше силы поддержания и начнется движение судна вниз со всевозрастающей скоростью, которая достигнет максимума в момент равенства веса судна и силы поддержания. По инерции судно пройдет положение равновесия, и его осадка будет продолжать увеличиваться, но с убывающей скоростью, так как увеличивается сила поддержания и сказывается демпфирующее действие воды. Когда скорость движения судна вниз окажется равной нулю, оно будет находиться в крайнем нижнем положении. Теперь сила поддержания будет больше веса судна, и оно начнет всплывать. Вследствие демпфирующего действия воды каждое новое свободное колебание судна от положения статического равновесия будет меньше предыдущего и постепенно вертикальная качка затухнет.
202
Период свободных колебаний судна при бортовой качке можно
определить по формуле
Те = 2л
(319)
где kx = 0,25 н- 0,3 — коэффициент присоединенного момента инерции; D — сила поддержания, кН; h — поперечная метацентрическая высота, м; 1Х — момент инерции массы судна относительно продольной оси, проходящей через его центр тяжести, кН-м-с2:
_ D Я2+42д х~ s 12
(zfi — аппликата центра тяжести судна).
Период свободных колебаний судна при килевой качке определяют по формуле
Тф = 2л|/Ц^, (321)
где k2 « 1,0 — коэффициент присоединенного момента инерции; Н — продольная метацентрическая высота; 1в — момент инерции массы судна относительно поперечной оси, проходящей через его центр тяжести, кН-м-с2:
Г =0,065-у а£2, 1 (322)
(а — коэффициент полноты ватерлинии).
Период свободных колебаний судна при вертикальной качке Тв можно рассчитать по формуле
Тв = 2л р/ (1 D , (323)
где k3 х 1,0 — коэффициент присоединенной массы; у — удельный вес забортной воды, кН/м3; S — площадь действующей ватерлинии, м2.
Из анализа формул (319), (321), (323) следует, что период качки на тихой воде не зависит от ее амплитуды и, следовательно, при затухании колебаний судна остается постоянным.
Во время колебаний судна его ускорение имеет положительный знак при движении к положению равновесия и отрицательный — при движении от положения равновесия; в положении равновесия ускорение равно нулю. Угловое ускорение является мерой стремительности бортовой и килевой качки, а линейное ускорение — мерой стремительности вертикальной качки. Чем стремительнее качка, тем она опаснее. Поскольку с увеличением периода качки ее стремительность уменьшается, желательно, чтобы период качки был возможно больше. Как видно из рассмотрения формул (319)
203
и (321), период бортовой и килевой качки данного судна при данном водоизмещении можно увеличить либо за счет увеличения момента инерции массы судна (например, расположив тяжелые грузы возможно дальше от центра тяжести), либо за счет уменьшения его метацентрической высоты, т. е.. остойчивости. Первый путь на практике не применяется, так как размещение грузов определяется конструкцией судна и условиями его эксплуатации, а чрезмерная загрузка оконечностей может привести к разрушению судна, оказавшегося на вершине волны. Поэтому в процессе проектирования и эксплуатации судна стремятся к тому, чтобы его метацентрическая высота имела минимальное значение, обеспечивающее безопасность мореплавания.
Сопоставив формулу (318) с формулами (319), (321) и (323), получим выражения для частоты:
бортовой качки
/Dh
---------; (324)
ОН)/,
килевой качки
(325)
вертикальной качки
йв=-1/-----
V (1+Аз)О
(326)
158. Сколько времени колебалось бы судно, если бы отсутствовали силы сопротивления воды его наклонениям?
159. Как изменяется стремительность бортовой качки при движении судна от наибольшего угла крена к прямому положению?
160. Вычислите частоты качки судна, если S = 1700 ма; D = 119 700 кН; h = 0,8 м; Я= 105 м; l'x = 569 000 кН-м-с2; f = 716-104 кН-м-с2; ? = = 9950 Н/м3; 1ц = 0,25.
§ 82. Качка судна на волнении (§ 80, 81)
Судно на волнении подвержено свободным и вынужденным колебаниям. Свободные колебания в результате демпфирующего действия воды быстро затухают. Вынужденные колебания обусловлены систематическим воздействием волн (см. § 50), поэтому они не затухают.
Рассмотрим колебание судна на регулярном волнении.
Некоторая частица воды А, расположенная у поверхности, волны, совершает круговые движения по орбите (рис. 115, а). Эта частица находится под действием собственного веса Рс и центробежной силы Q. Равнодействующая этих сил Р, перпендикулярная склону волны 1, называется кажущимся весом частицы. Кажущийся вес, направленный перпендикулярно склону волны, приближенно равен истинному весу частицы.
204
Допустим, что судно расположено лагом к волне и его ширина мала по сравнению с длиной волны Л. Это позволяет считать участок волновой поверхности возле судна плоским. Судно совершает движение, подобное движению частицы воды. Его кажущийся вес, приложенный в центре тяжести судна, и сила поддержания, проходящая через новый центр величины, направлены перпендикулярно волновому склону (рис. 115, б). Следовательно, и восстанавливающий момент действует перпендикулярно волновому склону. Уровни воды у бортов неодинаковы, поэтому давление на них также неодинаково и равнодействующая давлений создает кренящий момент. Корпус судна препятствует свободному распространению волн, в результате чего образуется система отраженных от него
волн, происходит перераспределение давлений и возникает кренящий момент. Профиль волны возле судна, а следовательно, значение и направление кренящего и восстанавливающего моментов непрерывно меняются, вызывая колебания судна. Поскольку колебания судна зависят от характеристик волны, период вынужденных колебаний оказывается равным периоду волны.
Свободные и вынужденные колебания накладываются друг на друга. При абсолютно регулярном волнении свободные колебания быстро затухали бы и бортовая качка имела бы правильный характер с периодом, равным периоду волны. Однако часто возникающие отклонения от регулярности волнения вызывают новые свободные колебания, поэтому бортовая качка, как правило, имеет неправильный характер. При килевой качке демпфирующее действие воды настолько велико, что свободные колебания затухают очень быстро, и качка на регулярном волнении имеет правильный характер, т. е. ее период равен периоду волны.
Если поперечные размеры судна малы по сравнению с длиной волны и оно располагается лагом к волне, то амплитуду вынужден
205
ной бортовой качки без учета сопротивления воды (демпфирования) можно вычислить по формуле
2
= (327)
1 —<*о
где 0Г — амплитуда качки; о0 = о/<ое; о — частота волны; <ое — частота свободных колебаний судна; q = £х/(1 + £х) — коэффициент присоединенного момента инерции.
Пусть частота волны во много раз меньше частоты свободных колебаний судна. Тогда о0 -* 0 и 0Г = атах, т. е. амплитуда бортовой качки будет равна наибольшему углу волнового склона и судно будет все время следовать за волной подобно плоту. Иначе говоря, судно будет подвержено частым колебаниям с небольшой амплитудой. Такое явление возможно при очень большой остойчивости судна или очень длинных волнах.
Если частота свободных колебаний судна во много раз меньше частоты волны, то в предельном случае о0 -* оо и выражение (327) приобретает характер неопределенности вида оо/со. Чтобы раскрыть эту неопределенность, разделим предварительно все члены числителя и знаменателя на оо и, устремив о0 к бесконечности, получим 0Г = <татах. Поскольку для бортовой качки q = = 0,2ч-0,25, в рассматриваемом случае амплитуда будет в четыре-пять раз меньше наибольшего угла волнового склона, т. е. будет незначительной. Если частота свободных колебаний судна меньше частоты волны более чем в два раза,— другими словами, если период свободных колебаний судна больше периода волны во столько же раз, то судно испытывает незначительную качку. У судов большого водоизмещения, как правило, период свободных колебаний большой, а частота — малая, поэтому они реже встречают волны близких периода и частоты, т. е. они реже подвергаются значительной качке, чем малые суда.
При равенстве частоты волны и частоты свободных колебаний судна наступает явление, называемое резонансом. В этом случае о0 = 1 и, как следует из формулы (327), амплитуда качки превращается в бесконечность. В действительности этого не происходит, так как, во-первых, формула (327) при больших амплитудах качки несправедлива, а во-вторых, в реальных условиях на судно всегда действуют демпфирующие силы, ограничивающие резонансную амплитуду. Однако и при учете этих сил резонансная амплитуда в несколько раз превышает наибольший угол волнового склона. Поэтому худшие последствия качки связаны с резонансом.
Если, наконец, а0 = 1/К?, то при отсутствии демпфирования амплитуда обращается в нуль.
Исследования вынужденных колебаний судна с учетом демпфирования показали, что при демпфирующие силы умень-
206
У 2 ----
1 +?
увеличивают ее. Правда, это
увеличение несущественно, и при частотах, соответствующих последнему неравенству, амплитуда не будет превышать наибольший угол волнового склона. Вместе с тем в области резонанса, когда амплитуды качки велики и их уменьшение весьма желательно, демпфирующие силы способствуют достижению этой цели. Поэтому в процессе проектирования стремятся к увеличению демпфирования, например путем установки скуловых килей. вг/*тпах
Отношение амплитуды борто- 5fi вой качки к наибольшему углу волнового склона называется коэффициентом динамичности. Ха-рактерный график коэффициента ’ динамичности (так называемый резонансный график) бортовой качки приведен на рис. 116. Штриховая линия отвечает случаю > отсутствия демпфирующих сил, сплошные кривые построены с учетом этих сил. На кривых ука- 2 заны значения безразмерного коэф- ’ фициента р.о, пропорционального коэффициенту демпфирования.
Для вертикальной качки коэф- f фициент динамичности представ- ’ ляет собой отношение амплитуды вынужденных вертикальных колебаний к полувысоте волны. График этого коэффициента ана- о логичен графику, приведенному на рис. 116 (для вертикальной качки q = &3/(1—&3), а о0 = °/мв-
До сих пор мы допускали, что поперечные размеры судна по сравнению с длиной волны малы, и определяли амплитуду борто-вой качки исходя из наибольшего угла волнового склона на поверхности воды атах. В действительности ширина судна обычно соизмерима с длиной волны, и, следовательно, угол волнового склона нельзя считать постоянным по ширцне. Кроме того, с увеличением глубины радиусы орбит частиц воды убывают настолько быстро, что угол волнового склона нельзя считать постоянным и по осадке.
Таким образом, при учете влияния размеров судна на бортовую качку в формулу (327) должна быть введена поправка, позволяющая вместо наибольшего угла волнового склона атах учитывать некоторый осредненный угол а0, называемый эффективным углом волнового склона.
207
Чтобы перейти от наибольшего угла волнового склона к эффективному, максимальный угол умножают на коэффициенты Ki и К2, каждый из которых меньше единицы:
а0 = ^VGamax* (328)
Коэффициент /Си учитывающий изменение угла волнового склона по ширине судна, зависит от коэффициента полноты ватерлинии а и отношения БД, а коэффициент /С2, учитывающий изменение угла волнового склона по осадке,— от коэффициента вертикальной полноты % и отношения ТД. Коэффициенты и К2 определяют по специальным графикам. С увеличением отношения БД и ТД коэффициенты и /С2 уменьшаются. Следовательно, если считать длину волны постоянной, то при прочих равных условиях увеличение ширины и осадки судна ведет к уменьшению амплитуды бортовой качки.
Подобным же образом вычисляют влияние конечности ширины и осадки суДна на амплитуду вертикальной качки. В расчет вместо амплитуды (полувысоты) волны г вводится эффективная амплитуда г0, определяемая по формуле
г» = (329)
где коэффициент К3 учитывает влияние конечности ширины, а К4— влияние конечности осадки. Коэффициент К3 зависит от отношения БД и коэффициента полноты ватерлинии, а К4 — от отношения ТД и коэффициента вертикальной полноты. Коэффициенты К3 и К4 также убывают с увеличением отношений БД и ТД.
Некоторые особенности имеет килевая качка. Она возникает, когда судно располагается вразрез волне (ДП перпендикулярна гребням волны), либо в случае, когда ДП неперпендикулярна гребню волны. Для расчета килевой качки гипотеза о малости размеров судна по сравнению с длиной волны не применима, так как длина судна обычно соизмерима с длиной' волны. Поэтому основоположник теории килевой качки академик А. Н. Крылов принял за основу гипотезу о том, что на каждую точку судовой поверхности действует такое же давление, какое действовало бы в соответствующей точке объема взволнованной жидкости при отсутствии судна. Эта гипотеза позволяет по известным ординатам теоретического чертежа и характеристикам волнения рассчитать кнлевую и сопровождающую ее вертикальную качку.
Очень важно обеспечить прочность корпуса судна на волнении. Если судно располагается вразрез волне и длина волны равна длине судна, а мидель находится на вершине волны, то палубные перекрытия испытывают напряжение растяжения, а днищевые — сжатия. Когда мидель окажется на подошве волны, знак напряжений изменится на обратный. Такое чередование знаков напряжений может привести к разрушению корпуса. Кроме того, связи корпуса при килевой качке на волнении испытывают действие инерционных сил, а заливающая оконечности вода увеличивает нх вес. Все эти 208
обстоятельства должны быть учтены при расчете прочности корпуса. Следует помнить, что седловатость палубы, развал шпангоутов в верхней части, увеличение высоты надводного борта и расположение надстроек в оконечностях уменьшают заливание палубы.
Пусть судно движется в направлении, которое составляет с направлением бега волн угол ф. Скорость бега волн относительно судна
с0 = с—о cos <р, (330)
где с= 1,25 — действительная скорость бега волн, м/с; и —
скорость судна, м/с.
Период волны относительно судна называется кажущимся периодом волны тк. Как легко видеть,
*к — — —
со 1,25 у Л, — v cos <р
Кажущийся период волны совпадает с истинным только при отсутствии хода либо при курсовом угле ф = 90°, т. е. когда диаметральная плоскость параллельна гребням волн. Изменяя скорость судна и и угол между диаметральной плоскостью и перпендикуляром к гребням волн ф, можно изменять кажущийся период волны и тем самым избегать неблагоприятных его соотношений с периодом свободных колебаний судна, удаляясь от резонанса колебаний.
161. Почему на резонансном графике (рис. 116) штриховая линия в верхней части имеет разрыв?
162. Буксир на регулярном волнении буксирует лайнер. Для какого из судов эффективный угол волнового склона и эффективная амплитуда вертикальной качки больше?
163. Судно плавает лагом к волне, имеющей характеристики: Н = 3 м; X = 121 м. Период свободных колебаний судна Те = 8 с, коэффициент присоединенного момента инерции q = 0,2. Какова амплитуда качки?
§ 83. Успокоители качки (§ 80—82) '
Специальные устройства, которые служат для умерения качки, называются успокоителями качки. Существующие типы успокоителей способны значительно умерить бортовую качку, но они не уменьшают килевую и вертикальную качку. Успокоители, приводимые в действие специальными механизмами, называют активными-, успокоители, действующие без помощи механизмов, называют пассивными.
Одним из видов пассивных успокоителей качки являются скуловые кили (рис. 117, а) — установленные перпендикулярно скуле пластины высотой 100—1200 мм, простирающиеся в средней части судна на 0,25—0,5 его длины. Суммарная площадь скуловых килей Ак = (0,02-е-0,04) LB. В период отсутствия хода скуловые кили увеличивают демпфирующее действие воды, а на ходу, кроме того, работают как крылья малого удлинения. (При крене судна скуловые
209
кили создают подъемную силу, направленную у поднимающегося борта вниз и у опускающегося — вверх.) Поэтому скуловые кили работают на ходу более эффективно, чем при его отсутствии. Ску-
Рис. 117
ловые кили несколько увеличивают сопротивление воды движению судна, ухудшают его поворотливость, сравнительно легко повреждаются. Их достоинства: хорошее действие при режимах качки,
210
близких к резонансу (амплитуды при этом уменьшаются на 25— 30%), простота устройства и малая масса.
Разрезные скуловые кили (рис. 117, б) представляют собой ряд крыльев, жестко соединенных с корпусом. Они имеют симметричный профиль и большее, чем у обычных скуловых килей, гидродинамическое удлинение. Поскольку площадь разрезных килей меньше площади обычных скуловых килей, они создают при отсутствии хода небольшой демпфирующий момент, т. е. действуют хуже. Но при Наличии хода на разрезные скуловые кили действует значительная подъемная сила, что с избытком компенсирует потери, связанные с их меньшей площадью. Чем больше скорость судна, тем больше подъемная сила разрезных килей и эффективность их действия.
Пассивные цистерны Фрама (рис. 117, в) представляют собой две расположенные у бортов цистерны 1, соединенные жидкостным 4 и воздушным 3 каналами и частично заполненные жидкостью. В воздушном канале находится дроссель 2, регулирующий перетекание воздуха. Сопротивление воздуха, силы инерции, вязкости и трения тормозят перетекание жидкости в такой мере, что период переливания жидкости оказывается равным периоду качки судна и отстает по фазе от колебаний судна на 90° и колебаний волны на 180°. Таким образом жидкость перетекает в сторону поднимающегося борта и ее масса создает момент, успокаивающий качку. Цистерны уменьшают грузовместимость судна на объем этих цистерн и грузоподъемность на массу жидкости в цистернах (1,5—3%). При режимах качки, близких к резонансу, цистерны Фрама уменьшают амплитуды качки примерно вдвое. По мере удаления от резонанса эффективность действия цистерн уменьшается.
Пассивные цистерны Макарова представляют собой две изолированные цистерны, сообщающиеся с забортной водой (рис. 117, г). При наклонении судна на данный борт вода поступает в цистерну этого борта, а при крене на противоположный борт вытекает из нее. Поступление и вытекание воды запаздывает, благодаря чему ее масса создает момент, препятствующий колебаниям судна.
Активные цистерны (рис. 117, д) отличаются от пассивных тем, что вода перетекает из цистерны в цистерну не самотеком, а при помощи автоматически действующей воздуходувки /, повышающей давление в одной цистерне и понижающей — в другой. Активные цистерны сложны и достаточно дороги, но они уменьшают амплитуды качки при всех ее режимах в три-четыре раза.
Управляемые выдвижные боковые рули (рис. 117, е) представляют собой одну или две пары горизонтальных балансирных рулей, установленных в подводной части судна. Автоматическая система перекладывает рули из горизонтального положения на 25—30° вверх и вниз так, чтобы со стороны опускающегося борта подъемная сила была направлена вверх, а со стороны поднимающегося борта — вниз. При этом должен быть создан момент, равный и противоположно направленный моменту, вызывающему качку. Боковые
211
управляемые рули хорошо успокаивают качку быстроходных судов (при скорости не менее 10—12 уз)/ независимо от режима качки.
Конструкция рулей и система управления сложны, а оборудование судов рулями обходится дорого.
164. Что является размахом скулового киля?
165. В какой зависимости находится подъемная сила разрезного скулового киля от скорости судна?
166. Период свободных колебаний судна при бортовой качке Те = 11 с на волне длиной X = 160 м (судно расположено лагом к волне). Будет ли при этом существенно уменьшаться качка судна, оборудованного цистернами Фрама?
Глава XII
СПУСК СУДНА НА ВОДУ
§ 84. Продольный спуск (§ 4, 18)
В теории корабля спуском на воду называется процесс перемещения судна со стапеля в воду. Как правило, спуск судна на воду производится по наклонной плоскости, на полозьях, т. е. используется принцип скольжения твердого тела по наклонной плоскости под действием собственного веса.
Если диаметральная плоскость спускаемого судна совпадает с направлением движения, то спуск называется продольным. При продольном спуске целесообразнее спускать судно более полной оконечностью вперед: в этом случае оно быстрее отделяется от стапеля и процесс спуска протекает безопаснее. Поскольку обычно корма полнее носа, чаще всего суда спускают кормой вперед.
Поверхность стапеля, на котором строится судно, называется зеркалом стапеля (рис. 118). Угол, составленный зеркалом стапеля с горизонтом, называется углом уклона стапеля р.
Пока судно опирается на спусковые дорожки, существует реакция фундамента. Она складывается из бесконечно большого числа элементарных усилий, распределенных по поверхности соприкосновения полозьев со спусковыми дорожками. Эти усилия можно свести к равнодействующей двух составляющих: нормальной реакции фундамента и силы трения, действующей в плоскости соприкосновения полозьев с дорожками.
Во время спуска судно находится под действием силы веса (спусковой вес), которая и заставляет его двигаться. Спусковой, вес складывается из веса судна Р и веса движущихся частей спускового устройства Ри т. е. Рс = Р + Рг.
Судно будет двигаться по стапелю, если составляющая Q спускового веса Рс будет больше силы трения N спусковых полозьев о поверхность дорожек, покрытых специальными насалками:
Q>N. (332)
212
Из рис. 118 видно, что
Q = Pcsin0 и W = /Pccos₽, (333)
где f — коэффициент трения. Различают статический коэффициент трения — коэффициент трения покоя fs — и динамический коэффициент трения — коэффициент трения движения fd. Известно, что fs>fd-
Таким образом, чтобы судно могло двигаться, необходимо выполнение неравенства
Pcsin 0>/dPccos0 (334)
или
Рис. 118
а для того, чтобы судно, освобожденное от задержников, самопроизвольно тронулось с места, должно быть выполнено условие
tg₽>fs. (336)
Уклон современных наклонных стапелей составляет от Via до 724.
Конец спусковых дорожек под водой называется порогом. Глубина погружения порога называется глубиной воды на пороге То. Пересечение поверхности дорожек с уровнем моря называется урезом воды.
Продольный спуск судна делят на четыре периода, которые отличаются действующими силами и характером движения. Первый период — от начала движения до начала входа в воду судна или спускового устройства; второй период — от конца первого периода до начала всплытия (всплытием при спуске называется вращение судна вокруг носовых концов полозьев); третий период — от начала всплытия до схода полозьев с порога, т. е. до полного отделения судна от стапеля; четвертый период — от конца третьего периода до остановки судна на воде.
213
В первом периоде судно движется вследствие того, что tg
В это время на судно действуют вес спускаемого судна,. реакция фундамента, состоящая из нормальной составляющей и силы трения, и силы инерции.
Во втором периоде кроме перечисленных появляются силы плавучести и сопротивления воды движению судна. В этом периоде спуска опасным является положение судна, при котором центр тяжести оказывается за порогом. Обозначим момент спускового веса относительно порога через Мр. Тогда (рис. 119)
Мр = Рса, (337)
где а — переменное расстояние от центра тяжести судна до порога.
Сила плавучести также у. I создает момент Му относи-
тельно порога стапеля:
M'v = 4VXl, (338) Рс $ где V — погруженный в дан-
£ ный момент объем судна
£ с подвижной частью спуско-
§ вого устройства.
J Если после прохода цен-
Рнс. 119 тром тяжести порога ока-
жется, ЧТО Мр>Му, то произойдет так называемое «опрокидывание» судна, сущность которого состоит в следующем: судно вращается вокруг порога, носовая оконечность отрывается от дорожек и создается сосредоточенное давление на порог стапеля, в результате чего возникает опасность разрушения порога или спусковых салазок. В дальнейшем, когда сила плавучести возрастет, судно будет поворачиваться в обратном направлении. При этом возможен удар судна о дорожки.
Всплытие кормы (третий период) начинается при равенстве моментов
MP = MV, (339)
где Мр и Му — соответственно моменты силы плавучести и веса относительно носового конца полозьев. Это равенство сохраняется на протяжении всего периода, в котором на судно действуют те же силы, что и во втором. В этом периоде судно скользит по дорожкам, опираясь на них только носовыми концами полозьев, поэтому реакция фундамента из распределенной нагрузки превращается в сосредоточенную. Наибольшее значение этой реакции, появляющееся в начале третьего периода спуска, называется баксовым давлением
Nb = Pc-yV, (340)
где V — погруженный к началу третьего периода объем судна с подвижной частью спускового устройства. Реакция фундамента ста
214
пеля по направлению действия противоположна барсовому давлению, т. е. направлена вверх. Вследствие этого в начале всплытия кормы реакция фундамента приводит к уменьшению метацентрической высоты, т. е. остойчивости судна на величину Д/г, которая в данном случае
Д/г = 2У£1, (341)
Р с где — глубина погружения нижней поверхности переднего конца полоза. Поскольку максимум давления соответствует началу третьего периода, с точки зрения остойчивости начало всплытия— опасный момент. Во избежание потери судном остойчивости во время спуска на воду на судне не должно быть жидких грузов со свободной поверхностью, все перемещающиеся грузы должны быть закреплены, а водонепроницаемые закрытия в бортах и палубах задраены.
По мере продвижения судна по стапелю и всплытия кормы реакция фундамента уменьшается вследствие увеличения yV. Баксо-вое давление иногда достигает трети спускового веса.'т. е. таких значений, при которых возможно разрушение спускового устройства и носовой оконечности судна. Во избежание этого в носовой части судна устанавливают так называемый поворотный копыл, шарнирно соединяющий корпус со спусковыми полозьями, или сминающиеся элементы. При всплытии кормы судно поворачивается вокруг шарнира и баксовое давление распределяется на Большую площадь.
Во время всплытия форштевень может задеть стапель и получить повреждения. Во избежание этого необходимо заранее определить максимально допустимое расстояние от форштевня до носового конца полозьев и необходимую высоту спускового устройства.
В начале четвертого периода, после прохождения носового конца полозьев через порог, судно подстерегает другая опасность. Если глубина на пороге То меньше осадки спущенного судна у носового конца полозьев Т2 (с учетом высоты полозьев), то происходит соскакивание (прыжок). При этом нос судна может удариться о стапель. Чтобы избежать удара, у порога вдоль оси стапеля устраивается специальная выемка. Кроме того, в случае недостаточной глубины за порогом Н судно может после прыжка удариться носовыми концами полозьев о грунт.
Рассмотрим этот вопрос несколько подробнее. Чтобы судно пришло в положение равновесия, нижняя кромка носовых концов полозьев должна достигнуть глубины Т2. Таким образом, если опускание судна было бы статическим, то наибольшее вертикальное смещение носовых концов полозьев определялось бы разностью Т2—То. Однако в связи с динамическим характером прыжка нижняя кромка носовых концов полозьев погружается на некоторую максимальную глубину г>Т2, т. е. смещается на величину г—То > Т2 — То. Отношение динамического смещения г —То
215
к статическому Т2—То представляет собой коэффициент динамичности прыжка k:
k = . (342)
— Т 0
Чтобы носовые концы полозьев не ударялись о грунт, глубина воды за порогом Н должна быть больше г:
H>kT\— (k— 1)Т0. (343)
Коэффициент динамичности k определяется также по приближенной формуле
/»2
6 = 2—с+-у, (344)
где
с = 0,87В 1 f---6(3~2а)----;
V а (Т + 0,42<р2В) L
а, 6, <р — коэффициенты полноты подводной части судна; L, В, Т — его главные размерения. При этом под Т понимается средняя осадка в состоянии спусковой нагрузки.
В четвертом периоде судно удаляется от стапеля, испытывая килевую и вертикальную качку.
167. Каким должен быть угол уклона спусковых дорожек, чтобы судно могло самостоятельно тронуться с места, если статический коэффициент трення flS = 0,05?
168. Произойдет ли опрокидывание судна при спуске в пресную воду, если спусковой вес Рс = 35 300 кН, центр тяжести перешел за порог на расстояние а = 3,4 м, объем погруженной части кормы V = 300 м3 и его центр тяжести находится за порогом на расстоянии = 29 м?
169. Определите баксовое давление при спусковом весе Рс = 40 220 кН, если в начале третьего периода спуска объем погруженной части V = 3000 м3; у = 9950 Н/м3.
170. Как изменяется величина ДЛ под действием реакции фундамента стапеля на протяжении третьего периода спуска?
§ 85. Диаграммы продольного спуска (§ 84)
Различают два метода исследования спуска: статический и динамический. При статическом исследовании спуска учитывают силы тяжести и плавучести, вертикальную составляющую реакции фундамента, силу статического трения. При динамическом исследовании спуска учитывают, кроме того, силы динамического трения, сопротивления воды движению судна и инерции. Хотя спуск судна на воду имеет динамический характер, на практике часто ограничиваются статическим исследованием спуска, считая скорость движения судна очень малой. Такое допущение в большинстве случаев не влияет на результат расчета спуска.
Статическое исследование спуска состоит в построении и анализе диаграмм спуска. На практике чаще всего используются так
216
называемые английская и французская диаграммы спуска, которые строятся по результатам расчета спуска данного судна.
Английская диаграмма (рис. 120) содержит графики следующих величин в функции от пути s, пройденного во втором периоде кормовыми концами полозьев: силы плавучести уУ (кривая); силы спускового веса Рс (горизонтальная прямая); момента Mv силы плавучести относительно носовых концов полозьев (кривая); момента Мр спускового веса относительно носовых концов полозьев (гори-
Рнс. 120
зонтальная прямая); момента Му силы плавучести относительно порога (кривая); момента МР спускового веса относительно порога (наклонная прямая).
Как известно, начало всплытия будет иметь место при условии Мр = Mv. Этому условию на диаграмме отвечает точка А, т. е. точка пересечения кривых МР и Mv. Опустив из точки А перпендикуляр на ось абсцисс, найдем путь sB, пройденный судном к началу всплытия. Измерив на этом же перпендикуляре разность ординат линий спускового веса Рс и у У, получим в масштабе баксо-вое давление Nt>. Момент Мр равен нулю при прохождении центра тяжести спускового веса Рс над порогом, следовательно, точка В
8 В. Л, Фукельмап
217
(точка пересечения линии Мр с осью абсцисс) соответствует пути, пройденному судном к моменту прохождения центра тяжести судна над порогом. На участке пути между точками А и В возможно опрокидывание судна, если кривая Му будет ниже линии Мр.
Левее точки А диаграмма неверна, так как после начала всплытия судно вращается вокруг носовых концов полозьев, а диаграмма построена без учета этого обстоятельства. Тем не менее если расчет и построения правильны, то точки F и Q должны лежать на одной вертикали. Действительно, точка F соответствует равенству моментов силы плавучести относительно порога стапеля и носовых концов полозьев (Мг = Му). Это возможно, если носовые концы полозьев будут находиться на пороге, а точка Q соответствовать равенству моментов веса относительно порога и носовых концов полозьев (Л4Р = Мр), что также возможно при указанном условии.
Французская диаграмма (рис. 121) построена в предположении, что судно неподвижно, а уровень воды и порог стапеля относительно него пёремещаются. Диаграмма содержит графики следующих величин в функции от погружения 7\ передних концов полозьев: силы плавучести yV (кривая); спускового веса Рс (вертикальная прямая); абсциссы равнодействующей веса и силы плавучести W (кривая); расстояния от порога до линии действия спускового веса. На диаграмме ось ординат проходит через центр тяжести судна..По’ оси абсцисс отложены элементы спуска, по оси ординат — осадки. Для большей компактности чертежа принято, что масштаб длин в несколько раз меньше масштаба осадок.
Отложив по оси абсцисс от оси ординат влево величину Lx cos 0 (где Lj — расстояние от плоскости шпангоута, в которой лежит центр тяжести спускового веса, до кормового конца полоза, 0 — угол уклона спусковых дорожек), получают точку Л, т. е. кормовой конец полоза. Через эту точку, совпадая с осью абсцисс, проходит нулевая ватерлиния. С учетом масштаба под углом 0 (угол получается искаженным) через точку А проводят спусковую линию фундамента. Отложив по оси абсцисс от оси ординат вправо величину L2 cos 0 (где L2 — расстояние от плоскости шпангоута, в которой лежит центр тяжести спускового веса, до носового конца полоза) и восставив в полученной точке перпендикуляр к оси абсцисс, на спусковой линии фундамента получают точку В, т. е. носовой конец полоза.
Параллельно спусковой линии фундамента на расстоянии, равном в масштабе глубине воды на пороге То, проводят линию положения порога. Точка F, т. е. точка пересечения кривой абсцисс равнодействующей W с вертикалью, проходящей через точку В, соответствует всплытию, так как при этом равнодействующая находится у заднего конца полоза. Ватерлиния, проведенная через точку В, является ватерлинией всплытия. Разность абсцисс прямой Рс и кривой yV, измеренная по ватерлинии всплытия, представляет собой баксовое давление Nb. Разность абсцисс прямой положения 218
порога стапеля и кривой расстояния от порога до линии действия спускового веса, измеренная по ватерлинии всплытия, представляет собой расстояние г равнодействующей W от порога до стапеля. Если эти линии не пересекаются, то опрокидывания не произойдет. Точка Q пересечения линии положения порога стапеля и центра тяжести спускового веса дает ватерлинию, при осадке по которую центр тяжести спускового веса проходит над порогом.
171. Почему возможно опрокидывание судна, если на английской диаграмме кривая Mv будет расположена ниже кривой Мр?
172. Почему не произойдет опрокидывания, если иа французской диаграмме линия положения порога стапеля и равнодействующая W не пересекаются?
§ 86. Поперечный спуск (§ 84, 85)
Поперечным (боковым) называется спуск, при котором диаметральная плоскость спускаемого судна расположена перпендикулярно направлению его движения по стапелю. Если основные расчеты продольного спуска осуществляются с помощью методов статики, то задача поперечного спуска может быть решена только методами динамики, отличающимися большей математической сложностью.
8
219
Поэтому поперечный спуск теоретически менее изучен и считается более опасным, чем продольный спуск.
Между тем поперечный спуск имеет ряд преимуществ перед продольным. При поперечном спуске благодаря большому -сопротивлению воды и малому расстоянию, проходимому судном в воде, не требуется большой свободной акватории у стапеля; значительно меньше или полностью отсутствует дорогостоящая подводная часть стапеля; возникающие в корпусе судна напряжения намного меньше, чем при продольном спуске.
При боковом спуске вследствие малой длины или отсутствия подводной части фундамента опрокидывание неизбежно, как только центр тяжести спускаемого судна перейдет за порог. В дальнейшем сила поддержания прекращает опрокидывание, и судно выравнивается. Кроме того, установка судна на стапеле и конструкция салазок таковы, что после входа в воду полозьев и до входа в воду корпуса судно проходит небольшое расстояние.
При боковом спуске (если составляющая спускового веса и сила инерции, приложенные в центре тяжести судна, а также равнодействующая сил трения действуют не в одной вертикально-поперечной плоскости) образуется пара сил, вызывающая занос одной из оконечностей. Этот занос может вызвать остановку судна на стапеле вследствие заклинивания полозьев на дорожках, а в момент опрокидывания — опасные напряжения в корпусе и зачерпывание воды опустившейся вниз оконечностью.
Боковой спуск делят на четыре периода. Первый период длится от начала движения до прохода центра тяжести над порогом. Второй — от конца первого периода до момента входа судна в воду, т. е. до появления силы плавучести. Во втором периоде происходит опрокидывание. Третий период длится от конца второго периода до начала отделения полозьев от стапеля. В третьем периоде судно может либо увеличить наклонение, полученное к концу второго периода, либо вращаться вокруг порога в обратном направлении. Четвертый период длится от конца третьего периода до прекращения движения. В четвертом периоде происходит соскакивание, поступательное движение от порога, возникновение вертикальной и бортовой качки.
173. Почему прн боковом спуске не используются приспособления, тормозящие движение судна в четвертом периоде?
Раздел четвертый
ОСНОВЫ ТЕОРИИ СУДОВ
ОСОБЫХ КЛАССОВ
Глава XIII
СУДА С ГИДРОДИНАМИЧЕСКИМИ ПРИНЦИПАМИ ПОДДЕРЖАНИЯ
§ 87: Глиссирующие суда (§ 8, 18, 58)
Глиссирующие суда, так же как суда на подводных крыльях (СПК) и воздушной подушке (СВП), составляют группу судов с гидродинамическими принципами поддержания.1
При движении глиссера с небольшой скоростью действующая на его смоченную поверхность гидродинамическая подъемная сила Ру — вертикальная проекция гидродинамической силы Q (рис. 122) — ничтожно мала и вес судна Р уравновешивается гидростатической (архимедовой) силой поддержания D = yV или
P=D. (345)
Этот режим движения глиссера, называемый плаванием, имеет место при числах Фруда Fr 1.
С увеличением скорости глиссера гидродинамическая подъемная сила Ру1 увеличивается настолько, что частично уравновешивает вес судна и вызывает уменьшение его осадки, т. е.
P = D1 + Pyl, (346)
где Dj — гидростатическая сила поддержания при новой осадке. Режим движения судна, при котором Ру1 < (0,9-г-0,95) Р, называется переходным. Он наблюдается при 1 Fr 3.
При дальнейшем увеличении скорости гидродинамическая подъемная сила Ру2 возрастает еще больше: Ру2 > (0,9-^0,95) Р. Глиссер выходит из воды и начинает скользить по ее поверхности. При этом гидростатическая сила поддержания D2 (созданная за счет небольшой погруженной части кормы, руля, винта, гребного вала и кронштейнов) составляет только 5—10% веса судна, т. е.
P = D2+Py2. (347)
Этот режим движения судна, называемый глиссированием, сохраняется при 3 < Fr 5. Поскольку в режиме глиссирования
1 Поскольку при эксплуатационной скорости эти суда полностью или почти полностью выходят из воды, их называют неводоизмещающими судами.
221
в воде остается лишь малая часть объема судна, сопротивление его движению уменьшается, а скорость при той же затрате мощности увеличивается. Дальнейшее увеличение скорости может привести к такому росту гидродинамической силы РуЯ, что она окажется больше веса судна:
Руз > р и £>з = 0. (348)
Тогда гидродинамическая сила вытолкнет судно из воды и оно пролетит по инерции некоторое расстояние в воздухе (РуЯ = 0), а затем опустится (с ударом) на воду. Следовательно, при скоростях, соответствующих РуЯ Р, глиссер рекошетирует от поверхности воды. Такой режим, называемый чистым глиссированием, наблюдается при Fr > 5. С изменением скорости один режим глиссера плавно переходит в другой.
Рис. 122
Л Основным параметром, определяющим тот или иной режим движения глиссирующего судна, является число Фруда. Применительно к глиссирующим судам число Фруда целесообразно представить в форме
где v — скорость глиссера, м/с; V — водоизмещение глиссера при плавании без хода, м3.
Точка приложения гидродинамической подъемной силы глиссера находится впереди его центра тяжести, поэтому она вместе с весом образует гидродинамический момент, придающий глиссеру ходовой дифферент. При глиссировании плоское в корме днище глиссера представляет собой несущую поверхность, для которой угол дифферента ф является углом атаки ак, обычно равным 4—6°. У крыла подъемная сила создается главным образом за счет разрежения сверху; у глиссера давление сверху постоянное, поэтому подъемная сила образуется только в результате увеличения давления снизу. Следовательно, подъемная сила глиссера меньше подъемной силы крыла, имеющего те же площадь, скорость и угол атаки.
г»с>о
Действующая на днище глиссера гидродинамическая сила Q может быть разложена на составляющие (рис. 122): Ри — подъемную силу и Рх — силу сопротивления или на Рг — силу трения и PN — силу гидродинамического давления. Соотношение этих сил определяется формулами (32), (33). Величина PTcosaK представляет собой сопротивление глиссера Рт, зависящее от площади смоченной поверхности. По мере увеличения скорости глиссера его смоченная поверхность и сопротивление трения быстро уменьшаются. Величина PN sin aK характеризует сопротивление давления Rd, приблизительно равное остаточному сопротивлению Ro глиссера (7?d « Ро).
На днище глиссера действует повышенное давление, причем в носу оно больше, чем в корме. Поскольку вода стремится перейти в область пониженного давления, в носовой оконечности образуются брызговые струи в виде «усов», а за кормой вода бьет фонтаном. Равнодействующая реакций «усов» и «фонтана» направлена против движения глиссера и является его брызговым сопротивлением. Сопротивление формы R$, являющееся частью сопротивления давления Rd, можно не учитывать, так как в данном случае вязкость жидкости очень слабо влияет на распределение гидродинамического давления по смоченной поверхности глиссера. В области повышенного давления возле глиссера создается водяной бугор, а дальше в корму — впадина. Эта деформация поверхности воды является причиной волнообразования и волнового сопротивления при глиссировании. С увеличением скорости глиссера его волновое сопротивление уменьшается. Таким образом, сопротивление давления состоит из брызгового и волнового сопротивлений. Сопротивление выступающих частей RB , и воздуха Лвозд играют существенную роль в режиме глиссирования.
Для того чтобы судно могло перейти в режим глиссирования и сохранить устойчивую форму движения, а также хорошую мореходность на волнении, оно должно иметь не только достаточно мощные двигатели, но и специальные обводы: резкую килеватость в носу, большой развал носовых шпангоутов в верхней части, уменьшающуюся по мере приближения к миделю килеватость, постепенно переходящую в плоское днище, острые скулы, транцевую корму. Нередко днище глиссера перед особенно нагруженной частью имеет один или несколько поперечных уступов, называемых реданами. При больших числах Фруда реданы снижают удельное сопротивление глиссера (R/D) за счет уменьшения смоченной поверхности днища и более целесообразного распределения давления на днище возле кормы и редана. При малых числах Фруда реданы увеличивают сопротивление воды.
174. Применим ли в настоящее время принцип глиссирования к пассажирским лайнерам?
175. Каков режим движения глиссера, если его скорость о = 25 уз, а водоизмещение при отсутствии хода V = 33,7 м3?
176. При какой скорости судно перейдет в режим глиссирования, если при статическом плавании его водоизмещение V = 64 м3?
223
§ 88. Суда на подводных крыльях (§ 8, 18, 58, 71)
Скорость судна можно увеличить, установив под. его корпусом несущие подводные крылья. При больших относительных скоростях на этих крыльях возникает гидродинамическая подъемная сила, достаточная для полного отрыва корпуса от поверхности воды. Этот вид гидродинамического поддержания обеспечивает значительное уменьшение сопротивления и более высокие мореходные качества судна при волнении до 4 баллов по сравнению с глиссирующими или водоизмещающими судами в том же диапазоне скоростей.
Рассмотрим процесс выхода судна на крыльях. При движении судна с относительной скоростью Fr<l на крылья и днище дейст-
вует малая гидродинамическая сила, т. е. судно движется в водо-измещающем режиме. С увеличением скорости растет гидродинамическая сила и ее вертикальная составляющая — подъемная, сила Ру, уравновешивающая часть веса судна Р (рис. 123). Кормовое крыло находится в потоке, возмущенном носовым крылом, и поэтому подъемная сила носового крыла растет быстрее, чем кормового. При Fr = 1,5ч-1,8 подъемная сила носового крыла оказывается настолько большой, что вся носовая оконечность выходит из воды, увеличивается угол атаки днища и крыльев. Поскольку корпус судна на подводных крыльях в нижней части имеет форму глиссера, наступает глиссирование. Для судна на подводных крыльях этот режим является переходным. При Fr « 2,2 гидродинамическая сила кормового крыла приподнимает кормовую оконечность над водой и в воде остаются только крылья, соединяющие их с корпусом стойки, гребной вал, винт, руль — судно вышло на крылья:
Рун + Рук=Р, (350)
где Ру н и Ру к — соответственно подъемная сила носового и кормового крыльев.
Подъемная сила крыла
Py = Cy-^v^SK, (351)
где р — плотность воды, кг/м3; v — скорость судна, м/с; SK — площадь крыла в плане, м2; Су — коэффициент подъемной силы,
224
зависящий при данном профиле крыла и угле атаки от отношения глубины погружения крыла к длине хорды его профиля.
Профиль подводных крыльев чаще всего имеет вид плосковыпуклого сегмента с относительной толщиной 6К = Зч-7% и удлинением Ак = 4-г-9. Их гидродинамическое качество равно 10—15. Форма крыла в плане, как правило, прямоугольная или стреловидная. Если глубина погружения крыла меньше хорды профиля, то такое крыло называется малопогруженным (в отличие от глубокопогруженного). Различают крылья, жестко соединенные с корпусом, и крылья, изменяющие угол атаки.
Работа подводного крыла несколько отличается от работы воздушного. Чем ближе крыло к свободной поверхности воды, тем ниже его гидродинамические характеристики, что объясняется образованием волн, брызг и прорывом воздуха к засасывающей (верхней) стороне крыла, т. е. повышением над ней давления. Но если воздух оттеснит воду от крыла, оно уподобится глиссирующей поверхности, его подъемная сила резко уменьшится и крыло опустится на некоторую глубину, после чего начнется нарастание подъемной силы, крыло приблизится к поверхности и последует новый провал. Судно будет испытывать тряску. Во избежание этого принимают ряд мер, препятствующих прорыву воздуха: на стойках и крыльях устанавливают ребра по направлению потока, судно оборудуют крыльями, автоматически изменяющими угол атаки, применяют глубокопогруженные крылья. Кроме того, крыльям придают такую форму, чтобы они пересекали поверхность воды, или располагают крылья в несколько ярусов («лестницей»). В результате за счет изменения площади смоченной части крыльев при данной скорости подъемная сила остается практически постоянной. При больших скоростях судна крылья подвержены кавитации, и в тем большей степени, чем ближе они расположены к поверхности воды.
Поперечная остойчивость СПК после выхода на крылья достигается за счет разности давлений на правую и левую части крыла, возникающей из-за изменения площади ее смоченной части (рис. 124, а), глубины погружения (рис. 124, б) или в результате автоматического действия предкрылков и закрылков (рис. 124, в), которые изменяют скорость потока над и под крылом. Продольная остойчивость обеспечивается действием момента, обусловленного изменением подъемной силы носового и кормового крыльев при дифференте.
При движении СПК в водоизмещающем режиме сопротивление корпуса составляет главную часть сопротивления движению. При переходном режиме судно испытывает сопротивление глиссирования и выступающих частей, наблюдается резкое волно- и брызго-образование. Сопротивление при переходном режиме наибольшее. Имея запас мощности, судно преодолевает это сопротивление, увеличивает скорость и выходит на крылья, после чего сопротивление уменьшается.
225
В режиме движения на крыльях судно с глубокопогруженными крыльями испытывает сопротивления крыльер (трения, формы, индуктивное), выступающих частей и воздуха. При использовании малопогруженных крыльев к указанным видам сопротивления присоединяются волновое и брызговое.
Ходовые характеристики СПК на мелководье улучшаются, так как дно фарватера подтормаживает поток под крылом и его подъемная сила увеличивается. Это обстоятельство, а также уменьшенное по сравнению с водоизмещающими судами волнообразование, разрушающее берега малых рек и каналов, делает СПК совершенно незаменимыми на малых реках.
Управление СПК осуществляется с помощью руля. Крылья несколько увеличивают устойчивость на курсе, поскольку они ока-
Рис. 124
зывают определенное сопротивление отклонению судна. Увеличение площади парусности и значительно меньшее сопротивление воды боковому смещению но сравнению с водоизмещающими судами затрудняют удержание судна на курсе при действии ветра. При циркуляции на часть крыла, обращенную в сторону поворота, действует меньшая сила, чем на противоположную часть крыла, что улучшает поворотливость.
177. Вес судна на подводных крыльях 1 570 кН. Подъемная сила носового крыла в три раза больше, чем кормового. Какой должна быть подъем иая сила носового и кормового крыльев?
§ 89. Суда на воздушной подушке (§ 18, 26, 58)
Суда на воздушной подушке могут «висеть» или двигаться с большой скоростью над любой не слишком неровной поверхностью воды или суши.
Принцип движения СВП состоит в следующем. Вентилятор (компрессор или воздушно-реактивный двигатель) нагнетает воздух под днище судна и создает там избыточное давление Др, которое является динамической поддерживающей силой. По мере увеличения избыточного давления осадка судна уменьшается, а затем оно отрывается от поверхности воды. Расход воздуха из воздушной подушки после отрыва судна от опорной поверхности восполняется 226
непрерывно работающим вентилятором. Судно получает поступательное движение за счет тяги специальных движителей, например воздушного винта или турбореактивного двигателя.
Существует ряд схем создания воздушной подушки. Наибольшее применение имеет камерная (рис. 125, а] и сопловая (рис. 125, б) схемы. В первом случае воздух нагнетается в полость (камеру), во втором — под днище через сопла в виде узких щелей, расположенных по периметру судна.
Рис. 125
Судно камерной схемы отрывается от опорной поверхности, когда подъемная сила
Ру=Др5п = Р, (352)
где Sn — площадь воздушной подушки; Р — вес судна.
У судна сопловой схемы подъемная сила увеличивается на величину реакции вытекающей из сопла струи воздуха:
Р„ = ДрЗп+^зшр = Р, (353)
где т, vH — масса и скорость вытекающего из сопла воздуха; 0 — угол наклона струи воздуха; t — время истечения воздуха, с.
Высота парения судна над опорной поверхностью зависит от подъемной силы, которую способен создать вентилятор. Поэтому
227
при одной и той же мощности вентилятора высота парения судов сопловой схемы больше, чем камерной (300—400 мм вместо 50— 150 мм).
С увеличением избыточного давления и высоты парения расход воздуха из подушки растет. Чтобы уменьшить его, воздушную подушку отделяют от окружающей атмосферы бортовыми жесткими ограждениями — скегами или гибким ограждением — «юбкой». При сопловой схеме струя воздуха, направленная внутрь подушки под углом р = 20-г-60о, уменьшает расход воздуха из подушки и восполняет этот расход.
Плавучесть и остойчивость на воде судов камерной схемы обеспечиваются устроенными вдоль бортов лодками-поплавками. Кроме того, для создания восстанавливающего момента камеру делят на части продольными и поперечными переборками: со стороны наклонения судна давление воздуха в отсеке камеры повышается, а с противоположной стороны — понижается. Плавучесть и остойчивость судов сопловой схемы достигается за счет силы поддержания и восстанавливающего момента, действующих на водонепроницаемый объем судна (см. рис. 125, б).
Непотопляемость СВП обеспечивается приданием лодкам-поплавкам или корпусу необходимого запаса плавучести и соответствующим делением объема на непроницаемые отсеки.
Суда на воздушной подушке испытывают сопротивления: волновое и брызговое, возникающее в результате действия избыточного давления в воздушной подушке на поверхность воды; импульсное— результат реактивной силы воздуха, приводимого в движение вентилятором; скегов и других выступающих частей, если таковые имеются; среза гребней волн гибким ограждением воздушной подушки; сопротивление, возникающее вследствие разности реакций струй воздуха, вытекающих из подушки в нос и в корму; сопротивление воздуха движению судна. Соотношение этих составляющих сопротивления зависит от значений чисел Фруда. С увеличением скорости доля волнового и брызгового сопротивлений уменьшается, а аэродинамических составляющих растет.
Управляемость СВП обеспечивается действием вертикальных воздушных рулей. Для увеличения эффективности их работы рули располагают в струе от движителя. Диаметр циркуляции на полном ходу достигает 40 L, где L — длина судна. При отсутствии поступательного движения СВП могут разворачиваться на месте. Эти суда испытывают незначительное сопротивление боковому смещению, поэтому удержание их на курсе затруднено. Чтобы увеличить это сопротивление, в надводной части судна устанавливают пластины — стабилизаторы (их располагают в диаметральной плоскости) или выдвигающиеся в воду кили.
178. Каким должно быть избыточное давление в камере СВП, если площадь подушки Зп = 130 м2, а вес судна Р = 140 кН?
228
§ 90. Экранопланы
При движении крыла вблизи экрана аэродинамическое качество крыла резко увеличивается вследствие роста подъемной силы. Это явление реализовано на судах специальной постройки — экрано-планах, основными, несущими элементами которых являются воздушные крылья. Двигаясь вблизи свободной поверхности воды — экрана, несущие крылья создают подъемную силу, достаточную для полного отрыва корпуса экраноплана от воды и поддержания его на небольшом расстоянии от ее поверхности.
Рис. 126
Наиболее часто встречаются экранопланы типа «летящее крыло» (рис. 126, а) и «самолетного» типа (рис. 126, б).
В статическом положении экраноплан плавает в воде, имея некоторую осадку. Экраноплан может двигаться в водоизмещающем режиме, глиссировать или совершать полет над поверхностью воды или земли на высоте, равной 0,3—0,5 длины хорды профиля его крыла. Этот последний режим движения экраноплана является основным.
В момент перехода к режиму полета сопротивление движению экраноплана достигает максимума и часто вдвое превышает сопротивление при полете. Чтобы облегчить переход к режиму полета, экранопланы снабжают водными или стартовыми движителями 2,
229
либо создают воздушную подушку. Для этой цели используются главным образом воздушно-реактивные движители. Поступательную скорость экраноплану сообщают маршевые движители 1.
Вследствие подтормаживания экраном потока воздуха и увеличения давления под крылом при незначительном изменении давления над крылом его подъемная сила увеличивается в 1,5—2 раза по сравнению с подъемной силой того же крыла, находящегося на большом расстоянии от экрана. Таким образом, если у крыла, находящегося в неограниченном потоке, подъемная сила создается главным образом за счет понижения давления над крылом, то у крыла вблизи экрана основной причиной создания подъемной силы является увеличение давления под крылом. Увеличение подъемной силы крыла вблизи экрана позволяет при сравнительно малой площади крыла получить подъемную силу, обеспечивающую отрыв судна от экрана и поддержание его в воздухе.
Как известно, перетекание воздуха через концы крыльев с нижней стороны на верхнюю вызывает образование свободных вихрей и скос потока за крылом, в результате чего появляется индуктивное сопротивление. Экран способствует резкому уменьшению угла скоса потока за крылом и уменьшению индуктивного и лобового сопротивлений. Следовательно, увеличивая подъемную силу и уменьшая лобовое сопротивление, экран почти вдвое повышает аэродинамическое качество крыла по сравнению с крылом, находящимся вдали от экрана.
Чтобы еще больше уменьшить лобовое сопротивление и перетекание воздуха через конец крыла, крылья экраноплана снабжают концевыми шайбами-поплавками 3. Они представляют собой объемные конструкции, профиль которых больше профиля крыла.
Плавучесть экранопланов гарантируется их непроницаемым объемом, причем запас плавучести достигает 300—350%.
Восстанавливающий момент, обеспечивающий поперечную остойчивость экраноплана, создается путем увеличения подъемной силы приближающегося к экрану крыла и силы поддержания входящих в воду концевых шайб-поплавков. Непотопляемость экранопланов рассчитывается для случая затопления двух любых смежных отсеков.
Трудно обеспечивается управляемость экранопланов в горизонтальной плоскости, т. е. по курсу, что объясняется малым сопротивлением воздуха дрейфу судна. Управление по курсу на режиме водоизмещающего плавания и глиссирования осуществляется с помощью водяного руля, а на полетном режиме — с помощью воздушных рулей, расположенных в струе, создаваемой винтом. Для управления в вертикальной плоскости экранопланы имеют рули высоты.
При движении над взволнованной поверхностью экранопланы испытывают заливание, забрызгивание и тряску от ударов волн.
230
Глава XIV
ПОДВОДНЫЕ ЛОДКИ
§ 91. Плавучесть (гл. IV)
Подводная лодка может плавать в надводном и подводном положениях. При плавании в надводном положении лодка подчиняется всем законам статики и динамики надводного корабля.
Центр величины и центр тяжести плавающей в надводном положении лодки лежат на одной вертикали, а вес лодки Р равен
ее силе поддержания в надводном положении D, т. е.
P = D = YV. (354)
В надводном положении лодка имеет запас плавучести W, равный разности ее полного объема У„ и объема подводной части V:
= — V. (355)
По мере поступления воды в балластные цистерны вес лодки и ее осадка увеличиваются, а запас плавучести уменьшается. Когда приемом воды в балластные цистерны
будет компенсирован весь
запас плавучести, лодка перейдет в подводное положение. Всплытие происходит в результате продувки балластных цистерн.
Из рис. 127 видно, что объем балластных цистерн
УЦ = 2КПЧ + 2УВЧ, (356)
где Упч и Унч — соответственно объемы подводной и надводной частей балластных цистерн с каждого борта.
Как мы уже знаем, переход в подводное положение возможен, если объем балластных цистерн равен запасу плавучести:
УЦ=Н7. (357)
Но П? = 2Унч + Упк, (358)
следовательно, 2V,14 + 2VH4 = 2VH4 + VnK, (359)
231
гДе V„K — объем надводной части прочного корпуса и непроницаемых выступающих частей. Отсюда
2ГПЧ = УПК, (360)
т. е. объем подводной части балластных цистерн должен быть равен объему надводной части прочного корпуса, рубки и непроницаемых выступающих частей. Если 27Пч<^пк> т0 лодка не сможет погасить запас плавучести и погрузиться.
С увеличением запаса плавучести увеличивается время погружения лодки, что нежелательно. Вместе с тем запас плавучести необходим для обеспечения непотопляемости и надводной мореходности лодки. Запас плавучести современных лодок, как правило, составляет 25—30% их надводного водоизмещения.
Балластные цистерны делятся на следующие группы:
цистерны главного балласта, предназначенные для погашения запаса плавучести. Их объем равен запасу плавучести. Они расположены между прочным и легким корпусами почти по всей длине лодки. При погружении цистерны главного балласта заполняются целиком, а при всплытии полностью продуваются;
уравнительные, служащие для точного уравновешивания сил поддержания и веса лодки. Их объем равен 1—2% надводного водоизмещения лодки. Они должны быть установлены в прочном корпусе так, чтобы центр тяжести их объема лежал возможно ближе к центру тяжести лодки;
средние, обеспечивающие плавание лодки в надводном положении с максимальной осадкой. Они расположены таким образом, что центр тяжести их объема лежит по длине близко к центру тяжести лодки. Объем средних цистерн должен быть таким, чтобы при заполнении цистерн главного балласта и порожних средних цистерн над водой возвышалась только палуба лодки;
дифферентные, предназначенные для выравнивания или придания лодке дифферента. Они расположены в оконечностях и соединены трубопроводом, по которому вода перетекает из одной цистерны в другую. Объем дифферентных цистерн составляет около 2—3% надводного водоизмещения лодки;
быстрого погружения, используемая для увеличения скорости погружения. Она установлена в нос от центра тяжести лодки, и ее объем равен 0,5—1% надводного водоизмещения лодки;
заместительные, т. е. компенсирующие вес расходуемых грузов. Их объем и расположение выбираются из условия равенства весов и моментов расходуемых грузов и принимаемой в цистерны забортной воды.
Различают три основных положения подводной лодки: крейсерское, позиционное и подводное.
В крейсерском положении лодка удифферентована и плавает на поверхности воды. Ее цистерны главного балласта порожние, а цистерна быстрого погружения заполнена. Лодка готова £ погру-232
жению. Крейсерскому положению соответствуют крейсерская ватерлиния, объем подводной части VK и сила поддержания DK.
В позиционном положении, промежуточном между крейсерским и подводным, лодка также удифферентована и плавает иа поверхности воды. Порожними остаются только средние цистерны и цистерны быстрого погружения. В подводном положении лодка удифферентована и плавает под водой. Все балластные цистерны, кроме цистерны быстрого погружения, заполнены. При этом объем лодки Уп и сила поддержания Dn.
Погружение подводной лодки производится в один или два приема. В первом случае у плавающей в крейсерском положении лодки одновременно заполняются все цистерны главного балласта. Во втором случае сначала заполняют концевые группы цистерн главного балласта и переводят лодку в позиционное положение, а затем заполняют средние цистерны и переводят лодку в подводное положение. Порядок продувки цистерн при всплытии — обратный рассмотренному.
Погружение и всплытие удифферентованной подводной лодки произойдет без крена и дифферента, если на протяжении всего процесса центры тяжести балластных цистерн и запаса плавучести будут лежать на одной вертикали. Поскольку цистерны и запас плавучести расположены симметрично относительно диаметральной плоскости лодки, указанные центры находятся в этой плоскости. Абсциссы центров тяжести цистерн главного балласта и запаса плавучести в процессе погружения или всплытия не равны, поэтому для компенсации дифферентующего момента на лодку принимают твердый балласт, количество и расположение которого определяют после окончания постройки лодки в процессе опытного погружения, называемого вывеской лодки.
После перехода в подводное положение только в идеальном случае вес лодки Рп равен силе поддержания уУп. Обычно лодка имеет либо положительную остаточную плавучесть (Pn<.yVn) и стремится всплыть, либо отрицательную остаточную плавучесть (Pn>yVn), под влиянием которой лодка продолжает погружаться. Подводная лодка с небольшой отрицательной остаточной плавучестью может всплыть, если она получит дифферент на корму, а вертикальная составляющая упора винта уравновесит отрицательную остаточную плавучесть. Погружение лодки при небольшой положительной остаточной плавучести также возможно при .условии, если ей будет придан дифферент на нос, а вертикальная составляющая упора винта уравновесит положительную остаточную плавучесть. Из сказанного следует, что лодка, имеющая остаточную положительную или отрицательную плавучесть, без хода может удерживать заданную глубину погружений только с помощью специальной стабилизирующей системы, а на ходу — с помощью горизонтальных рулей.
На величину остаточной плавучести влияет ряд факторов: изменение плотности воды на глубине, обжатие корпуса с увеличе-
233
нием глубины погружения, изменение плотности воды вследствие изменения ее температуры или солености. Последний фактор имеет особо важной значение. Плавающая в надводном положении подводная лодка при изменении удельного веса забортной воды изменяет свою осадку, вследствие чего после заполнения балластных цистерн у нее появляется значительная остаточная плавучесть. Так, если лодка из воды с удельным весом у перейдет в воду с удельным весом у1( причем у<?1, то осадка лодки уменьшится (27пч<РПк)» т- е- после заполнения балластных цистерн лодка будет иметь положительную остаточную плавучесть и не погрузится; если yj>Yi, то осадка лодки увеличится (2Vn,> VnK) и после заполнения балластных цистерн она будет иметь отрицательную остаточную плавучесть и может упасть на грунт. Чтобы избежать этих нежелательных явлений, вес лодки и ее осадку в надводном положении при изменении удельного веса забортной воды регулируют, принимая или удаляя воду из уравнительных цистерн в количестве Др = УкДу. Когда лодка, имеющая небольшую отрицательную остаточную плавучесть, встречает на глубине слой повышенного удельного веса, она перестает погружаться и ложится на этот слой, как на грунт, который так и называется жидким грунтом.
179. Сможет ли лодка погрузиться, если в процессе ее реконструкции будет увеличен объем непроницаемых выступающих частей?
180. Крейсерское водоизмещение лодки Кк = 2500 м8, запас плавучести IF 0,ЗКк. Каково подводное водоизмещение лодки в Черном море?
181. Сколько воды нужно принять в уравнительную цистерну, если лодка объемом V — 3300 м8 из Баренцева моря перешла в Северное?
§ 92. Остойчивость (гл. V—VI)
Различают остойчивость лодки в надводном, подводном положении и во время погружения или всплытия. Следует, однако, заметить, что во время погружения лодка находится в движении, поэтому, говоря об остойчивости лодки в момент погружения или всплытия, имеют в виду ее остойчивость в различных положениях прерванного процесса погружения или всплытия.
Остойчивость подводной лодки без учета влияния свободных поверхностей жидких грузов и водяного балласта называют основной остойчивостью.
Начальная остойчивость подводной лодки в надводном положении характеризуется метацентрическими высотами или коэффициентами остойчивости.
Поперечное сечение корпуса лодки без существенной ошибки можно считать кругом. При крене размеры и форма подводной части остаются постоянными, поэтому центр величины описывает кривую, концентричную поперечному сечению обшивки прочного корпуса. Следовательно, метацентр лодки находится в геометрическом центре ее поперечного сечения (рис. 128). Если центр тя-234
жести лодки лежит близко к метацентру (ниже или выше его), то для увеличения метацентрической высоты в доковый киль лодки принимают твердый балласт 1 (рис. 128, а).
Рнс. 128
В крейсерском положении восстанавливающий момент
M0K = DK(rK—ак) sin 0. (361)
Основная остойчивость лодки зависит от способа погружения (в один или в два приема).
При погружении в один прием в процессе заполнения балластных цистерн центр величины поднимается (растет осадка лодки),
235
а центр тяжести сначала опускается (вода поступает в нижние части цистерн), затем медленно поднимается (балласт принимается в верхние части цистерн).
До тех пор пока центр величины находится ниже центра тяжести, восстанавливающий момент
Af0i = Di(ri—aJsinO. (362)
Когда центр величины окажется в одной точке с центром тяжести (а2 = 0), восстанавливающий момент примет вид (рис. 128, 6):
At02 = D2(r2—0) sin 0 = D2r2 sin 0. (363)
В дальнейшем, когда центр величины переместится выше центра тяжести лодки и а3<0 (рис. 128, в), получим
Af03 = D3(r—(—аз)1 sin 0 = Z)3 (г3 +1 а31) sin 0. (364)
Из формул (362) — (364) следует, что основная остойчивость лодки на всех рассмотренных этапах погружения (всплытия) остается положительной. Лодка может потерять остойчивость только в том случае, если центр ее тяжести окажется выше метацентра.
При погружении лодки в два приема центр тяжести балласта и лодки будет выше, чем при погружении в один прием, так как то же количество воды располагается в меньшем количестве цистерн. Следовательно, основная остойчивость лодки при погружении в два приема меньше, чем при погружении в один прием.
При полном погружении лодки центр величины совпадает с метацентром гп = 0 и восстанавливающий момент (рис. 128, г)
M0n = Dn[O —(— an)]sin0 = Dn(|an[)sin0. (365)
Поскольку при крене на большие углы из-за круглой формы обводов подводной лодки ее метацентр не смещается, метацентрическая формула остойчивости справедлива не только при малых, но и при больших углах крена.
При плавании в подводном положении восстанавливающий момент лодки пропорционален синусу угла крена, т. е. диаграмма статической остойчивости имеет вид синусоиды: при крене 90° восстанавливающий момент наибольший и угол заката диаграммы равен 180°. Таким образом, поперечная остойчивость подводной лодки в подводном положении не вызывает опасений.
Когда лодка находится в подводном положении, ее продольный метацентрический радиус, как и поперечный, равен нулю, т. е. продольная и поперечная остойчивость лодки в этом положении одинаковы (если пренебречь разницей во влиянии свободных поверхностей жидкости в цистернах прочного корпуса). Как известно, дифферентующие моменты действуют на лодку чаще, чем кренящие, а большой самопроизвольный дифферент лодки опасен. В связи с этим продольной остойчивости лодки при ее проектировании и эксплуатации должен быть уделен максимум внимания.
236
Свободные поверхности жидких грузов на подводной лодке велики, поэтому их влияние на остойчивость необходимо тщательно исследовать. При закрытых кингстонах (Жидкость в цистернах не сообщается с забортной водой) поправка к метацентрической высоте составляет
Д/li = —у1, (366)
где Six — сумма моментов инерции площадей свободных поверхностей жидкости в цистернах относительно их собственных продольных осей.
Когда кингстоны и клапаны вентиляции цистерн открыты, уровень воды в цистернах такой же, как в море: со стороны накрененного борта он повышается, а с противоположного борта понижается. Поправка к метацентрической высоте в этом случае
Дй2 = —( (367)
где Sta — сумма моментов инерции свободных поверхностей жидкости в цистернах относительно диаметральной плоскости.
При открытых кингстонах и закрытых клапанах вентиляции цистерн воздух в последних препятствует свободному поступлению воды и уровень воды в цистернах правого и левого борта лежит в разных горизонтальных плоскостях. Поправка к метацентрической высоте в этом случае определяется по формуле
ДЛз = ~у1, (368)
где Si3 = S (1—а) ц + ai2; а = 0,2-5-0,25 — коэффициент.
При погружении (всплытии) в два приема суммарный момент инерции свободных поверхностей главного балласта и их влияние на остойчивость меньше, чем при погружении в один прием. Поэтому может оказаться, что сточки зрения остойчивости погружение (всплытие) лодки в Два приема надежнее, чем в один прием, несмотря на то что в последнем случае основная остойчивость лодки больше.
Чтобы судить об остойчивости лодки в любой момент ее погружения или всплытия, строят график, называемый диаграммой погружения: вычерчивают кривые плавучести и начальной остойчивости лодки и кривые поправок на влияние свободных поверхностей жидкости при всех возможных осадках лодки.
182. Как изменяется метацентрический радиус по мере заполнения балластных цистерн? z
183. Почему в подводном положении продольный метацентрический радиус лодки равен нулю?
184. Как влияет на остойчивость лодки объемом V = 1000 м3 свободная поверхность воды в цистерне главного балласта размером /ц = 3,0 м; Ьц — — 1,6 м, если диаметр прочного корпуса лодки d = 6,0 м? Кингстоны цистерны открыты, клапаны вентиляции закрыты; a = 0,2.
237
§ 93. Непотопляемость (гл. VII)
Различают надводную и подводную непотопляемость подводной лодки. ч
Надводной непотопляемостью называется способность лодки оставаться на плаву с достаточными плавучестью и остойчивостью при затоплении одного-двух отсеков прочного корпуса и прилегающих к нему бортовых цистерн главного балласта. Надводная непотопляемость лодки достигается теми же средствами, что и надводных судов. Однако из-за малости запаса плавучести и круговой формы сечений лодки, при которых с увеличением осадки резко убывают площади ватерлиний и остойчивость, обеспечить надводную непотопляемость лодки удается далеко не всегда.
Подводной непотопляемостью лодки называется ее способность погружаться, всплывать и плавать под водой, не теряя управляемости при затоплении одного-двух отсеков прочного корпуса и прилегающих к нему цистерн главного балласта. У современных подводных лодок подводная непотопляемость не обеспечивается, поэтому задача состоит в переводе поврежденной лодки из подводного положения в надводное. Этой способностью современные подводные лодки обладают. Для самостоятельного всплытия аварийной подводной лодки с грунта необходимо принять следующие меры: предотвратить распространение воды за пределы аварийного отсека; придать лодке подъемную силу путем продувки неповреждённых цистерн воздухом высокого давления и удаления вспомогательного балласта, жидких и некоторых твердых грузов. Необходимо помнить, что подъемная сила должна быть больше суммы веса воды в аварийном отсеке, силы присоса лодки к грунту и отрицательной остаточной плавучести лодки перед аварией, поэтому во время отрыва от грунта значение момента подъемной силы должно быть по возможности близким моменту сил, препятствующих всплытию.
185. Непотопляемость каких лодок легче обеспечить: больших или малых?
§ 94. Управляемость (гл. X)
Различают управляемость подводной лодки в горизонтальной и вертикальной плоскостях.
Управляемость лодки в горизонтальной плоскости при надводном плавании, во время погружения (всплытия) и в подводном положении обеспечивается действием вертикального руля и не имеет принципиальных отличий от управляемости надводных судов.
Управляемостью подводной лодки в вертикальной плоскости называется ее способность сохранять направление движения в этой плоскости или изменять его под действием горизонтальных рулей и движителей. Таким образом, управляемость лодки в вертикальной плоскости характеризуется устойчивостью движения и пово
238
ротливостью в этой плоскости. Помимо воздействия горизонтальных рулей, на устойчивость и поворотливость лодки влияют форма корпуса, форма, размеры и расположение стабилизаторов, скорость лодки, ее дифферентовка.
Режим движения лодки в подводном положении может быть как установившимся, так и неустановившимся.
Если параметры движения подводной лодки с течением времени не изменяются, а действующие на нее силы динамически уравновешиваются, то такое движение лодки называется установившимся. Ойо характеризуется тем, что угловая скорость вращения лодки равна нулю. Установившееся движение наблюдается, например, при плавании на постоянной глубине постоянным курсом, при продолжительном погружении или всплытии по прямой.
На лодку, движущуюся в установившемся режиме, действуют статические и динамические силы и моменты. К статическим относятся остаточная плавучесть и ее момент относительно центра тяжести лодки, а также продольный восстанавливающий момент; к динамическим — упор гребного винта й его момент относительно центра тяжести лодки, равнодействующая гидродинамических сил и ее момент относительно центра тяжести лодки. При вращательном движении подводной лодки на нее, кроме того, действуют гидродинамические силы, обусловленные вращением, и их момент относительно центра тяжести лодки.
При установившемся движении упор винта уравновешивается лобовым сопротивлением. Поскольку центр давления лобового сопротивления, как правило, лежит выше оси вала, эти силы создают момент, дифферентующий лодку на корму. Этот момент растет вместе с увеличением упора винта, т. е. скорости лодки. Величина и направление действующих на лодку гидродинамических сил и.их момента относительно центра тяжести лодки зависят от ее гидродинамических характеристик (форма корпуса, форма и расположение выступающих частей, скорость) и от угла атаки лодки, под которым понимается угол между вектором скорости и горизонталью. Если точка приложения равнодействующей гидродинамических сил (т. е. центра давления) расположена в нос от центра тяжести лодки, гидродинамический момент увеличивает появившиеся у лодки отклонения, т. е. оказывает возмущающее действие; если центр давления лежит в корму от центра тяжести лодки, то гидродинамический момент стабилизирует режим ее движения. При совпадении центра давления и центра тяжести лодки гидродинамический момент статически нейтрален, т. е. не влияет на параметры движения лодки. У подводных лодок центр давления чаще всего расположен в нос от центра тяжести.
При движении лодки в неустановившемся режиме на нее действуют динамически не уравновешенные силы, поэтому в случае криволинейной траектории или изменения глубины погружения угловая скорость вращения лодки уже не равна нулю. Неустановив-шийся режим наблюдается, например, при изменении остаточной
239
плавучести или остаточного момента, при перекладке вертикального или горизонтальных рулей и т. д.
В период неустановившегося движения на подводную лодку, кроме перечисленных ранее сил, действуют силы инерции лодки и присоединенных масс воды, а также силы сопротивления вращению лодки в вертикальной плоскости.
Все действующие на подводную лодку силы и моменты не постоянны во времени. Поэтому, изменяя упор гребного винта и его момент относительно центра тяжести лодки, изменяя остаточную плавучесть и ее момент, регулируя горизонтальными рулями величину и направление равнодействующей гидродинамических сил, можно поддерживать установившееся движение подводной лодки или изменять режим движения в желаемом направлении.
Управляемость лодки в вертикальной плоскости обеспечивается действием горизонтальных рулей, расположенных по бортам в носу и корме. Пусть горизонтальный руль поставлен в положение, указанное на рис. 129. Тогда на него действует сила Р, составляющие которой Рх и Ру. В центре тяжести лодки приложим равные по значению и противоположно направленные силы Ру и Ру (равные и параллельные силе Ру), а также равные по значению и противоположно направленные силы Рх и Рх (равные и параллельные силе Рх). При этом силы Ру и Ру образуют момент с плечом 1Ъ который дифферентует лодку на корму, а силы Рх и Рх образуют момент М 2 с плечом 12, дифферентующий лодку на нос. Поскольку Л11>Л12, лодка дифферентуется на корму и под действием упора движителя идет на всплытие. Сила Ру стремится заставить лодку всплыть, а сила Рх — уменьшить скорость лодки. Для увеличения дифферентующего момента носовые и кормовые рули перекладывают так, чтобы их углы имели противоположный знак.
Как мы знаем, лодка имеет остаточную плавучесть и в зависимости от ее знака стремится всплыть или погрузиться. Этому препятствуют соответствующей перекладкой горизонтальных рулей: если лодка уходит на глубину больше заданной, то ей придают дифферент на корму и она идет на всплытие. Как только лодка пройдет
240
заданную глубину, ей придают дифферент на нос и она идет на погружение. Таким образом, лодка движется в вертикальной плоскости зигзагообразно около заданной глубины погружения.
При переложенном вертикальном руле лодка в подводном положении кренится только внутрь циркуляции: равнодействующая сил сопротивления воды боковому смещению лодки приложена выше центра тяжести, поэтому момент этой и центробежной силы, а также момент силы давления воды на руль кренят лодку на одни борт. Таким образом, крен, возникающий в маневренный период циркуляции, во время эволюционного перйода увеличивается до максимума к началу периода установившегося движения н остается постоянным до перекладки руля в диаметральную плоскость. Нередко крен на подводной циркуляции достигает 30°.
186. Какими должны быть знаки углов атаки носовых и кормовых ру-лей, чтобы лодка шла на погружение?
ОТВЕТЫ НА ВОПРОСЫ И ЗАДАЧИ
1. В Тихом океане. 2. Уменьшается. 3. у = 8175 Н/м®. 4. Перпендикулярно к ней. 5. 5,89-10* Па. 6. На нижний. 7. Увеличивается на величину давления, создаваемого столбом жидкости в трубке. 8. 131 кН. 9. В реке. 10. Не изменяется. 11. Тх = 1,183 м. 12. С повышением температуры Re увеличивается. 13. Лайнера. 14. Re — 7,085-10®. 15. В трубопроводе большего диаметра. 16. v= 27,1 см/с. 17. За телом с тупой кормой. 18. 100%. 19. к = 38,2 м. 20. Нет. 21. Увеличится. 22. %к = 1,23; SK = 19,7 м2; хр — = 1,04 м; Рх = 195,3 кН; Ру = 512,7 кН; PN= 545,9 кН;-Рт = 55,9 кН; М — 567,7 кН-м. 23. Последующие значащие цифры не достоверны и практически не влияют на результат вычисления. 24. 346 000. 25. 64,05. 26. При вогнутой кривой результат больше истинной площади, при выпуклой — меньше. 27. <о = 121,0 м2. 28. <о — 199 м2. 29. При девяти ординатах. 30. Нет. 31. S = 1108 м2. 32. Нет. 33. 2,6; 6,1; 10,0; 14,0; 18,1 см. 34. Интегральной кривой. 35. V = 0; 10 500; 22 650; 35 400; 48 450 м®. 36. Единица. Параллелепипед. 37. Нет. 38. V = 33 340 м® 39. Минус. 40. Нет. 41. S = 192,4 м2; Му = — 19,65 м®; xs= — 0,102 м. .42. Абсциссы кривой сначала увеличиваются, а затем уменьшаются. 43. 1Х — 422,0-10s м4. 44. Забортной воды. 45. Увеличится. 46. Тг = 5,97 м. 47. Увеличились. 48. Цдв = 0,802; т]гп = = 0,672. 49. хв = — 0,492 м; yQ = — 0,001 2 м; гс = 6,1 м. 50. Равны. 51. SQ= 21 320 мм2; х'с = 2,41 м; <р = 0,578; V = 1066 м3; хс = 0,241 м-52. $4 5 = 1050 м2; SCT = 21 360 мм2; г'с = 68,7 мм; х = 0,828; V = 5340 м3; zc = 3,43 м. 53. Влево. 54. Нет. 55. Д' = 50 000 т; рдв = 2040 т. 56. Три. 57. <о = 24,5 м2. 58. V = 28 520 м®; х~с = — 5,98 м. 59. Меньше. 60. р = = 103,4 т. 61. р1см= Ю,7 т; ДТ = 11 см. 62. ДТ увеличивается. 63. Тт = = 8,36 м. 64. При осадке по зимнюю марку. 65. Уменьшится. 66. От 8820 до 14 700 м®. 67. Угол крена уменьшится. 68. Входящий. 69. ДТН = 1,953 м; ДТК = — 2,037 м. 70. Me = 0. 71. Нет. 72. Н-м. 73. Dh = 101 900 кН-м. 74. Мкр = 16 530 кН-м. 75. К первому. 76. = 4550 кН; 6 = 5°. 77. г =
— 2,5 м. 78. Is — 790 400 м4. 79. Нет. 80. I = 0,278 м. 81. Согласно теореме Эйлера. 82. х$ имеет знак минус. 83; ДЛ — — 0,024 м; hx = 0,576 м; 0 = = 4°10'; ф = б°10'; ДТН = 0,136 м; ДТК =—0,134 м; d'= 0,27 м. 84. Нет. 85. Д (Dh) = — 2390 кН; 0 = О’гг'; ф = 0°4'; ДТН = 0,079 м; ДТК = — 0,077 м; d' = 0,156 м. 86. Вес подвешенного груза фактически приложен к судну в точке подвеса. 87. ДЛ — — 0,107 м. 88. Вдоль. 89. hT = = 0,92 м. 90. Нет. 91. Да. 92. р — 83,6 т. 93. Ничто не должно мешать свободному наклонению судна. 94. Масса его уменьшается. 95. zQ = 10,26 м; ха = 3,97 м. 96. Ix = const, V — const, г — IXV. 97. = у cos 0 +
242
+ (z—zc) sin 0. 98. /B — a sin 0. 99. 8 — катет прямоугольного треуголь. ника, 1110/2 — его гипотенуза, Д0 — угол (в рад), противолежащий е. 100. Увеличивается. 101. а) 0 = 7° и 0 = 15°; б) Л4е 30 000 кН-м; в) 0т = 23°; г) Мс = 62 000 кН-м; д) /с = 0,345 м. Да. На 4000 кН-м. Да. 102. При Дуд = — Дго- ЮЗ. Д/Итах = — 5880 кН-м; Д0 = 4°; Д0„ = = — З^ЗО'. 104. /j = 0,159 м. 105. / = 0; 0,10; 0,15; 0,34; 0,15; -0,21; — 0,54; — 0,86; — 1,15 м. 106. /тах соответствует точка перегиба диаграммы динамической остойчивости; rfmax соответствует 0а. 107. d = 0,37 м. 108. а) 0=15°; б) Мкр = 71 400 кН-м; _в) Мс = 7400 кН-м; г) /с = = 0,787 м; ;О_0опр — 37°. 109. с = 1,25 УХ а так как v = с и % = L, то v = 1,25 Y L. ПО. Она увеличивается. 111. Нет. 112. Мс уменьшается с увеличением 0Г. 113. Судно достаточно остойчиво по основному критерию и характеристикам диаграммы статической остойчивости. 114. Уменьшением запасов плавучести и остойчивости. 115. Центр тяжести веса влившейся воды будет лежать в ДП. 116. Искусственное затопление. 117. Вес воды в отсеке уравновешивается силой поддержания, а все остальные составляющие веса судна остались прежними. 118. ДТ = 0,141 м; Ьг = —0,132 м; Zj = — — 1,02 м; Дхс =—0,809 м; &ус =— 0,147 м; Дгс = 0,075 м; Дг = = — 0,137 м; ДЛ = — 0,063 м; 0 = 9°58'; ДР = — 4,02 м; ДЯ = — 3,95 м; ф = 0°24'; ДТН = 0,638 м; ДТК = — 0,342 м; d' = 0,980 м. 119. Порожнего. 120. Сухогруза. 121. /доп — 6,17 м; 122. Нулю. 123. Нулю. 124. Ro — = 1250 Н. 125. Уменьшается. 126. RT = 205,3 кН. 127. Рф = 74 523 Н. 128. При 21,9 уз. 129. RB = 118,3 кН. 130. RB. ч = 25,4 кН. 131. Ухудшается обтекаемость. 132. Рвоад = 31,8 кН. 133. v 9,4 уз. 134. Больше. 135. Поверхность модели технически гладкая. 136. Во избежание движения воздуха по плоскости ватерлинии модели. 137. пм = 2 м/с; /?воды = = 518,8 кН. 138. N3 = 6880 кВт; Np = 10 580 кВт; Ne = 11 130 кВт; Я,- = = 11 840 кВт. 139. N3 = 6390 кВт. 140. Упор винта не должен создавать момент, поворачивающий судно. 141. 0 — 0,656. 142. И = 7,02 м; р — 1,46; 0 = 0,531. 143. 'Sa = Н. 144. vp = 5,44 м/с. 145. Ре ~ 139 100 Н; М = = 89 270 Н-м; т, = 0,37. 146. I стадия — кавитационная эрозия, II стадия — ухудшение гидродинамических характеристик винта. 147. «Тяжелыми 148. Такое положение, прн котором тяга винта равна нулю. 149. Нет. 150. Нет. 151. Полная. 152. ф = р + ср. 153. Тц = 280 с. 154. Г»ц = 1110 м; Пц = 8,39 м/с; 0 = 4°6’. 155. DT = 740 м. 156. Уменьшаются. 157. со = = 0,45 г/с. 158. Бесконечно долго. 159. Нарастает. 160. сое = 0,37 1/с; соф = = 0,94 1/с; со в = 0,84 1/с. 161. При о = 1 (при резонансе) и отсутствии демпфирования 0Г больше атах в бесконечно большое число раз, т. е. 0r/«max = = оо. 162. Для буксира. 163. 0Г = 22°. 164. Ширина киля. 165. Пропорциональна V2. 166. Да. 167. р>2°62'. 168. Да. 169. Nb = 10 370 кН. 170. Уменьшается. 171. MV<ZMP. 172. Равнодействующая спускового веса не переходит за порог. 173. Велико сопротивление воды. 174. Нет. 175. Переходный режим. 176. v = 36,5 уз. 177. Ран = 1177,5 кН; Рук = 392,5 кН. 178. Др = = 1077 Па. 179. Нет. 180. уУп = 32 340 кН. 181. Др = 66 кН. 182. Уменьшается. 183. R = Is/V = 0/V = 0. 184. Д/i = —0,015 м. 185. Больших. 186. У носовых ак отрицательный, у кормовых — положительный.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Алфер ье в М. Я- Теория корабля. М., «Транспорт», 1972.
2. Аифимов В. Н., Сиротина Г. Н., Чижов А. М. Устройство и гидромеханика судна. Л., «Судостроение», 1974.
3. Б а с и н А. М., Анфимов В. Н. Гидродинамика судна. Л., «Речной транспорт», 1974.
4. Б е л а в и н Н. И. Экранопланьь Л., «Судостроение», 1968.
5. Благовещенский С. Н., Холодилин А. Н. Справочник по статике и динамике корабля. Т. 1—2. Л., «Судостроение», 1975.
6. Войткунский Н. И., Першиц Р. Я., Тито в-И. А. Справочник по теории корабля. Л., «Судостроение», 1973.
7. Дорогостайский Д. В., Жученко М. М., Мальцев Н. Я. Теория и устройство судна. Л., «Судостроение», 1976.
8. Е ф и м ь е в Н. П. Основы теории подводных лодок. М., «Воен-издат», 1965.
9. К а ц м а н Ф. М., Кудреватый Г. М. Конструирование винторулевых комплексов морских судов. Л., «Судостроение», 1974.
10. К р ю ч к о в Ю. С., Лапин В. И. Парусные катамараны. Л., «Судостроение», 1967.
11. Лойцянский Л. Г. Механика жидкости и газа. М., «Наука», 1973.
12. Р у с е ц к и й А. А., Жученко М. М., Дубровин О. В. Судовые движители. Л., «Судостроение», 1971.
13. Семенов-Тян-Шанский В. В. Статика и динамика корабля. Л., «Судостроение», 1973.
244
ОГЛАВЛЕНИЕ
Введение ...................... ... 3
Раздел первый. ОСНОВЫ ГИДРОМЕХАНИКИ
Глава I. Гидростатика 6
§ 1. Свойства жидкости ... —
§ 2. Гидростатическое давление 9
§ 3. Закон Паскаля 10
§ 4. Закон Архимеда И
Глава II. Гидродинамика . 12
§ 5. Характеристики потока жидкости . —
§ 6. Уравнение Бернулли .... 14
§ 7. Обтекание тел жидкостью . 17
§ 8. Основы теории крыла ... 21
Раздел второй. СТАТИКА КОРАБЛЯ
Глава III. Приближенные вычисления геометрических элементов корабля......................................26
§ 9. Общие правила приближенных вычислений . —
§ 10. Правило трапеций 28
§ 11. Правило Чебышева . 31
§ 12. Интегральные кривые .... 32
§ 13. Вычисление объема тела......................34
§ 14. Вычисление площадей и объемов с помощью коэффициентов полноты подводной части судна .... 37
§ 15. Статические моменты площадей и объемов и координаты нх центров тяжести .'......................41
§ 16. Моменты инерции площади ватерлинии...........45
§ 17. Сводная таблица вычисления элементов площади ватерлинии .................... . ... 50
Глава IV. Плавучесть .............
§ 18. Уравнение плавучести . .-.....................
§ 19. Водоизмещение, масса судна и координаты его
центра тяжести . . . ... 51
§ 20. Строевые ...................... ... 54
§ 21. Грузовой размер и грузовая шкала ... 56
§ 22. Масштаб Бонжана . . . 57
245
§ 23. Изменение средней осадки судна при приеме или расходовании малого груза..........................61
§ 24. Изменение средней осадки судна при измеиеиии солености воды.......................................62
§ 25. Запас плавучести и грузовая марка.............63
Глава V. Начальная остойчивость.......................65
§ 26. Общие положения ...............................—
§ 27. Теорема Эйлера ...............................67
§ 28. Условие остойчивости судна....................68
§ 29. Метацентрическая формула остойчивости .... 70
§ 30. Момент, кренящий судно на 1°. Момент, дифферентующий судно на 1 см...............................73
§ 31. Определение метацентрических радиусов . . . . —
§ 32. Остойчивость формы и остойчивость веса .... 76
§ 33. Изменение начальной остойчивости и посадки судна при перемещении груза..............................77
§ 34. Изменение начальной остойчивости при приеме или расходовании малого груза ........................ 79
§ 35. Влияние подвешенного груза_на остойчивость . . 82
§ 36. Влияние жидкого груза на остойчивость........83
§ 37. Влияние сыпучего груза на остойчивость .... 85
§ 38. Удифферентовкгг судна .......................86
§ 39. Опыт кренования............................ 87
Глава VI. Статическая и динамическая остойчивость при больших углах креир................................................91
§ 40. Общие положения ..............................—
§ 41. Координаты центра величины и метацентра ... 92
§ 42. Плечо статической остойчивости...............93
§ 43. Построение чебышевского корпуса..............94
§ 44. Расчет остойчивости по методу Крылова—Дариьи 96
§ 45. Диаграмма статической остойчивости..........102
§ 46. Изменение диаграммы статической остойчивости при перемещении груза.............................106
§ 47. Изменение диаграммы статической остойчивости при приеме или расходовании малого груза, не вызывающем крена ...................................108
§ 48. Интерполяционные кривые плеч остойчивости
формы .........................................—
§ 49. Диаграмма динамической остойчивости........НО
§ 50. Понятие об остойчивости судна на попутном.волнении . . 112
§51. Нормы остойчивости Регистра СССР . . . . 114
§ 52. Особенности остойчивости катамаранов . . 120
Глава VII. Непотопляемость . 123
§ 53. Общие положения ..............................—
§ 54. Методы расчета непотопляемости..............125
§ 55. Расчет непотопляемости методом постоянного водоизмещения при затоплении единичного отсека . —
§ 56. Кривая предельных длин отсеков..............131
§ 57. Правила обеспечения непотопляемости судов . . .-134
Раздел третий. ДИНАМИКА КОРАБЛЯ
Глава VIII. Сопротивление среды движению судна . 137
§ 58. Общие понятия . . . '. . . . —
§ 59. Сопротивление трения . . ..........139
§ 60. Сопротивление формы .... ..........141
246
§ 61. Волновое сопротивление.................... 142
§ 62. Сопротивление выступаюш.их'частей . . . . 143
§ 63. Сопротивление воздуха ...................... —
§ 64. Особенности сопротивления воды на мелководье н в каналах ........................................144
§ 65. Влияние ветрового волнения..................147
§ 66. Испытание модели судна................. —
§ 67. Определение мощности главных двигателей ... 152
Глава IX. Общие сведения о судовых движителях........154
§ 68. Понятие о движителях..........................—
§ 69. Геометрия гребного винта...................158
§ 70. Характеристики гребного винта и его взаимодействие с корпусом....................................161
§ 71. Кавитация .................................171
§ 72. Проектирование гребного винта.............173
§ 73. Понятие о винтах регулируемого шага........181
§ 74. Насадки ...................................183
Глава X. Управляемость . 185
§ 75. Общие положения .............................—
§ 76. Работа судового руля ......................188
§ 77. Циркуляция судна ...........................190
§ 78. Расчет элементов циркуляции и их опытная проверка ............................................194
§ 79. Устойчивость судна иа курсе.................198
Глава XI. Качка судна ...............................199
§ 80. Общие положения ..............................—
§ 81. Качка судна на тихой воде...................202
§ 82. Качка судна на волнении.....................204
§ 83. Успокоители качки...........................209
Глава XII. Спуск судна иа воду ... ... 212
§ 84. Продольный спуск .............................—
§ 85. Диаграммы продольного спуска................216
§ 86. Поперечный спуск ...........................219
Раздел четвертый. ОСНОВЫ ТЕОРИИ СУДОВ ОСОБЫХ КЛАССОВ
Глава XIII. Суда с гидродинамическими принципами поддержа-
ния ...................................... 221
§ 87. Глиссирующие суда .... .........—
§ 88. Суда на подводных крыльях .........224
§ 89. Суда на воздушной подушке . .... 226
§ 90. Экранопланы ... . ... 229
Глава XIV. Подводные лодки . . . 231
§ 91. Плавучесть ............................ .... —
§ 92. Остойчивость .......................... .... 234
§ 93. Непотопляемость ... ... 238
§ 94. Управляемость ...................... . . —
Ответы на вопросы и задачи . . 242
Указатель литературы 244
247
Виктор Леонидович Фукельман
ОСНОВЫ
ТЕОРИИ
КОРАБЛЯ
Редактор М. И. Никитина
Технический редактор А. И. Казаков
Художественный редактор В. Т. Левченко
Корректоры И. П. Острогорова и Н. П. Шипина
Художник Ю. Н. Васильев
ИБ № 281
Сдано в набор 7 января 1977 г. М-19776. Подписано в печать 27 мая 1977 г. Формат бОХЭО’/м. Бумага типографская № 3. Печатных листов 15,5. Учетно-издательских листов 15,4. Издательский № 3182—75. Тираж ЮОООэкэ. Заказ 64. Цена 75 коп.
Издательство «Судостроение», 191065, Ленинград, ул. Гоголя, 8.
Ленинградская типография № 4 Союзполнграфпрома при Государственном комитете Совета Министров СССР по делам издательств, полиграфии н книжной торговли. 196126, Ленинград, Ф-126, Социалистическая ул., 14.