/
































































































































Автор: Богдан Н.В. Атаманов Ю.Е. Сафонов А И.
Теги: техника средств транспорта горное дело городской транспорт троллейбусы электрический транспорт
ISBN: 985-04-0407-8
Год: 1999



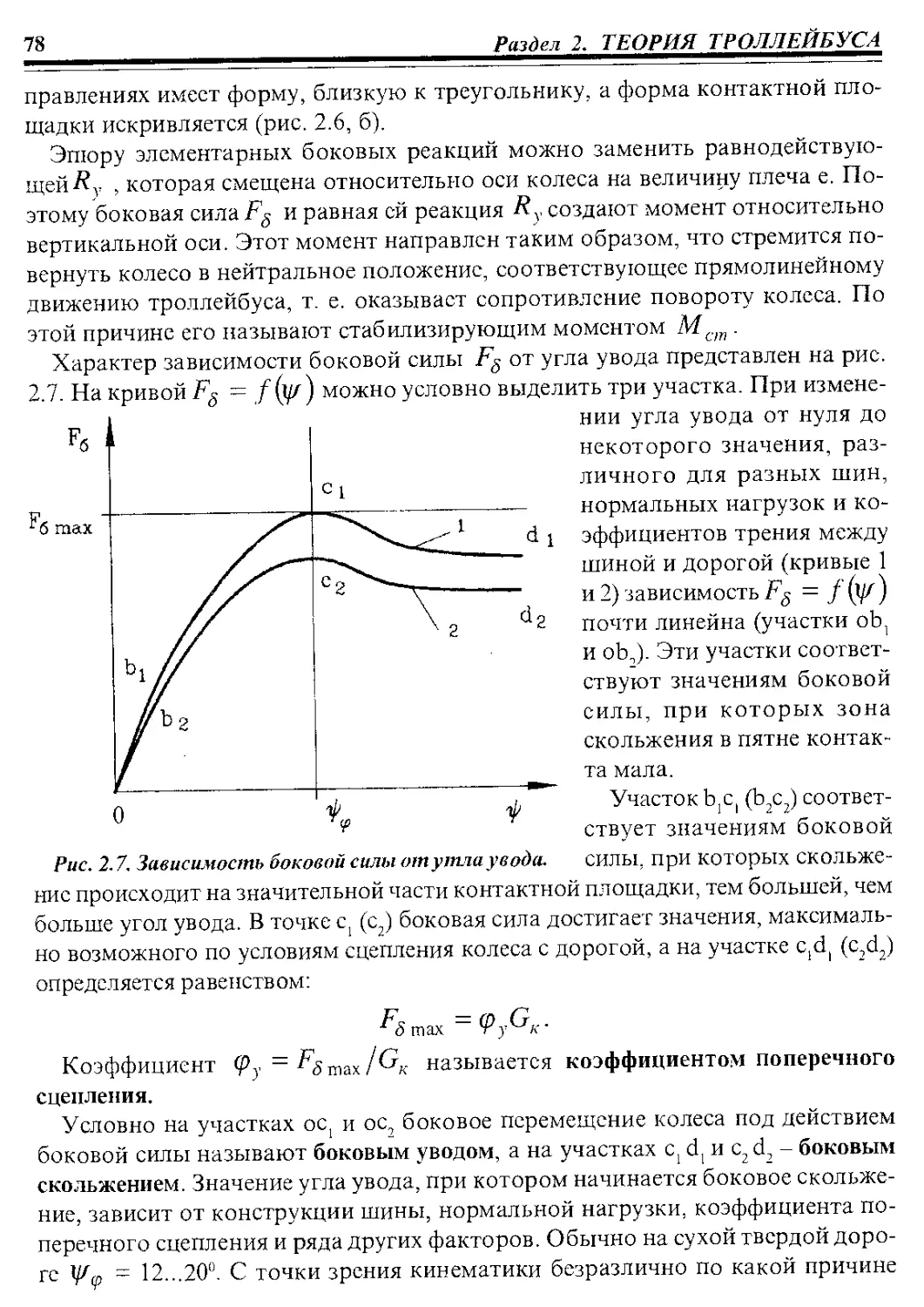
Текст
Н. В. Богдан
Ю.Е. Атаманов
А И. Сафонов
КОНСТРУИРОВАНИЕ,
РАСЧЕТ
Н.В. Богдан, Ю.Е. Атаманов, А. И. Сафонов
ТЕОРИЯ,
КОНСТРУИРОВАНИЕ,
РАСЧЕТ
Под редакцией доктора технических наук,
профессора Н.В. Богдана
МИНСК
«УРАДЖАЙ»
1999
УДК 629. 113.62. 0ei-. 6-6
ББК- -33;8-У-О4-
Б 73
Богдан Н.В. и др.
Б 73 Троллейбус. Теория, конструирование, расчет
/Богдан, Ю.Е. Атаманов, А. И. Сафонов; под род. Н. В. Богдана
- Мн.: Ураджай, 1999. - с.: ил.
ISBN 985-04-0407-8
В книге излагаются общие характеристики и конкретные сведения о ком-
фортабельности, безопасности и основах художественного конструирования
троллейбусов, тяговоскоростных и тормозных свойствах, тяговом расчете,
управляемости, утойчивости и плавности хода троллейбусов. Приведены ме-
тоды конструирования и расчета механического, гидравлического и пневма-
тического оборудования.
Предназначена для инженерно-технических работников конструкторских
бюро заводов, выпускающих троллейбусы, а также для студентов специаль-
ности ‘Тородекой электрический транспорт”.
УДК 629. 113.62.001.66
ББК 33.83-04
ISBN 985-04-0407-8
© Н. В. Богдан, Ю.Е. Атаманов,
А. И. Сафонов, 1999
© А. Н. Хилькевич, оформление
SCANNED BY SEMS
ВВЕДЕНИЕ
3
ВВЕДЕНИЕ
Троллейбус как вид городского общественного транспорта появился в на-
чале XX века. Этому предшествовали выдвинутые к середине XIX века идеи
по использованию электрической энергии для подвижного состава. Первой
попыткой их реализации было изобретение в 1834г. русским учёным акаде-
миком Б.С. Якоби магнитно-электрического двигателя с вращательным дви-
жением и изготовление в 1837-1838 г. под руководством комиссии Российской
академии наук небольшого электрохода. Его гребное колесо приводилось
во вращение электрическим двигателем, получающим питание от батарей
гальванических элементов. Проведенное в 1838 г. испытание электрохода
положило начало применению электрической энергии для тяги.
В 1874-1886 г. русский инженер Ф.А. Пироцкий изобрёл “электрический
способ передачи сил по рельсам и другим проводникам”, что послужило ос-
новой для дальнейшего практическщго развития электрического транспор-
та. Для передачи электрической энергии на расстояние одной версты он при-
способил рельсовый одноколейный путь. В 1880 г. Ф.А. Пироцкий построил в
Петербурге первый в мире троллейбусный вагон, установив электрический
двигатель на один из вагонов конной железной дороги. На вагоне был реали-
зован контактный способ питания двигателя электрической энергией, пода-
ваемой через рельсы. Одна нить рельсового пути служила положительным
полюсом, другая-отрицательным. Однако практическое использование элек-
трической тяги для перевозки пассажиров в России началось лишь в 1892 г. с
пуска первого трамвая в г. Киеве.
Основоположниками современной науки об электрической тяге поездов
являются русские учёные А.В. Вульф, Я.М. Гаккель, Г.Д. Дубелир, А.Б. Лебе-
дев, В.А. Шебалин и др. Разработанные ими основы теории электрической
тяги позволили значительно ускорить развитие городского электрического
транспорта.
Вскоре после появления первых опытных электрических железных дорог
возникла идея создания безрельсового электрического транспорта. Первая
троллейбусная линия была построена в 1882 г. в Германии в Шпандау-при-
городе Берлина. Вслед за Германией опытные маршруты безрельсового элек-
трического транспорта стали появляться и в других странах. В начальный пе-
риод в Германии при помощи троллейбусов перевозили не только пассажи-
ров, но и грузы на специальных прицепах к троллейбусу. Электрические тя-
гачи, близкие по своей конструкции к троллейбусам, были построены в 1894г.
во Франции. С их помощью в 1894 - 1896 г. в порядке опыта осуществлялось
вождение судов по каналам С.- Дени и Бургундскому. В 1890г. впервые от-
4
ВВЕДЕНИЕ
крылось троллейбусное движение в г. Лионе и тогда же была сдана в эксплу-
анашю первая троллейбусная линия в Вспсенском парке Парижа. В Чехии
(па террп'юрии бывшей Австро-Венгрии) троллейбусное движение было впер-
вые oj крыто в 1902 г. на линии Попрад - Смоковсц. Несколько позднее, в
1909 1были построены троллейбусные линии в Чешских Будейовицах, а за-
тем на трассе Братислава - Железна - Студанка длиной 5.8 км. В этот же пе-
риод вводились в эксплуатацию троллейбусные линии в Италии, Англии,
Швейцарии и США.
Следует отметить, что изложенные сведения сегодня для нас представляют
главным образом исторический интерес. Большинство возникших в то время
троллейбусных предприятий после непродолжительного времени существо-
вания были ликвидированы, в основном из-за крупных конструктивных не-
достатков первых троллейбусов, особенно в части устройства систем токосъё-
ма. Началом бурного развития троллейбусного транспорта следует считать
время после окончания первой мировой войны. Последовавшему за ней пери-
оду характерно быстрое расширение сферы применения электротехники, раз-
витие автомобилестроения и дорожного строительства. В результате появи-
лась возможность внести существенные для безрельсового транспорта его кон-
структивные улучшения, что и создало впоследствии благоприя тные предпо-
сылки для развития троллейбуса в качестве городского, а в ряде случаев и
пригородного общественного транспорта.
Идея создания первого троллейбуса в бывшем СССР зародилась в 1934 г.
Разработка проекта была поручена научному автотракторному институту
(ПАТИ) совместно с заводом ’'Динамо" им. С.М. Кирова. Ярославским и
Московским автомобильными заводами. К концу 1934 г. было собрано два
образца троллейбусов ЛК-1 (рис,1), которые успешно прошли испытание и
были рекомендованы к серийному производству. В дальнейшем на базе двухос-
ного троллейбуса ЛК-1 был разработан более совершенный трехосный трол-
лейбус ЛК-2 . В августе 1936 г. Ярославский автомобильный завод начал вы-
пуск более совершенных троллейбусов ЯТБ 1 (рис.2) с обтекаемым деревянным
кузовом. . Начиная с 1938 г. велись также работы по созданию двухэтажного
троллейбуса большой вместимости и в 1940 г. они были произведены в количе-
стве 12 штук. Однако в связи со сложностью организации их движения дальней-
шее производство двухэтажных троллейбусов прекратилось,В 1939 г. Ярослав-
ский завод выпустил троллейбус ЯТБ-4. Тяговое оборудование для него изго-
тавливалось заводом “Динамо”, хорошо себя зарекомендовало, так как позво-
ляло троллейбусу развивать большие ускорения и скорости движения.
Помимо троллейбусного, получили распространение и некоторые комби-
нированные виды городского электрического безрельсового транспорта. К
их числу может быть отнесён автобус, имеющий обычный двигатель внут-
реннего сгорания и электрический агрегат, состоящий из i снсратора постоян-
ВВЕДЕНИЕ
5
Рис.1. Общий вид троллейбуса ЛК-1
Рис. 2. Общий вид троллейбуса ЯТБ-1
ного тока и тягового электродвигателя. Такой автобус получил название теп-
лоэлектробуса. Применение на автобусе электрического агрегата улучшает
условия передачи силы тяги, обеспечивает более плавный разгон и широкое
регулирование скорости движения. В 1946 г. Московский автозавод выпус-
тил первые теплоэлектробусы ЗИС-154, которые эксплуатировались в ряде
городов СССР. Были также созданы экипажи с приводом от двигателя внут-
реннего сгорания и от электродвигателя, получающего питание от контакт-
ных проводов- контактные теплоэлектробусы. Несколько их опытных образ-
цов было изготовлено в 1943 г. коллективом работников троллейбусного
транспорта Москвы для грузовых перевозок. Однако необходимость уста-
•новки двойного комплекта оборудования на каждой машине, а также срав-
нительная сложность его содержания и обслуживания ограничили сферу при-
менения этого вида транспорта.
В 1944 г. в Москве был сконструирован троллейный электромобиль работа-
ющий как троллейбус па трассе с контактными проводами и как электромо-
биль на участках не имеющих контактной сети. Особенность такого кон-
тактного электробуса (троллейного электромобиля) состоит в том, что-его
двигатель работает как от контактной сети, так и от аккумуляторной бата-
реи, зарядка которой производится непосредственно от контактной сети во
время стоянки и движения электромобиля.
6
ВВЕДЕНИЕ
Рис. 3. Общий вид троллейбуса МТБ-82
Рис. 4. Общий вид троллейбуса ЗИУ-5
ВВЕДЕНИЕ
1
Проводимые в СССР научно-исследовательские и опытно-конструкторс-
кис работы по созданию комфортабельного типа подвижного состава город-
ского электрического транспорта позволило организовать в 1946 г. произ-
водство цельнометаллических троллейбусов типа МТБ с большей, чем у пред-
шсственника-ЯТБ вместимостью и комфортабельностью.
Серийный выпуск троллейбусов на специализированном заводе им. Уриц-
кого в г. Энгельсе Саратовской обл. начался в 1951 г. с выпуска 21 троллейбу-
са средней вместимости- модели МТБ-82 (рис 3). Впоследствии на заводе ос-
воили производство троллейбусов большой вместимости - ЗИУ-5 (рис.4). К
1968 г, их производство выросло до 1,5 тыс. в год, а троллейбусное движение
было организовано уже в 91 городе. В 1959 г. Московский сокольничий ваго-
норемонтный завод (СВАРЗ) изготовил первые троллейбусы шарнирно-со-
членённого типа ТС-1. На базе этой модели позже были созданы более совер-
шенные троллейбусы ТС-2.
В странах дальнего зарубежья к середине 60-х годов троллейбусы начали
вытесняться автобусами, производство которых благодаря низким ценам на
бензин стремительно росло. В связи с этим во многих странах производство
троллейбусов прекратилось и контактные линии были демонтированы, а трол-
лейбусное сообщение сохранилось в немногих странах (Швейцария. Чехосло-
вакия, Италия, Франция и др.). В конце 70-х годов в связи с возросшими цена-
ми на нефть и интенсивным загрязнением атмосферы крупных городов отра-
ботанными газами автомобилей и автобусов, началось возрождение трол-
лейбусов. Они опять появились почти в 200 городах Европы, Азии и Амери-
ки, Производством троллейбусов занялись в основном автобусостроительные
предприятия. Оно не было массовым и чаще осуществлялось в форме еди-
ничных или мелкооптовых поставок машин по заказам городов.
До распада СССР ЗЙУ был единственным в стране заводом по производ-
ству троллейбусов, объем выпуска которых составлял 2,5 тыс. в год. Начи-
ная с 1972 года завод начал выпуск троллейбусов нового поколения (ЗНУ - 9,
рис.5),одновременно с выпуском па их базе сочленённых троллейбусов особо
большой вместимости (ЗИУ--10). В дальнейшем завод перешёл на более со-
временные базовые модели троллейбусов- двухосные ЗИУ - 682В большой
вместимости и шарнирно - сочленённых ЗИУ - 6205 особо большой вмести-
мости. На их основе было освоено производство семи модификаций с тяго-
выми электро двигатслями(115 или 170 кВТ). В 1990 г. завод перешел на вы-
пуск модернизированных троллейбусов ЗИУ- 682Г и ЗИУ-683Г.
В Беларуси использование городского электрического транспорта началось
в 1898 г., когда было открыто трамвайное движение в г. Витебске. В 1929г.
открылось трамвайное движение в г. Минске. 17 ноября 1949г. Совет Мини-
стров БССР принял постановление о строительстве в Минске троллейбусной
линии, но лишь 19 сентября 1952г. первая очередь троллейбусной линии от
8
ВВЕДЕНИЕ
Рис.5. Общий вид троллейбуса ЗИУ-9Б
пассажирского вокзала до площади Победы вступила в строй. К 1991 г. в
Минске уже был 61 маршрут городского троллейбусного транспорта. Наряду
с г. Минском, троллейбусное движение было открыто в городах Гомеле,
Могилёве, Витебске, Бресте, Гродно, Бобруйске. Всего в республике в настоя-
щее время эксплуатируется около 1800 троллейбусов.
Широкое использование троллейбусов в городах Беларуси потребовало со-
здания ремонтной базы в республике. В связи с этим в 1973 г. был введен в эксп-
луатацию ремонтный трамвайно-троллейбусный завод, впоследствии переиме-
нованный в Минский ремонтно-механический завод “Белрсмкоммунмаш”. От-
ремонтированный здесь в начале 1974 г. троллейбус стал началом освоения про-
изводственных мощностей и выпуска основной, предусмотренной проектом,
продукции. Уже в октябре 1978 г. на заводе вторую жизнь обрел тысячный, а в
марте 1982г. двухтысячный троллейбус. В 1985-1987 г. предприятие было рекон-
струировано и расширено. Это дало возможность увеличить количество ремон-
тируемых троллейбусов до 400 штук в год. Одновременно в республике получи-
ли развитие научно-исследовательские и опытно-конструкторские работы по
созданию новых конструкций троллейбусов. Первые опытные образцы белорус-
ских двухосных троллейбусов модели 101 (рис.6) были изготовлены в 1994 г., а
уже с 1995 г. началось их серийное производство.
В 1996 г. заводом изготовлены опытные образцы, а 1997 г. начато и серий-
ное производство троллейбуса модели 201 (рис.7), который отличается отсво-
ВВЕДЕНИЕ
9
Рис. 6. Троллейбус модели 101
Рис. 7. Троллейбус модели 201
его предшественника более высокими технико-экономическими показателя-
ми и комфортабельностью. Особенностью сто является применение тягового
двигателя постоянного тока с тиристорно-импульсной системой управления,
что позволяет экономить до 30% потребляемой электроэнергии по сравнению
с реостатно-контакторной. На базе троллейбуса модели 201 создан также трол-
лейбус модели.20103, на котором применен тяговый двигатель переменного
10
ВВЕДЕНИЕ
Рис,8. Троллейбус модели 333
тока с транзисторной системой управления (JGBT - технология). Эта система
управления имеет меньшие габариты и массу по сравнению с тиристорно-им-
пульсной, проще в обслуживании и обеспечивает дополнительную экономию
электроэнергии за счет рационального управления приводом. В 1998 г. на за-
воде создан низкопольный шарнирно-сочлененный троллейбус модели 333
(рис.8). На нем установлен тяговый трехфазный двигатель переменного тока
для привода колес среднего моста с транзисторной системой управления, ис-
пользуется автономный дизсль-электрический агрегат мощностью 50 кВт для
движения без контактной линии, а также применена пневматическая система
управления штангоуловитслями.
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
11
РАЗДЕЛ I.
ОБЩАЯ ХАРАКТЕРИСТИКА
ТРОЛЛЕЙБУСОВ
Глава 1. Общие сведения
1.1. Общая характеристика и классификация
подвижного состава электрического
безрельсового транспорта
Современный городской электрический транспорт является массовым обще-
ственным для маршрутного обслуживания населения. Он должен обеспечивать:
- высокую надежность и безопасность движения;
- максимум удобств для пассажиров при минимальной стоимости перевозок;
- высокую скорость сообщения и достаточную провозную способность;
- необходимую частоту и регулярность движения на линии;
- хорошую маневренность и высокие тягово-динамические свойства при
работе в общем транспортном потоке;
- минимальный уровень шума при движении;
-уровень экологической безопасносности, отвечающий установленным тре-
бованиям к охране окружающей среды.
Наряду с рельсовым электрическим транспортом (трамваем и метрополи-
теном), широкое применение нашел в качестве городского общественного
транспорта безрельсовый электротранспорт. В зависимости от источника и
способа питания энергией безрельсовый транспорт подразделяется на следу-
ющие типы: контактный, бесконтактный или автономный, комбинированный.
Подвижным составом контактного типа, к которому относятся троллейбу-
сы, трамваи и метропоезда, называются средства дорожного транспорта, ко-
торые приводятся в движение тяговыми электродвигателями, получающими
электроэнергию от двухпроводной контактной сети через специальные сколь-
зящие токоприемники. При этом контактная сеть подпитывается централь-
ными электрическими станциями через тяговые подстанции.
Подвижной состав бесконтактного типа приводится в движение тяговыми
электродвигателями с питанием:
12
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
- от источника тока, расположенного на самом подвижном составе ;
- от аккумуляторных батарей (электромобили);
- от теплоэлсктрических агрегатов, установленных и а самом подвижном
составе (теплоэлектробусы);
- от центральных электрических станций через специальную кабельную сеть,
по которой проходят токи высокой частоты, прокладываемую под дорожным
покрытием (всчебусы).
Ограниченно используются также механические электробусы, которые при-
водятся в движение за счет, накопленной в маховой установке кинетической
энергии- так называемые жиробусы.
Комбинированным подвижным составом электрического транспорта назы-
ваются средства дорожного движения, которые могут получить энергию как
от центральных электрических станций через тяговые подстанции и контакт-
ную сеть, так и от собственных источников питания. При использовании в
качестве собственных источников питания аккумуляторных батарей они на-
зываются контактными электробусами, а при использовании двигателей внут-
реннего сгорания - дуобусами.
Дуобус работает как троллейбус с питанием от контактной сети в централь-
ной части города с высокой интенсивностью движения и в режиме обычного
автобуса на остальной части маршрута. Это компенсирует недостатки тради-
ционного троллейбуса, обусловленыс его низкой эксплуатационной и транс-
портной гибкостью из-за зависимости от контактной сети. Для использова-
ния в качестве дуобуса наиболее пригоден сочлененный автобус или троллей-
бус, одна из ведущих осей которого получает привод от двигателя внутренне-
го сгорания, а другая - от тягового двигателя.
По соотношению мощностей силовых установок дуобусы можно разделить
на два типа. К первому условно относят дуобусы с примерно равными мощ-
ностями силовых установок, ко второму-тс, мощность двигателя внутреннего
сгорания у которых составляет примерно 1/3 от мощности тягового электро-
двигателя. Такое соотношение мощностей предполагает кратковременное ис-
пользование дуобусов в автобусном режиме на коротких вылетных линиях,
естественно, с потерей тягово-динамических качеств. Двигатель внутреннего
сгорания в этой группе обычно работает на генератор, ток которого поступа-
ет к тяговому двигателю.
Подвижной состав безрельсового транспорта не зависимый от контактной
сети или подземной кабельной сети, называется автономным.
По назначению электрический подвижной состав городского транспорта
разделяется на пассажирский, грузовой и специальный (тягачи или буксиры,
передвижные лаборатории, передвижные мастерские и др.).
По конструктивному исполнению подвижной состав безрельсового транспор-
та можно классифицировать по следующим признакам: количеству этажей, ко-
Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 13
личеству осей, конструкции кузова и рамы, количеству тяговых электродвигате-
лей и типу системы управления. Подвижной состав соответвственно может иметь
двух-, трех-, четырехосное (например в сочлененных машинах), одно- и двухэ-
тажное исполнение, полу- и цельнометаллический, рамный или несущий (без-
рамный) кузов, один, два или четыре тяговых электродвигателя постоянного либо
переменного тока (асинхронные), контакторно-резисторную или тиристорно-
импульсную систему управления. Экономия электроэнергии от применения ти-
ристорных систем может достигать 30%. В последнее время в троллейбусных си-
стемах широко применяются микропроцессорные системы управления и борто-
вые средства технической диагностики.
1.2. Сравнительная оценка троллейбусов и
перспективы развития троллейбусостроения
В троллейбусе сочетаются конструктивные элементы и агрегаты подвижно-
го состава автомобильного типа и электрических железных дорог. Вся ходо-
вая часть, тяговая передача и частично органы управления однотипны с обо-
рудованием автобусов. Тяговый электродвигатель, система электрического
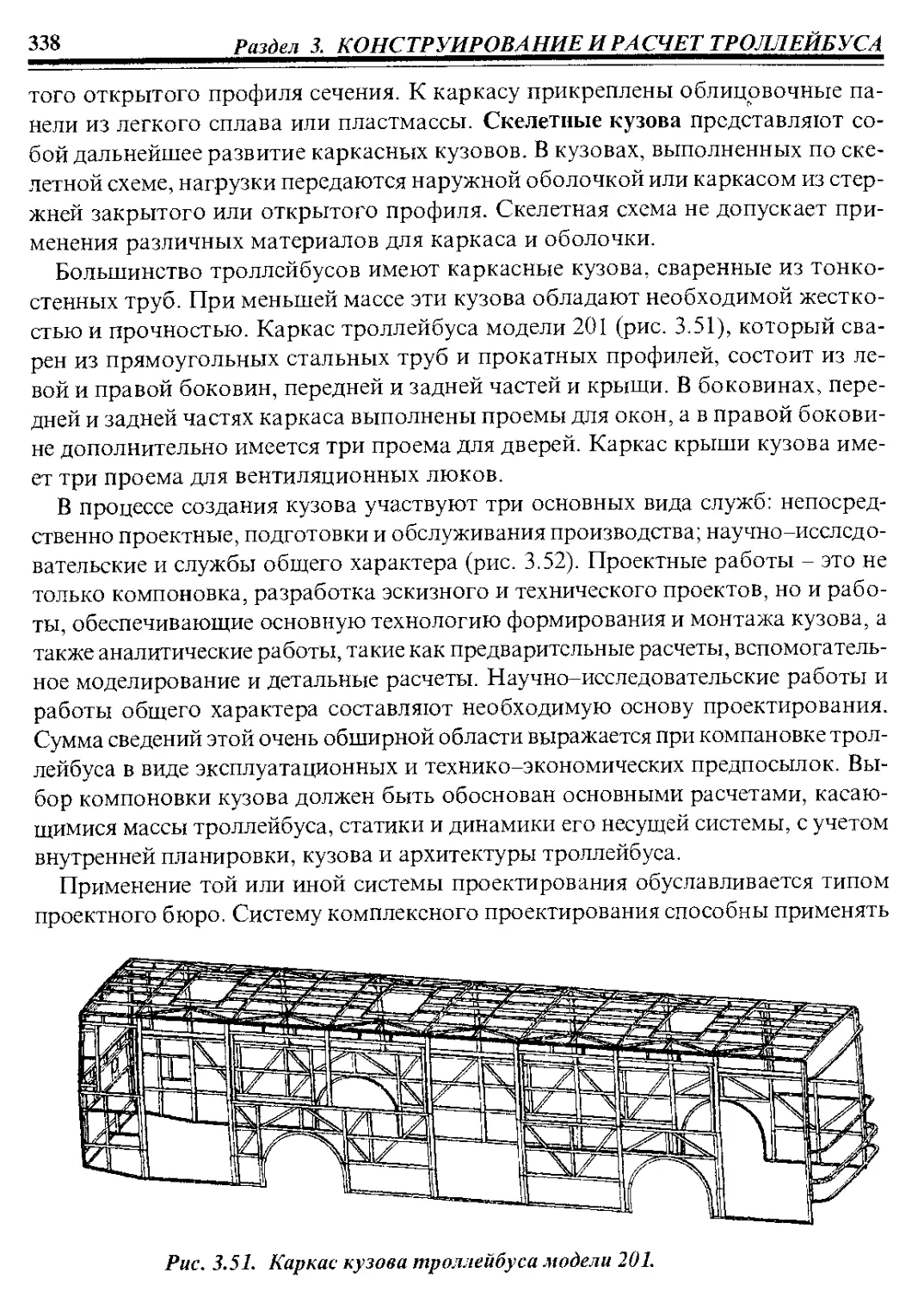
управления и электроаппаратура имеют много общего с оборудованием рель-
сового электрического подвижного состава. Троллейбус является безрельсо-
вым контактным видом городского электрического транспорта и для органи-
зации своего движения не требует создания специальных путевых устройств.
Как правило, он используется на внутригородских линиях, характеризующихся
пассажиропотоками средней величины.
По условиям токосъема троллейбус эксплуатируется только на улицах с усо-
вершенствованным покрытием, для которых допускаются уклоны и подъемы,
не превышающие 9%.
Весьма существенным преимуществом троллейбуса в сравнении с другими
видами транспорта является его бесшумность при движении и отсутствие про-
дуктов сгорания ( отработанных газов), загрязняющих воздух, что важно для
благоустройства городов. Провозная способность троллейбусного транспор-
та, которая зависит от вместимости, частоты движения и скорости сообщения
троллейбуса, составляет от 4000 до 10000, а при использовании подвижного
состава сочлененного типа до 12000-14000 пасс/ч.
В сравнении с трамваем, троллейбус обладает лучшей управляемостью и
маневренностью, так как может отклоняться от осевой линии контактных про-
водов на расстояние до 4,5 м в каждую сторону и обгонять движущиеся в пере-
ди или неподвижные транспортные средства, если в этом есть необходимость.
Остановка хотя бы одного трамвайного вагона или поезда вызывает задерж-
ку всех вагонов, следующих за ним. Троллейбус, в отличие от трамвая, на ос-
14 Раздел L ОБЩАЯ ХА РЛКТЕРИСГИКА ТРОЛЛЕЙБУСОВ
тановках подъезжает непосредственно к тротуару, что обеспечивает удобство
и безопасность посадки и высадки пассажиров. Система электроснабжения у
троллейбуса двухпроводная и не вызывает появления, как у трамваев подзем-
ных блуждающих токов, сокращающих срок службы дорогостоящих подзем-
ных металлических сооружений. Недостатками троллейбусного транспорта,
по сравнению с трамваем, являются: сравнительно сложная конструкция двух-
полюсных токоприемников, которые иногда сходят с контактных проводов,
особенно на пересечениях и стрелках; более высокий, чем у трамвая удельный
расход электрической энергии, а следовательно, и более высокая себестоимость
пассажирских перевозок; меньшая провозная способность.
Перед автобусом троллейбус, наряду с перечисленными выше, имеет следу-
ющие преимущества: он расходует более дешевую электрическую энергию, и ,
следовательно, имеет более низкую себестоимость пассажирских перевозок;
тяговый электродвигатель троллейбуса более надежен в эксплуатации и тре-
бует меньше ухода, чем двигатель внутреннего сгорания; срок службы трол-
лейбусов значительно больше, чем автобусов. Основным же недостатком при
этом выступает то, что троллейбусное хозяйство требует более высоких пер-
воначальных капиталовложений на сооружения подстанций и контактной сети.
Последняя, к тому же, загромождает улицы и площади городов, а наличие
специальных частей в узлах пересечения и соединения отдельных линий кон-
тактной сети несколько снижает скорость движения троллейбуса на этих уча-
стках по сравнению с автобусами. Кроме этого, троллейбус, связанный с кон-
тактной сетью, обладает значительно меньшей маневренностью.
Выбор вида транспорта зависит от экономическиих показателей, получае-
мых путем сравнительного расчета различных вариантов транспортного об-
служивания, градостроительных факторов, размеров ожидаемых пассажире;
потоков и других условий. Существенное влияние на выбор типа транспорта
оказывают местные условия: энергетические возможности, планировка горо-
да, профиль пути, качество дорожных покрытий и т.д.
Названные выше недостатки троллейбуса заставили троллейбусоустроите-
лей искать новые принципы конструирования, а транспортным предприяти-
ям применять более рациональные методы эксплуатации троллейбусов.
В ряде стран выработаны определенные требования к современному трол-
лейбусу:
- стандартизация основных параметров и оптимальная унификация с го-
родским автобусом;
- увеличение надежности и долговечности конструкции в сравнении с авто-
бусом;
- наличие автономного хода без контактных проводов;
- возможность осуществления рекуперации электроэнергии;
- улучшение доступа к узлам и агрегатам при их обслуживании и ремонте;
Раздел L ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ И
- повышение комфортности езды (плавность разгона и торможения);
- повышение общей безопасности конструкции.
Анализ основных направлений развития мирового троллейбусостроения
позволил выявить следующие направления их совершенствования:
- - оснащение троллейбусов трехфазным ассинхронным тяговым двигателем,
переход на повышенное напряжение питания контактной сети (750 В) и мак-
симальный вынос электрооборудования из-под подкузовного пространства
на крышу машины;
- широкое применение средств встроенной бортовой диагностики основ-
ных узлов и агрегатов с выносом сигналов водителю о результатах диагности-
рования на панель управления, а также оборудование троллейбусов устрой-
ствами контроля уровня утечки токов;
- установка дополнительных двигателей внутреннего сгорания (троллей-
бус в автобусном исполнении) или аккумуляторной батареи для повышения
маневренности при перевозке пассажиров на короткие расстояния;
- широкое применение подвижного состава с низким уровнем пола, и обо-
рудование токоприемников троллейбусов устройствами дистанционного уп-
равления с пневмоприводом;
- создание сочлененных троллейбусов, оснащенных двумя видами силовой
установки: тягового электродвигателя и двигателя внутреннего сгорания при-
мерно равной мощности(экономичность троллейбусов с комбинированной
силовой установкой в эксплуатации выше, чем у традиционных моделей);
- создание трехзвенных троллейбусов особо большой вместимости для эк-
сплуатации по обособленному пути(транспортные системы для таких трол-
лейбусов разработаны в Германии, Швеции и Франции с использованием на
линиях автоматизированных систем управления движением).
Повышает конкурентоспособность и экономичность троллейбусов их уни-
фикация с городскими автобусами и между собой. Унификация осуществляет-
ся прежде всего по конструкции рамы, мостам, шинам, рулевому механизму,
узлам тормозной системы и некоторым другим элементам. Подвергается оп-
ределенной переделке каркас кузова автобуса с целью усиления крыши в связи
с установкой на ней штанг и другого электрооборудования. -
Ввиду того, что новейшие троллейбусы оснащаются тиристорными преобра-
зователями, дизельным или бензиновым автономными двигателями с генерато-
рами, компрессорами, различными электронными блоками управления и защи-
ты цепей, в конструкции шасси и кузова вводятся дополнительные крепежные
элементы, изменяющие первоначальную компоновку базового автобуса. Самый
высокий уровень унификации в троллсйбусостроении достигнут в Швейцарии,
Франции, Австрии, Германии, Венгрии. Однако.,многие крупные фирмы произ-
водят и троллейбусы оригинальной конструкции, неунифицированные с городс-
кими стандартными автобусами. Характерна в этом плане деятельность пред-
Раздел L ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
приятия ЗИУ (Россия). Свои оригинальные модели имеют отдельные фирмы
Швейцарии, Канады, Финляндии, Великобритании, Беларуси и других стран.
Применение трехфазных асинхронных двигателей в троллейбусостроении бо-
лее предпочтительно, чем двигателей постоянного тока в силу простоты конст-
рукции и более высокой надежности и экономичности. В качестве автономного
привода на двухосных троллейбусах, выпускаемых европейскими фирмами, на-
шли широкое применение дизельные или бензиновые двигатели внутреннего сго-
рания небольшой мощности (40-90 кВТ). Троллейбусы, оснащенные такими дви-
гателями, способны развивать скорость в 20-60 км/ч, что вполне достаточно для
преодоления небольших расстояний при отсутствии контактной линии.
Создаются также троллейбусы с комбинированной силовой установкой с
двумя видами примерно одинаковых по мощности двигателей. Так, к приме-
ру, швейцарские троллейбусы типа TF Фрайбур и EVAG Эссен имеют мощ-
ность тягового двигателя 152 и 180 кВт, а вспомогательного дизельного дви-
гателя 203 и 177 кВт соответственно. По контактной сети такой троллейбус
передвигается в наиболее населенных районах города, а без нее- как обычный
автобус с дизельным двигателем на магистралях и в пригородах.
В управлении движением тролейбусного транспорта предусматривается ши-
рокое использование автоматизированных систем с организацией постоянной
речевой и цифровой связи по радиоканалам между каждым троллейбусом и
диспетчерским центром.
Для организации сбора проездной платы и контроля проездных документов
должны широко применяться автоматы по продаже билетов в подвижном соста-
ве и на маршрутной сети, электронные компостеры, выполненные на микропро-
цессорной основе и позволяющие при гашении билета указывать время, дату,
номер машины, номер остановки или зоны посадки. Кроме этого, предусматри-
вается применение систем оплаты с использованием билетов, выполненных на
основе традиционных магнитных карт, а также принципиально новой техноло-
гии, предусматривающей использование магнитных карт со встроенным излу-
чателем, что позволяет пользоваться ими,не вынимая из бумажника.
Предусматривается широкое внедрение автоматизированных информаци-
онных систем на остановочных пунктах, в крупных посадочных узлах, на под-
вижном составе, выдающих оперативную и справочную информацию пасса-
жирам в реальном масштабе времени.
1.3. Общее устройство троллейбуса.
Троллейбусы - сложные машины, состоящие из совокупности механизмов
и систем. Конструкции их могут отличаться. Однако у большинства троллей-
бусов принципы устройства и действия основных механизмов и систем одина-
ковы. В каждом троллейбусе выделяются пять основных частей: кузов, тяго-
Раздел I, ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 17
вне электродвигатели, шасси, пневматическое оборудование, пускорегулиру-
ющая электроаппаратура с системой управления и вспомогательным электри-
ческим оборудованием.
Кузов с рамой (или несущий кузов) представляет собой основу, дающую
возможность механически присоединять к ним оборудование или соединять
между собой отдельные агрегаты и элементы подвижного состава. В кузове
оборудуются помещение для пассажиров и кабина для водителя, размещают-
ся отдельные устройства и приспособления для крепления различной аппара-
туры и других элементов оборудования.
Тяговый электродвигатель предназначен для преобразования электричес-
кой энергии в механическую. В результате такого преобразования приводит-
ся во вращение вал электродвигателя, передающий через ряд механизмов кру-
тящий момент на ведущие колеса троллейбуса. На троллейбусах могут при-
меняться тяговые электродвигатели как постоянного, так и трехфазные дви-
гатели переменного тока.
Шасси объединяет группы деталей, механизмов и систем, в числе которых
трансмиссия, несущая система, мосты, подвеска, колеса, рулевое управление и
тормозные системы.
Трансмиссия передает и преобразует крутящий момент от тягового двига-
теля к ведущим колесам. В трансмиссию входят карданная передача, главная
передача, установленная в картере ведущего моста, дифференциал, полуоси и
конечные передачи.
Передний мост шарнирно соединяется с кузовом при помощи передней под-
вески и передает нагрузку передней части троллейбуса на дорогу через колеса.
Передние мосты троллейбусов управляемые и дают возможность в необходи-
мых случаях изменять направление движения троллейбуса.
Задний мост соединяется с кузовом при помощи задней подвески и передает
нагрузку задней части троллейбуса на дорогу через колеса. Задние мосты, как
правило, являются ведущими, т.е. обеспечивают реализацию силы тяги, а сле-
довательно, движение троллейбуса. В корпусе заднего моста располагаются
элементы трансмиссии, главная передача, дифференциал, полуоси и конеч-
ные передачи.
Передняя и задняя подвески троллейбуса обеспечивают комфортные усло-
вия поездки для пассажиров. Конструкция их с прогрессивной характеристи-
кой, что обеспечивается применением листовых рессор небольшой жесткости
и пневматических упругих элементов. Применяемые конструкции подвесок пре-
дусматривают восприятие рессорами как вертикальных, так и горизонталь-
ных нагрузок. Для гашения колебаний используются гидравлические телеско-
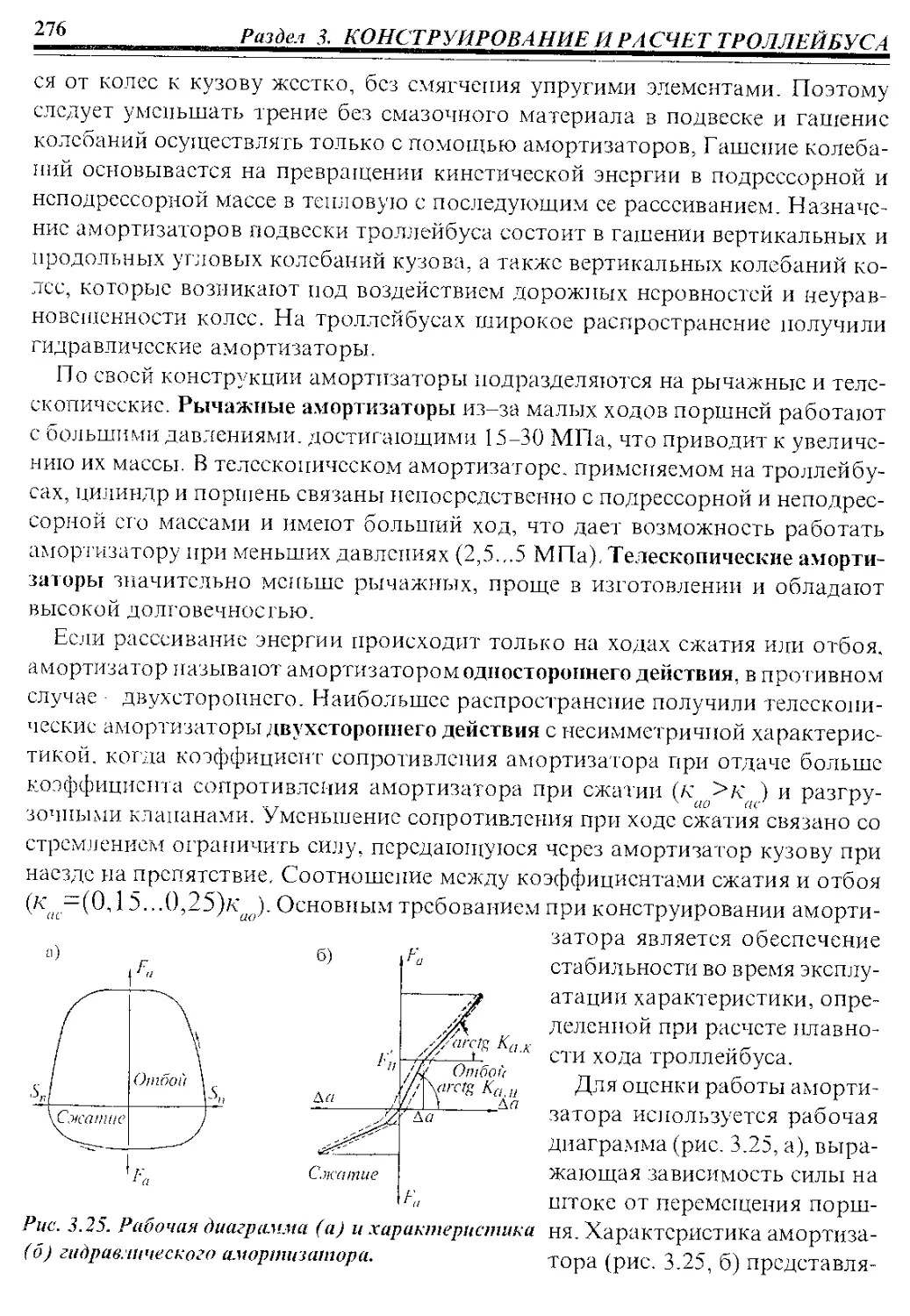
пические амортизаторы.
Механизм рулевого управления троллейбуса с гидроусилителем обеспечи-
вает поворот колес переднего моста в нужном направлении движения. Пово-
18 Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
рот рулевого колеса осуществляется при усилии, нс вызывающим дискомфорт
водителя. При движении по прямой исключается необходимость заметной кор-
ректировки водителем направления движения, что обеспечивается установ-
кой управляемых колее.
Тормозная система предназначена для обеспечения замедления движущего-
ся троллейбуса с желаемой интенсивностью вплоть до остановки, а также для
удержания его на стоянке. В конструкцию троллейбуса включено несколько
тормозных систем:
- система экстренного торможения (рабочая), воздействующая раздельно
на тормозные механизмы ведущих и управляемых колес с пневматическим при-
водом;
- запасная, функции которой может выполнять любой из контуров привода
рабочей тормозной системы, вступает в действие в случае повреждения в пнев-
моприводе какого-либо контура рабочей тормозной системы;
- остановочная, воздействующая на колеса ведущего моста при открыва-
нии дверей;
- стояночная с энергоаккумуляторами, воздействующая на тормозные ме-
ханизмы ведущих колес;
- вспомогательная, работающая в режиме электродинамического рекупе-
ративного торможения тяговым двигателем.
Пневматическое оборудование троллейбуса служит для получения и акку-
мулирования сжатого воздуха, подачи его к тормозным устройствам, пневма-
тической подвеске и механизмам обслуживания кузова, а также для приведе-
ния их в действие. Пневматическое оборудование располагается под кузовом
и внутри его.
Пускорегулирующая электрическая аппаратура предназначена для плавного
регулирования скорости троллейбуса, электродинамического торможения с ре-
куперацией электроэнергии в сеть и автоматического гашения электроэнергии
на радиаторы при отсутствии потребителей вырабатываемой энергии.
Система управления предназначена для реализации необходимых тяговых
характеристик и выполняется с применением средств микропроцессорной тех-
ники с целью автоматического выбора наиболее оптимального режима дви-
жения троллейбуса, реализации различных законов управления тяговым дви-
гателем в зависимости от условий движения, профиля дороги, нагрузки, поло-
жения педали. Система управления включает в себя следующие системы и бло-
ки: блок управления тяговыми двигателями; центральный пульт управления;
систему связи и информации.
Вспомогательная электрическая аппаратура включает электродвигатели
насосов, компрессоров, аккумуляторные батареи, системы управления для обес-
печения правильной их работы, а также освещения, отопления, вентиляции,
сигнализации и другие вспомогательные цепи.
Раздел L ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 19
Электрический подвижной состав комбинированного типа имеет по сравне-
нию с троллейбусами специфическое дополнительное оборудование. В тепло-
электробусах устанавливается двигатель внутреннего сгорания и электрический
генератор постоянного тока, выполняющие функции местной электрической стан-
ции. Особенностью дуобусов является использование, наряду с тяговым элект-
родвигателем, двигателя внутреннего сгорания для привода одного из ведущих
мостов. В электромобилях размещаются мощные аккумуляторные батареи или
другие источники тока, рассчитанные на питание тяговых электродвигателей.
Периодическая зарядка аккумуляторных батарей производится в гаражах или
на специально оборудованных зарядных станциях, расположенных в различных
пунктах маршрутов следования электромобилей. В вечебусах устанавливаются
приемные устройства и дополнительное оборудование для преобразования пе-
ременного тока высокой частоты в постоянный.
1.4. Оценочные показатели троллейбуса.
Оценку качества троллейбуса необходимо производить по определенным
показателям, зависящим от условий эксплуатации. К основным его показате-
лям относятся: массовая характеристика; габариты; полезная площадь; вмес-
тимость; проходимость и маневренность; динамические показатели и плав-
ность хода; удельный расход электрической энергии.
1.4.1. Массовые характеристики троллейбуса
К показателям массовой характеристики троллейбуса относятся: масса трол-
лейбуса в ненагруженном состоянии (снаряженная масса); полная масса трол-
лейбуса (при номинальной загрузке); распределение нагрузки по осям трол-
лейбуса в снаряженном состоянии и при номинальной загрузке; собственная
масса троллейбуса, приходящаяся на 1 кв. м площади пола; коэффициент ис-
пользования массы троллейбуса.
Полная масса троллейбуса:
т = тСЙ+иеЛ,
где mw - масса снаряженного троллейбуса; пвп - количество пассажиров
(включая обслуживающий персонал); - масса пассажира.
Снаряженная масса троллейбуса зависит от его размеров, типа, вместимос-
ти, конструкции, материалов, применяемых при изготовлении троллейбуса.
Она колеблется от 9 до 12 тонн одноэтажный, от 10 до 14 тонн для двухэтаж-
ных троллейбусов и от 12 до 18 тонн для шарнирно-сочлененного типа.
Распределение нагрузки по осям троллейбуса зависит от расположения его цен-
тра массы. Рекомендуется следующее соотношение нагрузок: 65 - 67 % на зад-
20
Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
нюю ось и 35 - 33 % на переднюю ось. Отклонение от заданного распределения
нагрузок связано с недоиспользованием сцепного веса троллейбуса, может при-
вести к перегрузке отдельных колес, неравномерному износу и неправильной
работе пневматических шин и другого оборудования. Допустимая величина на-
грузки на ось и количество осей определяется грузоподъемностью щин и являет-
ся одним из важнейших факторов при определении длины троллейбуса, конст-
рукции его ходовой части, удельной массовой характеристики. Правильный
выбор и расположение осей имеют существенное значение и при работе подвиж-
ного состава шарнирно^очлененного типа, поскольку в этом случае количество
и расположение осей во многом определяют динамику и кинематику движения
троллейбуса на повороте и при больших скоростях.
Собственная масса троллейбуса, приходящаяся на 1 кв.м площади пола, в из-
вестной степени характеризует уровень развития техники троллейбусостроения.
Чем ниже этот показатель, тем совершенней конструкция кузова и оборудова-
ния. Удельная масса современных троллейбусов составляет 330 - 390 кг/кв.м.
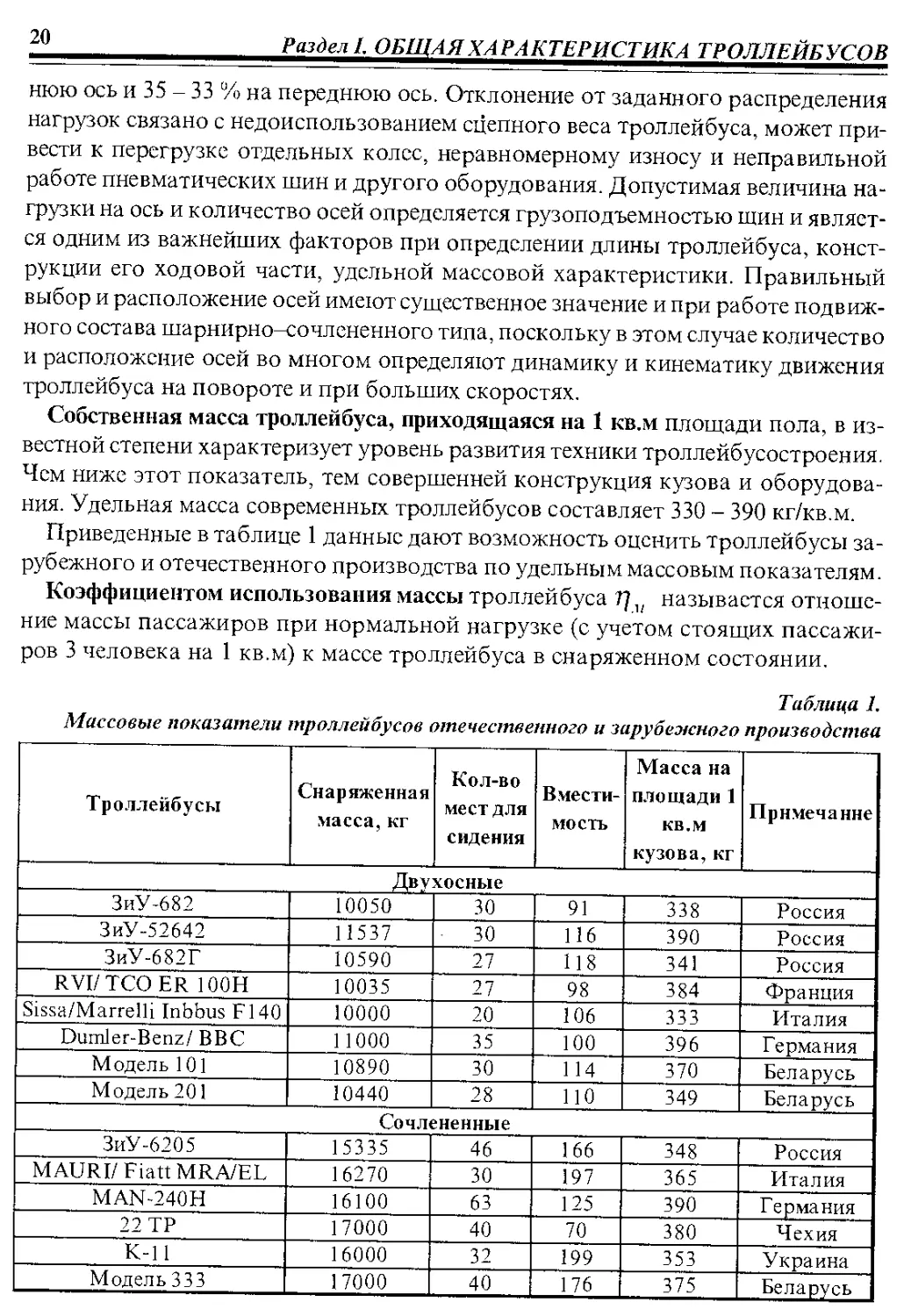
Приведенные в таблице 1 данные дают возможность оценить троллейбусы за-
рубежного и отечественного производства по удельным массовым показателям.
Коэффициентом использования массы троллейбуса 7) называется отноше-
ние массы пассажиров при нормальной нагрузке (с учетом стоящих пассажи-
ров 3 человека на 1 кв.м) к массе троллейбуса в снаряженном состоянии.
Таблица 1.
Массовые показатели троллейбусов отечественного и зарубежного производства
Троллейбусы Снаряженная масса, кг Кол-во мест для сидения Вмести- мость Масса на площади 1 кв.м кузова, кг Примечание
Двухосные
ЗиУ-682 10050 30 91 338 Россия
ЗиУ-52642 11537 30 116 390 Россия
ЗиУ-682Г 10590 27 118 341 Россия
RVI/TCO ER 100Н 10035 27 98 384 Франция
Sissa/Marrelli Inbbus Fl40 10000 20 106 333 Италия
Dumler-Benz/ ВВС 11000 35 100 396 Германия
Модель 101 10890 30 114 370 Беларусь
Модель 201 10440 28 НО 349 Беларусь
Сочлененные
ЗиУ-6205 1 5335 46 166 348 Россия
MAURI/ Fiatt MRA/EL 16270 30 197 365 Италия
MAN-240H 16100 63 125 390 Германия
22 TP 17000 40 70 380 Чехия
К-11 16000 32 199 353 Украина
Модель 333 17000 40 176 375 Беларусь
Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
21
т — т„, па„ т„
jy*» __ Cri __ tfrl ft
Im ~ ~
тсн тсн
Величина коэффициента использования массы современных троллейбусов
достигает следующих значений: для двухосных троллейбусов 0.35 - 0.45; для
сочлененных троллейбусов 0.36 - 0.52. Чем выше значение коэффициента
Д u при прочих равных условиях, тем совершеннее конструкция троллейбуса и
тем рациональней используются материалы. Повышение коэффициента
может достигаться с одной стороны увеличением вместимости троллейбуса и
с другой стороны снижением его конструктивной массы.
Однако, необходимо иметь в виду, что увеличение коэффициента использова-
ния массы за счет более плотного размещения сидений, уменьшения их размеров
или увеличения количества мест для стоящих пассажиров путем введения, на-
пример, продольных сидений снижает комфортабельность троллейбуса. Дости-
жение минимальной массы при обеспечении заданных параметров троллейбуса
- одна из важнейших задач проектирования. Она обуславливает не только сни-
жение расхода материала на изготовление, но также уменьшает расход энергии
на движение. Следовательно, снижение конструктивной массы троллейбуса
уменьшает не только его стоимость и эксплуатационные расходы, но также ка-
питальные и эксплуатационные расходы по электроснабжению.
1.4.2. Габариты и полезная площадь троллейбуса.
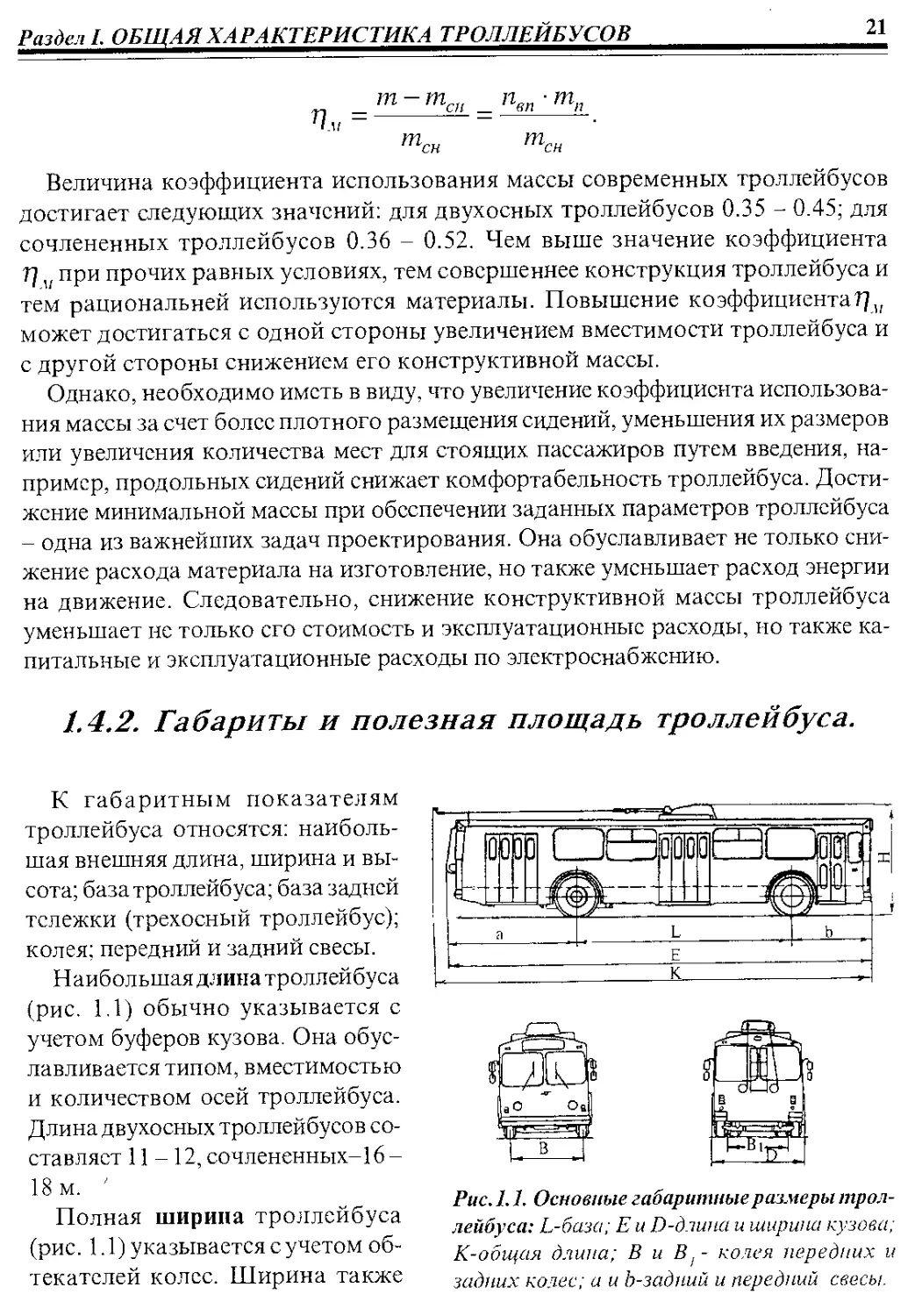
К габаритным показателям
троллейбуса относятся: наиболь-
шая внешняя длина, ширина и вы-
сота: база троллейбуса; база задней
тележки (трехосный троллейбус);
колея; передний и задний свесы.
Наибольшая длина троллейбуса
(рис. 1.1) обычно указывается с
учетом буферов кузова. Она обус-
лавливается типом, вместимостью
и количеством осей троллейбуса.
Длина двухосных троллейбусов со-
ставляет 11-12, сочлененных-16-
18 м. !
Полная ширина троллейбуса
(рис. 1.1) указывается с учетом об-
текателей колес. Ширина также
Рис. 1. Е Основные габаритные размеры трол-
лейбуса: L-база; Е и D-длина и ширина кузова;
К-общая длина; В и Вj - колея передних и
задних колес; а и b-задний и передний свесы.
22
Раздел!, ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
лейбуса и обычно составляет и у двухосных и у шарнирно-сочлененных при-
мерно 2,5 м.
Высота троллейбуса приводится с учетом электрического оборудования, рас-
положенного на крыше, и без его учета (рис. 1.1). В некоторых случаях высота
показывается в загруженном и незагруженном состоянии троллейбуса. Высо-
та незагруженных троллейбусов без учета надкрышного электрического обо-
рудования находится в пределах 2,9 - 3,5м..
Базой троллейбуса (рис. 1.1) является расстояние между передней и задней
осями. Если троллейбус имеет две задние (ведущие) оси, то его базой является
расстояние от передней до середины расстояния между средней и задней ося-
ми. Для троллейбусов различных типов база колеблется от 5,2 м. до 6,2 м.
Под передней или задней колеей троллейбуса (рис. 1,1) понимается расстоя-
ние между средними продольными плоскостями соответственно передних и зад-
них шин, а при сдвоенных колесах - между их серединами. Колея троллейбуса
составляет около 2 м.
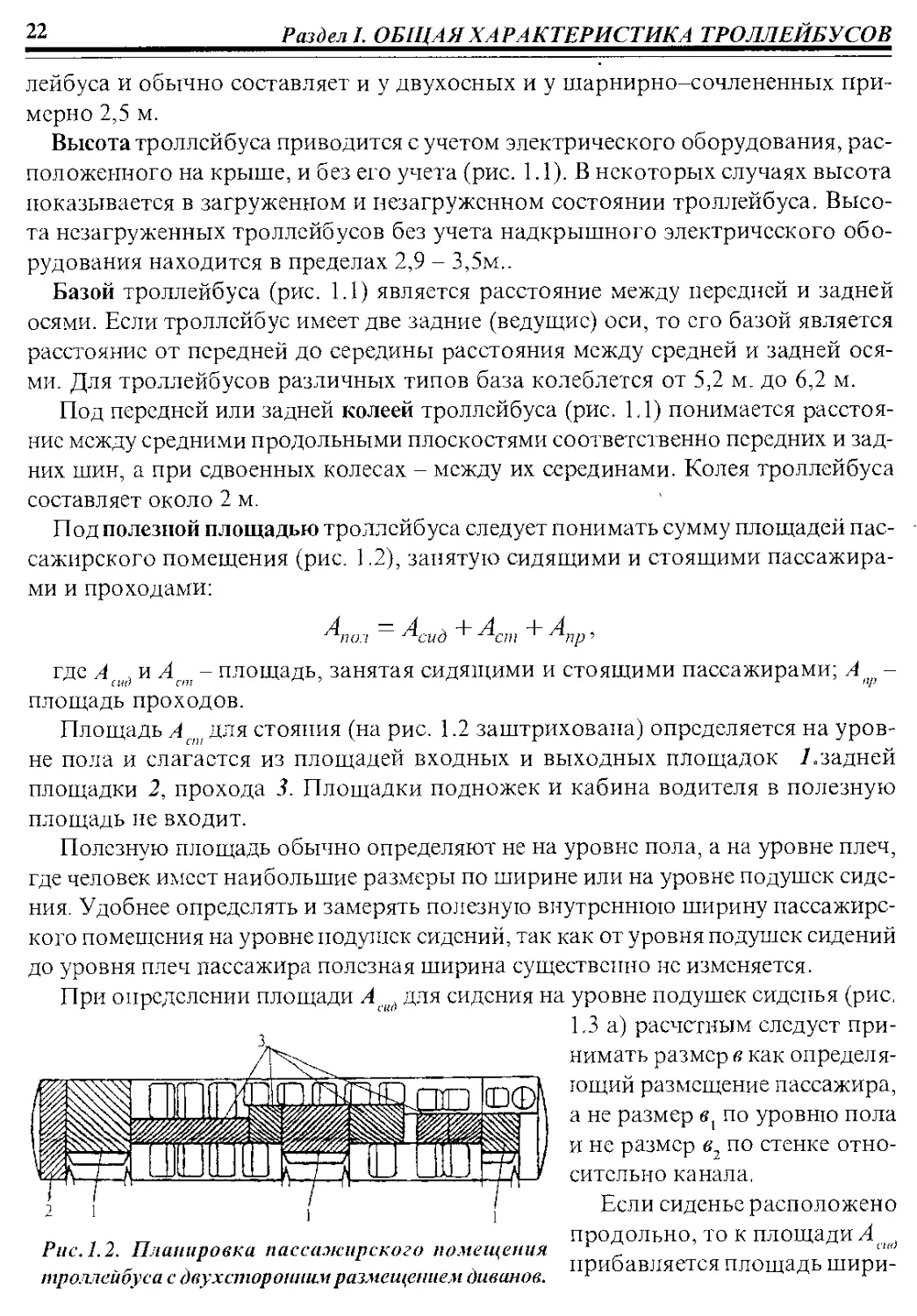
Под полезной площадью троллейбуса следует понимать сумму площадей пас-
сажирского помещения (рис. 1.2), занятую сидящими и стоящими пассажира-
ми и проходами:
где А(и[) и Аст - площадь, занятая сидящими и стоящими пассажирами; А -
площадь проходов.
Площадь Аст для стояния (на рис. 1.2 заштрихована) определяется на уров-
не пола и слагается из площадей входных и выходных площадок /.задней
площадки 2, прохода 3. Площадки подножек и кабина водителя в полезную
площадь не входит.
Полезную площадь обычно определяют не на уровне пола, а на уровне плеч,
где человек имеет наибольшие размеры по ширине или на уровне подушек сиде-
ния. Удобнее определять и замерять полезную внутреннюю ширину пассажирс-
кого помещения на уровне подушек сидений, так как от уровня подушек сидений
до уровня плеч пассажира полезная ширина существенно нс изменяется.
При определении площади А^ для сидения на уровне подушек сиденья (рис.
РисЛ.2. Планировка пассажирского помещения
троллейбуса с двухсторонним размещением диванов.
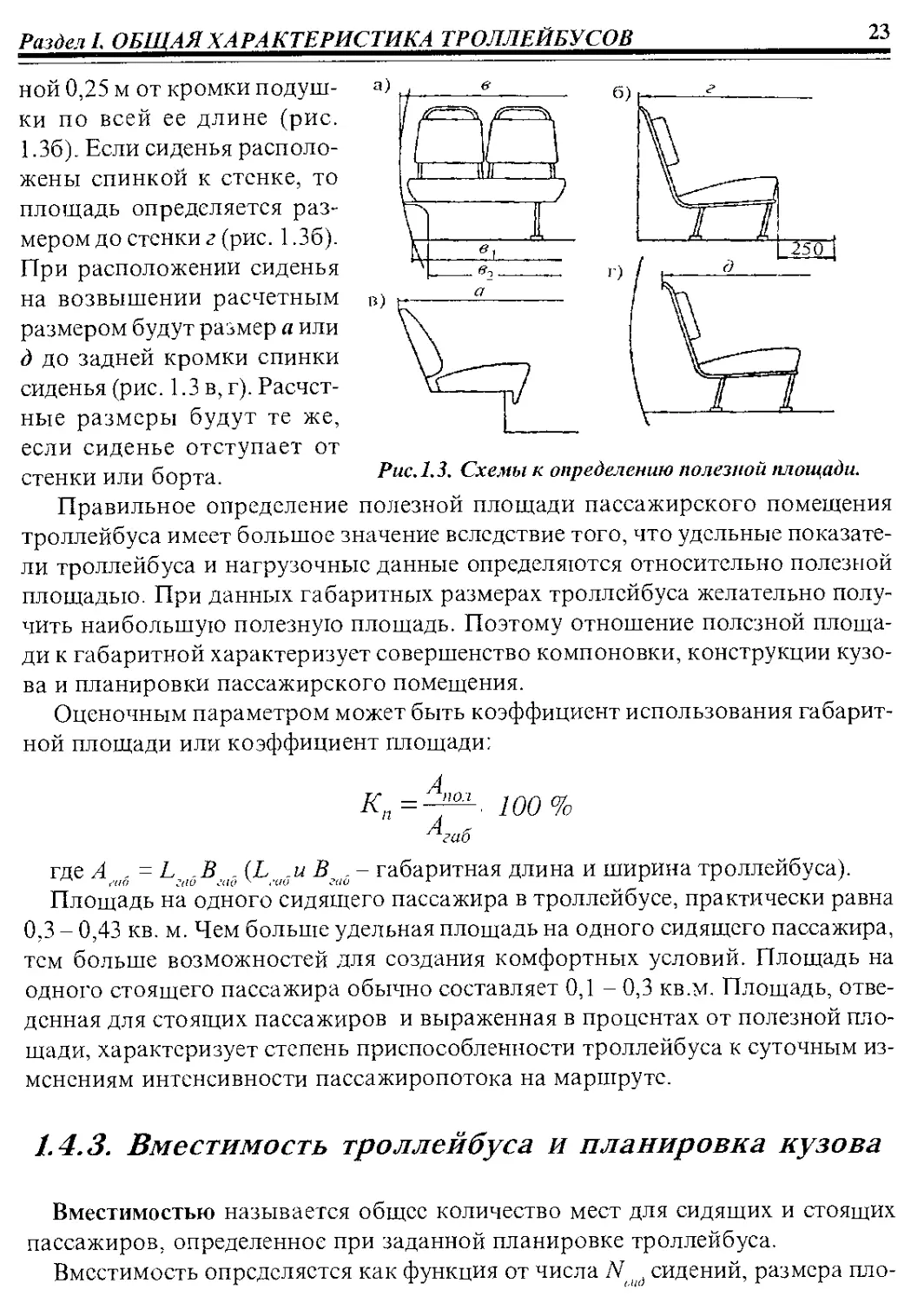
1,3 а) расчетным следует при-
нимать размер в как определя-
ющий размещение пассажира,
а не размер в по уровню пола
и не размер в2 по стенке отно-
сительно канала.
Если сиденье расположено
продольно, то к площади Л
прибавляется площадь шири-
Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
23
ной 0,25 м от кромки подуш-
ки по всей ее длине (рис.
1.36). Если сиденья располо-
жены спинкой к стенке, то
площадь определяется раз-
мером до стенки г (рис. 1.36).
При расположении сиденья
на возвышении расчетным
размером будут размер а или
д до задней кромки спинки
сиденья (рис. 1.3 в, г). Расчет-
ные размеры будут те же,
если сиденье отступает от
стенки или борта.
Правильное определение
РисЛ.З. Схемы к определению полезной площади.
полезной площади пассажирского помещения
троллейбуса имеет большое значение вследствие того, что удельные показате-
ли троллейбуса и нагрузочные данные определяются относительно полезной
площадью. При данных габаритных размерах троллейбуса желательно полу-
чить наибольшую полезную площадь. Поэтому отношение полезной площа-
ди к габаритной характеризует совершенство компоновки, конструкции кузо-
ва и планировки пассажирского помещения.
Оценочным параметром может быть коэффициент использования габарит-
ной площади или коэффициент площади:
А
кп 100 %
^габ
где А- L В ~ габаритная длина и ширина троллейбуса).
Площадь на одного сидящего пассажира в троллейбусе, практически равна
0,3 - 0,43 кв. м. Чем больше удельная площадь на одного сидящего пассажира,
тем больше возможностей для создания комфортных условий. Площадь на
одного стоящего пассажира обычно составляет 0,1 - 0,3 кв.м. Площадь, отве-
денная для стоящих пассажиров и выраженная в процентах от полезной пло-
щади, характеризует степень приспособленности троллейбуса к суточным из-
менениям интенсивности пассажиропотока на маршруте.
1.4.3. Вместимость троллейбуса и планировка кузова
Вместимостью называется общее количество мест для сидящих и стоящих
пассажиров, определенное при заданной планировке троллейбуса.
Вместимость определяется как функция от числа N сидений, размера пло-
24 Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
щади Аст для стоящих пассажиров и плотности у наполнения площади сто-
ящих пассажиров:
= /(Мсид'Лт'ЛсА
Вместимость троллейбуса характеризуется общим числом сидящих и сто-
ящих пассажиров и обслуживающего персонала:
~ ^ст + o6c:i >
где PCI!! ^cDi / У ст •
Вместимость троллейбуса определяется также отношением площади для
стоящих пассажиров к площади для сидящих:
&вм ~ ^ст !^сид
Чем больше площадь для стоящих пассажиров, тем больше вместимость
троллейбуса в часы пик. Наполняемость или действительная нагрузка трол-
лейбуса на маршруте отличается от вместимости как в большую, так и в мень-
шую стороны и изменяется на протяжении маршрута. Вместимость является
важнейшим показателем провозной способности троллейбуса. Она зависит от
размеров кузова - его длины и ширины и от планировки, определяемой рас-
положением входных и выходных дверей, также от соотношения площадей
для сидящих и стоящих пассажиров.
Расположение пассажирских сидений в троллейбусах бывает: двухсторон-
нее продольное; двухстороннее поперечное; двухстороннее продольно-попе-
речное, Основные типы троллейбусов имеют двухстороннее поперечное рас-
положение сидений. При двухстороннем поперечном размещении (рис. 1.2)
диванов применяются двух- и одноместные сидения (в зависимости от шири-
ны кузова). В современных троллейбусах с шириной кузова 2.6 - 2,7 м устанав-
ливаются двухместные диваны (двухстороннее поперечное расположение),
между которым остается проход достаточной ширины.
Двухстороннее поперечное расположение диванов в кузове обеспечивает
наибольшее количество мест для сидения и создает удобства для пассажиров.
Недостатком такого расположения диванов является некоторое ограничение
общей вместимости троллейбуса, так как площадь пола, занимаемая прохо-
дом, а следовательно, и количество мест для стоящих пассажиров при этой
планировке оказывается минимальными. С другой стороны, уменьшение ши-
рины прохода несколько затрудняет продвижение пассажиров. Основные типы
современных троллейбусов имеют поперечное расположение диванов.
На планировку кузова троллейбуса, его вместимость и комфортабельность
оказывает влияние количество дверей и их расположение в кузове. Троллейбу-
сы могут иметь разнос количество дверей: две двери (входную и выходную);
три двери (одну входную и две выходные или наоборот); четыре (две входные
и две выходные)двсри.
Ширина дверей имеет большое значение в ускорении прохода пассажиров.
Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
25
Двери могут быть одинарные двухстворчатые шириной 535 - 800 мм, двойные
четырех- и трехстворчатые двери - шириной 900 - 1400 мм и более. Для дву-
хосных троллейбусов рациональным является применение трех дверей, две из
которых расположены на переднем и заднем свесах, а третья расположена в
средней части базы троллейбуса. Сочлененные троллейбусы, как правило,
имеют четыре двери.
1.4.4. Проходимость и маневренность троллейбуса
Троллейбусы эксплуатируются на дорогах с твердым покрытием, имеющих
местные неровности, переходы профиля пути и закругления. В связи с этим
они должны иметь достаточную проходимость.
Проходимость зависит от многих факторов, основным из которых являются
опорно-тяговые свойства и геометрические параметры троллейбуса, а также кон-
струкция отдельных агрегатов шасси. Кроме того, на проходимость оказывают
определенное влияние и такие эксплуатационные свойства троллейбуса, как ус-
тойчивость и маневренность. Следует также отметить, что на проходимость су-
щественно влияет качество вождения троллейбуса, Очевидно, что более квали-
фицированный водитель при всех прочих равных условиях обеспечивает луч-'
шую проходимость троллейбуса, чем менее квалифицированный.
Для того, чтобы установить опорно-тяговые показатели проходимости трол-
лейбуса, определяют коэффициенты сопротивления качению и сцепления, а
также удельную силу тяги на крюке, т.е. отношение наибольшей силы тяги
развиваемой на крюке троллейбуса до начала буксования колес или останов-
ки двигателя, к полному весу троллейбуса.
Чтобы установить показатели геометрической проходимости троллейбуса,
определяют дорожные просветы/?, передний tZi и задний Об2 углы проходимо-
сти, радиусы продольной 7? и поперечной Rjwn проходимости (рис. 1.4).
Просвет - это расстояние h между одной из низких точек троллейбуса и плос-
костью дороги, которые характеризует возможность движения троллейбуса
без задевания сосредоточенных препятствий.
Передний Сб1 и задний a 2 углы проходимости характеризуют проходимость
троллейбуса по неровным дорогам при въезде на препятствие или съезде с него.
Для определения угловtZi и Сопроводят прямые линии, касательные к вне-
шним окружностям шин передних и задних колес и к наиболее удаленным точ-
кам передней и задней частей троллейбуса. Значение углов ол и СС2 для совре-
менных троллейбусов находится в пределах 7-97
Радиус продольной Я и поперечной А ; проходимости определяют очерта-
ния препятствия, которые не задевая может преодолеть троллейбус. Чем мень-
ше радиусы продольной и поперечной проходимости, тем лучше проходимость
троллейбуса.
26
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
Рис.}. 4. Радиусы продольной (а) и поперечной (б)проходимости троллейбуса.
Маневренностью называют свойство троллейбуса поворачиваться на мини-
мальной площади. Минимальный радиус поворота наружного переднего ко-
леса 7?^ (рис. 1.5), ширина полосы движения Л7 которую занимает троллейбус
при повороте, и максимальный выход отдельных частей троллейбуса за пре-
делы траекторий движения наружнего переднего и внутреннего заднего колес
(расстояния £'j и £ 2) являются показателями маневренности троллейбуса.
Максимальная ширина полосы движения (коридор) N, находится по формуле :
NK=R„-Rs+y+£2,
где Re - минимальный радиус поворота внутреннего заднего колеса.
Согласно ГОСТ 27815-88 (Правила ЕЭК ООН N 36) при движении на пово-
роте как вправо, так и влево троллейбус должен полностью вмещаться по наи-
более выступающей точке кузова или бампера в окружность радиусом 12м.
Этот радиус называют радиусом поворота троллейбуса и он равен :
R.=RH + C
При движении троллейбуса на повороте вправо или влево при минималь-
ном радиусе поворота равным 12 м, троллейбус должен вмещаться в коридор
Nk равный 6 - 7 м.
Рис. 1.5. Схема движения троллейбуса на повороте: а- двухосного; б- сочлененного.
Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
27
1.4.5. Динамические показатели и плавность хода.
Динамические показатели, включающие в себя тяговые и тормозные каче-
ства и скорость движения троллейбуса, зависят от мощности электрообору-
дования, принятой системы управления им, конструкции и эффективности дей-
ствия тормозной системы. Они характеризуют весь процесс движения трол-
лейбуса на линии.
К числу основных динамических показателей относят: ускорение, замедление,
конструктивную скорость, максимально- установившуюся скорость, которая в
зависимости от принятых условий эксплуатации (длина перегона, время, число
остановок и т.д,) определяет скорость сообщения. Все эти показатели могут быть
определены тяговым расчетом или соответствующими испытаниями. При оцен-
ке динамических качеств индивидуального состава обычно учитывают среднее
и максимальное ускорение, развиваемое им в период разгона.
Определение оптимальных значений динамических показателей (в особен-
ности скорости сообщения) представляет одну из главных задач при разра-
ботке новых более совершенных типов троллейбусов. Следует иметь в виду,
что ускорения и замедления ограничены допустимыми значениями силы тяги
и тормозных сил, а также удобством и безопасностью пассажиров. Для сто-
ящих пассажиров условия движения считают приемлемыми, если величина
среднего ускорения не превышает 1,5 м/с2, а скорость нарастания ускорения не
превосходит 1,5-2 м/с2. Более значительные величины ускорения (замедле-
ния) при разгоне и торможении, кроме экстренного торможения, вызывают
утомляемость и неприятные ощущения пассажиров.
Максимальная скорость движения троллейбуса реализуется в основном на
длинных перегонах и зависит от тяговой характеристики троллейбуса, т.е. от
вида зависимости
^=Ж).
(где Р сила тяги), и от веса нагруженного троллейбуса.
В обычных условиях городского движения при небольших расстояниях меж-
ду остановками и частых случаях ограничения скоростей нс всегда целесооб-
разно стремиться к высоким значениям максимальных скоростей, поскольку
они могут оказаться не реализованы. Высокие максимальные скорости могут
быть эффективно использованы в условиях движения по вылетным маршру-
там с относительно редкими остановками, где количество ограничений, вы-
зывающих снижение скорости меньше, чем в условиях интенсивного улично-
го движения. Максимальная скорость движения современных троллейбусов
составляет 55 - 75 км/ч.
При проектировании троллейбусов и в процессе его эксплуатации иногда
возникает необходимость в определении максимального подъема, который
28
Раздел I, ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
преодолевает троллейбус или угла подъема предельного профиля пути, кото-
рый может преодолеть троллейбус. Для современных троллейбусов максималь-
ная способность к преодолению подъема в пределах 8-15 %.
Под плавностью хода троллейбуса следует понимать его способность двигаться
с заданными эксплуатационными скоростями, нс оказывая вредного влияния на
физиологическое состояние водителя и пассажиров. При движении троллейбуса
по неровной дороге в различных его точках возникают колебания, которые по
разному воздействуют на водителя и пассажиров, Колебания, передаваемые че-
ловеку, могут создавать дискомфорт, т.с. ощущение неудобства, мешать выпол-
нению работы, создавать угрозу безопасности участников движения и угрозу здо-
ровью людей, испытывающих групповые колебания.
При определении реакции человека на вибрацию следует учитывать четыре
наиболее важных физических фактора: се интенсивность, частоту, направле-
ние действия и длительность. При любой оценке вибрации, которую можно
охарактеризовать с точностью этих факторов, необходимо исходить из трех
основных критериев, предусматривающих обеспечение производительной
работы, безопасности, здоровья и комфорта. Для каждого из критериев реко-
мендуются свои пределы воздействия вибрации.
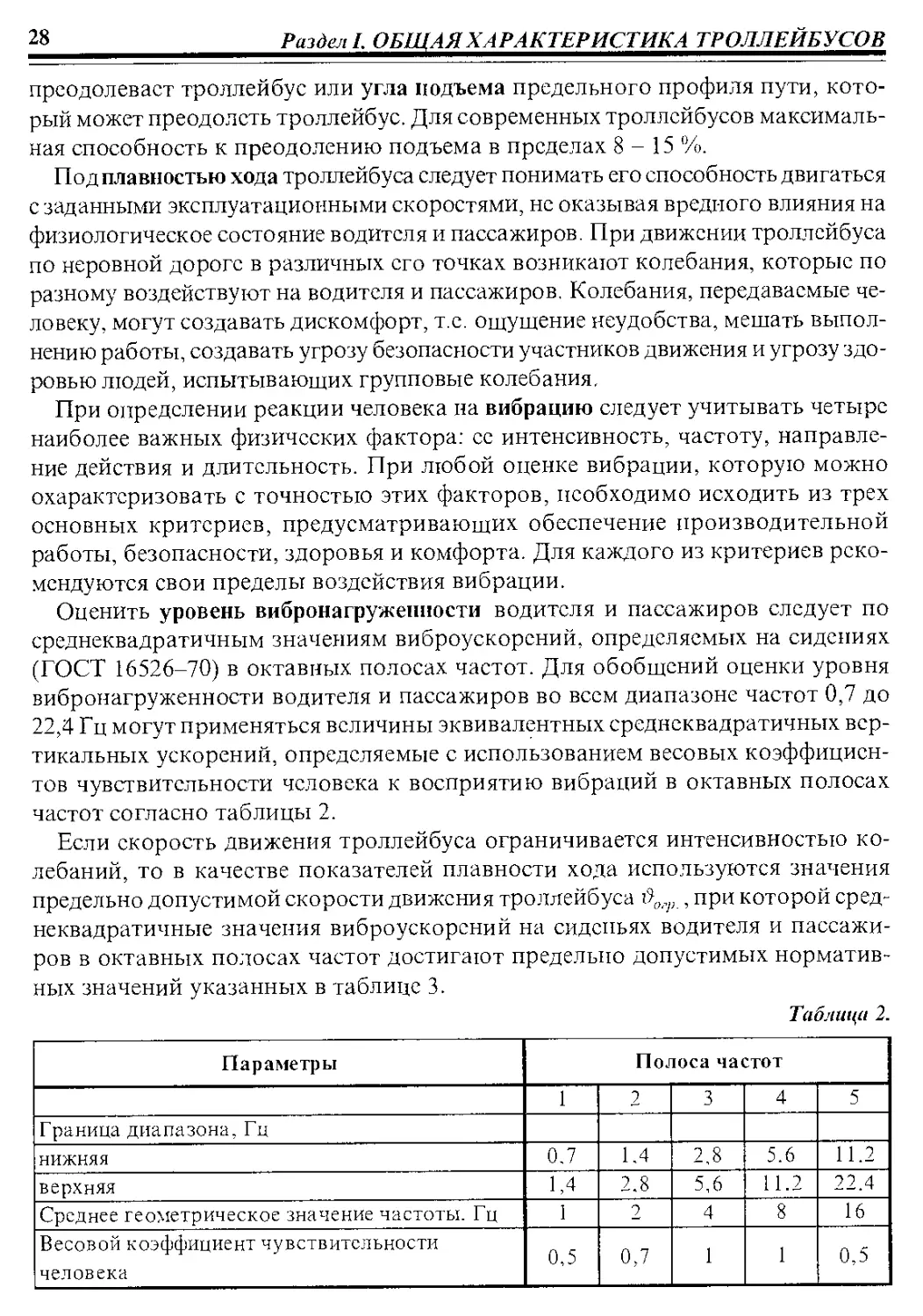
Оценить уровень вибронагружешюсти водителя и пассажиров следует по
среднеквадратичным значениям виброускорсний, определяемых на сидениях
(ГОСТ 16526-70) в октавных полосах частот. Для обобщений оценки уровня
вибронагруженности водителя и пассажиров во всем диапазоне частот 0,7 до
22,4 Гц могут применяться величины эквивалентных среднеквадратичных вер-
тикальных ускорений, определяемые с использованием весовых коэффициен-
тов чувствительности человека к восприятию вибраций в октавных полосах
частот согласно таблицы 2.
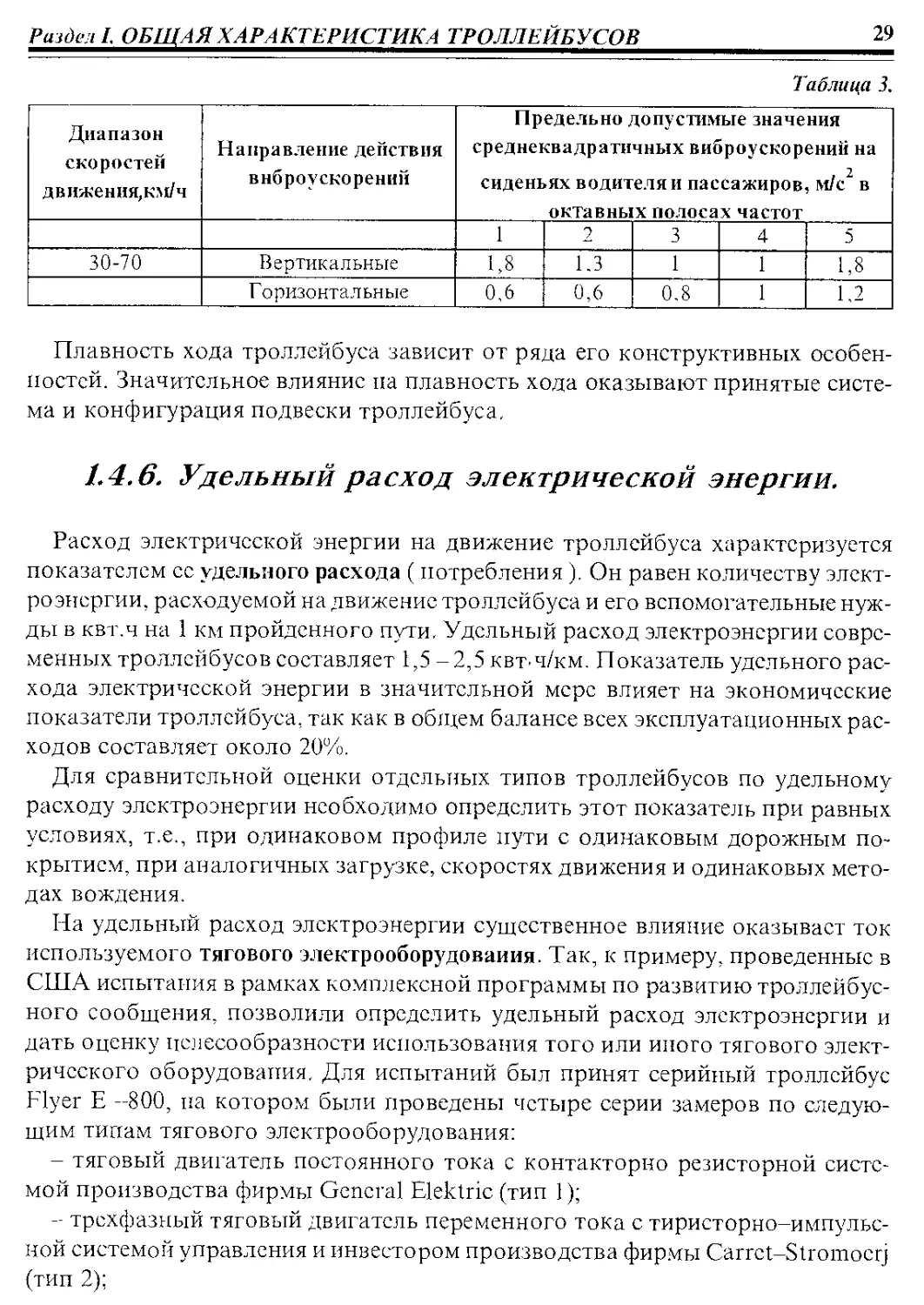
Если скорость движения троллейбуса ограничивается интенсивностью ко-
лебаний, то в качестве показателей плавности хода используются значения
предельно допустимой скорости движения троллейбуса , при которой сред-
неквадратичные значения виброускорсний на сиденьях водителя и пассажи-
ров в октавных полосах частот достигают предельно допустимых норматив-
ных значений указанных в таблице 3.
Таблица 2.
Параметры Полоса частот
1 2 3 4 5
Граница диапазона, Гц
нижняя 0,7 1.4 2,8 5.6 11.2
верхняя Е4 2.8 5,6 11.2 22.4
Среднее геометрическое значение частоты. Гц 1 2 4 8 16
Весовой коэффициент чувствительности человека 0,5 0,7 1 1 0,5
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
29
Таблица 3.
Диапазон скоростей движения,км/ч Направление действия внброускорений Предельно допустимые значения среднеквадратичных виброускорений на сиденьях водителя и пассажиров, м/с в октавных полосах частот
1 2 3 4 5
30-70 Вертикальные 1,8 ЕЗ 1 1 Е8
Г оризонтальные 0,6 0,6 0,8 1 1,2
Плавность хода троллейбуса зависит от ряда его конструктивных особен-
ностей. Значительное влияние па плавность хода оказывают принятые систе-
ма и конфигурация подвески троллейбуса,
/.4.6. Удельный расход электрической энергии.
Расход электрической энергии на движение троллейбуса характеризуется
показателем се удельного расхода ( потребления ), Он равен количеству элект-
роэнергии, расходуемой на движение троллейбуса и его вспомогательные нуж-
ды в квт.ч на 1 км пройденного пути. Удельный расход электроэнергии совре-
менных троллейбусов составляет 1,5 -2,5 квт-ч/км. Показатель удельного рас-
хода электрической энергии в значительной мерс влияет на экономические
показатели троллейбуса, так как в общем балансе всех эксплуатационных рас-
ходов составляет около 20%,
Для сравнительной оценки отдельных типов троллейбусов по удельному
расходу электроэнергии необходимо определить этот показатель при равных
условиях, т.е., при одинаковом профиле пути с одинаковым дорожным по-
крытием, при аналогичных загрузке, скоростях движения и одинаковых мето-
дах вождения.
На удельный расход электроэнергии существенное влияние оказывает ток
используемого тягового электрооборудования. Так, к примеру, проведенные в
США испытания в рамках комплексной программы по развитию троллейбус-
ного сообщения, позволили определить удельный расход электроэнергии и
дать оценку целесообразности использования того или иного тягового элект-
рического оборудования. Для испытаний был принят серийный троллейбус
Flyer Е -800, па котором были проведены четыре серии замеров по следую-
щим типам тягового электрооборудования:
- тяговый двигатель постоянного тока с контакторно резисторной систе-
мой производства фирмы General Elektric (тип 1);
- трехфазный тяговый двигатель переменного тока с тиристорно-импульс-
ной системой управления и инвестором производства фирмы Carret-Stromocrj
(тип 2);
30 Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
- тяговый двигатель постоянного тока с тиристорно- импульсной системой
управления, имеющей принудительное воздушное охлаждение производства
фирмы Westinghause Elektric Corporation (тип 3);
-тяговый двигатель постоянного тока с тиристорно- импульсной системой
управления с принудительным фреоновым охлаждением фирмы Alsthom-
Atlantic (тип 4).
В системах постоянного тока использовался один и тот же тяговый двига-
тель. Основным параметром, по которому сравнивалось тяговое электрообо-
рудование, явилось удельное потребление электроэнергии. Полученные резуль-
таты приведены в таблице 4. Как видно из таблицы, использование тиристор-
но- импульсных систем управления тяговым электроприводом существенно
Таблица 4.
Удельное потребление электроэнергии при использовании тягового
электрооборудования различных типов, квт-ч/км
Наполнение подвижного состава Тип тягового оборудования Среди, зиач.типов 2,3,4 Отношение среди, зная, к типу 1 в %
1 2 3 4
Холостой пробег (без нагрузки) 2.61 1,56 1,47 1,51 1,51 58
При среднем наполиеиии 3,2 2,01 1,83 1,88 1,84 57
При оптимальном наполнении 3.13 2,26 2,09 1,85 2,06 66
Среднее значение расхода 2,98 1,94 1,79 1,68 1.8 61
снижает удельный расход электроэнергии. Экономия электроэнергии от при-
менения тиристорных систем может достигать 30 % по сравнению с использо-
ванием контакторно-резисторной системой управления.
1.5. Условия работы троллейбуса и
устройств электроснабжения.
Режим движения троллейбуса определяется соотношением всех действую-
щих на него сил. анализ которых показывает, что в нормальных условиях эк-
сплуатации возможны три режима движения троллейбуса: тяга, выбег и тор-
можение (рис. 1.6).
При тяге, когда F > F (Fk - касательная сила тяги ведущих колес; F - сила
сопротивления движению троллейбуса) и, следовательно,
б/У .. п
— = х > О
dt
троллейбус движется ускоренно. Если в режиме тяги FK = Fy 5 то
б/У .. п
—- = х = О
dt
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
31
и троллейбус движется с установившейся скоростью. При FK — F?
dv .. „
— = х < О
dt
троллейбус движется замед-
ленно. В режиме выбега FK ~ 0;
режим движения троллейбуса
определяется силой сопротивле-
ния его движению на выбеге. На
горизонтальном участке дороги
если х < 0, то скорость трол-
лейбуса снижается. Однако при
выбеге на спусках, особенно
крутых, составляющая веса
троллейбуса может превысить
силу сопротивления движению,
Разность этих сил направлена в
сторону движения троллейбуса,
следовательно, х > 0 и трол-
лейбус ускоряет свое движение.
Рис. 1.6. Режимы движения троллейбуса.
►
t
Каждый из режимов движе-
ния троллейбуса рассчитывают
исходя из поставленных технических требований. Например, расчет режима
тяги начинают с трогания (пуска), интенсивность которого определяется пус-
ковым током тягового двигателя и массой троллейбуса. Максимальное значе-
ние пускового тока, как соответствующее наиболее тяжелому режиму работы
двигателя, назначают исходя из условий надежной работы двигателя (комму-
тации) и отсутствия значительного буксования ведущих колес.
В момент трогания троллейбуса, когда э.д.с. тягового двигателя равна нулю,
к нему нельзя подводить номинальное напряжение. Если представить, что к
неподвижному двигателю, сопротивление г обмоток которого примерно рав-
но 0,1 Ом, приложено напряжение 100...200 В, т. е. заведомо меньше номи-
нального 500 В, то через двигатель должен протекать ток 1 ...2 кА. При таком
чрезмерно большом токе возникающие электродинамические силы взаимо-
действия тока с магнитным потоком либо вырвут обмотку якоря из пазов,
либо возникнет круговой огонь по коллектору из-за недопустимо высокой
плотности тока под щетками и, следовательно, искажения распределения маг-
нитного потока под полюсами. И то, и другое приводит к повреждению дви-
гателя. Во избежание этого к неподвижному тяговому двигателю обычно под-
водят нс более 50 В, увеличивая его по мере роста скорости движения трол-
лейбуса, т. е. увеличения э.д.с. тягового двигателя.
32 Раздел I. ОБЩАЯ ХА РАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
По условию безискровой коммутации тяговых двигателей не допускают пус-
ковойток больше двойного часового: 7 <21 . В эксплуатации, учитывая
п max ~ ч
возможность случайных изменений условий работы тяговых двигателей, их
пусковой ток ограничивают значением 1,5 I .
Во избежание полного буксования ведущих колес троллейбуса их сила тяги,
зависящая от подводимого крутящего момента, не должна превышать силы
сцепления F(? колес троллейбуса с дорогой, которую можно выразить как :
F<p = (?ССц = cpAG.
где <р - коэффициент сцепления колес с дорогой; Gcy - спепной вес (вес, прихо-
дящийся на ведущие колеса) троллейбуса; ф — коэффициент нагрузки ведущих
колес, Л 33 Gc IG\ G- вес троллейбуса.
По условиям плавности трогания ускорение нс должно превышать 1 м/с2 .
По мерс разгона троллейбуса ускорение, как видно из рис. 1.6, уменьшается.
Это происходит с одной стороны, из-за снижения тока, а следовательно, и
крутящего момента тягового двигателя с увеличением скорости движения, а с
другой - вследствие увеличения сопротивления движению троллейбуса.
Установившаяся скорость движения троллейбуса, при которой F. — Ff, за-
висит от ряда факторов: мощности тягового двигателя, массы троллейбуса,
профиля и состояния дороги. Режим постоянной скорости является с точки
зрения использования оборудования системы электроснабжения предпочти-
тельным. так как обеспечивается постоянство ее нагрузок. Однако такой ре-
жим практически исключается в реальных условиях эксплуатации, из-за чего
увеличивается расход энергии в системе электроснабжения, а следовательно,
и общий расход энергии на тягу троллейбусов.
В режиме выбега движение троллейбуса происходит за счет накопленной им
кинетической, а на спусках - и потенциальной энергии, расходуемой по мерс
преодоления сопротивления движению, включая потери на трение в трансмис-
сии троллейбуса, которые в режиме тяги покрываются энергией, забираемой им
через контактную сеть от тяговой подстанции. Следующее за выбегом включе-
ние тягового двигателя на ходу троллейбуса опасности не представляет: в об-
мотке якоря наведена э.д.с., пропорциональная частоте его вращения, уравнове-
шивающая подведенное к нему напряжение и ограничивающая его ток,
В режиме торможения с помощью механических и электрических (реостат-
ного и рекуперативного) тормозов осуществляется замедление троллейбуса и,
в требуемых случаях, его остановка. Интенсивность торможения устанавли-
вает водитель, так как тормозная сила является регулируемой: при механичес-
ком торможении в зависимости от наполнения тормозных камер сжатым
воздухом, при электрическом - в зависимости от тока возбуждения и тока якоря
тягового двигателя, работающего в генераторном режиме. Предельные режи-
мы торможения устанавливают исходя из требований, аналогичных предъяв-
ляемых к режиму пуска и трогания троллейбуса.
Раздел Z ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 33
На начальной стадии изучения процесса движения троллейбуса рассматрива-
ют только его полезное перемещение, используя при этом номинальные харак-
теристики установившихся режимов его работы и систем электроснабжения.
Однако в процессе реализации тяги и торможения проявляется совокупность
сложных механических, электромеханических и электромагнитных процессов,
происходящих в системе контактная сеть - подвижной состав - тяговая подстан-
ция. Поэтому тяговые и тормозные свойства подвижного состава отличаются от
номинальных расчетных и в ряде случаев значительно отклоняются от приве-
денных в технических паспортах, соответствующих идеальным установившимся
режимам работы. При движении троллейбуса на процесс реализации сил тяги и
торможения оказывает влияние изменение нагрузок его узлов. Это прежде всего
вызвано случайными и периодическими колебаниями троллейбуса как электро-
механической системы со многими степенями свободы. Динамические нагрузки,
возникающие вследствие этих колебаний, вызывают появление изменяющихся
во времени механических напряжений прежде всего в опорной поверхности (до-
роге), ходовой системе (движителе, подвеске), трансмиссии, тяговых двигателях
и электрооборудовании. Взаимодействие троллейбуса и дороги заметно ослож-
няется в весенне-осенние и зимние периоды года, когда на дороге появляются
гололед и снежный покров. Именно в эти периоды происходит наибольшее чис-
ло повреждений и отказов оборудования троллейбуса и контактной сети.
Изменения нагрузок на колесах, являющиеся следствием динамики движе-
ния, не только отражаются на долговечности узлов троллейбуса, но и небла-
гоприятно сказываются на его тяговых и тормозных свойствах: ухудшаются
условия сцепления колес с дорогой, уменьшаются силы тяги и тормозные силы
по сцеплению, возрастает неравномерность распределения токов между па-
раллельно работающими тяговыми двигателями (некоторые модели сочленен-
ных троллейбусов), а следовательно, увеличивается разница температур на-
грева их обмоток, снижается долговечность и надежность изоляции наиболее
нагруженного двигателя. Износ протектора шип также приводит к измене-
нию тяговых и тормозных свойств троллейбуса.
В процессе движения троллейбусов по своим маршрутам меняется их взаим-
ное расположение на участке, ток тяговых двигателей и скорость, так как каж-
дый из них находится в данный момент на участке, оказывающем свое сопротив-
ление движению троллейбуса. В зависимости от профиля участка и расположе-
ния остановок одни троллейбусы могут работать в режиме тяги, другие в режи-
ме рекуперации. Вследствие этого меняются нагрузки тяговых подстанций и как
следствие величина напряжения в контактной сети до токоприемника каждого
троллейбуса. Это напряжение подводится к тяговым двигателям, следователь-
но, изменение напряжения в сети влияет на работу подвижного состава.
Связь режимов работы подвижного состава и устройств электроснабжения
проявляется не только во взаимном влиянии напряжений, но и в условиях то-
косъема при движении троллейбуса. Взаимодействие токоприемника с кон-
34
Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
тактными подвесками - сложный колебательный процесс, в котором участву-
ют, с одной стороны, дорога и подвижной состав, а с другой - токоприемники
и система контактных подвесок. На эти колебания накладывается действие
аэродинамических сил. возрастающих с увеличением скорости движения. То-
косъем должен быть непрерывным и бсзискровым. а значит, всякое изменение
нажатия токоприемника на контактный провод снижает его качество. Для
уменьшения этого влияния и вероятности отрыва токоприемника от контакт-
ного провода предусматривают в их конструкциях специальные демпферы.
В тех случаях, когда все же происходит отрыв токоприемника от контакт-
ного провода, в электрических цепях троллейбуса возникают неустановивши-
еся процессы, приводящие не только к дополнительным потерям электричес-
кой энергии, но и в ряде случаев и к повреждению оборудования, срабатыва-
нию защиты на подвижном составе и тяговой подстанции.
Таким образом, процессы происходящие в системе электрической тяги ха-
рактеризуются при движении троллейбуса, с одной стороны, механикой его
движения с сопутствующими явлениями, с другой - электромеханическими и
электромагнитным взаимодействием подвижного составе! и системы электро-
снабжения. Взаимодействие этих групп факторов, изменяющихся во времени,
определяют в конечном итоге тяговые, тормозные и энергетические свойства
троллейбуса и энергетику работы системы электроснабжения, т.е. электричес-
кой тяги в целом. Насколько полно мы научимся управлять этими факторами,
настолько эффективной будет работа и надежность электрической тяги.
Номинальное напряжение в контактной сети, при котором производят мно-
гие расчеты, связанные с движением троллейбусов, установлено стандартами
на токоприемнике троллейбуса 500 В. При движении троллейбусов, как отме-
чалось выше, напряжение в контактной цепи колеблется относительно сред-
него значения.
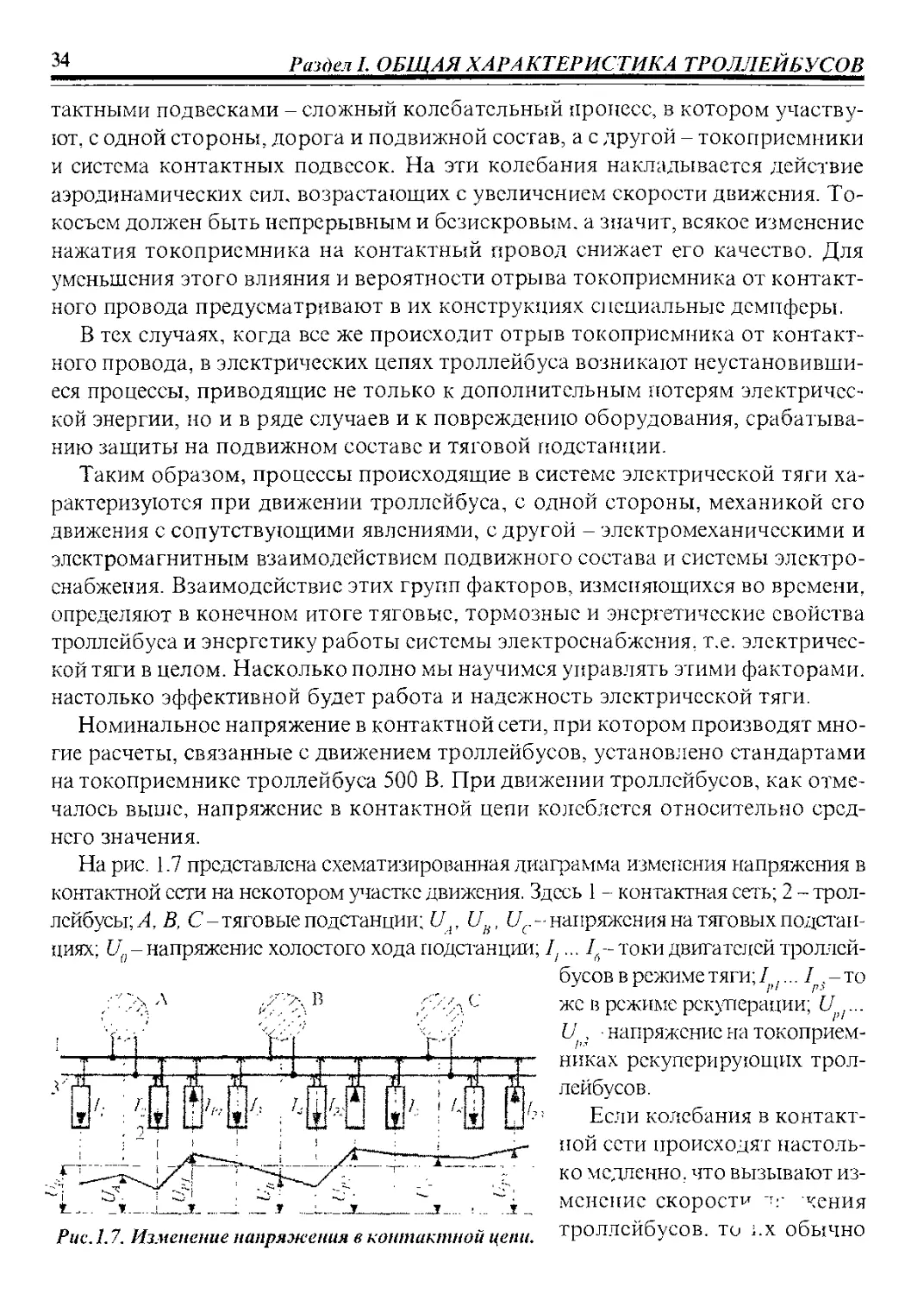
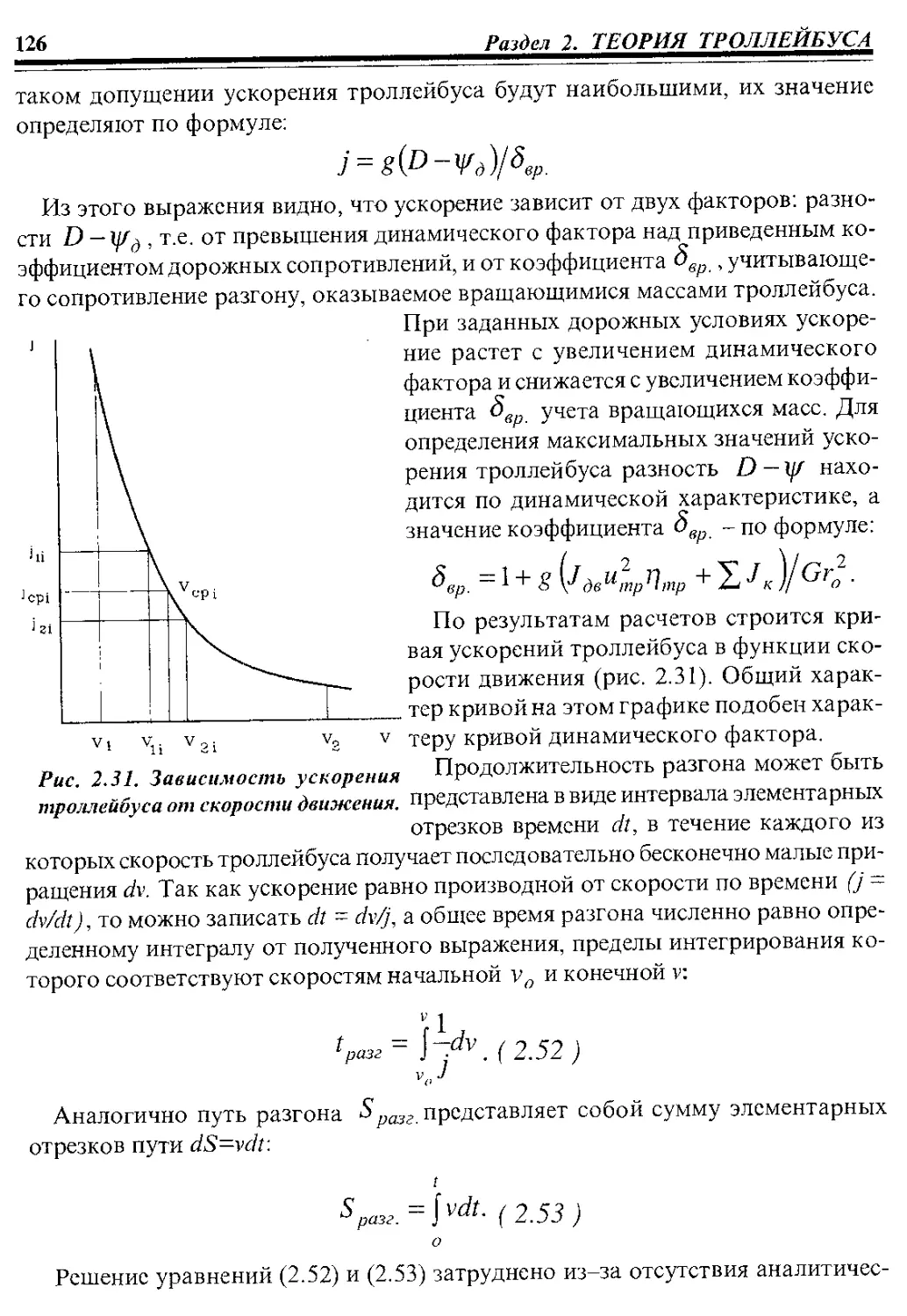
На рис. 1.7 представлена схематизированная диаграмма изменения напряжения в
контактной сети на некотором участке движения. Здесь 1 - контактная сеть; 2 - трол-
лейбусы;^, В, С-тяговые подстанции; U г UB, ^.--напряжения на тяговых подстан-
циях; U - напряжение холостого хода подстанции; ... токи двигателей троллей-
Рис. I.7. Изменение напряжения в контактной цени.
бусов в режиме тяги; / то
же в режиме рекуперации; £/ ...
U • напряжение на токоприем-
никах рекуперирующих трол-
лейбусов.
Если колебания в контакт-
ной сети происходят настоль-
ко медленно, что вызывают из-
менение скорости ''Г жения
троллейбусов, то их обычно
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
35
называют отклонениями напряжения. В том случае, когда частота изменений на-
пряжений настолько велика, что из-за инерции троллейбуса изменения напря-
жения не сказываются на его скорости, их называют колебаниями напряжения.
По условиям обеспечения нормальной работы троллейбусов пределы из-
менения напряжения в контактной сети ограничены. Отклонение напряжения
в контактной сети, а значит, и на токоприемнике троллейбуса, сохраняющее-
ся длительное время, вызывает пропорциональное изменение напряжения на
тяговых двигателях и, следовательно, скорости троллейбуса. Например, при
напряжении U; на токоприемнике и неизменном положении контроллера во-
дителя, полагая режим работы троллейбуса установившимся, можно рассчи-
тать скорость его движения :
=({/,-Z - л-)/(с„ф)
где I - ток тягового двигателя; г - сопротивление его обмоток; Ф - магнит-
ный поток; cv - const.
При напряжении на токоприемнике и так же в установившемся режиме
скорость троллейбуса станет :
v2=(t/2-/ r )/(с,Ф)
Так как в нормальных условиях работы тягового двигателя падение напря-
жения I • г в его обмотках обычно не превышает 3% номинального напряже-
ния, пренебрегая им и практически малой разницей в потерях энергии на под-
вижном составе при напряжениях U uU1} получим :
v^v^U^U,.
Если U\> U считают, что скорость движения троллейбуса возрастает про-
порционально отношению напряжений U7 / Us , и, наоборот, если U7 < U .
скорость уменьшается пропорционально этому отношению.
Сравнительная диаграмма изменения скорости движения троллейбуса при на-
пряжении U; > U, представлена на рис. 1.8, где t и t^- время движения троллей-
буса при напряжении соответственно U; (кривая 1), исключая разгон и выбег, и
С, (кривая 2); tt и t2 - общее время движения при напряжении соответственно U;
и U,; Af - поправка на время движения, обусловленная разностью напряжений
U Принято считать, что если изменение напряжений контактной сети вы-
зывает пропорциональное изменение скорости движения, то время движения
троллейбуса изменяется обратно пропорционально изменению напряжения, т. е.
и. следовательно, поправка на время движения
~ (U}/U2~~ 1 )г].
Напряжение в контактной сети нс влияет на время разгона троллейбуса, его
выбега и торможения. Поэтому поправку на время движения троллейбуса меж-
ду остановками по (перегону) определяют только за время его движения на хо-
довых позициях контроллера водителя. Изменения времени движения троллей-
36 Раздел L ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
РисЛ.8. Диаграмма изменения
скорости движения троллейбуса
буса по перегону также влияют на условия
работы подвижного состава: меняется по-
требление тока, расход энергии, нагрев тя-
говых двигателей, а также режим работы
вспомогательных машин. При снижении
скорости троллейбуса, а значит, увеличении
времени его движения растет время потреб-
ления тока из контактной сети в значитель-
но большей мере, чем снижается скорость
движения. Это приводит к увеличению ко-
личества тепла, нагревающего обмотки тя-
говых двигателей. Кроме того, при пониже-
нии напряжения в контактной сети снижа-
ется частота вращения якоря двигателя и,
следовательно, уменьшается количество ох-
лаждающего воздуха, поступающего в тяговый двигатель, В результате возрас-
тает опасность теплового разрушения обмоток двигателя.
Повышение напряжения в контактной сети до допустимого значения облег-
чает условия движения троллейбуса. Превышение же этого предела может при-
вести к электрическому разрушению оборудования троллейбуса и устройств элек-
троснабжения.
Взаимное влияние режимов работы устройств электроснабжения и под-
вижного состава проявляется и во взаимодействии электромагнитных полей,
возникающих при преобразовании электрической энергии на тяговых подстан-
циях и на подвижном составе. Возникающие электромагнитные поля создают
помехи для нормальной работы нс только оборудования подстанций и трол-
лейбусов, но и в большой степени устройств связи, телемеханики и т. п. Это
так называемое нарушение электромагнитной совместимости.
Раздел !. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
37
Глава 2. Комфортабельность и
безопасность троллейбуса
2.1. Общие сведения
К общественному пассажирскому транспорту, в том числе к троллейбусно-
му, предъявляются высокие требования в отношении удобства, комфорта и
безопасности для пассажиров и обслуживающего персонала. Степень предос-
тавляемых удобств при сравнительной оценке существующих и проектируе-
мых видов троллейбусов характеризуется обобщающим параметром, который
называется комфортабельностью. Различают динамическую и статическую ком-
фортабельность троллейбуса.
Под динамической комфортабельностью понимают уровень комфорта для
пассажиров и обслуживающего персонала во время движения. В числе ее по-
казателей- показатели плавности хода, уровни шума снаружи и внутри пасса-
жирского салона. Уровень шума снаружи троллейбуса определяет его шумо-
вые воздействия на пешеходов и жителей прилегающих районов, внутри пас-
сажирского салона - на пассажиров и обслуживающий персонал.
Под статической комфортабельностью понимают уровень комфорта для
пассажиров и обслуживающего персонала, независимый от движения трол-
лейбуса, а также эстетическо-художественное соответствие троллейбуса го-
родской застройке, её архитектурным принципам и планировке. К показате-
лям статического комфорта относят удобство посадки и высадки, качество
отделки и размеры сидений, вид подвижного состава, показатели качества
отделки и оборудования пассажирского салона и кабины водителя, их осве-
щенности, отопления и вентиляции, обслуживания пассажиров во время дви-
жения.
Безопасность подвижного состава оценивают по показателям:
- безопасности нормальной посадки и высадки пассажиров и обслуживаю-
щего персонала на остановках;
- безопасности пассажиров, обслуживающего персонала и пешеходов в нор-
мальных эксплуатационных режимах работы троллейбуса;
- безопасности пассажиров и обслуживающего персонала в аварийных си-
туациях, т.е. при столкновении с другими видами транспорта.
38
Раздел L ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
2.2. Шум и вибрации
Для конструкторов крайне важно уже на стадии проектирования оценить
акустические качества троллейбуса. Снижение уровня шума должно идти по
трем основным направлениям: обнаружение источника шума и снижение их
цумностн; изоляция источника шума; шумопоглощение. Кроме колебаний
подрессоренных и неподрессоренных масс, обусловленных взаимодействием
колес с неровностями микропрофиля дороги при движении троллейбуса, воз-
никают также вибрации отдельных элементов его шасси и кузова в диапазоне
застот от единицы до нескольких тысяч герц. Причинами возбуждения этих
вибраций , кроме сил, возникающих в результате взаимодействия колес с до-
рогой, являются колебательные явления, сопровождающие рабочие процессы
элементов шасси, а также аэродинамические силы.
Воздействие вибраций может существенно ухудшать комфортабельность,
вызывать неприятные ощущения, преждевременное утомление и снижение
производительности труда, повышенное напряжение некоторых элементов
шасси и кузова. Особенно вредным является создаваемый этими вибрациями
шум как внутри троллейбуса, так и на улицах городов.
Если уровень шума превышает определенный предел, то происходит пере-
грузка нервной системы человека, в результате чего повышается функциональ-
ная активность нервных структур головного мозга, ослаблются внимание и
память, снижается точность работы и острота реакции, затрудняются прием и
восприятие информации. Источником вибрации и шума являются: неуравно-
вешенность вращающихся частей и крутильные колебания тягового электро-
двигателя и деталей трансмиссии; неуравновешенность, деформации и износ
элементов карданной передачи; неуравновешенность и некруглостность шин,
взаимодействие шин с дорогой; работа компрессора и тормозов, прогиб пане-
лей кузова под влиянием изгибных, крутильных или инерционных нагрузок;
недостаточно жесткое крепление окон и дверей.
Звук может рассматриваться с позиций физики- как колебательное движе-
ние среды, с позиции физиологии- как субъективное ощущение, воспринима-
емое органом слуха. В физиологическом отношение простой звук характери-
зуется силой субъективного ощущения (громкостью), которое он дает, а так-
же своей высотой. Высота звука зависит от числа колебаний звучащего тела в
единицу времени: чем больше число колебаний, тем тон выше и наоборот.
Сила звукового ощущения зависит от интенсивности звука (фактор физичес-
кий) и от чувствительности уха (фактор физиологический).
Слуховые ощущения у человека возникают только в определенной области
частот. Нижний предел - 16 колебаний в секунду (16 Гц), верхний - 22000 Гц
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 39
(в пожилом возрасте 15000 Гц). Кроме того, возникновение слуховых ощуще-
ний возможно только тогда, когда интенсивность звука достигает некоторого
минимума, различного для разных тонов.
Уровень звуковых давлений внутри троллейбуса состоит из двух основных
слагающих звуковой вибрации, создаваемой собственными источниками шума
и проникающего наружно звукового поля, зависящего от звукоизоляции ог-
раждений.
Для предварительного расчета уровня шума внутри троллейбуса необходи-
мо знать:
средние величины уровня и спектр звуковой вибрации собственных источ-
ников звука в зависимости от давления;
характер распространения звуковой вибрации по конструкции экипажа;
характер излучения шума самими ограждениями, конструкциями экипажа;
средние величины уровня спектра наружного шума в зависимости от скоро-
сти движения;
характеристики звукоизоляции ограждений, полученных эксперименталь-
но при исследовании макетов этих ограждений в акустической камере.
Оперируя акустическими единицами можно записать что интенсивность
звука равна :
2
Г _ Р Зв
1 Зв ~ Q ,
Р -v3e
где рзв -среднеквадратичное звуковое давление (Н/м2); р - плотность сре-
ды (кг/м3); Йзв - скорость звука в среде (м/с).
Величина звукового давления и интенсивности звука изменяются в очень ши-
роких пределах. Поэтому в технической акустике принято оценивать интенсив-
ность звука, звуковое давление нс в абсолютных, а логарифмических единицах :
Д=101ё^,
1 о
где 10 - интенсивность звука, соответствующая условному пороговому уровню.
По международному соглашению, интенсивность звука Io —10-12Вт/л/2
приблизительно соответствует интенсивности едва слышимого звука в час-
тотной области наибольшей чувствительности звука.
Уровень интенсивности звука можно определить также по звуковому дав-
лению по формуле :
/.21) 1g- -зе-
Ро ’
40 Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
Вычисленный по этой формуле уровень интенсивности звука называется
уровнем звукового давления. Для того, чтобы уровень давления соответство-
вал уровням интенсивности, в качестве порогового уровня звукового давле-
ния р0 принимают значение р — 2-10” /77 ля2 , соответствующее порогу
интенсивности 10 Вт/м2. Предельная величина уровня звукового давления, не
вызывающего нарушения слуха, оценивается 100 дб.
Уровни шума измеряются специальными приборами - шумомерами при
интенсивном разгоне. Допустимые уровни внешнего и внутреннего шума (в
дб) автомобилей, регламентированные ГОСТ 27436 и ГОСТ 27435 - 87, приве-
дены ниже:
Транспортные средства Внешний шум Внутренний шум
Автомобили:
легковые 82 80
грузовые 89-91 84
Автобусы 89-91 82
Наибольшее значение имеет шумоизоляция тягового двигателя, который
расположен под полом в пределах базы троллейбуса. Источниками шума тя-
говых двигателей являются вентиляция, вибрация якоря двигателя в подшип-
никах, вибрация щеток. Сложность шумоизоляции тягового двигателя обус-
ловлена тем, что толщина пола лимитируется его уровнем. Наилучшие ре-
зультаты получают при применении фанерного пола, наихудшие - при изго-
товлении пола из тонколистовой стали. Кроме того, в полу необходимы люки
для доступа к агрегатам трансмиссии. Люки закрываются крышками, уплот-
нить которые очень трудно.
Вибрации панелей кузова дают низкочастотный шум, а дребезжание окон,
дверей и других элементов кузова- крайне неприятный высокочастотный. Виб-
рации и дребезжания проявляются тем больше, чем хуже состояние полотна
дороги. Кроме того, они проявляются при деформации кузова и могут резо-
нировать с колебаниями от тягового электродвигателя и трансмиссии.
При конструировании и доводке кузова рекомендуется увеличить жесткость
панелей, применять выпуклые панели, жесткие переходы от боковых панелей
к полу и потолку, противовибрационные листы и др. Дребезжание элементов
кузова должно быть исключено в любом состоянии износа сменными или ре-
гулируемыми уплотнениями.
В пассажирском помещении троллейбуса шум образует акустическую сис-
тему, связанную с воздушным объемом помешения, размерами панелей, нали-
чием сидений и другого оборудования и, наконец, наличем люден. Уровень
шума зависит от степени поглощения шума оборудованием кузова и пассажи-
рами. Для его глушения в пассажирском помещении троллейбуса предпочти-
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 41
тельно иметь мягкую обивку панелей, применять перфорированный (до 20%
площади перфорации) картон или другой материал для обивки потолка, на-
стилать на пол резиновые коврики.
Плоская крыша в современных троллейбусах обладает лучшими звукопог-
лащающими свойствами по сравнению с глубоковогнутой, которая фокуси-
рует звуки. При этом необходимы дополнительные меры предупреждения воз-
никновения вибраций, которые должны быть или исключены или хотя бы све-
дены к минимуму.
2.3. Удобства входа, проезда и выхода
Удобство и безопасность входа и выхода определяется высотой, глубиной и
числом ступенек, состоянием поверхности и освещенностью ступенек, распо-
ложением поручней, шириной дверного проема в свету, конструкцией дверей
и наличием специальных предохранительных устройств.
Для троллейбуса характерны короткие поездки пассажиров и быстрота их
входа и выхода. Отсюда стремление к наибольшему снижению уровня пола. В
современных троллейбусах с низким полом желательная высота уровня пола
находится в пределах 320-520 мм, а у обычных 650-825 мм.
При высоте уровня пола 725 мм с учетом высоты тротуара 125 мм пассажир
преодолевает три ступеньки по высоте 200 мм , обеспечивая при этом удоб-
ство входа и выхода. По глубине ступенька должна быть не менее 280 мм , а
подножка - не менее 300 мм.
Ширина дверного проёма в свету для одинарной двери регламентируется в
пределах 535-850 мм; для двойной двери 1200-1300 мм. Следует иметь в виду,
что чрезмерная ширина одинарной двери создает предпосылки для прохода
пассажиров в два ряда в неудобных стесненных условиях. Однако ширина двери
более 760 мм удобна для прохода с ребенком.
Поручни у дверей следует располагать так, чтобы они были досягаемы для
входящего пассажира с тротуара и для пассажира, стоящего на выходной пло-
щадке в салоне троллейбуса. При сдвоенных дверях желательно иметь, кроме
боковых поручней, центральный поручень, разделяющий дверной проём по-
ровну. Центральный дверной поручень может быть выполнен не на полную
высоту с учетом удобства пользованием при входе и выходе на высоте при-
мерно 800-900 мм до уровня пола. Высота дверного проема должна быть не
менее 1900 мм.
Удобство прохода пассажиров в салоне определяется его планировкой. Для
троллейбусов при наличии стоящих пассажиров ширина прохода при четы-
рехрядной планировке диванов недостаточна. Отсюда стремление к трехряд-
ной планировке в зоне салона стоящих пассажиров. При ширине прохода 940-
1060 мм можно обойти стоящих пассажиров. Таким образом, удобство прохо-
42 Раздел 1. ОБЩАЯ ХА РАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
да достигается за счет сокращения числа сидений, т.е. некоторого снижения
комфортабельности троллейбуса. При широких проходах особое значение
приобретает расположение поручней для обеспечения безопасности пассажи-
ров. Удобство и безопасность для стоящих пассажиров определяется ровнос-
тью пола, его покрытием, высотой салона, расположением поручней.
Наличие порогов представляет потенциальную опасность споткнуться, ос-
тупиться или быть прижатым к порогу. Наличие пандусов с уклоном более 3%
создает неустойчивое положение при стоянии в проходе, особенно при пере-
мещении пассажира под уклоном пандуса. Местные подъёмы пола под сиде-
ньем также неудобны. Тем не менее, все эти элементы планировки практичес-
ки в той или иной мере имеются в толлейбусах, ухудшая в некоторой степени
их комфортабельность.
Покрытие пола имеет большое значение по гигиеническим соображениям и
условиям безопасности. Пол должен быть достаточно гладким, доступным для
мойки и удаления пыли, жестким, с хорошей тепло и шумоизоляцией (напри-
мер, пол из бокелитизированной фанеры или многослойного стеклопласти-
ка), вода с него должна стекать. Пол не должен быть скользким, “вытапты-
ваться”, на нем не должны образовываться местные впадины - это опасно для
пассажиров. Пол покрывают резиновым или пластиковым ковром толщиной
2-4 мм с неглубоким рисунком и повышенным коэффициентом трения.
Сиденья для троллейбусов выполняют жесткими, полумягкими и мягкими,
с низкой спинкой, без регулировки. Широкое распространение в современ-
ных троллейбусах получили полумягкие сиденья, обеспечивающие вполне
приемлемую комфортабельность при кратковременных поездках. Их особен-
ность - наличие тонкой (20-50 мм) подкладки из губчатой резины, поролона,
прорезиненного волоса и других материалов без дополнительного подпружи-
нивания. Обычно подкладки для спинки делают в 1.5-2 раза тоньше, чем для
подушки. Форма подушки и спинки должна создать наибольшую и удобную
опорную площадь для тела человека. Правильно сконструированное сиденье
обеспечивает нормальное положение пассажира, удобство при посадке и вста-
вании, имеет достаточный наклон назад, чтобы грудь человека была свобод-
но расправлена, а плечи несколько откинуты назад, обеспечивает опору для
средней части спины, имеет достаточно места и удобную опору для ног, воз-
можность легко их вытянуть и согнуть.
2.4. Воздушная среда и микроклимат
пассажирского помещения
Воздушная среда пассажирского помещения троллейбуса загрязняется пы-
лью, проникающей из окружающего воздуха и поднимающейся с пола, а так-
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
43
же отработанными газами, пылью, влагой и другими компонентами, прони-
кающими в салон через щели люков и стенки. Условно принимается, что один
пассажир выделяет 20-23 л/ч углекислоты, 110-120 ккал/ч тепла и 40-280г/ч
влаги . Количество пыли и вредных веществ, вносимых в троллейбус, не мо-
жет быть нормировано. В средних условиях запыленность воздуха крупных
городов составляет 0.8-1.6 мг/м3, индустриальных городов 1.6-3.0 мг/м3. Для
нетоксичной пыли, содержащей частицы кварца, допустимая концентрация
состовляет 2.0 мг/м3, для всех других видов пыли- 10 мг/м3.
Предельно допустимая концентрация вредных веществ в воздухе пассажирс-
кого помещения наземного (троллейбусного и автобусного) подвижного со-
става не должна превышать по существующим нормам: двуокиси углерода
0.4%, окиси углерода 0.02 мг/л, акролеина 0.007 мг/л, паров бензина (для теп-
лоэлектрических экипажей) 0.1 мг/л, паров серной кислоты 0.001 мг/л, пыли
0.0005 мг/л. Уменьшение степени загрязнсности воздушной среды в троллей-
бусе достигается изоляцией агрегатов шасси от пассажирского помещения,
приспособленностью пола и всего салона для удаления пыли и мойки, венти-
ляцией кузова, обеспечивающей внутри его несколько повышенное давление
воздуха по сравнению с атмосферным.
Микроклимат салона троллейбуса характеризуется температурой, влажнос-
тью воздуха и скоростью воздушных потоков. Характерными температурными
параметрами для салонов троллейбусов являются: температура воздуха в сало-
не; разность температур воздуха на уровне ног и головы пассажира, разность
температур окружающего воздуха и воздуха в салоне летом и зимой; изменение
температуры в салоне по времени. Тепловое ощущение определяется совокуп-
ным воздействием на человека температуры окружающего воздуха и стенок ку-
зова, влажностью воздуха и скоростью воздушных потоков. Тепло, поступаю-
щее через систему отопления, должно равномерно распределяться по всему объёму
пассажирского помещения: минимальная температура на уровне пола около две-
рей должна быть не менее 5 °C. Скорость движения воздуха в пассажирском по-
мещении троллейбуса рекомендуется в летнее время не более 0.5 м/с, в зимнее
время 0.2 м/с. Разность (перепад) температур наружного воздуха в пассажирс-
ком помещении различна для лета и зимы. Для летних условий рекомендуется
следующая зависимость температуры в пассажирском помещении Z от темпера-
туры наружного t , замеряемых на уровне 1м от пола :
.А ^“20
tK = 20 + —-----, °с.
R 2
Разность температур воздуха на высоте уровня пола и головы сидящего пас-
сажира в зимних условиях может составлять 4-9 °C. Для летних условий раз-
ность температур на высоте уровня пола и на высоте 1 м может быть рекомен-
дована в 3-5 иС.
44 Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
Источником тепла при нагревании панелей пассажирского помещения мо-
гут быть: наружный воздух, солнечная инсоляция, тяговый электродвигатель,
шины, тормоза, система отопления, сами пассажиры.
В летний период при температуре окружающего воздуха 25-30 °C тепловы-
деление одного человека можно условно принять равнымOW7=110 ккал/ч. Тем-
пература внутренних панелей может достигнуть 40 °C и более. Температура
внутри троллейбуса превышает температуру окружающего воздуха, так как
она складывается из температур основных источников :
Q ~Q + Q
т и л а '
где Q - количество тепла от солнечной инсоляции; - тепловыделение пас-
сажиров; Qd - тепловыделение тягового электродвигателя и агрегатов шасси.
Солнечная инсоляция значительно влияет на нагрев воздуха салона и нахо-
дится в прямой зависимости от суммарной площади остекления кузова. В за-
висимости от площади остекления, применение дстермального или окрашен-
ного стекла, совершенства теплоизоляции крыши и боковых панелей Qu со-
ставляет суммарно 30-50% От. Величина (^определяется числом пассажиров
и поэтому изменяется в широких пределах. При номинальном наполнении
троллейбуса (^составляет 20-45% Qm. Тепловыделение Qdтягового двигателя
и агрегатов шасси значительно и зависит от теплоизоляции пола.
Вентиляционные системы троллейбусов могут быть классифицированы следу-
ющим образом: естественная вентиляция - организованная и неорганизованная;
принудительная вентиляция; совмещённая - естественная и принудительная; кон-
диционирование воздуха. Естественно организованная вентиляция осуществля-
ется за счёт открывающихся окон и специальных вентиляционных люков, распо-
ложенных на крыше. В зависимости от аэродинамического давления на поверх-
ность движущегося троллейбуса часть оконных проёмов и люков являются на-
гнетательными, а другая часть - вытяжными. Количество подаваемого в салон
воздуха при естественной вентиляции зависит от скорости движения троллейбу-
са. Учитывая, что скорость движения троллейбуса на некоторых маршрутах ма-
лая и он часто останавливается, естественная вентиляция не может быть призна-
на полноценной. Наиболее эффективной в этих условиях является система вен-
тиляции совмещённого типа (естественная и принудительная).
Наилучшим решением вопроса салона троллейбуса было бы применение
кондиционирования воздуха с самостоятельным источником энергии привода
компрессора и вентиляторов. Система кондиционирования воздуха представ-
ляет собой установку автоматически поддерживающую в замкнутом объёме
заданную температуру и влажность воздуха. Система полного кондициони-
рования должна обеспечивать: охлаждение воздуха; удаление из воздуха вла-
ги, поддержание температуры и влажности воздуха в наиболее благоприят-
ных пределах; фильтрацию воздуха; добавление к воздуху, циркулирующему
в салоне, некоторой доли свежего воздуха.
Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 45
Суммарная теплопроизводительность системы отопления для троллейбусов
длиной 11-12 м составляет 20000-60000 ккал/ч. Для обогрева салона троллейбу-
са используется тепло, выделяемое пусковыми реостатами при пуске тяговых дви-
гателей. Рабочее место водителя должно обогреваться воздухом с регулируемой
температурой, причём должна создаваться тепловая завеса, поднимающаяся снизу
и окружающая водителя со всех сторон. Оптимальные для работоспособности
водителя условия создаются при температуре окружающего воздуха 18 ()С. При
температуре 25 °C, его работоспособность снижается на 40%. Понижение темпе-
ратуры затрудняет работу водителя, а местное резкое охлаждение (например, в
зоне ног или поясницы) может вызвать заболевание.
Интенсивность нагрева воздуха салона при заданных параметрах внешней
среды является функцией производительности системы отопления, теплоус-
тойчивости кузова и инфильтрации воздуха. Поэтому кроме увеличения про-
изводительности отопительной установки для повышения интенсивности на-
грева и температуры воздуха салона необходимо совершенствовать теплоизо-
ляцию кузова и улучшать его герметичность.
2.5 Обзорность, освещённость, свет
Обзорность с рабочего места водителя при среднем росте 173 см должна со-
ответствовать нормативным требованиям. Стёкла ветрового окна кабин дол-
жны быть полированными, трёхслойными, нс дающими ранящих осколков,
бесцветными. Они не должны ухудшать видимость или искажать предметы,
находящиеся в поле зрения водителя. Стёкла ветрового окна должны обогре-
ваться при наружной температуре - 30°С для устранения запотевания и обмер-
зания части стекла, очищаемой стеклоочистителем. Ветровое стекло должно
иметь не менее двух очищаемых стеклоочистителем участков.
Кабина должна быть снабжена зеркалами или оптической системой, обес-
печивающими видимость с места водителя следующих зон: левой стороны
троллейбуса и дороги сзади, правой стороны троллейбуса и дороги сзади;
правой и левой части салона троллейбуса; кромки тротуара у правого борта
троллейбуса. Кабина должна иметь : непрозрачный противосолнечный козы-
рёк или шторку с регулировкой их положения в пределах, достаточных для
защиты глаз водителя от прямого действия солнечных лучей.
Обзорность для пассажиров сидящих и стоящих в троллейбусе необходима
для лучшей видимости окружающего ландшафта без искажений, раздражаю-
щих помех и ориентации по маршруту движения для фиксации вестибулярно-
го аппарата и, следовательно, уменьшения утомляемости. Она определяется
площадью застекления, высотой и шириной оконных проемов, шириной окон-
ных стоек, расположением сидений, наличием помех от оконных рамок.
Освещённость салопа в дневное время определяется площадью остекления или
46 Раздел L ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
площадью остекления, отнесённой к площади пола салона. В тёмное время су-
ток она обеспечивается лампочками накаливания или люминесцентными лам-
пами, причём освещённость на высоте 1 м от пола салона должна быть не мень-
ше 75 лк. Должно быть предусмотрено освещение дверных проёмов, подножек и
прилегающих участков дороги во время посадки и высадки пассажиров.
В кабине водителя должен быть установлен отдельный плафон и обеспече-
но регулирование освещения контрольных приборов. Освещённость панели
приборов должна быть 3~5лк. Троллейбусы должны оборудоваться световы-
ми приборами (габаритными огнями, указателями поворотов, сигналами тор-
можения т.д.) в соответствии с “Правилами дорожного движения”.
Цветовые композиции воздействуют на эмоциональную среду человечес-
кой психики: они способны утомлять, раздражать, успокаивать, возбуждать и
угнетать. Поэтому созданию “цветового климата” в интерьере салона нужно
уделять соответствующее внимание. Каждый человек воспринимает цветовые
ассоциации индивидуально, однако существует деление цветов по признаку
наиболее часто возникающих ассоциаций отдельных спектральных цветов. При
этом психологическое воздействие цветов зависит от их положения в простран-
стве. Проектирование и цветовое оформление интерьера должно рассматри-
ваться как творчество художника, а его результат- как художественное произ-
ведение, где могут быть найдены и применены неожиданные решения.
2.6. Безопасность
Безопасность троллейбуса рассматривается как безопасность активная (или
безопасность движения) и безопасность пассивная (или безопасность пассажир-
ского помещения). Активная безопасность обеспечивается совокупностью кон-
структивных, технологических и организационных мероприятий и включает в
себя комплекс вопросов, связанных с движением троллейбуса в транспортном
потоке, а именно: безопасность водителя и пассажиров троллейбуса; безопас-
ность водителя и пассажиров других транспортных средств, движущихся в транс-
портном потоке; безопасность пешеходов. Она связана с эффективностью тор-
можения, устойчивостью при движении как по прямой линии, так и на поворо-
тах, хорошей управляемостью, эффективностью освещения дороги фарами и
отсутствием ослепляемости, надёжностью, предупредительной звуковой и све-
товой сигнализацией, хорошей обзорностью с рабочего места водителя. Вопро-
сы активной безопасности троллейбусов решаются а одном ключе с таковыми
для других транспортных средств (легковых и грузовых автомобилей, автобу-
сов) и подчинены единым нормативам и законодательным требованиям.
Пассивная безопасность включает в себя комплекс вопросов безопасности
пассажиров и обслуживающего персонала на стоянке троллейбуса, при дви-
Раздел !. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 47
жении троллейбуса и в аварийной ситуации (столкновение , опрокидывание,
занос, пожар). Пассивная безопасность на стоянке связана со входом пасса-
жиров в троллейбус и выходом из него. Безопасность при входе и выходе оп-
ределяется высотой, числом и конструкцией ступенек, наличием и расположе-
нием поручней и шириной двери (см. п. 2. 3.) и другими факторами.
Несчастные случаи могут происходить при складывающихся дверях, а так-
же при плохом устройстве посадочной площадки (теснота, плохое освещение
и т.д.) Для безопасности пассажиров водитель через систему зеркал или не-
посредственно должен иметь возможность наблюдать за входом и выходом. В
конструкциях привода управления дверьми предусматриваются предохрани-
тельные устройства, не допускающие трогание с места при незакрытой двери
или при защемлении створками двери тела пассажира. Наибольшее число не-
счастных случаев относится ко времени пиковых нагрузок, при замедлениях,
поворотах, переездов через неровности. Во всех этих ситуациях возникают ус-
корения - продольные, поперечные, угловые и вертикальные. Безопасные зна-
чения ускорений различны по отношению к пассажирам сидящим свободно,
стоящим и держащимся за поручни; стоящим свободно (см. табл.5).
Пассивная безопасность в аварийной ситуации зависит от конструкции трол-
лейбуса, особенно его кузова, оборудования и уровня травмобезопасности
отделки интерьера. По влиянию на человека все аварийные ситуации могут
рассматриваться как возникающие в случаях лобовых столкновений, ударов в
борт или сзади, опрокидывания, заносов, пожара.
Все троллейбусы должны иметь прочные конструктивные элементы, распо-
ложенные на высоте бамперов легковых и грузовых автомобилей. В салоне не
должно быть элементов, имеющих острые кромки или закругления малого
радиуса. Стёкла должны оставаться на месте даже после того, как они подвер-
гнутся сильному удару головой или плечом пассажира. Кузов троллейбуса
должен быть выполнен в виде жёсткой пространственной системы, обладаю-
Таблица 5.
Предельные значения ускорений по условиям безопасности движения .wk2
Положение пассажиров Вертикальное При разгоне При торможении Угловые продол, попер.
Стоя Свободно Держась за поручни 3 10-30 0,5 1 0,8 1,2-2,0 —
Сидя Свободно Держась за поручни 10-30 10-30 1,2 1,8* 4-6 свыше 6 5,7 9,6
* при наличии подлокотника
48 Раздел L ОБЩАЯ ХА РАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
щей высоким сопротивлением изгибу, скручиванию и сложным системам уда-
ра. Особое внимание должно быть уделено конструкции шпангоутов и проч-
ности крыши. При любом опрокидывании каркас кузова должен сохранять
свои формы при минимальных значениях деформации.
Угроза пожара или сам пожар могут возникнуть на стоянке, при движении
и при авариях. Конструктивные особенности тролейбуса должны учитывать
эту возможность и предусматривать рациональное размещени и удобство
пользования огнетушителями, возможность быстрой эвакуации пассажиров.
К противопожарным конструктивным мероприятиям относят применение
трудновоспламеняющихся материалов, надлежащую изоляцию тягового дви-
гателя от салона. Троллейбус в обязательном порядке должен быть оборудо-
ван хотя бы одним огнетушителем. Быстрая эвакуация пассажиров при по-
жарной опасности гарантируется шириной прохода и дверей, числом и высо-
той ступенек, наличием нескольких дверей, возможностью эвакуации через
окна, что зависит от быстроты открытия окон или разбивания стёкол. Конст-
рукция кузова троллейбуса может включать до пяти аварийных выходов для
эвакуации пассажиров в случае необходимости.
Раздел!, ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
49
Глава 3. Основы художественного
конструирования троллейбуса
3.1. Цель, задачи и методы художественного
конструирования
Художественное конструирование - творческая проектная деятельность, на-
правленная на совершенствование окружающей человека предметной среды,
создаваемой средствами промышленного производства. Это достигается пу-
тем приведения в единую систему функциональных и композиционных связей
предметных комплексов и отдельных изделий, их эстетических и эксплуатаци-
онных характеристик. Цель художественного конструирования состоит в оп-
ределении формальных качеств проектируемого объекта, в определении фор-
мы через структурные и функциональные связи в системе (человек-машина -
окружающая среда), в которую объект (машина) входит как элемент. Для ре-
шения вопросов художественного конструирования привлекаются специали-
сты, освоившие искусствоведение, эргономику, социологию и другие науки. К
числу таких специалистов относятся художники-конструкторы.
В условиях жесткой конкуренции на первый план при создании новой про-
мышленной продукции наряду с другими параметрами качества выходят техни-
ко-эстетические свойства, относящиеся к внешнему виду, форме изделия. При
равных технико-экономических показателях потребитель отдает предпочтение
машине с высокими технике- эстетическими свойствами. Если первые проявля-
ются с течением времени в процессе эксплуатации троллейбуса, то вторые выс-
тупают своеобразной визитной карточкой. В связи с этим художественное кон-
струирование стало неотъемлемой составной частью процесса создания совре-
менных троллейбусов. Главной задачей их художественного конструирования
является наиболее лолный учет требований потребителя, повышение эффектив-
ности производства и использования троллейбусов в народном хозяйстве. Худо-
жественное конструирование широко использует специфические методы разных
наук, особенно тех, которые относятся непосредственно к человеку: социологии,
эргономики, инженерной психологии, семиотики и другие науки. Процесс худо-
жественного конструирования - творческий, а потому характеризуется субъек-
тивно в смысле подхода, метода работы над проектом объекта. Каждый худож-
ник - конструктор находит свой метод.
50 Раздел 1. ОБЩАЯ ХА РА КТЕРИСТИКА ТРОЛЛЕЙБУСОВ
Главными и наиболее часто используемыми на практике являются тради-
ционные инженерные методы, к которым относятся: разработка схем, черте-
жей, создание эскизов, рисунков, моделей и макетов-натуральных образцов.
Нового уровня в художественном конструировании достигли методы анало-
гий и модификаций. Первый из них предполагает разработку образа и ком-
позиции объекта в соответствии с образом и композицией однотипного по
назначению и функционированию образца, второй - дальнейшее совершен-
ствование идеи найденного образца базового объекта в его моделях разного
назначения за счет изменений в деталях формы. Наряду с этим, методология
художественного конструирования может включать художественно-конструк-
торский анализ (исследование исходной ситуации и построение объекта про-
ектирования, функционально-эргономический анализ), а также художествен-
но-конструкторский синтез в процессе которого ведется функционально- эр-
гономический поиск, работа над композицией изделия.
Для художественного конструирования характерно моделирование объекта
на всех этапах его разработки в соответствующем масштабе или в натуральную
величину, позволяющие проверить и выбрать оптимальные варианты компози-
ции, цветографическое, эргономическое и другие решения. Модель служит не
иллюстрацией к проекту, а инструментом проектирования и, постоянно моди-
фицируясь в ходе работы, становится эталоном образца троллейбуса.
Художественное конструирование - это творческий процесс, который заклю-
чается в том, что во всех собственных и заимствованных методах решающее зна-
чение всегда остается за интуицией, догадкой, методами творческого мышле-
ния, в частности эвристическим, так как конструирование состоит, как правило,
в отыскании компромиссных решений. К средствам организации, определения
формальных качеств любого объекта промышленного производства служат соб-
ственные законы композиции и формообразования. Они разрабатываются тео-
рией художественного конструирования -технической эстетикой.
3.2. Техническая эстетика
Техническая эстетика - научная дисциплина, изучающая закономерности
развития художественного конструирования, его общественную природу,
разрабатывающая основополагающие принципы и общие методы, на основе
которых формируется искусственная предметная среда с учетом человеческих
факторов средствами промышленного производства. Основные разделы тех-
нической эстетики - общая теория дизайна и теория художественного конст-
руирования. Главной задачей, решаемой технической эстетикой, является ус-
тановление типовых обобщенных требований к продукции со стороны потре-
бителя. Основа для синтеза типовых обобщенных требований технической
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 51
эстетики - общественные потребности в свойствах, которыми должна быть
наделена продукция. Оценка и прогнозирование потребительских свойств
позволили сформулировать шесть групп типовых обобщенных требований,
которые предъявляет техническая эстетика к изделиям промышленности- эс-
тетические, социально-экономические, унитарно-функциональные, эргономи-
ческие, технологические и общетехнические.
Теория художественного конструирования устанавливает место художествен-
ного конструирования в общей структуре процесса проектирования, его ти-
пологические особенности, исследует закономерности творческого мышления
художника-конструктора и определяет средства и методы профессиональной
деятельности. Существенной ее частью является теория формообразования и
композиции промышленных изделий. Законы формообразования раскрыва-
ют связи формы изделия с его конструкцией, материалом, технологией изго-
товления, выявляют исторические изменения формы и стиля изделия. Теория
композиции исследует закономерности и профессиональные методы создания
целостной, гармонической формы. Основные категории композиции: объем-
но-пространственная структура, тектоника, пластика (пластичность), средства
гармонизации (пропорция, ритм, контраст, нюанс).
Под эстетическими требованиями к изделию понимается потребность чело-
века в выражении потребительских свойств изделия через чувственно воспри-
нимаемые признаки формы. Они базируются как на чисто эстетических свой-
ствах, исходящих из разработанных технической эстетикой закономерностей
композиции и формообразования, так и на всех остальных потребительских,
основанных на внутренней структурно-функциональной сущности изделия как
звена системы “человек - машина”.
Эстетичность - обобщенное требование к изделию. В его структуру входят
групповые и единичные эстетические требования, которые конкретизируются
для каждого вида изделия в зависимости от его типа и назначения. Примени-
тельно к троллейбусам, разработанным в настоящее время, групповыми тре-
бованиями являются информативность формы, композиционное совершенство
и гармоничность.
Информативность формы обеспечивается наличием в ней признаков, кото-
рые позволяют потребителю без труда опознавать в изделии его назначение,
тип, марку, возможные варианты и порядок функционирования, завод -изго-
товитель. Все это вместе взятое есть опознавательность изделия. Оно реализу-
ется в изделии путем выделения художественными средствами главных эле-
ментов в общем композиционном строе формы, а также за счет наличия зна-
ковых элементов - эмблем, символов общепринятых кодов, надписей.
Основным объектом художественно-конструкторского обеспечения инфор-
мативности формы является кузов вагонного типа, составленный из оптималь-
ных функциональных частей (кабины и салона), обеспечивающих единство
52 Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
композиционных признаков и эксплуатационных параметров. Основным фак-
тором, определяющим композиционное построение троллейбуса, является ди-
намичность, выражающая суть транспортного средства. В художественно-кон-
структорском решении троллейбуса должна ставиться задача нахождения
обобщенного функционального решения, обеспечивающего единство компо-
зиционных признаков зоны кабины и салона. Динамический фактор компози-
ционного построения формы троллейбуса в целом должен подчеркиваться
линиями, начинающимися с активного изгиба и угла на кабине водителя, за-
дающими движение и проходящими через всю боковину мощными линиями
широких стекол, не имеющих значительных разъемов. Поддерживающими
линиями могут служить продольные штамповки, защищающие от дождя про-
фили, вентиляционные щели, проходящие по крыше.
Пластика построения передней части троллейбуса и боковины также при-
званы подчеркнуть динамический характер изделия. Соразмерность пропор-
ций основных формообразующих линий, найденных при построении передней
части (зоны кабины) и компоновки пассажирского салона, должна быть под-
черкнута наружными разъемами и подштамповками. Технологически сопря-
жения деталей и отдельных блоков, необхожимыс для пропорционирования,
выделяются специально укрупненно.
Опознаваемость троллейбусов модели 101 М (рис.6), выпускаемых в Рес-
публике Беларусь ПО “Белкоммунмаш”, обеспечивается характерной только
для них передней частью, расположением на крыше электрического оборудо-
вания и товарным знаком (рис.1.9). Признаком троллейбуса модели 201 (рис.7)
служит отсутствие на крыше электрического оборудования, использование
двухстворчатых пассажирских дверей поворотно-сдвинутого типа, улучшен-
ный дизайн. Для шарнирно-сочлененного троллейбуса характерным призна-
ком является наличие полуприцепа.
Естественным выражением информативности троллейбусов является инфор-
мативность их интерьеров. Примером реализации этого требования может
служить интерьер кабины троллейбуса (рис. 1.10) и его салона (рис. 1.11). Ка-
бина водителя должна представлять собой автономно расположенный от пас-
сажирского салона объем для управления. Разделение кабины и салона обес-
печивается специальной перегородкой с остеклением для визуальной ориен-
тации и кратковременной связи водителя и пассажиров. Кабина водителя дол-
жна иметь индивидуальную дверь входа и выхода.
Вопросам безопасности и надежности при художественно-конструкторской
разработке должны быть подчинены все этапы и все ее стороны: идеи и кон-
цепции, компоновки и эргономическое обеспечение, формообразование и пла-
стика, цветофактурное решение и подбор отделочных материалов. Особое зна-
чение необходимо придавать эффективности и безопасности труда водителя.
С этой целью для улучшения обзорности, поднимается уровень пола в кабине
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
53
относительно уровня пола в салоне, увеличивается по высоте, с заходом на
боковины, ветровое стекло, убирается центральная перемычка и применяется
цельное ветровое стекло .
Также исходя из требований эффективности и безопасности, особое внима-
ние при проектировании следует уделять проектированию рабочего места во-
дителя, Как правило, рабочее место водителя троллейбуса состоит из много-
функционального пульта управления сложной структурной формы, сиденья с
антропометрически оправданной пластикой и основания рабочего места, ла-
конично объединяющего пульт и сиденье в единую модульную систему с оп-
тимальными условиями посадки, досягаемости и обзорности. Сиденье води-
теля должно иметь регулировку угла наклона спинки, общую регулировку
“вверх-вниз” и “вперед-назад”, Наличие и удобство регулирования сиденья -
важный эргономический показатель посадки водителя транспортных средств.
Указанные регулировки позволяют “настроить” рабочее место водителя на
оптимальные рабочие характеристики для конкретного водителя и создать ему
необходимый и достаточный комфорт.
Наряду с опознавательностыо форм различных составляющих рабочего ме-
ста водителя троллейбуса интерьер кабины.должен содержать необходимое
количество информации в виде элементов графики, понятных потребителю
(рис. 1.12). Наличие большого числа органов управления и средств отображе-
1Ф1
Рис 1.10. Интерьер кабины
водителя.
Рис. 1.9. Товарный знак троллейбусов, выпускаемых
производственным объединением “Белкоммунмащ ”
(г. Минск).
Рис 1.11. Интерьер салона.
54
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
1 © 3 4 i 6QQ.B. | 27 В
6 7 8 9 10
Рис. 1.12. Пример кодовой информации; 1- остановочный тормоз включен; 2- указатель
поворота включен; 3- повышенный разряд аккумуляторной батареи; 4- преобразователь
включен; 5- насос гидроусилителя руля включен; 6- высокое напряжение 550 включено;
7- аварийное включение сопротивления изоляции; 8- напряжение контактной сети не
норма; 9- компрессор включен; 10- освещение кабины водителя.
ния информации предопределяет многопанельный пульт управления. Панели
пульта, являющиеся его рабочей поверхностью, ориентированы в простран-
стве в зависимости от положения водителя. В зависимости от функционально-
го назначения, последовательности и времени пользования, значимости, орга-
ны управления и средства отображения информации должны быть логически
сгруппированы в определенную пространственную структуру, что способствует
быстрому распознаванию их. Органы управления постоянного действия, а
также часто используемые, должны быть размещены в пределах оптимальных
границ, а органы управления периодического и эпизодического действия - в
пределах минимальных и максимальных границ пространства кабины.
В художественно-конструкторской разработке интерьера салона необходи-
мо ставить целью максимально повысить его потребительские свойства и, в
частности, комфортные характеристики при заданной вместимости пассажи-
ров. Для этого важно:
- найти количественные соотношения сидячих и стоячих мест, предусмот-
рев накопительные площадки и места для инвалидов, пассажиров с детьми;
- выполнишь цветовые решения интерьера пассажирского салона в спо-
койной для глаз цветовой гамме светлых тонов с более темным цветовым ак-
центом пассажирских сидений за счет обивочных материалов;
- разработать индивидуальные пассажирские сиденья с учетом эргономи-
ческих требований, а также систему поручней, ручек, опорных плоскостей для
стоящих пассажиров;
- обеспечить надлежащий уровень освещенности за счет двухрядных люми-
несцентных ламп по всей длине салона;
- обеспечить принцип принудительной вентиляции;
Композиционное совершенство троллейбуса не может быть достигнуто без
выполнения требований соблюдения единства характера элементов формы, увяз-
ки различных по структуре и функции элементов графики и цветового решения,
обеспечения законченности форм. На рис. 1.13-1.15 изображены троллейбусы
фирмы “KIPE ELEKTRIK”, которые могут служить иллюстрацией выполнения
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
55
Рис. 1. 13. Двухосный троллейбус.
Рис. 1. 14. Трехосный троллейбус.
этих требований. Несмотря на различную компоновку, они, однако, гармонич-
но входят в комплекс машин, составляющих предметную часть производствен-
ной среды. Необходимость увязки элементов графики и цветового решения про-
диктована тем, что элементы графики, носители информации должны быть хо-
рошо заметны. Их выделение на общем фоне вносит в форму некоторое контра-
стное начало, придает ей большую выразительность, делает се эстетически со-
вершеннее. Это относится к надписям на троллейбусах. Задача художника-кон-
структора - найти оптимальное стилевое решение разрабатываемого троллей-
буса. Он разрабатывает форму в стиле, присущем ему, но при этом обеспечивая
связь с окружающей средой, временем и стилем эпохи.
Социально-экономические требования выражают взаимоотношения потре-
бителя с отдельными изделиями промышленности и искусственной предмет-
56 Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
ной средой в целом и исходят из общественных потребностей и возможностей
общества. К ним относятся: соответствие изделия общественно необходимым
Рис. 1. 15. Шарнирно-сочлененный троллейбус
потребностям, соответствие самого изделия моде, требованиям унификации и
стандартизации, экономичности изготовления и его эксплуатации. Заверша-
ющим требованием является соответствие формы изделия высшим достиже-
ниям отечественного и зарубежного уровня.
К уии гарио фупкцлоиальиым требованиям к изделию относятся способность
выполнять главную (основную) функцию и выполнять дополнительные функ-
ции (универсальность), наличие условий для выполнения функций операто-
ром. Троллейбус, главной функцией которого является перевозка людей в го-
родских условиях, наряду с этим может быть использован, например, для пе-
ревозки грузов, или в качестве специальной машины (тягач, передвижная ла-
боратория и т.д.). Создание условий для успешного выполнения функций во-
дителем достигается прежде всего условиями труда, в значительной степени
это зависит от решения вопросов рациональной организации рабочего места
водителя, комфортабельности кабины, проектируемых усилий на органах уп-
равления и других факторов.
В основе технологических требований лежат свойства, которые связаны с
изготовлением изделия, отделкой его формы. Среди них различают следую-
щие, относящиеся к единым: соответствие формы технологическим возмож-
ностям ее изготовления (технологичность), материалоемкость и трудоемкость
ее изготовления, использование технологических приемов для декоративной
отделки поверхностей формы, соответствие покрытий поверхностей и спосо-
бов их отделки материалу и т.п.
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
57
3.3. Закономерности формообразования и
композиции
Под формой понимают внешнее очертание, наружный вид троллейбуса (из-
делия). В отличие от элементов конструкции, к которым относятся как от-
дельные детали, так и сборочные единицы, агрегаты троллейбуса элементами
формы являются линии, точки, плоские и криволинейные поверхности, а так
же их сочетание в различных комбинациях. Основные свойства формы -- про-
странственность, конечность, прерывность, бесконечность, глубина и т.п. Сре-
ди форм различают природные (форма листа, дерева) и созданные человеком
(все изделия, творения рук человеческих). Они делятся на расчетные (форма
винта судна, крыла самолета) и относительно произвольнные, порожденные
фантазией, как структура в рамках функциональности изделия. Расчетные и
относительно произвольные формы в свою очередь подразделяются на посто-
янные и переменные. Любая форма промышленного изделия определяется его
функцией и является результатом конструктивного решения. Но с другой сто-
роны она может оставаться сугубо утилитарной. Форма представляет собой
структуру взаимосвязанных в пространстве элементов. Она активно взаимо-
действует с самим пространством.
Объемно- пространственная структура - это уже категория композиции. Под
композицией понимают строение, частей целого объемно-пространственной
структуры объекта. Она является фактором, связывающим конструкцию (ком-
поновку) с эстетической формой, т.е. посредством ее закономерностей конст-
рукции изделия можно придать эстетическую форму. К важнейшим формам
композиции относятся целостность, выразительность, статичность, динамич-
ность и т.п. Различают объемные, плоские и линейные композиции. Если фор-
ма в пространстве имеет приблизительно одинаковые размеры в направлении
координатных осей, то композиция относится к объемной. Значительное от-
личие размера в направлении одной из координатных осей по отношению к
другим приводит к плоской или линейной зависимости. Плоскую композицию
часто называют фронтальной. Объемная композиция может рассматриваться
условно состоящей из фронтальных. Так в троллейбусе их виды спереди, сза-
ди, сбоку представляет собой набор взаимосвязанных фронтальных компози-
ций. Виды спереди и сзади построены в основном по закону симметрии, а вид
сбоку - по закону асимметрии (рис. 1.16). При этом основой для разработки
концепции троллейбуса является асимметрия его относительно оси движения,
четкое зонирование интерьера троллейбуса с выделением стороны, обращен-
ной к тротуару, композиционным выделением дверей и информации для пас-
сажиров, рабочего места водителя. Благодаря симметричному разнесению
58
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
Рис. 1. 16. Примеры симметрии и асимметрии тролейбуса:
а- вид спереди; б-вид сзади; в- вид сбоку.
дверей достигается возможность модульности элементов и удобство разведе-
ния пассажиропотоков.
В основе композиции лежит замысел, идея, мотив, приводящие к упорядоче-
нию и соподчиненности элементов формы. Факторами, влияющими на компози-
ционное решение экстерьера троллейбуса, являются хорошая обтекаемость ку-.
зова и связь решения внутреннего пространства и внешнего вида. В настоящее
время в практике художественного конструирования троллейбусов широкое рас-
пространение получила тенденция обобщения формы, ее лаконичности, стрем-
ление к цельности проработки, а также использование цвета, как активного сред-
ства организации объема и повышения информативности. В классе транспорт-
ных средств общественного пользования эта тенденция выражается в увеличе-
нии остекления передней части и боковых дверей, что с одной стороны улучшает
обзорность для водителя, а с другой --зрительно “разбивая” однообразный ритм
оконных проемов боковой поверхности, улучшает освещение салона и в боль-
шой степени обеспечивает визуальную ориентацию пассажиров при входе и вы-
ходе. Впечатление гармоничного единства основных формообразующих элемен-
тов троллейбуса создается благодаря межузловым и зональным связям, пласти-
чески объединяющим элементы конструкции.
В развитии форм троллейбусов просматривается тенденция улучшения ус-
ловий работы водителя. На троллейбусах модели 201 кабина водителя имеет
отдельный выход наружу, а также окна в перегородке для обзора салона. Ин-
терьер кабины выполнен на значительно более высоком, чем у троллейбуса
модели 101М, конструкторско-дизайнерском и эргономическом уровне. Для
улучшения обзорных характеристик используется многослойное безосколоч-
ное стекло панорамного типа, обеспечивающее хороший обзор, безопасность
и возможность работы в аварийных ситуациях. Имеется система слежения за
посадкой и высадкой, и за обстановкой в салоне троллейбуса.
В художественно-конструкторском решении прослеживается эргономичес-
кий подход, особенно в композиционной организации рабочего места. Орга-
ны управления монтируются в отдельные пульты и размещаются на передней,
задней и боковых зонах относительно сиденья. В цветовом решении облицов-
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 59
ки панелей и пульта управления, расположенных перед водителем, преобла-
дает черный цвет, что снижает зрительное утомление. Все выключатели и дру-
гие органы управления находятся в пределах досягаемости рук водителя.
3.4. Зрительное восприятие предмета и
средства композиции
Фиксируемый глазом предмет, а точнее его форма отражается в мозгу чело-
века в виде идеального образа. Его опознание осуществляется на основе того
опыта, который приобретен человеком. С помощью ассоциаций, установле-
ния связей между имеющимися представлениями возникает окончательное
представление о предмете. Ассоциации опознаются в форме статизма и дина-
мизма. Под статизмом понимают подчеркнутое выражение состояния покоя,
незыблемости, устойчивости формы во всем ее строе. Статические характери-
стики, как правило, в своей основе симметричны. Под динамизмом понимают
подчеркнутое в форме выражение однонаправленности, вторжение в простран-
ство. Для динамических композиций характерна явная асимметрия, некото-
рая напряженность в геометрическом строе формы.
Чтобы изделие не смущало потребителя, оно должно быть для него зрительно
смасштабировано. Под масштабом в технической эстетике понимают сопостав-
ление характеристик предмета с каким-либо фиксированным размером челове-
ка. Масштабность следует отнести к числу факторов, гуманизирующих проек-
тирование изделий, в том числе троллейбуса. Масштабность есть отражение под-
хода к проектированию предмета, когда его размеры проверяются по человеку.
Носителями масштаба являются масштабные характеристики к числу которых у
троллейбуса относятся салон, кабина, сиденья, двери, окна, фары.
Одним из важнейших свойств композиции является целостность. Недопусти-
мо чрезмерное дробление формы, так как множественное членение затрудняет
группировку расчлененных элементов в целое из-за рассеивания внимания чело-
века. Среди элементов формы некоторые являются главными и должны зани-
мать композиционно центральное место. В опознании предмета это имеет чрез-
вычайно важное место. Так в троллейбусе главные элементы конструкции - ку-
зов, характеризующий провозную способность и ходовой аппарат, обеспечива-
ющий тягово-скоростные свойства. Они символизируют назначение машины.
При зрительном восприятии формы предмета, его композиции, человек по-
стоянно сталкивается с явлением ракурса. Ракурс - это перспективное сокра-
щение отдельных размеров предмета при обозрении его с различных сторон
под острым углом зрения. Ракурс обеспечивает видение третьего измерения
пространства, его глубину. Композиция, разработанная без учета возможно-
го перспективного сокращения, может оказаться безнадежно искаженной при
60 Раздел I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
рассматривании предмета с какой-либо точки. Поэтому необходимо прори-
совывать предмет в разных положениях, создавать его макет и просматривать
последний с разных сторон, в разных ракурсах.
К средствам композиции относятся: тектоника, метрический повтор, ритм,
акцент, нюанс, пропорции, симметрия и асимметрия, цвет и свет, контраст. Под
тектоникой понимают зрительное выражение в форме конструктивной основы,
несущей способности, устойчивости предмета и его отдельных частей. Под кон-
структивной основой понимают работу несущей части конструкции, т.е. способ-
ность конструкции сопротивляться нагрузкам, характер распределения главных
усилий, распределение по мостам троллейбуса, организацию конструкционных
материалов и т.п. Форма должна четко отражать все эти особенности конструк-
тивной основы. Художественно-образная структура предмета, образованная из
композиционно связанных элементов конструкции, представляет тектоническую
систему. Законом тектонической системы является стилевое единство.
Метрический повтор (метр) в композиции - повторение какого-либо элемен-
та. Под ритмом в технической эстетике понимают повторность тех или иных сход-
ных составляющих формы и композиции через определенные соизмеримые про-
межутки. Метр представляет собой предельно упрощенный ритм. Ритм и метр
отражают количественное изменение формы, которая относится к любым ее эле-
ментам: отдельным линиям, целым образованиям и цвету, являющемуся само-
стоятельным средством формообразования. Ритмический и метрический строй
образуется не только с помощью линий, но и с помощью масс, цвета.
Метр может быть простым, если состоит из однородных элементов и слож-
'ным. Метр, составленный из окон и дверей в форме троллейбуса, относится
уже к сложным. Он может быть едва заметным, невыразительным или очень
активным, когда отдельные его составляющие выделяются яркими пятнами в
контуре формы, как показано на рис. 1.17. Метр выглядит законченным, если
его крайние промежутки больше остальных.
Под акцентом в технической эстетике понимают выделение художественными
средствами какого-либо элемента формы. Акцент увеличивает выразительность
формы. Нередко он используется для выделения главного элемента в ряду одно-
типных. Для акцентирования используют самые разные закономерности и сред-
ства формообразования, а также цвет и его контрастные сочетания.
Под нюансом в технической эстетике понимают закономерность тонкой про-
работки формы, придающей ей особое свойство пластичности. Закономерность
нюанса широко используется как средство формообразования для выражения
тектоничности акцентирования элементов формы предмета, образования метра
и ритма. Она приобретает особое значение в формообразовании при зримом
оптическом искажении формы, которое исправляется главным образом ню-
ансировкой. Нюансировка формы тесно связана с нюансной проработкой кон-
струкции.
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
61
Пропорции в техничес-
кой эстетике характеризу-
ют соразмерность элемен-
тов, систему отношений
частей формы предмета
между собой и с целым,
ние I. 17. Пример активности ритма и
метрического ряда в форме.
придающую ему гармони-
ческую целостность и худо-
жественную завершен-
ность. Любая форма почти
всегда зримо расчленяется
на части, которые обычно
являются подобными. Это
придаст форме определен-
ную стройность. После
уточнения конструкции с
помощью расчетов, опре-
деления габаритных разме-
ров сборочных единиц де-
талей дизайнер может пред-
ставить себе форму и уточ-
нить размерные соотноше-
ния главных элементов объемно-пространственной структуры. Пропорциональ-
ный строй, соразмерность частей и целого служат важной проверкой техничес-
кого совершенства конструкции. В художественном конструировании часто
пользуются так называемыми модульными пропорциями, или пропорциями крат-
ных отношений, которые возможны при условии, если в основе пропорциональ-
ного строя лежит условная единица, называемая модулем. В качестве модуля в
пропорции тела человека принята линейная величина, равная 5 см, Пропорции
тела человека называют золотым сечением. Гармоничность, придаваемая отно-
шением золотого сечения форме, обуславливает применение его в технике. Сре-
ди других пропорций, делающих форму красивой, находятся: арифметическая,
геометрическая и иррациональная, В троллейбусах важнее всего соотношение
высоты и длины, и продольной базы. Однако эти параметры являются расчет-
ными и их нельзя произвольно изменять, исходя из желания получить красивую
форму. Здесь'необходим рациональный подход.
Под симметрией понимают такой порядок в построении формы, при кото-
рой соблюдается соразмерность, пропорциональность в расположении час-
тей и целого относительно осевой линии, центра. Для симметричных компо-
зиций характерно зримое членение формы воображаемой осевой линией на
две абсолютно равные части или сосредоточение равных частей вокруг вооб-
62 Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
ражаемого центра. Симметрия придает предметам статичность, неподвижность
относительно опорной поверхности. Различают осевую, зеркальную, централь-
ную симметрии, Все они используются в троллсйбусостроении. По закону сим-
метрии организуют виды троллейбусов спереди, сзади и сверху. В технике не
всегда выдерживается строгая симметрия. Ес нарушение обуславливается фун-
кциональной необходимостью. Такие изделия как троллейбус сочетают в сво-
ем композиционном строе закономерности симметрии и асимметрии. Под асим-
метрией в технической эстетике понимают такой порядок в форме, при кото-
ром строго соблюдается уравновешенность масс относительно главного эле-
мента композиции, У троллейбусов такими элементами являются виды сбоку.
Уравновешивание масс при асимметрии может осуществляться по принципу
рычага, если центр (главный элемент) композиции по сравнению с другими
элементами мал и соизмерим с материальной точкой. Нарушение закономер-
ности равновесия масс при асимметрии приводит к нарушению тектоники и
ритма.
Цвет выражает и проявляет в форме многие закономерности, на основе ко-
торых создана композиция предмета. Различают чистые цвета - это цвета оп-
тического спектра, или хроматические и составные (сложные) - белый, серый,
черный, называемые ахроматическими. Цвет характеризуется тоном, насыщен-
ностью, светлотой. Тон представляет собой свойство, которым один цвет от-
личается от другого, насыщенность - свойство, указывающее на силу или ин-
тенсивность цвета; светлота - это степень насыщенности цвета относительно
бело-черной шкалы. Система гармонического сочетания цветов получила на-
звание колорита. Основой колористического решения композиции является
органическая взаимосвязь цвета и формы, зависящая от зрительного восприя-
тия и психофизиологических последствий от восприятия.
Цвет, функция и форма троллейбуса должны быть органически увязаны
между собой. Цвет необходимо рассматривать с учетом условий работы и кон-
кретной формы. Чем крупнее машина, тем светлее должна быть ее окраска и
наоборот. Но это требует нюансной проработки формы при исправлении оп-
тических иллюзий. При окраске в два цвета необходимо учитывать пропор-
циональный строй предмета, тектоничность, свойство статичности и динамич-
ности. Недопустимо расчленять подвижный предмет цветами поперек направ-
ления его перемещения. Окраска в разные цвета должна соответствовать чле-
нению формы. Отраженный цвет не участвует в образовании формы и не яв-
ляется средством выражения закономерностей формообразования, но отра-
жаясь от поверхностей формы, выявляет структуру композиции ее пластич-
ность. Обладая этим качеством, отраженный свет накладывает определенные
требования на формообразование.
Под контрастом в технической эстетике понимают противопоставление,
борьбу двух начал в композиции. Все отношения в форме, основанные на раз-
Раздел I. ОБЩАЯ ХА РА КТЕРИСТИКА ТРОЛЛЕЙБУСОВ 63
личии, являются закономерностями контраста. Умело применяемый контраст
придает предмету нарядность, яркость, делает его заметным. Перенасыщен-
ная контрастными отношениями форма становится излишне пестрой, разру-
шается красота даже удачно разработанной структуры. Контраст активизи-
рует любую форму, но достичь гармонии можно, подчинив контраст компо-
зиции, сопроводив необходимыми нюансными отношениями, снижающими
его резкость. Используя закономерность контраста в качестве средства фор-
мообразования, нередко необходимо отыскать особого рода мостики, связы-
вающие противоборствующие начала. Такими мостиками могут служить эле-
менты с характерными признаками одного начала, расположенные на фоне
другого или частично внедряющиеся в него. Подобные мостики обычно смяг-
чают контраст, повышают целостность композиций.
3.5. Этапы художественного конструирования
Художественное конструирование является неотъемлемой частью общего про-
ектирования, представляющего собой комплекс конструкторско- эксперимен-
тальных работ по подготовке производства изделия, Чтобы создать во всех от-
ношениях качественное изделие, художник-конструктор обязан принимать са-
мое деятельное участие во всех этапах проектирования, включая проектную ра-
боту и период производства, в котором осуществляется конструкторский надзор
и дальнейшее совершенствование поставленного на производство образца.
Первым подготовительным и наиболее важным и ответственным является этап
исследования, в котором проводится художественно-конструкторский анализ.
Высокое качество нового троллейбуса не может быть обеспечено без участия
дизайнера. Работа художника-конструктора над проектом начинается с разра-
ботки технического задания - исходного документа для разработки продукции
и технической документации на нее. Техническое задание устанавливает техни-
ческие и другие характеристики троллейбуса, показатели качества, технико-эко-
номические и специальные требования к нему, в том числе и неохваченные стан-
дартом требования технической эстетики, выполнение необходимых стадий раз-
работки конструкторской документации и ее состав. Его разработке предшествует
большая работа по сбору информации по проектируемому троллейбусу, Анали-
зируется лучший опыт, который накоплен отечественной и зарубежной практи-
кой изготовления аналогичных изделий, производится систематизация собран-
ных сведений и данных и составления морфологических и аксиологических по-
лей, разрабатываются оценочные показатели и дается оценка технико-эстети-
ческого уровня изделий-аналогов, их патентной чистоты и соответствия действу-
ющим стандартам. После проведенного анализа производится выбор базового
показателя (образца) качества для сравнительной оценки уровня разрабатывае-
мого троллейбуса на стадии его проектирования.
64 Раздел I, ОБЩАЯ ХА РА КТЕРИСТИКА ТРОЛЛЕЙБУСОВ
Изучение предпроектной ситуации обычно начинают со стадии распреде-
ления, где устанавливается социальная значимость предмета, возможность его
типизации и другие социально-экономические свойства. Важнейшим крите-
рием на данном этапе является спрос, а рычагом его стимулирования - рекла-
ма. Необходимо подчеркнуть единство подхода к оценке технико-экономи-
ческих показателей нового троллейбуса и оценки его технико-эстетических
показателей. Оценка этих показателей отражается при составлении карты тех-
нического уровня и качества продукции на различных этапах разработки трол-
лейбуса, начиная с разработки технического задания. Порядок составления и
ведения карты технического уровня и качества продукции регламентирует
выбор аналога и базового образца.
Аналог - продукция отечественного или зарубежного производства, подоб-
ная сравниваемому изделию, обладающая сходством функционального назна-
чения и условий применения. Базовый образец - образец продукции, приня-
тый за исходный для сравнения при оценке технического уровня и качества,
характеризующий научно-технические достижения на установленный пери-
од. Таким образом, дизайнер стоит у истоков разработки машины, начиная со
сбора и изучения исходной информации об объекте, систематизации собран-
ного материала, разбивки его на отельные поля - морфологическое и аксио-
логическое. Первое представляет собой сведения и данные о материально-про-
странственной организации объектов-аналогов и их форме, второе - сведе-
ния и данные о назначении аналогов и их элементов, способах функциониро-
вания, их ценностных качествах.
В морфологическое поле входят модели, макеты, рисунки, фотографии ана-
логов, которые когда-либо и где-либо производились или производятся. Они
служат для оценки формы с точки зрения удовлетворения требованиям техни-
ческой эстетики. Таким образом художник-конструктор исследует вопрос фор-
мообразования, включается в процесс улучшения отношений в системе “ че-
ловек - предмет - среда”, проводит анализ формы троллейбуса, его компози-
ционного решения в связи с функциональным назначением, конструкцией,
материалом, технологией, тенденцией формообразования. В аксиологическое
поле входят сведения и данные об аналогах в виде характеристик, результатов
исследований, графиков, таблиц, которые служат для аналитической оценки
того или иного художественно-конструкторского решения, примененного в
аналогах с целью придания им соответствующих потребительских свойств.
В ходе составления и изучения морфологического и аксиологического по-
лей рассматривается технико-эстетический уровень аналогов, соответствие
отечественным и международным стандартам и стандартам стран предпола-
гаемой поставки продукции, подыскивается базовый показатель или образец
качества, который должен служить в дальнейшем критерием при оценке эсте-
тического уровня проектируемого троллейбуса. При оценке художественного
Раздел Л ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ 65
проекта троллейбуса в той или иной степени присутствуют элементы субъек-
тивизма. Наиболее частым методом, используемым при этом, является метод
экспертных оценок. Экспертное заключение - документ, содержащий резуль-
таты проведенной экспертизы.
Второй этап - это художественно-конструкторский синтез, который охваты-
вает все этапы проектирования. На основании проведенного художественно-кон-
структорского анализа разрабатывается идеал, замысел конструкторского и ком-
позиционного решения. Из всех возможных вариантов решений проектной за-
дачи выбирают рациональный с точки зрения реализации в новом изделии по-
требительских свойств, и оформляют техническое предложение. Техническое
предложение - вид проектной конструкторской документации, содержащей тех-
нико-экономическое обоснование целесообразности разработки изделия и уточ-
няющий требования к изделию, полученные на основании анализа технического
задания и проработки вариантов возможных технических решений изделия. Оно
сопровождается разработкой эскизов проектируемого троллейбуса, которые
являются основной формой информации между инженером-конструктором и
художником- конструктором. Совместный поиск форм и конструктивного ре-
шения троллейбуса является творческим процессом и оптимальный вариант мо-
жет быть найден только при учете всех требований и предложений, которые выд-
вигают инженер-конструктор и художник-конструктор. На этом этапе, как пра-
вило, рождается большое количество решений,
Эскизы троллейбуса выполняются в виде рисунков и чертежей, что позво-
ляет оперативно вносить различные изменения. Помимо изготовления эски-
зов, художник-конструктор ведет поиск и отработку форм троллейбуса с по-
мощью макетирования, которое выполняется в условном материале (пласти-
лине, картоне, глине и т.д.).
Макеты или модели выполняют на первом этапе в том же масштабе, что
эскизы и рисунки. Малые макеты и модели изготавливаются на металличес-
кой плите размером 1500 х 800 мм с нанесенной на ее поверхности сеткой, име-
ющей размер клетки 40 х 40 мм при масштабе макета 1 : 5 или 20 х 20 при
масштабе 1:10. По мере готовности макета такая же сетка наносится на его
поверхности. Таким образом получается объемная сетка, которая облегчает
снятие с поверхности модели шаблонов, необходмых для разработки черте-
жей формы конструируемого объекта. В процессе работы над макетам уточ-
няются эстетические свойства троллейбуса и его форма.
По мере выполнения художественно-конструкторского проекта троллей-
буса ранее принятый эскизный проект отрабатывается окончательно. Разра-
батываются узлы и элементы конструкции и художник-конструктор должен
учесть в форме все изменения, которые могут произойти в процессе инженер-
ного проектирования. На этом этапе художник-конструктор более тщатель-
но отрабатывает форму отдельных деталей и особенно тех, которые связаны с
66
Раздел!. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
удобством пользования. Окончательно отрабатываются цветовые решения и
фактура поверхности троллейбуса. Художник-конструктор подбирает необ-
ходимые облицовочные и отделочные материалы. При необходимости изго-
тавливаются модели троллейбуса или его частей в натуральную величину. Они
помогают художнику-конструктору производить необходимую корректировку
формы и цветового решения. Завершение этапа дает полную характеристику,
конструктивные особенности и технико-экономические показатели производ-
ства троллейбуса, а так же заканчивает основную отработку его формы и цве-
тового решения.
При конструировании троллейбусов одновременно с работой над внешней
формой ведутся работы над организацией рабочего места водителя. В масш-
табе 1 : 1 делаются эскизы частей интерьера кабины: приборной панели, сиде-
нья водителя, органов управления. Изготавливают в натуральную величину
посадочный макет, который используют для отработки эргономических
свойств рабочего места.
Широкое применение при художественно-конструкторском проектирова-
нии находит вычислительная техника, так как она может внести существен-
ные коррективы в этот процесс. Она позволяет на экране дисплея выявить
множество вариантов форм и композиций, снижает затраты времени и средств
на выполнение работ, не исключает, а наоборот, повышает требования к ква-
лификации всех специалистов.
В процессе рабочего проектирования объем для работы художника-конст-
руктора уменьшается. Однако при необходимости он принимает непосред-
ственное участие при разработке шаблонов и сложных поверхностей, изго-
товлении различных надписей. При выполнении опытных образцов худож-
ник-конструктор осуществляет авторский надзор. В процессе испытания опыт-
ных образцов троллейбусов, в условиях близких к эксплуатационным, прове-
ряется правильность всех принятых при проектировании решений и в случае
необходимости в них вносятся соответствующие коррективы. Таким образом,
художник-конструктор является полноправным членом группы специалистов,
которые осуществляют авторский надзор за изготовлением опытного образ-
ца троллейбуса и выносят заключение по результатам его испытания.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
67
РАЗДЕЛ II.
ТЕОРИЯ ТРОЛЛЕЙБУСА
Глава 1. Колесный движитель
1.1. Основные понятия и определения
Анализ движения троллейбуса, а также внешних и внутренних сил, действу-
ющих на него, логично предварить рассмотрением основных зависимостей,
связанных с работой одного из важнейших устройств троллейбуса - колеса,
являющегося его движителем. С его помощью осуществляется взаимодействие
троллейбуса с внешней средой - дорогой, через него передаются силы, кото-
рые удерживают троллейбус на дороге, осуществляют его движение и оста-
новку, заставляют изменять направление движения.
Фактически колесо состоит из двух основных частей: собственно колеса и
упругой (эластичной) шины. Поскольку на троллейбусе эти обе части работа-
ют как единое целое, целесообразно в настоящем курсе пользоваться терми-
ном “колесо” или “эластичное колесо”, полагая, что шина является его час-
тью, лишь изредка обращаясь к термину “шина” в его прямом понимании. За
внешней простотой колеса скрывается сложное устройство, работа которого
в зависимости от поставленной цели и степени точности описывается различ-
ными математическими моделями. Рассмотрим движение колеса в продоль-
ной плоскости, которая перпендикулярна опорной поверхности и совпадает с
плоскостью его вращения.
Под действием внешних сил (нормальной нагрузки GK , тангенциальной FK,
боковой F6) и моментов эластичное колесо деформируется в радиальном,
тангенциальном, боковом и угловом направлениях. Результатом этих дефор-
маций являются изменение равновесной формы профиля шины и искривление
ее радиальных сечений. На все виды деформации расходуется значительная
энергия. Часть ее, затрачиваемая на трение в материале шины и в контакте с
дорогой, переходит в тепло и рассеивается. Другая, большая часть, определя-
емая упругой деформацией шины, возвращается при снятии нагрузки.
Вследствие радиальной деформации колеса от приходящейся на него нор-
мальной нагрузки GK , (рис. 2.1, а), касание колеса с дорогой происходит не
68
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
по линии, параллельной оси колеса, а по площадке контакта прямоугольной
или эллипсовидной формы. В зависимости от характера и направления сил и
моментов, действующих на колесо, различают несколько режимов силового
нагружения колес троллейбуса.
Приведомом режиме качения (рис. 2.1, а), колесо приводится во вращение про-
дольной (толкающей) силой Fx, приложенной к оси колеса и совпадающей по
направлению со скоростью его продольного перемещения. Крутящий момент
колеса Л/ при этом равен нулю. Колесо, работающее в таком режиме, называ-
ется ведомым. В нем работают передние управляемые колеса троллейбуса и ко-
леса пассажирского прицепа сочлененного троллейбуса;
При ведущем режиме качения (рис. 2.1, б), колесо приводится во вращение
крутящим моментом М к, совпадающим по направлению с направлением уг-
ловой скорости и нагружено продольной силой, противоположной по направ-
лению скорости продольного перемещения колеса vv. В пятне контакта коле-
са с дорогой действует касательная реакция, направленная в сторону движе-
ния, которая называется касательной силой тяги колеса FK — Rx. Колесо, ра-
ботающее в таком режиме, называется ведущим. В нем работают колеса веду-
щего моста троллейбуса.
При тормозном режиме качения (рис. 2.3, в), колесо приводится во враще-
ние толкающей силой Fx и нагружено тормозным моментом МТ—М направ-
ленным противоположно угловой скорости й)к . Колесо, работающее в таком
режиме, называется тормозным.
Для составления уравнений равновесия и описания движения колеса необ-
ходимо ввести понятия о радиусах и скорости колеса. У эластичного колеса
различают несколько радиусов, величина и наименование которых условны.
Свободный радиус колеса гс - половина диаметра наибольшего сечения
беговой дорожки шины плоскостью, перпендикулярной оси его вращения при
отсутствии контакта колеса с опорной поверхностью, т. е. в ненагруженном
внешними силами состоянии (шина при этом должна быть накачана воздухом
Рис. 2.1. Силы и моменты, действующие на колесо в различных режимах качения.
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА 69
до требуемого давления). Этот радиус можно определить замером диаметра
колеса, не установленного на троллейбус.
Статический радиус колеса гст - расстояние от центра неподвижного коле-
са, нагруженного только нормальной силой при заданном давлении воздуха в
шине, до опорной поверхности. Его можно определить непосредственно заме-
ром или по формуле:
г =: г — h
ст с
где Ьш - прогиб шины под действием нормальной нагрузки GK.
Нормальный прогиб или нормальную деформацию шины hM можно опре-
делить по формуле Хейдекеля:
Z Gk Gk
~ ~ Э Т=’ (2.1)
сш 2лрв^гЛл ’ >
где сш~ нормальная жесткость шины; рв- давление воздуха в шине;
гсх - радиус поперечного сечения шины.
Динамическим радиусом движущегося колеса называется расстояние от
центра колеса до равнодействующей тангенциальных составляющих реакций
дороги, (см. рис. 2.1). На твердой дороге динамический радиус незначительно
отличается от статического и для практических расчетов их можно принимать
равными, т.е. гд = гспг
Радиусом качения колеса гк называется отношение продольной составляю-
щей поступательной скорости колеса к его угловой скорости:
гк = vx/(DK.
Необходимость использования понятия “радиус качения” объясняется тем, что
вследствие тангенциальной эластичности, буксования или скольжения колеса,
путь 5, проходимый колесом за п его оборотов, не равен произведению 2яп на
динамический радиус гд или на свободный радиус г , а равен этой величине,
умноженной на некоторый фиктивный радиус г, который нельзя непосредствен-
но замерить. Поскольку этот радиус связывает поступательную и угловую ско-
рости колеса, он является одной из важнейших кинематических характеристик.
Радиус качения определяют обычно экспериментально, замеряя пройден-
ный колесом путь 5 за п оборотов. Он может быть определен для любого ре-
жима качения колеса.
Изменение радиуса качения колеса от действующего момента или каса-
тельной силы определяется зависимостями, предложенными академиком
Е.А.Чудаковым:
г — — A hd '
'к 'к
Гк=Г«-1-РМю
70
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Рис. 2.2. Зависимость радиуса качения колеса
от подводимого крутящего момента.
где г® - радиус колеса в ве-
домом режиме;Ли - ко-
эффициенты изменения ради-
уса качения колеса соответ-
ственно под действием мо-
мента и касательной силы.
Коэффициент Л1; или
иногда называют тангенци-
альной эластичностью систе-
мы “шина - опорная поверх-
ность”. Так как при качении
колеса по твердой дороге де-
формируется только шина
колеса, то коэффициент илиЛ^ - тангенциальная эластичность шины.
Характер изменения радиуса качения колеса от подводимого момента по-
казан на рис. 2.2. Как видно, при малых значениях момента тангенциальная
эластичность шины постоянна и изменение радиуса качения происходит по
линейному закону за счет деформации шины. По мере увеличения подводи-
мого момента линейный закон изменения радиуса качения нарушается за счет
буксования или скольжения точек в контактной площадке. При полном бук-
совании колеса его радиус качения становится равным нулю, а при полнос-
тью скользящем колесе - бесконечности.
Процессы буксования и скольжения оцениваются соответствующими коэф-
фициентами:
буксования -
ут
скольжения -
V.. л
= —-1- (2.3)
где - vT теоретическая скорость центра колеса (vT = й)кгсУ vK - действи-
тельная скорость центра колеса (v — СОК гк ).
Если действительная скорость центра колеса равна теоретической, то коэф-
фициент буксования и скольжения равны нулю, т. е. 5= 0 и 5 - 0. В случае, когда
действительная скорость равна нулю и ведущее колесо вращается на месте, ко-
эффициент буксования колеса равен единице (<5 = 1). Когда тормозящее колесо
заблокировано и движется юзом, его теоретическая скорость равна нулю, так
как угловая скорость колеса равна нулю ((Уя. = 0), а коэффициент скольжения
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
71
равен бесконечности. Следовательно, коэффициент буксования колеса изменя-
ется от нуля до единицы, коэффициент скольжения - от нуля до бесконечности.
1.2. Баланс мощности колеса и
КПД ведущего колеса
Схема сил и моментов, действующих на колесо, катящееся по твердой доро-
ге, приведена на рис. 2.1. На схеме обозначены: GK~ нормальная нагрузка
колеса, представляющая перпендикулярную к опорной поверхности состав-
ляющую всех сил, приложенных к колесу со стороны троллейбуса, включая и
вес колеса; Fx - составляющая равнодействующей сил, приложенных к колесу
со стороны троллейбуса, параллельная опорной поверхности; Rx~ продоль-
ная составляющая реакции дороги; Rz - нормальная составляющая реакции
дороги, смещенная относительно середины контактной площадки на расстоя-
ние а; Мк - момент, действующий на колесо со стороны троллейбуса; М-к -
момент сопротивления ускорению вращения колеса.
Для нахождения характеристик качения колеса, составим уравнения движе-
ния ведущего колеса относительно осей координат и вращения относительно
центра колеса:
т х = R - Fx; т z = GK-R ; J ф ~ М -R гд- aR7,
г\ Л Л Гк /х rk • .xtz Zr ‘
где тк - масса колеса; Rz - вертикальная и горизонтальная составляющие
равнодействующей опорной поверхности; J к - момент инерции колеса относи-
тельно его оси вращения; (р - угол поворота колеса в плоскости вращения.
При движении колеса по ровной дороге, когда координата z = гд = const,
ускорение z = 0 и из второго уравнения имеем:
Первое уравнение решим относительно Rx :
Fx + тк х — Fx + F!i/;,
а третье уравнение - относительно Мк:
мк = Rxrd + aR + JK<P =G. ' ( 2.4 )
где FjK = ткх - сила инерции; М? = aRz — aGK - момент сопротивления
качению ведущего колеса; а ~ коэффициент трения качения ведущего колеса,
измеряемый в единицах длины; МjK = Jкф - момент инерции колеса.
При установившемся движении ускорение х — О и из первого уравнения име-
ем Rx — Fx,T.e. сумма тангенциальных реакций дороги, возникающих при вза-
имодействии ведущего колеса с опорной поверхностью, равна реактивной силе
72
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Fx, и Мк = Fxrd + М? у т.е. подводимый к колесу крутящий момент равен
сумме: момента силы толкающей троллейбус и момента сопротивления каче-
нию колеса.
Разделив обе части уравнения (2.4) на динамический радиус колеса, получим:
К X к
гд гд гд
Отношение Мк /г.} называется касательной силой тяги FK, а отношение
коэффициента трения качения к динамическому радиусу - коэффициентом
качения ведущего колеса, т.е. f —а/гд.
Произведем оценку баланса мощности, подводимого к ведущему колесу
при качении его по дороге. Умножая обе части уравнения (2.4) на угловую
скорость колеса (Ок , получаем следующий баланс мощностей:
Мка)к = FKvr = +мf°K + (2.5 )
Как указывалось ранее, качение ведущего колеса сопровождается танген-
циальной деформацией шины или ее буксованием, что характеризуется умень-
шением скорости в переносно-поступательном движении, и действительная
скорость движения колеса определяется по выражению, в котором с некото-
рым приближением можно заменить кинематический радиус динамическим.
Тогда vT = (ОК гд и vK =®кгД1-5).
Следует учесть следующее обстоятельство. Если при движении с буксова-
нием (скольжением) при С0к ~ const скорость у* переносно-поступательного
движения уменьшается, то относительная скорость вращательного движения
остается величиной неизменной (см. рис. 2.3). Следовательно, затраты мощ-
ности на относительное вращение колеса не зависят от буксования (скольже-
а) б) в)
Рис. 2.3. Планы скоростей колеса: а ~ колесо катится без буксования и скольжения, б -
колесо катится с буксованием, в - колесо катится со скольжением..
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА 73
ния) и пропорциональны моментам инерции вращающихся масс. Имея в виду
это обстоятельство, учтем буксование колеса, для чего в уравнение (2.5) доба-
вим и отнимем сумму членов, отражающих переносно-поступательное движе-
ние, умноженных на действительную поступательную скорость, т.е.
±(ГТ +Mf /rd)vd :
Р = = КхГд<*>К +МДС ± (FT + Л// /Гд •
С учетом того, что Rx F}. + Fj и C0K ~ / ra , получим:
P = MKa>K = (F„, + FJ+Mf/rd\vT-vlt)+Mfa)K(l-8)+
+ FjVK + M jKa>K + FT vd.
Следовательно, мощность, подводимая к ведущему колесу, в рассматривае-
мом случае равна сумме следующих мощностей:
1) теряемой на буксование колеса: (Ft + FjMу )(vT — vK );
2) расходуемой на качение колеса, т.е. на гистерезис шины: М—
3) превращаемой в кинетическую энергию переносного поступательного дви-
жения: F.-v ’
j к
4) превращаемой в кинетическую энергию вращательного движения колеса
относительно его оси: М • СУ ;
JK к
5) передаваемой троллейбусу FTvd
При установившемся движении, когда FK = FT + r(), баланс мощнос-
ти принимает вид:
Мкак =(гт + Fj +Мf/rd\vT ~vK)+M/®Д1-<5)+
+ FyvK+MAcjK+FTva.
В результате потерь на качение и буксование мощность, передаваемая веду-
щим колесом троллейбусу, оказывается меньше мощности, подводимой к ко-
лесу. Отношение этих мощностей составляет коэффициент полезного дей-
ствия?) колеса. В соответствии с этим определением
Лк •
МЛЛ
К к
При установившемся движении М,.FKrd. Следовательно
F v
Лк = ~^‘
Fkvt
Отношение FT /FK можно рассматривать как КПД, учитывающий потери
74
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
на качение колеса вследствие гистерезиса в шине, а отношение vK/vT - как
КПД, учитывающий потери на буксование.
Обозначим первый коэффициент через , а второй через 7]kS и представим
общий КПД ведущего колеса в следующем виде:
Пк =Г1К/Г1К8-
Между величиной буксования <5 и КПД Т]к5 , учитывающим буксование,
существует зависимость:
_ Гд (1 ~ _ 1 е
Чк8 - —О,
Ут 0)к
где буксование изменяется в пределах 0 < (5 < 1.
Аналогично записываются уравнения движения и баланса мощностей для
других режимов качения колеса, но при этом следует учитывать, что в тормоз-
ном режиме Мк <0 и Rx < 0.
1.3. Сцепление колеса с дорогой и
сопротивление его качению
Сцепление шины с ровной дорогой можно уподобить трению скольжения.
Известно, что в начальный момент скольжения сила трения резины резко увели-
чивается, а затем, при повышении скорости скольжения, уменьшается. Не со-
всем строго, но качественно эту закономерность можно распространить и на
шину, имея также в виду, что с увеличением касательной силы увеличивается
относительное количество скользящих элементов шины, определяющих зону
скольжения и уменьшающих зону сцепления контактной площадки шины.
При рассмотрении качения колеса большое практическое значение имеет не
скорость скольжения, а коэффициенты буксования или скольжения, определяе-
мые соответственно по выражениям (2.2) и (2.3). Зависимость касательной силы,
а при постоянной нормальной нагрузке на колесо зависимость удельной каса-
тельной силы FK /GK от буксования (скольжения) колеса с эластичной шиной
имеет вид, показанный на рис. 2.4. Наибольшее значение силы, действующей в
пятне контакта, принято называть силой сцепления колеса Соответственно
наибольшее значение удельной силы колеса называют коэффициентом
сцепления колеса с дорогой. Коэффициент сцепления шины с дорогой
фтах = ^<р/&к соответствует 10... 15 7о буксованию (скольжению) колеса.
Проводя не строгую аналогию сцепления с трением, можно условно при-
нять, что наибольшая величина удельной силы соответствует коэффициенту
трения покоя. Ее величина при значительном буксовании (скольжении) соот-
ветствует коэффициенту сцепления (рс в состоянии движения, который на боль-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 75
шинстве твердых сухих по-
верхностей для стандартных
шин примерно на 20...25 %
меньше коэффициента сцеп-
ления в состоянии покоя.
Различают коэффициенты
сцепления в продольном и
боковом направлениях.
Существенное влияние
на величину коэффициента
сцепления оказывает влаж-
ность опорной поверхности.
На влажных и мокрых опор-
ных поверхностях коэффи-
циент (рс меньше, чем на су-
хих. Средние значения коэф-
фициентов сцепления при
движении по различным до-
рогам можно принимать в
соответствии с табл. 2.1.
При качении колеса проис-
ходят деформации шины в различных направлениях, которые сопровождаются
необратимыми потерями. Эти потери определяют сопротивление качению коле-
са, являющимся одним из основных составляющих сопротивления движению
троллейбуса. Необратимые потери при качении эластичного колеса по твердой
дороге обусловлены следующими причинами: внутренним трением в шине; про-
скальзыванием элементов шины по опорной поверхности; присасыванием шины
к опорной поверхности; аэродинамическим сопротивлением.
Рис. 2.4. Зависимость коэффициента сцепления
от буксования-скольжения.
Таблица 2.1
Опорная поверхность Коэффициент сцепления для шин
Наименование Состояние высокого давления низкого давления
Асфальтобетонное покрытие Сухое Мокрое Загрязненное 0,50.. .0,70 0,35...0,45 0,25...0,45 0,70...0,80 0,45...0,55 0,25...0,40
Обледенелая дорога Лед 0,08...0,15 0,10...0,20
Снег Рыхлый Укатанный 0,20...0,30 0,15...0,20 0,20...0,40 0,20...0,25
Щебеночное покрытие Сухое Мокрое 0,50... 0,60 0,30...0,40 0,60...0,70 0,40...0,50
76
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Внутреннее трение в шине является результатом всех видов деформаций
шины, вызванных в основном нормальной нагрузкой колеса. Эксперименты
показывают, что потери на различные виды трения в шине ведомого колеса
составляют 90...95 % от всех потерь на качение.
Проскальзывание шины по опорной поверхности является следствием де-
формации шины в тангенциальном направлении, т. е. в плоскости контакта.
Потери на трение в результате этого скольжения сравнительно не велики и
составляют для ведомого колеса 5... 10 % от потерь на деформацию шины. При
полном буксовании (скольжении) колеса, когда все элементы контактной пло-
щадки колеса перемещаются относительно дороги, потери на трение сколь-
жения достигают максимальной величины и являются основными.
Потери на присасывание шины к опорной поверхности объясняются тем,
что в момент соприкосновения отдельных участков протектора с опорной по-
верхностью образуются замкнутые контуры рисунка, из которых выжимается
воздух. В последующем на отрыв шины от дороги требуется затрата дополни-
тельной энергии.
Хотя причины возникновения потерь на качение колеса хорошо исследова-
ны, достаточно точных формул для определения коэффициента сопротивле-
ния качению / нет. Поэтому в теории используют значения этого коэффици-
ента, полученные опытным путем обычно в ведомом режиме качения колеса.
Примерные пределы изменения коэффициента / сопротивления качению про-
гретой шины при рекомендуемых заводами-изготовителями внутреннем дав-
лении, нагрузке и среней скорости движения приведены в табл. 2.2.
Таблица 2.2
Опорная поверхность Коэффициент сопротивления качению
Наименование Состояние
Асфальтобетон- ное покрытие Хорошее Удовлетворительное 0,007...0,015 0,015...0,02
Обледенелая дорога Лед 0,015...0,03
Снег Рыхлый Укатанный 0,10...0,30 0,03... 0,05
1.4. Движение колеса, нагруженного
боковой силой
При движении на троллейбус почти всегда действует боковая сила. Этой
силой может быть составляющая веса при боковом уклоне дороги, сила ветра,
отдельные кратковременно действующие случайные силы, появляющиеся, на-
пример, при наезде на препятствие. При криволинейном движении на трол-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
77
ковой силы на эластич-
ное колесо.
лсйбус действует боковая составляющая силы инерции.
Боковая сила может быть вызвана и другими причина-
ми, например, разностью касательных сил колес лево-
го и правого бортов.
Если к оси вертикально установленного и нагружен-
ного вертикальной силой GK колеса приложить также
боковую силу F§ (рис. 2.5), то вследствие боковой эла-
стичности шины изменится форма ее поперечного про-
филя. Шина становится несимметричной относитель-
но вертикальной плоскости, перпендикулярной к оси
колеса и совпадающей с плоскостью симметрии шины.
Элементы шины, находящиеся в опорной площадке,
вследствие сцепления с дорогой остаются на месте, а
верхняя часть шины вместе с колесом перемещается в
направлении приложенной силы. В результате на Шину
будет действовать боковая реакция R? и момент
Му .Форма контактной площадки из эллиптической превращается в "бобо-
видную" (рис. 2.6, а). Если колесо при этом катится, то в контакт с дорогой
входят деформированные элементы шины. Непрерывная боковая деформация
все новых участков шины приводит к перемещению плоскости колеса в на-
правления действия силы боковой Fg . Колесо катится уже не в плоскости сво-
его вращения, а под некоторым углом у/ к этой плоскости (рис. 2.6, б).
Качение колеса под углом к плоскости своего вращения называется качени-
ем с боковым уводом, а сам угол у/ - углом бокового увода. В реальных усло-
виях эксплуатации углы бокового увода могут достигать 7...8°, а в некоторых
случаях 10... 12°. Для поддержания прямолинейного движения троллейбуса уп-
равляемые колеса поворачиваются примерно на такие
прямолинейного движения
троллейбуса углы бокового
увода соизмеримы с углами
поворота управляемых колес и
поэтому углы бокового увода
колес оказывают влияние на
кинематику поворота, а также
на другие эксплуатационные
свойства троллейбуса.
По мере удаления от входа
в контакт напряженность элементов шины возрастает. Ближе к задней части
контактной площадки поперечные элементарные силы q становятся макси-
мальными, начинается проскальзывание элементов шины. В соответствии с
этим эпюра их по средней линии контактной площадки и в параллельных на-
же углы, т. е. в случае
78
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
правлениях имеет форму, близкую к треугольнику, а форма контактной пло-
щадки искривляется (рис. 2.6, б).
Эпюру элементарных боковых реакций можно заменить равнодействую-
щей , которая смещена относительно оси колеса на величину плеча е. По-
этому боковая сила Fg и равная ей реакция Ry создают момент относительно
вертикальной оси. Этот момент направлен таким образом, что стремится по-
вернуть колесо в нейтральное положение, соответствующее прямолинейному
движению троллейбуса, т. е. оказывает сопротивление повороту колеса. По
этой причине его называют стабилизирующим моментом Мст .
Характер зависимости боковой силы Fg от угла увода представлен на рис.
2.7. На кривой Fg — /(<//) можно условно выделить три участка. При измене-
Рис. 2.7. Зависимость боковой силы от утла увода.
нии угла увода от нуля до
некоторого значения, раз-
личного для разных шин,
нормальных нагрузок и ко-
эффициентов трения между
шиной и дорогой(кривые 1
и 2) зависимость Fg = f (l/)
почти линейна (участки ob1
и obj. Эти участки соответ-
ствуют значениям боковой
силы, при которых зона
скольжения в пятне контак-
та мала.
Участок bjCj (b2c2) соответ-
ствует значениям боковой
силы, при которых скольже-
ние происходит на значительной части контактной площадки, тем большей, чем
больше угол увода. В точке Cj (с2) боковая сила достигает значения, максималь-
но возможного по условиям сцепления колеса с дорогой, а на участке c1d) (c,d2)
определяется равенством:
^8 шах
Коэффициент (Ру =^Этах/^к называется коэффициентом поперечного
сцепления.
Условно на участках оф и ос2 боковое перемещение колеса под действием
боковой силы называют боковым уводом, а на участках Cj dt и c2d, - боковым
скольжением. Значение угла увода, при котором начинается боковое скольже-
ние, зависит от конструкции шины, нормальной нагрузки, коэффициента по-
перечного сцепления и ряда других факторов. Обычно на сухой твердой доро-
ге у/(р = 12...20°. С точки зрения кинематики безразлично по какой причине
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
79
возникает отклонение вектора скорости от плоскости вращения колеса, по-
этому этот угол будем называть углом увода на всем участке odt и od2.
Для линейного участка кривой Fs = ./'(('/) можно записать
Fs = kyfSV = kyV>
где k , - коэффициент сопротивления боковому уводу шины .
По формуле Р.Смилей и В.Горна с достаточной степенью точности можно
определить коэффициент сопротивления боковому уводу (Н/рад) для/?//.) > 0,088
kvo = с 1,75 -—12,7 —
D D
Р„Ъ2-,
для h/D < 0,088 ( 2.8 )
куа-с 0,095-0,49
где куо - коэффициент сопротивления уводу шины на линейном участке
зависимости
Fs=f^;
с - коэффициент (с = 60... 100);
h G Id~
^ = 0,42^улр;
D P„D2\ b
Dc - наружный диаметр шины в свободном состоянии; b - ширина шины.
На величину коэффициента сопротивления боковому уводу, а значит и на
направление качения колеса, кроме конструктивных (диаметр шины, ширина
профиля, расположение нитей корда и др.) факторов , влияет значительное
число эксплуатационных (нагрузка на колесо, давление воздуха в шине, силы,
действующие на колесо и др.) факторов. Влияние их учитывается соответству-
ющими поправочными коэффициентами, а величина коэффициента сопротив-
ления уводу шины подсчитывается по формуле, учитывающей основные эксп-
луатационные факторы:
где, £G,£p и&у - коэффициенты, учитывающие соответственно изменение
нормальной нагрузки на колесо, касательной силы колеса и влияние увода шины.
Поправочные коэффициенты подсчитываются по следующим эмпиричес-
ким формулам:
£g = 2,4а, -1,8а? + 0,4а^,
80
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
vrqCIz = GjGKH - нормальная нагрузка, рекомендуемая для данной шины,
arrtg[qy(y-yo)]
aV^~Vo)
где Яу — лкуо / (Z(pGK); у/о _ угол увода, соответствующий переходу от ли-
нейного участка к нелинейному (точ. Ь, см. рис. 2.7); обычноу/0 принимают
равным 0,025... 0,035 рад.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
81
Глава 2. Тягово-скоростные свойства
2.1. Определения. Оценочные показатели
Тягово скоростными свойствами называют совокупность свойств, опреде-
ляющих возможные по характеристике двигателя или сцепления ведущих ко-
лес с дорогой диапазоны изменения скоростей движения и пределы интенсив-
ности разгона троллейбуса при его работе в тяговом режиме.
Тяговым принято считать режим, при котором от двигателя к ведущим ко-
лесам подводится мощность, достаточная для преодоления сопротивления дви-
жению. Показатели тягово-скоростных свойств используются для решения двух
задач:
1) анализа - определения скоростей, ускорений и предельных дорожных ус-
ловий, в которых возможно движение троллейбуса с заданными конструктив-
ными параметрами;
2) синтеза - определения конструктивных параметров, которые могут обес-
печить заданные значения скоростей и ускорений в заданных дорожных усло-
виях, а также определения предельных дорожных условий, в которых может
двигаться троллейбус с выбранными конструктивными параметрами.
Решение первой задачи называют проверочным тяговым расчетом, второй -
проектировочным тяговым расчетом.
Возможно также сравнение троллейбусов по показателям тягово-скорост-
ных свойств и оценка их технического уровня и качества по степени соответ-
ствия этих показателей нормируемым или рекомендуемым значениям, приня-
тыми в качестве базовых. Часть показателей имеет нормированные ОСТами и
ГОСТами значения, для других - экспериментальным или расчетным путем
определяют среднестатистические или экстремальные значения показателей.
Для оценки тягово-скоростных свойств используют различные показатели,
наиболее употребительными и достаточными из них являются:
1) максимальная скорость;
2) условная максимальная скорость;
3) время разгона на пути 400 м и 1000 м;
4) время разгона до заданной скорости;
5) скоростная характеристика разгон-выбег;
6) скоростная характеристика на дороге с переменным продольным
профилем;
7) максимальный преодолеваемый подъем;
82
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
8) установившаяся скорость на затяжных подъемах;
9) ускорение при разгоне;
10) сила тяги на крюке.
Рис, 2.8. Скоростная характеристика
разгон-выбег 2-v=f(s)
Рис. 2.9. Скоростная характеристика на
дороге с переменным продольным профилем.
Рассмотрим кратко эти
оценочные показатели.
Максимальная скорость
V . Условиями on редел е-
ния является движение по
специальному измеритель-
ному участку с наиболь-
шей скоростью при полно-
стью нажатой педали уп-
равления тяговым двига-
телем.
Условная максимальная
скорость v .Это сред-
няя скорость троллейбуса
на последних 400 м при его
интенсивном разгоне с ме-
ста на участке 2000 м. Этот
показатель определяет
верхний предел скорост-
ных свойств на ограничен-
ном пути.
Время разгона иа пути
400 м и 1000 м t... и t и
до заданной скорости t .
Эти показатели определя-
ют при разгоне в тех же ус-
ловиях, в которых измеря-
ют v
шах усл
Скоростная характеристика разгон-выбег. Характеристика определяется гра-
фиком у —f(tJ и v — f(8), полученным при резком разгоне с места до макси-
мальной скорости У на пути 2000 м и выбеге до остановки (рис. 2.8 ).
Скоростная характеристика на дороге с переменным продольным профилем.
Эта характеристика используется для оценки троллейбусов, работающих на
дорогах, имеющих значительные уклоны. Она представляет собой зависимость
средней скорости у (рис. 2.9) от заданной максимально допускаемой скорос-
ти у При определении каждой точки этой характеристики движение проис-
ходит с возможно большей , но не превышающей у скоростью. Скорость
V задастся от максимальной до 30 км/ч и должна быть кратна десяти.
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА S3
По скоростной характеристике на дороге с переменным продольным профи-
лем подсчитывают и наносят на график осредненный показатель (среднеинтег-
ральная величина), характеризующий общий скоростной уровень троллейбуса.
Максимальный преодолеваемый подъем z . Подъем преодолевается при
полностью нажатой педали управления двигателем и постоянной скорости
V~const. Двухосный троллейбус с полной нагрузкой должен преодолевать
подъем нс менее 25 %, а сочлененный - 18 %.
Установившаяся скорость V на затяжных подъемах. Эта скорость оказы-
вает влияние на среднюю скорость движения троллейбуса по маршруту и транс-
портного потока в целом. С полной нагрузкой при движении по сухой и ров-
ной дороге троллейбус должен преодолевать подъем с уклоном 3 % протяжен-
ностью не менее 3 км при скорости не менее 30 км/ч.
Ускорение./ при разгоне. Это ускорение определяет потенциальные возмож-
ности троллейбуса при обгонах.
Сила тяги на крюке F. Данный показатель характеризует способность трол-
лейбуса работать с пассажирским прицепом (сочлененный троллейбус).
2.2. Силы, действующие на троллейбус
При изучении тягово-скоростгных свойств троллейбуса не учитывают взаим-
ные перемещения отдельных его масс (мостов, тягового электродвигателя) отно-
сительно рамы или кузова и учитывают вращение якоря двигателя, деталей транс-
миссии и ведущих колес. Считается, что центр масс троллейбуса совершает плос-
кое движение, копируя продольный профиль дороги, без вертикальных и угло-
вых колебаний кузова, вызываемых неровностями дороги (рис. 2.10). Если про-
дольный профиль дороги криволинейный, то троллейбус, кроме поступательно-
го движения, совершает еще и вращательное движение относительно вертикаль-
ной оси z, проходящей через его центр масс. Принимают, что все силы, действу-
ющие на троллейбус, лежат в плоскости движения. Это позволяет вместо про-
странственной расчетной схемы рассматривать плоскую двухколесную (велоси-
педную) схему, заменяя колеса каждого из мостов одним колесом.
Скоростью и ускорением троллейбуса называют скорости и ускорения его
центра масс, а для сочлененного троллейбуса - скорости и ускорения центров
масс троллейбуса и прицепа. Для их определения достаточно знать внешние
силы, действующие на троллейбус. Определить некоторые внешние силы мож-
но, зная соответствующие внутренние силы. К внешним силам относятся: сила
тяжести, реакции дороги и аэродинамическая сила.
Сила тяжести G = mg. Величину силы тяжести и положение центра масс (точка
С), которое характеризуется расстояниями а и b (см. рис. 2.10), можно опреде-
лить по данным, приведенным в технической характеристике троллейбуса и
справочных материалах. Расстояние L = а + b между осями переднего и заднего
84
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
мостов называется базой троллейбуса. В технической характеристике обычно
приводятся снаряженная т и полная m массы троллейбуса, а также распреде-
ление веса троллейбуса G по мостам и его база. Значения расстояний а и b
могут быть определены по выражениям:
аА. bA
G ’ G ?
где G] и б2 - вес, приходящийся соответственно на передний и задний
мосты.
Реакции дороги. Эти реакции приложены в пятне контакта шины с дорогой.
В каждой точке контактной площадки, как отмечалось выше, действуют эле-
ментарные реакции, различны по величине и направлению, которые могут быть
заменены равнодействующей реакцией и моментом. При изучении тягово-ско-
ростных свойств учитывают только продольные Rx и нормальные 7?. состав-
ляющие реакций колес, а также моменты инерции М, действующие в плоско-
сти вращения колес. Реакции, силы и моменты, приложенные к колесам обо-
значаются буквой с индексом, номер которого соответствует номеру моста
(см. рис. 2.10). Исходным для определения реакций на ведущих колесах явля-
ется механическая характеристика тягового двигателя:
Рис. 2.10. Силы, действующие на троллейбус
в общем случае движения.
р _ р _ дв
г х2 итрЧтр.
Гд2
где итр и 7]тр - передаточ-
ное число и КПД трансмис-
сии; М дб - момент, развива-
емый тяговым двигателем;
г^2 - динамический радиус
ведущего колеса.
КПД трансмиссии опреде-
ляется по формуле:
'Птр р ЛкпЙлп (2Л0)
где Рк - мощность на ведущих колесах; Рдв - мощность, развиваемая тяго-
вым двигателем; Т}кп - КПД карданной передачи; 7]}! - КПД ведущего моста.
КПД трансмиссии определяется мощностью трения Ртрен и зависит от схе-
мы трансмиссии, конструктивных и технологических особенностей ее меха-
низмов, передаваемой мощности, частоты вращения деталей трансмиссии и
связанной с ней скорости движения троллейбуса, характеристик и температу-
ры смазочных материалов, применяемых в трансмиссии, технического состо-
яния узлов трансмиссии.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА. 85
Мощность Рт ен можно представить в виде трех слагаемых, пропорцио-
нальных:
- мощности Р б, характеризующей потери на трение в зубчатых зацеплениях
и в подшипниках трансмиссии;
- скорости v, характеризующей трение в сальниках и подшипниках, имеющих
предварительный натяг;
- квадрату скорости v2, характеризующему гидравлические потери, связанные
с вращением зубчатых механизмов трансмиссии в масле, залитом в их корпуса.
Потери в подшипниках ведущих колес частично относят к первому и час-
тично ко второму из слагаемых, поскольку нагрузка на эти подшипники зави-
сит как от передаваемого момента, так и от нормальной нагрузки на колеса.
Потери в подшипниках ведомых колес учитываются отдельно и относят их ко
второму слагаемому потерь в трансмиссии.
Суммарная мощность, теряемая в трансмиссии:
Ртр = (1 -0,98* 0,97" 0.995“' + amv + bmv2, ( 2.11)
где ц и к - число соответственно цилиндрических и конических или гипоид-
ных зубчатых передач, через которые передается мощность; ш - число кардан-
ных шарниров; Р$в - мощность двигателя; ат и Ьт - коэффициенты, завися-
щие от числа механизмов в трансмиссии, их конструкции, температуры масла
в механизмах трансмиссии, массы троллейбуса.
Учитывая выражение (2.11) и соотношение (2.10), КПД трансмиссии пред-
ставим в виде:
h 2
71mp = 0,98* -0,97* -0,995'" -W + ”’V , ( 2.13 )
дв
При выбеге (напряжение к тяговому двигателю не подается) в формуле (2.10)
следует положить Рдв — 0. В этом случае понятие КПД теряет смысл и потери
в трансмиссии удобнее оценивать силой Fmp , приведенной к ведущим коле-
сам. Силу Ртр определяют экспериментально методом выбега при вывешен-
ных колесах троллейбуса по линейной зависимости
F = F +к v
* тр * тро /пр
где Ртро ~ сила трения в трансмиссии при скорости, близкой к нулю; ктр -
коэффициент, учитывающий влияние скорости на силу трения.
В связи с тем, что данные по коэффициенту ктр для трансмиссий троллей-
бусов отсутствуют, в табл. 2.3 приведены значения силы Ртро и коэффициен-
тов к для различных автомобилей.
Мощность Ртро, теряемая в трансмиссии при выбеге
Р = F у10-3
J тро Л тр v
86
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Таблица 2.3
Модель автомобиля Frpo, Н ктр, Н.с/м
ВАЗ 2121 15 4
ГАЗ-53 80 2,75
КамАЗ 5320 102 11
МАЗ 6422 ' 120 25
Без большой погрешности можно считать, что в тяговом режиме
Ртро = (1 - 0.98" • 0.97" • 0,995й )рдв + Ртро;
т]тр = 0,98" • 0,97" • 0,995"’ - .
?дв
Существенное влияние на КПД трансмиссии оказывают свойства смазоч-
ных материалов в механизмах трансмиссии. Их вязкость должна быть доста-
точной для обеспечения прочной масляной пленки в зубчатых зацеплениях,
но не должна быть чрезмерной во избежание значительного возрастания гид-
равлических потерь. КПД трансмиссии уменьшается при любых нарушениях
зацепления зубчатых колес, вызванное, например, изменением регулировок
подшипников, перекосом зубчатых колес и др. При работе тягового двигате-
ля в номинальном режиме среднее значение КПД трансмиссии троллейбусов
составляет 0,85...0,90 в зависимости от качества монтажа, применяемых ма-
сел, степени износа, точности регулировок и т.п.
2.3. Силы сопротивления движению
Для анализа процесса движения троллейбуса силы, действующие на него,
делят на движущие, направление которых совпадает с направлением вектора
скорости центра масс, и силы сопротивления, направленные противоположно
вектору скорости. При таком разделении сил допускаются некоторые услов-
ности, поскольку в различных случаях движения одни и те же силы могут иметь
разные направления (сила инерции, составляющая силы тяжести Gsina, каса-
тельные силы в пятне контакта шины с дорогой).
К движущим силам относится касательная сила тяги FK ведущих колес. У
ведущих колес по направлению движения направлена продольная реакция
дороги RK ~ FK = Мк/гд. Из уравнения проекций всех сил, действующих на
троллейбус, на ось х-ов, определим касательную силу тяги
F„ = mv+Gsina + (Jmpi^p+JK)-- + Ff+Fe+FKp =0,(2.14)
^7*
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 87
где у - ускорение троллейбуса; а - угол уклона местности; J тр - момент
инерции вращающихся деталей трансмиссии и двигателя; Jк - момент инер-
ции ведущих колес; Ff - сила сопротивления качению; Fe - сила сопротивле-
ния воздуха.
Все остальные силы, действующие на троллейбус и входящие в выражение
(2.14) - силы сопротивления движению. Если какая-либо из этих сил в конк-
ретных условиях окажется направлена по движению (сила инерции, составля-
ющая силы тяжести Gsina, нагрузка на крюке), то она станет отрицательной
силой сопротивления. Силы сопротивления разделяются соответственно при-
чинам, вызывающим их возникновение.
Сила сопротивления качению Ff - сумма, направленных против движения
троллейбуса сил сопротивления качению каждого из колес:
п
1=1
где п - число колес; /г- - коэффициент сопротивления качению каждого из
колес; GKi - нормальная нагрузка на каждое колесо.
В общем случае движения троллейбуса коэффициенты сопротивления каче-
нию различны у каждого колеса. Однако для удобства выполнения расчетов
коэффициенты сопротивления каждого из колес заменяют усредненный коэф-
фициент сопротивления, величины которых приведены в табл. 2.2. Тогда сила
сопротивления движению троллейбуса равна:
Ff=fiG^=fG'
i=\
Если троллейбус движется по дороге с уклоном, то нормальная реакция
дороги равна Gcosa. В этом случае сила сопротивления движению троллей-
буса определяется выражением
Ff = f Gcosa. (2.15)
Сила сопротивления подъему Fa возникает в случае движения троллейбуса по
дороге, имеющий уклон с углом а . Составляющая силы тяжести, параллельная
дороге равна Gsina. При небольших уклонах синус можно заменить тангенсом.
В дорожном строительстве тангенс угла наклона дороги к горизонту называют
продольным уклоном i — tga, который обычно выражается в процентах. Тогда
для определения силы сопротивления подъему (которая может быть как поло-
жительной, так и отрицательной), получаем следующие выражение:
Fa = Gsina ~GP( 2.16)
Знак силы Fa определяется знаком угла а или уклона /, который считается
положительным на подъеме.
88
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Сила сопротивления дороги F$ определяется суммой сил сопротивления ка-
чению и сопротивления подъему. Используя формулы (2.14) и (2.15) можем
записать
Fd “ (fcosu + sina^p = ffi-
Сумму fcosa + sina — fd называют суммарным коэффициентом сопротив-
ления дороги.
Сила сопротивления воздуха Fe является составляющей полной аэродина-
мической силы и направлена вдоль продольной оси троллейбуса.
Аэродинамическая сила возникает в результате движения троллейбуса в без-
ветренную погоду, обтекания неподвижного троллейбуса потоком движуще-
гося воздуха (ветром) и при движении троллейбуса в движущемся потоке воз-
духа. Элементарные аэродинамические силы, действующие в каждой точке по-
верхности троллейбуса, различны по величине и направлению. Совокупность
этих элементарных сил заменяется равнодействующей Fe и моментом М в.
Равнодействующую Fw называют полной аэродинамической силой
F„ = cAq,
где с - безразмерный коэффициент полной аэродинамической силы; А - пло-
щадь Миделя, q - скоростной напор.
Для троллейбуса в качестве площади Миделя принимают его проекцию на
плоскость, перпендикулярную продольной оси.
Скоростной напор равен кинетической энергии кубического метра воздуха,
движущегося со скоростью ve троллейбуса относительно воздушной среды:
где рв - плотность воздуха, принимаемая равной 1,225 кг/м3.
Момент Mw называется полным аэродинамическим моментом
Mw = mBAqb,
где тв - безразмерный коэффициент аэродинамического момента, b - ха-
рактерный линейный размер по ширине (обычно принимают b равным колее
троллейбуса В).
В общем случае сила Fw направлена относительно вектора скорости трол-
лейбуса под некоторыми углами натекания в плоскости, параллельной плос-
кости дороги и в плоскости, перпендикулярной ей. Силу Fw можно разло-
жить по осям системы координат, связанной с троллейбусом так, что начало
коордйнат совпадает с центром масс, а оси Ох и Оу направлены по продоль-
ной и поперечной осям троллейбуса. Проекция полной аэродинамической силы
F на ось Ох называется силой сопротивления воздуха или силой лобового
сопротивления и обозначается Fwx = Fe
Fe =0,5cpeAv2. (2.17)
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 89
Формулы для определения проекций полной аэродинамической силы Fw
на остальные оси координат отличаются от формулы (2.17) только коэффици-
ентами с. ((Fwy - боковая аэродинамическая сила; Fwz - подъемная сила).
Коэффициенты с и т определяются экспериментальным путем, чаще всего
продувая модели в аэродинамических трубах.
Аэродинамический момент Л/ относительно оси Ох называют моментом
крена; момент М относительно оси Оу - опрокидывающим моментом; мо-
мент относительно оси Oz - поворачивающим моментом.
На тягово-скоростные свойства троллейбуса влияют силы Fe, Fwx и мо-
мент Mwy • Другие составляющие аэродинамического сопротивления оказы-
вают на тягово-скоростные свойства троллейбуса косвенное влияние.
Сила сопротивления воздуха Fe может быть представлена несколькими со-
ставляющими.
Сопротивление формы составляет (0,5...0,6) Fe и обусловлено разностью
между повышенным фронтальным давлением, возникающим перед троллей-
бусом и пониженным давлением, вызванным завихрениями воздуха позади
него. Решающее значение при этом имеет форма передней и задней частей ку-
зова, крыши, боковых стенок;
Внутреннее сопротивление создаваемого потоками воздуха проходящими
внутри троллейбуса для вентиляции или обогрева кузова, а также для охлаж-
дения узлов троллейбуса. Внутреннее сопротивление составляет 0,10...0,15 от
силы сопротивления воздуха Fe .
Сопротивление поверхностного трения (0,05. ..0,10) Fe, вызываемое силами
вязкого пограничного слоя воздуха, движущегося у поверхности троллейбу-
са, и зависящее от размера и шероховатости этой поверхности;
Индуктируемое сопротивление, равное (0,05...0,10)/^, вызываемое воздей-
ствием сил в направлении продольной оси троллейбуса (подъемной) и пер-
пендикулярной продольной оси (боковой);
Дополнительное сопротивление до 0,15 Fe , создаваемое различными высту-
пающими частями: фарами, указателями поворота, зеркалами обратного вида,
штангами и т. п.
На коэффициент сх оказывают влияние различные мелкие изменения фор-
мы. Так, при открытых окнах коэффициент сх увеличивается приблизитель-
но на 5 % , на столько же увеличивают сопротивление воздуха выступающие
фары, зеркала и т. п.
Приняв плотность воздуха постоянной, можно коэффициент 0,5cxpg счи-
тать зависящим только от формы кузова и углов между полной аэродинами-
ческой силой и осями координат. Этот коэффициент называется коэффициен-
том обтекаемости. Согласно формуле (2.17) коэффициент обтекаемости кв эк-
вивалентен силе сопротивления воздуха, действующей на 1 м2 площади трол-
лейбуса при относительной скорости 1 м/с2 . Приближенные значения коэф-
90
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
фициентов сх и кв для различных автомобилей при углах натекания и атаки,
равных нулю, приведены в табл. 2.4.
Таблица 2.4
Автомобиль Сх Кв
Грузовые : бортовые с кузовом фургон 0,90... 1,15 0,8...1,0 0,5...0,7 0,5...0,6
Автопоезда 1,40...1,55 0,85...0,95
Автобусы : капотной компоновки вагонной компоновки 0,75...0,90 0,60...0,75 0,45... 0,55 0,35...0,45
При движении троллейбуса в неподвижной воздушной среде относитель-
ная скорость воздуха vg равна скорости троллейбуса г. Тогда сила сопротив-
ления воздуха
Fe=keAv\
Произведение квА называется фактором обтекаемости. Большая лобовая
площадь троллейбуса в сочетании с их плохой обтекаемостью приводят к воз-
никновению значительных сопротивлений воздуха при сравнительно малых
скоростях движения, характерных для городских условий.
Сила, действующая в сцепном устройстве FKp. Для различных звеньев со-
члененного троллейбуса эта сила имеет различное направление. Для троллей-
буса-тягача при движении в тяговом режиме сила на крюке FK является си-
лой сопротивления движению, Она равна сумме сил сопротивления движе-
нию пассажирского прицепа, включая силу инерции, действующую на при-
цеп. Для прицепа эта сила является движущей.
Значение силы FK можно определить в результате решения уравнений дви-
жения звеньев сочлененного троллейбуса.
2.4. Уравнения движения и тягового баланса
троллейбуса
При движении троллейбуса по ровной дороге, пользуясь схемой рис. 2.10
можно записать уравнение движения в проекции на ось Ох :
-Fe-Fa- FKP, (2.18)
где Fx2 - сила необходимая для преодоления сопротивлений движению
троллейбуса (окружная сила на ведущих колесах); - сила, необходимая
для обеспечения качения передних колес.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
91
к
к
Fa=f^GKi+~-------^.(2.19)
j rpi
гд&к число ведомых колес; GKi - вес, приходящийся на ведомое колесо; J Ki
- момент инерции ведомых колес; (bKi - угловое ускорение ведомых колес;
- расчетный радиус ведомого колеса.
Окружная сила на ведущих колесах определяется выражением:
МдвЫJдв^тр^1 тр . -Д JКп .
^2 --------:--------------®дв ~L----<*>к2> (2.20)
Гр2 rp2 i гр2
где Мдв - момент, развиваемый тяговым двигателем; Jдв - момент инер-
ции тягового двигателя; п - число ведущих колес; гр2 - расчетный радиус ве-
дущих колес.
Решая уравнение (2.18) относительно силы Fxl и подставляя в него значе-
ния сил Fx\ и Fxl соответственно по выражениям (2.19) и (2.20), получим:
дви трЛ тр
ГР2
д<Л тр'П тр
Гр2
Принимая расчетные радиусы ведомых и ведущих колес равными
(г 1 = гр2 = го) и используя соотношения Шк =v/r0 и СОК = СОдв1итр , после
преобразований получим
к
2 У J
°" тр lmp_ = F +F F +т 1 + дв тр1т^ + ^
] о о 2 2
F тго тго
(2.21)
Обозначим выражение в скобках через $вр . Тогда силу Fj , затрачиваемую
на разгон троллейбуса и его вращающихся масс, можно представить в виде:
Fj = Sepmx. ( 2.22 )
Коэффициент Звр называется коэффициентом учета вращающихся масс.
Учитывая выражение (2.22) и то, что ~ Мдвитр Т!тр/г0 5 уравнение (2.21)
представим в виде:
92
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
~Ff ( 2.23 )
Уравнение (2.23) называется уравнением тягового баланса троллейбуса: сум-
ма всех сил сопротивления движению троллейбуса равна окружной силе на
ведущих колесах. Графическое изображение уравнения тягового баланса в
координатах окружная скорость - скорость троллейбуса называется тяговой
характеристикой троллейбуса (рис. 2.11). Для ее построения используются за-
висимости:
Мдв^трП тр
v = 0,377 —~-(1-<5)_
^тр
С помощью графика тягового баланса решается целый ряд задач, связан-
ных с движением троллейбуса. Однако использовать этот график для сравни-
тельной оценки тягово-скоростных свойств троллейбусов затруднительно,
поскольку у троллейбусов различной массы имеет место и разные окружные
силы на ведущих колесах.
Окружная сила и сила сопротивления воздуха при заданной скорости дви-
жения целиком зависят от конструкции и технического состояния троллейбу-
са. Разность окружной силы и силы сопротивления воздуха - свободная сила
тяги, которая может быть использована для преодоления сопротивления до-
роги и разгона троллейбуса. Отношение
свободной силы тяги к весу троллейбуса на-
зывается динамическим фактором и обозна-
чается буквой D
F .р
D= к в
G *
Динамический фактор - величина безраз-
мерная.
Следовательно, теперь уравнение тягово-
го баланса (2.23) можно записать в виде
Рис. 2.11. Тяговая характерис-
тика троллейбуса.
£
Графическое изображение зависимости
динамического фактора от скорости движе-
ния троллейбуса называется динамической
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
93
характеристикой, (рис. 2.12.). С помощью ди-
намической характеристики можно сравни-
вать тягово-скоростные свойства троллейбу-
сов различной массы. В тоже время необхо-
димо отметить, что при изменении нагрузки
троллейбуса изменяется и динамическая ха-
рактеристика. Пересчет динамического фак-
тора при нагрузке, отличающейся от номи-
нальной, может быть проведен по формуле
, т
D =D — , (2.24)
т
где D и т - соответственно динамичес-
кий фактор и масса троллейбуса при задан-
ной нагрузке.
Максимальные значения окружных сил
Рис. 2.12. Динамическая характе-
ристика троллейбуса.
ограничены сцеплением колес с дорогой. Поэтому на тяговых и динамичес-
ких характеристиках показывают линии, соответствующие максимальным по
сцеплению окружным силам FK(p и динамическим факторам .
Поскольку максимальное сцепление колес имеет место при движении трол-
лейбуса с малой скоростью, при подсчете динамического фактора, ограни-
ченного сцеплением, в выражении (2.24) пренебрегают силой сопротивления
воздуха
F G
z к(р '-'си
v~ G G ’
Отношение Gcli/G {G = ^2) называют коэффициентом сцепного веса.
Этот коэффициент показывает какая доля полного веса троллейбуса прихо-
дится на ведущие колеса.
Особыми точками динамической характеристики, по которым целесообраз-
но проводить сравнение тягово-скоростных свойств троллейбусов и автомо-
билей как транспортных средств, движущихся в одном транспортном потоке,
являются: максимальная скорость v и динамический фактор при максималь-
ной скорости Dv ; значение динамического фактора при минимальной часто-
те вращения тягового двигателя Z> и соответствующая ему скорость vD.
В некоторых случаях для оценки тягово-скоростных свойств и экономичности
используется уравнение мощностного баланса, показывающего распределение
мощности тягового двигателя по видам сопротивления. Для его получения необ-
ходимо все члены уравнения (2.23) умножить на скорость троллейбуса
FKv = Cv + Fov+Fjv-
94
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Введя обозначения Рк — FKv, Ру — FyV; Рв — Fev; Рj — F-v представим
уравнение в следующем виде:
Рк=Ру+Рв+Рг(2.25)
где Рк - мощность подводимая к ведущим колесам; Ру - мощность, затра-
чиваемая на преодоление суммарного сопротивления дороги; Рв - мощность,
затрачиваемая на преодоление сопротивления воздуха; Pj - мощность, зат-
рачиваемая на разгон троллейбуса.
Так же, как уравнение тягового баланса, уравнение мощностного баланса
может быть представлено в графическом виде. Мощность, соответствующая
разности между мощностью, подводимой к ведущим колесам и мощностями,
затрачиваемой на преодоление суммарного сопротивления дороги и воздуха,
можно реализовать для разгона троллейбуса.
2.5. Нормальные реакции на колесах
Величины нормальных реакций на колесах троллейбуса определяют силы
сопротивления качению и силы сцепления колес с дорогой. Значения нормаль-
ных реакций необходимы нс только при оценке тягово-скоростных свойств,
но и при оценке таких эксплуатационных свойств троллейбуса как тормоз-
ных, управляемости и устойчивости, а также при расчете некоторых его узлов
(мосты, подвеска и др.). У троллейбуса, неподвижно стоящего на горизонталь-
ной дороге, сумма статических нормальных реакций R7 равна его весу:
= G = mg.
1=1
У двухосного троллейбуса, разложив силу веса на две составляющие G) и
G2, приложенные соответственно к переднему и заднему мостам, найдем нор-
мальные реакции колес переднего Rz}Cm и заднего Rz2cm мостов:
ЯЛст=СхЛ&, Rz2cm=G2 = a-G.
При определении на горизонтальной дороге статических нормальных реак-
ций на колесах сочлененного троллейбуса можно считать горизонтальную
составляющую крюкового усилия между тягачом и пассажирским прицепом
равной нулю FKpz =0 (рис. 2.13). Составим уравнения моментов сил, дей-
ствующих на прицеп в статике относительно точки сцепки D и точки Е кон-
такта колес прицепа с дорогой:
Рцр Pz3 ст ^пр^пр 0’ bnpGnp LnpFКр Ст в 0,
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
95
и решим первое уравнение относительно нормальной реакции на колесах при-
цепа ст
п _ @пР f’
“z3 cm ~ j ^пр ’
^пр
Второе уравнение - относительно вертикальной составляющей крюкового уси-
лия ^кр.ст.в •
F =^G
кр.ст.в j пр
^пр
Вертикальная составляющая крюкового усилия F ап в догружает через
сцепное устройство колеса заднего моста троллейбуса-тягача.
При движении сочлененного троллейбуса с ускорением (замедлением) на
подъем с углом а появляется сила инерции F , которую приложим в центре
масс, а силы веса троллейбуса и пассажирского прицепа разложим на две со-
ставляющие: параллельную дороге С since и нормальную дороге G cosa, рис.
2.13. Кроме того, на ведомые колеса троллейбуса и прицепа при движении
действует момент сопротивления качению М / . На рис. 2.13 сочлененный трол-
лейбус “разрезан” по сцепному устройству. Реакции сцепки горизонтальная
РКр.г и вертикальная FKp e приложенные к троллейбусу и прицепу, равны по
величине, но имеют противоположные направления для троллейбуса и прице-
па. Силы, действующие на прицеп, определяются следующим образом:
горизонтальная составляющая F крюкового усилия находится из уравне-
ния проекций всех сил на ось Ох:
96
Раздел.2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Fkp.z = тпр* + GnPsina + fGnpcosa\
вертикальная составляющая F крюкового усилия из уравнения моментов
относительно точки О3 контакта колес прицепа с дорогой:
1 Г / 1
FKP.e = — \^РОг^°8^^
^пР
нормальная реакция Аг3 на колесах прицепа - из уравнения моментом от-
носительно точки сцепки:
1 Г 1
Rl3 =~J-AanpGnpCOSa + (m^ + Gppsina)hc.np~ hKP)~M/з!
Ftp
(2.25)
После этого определяются нормальные реакции на колесах троллейбуса:
нормальная реакция RzX на передних колесах - из уравнения моментов от-
носительно точки О2 контакта задних колес с дорогой:
~ (m* + Gsina 4-Fe)hc -hKOFKn ,-^KI}F
T L- X D Z С Л./7 &LJ.C
GiP
(2,26)
нормальная реакция Rzl на задних колесах - из уравнения моментов отно-
сительно точки Оf контакта передних колес с дорогой:
Rzl = — [aGcosa + (тх + Gsina + Fe )hc + hKpFKp2
кр.в
(2.15)
Таким образом, выражения (2.25)...(2.27) позволяют определять нормаль-
ные реакции на колесах сочлененного троллейбуса в общем случае его движе-
ния. Если в выражениях (2.26) и (2.27) принять горизонтальную FKp,s и верти-
кальную F в составляющие крюкового усилия принять равными нулю, то
эти выражения можно использовать для определения нормальных реакций на
колесах двухосного троллейбуса.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
97
Глава 3. Тяговый расчет троллейбуса
3.1. Задачи расчета, задаваемые
и выбираемые параметры
Задачей тягового расчета является определение необходимой мощности тя-
гового двигателя и передаточного числа моста, обеспечивающих требуемые
тягово-скоростные свойства троллейбуса в заданных условиях эксплуатации.
Он выполняется при проектировании нового троллейбуса или модернизации
существующего. Исходные данные для этого задаются в техническом задании,
являющемся первичным документом, на основании которого выполняются эс-
кизный и технические проекты.
Техническое задание устанавливает основное назначение троллейбуса (пас-
сажирский, грузовой, специальный), условия эксплуатации, техническую ха-
рактеристику (число пассажиров или грузоподъемность), максимальную ско-
рость движения, максимальный преодолеваемый подъем. На его основании
конструктор, анализируя технические характеристики существующих троллей-
бусов и оценивая перспективы их развития, а также традиции и уровень осна-
щенности завода изготовителя, качество предполагаемых к использованию
материалов, выбирает ряд характеристик, необходимых для проведения тяго-
вого расчета. К таким характеристикам относятся: массо-геометрические па-
раметры, размеры шин, коэффициент полезного действия трансмиссии, коэф-
фициент сопротивления воздуха. При расчетах во внимание принимаются не-
сколько видов массовых показателей.
Масса сухого троллейбуса (тс) или сухая масса - масса троллейбуса без ин-
струмента, дополнительного оборудования, (например, радиоприемник, кон-
диционер и др.). Она включает массу жидкости в амортизаторах, смазочного
материала в агрегатах и шарнирах, электролита в аккумуляторных батареях.
Масса снаряженного троллейбуса (пгсн ) или снаряженная масса - масса трол-
лейбуса со снаряжением, но без водителя и пассажиров. Она зависит от номи-
нальной вместимости троллейбуса; определить ее можно по удельной снаря-
женной массе, т. с. массе троллейбуса, приходящийся на одного пассажира.
На рис. 2.14 показана зависимость снаряженной массы от номинальной вмес-
тимости городских автобусов. При этом под номинальной вместимостью по-
нимается число пассажиров, перевозимых автобусом в нормальных условиях
(не в часы “пик”). Огибающие кривые соответствуют наименьшим и наиболь-
шим удельным массам.
98
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Полная масса троллейбуса (w) - масса снаряженного троллейбуса с водите-
лями и пассажирами (в случае сочлененного троллейбуса - троллейбуса-тяга-
ча и полуприцепа с водителем и пассажирами). Полную массу троллейбуса
можно определить по формуле
т = тС}1 + т1( (и + к +1)+ тб (и + к),
Рис. 2.14. Зависимость снаряженной
массы городских автобусов от вмес-
тимости.
где тч - масса водителя или одного пас-
сажира (при расчетах принимают тч -75
кг); и - число мест для сидения пассажиров;
к - число мест для проезда пассажиров стоя;
тб - масса багажа одного пассажира (при
расчетах принимают тб - 5 кг).
Число мест для проезда пассажиров стоя
определяют исходя из площади, в пределах
которой возможно их размещение. В нор-
мальных условиях предполагается размеще-
ние на одном квадратном метре свободной
от сидений площади до 5 человек, а в часы
“пик” - до 8.
При выборе шин за исходный параметр
принимают нормальную (вертикальную)
нагрузку на наиболее нагруженный мост.
Для троллейбусов на мост допускается на-
грузка до 100 кН. При распределении мас-
сы троллейбуса по мостам следует иметь в виду, что увеличение нагрузки на
мост увеличивает сцепной вес (масса, приходящаяся на ведущие колеса) трол-
лейбуса и соответственно улучшает его тяговые свойства. Обычно масса, при-
ходящаяся на ведущий мост, колеса которого имеют сдвоенные шины, прини-
мается равной 0,67...0,70 полной массы троллейбуса. Массу пассажирского по-
луприцепа составляет 0,4...0,6 массы троллейбуса-тягача. После определения
полной массы троллейбуса и распределения его веса по мостам, конструктор,
используя ГОСТы с сортаментом шин, выбирает размеры шин и расчетный
радиус ведущих колес г.
Диапазон максимальных скоростей троллейбусов определяется условиями
обеспечения надежного токосъема с контактного провода, безопасности дви-
жения, действующими нормативными документами, скоростными показате-
лями троллейбуса-аналога, тенденциями развития троллсйбусостроеийя. Он
находится в пределах 70...75 км/ч при движении по горизонтальной дороге и
30...40 км/ч при движении на подъем с уклоном дороги не менее 3 %.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
99
3.2. Определение потребной мощности тягового
двигателя
Выбор потребной мощности тягового двигателя является одним из наиболее
ответственным этапом тягового расчета троллейбуса. При повышенной мощ-
ности тягового двигателя улучшаются динамические качества троллейбуса,
возрастает средняя скорость движения, но увеличиваются габариты и масса
тягового двигателя, размеры трансмиссии, что влияет на стоимость изготов-
ления троллейбуса. При недостаточной мощности тягового двигателя трол-
лейбус, обладая низкими тягово-скоростными свойствами, будет создавать
помехи для более скоростных видов транспорта, движущихся в общем транс-
портном потоке. При этом, чем хуже тягово-скоростные свойства троллейбу-
са и чем больше его габариты и масса, тем больше он создаст помех в транс-
портном потоке и уменьшает эффективность пассажирских перевозок. Выбор
двигателя производится в два этапа, которые получили название предвари-
тельный и поверочный расчеты.
Предварительный расчет. Потребную максимальную мощность Р (кВт)
тягового двигателя определяют из уравнения тягового баланса троллейбуса,
имеющего полную массу т(т), учитывая, что при установившемся движении
с максимальной скоростью (км/ч) при заданном дорожном сопротивле-
нии его ускорение равно нулю:
V
j — max
,лах ~ 3600г}1
r— +
тр
т j 2
max
3,62
(2.26)
где g - ускорение свободного падения.
Рассчитанную мощность сравнивают с мощностью тяговых двигателей
троллейбусов-аналогов. По итогам анализа, делают заключение о правильно-
сти расчета мощности тягового двигателя и возможности его установки на
троллейбус.
Для расчетов по формуле (2.26) значение дорожного сопротивления прини-
мают у/д =0,018...0,03, а относительный подъем местности/ = 0,02...0,03, В свя-
зи с этим за расчетное значение коэффициента Ц/д принимают 0,04.
При определении величины силы сопротивления воздуха коэффициент со-
противления воздуха кв и площадь лобового сопротивления Ав выбирают,
исходя из предварительной эскизной компоновки троллейбуса или по анало-
гии с существующими троллейбусами.
По определенной мощности Ртах выбирается тяговый двигатель из числа
выпускаемых промышленностью, имеющий мощность, близкую к требуемой,
желательно наиболее высокооборотный, но в то же время обеспечивающий
100
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
нормальную величину передаточного числа ведущего моста ми. Передаточ-
ное число моста выбирается по условиям движения троллейбуса на максималь-
ной скорости:
_ О,377г^й/Лйг
V
у max
где ro - расчетный радиус ведущего колеса, м; пдв тах - максимальная час-
тота вращения тягового электродвигателя, об/мин. В троллейбусах применя-
ются мосты с передаточным числом 12... 15.
Поверочный расчет. В процессе этого расчета уточняются параметры выб-
ранного тягового электродвигателя и проверяется его работоспособность в
наиболее тяжелых условиях. Для проверки режимов работы удобно пользо-
ваться динамической характеристикой троллейбуса [графическое изображе-
ние зависимости динамического фактора от скорости D = /(v).] с выбран-
ным тяговым двигателем. Для ее построения необходимо иметь величины КПД
тягового двигателя ) и всех узлов трансмиссии у1//1р ).
КПД тягового двигателя ) определяется по графику, представленному
на рис. 2.12. Если такого графика нет, зависимость = /(v) необходимо
построить. Делается это следующим образом.
В каталоге, по которому выбирался тяговый электродвигатель приведены
зависимости КПД от частоты вращения. Так как передаточное число моста
и 1( и расчетный радиус колеса г0 известны, строится график Т}дв = f (v). На
него наносится кривая изменения силы тока 1$в или напряжения U в зави-
симости от электрической схемы.
Коэффициент полезного действия трансмиссии характеризует потери
мощности в трансмиссии и равен произведению коэффициентов полезного
действия ее механизмов (карданная передача, механизмы ведущего моста)
йнр ~ ЛлЛкп •
Для проектных расчетов рекомендуются следующие значения КПД отдель-
ных механизмов трансмиссии: карданного шарнира Т]кп - 0,995; главной пе-
редачи Т]гп = 0,93...0,97; колесной передачи (редуктора) 7] = 0,96...0,98.
Для проверки работоспособности тягового электродвигателя на динами-
ческой характеристике D = f(v) (рис. 2.15) берутся точки, соответствующие
наиболее характерным режимам работы троллейбуса. К таким режимам от-
носятся:
- движение с максимальной скоростью;
-движение с минимальной скоростью.
Рассмотрим каждый режим работы троллейбуса в отдельности.
Режиму максимальной скорости соответствует минимальный динамический
фактор - 0,05. Тяговый двигатель в этом случае работает при макси-
Раздел 2. ТЕОРИЯТРОЛЛЕЙБУСА
101
мальной частоте вращения п/лах и развивает D,
при этом минимальный крутящий момент,
который может быть определен по формуле:
Г) г
,* mm о
мд=---------
^tnp^tnp
Зная крутящий момент двигателя М дв и ча-
стоту вращения сто вала пдв, по характерис-
тикам тягового электродвигателя определяют
величины: КПД двигателя Т]дв потребляемую
величину тока 1дв или напряжения U<)в.
Минимальная скорость движения vmi)[ ,как
Рис. 2Л5, Динамическая харак-
теристика троллейбуса с харак-
правило, используется при преодолении трол-
лейбусом максимального сопротивления, Пос-
леднее имеет место при движении на подъем с терными точками
углом уклона до 20° . В этом случае величина динамического фактора макси-
мальна и составляет DnKiX - 0,4...0,5. Отмстив па динамической характеристике
эту точку, для нее, как и для первого режима, находят все необходимые оценоч-
ные параметры. На этом режиме допускается некоторая перегрузка тягового
двигателя. В связи с тем, что характеристика тягового электродвигателя являет-
ся основой для расчета параметров движения троллейбуса, рассмотрим более
подробно расчет характеристик тяговых электродвигателей с различными спо-
собами возбуждения и требования к ним.
3.3. Расчет характеристик тяковых двигателей
постоянного тока
В процессе работы тягового двигателя происходит взаимное однозначное
изменение его параметров - напряжения, электродвижущей силы (э.д.с.) и тока.
Соотношения его параметров, представленное в табличной или графической
форме являются характеристиками тягового двигателя. В электрической тяге
используются три основные зависимости, рассчитанные при проектировании
тягового двигателя и отнесенные к его валу:
п(1) - зависимость частоты вращения якоря от его тока при заданном на-
пряжении питания тягового двигателя;
М(1) - зависимость крутящего момента двигателя от тока якоря с учетом
к.п.д. тягового двигателя;
h (I) - к.п.д. тягового двигателя от тока якоря.
Эти три электромеханические характеристики тягового двигателя после при-
ведения к колесу, трансформируются в его естественные характеристики:
102
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
v(I) - зависимость скорости движения колеса (троллейбуса) от тока якоря
тягового двигателя;
FK(I) - зависимость касательной силы тяги колеса от тока якоря тягового
двигателя;
hK(I) - к.п.д. системы “тяговый двигатель - трансмиссия - колесо” (колес-
но-моторного блока).
Современные системы автоматического управления позволяют реализовать
заданные значения тока двигателя и скорости. Следовательно, можно полу-
чить любые характеристики, которые, в отличие от естественных, называют-
ся автоматические. Иногда характеристики п(1) и v(I) называют скоростям-
ми, а Д.(/) - тяговыми колесно моторного-блока или троллейбуса.
Характеристику F (у ), полученную путем исключения силы тока I из зави-
симостей v(I) и т. е. фиксируя значения скорости и силы тяги при од-
них и тех же значениях тока, называют также тяговой характеристикой.
Форма характеристик тяговых двигателей, во многом определяющая тяго-
вые свойства троллейбуса, зависит прежде всего от принятой схемы возбужде-
ния магнитодвижущей силы (м.д.с. или магнитного потока) тягового двигате-
ля. Рассмотрим в этом плане двигатели постоянного тока, имеющие последо-
вательное (рис. 2.16, а), параллельное (рис. 2.16, б) и смешанное возбуждение
при согласном (рис, 2,16, в) и встречном (рис. 2.16, г) включении последова-
тельной и параллельной обмоток.
По закону электрического равновесия между приложенным к двигателю
напряжением U, его э.д.с. Е и падением напряжения в силовой цепи при уста-
новившемся режиме выполняется условие:
U=E + Ir,( 2.27)
где / - ток якоря двигателя; г - сопротивление якорной цепи двигателя.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
103
Напряжение, приложенное к двигателю:
U=Uc/Zde,
где U с - напряжение питания (сети); z$e ~ число двигателей, подключен-
ных к источнику питания последовательно;
p(i)N
Е -------*
^^пар
(2.28)
где N и а - число проводников и число параллельны^ ветвей обмотки якоря;
р - число пар полюсов; w - угловая скорость якоря; Ф - магнитный поток
главного полюса двигателя, Вб.
Выражая угловую скорость через поступательную скорость г (км/ч) трол-
лейбуса и пренебрегая незначительным буксованием колес, получим
Е-сгФ, (2.29)
где:
pN
с ”----——
Подставляя значение Е в формулу (2.27), получим следующее соотношение:
U = суФ + rl. ( 2.30 )
Решая уравнение (2,30) относительно тока / и скорости у, получаем:
Z = (С7 -cv<2>)/r; (2.31 )
v = (U-г1)/(сФ). (2.32)
При отсутствии цепей параллельного и независимого возбуждения подве-
денная к двигателю мощность Pj ~L4, а полезная мощность, подведенная к
ведущим колесам при суммарных потерях ДР в двигателе и трансмиссии
P = Px-kP = Ul-kP.
Потери мощности определяются по выражению:
ДР = г!2 + &РС +ЛР„ +ДР3 + ДР„„ (2.33)
где ДРС - магнитные потери; ДР1( - механические потери; ДР? - потери в
редукторах ведущего моста; ДР^ - электрические потери в щетках, которые
для упрощения включают в электрические потери г/2 .
Заменив в формуле (2.33) напряжение U и э.д.с. Е их значениями соответ-
ственно по формулам (2.27) и (2.29), получим:
Р = сФ/v - (ЬРС + ДР„ + ДР,), ( 2.34 )
где сФТу - так называемая электромагнитная мощность Рэи, равная подве-
денной мощности за вычетом механических и магнитных потерь.
104
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Подставив в выражение (2.34) значение мощности Р ~ Fv!\6 , и разделив
на скорость у (км/ч), получим значение касательной силы тяги, Н :
FK = 3,6сФ1-3,б(&Рс+Ы>Л1 + AP3)/v. (2.35)
Первый член правой части 3,6сФ1 = F3 и называют электромагнитной си-
лой тяги', второй член представляет собой потерю силы тяги, вызванную маг-
нитными и механическими потерями;
\FK = 3,6 (АРС + АР„ + ДА )/v. (2.36)
Следовательно:
FK=F3A,-~\FK.(2.37)
Коэффициент полезного действия колесно-моторного блока 7] равен отно-
шению полезной мощности на колесе Р к полной подведенной мощности Ро .
Учитывая, что Ро = Р + ЛР + ЛРв получим:
77 = (Ро - ДР - ЛР„ )/Ро = 1 - (ДР, + ДР)/Р0> ( 2.38 )
где АРв - потери мощности в цепях возбуждения.
Скоростную характеристику тягового двигателя v(I) рассчитывают по фор-
муле (2.32) на основании зависимости сФ(1). Эту зависимость устанавливают
по магнитным характеристикам двигателя Ф(Р1;), где Fu - его м.д.с. Если
1в[ и wej - соответственно ток и число витков обмоток возбуждения на один
полюс двигателя, то = ^wejIej .
Суммирование производится с учетом схем включения этих обмоток. Для
схемы возбуждения при известных ее параметрах может быть установлена за-
висимость м.д.с. от тока якоря Fu (/) и на основании характеристики Ф(Е}1)
определена зависимость сФ(/). Для двигателя с компенсационной обмоткой
используют магнитную характеристику при холостом ходе, известную по дан-
ным испытаний или расчетов. При отсутствии такой обмотки необходимо
учитывать размагничивающее действие реакции якоря и пользоваться нагру-
зочными характеристиками Ф(ЛП) при различных токах якоря.
Так как двигатель одного и того же типа может быть использован при раз-
личных передаточных числах трансмиссии С^тр и диаметрах ведущих колес
D , удобнее определять магнитный поток на основании зависимостей
E/Co(F\i') и величину сФ, В.ч/км, по формуле:
сФ = E/v = 2птр E/(3,6cdDk).
Для расчета скоростной характеристики v(I) задаются разными значения-
ми тока якоря и определяют для каждого тока м.д.с. Fи в соответствии со
схемой возбуждения двигателя и ее параметрами. При этой м.д.с. находят по
нагрузочной характеристике отношение E/(D и магнитные потоки сФ для
каждого тока I. Затем по формуле (2.32) рассчитывают скорость и строят ха-
рактеристику v(I).
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
105
Характеристику силы тяги FK(l) рассчитывают по формуле (2.35). Элект-
ромагнитную силу тяги F3]t = 3,6сФ1 вычисляют, используя полученные ра-
нее значения сФ. Для определения силы тяги по формуле (2.37) необходимо
найти AF по сумме магнитных и механических потерь в двигателе и транс-
миссии [см. формулу (2.36)].
Механические потери в двигателе
возрастают с увеличением его угловой
скорости. Магнитные потери, склады-
вающиеся из потерь на гистерезис и по-
терь, вызванных вихревыми токами,
зависят от угловой скорости двигате-
ля и его магнитного потока. Сумму ме-
ханических и магнитных потерь опре-
деляют по найденным опытным
путем кривым потерь холостого хода
АРХ((У) двигателя при разных м.д.с.
Flf. Их представляют обычно в виде
семейства кривых зависимости от уг-
ловой скорости (Упри различных зна-
чениях м.д.с. F, как показано на рис.
2.17. При этом кривая АР((у) для
F и - 0 соответствует одним лишь ме-
ханическим потерям, а разность меж-
ду кривыми для какой-либо м.д.с. Fi;
и Fu = 0 представляет собой магнит-
ные потери холостого хода - так назы-
ваемые основные магнитные потери .
Суммарные магнитные и механи-
ческие потери при нагрузке двигате-
ля рассчитывают по формуле:
магнитных потерь в тяговом двигате-
ле от угловой скоростй вращения его
якоря.
К + + АР3. ( 2.39 )
Характеристику рассчитывают по формуле (2.38). Все входящие в нее
величины уже определены при расчете характеристик у(1) и F(I). Для более
компактного представления исходных данных, используемых при расчетах
электромеханических характеристик, целесообразно совместить нагрузочные
характеристики и кривые потерь холостого хода на одном чертеже, как пока-
зано на рис. 2.17.
У наиболее распространенного тягового двигателя последовательного возбуж-
дения, как видно из рис. 2.16, а, м.д.с. прямо пропорциональна току якоря. По-
этому у двигателей с компенсационной обмоткой зависимость сФ(1) совпадает с
106
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
100 2(Ю 300
Рис. 2.18. Зависимость Ф от тока
возбуждения для тяговых двигате-
лей без компенсационной обмотки.
Рис. 2.19. Электротяговые харак-
теристики двигателя последова-
тельного возбуждения.
характеристикой сФ(Л ),т.е. с зависимо-
стью сФ от тока возбуждения 1в при холо-
стом ходе. Для двигателей без компенсаци-
онной обмотки кривая сФ(1) соответству-
ет режиму нагрузки с токами возбуждения,
равными в любой точке кривой току яко-
ря. Она пересекает нагрузочные характери-
стики в точках с абсциссами, равными то-
кам якоря, для которых построены эти ха-
рактеристики (жирная линия на рис. 2.18).
Так как скорость движения приблизи-
тельно обратно пропорциональна магнит-
ному потоку, то при малых токах в пре-
дельных близких к прямолинейной части
кривой сФ(1) значения v почти обратно
пропорциональны току якоря. При увели-
чении тока по мере насыщения двигателя
скорость снижается в меньшей степени
(рис. 2.19). Падение напряжения г! вызы-
вает некоторое дополнительное снижение
скорости при увеличении тока.
Электромагнитная сила тяги
F f = 3,6сФ1 возрастает при малых на-
грузках в пределах прямолинейной части
характеристики сФ(1) пропорционально
квадрату тока, т. с. по параболе. По мере
увеличения тока и насыщения магнитной
цепи двигателя кривая F}u(l) все больше
отклоняется от параболы, приближаясь к
прямой линии.
Ординаты характеристики силы
тяги/Д.(/) меньше ординат характерис-
тик /Дн(/) на потери силы тяги Л/Д [см.
формулу (2.34)]. Поэтому в отличие от
кривой F3U(/), проходящей через начало
координат, кривая FK (/) пересекла бы
ось абсцисс при небольшом токе /¥, со-
ответствующем холостому ходу двигате-
ля. Однако при нормальном напряжении и столь малых токах двигатель не
может работать из-за чрезмерного увеличения угловой скорости. На рис. 2.19
эта область характеристики изображена штриховой линией.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
107
Характеристика 7]к {/ ) тягового двигателя последовательного возбуждения
имеет форму, обычную для машин постоянного тока. При малых нагрузках
к.п.д. резко снижается (см. рис. 2.19) из-за больших механических потерь. При
токе / подведенная к двигателям мощность затрачивалась бы в основном на
покрытие механических потерь и к.п.д. был бы равен нулю. По мере возраста-
ния нагрузки к.п.д. быстро увеличивается вследствие снижения значений ме-
ханических потерь. В области нагрузок двигателя, близких к номинальной,
к.п.д. достигает максимума, а затем снова уменьшается, так как возрастают
электрические потери, пропорциональные /2 . При нагрузке, намного превы-
шающей максимальную допустимую, падение напряжения могло бы стать
равным подведенному напряжению и скорость у = (U — rl )/сФ, а следова-
тельно, мощность и к.п.д. упали бы до нуля. Этот предельный режим соответ-
ствует короткому замыканию двигателя, при котором вся подведенная мощ-
ность UI расходуется на электрические потери г! .
Положение максимума на характеристике к.п.д. зависит от соотношения элек-
трических и механических потерь. Чем больше доля электрических потерь, тем
при меньшей нагрузке к.п.д. достигает максимума. Поэтому для двигателей трол-
лейбусов, работающих значительную часть времени в пусковом режиме с боль-
шими токами, целесообразно уменьшать относительные электрические потери.
По кривым v(I) и FK(l) строят тяговую характеристику F(v), показанную
линией 1 на рис. 2.20 для двигателей после-
довательного возбуждения. В соответствии гл \ V3 I д
с электротяговыми характеристиками дви- \ V L
гатсля (см. рис. 2.19) при малых скоростях \Д | .
и, следовательно, больших токах сила тяги yl
резко уменьшается с увеличением скорости.
По мере дальнейшего увеличения скорости -----------\4----------------
эта характеристика становится все более V ^**^*"***3
мягкой. Степень жесткости характеристики k f
тягового двигателя последовательного воз-
буждения зависит в значительной мере от на- ~Е
сыщения его магнитной системы и воздуш- -2.2ft Тяговые характеристики
ного зазора. Чем меньше насыщение двига- двигателей.
теля при номинальном режиме и чем больше доля м.д.с., приходящаяся на воз-
душный зазор, тем в большем диапазоне нагрузок тяговая характеристика оста-
ется мягкой.
М.д.с. тяговых двигателей параллельного и независимого возбуждения не за-
висит от тока якоря. Поэтому для таких двигателей (при наличии у них компен-
сационной обмотки) характеристика сФ(1) представляет собой прямую линию,
параллельную оси абсцисс. При отсутствии компенсационной обмотки магнит-
ный поток несколько уменьшается с увеличением тока вследствие размагничи-
108
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
вающего действия реакции якоря, как это
показано на рис, 2.21. Характеристика v(I)
получается при этом весьма жесткой, так
как с возрастанием нагрузки скорость лишь
незначительно снижается из-за увеличения
падения напряжения на сопротивлении об-
моток двигателя, причем влияние его час-
тично компенсируется уменьшением маг-
нитного потока, обусловленным реакцией
якоря, В случае очень больших нагрузок ре-
акция якоря может вызвать даже незначи-
+Еэк, ф> Ла
Рис. 2.21. Электромеханические характе- тельное повышение скорости. Скоростная
ристики двигателя параллельного и неза- и другие электромеханические характерис-
виеимого возбуждения. тики двигателя параллельного или незави-
симого возбуждения показаны на рис. 2.21. Характеристика электромагнитной
силы тяги двигателя постоянного тока параллельного или независимого возбуж-
дения с компенсационной обмоткой представляет собой прямую линию, прохо-
дящую через начало координат. При снижении магнитного потока из-за реак-
ции якоря электромагнитная сила тяги F3U несколько отклоняется от этой пря-
мой. Вычитая из электромагнитной силы тяги величину AFK, получим характе-
ристику FK (/), которая пересекает ось абсцисс при токе Iх холостого хода.
Когда троллейбус с включенным двигателем движется-по крутому спуску,
его скорость, а соответственно и э.д.с. Е - суФ возрастают. При некоторой
скорости э.д.с. становится равной приложенному напряжению Uи ток двига-
теля, как это следует из формулы (2.31), уменьшается до нуля. Если скорость
продолжает возрастать, э.д.с. превышает приложенное напряжение и ток дви-
гателя меняет направление. Так как направление магнитного потока остается
при этом неизменным, изменяется знак силы FK : она будет действовать про-
тив движения машины. Тяговый двигатель автоматически перейдет в генера-
торный режим, создавая при этом тормозной момент, действующий на трол-
лейбус.. Ток генераторного режима может быть передан в контактную сеть.
Подобный режим работы тягового двигателя называется рекуперативным тор-
можением. Электромеханические характеристики, соответствующие рекупера-
тивному торможению расположены во втором и третьем квадрантах рис. 2.21.
Ток рекуперации возрастает с увеличением скорости движения, так как э.д.с.
рекуперирующего двигателя больше напряжения контактной сети на падение
напряжения г!в цепи его якоря. Возрастание скорости связано также с размаг-
ничивающим действием реакции якоря. В отличие от тягового режима, при
котором влияние этих двух факторов противоположны, в генераторном ре-
жиме они действуют согласно.
Непосредственный переход двигателя параллельного и независимого возбуж-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
109
дения в генераторный режим в случае повышения скорости возможен благодаря
наличию магнитного потока при отсутствии тока в якоре. В двигателе последо-
вательного возбуждения такой переход невозможен, так как при токе якоря, рав-
ном нулю, практически исчезает магнитный поток. Чтобы использовать тяго-
вый двигатель последовательного возбуждения в режиме рекуперации, его при-
ходится переключать на независимое или смешанное возбуждение.
Тяговая характеристика двигателя параллельного или независимого возбуж-
дения близка к прямой линии, пересекающей ось абсцисс и продолжающейся
в четвертый квадрант. Эта характеристика (кривая 2 на рис. 2.20) является
жесткой - скорость мало изменяется с изменением силы тяги.
Кривая к.п.д. ЧкОО Двигателя параллельного или независимого возбужде-
ния имеет в тяговом режиме приблизительно такой же вид, как и у двигателя
последовательного возбуждения (см. рис. 2.21). В генераторном режиме к.п.д.
двигателя представляет собой отношение отданной в питающую сеть мощно-
сти к подведенной механической мощности. Он равен нулю при токе якоря,
равным току I п параллельного возбуждения или току, соответствующему
мощности цепей независимого возбуждения. При отрицательных токах, близ-
ких к номинальному, он достигает максимума, затем вновь постепенно умень-
шается по мере возрастания тока рекуперации.
Рассмотрим характеристики двигателя согласно-смешанного возбуждения,
у которого в тяговом режиме суммируются м.д.с. последовательной и парал-
лельной обмоток. При этом общая м.д.с.
= l„wn + !wc = (I +1„ Wn/wc) = Wc(/ + Io), ( 2.40 )
где 1)г и - соответственно ток и число витков параллельной (или неза-
висимой) обмотки; wc - число витков последовательной обмотки;
/ — / vv / w
о 1 п vvn /
Следовательно, двигатель согласно-
смешанного возбуждения можно предста-
вить как электрическую машину с одной
последовательной обмоткой, по которой
наряду с током якоря протекает неизмен-
ный ток. Поэтому в двигателе согласно-
смешанного возбуждения с компенсацион-
ной обмоткой криваяотличается от
аналогичной зависимости при последова-
тельном возбуждении лишь тем. что нача-
ло ее сдвинуто из начала координат влево
на отрезок, соответствующий току I о
(рис. 2.22). Поэтому при токе якоря, рав-
Рис. 2.22. Электромеханические харак-
теристики двигателя согласно-сме-
шанного возбуждения.
ПО Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
ном нулю, F3Ai и сФ не равны нулю, а соответствуют току I о . Характеристика
v(I) такого двигателя имеет примерно ту же форму, что и у двигателя после-
довательного возбуждения, но сдвинута влево, как и кривая сФ(1).
В двигателе согласно-смешанного возбуждения при 1-0 сохраняется м.д.с.
параллельной (или независимой) обмотки, что обеспечивает возможность
автоматического перехода в режим рекуперативного торможения. Так как при
этом ток якоря меняет направление, в рекуперативном режиме двигатель ра-
ботает как генератор встречно-смешанного возбуждения, в котором м.д.с.
последовательной обмотки вычитается из м.д.с. параллельной (или независи-
мой) обмотки. Поэтому с увеличением тока рекуперации уменьшается маг-
нитный поток и, следовательно, резко возрастает скорость. При переходе в
генераторный режим электромагнитная сила F31; меняет знак и становится
тормозной. По мере увеличения тока рекуперации сила сначала возрас-
тает, а при больших токах рекуперации двигатель сильно размагничивается.
При этом абсолютное значение F3U стремиться к нулю при токе рекуперации
10, соответствующем м.д.с., равной нулю. В области тягового режима абсо-
лютное значение F меньше, а при рекуперации больше F3U (см. рис. 2.22).
Зависимости Т]к\1) в тяговом и тормозном режимах имеют такой же вид,
как у двигателя параллельного или независимого возбуждения. Тяговая ха-
рактеристика F(v) двигателя согласно- смешанного возбуждения показана на
рис. 2.20 (кривая 3).
В электрических машинах со встречно-смешанным возбуждением м.д.с. обе-
их обмоток не складываются, а вычитаются при длительном режиме. Если м.д.с.
параллельной или независимой обмотки больше м.д.с. последовательной, дви-
гатель непригоден для электрической тяги из-за неустойчивости работы. Дей-
ствительно, при случайном, даже самом незначительном увеличении тока дви-
гателя уменьшится его магнитный поток и э.д.с., а следовательно, в соответ-
ствии с формулой (2.31) возрастает ток. Это вызовет дальнейшее снижение
э.д.с., что приведет к еще большему увеличению тока. Процесс может разви-
ваться вплоть до короткого замыкания при э.д.с., равной нулю. Случайное
снижение тока приводит в таком двигателе к увеличению э.д.с., вызывающе-
му дальнейшее снижение тока. Эта так называемая электрическая неустойчи-
вость встречно-смешанного возбуждения.
3.4. Требования к характеристикам тяговых
двигателей
Рассмотренные характеристики тяговых двигателей различных систем воз-
буждения соответствовали установившимся режимам работы, при которых
параметры тяговых двигателей нс зависят от времени. Однако при движении
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА . Ш
троллейбуса приходится менять такие параметры, как скорость и силу тяги
ведущих колес, так как изменяются профиль дороги, дорожная обстановка,
сигналы светофора, а также условия безопасности движения. Если не учиты-
вать происходящих при этом изменений во времени работы самих тяговых
двигателей и режимов движения троллейбуса, могут возникнуть ситуации, при
которых невозможно обеспечить нормальное движение троллейбуса, как, на-
пример, при неограниченном увеличении скорости движения или, наоборот,
невозможность трогания троллейбуса с места.
Поэтому троллейбусы с тяговыми двигателями постоянного тока должны
удовлетворять следующим основным требованиям в режиме тяги и электри-
ческого торможения.
1. Иметь тяговые двигатели, обладающие электрической устойчивостью ре-
жимов'работы, т.е. автоматически восстанавливать состояние электрического
равновесия между своими параметрами (приложенным напряжением, током яко-
ря, падением напряжения в электрической цепи) при малейшем случайном от-
клонении режима работы от установившегося состояния. Это значит, что возни-
кающая по времени разность между напряжением, приложенным к двигателю, и
его э.д.с. должна изменяться так, чтобы ток двигателя возвращался к своему ус-
тановившемуся значению.
2. Обеспечивать механическую устойчивость режима работы, а значит, ме-
ханическую устойчивость режима движения троллейбуса. Иными словами при
малейшем случайном отклонении скорости движения троллейбуса от устано-
вившегося значения возникающая разность силы тяги FK и сопротивления
движению F? должна изменяться так, чтобы автоматически восстанавлива-
лась скорость движения, соответствующая предшествующему установивше-
муся режиму движения. Если при этом FK — F >0, троллейбус начинает дви-
гаться ускоренно, при FK — F? <0 - замедленно.
3. Обеспечивать равномерное распределение нагрузки между параллельно
работающими тяговыми двигателями в режиме электрического равновесия.
4. Обладать высокой надежностью и возможно простой схемой.
Рассмотрим в какой мере удовлетворяют тяговые двигатели постоянного
тока поставленным требованиям.
Электрическая устойчивость. Исследуя электрическую устойчивость двигате-
лей различных систем возбуждения, обычно рассматривают лишь силовую часть
двигателя и не учитывают влияния вихревых токов, вызывающих некоторое от-
ставание изменение магнитного потока от м.д.с. Применительно к силовой цепи
тягового двигателя постоянного тока уравнение Кирхгофа для неустановивше-
гося процесса имеет следующий вид:
(7-(сгФ + г/) = £—. ( 7 41 )
dt ’ ‘ 7
где L -индуктивность силовой цепи двигателя; I - ток якоря.
112
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
В установившемся режиме уравнение (2.41) совпадает с уравнением элект-
рического равновесия (2.30), так как dl/dt—0.
При отклонении от состояния равновесия в случае увеличения тока устой-
чивость будет обеспечена, если возникающие изменения соотношения между
напряжением U и э.д.с. с\Ф стремиться вернуть ее в первоначальное равновес-
ное состояние, т.е. вызвать уменьшение тока. При этом производная dl/dt
будет отрицательной. Если же произойдет случайное уменьшение тока, то
для возвращения к режиму электрического равновесия необходимо возраста-
ние тока, т.е. производная dl/dt должна стать положительной. Таким обра-
зом, условие электрической устойчивости
Учитывая уравнение (2.41), получим
-Щ(7-(срФ + г/)]<0, ,
откуда
dU й(суФ + г1)
di ~~dl
(2.42 )
Таким образом, для обеспечения электрической устойчивости необходимо,
чтобы при изменениях тока сумма э.д.с. и падения напряжения изменялась в
большей степени, чем напряжение.
Зависимости напряжений, э.д.с. и падения напряжения представлены для
двигателей последовательного возбуждения на рис. 2.23, а, параллельного или
независимого - на рис. 2.23, б, согласно-смешанного - на рис. 2.23, в и встреч-
но-смешанного при преобладании параллельной обмотки - на рис. 2.23, г.
Для всех двигателей кривые I э.д.с. суФ подобны кривым сФ(1), так как при
анализе быстро протекающих электрических переходных процессов допусти-
мо принимать скорость движения троллейбуса постоянной. Линии 2 на всех
диаграммах представляют собой приложенное к двигателям напряжение С7;
линии 3 , наклонные по отношению к оси абсцисс под углом, тангенс которо-
го пропорционален сопротивлению г, - падение напряжения гР, линии 4 - ве-
личину суФ + rl. Заштрихованные на рис. 2.23 области между ординатами U и
суФ + г! представляют собой величину
di
dt
определяющую знак и скорость
изменения тока. Точки пересечения а и b прямых 2 с кривыми 4 соответствуют
состоянию электрического равновесия, так как в них
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
ИЗ
стФ + rl-U и L~~~ — 0.
dt
Кривая 4 на рис 2.23, б дваж-
ды (в точках а и Ь) пересекает
прямую 2, что соответствует
двум положениям электричес-
кого равновесия - устойчиво-
го и неустойчивого.
Как видим, электрической
устойчивостью обладают во
всем диапазоне нагрузок дви-
гатели последовательного и
согласно-с мешанного воз- рис 2.23. Зависимость напряжений, э. д. с. и падения
буждения, а двигатель парал- напряжения от тока якоря для тяговых двигате-
лельного или независимого лей различного возбуждения.
возбуждения без компенсаци-
онной обмотки - только при нагрузке, соответствующей точке Ь. Электричес-
кую неустойчивость работы двигателя встречно-смешанного возбуждения с
преобладанием параллельной или независимой обмотки, исключающую его
использование на троллейбусах, иллюстрируют кривые на рис. 2.23.
Механическая устойчивость. Из уравнения движения троллейбуса в тяго-
вом режиме
m^; = T~Ff
следует, что динамическое равновесие, определяемое условием FK~ F? — 0}
устойчиво, если при увеличении скорости сила тяги FK становится меньше
силы сопротивления движению Fj , т.е. левая часть уравнения отрицательна,
а при уменьшении скорости FK > Fj , т.е. левая часть уравнения - положи-
тельна. Условие устойчивости описывается неравенством:
откуда
dFK dFf
dv dv
(2.43)
Следовательно, условия механической устойчивости формулируются ана-
логично условиям электрической устойчивости (2.42), т.е. производная актив-
ной касательной силы тяги FK по скорости должна быть меньше производной
114
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
от сил сопротивления движению Fу . Другими словами, производная равно-
действующей силы по скорости должна быть отрицательной, т.е. характерис-
тика \FK — Fjjy) - убывающей.
Тяговые характеристики (кривые 1) и характеристики сопротивления дви-
жению (кривые 2) для двигателей последовательного возбуждения представ-
лены на рис. 2.24, а, параллельного или независимого - на рис. 2.24, б, соглас-
Рис. 2.24. Тяговые характеристики и .харак-
теристики сопротивления движению для дви-
гателей различного возбуждения.
но-смешанного - на рис.
2.24, в и встречно-смешан-
ного - на рис. 2.24, г. Точ-
ки пересечения кривых 1 и
2 соответствуют устано-
вившемся скоростям у.
Устойчивым равновеси-
ем обладают во всем диа-
пазоне скоростей двигате-
ли последовательного и со-
гласно-смешанного воз-
буждения, так как FK
уменьшается, a Ff растет
с увеличением скорости.
Например, при любом слу-
чайном увеличении скоро-
сти Av сила тяги будет
меньше силы сопротивле-
ния движению. При этом
ускорение dv/dt станет от-
рицательным и движение
троллейбуса будет замед-
ляться, пока не установит-
ся прежняя скорость. Дви-
гатель параллельного или независимого возбуждения механически устойчив
в диапазоне рабочих скоростей. Лишь при весьма больших нагрузках двига-
тель без компенсационной обмотки может оказаться неустойчивым, если из-
за резкого размагничивания под влиянием реакции якоря скорость начинает
увеличиваться при возрастании нагрузки. Двигатель встречно-смешанного
возбуждения (см. рис. 2.24, г) механически неустойчив.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
115
3.5. Характеристики троллейбусов с
импульсным управлением
На троллейбусах до недавнего времени применялась только контактно-ре-
остатная система управления и регулирования. Развитие силовой полупровод-
никовой техники, применение выключаемых тиристоров позволили создать
качественно новые системы управления режимами работы тяговых электро-
двигателей - бесконтактные тиристорно-импульсные. Переход на бесконтак-
тное плавное управление коренным образом меняет схемы и условия работы
троллейбуса, значительно улучшая его тягово-эксплуатационные качества и
повышая экономическую эффективность электрической тяги.
Тиристорное плавное управление по сравнению с контактно-реостатным
имеет ряд важных преимуществ:
возможно осуществлять автоматическое управление работой двигателя,
получая практически любые тяговые характеристики, удовлетворяющие раз-
личным условиям эксплуатации;
бсзреостатный плавный пуск устраняет потери энергии в пусковых резисто-
рах и позволяет повысить ускорение троллейбуса при трогании без увеличе-
ния мощности тягового двигателя;
регулирование скорости возможно во всем се проектном диапазоне (отсут-
ствует ограниченное число детерминированных ходовых позиций);
упрощаются силовые схемы троллейбуса.
На троллейбусах применяют плавное регулирование напряжения, подводимого
к двигателям, а также сопротивления пусковых резисторов и тока возбуждения.
Принципы плавного регулирования напряжения па тяговых двигателях. Плав-
ное регулирование напряжения на тяговых двигателях осуществляется с по-
мощью преобразователей. Сущность этого регулирования заключается в том,
что ток поступает в цепь двигателя чередующимися импульсами, из которых с
помощью элементов, накапливающих и затем отдающих электрическую энер-
гию, - реакторов и конденсаторов - формируется непрерывный ток тяговых
двигателей. Изменяя соотношение между продолжительностью импульсов и
временем паузы, меняют среднее напряжение на двигателе, тем самым регули-
руя скорость движения троллейбуса. Плавный бсзреостатный пуск и электри-
ческое торможение троллейбуса осуществляются в широком диапазоне ско-
ростей. Периодическое отключение и подключение цепей нагрузки к источни-
ку энергии обеспечивается тиристорным устройством, называемым прерыва-
телем или ключом. Для сглаживания пульсаций тока в контактной сети и в
тяговом двигателе, неизбежно возникающих при импульсном регулировании,
предусматривают специальные фильтры.
116
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
На рис 2.25 приведена принципиальная схема управления двигателем с помо-
щью прерывателя П . Для сглаживания пульсаций тока в двигателе послсдова-
Рис. 2.25. Принципиальная схема управления дви-
гателем с помощью прерывателя.
тсльно с ним включен нагру-
зочный реактор LH, парал-
лельно цепи тягового двига-
теля - неуправляемый диод
Vo, называемый обратным.
Через этот диод замыкается
цепь тягового двигателя при
разомкнутом прерывателе.
На выходе преобразователя
установлен Г-образный
фильтр для сглаживания
пульсаций тока в контактной
цепи, состоящий из реактора
и конденсатора Сф.
На рис 2.26, а, б и в даны
соответственно диаграммы
изменений напряжения U н в
цепи нагрузки, тока , по-
ступающего из сети, и тока
I двигателя. Для сглажива-
ния пульсаций тока контак-
тной сети необходим кон-
денсатор большой емкости.
Поэтому напряжение на
входе импульсного преобра-
зователя может быть приня-
то постоянными равным на-
пряжению Uк сети. Для уп-
рощения принято, что пре-
рыватель отключает и вклю-
чает цепь нагрузки мгновен-
но, кроме того, не учтены
потери энергии в элементах
преобразователя. Длитель-
ность псриодг! между двумя
включениями прерывателя
обозначена Т, а время, в те-
чение которого прерыватель
замкнут, tA .
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА И?
При замкнутом прерывателе к цепи приложено напряжение, равное напря-
жению контактной сети (UH =Uк). В течение времени tA под действием на-
пряжения UK увеличивается ток I, равный току Ц. Поступающая из сети энер-
гия расходуется на работу тягового двигателя и увеличение электромагнит-
ной энергии его цепи на ЬиА № —1/2, где LuA - сумма индуктивностей
реактора LH и двигателя; 1Н и 1К ~ нагрузки соответственно в начале и в кон-
це интервала G . Остальную часть периода tB = Т — tA нагрузка отключена
от сети (UH = О), вследствие чего ток / двигателя замыкается через диод Vo ,
постепенно уменьшаясь до значения 1 н. Ток двигателя поддерживается в те-
чение периода tB за счет энергии, запасенной в нагрузочном контуре и умень-
шающейся на Lud (// — 1^ 1/2. Среднее напряжение
U=-^U„dt
1 о
на двигателе, как следует из рис. 2.26, а,
U = UKtA/T. (2.44)
Соотношение между средним током I двигателя и средним током /[ сети
можно приближенно определить при постоянных Uн и I, пренебрегая поте-
рями в преобразователе, на основании баланса первичной и вторичной мощ-
ностей UKI\ — UI, откуда
т U
1=йУ У (2-45)
Отношение tA /Т называют коэффициентом заполнения импульсов (или пе-
риода Т). В рассматриваемом простейшем случае этому коэффициенту, кото-
рый обозначим через Л, равно отношение U/Uк . В реальных импульсных си-
стемах отключение и включение прерывателем цепи нагрузки происходит не
мгновенно, вследствие чего отношение U/Uк несколько отличается от коэф-
фициента Л = tА /Т .
Из выражения (2.44) следует, что напряжение на двигателе можно регули-
ровать, изменяя продолжительность как проводящего состояния прерывате-
ля tA = АТ , так и всего периода Т цикла. Систему импульсного управления,
при которой частота импульсов и, следовательно, длительность периода не-
изменны, а меняется продолжительность импульса tA, называют широтно-
импульсной , так как регулируется широта импульса. Если же длительность
импульса сохраняют постоянной, а для регулирования напряжения меняют
время Т, т.е. частоту следования импульсов, то такую систему называют час-
тотно-импульсной . Возможны комбинированные импульсные системы, в ко-
торых изменяют как Т, так и tA .
118
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
При пуске двигателя в пускорсгулирующей аппаратуре выделяется мощность
АР = Ру — Рд, т.е. равная разности мощностей источника питания Ру и мощ-
ности Рд подведенной к двигателю. При этом
Pt=UKCP,=FKvK-
Если пуск происходит при.постоянной силе тяги FK — const, то
AP=Uk11-Fkv/t1k.(2.46)
Из выражения (2.46) видно, что при пуске АР=0 , если
/1
с.т’
т.е. потребляемый ток при постоянном напряжении UK должен возрастать
пропорционально скорости. Так как ly — XI, то экономичный режим разгона
будет обеспечен, если изменять коэффициент заполнения импульсов по закону
UhT
А. < А
Регулирование сопротивления пускового резистора. С помощью импульсно-
го регулятора можно плавно регулировать сопротивление пускового резисто-
ра, периодически выводя и вводя резистор (рис. 2.27, а). Среднее сопротивле-
ние Rcp за период работы регулятора определяется коэффициентом заполне-
ния. Как видно из диаграммы, приведенной на рис. 2.27, б ,
Rcp=R(l-tA/T)=(.\-^R,
т.е. зависимость сопротивления Rq) резистора от Л линейная. Такой пуск
можно рассматривать как пуск при плавном изменении R .
Регулирование тока возбуждения тяговых двигателей. Импульсное регули-
рование тока возбуждения осуществляется изменением длительности импуль-
сов напряжения, приклады-
ваемых к обмотке возбужде-
ния. Различают схемы регу-
лирования тока возбужде-
ния с последовательным
7 (рис. 2.28, а) и параллельным
включением (рис. 2.28, б)
прерывателя П.
Рис. 2.27. Схема регулирования пускового резистора.
Амплитуда импульса напряжения U в , прикладываемого к обмотке возбуж-
дения. равна падению напряжения на резисторе Рш, через который протекает
разность тока в обмотки якоря I и возбуждения 1в , поэтому
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА П9
ue = Ruy-iA
В схеме на рис. 2.28, при
включенном прерывателе
обмотка возбуждения шун-
тирована резистором Rul, а
при выключенном ток этой
обмотки замыкается через
диод V. В схеме рис. 2.28, б
при включенном прерывате-
ле П обмотка возбуждения
шунтирована резистором
RUi, а при включенном -
замкнута накоротко. Поэто-
му среднее напряжение на
обмотке возбуждения при последовательном и параллельном включениях пре-
рывателя в зависимости от коэффициента заполнения будет разным:
Среднее напряжение на обмотке возбуждения можно принять равным паде-
нию напряжения на эквивалентном сопротивлении резистора, постоянно шун-
тирующего обмотку возбуждения и обтекаемого разностью токов / — Iв . При
этом
.поел.
(2-48)
Коэффициент регулирования возбуждения при шунтировании обмотки воз-
буждения резистором
/3=/5// = ^/(^+/?Д. (2.49)
Подставляя в выражение (2.49) значения эквивалентного сопротивления из
соотношений (2.48), получим
/3 =----------
ю Л+
Р”“р -1-Л + Дв/Ди ' <150)
Из выражений (2.50) следует, что коэффициент /3 нелинейно зависит от коэф-
120
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
фициента Л : в схеме с последовательным включением прерывателя он увеличи-
вается по мере роста Л, в схеме с параллельным его включением уменьшается.
В процессе регулирования тока возбуждения тяговых двигателей потери в
шунтирующем резисторе Йш при последовательном включении прерывателя
больше, чем при параллельном. Это объясняется тем, что в первом случае по
резистору в одну часть периода ЛТ проходит ток I — I в , в другую часть
(1-Л)Г периода - ток /. При параллельном включении прерывателя через
резистор Rlu протекает меньший ток: часть периода он равен нулю, в остав-
шуюся часть - (/ — 1в ). Плавное регулирование тока возбуждения позволяет
наиболее полно использовать мощность тяговых двигателей в широком диа-
пазоне изменения режимов работы троллейбуса.
Тяговые и токовые характеристики при плавном регулировании. Благодаря
возможности плавного регулирования напряжения и возбуждения тяговых дви-
гателей при импульсном управлении могут быть получены любые тяговые ха-
рактеристики. Эти характеристики ограничены лишь предельно допустимыми
режимами. Поэтому характеристики тяговых двигателей и троллейбусов при
импульсном управлении изображаются не семейством кривых, как при контакт-
но-реостатном управлении, а в принципе множеством точек на площадях, зак-
люченных между кривыми, соответствующими предельным режимам работы.
Несмотря на это, понятие характеристики как кривой не теряет смысла и при
импульсном плавном управлении, если считать характеристиками зависимость
между скоростью, силой тяги, током и напряжением на тяговых двигателях со-
ответствующими определенной позиции педали управления двигателем.
Импульсное управление позволяет не только плавно регулировать в широ-
ком диапазоне скорость движения троллейбуса, но и производить пуск по пре-
дельным характеристикам. Рассмотрим такой пуск па примере кривых рис.
2.29. Благодаря плавному импульсному регулированию напряжения на тяго-
вых двигателях разгон троллейбуса может быть произведен, например, с прак-
тически неизменными пус-
ковым током 1п и силой
тяги вплоть до выхода
на характеристику ПП при
номинальном напряжении и
полном возбуждении.
Переход на ослабленное
возбуждение для дальнейше-
го увеличения скорости трол-
лейбуса при импульсном уп-
равлении не сопровождается
толчками тока. Для поддер-
жания пускового тока двига-
г Ь >„ < в
2.29. Пуск тягового двигателя по предельным харак-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА Ш
теля неизменным по мере увеличения скорости уменьшают ток возбуждения 1в
до скорости , соответствующей току 1п по характеристике ОП ослабленного
возбуждения. При неизменном токе 1п сохраняется постоянной и мощность UI п .
При этом сила тяги изменяется в зависимости от скорости по гиперболе, как по-
казано линией 1 в левой части рис. 2.29.
Если пусковой режим ограничен не наибольшим током двигателя, а условия-
ми сцепления, целесообразно сохранить в течение всего периода перехода на ос-
лабленное возбуждение ту же силу тяги Fn, что и при полном возбуждении. Для
этого в момент включения шунтирующего резистора следует увеличить ток дви-
гателя до значения, соответствующего силе тяги Fn при ослабленном возбужде-
нии. Во избежание чрезмерного толчка тока необходимо одновременно несколько
снизить напряжение на двигателе, а затем постепенно повышать его. После дос-
тижения скорости , соответствующей силе тяги Fn при ослабленном возбужде-
нии, к двигателю подводится полное напряжение. Процессу перехода при посто-
янной силе тяги соответствуют штриховые линии на рис. 2.29.
Притоке 1Ц и напряжении U =U н ток Цп , потребляемый из контактной
сети в момент выхода на характеристику при полном возбуждении
пдв/^}Т]пр),(2.51 )
где - число двигателей; Т}пр - КПД преобразователя; UK - напряжение
контактной сети.
При неизменном пусковом токе зависимость I]n (г) в течение периода раз-
гона троллейбуса при полном возбуждении может быть принята линейной (см.
рис. 2.29). Для учета снижения КПД преобразователя при пониженном напря-
жении начальное значение тока при у — () целесообразно принять равным не
нулю, а ориентировочно 5 % 1[}г.
Изменение тока 11п при переходе с полного возбуждения на ослабленное
зависит от принятого способа перехода. Если пусковой ток остается неизмен-
ным и постепенно плавно уменьшается ток возбуждения, ток остается
постоянным в течение всего переходного процесса. Этому соответствует вер-
тикальная прямая в правой части рис. 2.29. В случае перехода на ослабленное
возбуждение при неизменном пусковом токе путем включения шунтирующе-
го резистора с одновременным понижением напряжения двигателя ток Zj
уменьшается сначала пропорционально отношению силы тяги при ослаблен-
ном и полном возбуждении и токе двигателя 1п , а затем линейно возрастает с
увеличением скорости до значения, определяемого формулой (2.51) (пунктир-
ная линия на рис. 2.29). При сохранении же неизменной силы тяги Fn во вре-
мя перехода на ослабленное возбуждение ток Ц возрастает в функции скоро-
сти линейно до значения, соответствующего току двигателя при силе тяги Fn
и ослабленном возбуждении (штриховая линия на рис. 2.29). После выхода на
характеристику ОП ток Z1 определяется формулой (2.51).
122
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Расчет характеристик троллейбуса с импульсным возбуждением. Этот рас-
чет производится на основании выходных характеристик преобразователя
ивым которые определяются для конкретного преобразователя с учетом
принятого в системе автоматического регулирования закона. Зависимость
и FK(l) рассчитывают по формулам (2.32) и (2.34).
Независимо от параметров, по которым ведется регулирование, характерис-
тики троллейбуса ограничены предельно допустимыми режимам его работы. Это
прежде всего ограничения по наибольшему допустимому напряжению и наиболь-
шему допустимому току, определяемому мощностью тяговых двигателей и пре-
образователя или условиями сцепления колес с дорогой. В зоне между этими ог-
раничениями возможны любые характеристики, определяемые системой авто-
матического регулирования, в котором водитель с помощью педали контролле-
ра задает режим работы, а также значения тока и скорости.
Коэффициент полезного действия при импульсном управлении равен про-
изведению КПД Т]дв двигателя и преобразователя.
3.6. Влияние характеристик тяговых
двигателей на использование
сцепного веса и мощности
Жесткие характеристики тяговых двигателей независимого возбуждения
способствуют более полному использованию мощности и тяговых свойств
троллейбуса, чем мягкие характеристики двигателей последовательного воз-
буждения. Рассмотрим факторы, ограничивающие диапазон мощностей и сил
тяги тяговых двигателей.
Максимальная мощность, развиваемая тяговым двигателем постоянного тока,
определяется наибольшей допустимой нагрузкой, ограниченной механической
прочностью и условиями работы коллекторно-щеточного аппарата. Различают
четыре зоны ограничения мощности и сил тяги двигателя, рис. 2.30. При малых
скоростях (зона I) наибольшая сила тяги определяется либо максимальным до-
пустимым током 1пгах, либо сцеплением колес с дорогой в зависимости от того,
какое из этих условий даст меньшее значение силы тяги. Ограничению по сцеп-
лению на рис. 2,30 соответствует линия 2, по току 1тах - линия 1. В частном
случае, которому соответствует рис. 2.30, в пределах скорости от у = 0 до v = V]
сила тяги определяется максимальным током, а затем до скорости v2 , соответ-
ствующей окончанию зоны I, - условиями сцепления. В зоне II наибольшая сила
тяги ограничивается максимальной мощностью преобразователя в случае его
применения и изменяется, как это следует из соотношения UKI3T}3 = Fv, обрат-
но пропорционально скорости (кривая 3). В зоне III наибольшая сила тяги опре-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
123
деляется допустимым значением реактивной э.д.с, пропорциональной Ту , вслед-
ствие чего наибольший ток обратно пропорционален скорости, а предельная сила
тяги - квадрату скорости (кривая 4). Наконец в зоне IV, в которой скорость ог-
раничена наибольшим допустимым ослаблением возбуждения, т.е. максималь-
ным межламельным напряжением, сила тяги должна уменьшаться обратно про-
порционально скорости в степени несколько большей двух (кривая 5). Линия 6
соответствует наибольшей допустимой, так называемой конструкционной ско-
рости ^констр., которая ограничивается прочностью элементов тягового двига-
теля и троллейбуса.
Диапазон скоростей, при которых силу тяги ведущих колес лимитируют те
или иные условия, зависит от конструкции и параметров тягового двигателя ,
а также самого троллейбуса. На рис. 2.30 жир-
ная ломанная кривая представляет собой пре-
дельную тяговую характеристику F(v) , кото-
рой обладал бы тяговый двигатель при макси-
мальном использовании мощности двигателя,
установленного на троллейбусе.
Рассмотрим в какой степени приближаются
реальные характеристики тяговых двигателей
различных систем возбуждения к предельной тя-
говой характеристике. Ограничение силы тяги
по условиям сцепления (кривая 2) различно при
двигателях разных систем возбуждения. Исполь-
зование сцепного веса заметно улучшается с уве-
личением динамической жесткости характерис-
тик двигателей. Поэтому при двигателях неза-
висимого и параллельного возбуждения с жест-
Рис. 2.30. Зоны ограничения мощ-
ности и сил тяги двигателя.
кими характеристиками реализуется большая максимальная сила тяги по сцеп-
лению, чем при двигателях последовательного возбуждения. При современных
мощных тяговых двигателях предельная сила тяги определяется в большинстве
случаев условиями сцепления. Увеличение коэффициента сцепления шин с доро-
гой позволяет повысить ускорения и средние скорости движения.
Тяговая характеристика влияет на использование мощности двигателя не толь-
ко при максимальных, но и при средних и малых нагрузках, соответствующих
высоким скоростям. У двигателя последовательного возбуждения, работающе-
го по естественной характеристике с нормальным возбуждением, недостаточно
используется мощность при высоких скоростях. Как вытекает из формулы (2.31),
с увеличением скорости резко уменьшаются ток и сила тяги, а следовательно, и
мощность, развиваемая тяговым двигателем. Использование мощности можно
повысить, уменьшая м.д.с. двигателя путем шунтирования его обмотки возбуж-
дения или изменения числа ее витков. Однако добиться полного совпадения ка-
124
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
кой-либо из полученных характеристик с предельной тяговой не представляется
возможным, так как эти кривые различны по форме и могут совпадать лишь в
одной или нескольких точках. Кроме того, при колебаниях напряжения в кон-
тактной сети изменяются характеристики тяговых двигателей. Поэтому тяговые
характеристики ограничены максимальными допустимыми значениями силы тяги
и скорости при наибольшем напряжении. При нормальном и особенно при по-
ниженном напряжении в контактной сети скорости троллейбуса оказываются
ниже предельных и ухудшится использование мощности двигателя. Избежать
этого возможно только при автоматическом плавном регулировании возбужде-
ния в функции напряжения на двигателе.
Таким образом, мощность тяговых двигателей при независимом автомати-
чески регулируемом возбуждении используется лучше, чем при последователь-
ном возбуждении. Учитывая жесткие характеристики, наибольшую силу тяги
по сцеплению допустимо принимать для независимого возбуждения при ско-
ростях на 12...15 % большей, чем при последовательном возбуждении.
Как следует из сказанного выше, каждая из систем возбуждения тягового
двигателя обладает как положительными, так и отрицательными для элект-
рической тяги качествами. При двигателях с параллельным и последователь-
ным возбуждением нет необходимости устанавливать на троллейбусе специ-
альные возбудители для питания обмоток возбуждения. Однако параллель-
ную обмотку, получающую питание от контактной сети, приходится изоли-
ровать на относительно высокое напряжение и выполнять с большим числом
витков из провода малого сечения. Тем самым увеличивается объем между-
витковой изоляции и уменьшается ее надежность как в механическом, так и в
электрическом отношении, ухудшается протекание переходных процессов из-
за большей индуктивности обмотки.
Обмотки независимого возбуждения выполняют с небольшим числом витков
из провода большого сечения, так как питание их осуществляется от источников
низкого напряжения, Регулирование тока независимого возбуждения значительно
проще и легко может быть автоматизировано. Важным преимуществом являет-
ся независимость тока возбуждения от напряжения контактной сети, в то время
как при параллельном возбуждении этот ток прямо пропорционален напряже-
нию. Поэтому независимое возбуждение предпочтительнее параллельного. Лишь
для подвижного состава городского электрического транспорта, на котором не-
желательно устанавливать дополнительные источники питания, может оказать-
ся целесообразным применение параллельной оьмотки как одной из обмоток
тягового двигателя смешанного возбуждения. Такая система возбуждения осу-
ществлена на некоторых троллейбусах.
При независимом возбуждении лучше, чем при последовательном, исполь-
зуется сцепной вес, а следовательно, возможны реализация больших сил тяги
и более полное использование мошности тяговых двигателей во всем диапа-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 125
зоне скоростей движения. Это вызывает повышенный интерес к созданию трол-
лейбусов с тяговыми двигателями независимого возбуждения.
Однако недостатки жестких характеристик тяговых двигателей весьма суще-
ственны, и без их устранения или смягчения не всегда эффективно применение
двигателей с жесткими характеристиками на подвижном составе. Основные из
этих недостатков - чувствительность к колебаниям напряжения вследствие не-
благоприятного протекания вызванных ими переходных процессов и плохое рас-
пределение нагрузок между параллельно работающими двигателями.
Мероприятия по смягчению недостатков тяговых двигателей с жесткой ха-
рактеристикой связаны с определенными трудностями, неодинаковыми для
троллейбусов разных типов. Болес ощутимы они для троллейбусов без преоб-
разователей, т.е. при контактно-реостатном управлении. Однако применение
тяговых двигателей с независимым возбуждением и с контактно-реостатном
управлением настолько усложняет конструкцию троллейбуса, что становится
сомнительной целесообразность применения этой системы возбуждения. Зна-
чительно проще применять на нем тяговые двигатели смешанного возбужде-
ния с последовательной и независимой обмотками или подпиткой последова-
тельной обмотки от независимого низковольтного источника.
Сопоставляя перечисленные преимущества и недостатки различных систем
возбуждения, приходим к выводу, что для троллейбусов с контактно-реостат-
ным управлением наиболее приемлемы тяговые двигатели последовательно-
го возбуждения и двигатели смешанного возбуждения. На троллейбусах с им-
пульсным управлением условия для использования независимого возбужде-
ния более благоприятны.
3.7. Разгон троллейбуса
Скорость движения троллейбуса часто изменяется, например, при трога-
нии с места и обгоне впереди идущих транспортных средств. Поэтому важ-
ным динамическим свойством троллейбуса является приемистость, т.е. спо-
собность троллейбуса к быстрому разгону. Приемистость троллейбуса влияет
на среднюю скорость движения, а в условиях интенсивных транспортных по-
токов определяет пропускную способность дороги. Основные измерители,
характеризующие приемистость троллейбуса: значение ускоренияj в процессе
разгона: продолжительность разгона tразг з т.е. время, в течение которого ско-
рость троллейбуса возрастает от начального значения vo до заданной у ко-
нечной величины; путь $разг, проходимый троллейбусом за время разгона.
При теоретическом исследовании процесса разгона троллейбуса предпола-
гается, что водитель мгновенно выжимает до отказа педаль управления тяго-
вым электродвигателем, вследствие чего двигатель сразу же переходит на ре-
жим работы, соответствующий максимальной частоте вращения вала. При
126
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
таком допущении ускорения троллейбуса будут наибольшими, их значение
определяют по формуле:
Из этого выражения видно, что ускорение зависит от двух факторов: разно-
сти D — , т.е. от превышения динамического фактора над приведенным ко-
эффициентом дорожных сопротивлений, и от коэффициента Звр , учитывающе-
го сопротивление разгону, оказываемое вращающимися массами троллейбуса.
Рис. 2.31. Зависимость ускорения
троллейбуса от скорости движения.
При заданных дорожных условиях ускоре-
ние растет с увеличением динамического
фактора и снижается с увеличением коэффи-
циента учета вращающихся масс. Для
определения максимальных значений уско-
рения троллейбуса разность D — у/ нахо-
дится по динамической характеристике, а
значение коэффициента - по формуле:
&вр. ~ 1 ”1” S дв^тр^Ъпр ”1” к )/
По результатам расчетов строится кри-
вая ускорений троллейбуса в функции ско-
рости движения (рис. 2.31). Общий харак-
тер кривой на этом графике подобен харак-
теру кривой динамического фактора.
Продолжительность разгона может быть
представлена в виде интервала элементарных
отрезков времени dt, в течение каждого из
которых скорость троллейбуса получает последовательно бесконечно малые при-
ращения dv. Так как ускорение равно производной от скорости по времени (j ~
dv/dt), то можно записать dt = dv/j, а общее время разгона численно равно опре-
деленному интегралу от полученного выражения, пределы интегрирования ко-
торого соответствуют скоростям начальной уо и конечной v:
1разг ~ \~dv . ( 2.52 )
v(l J
Аналогично путь разгона Sразг представляет собой сумму элементарных
отрезков пути dS—vdt:
t
sPa3t=\vdt- (2.53 )
о
Решение уравнений (2.52) и (2.53) затруднено из-за отсутствия аналитичес-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 127
ких зависимостей между ускорением j и скоростью движения v в первом слу-
чае и между скоростью движения v и временем t во втором. Поэтому обычно
эти уравнения решают с помощью приближенного графоаналитического ме-
тода: кривая ускорения делится, как показано на рис. 2.31, на несколько от-
резков, которым соответствуют на оси абсцисс определенный интервал ско-
ростей Av • Примем, что в пределах одного интервала троллейбус разгоняет-
ся с постоянным средним ускорением Jcp :
jq?. “ 0,5(j] + J2)’
где jj и j2 - ускорения в начале и конце интервала.
На каждом /-ом интервале время разгона
А/(' — Av,/
Общая продолжительность разгона от начальной скорости до конечной г
равна:
разг^^Ь ~ ^^V,- / jCp(i)-
Для определения пути разгона примем, что в пределах каждого интервала
скоростей троллейбус движется равномерно со средней скоростью vcp :
Л,, =O,5(vj -v2).
Соответственно путь, проходимый троллейбусом в пределах каждого /-го ин-
тервала скоростей As,- = vcP(i) , л общий путь разгона до конечной скорости v:
разг. ~ ~ ’
Для общей характеристики действительного процесса разгона троллейбуса
могут служить данные по грузовым автомобилям движущихся на горизонталь-
ных асфальтированных дорогах: время разгона после трогания с места до ско-
рости 50 км/ч составляет 12...25 с, путь разгона - 150...200 м.
Изложенная методика определения значений измерителей разгона троллейбу-
са базируется на статических механических характеристиках тягового электро-
двигателя и не учитывает его приемистости, т. е, способности наращивать мощ-
ность при различной интенсивности разгона. Поэтому действительный процесс
разгона несколько отличается от расчетного по рассмотренной методике,
Для уточненного исследования разгона в зависимости от конкретных задач
применяются различные математические модели троллейбуса, которые отли-
чаются подробностью описания трансмиссии. Рассмотрим некоторые из них,
нашедшие широкое применение для исследования разгона.
В простейших математических моделях поступательно движущаяся масса
троллейбуса заменена вращающимся маховиком. Для соблюдения динамичес-
кого подобия математической модели реальному троллейбусу следует подби-
рать маховые массы маховиков таким образом, чтобы кинетическая энергия
128
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
каждого из них была бы равна кинетической энергии заменяемых ими масс.
На простейшей двухмассовой модели троллейбуса (рис. 2.32, а) можно оп-
ределить в первом приближении основные оценочные критерии разгона. Мо-
менты инерции ведущего ./], имитирующего вращающиеся массы тягового
двигателя, и ведомого /2 ? имитирующей вращающиеся детали трансмиссии,
ведущие колеса и поступательно движущуюся массу троллейбуса, маховиков
имеют для исследуемого троллейбуса постоянное значение:
*^2 Jтрол ”1” тр +
где Jmpoj - момент инерции маховика, имитирующего поступательно движу-
щуюся массу троллейбуса; J тр - суммарный момент инерции вращающихся
деталей трансмиссии; J к - момент инерции ведущего колеса.
Все моменты инерции, входящие в ведомую массу J 2 > приведены к валу
тягового двигателя. Суммарный момент инерции вращающихся деталей транс-
миссии по сравнению с моментами инерции JтрОл и J * невелик и им часто
пренебрегают. Момент инерции J,прол > приведенный к валу тягового двига-
теля находится из равенства кинетических энергий поступательно движущей-
ся массы троллейбуса EK.llipOn и враща-
ющегося маховика Ец.пр, имеющего
приведенный к валу дригателя момент
инерции:
2
г V
К.трОЛ 'J ’
Рис. 2.32. Динамические схемы трол-
лейбуса: а - с вращающимися махови-
ками, b - с поступательно движущей-
ся массой.
Ек
к. пр
2 шрол
и
тр J
где Jтрол - искомый момент инерции
маховика, имитирующего поступательно
движущуюся массу троллейбуса, приве-
денный к валу двигателя; Одв - угловая
скорость вращения якоря (вала) тягово-
го двигателя.
Выразив скорость движения троллей-
буса v через угловую скорость (0дв вала
тягового двигателя и расчетный радиус
г0 ведущих колес и приравнивая значе-
ния кинетических энергий поступатель-
ного Ек.1Ирол И вращательного ЕК )1р
движений, находим J ntpO1:
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
129
троя
^тр
(2.54)
Ведущая Jj и ведомая ,/2 маховые массы динамической схемы соединены
податливостью е , имитирующей крутильную податливость трансмиссии,
приведенную к валу тягового двигателя.
На динамическую модель действуют два внешних момента: крутящий мо-
мент двигателя М дв и приведенный к валу двигателя момент сопротивления
движению Му троллейбуса. Механическая характеристика двигателя апп-
роксимируется каким-либо выражением, удобнее -- полиномом. Приведенный
момент сопротивления движению троллейбуса принимается постоянным и рас-
считывается по формуле:
Mf = [(/ + ( 2.55)
ump’lnip
Процесс трогания и разгона троллейбуса описывается системой дифферен-
циальных уравнений:
J2ф2 — ^12 / ,
^\2е\2 ~Ф\ —(р2>( 2-56 )
где (р\ и (р2 - углы поворота соответственно ведущей и ведомой масс; Л/12
- упругий момент, действующий в трансмиссии.
Начальные условия для приведенной системы уравнений получим, исходя
из следующих соображений, В начальный момент времени вал двигателя и
ведомая масса неподвижны, т.е. при t = 0 = 0; (р2 — 0; ф1 -- == 0;;
ф2 — й)2 =0; М = 0. Рассмотренная математическая модель для исследова-
ния динамики разгона троллейбуса обладает некоторыми недостатками. В ре-
зультате решения исходной системы уравнений (2.56) не получаем в явном виде
значение поступательной скорости троллейбуса, а имеем только угловую ско-
рость, ведомой массы, приведенную к валу тягового двигателя. Поступатель-
ная скорость троллейбуса находится путем пересчета по известной угловой
скорости ведомой массы:
у = — г
у О'
и
тр
Как недостаток рассмотренной динамической системы можно отмстить и
некоторые трудности, связанные с расчетом крутильной податливости систе-
130
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
мы “колесо-дорога”. Чтобы избежать указанных недостатков, в последнее
время при исследовании динамики разгона троллейбуса на математической
модели поступательно движущуюся массу троллейбуса не заменяют вращаю-
щимся маховиком (рис. 2.32 , б) Уравнение движения поступательно движу-
щейся массы имеет следующий вид:
Динамическая схема трансмиссии троллейбуса в таких расчетных схемах
заканчивается маховиком с моментом инерции ведущих колес, к которому
приложен внешний момент Мк , действующий на колесо и приведенный к валу
тягового двигателя:
F г
Мк =—
^тр^тр
Таким образом, динамическая схема троллейбуса, показанная на рис. 2.32,
а, преобразуется в динамическую расчетную схему, изображенную на рис. 2.32.
б. Преобразованные расчетные схемы представляют исследователю более
широкие возможности, чем двухмассовая. Так. если учесть радиальную по-
датливость и демпфирование шин и подвески, можно исследовать нс только
разгон, но и колебания кузова троллейбуса при разгоне. Окончательно систе-
ма дифференциальных уравнений, описывающих движение элементов расчет-
ной схемы с поступательно движущейся массой, имеет вид:
•ЛФ1 = мдв —
^2^2 ~^12 К ° ’
^nip^ljnp
2ei2 “ ~ Ф2, ( 2.57)
тх = FK — Ff — Fa — Fe — FKp.
Начальные условия:
t = 0 <Р] = 0; (р2 = 0; ф} - = 0; ф2 = 692 = 0; М = 0; х = 0; х = 0.
Касательную силу тяги ведущих колес Fh. определяем следующим образом.
В результате решения исходной системы уравнений (2.57) находим скорость
движения троллейбуса у и угловую скорос'1 ь ведущих колес ф2 — 692 . Рассчи-
тываем теоретическую скорость движения троллейбуса vT = 692го , затем бук-
сование ведущих колее:
Ч
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 131
После этого вычисляем касательную силу тяги ведущих колес в зависимос-
ти от буксования, например, по формуле:
F = F (1 - e~kS )
1 к 1 К<р \ /’
где F - сила тяги ведущих колес по сцеплению их с дорогой; к- постоян-
ный коэффициент.
В системах уравнений (2.56) и (2.57), описывающих динамику разгона трол-
лейбуса, рекомендуется заменить углы поворота валов и их сечений на угло-
вые скорости поворота этих сечений. Это позволит снять ограничение на вре-
мя исследования на ЭВМ процесса разгона, вызванное быстрым нарастанием
величины угла поворота валов расчетной схемы, которое может привести к
прерыванию выполнения программы. Расчет на ЭВМ следует заканчивать,
когда крутящий момент тягового двигателя станет равным приведенному мо-
менту сопротивления движению.
132
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Глава 4. Тормозные свойства
троллейбуса
4.1 Основные определения
Под тормозными свойствами троллейбуса понимают способность его быстро
снижать скорость движения вплоть до полной остановки при минимальном тор-
мозном пути, сохранять заданную скорость при движении под уклон, а также
оставаться неподвижным при действии случайных сил. Торможение - важный
этап всего процесса движения машины так как служит одним из путей, обеспе-
чивающих активную безопасность движения. Вместе с тем способность трол-
лейбуса быстро или на малом пути уменьшать по желанию водителя скорость
движения является фактором положительно влияющим на среднюю скорость
движения. Это означает, что хорошие тормозные свойства способствуют повы-
шению эффективности работы машины как транспортного средства.
Уменьшение скорости движения троллейбуса при торможении происходит
за счёт искусственного создания момента сопротивления вращению колёс. При
этом уменьшается (или полностью рассеивается) энергия машины, накоплен-
ная в процессе предыдущего движения и достижения соответствующей ско-
рости или горизонтального уровня, причём скорость определяет кинетичес-
кую энергию машину, а горизонтальный уровень - потенциальную. Преобра-
зование этой накопленной энергии в работу трения или каких-либо других
сопротивлений может осуществляться в тормозных механизмах, располо-
женных непосредственно в колёсах, на валах трансмиссии или электродина-
мического рекуперативного или реостатного торможения тяговым двигате-
лем. Троллейбус должен иметь несколько тормозных систем, выполняющих
различные функции: рабочую, запасную, стояночную и вспомогательную, ра-
ботающую в режиме электродинамического торможения тяговым двигателем.
Рабочая (основная) тормозная система служит для уменьшения скорости дви-
жения троллейбуса и полной его остановки. В процессе торможения кинетичес-
кая энергия переходит в работу трения между фрикционными накладками и тор-
мозным барабаном колёсных тормозов, а также между шинами и дорогой. Уп-
равление рабочей тормозной системой осуществляется от ножной педали.
Запасная тормозная система служит для остановки троллейбуса при отказе
рабочей тормозной системы: Функции запасной тормозной системы может
выполнять любой из контуров привода рабочей тормозной системы, который
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 133
вступает в действие в случае повреждения в пневмопроводе какого-либо кон-
тура рабочей тормозной системы.
Остановочная тормозная система обеспечивает автоматическое затормажива-
ние троллейбуса при открывании дверей. Она имеет электропнев магическое уп-
равление и воздействует на тормозные механизмы колес ведущего моста.
Стояночная тормозная система предназначена для удержания троллейбуса
на месте. Привод стояночной тормозной системы воздействует на колёсные
тормоза рабочей тормозной системы. Управление стояночной тормозной си-
стемы ручное.
Вспомогательная тормозная система, обеспечивающая электрическое тор-
можение, служит для уменьшения скорости троллейбуса и полной остановки.
В процессе торможения кинетическая энергия, в этом режиме торможения,
преобразуется при помощи тягового двигателя, работающего в режиме гене-
ратора, в электрическую. Полученная электрическая энергия возвращается в
тяговую сеть (рекуперативное торможение) или преобразуется в тепловую в
пускотормозных сопротивлениях (реостатное торможение). В последнем слу-
чае энергия рассеивается в атмосферу или используется в системе подогрева
воздуха пассажирского салона. Управление вспомогательной тормозной сис-
темой осуществляется от ножной педали.
Различают аварийное (экстренное) управление тормозной системы и служеб-
ное торможение. Аварийное торможение производится с максимальной интен-
сивностью главным образом с помощью рабочей(основной) тормозной систе-
мы. Обычно их количество не превосходит 5-10% общего числа торможений.
Служебное торможение используют для плавного уменьшения скорости трол-
лейбуса или его остановки в заданном месте. Оно осуществляется либо рабо-
чей (основной) тормозной системой, либо вспомогательной тормозной систе-
мой. Торможение производится с небольшой интенсивностью, не вызывающих
неприятных ощущений у водителя и пассажиров. Замедление при служебном
торможении обычно не превышает 1 ...1,5 м/с2.
4.2. Диаграмма торможения и оценка
тормозных свойств троллейбуса
Весь процесс торможения состоит из нескольких этапов, которые показаны
на так называемой тормозной диаграмме (рис.2.33), представляющей собой за-
висимость замедления или тормозной силы от времени. Если в момент време-
ни t - 0 возникает ситуация, вынуждающая тормозить, водитель оценивает
обстановку и переходит к непосредственным действиям. Этот процесс зани-
мает время, называемое временем реакции водителя t . Это время зависит от
квалификации водителя, его возраста, психологического состояния и колеб-
134
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
лется в пределах от 0,2 до 1,5 с. Время реакции водителя включает время пси-
хической реакции tp (оценка обстановки и принятия решения торможения) и
время физической реакции t (перенос ноги на тормозную педаль).
Началом торможения принято считать момент времени, когда водитель нач-
нёт нажимать на тормозную педаль. После нажатия на тормозную педаль в тече-
ние некоторого времени t3 происходит передача усилия от педали к тормозным
а механизмам. Это время, которое называет-
ся временем запаздывания тормозного при-
I \ вода, зависит от типа тормозного привода,
? \ его конструктивных особенностей, техни-
/ \ ческого состояния и возрастает у нневма-
j \ тического привода при увеличении длины
“ L; П” I Л т трубопроводов. При расчётах для пневма-
t* ‘ тического привода можно принимать
~ = 0,2с. Тормозной момент и, соответ-
Рис.2.33. Тормозная диаграмма. ственно, замедление троллейбуса нараста-
ют в течение промежутка времени, называемого временем нарастания замедле-
ния. Это время определяется интенсивностью нажатия водителем педали тормо-
за, а также временем необходимым для наполнения воздухом тормозных камер
и деформации механизмов привода и тормоза. При расчётах тормозной динами-
ки троллейбуса обычно считают, что водитель быстро (мгновенно) нажимает
тормозную педаль. При этом нарастание замедления происходит по линейному
закону, а максимальное замедление достигает за время
tH -0,4...0,5 с.
Суммарное время t,3 + tH называют временем срабатывания тормозного при-
вода tn . Максимальное время срабатывания тормозного привода регламен-
тировано стандартами и не должно превышать 0,6 с. Использование электро-
динамического торможения приводит к отсутствию времени запаздывания t3,
а время нарастания замедления tH будет зависеть от податливости деталей
трансмиссии.
В течении некоторого времени tTтроллейбус движется с заданным замедле-
нием jT . При достижении троллейбусом требуемой скорости водитель отпус-
кает тормозную педаль. Происходит оттормаживание - уменьшение замедле-
ния троллейбуса. Время оттормаживания (/ ) при пневматическом приводе
составляет 0,5 -0,7 с. Если торможение происходит до полной остановки, в
момент остановки замедление уменьшается до нуля за очень короткий проме-
жуток времени.
Приведенная диаграмма представляет идеализированную характеристику
процесса торможения. В действительности в приводе и тормозных механиз-
мах происходят динамические процессы, тормозные силы не постоянны и на-
растают не плавно, что показано штриховыми линиями.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
135
Основными показателями оценки тормозных свойств являются тормозной путь
и установившееся замедление. Тормозной путь - расстояние, которое пройдёт
троллейбус с момента начала торможения до заданной скорости vH или до пол-
ной остановки. Определим тормозной путь на отдельных этапах торможения не
принимая во внимание сопротивлением воздуха и сопротивление качению. Про-
цесс торможения рассмотрим на горизонтальной плоской дороге.
За время t3 троллейбус движется с начальной скоростью vo. Путь, который
он при этом пройдёт 53 ~ v0 -t3. На участке пропорционального нарастания
замедления = с • t. Тогда за время tH величина пути торможения составит:
1 2 1 ,
J ct dt=vt -~ctH (258)
ri J v ,i*4 U tt ri ♦ I * гЛ f
О ~ О
Подставив в уравнение (2.58) с ~ jrmax/^н , получим:
1 . 2
$ н ~ ~ max^H • (2.59)
О
В конце второго этапа скорость троллейбуса составит:
Vh ~ тах^н (2.60)
Принимаем, что на последнем этапе движение происходит при постоянной
тормозной силе и замедлении. Скорость машины уменьшается с vH до vK.
Работу тормозных сил приравниваем к изменению кинетической энер-
гии троллейбуса:
уст т max уст т{ун j/ 2 ,
откуда
У — yF (VO “ Jt maxbi “ Vk
Syem = -------=---------7Г........- - . (2.61)
7 i 2 i ' 7
./T max Jx max
Полный тормозной путь составит:
Sr ~S3+SH + Sycm =
= (t3 + / 2)+ jT:naxt2 124 + (v2 - v2)/2Л max (2-62)
По полученной формуле (2.62) тормозной путь находят приближённо. Это
объясняется не только тем, что приближённо задана величина tH, но и пото-
му, что не учтено происходящее во времени перераспределение нормальных
реакций и соответствующие этому изменения качения колёс. К тому же тор-
мозной путь троллейбуса существенно зависит от времени срабатывания при-
вода тормозов.
136
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Комплексным показателем оценки эффективности торможения является
среднее замедление за весь промежуток времени торможения. Его значение за-
висит от установившегося замедления и времени срабатывания тормозной си-
стемы. Среднее замедление вычисляется по формуле:
2
Jtcp 2St
Основными силами, обеспечивающими установившееся замедление трол-
лейбуса (рис. 2.34) являются тормозные силы FT1 и Ft2 , действующие в плос-
кости контакта колёс с дорогой и направленные противоположно движения
троллейбуса. Максимально возможные значения тормозных сил ограничены
по сцеплению:
где Rzi~ нормальные реакции приходящиеся на тормозные колёса троллей-
буса.
При достаточном сцеплении тормозные силы FT1 и Ft2 , определяются тор-
мозными моментами М Ti, разбиваемыми тормозными механизмами мостов
F = М • / г
1 Tt Tl' 'к
Кроме тормозных сил на
троллейбус действуют силы
сопротивления качению ко-
лёс Fy15 Fy2 сила сопро-
тивления подъёму Fa и аэ-
родинамическое сопротив-
ление Fe.
Рис. 2.34. Силы действующие на троллейбус Движение троллейбуса
при торможении. при торможении на ровной
поверхности с постоянным отрицательным ускорением (рис.2.34) описывает-
ся уравнением:
= Е FTi +YFf±Fa+FB=Y FTl +
+ YR?if + Gsina+ k„Avy (2-63)
где -- коэффициент учёта вращающихся масс троллейбуса при торможе-
нии; kw - коэффициент сопротивления воздуха; Л- лобовая площадь троллейбу-
са; vT- скорость троллейбуса; mjT = Fj - сила инерции троллейбуса.
К вращающимся массам в процессе торможения обычно относят массы ко-
лёс и связанные с ним вращающиеся массы трансмиссии и тягового электро-
двигателя. Коэффициент учёта вращающихся масс близок к единице и поэто-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
137
му при расчётах принимают = 1,0. Сила сопротивления воздуха при тор-
можении троллейбуса незначительна, а сила сопротивления качения при дви-
жении по дороге с твёрдым покрытием существенно меньше тормозных сил. В
связи с этим их можно при торможении с высокой эффективностью не учиты-
вать. Тогда замедление троллейбуса будет равно:
Л =| ^T^-isinaV (2.
У Cr J
Эффективность тормозных систем определяется во время проведения тормоз-
ных испытаний. Перед проведением испытаний троллейбус должен пройти об-
катку в соответствии с инструкцией завода изготовителя. Нагрузка и её распре-
деление по мостам должны соответствовать техническим условиям. Агрегаты
трансмиссии и ходовой части (кроме тормозной) должны быть прогреты. Износ
рисунка протектора шин должен быть равномерным и не превышать 50%. Учас-
ток дороги, на котором проводятся испытания рабочей (основной), вспомога-
тельной и запасной тормозных систем, и погодные условия должны удовлетво-
рять тем же требованиям, которые к ним предъявляются при оценке скоростных
свойств троллейбуса. Поскольку эффективность тормозных механизмов в зна-
чительной степени зависит от температуры трущихся пар, тормозные испытания
проводятся при различных тепловых состояниях тормозных механизмов.
По принятым в настоящее время стандартам испытания по определению
эффективности рабочей (основной) тормозной системы делят на три типа: ис-
пытания “ноль”, испытания I и испытания II. Испытания “ноль” предназна-
чены для оценки эффективности рабочей (основной) тормозной системы при
холодных тормозных механизмах. При испытаниях I определяют эффектив-
ность рабочей (основной) тормозной системы при нагретых путём предвари-
тельных торможений тормозных механизмах, а при испытаниях II - при меха-
низмах, нагретых путём торможения на затяжном спуске.
Расчет нормативной длины тормозного пути (м) при испытаниях “ноль”
можно производить по формуле:
V2
sn=A'v°+^’(2-65>
где Aj - коэффициент, зависящий от типа транспортного средства и для
троллейбусов он равен 0,15; jvcm - установившееся замедление.
Установившееся замедление троллейбуса должно быть не менее 6 м/с2 при
действии рабочей (основной) тормозной системы и 2,5м/с2 при торможении
запасной тормозной системы. Минимальное установившееся замедление трол-
лейбусов находящихся в эксплуатации, обычно допускается несколько мень-
шим (на 10 ... 12%) чем у новых.
138
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
4.3 Электрическое торможение троллейбуса
На всех видах троллейбусов применяют электрическое торможение, так как
оно позволяет повысить надежность тормозной системы и существенно сни-
зить эксплуатационные расходы на смену тормозных колодок и ремонт тор-
мозной системы, в следствие энергонагруженности колесных тормозных ме-
ханизмов. Основная задача электрического торможения заключается в том,
чтобы преобразовать кинетическую энергию запасенную при разгоне трол-
лейбуса или потенциальную энергию при подтормаживании его на спуске в
электрическую или тепловую энергию.
Колеса троллейбуса при электрическом торможении менее подвержены юзу,
что повышает безопасность движения. Кроме того, наличие на троллейбусе вто-
рого вида тормоза-механического, обеспечивающего резервирование процесса
торможения, которое всегда сохраняется как дополнительное и экстренное.
Электрическое торможение осуществляется путем переключения электро-
двигателей на генераторный режим при гашении энергии в сопротивлениях
(реостатное торможение) или передаче ее в контактную сеть(рекуперативное
торможение). Наличие этих двух систем электрического торможения дает воз-
можность применять нх как раздельно так и комбинированно в общем тор-
мозном процессе.
Способ торможения, при котором рекуперативное торможение начинается
при высокой скорости движения, автоматически переходит в реостатное тор-
можение при низкой скорости, иногда называют рекуперативно-реостатным.
Однако этот способ электрического торможения на троллейбусах распрост-
ранения не получил. На троллейбусах с тяговым электродвигателем смешан-
ного возбуждения реостатное и рекуперативное торможения используются
раздельно и управляются от разных педалей.
Рекуперативное торможение используется в троллейбусах как средство сниже-
ния скорости и для подтормаживания при спусках. Возможность автоматизиро-
ванного перехода на генераторный режим позволяет при рекуперации осуще-
ствлять снижение скорости путем перехода с характеристик ослабленного на
характеристики более сильного поля без выключения тока, а следовательно без
снятия силы тяги. Управление рекуперативным торможением осуществляется
перемещением вала контроллера управления с позиций высокой на позицию
низкой скорости. Этотвид торможения нс используют для служебного торможе-
ния перед остановкой. Принципиально возможно использование рекуператив-
ного торможения с двигателем смешанного возбуждения в качестве средства ос-
тановки. Однако при относительно низких скоростях движения троллейбуса (при
малом отношении скорости движения к максимальной и низкой скорости нача-
ла торможения) оно не может быть достаточно эффективным.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
139
При торможении до остановки обычно используют только реостатное тор-
можение. Специфическим требованием, предъявляемым к реостатному тор-
можению троллейбусов, является ограничение максимальной тормозной силы,
необходимое для предотвращения перегрузок узлов механической передачи.
Это требование относительно просто выполняется при тяговых двигателях
смешанного возбуждения. Переход от рекуперативного торможения к реос-
татному требует предварительного выключения тока, а затем повторного
включения с заранее введенными сопротивлениями.
Система электрического торможения должна удовлетворять следующим тре-
бованиям:
-обеспечивать плавное и быстрое торможение при установке контроллера
управления в положение торможения;
-обладать электрической устойчивостью при всех возможных эксплуатаци-
онных режимах. Электрическая устойчивость характеризуется свойством вос-
становить устойчивое электрическое равновесие в результате любых переход-
ных процессов;
-обеспечивать необходимые тормозные характеристики: при реостатном
торможении троллейбусов эти характеристики должны быть достаточно “мяг-
кими” с тем, чтобы допускать торможение на одной ступени регулирования в
широком диапазоне скорости; при рекуперативном торможении жесткость
характеристики ограничена допустимыми колебаниями токов и тяговых тор-
мозных сил при колебаниях напряжения сети, а также при переходах с одной
ступени на другую;
- обеспечить удобное и простое в эксплуатации управление тормозным про-
цессом при минимуме дополнительного оборудования;
- обладать высокой эксплуатационной надежностью, быть достаточно про-
стым и существенно не удорожать стоимость троллейбуса.
Требование электрической устойчивости является общим и обязательным
для любой системы, работающей как в генераторном, так и в двигательном
режиме, особенно при разработке схем электрического торможения много-
двигательных приводов.
При реостатном торможении троллейбуса мощность, развиваемая электро-
двигателем, равна:
Ртдв^1дв1гЕг,(2.66)
где /г - ток в цепи каждого двигателя при работе его генератором; Ег -э.д.с.
двигателей, работающих генераторами, когда они соединены параллельно.
Получаемая при этом энергия поглощается реостатами и обмотками двига-
теля в виде тепла и определяется по формуле:
?т.дв ~ zdeC(^ + r) ’
где R - внешнее регулируемое сопротивление.
140
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
Величина э.д.с. двигателя при постоянном возбуждении равняется произве-
дению постоянной двигателя с на частоту вращения пдв, т.е.:
Ег = спде.
Скорость движения троллейбуса при торможении зависит от частоты вра-
щения тягового двигателя и определяется по формуле:
у - ? г м/с или ут = 0,377 ПдвГ- , км/ч
итр
Выразив частоту вращения тягового двигателя через скорость движения
троллейбуса определим э.д.с.:
30cvTumnr..
Ег =----- .(2.67)
71
Подставляя в уравнение (2.66) значение Ег, полученное из уравнения (2.67),
получим:
Р.-ЗО^сгД^^*
d C7ts Л с 2
71
Так как мощность Рг, развиваемая двигателем при электрическом тормо-
жении, представляет произведение тормозной силы FT3 на проходимый путь
за единицу времени, т.е.:
Д = FnvT
Подставив в это уравнение значение Рг и проведя преобразования, опреде-
лим тормозную силу при электрическом торможении:
Т., =30.’я„стДг (2.68)
7Г
Из полученного уравнения (2.68) следует, что тормозная сисла пропорцио-
нальна силе тока. При этом сила тока 1г и э.д.с. Е, с увеличением скорости
движения возрастают, т.е. тормозная сила тем больше, чем больше скорость
движения троллейбуса.
Для поддержания постоянной величины /г — Ег /(R -I- г) нужно уменьшать
сопротивление R реостата, что и используется на практике. При уменьшении
R до нуля в цепи остается сопротивление г самих двигателей, которые выклю-
чать нельзя, и поэтому в дальнейшем ток 1г быстро уменьшается с уменьше-
нием скорости, а вместе с ним снижается и тормозная сила. По этой причине
окончательная остановка троллейбуса осуществляется под действием рабо-
чей тормозной системы.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
141
Реостатное торможение наиболее целесообразно применять при служебных
торможениях троллейбуса, особенно при движении на спуске. Обеспечение
постоянной скорости движения троллейбуса достигается возможностью регу-
лирования реостатом величины тока, при котором на данном уклоне трол-
лейбус будет двигаться не ускоряя и не замедляя своего движения.
4.4 . Распределение тормозных сил
по мостам и колесам троллейбуса
Торможение троллейбуса, при котором достигается максимальная эффек-
тивность и обеспечивается при этом устойчивость движения, принято считать
идеальным. В этом случае производится распределение тормозных сил между
мостами с учетом изменяющихся нормальных реакций на колесах и дорож-
ных условий, которые оцениваются коэффициентом сцепления (р. Максималь-
ная тормозная сила достигается при определенном проскальзывании в зоне
контакта колеса с дорогой. Поэтому тормозные системы троллейбусов целе-
сообразно конструировать таким образом, чтобы при торможении коэффи-
циенты скольжения колес всех мостов были бы одинаковы. Только в этом слу-
чае можно полностью использовать сцепной вес троллейбуса при аварийных
торможениях, а также иметь возможность исключить блокировку колес.
Для определения тормозных сил необходимо знать величины нормальных
реакций действующих на тормозные колеса. Приведенная на рис. 2.34 расчет-
ная схема процесса торможения троллейбуса дает возможность определить
перераспределение тормозных реакций. При этом будем считать, что сопро-
тивление воздуха не оказывает влияния на распределение реакций, а силы со-
противления качению малы по сравнению с тормозными. Тогда тормозные
реакции при торможении всеми колесами будут равны:
_ gmecosa + У FTih
= gmacosa-'£FTih (2
л L
Из полученных выражений следует, что на переднем мосту нормальная ре-
акция возрастает, а на заднем - уменьшается. Степень их перераспределения
зависит от интенсивности торможения т.е от суммарной тормозной силы. При
максимальном использовании сцепного веса троллейбуса
^FTi ~ (pgmeosa
Подставив в уравнения (2.69) значения суммарной тормозной силы полу-
чаем:
142
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
R*=~ Г '
__ gmcosa(a-(ph)
R --------------
L
Тормозные силы на колесах переднего и заднего моста при максимальном
использовании сцепного веса будут равны:
gm epeosа (в У (ph)
гт] —---------------—;
1 L
_gm<pcosa(a-<ph)
El ----------,—....— ,(2.70)
Рабочая (основная) тормозная система троллейбуса, не имеющая специаль-
ных регулирующих устройств, обеспечивает постоянное распределение тор-
мозных сил, которое определяется конструкцией тормозных механизмов и
привода. При таком распределении тормозных сил возможность осуществ-
лять идеальное торможение достигается только при одном значении коэффи-
циента сцепления. В связи с этим на дорогах с (р отличным от (ро блокирова-
ние колес происходит не одновременно.
При (р < (ро первыми блокируются колеса переднего моста и водитель не
способен управлять троллейбусом, троллейбус продолжает движение, но ус-
тойчивость его при этом не теряется. Потеря управляемости водителем вос-
принимается быстро и управление может быть восстановлено за счет сниже-
ния интенсивности торможения. При (р > (р0 первыми блокируются колеса
заднего моста. При блокировке задних колес после определенного углового
отклонения троллейбуса водитель уже не в состоянии даже путем полного ра-
стормаживания восстановить устойчивость троллейбуса. Поэтому блокиров-
ка задних колес более опасна, чем передних.
Так как оба явления нежелательны, то необходимо не только регламенти-
ровать параметры эффективности торможения, но и обеспечить такой про-
цесс торможения, при котором обеспечивалась бы управляемость и устойчи-
вость троллейбуса. Такая задача решается путем соответствующего распреде-
ления тормозных сил между мостами троллейбуса. Для полного использова-
ния сцепления тормозные силы колес (при одинаковых коэффициентах сцеп-
ления) должны быть пропорциональны нормальным реакциям:
Ft}/Ft2=R^R22.
В качестве параметра, характеризующего распределение тормозных сил
между колесами переднего и заднего моста используют коэффициент распре-
деления тормозных сил:
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА
143
Рт -Fn/FT2 (2.71)
Оптимальное значение коэффициента распределения, тормозных сил, при
котором происходит одновременное блокирование колес, получим после под-
становки в выражение (2.71) значений (2.70):
„ _ e + <ph
Рт ,
а-(рп
Следовательно, для обеспечения полного использования веса троллейбуса
необходимо, чтобы соотношение между тормозными силами мостов изменя-
лось в зависимости от состояния дороги, т.е коэффициента сцепления.
Оценочным показателем распределения тормозных сил является удельная
тормозная сила моста или троллейбуса в целом:
у -73l.
I Т ’
mg
г = —Л
Л р
к.,
Рациональное распределение тормозных сил по мостам предполагается в
любых дорожных условиях при соблюдении равенства удельных тормозных
сил ут = . В условиях полного использования сцепного веса удельная тор-
мозная сила троллейбуса равна коэффициенту сцепления:
YT=Yr.=<P
При равенстве удельных тормозных сил коэффициенту сцепления достига-
ется максимальное возможное замедление троллейбуса:
Jimai = ^'L<pRzi/G=(pg.
Обеспечение устойчивости движения троллейбуса при экстренном тормо-
жении достигается тогда, когда колеса моста, который в данных условиях дол-
жен блокироваться первым, катятся со скольжением, соответствующим мак-
симальному коэффициенту сцепления, т.е нс доводя до полного “юза”. Колеса
второго моста не будут при этом реализовать по сцеплению тормозную силу.
Если торможение троллейбуса происходит на горизонтальном участке доро-
ги в условиях, когда первыми должны блокироваться колеса переднего моста
(<р <<?<>)> то тормозные силы на колесах мостов будут равны:
1
Гг1=<рЯг1; Fr2 = ~~<f>Ra
Рт
Суммарная тормозная сила равна:
(2.72)
Ft =Frl + Ю = <pRzl 1
144
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Определим из выражения (2.72) значение нормальной реакции, действую-
щей на колеса переднего моста:
п = С gyTm
21 <р(1 + 1//Зг) <p(l + l/jS,)’f2'75;
Значение нормальных реакций при условии нс полного использования сцеп-
ного веса можно определить по формулам:
_gm(e + yTh)
--------------(2.74)
Е/
Rz2^a^'(275)
Приравняв правые части уравнений (2.74) и (2.75) и проведя преобразова-
ния, получим:
V = т...............
7т V LpT-<ph(l + pr)
При условии, когда первыми блокируются колеса заднего моста троллей-
буса (ср > )тормозные силы мостов равны:
ГТ| =<рртКг2; Fr2=<pRz2_
Суммарная тормозная сила в этом случае будет равна:
FT - (pRz2(l +рт). (2.76)
Нормальную реакцию, действующую на колеса заднего моста,определим из
выражения (2.76)
Приравняв правые части уравнений (2.75) и (2.77) после преобразования,
получим:
Yi=(pf 77 V
L + (ph(l + рт)
Рассмотрим,как распределяются нормальные реакции по осям шарнирно-со-
члененного троллейбуса, состоящего из двух секций тягача и полуприцепа. Рас-
четная схема трехосного шарнирно-сочлененного троллейбуса приведена на рис.
2.35. При прямолинейном движении, троллейбуса замедление тягача и полупри-
цепа одинаковы так как в сцепном устройстве (узле стыковом) отсутствуют за-
зоры и упругие звенья. Особенность шарнирно-сочлененного троллейбуса
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
145
Рис. 235. Силы действующие на сочлененный трале иду с при торможении.
заключается в том, что в сцепном устройстве присутствуют как вертикальная
FKp в реакция так и горизонтальная г сила, которые при торможении завися от
загрузки полуприцепа и эффективности торможения тягача и полуприцепа.
Уравнениями равновесия тягача при торможение на горизонтальной доро-
ге являются:
+ FT2 — mjT — FKps — О
R-^L + FKpelKp FKp2hc gme —
где lKp - расстояние от задних колес тягача до тягово-сцепного устройства;
hc - высота тягово-сцепного устройства.
Уравнения равновесия полуприцепа таковы:
^z3 + ^кр.в ~~ 8™Пр ~ О
^*гЗ “ mnpjT + FKp2 — О
^кр.в^пр ^кр.г^с ^npS^np ^npF^np “ 0 *
Преобразовав полученные системы уравнения, определим нормальные ре-
акции на мостах сочлененного троллейбуса при максимальном использова-
нии сцепного веса на колесах переднего моста тягача:
_ mg(b + h(p) m„pg(e,v + hnp<p\lKp - hc<p)
d L L(Lnp+<phc) ’
на колесах заднего моста тягача:
( h — h(g m}1pg{e + hnp(p}( lKp ~ hcty
Rz2=mg 1--------+—---------------—1 + --------------.
\ J AjjP + L J
на колесах моста полуприцепа:
146
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
= mnpS
| пр ЕрФ
Ер+(РЕ
Величины вертикальной реакции и горизонтальной силы, действующих в
тягово-сцепном устройстве определяются по формулам:
, &Пр + ЬцрСр
“ /77 Р —С—.... ./—
Кр.в Л1П& г ,
ЕР+Е<Р
e„p+h„p<P
пр.г = «»М ;-----
Ер + Е<Р
При максимальном использовании сцепного веса в тягово-сцепном устрой-
стве возникают усилия сжатия, величина которых зависит как от эффективности
торможения, так и от загрузки сочлененного троллейбуса. В этом случае удель-
ные тормозные силы тягача ут и полуприцепа у?г будут равны. Усилия сжатия в
тягово-сцепном устройстве способствуют неустойчивому движению сочлененного
троллейбуса особенно при блокировании колес заднего моста тягача.
Для снижения усилий сжатия в тягово-сцепном устройстве распределение тор-
мозных сил должно быть такое, чтобы полуприцеп тормозился более эффектив-
но, чем тягач т.е, ут < уп . Полное отсутствие усилий сжатия достигается при оп-
ределенном соотношении ут и уи , которое для различной загрузки сочленен-
ного троллейбуса разное. В связи с этим осуществить идеальный процесс тормо-
жения сочлененного троллейбуса очень трудно. Следует учесть, что при любых
распределениях тормозных сил колеса не должны доводиться до полной блоки-
ровки, так как это может привести к снижению коэффициента сцепления, а глав-
ное, лишит колесо возможности сопротивляться боковым силам.
4.5 Регулирование тормозных сил
Одним из важных вопросов при проектировании тормозных систем от ко-
торого зависит эффективность торможения и устойчивость движения, являет-
ся обеспечение рационального соотношения тормозных сил на осях троллей-
буса. Рациональное соотношение тормозных сил при изменяющихся нагруз-
ках на мостах троллейбуса можно достигнуть за счет применения в тормозной
системе специальных регуляторов тормозных сил.
Снабжённая регулятором тормозных сил тормозная система транспортно-
го средства является системой автоматизированного управления. Водитель,
изменяя усилие на педали тормоза, регулируют замедление транспортного сред-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 147
ства, определяемое суммарной тормозной силой, а распределение тормозных
между мостами производится системой регулирования тормозных сил. Раз-
личают статическое и динамическое регулирование тормозных сил, которые
позволяют изменять чувствительность к управлению тормозной системой.
Чувствительность к управлению тормозной системой характеризует отно-
шение приращения удельной тормозной силы на оси транспортного средства
к приращению хода педали тормоза или давления воздуха в тормозных каме-
рах. Так, к примеру, чувствительность к управлению у снаряженного троллей-
буса будет значительно выше чем у троллейбуса с максимальной загрузкой.
Различная чувствительность к управлению тормозной системы и её зависи-
мость от загрузки троллейбуса и дорожных условий усложняют возможности
водителя регулировать эффективность торможения.
Идеальным статическим регулированием тормозных сил принято считать
такое регулирование, при котором обеспечивается независимость коэффици-
ента сцепления (р и чувствительности к управлению от массы транспортного
средства. Такой вид регулирования целесообразен для длиннобазных транс-
портных средств, имеющих значительное изменение статических реакций на
мостах при их загрузке и малое изменение нормальных реакций при торможе-
нии. К устройствам, которые обеспечивают статическое регулирование тор-
мозных сил относятся статические регуляторы, обеспечивающие ограничения
давления в тормозном приводе в зависимости от загрузки транспортного сред-
ства. Ограничение давления в приводе тормозов осуществляется регулятора-
ми, которые управляются вручную водителем или автоматически от датчика
фиксирующего загрузку транспортного средства.
Идеальным динамическим регулированием тормозных сил является такое
регулирование, при котором обеспечивается равенство удельных тормозных
сил = у2 = ут для любой загрузки транспортного средства и его эффектив-
ности торможения. При максимальном использовании сцепного веса в этом
случае будет производится одновременное блокирование колёс. Тормозные
силы на колёсах переднего и заднего моста троллейбуса зависят от давления
воздуха в тормозных камерах и в общем случае определяются выражениями:
F ) • р - ~ Pul)
ГТ] , гТ2 >
\ Гк2
где/q и к2 - коэффициенты пропорциональности тормозных механизмов
колёс переднего и заднего моста; Р\ и р2 - давление воздуха в тормозных ка-
мерах переднего и заднего моста; р и р 0,- давление воздуха в тормозных
камерах, соответствующее началу работы тормозов; гК^ игк2 - радиусы каче-
ния колёс переднего и заднего моста.
Для достижения рационального распределения тормозных сил давление воз-
духа в тормозных камерах переднего /?] и заднего р2 мостов должно регулиро-
148
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
ваться в зависимости от эффективности торможения и загрузки троллейбуса. На
основании выражений (2.70) значения давлений, соответствующих оптимально-
му распределению тормозных сил, определяется по формулам:
к । L
k2L
График, показывающий связь давлений в передних и задних тормозных каме-
рах, будем называть рабочей характеристикой регулятора. Соотношение давле-
ний р2 и при котором обеспечивается оптимальное распределение тормоз-
ных сил с полной нагрузкой
(100%), с половинной (50%)
и без груза показано на
рис.2.36 штрихпунктирными
линиями. У систем не имею-
щих регуляторов рабочая ха-
рактеристика представляет
прямую линию, выходящую
из начала координат под уг-
лом 45 градусов (р., = р2 )-
Идеальный регулятор, обес-
печивающий оптимальное
б)
Pi,
соотношение тормозных сил
между колёсами переднего и
заднего моста транс-
портного средства создать
довольно сложно. Практи-
ческое регулирование тор-
„ т п < мозных сил осуществляется
Рис. 2.36. Раоочие характеристики регуляторов. J
по более простым законам.
Одним из методов регулирования является изменение коэффициента пере-
дачи регулятора. Такие регуляторы применяют при пневматическом тормоз-
ном приводе и они поучили название лучевых регуляторов. При таком виде
регулирования давление воздуха в передних и задних тормозных камерах мож-
но связать соотношением р2 ~ (X - р^ где (X - коэффициент передачи регуля-
тора. Рабочие характеристики такого регулятора и их сравнение с идеальны-
ми показаны на рис.2.36 а. При использовании такого регулятора повышает-
ся эффективность торможения транспортного средства с неполной загрузкой
и без груза, но в то же время не исключается блокировка колёс заднего моста.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
149
Регуляторы с ограничением давления в тормозных камерах задних колёс при-
меняют на транспортных средствах с неизмсняющимися весовыми характерис-
тиками. Рабочая характеристика такого регулятора показана на рис. 2.36 б.
Давление, при котором изменяется характеристика регуляторов, называют
точкой срабатывания регулятора ро . Основной недостаток регулятора - ма-
лая эффективность торможения при больших коэффициентах сцепления вслед-
ствие неполного использования сцепного веса, приходящегося на задний мост.
Лучшая характеристика присуща регулятору, у которого в точке срабатыва-
ния меняется коэффициент передачи. Он называется регулятором с пропорцио-
нальным клапаном. Характеристика такого регулятора с пропорциональным
клапаном показана на рис. 2.36 б пунктирной линией. Использование в тор-
мозном приводе такого регулятора повышает эффективность торможения, но
не исключает блокирование колёс заднего моста.
Характеристика регулятора, у которого в зависимости от нагрузки, прихо-
дящейся на задний мост, меняется положение точки срабатывания приведена
на рис. 2.36 в. Характеристика регулятора определяется коэффициентом пере-
дачи а и законом изменения положения точки срабатывания в зависимости
от нагрузки приходящейся на задний мост. Применяют регуляторы с такой
характеристикой в системах с гидравлическим тормозным приводом.
В пневматическом тормозном приводе применяется регулятор у которого в
зависимости от нагрузки на задний мост меняется положение точки срабаты-
вания и коэффициент передачи а . Рабочая характеристика такого регулято-
ра показана на рис.2.36 г. Эти регуляторы наиболее полно удовлетворяют тре-
бования оптимального регулирования тормозных сил.
При подборе характеристик регулятора для конкретного троллейбуса не-
обходимо учитывать особенности пневматического привода и условия эксп-
луатации. Исходными данными для проектирования регуляторов является:
лучевого типа - зависимость коэффициента передачи (X от нагрузки, приходя-
щейся на задний мост; с клапаном ограничителем - точка срабатывания ро от
нагрузки, приходящейся на задний мост и коэффициента передачи (X (гидрав-
лический привод) или зависимости точки срабатывания ро и коэффициента
передачи (X от нагрузки (пневматический привод).
Регуляторы тормозных сил улучшают тормозные свойства транспортных
средств, однако не исключают возможности блокирования колёс, а следова-
тельно, возможности потери устойчивости транспортного средства вследствие
его заноса. .
Регулирование тормозных сил на колёсах транспортного средства можно осу-
ществлять против©блокировочной системой (ПБС), которая вне зависимости от
условий торможения обеспечивает такое относительное скольжение колёс, при
котором задаётся оптимальное сочетание их устойчивости и тормозной эффек-
тивности. Принципиальная схема современной ПБС показана на рис,2.37.
150
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Рис. 2.37. Принципиальная схема противоблоки-
ровочной системы: 1- тормозной цилиндр; 2-
пневматические магистрали; 3- модулятор; 4-
ресивер; 5- главный тормозной кран; 6- тормоз-
ная подаль; 7- соединение с атмосферой; 8- элек-
тронный блок управления; 9- электрические ма-
гистрали; 10- датчик скорости.
Рис. 2.38. График зависимости параметров
торможения автомобиля с ПБС от времени.
ПБС содержит датчик угловой
скорости колеса, регулятор дав-
ления (модулятор) и электрон-
ный блок управления. Функция
датчика угловой скорости коле-
са является выдача информации
об угловой скорости колеса на
электронный блок. Электронный
блок проводит логическую обра-
ботку поступившей информации
и даёт команду регулятору дав-
ления, который в зависимости от
поступившей из блока управле-
ния команды, снимает, повыша-
ет или удерживает на постоянном
уровне давление в тормозном
приводе колёс.
Процесс регулирования с по-
мощью ПБС торможения коле-
са циклический. Связано это с
инерционностью самого колеса,
привода, а также элементов
ПБС. Качество регулирования
оценивается по тому, насколько
ПБС обеспечивает скольжение
тормозного колеса в заданных
пределах, при которых обеспечи-
вается наибольшая тормозная
сила колеса. Качество работы
ПБС зависит от принятого прин-
ципа регулирования (алгоритма
функционирования), а также от
быстродействия системы в це-
лом. Важным свойством ПБС
должна быть способность при-
спосабливаться к изменению
условий торможения (адап-
тивность) и, в первую очередь,
к изменению коэффициента
сцепления в процессе торможе-
ния.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
151
На рис 2.38 приведены графи-
ки характеристики изменения
скорости движения v транспор-
тного средства, угловой скоро-
сти колёс й)т Л. , углового замед-
ления колеса ут к , тормозного
момента М т являющимися ос-
новными параметрами тормо-
жения, по времени. Описанный-
здесь процесс несколько идеали-
зирован. Практически команда
на растормаживание, заторма-
живание и фиксацию тормозно-
го момента должна подаваться
с некоторым опережением, с
учётом инерционности системы
в комплексе. Адаптированность
ПБС может быть обеспечена,
если в блоке управления предус-
матривается коррекция, учиты-
вающая ряд влияющих на тор-
можение факторов в частности
скорости. Блок-схема представ-
ленная на рис. 2.39 отражает
электронный блок управления
описанного алгоритма.
Процесс работы ПБС может
Рис. 2.39. Блок - схема управления ПБС.
проходить по двух- или трёхфазному циклу. При двухфазном цикле; первая
фаза нарастание давления; вторая фаза - сброс давления. Третья фаза - под-
держивание давления на постоянном уровне. В алгоритме по замедлению при-
менён трёхфазный цикл, достоинством которого является меньший расход воз-
духа, но сам модулятор является более сложным, чем при двухфазном цикле.
4.6 Устойчивость троллейбуса при
торможении
Обеспечение устойчивости троллейбуса при торможении в любых услови-
ях движения является основной задачей совершенствования тормозных сис-
тем. Устойчивость троллейбуса определяется боковыми реакциями, которые
дорога прикладывает к его колёсам. Боковые силы могут возникать вслед-
152
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
ствие неравенства тормозных сил левых и правых колёс, центробежных сил на
повороте, от поперечного уклона дороги т.д- Если боковые силы меньше пре-
дельной величины боковой реакции, то колёса будут двигаться по заданной
траектории, незначительно отклоняясь от неё только за счет бокового увода.
При превышении этого предела начинается боковое скольжение и колесо те-
ряет устойчивость. В этом случае существенно снижается коэффициент боко-
вого сцепления колеса с дорогой и оно не может воспринимать боковые силы.
Одной из наиболее вероятных причин потери устойчивости прямолинейного
движения при торможении является неравенство тормозных сил левых и пра-
вых колёс, которое приводит к возникновению момента, уравновешенного
боковыми реакциями колёс. Неравенство тормозных сил может быть вызвано
неодновременным срабатыванием тормозов, различной интенсивностью на-
растания тормозных сил в тормозных механизмах разных колёс. Это в свою
очередь может быть следствием разных зазоров и коэффициентов трения ко-
лодок с барабаном, разной жёсткости привода к тормозным механизмам и
других причин. Если осуществляется электрическое торможение , то на со-
отношение тормозных сил левых и правых колёс троллейбуса может повлиять
величина коэффициента блокировки механического дифференциала.
Потеря устойчивости и управляемости троллейбуса в случае бокового за-
носа, часто ведут к дорожно-транспортным происшествиям. Особенно опасен
занос троллейбуса, который возникает в основном когда колёса заблокирова-
ны. Боковой занос или боковое скольжение колёс происходит в том случае
когда боковые силы сцепления колёс с дорогой меньше горизонтальных реак-
ций действующих от дороги на колёса. Развитие начавшегося заноса в очень
большой степени зависит от квалификации водителя, который может поворо-
том рулевого колеса и притормаживанием или оттормаживанием колёс спо-
собствовать гашению появившегося заноса.
В связи с тем, что даже опытные водители не в состоянии поддерживать на
всех колёсах тормозные силы, строго соответствующие началу блокировки ко-
лёс (юзу), то наименьший тормозной путь во время экстренного торможения на
сухой дороге обычно получают при торможении всех колёс до юза. Однако та-
кое торможение часто приводит к аварийной ситуации, так как при скольжении
колёс (движение юзом) случайно возникшая боковая возмущающая сила влечёт
за собой занос троллейбуса. В реальных условиях при отсутствии регулирую-
щих устройств вначале блокируются колёса одного моста; блокирование всех
колёс происходит лишь при дальнейшем повышении приводного усиления.
В случае блокирования колёс заднего моста (рис. 2.40 а) троллейбус теряет
устойчивость, и при любом боковом возмущении возникает занос троллейбу-
са. В результате мост начинает двигаться вокруг центра О со скоростью
v р = ‘ Составляющая FVj возникающей при этом от центробеж-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
153
Рис. 2.40. Схема заноса мостов троллей-
буса: а) занос заднего моста ; б) занос пе-
реднего моста.
ной силы F.( , действует в том же
направлении,что и боковая ско-
рость ve, возникающая при за-
носе заднего моста. В результа-
те начавшееся отклонение задне-
го моста от прежнего направле-
ния быстро прогрессирует.
В том случае, когда блокируют-
ся колёса переднего моста
(рис2.40 б), троллейбус частично
или полностью теряет управляе-
мость. Колёса переднего моста
теряют возможность передавать
на троллейбус боковые реакции и
,следовательно, он не может
поворачивать и двигается только
прямо, несмотря на поворот руле-
вого колеса водителя. При блоки-
ровании колёс заднего моста мо-
жет возникнуть его занос со ско-
ростью Ув. Однако сохранению
прежнего направления движения
будет способствовать поперечная составляющая сил инерции F , приложенная
к центру масс троллейбуса и действующая в сторону, противоположную направ-
лению начавшегося заноса.
Для обеспечения устойчивости движения троллейбуса тормозные силы на ко-
лёсах каждого моста должны нарастать по заданному закону, соответствующему
изменению нормальных реакций на данном мосту, плавно и одновременно на
колёсах правой и левой стороны. Движение троллейбуса может происходить не-
устойчиво в том случае, когда нарастание тормозных на колёсах переднего и
заднего моста происходит не одновременно. Особенно неустойчивым оказыва-
ется движение, когда запаздывает возникновение тормозных сил на колёсах зад-
него моста. В этом случае действующая на троллейбус инерционная сила F- ,
приложенная к центру масс, которая при небольшом отклонении от направле-
ния движения или при наличии даже небольшой боковой возмущающей силы
будет стремиться вызвать занос заднего моста троллейбуса.
Дл^ сочленённого троллейбуса опережающее торможение тягача по отно-
шению к полуприцепу приведёт к тому что последний набегает на тягач, что
способствует неустойчивому его движению. Болес рациональным с точки зре-
ния устойчивости движения является опережающее торможение полуприцепа
по отношению к тягачу.
154
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Глава 5. Управляемость троллейбуса
5.1. Основные понятия и определения
Управление троллейбусом является одной из главных производственных
функций водителя, а основным назначением троллейбуса является перевозка
пассажиров или грузов (грузовой троллейбус). Поэтому под управлением по-
нимается целенаправленная организация процесса движения.
В предыдущих главах были рассмотрены эксплуатационные свойства трол-
лейбуса для прямолинейного движения. В действительности траектория дви-
жения троллейбуса всегда криволинейная, с беспрерывно изменяющейся кри-
визной. Такой характер траектории движения обусловлен не только наличи-
ем криволинейных участков дороги, но и действием на троллейбус внешних
возмущений и воздействием водителя на органы управления с целью коррек-
тировки характера движения (направления и скорости движения). При движе-
нии на прямолинейных участках пределы изменения радиуса кривизны траек-
тории невелики, потому такое движение рассматривают условно как прямо-
линейное. Эта условность позволяет рассматривать эксплуатационные свой-
ства отдельно при прямолинейном и при криволинейном движениях.
Процесс поворота троллейбуса состоит из входа в поворот, движение с по-
стоянным радиусом (этот этап может отсутствовать) и выхода из поворота.
При входе в поворот и выходе из него кривизна траектории центра масс трол-
лейбуса изменяется по закону, близкому к линейному, что соответствует при-
близительно равномерному повороту рулевого колеса. Относительная длина
криволинейных участков (в процентах) на дорогах различных категорий при-
ведена в табл. 2.5.
Движение по “разбитым” дорогам характеризуется почти беспрерывным
воздействием водителя на рулевое колесо. Время условного прямолинейного
Таблица 2.5.
Категория дороги Радиус криволинейного участка, м Всего
1000... 600... 300... менее
600 300 100 100
1 1,85 0,05 - - 1,9
II 3,8 1,2 0,235 - 5,235
III 6,6 2,2 0,8 0,1 9,7
IV 8,3 3,21 1,4 0,4 13,31
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 155-
движения со средним радиусом кривизны в пределах 300...400 м в этом случае
составляет всего 30...35 % общего времени движения.
Анализ особенностей криволинейного движения городского транспорта по-
зволяет выделить два режима поворотов: с малыми радиусами и невысокими
скоростями (характеризует в основном маневренность) и с большими радиу-
сами, высокими скоростями (характеризует управляемость и устойчивость дви-
жения).
Движение троллейбуса как механической системы может определяться тра-
екторией какой-либо ее точки (направляющей точки), а также углом поворо-
та некоторой прямой, связанной с троллейбусом, относительно выбранной
системы координат. В практике вождения в качестве направляющей точки
принимают различные точки, наиболее удобные для наблюдения за процес-
сом движения троллейбуса. При теоретическом изучении управляемости дву-
хосного троллейбуса в качестве направляющей точки удобно выбирать его
центр масс, а для сочлененного - центры масс его звеньев. Зная ускорения цен-
тров масс, можно определить силы инерции, действующие на систему.
В качестве прямой для троллейбуса или каждого из. звеньев сочлененного
троллейбуса принимают их продольные оси, положение которых определяет-
ся курсовым углом Д между их проекциями на плоскость дороги и осью х-ов
неподвижной системы координат.
Перемещение центра масс может быть разложено на составляющие х, направ-
ленную по продольной оси, и у, перпендикулярную ей. Законы изменения пере-
мещений, скоростей и ускорений по направлению продольной оси определяют
тягово-скоростные и тормозные свойства. Поэтому при изучении управляемос-
ти ограничиваются рассмотрением законов изменения курсового угла р , а так-
же бокового смещения у и их производных по времени р — О', р ~£ ; У ~ jу.
Скорость и ускорение в направлении продольной оси считаются известными.
При изучении управляемости в первом приближении можно пренебрегать
перемещениями отдельных масс троллейбуса или каждого из звеньев сочле-
ненного троллейбуса относительно их центров масс за исключением поворо-
та управляемых колес, а также звеньев сочлененного троллейбуса относитель-
но друг друга. При более детальном рассмотрении учитывают еще повороты
кузова в поперечной и продольной плоскостях.
В системе “троллейбус-водитель” троллейбус является объектом управле-
ния, а водитель - оператором. Являясь источником информации о задачах
управления и анализируя дорожную обстановку, результаты управления во-
дитель, воздействуя на органы управления, изменяет желаемым образом па-
раметры движения.
У троллейбуса изменение курсовых и боковых параметров движения осу-
ществляется в результате поворота рулевого колеса - управляющего воздей-
ствия. Возникающие в результате управляющего воздействия изменения кур-
156
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
совых и боковых параметров являются кинематической реакцией троллейбу-
са на него. Для поворота рулевого колеса водитель должен создать некото-
рый момент, значение которого зависит от параметров движения троллейбу-
са. Сопротивление повороту рулевого колеса при этом называют силовой ре-
акцией троллейбуса на управляющее воздействие.
Как кинематические, так и силовые реакции функционально связаны с уп-
равляющими воздействиями, причем зависимости определяются свойствами
троллейбуса как управляемого объекта. Для различных троллейбусов одни и
те же управляющие воздействия, осуществляемые в одних и тех же условиях
движения, вызывают неодинаковые кинематические и силовые реакции. Сле-
довательно, поворот рулевого колоса на один и тот же угол вызовет поворот,
характеризуемый разной угловой скоростью изменения курсового угла, нео-
динаковыми боковой скоростью и ускорением; неодинаковы также усилия,
необходимые для поворота рулевого колеса.
Характер функциональной зависимости между управляющими воздействи-
ями и реакциями на них может служить оценкой свойств троллейбуса как уп-
равляемого объекта. Исходя из сказанного, управляемостью называют сово-
купность свойств, определяющих характеристики кинематических и силовых
реакций на управляющие воздействия.
5.2. Оценочные показатели управляемости
Для оценки управляемости предложено много оценочных показателей:
1) устойчивость управления траектории, балл; 2) устойчивость курсового
управления, балл; 3) устойчивость управления траекторией при торможении,
балл; 4) устойчивость курсового управления, балл; 5) предельная скорость вы-
полнения маневра vnp км/ч; 6) скорость начала снижения устойчивости управ-
ления траекторией vmp , км/ч; 7) скорость начала снижения устойчивости кур-
сового управления vKypc, км/ч.
Показатели 1...4 определяют в эксплуатационных (штатных) режимах движе-
ния со скоростями vmax на специальных дорогах и скоростями, разрешенными
правилами дорожного движения, на дорогах категории 1. При оценке показате-
лей 3 и 4 торможение происходит от начальной скорости vo до скорости
V = 0,5vo с замедлением j3 ~ 0,5g. Оценку дают в баллах по субъективным ощу-
щениям испытателя (органолептический меч од) по шкале, приведенной ниже.
На основании протоколов испытаний, проводимых на разных дорогах, оп-
ределяют комплексные оценки устойчивости управления, которые должны
быть не ниже заданных нормативных значений в зависимости от категории
транспортных средств, табл.2.6 и 2.7. Троллейбус можно отнести к транспор-
тным средствам категории М3.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
157
Удовлетворительные оценки
отлично, улучшать не требуется 5
не ясно, хорошо или отлично 4,5
хорошо, желательно улучшить 4
не ясно, посредственно или хорошо 3,5
посредственно, необходимо улучшить при модернизации 3
не ясно, удовлетворительно или нет 2,5
Неудовлетворительные оценки
плохо, но бывает и хуже 2
не ясно, бывает ли хуже 1,5
хуже быть не может 1
Таблица 2.6.
Категория Полная масса, т Наименование автотракторного срадства
М1 Соответствуетполной массе базовой модели Автобусы, пассажирские автомобили и их модификации, а также пассажирские автопоезда с числом мест для сидения не
М2 До 5 То же, имеющие более 8 мест для сидения
М3 Свыше 5 То же
N1 До 3,5 Грузовые автомобили, автомобили-тягачи и грузовые автопоезда
N2 Свыше 3,5 до 12 То же
N3 Свыше 12 То же
01 До 0,75 Прицепы и полуприцепы
02 До 3,5 То же
03 До 10 То же
04 Свыше 10 То же
Таблица 2.7
Категория автотранспортного средства М1 М2 М3 N1 N2 N3
Устойчивость управления траекторией 4,5 4 4 4 4 3,5
Устойчивость курсового управления 4,5 4,5 4,5 4 4 4
Устойчивость управления траекторией при торможении 4 4 4 3,5 3,5 3,5
Устойчивость курсового управления при торможении 4 4 4 3,5 3,5 3,5
Показатели 5...7 определяют при испытаниях на критических (нештатных)
режимах движения, которые заключаются в выполнении заданных разметкой
маневров “переставка” (рис. 2.41, а), “поворот”, “торможение на повороте”
(рис. 2.41, б) с постепенно увеличивающейся скоростью.
158
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
6)
Рис. 2.41. Разметка участка испытания для выпол-
нения маневров: а - “переставка”; б - “поворот”.
По субъективным оценкам
контролера, находящегося вне
объекта испытаний, и водителя-
испытателя выставляется комп-
лексная оценка устойчивости
управления в баллах при раз-
личных скоростях движения и
строится график (рис. 2.42). Точ-
ка кривой, соответствующая ор-
динате 4,5, определяет скорость
устойчивого управления.
Кроме этого, имеется целый
ряд показателей и характерис-
тик, из которого для оценки уп-
равляемости могут использо-
ваться следующие: 1) характе-
ристика статической траектор-
ной управляемости; 2) характе-
ристика “рывок руля”; 3) ха-
рактеристика выхода из пово-
рота; 4) характеристика легко-
сти рулевого управления; 5)
предельная скорость входа в за-
данный поворот; 6) предельная
скорость входа в заданную пе-
реставь у; 7) средняя угловая скорость поворота ру-
Рис. 2.42. Зависимость ком-
плексной оценки от скорос-
ти устойчивости управле-
ния.
левого колеса на прямолинейном участке дороги.
Статическую траекторную управляемость оценива-
ют при постоянном ускорении 4 м/с2 зависимостью:
К = Q)[v~
где ССр -угол поворота рулевого колеса. Графичес-
кое выражение зависимости не должно выходить из
заштрихованной на рис. 2.43 области, а угол наклона
касательной к кривой К — f{pcp ) в любой точке не
должен превышав ь углы наклона прямых, ограничи-
вающих эту область. Зависимость позволяет оценить
реакцию транспортного средства на поворот рулево-
го колеса. Правая граница области допустимых зна-
чений соответствует рекомендациям эргономики по
возможности быстрого поворота или объезда препят-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
159
2.43. Характеристика траекто-
рией управляемости.
ствия со скоростью не менее 65 км/ч без перехвата рулевого колеса, левая грани-
ца установлена, исходя из максимально допустимой чувствительности колесной
машины к рулевому управлению. Если чувствительность машины превысит не-
который предел, то возможно появление ‘‘рыскания” при прямолинейном дви-
жении. Статическая траекторная управляемость определяется при различных зна-
чениях ос — const и v — const, соответствующих категорией транспортного
средства при постоянных оборотах вала двигателя.
Характеристика “рывок руля” - зависимость: (о/о)уСт — fit) (рис. 2.44),
где а) текущее значение угловой скорости машины при входе в поворот, G)ycm
ее установившееся значение. Зависимость описывает переходной процесс вхо-
да в поворот после быстрого (ОС? > 7 рад/с)
поворота рулевого колеса при различных ус-
тановившихся значениях ССр и v = const-
Управление не затруднено, если зависимость
йу 03 п — f(t) не выходит за пределы заш-
трихованной на рис. 2.44 области.
Характеристика “выход из поворота” по-
зволяет оценить стабилизирующие свойства
машины. При установившемся круговом
движении со скоростями 30 и 40 км/ч и jy ~
4+0,2 м/с2 освобождают рулевое колесо,
принимая этот момент за начало отсчета
(7 = 0), строят график изменения курсово-
го угла р — fit) (рис. 2.45). Зависи-
мость р = fit) не должна выходить за пре-
делы заштрихованной области.
Легкость рулевого управления оценивает-
ся по силе F на рулевом колесе, которая
при J р =4 м/с2 и скоростях движения 40 и
60 км/ч должна быть в пределах 60... 120 Н.
Нижний ее предел определен порогом раз-
личимости, ниже которого водитель теряет
ощущение взаимосвязи между поворотом
управляемых колес и усилием на рулевом
колесе; верхний предел связан с интенсифи-
кацией физической усталости водителя при
превышении определенного усилия на руле-
вом колесе. Легкость рулевого управления
может быть оценена также характеристикой,
представляющей собой график зависимос-
ти максимальной силы F — / \р>р), здесь
Рис. 2.44. Характеристика “ры-
вок руля ”.
160 Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
й)р - угловая скорость поворота рулевого колеса. Силу Fp необходимо при-
ложить к рулевому колесу при его равномерном повороте из нейтрального
положения, в положение соответствующее движению машины по кривой ра-
диуса 12 м, описываемой наружным передним колесом.
В соответствии с нормативными требованиями максимальные усилия (в Н)
на рулевом колесе при подобных испытаниях не должны превышать значе-
ний, приведенных ниже.
Для рулевого управления без усилителя на пути не более 17 м.250
Для рулевого управления с усилителем на пути не более 11 м..120
При прекращении действия усилителя на пути не более 17 м....500
Рис. 2.45. Характеристика “выход
из поворота ” при у —40 км/ч.
Предельная скорость входа в заданный по-
ворот определяется на участке с размеченной
траекторией, приведенной на рис. 2.41, б.
Оценочным показателем является скорость
машины в момент входа в поворот, предель-
ная по траекторной управляемости на пово-
роте. Нормируется параметр при радиусах
поворота 30 и 60 м по внутренней бровке по-
ворота. При превышении предельной скоро-
сти на 5 % не должно наблюдаться отрыва
всех колес одной стороны троллейбуса от до-
роги. Поворота рулевого колеса, корректиру-
ющего занос, не должно быть до скорости 50
км/ч и радиусе поворота 30 м, а также скоро-
сти 70 км/ч при радиусе поворота 60 м.
Предельная скорость входа в заданную “переставку” определяется на учас-
тке с размеченной траекторией, подобно приведенной на рис. 2.41, а. Оценоч-
ным показателем этого испытания является скорость в момент входа в “пере-
ставку15, предельная по траекторной управляемости. Нормируется значение
параметра при боковом смещении <:переставки” 3,5 м и длинах 12 и 20 м. При
превышении предельной скорости на 5 % нс должно наблюдаться отрыва ко-
лес от дороги. Поворот рулевого колеса, корректирующий занос, не должен
отмечаться до скорости 55 км/ч при длине 12 м и 80 км/ч при длине 20 м.
Средняя угловая скорость (в рад) поворотов рулевого колеса на прямоли-
нейном участке дороги определяется по формуле
<*>,, =2«,Л,
где ар = )
6
- средний угол поворота рулевого колеса от нейтрального положения, рад.;
Раздел Z ТЕОРИЯ ТРОЛЛЕЙБУСА Ш
v » 0,5j Р /(^2 — t]) ~ частота поворотов рулевого колеса, с 1 (р - число экстре-
мумов функции CZp = f v)’ больших 3° на измерительном участке; (?2 - -
время движения по измерительному участку, с). Нормированные значения па-
раметра для скорости движения машины 60 и 100 км/ч соответственно 0,1 и
0,15 рад/с.
5.3. Кинематика поворота троллейбуса
Поворот троллейбуса - изменение его курсового угла в результате измене-
ния положения управляемых колес.
Если к движущейся поступательно механической системе приложить силу
под углом к направлению ее движения, не проходящую через центр масс, то
система будет поворачиваться относительно центра масс, а траектория ее пе-
ремещения будет криволинейной. Поворот управляемых колес приводит к
созданию такой силы. Так как при действии на колесо боковой силы вектор
его скорости в результате увода или бокового скольжения отклоняется от плос-
кости вращения, то происходит и обратное явление: при движении колеса та-
ким образом, что вектор его скорости не совпадает с плоскостью вращения,
возникает боковая реакция. На этом основано направляющее действие управ-
ляемых колес, т.е. их способность создавать силы, изменяющие направление
движения троллейбуса. При повороте колес их центры в первое мгновение по
инерции движутся вместе с троллейбусом в первоначальном направлении, нс
совпадающем после поворота колес с их плоскостями вращения. В результате
этого возникнут реакции R ,, направленные так, что их моменты относитель-
но центра масс, преодолевая инерцию троллейбуса, вызовут его поворот. Бо-
ковая сила возникает и в том случае, когда плоскость вращения катящегося
колеса составляет с плоскостью, перпендикулярной дороге, угол а раз (угол
развала). Эта сила пропорциональна углу развала F6 = каа . Коэффициент
ка принимается равным нормальной реакции R в пятне контакта колеса.
При изучении поворота сочлененного троллейбуса, каждое из его звеньев
рассматривается как твердое тело. Мгновенный центр поворота каждого зве-
на можно найти, если известно направление скоростей двух любых его точек.
Пусть известно направление скоростей и vB точек А и В (рис. 2.46), явля-
ющихся серединами переднего и заднего мостов двухосного троллейбуса. На-
правления скоростей Гд и vs связано с несколькими процессами, возникающи-
ми при повороте. При отсутствии увода или бокового скольжения направления
скоростей каждого из колес совпадало бы с плоскостями их вращения. Если у
неуправляемых колес эти плоскости параллельны продольной оси АВ, то направ-
ление vB совпало бы с ней. Считают, что направление гл в этом случае состави-
ло бы с осью АВ угол а (средний угол поворота управляемых колее).
162
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Рис. 2.46. Схема поворота двухосного
троллейбуса.
Возникающие при повороте трол-
лейбуса боковые силы вызывают увод
колес, что приводит к отклонению
направлений скоростей гд и vB от
указанных выше. Отклонения зависят
также от угла развала колес. Углы
и , на которые отклоняются
направления скоростей Уд и vB за
счет увода или бокового скольжения,
развала и кинематики подвески, на-
зываются углами увода соответствен-
но переднего и заднего мостов.
Для нахождения расстояния R от
мгновенного центра поворота О до
продольной оси АВ и е (смещение
центра поворота) опустим перпен-
дикуляр из точки О на продольную ось троллейбуса. Угол AOD равен а — ;
угол BOD - ^2 как углы с взаимно перпендикулярными сторонами (см. рис.
2.46). Из треугольников AOD и BOD имеем
AD = Rtg(a-Vi); (2.78)
BD = e = Rtgy-1.(2.79 }
Складывая выражения (2.78) и (2.79), получим:
R = L = L
tg(a-\i/d+tg^2 a-V'i+V'? '(2'80)
Подставляя значение R из (2.79) в (2.80), получим:
Ltgy2 Lv-.
е - —.....—-------~------------Л 2 81 )
Радиусом поворота Rn троллейбуса называется расстояние от центра пово-
рота О до колеи переднего наружного колеса (рис. 2.46)
D R + 0,5В
"~cos(a-w }' (2'82)
При больших значениях радиуса поворота (небольшие углы поворота уп-
равляемых колес) можно пренебречь величиной 0,5В, малой по сравнению с
радиусом поворота, и считать cos(a — ~ 1 тогда Rn ~ R. В дальнейшем,
если это не оговорено особо, будем пренебрегать разницей между названны-
ми расстояниями, называя R радиусом поворота.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
163
Угловая скорость поворота троллейбуса й) = vD / R. Поскольку OD - пер-
пендикуляр к продольной оси, то скорость направлена по продольной оси
и является скоростью троллейбуса у. Тогда:
со = v/R = v[tg(a- tg\jf2]/L ~ v(a -\if} + i/2)/L. ( 2.83 )
Если пренебречь уводом колес, то из уравнений (2.80) и (2.81), получим:
R ~ Lltga = Ы а; е = 0. ( 2.84)
Следовательно, при отсутствии увода центр поворота лежит на продолже-
нии осей задних колес троллейбуса.
Из уравнений (2.82)...(2.84) в этом случае имеем:
= L/ sinа +В (2cosa) ~ Ы since,
(О = vtgoc/L~ va/L.
Из сравнения формул для определения кинематических параметров пово-
рота (R, е и (У) без учета и с учетом увода, видно, что в первом случае эти
величины при заданной базе L однозначно определяются средним утлом по-
ворота управляемых колес а, а во втором зависят еще и от разности (у2 ~Ж\)-
Значение и знак этой разности зависят от боковых сил, действующих на пере-
дние и задние колеса, и коэффициентов сопротивления уводу этих колес.
Свойство колесной машины изменять кинематические параметры пово-
рота под действием внешних боковых сил при фиксированной величине угла
а называется поворачиваемостью. Если т0 машина обладает нейт-
ральной поворачиваемостью. В этом случае параметры R и щ не зависят от
действующих на машину боковых сил и остаются такими же, как у машины с
жесткими колесами. Однако центр поворота смещен относительно оси задних
колес, т. е. е Ф 0. Если > 1/ю то считают, что машина обладает избыточ-
ной поворачиваемостью. В этом случае в результате действия боковых сил уг-
ловая скорость поворота машины возрастает, а радиус поворота - уменьша-
ется, присутствует и смещение центра поворота. Если 1/2< ’ т0 машине
присуща недостаточная поворачиваемость. Под действием боковых сил угло-
вая скорость поворота машины уменьшается, радиус поворота - увеличивает-
ся, смещение центра поворота не равно нулю.
Величины и направления боковых сил, действующих на задние и передние ко-
леса, зависят от многих факторов, в том числе и от характера маневра (круговое
движение, вход в поворот или выход из него). Поэтому в различных условиях
движения одна и та же машина может обладать различной поворачиваемостью.
Для характеристики влияния на поворачиваемость конструктивных особен-
ностей троллейбуса пользуются понятием статической поворачиваемости, оп-
ределяемой соотношениями между углами увода, при действии на троллейбус
постоянной боковой силы, приложенной в центре масс. Например, силы инер-
ции при круговом движении с постоянной скоростью или составляющей силы
164
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
веса на дороге с постоянным поперечным уклоном. Считают, что троллейбус
обладает нейтральной поворачиваемостью, если его статическая поворачива-
емость определяется равенством 1/2~ VC ’ избыточной или недостаточной
поворачиваемостью если при этом выполняются соответственно неравенства
уг2> 1/! или ул2< 1/1.
5.4. Силы и моменты, действующие на
троллейбус при повороте
О т]
Рис. 2.47. Схема для определения ускорения цент-
ра масс при повороте двухосного троллейбуса.
Методику определения сил,
действующих при криволиней-
ном движении, рассмотрим на
примере двухосного троллейбу-
са. Силы, действующие при
криволинейном движении на
сочлененный троллейбус, мож-
но определить для каждого из
звеньев, учитывая силы взаимо-
действия между ними, на осно-
вании этой же методики.
Найдем ускорение центра
масс троллейбуса в неподвижной
системе координат £01] (рис.
2.47). В рассматриваемый мо-
мент времени продольная ось
троллейбуса расположена под
углом (3 к оси От), а управляе-
мые колеса повернуты на сред-
ний угол (X . Скорость vc цент-
ра масс (точка С) перпендикулярна к радиусу ОС и равна vc — (ООС. Если (Хс
угол между продольной осью и вектором скорости центра масс, то проекции век-
тора этой скорости на оси координат
vt, ~ vccos(J3 + ас) = vccos/3cosac ~vcsinflsin(Xc =
= vcosp - VySinfl;
v, ~ vcsin(J3 + ac )= vcsinpcosac + vccosflsin(Xc =
o. r (2.86)
= vsinp + vYsinp, v 7
где vt. = v = vccos(Xc - проекция скорости центра масс на ось х (скорость
Раздел 2t ТЕОРИЯ ТРОЛЛЕЙБУСА 165
движения троллейбуса); vy = vcsinCLc - проекция скорости центра масс на ось
у (скорость бокового смещения троллейбуса).
Продифференцировав равенства (2.85) и (2.86) по времени, получим проек-
ции на оси неподвижной системы координат ускорения центра масс:
jn = vcosft - vftsinp -vysinp - vypcosp; ( 2.87)
= vsinp +vpcosp + vycosp - vypsinp; ( 2.88)
Положение троллейбуса относительно неподвижной системы координат из-
меняется с течением времени, поэтому изменяется положение и относи-
тельно его продольной и поперечной осей. Удобнее оперировать ускорения-
ми и силами, не изменяющими свое направление относительно троллейбуса.
Для этого спроецируем ускорения и троллейбуса на его продольную и
поперечную оси.
Сумма jx проекций ускорений и на продольную ось равна:
jx = jncosP + j^sinp. ( 2.89)
Сумма jy проекций ускорений jq и на поперечную ось равна:
Л = jrcosft - (2.90)
Подставляя в равенства (2.89) и (2.90) значения ускорений и из ра-
венств (2.87) и (2.88), и учитывая, что v = j и р = 0), получим:
A”J“V3.O); jy=v(O + vy.( 2.91)
Продольная Fjx поперечная Fjy составляющие силы инерции в системе
координат, связанной с троллейбусом
Fjx=m(j-Vya>);(2.92)
Fjy = т{у(о + vy).( 2.93 )
Иногда удобнее выразить составляющие силы инерции и в виде
функций от среднего угла поворота управляемых колес ОС. Пользуясь схемой,
приведенной на рис. 2.47, найдем:
tgac =(b- Ry/2)/R = [b(« -Fi)-
Тогда:
Vy = L + v^a-yj/^-ayfi^lL. (2.94)
Подставляя Vv и Vv в равенства (2.92) и (2.93), найдем:
166
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Fjx = m{j - va>[fc(a-^i )-a^21/L} (2.95)
положительное направление Fjx противоположно направлению движения
троллейбуса.
Fjy = m{vCOPv[b(d-y7l)~ay72]/L + j[b(a-y/l)-a\i/2]/L} (2.96)
положительное направление Fот центра поворота троллейбуса.
Составляющая сила Fможет быть представлена в виде трех слагаемых:
Рис. 2.48. Схема сил и боковых реакций, дей-
ствующих на троллейбус при повороте.
Z7 _ Z7z । Z7* । Г1'*
bjy~by+by+by’
Первое слагаемое - проекция
центробежной силы на попереч-
ную ось:
F'y = mveo = mv21R. (2.97 )
Если заданы R и v, то выра-
жения для силы р' одинаковы
как с учетом, так и без учета уво-
да. Слагаемое Fv возникает в
результате изменения угла пово-
рота управляемых колес и изме-
нения углов увода. При отсут-
ствии увода оно положительно при входе троллейбуса в поворот и отрица-
тельно при выходе. С учетом увода, если углы увода велики, то сила F* мо-
жет быть отрицательной при входе в поворот и положительной при выходе.
Третье слагаемое р” возникает в результате изменения скорости движе-
ния троллейбуса. При отсутствии увода оно положительно при ускоренном
движении и отрицательно при замедленном. При небольших углах увода сила
Fy может быть положительной и в процессе замедления.
Зная силы инерции и учитывая известные внешние силы, можно, пользуясь
принципом Даламбера, найти реакции дороги. Для их определения составим
уравнения моментов (рис. 2.48). Считая cosCC = 1 и йпа — СС, найдем:
Jxd) = a(F6l - Fn )- bFn. ( 2.98)
где Jx- момент инерции троллейбуса относительно вертикальной оси
проходящей через его центр масс.
Из условия равенства нулю проекций сил на поперечную ось имеем:
Fjy=Fsi +Fn~Ff\a- (2.99)
Если средний угол поворота управляемых колес невелик, то членом Fц(Х
можно пренебречь. Решая в этом случае совместно уравнения (2.98) и (2.99),
получим:
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА Ш
F6i = (bFjy + J^)/L;
F62=^Fjy+ Jzd))/L. (2.100)
Угловое ускорение ц) найдем, воспользовавшись равенством (2.83)
d) = v(a-\/fi + i/2)/L + +^2)/L.
Отношение '7 = rg/G боковой силы, действующей на мост, к нагрузке,
приходящейся на колеса этого моста, называют удельной боковой силой. При
установившемся круго вом движении Т[\ — ^2 = Л При неустановившемся дви-
жении ^Т]2. Если пренебречь уводом колес, то при входе в поворот или
ускоренном движении 7^ > Т]2 > а ПРИ выходе из поворота или замедлении
7]i <Т]2 . При больших скоростях изменений углов увода неравенство7^ >7]?
справедливо при выходе из поворота, а при больших углах увода при замедле-
нии движения, как будет показано в гл. 6, из условий устойчивости движения
более желательным является выполнение неравенства7]j <Т]2 .
5,5. Уравнения криволинейного движения
троллейбуса
Зная силы инерции, можно написать уравнения бокового и курсового дви-
жения троллейбуса. Будем считать, что углы а, l/i и V^2 невелики и их коси-
нусы равны единице, а синусы самим углам.
Уравнения бокового движения центра масс (см. рис. 2.48):
Fjy = miyco + vy)= + ку2у2 -Rxla. (2.101)
Так как передние колеса не ведущие, то = fR^, и последним членом
правой части, равенства (2.101) можно пренебречь. Углы увода мостов выра-
зим через иц)- Решая совместно равенства (2.83) и (2.93), получим:
у/} =a-[ao) + v )/v;
Iff2 ~ {b(O- V?)/v.
После подстановки значений углов увода в исходное уравнение (2.101), най-
дем:
г..[к,., + ку,?) со\mv2 + \ak',i - Ьку,7) к.лх
vv -Л— = 0. (2.102 )
mv mv т
В уравнение (2.102) входят неизвестные v и (о - Для составления второго
уравнения воспользуемся равенством (2.98), подставив в него значения углов
увода и считая J х = mab, получим:
168
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
vАкv]a + кv2b) й)\а2кvl + b2кv7) кх}а
+ -----^-7+ V -U ——^- = 0. ( 2.103 )
mabv mabv mb
Таким образом, курсовая и боковая реакции связаны с углом поворота уп-
равляемых колес, а следовательно, и углом поворота рулевого колеса (управ-
ляющим воздействием водителя), двумя дифференциальными уравнениями
первого порядка, в каждое из которых входит vy и 0) .
Решая совместно уравнения (2.102) и (2.103), можно определить зависимость
курсовых и боковых параметров движения троллейбуса от угла поворота
управляемых колес, а зная передаточное число рулевого управления - зависи-
мость от угла поворота рулевого колеса.
При известных 0) , v и vv можно найти в каждый момент времени коорди-
наты 0 и £ в неподвижной системе координат ^От] (см. рис. 2.47) центра
масс троллейбуса (траекторию его движения) и курсовой угол р . Пользуясь
равенствами (2.85) и (2.86) и принимая во внимание, что (о = р , найдем:
1] = J (ycosp - - v sinp)dt + Q;
f ~ / (ysinp + v v cosp}dt + C2;
P = j (Dell + C3.
где С], С2и - постоянные интегрирования, определяемые по началь-
ным условиям.
5.6. Переходные процессы
В результате поворота управляемых колес возникают силы, изменяющие
направление движения троллейбуса. Однако наличие инерционных факторов
приводит к тому, что новые параметры движения устанавливаются нс сразу, а
через какой-то промежуток времени, в течение которого несмотря на то, что
(X = const, параметры движения v и й) изменяются. Процесс изменения па-
раметров движения при переходе от одного установившегося режима к друго-
му называют переходным. Переходные процессы предшествуют любому уста-
новившемуся движению. Они занимают большую часть времени движения и
имеют большое значение при оценке управляемости.
Характеристики переходных процессов можно получить, если решить урав-
нения (2.102) и (2.103) относительно неизвестных vv и &>:
vx+nvx+pvx = qyia + q>.2a;
(д + п(д + рй) = q^a + q^a, (2.104)
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
169
гае: « = .?(fi+f2)/v; р = £2[(£2
?У1 =^\bg!L-t qyl = f1g2(f,fe-v2/g)/(vL); qaA =^g/L\
ЧЮ2 = ^2g2/(yL)’ fi =kyi f2 =p/(OT25).
Полученные уравнения имеют общее характеристическое уравнение:
Л2 + nA + р = 0.
Корни того характеристического уравнения:
Aj 2 = п / 2 ± д/и2 / 4 - р •
В зависимости от знака подкоренного выражения возможны два случая:
1. /?2 /4 — р > 0, при этом общий интеграл определяется равенством
/ - С^ехрХ^ + С^хрА^Т. ( 2.105 )
Подставляя вместо п и р их значения, найдем, что принятое неравенство
соответствует условиям — £] < 0 или f 2 — Ci > ^8^)- Первое из этих
условий при = mab определяет избыточную поворачиваемость. Следова-
тельно, у троллейбусов с избыточной поворачиваемостью переходной про-
цесс имеет экспоненциальный характер. Второе неравенство справедливо для
троллейбусов с большой недостаточной поворачиваемостью при малых ско-
ростях движения. В этих условиях экспоненциальный характер имеет переход-
ной процесс и для троллейбусов с недостаточной поворачиваемостью.
2. п / 4 — р < 0, тогда общий интеграл
I ~ ехр(— 0,5nt)[(2]Cos р — п2 /4t + С25Шд/р — ц2 /4?j. (2.106 )
Принятому неравенству отвечают условия £2 > или £2 — < 4v2 /(gL),
которые справедливы для машин с недостаточной поворачиваемостью. Сле-
довательно, при Jx — mab у троллейбусов с недостаточной поворачиваемос-
тью переходные процессы имеют колебательный характер за исключением
случаев, когда f2 - < 4v2 l(qL).
Выражение (2.105) можно представить в более удобной форме, обозначив
Q = Axsin(p ,С2 — A2sin(p , где А и (р~ новые произвольные постоянные.
Тогда уравнение (2.106) запишется:
_____L^Aiexp{~O,5nt)sin(o)t + (p) , ( 2.107)
где 0) = у[р~ п2 / 4 - частота колебательного процесса.
Из равенства (2.107) видно, что А} является начальной амплитудой, а (р-
фазовым углом.
Изменения параметров движения и (о при переходных процессах опре-
деляются интегралами неоднородных уравнений (2.104), которые находятся
170
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
суммированием общих интегралов I и частных интегралов, зависящих от пра-
вых частей и .
Характер переходного процесса имеет важное значение для оценки поведе-
ния троллейбуса, как управляемого объекта, поскольку этот процесс является
практически неуправляемым, что следует из уравнений (2.105) и (2.106), об-
щий интеграл которых не содержит средний угол поворота управляемых ко-
лес а, изменяемый водителем по своему усмотрению. В теории управления
переходные процессы принято оценивать по реакции управляемой системы
на единичное ступенчатое возмущение. Для троллейбуса это соответствует
реакции на быстрый поворот рулевого колеса с последующим движением с
постоянным углом поворота управляемых колес (“рывок руля”)- Рассмотрим
характеристики переходных процессов при таком возмущении.
При-экспоненциальном переходном процессе \п2 /4 — р > 0), если р < 0, то
один из корней характеристического уравнения положительный, поскольку
yjn2 /4 — р > п/2.
В этом случае интеграл I с увеличением времени t неограниченно возрастает и
круговое движение невозможно. Если р > 0, то оба корня характеристичес-
кого уравнения Л] и отрицательны поскольку
yjn2 /4 — р < и / 2 •
В этом случае при увеличении времени величина интеграла I стремится к нулю,
а движение стремится к установившемуся круговому. Текущее значение угло-
вой скорости поворота СО троллейбуса за время от мгновенного поворота
рулевого колеса до достижения установившегося значения угловой скорости
поворота СОуст определится равенством:
со = Cxexp\t + С2едрЛ2? + СО ст.
Считая, что при t _ (), СО~ (0 = 0, находят Q и С2 и подставляют их зна-
чения в полученное выражение. ________
При экспоненциальном переходном процессе Jn2 /4 — р >0, поэтому
Л^ехрЛ^ > Л^ехрА^, т.е. второй член скобки выражения (2.106) всегда поло-
жителен и переходной процесс заключается в асимптотическом приближении
к установившемуся значению угловой скорости поворота СОуст (рис. 2.49, кри-
вая 1). Время, за которое угловая скорость поворота со достигает 95 % СОуст ,
называется временем переходного процесса. Это время тем больше, чем боль-
Шеги £
При колебательном процессе
со = Aexp(-0,5t)sin(cot + cp)+coycm ( 2.108 )
Считая, что при t — 0 СО = СО = Q, можно записать:
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
171
А = -^уст 1 sin(P’ <Р = arctg20)ycm /п.
Значение А подставляем в уравнение (2.108) и получаем:
(У = О) [1 - sin(p)t + (р)ехр{- 0,5л/)/ мир].
Второй член квадратной скобки в зависимости от значения COt + (p может быть
положительным или отрицательным. В последнем случае текущее значение со пре-
вышает OyCSI]. Такой случай называют перерегулированием или забросом.
Таким образом, переходные процессы троллейбуса с недостаточной пово-
рачиваемостью характеризуются наличи-
ем забросов. Перерегулирование начина-
ется, когда (j)t + (р = 7Г , т.е. через проме-
жуток времени t — (л — (р)/й) после на-
чала переходного процесса. Если к этому
времени множитель ехр(— 0,5и/) ока-
жется малым, то перерегулирование мо-
жет быть почти незаметным (рис. 2.49,
кривая 2). Существенное перерегулирова-
ние возникает при больших значениях у
и £2 “‘ы (рис. 2.49, кривая 3). В тех слу-
чаях, когда перерегулирование невелико,
время переходного процесса для троллей-
бусов с недостаточной поворачиваемос-
тью обычно меньше, чем для троллейбу-
сов с избыточной поворачиваемостью и
Рас. 2.49. Характер переходных
процессов: 1- с асимптотическим
приближением; 2 - с небольшим
перерегулированием; 3 -с суще-
ственным перерегулированием.
меньше зависит от скорости движения у. Наличие значительного перерегули-
рования свидетельствует о чрезмерной недостаточной поворачиваемости.
5.7. Колебания управляемых колес
При движении троллейбуса на управляемые колеса действуют силы, стре-
мящиеся отклонить их от заданного положения. В силу наличия зазоров и уп-
ругости деталей колеса отклоняются даже при фиксированном положении
рулевого механизма. Это может явиться одной из причин неустойчивого дви-
жения троллейбуса, управляемый мост которого представляет собой динами-
ческую систему, включающую массы, связанные упругими элементами: шина-
ми, подвесками, рулевыми тягами (рис. 2.50).
При движении троллейбуса возможны следующие перемещения масс управ-
ляемого моста: £ - вертикальное перемещение в вертикально-поперечной
плоскости, у/ - угловое перемещение в вертикально-продольной плоскости.
ОС - угловое перемещение колес относительно шкворней в горизонтальной
172
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Рис. 2.50. Динамическая система
“управляемый мост”.
плоскости. Наибольшее влия-
ние на управляемость и устой-
чивость троллейбуса оказывают
угловые колебания колес моста
по координате I// и угловые коле-
бания по координате ОС •
Одной из характеристик ди-
намических систем являются ча-
стоты собственных колебаний.
Частота собственных угловых
колебаний моста в вертикаль-
но-поперечной плоскости опре-
деляется по формуле:
/J^, (2.109)
где &>у - частота собствен-
ных колебаний; Су - коэффици-
ент приведенной угловой жест-
кости; Jy - момент инерции
моста относительно оси, прохо-
дящей через центр его масс.
Коэффициент угловой жест-
кости подвески моста в верти-
кально-поперечной плоскости равен:
Су Q,5\cplp + сш1ш ф и тогда.
=7°’5(с/’^
~ /2 V '
Ду
где с , сш - коэффициенты линейной жесткости соответственно подвески и
шины; 1р, 1Ш - соответственно рессорная база и колея моста.
Следовательно, при снижении жесткости подвески и шин, а также увеличе-
нии момента инерции переднего моста частота собственных колебаний моста
в вертикально-поперечной плоскости уменьшается.
Частота собственных колебаний колес относительно осей шкворней может
быть найдена по выражению (2.109). В данном случае под Jу нужно понимать
момент инерции колес и связанных с ними деталей относительно осей шкворней.
Коэффициент угловой жесткости привода са может быть определен как отно-
шение момента Ма, необходимого для поворота колес на угол ОС, к этому углу.
Момент М а зависит не только от упругости тяг, но и от стабилизирующего
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА *73
момента, обусловленного наклоном шкворня и уводом шин. Поскольку после-
дний зависит от скорости движения, частота собственных колебаний колес в про-
дольной плоскости также зависит от скорости троллейбуса.
Угловые колебания моста вертикальной и горизонтальной плоскостях вза-
имосвязаны. Эта связь обусловлена гироскопическим эффектом, так как уп-
равляемые колеса движущегося троллейбуса представляют собой гироскопы
и реагируют на всякое угловое перемешение их осей. Например, если при на-
езде на неровность ось моста в вертикальной плоскости повернулась на угол
у , то возникает гироскопический момент, стремящийся повернуть колеса в
горизонтальной плоскости. Этот момент зависит от скорости троллейбуса,
момента инерции колеса и угловой скорости поворота колеса. Аналогично
при повороте колес в горизонтальной плоскости возникает гироскопический
момент, поворачивающий мост в вертикальной плоскости.
Таким образом, связь между угловыми колебаниями управляемых колес в
вертикальной и горизонтальной плоскостях зависит от скорости движения
троллейбуса и кинематики подвески. С увеличением скорости движения трол-
лейбуса она возрастает и будет тем больше, чем больше отклоняются плоско-
сти колес от вертикальной плоскости при их перемещениях. Если кинематика
подвески обеспечивает вертикальное перемещение колес без изменения угло-
вого положения их плоскостей в пространстве (свечная подвеска), колебания
в вертикальной и горизонтальной плоскостях будут независимыми. Незави-
симыми их можно считать и при малых скоростях движения, когда гироско-
пические моменты колес малы.
Вследствие того, что мост троллейбуса является колебательной системой,
при действии на него периодических или случайных возмущений возникают
колебания масс моста. Амплитуда колебаний зависит от амплитуды возмуще-
ния, соотношения частот возмущения и собственных колебаний, а также ха-
рактера затухания колебаний в системе. Наибольшая интенсивность колеба-
ний имеет место в случае, когда частота возмущения близка к частоте соб-
ственных колебаний (резонансная зона).
При движении троллейбуса колебания управляемых колес обусловлены нали-
чием дорожных неровностей и неуравновешенностью колес. В первом случае
имеет место вертикальные колебания управляемых колес, методы расчета кото-
рых приведены в гл. 7. Непосредственно вертикальные колебания колес на уп-
равляемость и устойчивость троллейбуса оказывают малое влияние. Однако они
могут вызвать угловые колебания управляемых колес в горизонтальной плоско-
сти, отрицательно влияющих на устойчивость и управляемость троллейбуса.
Угловые колебания управляемых колес могут возникнуть при вертикальных ко-
лебаниях управляемого моста вследствие появления переменных касательных
реакций и при несоответствии кинематики подвески и рулевого привода.
Если вынужденные колебания управляемых колес вызваны их неуравновешен-
174
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
ностью, то возникающие периодические силы меняются с частотой, равной уг-
ловой скорости вращения колее, и имеют амплитуду, пропорциональную квад-
рату скорости движения троллейбуса. Поворачивающие моменты на обоих ко-
лесах в случае их неуравновешенности могут действовать в одном или разных
направлениях, причем их сумма будет максимальна, если неуравновешенные
массы окажутся с противоположных сторон оси. Амплитуда колебаний управ-
ляемых колес в значительной степени зависит от трения в динамической системе
“управляемый мост”: от трения в шарнирах, шинах и гистерезиса в металле.
Вынужденные колебания масс в динамической системе возникают в случае,
когда на нес действует периодическое внешнее возбуждение. У автоколеба-
тельных систем внешнее возмущение становится периодическим только при
наличии колебаний в системе. Если же в автоколебательной системе колеба-
ния нс возникают, внешнее возмущение будет оставаться постоянным.
При движении колесной машины иногда появляются особого вида колебания
управляемых колес, получивших название “шимми”. Они включают угловые
колебания переднего моста в вертикально поперечной плоскости и колебания
колес вокруг шкворней. Автоколебания вызывают большие динамические на-
грузки на детали рулевого управления, интенсивное изнашивание шин и приво-
дит к потере машиной управляемости и устойчивости. Одной из основных при-
чин возникновения автоколебаний управляемых колес является наличие гирос-
копической связи между угловыми колебаниями управляемого моста в попереч-
ной плоскости и поворотом колес этого моста относительно шкворней.
Рассмотрим физическую сущность процессов, происходящих при автоколеба-
ниях управляемых колес. При движении колеса троллейбуса можно рассматри-
вать как быстро вращающиеся гироскопы. При случайном повороте управляе-
мых колес вокруг шкворней на углы 0Си и ав , причем 0С1{ = 0Св = ОС, (рис. 2.51)
возникает гироскопический момент Л/г1 = 2 J .ХОЛХ (J к , СО.. - момент инерции
и угловая скорость вращения колеса). Под действием этого момента управляе-
мый мост повернется в вертикальной плоскости на угол у/ , а в горизонтальной
плоскости появится гироскопический момент Мг2, увеличивающий угол пово-
рота управляемых колее Мг2 = 2 JKCOKy/. Таким образом, поворот управляе-
мых колес вызовет перекос балки переднего моста, который в свою очередь уве-
личивает поворот управляемых колес.
Вследствие поворота моста в вертикальной плоскости динамический ради-
ус одного из колес уменьшится, а другого - увеличится. В первом случае про-
дольная реакция дороги увеличивается, поскольку возрастает сила сопротив-
ления качению и уменьшается радиус качения колеса. Увеличение продоль-
ной реакции при уменьшении радиуса качения колеса объясняется тем, что
при постоянной скорости движения троллейбуса с уменьшением радиуса ка-
чения ведомого колеса должна увеличиться угловая скорость его вращения,
т.е. оно должно получить угловое ускорение. Изменение касательных реакций
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
175
дороги приводит к появлению
дополнительного момента, кото-
рый поворачивает управляемые
колеса в горизонтальной, а
вследствие гироскопической свя-
зп н в вертикальной плоскостях
на некоторый угол. При этом
происходит дополнительная де-
формация рулевого привода,
подвески и шин. Когда повора-
чивающий момент становится
равным моменту сопротивления,
угловая скорость вращения мос-
та равна нулю и колеса начина-
ют движение в сторону положе-
ния равновесия. Поскольку в уп-
ругих элементах подвески и ру-
левого привода произошло на-
копление потенциальной энер-
гии, мост проходит положение
равновесия и происходит пово-
рот колеса в противоположную
Рис. 2.51. Перемещение колес моста при ав-
токолебаниях.
сторону при одновременном уменьшении его радиуса. Это в свою очередь при-
водит к появлению момента сопротивления, “доворачивающсго” в ту же сто-
рону управляемый мост. После того как момент сопротивления становится
равным моменту упругих сил в подвеске, шинах и рулевом приводе, процесс
повторяется. Таким образом, при автоколебаниях управляемых колес возни-
кает переменное по значению и направлению сопротивление, поддерживаю-
щее колебание колес на определенном уровне.
При аналитическом исследовании автоколебаний принимают следующие
допущения:
1) подрессоренная масса колесной машины колебаний не совершает, а пере-
мещается по координате х с постоянной скоростью;
2) вертикальные и угловые перемещения моста в вертикальной плоскости
не связаны;
3) рулевое колесо в процессе колебаний неподвижно, а колебания колес вок-
руг шкворней происходят в силу упругости рулевого управления.
Исследования различных авторов показали, что при уменьшении жесткости
подвески, шин и привода, увеличении массы колес, а также гироскопической связи
(увеличение скорости движения) возрастает амплитуда колебаний колес,
Поскольку явление автоколебаний управляемых колес вызвано гироскопичес-
176 Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
кой связью угловых колебаний моста в вертикально-поперечной плоскости и
колес в горизонтальной плоскости, устранение этих колебаний обеспечивается
применением таких типов подвесок, в которых деформация упругих элементов
не приводит к изменению положения плоскости вращения колес, например, па-
ралелограмная независимая подвеска с равными по длине рычагами. В таких
подвесках вертикальное перемещение колеса не будет сопровождаться накло-
ном его плоскости. Поэтому гироскопический момент не возникает и при верти-
кальных перемещениях колеса не будет его колебания. В подвесках с неравными
по длине рычагами при вертикальном перемещении управляемого колеса угол
наклона его плоскости относительно плоскости дороги несколько меняется. Од-
нако пределы этого угла ограничены, ввиду чего гироскопический момент прак-
тически не оказывает влияния на движение колеса.
5.8. Усилие на рулевом колесе
Моменты’ действующие на управляемые колеса, через рулевое управление
передаются на рулевое колесо. Поэтому для поворотов управляемых колес
троллейбуса или удержания их в каком-либо положении приходится прикла-
дывать усилия, зависящие от этапов поворота (вход в поворот, выход из пово-
рота), эксплуатационных факторов (скорости движения, тип и состояние до-
рожного покрытия и др.), конструктивных параметров троллейбуса. Кроме
стабилизирующих моментов, на управляемые колеса действуют и другие мо-
менты. При качении колеса по криволинейной траектории расстояние от мгно-
венного центра поворота до различных точек контактной площадки неодина-
ковы. В то же время линейные скорости этих точек относительно оси враще-
ния колеса должны быть равными. Поэтому у элементов контактной площад-
ки возникают упругие деформации или скольжение, создающие элементарные
реакции, момент М , который стремится уменьшить кривизну траектории
колес. Этот момент тем больше, чем меньше радиус кривизны траектории ко-
леса и больше ширина контактной площадки. Этот момент имеет существен-
ное значение только при очень малых радиусах кривизны.
Элементарные реакции, являющиеся следствием упругих деформаций или
скольжения элементов контактной площадки, возникают также при повороте
колеса относительно шкворня. Если поворачивать не катящееся колеса, то при
малых углах поворота будут возникать только упругие деформации. При уве-
личении угла поворота по контуру контактной площадки начнется скольже-
ние, захватывающее все большую его часть, вплоть до полного скольжения.
Если одновременно с поворотом колесо катится , то при заданной скорости
поворота управляемого колеса ос можно найти такую угловую скорость ка-
чения (0к , при которой элементы шины будут успевать выйти из контакта до
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 177
того, как шина повернется относительно шкворня на угол 0Сс к , соответствуй
ющего началу скольжения. Момент Ма сопротивления повороту колеса от-
носительно шкворня в этом случае обусловлен только упругими угловыми
деформациями шины и будет тем меньшим, чем на меньший угол поворачива-
ется шина за время нахождения ее элементов в контакте. Приближенно для
обоих управляемых колес можно записать:
где са - угловая жесткость шины (в Н.м/рад); 1п 7 - длина контактной пло-
щадки.
Момент М(1) оказывает существенное влияние на сопротивление повороту
колеса при малых скоростях движения и при больших угловых скоростях &
поворота управляемых колес относительно шкворней. При больших v и ма-
лых а, например при корректировке прямолинейного движения троллейбуса
этим моментом можно пренебречь.
При повороте управляемых колес на месте момент сопротивления вызыва-
ется скольжением элементов контактной площадки и может быть приближен-
но рассчитан по формуле:
Мс = 0,667
Продольные силы создают относительно шкворней моменты Мсх = cRxl,
где с - плечо обкатки. Моменты на правом и левом колесах направлены в про-
тивоположные стороны и при прямолинейном движении, когда реакции
одинаковы на обоих колесах - взаимно уравновешиваются. При повори гс про-
исходит перераспределение нормальных реакций и равенство продольных ре-
акций нарушается. При неведущем управляемом мосту продольными реакци-
ями являются силы сопротивления качению. Тогда суммарный момент сопро-
тивления обоих колес определяется по формуле:
м„=Ж,-яа),
где RZH и Rze - нормальные реакции на наружном и внутреннем колесах.
На хороших дорогах Мсх мал по сравнению с остальными моментами, дей-
ствующими на управляемые колеса.
Если усилитель рулевого привода отсутствует, то при входе в поворот во-
дитель должен приложить к рулевому колесу силу Fp , которая на плече г,
равным радиусу рулевого колеса, создает момент, равный с учетом переда-
точного числа ирл рулевого управления и его КПД Rpy, сумме стабилизиру-
ющих моментов, действующих на колеса:
Fp - (S Mcw +ЪМсу Mcz ^MR)/{rpTlpUpy )
При удержании рулевого колеса с постоянным углом 0Ср сумма стабилизи-
рующих моментов уравновешивается как моментом rpFp , так и моментом сил
178 Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
трения в рулевом управлении. В этом случае
F,, = +2,Мсу +£М„ +МШ +М„ +lMR)/rJ'py/(rl,upy),
f
где Пру - КПД рулевого управления при передаче сил от колес к рулевому
колосу (обратный КПД рулевого управления).
В среднем можно считать для троллейбуса
ПрУ = 0,58...0,63; Пру =0,67...0,82 и иру = 20...25.
При выходе из поворота суммарный стабилизирующий момент, если он
правильно выбран, достаточен, чтобы преодолев трение в деталях рулевого
управления, возвратить колеса в положение, близкое к нейтральному.
Уравнение движения рулевого колеса может быть представлено так:
где J = 2J кш + J- момент инерции деталей рулевого управления,
приведенный к колесам; Jкш - момент инерции колеса относительно шквор-
ня; J рк - момент инерции рулевого колеса.
5.9. Расчетный метод определения параметров
кругового движения сочлененного троллейбуса
На рис. 2.52 показана расчетная схема равномерного кругового движения
(R - const, v = const) сочлененного троллейбуса. В теоретическом центре пово-
рота От при установившемся круговом движении пересекаются продолжения
осей: заднего моста троллейбуса ОуВ, моста прицепа ОТЕ и нормали к на-
правлению среднего угла поворота управляемых колес O.VA, тем самым опре-
деляя угол У, отклонения продольной оси полуприцепа DE от продольной
оси тягача АВ, рис. 2.52, а.
Определим этот угол (у = Z ВО^Е} воспользовавшись кинематикой по-
ворота сочлененного троллейбуса относительно теоретического центра пово-
рота От (см. рис. 2.52, а). Соединим точку сцепки D с теоретическим центром
поворота От и обозначим угол BOrD через , угол DOTE — у2 • Тогда
можем записать:
/ = /1 +у2. ( 2:110)
Из прямоугольного треугольника ВВОГ, в котором катет
ОУВ = RT — Ыtg(X и катет BD — I, находим гипотенузу O^D и угол :
От£> = .Д2 + 7= .
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА
179
2.52. Установившийся поворот сочлененного тролллейбуса: а- ки-
нематика поворота; б - схема сил и реакций .
180
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Откуда:
/1 =arctg^C4tga),(2.111)
где ^сц — 1кр /L\ - относительный вынос точки сцепки.
Вторую составляющую угла /'найдем из прямоугольного треугольни-
ка DEC). , в котором известны две стороны ОТР и DE ~ Е2
siny2 =
РЕ _ Е2
\ 1VT 'Ср.
Откуда:
Уг
= arc sin
^„ptga
^.E^tgaf
(2.112)
где — ^2/Ц - относительная база полуприцепа.
Перепишем выражение (2.110), используя принятые обозначения и форму-
лы (2.111), (2.112):
Теоретический радиус поворота полуприцепа пр = ОГЕ отличается от
теоретического радиуса ^ттр = ОТВ троллейбуса-тягача чаще всего в мень-
шую сторону. Чтобы колеса полуприцепа двигались по следу задних колес
тягача, следует выполнить условие Яттр = ^т.пр. •
Определим теоретические радиусы поворота троллейбуса ^! тр и полупри-
цепа /?т пр . Из ЕР В С), имеем:
ОтО2 = 7^,+Я2тр. .
Из ЕРЕОГ определяем эту же сторону OTD :
O.D^L^+R1^.
Приравнивая правые части полученных выражений, имеем:
/2 , р2 _г2.р2
1 кр “Г ^т.тр. ^2 “Г ^т.пр. •
. Чтобы радиусы поворота троллейбуса и полуприцепа были равны
(/?ттр = ^т.пр./» необходимо выполнить условие:
1^=1^. (2.114)
Условие (2.114) обычно не выполняется и колеса полуприцепа катятся по
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 181
траектории отличной от траектории задних колес тягача. Колеса полуприце-
па будут с некоторым приближением следовать по траектории задних колес
тягача если их сделать управляемыми.
После нахождения угла у между продольными осями тягача и полуприце-
па можно определить характеристики установившегося кругового движения
тягача, используя принцип освобождения от связи между тягачом и полупри-
цепом. Усилие FKp, действующее в сцепке, приложим к тягачу и полуприце-
пу. В результате получаем расчетную схему, показанную на рис. 2.52, б.
При движении по круговой траектории с постоянной скоростью v величина
силы инерции Fj составляет:
mv2
j ’ '
где т - масса тягача; 7?с1 - расстояние от центра поворота О до центра масс
троллейбуса-тягача, точка q .
Силу инерции разложим на составляющие: вдоль продольной оси тягача
Fj( — FjSinCCc и нормальную продольной оси тягача Fjt — FjCOsCCc.
Угол ас определим из прямоугольного треугольника ОКС, в котором
OK=R\ КС=Ь - е:
КС
tgac =---,
с ОК
откуда
Ь — е
а = arctg------
Для первого шага итерационного процесса принимаются R — и е — 0.
Боковые силы, действующие на передний и задний мосты опреде-
лим из уравнений моментов сил относительно середин мостов: середины зад-
него моста (точ. В)
+ + + /А7ЛР.Я +МС =0,
откуда
Г61 =—2—(L{Ffisina + b}Fjn+lKpFKpn +МС\
iji cos cjc
середины переднего моста (точка А)
а1F/п + L\ F62 + tyKp + Л fop.» + Af с = 0,
откуда
182 Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
Рб2=~ к pj„ - (1кр + A kpJ, - Мс ]
bj
Итерационный процесс определения радиуса поворота тягача заканчивает-
ся, когда изменение радиуса поворота Д/? станет меньше или равно принятой
точности е расчетов, т.е. при выполнении условия
\R=R, -R .
Кинематические и динамические параметры установившегося поворота
полуприцепа определим, воспользовавшись кинематикой поворота сочленен-
ного троллейбуса (см. рис. 2.52,6).
Из прямоугольного треугольника DKO найдем гипотенузу OD и угол
ODK = :
OD = Д,+^+*2; £> = arctg ГТе •
КД-
Далее воспользуемся треугольником DOE, в котором известны две стороны
ED = L2 и OD — Rd , а так же угол EOD = £2 = 180° — (у + £j) и по теореме
косинусов найдем сторону ЕО‘.
ЕО - -lE^cosc-,
Угол увода полуприцепа равен:
Уз =90°-£3.
Угол £3 = Z DEO найдем из того же треугольника DOE, в котором извес-
тны три стороны и угол между двумя из них, по теореме синусов:
. (OD . А
£; = arcsm\--sinE^
5 \ОЕ J
Таким образом, описанный алгоритм позволяет определить характеристи-
ки установившегося движения по кругу сочлененного троллейбуса.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
183
Глава 6. Устойчивость троллейбуса
6.1. Основные понятия и определения
Для управления курсовым и боковым движением троллейбуса водитель,
поворачивая управляемые колеса, создает управляющие силы. Величины этих
сил регулируются водителем таким образом, чтобы получить желаемые изме-
нения курсового угла и траектории движения. Движение троллейбуса под дей-
ствием заданных сил называется невозмущенным. Однако, кроме управляю-
щих сил, на троллейбус действуют случайные внешние силы, вызываемые раз-
личными причинами: взаимодействием колес с дорогой, аэродинамическими
силами, наклоном дороги и др. Эти силы, а также их кинематические послед-
ствия называются возмущениями.
Влияние возмущений на характер движения может быть различным в зави-
симости как от параметров невозмущенного движения, так и от особенностей
конструкции троллейбуса. При одних параметрах невозмущенного движения
после временного отклонения, вызванного возмущением, параметры движе-
ния возвращаются к исходным - случаи асимптотического устойчивого движе-
ния. При других параметрах отклонение, вызванное возмущением, с течением
времени увеличивается даже после прекращения действия возмущения - слу-
чаи неустойчивого движения. Иногда после окончания действия возмущения
вызванное им отклонение, не увеличивается, но параметры движения не воз-
вращаются к исходным. При этом, если отклонение не превышает заданной
нормы, то движение называется условно устойчивым или не асимптотически
устойчивым. Движение может быть одновременно устойчивым по одним па-
раметрам и неустойчивым по другим.
При изучении устойчивости троллейбуса рассматривают условия устойчи-
вости движения по боковому смещению, угловой скорости поворота, опроки-
дыванию в поперечной и продольной плоскостях.
Неустойчивость по угловой скорости поворота вызывается: боковыми де-
формациями шин с частичным проскальзыванием элементов их контактных
площадок, полным скольжением колес переднего и заднего мостов, или пол-
ным скольжением задних колес. Последний случай называется заносом.
У сочлененного троллейбуса рассматривают условия устойчивости движе-
ния каждого из звеньев. Общая устойчивость оценивается параметрами неус-
тойчивого звена.
Параметры невозмущенного движения, определяющие границу между ус-
184
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
тойчивостью и неустойчивостью, называются критическими.
В ряде случаев граничные условия могут определяться одним из парамет-
ров невозмущенного движения. Например, условия возникновения опроки-
дывания или бокового скольжения при установившемся круговом движении с
заданным радиусом поворота полностью определяются его скоростью, кото-
рая называется критической по опрокидыванию. Также определяется и гра-
ничное условие устойчивости по угловой скорости поворота. '
Иногда граничные условия устойчивости определяются положением трол-
лейбуса в пространстве (устойчивость положения). Критические условия при
этом определяются поперечными и продольными наклонами дороги. Значе-
ния критических параметров движения или положения зависят от некоторых
свойств троллейбуса, определяемых его конструктивными параметрами.
Устойчивость - совокупность свойств, определяющих критические парамет-
ры по устойчивости движения и положения троллейбуса или звеньев сочле-
ненного троллейбуса в пространстве.
6.2. Оценочные показатели
Оценочными показателями устойчивости являются критические парамет-
ры движения и положения. Общепринятая система оценочных показателей
устойчивости отсутствуют. В дальнейшем будем использовать следующие оце-
ночные показатели:
- критические скорости УкрЛр по боковому скольжению и Укр оп по боково-
му опрокидыванию;
- критические углы уклона (XKpJp по боковому скольжению и 0СкрОп - по
боковому опрокидыванию;
- коэффициент поперечной устойчивости Т}11у — Bl2hc ;
- критические скорости V jj по курсовой устойчивости и vKpC4 сочленен-
ного троллейбуса по вилянию (колебаниям) пассажирского прицепа.
Скорости v и v оп соответствуют установившемуся круговому движе-
нию по дороге с заданным радиусом поворота R и углом а поперечного на-
клона плоскости дороги к горизонту. Скорость vKp ш - соответствует прямо-
линейному или установившемуся движению по дороге. Критической скорос-
тью УКР'СЧ называется установившаяся скорость прямолинейного движения
сочлененного троллейбуса, при которой отклонение прицепа в каждую сто-
рону превышает 3% его габаритной ширины. По приведенным выше оценоч-
ным показателям нормы отсутствуют. Устойчивость по опрокидыванию оп-
ределяется по субъективным оценкам испытателей при выполнении маневров
“переставка” и “торможение на повороте”. В качестве одного из оценочных
показателей устойчивости в некоторых методиках испытаний по устойчивое-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 185
in л управляемости предлагается угол дрейфа /3^ . Это угол между продоль-
ной осью троллейбуса и направлением вектора скорости точки продольной
оси являющейся проекцией центра поворота на эту ось при круговом движе-
нии со скоростью, близкой к нулю. У двухосного троллейбуса Рд = 1^2 •
Угол рд характеризует склонность троллейбуса к заносу. Рекомендуется,
чтобы при боковом ускорении Jv = 4 м/с2 в пределах скоростей движения
у=40... 100 км/ч угол Рд < 7°. При этом сохраняется возможность ликвидации
заноса без перехвата рулевого колеса.
6.3. Поперечная устойчивость
0’
Gsina
Рис. 2.53. Схема сил, действующих на троллей-
бус при движении на вираже.
Чаще нарушение устойчивости проявляется в боковом скольжении колес или
боковом опрокидывании. Возмущающими силами могут быть: составляющая
силы инерции, поперечная составляющая силы тяжести Gsina, возникающая в
результате поперечного наклона дороги на угол а, аэродинамическая сила Fsv .
Потеря устойчивости, когда невозмущеиное движение является установив-
шимся круговым. Для нахождения критических параметров устойчивости в
этом случае рассматриваются условия равновесия троллейбуса с учетом силы
инерции Fjy, приложенной в центре масс. Поскольку поперечная составляю-
щая силы тяжести троллейбуса приложена в центре масс и так же как и сила
инерции Fjv пропорциональна массе, то удобно начинать со случая, когда
одновременно действуют обе поперечные силы, - движение на закруглениях
дороги с поперечным уклоном
(виражи), который делается та-
ким, чтобы сила Gsina ,была
направлена в сторону, противо-
положную силе инерции Fjy
Дорогу в этом случае можно
рассматривать как часть внут-
ренней поверхности конуса, ось
00' вертикальна (рис.2.53). Под
действием поперечных сил про-
исходит крен кузова в направле-
нии действия большей из них
силы инерции F -у или Gsina
В результате крена центр масс
смещается от плоскости, пер-
пендикулярной дороге и прохо-
дящей через продольную ось на
величину КузЦ/куз .
186
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Условие, при котором возникает боковое скольжение колес, можно найти
из уравнения равновесия поперечных сил и реакций дороги:
F-ycosa - Gsina = X Ку, (2.115)
где “ сумма проекций на поперечную ось реакций,
действующих на колеса.
Из рис.2.54 следует, что:
^Л = Лт|„со5ая +RyXecosae + Ry2 +Rxll,sina„ + Rrlesina„.
При боковом скольжении колес
Ку1н ~Фу1нКг\н >' Ry\e ~ Pyle^zle j ^у2 — Фу2^г2*
Если углы поворота колес и реакции Rx невелики и равны коэффициенты
сцепления колес с дорогой, то приближенно
у Ry = (Яг1 + Rz2 Ур2 = {Gsina + Fjycosa{py.
Принимая во внимание, что при круговом движении сила инерции равна
Fjy — mv2 / R из уравнения ( 2.115) найдем критическую скорость по боково-
му скольжению колес:
+tga (pv + а
vK„ =3,13 р--------Л =3,13 R------R. (2.116)
Vl-<pytga yi-<pa i
Если движение происходит на горизонтальной дороге, то ОС — 0 и критичес-
кая скорость по боковому скольжению
= 3,13^.
Если F-.cosОС < Gsina , то направление боковых реакций ^RyH и
2.54. Схема поперечных сил и боковых реакций,
действующих на троллейбус при повороте.
изменяются. Опасность возникно-
вения бокового скольжения в этом
случае тем больше, чем меньше
скорость и больше уклон дороги.
Наименьшее значение уклона
дороги соответствующего воз-
никновению бокового скольже-
ния неподвижного троллейбуса
(v=0) называется критическим
углом уклона дороги по боковому
скольжению.
Из уравнения (2.115), принимая
у-О, jy~ 0 и изменяя
знак , найдем:
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
187
^arctg(py.(2.117)
Чтооы выяснить условия, при которых боковое скольжение колес приводит
к значительному отклонению от параметров невозмущенного движения, най-
дем критические скорости по скольжению передних и задних колес на гори-
зонтальной дороге. Условием бокового скольжения колес переднего моста
является неравенство:
Ry^^H “I” Rxle^^^e “ Фу\нКх!н ^yle^zlw •
Если принять cos(XH = cos(Xe = 1; RXfrtsin(XH +RxlesinOCe =0 ;
Фу\н “ Фу\в = <Pvi, то это неравенство запишется так:
Я,.| (2.118)
Условие бокового скольжения колес заднего моста характеризуется нера-
венством:
Ryi *<Py2Rz2. (2.119)
при установившемся движении
/?у1 = FyX = т}у2 / R; Ry2 = Fy2 ~ и др 2 / R (2.120)
где W] = mb/ L; m2 = пи/ / L - массы, приходящиеся на передний и задний
мосты.
Используя равенства (2.120), а также неравенства (2.118) и (2.119), найдем
v\KPI(,=2>yi^<pyXmplR-, v2Kplp = 3,l3^<py2mp2R.
где трХ —R,\ тр2 ~ R^2^(.nt2g) ~ коэффициенты динамического
изменения нормальных реакций.
Если т = т 2 = 1 <PV\H ~ Фу2 ~ Фу > то условия возникновения скольже-
ния каждого моста на горизонтальной дороге будут:
Vlxp.(p ~ ^2кр.(р ~ ^кр.ф ~ 3^(PyR .
При принятых допущениях критические скорости для колес обоих мостов
одинаковы.
В случае поворота управляемых колес на максимальные углы принятые до-
пущения могут привести к существенным погрешностям.
Наибольшее влияние на критические по боковому скольжению скорости
оказывают продольные реакции, возникающие в тяговом режиме на ведущих
колесах или в процессе торможения. При действии значительных тяговых или
тормозных сил снижается способность колес сопротивляться боковому сколь-
жению и, кроме того, возникает существенное перераспределение нормаль-
188
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
ных реакций, влиянием которого на критические скорости по боковому сколь-
жению в этом случае пренебрегать нельзя.
Условия устойчивости, при которых происходит боковое опрокидывание. Это
условие определяется равенством нулю реакций внутренних колес обоих мос-
тов. Для его выполнения достаточно, чтобы опрокидывающий момент попе-
речных сил на высоте расположения центра масс hc, равнялся восстанавлива-
ющему моменту силы тяжести на плече т, равном расстоянию от прямой, со-
единяющей центры контактов наружных колес до проекции на дорогу центра
масс (см. рис.2.53).
При движении на вираже это равенство запишется так:
(Fjvcosa - Gsina)hc = {Gcosa + Fjvsina\n. ( 2.121)
Плечо m зависит от ряда факторов: положения центр масс в продольной и
поперечных плоскостях, колеи передних и задних колес, радиальных жесткос-
тей шин, определяющих боковой крен за счет их деформаций под действием
опрокидывающего момента, суммарной угловой жесткости подвески и плеча
крена, определяющих смещение центра подрессоренной массы.
Если центр масс расположен в продольной плоскости симметрии и его сме-
щением CCj относительно этой плоскости за счет крена можно пренебречь, то
т - Вср / 2 , где Вср ~ (В\ + В2 )/ 2 - среднее значение колеи.
Подставляя в выражение (2.121) Fjy = mv IR и m = Bcp / 2, после реше-
ния относительно у/ получим:
Вс„ + 2hctga Вср + 2hca
vKDOn =3,13 ----—Я «3,13 ----— R (2122\
phc-Bcptga y2hc-Bcpa '(2-122>
На горизонтальной дороге (Х=0:
^„=2,22^7?/^ (2.123)
Если F-ycosa < Gsina, т.е. левая часть равенства (2.121) отрицательна, что
соответствует стремлению к опрокидыванию в сторону действия силы
Gsina относительно прямой, соединяющей центры контактов внутреииих пе-
реднего и задних колес. В этом случае на плече hc опрокидывающим будет
момент определяемый разностью сил Gsina — Fjycosa •
При заданных значениях у и R критический угол уклона &крит., при котором
опрокидывание еще не происходит, но может произойти в результате любого
возмущения, направленного в сторону действия силы Gsina можно найти из
равенства (2.121), изменив знаки в левой его части и считая т = Вср/2 .
Решая это равенство относительно угла ос, найдем:
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
189
Bc.,Rg + 2v2he
= arctg —-----------
2hcRg-v2Bcp
‘(2.124 )
Из равенства (2.124) видно, что (X тем меньше, чем меньше скорость v и
больше радиус R. Минимальное значение угла (X соответствует v =0 или
R=°°.
Для неподвижного или движущегося прямолинейно троллейбуса
aKp=arctgBcp/(2hc\( 2.125)
Рассчитанная по формулам (2.122) и (2.123) критическая скорость характери-
зует граничное по устойчивости невозмущенное движение троллейбуса как ме-
ханической системы. Если на дви-
жущейся с такой скоростью трол-
лейбус воздействует сколь угодно
малое возмущение, направленное
в сторону действия силы инерции
Fjy , то в результате поворота,
вызванного этим возмущением на
некоторый угол у/ относительно
прямой, соединяющей центры кон-
тактов наружных колес, плечо /
уменьшается до / а плечо hc уве-
личиться до hc (точка С;, рис.
2.55).
Если при этом г и R останутся
неизменными, то опрокидываю-
щий момент М оп станет больше
Рис. 2.55. Схема сил, действующих в начале
опрокидывания.
восстанавливающего М 6 , причем их равенство не восстановится после пре-
кращения возмущения. Уравнение движения в этом случае будет таким:
где JЛ - момент инерции троллейбуса относительно оси опрокидывания,
следовательно
Поскольку в результате действия возмущения возникла положительная раз-
ность М оп — , то угол у непрерывно возрастает с ускорением, пропорцио-
нальным этой разности. Увеличение ^приводит к дальнейшему уменьшению
плеча / и увеличению плеча Лс, в результате чего разность М оп — М в еще
больше возрастает. Когда троллейбус повернется на такой угол у/, при кото-
ром вектор силы тяжести будет пересекать опорную плоскость вне колеи, вое-
190
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
станавливающий момент меняет знак и угол будет увеличиваться с возраста-
ющим ускорением.
Иначе обстоит дело в случае вмешательства водителя. После того как реак-
ция R.e станет равной нулю, водитель может уменьшив скорость или увели-
чив радиус уменьшить силу инерции. Если в результате действия водителя
выполняется условие MOfl < Мв , то троллейбус возвратится в исходное по-
ложение. При М оп = Мв движение продолжается, но внутренние колеса бу-
дут приподняты над дорогой.
6.4. Коэффициент поперечной устойчивости
Потеря устойчивости по опрокидыванию более опасна, чем по боковому
скольжению. Поэтому троллейбусы проектируют так, чтобы
^'кр.(р ^кр.ап . ( 2.126 )
Подставив вместо Икр.^и У^ирл? их значения из формул (2.116) и (2.122) по-
лучим, что неравенство (2.126) выполняется, если
Bcp/(2hc)xpy.( 2.127)
Поскольку формулы (2.117) и (2.122) относятся к общему случаю, когда на
троллейбус действуют поперечные составляющие как силы инерции, так и силы
тяжести, то условие (2.127) является действительным как для устойчивости
движения, так и устойчивости положения. Параметр ВС]} /\2hc ) = 7]пу называ-
ется коэффициентом поперечной устойчивости.
В условиях эксплуатации коэффициент Т1„у не постоянен, поскольку высо-
та центра масс hc зависит от степени заполнения салона троллейбуса. Обыч-
но даются значения этого коэффициента для порожнего и для полностью за-
полненном троллейбуса.
Чтобы надежно обеспечить выполнение условия (2.127) следует в расчет при-
нимать наибольшее значение коэффициента (ру . Если принять (ру =0,7...0,9
и нс учитывать уменьшение плеча m за счет крена, то следует считать жела-
тельным • Поскольку коэффициент Tfny позволяет оценивать устойчи-
вость положения и устойчивость движения, то угол <ХКр,Ол может быть исполь-
зован как один из обобщенных критериев. Минимально допустимое значение
угла ОС оп — 2 Г . Правильный выбор коэффициента T)/?v уменьшает опасность
опрокидывания, но не устраняет се полностью. Если при боковом скольже-
нии колес они встретят препятствие, то возникает поперечная сила инерции,
которая может вызвать опрокидывание даже при Т]пу, > 1.
Если в момент прекращения бокового скольжения колес в результате наез-
да на препятствие троллейбус обладал боковой скоростью V , то поскольку
перемещения колес прекратились, а центр масс по инерции еще перемещается,
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
191
троллейбус будет опрокидываться, вращаясь относительно оси, проходящей
через точки упора колес в препятствие.
В момент начала опрокидывания троллейбус во вращательном движении
обладает кинетической энергией J хС0х^2 (й\ - угловая скорость; Jx - мо-
мент инерции). В процессе опрокидывания центр масс описывает дугу СС; в
результате чего его расстояние от дороги увеличивается от hc в точке опро-
кидывания, до ^h2 + В2 /4 , когда сила веса проходит через ось опрокиды-
вания. Если кинетическая энергия в начале опрокидывания больше работы
силы тяжести, то происходит опрокидывание. Принимая во внимание, что
CO\h2 + В2 /4 , условие опрокидывания запишется:
0,54vv2/(7/ic2+B2/4)2> G^h^+B114 -hc).
Минимальное значение боковой скорости, при превышении которой про-
исходит опрокидывание, равно
Vv„„„ = ^2G(/i2 + В2 / 4^/ + в2 / 4 - \. / 7.).
Момент инерции J = J+ тВ2 /4 (Jc - момент инерции относительно
продольной оси троллейбуса; приближенно Jc = тВ2/4-
Тогда в первом приближении
Величина минимальной боковой скорости находится в пределах
min ~ 5...6 м/с.
6.5. Курсовая устойчивость
Одной из задач управления является ориентирование в пространстве про-
дольной оси троллейбуса, т.е. обеспечения его курсового положения, опреде-
ляемого курсовым углом fl. В зависимости от цели управления водитель в ре-
зультате управляющих воздействий стремится или поддержать курсовой угол
fl постоянным, или изменить его определенным образом. Кроме управляю-
щих сил на троллейбус действуют возмущающие силы, вызывающие измене-
ние угла fl. К возмущающим относятся и погрешности воздействий водителя
на рулевое колесо, возникающие вследствие того, что он судит о правильнос-
ти воздействия только по реакции на него, которое всегда несколько отстает
192
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
по определению к воздействию.
Энергия, затрачиваемая боковыми силами на боковое смещение колес как
при уводе, так и при скольжении, теряется безвозвратно. Поэтому сами боко-
вые отклонения являются необратимыми. В результате изменения направле-
ния качения колес изменяется и угол Д причем без дополнительного управля-
ющего воздействия троллейбус нс возвратится к прежнему положению. Сле-
довательно, по курсовому углу троллейбус как механическая система - неус-
тойчив.
Неустойчивость проявляется по-разному. У одних троллейбусов после пре-
кращения возмущения курсовой угол стабилизируется не возвращаясь к пре-
жнему, но и не увеличивая своего отклонения. У других - отклонение продол-
жается и после прекращения возмущения, со = р после прекращения возму-
щения возвращается к величине соответствующей невозмущенному состоянию
(троллейбус устойчив по угловой скорости со), а во втором - продолжает из-
меняться (троллейбус неустойчив по (о).
Для определения признаков устойчивости или неустойчивости троллейбу-
са по СО воспользуемся уравнением движения:
со + т со + рсо = qw]a + qwla,
где : т = g g| + ч2 )/ v ; р = g 2 [(£2 - )v2 )]/ v2;
Qyi=^bg/L; qyT=^g1^2b-v1!g)/(yL);qwt=^g/L; (2.128)
9l,., =^|^^2/(гГ),-'?| =Kvl(m|g) = Ky2(m2g)
- удельные коэффициенты сопротивления соответственно переднего и зад-
него мостов.
Движение устойчиво, если корни характеристического уравнения соответ-
ствующего уравнению (2.128), отрицательны, а коэффициенты т' и р будут
положительны. Коэффициент т' всегда удовлетворяет этому требованию.
Следовательно, для устойчивого движения требуется выполнение неравенства;
Р = g2 / V2 Ife - У /(^)+^2 J> 0 (2.129 )
Для троллейбусов с нейтральной =^2) и недостаточной поворачивае-
мостью (<^2 > <?] )неравснство ( 2.129) выполняется при любой скорости г, т.е.
такие троллейбусы всегда устойчивы по угловой скорости. Для троллейбусов
с избыточной поворачиваемостью (£2 < ^^неравенство (2.129) выполняется,
если (£,<Д,)1'2/(Д.)<£,£.•
Скорость vKpM, при которой (ф2 <^])v /(gL)=q^ - граничная между
устойчивым и неустойчивым движением называется критической скоростью
по курсовой устойчивости:
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
193
— |_ [ LKy\Ky2
vkPm - J r c _ p m •( 2-130)
V 52 S] \ Ky2ml
При скорости движения больше критической троллейбус не может двигать-
ся с постоянной угловой скоростью, если угол поворота управляемых колес
нс меняется. В частности при (7=0 невозможно без участия водителя поддер-
живать прямолинейное движение.
Формула (2.130) справедлива для постоянных коэффициентов сопротивления
уводу, т.е. в пределах когда зависимость боковой силы от угла увода линейна.
Курсовая неустойчивость присуща только троллейбусам с избыточной по-
ворачиваемостью и обусловлена сочетанием углов увода переднего и заднего
мостов.
Потеря курсовой устойчивости в результате скольжения колес зависит не
от поворачиваемости, а от того какой из мостов начинает скользить раньше.
Для упрощения рассмотрим случай, когда можно считать колеса жесткими в
боковом направлении. Примем скорость движения троллейбуса (v~const) и
углы поворота управляемых колес постоянными (OC-const). Если первым на-
чинает скользить задний мост, то угол увода переднего моста равен нулю
= 0 и боковая сила, действующая на задний мост равны силе сцепления
задних колес с дорогой F$2 ~ (Py^z2 Тогда боковую силу, действующую на
задний мост, найдем из выражения.
Аг =m2[v2(a + vy2/v)/L~ vy2 ] ,
Если пренебречь динамическим перераспределением реакций между ко-
лесами переднего и заднего мостов, то Rz2 — Сокращая на т2 и перене-
ся влево члены, содержащие vv2 , а вправо - члены, не содержащие боковую
скорость заднего моста, получим:
vy2 - wv2 /L = (v2oj - g(pyL)~ L.( 2.131 )
Решением уравнения (2.131) является
2 т
vt v a - g(pL
vv2 = Сехр~-----— J -. ( 2.132 )
L v
Если при t = 0 vy2 ~ vy20 , то постоянная интегрирования равна
C = vy2o+(v2a-g(pyL)/v
Тогда уравнение (2.132) после подстановки С принимает вид
v 2 = vy2Qexpvt/L + (у2 а - g(pyL^expt/L -1)/ v. (2.133)
194
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Пользуясь равенством V2Kp.<p ~ ^P^g(Pymp2^ , найдем, считая /72/?2 “ 1,
v2Kp.<p =3,132<pyR = gtPyL/a.
Откуда
2 7
^2кр.(р^ “ g<PyL*
Следовательно, равенство (2.133) можно записать так:
4-2 = vy20^P^ + a(v2-v^/v)(expvt/L-l)/v.
Поскольку при увеличении времени t множитель expt/L возрастает, то при
v — v2kPa? любая сколь угодно малая величина начальной скорости v^o вы-
зывает скольжение заднего моста, непрерывно увеличивается по экспоненци-
альному закону.
Если первым начинает скользить передний мост, то приняв 1/2 = 0 ,
~ vj'l tv , Л)1 “ = , получим:
wvI _ v2q-(pygL
Решая это уравнение и считая, что при t-0 V-д — vyl0 найдем
vy2 =vvioexp(-vf/t)+a(v2-v^Kp<II)[l-exp(-vt/L)]/v.
Поскольку множитель ехр(- vt/L) с течением времени стремится к нулю, то
скольжение передних колес затухает. Следовательно, курсовое движение трол-
лейбуса в этом случае является устойчивым.
6.6 Устойчивость движения сочлененного
троллейбуса по колебанию полуприцепа
При достижении определенной скорости, обычно 35...40 км/ч и выше, если
не принять специальных мер, у полуприцепа сочлененного троллейбуса могут
возникать поперечные колебания в горизонтальной плоскости (виляние при-
цепа). В результате колебания полуприцепа увеличивается ширина полосы дви-
жения сочлененного троллейбуса, что отрицательно сказывается на безопас-
ности движения ~ появляется опасность заноса полуприцепа, затрудняется
управление сочлененным троллейбусом, увеличивается износ шин и шарнир-
ных соединений сцепки, повышается нагрузка на сцепное устройство (на крю-
ке) и расход электроэнергии.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
195
Колебания полуприцепа возникают как следствие его начального отклоне-
ния, причинами которого могут быть: выход сочлененного троллейбуса из
поворота; движение полуприцепа с уводом при поперечном уклоне дороги;
наезд колес полуприцепа на препятствие и боковой удар.
Рассмотрим поперечные колебания полуприцепа при следующих допуще-
ниях:
-сцепка полуприцепа с троллейбусом-тягачом- жесткая и беззазорная;
-колебаниями полуприцепа в вертикальной плоскости пренебрегаем;
-движение точки сцепки прямолинейное.
На рис.2.56 показана расчетная схема полуприцепа при отклонении его про-
дольной оси на угол J от направления прямолинейного движения точки сцепки
А, где FKp.x и ^кп.у - соответственно продольная и поперечная составляющие
силы на крюке Ff _ сила сопротивления движению прицепа; - попереч-
ная реакция колес прицепа.
Точка В полуприцепа (середи-
на моста) участвует в двух движе-
ниях: переносном (продольном)
со скоростью v точки А и отно-
сительном - колебании относи-
тельно точки сцепки А с угловой
скоростью у Линейная относи-
тельная скорость точки В:
veo = Lj. (2.134)
Суммарная скорость точки В
равна vff = V + v6O и составляет с
продольной осью полуприцепа
угол увода у/. Это угол равен сум-
ме двух углов
у<2 - угол, возникающий в ре-
зультате колебаний полуприцепа
со скоростью veo.
Учитывая малость углов и
у<2, можно считать, что
V2=vm/v и Vi =7 + vmlv
или с учетом выражения (2.134)
у/ = у+ Ly/v.
Поперечная реакция колес по-
луприцепа
Рис. 2.56. Схема действия сил на полупри-
цеп при его отклонении от продольной оси
тр оллейбуса-тягача.
У
196
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Ry=k^ = ky{7 + L'ylv),
где ку - коэффициент сопротивления уводу колес моста полуприцепа.
Поперечную реакцию Ry представим двумя составляющими:
Ry = куу = Ryr + Ryy.
Составляющая Ry? — к у направлена в сторону равновесного положения
полуприцепа. Она идентична упругой восстанавливающей силе при свобод-
ном колебании массы на пружине. Коэффициент ку аналогичен коэффициен-
ту жесткости пружины, а у - линейному перемещению массы.
Составляющая Ry? ~ kyLy / у направлена противоположно направлению
скорости уво , и идентична силе сопротивления, пропорциональной скорости.
Составим уравнение колебательного движения центра масс прицепа отно-
сительно точки А:
Jay = -RyL (2.135)
где J а = J с+ тпра2 - момент инерции полуприцепа относительно точки
сцепки A; Jс - момент инерции полуприцепа относительно его центра масс
(точка С); - масса полуприцепа.
Подставляя значение Ry в уравнение (2.135), после преобразований полу-
чим уравнение колебаний прицепа:
CT2 k,.L
У1- , У+ ; - У = °. (2.136)
vJa Ja
Характер движения, описываемого уравнением (2.136), зависит от соотно-
шения коэффициентов характеристического уравнения:
А + + #2 ~ 0 ’
где ах = kyll «2 ~ kyL/ Jа .
Корни характеристического уравнения:
Если коэффициент ах характеристического уравнения равен нулю, то по-
луприцеп будет совершать гармонические колебания по закону:
У = Asin(J3t+ уи),
что возможно либо При ку — 0 , либо при У =
Параметры под знаком корня за исключением скорости v является для кон-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 197
кретного полуприцепа определенными величинами. Скорость движения из-
меняется в диапазоне от нуля до максимального значения vmax. Поэтому можно
выделить три характерных случая движения
1.Корни характеристического уравнения равны, когда
v - 0,5L^kyL/JA .
Общим решением уравнения (2.136) будет равенство
, Ч ( )
Г = (С1 +C2t)exp -72--
2vJ4 ’
\ А )
в соответствии с которым при любых начальных условиях и угол у—>0.
Следовательно полуприцеп, выведенный из равновесия при любых значениях
начального угла у вернется в исходное положение.
2. Корни характеристического уравнения не равны и являются действитель-
ными отрицательными числами. При
v < 0,5L^kyL/ J А
общим решением дифференциального уравнения (2.136) в этом случае являет-
ся равенство
у = Цедр (2^)+
Следовательно и в этом случае при t—>°° у—>0, т.е. прицеп, выведенный из
состояния равновесия, вернется к нему, причем быстрее, чем в первом случае.
3. Корни характеристического уравнения комплексные с отрицательной ве-
щественной частью получаются при
v > Q,5L^kyL/ JА.
т.е. \ + ; /U = ,
kyL2 jkyL kyL4 .
™a-~2vJA’^JA ~4v2J}
Общее решение дифференциального уравнения (2.136) имеет вид;
у = exp(at}(Cxcospt + C2sinfit)= A(J3t + уо )exp(at)
Поскольку а отрицательно, то при t—амплитуда колебаний
Аехр(ш)стремится к нулю и колебания являются затухающими.
Таким образом, для полуприцепа при определенной скорости движения в
результате начального отклонения полуприцепа возможно возникновение его
198
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
затухающих колебаний, характеризуемых граничной по затуханию скоростью:
Vrp = 0,5L —2.137)
V J А
При проектировании сочлененного троллейбуса следует стремиться, что-
бы граничная скорость была выше максимальной скорости движения сочле-
ненного троллейбуса.
Анализ формулы (2.137) показывают, что повышению граничной скорости
способствует увеличение базы L и коэффициента сопротивления уводу колес
полуприцепа, а также снижение момента инерции полуприцепа относительно
точки сцепки, для чего необходимо располагать центр масс полуприцепа как
можно ближе к точке сцепки. Наибольшее влияние на величину граничной
скорости оказывает увеличение базы полуприцепа. Увеличение коэффициен-
та сопротивления уводу колес полуприцепа может быть достигнуто при ис-
пользовании сдвоенных колес.
Раздел 2. ТЕОРИЯТРОЛЛЕЙБУСА
199
Глава 7. Плавность хода
7.1. Основные понятия и определения
Под плавностью хода понимается совокупность свойств, обеспечивающих
ограничение в пределах установленных норм вибронагруженности водителя,
пассажиров, элементов шасси и кузова. Нормы вибронагруженности устанав-
ливаются такими, чтобы на дорогах, для которых предназначен троллейбус, в
диапазоне эксплуатационных скоростей вибрации водителя и пассажиров не
вызывали у них неприятных ощущений и быстрой утомляемости, а вибрации
элементов шасси и кузова - их повреждений.
Основными источниками возникновения вынужденных колебаний являют-
ся взаимодействие колес с неровностями дороги, геометрическая и силовая
неоднородность шин, неравномерность вращения колес. В зависимости от воз-
действия на троллейбус все дорожные неровности делятся на три группы: не-
ровности макропрофиля, неровности микропрофиля и шероховатости. Выс-
тупы и впадины дороги, имеющие длины волн от 10 м до 10 см, условно назы-
вают микропрофилем дороги. Он является основным источником сил, вызы-
вающих колебание троллейбуса на подвеске. Мелкие неровности структуры
дорожной поверхности с длиной волн менее 10 см называют шероховатостью.
Они могут возбудить высокочастотные вибрации отдельных элементов шасси
и кузова и связанные с этими вибрациями шумы внутри кузова и внешний
шум, вызываемый троллейбусом.
Основными устройствами, защищающие троллейбус, водителя, пассажиров
от чрезмерно больших динамических воздействий дороги и ограничивающи-
ми их вибронагруженность допустимым уровнем, являются подвеска и шины,
а для пассажиров и водителя также упругие сиденья. Значения частот, переме-
щений, скоростей и ускорений различных колеблющихся элементов троллей-
буса определяются характеристиками их масс и упругих элементов, скорос-
тью движения и характеристиками микропрофиля дороги. Выступы и впади-
ны микропрофиля случайны как по размерам, так и взаимному расположе-
нию. Колебания, возникающие в результате движения по дороге со случай-
ным микропрофилем, также имеют случайный характер.
200
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
7.2. Оценочные показатели и нормы
Водитель и пассажиры оценивают плавность хода субъективно на основе
собственных ощущений. Ощущения людей и наступающее утомление обычно
связывают с ускорениями колебаний и их повторяемостью. Наиболее простым
оценочным показателем плавности хода может служить частота собственных
колебаний кузова. Экспериментально установлено, что условием хорошей плав-
ности хода является совпадение величин собственных частот колебаний со сред-
ней частотой шагов (60...90 в мин) человека, что соответствует 1... 1,5 Гц. Наи-
более чувствителен человеческий организм к вертикальным колебаниям в ди-
апазоне частот 4...8 Гц и горизонтальном - 1...2 Гц.
Для более точной характеристики плавности хода необходимо оценивать
параметры не только собственных, но и вынужденных колебаний, в том числе
и случайных.
Допустимый уровень вибрации, действующих на водителя и пассажиров,
определяется ГОСТ 12.1.012 “Вибрация. Общие требования безопасности” и
стандартом 2631 международной организации по стандартизации (ISO) “Виб-
рация, передаваемая человеческому телу”.
Основными оценочными показателями плавности хода являются уровни виб-
ронагруженности водителя, пассажиров и характерных элементов шасси и кузо-
ва. Оценка уровня вибронагруженности производится по средним квадратичес-
ким значениям ускорений колебаний (виброускорений) или скоростей колеба-
ний (виброскоростей) в вертикальном и горизонтальном направлениях. Вибро-
нагруженность оценивается логарифмическим уровнем виброскорости (в дБ):
К = 20Л|а<71/(5-10’8),
где (71 - среднее квадратическое значение виброскорости в октавной поло-
се, м/с; 5 . Ю-8 _ значение виброскорости, с которой проводят сравнение.
Нормы допустимых виброскоростсй, различны для различных частот коле-
баний. Частоты группируют в октавные полосы. Октава - это полоса частот,
в которой конечная граничная частота в два раза выше начальной. Каждая
октава имеет номер и среднегеометрическую частоту октавной полосы. В табл.
2.8 приведены частотные характеристики первых пяти октав. В первую октав-
ную полосу входят частоты от 0,7 до 1,4 Гц. Среднее геометрическое значение
равно д/0,7х!,4 ~ 1.
Для второй октавной полосы (1,4...2,8 Гц) среднее геометрическое значение
равно 2, для третьей 4 и т. д.
Для более точной оценки зависимости допустимых значений виброскорос-
тсй от частот колебаний октавные полосы делят на 1/3-октавные. Для этого
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
201
Таблица 2.8.
Номер октавы Среднегеометриче ская частота, Гц Начальная граничная частота, Гц Конечная граничная частота, Гц
1 1 0,7 1,4
II 2 2,4 2,8
III 4 2,8 5,6
IV 8 5,6 11,2
V 16 11,2 22,4
диапазон частот, составляющих октавы, делят на три и средние геометричес-
кие значения каждой трети округляют. Например, для октавы 0,7...1,4 треть-
октавные полосы 0,8; 1,0 и 1,25 Гц.
Нормы виброскоростей в октавных полосах при длительности рабочего дня
8 часов для вибраций, которые возникают в результате движения различных
экипажей, приведены ниже:
Средние геометрические значения частот полос, Гц 1 2 4 8 16 31,5 63
Допустимые значения 1,1 0,79 0,57 0,6 1,14 2,26 4,49
виброускорений, м/с2 0,39 0,42 0,8 1,62 3,2 6,38 12,76
вертикальных Допустимые значения 0,2 0,071 0,025 0,013 0,011 0,011 0,011
виброскорости, м/с (132) (123) (114) (108) (Ю7) (107) (Ю7)
(дБ)вертикальной 0,063 0,035 0,032 0,032 0,032 0,032 0,032
горизонтальной (122) (117) (116) (116) (116) (116) (116)
Они распространяются и на вибрации, возникающие на сиденьях пассажи-
ров и водителя. Иногда вместо виброскоростей пользуются их логарифмичес-
кими уровнями (в дБ).
Основным измерителем вибронагружснности при оценке плавности хода мо-
жет служить среднее квадратическое значение ускорений, которое связано со сред-
ними квадратическими значениями скорости приближенной зависимостью
(Ул = 2тгсг^-/Ус,
где V - среднее геометрическое значение частоты октавных полос, Гц.
В тех случаях, когда реальные значения среднего квадратического ускорения
превышают нормативные, время работы, при котором сохраняется работоспо-
собность и вызываемое вибрацией утомление не ведет к снижению производи-
тельности труда (уровень “производительной работы”), уменьшают с 8 часов до
следующих значений: при превышении допустимых норм в 1,4 раза - до 2 ч, в 2
раза - до 1 ч, в 4 раза до 15 мин. Кроме того, для каждой полосы частот приво-
202
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА
Рис. 2.57. Среднеквадратические
значения ускорении при верти-
кальных (....) и горизонталь-
ных (---) колебаниях продолжи-
тельности: 1-8 ч.; 2-2,5 ч.; 3-1 ч.
дятся уровни допустимых для здоровья чело-
века ускорений (“безопасности здоровья") и
уровень, при котором нарушаются условия
комфорта (уровень ''комфорта"). Допустимые
ускорения первого уровня в 2 раза выше, чем
уровня “производительной работы", а второ-
го - в 3,15 раза ниже.
На рис, 2,57 показаны среднсквадратичсс-
кис ускорения, соответствующие уровню про-
изводительной работы человека при верти-
кальных и горизонтальных колебаниях. В не-
которых случаях, особенно при сравнитель-
ной оценке плавности хода различных ма-
шин, удобно пользоваться одним показате-
лем - эквивалентным средиеквадратическим
ускорением, определяемым по формуле:
ДПб \2
V
где п- число октавных полос частот: к^ - весовой коэффициент чувствитель-
ности человека к ускорениям в различных октавных полосах частот (табл, 2,9);
(5 среднеквадратическое ускорение в /-ой октавной полосе частот колебаний.
Таблица 2.9
Номер октавной полосы частот Весовой коэффициент при колебаниях
вертикальных горизонтальных
1 0,5 1
2 0,71 1
3 1 0,5
4 1 0,25
5 0,5 0,125
На плавность хода и некоторые другие эксплуатационные свойства троллей-
буса большое влияние оказывают также колебания колес и жестко связанных с
ними элементов. Нормы на эти колебания нс установлены, однако при проекти-
ровании подвесок к параметрам колебаний колес предъявляют ряд требований,
основными из которых являются отсутствие возникающих в результате полного
использования упругого хода подвески жестких ударов элементов подвески в
ограничители, укрепленные на рамс или кузове (отсутствие пробоя подвески);
ограничение изменений динамических нормальных реакций в контактной пло-
щадке колеса с опорной поверхностью дороги (стабильность контакта).
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
203
7.3. Характеристики дорожных неровностей
Основной причиной, вызывающей колебания масс троллейбуса, является
взаимодействие его колес с неровностями дороги. Поверхность даже хорошей
дороги не является идеально ровной. С течением времени она изнашивается и
разрушается, а количество неровностей и их высота увеличиваются. В про-
стейшем виде дорожную неровность можно представить в виде косинусоидаль-
ного выступа (рис. 2.58). В этом случае профиль неровности описывается вы-
ражением вида:
ч 2тгх
Ч = Чо l-cos~~
\ 1
где qo амплитуда высоты неровности; х - абсцисса неровности; I - ее длина.
При движении троллейбуса с постоянной скоростью V абсцисса неровности
изменяется по закону Л' = vt, а возмущение, передаваемое от неровности на
динамическую систему троллейбуса, по закону
<7 = <7o[1-«w(w)L
где V - частота возмущения, связанная со скоростью движения троллейбуса
и длиной неровности соотношением V = 2ТСХ) /1.
Поскольку характеристики дорожных неровностей не связаны со скорос-
тью движения троллейбуса, для оценки их состава по длине используют поня-
тия путевой и циклической частоты.
Под циклической частотой понимают ко-
личество неровностей, расположенных на
участке дороги длиной 1м: Л —1/1 Путе-
вая частота связана с циклической соотно-
шением : - 2тг Л = 2тг / / • Путевую и
циклическию частоты можно представить
как частоты возмущений, передаваемые на
троллейбус от неровностей дороги при его
движении со скоростью 1 м/с; путевую - в ра-
Рис. 2.58, Профиль косинусои-
дальной неровности.
дианах за секунду, циклическую - в герцах.
Из теории колебаний известно, что степень воздействия на динамическую си-
стему зависит от соотношения частот возмущений и собственных частот колеба-
ний системы. Если частоты возмущения и собственная частота колебаний близ-
ки, реакция динамической системы на возмущение будет наибольшей. При зна-
чительном различии частот действие возмущения можно рассматривать как ста-
тическое. В частности, если частота собственных колебаний динамической сис-
204
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
темы превосходит частоту возмущений в 5... 10 раз, можно считать, что переме-
щения масс в динамической системе будут такими же, как при статическом внеш-
нем воздействии. Если частота собственных колебаний будет во столько же раз
ниже частоты возмущения, массы не будут перемещаться.
Применительно к троллейбусу это означает, что если он движется по неров-
ностям, создающим возмущения, частота которых значительно ниже наимень-
шей частоты собственных колебаний масс троллейбуса, имеющиеся в динами-
ческой системе подвески упругие элементы не будут деформироваться, а дви-
жение троллейбуса можно рассматривать как движение жесткого тела. Если
же частота возмущений значительно выше наибольшей частоты собственных
колебаний троллейбуса, его массы не будут совершать колебания. Под воз-
действием неровностей будут деформироваться только шины.
Исследования профилей дорог, выполненные различными авторами, позво-
ляют сформулировать некоторые наиболее общие закономерности распределе-
ния неровностей на поверхности дорожного покрытия, В реальных условиях не-
ровности дороги имеют беспорядочный характер; различный профиль и длину,
они могут налагаться друг на друга или следовать одна за другой. С позиций
математической статистики изменение ординат продольного профиля дороги
(продольного сечения дороги по колее) можно рассматривать как случайный
процесс, который проявляется в том, что зная характер неровностей на одном
участке дороги, невозможно предсказать их характер на последующем.
В общем случае ординаты профиля можно рассматривать как нестационар-
ную случайную функцию пути q ~ /(<$) Под нестационарностью понимается
переменность основных статистических параметров, обусловленную тем, что
отдельные участки дорог имеют различный характер неровностей. Как пра-
вило, на дорогах происходит чередование различных по длине относительно
ровных и неровных участков. В то же время измерения микропрофиля на дос-
таточно большом отрезке пути показывают, что статистические характерис-
тики определенной дороги стабильны. Это позволяет считать ординаты про-
дольного профиля конкретных дорог стационарной эргодической случайной
функцией, а относительно короткие участки представительными, если их ста-
тистические характеристики такие же, как всей дороги. Проведенные измере-
ния высот неровностей показали, что ординаты микропрофиля подчиняются
нормальному закону распределения. При этих допущениях статистические ха-
рактеристики микропрофиля дороги можно полностью описать спектральной
плотностью распределения дисперсий ординат микропрофиля (спектральной
плотностью микропрофиля) по путевой (циклической) частоте (Л).
Многочисленными измерениями установлено, что спектральная плотность
микропрофиля - это монотонно убывающая с ростом Д функция, на графике
которой возможно появление одного или двух максимумов (рис. 2.59). Появ-
ление этих максимумов объясняется направленным воздействием транспорта
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
205
на полотно дороги при образовании неров-
ностей. Возникновение периодических не-
ровностей объясняется следующим образом.
После проезда автомобилем или троллейбу-
сом какой-либо неровности из-за колебаний
их масс возникает переменное давление на
дорожное покрытие. Так как частоты соб-
ственных колебаний всех автомобилей и
троллейбусов, как и эксплуатационные ско-
рости движения близки, все машины в одних
и тех же местах создают повышенное или по-
ниженное давление на дорогу. Это в конеч-
ном итоге приводит к появлению периоди-
ческих неровностей: длинных и коротких, со-
ответствующих двум частотам собственных
колебаний масс автомобиля и троллейбуса
- низким и высоким. На цементобетонных
Рис. 2.59. Типичная кривая спек-
тральной плотности микропро-
филя дороги.
дорогах длина периодических волн может определяться длиной плит.
Длина участков с периодическими неровностями обычно небольшая - две-
три волны. Это объясняется тем, что водитель на таком участке, резко изме-
няя скорость движения, выводит машину из режима интенсивных колебаний.
Поэтому большие экстремальные значения спектральной плотности микро-
профиля имеют место для коротких участков дорог. С увеличением протя-
женности измеренных участков доля периодических неровностей уменьшает-
ся и кривая спектральной плотности принимает более плавное очертание.
В общем виде кривая спектральной плотности микропрофиля дороги мо-
жет быть аппроксимирована дробно-рациональной функцией вида:
q + ^2 )"(^2 + ^2/г )’
(2.138)
где Ко , Д - константы.
Учитывая, что функция (2.138) монотонно убывает, ее можно представить
кривой, состоящей из нескольких участков с различной скоростью изменения
спектральной плотности. Каждый участок может быть аппроксимирован вы-
ражением вида:
5,1(Л)=5(ЛОХЛ/Л„ГД2./39)
где - характерная для данного типа дорог путевая частота, при которой
происходит изменение интенсивности убывания спектральной плотности;
- уровень спектральной плотности при характерной путевой частоте;
Wj - показатель степени.
206
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Для аппроксимирования спектральной плотности реальной дороги оказы-
вается достаточным ее кривую разбить на два участка. Большие значения по-
казателя указывает на то, что дорога имеет большую длину неровностей,
причем их высоты с увеличением длины неровностей значительно возраста-
ют, малые значения показателя иу - что для данной дороги характерна боль-
шая доля коротких неровностей.
Принято спектральные плотности микропрофиля изображать в логариф-
мической системе координат. При этом функция (2.139) представляется в виде
двух прямых, пересекающихся в точке с координатами и 5(Ло ) (рис. 2.60).
Функция (2.138) полностью определяет статистические характеристики мик-
ропрофиля дорог. Интеграл в пределах от Ла до равен дисперсии высот
неровностей в диапазоне длин la — lb(la — \JXa\Ib — 1/):
Dab = (2 140 )
4
Рис. 2.60. Изображение спект-
ральной плотности микропрофи-
ля в логоарифметических коорди-
натах.
Рис. 2.61. Определение максимально-
го перепада высот микропрофиля.
Среднеквадратическое отклонение высот
неровностей в этом диапазоне
оаЬ=^ь,(2.14] )
максимально возможный перепад высо!'
(рис. 2.61) -
~ ^У-тах ~ ab ~ ab"
Циклическая (путевая) частота X соответ-
ствует частоте возмущений при скорости
троллейбуса 1 м/с. Если троллейбус движет-
ся со скоростью V, частота возмущения и
при тех же длинах неровностей увеличива-
ется в у раз. В общем виде V = Лу , что рав-
носильно удлинению оси абсцисс графика и
площади под кривой спектральной плотно-
сти, равной дисперсии высот неровностей,
в v раз. Поскольку дисперсия ординат мик-
ропрофиля нс зависит от скорости троллей-
буса, то для того, чтобы оставить ее неиз-
менной, необходимо в соответствующее чис-
ло раз уменьшить масштаб по оси ординат.
Таким образом, связь между спектральны-
ми плотностями микропрофиля и возмуще-
ний устанавливается соотношением:
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
207
Например, если задана функция
спектральная плотность возмущения составит:
или
где и0 = vA0; Vj = vAj; v2 = vA2.
7.4. Характеристика подвески
Интенсивность колебаний масс троллейбуса при его движении по дорогам
с неровной поверхностью зависит от компоновочных характеристик троллей-
буса, параметров подвесок и шин.
При проектировании в большинстве случаев компоновка троллейбуса оп-
ределена, а параметры шин определяются тяговым расчетом. Потому основ-
ной задачей конструктора является разработка подвески, которая обеспечи-
вала бы максимальную производительность троллейбуса в наиболее харак-
терных условиях эксплуатации. Поскольку производительность троллейбуса
непосредственно связана со скоростью движения, задача заключается в разра-
ботке подвески, обеспечивающей возможность движения троллейбуса по до-
рогам с неровной поверхностью в интервале эксплуатационных скоростей, без
быстрой утомляемости водителя и пассажиров. Конструкция подвески влияет
и на другие эксплуатационные свойства троллейбуса, в первую очередь, на
его устойчивость и управляемость.
Все расчеты плавности хода носят условный характер. Связано это с тем,
что по дорогам с неровной поверхностью троллейбус движется неравномер-
но: водитель увеличивает скорость движения на относительно ровных участ-
ках и резко снижает ее перед значительными неровностями, не допуская боль-
ших динамических воздействий на троллейбус. При расчетах плавности хода
208
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
скорость движения принимают постоянной, что не соответствуют реальным
режимам движения троллейбуса. Однако такой метод в настоящее время яв-
ляется единственно приемлемым, поскольку изменение скорости движения
определяется не только характеристиками подвески, но и особенности вожде-
ния троллейбуса. Испытания и расчеты при постоянных скоростях движения
позволяют получать хотя и сравнительную, но достаточно объективную оценку
качеств подвески троллейбуса.
К подвескам относят все узлы и детали, соединяющие мосты с рамой трол-
лейбуса. В них различают три группы элементов: направляющие устройства,
упругие элементы, гасящие устройства.
Направляющие устройства определяют закон, по которому происходит пе-
ремещение колес относительно рамы, и обеспечивают передачу усилий между
мостами и рамой троллейбуса.
Упругие элементы предназначены для преобразования энергии толчков и
ударов, возникающих на неровностях дороги, в потенциальную энергию уп-
ругих элементов.
Гасящие устройства обеспечивают рассеивание энергии при колебаниях масс
троллейбуса.
В некоторых случаях один и тот же элемент подвески может выполнять раз-
личные функции. При расчетах плавности хода условно считают, что упругие и
гасящие устройства установлены в плоскости колеса и создают вертикальные
силы, приложенные к его центру. Такие устройства и их характеристики называ-
ют приведенными. Под приведенной характеристикой упругого элемента пони-
мается зависимость приращения нормальной составляющей реакции дороги, дей-
ствующей на колесо, при медленном изменении расстояния между осью колеса и
рамой, которое замеряется в плоскости колеса. Приведенные характеристики
определяются экспериментально или расчетным путем по кинематике направля-
ющего устройства подвески и характеристике упругого элемента.
2
Рис. 2.62. Схема определения упругих характеристик подвески и шип: 1 - ладо-
метр; 2 - устройство, подтягивающее кузов вверх; 3 - то же, вниз.
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА
209
На рис. 2.62 показана принципиальная схе- F
ма определения приведенной характеристики Fmax
подвески. Колеса моста троллейбуса устанав-
ливаются на весовые устройства (ладометры).
Нагрузку на подвеску троллейбуса изменяют
путем подтягивания с помощью тросов и ле-
бедки кузова вниз 3 или вверх 2. При каждом
положении кузова снимается показание ладо-
метра 1, равное нормальной составляющей ре-
акции дороги, и расстояние между осью
колеса и некоторой точкой кузова, которое за-
меряется в вертикальной плоскости, проходя-
щей через центр колеса. Измерения произво-
дят при загрузке и разгрузке подвески. Вслед-
ствие неизбежного гистерезиса кривые нагру- />мс. 2,63. Характеристика упру-
жения и разгрузки не совпадают. За характе- гого элемента подвески: 1-нагру-
ристику подвески принимается средняя линия жение; 2 - разгрузка.
между кривыми нагружения и разгрузки, как
показано на рис. 2.63 (1 и 2). При построе-
нии характеристики началом отсчета может
быть точка, соответствующая нулевой на-
грузке на упругий элемент (значение нор-
мальной реакции опорной поверхности рав-
но доле веса моста, приходящегося на ладо-
метр), или положение, соответствующее ста-
тической нагрузке. Последние характеристи-
ки являются предпочтительней, так как они
без перестроения могут использоваться в
расчетах плавности хода троллейбуса. Ос-
новным параметром, определяющим свой-
ства подвески, является полный ход (полный
прогиб), равный перемещению оси колеса
относительно кузова по вертикали от ниж-
него до верхнего ограничителей хода. Пол-
ный ход подвески делят на ход отбоя и ход сжатия Асж.. Ход отбоя - пере-
мещение оси колеса от нижнего ограничителя до положения, соответствующего
статической нагрузке. Ход сжатия - перемещение оси колеса от статического по-
ложения до верхнего ограничителя. Прогибы измеряются в плоскости колеса.
При максимальной деформации упругого элемента через подвеску на мост пере-
дастся максимальная нагрузка Fmax .
Покажем, как при исследовании колебаний несколько упругих элементов
Рис. 2.64. Схемы для расчета при-
веденной жесткости: а - при со-
впадении оси деформации упругих
элементов с линией действия нор-
мальной реакции; б - при несовпа-
дении.
210
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
можно заменить одним, имеющим специально подобранную жесткость С ;
которую называют приведенной жесткостью. Ее подбирают из условия неиз-
менности прогиба, вызываемого действием некоторой силы, при замене не-
скольких упругих элементов реальной колебательной системы одним упру-
гим элементом приведенной жесткости.
Пусть два упругих элемента расположены на прямой, совпадающей с лини-
ей действия силы Е(рис. 2.64, а). Обозначим fnp суммарный прогиб двух эле-
ментов под действием этой силы. Прогибы элементов, имеющих жесткости
соответственно
Ср и СШ. fp=F/Cp и /ш =Р!Сш-
Но f„p=fp +/ш=Р(1/ср +^/cul)=F(cl, + сш)/(срсш).
В то же время fnp. ~ Fспр , следовательно,
Сспр ={ср+Ст)1[СрСЛ
Откуда
р ш
пр
С + С
ьр
где Ср и сш - жесткости соответственно подвески и шины.
При использовании независимых подвесок возможны более сложные слу-
чаи расположения упругих элементов. Один из вариантов изображен на рис.
2.64, б. Применяя предыдущую методику, получим
_ р ш р
12Т+Рс '
pLp '
Важным параметром характеристики является коэффициент жесткости С
- производная нагрузки по перемещению:
dF
Если ср = const; упругая характеристика называется линейной (рис. 2.65,
а), если жесткость зависит от деформации - нелинейной (рис. 2.65, б). Для
линейных характеристик целесообразно рассматривать статический прогиб
А _ jy 1
”ст ' Ср .
Если нет ограничителя хода отбоя, ход отбоя линейных подвесок равен ста-
тическому ходу.
К оценочным параметрам подвески относится и коэффициент дииамнчиос-
Раздел 2. ТЕОРИЯТРОЛЛЕЙБУСА
211
ти кд , представляющий отношение максимальной нагрузки, которая переда-
ется через подвеску, к статической:
k - F / Е
д max cm .
Этот коэффициент характеризует степень вероятности движения троллей-
буса по неровностям дороги без ударов в ограничители хода.
Для линейных подвесок:
— (А + А )/ А = 1 + А / А .
У таких подвесок иногда степень безударного движения оценивают по от-
ношению ходов сжатия и отбоя:
^ = Д«ЛД„„; *а = 1+Па •
Характеристика шины представляет зависимость нормальной составляющей
реакции опорной поверхности от деформации шины при изменении действую-
щей на нее нагрузки и определяется на специальных установках. Она может быть
найдена одновременно с приведенной характеристикой подвески путем измере-
ния расстояния h7 (см. рис. 2.62). При этом следует иметь в виду, что нормальная
реакция, действующая на шину, равна показанию ладометра, а на подвеску -
показанию ладометра за вычетом веса моста, приходящегося на рассматривае-
мое колесо. Характеристики шин близки к линейным, поэтому основным их па-
раметром является жесткость, определяемая в зоне статической нагрузки. Жест-
кость шины (радиальная) зависит от ее конструкции, размеров, давления возду-
ха в ней, а также от формы неровностей опорной поверхности. На выпуклых
поверхностях жесткость уменьшается, а на вогнутых - возрастает. При расчетах
Рис. 2.65. Приведенная характеристика подвески.
212
Раздел 2. ТЕОРИЯ ТРОЛ ЛЕЙБУСА
плавности хода шину представляют в виде пружины, нижний конец которой кон-
тактирует с опорной поверхностью в одной точке.
В реальных условиях шина взаимодействует с дорогой по площадке кон-
такта. При этом неровности, длина которых соизмерима с длиной контакт-
ной площадки, сглаживаются. Происходит это вследствие того, что радиус
колеса значительно превосходит размеры неровности, а также из-за упругос-
ти и гибкости шины. Поскольку жесткость шины зависит от формы опорной
поверхности, представление шины в виде пружины, контактирующей с опор-
ной поверхностью в одной точке, может привести к погрешностям, особенно
при анализе воздействий на троллейбус коротких неровностей. В связи с этим
в расчетных моделях, когда это требуется, должна учитываться “сглаживаю-
щая” способность шин. Наиболее часто сглаживающую способность модели-
руют путем уменьшения по определенному закону высот неровностей, длины
которых соизмеримы с длиной контактной площадки шины.
Рассеивание энергии при колебаниях троллейбуса обеспечивается специаль-
ными устройствами - амортизаторами. Наибольшше распространение в на-
стоящее время получили гидравлические телескопические амортизаторы двух-
стороннего действия. Сила сопротивления, Fa, создаваемая амортизатором,
зависит от скорости деформации подвески:
Рис. 2.66. Характеристика гид-
равлического амортизатора.
где к - коэффициент сопротивления амортизатора.
Когда кр = const, амортизатор считается линейным. Зависимость силы со-
противления амортизатора Fa от скорости деформации Д ? называется ха-
рактеристикой амортизатора. При расчетах плавности хода используют при-
веденные характеристики амортизаторов.
На рис. 2.66 показана характеристика гидравлического амортизатора. Обыч-
но коэффициент сопротивления амортизато-
ра при ходе к сж сжатия меньше, чем коэф-
фициент сопротивления при ходе отбоя
крот : к1>сж=(0Л...025)к1>от.
Для предохранения амортизаторов от раз-
рушения в полостях с высоким давлением ус-
танавливают разгрузочные клапаны,
уменьшающие коэффициенты сопротивления
кр.сж и кр о/п при скоростях деформации,
больших Д(.ж, и Д Y соответственно. Как
правило, скорости включения разгрузочных
клапанов превосходят максимальные скоро-
сти деформаций подвесок при эксплуатацион-
ных режимах движения.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
213
Рассеивание энергии при колебаниях масс
троллейбуса происходит также за счет неиз-
бежного трения между элементами подвес-
ки, гистерезисных потерь в деформируемом
материале, при вертикальных деформациях
катящейся шины. Сила трения в элементах
подвески может рассматриваться как посто-
янная. Она определяется главным образом
типом и конструкцией упругого элемента и
направляющего устройства. При деформа-
ции пружин и баллонов пневматических под-
весок трение практически отсутствует. Тре-
ние в рычажной подвеске определяется чис-
лом шарниров и их конструкцией. При этом
большее трение создают шарниры с гладки-
ми пальцами, меньшее - с резьбовыми паль-
v - О
цами, а у шарниров с шариковыми, ролико-
выми или резиновыми опорами они практи-
чески отсутствуют.
Силу трения, возникающую при нор-
мальной деформации шины, можно рас-
сматривать как зависящую от скорости де-
формации:
р — л л
' ш '
Внутреннее трение в шине зависит от ее
конструкции, главным образом от числа
слоев корда, внутреннего давления возду-
ха, размеров шины и ее деформации. Как
правило, оно нс является значительным и
уменьшается при увеличении скорости ка-
чения колеса.
На рис. 2.67 показано, как затухают сво-
бодные колебания груза, подрессоренного
на шине, а на рис. 2.68, представлена зави-
симость относительного коэффициента за-
тухания Ц/ от скорости качения. Относи-
тельный коэффициент затухания оценива-
б)
Рис. 2.67. Свободные колебания
массы, подрессоренной: а - на не-
подвижной шине; б - катящейся.
0 10 20 V км/ч
Рис. 2.68. Экспериментальная зави-
симость относительного коэффици-
ента затухания массы, подрессорен-
ной на катящейся шине, от скорос-
ти качения.
ется по отношению амплитуд колеблющейся массы. Уменьшение рассеивания
энергии при вертикальных колебаниях быстро катящейся шины обусловлено
тем, что скорость ее деформации при качении существенно больше скорости
деформаций от вертикальных колебаний.
214
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
7.5. Троллейбус как колебательная система
Троллейбус является сложной механической системой, состоящей из боль-
шого числа масс с различными связями. Степень подробности описания трол-
лейбуса как колебательной системы, а следовательно, и число учитываемых
степеней свободы зависят от характера решаемой задачи: при научных иссле-
дованиях число уравнений может исчисляться несколькими десятками; при
проектировочных расчетах пользуются колебательной системой, показанной
на рис. 2.69. Она включает четыре массы для двухосного троллейбуса и шесть
масс - для сочлененного (массы обозначены т, упругие элементы - с, демпфи-
рующие элементы - к).
К подрессоренным массам относятся: тв - водителя; тт - кузова троллей-
буса, включая пассажиров, раму с укрепленным на ней двигателем, механиз-
мами трансмиссии и управления; тп - кузова полуприцепа с пассажирами и
рамой полуприцепа. К неподрессоренпым массам относятся массы мостов пе-
реднего mtd , заднего тн2 и полуприцепа тн3.
Масса тв , связанная с массой тт упругим элементом сс , имеет одну сте-
пень свободы (вертикальное перемещение). Потери энергии на трение в эле-
ментах подвески сиденья имитируется демпфером . Масса тт, связанная уп-
Рис. 2.69.Схемы колебательной системы троллейбуса: а - двухосного; б - сочлененного.
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА 215
ругими элементами с массами тв, т/Л , ти2 и шарнирно с массой тп, имеет
две степени свободы: перемещение в вертикальном направлении и поворот в
вертикальной плоскости. Параллельно упругим элементам передней с \ и
задней Су?2 подвесок включены демпферы &/?] и кр2 , имитирующие потери
энергии в амортизаторах и на зрение в элементах подвески. Масса тп может
совершать перемещение в вертикальном направлении и поворот в вертикаль-
ной плоскости. Однако угловое перемещение полуприцепа зависит от переме-
щений подрессоренной массы троллейбуса-тягача и поэтому нс является обоб-
щенной координатой. Каждая из нсподрессоренных масс троллейбуса и полу-
прицепа имеет по одной степени свободы (вертикальные перемещения). Эти
массы опираются на дорогу через упругие элементы и демпфе-
ры (кш}, кш2, ки/3). имитирующие упругие и демпфирующие свойства шин.
При изучении колебаний троллейбуса примем допущение, что каждая шина
соприкасается с дорогой в одной точке, т.е. перемещение контактных поверх-
ностей шин точно копируют неровности доро: и. Считаем, что профили доро-
ги под правым и левым колесами каждого моста идентичны, поэтому эти два
колеса заменим одним обобщенным колесом, которое разместим в продоль-
ной плоскости троллейбуса.
Число степеней свободы двухосного троллейбуса, как колебательной систе-
мы, равно четырем и его колебания описываются системой четырех диффе-
ренциальных уравнений второго порядка. Число степеней свободы сочленен-
ного троллейбуса равно шести и его колебания описываются соответственно
системой шести дифференциальных уравнений второго порядка. Число соб-
ственных частот колебаний материальной системы равно числу степеней сво-
боды. У систем, представленных на рис. 2.69, соответственно четыре и шесть
собственных частот.
7.6. Свободные колебания троллейбуса
Свободными колебаниями называются колебания, которые совершает сис-
тема, выведенная из состояния равновесия, после прекращения действия сил,
нарушивших равновесие.
Собственные колебания троллейбуса возникают после проезда единичной
неровности, при трогании с места или торможении и в других случаях. Часто-
ты собственных колебаний, коэффициенты затухания и соотношения ампли-
туд оказывают большое влияние на плавность хода троллейбуса, так как от
них зависят интенсивность и характер колебаний и возникновение наиболее
неблагоприятных резонансных колебаний, при которых частота возмущаю-
щего воздействия со стороны дороги совпадает с одной из частот собствен-
ных колебаний троллейбуса.
216
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
7.6.1. Свободные колебания без учета
демпфирования и неподрессоренных масс
Рассмотрим вначале колебания только подрессоренной массы при отсут-
ствии демпфирования (рис. 2.70). В этом случае колебания будут незатухаю-
щими. Спереди и сзади подрессоренная масса опирается на упругие элементы,
имеющие приведенные жесткости передней ср\ и с 2 Данная колебательная
система имеет две степени свободы вертикальное перемещение zc центра
масс и поворот на угол (р в продольной плоскости. Оба этих движения вызы-
Рис. 2.70.Схема для расчета колебании под-
вают изменения прогибов Z[ и z2
упругих элементов и возникнове-
ние в них сил упругости Cnp[Z[ и
Сир2 ^2 , действующих со стороны
этих элементов на подрессорен-
ную массу. Обобщенные коорди-
наты связаны с перемещениями
точек А и В следующими зависи-
мостями (см. рис. 2.70):
Zc - (zfi + Z2d)/Ц
рессоренноймассы. tg(p ~ (р — — Z2 )/ L.
где L - база троллейбуса -
Для вывода дифференциальных уравнений, описывающих колебание под-
рессоренной массы, воспользуемся уравнениями Лагранжа второго рода. Для
этого напишем выражения для кинетической и потенциальной энергий.
Кинетическая энергия системы:
1 2 1 т 2 1
Е ~-mzc +-J (p =-
к 2 2' 2
Ц(,И|;г+И,гЬм.,.-|г,1
т Л.
где J v = тр ~ момент инерции подрессоренной массы относительно попе-
речной оси; р - радиус инерции подрессоренной массы относительно этой же оси;
а и h - расстояние от передней и задней осей до центра подрессоренной массы;
= m(b2 + р2)/!?; М2 = m(a2 + р2)/ Д; М3 = J у[аЬ - р2)/ Д ; Jy -
момент инерции подрессоренной массы троллейбуса, относительно горизонталь-
ной оси, проходящей через центр масс перпендикулярно плоскости рисунка.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 217
Потенциальная энергия системы:
~~ 2 ^пр2^'2'
Обобщенные силы в данном случае равны нулю, т.е. = 0 и Q72 = 0 .
Находим соответствующие частные производные от выражений для кине-
тической и потенциальной энергий и, подставляя их значения в уравнения
Лагранжа второго рода, получаем систему дифференциальных уравнений,
описывающих собственные колебания подрессоренной массы троллейбуса:
MyZy+M^+c^yZy =0;
M2z2 +M3z'i + c„p2z2 =0.
Разделив первое уравнение на М\ , а второе на М2, получим:
Z, +71^2+(Dy Zy =0;
2 (2.142)
z2+??2z1+6U2z2=0.
где Т)у = ml Му,т\2=т! М2; ОК -спр1! Му; ®2 =спр21 М2.
Система уравнений (2.42) является связанной, поскольку в первое уравне-
ние наряду с ускорением и перемещением Z{ точки А подрессоренной мас-
сы входит также ускорение г2 точки В, а во второе уравнение наряду с уско-
рением z? и перемещением т2 точки В входит и ускорение точки А. Пото-
му колебания точки А, расположенной над упругим элементом передней под-
вески, и точки В, расположенной над упругим элементом задней подвески,
связаны. Это проявляется в том, что колебания каждой из точек представляют
собой сумму двух синусоидальных колебаний с различными амплитудами и
частотами, зависящих от параметров обеих подвесок.
Решение уравнений системы (2.142) будет таким;
Z] = Acos(^llt) + Bcos(^l2t);
z2 - Ccos(£l\t) + Dcos(fl2t), ( 2.143 )
где Ц, n2 - собственные частоты колебаний системы; А, С - амплитуды
перемещения массы над передним мостом (точка А) с частотами и f22 > В и
D - амплитуды перемещения массы над задним мостом (точка В) с частотами
^2 и £2 2.
Для определения частот Г21 и Q2. подставим выражения (2.143), а также
вторых производных Zi и Z.2 в исходную систему уравнений (2.142):
218
Раздел 2: ТЕОРИЯТРОЛЛЕЙБУСА
[(ш2 - 2 )с ~ г}2 £21A [ t + [(ш2 ~ 1 )° ~ ^2 2 21 ~ 0 -
Полученные уравнения удовлетворяются для произвольных значений вре-
мени t в том случае, если выражения в квадратных скобках равны нулю:
(®2 -й,)а-77|Й?С = 0;
(со/
(ю22-Й2)с-»?2Й24 = 0;
(й>2 -П2]о-Т72П1В = 0.
На основании этих уравнений получаем следующие соотношения:
А _ r}^ _а>2
С ау - Qy т/2^1 ’
В _а>2-О.1
D (Оу П?^2
Следовательно, отношения А/С и В/D зависят от распределения масс и уп-
ругих свойств подвески. Решая полученные соотношения относительно иско-
мых величин £1] и £12 получаем:
[®2 +й)22]+7(®1 -<о2) +4itfl2rfa>l
и ? 9
-0д2) +4Г}уГ12(Оу(О2
(2.144)
Из полученных выражений следует, что при П1^2 ^0;^2<^1- Поэтому
частоту называют высокой, а частоту £22 - низкой.
Чем больше коэффициенты и 7]2, тсм больше взаимное влияние пара-
метров передней И задней подвесок на колебания точек А и В и больше раз-
ность между собственными частотами.
Коэффициенты 6Ц и (О2 называются парциальными (частными) частотами
- частотами колебаний сложной колебательной системы по одной из обоб-
щенной координате, если перемещения по другим координатам невозможны.
Так, если шарнирно закрепить подрессоренную массу в точке В (рис. 2.71, а),
т. е. в уравнениях (2.142) принять Тф = О, то уравнение гармонического коле-
бания точки А по координате примет вид:
Раздел 2, ТЕОРИЯ ТРОЛЛЕЙБУСА
219
Z] + a)^zl = 0.
Частота 6Ц является парциальной по
координате Z} Если устранить возмож-
ность перемещения точки А (рис.2.71, б),
т. е. в уравнениях (2.142) принять Т}2 ~ 0,
то уравнение гармонического колебания
точки В по координате z2 будут описы-
ваться уравнением:
Z2+®2Z2 =0.
Частота 0)2 является парциальной по
этой координате.
Из формул (2.144) видно, что собственные
частоты колебаний подрессоренной массы
зависят только парциальных частот и коэф-
фициентов связи. В отличие от парциальных
частот, частоты и Q2 называются час-
тотами связи.
На коэффициенты связи основное влия-
ние оказывает разность ah-py. Отноше-
ние p~!(ab) = £ называется коэффициен-
том распределения подрессоренных масс.
Если £ — 1,топ£>— pv и оба коэффициента
связи равны нулю.
В этом случае уравнения системы (2.142)
оказываются независимыми. Это указыва-
ет также на независимость колебаний то-
Рис. 2.71. Схемы колебаний под-
рессоренной массы с парциаль-
ными частотами.
Рис. 2.72. Схемы для расчета несвязан-
ных колебаний подрессоренной массы.
чек А и В, т. е. на то, что подрессоренную массу при исследовании колебаний
можно считать состоящей из двух взаимонсзависимых частей (рис. 2.72) одна
из которых т1 опирается на переднюю подвеску, а вторая т2 - на заднюю.
Частоты колебаний масс гщ и т2 могут быть получены из формул парциаль-
ных частот. Принимая во внимание, что ру = ab, получим:
=cnPiLI(bm) = cnp}lm\;
(of=cni,2L/(bm)=cnpl/т2.
При малых значениях коэффициентов T/i и р2 основные колебания массы
/71] будут происходить с частотой, мало отличающейся от парциальной час-
тоты бЭ]. Накладывающееся на них колебания с частотой 0)2 будут иметь столь
малые амплитуды, что их влияние окажется незначительным. Точно так же
220
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
малозаметным будет влияние колебаний с частотой, близкой к СЦ, на основ-
ные колебания массы т2 . При условии 0,8ab< pv< l,2ab частоты связей отли-
чаются от парциальных не более чем на 5...6 %. Колебания масс т1 и т2, при
выполнении указанного условия, можно считать практически независимыми.
7.6.2, Свободные колебания
подрессоренных и неподрессоренных
масс без учета демпфирования
Выше были рассмотрены свободные колебания подрессоренной массы при
допущении, что на нее не оказывают влияние неподрессоренные массы. Рас-
смотрим справедливость этого допущения для случая, когда е = 1
При учете неподрессоренных масс двухосный троллейбус представляет собой
две независимые колебательные системы, каждая из которых имеет две степени
свободы: вертикальные перемещения z подрессоренной массы и вертикальное
перемещение неподрессоренной массы. Обе системы идентичны, потому дос-
таточно рассмотреть одну из них (см. рис, 2.73), опустив индексы 1 и 2. Уравне-
ния движения соответственно подрессоренной и неподрессоренной масс:
m„z + cp(z —£)=0;
ё / Е a (2.145)
+cp(z-i) + cu^=0. '
где ср - жесткость упругих элементов подвесок; сш - жесткость шин; mtl -
подрессоренная масса, приходящаяся на рассматриваемую подвеску; m - не-
Рис. 2.73. Схема двухосного
троллейбуса с учетом демпфи-
рования колебаний при Е —1.
подрессоренная масса.
Уравнения (2.145) могут быть переписа-
ны следующим образом:
z+co^z-cu,^ = 0;
и 2 2 Л (2.146)
^+(O„z-(DHz = 0,
где й)„ = с / тп - парциальная часто-
та подрессоренной массы при закреплен-
ной неподрессоренной массе (рис. 2.74, а);
= (с + сш)/ тн - парциальная часто-
та неподрессоренной массы при закреплен-
ной подрессоренной массе ( рис. 2.74, б);
(5Н = Ср / т/{ - частота колебаний непод-
рессоренной массы на упругом элементе
подвески при закрепленной подрессорен-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
221
ной массе и сш = 0 (рис. 2.74, в), а)
Уравнения (2.146) являются свя-
занными, так как каждое из них
включает в себя координаты z и ,
что указывает на неправомерность
принятого ранее допущения об от-
Z/Z/Z/Z’
сутствии взаимного влияния колеба-
ний подрессоренной и неподрессо-
ренной масс.
Заменим систему уравнений
(2.146) уравнениями четвертого
порядка:
по координате z
;JV ™(co2+co2)z-h
Рис. 2.74. Схемы колебаний с парциальными
частотами: а - подрессоренной массы при за-
цепленной неподрессоренной; б - неподрессореп-
ной при закрепленной подрессоренной; в - непод-
рессоренной массы на упругом элементе под-
вески при закрепленной подрессоренной.
'K«„2-®h)z = O- (2.147)
по координате £
С -(со2 + со2 ^'+о;2 (со2 -ГО2)^ =0. (2.148)
Для полученных уравнений общим является характеристическое уравнение
Q4 - (со2 + со2 )q2 + со2 (со2 - ®„2 )= 0.
Положительные корни этого уравнения характеризуют частоты колебаний:
низкую частоту
Q2 =0.5 (w2+w2)-7w2+w2y-4(y2(tti2-GJ2)
высокую частоту
2 2
ш,; + <л~
'2
^2
Решение уравнений (2.147) и (2.148) имеет вид:
Z ~ z cos (^V)+ z*cos (Q„c>,
= ycos{yind+^’cos{yint\
где ц z ~ амплитуды колебаний массы тп с частотами соответственно и
Q ; амплитуда колебания массы тн с теми же частотами.
Следовательно, как подрессоренные, так и неподрессоренные массы совер-
шают сложные двухчастотные колебания и двухосный троллейбус имеет че-
тыре собственные частоты - две низкие (Qnt и Q/;2) и Две высокие (ПЛ1 и
) Во многих случаях частота может быть близка к парциальной час-
222
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
тоте СО,: , а частота к парциальной частоте ОУ , т. е. можно считать;
=у1ср/тп ; = у](ср + с,„)/тн (2.149)
Погрешность при определении частот и по формулам (2,149) зави-
сит главным образом от отношений сш / сп и тп / тн. При расчете по-
грешность определяется в основном значением отношений жесткостей и прак-
тически не зависит от отношения масс. Например, если сш > 1 Ос^ , то погреш-
ность подсчета Q„no формуле (2,149) не превышает 5 % ; для груженного и
для не груженного троллейбуса. Точность подсчета этой частоты значитель-
но повышается, если в формулу (2.149) вместо ср подставить приведенную
жесткость сцр . Формулой = yjciip / тп можно пользоваться для расчетов
низких частот практически при всех значениях сш / ср , характерных для со-
временных троллейбусов (сш/ср - 2,5...5).
При расчете по приближенной формуле (2.149) значения Q несколько зани-
жены. Погрешность зависит также, как и в первом случае от соотношения жест-
костей и масс. Если сги > 2СП и тп > 4т 1{, то погрешность не превосходит 1
%. Для троллейбусов с полной нагрузкой указанные пределы соотношений масс
выполняются для задней подвески. Без пассажиров во многих случаях отноше-
ния названных масс меньше четырех и погрешность определения частоты
может достигать нескольких процентов (в-неблагоприятных случаях до 10 %).
При расчетах удобно выражать частоту колебаний подрессоренной массы
через статический прогиб fc подвески. Статическим прогибом называется пе-
ремещение колес относительно кузова за счет деформации упругого элемента
подвески под действием силы тяжести троллейбуса
Л =mnglcp - С 2.150)
Определив из равенства (2.150) жесткость подвески с и подставив ее зна-
чение в выражение (2.149), получим приближенную формулу для определения
частоты (в рад/с) в случае, когда коэффициент £ близок к единице:
-ЛЛТ = 31,3/fc.( 2.151 )
Здесь статический прогиб измеряется в сантиметрах. Если частота колеба-
ний выражается в герцах, то
£1И=5/^ .(2J52)
Техническая частота пк - число колебаний в минуту
пк = 300/^/77 (.2.153 )
У грузовых автомобилей: для передней подвески fc =7,5...10 см, для зад-
ней /с=7...12 см. Для сравнения, статический прогиб передней подвески лег-
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА 223
ковых автомобилей составляет 15...25 см, задней - 12...18 см.
Формулы(2.151) и (2.152) дают несколько завышенные значения частоты Qfl,
поскольку в них не учитывается влияние ни шин, ни неподрессоренных масс.
Подвеску троллейбуса можно считать удовлетворительной, если частота
колебаний подрессоренной массы составляет 1,2... 1,8 Гц (75...110 мин '), а ча-
стота колебаний неподрессоренных масс 6,5...9 Гц (400...500 мин ’).
Свободные колебания с учетом демпфирования
Как указывалось выше, в процессе колебаний всегда происходит рассеива-
ние энергии в элементах подвески и шинах. Поэтому свободные колебания
являются затухающими.
Силы сопротивления амортизаторов можно в первом приближении считать
пропорциональными скорости перемещения подрессоренной массы относитель-
но неподрессоренной. Такое же допущение может быть принято и в случае, ког-
да гашение колебаний происходит частично в результате сопротивления амор-
тизаторов, частично из-за трения в шарнирах
рычагов подвески. С некоторым приближени-
ем можно также допустить пропорциональ-
ность между силами сопротивления, вызыва-
ющими гашение колебаний в шинах, и скоро-
стью деформации шин. Величина этих сил зна-
чительно меньше сил сопротивления в подвес-
ке и быстро уменьшается с увеличением ско-
рости качения колес. Поэтому в дальнейшем
будем учитывать только рассеяние энергии в
подвеске.
Рассмотрим с учетом демпфирования сис-
тему (рис. 2.75), соответствующую подрессо-
ренной и неподрессоренной массам двухос-
ного троллейбуса, у которого коэффици-
енту = 1.
В этом случае движения подрессоренной
неподрессоренной масс описываются соот-
ветственно уравнениями:
m„z + /r/,(z-^)+c;,(z-^) = 0; (2.154)
тн^~кУ -()+сР^--^)+ст^ = ^- ( 2.155)
Коэффициент неупругого сопротивления подвески к р характеризует ее спо-
собность рассеивать механическую энергию, запасенную элементами подвес-
Рнс. 2.75. Схема для расчета
вынужденных колебании.
224
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА
ки в результате деформации их внешними силами. Он численно равен силе
неупругого сопротивления, возникающей при перемещении подрессоренной
массы относительно неподрессоренной со скоростью 1 м/с. Размерность коэф-
фициента к - Н.с/м. Если обе части уравнения (2.154) разделить на т , урав-
нения (2.155) - на тп, то получатся соотношения — кр / тп и hu = кр / тНу
которые называются парциальными коэффициентами сопротивления подвес-
ки (их размерность с ’). Учитывая введенные ранее обозначения для парци-
альных частот подрессоренной и неподрессоренной масс, напишем уравнения,
описывающие колебания системы, показанной на рис. 2.75:
z + h„ z + ю2г - h„£ - = 0;
^ + h^+(O^-hHz-a)^z = 0- (2.156)
Из уравнений (2.156) следует, что колебания подрессоренной и неподрессо-
ренной масс оказываются связанными. Ранее было показано, что при колеба-
ниях без демпфирования взаимным влиянием подрессоренных и неподрессо-
ренных масс можно пренебречь. В этом случае в уравнениях (2.156) без суще-
ственной погрешности можно исключить члены, определяющие связанность
этих уравнений, т. е. в первом уравнении считать равными нулю члены, содер-
жащие скорость и перемещение неподрессоренной массы, а во втором - чле-
ны, содержащие скорость и перемещение подрессоренной массы.
Для уравнений, полученных в результате исключения указанных членов из
равенств (2.156), составим соответствующие характеристические уравнения:
Ь + h„s„ + СО? = 0; s„ + hHs„ + <а„2 = 0.
Если (0^ > / 4 и (0^ > h* / 4, то решения характеристических уравнений
имеют следующий вид:
= -0,5Лл ±0,5/^469^ - Л,J; sf[ = -0,5Лн ±0,5i^4(i)2 ~h^.
Таким характеристическим уравнениям соответствуют следующие решения
дифференциальных уравнений, описывающих свободные колебания при на-
личии неупругих сопротивлений:
Z = [Cq cos (&)t) + С2 s i n(cot (- 0,5 hn t);
£ = \C{cos{(Ot') + C^sin^t^xpi- 0,5hHt\ (2-157)
где о = 0,5^40)2 - (On д/1 -- частота колебаний подрессоренной
массы с учетом затухания; — hn /(20)п ) - относительный коэффициент за-
тухания колебаний подрессоренной массы; (о' = 0,5^4й>^ = (Он д/1 —
- частота колебаний неподрессоренной массы с учетом демпфирования;
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
225
— h/2C0){ - относительный коэффициент затухания неподрессоренной
массы; Q , С2 , , С2 - постоянные интегрирования, зависящие о г началь-
ных условий.
Постоянные интегрирования С(, , С( , С? заменим выражениями:
С\ = Azsin(pt1; С2 = Azcos(pn ; = A^sincpH ; С2 = A coscpн.
пятая амплитуда затухания колебаний подрессорен-
+ (с?У начальная амплитуда колебаний неподрес-
соренной массы: (ро = arcty(C\ /С2) - начальный фазовый угол колебаний
подрессоренной массы: = arctg(C[lС2) - начальный фазовый угол коле-
баний неподрессоренной массы.
После подстановки этих выражений в (2.157) получим
z = sin[(Ot + ср/г )ехр(- 0,5hnt);
£ = sin(a/Ht + (pst)exp(A),5hHt).( 2Л58 ')
Начальная амплитуда и начальный фазовый угол могут быть найдены, если
известны начальные условия.
Рассмотрим колебания, которые возникают после того, как подрессорен-
ная масса за счет деформации упругого элемента подвески была перемещена
на величину zo и отпущена, т. е. при t = О Z = Z.() и v — Q . Используя выраже-
ния (2.157), найдем С[ = z.o , а продифференцировав равенство (2.157) с учетом
начальных условий и найденного значения С( , получим
_______________________ с2 =дта(2и) = ул„г„.
Тогда А. = 7Cj2 +Cj = 71 + Л ’ Vn =С[/ = 1/уг„.
Если неупругос сопротивление отсутствует, т. е. Л/; = 0, то Ц/п = 0 ; СО = СОп,
А7 — z() \ ф0 = 90°; Z. — z0cos((Olft). Следовательно, при наличии псупругих
сопротивлений в колебательной системе уменьшается частота колебаний и
увеличивается начальная амплитуда тем в большей степени, чем больше отно-
сительный коэффициент затухания ЦС/г.
Наличие в формулах (2.157) множителя ехр(— указывает на то, что с
течением времени размах колебаний непрерывно уменьшается. Проследим, как
убывают размахи колебаний подрессоренных масс в результате действия не-
упругих сил сопротивления в подвеске. Пользуясь уравнением (2.158). найдем
отношение между колебаниями, отличающимися промежутком времени, рав-
ным периоду колебаний 7’ = 2?Г / СУ •
Отклонение zn , соответствующее времени t — пТо (/? -любое целое число),
равно:
226
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
zH - Ал1п(2лп + (ро )ехр(- 0,5nhoTo) = А7sin(роехр[- 2тт .
где (//,'= Д,/(2й>).
Отклонение 7/г+1, соответствующее времени t = (н 4-1 )Т(}, равно:
z„+i = A. sin[2Tt (п +1)+<р„ kv’[- 0,5(п +1 )h„T„ ] =
A.sin(poexp[- 2л(п + J
Отношение предыдущего отклонения к последующему, если промежуток
времени между ними равен То , будет:
z„ / Z„+| = 11 ехр(- 2Tt(p',) = ехр(2лу/'о).
Следовательно, при наличии в колебательной системе сопротивлений, про-
порциональных скорости колебаний, отклонения убывают по геометрической
прогрессии, имеющей знаменатель р = ехр{— 2ТГ1//' ). Часто в качестве харак-
теристики затухания колебаний рассматривают не отношение z / Zn+1, а его
логарифм - логарифмический декремент затухания колебаний:
8 =1п(г„/ г„+|)=2лу„.
При расчете параметров затухания колебаний нсподрсссорснных масс, при-
меняя для уравнения (2,158) ту же методику решения, найдем:
Г /<„+| = ехр(- 2лу/„)
У современных подвесок с удовлетворительными гасящими свойствами 1//о =
0,15...0,25 и ЦЕ и ~ 0,25...0,45. При таких значениях \ро и 1/ н затухание колеба-
ний происходит достаточно быстро. Если \ро - 0,2, то Р- 3,56, т. е. после каждо-
го периода колебания уменьшается в 3,56 раза, после двух - в 3,562 или в 13 раз,
после трех - в 3,563 или в 45 раз и т.д. Уменьшение частоты колебаний и увеличе-
ние их начальной амплитуды при таких значениях и iff получаются незна-
чительными. При = 0,2 частота со затухающих колебаний уменьшается по
сравнению с Ыо лишь на 2%. Приблизительно на столько же увеличивается на-
чальная амплитуда затухающих колебаний по сравнению с начальным отклоне-
нием подрессоренной массы. Поэтому без большой погрешности при наиболее
часто применяемых относительных коэффициентах затухания влиянием затуха-
ния на частоту колебаний и начальную амплитуду колебаний можно пренебречь.
На троллейбусах нашли применение гидропневматичсскис подвески, по-
зволяющие снизить до 0,8... 1,2 Гц частоты колебаний подрессоренных масс. В
этих случаях применяют амортизаторы со значительно большими относитель-
ными коэффициентами затухания = 0,6...0,4). Применение подвесок с та-
кими характеристиками позволяет существенно повысить скорости движения
по дорогам с большими неровностями при условии обеспечения значений виб-
роскоростей и виброускорений подрессоренных и нсподрессорснных масс, не
превышающих нормативные.
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
227
7.7. Вынужденные колебания
При движении па троллейбус через его колеса действуют переменные но
величине силы взаимодействия с дорогой. Колебания системы под действием
переменных внешних сил называются вынужденными. Характеристика этих
колебаний определяется сочетанием свойств колебательной системы и зако-
нов изменения внешних возмущающих сил. Для выяснения физической сущ-
ности и основных закономерностей вынужденных колебаний троллейбусе! вна-
чале будем считать микропрофиль дороги состоящим из синусоидальных не-
ровностей (волн). При движении по такой дороге троллейбус испытывает гар-
монические возмущения.
Рассмотрим вынужденные колебания системы, представленной на рис. 2.75
при £ = 1. Уравнения движения подрессоренной массы будут иметь такой же
вид, как и при свободных колебаниях [см. уравнения (2.154)]. При составле-
нии уравнения движения неподрессоренной массы следует учитывать, что од-
новременно с перемещением неподрессоренной массы на величину £ проис-
ходит перемещение па величину г/ точки контакта колеса с дорогой, т. е. ниж-
него конца пружины, имитирующей работу шины. С учетом сказанного, урав-
нение движения неподрессоренной массы будет иметь вид:
'«4-^(z-^-c;,(z-^)+c1„g-<7) = 0. (2.159)
Уравнения (2.154) и (2.159) являются связанными, что указывает на взаим-
ное влияние колебаний подрессоренных и неподрессорепных масс. При изуче-
нии свободных колебаний было показано, что во многих случаях таким взаи-
мовлиянием можно пренебрегать. Примем допущение, что этот вывод спра-
ведлив и для вынужденных колебаний. Тогда оба упругих элемента (подвеска
и шина) можно заменить одним, имеющим приведенную жесткость спр и рас-
сматривать колебательную систему с одной степенью свободы, показанную
на рис. 2.75. Колебания такой системы описывается уравнением:
тн +^р(г-^)+с,1р(г-'?) = 0. (2.160)
Подставив в уравнение (2.160) значения q и q и разделив обе части на та,
после преобразований получим:
z + hz + o}\ =QO
^sinfyt)+l-cos(yt) . (2.161)
С'У
где h - кр / тн; Ш2 = спр / m;l; Q() = qocnp I mrl = q(}0T •
Общее решение этого уравнения найдется как сумма решений z.[ однород-
ного уравнения 2 +hz +0)2z. = 0 и частного решения z2 уравнения (2.161).
228
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА
Если, как то имеет место в колебательных системах, ш > 0,5/z. то решение
однородного уравнения можно представить так:
Zi = [Cj sin(co} t) + С2 (<У] )
где ц = 0,5д/4(О2 — 7]2 ; С} и С2 - постоянные интегрирования.
Частное решение уравнения (2.161) будем искать в виде:
Z 2 = (% л /3s in(yt) У V cos (yt).
Подставив значения д2 его первой и второй производных в выражение
(21.61) и принимая во внимание, что h — 2у/(О , найдем:
а=Щ/«2;
уЛ.
(аГ-v2)2 +4</л2<э2и2
СО
(02 -и2 4- 4y/2U2
7 = Т~~2 2V 9 "ГТ ’
(й) -V ) + 4iy“(O V
Общее решение уравнения (2.161) запишется так:
z — Z] л z2 - [C}sin(co}t)y C2cos(cOji)]exp(-0,5hflt)+a + /3 sin(yt)o~ у cos(yt)
(2.162 )
Удобнее уравнение (2.162) преобразовать, считая
/3 = zacoscpv; у = Zasincpv; Za = //32+у2- (2.163 )
Тогда уравнение, описывающее вертикальные перемещения подрессорен-
ной массы в процессе колебаний, запишется так:
z. - [С| w(fj9/)+ С 2cos (рэ }tfyxp 0,5h Qo /ш2 4- za sin(yt + cpv ).
(2.164)
Для определения амплитуды z(i возведем в квадрат обе части каждого из
равенств (2.163) и сложим их
Р + У =4 фу + cos фу)=
После подстановки значений а и /3 . учитывая, что Qo / СО2 = , получим:
j 4i//2v2yco2
Z“ 2 у < 2.J6S)
v[co v ) л4г//~со ю
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА 229
Угол (pv называют фазовым углом. Для его нахождения разделим второе
из уравнений (2.163) на первое:
7 7 7 ?
69 — V + 41//ПЮ
Ж = —•— ----------СО •
2if/ v~
Отсюда
2 2 л 7 2
co. - v + 4i//;u
(pv = —arctg —---------CO,
2y<T
Согласно выражению (2.164) колебания, определяемые первым членом (их
называют свободными сопровождающими колебаниями), с течением времени
затухают, так что через некоторый промежуток времени ими можно вообще
пренебречь, считая, что в дальнейшем остаются только колебания, определя-
емые последними членами, - установившиеся вынужденные колебания. При
их анализе удобно пользоваться безразмерными величинами. Обозначим
zv = Zal Цо , ГДС Z-v ~ относительная амплитуда колебаний подрессоренной
массы. Тогда принимая во внимание (2.165) и то, что Qo / 69 = q0 , получим:
zj4„ =l + z,..sm(vf + <p,,);
А 2 2 2
7 = ,„ +а<>
4 1 н 2 2 V 2 2 ( 2.J66 )
(б9 -V ) + 41/ U 69“ 1 7
При V = СО() относительная амплитуда, как следует из формулы (2.166),
равна:
zY = (озДЩ +1 J/I/Z.f 2.167)
При выводе формул для расчета амплитуд вынужденных колебаний под-
рессоренной массы было принято допущение о том, что колебания нсподрсс-
сорснных масс нс влияют на колебания подрессоренной массы. При частотах
возмущений (0. ..0,5) 69zi это допущение не приводит к существенным погреш-
ностям. При значениях V , близких собственным частотам 69н неподрессорен-
ных масс, расчет по формуле (2.166) даст существенно заниженные значения
Zv • Более точные значения относительных амплитуд подрессоренных масс
можно найти, умножая значения , полученные по формуле (2.167), на
69 2 / J (б92 - V 2 Г + 4шТ69 2Б 2
/г V \ п / Г п п
для учета влияния неподрессоренных масс.
230
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
Из анализа уравнений (2.166) и (2.167) можно сделать следующие выводы
об особенностях установившихся вынужденных колебаний:
- установившиеся вынужденные колебания происходят с частотой возмущаю-
щей силы. Это общий закон вынужденных колебаний линейной колебательной
системы, справедливый независимо от условий, в каких они происходят, и от
того, имеются ли в системе неупругие сопротивления и какова их величина;
- амплитуда установившихся вынужденных колебаний не зависит от време-
ни и от начальных условий. С течением времени на не изменяется, и, следова-
тельно, установившиеся вынужденные колебания при наличии в системе нс-
упругих сопротивлений не затухают, как свободные колебания;
При постоянном значении I///;и (Оп амплитуда установившихся вынужден-
ных колебаний подрессоренной массы зависит от соотношения между собствен-
ной частотой и частотой возмущений. Наибольших значений амплитуда вы-
нужденных колебаний (низкочастотный резонанс) достигает при значениях
I), несколько меньших сьу . При обычных для подвесок значениях h р и 0д!}
резонансная частота лишь незначительно отличается отОп . Например, при
й)и =1 Гц и =0,2 наибольшая амплитуда достигается при и всего
лишь на 1 % меньшей, чем ОЕ , а значение амплитуды при V = (Оп отличает-
ся от наибольшего на 0,4 %. При увеличении псупругого сопротивления эта
разница несколько увеличивается. Поэтому для определения резонансного
значения относительной амплитуды колебаний подрессоренной массы
можно пользоваться формулой (2.167).
Для установившихся вынужденных колебаний при наличии неупругих со-
противлений характерен сдвиг фаз перемещения относительно возмущающей
силы, т. е. синусоидальные перемещения подрессоренной массы смещены от-
носительно изменения вертикальной ординаты микропрофиля дороги. Фазо-
вый угол при заданных значениях hn и (ЕЕ меняется с изменением частоты
возмущения. Зная перемещения подрессоренных масс, можно найти виброс-
корости и виброускорения по формулам:
И q() = zvcos(yt A~(pv)u\
zl q() ^-zvsin(v + (pv)l)2.
Тем же законам подчиняются и вынужденные колебания неподрессорен-
ной массы.
Зависимость амплитудных значений перемещений, виброскоростей и вибро-
ускорений хорошо характеризует график, называемый амплитудно-частотной
характеристикой (АЧХ). На рис. 2.76 представлена типовая АЧХ перемещений и
виброускорсний. Максимальное значение z/ qo соответствует резонансу под-
рессоренных масс (низкочастотный резонанс ну ~и).При частотах возмуще-
ния, близких к собственным частотам неподрессоренной массы, наблюдается нс-
Раздел 2: ТЕОРИЯ ТРОЛЛЕЙБУСА
231
значительное увеличение перемещений подрессоренных масс, вызванное влия-
нием на него нсподрессоренных масс. При больших частотах возмущения пере-
мещения подрессоренных масс стремятся к нулю.
Перемещения нсподрессоренных масс имеют два максимума: первый - при
низкочастотном резонансе, вызванный влияние колебаний подрессоренной
массы, а второй - в области со-
впадения частот возмущения с
собственной частотой неподрес-
соренной массы (высокочастот-
ный резонанс V = (Эн). В неко-
торых случаях амплитуда пере-
мещений нсподрессоренных
масс, соответствующая низкоча-
стотному резонансу, может пре-
вышать амплитуду, соответ-
ствующую, высокочастотному
резонансу.
Рис. 2.76. Амплитудно-частотная характеристика.
Амплитуда ускорений подрессоренных масс также имеет два максимума.
Увеличение этой амплитуды при высокочастотном резонансе объясняется вли-
янием неподрессоренной массы. Влияние неподрессоренной массы на ускоре-
ние подрессоренной значительно больше, чем на перемещение. Это связано
тем, что амплитуда ускорений включает в качестве множителя квадрат часто-
ты, в связи с чем резонансные ускорения подрессоренных масс значительны.
Амплитудные значения перемещений, виброускорений и виброскоростсй
уменьшаются с увеличением неупругих сопротивлений, характеризуемых пар-
циальными коэффициентами сопротивления подвески hfl и hH или относи-
тельными коэффициентами затухания и . Так, при увеличении относи-
тельного коэффициента затухания подрессоренной массы в интервале
0,2...0,4 амплитудное значение перемещений и ускорений подрессоренной мас-
сы при низкочастотном резонансе уменьшается почти в два раза.
Частота возмущений зависит от длины / неровностей и скорости V движения
троллейбуса. Путь, длинной /, при скорости движения V будет пройден за вре-
мяврсмя t - И V . С другой стороны, t = То 2п !v (Т(), в - период и частота
возмущений). Подставляя значение t и решая уравнение относительно V , полу-
чим уравнение прямой, проходящей через начало координат с осями V и V
(рис. 2.77), v = 1 /2тГд ). Пользуясь графиком рис. 2.77, можно для неровностей
различной длины определить скорости, соответствующие возникновению низ-
кочастотного и высокочастотного резонансов. Заштрихованная зона соответ-
ствует движению с эксплуатационными скоростями в пределах v/nill...vmax.
При рассмотрении вынужденных колебаний троллейбуса, возникающих при
движении по синусоидальным неровностям, могут быть получены уравнения.
232
Раздел 2. ТЕОРИЯ ТРОЛЛЕЙБУСА
определяющие относительные
величины амплитуд, скоростей
и ускорений подрессоренной
массы в зависимости от пара-
метров подвески троллейбуса.
По этим уравнениям можно по-
строить амплитудно-частот-
ную характеристику. Это озна-
чает, что для заданной колеба-
тельной системы можно полу-
чить модули передаточных фун-
кций. т. с. аналитические выра-
жения с помощью которых оп-
Рис. 2.77. График для определения резоиансиыхско- рсделяются перемещения и ус-
пастей движения.
г корсния масс в зависимости от
изменения функции профиля дороги q(t). Передаточные функции по ускоре-
нию для заданной частоты представляют собой квадрат ординаты амплитуд-
но-частотной характеристики, что позволяет для каждой частоты определить
спектральную плотность ускорений:
2
у(Д=
Яо
Если провести расчет 5 Ди) для всего рабочего диапазона частот V , то
получим распределение дисперсии ускорения кузова троллейбуса в заданном
диапазоне частот, с помощью которого можно оценить плавность хода.
Раздел 3. KOI1CTP У ИРОВ А НИЕ И РА СЧЕТ ТРОЛЛЕЙБ УСА
233
РАЗДЕЛ III.
Конструирование и расчет
троллейбуса.
Глава 1. Механическая передача тягового
электрического привода троллейбусов.
1.1. Схемы тяговых передач.
Тяговым электроприводом движущих колес ходовой части троллейбуса на-
зывают устройство для управляемого преобразования электрической энергии
в механическую (в режиме тяги) или механической в электрическую (в режиме
реостатного или рекуперативного торможения). Механическая энергия при-
вода расходуется на создание на движущих колесах крутящего момента, обес-
печивающего поступательное движение троллейбуса. Электропривод состоит
из электродвигателя и тяговой механической передачи, включающей кардан-
ное соединение и редуктор. Применение редуктора позволяет обеспечить оп-
тимальный режим работы тягового двигателя и за счет этого снизить его удель-
ные весовые показатели и габариты.
Тяговые передачи троллейбусов классифицируются:
- по количеству ведущих мостов;
- по количеству тяговых электродвигателей;
- по расположению тяговых электродвигателей на шасси;
- по типу и расположению элементов редуктора.
Наибольшее распространение получили тяговые передачи с одним и двумя
ведущими мостами. Троллейбусы выполняются с одним, двумя и, в редких
случаях, четырьмя тяговыми электродвигателями. В зависимости от их распо-
ложения относительно заднего ведущего моста различают троллейбусы: с рас-
положением электродвигателей передним, задним и с расположением внутри
ведущего моста.
На рис.3.1 приведены основные схемы тяговой передачи с одним ведущим
мостом. Наибольшее распространение получила схема (рис.3.1а), в которой пе-
редача имеет один тяговый электродвигатель расположенный впереди ведущего
234
Раздел 1 КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Рис.З. 1. Схемы тяговой передачи троллейбу-
сов с одним ведущим мостом.
моста. Крутящий момент от
электродвигателя 1 к ведущим
колесам 2 передается карданным
валом 3 и на двойную разнесен-
ную главную передачу, состоя-
щую из центрального коническо-
го редуктора 4, межколесного
дифференциала 5 и планетарных
колесных передач 6, размещен-
ных в ступицах колес.
При заднем расположении тя-
гового электродвигателя (позади
ведущего моста), (рис.3.16) кру-
тящий момент от электродвига-
теля передается к ведущим коле-
сам 2 аналогично как и по схеме
(рис 3.1. а). Как правило, заднее
расположение электродвигателя
предопределяет и заднее распо-
ложение тяговой электроаппара-
туры. В этом случае достигается
минимальная протяженность
электропроводки, улучшается изоляция и уменьшается утечка тока.
На рис.3.1.в показана тяговая передача с электродвигателями 1 располо-
женных впереди ведущего моста. От каждого двигателя вращающий момент
через карданные передачи 3, редуктора 7 передастся к одному из ведущих ко-
лес. К преимуществам этой схемы относится отсутствие механической диффе-
ренциальной связи между ведущими колесами, что позволяет более полно ис-
пользовать тяговые свойства троллейбуса, так как при буксовании одного
колеса второе продолжает развивать максимальную касательную силу тяги.
Передачи с двумя тяговыми электродвигателями позволяют существенно по-
низить уровень пола в троллейбусе благодаря меньшим размерам двигателей
и редукторов. Недостатками такой передачи является некоторое увеличение
веса и удорожание оборудования.
На рис. 3.2 показаны схемы тяговой передачи троллейбусов с двумя ведущими
мостами. Схема (рис.3.2а) содержит один тяговый электродвигатель 1 располо-
женный впереди двух задних ведущих мостов, который передает мощность че-
рез карданные передачи 3, межосевой дифференциал 7, главные передачи 4, меж-
колесные дифференциалы 5 и конечные передачи 6 к ведущим колесам 2 средне-
го и заднего ведущего моста. При установке межоссвого и межколесных диффе-
ренциалов все четыре движущих колеса получают от тягового электродвигателя
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
235
1/4 часть мощности (без учета
внутреннего трения в дифференци-
але) независимо от режима их ра-
боты. В частности, при попадании
одного из колес на участок дороги
с низким коэффициентом сцепле-
ния и его проскальзывании, пада-
ет не только мощность, реализуе-
мая этим колесом, но и мощность,
реализуемая остальными ведущи-
ми колесами. В этом, как извест-
но, состоит основной недостаток
всех приводов дифференциально-
го типа,
Рис. 3.2. Схемы тяговой передачи троллей-
бусов с двумя ведущими мостами.
На рис.3.2 б показана тяговая передача с продольным расположением двух
электродвигателей впереди ведущих мостов. Каждый из них передает тяго-
вый момент к ведущим колесам 2 одного из мостов через карданную передачу
3, главную передачу 4, межколссный дифференциал 5 и конечную передачу 6.
Тяговая передача принадлежит к ответственным частям механического обо-
рудования современного троллейбуса. К ней предъявляются следующие тре-
бования:
- отсутствие шума, в том числе при передаче больших значений вращаю-
щихся моментов и при значительной частоте вращения якоря тягового элект-
родвигателя;
- возможность реализации значительных передаточных чисел при минималь-
ных размерах редуктора;
- достаточно высокий КПД;
- простота конструкции и относительно низкая стоимость изготовления ме-
ханизмов и устройств:
- высокая износостойкость деталей и узлов;
- высокая работоспособность механизмов, обеспечивающая бесперебойную
эксплуатацию троллейбуса;
- простота и экономичность технического обслуживания.
1.2 .Карданная передача.
Карданная передача служит для передачи крутящего момента от тягового дви-
гателя к главной передаче, валы которых при движении троллейбуса располо-
жены несоосно. Условия ее работы определяются, в первую очередь, углами на-
клона валов; чем больше углы, тем условия эксплуатации карданной передачи
236
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
тяжелее. Работа передачи сопровождается изменением расстояния между тяго-
вым двигателем и главной передачей. Это необходимо учитывать при конструи-
ровании передачи и применять подвижные шлицевые соединения.
К карданной передаче троллейбуса предтывляются следующие требования:
- осуществление падежной передачи крутящего момента и создание усло-
вий для равномерного вращения вала механизма приводимого в движение
карданной передачей;
- отсутствие резонансных явлений в зоне эксплуатационных скоростей;
- минимальные вибрационные нагрузки и уровень шума при работе;
- обеспечение минимальных динамических нагрузок, вызванных неравно-
мерностью вращения и несбалансированностью вала;
- обеспечение критической частоты вращения карданной передачи, более
высокой, чем частота вращения, максимально возможная по условиям эксп-
луатации;
- обеспечение высокого КПД малым трением во всех соединениях (в том
числе и шлицевых);
- создание условии для надежной работы передачи с большим периодом
технического обслуживания.
Основным элементом карданной передачи является карданный шарнир. Его
шарнир определяет кинематическую схему и максимально допустимые углы
наклона валов. Карданные шарниры подразделяются на шарниры неравных
и равных угловых скоростей. Шарниры неравных угловых скоростей (асинх-
ронные) при наличии угла между валами характеризуются периодическим не-
равенством угловых скоростей ведущего и ведомого валов. При установке
шарниров равных угловых скоростей (синхронные) угловые скорости соеди-
няемых ими валов равны при любом их угловом перемещении. Они применя-
ются главным образом в приводах ведущих управляемых колес.
По конструктивным признакам шарниры делятся на жесткие и мягкие (упру-
гие). В жестких шарнирах передача крутящего момента обеспечивается шарнир-
ным соединением деталей, в мяпенх - деталями с большой податливостью.
На троллейбусах применяются карданные передачи, состоящие из двух шар-
ниров неравных угловых скоростей, соединенных трубой и имеющих подвиж-
ное шлицевое соединение. Карданные шарниры неравных угловых скоростей
(рис. 3.3), имеющие две фиксированные оси качания, можно использовать в
карданной передаче при угле наклона ведомого вала нс более 20°.
Карданный шарнир является одним из новных узлов карданной передачи,
определяющим сё долговечность. Его разрушение происходит в результате бри-
нслирования и выкрашивания (питинга) шипов крестовины или рабочих поверх-
ностей стаканов игольчатых подшипников (чаще всего у подрезов); износа ра-
бочих поверхностей шипов и стаканов игольчатых подшипников при попада-
нии в соединение грязи и утечки смазки из-за недостаточной герметичности узла,
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
237
обеспечиваемой уплотнением игольчатых
подшипников.
Выкрашивание рабочих поверхностей
шипов крестовины и стаканов подшипни-
ков является следствием усталостного раз-
рушения поверхности из-за возникнове-
ния значительных контактных напряже-
ний при неравномерном распределении
нагрузки по длине рабочих игл. Она рас-
пределяется неравномерно при сдвиге игл
от оси цилиндрических рабочих поверхно-
стей шипа и стакана подшипника в резуль-
тате возникновения на их торцах неоди-
наковых сил трения при перемещении в
подшипнике, Бринилирование шипов кре-
стовины также является результатом не-
/
Рис. 3.3. Карданный шарнир неравных
угловых скоростей: 1 и 6- вилки; 2 - пре-
дохранительный клапан; 3 - крышка; 4 -
игольчатый подшипник; 5 - крестовина;
7 - сальник; 8 - масленка.
равномерного распределения нагрузки по
длине игл при их сдвиге относительно оси
рабочих поверхностей шипов крестовин и
стаканов подшипников.
Идеально изготовленная карданная
передача не должна иметь дисбаланса, так как её геометрическая ось должна
совпадать с главной осью момента инерции. Однако из-за наличия зазоров,
полученных вследствие неблагоприятного сочетания полей допусков, недо-
статочно симметричного изготовления кованых деталей, карданные переда-
чи имеют повышенный дисбаланс. В результате при их работе возникают зна-
чительные центробежные и боковые силы, вызывающие шумы и вибрации и
способствующие преждевременному выходу деталей из строя. Максимально
допустимая норма удельного остаточного дисбаланса карданных валов при
любом положении на балансировочном станке не должна быть больше 10 гс-см/
кг (ОСТ37.001.053-74).
Рассмотрим кинематику карданного шарнира, состоящего из ведущей и ведо-
мой вилок и крестовины. Концы вилок соединены с крестовиной шарнирно, Оси
вращения валов вилок расположены одна к другой под углом У (рис. 3.4).
Окружная скорость Vc в точке Q равна:
К=®О =®2'2 , (3.1)
где и г2 - расстояние до точки С] от осей валов шарниров;
= AC^sincc^; = BCxsina2. Здесь АС] и ВС\ - длина условных по-
водков; CZ] и(72 - углы между поводками и осями валов вилок; (Л, и о2 -
угловая скорость соответственно ведущего 1 и ведомого 2 валов шарнира.
238
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Рис. 3.4. Схема работы карданного шарнира; а) — (р^ = 90° б) — (р^ ~ 90°
Из уравнения (3.1) следует, что и й)2 равны при условии равенства
= г2, т.е. при ACpVZ/itZ] = ВС^т(Х2 . Так как АС} = ВС{, то для выпол-
нения условия COj = й)2 необходимо, чтобы точка С; лежала на биссектрисе
угла между балками, а при вращении валов и изменении угла между ними ос-
тавалась в биссекторпой плоскости.
При фиксированной шарнирной связи в карданном шарнире неравных уг-
ловых скоростей при повороте вала на 90° крестовина, поворачиваясь, откло-
няется на угол / . Тогда С2 нс лежит на биссектрисе ОО}, и поэтому шарнир
с крестовиной нс может обеспечить равенство угловых скоростей ведущего 1
и ведомого 2 валов шарнира.
Соотношение между углами поворота (р^(р2 простого одиночного кар-
данного шарнира определяется выражением:
lg<p] =tg(p2cosy. (3.2)
Проинтегрировав выражение (3.2) получим:
(1/cos2(p}= (cosy/cos2(p2 )б02 ,
откуда
w2/a)i = (cos2(p2/cos2(p}\\/cosy) .
Воспользовавшись уравнением (3.2), исклто нм из равенства угол (р2 . Тогда
w2/wi = cosy/(sin2 (р} - cos^cos'y)
Наибольшее значение 0д7 / , характеризующее неравномерность враще-
ния, отмечается при - 0" и 2л .
Таким образом
Раздел 3. КОНСТРУИРОВА НИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
239
Наибольшее значение 6О2 / (О\ наблюдается при (р{ = л /2 ; (р\ =3 71 /2. Следо-
вательно,
= cos7 -(3.3).
Таким образом для угловых скоростей карданного вала справедливо нера-
венство:
tycosy < а>2 < cojeosy.
Неравномерность вращения ведомого иалг! характеризуется коэффициентом
неравномерности:
к = famas - )/®1 = 0 - COS2у}/COSy .
Неравномерность вращения выходного вала можно устранить, применив в
передаче два карданных шарнира. Пользуясь формулами (3.2) и (3.3), найдем,
что угловая скорость карданного вала после первого шарнира (0 = (djeosy,
а после второго й)2 = (Ocosy2lcoSY\ Из последнего выражения видно, что
равномерное вращение выходного вала с помощью двух карданных шарни-
ров может быть получено при равенстве углов иу2. На рис.3.5 представле-
на схема карданного вала оси входного и выходного валов которого могут
быть не параллельны, однако равенство у^ = у2 должно сохраняться. Кроме
того, необходимо обеспечить расположение вилок карданных шарниров в
одной плоскости.
В карданной передаче рассчитывают следующие элементы:
- карданный вал (на кручение, растяжение-сжатие, угол закручивания):
- вилку и крестовину ( на прочность и износ);
- подшипники карданного шарнира (на долговечность);
- критическую частоту вращения вала.
При расчете на прочность для определения максимальных напряжений в
деталях карданной передачи необходимо знать максимально возможные пи-
ковые нагрузки, что позволяет определить коэффициент динамичности
(отношение максимального ‘'пикового” момента к максимальному моменту
М д max тягового двигателя).
Максимальное напряжение кручения карданного вала определяется фор-
мулой:
кр МdmaxK()Uг^к/^кр ,
где u„, uK - передаточное число глав-
ной и конечной передачи; WKp - момент со-
противления кручению.
Величина углов закручивания карданно-
го вала равна:
Рис.3.5. Кинематическая схема
карданной передачи.
240 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
® = ^Мд„,ахКдигик1/^3К1>).
где G - модуль упругости при кручении; G- 85 ГПа; J- момент
инерции сечения вала при кручении; /-длина вала.
Относительный угол сдвига трубы карданного вала, соответствующий преде-
лу текучести равен:
1/ = 2Д//(100С),
где Л - допустимый для предела текучести остаточный сдвиг (0,3%);
D - диаметр вала.
Карданный шарнир с крестовиной не обеспечивает постоянства момента
М2 на ведомом валу по углу поворота при неизменном значении крутящего
момента М2 Тогда
М2 = Мх (sin2(px + cos2 (pxcos2y)/cosy •
Действия крутящих моментов создают соответственно тангенциальные и
осевые силы на вилках карданного шарнира
РП=М,/2Л;
Fz2=(M,/27? ) (sin 2(рх + с os2 (рх cos )/ cos у;
Fa\ = (F1 x/2R)sm(pxtgy,
Fa2—(MX/ 2R)coscpx sin y^\ + sin2(px + tg2y,
где (px - угол поворота входного вала; у - угол между входным и выходным
валами.
Сила Q, действующая в плоскости крестовины, является результирующей
сил Ftx и ^й1,атакже Ft2 и Fa2, лежащих в плоскости крестовины
Q = (MX i2R)^\rsin2(pxtg2y
На рис.3.6 приведены схемы действия сил на детали карданного сочленения
для двух случаев поворота ведущего вала. Максимальное значение сил:
Qmax = м I /(27?co.vy>,
^2тал =Л,/27?;
-={Mj2R)tgy.
Размеры карданного шарнира неравных угловых скоростей определяются
размерами крестовины. Шины крестовины испытывают на напряжения изги-
ба и смятия, а крестовину на напряжение разрыва. Вилка подвергается изгибу
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
241
Рис. 3.6 Схема сил, действующих на вилки и крестовину шарнира: а - на-
чальное положение (X — /3 = 0 б - ведущий вал повернут на угол ОС = 90°.
и скручиванию. Напряжение изгиба в сечении А-А (рис.3.7)
(У1П = Qmnxk, ,
U3 х-'гПил Ш : \ U3 / 7
где ]V = КЙ^/32 - момент сопротивления изгибу, - длина шипа.
Напряжение среза
— ^Qmax / (^ш ) •
В конструкциях карданных шарниров напряжения <У11} < 250...300 МПа
Ts <75...90 МПа.
В сечении Б-Б (рис.3.7) напряжение изгиба и кручения вилки:
^=!UK;
к;> “ Qnwx .
где WU3 и WKp - моменты сопротивления изгибу и кручению; W = hh2 / 6
и = khb2 - для прямоугольного сечения и = bh2 /10 и W ~bh2 /5
- для эллиптического сечения.
Коэффициент к зависит от отношения h/b
Напряжение в выполненных конструкциях вилок
еиз <50...80МПа т5<80...160 МПа.
242
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Рис. 3.7. Расчетные схемы: а - крестовины, б - вилки.
h/b 1 1,5 1,75 2 2,5 3
к 0,208 0,231 0,239 0,246 0,258 0,267
Допустимая нагрузка на игольчатые подшипники
Qma.x 79оог„/Д„ /(ие^/)1/3,
где zu - число иголок в подшипнике; 1и -длина иголок; du -диаметр игол-
ки; пе - частота вращения вала тягового двигателя при тах .
Материал вилок: стали 35, 40, 45; крестовин - стали 18ХГТ, 20Х.
1.3 Ведущий и ведомый мост.
1.3.1. Назначение и классификация мостов.
Мостом называется узел троллейбуса, сое щняющий колеса одной оси меж-
ду собой и через подвеску с основанием к\ юва. Мост воспринимает от колес
силы и реактивные моменты, возникающие в результате взаимодействия ко-
лес с дорогой, и передает их подрессоренной части. Функционально мосты
можно разделить на ведущие, управляемые и поддерживающие.
Ведущие мосты применяют у двухосных троллейбусов в качестве заднего, а
у трехосного сочлененного - среднего моста. Ведущий мост представляет со-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
243
бой пустотелую балку, внутри которой размещены главная передача, диффе-
ренциал и полуоси, а на концах на подшипниках установлены ступицы колес.
Он воспринимает вес троллейбуса, приходящийся на заднее основание кузо-
ва, передает вертикальную нагрузку колесам, а также тяговые и тормозные
усилия ведущих колес на основание кузова. Управляемый мост применяется у
троллейбусов в качестве переднего и выполнен в виде балки двутаврового се-
чения на концах которого устанавливаются колеса троллейбуса. На управля-
емых мостах цапфы колес имеют шарнирную связь с мостом. Поворотом цапф
относительно моста изменяется направление движения троллейбуса. Поддер-
живающие мосты используются у полуприцепов сочлененных троллейбусов.
В этих случаях мост служит только для передачи нагрузки от основания кузо-
ва к колесам.
Поскольку балки мостов являются неподрессорснными узлами троллейбу-
са, они подвержены воздействию значительных динамических нагрузок, вели-
чина которых будет тем выше, чем больше масса моста и колес установлен-
ных на нем.
1.3.2. Ведущие мосты.
Ведущий мост троллейбуса обеспечивает изменение крутящего момента
тягового двигателя при передаче его к ведущим колесам таким образом, что-
бы обеспечить согласование скоростной характеристики тягового двигателя
с динамической характеристикой троллейбуса. К основным требованиям
предъявляемым к ведущему мосту относятся:
- высокая жесткость (максимальный статический прогиб не должен превы-
шать 1,5мм на 1м колеи), обеспечивающая нормальные условия работы зуб-
чатых зацеплений и не создающая дополнительное напряжение изгиба в полу-
осях;
- небольшие габаритные размеры дающие возможность удобно компоно-
вать мост на троллейбусе и обеспечить достаточный дорожный просвет;
- минимальная масса нсподрессоренных частей при гарантированной проч-
ности и долговечности в пределах срока службы троллейбуса;
- отсутствие пульсации угловой скорости при передаче крутящего момента
к ведущим колесам;
- высокий КПД при различных нагрузках и частоте вращения;
- хороший доступ ко всем укрепленным на балке механизмам и устройствам
для обслуживания и ремонта;
- защищенность от проникновения воды, грязи и повреждения механизмов
трансмиссии, расположенных в балке;
- технологичность в изготовлении.
244 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
По способу передачи мощности к ведущим колесам различают следующие
типы главных передач грузовых автомобилей: с одинарными и двойными цен-
тральными редукторами и с двойными разнесенными редукторами. Редукто-
ры могут быть также в виде двухступенчатых передач. На троллейбусах при-
меняются передачи с двойными разнесенными редукторами, которые состоят
из центрального конического редуктора и колесных цилиндрических редук-
торов. К преимуществам таких передач относятся снижение нагрузки на диф-
ференциал и полуоси, уменьшение в связи с этим их габаритных размеров и
массы, малые нагрузки на зубья при небольших размерах центрального и ко-
лесных редукторов, малые габаритные размеры центральной части моста, уве-
личение дорожного просвета, наибольший возможный диапазон передаточ-
ных чисел, к недостаткам - относительная сложность конструкции в связи с
увеличением числа цилиндрических зубчатых колес.
Преимуществами гипоидных передач являются простота конструкции, вы-
сокий КПД, относительная малая масса и металлоемкость, бесшумность, не-
достатками - снижение дорожного просвета вследствие большого диаметра
ведомого зубчатого колеса, повышенные осевые усилия, действующие на под-
шипники, необходимость применения только гипоидной смазки, ограничение
возможности увеличения передаточного числа до 6,5.
Взаимное расположение осей у гипоидных передач определяется компонов-
кой троллейбуса и углом наклона карданного вала. Гипоидное зацепление до-
пускает смещение ведущего зубчатого колеса вверх или вниз от центра ведомого
колеса, а также вправо или влево от него, в зависимости от особенностей конст-
рукции и желательного направления вращения. Величина гипоидного смещения
Е = (0,125-0,20)£>2,
где D2 - диаметр зубчатого колеса.
Гипоидные передачи отличаются от конических передач со спиральным зу-
бом смещением осей валов на величину Е (рис. 3.8). Поэтому углы наклона
зубов колеса и различны. Эта разница создаст одно из основных пре-
имуществ гипоидной передачи - ее контактность.
Приводимая расчетная схема (рис. 3.8) показывает, что нормальные силы
FH, действующие в зацеплении, равны между собой, а касательные силы свя-
заны соотношением:
Д1/ Ft2= COSP' COSP2-
С учетом этого соотношения передаточное число гипоидной передачи
иог = (?2 ’ COSP2 VU1 ’ СЫР]. ),
где Z] и ^2 - число зубьев ведущей и ведомой шестерен.
В гипоидных передачах обычно принимают отношение cosfi2 /cosfli = 1,3-
1,5, а углы =50° при числе зубьев ведущей шестерни г} < 13 и fl2 -45° при
Раздел 3. КОНСТРУИРОВАНИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
245
= 14 и 15. Передаточные числа
гипоидных передач для троллей-
бусов должны находиться в пре-
делах иог — 5...7.
При одинаковых передаточных
числах гипоидные передачи при
прочих равных условиях имеют
более высокую прочность по срав-
нению с коническими передачами
со спиральным зубом. Увеличение
диаметра ведущей шестерни созда-
ет благоприятные условия для по-
вышения жесткости ведущего вала
Рис. 3.8. Расчетная схема гипоидной передачи
и его подшипникового узла.
Характерным для зацепления
гипоидных колес является наличие наряду со скольжением в поперечном на-
правлении, продольного скольжения
2 ’
где Уш - окружная скорость зубчатой передачи.
Продольное скольжение улучшает процесс приработки зубчатых колес, спо-
собствует устранению изменений направления скольжения по начальной окруж-
ности, что является одной из основных причин бесшумной работы гипоидной
передачи. Однако наличие продольного скольжения способствует увеличению
потерь в передаче и снижению се КПД, что вызывает ограничения в смещении
осей Е. Вместе с тем, увеличение продольного скольжения при малом угле кон-
такта может привести к разрушению масляной пленки, повысить потери и сни-
зить КПД передачи, что приводит к необходимости применения специальной
гипоидной смазки с сернистыми и другими присадками для образования на по-
верхности зубьев прочной пленки с целью исключения возможности заедания.
Гипоидное смещение бывает верхним и нижним, что дает возможность из-
менять расположение пода кузова. При нижнем смещении шестерни осевая
сила в зацеплении должна быть направлена к большему конусу (см.рис.3.8).
КПД гипоидной передачи можно найти по формуле;
=(1 + МД2)/(1 + Д^1)>
где ц=0,05...0,7 - коэффициент трения между зубьями.
КПД гипоидной передачи несколько ниже КПД конической и составляет
примерно 0,96...0,97.
Источником нагрузок на зубья зубчатых колес, вал и подшипники являются
силы, действующие в зацеплении. Для определения этих сил в гипоидной парс
воспользуемся рис. 3.9, где приведена схема шестерни с валом. На схеме показа-
246 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
ны три составляющие нормаль-
ной силы, действующей на зубья
шестерни: F\ - окружная; Fxl -
осевая; Frl - радиальная (индек-
сы 1 и 2 характеризуют принад-
лежность параметра соответ-
ственно шестерне и колесу).
Окружная сила шестерни
Fj — Мтах / го,
„ , а х л где г' - средний радиус ;
Рис. 3. у. Схема для определения нагрузок на кони- г i -с
. гп = г,, -0,5 b • sino} ; г< - ра-
ческую шестерню главной передачи. о к ’ 1 1 к
диус основания начального кону-
са; Ъ - ширина шестерни; - половина угла начального конуса.
Осевая сила шестерни
Fxl = (Fx/cosp} \tgasind{ + sinp]cosdi ),
где при одноименном направлении вращения и спирали; “+” - при раз-
ноименных; а- угол зацепления.
Радиальная сила шестерни
FrI = (Fj/cosftх \tgasindi ± sinpvsind\).
Окружная сила колеса
Осевая сила колеса
Fr2 - (Fj /cospi \tgasin§2 + sinp2cosS2 )•
Радиальная сила колеса
Cl = (г l'cosp} )(tgasind2 ± sinp2sinS2).
Расчет на прочность зубьев конических шестерен главной передачи по дефор-
мации изгиба и сжатия производится по следующей приближенной формуле:
& Мтах^-д
/\ybtsr0О - (b/2/;, )sin <5)2 cos /з] ,
1ДР М$ тах - максимальный момент тягового двигателя;
— М. тах / А/д тах - коэффициент динамичности; Мтах - максимальный
“пиковый1’ момент тягового двигателя; у- коэффициент формы зуба; b - дли-
на зуба по образующей начального конуса; ts ~ торцовой шаг по основанию
начального конуса.
Напряжение сжатия, характеризующее износ профиля зуба, определяется
по формуле:
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
247
<УС = 0,418^FK/(bsmomya)(l/гэ +1/гэ).
Эквивалентные радиусы ведущего и ведомого зубчатых колес гэ и гэ под-
считываются по формуле:
гэ = rQ/(fOS2p cosd).
Прочность зубьев гипоидных зубчатых колес рассчитывается по ГОСТ
21354-87. В качестве материалов применяются легированные, цементуемые или
нитроцементуемыс закаливаемые стали 15ХНЗА, 20ХНЗА. Для существую-
щих конструкций максимальное напряжение изгиба [<7и] - 500...700 МПа, Вы-
ход из строя главной передачи связан в первую очередь с износом зубьев -
более 70 %, усталостным выкрашиванием ( питингом- более 20 % и поломка-
ми - более 5 % зубьев).
1.3.3. Дифференциалы.
Дифференциал - механизм трансмиссии троллейбуса, распределяющий под-
водимый к нему крутящий момент между выходными валами и обеспечиваю-
щий их вращение с разными угловыми скоростями. К нему предъявляются сле-
дующие требования:
распределение крутящих моментов между колесами в пропорции, обеспе-
чивающей наилучшие эксплуатационные свойства(максимальную тяговую
силу, хорошие устойчивость и управляемость);
обеспечение различной частоты вращения ведущих колес, что необходимо
при повороте, движении троллейбуса по неровной поверхности дороги и в
ряде других случаях.
В зависимости от места установки дифференциалы бывают межосевые (если
они распределяют мощность между ведущими мостами) и межколесные (если
деление мощности производится между ведущими колесами). По конструк-
ции основных элементов дифференциалы подразделяют на шестеренчатые, ку-
лачковые и червячные. На троллейбусах применяются межколесные шестерен-
чатые дифференциалы, которые представляют собой трехзвенные планетар-
ные механизмы с двумя степенями свободы. Тремя звеньями дифференциала
являются: водило (корпус дифференциала), сателлиты, полуоссвые шестерни.
На рис. 3.10 приведены схемы дифференциалов с постоянным соотношени-
ем моментов: конического и цилиндрического симметричных (рис.3.10а,б), ко-
нического и цилиндрического не симметричных дифференциалов (рис.3.10в,г).
Для вывода уравнения кинематики дифференциала пользуются обычным
для планетарного механизма приемом остановки водила. Тогда внутреннее
передаточное число
248 Раздел КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Р = 21/Z2 =(®|~®й)/(®2-°>Л
где Z\ и z2 - зубья полуосевых шестерен; 60] , 602и - угловые скорости
полуосевых шестерен и корпуса дифференциала.
Уравнение кинематических связей между звеньями дифференциала имеет вид:
Рис. 3.10. Схемы дифференциалов с постоянным
соотношением моментов на ведомых валах.
-рСО2 =(1~р)й)д.
Для симметричного диффе-
ренциала, у которого р = -1,
60] 4” 602 = 2/0, .
Из условия равновесия со-
отношения внешних моментов
и мощностей, приложенных к
дифференциалу, следует:
Мх +М2 ~ М();
Nl + N2=Nd-Nr,
где М] и М2 - моменты на
полуосях; Мд - момент на
корпусе дифференциала; /V] и
М2 _ мощность на полуосях;
N() - мощность на корпусе
дифференциала; Nпотери мощности на трение.
Раскрывая уравнения мощностей и проведя преобразование полуоси, полу-
чим:
Мхвдх +М2вд2 = 0,5Мдсод -Nr,
Мощность затрачиваемая на трение в дифференциале при условии, что
69] > 602 , составит:
=Мг(й)х -6Оэ)=О,57Иг(бО] -602 ) ,
где Мг - общий момент трения в дифференциале.
Полуось, имеющая меньшую угловую скорость, называется отстающей, а с
большей угловой скоростью- забегающей. Момент на отстающей полуоси для
симметричного дифференциала (когда р = 1) определяется:
Мотс =(мр^+мг!м,) = (ю /2)(1+^).
Момент на забегающей оси:
М3аб = (У / 2)(1 - м,. !Мд) = (М„ /2)(1 - кб ).
где кб - коэффициент блокировки дифференциала.
Коэффициент блокировки дифференциала:
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
249
ks =Mr/Ma = (Мтс-M3aS)/(M0mc + Мза3\
При таком определении коэффициента блокировки кб —О...]; кб = О,ссли
трение в дифференциале отсутствует; кб — 1 если Мr = Мд (полная блоки-
ровка дифференциала). Иногда пользуются при определении коэффициента
блокировки дифференциала зависимостью кб =MonclM.ia6 . При этом
*0=щ-1)/(ц+1).
Увеличение коэффициента блокировки дифференциала приводит к увеличе-
нию использования силы сцепления ведущих колес с опорной поверхностью, уве-
личению тяговой силы и улучшению проходимости троллейбуса. Однако, при
высоких значениях к^ ухудшается управляемость троллейбуса, возрастает из-
нос шин, увеличивается нагрузка на одну из полуосей, снижается КПД передачи.
Следует отметить, что при повышенных значениях коэффициента блокировки
из-за большого трения в дифференциале снижается время и относительная ско-
рость перемещения поверхностей трения, что уменьшает их износ, несмотря на
относительно низкий КПД по сравнению с простым дифференциалом. Значение
кб для шестеренчатых дифференциалов составляет 0,05...0,15.
КПД передачи связан с коэффициентом блокировки дифференциала зави-
симостью
Т, = 1 - (й/2Л)(М„,„с -Мза3 + Мза3 )= 1 - (В/2Л>6,
где В - колея ведущих колес троллейбуса; R - радиус поворота ведущей оси
троллейбуса.
Таким образом КПД передачи является величиной переменной и зависит от
радиуса поворота троллейбуса.
Симметричный конический дифференциал, применяемый на троллейбусе,
включает корпус, сателлиты, крестовину и полуосевые шестерни. Для повы-
шения срока службы дифференциала между опорными поверхностями сател-
литов и полуосевых шестерен устанавливают бронзовые или стальные шай-
бы, уменьшающие трение. При проектировании дифференциалов в передачах
с разнесенными редукторами следует учитывать повышенные относительные
скорости между полуосевыми шестернями и чашкой дифференциала и обеспе-
чивать достаточное смазывание для предотвращения задиров поверхностей.
Сателлиты и полуосевые шестерни выполняются прямозубыми. Число зу-
бьев сателлитов и полуосевых шестерен может быть четным и нечетным, но
для обеспечения сборки должно подчиняться условию:
2г„,/п = к.
где zw число зубьев полуоссвой шестерни; п - число сателлитов; к - целое
число.
К преимуществам простого конического дифференциала следует отнести:
обеспечение устойчивости при движении по скользкой дороге и торможении тя-
250
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
говым двигателем благодаря равенству тангенциальных реакций на ведущих
колесах; простоту устройства, малые размеры и массу, надежность, высокий КПД,
Отрицательным качеством является ограничение проходимости троллейбуса.
В простых конических дифференциалах необходимо рассчитывать сателлиты,
полуосевые шестерни и оси сателлитов. Расчет зубьев полуоссвых шестерен и
сателлитов производится только на прочность по максимальной динамической
нагрузке. Для расчета полуоссвых шестерен и сателлитов выбирается наиболь-
ший момент по сцеплению ведущих колес с опорной поверхностью:
МСЧ =4>GKrJ(uK4K\
где ик и Т{к - соответственно передаточное число и КПД бортовой (конеч-
ной) передачи, GK - нагрузка, приходящаяся на колесо.
Силы, действующие в дифференциале с симметричным расположением са-
теллитов, взаимно уравновешиваются и воспринимаются его корпусом. На
подшипники, в которых вращается корпус, эти усилия не передаются. Одна-
ко, силы от зацепления конических шестерен прижимают торцы сателлитов
и полуосевых шестерен к корпусу дифференциала. Торцы рассчитываются
на смятие от осевых сил :
Qu, = (м<ч / Ур.ш )t&asin8M;
Qc = (мср I Ур.с )tgotsin8c,
где и тс с - соответственно расстояние от вершины конусов до сере-
дины ширины зуба полуосевой шестерни сателлита; и - половины уг-
лов начальных конусов шестерен и сателлитов.
Прочность зубьев сателлитов и полуосевых шестерен определяется по ГОСТ
21354—87. Материалы сателлитов и полуосевых шестерен; сталь 18ХГТ, 25ХГМ,
20ХН2М; [<5„ ] = 500...800 МПа. Шип крестовины под сателлитами испытыва-
ют на напряжение смятия и среза, крестовины рассчитываются на срез от ок-
ружной силы:
Р = М /(и • г )
кр сц / V кр J,
где Gp ~ средний радиус действия окружной силы на крестовине.
Материала крестовины: 18ХГТ, 20ХН2М; [CFc.v] = 50 ...60 МПа; [Тс/Д -
100...120 МПа,
1.3.4. Расчет балки ведущего моста.
При расчете балки ведущего моста рассматривают три нагрузочных режи-
ма: прямолинейное движение, занос, динамическое нагружение.
При прямолинейном движении значения приложенных к колесам тяговых
или тормозных сил (рис, 3.11) принимаются максимальными, коэффициент
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 251
сцепления колеса с дорогой (р ~ 8. Максимальная возможная сила тяги или
тормозная сила на колесе:
' где /?„3 - нормальная реакция опорной поверхности на колеса заднего веду-
щего моста; mnrj - доля массы троллейбуса, приходящаяся на задний ведущий
мост; шк^-коэффициент перераспределения нагрузки между мостами.
Коэффициент перераспределения нагрузки при разгоне и торможении трол-
лейбуса равен:
- для переднего моста -
mK ~\~(ph/тт = 1 -Г (ph jL,
- для заднего моста -
тк = 1 + (ph/L; тТ ~ 1 - (ph/L.
Изгибающие моменты, создаваемые R73 в вертикальной плоскости и
в горизонтальной достигают максимальных значений в сечении I — I в месте
крепления рессоры. Если принять , что на балку действует сила, равная верти-
кальной реакции в точке контакта колеса с опорной поверхностью, то
Мв = Ri3l; Мг = <рАг3/.
где I - расстояние от центральной плоскости колеса до места крепления
рессоры.
Реактивный крутящийся момент, создаваемый силой тяги, действует па балку
на участке от оси шестерни главной передачи до места крепления рессоры, а
реактивный тормозной момент - на участке от фланца крепления суппорта
тормозного механизма до места крепления рессоры:
Т = <Р^гзгк
При круглом трубчатом сечении (место крепления рессоры) согласно
теории наибольших касательных напряжений рассчитывается по формуле:
Мсу ',=у[м^ +м1 + тг.
Результирующее напряжение от изгиба и кручения для круглого трубчатого
сечения равно:
(7 = М W
где Д/ = 0,2(04 — J4 )/ О - момент сопротивления трубчатого сечения; D
и d - наружный и внутренний диаметр трубы.
Для прямоугольного коробчатого сечения напряжения в вертикальной и го-
ризонтальной плоскостях определяют раздельно и суммируют арифметически:
<7„=ЩМ+Л./Ю; t = T/Wk.
252
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Рис. ЗЛЕ Схема сил, действующих на ве-
дущий мост при максимальной силе тяги
и тормозной силы, и эпюры изгибающих
крутящих моментов. 1 - тяговый режим;
2 - тормозной.
где Иф и Мг - моменты со-
противления в вертикальной и го-
ризонтальной плоскостях.
Момент сопротивления круче-
нию Ифдля прямоугольного се-
чения с одинаковой толщиной d
стенок равен:
Ю = 2(h-8\b-8)8,
где h и b наружные размеры
поперечного сечения .
Максимальные напряжения
изгиба относятся к крайним во-
локнам сечения, а напряжения
кручения к средним волокнам се-
чения.
Полученные напряже-
ния нс должны превышать
[ <Т„ ] = 300...500 МПа;
[т] = 150...400 МПа.Меньшие зна-
чения напряжений относятся к
литым балкам из ковкого чугуна,
большие - к сварным - штампо-
ванным из листовой стали.
При заносе (рис. 3.12) балку
моста рассчитывают на изгиб в
вертикальной плоскости, считая,
что реакции в продольной плос-
кости отсутствуют. Вертикаль-
ные и горизонтальные реакции,
действующие в точке контакта
колеса с опорной поверхностью для случая скольжения троллейбуса влево оп-
ределяются по формулам соответственно:
RZ3,=0,5m,.3^ + <p 2h/B);
RZ3n =0,5mT3g(l-<p 2h/в)',
Ry.3.7 ~ Ф ^2 33 ’
Ку.зп ~ ф '
Раздел 3. КОНСТР У И РОВ А НИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
253
где (р'- коэффициент сцепления колеса в боковом направлении, который
при боковом скольжении равен ср' —М
В случае скольжения троллейбуса влево изгибающий момент левой сторо-
ны балки достигает максимального значения в сечении I - I (рис. 3.12), соот-
ветствующем центральной плоскости колеса, а изгибающий момент на пра-
вой стороне балки - в сечении II - II - месте крепления рессоры:
M R г ;
.7 уЗЛ К ’
- Ry3nl + Ry3nrK-
При динамическом нагружении, которое возникает при переезде препят-
ствия или при движении троллейбуса по неровной дороге, предполагают, что
продольные и поперечные силы в точках контакте! колеса с опорной поверх-
ностью отсутствуют, а вертикальные реакции достигают максимального зна-
чения. Изгибающий момент в вертикальной плоскости:
M„=Rakdl,
где кд - 1,5...3 - коэффици-
ент динамичности.
Напряжения изгиба в месте
крепления рессоры определя-
ют по формуле:
<Уи =MJW.
Напряжение не должно пре-
вышать значений, приведен-
ных для первого случая нагру-
жения.
При движении троллейбуса
по неровной дороге верти-
кальное ускорение моста мо-
жет достигать значения 10g. и
превышать статическую на-
грузку от силы тяжести под-
рсссорной части. В связи с
этим литые балки ведущих мо-
стов троллейбусов, имеющих
относительно большую массу,
должны быть привязаны с уче-
том сил инерции от собствен-
ной массы моста.
Рис. 3.12. Схема сил, действующих на веду-
щий мост при заносе автомобиля, и эпюры
изгибающих моментов.
254
Раздел 3. КОНСТР У ИРОВ А НИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
1.3.5. Управляемый мост.
Управляемым мостом троллейбуса является передний мост состоящий из
балки и поворотных кулаков, шарнирно соединенных с ней при помощи шквор-
ней. Управляемый мост должен удовлетворять по только общим требовани-
ям, но и специфическим и обеспечивать:
- необходимую кинематику поворота троллейбуса при всех режимах дви-
жения;
- хорошую устойчивость движения, высокую маневренность и безопасность
движения;
- обеспечивать стабилизацию и иметь развал управляемых колес.
При общей конструктивной схеме управляемые мосты могут различаться
некоторыми особенностями в зависимости от компоновки троллейбуса, на-
грузки на мост, а также линейными размерами и размерами поперечных сече-
ний балки, рычагов и способов их крепления. Балка моста, как правило, ко-
ванная стальная двутаврового сечения. Иногда применяют трубчатую балку
моста круглого или эллиптического сечения. Такие балки имеют высокую
прочность при малой массе и хорошо работают на изгиб в двуЛ взаимно пер-
пендикулярных плоскостях и на кручение. Однако, балка трубчатого сечения
сложна в производстве и дороже двутавровой балки.
Среднюю часть балки обычно опускают, чтобы можно было ниже располо-
жить раму троллейбуса, но это ограничено дорожным просветом под балкой.
Концы балки выполняют в виде кулаков, которые входят в вилки поворотных
кулаков. Поворотные кулаки, выполненные вместе с цапфами подшипников
ступиц колес и фланцами для крепления суппортов тормозных механизмов,
воспринимают и передают на балку вертикальные боковые и продольные ре-
акции, действующие в точке контакта колеса с опорной поверхностью.
Кроме этого передаются также реактивные тормозные моменты, возникаю-
щие в суппортах тормозных механизмов, которые передаются на подрессо-
ренную часть через элементы подвески.
Колея передних колес троллейбуса при выбранном размере колес и ширине
рамы определяется в основном условиями обеспечения необходимых углов по-
ворота управляемых колес и размещения деталей рулевого привода между ко-
лесами и лонжероном рамы. Максимальный угол поворота управляемых ко-
лес находится в пределах 38й- 46й. Правильная установка управляемых колес,
приводящая к их качению с минимальной затратой мощности, без значитель-
ного износа шин и с необходимой стабилизацией, обуславливается правиль-
ным выбором углов шкворней и колес.
Положение шкворня определяется углами а и Д (рис. 3.13), характеризую-
щими наклоном в поперечной и продольной плоскостях. Поперечный угол Об
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 255
наклона шкворня служит для стабилизации колес за счет использования при-
ходящегося на мост веса троллейбуса и находится в пределах от 3° до 8° и
обеспечивается конструкцией балки моста. Продольный угол наклона (3
шкворня вводится для стабилизации колес за счет использования боковых
реакций опорной поверхности, возникающих под действием центробежной
силы при повороте, и устанавливается в пределах от 1° 30' до 4° в зависимости
от эластичности шин и конструкции рулевого управления. Эластичность шин
также способствует стабилизации колес. Продольный угол наклона шкворня
обеспечивается соответствующей установкой передней рессоры.
Угол развала у передних колес необходим для компенсации деформации в
системе передней подвески и зазоров в деталях моста по мере их износа. Угол
развала устанавливается от 0° 30’ до 1 ° 30’ и обеспечивается конструкцией мо-
ста. Для уменьшения напряженности в контакте управляемых колес с дорогой
углу развала должно соответствовать оптимальное схождение колес (А-Б), ко-
торое регулируется поперечной рулевой тягой. Оптимальный угол схождения
управляемых колес составляет в среднем 15...20 % от угла развала в зависимо-
сти от типа шин и других конструктивных факторов.
При проектировании управляемого моста необходимые размеры его дета-
лей ориентировочно определяют путем расчета на прочность с учетом веса,
приходящегося на управляемый мост, и максимальных нагрузок при тормо-
жении, заносе и динамическом ударе.
При торможении мост изгибается в вертикальной плоскости от сил ZK , ZK ,
в горизонтальной плоскости от тормозной силы F а участок от поворотно-
го кулака до площадок крепления рессор скручивается моментом М . Эпюры
моментов показаны на рис. 3.14а. Балку моста считаем прямой, С учетом пе-
рераспределения нагрузки между мостами при торможении троллейбуса мож-
но записать:
R.„, = 0,5mmgmT .
Рис. 3. !3 Углы установки новки передних управляемых колес.
256
Раздел Л КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
г
> Тооможение
Рис. 3.14. Схема сил, действую-
щих на ведомый управляемый
мост троллейбуса.
Рис. 3.15. Расчетное сечение дву-
тавровой балки моста.
Тормозная сила на колесе:
К = •
Изгибающие моменты от в верти-
кальной и горизонтальной плоскостях име-
ют максимальные значения в местах креп-
ления рессоры:
M6=R^
М г = <pRZTl\-
Реактивный тормозной момент действу-
ющий на участке от отверстия для шкворня
до места крепления рессоры:
T = <PRMX
При заносе эпюра суммарных изгибаю-
щих моментов в вертикальной плоскости от
сил R,r и RV! показана на рис. 3.146.
Вследствие действия поперечной силы
ттп g(p нагрузка на наружное колесо будет
больше, чем на внутреннее, но на левую
часть балки действует разность моментов от
сил RZIJJ и Ryr/{, а на правую - сумма этих
моментов. За расчетное сечение следует
брать: для левой половины балки моста се-
чение. расположенное рядом с кулаком бал-
ки, а для правой половины - рядом с пло-
щадкой крепления рессоры. Для первого се-
чения изгибающий момент равен:
Щз! = Rz,l2~ Rynl^
для второго сечения -
М из ]] — ~ Куте t К ’
При преодолении препятствий без тор-
мозной силы изгибающий момент в опасном
сечении под рессорами будет:
Сложное напряжение в балке моста дву-
таврового сегмента от изгибающих момен-
тов в вертикальной и горизонтальной плос-
Раздел 3, КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
257
костях получается как сумма составляющих
напряжений:
т = 77'Иф .
К
Для расчета берется схема ссчсния при-
веденного двутавра, как показано на рис.
3.15. Для такого сечения
We = {ВН3-М3)/(6Н);
1С. = [(Н-Л)В3 +/г(В-В)зУ(бН);
WK = (2/9)t3(H + 2b),
Рис. 3.16. Схема сил, действую-
щих на поворотный кулак.
где t - толщина полок и стенок балки, ко-
торая принимается t = В —Ь .
Напряжение не должно превышать [ <5и ]
= 300 МПа, [т] = 150 МПа.
Поворотный кулак рассчитывают так же как и балку моста, для трех слу-
чаев движения троллейбуса. Опасным сечением поворотного кулака является
сечение I - I (рис. 3.16) у галтели цапфы диаметром d. Так как реактивный
крутящий момент прикладывается на фланце крепления опорного диска или
суппорта тормозного механизма, то при торможении у галтелей действуют
только изгибающие моменты в вертикальной и горизонтальной плоскостях,
которые могут быть определены по формуле:
Л, = 7И + М2г W = Ф + -//((W3).
Это уравнение справедливо для обоих поворотных кулаков - левого и пра-
вого. Вертикальная реакция R;m должна быть передана с учетом перераспре-
деления веса по осям троллейбуса при торможении.
При заносе (рис. 3.14 6) напряжение изгиба в опасном сечении (сечении I -I)
для наружного (левого) и внутреннего (правого) поворотного кулаков раз-
личны и могут быть определены по формулам:
0101 гк)/^и
= "W С + 2(p'h/в //1( - <р'гк)/ (о, 2а!3);
= "w(l - 2<ph/B^lt, + <р\ )/(o,2rf3 ).
258
Раздел 3. КОНСТРУИРОВА НИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
При преодолении препятствий напряжение изгиба равно:
Напряжение не должно превышать [<уц] = 550 МПа. На прочность цапфы
поворотного кулака значительное влияние оказывает радиус галтели. При на-
кате галтелей роликом прочность цапф повышается.
Шкворень и втулки поворотно-
Рнс. 3.17. Схема сил, действующих на шкворень
при торможении троллейбуса.
го кулака рассчитываются при тех
же режимах движения, что и при
расчете поворота кулака. Углами
наклона шкворня пренебрегаем.
При торможении сила R„T вызы-
вает в выступах поворотного ку-
лака силы F] и F} , действующие
на шкворень в поперечной плоско-
сти троллейбуса (рис. 3.17).
F'=F'=R,rl/(a + b) .
В результате наложения тор-
мозной силы Fm со стороны по-
перечной рулевой тяги па рычаг
поворотной цапфы будет дей-
ствовать реакция Q равная:
Q = RZT(pl/c.
Под действием реакции Q в той же плоскости возникают силы F^ и F% при-
ложенные к концам шкворня. Их величина определяется формулами:
F4z — Qnj(a + b)\ F^=Qm/(a+b) .
Тормозная сила приведенная к оси колеса, кроме того, создает силы F$
и F3 , действующие в продольной плоскости троллейбуса:
F2 ~ RZT(pb/(a + b)', F - Rzr(pa/(a + b) •
От тормозного момента возникают силы F2 и ^2 ’ действующие в той же
продольной плоскости:
Fi = C=^Kl{a+bY
Рассматривая силы, действующие на шкворень, замечаем, что максимальная
нагрузка приходится на нижний конец шкворня, где силы (Т) , F4 и F2 , F") в
каждой плоскости совпадают по направлению. Суммарная расчетная сила, дей-
ствующая на нижний конец шкворня, будет равна:
F
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
259
Что бы несколько уравнять силы, действующие на верхнюю и нижнюю ча-
сти, а также уменьшить износ, причем а и b делают непрерывными (а < Б).
При заносе силы и моменты действуют только в поперечной плоскости (рис.
3.18). Силы действующие на шкворень наружного колеса (на рисунке левого),
будут равны:
Т, = (ттп g/2Xl + 2<р'/г/В)[<р'С-Ь)~ *]/(« +
С=(.тгп я/^ + 2<рЪ/В)[<р'(гк +a)-l]/(a +Ь).
Силы, действующие на шкворень внутреннего колеса (на рисунке правого),
будут
С = ('«„, g/2)(.l-2<p'h/B)[(p'(rK-b)+l]/(a + b);
С=(тт С2Х1~2<С/В)[<?’'(Л + «)+ /]/Щ + Ь).
При Преодолении препятствий на шкворень действуют силы
F'= F = (тп, g/l^l/la +b)
Шкворень диаметром dUi рассчитывают на изгиб и срез в сечении, совпа-
дающем с нижним торцом бобышки балки. За расчетное усилие Fy принима-
ют наибольшую из сил при торможении или заносе (наибольшее значение для
левого или правого поворота кулака):
Т, =^Л/(т2С); Лр=4С/(ж/„2<) ,
где hB - высота втулки шкворня.
260 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
При расчете втулки шкворня на смятие
=Fpl{hedul) .
Напряжения в шкворнях могу быть: на изгиб <5из —500 МПа. на срез Тср —100
МПа и на смятие (7С1; =500 МПа.
Расчет опорного подшипника заключается в определении эквивалентной ста-
тической нагрузки в соответствии с ГОСТ 18854-82 “Подшипники качения.
Методы расчета статической грузоподъемности и эквивалентной статической
нагрузки”. За расчетный режим для роликового конического подшипника по-
воротного кулака принимают движение троллейбуса с постоянной скоростью
Vm = 40 км/ч по криволинейной траектории радиусом R = 50м или Vm = 20
км/ч при R = 12м.
Вертикальная реакция в точке контакта колеса с опорной поверхностью для
наиболее нагруженного по отношению к центру поворота колеса равна:
д=йга«/4+ж„2)/(^).
Если принять, что на поворотный кулак действует усилие, равное в верти-
кальной реакции в точке контакта, и предположить, что h/B - 0.5, то
Rc =l,25rnm g/2 .
и осевая нагрузка на опорный подшипник
Fa = 0,625mm g/2.
В связи с относительно небольшим угловым перемещением и опасностью
поверхностного разрушения колец подшипник выбирают по статической
грузоподъемности Со, принимая эквивалентную статическую нагрузку
Ро = (О,5...О,33)Со.
За расчетный режим для опорной бронзовой шайбы, применяемой в управля-
емых мостах принимают статическую нагрузку при полной массе троллейбуса
Fa =тт8/'1-
При этом напряжение смятия
где Dvid- соответственно наружный и внутренний диаметры шайбы. Обычно
[<уси] < 30 МПа.
1.4. Шины и колёса.
Троллейбусные колеса воспринимают всю массу троллейбуса и динамичес-
кие нагрузки, осуществляют кинетическую связь трансмиссии с дорогой, обес-
печивая передвижение и маневрирование троллейбуса, способствуют повы-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 261
шснию плавности хода, смягчая и поглощая, наряду с подсветкой, удары и
толчки от дорожных неровностей. На троллейбусах применяются колёса гру-
зовых автомобилей, содержащих шину, обод, детали его крепления и ступицу.
Шина состоит из каркаса, брекера, протектора, боковины, камеры или гер-
метизирующего слоя, ободной ленты и вентиля.
Шины подразделяют:
- по конструкции каркаса - на диагональные и радиальные:
- по характеристике протектора на предназначенные для эксплуатации на
дорогах с усовершенствованным покрытием, в смешанных условиях, в усло-
виях бездорожья, на зимних дорогах;
- по комплектности - на камерные и бескамерные.
Основные параметры и размеры шин регламентированы ГОСТ 17393-82, ГОСТ
8430-85, ГОСТ 5513-86 и др. В последнее время преимущественное развитие по-
лучают радиальные шины. Расширяется применение бескамерных шин. Преиму-
щества бескамерных шин по сравнению с камерными: меньшая масса, больший
срок службы, меньшее сопротивление качению, постоянство давления в течение
продолжительного времени. Для бескамерных шин требуется специальный глу-
бокий обод, обеспечивающий полное уплотнение при простоте сборки. Угол на-
клона полки в таком ободе составляет 15°, вместо обычных 5°.
Требования к безопасности шин предусматривают :
- исключение разрыва (возможен при возрастании давления до 2 ... 2,5 МПа);
- надежность прилегания бортов к закраинам обода;
- предотвращение смещения бортов шины при понижении давления:
- замедление или предотвращение падения давления при проколе шины (в
этом случае наиболее безопасна бсскамерная шина, так как герметизирующий
слой заполняет прокол);
- передачу тяговых и тормозных сил без проскальзывания;
- снижение безопасности повреждений боковых стенок;
- износостойкость (продолжительное сохранение глубины рисунка протек-
тора 8 ...9 мм);
- малое сопротивление качению;
- приемлемый дисбаланс и ремонтопригодность.
Решающее влияние на срок службы шин оказывают следующие эксплуата-
ционно-технические факторы: нагрузка на колесо G}., величина давления рв
воздуха в шинах, скорость движения V троллейбуса и тип дороги. Увеличение
нагрузки на колесо сверх минимальной в 1,5 раза приводит к снижению нор-
мы пробега на 50 ... 60 %. К такому же результату приводит эксплуатация шин
на разбитых дорогах. Очень чувствительны шины к износу при отклонениях
от нормы давления воздуха в них: например, снижение давления воздуха в 2
раза сокращает пробег шин не менее чем па 40 - 50 %.
При качении шины вследствие наличия значительного гистерезиса проис-
262
Раздел J. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
ходит сё нагревание. Допустимая температура нагрева не должна превосхо-
дить 100 °C. Наиболее “горячими” точками являются брекер и протектор шины.
Для каждого типоразмера шины существует определенное значение критичес-
ких скоростей, превышение которой приводит к существенному изменению
основных свойств шины. При скоростях больших критической на беговой
поверхности шины возникают непрерывные тангенциальные колебания в ре-
зультате чего резко увеличивается сопротивление качению, возрастает тепло-
выделение, сокращается до минимума срок службы шин.
Все шины согласно ГОСТ 5513 - 86, имеют диаметр обода 508 мм (20 дюй-
мов). Ориентировочное значение максимальной допустимой нагрузки на шину:
с,тт- = хв20+в)/(< + в).
где К - коэффициент грузоподъемности шины, равный 0,23...0,27 МПа;
В - ширина профиля надутой шины; d- диаметр обода рассматриваемой шины;
dc-диаметр стандартного 20-дюймового обода (50,8 см).
Из приведенного выражения видно, что определяющим параметром, обес-
печивающим увеличение нагрузочной способности шины, является её шири-
на, поскольку максимально допустимая нагрузка на шину зависит от квадра-
Рис. ЗЛ9. Ободья колес.
та се ширины. Однако ширину
шины стремятся ограничивать,
поскольку при использовании
сдвоенных колёс она в значи-
тельной степени влияет на габа-
ритную ширину транспортных
средств, ограниченную стан-
дартом (не более 2500 мм).
Пневматическая шина мон-
тируется па колесо, которое за-
тем закрепляется на ступице.
Колесо состоит из обода и со-
единительного элемента (диска) с деталями крепления. Ободья для шин грузо-
вых автомобилей делают разборными в двух вариантах: с разъёмным коль-
цом (рис. 3.19а) либо с цельным бортовым кольцом и разрезным замочным
кольцом (рис. 3.19в). Как правило разборные ободья имеют конические пол-
ки. Основные размеры профиля обода в зависимости от типоразмера регла-
ментированы ГОСТ 10409-74. Этим стандартом предусматриваются ширина
профиля обода и бортовых закраин и номинальный размер. Для ободьев всех
типоразмеров уклон полки составляет а - 5°.
Перспективной является конструкция обода с разъемом в поперечной плоско-
сти. Каждый разъёмный обод состоит из нескольких (обычно трёх) секторов.
Торцы секторов обработаны под определёнными углами и образуют замки при
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 263
сборе секторов в обод (рис. 3.19в). Разъёмные ободья секторного типа облегча-
ют монтажно-демонтажные работы, что особенно важно для троллейбусов.
Динамические показатели троллейбуса в значительной мере зависят от мо-
мента инерции колёс, которые из-за разницы в массах колёс с шинами изменя-
ются в очень широких пределах даже для колёс, оборудованных шинами од-
ного номинального размера. Поэтому вместо момента инерции удобней
пользоваться массой и радиусом инерции колеса с шиной, относя его к номи-
нальному диаметру обода. Это отношение для дисковых колёс с шиной со-
ставляет 0,7...0,75. Таким образом, для предварительных расчетов можно при-
нять, что момент инерции дискового колеса с шиной равен:
7 =(mK +/n1„X0J2j)2>
где тк итш массы соответственно колеса и шины; d - номинальный диа-
метр обода.
Важной проблемой обеспечения надёжности колёс является их балансиров-
ка, влияние которой возрастает в связи с увеличением скоростей движения.
Колесо и детали его крепления изготавливают с определёнными допусками,
поэтому оно в общем случае не уравновешено, но приводит к его биению, зат-
рудняющему управление троллейбусом, снижению срока службы шин, ухуд-
шению безопасности движения.
Различают статическую, динамическую и комбинированную неуравновешен-
ность (дисбаланс). Дисбаланс складывается из дисбаланса тормозного бара-
бана со ступицей, дисбаланса колеса, шины и вентиля, а также дисбаланса,
создаваемого радиальным и торцевым биением колеса. При дисбалансе колёс
ухудшается комфортабельность езды и увеличивается износ шин. Дисбаланс
передних управляемых колёс может вызвать ухудшение устойчивости и уп-
равляемости троллейбуса, стать причиной возникновения опасных автоколе-
баний и ускоренного износа шарниров подвески и рулевого привода.
Дисбаланс колеса с шиной в сборе устраняют за счёт установки на обод
балансировочных грузов. Балансировка выполняется при центрировании ко-
леса по посадочным поверхностям. Из общего дисбаланса колеса троллейбу-
са по результатам исследований на долю шины приходится примерно 74 %, на
ступицу с тормозным барабаном 18 % и на обод 8 %.
264
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Глава 2. Подвеска троллейбуса.
2.1. Общие сведения
Подвеской троллейбуса называют совокупность устройств, обеспечивающих
упругую связь между подрессорными и неподрсссорными массами, уменьше-
ние динамических нагрузок на несущую систему и колеса и затухание их коле-
баний, а также регулирование положения кузова троллейбуса во время движе-
ния. Она состоит из трех устройств: упругого, направляющего и демпфирую-
щего.
Упругий элемент передает вертикальные нагрузки и снижает уровень дина-
мических нагрузок, возникающих при движении троллейбуса по неровностям
поверхности дороги, обеспечивая при этом необходимую плавность хода трол-
лейбуса. Направляющее устройство подвески передаст несущей системе трол-
лейбуса силы и моменты между колесами и кузовом. Кинематика направляю-
щего устройства определяет характер перемещения колеса относительно не-
сущей системы. В зависимости от конструкции направляющее устройство пол-
ностью или частично освобождает упругий элемент от дополнительных на-
грузок, передаваемых колесами раме троллейбуса. Демпфирующее устройство
предназначено для гашения колебаний кузова и колес путем преобразования
энергии колебаний в тепловую и рассеивания се в окружающую среду.
Подвески по типу упругого элемента подразделяются на рессорные, пружин-
ные, торсионные, резиновые, пневматические, гидравлические и комбинирован-
ные. В зависимости от типа направляющего устройства все подвески делятся
па зависимые и независимые. Зависимая подвеска характеризуется зависимос-
тью перемещения одного колеса моста от перемещения другого колеса. Пере-
дача сил и моментов от колес на кузов при такой подвеске осуществляется
непосредственно упругими элементами-рессорами или с помощью штанг -
штанговая подвеска. При независимой подвеске отсутствует непосредствен-
ная связь между колесами. Каждое колесо данного моста перемещается неза-
висимо одно от другого.
Подвеска должна удовлетворять следующим требованиям:
иметь надлежащие упругие и амортизационные характеристики, обуслав-
ливающие плавность хода, поперечные крены, удары в ограничителе хода (про-
бои подвески),устойчивость движения;
надежно передавать горизонтальные силы и их моменты от колес к раме трол-
лейбуса, в частности обеспечивать надежное торможение двухосных тележек;
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
265
иметь надлежащую кинематическую характеристику, в частности кинема-
тика подвески должна быть хорошо согласована с кинематикой рулевого при-
вода, карданной передачи, обеспечивать при повороте качение колес передней
и задней оси по одному следу;
обладать высокой прочностью и долговечностью при минимальных сто-
имостных и эксплуатационных затратах;
обеспечивать оптимальную величину затухания колебаний кузова и колес;
иметь минимальную массу составляющих элементов (особенно неподрессо-
ренных частей).
На троллейбусах применяется зависимая рессорно-пневматическая подвес-
ка, обеспечивающая автоматическое поддержание постоянного уровня пола
относительно дорожного покрытия независимо от нагрузки. Основными эле-
ментами подвески являются: упругие пневматические элементы, гидравличес-
кие телескопические амортизаторы и листовые полуэллиптические рессоры.
Использование в качестве упругих элементов листовых рессор объясняется про-
стотой конструкции, низкой стоимостью и нетрудоемким, по сравнению с дру-
гими типами упругих элементов обслуживанием в эксплуатации, а также от-
сутствием направляющего устройства.
2.2 Выбор основных конструктивных
параметров рессор.
Листовые рессоры получили широкое распространение на троллейбусах, так
как могут выполнять функции упругого элемента, направляющего и гасящего
устройства. Они просты в изготовлении и удобны при проведении ремонтных
работ. Недостатком листовых рессор является высокая металлоемкость, зна-
чительная нсподрсссорснная масса и малый срок службы.
Листовая рессора представляет собой состоящий из набора листов упругий
элемент, соединяющий подрессоренную и ненодрессоренную массы троллей-
буса. Рессора крепится по середине к одной из них, а по концам - к другой.
При изготовлении листовых рессор листам придают различную кривизну:
более длинные листы (коренной и смежный с ним) имеют больший радиус.
Поэтому при сборке они получают Предварительные деформации, знак кото-
рых противоположен знаку рабочих деформаций. Это обеспечивает некото-
рую разгрузку длинных листов при соответствующей перегрузке коротких.
Листы рессоры стянуты центровым болтом, основное назначение которого -
удержание листов в собранном состоянии. Головки центровых болтов служат в
качестве установочного штифта при монтаже рессоры на балке моста. Собран-
ные листы стягиваются стремянкой и дополнительно удерживаются хомутами,
допускающими проскальзывание между поверхностями листов при деформации
266
Раздел .< КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Рис. 3.20. Расчетная схема двухплечих рес-
сор равного сопротивления: а) - однолис-
товой; б)и в) - многолистовой
рессоры. Недостаточная долговеч-
ность листовых рессор определяется
большим межлистовым трением и
сложным напряженным состоянием,
восприятием вертикальных, про-
дольных и боковых усилий и их мо-
ментов. Для уменьшения трения по-
верхности листов смазывают графит-
ной смазкой.
В основу расчета многолистовых
рессор положен расчет однолисто-
вой рессоры, представляющей со-
бой балку равного сопротивления
(рис. 3.20). Двухплечная однолисто-
вая рессора состоит из двух рессор
треугольной формы, приложенных
одна к другой основаниями. Общая
длина такой рессоры равна L. На-
пряжение и прогиб для одноплечей
треугольной консольной рессоры с
заделкой в сечении КК\
ми ’ 1EJO
(3.4)
где Ми - действующий в сечении изгибающий момент; М ц — Pl \ Wu - момент
сопротивления прямоугольного сечения балки высотой h и шириной В\
W =Bh~/6’, J 0~ момент инерции рессоры в среднем сечении;
J0 — Bh3 /12 ; I - активная длина рессоры; Е - модуль продольной упругости.
Для двухплечей однолистовой рессоры при раскрытии формулы (3.4) и под-
становке P~0,5Q и 1-0,5L
3 (К 3 QL
Однолистовая рессора может быть заменена многолистовой рессорой (рис.
3.20 б, в). Если в центре рессоры приложить усилие Q-2P. то можно принять,
что прогиб / и напряжение <Jit возникающее в рессоре, будут те же, что и в
однолистовой двухплечей рессоре, т.е.
„ _3 QL_. QL"
(У _-----, / — ’
1 nbh' 8 Enbh
Раздел 5. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
267
где п и b - число и ширина листов многолистовой рессоры.
Соответственно жесткость такой рессоры:
Q 8 Enbh3
' f 3 L3
Таким образом, задав необходимую жесткость, нагрузку и допускаемые на-
пряжения, можно определить размеры многолистовой рессоры равного со-
противления. Практически она имеет в плане трапецеидальную форму.
Прогиб рессоры:
Ы _s QL3
4SEIq 4Enbh3
где 8~ коэффициент прогиба.
Коэффициент прогиба зависит главным образом от конструкции концов рес-
соры. Для рессоры равного сопро-
тивления изгибу<5 = 1,5; для реаль-
ных рессор 8 = 1,25 -1,40. При ис-
пользовании второго листа для
усиления коренного 8 = 1.25.
Жесткость и напряжение в та-
кой рессоре соответственно:
1 Enbh3
8 L3 ’
СР
и
1ДО
nbh2
При постоянных других пара-
метрах увеличение длины рессоры
и даст возможность значительно
повысить толщину листов, что
особенно важно для коренного
листа, воспринимающего кроме
вертикальных нагрузок боковые, продольные и скручивание. Ширину листов
выбирают из существующего сортамента проката. Желательно чтобы выпол-
нялось неравенство:
Рис. 3.21. Узлы крепления рессоры к раме: а)и
б) - резиновые опоры рессоры соответствен-
но передняя и задняя; в) - опора рессоры со
съемным ушком; г) - серьга рессоры.
6 < bin < 10 .
Число листов рессоры составляет обычно 6-14. Если число листов меньше
шести, то рессора излишне тяжела, а если больше десяти, то прочность корен-
268 Раздел J. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
ных листов недостаточна. Рессорные листы изготавливают из кремнемарган-
цевых и кремнистых сталей 55ГС, 55С2, 60С2. При максимальном динамичес-
ком прогибе напряжения не должны превышать 900 МПА. Для повышения
сопротивления усталости рессор поверхности листов, работающих на растя-
жение, после тер мичсской обработки подвергают дробеструйной обработке,
в результате в поверхностном слое (глубиной до 0.8 мм) создаются предвари-
тельные напряжения сжатия.
Рессора переднего моста троллейбуса связана с рамой через резиновые опо-
ры (рис. 3.21, б), которые не требуют смазки, уменьшают динамические на-
грузки, вибрацию и скручивание рессоры. Однако их применение ограничено
нагрузками, действующими на резиновые элементы с недостаточной жесткос-
тью соединений, что может вызвать дополнительные колебания. Передний
конец рессоры заднего моста троллейбуса крепится к кронштейну основания
шарнирно с помощью специального литого ушка (рис. 3.21, в) и пальца. Вто-
рой конец рессоры делается с ушком и соединяется с кронштейном на рамс
серьгой (рис 3.21, г) и двумя рессорными пальцами.
2.3. Конструирование и расчет
пневматического упругого элемента.
Пневматические упругие элементы представляют собой резинокордовые обо-
Рис. 3.22. Пневматический упругий
элемент рукавного типа: 1 - буфер; 2 -
пробка; 3 - поршень; 4, 7 - верхний и
нижний фланец; 5 - оболочка; 6 - крыш-
ка; 8 - штуцер.
дочки, уплотненные по торцам и заполнен-
ные воздухом под давлением. Для мобиль-
ных машин используются следующие типы
пневматических упругих элементов: круглые
пневмобаллоны, рукавные и диафрагменные
элементы. В пневматических подвесках трол-
лейбусов применяются рукавные упругие
элементы (рис. 3.22). Они имеют ряд преиму-
ществ по сравнению с другими типами пнев-
матических упругих элементов: при одина-
ковой грузоподъемности рукавные элемен-
ты имеют меньшую размерность и массу; по-
зволяют получить упругую характеристику
желаемого вида за счет придания поршню не-
обходимой конфигурации; допускают значи-
тельные перекосы и не требуют точной уста-
новки, так как оболочка самоцептрируется
по поршню. Оболочка 5 рукавного упруго-
го элемента изготавливается из полимерно-
го корда и заполняется сжатым воздухом.
Раздел J. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
269
Оболочка нс деформируется под действием
сжатого воздуха, следовательно D=const.
Статистическая нагрузка на пневматический
упругий элемент (рис 3.23)
РуО РО А? Ро
где ро - давление воздуха в упругом эле-
менте в положении статического равнове-
сия, Аэ - эффективная площадь в положе-
нии статического равновесия; D3 - эффек-
тивный диаметр пневматического упруго-
го элемента.
Рис. 2.23. Расчетная схема
рукавного элемента.
Объем воздуха в пневматическом упругом элементе при деформации на ве-
личину z будет:
V,= У„ - -- Z - - (н2 - d 2 )- = Г„ - — (о2 + d -).
4 4V 1 8'
При ходе отбоя = —z?)
V- — V2 з z з— \Jd ~ d )— — V, з — \D d )
1 f 4 4 7 2 8 v 7
где V(> - объем сжатого воздуха в упругом элементе при номинальной ста-
тистической нагрузке; D и d- наружный диаметр оболочки и поршня.
Объем сжатого воздуха в пневматическом упругом элементе при номиналь-
ной статистической нагрузке
л! Ch л ( > 2\.
V К
где h - высота рукавного пневматического упругого элемента над поршнем в
положении статического равновесия {р ~ р^ j; Д- свес оболочки при F — Fvo .
Давление воздуха в пневматическом упругом элементе будет:
V!1 V!1
к О ' _ v0
Р' vp Р'~Ро (уТ '
В процессе медленных изменений давления показатель политропы л=1, при
динамическом нагружении п~\ ,4. При максимальном сжатии пневматическо-
го упругого элемента нижняя кромка оболочки переместится на /;/2, поэтому
свободная длина поршня равняется:
270
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Общая высота пневматического упругого элемента:
Н =h+A+Ac ,
где Ас - свободная длина поршня.
Усилие, реализуемое пневматическим упругим элементом
при ходе сжатия -
F - — р
XI г О
у."
4;
при ходе отбоя -
Зная закономерность изменения эффективной площади и объема воздуха в
упругом элементе в процессе деформации, можно рассчитать характеристику
резинокордового упругого элемента. Жесткость упругого элемента:
dF
cZA v
пРоУ д2
1 )
у/П + 1 31
dA±
dA
(3.5)
где г/A - приращение деформации упругого элемента.
Первое слагаемое формулы (3.5) определяется давлением воздуха при за-
данной деформации и обуславливается такими конструктивными параметра-
ми, как объем, эффективная площадь и характер нагружения. Второе слагае-
мое определяется изменением эффективной площади при деформации, т.е. из-
менением конфигурации оболочки.
Жесткость упругого элемента в положении статического равновесия (п — 1)
равна:
прп 2 dA.
= +р0----:
V э dA
Определение основных размеров рукавных пневматических упругих элемен-
тов производится следующим порядком. В соответствии со статической на-
грузкой Fy0 до табл. 3.1 подбирают упругий элемент. Если нагрузка не совпа-
дает с указанной в таблице, уточняется давление воздуха в упругом элементе
Раздел 3. КОНСТРУИРОВАНИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
271
Табл. 3.1. Типоразмерный ряд рукавных упругих элементов
Статическая иагрузка(кН) при давлении 0,6 МПа Эффективный диаметр (м) придавлении 0,6 МПа Наружный днаметр (м) при максимальном ходе сжатия элемента, не более
8,5+0,35 0,15 0,195
12,5+0,5 0,18 0,225
16,5+0,65 0,205 0,26
20,0+0,8 0,23 0,285
25,0+1,0 0,255 0,325
33,0+1,3 0,29 0,37
40,0+1,6 0,32 0,4
Примечания:
1. Высота упругого элемента в сборе с арматурой не более 0,3 м при давлении 0,6 МПа.
2. Максимальный ход сжатия и отбоя должен быть не менее 0,12 м.
3. Максимальное давление при статической нагрузке 0, 7 МПа, минимальное -0,1 МПа.
4. Долговечность (по пробегу) не менее 250 тыс. км.
Р„ = “ТТ
ЕслиРо > Ртах, принимается Ро = 0,6 МПа и определяется эффективный
диаметр поршня в положении статического равновесия:
D., = 2-2—; d = 2D3-D.
УФ,,
Для обеспечения долговечности оболочки и уменьшения в ней гистерезис-
ных потерь необходимо соблюдать условие:
0,06 < (D-d)<0,12.
Если оно нс соблюдается, следует выбирать другой упругий элемент боль-
шой грузоподъемности.
Характеристика пневматического упругого элемента определяется измене-
нием его эффективной площади, зависящим от конфигурации профиля порш-
ня. Для обеспечения минимальной жесткости поршень в положении статичес-
кого равновесия должен иметь наименьший диаметр, который постепенно уве-
личивается на ходах сжатия и отбоя (рис. 3.22) с целью получения наиболь-
шей энергоемкости.
272
Раздел КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
2.4. Определение параметров регулятора
положения кузова.
Регулятор положения кузова обеспечивает при любой загрузке троллейбуса
одно и то же расстояние между мостом и кузовом, чем достигается поддержания
постоянного уровня пола троллейбуса над дорожным покрытием независимо от
его загрузки. Применяют на троллейбусах двухступенчатый регулятор, имею-
щий специальное устройство, замедляющее его срабатывание.
Конструктивная схема простейшего регулятора положения кузова приведе-
Рис.ЗЛ4. Автоматический двухклапанный
регулятор.
на на рис. 3.24. При увеличении
нагрузки на рукавный пневма-
тический элемент он сжимает-
ся и кузов, вместе с закреплен-
ным на нем регулятором опус-
кается вниз относительно опор-
ной оси (точка "о” на рис. 3.24),
При этом толкатель 6 движется
вверх относительно регулятора,
и коромысло 7 поворачивается
против часовой стрелки. Коро-
мысло 7, воздействуя на плун-
жер 4, перемещает последний
влево, и клапан 2 открывается.
Вследствие этого начинает по-
ступать сжатый воздух из реси-
вера 3 по магистрали 1 в пнев-
матический элемент. Давление
в пневматическом элементе по-
вышается до тех пор, пока плат-
форма нс востановит прежнее
(номинальное) положение. При
уменьшении нагрузки на плат-
форму движение рычагов, ко-
ромысла 7 и плунжера 4 проис-
ходит в обратном направлении.
Клапан 5 открывается и сжатый
воздух выпускается из пневма-
тического элемента по магист-
рали 1, через сверление в плун-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА т
жсрс 4 и открытый клапан 5 в атмосферу. Следовательно, давление в пневма-
тическом элементе снижается и платформа опускается до номинального по-
ложения, при достижении которого клапан 5 закроется.
При определении параметров регулятора рассчитываются объем(масса)
воздуха Ve , подаваемого в пневматический элемент или выпускаемого из него
объема Ув для выравнивания положения платформы и проходные сечения
клапанов и каналов регулятора. Объем воздушной полости V- рукавного пнев-
матического элемента изменяется в соответствии с изменением статической
нагрузки FYO на пневматическом элементе. Однако, чтобы сохранить задан-
ное положение кузова при изменении нагрузки, необходимо соответственно
добавить или выпустить из пневматического элемента сжатый воздух массой
Am =+V„ (р, - р(,), (3.6)
где Vo - объем сжатого воздуха в пневматическом элементе при номиналь-
ной статической нагрузке, pi и р0 - плотность воздуха в пневматическом
элементе при измененной статической нагрузке и при номинальной нагрузке.
С учетом зависимости р = р/ RT выражение (3.6) можно преобразовать к
виду:
Ат = ±
V (р . - F )
RTA:j
где А - газовая постоянная для воздуха R = 287,1 м2 /\с2/С J , Г-абсолютная
температура воздуха в пневматическом элементе; знак (+) берется при увеличе-
нии нагрузки на пневматический элемент , знак (-) при уменьшении нагрузки.
Площадь проходных сечений регулятора выбирается исходя из времени вы-
равнивания платформы Z
У, + ^1 ’ Pl ^1
где t} - время демпфирования, принимается = 5...8 с. 11- время наполне-
ния пневматического элемента сжатым воздухом, принимается для регулято-
ров с гидро замедлителем (демпфером) t ~ 5...15 с, а для регулятора без гидро-
замедлителя zy=2O...3O с; - время выпуска сжатого воздуха из пневммати-
чсского элемента при уменьшении нагрузки F, принимается < /) .
Приведенная эффективная площадь каналов при наполнении и опоражни-
вании пневматического элемента можно определить по формулам:
( Pj
0.654V,.,,Z, уртах
-^ + 0.13111^^ Рп
Ртах Р тих
(ца) пр
ТТ ;(3.7)
_ _ nV,L___
0.654VK,,f[
In
+ 0.131n-——Ра
Р\ Р\ ~ Ра
(3F)
274 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
где/? - число пневматических элементов, подключенных к одному регулято-
ру; И - критическая скорость воздуха; VKp — -\IkRT ; к - показатель адиаба-
ты; ртах - максимальное давление в ресивере; р} и рх - давление в пневма-
тическом элементе при увеличении и снижении нагрузки;- атмосферное дав-
ление, равное 0,1 МПа.
Приведенная эффективная площадь определяется по формулам:
„р =,(3.10)
(Д14) + (аМз)~
где /р -коэффициент расхода трубопровода; р2 и йз~ коэффициент расхо-
да регулятора соответственно при наполнении и опоражнивании пневмати-
ческого элемента /1 ~ 0,5. ..0,7; А ^-площадь проходного сечения трубопрово-
да; А2 - площадь проходного сечения центрального сверления в клапане
2, А2 — ТСС12 / 4; А. ? - площадь проходного сечения центрального сверления в
клапане 2 и плунжере 4.
Если принять, что р} — р2 = р3 — р и Aj=A2=A3=A, то из выражений (3.9)
и (3.10) получим:
(М)„Р = (М)Ф=0.71дЛ .(3.11)
Задаваясь значениями коэффициента расхода (Д =0,6) и подставляя выра-
жение (3.11) в формулы (3.7) и (3.8), получаем разные значения А, из которых
выбираем большее значение. Затем определяем диаметры трубопровода и
каналов регулятора:
dm = dx = d2- 4ааТл =1.13д/A .
Наружный диаметр седла клапана определяется из конструктивных сообра-
жений
d^-d^l 10...12) 103м.
Для плоского клапана величина! его открытия п находится из соотношений
h = dK / 4. Наружный диаметр седла клапана D обычно принимается
D=d+(4...8) 10~3м ,
Диаметр направляющей клапана D выбирается из условия запаса герметич-
ности клапана, определяемого коэффициентом герметичности </, который для
разгруженных клапанов принимается <у=1,3... 1,7. Для определения Dp запишем
уравнение равновесия клапана, при отсутствии силы Fk открытие клапана
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 275
для клапана 2 (при D} < dK) -
i \dD1~dd dK'-D2} „ ,
Pk ' + ‘Зр.пах ~ Pk )-L—-' = Ртах ’ + Pnp 12)
4 4 4
для клапана 5 (при D>d}) -
где рк - давление во внутренних полостях клапанов и в пневматическом
элементе; Р - сила клапанной пружины.
Если пренебрегаем силой клапанной пружины Р , то из уравнений (3.12) и
(3.13) находим соответственно:
Расчет кинематики рычажной передачи регулятора сводится к определению
коэффициента передачи который равен:
^чпах} _ ^4 ^2
д'|+д\
где zmax и zmttx "" максимальные хода сжатия и отбоя подвески; и 32 -
зазоры соответственно между клапаном 2 (или 5) и плунжером 4 и между ко-
ромыслом 7 и плунжером 4.
Зазоры и е)2 определяют начальную зону лечуствительности регулято-
ра. Задачей конструктора является выбрать указанные зазоры, а также соот-
ношения длин рычагов, руководствуясь условиями компановки регулятора на
объекте.
2.5. Расчет амортизатора.
В подвеске имеется два основных вида сопротивлений движению подрес-
сорных и неподрессорных масс - трение без смазочного материала и сопро-
тивление, создаваемое амортизаторами. Трение без смазочного материала ухуд-
шает плавность хода троллейбуса; усилия меньше, чем сила трения, передают-
™ Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
ся от колес к кузову жестко, без смягчения упругими элементами. Поэтому
следует уменьшать трение без смазочного материала в подвеске и гашение
колебаний осуществлять только с помощью амортизаторов, Гашение колеба-
ний основывается на превращении кинетической энергии в подрсссорной и
нсподрессориой массе в тепловую с последующим се рассеиванием. Назначе-
ние амортизаторов подвески троллейбуса состоит в гашении вертикальных и
продольных угловых колебаний кузова, а также вертикальных колебаний ко-
лес, которые возникают под воздействием дорожных неровностей и неурав-
новешенности колес. На троллейбусах широкое распространение получили
гидравлические амортизаторы.
По своей конструкции амортизаторы подразделяются на рычажные и теле-
скопические. Рычажные амортизаторы из-за малых ходов поршней работают
с большими давлениями, достигающими 15-30 МПа, что приводит к увеличе-
нию их массы. В телескопическом амортизаторе, применяемом на троллейбу-
сах, цилиндр и поршень связаны непосредственно с подрессорной и неподрес-
сорной его массами и имеют больший ход, что дает возможность работать
амортизатору при меньших давлениях (2,5.,.5 МПа). Телескопические аморти-
заторы значительно меньше рычажных, проще в изготовлении и обладают
высокой долговечностью.
Если рассеивание энергии происходит только на ходах сжатия или отбоя,
амортизатор называют амортизатором одностороннего действия, в противном
случае двухстороннего. Наибольшее распространение получили телескопи-
ческие амортизаторы двухстороннего действия с несимметричной характерис-
тикой, когда коэффициент сопротивления амортизатора при отдаче больше
коэффициенте! сопротивления амортизатора при сжатии (Ки>к ) и разгру-
зочными клапанами. Уменьшение сопротивления при ходе сжатия связано со
стремлением ограничить силу, передающуюся через амортизатор кузову при
наезде на препятствие. Соотношение между коэффициентами сжатия и отбоя
(к —(0,15...0,25)кфД. Основным требованием при конструировании аморти-
затора является обеспечение
стабильности во время эксплу-
атации характеристики, опре-
деленной при расчете плавно-
сти хода троллейбуса.
Для оценки работы аморти-
затора используется рабочая
диаграмма (рис. 3.25, а), выра-
жающая зависимость силы на
штоке от перемещения порш-
ня. Характеристика амортиза-
тора (рис. 3.25, б) представля-
Рис. 3.25. Рабочая диаграмма (а) и характеристика
(б) гидравлического амортизатора.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
ет зависимость силы на штоке от скорости поршня . Она имеет петлеобразный
вид вследствие эмульсирования масла воздухом (масло приобретает упругие
свойства) и трения во фрикционных парах.
Основными оценочными параметрами амортизаторов являются:
коэффициент апериодичности в подвеске при колебаниях троллейбуса;
максимальные усилия при сжатии и отбое;
критические скорости движения поршня, при которых открываются клапаны;
энергоемкость и степень се уменьшения при нагреве.
Сила сопротивления амортизатора, создаваемая на начальном участке
(рис. 3.25, б) определяется по формуле:
F, = ..
f (• lZ / I-
где к - коэффициент сопротивления на начальном участке до открытия
клапанов; / -показатель степени.
В зависимости от степени i характеристика амортизатора может быть ли-
нейной (Z— 1), прогрессивной (/>1) и регрессивной (/<1). Тип характеристики
зависит от размеров калиброванных отверстий, вязкости жидкости и конст-
рукции клапанов.
Сила сопротивления амортизатора на клапанном участке определяется по
формуле:
Ц = С+К«к(ла-Д'а)‘ •
где: Д' - критическая скорость поршня, соответствующая открытию
клапана; FH - сопротивление соответствующее началу открытия клапана:
Как - коэффициент сопротивления на клапанном участке.
Характеристика, выражающая зависимость силы сопротивления от скорости
поршня является нелинейной и ее можно экстраполировать двумя прямыми; на-
чальным и клапанным участком (рис. 3.25, б). Коэффициенты сопротивления для
обоих участков определяются тангенсами угла наклона характеристик.
Амортизатор с линейной характеристикой рассеивает мощность (i—1):
При нелинейной характеристике рассеиваемая мощность определяется пло-
щадью рабочей диаграммы (рис. 3.25, а). Приравнивая мощность, рассеивае-
мую при сжатии Nмощности, условного амортизатора с линейной характе-
ристикой, можно найти среднее значение сопротивления:
хода сжатия -к - 2N? / Д^.:
хода отбоя -к'0 = 2N0 / До
Эквивалентный коэффициент сопротивления амортизатора определяется как
средний для ходов сжатия и отбоя:
278 Раздел 3. КОНСТРУИРОВАНИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
Характеристика амортизатора, приведенная к колесу, зависит от кинемати-
ки направляющего устройства и угла наклона амортизатора. Коэффициент
сопротивления, приведенный к колесу:
кп = кэи«со$2у,
где U - передаточное число установки амортизатора в подвеске; у - угол
наклона амортизатора.
По величине кп определяют коэффициент апериодичности:
Мй)
где: М- масса подрессорных частей; О) - частота колебаний.
Коэффициент апериодичности для выполненных конструкций 0,2< \//п <0,3 5.
Расчет амортизатора заключается в определении площадей проходных се-
чений отверстий для перепуска масла и параметров клапанов, обеспечиваю-
щих характеристику, полученную при расчете плавности хода автомобиля, при
выбранных по стандартам основных размерах (диаметра поршня, штока и т.д,)
При перемещении поршня в цилиндре объемный расход масла
е=тАМ >
где: Йу - коэффициент, учитывающий утечки масла через зазоры ~
0,95..,0,98); Ав - площадь вытеснителя.
С другой стороны,
где: р - коэффициент расхода, /1 =0,6...0.75; .Л - площадь проходного от-
верстия; р - плотность масла.
Так как давление масла
F
Р~Ае'
формула для расчета гидравлической характеристики амортизатора будет
иметь вид:
F“~ 224
Раздел 3. КОНСТРУИРОВАНИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
279
Полученную характеристику сравнивают с заданной линейной Fa = каАа
и в случае необходимости выбранные параметры корректируются.
Суммарная поверхность охлаждения амортизатора определяется по усло-
виям ограничения температуры нагрева рабочей жидкости. За основу берется
уравнение теплового баланса:
где: N - мощность рассеиваемая амортизатором; - коэффициент тепло-
отдачи стенок - 45...60 Вт/(л-/2°с)) в B0Wx; площадь поверхности
стенок амортизатора; t и t - температура стенок амортизатора и окружаю-
щей среды соответственно.
Для цилиндрической поверхности
где: - скорость потока воздуха, которая равна скорости троллейбуса;
D - наружный диаметр амортизатора.
Мощность, рассеиваемую амортизатором можно определить при предва-
рительных расчетах параллельно с расчетом плавности хода троллейбуса:
У =0.5(к£1£.+к£,„)А;.
Для амортизаторов, работающих на минеральных маслах в тяжелых дорож-
ных условиях температура нагрева рабочей жидкости не должна превышать
120 °C. Если температура нагрева выше указанной, необходимо выбрать боль-
ший типоразмер амортизатора из ряда, приведенного в стандарте.
280
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Глава 3.
Рулевое управление троллейбуса.
3.1. Общие сведения.
Рулевое управление служит для изменения или поддержания выбранного
направления движения троллейбуса и осуществления маневрирования им. Ру-
левое управление состоит из рулевого механизма с рулевым валом и колесом,
рулевого привода и усилителя. Рулевой механизм предназначен для передачи
усилия от рулевого механизма к рулевому приводу. Рулевой привод служит
для передачи усилия от рулевого механизма к управляемым колесам троллей-
буса и для обеспечения необходимого соотношения между углами их поворо-
та. Для обеспечения поворота управляемых колее в рулевой привод троллей-
буса встраивается гидроусилитель.
Рулевое управление должно удовлетворять следующим требованиям:
поддерживать такое соотношение между углами поворота колес, при котором
качение всех колес троллейбуса нс сопровождается их боковым скольжением;
- обеспечивать согласованность в кинематическом и силовом отношении
между поворотом рулевого и управляемых колес;
- создавать условия для обеспечения легкости управления, высокой манев-
ренности троллейбуса;
- предотвращать передачу ударов на рулевое колесо при наезде управляе-
мых колес на препятствие;
- обеспечивать стабилизацию повернутых управляемых колес и их возвра-
щение в положение, соответствующее прямолинейному, при отпущенном ру-
левом колесе:
- иметь высокую степень надежности действия и минимальные зазоры в со-
единениях.
Для грузовых автомобилей, а, следовательно, и для троллейбусов, усилие
па рулевом колесе регламентируется ГОСТ 21398-89 и при движении не долж-
но превышать:
- 118 Н (12 кГс) для рулевого управления с усилителем;
- 588 Н (60 кГс) для рулевого управления с усилителем в случае прекраще-
ния действия усилителя.
Суммарный (кинематический) люфт рулевого колеса для автомобиля (трол-
лейбуса) с усилителем рулевого управления, стоящего на дороге с сухим, твер-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
281
дым и равным покрытием не должен превышать 10°. При выходе из строя уси-
лителя рулевого управления должна быть сохранена возможность управле-
ния троллейбусом.
Оценочными параметрами рулевого управления являются кинематическое
и силовое передаточные числа, а также КПД рулевого привода и рулевого
механизма.
3.2. Рулевой механизм.
Рулевой механизм, являющийся редуктором, обеспечивает увеличение кру-
тящего момента, создаваемого водителем на рулевом колесе. Увеличение кру-
тящего момента пропорционально угловому передаточному числу рулевого ме-
ханизма, в общем случае равного:
JJ =
" ~ V
где da , dy - элементарные углы поворота рулевого колеса и вала сошки.
Максимальная величина углового передаточного числа для машин разных
типов и классов находится в пределах Uy = 15...25, в некоторых случаях дохо-
дит до 40. При выборе его исходят из того, что за один - два полных оборота
рулевого колеса управляемые колеса машины должны успевать поворачиваться
из нейтрального положения на максимальные углы (35 - 40()). С увеличением
U уменьшается затрачиваемое для осуществления маневрирования усилие на
рулевом колесе, однако одновременно возрастет количество оборотов руле-
вого колеса, которое требуется выполнить, чтобы повернуть управляемые ко-
леса на необходимые углы.
Передаточное число может быть постоянным или переменным. Рекоменду-
емый закон изменения Uu =f(a) показан на
рис.3.26. Для рулевых управлений с усили-
телем особых требований к характеру из-
менения передаточного число нс предъяв-
ляется и оно обычно постоянно. Рулевой
механизм в таких рулевых управлениях слу-
жит в основном лишь для включения золот-
ников усилителя в работу и для обеспече-
ния кинематического и силового действия
этой системы. Однако, передаточное чис-
ло и здесь должно быть все-таки достаточ-
но большим, чтобы при выходе из строя
Рис. 3.26. Рекомендуемое измене-
ние передаточного числа рулево-
го механизма.
282 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
усилителя водитель мог бы некоторое время управлять машиной без излиш-
него напряжения.
Рулевой механизм должен быть обратимым, чтобы нс препятствовать ста-
билизации управляемых колее и иметь высокий КПД в прямом направлении
(от рулевого вала к валу сошки) не ниже 70% при моменте на валу сошки,
составляющем 20% от максимального и несколько меньший КПД в обратном
направлении.
Во всех кинематических звеньях рулевого управления - от рулевого колеса
до управляемых колес - зазоры (люфты) сводятся до минимума. Люфты обус-
лавливаются ослаблением крепления рулевого колеса и сошки, износом дета-
лей рулевого механизма, шарниров рулевого вала, тяг рулевого привода.
Люфты при нейтральном положении управляемых колес, соответствующем
прямолинейному движению троллейбуса, должны бать минимальны. В этом
положении рабочие поверхности деталей рулевого механизма подвержены
наиболее интенсивному изнашиванию, т.е. люфт рулевого колеса в среднем
положении увеличивается быстрее, чем в крайних. Чтобы при регулировке
зазоров нс происходило заклинивание в крайних положениях, зацепление ру-
левого механизма выполняется с увеличенным зазором в крайних положени-
ях, что достигается конструктивными и технологическими мероприятиями. В
процессе эксплуатации разница в зазорах зацепления в среднем и крайних по-
ложениях уменьшается. Следует иметь в виду, что при наличии усилителей
некоторый люфт рулевого колеса даже при нейтральном положении неизбе-
жен. Это объясняется тем, что для включения усилителя в работу необходим
некоторый осевой ход золотника и соответствующий этому ходу люфт руле-
вого колеса. Отсутствие люфтов в рулевом управлении при нейтральном по-
ложении управляемых колес предотвращает "рыскание’' троллейбуса и его
неустойчивое движение.
По типу передачи различают следующие рулевые механизмы: червяк-ро-
лик, червяк-шестерня, червяк-сектор, винт-кривошип, винт-рсйка-шсстерпя,
шестерня-рейка. В рулевом управлении троллейбуса применяется более со-
вершенный в сравнении с другими механизмами рулевой механизм винт-рей-
ка-шестерня. В рулевой паре этих рулевых механизмов имеет место не трение
скольжения, а трение качения- между винтами 3 и гайкой 2 размещены 90... 120
шариков диаметром 7...9мм (рис.3.27). Входные и выходные концы нарезки
гайки замыкаются двумя направляющими трубками 1, заполненными шари-
ками. В результате получается два замкнутых “ручья”, в которых циркулиру-
ют шарики при вращении винта. Поступательное перемещение гайки преоб-
разуется в угловое перемещение с помощью рейки, конструктивно объединен-
ной с гайкой, и вала сектора 7 с закрепленной на нем сошкой.
Механизм отличается удобством компоновки совместно с распределителем
гидроусилителя, а при необходимости и с его силовым цилиндром, имеет вы-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
283
сокий прямой КПД, достаточную надежность и долговечность. Передаточ-
ное число рассматриваемого комбинированного рулевого механизма опреде-
лим на основании следующего. В результате поворота рулевого колеса на угол
а гайка с рейкой переместится на расстояние
а
где t - шаг винтового канала, образованного канавками винта и гайки.
В следствии этого сектор
повернется на угол ф, которо-
му соответствует длина дуги
его начальной окружности:
ooU
где - радиус начальной
окружности сектора.
Решая совместно выраже-
ния (3.14) и (3.15), найдем ис-
комое передаточное число ру-
левого механизма:
у = & = .(3.16)
(р t
Регулировка зацепления
рейка-сектор производится
приближением сошки к рейке
с помощью втулок 4, в кото-
рых располагаются подшип-
ники вала (рис.3.27). Для этой
цели центр окружности, на
которой располагаются бол-
ты 5 крепления крышек 6 к
картеру рулевого механизма,
смещен относительно оси вра-
щения вала сошки. Для изме-
нения расстояния между рей-
кой и сектором достаточно
Рис. 3.2 7. Рулевой механизм винт - рейка -
шестерня.
отвернуть болты крепления, повернуть крышки вместе с втулками до очеред-
ного совпадения их отверстий с резьбовыми отверстиями в картере и снова
завернуть болты.
284
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
3.3. Конструирование и расчет рулевого
привода.
Рулевой привод, представляющий собой систему тяг и рычагов, служит для
передачи усилия от сошки на поворотные цапфы и осуществления заданной
зависимости между углами поворота управляемых колес. При проектирова-
нии рулевых управлений выполняют кинетический и силовой расчет рулевого
привода и прочностной расчет узлов и деталей рулевого управления.
Основной задачей кинематического расчета рулевого привода является опре-
деление углов поворота управляемых колес, нахождении передаточных чисел
рулевого механизма, привода и управления в целом, выбор параметров рулевой
трапеции и согласовании кинематики рулевого управления и подвески. Исходя
Рис. 3.28. Схема поворота трол-
лейбуса без учета боковой элас-
тичности шин.
из геометрии поворота троллейбуса (рис.3.28)
при условии, что управляемые передние колеса
катятся без проскальзывания и их мгновенный
центр поворота лежит на пересечении осей вра-
щения всех колес наружный и внутренний СХ,2
углы поворота колес связаны зависимостью:
^0
ctga{-ctga2^^ ,(3.17)
где 1 q - расстояние между точками пересе-
чения осей шкворней с опорной поверхностью.
Из полученного выражения (3.17) следует, что
разность котангенсов углов поворота внешнего
и внутреннего управляемых колес должна быть
всегда величиной постоянной, а мгновенный
центр поворота троллейбуса (точка 0) должен
лежать на продолжении неуправляемой оси.
Только при соблюдении этих теоретических условий все колеса троллейбуса на
повороте будут двигаться без скольжения, т.е. иметь чистое кайение. От рулевой
трапеции требуется, чтобы она обеспечивала вытекающие из геометрии поворо-
та соотношения между углами поворота управляемых колес.
Параметрами рулевой трапеции являются шкворневая ширина
(рис.3.29а), расстояние п между центрами шаровых шарниров рычагов трапе-
ции; длина т и угол в наклона рычагов поворотных цапф. Подбор парамет-
ров трапеции при жестких в боковом направлении управляемых колесах на-
чинается с определения угла 6 наклона рычагов трапеции. Они располагают-
ся таким образом, чтобы а - (0.7...0.8JL при заднем расположении поперсч-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
285
Рис. 3.29. Схема рулевой трапеции и зависимость а/ L от I,/1-1-3: при
т/п равном соответственно 0,12; 0,14; 0,16
ной тяги. Угол Сможет быть найден для максимальных теоретических углов
&imax w &imax ^О формуле.
n sina2 ~sinaXmax
О = arctg --• •
_ 2 “ Щ^^^]тах ~ ^SO^max )_
или по графикам, приведенным на (рис.3.296). Значение угла 0 ~ 66...74°, а
отношение длины рычагов к длине поперечной тяги т/п = 0.12....0.16. Длину
ш принимают возможно большей по условиям компоновки. Тогда
1 + (2m/n)cos0
Общее кинематическое передаточное число рулевого управления, опреде-
ляемое передаточными числами механизма [//И привода [/ равно отноше-
нию полного угла поворота рулевого колеса (Х\тах к углу поворота колеса от
упора до упора
(У
гт _ \Hiax
РУ ~
^[тах + ^2тах
Для нормальной работы рулевого привода максимальное значение углов а,
и о;, находится в пределах ОСЬ}ШХ + ОС^111ах = 65...70°. Для троллейбусов суммар-
ное число оборотов рулевого колеса при повороте управляемых колес на 4С)и
(± 20°) от нейтрального положения нс должно превышать 3,5 (Ct . " 1260°) без
учета угла свободного поворота рулевого колеса, что соответствует U <31,5.
Схематическую компоновку рулевого привода выполняют для определения
размеров и расположения в пространстве сошки, тяг и рычагов, а также пере-
даточного числа привода. При этом стремятся обеспечить одновременную
симметричность крайних положений сошки относительно ее нейтрального
положения, а также равенство кинематических передаточных чисел привода
286 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
при повороте колес как вправо, так и влево. Если углы между сошкой и про-
дольной тягой , а также между тягой и поворотным рычагом в его крайнем
положении приблизительно одинаковы, то эти условия выполняются.
В силовом расчете определяются усилия: необходимые для поворота управ-
ляемых колес на месте, развиваемые цилиндром усилителя; на рулевом колесе
при работающем и неработающем усилителе; на рулевом колесе со стороны
реактивных элементов распределителя; на колесах при торможении; на отдель-
ных деталях рулевого управления.
Сила 7^, необходимая для поворота управляемых колес на горизонтальной
поверхности троллейбуса, находится исходя из суммарного момента М на
цапфах управляемых колес;
Мъ= М f+М V+M р+М v ,
где Л/у - момент сопротивления перекатыванию управляемых колес при
повороте вокруг шкворней; М - момент сопротивления деформации шин и
трения в контакте с опорной поверхностью в следствии проскальзывания
шины; Мр , М - моменты обусловленные поперечным и продольным на-
клоном шкворней (рис.3,30).
Момент сопротивления перекатыванию управляемых колес при повороте
вокруг шкворней определяется зависимостью:
М f = fGtiy = fGt £-
дчО+Д)
180
где f- коэффициент сопротивления перекатыванию; - осевая нагрузка
передаваемая управляемыми колесами; гу - радиус обкатки колеса вокруг оси
шкворня: Q — 0.06 ... 0.08м; Ц- длина цапфы; го- расчетный радиус колеса;
Л-угол развала колес; /3 - угол наклона шкворня.
Момент сопротивления деформации шин и трения в контакте с опорной по-
верхностью в следствии проскальзывания шины определяются зависимостью:
м<р =<pGir<p,
Рис330. К расчету момента со-
противления повороту колеса.
где - плечо силы трения скольжения
относительно центра отпечатка шины.
Если принять, что давление по площади
отпечатка распределяется равномерно,
r<p = ’
?*.- свободный радиус колеса. В случае,
когда г0 =0.96 гс,Гф =0.14гс.
При расчетах коэффициент сцепления с
опорной поверхностью выбирают макси-
мальным <р=0.8.
Рак)е.1 3. КОНСТР У ИРОВ А НИЕ И РЛ СЧЕТ ТРОЛЛЕЙБУСА 2S7
Моменты, обусловленные поперечным и продольным наклоном шкворней,
равны:
М р =0,5G}iysinp (sin ах + sin Of 2) ~G}r< sin flsin ac ;
My ~ -G}rosin2ysinac,
где Off - средний угол поворота колеса; Of6, = (ofj + Of2 )/ 2; у- угол наклона
шкворня назад.
Усилие на ободе рулевого колеса
Р Ww’
где Ry - радиус рулевого колеса; Д - КПД рулевого управления: 7] =
0.7...0.85.
Полученное значение F/f сопоставляют с допустимым [/д,] на рулевом коле-
се. Принимают [ F >] = 118 Н. Если Fp > [ Fp], необходима установка усилителя.
3.4. Расчет гидроусилителя рулевого
управления.
Гидроусилитель рулевого управления применяют для облегчения труда во-
дителя и повышения активной безопасности троллейбуса. Гидравлический уси-
литель состоит из насоса с бачком, распределительного устройства со следя-
щим механизмом, которое реализует подачу жидкости к исполнительному ме-
ханизму пропорционально усилию приложенному к рулевому колесу и углу
поворота, и исполнительного механизма, выполненного в виде силового ци-
линдра, создающего необходимое усилие для поворота управляемых колес.
К гидроусилителю предъявляют следующие требования:
- исключить возможность возникновения колебания управляемых колес;
- обеспечивать кинематическое следящее действие, характеризующееся про-
порциональностью углов поворота управляемых колес углу поворота рулево-
го колеса;
- минимальное запаздывание в срабатывании;
- обеспечить силовое слежение, т.е. “чувство дороги”, выражающегося в
том, что с увеличением сопротивления повороту должно возрастать и потреб-
ное усилие на рулевом колесе;
- вступать в действие лишь при условии F > [F/?],
Для усилителей рулевого управления основными оценочными параметра-
ми являются:
288
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
- показатель эффективности э, равный отношению усилия F бу на руле-
вом колесе при повороте троллейбуса без усилия к усилию Ff)cy при работаю-
щем усилителе;
- показатель реактивного воздействия усилителя на рулевое колесо.
Достаточно заметное повышение усилия на рулевом колесе характеризует
одно из важнейших свойств рулевого управления - “чувство дороги”, т.е. ощу-
щение водителем производимого им поворота, и оценивается показатель р
реактивного воздействия усилителя на рулевое колесо, которое выражается
отношением приращения усилия F >су к приращению усилия dFрбу.;
-показатель чувствительности, определяемый углом поворота рулевого ко-
леса, при котором усилитель включается в действие. Этот угол зависит от кон-
структивных факторов распределителя и его расположения в системе рулево-
го управления;
- показатель маневренности троллейбуса на поворотах, определяемый от-
ношением времени поворота троллейбуса при работе без усилителя ко време-
ни при работе с усилителем;
- показатель прямого и обратного включения усилителя (прямой и обратной
жесткости усилителя). Прямое включение усилителя характеризуется прилагае-
мым к рулевому колесу усилием при котором усилитель включается в дей-
ствие. Обратное действие характеризуется действующим вдоль продольной тяги
усилием Т, при котором усилитель включается в действие со стороны управляе-
мых колес. Эти усилия определяются соответственно по следующим формулам:
1
р — Р------------
р" с[)71
’ = F 1 ру
₽° С2772 U^2
где Р - сопротивление распределителя включению; U{ и - прямое пере-
даточное число и прямой КПД передачи от рулевого колеса до золотника; U]
и 7]1 - обратное передаточное число и обратный КПД передачи от продоль-
ной тяги до распределителя.
При расчете гидроусилителя определяют основные его размеры и характе-
ристики: диаметр и ход поршня силового цилиндра; диаметр трубопроводов.
Найденные значения корректируются с учетом требований и ограничений дей-
ствующих нормативных документов. При проектировании усилителя внача-
ле выбирают схему его компоновки. Затем определяют работу, которую со-
вершает водитель для поворота управляемых колес при нормативном усилии
на ободе рулевого колеса:
I I Of]
= \Fi]RP maX 2
Работу, которую совершает водитель для поворота управляемых колес при
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 289
отсутствии усилителя из одного крайнего положения в другое, рассчитывают
по формуле;
^1тах + ^2тах
Ш ___ 77 d 1/яях 2тах
W2 ~ Ff.6yRp----------------
Необходимая работа, совершаемая усилителем равна;
^1 max + <%2гнах
Определим необходимый рабочий объем силового гидроцилиндра усилителя;
У = (р —I/*" + ^2тах
где р,пах - максимальное давление в гидросистеме.
Исходя из кинематического расчета находят ход х поршня силового ци-
линдра и определяют его диаметр
где dUi - диаметр штока поршня.
Диаметр силового цилиндра можно определить также из проведенного си-
лового расчета рулевого привода. В существующих конструкциях усилитель
позволяет осуществлять поворот на месте без значительного усилия на руле-
вом колесе. Сила цилиндра гидроусилителя:
где U цк передаточное число привода между цилиндром и управляемыми
колесам; плечо силы Ftj.
По известному из силового расчета рулевого привода усилию Рц и по мак-
симальному давлению в гидросистеме ртах можно определить также диаметр
силового цилиндра по формуле;
Подача насоса Q выбирается такой, чтобы силовой цилиндр усилителя успе-
вал поворачивать управляемые колеса быстрее, чем это может сделать водитель.
Если это условие не соблюдается, то водителю во время быстрых поворотов при-
290 Раздел 3, КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
дется затрачивать усилие не только на преодоление сопротивления колес пово-
роту, но и на перекачивание рабочей жидкости в гидроцилиндрс. Расчетную по-
дачу насоса определяют при давлении жидкости, равном 0.5 ртах и частоте вра-
щения коленчатого вала двигателя, превышающей его частоту вращения на хо-
лостом ходу не более чем на 25% :
где Т\н - объемный КПД насоса при давлении 0.5 ртах; Д7 - активная пло-
щадь поршня силового цилиндра; А - утечки в системе (А = 0.05...0.1);
v;i - скорость поршня силового цилиндра.
Для усилителей с силовым цилиндром в продольной тяге скорость поршня
равна:
V = ~ ,
З°щ?
где пр - максимальная кратковременная частота вращения рулевого колеса
(для троллейбусов пр - 60...70 или 1,0 ...1,2 м/с).
Для усилителя с силовым цилиндром в рулевом механизме:
1 ,
v = —Rd пntgy
60 в р ’
где de - диаметр винта (по начальной образующей); у- угол подъема нарез-
ки винта.
Распределитель представляет собой золотниковое устройство, управляющее
потоком рабочей жидкости и состоящее из плунжера и корпуса. Распредели-
тель включает также центрирующий элемент и реактивное устройство. Для
уменьшения частоты включений при случайных поворотах управляемых ко-
лес предпочтительно встраивать распределитель в рулевой механизм так, что-
бы низкий обратный КПД рулевого механизма вызывал трудности при дос-
тижении обратных воздействий распределителя.
При любом размещении распределителя включение его с обратной сторо-
ны должно происходить при усилии, большем, чем сила трения в рулевом ме-
ханизме, приведенная к щтоку золотника или распределителя. В противном
случае, устойчивость усилителя нарушается, и он, будучи включенным с об-
ратной стороны, противодействует стабилизирующим силам, и стабилизация
колес полностью исключается. Исходя из этого, сумма стабилизирующих сил
XFC;;) и сила сопротивления должны удовлетворять условию:
EF >XF +XF
i ст __ т ^-,4. ,
где Fm - сумма сил трения в системе рулевого управления, в том числе и в
силовом цилиндре; Fcll - сумма сил сопротивления колес повороту.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 291
Это является первым условием статической устойчивости усилителя. Реше-
ние задачи достигается правильным определением размеров реактивных эле-
ментов и жесткости центрирующих пружин распределителя. Другим факто-
рам, влияющим на статическую устойчивость усилителя, является равенство
нулю суммы сил, действующих в самом усилителе. Это - второе условие, ха-
рактеризующее устойчивое состояние усилителя.
В применяемых на троллейбусах распределителях центрирующими элемен-
тами, которые служат для установки плунжера в нейтральное положение и
выполняют одновременно реактивные функции, являются реактивные плун-
жеры, расширяемые пружинами и рабочим давлением жидкости или только
давлением жидкости. Момент на рулевом колесе уравновешивается реактив-
ным моментом распределительного устройства:
( nd1
Ft>Rp = z P°+-fp + cbS
где z - число плунжеров; Р®- предварительная затяжка пружины плунже-
ра; с - жесткость одной пружины плунжера; de - средний диаметр винтового
канала; /3 - угол подъема винтовой линии рулевого механизма; /3 = 10... 15°;
р;_ - приведенный угол трения.
Предварительную затяжку пружин Р® выбирают из условия обеспечения
силы, при которой включится усилитель, = 25..100 Н. В начале включения
усилителя A S = 0 ир ~ 0. Тогда из уравнения (3.18)
de2tg(P + pK)’
Из уравнения (3.18) видно, что сила на рулевом колесе пропорциональна
давлению/?, действующему в силовом цилиндре. В то же время давление зави-
сит от момента сопротивления повороту управляемых колес, что обеспечива-
ет “чувство дороги”. Диаметры плунжеров выбирают таким образом, чтобы
сила F? при достижении максимального давления в рулевом цилиндре ртах
не превышала допустимого значения [F ] :
Наиболее сложным и нагруженным узлом гидросистемы усилителя являет-
ся насос. Тяжелые условия работы насоса вызваны резкопеременными режи-
мами нагрузки, повышенной тепловой напряженностью (нагрев насосов до-
ходит до 100... 110° С), неблагоприятной окружающей средой и т.д. В системах
292
Раздел 3, КОНСТРУИРОВАНИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
гидравлических усилителей троллейбусов получили распространение пластин-
чатые насосы двойного действия и шестеренчатые насосы.
Рис. 3.31. Схема пластинчатого насоса
двухкратноного действия.
ной (/?2) магистралями.
Пластинчатым называется ро-
торный насос, в число рабочих
органов которого входят вытес-
нители, выполненные в виде пла-
стин. В пластинчатом насосе дву-
кратного действия (рис.3.31) ро-
тор 1 с пластинами 2 охвачен ста-
тором 5 специального профиля.
За один оборот ротора две любые
соседние пластины совершают
два рабочих цикла, перемещая
жидкость через окна 7 и 9, разде-
ленные перемычкой 8, а затем
окна 11 и 4, разделенные перемыч-
кой 3. Окна 7 и 11, а также 9 и 4
соединены между собой и далее со
всасывающей ) и нагнетатель-
Участки статора 0^ и 0f2, соответствующие перемычкам 8, 3, 10 и 6 описа-
ны дугами окружностей радиусами Яд и R2 , проведенными из центра ротора
0. Профиль участков статора между перемычками описан лекальными кривы-
ми, обеспечивающими плавное изменение скорости движения пластины во из-
бежании ударов их о статор. Благодаря такой форме статора объем жидкости
между двумя пластинами во время перемещения ее по перемычкам нс изменя-
ется, чем устраняется пульсация давления и шум, которые имеют место при
изменении этого объема жидкости.
Рабочий объем пластинчатого насоса двукратного действия определяется
выражением:
Г0 = 2в„(К1-А2)[(/?1+К2>-г5],
где вп - ширина пластины: z ~ количество пластин; S - толщина пластин.
Объемная подача насоса:
Й, = ГЛ = 2«„ (Я, - /?2)[(/?! + Л2 X - Z5]п„,
где пн - частота вращения ротора.
Пластинчатые насосы двойного действия, специально сконструированные
для гидроусилителей рулевого управления, развивают давление 6.5...8.5 МПа
при частоте вращения пн тах ~ 4800 мин.'1
На троллейбусах, у которых нагрузка на управляемые колеса достигает
7,0 тс, рекомендуется применять в системах гидравлических усилителей шесте-
Раздел 1 КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 293
рснчатые насосы. Шестеренчатой называют роторную гидромашину с рабочи-
ми камерами образованными рабочими поверхностями зубчатых колес, корпу-
са и боковых крышек.
Шестеренчатый насос с наружным зацеплением (рис 3.32) представляет собой
пару одинаковых шестерен 1 и 2,
находящихся в зацеплении и по-
мещенных в камеру с малым за-
зором относительно ее стенок.
Камеру образуют корпус 3 и бо-
ковые диски 4 и 5. По обе сторо-
ны области зацепления в корпу-
се имеются полости А и Б соеди-
ненные с трубопроводами высо-
кого р2 и низкого давлений.
Рабочий процесс шестеренного
насоса протекает следующим об-
разом. Ведущая шестерня 1 при-
водит во вращательное движение
ведомую 2. При вращении шесте-
рен насоса в противоположные
стороны в камере всасывания А
А~А
их зубья выходят из зацепления - т*-*
образуется разряжение. За счет рис } 32 шестереитго 11ажа
созданного разряжения из бака в
камеру всасывания поступает рабочая жидкость и заполняет впадины между зу-
бьями шестерен 1и 2. Рабочая жидкость, находящаяся во впадинах зубьев шесте-
рен, перемещается по внутренней поверхности корпуса 3 и переносится из зоны
всасывания (из камеры А) в зону нагнетания (в камеру Б). В камере нагнетания
зубья шестерен входят в зацепление и выталкивают из впадин жидкость, кото-
рая из камер Б поступает в нагнетательный трубопровод.
Рабочий объем шестеренчатого насоса:
Vo = 2лт2 (z. + 1)в,
где 777 - модуль зацепления: z - число зубьев; в - ширина шестерни в ~ (4...6)777.
Объемная подача шестеренчатого насоса:
Q = 27D7/;7712(^ + 1)в .
Приводная мощность насоса
QHp = 2KnHm2ep(z + l)
Лойи?.
294
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
где и 7] }!ех - объемный и механический КПД насоса.
Внутренний диаметр трубопроводов определяется по формуле:
d = №
т л ,
V ПУ
где Q-- расход жидкости на рассматриваемом участке трубопровода;
V - максимально допустимая скорость течения жидкости.
Ориентировочная максимальная скорость течения жидкости во всасываю-
щих гидролиниях - 1.2 м/с, сливной - 2 м/с, нагнетательных при давлении 10
МПа - 4 м/с. Полученные значения din округляют до ближайшего большего
значения в нормальном ряду (ГОСТ 16516-80).
3.5. Прочностной расчет рулевого управления.
Расчет деталей рулевого управления на прочность производится при дости-
жении наибольших значений нагрузок в рулевом управлении, которое дости-
гают при повороте управляемых колес стоящего на месте троллейбуса на пре-
пятствие. Рулевой вал рассчитывается на момент
MP = CDf-
Диаметр обода рулевого колеса D нормируется (ГОСТ 37.001.0.62- 75) и
для существующих конструкций находится в пределах 380...550 мм. Рулевой
вал рассчитывается на кручение и жесткость. Напряжение кручения вала ру-
левого механизма рассчитывается при максимальных углах закручивания не
превышающих 5.5...7.5° и составит Т = 25...75 МПа.
Наиболее сильно нагруженным местам рулевых механизмов является зацеп-
ление. Элементы зацепления рассчитываются на прочность, по напряжению
изгиба СУ, и износ, по контактным напряжениям сжатия. Кроме того, рулевые
механизмы проверяются на жесткость по величине допускаемых деформаций,
а отдельные сопряжения на удельное давление и смятие. Сектор выполняется
из стали 20ХНЗА с твердостью поверхности нс менее HRC 58.
Окружное усилие, действующее на винт равно:
где г] - радиус начальной окружности винта.
Усилие на начальной окружности зубьев сектора равна усилию действую-
щему вдоль оси винта:
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
295
Foc = ±-£-~tgP1,
'i
где - угол подъема винтовой линии винта.
Радиальное усилие, действующее в зацеплении, равно:
' = F fgQ! = FPRp tga
РШ> ' tgPX Г] tgPl
где а - угол зацепления.
Долговечность шариковой пары рулевых механизмов зависит от контакт-
ных напряжений сжатия. Напряжение сжатия в паре шарик-поверхность ка-
навок определяются по формуле:
Осж = ml --
СЖ 11 * • /Э с
ISin PiCOSO
где т - коэффициент зависящий от кривизны соприкасающихся поверхнос-
тей (для выполненных конструкций т ~ 0.6...0.8); Е - модуль упругости (для
сталей Е = 200 ГПа); dw - диаметр циркулирующего шарика; dK ~ диаметр
канавки винта (гайки); i - число одновременно находящихся под нагрузкой
шариков в нарезке винта, d - угол контактов шариков: d - 40...45°.
Внутренний диаметр резьбы находится исходя из условия устойчивости
d;>0,056j—^с-
I >
V к
где п - запас устойчивости: п = 3...7; £ р - рабочая длина винта; к - коэффи-
циент приведенной длины: для двухопорного винта с одной самоустанавлива-
ющсйся гайкой к ~ 2.5, при не самоустанавливающихся опорах к - 3.3.
Диаметр шариков при проектном расчете принимают в зависимости от шага
резьбы t: d - (0.40...0.65) I. Минимальное число рабочих шариков в гайке вос-
принимающих осевую нагрузку:
ртп qAsin5 cosp}
где q - нагрузка на шарик действующая по нормали к поверхности контак-
та; Л - коэффициент неравномерности распределения нагрузки между шари-
ками: Л = 0.8...0.9.
Угол подъема винтовой линии равен:
296
Раздел .< КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
у/ = arctg
При уменьшении d от 45() до 30° число рабочих шариков увеличивается в 1.5
раза, а при их неизмененном числе в 1.5 вырастает нагрузка на один шарик.
При этом увеличивается и сила, выталкивающая шарик в выпускной канал. В
рулевом механизме применяется 102 шарика. Большим изгибающим напря-
жением при неработающем усилителе подвергаются зубья сектора и винта.
Пренебрегая небольшой конусностью зацепления, выражение для подсчета
изгибных напряжений можно записать в виде:
(У ~ FpRpupv
г2Уе212КЪ
где г2 - радиус начальной окружности сектора; у - коэффициент формы
зубьев; е2 - длина зубьев сектора; к%- коэффициент перекрытия: = 1.5...1.8.
Расчет рычагов и тяг привода определяют с учетом их места расположения
и конструктивной формы. Основные размеры деталей рулевого привода оп-
ределяют с учетом усилий передающихся через них. Наиболее интенсивно на-
гружены сошка, продольная тяга, рычаг поворотной цапфы и шарниры. Со-
шка изготавливается из стали 40Х и рассчитывается на изгиб и кручение в
Рис.3.33. К расчету рычага рулевого
управления.
сечении у основания от действую-
щей силы Еи, приложенной к
пальцу (рис.3.33). Опасные напря-
жения возникают в точках х и у:
для точки х -
для точки у -
где Wu и - моменты сопро-
тивления сечения А-А соответ-
ственно изгибу и кручению.
Продольная рулевая тяга рассчи-
тывается по усилию Fu При этом
критическое напряжение <Укр про-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 297
дольного изгиба определяется по формуле:
= ~2Е1
Окр ~ f2 А ’
' т nt
где Е ~ 2 х 10" МПа - модуль упругости при растяжении; I- момент инерции
среднего сечения тяги; £ - длина тяги; Ат площадь сечения тяги.
Продольная и поперечная тяги проверяются на устойчивость:
г. УЕ1
Г < ------ ,
сж ~ ’
где Есж - сила сжатия тяги.
Ширина рычагов и тяг проверяются по контактным напряжениям
(СУК < 25,..30Мпа). Размеры шаровых пальцев выбираются в зависимости от
нагрузки G{ на управляемые колеса, которая у троллейбуса достигает 90кН.
Следовательно, диаметр сферы D должен быть равен исходя из рекомендаций
НАМИ (ОСТ 37.001.233-80) 50мм.
298
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Глава 4. Тормозные механизмы.
4.1. Классификация тормозов и основные
требования к тормозным механизмам
Исполнительным органом тормозных систем являются тормозные механиз-
мы, в которых усилие, вызванное тормозным приводом преобразуется в тор-
мозной момент. По конструктивному исполнению рабочих элементов тормоз-
ные механизмы различают на барабанные, ленточные, дисковые и конические.
Рабочими элементами барабанных тормозных механизмов являются колод-
ки. взаимодействующие с наружной или внутренней поверхностью тормозно-
го барабана. У лептонных тормозных механизмов рабочими элементами яв-
ляются гибкая лента, взаимодействующая с тормозным барабаном. Дисковые
тормоза могут быть с рабочими элементами в виде целых дисков или отдель-
ных сегментных колодок. Рабочий элемент конического тормоза выполнен в
виде конуса. Последние две конструктивные разновидности объединяются в
одну группу тормозов с осевым нажатием.
На троллейбусах применяются барабанные, дисковые и ленточные тормо-
за. Барабанные и дисковые тормоза расположены в колесах троллейбуса и
служат для создания искусственного сопротивления его вращению, а следова-
тельно и движению троллейбуса. Барабанные и дисковые тормозные механиз-
мы при торможении преобразуют кинетическую энергию вращающихся и по-
ступательно-движущихся масс троллейбуса в тепловую энергию, рассеивае-
мую ими в окружающую среду.
Барабанный тормоз состоит из барабана, колодок, опорного диска (суппор-
та). опоры колодок, разжимного устройства и регулятора зазоров. Тормоз-
ные барабаны отливаются из чугуна (с примесью никеля, молибдена, меди,
титана) и выполняются с ребрами по наружной поверхности, которые увели-
чивают площадь теплоотдачи барабана и его жесткость. К наружной поверх-
ности колодки (рис. 3.34) крепится фрикционная накладка 2 с помощью закле-
пок 1. Колодка имеет ребро жес ткости 4. Нижним концом колодка шарнирно
крепится с помощью опорных пальцев к суппорту. Верхний конец колодки 5
упирается в разжимной кулак. Величина удельного давления между бараба-
ном и накладкой при экстренном торможении нс должна превышать 2.5 МПа.
Тормозной механизм имеет кулачковое разжимное устройство, которое обес-
печивает равенство перемещений колодок.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
299
Ленточный тормоз использу-
ется в каждом из двух головных
механизмов штангоуловителя
троллейбуса, который заторма-
живает диностартер охватывая
его барабан тормозными колод-
ками после отключения штанго-
уловителя, Это необходимо для
исключения самопроизвольного
подъема токоприемника после
притягивания его к крыше трол-
лейбуса и повторного включе-
ние 3,34. Тормозная колодка.
ния штангоуловителя.
К фрикционным тормозным механизмам предъявляются следующие основ-
ные требования: высокая надежность и стабильность действия; достаточный
тормозной момент; плавность торможения; прочность и долговечность; со-
хранение физических свойств при нагреве без обугливания, выкрашивания и
выделения связующих компонентов; удобство осмотра и регулирования.
4.2. Расчет барабанного тормозного механизма
При расчете барабанных тор-
мозных механизмов необходимо
установить зависимость между
тормозными моментами, которые
создаются силами, прижимающи-
ми колодки к тормозному бара-
бану. При определении тормозно-
го момента рассматривается рав-
новесие колодки под действием
внешних сил с учетом следующих “
допущений:
- давление на накладку на вы-
деленном элементарном участке,
расположенном под углом (X к
линиям ОС, одинаково по всей
ширине накладки;
- закон распределения давле-
ний по длине накладки не умень-
шается с изменением силы F раз-
жимающих колодок:
Рис 3.35. Схема расчета колодки.
300
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
р = рта^(а\ (3.19)
где ртах - максимальное давление на накладку; ^(Of) - функция отобра-
жения закона распределения давлений по длине накладки;
- коэффициент трения р между накладкой и барабаном остается постоян-
ным на всех режимах торможения.
Для определения момента колодки с одной степенью свободы (рис. 3.35)
выделим на поверхности накладки элементарную полоску, расположенную под
углом Of, отсчитываемого от прямой ОС, проходящей через центр вращения
барабана и колодки и имеющую площадь erd(X, где в - ширина накладки. Со
стороны барабана на полоску действует нормальная сила
dN = pbrda = brp})U(Xy/(a)da,
где г - радиус тормозного барабана.
При вращении барабана возникает элементарная сила dFT в плоскости,
касательной к поверхности трения:
dFi = pdN = pbrpmaxy/(a)da, (3.20)
где р - коэффициент трения.
Тормозной момент МЕ2 на колодке, создаваемый силами трения между
накладкой и барабаном:
а1 oq
Л/, 2 = г fdFT = рг2йр,„ал. • О21)
Of0 «о
Для определения ртах определяется сумма моментов относительно точки
поворота колодки С:
Of1 «•
^Mc-Fh± \ldFT~ \SsinadN -0 . (3.22)
a0
Подставляя в уравнение (3.22) выражение dFT и dN , и учитывая, что
I — г — s cos ОС после преобразования получим:
Fh
Ртах ~ Ofj Ofj
br(s j \/f(a)sinada±p[r J \p(a)da-s jy/(a)cosada]}
a0 «0 «0
(3.23)
Подставив выражение (3.23) в уравнение (3.21) и разделив числитель и зна-
менатель на
Раздел 3. КОНСТРУИРОВАНИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
301
(X
г \y(a)da ,
получаем уравнение для тормозного момента одной колодки:
Л/, 2 = Fh>1 , (3.24)
A±U.B
где
X X
5 \yr(a)sinada 1-5 \i//(a)cosada
СХл г,
•'= % — ...........^25) B =-------------1------------',(3.26)
г \y/(a)da г \\y(a)da
aQ а0
Знак “минус" в знаменателе уравнения (3.24) берется для активной колодки,
а знак “плюс” - для пассивной . Общий тормозной момент двухколодочного
тормоза складывается из моментов обоих колодок Мт = Мх + М2, т.е.
м =JyJhK +.(3.27)
Д + и В. А2 +
Закон распределения давлений по длине накладки в тормозных механизмах с
высокой жесткостью барабана, накладки и колодки принимается синусоидаль-
ным, т.е. уу(а) = sinCX. Максимальное давление ртах действует на элемент на-
кладки, расположенные под углом СХ = 90 . После интегрирования выражений
(3.25) и (3.26) при синусоидальном распределении давлений получаем:
_5 5m(2cz0)-5m(2cz1)4-2(cz1 -CZ0) .
““ у
Г 4(C(75CZ0 - coscxx)
5
вс = 1 - — (cosa0 + cosa,) .(3,28)
dr
Тормоза с фиксированным разжимным кулаком при приработанных наклад-
кам имеют М] = М2 , т. е.
F}h{(A- /АВ) = F2h2(A + рВ) . (3.28)
Из условия равновесия разжимного кулака (рис. 3.36) получим:
302
Раздел 3. КОНСТРУИРОВАНИЕ И РА СЧЕТТРОЛЛЕЙБУСА
Рис. 3.36. Разжимное устройство ба-
рабанного тормоза.
F'lK =(F\ + Fi)dy , (3.29)
где F1 - сила действующая на
рычаг разжимного кулака; 1К- дли-
на рычага; dK - диаметр начальной
окружности разжимного кулака.
Исключив из уравнений (3.28) и
(3.29) поочередно F\ и F? нахо-
дим зависимость последних от р1
и конструктивных параметров
(при допущении hx ~ h2)
d' K \ )
Профиль разжимных кулаков выполняется таким, чтобы силы Fx и F2 при
любом угле поворота кулака были направлены по касательной к его началь-
ной окружности. Подставляя F^ и F2 из выражения (3,30) в уравнение (3,37)
получим тормозной момент для тормоза с фиксированным разжимным ку-
лачком:
+F,)^L±^ ;(3.31)
ИЛИ
р! .(3.32)
При проектированном расчете предварительно определяют максимальный
тормозной момент на колесе исходя из нормативов эффективности торможе-
ния троллейбуса. Максимальную тормозную силу можно получить при усло-
вии полного использования сцепного веса троллейбуса. При этом тормозные
силы должны быть пропорциональны нормальным реакциям на колесах. При-
менительно к троллейбусу
__ Д _ ^2 + у
^Т2 ~(phT
Как видно из уравнения ( 3.33 ) это соотношение зависит от коэффициента
сцепления (р, который определяет значение установленного замедления ат .
Задаваясь нормативным замедлением можно определить соотношение между
тормозными силами. Моменты, которые могут быть реализованы тормозни-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
303
ми механизмами, обусловлены расчетными тормозными моментами на коле-
сах по сцеплению, следовательно:
Mn=FT\ ra=R^ro :
где гд - динамический радиус колеса.
Определение основных размеров тормозного механизма производят одно-
временно с разработкой его компоновки. Радиус г поверхности трения бара-
бана выбирают с таким расчетом, чтобы между ободом колеса и барабаном
зазор, необходимый для вентиляции составлял не менее 20 -30 мм. Угол об-
хвата р фрикционной накладки находится в пределах 90 -120° . На колодках
с одной степенью свободы накладку следует располагать симметрично отно-
сительно оси х. Ширину в фрикционных накладок определяют из условия обес-
печения при аварийном торможении давления, не превышающего 2.5 МПа.
Кроме того, условная удельная нагрузка q на накладки, определяется из соот-
ношения (3.34). По рекомендациям СЭВ для транспортных средств с полной
массой более 11т должна быть нс более 0.3 МПа:.
mg <-г 1
-<3-34)
где т - масса троллейбуса; Ап и Аз - суммарные площади накладок тор-
мозных механизмов соответственно переднего и заднего мостов.
Проверочный расчет на износ и нагрев осуществляется по косвенным показа-
телям - среднему давлению на поверхности само прижимной колодки, удельной
работе трения, которая определяет температуру нагрева тормозного барабана.
Среднее давление рср на поверхности принимается равным отношению
нормальной силы У) к площади А, тормозной накладки. Согласно техни-
ческим требованиям на накладки должно соблюдаться условие:
ЛО
пГГ) — — < 2 МПа .
р А,
Удельная работа трения равна отношению работы трения, совершенной при
торможении от максимальной скорости движения троллейбуса до полной его
остановки, к суммарной площади As всех накладок, т.е.
2
т у
____max <
2АХ
где - допускаемая величина удельной работы трения которую при-
нимают для автобусов и троллейбусов 600-800 Дж/см2.
304 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
При проектировании тормозных барабанов действительная толщина их
выбирается с учетом требований жесткости и теплоемкости. Если рассматри-
вать барабан как тонкостенный цилиндр бесконечной длины, то расчетная
толщина стенки барабана составит:
с _ Рср ^б
13 —-
2о
где - диаметр барабана; о - сопротивление разрыву в диаметральном
сечении барабана.
Как показала практика, действительная толщина барабана должна прини-
маться в 1.4- 1.6 раз больше расчетной. При выполнении барабана с наруж-
ными ребрами толщина барабана измеряемая на впадине ребер принимается
0.7 - 0.8 от расчетной.
4.3. Расчет ленточного тормоза.
В лен точных тормозах торможение осуществляется за счет трения гибкой
стальной ленты о наружную поверхность цилиндрического тормозного шки-
ва или внутреннюю поверхность цилиндрического барабана. Повышение ко-
эффициента трения достигается путем закрепления на рабочей стороне ленты
накладки из фрикционного материала. При одинаковых замыкающих усили-
ях, коэффициенте трения и диаметрах шкивов (барабанов) тормозной момент
ленточного тормоза значительно больше колодочного. Угол обхвата лентой
тормозного шкива обычно составляет 2700. Допустимое давление на фрик-
ционный материал 0.8 МПа, а коэффициент трения не превышает 0.35.
В зависимости от способа крепления концов ленты тормоза подразделяют на
плавающие с двухсторонним ссрводействием, без серводействия, с односторон-
ним ссрводействием. На троллейбусах применяются ленточные тормоза первого
типа (рис,3.37). Лучшим с точки зрения получения минимальных усилий на ры-
чаге управления и работы в обоих направлениях считается плавающий ленточ-
ный тормоз.
При расчете ленточных тормозов делаются следующие допущения:
- тормозной барабан рассматривается как абсолютно твердое тело;
- поперечные сечения ленты остаются плоскими и не искажаются после де-
формации;
- на всем протяжении прилегания ленты обеспечивается плотный контакт;
- вес ленты и смещение силы трения относительно линии силы ее натяжения
не принимаются во внимание.
Обозначим силы, действующие на концы тормозной ленты и 52 , Из ус-
ловия равновесия тормозного барабана определяется тормозной момент:
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
305
МТ =(5t -S2)r , (3.35)
где и S2 - силы натяжения набегающей и сбегающей ветви ленты;
г - радиус тормозного барабана.
В соответствии с уравнением Эйлера связь между 5] и 52 определяется
формулой:
S} =S2e^ ,
где (X - угол обхвата лентой тормозного барабана.
Подставляя в уравнение (3,35) вместо силы 5] ее значение получим:
М - У
Усилие на сбегающем конце определяется из выражения:
52=^
/ Ди _
Перемещение сбегающего конца центы:
Ct
h = 2n8- - ,
360
где S - радиальный зазор между лентой и
барабаном в начале затяжки.
Величина, характеризующая усилие, необ-
ходимое для затяжки, определяется до вы-
ражению:
Рис. 3.37. Схема плавающего лен-
точного тормоза с двухсторонним
серводействием.
я Mr 8ad
1(Уа -1)г180
F =
Ширина тормозного элемента подсчи-
тывается следующим образом:
, (3.37)
2
dM7e^a
где [с/] - допустимое давление.
Давление в ленточном тормозе, имеющем ширину Ь:
и = - -
rb
ЕМ
252г3
306 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
где Е - модуль упругости первого рода; I - момент инерции поперечного
сечения ленты.
Минимальное удельное давление при (X — 0 ;
_ 52 Г EI8
Ят1п ~~ 1 ~ ~ „ з
rb 2S2r~
X /
Для абсолютно гибкой ленты EI — 0, тогда
^S2e»a
Qmin ” . ’ Ящах ~ ,
rb rb
Необходимо отмстить, что удельные давления qx - не остаются постоян-
ными по длине ленты, поскольку сила натяжения Рх в разных точках ленты
различная.
Под коэффициентом неуравновешенности тормоза понимается отношение
радиального усилия на ось барабана к тормозному усилию на окружности
барабана:
Эффективность действия тормоза определяется тормозными моментами при
прямом и обратном вращении вала. Плавающий ленточный тормоз с двух-
сторонним серводействием имеет одинаковую эффективность действия тор-
моза независимо от направления вращения барабана. Тормозной момент пла-
вающего ленточного тормоза при условии, что S2 ~ Fl / d равен:
Frl
МТ= — {е^а -1) , (3.38)
а
где - / и d плечи рычага.
Затяжка ленточного тормоза, применяемого для затормаживания диностар-
тсра главного механизма штангоуловитсля троллейбуса, производится яко-
рем электромагнита.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
307
Глава 5. Расчет пневматического
привода троллейбуса.
5.1. Функции пневматического привода.
Пневматический привод троллейбуса представляет собой систему взаимо-
связанных пневмоустройств, которые служат для получения сжатого воздуха
и использования его для приведения в действие тормозных механизмов, от-
крывания и закрывания дверей и пневматической подвески. Пневматическим
устройством (пневмеаппаратом) называют устройство, в котором в качестве
рабочего тела используют сжатый воздух. Физические свойства воздуха про-
являются в виде давления на поверхность твердых звеньев устройства ( пор-
шень, мембрана и др.). В зависимости от характера взаимодействия подвиж-
ного твердого звена с воздухом различают три вида устройств: приводное,
компрессионное и комбинированное. Приводным называют пневмоустройство,
в котором энергия потока сжатого воздуха преобразуется в энергию движе-
ния твердого звена - поршня или мембраны. Компрессионным называют пнев-
моустройство, в котором механическая энергия твердого звена преобразуется
в энергию сжатого воздуха (компрессор). Комбинированным называют уст-
ройство, в котором осуществляется двойное преобразование энергии (пнев-
моаккумулятор).
Пневматические устройства как составные элементы привода по функцио-
нальному назначению делятся на следующие группы; исполнительные, рас-
пределительные и управляющие. Исполнительные устройства предназначены
для преобразования энергии сжатого воздуха в энергию движения приводных
устройств, узлов и агрегатов троллейбусов. Распределительные устройства
служат для изменения потоков сжатого воздуха в линиях, соединяющих уст-
ройства в приводе. Управляющие устройства предназначены для обеспечения
заданной последовательности перемещения^исполнительных устройств в со-
ответствии с требуемым законом их движения.
Пневматические устройства (пневмоаппараты), используемые на современ-
ных троллейбусах, объединены в три системы: питающая часть пневмосис-
тсмы, пневматический привод тормозной системы и пневматический привод
для обслуживания нетормозных устройств.
308
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
5.2. Сжатый воздух и его загрязнители.
В пневматических системах транспортных средств в качестве рабочего тела
используется атмосферный воздух, который представляет собой газовую смесь,
состоящую из 21% кислорода, 78% азота и 1% инертных газов, аммиака, озо-
на, углекислого газа и др. компонентов, В воздухе всегда имеются вода (в виде
водяного пара), твердые частицы и жидкие включения, которые для пневмо-
нроивода являются загрязнителями.
Вода относится к числу наиболее вредных загрязнителей сжатого воздуха
пневмосистем. Она ускоряет коррозию внутренних поверхностей трубопро-
водов, ресиверов и пневматических аппаратов, смывает смазку с трущихся по-
верхностей пневмоаппаратов ухудшая условия их работы. Однако, самым опас-
ным является замерзание влаги в приводе при отрицательных температурах.
Образующийся при этом лед или снег (иней) может обусловить потерю рабо-
тоспособности пневматического привода. Применение в последнее время на
троллейбусах стояночных тормозных систем с пружинными энергоаккумуля-
торами, ростормаживание которых осуществляется сжатым воздухом, а так-
же пневматического привода управления дверями, обострило проблему, так
как в этом случае замерзание влаги приводит не только к отказу тормозного
привода, но и к невозможности движения троллейбуса.
Постоянно содержащиеся в атмосферном воздухе твердые частицы пред-
ставляют собой главным образом пыль, образующуюся в результате промыш-
ленной деятельности человека. Их размер обычно - от 0.01 до 200 мкм, кон-
центрация в атмосферном воздухе - от 0.5 до 10 мг/м3. Источником твердых
загрязнений сжатого воздуха являются также продукты износа деталей комп-
рессора. Попадая на поверхности трения пневмоаппаратов, твердые частицы
способствуют их износу и снижают долговечность, При попадании в клапаны
и другие уплотняющие элементы аппаратов частицы препятствуют их герме-
тичности, что может привести к отказу.
В сжатом воздухе, поступающем от компрессора, всегда присутствует смазоч-
ное масло в форме масляных и мелкодисперсных частиц. Кроме того, вследствие
высокой температуры в цилиндре компрессора оно испаряется и частично тер-
мически разлагается. Часть его, попавшего в привод, выбрасывается в атмосфе-
ру с отработанным воздухом, а оставшаяся смешивается с имеющейся в приводе
водой и образует водомасленую эмульсию, которую обычно называют конден-
сатом. Конденсат в приводе скапливается в ресиверах и периодически сливается
наружу. Масло, находящееся в пневмоприводе, оказывает вредное влияние на
некоторые материалы, из которых изготавливаются детали пневмоаппаратов (в
частности на резину) и тем самым снижает их долговечность.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 309
На сжатый воздух, предназначенный для питания пневматических устройств
и систем, работающих при давлении до 2.5 МПа (ГОСТ 17433-80), устанавлива-
ется 14 классов загрязненности по составу и содержанию посторонних приме-
сей. Условное обозначение сжатого воздуха 10-го класса загрязненности для при-
вода дверей троллейбуса имеет следующий вид : воздух кл. 10 ГОСТ-17433-80,
5.3. Термодинамические процессы в
компрессорной машине.
Рассмотрим термодинамические процессы происходящие в идеальном ком-
прессоре. Компрессор считается идеальным, если в нем отсутствует мертвый
объем, т.е. в цилиндре компрессора в конце рабочего хода поршня не остается
воздух, а также равно нулю пневматическое сопротивление всасывающих кла-
панов, всасывающего трубопровода, нагнетательного клапана и нагнетатель-
ного трубопровода. На рис. 3,38 приведена теоретическая диаграмма работы
такого компрессора в координатах р — V.
Работа И7, затрачиваемая в компрессорном процессе на сжатие и выталки-
вание газа выражается площадью/? — V ди-
аграммы, ограниченной изобарами, соот-
ветствующими начальному р0 и конечно-
му pj давлениям воздуха, кривой процес-
са сжатия и осью ординат.
Суммарная работа за цикл:
ес ' сж выт>
где We - работа всасывания (эквивален-
тная площади фигуры а -1- 4 - 0); -
работа сжатия (эквивалентная площади фи-
гуры а - 1 - 2 - б); - работа выталки-
вания (эквивалентная площади фигуры б-
Рис. 3.38. Теоретический цикл
поршневого компрессора.
2-3-0).
Работу, совершаемую поршнем при сжа-
тии воздуха, будем считать положительной, а при расширении - отрицатель-
ной. Тогда работа, затрачиваемая на сжатие и выталкивание 1кг газа равна:
~ РоУо> ^выт ' Р1Н ’
где И - удельные объемы воздуха в начале и в конце сжатия; р0,р\~ его
давление.
Работа №сж зависит от закона сжатия. Поэтому в общем случае
W “ ^сж + Р1И ~ PoVo
C-tZrt. J 1 1 -* О С? .
310 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Для определения суммарной работы должен быть известен характер про-
цесса сжатия. Рассмотрим теоретические основы процессов, протекающих в
одноступенчатом компрессоре при изотермическом, адиабатическом и полит-
ропическом сжатии воздуха.
Для изотермического процесса в компрессоре р v = ро vo = P\V\- Тогда
l-’l V'!
WU3 = - J Pdv + Plvl - Povo = - J Pdv .
v0 v0
Так как p~ povo/v, получим;
WU3 = P<,v„ln(pil Po)= p„volne,
где г ~ степень сжатия:
£•
Ро
При адиабатическом сжатии газа
pvx = povx , откуда р = povx /Vх .
Следовательно:
Wa = -Povo\v Xdv+ P\V\- Povo ,
v<>
где / - показатель адиабаты.
После интегрирования и алгебраического преобразования получим:
Wa
При политропном сжатии газа
pv п= const
Как известно, это уравнение при показателе политропы п = const
справедливо как для совершенного так и для реального газа. Полную
суммарную работу, необходимую для сжатия 1 кг воздуха, определяют по
аналогии с адиабатическим процессом по формуле:
( п~\ \
И и'
W„ =—тР^о е -1
П-1
Раздел 3. КОНСТРУИРОВАНИЕИРАСХЩТТРОЛЛЕЙБУСА
311
При п < % политропическое сжатие протекает с отводом теплоты, при
п <Х — с подводом теплоты. Теплота отведенная (подведенная) в процессе
политропического сжатия:
п — У
п -1
где cv - удельная теплоемкость воздуха при постоянном объеме; Ту. Т2~
термодинамическая температура воздуха в начале и конце процесса сжатия.
Из всех возможных типов компрессорных процессов наименьших затрат энер-
гии требует изотермический процесс (п = 7). Максимальная работа сжатия в ком-
прессоре имеет место при адиабатическом процессе. В связи с этим следует стре-
миться к осуществлению изотермического процесса сжатия воздуха, что требует
охлаждения компрессора. Однако, при воздушном или водяном охлаждении ком-
прессора отводится не вся выделяющаяся при сжатии воздуха теплота, процесс
сжатия в реальных компрессорах всегда идет по политропе. В зависимости от
эффективности охлаждения показатель политропы обычно находится в преде-
лахи = 1,2 ... 1,3. Путем сравнения с идеальным изотермическим процессом сжа-
тия производится оценка эффективности работы компрессора.
5.4. Расчет поршневого компрессора.
Основные характеристики, которые необходимо определить при расчете
компрессора, - подача, максимально допустимая частота вращения вала, па-
раметры конструкции и рабочего процесса, суммарный объем ресиверов и их
количество, номинальное давление в ресивере и потребляемая мощность.
Подача идеального компрессора
2 = Ул=0,25тгОХч ,
где Vo - рабочий объем компрессора; пк - частота вращения вала компрес-
сора; D - диаметр поршня; S - ход поршня; 7,ц - число цилиндров.
Компрессор нагнетает воздух в пневматическую емкость (ресивер). Измене-
ние массы воздуха в ресивере за время dt равно, с одной стороны, разности
массы воздуха, вытекающего из ресивера, и, с другой стороны, произведению
вместимости ресивера и приращения плотности воздуха. Справедливо
(Q-Qp)pmdt = VPdpp , (3.39)
где Q - объемная подача воздуха в ресивер: Qp - объемный расход воздуха
из ресивера; рв}1 - плотность воздуха на впуске; Vp~ вместимость ресивера;
рр- плотность воздуха в ресивере.
При условии постоянства температуры воздуха в ресивере из уравнения со-
стояния воздуха найдем:
312
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
dp „
dp (3.40)
1 RTp
где рр р - соответственно давление и термодинамическая температура
воздуха в ресивере: R - газовая постоянная.
После подстановки выражения (3.40) в уравнение (3.39) и последующего
преобразования получим:
-r =—(Q-Qp)pM .(3.41)
at Vp
Изменение давления в рееивере во времени, согласно уравнению (3.41) зави-
сит от многих факторов, которые в свою очередь также могут меняться. Вме-
стимость ресивера может быть постоянной или переменной. Причем измене-
ние её может производиться автоматически с помощью пружинного клапана
или выключения части емкостей, входящих в ресивер. У троллейбусов вмести-
мость ресиверов постоянная.
Температура воздуха в ресивере зависит от температуры поступающего воз-
духа и окружающей среды, вместимости ресивера и интенсивности его охлаж-
дения, продолжительности накопления воздуха в ресивере, определяемой со-
отношением между притоком и оттоком воздуха из ресивера и др. При дли-
тельной работе компрессора и пневматической системы температура воздуха
ресивера и окружающей среды практически одна и та же.
Объемная подача воздуха в ресивер определяется по формуле:
Q = KQVBnK,(3.42)
где Kq - коэффициент подачи.
Рабочий объем компрессора:
ТЛ с
V0=—Sz4,(3.43)
Коэффициент подачи, представляющий собой отношение действительной
подачи воздуха в ресивер к теоретической, вычисленной по рабочему объему
компрессора и частоте вращения его вала:
Q V п
v ок
Суммарный объём воздуха из ресивера складывается из подач его потреби-
телям и утечки из системы. Если все потребители работают одновременно,
суммарный расход воздуха составляет:
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
313
Крвп /=1 ’ ni
где п - количество одновременно работающих потребителей; nni - частота
рабочих операций z-ro потребителя; рпц, Pn2i - соответственно начальное и
конечное установившееся давление воздуха; Tni - термодинамическая темпе-
ратура воздуха у /-го потребителя; tm - продолжительность одной рабочей
операции потребителя; Vn-~ рабочий объем /-го потребителя.
Расход воздуха в следствии утечек из систем (без учета зависимости утечек
от давления) равен:
р ,
q - PjPL
RPmty^p
где Pp.Hi Р р'К - начальное и конечное давление воздуха в ресивере; ty- пе-
риод времени, в течении которого происходили утечки воздуха.
Утечки воздуха из пнсвмосистем зависят от конструктивных, технологичес-
ких и эксплуатационных особенностей и технического состояния потребляю-
щих устройств и соединительных воздухопроводов.
Компрессор троллейбуса кинематически через двухступенчатый редуктор
связан с электродвигателем. При нормальной работе привода компрессора от
электродвигателя угловое ускорение вала компрессоре! равно:
doc М. - М г
----=ик ----------- •
dt Jnp
где Ок - угловая скорость вращения вала компрессора; ик - передаточное
отношение привода компрессора ик = пк / пд ; пд - частота вращения элект-
родвигателя; Мд - крутящийся момент на валу электродвигателя; Мс - мо-
мент сопротивления вращению вала, приведенный к электродвигателю; Jпр
- приведенный момент инерции вала двигателя.
Расчетная максимальная угловая скорость вращения вала компрессора на-
ходится из условия равенства силы давления воздуха на поршень Fn и силы
инерции Flf возвратно-поступательно движущихся масс шатунно-поршневой
группы в начале хода поршня:
где приведенная к оси поршневого пальца масса деталей шатунно-
поршневой группы, совершающих возвратно-поступательное движение; /у.-
радиус кривошипа; Х = гк/£ш'-> ш ~ длина шатуна.
Массу деталей шатунно-поршневой группы и радиус кривошипа можно
выразить с помощью следующих зависимостей:
314
Раздел 3. КОНСТРУИРОВАНИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
тш =7iD2 /44 пор ; (3.45)
rK = yD/2 = S/2 , (3.46)
где qno - удельная масса деталей поршневой группы; у/ — S / D .
Величина qnop - это отношение приведенной массы прямолинейно движущих-
ся деталей кривошипно-шатунного механизма тп ш к площади поршня Ап
4 пор ~ тп ш / Ап . (3.47)
Подставив в формулу (3.44) выражения (3.45), (3.46), (3.47), и принимая во
внимание, что Ок = 2тг пк , получим:
FM max = 0.5(тгО)3 (1 +
Сила давления воздуха на поршень равна:
F,=nD2/4Pp .
Из условия F1( тах = Fn найдем:
! Рр
/7 — --- ----I—------ .
‘‘'к.max - л э ... „.
рл: Dy/(1-A)q„op
Диаметр цилиндра компрессора вычисляется исходя из формул (4.42), (4.43):
D = ^4Q/(,mpz4KQnK).
При известном D полный ход поршня и длина шатуна равны:
5=1/0; 1Ш = 0,51/0/Л.
Суммарная вместимость ресиверов с учетом условий эксплуатации комп-
рессора определяется по формуле:
V = Vn (1 - Vn ) - 1 - —— — рвп
fj Н К fl z А гтз •* Сэп
Прег ^Рр Твп
где Vn - относительная продолжительность подачи воздуха; прег - частота
циклов нагружения компрессора; А рр - диапазон регулирования давления
воздуха в ресивере; Твп - температура воздуха на впуске в компрессор.
Относительная продолжительность подачи воздуха характеризует напря-
женность работы компрессора:
Ч, =1,Лрег =4/e,1 +Ы>).
где tn - продолжительность подачи воздуха в ресивер (продолжительность
работы компрессора под нагрузкой); tрег - длительность цикла рсгулирова-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 315
ния давления в ресивере; tn п - продолжительность перерывов подали (выпус-
ка воздуха из компрессора в атмосферу).
Длительность периодов tn и tn п определяется расходом воздуха при тор-
можении транспортного средства и наличии утечек в системе. С увеличением
расхода воздуха уменьшается п и, соответственно, длительность цикла ре-
гулирования t })ег что приводит к более напряженному режиму работы комп-
рессора, повышенному его нагреву и снижению подачи. На диаграмме нагру-
жения компрессора (рис.3.39), рг - давление воздуха в нагнетательном тру-
бопроводе, Рр - давление воздуха в ресивере.
Вместимость и количество рабочих ресиверов следует выбирать исходя из но-
минального давления воздуха в них, принципа взаимозаменяемости и необходи-
мой суммарной их вместимости. Ресиверы пневматической системы транспорт-
ных средств относятся к емкос-
тям не выше 25 л, для которых p„iax
произведение номинальной вме- рт ,п
стимости VHOU (в литрах) на ра-
бочее давление (в мегапаскалях)
составляет нс более 20. В неко-
торых случаях применяют реси-
веры емкостью 40 л.
Количество рабочих ресиве-
ров определяется по формуле:
П — V /V
р ¥ р 1 v но.м
В практических расчетах мо-
гут встретиться два случая: оп-
ределение мощности электро-
Рис. 3.39. Диаграмма нагружения компрессора.
двигателя необходимого для привода выбираемого компрессора, и определе-
ние мощности потребляемой эксплуатируемым компрессором.
Теоретическая мощность потребляемая компрессором при любом процессе:
Р =. W п
1 т н vortк >
где ж - работа сжатия 1м3 газа за цикл.
Мощность потребляемая компрессором при изотермическом процессе:
R = иу,_Упи.. /п
где Т[из - полный изотермический КПД; Т]из ~Pill3 = 0,55...0,75; T}iu3-
индикаторный изотермический КПД; Т/1;еА. - механический КПД компрессора:
71_иех=0,8. .0,95.
При адиабатическом процессе:
~ ^ад^о^к ’
316 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
где Т\ад полный адиабатический КПД; Т]ад ~Т]1 адТ]Л1ех ~ 0,7...0,85;
7]iad - индикаторный адиабатический КПД.
Потребляемую мощность электродвигателя для привода компрессора оп-
ределяют по формуле:
где к~ коэффициент запаса мощности; 1,1... 1,2; Т}п- КПД передачи.
Если компрессор находится в работе, потребляемую им мощность можно
определить, сняв индикаторную диаграмму. Для одноступенчатого компрес-
сора индикаторная мощность:
Р, = PtAnSnK ,
где pi - среднее индикаторное давление.
5.5. Расчет пневматических клапанов.
Клапанная система является важнейшим элементом пневмоаппарата. К ней
предъявляются следующие требования:
- высокая герметичность - утечка сжатого воздуха через закрытый клапан
недопустима;
- достаточное проходное сечение. Одним из основных требований является
его быстродействие и креме того, клапанная система при открывании должна
обеспечивать скорейший проход нужного количества сжатого воздуха;
- малую начальную нечувствительность. Уровень входного сигнала, обеспе-
чивающего открытие или закрытие клапана, должен быть как можно меньше.
На рис.3.40а показана расчетная схема простого одинарного клапана, вы-
полняющего только одну функцию - впуск сжатого воздуха. Под воздействи-
ем пружины 5 и давления воздуха р( снизу клапан 1 прижимается к седлу 2,
Рис. 3.40. Простой одинарный клапан: а- кон-
структивная схема; б- зависимость усилия
на толкателе от хода.
вслсдствии чего проход сжато-
го воздуха от входа I к входу II
перекрыт. Пружина 4 обеспечи-
вает удержанистолкателя 3 на
некотором удалении от клапана
1, чтобы толкатель не нарушал
герметичность соединения кла-
пана с седлом. При этом усилие
прижатия клапана к седлу:
Рпр = 0,25/?|тЙ|2 + Fnp} ,
где FnfA - усилие пружины
клапана.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
317
Для открытия клапана 1 толкатель 3 должен переместиться вниз и преодо-
леть усилие прижатия клапана к седлу. Вследствие отрыва клапана от седла
открывается проход сжатого воздуха от входа к выходу и на выходе устанав-
ливается тоже давление рг При этом усилие на толкателе открывающее кла-
пан и определяющее начальную нечувствительность должно быть:
г,„ = + Fnp2 = 0,25 р^ + Fnpl + F„p2 t
где F 2 ~ усилие пружины толкателя.
Зависимость усилия на толкателе от его хода при открывании приведена на
рис.3.40 б. Как только клапан откроется требуется усилие:
= 0,25Plnd2o+F„p{ + Fnp2 ,
Для закрывания клапана тол-
катель необходимо переместить
вверх. Т.к. в любом движущимся
механизме имеется трение, то за-
висимость усилия от хода при
закрывании клапана (рис. 3.406)
изображенная штриховыми ли-
ниями, лежит ниже, чем при от-
крывании.
Для уменьшения начальной
нечувствительности при сохране-
нии больших проходных сечений
используют клапанную систему
Рис. 3.41. Разгрунсеный одинарный клапан двой-
ного действия: а- конструктивная схема; б- за-
висимость усилия на толкателе от хода.
с разгруженными клапанами. Разгруженная клапанная система показана на рис.
3.41а. Здесь на впускной клапан действует усилие:
= npd.d2 ~d2') + Fnpi ,
где d-2 - диаметр направляющей клапана 5, выходящей в атмосферу.
Работает разгруженная клапанная система так же, как и неразгруженная,
только выпуск в атмосферу производится через отверстие в клапанах. Усилие
на толкателе 4, необходимое для открывания впускного клапана 1:
F„ = 0,25т?»] (d2 - d2) + F„pi + F„p2 ,
а для удержания клапана в открытом состоянии:
F„, = 0,25т??, (df -d2) + F„p} + Fnp2 .
Приведенная на рис. 3.416 зависимость усилия на толкателе от его хода при
открывании обусловлено существенным снижением нечувствительности сис-
темы с разгруженными клапанами.
318
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
5.6. Статический расчет пневмоаппаратов
тормозного привода.
Оценка работы следящего пневмоаппарата в статике производится по ста-
тической характеристике, устанавливающей зависимость давления воздуха в
выходной магистрали от приводной силы (хода тормозной педали) как при
торможении так и при расторможивании. В практике использущтся два вида
статического расчета: проектный и проверочный.
При проектном расчете задаются рабочие характеристики пневмоаппарата,
т.е. входными сигналами поступающими на аппарат и действующими вход-
ными величинами (давление, сила, перемещение). Требуется определить ос-
новные конструктивные параметры проектируемого аппарата, обеспечиваю-
щие заданные рабочие характеристики. Могут также задаваться дополнитель-
ные условия и ограничения, например, максимальная сила и перемещение тор-
мозной педали, допустимая зона нечувствительности аппарата.
Рис. 3.42. Р счетная схема секции тормозного
крана.
Проверочный расчет произво-
дится тогда, когда известна конст-
рукция и параметры аппарата и
требуется определить его характе-
ристики. В этом случае составля-
ются уравнения равновесия сил,
действующих на подвижные силы
аппарата и по этим уравнениям
рассчитывается статическая ха-
рактеристика, которой отобража-
ются установившиеся процессы в
аппарате или системе. Она пред-
ставляет собой зависимость вы-
ходной величины от входной.
При проектном расчете тормозного крана выбирается его расчетная схема
(рис.3.42) и рассчитываются конструктивные параметры, обуславливающие
статические характеристики: диаметр следящего поршня или диаметр D, жес-
ткость с и предварительный натяг F30 следящей пружины 3, передаточное
отношение педального привода и, максимальное укорочение х/пах следящей
пружины 3. При этом должно быть задано: максимальное перемещение педа-
ли Slfmx максимальное усилие Fmax, прилагаемое к педали; зазр h0 между
клапаном 1 и штоком; перемещение h клапана; максимальное давление возду-
ха в ресивере ррес и максимальное давление воздуха на выходе тормозного
крана pfnax (обычно ррес ~ ртак }, зона нечувствительности тормозного кра-
Раздел 3. КОНСТР У ИРОВ А НИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
319
на. Пропускная способность тормозного крана (площадь проходных сечений,
диаметр клапана) определяется динамическим расчетом.
Расчет следует вести по участкам характеристики (рис.3.43). Линия оа соот-
ветствует перемещению педали и следящего поршня от начального положения
до положения, при котором давление клапана 1 на седло корпуса (см.
рис.3.42.) уменьшается и, следова-
тельно, начнет расти избыточное
давление воздуха в рабочей полости
В. Этот участок представляет собой
начальную зону нечувствительности
пневмоаппарата. Здесь и в дальней-
шем при статических расчетах пнев-
моаппаратов под давлением возду-
ха понимается избыточное его дав-
ление, что упрощает расчет.
Линия ab изображает нарастание
давления рв в плоскости В при
дальнейшем перемещении тормоз-
ной педали от положения Sa до
положения Sb . Линия Ьс соответ-
ствует обратному движению (от-
пусканию педали), при котором нс
происходит падение давления в по-
лости В, что обуславливает зону нечувствительности крана. Линия cd соот-
ветствует обратному ходу педали от положения начала падения давления
рв до положения педали Sd в котором давление рв равно нулю.
Перемещение тормозной педали Sn (см. рис. 3.42) затрачивается на выбор
зазора h() между штоком и клапаном 1, перемещение h клапана 1 и деформа-
цию х следящей пружины 3, т.е.
(x + h + ho)u = Sn , (3.48)
где u - передаточное отношение педали, равное w = b/сг, а,Ь- плечи рычагов
педали.
Баланс сил, действующих на поршень 2:
nD2
-—pB + R = F„u , (3.49)
где р3 - давления в полости В крана; R - сила сопротивления перемещению
поршня 2 клапана 1; У7 - усилие, приложенное к педали.
В общем случае:
R — Ro + Aj + ,
Рис. 3.43. Примерная статическая харак-
теристика тормозного крана.
320 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
где Ro - сила сопротивления перемещению поршня 2; /х) - сила сопротив-
ления перемещению клапана 1; R2 - сила сопротивления перемещению порш-
ня 2, возникающая в следствии прижатия резинового уплотнения к стенке ци-
линдра (у диаграммы сила трения R2 отсутствует).
Когда давление в полости В отсутствует, то сила Ro обуславливается сила-
ми сухого трения Rmp и силой Rnp возвратной пружины, т.е. Ro — Rmp + Rnp.
Таким образом, сила сопротивления перемещения поршня и клапана в об-
щем случае:
R = + [(Л - Рв )рт1х1х +7t(dl -d(y (Ре - Рв)/4] + pnDl2Pe ,(3.50)
где р6 - давление в полости Б; Рб Рр Рmax й~~ коэффициент трения
резинового уплотнителя о стенку цилиндра; /А =0.008; I 12~ ширина контакта
между уплотнителем и стенкой соответственно для клапана 1 и поршня 2;
- наружный диаметр седла корпуса, в который упирается клапан.
Ширина седла корпуса и диаметр d\ выбирается таким образом, чтобы дав-
лением р5 обеспечивалось надежное прижатие клапана 1 к седлу корпуса. Дав-
ление в контакте клапана с седлом корпуса должно быть равным (1,25...1,30)
рб при рв - 0. Выражением в квадратных скобках формулы (3.50) описыва-
ются силы сопротивления перемещению клапана, обусловленные силой тре-
ния уплотнения клапана о стенку цилиндра (первый член) и силой, возникаю-
щей от давления (/?- — /?ff)Ha площадь [tt(J2 — б/2)/4] . Сила сопротивле-
ния перемещению клапана при отсутствии избыточных давлений воздуха во
всех полостях здесь нс учитывается из-за се малости.
При практических расчетах часто пренебрегают силой Aj сопротивления
перемещения канала. Тогда выражение (3.50) будет иметь вид:
R = Ro + «2 = + ^Di1Pe. (3.51)
На основании формул (3.48), (3.49) и (3.51) перемещение педали S и при-
ложенная к педали сила F для крайних точек а, Ь, с, d рассмотренных четы-
рех участков (рис. 3.43):
Sa = hou 4. Fa = Ro / и - для точки я; (3.52)
~ $/пах ~ OF + Fyiax + ^тах )^">
Fh = Рта.< = + ^D(Pl2 + D/4)/рв} /и •для точки Ь’
Sc — (h0 + хтах)и,
Fc=[nD(DU-Pl2)Pti-R0Vu л™тонкие; Л.54;
“°, Fd ~(^ар ~RmpVu -для точки 4; (3.55)
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 321
где хтах - максимальная деформация следящей пружины 3; hinax - макси-
мальное перемещение клапана. ho ; hmax- обычно принимают 2.5...4 мм; Rnp
- сила трения поршня о стенки корпуса при отсутствии давления в полости В.
Зона нечувствительности по усилию на участке Ьс\
AF3~Fh-Fc = 2(R0-R7iDl2pj/u .(3.56)
Формулы (3.48)... (3.56) могут использоваться как в проектном расчете так
и в проверочных расчетах. В проектном расчете диаметры d2 и d3 и переме-
щения hmax и h0 выбираются заранее исходя из необходимой пропускной спо-
собности тормозного крана. Диаметр D следящего поршня 2 задается на ос-
нове существующих аналогов или конструктивных соображений, базирующих-
ся на стремлении получить наименьшие размеры тормозного крана.
Предварительное натяжение F3q ~ Rq — Rnp + Rmp. Максимальная сила
пружины Fmax = P3Q + сх/пах находится из условия, что рв = qpmax подвиж-
ный стакан 4 (см. рис.3.42) упирается в поршень 2. Коэффициент q обычно
принимается 0.7...0.85.
jdD
Г3„,„Л = Ко + схтах = Ло + PltDl2qPlnax + ,
ч
Откуда
г = пРдртах(р1г+Р14) (357)
Хулах
С
Подставляя найденное выражение для хтах в уравнение (3.53) и исключая
из них передаточные отношения и после преобразований получаем уравнение
вида:
с - + ^/4)[ УкРр1иах(р12 +0/4)] ^2.58)
$max Ртах -(Ло + ^тах )[/?0 +xDp
max (///> + D/4)] '
По выражению (3.58) определяется жесткость с пружины 3 при известных
параметрах, входящих в правую часть выражения. Далее по формуле (3.57)
рассчитывается и Хтах , а затем по одному из уравнений (3.53) находится пере-
даточное отношение педального привода. В дальнейшем по уравнениям
(3.52) ... (3.55) строится расчетная статическая характеристика проектируемо-
го крана (рис. 3.43). При необходимости делается уточнение и корректировка
некоторых конструктивных параметров проектируемого тормозного крана.
Если тормозной кран двухсекционный с одинаковыми параллельно располо-
женными секциями, во всех уравнениях вместо Fmctx принимается 0.5 Ffnax .
322
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
5.7. Динамический расчет пневмопривода.
Расчет динамики пневмопривода вследствие сложности переходных процес-
сов, происходящих при течении воздуха через устройства реальных пневмопри-
водов, связан с большими трудностями. В связи с этим на практике при составле-
нии математической модели расчета пневматических цепей прибегают к различ-
ным упрощениям и допущениям, не уменьшая точности результатов. Различные
промежуточные устройства и аппараты пневмопривода при динамическом рас-
чете заменяются идеализированными элементами цепи, приближенно отражаю-
щими переходные процессы в реальных устройствах. В ряде случаев даже слож-
ные пневмоаппараты, представляющие собой совокупность клапанов к каналов,
в расчетной схеме заменяются эквивалентными сосредоточенными сопротивле-
ниями (дросселями). В результате можно создать достаточно простые математи-
ческие модели, что облегчает исследование и проектирование пневмоприводов.
Простейшую одноконтурную пневматическую цепь можно представить в виде
дросселя (Д) и одной подключенной к дросселю емкости. Емкостью Е называют
элемент пневматической цепи., в котором накапливается сжатый воздух. Массо-
вый расход воздуха через местное сопротивление (дроссель):
dm л Ро / \
---= uAv -^-ю(сг),
dt ‘ RT
где А - площадь поперечного сечения канала дросселя; Д - коэффициент рас-
хода; v — у/kRT - критическая скорость; R - газовая постоянная; Т - абсо-
лютная температура воздуха перед дросселем; к - показатель адиабаты; -
давление в резервуаре перед дросселем; ф(сг)- функция расхода; <у - безраз-
мерное давление равное <Т ~ Ру!р<у, Р\ “-давление в полости за дросселем.
Функция расхода ф(сг) представляет собой закон изменения массового рас-
хода воздуха через пнсвмосопротивленис в зависимости от изменения безраз-
мерного давления ст . Для расчетов как простейших так и сложных многокон-
турных пневмоприводов автомобилей и тракторов используется гиперболи-
ческая функция расхода:
, . „ 1 —<т
С -----,
В
где С - ~ -- - B(pivcl^o) .
D — 1
Постоянные С и В означают сдвиг горизонтальной и вертикальной асимп-
тот гиперболы, а величина h характеризует форму гиперболы.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 323
Дифференциальные уравнения переходного процесса ДЕ - звена с постоян-
ной емкостью (dv / dt = 0) с учетом гиперболической функции расхода
Ф1 Ро - Р1
для наполнения - L n ’ ’
at V Вр0 - pj
для опоражнивания -
Р1~ Ро
dt V Вр{ - pQ
Переходный процесс пневмоцепи с переменным объемом исполнительного
органа описывается нелинейными дифференциальными уравнениями:
Ч> + А, у Ф1 , Д „ dy_ = ,,Д„ „ г До - PL-
наполнение- к d~+ nPi dt ^рР<>С BpQ_pi'
V0+Anydp} . dy ^P\~Po
опоражнивания--------------1 + Anp{ — ~ -ptAv p{C——— u- ,
к dt dt Bpx - p0
где Vo - начальный объем цилиндра; у - перемещение поршня.
Для расчета разветвленных пневмоцепей используется закон узлов, кото-
рый формулируется так: алгебраическая сумма мгновенных массовых расхо-
дов воздуха в узле равна нулю, т.е.:
= 0 •
Массовый расход dm /dt будет считаться положительным по отношению к
данном узлу, если движение потока направлено с узлу, и отрицательным, если
оно направлено от узла.
Для определения узлов важно иметь ввиду, что все они отделяются друг от
друга элементами (сопротивление, инерционность), создающими в переход-
ном режиме разные перепады давлений. Узлы бывают емкостные и безъемко-
стные. В емкостных узлах, в отличии от безъемкостных, к сумме расходов че-
рез подключенные к узлу ветви добавляется расход на емкость, подключен-
ную к узлу. В пневматических цепях все узлы являются емкостными, так как
место соединения ветвей обычно содержит в себе емкость.
Математические модели различных элементов пневмоцепей, приведенных
на рис. 3.44, составляются по методу узлов. Пропускная способность дроссе-
ля, заменяющем трубопровод, обозначена на схемах р = (Д/Д). Уравнение
расходов для проточного звена составляют лишь для одного узла, в котором
(dm / dt) - представляет собой массовый расход воздуха через первое
пневмосопретивление; (dm / dt) , - через второе пневмосопротивленис;
324
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Проточный
элемент
пневмоцепи
Элемент пневмо-
цепи с последо-
вательно соеди-
ненными посто-
янными емкостями
Разветвлен-
ная пневмо-
цепь с посто-
янными емкос-
тями
Разветвлённая
пневмоцепь с
переменной ем-
костью
и,
Pi
Pi Р2
Рис. 3.44. Расчетные схемы элементов пневмоцепей.
(dm / dt) Е~ расход воздуха в емкости Е, подключенную непосредственно к
узлу с объемом V. Уравнение расходов для проточного узла:
т\~т2~ тЕ -0. ('3.59)
На основании уравнений (3.59) составлены уравнения газодинамических
функций для проточного звена:
л А) (А л Р\ {Pl {Рз п
Н iKpRT\pQ) 2KpRT kRT\Pi]
При последовательном соединении двух ДЕ-звеньев с постоянными емкос-
тями выделяются два узла, представляющие емкости V) и У2, для которых
уравнения будут представлены в следующем виде:
- т2- тЕ1 = 0;
тг -тЕг =0.
Уравнения газодинамических функций для процесса наполнения можно
представить зависимостями:
. \ Pi ) л (Рг ) Г, (dp,
PlAlV KpP0<P — ~P2A2v.4,Pl<P\~ ' 1
И1 j
dP 2
к
Pl
<Po
। r°;
А РЗ
---
IM
= 0.
dt
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
325
Для разветвленного ДЕ-звеньев выделяются три узла, для которых состав-
ляются уравнения расходов:
~ т2 ~~ тз ~ mEY\ = 0 >
т2-тЕ2= °;
п (3.60)
т3 — тЕЗ — 0. 7
На основании полученных уравнений расходов (3.60) составлены уравне-
ния газодинамических функций для процесса наполнения:
Pl
МлкрРоЧ> — - Р}(р -
(Ро (Pi
И0)
(р )
-pAo^pPiV — -
J
(рЛ
P2A2vVPi<P - -
(о J
РзАР«pPi<P -
(Pi J
Уз
к
dt
= 0;
3^ =0;
dt
=0.
dt
К
ъ
к
При наличии в разветвленном соединении ДЕ-звеньев одного элемента зве-
на с переменной емкостью уравнения расходов для этой схемы составляются
аналогично, как и для выше рассмотренных звеньев:
т1 ” т2 ~ тз -Л1^-тЕуу = 0 ;
т2 — тЕ2 = 0;
тз - тЕз = °;
т4 ~ тЕЛ = °'
Уравнение газодинамический функций для процессов наполнения этого
разветвленного звена будет иметь вид:
Р1
Рг
Рз
^Р1 J
PlA^pPo?’ — -PAlVKpPl<P -P2AlVKpPl<P -
^Ро
1.Р1
-Рз^крРМ
(Р,
326
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Р*А^крР\У —-
Р\
к I dt
А Рз
РлАгУ р[(р
Pi
ЙЗА3^крР1<Р
£1
Pl
dV
~Рз ~17
at
= 0;
Пропускная способность дросселя представляет собой произведение ко-
эффициента расхода Д , зависящего от типа дросселя, размеров магистрали
на площадь проходного сечения А дросселя. Для тормозного крана принима-
ется, что коэффициент расхода постоянен, а площадь проходного сечения
впускного крана зависит от его открытия (хода) h, т.е. ,А;< = 7tdKh
( dK — диаметр седла клапана). Значение Л определяется законом перемещения
тормозной педали и параметрами механизма слежения крана, ограничивается
максимальным ходом клапана hmax:
0, при 0 < Xq < Ло
Х| х, при X }lQ,
где /?0 - зазор между штоком и впускным клапаном; Xj - перемещение што-
ка крана; х - деформация управляющей пружины.
Параметры xt и х вычисляются по выражениям:
0, при
при
Sn!u, при
0 < г < т0 ,
то < t < Tq + tmax
t > Tq + t;nax
0, при 1 — Рк — Рок ,
X = < PndAnICK при Рок < Рк — Рк
при
Рк > Рк >
x
max,
где t- текущее время; Tq - продолжительность выборки зазоров в механи-
ческом приводе; tmax - продолжительность перемещения педали на Sfl; pOj,
-зона нечувствительности крана определяемая предварительным поджатием
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 327
уравновешивающей пружины: ск - жесткость уравнивающей пружины; р'к ~
давление в полости крана, при котором прекращается его следящее действие;
Хтах ~ максимальная деформация уравновешивающей пружины ;
х,„м=(рк+ p'F„K-
Рассмотренные схемы пневмоцепей являются типовыми для пневматичес-
кой системы троллейбуса. Используя эти типовые схемы, можно составить рас-
четную схему и математическую модель для любого контура или ветви пнев-
матической системы троллейбуса и осуществлять динамический расчет тор-
мозного привода. Под динамическим расчетом понимается определение ха-
рактера изменений во времени давления воздуха в пневматических органах и
следящих аппаратах при резком перемещении тормозной педали. Получен-
ные зависимости называются динамическими характеристиками тормозного
привода и позволяют определять его быстродействие, синхронность работы
контуров и т.д. В следствии сложности переходных процессов в пневматичес-
ком тормозном приводе троллейбуса динамический расчет их проводится с
помощью ЭВМ.
5.8. Исполнительные устройства
пневматического привода.
Исполнительными органами пневматического привода троллейбуса служат
тормозные камеры и пневматические цилиндры. Существует общепринятый
ряд типоразмеров камер (9, 12, 16, 20, 24, 30, 36 квадратных дюймов), в основу
которого положены величины эффективной (активной) площади этих прибо-
ров. Эффективной площадью диафрагмы называют условную площадь, рав-
ную от деления внешнего рабочего усилия, развиваемого мембраной под дей-
ствием перепада давлений, на этот период:
А =Е .
зф Др
Эффективная площадь диафрагмы существенно зависит от перемещения х
ее центра от нулевого уровня, за которое принимается плоскость заделки. При
увеличении х эффективная площадь мембраны так же, как и развиваемое уси-
лие F, падает. Если нет упора и мембрана прогибается свободно, то развивае-
мое ею усилие F и эффективная площадь Аэф равны нулю. В данном случае
развиваемое мембраной усилие полностью компенсируется внутренними си-
лами, возникающими в материале мембраны.
Эффективная площадь эластичной диафрагмы, устанавливающей зависимость
последней от конструкторских размеров и прогиба вычисляется по формуле:
328
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
2
А
TiDy
12
.2 _ 2
max %
,(3.61)
о
1 + р + р
где р О, ;
тра диафрагмы; % - ход жесткого центра от плоскости заделки; х
мально возможный ход мембраны.
Максимальный ход мембраны хтах можно определить, если считать, что
образующая 1 диафрагмы, в некотором условном отклонении являются пря-
молинейной (см. рис. 3.45). Такое нахождение диафрагмы (как и прогиб хтах)
фиксированное. Если х = х0, то из уравнения (3.61) можно определить х:
Dj - диаметр заделки диафрагмы; D2 -диаметр жесткого цен-
- макси-
_ |(1" р2)(4 + 7 р + 4р2)
max ~ ^0
5(1 + р + р2)
Диафрагмы изготавливают формированными из резины с двумя-четырьмя
слоями кордной ткани для придания им необходимой прочности. Для опреде-
ления усилия, развиваемого диафрагмой тормозной камеры может быть ис-
пользована зависимость:
г л Р
= АэР =
2
э
1 + р + р
2 2
$ (% max %
В связи с тем, что тормозная камера оснащена возвратной пружиной диаф-
рагмы, усилие развиваемое штоком тормозной камеры равно:
~ АэР ZUi ,
где сп - жесткость возвратной пружины; zU{ - ход штока.
На рис. 3.46. представлена силовая характеристика безфъянцевой тормоз-
ной камеры. Как видно их характеристики, усилие на штоке FU! камеры умень-
шается при увеличении хода штока и увеличивается с повышением давле-
ния воздуха.
Для привода дверей троллейбуса используется пневмоцилиндр двухсторон-
него действия с постоянным двухсторонним торможением в конце хода. В
поршневом пневмоприводе одностороннего действия сила давления воздуха
при подаче его в поршневую полость (прямой ход штока), равна:
с _/ ,лГ>2 ^ш
Д Ру Рш.д . Рш.а . ’
4 4
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 329
где рц -давление воздуха, подаваемого в пневмоцилиндр; рш а - давление
воздуха вытесняемого из штоковой полости в атмосферу; D и d - диаметр
поршня и штока.
При подаче сжатого воздуха в штоковую полость (обратный ход штока) тео-
ретическая сила действующая на шток :
г _ ДО2 _
С (Ру Рп.аУ , Рц . ’
Ч- ч-
где рп а - давление воздуха, вытесняемо-
го из поршневой полости в атмосферу.
На рис. 3.47 представлена схема пнев-
моцилиндра с торможением. Поршень 1
снабжен цилиндрическим выступом (плун-
жером) 2 с обоих сторон, который в конце
хода поршня входит в камеру 3, запирая
тем самым некоторый объем воздуха. Ско-
рость дальнейшего движения поршня бу-
дет снижаться, поскольку запертый в по-
лости воздух будет сжиматься. Энергия,
поглощаемая демпфером определяется из
уравнения:
W = = FdSd ,
где А^ - площадь демпфирования;
Ад = tt(D2 - d^ - давление
воздуха в камере демпфирования; -
путь демпфирования; Fd - среднее по ходу
поршня усилие торможения.
Рис. 3.45. Схема отсчета макси-
мального прогиба мембраны.
Приняв за кинетическую энергию дви-
жущихся масс ш энергию, поглощаемую
демпфером, определим необходимое уси-
лие торможения :
F() = mv2/(2Sd) ,
где v - скорость поршня в начале тор-
можения.
Основным рабочим параметром пневмо-
цилиндра является номинальное давление
р диаметр цилиндра D, ход поршня S и
диаметр штока dlu. Номинальное давление
Рис. 3.46. Силовая характерис-
тика тормозной камеры.
Рис. 3.47. Схема пневмоцилинд-
ра с торможением.
330
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
воздуха определяется давлением, которое поддерживается в ресивере. Диаметр
цилиндра находится из условия обеспечения требуемого максимального усилия
Fmax на штоке гидроцилиндра
где к - коэффициент запаса по давлению, учитывающий потери давления в
трубопроводах к< 1,2; Т[м - механический КПД равный 0,9 - 0,95.
Ход поршня должен выбираться из условия обеспечения функционирова-
ния приводного механизма. При этом максимальный ход ограничивается для
предупреждения потери продольной устойчивости цилиндра S/D < 15, где 5
- ход поршня пневмоцилиндра.
Корпус пневмоцилиндра тонкостенный, т.е. RH /R <1,2 (Rt{ ,R - соответ-
ственно наружный и внутренний радиус стенки цилиндра). Требуемая толщи-
на стенки цилиндра:
X D
° = Р1{~г
где [ст]-допускаемое напряжение растяжения для материалов стенки, при-
нимается [ст] = 0,3 (У6 ((Ув - предел прочности материала).
Раздел 3. КОНСТРУИРОВАНИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
331
Глава 6. Рамы и кузова троллейбусов.
6.1. Назначение, классификация и требования
к конструкции
Кузов троллейбуса является несущей системой и предназначен для разме-
щения пассажиров и водителя, а также электрического и механического обо-
рудования. Кроме этого он обеспечивает комфортабельные условия для пас-
сажиров и водителя и защиту их при дорожно-транспортных происшествиях.
Кузов пассажирского троллейбуса состоит из рамы или усиленного основа-
ния, боковых и лобовых стенок, пола, крыши, внутреннего и наружного обору-
дования, дверей, окон, люков сидений, поручней и т.д. Основанием кузова слу-
жит рама, представляющая собой в ряде случаев самостоятельный конструктив-
ный элемент. В троллейбусах с несущим кузовом рама составляет с ним одно
целое, причем кузов воспринимает на себя все основные нагрузки. В таких трол-
лейбусах раму нельзя рассматривать как самостоятельную часть конструкции.
По роду применяемого материала кузова троллейбуса разделяются на два
типа: цельнометаллические и смешанной конструкции. Цельнометаллические
кузова имеют каркас, изготовленный из стальных профилей различной фор-
мы и сечения. При правильном решении вопросов конструкции и антикорро-
зийной защиты каркаса цельнометаллические кузова служат весьма длитель-
ное время. Кузова смешанной конструкции выполнены из металла и пласт-
массы. Использование различных типов пластмасс и стеклопластика позволя-
ет обеспечить дополнительный срок эксплуатации троллейбуса.
Общие требования к кузову:
- долговечность соответствующая сроку службы троллейбуса при мини-
мальном весе кузова;
- жесткость достаточная для того, чтобы ее деформации не нарушали усло-
вий работы агрегатов и механизмов троллейбуса и обеспечивали комфорта-
бельность, безопасность работы троллейбуса;
- высокая производственная и ремонтная технологичность;
- форма рамы, обеспечивающая удобство монтажа агрегатов, низкое поло-
жение пола, улучшающего быстроту входа и выхода пассажиров, низкое по-
ложение центра тяжести.
332
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
6.2. Рамы и их расчет
Рама представляет собой основание, на котором размещены все основные
агрегаты механического, пневматического, гидравлического и электрическо-
го оборудования троллейбуса. Она несет на себе кузов и воспринимает уси-
лия, действующие на троллейбус.
По основным конструктивным признакам различают:
- рамы с двумя продольными балками;
- рамы с одной центральной балкой (хребтовая рама);
- - безрамные конструкции, в которых роль рамы выполняют основание и
каркас кузова.
Рамы первого типа обычно изготовляют сварными из балок швеллерного
сечения, соединенных поперечинами. Форма сечения поперечин зависит от их
дополнительного назначения, связанного с установкой агрегатов. Преимуще-
ственное распространение имеют лонжероны открытого профиля - швеллер с
обращенными внутрь полками. Они имеют малую жесткость при кручении.
Лонжероны с целью снижения веса, лучшего использования материала и дос-
тижения равнопрочности могут иметь переменное сечение в соответствии с
характером распределения изгибающих и крутящих моментов по длине рамы.
Минимальная толщина стенки должна обеспечивать ее устойчивость против
бокового выпучивания при изгибе. Сопротивление рамы продольному сдви-
гу лонжеронов увеличивается применением ферм, раскосов и косынок в мес-
тах соединения с поперечинами.
Центральная балка хребтовой рамы располагается по продольной оси трол-
лейбуса. Ес изготавливают штамповапой или сварной, обычно в виде трубы,
к которой крепятся различные кронштейны для установки оборудования в
кузове. Хребтовая рама обладает большой жесткостью на кручение.
Безрамные и смешанные конструкции кузовов, получившие в современных
троллейбусах наибольшее распространение, имеют усиленные нижние элемен-
ты основания кузова.
На троллейбусах, выпускаемых в Беларуси, применяются рамы с двумя про-
дольными балками. Рама троллейбуса модели 201 (рис.3.48), состоит из двух
Рис. 3.48. Рама троллейбуса модели 201.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 333
продольных лонжеронов 1 и ферм 2, 6. Для увеличения жесткости основания
на кручение вварены раскосы 3. Присоединение агрегатов механического и
электрического оборудования к раме осуществляется с помощью специаль-
ных кронштейнов. Для установки передней пневмоподвески вварена балка
передней подвески 5 с двумя площадками для крепления пневмоэлементов, а
для крепления задней пневмоподвески - четыре площадки 4.
Расчет рамы. Рама троллейбуса представляет собой пространственную, ста-
тически неопределимую несущую систему, нагруженную статическими и дина-
мическими нагрузками. Напряжения в элементах рамы определяются: изгибом в
вертикальной плоскости под влиянием симметричной системы сил; кручением
вокруг продольной оси под влиянием кососимметричной системы сил; изгибом
в горизонтальной плоскости; местными нагрузками (электрическое, пневмати-
ческое оборудование, усилия при буксировке и др.). Статические нагрузки воз-
никают под действием собственного веса рамы и веса электрического и механи-
ческого оборудования, кузова, пассажиров и от реакции опор рессор.
При движении троллейбуса на раму действуют динамические нагрузки. Ос-
новной причиной возникновения симметричных динамических нагрузок яв-
ляются силы инерции подрессоренных масс, действующих на раму при коле-
баниях троллейбуса. Вертикальные и угловые колебания троллейбуса в вер-
тикальной плоскости обусловлены симметричными составляющими прогибов
подвески. Эти колебания вызывают изгиб рамы, создавая напряжения в лон-
жеронах и незначительные напряжения в поперечинах. Кососимметричные
составляющие прогибов подвески вызывают бортовую качку и кручение рамы,
создавая напряжения в поперечинах.
При кручении рамы возникают горизонтальные составляющие нагрузок. Они
зависят от боковой жесткости рессор и смещения оси вращения от плоскости
рамы, а также от угла закручивания. Чем больше жесткость рессор, смещение
оси вращения и угол закручивания, тем больше горизонтальные усилия. Та-
ким образом, элементы рамы при перекосе находятся в сложном нагружении
под действием вертикального изгиба, естественного кручения, горизонталь-
ного изгиба и др.
Для того чтобы не только оценить общую податливость рамы и действую-
щие в ней напряжения и темп их изменения по длине рамы, значения проги-
бов, углов закручивания и напряжений, следует рассчитывать для ряда попе-
речных плоскостей, проходящих через характерные точки (места присоедине-
ния поперечин, изменения высоты и ширины сечения лонжеронов, приложе-
ния нагрузок и т.д.). Результаты расчета целесообразно представлять в виде
эпюр прогибов, углов закручивания и напряжений по длине рамы.
При расчете на изгиб рамы податливой на кручение, силу тяжести агрега-
тов, имеющих несколько точек опоры, распределяют по этим опорам с учетом
их расположения относительно центра массы агрегата. Силу тяжести рамы
334 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
вместе с каркасом и расчетной нагрузки силы тяжести пассажиров принима-
ют равномерно распределенной по длине рамы, причем раму разделяют на
отдельные участки, для которых осевой момент инерции сечения лонжерона
может быть принят постоянным.
Ввиду симметрии изгибающей нагрузки расчет на изгиб ведется по одному
лонжерону как балки опертой на рессоры. При расчете определяются величи-
ны и координаты приложения нагрузок и опорные реакции, рассчитывают
эпюру изгибающих моментов Ми , вычисляются моменты сопротивления
изгибу сечения лонжерона и вычисляются напряжения изгиба:
<Уи = Mti !№х .
Эпюру изгибающих моментов рассчитывают по точкам, вычисляя сумму
произведений сил на соответствующие плечи, или методом веревочного мно-
гоугольника. В точке приложения силы Pi изгибающий момент равен:
Мш = X PKtKt,
К=1
где Л?к- - расстояние между точками приложения сил Рк и .
На раму троллейбуса действуют статические и динамические изгибающие
нагрузки, вызывающие напряжения Ости Од. При пределе текучести усло-
вие прочности:
& ст & д — s / ^без ’
где кбез = 1,3... 1,8-коэффициент безопасности, учитывающий местные кон-
центраторы напряжений, технологические отступления, нестабильность ме-
ханических свойств и др.
Между нагрузкой и напряжением сохраняется прямая зависимость, поэто-
му увеличение нагрузки в кд раз вызывает такое же увеличение напряжения:
~ / & ст -
Подставляя значение в предыдущее уравнение, получим условие, опре-
деляющее допускаемые напряжения при изгибе рамы статической нагрузкой:
При расчете рамы на кручение ее рассматривают как плоскую систему. Рас-
четная схема представлена на рис. 3.49 б. Жесткость лонжерона на изгиб в сотни
раз превышает их жесткость на кручение. В связи с этим деформациями изгиба
лонжерона можно пренебречь. Условно примем лонжероны прямыми, тогда де-
формации кручения всех стержней можно выразить через угол закручивания рамы
ОС (рис. 3.49 а), определяемым углами поворота двух поперечных сечений рамы,
взятых над передней и задней осями, т.е. на расстоянии колесной базы L.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 335
При рассмотрении изгиба стержней, поперечные сечения остаются плоскими.
При кручении они искривляются, т.е. испытывают деплантацию. Деплантация
сечений по длине стержня обычно неодинакова. Так в узлах, усиленных косын-
ками, и прикрепленных к полкам лонжеронов, ее можно считать равной нулю. В
остальных сечениях она может оказаться весьма значительной. Такой характер
деформации стержней носит название стесненного кручения.
При стесненном кручении, наряду с касательными напряжениями кручения,
в сечениях стержней вследствие
деплантации появляются допол-
нительные нормальные напря-
жения. Крепление поперечин к
стенкам лонжеронов более эла-
стично и напряженное состоя-
ние здесь ближе к свободному
кручению: дсплантация сечений
по длине стержня одинакова и
дополнительных нормальных
напряжений не возникает.
Суммарное нормальное на-
пряжение в сечениях стержня
при стесненном кручении опре-
деляется по формуле:
где М х и Wx -- изгибающий
момент и момент сопротивле-
ния сечения изгибу; М 6 - бимо-
мент; - секториальный мо-
мент сопротивления.
Первый член в приведенной
формуле дает нормальные на-
пряжения от чистого изгиба
(рис. 3.50 а), а второй - допол-
нительные нормальные напря-
жения от стесненного кручения
(рис. 3.50 б). Алгебраическое
сложение указанных напряже-
ний дает результирующее нор-
мальное напряжение в расчет-
ном сечении (рис. 3.50 в).
Рис. 3.49. Схемы последовательности расче-
та рамы на кручение:а - нагрузочная; б-рас-
четная; в - эпюра изгибающих моментов; г -
эпюра бимоментов; д - эпюра напряжений.
336 Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Величина бимомента стерж-
ней открытого профиля (тавр,
швеллер и т.д.) с жестко заде-
ланными концами (деплантация
в заделке равна нулю) может
быть найдена из выражения:
,, GaEJw
° 1в
где Е{ - модуль упругости
Рис. 3.50. Эпюры распределения нормальных на- 1-го рода (£—2,10 кг/см );
пряжений в сечении лонжерона. Jw - секториальный момент
инерции сечения; в - половина ширины рамы; I - длина стержня.
При отсутствии изгиба лонжеронов, углы закручивания всех поперечин бу-
дут равны между собой и могут быть выражены через угол закручивания рамы:
/-ч
0 =------а
L ’
Поворот сечений поперечин происходит по часовой стрелке, а поворот се-
чений рамы против часовой стрелки, поэтому появляется знак минус. Угол
закручивания участка лонжерона между z-й и (z+ 1)-й точками:
Ц(1+1)~ г~ а-
Ху
Связь между углом закручивания стержня и крутящим моментом определя-
ется формулой:
££0,,
M = ——
Kp I
где Е - модуль упругости, соответственно первого и второго рода; I
момент инерции сечения стержня при кручении.
Подставляя значения углов закручивания, получаем формулы:
для поперечин -
n _ ^Ki^i _ Ki^
Kpi Te ' L ’
для лонжеронов -
___ Ki(i+\ )^i(z + l) ______ +
Раздел 3. КОНСТРУИРОВА НИЕ И РА СЧЕТ ТРОЛЛЕЙБУСА
337
Все стержни рамы работают в условиях стесненного кручения, поэтому в
формулы подставляются значения приведенного момента инерции.
Изложенное позволяет перейти от статически неопределенной системы (рис.
3.49 а) к статически определенной системе (рис. 3.496), которая получится если
условно разрезать все поперечины в плоскости симметрии рамы. В местах раз-
реза необходимо приложить внутренние силовые факторы - крутящие момен-
ты М и перерезывающие силы .
Общий крутящий момент, действующий на раму, равен произведению силы
Р на ширину рамы 2/?, т.е.:
М -2Ь-Р
Угол закручивания рамы:
а = Мкр/Е-!кр,
где [ - приведенный момент инерции при кручении всей рамы в целом.
Затем определяют расчетную схему, а также геометрические и сскториаль-
ные характеристики сечений, внутренние силовые факторы и строят эпюры
изгибающих моментов (рис. 3.49 в) и бимоментов (рис. 3.49 г), а затем эпюры
нормальных напряжений (рис. 3.49 д). В соответствии с принятыми упроще-
ниями раму считают плоской, криволинейность стержней не учитывается. Же-
сткость узла влияет не на характер распределения бимомента, а на величину
приведенного момента инерции, поэтому этим можно пренебречь, или в фор-
мулу приведенного момента необходимо ввести некоторый поправочный ко-
эффициент. По эпюрам изгибающего момента определяем суммарное нормаль-
ное напряжение (рис. 3.49 4).
6.3. Кузова
Кузова троллейбуса выполняются цельнометаллическими вагонного типа,
имеющего полуобтекасмую форму. Он выполняет две функции: образует закры-
тое пространство для размещения водителя, пассажиров и багажа и целиком или
частично, при наличии рамы выполняет функции несущей системы троллейбуса.
Кузов можно представить состоящим из двух частей: верхней, или собственно
кузова, образующего полезно используемое пространство, и нижней - основа-
ния, включающего в себя панель пола и образующего вместе с порогами, усили-
телями и рамой (при ее наличии) базу для крепления силового агрегата и ходо-
вой части. Соединение верхней и нижней частей кузова может быть неразбор-
ным (сварной или с помощью заклепок), или разборным (посредством болтов).
Кузова троллейбусов, в зависимости от использования облицовочных па-
нелей в качестве несущего элемента, делят на каркасные и скелетные. Каркас-
ные кузова представляют собой каркас из стержней закрытого или коробча-
338
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
того открытого профиля сечения. К каркасу прикреплены облицовочные па-
нели из легкого сплава или пластмассы. Скелетные кузова представляют со-
бой дальнейшее развитие каркасных кузовов. В кузовах, выполненных по ске-
летной схеме, нагрузки передаются наружной оболочкой или каркасом из стер-
жней закрытого или открытого профиля. Скелетная схема не допускает при-
менения различных материалов для каркаса и оболочки.
Большинство троллейбусов имеют каркасные кузова, сваренные из тонко-
стенных труб. При меньшей массе эти кузова обладают необходимой жестко-
стью и прочностью. Каркас троллейбуса модели 201 (рис. 3.51), который сва-
рен из прямоугольных стальных труб и прокатных профилей, состоит из ле-
вой и правой боковин, передней и задней частей и крыши. В боковинах, пере-
дней и задней частях каркаса выполнены проемы для окон, а в правой бокови-
не дополнительно имеется три проема для дверей. Каркас крыши кузова име-
ет три проема для вентиляционных люков.
В процессе создания кузова участвуют три основных вида служб: непосред-
ственно проектные, подготовки и обслуживания производства; научно-исследо-
вательские и службы общего характера (рис. 3.52). Проектные работы - это не
только компоновка, разработка эскизного и технического проектов, но и рабо-
ты, обеспечивающие основную технологию формирования и монтажа кузова, а
также аналитические работы, такие как предварительные расчеты, вспомогатель-
ное моделирование и детальные расчеты. Научно-исследовательские работы и
работы общего характера составляют необходимую основу проектирования.
Сумма сведений этой очень обширной области выражается при компановке трол-
лейбуса в виде эксплуатационных и технико-экономических предпосылок. Вы-
бор компоновки кузова должен быть обоснован основными расчетами, касаю-
щимися массы троллейбуса, статики и динамики его несущей системы, с учетом
внутренней планировки, кузова и архитектуры троллейбуса.
Применение той или иной системы проектирования обуславливается типом
проектного бюро. Систему комплексного проектирования способны применять
Рис. 3.51. Каркас кузова троллейбуса модели 201.
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
339
Службы
кузовного
производства
технология
изготовления,
калькуляция,
инструмент,
кооперация,
материальное
снабжение,
сбыт
Рис, 3.52, Схема процесса создания кузова.
только крупные центры, располагающие многочисленными квалифицированны-
ми кадрами и различными вспомогательными службами. Центры, работающие
на основе комплексного проектирования, очень эффективны, но характеризу-
ются высокими первоначальными затратами и долгим периодом подготовки.
Небольшие проектные бюро и те, которые не имеют модельно-расчетных служб
при разработке структур, технологии и т.п,, используют последовательную сис-
тему. Это приводит к общей не о куп а ем ости подготовительных работ. Неболь-
шие подразделения способны удовлетворить требования производства в случае
удачной исходной модели кузова и при стабильном характере работы бюро.
Аэродинамические свойства троллейбуса зависят главным образом от осо-
бенности его кузова. Вследствие преимуществ, получаемых при хороших аэро-
динамических свойствах троллейбуса, проблема аэродинамики кузова стано-
340
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
вится все более важной. Кузова вагонной компоновки могут иметь округлую
или прямоугольную форму. Хотя распределение давлений одинаково для обоих
разновидностей формы, однако имеется существенная разница в величине дав-
лений. На рис. 3.53 показано распределение давлений воздуха для автобусных
кузовов обтекаемой и прямоугольной формы. Наибольшее избыточное дав-
ление F/q (где F сила лобового сопротивления; q - динамическое давление
потока воздуха) действует на передней стенке кузовов обоих форм на уровне,
равном половине высоты стенки. Отрицательное же давление распределяется
по-разному: наименьшее давление приходится в кузовах округленной формы
на переднюю часть крыши, а прямоугольной формы - на переднюю часть бо-
ковин. Характерным различием является то, что при боковом ветре измене-
ние распределения давлений для округленной формы кузова очень небольшое,
а для прямоугольной - весьма значительное. Следовательно, лучшими аэро-
динамическими свойствами обладают кузова, имеющие округлую форму. Для
оценки влияния форм кузова троллейбуса на распределение давлений по по-
верхности кузова в результате действия на троллейбус аэродинамической силы
целесообразно производить испытания в аэродинамической трубе.
Работоспособность кузова характеризуется его прочностью и жесткостью
под действием динамических
нагрузок. При движении трол-
лейбус испытывает динамичес-
кие нагрузки от неровностей
дороги, от разгона и торможе-
ния, при поворотах и от полез-
ной нагрузки и веса агрегатов.
Кузов подвергается изгибу и
кручению: симметричная на-
грузка вызывает изгиб, косо-
симметричная нагрузка - круче-
ние в вертикальной и горизон-
тальной плоскостях. Статичес-
кая нагрузка, умноженная на ус-
Рис. 3.53. Распределение давлений воздуха для ав-
тобусных кузовов обтекаемой фирмы (ПАЗ-652) и
прямоугольной формы (ПАЗ-665): а - при встреч-
ном ветре; б - при встречно-боковом ветре.
корение, определяет динами-
ческую нагрузку.
’ у Пространственная схема кузо-
ва трудно поддается расчету на
сложные напряжения изгиба и
кручения. Поэтому кузов услов-
но расчленяют на отдельные эле-
менты и рассчитывают их на из-
гиб и кручение раздельно. Наи-
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА 341
более достоверную информацию о напряженном состоянии кузова получают ме-
тодом тензометрирования как в стендовых, так и в дорожных условиях.
Прочность кузова оценивают по пределу текучести материалов. При одно-
стороннем растяжении или сжатии допускаемое напряжение:
^без
Условия прочности:
при изгибе -
или
О» <GslK6e3(l-Kd)-
при кручении -
При наличии сложно напря-
женного состояния эквивален-
тное напряжение:
<Ч=У<Л2+Зт2 •
Рис. 3.54, Расчетная модель узлового элемента
кузова.
Наиболее полное приближение к результатам натурных испытаний несу-
щей системы дает расчет кузова и рамы с использованием метода конечных
элементов. Этот метод расчета многократно статически неопределенных кон-
струкций основан на совместном рассмотрении напряженного состояния сис-
темы небольших элементов конечного размера. Метод конечных элементов
заключается в том, что реальная конструкция заменяется структурной моде-
лью, состоящей из простейших элементов, таких, как стержни, пластины и др.
объемные элементы с известными упругими свойствами. Исходя из того, что
упругие свойства отдельных элементов известны, можно определить свойства
всей системы в целом при определенных нагрузках.
Расчет осуществляется в несколько этапов. На этапе предварительной под-
готовки конструкцию разбивают на простые элементы. Например, разбивку
кузова производят на одной половине оси симметрии примерно на 200 - 500
элементов. На этапе получения предварительной модели определяют коорди-
наты узловых точек. На рис. 3.54 показана модель с пятью узловыми точками
и семью стержнями. Затем проводится расчет с использованием ЭВМ по спе-
циально разработанным программам.
342
Раздел 3. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
ЛИТЕРАТУРА
1. Автомобили. Конструкция, конструирование и расчет. Системы управления
и ходовая часть /А.И.Гришкевич, Д.А.Ломако, В.П.Автушко и др. Под ред.
А.И.Гришкевича. - Мн.: “Вышэйшая школа”, 1987.
2. Гидропневмоавтоматика и гидропривод мобильных машин. Объемные гид-
ро- и пневмомашины и передачи /А.Ф.Андреев, Л.В.Барташевич, Н. В.Бог-
дан и др.; Под ред. В.В.Гуськова. - Мн.: “Вышэйшая школа”, 1987.
3. Гришкевич А.И. Автомобили. Теория. - Мн.: “Вышэйшая школа”, 1986.
4. Грузовые автомобили /М.С.Высоцкий, Ю.Ю.Беленький, Н.С.Филиповский
и др. - М.: “Машиностроение”, 1979.
5. Ефремов И.С. Троллейбусы. Теория, конструкция и расчет. - М.: “Высшая
школа”, 1969.
6. Кабанов В.И. Тракторы. Часть 4. Основы художественного конструирова-
ния. - Мн.: “Вышэйшая школа”,1981.
7. Литвинов А.С., Фаробин Я.Е. Автомобиль. Теория эксплуатационных
свойств. - М.:”Машиноетросние”,1989.
8. Осепчугов В.В., Фрумкин А.К. Автомобиль. Анализ конструкций, элемен-
ты расчета. - М.: “Машиностроение”, 1989.
9. Осепчугов В.В. Автобусы.-М.: “Машиностроение”, 1971.
10. Павловский Януш. Автомобильные кузова. - М.: “Машиностроение”, 1977.
11. Теория электрической тяги / Под ред. И.П.Исаева. - М.: “Транспорт”. 1995.
12. Троллейбусы. Устройство и техническое обслуживание /Н.В.Богдан,
Ю.Е.Атаманов, Р.Р.Джагитян и др. Под ред. Н.В.Богдана. - Мн.: НПО “Три-
бофатика”, 1997.
343
Содержание
РАЗДЕЛ I. ОБЩАЯ ХАРАКТЕРИСТИКА ТРОЛЛЕЙБУСОВ
Глава 1. Общие сведения
1.1. Общая характеристика и классификация подвижного
состав^! электрического безрельсового транспорта.......11
1.2. Сравнительная оценка троллейбусов и перспективы
развития троллсйбусостроения..........................13
1.3. Общее устройство троллейбуса.........................16
1.4. Оценочные показатели троллейбуса.................... 19
1.5. Условия работы троллейбуса и устройств электроснабжения..30
Глава 2. Комфортабельность и безопасность троллейбуса
2.1. Общие сведения.......................................37
2.2. Шум и вибрации.......................................38
2.3. Удобства входа, проезда и выхода.....................41
2.4. Воздушная среда и микроклимат пассажирского помещения.. 42
2.5 Обзорность, освещённость, свет........................45
2.6. Безопасность.........................................46
Глава 3. Основы художественного конструирования троллейбуса
3.1. Цель, задачи и методы художественного конструирования... 49
3.2. Техническая эстетика.................................50
3.3. Закономерности формообразования и композиции.........57
3.4. Зрительное восприятие предмета и средства композиции.59
3.5. Этапы художественного конструирования................63
РАЗДЕЛ П. ТЕОРИЯ ТРОЛЛЕЙБУСА
Глава Е Колесный движитель
1.1. Основные понятия и определения.......................67
1.2. Баланс мощности колеса н КПД ведущего колеса.........71
1.3. Сцепление колеса с дорогой и сопротивление его качению.74
1.4. Движение колеса, нагруженного боковой силой..........76
Глава 2. Тягово-скоростные свойства
2.1. Определения. Оценочные показатели....................81
2.2. Силы, действующие на троллейбус......................83
2.3. Силы сопротивления движению..........................86
2.4. Уравнения движения и тягового баланса троллейбуса....90
2.5. Нормальные реакции на колесах........................94
Глава 3. Тяговый расчет троллейбуса
3.1. Задачи расчета, задаваемые и выбираемые параметры......97
3.2. Определение потребной мощности тягового двигателя......99
3.3. Расчет характеристик тяговых двигателей постоянного тока.. 101
3.4. Требования к характеристикам тяговых двигателей........ 110
3.5. Характеристики троллейбусов с импульсным управлением.... 115
344
3.6. Влияние характеристик тяговых двигателей на использование
сцепного веса и мощности............................122
3.7. Разгон троллейбуса............................... 125
Глава 4. Тормозные свойства троллейбуса
4.1. Основные определения..............................132
4.2. Диаграмма торможения и оценка тормозных свойств
троллейбуса.............................................133
4.3. Электрическое торможение троллейбуса..............138
4.4. Распределение тормозных сил по мостам и колесам
троллейбуса.............................................141
4.5. Регулирование тормозных сил.......................146
4.6. Устойчивость троллейбуса при торможении...........151
Глава 5. Управляемость троллейбуса
5.1. Основные понятия и определения................... 154
5.2. Оценочные показатели управляемости................156
5.3. Кинематика поворота троллейбуса...................161
5.4. Силы и моменты, действующие на троллейбус при повороте.. 164
5.5. Уравнения криволинейного движения троллейбуса.....167
5.6. Переходные процессы...............................168
5.7. Колебания управляемых колес.......................171
5.8. Усилие на рулевом колесе..........................176
5.9. Расчетный метод определения параметров кругового
движения сочлененного троллейбуса.......................178
Глава 6. Устойчивость троллейбуса
6.1. Основные понятия и определения....................183
6.2. Оценочные показатели..............................184
6.3. Поперечная устойчивость...........................185
6.4. Коэффициент поперечной устойчивости........'......190
6.5. Курсовая устойчивость.............................191
6.6. Устойчивость движения сочлененного троллейбуса по
колебанию полуприцепа...................................194
Глава 7. Плавность хода
7.1. Основные понятия и определения....................199
7.2. Оценочные показатели и нормы......................200
7.3. Характеристики дорожных неровностей...............203
7.4. Характеристика подвески...........................207
7.5. Троллейбус как колебательная система..............214
7.6. Свободные колебания троллейбуса...................215
7.7. Вынужденные колебания.............................227
РАЗДЕЛ Ш. КОНСТРУИРОВАНИЕ И РАСЧЕТ ТРОЛЛЕЙБУСА
Глава 1. Механическая передача тягового электрического
привода троллейбусов................................233
1.1. Схемы тяговых передач.............................233
1.2. Карданная передача................................235
1.3. Ведущий и ведомый мост............................242
345
1.4. Шины и колёса......................................261
Глава 2. Подвеска троллейбуса.
2.1. Общие сведения.....................................264
2.2 Выбор основных конструктивных параметров рессор.....265
2.3. Конструирование и расчет пневматического упругого
элемента.................................................268
2.4. Определение параметров регулятора положения кузова.272
2.5. Расчет амортизатора................................275
Глава 3. Рулевое управление троллейбуса.
3.1. Общие сведения.....................................280
3.2. Рулевой механизм...................................281
3.3. Конструирование и расчет рулевого привода..........284
3.4. Расчет гидроусилителя рулевого управления..........287
3.5. Прочностной расчет рулевого управления.............294
Глава 4. Тормозные механизмы
4.1. Классификация тормозов и основные требования к
тормозным механизмам.....................................298
4.2. Расчет барабанного тормозного механизма............299
4.3. Расчет ленточного тормоза..........................304
Глава 5. Расчет пневматического привода троллейбуса.
5.1. Функции пневматического привода....................307
5.2. Сжатый воздух и его загрязнители...................308
5.3. Термодинамические процессы в компрессорной машине..309
5.4. Расчет поршневого компрессора......................311
5.5. Расчет пневматических клапанов.....................316
5.6. Статический расчет пневмоаппаратов тормозного привода.... 318
5.7. Динамический расчет пневмопривода..................322
5.8. Исполнительные устройства пневматического привода..327
Глава 6. Рамы и кузова троллейбусов
6.1. Назначение, классификация и требование к конструкции.331
6.2. Рамы и их расчет...................................332
6.3. Кузова.............................................337
Литература..............................................342
Научное издание
БОГДАН Николай Владимирович
АТАМАНОВ Юрий Евгеньевич
САФОНОВ Андрей Иванович
ТРОЛЛЕЙБУС.
ТЕОРИЯ, КОНСТРУИРОВАНИЕ, РАСЧЕТ
Ответственная за выпуск: Б.Б. Пятчеики. Художественный редактор: А.Н. Хилькевнч.
Технический редактор: В.А. Витенко. Корректор: К. А. Степанова.
Компьютерная верстка и дизайн: С. А. Ь'анденок. С.А. Чепик. СЮ. Сидорова.
Н.А. Гурова. А.Э. Зсневнч.
Сдано в набор 15.11.98. Подписано в печать 18.01.99.
Формат 70x100 1/16. Бумага офсетная 'Тосзиак”. Гарнитура Петербург.
Офсетная печать. Уел. псч. л. 28.11.
Уел. кр-отт. 28.45. Уч.-изд. л. 25.0.
Тираж 500 экз. Заказ 16.
Государственное предприятие «Издательство "Ураджай" Государственного комитета
Республики Беларусь по печати. Лицензия Л В № 8 от 02.1 2.97.
220600. Минск, пр. Машсрова. И.
Отпечатано в типографии ООО "Иппредо". Л и ценз и я Л11 № 179 от 05.01.1998.
220031. Минск, ул. Декабристов. 33.