/
































Текст
МИНИСТЕРСТВО ВЫСШЕГО ОБРАЗОВАНИЯ СССР
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА АВИАЦИОННЫЙ ИНСТИТУТ
имени СЕРГО ОРДЖОНИКИДЗЕ
А. Г. САИБЕЛЬ
ОСНОВЫ ТЕОРИИ ТОЧНОСТИ
РАДИОТЕХНИЧЕСКИХ МЕТОДОВ
МЕСТООПРЕДЕЛЕНИЯ
УЧЕБНОЕ ПОСОБИЕ
ГОСУДАРСТВЕННОЕ
ИЗДАТЕЛЬСТВО ОБОРОННОЙ ПРОМЫШЛЕННОСТИ
Москва 1958
В данном учебном пособии рассмотрены радиотехнические
методы определения местоположения объекта, используемые в
радиолокации и в радионавигации, и изложены основы теории
ошибок различных методов местоопределения.
Учебное пособие рассчитано на студентов высших учебных
заведений и аспирантов, изучающих радиолокацию,
радионавигацию и радиотехнические системы
Редактор инж. В. М. Токарь
Зав. редакцией инж. А. С. Займовская
ПРЕДИСЛОВИЕ
За последние 10—15 лет вышло значительное количество
учебных пособий по курсам «Основы радиолокации» и «Основы
радионавигации», в которых рассматриваются методы определения
местоположения объекта и технические средства их реализации. Однако
до настоящего времени далеко недостаточно освещен такой важный
вопрос, как теория ошибок радиотехнических методов местоопреде-
ления.
Настоящее учебное пособие является попыткой устранить, хотя
бы частично, существующий пробел. В пособии рассматриваются
радиотехнические методы определения местоположения объекта на
плоскости и в пространстве, используемые в радиолокации и в
радионавигации, и излагаются основы теории ошибок различных
методов местоопределения.
Теория ошибок местоопределения изложена на базе основных
положений теории скалярного поля в теории вероятностей.
Учебное пособие рассчитано на студентов высших учебных
заведений и аспирантов, изучающих основы радиолокации, основы
радионавигации и радиотехнические системы.
Автор выражает благодарность проф. И. С. Джигиту, канд. техн.
наук В. М. Бовшеверову, канд. техн. наук В. А. Вейцелю, канд. техн.
наук П. А. Бакулеву и аспиранту А. А. Сосновскому за ценные
советы.
t. ГЕОМЕТРИЧЕСКИЕ ВЕЛИЧИНЫ,
ОПРЕДЕЛЯЕМЫЕ РАДИОТЕХНИЧЕСКИМИ МЕТОДАМИ
Задача определения местоположения объекта
радиотехническими методами на плоскости или в пространстве сводится к
измерению геометрических величин, однозначно характеризующих
искомое местоположение относительно заданной точки.
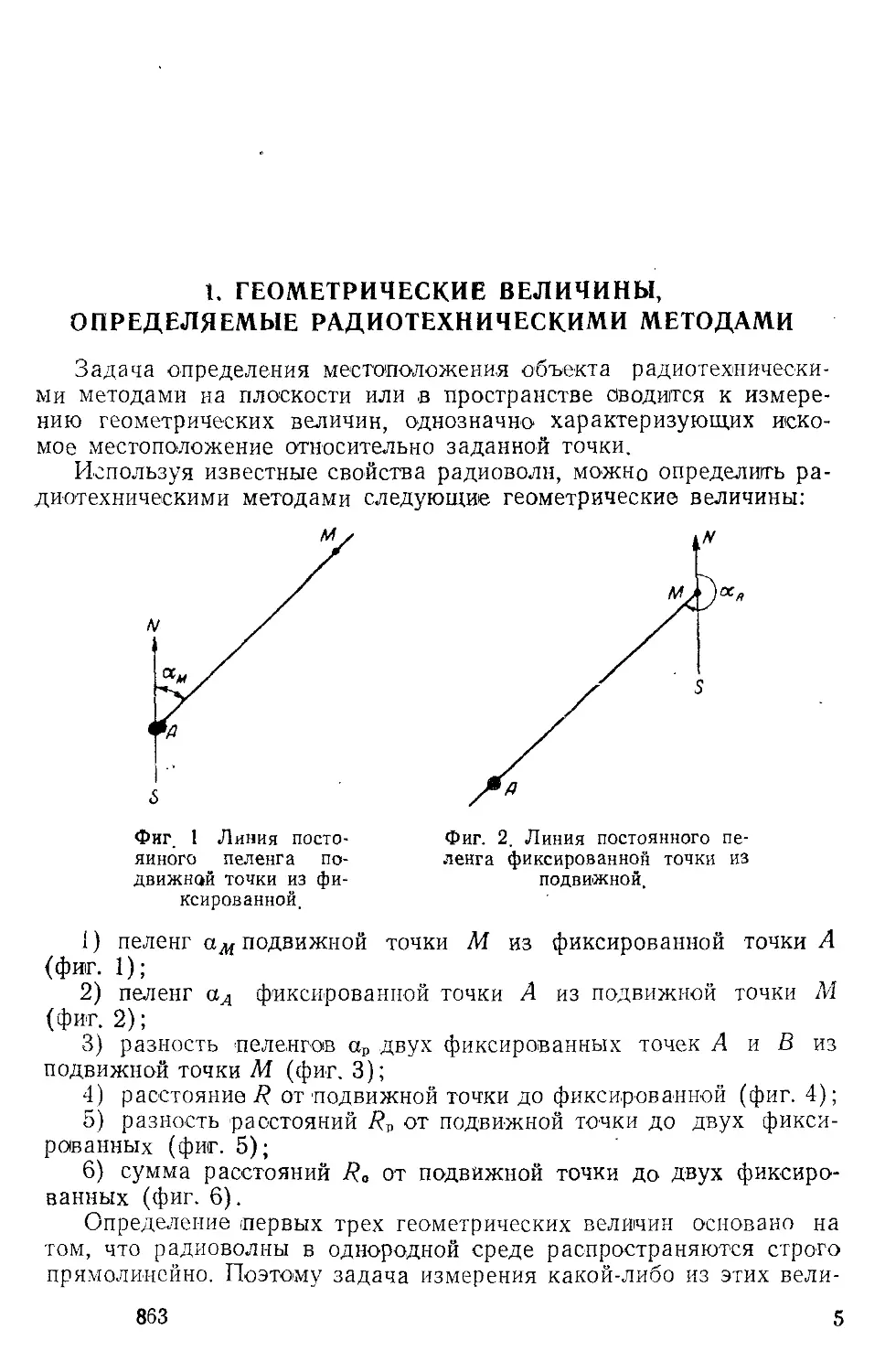
Используя известные свойства радиоволн, можно определить
радиотехническими методами следующие геометрические величины:
Фиг. 1. Линия
постоянного пеленга
подвижной точки из
фиксированной.
Фиг. 2. Линия постоянного
пеленга фиксированной точки из
подвижной.
1) пеленг ам подвижной точки М из фиксированной точки Л
(фиг. 1);
2) пеленг ал фиксированной точки А из подвижной точки М
(фиг. 2);
3) разность 'пеленгов ар двух фиксированных точек А и В из
подвижной точки М (фиг. 3);
4) расстояние R от подвижной точки до фиксированной (фиг. 4);
5) разность расстояний /?р от подвижной точки до двух
фиксированных (фиг. 5);
6) сумма расстояний R0 от подвижной точки до двух
фиксированных (фиг. 6).
Определение первых трех геометрических величин основано на
том, что радиоволны в однородной среде распространяются строго
прямолинейно. Поэтому задача измерения какой-либо из этих вели-
чин сводится к определению направления распространения
радиоволн, излучаемых или рассеиваемых пеленгуемым объектом.
Реальная среда, даже без учета влияния земной поверхности, не
является строго однородной, так как параметры атмосферы на
трассе распространения подвержены
регулярным и нерегулярным
изменениям. Так, изменения влажности,
плотности и температуры атмосферы
Фиг. 3. Линия постоянной
разности пеленгов двух
фиксированных точек из подвижной.
Фиг. 4. Линия
постоянного расстояния от
подвижной точки до
фиксированной.
с изменением высоты вызывают искривление траектории
распространения радиоволн. Неоднородность земной поверхности и
неровности рельефа вызывают местные искривления направления
распространения радиоволн. Все эти отклонения приводят к возникновению
соответствующих ошибок
пеленгации. Однако (величины этих оши-
Фкг. 5. Ливия постоянной (разности
расстояний от подвижной точки до
двух фиксированных.
Фиг. 6. Линия постоянной
суммы расстояний от подвижной
точки до двух фиксированных.
бок таковы, что позволяют осуществлять пеленгацию с приемлемой
для практики точностью.
Определение последних трех геометрических величин основано
на том, что радиоволны в однородной среде распространяются с по-
стояннои скоростью. Поэтому задача измерения какой-либо из этих
величин сводится к измерению соответствующих интервалов
времени.
В реальных условиях скорость распространения радиоволн
подвержена регулярным и нерегулярным изменениям, что, естественно,
вызывает соответствующие ошибки дальнометрии. Однако величины
этих ошибок таковы, что позволяют осуществлять дальнометрию с
достаточной для практики: точностью.
2. ЛИНИИ ПОЛОЖЕНИЯ И ПЛОСКОСТИ ПОЛОЖЕНИЯ
Рассмотрим сначала случай определения местоположения
объекта на плоскости.
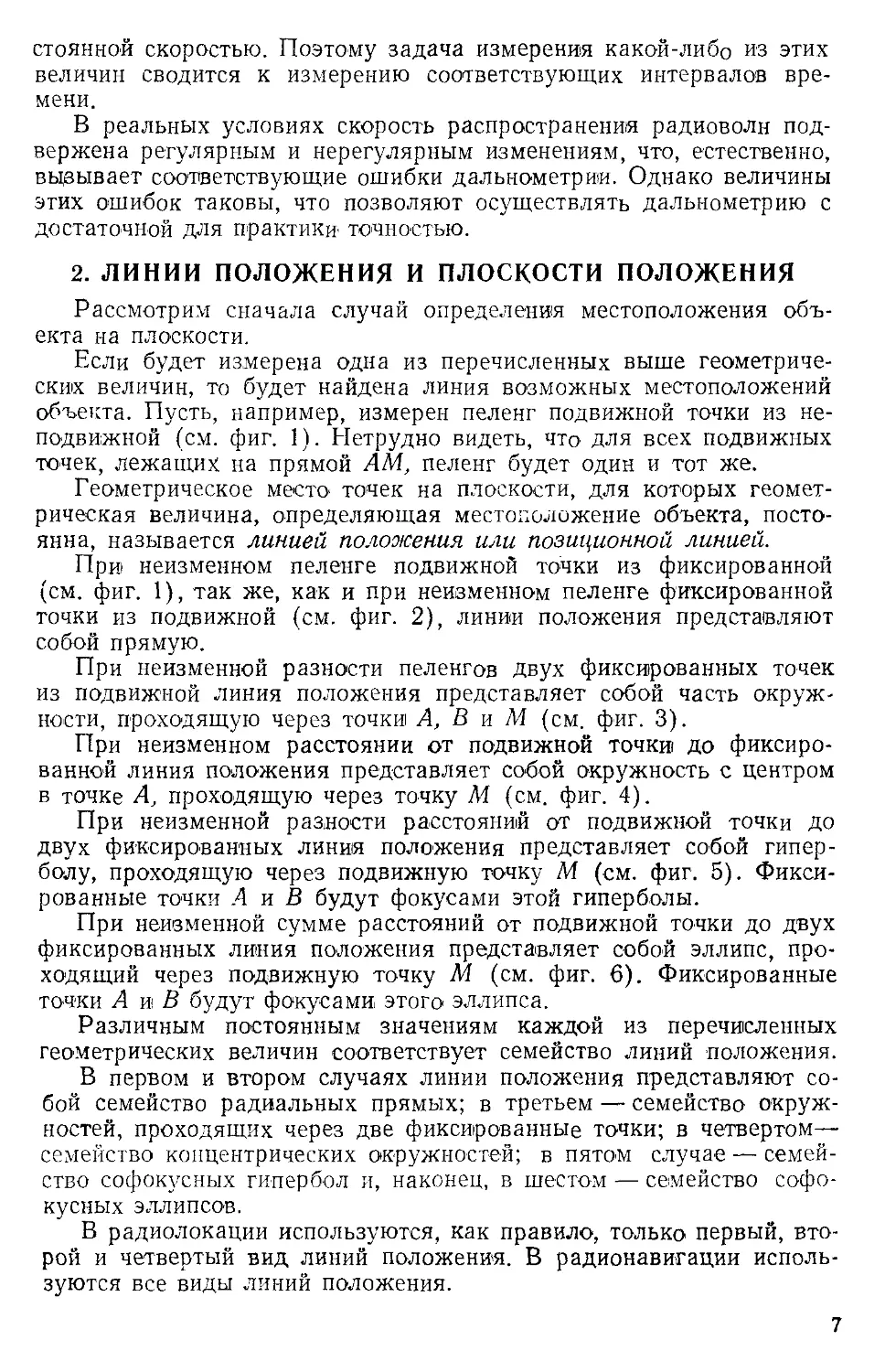
Если будет измерена одна из перечисленных выше
геометрических величин, то будет найдена линия возможных местоположений
объекта. Пусть, например, измерен пеленг подвижной точки из
неподвижной (см. фиг. 1). Нетрудно видеть, что для всех подвижных
точек, лежащих на прямой AM, пеленг будет один и тот же.
Геометрическое место точек на плоскости, для которых
геометрическая величина, определяющая местоположение объекта,
постоянна, называется линией положения или позиционной линией.
При неизменном пеленге подвижной точки из фиксированной
(см. фиг. 1), так же, как и при неизменном пеленге фиксированной
точки из подвижной (см. фиг. 2), линии положения представляют
собой прямую.
При неизменной разности пеленгов двух фиксированных точек
из подвижной линия положения представляет собой часть
окружности, проходящую через точки А, В и М (см. фиг. 3).
При неизменном расстоянии от подвижной точки до
фиксированной линия положения представляет собой окружность с центром
в точке А, проходящую через точку М (см. фиг. 4).
При неизменной разности расстояний от подвижной точки до
двух фиксированных линия положения представляет собой
гиперболу, проходящую через подвижную точку М (см. фиг. 5).
Фиксированные точки А я В будут фокусами этой гиперболы.
При неизменной сумме расстояний от подвижной точки до двух
фиксированных линия положения представляет собой эллипс,
проходящий через подвижную точку М (см. фиг. б). Фиксированные
точки А и>, В будут фокусами этого эллипса.
Различным постоянным значениям каждой из перечисленных
геометрических величин соответствует семейство линий положения.
В первом и втором случаях линии положения представляют
собой семейство радиальных прямых; в третьем —семейство
окружностей, проходящих через две фиксированные точки; в четвертом—
семейство концентрических окружностей; в пятом случае —
семейство софокусных гипербол и, наконец, в шестом — се'Мейство софо-
кусных эллипсов.
В радиолокации используются, как правило, только первый,
второй и четвертый вид линий положения. В радионавигации
используются все виды линий положения.
7
Если определяется местоположение объекта в пространстве, го
постоянному значению любой из перечисленных геометрических
(величин соответствует поверхность возможных местоположений
объекта, которая называется поверхностью положения или
позиционной поверхностью.
Так, например, постоянному значению расстояния от
фиксированной точки до подвижной соответствует поверхность положения
в виде сферы. Постоянному в горизонтальной плоскости значению
пеленга подвижной точки М из фиксированной — А соответствует
вертикальная плоскость, проходящая через точки М и А.
3. МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
ОБЪЕКТА
Выше было показано, что измерение одной из геометрических
величин дает лишь линию положения на плоскости или поверхность
положения в пространстве.
При определении местоположения на плоскости необходимо
найти две пересекающиеся линии положения. Тогда точка пересечения
линий положения и дает искомое местоположение. При этом могут
быть использованы линии положения различных видов.
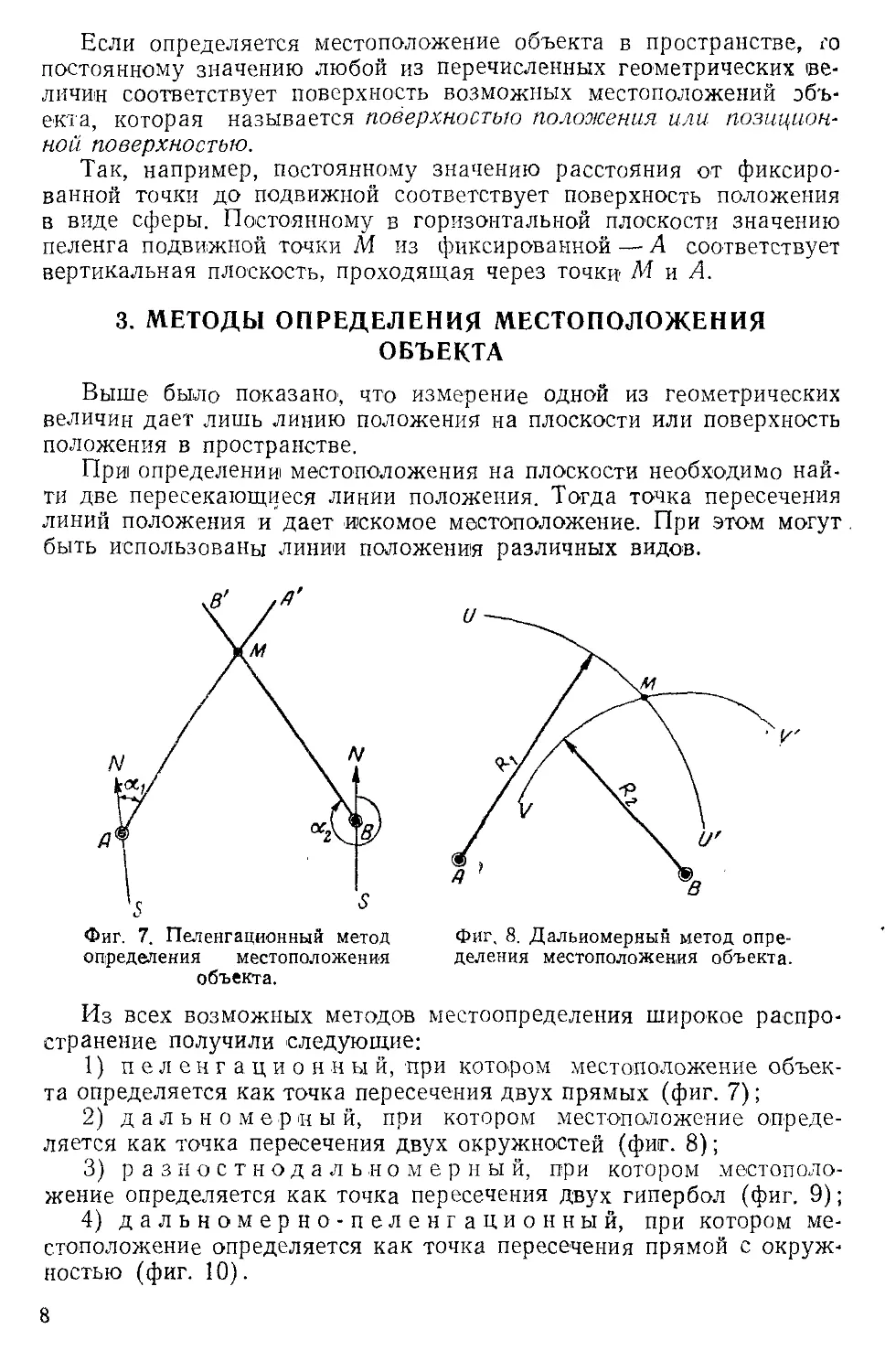
Фиг. 7. Пеленгационный метод Фиг, 8. Дальномерный метод опре-
определения местоположения деления местоположения объекта,
объекта.
Из всех возможных методов местоопределения широкое
распространение получили следующие:
1) пеленгационный, при котором местоположение
объекта определяется как точка пересечения двух прямых (фиг. 7);
2) д а л ь н о м е р и ы й, при котором местоположение
определяется как точка пересечения двух окружностей (фиг. 8);
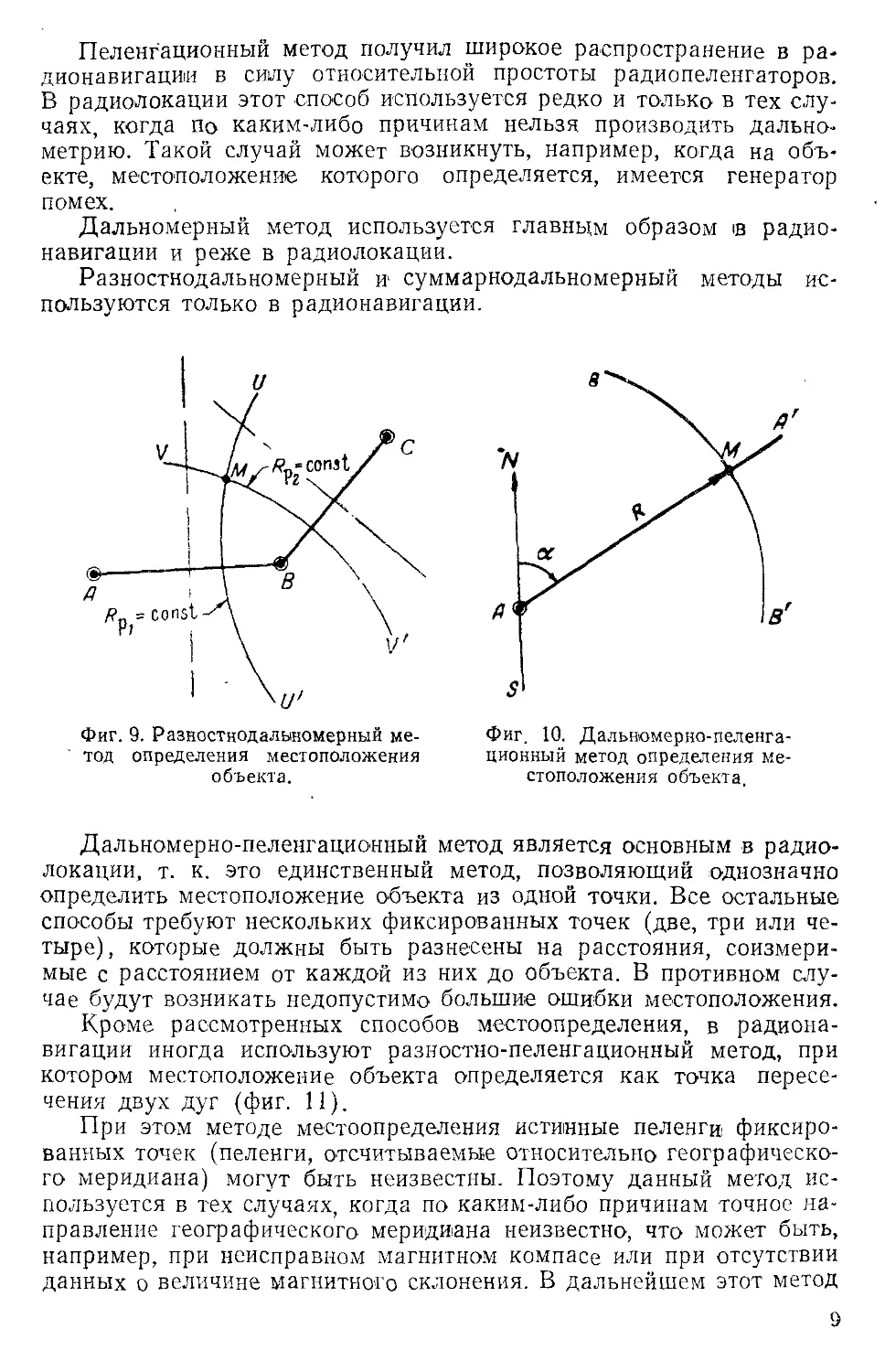
3) разностнодаль.но мерный, при котором
местоположение определяется как точка пересечения двух гипербол (фиг. 9);
4) дальномерно-пеленгационный, при котором
местоположение определяется как точка пересечения прямой с
окружностью (фиг. 10).
8
Пеленг'ационный метод получил широкое распространение в
радионавигации в силу относительной простоты радиопеленгаторов.
В радиолокации этот способ используется редко и только в тех
случаях, когда по каким-либо причинам нельзя производить дально-
метрию. Такой случай может возникнуть, например, когда на
объекте, местоположение которого определяется, имеется генератор
помех.
Дальномерный метод используется главньда образом в
радионавигации и реже в радиолокации.
Разностнодальномерный и суммарнодальномерный методы
используются только в радионавигации.
Фиг. 9. Разностнодальномерный ме- Фиг. 10. Дальномерно-пеленга-
тод определения местоположения ционный метод определения ме-
объекта. стоположения объекта.
Дальномерно-пеленгационный метод является основным в
радиолокации, т. к. это единственный метод, позволяющий однозначно
определить местоположение объекта из одной точки. Все остальные
способы требуют нескольких фиксированных точек (две, три или
четыре), которые должны быть разнесены на расстояния,
соизмеримые с расстоянием от каждой из них до объекта. В противном
случае будут возникать недопустимо большие ошибки местоположения.
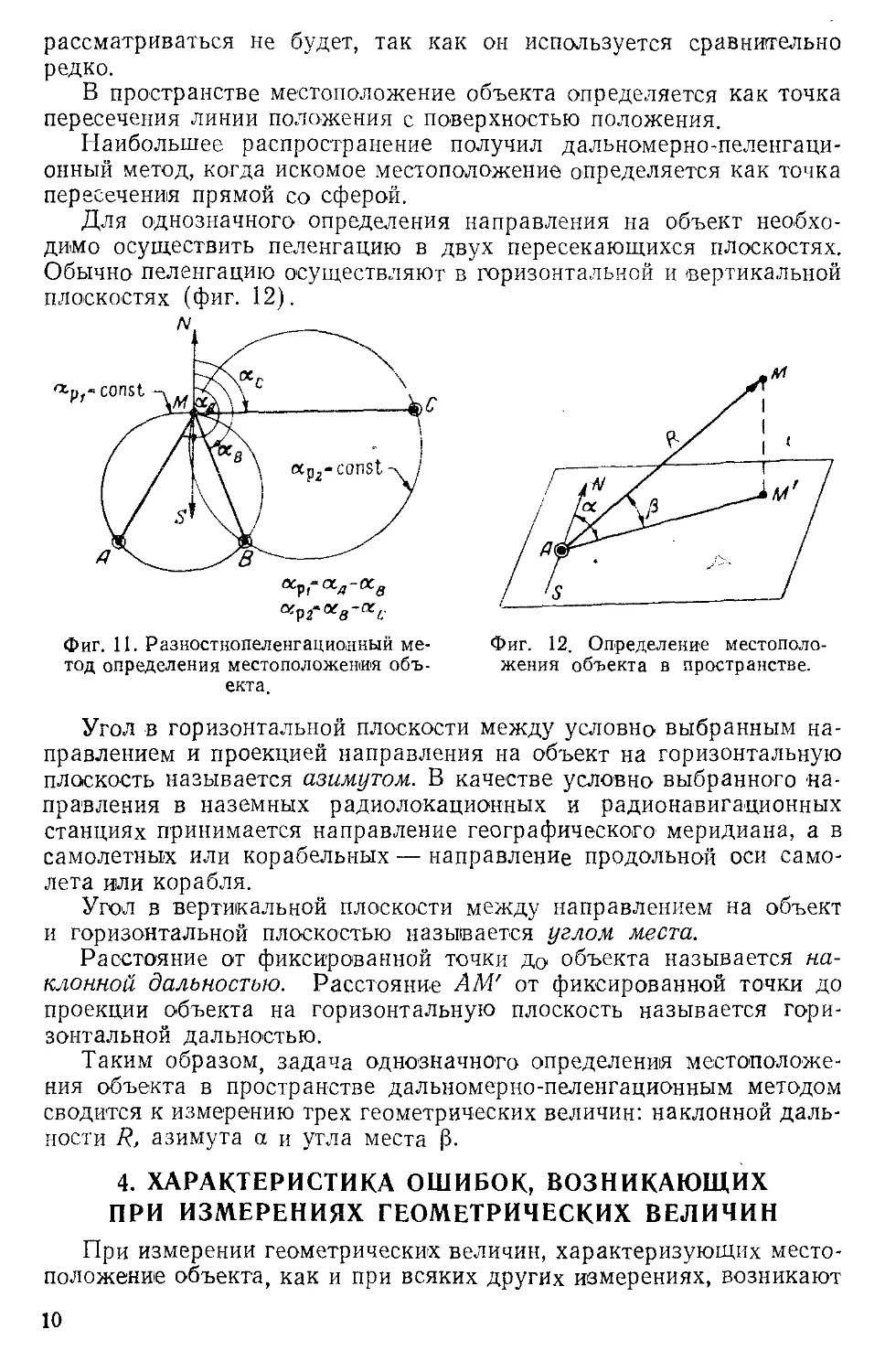
Кроме рассмотренных способов местоопределения, в
радионавигации иногда используют разностно-пеленгационный метод, при
котором местоположение объекта определяется как точка
пересечения двух дуг (фиг. 11).
При этом методе местоопределения истинные пеленги
фиксированных точек (пеленги, отсчитываемые относительно
географического меридиана) могут быть неизвестны. Поэтому данный метод
используется в тех случаях, когда по каким-либо причинам точное
направление географического меридиана неизвестно, что может быть,
например, при неисправном магнитном компасе или при отсутствии
данных о величине магнитного склонения. В дальнейшем этот метод
9
рассматриваться не будет, так как он используется сравнительно
редко.
В пространстве местоположение объекта определяется как точка
пересечения линии положения с поверхностью положения.
Наибольшее распространение получил дальномерно-пеленгаци-
онный метод, когда искомое местоположение определяется как точка
пересечения прямой со сферой.
Для однозначного определения направления на объект
необходимо осуществить пеленгацию в двух пересекающихся плоскостях.
Обычно пеленгацию осуществляют в горизонтальной и вертикальной
плоскостях (фиг. 12).
Фиг. 11. Разностнопеленгационный ме- Фиг. 12. Определение местополо-
тод определения местоположения объ- жения объекта в пространстве,
екта.
Угол в горизонтальной плоскости между условно выбранным
направлением и проекцией направления на объект на горизонтальную
плоскость называется азимутом. В качестве условно выбранного
направления в наземных радиолокационных и радионавигационных
станциях принимается направление географического меридиана, а в
самолетных или корабельных — направление продольной оси
самолета или корабля.
Угол в вертикальной плоскости между направлением на объект
и горизонтальной плоскостью называется углом места.
Расстояние от фиксированной точки до объекта называется
наклонной дальностью. Расстояние AM' от фиксированной точки до
проекции объекта на горизонтальную плоскость называется
горизонтальной дальностью.
Таким образом, задача однозначного определения
местоположения объекта в пространстве дальномерно-пеленгационным методом
сводится к измерению трех геометрических величин: наклонной
дальности R, азимута а и угла места C.
4. ХАРАКТЕРИСТИКА ОШИБОК, ВОЗНИКАЮЩИХ
ПРИ ИЗМЕРЕНИЯХ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИН
При измерении геометрических величин, характеризующих
местоположение объекта, как и при всяких других измерениях, возникают
10
ошибки. Величины этих ошибок зависят от условий
распространения радиоволн и инструментальной точности радиолокационного
или радионавигационного устройства. Последняя, в свою очередь,
зависит от степени технического совершенства устройства, величины'
отношения сигнал/помеха & т. д.
Ошибки, возникающие при измерениях, разделяются на система-
тические и случайные.
Систематические ошибки обусловливаются причинами,
действующими вполне определенным образом. Так, например, задержка
сигнала в приемнике вызывает систематическую дальномерную
ошибку, а смещение азимутального лимба вызывает систематическую
ошибку пеленга. Систематические ошибки могут быть определены
расчетным путем или экспериментально при помощи более точных
Ui
10 И 12 13 14 п
Фиг. 13. График дискретной случайной величины.
методов и, следовательно, могут быть либо устранены, либо учтены
в поправочных графиках, таблицах и т. п.
Условимся в дальнейшем под результатом измерения понимать
величину, свободную от систематической ошибки.
Случайные ошибки, как правило, вызываются весьма большим
числом отдельных причин, не поддающихся точному учету и
действующих в каждом отдельном измерении различным образом.
Исключить случайные ошибки невозможно. Поэтому результат
любого измерения фактически является случайной величиной.
Измерения геометрической величины можно производить как
дискретно, так и непрерывно. В первом случае результат измерения
называется дискретной случайной величиной и является функцией
целочисленного аргумента п:
U=f(n),
где п — номер дискретного измерения.
Во^ втором случае результат измерения называется непрерывной
случайной величиной и является функцией непрерывного аргумента t:
и=№,
где t — текущее время наблюдения при непрерывном измерении.
Для иллюстрации сказанного на фиг. 13 представлены
результаты дискретных измерений, а на фиг. 14 приведен график
непрерывных измерении.
11
Результат отдельного индивидуального измерения невозможно
предсказать точно. Вместе с тем последовательность ряда измерений
в ц2лом обладает определенными свойствами. В частности при
неизменных условиях опыта средние результаты достаточно большого
числа отдельных измерений практически остаются постоянными.
Постоянство средних результатов носит устойчивый характер.
Чтобы иметь достаточно полное представление о статистических
закономерностях случайных величин, необходимо знать, во-первых,
область значений случайной величины и, во-вторых, вероятность
возможных ее значений. С этой целью в теории вероятностей вводится
понятие функции распределения вероятностей случайной величины, под
которой понимают вероятность того, что случайная величина примет
значение, меньшее, чем действительное произвольное число х, т. е.
F(x)=P(U<x).
и Функция распределения
вероятностей F(x) иначе
называется интегральным
законом распределения или
интегральной функцией
распределения.
\ Производная функции
„ t . , распределения непрерывной
Фиг. 14. График^епрерывной случайной случайной величины
, . dF(x)
*<*>—ST"
называется плотностью распределения вероятностей или
дифференциальным законом распределения.
Вероятность того, что значение случайной величины будет
лежать в пределах от х до x+dx,
P{x<U<x + dx) = <?(x) dx.
Вероятность того, что значение случайной величины U не будет
превосходить некоторого уровня х,
P(U<x) = F(x) = J f(x)dx.
Функция распределения вероятностей или плотность
распределения вероятностей дают наиболее полное представление о случайной
величине. Однако довольно часто о случайной величине требуется
иметь лишь некоторое суммарное представление. С этой целью в
теории вероятностей применяют числовые характеристики
случайных величин в виде начальных и центральных моментов
распределения различных порядков.
Начальные моменты распределения й-того порядка определяются
по формуле
mft— I xky(x)dx.
12
Начальный момент распределения первого порядка является
математическим ожиданием или средним значением случайной
величины U:
т1 = \ х<? (х) dx = U.
— ее
Начальный момент распределения второго порядка является
математическим ожиданием квадрата случайной величины:
+°° _
т2 = J х\ (x) dx= U2.
Центральные моменты распределения определяются по формуле
+-
Mk= | (x — m1)kf(x)dx.
Центральный момент распределения первого порядка всегда
равен нулю.
Центральный момент распределения второго порядка является
математическим ожиданием квадрата отклонения случайной
величины от ее среднего значения и называется дисперсией случайной
величины
М2= J (x-m1J<?(x)dx = (U-m1J = D(U).
Дисперсия дает представление о степени разброса значений
случайной величины около ее среднего значения.
В теории вероятностей доказывается, что закон распределения
суммы независимых случайных величин при стремлении числа
слагаемых к бесконечности и при ограниченной роли каждого из ела'
гаемых стремится к нормальному закону распределения вне
зависимости от законов распределения слагаемых (центральная предельная
теорема теории вероятностей). Это означает, что в тех случаях,
когда случайные ошибки определяются большим числом факторов,
из которых ни один не явл.мтся доминирующим, можно с
достаточной для практики точностью считать, что случайные ошибки, а
следовательно, и результаты измерений имеют нормальный закон
распределения.
Плотность распределения вероятностей нормального закона
<?(х)=-7±-е ^ ,
у 2тс а
где а — среднее значение случайной величины;
о2— дисперсия случайной величины.
Нормальный закон распределения называется также законом
Гаусса.
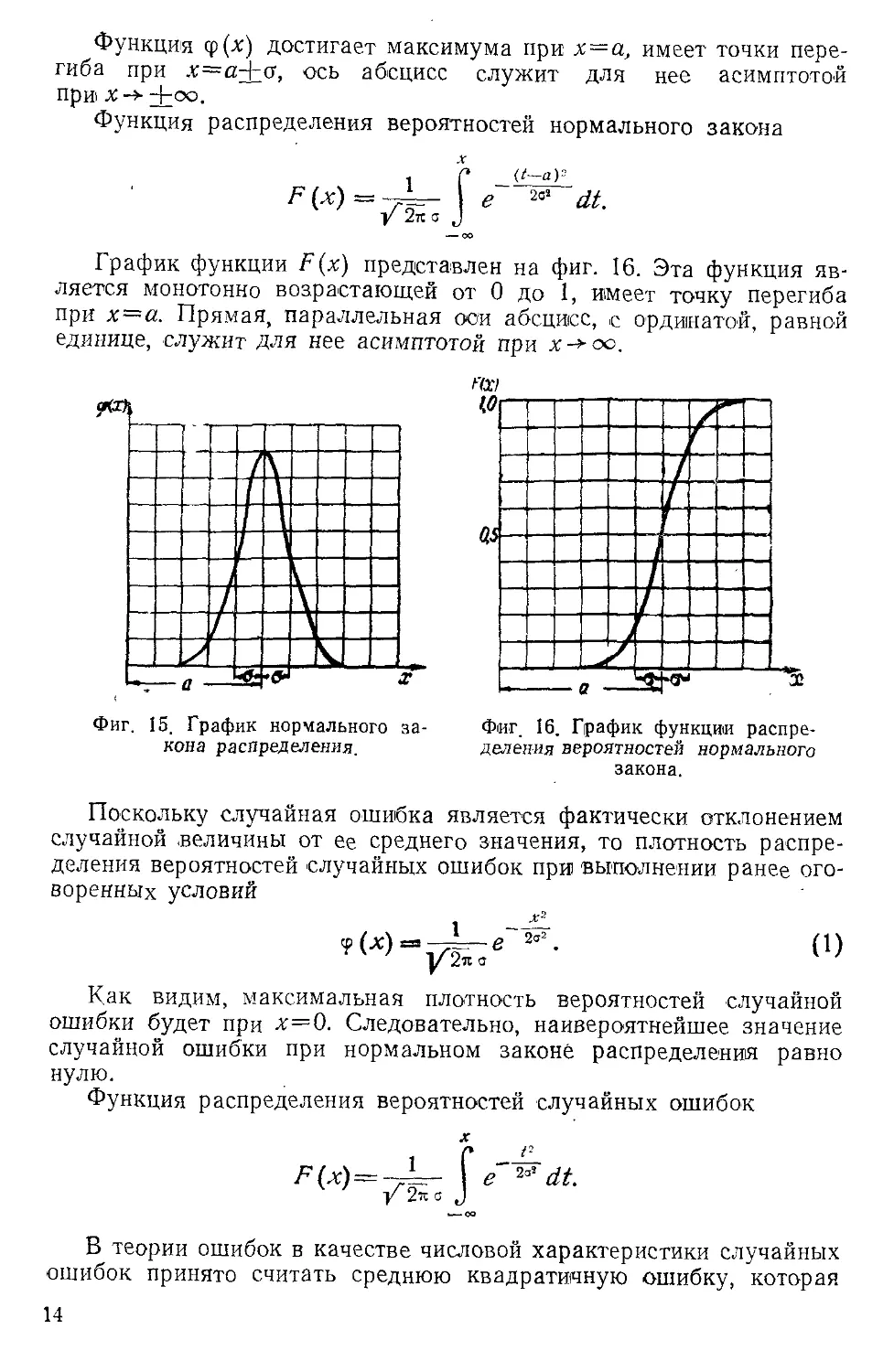
График функции ф(х) представлен на фиг. 15.
863 13
Функция (f(x) достигает максимума при х=а, имеет точки
перегиба при х=а+о, ось абсцисс служит для нее асимптотой
при л->+оо.
Функция распределения вероятностей нормального закона
График функции F(x) представлен на фиг. 16. Эта функция
является монотонно возрастающей от 0 до 1, имеет точку перегиба
при х—а. Прямая, параллельная оси абсцисс, с ординатой, равней
единице, служит для нее асимптотой при х->оо.
Фиг. 15. График нормального
закона распределения.
Фиг. 16. График функции
распределения вероятностей нормального
закона.
Поскольку случайная ошибка является фактически отклонением
случайной величины от ее среднего значения, то плотность
распределения вероятностей случайных ошибок при выполнении ранее
оговоренных условий
Как видим, максимальная плотность вероятностей случайной
ошибки будет при х=0. Следовательно, наивероятнейшее значение
случайной ошибки при нормальном законе распределения равно
нулю.
Функция распределения вероятностей случайных ошибок
В теории ошибок в качестве числовой характеристики случайных
ошибок принято считать среднюю квадратичную ошибку, которая
равна корню квадратному ив среднего значения квадрата случайной
ошибки. При нормальном законе распределения случайных ошибок
средняя квадратичная ошибка равна а.
Для иллюстрации влияния величины средней квадратичной
ошибки на форму графика плотности нормального распределения
вероятностей на фиг. 17 представлено семейство графиков <р(х),
соответствующих различным значениям а. Как видим, чем меньше
средняя квадратичная ошибка, тем график ср(х) имеет большее значение
максимума и падает круче. Это означает, что уменьшению средней
квадратичной ошибки соответствует уменьшение вероятности
больших ошибок. Таким образом, величина средней квадратичной ошиб-
4 X
Фиг. 17. Семейство графиков плотности распределения
вероятностей нормального закона.
ки является характеристикой разброса значений случайных ошибок.
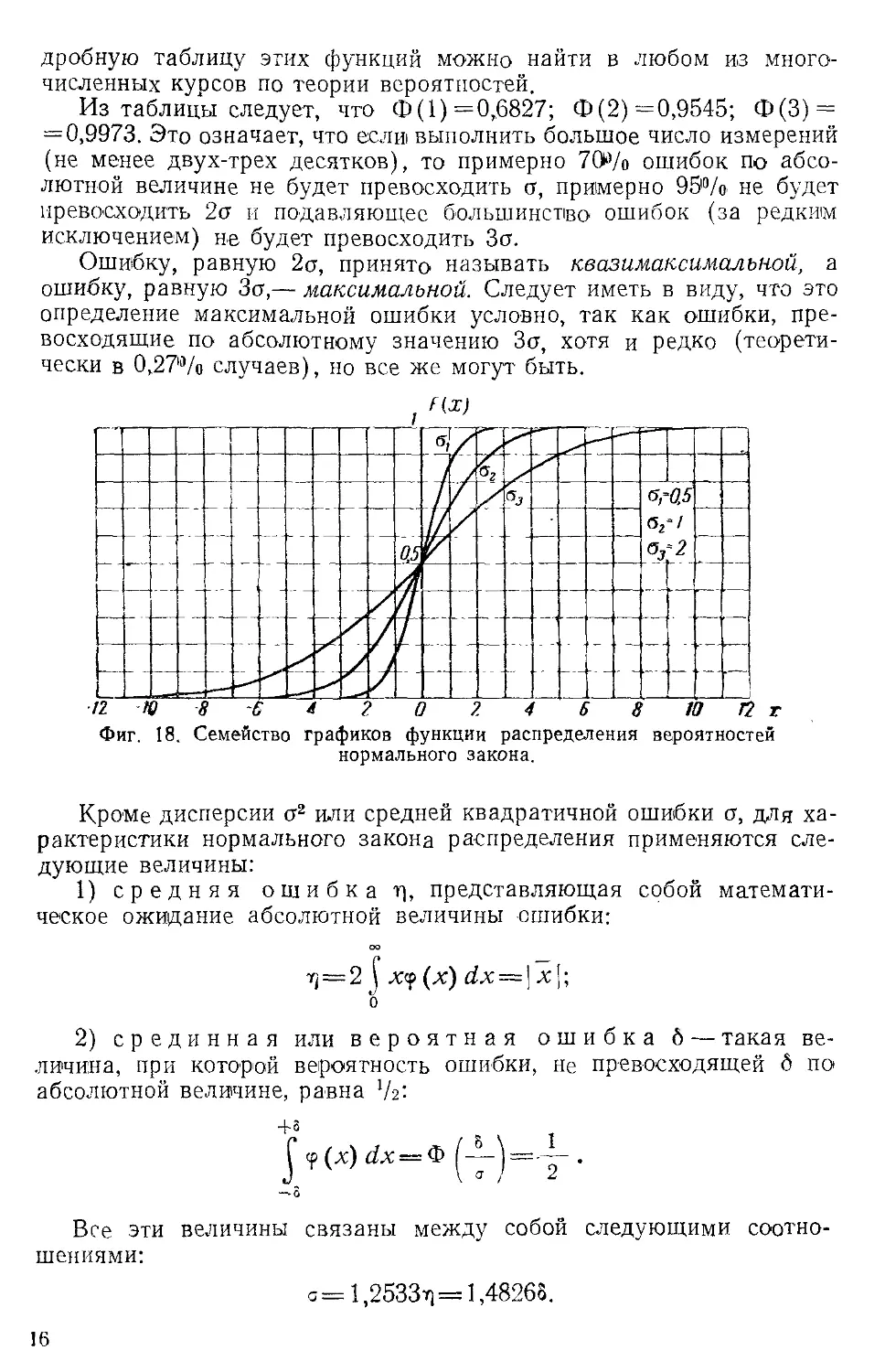
Для иллюстрации влияния величины средней квадратичной
ошибки на форму графика функции нормального распределения
случайных ошибок на фиг. 18 представлено семейство графиков F(x),
соответствующих различным значениям а.
Рассмотрим теперь, какова вероятность того, что случайная
ошибка по абсолютной величине не превышает наперед заданной
величины х. Поскольку функция ф(х) является четной, то указанная
вероятность равна
2<з2
dt.
B)
Функция Ф(х) является фактически другой формой записи
функции распределения и называется интегралом вероятности.
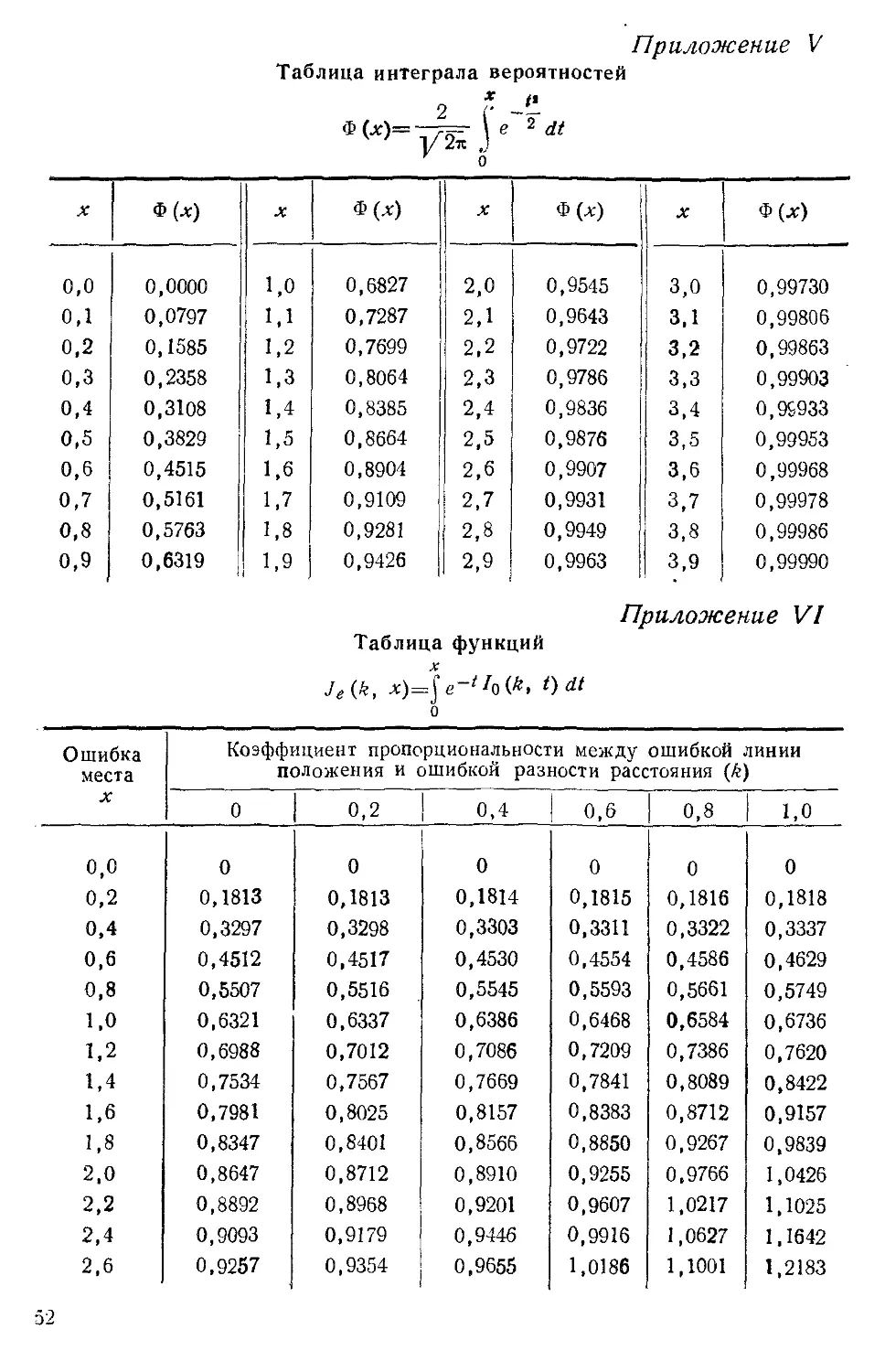
Таблица функции Ф (—) приведена в приложении V. Более по-
15
дробную таблицу этих функций можно найти в любом из
многочисленных куосов по теории вероятностей.
Из таблицы следует, что ФA) =0,6827; ФB) =0,9545; ФC) =
= 0,9973. Это означает, что если выполнить большое число измерений
(не менее двух-трех десятков), то примерно 70% ошибок по
абсолютной величине не будет превосходить а, примерно 95% не будет
превосходить 2а и подавляющее большинство ошибок (за редким
исключением) не будет превосходить За.
Ошибку, равную 2ст, принято называть квазимаксимальной, а
ошибку, равную За,— максимальной. Следует иметь в виду, что это
определение максимальной ошибки условно, так как ошибки,
превосходящие по абсолютному значению За, хотя и редко
(теоретически в 0,2715/о случаев), но все же могут быть.
, Пх)
Фиг. 18. Семейство графиков функции распределения вероятностей
нормального закона.
Кроме дисперсии а2 или средней квадратичной ошибки а, для
характеристики нормального закона распределения применяются
следующие величины:
1) средняя ошибка г\, представляющая собой
математическое ожидание абсолютной величины ошибки:
yj = 2 J x<?(x) dx = \x\;
о
2) срединная или вероятная ошибка 6 — такая
величина, при которой вероятность ошибки, не превосходящей 6 по
абсолютной величине, равна lk:
|tW^-*(t)=i-
Все эти величины связаны между собой следующими
соотношениями:
с= 1,2533*1 = 1,48265.
16
Определение средней квадратичной ошибки по опытным данным
выполняется следующим образом. Пусть при измерении какой-либо
величины U получено п значений U с одинаковой степенью
точности. Если ошибки измерения величины U подчиняются
нормальному закону распределения, то наиболее вероятным значением U будет
среднее арифметическое
Затем определяются отклонения измеренного значения
(величины от среднего арифметического:
г{=и,-и0.
Средняя квадратичная ошибка
... •-/?
а средняя ошибка
2 I е/1
П~-/п(п-Ц '
Как уже указывалось выше, для нормального закона
распределения отношение
—=1,25.
ri
Если же отношение найденных а и ц значительно отличается от
приведенного, то это свидетельствует о неприменимости в данном
случае закона нормального распределения.
5. ОШИБКИ ЛИНИЙ ПОЛОЖЕНИЯ ,
Выше указывалось, что при измерении какой-либо геометрической
величины, характеризующей местоположение объекта, неизбежны
ошибки вследствие отличия реальных условий распространения
радиоволн от идеальных, и вследствие инструментальных ошибок. Эти
ошибки измерений вызывают, естественно, соответствующие ошибки
в определении линии положения. Расстояние между истинной линией
положения в заданной точке и найденной называется ошибкой
линии положения.
Для определения зависимости ошибки линии положения от
ошибки геометрической величины воспользуемся теорией скалярного
поля.
Семейство линий положения можно рассматривать как линии
уровня плоского скалярного поля геометрической величины U.
Из теории поля известно, что
I ATT' dU
2 863
17
Заменяя дифференциалы конечными приращениями, получим
ошибку линии положения
4га = - —Г. C)
! grad U i
где Д?/— ошибка геометрической величины.
Из формулы C) следует, что ошибка линии положения прямо
пропорциональна ошибке геометрической величины. Поэтому закон
распределения ошибок линий положений будет такой же, как и
закон распределения ошибок геометрической величины. Но выше
указывалось, что в подавляющем большинстве случаев закон
распределения ошибок геометрической величины; достаточно точно
описывается нормальным законом распределения, который вполне
характеризуется величиной средней квадратичной ошибки.
Поэтому точность определения линии положения также вполне
характеризуется средней квадратичной ошибкой линии положения.
Коэффициент пропорциональности между средней квадратичной
ошибкой линии положения и средней квадратичной ошибкой
геометрической величины зависит от вида линии положения и
взаимного расположения подвижной и фиксированных точек.
Линия положения постоянного пеленга (см. фиг. 1 и фиг. 2)
описывается в декартовой системе координат уравнением
a = arctg—. D)
У
Модуль градиента в декартовой системе координат равен
] grad а | = —,
где Я ¦— расстояние между подвижной точкой и фиксированной.
Подставляя значение | grad a | в формулу C), найдем ошибку
линии положения при пеленгации
Дпп=/?Да, E)
где Да — ошибка пеленга в радианах.
Формулу E) можно представить в следующем виде:
Дяп = 0,0175/?Да°, E')
где Аа°— ошибка пеленга в градусах.
Заменяя Да средней квадратичной ошибкой пеленга а«, найдем
среднюю квадратичную ошибку линии положения при пеленгации
an=Raa,
или
зп = 0,0175/&1. F)
18
Линия положения постоянного расстояния (см. фиг. 4)
описывается уравнением
#=у^+7, G)
и
[grad#| = l.
Поэтому согласно формуле C) ошибка линии положения при даль-
нометрии
ДЛд = Д#, (8)
т. е. ошибка линии положения в рассматриваемом случае равна
дальномерной ошибке. Следовательно, средняя квадратичная
ошибка линии положения при дальнометрии равна средней квадратичной
дальномерной ошибке, т. е.
°« = **. ' <9>
Гиперболическая линия положения (см. фиг. 5) описывается
уравнением
где d — база разностнодальномерной системы.
Тогда
Подставляя найденное значение |grad7?p| в формулу C), получим
•ошибку гиперболической линии положения
где Д/?р— ошибка разности расстояний;
Ф — угол между фокальными радиусами-векторами.
Если расстояние R от середины базы до точки М (см. фиг. 5)
значительно больше базы d, то
Заменяя Д/?р средней квадратичной ошибкой разности
расстояний ар, найдем среднюю квадратичную ошибку гиперболической
линии положения
2sin-^-
2
Эллиптическая линия положения (см. фиг. 6) описывается
уравнением
Из треугольника АМВ следует, что
Подставляя найденное значение J grad i?c.| в формулу C), получим
ошибку эллиптической линии положения
где ARU— ошибка суммы расстояний;
Ф — угол между фокальными радиусами-векторами.
Заменяя ARC средней квадратичной ошибкой суммы
расстояний а с, получим среднюю квадратичную ошибку эллиптической
линии положения
=э = ^— . A5)
9
2 cos —
2
Полученные формулы позволяют сделать следующие выводы.
При пеленгации ошибка линии положения, как это следует из
формулы F), при неизменной ошибке пеленга увеличивается с
увеличением расстояния до объекта.
При дальнометрии ошибка линии положения равна дальномер-
ной ошибке и, следовательно, зависит от расстояния так же, как и
дальномерная ошибка.
При измерении разности расстояний ошибка линии положения,
как это следует из формулы A2), уменьшается с возрастанием
расстояния между фиксированными точками. Следовательно, чтобы
повысить точность определения линии положения, необходимо
указанное расстояние увеличивать, если это не лимитируется
организационно техническими причинами или условиями распространения
радиоволн.
При измерении суммы расстояний, наоборот, целесообразно
уменьшать расстояние между фиксированными точками, так как
наименьшая ошибка линии положения, как это следует из формулы A5),
будет при ф = 0, чему соответствует d=Q.
Существенно отметить, что при одинаковых ошибках измерения
интервалов времени наибольшую точность определения линии
положения обеспечивает дальномерная система. Точность эллиптической
системы будет в раз меньше. В этом, собственно, заключает-
9
cos —
2
ся одна из причин, почему эллиптические системы пока еще не
нашли широкого применения.
Точность гиперболических систем также будет меньше в
раз. Однако, несмотря на это, гиперболические системы ши-
. <Р
sin —
2
роко- применяются в радионавигации, т. к. они позволяют определять
линию положения непосредственно на самолете или корабле при
помощи более простых бортовых устройств, чем устройства дальномер-
ных систем.
Существенно также, что коэффициент пропорциональности
между ошибкой линии положения и ошибкой измеряемой
геометрической величины для азимутальных и дальномерных систем, как это
следует из формул E) и (8), не зависит от направления. Поэтому
азимутальные и дальномерные системы являются всенаправлен-
ньдои.
863
21
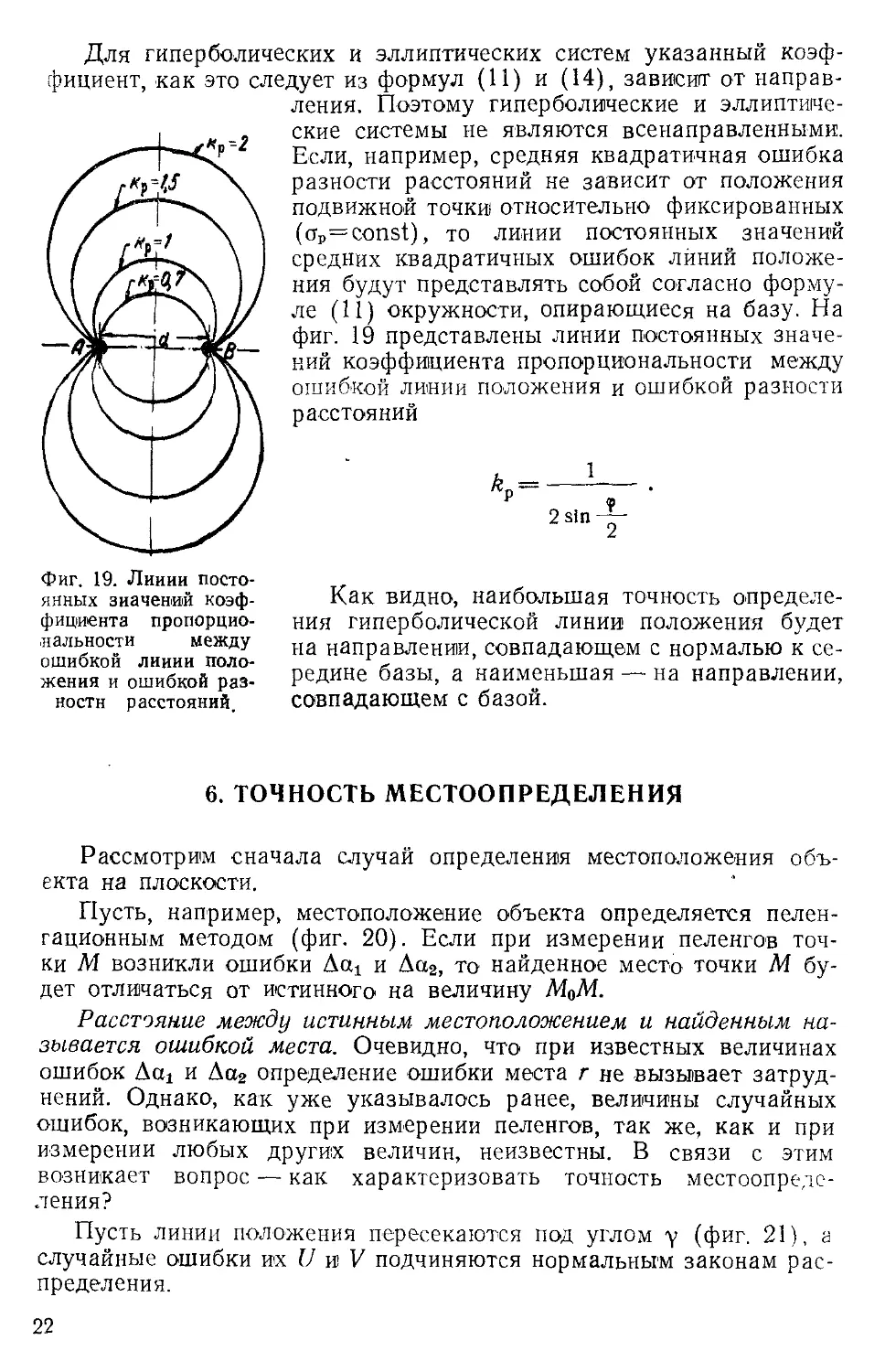
Для гиперболических и эллиптических систем указанный
коэффициент, как это следует из формул A1) и A4), зависит от
направления. Поэтому гиперболические и
эллиптические системы не являются всенаправленными.
Если, например, средняя квадратичная ошибка
разности расстояний не зависит от положения
подвижной точки относительно фиксированных
(сХр=const), то линии постоянных значений
средних квадратичных ошибок линий
положения будут представлять собой согласно
формуле A1) окружности, опирающиеся на базу. На
фиг. 19 представлены линии постоянных
значений коэффициента пропорциональности между
ошибкой линии положения и ошибкой разности
расстояний
Фиг. 19. Линии
постоянных значения
коэффициента
пропорциональности между
ошибкой линии
положения и ошибкой
разности расстояний.
Как видно, наибольшая точность
определения гиперболической линии положения будет
на направлении, совпадающем с нормалью к
середине базы, а наименьшая — на направлении,
совпадающем с базой.
6. ТОЧНОСТЬ МЕСТООПРЕДЕЛЕНИЯ
Рассмотрим сначала случай определения местоположения
объекта на плоскости.
Пусть, например, местоположение объекта определяется пелен-
гационным методом (фиг. 20). Если при измерении пеленгов
точки М возникли ошибки Aat и Аа2, то найденное место точки М
будет отличаться от истинного на величину М0М.
Расстояние между истинным местоположением и найденным
называется ошибкой места. Очевидно, что при известных величинах
ошибок Act! и Аа2 определение ошибки места г не вызывает
затруднений. Однако, как уже указывалось ранее, величины случайных
ошибок, возникающих при измерении пеленгов, так же, как и при
измерении любых других величин, неизвестны. В связи с этим
возникает вопрос — как характеризовать точность местоопреде-
ления?
Пусть линии положения пересекаются под углом y (фиг. 21), а
случайные ошибки их U и V подчиняются нормальным законам
распределения.
22
Фиг. 20. Ошибка места на плоскости
при пеленгационном методе
определения местоположения
Фиг. 21. Ошибка места.
23
Из теории вероятностей известно, что в этом случае двухмерная
плотность распределения вероятностей ошибок U и V -
где Су и ov—средние квадратичные ошибки линий положения;
р — коэффициент корреляции.
Коэффициент корреляции характеризует степень вероятностной
связи между случайными ошибками U и V:
Если случайные ошибки U и V независимы, то р=0.
Приравнивая показатель степени некоторой постоянной
величине, получим уравнение кривой, равной плотности распределения
вероятностей:
Значение ошибки линий положения в реальных условиях таково,
что в пределах возможных положений точки М линии положения
практически можно считать параллельными.
В этих условиях кривая равной плотности распределения
представляет собой эллипс (см. приложение I).
Различным значениям А, соответствует семейство софокусных
эллипсов, которые принято называть эллипсами ошибок.
Размеры полуосей эллипса ошибок заданной вероятности будут
равны (см. приложение I)
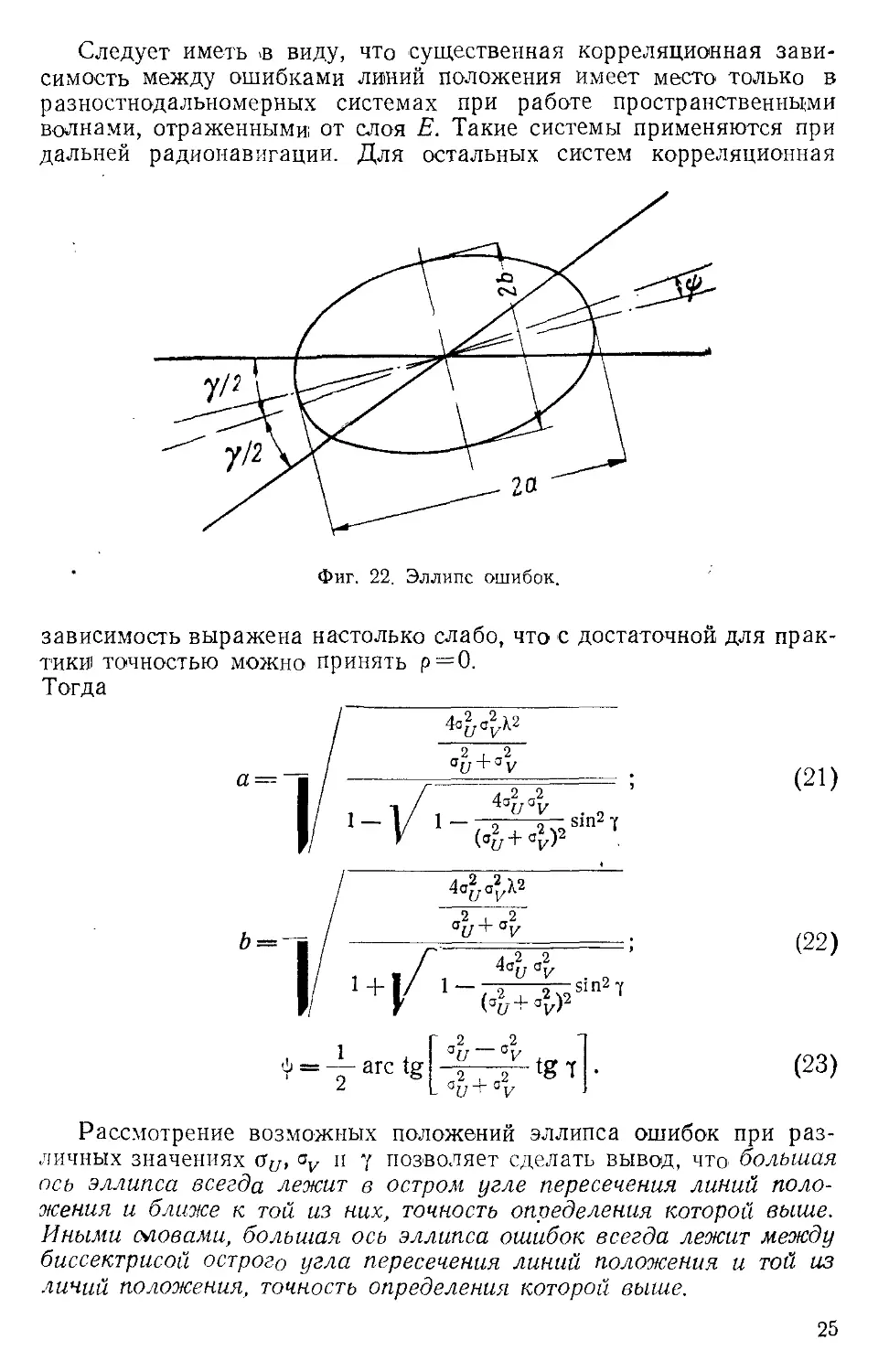
Положение эллипса ошибок определяется углом между большой
осью эллипса и биссектрисой угла между линиями положения
(фиг. 22), равного
Следует иметь в виду, что существенная корреляционная
зависимость между ошибками линий положения имеет место только в
разностнодальномерных системах при работе пространственными
волнами, отраженными от слоя Е. Такие системы применяются при
дальней радионавигации. Для остальных систем корреляционная
Фиг. 22. Эллипс ошибок.
зависимость выражена настолько слабо, что с достаточной для
практики точностью можно принять р = 0.
Тогда
а =
Рассмотрение возможных положений эллипса ошибок при
различных значениях ац, av и у позволяет сделать вывод, что большая
ось эллипса всегда лежит в остром угле пересечения линий
положения и ближе к той из них, точность определения которой выше.
Иными оловами, большая ось эллипса ошибок всегда лежит между
биссектрисой острого угла пересечения линий положения и той из
линий положения, точность определения которой выше.
25
В частном случае, когда точности определения линий положения
равны между собой, большая ось эллипса совпадет с биссектрисой
острого угла пересечения линий положения.
В другом частном случае, когда угол пересечения прямой, что
справедливо при дальномерно-пеленгационном методе определения
место-положения, а р = 0, т. е. ошибки U и V являются взаимно
независимыми, оси эллипса ошибок совпадают с линиями положения.
В этом случае полуоси эллипса
а = Х]/2а, 1
B4)
где а, и ау—- средние квадратичные ошибки двух взаимно
перпендикулярных линий положения.
Если при этом ах=а„, то эллипсы ошибок превращаются в
окружности, и эллиптическое рассеивание превращается в круговое.
Вероятность того, что- искомое место находится в пределах
эллипса ошибок,
Р (х) = { f «p (?/, V) dU dV; B5)
so.)
через S(X) обозначена область, ограниченная эллипсом ошибок.
Выполнив интегрирование (см. приложение II), получим
Р(>0 = 1-?-х\ B6)
откуда
Х==У —ln(l— P) B7)
Для эллипса ошибок, обладающего тем свойством, что
вероятность нахождения в нем искомого местоположения равна 1/2,
значение параметра Х=0,832. .
Итак, точность определения местоположения объекта на
плоскости наиболее полно характеризуется эллипсом ошибок.
Поэтому наиболее полное представление о зависимости точности
местоопределения от взаимного расположения подвижной и
фиксированных точек дает так называемое поле ошибок, представляющее
собой ряд эллипсов ошибок заданной вероятности.
Приведенные выше формулы позволяют построить поле ошибок
в заданных конкретных условиях, при этом необходимо иметь
опытные данные о зависимости средних квадратичных ошибок
геометрических величин от взаимного расположения подвижной и
неподвижных точек. Если по каким-либо причинам эти зависимости
неизвестны, то в первом приближении для ориентировочного
суждения о поле ошибок можно принять средние квадратичные ошибки
геометрических величин постоянными.
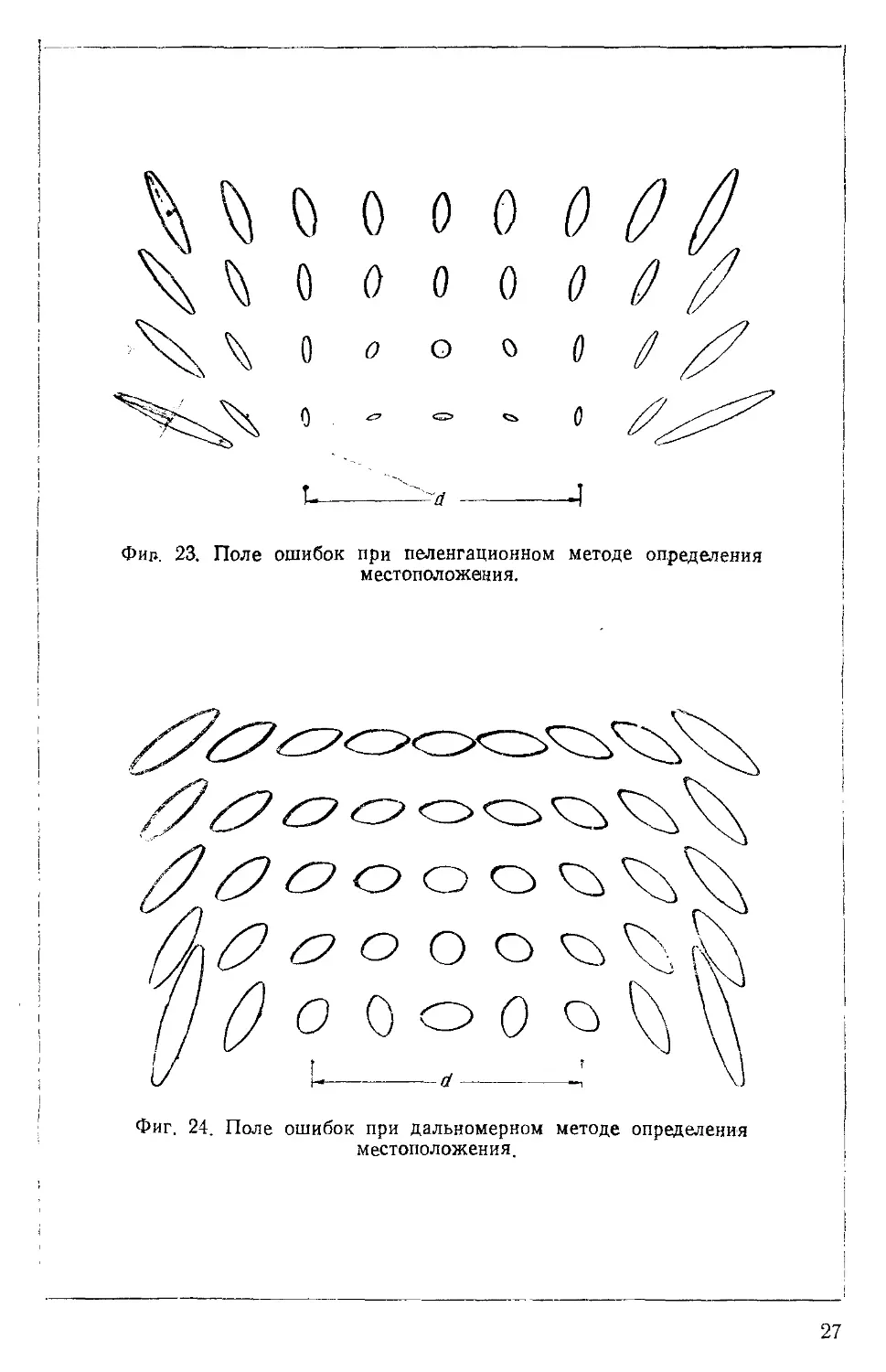
Для иллюстрации на фиг. 23, 24, 25 и 26 представлены поля
ошибок при пеленгационном, дальномерном, разностнодальномер-
ном и дальномерно-пеленгационном методах определения
местоположения.
26
Фиг.. 23. Поле ошибок при пеленгационном методе определения
местоположения.
Фиг. 24. Поле ошибок при дальномерном методе определения
местоположения.
27
Фиг 25. Поле ошибок при разностнодальномерном методе
определения местоположения.
Фиг. 26. Поле ошибок при дальномерно-пеленгациовном методе
определения местоположения.
?я
Для упрощения расчетов, связанных с построением полей
ошибок, можно предварительно построить ряд вспомогательных
графиков (см. приложение I).
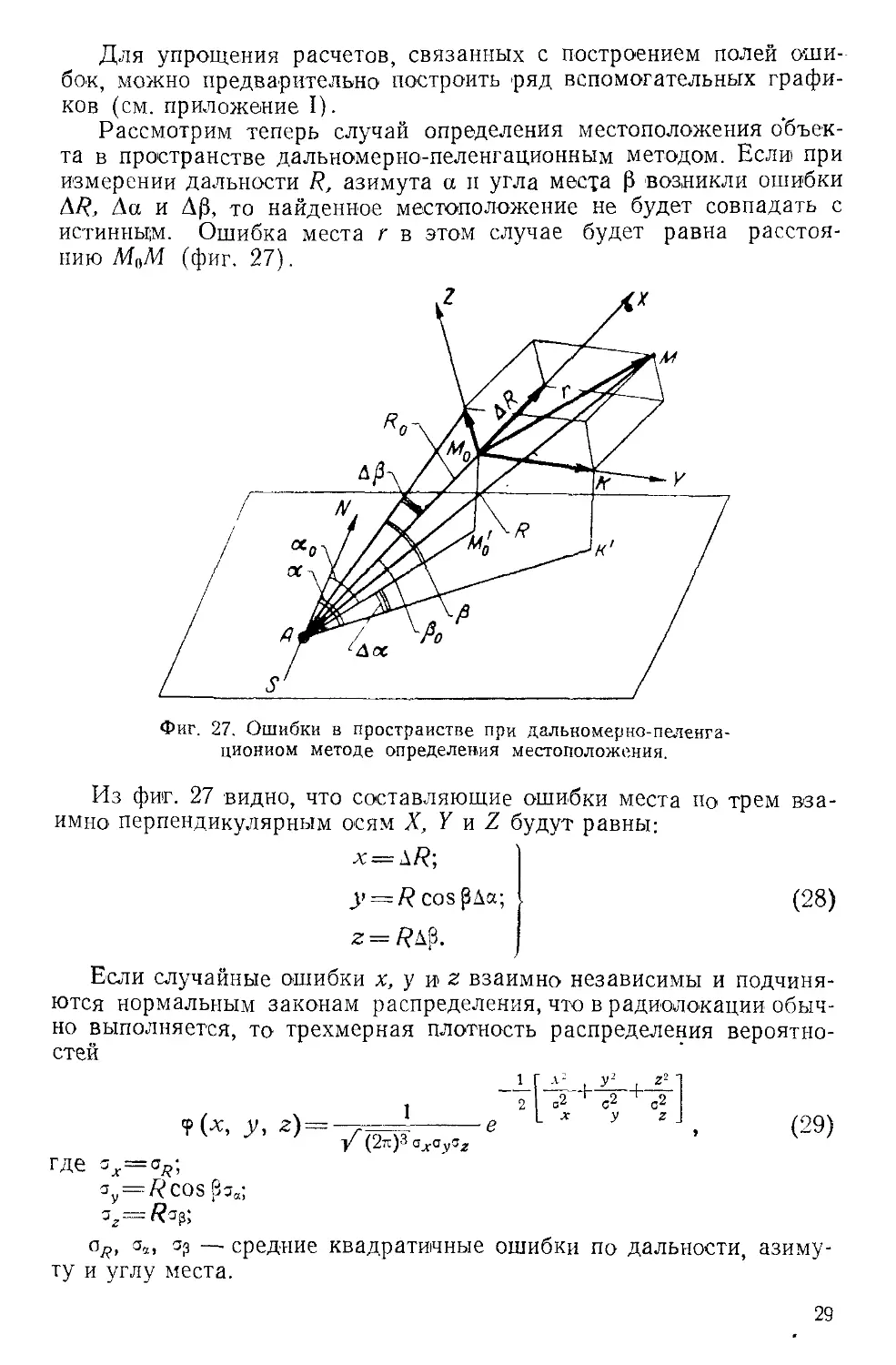
Рассмотрим теперь случай определения местоположения
объекта в пространстве дальномерно-пеленгационным методом. Если при
измерении дальности R, азимута а и угла места В возникли ошибки
AR, Аа и Ай, то найденное местоположение не будет совпадать с
истинньпм. Ошибка места г в этом случае будет равна
расстоянию МпМ (фиг. 27).
Фиг. 27. Ошибки в пространстве при дальномерно-пеленга-
ционном методе определения местоположения.
Из фиг. 27 видно, что составляющие ошибки места по трем вза
имно перпендикулярным осям X, Y и Z будут равны:
J' = /?COspAa;
Если случайные ошибки х, у и> z взаимно независимы и
подчиняются нормальным законам распределения, что в радиолокации
обычно выполняется, то трехмерная плотность распределения
вероятностей
B8)
?(•*, У, г)-
2 о2 + G2 ^ 02
где
¦/'BяK ахаучг
B9)
3*>
ay==RcOS^;
Од, о*, з3 — средние квадратичные ошибки по дальности,
азимуту и углу места.
29
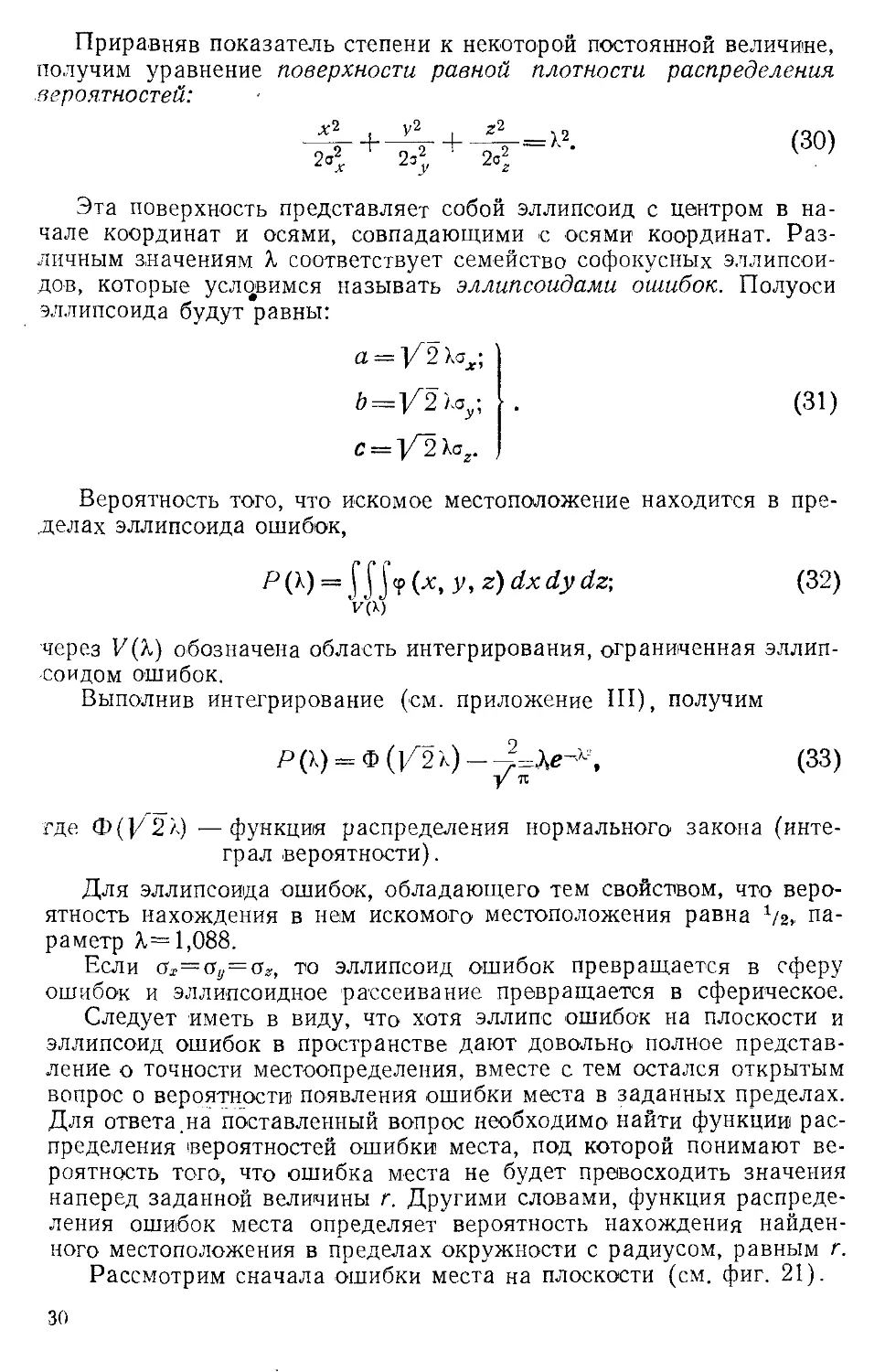
Приравняв показатель степени к некоторой постоянной величине,
получим уравнение поверхности равной плотности распределения
¦вероятностей:
2ах 2ау 2az
Эта поверхность представляет собой эллипсоид с центром в
начале координат и осями, совпадающими с осями координат.
Различным значениям К соответствует семейство софокусных
эллипсоидов, которые условимся называть эллипсоидами ошибок. Полуоси
эллипсоида будут равны:
а = 1/2 Ц,; '
ft = |/2XV,
С = 1/~2Хо,.
C1)
Вероятность того, что искомое местоположение находится в
пределах эллипсоида ошибок,
Р (К) = [ f jcp (x, у, z) dx dy dz; C2)
V(X)
через V(X) обозначена область интегрирования, ограниченная
эллипсоидом ошибок.
Выполнив интегрирование (см. приложение III), получим
Р (X) = Ф (/2 X) —!=Ае-^, C3)
где Ф(\/'2к) ¦—функция распределения нормального закона
(интеграл вероятности).
Для эллипсоида ошибок, обладающего тем свойством, что
вероятность нахождения в нем искомого местоположения равна 1/2,
параметр К= 1,088.
Если ах=ау=аг, то эллипсоид ошибок превращается в сферу
ошибок и эллипсоидное рассеивание превращается в сферическое.
Следует иметь в виду, что хотя эллипс ошибок на плоскости и
эллипсоид ошибок в пространстве дают довольно полное
представление о точности местоопределения, вместе с тем остался открытым
вопрос о вероятности появления ошибки места в заданных пределах.
Для ответа.на поставленный вопрос необходимо найти функции
распределения вероятностей ошибки места, под которой понимают
вероятность того, что ошибка места не будет превосходить значения
наперед заданной величины г. Другими словами, функция
распределения ошибок места определяет вероятность нахождения
найденного местоположения в пределах окружности с радиусом, равным г.
Рассмотрим сначала ошибки места на плоскости (см. фиг. 21).
30
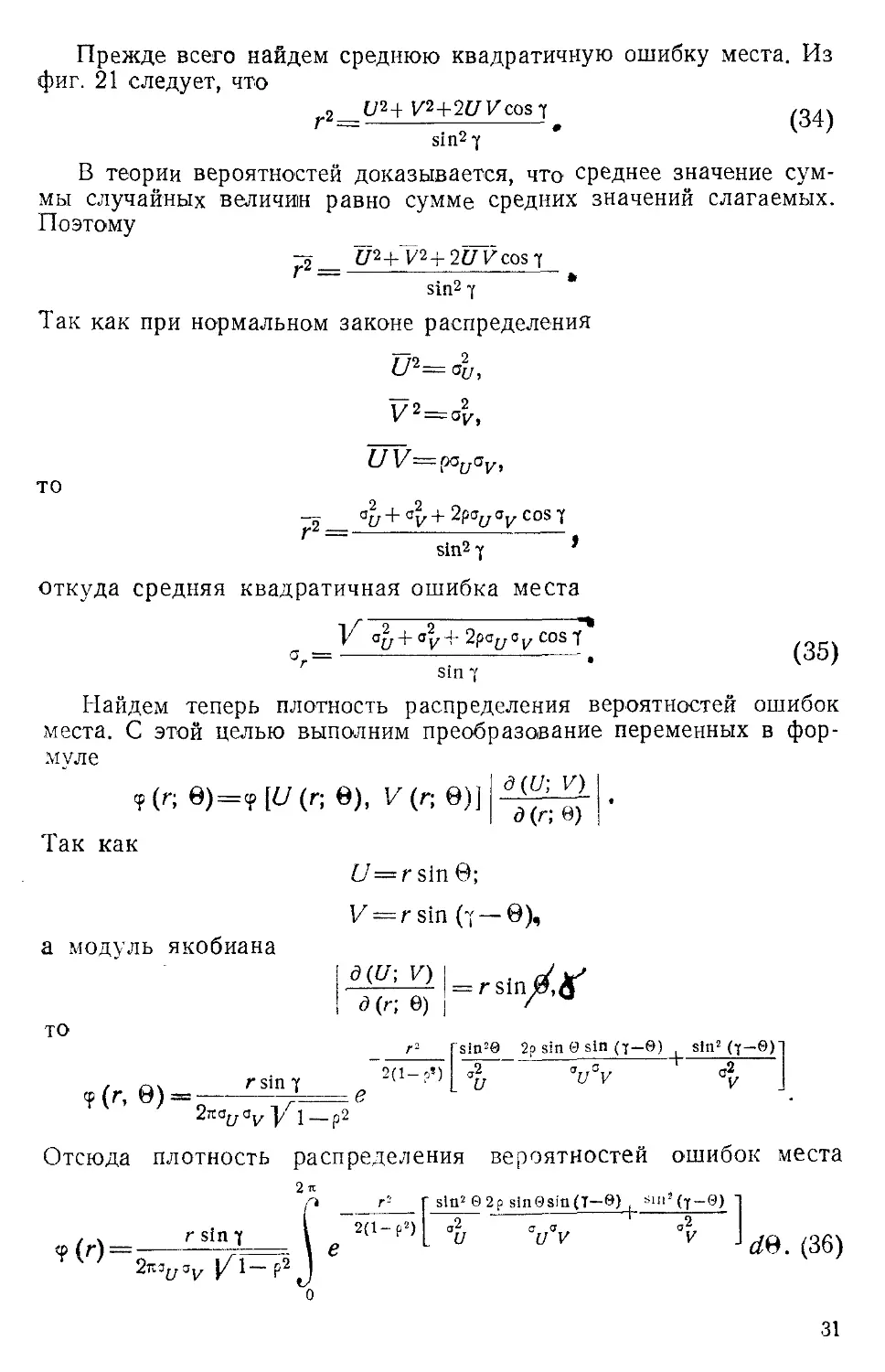
Прежде всего найдем среднюю квадратичную ошибку места. Из
фиг. 21 следует, что
В теории вероятностей доказывается, что среднее значение
суммы случайных величин равно сумме средних значений слагаемых.
Поэтому
Так как при нормальном законе распределения
откуда средняя квадратичная ошибка места
Найдем теперь плотность распределения вероятностей ошибок
места. С этой целью выполним преобразование переменных в
формуле
Так как
а модуль якобиана
Отсюда плотность распределения вероятностей ошибок места
Тогда функция распределения вероятностей ошибок места
В общем случае <р(г) и F(r) через, известные функции не
выражаются. «
В частном случае, когда ?=—, р = 0, ои = зк = о, т. е. при
круговом рассеивании, плотность распределения вероятностей
ошибки места
Фиг. 28. График распределения плотности вероятностей
по закону Релея.
Этот закон распределения плотности вероятностей определяет
вероятность нахождения точки пересечения двух взаимно
перпендикулярных линий положения, случайные ошибки которых
независимы и распределены, по нормальному закону с одинаковыми
дисперсиями в кольце, ограниченном радиусами г и r+dr, с центром в
начале координат.
График закона распределения Релея представлен на фиг. 28.
Как видно из графика, такое распределение существенно отличается
от нормального. Если при нормальном законе распределения наиве-
роятнейшее значение случайной ошибки равно нулю, то при
распределении по закону Релея максимальная плотность достигается
при г= с и равняется
32
Эта функция называется законом распределения Релея.
Иными словам», при распределении ошибки места по закону Релея
наивероятнейшее ее значение равно средней квадратичной ошибке
линии положения.
Функция распределения ошибок места при круговом рассеивании
Поскольку в рассматриваемом случае средняя квадратичная
ошибка места согласно формуле C5)
График функции распределения по Релею представлен на фиг. 29.
Среднее значение ошибки места, распределенной по закону
Релея
Среднее значение квадрата ошибки места
Средняя квадратичная ошибка места
Дисперсия ошибки места
При распределении ошибок места по Релею в отличие от
нормального распределения средняя квадратичная ошибка места не
равна корню квадратному ив дисперсии.
В другом, более общем случае, когда f =—-, р = 0, но ¦su =
= злфау=:з , т. е. при таком эллиптическом рассеивании, когда
оси эллипса ошибок совпадают с линиями положения,
порядка.
Функция распределения ошибок места в рассматриваемом
случае будет равна
Полученный интеграл можно привести к виду функции
таблица которой приведена в приложении VI. Действительно,
используя замену переменных
и вводя обозначения
получим
где
На фиг. 30 представлены графики функции распределения
вероятностей ошибок места в зависимости от отношения —- , соответст-
вующие различным значениям т.
р(?г)
Фиг. 30. Семейство графиков функции распределения вероятностей
ошибок места
Приведенные графики верны и для общего случая, когда '{ф—ir
и р-^, но под т следует понимать отношения малой полуоси
эллипса ошибок к большой.
Как видно, функции распределения ошибок места как при
круговом рассеивании (т=1), так и при эллиптическом рассеивании
@<^/п<Т) отличаются от функции распределения нормального
закона (т—0).
Однако при Р^>0,6 эти различия не столь уж велики. Так,
вероятность того, что ошибка места не будет превосходить (величины ст,
и 2ov, лежит соответственно в пределах 0,63-^0,68 и 0,95^-0,98.
Таким образом, точность местоопределения на плоскости можно
характеризовать либо эллипсом ошибок заданной вероятности, либо
величиной средней квадратичной ошибки места.
3*
ЗГ;
то
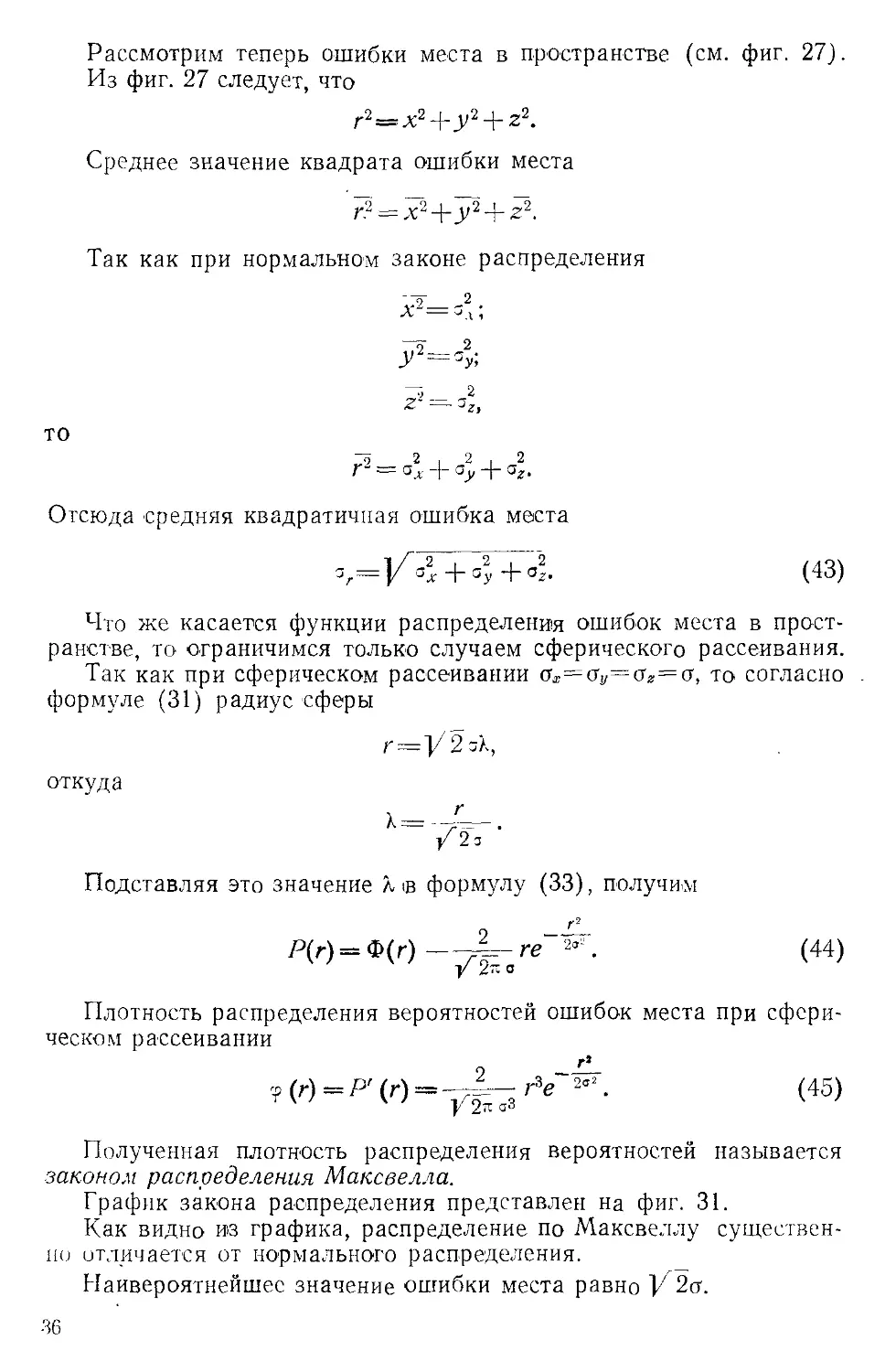
Рассмотрим теперь ошибки места в пространстве (см. фиг. 27J.
Из фиг. 27 следует, что
r2=x2+y2 + z2.
Среднее значение квадрата ошибки места
72 = x2+J2 + z2.
Так как при нормальном законе распределения
,.т_ 2.
X — ^ л 1
~> 2
Z- = Зг>
Z2 2 i 2 i 2
Отсюда средняя квадратичная ошибка места
3,= 1/Ч+о2у+о!. D3)
Что же касается функции распределения ошибок места в
пространстве, то ограничимся только случаем сферического рассеивания.
Так как при сферическом рассеивании ах=аи=аг=а, то согласно
формуле C1) радиус сферы
откуда
/2
Подставляя это значение % т формулу C3), получим
2 -¦?-
Р{г) = Ф(г) — ~~=- re 23L. D4)
Плотность распределения вероятностей ошибок места при
сферическом рассеивании
2 -—
Полученная плотность распределения вероятностей называется
законом распределения Максвелла.
График закона распределения представлен на фиг. 31.
Как видно из графика, распределение по Максвеллу
существенно отличается от нормального распределения.
Наивероятнейшее значение ошибки места равно У 2а.
36
Среднее значение ошибки места
г 2 ^fWdr
/7соЗ J ~" У'2т:
О
=-о.
Среднее значение квадрата ошибки места
/2u03 J
о
Средняя квадратичная ошибка места
а, = УЗа.
Дисперсия ошибки места
D (г) =72 - (FJ = /з —М з2.
При распределении ошибок места по Максвеллу в отличие от
нормального распределения средняя квадратичная ошибка места не
равна корню квадратному из дисперсии.
US
as
Q3
0.2
0
а
5
1
>
1
$
у—
/
5
j
Г
3
5
4
Фиг. 31. График распределения плотности вероятностей,
по закону Максвелла.
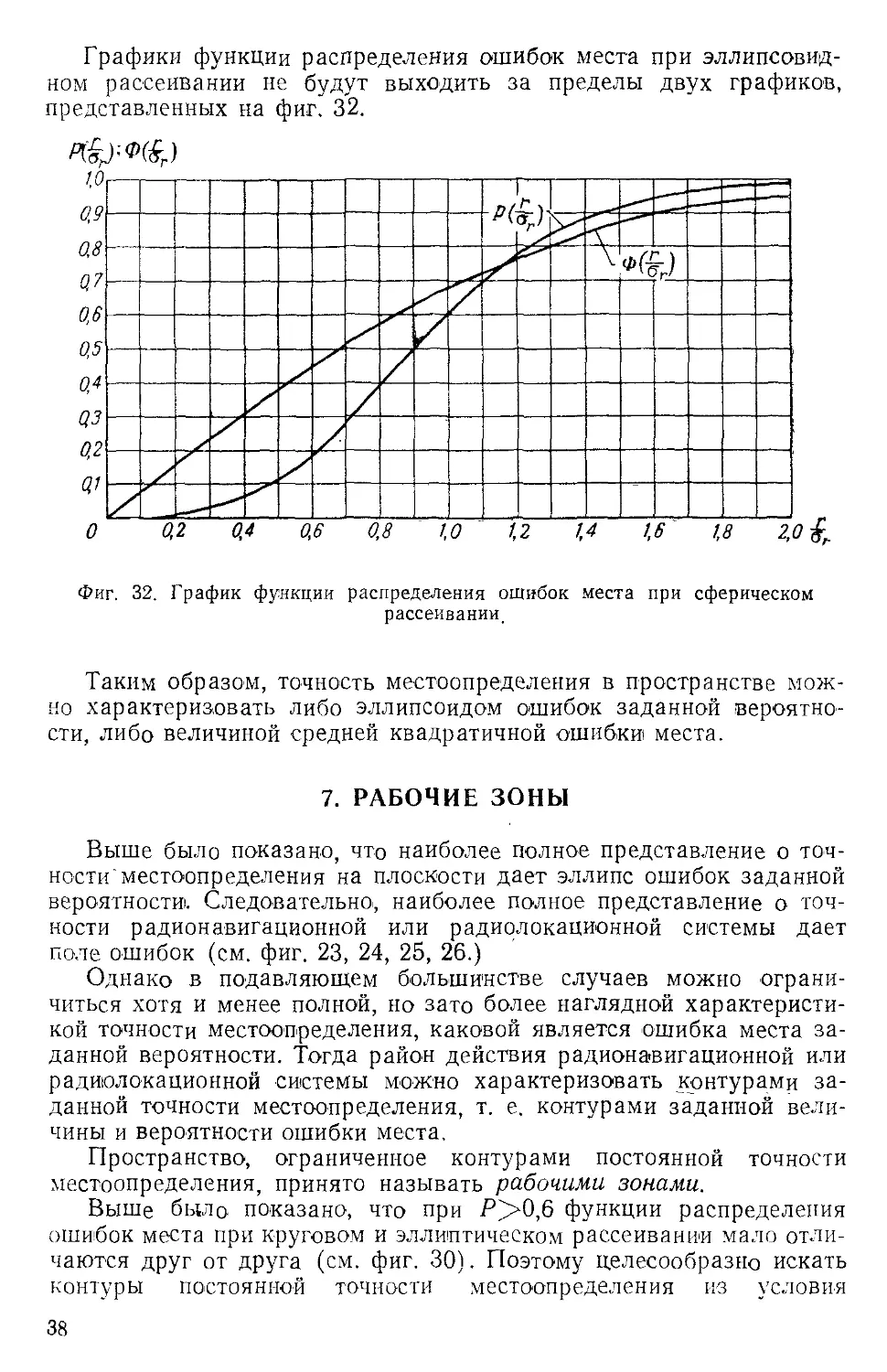
График функции распределения ошибок места при сферическом
рассеивании представлен на фиг. 32. Там же представлен график
функции распределения нормального закона. Функция
распределения ошибок места при сферическом рассеивании отличается от
нормального распределения. Однако при Р>0,6 эти различия
незначительны.
Вероятность того, что ошибка места при сферическом
рассеивании не будет превосходить величины аг и 2аг, равна соответственно
0,61 и 0,99.
37
Графики функции распределения ошибок места при
эллипсовидном рассеивании не будут выходить за пределы двух графиков,
представленных на фиг. 32.
Фиг. 32. График функции распределения ошибок места при сферическом
рассеивании.
Таким образом, точность местоопределения в пространстве
можно характеризовать либо эллипсоидом ошибок заданной
вероятности, либо величиной средней квадратичной ошибки места.
7. РАБОЧИЕ ЗОНЫ
Выше было показано, что наиболее полное представление о
точности местоопределения на плоскости дает эллипс ошибок заданной
вероятности. Следовательно!, наиболее полное представление о
точности радионавигационной или радиолокационной системы дает
поле ошибок (см. фиг. 23, 24, 25, 26.)
Однако в подавляющем большинстве случаев можно
ограничиться хотя и менее полной, но зато более наглядной
характеристикой точности местоопределения, каковой является ошибка места
заданной вероятности. Тогда район действия радионавигационной или
радиолокационной системы можно характеризовать контурами
заданной точности местоопределения, т. е. контурами заданной
величины и вероятности ошибки места.
Пространство, ограниченное контурами постоянной точности
местоопределения, принято называть рабочими зонами.
Выше было показано, что при Р>0,6 функции распределения
ошибок места при круговом и эллиптическом рассеивании мало
отличаются друг от друга (см. фиг. 30). Поэтому целесообразно искать
контуры постоянной точности местоопределения из условия
38
о,. = const. Вероятность того, что ошибка места на кривой ov=const
не будет превосходить величины ov при различных значениях т= ,
лежит в пределах 0,63-=-0,68.
Для нахождения контуров постоянной точности необходимо в
уравнение C5) подставить значения аи и зк в соответствии с
формулами F), (9) или A2).
Само собой разумеется, что при этом должны быть известны
зависимости средних квадратичных ошибок измеряемой
геометрической величины от положения подвижной точки относительно
фиксированных. Если указанные зависимости неизвестны, то в первом
приближении можно принять средние квадратичные ошибки
измерений постоянными.
Рассмотрим теперь рабочие зоны для некоторых частных случаев.
При пеленгационном способе определения местоположения
объекта коэффициент корреляции между ошибками двух
пеленгаторов или маяков, работающих на пеленг, практически равен нулю.
Тогда уравнение C5) с учетом формулы F) примет вид
0,0175 l/"n2 2 , г>2 2 ,,с\
з,=—Ч J/ Ajioi-I- К2З2, Db)
sin f
где Rt и R2 — расстояния от подвижной точки до каждой из
фиксированных;
'<Ti и ст2 — средние квадратичные ошибки пеленгаторов в
градусах.
В частном случае, когда et = 02=a — const,
от^уЖ^Ш. D7)
sin 7
Переходя к полярным координатам, получим (см.
приложение IV)
Величины, входящие в это уравнение, представлены на фиг. 33.
Уравнение D8) можно решить графически, для чего следует
построить серию кривых—=/(— |, соответствующих различным
ad \ d J
значениям а (фиг. 34).
Контуры постоянной точности местоопределения для
рассматриваемого случая представлены на фиг. 35._Минимальная ошибка
места будет в точке, находящейся на перпендикуляре, восстановлен-
~ном в середине базы на расстоянии 0,35cf от нее, этой точке
соответствует у = 109°.
При дальномерном способе определения местоположения
объекта коэффициент корреляции между случайными ошибками двух
Фиг. 33. Взаимное
расположение пеленгаторов и
объекта.
чт R
Фиг. 34. Графики зависимости — от —.
. ad d
Фиг. 35. Контуры постоянной
точности при пеленгационном
методе определения
местоположения.
дальномеров практически равен нулю. Поэтому уравнение C5) с
учетом формулы (9) примет вид
где CTj и а2 — средние квадратичные ошибки дальномеров.
Если ах и ст2 не зависят от расстояний, т. е. 0i = const и O2=const,
то контуры постоянной точности местоопределения представляют
собой окружности, опирающиеся на базу (фиг. 36).
При разностнодальномерном способе определения
местоположения объекта уравнение C5) с учетом формулы A2) примет вид
где Ох и 02 — средние квадратичные ошибки разности расстояний.
В частном случае, когда 0! = 02=0 и разностнодальномерная
система имеет три фиксированных точки (фиг. 37 и 38),
уравнение E0) примет вид
где 0д— средняя квадратичная дальномерная ошибка;
а а—средняя квадратичная азимутальная ошибка в градусах;
R — расстояние до объекта.
Для случая, когда <sR и ста не зависят от азимута, контуры
постоянной точности местоопределения представляют собой окружности
с центром в фиксированной точке.
Аналогичным путем могут быть найдены рабочие зоны в
азимутальной и угломестной плоскостях при определении
местоположения объекта в пространстве, но в этом случае необходимо решать
уравнение D3).
Контуры постоянной точности местоопределения для рассматри-
- ваемого случая (при р=0 и р=0,5) представлены на фиг. 37 и
фиг. 38.
При дальномерно-пеленгационном способе местоопределения
уравнение C5) с учетом формул F) и (9), принимает вид
42
Фиг. 38. Контуры постоянной точности при раз-
ностнодальномерном методе определения
местоположения.
Фиг. 36. Контуры
постоянной точности при дальномер-
ном методе определения
местоположения.
Фиг. 37. Контуры постоянной
точности при разностнодаль-
яомерном методе
определения местоположения.
Приложение I
ОПРЕДЕЛЕНИЕ КРИВОЙ РАВНОЙ ПЛОТНОСТИ
РАСПРЕДЕЛЕНИЯ ВЕРОЯТНОСТЕЙ
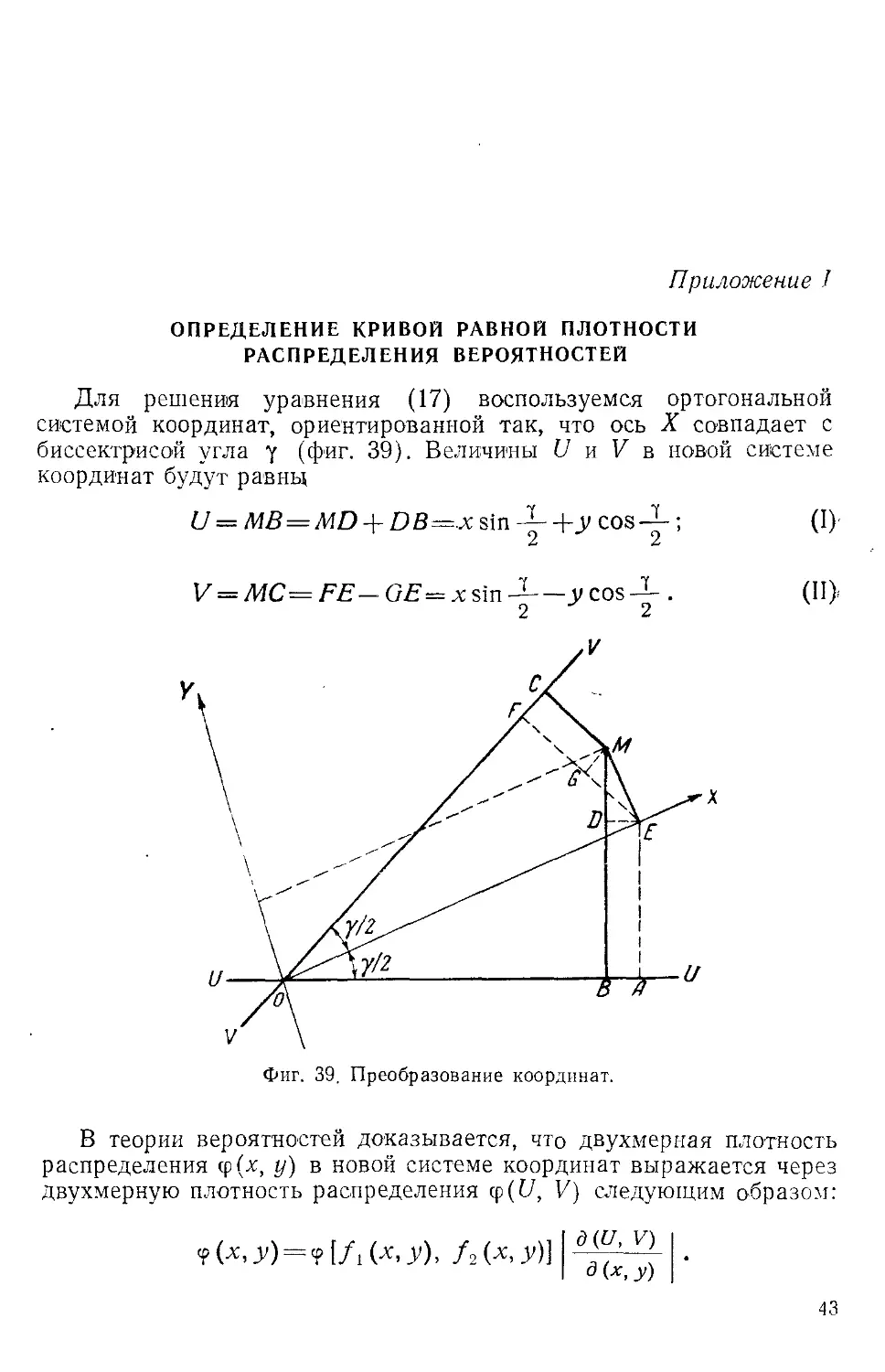
Для решения уравнения A7) воспользуемся ортогональной
системой координат, ориентированной так, что ось X совпадает с
биссектрисой угла у (фиг. 39). Величины U и V в новой системе
координат будут равны
Фиг. 39. Преобразование координат.
В теории вероятностей доказывается, что двухмерная плотность
распределения ср(х, у) в новой системе координат выражается через
двухмерную плотность распределения (p(U, V) следующим образом:
Подставляя в это уравнение значения U и V из формул (I) и (II) и
приравнивая показатель степени постоянной величине, получим
уравнение кривой равной плотности распределения вероятностей в
новой системе координат
откуда
Представим уравнение (III) в следующем виде:
•Функции fi(xiy) и /г(.ад) определяются формулами (I) и (II), а
модуль якобиана равен
Тогда двухмерная плотность распределения A6) в новой
системе координат
Так как дискриминант старших членов
то кривая, описываемая уравнением (III), есть эллипс. Чтобы найти
полуоси эллипса, приведем уравнение (III) к каноническому виду
Уравнение (III) можно представить в виде
/га1л2+т2У=2A-р2)Х2,
где т1 и т2 — корни характеристического уравнения
/и2 — /1т + /2=0.
Решая уравнение (VI), получим
тл
Инварианты It и /2 будут соответственно равны
Подставляя значения 1± и /2 из формул (VIII) в (IX) в
формулу (VII), получим
Тогда согласно уравнениям (IV) и (V) получим формулы A8)
и A9)
Положение большой оси определяется выражением
46
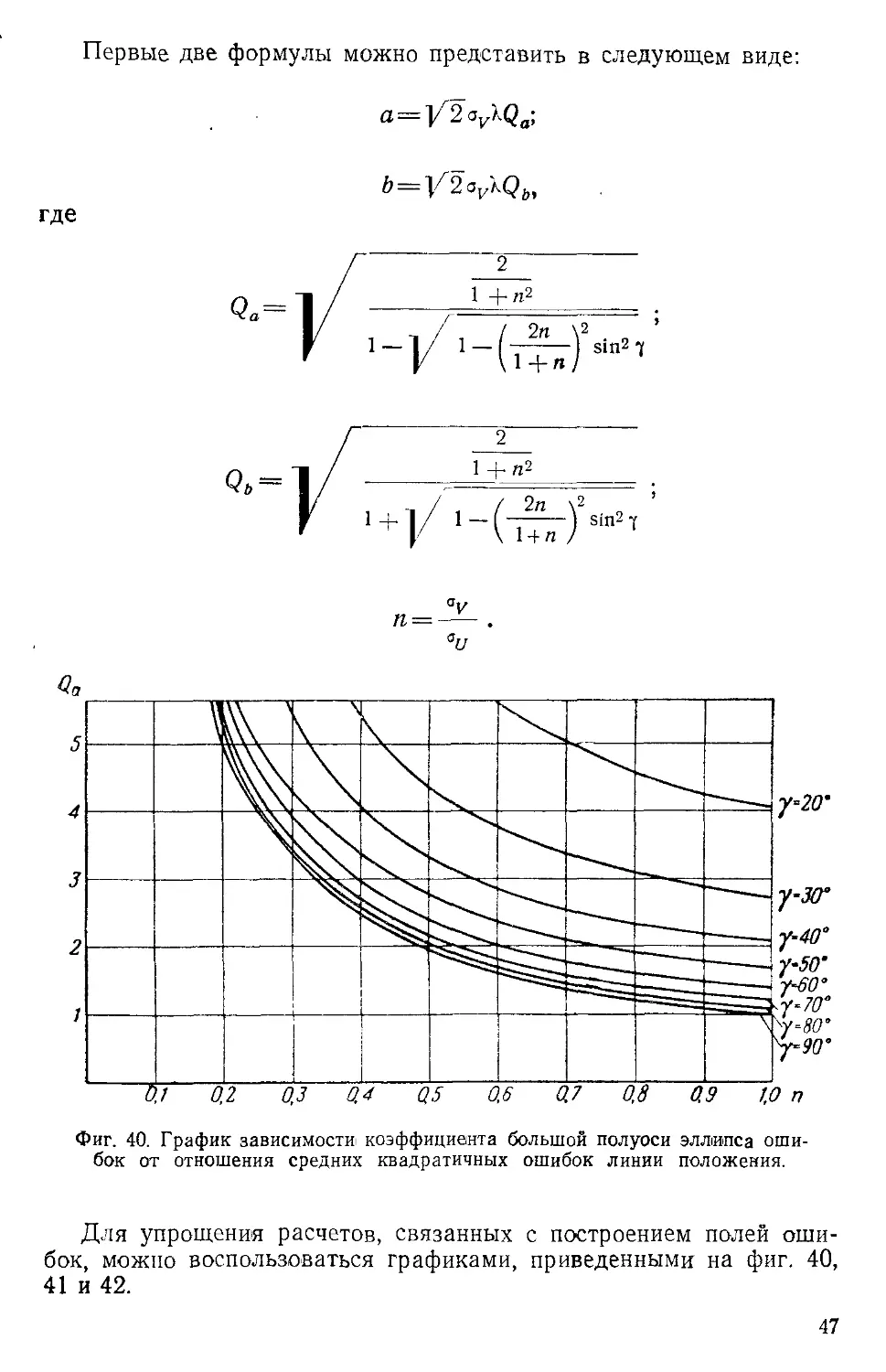
Первые две формулы можно представить в следующем виде:
где
sin2 7
Фиг. 40. График зависимости! коэффициента большой полуоси эллипса
ошибок от отношения средних квадратичных ошибок линии положения.
Для упрощения расчетов, связанных с построением полей
ошибок, можно воспользоваться графиками, приведенными на фиг. 40,
41 и 42.
Qb
Фиг. 41. График зависимости коэффициента малой полуоси эллипса ошибок
от отношения средних квадратичных ошибок линий положения.
Фиг. 42. График зависимости угла между большой осью
эллипса ошибок и биссектрисой угла пересечения линий
положения от отношения средних квадратичных ошибок
линий положения.
48
Приложение II
ОПРЕДЕЛЕНИЕ ВЕРОЯТНОСТИ НАХОЖДЕНИЯ ИСКОМОГО
МЕСТОПОЛОЖЕНИЯ В ПРЕДЕЛАХ ЭЛЛИПСА ОШИБОК
Вероятность того, что искомое местоположение находится в
пределах эллипса ошибок, согласно формуле B5) с учетом формул
A6) и A7) равна
Р (X)=- \ Г Г е-*' dU d V.
2Па а -|/1_р2 J J
U V S(X)
Из фиг. 21 видно, что
dUdV
dS = -
sin y
Вероятность нахождения искомого местоположения в пределах
дифференциала площади dS
dP= sin? е-» dS. (X)
Площадь эллипса
Подставляя значения а и b ив формул B1) и B2), получим
^л~ sinT
Дифференциал площади эллипса, соответствующий
дифференциалу параметра Я,,
э sin 1
Если теперь dS в формуле (X) заменить выражением dSan из
формулы (XI), то получим вероятность нахождения искомого
местоположения в пределах дифференциала площади эллипса:
dP=2\e-x'dK
Интегрируя это выражение, получим формулу B6)
P(\) = ^e-X22ldl=\-e~l\
4 863 49
Приложение III
ОПРЕДЕЛЕНИЕ ВЕРОЯТНОСТИ НАХОЖДЕНИЯ ИСКОМОГО
МЕСТОПОЛОЖЕНИЯ В ПРЕДЕЛАХ ЭЛЛИПСОИДА ОШИБОК
- Вероятность того, что искомое местоположение находится в
пределах эллипсоида ошибок, согласно формуле C1) с учетом
формул B9) и C0) равна
P(X) = _J [[[e^dxdydz.
У Bт:K охау<1г J J J
Вероятность нахождения искомого местоположения в пределах
дифференциала объема dV=dxdydz
dP= r \ e~vdV. (XII)
У BтсK охауег
Уравнение эллипсоида имеет вид
Поэтому полуоси эллипсоида равны:
с = ]/2огХ.
Объем эллипсоида
3 3 *у г
Дифференциал объема эллипсоида, соответствующий
дифференциалу параметра К,
dV„-*l^-*asyazVdK (XIII)
Если теперь dV в формуле (XII) заменить выражением dV3n из
формулы (XIII), то будет найдена вероятность того, что искомое
местоположение окажется в пределах дифференциала объема
эллипсоида
/ тс
откуда вероятность нахождения искомого местоположения в
пределах эллипсоида с параметром Я
х
Р(к) = -4= [е-^1ЧЪ.
V* J
о
50
Интегрируя по частям, получим
Первое слагаемое полученного выражения является функцией
распределения нормального закона, т. е. интегралом вероятности
ф(|/2>.). Учитывая сказанное, получим формулу C3)
ВЫВОД ФОРМУЛЫ D8)
Из фигуры 33 следует, что
откуда
Площадь треугольника ABC равна
Приложение IV
Since
Подставляя выражения (XIV) и (XV) в формулу D7), получим
формулу D8):
Таблица интеграла вероятностей
X
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
Ф(х)
0,0000
0,0797
0,1585
0,2358
0,3108
0,3829
0,4515
0,5161
0,5763
0,6319
X
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
Ф(х)
0,6827
0,7287
0,7699
0,8064
0,8385
0,8664
0,8904
0,9109
0,9281
0,9426
X
2,0
2,1
2.2
2,3
2,4
2,5
2,6
2,7
2,8
2,9
Ф(х)
0,9545
0,9643
0,9722
0,9786
0,9836
0,9876
0,9907
0,9931
0,9949
0,9963
X
3,0
3,1
3,2
3,3
3.4
3,5
3,6
3,7
3,8
3,9
Ф(х)
0,99730
0,99806
0,99863
0,99903
0,96933
0,99953
0,99968
0,99978
0,99986
0,99990
Таблица функций
Ошибка
места
X
0,0
0,2
0,4
0,6
0,8
1,0
1.2
1,4
1,6
1,8
2.0
2,2
2,4
2.6
Коэффициент пропорциональности между
ошибкой
положения и ошибкой разности расстояния (k
0
0
0,1813
0,3297
0,4512
0,5507
0,6321
0,6988
0,7534
0,7981
0,8347
0,8647
0,8892
0,9093
0,9257
0,2
0
0,1813
0,3298
0,4517
0,5516
0,6337
0,7012
0,7567
0,8025
0,8401
0,8712
0,8968
0,9179
0,9354
0,4
0
0,1814
0,3303
0,4530
0,5545
0,6386
0,7086
0,7669
0,8157
0,8566
0,8910
0,9201
0,9446
0,9655
0,6
0
0,1815
0,3311
0,4554
0,5593
0,6468
0,7209
0,7841
0,8383
0,8850
0,9255
0,9607
0,9916
1,0186
0,8
0
0,1816
0,3322
0,4586
0,5661
0,6584
0,7386
0,8089
0,8712
0,9267
0.9766
1,0217
1,0627
1,1001
пинии
1,0
0
0,1818
0,3337
0,4629
0,5749
0,6736
0,7620
0,8422
0,9157
0,9839
1,0426
1,1025
1,1642
1,2183
52
Продолжение
Ошибка
места
X
2,8
3,0
3,2
3,4
3,6
3,8
4,0
4,2
4,4
4,6
4,8
5,0
5,4
5,8
6,2
6,6
7,0
7,4
7,8
8,2
8,6
9,0
Коэффициент пропорциональности между ошибкой линии
положения и ошибкой разности расстояния (к)
0
0,9392
0,9502
0,9592
0,9666
0,9727
0,9776
0,9817
0,9830
0,9877
0,9899
0,9918
0,9933
0,9955
0,9970
0,9980
0,9986
0,9991
0,9994
0,9996
0,9997
0,9998
0,9999
0,2
0,9499
0,9618
0,9718
0,9800
0,9868
0,9925
0,9971
1,0010
1,0043
1,0070
1,0092
1,0111
1,0140
1,0160
1,0174
1,0183
1,0190
1,0195
1,0198
1,0201
1,0202
1,0203
0,4
0,9831
0,9982
1,0110
1,0220
1,0314
1,0394
1,0463
1,0522
1,0574
1,0619
1,0657
1,0690
1,0743
1,0783
1,0814
1,0837
1,0854
1,0867
1,0876
1,0885
1,0891
1,0896
0,6
1,0424
1,0635
1,0822
1,0988
1,1136
1,1268
1,1386
1,1492
1,1587
1,1679
1,1749
1,1818
1,1937
1,2034
1,2114
1,2180
1,2237
1,2278
1,2315
1,2346
1,2371
1,2393
0,8
1,1345
1,1661
1,1953
1,2223
1,2475
1,2708
1,2926
1,3130
1,3320
1,3499
1,3666
1,3823
1,4110
1,4369
1,4590
1,4792
1,4972
1,5134
1,5279
1,5409
1,5526
1,5631
1,0
1,2699
1,3195
1,3672
1,4132
1,4578
1,5010
1,5430
1,5839
1,6237
1,6625
1,7005
1,7376
1,8025
1,8786
1,9452
2,0097
2,0722
2,1328
2,1917
2,2491
2,3050
2,3597
Более полная таблица функции Je(k, x) приведена в статье Рейса (см. Bel
Sistem Technical Journal, 27, N 1, January, 1948).
ЛИТЕРАТУРА
Гнеденко Б. В., Курс теории вероятностей, Гостехиздат, 1954.
Радиотехнические средства кораблевождения. Перевод с английского под редакцией
В. В. Алексеева, Советское радио, 1948.
Сайбель А. Г., Общий метод построения рабочих зон
радионавигационных систем, Оборонгиз, 1953.
Сайбель А. Г., К вопросу о характеристике точности местоопределения
в радионавигации, Радиотехника, № 5, 1957.
Ширков В. В., Основные вопросы точности радиопеленгации, Редиздат
Аэрофлота, 1943.
Rice S. О., Statistical Properties of a Sine Wave Plus Random Noise, BSTJ.
Jan., 1948.
СОДЕРЖАНИЕ
Стр.
Предисловие 3
1. Геоме-фйческие величины, определяемые радиотехмичесимми методами 5
2. Линии положения и плоскости положения Т
3. Методы определения местоположения объекта 8
4. Характеристика ошибок, возникающих при измерениях геометрических
величин 10
5. Ошибки линий положения . 17
6. Точность местоопределения 22
7. Рабочие зоны 38
Приложение I 43
Приложение II 49
Приложение III 50
Приложение IV . 51
Приложение V . 52
Приложение VI . 52
Литература 54
Анатолий Георгиевич Сайбедь
ОСНОВЫ ТЕОРИИ ТОЧНОСТИ
РАДИОТЕХНИЧЕСКИХ МЕТОДОВ МЕСТООПРЕДЕЛЕНИЯ
Издательский редактор С. Д. Хаметова Техн. редактор И. М. Зудакин
Г-41691. Подписано в печать 15/V 1958 г. Учетно-изд. л. 2,73
Формат бумаги 60х92'/16. '.75 бум. л.—3,50 печ. л.
Цена 1 руб. Тираж 13500. Заказ 863/9121
Типография Оборонгиза