

























































































































































































































































































































































































































































































































































































Автор: Леньшин А.В.
Теги: военно-инженерное оборудование и работы по инженерному обеспечению пути сообщения противорадиолокационные средства военная топография общая радиотехника радиотехника авиационное оборудование
ISBN: 978-5-4446-0456-4
Год: 2014




2014
УДК 623.624
ББК 32.84
Л 46
Рецензенты:
Заслуженный деятель науки Российской Федерации,
доктор технических наук, профессор Ю. Л. Козирацкий
(ВУНЦ ВВС «Военно-воздушная академия
имени профессора Н.Е. Жуковского и Ю.А. Гагарина»);
доктор технических наук, с. н. с. Ю. И. Маевский
(ОАО «Концерн Радиоэлектронные технологии»)
Леньшин, А. В.
Л46 Бортовые системы и комплексы радиоэлектронного
подавления [Текст] / А. В. Леньшин. - Воронеж : Изда-
тельско-полиграфический центр «Научная книга»,
2014. - 590 с.
ISBN 978-5-4446-0456-4
В настоящей книге излагаются основные принципы построе-
ния бортовых комплексов радиоэлектронного подавления, особен-
ности функционирования в различных условиях, методы создания
помех и характер их воздействия на радиоэлектронные средства, а
также способы защиты от воздействия преднамеренных и естест-
венных помех. Материал базируется на опыте чтения автором лек-
ций по дисциплине «Авиационные комплексы радиоэлектронной
борьбы» на факультете авиационного радиоэлектронного оборудо-
вания Военного учебно-научного центра Военно-воздушных сил
«Военно-воздушная академия имени профессора Н. Е. Жуковского
и Ю. А. Гагарина».
Книга рассчитана на широкий круг специалистов, работающих
в области исследований и проектирования авиационной техники
радиоэлектронной борьбы, адъюнктов (аспирантов) и слушателей,
курсантов (студентов I старших курсов высших хчебных заведений
авиационного и радиотехнического профилей.
УДК 623.624
ББК 32.84
ISBN 978-5-4446-456-4
© Леньшин А. В., 2014
© Издательско- полиграфический
центр «Научная книга», 2014
ВВЕДЕНИЕ
Анализ боевых действий в локальных войнах последних лет подтверждает
возрастающую роль авиации на всех этапах конфликтов. Победа в современном
локальном военном конфликте невозможна без применения пилотируемых и бес-
пилотных летательных аппаратов (ЛА). В современную эпоху, отличающуюся бур-
ным научно-техническим прогрессом и существенными изменениями в военно-
политических и экономических условиях России, особо остро стоит задача разви-
тия авиационной техники военного назначения, характеризуемой высокой насы-
щенностью ее радиоэлектронным оборудованием (РЭО). Радиоэлектроника про-
должает оставаться материально-технической основой всех систем управления
(СУ) войсками и оружием, применяемых в воздухе, в космосе, на суше и на море.
Важной составляющей современных войн и вооруженных конфликтов является
информационное противоборство, проводимое с целью завоевания и удержания
превосходства над противником в управлении войсками и оружием. Одним из ос-
новных путей достижения такой цели является дезорганизация СУ7 противника и
зашита своих систем управления от его воздействия. Главную роль в достижении
этой цели призваны вносить силы и средства радиоэлектронной борьбы (РЭБ). По
мере развития и совершенствования РЭБ этот вклад имеет устойчивую тенденцию
к увеличению. Возрастание роли РЭБ в операциях и боевых действиях выводит ее
за рамки вида оперативного обеспечения и превращает в отдельную специфиче-
скую часть боевых действий.
В настоящее время радиоэлектронная борьба рассматривается как инстру-
мент, который с помошью разнообразных комбинаций наступательных и оборони-
тельных тактик, методик формирует срыв информационной операции в электро-
магнитном спектре противника, используя его в собственных целях, и тем самым
обеспечивает свободу' действий в указанном спектре своим войскам. Стремитель-
ный рост возможностей, интенсивности и влияния РЭБ на исход боевых действий
требует глубокого изучения и учета исторического опыта, условий развития РЭБ,
ее влияния на современные войны и вооруженные конфликты. РЭБ в современных
условиях приняла форму специальной операции в вооруженной борьбе и, несо-
мненно, будет совершенствоваться в войнах и военных конфликтах XXI века. Из-
менение роли РЭБ в будущих операциях и боевых действиях неизбежно отразится
на перспективном содержании РЭБ.
Завоевание и сохранение превосходства в области РЭБ стало важным фак-
тором современной войны. Качественные изменения в развитии авиационных
средств, систем и комплексов РЭБ, значительное возрастание их возможностей и
влияния на исход боевых действий требуют глубокого изучения опыта организации
и ведения РЭБ в ВВС. Обьекгивный и критический анализ современного состояния
РЭБ в ВВС свидетельствует о состоявшемся переломе качественной оценки влия-
ния РЭБ на все стратегические направления развития ВВС. Авиационные системы
и комплексы радиоэлектронного противодействия (КРЭП) динамично развиваются,
используя, с одной стороны, все новейшие достижения современной науки, а с дру-
гой - способствуют стремительному развитию наукоемких отраслей. Будущее
4
Введении
авиационной техники РЭБ в значительной степени определяется двумя взаимосвя-
занными направлениями развития элементной базы современных РЭС: созданием
разнообразных схем с использованием нанотехнологий и расширением возможно-
стей цифровой обработки сигналов.
В силу целого ряда известных причин общедоступной литературы по во-
просам построения авиационных систем и комплексов РЭБ очень мало. Во всяком
случае, много меньше, чем требуют современные общественно-научные потребно-
сти. Специфика и физические принципы построения авиационных средств и ком-
плексов РЭБ, особенностей функционирования авиационных средств и комплексов
РЭБ в различных условиях такова, что далеко не все аспекты могут излагаться с
одинаковой степенью подробности в общедоступной литературе.
Среди основных книг по теории и технике РЭБ необходимо отметить
работы С.А. Вакина и ЛН. Шустова [1, 2], Лероя Ван-Бранта [3], Н.Ф. Николенко
[4], А.И. Палия [5], В.А. Вартанесяна [6], В.Г. Радзиевского и А.А. Сироты [7, 8],
А.И. Куприянова и А.В. Сахарова [9, 10], монографию под редакцией В.Г.
Радзиевского [11], монографию Ю.М. Перунова, К.И. Фомичева и Л.М. Юдина
[12], а также монографию А.И. Куприянова и Л.Н. Шустова [13].
Президентом Российской Федерации 09 января 2012 года утверждены
«Основы политики Российской Федерации в области развития системы РЭБ на
период до 2020 года и дальнейшую перспективу». Руководством страны и
Вооруженных Сил уделяется приоритетное внимание развитию и
совершенствованию системы РЭБ в непростых условиях реформирования
Вооруженных Сил Российской Федерации. Ныне исход конфликта в значительной
степени определяется устойчивостью системы государственного, военного
управления, других информационных систем к радиоэлектронному воздействию
противника [14]. Интересы национальной безопасности требуют развития
электронного компонента вооружений, создания перспективных и
совершенствования существующих авиационных комплексов и систем РЭБ.
В настоящее время ведется работы по созданию средств РЭБ на новых
физических принципах. Вселяет оптимизм то, что в России в том или ином виде
сохранены научно-исследовательские, конструкторские учреждения и предприятия
оборонно-промышленного комплекса, способные модернизировать средства и
комплексы РЭБ, создавать перспективные образцы техники. Теоретические
разработки отечественных ученых в области РЭБ, например, способов и устройств
формирования помех, до сих пор на годы опережают подобные зарубежные
достижения.
Цель данной книги - рассмотрение основных принципов построения борто-
вых комплексов радиоэлектронного противодействия, особенностей функциониро-
вания в различных условиях и оценки эффективности, способов создания помех и
их воздействия на РЭС, способов защиты от воздействия преднамеренных и есте-
ственных помех.
Автор стремился изложить материал книги с учетом последних исследова-
ний и достижений в области авиационной техники РЭБ. При подготовке книги ис-
пользовалась только открытая отечественная и зарубежная литература, а также соб-
ственный опыт чтения лекций по дисциплине «Авиационные комплексы радио-
Введение
5
электронной борьбы» на факультете авиационного радиоэлектронного оборудова-
ния Военного учебно-научного центра ВВС «Военно-воздушная академия имени
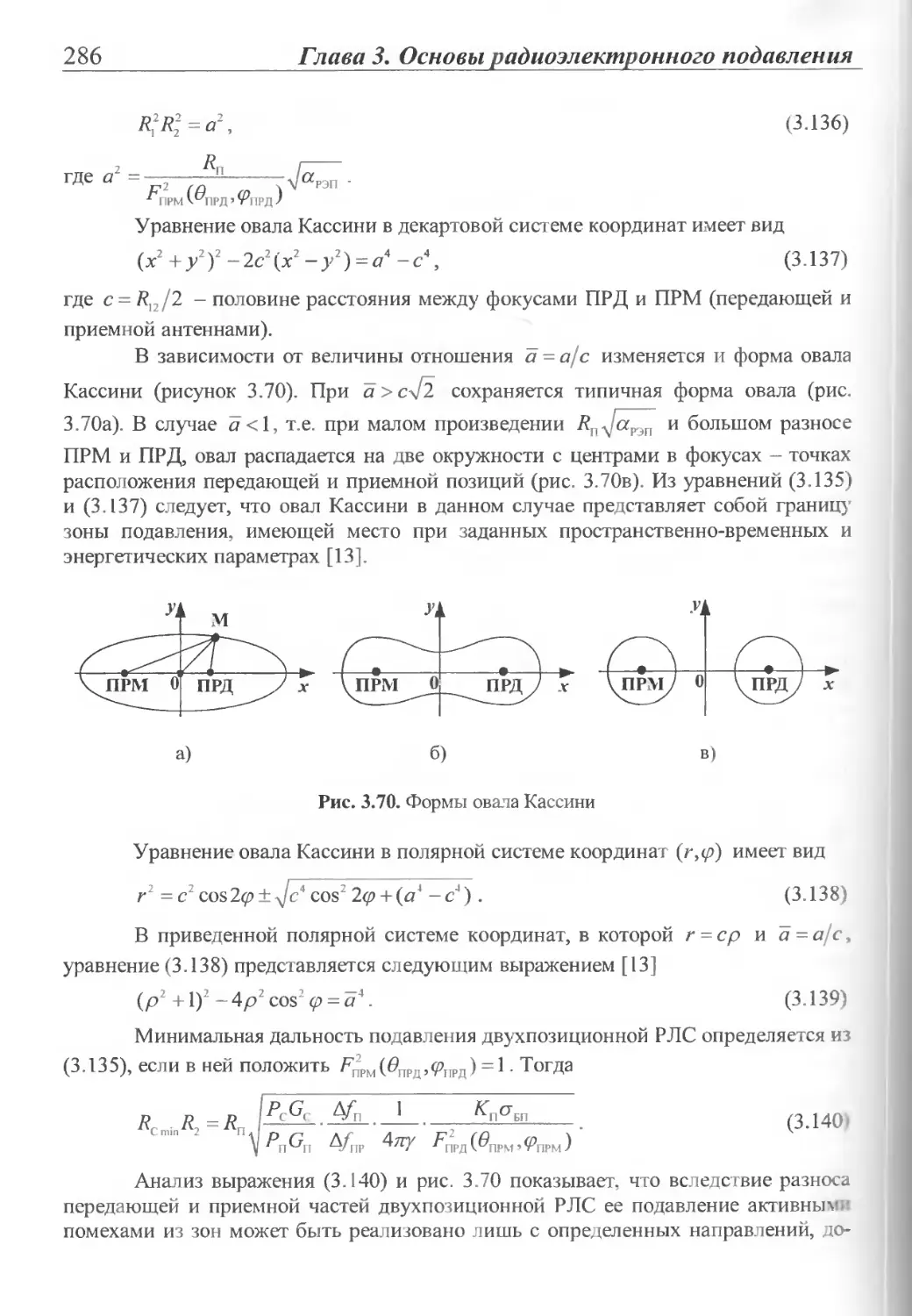
профессора Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж). Книга состоит из ше-
сти глав и приложения.
В первой главе кратко описаны общие положения радиоэлектронной борь-
бы, рассмотрены цели, задачи, условия ведения и составные части РЭБ, проанали-
зированы радиолокационные системы (РЛС) как объекты РЭБ. Выделены сильные
и слабые стороны радиолокационных систем, показана уязвимость их от систем и
средств РЭБ. Рассмотрены частные и обобщенные критерии и показатели эффек-
тивности радиоэлектронной борьбы.
Во второй главе рассмотрены теоретические основы радиоэлектронной раз-
ведки (РЭР). При этом принято традиционное деление РЭР на радиоразведку, ра-
диотехническую и радиолокационную разведку. Особое место отводится методам
определения местоположения РЭС и методам измерения параметров сигналов
средствами радиотехнической разведки. Дана характеристика способам запомина-
ния и воспроизведения сигналов. Рассмотрены принципы действия цифровых
устройств запоминания и воспроизведения радиолокационных сигналов DRFM
(Digital Radio Frequency Memory).
В третьей главе затронуты вопросы, связанные с классификацией помех и
особенностями радиоэлектронного подавления (РЭП) различного вида РЛС (обзо-
ра, обнаружения целей, управления войсками, сопровождения целей). Описаны ме-
тоды воздействия на среду распространения и отражения сигналов, использование
радиолокационных ложных целей и ловушек для противодействия РЛС, способы
снижения радиолокационной и оптической заметности ЛА.
Отдельное внимание в четвертой главе уделено функциональному радио-
электронному поражению мощным электромагнитным излучением и специальным
программным средством. Рассмотрены особенности подавления оптико-
электронных систем управления оружием, с помощью уравнения оптико-
электронного подавления проанализировано подавление ПК головок самонаведе-
ния управляемых ракет (УР) с различными видами модуляции.
В пятой главе изложены общие положения радиоэлектронной защиты РЭС
от преднамеренных и непреднамеренных помех, рассмотрены методы повышения
скрытности и помехоустойчивости, способы и системы защиты РЭС. Проанализи-
рованы неосновные каналы излучения и приема, вопросы обеспечения электромаг-
нитной совместимости (ЭМС). Изложены основные мероприятия по противодей-
ствию самонаводящемуся на излучение оружию (CHI1O).
Шестая глава посвящена теоретическим основам построения бортовых
комплексов обороны (БКО). Приведены характеристики БКО воздушных судов во-
енного назначения. Представлены основные функции БКО, проанализированы ос-
новные подсистемы комплексов индивидуальных и групповых средств РЭБ авиа-
ционного базирования. Проанализирован бортовой комплекс обороны как система
массового обслуживания. Рассмотрены показатели эффективности БКО и его под-
систем. Отдельное внимание уделено перспективам развития БКО. В приложении
приведены основные технические характеристики систем и средств РЭБ воздуш-
ных судов военного назначения.
6
Введение
Первое издание книги [15] достаточно быстро разошлось и получило поло-
жительную оценку специалистов. Книга предназначена для специалистов в области
РЭБ, а также для студентов старших курсов и аспирантов радиотехнических специ-
альностей вузов. Для обеспечения понимания излагаемого материала книга иллю-
стрирована большим количеством графического материала. Список литературы не
претендует на полноту и является перечнем материалов, используемых автором и
рекомендуемым для более глубокого изучения. Автор считает эту монографию
своим посильным вкладом в раскрытие и освещение уникальной научной школы
ВУНЦ ВВС «ВВА» в области радиоэлектронной борьбы, созданной несколькими
поколениями ученых и специалистов академии.
Автор признателен д.т.н. Тихомирову Н.М., д.т.н., проф. Лихачеву В.П.,
д.т.н. Баринову С.П., к.т.н. Беляеву В.В., к.г.н. Панову С.А. за обсуждение отдель-
ных вопросов книги.
Автор выражает свою глубокую признательность уважаемым рецензентам:
заместителю генерального директора ОАО «Концерн Радиоэлектронные техноло-
гии» по инновациям и научной работе, генеральному конструктору по направлению
«Системы и средства радиоэлектронной борьбы» доктору технических наук Юрию
Ивановичу Маевскому и Заслуженному деятелю науки РФ, профессору' кафедры
радиоэлектронной борьбы (и технического обеспечения частей РЭБ) ВУНЦ ВВС
«ВВА» доктору технических наук, профессору' Козпрацкому Юрию Леонтьевичу,
просмотревших рукопись и сделавших ряд полезных замечаний и ценных советов,
которые были учтены при подготовке книги к печати.
Выражаю искреннюю благодарность Л.Е. Ленъшиной за кропотливое ре-
дактирование рукописи. Автор признателен и благодарен коллегам (Богданову
Ю.Н., Лебедеву В.В., Сидорчуку В.П.) по работе в Военно-воздушной академии,
оказавшим существенную помошь при подготовке и оформлении графических и
иллюстративных материалов настоящего издания, а также всем, кто способствовал
улучшению качества и содержания предлагаемой книги.
В книге автор не ставил целью дать максимально полное изложение всех
вопросов, связанных с разработкой бортовых средств, систем и комплексов радио-
электронного противодействия. Однако хочется надеяться, что читатель, проанали-
зировав результаты работы, сможет почерпнуть для себя новые сведения и продол-
жить самостоятельную работу в области авиационной техники радиоэлектронного
подавления.
Автор будет рад любым замечаниям и предложениям по улучшению кнш и.
СПИСОК ОСНОВНЫХ СОКРАЩЕНИЙ
АД
AM
АРУ
АС
АСН
АСД
АСП
АСС
АЦП
АЧХ
БКО
БЛ
БПФ
БРЛС
ВРТР
ВТО
ВУ
гон
ген
ДНА
ДПФ
ЗАК
ЗРК
ЗУ
ИИ
ИРИ
ик
КРЭБ
ЛА
ЛЗ
лц
лчм
миле
мич
но
нч
оген
ОЗУ
оэп
ОЭС
ПАВ
ПВО
— амплитудный детектор
— амплитудная модуляция
— автоматическая регулировка усиления
— автосопровождение
— автоматическое сопровождение по направлению
— автоматическое сопровождение по дальности
— атакующее средство перехвата
— автоматическое сопровождение по скорости
— аналого-цифровое (-ый) преобразование (-тель)
— амплитудно-частотная характеристика
— бортовой комплекс обороны
— боковые лепестки
— быстрое преобразование Фурье
— бортовая радиолокационная система
— воздушная радиотехническая разведка
— высокоточное оружие
— видеоусилитель
— генератор опорного напряжения
— головка самонаведения
— диаграмма направленности антенны
— дискретное преобразование Фурье
— зенитно-артиллерийский комплекс
— зенитно-ракетный комплекс
— запоминающее устройство
— источник излучения
— источник радиоизлучения
— инфракрасный
— комплекс радиоэлектронной борьбы
— летательный аппарат
— линия задержки
— ложная цель
— линейно-частотная модуляция
— модуль измерителей параметров сигналов
— мгновенное измерение частоты
— направленный ответвитель
— низкочастотный
— оптическая головка самонаведения
— оперативное запоминающее усзройство
— оптико-электронное подавление
— оптико-электронное средство
— поверхностные акустические волны
— противовоздушная оборона
8
Список сокращений
ПП
ППРЧ
ппос
ПРЛ
ПФ
пч
РИО
РЛ
РЛР
РЛС
РСН
РТ
РТР
РЭ
РЭБ
РЭЗ
РЭО
РЭП
РЭПр
РЭР
РЭС
САП
СВЧ
сдц
снио
СУ
TCP
УЗВС
УЛЗ
УР
УУ
УПЧ
ФАПЧ
ФКМ
ФМ
ФРЭПр
ЦАП
ЦУЗВС
чм
ШУ
ЭМВ
ЭМИ
ЭМС
— передатчик помех
— программная перестройка рабочей частоты
— подсистема первичной обработки сигналов
— противорадиолокационный
— полосовой фильтр
— промежуточная частота
— радиоэлектронно-информационное обеспечение
— радиолокационный
— радиолокационная разведка
— радиолокационная система
— равносигнальное направление
— радиотехническая (-ое)
— радиотехническая разведка
— радиоэлектронная (-ое)
— радиоэлектронная борьба
— радиоэлектронная защита
— радиоэлектронные объекты
— радиоэлектронное подавление
— радиоэлектронное поражение
— радиоэлектронная разведка
— радиоэлектронное средство
— станция активных помех
— сверхвысокие частоты
— селекция движущихся целей
— самонаводящееся на излучение оружие
— система управления
— технические средства разведки
— устройство запоминания и воспроизведения сигналов
— ультразвуковая линия задержки
— управляемая ракета
— устройство управления
— усилитель промежуточной частоты
— фазовая автоподстройка частоты
— фазовый детектор
— фазокодовая модуляция (манипуляция)
— фазовая модуляция
— функциональное радиоэлектронное поражение
— цифро-аналоговое (-ый) преобразование (-тель)
— цифровое УЗВС
— частотная модуляция
— широкополосный усилитель
— электромагнитные волны
— электромагнитный импульс
— электромагнитная совместимость
ГЛАВА 1
ОБЩИЕ ПОЛОЖЕНИЯ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
1.1. Цели, задачи и составные части РЭБ
На современном этапе РЭБ является важнейшей составной частью
оперативного обеспечения деятельности сил в мирное и военное время,
неотъемлемой частью информационной войны. Задачей РЭБ является обеспечение
достоверности разведки РЭС противника и одновременное недопущение или
снижение возможности разведки своих РЭС, а также защита вооружения и военной
техники от средств поражения. РЭБ в современных условиях приняла форму
специальной операции в вооруженной борьбе и, несомненно, будет
совершенствоваться в войнах и военных конфликтах XXI века.
Решающий шаг, позволивший перевести идеи РЭБ в практическую область,
был сделан в первые дни войны с Японией командующим Тихоокеанской эскадрой
вице-адмиралом Макаровым С.О. Вступив 24 февраля 1904 года в командование
флотом Тихого океана, уже 7 марта адмирал издал исторический приказ № 27 -
первый официальный документ в области РЭБ. Значение данного документа для
развития РЭБ и радиоразведки в русском флоте неоценимо. В короткий срок
практически на всех кораблях и судах флота было организовано несение вахт
радиоразведки. Под Порт-Артуром к решению этой задачи привлекалась береговая
радиостанция, расположенная в районе Золотой горы [14].
Особо следует выделить дату 2(15 ) апреля 1904 года, когда впервые в миро-
вой истории был сделан практический шаг от организации радиоразведки к веде-
нию РЭБ в боевых действиях на море. Японцы предприняли очередной обстрел
Порт-Артура корабельной артиллерией, вошедший в историческую хронику оборо-
ны крепости под названием «третьей перекидной стрельбы». Официальный рапорт
временно исполняющего должность командующего флотом Тихого океана содер-
жит сообщение: «В 9.11 угра неприятельские броненосные крейсера «Ниссин» и
«Касуга», маневрируя на зюйд-зюйд-вест от маяка Ляотешань, начали перекидную
стрельбу по фортам и внутреннему рейду. С самого начала стрельбы два неприя-
тельских крейсера, выбрав позиции против прохода Ляотешанского мыса, вне вы-
стрелов крепости, начали телеграфировать, почему немедленно же броненосец
«Победа» и станции Золотой горы начали перебивать большой искрой неприятель-
ские телеграммы, полагая, что эти крейсера сообщают стреляющим броненосцам о
попадании их снарядов. Неприятелем выпущено 208 снарядов большого калибра.
Попаданий в суда не было».
Успешное отражение удара японского отряда кораблей стало возможным
благодаря решению двух главных задач: дезорганизации радиопомехами каналов
управления огнем корабельной артиллерии противника и обеспечению устойчивого
функционирования собственной системы управления. Бой под Порт-Артуром 2(15)
апреля 1904 года не просто открыл эпоху РЭБ в военном деле, но и явился прообра-
зом радиоэлектронной борьбы в современном ее понимании.
10
Глава 1. Общие положения радиоэлектронной борьбы
Но были и примеры противоположного отношения к РЭБ. Вице-адмирал
З.П. Рожественский. командовавший Второй и Третьей Тихоокеанскими эскадрами
в Цусимском сражении, запретил использование радиопомех в ситуациях, когда их
необходимость была очевидной для многих офицеров российского флота. Сразу
после окончания Русско-Японской войны причины и обстоятельства Цусимской
трагедии стали предметом особого рассмотрения специальной комиссии под пред-
седательством адмирала А.В. Колчака, созданной при Главном морском штабе.
Выводы комиссии были совершенно конкретны: «Адмиралу З.П. Рожественскому
надлежало, как только он был открыт японцами, сделать все возможное, чтобы
нарушить радиотелеграфную связь между отрядами противника. Японцы, дабы не
упустить нашей эскадры, были принуждены рассеять свои силы по большому про-
странству, и радиотелеграфная связь являлась существеннейшим элементом их сил.
Нарушение этой связи радиостанциями нашей эскадры, шедшей соединенно и по-
тому не столь нуждающейся в радиотелеграфе, было тем преимуществом нашей
эскадры, которым грех было не воспользоваться. Несколько мощных, умело при-
мененных радиотелеграфных станций на русской эскадре, нарушив связь между
отрядами, сделали бы больше, чем десяток пушек» [14].
Современная история создания отечественной техники РЭБ начинается с
двух крупных событий. Первое - это подписанное И.В. Сталиным Постановление
Государственного Комитета Обороны (ГКО) от 16 декабря 1942 г. № ГОКО 2633сс
«Об организации в Красной Армии специальной службы по забивке немецких ра-
диостанций, действующих на поле боя». И второе событие — Постановление ГКО
от 7 июля 1943 г. № ГОКО ЗбЗбсс «О радиолокации», предусматривающее органи-
зацию в Наркомате электропромышленности Главного управления радиолокацион-
ной промышленности, в компетенции которого находились вопросы разработки
техники радиопротиводействия (РИД). В том же году был основан центр по разра-
ботке средств РПД (РЭБ) - Всесоюзный научно-исследовательский институт ра-
диолокации (ныне - ЦНИРТИ).
В локальных войнах и конфликтах в Корее, во Вьетнаме и на Ближнем Во-
стоке РЭБ велась всеми видами вооруженных сил воюющих стран, но наиболее ин-
тенсивно ВВС и ПВО (в США до 70 % материальных ресурсов, предназначенных
для развития и совершенствования РЭБ, поступают в авиацию). В ходе ряда кон-
фликтов в дальнем зарубежье («Буря в пустыне», «Лиса в пустыне», «Шок и тре-
пет», «Рассвет Одиссеи») авиация решала задачи по:
• дезорганизации системы государственного и военного управления стран и
их вооруженных сил;
• деморализации и слому воли армии и народа к сопротивлению;
• нанесению существенного ущерба военно-экономическому потенциалу
стран и разрушению их инфраструктуры;
• нанесению значительного урона группировкам вооруженных сил и созда-
нию условий для гарантированного успеха планируемых операций наземных сил с
минимальными потерями [16-18].
Опыт локальных воин свидетельствует: вкладывать деньги в развитие
средств РЭБ сегодня очень выгодно. По подсчетам специалистов на каждый дол-
Г\пава L Общ1№ положения раЬиоэлектронн^ боръаы
И
лар, вложенный в информационную войну, можно ждать 10 долларов прибыли.
Анализ показывает, что стоимость техники РЭБ по отношению к стоимости основ-
ных видов вооружения составляет 5...8 %. В локальных войнах и вооруженных
конфликтах были весьма наглядно продемонстрированы роль и значимость РЭБ,
когда умелое применение сил и средств РЭБ приводило к повышению боевого по-
тенциала группировок войск в 1,5 раза, позволяло снизить потери кораблей в 2...3
раза, авиации - в 4...6 раз [19, 20]. При этом потери военных объектов (бронетех-
ники, самолетов, кораблей и т.д.) часто сводились практически к нулю, а в решении
такой важнейшей задачи войск как дезорганизация СУ войсками и оружием про-
тивника вклад РЭБ был несравнимо больше, чем иных действий войск.
В настоящее время радиоэлектронные средства (РЭС) составляют основу
СУ войсками и оружием во всех видах ВС современных государств [9, 12].
Современные боевые порядки чрезвычайно насыщены РЭС и от их успешного
функционирования во многом зависит успех боевых действий. Особенностью РЭБ
на современном этапе является резкое возрастание ее роли во всех звеньях
управления [11, 15. 19, 21], все больший перенос усилий в такгическое звено, в
сферу' общевойскового и воздушного боя. Возрастание значения фактора времени,
сложность и высокая динамичность общей оперативной и радиоэлектронной
обстановки при ведении боевых действий в современных условиях определили
следующие основные принципы организации и ведения РЭБ:
1. Полное соответствие организации и ведения РЭБ замыслу боевых дей-
ствий. Цели этой борьбы, привлекаемые силы и средства РЭБ, время и порядок их
применения, организация зашиты от радиоэлектронной разведки (РЭР) и радио-
электронного поражения (РЭПр) противника должны быть тесно увязаны с дей-
ствиями авиационных частей и соединений, сухопутных войск в полосе (районе)
боевых действий, рассчитаны и спланированы по выполняемым ими задачам.
2. Массированное и комплексное применение сил и средств РЭБ на главных
направлениях при решении войсками наиболее важных задач. Поскольку одновре-
менное поражение всех РЭС противника затруднено и может привести к распыле-
нию усилий и невыполнению поставленных задач, то необходимо правильно рас-
пределить силы и средства РЭБ, быстрого сосредоточения их усилий на главных
направлениях и перенацеливания с одной за (ачи на другую. Такой же подход необ-
ходим при организации защиты своих РЭС от помех противника.
3. Внезапность применения сил и средств РЭБ, ее тактических приемов и
способов, исключение шаблона в их применении достигается:
• скрытием от противника планируемых мероприятий, планов их реализации;
• созданием группировки сил для решения задач РЭБ;
• прогнозированием изменен! РЭ обстановки и намерений противника и
упреждением его в реакции на эти изменения.
4. Обеспечение непрерывного взаимодействия сил и средств РЭБ всех видов
ВС, согласованности РЭПр с ядерным и огневым поражением, а также между сред-
ствами РЭ1I и другими РЭС с целью обеспечения их ЭМС.
5. Обеспечение одновременного комплексного воздействия на все важней-
шие элементы СУ силами и оружием противника.
12
Глава 1. Общие положения радиоэлектронной борьбы
6. Непрерывное осуществление мероприятий по РЭЗ систем и средств
управления авиационными частями, подразделениями и оружием заключается в
постоянном их проведении во всех видах деятельности войск и в любых условиях
обстановки с учетом действий противника. В основе реализации этого принципа
лежит глубокое знание состава, возможностей и характера боевого применения сил
и средств РЭБ противника, своих РЭС, а также непрерывная координация органи-
зационных и технических мер по РЭЗ.
7. Активное и комплексное противодействие техническим средствам раз-
ведки (TCP) противника достигается:
• знанием состава и возможностей TCP противника;
• проведением мероприятий по противодействию TCP;
• организацией и осуществлением эффективного контроля.
8. Активность РЭБ в целом заключается в способности и готовности штабов
авиационных частей и соединений в любых условиях обстановки умело организо-
вывать и настойчиво проводить мероприятия по дезорганизации управления ПВО и
авиацией противника, а также по сохранению своего устойчивого управления и
снижению возможностей TCP противника. Она достигается: своевременным добы-
ванием и анализом данных о силах и средствах управления, разведки и РЭБ про-
тивника; своевременной и скрытной подготовкой сил и средств, выделенных для
решения задач РЭБ, к боевому применению, их решительными действиями в ходе
боевых действий; организацией и поддержанием четкого и непрерывного взаимо-
действия сил РЭБ с обеспечиваемыми соединениями и частями [15].
Военный энциклопедический словарь определяет радиоэлектронную
борьбу как совокупность взаимосвязанных по цели, задачам, месту и времени
мероприятий, действий, направленных на выявление РЭС и систем противника, их
подавлению, а также на РЭЗ своих РЭС и средств от средств РЭП. РЭБ
представляет собой совокупность согласованных мероприятий и действий по
радиоэлектронному поражению РЭО противника, РЭЗ своих РЭО, а также по
радиоэлектронно-информационному обеспечению (РИО). РЭБ проводится в тесной
взаимосвязи с ядерным, огневым поражением, захватом и выводом из строя РЭО в
СУ силами и оружием противника [21]. Первичная цель РЭБ — затруднение или
исключение функционирования РЭО СУ. Основны ми целями РЭБ выступают:
• вскрытие и анализ радиоэлектронной обстановки;
• дезорганизация управления силами и оружием противника, поражение СУ
войсками и оружием противника, а также его средств разведки и РЭБ;
• уничтожение (разрушение) и/или внесение искажений в программное обес-
печение информационных систем противника, его баз данных, АСУ;
• снижение эффективности применения оружия, боевой техники и TCP про-
тивника;
• обеспечение устойчивости работы систем и средств управления своими
войсками и оружием в условиях двусторонней РЭБ:
• обеспечение электромагнитной совместимости (ЭМС) РЭС [15, 22].
Главными и конечными целями РЭБ как вида оперативного (боевого)
обеспечения являются: повышение эффективности применения оружия по силам
Глава 1. Общие положения радиоэлектронной борьбы
противника; повышение боевой устойчивости сил при отражении ударов против-
ника. К общим задачам РЭБ относятся:
1. Дезорганизация управления силами, снижение эффективности примене-
ния оружия и боевой техники противника.
2. Снижение возможностей TCP противника.
3. Срыв или существенное затруднение выдачи ЦУ силам противника на
прицельное применение им своего оружия.
4. Отвлечение части ударных сил противника и его оружия на ЛЦ.
5. Обеспечение устойчивой работы СУ своими силами и оружием [15, 22].
Группа задач РЭБ. решаемых авиационными РЭК современных ЛА военной
авиации, состоит из следующих частных задач'.
• индивидуальная и групповая защита ЛА от поражения средствами ПВО
противника путем соз дания активных и пассивных радиопомех и помех лазерным,
тепловизионным (ИК) бортовым и наземным системам и ГСП УР;
• контроль ЭМ обстановки, обеспечение адаптации РЭС и электронных си-
стем АРЭК к ее изменениям;
• опенка степени угрозы ЛА со стороны воздушных и наземных средств по-
ражения против! ика, оповещение летчика (экипажа) об облучении ЭМИ различных
диапазонов волн;
• определение приоритета угрозы;
• обнаружение и определение местоположения ИИ (РЛС, средств навигации
и связи, СУ);
• выбор оптимальных режимов РЭ и оптико-электронного подавления;
• автоматическое подавление РЭС противника;
• определение воздушных целей, подлежащих уничтожению;
• адаптивное управление мощностью создаваемых помех САП [15, 23].
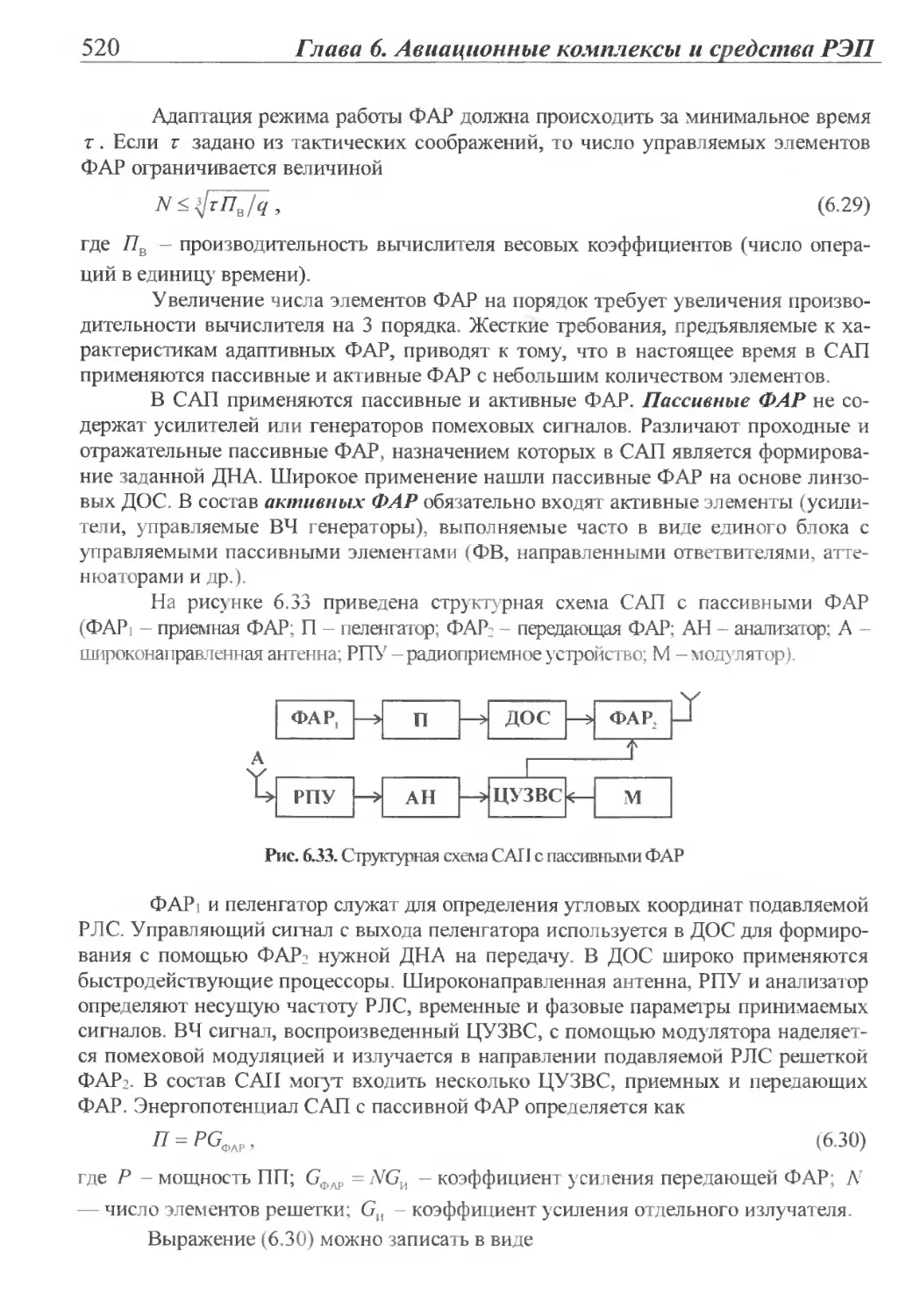
В соответствия с определением РЭБ ее составными частями, представлен-
ными на рисунке 1.1. выступают: радиоэлектронное поражение (РЭПр); радиоэлек-
тронная защита (РЭЗ); радиоэлектронно-информационное обеспечение (Р1Ю).
Г и с. 1.1. Составные части РЭБ
1. Радиоэлектронное поражение (РЭПр) — совокупность мероприятий и
действий по функциональном радиоэлектронном} поражению, РЭП, поражению
самонаводящимся на излучение оружием РЭО противника (рисунок 1.2).
14
Глава^ L Общи£ положения ^адиоэлекпг^оннай бо]Уьбъ1
Рис. 1.2. Составные части РЭПр
Функциональное радиоэлектронное поражение (ФРЭПр) - РЭПр, заклю-
чающееся в разрушении и/или повреждении элементов РЭО противника ЭМИ или
в искажении информации противника специальными программными средствами
(рисунок 1.3).
Рис. 1.3. Составные часги ФРЭПр
Поражение ЭМИ - функциональное поражение РЭО. заключающееся в
разрушении и/или повреждении элементов РЭО противника средствами поражения
ЭМ излучением. Оно может проводиться путем использования однократных или
многократных импульсных воздействий ЭМП, приводящих к необратимым изме-
нениям электрофизических параметров в полупроводниковых или оптико-
электронных элементах РЭС в результате их перегрева или пробоя [13, 22, 24].
Поражение специальным программным средством (СПС) заключается в
снижении эффективности функционирования или выводе из строя компонентов
систем обработки информации РЭО противника, нарушении конфиденциальности,
целостности и доступности информации путем применения СПС.
Радиоэлектронное подавление (РЭП) - РЭПр, заключающееся в снижении
эффективности функционирования РЭО противника путем воздействия на них
преднамеренными РЭ помехами (рисунок 1.4). РЭП включает радио-, оптико-
электронное, акустическое и гидроакустическое подавление. Различают РЭП си-
стем управления оружием (СУО) и РЭП систем управления войсками (СУВ). Од-
ним из видов РЭП является изменение условий распространения и/или отражения
ЭМВ.
Глава L Общир положения радиоэлеюпронной борьбы
15
Рис. 1.4. Составные части РЭП
Радиоподавление - РЭП, ведущееся в диапазоне радиоволн, заключающее-
ся в снижении эффективности функционирования РЭС противника путем воздей-
ствия на них преднамеренными радиопомехами. Оптико-электронное подавление
(ОЭП) - РЭП, ведущееся в оптическом диапазоне и заключающееся в снижении
эффективности функционирования ОЭС противника путем воздействия на них
преднамеренными оптико-электронными помехами. Результатом ОЭП может быть
нарушение работы тепловых, телевизионных, лазерных и оптико-визуальных си-
стем и средств разведки, наблюдения и связи.
Акустическое подавление ведется в диапазоне акустических волн и заклю-
чается в снижении эффективности функционирования акустических средств про-
тивника путем воздействия на них преднамеренными акустическими помехами.
Гидроакустическое подав и нне (ГАП) - акустическое подавление, ведущееся в
водной среде путем применения преднамеренных гидроакустических помех. ГАЛ
предусматривает создание помех стационарным и авиационным средствам гидро-1
акустического обнаружения и гидроакустическим системам самонаведения оружия
противника [15, 22].
Изменение условий распространения ЭМ (акустических) волн заключа-
ется в изменении свойств среды распространения ЭМ (акустических) волн путем
применения средств постановки пассивных преднамеренных РЭ помех и/или со-
здания искусственных ионизированных образований. Изменение условий отра-
жения ЭМ (акустических) волн заключается в изменении величины отражения
ЭМ (акустических) волн путем применения средств постановки пассивных предна-
меренных РЭ помех и или изменения контраста окружающей среды.
Поражение СНИО - РЭПр, заключающееся в уничтожении или поврежде-
нии элементов РЭО противника СНИО. СНИО - оружие с пассивной системой
наведения по излучениям военной техники в диапазонах ЭМ и акустических волн.
При организации РЭП необходимо учитывать, что любой СУ оружием при-
сущи следу тощие функции [12]:
• поиск и обнаружение нарушителя;
• опознавание государственной принадлежности («свой - чужой»);
16
Глава 1. Общие положения радиоэлектронной борьбы
• передача по линии связи информации об обстановке в зоне ответственности
и обработка этой информации;
• выработка команд управления и передача их по линии связи;
• наведение оружия и открытие огня по нарушителю.
Усилия при организации РЭП должны быть направлены на:
• ухудшение радиолокационной (РЛ) видимости цели с помощью радиопо-
глощающих материалов и других мер, снижающих ЭПР цели;
• ухудшение условий РЛ видимости цели путем создания маскирующих ак-
тивных или пассивных помех;
• дезинформацию системы опознавания государственной принадлежности
цели путем создания ей имитационных помех;
• нарушение работы каналов передачи информации и команд управления пу-
тем создания им активных помех;
• перегрузку датчиков СУ оружием ЛЦ с помощью имитационных помех:
• создание ошибок в наведении и ложные срабатывания оружия.
II. Радиоэлектронная защита (РЭЗ) - совокупность мероприятий и дей-
ствий по устранению или ослаблению воздействия на свои РЭО средств РЭПр, за-
щите от TCP противника и обеспечению ЭМС своих РЭС (рисунок 1.5).
Рис. 1.5. Составные части РЭЗ
Защита от средств РЭПр противника заключается в снижении эффек-
тивности воздействия на свои РЭО средств функционального поражения РЭО, РЭП
и С НПО. РЭЗ от технической разведки противника заключается в исключении
или существенном затруднении добывания противником с помощью TCP охраняе-
мых сведений о РЭО. РЭЗ от TCP противника ставит целью устранение разведыва-
тельных признаков по первичным и вторичным полям военных объектов, защите
передаваемой, обрабатываемой и хранимой информации. Важное значение в обес-
Глава 1. Общие положения радиоэлектронной борьбы 17
печении РЭЗ от TCP противника имеет комплексный технический контроль защи-
щаемых объектов.
Ш. Радиоэлектронно-информационное обеспечение fPHO) - совокуп-
ность мероприятий и действий по выявлению функционирования РЭО противника
в целях их РЭПр и контролю функционирования своих РЭО в целях их РЭЗ (рису-
нок 1.6). Комплексный технический контроль мероприятий РЭЗ заключается в
оценке защищенности от TCP противника охраняемых сведений своих РЭО,
средств, комплексов и систем, а также мер обеспечения ЭМС.
Рис. 1.6. Составные части РИО
Информационная работа органов управления РЭБ заключается в сборе,
накоплении, анализе, обобщении, хранении и распределении данных о РЭО про-
тивника и своих РЭО, добываемых TCP и комплексном техническом контроле ме-
роприятий РЭЗ. Эти данные получают с помощью РЭР, для чего соответственно
оборудованные наземные станции, корабли, самолеты и ИСЗ перехватывают сигна-
лы РЭС, измеряют рабочую частоту и другие параметры радиосигналов. Для полу-
чения информации могут использоваться шпионаж, аварии военных самолетов, из-
менение политической обстановки при экспорте военной техники, а в военное вре-
мя - захват РЭС противника [12, 15].
Организационно в РИО включается контроль комплексной защиты инфор-
мации, задачами которого являются:
• выявление демаскирующих признаков в деятельности войск в ходе боевого
применения и использования вооружения, военной техники и военных объектов;
• оперативное пресечение нарушении установленных норм и требований по
противодейст в ию разведкам.
Структурная схема объединенной системы РЭБ показана на рисунке 1.7.
Получение информации от космических средств разведки отражает общую
тенденцию к объединению ресурсов (и не только информационных) средств воз-
душного и космического базирования. В связи со сложностью решения задач РЭБ и
большим влиянием результатов РЭБ на ход и исход боевых действий управление
силами и средствами РЭБ является сугубо творческим процессом и осуществляется
соответствующим должностным лицом РЭБ под руководством авиационных ко-
мандиров. Данные о своих средствах РЭБ, о РЭ обстановке обобщаются на команд-
ных пунктах объединений, соединений и частей ВВС. Управление силами и сред-
ствами РЭБ производится с наземных или воздушных командных пунктов, где
18
Глава 1. Общие положения радиоэлектронной борьбы
предусмотрено специальное рабочее место начальника РЭБ (ПУ РЭБ) с устрой-
ствами отображения информации, управления, ЭВМ и каналами связи.
Рис. 1.7. Структурная схема объединенной системы РЭБ
Выбор рациональных вариантов использования сил и средств РЭБ
производится авиационными командирами на основании предложений начальников
РЭБ. В АСУ РЭБ широко используются ЭВМ, решающие информационные или
расчетные задачи по определению потребного наряда сил и средств РЭП для
прикрытия боевых порядков групп и обороны ЛА.
На рисунке 1.8 приведена классификация (вариант) средств РЭБ ВВС.
Основными задачами РЭБ в боевых действиях авиационных частей и
соединений являются: 1) срыв или затруднение обнаружения, опознавания и
сопровождения РЛС противника боевых порядков самолетов, ракет и
своевременного принятия правильного решения на применение сил и средств ПВО;
2) снижение эффективности применения ЗРК, УР и ЗА противника; 3) снижение
вероятности наведения истребителей противника и эффективность применения ими
бортового оружия; 4) затруднение разведки и наведения авиации и других средств
поражения противника на наземные объекты и прицеливания по ним с помощью
бортовых РЭС; 5) обеспечение устойчивого управления своими войсками и
оружием в условиях двусторонней РЭБ [15].
Применительно к части, подразделению и экипажу7 цели РЭБ конкретизи-
руются с учетом ряда факторов, основными из которых могут быть: решаемые за-
дачи; состояние и возможности сил и средств ПВО противника, его средств развед-
ки и РЭБ; состав и возможности своих сил и средств РЭБ, СУ своими силами и
оружием и др.
Глсиш L Общир ш^южения^ 1)адиоэлек1пронной борьбы
19
Средства РЭБ ВВС
___у
Групповые
СНРТР
Аппаратура разведки в ИК
и оптическом диапазонах
САП различных диапазонов
Станции (средства) ОЭП
Устройства выброса
средств РЭБ
Устройства
РЭЗ бортовых РЭС
Устройства ПДТСР
*____
Бортовые
Наземные
Индивидуальные
Станции РЭР
Станции
непосредственной РЭР
Аппаратура
предупреждения
экипажа о пуске ракет
Станции и передатчики
активных помех
различных диапазонов ЭМВ
Устройства выброса
средств РЭБ
(ЛЦ, ЛТЦ, снарядов)
Устройства управления
заметностью ЛА в
различных диапазонах ЭМВ
Станции активных помех
Станции пассивных помех
Средства уменьшения
оптической и
РЛ контрастности
Устройства управления
заметностью ЛА и создания
аэрозольных облаков
и образований
Управляемые и
неуправляемые средства
поражения РЭС противника
Средства
фун кционал ьного
поражения
Устройства управления
(БЦВМ), контроля и
индикации
ДПЛА (ПП)
Средства контроля
состояния и
боевой эффективности
Рис. 1.8. Классификация средств РЭБ ВВС
РЭБ организуется в соответствии с решением командующего (командира),
указаниями начальника штаба и распоряжением по РЭБ вышестоящего штаба. РЭБ
в ВВС по своему содержанию, мест} и роли в подготовке и ведении боевых дей-
ствий охватывает деятельность всех отделов и служб штабов, командиров частей и
соединений.
1.2. Условия ведения РЭБ
При выборе сил. средств и способов ведения РЭБ должны учитываться сле-
дующие факторы: решаемые задачи СУ противника, их физические и логические
структуры; алгоритмы (правила) функционирования; возможности элементов СУ,
20
Глава 1, Общие положения радиоэлектронной борьбы
реализуемые функции; исходные и конечные состояния СУ, внешние условия и
другие факторы [15, 22]. К исходным данным о системах РЭБ относятся:
• решаемые задачи, возможности систем управления средствами РЭБ;
• характеристики средств РЭБ, реализуемые функции;
• условия взаимодействия с другими системами РЭБ и РЭР;
• затраты на решение поставленных задач и другие.
При планировании РЭБ необходимо принимать во внимание важность ре-
шаемых задач объектами РЭБ. К самым важным относятся задачи боевых систем и
их СУ. Это задачи нанесения ракетно-бомбовых ударов авиацией, применение ра-
кетного оружия по защищаемым объектам и другие. Успешность их решения зави-
сит о г эффективности космической, воздушной, морской и наземной РЭР, осу-
ществляющей наблюдение за театром военных действий, вскрывающей СУ силами
и оружием. Требуется обоснование управляющих решений, своевременная и точная
их передача системами радио-, оптической, проводной связи ударным силам и
средствам. Для обоснования управляющих решений, связанных с большим объе-
мом обработки информации, в настоящее время задействуют вычислительные цен-
тры, боевые информационно-управляющие системы, различные автоматизирован-
ные рабочие места.
Добываемая, передаваемая и обрабатываемая информация характеризуется
ценностью и полнотой; избыточностью и защищенностью; достоверностью и дру-
гими свойствами. Значение ценности информации определяется, прежде всего,
важностью задач, решаемых получателями информации, и ее ролью в достижении
преследуемых ими целей. Каждый объект РЭБ имеет свою структуру и состав эле-
ментов, различающихся по их показателям. Объекты РЭБ функционируют по свой-
ственным им правилам. Применяемые РЭС добывания, передачи и обработки ин-
формации работают в конкретных средах, частотных диапазонах, обладают своей
пропускной способностью, дальностью действия, помехозащищенностью и други-
ми особенностями.
Объекты РЭБ имеют свои исходные состояния, которые во многом опреде-
ляют их возможности в различных ситуациях. Среда (естественная или искусствен-
ная) распространения энергии накладывает существенные ограничения как на воз-
можности объектов противника, так и на способы РЭБ. Влияние среды, в частности
атмосферы, на работу РЭС в различных диапазонах волн сказывается по-разному.
Системы РЭБ характеризуются своими структурами, применяемыми сред-
ствами РЭР, РЭП и РЭЗ, их параметрами. Возможно использование средств радио-,
радиотехнической (РТ), радиолокационной, оптико-электронной, гидроакустиче-
ской и другой разведки. В системах и средствах РЭР имеют место различные мето-
ды обработки принимаемых сигналов и измерения их параметров. Системы и сред-
ства РЭП обладают своим запасом ресурсов. Средства РЭП различаются по рабо-
чему диапазону частот, излучаемой мощности, направленности приемных и пере-
дающих антенн, чувствительности, времени реакции, ширине спектра и видам
формируемых маскирующих и имитирующих помех, пропускной способности,
числу одновременно подавляемых РЭС, обслуживаемых секторов [2, 5].
Глава 1, Общие положения радиоэлектронной борьбы
21
Возможно применение как индивидуальных, так и коллективных средств
РЭЗ. Средства и мероприятия РЭЗ не идеальны, обладают своими характеристика-
ми, рассчитаны на защиту от определенных воздействий. Мероприятия по РЭЗ мо-
гут предусматривать селекцию полезных сигналов по времени и направлению при-
хода, несущей частоте, длительности и другим параметрам. Средства противодей-
ствия TCP позволяют устранять демаскирующие признаки, защищать передавае-
мую информацию. СУ силами и средствами РЭБ характеризуются своим временем
реакции и точностью действий.
Для успешного решения задач РЭБ с СУ силами и оружием противника си-
лы и средства РЭБ должны удовлетворять требованиям [15]:
• по наносимому (предотвращаемому) ущербу;
• оперативности и точности решения боевых задач;
• пропускной способности, количеству и видам одновременно наблюдаемых
и подавляемых систем;
• разведывательной доступности;
• управляемости средствами РЭБ и защищаемыми объектами;
• видам формируемых помех и их характеристикам;
• скрытности и непрерывности функционирования;
• внезапности и мобильности;
• надежности и устойчивости от внешних воздействий;
• совместимости с другими системами;
• распределенности в пространстве;
• взаимодействию (сопряженности) с другими аналогичными системами, пе-
рестраиваемости и адаптивности;
• времени жизни, непрерывной работе;
• составу средств РЭБ в системах и их характеристикам;
• аппаратному и программному^ обеспечению процессов РЭБ;
• подготовленности личного состава, затратам материально-технических,
людских, финансовых и друтих ресурсов.
Кроме того, в конкретных ситуациях должны учитываться и другие усло-
вия, свойственные процессу двусторонней РЭБ [7].
1.3. Радиолокационные системы как объекты РЭБ
В качестве объектов РЭБ могут рассматриваться различные СУ силами,
войсками и оружием, входящие в них отдельные РЭС добывания, передачи и обра-
ботки информации, а также энергетические системы. СУ силами как объекты РЭБ в
зависимости от важности решаемых задач подразделяют на системы стратегическо-
го, оперативно-стратегического, оперативного, оперативно-тактического и тактиче-
ского уровней [22]. В качестве РЭС добывания информации выступают активные и
пассивные рати о, оптико-электронные комплексы, станции и устройства Средства
передачи информации как объекты РЭБ - это средства радио, оптической, кабель-
ной связи. К системам и среде вам обработки информации как объектам РЭБ отно-
сятся различные ЭВС и устройства: глобальные и локальные вычислительные сети.
22
Глава L Общие положения радиоэлекр1роннор борьбы
вычислительные центры, боевые информациоцно-управляющие системы, отдель-
ные ЭВМ, микропроцессорные устройства. Всем системам и средствам свойствен-
ны свои сильные и слабые стороны, которые необходимо учитывать при решении
задач РЭБ. К сильным сторонам СУ силами относятся:
• возможность ведения РЭР в широком диапазоне частот с использованием
разветвленной сети космических, воздушных, корабельных, наземных подвижных
и стационарных сил разведки;
• применение развито!: системы космической и наземной связи с высокими
показателями оперативности и достоверности передачи информации, значительное
резервирование узлов и линий связи;
• широкое использование средств автоматизации при обработке информации
и выработке управляющих решений.
Слабыми сторонами СУ силами являются:
• уязвимость РЭС от преднамеренных помех и поражающих воздействий;
• высокая наблюдаемость излучений РЭС средствами РЭР;
• зависимость эффективности сил от успешности функционирования систем
РЭР, навигации и связи, недостаточно защищенных от средств поражения и РЭБ.
В условиях применения противником средств РЭБ эффективность РЭС
управления различного назначения в значительной степени зависит от успешного
функционирования РЛС, позволяющие обнаруживать и распознавать различные
объекты (цели), определять их координаты, параметры движения и другие данные
методами радиолокации. Наиболее существенные изменения в требования к даль-
нейшему совершенствованию РЛС обусловлены развитием средств воздушного
нападения по пути снижения РЛ заметности ЛА, повышения маневренности и рас-
ширения диапазона скоростей и высот полета, создания мини и микро ЛА. а также
в результате возросших возможностей средств РЭП и ракетно-бомбового пораже-
ния РЛС. Многочисленные попытки совершенствования РЛС на базе традиционной
физической радиолокации наталкиваются на проблемы принципиального характе-
ра. Выходом из создавшегося положения является развитие новых радиолокацион-
ных технологий MIMO (multipleinput — multipleoutpui («много входов - много вы-
ходов») - РЛ технология, основанная на получении и совместной апостериорной
обработке результатов измерений), САОРИ (JAPRM technology) и создание нетра-
диционных РЛС на их основе.
Достоинства РЛС САОРИ состоят в возможности непротиворечивого при-
менения известных принципов повышения живучести, информативности, помехо-
защищенности и быстродействия РЛС, представленных в таблице 1.1 [25].
Таблица 1.1
Требования Принципы
Повышение живучести РЛС Сетевой принцип построения РЛС с большим количе- ством простейших в конструктивных отношениях авто- матических предающих элементов. Повышение эффективности ЗРК по защше элементов РЛС на основе повышения информативности и быстро-
Глава L Общие^ положения ^адиоэлект])онной^ бо])ьбь1
действия за счет многофункциональности РЛС и автома- тизации процессов ПВО.
Повышение информативности РЛС: 1) по обнаружению ЛА с ма- лой РЛ заметностью (снижен- ной по программе «Stealth») и малозаметных БЛА; 2) по распознаванию целей; 3) по обнаружению целей на фоне пассивных помех и мед- ленно летящих целей на фоне отражениг от земной поверх- ности. Сетевой принцип построения, обеспечивающий миними- зацию результирующего рассеяния до всех целей, нахо- дящихся в зоне обороны. Использование сигналов боль- шой когерентной длительности и когерентное накопление отраженных сигналов. Разнесенный прием, использующий повышенную отра- жающую способность целей. Использование сверхширокополосных многочастотных сигналов различных длин волн, ориентированных на про- явление эффекта резонансного отражения волн. Сетевой принцип построения с использованием сверхши- рокополосных сигналов большой когерентной длительно- сти. Реализация принципа радиовидения целей. Применение сиг налов большой когерентной длительно- сти, оптимальная обработка сигналов с выделением сиг- налов медленно летящих ЛА.
Повышение помехозащищен- ности РЛС: 1) к активным помехам путем подавления сигналов САП; 2) по отношению к ложным целям за счет селекции реаль- ных целей на фоне ЛЦ и РЛ ловушек. Применение многоэлементных АФАР с адаптивной обра- боткой сигналов и формирование провалов в ДНА на ис- точник помех. Применение оптимальной ПВО многоканальных и мно- гочастотных сигналов с получением РЛ изображении це- ли с разрешающей способностью порядка длины волны излучения.
Повышение быстродействия РЛС Постоянный одновременный обзор всей зоны ИВО за счет использования ненаправленных приемных и пере- дающих элементов и технологии САОРИ. Обеспечение прямого доступа потребителей к первичной РЛ информа- ции. момент обнаружения, измерения координат и опо- знавание цели соответствует моменту захвата ее на со- провождение и пуску ЗУ Р
Для описания качества функционирования РЛС, как правило, используются
II, точности ".К и достоверности X Получаемой информации,
показатели полноты
определяемые как
1 А'с
N.
5
Л
24
Глава 1, Общие положения радиоэлектронной борьбы
где Nc - число правильно отображенных системой (с допусти «ой ошибкой) объек-
тов из общего числа Nx воздушных объектов в зоне ее ответственности: сг1 - СКО
(радиальная) сопровождения /-го истинного объекта; - число сопровождаемых
ложных траекторий.
Специфика РЭП при групповой и коллективной защите ЛА заключается в
том, что ограниченным числом постановщиков помех должны быть прикрыты от
обнаружения все объекты защит.: ем ого боевого поря ка. I [нформационный ущерб
системе ПВО прп решении указанной задачи может быть лишь частично охаракте-
ризован показателем полноты радиолокационной информации. Так. в первом при-
ближении можно считать, что при П —> 0 задача групповой зашиты решается в
полном объеме, а при П 1 задача не решена. В то же время указанный показа-
тель не отражает всю возможною информацию, извлекаем}ю в РЛС при обработке
принимаемой реализации, никак не определяя области возможного (наиболее веро-
ятного) нахождения воздушных объектов [17].
Классификацию РЛС можно проводить по различным признакам. Различа-
ют РЛС по следующим основным признакам [26]:
1) по способу локации - активные, пол} активные, пасс ивные:
2) по месту установки - наземные, корабельные, авиационные, ракетные,
космического базирования (спутниковые) и другие;
3) по виду излучения - импульсного, непрерывного, квазинепрерывного,
щумового и комбинированного излучения:
4) по рабочему диапазону длин волн — миллиметровые, сантиметровые, де-
циметровые, метровые, декаметровые, многодиапазонные и другие;
5) по назначению — обнаружения целей, разведки навигационные, управ-
ления оружием, обзора, обеспечения полетов, метеорологические, опознавания гос-
ударственной принадлежности, многофункциональные и другие;
6) по числу измеряемых координат - двух координатные (обычно даль-
ность и азимут), трехкоординатные (обычно дальность, азимут и угол места);
7) по числу занимаемых позиций — однопозиционные, многопозиционные.
Авиационные (самолетные) РЛС делятся на РЛС обзора воздушного про-
странства (перехвата и прицеливания, дальнего радиолокационного обнаружения
(дозора) и наведения (управления), защиты своих самолетов, обхода препятствий в
воздухе), РЛС обзора земной поверхности (панорамные, бокового обзора с антен-
ной. расположенной вдоль фюзеляжа, бокового обзора с синтезированной аперту-
рой, подповерхностной радиолокации), многофункциональные РЛС. Авиационные
РЛС задействуются для обнаружения наземных, надводных и воздушных объектов,
а также для решения задач навигации, бомбометания, пуска ракет, разведки, обес-
печения безопасности полета. Среди БРЛС имеют место:
• бортовые станции наведения на цели;
• станции перехвата и прицеливания, используемые на истребителях для об-
наружения целей, сближения и атаки, для выхода из атаки;
• самолетные панорамные станции, предназначенные для получения изобра-
жения земной поверхности, над которой пролетает ЛА;
Глава L Общие положения радиоэлектронной. борьбы
25
• станции бокового обзора, обеспечивающие наблюдение земной поверхно-
сти с высокой разрешающей способностью по угловым координатам;
• РЛ прицелы, устанавливаемые на ЛА для обнаружения воздушных целей и
управления стрельбой по этим целям;
• РЛ дальномеры, пре. назначенные для точного измерения дальности и ис-
пользуемые совместно с различными прицелами;
• станции измерения скорости полета самолета;
• РЛ высотомеры точного измерения истинной высоты полета ЛА (ракеты);
• РЛ взрыватели, обеспечивают ле подрыв боевого заряда УР при ее прибли-
жении к цели.
Среди основных задач БРЛС можно выделить:
• обнаружение и идентификация целей для формирования первичных изме-
рений дальности, скорости сближения, бортовых пеленгов в двух взаимно-
перпенд.икулярны\ плоскостях (азимута и \ гл а места);
• завязка траектории истинных и ложных целей с использованием стробов
отождествления информации по параметрам первичных измерений;
• экстраполяция траекторий всех видов (прогнозирование фазовых координат
относительно движения целей и ЛА);
• фильтрация и и юнтифпкация вновь поступающих измерений с экстраполи-
руемыми траекториями;
• коррекция раекторий, выделение истинных целей и сброс ложных отметок.
Перечисленные задачи должны выполняться последовательно, однако ре-
альный поря ок их выполнения зависит от скла. ывающейся обстановки (тактиче-
ской, радиоэлектронной, угроз АСП. наличия отказов и т.д.) и диктуется общим
алгоритмом управления ИР Э К [27].
Основными тенденциями развития перспективных БРЛС являются:
1) расширение перечня задач, решаемых БРЛС в интеграции с системами
РТР, РЭП и навигации для решения задач обороны ЛА;
2) повышение скрытности излучения за счет использования различных диа-
пазонов ЭМВ (3 мм, 8 мм) и свер\широкополосны . сигналов, управления мощно-
стью излучения I изменения формы перелающей ДНА;
3) групповое применение авиации - бистатические системы, работа в усло-
виях встречного излучения БРЛС противника и помех, обеспечение ЭМС.
К тактическим характеристикам РЛС относятся: 1) назначение; 2) сек-
тор или зона работы: 3) время обзора этого сектора; 4) качественные показатели
(показатели эффективноеiи > обнаружения объекта; 5) число измеряемых координат
и параметров движения объекта и точность этих измерений; 6) вид выходных дан-
ных: 7) разрешают я способность; 8) пропускная способность; 9) помехозащищен-
ность; 10) надежность; 11) экономичность; 12) мобильность (маневренность) и др.
Основными техническими характеристиками РЛС являются следующие:
• режим работы и вид модуляции (манипуляции i зондирующих сигналов;
• диапазон частот (длин волн);
• энергетические характеристики (импульсная и средняя мощности передат-
чика, чувствительность приемника);
26
Глава 1. Общие положения радиоэлектронной борьбы
характеристик антенн, способы обзора пространства;
• характеристики вычислительных средств;
• используемая элементная база;
• число и тип выходных устройств;
• массогабаритные характеристики;
• мощность первичных источников питания и др. [26].
Структура РЛС существенно зависит от их назначения, места установки,
источника сигнала, способов измерения координат и т.д. Однако при всем много-
образии РЛС можно выделить элементы, которые в топ или иной степени присущи
большинству современных, а также перспективных РЛС. На рисунке 1.9 приведена
обобщенная структурная схема РЛС, содержащая системы (подсистемы), предна-
значенные для непосредственного получения РЛ информации.
Рис. 1.9. Обобщенная структурная схема РЛС
На рис. 1.9 введены обозначения: АС - антенная система; ППМ - приемо-
передающий модуль; СПОИП - система первичной обработки информации и поме-
хозащиты; СВ(Т)О РЛИ - система вторичной (третичной) обработки РЛ информа-
ции; САР - система автоматического распознавания; АРМ - автоматизированное
рабочее место оператора. В качестве дополнительных систем (подсистем), которые
могут включаться в состав РЛС, выделяют: робототехнические устройства для ав-
томатического свертывания и развертывания АС; аппаратура зашиты от ВТО;
спецпроцессор для управления и обработки РЛ информации: тренажерно-
имитационные средства; система первичного и вторичного питания; система госу-
дарственного опознавания; автоматизированная система контроля (диагностики),
поиска неисправностей и восстановления работоспособности; спутниковая радио-
навигационная система [26].
Широкое распространение получили многофункциональные РЛС, решаю-
щие несколько различных задач. В системе ПВО используются следующие типы
РЛС: импульсные, непрерывные и импульсно-доплеровские. Принцип действия
импульсной РЛС основан на излучении в пространство ВЧ импульсных сигналов с
периодом повторения, согласованным с максимальной дальностью обнаружения.
Отраженный от цели сигнал после соответствующей обработки в приемнике инди-
цируется на экране индикатора или фиксируется автоматическим устройством об-
наружения. Упрощенная структурная схема непрерывной РЛС приведена на рисун-
ке 1.10.
Глшш /. Общи£ положения радиоэлекп^онной^ бо])ьб1Я
27
Рис. 1.10. Структурная схема непрерывной РЛС
Для реализации непрерывной РЛС требуется когерентный ВЧ передатчик и
высокостабильный гетеродин. Сигнал гетеродина /г поступает на первый смеси-
тель, где смешивается с сигналом передатчика fG, в результате чего формируется
сигнал на частоте /р ± /г и подается на второй смеситель, где смешивается с отра-
женным от цели сигналом. В результате формируется сигнал на частоте гетероди-
на, смешенный на частоту Доплера Л , который далее подается на ФД. На выходе
ФД выделяется сигнал только доплеровской частоты, в результате чего обеспечива-
ется обнаружение и селекция движущихся целен. Для обеспечения возможности
измерения дальности, частота передатчика модулируется по периодическому зако-
ну (обычно треугольному и ли синусои 1альному).
Структурная схема импульсно-доплеровской РЛС показана на рисунке 1.11.
КОГЕРЕНТНЫЙ
ГЕНЕРАТОР
ГЕН ЕРА ТОР
СО СДВИГОМ
ЧАСТОТЫ
пч
ИМПУЛЬСНЫЙ
УСИЛИТЕЛЬ
НЕ РЕ КЛЮЧ А ТЕЛЬ
ПРИЕМ/
ПЕРЕДАЧ I
СМЕСИТЕЛЬ
И УПЧ
БАНК ФИЛЬТРОВ
УСТРОЙСТВО
СТРОБИРОВА НИЯ
ПОЯ
СМЕСИТЕЛЬ
ПРИЕМО-
ПЕРЕДАЮЩАЯ
АНТЕННА
Рис. 1.11. Структурная схема импульсно-доплеровской РЛС
Разрешающая способность по дальности такая же, как и в обычных импуль-
сных РЛС, но за счет использования высокой частоты следования импульсов воз-
Глава L Общи£ пшмженлм радиоэл£кт])онной_ борьбы^
никают проблемы неоднозначности измерения да бности. которые решаются
обычно путем модуляции или переключения трех сменных частот следования им-
пульсов [12]. В настоящее время РЛС с ЛЧМ сигналам i и с фазокодоман ш\ лиро-
ванными (ФКМ) сигналами (рисунок 1.12) получили наиболее широкое распро-
странение [15].
Рис. 1.12. Упрощенная структурная схема РЛС с ФКМ-сигналом и сжатием импульсов
Как видно из рисунка 1.1 первичным источником ФКМ-сигналов является
генератор непрерывного сигнала. Этот сигнал подается на стробирующую схему и
преобразуегся в широкие СВЧ-импульсы длительностью Ти, которые далее посту-
пают на ФМ и кодируются по фазе с определенным декретом. С этой целью фор-
мируется специальный управляющий код, обычно бинарный, обеспечивающий
ступенчатое изменение фазы СВЧ-сигнала на 180°. Отраженный от цели сигнал
после усиления в приемнике подвергается сжатию по длительности, осуществляе-
мому, как правило, с помощью линии с отводами, фазовая характеристика которых
соответствует обратному коду ФКМ рабочего импульса РЛС. Например, если код
ФКМ импульса соответствует структуре 11001, где условно под 1 подразумевается
значение фазы 0, а под 0 - значение фазы 180°, то фазовая характеристика отводов
ЛЗ фильтра должна соответствовать структуре 10011. В результате осу ществляетея
когерентное сложение и формирование узкого импульса с длительностью, равной
длительности дискрета кода. При использовании оптимальных кодов образующие-
ся в процессе сжатия БЛ имеют малую величину.
Ядром современных РЛС становятся мощные специализированные ЭВМ.
При первичной обработке сигналов они обеспечивают:
• аналого-цифровое преобразование принимаемых сигналов;
• защиту от импульсных помех;
• межпериодное накопление сигналов;
• автоматическое обнаружение сигналов;
• селекцию отметок целей и измерение координат отметок;
• оценку параметров отметок и другие задачи.
Глава L Общир положения радиоэлеюпроннай борьбы
29
Во время вторичной обработки с помощью ЭВМ реализуется автоматиче-
ский захват целей на сопровождение, идентификация отметок, фильтрация траек-
торий движения целей.
К основным показателям эффективности РЛС относят зону и период об-
зора, вероятность обнаружения и точность измерения координат целей, разрешаю-
щую способность, помехозащищенность. Зона обзора характеризуется максималь-
ной и минимальной дальностями действия РЛС.
Максимальная дальность действия РЛС в свободном пространстве в
условиях преднамеренных активных помех имеет вид
PcGcffXA/„
4я/’п6пО„рлД4рМ'р
(1.4)
где Рс - излучаемая мощность РЛС; Gc - максимальное значение коэффициента
усиления (КУ I антенны РЛС; <тц -ЭПРцели; R. - расстояние от СП до РЛС; Д/п
- ширина спектра помехи; Р - излучаемая мощность СП; Gn - КУ антенны ПП;
6 - КУ антенны РЛС в направлении СП; Д/ПР - ширина полосы пропускания
приемника РЛС; у — коэффициент, учитывающий несовпадение поляризации ан-
тенн РЛС и СП; К - коэффициент различимости по мощности [22].
Из формулы (1.4) следует, что с ростом R и Д/п уменьшается спектраль-
ная плотность помехи на входе РЛС и увеличивается дальность ее действия. Уве-
личение этой дальности возможно путем уменьшения А\, т.е. увеличения помехо-
р
устойчивости РЛС.
К сильным сторонам РЛС относят применение в них высокоэффективных
антенн, мощных передатчиков, сигналов с большой базой, наличие ППРЧ по псев-
дослучайному закону, когерентной обработки сигналов.
( iми сторонами РЛС как объектов РЭБ являются:
• мощность принимаемых сигналов, отраженных от цели, убывает пропорци-
онально 1/R4, где R - расстояние до цели, для преднамеренных активных помех
коэффициент равен 1/R2 ;
• РЛС открыты как для преднамеренных помех, так и для средств функцио-
нального поражения РЛС мощными ЭМИ, СНИО;
• активные помехи могут восприниматься РЛС не только по основным, но и
по БЛ ДНА;
• возможности обработки сигналов в РЛС не безграничны: РЛС обладают от-
носительно низкой способностью классификации целей по сравнению с оптиче-
скими устройствами.
Возможности нарушения работоспособности большинства РЛС вытекают
непосредственно из принципа их работы, заключающегося в излучешш радиосигна-
лов в пространство и приехме отраженных объектами сигналов [15]. Излучение сиг-
налов не только демаскирует РЛС и позволяет обнаружить его местоположение, но и
Глава 1. Общие положения радиоэлектронной борьбы
дает возможность определить основные характеристики режима его работы: рабочую
частоту, вид излучения, поляризацию сигнала, вп । и параметры модуляции сигнала
(AM, ЧМ, ФМ, ФКМ), ширину спектра, длительность импульса, частоту следования
импульсов, излучаемую мощность.
Измеренные характеристики дают возможность определить тип облучающей
защищаемый объект РЛС, сформировать помеховый сигнал в соответствии с преду-
смотренным заранее алгоритмом и нарушить нормальнуто работу РЛС. При этом
непосредственная задача РЭП может заключаться в создании \ словим. при которых
отраженный от объекта сигнал будет замаскирован более мощным помеховый! сиг-
налом, в результате чего исключается возможность извлечения из него полезной ин-
формации, необходимой для системы ПВО, или создаются сигналы, несущие лож-
ную информацию об объектах и воздушной обстановке в целом.
В результате этого в системе ПВО могут вырабатываться неверные реше-
ния, снижающие эффективность ее работы и влекушие за собой последствия раз-
личной тяжести. Методы создания помехи могут быть самыми различными, обу-
словленными различиями подавляемых РЛС и количество ! объектов частвующих
в РЭП [2, 12, 15].
Современные РЛС решают широкий крут задач, связанных с обнаружением РЛ
объектов, определением их местоположения в пространстве и оценкой параметров их
движения. РЭ воздействие на РЛС требует знания конкретных функциональных ха-
рактеристик аппаратуры, определяющих возможности решения возложенных на си-
стему задач. Наибольшего эффекта РЭП достигает тогда, когда оно организуется це-
ленаправленно с учетом индивидуальных особенностей подавляемой аппаратуры.
Приемную РЛС можно представить в виде совокупности устройств, изображенных на
рисунке 1.13.
Рис. 1.13. Структурная схема приемной радиолокационной системы
с точки зрения возможностей создания ей похмех
Основным устройством, определяющим возможность работы системы в це-
лом, является приемная антенна. Важную роль приемная антенна m рает в обеспече-
нии работы системы определения угловых координат цели ! системы АСН). Сигна-
лы, принятые антенной от цели, проходят преобразование частоты, после чего по-
ступают на УПЧ, обеспечивающий поднятие их уровня до необходимой величины.
Глава 4. Основы ФРЭПр и ОЭП
361
Рт
~R0~
(421)
где Р - мощность ИИ; г - длительность импульса; R — расстояние до цели; 0 -
угол расходимости пучка лазерного излучения (0 = а = /3).
Для того, чтобы лазер разрушил (прожег) металлическую защитную по-
верхность корпуса цели на дальности , его яркость В = Рт/О2 должна удовле-
творять условию B = QR^ (Qo =20 кДж/см2).
4.3. Функциональное поражение специальным
программным средством
Функциональное поражение СПС заключается в выводе из строя или сни-
жении эффективности функционирования компонентов систем обработки инфор-
мации РЭО противника, нарушении конфиденциальное!и, целостности и доступно-
сти информации путем применения СПС. К радиоэлектронным угрозам инфор-
мационной безопасности АРЭК относятся:
• перехват и дешифрирование информации в каналах радиосвязи и передачи
данных;
• РЭП радиоэлектронных систем и устройств;
• РЭП и ОЭП каналов передачи данных и линий связи;
• дезорганизация информационных систем и СУ;
• ввод ложной информации в каналы передачи данных и линии связи;
• вирусные «атаки» (внедрение вирусных программ в информационные и
управляющие сисл емы);
• внедрение электронных средств перехвата информации в аппаратные сред-
ства устройств и систем [23].
Среди известных к настоящему времни разновидностей вредоносных про-
грамм наиболее опасными для БЦВМ являются электронные вирусы, которые мо-
гут не только осуществлять несанкционированные действия, но и обладают спо-
собностью к саморазмножению. Вирусные «атаки» можно рассматривать как спе-
цифическую форму РЭБ и называть ее вирусным подавлением [23]. Вирусное по-
давление может при . сняться для достижения следующих целей: 1) скрытого изме-
нения функций системы; 2) вывода системы из строя; 3) разрушения файлов дан-
ных, функциональных и прикладных программ.
Специальные программные средства - совокупность программных и7или
технических средств, предназначенных для нарушения (изменения) заданной тех-
нологии обработки информации и/или целенаправленного разрушения извне внут-
реннего состояния информационного вычислительного процесса в ЭВС [126].
Под поражением ЭВС понимается комплекс организационно-технических
мероприятий, направленных на нарушение нормального функционирования этих
систем путем создания преднамеренных программных помех (СПС). СПС облада-
ют рядом отличительных характеристик по сниженному энергопотреблению, высо-
кой скрытности, избирательности, авторегенерируемости, прозрачности, сложности
Глава L Общие положения радтоэлеюпроннор борьбы
31
Как правило, в РЛС УПЧ снабжается системой АРУ, позволяющей обеспе-
чивать требуемый динамический диапазон приемника и устраняющий амплитудные
искажения принимаемых сигналов, способные существенно нарушить точность ра-
боты угломерных систем. С выхода УПЧ после видеодетектирования сигналы по-
ступают на индикатор. За УПЧ обычно следуют системы селекции по дальности и
скорости, обеспечивающие измерение дальности и скорости цели и работу систем
АСД и ACC. С выхода системы селекции целей сигналы поступают на угломерную
систему, обеспечивающую автосопровождение по направлению.
Каждое из перечисленных устройств может быть объектом РЭП. Антенная
система в совокупности с системой АСН может являться объектом РЭП, нацелен-
ным на срыв режима автосопровождения цели по направлению или существенное
искажение угловых координат цели. Известен большой набор средств РЭП угло-
мерных систем [9-13, 15, 19]. Часть из них рассчитана на подавление конкретных
типов угломерных систем. При их создании обычно требуется информация о прин-
ципах и параметрах системы АСН подавляемой РЛС.
Проведенный анализ РЛ приемника как объекта РЭБ свидетельствует о необ-
ходимости комплексного подхода к оценке возможностей и эффективности РЭП
РЛС. Для разработки средств РЭП имеют значение следующие характеристики си-
стем оружия, управляемого РЛС [15]:
• диапазон рабочих частот;
• вид сигнала, внутри импульсная модуляция (ЛЧМ, ФКМ);
♦ скачкообразная перестройка несущей частоты РЛС или работа на разнесен-
ных частотах:
• эффективная излучаемая мощность передатчика РЛС;
• длительность импульса, модуляция длительности импульсов, использова-
ние групп импульсов;
• период повторен Iя импульсов, модуляция периода повторения;
• модуляция сигнала из-за сканирования антенного луча;
• характеристики IHA РЛС (главного луча и БЛ);
• поляризационные характеристики антенной системы РЛС;
• способ сопровождения цели по угловым координатам;
• способ наведения ракет;
• способность работать в пассивном режиме по импульсным и непрерывным
сигналам;
• характеристики неконтактных взрывателей;
• способы взаимодействия с другими системами оружия;
• число, местоположение, максимальная дальность действия и другая инфор-
мация о назначении РЛС;
• используемые способы защиты от воздействия помех и их характеристики.
Значительное возрастание роли РЭБ привело к тому, что любая современная
РЛС оснащена системой помехозащиты (ПЗ), включающей набор соответствующих
алгоритмов и устройств. Анализ типовых способов ПЗ РЛС показывает, что их
условно можно разделить на три группы.
32
Глава I. Общие положения радиоэлектронной борьбы
В первую группу входят способы, основанные на применении специальных
устройств (компенсаторов помех по БЛ ДНА, устройств бланкирования имитиру-
ющих помех, схем селекции движущихся целей (СДЦ)), обеспечивающих частич-
ное или полное устранение помеховых воздействий. Специфической особенностью
способов этой группы является возможность улучшения характеристик системы
при их применении. Управление устройствами ПЗ осуществляется по принципу
«включил - выключил» после установления факта создания помех. Применение
первой группы способов ПЗ практически не требует временных затрат РЛС и обес-
печивает снижение уровня помех в полосе пропускания приемника.
Во вторую группу входят способы, основанные на применении специаль-
ных режимов работы, позволяющих эффективно извлекать информацию из помех и
затруднять их создание на противостоящей стороне <пассивное сопровождение,
сопровождение по переднему импульсу и силовое преодоление («прожигание»)
постановщика помех). Способы второй группы реализуются, как правило, при
установлении факта создания помех по главному лепестку ДНА РЛС.
Третья группа включает способы ПЗ, основанные на управлении характе-
ристиками (структурой и парамеграми) РЛС. Применение способов данной грлттпы
осуществляется, как правило, в сочетании со способами первой группы и позволяет
перераспределять энергетический ресурс РЛС между обслуживаемыми целями и
режимами работы, добиваясь требуемого качества ее функционирования в текущей
радиоэлектронной обстановке.
Среди возможных способов защиты РЛС от воздействия помех представля-
ют интерес для РЭП следующие сведения:
• виды и особенности работы АРУ приемника;
• способы накопления сигнала в приемнике;
• способы селекции движущихся целей;
• наличие схемы, состоящей из широкополосного усиления, ограничителя и
узкополосного усилителя (ШОУ);
• способ поддержания в приемнике постоянного уровня ложных тревог;
• применение корреляционных методов;
• алгоритм обработки сигнала в приемнике;
• наличие сторожевых стробов в каналах автосопровождения;
• обработка сигнала в фазированной антенной системе РЛС;
• способы подавления приема помех, воздействующих через БЛ;
• способы пассивного определения дальности;
• другие меры защиты РЛС от диполей, помех по дальности, скорости и угло-
вым координатам, от ЛЦ [2, 9, 10, 24, 28].
На определенном этапе РЭП может быть достаточно эффективным для по-
давления РЛС, но разработка средств защиты РЛС вновь восстанавливает баланс,
отбрасывая РЭП назад, т.е. сводя к нулю его эффективность. Изолированное рас-
смотрение функциональных систем, входящих в РЛС, не позволяет в полной мере
оценить эффективность подавления. Подавление только систем АСД и АСС еще не
решает задачи РЭП. Если при этом работоспособность угломерной системы будет
сохранена, РЛС может выполнить боевую задачу, например, связанную с обеспече-
Ijiaeci L Общие положение ^адиоэлеюпронной^ oojjbfart
33
нием полуакгивного наведения ракет или управлением наведения ракет триангуля-
ционным методом.
Различные виды РЭП вызывают в РЛС У О следующие основные эффекты-.
• нарушение процесса обнаружения (пропуск цели);
• дезориентацию оператора РЛС;
• задержку обнаружения или задержку начала АС цели;
• сопровождение ЛЦ. перегрузку систем обработки информации большим ко-
личеством ЛЦ;
• нарушение способности измерения РЛ средствами дальности, скорости и
направления;
• создание ошибок в измерении дальности, скорости и направления;
• срыв автосопровождения цели или ракеты [12, 15].
Достижение указанных эффектов возможно при правильной реализации пе-
речисленных методов создания помех в аппаратуре РЭП и ее установке на соответ-
ствующих защищаемых ЛА.
1.4. Частные и обобщенные критерии оценки
эффективности радиоэлектронной борьбы
Основная и непосредственная цель РЭП- нарушение нормальной работы
РЭС противника, максимальное снижение эффективности их использования.
Достижение этой цели приводит к ухудшению качества функционирования СУ
силами и оружием, снижению эффективности применения боевой техники и
созданию благоприятных условии для действия своих сил и использования своего
оружия. Указанное выше может быть достигнуто решением задач-.
• прерыванием функционирования РЭС за счет ФРЭПр;
• уменьшением в заданном интервале времени количества полезной
информации, циркулирующей в СУ (задержкой ее во времени);
• внесением ложной информации в СУ [15].
Основу методов РЭПр составляют:
• подавление РЭС маскирующими и имитирующими помехами;
• ФРЭПр, рассчитанное на выведение из строя элементов приемных
устройств, создание компьютерных помех путем внедрения в ЭВМ компьютерных
вирусов (СПС);
• применение ложных радиолокационных целей и ловушек;
• воздействие на среду распространения и отражения ЭМВ.
Методы создана я к iu пых и пассивных помех применимы к:
• системам обнаружения и распознавания;
• системам АС по дальности, скорости и направлению;
• системам связи и линиям управления;
• радиовзрывателям и др.
Основной принцип РЭП - уменьшение радиотехническими методами бое-
вой эффективности средств поражения противника путем изменения количества
34
Глава L Oqiaiie^ поломам борьбь)
информации в его СУ. Эффективность подавления РЭС определяется мерой разру-
шения полезной информации, поступающей на вход обнаружителя РЭС путем
формирования энергетической суммы полезного сигнала и помехи. Для уяснения
общих принципов РЭП и определения критериев оценки их эффективности необ-
ходимо установить зависимость между параметрам! средств РЭБ и степенью их
влияния на боевую эффективность подавляемых РЭС противника. Если сложное
действие может быть разбито на составные этапы, каждый из которых оценивается
независимо, как решение частной задачи, то в этом случае применяются главные
(основные) и частные критерии.
При оценке эффекгивности радиоэлектронного подавления РЭС противни-
ка пользуются основными (главными) и частными критериями. Основными
(главными) критериями оцениваются мероприятия по РЭБ (по нанесению ущерба
той или иной стороной в процессе проведения боевых операций с применением
средств РЭБ [9]) в боевых действиях авиационных частей и соединений, и для их
вычисления, как правило, необходимо предварительное вычисление частных кри-
териев. Частными критериями оценивается эффективность решения частных за-
дач. Частные критерии могут использоваться для уяснения влияния отдельных фак-
торов на успешность боевых действий, позволяют оценивать качество отдельных
технических решений, проводить сравнение различных средств РЭБ, определять
рациональные технические характеристики и оценивать степень совершенства экс-
плуатационных характеристик комплексов РЭБ.
Выбор критерия определяется целью, которая должна быть достигнута в ре-
зультате применения оружия и действия войск. Критерий должен отражать:
• конечную цель, поставленную на ведение боевых действий;
• связь между параметрами средств РЭБ;
• способами их применения и степенью их влияния на боевую эффективность
подавляемых РЭС противника.
В то же время он должен быть чувствительны?: к изменению регулировок,
параметров средств создания по мех при изменении способов их применения. Не
существует универсального критерия эффективности РЭБ: в различных условиях,
на различных этапах ведения РЭБ используют различные критерии. Под критери-
ем! боевой эффективности понимается правило, по численном} значению которо-
го оценивается эффективность действия боевой техники и войск.
Для количественной оценки эффективности РЭБ применяются обобщенные
(общие) и частные критерии. К основным (главным) критериям относятся опера-
тивно-тактические критерии, определяющие степень выполнения комплексом или
средством РЭБ стоящих перед ним задач в заданное время. Оперативно-
тактически е критерии являются определяющими при разработке концепции РЭБ
на определенном этапе развития ВВС. С помощью оперативно-тактических крите-
риев формируются исходные положения для разработки новых комплексов РЭБ,
оцениваются мероприятия по организации РЭБ в боевых действиях ВВС по степе-
ни нанесенного информационного ущерба в СУ оружием на показатели боевых
возможностей группировки войск противника.
Глава L Общи£ положения радиоэл^юпронной барьбы
К частным критериям относятся, главным образом, технические крите-
рии. характеризующие качество применяемых помех и эффективность отдельных
средств создания помех:
• Информационные критерии позволяют оценить качество конкретных по-
меховых сигналов и качество мероприятий по нанесению противнику информаци-
онного ущерба.
• Энергетические критерии рассматривают энергетические характеристики
помехового сигнала и подавляемого средства.
• Эксплуатационные критерии используют при эксплуатации средств РЭБ.
• Военно-экономические критерии в виде абсолютной или относительной
стоимости средств РЭБ применяется при оценке деятельности предприятий про-
мышленности. Критерии позволяют оценить экономические показатели различной
техники РЭБ при ее эксплуатации и боевом применении, являются одним из основ-
ных критериев при принятии решения о разработке комплексов РЭБ.
Оптимальное согласование частных и общих критериев ведет к повышению
эффективности РЭБ [15].
1.4.1. Оперативно-тактические критерии
В качестве критериев боевой эффективности применяются оперативно-
тактические критерии:
• степень снижения надежности управления войсками и оружием ПВО про-
тивника;
вероятность выполнения гручшой ЛА (звено, эскадрилья, полк и т.д.) боевой
задачи (задания I РБЗ;
• вероятность прорыва ПВО Р во в условиях постановки помех;
• вероятность поражения Рпр (непоражения) самолета;
• среднее число подавленных радиопомехами РЛС;
• среднее число потерь группы самолетов m(k) за k возможных атак;
• снижение математического ожидания т количества потерянных самолетов,
наведений истребителей /?ис, количества выпущенных по своим самолетам ракет,
снарядов п и др. [9, 15].
На каждом этапе исследования комплекса РЭБ < проектирование, испытание,
эксплуатация, боевое применение) обосновывается необходимость применения то-
го или иного критерия и устанавливается функциональная связь выбранного крите-
рия с оперативно-тактическими /й; । и техническими характеристиками комплекса:
^бз = ^бз («(')> ДО) , ™ = ™(«(0> ДО), РПР = ОЛДО» ДО) и др.
Пусть гру ппа ударных самолетов должна выполнить боевую задачу и выйти
в зону применения оружия. Предварительно выбирается маршрут их полега, назна-
чаются априа(/)ори количество возможных атак перехвата на маршруте, конкрет-
ных типов ЗРК, АСП. Затем, в качестве фрагмента, берется промах группы самоле-
Глава L Общш ш>ложения ^адиоэл^ктр^11ной борь&ы
тов над одним из средств ПВО. В качестве критерия оперативной эффективности
выбирается среднее число потерь группы самолетов т(к) за к возможных атак
этого средства
т(к) = No-Nk = кп() - Р), n<Nk_},
(1-5)
'No - кн([ -Р}), при п < Nk_t,
(1.6)
’ прн
где No — число ударных самолетов, преодолевающих зону ПВО: Л - число само-
летов, оставшихся непораженными после А>ой а гаки; п — число ракет ЗРК. выпу-
щенных залпом по самолетам в каждой А-ой атаке; Р} - вероятность непораженья
каждого самолета в одной атаке (дуэльной ситуации).
Из выражений (1.5) и (1.6) следует, что критерий оперативной эффективно-
сти связан простой зависимостью
т(к) = кпРпог (1.7)
с вероятностью поражения о того самолета Рпор = 1 - Р, в дуэли с ЗРК.
В качестве оценки эффективности комплексов РЭБ используют показатель
где Р ,р - эффективность залповой атаки ЗРК. когда средства РЭБ на ударных ЛА
не применяются; Р ор - эффективность при условии применения средств РЭБ [9].
Обоснованным критерием выбора наилучшего варианта применения помех
может быть максимум снижения относительных потерь группировки авиации
[171]. С учетом динамики возможного изменения численности группировки авиа-
ции данный критерий имеет вид
где j - номер варианта применения помех; М - число вылетов группировки ЛА
(i = Х...М ); Aj - число ЛА в первом вылете: Д'П(. - среднее число возможных по-
терь группировки в /-ом вылете без применения помех; А , - среднее число воз-
можных потерь группировки в /-ом вылете и применении помех по /-му варианту;
NPj — число ЛА, дополнительно привлекаемых к выполнению /-го вылета.
Рассмо/рим подробнее оценку7 эффективности РЭБ по вероятности вы-
полнения боевой задачи РБЗ заданной группой самолетов. Для того, чтобы боевая
задача была выполнена, необходимо совместное наступление трех основных неза-
висимых событий:
Глава L Общие положения радиоэлек1пронной борьбы
37
преодоление ПВО ударными самолетами;
отыскание (обнаружение) цели;
нанесение объекту действий заданного ущерба.
Вероятность выполнения боевой задачи можно записать как
БЗ ГПВО ’ Г ОБН ’ Г ПОР ’
(1-9)
где Д1В0 - вероятность преодоления самолетами ПВО противника (определяется на
основании технических характеристик РЭС противника); Р0БН - вероятность обна-
ружения цели (тактическая характеристика РЭС); Рпор — вероятность нанесения
объекту7 действий заданного утцерба, определяется качеством СУ оружием [15].
Во многих случаях для оценки эффективности РЭБ достаточно ограничить-
ся рассмотрением только вероятности преодоления ПВО. Количественные значе-
ния Р в могут быть определены только для конкретных условий боевого приме-
нения. Аналитическая модель преодоления системы ПВО должна оценивать веро-
ятность пролета группировкой ЛА определенного маршрута с учетом возможных
типов атакующих средств перехвата (АСП), которые включают в себя зенитно-
ракетные комплексы (ЗРК), истребительную авиацию (ИА), зенитную артиллерию
(ЗА). Кроме того, вероятность прорыва системы ПВО группой ЛА зависит от:
• номенклатуры и характеристик АСП, ь том числе данных о РЭО, оружии и
средствах защиты от РЭП, применяемых в АСП — помехозащищенности и наличия
контррадиопротиводействпя;
• видов собственных ЛА, состава и ТТХ РЭО, установленного на них оружия
нападения и защиты ЛА от АСП;
• основных способов применения средств РЭП (впереди, в строю или позади
ударной авиации);
• номенклатуры авиационных средств РЭП, имеющейся в составе группиров-
ки, и наличия постановщиков помех;
• наличия в составе группировки самолетов огневой поддержки, оборудован-
ных индивидуальными комплексами защиты ЛА (самолеты поддержки связывают
боем ИА противника и уничтожают РЛС пунктов наведения и управления ЗРК, ИА,
ЗА [29].
Наиболее эффективным способом массового налета авиации, преодолева-
ющей систему7 ПВО с допустимыми потерями, являются «три волны» налета:
1) первоначальная постановка пассивных или комбинированных (активно-
пассивных) маскирутощих помех с ДПЛА путем сброса ДО, ПЛОД и применения
других средств РЭП;
2) нанесение ракетных ударов под прикрытием помех с самолетов поддерж-
ки по РЛС ЗРК, ЗА и аэродро мам базирования ИА в условиях противодействия со
стороны системы ПВО:
3) уничтожение заданных целей ударной авиацией, поддержанной ПП, так-
тическими разведчиками с аппаратурой РЭП для выявления оставшихся наземных
средств ПВО и собственной авиации.
38
Глава L Общи£ положения радиоэлектроннай qojjbobi
Со стороны авиапин при преодолении системы ПВО могут участвовать до
4...6 тактических групп по 2. ..6 ЛА в каждой. Для их поражения могут привлекать-
ся 4...6 истребителей перехватчиков, 5...7 наземных (корабельных) ЗРК большой и
средней дальности и до 3...5 зенитных комплексов малой дальности. 1нформаци-
онное обеспечение применения комплексов перехвата возможно в пределах даль-
ности прямой видимости с использованием их собственных и взаимодействующих
РЛС при их общем числе до нескольких десятков [17].
Для получения аналитического выражения вероятности прорыва системы
ПВО рассматриваемые «три волны» налета авиации нельзя считать независимыми,
что существенно усложняет расчеты. Предположим, что в аналитической модели
не надо учитывать первые две «волны» налета авиации, а только задать коэффици-
ент вывода из строя (подавления! системы ПВО порядка 0,75 и более. Такое усло-
вие реально и достаточно часто выполняется в локальных конфликтах. Следствием
этого предложения является децентрализация системы ПВО, когда атаки уцелев-
ших средств перехвата случайны и независимы друг от друга [29]. В этих предпо-
ложениях любой самолет ударной группировки преодолеет ПВО, если имеет место
совместное наступление трех, как правило, независимых событий: самолет не сбит
ИА, ЗРК или ЗА.
По теореме произведения соответствующих вероятностей итоговая вероят-
ность преодоления ПВО Рпв0 определяется как
ПВО
"3PKJ
(110)
где Р|ЗА, Р13рк, Р|ИА - вероятность поражения ЛА за одну атаку ЗА, ЗРК, ИА (веро-
ятность поражения ЛА одни*м обобщенным выстрелом может быть снижена за счет
применения индивидуальных средств РЭБ, воздействующих на РЛС управления
оружием - бортовые РЛС, РГСН и т.д.)); лЗА1, иЗРК1 - среднее количество выстрелов
ЗА и ЗРК, приходящихся на одну цель; - количество атак ИА.
Выражение (1.10) можно представить в компактном и общем виде
т т
^пво = П(1--Р.,Г=ПИ? .
/=1 r=1
(111)
где Рп - вероятность поражения (Иу - вероятность непоражения) ЛА в одной ата-
ке z-м АСП; п - число атак /-го АСП; т - количество различных типов АСП.
Простейшее выражение для вероятности прорыва предварительно ослаб-
ленной системы ПВО имеет следующий физический смысл: если система ПВО де-
централизована и атаки средств перехвата независимы, то вероятность сохранения
каждого ЛА прорывающейся группы определяется только числом атак и вероятно-
стью непоражения ЛА в одной из этих атак. Если атаки АСП разного качества, то
ПВО
т п,
П П У •
/=1 /=1
(1.12)
где п - число атак /-го АСП различными видами вооружений.
Глава L Общие положения радиоэлектронной борьбы
39
Если необходимо обеспечить минимум потерь авиации при преодолении
системы ПВО, то первые две волны налета авиации должны обеспечить децентра-
лизацию и минимальное число атак системы ПВО по труппировке по формулам
• 1.10), (1.11), т.е. добиться пуассоновского потока атак малой интенсивности. В то
же время БКО должен отражать любую атаку с максимальной эффективностью
И’, —> 1 в (1.11). По подсчетам зарубежных специалистов применение средств РЭБ
индивид} альной и групповой защиты ударной группировки в 20 раз снижает уяз-
вимость самолетов в зоне действия противоборствующей стороны, что означает
снижение Pti j\q> 0,05. Другие исследования показывают, что уменьшить Р. до зна-
чений, близких к нулю, достаточно сложно из-за залпового применения УР в одной
атаке ИА, высокой помехозащищенности АСП от преднамеренных помех, моноим-
пульсных методов получения и обработки информации в РЛС АСП [29]. В услови-
ях ведения РЭБ указанные величины изменяются
р’ = (]-Р* 'PFKI.h-P* Г*41 fi и}
^ПВО V Г1ИА ) V1 Г\ЗРк) V1 ^I3A ) ’ к1-13/
где знаком * обозначены значения в условиях ведения РЭБ.
В качестве оперативно-тактического показателя эффективности ведения
РЭБ выбирают разность
(1.14)
или отношение
(М5)
показывающее, во сколько раз вероятность выполнения боевой задачи
увеличивается при ведении РЭБ.
При ведении РЭБ сокращается время для анализа воздушной обстановки и
принятия решения. Эго приводит к уменьшению среднего числа атак истребителей,
среднего количества запушенных ракет. Поэтому показатели эффективности РЭБ
могут вычисляться как отношения
_ ПИА п _ ЗРК
ИА ♦ 5 ЧЗРК *
п И
"ИА *ЗРК
(1.16)
Трудности использования оперативно-тактических критериев
эффективности РЭБ заключаются в сложности создания математической модели
системы ПВО, адекватной реальной ситуации. Вид показателя эффективности РЭБ
определяется также типом подавляемой РЛС, ее основным тактическим
назначением. К недостаткам критерия выполнения боевой задачи можно отнести:
1. Количественные соотношения могут быть определены только для
конкретных условий.
2. Критерий не критичен к конкретным видам помех и средствам РЭБ из-за
достаточно больших обобщений.
3. Критерий не учитывает цену7 выполнения боевой задачи [15].
40
Глава 1, Общие положения радиоэлектронной борьбы
Для определения вероятности поражения ЛА ракетой с контактным
взрывателем необходимо знать характеристику уязвимости ЛА и закон рассеяния
ракет (снарядов). Характеристика уязвимости (живучести) ЛА опись вается коор-
динатным законом G(m который представляет собой условную вероятность по-
ражения ЛА очередью независимых выстрелов при условии, что в ЛА попало ровно
т снарядов
G(m) = l-(l-p,)",
(1.17)
где р —вероятность поражения цели одним снарядом, попавшим в нее.
Вероятность попадания снаряда в контур цели S (в картинной плоскости
XY) определяется законом рассеяния Р(ДХ,ДУ)
Рх = Др(Дх,Ду)б7х<Л>,
(1.18)
где Дх, Ду - промахи, порождаемые действ! ем помех.
При малых размерах J . но сравнению с размерами области рассеяния
(1-19)
где Ех = 0,68сгх . Еу = 0,68сгу — главные вероятные отклонения вдоль главных осей
эллипса рассеяния; <тх, сгу — среднеквалрат ические значения промахов; р = 0,477;
Дх, ДY — математические ожидания промахов [13].
Если установлены зависимости £' = £(«(/), Д (г)) и Д = Д(а(г),Д(г)), то с
помощью формулы (1.19) можно оценить эффективность комплекса РЭБ по борьбе
с ЗРК и определить оптимальные параметры характеристики) комплекса. При от-
сутствии систематических ошибок (Дх = 0, Ду = 0)
Анализ выражения (1.20) показывает, что при нулевом математическом
ожидании промахов наиболее эффективны те помехи, которые приводят к росту сгх
и сгу. В некоторых случаях можно положить Дх = Ду = Д, сгх = сгу = ст, тогда
При ст = Д вероятность Д достигает максимального значения
2теД2
(1-22)
Глава L Общие положения радиоэлектронной борьбы
41
Наиболее неэффективными с точки зрения РЭБ являются такие помехи, ко-
торые вызывают промахи с одинаковыми эффективным значением и математиче-
ским ожиданием ст = А. Более целесообразно выбирать такие помехи, которые
приводят к промахам с ст» А или А
it к промахам с ст» А или А » а [13].
Вероятность поражения ЛА ракетой с неконтактным взрывателем
^ПОР = | )^Дх^Ау ’ (1
(1-23)
где /?(Дх,Ду) - условная вероятность поражения цели при заданных значениях
ошибок наведения Ах, Ау - закон рассеивания ракеты, характеризующий двумер-
ную плотность вероятности промахов Дх, ДY ; 5 - область интегрирования, соот-
ветствующая площади, ограниченной проекцией контура цели в картинной плоско-
сти XY.
Для. гауссовского закона распределения ошибок наведения ракеты Дх и Ду
при Ах = Ду = 0 и среднеквадратических отклонениях промахов = crY = ст вы-
ражение для вероятности поражения ЛА имеет вид
где АЭФ - эффективный радиус поражения цели (характеризует точность наведения
ракет с неконтактными взрывателями).
Описанные выше способы количественной опенки эффективности средств
РЭБ справедливы, когда ошибки наведения, порождаемые помехами, значительно
превышают естественные ошибки системы, вызываемые непреднамеренными по-
мехами [13].
Вероятность наведения истребителя противника на цель может быть
определена следующим образом. Истребитель противника может поразить цель
при условии, что сам он выведен в зону, где его БРЛС обнаружит цель, создающую
помехи. В предположении возможности всеракурсной атаки с дальностей, соответ-
ствующих дальности /)0БН обнаружения цели БРЛС вероятность поражения це-
ли равна
ПОР ГНАВ‘ГР’
(1-25)
где Рндв - вероятность наведения истребителя на цель (вероятность того, что
ошибка наведения (промах) А не превышает допустимого значения А < Дп); Р. -
условная вероятность сбитня прикрываемого самолета. При известном законе рас-
пределения промахов /2(А) вероятность наведения истребителя на цель равна
j /?(АрА.
(1-26)
42
Глава 1. Общие положения радиоэлектронной борьбы
При нормальном законе распределения промахов /?(Д I с математическим
ожиданием А и дисперсией ст2
(1-27)
Z. Г Д
где Ф\х) = le at - интеграл вероятности (функция Лапласа i [4].
W Jo
Значение Р0БН в случае самоприкрытия зависит от характеристик БКО a(t)
и /?(/). При подавлении БРЛС активными помехами D равна минимальной
дальности подавления
ОБН min
4ffPnGn7A/n[. '
(1.28)
где К. - коэффициент подавления; PCGC, PnGn - энергетические потенциалы
БРЛС и САП; А/н - ширина спектра помехи; - полоса пропускания подавля-
емого приемника; сгц - ЭПР самолета-цели; у - поляризационный коэффициент.
Математическое ожидание и среднеквадратическое значение ошибки наве-
дения истребителя на цель зависят от характеристик БКО а(/) и Д(7)
сг = су (а(О,Д(С)> А = Д(а(/),Д(/)).
(1-29)
Функциональные зависимости (1.29) могут быть определены для каждой
конкретной задачи. Выражение (1.27) с учетом (1.28), 11.29) дает возможность ис-
пользовать оперативно-тактический критерий вероятность наведения истребителя
на цель для решения различных задач по оценке эффективносги комплексов РЭБ.
Вероятность Р{ в формуле (1.25) зависит от вида применяемого оружия и характе-
ристик БКО a(t) и [3(1} [13].
Под эффективным обстрелом понимается выстрел г пуск ракеты i. пора-
жающий ЛА с вероятностью />пор. Для определения числа эффективных обстре-
лов ЛА иЭФ, преодолевающего зоны обстрела средств ПВО, местоположение кото-
рых известно, используется выражение
= z VРппр п > (1.зо)
ЭФ ^j^jrnOP// эф/ ’ v z
7-1 у-1 /=1
4
где п Эф(. = д у>ПС1Р - число эффективных обстрелов, совершаемых 7-ым средством
7=1
ПВО; - вероятность поражения ЛА 7-ым средством ПВО при у-ом обстреле;
чу - число типов оружия, применяемого противником при перехвате (обстреле)
ЛА; / - число обстрелов, совершаемых /-ым средством ПВО [13].
Глава 1. Общие положения радиоэлектронной борьбы
Если количество средств ПВО большое и координаты их точно не известны,
то для определения при пролете ЛА к зон ПВО используется выражение
(1-31)
ш
где п.,= \L SR РуРпор, - число эффективных обстрелов на каждом участке
7 = 1
к
маршрута (всего к участков) всеми типами средств ПВО; п ф1 = p^^p^^R -
7=1
число эффективных обстрелов, совершаемых 2-ым средством ПВО (всего средств т
штук) на всем маршруте: L - ширина зоны обстрела Z-го комплекса ПВО на у-ом
участке (при общем числе типов ти); р - плотность комплексов ПВО 2-то типа на
каждом у-ом участке маршрута; Д7?. — длина отрезков маршрута, проходящего че-
рез зону ПВО, обслуживаемую комплексом ПВО 7-го типа на каждом /-ом участке;
у>пор, - вероятность поражения ЛА при обстреле его комплексом /-го типа.
Ожидаемые потери ЛА (УБП - число самолетов боевого порядка), преодо-
левающих зону ПВО при нар\ шенном целераспределении, определяются как
(1-32)
Число эффективных обстрелов при использовании средств РЭБ зависит от
характеристик средств РЭБ а(г) и /?(/) [13]. Эффективность средств РЭБ может
быть оценена с помощью абсолютного и относительного снижения числа обстрелов
Ал Эф («(О, Р (0) = 'Чф “ "эф рэб («(')> /КО) > (1-33)
/2ОТ11 (а VI • Р V))=--------------• (1 • ->4)
/7ЭФ
где л ф, п фрэв (а(Э,/?(0) _ число обстрелов при отсутствии и при использовании
средств РЭБ соответственно.
Оптимизация характеристик комплекса РЭБ сводится к минимизации числа
эффективных обстрелов [13]
77ЭФРЭб(®0) — ®ОРт(0’/К0 — ДэРТ^О) — 0?ЭФРЭБ L ' (1.э5)
Аналогично определяется снижение ожидаемого числа потерь ЛА, преодо-
левающих зону ПВО.
ААПОТ (= Nnor - А ПОТРЭБ («(/)./?(/)), (1.36)
A’ \ R/t\\ А^ПОТ РЭБ .
7' отн (О, р (о) =------------------- (1-57)
пот
44
Глава L Общи£ положения ^адиоэлект^орнор борьбы
где У,..т, Л^потрэб(a(Z),/?GH - число ожидаемых потерь ЛА при отсутствии и при
использовании средств РЭБ соответственно.
Среднее число подавленных помехами РЛС М зависит от многих харак-
теристик комплекса или системы РЭБ: от количества САП Д и их энергетического
потенциала РПСП; вида и качества помех; характеристик систем разведки и управ-
ления (АСУ) и др. Для определения зависимости .1/ от числа САП в системе РЭБ
N и вероятности подавления РЛС р предположим, что подавляемая система
ПВО имеет Л/ однотипных РЛС, а система РЭБ - \ однотипных САП. Вероят-
ность подавления каждой /-ой РЛС одной у-ой САП равна
/’пД9 = А-^’ О'38)
где р - вероятность действия (наведения)у-ой САП на /-ю РЛС (при наличии АСУ
РЭБ р -1, при отсутствии АСУ РЭБ р < 1); ру - условная вероятность подавле-
ния 7-ой РЛСу-ой станцией помех.
Вероятность подавления /-ой РЛС системой РЭБ, состоящей из N штук
САП, определяется выражением
N
аи^-ПО-ла)-
7=1
(1-39)
Среднее число подавленных РЛС Л/ определяется как сумма вероятностей
м v Г у
M=Y.Pm=l. ’-ПО-ла)
/=1 /=1 _ у=1
При подавлении однотипных РЛС (рх,, = рх 12 =
(1-40)
= Р-h ~ Р}) получаем
А/
(1.41)
Среднее число подавленных РЛС М. АСУ системой РЭБ. состоящей из одно-
типных САП и имеющей систему' АСУ, можно получить при р = 1 в (1.41)
Ч АСУ =
(1.42)
В выражении (1.42) учтено, что с вероятностью р = 1 на каждую подавля-
емую РЛС наводится N = N/ М штук САП. При отсутствии АСУ РЭБ или при ее
подавлении можно положить, что САП распределяются на все подавляемые РЛС с
равной вероятностью. Полагая в формуле (1.41) рг = 1/М, можно получить выра-
жение для среднего числа подавленных РЛС Л/, системой РЭБ без АСУ
Глава 1. Общие положения радиоэлектронной борьбы
45
М,=М 1-
(1-43)
Если известны тактические характеристики подавляемого РЭС, то вводят
тактические критерии эффективности РЭБ, позволяющие оценить на (во) сколько
ухудшились тактические характеристики подавляемого РЭС. Тактические крите-
рии, как правило, применяются на этапе проектирования и боевого применения
средств РЭБ. В качестве тактических критериев могут быть использованы: уве-
личение ошибок сопровождения цели; уменьшение дальности действия РЭС; уве-
личение времени выполнения задачи и т.д. [15]. Поскольку конечной задачей всех
РЭС является получение информации, то задача РЭБ - разрушение этой информа-
ции. Поэтому для оценки эффективности РЭБ можно использовать информацион-
ные критерии.
1.4.2. Информационные критерии
Информационные критерии используются для сравнительной оценки каче-
ства помеховых сигналов и их способности нанесения противнику наибольшего
информационного ущерба. Перспективным считается применение информацион-
ных критериев для оценки качества функционирования систем информационного
обеспечения, систем принятия решения, систем контроля надежности и боевой эф-
фективности комплексов РЭБ [13]. Информ анионные критерии характеризуют со-
вокупность различных технических характеристик комплекса РЭБ по наносимому
информационному ущербу и позволяют судить о том, насколько эффективен ком-
плекс РЭБ к насколько он устойчив к контрмерам противника.
В зависимости от вида помехового сит нала и класса подавляемого РЭС
имеют место различные информационные критерии'.
1. Максимум дифференциальной энтропии.
2. Дивергенция Кульбака.
3. Критерии информационно! о \ шерба.
4. Энтропийная мощность.
5. Информационный коэффициент качества.
Для правильного функционирования современных РЭС систем ПВО обяза-
тельным является знание в той или иной степени характеристик полезного сигнала.
В противном случае не представляется возможным обеспечить работоспособность
информационной системы. Маскирующие помеховые сигналы должны исключить
возможность обнаружения полезного сигнала с вероятностью, превышающей за-
данное значение. Идеальные маскирующие сигналы должны создавать такие усло-
вия, при которых апостериори, после приема полезного сигнала, априорная неопре-
деленность в системе информационного обеспечения сохранялась бы.
Рассмотрим сличай, когда с источника информации могут быть переданы
независимые и несовместимые сообщения х ,х2, ... х с априорной вероятностью
46 Глава L Общие положения радиоэлуектроннай борьбы
/7(х(), /?(х2),.... р(хн) соответственно. Эти сооощения образ}тот полную группу
п
событий Ур(х ) = 1 .
7 = 1
Чем меньше априорная вероятность, тем большее количество информации
она несет. Количество информации, содержащейся в сообщении х,, связано с
априорной неопределенностью этого события. Априорная штропия Н(Х) для
всей совокупности случайных сообщений получается усреднением по всем
сообщениям
п
Н(Х) = -^р(х,)10ё,р(х,). (1.44)
/=1
Если бы РЭС работала в условиях отсутствия помех, то в результате обра-
ботки сигналов априорная неопределенность была бы полностью снята. При созда-
нии помех после приема и обработки сигналов неопределенность не снимается.
Обозначим принятые сообщения через yt,y,, ... у„. Наличие помех нару-
шает однозначное соотношение между передаваемы м принимаемыми сообще-
ниями. Необходимо уже говорить об условной вероятности pi х у) передачи со-
общения х при условии, что принято сообщение у.. Условная вероятность
р(х jy) говорит о том, что имеется неопределенность в сообщении у. относи-
тельно х(. Энтропия всего переданного сообщения Н(АбУ) на прие1мной стороне
определяется условной энтропией
п
Я(Х| Y) = -£ X \ | у,) log, р( х, Р,). (1.45)
7=1
Количество пришедшей информации I(X,Y) на приемной стороне ха-
рактеризует величину исчезнувшей неопределенности
Выражение (1.46), используя свойство условной энтропии, можно привести
к виду
1(Х, У) = Н(Х) + Я(У) -Я(АГ,У) • (1-47)
Следовательно, количество получаемой информации равно сумме энтропий
передаваемого А и принятого У сообщений за вычетом совместной энтропии
H(X,Y). В канале связи без помех может быть установлено однозначное соотно-
шение между X и У \Н(Х Y} = 0, т.е. 7(Х,У) = Я(А ).
При наличии в канале помех Н(1 )^Н(Х) и Н(Х У)^0. В этом слу-
чае количество информации, содержащейся в У равно
Г(Х,У) = Н(Х) - Н\Х | У) . (1.48)
В качестве информационного показателя РЭБ берут количество исчезнув-
шей для получателя информации AZ
Глава 1. Общие положения радиоэлектронной борьбы
47
М = /(X,Y) - Г(Х,У) = Н*(Х | У). (1.49)
Следовательно, информационный ущерб равен апостериорной энтропии.
Количество информации, получаемое противником от данной РЛС, может быть
уменьшено за счет увеличения энтропии помехи. В настоящее время
информационные критерии разработаны для оценки качества маскирующих и
имитирующих помех [1,4, 13, 26].
Информационные критерии для оценки качества маскирующих помех.
Любое РЭС противника работает в условиях неопределенности. Мера неопреде-
ленности - энтропия Н [1]. Для РЛС - это пространственно-временная неопреде-
ленность положения целей, для систем связи - это неопределенность принимаемого
сообщения. В теории информации конечную задачу РЛС представляют как выбор
конкретного элементарного объема Кц, содержащего цель, из всего рабочего объе-
ма Ко, обслуживаемого РЛС. Объем Иц определяется пространственно-временной
разрешающей способностью РЛС. Весь рабочий объем Ео можно разбить на эле-
ментарные объемы V' (z = 1, 2, ... /V), а затем каким-либо методом произвести вы-
бор объема Гц из всей совокупности объемов
Отраженный от цели сигнал 5 = £(/,/*,Л,а) несет полную информацию о
состоянии цели (г - вектор, характеризующий местоположение цели; Л , а - век-
торы измеряемых и неизмеряемых параметров полезного сигнала). Маскирующие и
имитирующие помеховые сигналы п = я(/,гп,Лп,ап) характеризуются аналогично
(гп — вектор, характеризующий местоположение САП; аП — векторы измеряе-
мых и неизмеряемых параметров помехи).
Если сигнал 5’(/,г,Л,а) и помеха /?(/,гп,Лп,ап) являются независимыми
^((,г,гп,Л,Лп,а,ап) = 5(/,г,Л,а)+ н(г,гп,Лп,ап), (1.51)
то количество информации на один отсчет (или на единицу времени) равно
I&S) = Н (и), (1.52)
где и Я(«) - энтропии принимаемой смеси %(/,г,гп,Л,Лп,а,ап) и помехи
п {/,гп,Лп,ссп) соответственно [30].
Из формулы (1.52) следует, что необходимо обеспечивать увеличение эн-
тропии помехового сигнала «(г,гп,Лп,ап), так как это приводит к росту неопреде-
ленности сообщения. Неопределенность в данном случае определяется лишь мно-
гомерной плотностью случайного процесса £(уг,гп,Л,Лп,а,ап).
В теории РЭБ наилучший маскирующий сигнал определяется, исходя из
принципа максимума энтропии, согласно которому из множества помеховых сиг-
48
Глава 1. Общие положения радиоэлектронной борьбы
налов выбирается тот, энтропия которого выше (при одних и тех же ограничениях,
наложенных на помеховые сигналы) [1]. Распределения вероятностей случайной
величины (амплитуды, частоты, фазы), позволяющие получить максимальное зна-
чение энтропии, называются экстремальными. При постоянной средней мощности
максимальной энтропией обладает гауссовский процесс, в этом смысле прямошу-
мовая помеха имеет наилучшие маскирующие свойства.
Достоинством энтропии как характеристики качества маскирующих помех
является возможность оценки потенп иалыюи маскирующей способности помех без
рассмотрения конкретных особенностей обработки сигналов в подавляемом РЭС.
Маскирующий помеховый сигнал, синтезированный по критерию максимума эн-
тропии, является наилучшим среди всех видов маскирующих помех только в том
случае, если в процессе синтеза не задаются конкретной структурой подавляемого
РЭС. Когда структура подавляемого РЭС известна, с помощью друтих критериев
^например, по критерию минимума вероятности плавильного обнаружения цели
Рп0 при заданном значении ложной тревоги Рлт,) можно подобрать помеху,
наилучшим образом маскирую иду ю полезный сигнал 13].
Энтропия помехи /?(/,гп,Лп,ап) является основной характеристикой ее
маскирующей способности. С помощью энтропии помехи Н(н) определяется ко-
эффициент качества маскирутощей помехи г/, являющийся функцией энтропии
?7 = rj[H(n. Многомерная энтропия непрерывной маскирутощей помехи опреде-
ляется выражением
оо оо
#п(м) = “[•••[ - z/„)l°g^n(nPw2’ - un)duxdu2.,.dun, (1.53)
где ГЕп(?/.,щ, ... ип) - многомерная плотность вероятности мгновенных значений
помехового сигнала [1].
Если помеховый сигнал представляет собой стационарный случайный про-
цесс длительностью 7ф и шириной спектра Аф, то его многомерная энтропия
ЯП(«) = 27’НД/Л,(«), (154)
00
где Нх(и) = - W(i/)log2H/(u)du - одномерная энтропия; И(п) - одномерная плот-
ность вероятности [4].
Коэффициент качества маскирующей помехи может быть записан в виде
Л ~ ^7эн ' ^сп ’ .55)
где ?/эн - энтропийный коэффициент качества, учитывающий степень отличия
плотности распределения мгновенных значений помехи от гауссовой; Г) п -
спектральный коэффициент качества, учитывающий неравномерность спектра по-
мехи 5П(/) [13].
Энтропийный коэффициент качества определяется выражением
Глава L Общир положения радиоэлеюпронной борьбы^
49
е2Н{"}
(1'56
Рп - средняя мощность помехи.
Спектральный коэффициент качества находится с помощью выражения
А^п
J 1п5п(/)#
о
^сп —
Д/т
4/п
Т^п ’
f $П(Ш
о
Д/и _ ширина спектра помехи.
В качестве грубой опенки ;/сп можно принять
^7сп
П max П min
П max П min
П шах
nmin ~ максимальное и минимальное значения спектральной плотности
помехи соответственно [13].
Наибольшей энтропией наилучшими маскирующими свойствами) при
одинаковых мощностях обладает «белый» шум (гауссов шум (БГШ) с равномерной
спектральной плотностью). Одномерная энтропия такого шума имеет вид
(1-59)
БШ >
' 4 БГШ
где Р л - мощность «белого» шума [4}.
Многомерная пия помехового сигнала с равномерной спектральной
плотностью, О1раниченной полосой Л/п, на интервале наблюдения
(1.60)
П БШ Н .'П >VO2 \ БШ '
Для сравнения качества маскирующих помех с Ы Ш вводят коэффициент
качества помехи
п
КАЧ н бгш log, у12леР.ш
Иногда коэффициент качества определяется отношением
(1.61)
^КАЧ=-^- (1-62)
гд,е Рл - мощность помехи, эн ропия которой равна энтропии «белого» шума [4,
111Значение коэффициента находится в пределах 0 < < 1.
Коэффициент качества помехи А КАЧ показывает во сколько раз мера не-
определенности. вносимая маскирующей помехой, меньше меры неопределенности
БГШ. Примеры расчета коэффициента качества помехи приведены в работе [31].
50 Глава 1. Общие положения радиоэлектронной борьбы
Наилучшей маскирующей помехой является та, у которот i равных ширине
спектра и средней мощности больше энтропия.
Информационные критерии для оценки качества имитирующих помех.
Имитирующие помехи действуют на РЭС (вояким образом: 1 iaipj няют выделе-
ние (обнаружение) полезных сигналов на фоне подобных им имитирующих помех;
2) вносят случайные и детерминированные ошибки при оценке информационных
параметров Л полезного сигнала и пространственны х координат г источника полез-
ного сигнала. Исходя из особенностей воздействия имитирующих помех на РЭС,
необходимо оценивать эффективность действия помех по изменениям тех характе-
ристик РЭС, которые определяют их тактико-технические возможности. Такими
характеристиками РЭС являются способность опознавания полезного сигнала на
фоне помех, а также точность и разрешающая способность.
Для оценки степени устойчивости имитирующей помехи к мерам против-
ника, направленным на ее распознавание, используется информационный крите-
рий подобия (ИКП). Информационный критерий подоб;1я (ИКП) оценивает (в ве-
роятностном смысле) степень отличия имитирующей помехи от полезного сигнала.
Эффективность имитирующей помехи с точки зрения ухудшения точности и раз-
решающей способности подавляемой РЭС оценивается информационными кри-
териями ошибок (ИКО). ИКО дает возможность количественно определить сте-
пень ухудшения точностных характеристик РЭС, работающих в условиях РЭП, и
произвести оценку ухудшения разрешающей способности РЭС [13]. В качестве
ИКО применяется разность многомерных условных энтропий некоторого случай-
ного параметра а, (например, мощности) имитирующей помехи и полезного сиг-
нала АН . Наилучший эффект имитации будет при условии, что эта разность равна
нулю [4].
Для помех, имитирующих полезные сигналы в пространстве пара-
метров Л, случайно изменяющихся во времени Л =(Л,(/),Л,(г), ... л;(()) разность
многомерных условных энтропий АН определяется по формуле
ЛЯ, = Л„(Д)-ЯС(Л,), (1.63)
где 77П(Л ), НС(Л;) - условные многомерные энтропии имитирующей помехи и
полезного сигнапа по параметру7 Л (при условии, что опознавание ведется по пара-
метру Л.) [1].
Полное и достоверное описание информационного ущерба, наносимого по-
мехами, может быть достигнуто путем изучения статистических характеристик до-
статочной статистики, под которой понимается некоторая функция оцениваемого
случайного параметра Л . При исследовании особенностей радиоподавления РЛС
под достаточной статистикой понимается отклик РЛС как реакция на воздействие
полезного сигнала и помехи. Отклик РЛС «выходной эффект РЛС) при простран-
ственно-временной обработке суммарного случайного ЭМП можно записать в виде
А) = J J ,Лп,х)1Г(/,Лс, х)ЛА, (1.64)
Т
Глава 7. Общие положения радиоэлектронной борьбы
51
(1-65)
где Sc(t,A,Ac,x) й 5п(/,Я,Лп,х) - сигнальные и помеховые поля в апертуре антен-
ны РЛС; w(/,A,x) - приведенные внутренние и внешние шумы; А = (Л,,Л2, ... Лп)~
вектор информационных параметров, измеряемых РЛС; Яс и Яп - истинные значе-
ния информационных параметров сигнала и помехи; х - радиус-вектор точки обла-
сти интегрирования Sa, занимаемой антенной; dx — элемент интегрирования обла-
сти <Sa; W(t,Ac,x) — весовая функция РЛС, описывающая особенности обработки
пространственно-временного сигнала в приемном тракте, включая антенну; Т -
время обработки сигнала в РЛС [13].
Выражение для отклика (1.64) можно представить в виде трех слагаемых
^(Я,ЯС, Ап) — <?с(А А?) <7п(А Ai) + (7ц! ’ (1.66)
где qc(A,Ac) и qn(A.Ait) - соответственно отклики на полезное и помеховое воз-
действия; <7Ш - составляющая, порожденная приведенным естественным шумом (в
дальнейшем при большом отношении помеха/сигнал не учитывается).
На рисунке 1.14 пунктирными линиями изображены отклики РЛС на воз-
действие полезного сигнала и помехи. Предполагается, что энергия помехового от-
клика ^„(Л.Ап) значительно превышает энергию полезного отклика g .(/l,/lc).
I ’ис. 1.14. Отклики РЛС на воздействие полезного сигнала и помехи
Помеховый и полезный отклики имеют максимумы соответственно в точ-
ках : = лп и /. = /.с. Суммарный отклик РЛС #(Я) принимает максимальное зна-
52
Глава 1. Общие положения радиоэлектронной борьбы
чение при Л^ЛП [13]. Качество имитирующей помехи и вносимая в измеритель-
ную систему РЛС ошибка могут быть оценены средним смещением и средней ши-
риной отклика тл и сг, [32]
(1-67)
Смещение максимума суммарного отклика АЛ относительно положения
максимума помехового отклика ЛП носит случайный характер и зависит от ширины
помехового отклика сгл. Если АЛ = 0. то вносимая помехой ошибка полностью
определяется значением т (рис. 1.14). Для определения V. разложим выходной
отклик q( Л) в ряд Тейлора в окрестности экстрем ума 7. = .
Ч(Л) = 9(ЛП) + (Л-ЛП)^- +Л(Лп).
Л.Л,
(1.68)
Уравнение правдоподобия в линейном приближении имеет вид [32]
сП-
d Чп ( )
dT
(1-69)
При оценивании по максимуму функции прав доподобия при большом от-
ношении помеха/сигнал должно выполняться условие dqu{ 7. )/</7. = 0 при 7=7.^.
поэтому из уравнения (1.69) получим выражение для абсолютного значения слу-
чайной ошибки (без учета знака)
(1-70)
При большом отношении помеха/сигнал можно пренебречь вторым слагае-
мым в знаменателе (1.70), поэтому
дЛ2
(1-71)
На практике для оценки среднего смещения ДЛСР применяют выражение
Главр L Общие. положения, радисп-^^^ борьбы
(1-72)
Для гауссовой аппроксимации отклика <7П(Л)
\ бл2
(1-73)
— П
о ’
п Л
где ст. определяется формулой (1.67); £. - энергия имитирующей помехи.
Выражение (1.72) с учетом (1.73) принимает вид
(1.74)
где Е — энергия полезного сигнала; <7сн(л) - нормированный отклик РЛС на дей-
ствие полезного сигнала.
Как следует из (1.74), имеет место квадратичная зависимость Алср от ши-
рины помехового отклика, что имеет важное значение для определения требовании
к структуре имитирующей помехи. Физически выражение (1.74) характеризует по-
ложение «центра тяжести» отклика РЛС на суммарное воздействие помехи и сиг-
нала. При значительном отношении помеха/сигнал (Еп/Ес »1) ДАСР = 0 и вноси-
мая помехой ошибка в определении истинно! оценки (координат цели) полностью
характеризуется средним смещением т; . значение которого можно найти с помо-
щью соотношения (1.67). В качестве критерия эффективности имитирующих по-
мех, широко применяемых для подавления следящих систем, можно использовать
среднее значение ошибки, т.е. усредненное смещение т., определяемое с помо-
щью (1.67).
Выражения (1.66)...(1.68) позволяют при заданных характеристиках полез-
ного сигнала S (7,Л.Лс,х) и весовой функции РЛС П’(г,А ,х) найти оптимальную
пространственно-временную структуру помехи, которая при фиксированном отно-
шении помеха/сигнал вызывает наибольшую погрешность оценки координат цели
при определении ее типа. При необходимости получения максимального смещения
т следует применять помехи, порождающие отклики с минимальной шириной,
определяемой соотношением (1.67) [13]. Введение энтропии как характеристики
качества помех позволяет оценить потенциальные возможности помех, не учитывая
при этом конкретные способы обработки сигналов в подавляемых устройствах.
Удобной характеристикой качества имитирующей помехи является дивер-
генция Кульбака [1, 33], которая записывается следующим образом
1
(1.75)
54
Глава 1. Общие положения радиоэлектронной борьбы
где Р (ЛА С) - условная вероятность k-му признаку истинной цели принять значе-
ние Л/ (у = 1, 2, ... N ,к-\, 2, ... ли); РГкк П) - условная вероятность £-му при-
знаку ложной цели принять значение Л/ ; т - количество элементов в множестве
истинных и ложных целей.
Дивергенция Кульбака выгодно отличается от энтропийной меры тем, что
она позволяет получить более простые расчетные формулы в случае нормальных
законов распределения. Дивергенция Кульбака полностью определяется апостери-
орными распределениями. В силу независимое гл от априорных распределений ве-
роятностей дивергенция Кульбака является весьма удобным критерием качества не
только имитирующих, но и маскирующих помех 1]. Чтобы применять этот крите-
рий качества для маскирующих помех, необходимо знать условные апостериорные
распределения вероятностей для реализации, представляющей только помеховый
сигнал р(х{,х2, ... хп П), и реализации, содержащей смесь полезного и помехового
сигналов р(х ,х2, ... х С).
Если многомерные плотности распределения дифференцируемы и опреде-
лены на всей действительной оси, то
оо со
Div П|С= л„|С)-р(л-,,.т,,... х„ П)]х
(1-76)
Удобство приведенных выше информационных критериев состоит, прежде
всего, в том, что у разработчиков средств РЭП практически всегда имеется необхо-
димая информация для проведения конкретных расчетов по этим критериям. Ин-
формационные критерии позволяют оценить качество помеховых сигналов без
привязки к конкретным подавляемым РЭС, способам обработки сигналов и алго-
ритмам принятия решения противником в условиях помех. Информационные кри-
терии позволяют выбрать из широкого класса помеховых сигналов тот, который в
наилучшей степени осуществляет подавление полезных сигналов, даже если вид
последних неизвестен [1, 15].
1.4.3. Энергетические критерии. Коэффициент подавления
Использование информационных критериев оценки эффективности РЭБ
позволяет определить количество информации, теряемой противником при
воздействии на его РЭС различных помех. Информационный ущерб, порождаемый
воздействием помех, проявляется в маскировке, имитации, искажении полезного
сигнала и в общем слу'чае приводит к ухудшению тактических показателей
(характеристик) подавляемых РЭС. Для успешного применения помех
недостаточно их «разрушительных» свойств в информационном смысле.
Необходимо еще, чтобы помехи обладали энергией, достаточной для нанесения
Глава 1. Общие положения радиоэлектронной борьбы
55
заданного информационного ущерба (эффекта подавления). Один и тот же эффект
подавления может быть доспи нут при воздействии на конкретные РЭС различных
видов помех. Очевидно, что помеха, для которой требуемый эффект подавления
достигается при меньшей мощности может считаться более эффективной.
Энергетические критерии предназначены для оценки энергетических воз-
можностей комплексов РЭБ по подавлению РЭС противника. С помощью энерге-
тических критериев оценивается эффективность использования энергетического
ресурса, отводимого для комплекса РЭБ, в интересах радиоэлектронной борьбы с
РЭС противника. Энергетические критерии сложат для определения необходимого
энергетического потенциала САП, значений параметров ЛЦ, средств создания пас-
сивных помех и других средств РЭБ, применение которых дает возможность нане-
сти противнику за щнйый информационный ущерб 113].
Сравнение различных помех можно осуществить по энергетическому кри-
терию, в качестве показателя которого используют коэффициент подавления. Ко-
эффициентам подавления называется минимально необходимое отношение
мощности помехи Рпвх к мощности полезного сигнала Р . на входе приёмника
подавляемого РЭС в пределах полосы пропускания VnPM линейной части прием-
ника, при котором обеспечивается заданный информационный ущерб Ц (требуе-
мый эффект подавления, снижение показателей качества функционирования РЛС)
А=тш^- . (1.77)
-Vrpm Р р
СВХ
"свх
Заданный информационный ущерб и степень подавления РЭС определяют-
ся предварительно с учетом боевой задачи с использованием оперативно-
тактических критериев и соответствующих показателей эффективности и требуют
знания конкретных характеристик подавляемых РЭС. условий их функционирова-
ния и характеристик срелств Р >П. Коэффициент подавления А может быть опре-
делен теоретически и экспериментально. В обоих случаях задаются парой «подав-
ляемое РЭС - САП» и для конкре ho i помехи определяют К .
При теоретическом определении Кц используются различные зависимо-
сти, характеризующие функциональную связь показателей качества функциониро-
вания РЭС с отношением помеха сигнал. Применительно к РЛС обнаружения для
определения А используют кривые обнаружения. Задаваясь значениями вероят-
ности правильного обнаружения Р1Ю и ложной тревоги Рт, находят пороговое
значение отношения мощности помехи к мощности сигнала. РЛС считается подав-
ленной. если Рпо<0.5 и Рп >1-10“5 [4]. Для определения Кп при подавлении
связных радиоприемников в качестве исходных рассматривают зависимости раз-
борчивости речи от отношения помеха сигнал. Коэффициент подавления каналов
АС целей по скорости. дальности и углу определяется с помощью кривых срыва
слежения или зависимостей ошибок слежения от энергетических параметров поме-
хи и сигнала.
56
Глава 1, Общие положения радиоэлектронной борьбы
Значение А , во многом определяется характеристиками помехового сигна-
ла: плотностью распределения мгновенных значений, спектральной плотностью,
шириной спектра и др. Обычно имеются оптимальные параметры помехи, при ко-
торых коэффициент подавления минимален. Однако оптимизация помехового сиг-
нала по минимальному значению коэффициента подавления может быть проведена
только для конкретной пары «РЭС - САП» и не может распространяться на широ-
кий класс помех (маскирующих, имитирующих», предназначенных для подавления
нескольких типов РЭС. Оптимальные параметры помехи, определенные для одного
РЭС, могут быть неоптимальными для другого РЭС [13, 15].
Для экспериментального определения } необходимо иметь макет по-
давляемого РЭС, САП, имитатор полезного сигнала и измеритель мощности. На
вход приемного устройства РЭС подается полезный сигнал и фиксируется его
мощность Рсвх . Затем туда же подается помеха, мощность которой увеличивается
до тех пор, пока не будет достигнут заданный информационный ущерб. Пороговое
значение Рппор замеряется. Отношение Рппор/Р зч является искомым коэффици-
ентом подавления. Когда по условиям эксперимента нет возможности изменять
мощность помехи, варьируют мощностью полезного сигнала.
Значение К. имеет большое практическое значение для проведения опера-
тивно-тактических расчетов. Помеховые сигналы САП одного и того же комплекса
РЭБ однотипных ЛА могут иметь различные значения коэффициента подавления
Кп заданной РЛС. Поэтому при эксплуатации необходима паспортизация К по
отношению к типовым РЛС противника. Изменения Кп должны немедленно дово-
диться до начальников РЭБ частей и учитываться ими при проведении оперативно-
тактических расчетов [13].
На практике иногда применяют понятие «коэффициента подавления по
напряжению»
а'""=?"177^ = ^- (L7S)
ч/црм и
^СВХ
Замечания:
1. Коэффициент подавления К не может быть принят в качестве обоб-
щенного энергетического критерия, способного оценивать качество маскирующего
или имитирующего сигнала по подавлению РЭС различного назначения.
2. Коэффициент подавления характеризует качество помехи, а не эффектив-
ность подавления РЭС. Требуемая эффективность подавления задается заранее на
основе оперативно-тактических критериев. Например, для РЛС обнаружения за-
данный эффект может заключаться в ухудшении ее основных тактических показа-
телей (вероятностей правильного обнаружения, ложной тревоги, дальности обна-
ружения и т.д.) до определенных величин.
Для РЛС слежения за негью заданный эффект может выражаться в увели-
чении вероятности срыва слежен» я или увеличении ошибок слежения больше не-
которых пороговых величин. Радиолинии связи могут считаться подавленными,
Глава 1. Общие положения радиоэлектронной борьбы
57
если на приемной стороне не воспринимается больше половины переданных слов
или команд. Чем меньше значение Ки при одном и том же эффекте воздействия на
РЭС, тем качество помехи лучше. Требуемый эффект подавления достигается при
меньшей мощности помехи, то есть такая помеха энергетически более выгодна.
3. Коэффициент А?п характеризует помехозащищенность подавляемой РЭС
[4, 15]. Та РЭС, для которой значение Кп больше, является более помехозащищен-
ной от данной помехи, для ее подавления требуется большая мощность помехи.
Значение Кп зависит от конкретных видов (спектральной структуры) помехи и
сигнала, способа обработки сигнала в процессе его приема в подавляемом РЭС, из-
быточности кода и некоторых параметров, характеризующих помехозащищенность
РЭС [22]. Вместе с тем, однозначно определять степень помехозащищенности ка-
ких-либо РЭС по значению К нельзя.
4. При определении К учитываются лишь мощности, взятые в пределах
полосы пропускания подавляемого приемника. Частотные составляющие помехи,
выходящие за пределы полосы пропускания приемника, не оказывают воздействия
на РЭС.
Энергетический критерий в отличие от информационного требует знания
конкретных характеристик подавляемых систем. Заранее известная система может
быть подавлена с меньшими энергетическими затратами помеховым сигналом, не
обязательно оптимальным по информационному критерию [15, 19]. Если помехо-
вый сигнал выбран и имеется возможность изменения какого-либо из его парамет-
ров. то наилучшая степень подавления будет соответствовать помехе с минималь-
ным коэффициентом подавления и наибольшей энтропией.
При воздействии на РЛС шумовых помех уменьшается вероятность РГ|0
правильного обнаружения и возрастает вероятность Рп ложной тревоги. Под ко-
эффициентом подавления шумовым сигналом импульсных РЛС, работающих в
режиме обзора, понимается минимально необходимое отношение мощности Ртох
помехового сигнала к мощности полезного сигнала Рсвх на входе приемника РЛС в
пределах полосы пропускания его линейной части, при котором вероятность Рпо и
вероятность Р Принимают некоторые критические значения, задаваемые с уче-
том необходимой степени подавления РЛС.
Для оптимального по критерию Неймана-Пирсона обнаружителя, обеспечи-
вающего наибольшую вероятность Рпо правильного обнаружения сигнала на фоне
ГБШ при заданной вероятности ложной тревоги, пороговое значение
q=hP Р ) определяется выражением
9 = (IgP1T/lgPno)-l. (1.79)
При когерентном накоплении пачки п импульсов
К„=Р-Вп, (1.80)
Яп
Глава 1. Общие положения радиоэлектронной борьбы
для случая некогерентного приел а сигналов
К„=-Ев-Л, (1.81)
где q\ =3/N0; Э - энергия сигнала; ;V0 - спектральная плотность мощности по-
мехи; В - база сигнала [31]. Количество накапливаемых импульсов л =to6 F_, (г
- время облучения БРЛС цели; Аи - частота следования импульсов).
Если ширина ДНА по азимуту Да , а скорость ее вращения (сканирования)
Qc, то время облучения = Ла/Q,,, и
В РЛС с системами АС луч ДНА не сканирует в режиме сопровождения
(когда она «удерживает» захваченную дель). Количество накапливаемых при
обработке импульсов определяется техническими возможностями аппаратуры
накопления.
К энергетическим показателям эффективности средств РЭБ можно отнести:
1. Энергетический потенциал р = PnGn
2. Удельный энергетический потенциал САП
Рп=^- (1.83)
3. Средний удельный энергетически м потенциал
Рур. Руд ' ^кдч ' 'пл ' 'бр ’
(1-84)
где /ГКАЧ - коэффициент качества помехи; - вероятность обслуживания
(постановки помех); Р ? - вероятность безотказной работы.
4. Энерготехнологический показатель САП
Ръ Руд
"'САП^САП
(1.85)
где Д/сАп - перекрываемый диапазон частот постановки помех; т хп - масса САП;
Е. хп - энергия, потребляемая от бортовой сети.
5. Энергетический коэффициент качества
^КЭ = ^"гБш/^Ш • (1 .86)
Энергетический коэффициент качества - это отношение мощности
гауссового белого шума в пределах полосы пропускания линейной части ПРМ, при
которой обеспечиваются заданные Роьн и Р1|Т, к средней мощности реального
шума, обеспечивающей те же значения РОБН и Р^ [15, 19].
Глава L О&щир нолдженшц)^ борьбы
59
1.4.4. Военно-экономьческие критерии
Военно-экономические критерии характеризуют затраты на создание и
эксплуатацию комплекса РЭП. Основными показателями военно-технической
эффективности техники РЭБ являются:
• тактико-технические характеристики комплекса РЭБ;
• решение принципиально новых военно-технических задач РЭБ;
• практическая значимость технологии в аспекте возможности применения в
различных системах вооружения РЭБ;
• степень унификации отдельных блоков и модулей;
• модернизационный потенциал и научно-технический уровень (новизна тех-
нологии, сравнение с мировым уровнем).
В качестве показателей военно-экономической эффективности КРЭП
выделяют: снижение необходимых ресурсных затрат; экспортный потенциал; уве-
личение экономического показателя. Военно-экономические критерии в виде абсо-
лютной или относительной стоимости КРЭП позволяют оценить экономические
показатели различных КРЭП при их эксплуатации и боевом применении. Эффек-
тивность подавления РЭС противника определяется мерой разрушения полезной
информации, поступающей на вход РЭС путем формирования энергетической сум-
мы полезного сигнала и помехи [12]. Реализация определенных энергетических со-
отношений помеха/сигнал на входе подавляемого РЭС требует решения сложных
технических вопросов, связанных с созданием высокоэффективных САП и их
управлением в комплексе РЭП [15, 20].
Сложность повышения боевой эффективности КРЭП определяется тем, что
в конкретных условиях достижение требуемого значения боевой эффективности
может быть осуществлено множеством вариантов, среди которых имеется
оптимальный вариант, соответствующий минимуму затрат на его реализацию.
Перед разработчиками КРЭП возникает актуальная проблема, связанная с выбором
системы РЭБ, которая при заданном значении эффективности имела бы
наименьшую стоимость (наименьшие затраты на разработку, эксплуатацию и
боевое применение), т.е. возникает необходимость оценки по критерию
«эффективность-стоимость».
Реализация КРЭП будет оптимальной при условии
Э = Ръ/С- max.
(1-87)
где PF> - показатель боевой эффективности комплекса; С — затраты на создание,
эксплуатацию и боевое применение комплекса [12].
Критерием «эффективность-стоимость» 11.87) удобно пользоваться при
оценке однотипных КРЭП
(1.88)
При большом числе исследуемых КРЭП их эффективность удобно
оценивать путем сравнения с эффективностью некоторого эталона
60
Глава L Общие полоэкения ^аЪлоэлекпр^оннай боръбы
отн
(1-89)
Для проведения оценки эффективности КРЭП на различных этапах (разра-
ботка, изготовление опытного или серийного образца, испытания, эксплуатация,
боевое применение) необходимо установить функциональные зависимости Ръ и С
от технических и оперативно-тактических характеристик исследуемого КРЭП.
Под техническими понимается совокупность пара-
метров величин «(/) = [« а2 ... at... ап], описывающих схемные, конструктивные,
энергетические, информационные и другие особенности средства. Технические ха-
рактеристики зависят от состояния элементной базы, уровня профессиональной
подготовки разработчиков и заказчиков. К техническим характеристикам относят
энергетический потенциал САП, силу излучения ЛТЦ, чувствительность разведы-
вательного приемника, рабочий диапазон частот САП. массу, надежность и др.
Оперативно-тактические характеристики Д|/) = [Д /32 ... Д ... /З.г]
определяют способы и условия боевого применения средств, комплексов и систем
РЭБ. Примерами таких характеристик являются: число САП в комплексе или си-
стеме РЭБ, пропускная способность комплекса, виды помеховых сигналов, пара-
метры боевых порядков самолетов и др. Оперативно-тактические и технические
характеристики взаимосвязаны: пропускная способность комплекса зависит от та-
ких технических характеристик, как быстродействие ЭВМ, чувствительность раз-
ведывательных приемников, энергетических возможностей передатчиков и других.
С учетом зависимости боевой эффективности и стоимости средства (ком-
плекса, системы) РЭБ от технических и оперативно-тактических характеристик,
можно записать показатель критерия «эффективность-стоимость» в виде
Э(а(г),/?(/))
Р„ (afr),/?(Q)
С(а(/),/?(г)) '
(1.90)
где a(j) = [at а2 ... а ... ап] - вектор технических параметров КРЭП;
Д(/)-[Д Pi ••• Pi ••• Рт] -вектор оперативно-тактических параметров КРЭП.
Определение зависимостей вида (1.91) дает возможность приступить к ре-
шению задач исследования эффективности средств, комплексов и систем РЭБ:
• синтез средства, комплекса или системы РЭБ;
• оптимизация отдельных характеристик средства РЭБ;
• оценка эффективности применения КРЭБ при решении конкретных БЗ;
• поиск и определение рациональных путей совершенствования КРЭП;
• определение новых способов боевого применения комплексов РЭП [13].
В работе [12] приведены характеристики КРЭП, определяющие
эффективность РЭП, и методика использования критерия «эффективность-
стоимость» на примере подавления самолетной РЛС обзора земной поверхности и
управления оружием с помощью САП. Критерий «эффективность-стоимость»,
учитывающий боевую и экономическую эффективность КРЭП. является
Глава 1. Общие положения радиоэлектронной борьбы 61
универсальной мерой оптимальности КРЭП. Критерий позволяет разработчикам
КРЭП и тем, кто их эксплуатирует, решить актуальную задачу получения боевой
эффективности не ниже заданной при минимальных затратах на создание,
эксплуатацию и боевое применение этих комплексов.
1.5. Показатели эффективности РЭБ
Эффективность РЭБ оценивается по показателям различных уровней (рису-
нок 1.15). Это могут быть показатели эффективности объектов (сил, оружия), в ин-
тересах которых задействованы дезорганизуемые (защищаемые) СУ.
Рис. 1.15. Показатели эффективности РЭБ
Часто показатели эффективности этого уровня называют боевыми показате-
лями. При их использовании эффективность РЭБ определяется по приращению
(уменьшению) числа уничтожаемых объектов заданным оружием за счет меропри-
ятий РЭБ, снижению затрат на поражение целей, уменьшению расхода боезапаса и
др. [21, 22]. На уровне показателей эффективности дезорганизуемых (защищаемых)
СУ эффективность РЭБ оценивается по приращениям времени цикла управления,
уменьшению количества добываемой и передаваемой информации, вероятности
своевременного управления, расходу материальных ресурсов на управление и др.
62
Глава 1. Общие положения радиоэлектронной борьбы
Говоря о показателях эффективности РЭБ на уровне функционирования от-
дельных РЭС противника, отметим, что они подразделяются на группы по видам
РЭС. Эффективность РЭБ на этом уровне оценивается через изменения показателей
эффективности РЭС противника. В качестве показателей эффективности систем
добывания информации как элементов СУ — объектов РЭБ выступают дальность и
вероятность обнаружения сигналов (целей), затраты времени на получение разве-
дывательных данных и другие. К показателям систем передачи информации, через
которые часто оценивают эффективность (ероприятп РЭБ. относят дальность свя-
зи, задержку во времени при передаче сообщений, вероятность своевременной и
безошибочной передачи данных и другие.
Среди собственных показателей систем обработки информации, чув-
ствительных к мероприятиям РЭБ, выделяют:
• ценность результатов решения расчетных и информационных задач;
• число решаемых задач за заданное время;
• технические, материальные и другие ресурсы для решения задач.
Помимо основных показателей эффективности этих систем и средств в
условиях РЭБ имеют место вспомогательные показатели, отражающие успешность
решения не основных задач, достижения второстепенных целей. К вспомогатель-
ным показателям могут относиться показатели:
• защищенности от различных преднамеренных воздействий:
• совместимости и скрытности;
• надежности и восстанавливаемости;
• распределенности в пространстве;
• мобильности, времени жизни и другие.
Показателями защищенности систем обработки информации выступают:
среднее время обнаружения и устранения помех; структурная и временная слож-
ность защиты; потребляемые системой зашиты ресурсы и др. При решении различ-
ных задач РЭБ одни и те же показатели эффективности могут выступать как основ-
ными, так и вспомогательными. Наиболее чувствительны к мероприятиям РЭБ по-
казатели информационного и программного обеспечения: ценность, содержатель-
ность, достоверность, полнота, избыточность, надежность, защищенность и другие
показатели. Влияние мероприятий РЭБ на операторов может быть оценено через
снижение (увеличение) времени выполнения возложенных на них операций, изме-
нение их состояния и другие показатели.
Собственные показатели эффективности средств РЭБ\
• дальности эффективной РЭР и эффективного действия помех;
• вероятности обнаружения и РЭП РЭС противника;
• время реакции средств РЭБ, продолжительность работы средств РЭБ;
• одновременное число подавляемых и защищаемых объектов;
• полоса частот, в которой одновременно могут наблюдаться и подавляться
объекты противника;
• виды разведываемых сигналов и виды создаваемых помех;
• затраты технических, материальных ресурсов и др.
К показателям эффективности СУ средствами РЭБ относят:
Глава 1, Общие положения радиоэлектронной борьбы
63
• вероятность своевременного и безошибочного управления средствами РЭБ
и длительность цикла управления;
• затраты людских, материальных и других ресурсов на управление сред-
ствами РЭБ;
• скрытность функционирования;
• оперативность взаимодействия с аналогичными системами;
• мобильность, распред ел енность в пространстве, надежность и другие.
Показатели боевой устойчивости систем РЭБ - это вероятность неуни-
чгожения системы РЭБ противником за заданное время, время ее восстановления
после поражения, время жизни и другие. Все показатели эффективности РЭБ в об-
щем случае носят вероятносгный характер. На них влияют многие случайные фак-
торы. Нередко применяется способ составления «обобщенного показателя эффек-
тивности», который представляет собой «взвешенную сумму» частных показателей
[34], в которую каждый из них входит с каким-то весовым коэффициентом а,,
отражающим его важность
(1.91)
Для тех показателей, которые желательно увеличить, весовые коэффициен-
ты берутся положительными, уменьшить — отрицательными.
Правильны/} выбор критерия эффективности определяет глубину и качество
исследований, проектирования и испытаний средств РЭБ. Без правильно выбранно-
го критерия эффективности не могут быть получены правильные для принятия ре-
шения рекомендации. Особое значение имеет выбор соответствующего критерия
при планировании боевого применения средств РЭБ. Операции, организованные
под углом неудачно выбранного критерия, могут привести к неоправданным затра-
там и потерям [15]. Неправильный выбор показателя эффективности очень опасен,
в этом случае выбранный тот или иной показатель эффективности средств РЭБ в
значительной степени может оказать негативное влияние на выполнение боевой
задачи.
ГЛАВА 2
РАДИОЭЛЕКТРОННАЯ РАЗВЕДКА
2.1. Задачи радиоэлектронной разведки. Критерии
эффективности воздушной разведки
Выявление РЭС управления войсками и оружием противника проводится
для определения назначения, состава и принадлежности СУ войсками, разведыва-
тельно-ударными комплексами (РУК) и другими видами ВТО, сил и средств раз-
ведки и РЭБ противника. Основные задачи разведки в интересах РЭБ решаются с
помощью средств РЭР. Современные технические средства разведки используют
для добывания информации практически все известные к настоящему времени фи-
зические поля. Арсенал средств разведки отличается большим разнообразием по
назначению, по оперативности, по местам базирования и платформам размещения,
по характеру и особенностям добываемой разведывательной информации [15].
РЭР является одним из существенных элементов, обеспечивающих эффек-
тивное выполнение боевых действий. В современных условиях к действиям разве-
дывательной авиации предъявляются следующие основные требования: целе-
устремленность, непрерывность, активность, своевременность, достоверность и
полнота разведывательных данных, высокая точность определения координат, вне-
запность и скрытность. Информация РЭР может использоваться по-разному: для
уточнения обстановки, чтобы затем могло быть принято решение предпринимать
ли какую-то совокупность мероприятий (наступательных, оборонительных) или
воздержаться от них; для уточнения конкретного плана операции, решение о кото-
рой уже принято [35].
В зависимости от характера поставленных задач, целей и глубины ведения
разведки, от масштаба командных инстанций, в интересах которых она организует-
ся и ведется, воздушная разведка подразделяется на стратегическую, оперативную
и тактическую. Среди источников информации РЭР можно выделить: 1) радиоло-
кационные системы; 2) системы АСУ; 3) системы (сети) связи и передачи данных.
РЭР представляет комплекс мероприятий, направленных на добывание и
уточнение данных о РЭС противника, необходимых для организации и ведения
РЭБ. В зависимости от характера решаемых задач РЭР подразделяется на РЭР в
интересах принятия решения командованием, штабами и РЭР в интересах обеспе-
чения действий по РЭПр и РЭЗ. РЭР в интересах РЭБ включает в свой состав [15,
22]: радиоразведку (РР); радиотехническую разведку (РТР); радиолокационную
разведку (РЛР); оптико-электронную разведку (ОЭР); инфракрасную разведку
(ИКР); лазерную разведку; компьютерную разведку (КР); радиотепловую разведку;
акустическую (АР) и гидроакустическую (ТАР) разведки; другие средства разведки
(тепловая, фото-, теле-, и др.).
Радиоразведка (РР) — пассивная разновидность РЭР добывает сведения о
противнике путем поиска, обнаружения, пеленгования излучений его радиосредств
и перехвата сообщений, циркулирующих в радиоканалах и сетях.
Глава 2. Радиоэлектронная разведка
65
Радиотехническая разведка (РТР) в пассивном режиме добывает сведения
о пространственно-временных параметрах сигналов РЭС противника и на основа-
нии анализа этих сигналов определяет тип и назначение РЭС. Средства РТР ис-
пользуются для определения назначения, типа и местоположения РЭС по данным
измерений параметров принятых сигналов; вскрытия дислокации и назначения во-
енных и военно-промышленных объектов; определения состава группировок и дея-
тельности вооруженных сил; вскрытия систем радиотехнического обеспечения
противовоздушной, противоракетной и противокосмической обороны; определения
состояния и перспектив развития радиоэлектронного вооружения.
Радиолокационная разведка (PJ1P) обеспечивает извлечение информации
из ЭМ полей, рассеянных объектами разведки. РЛР делится на видовую и парамет-
рическую. Видовая РЛР добывает информацию, содержащуюся в радиолокацион-
ных изображениях различных объектов и окружающей их местности, а параметри-
ческая РЛР связана с получением информации о пространственных, скоростных и
отражательных характеристиках подвижных объектов (космических, воздушных,
наземных и морских).
оптико-электронная разведка (ОЭР) добывает информацию с помощью
средств, включающих входную оптическую систему с фотоприемйикоЛ и элек-
тронные схемы обработки электрического сигнала, которые обеспечивают прием
ЭМВ видимого и ПК диапазонов, излеченных или отраженных объектами и мест-
ностью. ОЭР выявляет военные и военно-промышленные объекты; определяет их
характеристики, в том числе и боеготовность; вскрывает характер и объем выпус-
каемой военно-промышленными объектами продукции; производит съемку терри-
торий при картографировании местности. Средства ОЭР характеризуются следую-
щими параметрами [36]:
• мгновенным утлом поля зрения приемного канала;
• временем наблюдения элемента сектора поиска или числом посылок зонди-
рующих импульсов в элемент сектора поиска;
• законом сканирования (просмотра) сектора поиска;
• алгоритмом принятия решения об окончании поиска;
• условной вероятностью ложных тревог за время наблюдения в элементе
сектора поиска;
• условной вероятностью правильного обнаружения за время наблюдения.
Оптико-локационная разведка основана на обнаружении, опознавании и
определении местоположения объектов по отраженным от них ЭМ излучениям оп-
тического диапазона с использованием принципов и устройств радиолокации и
теплопеленгации. Оптический локатор облучает объекты ЭМВ, принимает отра-
женные излучения и преобразует их в электрические сигналы, а затем в видимое
изображение.
Инфракрасная разведка (ИКР) получает информацию, принимая и анали-
зируя сигналы электромагнитных полей ИК диапазона, излученных или отражен-
ных объектами и предметами окружающей местности. Средства ИКР - это прибо-
ры ночного видения (ПНВ), тепловизоры, теплопеленгаторы, радиометры. НЫВ
могут быть активными, пассивными и полу активными, работающими с подсветом
местности специальъгым излучателем.
66
Г.лава 2. Радиоэлек1пронная разведка
азерная разведка и разведка лазерных излучений решает те же задачи, что
и фоторазведка, но по сравнению с ней обеспечивает возможность скрытного веде-
ния разведки в ночных условиях; обеспечивает оперативную обработку и передачу
разведывательной информации на пункт сбора и обработки данных.
Радиотепловая разведка обнаруживает и определяет местоположение
наземных, морских, воздушных и космических объектов по их тепловому излуче-
нию в радиодиапазоне. Характеристики радиотеплового гзлученья, такие как ин-
тенсивность и спектральный состав, зависят от физических свойств вещества и
температуры объекта. Разведка ведется с помощью радиотепчолоканионных стан-
ций (РТЛС), устанавливаемых на воздушных и космических платформах. Радио-
тепловая разведка возможна только при наличии контрастности теплового излуче-
ния объектов и фона (земной поверхности, неба и т.д.). Контрастность объекта и
окружающего фона оказывает существенное влияние на дальность действия РТЛС.
Телевизионная разведка (ТР) позволяет получать видимые изображения
объектов, в том числе ночью при низком уровне освещенности. ТР основана на
преобразованиях видимого изображения объекта - пространственного распределе-
ния освещенности на наблюдаемом объекте во временную последовательность
электрических сигналов (видеосигналов! - с помощью построчно сканирующей
оптической системы и фоточувствительного преообразователя.
Компьютерная разведка (КР) - это деятельность, направленная на получе-
ние информации из электронных баз данных ЭВМ, включенных в компьютерные
сети, а также информации об особенностях их построения и функционирования. КР
добывает сведения о предмете, конечных результатах, формах и способах деятель-
ности субъектов, являющихся пользователями информационно-вычислительной
сети, и используемом аппаратурном и программном обеспечении, протоколах
управления и информационного взаимодействия, а также используемых средствах
и методах защиты информации.
Акустическая разведка (АР) получает информацию, переносимую упруги-
ми колебаниям л воздушной среды и вибрационным i колебаниями строительных
конструкции. При этом принимаются и анализируются акустические сигналы ин-
фразвукового, звукового и ультразвукового диапазонов. Гидроакустическая раз-
ведка (ГАР) получает информацию, принимая и анализируя упругие колебания
водной среды в инфразвуковом, звуковом и улыразвуковом диапазонах. ГАР
предусматривает разведку гидроакустических шумовых полей, создаваемых рабо-
тающими гребными винтами, различными двигателями и механизмами надводных
кораблей и подводных лодок, гидролокационную видовую разведку, обеспечиваю-
щую добывание информации о рельефе дна. Также ГАР обеспечивает гидролока-
ционную параметрическую разведку информации, которая содержится в простран-
ственных, скоростных и других характеристиках объектов, разведку7 гидроакусти-
ческих сигналов, создаваемых различными работающими средствами гидроакусти-
ческого вооружения надводных кораблей и подводных лодок.
В интересах решения задач воздушной разведки объекты разведки условно
подразделяются по следующим основным признакам: назначению, конструктив-
ным особенностям, степени важности, размерам занимаемой площади, степени по-
движности, расположению относительно земли, степени маскировки. К числу7 объ-
Глава 2, Радиоэлектронная разведка
61
ектов самолетной РЭР относят: наземные РЛС и РЛС истребителей-перехватчиков
ПВО; ЗРК со своими каналами радиолокации и радиоуправления; ракеты с ГСН,
использующие различные системы наведения; РЭС передачи данных и т.д.
Обнаружение и опознавание объектов противника в процессе выполнения
воздушной разведки и обработки ее результатов осуществляется по совокупности
опознавательных признаков или по одному из них. Задачи РЭР самолетов-
разведчиков, самолетов РЭБ и ударных самолетов детализируются различным об-
разом: в первом случае проводится предварительная, во втором и третьем - непо-
средственная разведка, определяющая текущее использование средств создания
помех и СНИО. На ударных самолетах используется при этом более простая аппа-
ратура РЭР и меньший арсенал средств РЭП, чем на специализированных самоле-
тах РЭБ. Простейшая аппаратура РЭР ЛА - это аппаратура предупреждения об об-
лучении комплексами наведения средств поражения противника.
Аппаратура воздушной РТР (ВРГР) работает, главным образом, с сигналами
РЛС. Специфика разведки - большое число достаточно мощных сигналов с весьма
разнообразными характеристиками, бортовые антенны из-за габаритных и аэроди-
намических ограничении имеют слабую направленность. Основными достоин-
ствами средств ВРГР являются: 11 высокая дальность, обеспечивающая принци-
пиальную возможность превентивного обнаружения объекта, имеющего активную
РЛС; 2) возможность распознавания типа ПРИ, а затем и типа объекта; 3) скрыт-
ность (отсутствие активного излучения) [37]. Необходимо учитывать и недостат-
ки В РТР, состоящие в невозможности обнаружения объекта при отсутствии на нем
' вблизи него) работающего на излучение ПРИ; низкой точности измерения дально-
сти до ИРИ из одной точки; необходимости использования угловых измерений для
определения координат ИРИ. Важные особенности В РТР:
• большое число мощных сигналов с различными характеристиками;
• площади ВРГР достигают миллиона квадратных километров;
• бортовые приемные антенны из-за массогабаритных и аэродинамических
ограничений имеют слабую направленность;
• кратковременность, зачастую, однократность разведки;
• трудность определения дальности до РЛС, когда приходится базироваться
на угловых измерениях;
• необходимость измерения большого числа параметров сигналов.
Основные функции и этапы ВРТР в интересах РЭБ: 1) обнаружение объ-
ектов РЭБ по их первичным и вторичным полям; 2) селекция; 3) местоопределение;
4) обработка и анализ добытой информации, распознавание типа РЛС (определение
характеристик), распознавание сложного объекта; 5) выдача рекомендаций по про-
ведению мероприятий РЭБ.
С использованием информации ВРТР решаются задачи:
1. Планирование нанесения удара авиации по военным объектам (аэродро-
мам, позициям ЗРК, ЗАК, РЛС).
2. Планирование РЭП и управление в процессе РЭБ средствами индивиду-
альной и групповой РЭБ ЛА (выяснение загрузки диапазонов волн, обшей интен-
сивности работы РЛС, режимы работы и координаты средств ПВО).
3. Планирование рациональных маршрутов преодоления ПВО.
68
Глава 2. Радиоэлектронная разведка
4. Контроль процесса перевооружения (детальная разведка ранее неизвест-
ных РЛС и новых режимов известных РЛС) разведываемого РЛ поля.
5. Контроль эффективности воздействия на РЭС помехами.
Перечисленные решаемые задачи формулируют задачи В РТР:
• разведка РЛС (тип, место, режим, детальная разведка);
• разведка РЛ поля (тип и песто множества РЛС, разведка плотности, количе-
ства РЛС разных типов по маршруту, разведка загрузки разведываемого диапазона
волн);
• разведка сложных объектов, обслуживаемых несколькими РЛС. в комплек-
се с другими средствами или самостоятельно;
• разведка в интересах обороны ЛА (индивидуальной, групповой).
Все названные задачи сводятся к задаче разведки отдельных РЛС и их сово-
купности, образующей РЛ поле [37].
Обнаружением сигнала называется последовательность РТ операций, вы-
полняемых над входным напряжением, в результате которой формируется решение
о наличии (отсутствии) сигнала. Оконечным каскадом обнаружителя должно яв-
ляться пороговое устройство, формирующее на своем выходе значения 1 или 0.
Обычно под входным напряжением i < ) понимается либо аддитивная смесь полез-
ного сигнала Sir » и помех (шума) /?(/)
и(0 = ЭД + и('), (2.1)
либо только помеха (шум) = n(f).
Обнаружение — процесс установления факта наличия сигнала S(i) на вы-
ходе приемника в одном из элементов его разрешения по одной из координат
(дальности, скорости, углу', частоте), когда на его входе присутствует аддитивная
смесь сигнала и помехи (шума ! или только помеха (шум) и(/). Под обнаружением
сигнала в радиоэлектронике понимают процесс анализа принятого колебания ?/(/),
завершающийся установлением факта наличия или отсутствия в нем некоторой по-
лезной составляющей, которую и называют сигналом <$(/) [36]. Возможность при-
нятия того или иного решения определяется физическим различием между' смесью
сигнала с помехой (шумом) и только помехой (шумом). Чем больше эти различия
(в амплитуде, длительности, частоте), тем легче обнаружить сигнал.
Шумовая составляющая н(Т) присутствует в напряжении «(/) всегда, по-
скольку своим происхождением она обязана таким неустранимым факторам как
тепловое движение электронов, наличие галактических радиоизлучений, флуктуа-
ции электронных потоков и т.д. [28, 38]. Вследствие этого шумовое напряжение
«(/) является случайным и его поведение описывается плотностью распределения
вероятностей РКш(м). Плотность Иш(н), существующая на входе приемного
устройства, должна быть пересчитана в соответствующую плотность Н7ш(и) для
выхода приемного устройства, которая для шума, прошедшего через согласован-
ный с сигналом фильтр и АД, задается выражением
Глава 2. Радиоэлектронная разведка
69
(2.2)
где <Тщ - мощность шума на выходе порогового устройства (дисперсия случайного
процесса i/(Z)). Из-за наличия шумовой составляющей в выражении (2.1) случай-
ным является и соответствующее напряжение u(t).
Плотность распределения вероятностей FFCJ <w) напряжения, прошедшего
согласованный с сигналом фильтр и АД, на выходе приемного устройства записы-
вается как
^с+ш (") =
где Е - энергия сигнала; 70(...) - модифицированная функция Бесселя нулевого
порядка 128].
Поскольку во входном напряжении щ7) присутствует случайный компо-
нент «(г), то выходные сигналы (0 и 1) порогового устройства будут иметь вероят-
ностную природу, причем вероятности возникновения этих (0 и 1) сигналов будут
зависеть от того, какой именно плотности Иш(7/) или Wc+U (?/) будет подчиняться
случайный процесс «(/) на входе порогового устройства в данный момент. Плот-
ности и распределения вероятностей выходного напряжения при-
емного устройства показаны на рисунке 2.1.
ЮЧ4
Рис. 2.1. Плотности й (г/) и Р’ . г (м) распределения вероятностей
выходного напряжения приемного устройства
Возможны четыре различные ситуации:
1. Смесь сигнала с шумом превышает порог Uo. Вероятность этого события
называется вероятностью права. н>ного обнаружения
еЛ
2. Смесь сигнала с шумом не превышает порог . Вероятность этого со-
бытия называется вероятностью пропуска
70
Глава 2. Радиоэлектронная разведка
Р =\-Р (2 5)
3. Шумовое напряжение превышает порог UQ. Вероятность этого события
называется вероятностью ложной тревоги
со
Д, = J («М« • (2-6)
Ь’о
4. Шумовое напряжение не превышает порог Ц,. Вероятность этого собы-
тия - вероятность правильного необнаружения
Рнов=1-^Т- (2-7)
Вероятности РОБН и РН0Б являются вероятностями правильных решений,
вероятности Рпр и Рт - вероятностями ошибочных решений. Качество обнаруже-
ния тем выше, чем больше Розц (обычно 0,8...0,99) и чем меньше Рлг ( Ю’5...1О’8)
[28]. Сочетание этих величин с отношением мощности сигнала к мощности шума
дается характеристиками обнаружения (зависимостью Р0БН от отношения сиг-
нал/шум при параметре Рпг), представленными на рисунке 2.2а. При обнаружении
сигнала в условиях априорной неопределенности о его структуре и параметрах це-
лесообразно использовать схему энергетического обнаружителя (рисунок 2.26),
состоящую из полосового фильтра (ПФ) с полосой А/ = Д/пр, квадратичного детек-
тора (КД), интегратора со сбросом (И) с постоянной интегрирования ТИ и порого-
вого устройства (ПУ) [36, 39].
Рис. 2.2. Характеристики обнаружения (а) и С1руктурная схема
энергет ического обнаружителя (б)
Известной считается полоса частот Af, которую приблизительно занимает
сигнал. Шум предполагается гауссовым и аддитивным с нулевым средним значени-
ем. Выходной сигнал интегратора равен энергии той части сигнала на входе КД,
которая заключена в интервале длительности [0,Ти]. Предварительная фильтрация
используется для ограничения шума по полосе (шум на входе КД имеет ограничен-
ную по полосе постоянную спектральную плотность).
Глава 2. РаЬиоэлекпууонлая разведка
71
Согласно критерию Неймана-Пирсона задается вероятность ложной тревоги
Р}Т (вероятность превышения шумом порогового уровня Uo. На практике порог
устанавливают по дисперсии шума на выходе приемника h =ич/сш . Вероятности
правильного обнаружения и ложной тревоги для сигнала со случайными амплиту-
дой и начальной фазой будут определены как
Для вероятное: / правильного обнаружения получим
= (Ат . (2-9)
где а - отношение сигнал/шум [36, 39]. Выражение (2.9) устанавливает функцио-
нальную связь между качественными показателями обнаружения по критерию
Неймана-Пирсона для сигнала со случайными амплитудой и начальной фазой.
Характеристики обнаружения используются для сравнительной оценки эф-
фективности различных обнаружителей. Процесс обнаружения опережает процес-
сы измерения параметров, которые начинают выполняться сразу после формирова-
ния решения «сигнал есть» (1 на выходе порогового устройства). При достаточном
динамическом диапазоне приемника условие обнаружения цели в маскирующих
стационарных активных помехах типа белого шума имеет вид
Епг.><7(Л'0+Л'пвх), (2.10)
где £пр - энергия отраженного от цели сигнала, принимаемого на ходе приемника
РЛС; q - коэффициент различимости при заданных показателях эффективности
обнаркжения или измерения; N() = кТКш — спектральная плотность внутреннего
шума приемника; А =1,38-!0 23 Вт• с/град - постоянная Больцмана; Т - абсолют-
ная температура; Хш - коэффициент шума приемника РЛС; А’п вх - спектральная
плотность маскирующей помехи на входе приемника.
Если на вход приемника воздействуют колебания от нескольких источников
активных помех (i = 1, 2, ..., /и), то
N
П ВХ
(2.11)
где Pn., - мощность шума и ширина его энергетического спектра; <7П/. - коэф-
фициент усиления антенны в направлении на РЛС для z-го источника помех; Д. -
эффективная площадь приемной антенны в направлении на /-й источник помех; г
- расстояние от РЛС до /-го источника помех; - коэффициент, учитывающий
различие поляризаций помехи, приходящей от z-го источника помех, и поляриза-
ции. оптимальной для приемной антенны (от 1 до 0); at - коэффициент, учитыва-
ющий возможное ухудшение качества помехи от /-го источника за счет использо-
вания модуляции шумом [26].
72
Глава 2. Радиоэлеюпроннар разведка
Дальность обнаружения при наличии помехи D выражается через даль-
ность [36], соответствующую тем же вероятности : Р и Р при отсутствии по-
мехи 7)0 следующим образом
(2.12)
где ЛГП, Nq - спектральные плотности помехи и собственных шумов.
Примерны;! перечень за ач и требований к измерениям пространсгвенно-
временных параметров сигналов (к обработке сигналов) [7] приведен в таблице 2.1.
Таблица 2.1 - Перечень задач и требований к обработке сигналов
Формулировки задач Технические характеристики и частные показатели ффекгивности
Первичная обработка си налов: обнару- жение и измерение первичных параметров сигналов, поимпульсное (поэлементное) распознавание (идентификация) сигналов. Чувствительность приемников. Пропускная способность приемников по потоку входных сигналов. Точность измерения первичных параметров. Вероятностные характеристики обнаружения и распознавания сигналов.
Вторичная обработка информации: раз- деление (селекция i смешанного потока результатов измерения первичных пара- метров сигналов; сопровождение объектов в пространстве первичных наблюдений в соответствии с гипотезами относительно структуры и параметров ПРИ: оценка па- раметров СОСТОЯН1 it 11РИ по совокупности первичных наблюдений; распознавание типов ПРИ по вторичным параметрам. Вероятностно-временные характерце гики разделения входного потока и выделения последовательностей сигналов различных источников. Вероятностно-временные ха- рактеристики сопровождения. Точность и достоверность оценки вторичных парамет- ров. Вероятностные характеристики распо- знавания. Пропускная способность аппара- туры вторичной обработки по потоку ра- диоизлучений.
Третичная обработка информации: се- лекция смешанного потока наблюдений вторичных параметров; сопровождение объектов в пространстве вторичных наблюдений; оценка гипотез и комплекси- рование информации, получаемой при вы- явлении основных состояний; распознава- ние объектов по третичным наблюдаемым параметрам. Точность и достоверность оценки третичных параметров. Вероятностно-временные ха- рактеристики выделения основных состоя- ний. Вероятностные характеристики вскры- тия объектов.
Примерный порядок временных интервалов, в переделах которых проявля-
ются изменения состояний объекта наблюдений, определяется для выделенных
этапов обработки сигналов в радиолокации следующими значениями: 10...103 с;
0,1. ..10 с; 0,0001. ..0,1 с [39].
Существует много методов фильтрации наблюдений ПРИ. полученных пас-
сивными способами. Укрупненно их можно разделить на три группы: 1) по макси-
Глава. 2. Радиоэлектртшая разведка
73
муму апостериорной вероятности обнаружения ИРИ, оценки его параметров и
определения координат; 2) по минимуму СКО определения местоположения ИРИ;
3) по минимуму применения расходуемых ресурсов на траектории полета ЛА при
выводе его в заданную область пуска ВТО. Все эти методы используют различные
модификации калмановской фильтрации или линеаризованную марковскую филь-
трацию (разложение в ряд уравнений Стратоновича и ограничение линейными чле-
нами при малых помеховых возмущениях) с корректировкой расходимости оценок.
Реальные возможности техники Р ГР в значительной степени определяются
достижимыми характеристиками элементной базы радиоэлектроники. Главное
направление разработок связывается с реализацией принципов построения беспо-
исковой или быстродействующей поисковой приемоанализирующей аппаратуры.
Можно выделить технику аналоговой (акустоэлектронная (АЭ), акустооптоэлек-
тронная (АОЭ), магнитоэлектронная (МЭ), РЭ) и технику цифровой обработки.
Аналоговые элементы используются в основном на этапе первичной обработки
сигналов, цифровые устройства - на этапах первичной, вторичной и третичной об-
работки сигналов и информации [7]. В таблице 2.2 приведены сравнительные ха-
рактеристики используемых в средствах РТР устройств обработки узкополосных
сигналов с применением современной и перспективной элементных баз [172].
Таблица 2.2 — Сравнительные характеристики устройств обработки сигналов
с применением перспективной элементной базы
< обобщенные характеристики устройств АОЭ- те\н 1ка АЭ- техника МЭ- техника Цифровая техника
Верхняя граница диапазона рабочих частот (без гетеродинирования), МГц 5000 2000 40000 100...300
Динамический диапазон, дБ 35...45 40...50 50...60 80...100
Ширина полосы беспо исков ого по частоте приема, МГц 500...2000 100...500 200... 1000 100
Ширина полосы пропускания элемен- тарного канала (разрешение по часто- те), МГц 0,05 и более 1 и более 5 и более неограни- чена
Длительность обрабатываемых сигна- лов при запоминании и корреляции, мкс Ю3...1О4 1О3...1О4 до 20 неограни- чена
Плотность размещения частотных v... каналов при интегральном исполне- нии, ед/см’ деся гки единицы единицы сотни
Как следует из анализа обобщенн ix характеристик, к основным недостат-
кам аналоговых устройств можно отнести ограниченность динамического диапазо-
на и способность флт1кционирования в фиксированном частотном диапазоне. По-
следний недостаток присущ и цифровым устройствам, которые включаются на ПЧ
после предварительного гетеродинирования. Выбор способа реализации отдельных
блоков и устройств тесно связан со спецификой целевого использования и типа
Jb_______________________2. Радиуэл^кт^онная разведка
средства ВРТР. При ВРТР сигналов РЛС достаточно широкие возможности откры-
ваются на основе акустооптоэлектронной обработки сигналов [172].
Анализ процессов получения и обработки данных ВР ГР позволили сформу-
лировать ряд частных и комплексных критериев оценки эффективности разведки
[37] для отдельных РЛС (дифференциальные) и для всего РЛ поля в целом (инте-
гральные). Эти критерии приведены в таблице 2.3. Критерии эффективности, пред-
ставленные в таблице 2.3, носят вероятностный характер.
Таблица 2.3 — Критерии оценки эффективности ВРТР
Этапы разведки Критерии оценки эффективности
дифференциальные (для отдельных РЛС) интегральные (для РЛП)
Обнаружение Вероятность обнаружения. Даль- ность обнаружения при фиксиро- ванной вероятности. Математическое ожидание числа обнаруженных РЛС в заданной зоне.
Селекция Вероя гность селекции по пара- метрам или координатам. Средняя вероятность ошибки селекции.
Местоопределение Погрешность определения коор- динат. Вероятность определения координат с погрешностью не бо- лее заданной. Распределение числа РЛС. координаты которых опреде- лены с погрешностью не бо- лее заданной.
Распознавание типа РЛС Вероятность распознавания типа РЛС Средняя вероятность распо- знавания типа РЛС
Распознавание типа сложного объекта Вероятность распознавания слож- ного объекта, включающего РЛС. Средняя вероятность распо- знавания тала сложного объ- екта поля.
Возможно использование информационных оценок, но выигрыш от введе-
ния больших объемов данных далеко не очевиден. Вероятностные критерии удоб-
ны для оценки комплексов, составленных из разнородных средств. Критерии 4. 5
являются наиболее полными тактическими характеристиками аппаратуры ВРТР.
2.2. Разведывательные и демаскирующие признаки
объектов
В процессе РЭР осуществляется обнаружение и распознавание объектов,
т.е. отнесение их к тому или иному классу, подклассу, типу. Под классом
(подклассом, типом) понимается совокупность (множество) объектов, имеющих
общий признак (совокупность признаков), позволяющий отличить их от объектов
другого класса (подкласса, типа).
Любое РЭС характеризуется некоторым множеством независимых призна-
ков (параметров). Совокупность этих параметров - вектор
Индекс j указывает на принадлежность вектора X /-му
РЭС. Иначе вектор Х7 называется собственным вектором РЭС /-го класса. Первая
Глава 2. Радиоэлектронная разведка
75
координата X' может характеризовать, например, несущую частоту сигнала РЭС,
Xj - длительность импульсов. Вероятность опознавания типа РЭС зависит от чис-
ла измеряемых признаков и точности их измерения. В предельном случае, когда
ошибки измерения несущей частоты /0, длительности импульсов ти, периода сле-
дования Т стремятся к нулю, вероятность опознавания РЛС по параметрам /0, ти,
Т близка к Р = 0,96 [13].
Степень деления на класс, подкласс, тип зависит, как правило, от степени
близости признаков. Обычно под признаками объектов понимают все то, по чему
можно узнать, определить, т.е. распознать или описать эти объекты. Признаки
разведываемых объектов часто называют разведывательными признаками.
Необходимым условием использования признака в качесгве разведывательного
является возможность его обнаружения с помощью TCP. Разведывательные
признаки объектов в условиях применения средств маскировки называются
демаскирующими признаками. Демаскирующие признаки, по которым объекты
обнаруживаются, называются первичными, а признаки, по которым объекты
распознаются, - вторичными. Если вторичные демаскирующие признаки являются
постоянными, то первичные демаскирующие признаки непостоянны.
Объекты разведки по характеру и количеству демаскирующих признаков
делятся на простые и сложные. К простым объектам (ПО) относятся отдельные
образцы военной техники и вооружений, а также отдельные военные объекты.
Сложный объект (СО) - совокупность нескольких одинаковых или различных ПО,
расположенных на ограниченной территории и функционально связанных между
собой. Демаскирующие признаки, непосредственно принадлежащие объекту,
называются прямыми демаскирующими признаками. Демаскирующие признаки,
косвенным образом указывающие на наличие объекта в данном месте, называются
косвенными демаскирующими признаками. ДехМаскирующие признаки СО часто
называют оперативно-тактическими признаками.
Детерминированные признаки - признаки, принимающие конкретные
числовые значения (например, размеры объектов), которые могут рассматриваться
в качестве координат точки в признаковом пространстве, соответствующей
данному объекту. Вероятностные признаки - признаки, случайные значения
которых распределены по всем классам объектов, при этом решение о
принадтежности распознаваемого объекта к тому или другому классу может
приниматься только на основании конкретных значений признаков данного
объекта, определенных в результате разведки.
Логические признаки объектов можно рассматривать как элементарные
высказывания, принимающие два значения истинности («да», «нет» или «истина»,
«ложь») с полной определенностью [37]. К логическим относятся признаки, не
имеющие количественного выражения. К логическим можно отнести такие
признаки, у которых важна не величина признака объекта, а лишь факт попадания
или непопадания ее в заданный интервал. Каждый объект характеризуется во
времени свойствами используемых РЭС и множеством физических портретов,
отражающих специфические особенности формы, содержания и решаемые задачи
объекта через его собственные физические поля: оптические (видимые и ИК) и РЛ.
76
Глава. 2. Радиоэлектронная. разведка
Признаками источников разведывательных сведений являются те характеристики и
параметры РЭС, которые позволяют распознавать их среди множества других и
определять их состояние.
Для радиотехнических источников эти признаки присутствуют в органи-
зации систем РТ обеспечения; технических характеристиках; их расположении на
местности, воздушном и космическом пространстве. Признаки состояний источни-
ков проявляются в изменениях перечисленных характеристик РЭС систем связи и
РТ обеспечения. Все признаки принадлежности и состава источников подразделя-
ются на групповые и индивидуальные.
Групповые признаки характеризуют принадлежность источников к опреде-
ленному классу РЭС и служат для определения их назначения, типа и места уста-
новки (принадлежности к объектам определенного класса). Они позволяют устано-
вить принадлежность РЭС к определенной стране, вид}' ВС, роду войск, соедине-
нию, части, подразделению, пункту управления [22]. Индивидуальные признаки
служат для поэкземплярного распознавания однотипных источников с целью опре-
деления их принадлежности к конкретным объектам данного класса.
Демаскирующими признаками средств ря щосвязи являются: диапазон ис-
пользуемых частот; технические параметры и время работы радиостанций; подго-
товка, дисциплина и индивидуальные особенности радистов; особенности элемен-
тов радиообмена (позывные, коды, служебные знаки, адреса, тексты радиограмм);
правила построения радиограмм и радиообмена; порядок назначения (количество
частот назначаемой радиосети, назначение специальных частот, частот вызова и
передачи радиограмм) и смены частот [15].
К основным демаскирующим признакам РЛС относятся: несущая частота
(длина волны) и частота повторения импульсов; длительность и форма огибающей
серии импульсов; способ и скорость обзора пространства; форма импульса и дру-
гие. Несущая частота (длина волны) позволяет судить о назначении, типе и дально-
сти действия РЛС. По частоте повторения импульсов можно выявлять информацию
о назначении, типе, дальности до цели, а в некоторых случаях и о характере дей-
ствий объекта, на котором РЛС установлена. Длительность импульса определяет
разрешающую способность РЛС по дальности (для простых импульсов, без БИМ).
Форма огибающей серии импульсов характеризует класс РЛС. Способ и скорость
обзора пространства позволяют судить о назначении, типе и режиме работы РЛС.
Форма импульса может быть использована в качестве индивидуального признака,
позволяющего различать однотипные РЛС. Демаскирующие признаки активных
оптических систем во многом совпадают с выделенными признаками для радиосвя-
зи и радиолокации [15,22].
2.3. Типовые характеристики РЛС как объекта воздушной
радиотехнической разведки
Проанализируем характеристики РЛС как объекта ВРТР с позиций возмож-
ности ее обнаружения, определения координат и распознавания типа РЛС.
Характеристики РЛС, влияющие на вероятность ее обнаружения. Воз-
можности обнаружения сигналов РЛС средствами ВРТР определяются уровнем
Глава 2. Радиоэлек^^ разведка
77
входной мощности Рвх, которая находится по известному уравнению радиосвязи
[1]. Специфика ВРТР, заключается в необходимости обнаружения сигналов не
только по главному, но и, главным образом, по боковым и задним лепесткам ДНА
[37]. Поэтому уравнение радиосвязи для входного сигнала удобно записать в виде
Рвх = Z*GJG, (0) / G,„ ] [G2 (0) / GMK ID2, (2.13)
где Z = (A / - энергетический парамегр РЛС; Я - длина волны; Р - из-
лучаемая мощность; GiC и С20 - КУ антенн РЛС и станции ВРТР в главных
направлениях; £ - коэффициент потерь (на распространение, несогласованность
трактов и др.); Gi(6y/Gw и G2(0)/G2Q - нормированные коэффициенты усиления
антенн в направлении «РЛС - ВРТР»; в - угол между заказанным направлением и
главными направлениями антенн РЛС и ВРТР; D - дальность до РЛС.
Антенны станции ВРТР в силу особенностей размещения обычно имеют
слабую направленность и неравномерность коэффициента усиления в пределах ра-
бочего сектора, поэтому, когда зависимость коэффициента усиления антенны от
угла рассогласования для конкретного ЛА неизвестна, принимается G2(#)/G20 =1.
Применительно к антеннам РЛС такое приближение недопустимо, так как отличия
в уровнях главного и БЛ измеряются десятками децибел. Для дальнейших расчетов
необходимо знать нормированную ДНА G](#)/Gl0, удовлетворяющую требовани-
ями: адекватности типовым ДНА РЛС; возможности учета характеристик, приводи-
мых в паспортных данных РЛС и справочниках; сравнительной простоте.
Часто используется зависимость КУ типовой параболической антенны от
угла рассогласования в и диаметра антенны £>А [15]
G\(6} ~ (1 + cos#)2 sin2 [(7tDa /A)sm6>]
<7io 4 [(л-£)а /Я) sin#]2
(2. J 4)
В справочных данных по РЛС диаметр антенны обычно не приводится, а
дается ширина ДНА в горизонтальной (#(1) и вертикальной плоскостях (#L,B). В
функции от нормированного угла рассогласования (# / в0) выражение (2.14) приоб-
ретает вид
£,(#) ~ Г sin 2,78(#/#0)
Gl0 2,78(#/#0)
(2-15)
В реальных ДНА из-за неоднородности апертуры, отражений от местных
предметов и других непредсказуемых факторов провалы между лепестками ча-
стично заполняются, положения минимумов и максимумов смещаются, а их отно-
сительный уровень имеет, как правило, меньшее значение [7, 37], чем вычисленное
согласно (2.15). При расчетах вероятности обнаружения сигналов РЛС часто необ-
ходимо знание суммарного за период вращения антенны времени, когда уровень
принимаемого сигнала превышает пороговый (время облучения). Из (2.15) может
быть получена такая зависимость в области БЛ, для которой суммарное время об-
78
Глава 2. Радиоэлектронная разведка
лучения за период вращения антенны было бы равно суммарному времени облуче-
ния ДНА. Результаты решений уравнений и расчетов привозят к выражению
G(0)
<Л>
exp -2,78(01 $0)2 ”1 при 0 < 0 < 0Q,
I— —
О,О625/(0/0о)д при 0^<0<тг.
(2-16)
Можно использовать среднюю характеристик} ДНА в виде зависимости
уровня ослабления по отношению к главному лучу от вероятности Р достижения
этого уровня всеми лепестками ДНА. В аппроксимации (2.16) СКО флюктуаций
относительно среднего значения составляет 5...7 дБ, что в 1.5...2 раза меньше СКО
относительно среднего значения, рассчитанного для всего иапазона значений уг-
лов 0...2/Г. Выражение (2.16) позволяет также учесть так называемое «качество»
позиции РЛС. ее «засоренность» местными предметами. Этот учет осуществляется
с помощью показателя степени и во второй ветви формулы [7]. Для «хорошей»
позиции с минимальным числом местных предметов показатель степени
/7=2 ... 2,5, для «плохой», где отражения от местных предметов поднимают сред-
ний уровень бокового излучения, // = 1 ... 1,2. Для позиций неизвестного качества
можно принять /7 = 1.5. Зависимость (2.16) в логарифмическом масштабе имеет вид
'С(6>)\ |-12(^/6*0); при 0<6><£0,
k Со ? —12 —10//lg(0 / 0.,) при (90 <0 < л.
(2Д7)
Кроме характеристик ДНА РЛС на процесс обнаружения сигналов РЛС
станцией ВРТР влияют также: параметры модуляции, режимы их изменения (пере-
стройка несущей частоты от импульса к импульсу); плотность входного потока
сигналов от РЛС, не являющихся в данный момент объектами ВРТР; интерферен-
ция радиоволн от подстилающей поверхности и др. [15].
Характеристики РЛС, влияющие на эффективность определения их
координат.
1. Координаты РЛС, разведуемой станцией ВРТР, определяются путем об-
работки угловых измерений, существенное влияние на точность местоопределения
оказывает рабочий диапазон волн РЛС, что вызвано зависимостью точности изме-
рения направления на РЛС от размеров антенны станции ВРТР и ограниченностью
линейных размеров антенн на ЛА. Координаты РЛС. работающих в длинноволно-
вой части диапазона, определяются с меньшей точностью, чеу! РЛС. работающих в
коротковолновой части [37].
2. На точность местоопределения РЛС влияет степень подвижности объ-
екта, на котором она установлена. Задачи определения координат подвижных и
неподвижных объектов решаются по-разному на уровне различий в алгоритмах об-
работки результатов измерений углов на уровне осуществления самих измерений
[15]. При получении дополнительной информации, необходимой для компенсации
погрешностей, вызываемых движением объекта ВРТР, может оказаться необходи-
мым специальный маневр ЛА, на котором установлены средства ВРТР.
3. На эффективность местоопределения влияет так называемый «паузный»
режим работы РЛС. когда измеряется число пеленгов, недостаточное для уверен-
Глава 2. Радиоэлектронная разведка
79
ной идентификации и оптимальной обработки результатов измерений. Причиной
недопустимо высоких погрешностей местоопределен ия может быть также работа
нескольких РЛС на близких или одинаковых несущих частотах.
Характеристики, влияющие на эффективность распознавания типа
РЛС и типа сложного объекта. Основной характеристикой РЛС, определяющей
эффективность распознавания ее типа, является «контрастность» многомерной об-
ласти возможных значений параметров сигналов этого типа на фоне характеристик
других РЛС. Мерой «конграсзности» может быть вероятность распознавания
типа РЛС. Достоверное распознавание имеет место в том случае, если хотя бы
один из параметров сигнала, измеряемых станцией ВРТР, занимает такую область
возможных значений, которая не пересекается ни с одной из областей других типов
РЛС. Для распознавания СО помимо сведений о технических параметрах РЛС, со-
ставляющих эти объекты, необходима также априорная информация о комплекта-
ции объектов теми или иными типами РЛС. Задача распознавания отдельных РЛС
и отдельных СО не может быть решена без рассмотрения всей совокупности РЛС,
которая может оказаться в зоне действия станции ВРТР (РЛ поля). В системе ПВО
главной задачей при формировании РЛ поля является создание сплошного поля
обнаружения ЛА для разных высот их полетов [15].
2.4. Задачи и организация радиолокационной разведки
Радиолокационная разведка обнаруживает, распознает, идентифицирует,
определяет координаты и параметры движения объектов, способных отражать
энергию ЭМВ и обладающих радиоконтрастом с окружающей средой [10]. Опреде-
ляя параметры движения объектов разведки (РЛ целей), средства РЛР позволяют
судить об их ТТХ. Аналогичные средства также применяют для картографирования
земной, водной и ледовой поверхности, для экологического мониторинга, исследо-
вания природных ресурсов Земли [40, 41]. Обобщенная блок-схема средства РЛР
представлена на рисунке 2.3 и практически ничем не отличается от схемы РЛС.
К основным показателям, по которым судят об эффективности средства
РЛР, следует отнести следующие:
1. Точность, которая измеряется величиной ошибки, сопровождающей ра-
боту средства РЛР. Особую роль для описания точности в области малых ошибок
итраег нормальный закон распределения вероятностен. Практически любая сим-
метричная и «узкая» по сравнению с интервалом априорных значений функция
плотности распределения вероятностей ошибки можег быть хорошо аппроксими-
рована квадратичной экспонентой (гауссовой кривой). Условие «узости» плотности
распределения вероятностей ошибки РЛ измерителей на практике всегда выполня-
ются. Если форма закона распределения ГЕ(г) нормальных ошибок задана таким
образом, достаточной характеристикой точности будут два параметра этого закона:
математическое ожидание (ошибка смещения опенки /* относительно истинного
значения оцениваемой величины Л) М{е} = Л/{Л-2‘} и дисперсия
Глава_ 2. Радиоэлект]2йннй^
прд
АНТЕННА
ПРМ
Рис. 2.3. ()бобшенная блок-схема средства РЛР
АНТЕННЫЙ
ПЕРЕ КЛЮЧ А ТЕЛЬ
1ЕМОД
ОБРАБОТКА
ИНДИКАЦИЯ
РЕГИСТРА-
ЦИЯ
Характер поведения оценки (результата работы РЛР) во времени характери-
зуется автокорреляционной функцией (АКФ) или функционально связанным с
АКФ энергетическим спектром Ge (со). Конкретные значения больших, грубых
ошибок не важны для характеристики точности. Эти ошибки оценивают по вероят-
ности их появления Р(|£|)» Зег. . Грубые ошибки (промахи) могут происходить ,
при неправильном раскрытии неоднозначности измерении, сбоях в аппаратуре, при
действии специально организованных помех.
Средняя вероятность правильного обнаружения с помощью БРЛС сигналов
групповой цели, прикрытой ПП, для случая, когда цели и ПП равномерно распре-
делены в круге радиуса R, определяется выражением [27]
2 R/D
р'от= \ p^D,e)\v(6)de, (2.18)
О
где D - дальность до групповой цели; РОЬ1( (£),#) - зависимость вероятности обна-
ружения от D и 0 - углового «расстояния» между целями и ПП; 1Р(в) - плот-
ность распределения в, которая при 0 <6 < 2Rj D имеет вид [421
W(3) =
32D
3n2R
exp
(2.19)
Зависимость 7^bfI( Z),0) получена в работе [421 и представляется в виде
^оБн(А<9) = ехр
1п4г
1 +-----—------поп
<70^о;ю(Рв)п G(e)/«,] °"
Глава 2. Радиоэлектронная разведка
81
О ’
- энергетический потенциал аппаратуры РЭП; Dn = D}
- дальность обнаружения цели с определенной ЭПР сг0 и
ПО 5
О >
где Рт - вероятность ложной тревоги; q )П = (In Р T/ln Р,) -1; Ро - вероятность об-
наружения цели в условиях получения паспортных данных,
(PG)„ = (PG)n0
G(0)/G„ = [G(₽)/G„ ]0; O0
определенной вероятностью PQ при фиксированной Pm; D - удаление аппарату-
ры РЭП от БРЛС для которых приводятся значения Do, Ро, Рпг.
2. Рабочая область (зона действия) - это область геометрического про-
странства R , в пределах которой средство РЛР обеспечивает требуемую точность.
Размер рабочей области определяет максимальное удаление R объекта разведки
от разведывательной РЛС. Па величину Rmax влияют несколько факторов. На пути
27?тах от РЛС до цели и обратно, а также при отражении от цели, рассеивается
энергия РЛ сигнала. Для обеспечения точности РЛР принятый сигнал должен иметь
мощность не ниже некоторого порогового значения Р .
Максимальная дальность, которой соответствует уровень Р на входе
приемника средства РЛР, определяется как
ц
max
(2.21)
у у у пор
где Р - мощность излучаемого радиолокации зондирующего сигнала; Gc - коэф-
фициент усиления передающей антенны; S = СсЛ2 / 4л - эффективная площадь
приемной антенны, если передача и прием ведется на одну и ту же антенну; сгц -
ЭПР пели; ту - коэффициент, учитывающий потери в антенно-фидерном тракте.
Для больших антенн величина S приближается к геометрической площади раскры-
ва, но и у антенн с исчезающе малой геометрической площадью величина S конеч-
на и вполне значима [9].
Соотношение (2.21) получено для условий прямолинейного распростране-
ния радиоволны на трассе между РЛС и РЛ целью. Какова бы ни была мощность
излучения и другие переменные в (2.21), все равно радиус рабочей зоны средства
РЛР, работающего в обычных РЛ диапазонах, не может превзойти дальности пря-
мой видимости. С учетом рефракции в атмосфере эта дальность составляет
(2.22)
О max
где Н и Н - соответственно высота антенны РЛС и высота РЛ цели над сфе-
рической земной поверхностью среднего радиуса = 6400 км. Все величины в
(2.22) измеряются в километрах и формула (2.22) справедлива вплоть до высот ор-
бит ИСЗ РЛ разведки. Для увеличения R антенну средства РЛР поднимают над
поверхностью Земли, размещая РЛР на борт}' самолета (это системы дальнего ра-
диолокационного обнаружения - ДРЛО) или ИСЗ. Другой способ увеличения даль-
ности основывается на использовании декаметровых волн, трасса распространения
82
Глава 2. Радиоэлектронная разведка
которых увеличивается за счет отражений от земной поверхности и от ионосферы.
Этот принцип использует загоризонтная радиолокация (ЗГРЛ). Поскольку при ре-
шении разных задач (обнаружения, распознавания, измерения параметров движе-
ния) требуемая точность достигается при разных Р , максимальная дальность то-
же может быть разной у одного и того же средства РЛР.
3. Помехоустойчивость и помехозащищенность - это способность РЛР
обеспечивать требуемую точность в условиях действия помех естественного про-
исхождения (помехоустойчивость) и специально организованных противоборству-
ющей стороной, с которой средство РЛР состоит в информационном конфликте
(помехозащищенность) [9]. При анализе и проектировании средств РЛР различают
реальную и потенциальную помехоустойчивость. Потенциальные - наивысшие,
предельно достижимые - характеристики помехоустойчивости и помехозащищен-
ности всегда выше реальных и соответствуют наилучщим способам обработки при
приеме РЛ ст нала.
4. Скрытность характеризует доступность информации о параметрах сиг-
налов для средств РТР противника в условия РЭБ при том, что РЛР обеспечивает
требуемую точность.
5. Разрешающая способность средств РЛР - это способность к раздельно-
му наблюдению (обнаружению, измерению параметров и т.п.) сигналов от разных
объектов разведки при обеспечении требуемой точности. Разрешающая способ-
ность характеризуется минимальным рассогласованием ДА = \ -А, значений па-
раметров сигналов, отраженных раздельно наблюдаемыми РЛ целями Ц и LP .
Мера разрешающей способности ДА, определяет размер элемента разрешения в
рабочей зоне средства РЛР по параметру А. Количество элементов разрешения в
рабочей зоне средства РЛР зависит от размера этой зоны, свойств зондирующего
сигнала, характеристик и свойств антенной системы.
Для улучшения разрешающей способности по дальности расширяют спектр
зондирующего сигнала; по радиальной скорости - увеличивают длительность сиг-
нала Тс. Совместное уменьшение размеров элемента разрешения по дальности и по
скорости требует увеличения базы сигнала В = BfcTc. Увеличение разрешающей
способности по угловым координатам достигается за счет уменьшения ширины
ДНА РЛР: чем меньше ширина ДНА, тем меньше размер элемента разрешения по
угловым координатам. Радиолокаторы, установленные на борту самолета или ИСЗ,
синтезируют апертуру антенны за время движения по дуге траектории L. При этом
размер синтезированной апертуры, определяющий размер элемента разрешения,
оказывается гораздо больше физического размера антенной апертуры.
6. Пропускная способность - это максимальное количество информации,
которое может быть извлечено средством РЛР в единицу времени при выполнении
требований к точности формируемых разведывательных данных. Пропускная спо-
собность может измеряться числом целей (обнаруженных, распознанных, принятых
на сопровождение) в секунду [15]. Кроме перечисленных показателей, средства
РЛР могут характеризоваться надежностью, эксплуатационной эффективностью,
экономическими и оперативно-тактическими параметрами.
Глава 2, Радиоэлектронная разведка
83
2.5. Работа средств разведки в сложной
сигнальной обстановке
Информативность сигнала РЭС для средств РТР зависит от того,
насколько надежно этот сигнал обнаруживается и достоверно определяются его
параметры, несущие полезные для разведки сообщения. Информацию средства РТР
получают, анализируя ЭМП w(/,r) на раскрыве приемной антенны reL в течение
времени te[-Tl2’,T 2] на фоне пространственно-временных помех n(t,r)
w(/‘,r,A) = 5(f,r,A) + w(r,r), (2.23)
5’(г,г,л) - сигнал, зависящий от временных Л и пространственных г параметров.
Временные параметры Л и пространственные параметры г доставляют
разведке полезную для нее информацию. При этом совершенно не обязательно,
чтобы векторы параметров Л и г информативны и для средства разведки, и для
РЭС противника. Обработка сигнала w(r,r,A) на раскрыве приемной антенны сред-
ства РТР почти всегда разделяется на пространственную и временную [15]. Вначале
производ! тся пространственная обработка. Эту операцию выполняет антенная
система - пространственный фильтр, селектирующий сигнал на фоне помех из раз-
ных областей пространства и определяющий пространственные параметры сигнала.
Результатом пространственной обработки являются оценка параметров простран-
ственного положения и движения ИРП.
Далее производится временная обработка. В результате временной обра-
ботки определяются несу ши с частоты, мощности излучения, качественные и коли-
чественные характеристики модулирующих функций и другие параметру сигналов
РЭС объектов разведки: вид сигнала (импульсный, непрерывный, квазинепрерыв-
ный); вид модуляции (AM, ЧМ, ФМ и т.п.); параметры .модуляции (длительность
импульсов ги, период следования импульсов 7И, частоту модуляции, индекс моду-
ляции). Знание этих параметров позволяет определять назначение и тип разведыва-
емых РЭС. а также режимы работы РЭС: последовательность использования режи-
мов РЭС (обзор, захват, автосопровождение, подсвет цели и т.п.) и моменты вклю-
чения, продолжительность и периодичность излучения.
Информативные для РТР параметры сигнала могут иметь различный
характер [10, 43]:
1. Я — дискретная величина, в фиксированный момент времени Л может
принимать лишь одно значение из счетного множества Л,, Я,,..., Л.. Для систем
передачи данных параметрами являются цифровые сообщения, при передаче дан-
ных. представленных числами в двоичной системе, ? = 2 (0 или 1).
2. Л - непрерывная величина, постоянная в течение времени воспроизве-
дения Т. но способная принимать любое значение в некоторых пределах (в дина-
мическом диапазоне) Л < Я < Ятах. В радиолокации такой характер имеют дан-
ные о координатах и параметрах движения целей, когда время Т сравнительно не-
велико.
84
Г.павр 2^ Радиоэлектронная разведка
3. Л - непрерывная функция времени (так меняются параметры сигнала в
системах связи, передающих аналоговые сообщения).
4. r = r(t, х, у, z) - функция времени t и пространственных координат.
Сама сложная сигнальная обстановка является, с одной стороны, яредхметом
анализа для средств ВРГР: в ее создании участвуют излучения объектов разведки.
С другой стороны, сложность сигнальной обстановки затрудняет средствам ВРТР
обнаружение и определение параметров сигналов объектов разведки на фоне неин-
формативных для разведки излучений. Первейшая задача ВРТР состоит в слежении
за динамикой изменений сигнальной обстановки, т.е. фиксации следующих сиг-
нальных ситуаций в области интересов разведки [9, 15].
1. В области интересов разведки не наблюдаются сигналы, имевшиеся ра-
нее, что может быть признаком изменения дислокации или снятия с эксплуатации
излучающих эти сигналы объектов.
2. В области интересов разведки появились новые для средства разведки, но
известные ему сигналы.
3. В области интересов разведки появились новые неизвестные ранее сигна-
лы, что может служить признаком появления новых, ранее не известных РТР объ-
ектов, систем или средств.
Решения по указанным ситуациям средство ВРГР формирует на основе ана-
лиза принятого колебания u(t) = S(/) + /?(Г), содержащего в аддитивной смеси с
шумом ;?(/) все сосредоточенные в области разведки сигналы. S(f) - сигнал, пред-
ставляющий собой сумму /н модулированных колебаний (парциальных сигналов).
п/
(2.24)
Формально для фиксации любой из трех перечисленных ситуаций средству
разведки по наблюдениям колебания z/(f) нужно проверить гипотезу о том, содер-
жит ли u(t) все ожидаемые априори сигналы или некоторых сигналов в u(t) нет
(решение по эт ой гипотезе фиксирует ситуации 1 и 2). против гипотезы о том, со-
держит ли ?/(/) только априори ожидаемые сигналы, или ь области разведки есть
еще сигналы, априорная информация о которых у разведчика отсутствует (под-
тверждение этой гипотезы фиксирует ситуацию 3).
Первая из указанных задач сводится к обнаружению на фоне шума и
остальных сигналов каждого из парциальных сигналов S(l), для которых априор-
ная вероятность присутствия в смеси u(t) не равна нулю. Средство ВРТР наблюда-
ет ситуацию, обусловленную «нормальной» сигнальной обстановкой, которая
предполагает выполнение требований ЭМС. В конечном итоге «нормальная» сиг-
нальная обстановка предусматривает обеспечение ортогональности сигналов всех
РЭС, совместно работающих в области интересов разведки РЭС, т.е. взаимной ор-
тогональности парциальных сигналов s.It). Если ортогональность нарушается,
шумы неортогональности снижают качество обнаружения парциальных сигналов
по сравнению с обнаружением сигналов ортогональных. Поэтому характеристики
Глава 2^ Радиоэлектронная разведка
85
обнаружения ортогональных сигналов могут служить верхними оценками эффек-
тивности обнаружения сигналов.
Структура приемника, оптимального для обнаружения с распознаванием
ортогональных сигналов, сводится к т канальному приемному устройству. Каждый
из каналов согласован с определенным сигналом и содержит пороговое устройство
для его обнаружения. Лучшего приемника средство разведки принципиально при-
менить не может [9]. Решение о наличии на входе такого приемника (в составе ко-
лебания w(0) любого парциального сигнала s (f) эквивалентно решению о том,
что амплитуда а. отлична от нуля. Вероятность ошибки принятия такого решения
при наблюдении на фоне шума суммы ортогональных сигналов будет определяться
априорной информированностью средства разведки о каждом из этих сигналов и
степенью учета априорной информации при построении приемника-обнаружителя.
Априорная информация всегда ограничена. Значения пространственно-
временных параметров обнаруживаемого сигнала для разведчика случайны. Мак-
симум, что о них может быть известно, - это априорная плотность распределения
И' (Л). Априорные распределения параметров сигнала либо определяются на осно-
ве некоторых моделей, либо считаются равномерными. Равномерные распределе-
ния часто оказываются наименее благоприятными. Основываясь на них, можно по-
лучить осторожные оценки качества обнаружения и определения параметров сиг-
налов. При сделанных предположениях функция правдоподобия может быть
найдена усре, нением по априори известным случайным для средств и систем раз-
ведки параметрам сигнала
Р(.г. 5(/)) = I Р(х, 5(/,Л)^(Л)Л , (2.25)
где область интегрирования совпадает с областью определения совместной плотно-
сти П .(/.') [44]. Неизвестными для разведки могут быть следующие параметры
сигналов, определенных в соответствии с (2.25).
Начальная фаза (р и амплитуда. Обычно считается, что фаза сигнала рав-
новероятна в пределах [0: 2л], а амплитуда распределена на сегменте [0; Ас].
Несущая частота сигнала щ(1, которая может изменяться при использова-
нии для маскировки нерест poi ки (скачков» по частоте или из-за взаимного движе-
ния источника сигнала и средства разведки. Несущую частоту можно считать неиз-
вестной для средства разведки и равновероятно распределенной в диапазоне
[щ0 -5си / 2; со0 + Seo / 2].
Ширина спектра chi нала Ай). Многие современные РЭС используют
дискретные виды модуляции и кодированные последовательности для повышения
скрытности. Несущие колебания модулируются дискретнокодированными подне-
сущими колебаниями. Неизвестность ширины спекгра оказывается в этих условиях
эквивалентной неизвестности тактовых частот модулирующих колебаний. Считает-
ся. что априорные для средств разведки плотности распределения тактовых частот
И' (Ту) равномерны в интервале [0; /\А].
( редкий риск средства разведки при обнаружении сигнала
86
Глава 2. Радиоэлектронная разведка
R = r0P(S = 0)Р(15 = 0) + г1/’(5 = 1)Р(0 5*0),
(2.26)
где г и г\ - парциальные риски соответствующих ошибок: /’(5 = 1) и Р(5 = 0) -
априорные для разведчика вероятности наличия и отсутствия сигнала в принимае-
мом колебании;
Р(1
5=0) = Рлт
CG
= J W(x 5 = O)dx -условная вероятность ложной тревоги;
h
h
Р(015 * 0) = Рпр = [ 1Е(х|5 * 0)<7х
-условная вероятность пропуска сигнала обна-
ружителем средства разведки; й - пороговый уровень, который определяется ис-
пользуемым критерием обнаружения.
Если сигнал наблюдается на фоне белого шума с равномерным в полосе
наблюдения спектром, то
[ ] т
Р(х 15) = к ехр [[ЛЭД - 5(/)]2 dx , (2.27)
I A0J J
где Nq - спектральная плотность мощности шума: Т — длительность временного
интервала наблюдения сигнала [38].
При одинаковых значениях парциального риска г0 =/;. т.е. при одинаково
опасных для разведчика ошибках типа пропуска и ложной тревоги, максимальная
эффективность разведки (минимальный риск разведчика» достигается при равен-
стве апостериорных вероятностей ошибок [44]
P(S = 0) Р|115 = 0) = P(S * 1)Р(0 |5 * 0). (2.28)
Из условия (2.28) выбирается величина порога обнаружения в приемнике
средства разведки. Традиционные модели параметрической неопределенности сиг-
нала [9, 10] (полностью известный сигнал, сигнал с неизвестной фазой и флуктуи-
рующей амплитудой, неизвестными временем прихода и частотой) дают хорошее
приближение при описании работы обнаружителей в РЛ и радионавигационных
приемниках, в радиосистемах передачи информации. Опенка качества обнаружения
и пороговых соотношений сигнал/шум в условиях параметрической неопределен-
ности сигнала можно характеризовать диаграммой, представленной на рисунке 2.4.
Па рис. 2.4 обозначено: Т - длительность времени наблюдения; 8 - диапа-
зон неизвестности частоты; &f0 - диапазон неопределенности ширины спектра; I -
количество элементов сигнала, из которых составляется сложная структура; А/ш -
эквивалентная шумовая полоса приемника средства РТР. Расстояние между стол-
биками диаграммы по оси абсцисс характеризует изменение (увеличение) энтропии
сигнала за счет роста неопределенности его параметров.
Высота столбиков на диаграмме (рис. 2.4) показывает, в какой мере порого-
вое для обнаружения соотношение сигнал/шугм обменивается на неопределенность
параметров сигнала. При построении диаграммы считалось, что средство РТР рабо-
тает в условиях Рпр = 0,5 при Рп = 0,1 [9].
2. Радиоэлектронная разведка
87
Рис. 2.4. Сравнение качества обнаружения и пороговых соотношении сигнал/шум в
условиях параметрической неопределенности сигнала
Объект разведки излучает сигнал s(t,V) зависящий от времени на интерва-
ле наблюдения t g [-Т / 2;Т / 2] и набора параметров к е /\ . Компонентами вектора
к «кроме частоты, амплитуды, фазы, задержки) могут быть: средняя и пиковая
мощности передатчика, координаты точки расположения ИИ, ширина спектра из-
лучения, стабильность частоты, вид и индекс модуляции несущего колебания и др.
Но основные скрываемые параметры - координаты точки расположения РЭС, ха-
рактерные частоты излучения (несущие и поднесущие), ширина спектра излучае-
мого сигнала, связанная с видом и индексом модуляции.
Качество РТР и эффективность противодействияоцениваются по величинам
ошибок, навязываемых средству РТР. Если истинные значения параметров к0, а
оцененные средством РТР к, ошибки Д = к’ -к0 можно рассматривать, выделив
нормальные (малые) и аномальные составляющие. Ошибка принадлежит к нор-
мальный. если оан по модулю не превосходит полуширины интервала апостериор-
ной неопределенности Дк; / 2. Величина ДХ# совпадает с интервалом разрешения
(по Релею) двух сигналов по параметрам - областью значений к., в которой суще-
ственно отлична от нуля огибающая модуля сигнальной фнукции (функции не-
опр ед ел енн ости).
Абсолютные величины аномальных ошибок определяются протяженностью
интервалов априорной для средств РТР неопределенности значений измеряемого
параметра. Аномальные ошибки характеризуются вероятностью того, что ошибка
оценивания превосходит по модулю пороговый для нормальных значений уровень
Л=р{|).’-;,7|»ДХ,/2}. (2.29)
88
Глава Z Радиоэлектронная разведка
Обыкновенный набор оснвоных параметров РЭС, информативных для
средств РТР, — это пространственные координаты точки расположения ИИ и рабо-
чие частоты.
2.6. Обобщенная структурная схема станции
воздушной РТР
При всем многообразии схем средств ВРТР [9, 10, 15, 28] можно отметить
ряд обязательных блоков, которые могут бьпь раздельными либо конструктивно
объединенными друг с другом. Типовая станция ВРТР [37], представленная на
рисунке 2.5, состоит из: приемной антенной системы; приемника; пеленгатора; се-
лектора; устройства обработки принимаемого сигнала: измерителя параметров сиг-
нала; запоминающего устройства; линии передачи данных (телеметрического
устройства). Антенная система должна удовлетворять требованиям:
• быть широкополосной (применение нескольких антенн);
• обеспечивать пеленгацию РЭС с необходимой точностью во всем разведы-
ваемом диапазоне частот;
• иметь минимальные БЛ и обеспечивать хорошую ЭМС с другими РЭС, что-
бы исключить ложное определение направления на пеленгуемый источник.
ОТ НАВИТАЦИОННОЙ
СИСТЕМЫ
Рис. 2.5. Обобщенная структурная схема станции ВРТР
Удовлетворить всем требованиям с помощью одной антенны просто невоз-
можно, поэтому обычно применяют несколько антенн, перекрывающих весь разве-
дываемый частотный диапазон: рутюрные, диэлектрические, линзовые, параболи-
ческие, спиральные и другие. Для РЭС с направленными антеннами ВЧ диапазона
могут применяться несколько аппроксимаций ДНА. Простейшей из них является
прямоугольная аппроксимация [7], при которой зависимость рассеиваемой мощно-
сти в указанном направлении имеет вид
0.5’
0.5
(2.30)
Глава 2, Радиоэлектронная разведка
где Ри - излучаемая мощность; G. - КНД антенны излучателя; Аи(0) - функция,
описывающая ДНА излучателя; 0 - угол между указанным направлением и
направлением главного луча ДНА: 0О 5 - ширина ДНА в соответствующей плоско-
сти сечения на уровне половинной мощности; b1 «1 - относительный уровень
мощности БЛ.
Данная аппроксимация определяет связь между С?и , Ь2 и ©05 для антенн с
достаточно узкой («игольчатой») формой главного лепестка, обладающих осевой
симметрией
(2.31)
В [7] приводится более сложная аппроксимация узконаправленных антенн
2,78(©/©0 5) _, © <©05,
_|о.О625/(0/0О5Г, 0О5 <|0|<тг,
(2.32)
где // - коэффициент, изменяющийся от 2 до 1 в зависимости от степени «засорен-
ности» позиции 11РИ местными предметами.
Усредненные ДНА некоторых РЛС обычно помещают в справочниках. При
отсутствии данных о форме ДНА можно использовать следующие аппроксимации
F(©) =
2,т" - sin2 0
(2.33)
1 +13 • (®/0й5 )3'7
F(@) = exp -1,4-(®/©05)2
(2.34)
(2.35)
Для определения направления на РЭС могут применяться специальные ост-
ронаправленные антенны или антенны специальной конфигурации. Антенны раз-
мещаются вдоль бортов ЛА, а также в носовой и хвостовой части. Размеры и коли-
чество антенн определяются диапазоном и заданной точностью пеленгации [15].
Приемник характеризуется следующими параметрами:
• разведываемым диапазоном частот />;
• временем перестройки Т (характеризует оперативность разведки в диапа-
зоне/;);
• коэффициентом шума и чувствительностью Pmin;
• разрешающей способностью по частоте 8f;
способом поиска сигнала объекта разведки по несущей частоте;
вероятностью его обнаружения;
шириной полосы пропускания ;
точностью определения параметров принимаемых сигналов;
90
Глава 2. Радиоэлекп1ронная разведка
• динамическим диапазоном;
• величиной перекрестных искажений;
• фазовыми шумами, стабильностью и скоростью перестройки синтезатора:
• массой и габаритными размерами;
• сложностью в производстве и эксплуатации, стоимостью [15].
Важной технической характеристикой приемника является полный диапа-
зон частот, в котором с его помощью можно осуществить поиск разведываемых
сигналов. Приемник - беспоисковый многоканальный, поисковый по частоте (ска-
нирующий), смешанный (комбинированньш I, матричный или цифровой [7-10, 43].
Пеленгатор служит для определения утла прихода радиоволн и местопо-
ложения разведываемого РЭС. Наиболее важными показателями качества пеленга-
тора (амплитудного, фазового или комбинированного) являются [15]:
• точность пеленгации и быстродействие;
• чувствительность и помехоустойчивость;
• разрешающая способность и диапазон рабочих частот;
• вид пеленгуемого сигнала: масса и габаритные размеры:
• сложность в производстве и эксплуатации, стоимость.
Селектор используется аналоговый или цифровой, совмещенный с устрой-
ством обработки. Устройство обработки принимаемого сигнала (УО) служит
для обнаружения и опознавания образа разведываемого РЭС. У О оценивает пара-
метры разведываемых сигналов: временные (частоты и длительности сигналов,
временные интервалы между импульсами, параметры модулирующей функции);
пространственные (координаты точки излучения, характеристики направленности
его антенн); поляризационные (ориентация вектора электрического поля объекта
разведки); спектральные <ВЧ спектр и спектр огибающей сигнала); энергетические
(мощность и спектральная плотность) [15].
У О также демодулирует сигнал, определяет вид и индекс модуляции, харак-
теристики модулирующей функции. Исходная информация для опознавания сигна-
ла содержится в значениях его параметров. На основе опенок первичных парамет-
ров находят более сложные обобщенные характеристики (например, тип и назначе-
ние РЭС, тип объекта, использующего РЭС, и др.). УО характеризуются количе-
ством учитываемых при обработке параметров сигналов, а также количеством об-
рабатываемых сигналов за единицу времени (пропускной способностью).
ЗУ обеспечивает автоматическое запоминание параметров разведанных
сигналов. Для запоминания параметров сигналов могут использоваться: элек-
тронно-лучевые трубки, магнитные ленты, фотографирование индикаторов, спе-
циальные индикаторы и запоминание в памяти БЦВМ, магнитные и другие носи-
тели, используемые в современной вычислительной технике. Линия передачи
данных (телеметрическое устройство) служит для передачи разведывательной
информации на землю в реальном масштабе времени.
Основными характеристиками станций ВРТРявляются:
• диапазон разведываемых частот и сектор разведки;
• разрешающая способность;
• вид используемого приемника;
• пропускная способность и время разведки;
Глава 2. Радиоэлектронная разведка
91
вероятность правильного распознавания типа РЭС;
сложность в производстве и эксплуатации, стоимость [15].
2.7. Дальность воздушной РТР
Успешное обнаружение и последующая обработка сигналов объектов
разведки возможны [7, 22] в случае:
• сигналы попадают в ДНА станции ВРТР;
• поляризация приемной антенны соответствует поляризации принимаемых
сигналов, иначе обнаружение будет затруднено;
• несущая частота сигнала объекта разведки попадает в полосу контролируе-
мых частот станции ВРГР;
• ширина спектра сигнала не превышает полосу пропускания станции ВРТР,
в противном случае сигнал может быть обнаружен, но его параметры будут опре-
делены с искажениями;
• мощность сигналов Р. на входе приемника станции ВРТР больше или равна
некоторому порогу обнаружения (условие энергетического обнаружения сигналов)
(2-36)
где q - коэффициент различимости (определяется параметрами приемника, усло-
виями обнаружения и индикации ^ = 1...10); Р ... - мощность собственных шумов;
Рп - мощность внешних помех;
• длительность обнаруживаемого сигнала гс при использовании панорамных
средств BP 1 Р не меньше разности между периодом перестройки разведывательно-
го приемника Т = Ф/ у и временем просмотра им элементарного участка А/ по-
лосы обзора Фо
tc >Т-т,
(2-37)
где у - скорость изменения частоты, а г связана с разрешающей способностью
Д4 условием &f0‘T = const.
Решение задачи обнаружения сигнала базируется на определении вероятно-
сти совпадения частотно-временных характеристик сигнала со временем просмотра
и частотой соотвест вующего участка диапазона поискового приемника станции
ВРГР и вероятности энергетического обнаружения [36]. Следует отметить, что все
параметры объектов разведки и самой системы РЭР носят вероятностный характер.
Вероятность обнаружения сигналов объектов разведки PityОБН в ряде случаев
можно рассматривать как следующую функцию времени
^(Ообн
(2-38)
где тс = 1 / AF - длительность принимаемых сигналов; AF - ширина спектра сиг-
налов. При малых значениях отношения К = РС /д(Ршс +4J вместо (2.38) имеем
92
Гпава 2. Радиоэлектронная разведка
^(ОоБН
(2.39)
Из формулы (2.39) видно, что увеличение времени наблюдения за слабым
сигналом равноправно увеличению его мощности на входе приемника.
Среднее время обнаружения /0БН слабого сигнала равно
^ = д(РщСрРп)Тс (2.40)
Под дальностью ВРТР понимается расстояние между станцией ВРТР и
разведываемым РЭС, в пределах которого обеспечивается прием сигналов РЭС с
заданной вероятностью. Требуемую чувствительность разведывательного прием-
ника Piin и дальность разведки Dp связывают между собой, исходя из условия, что
мощность сигнала разведываемого РЭС на входе приёмника Р должна превы-
шать чувствительность приемника Р > Рт.п. Для надежной регистрации сигнала
его мощность на входе приемника станции ВРТР должна превышать чувствитель-
ность в q раз: Р =qP. .
J п вхр 1 ппп
Мощность сигнала нс входе разведывательного приемника определяется
следующим выражением
, (2.41)
4я Dp-
где Рс - мощность излучения РЭС; G - КНД антенны РЭС; /\:(6),<р) - нормиро-
ванная ДНА по мощности антенны РЭС; Ар - эффективная площадь антенны стан-
ции ВРТР; у - коэффициент, учитывающий несовпадение поляризации сигнала
разведываемого РЭС и антенны станции ВРТР; с/ - коэффициент передачи мощ-
ности из антенны на вход разведывательного приемника; а - коэффициент, учи-
тывающий затухание в атмосфере, дБ/км.
Из анализа выражения (2.41) можно сделать выводы:
1. В сантиметровом и дециметровом диапазонах для реальных дальностей
разведки затуханием в атмосфере можно пренебречь, т.е. io~o l a Dp «1.
2. При расчетах среднее значение у и <// принимают равным 0,5.
3. Эффективная площадь антенны станции ВРГР Ар = A2GPFP /4 л (где
Л - длина волны сигнала РЭС; G? - КНД антенны станции ВРТР; Fp(0,(p) - нор-
мированная ДНА по мощности антенны станции ВРТР). Можно считать, что
Fp(&,(p) - 1, так как станции ВРТР имеют ненаправленные антенны, либо обработ-
ка сигнала производится в момент, когда максимум ДНА направлен на РЭС [15]. В
этом случае Ар = Л2Ср/4л . С учетом этих замечаний выражение (2.41) имеет вид
вхр
(2.42)
Глава 2. Радиоэлектронная разведка
Необходимая чувствительность разведывательного приемника опреде-
ляется как
PcGcGp Л" х /О /12\
Р- = /л П v •~Грс(6>.<Р)- (2.43)
(4/т£>р) 4q
Из выражения (2.43) дальность BPl Р
(2.44)
Дальность ВРТР и требуемая чувствительность разведывательного приём-
ника зависят от ориентации антенны и мощности излучения разведываемого РЭС.
Требуемые чувствительности по главному и БЛ ДНА РЭС отличаются на несколь-
ко порядков, а граница зоны, где возможна разведка, повторяег форму ДНА РЭС,
т. е. Dp (0. ф) = KFC (0, <р).
2.8. Способы построения приемоанализирующей
аппаратуры
Этап первичной обработки сигнала предусматривает решение ряда задач,
объединенных термином «прием сигналов». Можно выделить подсистему первич-
ной обработки сигналов (ППОС), несущую основную функциональную нагрузку
по решению задач приема и состоящу ю из первичных датчиков, соединенных в со-
ответствии с принятым алгоритмом обработки. На выходе ППОС формируется по-
ток наблюдений первичных параметров в виде сгруппированных данных, содер-
жащих результаты измерения параметров сигналов в соответствующем формате.
Типовой перечень данных, вырабатываемых на выходе ППОС, содержит измерения
его несущей частоты, длительности, амплитуды, времени прихода, направления
прихода в азимутальной и угломестной плоскостях, признак наличия и вида ВИМ и
т.п. В рамках ППОС осуществляется классический набор системных операций «об-
наружения - различения - оценивания» параметров сигналов ПРИ - РЭС различно-
го назначения.
Функциональная схема первичной обработки представлена на рисунке 2.6.
Операции обнаружения и оценивания параметров сигналов могут осу-
ществляться как раздельно (данный вариант показан на схеме рис. 2.6), так и сов-
местно [7]. Другими специальными операциями, которые могут осуществляться в
ходе первичной обработки, являются распознавание и идентификация наблюдений.
Задача распознавания состоит в определении принадлежности данного объекта
(наблюдения) одному из заранее выделенных классов объектов в соответствии с
имеющимися эталонными описаниями [38].
Для определения сходных по смыслу задач используются термины «иден-
тификащ я», «отождествление», «классификация». Задача идентификации состо-
ит в определении принадлежности объекта к некоторому классу объектов без ука-
зания на его принадлежность к каким-либо другим классам («он - не он»). Задача
отождествления состоит в определении принадлежности двух объектов одному
классу, в том числе и в случае, если эталонное описание этого класса отсутствует
94
Глава 2. Радиоэлеюпронная разведка
(«один и тот же» - «разные»). Задача классификации - определение числа классов
и их эталонных описаний на основе имеющейся совокупности объектов [7, 8].
На следующий этап
Входной поток сигналов
Рис. 2.6. Функциональная схема первичной обработки
Серьезной проблемой при создании современных средств ВРТР в интересах
достижения требуемых времени и достоверности принятия решений является обес-
печение беспоискового по частоте и направлению прихода поимпульсного (поэле-
ментного) приема сигналов. При этом должны сохраняться необходимые уровни
чувствительности обнаружения и точности измерения основных параметров сигна-
лов, что противоречит требованиям широкополосности аппаратуры приема. Суще-
ствует группа проблем, связанная с необходимостью привлечения для анализа сиг-
налов ранее нетрадиционных для данной области характеристик [8, 15], а также с
необходимостью обработки новых видов сигналов (сигналов повышенной скрыт-
ности и сверхширокополосных сигналов). Сигналы повышенной скрытности имеют
большую базу (до 106) и являются обычными длинноимпульсными и широкополос-
ными сигналами при малой излучаемой мощности.
Построение ППОС во многом определяется реализуемыми принципами по-
иска сигналов по частоте и направлению при их обнаружении. Это связано с тем,
что наиболее громоздкая часть приемоанализирующей аппаратуры (антенны, фиде-
ры, ВЧ-фильгры) в своем конструктивном исполнении определяется поддиапазо-
нами частот и секторами направлений, в пределах которых обеспечивается одно-
временный прием сигналов различных РЭС [7]. Обобщенная структурная схема
ППОС представлена на рисунке 2.7 (МРЧ, МОН - модули определения частоты и
направления; МИПС - модуль измерителей параметров сигналов).
Глава 2. Радиоэлектронная разведка
95
Рис. 2.7. Обобщенная структурная схема ППОС и разведывательного средства в целом
Связи между МОЧ и МОН могут осуществляться различным образом, как
напрямую, в рамках схем, обеспечивающих определенную интеграцию процедур
обнаружения - определения частоты и направления прихода сигналов, так и через
МИНС. В рамках МИПС реализуется измерение полного набора первичных пара-
метров сигналов, включая, частоту и направление прихода. В общем случае МИПС
состоит из набора измерителей частотно-временных и пространственных парамет-
ров сигналов, обнаруживаемых в каналах приема по частоте и направлению. На
выходе МИПС формируются оцифрованные результаты измерений, сгруппирован-
ные по каждому принятому сигналу.
Варианты построения приемника [7], реализующие различные схемы орга-
низации взаимодействия МОЧ и МОН, представлены на рисунке 2.8, где обозначе-
но: а) поисковый по частоте без определения направления; б) беспоисковый (мно-
гоканальный : по частоте без определения направления; в) поисковый по направле-
нию и поисковый или беспоисковый по частоте; г) беспоисковый по частоте с уз-
кополосным МОН, наводимым по частоте; д) многоканальный по направлению с
независимым поисковым или беспоисковым определением частоты; е) беспоиско-
вый по частоте и направлению с реализацией функциональной обработки; Р — схе-
ма регистрации, обеспечивающая грубое (с точностью до канала) или точное опре-
деление частоты и направления.
В схемах «а», «б» отсутствует возможность определения направления при-
хода сигналов: АФУ реализует либо ненаправленный прием сигналов, либо прием
сигналов в широком секторе направлений прихода. На практике реализуется ком-
бинированный поиско-беспоисковый просмотр пространства наблюдений на ча-
стотной оси. Схема «в» реализует сочетание поиска по направлению со схемами
поискового или беспоискового по частоте приемников («а», «б»). Поиск по направ-
лению здесь осуществляется путем вращения или сканирования узконаправленной
антенны в заданном секторе. Положение антенны в данный момент времени с точ-
ностью до ширины главного луча ДНА автоматически определяет оценку направ-
ления прихода принимаемого сигнала, для которого далее тем или иным способом
определяется частота.
Схема «г» реализует часто используемый подход, когда при беспоисковом
(многоканальном) режиме определения частоты осуществляется настройка узкопо-
лосного пеленгатора. Такая схема приближается к реализации беспоискового по
Глава 2. Радиоэлектронная разведка
частоте и направлению приемника в случае, если решается задача обработки потока
неперекрывающихся во времени импульсных сигналов и время настройки пеленга-
тора много меньше длительности этих сигналов. Вариант приемника (схема «д»)
является многоканальным, беспоисковым по направлению прихода с использова-
нием набора узконаправленных антенн, перекрывающих в совокупности заданный
сектор направлений, к выходу каждой из которых подключен поисковый или бес-
поисковый по частоте приемник. Схема является громоздкой и не обеспечивает вы-
сокой точности определения направления.
г)
Д)
Рис. 2.8. Типовые схемы построения приемников
Схема «е» реализует беспоисковым по частоте и направлению прием сигна-
лов на основе функциональной обработки, обеспечивающей совместную оценку
частоты и направления прихода сигнала. Для ее реализации применяют специаль-
ные технологии создания малогабаритных многоканальных по частоте приемных
устройств. Введенная классификация вариантов построения приемников раскрыва-
ет возможные способы организации взаимодействия МОЧ и МОН. Приведенные
варианты построения приемоанализирутощей аппаратуры в основном известны и
подробно описаны в [1, 7-10, 13, 15, 28].
Панорамный (сканирующий) npi [емник. Поисковый по частоте приемник
панорамного типа в простейшем случае представляет супергетеродин, перестраива-
емый в диапазоне рабочих частог РЭС [1, 7]. Его структурная схема представлена
на рисунке 2.9 (СМ - смеситель. Д - детектор, ПГ (СЧ) - перестраиваемый гетеро-
дин, ПУ — пороговое устройство).
Панорамные приемники настраиваются по программе на все частоты в диа-
пазоне разведки. Чаще всего программа перестройки сводится к последовательному
просмотру всех частот разведывательного диапазона. Но возможны и другие алго-
ритмы работы, например, перестройка с пропуском участков диапазона, в которых
работают неинформативные для разведки РЭС. Наиболее часто среднюю частоту
приемника изменяют по линейному (или близкому7 к линейному) закону. Портатив-
Глава 2, Радиоэлектронная разведка
97
ные сканирующие приемники способны вести разведку в полосе частот 100 кГц...2
ГГц. Для приемников ВРТР этот диапазон шире, так как он перекрывает все воз-
можные рабочие частоты РЭС, т.е. простирается до 40 ГГц и выше, в диапазон
миллиметровых волн.
Рис. 2.9. Структурная схема перестраиваемого приемника панорамного типа
При перестройке частоты гетеродина сигнал принимается фактически в уз-
кой полосе частот шириной АЛ,, определяемой характеристиками частотно-
избирательной части приемника (шириной полосы пропускания в статическом ре-
жиме А/Д и скоростью перестройки у ). и далее поступает на детектор и видеоуси-
литель (ВУ). Схема регистрации осуществляет определение частоты на основе ана-
лиза выходного сигнала с учетом данных о реализуемой в данный момент времени
частоте гетеродина. В качестве гетеродина широко используются цифровые синте-
заторы частот (ЦСЧ• с системой ИФАПЧ [45, 46].
При медленной перестройке, когда А/ст / у » 1, эквивалентная ширина по-
лосы пропускания равна А/Пр ~А/СТ [7]. Точность определения частоты составляет
половину ширины полосы пропускания 5f = 0,5 А/Д. Увеличение скорости пере-
стройки ведет к потере точности измерения частоты и к снижению чувствительно-
стп приема, так как при этом фактически увеличивается ширина эквивалентной по-
лосы пропускания, а точность определения частоты определяется величиной
А/тах ^0,5А/пр [7, 15]. При воздействии на вход приемника узкополосного непре-
рывного сигнала и при АДт / У «1 на выходе ВУ формируется импульсный сиг-
нал, длительность которого определяется соотношением т = А/ст / у .
При больших значениях у с уменьшением А/Д уменьшается т, что равно-
ценно увеличению Л/пр или увеличению у при прежнем значении А/ст. В общем
же случае соотношение между АД. и А/Д определяется закономерностью вида [8]
А/Д = А/Д + const f IА/Д . (2.45)
Стремление повысить разрешающую способность приемника вызывает же-
лание уменьшить статическою полосу пропускания частотно-избирательной части.
98
Глава 2. Радиоэлектронная разведка
При этом существует оптимальное сочетание величины Л/ст для заданной у [7],
когда можно полечить минимальную динамическую полосу пропускания Л/^,
Д/СТ0„ =(0,60...0,66)V7, Д/т,Л =(0,8...0,9)V7. (2.46)
Величина у связана с величиной общей полосы частот обзора АГ и вели-
чиной времени обзора Т соотношением у = hf /T . Требования по чувствитель-
ности, точности и разрешающей способности находятся в противоречии с требова-
ниями по полосе частот и времени обзора. Это является одним из главных недо-
статков данного типа приемников. Иначе обстоит ситуация, когда такой приемник
функционирует при дискретной настройке частоты, например, в рамках пеленгаци-
онных каналов схемы «г» рис. 2.8. В данном случае проявляются все основные до-
стоинства такого приемника: высокая частотная избирательность и относительная
простота аппаратуры. Время анализа (перестройки по диапазону Л/р) составляет
TatfX [43].
Используемые для РТР сканирующие панорамные приемники перестраива-
ются со скоростью 20.. .30 частотных каналов в секунду при полосе каждого канала
А/" в пределах от 50...500 Гц до 50 кГц...1 МГц. Принципиальным недостатком
поискового метода является возможность пропуска кратковременных сигналов,
например, сигналов импульсных РЛС.
Многоьанальный приемник. Наиболее распространенным методом бес-
поискового определения несущей частоты является многоканальный прием, с по-
мощью которого могут быть получены большая точность и разрешающая способ-
ность. Весь заданный для разведки диапазон частот перекрывается системой ПФ,
полосы пропускания которых примыкаю! друг к друту. В качестве ПФ часто ис-
пользуют автономные приемники с фиксированной настройкой. Функциональная
схема многоканального приемника, реализующего данный метод, показана на ри-
сунке 2.10. Антенны могут быть как отдельными для каждого канала, так и общими
для нескольких каналов или даже для всех каналов.
Рис. 2.10. Структурная схема многоканального приемника
При этом факт наличия сигнала определяется номером сработавшего кана-
ла. Если в многоканальном приемнике используется общая антенна, то после нее
может быть поставлен общий широкополосный усилитель. Это позволит не только
повысить чувствительность приемника, но и сократить число усилителей в каналах.
Данный приемник состоит из общей ВЧ части, гетеродина и смесителя, преобразу-
ющих входные сигналы в область промежуточных частот. Далее диапазон ПЧ раз-
Глава 2, Радиоэлектронная разведка
99
деляется системой фильтров на ряд элементарных поддиапазонов шириной
Af = А/" / N, а затем параллельно для каждого канала элементарного поддиапазо-
на осуществляю!ся стандартные операции усиления на ПЧ, детектирования и уси-
ления НЧ сигналов. Схема регистрации проводит обнаружение сигналов на выходе
каждого канала и регистрацию частот.
Точность измерения частоты определяется шириной полос пропускания
фильтров. Если полосы всех каналов равны Д/i = Л4 = = ••• = •> т0 макси-
мальное зн ачение абсолютной ошибки измерения частоты будет одинаковым
во всем диапазоне частот и равным А/^х = А/" / 2.
Среднеквадратическая ошибка измерения частоты определяется как
<7, = Д//2ч/з .
(2-47)
При этом число N каналов, на которое разбивается разведываемый диапазон
частот, равно Аг = Л/'р/Д/’. Однако при таком разбиении относительная ошибка
8 = Af/2/ измерения частоты будет различной на разных участках разведываемо-
го диапазона (разные значения /с), что неприемлемо при больших диапазонах раз-
ведываемых частот. Целесообразнее ширину полос пропускания ПФ выбирать так,
чтобы относительная погрешность <5 измерений была одинаковой во всем диапа-
зоне частот. Ширина полосы пропускания i-го канала будет определяться как
(2.48)
Число необходимых каналов N, обеспечивающих перекрытие заданного
диапазона частот, равно
1g----
]-<5
(2.49)
Время разведки не может быть .меньше времени установления переходных
процессов в каждом фильтре и составляет Т ^a/kf (а = 2 ... 3). При одинаковой
разрешающей способности Л/ время анализа многоканальным приемником оказы-
вается примерно в N раз меньше времени обзора полосы Д/р сканирующим одно-
канальным приемником. Цена такого увеличения оперативности разведки - про-
порциональное (в Д’ раз) усложнение аппаратуры [43].
Достоинствами данного приемника являются: достаточно высокая точ-
ность определения несущей частоты разведываемого РЭС для целей непосред-
ственной РТР; простота реализации и малое время измерения; отсутствие времен-
ных искажений разведываемого сигнала.
Недостатком метода является рост числа каналов, веса и габаритов при
большом диапазоне разведываемых частот и требуемой высокой точности. При
одинаковой разрешающей способности время анализа многоканальным приемни-
ком примерно в N раз .меньше времени обзора полосы панорамным (сканирующим i
одноканальным приемником. Платой за увеличение оперативности (быстродей-
ствия) является пропорциональное (в N раз) усложнение аппаратуры [15].
100
Глава 2. Радиоэлектронная разведка
Матричный приемник. Главный недостаток многоканального приемника
— его громоздкость. Требования повышения точности, разрешающей способности и
ширины полосы обзора по частоте находятся в противоречии с ограничениями по
массогабаритным характеристикам приемника. Один из возможных вариантов раз-
решения этого прогиворечия связан с реализацией схемы матричного приемника [1,
Я 10,15,20], представленной на рисунке 2.11.
Рис. 2.1 J. Структурная схема матричного приемника
Матричный приемник содержит набор элементарных ячеек, состоящих из
фильтров Фу. индикаторов И у, гетеродинов Гу\\ смесителей. Ячейки располагаются
по М строкам (/ = ) и N столбцам ( / = 1.А’). Фильтры 1-го столбца разбивают
весь заданный разведывательный диапазон шириной Д/р на М поддиапазонов с
шириной полосы
Д/ = Д/„/М. (2.50)
Все сигналы с выходов этих фильтров гетеродинируются на одну и ту же
ПЧ / • Таким образом, исходный рабочий диапазон частот [/min./min + ДАР] преоб-
разуется в М раз более узкую полосу’ A/J. Второй столбец трансформирует про-
цесс из полосы Д/ в полосу’ Af2
Д/; = Д/; / А/= Vp / Л/;. (2.51)
В последнем Л-ом столбце сигнал наблюдается в полосе
Глава 2, Радиоэлектронная разведка
При таком построении приемник обеспечивает разрешение по частоте
А/ = А/ / MN при использовании MN фильгров, тогда как многоканальный прием-
ник такого же разрешения потребовал бы Л/л >MN фильтров [9, 43]. Для исклю-
чения неоднозначности при определении частоты в каждой ступени преобразова-
ния используется система индикаторов, позволяющая определить реализуемое со-
четание задействованных фильтров. Срабатывание индикатора означает.' обнаруже-
ние сигнала на частоте соответствующего фильтра, точность измерения частоты в
матричном приемнике определяется шириной полосы этого фильтра. Матричные
приемники представляют собой достаточно сложные устройства и имеют ряд недо-
статков, связанных с проблемой устранения неоднозначности. Учитывая возросшие
возможности по миниатюризации основных конструктивных элементов приемни-
ков и реализации интегрированной функциональной обработки сигналов, все чаще
возвращаются к классической схеме многоканального беспоискового приемника.
Сканирующий приемник с многоканальным измерением частоты. Хо-
рошие результаты может дать совместное применение поискового и многоканаль-
ного методов. Противоречие между высокой скоростью перестройки по частоте,
которую для повышения оперативности разведки нужно выбирать как можно
большей, и разрешающей способностью устраняется в сканирующем приемнике с
многоканальным измерением частоты [9, 10] (рисунок 2.12).
Рис. 2.12. Сканирующий приемник с многоканальным измерением частоты
Параллельные узкополосные фильтры (УПЧ) на выходе смесителя пере-
крывают своими полосами пропускания весь частотный диапазон. Приемник поз-
воляет раздельно наблюдать (разрешать по частоте! сигналы РЭС, если только раз-
нос рабочих частот этих РЭС не меньше разрешающей способности. В разведывае-
мом диапазоне А/ нужно разместить N = / А/1 +1 параллельных фильтров [10].
Время разведки не может быть меньше времени установления переходных процес-
сов в каждом фильтре. Для Л-канального приемника (рисунок 2.12)
/р «(2,..3)/Д/-.
(2.53)
102
Глава_ 2. Радидэл£К1п])онная 1)азведка
Беспоисковый приемник с функциональной обработкой сигналов при
измерении частоты. Приемники данного типа основаны на применении частотных
различителен (дискриминаторов), выходной эффект которых связан функциональ-
ной зависимостью с частотой одиночного входного сигнала. Условием их нормаль-
ной работы является несовпадение сигналов входного потока по времени. Класси-
ческой схемой построения является схема приемника с мгновенным измерением
частоты (МИЧ) в широкой полосе рабочих частот [7]. Приемник способен обеспе-
чивать высокую точность измерения частоты при плотности потока входных им-
пульсов, для которой сохраняется малая вероятность их перекрытия по времени.
Структурная схема МИЧ-лриемника представлена на рисунке 2.13.
Рис. 2.13. Структурная схема МИЧ-прпемника
ВЧ сигнал, разделяясь на два идентичных сигнала, поступает в два канала: с
ЛЗ и без нее. Сдвиг фазы сигнала при известном времени задержки т3 зависит от
частоты Д^ = 2тг/т3, то на выходе фазового коррелятора (ФД) формируется два
видеосигнала, пропорциональные синусу и косинусу Д^>. Далее эти сиг налы оциф-
ровываются и производится обнаружение и измерение частоты входного сигнала.
Точность измерения частоты определяется как относительная величина
8f!f « 8<plb<p, (2.54)
где 8f - ошибка измерения частоты, а 8<р - ошибка измерения фазы. При этом
ширина рабочего диапазона однозначного измерения частоты зависит от выбран-
ных граничных значении измеряемой разности фаз, кратных тс, и будет обратно
пропорциональна величине задержки.
Для расширения рабочего диапазона частот требуется уменьшить время за-
держки, что одновременно приводит к снижению точности и разрешающей способ-
ности приемника. Преодоление данного противоречия основывается на использо-
вании многоканальных приемников с несколькими ЛЗ, настроенными на однознач-
ное измерение частоты в различных участках рабочего диапазона [7].
Достоинствами МИЧ-приемииков являются предельно малое время обна-
ружения и измерения частоты, широкий рабочий диапазон и достаточно малые га-
бариты. Недостатки', относительно низкая чувствительность и необходимость
существенного усложнения аппаратуры для обеспечения возможности определения
частоты нескольких перекрывающихся по времени сигналов.
Приемник со сжатием представляет собой супергетеродинный приемник
со сверхбыстрой перестройкой частоты и функциональной обработкой сигналов,
реализуемой специальным фильтром сжатия. Приемник обеспечивает вероятность
Глава 2. Радиоэлектронная разведка
103
перехвата, которая обычно бывает у широкополосных и высокочувствительных
приемников, и, кроме того, обладает способностью разделять сигналы, близкие по
частоте, как это делает узкополосный супергетеродин [7, 15]. Структурная схема
приемника со сжатием представлена на рисунке 2.14.
Рис. 2.14. Структурная схема приемника со сжатием
Гетеродин сканирует всю рабочую полосу ДГ за время Т , меньшее, чем
длительность самого короткого из подлежащих прием} импульсов. На выходе сме-
сителя при этом формируется импульсный сигнал с ЛЧМ, который подается на
фильтр сжатия (дисперсионную ЛЗ). Наличие линейной зависимости времени за-
держки сигнала т3 в фильтре от его частоты приводит к тому, что задержка НЧ со-
ставляющих будет больше задержки ВЧ составляющих.
Результатом этого является сжатие импульса на выходе фильтра, причем
форма импульса отражает Фурье-преобразование входного сигнала, а результиру-
ющая задержка зависит от частоты. Если на входе присутствует несколько сигна-
лов с различными частотами, то на выходе появляется последовательность импуль-
сов, расстояние между которыми определяется разностью соответствующих частот.
Непрерывный сигнал приемник будет преобразовывать в импульсный с фиксиро-
ванной длительностью. Эквивалентная полоса пропускания приемника на ПЧ,
определяющая уровень собственных шумов, равна ~ 1 / ДТ (где Д77 - время
задержки сжимающего фильтра).
Благодаря этому приемник имеет высокую вероятность перехвата, харак-
терную для широкополосных приемников, и одновременно высокую чувствитель-
ность. Практические ограничения возможностей приемника связаны с требования-
ми обеспечения высокой скорости перестройки и линейности закона модуляции
гетеродина. Кроме того, ограничены разрешающая способность и динамический
диапазон приемника, а также точность измерения времени прихода сигналов, кото-
рая не может быть ц'чше. чем величина времени сканирования.
Цифровые радиоприемные устройства. Использование цифровой техни-
ки в приемниках ВРТР основано на возможности выполнения сколь угодно слож-
ных, функциональных операций над дискретизированными по уровню и времени
цифровыми эквивалентами принимаемых сигналов. Принципиальные ограничения
по характеристикам цифровых устройств обработки связаны с быстродействием
104
Глава Г Радаоэлекп1ронная разведка
выполнения основных операций, разрядностью представления данных и необходи-
мым объемом памяти для хранения данных.
Преимущества цифровых методов обработки общеизвестны [47]: высокая
точность и стабильность характеристик аппаратуры, возможность запоминания,
хранения и воспроизведение сигнала, что очень важно для систем непосредствен-
ной РТР поддержки РЭП. Недостатки цифровых методов (зависимость ширины
частотного диапазона разведки от быстродействия цифровых схем, дополнитель-
ные погрешности, обусловленные шумами вычислений, аналого-цифровыми и
цифроаналоговыми преобразованиями) достаточно убедительно компенсируются
преимуществами цифровых устройств [15]. Совершенствование методов и алго-
ритмов обработки сигнала, использование современной элементной базы РЭ аппа-
ратуры позволяет решать многие задачи ВРТР при помощи цифровых приемников.
Цифровое радиоприемное устройство (ЦРПУ) — это приел ное устрой-
ство, в котором осуществляется обработка сигнала в аналоговой и цифровой фор-
мах. В ЦРПУ, предназначенном для приема аналоговых сигналов, осуществляется
полная или частичная цифровая обработка сигналов (ЦОС). По степени использо-
вания ЦОС ЦРПУ можно разделить на две группы:
• приемники, в которых отсутствует преобразование принимаемого сигнала в
цифровую форму, а на цифровой элементной базе реализованы отдельные узлы
(УУ, контроля, отображения информации, системы вхождения в связь. ЦСЧ);
• приемники, в которых сигнал преобразуется в цифровой вид и на цифровой
элементной базе выполнена часть главного тракта приема, включая цифровой
фильтр селекции сигналов, цифровые демодуляторы, цифровые устройства распо-
знавания и измерения параметров сигналов, а также вспомогательные узлы.
Практически все современные профессиональные ЦРПУ' имеют в своем со-
ставе узлы, реализованные на цифровой базе. К приемникам второй группы отно-
сятся устройства, в которых в аналоговом виде осуществляется предварительная
фильтрация сигнала, его усиление, преобразование частоты сигнала на ПЧ, далее
сигнал ПЧ подвергается АЦП и вся дальнейшая обработка сигнала осуществляется
в цифровом виде. Ко второй группе относятся практически все современные ЦРПУ.
Обобщенная структурная схема ЦРПУ [33] показана на рисунке 2.15.
L____________________________________________________________________________________J
Рис. 2.15. Обобщенная структурная схема ЦРПУ
Глава 2. Радноэлектронная развеох
105
Усилительно-преобразовательным тракт принимает сигнал от антенны,
отфильтровывает его от помех, смещает спектр входного сигнала на ПЧ, на кото-
рой выполняется АЦП. В состав тракта могут входить вспомогательные узлы - си-
стема АРУ, аттенюаторы, ограничители. В тракте ЦОС осуществляется основная
обработка сигнала. Он включает фильтр, определяющий помехоустойчивость при-
емного устройства, демодулятор, цепи последетекторной обработки.
Синтезатор частот (СЧ) преобразует частоту внешнего или собственного
опорного генератора и формирует из него необходимые для работы сетки частот.
СЧ позволяет перестраивать приемное устройство на другую входную частоту. От-
дельные СЧ могут входить в состав следящих систем, формировать сетки частот,
необходимые для работы цифровых устройств обработки сигнала.
Устройство управления и отображения реализует в автономном режиме
заданный алгоритм работы приемного устройства (включение, выключение, поиск
и выбор сигнала, адаптацию к меняющимся условиям работы и т.п.). Вторичный
источник питания предназначен для преобразования энергии первичного источ-
ника (бортовой сети), в форму пригодную для использования непосредственно в
приемном устройстве.
Для реализации цифрового приема сигналов в заданной полосе частот сиг-
налов в аппаратуре обязательным является наличие двух основных устройств: ана-
лого-цифрового преобразователя (АЦП) и процессора, выполняющего дискретное
преобразование Фурье (ДПФ) (рисунок 2.16).
Рис. 2.16. Цифровой приемник-спектранализатор
.АЦП осуществляет квантование по уровню и дискретизацию по времени
сигнала 5(?), поступающего от входной ВЧ части приемника или после гетероди-
нирования на ПЧ. Если сигнал 5(г) изменяется в диапазоне 5’inin..-5'max, то каждое
числовое значение, харакгеризующее величину аналогового сигнала в момент t,, на
выходе представляется /7-разрядным двоичным кодом с погрешностью квантова-
ния, относительная величина которой не превосходит 2 ". Отдельные элементы
данных, характеризующих величин} преобразуемого сигнала в моменты времени
t , формируются с некоторым интервалом At, называемым интервалом дискрети-
зации [7]. Обычно At определяется, исходя из величины верхней границы обслу-
живаемой полосы рабочих частот At < 1/2 f . Если f = 2 f. , Az = f - f. , to
t / J rnax max mm 7 p </ max J min 7
достаточно выбрать At = 1/ Af [47].
Современные технологии АЦП позволяют получать разрядность представ-
ления данных до 16 бит при частотах дискретизации входного сигнала от единиц
герц до 100 МГц. Разрядность представления данных в АЦП определяет и динами-
ческий диапазон обрабатываемых сигналов, предельное отношение 5max /Smin = 2".
106
Глшш 2. Радиоэлек1нронная разведка
АЦП, необходимое при переходе к ЦОС, предусматривает дискретизацию сигнала
по времени и квантование по уровню. Используя известное представление процесса
5(f) в виде огибающей и фазы или через две квадратурные компоненты [46], мож-
но получить
s(t) = <S(f )cos[ct>0/ - cp(f) = Х(/) cos + У(7) sin <дог, (2.55)
где S(t) и (p(n - соответственно огибающая и фаза процесса s(t), а
X(t) = s(t)cos<p(l), Y(f) = 5(nsin<p(f) - квадратурные компоненты, однозначно свя-
занные с огибающей и фазой соотношениями
S(t) = 7F?r) + r2(7); р(О = arctg^- . (2.56)
Х(7)
Из (2.55) и (2.56) следует, что процесс на выходе линейной части разведы-
вательного приемника однозначно определяется парами процессов: огибающей
S{t) и фазой (p(t) или квадратурными компонентами X(t) и }'(/). Для такого пре-
образования процесса 5(f) в цифровую форму достаточно сформировать цифровые
выборки двух процессов: огибающей S(r) и фазы <р(0 либо квадратурных компо-
нент А (/) и У(7) [15]. Основные характеристики и показатели качества АЦП:
• число разрядов (число символов кода, необходимое для того, чтобы в вы-
бранной системе исчисления отобразить в заданном объеме информацию о преоб-
разуемом сигнале);
• нелинейность (максимальное отклонение уровней квантования от линеари-
зованной характеристики преобразования);
• дифференциальная нелинейность (максимальное отклонение значения
младшего разряда от его среднего значения);
• погрешность в конечной точке шкалы (отклонение уровня квантования от
номинального значения в конечной точке характеристики преобразования);
• время преобразования (интервал времени от момента заданного изменения
входного сигнала до появления на выходе соответствующего устойчивого кода);
• диапазон входного напряжения (динамический диапазон);
• максимальное значение опорного напряжения [20].
Диапазон входного напряжения (тока) и максимальное значение опорного
напряжения, как и другие конкретные параметры, зависят от типа АЦП. В частно-
сти, разрядность АЦП определяется двумя факторами: допустимым уровнем шума
квантования и выбранным динамическим диапазоном.
Следующим этапом обработки в схеме на рис. 2.16 является реализация
ДПФ, при котором преобразованию подвергаются элементы конечной структуры
данных - векторы, полученные при равномерной дискретизации с интервалом Xt
входного сигнала длительностью . Длина обрабатываемого вектора
S = (5(0),...,5(Л' - 1))т, 5(/) = 5(7 = iXt), 7 = 0, Л -1 определяется соотношением
N = Tc/Xt.
Для формирования вектора перед выполнением спектрального анализа в
структуре цифрового приемника обычно требуется предусмотреть использование
Глава 2. Радиоэл^юпронная разведка
107
буферной памяти накопления данных. При выполнении ДПФ на выходе процессора
формируется N спектральных составляющих
/=0
(2-57)
при этом расстояние между спектральными линиями ДПФ, то есть фактическое
разрешение, равно \/Тс .
Прямая реализация ДПФ в последовательных алгоритмах не находит при-
менения, вычисления по приведенной выше формуле требуют примерно N2 опера-
ций сложения и умножения. На практике широко применяется метод быстрого пре-
образования Фурье (БПФ), в котором объем вычислений имеет порядок NlogjN
операций сложения и умножения [7]. Для обеспечения непрерывности обработки
сигналов в цифровом приемнике схемы рис. 2.16 должен быть реализован анализ
перекрывающихся по времени входных реализаций.
Особенно следует отметить цифровое МИЧ-приемник, имеющий очень
широкую полосу частот и обеспечивающий мгновенное перекрытие большой части
спектра. Его чувствительность ниже чувствительности перестраиваемого по часто-
те супергетеродинного приемника. Дальность обнаружения сигналов подавляемых
РЭС приемником с МИЧ будет несколько меньше дальности обнаружения суперге-
теродинного приемника [15]. Принимая РЛ сигналы с перестройкой несущей ча-
стоты от импульса к импульсу, цифровой приемник с МИЧ регистрирует несущую
частоту каждого импульса, в то время как на выходе супергетеродинного приемни-
ка импульсные сигналы будут возникать в случайные моменты времени, определя-
емые моментами попадания сигнала в узкую полосу приемника. Для перехвата им-
пульсов длительностью 0,1 мкс в полосе частот 2... 18 ГГц приемнику с МИЧ доста-
точно использовать 1600 фильтров, одновременно перестраиваемых за это время в
полосе 10 МГц каждый. Особенностями вышеуказанных приемников являются
возможности измерения частоты излучаемых РЛС импульсов при ее перестройке от
импульса к импульсу и внутриимпульсном кодировании, прямое подключение
принимаемых сигналов к процессорам без использования АЦП. Сравнительные
характеристики цифровых приемников МИЧ приведены в таблице 2.4 [20].
Таблица 2.4 — Характеристики цифровых приемников МИЧ
Параметры приемников Диапазон частот, ГГц
1...2 2...4 4...8 8...12 12...18
Мгновенная полоса частот, МГц 1060 2120 4240 4240 6360
Чувствительность, дБ/Вт -95 -95 -95 -95 -90
Динамический диапазон, дБ 70 70 70 70 65
Разрешение по частоте, МГц 0,52 1,04 2,08 2,08 3,12
Точность определения частоты (СКО), МГц 1,25 2,50 5,00 6,50 12.00
Минимальная длительность принимаемого импульса, нс 95 60 45 45 40
108
Глава 2. Радиоэлектронная разведка
Возможной альтернативой построения беспоискового многоканального по
частоте приемника с ЦОС является использование блока цифровых ПФ, перекры-
вающих заданную полосу анализа частот. Фильтры могут быть с конечными и бес-
конечными импульсными характеристикам ! имеют высокую стабильность пара-
метров, любые самые разнообразные формы АЧХ и ФЧХ, не требуют настройки и
легко программируются [47]. До настоящего времени в силу ограничений по быст-
родействию выполнения операций над данными они уступают по возможностям
параллельной обработки сигналов в широкой полосе частот процессорам БПФ.
2.9. Методы определения местоположения РЭС
При выполнении прицеливания требуются данные о дальности до цели,
скорости сближения, углах пеленга и угловых скоростях линии визирования в вер-
тикальной и горизонтальной плоскостях. В случае самоприкрытия цели помехами и
при подавленных в БРЛС каналах измерения дальности и скорости, а также при
действии по другим радиоизлучающим целям определение местоположения ПРИ
проводится пассивными методами Г15].
Процедуры определения фазовых координат состояния радиоизлучающей
цели являются достаточно сложными и могут быть классифицированы по множе-
ству признаков. В зависимости от количества оцениваемых координат состояния
пеленгуемой цели различают позиционные и позиционно-скоростные методы
[48]. При использовании позиционных методов определяются только абсолютные
или относительные координаты, характеризующие местоположения цели в про-
странстве. Позиционные методы определения координат ПРИ используются для
определения местоположения наземных РЛС и других радиоизлучающих средств
противника при ведении воздушной разведки, а также при применении противора-
диолокационных ракет, при нахождении расстояния до воздушной цели, когда до-
пустимы большие погрешности оценивания. Позиционно-скоростные методы поз-
воляют наряду с местоположением определять скорости и ускорения движущейся
цели. В рамках последнего метода фазовые координаты ЛА и измерения представ-
ляются в виде векторов в многомерном пространстве состояния.
Среди алгоритмов, оптимальных по минимуму дисперсии ошибок оценива-
ния состояния радиоизлучающих целей, можно выделить три большие группы. Од-
на из них, получившая наибольшее распространение, базируется на использовании
процедур оптимальной фильтрации (как нелинейной, так и линейной) [49]. В осно-
ве второй группы лежат алгоритмы метода наименьших квадратов. В последнее
время все большее распространение получают алгоритмы третьей группы, осно-
ванные на использовании процедур параметрической идентификации.
На практике приходится использовать алгоритмы с автоматическим устра-
нением расходимости. Наиболее точными из них являются алгоритмы адаптивной
фильтрации [50]. Более простыми являются алгоритмы фильтрации с коррекцией
коэффициентов усиления невязок на основе S-модификации фильтра Калмана [51,
52] и алгоритмы с оптимальной коррекцией прогноза на основе математического
аппарата статистической теории оптимального управления [53].
Глава 2. Радцоэлекп1])онш1^ разведка
109
Местоположение РЭС противника может быть определено как прямыми,
так и косвенными методами. Под прямыми методами понимают измерения ме-
стоположения источника в результате непосредственной обработки принимаемых
сигналов. В косвенных методах определение местоположения источника по
формулам, связывающим координаты источника с его пеленгами, произведенны-
ми из нескольких точек, и расстояниями между точками измерения пеленгов. Ос-
новное отличие между прямыми и косвенными методами определения местопо-
ложения: прямой метод - местоположение принципиально может быть осу-
ществлено за счет направленного приема сигнала в одной точке; косвенный ме-
тод - требуется осуществить прием и пеленгацию минимум в 2-х точках про-
странства [15]. Задача определения местоположения РЭС при ведении РЭР прин-
ципиально не отличается от соответствующей задачи радионавигации. Однако она
усложняется рядом обстоятельств:
1. Ни параметры разведываемых сигналов, ни режим работы РЭС заранее
не известны. Разведывательный приемник не согласован с принимаемым сигна-
лом, что ухудшает соотношение сигнал/шум и характеристики обнаружения.
2. Для определения местоположения разведываемых РЭС нельзя использо-
вать методы радионавигации, которые требуют согласованной работы передающе-
го и приемного устройства. Это снижает точность и затрудняет определение ме-
стоположения РЭС.
3. Средства ВРТР определяют местоположение РЭС в системе координат,
связанной с самолетом-разведчиком. Для привязки разведанных РЭС к местности
необходимо определять местоположение самолета и ориентацию его в простран-
стве в момент измерения координат РЭС (производится обычными навигационны-
ми способами).
4. Необходимая точность определения местоположения РЭС зависит от цели
разведки. Если координаты РЭС определяются с целью организации их подав пения
САП. то в высокой точности измерения координат нет необходимости. Если же ко-
ординаты РЭС измеряются с целью его последующего поражения (уничтожения),
то точность измерения координат при ведении ВРТР должна быть значительно бо-
лее высокой. Обеспечение высокой точности определения местоположения РЭС -
одна из наиболее трудных задач ВРТР [37, 54].
На первом этане на основании анализа РТ параметров сигналов объектов
разведки определяются геометрические параметры (пеленг, направляющие коси-
нусы или разности дальностей), однозначно характеризующие искомое местопо-
ложение РЭС относительно места самолета-разведчика. На втором этапе на ос-
нове геометрических параметров вычисляются пространственные координаты
РЭС. Чаще всего средства РТР для местоопределения ИН используют триангуля-
ционные методы, но находят применение и другие методы - взаимокорреляцион-
ные, основанные на разностно-дальномерных измерениях, и комбинированные.
2. 9.1. Триангуляционнь-г метод
К позиционным методам определения местоположения целей относится
широко известный триангуляционной метод, называемый также пеленга цион-
по
Глава_ 2. Радиоэлеюпррннар разведка
ным или угломерным [9, 48]. Триангуляционный метод определения положения
цели основан на определении направлений (пеленгов) на ИИ в двух точках про-
странства и использует формульные зависимости между сторонами и углами тре-
угольника, вершины которых связаны с целью и ЛА. Этот метод предполагает ре-
шение алгебраических уравнений. Принцип триангуляционного местоолределе-
ния на основе измерений азимута и угла места ИИ иллюстрируется рисунком 2.17.
РЭС (x,y,z)
Рис. 2.17. Триангуляционное местоопределение
Линией положения - геометрическим местом точек, которым соответству-
ют постоянные значения измеренного азимута a - const и угла места ft = const -
является прямая. Поэтому точка положения излучающего объекта в пространстве
может быть определена на пересечении двух таких прямых, т.е. по двум парам оце-
нок (а *; /3 *), измеренных в двух точках, разнесенных в пространстве [15]. Пелен-
гаторы расположены на поверхности Земли на расстоянии d друг от друга. С пелен-
гаторами связаны декартовы топоцентрические системы координат соответственно
OIXIYZI и <92A2Y,Z2. Если в качестве основной системы принять одну из систем
координат OtX.YlZl = Oxyz, то координаты объекта разведки в этой системе можно
оценить на основе очевидных из рисунка 2.17 геометрических построений [9]
, sin a, cos а.
х = d----------------L,
sin(cz2 - а,)
sintz2 sin
sin(cr> -а,)со8(Д + cp2)
d sin a,
III- .1 « I I —. —..
R sin(a2 — a})
(2.58)
(2-59)
(2.60)
(2.61)
Глава 2. Радиоэлектронная разведка
111
sma
5
R sin(a, - «J)
где R - радиус Земли для топ области, где работают пеленгаторы; Az - превыше-
ние точки расположения 2-го пеленгатора над точкой расположения 1-го пеленга-
тора.
Для определения трех пространственных координат объекта разведки в
принципе достаточно трех независимых измерений. В четырех измерениях (двух
азимутов и двух углов места) содержится избыточность. Но практически число из-
мерений для местоопределения не только не уменьшают, но даже увеличивают за
счет применения большего числа пеленгаторов. Действительно, при двух пеленга-
торах возможны такие ситуации, когда две из трех пространственных координат не
определяются. Это непосредственно следует из (2.58) - (2.62) при На прак-
тике обычно используют число пеленгаторов больше двух. Избыточность в изме-
рениях позволяет увеличить точность определения местоположения РЭС 115].
Триангуляционный метод с использовнаием фазового пеленгатора, оцени-
ваюшего направляющие косинусы, описан в [9]. Для триангуляционного определе-
ния пространственных координат объекта разведки вовсе не обязательно использо-
вать неподвижные пеленгаторы. Пеленгаторы могут перемещаться в пространстве,
но при этом нужно, чтобы законы их движения (траектории) были известны и вре-
менные зависимости собственных мгновенных координат ].x(/), _v(/),z(/)} учитыва-
лись бы при обработке. Измеряя пеленги на ИИ в разных точках, которые последо-
вательно занимает ЛА при движении по траектории, и зная координаты этих точек,
можно вычислить неизвестные координаты неподвижного излучающего объекта.
СКО определения местоопределения зависит не только от ошибок пелен-
гации, но и от дальности и D.) до РЭС и угла пересечения пеленгов у
Дон
Да,
sin у
и _ дисперсии ошибок пеленгации.
При использовании идентичных пеленгаторов сгДа] = <т. = сгд
ТР
(2.63)
ТР
smy
Существенным недостатком триангуляционного метода является то, что
при увеличении количества ИИ, находящихся в зоне действия пеленгаторов, могут
происходить ложные обнаружения несуществующих источников (рисунком 2.18).
Антенны пеленгаторов, расположенных в точках П1 и П2, обладают конеч-
ной шириной ДН. Если в пределах этой ширины наблюдаются несколько ИИ
(например, как па рис. 2.18 два источника ОР1 и ОР2) по азимутам соответственно
а.., О' и О', , то триангуляционная система кроме истинных координат (х,у.)
и (х, v„) будет определять ложные координаты (,v, yt) и (х2у,). Соответствующие
этим координатам ложные отметки местоположения объектов разведки (ЛЦ1 и
112
Глава 2, Радиоэлек1П])онная разведка
ЛЦ2 на рис. 2.18) находятся на пересечении линий пеленгов. Исключить ложные
обнаружения можно путем получения избыточной информации о пеленгуемых ис-
точниках - увеличением количества разнесенных пеленгаторов или опознаванием
принадлежности получаемой информации к определенному источнику.
Рис. 2.18. Эффект размножения целей при пеленгации
Опознавание может быть проведено при сравнении сигналов, принимаемых
пеленгаторами, по несущей частоте, периоду следования и длительности импуль-
сов. Дополнительную информацию о положении и количестве ИИ получают и за
счел корреляционной обработки сигналов, принимаемых в пространственно разне-
сенных точках [4].
Триангуляционный метод определения координат
радиоизлучающих целей
В простейшем случае при неподвижной цели этот метод основан на измере-
нии угловых направлении на объект в двух приемных пунктах, разнесенных на рас-
стояние L, называемое базой (рисунок 2.19). Если самолет перемещается в горизон-
тальной (вертикальной) плоскости, достаточно измерить два азимута и а, (или
угла места Д и Д,). Местоположение цели определяется точкой пересечения двух
прямых, каждая из которых является линией положения, т.е. геометрическим ме-
стом точек возможного местонахождения ИИ. При определении пространственных
координат цели достаточно точно измерить азимуты и а, в двух пунктах и утол
места Д и Д в одном, либо, наоборот, углы места Д и Д в двуч пунктах и ази-
мут и в одном.
На рисунке 2.19 точка Т характеризует положение цели на земной поверх-
ности, а точки Р] и Р2 показывают положение самолета в моменты времени /, и г,
измерения углов. Положение точки Р] на рисунке совпадает с началом системы ко-
ординат. Точка Th — проекция точки Т на горизонтальную плоскость, проходящую
Глава 2. Радиоэлектронная разведка
через траекторию полета самолета. OXYZ - прямоугольная невращающаяся система
координат, ось OY направлена по местной вертикали, ось ОХ совпадает с линией
пути самолета, движущегося прямолинейно в горизонтальной плоскости.
Рис. 2.19. Определение местоположения неподвижной цели триангуляционным методом
Местоположение цели соответствует точке пересечения трех поверхностей
положения (трех плоскостей). Дальность до цели вычисляют по измеренным углам
и известной базе L [48]
£ =-----------—-----------(2.65)
cosР] (cosa, -sma}ciga2)
Выражение (2.65) не имеет смысла при = 90°, а, = 0°, Д = 90° . В само-
летных системах обычно имеют дело с углами визирования цели в вертикальной и
горизонтальной плоскостях. Так как точность пеленгования ограничена, вместо
линий и поверхностей положения приходится иметь место с областями положения.
Размеры областей положения (областей неопределенности) тем больше, чем выше
заданная вероятность местонахождения объекта в пределах области. Для уточнения
положения цели в расчет необходимо вводить большее число результатов измере-
ний. чем это минимально необходимо для определения координат. Точность изме-
рения наиболее высока, если угол пересечения линий положения достаточно бли-
зок к прямому, и заметно снижается, если линии положения пересекаются под ост-
рым утлом.
Минимальная ошибка определения местоположения будет, если цель рас-
полагается в точке, находящейся на перпендикуляре, восстановленном в середине
базы, на расстоянии 0.35L от базы [15]. Этой точке соответствует угол у = 109° (у
— угол, определяемый направлениями на точки пеленгации с цели, или угол, обра-
зуемый двумя пеленгами на источник). Минимальная ошибка не превосходит 4 % в
случае, когда отношение дальности от объекта до середины базы к базе находится в
пределах от 0,2 до 0,8. Статистическая обработка случайных ошибок позволяет
уменьшить СКО определения дальности R для триангуляционного метода
114
Г\лава_ 2. Радиоэл£1рпронная разведка
R
(2.66)
где у¥ - число отсчетов; сга — СКО пеленгатора [48]. Выражение t2.66) справедливо
при 0° < у <180°. При определении координат наземных пелен часто высота поле-
та ЛА значительно меньше дальности до цели, поэтому угол места близок к нулю.
Случай двукратной пелен! ации имеет место при ведении воздушной раз-
ведки наземных РЛС. При пеленгации неподвижного ИИ, расположенного в точке
Т, из двух точек Р} и Л (рисунок 2.20 а), отстоящих друг от друга на расстояние L,
координаты источника определяются путем решения треугольника РхТР-> по двум
углам (р{ и (р2 и основанию L. При этом имеют место следующие соотношения [37]
= ср1-(р, - утол. равный разни-
, 2 ч , R. = . , ч • (2.67)
где (р} и (р2 - бортовые пеленги цели в точках Т~\ и Р относительно направления
полета, совпадающего с продольной осью самолета.
Минимальные погрешности определения координат при двукратной сим-
метричной пеленгации получаются при у = 70.5° (
це пеленгов). Отношение дальности R до цели по линии траверза к базе L равно 0.7.
Ранее для угла у было приведено другое значение (109.5'). Различие в значениях
чисел объясняется тем, что при минимизации ошибок местоположения в 48] ми-
нимизировалась величина crR / L , а в работе [37] — <rR / R.
При выполнении боевого задания самолетом важна погрешность определе-
ния местоположения цели, отнесенная к дальности до цели. В работе [37] найдено,
что при двукратной пеленгации на базе, сравнимой с дальностью до объекта, и точ-
ности пеленга около одного градуса, относительная погрешность определения ме-
ста 3...5 %. Предполагается, что координаты ЛА, осуществляющего пеленгацию,
определяются с существенно более высокой точностью, чем координаты цели, т.е
составляющими из-за неточности знания собственных координат ЛА можно не
считаться.
( лучай малых углов пеленгации. Некоторые варианты боевого примене-
ния авиации требуют полета к наземной РЛС по кратчайшему пути. При примене-
нии ПРЛ ракет вначале осуществляется обнаружение работающей наземной РЛС,
затем измерение ее координат и далее прицеливание и пуск ракеты, который целе-
сообразно производить при совпадении ее продольной оси с направлением на цель.
Продолжительность процедур обнаружения, измерения и прицеливания должна
быть минимальной, чтобы в максимальной степени обеспечить безопасность само-
лета-носителя. В процессе обнаружения, измерения и прицеливания траектория
самолета должна иметь искривление. В этом случае приходится определять даль-
ность до цели при малых углах пеленга цели. Пеленги на РЛС измеряются в двуос
точках: точке Р\ первоначального обнаружения (дальность 7?i) и точке Рг выдачи
данных (ТС) (рисунок 2.20 б).
Глава 2. Радиоэлект^^
115
Рис. 2.20. Определение местоположения неподвижной цели при
двукратной пеленгации в одной плоскости (а) и в случае малых углов пеленгации (б)
Недостатками метода являются: 1) увеличение точности пеленгации
требует увеличения габаритов антенных устройств, что не всегда допустимо на ЛА;
2) дальность пеленгации в УКВ диапазоне ограничивается дальностью прямой ви-
димости; 3 ♦ при пеленгации РЭС двумя и более пеленгаторами, установленными на
различных ЛА, усложняется аппаратура разведки [15].
Случай многократной пеленгации. В процессе воздушной разведки воз-
можен прямолинейный полет самолета и измерение пеленгов цели через равные
промежутки времени. Получены алгоритмы обработки результатов измерения по
методам наименьших квадратов и весовых коэффициентов. Целесообразным явля-
ется такой порядок обработки, когда два пеленга, соответствующие одному изме-
рению. выбираются симметричными относительно линии траверза. При большем
числе пар пеленгов (более 10) оптимальный угол между крайними пеленгами со-
ставляет 102,67° [48].
2. 9.2. Разностно-дальномерный метод
Триангуляционная система местоопределения поддерживается измерения-
ми пеленгов (или направляющих косинусов) объекта разведки. В совокупности
оценок пеленгов из разных точек пространства разрутпена значительная часть ин-
формации о взаимной корреляции принимаемых сигналов разведываемого объекта.
Учет этой информации может существенно повысить точность местоопределения.
Взаимную корреляцию сигналов в разнесенных точках используют разностно-
дальномерные методы местоопределения [9]. Геометрические соотношения, ил-
люстрирующие применение разностно-дальномерного метода местоопределения,
показаны на рисунке 2.21.
Местоположение ИII на плоскости определяется в результате измерения
разности моментов времени приема сигнала в двух точках, разнесенных на величи-
ну базы d. Геометрическое место точек, соответствующих разности дальностей
R} (,v, у) - Л, (х, у) = AR, = const, это гипербола. Точка положения ИИ находится как
точка пересечения двух гипербол, для построения которых нужно измерить две
разности дальностей А7?12 и ДЯ,. на двух базах d]2 и d23. Для определения трех
116
Глава 2. Радиоэлектронная разведка
пространственных координат нужно, соответственно, получать три независимых
измерения на трех базах [15].
Рис. 2.21. Разности о-дальномерный метод местоопределения
Для измерения разности дальностей до объекта разведки применяются вза-
имокорреляционные измерители (рисунок 2.22).
от ИI:
П РМ
► ПРМ
ЛЗ
Рис. 2.22. Взаимокорреляционный измеритель
Схема подобна схеме фазового пеленгатора и содержит: двухканальное
РПУ с общим гетеродином (Г) на оба канала; ЛЗ - измерительную ЛЗ; измеритель,
состоящий из перемножителя и интегратора; СУ - систему управления, синхронно
Глава 'L разведка
управляющую ЛЗ; дифференцирующую цепь. В этом следящем измерителе сигна-
лы с выходов обоих каналов перемножаются, результат перемножения усредняется
и управляет задержкой в ЛЗ, устанавливая Дт *, при котором максимизируется
выходное напряжение измерителя z(/). Оценка Дт * - это формируемый схемой
выходной отсчет. На выходе включена дифференцирующая цепь dj dt для форми-
рования нечетной дискриминационной характеристики измерителя.
На входах антенн создаются напряжения
w, (?) = Re {£, (?) ехр(/®0?)},
W] (?) = и2 (t - At) = Re {£, (t - At) exp (jco0 (t - Д?))},
(2.68)
где At = AR/c = (R - £, )/c = t -f2 — измеряемая взаимокорреляционным измерите-
лем разность задержек когерентных сигналов, связанная с пеленгом соотношением
ARV = d cos 8 = с At.
(2.69)
Гетеродин создает напряжение z/r(?) = Re(£r ехр(у(д)0 + &>Iir)?)j. При иде-
альных идентичных комплексных коэффициентах передачи приемников в точках 4,
5 формируются напряжения
U2(t) = Re{£0(?)• £д ехр(./бУ1|Г/)},
(?) = Re {£о(г - At) £д ехр(уй)пг?) • ехр(-у«0Д?)} .
ВЧ взаимокорреляционная функция принимаемого сигнала
_ «о(О "о(' + ') dt = -Re{fi„(r)exp(y<i>(,-)}
О ~
т
где 7^ (г) = Г£0(?)£ (? + г) dt - огибающая корреляционной функции.
J
о
Выходной эффект измерителя на выходе 8 имеет вид
т
Z(r) = 2£ J//,(?- r)u2(t - Ат*) dt =
о
(2.70)
(2.71)
(2.72)
£ (t -At - т)Е0У - Дт*)ехр(- /(<у0Д? + &>пг(/ - AT*))dt
Сравнивая полученное выражение (2.72) с (2.71), можно установить, что
полезный выходной эффект измерителя с точностью до коэффициента пропор-
циональности совпадает со смещенной АКФ принимаемого сигнала
7(т) = г[т-(Дт*-Дг)] = £,
[г-(Дт*-Дт)1
L -“-Л1
(2.73)
Выходной эффект (2.73) корреляционного измерителя в точке 8 воспроиз-
веден на рисунке 2.24. Выражение (2.73) позволяет сделать следующие выводы.
118
Глава 2. Радиоэлектронная разведка
1. Выходной эффект взаимокорреляшюнного измерителя соответствует
смещенной на Ат*-Ат = Ати АКФ К (т) принимаемого сигнала с отличием лишь
частоты заполнения (й)пг вместо щ0).
б/
2. При установке ЛЗ на величину задержки Ат* = А/ = —sins Z(t) совме-
щается с А?0(т) по методу максимума.
Для повышения точности измерителя система, следящая за задержкой Ат,
формирует производную dr . Измерения взаимокорреляционной функции
можно проводить по огибающей выходного эффекта R^ т-(Ат*-Дт)], показан-
ной на рисунке 2.23 пунктиром, но точность отсчета задержки при этом будет ни-
же. Цифровой измеритель разности задержек сигнала на основе системы слежения
за максимумом взаимокорреляционной функции подробно описан в [9].
Функция ЯДА^т) - огибающая корреляционной функции - является чет-
ной. Максимум функции Яо (АЯт) будет проявляться при равенстве задержки сиг-
нала А/ и задержки т, введенной одной из ЛЗ. К выходу 8 интегратора подключе-
на дифференцирующая цепь, на выходе которой формируется сигнал dR (т)/ dr,
являющийся нечетной функцией (рисунок 2.24). Этот сигнал используется СУ для
подстройки ЛЗ.
Рис. 2.23. Выходной эффект
корреляционного измерителя
Рис. 2.24. Характеристика дискриминатора
Измерив относительную задержку, можно определить разность расстояний,
которую прошла волна от РЭС (ИИ) до антенн измерительной системы.
АЯП = dcoss = с At,
где s - направление на ИИ (направление прихода волны от ИИ составляет угол s
с нормалью к базе d).
Цифровой измеритель разности задержек сигнала на основе системы слеже-
ния за максимумом взаимокорреляционной функции описан в [9. 13].
Глава 2. Радиоэл£К1п^онная [разведка
119
Точность взаимокорреляционного из мерителя зависит от протяженности
базы d. При наличии ошибки измерения задержки сгДг ошибка определения пелен-
га составит
coss
(2.74)
Следовательно, для повышения точности местоопределения нужно увели-
п / 2 измерения сопровождаются очень большими ошибка-
чивать базу. При s
ми. Поэтому взаимокорреляционный измеритель должен иметь несколько непарал-
лельных баз. Применительно к широкополосным сигналам использование разност-
но-дальномерного метода местоопределения позволяет существенно уменьшить
ошибку местоопределения ПРИ (до 65 %) по сравнению с триангуляционным ме-
тодом [15]. Разностно-дальномерный метод наиболее удобен при определении ме-
стоположения импульсных РЭС. Технически метод сложен, гребует согласованной
работы аппаратуры разведки. В сложной РЭ обстановке задача выделения всеми
приемными устройствами сигналов одного и того же РЭС также представляет серь-
езные трудности.
2.9.3. Кинематическим метод определения местоположения
Простейший кинематический метод опирается на знание уравнений, опи-
сывающих процесс взаимного перемещения самолета и цели, в том числе и движу-
щейся. Современный кинематический метод, который можно было бы назвать
намико-кинематическим [45], основан на математическом описании в простран-
стве состояний относительного движения цели и ЛА. В качестве фазовых коорди-
нат относительного движения выступают дальность до цели и угловые координаты.
Данный метод хорошо сочетается с оптимальными (квазиоптимальными) алгорит-
мами оценивания. При использовании простейшего варианта кинематического ме-
тода модель относительного движения в одной плоскости описывается уравнением
co = V,!R.
(2.75)
где со — угловая скорость линии визирования; V - составляющая скорости движе-
ния цели относительно самолета, перпендикулярная линия визирования и называе-
мая тангенциальной; 7’ - дальность до цели (так как цель неподвижна, то пред-
ставляет собой проекцию скорости самолета на нормаль к линии визирования) [48].
При наличии оценок величин, входящих в формулу (2.75), ошибка вычис-
ления дальности определяется выражением
AR = R-R =
ДТсо - ДсоТ
о
СО'
(2.76)
А А А А
где Дсо = со - со. Д1'=Р;-К,; R, со,
Vt — оценки соответствующих величин.
Если считать ошибки Дсо и ДР' гауссовскими с математическим ожидани-
ем, равным нулю, некоррелированными между собой, то математическое ожидание
120
Глава 2. Радиоэлектронная разведка
ошибки АТ? оценивания R также равно нулю, а дисперсия DR ошибки &R с учетом
равенства V = Rco
(2.77)
R
со
СО'
где Dy и Da - дисперсии ошибок оценивания F, и со. DR меньше, чем больше со.
При фиксированном R увеличения со можно достичь возрастанием F,, что
обеспечивается за счет увеличения нормальной к линии визирования составляющей
скорости движения самолета. Одноразового оценивания дальности может быть не-
достаточно, в процессе прицеливания требуется периодически уточнять координа-
ты движущейся цели. Для достижения приемлемой точности необходимо специ-
альным образом формировать траекторию полета ЛА.
Простейший кинематический метод определения координат радиоиз-
лучающих воздушных целей позволяет определять расстояния до радиоизлучаю-
щей цели автономно без привлечения данных от других измерителен. Пусть цель и
истребитель для простоты движутся в одной плоскости. БРЛС истребителя Р (ри-
сунок 2.25) принимает сигнал от РЭС. установленного на самолете Т противника, и
измеряет угловое положение (бортовой пеленг) цели ср} и угловую скорость линии
визирования истребитель-нель
(2.78)
где £t - угол визирования в момент времени [48].
Рис. 2.25. Определение координат воздушной цели простейшим кинематическим методом
Глава 2. Радиоэлектронная разведка
121
Угловая скорость линии визирования связана с дальностью R\ до цели и
тангенциальной составляющей У/ге1 линейной скорости перемещения цели относи-
тельно истребителя
V. . = И. sin<7 +И,sine). = К + К„, (2.79)
tre\ Т э Р г 1 Tt pt\ 1 v
где q - курсовой угол цели; Ут - скорость цели; Vp - скорость своего самолета; УГ!
и /г ! - тангенциальные составляющие скоростей цели и истребителя.
При известных значениях скоростей VT, Vp и углов <7, измерение угловой
скорости 6), позволяет найти дальность до цели
^ = rrsin? + /fsin^ (280)
но скорость цели VT и угол q неизвестны. В этом случае истребитель Р маневром в
направлении относительно линии визирования LOSi изменяет угловое положение
линии визирования и, тем самым, бортовой пеленг цели.
Этот маневр приводит к изменению угловой скорости визирования, которая,
если пренебречь изменением курсового угла q за время маневра, становится равной
(2.81)
Разность }тловых скоростей и после выполнения маневра истребите-
ля определяется соотношением
Дщ = со, -
I •—
(2.82)
Изменением расстояния до цели за время измерений можно пренебречь,
R « , что позволяет упростить выражение (2.82)
Дбо =—(sin^- sin<p2), (2.83)
R,
k(o = bVpJR2 (2.84)
Величина ДИ = I .н - Г , характеризует изменение относительной танген-
циальной скорости цели, обусловленное только маневром истребителя Р. Она зави-
сит лишь от величины изменения угла пеленга (р и всегда может быть вычислена на
борту истребителя. Приращение угловой скорости Дш находится при непрерывном
отслеживании цели по угловым координатам путем вычитания угловых скоростей
Дбд = й)( — (о~. Дальность до цели А, рассчитывают по результатам измерений как
отношение приращения ДГ тангенциальной скорости истребителя к приращению
Д<у угловой скорости визирования [48]
122
Глава 2, Радиоэлектронная разведка
R2=bVpt/bco. (2.85)
Анализ точности определения дальности R до цели показывает, что вычис-
ление расстояния по формуле (2.85) приводит к значительным погрешностям. При
больших расстояниях до цели погрешность вычисления дальности существенно
возрастает. Требуется дополнительно вводить фильтрацию параметра R. например,
с помощью фильтра Каймана, т.е. необходимо переходить к кинематическому ме-
тоду определения координат в пространстве состояний. При последовательных
дискретных измерениях величин А К и Аш можно выполнять с помощью фильтра
оценивания дальности до цели и в результате значительно уменьшить погрешность
вычисления R.
2.9.4. Дальномерный и дальномерно-угломерный методы
При дальномерном методе определение местоположения разведываемого
РЭС производится измерением расстояния до него из двух или более точек (точки
А и В на рисунке 2.26). Линии положения в этом случае являются дугами окружно-
стей с центрами в точках А и В. Местоположение разведываемого РЭС находится
как точка пересечения линий положения. СКО местоопределения определяется
СКО измерения дальностей О и D,
где ст" , сг^ - СКО измерения дальностей. Дальномерный метод не нашел широ-
кого применения в ВРТР из-за сложности аппаратуры, необходимой для измерения
дальности до РЭС и невысокой точности измерения места [15]. Время разведки при
использовании данного метода оказывается большим.
Дальномерно-угломерный метод позволяег определять координаты разве-
дываемого РЭС с помощью аппаратуры разведки, установленной на одном ЛА, в
сравнительно короткие промежутки времени. При использовании этого метода для
определения местоположения РЭС из одной точки одновременно измеряется пе-
ленг (угол О на рисунке 2.27) этого РЭС и дальность D до него.
Рис. 2.26. Дальномерный метод
местоопределениия
Рис. 2.27. Дальномерно-
угломерный метод
Глава 2, Радиоэлектронная разведка
123
Местоположение РЭС определяется как точка пересечения линии пеленга с
окружностью радиуса D, проведенной из точки измерения. СКО ошибка место-
определения определяется выражением
<т„ = 7(0,0175-0., (2.87)
где сгде - СКО измерения пеленга; o\D - СКО измерения дальности.
К недостаткам угломерно-дальномерного метода относится сложность
разведывательной аппаратуры (необходимость иметь и пеленгатор, и дальномер) и
невысокая точность измерения дальности. Однако имеегся возможность быстрого
определения местоположения разведываемого РЭС, что особенно важно при раз-
ведке кратковременно излучающих РЭС [15].
На основании вышеизложенного сделаем несколько замечаний:
1. В случае самоприкрытпя цели помехами целесообразен переход к одно-
или многопозиционным системам определения местоположения цели, основанным
на пеленгационных методах. Наиболее широкое распространение получили одно-
позиционные системы [48]. Основны м недостатком является значительное время,
затрачиваемое на выполнение местоопределения цели, а в некоторых случаях и
низкая точность оценивания координат и параметров ее движения, а основное до-
стоинство - независимость от других ЛА и более простой состав оборудования,
чем в многопозпцпонных системах. Для получения удовлетворительной точности в
однопозиционной системе ЛА необходимо лететь по специальной траектории.
2. Способы и алгоритмы оценивания местоположения ИИ на основе угло-
мерных данных базируются на различных вариантах триангуляционного, разност-
но-дальномерного и кинематического методов. Триангуляционные методы опреде-
ления положения цели используют формульные зависимости между сторонами и
углами треугольника, вершины которых связаны с целью и ЛА (решение систем
алгебраических уравнений». Кинематические методы в пространстве состояний ос-
нованы на математическом описании собственного или относительного движения
цели и ЛА и использовании результатов измерений в алгоритмах фильтрации.
3. Некоторые методы определения местоположения целей предполагают
знание собственных координат и параметров движения ЛА. осуществляющего пе-
ленгацию. Устройство оценивания координат и параметров движения цели включа-
ет в свой состав, наряду с пеленгатором, датчики собственного движения ЛА.
4. В однопозиционных системах актуальной является задача управления ЛА
для достижения максимальной точности определения местоположения цели [15,
54]. Одним из резервов повышения точности функционирования измерительных
систем является разработка алгоритмов оптимального управления процессами
наблюдения, к решению задачи оптимального управления ЛА как измерительным
объектом привлекаются методы оптимального управления наблюдением.
2. 10. Методы определения дальности до РЭС
Рассмотрим некоторые методы определения дальности до РЭС, применяе-
мые в устройствах ВРТР. Угломестный метод определения дальности до РЭС ил-
124
Глава. 2, Радиоэлеюпроннар разведка.
люстрируется рисунком 2.28. При использовании угломестного метода горизон-
тальная дальность Dr до РЭС находится по высоте полета Н и углу места ср
Dr=H-tg<p. (2.88)
Этому методу присущи следующие недостатки', при больших значениях
ср точность метода невелика, так как в этом случае малым изменениям ср соответ-
ствуют значительные изменения функции ig(p; при больших дальностях сказывает-
ся кривизна земной поверхности (ошибка на дальности прямой видимости состав-
ляет 50 % от измеренного значения £>г).
Рис. 2.28. Угломестный метод измерения дальности
Угломестный метод целесообразно применять лишь при относительно не-
больших дальностях, не превышающих нескольких высот полета. Этот метод обес-
печивает приемлемые точности измерения только при больших высотах полета са-
молета [15]. Сфера его применения ограничена.
Метод измерения дальности по многократным значениям пеленга пред-
ставлен на рисунке 2.29. Станция разведки, установленная на ЛА, перемещается
вдоль оси X с путевой скоростью I [15].
Рис. 2.29. Измерение дальности по многократным значениям пеленга
Глава_ 2. Радиоэлект^Р^ЬРЗ. PHAJFPllPL
125
Пусть в момент времени /, самолет находился в точке А и пеленг разведы-
ваемого РЭС составлял угол 0(, а в момент в времени t2 самолет переместился в
точку В и пеленг РЭС составлял угол 02. За это время самолет пролетит путь
S = VAt, где Д/ = Л - /]. Тогда в момент времени А, появляется возможность изме-
рения дальности D до РЭС. Действительно по теореме синусов имеем
ГД/
sin©
sin(0, -0,)
sin(0, -©,)
(2.89)
Отсюда дальность до РЭС равна
тг sin О.
D = VM • ------’--.
sin(®2 -0j)
(2.90)
Достоинствами данного метода измерения D являются простота и доста-
точно высокая точность измерения дальности до РЭС. К недостаткам метода сле-
дует отнести следующее: большие ошибки при малых значениях курсовых углов
0, метод применяется, как правило, при углах 0 > 20°; невозможность использо-
вания метода при полете на РЭС; большое время разведки.
Метод измерения дальности по выходному напряжению приемника и
скорости его изменения. При полете на РЭС дальность D до РЭС и мощность
Рвхр сигнала на входе приёмника непрерывно меняются. Характер этого изменения
может быть использован для определения дальности до РЭС. При этом предполага-
ется, что разведываемое РЭС непрерывно сопровождает JIA, и, следовательно, зна-
чение его ДНА во времени не изменяется: Fc(6' ср ,t) ® const. Кроме того, предпо-
лагается неизменным во времени и значение ДНА станции разведки, антенна стан-
ции РТР сопровождает РЭС. Из уравнения дальности ВРТР, пренебрегая затухани-
ем ЭМВ, получаем
/>„.(/) = СДГ(/), (2.9!)
где С - ——- А уу/ «const; Рс - мощность излучения РЭС; Gc - КНД антенны
4лг
РЭС: у — коэффициент, учитывающий несовпадение поляризации сигнала разве-
дываемого РЭС и антенны станции ВРТР; у/ - коэффициент передачи мощности из
антенны на вход разведывательного приемника.
Прологарифмируем выражение (2.91) и выполним операцию дифференци-
рования по времени Рар(/)/Рвхр(0 = D(t) . Выражение для дальности мож-
но записать в виде
D(t) = -2D’(t)
(2.92)
Так как Рвхр(/) = Ajt/BXp(/) , где £/вхр(/) - эффективное напряжение на вхо-
де разведывательного приемника, то, полагая, что приемник работает в линейном
режиме с постоянным коэффициентом усиления, получаем
126
Глава 2. Радиоэлектронная разведка
(2.93)
где СВЬ1ХР(/‘) - эффективное напряжение на выходе разведывательного приемника.
При приближении к разведываемому РЭС
D'(f) = -V -cos0(Z), (2.94)
где #(/) - угол между направление.м вектора путевой скорости и направлением на
РЭС. Окончательно получаем
D(t) = V cos 6(t)
(2-95)
Дальность до РЭС можно определять, измеряя путевую скорость Г, угол
0(/) между вектором путевой скорости и направлением на Р 'С и напряжение на
выходе разведывательного приёмника. Достоинствами метода являются: 1) ма-
лое влияние значения утла 6(f) на точность измерения дальности; 2) метод приме-
ним при полете на РЭС, когда 6(f) = 0. Недостатками метода являются:
1. Величина С не всегда постоянная из-за изменений условий распростра-
нения ЭМВ, флуктуаций мощности передатчика и т.п.
2. Для реализации метода требуется приемник с линейной характеристикой
в широком диапазоне изменения входной мощности, которая изменяется обратно
пропорционально квадрату дальности до РЭС [15].
Существует несколько способов измерения дальности преимущественно
путем измерений уровня принимаемого сигнала и его изменениями [54], вызван-
ными перемещением ЛА:
• измерение дальности при малых высотах полета и малых курсовых утлах на
объект;
• определение дальности по характеристиках интерференционной кривой;
• определение дальности методом регистрации пролета горизонта:
• определение дальност i методами энергетических измерений.
Конкретный метод измерения дальности до РЭС выбирается с учетом задач
воздушной разведки, параметров разведываемых РЭС, радиоэлектронной и опера-
тивно-тактической обстановки.
2.11. Пеленгация РЭС средствами ВРТР
Направление на РЭС (или пеленгование РЭС) в целях ВРТР определяется
теми же методами, что и в радионавигации, и в радиолокации. Пеленгуются РЭС с
помощью антенн, ДНА которых позволяют установить направление прихода ЭМВ
(направление на ИИ). Пеленгаторы служат для определения угловых координат
ИИ. К пеленгационным устройствам станции РТР предъявляются высокие требова-
ния по: быстродействию (возможность измерения пеленга по максимально корот-
кой реализации сигнала, в идеале — по 1 импульсу); точности пеленгации; разре-
шающей способности в широком диапазоне частот [9, 15]. Различаю! два основных
способа определения пеленга: амплитудный и фазовый.
Глава 2. Padiiopj^KiHpoiman разведка 127
Амплитудный способ пеленгования основан на анализе амплитудного
распределения поля, создаваемого сигналом РЭС на раскрыве приемной антенны:
уровень сигнала максимален в том случае, когда раскрыв антенны параллелен
фронту падающей волны. Известны три разновидности амплитудного способа:
пеленгование по максимуму, по минимуму и пеленгование на основе сравнения
[7-10, 13, 15,43].
Пеленгование но максимуму ДНА применяют средства РТР, работающие в
дециметровом и сантиметровом диапазоне, в которых можно построить острона-
правленные антенны. ДН такой антенны показана на рисунке 2.30, где обо-
значены: 0. - угол ориентации максимума ДНА; 0И - угол между заданным
направлением и направлением на ИИ (истинный пеленг источника); 0 - угол меж-
ду направлением максимума ДНА и направлением на ИИ. При пеленговании про-
странственное положение ДНА изменяется и направление максимума совмещается
с направлением на ИИ. При использовании метода максимума ДНА обеспечивается
большая дальность пеленгации, но точность пеленгации невысока - она определя-
ется крутизной ДНА в окрестностях максимума и составляет примерно 0,1 от ши-
рины ДНА по уровню половинной мощности.
Пеленгование но минимуму ДН 1 применяется, когда можно сформировать
ДНА с ярко выраженным минимумом приема (рисунок 2.31).
Рис. .30. Пеленгация по максимуму
Рис. 2.31. Пеленгация по минимуму
Пеленгование осуществляется путем поворота ДНА до положения, при ко-
торое уровень сигнала на выходе приемника имеет минимальное значение. При
пеленгации по способ}' минимума достигается более высокая точность измерения,
поскольку в окрестности минимума ДНА имеет большую крутизну зависимости
dF(0,<p) / й0. Но дальность действия пеленгаторов по минимуму меньше, чем у
пеленгаторов по способу максимума (уровень принимаемого сигнала выше).
Структурная схема амплитудного пеленгатора, работающего по способу
максимума или минимума, представлена на рисунке 2.32. Сущность пеленгования
128
Глава 2. Радиоэлектронная разведка
на основе сравнения (метод равносигнальной пеленгации) иллюстрируется рисун-
ком 2.33.
Рис. 2.32. Следящий пеленгатор РТР
ДНА
Рис. 2.33. ДНА при равносигналь-
ной пеленгации
ДНА пеленгатора имеет два одинаковых главных лепестка Fi0) и F(0),
максимумы которых развернуты в пространстве на углы ±0О относительно неко-
торого среднего направления 0 = 0. Направление на РЭС определяется путем
сравнения сигналов на выходе пеленгатора, принимаемых соседними лепестками
Д(0-0О) и F,(0-0O) ДНА, отчет пеленга производится при равенстве амплитуд
сигналов на выходе приемного устройства. При 0 = 0 Д (0) = F,(0) и направление
0 = 0 называется равносигнальным. Амплитуды сигналов, принимаемых лепест-
ками ДНА такой антенны с некоторого направления 0, составят
Е} = K}EF} (0), Е2 = K2EF2 (0).
По физическому смыслу К и К2 - коэффициенты усиления принимаемого
сигнала, имеющего амплитуду Е. Представив функции Д(0) и F,(0) в окрестно-
сти 0 = 0 их степенными рядами и удерживая два члена разложения, получаем
Е} = К EF^-K^E
F(0) +
Л0
Е2 = К EF2(@) К2Ё F2(0) +
^Д(О) n
------0
d&
(2.96)
По условию Д (0) = Д(0), а производные ДНА в окрестности РСН равны по
абсолютной величине и имеют разный знак
dF(0)_ JF(0)_ dF(®)
dF) dF) d®
Решая (2.96) относительно пеленга 0 , можно установить, что
0 = А,Д(©)~ К'2Д(0)
2(F,+F2)F'(0)
(2.97)
(2.98)
Главр 2. PadaoppeKinponiutn разведка
129
В случае равенства коэффициентов усиления К{ = К2= К, угол пеленга
0 ^(0)~Л(©)_ Et-E2
4Г'(0) 4ХЕ'(0)
(2.99)
линейно связан с разностью уровней сигнала, принимаемых антеннами с ДНА
F}(®) и Е2(0). Измеряя разность уровней сигнала, можно определять пеленг. Ин-
тервал значений 0, в пределах которого имеет место линейная связь разности ам-
плитуд Ех-Е2 с пеленгом, может составлять величину порядка 0О. Примерный
вид этой зависимости — дискриминационной характеристики амплитудного пе-
ленгатора - представлен на рисунке 2.34.
Рис. 2.34. Дискриминационная характеристика амплитудного пеленгатора
Амплитудный пеленгатор, реализующий метод РСН для измерения угловой
координаты в одной плоскости, может использовать одну антенну, максимум ДНА
которой изменяет свое пространственное положение (сканирует) в пределах +0СК
около РСН, или две антенны, с ДНА, развернутыми на ±0 относительно того же
РСН. Пеленгатор со сканирующей антенной осуществляет последовательное срав-
нение амплитуд сигналов, принятых при разных ориентациях ДНА. Для определе-
ния угловых координат ИИ в двух направлениях антенна должна совершать пере-
мещения в двух плоскостях. Легче всего перемещение осуществить за счет враще-
ния ДНА вокруг РСН, при котором ось ДНА описывает коническую поверхность.
Амплитуда принятого сканирующей антенной сигнала
£(/) = Ео[1 + kEcos(QCKt -<р)1 = Ео[1 + ksx cosQ.CKt +ке} sinQcl7], (2.100)
где Ео - средняя амплитуда за период сканирования; е - угловое рассогласование
направления прихода падающей на антенну волны и РСН; QCK - угловая скорость
вращения ДНА при коническом сканировании; (р - фаза огибающей принятого мо-
дулированного по амплитуде сигнала; s, и s — ортогональные проекции состав-
ляющих угловой ошибки 8 ; к - крутизна дискриминационной характеристики,
равная в соответствии с (2.99)
Глава 2. Радиоэлектронная разведка
д(0) _ 1
д(Е} -Е2)~ 4KF'(0)
(2.101)
Амплитуды двух ортогональных составляющих огибающей принятого ска-
нирующей антенной сигнала Ех (z) = кехЕй cos QCK t, Е ‘. f) = ksyE sinQ^r содержат
информацию об угловых рассогласованиях направления на излучающий объект и
РСН. Выделяя эти амплитуды ФД, можно измерить составляющие угловой ошибки
£х и s. Если оси ДНА ориентированы соответственно в горизонтальном и верти-
кальном направлениях, ортогональные составляющие углового рассогласования £
будут соответственно ошибками пеленга по азимуту и по углу места.
Пеленгаторы, использующие последовательное сравнение амплитуд сигна-
ла, принимаемого одной сканирующей антенной в разные моменты времени, обла-
дают существенными недостатками. Онг: весьма чувствительны к таким колебани-
ям уровня принимаемого сигнала, которые искажают информативную для них оги-
бающую сигнала. В настоящее время в основном используют измерители угловых
координат с одновременным сравнением сигналов, принятых’ несколькими антен-
нами [7, 15]. Такие системы не разворачивают во времени процесс анализа ориен-
тации фронта волны, падающей на раскрыв антенной системы, их называют пелен-
гаторами с мгновенным РСН. или моноимпулЯсными (способными определять пе-
ленг мгновенно, по одному принятому Импульсу, а не по огибающей, которую
можно выявить только приняв и обработав некоторую пачку импульсов).
В моноимпульсных пеленгаторах применяют амплитудное, фазовое или
смешанное амплитудно-фазовое сравнение сигналов, принятых разными антенна-
ми. Усложнение пеленгатора с одновременным сравнением за счет замены одной
антенны системой их нескольких и соответствующий переход к многоканальному
приемному устройству - это плата за улучшение качества - точности пеленгации и
устойчивость к помехам.
Амплитуда а я обработка сигнала в моноимпульсных пеленгаторах осно-
вывается на использовании систем из нескольких антенн, минимум - двух для пе-
ленгации в одной плоскости. Амплитуды сигналов, принятых двумя антеннами, оси
ДНА которых развернуты на угол 0О относительно РСН 0 = 0, представляются
выражениями (2.96), а работа моноимпульсного пеленгатора с амплитудной обра-
боткой иллюстрируется рисунком 2.35.
При одинаковых формах ДНА и коэффициентах усиления приемников (рис.
2.35) отношение амплитуд, вычисляемое схемой сравнения, составит
д ^(0) эд+вд-0 1|2Н0)
Е2 F2 (0) ~ R (0) - К'(0) • 0 ~ “ /ДО)
(2.102)
Приближение в (2.102) оправдано постольку, поскольку
Д (0) = Е (0) = /ДО), F'(0) = -ГДО) = Г (0) и
F'(0)
/ДО)
Дискриминационная характеристика моноимпульсного пеленгатора с ам-
плитудной обработкой изображена на рис. 2.35.
Глава 2. РаЬиоэлектртпшя разведка
131
Рис. 2.35. Моноимпульсный пеленгатор с амплитудной обработкой сигнала
Для вычисления отношения (2.102) УПЧ идентичных приемников обоих
каналов пеленгатора охватываются цепями АРУ, причем регулирующее напряже-
ние в приемнике первого канала выбирается из условия постоянства амплитуды на
выходе приемника второго канала Е2 = const. Это возможно, когда коэффициент
усиления УПЧ второго канала обратно пропорционален амплитуде сигнала на его
входе, т.е. иАРУ -cfEm2 . Используя г/^ру для регулировки усиления в УПЧ
первого канала так, что кК - и <ру , можно полая ить на его выходе
Е.=КЕВХ1=с^-. (2.103)
^ В\ 2
Сравнение амплитуд Et и Е2 облегчается, если в обоих каналах использо-
вать УПЧ с логарифмическими характеристиками, а схему сравнения выполнить
как устройство вычитания. Действительно, разность логарифмов амплитуд эквива-
лентна монотонной функции их отношения - логарифму. При этом дискриминаци-
онная характеристика оказывается равной
//(0) = log = log (©) - log Е (0) (2.104)
Д,
и проходит через нуль при Д(0) = Д(0), т.е. при ориентации РСН на направление
прихода волны от ИИ.
Сумм ирно-разностная обработка сигнала в моноимпульсных пеленгато-
рах существенно снижает требования к идентичности амплитудных и фазовых ха-
рактеристик усиления в разных каналах. Для получения суммарных и разностных
сигналов выходы антенн моноимпульсного пеленгатора (рисунок 2.36) подключа-
ются к волноводному мосту (двойному волноводному тройнику).
Если фронт волны, созданной ИИ, образует с базой антенной системы мо-
ноимпульсного пеленгатора угол 0, то сигналы на входах антенн оказываются
сдвинутыми по фазе относительно фазы в центре базы на величину
Е(р = +л—sin0, (2.105)
где d - размер базы (расстояние между фазовыми центрами антенн).
132
Глсиш 'L Радиоэлект])онная разведка
Рис. 2.36. Моноимпульсный пеленгатор с суммарно-разное гной обработкой
Разностный н суммарный сигналы оказываются равными
и (/) = Ео cos(a)/ - &<р)-Е0 cos(d)/ + А</>) = 2Е0 sin Aipsin&ir,
и- (t) = E0cos(cot - A<p) + E, cos(d>r + A 4?) = 2£0cosA<7)COS6)r.
(2.106)
Амплитуды сигналов на выходе приемников разностного £д и суммарного
каналов будут пропорциональны £osinA<p и £bcosA<p соответственно, а их
отношение с учетом (2.105) и (2.106)
£д _ sinA<p
£v cos \(р
(2.107)
В пределах малых отклонений пеленга на 11И от РСН когда тангенс при-
мерно равен своему аргументу, дискриминационная характеристика пеленгато-
ра будет определяться соотношением
0 = arcsin
(2.108)
Ошибки при реализации амплитудного способа пеленгования возникают из-
за неидентичности амплитудных каналов приема сигналов, включая и искажения
формы реальных ДНА.
Фазовый способ пеленгования основан на использовании завис![мости
разности фаз сигналов, принимаемых двумя одинаковыми антеннами А1 и А2 (ри-
сунок 2.37), которые разнесены в пространстве на некоторое расстояние (базу d).
Если объект разведки удален от середины базы пеленгатора на очень большое рас-
стояние R » d , фронт излученной им волны около антенной системы пеленгатора
можно считать плоским.
Приемный тракт фазовых пеленгаторов строится, как правило, по суперге-
теродинной схеме, включающей перестраиваемый гетеродин (Г), смесители (СМ) и
УПЧ, а также ограничители (ОГ), используемые для уменьшения влияния неста-
бильности усиления сигналов в каналах, и ФД, обеспечивающий измерение разно-
сти фаз в канавах, которая преобразуется в выходной сигнал пеленгатора [15]. Раз-
ность фаз возникает из-за разности расстояний от ИИ до точек приема. Как следует
из рисунка 2.37, AD = d sin 0И . При разности расстояний А£> разность фаз сигна-
лов л, (/) и и, (f) на несущей частоте при истинном пеленге 0И составит
Глава 2. Радиоэлектронная разведка
133
ч ЛйК . _
Д<р = <у0Дт =—-sjn®
= 2/Т—sin®H,
(2.109)
где Дт = Д/с - временная задержка прихода сигналов на разнесенные антенны.
Рис. 2.37. Фазовый пеленгатор
Из выражения (2.109) можно определить направление на ИИ
. сДс? . ЯДб?
®= arcs ш------ arcs m----. (2.110)
и co0d 2nd
Во многих случаях от пеленгаторов не требуется вычисления угла 0(1, а до-
статочно измерения значения некоторой функции от этого угла (например, направ-
ляющего косинуса, т.е. косинуса угла между базой пеленгатора и направлением на
ИИ). Этот угол дополняет ®и до 90° и поэтому
cos(9O-0H ) = cky/a^d. (2.111)
В фазовых пеленгаторах высокие требования предъявляются к идентично-
сти фазовых характеристик приемных трактов. Точность определения направления
будет тем выше, чем больше отношение базы антенны d к длине волны Я. Однако
увеличение отношения dj X приводит к неоднозначности измерений, для устране-
ния которых увеличивают количество элементов антенной системы, что вызывает
трудности возникновения взаимного влияния элементов, искажающих структуру
поля в раскрыве антенны, и усложнением обработки [7]. Возникающую неодно-
значность измерений можно устранить путем использования нескольких баз, раз-
меры которых меньше, чем у основной базы, определяющей точность измерений.
134
Глава 2, Радиоэлеюпронная разведка
Элементы антенн фазовых пеленгаторов обычно размешают так, чтобы их
фазовые центры находились на заданных расстояниях друг от друга, а раскрывы
располагались в одной плоскости. Обычно используют слабонаправленные элемен-
ты, обеспечивающие обзор заданного сектора по направлению в беспоисковом ре-
жиме [8]. Mei од использования базы для измерения пеленга получил дальнейшее
развитие при построении автоматических двухканальных пеленгаторов с вращаю-
щимися антеннами [15]. В современных станциях РТР такие пеленгаторы широко
используются и называются доплеровскими [9].
Упрощенная схема доплеровского пеленгатора, работающего в КВ и УКВ
диапазонах, показана на рисунке 2.38. Две антенны, ненаправленные в горизон-
тальной плоскости (например, вертикальные штыри А' и А2), расположены сим-
метрично относительно оси и вращаются мотором (М) с угловой скоростью Q,
описывая цилиндрическую поверхность радиуса R.
Рис. 2.38. Доплеровский пеленгатор
На рисунке 2.39 показана функциональная схема доплеровского пеленгато-
ра.
Рис. 2.39. Функциональная схема доплеровского пеленгатора
Если РЭС излучает сигнал на частоте 69О, сигналы во вращающихся антен-
нах составят
Глава. 2. Радиоэлекп1ро1П1ая разведка
135
и. (t) = Е cos Г a)of - (р} (z)l = Е cos
и it} = Ecos o\t-cp2(/)] = £cos
®о(1 +
(2.112)
где <p,(f), (p2(t) - фазы сигнала, изменившиеся во времени в силу взаимного движе-
ния антенны и ИИ; Гк(г) - радиальная скорость этого движения - проекция вектора
линейной скорости движения антенны на направление прихода сигнала, равная
ГДЛ = И cosa(n = QjRcosa(z) = Q7?cos«(Q/ + 0И), (2.113)
где a(t) - мгновенное значение угла между направлением на ИИ и вектором ли-
нейной скорости вращающейся антенны V.
Приемники пеленгатора перемножают колебания с выходов двух симмет-
ричных антенн. Результат перемножения с точностью до усредняемых в фильтрах
осциллирующих составляющих на частотах 2<д0 дает
0ftsin(Q/ + 0И)
(2.514)
Спектр колебания с периодической угловой модуляцией (2.114) содержит
гармоники известной частоты Q вращения антенны
(w) - функция Бесселя порядка к от аргумента; т =
ФНЧ после перемножителя (рис. 2.39) всегда можно выделить первую гар-
монику этого напряжения
и, используя формируемые ГОН колебания, синхронные и синфазные с вращением
антенны, вычислить оценку пеленга 0' как
- arcig
U ’sinQz sin®.,
= arctg——------~ arctg-----
U cosQz cosO .
(2.116)
Приближение в (2.116) означает, что величины X и 1 формируются в ре-
зультате усреднения напряжений на выходах соответствующих ФД (перемножите-
лей). При усреднении можно пренебречь колебаниями с двойной частотой 2Q. В
доплеровских пеленгаторах не вращают антенну, а используют кольцевую решетку
неподвижных антенн, расположенных по образующим цилиндра радиуса R и пери-
одически подключаемых парами ко входу приемника. Скорость коммутации антенн
— 0. В случае использования в составе пеленгатора многоканального приемника, с
его помощью можно определять направления на разные РЭС, работающие на раз-
ных несущих частотах.
136
Главр 2. Радиоэлектронная разведка
Современные доплеровские пеленгаторы работают в диапазоне 20 МГц...2
ГГц и обеспечивают при этом точность пеленгования не хуже <т0 <2° j 15]. Точ-
ность пеленгования определяется как мощностью сигнала РЭС, так и базой пелен-
гатора R (вернее, величиной 2R/Л). Точность определения направления и опера-
тивность получения информации о пеленге на РЭС в значительной степени зависит
от метода обзора пространства в области разведки. Все системы радиопеленгова-
ния, используемые для целей РТР, по методу обзора пространства подразделяются
на беспоисковые (одновременные) и поисковые (последовательные).
2.12. Методы обзора пространства средствами ВРТР
Для обзора пространства используют направленные свойства антенных си-
стем. Мощность сигнала, подводимого от антенны к входу приемника, зависит от
ориентации направления максимума приема относительно направления на ИИ.
Диаграмма направленности антенны (ДНА) - нормированная к единице зависи-
мость мощности принятого сигнала от направления прихода сигнала. Уровень при-
нимаемого сигнала тем выше, чем выше коэффициент усиления приемной антенны
G = 4/r.S',,JA2 ,
(2. И 7)
где 5ЭФ - Рзых/ /7 j - эффективная поверхность антенны (отношение мощности
выходного сигнала к плотности потока мощности через раскрыв антенны).
КУ антенны также связан с шириной ДНА. Для узконаправленных антенн
значение КУ в направлении максимутла ДНА (а0; Д) составляет
(-7(^0 ’ Ро )
max
41235
Дб/О5АД5
(2.118)
где Да05 и ДД05 - параметры ширины ДНА в двух ортогональных плоскостях (по
азимуту а и по утлу7 места Д ) [43].
Увеличение надежности поиска сигнала по направлению прихода за счет
коэффициента усиления антенны потребует сужения ДНА (уменьшения Да05 и
ДД05). Но при этом неизбежно возрастет время, необходимое для анализа (скани-
рования направления прихода сигнала) подпространства области разведки. Для
ускорения поиска сигнала по направлению используют многоканальные системы,
аналогичные применяемым для ускорения поиска по частоте. В таких системах ис-
пользуют антенные системы с многолучевыми ДНА.
Беспоисковым называется такой метод пеленгации, при котором определе-
ние направления на РЭС возможно в любые моменты времени в пределах заданно-
го сектора пространства без изменения (перемещения) ДНА. Антенны должны
иметь узкие и развернутые в пространстве ДНА. Беспоисковые пеленгаторы служат
для оповещения об облучении ЛА в станциях оперативной ВРТР для непосред-
ственной поддержки РЭП [15]. Беспоисковые методы позволяют в принципе
определять направление на РЭС мгновенно, в то время как поисковые методы тре-
буют некоторого времени в связи с необходимостью просмотра всего сектора обзо-
ра. Сокращение времени разведки при использовании беспоисковых методов дает-
Глава 2, Радиоэлектронная разведка
ся ценой либо ухудшения точности и разрешающей способности, либо увеличени-
ем объема аппаратуры.
Поисковым называется метод пеленгации, при котором сигналы разведыва-
емого РЭС в данный момент времени принимаются в пределах сектора меньшего,
чем сектор обзора, и для просмотра всего заданного сектора обзора производится
перемещение в пространстве ДНА. При поисковых способах определения направ-
ления применяются сканирующие антенны. Поисковые методы при значительном
времени разведки позволяют измерять направление на РЭС с большой точностью и
обеспечивают высокую разрешающую способность.
2.12.1. Беспоисковые методы обзора пространства
Многоканальный метод относится к амплитудным методам определения
направления. При использовании этого метода система определения направления
включает п антенных устройств (А ,А2 ... Ап на рисунке 2.40), каждое из которых
подключено к своему разведывательному приемнику (ПРМл, ПРМг,..., ПРМ„) с ин-
дикатором. ДНА примыкают друг к другу (рисунок 2.41) и в совокупности пере-
крывают весь заданный сектор А© углов обзора
н
/=1
где ©0 s, - ширина ДН z-ой антенны.
Рис. 2.40. Многоканальная система
определения направления
Рис. 2.41. ДН
многоканальной системы
Направление на РЭС определяется по номеру канала, в котором принят сиг-
нал. При этом ошибка пеленгования ах не превышает половины ширины ДНА
max
(2.119)
Обычно допустимая ошибка измерения задается. Ширина каждой из ДНА
определяется выражением О9 . < 2<9Эп1ах. Требуемое число лучей ДНА (в случае
идентичных антенн)
138
Глава_ 2. Радноэлектроиная разведка.
(2.120)
max
0.5,
Достоинствами многоканального метода являются: простота реализации;
практически мгновенное определение направления на РЭС; возможность одновре-
менной пеленгации нескольких РЭС, разнесенных по углу не менее, чем на 0О5
[15]. К недостаткам многоканального метода можно отнести: невысокую точ-
ность пеленгации (достижимая на практике ошибка пеленгации лежит в пределах
5... 10°); для обеспечения более высокой точности необходимо большое число ан-
тенн и приемников, чго приводит к усложнению аппаратуры.
2.12.2. Поисковые методы обзора пространства
(в течение времени поиска Т?). За
В поисковых системах наибольшее распространение получил метод пелен-
гации по максимуму ДНА из-за сравнительно простой технической реализации.
Антенна станции РТР с узкой ДНА вращается (или сканирует) в заданном секторе
направлений Д0 с угловой скоростью Q
направление на ИИ принимается положение максимума ДНА в момент приема сиг-
нала разведываемого РЭС. Если разведываемое РЭС работает на направленную ан-
тенну, то его обнаружение (и определение направления на него) возможно только в
те интервалы времени, когда антенна разведываемого РЭС направлена на станцию
РТР, а антенна последней - на разведываемое РЭС. Разведываемое РЭС, располо-
женное в точке Ос, излучает в направлении станции разведки, расположенной в
точке Ор. только в интервалы времени, называемые временем облучения
0.5с
f — 0-5с
0БЛ - ОАс
где Тс - период вращения антенны разведываемого РЭС [15].
Антенна станции разведки принимает сигналы с направления ОДЭр только
в интервалы времени, называемые временем приема
__ 0,5р __ 0.5р гр
ПРМ — ~ А Р ’
где Тр — период вращения антенны станции разведки; Д0 - заданный сектор ска-
нирования. Данному случаю соответствует азимутально-временная диаграмма, по-
казанная на рисунке 2.42.
Из диаграммы следует, что обнаружение РЭС возможно только при совпа-
дении интервалов /оь и /прм . Причем эти интервалы должны совпадать в течение
времени rmin, достаточного для регистрации сигнала разведываемого РЭС. Такое
совпадение является случайным событием. В общем случае вероятность обнаруже-
ния РЭС меньше единицы, и соответственно метод определения направления назы-
вается вероятностным поиском по направлению.
Глава 2. Ради^эл^кн1]юнли1я разведка
139
Рис. 2.42. Азимутально-временная диаграмма при вероятностном поиске по направлению
В частных случаях вероятность обнаружения РЭС может равняться едини-
це, и соответствующий метод определения направления называется достоверным
(гарантированным) поиском по направлению. Различают достоверный поиск при
медленном и быстром обзоре пространства - медленный и быстрый поиски по
направлению. При вероятностном поиске по направлению скорость обзора про-
странства выше, чем при медленном поиске, но ниже, чем при быстром. Поэтому
вероятностный поиск по направлению часто называют поиском со средней скоро-
стью [1, 15].
Вероятностный поиск по направлению. Обнаружение РЭС возможно
только в том случае, если интервалы г0Б ( и тПРМ перекрываются в течение интерва-
ла времени /сов не меньшего rmjn. Определим вероятность этого события.
Последовательность интервалов /ОБП и /прм можно представить как после-
довательность импульсов с длительностями /0БП и /прм и периодами следования Тр
и Тс. Вероятность разведки зависит от времени наблюдения. За время наблюдения
выберем максимальный из интервалов Тр или Тс, так как за это время будут
наблюдаться не менее, чем по одному импульсу каждой последовательности. Об-
наружение состоится, если момент начала импульса первой последовательности
будет опережать момент начала импульса второй последовательности на время, не
менее, чем -Tmin, или запаздывать не более, чем на г,-Tmin. Здесь = t а
г2 =^ПРМ . Тогда вероятность обнаружения РЭС определяется как
^(^гпах ) ^благопр ^возм.исх *
(2.123)
140
Глсиш 2, Радиоэлек^^ разведка
t — т—т+т—т—t +1 — ^т 1 — 7 — min 7 J
олаголр *4 ‘'min z ^min 4ПРМ *ОБЛ ~ L min 5 возм.исх л min 11/ С ’ г J ?
Ттах = тах{7^,Тр} . Интервал Tmin обычно определяют как Tmin = аТи (а- количество
импульсов, необходимых для обработки сигнала).
При определении вероятности обнаружения РЭС необходимо рассмотреть
два случая: 1) Тс > Тр; 2) Тс < Тр.
Случай Ле 1, тс > Тр. В этом случае 7тах = Тс, а Т = Тр. Тогда
(2.124)
— скважность по направлению.
Случай Ли 2. Тг <Тр .В этом случае Т = Tp,a Т . = Тг . Тогда
СР J max Р 5 min С
Р(ТГ) =
Тр/ М,, + СКП -2т .
Р/ 0р ОБЛ min
т
J с
(2-125)
Анализ выражений (2.124) и (2.125) показывает, что вероятность обнаруже-
ния РЭС растет с увеличением интервалов /прм и Г0БП (с расширением соответству-
ющих ДНА) и с уменьшением rmin. Однако такой путь увеличения вероятности об-
наружения приводит к снижению точности измерений. Увеличение периода враще-
ния антенны станции РТР приводит к возрастанию вероятности обнаружения толь-
ко при Гс < Тр. Для увеличения вероятности обнаружения приходится увеличивать
время наблюдения, что является одним из недостатков вероятностного поиска по
направлению. Другим недостатком является малая вероятность пеленгования за
один период. Полученные результаты справедливы при выполнении следующих
условий: 1) гГ1РМ >ТИ, иначе антенна станции РТР может пройти направление на
РЭС в промежутках между' импульсами; 2) Тр > М 7И, это условие следует из пер-
вого условия.
Время разведки, необходимое для получения требуемой вероятности раз-
ведки, определяется выражением
1g 0 Дал)
max
(2.126)
Способы уменьшен ня время разведки при Тр > Тс :
1. Увеличение Р(Тр) при неизменном периоде вращения антенны станции
РТР. Для этого необходимо увеличивать ширину ДНА, что обуславливает сниже-
ние точности пеленгации.
2. Уменьшение периода Тр вращения антенны станции РТР, хотя при этом
уменьшится вероятность обнаружения.
Сократить время разведки при Тр < Тс можно уменьшением периода Тр,
расширением ДНА (в этом случае увеличивается и вероятность обнаружения).
Глава 2. Радиоэлектр_2РРРЛ разведка 141
Медленный поиск по направлению. При увеличении периода Тр враще-
ния антенны станции разведки /прм растет, поиск по направлению становится до-
стоверным. Так как он характеризуется медленным вращением антенны станции
РТР, то такой вид поиска называется медленным. Условие медленного поиска
можно записать в виде [15]
t + t . -2т . >ТС или Т >М, -(Г + 2т . -К). (2.127)
прм оол min С р 0р V С min опт / х /
Если разведывается РЭС с узкой ДНА, то Тс »t и Тс »2rlin. Условие
медленного поиска по направлению имеет вид
'прм Тс или Т? МеРТс • (2-1 28)
При медленном обзоре пространства за время поворота ДНА станции раз-
ведки на угол ®05, равный ширине этой диаграммы, антенна разведываемого РЭС
должна совершить полный оборот. При кратковременной работе разведываемого
РЭС скважность по направлению М0 должна быть мала, или ДНА станции РТР
должна быть достаточно широкой, что ведет к увеличению ошибок в определении
направления [15]. Данный вид поиска применяют при разведке РЛС с длительным
временем работы и РЛС с быстровращаюшими антеннами.
Быстрый поиск по направлению. При ТС>ТР уменьшение периода Тр
вращения антенны станции РТР ведет к увеличению вероятности обнаружения РЭС
и поиск становится достоверным. Так как этот поиск характеризуется быстрым
вращением антенны станции РТР, он называется быстрым поиском по направле-
нию. Условие быстрого поиска по направлению имеет вид,
(2.129)
При узких ДНА станции Р ГР (1 «1 и тт!п «/, .) условие (2.129) за-
пишем в виде
7)</оел. (2.130)
При быстром поиске антенна станции РТР просматривает весь заданный
сектор пространства за время, не превышающее длительности облучения станции
РТР разведываемым РЭС. Для регистрации сигнала должно выполняться условие
т. < 1 (РМ или Л/Ипг . < Тр. (2.131)
mm I ИМ Op mm г х /
Неравенства (2.130), (2.131) полностью определяют условия быстрого по-
иска по направлению. К недостаткам быстрого поиска следует отнести:
• технические трудности реализации большой скорости вращения антенны
станции РТР 'При разведке РЭС с узкой ДНА (единицы градусов) и периодом вра-
щения, равным единицам секунд, интервал t ,БЛ составляет десятки миллисекунд.
Для выполнения условий быстрого поиска антенна станции РТР должна вращаться
со скоростью, равной сотням или тысячам оборотов в минуту, что не всегда прием-
лемо в реальных устройствах.);
• низкую точность пеленгации и дальность РТР при широкой ДНА [15].
142
Глава 2. Радиоэлектронная разведка
Вероятность оонаружения сигнала РЭС за п циклов обзора остронаправ-
ленной антенны РТР определяется как
Р = ]-ехр(-/7/;),
(2.132)
где Р — вероятность обнаружения сигнала за время одного оборота антенны РЭС.
Вероятность обнаружения сигнала РЭС за время fp имеет вид
(2.133)
Формула (2.133) показывает, что вероятность обнаружения сигнала стре-
мится к единице при увеличении общего времени разведки tp и уменьшении пери-
ода поиска Тр [1]. Достоверный поиск по направлению как при быстром, так и при
медленном обзоре пространства на практике не всегда осуществим. Для осуществ-
ления достоверного поиска по направлению необходимо заранее знать некоторые
параметры разведываемых РЭС.
2.13. Способы определения частоты сигналов
разведываемых РЭС противника
Измерение и запоминание несущей частоты сигнала разведываемого РЭС -
одного из главных, весьма информативных для РТР параметров сигнала разведки -
является одной из наиболее важных функций станции ВРТР. Применяемые в РТР
способы определения и запоминания несущей частоты являются достаточно спе-
цифическими. Их специфичность обусловлена ограниченностью времени разведки
и широким диапазоном разведываемых частот [15]. Существующие методы опре-
деления несущей частоты по принципу измерения делятся на поисковые и бесно-
исковые. По принципу использования тех или иных свойств РТ цепей они подраз-
деляются на избирательные и функциональные. Классификация методов измере-
ния несущей частоты разведываемых РЭС показана на рисунке 2.43.
Рис. 2.43. Классификация методов измерения несущей частоты
Беспоисковыи .метод позволяет в принципе определять несущую частоту
практически мгновенно, в то время как поисковые методы требуют некоторого
Глава 2^ Радиоэлектронная разведка
времени в связи с необходимостью перестройки приемника. Данный метод позво-
ляет значительно сократить время разведки, это дается ценой ухудшения точности
и разрешающей способности измерений или увеличением объема аппаратуры [15].
Если для приема сигнала и измерения его несущей частоты приходится последова-
тельно изменять во времени состояние избирательной системы или преобразовате-
ля «частота - измеряемая величина», то такой метод называется поисковым.
Время, в течение которого приемник перестраивается на ширину его поло-
сы пропускания, т.е. время, в течение которого разведываемый сигнал может
наблюдаться на выходе приемника, можно записать в виде
ПРМ f
Д'1РМ у
. у 7 ПРМ ’
Д/р
(2.134)
где Д/^РМ - ширина полосы пропускания приемника; Л/"р - диапазон разведывае-
мых частот; Тпрм - период перестройки частоты разведывательного приемника [4].
Разрешающая способность по частоте 8 f и точность измерения частоты
определяются шириной полосы пропускания приемника Д/^РМ, а среднеквадрати-
ческая ошибка измерения частоты
аг=(0,1...0,2)Д/прм.
(2.135)
Если перестройка разведывательного приемника по частоте осуществляется
по линейному закону и несущая частота разведываемых сигналов с равной вероят-
ностью может находиться в любой части рабочего диапазона частот приемника, то
вероятность приема сигнала за п циклов перестройки приемника по частоте
(2.136)
где Р{ - вероятность приема одного импульсного сигнала за один период пере-
стройки приемника.
При запанной вероятности обнаружения сигнала У^АД можно определить
требуемое количество циклов перестройки
1п(1 ^здд)
1п(1 - Р)
(2.137)
и время разведки
(2.138)
Поисковые системы при значительном времени разведки позволяют изме-
рять несущую частоту с большой точностью и обеспечивают высокую разрешаю-
щую способность. В избирательных методах используются избирательные ча-
стотные свойства РТ цепей (избирательных контуров). При использовании избира-
тельных методов за частоту разведываемого сигнала принимается частота настрой-
ки избирательной системы (ценгральная частота), если сигнал входит в ее полосу
пропускания. При этом максимальная ошибка измерения частоты равна поло-
вине полосы пропускания избирательной системы 8 fmax = bfjl.
144
Глава 2. Радиоэлектронная разведка
При использовании функциональных методов измеряется не сама частота,
а величина, функционально с ней связанная. Поэтому в состав функциональных
устройств измерения частоты входят преобразователи «частота - измеряемая вели-
чина». Сравнивая поиск по частоте с поиском по направлению, нетрудно заметить
аналогичность этих процессов. При этом анализ работы поискового устройства по
частоте аналогичен анализу работы поискового устройства по направлению с той
лишь разницей, что при этом рассматривается не азимутально-временные, а ча-
стотно-временные диаграммы. Формулы, характеризующие поиск по частоте, мо-
гут быть получены из аналогичных формул, характеризующих поиск по направле-
нию, путем замен, указанных в таблице 2.5.
Таблица 2.5
Поиск по направлению Поиск по частоте
0 - среднее значение ДНА f - средняя частота настройки контура разведывательного приемника.
Д0 - сектор поиска (разведки) А/' - диапазон разведываемых частот
Д0„ . - ширина ДНА Д^ - ширина полосы пропускания
/ м - время приема гпрч - длительность импульса приема
fo5n - время облучения гс - длительность импульса сигнала
Гр - период вращения антенны станции раз- ведки Г - период перестройки частоты разве- дывательного приемника
Т( - период вращения антенны РЭС Гп - период следования сигналов РЭС на несущей частоте fQ
М - скважность по направлению М f - скважность по частоте
В зависимости от соотношения параметров потоков импульсов приема г
и сигнала разведываемого средства г при поисковых методах измерения частоты
различают: вероятностный поиск (поиск со средней скоростью) и достоверный
поиск (быстрый, медленный поиски). Вероятностный поиск по частоте наиболее
характерен для РТР. Факт приема сигналов можно рассматривать как совпадение
двух событий: наличие разведываемого сигнала (последовательность гс с перио-
дом Гп) и пребывания несущей частоты сигнала в полосе пропускания разведыва-
тельного приемника (последовательность гпрч с периодом Т,) [15]. Прием сигна-
лов и измерение частоты происходит в моменты совпадения этих двух потоков.
Вероятность обнаружения сигнала РЭС и измерение его несущей часто-
ты определ яется выражением
т + г — 2т
= (213Q)
J min
Глава 2. РшУиУэлеюпрслииш разведка
145
ГТЧ I ГГ> ГТ1 I ГТ“Ч I гтп fti I
где Т . = тш{гп,Т, >; Т . =-тпах-ип,7\ ?.
min П 3 р/) 3 max ( П 3 р/ J
Как и при вероятностном поиске по направлению рассмотрим два случая.
1. При Тп >Т, имеем
г п р/
2. При Тп <TpJ имеем
(2.140)
(2.141)
Время разведки при заданной вероятности обнаружения можно уменьшить
путем уменьшения периода перестройки приемника либо путем расширения поло-
сы пропускания и уменьшения скважности XI. В последнем случае уменьшается
точность измерения частоты. В современных станциях ВРТР для увеличения веро-
ятности обнаружения увеличивают чувствительность приемника так, чтобы прини-
мать сигналы, излучаемые разведываемым РЭС по БЛ [15]. Это существенно уве-
личивает время облучения (длину пачки импульсов, излучаемых в направлении
станции разведки) и, следовательно, вероятность разведки за один период.
При одновременном поиске по частоте и по направлению вероятность
обнаружения РЭС равняется произведению вероятностей обнаружения по частоте и
по направлению, так как обнаружение по частоте и направлению - события незави-
симые
р,=р,рв-
(2.142)
Медленный поиск' по частоте. При медленном поиске выполняется усло-
вие т > Гг1, за время приема г , которое очень велико, будет принят хоты бы
один сигнал разведываемого РЭС. При этом вероятность обнаружения Р (Ттах) = 1,
а скорость перестройки у находится из соотношения
А/прм
/мп
(2.143)
Следовательно, /мп < 44™/^п •
Недостатком медленного поиска является большое время разведки (пере-
стройки ). Для его уменьшения необходимо расширять полосу пропускания прием-
ника. Поэтому приемники с медленным поиском, как правило, являются широко-
полосными. Ширина полосы пропускания таких приемников
44м ~ (0.1...0,01)-АС • Точность определения несущей частоты с помощью таких
приемников невелика. Вследствие значительной полосы пропускания и чувстви-
тельность приемников с медленным поиском не может быть высокой. Время гаран-
146
Глава 2. Радиоэлекп1£оти1я разведка^
тированного обнаружения при медленном поиске определяется периодом пере-
стройки приемника Тf.
Быстрый поиск по частоте. При быстром поиске должно выполняться
условие тс ^Tf, перестройка приемника в заданном диапазоне осуществляется за
время, равное или меньшее длительности сигнала, что обеспечивает достоверное
обнаружение сигнала Л(Ттах) = 1. Скорость перестройки удовлетворяет условию
Д/р Ас- . (2-144)
Скорости перестройки при быстром поиске чрезвычайно большие (сотни и
тысячи мегагерц в секунду). Такие скорости могут быть обеспечены только элек-
тронным способом. Скорость перестройки не может быть бесконечно большой.
Она ограничивается допустимыми пределами снижения чувствительности, точно-
сти и разрешающей способности приемника при определении частоты. Вследствие
инерционности резонансных устройств приемника при больших скоростях пере-
стройки за время установления амплитуда вынужденных колебаний в резонансной
системе не успевает достичь установившегося значения, определяемого статиче-
ской резонансной кривой. Это явление иногда называют динамическим эффектом.
Динамический эффект приводит к следующим негативным последствиям:
уменьшается чувствительность приемника: ухудшается точность и разрешающая
способность; ограничивается скорость перестройки, а, следовательно, увеличивает-
ся время разведки; искажаются параметры разведываемого сигнала [15]. В случае
аппроксимации формы импульса и частотной характеристики приемника прямо-
угольниками полоса пропускания Д/прм и длительность импульса т , образующего-
ся на выходе в результате быстрой перестройки, связаны в первом приближении
Д/прм Длительность импульса при заданных скорости перестройки и полосе
пропускания т = Д/прм / /бп • Отсюда следует, что
АА • (2-145)
Более точные исследования показывают [1]. что в случае колокообразной
частотной характеристики
Д/прм (2-146)
Сокращая время поиска, уменьшается точность определения частоты и
наоборот, увеличивая точность измерения частоты, одновременно должны увели-
чить время разведки. При неизменной скорости перестройки для уменьшения ди-
намического эффекта необходимо увеличивать полосу пропускания, но это в свою
очередь ведет к уменьшению чувствительности и точности измерений.
2.14. Функциональные методы измерения несущей частоты
В основу функциональных методов измерения частоты положено свойство
частотных различителей преобразовывать отклонение частоты от заданного значе-
Глава 2. Радиоэлектронная разведка
147
ния в напряжение, пропорциональное этому отклонению. Измерение частоты
функциональным методом может реализовываться при помощи частотных дис-
криминаторов. Частотные дискриминаторы преобразуют отклонения частоты сиг-
нала от некоторого известного значения в напряжение, пропорциональное величине
и знаку этого отклонения [9, 15]. Работа устройства дискриминаторного измерения
частоты иллюстрируется структурной схемой, представленной на рисунке 2.44.
Ч. 1 СТОТНЫН ДИСКРИМИНАТОР
Рис. 2.44. Дискриминаторный метод измерения частоты
Принятый сигнал усиливается в широкополосном усилителе и подается на
частотный дискриминатор, содержащий два фильтра Ф1 и Ф2, несколько расстро-
енных от частоты fcp. Разность значений огибающих сигналов на выходах филь-
тров £7ВЫХ зависит от частоты, как показано на графике рис. 2.44. Частотный дис-
криминатор преобразует частоту входного сигнала в напряжение на выходе. При-
емники с частотными дискриминаторами способны определять частоту разведыва-
емого сигнала в широком диапазоне и с относительно высокой точностью (~1 %).
Принцип интерференционного измерения частоты в приемниках РТР
иллюстрируется схемой, показанной на рисунке 2.45 (АО - амплитудный ограни-
читель; Д - детектор; ВУ - видеоусилитель; И - измеритель).
Рис. 2.45. Интерференционный измеритель частоты
Принятый и усиленный сигнал подаегся на двухканальную фидерную ли-
нию. обладающую некоторыми дисперсионными свойствами: фаза и амплитуда
выходного сигнала линейно зависят от частоты. Разность электрических длин двух
148
Глава 2. Радиоэлектронная разведка
каналов (рис. 2.45) распространения сигнала AL приводит к тому, что фазы двух
этих сигналов будут различаться на
= (d&L/V* ,
(2.147)
где Уф - фазовая скорость распространения ЭМВ в фидерной линии.
Сигналы на выходах волноводов имеют вид
W,
-k -Ucos
<у(/ +
(2.148)
где к — постоянный коэффициент. Амплитуда суммы двух синусоид, сдвинутых по
фазе на Д^?, после детектирования (к„ — постоянный коэффициент)
^вых
гт G) Л Л
• U cos----
2КФ
(2.149)
Как следует из (2.149), детектируя выходной сигнал и измеряя амплитуду,
можно определить его частоту. Поскольку напряжение i/BbIX зависит, кроме часто-
ты, еще и от амплитуды входного сигнала, требуется его нормировка. Для этого
используется ограничитель на входе двухканального фидерного устройства и, кро-
ме того, в измерителе организуется схема АРУ по амплитуде входного сигнала.
К достоинствам интерференционного измерителя относится возможность
практически мгновенного измерения частоты разведываемого сигнала. К недо-
статкам - невозможность определения частоты при одновременном наблюдении
нескольких сигналов, а также сравнительно небольшой диапазон однозначного из-
мерения [15]. Последнее свойство обусловлено неоднозначностью зависимости
функции cos(«AL'2 Кф) от своего аргумента.
Корреляционные измерители несущей частоты строятся по схеме, изобра-
женной на рисунке 2.46. Сигнал с выхода широкополосного усилителя подается на
перемножитель вместе со своей копией, задержанной в ЛЗ. Усредненное ФНЧ
напряжение с выхода перемножителя пропорционально значению АКФ входного
процесса для аргумента т = т3.
Рис. 2.46. Корреляционный измеритель частоты
Глава 2. Радиоэлектронная разведка 149
Задержка входного сигнала на т3 эквивалентна его сдвигу фазы на ср = т3а>.
Перемножение прямого и задержанного сигнала дает (с точностью до быстропере-
менной составляющей, усредняемой ФНЧ) на выходе коррелятора
COS ((УТ.
(2.150)
Выходное напряжение коррелятора зависит от частоты сигнала со и его
мощности U2 / 2. Зависимость от частоты используется измерителем, а зависи-
мость от мощности компенсируется сигналом с выхода квадратичного детектора [9,
15]. Как и интерференционный, корреляционный измеритель обеспечивает одно-
значное измерение только в пределах одной октавы (диапазона с отношением верх-
ней и нижней частоты равным 2).
Цифровые способы измерения частоты обеспечивают высокую точность и
хорошо сопрягаются с вычислительными устройствами последующей обработки
сигнала. Для измерения частоты применяют схемы, реализующие различные моди-
фикации двух основных способов: цифрового частотомера и цифрового периодо-
мера. Работа цифрового частотомера иллюстрируется схемой, показанной на ри-
сунке 2.47.
линеен 1Я
ЧАСТЬ
ПРИЕМНИКА
ФОРМИРО-
ВАТЕЛЬ
ИЗМЕРИТЕЛЬ И
ИНДИКАТОР
Рис. 2.47. Цифровой частотомер
Входной формирователь создает узкие импульсы в моменты перехода сиг-
налом через нулевой уровень снизу-вверх (с положительной производной). Им-
пульсы через схему совпадений, открываемую стробом на время измерения Ттм,
попадают на счетчик. Результат подсчета числа импульсов за время Тты выводят в
качестве оценки частоты F* = N/TM3M (N - число в счетчике). Ошибка дискрета
измерений по методу частотомера соответствует ошибке в один счетный импульс,
т.е. один период входного сигнала за время измерения AF = 1/7"изм •
Для уменьшения ошибки дискрета цифрового измерителя частоты исполь-
зуют метод периодомера. Схема измерения по методу периодомера показана на
рисунке 2.48. Периодомер подсчитывает число импульсов частоты fc4 »fc за
время Гсч = пТс =п / /с . Показания счетчика-измерителя и индикатора оказываются
равными N - f„TC4 = й4ч Л/с ’ частота сигнала может быть оценена как
сч
С
(2-151)
150
Глава 2. Радиоэлекргронная разведка
Рис. 2.48. Цифровой периодомер
Погрешность дискретизации в один счетный импульс kN = 1 (период коле-
баний частоты fC4) соответствует ошибке в оценивании часпюты
Погрешность дискретизации тем меньше, чем больше частота счета /сч по
сравнению с частотой сигнала /с. Аналогичные схемы применяются средствами
РТР для определения параметров импульсных сигналов РЛС и систем передачи
информации: длительности импульсов и периода били частоты) их повторения.
Основными достоинствами функциональных методов определения не-
сущей частоты являются: предельное малое время разведки и относительно широ-
кая полоса разведываемых частот при малом объеме аппаратуры. Недостатки
функциональных методов', отсутствие разрешающей способности по частоте (при
одновременном приеме двух и более сигналов значения частоты, в общем случае,
не соответствуют ни одной из частот принимаемых сигналов); низкая чувствитель-
ность приемных устройств [15]. Указанные недостатки не являются решающими
при разведке импульсных РЛС, вероятность одновременного приема нескольких
сигналов в этом случае невелика, а мощность сигналов значительна.
2.15. Устройства запоминания и воспроизведения сигналов
Устройства запоминания и воспроизведения сигналов (УЗВС) являются со-
ставной частью систем информацпочного обеспечения современных многофункци-
ональных комплексов различного назначения. УЗВС предназначены для:
• запоминания частотно-временной (несущая частота, форма огибающей им-
пульса, длительность и период следования импульсов, форма и ширина спектра
сигнала, параметры модуляции, моменты приема сигналов, период обзора про-
странства) и пространственной структуры (направление прихода, параметры про-
дольной и поперечной функций пространственно-временной когерентности ЭМП и
Глава 2. Радиоэлектронная разведка
151
параметры эллипса поляризации сигнала в раскрыве приемной антенны) принима-
емых сигналов;
• выдачи данных в системы измерения и анализа параметров этих сигналов;
• воспроизведения в необходимые промежутки времени запомненных сигна-
лов [20].
Запоминание параметров сигналов РЭС в КБО и их воспроизведение необ-
ходимо при:
• обработке сигналов в реальном масштабе времени в условиях отсутствия
возможности детального анализа их пространственно-временной и спектральной
структуры;
• разработке систем РТР и РЭП когерентно-импульсных РЛС и РЛС с про-
странственно-временной обработкой сигналов.
В настояшее время для запоминания радиосигналов в средствах РТР и РЭП
используются следующие физические принципы:
1) запоминание с помощью многоканальных (матричных) усилительно-
генераторных уо^роЯств;
2) запоминание на ВЧ и ультразвуковых ЛЗ (рециркуляторах);
3) дискретно-аналоговое запоминание на приборах с переносом зарядов;
4) цифровое запоминание [55].
Необходимость в системе запоминания частоты сигналов обусловлена тем,
что при создании уводящих помех по дальности и ЛЦ импульсным РЛС длитель-
ность создания помехи на частоте РЛС превосходит длительность импульса РЛС,
поступающего на вход системы РЭП. ЗУ используются и для обеспечения развязки
между приемом и передачей, давая возможность передавать запомненный сигнал
гак. чтобы передача и прием никогда не совпадали во времени.
В системах РЭП используются различные типы ЗУ: многоканальные мат-
ричные ЗУ; рециркуляторы радиоимпульсов; потенциалоскопы, работающие на
ПЧ; настраиваемые по частоте генераторы гармонических колебаний или источни-
ки шума; ЛЗ; ЗУ рециркуляторного типа и взаимодействующие пространственно-
разнесенные ретрансляторы, в работе которых используется задержка при распро-
странении в окружающем пространстве.
Наиболее важными характеристиками ЗУ любого типа являются:
• частотный и динамический диапазон;
• чувствительность:
• длительность запоминания частоты;
• спектральные характеристики запомненного сигнала;
• когерентность;
• быстродействие;
• разрешающая способность (способность одновременно запоминать не-
сколько сигналов);
• информационная доступность (произвольная и регламентированная во вре-
мени);
• способность считывания без разрушения информации;
• стоимость, размеры, масса и энергетические характеристики [12. 55].
152
Глава 2. Радиоэлектронная разведка
В зависимости от характера задач использование данных о несущей частоте
разведываемых РЭС может быть различным. При предварительной разведке изме-
ренную несущую частоту наиболее удобно представлять в виде соответствующего
ей кода - числа (например, абсолютного значения несущей частоты). При испол-
нительной разведке важно не измерение абсолютного значения несущей частоты,
а возможность запомнить ее с тем, чтобы создать помехи на несущей частоте раз-
веданного РЭС. То есть несущая частота должна быть представлена в таком виде,
который простейшим образом позволил бы настроить САП на эту' частоту [15].
Различают кратковременные и долговременные способы запоминания ча-
стоты. Кратковременные способы запоминания - это запоминание на время, необ-
ходимое для настройки ПП, запоминание используется средствами для оператив-
ной поддержки РЭП. В настоящее время разработано много разнообразных схем
запоминания частоты. Выбор той или иной схемы в каждом конкретном случае
определяется ее возможностями и требованиями, предъявляемыми к устройству
запоминания частоты.
2.15.1. Аналоговые устройства запоминания и
воспроизведения параметров сигналов
В существующих САП и станциях РТР применяются два типа аналоговых
устройств запоминания (УЗ): многоканальные УЗ частоты на основе матричных
приемников (устройства длительного запоминания частоты и одноканальные УЗ
частоты (УЗЧ), использчющие принцип построения генератора с запаздывающей
обратной связью (устройства кратковременного запоминания частоты). В УЗВС
таких средств, как правило, применяются беспоисковые методы обнаружения сиг-
налов РЭС по частоте, которые основываются на одновременном (параллельном)
приеме сигналов УЗЧ во всем диапазоне разведываемых частот. При этом обеспе-
чивается практически мгновенное определение частоты РЭС. В данном случае
уменьшение времени разведки достигается за счет увеличения объема аппаратуры
приемного устройства УЗЧ. В современной технике РТР и РЭП наибольшее рас-
пространение получили беспоисковые методы с использованием многоканальных
одно- и многоступенчатых, двоичнокодовых приемных устройств УЗЧ и др. Рас-
смотрим особенности их построения.
В многоканальной одноступенчатой (параллельной) схеме > 34
(рисунок 2.49 а, б) весь диапазон разведываемых частот Л/р перекрывается
полосовыми фильтрами (Ф;, i=l, ..., п) так, что полосы пропускания 2J соседних
фильтров соприкасаются на частотной оси (рисунок 2.50 а) [55].
Каждый фильтр работает на свой автономный приемный канал, состоящий
из усилителя (У), детектора (Д) и видеоусилителя сигналов (ВУС). Значение
частоты разведываемого сигнала принимается равной средней частоте
соответствующего канала. В такой УЗЧ диапазон разведываемых частот равен
н
АЛ = Еа/:, (2.153)
7 = 1
где п - количество фильтров (каналов) в УЗЧ.
Глава 2, Радиоэлектронная разведка
153
'ПРМ и * гЧтРДл
А А
ЛПРМ 1 rtllEI 1
гш
Рис. 2.49. Многоканальная одноступенчатая схема У34
При использовании многоканальных приемников, в том числе приемников с
цифровым анализом спектра разведываемого сигнала, запоминание частоты сво-
дится к запоминанию номера фильтра, в котором обнаруживается сигнал. Напря-
жение с выхода этих фильтров поступает после детектирования и усиления на реле.
Если в каком-либо канале обнаружится сигнал, то срабатывает реле и включается
соответствующий генератор помех Г„ (рисунок 2.49 а) или широкополосный гене-
ратор шума (ГШ) (рисунок 2.49 б).--
Подобные схемы иногда называют релейно-спусковыми схемами запоми-
нания частоты. Средние частоты спектров помеховых сигналов совпадают со сред-
ними частотами полос пропускания соответствующих фильтров, но частоты при-
нимаемых сигналов могут отличаться от последних на величину, не превышающую
половины ширины полосы пропускания [15, 55]. Чтобы в любом случае создавать
помеху на частоте принятого сигнала, ширина спектра помехи должна быть не
меньше ширины полосы пропускания соответствующего фильтра.
Время, затрачиваемое на измерение частоты РЭС, равно времени установ-
ления колебаний в фильтре. Описанные многоканальные измерители частоты мож-
154
Глава 2. Радиоэлектронная разведка
но рассматривать как устройства одновременного разделения сигналов, характери-
стики которых определяются диапазоном, числом каналов и формой характеристик
избирательности (АЧХ) каждого из каналов.
а)
Рис. 2.50. Полосы пропускания фильтров многоканальной одноступенчатой схемы УЗЧ
Точность измерения частоты в параллельной схеме УЗЧ с АЧХ фильтров,
аппроксимированной прямоугольником, может быть оценена максимальной
ошибкой
5f = ±^l2. (2.154)
В реальных УЗЧ АЧХ фильтров может существенно отличаться от прямо-
угольной формы. Поэтому сигналы большой мощности мог^т проходить на выход
реальных фильтров даже в том случае, когда их несущая частота лежит вне преде-
лов полосы пропускания канала. Если при этом в УЗЧ не осуществляется логиче-
ская обработка сигналов на выходах соседних фильтров путем сравнения их интен-
сивности и частота сигнала будет принята равной средней частоте канала, то ошиб-
ка измерения превысит величину, определяемую формулой (2.154).
Основными достоинствами многоканальных одноступенчатых УЗЧ счи-
таются: большое быстродействие; неограниченное время запоминания; простота
схемного решения; надежность; возможность обеспечения высокого разрешения
сигналов РЭС по частоте; достаточно высокая точность определения частоты. Од-
нако для обеспечения высокой точности запоминания частоты необходимо созда-
вать большое число каналов, а это приводит к усложнению схемы и к увеличению
объема аппаратуры, что является недостаткам таких УЗЧ. У меньшение числа вход-
ных избирательных фильтров возможно при применении фильтров различной по-
лосы пропускания с взаимным перекрытием. Например, использование четырех
Глава 2, Радиоэлекп1ронная разведка
155
фильтров с различной шириной полосы пропускания А/? и взаимным перекрытием
позволяет получить 7 частотно-избирательных каналов (I, И,...VII) (рис. 2.50 б). В
данном случае необходимо дополнительное устройство логической обработки вы-
ходных сигналов фильтров.
Получившая широкое распространение матричная схема запоминания
частоты, сохраняя достоинства многоканальной схемы, позволяет существенно
повысить точность измерения и запоминания несущей частоты и уменьшить число
избирательных элементов. Матричная схема представляет собой матрицу из т ка-
налов и п ступеней. На рисунке 2.51 приведена схема матричного устройства запо-
минания и воспроизведения частоты принятого сигнала РЭС [2, 12].
Рис. 2.51. Схема матричного устройства запоминания и воспроизведения частоты
Устройство представляет собой совокупность модулей М (рисунок
2.52), в каждом из которых кроме фильтра, триггера, гетеродина и смесителя име-
ется еще реле Рл, срабатывающее по импульсу, поступающему с триггера в момент
появления сигнала в фильтре Ф . ВЧ напряжение гетеродина через сработавшее
реле подается на соответствующий смеситель Си канала восстановления частоты
[20]. Элементы канала восстановления частоты показаны в нижней строке на ри-
сунке 2.51. Его элементами, помимо смесителей и фильтров, являются также гете-
родины модулей, сработавших при приеме сигнала.
В канале восстановления необходимо иметь смеситель и /7-1 фильтр.
Принятый сигнал sc(r,fc) вызывает последовательное срабатывание цепочки
фильтров (в идеале по одному) в каждом из столбцов от первого до и-го. В первой
ступени все ее фильтры (Фн) имеют одинаковую полосу пропускания и делят
весь диапазон разведываемых частот bfp на т частей, т.е. A/" = &/р/тп. На выходе
1-й ступени приемника за счет соответствующего выбора частот гетеродинов весь
частотный диапазон разведки А/р сужается по промежуточным частотам до полосы
156
Глава 2. Радиоэлектронная разведка
пропускания одного фильтра первой ступени АД. Суммарная полоса пропускания
всех фильтров 2-й ступени равна полосе пропускания одного фильтра 1-й ступени.
Полоса пропускания фильтров 2-й ступени АД2=АД/т. На выходе 2-й ступени
весь диапазон частот разведки АД, сужается по промежуточным частотам до поло-
сы пропускания АД одного фильтра 3-й ступени.
Рис. 2.52. Устройство модуля
Аналогичным образом могут быть построены третья и последующие ступе-
ни матричной схемы. В последней ступени матричной схемы 34 отпадает необхо-
димость в смесителях и гетеродинах, т.к. диапазон ПЧ предпоследней ступени про-
сто деляг фильтрахми на каналы, детектируют и запоминают. Частоту принятого
сигнала определяют по комбинации показаний устройств запоминания каналов
каждой ступени матричной схемы. Как правило, в технической документации на
матричной схемы 34 приводится матрица абсолютных значений частоты сигнала в
зависимости от показаний устройств запоминания.
Номера модулей, в которых сработали фильтры, несут информацию о ча-
стоте сигнала, а их гетеродины выдают напряжения, необходимые для воспроизве-
дения частоты методом обратного преобразования частоты от значения ее в срабо-
тавшем последнем фильтре ч-го столбца до первоначального значения частоты
сигнала. При воспроизведении сигнала сработавшие при приеме сигнала гетероди-
ны выдают напряжения, необходимые для воспроизведения частоты методом об-
ратного преобразования частоты от значения ее в сработавшем последнем фильтре
/7-го столбца до первоначального значения частоты сигнала. Сит нал усиливается,
наделяется помеховой модуляцией и излучается антенной САП на частоте /п. В
канале восстановления необходимо иметь /7-1 смеситель и п-1 фильтр.
Точность измерения частоты, а, следовательно, и точность настройки часто-
ты сигнала помехи на частоту сигнала подавляемого РЭС, определяется полосой
пропускания фильтра последнего столбца
•/min 2 2/77"
(2.155)
Глава 'L Радноэлекнзронная разведка
157
Рассматриваемое устройство обеспечивает однозначное запоминание и вос-
произведение частоты в том случае, когда на его вход поступают одиночные сигна-
лы. В случае одновременного прихода сигналов от нескольких РЭС возникают
проблемы с запоминанием и восстановлением их частот [20, 55]. Причина этого
эффекта в том, что взаимодейсгвие в смесителях одновременно нескольких напря-
жений (более двух) вызывает образование сигналов комбинационных частот. В ре-
зультате на вход усилителя-модулятора будут поступать также сигналы с частота-
ми, на которых в действительности не работает ни одно из РЭС. Указать, какие из
частот соответствуют сигналам реальных РЭС, а какие - нет, невозможно, имеет
место неоднозначность отсчета, запоминания и воспроизведения частот.
Основным преимуществом матричных устройств по сравнению с обыч-
ными многоканальными, обеспечивающими ту же точность воспроизведения ча-
стоты, является меньшее количество используемых элементов. Поэтому одной из
главных характеристик матричных устройств является объем аппаратуры, оценива-
емый количеством элементов матричной схемы.
Наибольшие трудности при разработке матричных устройств запоминания
возникают из-за необходимости принятия мер по устранению взаимного влияния
между каналами. Эта трудность преодолевается с помощью специальных фильтров.
Матричные приемники обеспечивают лучшую чувствительность и разрешающую
способность по частоте по сравнению с обычными многоканальными приемника-
ми. Однако время реакции, т.е. время от приема сигнала до восстановления, у мат-
ричных устройств несколько больше, чем у простых многоканальных. ЦУЗВС так-
же уступают простым многоканальным по быстродействию.
Недостатки матричных устройств запоминания и воспроизведения-.
• невозможность запоминания и воспроизведения всех частотно-временных
параметров сигнала РЭС (определяется и воспроизводится только несущая частота
РЭС) и низкая точность измерения и воспроизведения частоты;
• большое число ВЧ элементов i избирательных фильтров, гетеродинов, сме-
сителей);
• трудности обеспечения ЭМС из-за большого количества гетеродинов и сме-
сителей;
• плохая РЭЗ. обусловленная генерацией сигналов в разных нерабочих диапа-
зонах частот при одновременном воздействии на приемник нескольких сигналов
РЭС противника с разными несущими частотами;
• значительные масса и габариты [55].
В аналоговом УЗВС может использоваться комбинированный способ изме-
рения и восстановления сигнала с использованием ПФ и устройств ФАПЧ радио-
сигнала [15], обеспечивающие высокое качество восстановления частоты сигнала
(погрешность восстановления частоты ст, «10 Гц).
2.15.2. Рециркуляторные устройства запоминания и
воспроизведения частоты
В качестве аналоговых УЗВС в САП нашли применение управляемые авто-
генераторы на основе усилителей с запаздывающей обратной связью. Такие
158
Главр 2. Радиоэлекргроннар разведка
устройства называются рециркуляторами [20]. На рисунке 2.53 изображена про-
стейшая схема рециркулятора.
Рис. 2.53. Простейшая схема рециркулятора
Сигнал 5С(И с несущей частотой * поступает на вход широкополосного
усилителя (ШУ) и усиливается в нем. С выхода усилителя часть сигнала через
направленный ответвитель (НО) подается на ВЧ линию задержки (ЛЗ), где задер-
живается на время Т3, а затем снова поступает на вход ШУ. В зависимости от дли-
тельности тс принимаемого сигнала и задержки Т3 его на ЛЗ могут иметь место
два режима работы этого устройства:
1) длительность сигнала гс меньше времени запаздывания тс <т3 (рисунок
2.54 а);
2) длительность сигнала тс больше времени запаздывания тс > т3 (рисунок
2.54 в).
В первом случае (гс < г3) на выходе устройства запоминания частоты в от-
вет на каждый входной импульс сигнала РЭС sc(t) образуется последовательность
импульсов, представляющая собой пачку копий входного сигнала sc(t)
к
= (2.156)
k=0
где А’ = 0, 1, 2,..., /V — номер копии в последовательности.
Число W задается устройством управления САП с учетом того, чтобы к при-
ходу очередного импульса РЭС устройство было готово к его запоминанию и вос-
произведению. Для этого через интервал времени, несколько меньший периода по-
вторения импульсов подавляемого РЭС, производится принудительное прерывание
текущей последовательности копий. Период следования ВЧ импульсов длительно-
сти тс в пачке равен времени задержки. Амплитуда импульсов определяется ам-
плитудой импульса, поступившего на вход ЛЗ с НО, потерями в ЛЗ и коэффициен-
том усиления ШУ (рисунок 2.54 б).
Практическая реализация этого устройства встречает значительные трудно-
сти в связи с необходимостью применения ВЧ линий, позволяющих обеспечить
задержку радиоимпульса на необходимую величину. При использовании коакси-
альных линий задержки, в которых радиосигнал распространяется с фазовой скоро-
стью К « 2 • 10* м/с, задержка сигнала на т3 =1 мкс обеспечивается линией, длина
которой / = К т3 ® 200 м. При использовании спиральных ЛЗ удается снизить длину
линии на порядок.
Глава 2, Радиоэлектронная разведка
159
Рис. 2.54. Элементы канала восстановления частоты
В режиме 1 устройство работает как усилитель радиоимпульсов, циркули-
рующих в цепи: вход ШУ - выход ШУ - НО - линия задержки - вход ШУ. Боль-
шая часть мощности импульсов с выхода ШУ поступает в усилитель-модулятор,
где наделяется помеховой модуляцией. После усиления в усилителе мощности по-
меховые импульсы излучаются передающей антенной САП в направлении подав-
ляемого РЭС. В режиме i устройство выполняет функции запоминания и воспроиз-
ведения коротких импульсных сигналов, а не только их несущей частоты.
Во втором случае (гс >т3) усилитель переходит в режим автогенерации и
запоминание сигнала (его частоты) возможно на длительное время, если выполня-
ются условия баланса амплитуд и фаз (рис. 2.54 г). На выходе УЗВС в этом случае
образуется непрерывный ВЧ сигнал
(2.157)
мВых(0 = ^СО8(ШвыУ + <р0),
вых
Условие баланса фаз будет выполнено, если время задержки т3 кратно пе-
риоду ВЧ колебаний ГВЬ1Х = 1//вых
ВЫХ
или ГВЬ1Х
(2.158)
160
Главр 2. Радиоэлектронная. разведка
Отсюда следует многочастотность рассматриваемого УЗВС. Теоретически
автоколебания в устройстве могут возникать на собственных частотах генерации
fk = 1с/. Практически из-за неравномерности АЧХ ШУ в установившемся режиме
автоколебания возникают и поддерживаются преимущественно на одной или не-
скольких частотах, соответствующих наибольшим значениям коэффициента усиле-
ния ШУ. В качестве ШУ может использоваться ЛЕВ, АЧХ К (/) которой обычно
неравномерна. Сразу после прихода запоминаемого импульса возбуждение УЗВС
происходит непосредственно на несущей частоте fc этого импульса [15, 20]. Затем
наблюдается постепенный уход частоты («сваливание») на ближайшую к /с соб-
ственную частоту генерации устройства с запаздывающей обратной связью. Чтобы
обеспечить длительное запоминание сигнала на частоте /вых, близкой к частоте
входного сигнала, необходимо иметь ЛЕВ с равномерной АЧХ.
Точность запоминания частоты определяется выражением
(2.159)
Для достижения высокой точности воспроизведения необходимо иметь ВЧ
ЛЗ, обеспечивающие значительную величину т3. Если необходимо получить
8f = 1000 Гц, то задержка т3=103 с. Для получения значительных задержек ра-
диосигналов (десятки, сотни мкс) могут быть использованы линии задержки на по-
верхностных акустических волнах (ПАВ) или световоды. В таких линиях радио-
сигнал в соответствующих преобразователях преобразуется в звуковую или свето-
вую волну, затем задерживается в ЛЗ, после чего обратным преобразованием «свез
- радиоволна» или «звук - радиоволна» восстанавливается ВЧ сигнал.
Условие баланса фаз определяет ЛЗ. Для обеспечения баланса амплитуд в
цепь обратной связи включают усилитель, столь же широкополосный, как и ШУ.
Обычно в качестве обоих усилителей выбирают ЛЕВ. Усилитель в цепи обратной
связи должен обеспечивать компенсацию потерь в НО и в ЛЗ. Уравнение баланса
амплитуд записывается в виде
^.,(1/,щ)Дс(«)) = 1, (2.160)
где К {(U,со) - коэффициент усиления (передачи) линии, включающей ШУ, НО и
ЛЗ, как функция амплитуды входного сигнала и частоты; Хос (со) - коэффициент
усиления усилителя в цепи обратной связи. Соотношение (2.160) сводится к тому,
что запаздывающий сигнал, поступающий на вход ШУ из цепи обратной связи,
должен быть по амплитуде равен породившему его принятому сигналу РЭС.
Одна из самых распространенных схем кратковременного запоминания ча-
стоты -управляемый рециркулятор (рисунок 2.55). Из сигнала с выхода приемни-
ка ключом & вырезается прямоугольный импульс длительностью т3. Этот импульс
усиливается и подается на выходной ключ и на ЛЗ. Задержанный на т, импульс
снова подается на вход усилителя. Этот импульс начинается в момент окончания
предыдущего импульса. Пока открыт выходной ключ, на выходе будет существо-
вать последовательность вплотную примыкающих друг к друту радиоимпульсов
Глава 2. Радиоэлектронная разведка
161
частоты сигнала. Основным условием поддержания незатухающих колебаний на
выходе является баланс амплитуд: коэффициент усиления по петле рециркуляции,
содержащей усилитель, ЛЗ, сумматор и ответвитель сигнала в цепь обратной связи,
должен быть не меньше единицы.
линейная
ЧАСТЬ
ПРИЕМНИКА
Рис. 2.55. Рециркулятор для запоминания частоты
При очевидной простоте построения схема запоминания с рециркулятором
имеет существенный недостаток-, выходной сигнал не сохраняет когерентность
входному, поскольку в моменты коммутации происходит разрыв фазы [15].
Другой способ запоминания частоты использует синхронизацию подстра-
иваемого генератора и иллюстрируется рисунком 2.56.
Рис. 2.56. Запоминание частоты синхронизируемым генератором
Сигнал с выхода приемника стробируется ключом & и подается на ИФД,
формирующий за время г, напряжение, пропорциональное разности фаз, и запоми-
нающий это напряжение после окончания сзроба. Это напряжение подается на
управляющий элемент и перестраиваемый генератор (ПГ). Выходное колебание
генератора подстраивается под частоту и фазу входного сигнала. После окончания
входного сигнала параметры выходного колебания сохраняются на теоретически
сколь угодно длительное время. Практически время хранения ограничивается ста-
бильностью параметров ПГ.
Из рассмотренных устройств собственно запоминание и воспроизведение
сигналов как таковое обеспечивает только рециркулятор, и то, если входные им-
пульсы имеют длительности порядка долей мкс, а точнее, ти < Т-. Импульсы со-
временных РЭС, как правило, имеют большие длительности (десятки - сотни мкс)
и сложную внутриимпульсную структуру. Применительно к таким сигналам осо-
бенно важно иметь копни именно самих сигналов, а не сигнал с более или менее
точно запомненной средней частотой.
162
Глава 2, Радиоэлектронная разведка
2.15.3. Устройства запоминания, использующие задержку
волны
В качестве ВЧ ЛЗ, не очень существенно искажающих внутреннюю струк-
туру сложных сигналов, могут использоваться: коаксиальные ЛЗ; волоконные све-
товоды; ЛЗ на поверхностных акустических волнах (ПАВ); волноводные ЛЗ (в виде
компактных «скруток»); ультразвуковые ЛЗ; ЗУ с переносом заряда и приборах с
зарядовой связью [20].
Линии задержки коаксиального типа. Скорость распространения волн в
коаксиальных радиотехнических кабелях 170...220 м/мкс. Для задержки на время
т3 нужен кабель длиной 7 = Vt3. Понятно, что, в самолетных САП кабельные ЛЗ на
время, превышающее доли мкс (0,2...0,5 мкс), применять нецелесообразно из-за их
громоздкости и значительной массы. К тому же в кабелях имеет место заметное
затухание волн, возрастающее с повышением частоты передаваемых по ним сигна-
лов [15]. Если 8, - затухание в кабеле, измеряемое в децибелах на метр его длины,
то общее затухание А, = 18,.
Известно, что на частоте f = 1 МГц 8, =0,01 дБ/м, а на / = 100 МГц оно
увеличивается до <5, =0,1 дБ/м. Большие потери ограничивают диапазон частот
волн, которые могут быть переданы по кабейю. Расширение полосы частот переда-
ваемых сигналов обеспечивается применением в ЛЗ полосковых линий и миниа-
тюрных коаксиальных кабелей с центральным проводом из сверхпроводящего ма-
териала. Уменьшения длины кабеля при заданной задержке добились за счет ис-
пользования специальных кабелей со спиральной намоткой внутреннего провода на
полиэтиленовый цилиндр. Такая конструкция обеспечивает снижение скорости
распространения волн 0,5... 10 м/мкс, т. е. в 20...400 раз по сравнению с обычным
кабелем [55]. Однако такие спиральные кабели не годятся для воспроизведения ВЧ
сигналов. На частотах f > 2... 10 МГц наблюдается существенное изменение скоро-
сти распространения волн, т.е. заметное искажение формы импульсов.
Линии задержки на акустических волнах обеспечивают задержку сигна-
лов на время от единиц микросекунд до нескольких миллисекунд. В них использу-
ется распространение упругих волн в твердом теле (в кристалле кварца, в керамике,
в магниевых сплавах). Скорость распространения акустических волн в 104... 105 раз
меньше скорости света (в среднем V «З-Ю-3 м/мкс, а весь диапазон скоростей от
10’3 м/мкс до 10’2 м/мкс) [20, 55]. Затухание акустических волн обычно невелико.
Приемлемую величину затухания можно обеспечить надлежащим выбором матери-
ала пластины (подложки). Именно эти свойства позволяют создавать ЛЗ с хороши-
ми характеристиками.
Время задержки зависит от длины пути акустической волны в звукопроводе
и от скорости ее распространения. Обычно задержка равна нескольким микросе-
кундам на каждый сантимегр пути. Для частот ниже 50 МГц в качестве звукопро-
вода используют плавленый кварц или стекло. На более высоких частотах приме-
няются кристаллические звукопроводы, например, из сапфира, обеспечивающего
на частоте 1 ГГц затухание всего 0,3 дБ/мкс и т3 = 10 мкс.
Глава 2. Радиоэлектронная разведка
163
В преобразователях используется пьезоэлектрический эффект. Они выпол-
няются в виде тонких пластинок оксида цинка или ниобата лития, способных рабо-
тать вплоть до частот 5 ГГц [55]. В ЛЗ на ПАВ звукопровод (подложка) - это пла-
стинка пз пьезоэлектрического кристалла толщиной около 1 мм и шириной от 20 до
100 длин волн задерживаемого сигнала (несколько миллиметров). Время задержки
зависит от расстояния между преобразователями и от скорости распространения
ПАВ. Типичное время задержки т3=1...5О мкс. Основные потери порядка 6 дБ
происходят в преобразователях, а общие потери примерно равны 10 дБ. Однако для
подавления паразитных выходных сигналов потери намеренно увеличивают до 15
дБ за счет рассогласования линии с источником и с нагрузкой. При этом уровень
паразитных сигналов опускается ниже порога чувствительности нагрузки.
Верхняя граница центральной частоты устройств на ПАВ обусловлена тех-
нологией изготовления и составляет несколько ГГц. Ширина полосы пропускания
находится в пределах от 100 кГц до 50 % от центральной частоты. Повышения
верхней границы добиваются переходом к работе на гармониках. По технологиче-
ским причинам для работы на ВЧ используются лишь несколько низших гармоник.
Другой метод достижения высоких рабочих частот основан на использова-
нии волны с большей фазовой скоростью, но при этом уменьшается время задерж-
ки. Существенного повышения частоты добиваются при работе с объемными аку-
стическими волнами. Входной преобразователь возбуждает в подложке объемные
волны, которые идут под углом к верхней ее поверхности (рисунок 2.57).
входном
ПРЕОБР ЕЗОВЛТЕЛЬ
ВЫХОДНОЙ
ПРЕОБР. {ЗОВА ТЕЛЬ
ПОДЛОЖКА
Рис. 2.57. Объемные волны в подложке входного преобразователя
Эта волна достигает выходного преобразователя, один или несколько раз
отразившись от нижней поверхности. Если L - расстояние между соседними элек-
тродами преобразователя, подключенными к одной шине, а - длина объемной
волны, то частота преобразуемой волны будет равна
Г
f = ~----(2.16!)
Leos и
тогда как обычно f = 1Г/ L [20]. Поскольку cos# < 1. рабочая частота ЛЗ повышает-
ся. Созданы устройства с рабочими частотами до 10 ГГц (в 6 раз более высокими,
чем в устройствах на ПАВ). За счет многократного отражения волны от плоских
граней можно увеличить время задержки до 1 мс.
164
Глава 2, Радиоэлектронная разведка
Ультразвуковые линии задержки. В УЛЗ используется распространение
упругих (акустических) волн в сплошных средах типа кварца, керамики и др. Их
отличие от описанных выше в том, что на входном конце УЛЗ осуществляется пре-
образование в ультразвуковые колебания не ВЧ сигнала, а видеоимпульса. Огиба-
ющая ультразвукового колебания подобна огибающей видеоимпульса. При преоб-
разовании на выходе акустической волны в исходный сигнал подобие сохраняется.
С помощью УЛЗ удается задерживать импульсы на время от 10 мкс до нескольких
миллисекунд. Основным недостатком УЛЗ при применении для запоминания ВЧ
сигналов является необходимость преобразования их несущей к центральной ча-
стоте полосы пропускания УЛЗ, а затем обратного преобразования к несущей [15].
У’ЗВ С на ПАВ обеспечивают запоминание акустических сигналов на осно-
ве накопления заряда на поверхности полупроводника [20]. Структура подобного
устройства изображена на рисунке 2.58.
в
Рис. 2.58. Запоминание сигналов за счет накопления заряда на поверхности полупроводника
На поверхности пластины кремния размещаются полупроводниковые дио-
ды типа диодов Шотки или p-i-n диодов. Имеются преобразователи, расположен-
ные на левом и правом концах подложки, в качестве которой использована пла-
стинка из ниобата лития. Между кремниевой пластиной с диодами и подложкой
имеется изолирующий зазор. Подаваемое на верхний элекгрод отрицательное
напряжение смещает диоды в прямом направлении. Типичное значение постоянной
времени переключения составляет примерно 0,5 нс. Если напряжение смещения
нулевое или обратное, то постоянная времени увеличивается до 1...100 мкс.
Устройство способно запомнить сигнал, длительностью не более задержки акусти-
ческой волны в звукопроводе.
Запоминаемый сигнал м(/) подается на левый преобразователь (рис. 2.58 а).
Когда соответствующий импульсу г/(/) волновой пакет целиком находится в зву-
копроводе, на верхний электрод подается импульс, смещающий диоды в прямом
Глава 2. Радиоэлектронная разведка
направлении. Диоды накапливают заряды пропорционально суммарному полю
смещения и поверхностной акустической волны. По окончании действия отрица-
тельного импульса смещения накопленные заряды сохраняются, создавая обратное
напряжение смещения. Для того чтобы распределение накопленных диодами заря-
дов точно описывало сигнал u(t\, расстояние между диодами в соответствии с
условием дискретизации должно быть меньше половины длины поверхностной
волны.
Записанный акустический сигнал, а вместе с ним и исходный сигнал u(t;
может быть воспроизведен, если подать на входной преобразователь короткий им-
пульс (рис. 2.58 б). Взаимодействие поля этого импульса с полем накопленных за-
рядов приводит к возникновению копии записанного сигнала. Обеспечивается мно-
гократное (десятки и сотни тысяч раз) считывание без заметного искажения.
Устройство способно выполнять также корреляционную обработку приня-
того сигнала. Принятый первым сигнал «записывается» в виде распределения
накопленных зарядов и играет роль опорного сигнала. Следующие сигналы, посту-
пающие на левый край подложки от того же РЭС, что и первый, образуют в про-
цессе взаимодействия с опорным сигналом выходной сигнал, являющийся взаимо-
корреляционной функцией вновь принятого и опорного сигналов (рис. 2.58 в). Ин-
формация об опорном сигнале может храниться порядка миллисекунд. Данный эф-
фект может быть использован в средствах ВРТР для разведки РЛС с высокой ча-
стотой повторения импульсов [20].
Радиосигналы могут быть запомнены и воспроизведены после смещения в
область акустических волн и обратно. Использование диодов Шотки позволяет за-
поминать сигналы в течение сотен мкс. Если вместо них применяют /йн-диоды, то
время запоминания увеличивается до десятков и сотен миллисекунд. Запомнен и
воспроизведен может быть также ВЧ сигнал, для этого необходимо преобразовать
его несущую к частотам полосы пропускания описанного устройства, а затем вы-
полнить обратное преобразование.
Для получения значительных задержек в десятки и сотни микросекунд мо-
гут быть использованы ЛЗ на ПАВ или волоконных счетоводах. Вариант построе-
ния УЗВС с линиями задержки на ПАВ или счетоводах показан на рисунке -.59 (У
- усилитель) [13].
Рис. 2.59. УЗВС с ЛЗ на ПАВ пли световодах
Глава 2. Радиоэлектронная разведка
Сигнал uc(t) после усиления преобразуется в преобразователе Пзх е аку-
стические или ЭМ волны оптического диапазона, задерживается на время
т(, т2, ... тк и после обратного преобразования в радиосигнал поступает вновь на
вход усилителя. В результате происходит размножение сигнала РЭС. Структура
входного сигнала может быть искажена путем переключения выходов ЛЗ по соот-
ветствующему закону.
Одноканальные аналоговые УЗВС позволяют запомнить сигнал на малое
время. Их конструкция содержит большое число ВЧ элементов. Существенный их
недостаток — трудности изменения алгоритма их работы в сложной радиоэлек-
тронной обстановке [15, 19, 20].
2.15.4. Цифровые устройства запоминания и
воспроизведения высокочастотных сигналов
В ЦУЗВС в значительной мере преодолены недостатки аналоговых
устройств запоминания и воспроизведения сигналов. Однако внедрение цифровой
обработки сигналов (ЦОС) в РЭС не исключает применения аналоговой техники. В
[56] приводятся варианты комбинированного применения цифровых и аналоговых
устройств в различных РЭС. Не утратили своего значения такие широко известные
ВЧ усилители, как ЛЕВ, которые широко применяются в САП для осуществления
разнообразной модуляции. Нельзя обойтись без аналоговых элементов при разра-
ботке приемных, антенных и других устройств. В ЦУЗВС в значительной мере пре-
одолены недостатки аналоговых УЗВС [9, 15]. Находят применение три основных
способа цифрового запоминания и воспроизведения сигналов [20].
1-й способ. Запоминание последовательности дискретизированных по вре-
мени и квантованных по уровню отсчетов мгновенных значений радиосигнала s(f).
Цифровой образ сигнала запоминается и затем воспроизводится ЦДЛ.
2-й способ — амплитудно-фазовый. Способ предполагает цифровое пред-
ставление амплитуды (огибающей) Sc(t) и фазы <рс(/) сигнала. Запоминание от-
счетов амплитуды £сд(/) и фазы <рсд(0 производится в ОЗУ. Воспроизведение ана-
логовой копии сигнала и ых (г) происходит путем AM и ФМ ВЧ сигнала местного
высокостабильного гетеродина. Законы AM и ФМ формируются в соответствии с
цифровыми кодами амплитуды и фазы, считываемыми из ОЗУ.
3-й способ - спектральный. Способ предполагает представление входного
сигнала sc(r) в виде спектрального образа 8с(со) и дальнейшую его цифровую об-
работку. При этом широко используются алгоритмы быстрого прямого и обратного
преобразования Фурье. В отличие от двух предыдущих способов в память ОЗУ за-
писываются цифровые образы спектральной плотности 5 (®) сигнала, а восста-
новление аналоговой копии входного сигнала осуществляется устройством обрат-
ного БПФ (ОБПФ).
В САП применяются одноканальные и двухканальные однобитовые ЦУ-
ЗВС. Одноканальные однобитовые ЦУЗВС просты в разработке и дешевы в произ-
водстве. Известные технические решения таких устройств имеют ряд недостатков,
Глава 2. Радиоэлектронная разведка
167
главным из которых является заметное искажение аналоговой копии восстановлен-
ного сигнала, что связано с влиянием различных шумов и паразитных излучений на
эффективность функционирования ЦУЗВС. Более устойчивы к воздействию помех
двухканальные ЦУЗВС квадратурного типа, в которых реализуется квазиоптималь-
ная цифровая обработка сигналов.
Основными этапами обработки принятого сигнала в ЦУЗВС являются:
1) прием и дискретизация входных сигналов;
2) хранение в памяти цифровых образов этих сигналов;
3) считывание цифровых образов из памяти и дополнительная их обработка;
4) воспроизведение сигналов с требуемыми параметрами в аналоговой фор-
ме [20, 55].
Структурная схема ЦУЗВС представлена на рисунке 2.60.
Рис. 2.60. Обобщенная структурная схема ЦУЗВС
Радиосигнал 5с(/|, принятый приемником ПРМ, поступает на смеситель
СМ], куда также подается сигнал нг(7) внутреннего гетеродина Г, частота которого
щгЦ) близка к средней частоте л»с принятого сигнала. Частота сигнала понижается
до значения <л1Р =а>с -<дг. Если быстродействие цифровых блоков ЦУЗВС реали-
зует обработку сигналов на частоте сос , то понижение частоты необязательно. АЦП
производит цифровое кодирование аналогового сигнала s (?) или его спектраль-
ной плотности 5с(щ). После очищения цифровой копии сигнала от паразитных
гармоник в ЦФ цифровой образ сигнала scu(t) или его спектральной плотности
запоминается в ОЗУ. Цифровые слова sctl(r) или Scli(a>), списываемые из
ячеек ОЗ У, преобразуются в ПАП в аналоговый сигнал s •11.
Средняя частота восстановленного сигнала s (t) равна щпр, поэтому для
восстановления точной копии входного радиосигнала sc(t) с помощью смесителя
СМ2 и местного гетеродина Г спектр НЧ сигнала 5 (Ц смещается на частоту
а>с = а>г + й)пр. Аналоговый фильтр Ф устраняет паразитные гармоники, порожден-
ные смесителем СМ?. В результате на его выходе формируется копия 5вьр (t) ис-
168
Глава 2. Радиоэлек1пронная разведка
ходи ого сигнала sc(t). Работой АЦП, ОЗУ и ЦАП управляет специализированное
устройство управления УУ.
На рисунке 2.61 представлена структурная схема устройства цифрового за-
поминания частоты [57].
Рис. 2.61. Структурная схема устройства цифрового запоминания частоты
На рис. 2.61 введены обозначения: НКП, ПКП - понижающий и повышаю-
щий квадратурные преобразователи; АЦПц АЦГЬ - АЦП прямой и квадратурной
составляющих входного сигнала; СЧ-1, СЧ-2 - первый и второй синтезаторы ча-
стот; СБИС 1879ВМЗ - устройство цифровой обработки и запоминания радиосиг-
нала на промежуточной частоте (обведено пунктиром); У - буфер-упаковшик; Д -
цифровой детектор сигналов; ПД - блок памяти данных; БСК - блок сигнальных
каналов; АУ - арифметическое устройство; ЗТГ - задающий тактовый генератор; Р
- буфер-распаковшик; ПК - программный контроллер; Г111 - генератор шума;
ДЧТС — делитель частоты тактового сигнала; Ц.ХП1, ЦАП? — ЦАП прямой и квадра-
турной составляющих сигнала; ФСУ - шинный формирователь и формирователь
сигналов управления; ВУ - внешнее устройство.
Устройство (рис. 2.61) позволяет создавать имитационные отметки и уво-
дящие помехи по дальности и скорости, шумовые помехи (доплеровский шум с пе-
рестраиваемой полосой, широкополосный фазовый шум с перестраиваемой поло-
сой), а также различные их комбинации, например, увод по дальности на фоне ши-
рокополосного шума или увод по скорости на фоне доплеровского шума [57].
СБИС 1879ВМЗ - аналого-цифровая микросхема (без DSP-ядра Neuro Ma-
trix) с несколькими каналами ЦАП и АЦП, 2 Мбит ОЗУ, с логикой обработки
Глава 2. Радиоэлектронная разведка
оцифрованного сигнала и управляющего контроллера со 128-битной длиной
обрабатываемых данных. Структурная и функциональная схемы СБИС 1879ВМЗ
приведены в [55]. СБИС 1879ВМЗ представляет собой однокристальную систему
накопления и обработки сигналов со встроенными АЦП и ЦАП, предназначенную
для предварительной обработки широкополосных (полоса пропускания 600 МГц)
аналоговых сигналов, формирования потока данных для вторичной обработки
цифровым процессором сигналов <ЦПС) Л1879ВМ1 или 1879ВМ2, восстановления
аналогового сигнала после вторичной обработки. Полное время обработки
аналогового сигнала (включая его воспроизведение на выходе) — менее 40 нс.
Основные процедуры, реализуемые СБИС 1879ВМЗ, и основные особенно-
сти 1879ВМЗ приведены в работе [55]. Преимущество микросхемы 1879ВМЗ за-
ключается не только в уменьшении габаритов, энергопотребления, увеличение
надежности и помехозащищенности, но и позволяет достичь качественно иного
уровня обработки сигналов.
Вариант структурной схемы системы цифрового запоминания ВЧ сигналов
[12] представлен на рисунке 2.62.
Рис. 2.62. Структурная схема системы цифрового запоминания ВЧ сигналов
Входной СВЧ-сигнал поступает на А-фазныи преобразователь, где с помо-
щью сигналов гетеродина преобразуются в сигналы ПЧ с разными фазами. Сум-
марные частотные составляющие на выходе преобразователя устраняются филь-
трацией. .Аналоговые сигналы ПЧ затем преобразуются в цифровую форму с по-
мощью Л-фазного АЦП и квантуются в цифровом квантователе. Требуемое число
бит при этом зависит от числа воспроизводимых параметров входного сигнала. Ес-
ли требуется, например, воспроизвести только несущую частоту входного сигнала,
а его амплитуда не требуется, то достаточны две фазы преобразованного сигнала и
только один бит для представления полярности каждого из двух преобразованных
сигналов.
170
Глава_ 2. Радиоолекптронная разведка
До поступления в цифровое ЗУ сигналы квантуются по времени, в результа-
те чего образуются выборки с периодом синхронизации, используемые в цифровом
ЗУ. Синхронизирующие сигналы могут иметь любую фазу, однако наилучшие ре-
зультаты достигаются, когда их фазы имеют соответствующую связь с фазами пре-
образованных сигналов. Квантованные выборки запоминаются в цифровом ЗУ с
произвольной выборкой, позволяющем осуществлять многократное считывание
информации без ее разрушения. Процесс восстановления входного сигнала вклю-
чает многоканальное цифроаналоговое преобразование запомненных выборок с
последующим их преобразованием в /V-фазном преобразователе для восстановле-
ния частоты и фазы отдельных сигналов, которые после суммирования образуют
восстановленный СВЧ-сигнал.
Наиболее простая система цифрового запоминания сигналов получается
при однофазном преобразовании (N = 1), когда не требуются квадратурные каналы,
но при этом на половину сокращается мгновенная полоса рабочих частот. По срав-
нению с системами, имеющими многофазное преобразование, системы запомина-
ния с однофазным преобразованием имеют на 60...80 % меньшую стоимость при
хороших рабочих характеристиках.
Относительное изменение частоты и фазы в восстановленном СВЧ-сигнале
достигается нулем соответствующей частотной (фазовой) расстройки генераторов
Л-фазных сигналов, используемых в Л-фазном устройстве восстановления сигнала.
При этом сохраняется внутрисигнальная модуляция запоминания сигнала.
Для сохранения информации не только о частоте (фазе), но и амплитуде
входного сигнала необходим дополнительный канал. В этом случае цифровая си-
стема запоминания строится в соответствии со структурной схемой, представлен-
ной на рисунке 2.63.
Рис. 2.63. Структурная схема системы цифрового запоминания сигналов с сохранением
амплитудной информации
Дополнительный канал включает в себя АД, АЦП, цифровое ЗУ, ЦАП и
AM, предназначенный для восстановления амплитудной информации в запоминае-
мом СВЧ-сигнале [4]. Цифровые запоминающие системы обеспечивают когерент-
ное и длительное запоминание радиосигнала и открывают хорошие перспективы
Глава 2. Радиоэлектронная разведка
171
для повышения эффективности РЭП. С их помощью можно синтезировать частоты
СВЧ-сигналов, воспроизводить сигналы с ЛЧМ и ФКМ, создавать уводящие поме-
хи и генерировать многочисленные ЛЦ. Они могут применяться также в качестве
источников маскирующих и имитационных помех.
На рисунке 2.64 показана структурная схема фазового ЦУЗВС, запоминаю-
щего и воспроизводящего фазу (частоту) ВЧ сигнала с постоянной амплитудой
[20]. На вход поступает сигнал ПЧ <дпр
5ПР (0 = Sc cos [й)пр/ + <рс (г)],
(2.162)
где #>с(/) - функция, отображающая закон ФМ (ЧМ) принятого сигнала РЭС.
^д/0 ll/t)
uz(t) ип2(1) и n(t)
Рис. 2.64. Структурная схема фазового ЦУЗВС
Сигнал 5 (/) поступает на входы двух квадратурных фазовых детекторов
ФД1 и ФД2, в которых в качестве опорных сигналов используются напряжения ста-
бильного опорного гетеродина ОГ. Частота сигнала ОГ практически совпадает ПЧ
сигналов, обрабатываемых ЦУЗВС. Опорные сигналы, поступающие на ФД1 и ФДг,
сдвинуты относительно друг друга на л/2 .
При различии между частотами <упр и <дО1 на выходе ФД] и ФДз образуют-
ся напряжения
х/фД1 = C0S[Qz + ^с(0], (0 = Го cos [О/ + <рс(/) - тг/2].
Далее эти сигналы ограничиваются в Orpi и Огр? и преобразуются в одно-
полярные меандровыеНЧ напряжения и}(Г) и ?/;(Г), также сдвинутые относительно
друг друга на я/2 . В фазовом ЦУЗВС при обработке сложного сигнала s (7 ) ча-
стота меандровых напряжений и (t) и z/,(f) реально изменяется по закону
, _0_ + <р(/)
м о
2л
(2.163)
фактически на выходе ограничителей образуются фазоманипулированные сигналы.
172
Глава 2. Радиоэлектронная разведка
Ограничение напряжений с выходов ФД1 и ФДг можно рассматривать как
квантование их амплитуд по уровню. В АЦП происходит дискретизация напряже-
ний г/](7) и по времени и цифровое однобитное кодирование отсчетов. Циф-
ровые сигналы ».,,(/) и и ,(/) в виде последовательности однобитовых кодовых
чисел поступают в ОЗУ1 и ОЗУ2, в регистры которых записывается информация о
фазах сигналов и w,(7). Работой ОЗУ управляет генератор тактовых импуль-
сов ГТИ, совмещенный с УУ. Воспроизведение аналоговой копии входного сигнала
s(f) производится по командам УУ [20].
С выходов ОЗУ1 и ОЗУ2 цифровые сигналы иЦ1(г) и иЦ2(/) вида 01 или 10
поступают на ЦАП1 и ЦАГЬ, на выходе которых восстанавливаются аналоговые
сигналы мВ1(0 и wB (/) фазоманипулированного сигнала. ЦАГД и ЦАП2 выполнены
в виде ключей (схемы «И»), на вход которых подаются цифровые сигналы иЦ1(г) и
w(?) и ВЧ сигналы и it) и z/on2 (г) опорного гетеродина. Цифровые сигналы
1/ц,Й1 и н Д2(О преобразуются в соответствующие напряжения, открывающие клю-
чи для пропускания сигналов ОГ в нужное время.
Ключ ЦАП2 нижнего канала открывается с задержкой, соответствующей
сдвигу фаз тг '2, так что на выходе ЦАПг формируется сигнал ив,(7), противофаз-
ный напряжению wB)(0 . В сумматоре Z оба эти сигнала складываются, и в резуль-
тате на выходе S образуется фазоманипулированное колебание
мв (Л) = SB cos [«or Л + , (2.164)
где ) - закон фазовой манипуляции, соответствующий закону изменения фазы
сигнала wB(Z);
Vmax при 0<r<7M/2,
-«/max при TM/2<t<TM,
(2.165)
<//max _ значение девиации фазы.
Восстановленное колебание наряду с информативной составляющей
д»ог +Q содержит значительное количество паразитных колебаний на комбинаци-
онных частотах щог - Q, <уог ± 3Q, щог ± 5Q и т.д. Паразитные гармоники филь-
труются фильтром Ф, настроенного на частоту <дог «<ynp и имеющим полосу про-
пускания. обеспечивающую неискаженную передачу спектра принятого фазомоду-
лированного сигнала РЛС. Суммарная мощность паразитных гармоник в однобито-
вом ЦУВЗС составляет около 23,4 % от мощности основной составляющей или 19
% от мощности передатчика САП [55]. Двухканальное ЦУВЗС позволяет снизить
мощность 3-й и 5-й гармоник примерно на 10 дБ по сравнению с одноканальными
ЦУВЗС.
На рисунке 2.65 изображена структурная схема двухканального квадратур-
ного УЗВС [20]. Схема работает в полосе частот ± 125 МГц. На вход ЦУЗВС пода-
Глава 2. РаЪиоэлекпгронная разведка
173
ется ВЧ сигнал со средней частотой 1 ГГц (спектральные составляющие входного
сигнала лежат в полосе частот 1 ± 0,125 ГГц).
CMj s^t)
Рис. 2.65. Структурная схема двухканального квадратурного УЗВС
Входной сигнал $СВХ(Ц путем преобразования частоты с помощью местно-
го гетеродина (Г) разделяется на пар) квадратурных составляющих 5CS(/) и sss(/),
которые образ>тотся на выходе смесителей Cmi и См?. Фильтры (Ф) устраняют па-
разитные гармоники, возникающие на выходе смесителей в процессе гетеродини-
рования. С выходов фильтров ВЧ сигнал направляется в АЦП, где он преобразуется
в цифровой код. Дискретизация непрерывного сигнала хс(/) проводится под воз-
действием импульсов дискретизации ИД, вырабатываемыми УУ. Цифровой код
сигнала 5к(г) направляется в ОЗУ, в состав которого входят регистры памяти.
При необходимости воспроизведения сигнала запомненные цифровые слова
с УУ списываются с ячеек регистра и передаются в ЦАП для преобразования дис-
кретного двоичного кода в напряжение. Каждый разряд преобразуемого двоичного
числа представляется соответствлтощей порцией эталонного напряжения. За счет
суммирования всех порций эталонных напряжений на выходе ЦАП образуются
аналоговые копии квадратурных составляющих входного сигнала, средняя частота
которых имеет значение, равное ПЧ принятого сигнала. Перенос спектра сигнала на
истинную частоту /с входного воздействия 5С|,. г j происходит в смесителях Смз и
См4. Если необходимо немедленное воспроизведение хсвх(/), то УУ должно фор-
мировать импульсы считывания сразу же после окончания входного воздействия.
2.15.5. Принцип действия цифровых устройств
запоминания и воспроизведения радиолокационных
сигналов DRFM
Современные РЛС используют широкополосные сигналы с последующей
когерентной обработкой отраженного сигнала. Параметры и закон модуляции зон-
174
Гяава_ 2, Радиоэл^кгп])онная разведка
дирующего сигнала могут адаптироваться к текущим условиям наблюдения цели
(РЭ обстановка, дальность до цели, ее скорость) и режимам работы РЛС (обнару-
жение, сопровождение цели). В этом случае УЗВС должно обеспечивать формиро-
вание имитирующей помехи, когерентной с зондирующим сигналом с точностью
до доплеровского сдвига частоты и случайной фазы отражения от цели. Создание
УЗВС, формирую тих имитирующие помехи и обеспечивающих их когерентность,
стало возможным благодаря появлению цифровых процессоров обработки сигна-
лов с производительностью, обеспечивающей преобразование зондирующего сиг-
нала (задержку с дискретом в единицы метров и доплеровское смещение частоты с
дискретом единицы Гц) в реальном масштабе времени при ширине спектра зонди-
рующего сигнала в десятки МГц.
В настоящее время разработаны, производятся и успешно эксплуатируют-
ся многие образны цифровых устройств запоминания и воспроизведения частоты,
сокращенно называемых DRFM (Digital Radio Frequency Memory). Несмотря на то,
что в их названии сделан акцент на «частоту», DRFM являются, по существу,
устройствами запоминания и воспроизведения РЛ сигналов (и других тоже) с лю-
быми видами частотной и фазовой модуляции. Разработана технология цифрового
запоминания пространственных частот DRFM-S, которая является естественным
обобщением обычной технологии DRFM и имеет дополнительные преимущества,
связанные с учетом направлений приема и передачи сигналов [58].
Структурная схема ЦУЗВС в виде конструктивно законченного модуля
DRFM изображена на рисунке 2.66 [20, 55].
DRFM осуществляет запоминание и воспроизведение сигналов, несущие
частоты которых попадают в полосу 8... 16 ГГц. Эта полоса набором предваритель-
ных фильтров усилителей У С-1...У С-16 разбита на 16 поддиапазонов таким обра-
зом, что одновременный прием сигналов РЭС возможен только в мгновенной поло-
се частот шириной 500 МГц. Средние частоты поддиапазонов фиксированы. Пере-
ход от одного диапазона к другому происходит либо по команде, либо по програм-
ме. Любой сигнал, спектр которого частично или полностью попадает в полосу ча-
стот задействованного поддиапазона, подвергается двойному преобразованию по
частоте с помощью двух понижающих преобразователей частоты (рис. 2.66): блок
опорных генераторов (БОГ) первой ступени - Cmi - фильтр первой промежуточной
частоты Ф1 (первый преобразователь), ОГ - См? - аналоговый фильтр (АФ) «нуле-
вых» промежуточных частот (второй преобразователь).
Первый преобразователь обеспечивает перенос спектров сигналов в полосу
частот 0, 75... 1,25 ГГц. Для перекрытия всего диапазона частот 8... 16 ГГц в данном
DRFM понадобилось 8 первых гетеродинов - ОГ Гь..Гв, работающих соответ-
ственно на частотах: fvk =9,25 + 0,5к ГГц, где к = 0, 1, 2, 3 (гетеродины Г 1...Г4) и
/Гп =13,25 + О,5и ГГц, где /2 = 0, 1, 2, 3 (гетеродины Г5...Г8).
Подключением гет еродинов к Cmi управляет процессор программирующего
устройства либо по заданной программе, либо по данным станции РТР. При обна-
ружении станцией Р ГР сигнала одного из РЭС, подлежащих РЭП, в процессор вы-
дается информация о его частоте. По этой информации в процессоре вырабатыва-
ется команда на включение соответствующих предварительного усилителя УС, и
гегеродина П или Г„. Частота второго гетеродина - высокостабильного ОГ равна
Глава 2. Радиоэлектронная разведка
/Г2=1 ГГц. Она не изменяется при переходе с одного поддиапазона на другой
(второй гетеродин является общим для всех диапазонов).
Рис. 2.66. Структурная схема DRFM
Еще одна особенность функционирования второго гетеродина в том. что он
обслуживает 2 квадратурных канала. В DRFM реализовано разделение сигнала РЭС
на квадратурные составляющие. При любой начальной фазе сигнал можно разло-
жить на косинусную и синусную составляющие, а затем восстановить, сохранив
всю информацию, но уже в НЧ колебании. Использованная в DRFM схема имеет
чисто внешнее сходство с оптимальным квадратурным приемником РЛС (в ней от-
сутствует такие важнейшие элементы, как ФД, интегратор (накопитель), устрой-
ство возведения в квадрат, сумматор и пороговое устройство) [20].
В DRFM разделение сигнала РЭС на квадратурные составляющие произво-
дится с помощью ответвителя OTi и двух смесителей См2, на входах которых сиг-
налы гетеродина ОГ отличаются по фазе на тг 2 (ФВ). С выходов смесителей Смэ
квадратурные составляющие поступают на АФ, пропускающие на дальнейшую об-
работку только те из них. частоты которых попадают в полосу7 ±250 МГц (для
примера). Эти составляющие в строгом соответствии с теоремой отсчетов для по-
лосовых сигналов подвергаются дискретизации с шагом 7’a = l/2FA<I,=2 нс, где
FAO -250 МГц - реальная ширина полосы пропускания АФ. В данном устройстве
176
Глава 2. Радиоэлектронная разведка
мгновенная полоса частот, в которой может производиться цифровое преобразова-
ние сш налов «нулевой» ПЧ. равна 250 МГц, но при этом просматривается полоса
радиочастот шириной 500 МГц [55]. Промышленностью созданы устройства, быст-
родействие которых обеспечивает цифровое преобразование сигналов в полосе
400...500 МГц.
Дискретизированные составляющие преобразуются в цифровую форму в
квантователе - кодирующем устройстве АЦП и записываются в памяти магнитного
ОЗУ. Запись информации о составляющих в синфазном и квадратурном каналах
начинается с передним и заканчивается с за дним фронтом импульса записи, выда-
ваемого программирующим устройством (ПУ). При выборе длительности импульса
записи должно быть учтено время паразитной задержки (порядка 10... 20 нс) в ОЗУ.
Из-за ограниченной емкости ОЗУ максимальная длительность записываемого сиг-
нала обычно не превышает 1.5...2 мс (это время сравнимо со средним временем
когерентного накопления сигнала б современных РЛС). Фаза «несущих» частот
квадратурных составляющих регистрируется с точностью до л , т.е. в АЦП реали-
зовано однобитовое квантование фазы [20]. При восстановлении сигнача такое гру-
бое определение фазы приводит к образованию паразитных боковых полос около
каждой спектральной составляющей восстановленного сигнала.
Уровень полос лишь на 8 дБ ниже уровня соответствующих основных со-
ставляющих. В результате до 14 % мощности восстановленного сигнала приходит-
ся на паразитные боковые полосы его спектральных составляющих. При использо-
вании такого сигнала для создания сигналоподобных помех наличие паразитных
боковых полос опасно. Эти составляющие позволяют отличать сигналы от помех.
Вероятнее всего, именно по этой причине разработчики DRFM посчитали одноби-
товое квантование фазы достаточным для обеспечения РЭП импульсно-
доплеровских РЛС и РЛС со сжатием импульсов сигналоподобными помехами,
сформированными на основе сигналов таких РЛС, восстановленных с точностью до
л по фазе.
В главном разработчики DRFM правы, полагая, что зряд ли будут предпри-
няты серьезные усилия по реализации в РЭС указанной возможности различения
полезных сигналов и сигналоподобных помех, поскольку’ соответствующие устрой-
ства различения окажутся достаточно сложными и дорогостоящими [20]. В то же
время затруднить различение можно простым увеличением количества разрядов
квантования фазы квадратурных составляющих.
Так, при двух-, трех-, четырех- и пятибитовом квантовании, или, что то же
самое, при четырех, восьми, шестнадцати и тридцати двух уровнях квантования
фазы интенсивности паразитных боковых полос уменьшаются соответственно на 9,
17, 23 и 29 дБ по сравнению со случаем однобитового квантования. При этом поте-
ри мощности на паразитные составляющие в восстановленном сигнале снижаются
с 14 % до 2; 0,3; 0,1 и 0,02 % соответственно. С уменьшением указанных потерь
точность воспроизведения сигнала повышается. В принципе увеличение уровней
квантования не представляет большой сложности, поэтому кажется разумным сразу
использовать м{югобитовое квантование с чем, чтобы устранить влияние рассмат-
риваемого фактора на точность воспроизведения сигнала. Шаг квантования можно
Глава 2. Радиоэлектронная разведка
избрать произвольно. Выбор шага определяется интенсивностью шумов и ошибка-
ми датчика сигналов [55].
Как и во всех других устройствах подобного назначения, восстановление
сигнала в DRFM производится в порядке, обратном запоминанию. Восстановление
начинается по сигналу считывания, выдаваемому ПУ. С момента поступления им-
пульса считывания ОЗУ начинает выдавать хранящиеся в нем коды отсчетов сигна-
ла в ЦДЛ каналов. С выходов ЦАП восстановленные в аналоговом виде НЧ квадра-
турные составляющие подаются на Смз своих каналов. На эти же смесители посту-
пают сдвинутые ио фазе на я/2 колебания ОГ. В результате осуществляется пере-
нос восстановленных квадратурных составляющих на первую ПЧ. Эти составляю-
щие подаются на сумматор (СУМ), а суммарный сигнал - на вход Смд. На втором
входе смесителя действует сигнал того из гетеродинов Г1...Г8, который был задей-
ствован во время запоминания восстанавливаемого сигнала РЭС.
Воспроизведенный на рабочей несущей частоте fc сигнал отфильтровыва-
ется на выходе Смд и поступает для наделения его соответствующими видами по-
меховой модуляции в устройство формирования сигналоподобной помехи (УФП), в
котором формируются:
• уводящие по дальности (путем изменения по заданному закону задержек от
импульса к импульсу):
• уводящие по скорости (путем сообщения считываемой из ОЗУ последова-
тельности цифровых сигналов цифровыми методами необходимых доплеровских
сдвигов в соответствии с имитируемым законом увода);
• перенацеливающие и другие помехи.
Ложный доплеровский сдвиг вводится с помощью цифрового синтезатора
частот. Имеются синтезаторы сантиметрового диапазона с шагом перестройки ча-
стоты порядка единиц герц, обеспечивающие .Изменение частоты излучаемого по-
мехового сигнала по любому' закону' в пределах сотен кГц.
При формировании помех каналу' АСС в DRFM учитывается, что точность
воспроизведения им частоты сигнала подавляемого РЭС порядка 1 кГц. Неточность
воспроизведения частоты может быть скомпенсирована, например, введением
близкого к 1 кГ ц начального смещения частоты восстановленного сигнала в сторо-
ну, противоположную выбранному для увода направлению изменения частоты.
Точность в DRFM может быть и выше. В одном из DRFM, работающим в полосе
частот 7... 18 ГГц. достигнута точность не хуже 50 Гц при приеме сигнала длитель-
ностью 1 мс. При запоминании более коротких сигналов точность уменьшается.
Сформированная сигналоподобная помеха усиливается оконечным усилителем
мощности (ОУ) соответствующего поддиапазона частот и излучается передающей
антенной САП.
На рисунке 2.67 представлена структурная схема устройства формирования
когерентной помехи в широком диапазоне частот для подавления РЛС и РЛ ГСП
УР, работающих в режиме сопровождения и наведения [59]. На рис. 2.67 обозначе-
но: Aj, Аз - первая и вторая антенны; 1,2- первый и второй узлы развязки; У], Уз —
усилители; 3, 6 - полосовые цифро-радиочастотные преобразователи; 4, 5 — поло-
совые радиочастотно-цифровые преобразователи; 7, 10 - цифровая память; 8, 9 -
измерители комплексного коэффициента усиления; РТР - система радиотехниче-
178
Глава 2. Радиоэлектронная развел /
ской разведки; 11, 14 - доплеровские модуляторы; 12, 13 - генераторы калибровоч-
ного сигнала; 15, 16 — коммутаторы режимов работы; 17, 18 — фазовращатели; ]9 -
модулятор когерентной помехи; 20 - банк выравнивающих поправок; 21, 22 - атте-
нюаторы.
Рис. 2.67. Схема устройства формирования когерентной помехи
Устройство формирования когерентной помехи работает в двух режимах: в
режиме калибровки и в рабочем режиме. Элементы 5, 10 14, 22, 6 в совокупности и
элементы 4, 7, 11, 21, 3 в совокупности представляют собой каналы DRFM [59].
Полосовые радиочастотно-цифровые преобразователи 4 и 5, осуществляющие пе-
ренос спектра входного сигнала в область ПЧ. его фильтрацию и оцифровку, по-
строены на следующих элементах: СВЧ-фильтр, квадратурный преобразователь
частоты, фильтр базовой частоты и АЦП. Полосовые цифро-радиочастотные пре-
образователи 3 и 6, осуществляющие цифро-аналоговое преобразование сформиро-
ванного цифрового сигнала, фильтрацию и перенос спектра в рабочий диапазон
частот, содержит ЦАП, фильтр базовой частоты, квадратурный преобразователь
частоты и выходной СВЧ-фильтр.
На рисунке 2.68 приведена структурная схема устройства, построенного на
основе DRFM, формирующего радиосигнал с наклонным фронтом волны относи-
тельно перпендикуляра к линии визирования «БКО — обслуживаемое РЭС» [60].
Устройство содержит: две приемопередающие антенны (А), разнесенные на
базу 4; два переключателя «прием-передача» (ППП); входные и выходные усилите-
ли (У); цифровую приемо-анализирующую систему (ЦПАС); центральный процес-
сор (ЦП) модуля DRFM; два канала DRFM, каждый из которых содержит входной
(КП1) и выходной (КП?) квадратурный преобразователь, АЦП, входной <ЦБ1) и вы-
ходной (ЦБ?) цифровой буфер, типовой состав (ТС) DRFM, цифровой генератор
Глава 2. Радиоэлектронная разведка
179
калибровочного сигнала (ЦГКС), мультиплексор (MS), цифровой измеритель ком-
плексного коэффициента усиления (ЦИККУ), цифровой фазовращатель (ЦФВ),
цифровой аттенюатор (ЦА), ЦАП. Канал DRFM № 1 содержит банк выравниваю-
щих поправок фазы и коэффициента усиления (ВВП). Канал DRFM № 2 содержит
модулятор.
Рис. 2.68. Структурная схема устройства, формирующего радиосигнал с наклонным фрон-
том волны
В канале DRFM № 1 происходит выравнивание частотных характеристик
(ЧХ) ретрансляционных трактов путем введения полученных в результате калиб-
ровки поправок фазы Д<р и коэффициента усиления АЛ для частоты ретранслиру-
емого сигнала. В канале DRFM № 2 путем модуляции фазы и амплитуды в неболь-
ших пределах обеспечивается эффект динамического изменения направления и ве-
личины вносимого наклона фазового фронта формируемого ответного сигнала (в
отсутствии вносимых изменений фронт волны ответного сигнала перпендикулярен
80
Глава 2. Радиоэлектронная разведка
линии визирования «БКО - обслуживаемое РЭС»). Калибровка ретрансляционных
трактов устройства осуществляется после включения и периодически в процессе
работы через пространство между антеннами, что обеспечивает полный охват всех
участников ретрансляционных трактов. Аналогичные способы формирования сиг-
налов и выравнивания ЧХ трактов могут быть использованы для формирования
ответных сигналов на кроссполяризации [60].
ГЛАВА 3
ОСНОВЫ РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
3.1. Классификация радиоэлектронных помех
Радиоэлектронная помеха — это ЭМ или акустическое излучение в виде
отражающего, рассеивающего или модулирующего образования, которое,
воздействуя на элементы радио-, оптико- или акустоэлекгронного средства или на
среду распространения ЭМ и/или акустических волн, снижают эффективность его
функционирования. Под действием помех РЭС могут перестать быть источниками
информации, несмотря на их полную исправность и работоспособность.
Преднамеренная (организованная) РЭ помеха создается источником искус-
ственного происхождения. Активная преднамеренная РЭ по меха создается непо-
средственно источником искусственного происхождения. Пассивная преднаме-
ренная РЭ помеха создаегся отражением излучения подавляемого РЭС или фор-
мированием в среде распространения этого излучения отражающих, поглощающих,
рассеивающих или модулирующих образований [15]. РЭ помехи классифицируют
по различным признакам. Так как подавить разнообразные РЭС помехами одного
вида невозможно, то применяют специальные их виды, предназначенные для по-
давления РЛС. систем радионавигации, радиосвязи, лазерной, инфракрасной тех-
ники и т.д. Более того, для подавления средств одного и того же класса, но исполь-
зующих различные виды сигналов и способы их обработки, применяются отлича-
ющиеся друг от друга виды помех.
Под помехами РЭС также принято понимать всевозможные излучения, до-
полнительные к рабочему излучению РЭС, наводки в цепях приемников и измене-
ния рабочего излучения, снижающие качество (эффективность! функционирования
РЭС или системы, элементом которой является РЭС. В 11] предложена классифи-
кация помех, полученная путем обобщения и развития известных в литературе
классификаций и отражающая все основные аспекты возникновения, формирова-
ния и применения помех.
1. Вид используемых волн: ЭМ и гидроакустические помехи.
2. Диапазоны частот (длин волн):
2.1. Радиопомехи различных стандартизованных диапазонов частот.
2.2. Оптические помехи:
• ПК ближнего и 1альнего диапазона волн:
• видимого диапазона;
• УФ диапазона.
2.3. Рентгеновского диапазона.
3. Происхождение:
3.1. Естественные помехи:
• собственные шумы антенн и приемников, излучения окружающей среды и
космических объектов:
182
Глава 3. Основы радиоэлектронного подавления
• отражения рабочего излучения ГЭС от земной поверхности, местных пред-
метов, метеообразований;
• поглощающие (экранирующие) образования на трассе распространения из-
лучения РЭС;
• рассеивающие образования;
• преломляющие образования;
• деполяризующие образования.
3.2. Искусственные помехи:
• преднамеренные (от специальных средств и мер создания);
• непреднамеренные (от других РЭС. взаимные помехи).
3.3. Индустриальные (от электрооборудования).
4. Путь проникновения в приемник РЭС:
• наводимые в приемной антенне;
• наводимые в цепях приемника через кожух, мину я антенну;
• наводимые в цепях питания.
5. Радиофизическая основа:
5.1. Помехи-излучения, дополнительные к рабочему излучению РЭС:
• генерированные, в том числе естественными источниками;
• ретранслированные с усилением (с помощью активных ретрансляторов и
ответчиков);
• отраженные (ретранслированные пассивными ретрансляторами).
5.2. Помехи ухудшения рабочего излучения РЭС за счет воздействия на среду рас-
пространения излучения (применение поглощающих, рассеивающих, преломляю-
щих и модулирующих структур).
5.3. Помехи ухудшения отражательных характеристик объектов активной локации:
• придание объектам малоотражающей формы:
• применение поглощающих материалов и покрытий;
• применение импедансных стру ктур;
• применение модулирующих упиавдяемых структур.
5.4. Помехи изменения излучений объектов пассивной локации и разведки:
• применение мер и средств, ослабляющих излучение;
• применение мер и средств, модулирующих излучение (с целью придания им
повышенной скрытности|.
5.5. Помехи - специальные воздействия на приемники РЭС:
• вибрационные помехи;
• помехи функционального подавления (обратимого функционального пора-
жения).
6. Энергия, затрачиваемая на создание помехового излучения: активные
помехи; пассивные помехи и активно-пассивные «комбинированные) помехи.
7. Объекты и задачи воздействия:
7.1. Помехи средствам локации и навигации в различных режимах функционирова-
ния:
• помехи обнаружению;
• помехи захвату на сопровождение (системам АСН, АСД, АСС);
Глава 3. Основы радиоэлектронного подавления
183
• помехи следящему измерению (сопровождению) и неследящему (разовому)
измерению с физическими и алгоритмическими стробами;
• помехи распознаванию объектов;
• помехи наведению средств поражения;
• помехи пуску средств поражения;
• помехи прицеливанию средств поражения;
• помехи подрыву средств поражения воздействием на РЛС наведения;
• помехи картографированию;
• помехи высотомерам;
• помехи доплеровскому измерению скорости.
7.2. Помехи линиям связи в различных режимах функционирования:
• помехи передаче служебных сообщений;
• помехи вхождению в связь;
• помехи синхронизации связи.
7.3. Помехи РЭ взрывателям (средствам подрыва БЧ средств поражения).
7.4. Помехи командным радиолиниям наведения.
7.5. Помехи средствам РЭ опознавания государственной принадлежности объектов.
7.6. Помехи средствам разведки излучения РЭС.
8. Виды защиты объектов'.
• помехи для индивидуальной защиты • помехи самолрикрытия);
• помехи для взаимной (коллективной) зашиты;
• помехи для групповой защиты (ГЗ) из боевого порядка;
• помехи для зонной защиты (ГЗ из удаленных от боевых порядков зон).
9. Характер взаимодействия с рабочим излучением РЭО.
• аддитивные помехи;
• мультипликативные (модулирующие) помехи;
• аппликативные (аддитивно-мультипликативные помехи).
10. Эффекты воздействия'.
10.1. Помехи, скрывающие (маскирующие) сигнал.
10.2. Помехи, ослабляющие сигнал.
10.3. Помехи, имитирующие сигнал:
• размножающие корреляционные пики (отметки целей) на выходе приемни-
ка РЭС;
• смещающие отметки в пределах элемента разрешения;
• уводящие (перенацеливающие) стробы слежения (с раздвоением и много-
кратным ветвлением отметок).
10.4. Искажающие характеристики тракта приема и обработки сигналов (аберраци-
онные помехи).
11. Вид модулируемого параметра помехового или рабочего излучения
(при создании помех пассивной локации и разведке)'.
• амплитудно-модулированные. в т.ч. импульсно-модулированные и преры-
вистые;
• частотно-мод\лированные:
• фазомодулированные:
184
Глава 3. Основы радиоэлек!П2онного подавления
• поляризационно-модулщрованные;
• модулированные по направлению излучения;
• модулированные по положению фазового центра излучения < направлению
прихода излучения).
12. Статистическая структура помехового излучения:
12.1. Помехи в виде случайных процессов:
• прямошумовые помехи;
• модулированные шумом по одному' или нескольким параметрам:
• хаотические импульсные помехи (ХИП).
12.2. Помехи в виде колебаний со случайными параметрами.
12.3. Детерминированные помехи.
13. Число точек излучения помех: одноточечные и многоточечные помехи.
14. Пространственные положения источников помех относительно
защищаемых объектов:
• создаваемые с объекта (помехи самоприкрытия);
• отделяемые от объекта;
• вынесенные сопровождающие защищаемые объекты и отличающиеся
направлением выноса;
• несопровождающие защищаемые объекты, вынесенные в специальную зону
(в зону недосягаемости оружия, действующего по защищаемым объектам).
15. Степень пространственной когерентности: некогерентные, частично
когерентные и когерентные.
16. Степень прицельности по направлению, частоте, поляризации, вре-
мени:
16.1. Прицельные:
• со следящей (запаздывающей) погоней за параметрами:
• с программной (упреждающей) погоней за параметрами.
16.2. Заградительные п ом ехи:
• параллельно-заградительные;
• последовательно-заградительные (скользящие или сканирующие).
16.3. Прицельно-заградительные помехи.
17. Степень статистической связи с сигналом: независимые от сигнала;
коррелированные с сигналом; жестко связанные с сигналом.
18. Способ формирования:
18.1. Генерируемые по априорным данным о сигнале.
18.2. Ответственно-ген ерируемые по данным непосредственной разведки излуче-
ний подавляемых РЭС.
18.3. Формируемые из рабочего излучения РЭС с использованием ретрансляторов
(помехи-копии сигнала, помехи-преобразованные копии сигнала).
19. Вид используе. юго канала приема излучений в подавляемых РЭС: по-
мехи по основным каналам приема излучений; помехи по побочным каналам прие-
ма.
20. Пропускная способность (количество одновременно обслуживаемых
разночастотных РЭС):
Глава В. Основы- paduodJieiw подавления
185
• создаваемые одному РЭС;
• создаваемые ограниченному ряду РЭС;
• создаваемые Heoi раниченному ряду РЭС.
21. Инд уплотнения в многоканальных по частоте средствах создания
активных помех', с временным уплотнением (частотно-дискретизированные поме-
хи); с частотным уплотнением (излучаемые одновременно на разных частотах).
22. Вид запретов излучений помех в интересах обеспечения ЭМС с соб-
ственной подсистемой разведки и другими РЭС’.
22.1. Помехи без запретов излучения.
22.2. Помехи с временными запретами излучения:
• с быстрыми запретами с периодом повторения сигнала РЭС;
• с медленными запретами в общем цикле разведки-подавления.
22.3. Помехи с частотными запретами.
23. Характер трассы распространения помехового излучения'.
• помехи класса «воздух-поверхность»;
• помехи класса «воздух-в оз дух»;
• помехи класса «поверхность-воздух»;
• помехи класса «поверхность-поверхность»;
• помехи класса «космос-поверхность»;
• помехи класса «поверхность-космос»;
• помехи класса «космос-космос».
24. Наблюдаемость помехи'. легко обнаруживаемые (видимые помехи);
трудно обнаруживаемые (невидимые помехи).
25. Тин помехового ресурса', с неограниченным ресурсом (нерасходуемые
помехи или помехи многоразового использования); с ограниченным ресурсом (рас-
ходуемые помехи пли помехи одноразового использования).
26. Характер функции эффективности', помехи с неограниченной энерге-
тической эффективностью; помехи с ограниченной энергетической эффективно-
стью.
27. Стойкость источника помехи к поражению по излучению’, помехи,
уничтожаемые по излх’чению; помехи, неуничтожаемые по излучению.
28. Степень статистической взаимосвязи отсчетов', коррелированные,
некоррелированные.
29. Время создания', упреждающие, синхронные, ответные
Смысл помех в основном ясен из их названия. Поясним лишь некоторые из
них. Аддитивные помехи создаются передатчиками помех. Сигнал на входе при-
емного устройства имеет вид С>(0 = ^дп(0 + ЦХО •
Мультипликативные помехи возникают, как правило, при случайных из-
менениях показателя преломления среды, в которой распространяются ЭМВ [61].
Сигнал на входе приемного устройства имеет вид СС(/) = ?7МП(/) • Ц.(/) •
Аппликативные помехи содержат в себе как аддитивную, так и мульти-
пликативную компоненты. Примером могут служить оптические помехи в виде
полупрозрачных масок, накладываемых на прикрываемые объекты.
186
Глава 3. Основы радиоэлектронного подавления
Прицельная помеха - помеха, ширина спектра которой AFn соизмерима с
полосой пропускания А/Прм приемника подавляемого РЭС. Обычно ЛЕ., в несколь-
ко раз больше Д/прм • Заградительная помеха имеет ширину спектра, значительно
превышающую полосу частот, занимаемую полезным сигналом. При этом спек-
тральная плотность мощности помехи 5П = PnAFn уменьшается по мере увеличе-
ния ширины спектра [15, 19]. Скользящие помехи имеют спектр заградительной
или прицельной помехи, который «скользит» в заданном интервале частот. К при-
цельно-заградительным помехам относятся, например, помехи РЭС с программ-
ной перестройкой рабочей частоты при известной сетке частот: помеха является
прицельной по каждой из частот сетки, а в целом является заградительной, имею-
щей многополосный спектр в широком диапазоне частот.
Под видимыми помехами понимаются помехи, наблюдаемые непосред-
ственно на выходе приемника РЭС (например, непрерывные шумовые маскирую-
щие помехи РЛС). К «невидимым» (скрытным) помехам относятся имитирующие
помехи с высокой степенью подобия истинным целям по сигнальным и траектор-
ным характеристикам. Для обнаружения «невидимых» помех требуется принимать
специальные меры.
3.2. Создание активных помех РЛС обнаружения целей
Подавление РЛС ПВО противника является одной из важнейших задач со-
временных военных воздушных действий. Операции, направленные на нейтрализа-
цию, уничтожение или временный вывод из строя ПВО противника получили на
Западе обозначение SEAD (Supression of Enemy Air Defence). Наиболее подходя-
щими для решения задач SEAD являются малозаметные (steakh) самолеты. Самолет
типа F-35 может незамеченным подойти достаточно близко к РЛС, используя пас-
сивные датчики или наведение со стороны, чтобы нанести точный удар ПРЛ раке-
тами. Тактика подавления РЛС ПВО совершенствуется в соответствии с вновь воз-
никающими угрозами и развитием технологий. РЛС с АФАР (AESA - Active Elec-
tronically Scanned Array) отличаются не только большой разрешающей способно-
стью, но и могут использоваться для «выжигания» РЛС противника (вероятно, эта
техника будет использоваться на F-35).
Различные методы и способы РЭП вызывают в РЛС следующие эффекты.
• нарушение процесса обнаружения (пропуск цели);
• дезориентацию оператора РЛС;
• задержку обнаружения цели или задержку начала АС цели;
• перегрузку систем обработки информации большим количеством ЛЦ, со-
провождение ЛЦ;
• нарушение способности измерения радиолокационными средствами даль-
ности, скорости и направления цели;
• создание ошибок в измерении дальности, скорости и направления цели,
срыв АС цели или ракеты [12, 13, 15, 19, 22].
Важнейшими свойствами СУ оружием являются:
1) многопозиционность, построение по сетевому принципу;
Глава 3. Основы радиоэлектронного подавления
187
2) адаптация к быстроменяющейся РЭ и тактической обстановке;
3) возможность изменения структуры, передача функции управления прак-
тически любому из элементов системы;
4) функционирование как по отраженному от цели сигналу, так и по излуча-
емой активной помехе;
5) сложность выделения доминирующих элементов в информционном поле
системы.
При организации РЭП необходимо учитывать, что любой СУ присущи сле-
дующие функции [12]: поиск и обнаружение нарушителя; опознавание государ-
ственной принадлежности («свой-чужой»); передача по линии связи информации
об обстановке в зоне ответственности; обработка информации и выработка команд
управления; передача команд управления по линии связи; наведение оружия и от-
крытие огня. В современных РЛС для противодействия помехам используются:
1) перестройка несущей частоты от импульса к импульсу в широкой полосе
частот по случайному закону;
2) монопмпульсный метод измерения угловых координат целей и угловое
стробирование отметок;
3) применение простых и сложных импульсных зондирующих сигналов, пе-
риод повторения и длительность которых могут изменяться в широких пределах;
4) управление параметрами обзора (временем облучения цели, частотой об-
ращения к цели, периодом просмотра сектора поиска и др.) в соответствии с быстро
изменяющейся тактической и РЭ обстановкой:
5) компенсация и бланкирование помех, принимаемых по БЛ ДНА;
6) СДЦ на фоне естественных и искусственных пассивных помех;
7) применение специальных режимов - пеленгация (пассивное сопровожде-
ние), сопровождение по переднему фронту импульса, силовое преодоление ПП;
8) применение оптимальных и квази оптимальных алгорт тмов обнаружения
и селекции целей;
9) фильтрация параметров траекторий и управление полетом ЗУР;
10) структурная адаптация дногопоз! шюнной системы, использование
ложных излучений;
11) различные модификации АРУ и стабилизация ложных тревог.
Типичным представителем наземных РЛС УО группировок ПВО вероятно-
го противника является система, реализованная в ЗРК большой дальности
«Пэтриот». Режимами работы РЛС ЗРК «Патриот» являются: 11 режим поиска це-
лей; 2) режим захвата целей на сопровождение: 3) режим сопровождения целей; 4)
режим командного наве юния ЗУР; 5) режим наведения ЗУР способом TVM [15].
К наиболее важным с точки зрения РЭБ особенностям функционирования
РЛС УО перспективных ЗРК можно отнести следующие:
• оптимальное (квазиоптимальное) распределение энергопотенциала между
различными элементам:! системы при одновременном обслуживании (обнаруже-
нии, захвате, сопровождении) нескольких целей;
• выделение полезной информации о коодинатах цели как из отраженных от
цели сигналов, так и из излучаемых помех и использование этой информации для
управления характеристиками системы;
188
Глава 3. Основы })адиоэлекпд)онног<о подавления
• структурно-параметрическая адаптация к тактической и Р ) обстановке:
• интеграция РЛС и РГС ЗУР в активно-пассивную пространственно-
распределенную систему когерентного типа, в которой РЛС выполняют функции
центров обработки информации и управления.
Основными закономерности ни РЭП сетевых РЛС УО являются:
• увеличение числа ПП приводит к снижению отношения сигнал/шум, кото-
рое тем существеннее, чем ниже уровень взаимной корреляции помех, при этом
выигрыш оптимальной обработки по сравнению с согласованной резко снижается и
при наличии более 4 ПП составляет не более 2. .>3 дБ;
• наиболее низкой помехозащищенностью характеризуется режим захвата
цели, для которого характерна пороговая зависимость относительной пропускной
способности от интенсивности входного потока ложных отметок и повышенные на
7... 10 дБ требования к пороговому отношению сигнал/шум;
• при обнаружении ПП алгоритм оптимальной пространственно-временной
обработки сигналов и помех в РЛС обеспечивает суммирование энергий сигналов и
помех, что приводит к невозможности подавления таких систем широкополоснькми
шумовыми помехами;
• случайные изменения уровня БЛ ДНА при ее сканировании приводят к
флуктуационным потерям мощностей шумовой и имитирующей помех, и как след-
ствие, к повышению вероятности обнаружения сигнала и снижению вероятности
обнаружения имитирующей помехи на 25...30 %;
• имитирующие помехи, создаваемые по БЛ ДНА приемных элементов РЛС,
не приводят к образованию устойчивых ложных траекторий по причине большого
«разброса» результатов измерений угловых координат, а наложение имитирующей
помехи на отметку цели при достаточном превышено г мощности помехи над мощ-
ностью сигнала может приводить к срыву сопровождения ее траектории;
• эффект совместного применения когерентных помех по главному и некоге-
рентных помех по БЛ ДНА приемных элементов РЛС, характеризуемый увеличе-
нием систематической ошибки измерения угловых координат цели, имеет место
при создании некогерентных помех только по ближним БЛ ДН А;
• в режиме поиска и захвата существует оптимальное значение энергопотен-
циала ПП по главному лепестку ДНА, при котором обеспечивается максимальное
значение необнаружения цели ни по отраженному сигналу, ни по помехе:
• для нейтрализации алгоритмов корреляционной обработки в структуре по-
мехи должна присутствовать узкополосная составляющая [15].
Энергетические характеристики помех и возможности подавления РЛС во
многом зависят от:
• параметров антенной системы;
• способности защищаемого объекта переотражать РЛ сигналы;
• условий распространения ЭМВ в пространстве взаимодействия;
• взаимного расположения РЛС, защищаемого объекта и ПП.
Мощности сигнала и помехи на входе приемника завися г от положения це-
ли, РЛС и постановщика помех, подавление РЛС помехами будет осуществляться
только при определенном их взаимном положении. При планировании РЭП реша-
ются следующие задачи’. 1) необходимо определить требуемое местоположение
Глава 3. Основы радиоэлектронного подавлении
(МП) ПП, при котором будут прикрыты помехами цели в заданном районе; 2)
необходимо определить допустимое МП прикрытых помехами целей при заданном
положении ПП.
На определенном удалении прикрываемого ЛА от подавляемой РЛС
отношение помеха/сигнал на входе приемника РЛС уменьшится настолько, что
помеха становится неэффективной. Область пространства, в пределах которой
может находиться прикрываемая цель, не будучи обнаруженной подавляемой РЛС.
называется зоной подавления [15, 60]. Понятие «зона подавления» относится к
одной РЛС и вводится для оценки действия активных помех в статике. РЭС могут
подавляться радиопомехами только в том случае, когда мощность помехи,
попадающей в полосу пропускания РПУ, превышает некоторую пороговую
величину, характерную для данного вида помехи, сигнала, условия их
взаимодействия и способа обработки принимаемой суммы сигнала с помехой.
Помеха считается эффективной, если отношение ее мощности к мощности сигнала
на входе приемного устройства дольше коэффициента подавления Кп . Чем меньше
Кп, тем при прочих равных условиях эффективнее помеха. Пространство, в
пределах которого отношение мощностей помехи и сигнала превосходит
коэффициент А . называется зоной подавления РЭС. При определении зоны
подавления активными помехами РЛС наиболее часто различают два случая:
самоприкрытие и взаимная защита.
Взаимное прикрытие. Возможен случай, когда ПП РЛС не совмещен с
прикрываемым самолетом (рисунок 3.1). протяженности трасс распространения
сигнала и помехи неравны друг другу. Тактико-технические данные о подавляемой
РЛС, ПП и прикрываемой цели i П Ц • считаются известными.
F 2(0 .<р )
с v п'“п'
Рис. 3.1. Создание помех РЛС в случае взаимного прикрытия
Мощность полезного сигнала на входе приемника подавляемой РЛС опре-
деляется как
190 Глава 3. Основы радиоэлектронного подавления
свх
-----Чч• (Ос)• 1 °‘°’,О*П
(4тгЯс ) ц Р с с с
(3-1)
где Рс - излучаемая мощность передатчика РЛС; Gc - максимальное значение КУ
антенны РЛС; F^(0c,(pc) - нормированная функция ДНА РЛС но мощности с по-
лосой пропускания приемника Д/[]р в направлении на цель; - ЭПР прикрывае-
мой цели; Ар - максимальное значение площади антенны РЛС; сгц — коэффициент,
учитывающий затухание в атмосфере [дБ/км] при прохождении сигнала только в
одну сторону.
Мощность помехового сигнала на входе приемника РЛС определяется как
► __ Л П^П ПРМ
пвх " 4я7?п2 ' Д/п
• у4 Гп2 (0’п, )FC2 (0П, <рп ) • 10^ + Рш ,
(3-2)
где Рп - излучаемая мощность ПП; Gn - максимальное значение КУ антенны ПП;
Fn2(©n,(Pn) - нормированная функция ДНА ПП по мощности; Рс2(0п,<рп) - норми-
рованная функция ДНА РЛС по мощности в направлении на ПП; А/п - ширина
спектра помехи; у <1 - коэффициент, учитывающий различие поляризаций сигнала
и помехи; Рш =APVir A -" v _ мощность собственных шумов в полосе пропускания
линейной части приемника РЛС; к = 1,38-10’23 Вт град Гц - постоянная Больцмана;
Т - абсолютная температура приемника; А и - коэффициент шума приемника.
Коэффициент подавленья (влияние отражений от земной поверхности и по-
глощение энергии ЭМВ в атмосфере не учитываются) составит
и
4лу А/пРМ (®П - ffVl )^С (® П - Фп ) | д0,1а(2Лс-Лп)
<^ц А/п ^(©с^с)
(3.3)
Соотношение (3.3) называется уравнен нем РЭП для случая взаимного при-
крытия (уравнением противорадиолокации). Это уравнение справедливо в прене-
брежении мощностью собственных шумов приемного устройства РЛС и определя-
ет отношение мощности помехового сигнала к мощности полезного сигнала на
входе приемника подавляемой РЛС в зависимости от параметров РЛС, ПП, цели и
их взаимного расположения.
Уравнение может быть использовано для решения следу тощих задач;
1) определения границ зоны подавления;
2) расчета размеров эффективного сектора, прикрытого помехами, при за-
данных параметрах ПП и заданной минимальной дальности до него;
3) оценки энергопотенциала ПП. необходимого для подавления РЛС в пре-
делах заданного сектора [1,4].
Цель не будет обнаружена, если ее удаление от РЛС не менее величины
Глава 3. Основы радиоэлектронного подавления
191
Выражение (3.4) дает пространственное описание зоны подавления. Анализ
выражения (3.4) показывает, что зона подавления и ее границы в значительной сте-
пени опре деляются ДНА подавляемой РЛС. Максимально допустимое удаление
ПП от подавляемой станции ЯПтах, при котором обеспечивается требуемое значе-
ние Кп, в пределах расстояния «подавляемая РЛС-защищаемый объект» при за-
данном коэффициенте подавления определяется соотношением
п _ п2 ^п<^п 4лу Д/^рм (Оп, фп )7у. (Оп, <дГ|) . .
П max € » | т .г А с п 4 / г \ \
\ АП^Ц А/п
Граница зоны подавления РЛС помехами зависит от формы ее ДНА и ра-
курса, под которым воздействуют помехи. Если помеха действует по главному ле-
пестку ДНА, зона подавления, отсчитываемая от самолета-постановщика помех,
будет больше, чем в случае воздействия помех по БЛ. Качественный вид зоны по-
давления представлен на рисунке 3.2.
ШИРОКАЯ ДНА ПП
Рис. 3.2. Зона подавления РЛС для случая взаимного прикрытия
Увеличение энергетического потенциала ПП (САП) приводит к смещению
границы зоны подавления в сторону РЛС. Когда уровни БЛ ДНА РЛС неизвестны,
при определении границы зоны подавления уровни 1-го и 2-го БЛ считают на 20 и
30 дБ ниже уровня главного лепестка.
Самоирикрытие. Случай установки ПП на прикрываемом объекте (рису-
нок 3.3), когда помехи создаются с борта самолета, преодолевающего рубеж ПВО.
Коэффициент подавления (соотношение мощностей помехи и сигнала на входе
РЛС) составит
(3.6)
192
Глава 3, Основы радиоэлектронного подавления
где ст — ЭПР самолета; у <1 - коэффициент, учитывающий различие поляризаций
сигнала и помехи.
Параболическая зависимость К -(Т?п), заданная уравнением (3.6), иллю-
стрируется графиком, представленном на рисунке 3.4.
Рис. 3.3. Создание помех РЛС в
случае самоприкрытия
Рис. 3.4. Зона действия помех в
случае самоприкрытия
Как видно из рисунка 3.4. по мере сокращения дальности R. наблюдается
относительное уменьшение мощности помехи по сравнению с мощностью подав-
ляемого сигнала (сигнала РЛС). Начиная с некоторой дальности T?min, выполняется
соотношение Рш^/Рст и помеха становится неэффективной: цель обнаружи-
вается РЛС на фоне помех. Такое снижение эффективности воздействия помех объ-
ясняется различием характера изменения мощностей помехи и отраженного от цели
сигнала. С уменьшением расстояния между ПП и РЛС мощность помех Ршх на
входе приемника РЛС возрастает как А 2, в то время как мощность принимаемого
сигнала Рсвх, отраженного РЛ целью, изменяется пропорционально R~\ т.е. мощ-
ность сигнала возрастаег быстрее, чем мощность помехи [19].
У реальной РЛС динамический диапазон приемника ограничен. Поэтому на
некотором расстоянии R' приемник РЛС перегружается и перестает выполнять
свои функции. Начиная с расстояния R', РЛС снова будет подавлена за счет пере-
грузки приемно-индикагорного тракта. Учитывая меры, принимаемые в РЛС для
защиты от сильных помех, при расчете зон подавления эффект перегрузки прием-
ника не учитывается. Граничное расстояние R. ш - это дальность самоприкрытия
цели. Дальность самоприкрытия может быть определена из уравнения РЭП для
случая самоприкрытия (3.6) при заданном значении А.'п
Ту. (€)с, (Pq )
Глава 3. Основы радиоэлектронного подавления
193
Для уменьшения 7?min необходимо увеличивать энергопотенциал САП,
улучшать качество помехи, делать помеху прицельной по частоте, направлению,
поляризации, а также уменьшать ЭПР цели [19, 28]. На рисунке 3.5 представлена
качественная картина зависимости коэффициента подавления Кп от Rc и парамет-
ров 7?п, Рп, С?п.
Рис. 3.5. Зависимость коэффициента подавления от дальности до прикрываемого самолета
Анализ зависимостей рисунка 3.5 показывает, что при заданном энергети-
ческом потенциале ПП РПСП и постоянном расстоянии до постановщика помех 7?п
от ношение помеха/сигнал на входе приемника РЛС уменьшается с уменьшением
расстояния до прикрываем ого самолета. Уменьшение или увеличение Rn приводит
соответственно к уменьшению или увеличению минимальной дальности подавле-
ния PCmin [1, 4]. Выражения (3.3), (3.6) справедливы, если приемник не перегружа-
ется помехой. Реальные приемники и индикаторные устройства имеют ограничен-
ный динамический диапазон, обычно существует некоторое значение мощности
помехи РП тах, при которой наступает перегрузка приемника (приемник теряет воз-
можность выполнять свои функции по выделению входного сигнала). На рисунке
3.6 изображены варианты усиления смеси полезного сигнала и помехи.
Случай на рис. 3.6а соответствует такому уровню помехи, при котором пе-
регрузки приемника нет. Сигнал уверенно наблюдается на фоне помех. Случай на
рис. 3.66 соответствует перегрузке приемника помехам! большой интенсивности.
И хотя мощность сигнала значительно больше мощности помехи, сигнал на выходе
приемника не наблюдается. Часто используют дальность подавления при приеме
помехи главным лепестком ДНА РЛС на уровне половинной мощности
п
^€0.5
Кроме того, используют понятие сечения зоны подавления
194
Глава 3. Основы радиоэлектронного подавления
Если ширина боевого порядка d меньше сечения зоны подавления 1Л, то
прикрываемые самолеты могут подлетать к подавляемой РЛС на расстояние Rc 05
незамеченными. Если ширина боевого порядка d больше сечения зоны подавления
1п, то необходимо увеличить число ПП на борту постановщика помех или их число
в т раз [15].
Рис. 3.6. Перегрузка приемника помехами большой интенсивности: а) случай
неперегруженного помехой приемника; б) случай, когда приемник перегружен помехой
Суммарная мощность передатчиков будет равна Л = шРП1 ( Р. - мощность
одного передатчика). Величина т определяется как т =
{(О4)-
Определенное выше понятие «зона подавления» относится к одной РЛС. В
реальных условиях цели обнаруживаются (комплексомI группировкой разнообраз-
ных РЛС, информация о координатах цели пост} пае г в центры управления (наве-
дения) от нескольких РЛС, расположенных в различных местах. Информация о це-
лях и постановщиках помех в центрах управления обрабатывается, данные одной
РЛС дополняются и уточняются с помощью данных от других РЛС. Поэтому в ди-
намике боя область действия помех (область, прикрытая помехами), строго говоря,
не будет соответствовать зоне подавления. Если данные о координатах ПП посту-
пают от двух РЛС (рисунок 3.7), то в результате обработки информации можно
определить положение ПП с большей точностью, чем в случае одной РЛС.
Для каждой из двух РЛС имеются зоны подавления, определяемые соответ-
ственно площадями секторов S, и 5,. Сопоставление этих зон позволяет в значи-
тельной мере увеличить разрешающую способность системы РЛС в условиях по-
Глава 3. ОсновЫ- ^одиоэл^юпронного подавления
195
мех. Точность определения координат ПП и прикрываемых им самолетов зависит
от величины секторов 5] и S2, а также величины запаздывания в поступлении ин-
формации от РЛС-1 и РЛС-2. При обработке данных от двух РЛС точность опреде-
ления координат ПП увеличится, но останется все же меньшей, чем в случае рабо-
ты без помех. Наличие помех приводит к образованию вокруг постановщика помех
некоторой области 5Н, называемой областью неопределенности. Размеры ее
определяют разрешающую способность и точность системы РЛС в условиях помех.
При наличии нескольких РЛС £н <«$,, S2, ... SN. В случае одной РЛС область не-
определенности совпадает с зоной подавления SH = .
РЛС-1
РЛС-2
Рис. 3.7. Область неопределенности, образующаяся вокруг 1111
Размеры областей неопределенности приближенно можно определить с по-
мощью уравнений (3.3) и (3.6). Зная размеры областей неопределенности и харак-
тер их изменения во времени, можно решать некоторые задачи радиоэлектронного
противодействия: определять минимальные дальности подавления; находить без-
опасные участки маршрута в зоне ПВО; производить расчет нарядов сил и средств
РЭП, необходимых для подавления данной системы РЛС [1].
3.3. Энергетические соотношения при создании активных
помех РЛС и радиоголовкам самонаведения
Энергетические соотношения при создании активных помех целесообразно
рассматривать применительно к двум основным типам передатчиков помех ПП:
генераторном} и ретрансляционному. Особенностью генераторного ПП является
независимость выходной мощности передатчика помех от уровня мощности РЛ
сигнала, облучающего этот постановщик помех. Подавлению РЭС маскирующими
помехами характерны своп особенности, при этом могут преследоваться цели со-
кращения дальности РЛ обиарх жения, снижение вероятности или увеличение вре-
мени передач i информации в каналах связи противника, снижение точности ме-
196
Глава 3. Основы [радиоэлектронного подавления
стоопределения с использованием средств радионавигации и др. Успешное дости-
жение указанных целей возможно при выполнении основных условий РЭП РЭС
маскирующим и помехам и:
• своевременное обнаружение и определение параметров сигналов подавляе-
мого РЭС;
• распознавание объектов подавления и ранжирование по степени важности;
• целераспределение САП и реализация этого целераспределения;
• требования по пространственно-энергетическим характеристикам САП.
диапазонам рабочих частот и быстродействию (времени реакции!, ширине спектра
помех, распространению энергии в среде;
• требования по числу одновременно подавляемых РЭС одной САП, направ-
ленности передающих антенн САП. видам формируемых помех [22].
Для ретрансляционного ПП характерны два режима работы: режим посто-
янного коэффициента усиления (линейный ретранслятор) и режим постоянной вы-
ходной мощности. Важная характеристика ретранслятора - реализуемый динами-
ческий диапазон входных сигналов, при которых обеспечивается линейный режим
усиления или уровень постоянной выходной мощности [12]. Энергетические соот-
ношения целесообразно рассматривать для основных способов РЭЗ: самозащиты и
прикрытия. При самозащите ПП находится на защищаемом объекте, а в случае по-
мех прикрытия - на объекте, пространственно не совпадающем с защищаемым
объектом.
Уравнение РЭП при создании помех РЛС ПП генераторного типа. При
энергетической оценке действия активных помех на РЛС необходимо учитывать
взаимное расположение защищаемого объекта, постановщика помех и РЛС, а также
ДНА РЛС при создании помех. Схема для определения энергетических характери-
стик отраженного от цели сигнала и помехи, создаваемой передатчиком генератор-
ного типа, приведена на рисунке 3.8.
Рис. 3.8. Схема для определения энергетических характеристик отраженного от цели РЛ
сигнала и помехи, создаваемой передатчиком генераторного типа
Ослабление радиолокационного сигнала в атмосфере учитывается коэффи-
циентом 10-°’2“\ так как радиолокационный сигнал проходит атмосферу дважды
(tx — удельное затухание радиоволн в атмосфере, дБ/км; R — протяженность трассы
Глава 3. Основы радиоэлектронного подавления
в атмосфере, км) [12]. Минимальные энергетические потери сигнала помехи
наблюдаются только в случае, когда поляризация антенны ПП согласована с поля-
ризацией приемной антенны подавляемой РЛС. В остальных случаях наблюдается
увеличение потерь из-за различий их поляризаций. Если в ПП и РЛС используются
линейно-поляризованные антенны, то у = cos2 Д0П, (Д0П - угол между векторами
поляризации).
С учетом ослабления волн в атмосфере и из-за влияния поверхности Земли
в сражение для мощности радиолокационного сигнала, отраженного от самолета,
примет следующий вид
(3.9)
где Рс - мощность передатчика РЛС; Gc, Gnp - усиление соответственно переда-
ющей и приемной антенн РЛС в направлении на защищаемый самолет; ст,, - ЭПР
самолета; R - удаление самолета от РЛС; g* - коэффициент, учитывающий влия-
ние подстилающей поверхности на сигнал РЛС, отраженный от самолета [12].
Уровень сигнала помехи на входе приемника РЛС для ПП генераторного
типа равен
<?пр.п(®)Г
4л
• 10-01огЛп g2 у
о ПС /
(3.10)
где Рл - мощность ПП; 6П - усиление передающей антенны ПП в направлении
РЛС; Rn - удаление ПП от РЛС (рисунок 3.9); Сгпрп(0) - усиление приемной ан-
тенны РЛС в направлении на ПП; g2c - коэффициент, учитывающий влияние под-
стилающей поверхности на помеху; Ю-01^ - коэффициент, учитывающий затуха-
ние помехи в атмосфере [1].
Рис. 3.9. Схема для определения энергетических характеристик
Для подавления нескольких радиолокаторов, использующих линейную го-
ризонтальную и вертикальную поляризации, ПП должен применять систему либо с
198
Глава 3. Основы радиоэлектронного подавления
круговой поляризацией, либо с наклонной (0 = 45°). В этом случае потери сигнала
помехи составят 3 дБ, нет необходим ости в сложном устройстве определения и
управления поляризацией антенны ПП. Используя (3.9) и (3.10), находим отноше-
ние мощности помехи к мощности отраженного от цели сигнала на входе приемни-
ка РЛС
П прикр
(3.11)
где NSOK - Gnp/<7ПР п(О) — относительный уровень БЛ приемной антенны РЛС в
направлении на ПП.
Выражение (3.11) для коэффициента подавлени i характерно для случая, ко-
гда ПП не совмещен с целью, т.е. для прикрытия защищаемого самолета вынесен-
ным постановщиком помехи. Если ПП совмещен с целью (случай самоз1шиты),
коэффициенты усиления приемной антенны РЛС в направлении на цель и ПП сов-
падают ( Дабок = 1)
(3.12)
Из уравнений (3.11), (3.12) можно видеть, что коэффициент КГ в случае ге-
нераторных помех прикрытия зависит прямо пропорционально удалению защища-
емого самолета от РЛС в 4-й степени и обратно пропорционально удалению поста-
новщика помех от РЛС во 2-й степени. Чем больше излучаемая мощность ПП, тем
больше уровень помехи и, следовательно, больше коэффициент Ап . Чем больше
излучаемая мощность РЛС и сгц защищаемого самолета, тем меньше КП . В случае
самозащиты Кп изменяется прямо пропорционально 2-й степени удаленья самоле-
та от РЛС.
Для каждой РЛС существует минимальное значение A ,min, начиная с кото-
рого помеха создает требуемый помеховый эффект (маскировку сигнала цели, срыв
сопровождения и т.д.). Он зависит от стр\ктурь сигнала РЛС и помехи, параметров
и вида обработки сигнала в приемнике РЛС, типа индикатора, а также от режима
работы РЛС (обзор, автоматическое и ручное сопровождение). При приближении
защищаемого самолета к РЛС на дальность К коэффициент подавления может
настолько уменьшиться, что помеха перестает создавать требуемый эффект. Гра-
ница, при приближении защищаемого самолета к которой помеха перестает быть
эффективной, определяется условием Ап = А'п mjn.
Область пространства, в которой выполняется условие Кп > К min (в
пределах которой может находиться прикрываемая цель, не будучи обнаруженной
подавляемой РЛС), называется зоной подавления РЭС помехами и находится
численным или графическим решением уравнения РЭП (уравнения
противорадиолокации). Пренебрегая потерями в среде распространения (А' = 0,
Глава 3. OcHoebi ^адиоэлек/пронног^ ио^двле/п/я
199
£пс = gpc = 1) и предполагая равенство ширины полосы пропускания приемника
РЛС ширине спектра помехи, эти уравнения имеют вид: для помех прикрытия
г> л~< 1 ' г» V г>2
. = 4тгу—-—-
nmin п
(3-13)
БОК
Ц
для еамозащиты
= 4тг/—~
Hrnin rx
Минимальная дальность действия генераторного ПП прикрытия
n.min
БОК р2
"----°ЦЛП ’
4лу
Минимальная дальность действия генераторного ПП для самозащиты
самозащ
Fimin
(3.16)
Ц ’
П
Если заданы значения К1, ^саЛ1ОЗащ, и параметры РЛС, то можно опреде-
лить требуемый энергопотенцлал ПП. используя выражения:
для помех при рытия
n.min
прикр А
\ 2
п
ц
2
О
(3-17)
БОК ’
О
для самозаши । и
n.min
самсващ л __.
и
о
Сравнение полученных выражений показывает, что для помех прикрытия из
вынесенного за пределы зоны поражения района барражирования требуемая мощ-
ность ПП в A r IR 'R, Г раз больше требуемой мощности ПП для самозащиты.
Если ПП одинаково удален от РЛС (как и прикрываемый самолет, Ап = RQ), но не
совмещен с защищаемым самолетом, то требуемая мощность ПП для прикрытия
должна быть больше мощности передатчика самозащиты всего в ЛГБ0К раз. С энер-
гетической точки зрения наиболее благоприятные условия наступают, когда поста-
новщик помех прикрытия находится впереди защищаемых объектов. В этом случае
требуемая излучаемая мощность уменьшится в (Ап R V раз по сравнению с ПП
прикрытия, находящимся в удаленной зоне [12]. Однако, такой постановщик помех
подвергается большей опасности, так как он вынлж юн находиться в зоне пораже-
ния огневых средств IIBO.
> равг I при соз |ании помех РЛС ГШ ретрансляторного типа. В
ретрансляционном ПП помеха формируется путем усиления и модуляции принято-
го РЛ сигнала с последующим излучением сформированной помехи в направлении
200
Глава 3. Основы радиоэлектронного подавления
подавляемой РЛС. Ретрансляционный передатчик можно охарактеризовать макси-
мальной излучаемой выходной мощностью и его полным коэффициентом усиления
АГПОЛ, равным произведению коэффициентов усиления ретранслятора , прием-
ной и передающей антенн
- ^пол ~ ^ПР.ретр ’ Ку ' СПрд ре1р . (3.19)
Рассмотрим случай создания помех прикрытия, когда ретрансляшюнны
передатчик пространственно не совмещен с прикрываемым объектом защиты
Пусть РЛС сопровождает один самолет, отраженный от него сигнал РЛС принима-
ется основным лепестком ДНА РЛС. Тогда на постановщике помех сигнал РЛС
принимается ретранслятором через БЛ ДН передающей антенны РЛС, усиливается,
наделяется помеховой модуляцией и излучается в направлении РЛС, воздействуя
на нее через БЛ ДН приемной антенны. Схема для определения энергетических ха-
рактеристик сигналов в случае создания помех прикрытия с помощью ретрансля-
ционного передатчика приведена на рисунке 3.10.
ЭКВ1 ’ВАЛЕНТНЫЙ
КУ ЦЕЛИ
Рис. 3.10. Схема для определения энергетических потерь РЛ сигнала и помехи
прикрытия для ретрансляционного передатчика
Коэффициент подавления на входе приемника РЛС (рис. 3.10) равен
. 0-О,2а(Яп-Я) 2
___________________о ПС
N -N -р-2 ’
1 ’БОК.пер БОК.пр <5рс
(3.20)
где - эквивалентный КУ цели; Афок , УБОК.пР _ относительные уровни БЛ пе-
редающей и приемной антенн ретрансляционного передатчика [12].
Пренебрегая потерями в среде распространения ( К = 0, gnc = gpc = 1), из
(3.20) найдем значение полного коэффициента ретранслятора в случае создания
помех прикрытия
Гшиш 3. Основы ^адиоэлеюпронного подавления
201
= ЬЬ
ПОЛ.ретр 2
N
БОК. пер J BOK.np
(3.21)
Если принять АБОКпер = УБ0К = 1, a Rn=R, то получим выражение для
полного коэффициента усиления ретранслятора в случае самозащиты.
Для получения на входе приемника подавляемой РЛС одного и того же от-
ношения помеха/сигнал полный коэффициент усиления ретранслятора, создающего
помехи прикрытия, должен быть больше полного коэффициента усиления ретранс-
лятора самозащиты на величину, определяемую потерями сигнала из-за приема и
воздействия по БЛ ДНА подавляемой РЛС, а также различиями расстояний защи-
щаемого самолета и постановщика помех от РЛС
I к ) N
\ ПОЛ.ретр /самозащ БОК.пер
•N
1 v БОК. пр
(3.22)
Максимальная выходная мощность ретрансляционного ПП прикрытия
определяется минимальной дальностью подавления и /. , mjn, может быть найдена
путем умножения уровня РЛ сигнала, принятого по БЛ передающей антенны РЛС,
на КУ передающей антенны ПП. что после преобразований выражается формулой
п
= nmin. .PG . — .N
тах.прикр пеР БОК. пр
(3.23)
9
0
где G - усиление передающей антенны РЛС в направлении на ПП [12].
Максимальная мощность ретрансляционного ПП в случае прикрытия связа-
на с максимально! мощностью ретрансляционного ПП самозащиты следующим
выражеш i ем
max. прикр
max. самозащ
БОК. пр
(3-24)
Коэффициент подавления. описываемый отношением мощностей
помеха/сигнал на входе приемника подавляемой РЛС в полосе пропускания его
лине, ной части, при котором имеет место требуемый информационный ущерб,
имеет статистический характер. Это связано с тем, что отраженный от цели сигнал
флуктуирует из-за случайных изменений ЭПР цели и условий распространения
радиоволн. Уровень помехи также имеет случайный характер, обусловленный,
например, изрезанностью ДНА ПП РЛС) и частотной характеристики усилителя
ПП, а также влиянием земной и водной поверхностей.
3.4. Активные помехи РЛС управления войскам
РЛС управления войсками I ВО .РЛС У В работают, как правило, в режиме
обзора. Типовая РЛС поиска и обнаружения обычно решает четыре
взаимосвязанных задачи:
202
Глава 3, Основы радиоэлектронного подавления
• поиск, обнаружение, определение основных характеристик и
идентификация целей;
• установка приоритета обнаруженных целей;
• формирование исходных данных для выработки команд ЦУ
соответствующим потребителям;
• контроль изменения состояния и характеристик объектов наблюдения в
течение отведенного времени [19].
Для РЭП данных РЛС используются все виды непрерывных помех,
хаотические импульсные помехи (ХИЛ), а также многократные ответные
импульсные помехи. Данные помехи являются маскирующими. Эффективность
помех зависит от их структуры, типа подавляемой РЛС и используемых устройств
защиты от помех. В качестве непрерывных помех используют [15]:
• прямошумовую (ПШП);
• амплитудно-модулированные шумовые < АМШП);
• частотно-модулированные шумовые (ЧМШП);
• фазомодулированные шумовые ( ФМШП);
• амплитудно-частотно модулированные (АЧМП).
Результатом действия непрерывных шумовых помех является маскировка
полезных сигналов в некотором телесном утле и интервале дальности. Вследствие
этого существенно ухудшается разрешающая способность и снижается точность
определения направления на цель. Измерение дальности с помощью РЛС может
быть исключено в течение длительного времени. Шумовые помеховые сигналы
обеспечивают принципиальную возможность маскировки полезных сигналов лю-
бой структуры и формы. В качестве многократных ответных импульсных помех
используется серия импульсов, излучаемых в ответ на принятый сигнал РЛС.
Прямошумовая помеха. Идеальная шумовая помеха с точки зрения ин-
формационного критерия, должна иметь нормальную (гауссовую) плотность рас-
пределения мгновенных значений и равномерный энергетический спектр в задан-
ной полосе частот А/, [1]. В наибольшей степени к такой помехе приближается
ПШП, представляющая собой хаотическое изменение ЭМ колебания или электри-
ческого сигнала в диапазоне частот подавляемой РЛС. ПШП в первом приближе-
нии можно считать узкополосным случайным процессом с гауссовским законом
распределения мгновенных значений и равномерной спектральной плотностью.
Узкополосность помехи обусловлена тем, что ширина ее спектра А/7 много мень-
ше ее центральной частоты. БГШ имеет корреляционную функцию R(t) в виде <5 -
функции, реальные шумы имеют ограниченный по частоте спектр, называются
«небелыми» и являются коррелированными: при сужении спектра корреляционная
функция расширяется.
Распространенной и удобной для решения многих задач анализа моделью
узкополосного («небелого») шума является квазигармоническое колебание [9. 15]
мшп(/) -^(/)cos[6q/ + $»(r)] = ^(/)coso0/ + B(/)sin690/ = Re *7?u)exp( /&)/)], (3.25)
Глава 3. Основы радиоэлектронного подавления
203
где
хи;
R(t) = R(t)exp(-j(p(f)) = A(f)~ jB(t) - комплексная огибающая шумовой поме-
лу) и (p(t) - медленно меняющиеся функции по сравнению с cos a>ot.
Закон распределения мгновенных значений является гауссовым
1 w2
2?
W (w) = —т=1=— схр-
х/2тгсг
(3.26)
□о
где ст2 = JSllin (/)^f - мощность шумовой помехи; ^шп(/) - энергетический
о
спектр помехи.
Совместная плотность вероятностей проекций вектора шумового колебания
помехи A(f) = /?(r)cos<p(0 и B(t) = R(t) sin (p(t) тоже подчиняется нормальному за-
кону распределения
W (А, В) - J~=— exp <
л/2тгсг
(3.27)
Огибающая шумовой помехи R(i) = -Jj2(z) + В2 (t) распределена по закону
Релея [9]
Иг(/?) = —ехр
R‘
(3.28)
Математическое ожидание огибающей
{R) = ^7r/2, (3.29)
а дисперсия равна ст2. Фаза tp(t) ПШП равновероятна в диапазоне \<р\<л.
При равномерной спектральной плотности So в пределах полосы корреля-
ционная функция ПШП описывается выражением
R[t) = S.i\F—--------cos69 т.
Winn*
(3.30)
Значительное влияние на маскирующие свойства ПШП оказывают ограничители,
применяемые в САП в целях повышения КПД выходных усилителей, с характери-
стикой (А - порог ограничения)
-h при <Ji,
мвых(0 = 1«вх(0 при
(3.31)
h при u^(f)>h.
Коэффициент качества ПШП был бы равен единице, если бы не было огра-
ничения по амплитуде, происходящего в любом усилительном каскаде. Ограниче-
ние амплитуды приводит к изменению плотности вероятности мгновенных значе-
ний амплитуды, а так же к изменению спектра сигнала. Двустороннее ограничение
шумов ухудшает энтропийный и спектральный коэффициенты качества помех.
Ограничение наиболее сильно влияет на энтропийный коэффициент качества поме-
204
Глава 3. Основы радиоэлектронного подавления
хи, гак как при этом искажается плотность вероятности мгновенных значений по-
мехи. На рисунке 3.11 показан характер искажения плотности распределения вы-
ходного напряжения ограничителя p(wBb.x) для трех характерных значений эффек-
тивного напряжения входного шума wBX(r) .
Рис. 3.11. Плотности вероятностей ПШП при изменении уровня ограничения
При сгп«й плотность распределения /2(мВЬ1Х) практически не искажается,
выходной процесс для гауссового входного шума имеет энтропию
Явнх=Ш(<7„>/2^). (3-32)
При дальнейшем росте эффек гивного напряжения ст,, искажение плотности
распределения проявляется сильнее и при сгп » h форма р.. (wBbIX) не имеет ника-
кого сходства с гауссовой кривой. Плотность распределения р (мвых) вырождается
в две симметрично расположенные (5-функции, что говорит об отсутствии случай-
ного изменения напряжения помехи. Такая помеха практически не обладает маски-
рующими свойствами, так как она вырождается в импульсный сигнал меандрового
типа [13]. При ст «h рост эффективного значения входного шумового напряже-
ния приводит к увеличению При <5,>h плотность распределения л(пВЬ1х)
начинает заметно искажаться, рост энтропии помехи прекращается. В случае
сгп « h процесс становится неслучайным и энтропия резко уменьшается.
Зависимость энтропии выходного процесса от параметра сгп//7, представ-
ленная на рисунке 3.12, позволяет установить экстремальное значение /7ВЬ|Х тах при
сгп = hj2. С учетом нелинейности выходного усилителя ПШП «пщ(/) имеет
наилучшую маскирующую способность (по энтропийному критерию) при условии
<ynv=h^2- (3.33)
Ограничение входного процесса wBX (г) выгодно также и с точки зрения по-
вышения КПД передатчика помех. Если поставить задачу неискаженного усиления
исходных шумов мвх(/), ю необходимо параметры усилительного тракта выбирать
так, чюбы порог ограничения h не был бы меньше пиковых значений z/BX(r) . Бла-
Гпава 3, Основы радиоэлектронного подавления
205
гоприятный энергетический режим передатчика прямошумовых помех создается
при условии £’(|иВЬ1Х0)1 - 2сгп) = 0,8. Следовательно, только около 20 % выбросов
ограничиваются оконечным усилителем [13]. В то же время плотность распределе-
ния Хг/Вых) искажается несущественно.
Ограничение шумов и, (/) ведет к искажению спектральной плотности по-
мехи 5„1Г(/). При отсутствии ограничения (6 =/г/сгп —> оо) спектр имеет прямо-
угольную форму с шириной спектра FM и нормированной спектральной плотно-
стью 5ШП max(/)= I Ограничение исходного процесса приводит к двум эффектам:
1) появляются побочные излучения («хвосты») вблизи эффективной полосы шума;
2) часть энергии помехи после ограничения распределяется на гармоники.
В случае предельного ограничения (b = h'cr,. —> 0) на гармониках теряется
около 19 % полной мощности излучаемой помехи. При 6 = 0 на побочные излуче-
ния («хвосты») расходуется 12 % всей мощности передатчика помех. Итоговые
предельные потери составляют около 31 %. Если в передатчике прямошумовых
помех выдержан оптимальный ограничительный режим 6 = /1/аП = 1/ , то потери
на побочные и внеполосные излучения будут небольшими (около 3 %), что также
имеет большое значение при решении задач ЭМС.
При разработке САП большое значение имеет пиковая мощность помехи.
Ограничение заметно улучшает эффективность работы выходных устройств. При
оптимальном уровне ограничения b = 1/ х'2 пиковая мощность лишь примерно в 1,5
раза больше эффективной мощности помехи. Энтропийный коэффициент качества
прямошумовой ограниченной помехи составляет
77эн ₽ 0,7...0,8. (3.34)
Спектральный коэффициент качества с учетом неравномерности спектра
помехи лишь в пределах эффективной ширины спектра /п -FM/2</n </f +FM/2
определяется как
206
Глава 3. Основы радиоэлектронного подавления
ШП шах ШП ты
+ V
ШП max тиШПти1
Из (3.34) и (3.35) получаем выражение для коэффициента качества
ГМсп^ЛОЛ (3.36)
?7сп
О
96.
(3-35)
Выбор оптимального уровня ограничения приводит к сравнительно не-
большому снижению качества помехи (на 20...30 %). Однако КПД станции помех
значительно возрастает (в несколько раз), а внеполосные и побочные излучения
имеют достаточно низкий уровень (порядка 3 %) [13]. Возможны два способа со-
здания ПШП:
1. Непосредственное генерирование ВЧ шума. Специальный ВЧ генератор
формирует шум с широким равномерным спектром (рисунок 3.13). После ПФ и
усиления по мощности формируется и излучается в пространство ПШП с э нергети-
ческим спектром
^шп(/) = ^лЛ^2(/), (3.37)
где So = const - спектральная плотность шума на выходе генератора; КУУЛ - коэф-
фициент усиления выходного усилителя; K(f) - АЧХ формирующего ПФ.
^ПРД
4/пф
ГЕНЕРАТОР ВЧ ШУМА ► ПОЛОСОВОЙ ФИЛЬТР ► УА/
Рис. 3.13. Непосредственное генерирование ВЧ шума
Интегрируя энергетический спектр £шп (/), можно найти выходную мощ-
ность ПШП
ШП
о
=fsu,n(/)#=s.TvM^zy'„n>
(3.38)
где Kv - резонансное усиление на частоте настройки ПФ; А/,- л - эффективная по-
лоса шума, определяемая полосой пропускания ПФ.
Часто заградительную шумовую помеху с шириной спектра А', 1П до 500
МГц оценивают по максимальной спектральной плотности
5м«=5шп(/0)=^П- = 5ЖеХм- (3.39)
44.П
САП. создающие прямошумовую помеху с шириной спектра до 500 МГц,
способны развить на выходе мощность до 10 кВт. Важнейшие элементы, формиру-
ющие ВЧ шум, в сантиметровом и дециметровом диапазоне волн - клистроны,
магнетроны, ЛБВ, ЛОВ.
2. Гетеродинирование шума. Шум генерируется НЧ генератором шума с
целью переноса спектра шума в область ВЧ (рисунок 3.14).
Глава 3. Основы радиоэлектронного подавления
207
Рис. 3.14. Гетеродинирование низкочастотного шума
ПФ обеспечивает выделение требуемых спектральных составляющих ПШП.
Второй способ применяется, когда частотные составляющие генератора шума ниже
частоты подавляемых РЭС. Этот способ даёт возможность подавлять РЭС на не-
скольких несущих частотах f0 путем перестройки гетеродина и создавать сколь-
зящую по частоте помеху. Напряжение шумовой помехи z/lun(/) действует на входе
приемного устройства в аддитивной смеси с подавляемым сигналом uk (f) и шумом
естественного происхождения иш (Г) : uY (t) = uQ (t) + иш (/) + ишп (f) .
Рассматриваемые варианты технических решений при построении станций
активных ПШП различаются, в основном, способами увеличения выходной мощ-
ности. Схема на рисунке 3.15 [15, 28] выполнена на рециркуляторе (РЦ).
Рис. 3.15. Схема настройки ответной шумовой помехи
Принимаемый сигнал поступает через РЦ на приемник (ПРМ) и на схему
оперативной РТР (ОРТР), где анализатор определяет и фиксирует несущие частоты
сигналов, наблюдаемых на входе и подлежащих подавлению. Полученные данные
вводятся в вычислитель (ВЧС), который вырабатывает цифровые значения требуе-
мых частотных параметров ПШП. Эти цифровые значения подаются на блок
управления БУ), который преобразует их в у лравляющие сигналы генератора шу-
мового напряжения (ГШП). До поступления сигнала РЭС противника ГШН не ра-
ботает: включение указанного генератора осуществляется с БУ - либо по внешней
команде, либо от вычислителя. Помеха излучается через РЦ и общую антенную
систему (АС).
Многоканальный передатчик прицельных шумовых помех представлен на
рисунке 3.16, где введены обозначения: ВК - входной коммутатор; ВЧУ - ВЧ уси-
литель; ПФ - полосовой фильтр; ДВ - детектор, видеоусилитель; ФСУ - формиро-
ватель строба управления. К - коммутатор; ШУ - широкополосный усилитель:
ФСИ - формирова1ель строо-импульса [62].
208
Глава 3. Основы радиоэлектронного подавления
Рис. 3.16. Схема многоканального передатчика прицельных шумовые помех
Сигналы РЛС, амплитуда которых превышает определенный пороговый
уровень в частотном диапазоне соответствующего канала, замыкают коммутатор
этого канала. Помеховый сигнал формируется путем модуляции принятого сигнала
РЛС тепловыми шумами, суммирования сигналов в сумматоре и у сил ения в выход-
ном ШУ. Многоканальный приемник состоит из входного коммутатора, разветви-
теля сигналов и ВЧУ. который также является источником теплового шума в рабо-
чем диапазоне частот приемника. Типичная ширина полосы спектра помехи, как
правило, А/mn ^Ю...2О МГц. Достоинством схемы является быстродействие, одно-
временный просмотр всего диапазона час ют и мгновенный выбор частотного кана-
ла создания помех.
Амплитудно-модулированная шумовая помеха представляет собой неза-
тухающее гармоническое колебание, модулированное по амплитуде случайным
модулирующим сигналом
wXM(r) = 6\M[l + A\M -nUI(/)]cos(r/) t + (p ), (3.40)
где К>м - крутизна модуляционной характеристики передатчика (определяется
технической реализацией модуляции); - модулирующее шумовое
напряжение.
Одномерная плотность вероятности АМШП имеег вид [13]
1 г p(4)d4 । I /э nix
РКм)=-[ / 2 км <А' (3-4П
АМШП не является гауссовой, так как ее одномерная плотность двумо-
дальная Так как плотность распределения мгновенных значений амплитудно-
модулированной шумовой помехи не является гауссовой, то маскирующие способ-
ности помехи ниже, чем прямошумовой. Если модулирующий шум имеег постоян-
ную спектральную плотность в пределах от нулевой частоты до Flu, го ширина
спектра АМШП
Глава 3. Основы радиоэлектронного подавления
209
^АМ ~ 2 >
т.е. в два раза больше ширины спектра модулирующего шума. Спектр помехи
включает колебание на несущей частоте и боковые составляющие. Присутствие в
спектре АМШП несущей значительно ухудшает маскирующие свойства шумов, так
как сама несущая маскирующим свойством не обладает, а отбирает на себя боль-
шую часть излучаемой мощности.
Энтропия АМШП определяется энтропией боковых составляющих спектра
AM сигнала. Наличие внутриспектральных связей между верхними и нижними со-
ставляющими спектра помехи немного уменьшает энтропию помехи. На качество
помехи также оказывает влияние ограничение амплитуды помехи, происходящее в
любом передатчике. Ограничение обычно производят с целью обеспечения боль-
шей мощности излучения на боковых составляющих спектра ПП за счет увеличе-
ния эффективной глубины 'юдуляции всеми составляющими спектра модулирую-
щего шума [1, 9].
Чтобы иметь возможность характеризовать количественно глубину
модуляции шумом, вводится понятие эффективного коэффициента амплитудной
модуляции шумами. Под эффективным коэффициентом модуляции шумом
понимают отношение эффективного значения напряжения шумов к
напряжению, определяющему уровень ограничения w, п
ш
"эф V
'"am =------= —
"огр "огр
С3.42)
где Рт - мощность шума.
Коэффициент качества \МШП зависит от л?АМ . Энтропийный коэффици-
ент качества помехи низкий и равен эн ч 0,3 [13]. Так как в маскировке сигнала
участвуют только спекгральные составляющие помехи, то несущую можно считать
«вредной», с точки зрения РЭП, составляющей помехи, которую в принципе про-
тивник может легко устранить (с помощью режекторного фильтра). На несущую
частот} расходуется значительная мощность ПП, поэтому оценка z/AM сн может
быть проведена путем сравнения мощности боковых составляющих с полной мощ-
ностью помехи
'/am сп
^п ^нес _ -^бок _ '"am
^п 1 +"'ам
(3.43)
Спектральный коэффициент неограниченных шумов чрезвычайно низок
(т/ам сп -0,1), так как "'am -0,3. Ограничение модулирующих шумов на оптималь-
ном уровне (су = 11у/2) позволяет получить w^®0,7, что соответствует
77амсп~0,4. Из-за малых значений энтропийного коэффициента качества
'/am эн -0,3 и спектрального коэффициента качества /?АМСП ~ 0,4 результирующий
коэффициент качества АМШП имеет весьма низкое значение
'/am СП — 7 AM ЭН ’ '/am СП 0» 1 •
210
Глава 3. Основы радиоэлектронного подавления
При тАМ «1 (влиянием амплитудного ограничения можно пренебречь)
обеспечивается хороший маскирующий эффект, но мощность боковых составляю-
щих мала РБОК = wAMPHEC. Энтропия помехи зависит от её мощности, поэтому ко-
эффициент качества помехи мал. При увеличении wAM отношение Рьок / РНЕС рас-
тет, но из-за ограничения (эффекта «потолка») помехи превращается в импульсы
приблизительно постоянной амплитуды, что существенно уменьшает ее энтропию.
Степень уменьшения потерь за счет несущей можно оценить с помощью отноше-
ния полной мощности боковых составляющих к мощности несущей [1]
= 1 - ехр(- ——) + (/»L - W/m ш V2), (3.44)
РНЕС х/2я 2wam
2 ’/'"AM
где 0(1//иЛмх/2) - —Г ехр(-Г )dt - функция Лапласа.
л/Я Jo
Оптимальное значение (коэффициента эффективной модуляции), при
котором и Л?КАЧ максимальны, равен »?АМ = 1. Улучшить качество АМШП
возможно путем выбора экстремального закона плотности распределения модули-
рующих шумов. Оптимизационная задача получения на выходе модулятора поме-
хового сигнала пАМ (Г) с заданной плотностью распределения , за счет выбо-
ра закона распределения модулирующей функции uv (г) подробно описана в [13].
Частотно-модулированная шумовая помеха формируется путем модуля-
ции частоты колебаний генератора шумовым напряжением. При этом мгновенная
частота ЧМШП описывается выражением
^чм (0 — + ^ЧМ ’ ^111 (0 ’ (3.45)
где А?чм - крутизна модуляционной характеристики; мш (Г) - модулирующее шу-
мовое напряжение; - несущая частота. Реализацию ЧМШП можно представить
в виде
W4m(0 = ^0COS
t
+ А?чм (tf)d0 + (рй
0
(3.46)
Начальная фаза предполагается случайной и распределенной на интервале
[-д', я]. Если закон распределения мгновенных значений напряжений модулирую-
щего шума гауссовский, то плотность распределения частоты шчм(/) тоже будет
иметь гауссовский вид.
Эффективное значение девиации частоты (СКО) ЧМШП равно
=^чм°'Ш’ (3‘47)
где (Tj.j - эффективное значение напряжения модулирутоще] о шума.
Одним из основных параметров ЧМШП является эффективный индекс ча-
стотной модуляции [11
W4M — ^//^ШМАХ ’ (3.48)
Глава 3. Основы радиоэлектронного подавления
211
где .ГШМАХ - максимальная частота модулирующего спектра.
Характеристики энергетического спектра 5ЧГ. (<у) зависят главным образом
от индекса частотной модуляции и?чм, плотности распределения мгновенных зна-
чений моду, гирующего процесса иш (t) и спектральной плотности 5П| (<у). При
больших индексах /нчм »1 спектральная плотность ЧМШП асимптотически при-
ближается к гауссовому виду [ 1 ]
«чм(Л
(3.49)
Ширина спектра AF4.. ЧМШП в этом случае равна
AFlM ~ л/2тт/нчмААш , (3.50)
т.е. ширина спектра помехи оказывается больше, чем ширина спектра модулирую-
щего шума AF . Следовательно, используя узкополосный модулирующий шум,
можно получить широкополосную помеху. Отсутствие в спектре ЧМШП несущей
улучшает ее маскирующие свойства, приближая ее качество к качеству прямошу-
мовой помехи. При л/чм » 1 и » 1 спектральный коэффициент качества имеет
высокое значение тучм сп 0,8.-.0,9 [13].
При малых индексах /ячм «1 (/ичм =0,1...0,5) ширина спектра ЧМШП
равна [1]
Д^чм (3-5])
При тчм «1 форма спектра зависит от спектра модулирующего процесса
5П| (<у). Наибольшую мощность имеет составляющая на несущей частоте, боковые
же составляющие выражены слабо Рьок = rri^Ul/2. Форма энергетического спектра
аналогична спектру AM колебания. При тч1Л «1 спектр ЧМШП 5ЧМ(«) имеет яр-
ко выраженную спектральную составляющую на частоте <у0 , а форма боковых со-
ставляющих определяется спектром модулирующего процесса (а>). Спектраль-
ный коэффициент качесгва ЧМШП имеет низкое значение
'7чмеп=Т^Ь«1- " (3.52)
1 + тчм
При неизменной мощности ЧМШП увеличение мощности боковых состав-
ляющих и одновременное расширение спектра может происходить только за счет
перекачки мощности несущей в боковые полосы. Благодаря этому эффекту мощ-
ность составляющей на несущей частоте ослабляется, а спектр в некоторой степени
выравнивается. Так как интенсивность спектра при f > снижается напо-
ловину, го спектральный коэффициент качества ЧМШП в этом случае равен
^7чм СП ~ 0’7 L1
212
Глава 3. Основы радиоэлектронного подавления
Наиболее распространенным методом построения передатчиков ЧМШП яв-
ляется использование генератора, управляемого напряжением (ГУН1, охваченного
петлей фазовой автоподстройки частоты (ФАПЧ) [63-65]. Схема формирования
ЧМШП показана на рисунке 3.17.
Рис. 3.17. Блок-схема формирования ЧМШП
На рис. 3.17 введены обозначения: блок М — плата модулятора; ДФКД,
ДПКД - делители частоты с фиксированным и переменным коэффициентами деле-
ния соответственно; ИФД - импульсно-фазовый детектор; ОГ - опорный генера-
тор: БУ - блок управления [66]. Ширина спектра ЧМШП определяется амплитудой
пилообразного сигнала модуляции со случайным периодом следования. Модули-
рующий сигнал поступает на ГУН с блока модулятора, состоящего из источника
шумового сигнала (сформированного шумовым диодом с последующим усилени-
ем) и генератора пилообразного напряжения, частота которого изменяется по слу-
чайному закону. Эти сигналы суммируются в сумматоре,
На рисунке 3.18 показана структурная схема возбудителя передатчика
ЧМШП [19]. На рисунке 3.18 обозначено: ОГ - опорный генератор; ОД - опорный
делитель; ФМ - фазовый модулятор; ЧФД - частотно-фазовый детектор; ИШ - ис-
точник шума; Д — программируемый делитель.
Рис. 3.18. Структурная схема возбудителя передатчика ЧМШП
Фазомодулированная шумовая помеха формируется изменением фазы
колебаний генератора шума. ВЧ колебание, модулированное по фазе, записывают в
виде
Глава 3, Основы радиоэлектронного подавления
213
(0 = U sin [й)0Г + Кфму/ (Г) + ул, ], (3.53)
где y/(f) - модулирующий случайный процесс с нулевым средним значением и с
дисперсией сг( ; /СФМ — крутизна линейной части модуляционной характеристики
определяет эффективное значение фазы Аул,ф в зависимости от эффективного зна-
чения модулирующего шумового напряжения
А^эф ^фм^эф
Среднее значение ФМШП при y/d = О определяется как
Км(О) = ^сехр
О~фм
2
exp(>0/)
(3.54)
(3.55)
где сгФМ = /СФМсг - эффективный индекс фазовой модуляции.
ФМШП является нестационарным случайным процессом. При исследова-
нии нестационарных процессов в рамках корреляционной теории применяют двой-
ное усреднение - по множеству и по времени. Корреляционная функция ФМШП
имеет вид
ЯФМ (г) = РФМ ехр(-сгФМ [1-7^ (т)])ехр( jcoj),
(3.56)
где ^фм
- полная мощносгь ФМШП; 7? (г) =
(ул(г)у/(б + т))
?
коэффициент корре-
ляции модулирующего процесса [13].
Из выражения (3.56) следует, что в общем случае энергетический спектр
ФМШП не является равномерным. При сгфМ «1 вследствие значительной нерав-
номерности спектра ФМШП имеет низкие маскирующие свойства. С ростом ин-
декса фазовой модуляции спектр расширяется, а мощность боковых составляющих
спектра повышается за счет «перекачки» энергии несущей в боковые пол осы. При
(Тфм »1 можно считать /?ФМ сп ~0.9. Это является одним из достоинств ФМШП.
На рисунке 3.19 представлен спектр ФМШП для сгфМ «1 и сгфМ »1. В данном
случае модулирующий процесс получен путем пропускания белого шума через
низкочастотный RC -фильтр.
В зависимости от Ау/)ф могут быть два качественно различных случая.
1. При Ау/)ф »1 ширина спектра ФМШП равна
Д^ЭфЛиМАХ J '
(3.57)
где FmMAX ~ максимальная частота модулирующего спектра [1]. В частном случае,
когда в спектр модулиру ющего шума включена и нулевая часз ота 7^,^ = AFW .
2. При малой девиации фазы Ау/Эф «1 спектр ФМШП состоит из дискрет-
ной составляющей на несущей частоте и сплошного спекгра. Форма спектра анаю-
гична спектру АМШП с эффективным коэффициентом модуляции «1. Ши-
214 Глава 3. Основы радиоэлектронного подавления
рина спектра ФМШП примерно равна удвоенной ширине спектра модулирующих
шумов [1]
ДРФМ=2ДЕШ. (3 58)
При выполнении условия А^ЭФ <<1 удается с помощью модуляции узко-
полосным шумом также получать узкополосный помеховый сигнал. Форма сплош-
ного ВЧ спектра подобна при этом форме спектра модулирующего напряжения.
Таким образом, спектры ЧМШП и ФМШП близки, следовательно, по качеству эти
помехи также близки.
К достоинствам ЧМШП и ФМШП можно отнести:
• возможность получения достаточно равномерного спектра при /лчм »1 и
<jf »1 (спектральный коэффициент качества имеет значение z?cll » 0.8...0.9);
• простоту технической реализации в САП на СВЧ-приборах типа ЛЕВ;
• возможность использования потенциальных возможностей СВЧ-усилителей
по динамическому диапазону вследствие минимального значения пикфактора
^п.ж = МтахМф=2.
Недостатками ЧМШП и ФМШП являются:
• негауссовый характер помех, вследствие чего энтропийный коэффициент
качества помех имеет весьма малое значение (~ 0,1);
• значительное влияние нелинейносги модуляционных характеристик на
форму спектра (особенно для ЧМШП при тичм » 1) [13].
Возможно применение амплитудно-фазомодулированной помехи
иАФ(/) = t/n [1 + £(r)]cos[®0/ + КЛму/(г) + у/0]> (3-59)
Для повышения качества помехи амплитудную и фазовую модуляции
производят от независимых источников шума ^(t) и [9, 15]. Эффективная
полоса шумовой помехи здесь определяется иначе
ДЛ,111п=2М/у, (3 60)
Глава 3, Основы радиоэлектронного подавления
215
в зависимости от того, какая модуляция (AM или ФМ) определяет спектр вы кодной
помехи.
Вариант структурной схемы СЧ с использованием коммутирующего
фильтра для быстродействующего формирователя помех (ЧМШП или ФМШП)
представлен на рисунке 3.20.
Рис. 3.20. Структурная схема СЧ с коммутирующим ФНЧ
СЧ содержит: ГУН - управляемый напряжением генератор; ДПКД - дели-
тель частоты с переменным коэффициентом деления; ЧФД - частотно-фазовый де-
тектор; ОКГ - опорный кварцевый генератор; ДФКД — делитель частоты с фикси-
рованным коэффициентом деления; БКЗН - блок коммутируемой зарядовой накач-
ки; БОСФ - блок определения синхронизма по фазе; КФНЧ - коммутирующий
фильтр нижних частот; К1 и К2 - коммутаторы [67].
В СЧ-ИФАПЧ с коммутацией структуры и параметров характер ПП при
смене выходных частот существенно улучшается, сокращается его длительность за
счет изменения в определенные моменты времени структуры ФНЧ и параметров
блока управляемой зарядовой накачки в течение ПП [68]. В результате этого дости-
гается стабилизация передаточной характеристики кольца ИФАПЧ. что позволяет
оптимизировать систему по заданному качеству динамических и спектральных ха-
рактеристик во всем диапазоне синтезируемых колебаний [69].
Энергетические характеристики модуляционных шумовых помех и ПШП
полностью идентичны, поэтому эффективность модуляционных шумовых помех
определяется соотношением (3.37). Следует учесть, что из-за большей
эффективности схем помехозащиты при работе с МШП коэффициент р в (3.60)
надо принять большим, чем для ПШП.
Хаотическая импульсная помеха (ХИП) в общем случае предел авляет со-
бой последовагельность радиоимпульсов с несущей частотой, равной частоте по-
давляемого РЭС, амплитуды и длительности которых, а также интервала между
соседними импульсами изменяются случайным образом [70]. Математическую мо-
дель ХИП с использованием алгоритма формирования импульсной последователь-
ности со случайным генерированием единичных и нулевых посылок можно пред-
ставить в виде
216
Глава 3, Основы радиоэлектронного подавления
п
Л=0 п=0
3
rnd(Y) >0,5
Л'„
1₽п=Л'п[по,7п(Л'.Л/-£>)]_ ’
(3-61)
*К-1 Лц_,
О
где t3 - длительность интервала задержки кодовой посылки относительно момента
времени tj = 0; Nv — количество импульсов в посылке; Г - длительность кодовой
посылки; NK - количество посылок в последовательности; Р - период повторения
посылок; (рп = Xv\norm(N ,D)\ — случайные начальные фазовые сдвиги единич-
ных посыдок, получаемые с помощью независимого генератора случайных чисел;
N — длина массива случайных чисел, сформированного с помощью процедуры
norm вектора случайных чисел с нормальным распределением; М - математиче-
ское ожидание распределения вектора чисел: D - дисперсия вектора [71].
Практическая реализация таких помех достаточно затруднительна. Значи-
тельно проще реализовать последовательность радиоимпульсов, имеющих посто-
янную амплитуду и характеризующихся случайным изменением длит ельност и им-
пульсов и временных интервалов между ними. Принцип создания такой помехи
поясняет рисунок 3.21 (УО — усилитель-ограничитель; ГИ - генератор импульсов;
М - модулятор; ВУ — выходной усилитель).
Рис. 3.21. Принцип генерации хаотической импульсной помехи
Генерация ВЧ колебаний заданной частоты происходит только в те момен-
ты времени, когда напряжение (?), поступающее от генератора шума, превыша-
ет порог Uo. Если плотность вероятности мгновенных значений шума подчинена
нормальному закону с нулевым средним значением, то средние значения длител ь-
ности импульсов МТ, интервала (паузы) между ними Мд и числа импульсов в се-
кунду (числа пересечений порогового уровня в единицу времени) 7VCP можно опре-
делить с помощью следующих формул:
Глава 3. Основы радиоэлектронного подавления
217
(3.62)
(3.63)
(3.64)
где = —х2 dx - интеграл вероятности; сг^ - дисперсия шума, создаваемо-
го генератором.
Выражения (3.62)...(3.64) справедливы для широкополосного шумового
напряжения, имеющего равномерный частотный спектр в пределах диапазона
AFm “ Fmax - Fmin, и коэффициента корреляции шума генератора
sin(7rAFmr)
ttAF г
(3-65)
Изменяя порог С70, можно подбирать желаемое соотношение между МТ и
МА. Среднее значение частоты следования помеховых импульсов определяется
шириной спектра модулирующего ш) ма. Выбором порогового уровня LT0 значения
МГ и Мможно уравнять, т. е. сделать среднюю скважность импульсов равной 2.
При этом условии плотности вероятностей для г (г > 0 ) и А (А>0) определяются
экспоненциальным законом [70]
р(г) = /VCP ехр(-Ут), />(А) = Лгср exp(-.VCPA) . (3.66)
Спектральная плотность S^^cd) и корреляционная функция 7?дг(т) стацио-
нарной последовательности независимых импульсов прямоугольной формы с по-
стоянной амплитудой L огр и Мт = равны
U2 V
^г(^) = -^т^ + 4^р, (3.64
аг
= ^ОГР exp(-2W,„ |т|). (3.68)
Время корреляции гк, однозначно связанное с шириной спектра процесса,
составляет т. - \/2Ncp . Распределение ХИП подчиняется закону Пуассона: вероят-
ность появления £ импульсов в интервале времени т имеет вид
р, W = (Fx^,r) ехР rFxnnr}.
(3.69)
где FXHII - средняя частота следования импульсов ХИП [15].
218 Глава 3. Основы радиоэлектронного подавления
Вероятность попадания в интервал А/ хотя бы одного импульса ХИП
Л>1(А0 =1 -ехр{-гхипдг} • (3-70)
Могут быть созданы радиоимпульсы с заданной частотой заполнения, по-
стоянными амплитудой и длительностью, но со случайно меняющимся интервалом
между импульсами. В принципе для решения указанной задачи достаточно фикси-
ровать с помощью компаратора каждое пересечение шумовым напряжением поро-
гового уровня UG снизу вверх. После каждого такого пересечения компаратор вы-
дает импульс напряжения с определенными значениями амплитуды и длительно-
сти, который используется для управления ВЧ колебаниями.
ХИП оказывают эффективное воздействие на командные радиолинии
управления (КРУ), линии радиосвязи, а также на некоторые типы РЛС. Примени-
тельно к работе КРУ хаотические импульсные помехи являются заградительными
по коду и вызывают полное или частичное подавление передаваемых команд, из-
менение значений параметров модуляции поднесущих колебаний и образование
ложных команд. При оценке влияния помех, заградительных по коду, на работу
КРУ одним из важнейших показателей является среднее число помеховых импуль-
сов, поступающих на вход приемника в единицу времени, оптимальное значение
которого зависит от вида полезного сигнала. Существенное значение имеет и от-
ношение импульсных мощностей помехи и сигнала. При подавлении цифровых
линий связи и передачи данных для повышения эффективности ХИП также необ-
ходимо оптимальным образом подбирать средние значения длительностей помехо-
вых импульсов и пауз между ними [13].
ХИП могут отличаться от полезных сигналов по ряду показателей. Разли-
чия могут быть во временной структуре (например, ХИП используются для подав-
ления каналов радиосвязи, которые в ряде случаев характеризуются непрерывным
сигналом, в то время как помеха носит явно выраженный импульсный характер).
Могут иметь место различия в ширине спектра сигнала и помехи. При организации
защиты от помех одним из важных факторов является то, чт о значения средней ча-
стоты помехи и сигнала всегда различны. При создании активных помех мини-
мальная ошибка настройки ПП сопоставима с полосой пропу скания приемника по-
давляемой РЭС. Если в приемнике применяется когерентная обработка сигналов, i о
различие частот сигнала и помехи может способствовать существенному снижению
эффективности помех.
ХИП относится к ответным импульсным случайным помехам.
Ретранслированные импульсные шумовые помехи должны создавать шумовой
импульс большей длительности тп>т( в ответ на каждый импульс сигнала.
Несущая частота помехи fm ~ f0 в каждом импульсе. Такой метод создания помех
позволяет бороться с РЭС, у которых несущая частота меняется от импульса к
импульсу по неизвестному для средства РЭП закону.
Один из методов создания ХИП - запоминать параметры импульсного сиг-
нала rc, Tt , fc и генерировать шумовые помехи с параметрами тц. Ги *ТС,
« fc независимым генератором помех Г9]. Формирование ХИП иллюстрируется
рисунком 3.22 (ВУ - выходной усилитель мощности).
Глава 3. Основы радиоэлектронного подавления
219
Рис. 3.22. Формирование хаотической импульсной помехи
В ответ на каждый импульс сигнала с параметрами гс , Тс генератор ХИП
формирует примерно такие же импульсы с длительностью тп & тс, но со случай-
ным периодом повторения, в среднем значительно меньшим периода следования
сигнальных импульсов ТП « Тс . Несущие частоты и формы импульсов ХИП также
мало отличаются от импульсов сигнала. В прямом канале устройство ОРТР с по-
мощью ВЧ части приемника и УЗЧ измеряет несущую частоту сигнала, формируя
оценку /с*. Оценка используется для синхронизации задающего генератора (ЗГ),
который формирует колебание с частотой /оп - f*. В нижнем канале (рис. 3.22) с
помощью анализатора сигнала оцениваются параметры импульсов г*, Т . Эти
оценки позволяют ЗГ создать видеоимпульсы помехи с параметрами гп~т*,
7П«71‘. Два модулятора М0Д1 и МОД2 формируют импульсы с полосой
Л^хип (Р^1)-
Вариант схемы формирования ХИП представлен на рисунке 3.23 [15]. На
рисунке 3.23 обозначены: РГГУ — радиоприемное устройство; УЗЧ - устройство за-
поминания частоты; ГК - генератор ралиоколебаний; AM ИМ - амплитудный и
импульсный модуляторы; РПрУ - радиопередающее устройство; АД - амплитуд-
ный детектор; ФКИ - формирователь коротких импульсов; ГВИ - генератор видео-
импульсов; ГШ1, ГШ2, ГШЗ - генераторы шу^ма.
Рис. 3.23. Схема формирования ХИП
Формирование ХИП начинается с подачи колебания частоты /с и напря-
жения шума (от ГШ1) на AM, в резулыате чею на его выходе вырабатывается ам-
220
Глава 3. Основы радиоэлектронного подавления
плитуцно-модулированное шумовым напряжением радиоколебание частоты fc.
Для создания случайности в периоде следования помеховых импульсов использу-
ются ФКИ и ГШ2, под воздействием которого дл ительность временного интервала
между соседними короткими импульсами меняется по случайному закону. Каждый
импульс запускает ГВИ, длительность этих видеоимпульсов изменяется хаотиче-
ским образом под действием ГШЗ. На выходе ИМ формируется ХИП «хиг(/)5 кото-
рая через РПрУ и антенну излучается в пространство.
На рисунке 3.24 представлена схема формирования прицельной ретрансли-
руемой помехи в виде ХИП со случайной модуляцией и с быстрой перестройкой
несущей частоты от импульса к импульсу [10].
Рис. 3.24. Схема формирования прицельной помехи со случайной модуляцией
и быстрой перестройкой несущей частоты
Для поиска по частоте гетеродин Г: перестраивается ГЛИН Поиск останав-
ливается лишь тогда, когда приходит импульс сигнала с несущей /0 и на выходе
ПФ1 появляется импульс сигнала с частотой fnp= fx - f, к которой добавляются
остаточные флуктуации частоты А/ (t) от устройства остановки поиска. ГИ форми-
рует импульс помех гп » тс. В момен г остановки частота гетеродина Гi равна
fr = fo ~fnp ~ &f(f) • Нижний канал (рис. 3.24) в моменты остановки восстанавлива-
ет частоту сигнала /пр + АГ (Г), затем этот импульс длительностью тп модулирует-
ся видеошумом и на выходе создается ВЧ импульсная шумовая помеха.
Спектральная плотность ХИП определяется характеристиками модулиру-
ющих импульсов и режимом работы модулируемого генератора несущего колеба-
ния [4] и имеет непрерывную и дискретную составляющие (зависит от длительно-
сти импульсов и их средней частоты повторения). ХИП по своим маскирующим
свойствам близка к ограниченной АМШП. ХИП эффективно воздействуют на
большинство типов РЛС, в том числе и с быстрой перестройкой рабочей частоты
[12, 15], и являются достаточно универсальными.
Глава 3. Основы радиоэлектронного подавления
221
3.5. Способы создания активных помех для подавления
РЛС обнаружения целей
САП групповой защиты (ГЗ) предназначены для подавления РЛС, работа-
ющих в режиме обзора. Они могут быть автоматическими и неавтоматически-
ми. В отличие от неавтоматических, автоматические станции содержат в составе
аппаратуру РТР. В неавтоматической САП режимы работы и виды создаваемых
помех не зависят от радиолокационной обстановки в данный момент времени, а
задаются оператором по априорной информации [19]. Для создания прицельных по
направлению, ширине спектра помех, выбора наиболее эффективной программы их
применения в условиях меняющейся радиолокационной обстановки применяют
автоматические станции маскирующих помех (рисунок 3.25).
Рис. 3.25. С зруктурная схема автоматической станции активных маскирующих помех
Излучение маскирующих помех связано с функционированием таких элек-
тронных приборов сверхвысоких частот, как ЛЕВ О-типа. ЛОВ М-типа. лавинно-
пролетные диоды, диоды с барьером Шоттки, биполярные и полевые транзисторы.
Основным элементом схемы (рис. 3.25) является генератор шумового напряжения
(ГШ). У обычных резисторов (формирующих тепловые шумы) выработанные ими
шумовые напряжения имеют ширину спектра 0,2...0,3 ГГц при равномерной спек-
тральной плотности 10’17...10‘16 ВъТц [28]. В пространство излучается значительно
более мощная (в 100... 1000 раз по сравнению с мощностью ГШ) активная помеха.
Сигналы РЭС противника принимаются антенной Лцрм и поступают на ра-
диоприемное устройство (РПУ), с выхода которого поступают на блок запоминания
частоты (34) и на анализатор. Анализатор формирует управляющий сигнал для
блока 34 и задает необходимый режим блоку настройки (БН). БН воздействует на
генератор колебаний (ГК), который вырабатывает колебания частоты, равной ча-
стоте излучения РЭС противника. Сформированное радиоколебание подается на
первый вход модулятора (М). на второй вход М подается усиленное шумовое
напряжение. С помощью модулятора в передатчиках формируются помехи с требу-
емыми видами модуляции (амплитудная, частотная) и спектральными характери-
стиками [19]. Сформированная активная помеха поступает на радиопередающее
устройство (РПрУ), антенна Лцрд излучает помеху в пространство. Для обеспечения
разведки приемного и передающего трактов в автоматической СП может использо-
ваться временное разделение сигналов разведки и создания помех [15].
Передатчик прицельных шумовых помех на лампе обратной волны. В
таком передатчике (рисунок 3.26) имеется мощный СВ4-генератор на ЛОВ. моду-
222
Глава 3. Основы радиоэлектронного подавления
лируемый по частоте смесью шума и периодического (синусоидального) сигнала
либо по амплитуде шумовым сигналом.
Рис. 3.26. Схема передатчика прицельных шумовых помех на ЛОВ
На рис. 3.26 обозначено: СМ - смеситель; ИПС - источник периодического
сигнала; ПМ - подмодулятор; УУЧ — устройство управления частотой. Источник
шума (ГШ) генерирует шумы с полосой не более 10 МГц как для ЧМ, так и для
AM. Выбирается небольшой индекс ЧМ шумами и большой индекс AM синусои-
дальным сигналом. Если синусоидальная частота модуляции образует линейчатый
спектр, то добавление шумовой ЧМ образует сплошной спектр помехи. Ширина
этого спектра регулируется амплитудой синусоидального сигнала. Для наведения
помехи на частоту подавляемой РЛС используется панорамный приемник IППРМ).
На рисунке 3.27 приведена схема передатчика прицельной шумовой помехи
с поиском по частоте (СМ - смеситель, Р - разветвитель, ГПЧ — генератор ПЧ, Ф -
фильтр, М - модулятор, ГШ — генератор шума).
Рис. 3.27. Схема передатчика прицельной шумовой помехи с поиском по частоте
Основным элементом ГШ является гетеродин с перестройкой по частоте
(СЧ). В режиме поиска частота СЧ изменяется по пилообразному закону в пределах
диапазона возможных рабочих частот РЛС. В режиме захвата принятый сигнал де-
тектируется (Д) и подается на генератор импульсов (ГИ), который формирует оди-
ночный видеоимпульс длительностью около 100 мкс. Видеоимпульс поступает в
устройство управления частотой гетеродина (УУ). Скорость перестройки СЧ в ре-
Глава 3. Основы радиоэлектронного подавления
223
жиме захвата выбирается намного выше, чем в режиме поиска (например, прохож-
дение полосы пропускания приемника РЛС происходит за время, равное длитель-
ности РЛ импульса) [62].
Передатчики скользящих по частоте шумовых помех эффективны против
системы РЛС с различными частотами. В зависимости от скорости изменения не-
сущей частоты ПП возможны следующие режимы работы:
1) режим медленной перестройки уПЕР , когда время прохождения помехо-
вым сигналом полосы пропускания приемника РЛС А^1И значительно больше дли-
тельности ти импульса РЛС 4/^р/уПер >у ги ’
2) режим быстрой перестройки, когда время прохождения помеховым
сигналом полосы пропускания приемника РЛС очень мало по сравнению с дли-
тельностью импульса РЛС Д/цр/Упер « ги;
3) режим средней скорости перестройки, когда время прохождения поме-
ховым сигналом полосы пропускания приемника РЛС соизмеримо с длительностью
импульса РЛС A/np/ynEp * ги.
Вероятность Р.Л подавления РЛС перестраиваемой по частоте помехой
можно оценить выражением
Рпд=1-(1-1/0' , (3.71)
где Q - скважность скользящей по частоте помехи, определяемая отношением
времени перестройки частоты помехи в заданном диапазоне частот ко времени
прохождения помехой полосы пропускания РЛС; N - число ПП.
Анализ выражения (3.71) показывает, что при заданной вероятности Р-.Л
число N требуемых ПП изменяется прямо пропорционально Q. Для уменьшения
скважности обычно изменяют скорость перестройки частоты ПП. В этом случае
вероятность РПЛ подавления РЛС определяется выражением [62]
L^-Vn+^-DJ
где k ~ отношение скоростей быстрой уь и медленной ум перестройки;
FnEP - диапазон частот перестройки; - ширина полосы шумовой помехи; п -
число подавляемых РЛС.
За счет оптимального выбора режима перестройки частоты ПП можно зна-
чительно повысить вероятность подавления РЛС. На рисунке 3.28 приведена упро-
щенная схема передатчика скользящих по частоте помех с автоматическим измене-
нием скорости перестройки частоты (НО - направленный ответвитель; ГП - гене-
ратор прмех; ПСМ - привод сервомеханизма).
При обнаружении приемником сигнала РЛС сигнал поступает на балансный
смеситель (БС), далее на УПЧ, детектор, видеоусилитель (ВУ) в устройство за-
держки и подавления шума (УЗ), а затем в блок управления и синхронизации
(БУС), которое включает модуляцию шумами и управляет режимом генератора (Г),
определяющего скорость перестройки частоты и соединенного с ПСМ. Высокая
224
Глава 3. Основы радиоэлектронного подавления
скорость перестройки передатчика сохраняется до тех пор, пока разность межд) его
частотой и частотой подавляемой РЛС не станет равной промежуточной частоте,
после чего БУС включает модуляцию шумами сигнала передатчика и замедляет
скорость перестройки частоты передатчика. В это же момент УПЧ приемника стро-
бируется. Обеспечивая необходимую развязку между приемником и передатчиком
при излучении помехи.
Рис. 3.28. Упрощенная схема передатчика скользящих по частоте помех
с автоматическим изменением скорости перестройки частоты
На рисунке 3.29 приведена схема передатчика скользящих по частоте шу-
мовых помех с остановкой на частоте подавляемого приемника РЛС (ИШ - источ-
ник шума. ШУ — широкополосный усилитель, ИПС - источник периодического
сигнала, М - модулятор, НО - направленный ответвитель, УГ - СВЧ управляемый
генератор, УУЧ — устройство управления частотой, СПЧ - блок сравнения по ча-
стоте, УЗЧ - устройство захвата по частоте).
Рис. 3.29. Схема передатчика скользящих по частоте шумовых помех
с остановкой на частоте подавляемого приемника РЛС
При обнаружении сигнала РЛС перестройка несущей частоты НП прекра-
щается. передатчик излучает на этой частоте как передатчик прицельных маскиру-
ющих помех. Как правило, передатчики маскирующих помех работают в несколь-
Глава 3, Основы радиоэлектронного подавления
225
ких режимах: в прицельном, скользящем или заградительном, а также по опреде-
ленной программе [62]. Дальность подавления РЛС с повышенной скрытностью
работы, мощность излучения которых регулируется по закону радиолокации при
подлете ЛА к РЛС, шумовой заградительной по частоте помехой не зависит от ЭПР
цели и определяется как
О < R < R = I _ I
- °-
где N - спектральная плотность мощности излучаемой помехи; - эквивалент-
ная площадь приемной антенны РЛС; q - отношение сигнал/шум. при котором
РЛС считается подавленной; q — требуемое для работы РЛС отношение сиг-
нал/шум; АЛ - диапазон рабочих частот РЛС; Дгш - спектральная плотность мощ-
ности собственных шулов; KL, - коэффициент ослабления среднего уровня БЛ
ДНА РЛС по отношению к главному лепестку (при постановке помехи по главному
лепестку ДНА РЛС КЕ п = 1). Предполагается, что ПП совмещен с ЛА, помеха за-
благовременно включается по априорным данным без использования средств РТР
(помеха заградительная как по частоте, так и по времени) [72].
Автоматические станции имитирующих помех строятся по принципу
ретрансляции зондирующих сигналов (рисунок 3.30). На рисунке 3.30 обозначено:
МУ - модуляционный усилитель; ВУМ - выходной усилитель мощности; М - мо-
дулятор; УУ - устройство у правления.
Рис. 3.30. Схема автоматической станции активных имитирующих помех
Принимаемые сигналы усиливаются во входном усилителе (ВУ). Часть уси-
ленного сигнала поступает на анализатор (АН). Устройство запоминания частоты
(УЗЧ) необходимо для создания многократных ответных импульсных помех. В
САП ретрансляционного типа требуется применять методы по обеспечению раз-
вязки приемного и передающего трактов, т.к. оба тракта работают одновременно.
Основные характеристики САП ГЗ. Основными тактическими харак-
теристиками, определяющими боевые возможности САП ГЗ, являются:
• частотный диапазон;
• размеры сектора и зоны подавления;
• минимальная дальность подавления;
226
Глава 3. Основы радиоэлектронного подавления
• сектора излучения помех;
• время реакции (от момента обнаружения до момента создания помех):
• пропускная способность (количество одновременно подавляемых РЭС);
• ЭМС станций помех с бортовым РЭ оборудованием;
• эксплуатационная надежность [19].
Технические характеристики должны обеспечивать тактические показатели.
К основным техническим характеристикам САП ГЗ относятся: виды помех и их
параметры; мощность передатчика помех; коэффициент усиления антенны, КНД
антенны; масса и габариты. Автоматические САП. кроме того, характеризуются
тактическими и техническими параметрами устройств РТР, входящих в их состав.
Тактические параметры'.
• дальность разведки:
• частотный диапазон;
• точность измерения параметров сигналов РЛС и ее координат;
• разрешающая способность и т.п.
Технические параметры', чувствительность разведывательного приемника,
коэффициент усиления антенны, массогабаритные показатели и т.п.
Интенсивное развитие элементной базы, разработка быстродействующих
процессоров для обработки данных и определения оптимальных помеховых сигна-
лов позволяют создавать системы и комплексы РЭП с расширенными функцио-
нальными возможностями, что ведет к их усложнению и удорожанию [19].
3.6. Создание активных помех командным радиолиниям,
линиям навигации и радиосвязи
Команды управления ЛА или ракетой передаются по линиям радиосвязи и
командным радиолиниям управления (КРУ). Воздействие помех на эти системы
может привести к ошибкам наведения, размыканию контура наведения и, в
конечном итоге, к невыполнению БЗ. При создании помех радионавигации
возникают ошибки в определении местоположения ЛА, что приводит к неточному
выходу ЛА в требуемую зону. Особенность подавления КРУ. радиосвязи,
навигации в том, что источник полезного сигнала и источник помех находятся по
отношению к подавляемому приемнику примерно в одинаковых условиях [15]. В
процессе создания помех КРУ, линиям радиосвязи и навигации дезорганизуется
система ПВО противника, исключается или затрудняется наведение истребителей и
ракет, снижается точность навигационных систем.
Если известен необходимый коэффициент подавления Ки и его зависи-
мость от расположения ПП и подавляемого средства, можно определить зону по-
давления, в пределах которой создаются эффективные помехи данному РЭС. Для
определения энергетических соотношений РЭП системы передачи информации
рассмотрим ситуацию, показанною на рисунке 3.31. Объект подавления - приемное
устройство на борту ЛА.
Мощность полезного сигнала на входе абонентского радиоприемника си-
стемы передачи информации составит
Глава 3. Основы радиоэлектронного подавления
227
о лri~\ А \ 1 Г\~ ОЛссЛг' /о TOX
^СВХ — ~Л D 2 А ^ПР С ^ПР С (® 2 ’ ^2) ’ Ю ’ О • 73)
4яЛс
где PQ - излучаемая мощность передатчика линии передачи информации; Gr -
максимальное значение КУ передающей антенны; Gnp с - максимальное значение
КУ приемной антенны в направлении на передатчик; Fn\ (0,,^), F]2, f (®2~
нормированные функции ДНА передатчика и приемника по мощности; А - макси-
мальное значение эффективной площади приемной антенны, установленной на ЛА;
Rc - протяженность трассы распространения сигнала линии передачи информации.
ПРМ
Рис. 3.31. Схема создания помех системе передачи информации
Мощность помехового сигнала на входе подавляемого приемника
Л™ = PnGr/ T-; -YAGm ПЛ1. с(®4.^) 10""""" + рш, (3.74)
4лЯ.1 А/.
где Рп — излучаемая мощность ПП; Gn - максимальное значение КУ антенны ПП;
Fn2(0.,^,) - нормированная функция ДНА ПП по мощности Gri[,n - максималь-
ное значение КУ приемной антенны в направлении на ПП; Flp (04 .tp ) - нормиро-
ванная функция ДНА приемника по мощности в направлении на ПП; ~ ширина
спектра помехи; у <1 - коэффициент, учитывающий различие поляризаций полез-
ного сигнала и помехи; = кТ\ Д/прм ~ мощность собственных шумов в полосе
пропускания линейной части подавляемого приемника [4, 15].
Пз (3.73), (3.74) следует, что отношение мощностей помехи и сигнала (без
учета собственных шумов приемника) при РЭП линии передачи информации равно
js ^ПВХ )6ПР гДпР Л А/пРМ (О 40
228
Глава 3. Основы радиоэлектронного подавления
Выражение (3.75) называется уравнением РЭП КРУ, линий радиосвязи и
навигации. Для учета затухания ЭМВ на трассах распространения в правую часть
выражения (3.55) нужно ввести множитель / -ю0-10^-^) При наведении истреби-
телей значения углов 0, и 02 могут изменяться от 0 до 360°, поэтому в передат-
чике и приемнике, как правило, используют слабонаправленные антенны с совпа-
дающими поляризациями. Это позволяет в (3.75) положить
-^П С 1 ’ <Pi ) ~ ПРД ’ ^ПР С^*ПР С ? 9^2 ) ~ ^ПР С » ^ПР П^ПР С (®4 »^4 ) ~ ^ПР П '
В этом случае уравнение РЭП (3.75) принимает более простой вид
К _ ^пвх _ (®3»^з)^ПР п Рс А/црМ (3 76)
п ^вх едбпрс Л- А/п
Наименьшая мощность ПП, необходимая для РЭП системы передачи ин-
формации (при условии Fn2(03,^3) = 1 и согласованном помеховом сигнале
Д/7 » Д/Прм) при известном расположении приемников и передатчиков
PcGrGnp с
рп/ Rc
Если известны характеристики передатчиков подавляемой радиосистемы и
ПП, можно определить зоны подавления РЭС передачи информации помехами
Rn — Rc
(3.78)
РпСпЧ.п; =Дс
«GcGhpc
При ft <1, т.е. когда энергетический потенциал СП невелик, зона подавле-
ния РЭС передачи информации - это окружность радиусом
R=R'-"^’ (3-79)
где Лг_п - расстояние межд) переда! чиками сигнала и помехи. Центр круговое
зоны подавления при ft < 1 смещен на величину Rn /3 по направлению базовой ли-
нии, соединяющей передатчики сигнала и помех в сторону от передатчика сигнала.
При Р > 1, когда энергетический потенциал СП превосходит мощность пе-
редатчика подавляемой РЭС связи, зона подавления занимает всю плоскость, за
исключением окружности радиуса
й=яс-п-^т7 (3-8°)
с центром, смещенным относительно точки расположения передатчика подавляе-
мой радиолинии в сторону, противоположную направлению на ПП, на R ‘ Р .
При Р = 1 граница зоны подавления будет проходить посередине между пе-
редатчиками помех и радиосвязи [4. 10, 19]. Зоны подавления радиолинии переда-
чи информации показаны на рисунке 3.32.
Глава 3, Основы радиоэлектронного подавления
229
Рис. 3.32. Зоны подавления радиолинии передачи информации
Эффективность подавления средства радиосвязи в основном определяется:
правильностью и своевременностью обнаружения и идентификации объектов по-
давления среди множества других ИИ; правильностью выбора и точностью форми-
рования помехи надлежащей структуры и с параметрами, соответствующими вид)
и параметрам сигнала подавляемого средства.
Для исполнения j казанных функций требуются средства радиоразведки,
реализующие обнаружение, пеленгование и анализ структуры разведанных
сигналов, а также устройства формирования и излучения помех требуемой
структуры. Для повышения эффективности РЭП радиолиний управления минно-
взрывными устройствами можно использовать ПП, структурная схема которого
представлена на рисунке 3.33 [73].
ПР
А
пгд
Рис. 3.33. Передатчик помех для РЭП радиолиний управления
минно-взрывными устройствами
ПРД
230
Глава 3. Основы радиоэлектронного подавления
Данная схема (рис. 3.33) формирует мешающий сигнал в виде комбиниции
узкополосной помехи и широкополосной заградительной помехи. В состав схемы
входят: управляющая ЭВМ; блокиратор сигнала радиолинии управления; БУ - блок
управления; БВ - блок вычитания; ПУП - передатчик узкополосной помехи; ПШП
- передатчик широкополосной помехи; БП - блок питания. Для подавления КРУ,
линий радиосвязи и навигации используются забрасываемые на территорию
противника ПП одноразового действия (ППОД), работающие в диапазоне рабочих
частот 3...50 ГГц [19, 74], и беспилотные ЛА (БЛА), ЭПР которых не превышает
0,01 м-, что представляет значительные трудности их обнаружения даже самыми
современными РЛС. Характеристики существующих командных линий и линий
передач данных «земля-БЛА» и «БЛА-земля» приведены в работе [173].
При подавлении информационных каналов связи «земля-БЛА» и «БЛА-
земля» эффективность подавления достаточна при К = 1...2. Энергетический по-
тенциал канала «земля-БЛА» при дальности связи до 70 км составляет 30...50 Вт.
При дальности «САП - БЛА» до 30 км энергетический потенциал ПП должен со-
ставлять 10...20 Вт. Необходимая мощность ПП для подавления канала «БЛА-
земля» при мощности передатчика БЛА 2...5 Вт и дальности «САП-пункт управ-
ления БЛА» от 30 до 50 км должна составлять 5... 10 Вт [173].
Подавлению спутниковых радионавигационных систем посвящена работа
[75]. Характеристики действующей сегодня системы GPS: энергетический потен-
циал PcGf = 240...750 Вт; высота орбиты 20000 км; поляризационный коэффициент
у = 0.5 , усчитывающий различие поляризаций передатчика спутника и ПП [173].
ППОД также используются для подавления РЛС ПВО и радиолокационных
ГСН, работающих в диапазоне рабочих частот 8...20 ГГц [5]. Основные
характеристики малогабаритных ППОД представлены в [19]. При ограниченной
мощности ПП необходимо: увеличивать направленные свойства передающей
антенны ПП; создавать прицельную по частоте помеху АГП ~ А/ ,м; повышать
качество помехи.
3.7. Активные помехи РЛС, работающим в режиме
сопровождения
Подавление РЛС управления оружием (УО) значительно снижает вероят-
ность поражения цели. Информация, получаемая от РЛС УО, используется при
прицеливании, стрельбе неуправляемыми авиационными ракетами, снарядами и
наведении управляемых ракет на сопровождаемые цели. Особенностями РЭП РЛС,
работающих в режиме авгосопровождения (АС), являются:
1. В состав РЛС У О входят системы АС цели по угловым координатам, ско-
рости и дальности, для каждой системы (канала) создаются свои помехи. Также
могут создаваться помехи, препятствующие переходу РЛС из режима «Обзор» в
режим «Автосопровождение».
2. На каждый ЛА может наводиться свое средство поражения, поэтому
необходимо обеспечить защиту каждого ЛА, помехи для РЛС УО должны созда-
ваться с каждого защищаемого ЛА.
Глава 3. Основы радиоэлектронного подавления
231
3. Время атаки обычно мало, поэтому САП индивидуальной защиты (ИЗ)
должны иметь малое время реакции (высокое быстродействие). Лучше всего этому
условию соответствуют станции ИЗ ретрансляционного типа.
4. Коэффициент подавления для различных видов имитирующих помех мо-
жет существенно различаться. Уравнение РЭП для РЛС У О аналогично уравнению
РЭП для случая самоприкрытия
^пвх _ Wn(Qn>yn) Д/прм
^свх ^GcFc(®c><PC) 4/н
5. Характерной чертой РЛС с сопровождением на проходе является совме-
щение в них функций обзора и автосопровождения. Таким системам необходимо
ставить более эффективные помехи, воздействующие на каналы АСН, АСД, АСС.
6. Структура создаваемых помех определяется не только принципом дей-
ствия подавляемого канала РЛС, но и видом зондирующего сигнала. Воздействие
одной и той же помехи на РЛС с когерентными сигналами отлично от воздействия
на РЛС с некогерентными сигналами, воздействие помехи на РЛС со сложными
сигналами отлично от воздействия на РЛС с простыми сигналами [15, 19].
Вид активных помех для каналов АСН зависит от принципа работы пелен-
гатора. В настоящее время широко известны и применяются на практике системы с
одновременным и последовательным сравнением сигналов. Виды помех РЛС У О
представлены на рисунке 3.34 [15].
В системах АСН с одновременным сравнен нем сигналов (м оно импульс-
ная система) определение угловой координаты цели производится по результатам
сравнения сигналов, принимаемых одновременно двумя разнесенными в простран-
стве антеннами. Информация об угловом положении цели может быть получена в
момент прихода отраженного сигнала, в моноимпульсных системах АСН каждый
принятый импульс несет информацию об угловом положении цели.
Рис. 3.34. Виды помех РЛС УО
232
Глава 3. Основы радиоэлектронного подавления
В системах АСН с последовательным сравнением сигналов (системы с
коническим сканированием) прием сигналов от цели в каждый данный момент
времени ведется на одну антенну, ДН которой совершает периодические кол ебания
относительно некоторой оси (направление равносигнальной зоны). Определение
координат производится на основании сравнения огибающей принятых сигналов с
опорным сигналом. Для получения информации о направлении на цель требуется
некоторое время, соизмеримое с периодом сканирования антенны. Поскольку ин-
формация о направлении на цель передается с помощью AM отраженных от цели
сигналов, РЛС с коническим сканированием оказывается очень чувствительной к
AM помехам.
Принцип работы РЛС с коническим сканированием луча. Метод сопро-
вождения угловых координат путем конического сканирования луча является од-
ним из первых методов, нашедших применение в угломерных РЛ системах. При
реализации данного метода антенной РЛС формируется вращающийся с частотой
сканирования 0С луч, максимум которого смещен относительно электрической
оси антенны на определенный угол 0 и в процессе сканирования описывает в
пространстве конус. При облучении через такую антенну цели, смещенной относи-
тельно ее электрической оси на угол 0 , отраженный сигнал будет модулироваться
по амплитуде, глубина модуляции отраженных сигналов тс будет определять ве-
личину отклонения цели от РСН, совпадающего с электрической осью антенны
РЛС, а фаза - направление отклонения цели от РСН.
Упрощенная структурная схема РЛС с коническим сканированием луча по-
казана на рисунке 3.35. (ГОН - генератор опорных напряжений, ППП - переключа-
тель приемо-перелачи).
Рис. 3.35. Структурная схема РЛС с коническим сканированием луча
НЧ огибающая отраженных сигналов при их приеме выделяется и исполь-
зуется в качестве сигнала ошибки, несущего информацию о направлении на цель.
Для этого ВЧ сигнал усиливается в приемнике РЛС и дважды детектируется (по
видеочастоте и низкой частоте). С помощью сигнаяов ошибки антенна поворачива-
ется в соответствии с их величиной и полярностью до положения, когда сигналы
Глава 3. Основы радиоэлектронного подавления
233
ошибки становятся равными нулю. Электрическая ось антенны будет направлена
на цель, амплитуда отраженных сигналов не будет зависеть от положения ее луча,
модуляция сигналов за счет сканирования луча будет отсутствовать. В первом при-
ближении сигнал на входе приемного устройства может быть записан как
£(/) = Е[1 + ?ис (<9) cos (£>Д + (рс ) cos cot,
с ' |я0,-0):+|т,+я)|
- коэффициент AM на частоте сканирования; ± <9) - нормированные ДНА,
повернутые относительно друг друга в плоскости пеленгации на 180°. Данным вы-
ражением можно пользоваться до значений угла рассогласований 0 - 0,5 / 2, где
0 5 — ширина ДНА по уровню половинной мощности.
На выходе ФД сигналы ошибки по азимуту и углу места имеют вид
= U, тс sin<pc /2, UCO£(t) = Uomc cos<pc / 2 . (3.81)
В процессе слежения за целью угловые рассогласования составляют малую
величину, функции F(0B±<9) можно линеаризовать, разложив их в ряд Тейлора,
ограничившись двумя членами
F(0 ±0) = F(0O)-(1±^),
снв) ее
где р=—-———
F(0 )
(ПХ) в линейной ее части [15].
Подставляем линеаризованные функции в выражение для /т?(
- нормированная крутизна пеленгационной характеристики
в=0
тс(0) = р0. (3.82)
Глубина модуляции отраженного от цели сигнала за счег сканирования
ДНА пропорциональна углу рассогласования цели, поэтому РЛС с коническим ска-
нированием оказывается очень чувствительной к AM помехам. Работа РЛС с кони-
ческим сканированием может быть серьезно нарушена мощной ретрансляционной
помехой с AM на частоте сканирования в противофазе. Виды помех РЛС с кониче-
ским сканированием луча представлены на рисунке 3.36 115].
Прицельная по частоте сканирования помеха представляет ВЧ сигнал,
модулированный по амплитуде с частотой, равной частоте сканирования РЛС. Воз-
действие такой помехи по своему характеру будет равносильно поступлению отра-
женного сигнала от какой-то цели. Система АС РЛС начнет поворачивать антенну
РЛС в соответствии с глубиной и фазой модуляции помехи, стремясь запеленговать
ЛЦ. Прицельная по частоте сканирования помеха создается для РЛС с коническим
сканированием, частота сканирования которых точно известна либо может быть
определена в процессе создания пс лех. В РЛС с открытой частотой сканирования
полезный сигнал модулируется дважды: при излучении зондирулощего сигнала и
при приеме отраженного от цели и уже однократно промоду лированного сигнала.
234
Глава 3. Основы радиоэлектронного подавления
Амплитуда боковых составляющих, несущих информацию о координатах цели,
будет в 2 раза больше.
Рис. 3.36. Классификация помех РЛС с коническим сканированием луча
Помеха имеет параметры, совпадающие с параметрами полезного сигнала
за исключением коэффициента модуляции /ип и начальной фазы модулирующего
напряжения cpv . Полезный и помеховый сигналы на входе антенны могут быть
представлены следующим образом
ис (Г) - Uc cos cot, иП (г) = Ut] [1 + cos(QnZ - <рП)] cos cot,
где Qn, срп - частота и фаза модулирующего помехового напряжения. Предполага-
ется, что Qn ~ Qc. Сканирующая антенна осуществляет AM принимаемой смеси
сигнала и помехи, в результате напряжение на входе приемника имеет вид
WA (0 = [wn (0 + WC 0)] [1 + W( (0)cos( Qcr - <pc)], (3.83)
где nic(0) - коэффициент полезной AM, зависящий от угловой ошибки 6 сопро-
вождения цели.
Сигналы ошибки для азимутального и угломестного каналов имеют вид
(0 = К' [(1 + Q) • '«< (0)sin срс + q sin((Qn - Q, )t + cp}.)], (3.84)
z/Д/) = ^-[(1+<?)-wf.(0)cos^c + ^-wncos((Qn -fi|)/ + <pn)], (3.85)
где q = Un/Uc [15].
Действие помехи вызывает деформацию ПХ, которая при Qr = QC,
~(Рп - 71 и = 0 для одного из каналов пеленгации записывается в виде [70]
wnx =^фдГ^с(^)-Л7п(^/2 + ^)]’ О-86)
в отсутствии помехи ипх = кФат< (0).
Глава 3. Основы радиоэлектронного подавления
235
Эффективность помехи сущест венно зависит от соотношения между часто-
той модуляции помехи и частотой сканирования [19], т.е. от величины
AQ = Q1 - Qc |. Помеха по своему действию эквивалентна некоторой фикт ивной
цели, несовмещенной в пространстве с истинной целью. Помеховый сигнал порож-
дает ложную информацию, имитируя появление ЛЦ, угловые координаты которой
отличаются от координат истинной цели. В результате равносигнальная линия ан-
тенны ориентируется в амплитудный центр тяжести источников Ц и Ц\, располо-
женный на прямой, соединяющей точки Цн Ц\ [15].
С ростом тп и q ПХ становится несимметричной, точка устойчивого со-
стояния равновесия смещается на величину 0, значение которой равно угловой
ошибке сопровождения цели. Ошибка 0 может быть найдена из уравнения (3.86).
При wnx = О
(3.87)
(3.88)
тс(0) = тП--^.
1 + ^г
При малых значениях ошибки 0 получаем
— = 0,36^—2-mn,
05 0 1 + q
где О. - угол между РСН и максимуме ДНА.
Даже при q »1 нельзя получить величину ошибки больше шачения
---— и.Зо т
© 5-©•
Это объясняется тем, что помеховый сигнал, излучаемый с прикрываемого
самолета, сам несет информацию об его угловых координатах. Антенна РЛС от-
клоняется до тех пор, пока помеховая модуляция не будет скомпенсирована полез-
ной модуляцией [70]. При аппроксимации ПХ функцией wpx = кфщ (0) = кфГ[ sin6
значение углов 0-0,Л1], при которых наблюдается устойчивое состояние равнове-
сия, определяются выражением
П
/) • Ч
cLn = arcsin —-—тп .
иш -а 11
1 + 9
<3.89)
В этом случае коэффициент передачи пеленгатора при 0 = 0ОШ равен
_ ^1{ПХ
m~d0\
10-0ОШ
= &фд cos arcsin
(3-90)
Уменьшение Кцх приросте тп и q может привести к потере устойчивост и
системы АСН. Если частота AM Qn не точно совпадает с частотой сканирования
антенны подавляемой РЛС, но AQach / 2 >|Qn - Qc|, условие баланса фаз имеет вид
(рс =(Q„ -Ц )t + (pn ±л. (3.91)
236
Глава 3. Основы радиоэлектронного подавления
Первое слагаемое в выражении (3.91) непрерывно изменяется, поэтому РСН
будет вращаться, описывая поверхность конуса. Угловая частота вращения РСН
равна AQ = |Qn -Qc|. Воздействие помехи приводит также к изменению динами-
ческих характеристик канала АСН. С увеличением q и тл крутизна ПХ /л умень-
шается, что может привести к срыву слежения. Частоту сканирования РЛС можно
определить из анализа сигнала, отраженного от антенны подавляемой РЛС. Приня-
тый сигнал детектируется, далее выделяется сигнал частоты сканирования. Струк-
турная схема передатчика прицельных помех представлена на рисунке 3.37 [12].
Рис. 3.37. Передатчик прицельных помех
Модуляция меандром по сравнению с модуляцией гармоническим сит налом
при одинаковых амплитудах помех обеспечивает большую ошибку в сопровожде-
нии цели [19]. Для обеспечения максимальной крутизны ПХ в РЛС выбирают
О0 «0,4-О05. На рисунке 3.38 представлена структурная схема ПП, позволяющего
формировать прицельную по частоте сканирования помеху в противофазе одно-
временно нескольким РЛС с открытым коническим сканированием.
Рис. 3.38. Передан чик прицельных помех одновременно нескольким импульсным РЛС
Глава 3. Основы радиоэлектронного подавления
237
На рис 3.38 введены обозначения: У-ЛБВ - усилитель на ЛБВ. УМ - усили-
тель мощности на ЛБВ, ГИ - генератор импульсов. ВД1, ВДу- видеодетекторы,
ДО - детектор огибающей, Инв. — инвертор, С-К - строб-каскад [12].
Принимаемый сигнал с выхода антенны поступает на многоканальный раз-
делитель сигналов. Разделение сигналов может основываться на различии направ-
ления их прихода, несущей частоты, частоты повторения импульсов, длительности
импульсов или комбинации указанных параметров. Каждая последовательность
импульсов будет отдельно модулироваться соответствующей частотой сканирова-
ния в противофазе. В результате помеховые сигналы будут иметь оптимальную
структуру модуляции, обеспечивающую максимальную эффективность воздей-
ствия. Если частота сканирования неизвестна, для подавления РЛС можно приме-
нять заградительную или скользящую по частоте сканирования помехи.
Передатчик прицельных помех с многоканальными частотно-
избирательными системами представлен на рисунке 3.39 (ПФ1,..., ПФу — полосовые
фильтры; Д1,..., Ду- детекторы; Ki,..., Кд - коммутаторы; ГШ - генератор шума)
[62]. От ГШ сигнал потсупает на вход ЛБВ через частотно-избирательную комму-
тационную систему. На выходе передатчика обеспечивается достаточно равномер-
ный спектр шумов во всем частотном диапазоне, регулируемом соответствующими
характеристиками ЛБВ.Для определения требуемой частоты передатчика использу-
ется многоканальный приемник.
Рис. 3.39. Передатчик прицельных помех с многоканальными частотно-избирательными
системами
Передатчик прицельных шумовых помех с преобразованием частоты пред-
ставлен на рисунке 3.40. На рис. 3.40 обозначено: Д1,..., Д, - детекторы: Ki,..., К„-
коммутаторы; ИШ - источник шума диапазона промежуточной частоты; СЧ - син-
тезатор частот (генератор сетки частот); ФП1,..., ФП,. - фильтры одной полосы.
Принятый сигнал проходит через соответствующий смеситель (Ci,.... Си) и фильгр
ПЧ (ПФ,..., ПФД Видеоимпульс с выхода Д запускает генератор импульсов
(ГИ.,..., ГП„), который открывает соответствующий К в сопряженной выходной
частотно-избираге 1ьной системе. На выходе канала ПЧ формируется помеховый
сигнал с шириной полосы, определяемой полосой пропускания фильтра. Далее по-
238
Глава 3. Основы радиоэлектронного подавления
меховый сигналчерез сумматор подается на вход смесителя обратного восстанов-
ления частоты, усиливается ЛЕВ и излучается Апрд. Приемное устройство имеет
частотно-избирательные каналы, которые постоянно открыты, и весь частотный
диапазон непрерывно просматривается [62].
Рис. 3.40. Передатчик прицельных шумовых помех с преобразованием частоты
Схема передатчика шумовых помех, прицельных по частоте и направлению,
представлена на рисунке 3.41 (ИГ1,..., ИГ„ - импульсные генераторы, С;,..., С„ -
сумматоры, Pi,..., Р~-разветвители).
Эффективность САП возрастает, если наряду с концентрацией мощности
помехи в узкой полосе частот сконцентрировать ее в узком луче в направлении
РЛС. Сигналы РЛС принимаются приемной антенной решеткой (АР) и поступают
на ДОС, выходы которой соединены с многоканальной сист емой определения ча-
Глава 3. Основы радиоэлектронного подавления
239
стоты сигналов РЛС. 1LT формируют видеоимпульс с длительностью порядка не-
скольких периодов повторения импульсов подавляемой РЛС.
Рис. 3.41. Передатчик прицельных шумовых помех, прицельных по частоте и направлению
Сигнал принятый с данного направления, потсупает в свой частотный канал
и запускает ПГ, видеоимпульс которого открывает коммутатор соответствующего
канала формирования помехи. Быстродействие процесса меньше, чем длительность
РЛ импульса. Все каналы формирования помех по направлению работают незави-
симо друг от друга. Для развязки приемная и передающая АР разнесены в про-
странстве или работают в режиме разнесения во времени. Недостаток такого
устройства — при одновременной обработке сигналов с нескольких направлений
или на нескольких частотах помеховый сигнал формируется на всех возможных
комбинациях этих частот и направлений [62].
Когда не известна точно частота сканирования, но известен диапазон частот
сканирования, можно создавать заградительную по частоте сканирования
помеху, представляющую собой несущую, модулированную по амплитуде НЧ шу-
мовым напряжением с равномерным спектром. Ширина спектра модулирующего
сигнала АЛ', перекрывает возможный диапазон частот сканирования подавляемых
РЛС A/7 > |АОСК. Модулирующий НЧ шум можно представить в виде ряда Фурье
240
Глава 3. Основы радиоэлектронного подавления
Л'
«W = E4Wcos(Q/-Pi(0)-
Заградительная по частоте сканирования помеха имеет вид
Г N
(f)=Un 1 + £ ZHn/COs(Q/-<J9i.(0) COSft)/,
(3.92)
(3.93)
wn
где т1 - коэффициент модуляции, обеспечиваемый /-Й составляющей модулиру-
ющего шума.
Дисперсия угловой ошибки определяется выражением
204
=---------2^-<3:т(^гк)А^АСН ,
(3.94)
где Gra(QCK) - спектральная плотность случайного коэффициента ДМ помехового
сигнала на частоте сканирования; ДОАСН -полоса пропускания системы АСН [70].
В случае АЛШ » ДОСК, можно считать
А^АСН
(3-95)
(3.96)
ш
(^СК ) _ Л?7ПЭ /^111 ,
где тПЗ - эффективное значение коэффициента AM помехового сигнала.
Из выражений (3.94) и (3.95) следует
С а — ----
в 2,8-0п пэ
Эффективное значение угловой ошибки сопровождения уменьшается при
увеличении ширины спектра шумов ДЛ и сужения полосы пропускания AQ4CH
системы АСН [70]. Заградительная по частоте сканирования помеха вызывает пе-
риодические возмущения в моменты времени, когда частота помеховой модуляции
Qr (г) совпадает с частотой сканирования (с точностью до полосы пропускания
системы АСН). Величина угловой ошибки сопровождения цели зависит от времени
эффективного воздействия помехи Д/ЭФ на систему АСН, которое определяется
скоростью изменениямодулирующей функции dFn(f)/dl. Время эффективного
воздействия помехи при заданной скорости перестройки dFr (t)jdt равно
Д/ = - AQach
ЭФ dF^dt
При медленной перестройке скорость изменения частоты помеховой моду-
ляции выбирается из условия ДСФ > Зтхсн (гАСН « l;AQAClj ). Из (3.97) имеем
(3.97)
(3 98)
^(г)М<-ДО;сн.
Условие (3.98) показывает, что при медленной перестройке период следо-
вания возмущении довольно большой
Глава 3. Основы радиоэлектронного подавления
241
_ Л/У .3
dF? (t) dt ДО;СН’
(3.99)
где AF — диапазон перестройки генератора помеховой модуляции.
При быстрой перестройке скорость изменения частоты помеховой модуля-
ции dFn(t)/dt» ДО2СН велика. Время эффективного воздействия помехи ДгЭФ ма-
ло (Дг)ф«т\сн), однако период следования возмущений близок к постоянному
времени системы. В этом случае помеха по эффекту действия приближается к за-
градительной шумовой помехе [70]. Ошибка сопровождения цели в случае загради-
тельной помехи будет значительно меньше, чем в случае прицельной помехи,
ошибка сопровождения цели будет случайной величиной, медленно изменяющейся
во времени. Воздействие заградительной помехи аналогично действию прицельной
по частоте сканирования но эффективность заградительной помехи ниже [15, 19].
Скользящая по частоте сканирования помеха создается путем изменения
частоты помеховой модуляции Ои(/) в некотором диапазоне ДО возможных ча-
стот сканирования подавляемых РЛС. Наилучшим законом скольжения частоты
является линейный закон, поскольку он обеспечивает равную вероятность эффек-
тивного воздействия помехи на все РЛС, частоты сканирования которых перекры
диапазоном перестройки частоты модуляции помехи [12]. В этом случае помеху на
выходе антенны РЛС со скрытым сканированием (реакция следящей системы на
помеховые воздействия всегда противоположна по фазе) можно представить в виде
un{t}-Un [1 + 777п cos Оп (/)/](!-cos Q( z) cos cot. (3.100)
Отраженный от цели сигнал соответственно
ис (Г) = ис [1 - 777,. COS Qcr] COS cot,
где Qn (Z) - закон изменения частоты помеховой модуляции.
Управляющее напряжение одного из каналов (например, }тл ©местного),
учитывая узкополосность следящей системы, не пропускающей составляющие ча-
стоты Q , 20, , О (г) + 20с , можно представить в виде [12]
„ (,) = ^cos[n^ry-nj]--^-^--.^Ytcos[Qn(ry-2nc/]. (3 101)
Если при скольжении частоты модуляции помехи удвоенные частоты ска-
нирования не захватываются, то управляющее напряжение на выходе НЧ фильтра
ФД с учетом реакции на воздействие сигнала с переменной частотой имеет вид
C/(,) = ^F[Q,](r)-n, ]-(9 + 1)^. (3.102)
Приравнивая (3.102) к нулю, найдем условия равновесия в виде
/7?с =/77п -j-^-|F[Qn(r)-Qc ]|. (3.103)
242
Глава 3. Основы радиоэлектронного подавления
где F[Qn(Z)-Q( ] - динамический коэффициент передачи, опредялющий реакцию
НЧ фильтра на сигнал с переменной частотой.
При Qn(r) = Qc имеем F[Qn(7)-Qc] = 1 и выражение (3.103) совпадает с
выражением (3.87), определяющим эффект воздействия прицельной по частоте
сканирования помехи. По мере увеличения скорости ско1ьжения частоты макси-
мум коэффициента передачи системы понижается, в соответствии с чем понижает-
ся и эффективность помехи. Поэтому для каждой конкретной системы су ществует
предельная скорость изменения частоты модуляции, превышение которой с точки
зрения эффективности помехи недопустимо [12]. Помеха по эффекту подавления
приближается к заградительной по частоте сканирования помехе, а величина угло-
вой ошибки определяется отношением AQ . , AQ. Достоинством скользящей по
частоте сканирования помехи является возможность подавления нескольких РЛС с
разной частотой сканирования. Недостатком - дискретность воздействия на РЛС.
3.8. Виды помех моноимпульсным РЛС и способы их
создания
Принцип моноимпульсного метода измерения угловых координат основы-
вается на одновременном приеме отраженных от цели сигналов независимыми
приемными каналами по каждой координатной плоскости пеленгации (двумя в
азимутальной и двумя в угломестной). Весь объем необходимой информации из-
влекается при приеме каждого импульса и практически не зависит от AM принима-
емых импульсных сигналов. При реализации амплитудного метода антенная си-
стема формирует в каждой координатной плоскости две ДНА, каждая из которых
отклонена от электрической оси антенны на определенный угол. При реализации
фазового метода в каждой координатной плоскости формируются пары парал-
лельных ДНА. соосных с направлением электрической оси антенны.
На рисунке 3.42 приведена структурная схема наиболее распространенной
амплитудной суммарно-разностной моноимпу тьсной системы пеленгации в одной
плоскости [43].
Рис. 3.42. Структурная схема амплитудной суммарно-разностной
моноимпульсной сис гемы пеленгации
Глава 3. Основы радиоэлектронного подавления 243
Сигнал, обозначенный знаком Д, равен разности амплитуд принимаемых
сигналов и определяет положение источника излучения (ИИ) относительно линии
визирования антенны РЛС. например, в азимутальной плоскости. Знаком Е обо-
значен сигнал, равный сумме принимаемых сигналов, и, как правило, используется
для нормировки по амплитуде сигналов обоих каналов с помощью системы АРУ.
Структурная схема фазовой суммарно-разностной моноимпульсной системы пе-
ленгации в одной плоскости приведена в [10, 15]. Отличие ее от амплитудной си-
стемы в конструкции антенны, разностный сигнал обуславливается разностью фаз
принимаемых сигналов.
В силу своей сложности по сравнению с методом конического сканирова-
ния моноимпульсный метод первоначально нашел применение в РЛС сопровожде-
ния ЗРК. В настоящее время монои шульсный метод широко используется в РЛС
управления оружием. Возможные виды помех моноимпульсным системам пред-
ставлены на рисунке 3.43 [15].
Рис. 3.43. Классификация помех моноимпульсным сис гемам
Важное значение при анализе воздействия двухточечных помех приобрета-
ют фазовые соотношения сигналов, поступающих на вход РЛС. Помеховые сигна-
лы разделяются на некогерентные (характеризуются отсутствием какой-либо де-
терминированной связи между фазами помеховых ВЧ колебаний, поступающих на
вход системы) и когерентные (разность фаз ВЧ колебаний в течение относительно
длительного времени не меняется). Действие помех в конечном итоге сводится к
искажению фазового фронта волны, по направлению нормали к которому опреде-
ляется направление на цель [76-79]. Воздействие многоточечной помехи приводиг
к тому, что нормаль к фазовому фронту уже не совпадает с ист инны м направл ени-
244
Глава 3. Основы радиоэлектронного подавления
ем на цель. Помехи, излучаемые из разных точек пространства, изменяют ориента-
цию фронта ЭМВ, падающей на антенну РЛС. В качестве носителей (платформ)
постановщиков помех используются: пилотируемые ПП и беспилотные ДПЛА;
медленно опускающиеся ЛА (парашюты, летающие крылья, аэростаты с ППОД).
буксируемые РЛ ловушки; отстреливаемые снаряды и ракеты, несущие передатчи-
ки перенацеливающих на себя помех [15].
В общем случае среднее значение сигнала рассогласования на выходе ФД
моноимпульсного пеленгатора РЛС суммарно-разностной обработкой может быть
рассчитано по формуле
Да = 0О 5 Re
(3.104)
где Ut = i = \,N - комплексная амплитуда сигнала /-го источника на входе
антенны РЛС; л - комплексная амплитуда регулярной компоненты; - ком-
плексная амплитуда флуктуационной компоненты, имеющая гауссовский закон
распределения с нулевым средним значением и дисперсией ст = 0,5^* ; * - знак
комплексного сопряжения; F. = Ftl + /д,, = F. i - комплексные значения
суммарной и разностной ДНА по напряжению в направлении на /-источник помех;
FJD , F.y - комплесные величины, соответствующие значениям детерминирован-
ных составляющих суммарной и разностной ДНА по напряжению в направлении на
/-источник помех; /д , /д - гауссовские комплексные величины с нулевым сред-
ним значением, одинаковой дисперсией or; .V - количест во частично когерент-
ных источников помех [80].
В случае некогерентных источников помеховых сигналов мгновенное ре-
зультирующее положение фазового фронта быстро изменяется около среднего по-
ложения. Источники помех, разнесенные на расстояние d и наблюдаемые с подав-
ляемой РЛС под углом Д0П , формируют сигналы с амплитудами 4 и А,, ошибка
сопровождения главной цели (ГЦ) равна
© __А0л '-Р
ош 2 1 + 2Дсоз(ДФ) + Д: ’
(3.105)
где Р = Л, /А2 , ДФ = — • d sin (<?) + ср} + ср2 - фазовый сдвиг на входе приемной ан-
Л
тенны РЛС; <р}, <р2 — начальные фазы помеховых сигналов; Д0П - угловая база ис-
точников помех [19].
Ошибка сопровождения ГЦ постановщиков помех определяется соотноше-
нием Р - 4 /А. амплитуд источников на входе антенны, угловой базой между ис-
точниками Д0Ь и фазовым сдвигом несущей частоты в точке приема ДФ . Эффек-
тивность двухточечной помехи во многом обуславливается наличием когерентной
связи двух сигналов, а также характером изменения мощности источников помех.
Глава 3. Основы радиоэлектронного подавления
245
Когерентная двухточечная помеха. Возможность создания помех каналам
АСН с помощью двух разнесенных в простанстве когерентных источников основы-
вается на искажении фазовой и амплитудной структуры ЭМП в раскрыве антенны
угломерного устройства. Условием когерентности является наличие детерминиро-
ванной связи между начальными фазами помеховых сигналов. Если когерентные
помехи синфазны (&Ф = 0) [12, 19], то
А
ош 2 1 + ft '
При р = 1, 0, ,ш = 0, РЛС следит за центром базы (амплитудным центром
тяжести гантели, образованной двумя источниками одинаковых по амплитуде по-
мех), амплитудный центр совпадает с геометрическим. При р Ф1 равносигнальное
направление РЛС следит за некоторой точкой внутри базы. Система АСН будет
отрабатывать направление ближе к источнику помех с большей мощностью. Если
когерентные помехи противофазны (АФ = л ), то
деп 1+/?
ош 2 \-р’
т.е. ошибка пеленгации резко возрастает и при р -> 1 может достигать очень боль-
ших значений [15]. По мере приближения АФ—> 180' , при р ->1 ошибка пеленго-
вания резко возрастает, пеленгатор дает ошибку, уводящую пеленг за базу ИИ. Эти
ошибки ограничиваются ДН приемной антенны подавляемой РЛС и не могут пре-
восходить по величине ее ширину.
Воздействие двухточечны^ когерентных помех приводит к следующим по-
следствиям: 1) возможен увод РСН за пределы базы источников помех; 2) макси-
мального значения ошибка достигает при противофазных сигналах (АФ = тг); 3)
изменение амплитудных соотношений обеспечивает варьирование величиной и
знаком ошибки, что позволяет управлять отклонением линии визирования коорди-
натора. Эффект воздействия двухточечной когерентной помехи на угломерные
пеленгаторы моноимпульсного типа описывается соотношением [81]
tg0 ________________и____________
1&^ОШ 2 2 П I- г- А ’
2 Е{ + Е- + 2Е ЕУ cos дхр
(3.106)
где 0, ш - отклонение пеленгуемого направления (кажущегося центра излучения)
от направления на центр базы источников; Е}, Е, - мощности сигналов помех на
входе пеленгатора; _ разность фаз помеховых сигналов на входе пеленгатора:
А0П - угловая база источников помех.
Точное значение ошибки определяется путем анализа семейства обощенных
ИХ системы АСН при действии на нее когерентных помех. Необходимо учитывать
амплитудные и фазовые характеристики антенны РЛС. Анализ показывает, что
максимальная ошибка при создании когерентных помех не превышает значения
0,„ ^Ог70 [70]. Действие когерентной помехи приводит к трансформирова-
нию однолепестковой ДН приемной антенны в двухлепестковую. При действии на
246
Гпава 3. Основы радиоэлектронного подавления
суммарно-разностную моноимпульсную систему когерентная помеха приводит к
функциональному перевороту угломерных каналов: суммарный канал становится
разностным, а разностный - суммарным [19]. Для получения максимальных оши-
бок пеленгования и, в конечном счете, срыва слежения необходимо обеспечить в
точке приема разность фаз помеховых сигналов, близкую к я . Cxeia передатчика
когерентной помехи со стробированием по времени приведена в [12]
Для более эффективного подавления в устройствах формирования двуто-
чечной когерентной помехи ( ДФ—>180 ’) возможно использование поляризацион-
ных приемников, поляриметров и специализированные процессоров [82]. В этом
случае работу устройства можно разделить на несколько этапов: 1) прием сигнала
РЛС; 2) измерение параметров принятого сигнала РЛС; 3) синтезирование полу-
ченного сигнала РЛС; 4) передача сформированного помехового сигнала.
Достоинством двухточечной когерентной помехи являются ее высокая
эффективность и универсальность. Помеха оказывает воздействие в равной степени
как на одноканальные, так и на многоканальные системы АСН. К недостаткам
следует отнести:
1. Необходимость разноса передающих антенн на большую величин}. В
противном случае угол наблюдения Д0 оказывается чрезвычайно мал, ошибка
пеленгования будет незначительной. При размещении ПП на различных ЛА возни-
кают трудности с обеспечением когерентности. Максимальный эффект действия
помехи происходит при противофазных помеховых сигналах. Когерентная помеха
создается и естественным образом при сопровождении сложной цели. Многоточеч-
ная структура отражающей поверхности сложной цели обуславливает флуктуации
фазового фронта отраженного от цели сигнала («угловой» шум).
2. Трудности обеспечения развязки приемных и передающих антенн при ре-
трансляции помехи. Основные пути решения этой задачи: использование адаптив-
ного интерферометра, размещение приемных и передающих антенн на разных кры-
льях самолета [83] и временное стробирование, при котором прием зондирующих
сигналов РЛС и излучение помех разнесены во времени.
Некогерентная двухточечная помеха. ДФ = Ф, - Ф, - случайная величина.
Среднее значение случайной величины соз(ДФ) равно нулю. Ошибка сопровожде-
ния ГЦ некогерентной двухточечной помехи
_Д© I-/?2
ош 2 1 + Д ’
(3.107)
Система АСН сопровождает энергетический центр двух источников помех.
При Д =1 РСН направлено на ГЦ. Увеличение мощности одного из источников
приводит к смещению РСН в сторону источника с большой мощностью. Ошибка
сопровождения источника с большей мощностью равна [19]
а©,,
2
^Д0П 2Д
2 1+ В
(3.108а)
а источника помех с меньшей мощностью
Глава 3. Основы радиоэлектронного подавления 247
=^L + Q =^L--------?— . (3.1086)
1 2 ош 2 \ + р‘
При Р~ > 4...5 ошибка сопровождения источника с большей мощностью
становится незначительной, это обстоятельство используется в специальных
устройствах защиты (схемах углового стробирования мешающего источника). Со-
отношение р' >4...5 может быть достигнуто путем использования антенн с неоди-
наковыми ДН. Приведенные выше рассуждения справедливы в диапазоне малых
углов Д0, = (О,1-О,2)-015. С ростом Д0П начинает сказываться нелинейность
ДН и поведение системы АСН при сопровождении парной или сложной цели при-
ходится анализировать с помощью семейства обощенных ПХ. При сближении
управляемой ракеты с парной целью угол Д0 , под которым наблюдаются оба ис-
точника помех, возрастает. При некотором критическом значении угла наблюдения
источников помех Д0П = 0Р, называемом углом разрешения, крутизна ПХ стано-
вится равной нулю, система АСН переходит на сопровождение одного из поста-
новщиков помех Достоинством некогерентной помехи является простота техни-
ческой реализации, недостатком - малый угол разрешения Д0Р = (0,8 - 0,9) • 0О 5.
Мерцающие помехи - некогерентные или когерентные двухточечные по-
мехи с глубокой AM, создаются дву мя (или более) ПП, установленными на различ-
ных ЛА, путем их поочередного включения. Воздействие помех нарушает селек-
цию целей-постановщиков помех по дальности, а мерцания приводят к ошибкам и
срыву слежения по утловыл координатам. Мерцающие помехи используются в
групповых средствах защиты. РЛС наблюдает цели в той последовательности, в
какой производится включение и выключение ПП. ПП могут включаться по слу-
чайному закону, чтобы не дать РЛС возможности сопровождать отдельную цель в
течение времени, достаточного для точного определения ее местоположения.
Действие мерцающей помехи основывается на ограниченной разрешающей
способности угломерного координатора. При наличии двух ПП, неразрешаемых по
направлению, РЛС отслеживает положение энергетического центра, определяемого
выражением [12]
-ДА_--------, зло
Д0П ^.(0 + ^W+^W+^tO
где Д0 - угол между направлениями на энергетический центр и середину угла
Д0П ; РС1(0, РС2 (/) - мощности сигналов, отраженных от каждого ПП [12].
Положение энергетического центра излучения определяется в основном со-
отношением мощностей ПП и характером изменения мощности во времени. При
создании мерцающих помех ракета с РЛ наведением в начальный момент движется
в направлении энергетического центра совокупности помех и не различает по
направлению самолеты-постановщики помех. По мере ее движения расстояние
между ракетой и целями уменьшается, а угол между направлениями на ПП увели-
чивается, в результате чего наступает момент, когда ГСН ракеты начинает разре-
шать по направлению оздельные источники помехи. С тгого момента ракета будет
наводиться на одну из разрешаемых целей. Дальность до цели с момента ее разре-
248
Глава 3. Основы радиоэлектронного подавления
шения по направлению сравнительно невелика, допустимые перегрузки ракеты
ограничены, ракета не успевает точно выйти на цель и проходит ее со значитель-
ным промахом, не причиняя ей вреда.
Величина промаха (в линейных единицах) определяется выражением
Л 1 _ /б_____
7 71/2 Л)2 *
(3.110)
где L - проекция линейной базы (расстояние между целями) на плоскость, перпен-
дикулярную линии визирования; ng - предельно допустимая перегрузка ракеты:
Готн - относительная скорость сближения ракеты с целью; $кр - критический ) гол
разрешения целей [12].
Для того, чтобы система пеленгации отслеживала перемещающийся в про-
странстве энергетический центр излучения, частота ком иутации ПП должна соот-
ветствовать условию FK < А/\С11 /2 (Л7\сн -- полоса пропускания следящей системы
угломерного координатора [15, 19]. При более высоких частотах коммутации сле-
дящее устройство будет усреднять угловые ошибки и отслеживать направление на
энергетический центр источников помех. Выбор слишком низкой частоты комму-
тации также недопустим, в этом случае атакующая ракета будет успевать наводить-
ся на один из постановщиков помех при излучении им помехи. Оптимальная часто-
та мерцания обычно выбирается в пределах 0,5... 10 Гц [62].
Мерцающие помехи могут быть синхронными и несинхронными. В зави-
симости от периода мерцания различают быстрые и медленные мерцания. При
синхронных мерцаниях помеховые сигналы с прикрываемых целей излучаются по-
очередно, а при несинхронных - временные интервалы излучения помех с различ-
ных постановщиков не связаны между собой.
При быстрых мерцаниях FM > А7\сн (FM - частота мерцаний). Ни одна из
частотных спектральных составляющих помехи не проходит через систему АСН,
которая в этом случае обрабатывает постоянную составляющую. При быстрых
мерцаниях АСН следит за ГЦ двухточечной мерцающей помехи, утол разрешения
0РЬ ~20О5, т.е. угол разрешения при быстрых мерцаниях примерно в 2 раза боль-
ше, чем при применении двухточечной некогерентной помехи. При быстрых мер-
цаниях FM не должна превышать полосу пропускания АРУ. При > AFapy мер-
цающая помеха по свойствам приближается к некогерентной двухточечной помехе
с углом разрешения 0Г « (0,8 ч- 0,9) 0О 5.
При медленных мерцаниях FM < Д/\сн и система АСН отрабатывает одну
или несколько гармоник помехового сигнала. Нуль ПХ при этом перемещается.
При A0fl > А011ах АСН перестает переходить на поочередное сопровождение ис-
точников помех. При медленных мерцаниях угол разрешения 0РМ ~(2 т 3) 0О5.
Дальнейшее совершенствование метода создания мерцающих помех, пред-
положительно, должно идги по пути управления бортовыми средствами помех с
помощью каналов связи и увеличения мощности передатчиков мерцающих помех
до уровней, гарантирующих воздействие помехи через БЛ ДНА подавляемых РЛС.
Глава 3. Основы радиоэлектронного подавления 249
Варианты создания синхронных мерцающих помех описаны в [15]. Наиболее про-
стым путем создания мерцающих помех является использование передатчиков
прицельно-заградительных шумовых помех, несинхронно коммутируемых низкой
частотой. Режим несинхронной коммутации несколько снизит эффективность за-
щиты, однако обеспечит ряд существенных преимуществ, включая снижение стои-
мости и сохранение автономности действий самолетов защищаемой группы.
Мерцающая помеха достаточно эффективна при подавлении РЛС с сопро-
вождении «на проходе». Особенностью этих РЛС является использование линейно-
го сканировнаия АС по азиму ту и углу места. Приемные каналы пеленгации цели
имеют ортогональные рабочие поляризации и настроены на разные несущие часто-
ты. Одним из вариантов создания помехи таким РЛС является генерирование шу-
мовых помех с переключаемой поляризацией [62]. К достоинствам мерцающих
помех относятся большой угол разрешения, универсальность и относительная про-
стота реализации. Недостаток - сложность реализации синхронного режима [19].
Эффект воздействия помех, действие которых основано на конструктив-
ных недостатках РЭС, определяется как особенностями построения подавляемых
систем, так и техническим несовершенством отдельных элементов этих систем. К
таким помехам относятся: поляризационная, прерывистая, помеха по зеркальному
каналу, дву^счастотная и расстроенная по частоте помеха.
Поляризационная помеха. Принцип действия поляризационной помехи со-
стоит в облучении приемных антенн подавляемых РЛС ВЧ сигналами на частоте
РЛС с поляризацией, ортогональной рабочей поляризации РЛС или близкой к ней.
Большинство РЛС работают с линейно-поляризованными сигналами, у которых
вектор напряженности электрического поля либо вертикален, либо горизонтал ен. У
большинства антенн РЛС помимо излучений на рабочей поляризации имеется из-
лучение на ортогональной поляризации называемой кроссполяризацией. ДНА на
ортогональной поляризации существенно отличается от ДНА на основной поляри-
зации. Поляризационной помехой называется помеха, излучаемая ПП на поляри-
зации. ортогональной поляризации сигнала РЛС (на кроссполяризации). Действие
ее основывается на том, что у большинства существующих антенн при работе воз-
никает кроссполяризационное излучение, наличие которого обуславливает зависи-
мость ДН приемных антенн РЛС и, как следствие, их ПХ от поляризации принима-
емых сигналов, что приводит к снижению точности пеленгации цели [15].
ДНА при приеме сигналов с ортогональной поляризацией по отношению к
рабочей поляризации не соответствует принципам амплитудной моноимпульсной
пеленгации. Разрывы в ПХ происходят из-за нарушения нормировки сигналов.
Эффект нарушения нормировки сигналов проявляется в росте сигнала ошибки,
поскольку’ система АРУ будет работать по разностному (а не по суммарному)
сигналу с уровнем, приближающимся к нулевому. ПХ в своей рабочей точке
становится неустойчивой, что вынудит антенну РЛС отклониться в сторону от
направления на источник сигналов с кроссполяризацией и приведет к срыву
режима сопровождения цели. При приеме сигналов с кроссполяризацией в
азимутальной плоскосги формируется разностная ДНА, типичная для угломесшой
плоскости, а в угломестной плоскости - типичная для азимутальной плоскости.
Иными словами, при приеме сигналов с кроссполяризацией наблюдается
250
Глава 3. Основы радиоэлектронного подавления
функциональный «переворот» каналов пеленгации: угломестный канал становится
азимутальным, а азимутальный - угломестным.
При одновременном приходе полезного сигнала и поляризационной помехи
вырабатываются и полезный, и помеховый сигналы управления. При этом ошибка
сопровождения цели определяется из решения трансцендентного уравнения
^G«ra(eolII)+^GK^(0OI1I) = O, (3.111)
где G и С7К - КУ антенны на рабочей и ортогональной поляризациях. При малой
мощности помехового сигнала (Рс / РГ »]), уменьшается лишь крутизна ПХ.
происходит смещение точки устойчивого равновесия. Если Рс/Р}. «1, то ПХ
существенно деформируется, а следящая система АСН теряет у стойчивость.
Для подавления канала АСН поляризационной помехой необходимо
значительное превышение мощности помехи по сравнению с мощностью сигнала.
Однако при комбинировании поляризационной помехи с помехами каналам АСД и
АСС требуемое превышение может быть снижено до 6 дБ. Если поляризационная
помеха отличается от поляризации полезного сигнала не на 90°, а на величину
90° - А99, то появляется составляющая помехи на пол яризации, совпадающей с
рабочей поляризацией. Эта часть помехи будет «подсвечивать» постановщик
помех. Отношение мощности помехи к мощности сигнала
РпСк cos’ А^/(Д G + PnGsin А^>) уменьшается. Поэтому необходимо, чтобы
точность установки поляризации помехи была достаточно высокой (единицы
градусов) [12. 15]. Допустимое отклонение поляризации помехи
Л п цоч
М)< —----------—--- . (3.112)
У KnPnG
Если условие ортогональности поляризации помехи выполнить трудно, то
можно создать скользящую по поляризации помеху, вектор напряженности
электрического поля помехи качается в некотором угловом секторе относительно
положения кроссполяризации. Воздействие помехи на кроссполяризации с
фиксированными поляризационными параметрами не приводит к срыву АС цели
по угловым координатам, а вызывает отклонение РСН на некоторый угол в
пределах ДНА от направления на источник помехи. При воздействии помехи с
перестраиваемыми поляризационными параметрами возникают угловые ошибки,
которые по величине превышают ширину ДНА и приводят к полному срыву АС.
Возможная структурная схема передатчика поляризационных помех
ретрансляционного типа [10, 12] приведена на рисунке 3.44.
Каждый канал данной системы стробируется по времени в противофазе. В
результате прием сигнала и излучение помехи на одной и той же поляризации
происходят разновременно, развязка приемной и передающей антенн, работающих
на согласованной поляризации, обеспечивается. Развязка приемной и передающей
антенн одного и того же ретрансляционного канала дополнительно обеспечивается
ортогональностью их поляризапий. Снижение уровня мощности помехи на
кроссполяризации возможно за счет комбинирования ее с уводящей помехой по
дальности или по скорости.
Глава 3. Основы радиоэлектронного подавления
251
КАНАЛ 1
ЗАДЕРЖКА
Рис. 3.44. Структурная схема передатчика поляризационных помех ретрансляционного типа
с временным стробированием каналов
На рисунке 3.45 приведена структурная
реализовать такое комбинирование помех [12].
схема системы, позволяющей
д
ЛПРМ А
» ^ПРД
Рис. 3.45. Создание кроссполяризационной помехи в комбинации с уводящими помехами
по скорости и дальности
Каждый канал содержит детекторный приемник, который синхронизирует
работу ПП с частотой повторения импульосов РЛС. Максимальный увод по скоро-
сти 50 кГц. подавление сигнала на несущей, остающегося после модуляции, со-
ставляет 20...30 дБ [621. Поляризационная помеха наряду с когерентной помехой
относится к перспективным эффективным средствам подавления ГСН ракет
252
Глава 3. Основы радиоэлектронного подавления
моноимпульсного типа. Она способна лишить ГСН угловой информации о цели
или, по меньшей мере, значительно снизить точность сопровождения и наведения.
Прерывистые помехи предназначены для воздействия на РЛС
сопровождения и рассчитаны на нарушение работы системы АРУ, что вызывает
ухудшение функционирования РЛС, особенно ее угломерной системы. Действие
помехи основано на том недостатке РЛС, что используемые в них АРУ являются
инерционными. При воздействии прерывистой помехи информация об угловом
положении сопровождаемой цели поступает в систему АСН не непрерывно, как это
происходит при отсутствии помехи, а дискретно, с перерывами, длительность
которых зависит от параметров системы АРУ подавляемой РЛС и характеристик
помехи. Перерывы в информации приводят к уменьшению коэффициента передачи
системы АСН и к росту динамических ошибок сопровождения цели. Нарушение
работы системы АРУ с помощью прерывистой мощной помехи неизбежно
приводит к нарушению нормальной работы РЛС, появлению существенных
угловых ошибок. Нарушение работоспособности РЛС в этом случае происходит
также и за счет периодического насыщения приемника прерывистой помехой,
поскольку в амплитудных моноимпульсных РЛС информация о направлении на
цель содержится в амплитудных соотношениях принимаемых сигналов.
Достоинство прерывистой помехи - простота реализации. Недостатком
является необходимость существенного превышения мощности помехи над
мощностью полезного сигнала [15]. Чтобы не прибегать к очень большим
превышениям мощности помехи над сигналом, прерывистую помеху следует
сочетать с уводящими помехами по дальности и скорости. Период следования
прерывистой помехи должен быть меньше постоянной времени АРУ rAPV = 1/АГару .
Помеха по зеркальному каналу представляет собой ВЧ сигнал на
зеркальной частоте, расположенной симметрично несу шей частоте полезного
сигнала относительно частоты гетеродина. Действие помехи по зеркальному каналу
приводит к формированию противофазного сигнала ошибки и, как следствие, к
нарушению устойчивости следящей системы [15]. Помеха особенно эффективна
при воздействии на фазовые моноимпульсные РЛС, в которых направление на цель
определяется путем измерения разности фаз. На рисунке 3.46 приведена схема
передатчика, реализующего помеху по зеркальному каналу РЛС (ЗФ - заградигель-
ный фильтр, ИЛБВ - импульсная выходная ЛЕВ, ИГ - импульсный генератор).
Рис. 3.46. Схема ПП по зеркальному каналу
Глава 3. Основы радиоэлектронного подавления
253
В состав устройства входит гетеродин, частота которого равна удвоенной
ПЧ приемника РЛС. Данная помеха наиболее эффективна при воздействии на
фазовые моноимпульсные РЛС. ПХ меняет наклон на обратный, следящая система
АСН теряет устойчивость. Для эффективного создания такой помехи необходимо
априорное значение ПЧ приемника РЛС. Однако и при полностью неизвестных
параметрах РЛС наведение помехи на ПЧ теоретически возможно по реакции
передающей антенны РЛС на воздействие помех. Схема (рис. 3.46) обеспечивает
формирование ответной помехи, когда каждый помеховый импульс приходит к
РЛС практически одновременно с импульсом, отраженным от цели. Недостаток
помехи по зеркальному каналу - необходима информация о ПЧ приемника РЛС.
Двухчастотная помеха. В направлении подавляемой РЛС излучается два
ВЧ сигнала, частоты которых находятся в пределах рабочего диапазона РЛС, но
разнесены друг относительно друга на величину, равную ПЧ приемника РЛС
Wn (О = Wni (О WT12 (г) = и. fl COS CO t + Un- COS [(б9 + Абэ) t + у/ ].
При воздействии на приемник такая помеха формирует сигнал ПЧ. Эффект
действия такой помехи может проявляться в перегрузке приемника и нарушении
работы угломерного канала (существенно искажается ПХ). ПХ, описываемая в
нормальных условиях нечетной функцией, становится четной. Преимущество
двухчастотной помехи: при ее создании не требуется наведения по несущей
частоте. Недостаток — реализация помехи требует априорных знаний ПЧ
подавляемого радиолокатора и ширины его полосы пропускания [15]. При
неизвестной ПЧ можно использовать скользящую по нес , шей частоте помеху с
контролем поведения подавляемой РЛС.
Расстроенная по частоте помеха. У моноимпульсных систем точность
сопровождения может уменьшаться из-за неточной настройки приемника на
принимаемый сигнал, что обуславливается наличием неидентичности частотных
характеристик приемных каналов по ПЧ, что может использоваться при
организации РЭП путем излучения помехи с несущей частотой, отличающейся от
рабочей частоты РЛС примерно на половину полосы пропускания приемника по
ПЧ. Эффективность такой помехи зависит от степени неидентичности приемных
каналов РЛС на этих частотах. Помеховый сигнал смещается по частоте
относительно несущей частоты РЛС так, чтобы биения с сигналом гетеродина РЛС
создавали ложный сигнал, попадающий на скат полосы пропускания по ПЧ
приемника РЛС.
На рисунке 3.47 приведена структурная схема импульсного передатчика
расстроенной по частоте помехи (ВД - видеодетектор, ИГ - импульсный генератор,
ЛБВ1 - ЛБВ с непрерывным режимом, БСМ - балансный смеситель, ЛБВ: - ЛБВ с
импульсным режимом, PICi - источник сигнала постоянного уровня с изменяемой
частотой или фазой, ИС2 — источник сигнала постоянной частоты с изменяемым
уровней). Характеристика балансного смесителя позволяет формировать на выходе
обе боковые составляющие f( ±f0 с очень малым уровнем остатка на несущей
частоте входного сигнала. Величина сдвига частоты должна быть достаточной,
чтобы сигнал попадал на скаты полосы пропускания с относительным уровнем от
254
Глава 3. Основы радиоэлектронного подавления
10 до 30 дБ. При изменении частоты помехи ложные сигналы скользят вверх и вниз
по скатам полосы пропускания, создавая AM.
Рис. 3.47. Схема передатчика расстроенной по частоте помехи, действующей на скатах
полосы пропускания приемника РЛС
При необходимости могут генерироваться два таких сигнала,
обеспечивающие ложные сигналы на каждом скате полосы пропускания
приемника. Положение ложного сигнала на скатах полосы пропускания может
совпадать с частотами, на которых трудно управлять фазовой характеристикой
приемника, и могут существовать ошибки согласования по фазе, что будет
вызывать неустойчивость углового сопровождения РЛС [15].
3.9. Создание активных помех каналу дальности
Каналы селекции целей по дальности имеются во всех РЛС. предназначен-
ных для АС целей и наведения средств поражения на опасные цели. Целевое назна-
чение помех по дальности состоит в том, чтобы сорвать селекцию целей или ввести
погрешность в определение дальности, нарушить непрерывность измерения коор-
динат цели и заставить перейти на ручное сопровождение. Нарушение селекции
целей облегчает также энергетически создание помех системе АСН.
Дальность используется в расчетах упрежденного угла при пусках ракет с
командным управлением и стрельбе ЗА. При пуске ракеты-перехватчика ошибки в
расчете упрежденной точки могут привести к увеличению перегрузок ракеты при
ее движении и снижению вероятности поражения цели. Ответные имитационные
помехи каналу дальности создают ЛЦ, перенацел ивают на нее строб дальности (си-
стема АСД захватывает помеху) и уводят строб на ложную дальность. Закон, по
которому помеха уводит строб дальности, может быть любым. Наиболее распро-
страненными видами помех, срывающих АС по дальности, являются: 1) уводящие
по дальности помехи; 2) прицельные и заградительные по частоте шумовые поме-
хи; 3) однократные и многократные ответные помехи; 4) комбинированные помехи;
5) пассивные помехи (ДО, УО) [15].
Уводящая по дальности помеха представляет собой последовательность
ответных импульсов, задержанных относительно сигнала на величин}, монотонно
изменяющуюся от нуля до некогорого значения т(тах. Ошибка измерения дально-
Глава 3. Основы радиоэлектронного подавления
255
сти пропорциональна смещению строба дальности. Максимальная ошибка AD
определяется выражением
Д£> = Сг3гах/2. (3.113)
Однократные ответные импульсные помехи, уводящие по дальности. В
ответ на импульсы сигнала с параметрами тс, Тс, fc создаются импульсы ЛЦ с
теми же или примерно теми же параметрами гс «тп, ТС^ТП, Помеху
формирует генератор ЛЦ. Если помеха сильнее сигнала, строб дальности захватит
более сильную помеху. Этому будет способствовать схема АРУ, благодаря которой
сильная помеха подавляет слабый сигнал. Произойдет перенацеливание системы
АСД на помеху. После этого задержка импульса помехи Атп(О изменяется, изме-
няется и положение строба дальности (помехи осуществляют увод по дальности).
Для имитации равномерного движения ЛЦ Дтп(г) меняется по кусочно-
линейному (пилообразному) закону, Дтп(г) меняется медленно за много периодов
Тс . Для имитации движения ЛЦ с постоянным ускорением используют параболи-
ческий закон изменения задержки Дтп(г) = kt2 Иногда одновременно с уводом ме-
няют мощность помехи Рп(г), имитируя изменение интенсивности сигнала по мере
его приближения (удаления) к РЛС. На рисунке 3.48 приведена структурная схема
передатчика уводящих по дальности помех, в которой используется рециркулятор с
дискретной автоподстройкой набега фазы [84].
Рис. 3.48. Стуктурная схема передатчика уводящих по дальности помех
на рециркуляторе с автоподстройкой фазы
На рис. 3.48 обозначено: Al, А2 - приемная и передающая антенны; У1, У2
- усилители; Д - детектор: ВУ - видеоусилитель; К - коммутатор; ФД - фазовый
детектор: ЛЗ - линия задержки: ФВ - фазовращатель; ИУ - импульсный усилитель;
МОД - модулятор. На один вход ФД поступает входной радиоимпульс, а на другой
- задержанный сигнал. ФВ осуществляет сдвиг фазы на 0. 90, 180 и 270 градусов с
распределением получаемых сигналов на входы четырехпозиционного переключа-
256
Глава 3. Основы радиоэлектронного подавления
теля, который установлен в положение, обеспечивающее точность подстройки
набега фазы не хуже 45 град. Логическое устройство (ЛУ), на которое поступает
продетектированный входной радиоимпульс, синхронизирует работу передатчика.
На точность запоминания фазы и частоты оказывают влияние длительность пере-
даваемого импульса уводящей по дальности помехи и его положение относительно
входного импульса.
На рисунке 3.49 показана стуктурная схема передатчика имитационных по-
мех с использованием цифрового запоминания сигналов (ЦЗС) на арсениде галлия.
На рис. 3.49 обозначено: Al, А2 - приемная и передающая антенны; СМ - смеси-
тель; МИЧ - мгновенный измеритель частоты; Ф - фильтр: УСч - управление СЧ;
ППРС1, ППРС2 - последовательно-параллельный и параллельно-
последовательный восьмиразрядный сдвиговый регистр; РЗ - восьмиразрядный
регистр «защелка»; БОЗУ - быстродействующее ОЗУ; КСС - контроллер системы
синхронизации; БОАС - блок обработки и анализа сигналов для определения типа
РЛС и формирования помехи; ВУМ - выходной усилитель мощности [84].
Рис. 3.49. Стуктурная схема передатчика имитационных помех с ЦЗС на арсениде галлия
Для компенсации запаздывания в измерении несущей частоты и установке
частоты синтезатора (СЧ) при преобразовании требуемого участка частот в основ-
ной канал передатчика включена ЛЗ. После АЦП цифровой сигнал проходит через
восьмиразрядный регистр с частотой синхронизации 1,5 ГГц при образовании 8
параллельных каналов. Далее данные поступают на регистр-защелку в интервалы
времени, соответствующие 1'8 частоты синхронизации (187,5 МГц), и на БОЗУ.
После обработки данные проходят параллельно-последовательный восьмиразряд-
ный сдвиговый регистр и потсупают на ЦАП. Сформированный СВЧ-сигнал пред-
ставляет собой копию входного. В передатчике помех может быть несколько си-
стем ЦЗС [19].
Для создания многократных ответных импульсных помех, уводящих по
дальности, в ответ на каждый импульс сигнала излучается пачка из п импульсов с
периодом 7],. При этом вся пачка синхронно уводится по пилообразному7 закону.
Здесь при выполнении условий Рп » Рс система АСД захватывает один ит п им-
Глава 3. Основы радиоэлектронного подавления
257
пульсов и следит за перемещающейся пачкой. Распространенная в технике РЭБ
схема формирования ответных импульсных помех для увода систем АСД приведе-
на на рисунке 3.50 (ВУ - входной усилитель, УМ - усилитель мощности).
Рис. 3.50. Формирование ответных импульсных помех для увода систем АСД
УЛЗ на Дтп(Г) перестраивается генератором линейно изменяющегося
напряжения (ГЛИН). Затем с помощью управляемого усилителя меняется мощ-
ность помехи на выходе Pn(f). УЗЧ оценивает несущую сигнала /с* и создает усло-
вия для излучения задержанного импульса на той же несущей /с. что и у принято-
го импульса [9, 10].
На рисунке 3.51 приведена структурная схема формирования помехи, уво-
дящей по дальности (СМ1, СМ2 - смесители; УУЗ - устройство управляемой за-
держки; УУ - устройство управления) [15].
Рис. 3.51. Схема формирования помехи, уводящей по дальности
После поступления на антенну и ПРМ радиоимпульс от РЭС прогивника с
помощью СМ1 и гетеродина (Г) переводится на промежуточную (разностную) ча-
стоту /, = f0- fx. УУЗ под воздействием линейно- или квадратично-
возрастающего напряжения, поданного с УУ, формирует временной интервал за-
держки г, (/,) между входным и выходным импульсами УУЗ. Далее частота запол-
нения задержанного импульса /р с помощью СМ2 и Г переносится на первона-
чальную частоту заполнения f - fp + fr, импульс излучается в пространство в
направлении РЭС противника. В следующий период повторения импульсов РЭС
противника формируемый временной интервал задержки т3(Г) в сил> возрастания
258
Глава 3. Основы радиоэлектронного подавления
напряжения с УУ оказывается большим, чем г3(т), что воспринимается РЭС про-
тивника как импульс, отраженный от удаляющегося (несуществу ющего) ЛА.
Схема формирования активной помехи, перенацеливающей по дальности,
показана на рисунке 3.52 (ДЧ - делитель частоты; У1, У2 - усилители; ПЧ1, ПЧ2 -
преобразователи частоты; УЛЗ — ультразвуковая ЛЗ; УЧ - умножитель частоты).
Рис. 3.52. Схема формирования помехи, перенацеливающей по дальности
Частота заполнения импульса fr РЭС противника в ДЧ понижается до ча-
стоты / . Затем импульс с частотой заполнения / подается на 1-й вход сумматора
S и на У1, с выхода которого поступает на ПЧ1 - в нем частота / уменьшается до
частоты /2, фаза которой при прохождении через УЛЗ (время задержки в этой ли-
нии г3) меняется сравнительно мало. Далее в ПЧ2 частота /. увеличивается до
/ , импульс с частотой заполнения / усиливается в У2. после чего поступает на 2-
й вход S, на У1 и УЧ, в котором частота / возрастает до частоты заполнения f}.
Помимо подачи на УЧ импульс с выхода У1 поступает также и в кольцо обратной
связи (на ПЧ1). В результате второй импульс, отделенный от первого временным
интервалом гЗАД, также будет излучаться с антенны. На вход РЭС противника по-
мимо сравнительно небольшого импульса, отраженного от ЛА, поступит целая се-
рия достаточно мощных импульсов, отделенных друг от друга интервалом тзхд.
которые могут быть интерпретированы получателем информации от РЭС против-
ника как отражения от строя ЛА, равномерно расположившихся по дальности [15].
Существуют также помехи, уводящие строб системы АСД в пределах дли-
тельности импульса сигнала тс за счет смещения энерг етического ценгра (ЭЦ)
суммарного импульса сигнала и помехи [19]. В системах АСД часто применяется
схема помехозащиты, работа которой основана на том, что при одновременном
наблюдении нескольких сит налов захватывается самый слабый из них, у которого
Рс = min. Для противодействия в условиях такой помехозащиты эффективна уво-
дящая помеха со специальным законом изменения мощности Р (t).
Несмотря на то. что система АСД сопровождает фиктивную цель, система
АСН функционирует нормально, так как помеха несет информацию об угловых
координатах постановщика помех. Поэтому осуществлягь увод строба длительное
время нецелесообразно. Увод осуществляется с максимальными скоростями, но
Глава 3. Основы радиоэлектронного подавления
259
соответствующими реальным скоростям изменения дальности, и на величину г3п Л,
равную всего нескольким длительностям отраженных сигналов. После достижения
требуемой величины увода строба дальности ПП выключается или излучается
мощный импульс на рабочей частоте РЛС для обеспечения в РЛС срыва сопровож-
дения по дальности. РЛС переходит в режим повторного поиска по дальности.
Процесс излучения помехи при необходимости повторяется.
Каналу АСД так же могут создаваться маскирующие шумовые помехи раз-
личного вида: ПШП, АМШП, ЧМШП, ФМШП, а также ХИП. Действие шумовых
помех на импульсный канал АСД аналогично действию совокупности импульсов
со случайными положениями. В такой ситуации строб дальности начинает «блуж-
дать». Эффективность имитационных и маскирующих помех во многом зависит от
точности воспроизведения фазовых, частотных и временных характеристик сигна-
лов РЛС. В связи с этим большое значение получили методы цифрового запомина-
ния сигналов [20], которые обеспечивают высокоточное воспроизведение структу-
ры радиолокационного сигнала, и в отличие от традиционной аппаратуры не тре-
буют необходимости в измерении частоты сигнала подавляемой РЛС.
3.10. Создание активных помех каналу скорости
РЛС У О обычно имеют канал поиска и АС цели по скорости (доплеровской
частоте), обеспечивающий СДЦ среди других на фоне пассивных помех и отраже-
ний от местных предметов. В основу селекции по скорости положен принцип ча-
стотной фильтрации сигналов, отраженных от целей, движущихся с различными
радиальными скоростями относительно РЛС. Помехи каналу скорости во всем ана-
логичны помехам каналу дальности, но при формировании помех производится
управление не временными задержками, а частотными сдвигами. Основными вида-
ми помех будут помехи, нарушающие сопровождение и селекцию целей по скоро-
сти: уводящие по скорости помехи, создаваемые путем имитации ложных допле-
ровских частот узкополосные шумовые помехи, спектр которых перекрывает диа-
пазон возможных доплеровских частот отраженного сигнала (доплеровский шум}
Если (г) = Re j Ё,,(г)ехр(уб90г)|, то помеха каналу АСС может быть пред-
ставлена в виде
«и(/) = A Re {£,(/)exp(jwor)exp(j 2 лД/п (/)/)}.
Принцип действия помех каналу АСС иллюстрируется рисунком 3.53. На
рис. 3.53а показан спектр помехи, уводящей по скорости. Помеха имеет спектр, не-
сколько расширенный по сравнению со спектром сигнала. Разность частот
/п(/)~ (/) - А/п (г) Частота /п(г) может изменяться, например, по параболиче-
скому закону (рис. 3.53г). На рис. 3.536 приведена многократная помеха по скоро-
сти. Эта помеха представляет собой пачку спектральных гармоник с синхронным
изменением частот всех составляющих пачки. На рис. 3.53в показана помеха, име-
ющая расширенный шумовой спектр, центральная частота которого также может
уводиться по закону /п (г).
260
Глава 3. Основы радиоэлектронного подавления
Рис. 3.53. Принцип организации помех каналу АСС
Почти все способы создания помех по скорое г и используют устройства
сдвига частоты с помощью пилообразной ФМ. Для увода по скорости чаще всего
применяют схему с фазовой модуляцией ЛБВ [9, 10, 15. 28], представленной на ри-
сунке 3.54 (AM - амплитудный модулятор: ГК - генератор гармонического колеба-
ния; ФМ - фазовый модулятор; ГПН - генератор пилообразного напряжения).
Рис. 3.54. Увод по скорости с помощью фазовой модуляции ЛБВ
После приема антенной и ПРМ сигнала частоты /г от РЭС противника и
выполнения с помощью AM и ГК амплитудной модуляции осучцествляется смеще-
ние частоты АД(/) этого сигнала. Данная операция происходит в ФМ, на другой
вход которого подается линейно изменяющееся напряжение от ГПН цюжим работы
ГПН задается УУ). В ФМ используется ЛБВ, пилообразное напряжение производит
фазовую модуляцию по закону <p(f) = kt, что соответству ет част отному сдвигу уси-
ливаемого сигнала А£,(/) = d (p(t)/d t = k'lrt. Изменяя по сигналам от УУ крутизну
пилообразного напряжения к. можно осуществить увод по скорости как вперед
(А/|( растет), так и назад (А/п уменьшается со временем). Далее AM напряжение с
Глава 3. Основы радиоэлектронного подавления
261
частотой заполнения /п (/) = /0 + А/п (/) через ПРД и антенну излучается в направ-
лении РЭС противника.
Существует несколько методов создания многократных помех, уводящих
по скорости. Вариант схемы показан на рисунке 3.55 [15].
Рис. 3.55. Формирование помех каналу скорости при произвольной модуляции несущей
Данная схема может работать при любых сигналах, в частности ЛЧМ, ФКМ
сигналах. Для создания пар в помеховых излучениях в схему добавляют эд ектрон-
ные ключи и коммутаторы для прерывания работы САП. В ЛБВ-2 с помощью гене-
ратора пилообразного напряжения и ФМ частота сигнала сдвигается и уводится по
закон) A/qtO = k(f)/2ji . В модуляторе помеховый сигнал модулируется по частоте
импульсным колебанием с частотой . Такая модуляция создает колебание со
спектром, содержащим набор из п гармоник. Часто 1ы этих гармонических состав-
ляющих отличаются на z- FM, ze (1 ...я), т.е. помеха имеет спектр в виде сетки ча-
стот с шагом FM. Ограничитель выравнивает интенсивность гармонических со-
ставляющих.
Схема формирования доплеровского шума в канале скорости представлена
на рисунке 3.56 [9, 10].
частоты
Рис. 3.56. Схема формирования случайной уводящей помехи каналу АСС
В модуляторе происходит AM принятого и усиленного сигнала случайным
колебанием - видеошумом £(г) и ФМ видеошумом r[(t}. Увод по частоте А/п(/)
происходит в ЛБВ за счет ФМ по закону = с изменяющейся крутизной
k(t} = 2лА< /. Помеха на выходе в ответ на сигнал г/с (г) = Ке[Е(1(г)ехр(/Ъ;0/)] созда-
ет колебание
z/n W = Re [£„ (/) - £м (Г) ехрО/)]
262
Глава 3. Основы радиоэлектронного подавления
W £м(0 = []
Фазовая и амплитудная модуляции напряжениями видеошумов ту1/), ^(/)
создает шумовое колебание со спектром (рис. 3.53в), где центральная частота
/п (0 - /о + А/п (/) изменяется в соответствии с заданным законом увода по частоте
(скорости) [15]. Полоса помехи А/щ^Г) обычно составляет примерно 7...20 кГц.
период увода - до 10 с, А/п(/) = 0...200 кГц. Вместо генератора видеошума (ГВШ)
могут использоваться генераторы псевдослучайного сигнала, а в качестве ФМ -
балансный модулятор, подавляющий несушую частоту на выходе [9].
Во всех САП. формирующих помехи каналу скорости, можно добавить AM
выходного колебания. Изменяя мощность Pn(t), организуют «мерцание» помехи.
Как и при постановке помех каналу дальности, имеются многопрограммные САП
каналу скорости, где одновременно изловчаются помехи разных частот, каждая из
которых уводится по своему закону. В ряде САП адаптивно меняется цикл увода.
Для затруднения слежения за помехой ее мощность в момент прекращения увода
может резко уменьшаться [9, 10, 12, 13, 15]. Достаточно часто помехи каналу даль-
ности и скорости формируются одной САП. При этом скорость изменения частоты
и закон изменения задержки (дальности) должны согласовываться.
Схема формирования уводящей по углу помехи показана на рисунке 3.57.
Рис. 3.57. Схема ф< >рмирования уводящей по углу помехи
На рис. 3.57 обозначено: АД - амплитудный детектор; УЗЧ - устройство за-
поминания частоты; М - модулятор; ГСП - генератор селектирующих импульсов.
УУЗ - устройство управляемой задержки; УУ - устройство управления. РЛС про-
тивника. работающая в импульсном режиме, выполняет круговое сканирование ДН
по углу с угловой скоростью Q. На вход антенны, а затем ПРМ поступает пачка
импульсов, промодулированных по амплитуде указанной ДН- Анализатор форми-
рует сигналы наличия первого бокового и центрального лепестков ДН. Оба этих
сигнала вместе с wAJ(/) подаются на первый и второй входы ГСИ, на третий вход
которою вводится пороговое напряжение Uo. В ГСИ напряжение и сравнива-
ется с порогом Со, в результате чего формируется выходной импульс игси (/). по-
лярность частей которого определяется сигналами с выхода анализатора [15].
Глава 3. Основы радиоэлектронного подавления 263
Модулятор открывается для прохождения импульсов си (г) только частью
импульса мгси (г), которая имеет положительную полярность. В результате на вы-
ходе М вырабатывается колоколобразная (модулированная по амплитуде) пачка
импульсов, причем максимум этой пачки смещен во времени на величину т отно-
сительно максимума центрального лепестка ДН. Это смещение с учетом угловой
скорости сканирования Q ДН создает имитацию местонахождения объекта на уг-
ловом направлении, равном От . Для изменения местоположения максимума ими-
тационной пачки импульсов вводится УУЗ, осуществляющее изменение величины
т, и УУ, задающее характер изменения г. Сформированная пачка иПРД(0 помехо-
вых импульсов (являясь прицельной помехой) после ПРД через антенну излучается
в сторону РЛС противника, что значительно затруднит противнику правильную
оценку воздушной ситуации.
3.11. Способы создания помех радиовзрывателям
Подрыв боевой части (БЧ) ракеты в районе точки встречи с целью может
быть осуществлен путем выдачи, например команды на подрыв БЧ с наземного
пункта наведения ракеты в момент, когда она приблизится к цели на минимальное
расстояние, находясь в пределах области возможного поражения цели. Этот метод
подрыва находит широкое применение в ЗРК с командным методом наведения ра-
кет [12]. Существует способ подрыва БЧ ЗУР с применением неконтактного радио-
взрывателя (РВ), автономно осуществляющего подрыв БЧ ракеты у цели. Если РВ
содержит передатчик, облучающий цель, и приемник отраженных от цели сигна-
лов, го такой РВ называется активным. Когда передатчик в РВ отсутствует, но есть
приемник переотраженных целью сигналов, создаваемых передатчиком подсвета
цели, находящимся на позиции ЗРК, то такой РВ называется полуактивным. В пас-
сивном режиме работы РВ принимаются радиосигналы, излучаемые аппаратурой,
установленной на цели.
Область срабатывания РВ должна быть согласована с областью разлета
осколков БЧ ракеты (областью возможного поражения цели). Если излучаемый пе-
редатчиком РВ сигнал Ц = Л(Z) cos[&>(/ +<£>(/)], то возможны следующие типы од-
ноканальных РВ:
• с непрерывным излучением, если A(t) = const и ip{t} = const;
• с ЧМ, если A(t) = const, a (p(f) = A&>sin(&>r,/ + фп) ;
• импульсно-доплеровский, если (p(f) = const в пределах импульса или кор-
релирована от импульса к импульсу;
• с шумовым сигналом, если А(1) и <р(/) — случайные функции [12].
В общем виде РВ должен измерять дальность и/или скорость сближения с
целью, а угловое положение области срабатывания РВ определяется ориентацией и
формой ДНА РВ. Импу льсные РВ представляют собой миниатюрные РЛС ближне-
го действия, измеряющие дальность до ближайшего объекта, попавшего в главный
луч ДНА РВ. Положение цели относительно ракеты в момент срабатывания РВ
определяется величиной задержки и длительностью строб-импул ьсов приемного
264
Глава 3. Основы радиоэлектронного подавления
устройства, а также формой ДНА РВ. Подрыв БЧ ракеты происходит при вхожде-
нии цели в область ДНА РВ и совпадении по времени импульсов, отраженных от
цели со строб-импульсами. Срабатывание РВ происходит в некотором диапазоне
дальностей. Типы и режимы работы активных РВ приведены в таблице 3.1.
Таблица 3.1- Типы и режимы работы активных РВ
ТипРВ Режим работы РВ
Сверхрегенеративный Измерение амплитуды отраженного сигнала
Импульсный Измерение дальности
Непрерывного из. [учения Измерение скорости
Непрерывного излучения с ЧМ Измерение дальности и/или скорости
Импульсно-доплеровский Измерение дальности и/или скорости
Шумовой (включая псевдослучайную фазо- вую манипуляцию) Измерение дальности и/или скорости
Для получения максимальной эффективности боевого снаряжения ракеты
необходимо согласование РВ и БЧ ракеты. Необходимо подрыв БЧ осуществить
так, чтобы цель оказалась в секторе направленного разлета осколков. Известно не-
сколько способов такого согласования:
• выбор утла наклона ДНА к продольной оси ракеты;
• изменение угла наклона области разлета осколков в зависимости от скоро-
сти цели;
• выбор времени задержки между обнаружением цели и подачей команды
на подрыв БЧ;
• выбор момента срабатывания РВ с помощью доплеровских измерителей
скорости [12].
При третьем способе оптимальное согласование РВ и БЧ осуществляется
путем выбора задержки между моментом обнаружения цели в ДНА РВ и моментом
инициирования БЧ. Задержка меж ту обнаружением цели и подрывом БЧ ракеты
рассчитывается по алгоритму, учитывающему параметры перехвата цели.
В простейшем виде эта задержка может быть определена как
ЗАД [/g(a + 0)- rgO] ’
где т - величина промаха: V\ - скорость цели относительно ракеты; а — угол между
осью сектора разлета осколков БЧ и направлением ДНА РВ; 0 — угол между
направлением полета ракеты и цели. Более точный алгоритм расчета точки пере-
хвата цели может быть получен при введении параметров перехвата от ГСН УР.
При четвертом способе согласования используется тот факт, что в районе
точки встречи можно считать скорость сближения УР с целью постоянной- допле-
ровская частота отраженного сигнала зависит только от угла между вектором отно-
сительной скорости и линией ракета-цель. Срабатывание РВ осуществляется при
напряжении, пропорциональном доплеровской частоте сигнала.
Глава 3. Основы радиоэлектронного подавления 265
Доплеровские взрыватели с непрерывным излучением производят измере-
ние доплеровской скорости сближения ракеты с целью. В точке максимального
сближения ракеты с целью доплеровский сдвиг равен нулю. Обычно ДНА РВ со-
гласована с зоной поражения БЧ ракеты. Как правило, при подрыве БЧ ракеты
осколки рассеиваются в пределах некоторого конуса по направлению движения.
Когда отраженный от цели сигнал передатчика РВ обнаруживается в пределах
главного луча ДНА, то подрыв БЧ будет приводить к поражению цели. Когда раке-
та приближается к местоположению цели, амплитуда сигнала на выходе приемника
РВ отображает диаграмму отраженного сигнала, которая соответствует ДНА раке-
ты. Отраженный сигнал только тогда превышает установленный порог, когда цель
находится в пределах главного луча ДНА РВ. Подрыв БЧ имеет место тогда, когда
цель находится в главном луче ДНА РВ.
Доплеровская частота сигнала имеет положительный знак, а после пролета
цели - отрицательный, проходит через нуль в момент пролета цели. Нуль допле-
ровской частоты соответствует моменту наибольшего приближения ракеты к цели.
Характер изменения доплеровской частоты зависит от величины промаха ракеты
относительно цели. Если величина промаха велика, то по мере сближения с целью
доплеровская частота уменьшается постепенно. Когда величина промаха мала, до-
плеровская частота резко уменьшается до нуля.
РВ непрерывного излучения с ЧМ, импульсно-доплеровские и шумовые РВ
могут работать в режиме измерения дальности, скорости или дальности и скорости
одновременно. В РВ с ЧМ закон частотной модуляции может быть линейным (пи-
лообразным) или синусоидальным, возможны и более сложные виды ЧМ и ФМ.
Принцип действия такого РВ основан на сравнении измеренных мгновенных зна-
чений разностной частоты с заранее заданной частотой, характеризующей даль-
ность срабатывания РВ. Разведка параметров сигнала РВ затрудняется не только их
коротким временем работы и малыми дальностями действия, но и малой выходной
мощностью передатчика РВ.
Помехи РВ создаются с целью обеспечения таких условий, при которых про-
исходит либо преждевременный подрыв РВ на расстояниях, превышающих даль-
ность поражения цели осколками БЧ ракеты, либо срабатывания РВ вообще не про-
исходит при пролете УР цели (нейтрализация РВ). Для этого необходимо ретранс-
лировать сигнал или создавать шумы на несущей частоте передатчика РВ или пере-
излучать сигнал с амплитудой, которая компенсирует потери из-за воздействия через
БЛ ДНА, когда ракета еще удалена от цели. ПП может находиться как на защищае-
мом ЛА, так и на другом ЛА. Последний случай предпочтителен; весьма вероятна
ситуация, когда сигнал помехи с вынесенного объекта попадет в главный луч ДНА
РВ и вызовет превышение установленного порога срабатывания РВ. Можно также
вносить дополнительный сдвиг частоты в сторону уменьшения доплеровской часто-
ты до нулевой с целью имитации пролета цели ракетой, вызывая прежд евременный
подрыв БЧ.
Если РВ использует оба признака для своего срабатывания (амплитудный и
доплеровский), то с помощью ретранслятора, обеспечивающего необходимое уси-
ление принимаемого сигнала передатчика РВ и внесение соответствующего допле-
ровского сдвига, можно вызвать его преждевременное срабатывание. Если сдвигать
266 Глава 3. Основы радиоэлектронного подавления
частоту ретранслируемого сигнала таким образом, чтобы пересечение нулевой до-
плеровской частоты не происходило при пролете ракетой цели, то можно предот-
вратить срабатывание РВ, для этого необходимо обеспечить условия для необнару-
жения истинной доплеровской частоты. Имитация доплеровского сдвига может
быть осуществлена, например, посредством модуляции переизлучаемого ретранс-
лятором сигнала одной меняющейся или несколькими фиксированными частотами.
Каждая модулирующая частота соответствующих AM образует от двух (верхняя и
нижняя) до нескольких пар боковых полос, соответствующих широкополосной ЧМ.
Другой метод — пилообразная ФМ — применяется для сдвига частоты выход-
ного сигнала ретранслятора на заданную величину вверх или вниз. На выходе такого
модулятора можно получить спектр с одной доминирующей составляющей и срав-
нительно малого уровня составляющими на несущей и боковых частотах.
Анализ траектории полета зенитных ракет показывает, что эффективная по-
становка помех РВ имеет место при поступлении сигнала помехи по БЛ ДНА РВ. В
связи с этим уровень мощности ПП, необходимый для преждевременного подрыва
РВ за пределами зоны эффективного действия боевой части ракеты, должен дости-
гать 100 Вт и более, а коэффициент усиления ретранслятора должен превышать 100
дБ [12]. При недостаточной величине развязки между передающей и приемной ан-
теннами ретранслятора образуется положительная обратная связь и возникает гене-
рация, блокирующая переизлучение непрерывного сигнала РВ. Если длительность
открытого состояния коммутатора на выходе приемной антенны не превышает за-
держку в ретрансляторе, а интервал закрытого состояния равен или превышает за-
держку, то генерация в ретрансляторе не возникает.
На рисунке 3.58 показана структурная схема передатчика помех РВ. ЛБВ
используется не только для усиления, но и для ФМ пилообразным сигналом с целью
имитации изменения доплеровской частоты, характерного для пролета ракеты на
минимальном расстоянии от самолета.
Рис. 3.58. Структурная схема 1111 доплеровским РВ
Потенциально наиболее эффективным средством против РВ всех типов яв-
ляются ловушки. РВ будет реагировать на такую ловушку как на реальную цель.
Располагая ловушки между целью и атакующей ракетой, можно обеспечить защиту'
ЛА. В качестве активных ловушек могут использоваться выстреливаемые в направ-
лении приближаюшейся ракеты ППОД ретрансляционного типа. Полный коэффи-
циент усиления выходной мощности ретранслятора ловушки определяется имити-
руемой ЭПР, энергопотенциалом передатчика РВ, чувствительностью его присмни-
Глава 3. Основы радиоэлектронного подавления
267
ка, уровнем БЛ ДНА РВ, через которые на ловушке принимается сигнал РВ и через
которые сигнал помехи воздействует на РВ.
На рисунке 3.59 предсгавлена структурная схема устройства для блокиро-
вания РВ, которое содержит несколько частотных каналов подавления (рисунок
3.60) и блок формирования помехи [85].
1 ПЕРВЫЙ
ЧАСТОТНЫЙ
КАНАЛ
ПОД ЯВЛЕНИЯ
2 ВТОРОЙ
ЧАСТОТНЫЙ
КАНА!
ПОДАВ ‘ГНИЯ
/4
Л’ ,х-й
ЧАСТОТНЫЙ
К АН АЛ
ПОДА ЗЛЕНИЯ
БЛОК ФОРМИРОВАНИЯ ПОМЕХИ
Ц
Рис. 3.59. Структурная схема устройства для блокирования РВ
Частотный канал подавления содержит приемо-передающую антенну, свя-
занную двусторонней связью с антенным коммутатором (АК), блок обнаружения
сигналов и передатчик помехи. Блок обнаружения сигналов содержит УВЧ, управ-
ляемый СЧ гетеродина (УСЧ), УПЧ и обнаружитель сигнала. Передатчик помехи
содержит управляемый СЧ передатчика и усилитель мощности (УМ). 1-м входом
частотного канала подавления является вход передатчика помехи, 2-м входом - вход
управления АК и 2-й вход блока обнаружения сигналов, выход которого является
выходом частотного канала подавления. Частотные каналы подавления работают
параллельно в различных частотных диапазонах, например, в трех частотных диапа-
зонах 26-28 МГц, 136-174 МГц и 400-470 МГц [85].
Блок формирования помехи (рис. 3.59) содержит блок ввода (памяти) пара-
метров помехи, блок формирования последовательности слотов и блок выбора сво-
бодного слота, блок памяти подавляемых частот, блок формирования команд управ-
ления (ФКУ) передачей и блок ФКУ приема. Устройство обеспечивает увеличение
радиуса блокирования РВ за счет постановки прицельной импульсной помехи, ко-
торая формируется с учетом априорной информации о структуре сигнала, использу-
емого для передачи команд на запуск РВ, и измеренной частоты передачи команд
запуска.
268
Глава 3. Основы радиоэлектронного подавления
Рис. 3.60. Структурная схема частотного канала подавления
Для РЭП активного РВ полный КУ ретранслятора ловушек равен
47ГСГ.,
К >а—-У-A N , (3.115)
п.ретр. л п 2 опер о пр у 47
Л.
гле 7Vnnep и У -уровни БЛ ДН передающей и приемной антенн РВ; q - пороговое
отношение помеха-сигнал на входе приемника РВ; сгц - ЭПР защищаемого ЛА.
Ловушка с ретранслятором на борту находится между защищаемым ЛА и
приближающейся ракетой, уровень сигнала ретрансляционной помехи на входе
приемника РВ по мере сближения возрастает, достигая максиму ма, koi да доплеров-
ская частота сигнала помехи приближается к нулю. Если РВ к этому моменту был
взведен, то произойдет его срабатывание. Несмотря на кажущуюся простоту ре-
трансляционного способа РЭП активных РВ. его реализация наталкивается на необ-
ходимость решения таких проблем, как построение многокаскадных у си ли. ел ей с
очень высоким коэффициентом усиления и обеспечения их устойчивости при недо-
статочной развязке между приемной и передающей антеннами на лову шке.
Активные ловушки могут успешно применяться и для преждевременного
срабатывания полуактивных РВ, работающих по отраженному от цели сигналу РЛС
подсвета. Если ловушка находится одновременно в главном луче ДНА РЛС подсве-
та и ракеты, го существенно снижаются требования к коэффициенту усиления ре-
транслятора, гак как Д' ~ 1. Могут использоваться также ловушки с ПП генера-
торного типа, нарушающие селекцию цели по дальности или скорости [12]. в ре-
зультате чего РВ переходят в режим работы по сигналу маскирующей помехи.
Глава 3. Основы радиоэлектронного подавления
269
3.12. Создание активных помех для подавления РЛС
с активным ответом
Имитостойкая идентификация вооружения и военной техники является
важным условием функционирования единого информационно-
коммуникационного пространства. В настоящее время основным методом иденти-
фикации является запросно-ответный режим связи, реализованный в радиолокаци-
онных системах с активным ответом (РСАО). РСАО используются в системах гос-
ударственного радиолокационного опознавания (системы «свой-чужой»), пред-
ставляющих собой аппаратно-программный комплекс для автоматического опреде-
ления принадлежности обнаруженных воздушных, морских и наземных объектов
по принципу «свой-чужой» или определения других признаков полезных объектов
(например, номера и полетной информации). Опознавание осуществляется с помо-
щью запросчиков и ответчиков, криптографической аппаратуры и устройств авто-
матической блокировки оружия при ошибочном прицеливании по своему объекту
[39, 86, 87].
СГО, отсутствие или несовершенство которой дорого обходится в боевой
обстановке, — важнейшая составная часть всей системы вооружений. Основными
задачами СГО являются:
• опознавание объектов, обнаруженных бортовыми обзорно-прицельными
системами;
• формирование выходных формуляров по результатам опознавания с при-
вязкой к данным навигационных систем;
• представление выходных формуляров в терминалы ЕСУ ТЗ по защищенным
каналам связи;
• комплексное опознавание объектов с использованием данных от других
информационных источников, содержащих признаки госпринадлежности обнару-
женных объектов;
• обеспечение заданной эффективности вооружения;
• исключение ошибочного поражения своего объекта путем выработки ко-
манд запрета/разрешения огневого воздействия на основе информации СГО:
• контроль воздушного пространства и управления воздушным движением
(УВД):
• отображение и периодическое обновление информации опознавания на ин-
дикаторах ЛА и наземных терминалов ЕСУ ТЗ;
• необходимое взаимодействйе с ВС дружественных стран, в том числе и при
ведении боевых действий миротворческими силами [39, 88].
Своевременность и достоверность опознавания во многом определяют пра-
вильность принимаемых решений на применение оружия, обеспечение безопасно-
сти своей авиации, эффективность выполнения задач по охране границ РФ. В по-
следнее время возросла цена ошибочного опознавания своих объектов - непредна-
меренный удар по своим объектам способен изменить результат боевых действий.
Значительно расширились возможности противодействия РЛС и область примене-
ния средств радиоэлектронного подавления (РЭП). Действующие системы опозна-
270
Глава 3. Основы радиоэлект эонного подавления
вания, как отечественные, так и зарубежные, не всегда смогут эффективно работать
в сложных тактических ситуациях и современных условиях РЭП [89, 90].
Основной целью подавления СГО, основанных на принципах радиолокации
с активным ответом (РСАО), в условиях вооруженного конфликта является дезор-
ганизация и ухудшение качества функционирования систем управления (СУ) сила-
ми и средствами поражения противника, а также создание благоприятных условий
для применения своего вооружения. Различные виды РЭП могут вызывагь в СГО
следующие эффекты: задержку во времени опознавания цели; ошибочное опозна-
вание; перегрузку систем обработки информации чрезмерным потоком запросных
и ответных сигналов; применение средств поражения по «своей» цели и блокиров-
ка применения средств поражения по «чужой» цели.
Существующие системы опознавания (СО) стран НАТО Mark X (SIF. А),
Mark ХП (S, А) работают на фиксированных частотах запроса 1030 МГц и ответа
1090 МГц. Совместная тактическая система распределения информации (MIDS)
использует 51 частотный канал в диапазоне от 960 до 1215 МГц. В MIDS-сигналах
применяются модуляции с расширением спектра (скачкообразной перестройки ча-
стоты и фазового кодирования). Ближайшие MIDS частоты (1008 МГц и 1052 МГц)
обстроены от используемой в самолетных запросчиках (СРЗ) на 22 МГц. Это огра-
ничивает возможности по применению сложных сигналов с расширением спектра в
СГО (из-за возможных ложных сигналов MIDS в системе обработки) и упрощает
задачу РЭП.
Структура олноканального мультирежимного ответчика СГО изображена на
рисунке 3.61, где использованы обозначения: ЦСП — цифровой сигнальный процес-
сор; УУ — управляющее устройство (модулятор); ЧРФ - частотно-разделительный
фильтр (диплексер); ВЧП - высокочастотный переключатель; УТ - устройство раз-
вязки; АС - антенная система [91].
Рис. 3.61. Структурная схема ответчика СГО
СО Mark XII в режимах (Mode) 1, 2, 3/А, 4 и С использует заданную конфи-
гурацию амплитудно-импульсной модуляции (РАМ - pulse-amplitude modulation!. В
Глава 3. Основы радиоэлектронного подавления
271
режиме S используется фазовая манипуляция (PSK - phase-shift keying). В режиме 5
применяется манипуляция с минимальным частотным сдвигом (MSK — minimum
shift key) с относительно широкой полосой спектра (как правило, 16 МГц), которая
увеличивается с ростом скорости передачи данных [39].
На рисунке 3.62 представлены структуры запросного (рис. 3.62а) и
ответного (рис. 3.626) сигналов в режимах 1, 2, 3/А, С.
C1A1 С2А2С4А4 X В, Dt В2 D2B4D4
SPI
I .
I, мкс
Рис. 3.62. Запросный (а) и ответный (б) сигналы в режимах 1, 2, 3/А, С
Запросный сигнал представляет собой два импульса Р} и Л, разнесенных
во времени на Гкз и импульс ПБЛ Р.. Параметр кода запроса Гкз =3 мкс (Mode 1),
5 мкс (Mode 2), 8 мкс (Mode 3), 21 мкс (Mode С). В ответном сигнале Mode 1
ответчика используются до пяти информационных кодовых позиций,
расположенных на 2,9 мкс друг от друга. В Mode 2 используются комбинации
импульсов на 13 кодовых позициях с шагом 1,45 микросекунды, седьмая позиция
импульса X всегда исключена (используется для беспилотных летательных
аппаратов). В Mode 3 используются до шести информационных импульсных
позиций с шагом 2,9 мкс (в Mode 3/А аналогично Mode 2). По команде диспетчера
может излучаться импульс SPI, отстоящий or F? на 4,35 мкс, в течение 15...30 с
для определения местоположения (метки на индикаторе) ЛА. Ответный сигнал
Mode С аналогичен Mode 3 за исключением позиции .
На рисунке 3.63 показана структура запросного (рис. 3.63а) и ответного
(рис. 3.636) сигналов в имитостойком режиме Mode 4, используемою в СО Mark
XII, Mark XII (S), Mark XII (A).
Рис. 3.63. Запросный (а) и ответный (б) сигналы в режиме Mode 4
Имитостойкость обеспечивается закрытым кодированием. Запросный сиг-
нал включает четырехимпульсн} ю синхрогруппу (СГ), импульс ПБЛ и 32-
разрядный информационный код (ПК). Он формируется в запросчике и обрабаты-
272
Глава 3. Основы радиоэлектронного подавления
вается в ответчике криптокомпьютером. В отсутствие импульсов на смежных по-
зициях вставляется противопомеховый импульс (ППИ). Ответный неизменяемый
трехимпульсный импульсно-временной код дополняется кодированием пассивной
паузой. Задержки ответа (16 значений с дискретностью 4 мкс) определяются крип-
тоалгоритмом. На рисунке 3.64 приведены структуры адресных запросного (рис.
3.64а) и ответного (рис. 3.646) сигналов в Mode S.
а)
Рис. 3.64. Запросны й (а) и ответный (б) сигналы СО Mark XII (S) в режиме .Mode S
Адресный запрос начинается с преамбулы, состоящей из двух импульсов,
воспринимаемых обычными ответчиками как запрос, излучаемый по боковым ле-
песткам ДНА. Поэтому обычные ответчики на адресный запрос не отвечают. За
преамбулой следует информационный сигнал, который содержит 56 или 112 бит
информации, передаваемой относительной фазовой модуляцией. Модуляция фазы
высокочастотной несущей обеспечивает скорость передачи данных 4 Мбит/с, что
позволяет передать 112-битовое сообщение за время, соответствующее блокировке
обычных ответчиков. При относительной фазовой модуляции первый поворот фазы
является синхронизирующим.Каждый следующий поворот возможен с дискретом
0,25 мкс. Для защиты адресного ответчика от приема запросов по боковым лепест-
кам ДНА используется импульс подавления бокового лепестка (ПБЛ), который пе-
редается с помощью антенны, центрируется относительно момента опрокидывания
синхрофазы.
Появление импульса ПБЛ при достаточной амплитуде затеняет опрокиды-
вание синхрофазы в адресном ответчике, в результате чего информация не кодиру-
ется. В запросных сигналах имитостойкого режима Mode 5 используются формати-
рованные сообщения с увеличенной информационной емкостью, новый криптогра-
фический алгоритм, функции безопасной идентификации в зависимости от времени
суток и информация от глобальной системы позиционирования [92. 93].
Структурная схема тракта приема и обработки сигналов му льтирежимного
СРО приведена на рисунке 3.65.
Глава 3. Основы радиоэлектронного подавления
273
Рис. 3.65. Структурная схема тракта приема и обработки сигналов ответчика СГО
На рис. 3.65 использованы обозначения: ОД1, ОД2 - входные ограничитель-
ные диоды; РЧ1, РЧ2 — высокочастотный усилитель (монолитная микроволновая
интегральная схема) с низким уровнем шума (ЛГШ = 2,6 дБ) и большим динамиче-
ским диапазоном (26 дБм); ФШП - фильтр широкополосного преселектора (8-
резонаторный керамический фильтр) имеет полосу пропускания 20 МГц с центром
1030 МГц (уровень подавления ближайших частот MIDS 1008 МГц и 1052 МГц со-
ставляет 65 дБ); СМ - смеситель; УПЧ - усилитель промежуточной частоты 60 МГц
с низким уровнем шума и высоким динамическим диапазоном (26 дБм); ШФПЧ -
широкополосный полосовой фильтр (промежуточной частоты, с полосой пропуска-
ния 18 МГц) с двумя выходными портами для выравнивания общего времени откли-
ка транспондера; ФПЧ - узкополосный полосовой фильтр (промежуточной частоты,
с полосой пропускания 7.5 МГц по уровню 3 дБ и 44 МГц по уровню 80 дБ); НО -
направленный ответвитель с частотно-избирательным фильтром; ЛУ - логарифмиче-
ский усилитель с диапазоном регистрации 72 дБ для обнаружения режима РАМ за-
просных сигналов; ПФ1 - полосовой низкочастотный фильтр (согласован с сигналом
Mode 4); БУ - буферный усилитель; УО1. УО2, УО - усилители-ограничители; ПФ -
полосовой фильтр промежуточной частоты 20 МГц; ЦКД- цифровой квадратурный
декодер; ЦФНЧ - цифровой фильтр низких частот (согласован с сигналом Mode 5);
ЦД - цифровой детектор; БВВ - блок векторных вычислений [91, 94].
Анализ рисунка 3,65 показывает, что влияние характеристик УРЧ1 и ФШП
является доминирующими в создании общего коэффициента шума ресивера. Поло-
са частот приемного тракта определяется: в широкополосном режиме - характери-
стиками ШФПЧ, в узкополосном - характеристиками ШФПЧ и ФПЧ. Воздействие
маскирующих помех на ответчик СГО при достаточной мощности затрудняет
274
Гпава 3. Основы радиоэлектронного подавления
определение модулирующих сигнальных признаков кодовых последовательностей
и проявляется в подавлении части импульсов запросного сигнала [95].
Энергетические соотношения при создании активных помех рассматривают
применительно к двум основным типам ПП: генераторному и ретрансляционному.
Генераторный ПП характеризуется независимостью выходной мощности от рассто-
яния между подавляемым приемником РЛС и ПП. В ретрансляционном ПП сигнал
помехи формируется путем усиления и модуляции принятого запросного или от-
ветного сигнала с последующим излучением сформированного сигнала помехи в
направлении подавляемого объекта. Ретрансляционный передатчик характеризует-
ся максимальной излучаемой выходной мощностью и его полным коэффициентом
усиления при ретрансляции запросного сигнала.
Рассмотрим конфликт РЭС, согласно которому сторона «А» задействует си-
стему опознавания (СО) в качестве элемента сетецентрической информационно-
мониторинговой системы, обеспечивающей возможность адресного взаимодей-
ствия и оперативный обмен информации между участниками конфликта. В этом
случае для стороны «В» представляет интерес снижение качества функционирова-
ния СУ силами и средствами поражения, а также увеличение доли «сопутствующих
потерь от дружественного огня» конфликтной стороны. Данная цель может быть
достигнута за счет организации стороной «В» РЭП в процессе конфликта с СО сто-
роны «А». В современных СО для определения принадлежности объектов исполь-
зуют радиолокационно-связной и координатно-связной методы опознавания, осно-
ванные на принципах работы РСАО [86-90].
В составе СО стороны «А» для решения задачи идентификации имеются i
самолетных радиолокационных запросчиков (СР31 ...СР32) и к самолетных радиоло-
кационных ответчиков (СРОь..СРОа). Для организации радиоэлектронного подав-
ления (РЭП) сторона «В» имеет п постановщиков помех (ПП[...ППИ). Объектами
непосредственного наблюдения и воздействия выступают средства СО стороны
«А» и среда распространения ЭМВ (рисунок 3.66).
Рис. 3.66. Структура процесса РЭП СО вероятного проти вника
Глава 3. Основы радиоэлектронного подавления
275
На рис. 3.66 приняты обозначения: «А» и «Б» - противостоящие системы
опознавания и радиоэлектронной борьбы; х., yr, zr - внутренние состояния, соот-
ветственно системы опознавания «А», системы РЭП «В», среды распространения
ЭМВ на r-й момент времени [22]. На рис. 3.66 выделены взаимосвязи: 1,5- внеш-
ние целеуказания для сторон конфликта «А» и «В»; 2, 4 — передача взаимодейсз ву-
ющим сторонам донесений, данных о РЭ обстановке, решаемых задачах и об их
эффективности; 3, 6 — процессы контроля за использованием РЭС сторон «А» и
«В?>; 3, ...3, - процессы излучения запросных сигналов (ЗС) соответствующим СРЗ;
3(...3Л — процессы приема ЗС (помех) средствами k-ro СРО; О1...ОА - процессы
излучения ответных сигналов (ОС) соответствующим СРО; О,...О - процессы
приема ОС (помех) соответствующим СРЗ; Р, ...Р„ -процессы разведки ПП радио-
электронной обстановки (наличие сигналов РСАО, помех, ложных излучений):
П].. .Пи - организация РЭП п-м. ПП.
Все выделенные состояния процесса конфликта могут быть связаны между
собой соответствующими функциями переходов сторон «А» и «В», среды распро-
странения ЭМВ из одних состояний в другие, а также функциями выходов, опреде-
ляющими состояния выходов сторон в зависимости от их внутренних состояний и
состояний входов. Рассматриваемые в конкретный момент времени входные, внут-
ренние и входные состояния должны находится в областях допустимых сося ояний,
которые могут отражать физические и логические условия протекания конфликта.
Для определения энергетических соотношений и требований к техническим
характ еристикам средств РЭП для обеспечения заданного информационного ущер-
ба в зоне эффективного действия помех выполним обобщение формул РЭП [1. 12].
Для построения математической модели подавления СГО в виде уравнений РЭП и
определения энергетических соотношений РЭП СГО рассмотрим ситуацию, пред-
ставленную на рисунке 3.67 (СРЗ - самолетный радиозапросчик; СРО - самолет-
ный радиоответчик; ПП - постановщик помех) [92].
Рис. 3.67. Схема (вариант 1 создания помех СГО
276
Глава 3. Основы радиоэлектронного подавления
Схема для определения энергетических потерь запросного радиолокацион-
ного сигнала и помехи для ретрансляционного передатчика в случае постановки
помех самолетному радиолокационному ответчику (СРО) из вынесенной точки
(« СРЗ —> СРО u СРЗ —> ПП —> СРО ») показана на рисунке 3.68.
Рис. 3.68. Схема для определения энергетических характерисэ ик сигналов в случае
создания ретрансляционных помех СРО
На рис. 3.68 введены обозначения: СРЗ - самолетный радиолокационный
запросчик; ЗС - запросный сигнал; ПП - постановщик помех; ИС - имитирующий
сигнал (от ретранслятора); гп, г , гп - пространственные координаты, определяю-
щие положение СРО, СРЗ и ПП; P3(t,r3), И(/,гп) - мощности передатчиков СРЗ и
ПП; , - длина рабочей волны СРЗ; - коэффициент усиления (КУ) антенны
СРЗ, в режиме излучения в основном направлении; Спрдп0, СПРМПЗ - КУ антенны
ПП в направлении на подавляемый объект (СРО) и в направлении приема ЗС;
СПРМО - КУ антенны СРО в режиме приема; FnPMfn(^n,^n)> - норми-
рованные диаграммы направленности (ДН) приемных антенн ПП, СРО в утломер-
ных плоскостях (в,(ру, Fnpfl3(6»3,<p3), ГПРДПО(1,^П) - нормированные ДН переда-
ющих антенн СРЗ и ПП в угломерных плоскостях (0,ср).
Мощность сигнала СРЗ на входе приемников СРО и ПП можно записать как
р z. - - х _ ^(^’^з^прдз-^прдзС^зо’^зо)
'ЗСВХО'/’Г3’,О' . р2 Т х
^^^ЗО^ПРО.ЗС (3 116)
х fiiPM о^прмоС^оз’^оз^г J q-о , аэ
4я
Глава 3. Основы радиоэлектронного подавления
277
ЗС вхп
P-i (/•> ^3 )^ПРД З-^ПРД 3 (^зп ’ ^зп )
/зс х
4Я’^ЗП^'ПРП.ЗС
х ^ПРМ ПЗ-^ПРМ Пз(^ПЗ’^Пз )А ] д-0.1К3йпз
(3.117)
4я
где 6?ЗО, (р^ и 0ОЗ, (pG3 - значения азимута и угла места в направлении от СРЗ на
СРО и от СРО на СРЗ; 7?ю - расстояние между передатчиком СРЗ и приемником
СРО; 0ЗП , ^зп и 0ГЗ, (рЛЗ - значения азимута и угла места в направлении от СРЗ на
ПП и от ПП на СРЗ; /?пз - расстояние между передатчиком СРЗ и приемником ПП;
К, - удельное ослабление ЭМ поля на единицу дальности при длине волны Aj; /зс
коэффициент несовпадения поляризации ЗС с рабочей поляризацией антенны ПП
(0 < узс < 1); £ПРОЗГ и £прпзс. - коэффициенты, учитывающие потери запросного
сигнала в приемниках СРО и ПП.
Мощность ИС, излучаемого в направлении СРО, имеет вид
_ _ ^УЗС^СВХП^^З^п)’ при ^узс^ЗСВХИ^’^З’^п) < ^ПО’ , , ,
Рпо(/.гз,гп) = 1 (3.118)
I к ) X ’ 57 11 / JTJ ГЛ D I / 7? "’ Ч 'S P
при 'Хузс-'зсвх П V Эз>^п * — 'ПО’
где Л\зс - коэффициент усиления ЗС ретранслятором ПП (по мощности); Р^-
максимальная мощность передатчика ПП на длине волны ЗС [96].
Суммарная мощность помехового воздействия на входе приемника СРО
описывается выражением
р z -х _ ^поСЛ^’^^прдпо^прдпоС^по^по)
Cibx о V,г ) - . п? J х
474 РО.ЗП
filPM рЛ1Р»1 О (ffon ’ ffon )Л 1 Л-ОЛ'Лю . р
Х Л / ИС Z 1U “Г ' шо
4тг
где #по. (опп и О п , (роп - значения азимута и угла места в направлении от ПП на
СРО и от СРО на ПП; / - коэффициент качества помехи (0 < / < 1); /ис — коэффи-
циент несовпадения поляризации помехи с рабочей поляризацией антенны подав-
ляемого приемника СРО (0 < /ис < 1); 7?по - расстояние между передатчиком ПП и
приемником СРО; 7JJ0 = kTQi\w AfnPO — мощность собственных шумов в полосе
пропускания линейной части приемника СРО; 7ПРОЗП.- коэффициент, учитываю-
щий потери помехового сигнала в приемнике СРО; к = 1,38 • 10"23 ВтГрадТц- по-
стоянная Больцмана; Т{, - абсолютная температура приемника СРО; 0 - коэф-
фициент шума приемника СРО.
Условия РЭП ретрансляционными помехами приемника СРО имеют: вид
278
Гпава 3. Основы радиоэлектронного подавления
х
(/ Г) < ^прД ПрТпРД ПО(^ПО’Упо)7прмО(^ОП >Уоп ) х
^ПРД З-Тпрд 3 (0ЗО , (рзо )^ПРМ О (^03 » ^03 )
7по(^*3»*п) RjU -^ПРО.ЗС vv 1 Л-0-1 МЛзо-Лпо)
P(tr} R- L /7ис
1 по ^ПРОЗП
IT1 kJ 47т R~ f Дтг
7>3(/,r3)Gnpfl37?npfl3(63O,^3O)GnpMOFnpMO(0O3,^O3)A32l 0 3 30
z-. / v v \ ^зс (Д ~~ £1) ~ ^cp ~ (^пз ^no ~ ^o)
(3 119)
(3.120)
дзс
(Л^,70) _ коэффициент подавления СРО;
где ЛГП0(/,г) 7^IBXO(/,r3,rn,^)/P3CBXO
р0(г,,гп,^)) - коэффициент накрытия на входе приемника СРО во временной обла-
сти запросного сигнала СРЗ и помехи ретрансляторного типа со стороны ПП, по-
ставленной по факту приема излученного запросного сигнала со стороны СРЗ; Д, -
длительность запросного сигнала СРЗ: - коэффициент, показывающий, какую
часть запросного сигнала может использовать система РЭП для принятия решения
о том, что СРЗ излучает запросный сигнал (0<£, <1); тСР - время срабатывания,
которое затрачивает система РЭП на выполнение функций для создания помех с
момента принятия решения об излучении запросного сигнала; с = 3 10 (м с) - ско-
рость света в свободном пространстве [96].
Условия подавления ретрансляционными помехами приемника СРЗ
(« СРО СРЗ и СРО ПП СРЗ ») можно записать в виде
К. (^ F) < ^ПРД П3-7прд ПЗ (^пз>^ПЗЖрм 3 (^зп ’^ЗП ) *
^ПРД О 7*ПРД О ( ’ ^03 )7*ПРМ 3 ^30 ’ ^30 )
7^3(/, ^, Яп ) /?зо /дтрз гс . ~-0 1ЛГ0(Лзо-Лт)
P(tr} R? L
1VH3 ^ГРЗОП
। Л’Т'зУ ш 3Д7ip з R30 7ПРЗ oc 4я
7q (fj f'o ) ^ПРД О-Тпрд О ( ^03 ’ ^ПЗ ) ^ПРМ зТпРМ 3 (^30 ’ ^ЗО Мп 1 О
С\ z ~ ГСР ~ (^1 К ' + ^гз — ^30) с
(3.121)
(3.122)
‘ос
где выходная мощность передатчика ретранслятора с КУ ответного сигнала Ку f< и
максимальной выходной мощностью РГ|, на длине волны ОС Ло
кУОС^СВХПо(^’ЛО’,п)1 ПРИ ^УОС^СВХПО
ПЗ ’ при ос 7с ВХ ПО
Р (t Г Г )=
-1 ПЗ ' ’ 3 ’ п /
ПЗ’
ПЗ’
Глава 3. Основы радиоэлектронного подавления
279
^свх ПО (£Г0’ГГ1
-^о(^^о)(7пРДО-^ПРДО (^оп> ^оп )
4Л’/?ОГ|7'11РП.ОС
X
С' F1'
^ПРМ ПОГПРМ по
(^ПО’^По)2-о
4тг
/ис10ч’-,А°/'по
KU3(t,r) - коэффициент подавления СРЗ; р3(ЯрГп,г0) - коэффициент накрытия на
входе приемника СРЗ во временной области ответного сигнала СРО и помехи ре-
трансляторного типа со стороны ПП, поставленной по факту приема излученного
запросного сигнала со стороны СРО длительностью TQyf ; 0ПЗ, <д[]3 и 0ОП ; <доп - зна-
чения азимута и угла места в направлении от ПП на СРЗ и от СРО на ПП; д2 - ко-
эффициент, показывающий, какую часть ответного сигнала может использовать
система РЭП для принятия решения о том, что СРО излучает запросный сигнал
(0 < g2 < 1); £ПР11ОС - коэффициент потерь ОС в приемнике ПП, £прзос, £1|РЗОП •“ к0~
эффициент потерь ОС и ИС в приемнике СРЗ; Ко - удельное ослабление ЭМ поля
на единицу дальности при длине волны Ло; уос - коэффициент несовпадения по-
ляризации ОС с рабочей поляризацией антенны ПП ( 0 < уос < 1); Т„ - абсолютная
температура приемника СРЗ; Лгшз - коэффициент шума приемника СРЗ [96].
При использовании передатчика маскирующих помех генераторного типа
условия РЭП приемника СРО (« СРЗ —> СРО ПП —> СРО ») записываются в виде
К’ (t г) < ^п0 (^’^п)^по-^п (^по > ^ПО )^ПРО П ^ПРМ о (^оп > ^оп 2?30 Л/„,.о ,,
^3U’*3 )^ПРД 3-^ПРД3(^30’^30 )^ПРМО^ПРМо (^ОЗ’^Оз)^ПоА^1
т VV 1 П_0-,/гз(яэо-Лпо)
-^про.сХ/ olv
(3.123)
'Лпро.п
4 лкТONш ОЛ/ПР t До
^TlPO.C__________________________________________
ПРДзЛ1РДз(^30-^>Зо)^:ПРМоЛ1РМо(^03-9?Оз)>^1 Ю
0^Ро(гп>гзЛ»
К (1 - С3) - ТСР - (^пз + *по - /?ЗС )/'с
(3.124)
где Л?'(11 (7,г) - коэффициент подавления СРО маскирующими помехами ПП гене-
раторного типа; Ро^п’^з’^о) _ коэффициент накрытия на входе приемника СРО во
временной области запросного сигнала СРЗ и помехи генераторного типа со сторо-
ны ПП, поставленной по факту приема излученного запросного сигнала со стороны
СРЗ; Гзс - длительность запросного сигнала СРЗ; /0 - коэффициент несовпадения
поляризации помехи с рабочей поляризацией антенны подавляемого приемника
СРО (0</о < 1); £ПРОП, £ПРОГ _ коэффициенты, учитывающий потери помехи и
запросного сигнала СРО; д3 - коэффициент, показывающий, как>ю часть запрос-
ного сигнала может использовать система РЭП для принятия решения о том, что
СРЗ выполняет запрос (0 < g3 < 1) [92 ].
280
Глава 3. Основы радиоэлектронного подавления
Условия подавления маскирующими помехам приемника СРЗ
торного типа (« СРЗ <-> СРО о ПП -> СРЗ ») имеют вид
Т^1 ' ^пз0’гп)^пз^п (^пз’^пз)^прзп^прмз (^зп’^зп)^зоА/прз
Л п 3 (Z, Г ) <-з-------------------------------------------X
^о(С^о)^ПРД оЛ1РД О (^03 ’ ^03 )^ПРМ З^ПРМ 3 (^зо’^зо)^пзА^п
ПП
генера-
(3.125)
ПРЗ.П
^TCKT^Nш 3Л/"ПР З^ЗО^ПРЗ.С
ПРД О^ПРД о (0< В ’ ‘/’оз ) Gf 1PM 3FnPM 3 (630 > <Рзо Но •1 °’С ’
. ГОС +ГОБР ~ГСР +7ЗС • 0 - £) + 2 (Язо - ЯПЗ)/ С
(3.126)
ос
где ЛГ'3(г,г) - коэффициент подавления СРЗ; р'(гп,^,^) - коэффициент накрытия
на входе приемника СРЗ во временной области ответного сигнала со стороны СРО
и помехи генераторного типа со стороны ПП, поставленной по факту излучения
запросного сигнала со стороны СРЗ (начала цикла опознавания); — длитель-
ность ответного сигнала СРО; тОБР - время обработки (дешифрования) в СРО с мо-
мента получения запросного сигнала до излучения ответного сигнала.
Анализ рисунка 3.65 показывает, что каждый канал обработки сигналов
СРО представляет собой типовой тракт обнаружения (ТТО) с эвристической струк-
турой «фильтр - детектор - фильтр», который при правильном выборе параметров
схемы может обеспечить помехоустойчивость, близкую к оптимальной. Структура
ТТО синтезируется для решения задачи бинарного обнаружения. Характеристики
таких обнаружителей сигналов на фоне гауссовского белого шума достаточно хо-
рошо изучены. При этом вероятность правильного обнаружения (ВПО) бинарного
сигнала определяется выражением
Лю =Ф[(Л /Л,)пу -а^ФО-Лп )], (3.127)
где Ф(г) = —^= j ехр( х2/2)<А - функция Лапласа; (Pt /Рп )пу - отношение мощ-
у/2л Д
ностей сигнала и помехи на входе порогового устройства; Р г - заданная вероят-
ность ложной тревоги, определяющая порог обнаружения [39].
Полагая, что (Рс/Рп)пу определяется частотными характеристиками филь-
тров ПЧ ТТО (т.е. полоса частот помехи на выходе ПЧ согласована со спектре',
сигнала), ПЧ имеет линейные характеристики усиления в пределах рассматривае-
мой полосы пропускания, помеха представляет собой узкополосный случайный
процесс с гауссовским законом распределения мгновенных значений и равномер-
ной спектральной плотностью, можно принять (Л /^л)Пу = 1' К, - ВПО для бинар-
ных сигналов существенно (0,1 и менее) снижается при КП >0,3. В этом случае
можно полагать, что запросный и ответный сигналы, состоящие из двух и более
информационных импульсов, будут подавлены прицельными маскирующими по-
Глава 3. Основы радиоэлектронного подавления
281
мехами. Обычно мощность помехового сигнала значительно превышает мощность
собственных шумов приемника, поэтому в большинстве случаев со вторым слагае-
мым в выражениях (3.119) и (3.121), (3.123) и (3.125) можно не считаться [92].
Основным принципом выбора показателя эффективности РЭП СГО являет-
ся его строгое соответствие цели, которая должна быть достигнута в результате
выполнения боевой задачи. Показатель эффективности должен быть мерой дости-
жения цели действий, мерой успешности выполнения задачи. Исход планируемого
действия не может быть точно предсказан и будет случайным, поэтому в качестве
показателей эффективности принимаются неслучайные характеристики случайной
величины. Среди собственных показателей эффективности подавления можно вы-
делить: дальности эффективного обнаружения сигналов запросчика и ответчика
СГО; дальности эффективного действия маскирующих и имитирующих помех; ве-
роятности обнаружения сигналов СГО; время реакции (быстродействие) средств
РЭП; одновременное число подавляемых средств СГО; затраты технических, ча-
стотных, энергетических, материальных ресурсов и др. [92, 97].
В соответствии с основными функциональными задачами наиболее общим
показателем качества функционирования СГО следует считать вероятность полу-
чения достоверной информации об идентификационных признаках наблюдаемых в
контролируемом пространстве объектов в заданной оперативно-тактической и
электромагнитной обстановке
РЛ =ф{а(Н./?(г),ап(Г)^п(0-^,^,^}, (3.128)
где а(П = {а?3(Лг3), ao(7,fo)j ; ап(Г) - векторы технических характеристик средств
СГО и РЭП, ап(Лгп) = [Рп>(г,^);^}(Лгп);Яп;Д/'п;Сп0;Сго;^п(^п,^п)]; А(0> Дп(0
— векторы характеристик, описывающих порядок (стратегию) использования
средств СГО и РЭП [97]. Для заданных векторов «(/), Д(г) при фиксации пара-
метров векторов ап(0 , (О функционал (3.128) можно интерпретировать как ве-
роятность идентификации объектов для некоторого временного сечения динамиче-
ского процесса ведения боевых действий.
В качестве критерия эффективности РЭП можно использовать минимиза-
цию количества достоверной информации в результате использования средств СГО
И' = FP [а(Г), Д(О) Рп {а (г), Д (/),ап (/), Д, (г), г3, го, гп} -> min , (3.129)
где Иг0{а(О,Д(О} - количество достоверной информации, получаемой в резул ьтате
использования PC АО в случае отсутствия организованных помех.
Задача РЭП СГО сводится к определению параметров dn(r). Дп(0 при ко-
торых
Рп{«(05А(0,«п(0,Ап(0э73,^о>И) —>min, (3.130)
а функция потерь
282
Глава 3. Основы радиоэлектронного подавления
f-г \ ГМ \ -* ( \ /5 Г 1 Д(Л)эап(/)’А1(/)’73» *О’ гп} 1О1\
/ «(/),ДО),ап(0,/Зп(7)к1----1----г~-------- }>тах, (3.131)
Р(0»^з’ ^О’ Tij
где Ро |а(/),Д(г),Г3, г0, гп| — вероятность успешного применения средств СГО (пра-
вильного опознавания) в случае отсутствия организованных помех [97].
Усреднение (3.128) за время боевого эпизода позволяет определить среднее
значение качества функционирования СГО. Понятно, что такая интегральная оцен-
ка хотя и дает общее представление о качестве системы, однако не позволяет уста-
новить факторы уязвимости для организации эффективного подавления. В этой
связи представляется целесообразным декомпозировать общий показатель (3.128)
на частные, которые можно оценивать аналитически и проверять эксперименталь-
но. Вероятность идентификации объекта может быть представлена произведением
вероятностей независимых событий приема ответчиком запросных сигналов и за-
просчиком - сигналов СРО в одном цикле опознавания
Р„ = Р, (aft), pit),dn (Z), рп (z)) Ро (d(t),P(t),an (z), p„ (z)). (3.132)
Анализ структуры сигналов PC АО показывает [97], что они состоят из ко-
довых опорной и информационной групп импульсов. Алгоритмы обработки сигна-
лов в РСАО исключают формирование ответного сигнала в случаях ошибочного
определения опорной группы или попадания двух и более одинаковых сигналов в
заданный интервал времени [93]. Применение ретрансляционных помех в отноше-
нии СРО с искаженной информационной группой может спровоцировать ложный
ответ, ретрансляция неискаженного запросного сигнала в случае попадания в за-
данный временной интервал ожидания — исключить обработку и формирование
ответного сигнала. Использование ретрансляционных помех в отношении СРЗ мо-
жет вызвать исключение обработки на ожидаемом интервале времени, привязанном
к стробу дальности в случае передачи неискаженного сигнала, или декодирование
искаженной информационной группы, что приведет к неправильному определению
идентификационных признаков объекта. При этом требуемое быстродействие к
станции активных помех определяется из выражений (3.120) и (3.122), а требования
по коэффициенту усиления (мощности) приемопередатчика ретранслятора - из вы-
ражений (3.119) и (3.121). Многократное излучение имитационных помех может
вызвать перегрузку системы обработки средств СГО.
При воздействии маскирующих помех может происходить подавление
опорных и информационных кодов и образование ложных как за счет импульсов
помех, так и за счет комбинаций помеховых и рабочих импульсов. Применение
ХИП может вызывать следующие эффекты: задержку опознавания цели (ответ не
производится вследствие подавления опорных групп импульсов); ошибочное опо-
знавание (вследствие подавления информационной группы импульсов); перегрузку
системы обработки чрезмерным потоком сигналов (образование ложных посылок).
Требования к быстродействию генераторного постановщика помех опреде-
ляются из выражений (3.124) и (3.126). к мощности ПП генераторного типа - из
выражений (3.123) и (3.125). Математическое моделирование с использованием
выражений (3.123) и (3.125) показывает, что эффективность воздействия маскиру-
Глава 3. Основы радиоэлектронного подавления 283
ющих помех на СГО во многом определяется энергопотенциалом ПП, видами фор-
мируемых помех, мощностью передатчиков и параметрами антенных систем СГО.
Радиоэлектронное подавление можно осуществлять, располагая ПП относительно
СРЗ и СРО на удалениях, превышающих максимальные дальности применения
авиационных управляемых ракет, при этом энергопотенциалы современных ПП
обеспечивают требуемый коэффициент подавления.
Математические модели (3.119)...(3.126) для определения требований к ча-
стотным, энергетическим ресурсам и быстродействию ПП позволяют оценить эф-
фективность подавления средств РСАО с точки зрения возможности применения
типовых станций помех, а также определения требований и рекомендаций при раз-
работке или модернизации средств РЭП в приложении снижения информационного
обеспечения управления силами и средствами конфликтной стороны. Модели так-
же могут быть использованы при разработке программного продукта для имитаци-
онного моделирования.
3.13. Радиоэлектронное подавление многопозиционных
РЛС
Многопозиционная радиолокационная система (МП РЛС) - радиолокаци-
онная система, включающая несколько разнесенных в пространстве передающих,
приемных или приемопередающих позиций, в которой получаемая ими информа-
ция о целях обрабатывается совместно [98]. МП РЛС (РЛС с разнесенным приемом,
multistatic radars, multiradar systems) могут объединять однопозиционные, пассив-
ные и двухпозиционные РЛС, расположенные в разных точках пространства (на
разных позициях). Основная идея МП РЛС - более эффективно (чем в обычных
однопозиционных РЛС) использовать информацию, заключенную в простран-
ственных характеристиках ЭМП. Основные различия в параметрах совмещенных
РЛС и МП РЛС приведены в таблице 3.2.
Таблица 3.2 — Основные различия в параметрах совмещенных РЛС и МП РЛС
Параметр, определяющий сигнал Совмещенная РЛС МПРЛС
Усиление ант енн при приеме и передаче Эффективная поверхность отражения цели Нормальные пот ери при распространении Набег фаз сигнала при распространении Изменение набега фаз <а счет движения це- ш Временной сдвиг отраженного сигнала g; °, № 2k R ' и (R. 2k - —t dt 2Rjc GG . и k.(R..+R ) (cR dR.y k —+—t A Sf & J (R^+R^/c
К этим различиям необходимо добавить, что поляризация отраженных сиг-
налов от одного и того же объекта в совмещенной РЛС и МП РЛС может иметь
284 Глава 3. Основы радиоэлектронного подавления
различный характер, зависящий от геометрической конфигурации отражающего
объекта и его ориентации в пространстве [98].
Основными преимуществами МП РЛС являются:
1. Возможность создания зоны действия требуемой конфигурации с учетом
ожидаемой РЛ обстановки.
2. Энергетические преимущества.
3. Высокоточное измерение пространственного положения цели.
4. Возможность доплеровского измерения скорости и ускорения цели.
5. Возможность измерения трех координат и вектора скорости ИИ.
6. Повышение разрешающей и пропускной способности.
7. Увеличение объема «сигнальной» информации.
8. Повышение защищенности от активных и пассивных помех.
9. Повышение живучести.
Недостатками МП РЛС (дополнительными трудностями при создании
МП РЛС) принято считать:
• необходимость совместного управления разнесенными позициями и пере-
дачи данных по линиям связи;
• дополнительные требования по синхронизации, передаче опорных сигна-
лов, фазирования разнесенных позиций;
• повышение требований к устройствам обработки сигналов и производи-
тельности ЭВМ;
• геодезическая или навигационная привязка и союстировка позиций [98].
Если радиолокационное поле состоит из РЛС в соответствии с рисунком
3.69а (О; - облучатель; Ц; — цель; П^ - центр сбора и обработки информации; -
база РЛС), то сумма сигналов в общем виде выражается формулой
п т
(3.133)
x5 t
c c J
cot-k R +—-t + R +——t +
' 'J dt JC dt
где M - число центров сбора и обработки информации % ; п - число облучателей
i; г]., rjiC - коэффициенты дополнительных потерь на распространение ЭМ энер-
гии от z -го облучателя к J -й цели и от j -й к g -му центру сбора информации; ср
- эффективная поверхность отражения j -й цели при облучении i -м облучателем и
приеме £ -м центром; /?. , R.^ - расстояние от i -го облучателя до j -й цели и от j -
й цели до £, -го центра при приеме сигнала от j -й цели; Gn, — коэффициент усиле-
ния приемной антенны £-го центра при приеме сигнала от j -й цели; Р, G.,
мощность /-го облучателя и коэффициент направленности его антенны на ,/-ую
цель; ср - изменение фазы при отражении z-го зондирующего сигнала oi j-й це-
ли и при приеме £ -м центром.
Глава 3. Основы радиоэлектронного подавления
285
Вариант реализации двухпозиционной РЛС приведен на рисунке 3.696.
Рис. 3.69а. Схема
разнесенной РЛС
Рис. 3.696. Двухпозиционная РЛС
Необходимо отметить, что кроме существенного усложнения процедур
совместной обработки информации МП РЛС присущ еще один недостаток, обу-
словленный нелинейной зависимостьюих тактических показателей от взаимного
расположения позиций и целей. Например, точность оценивания местоположения
цели в двухпозиционном варианте МП РЛС (рис. 3.696) с идентичными пеленга го-
рами определяется соотношением [99]
0,0175аДя; +Я;
О\.. —-----------------,
Ли - ’
smy
где сгМ7, ст, - СКО определения местоположения и измерения пеленгов цели.
Передающая (ПРД) и приемная (ПРМ) части РЛС разнесены на расстояние
Я,, . Излучаемые радиолокационные сигналы после отражения от самолетов боево-
го порядка (БП) принимаются в пункте ПРМ, являющимся объектом РЭП. Уравне-
ние РЭП для случая на рис. 3.696 имеет вид
К - Л/пР ^^/^ПРдС^ПРМ’^ПРм) 02^2^2 fn „ X , о 1 пдх
AZ- г>? К -^2^ПРм(^ПРД-^11Рд) • (э.1э4)
А/||
Разрешая (3.134) относительно произведения R, R^ , можно получить
D -
RTR2 = а (П —-----с------, (3.135)
1 Э ^(^прд.^прд)
PG Д/ 1
где арэп = —--------------------°—------.
ЛА А/р 4л7 Лпрд (ЛрМ ’ ^ПРМ )
Из анализа выражения (3.135) следует, что зона подавления двухпозицион-
ной РЛС может быть представлена с помощью овала Кассини [98]. Если предполо-
жить. что точки расположения ПРД и ПРМ являются фокусами, то соответствую-
щее уравнение овала имеет вид
286
Глава 3. Основы радиоэлектронного подавления
r;-ri=о2,
(3 136)
R
где а2
^ПРМ (^ПРД ’ ^ПРД )
л/^рэп
п
Уравнение овала Кассини в декартовой системе координат имеет вид
(х2 + у2 )2 - 2с2 (х2 - у2) = а4 - с4,
(3.137)
где с = /?12/2 - половине расстояния между фокусами ПРД и ПРМ (передающей и
приемной антеннами).
В зависимости от величины отношения а- а/с изменяется и форма овала
Кассини (рисунок 3.70). При а>с\/2 сохраняется типичная форма овала (рис.
3.70а). В случае я<1, т.е. при малом произведении Лпи большом разносе
ПРМ и ПРД, овал распадается на две окружности с центрами в фокусах - точках
расположения передающей и приемной позиций (рис. 3.70в). Из уравнений (3.135)
и (3.137) следует, что овал Кассини в данном случае представляет собой границу
зоны подавления, имеющей место при заданных пространственно-временных и
энергетических параметрах [13].
Рис. 3.70. Формы овала Кассини
Уравнение овала Кассини в полярной системе координат (г,<р) имеет вид
г2 = с2 cos2(p±yjc4 cos" 2(р + (а* - с1) . (3.138)
В приведенной полярной системе координат, в которой г = ср и а = а/с,
уравнение (3.138) представляется следуюшим выражением [13]
(р2 + l)2-4p2cos> = ^4. (3.139)
Минимальная дальность подавления двухпозиционной РЛС определяется из
(3.135), если в ней положить ^п>м($Пр-р^прд) = 1 • Тогда
Я. Я,=ЯП -----: ---- (зЛ40
.... 4л/ /•;Р„(0,РЧ;<9т1)
Анализ выражения (3.140) и рис. 3.70 показывает, что вследствие разноса
передающей и приемной частей двухпозиционной РЛС ее подавление активны*
помехами из зон может быть реализовано лишь с опре, шлейных направлений, до-
Глава 3. Основы радиоэлектронного подавления
287
пускающих возможность выполнения ряда условий, непосредственно связанных с
ДНА передающей и приемной антенн. Речь идет об обеспечении условий запуска
ПП и достижении требуемой степени подавления приемного устройства. Таким
образом, прежде чем принимать решение о конкретной реализации способа созда-
ния помех двухпозиционной РЛС из зоны необходимо убедиться, что на всех эта-
пах реализации выбранного маршрута указанные условия выполняются. Практиче-
ски эти условия выполняются при создании помех из БП. Основные виды помех
(большинство из них может излучаться одновременно) для подавления различных
классов МП РЛС приведены в таблицах 3.3, 3.4 [100]
Таблица 3.3 - Основные виды помех для подавления МП РЛС
Виды помех Типы МП РЛС
Внугриимпульсная AM С линейной частотной модуляцией Со сжатием импульса Когерентные
Внутриимпульсный сдвиг частоты
Внугриимпульсная ЛЧМ
Внугриимпульсная фазовая манипуляция (0-180°) С фазовым кодированием
«Растяжение» переднего фронта импульса
Дезинформация сопровождения по переднему фронту импульса
Повторно-периодическая когерентная импульсная пачка Импульсно- доплеровские
Ложные по дальности и скорости цели
Доплеровский шум
«Прыгающие» (от -3 до +2 кГц 1 ложные по скорости цели Непреры вного излучения
Стационарные ложные по скорости цели
Увод строба скорости
Увод строба скорости совместно с выбросом ДО
Ложные по скорости цели в коридоре ДО
Непрерывная шумовая помеха Некогерентные импульсные
fc-
Шумовой накрывающий импульс
Воздействие шумовых и имитирующих помех на МП РЛС рассмотрены в
работе [1011.
288
Глава 3. Основы радиоэлектронного подавления
Вариант создания преднамеренных активных пимех из БП самолетов РЛ
ГСН ракеты «земля-воздух» приведен в [13].
Таблица 3.4 — Основные виды помех для подавления МП РЛС
Виды помех Типы МП РЛС
Переключение поляризации Поиска и целеуказания
Многочастотная шумовая помеха
Инверсное усиление сигнала
Ложные цели по дальности
Увод строба дальности По дальности Автоматичского сопровождения j!А
Увод строба дальности с AM
Помеха зеркального переотражения Моно- импульсные По угловым координатам
Перекрестная поляризация
«Кросс ай»
Дельта помеха (на частоте несущей и гетеродина МП РЛС)
Пропорциональное последовательное снижение <на 30%) заполнения импульсной последовательности, насыщающей АРУ
Мерцающий шум С конически и сканирова- нием
AM сигнала конического сканирования
Помеха с поиском частоты пассивного конического сканирования
Кооперативная (коллективная) помеха в паре с другим самолетом
AM сигнала азимулально-угломеелного сканирования Обзорные
Многопозиционные РЛС применяются для определения местоположения
ПП (САП). Для определения координат САП вначале использовались триангуляци-
онные методы, сущность которых заключается в пассивном пеленговании источни-
ка помех несколькими пространственно-разнесенными РЛС. Триангуляционные
методы дают хорошие результаты при пеленговании одной САП. При наличии же
нескольких САП образуются ложные пеленги, что является существенным недо-
статком триангуляционного метода. Если число действующих САП равно Л’, то
при двухпозиционном триангуляционном методе определения координат САП об-
разуется большое число ложных пересечений (ложных тревог)
Nn = N2-N = N(N- 1).
Число ложных отметок , может быть снижено при корреляционной про-
странственной обработке сигналов. Такой вид обработки сигналов используется -
Глава 3. Основы радиоэлектронного подавления
289
многопозиционных активно-пассивных корреляционных системах. Принцип дей-
ствия активно-пассивных корреляционных систем основан на определении место-
положения ПП разностно-дальномерным или угломерно-дальномерным способом.
Главной особенностью этих систем является измерение разности времени запазды-
вания помеховых сигналов, принимаемых разнесенными приемниками.
Время запаздывания сигналов и, (7) и w2(7), принимаемых антеннами Al и
Аз, определяется измерителем-коррелятором. Относительная задержка сигналов т3
зависит от временного положения максимума корреляционной функции
^ВЫХ ~ (^1 ^з)^2 + ^)) [13].
Реализованы активно-пассивные и пассивные корреляционные системы с
большой (десятки-сотни км) и малой (от десятков метров до нескольких км) база-
ми. Корреляционно-базовые системы (КБС) могут быть подавлены маскирующими
и имитирующими помехами, создаваемыми с борта одного или нескольких ЛА.
Маскирующие помехи затрудняют обнаружение истинного выброса корреляцион-
ной функции, а имитирующие порождают большое количество ложных отметок.
Маскирующие помехи могут быть созданы путем излучения простран-
ственно-некоррелированных помеховых сигналов. На ЛА устанавливаются не-
сколько САП, излучающих некоррелированные помехи в различных секторах (от 2
до 50 секгоров). Если на антенны А] и А- помехи поступают от разных передатчи-
ков по разным лепесткам ДНА, то корреляционная обработка помеховых сигналов
приводит к появлению шумового маскирующего фона.
Если имеется Г л САП, то на выходе корреляционного обнаружителя КБС
формируется корреляционная функция
Цг) = (И|(/)«2(Г + г,)У (3.141)
где м,(г-т3) и г/2(г) - помеховые сигналы на выходах антенн А] и Аз КБС; -
временная задержка помехового сигнала в антенне А] относительно помехи, при-
нимаемой антенной А?.
В общем случае помеховые колебания на выходах антенн Ai и Аз представ-
ляют собой аддитивные смеси ВЧ сигналов, излучаемых передающими самолет-
ными антеннами Ая (п е 1 ...N),
н, (/ + г3) = £ ип/ (/ + ), (3.142)
1=1
+ = + (3.143)
где z/n,, wn - помеховые сигналы в антеннах А] или Аз от элементарных самолет-
ных ПП (z,j е 1...Л’); (р — случайная фаза, распределенная на интервале [-я; я].
Подставляя (3.142) и (3.143) в выражение (3.141), можно получить
Цт,г3) = ^(иге(Нг3,^)и^(/ + т3,^.)). (3 J 44)
290
Глава 3. Основы радиоэлектронного подавления
Для прямошумовой помехи (ПШП) из (3.141) и (3.144) следует, что
^(^'гз)=^п2?(г-гз)х
V N .
xLS\cosho(z
+ г « ) + <Pi 0 + )] cos (t + Т^} + (Г + т3.)]},
(3.145)
где Рп - мощность помехи на выходе коррелятора; /?(г) - нормированная корре-
ляционная функция огибающей помехи.
Пространственный разнос ПП незначительный (не может быть больше га-
баритных размеров ЛА), то огибающая корреляционной функции на входе обнару-
жителя для всех z-x или j-х принимаемых помеховых сигналов будет одинаковой.
Вследствие независимости ВЧ фаз ср\Г) и ср (/) после статистического усреднение
проводимого под знаком суммы в выражении (3.145), получается
£(т,т3) = 0. (3.146)
Следовательно, рассматриваемый способ создания активных помех затруд-
няет выделение полезного выброса (пика) корреляционной функции. При действии
на КБС прямошумовых помех на выходе коррелятора образуется маскирующий
фон, действие которого приводит к снижению ВПО полезного пика корреляцион-
ной функции (при запанной вероятности ложных тревог).
Значительно уменьшить интенсивность полезного выброса функции корре-
ляции на выходе корреляционного обнаружителя можно за счет быстрого подклю-
чения выхода одного ПП последовательно ко входу разных бортовых антенн. Такой
вид помех получил название помехи с перемещающимся фазовым центром, что
связано с истинным перемещением фазового центра антенной решетки, составлен-
ной из множества бортовых антенн А] .. Av. Если цикл перемещения фазового цен-
тра от антенны Ai до антенны Av проводится за время ТФЦ, меньшее времени инте-
грирования сигналов в интеграторе коррелятора Ти (ТФЦ < Т\,), то по эффекту воз-
действия ПШП эквивалентна пространственно-некоррелированной помехе, созда-
ваемой из N точек [13].
В результате корреляционно-базовой обработки имитирующих помех на
выходе коррелятора образуется несколько ложных выбросов. Эффективность воз-
действия имитирующих помех зависит от степени подобия ложных и истинных вы-
бросов корреляционной функции. Известно несколько видов имитирующих помех
для подавления КБС:
• одноточечная помеха с многопиковой функцией корреляции (помеха фор-
мируется САП, установленной на одном ЛА);
• многоточечная помеха с многопиковой функцией корреляции (помеха фор-
мируется САП, размещенными на нескольких ЛА).
Одноточечная помеха с многопиковой функцией корреляции создастся
помеховыми излучениями с периодической структурой. Перспективными следует
считать имитирующие помехи, которые создаются путем строго периодической
линейной частотной модуляции квазигармонического шу'ма или путем суммирова-
ния квазигармонического шума, пропущенного через несколько ЛЗ. При линейной
частотной модуляции (ЛЧМ) приращение частоты помехи меняется по закону
Глава 3. Основы радиоэлектронного подавления
291
* о
I.
при t < kT, к =\, 2, ... ,
при t = T,
где /счм - крутизна ЛЧМ в полосе частот Л/, .
Под действием ЛЧМ-помехи на выходе приемников ПРМ] и ПРМ2, имею-
щих полосу пропускания Д/ р, образуются последовательности импульсов с дли-
тельностью ти = Т и периодом Т, корреляционная функция которых име-
ет следующий вид
(3.147)
1 1 л/_|
= 77к<+ ^к (т + zT) + • • •
л /V
где N = TjT — число импульсов; То - время действия помехи (или время обработ-
ки помехового сигнала в КБС); Т - период частотной модуляции; к.,(г) - корреля-
ционная функция одиночного импульса.
Корреляционная функция помехи на выходе приемников имеет (27/-1)
пиков. Интенсивность z-го пика (при числе импульсов N) равна
(3.148)
(3.149)
(3.150)
d И /’
н
(3.151)
где Р — интенсивность (пиковая мощность) «нулевого» пика (i = 0 ), / g 1...N -1.
Анализ выражения (3.147) позволяет выделить недостатки рассматриваемой
помехи: 1) совпадение «нулевого» выброса с координатами ПП (т.е. ПП «подсвечи-
вает» себя самым мощным импульсом); 2) уменьшение интенсивности ложных вы-
бросов с ростом номера ЛЦ.
Если считать допустимым снижение интенсивное™ граничного (наиболее
удаленного) /-го пика примерно в два раза по сравнению с «нулевым», то необхо-
димое число периодов изменения частоты zh за время Т определяется как
i =^=JL
и 2 2Т
Период изменения частоты Т тккже должен удовлетворять условию
cT = d,
где d - интервал между имитируемыми ЛЦ.
С помощью выражений (3.149) и (3.150) при заданных значениях
можно определить период частотной модуляции
7; = Idijc.
Имитирующая помеха с многопиковой функцией корреляции может быть
создана с помощью суммирующего устройства с многоотводной ЛЗ. Отклик обна-
ружителя КБС имеет вид такой же, как и в случае воздействия ЛЧМ-помехи. Отли-
чие состои! лишь в огибающих отдельных выбросов, которые определяются видом
корреляционной функции исходного шума.
Многоточечные имитирующие помехи могут быть двух видов:
292
Глава 3. Основы радиоэлектронного подавления
1) помеха с тождественной модуляцией, создаваемая с различных самолетов
путем излучения ВЧ сигналов, модулированных по амплитуде одним и тем же шу-
мом;
2) помеха, создаваемая путем ретрансляции сигналов САП, установленных
на нескольких ЛА.
В обоих случаях реализуется индивидуально-взаимная зашита самолетов за
счет «размножения» коррелированных помех в рабочей зоне КБС. За счет действия
помех образуется N2 отметок, среди которых число ложных равно = N(N -1).
Достоинствами такого способа создания помех являются:
• одинаковые структура и интенсивность всех помеховых выбросов, что за-
трудняет работу схем помехозашиты;
• большое число ЛЦ с кинематическими характеристиками, соответствую-
щими истинным целям.
Для создания многоточечных помех могут применяться пассивные переиз-
лучатели. переизлучающие АР, компактные облака противорадиолокационных от-
ражателей, участки водной и земной поверхности и др. При облучении переизлуча-
телей активной помехой за счет отражения создаются многоточечные коррелиро-
ванные помехи [13].
3.14. Воздействие на среду распространения и отражения
электромагнитных волн
Изменением условий распространения ЭМВ можно существенно нарушить
функционирование РЭС. ЭМВ, проходя через ионизированные участки простран-
ства, где среднее расстояние между частицами среды d < Л , частично отражается,
поглощается и изменяет направление распространения. Интенсивное отражение и
преломление происходит, когда параметры, характеризующие ЭМ свойства иони-
зированных областей, отличны от аналогичных параметров среды, в которой рас-
пространяется ЭМВ. Наибольшее отклонение направления их распространения
происходит, когда ионизированная область состоит из участков с различными элек-
трическими параметрами. Без учета влияния магнитного поля Земли и частоты
столкновений электронов коэффициент преломления ЭМВ в ионизированной среде
зависит от частоты f и концентрации TVE электронов в единице объема
» = 71-81(Уе//2)-
Для изменения наблюдаемости объектов разведки известно достаточно
много методов и способов воздействия на среду распространения сигнала. Моди-
фикация среды маскирует объекты от средств РТР и от РЛС обнаружения и сопро-
вождения не за счет излучения специальных помеховых сигналов. Многие способы
воздействия на среду называют «пассивными» в отличие от «активных» способов,
предлагающих маскировку излучаемыми помехами [10, 43].
Под пассивными помехами в технике РЭБ понимают помехи, образующие-
ся на входе приемника подавляемого РЭС в результате рассеяния и переотражения
ЭМВ от различных массовых и пространственно распределенных объектов (сред)
Глава 3. Основы радиоэлектронного подавления 293
К пассивным помехам относятся также различные ионизированные плазменные
образования, которые модифицируют электрические свойства среды распростране-
ния ЭМВ. Создание пассивных помех возможно только тем РЭС, действие которых
основано на приеме рассеянных ЭМВ. Возможность их создания обусловлена тем.
что отметки на экране ЭЛТ, образуемые сигналами, рассеянными искусственными
объектами или отражающими средами, могут практически не отличаться от отме-
ток реальных объектов. Энергия, рассеянная множеством близко расположенных
друг к другу отражателей, может вызвать частичную или полную засветку экрана,
имитировать или маскировать отметки целей. Ложные отметки затрудняют наблю-
дение и распознавание реальных целей.
Следует выделить два основных класса пассивных помех:
• пассивные пространственно протяженные помехи (в т.ч. ЛЦ);
• средства, модифицирующие свойства среды распространения ЭМВ (в т.ч.
плазмообразования) [15, 43].
В зависимости от источника образования различают естественные и искус-
ственные пассивные помехи. Естественные пассивные помехи возникают вслед-
ствие рассеяния ЭМ (акусз ических) волн земной и водной поверхностью, различ-
ными местными предметами, облаками, каплями дождя, частицами снега и неодно-
родностями атмосферы, ионосферы, океанов, морей. Искусственные пассивные
помехи являются результатом рассеяния ЭМ (акустических) волн дипольными,
уголковыми и линзовыми радиоотражателями, отражающими антенными решетка-
ми. ионизированными средами и аэрозольными образованиями.
Способы модификации среды распространения ЭМВ можно разделить на
пассивные помехи (ДО. аэрозоли) и плазменные образования (локальные, глобаль-
ные). Существуют несколько способов создания пассивных помех:
• разбрасывание большого количества специальных отражателей;
• буксировка или запуск специальных отражателей в качестве ЛЦ;
• применение специальных методов для изменения отражающих свойств
цели;
• инжекция специальных химических веществ или излучений для изменения
свойств среды распространения, которая становится неоднородной или
поглощающей в большей степени.
По характеру воздействия пассивные помехи бывают: маскирующие (обла-
ко ДО) и имитирующие (ЛЦ и РЛ ловушки). Маскирующие и имитирующие пас-
сивные помехи создаются одними и теми же средствами, но применяются по-
разному. Средствами создания являются:
• отражатели (дипольные, уголковые, линзовые):
• переизлучающие решетки (Ван-Атта) и линзы (Люнеберга, Игона-
Липмана);
• вещества, аэрозоли, ионизирующие среду распространения;
• плазмообразования (локальные, глобальные).
В настоящее время пассивные помехи создаются в основном с помощью
прогиворадио-юкационных (дипольных) отражателей, выбрасываемых в большом
количестве в атмосферу.
294
Глава 3. Основы радиоэлектронного подавления
Дипольные отражатели способны поглощать и рассеивать энергию ЭМВ,
создаваемых передающими антеннами РЛС. В результате РЛС дезинформируются
относительно параметров пространственного положения и движения маскируемого
объекта. Отражающие (рассеивающие) свойства различных объектов и местности
оценивают эффективной поверхностью рассеяния (ЭПР), характеризующей их
способность отражать падающую ЭМВ в направлении облучающего устройства.
Применительно к радиолокации ЭПР объекта называют эквивалентную ей площадь
поперечного сечения, которая, будучи помещенной в точку нахождения объекта,
рассеивает во все стороны падающую энергию радиоволн, создавая в приемнике
РЛС такую же плотность потока мощности, как и реальный объект. Значение ЭПР
зависит от отражающих свойств объекта (размеров, формы, материала) и его
положения, длины и поляризации волны излучаемой РЛС.
Дипольные отражатели (ДО) представляют собой пассивные тонкие
(десятки микрон) вибраторы, изготовленные из станиолевых лент, алюминиевой
фольги, металлизированной бумаги, стекловолокна, покрытого электропроводящим
слоем. Возможно также применение поглощающих («черных») диполей с
графитовым покрытием. Длина и толщина ДО выбирается так, чтобы обеспечить
наиболее эффективное рассеяние ЭМВ (максимальную ЭПР) в широком диапазоне
частот. Основными характеристиками ДО являются:
• ЭПР, диапазонность;
• характер и время развертывания облака ДО;
• спектр помехи и ширина полосы, маскирующей цель.
Максимальную величину ЭПР имеют диполи с длиной, близкой к половине
длины волны облучающего колебания, на практике длина диполя составляет
/ = 0,47ЛА (к— целое число) [15]. Отражения от диполей имеют резонансный
характер, ЭПР диполя зависит от длины волны. ДО разных длин комплектуются в
пачки. При их сбрасывании с ЛА и рассеивания в пространстве отражения от
воздушного облака диполей формируются в полосе частот [43]
А/ 40,05 4-0.15)-/. (3.152)
При создании пассивных помех в атмосферу выбрасывается большое
количество ДО. Эти диполи попадают в турбулентную атмосферу и ориентируются
произвольно относительно падающего на них ЭМП. Положение и поворот
относительно падающей волны постоянно изменяется. ЭПР облака диполей будет
случайной величиной в каждый момент времени. Если считать, что одиночный
полуволновой диполь может быть равновероятным образом произвольно
сориентирован в пространстве относительно падающей на него волны, го его
средняя ЭПР равна [9, 10, 28. 43]
о7, = 0,17А2. (3.153)
ЭПР пачки из N диполей после полного развертывания составит
= £а. ~0,17A2/V. (3.154)
Глава 3. Основы радиоэлектронного подавления 295
В силу того, что в процессе применения некоторые диполи смещаются,
ломаются, запутываются и экранируют друг друга, необходимо учитывать КПД
диполей. ЭПР облака диполей
(3.155)
где т]Л < 1 - КПД сброшенных диполей (на практике я 0,2...0,8) [9].
Иногда требуется знать ЭПР диполя для разнесения точек излучения и
приема сигнала
о7, = 0,17A2cos2y/ + 0,llA2sin2y/ , (3.156)
где у/ - угол, между направлениями «передатчик-диполь» и «приемник-диполь».
Парциальная скорость диполя - величина случайная и зависит от ряда
факторов: турбулентности атмосферы, аэродинамических характеристик диполей,
особенностей движения под действием ветра, скорости снижения диполей под
влиянием силы тяжести, влияния выходной струи двигателя ЛА. Флуктуации
отраженного сигнала также вызываются собственным вращением диполей, при
этом различают быстрые и медленные вращающиеся диполи. Медленные диполи
стремятся сориентироват ься горизонтально, наличие быстрых диполей
обусловлено дефектами диполей: деформациями, зазубринами, что делает их
похожими на аэродинамические рули. Экспериментальные данные
свидетельствуют о преимущественной горизонтальной ориентации диполем
Расширение спектра суммарного отраженного сигнала происходит за счет
доплеровских составляющих спектра, обусловленных следующими причинами:
собственным рассеиванием ДО в атмосфере; рассеиванием в пространстве под
действием турбулентности атмосферы; движением под действием ветра;
снижением диполей под действием сил ы тяжести; рассеиванием в пространстве под
действием турбулентной струи самолета. Причинами расширения спектра
флуктуаций амплитуды отраженного сигнала также являются собственные
вращения ДО, неравномерность ДНА РЛС и др. Ширина спектра отраженного
сигнала возрастает с увеличением скорости ветра и уровня турбулентности
атмосферы. На ширин} спекгра отраженных сигналов с}щественное влияние
оказывают метеорологические параметры атмосферы: средняя скорость ветра;
вертикальный градиент скорости ветра; средняя температура воздушного слоя:
вертикальный градиент температур. Указанные метеорологические параметры
атмосферы меняются с высотой [2].
Если излучающий сигнал РЛС имеет вид w, (?) = ACi cos(to,/ - , то
отраженный от облака ДО помеховый сигнал будет узкополосным случайным
процессом, мгновенное значение которого записывается в виде
«п (0 = Л (0 cos(ttn/ - срп (?)),
где Лп (?), <рп (?) - случайные функции времени, обусловл енные перемещением ДО
относительно друг др} та.
Огибающая спектра часто аппроксимируется гауссовой кривой [4.
296
Глава 3. Основы радиоэлектронного подавления
Gn(/) = Gn(/cp)exp-^-4^. <3157)
2сгг
где СП(/СР) - спектральная плотность помехи на средней частоте спектра /ср; crF -
среднеквадратическое значение приращений доплеровских частот, обусловленных
радиальными скоростями перемещения облака ДО относительно подавляемой РЛС.
Средняя частота спектра помехи fcv= f0+Fa. Максимум спектра
помехового сигнала смещен относительно частоты f0 = со Jin на величину
F ’ = ± 2К? /Л«± 2К/Л, (3.158)
где Гд - среднее значение радиальной скорости движения ДО относительно РЛС.
Знак «+» соответствует случаю, когда облако ДО движется на РЛС, знак «-» - от
РЛС.
Величина среднеквадратического значения приращений доплеровских
частот crF определяется выражением
6TF=2(7v/2, (3.159)
где crv - среднеквадратический разброс радиальных скоростей движения ДО
относительно РЛС, обусловленный радиальной составляющей скорости ветра Кв,
турбулентностью атмосферы и скоростью движения ДНА РЛС.
Эффективная ширина спектра помехи 47^2,50^ [4].
Нормированная функция спектральной плотности флуктуаций
амплитуд отраженного сигнала за счет перемещения отражателей при
неподвижном ИИ имеет вид
G(F) = ехр
где Л — длина волны подавляемой РЛС; F — частота; V — модуль полной скорости
движения диполя, имеющей своими составляющими скорость снижения за счет
собственного веса, скорость перемещения под действием ветра, скорость движения
под действием турбулентностей.
ЭМВ затухают при прохождении через облако ДО из-за рассеяния энергии
диполями. Коэффициент ослабления ЭМВ
/3=0,13Л2п, (3.161)
где п - среднее число диполей в единице объема. Мощность ЭМВ, прошедшей
через облако толщиной х в одном направлении,
Р = Рп10’°’,/?\ (3.162)
Средние размеры облака диполей для спокойной атмосферы составляют
400... 1000 м (как в горизонтальной, так и в вертикальной плоскости), а при
сбрасывании в направлении ветра - около 500 м в горизонтальной плоскости и
Глава 3, Основы радиоэлектронного подавления 297
более 1,5 км в вертикальной плоскости. Диапазон част от радиосигналов f0,
отражаемых от облаков ДО, составляет 250...8000 МГц.
Облако с максимальной ЭПР разворачивается после выброса ДО за
единицы секунд. В спокойной атмосфере средняя скорость снижения ДО
составляет 1...3 м/с на больших высотах и 0.5... 1 м/с на малых высотах. Через
определенный промежуток времени облако «размывается» и теряет свои
маскирующие свойства. Это свидетельствует о кратковременности существования
и одноразовости применения ДО. Кроме того, ДО не обеспечивают достаточной
широкодиапазонности. Это устраняется путем использования диполей разной
длины, металлизированных лент, которые, изгибаясь в пространстве, меняют свою
резонансную частоту. К недостатки ДО можно отнести следующие:
кратковременность воздействия; одноразовость применения; узкодиапазонность,
различие спектров сигнала и помехи. Достоинства ДО'. простота изготовления и
применения; дешевизна; универсальность применения; хорошая ЭМС с другим
РЭО [15, 19].
Для формирования ДО применяют: автоматы отстрела ДО и авиационные
бомбы, ракеты и снаряды. Подавление РЛС пассивными помехами, созданными с
помощью ДО возможно вследствие двух эффектов: 1) маскировки отраженного от
цели си гнала помеховым сигналом, что затрудняет обнаружение цели и захват ее на
АС; 2) имитации ЛЦ.
Цель не наблюдается на фоне пассивных помех, если выполняется условие
^ibx/^ зх - - Помеховый и полезный сигналы создаются путем отражения от
различных тел, находящихся в одном импульсном объеме разрешения РЛС.
падающий полезный и отраженный помеховый сигналы проходят одно и то же
расстояние. Следовательно,
5^ = 2^, (3.163)
^вх о-ц
где сгп - средняя ЭПР ДО, которая попадает в импульсный объем разрешения
РЛС; сг.( - средняя ЭПР цели. Тогда потребная ЭПР ДО в импульсном объеме
должна удовлетворять условию
с-п^Лп- (3.164)
Если в импульсный объем разрешения попадает т прикрываемых
самолетов,
аи=Етс\ , (3.165)
гле сгг - ЭПР одного самолета; е - коэффициент, учитывающий экранирование
одних самолетов другими (с<1). Если в импульсный объем сбрасывать /У1]дч
пачек диполей по N в каждой, то
°"[| — ^ПАЧ^ ПАЧ — П\Ч7^ • (3.166)
Выражение для потребного количества пачек, которые необходимо
сбросить в импульсный объем, имеет вид
298
Глава 3, Основы радиоэлектронного подавления
N
* ’ ПАЧ
> КиЕ т сг(.
Мт.т/д
(3.167)
Маскировка движущихся объектов достигается при выбрасывании по
маршруту движения самолета ДО с интервалом, не превышающим разрешающую
способность по дальности подавляемой РЛС. Если самолет летит на РЛС (Кц -
путевая скорость ПП), интервал сброса должен удовлетворять условию
(3.168)
/ <_
СБР " 2V N
Y LT *ПАЧ
Для прикрытия ЛА пассивными помехами на участке ДА потребный запас
Nt пачек ДО на постановщике помех определяется выражением
^=-^->^£апдч. (3.169)
у • t С-Т
*Ц '( БР е
Часть пространства, в пределах которого обеспечивается требуемое д-м
прикрытия цели оз РЛ наблюдения отношение помеха/сигнал, называете-
маскируемой областью. Ее размеры приближенно определяются шириной полосы
разлета ДО и разрешающей способностью подавляемой РЛС по дальности и
угловым координатам, а также взаимным расположением полосы ДО и
подавляемой РЛС. Эффективная ширина полосы маскирующей области
£э «Я-АД+7ЭП, (3.170)
где R А/3 - линейная разрешающая способность РЛС по углу; /эп - эффективн -
ширина полосы отражателей.
Величина импульсного объема РЛС (рисунок 3.71) определяется как
к„=я2е,,А5-
(3.171)
гче О ,, е 5 - ширина ДНА РЛС в азимутальной и угломестной плоскости; i,
длительность импульсов.
Зная плотность диполей, можно вычислить количество пачек в
импульсном объеме
Za -Аг
V 1
г Ц* СБР
(3.172)
где za — число автоматов выброса ДО; Сц - скорость постановщика помех; Аг -
разрешающая способность по дальности подавляемой РЛС.
Если пассивными помехами маскируется объем V пространства, в котором
строй разнесенных по азимуту и углу места самолетов проходит расстояние R, то
количество пачек, сбрасываемых в этом объеме, определяется выражением
I Н
K.L.ri
R_ L Н
А* гА0 г&е '
(3.173)
Глава 3, Основы радиоэлектронного подавления
299
где R, L, Н - размеры маскируемого объекта V; Дг, гД0, гДе - размеры
импульсного объема РЛС на расстоянии г от станции.
Рис. 3.71. Размеры импульсного объема РЛС
Количество ДО в импульсном объеме РЛС в функциональной зависимости
от координаты X и времени имеет вид
N N ст
Мю О 5 M(x,t)-±, (3.174)
’ Ц СбР
где Л/(х,г) - коэффициент, определяющий турбулентное влияние атмосферы и
учитывающий зависимость от координаты х и времени,
М(х,Г) = —. exp
ZyjTrDj
4Dt
X
(3.175)
где Dr — коэффициент турбулентной диффузии [4].
Для срыва слежения необходимо, чтобы ЭПР диполей, сброшенных в
импульсный объем разрешения подавляемой РЛС. существенно превышал ЭПР
прикрываемой цели, а время их совместного нахождения в импульсном объеме
было не меньше постоянных времени систем слежения за целью по
соответствующим координатам [15]. Условие подавления РЛС, защищенной от
пассивных помех, можно записать в виде
о-п >K^KnB/q. (3.176)
где Кх в - коэффициент подпомеховой видимости аппаратуры защиты [26]; q —
коэффициен г различимости при заданных показателях эффективности
обнаружения или измерения
Плазменные образования возникают за счет сжигания в атмосфере
углеводородного топлива, обычно со специальными легкоионизируемыми
добавками. Так создаются локальные ионизированные области, непрозрачные для
сигналов, используемых средствами радиоэлектронных разведок. Локальные
300
Глава 3. Основы радиоэлектронного подавления
плазменные облака могут возникать и при движении ЛА (прежде всего - головных
частей баллистических ракет) в разреженной высотной атмосфере. Глобальные
плазмообразования в атмосфере, а точнее, большие пространственные области
высокой ионизации, образуются за счет ударной ионизации молек) л атмосферных
газов частицами высокой энергии, образующимися при высотных ядерных взрывах.
Модификация среды на трассе распространения сигнала,
предусматривающая искусственное создание плазменных образований, может
использоваться для радиомаскировки. При взаимодействии ЭМВ с ионизированной
средой заряженные частицы колеблются в такт изменениям напряженности
электрического поля. Эффект поглощения энергии становится заметным, когда
частота столкновений возрастет настолько, что значительная часть энергии
колеблющихся электронов в результате столкновений преобразуется в
кинетическую энергию других частиц.
Коэффициент поглощения радиоволн, измеряемый в децибелах на
километр длины трассы распространения их в плазменном облаке [43],
(3-177)
со~ + п
где АГ - средняя концентрация электронов в плазменном облаке: п - число
соударений электронов с ионами, атомами и молекулами газов. Для создания
условий требуемого поглощения ЭМВ локальным плазменным образованием
нужно в облаке плазмы обеспечить концентрацию электронов А’* 2.2-10'ДГ2.
Заметное поглощение радиоволн имеет место на малых высотах уже при
концентрациях К - 10й... 1014.
Ионизацию атмосферных газов с образованием свободных электронов
можно получить в результате реакций термического или взрывного типа.
Работающие на большой высоте двигатели могут генерировать плазму с высокой
концентрацией заряженных частиц, если добавить в топливо легко ионизированные
вещества (легкие металлы и некоторые их соединения). Под влиянием солнечного
света нейтральные металлы подвергаются фотоионизации, увеличивая
продолжительность жизни плазменного облака. В качестве ионизирующих добавок
к топливам могут использоваться алюминий с нитратами калия или цезия.
Недостатками таких методов формирования ионизированных образований
являются низкая эффективность преобразования вещества в ионы и ограничения по
высоте (не менее 100 км над поверхностью Земли) формирования облака.
На меньших высотах можно сформировать ионизированные облака за счет
распыления из сопла двигателя микросфер, покрытых аблирующим материалом
(гидратами лития или натрия). Аблирующее покрытие уносится струей горячего
газа и под действием фотонов солнечного излучения подвергается фотоио] шзации,
образуя положительно заряженные ионы металлов и свободные электроны.
Расчеты и эксперименты показывают высокие значения КПД такого метода:
из каждого кг гидрата лития LiH получается 875 г ионизированного элементарного
лития и ~7-1022 свободных электронов, в объеме 100 м3 можно создать
электронную концентрацию А ~ 10". Метод может применяться на высотах 15.. .60
Глава 3. Основы радиоэлектронного подавления 301
км [19]. Недостатками являются: влияние влажности воздуха, вещества
небезопасны в обращении, высокая стоимость.
Ослабление ЭМВ происходит вследствие наличия свободных электронов в
среде распространения этой волны. Наличие необходимого количества электронов
в воздухе позволит обеспечить поглощение излучения, падающего на ЛА и необхо-
димого для требуемого уровня снижения ЭПР. Если же соответствующим образом
управлять концентрацией свободных электронов, то можно производить модуля-
цию переотраженных сигналов. В результате такой модуляции сигнал, принятый
приемником подавляемой РЛС, может коренным образом отличаться от зондиру-
ющего сигнала со всеми вытекающими отсюда последствиями. Преимущество та-
кого способа - отсутствие специфических требований к форме и конструкции ЛА.
Создать необходимое количество свободных электронов в воздухе, окру-
жающем Л А, возможно путем его принудительной ионизации. Ионизацию воздуха
можно осуществить потоками УФ, рентгеновского и / -излучений, а также а - и
р -частицами. Предлагается использовать для этой цели ускоритель электронов.
Электроны, получившие необходимую для ионизации воздуха энергию в ускорите-
ле, инжектируются в воздух, создавая вокруг ЛА слой плазмы.
В зависимости от значений диэлектрической проницаемости £ ионизиро-
ванной газообразной среды (атмосферы), определяемой такими параметрами, как
несущая частота со сигнала подавляемой РЛС, концентрация свободных электро-
нов А’г, время релаксации электронов г и круговая плазменная частота
сор =56.5л/а7, плазма может быть либо радиопрозрачной, либо радиопоглощаю-
щей, либо радиоотражающей.
При создании с помощью ускорителя слоя плазмы площадью 500 м2 с
ослаблением излучения на 100 дБ на длине волны А = 3 см мощность, потребляе-
мая от электрической сети ЛА, должна составлять —I МВт. Все вышесказанное
справедливо в том случае, когда отсутствует отражение энергии ЭМВ от границы
раздела «воздух - плазма». Это отражение будет малым только в случае плавного
уменьшения концентрации электронов по направлению от выхода ускорителя элек-
тронов к РЛС, облучающей ЛА.
Существуют другие способы управления средой. Например, способ иониза-
ции воздуха излучением радиоизотопов, таких как полоний-210 или кюрий-242.
Основным источником ионизации для указанных изотопов является поток а -
частиц с энергией ~5,3 МэВ. Предлагается наносить такое покрытие с поверхност-
ной радиоактивностью -5,5 Кю см . При такой поверхностной радиоактивности
коэффициент отражения от металла, покрытого изотопом, уменьшается: на 1...2 дБ
при давлении воздуха р = 1 атм; на 10 дБ при р = 0,1 атм, что соответствует высоте
Н ~1 5 км; на 18 дБ при р - 0,01 атм, Н = 30 км; частоты облучения 2... 10 ГГц.
Время нормального функционирования такого покрытия определяется временем
полураспада изотопа (для полония-210 составляет 138 дней).
Степень ионизации, обусловленная действием лазерного излучения, при
атмосферном давлении может составить Ю^.-.Ю1' ионов см3. Концентрация ионов
в лазерном следе, повышенная в результате дополнительного разряда, может
302 Глава 3. Основы радиоэлектронного подавления
составить 10'6 ионов'см’ [40]. Самый мощный источник ионизации атмосферных
газов - ядерный взрыв. Взрывы на высоте ниже 16 км не вызывают
продолжительной и устойчивой ионизации. Области сильного поглощения и
отражения могут образовываться при наземных взрывах. Но они связаны не с
ионизацией, а с выбросом в атмосферу большого количества пыли, водяного пара и
аэрозолей. При взрывах на больших высотах порядка 40...50 км образуются
устойчивые области с невысокой концентрацией электронов N « 1О'°...1О * ионов/м3
[19]. На ионизацию атмосферных газов расходуется 10...80 % энергии высотного
ядерного взрыва. Эти области могут существовать несколько часов. Ионизация за
счет высотного ядерного взрыва способна оказывать длительное влияние в
основном на работу РЭС метрового диапазона.
3.15. Противодействие РЛС с использованием
радиолокационных ложных целей и ловушек
Мощным способом противодействия РЛС является создание ложной
сигнальной обстановки путем использования ложных радиолокационных целей
(ЛЦ) и ловушек. Перед ЛЦ стоит задача ввести в заблуждение РЛС или ракету
противника и заставить их принять ложную цель за истинную. ЛЦ не изменяют
электрических свойств среды распространения сигналов. ЛЦ искажают свойства и
характеристики информационной среды функционирования РЛС, имитируя
реальные цели.
Ложная цель представляет собой малоразмерное искусственное устройство
(малоразмерный объект) с пассивными отражателями, имитирующее по отража-
тельным характеристикам реальные объекгы. С помощью ЛЦ на экранах индикато-
ров различных РЭС образуются отметки, подобные отметкам реальных объектов.
Это усложняет обстановку, дезориентирует операторов и системы целераспределе-
ния, увеличивает время опознавания целей, создавая возможность ударной авиации
выполнить свою задачу. В качестве пассивных ЛЦ применяют:
• уголковые отражатели;
• лин }ы Люнеберга и 1 [тона-Липмана;
• переиз. [учающие антенные решетки Ван-Атта;
• аэростаты с металлическим покрытием;
• большие металлические экраны [19].
По месту (среде) применения ЛЦ могут быть наземными, воздушными
космическими и морскими. Вектор признаков ЛЦ должен содержать минимум три
основных компоненты: а} - амплитуду отраженного от ЛЦ сигнала, а. - скорость.
а3 - ускорение. Основными задачами применения ЛЦ в контурах целераспреде-
ления являются:
1) дезорганизация РЛС и перегрузка системы обработки данных;
2) увеличение времени на опознавание образа цели:
3) отвлечение ударных средств ПВО на поражение ЛЦ [15].
В качестве радиолокационных ЛЦ используются ракеты, БПЛА, а также
ионизированные локальные области пространства, обладающие динамикой движе-
Глава 3. Основы радиоэлектронного подавления
303
ния имитируемой цели, при распылении или сжигании в атмосфере легко ионизи-
рующихся элементов. Эффективность применения ЛЦ может быть оценена сниже-
нием вероятности поражения прикрываемых самолетов. Вероятность поражения
самолета, прикрываемого п , ЛЦ, можно определить как [22]
(3.178)
где т - число выпущенных ракет (снарядов); N - количество самолетов, летящих в
боевом порядке; Р} - вероятность поражения самолета одной ракетой (снарядом).
Для увеличения ЭПР ЛЦ используют уголковые, линзовые и дипольные ра-
диоотражатели, пассивные антенные решетки или активные усилители-
ретрансляторы. Активные усилители-ретрансляторы могут быть эффективны в
метровом и дециметровом диапазонах волн на больших удалениях от подавляемых
РЛС в связи с их ограниченными энергетическими возможностями. Пассивные пе-
реизлучатели (отражатели) обеспечивают получение большой ЭПР ложной цели,
соизмеримой с ЭПР прикрываемой цели в сантиметровом диапазоне.
Ловушка представляет собой техническое средство, имитирующее объект
(цель) для РЭС управления (наведения) оружием и используемое для увода от
целей управляемых боеприпасов или срыва автосопровождения цели РЛС. Сигнал,
создаваемый ловушкой, должен быть аналогичен сигналу, образуемому
защищаемым объектом по различным характеристикам (амплитудным,
энергетическим, временным и др.).
Ловушки по способу применения могут быть управляемыми, буксирующи-
ми и сбрасываемыми. Управляемые ловушки представляют собой ракеты с пас-
сивными или активными переизлучателями ЭМ энергии. На них могут устанавли-
ваться как стартовые, так и маршевые двигатели, которые обеспечивают управляе-
мый полет по программе в течение нескольких минут. Такие ловушки обеспечива-
ют срыв наведения ракеты за счет перенацеливания на себя атакующей ракеты. Для
ловушек разработаны сверхминиатюрные ЛБВ. обеспечивающие уровень выходной
мощности 100. 200 Вт и полос} частот 3 ГГц и при этом имеющие малые массу и
размеры. Возможным источником питания ловушки служит батарея термоэлемен-
тов, способных обеспечить мощность 1 кВт в течение 5 мин.
Цель буксируемой ловушки (пассивной, активной) - создание излучения
сигналов, аналогичных по структуре сигналам, отраженным от защищаемого
самолета, и превосходящих их по мощности. В этих условиях ГСН атакующей
ракеты, принимая оба указанных сигнала, наводится на энергетический центр.
Поскольку мощность сигнала ловушки существенно превосходит мощность
отраженного от самолета сигнала, атакующая ракета практически наводится на
ловушку, поражение самолета ракетой исключается [15]. Трос-буксир удерживает
ловушку на определенном расстоянии от самолета. Если существующие тенденции
сохранятся, то буксируемые активные ловушки могут стать чуть ли не
единственным метолом самозащиты самотетов от современных и перспективных
средств поражения.
304
Глава 3. Основы радиоэлектронного подавления
Сбрасываемые ловушки представляют собой активный излучатель или
пассивный переизлучатель ЭМ (акустической) энергии. ППОД, будучи
доставленными в зону непосредственных боевых действий, выполняют роль маяка
для оружия противника с самонаведением на ИИ и средств ПВО, управляемых с
помощью РЛС. Кроме обеспечения перенасыщения, они также могут создавать
эффективные дезинформирующие помехи на рабочих частотах РЛС и нарушать
нормальную работу системы ПВО. Достоинствами ППОД являются: возможность
доставки на близкие расстояния к подавляемым РЛС; сравнительно низкая
энергетика; простота конструкции. Важнейшими характеристиками ППОД
являются: габариты, масса и потребляемая мощность.
Активные буксируемые радиолокационные ловушки (АБРЛ) могут
быть использованы для защиты ЛА различных типов. Первое боевое использование
активных буксируемых ЛЦ имело место в операциях стран НАТО против Югосла-
вии и было признано весьма успешным. По мнению зарубежных военных специа-
листов, буксируемые ЛЦ с активными излучателями могут стать единственным
средством ИЗ самолетов от ЗУР и ракет «воздух-воздух» [102].
Наиболее широкое применение АБРЛ предусматривается для защиты само-
летов ФА. Они также с успехом могут быть использованы для защиты больших са-
молетов типа ДА, ВТ А и малогабаритных объектов типа ДПЛА. Основной задачей
АБРЛ является защита ЛА путем перенацеливания атакующей УР на завершающем
этапе работы комплекса перехвата (на этапе наведения оружия). Объектами проти-
водействия для АБРЛ будут системы и каналы наведения оружия средств ПВО
противника. АБРЛ должна обеспечивать сектора защиты ±60’ по азимуту и ±30° по
углу места в передней (ППС) и задней (ЗПС) полусферах. Излучение должно осу-
ществляться поочередно либо в ППС, либо в ЗПС в зависимости от направления
атаки по команде с борта ЛА.
Структурная схема автономной АБРЛ представлена на рисунке 3.72 (ВУК.
ПУК - входной и предварительный усилители-коммутаторы, АФМ - амплитудно-
фазовый модулятор, ОУМ - оконечный усилитель мощности, ФМС — формирова-
тель модулирующих сигналов, ВИП - вторичный источник питания, КТ - кабель-
тросс) [103].
Рис. 3.72. Структурная схема автономной АБРЛ
Глава 3. Основы радиоэлектронного подавления
305
Применительно к защите ФА автомат выброса должен обеспечивать выпуск
АБРЛ на полную длину буксировочного троса (около 100 м) и выход ее аппаратуры
на рабочий режим за время не более 5 с. В случае необходимости трос с буксируе-
мой ловушкой должен быть немедленно отделен от ЛА по команде экипажа, что
позволяет отнести АБРЛ к устройствам одноразового использования. Максималь-
ное время непрерывной работы АБРЛ одноразового использования по предвари-
тельным оценкам не должно превышать 30 мин.
Для других типов ЛА, например, для самолетов ДА и ВТ А, требования к
оперативности (быстродействию) применения АБРЛ могут быть снижены, но при
этом возрастают требования к продолжительности ее работы. В связи с этим целе-
сообразно наряду с разработкой одноразовых АБРЛ разрабатывать также АБРЛ
многоразового использования.
Структурная схема АБРЛ с радиочастотной связью с бортом ЛА показана
на рисунке 3.73 (ОПУ - оптического приемное устройство, ВУ - входной СВЧ-
усилитель, ОКТ - оптический кабель-тросс) [103].
Рис. 3.73. Структурная схема АБРЛ с радиочастотной связью с бортом ЛА
В состав устройства индивидуальной защиты на основе АБРЛ входят: 1)
собственно АБРЛ; 2) автомат выброса АБРЛ; 3) блок управления.
Как показали исследования [103], с точки зрения аппаратурного построения
целесообразна разработка АБРЛ двух типов:
1) автономной АБРЛ, осуществляющей прием, обработку и переизчучение
сигналов РЭС У О, при этом с борта ЛА на АБРЛ должны подаваться по кабель-
тросу электропитание и команды управления режимами работы аппаратуры АБРЛ
(зарубежным аналогом является буксируемая ловушка типа AMALE-50 компании
Raytheon Systems);
2) АБРЛ с радиочастотной связью бортов ЛА и ловушки, при этом АБРЛ
усиливает и излз'чает сигнал, сформированный на борту ЛА и передаваемый на
борт ловушки посредством волоконно-оптической системы передачи СВЧ-сигнала
(ВОСП-СВЧ) по электрооптическому кабель-гросу; по этому же кабелю должны
подаваться электропитание и команды управления на АБРЛ (зарубежным аналогом
является буксируемая ловушка типа FOTD (АНALE-55), входящая в состав инте-
грированной системы РЭП IDECM RFCM [102]).
306 Глава 3, Основы радиоэлектронного подавления
Для применения автономной АБРЛ требуется минимальный состав средств
РЭБ защищаемого ЛА, вследствие чего она может быть использована как в составе
разрабатываемых КРЭП, так и при модернизации средств РЭБ самолетов без суще-
ственной доработки их бортов. АБРЛ с радиочастотной связью с бортом ЛА потен-
циально позволяют обеспечить более высокую эффективность их применения и
существенно расширить функциональные возможности КРЭП ЛА. В основу по-
строения аппаратуры АБРЛ положен принцип использования базовых унифициро-
ванных СВЧ-модулей, применяемых в разных типах АБРЛ.
Блок управления обеспечивает функциональную связь АБРЛ с КРЭП, в том
числе:
• взаимодействие с бортовым КРЭП ЛА для выработки управляющих команд
на выпуск АБРЛ и выбор режима ее работы;
• индикацию количества имеющихся на борту ЛА ловушек и их состояние
(количество использованных и неиспользованных АБРЛ, наличие выпущенных
АБРЛ, исправность АБРЛ);
• формирование команды на выпуск АБРЛ и ее отделение от ЛА (по команде
от КРЭП либо от пилота);
• подачу электропитания на АБРЛ и контроль (индикацию) энер] опотребле-
ния по цепям питания;
• формирование команд для управления режимами работы АБРЛ (в соответ-
ствии с командами от КРЭП либо от пилота).
В общем случае для функционирования АБРЛ требуется следующее ин-
формационное обеспечение:
• ракурс атаки РЭС У О (для выбора сектора защиты и принятия решения о
необходимости совершения маневра ЛА);
• фазу атаки РЭС УО (сопровождение цели, наведение УР) для принятия ре-
шения о выпуске АБРЛ;
• тип РЭС УО (для выбора вида формируемого сигнала).
Для оснащения самолетов типа ФА рекомендуется использовать от двух до
четырех АБРЛ. По мнению ряда специалистов, активные ложные РЛ цели (ЛРЛЦ) с
повышенным энергопотенциалом и с имитапией ЭПР-цели имею! большую эффек-
тивность. Для этого используют автоматическое переключение с режима работы
ЛРЛЦ с временной развязкой («прием/передача») в режим работы ловушки с про-
странственной развязкой и непрерывным излучением, благодаря чему повышаете
энергетический потенциал на завершающем этапе наведения.
На рисунке 3.74 представлена структурная схема ЛРЛЦ (Ацрд, Апрм - пере-
дающая и приемная антенны; УМ - усилитель мощности; ИЛИ - элемент ИЛИ: ГИ
- ген ера юр импульсов; Р - разветвитель: ПУ - предварительный усилитель; ЛЗ -
линия задержки: МВ - мультивибратор: АД - амплитудный детектор: ПН - пере-
ключатель напряжения; ИНТ - интегратор: ДН - делитель напряжения: К - компа-
ратор) [81].
На время запоминания сигнала в ЛЗ (в режиме «прием») стробируюшг”
импульс с выхода ГИ через элемент ИЛИ поступает на стробирующий вход ГВ i
открывает его. Сигнал от РЛ ГСН. атакующей самолет ракеты, с выхода Апрм через
Р и открытый ПУ поступает на вход ЛЗ. На время запоминания сигнала стробир'-
Глава 3. Основы радиоэлектронного подавления
307
ющий импульс в передающем канале отсутствует и УМ закрыт. По окончании вре-
мени запоминания стробирующий импульс со второго выхода ГИ через элемент
ИЛИ поступает на стрбирующий вход УМ и открываетего на время переизлучения
запомненного сигнала (режим «передача»). Поскольку стробирующие импульсы
режимов приема и передачи являются противофазными, ПУ на время передачи за-
крывается. Период процесса «прием/передача» Т = (2,2...2,5)ГЗАП (ГЗАП - время за-
поминания сигнала в ЛЗ).
Рис. 3.74. Структурная схема активной ЛРЛЦ
С выхода Аирм часть суммарного сигнала от ГСН и Апрд (в режиме «пере-
дача») ответвляется Р на АД. детектируется и поступает на вход ПН. который пере-
дает сигнал на вход ИНТ синхронно с открыванием УМ. С выхода ИНТ сигнал в
виде постоянного напряжения с амплитудой, соответствующей суммарной мощно-
сти двух сигналов - сигнала от РЛ ГСН и сигнала от Апрд, через ДН с коэффициен-
том деления Д’ < 2 поступает на инвертирующий вход К. В режиме «прием» со
входа ПН сигнал, соответствующий только сигналу ГСН, через нормально замкну-
тый канал переключателя и ИНТ в виде постоянного напряжения с амплитудой,
соответствующей мощности принятого сигнала от ГСН, поступает на неинверти-
рующий вход К. В усилительном тракте ретранслируемый сигнал наделяют ампл и-
тудной и или фазовой модуляцией для имитации флуктуации ЭПР реальной цели.
Уголковые отражатели (УО) представляют собой конструкцию взаимно-
перпендикулярных металлизированных плоскостей, которые образуют систему из
трех зеркал. Важнейшее свойство УО — значительная доля ВЧ энергии, падающая
на него с любого направления, отражается обратно в сторону облучающей РЛС.
Поэтому У О даже небольших размеров обладают значительной ЭПР. По форме
граней УО различают: треугольные, прямоугольные. полукруглые.
308
Глава 3. Основы радиоэлектронного подавления
восьмиугольные. ЭПР У О связана с длиной ребра а и длиной волны Л
следующими соотношениями [15, 43]:
4 ос4
ст4 =—тт— {треугольные УО),
oci
сгп =12тг— {прямоугольные У О),
ос
сгэ = Зтг — {восьмиугольные У О с полукруглыми гранями).
(3.179)
Максимальная ЭПР У О возрастает при увеличении размера граней и
уменьшении длины волны. Основные недостатки уголковых отражателей - малая
скорость движения в атмосфере и узкая ширина ДН, которая составляет 40...50е .
Для увеличения ширины ДН несколько УО, ориентированных в разные стороны,
объединяют вместе. Небольшая ширина ДН является одним из недостатков У О,
этот недостаток в значительной мере устранен в линзе Люнеберга, обладающей
достаточно широкой ДН. Заметное развитие получили пассивные средства
имитации подвижных целей, вносящие частотные искажения в отраженный сигнал:
использование вращающейся сборки объемных У О, а также УО с вибрирующей
гранью (вибрация может создаваться разными механическими и
электромагнитными приводами, акустическими и пневматическими устройствами).
Линза Люнеберга представляет собой шар из нескольких слоев
диэлектрика. Одна из полусфер этого шара покрыта металлическим слоем.
Диэлектрическая проницаемость е в приповерхностном слое шара близка к
диэлектрической проницаемости воздуха, а по мере продвижения внутрь шара она
возрастает. Коэффициент преломления п изменяется в зависимости от расстояния
г до центра линзы радиусом согласно выражению
И = 72-(г/Л0)2 ,
(3.180)
из-за чего падающий на линзу параллельный пучок ЭМВ фиксируется в одной
точке на внутренней металлической поверхности сферы. Сфокусированные ЭМВ
отражаются и, пройдя в обратную сторону через слои диэлектрика, уходят в виде
параллельного пучка в направлении облучающей РЭС противника (рисунок 3.75).
Максимальную ЭПР линзы Люнеберга можно вычислить как [19]
<7л=4л-3^-. (3.181)
Важной характеристикой пассивных ЛЦ является диаграмма обратного
рассеяния (ДОР, ДН на отражение). Подобная диаграмма для линз Люнеберга
приведена на рисунке 3.76. Здесь же показаны ДОР уголкового отражателя (1) и
металлической пластины (2).
Для расширения углового диапазона переизлучения ЭМВ используют
кольцевую металлизацию сферы. Изменяя положение и ширин) кольца, можно
формировать различные ДН. Одной из характеристик линзы Люнеберга является ее
масса. Характеристики ЛЦ на основе линз Люнеберга приведены в таблице 3.5 [81].
Глава 3. Основы радиоэлектронного подавления
309
Основным недостатком линзы Люнеберга является сложность изготовле-
ния и, следовательно, высокая стоимость [15]. Существует способ набора линзы
Люнеьерга из отдельных кубиков с различными коэффициентами преломления.
Рис. 3.76. ДОР линз Люнеберга
РЕФЛЕКТОР
Рис. 3.75. Траектория лучей в линзе
Люнеберга
Таблица 3.5 - Характеристики ЛЦ на основе линз Люнеберга
Диаметр, см ЭПР, м2 Масса, кг
Л = 3,2 см Л = 10 см
7,65 0,255 0,026 0,136
10 0,80” 0,083 0.227
12,7 1,97 0,202 0,408
20.2 12,9 1,32 1.588
25,4 31,5 3,23
40,7 206 21,1 11,6
91.5 5292 542 136
121,5 16762 1713 311
Принципиально возможно создание линзы без металлических колец с
изотропным переизлучением (линза Итона-Липмана). Для этого коэффициент
преломления п должен меняться по закону
Н D
п = -1. (3.182)
v г
Траектории лучей в линзе Итона-Липмана с круговым переизлучением
изображены на рисунке 3.77. Вместе с уголковыми и линзовыми отражателями
могут применяться переизлучающие антенные решетки. Переизлучающие
антенные решетки, строящиеся на основе решеток Ван-Атта, выполненные в
пассивном варианте, также могут играть роль ЛЦ (рисунок 3.78).
310
Гпава 3. Основы радиоэлектронного подавления
Решетки Ван-Атта выполнены из большого количества элементарных
антенн (диполей или спиралей). По способности фокусировать ЭМВ такие решетки
подобны трехгранным уголковым отражателям. Решетки Ван-Атта представляют
собой совокупность приемно-излучающих антенных элементов (например,
полуволновых диполей 1-6), закрепленных с шагом 0,5Я на экране на расстоянии
0.25Я от него и попарно соединенных коаксиальными кабелями, имеющими
одинаковые электрические длины [15]. При этом ЭМВ, принятая диполем 1, будет
излучаться диполем 6 и наоборот. Решетки рассчитываются на отражение волн с
любой поляризацией. Для этого диполи располагают на металлическом экране под
различными углами (как правило, каждая пара под углом 90" к соседней).
Рис. 3.77. Ход лучей в
линзе Итона-Липмана
Рис. 3.78. Пассивный ответчик Ван-Атта
Максимальная ЭПРрешетки Ван-Атта равна [10]
ств.д=^№Л2, (3.183)
гдеДт- количество полуволновых диполей.
Решетка Ван-Атта обладает следующими преимуществами перед
уголковыми и линзовыми отражателями [4, 19]:
1) диаграмма переизлучения шире, чем у У О:
2) отраженный (переизлученный) сигнал можно промодулировать;
3) имеется возможность изменять направление переизлучения:
4) можно изменять поляризацию псреизлученного сигнала;
5) возможно обеспечить угловое сканирование диаграммы переизлучения.
Недостатком решетки Ван-Атта помимо сложности конструкции
является ее настроенность на конкретное значение частоты /0 и, следовательно,
малая диапазонность А/ . Общим недостатком, характерным для ЛЦ, является их
сравнительно малая подвижность в пространстве, вследствие чего отраженные от
них радиосигналы могут подавляться в РЭС противника с помощью устройств
селекции движущихся целей. На практике нередко используют более дорогой
способ перемещения ЛЦ в атмосфере - специальные отстреливаемые ракеты.
Активно-пассивные (комбинированные) помехи создаются путем одно-
временного применения активных и пассивных помех, с помощью подсвета пас-
сивных помех активными. Совместное применение активных и пассивных помех в
Глава 3, Основы радиоэлектронного подавления
311
интересах повышения эффективности радиоэлектронного подавления РЛС возмож-
но в различных вариантах с целью:
• повышения эффективности активных помех, непосредственно воздейству-
ющих на РЛС;
• преднамеренного изменения угла прихода помехового излучения путем
подсвета облака ДО;
• увеличения отношения мощностей помехи и полезного сигнала на входе
подавляемого приемника вследствие постановки в зоне обзора РЛС в створе со
САП полосы отражателей достаточно большой плотности [15].
Уравнение РЭП активно-пассивными помехами может быть записано в
следующем виде
g _ А/пщл у ‘Здо ^СР
п [pJBx PCGC Д/п v <тц L- '
(3.184)
где PnGn - энергетический потенциал САП; P{GC - энергетический потенциал
РЛС подсвета цели; Д/ - полоса пропускания линейной части приемника подав-
ляемого РЭС; - ширина спектра помехи; у - поляризационный коэффициент;
ст - ЭПР части облака ДО, попадающей в элемент разрешения РЭС. определяе-
мый его ДНА; сгц - ЭПР самолета; £)( - расстояние от самолета до РЛС подсвета;
L - удаление облака отражателей от самолета; DCP и £>Г1Р - рассз ояния от ракеты
до самолета и облака отражателей [2].
Во многих случаях при проведении практических расчетов можно полагать
£>пр = £>т. Уравнение РЭП в каноническом виде, разрешенное относительно мини-
мальной дальности подавления РЛС, имеет вид
<3-185)
гпе С - Рс&с .
Активно-пассивные (комбинированные) помехи могут с успехом приме-
няться как против когерентных РЛС с непрерывным сигналом, так и против РЛС с
селекцией движущихся целей (СДЦ), что может сущешвенно повысить эффектив-
ность РЭП [15]. Эти помехи являются, как правило, перенацеливающими и исполь-
зуются для индивидуально-взаимной защиты ЛА от средств ПВО.
3.16. Снижение заметности летательных аппаратов
военного назначения
Комплексные исследования и разработки методов снижения вероятности
обнаружения объектов вооружения и военной техники в последние годы имену ют-
ся собирательным термином «технология Stealth». Применение технологии «Стеле»
(от англ, stealth - тайный, скрытный) - одна из самых заметных тенденций в созда-
нии новых боевых самолетов в поел едние годы. Однако ее использование заставля-
312
Глава 3. Основы радиоэлектронного подавления
ет конструкторов идти на компромисы, негативно сказывающиеся на летных харак-
теритсиках и массе боевой нагрузки. Программа Stealth объединила исследователь-
ские, конструкторские и технологические направления, ставящие целью снижение
РЛ и тепловой (аметности объектов за счет совершенствования форм их наружной
поверхности, устранения блестящих точек и применения специальных конструкци-
онных материалов. Снижение РЛ заметности прямо связано с уменьшением ЭПР
объекта. В рамках программы Stealth была поставлена задача снизить ЭПР самоле-
тов до 0,001...0,01 м~, что позволяет создать самолет практически невидимый для
моностатических РЛС [10, 15, 55].
Первым малозаметным самолетом, принятым на вооружение ВВС США,
стал Lockheed F-117A, поднявшийся в воздух 18 июня 1981 года. Следующим при-
нятым на вооружение «самолетом-невидимкой» стал стратегический бомбарди-
ровщик В-2 А фирмы Northrop. Поверхность F-l 17А собирается главным образом из
фасеток в виде многоугольников, образующих клин с прямыми ребрами и плоски-
ми гранями. Клин с прямыми ребрами, но с искривленной поверхностью играет
ключевую роль в дизайне В-2А, где ребра формируются с помощью объединения
неглубоких верхних и нижних поверхностей вдоль полигональной платформы.
В рамках программы ATF (Advanced Tactical Fighter) ВВС США делали вы-
бор между самолетами Lockheed YF-22 и Northrop YF-23. Победитель был объяв-
лен 23 апреля 1991 года, им стал YF-22. Истребитель F-22 Raptor имеет крыло пло-
щадью 78 м". Следующее поколение самолетов было создано в рамках программы
JSF (Joint Strike Fighter). В конце 2001 года после этапа создания самолетов-
демонстрантов победителем стала фирма «Lockheed Martin» со своим проектом X-
35 (истребитель F-35), конкурентом которого был самолет Х-32 фирмы «Boeing».
Еще шире используется технология «Стеле» на создаваемых перепек.' ивных
беспилотных боевых самолетах (ББС или UCAV - unmanned combat air venicle).
Отсутствие кабины оставляет конструкторам более широкое поле деятельности. В
США созданы беспилотные демонстраторы технологий Boeing Х-45 и Northrop
Grumman Х-47. В Европе концерн «ВАЕ Systems» работает над демонстратором
ББС Taranis, а мультинациональный консорциум, возглавляемый фирмой
«Dassault», строит демоне гатор Neuron [19].
Основные принципы компоновки малоотражающего объекта, на которых
основывается технология Stealth, сводятся к следующему:
1) совершенствование конфигурации планера, что предполагает уменьше-
ние размеров плоскостей, устранения возникновения «блестящих точек», образую-
щихся стыками поверхностей, острыми кромками, уголковыми элементами;
2) специальную конструкцию воздухозаборников и выхлопных сопл двига-
телей, вынос их в верхнюю часть ЛА;
3) освоение технологии и производства композиционных Материалов, не от-
ражающих ЭМ энергию, с целью замены ими материалов в конструкции ЛА;
4) создание высокоэффективных покрытий с различными импедансами, по-
глощающих ил и рассеивающих энергию РЛ сигналов;
5) уменьшение ПК излучений двигателей ЛА [15].
К не, юст аткам технологии следует огнести cj гедующее:
Глава 3, Основы радиоэлектронного подавления 313
1. ЭПР может возрасти в 20... 100 раз, когда у само.тета-«невидимки» от-
крываются какие-либо створки. Створки приходится специально проектировать и
открывать непосредственно перед выполнением операции и закрывать сразу после
ее завершения.
2. Существует ряд разработок, которые могут свести на нет преимущества
этой технологии. Усовершенствованные каналы обмена данными могут позволить
паре истребителей реализовать принцип бипозиционного радара, у которого пере-
датчик и приемник разнесены на значительное расстояние и который позволяет
фиксировать слабое излучение самолета-«невидимки». Ведутся разработки моду-
лей приемников и передатчиков на основе нитрида галлия. По сравнению с приме-
няемыми сегодня модулями на основе арсенида галлия они работают с более широ-
ким спектром излучения, что сводит на нет преимущества РПМ, которые способны
выполнять свои функции лишь в узком диапазоне длин волн.
В связи с созданием самолетов-«невидимок» (подобных В-2 и F-117A) ак-
тивно обсуждается проблема подавления РЭС любого вида так называемой «анни-
гилирующей» помехой (аннигиляция (.чат) - nihil - ничто, превращение в ничто,
уничтожение). Эффект аннигиляции основан на теоретической возможности созда-
ния в апературе любой приемной антенны помехового ЭМП, амплитудно-фазовые
характеристики которого подобраны стороной РЭБ таким образом, что интерфе-
ренция помехового и сигнального полей приводит к их взаимной компенсации. В
результате на выходе антенной сист емы не будет прису гст вовать сигнал и, вслед-
ствие этого, исключится возможность приема и извлечения полезной информации.
Если проблема создания аннигилирующей помехи будет решена, коренным
образом будет изменен и весь облик бортовых систем РЭБ. По мнению иносгран-
ных специалистов, технология Stealth заставит отказаться от бортовой многоцеле-
вой микроволновой ФАР поиска, сопровождения, подсветки целей и решения дру-
гих задач. Технология Stealth исключает использование активных помех ИЗ в об-
щепринятом понятии. Большие многоцел евые САП уйдут в прошл ое. Это связано с
эффектом маяка, который присущ любому постановщику активных помех. Инте-
грация систем ПВО со средствами РТР будет способна нейтрализовать действие
средств РЭП [13].
3.16.1. Радиолокационная заметность ЛА и методы
уменьшения эффективной поверхности рассеяния
РЛС — основное средство обнаружения ЛА. Уменьшение ЭПР является ос-
новным направлением по снижению РЛ заметности ЛА. Ощутимого снижения РЛ
заметности можно добиться только в случае резкого снижения ЭПР. Уменьшение
заметности авиационной техники является одной из важнейших задач по скрытию
ЛА от обнаружения РЭС и позволяет применять ПП с меньшей мощностью, ис-
пользовать меньшее количество радиоотражателей и ловутиек. Термин «радиолока-
ционная заметность» является одним из основных параметров, характеризующих
уровень оснащенности и боевых качеств современных объектов военной техники и
определяется относительной величиной вторичного излучения объекта при его
зондировании современными РЛС обнаружения и сопровождения [104].
314 Глава 3, Основы радиоэлектронного подавления
Заметность ЛА в радиолокационном диапазоне является одним из главных
факторов, влияющих на их живучесть. Уменьшение уровня РЛ заметности истре-
бителя ведет к снижению дальности его обнаружения РЛС ПВО и самолетов про-
тивника, а в сочетании с применением активных и пассивных систем РЭП (САП и
устройств выброса ДО) может сделать его практически невидимым для РЛС и
РГСН. Основные направления уменьшения РЛ заметности ЛА'.
• изменение внешней формы объекта для рассеяния и ослабления падающих
на него ЭМВ (малоотражающая форма объекта), углы различных поверхностей
формируют пики отраженных сигналов РЛС, согласование и несовпадение кромок
поверхностей планера резко снижает количество «пиков» отраженного сигнала,
планер полност ью образуется поверхностями двойной кривизны;
• использование в качестве основных конструкционных мат ериалов неметал-
лических композитов (железный карбонил), способных поглощать и ослаблять
ЭМВ;
• применение специальных радиопоглощающих покрытий, способствующих
уменьшению отраженного сигнала;
• использование радиопоглощающих конструкций (часть энергии излучения,
проникшей внутрь ЛА, поглощается сотовыми конструкциями);
• управление рассеянием и поглощением ЭМВ, контроль излучения соб-
ственного БРЭО (технология EMCON);
• противодействие уверенному обнаружению и распознаванию объектов пу-
тем имитации больших ложных (в т.ч. и «отводящих») ЭПР с помощью пассивных
отражателей и активных излучателей (СВЧ-генераторов);
• экранирование радиолокационно-контрастных элементов конструкции ЛА и
его вооружения (последнее касается таких «заметных» агрегатов, как компрессоры
реактивных двигателей, ракеты на внешней подвеске, антенны БРЛС; при облуче-
нии самолета из ППС они дают наибольший вклад в его ЭПР) [15, 19, 104].
Уменьшение величины ЭПР путем выбора малоотражающей формы
объекта. Заметность объектов для средств РЛР принят о оценивать величиной ЭПР
(3.186)
где £ е [0; 1] - коэффициент деполяризации рассеянного целью поля; Ротр - мощ-
ность отраженного РЛ целью сигнала; - плотность потока мощности РЛ сигна-
ла в окрестности точки расположения цели: Га. ft) - значение диаграммы обрат-
ного рассеяния (ДОР) цели в направлении на РЛС: 5 - полная площадь рассеяния
цели [15].
Физически ЭПР представляет собой размерный коэффициент пропорцио-
нальности межц} мощностью отраженного РЛ целью сигнала и плотностью потока
мощности ЭМП, созданного антенной РЛС в окрестности точки расположения це-
ли. Объекты РЛР (радиолокационные цели) имеют сложную форму и рассеивают
ЭМВ не изотропно. Значения ЭПР для каждого конкретного направления (а.Д)
могут сильно различаться. Обычно ЭПР представляют в виде произведения
Глава 3. Основы радиоэлектронного подавления 315
(3.187)
где <ттах - максимальная ЭПР; D(a,p} - функция ДОР РЛ цели [43].
Реальные рассеивающие объекты имеют сложную форму и структуру, от-
раженный сигнал представляет собой сумму элементарных полей Е (f), образуе-
мых отдельными элементами в раскрыве приемной антенны РЭС на расстоянии г ,
(3.188)
Наибольший вклад в суммарное поле Е (г) вносят поля сигналов, рассея-
ных в направлении на РЭС (блестящие точки, имеющие форму УО). Сравнение ве-
личины ЭПР разных элементарных отражателей, имеющих примерно равные зна-
чения площадей проекций на плоскость, нормальную поверхности наблюдения,
показывает, что их ЭПР может отличаться на 30...40 дБ. а ширина главного лепест-
ка ДОР может изменяться в большом диапазоне [10].
Можно сформулировать ряд принципов, которым нужно следовать при со-
здании облика малоотражающего объекта:
1. Для повышения РЛ незаметности объекты нужно компоновать из элемен-
тов с минимальной шириной ДОР.
2. При создании малозаметных для РЛС объектов следует использовать
элементы с минимальными значениями ЭПР и минимизировать число самих этих
отражателей. Следует избегать использования взаимно перпендикулярных поверх-
ностей, которые образуют У О.
3. Взаимное расположение элементов, из которых состоит сложный объект,
должно минимизировать число направлений, на которых могут совмещаться глав-
ные лепестки ДОР. А если такого совмещения избежать не удается, нужно миними-
зировать ЭПР элементов по этим направлениям [15].
Вследствие сложной формы объекта для его ЭПР характерны существенные
флуктуации значений при очень малом изменении углов падения электромагнитной
волны. Такая картина возникает за счет явлений дифракции и последующей интер-
ференции электромагнитных волн, отраженных от различных частей самолета с
соответствующей задержкой фазы от каждого отражающего элемента.
Различные части самолета создают различный вклад в ЭПР. Опыт исследо-
вания РЛ характеристик сложных объектов (самолет, вертолет) показал, что
наибольший вклад в его ЭПР вносят такие элементы, как каналы воздухозаборни-
ков двигателей, антенна БРЛС, кабина пилота и др. Экспериментально проверено,
что для углов наблюдения в секторе носовых ракурсов обычного самолета из всех
источников отражения двигатели являются доминирующим. Поэтому в мировой
практике широкое распространение получили способы и устройства радиолокаци-
онной маскировки каналов воздухозаборников двигателей с системой лопаток
входной части двигателя. Для уменьшения ЭПР воздухозаборника его конструкцию
часто выполняют в виде буквы <<S» [19].
На рисунке 3.79 представлено устройство радиолокационной маскировки
воздухозаборника самолетного двигателя. Устройство представляет собой повто-
ряющую профиль входного окна воздухозаборника объемную металлизированную
316
Глава 3. Основы радиоэлектронного подавления
решетку с квадратной ячейкой с внешним ребром а, образованна ю пересекающи-
мися металлизированными листами шириной а, толщиной h с электрическим кон-
тактом в узлах. К внешним ребрам объемной решетки пристыкован металлизиро-
ванный лист в виде равнобедренного треугольника толщиной h, с основанием,
равным внешнему ребру а, и противолежащим основанию острым утлом а . Па-
раметры объемной решетки и равнобедренных треугольников выбираются, исходя
из соотношений а > 2Л , h < 0,1Л , а < 60' ’, где Л - длина волны радиоизлучения.
Наличие пристыкованных к внешнему ребру каждой ячейки металлизированных
листов в виде равнобедренных треугольников позволяет снизить на 2 ... 4 дБ уро-
вень РЛ отражений от воздухозаборника в широком диапазоне длин волн [105].
Рис. 3.79. Устройство радиолокационной маскировки воздухозаборника
самолез ного двигаз е.1я
Для маскировки воздухозаборников ЛА используют устройство, содержа-
щее внутреннее и внешнее покрытия каналов воздухозаборников: светоизлучающее
покрытие 2 и последовательно расположенные покрытие из стеклопластика 3 тол-
щиной 0,8... 1,5 мм, покрытие из структурированной пены 4 с углеродным напол-
нителем толщиной порядка 15 мм, покрытие из стеклопластика 5 толщиной
0,8... 1,5 мм (рисунок 3.80) [106].
Рис. 3.80. Поперечное сечение видимой снаружи стенки канала воздухозаборника
Светоизлучающее покрытие 2 выполнено в виде многослойной матрицы
(6.1.1...6.M.N). каждый элемент которой состоит из последовательно расположен-
ных слоя первого тонкопленочного проводника 7 (сплав соединений магния и сере-
Глава 3. Основы радиоэлектронного подавления
317
бра), первого слоя органической пленки 8 (органическое соединение на основе
ароматических углеводов), слоя проводящего люминесцентного полимера 9, второ-
го слоя органической пленки 10 (ароматический диамин) и слоя второго прозрачно-
го тонкопленочного проводника 11 (слой оксида олова или индия).
Устройство снабжено последовательно соединенными измерителем яркости
фона дневного неба (ИФ), ориентированным в направлении, противоположном
направлению из. гучения воздухозаборников, и бортовым источником питания с ре-
гулируемой силой тока (БИП) (рисунок 3.81).
Рис. 3.81. Структура светоизлучающею покрытия
Толщина светоизлучающего покрытия 2 не менее чем в 100 раз меньше
толщины внутреннего покрытия из стеклопластика 3. В качестве ИФ можно ис-
пользовать типовые яркомеры, а в качестве БИП - бортовые источники с регулиру-
емой силой тока [106]. При пролете ЛА в зоне ПВО противника с помощью ИФ
измеряют яркость фона дневного неба в направлении, противоположном направле-
нию излучения воздухозаборников. В Б1Ш вырабатывается уровень сигнала, поз-
воляющего выравнивать яркость светоизлучающего покрытия (2) с фоном дневного
неба. Матрица (6.1.1 ...6.M.N) начинает работать как светодиод: электроны из слоя
8 начинают движение к слою 10. а дырки из слоя 10 - к слою 8. Те и другие скапли-
ваются в слое 9, образуя друг с другом нестабильные высокоэнергетические связи.
Возникшие пары «электрон-дырка» имеют малое время жизни: заряды рекомбини-
руются, выделяется энергия в виде света. За счет поглощения энергии ЭМВ санти-
метрового диапазона в слоях 3, 4 и 5 происходит маскировка воздухозаборников от
средств РЛ обнаружения.
Очень большой вклад в ЭПР дают резкие переходы и изломы поверхностей
в узлах крепления наружных подвесных контейнеров и средств вооружения. Для
улучшения РЛ незаметности избегают использовать подвесные элементы на пило-
нах и стремятся к внутрифюзеляжпому расположению всего дополнительного обо-
рудования. В свою очередь, это требует продольной жесткости фюзеляжа, ввода в
конструкцию дополнительных гидромеханических агрега гов, безопасности пуска и
сброса оружия и даже изменения алгоритмов ЦУ.
318
Глава 3. Основы радиоэлектронного подавления
При изменении ориентации объекта относительно РЛС его заметность тоже
изменяется вместе с изменением ЭПР. При этом мощность сигнала, отраженного
объектом, флуктуирует случайным образом. Вероятность правильного обнаруже-
ния флуктуирующего сигнала меньше, чем вероятность обнаружения детерминиро-
ванного сигнала при той же средней мощности. Для увеличения незаметности сле-
дует не только снижать среднее значение ЭПР целей, но и увеличивать дисперсию
ее флуктуаций. ДОР должна иметь многолепестковую форму с большим различием
между уровнями лепестков.
Зависимость снижения дальности действия РЛС от степени уменьшения
ЭПР воздушной цели иллюстрируется таблицей 3.6 [19].
Таблица 3.6- Снижение дальности действия РЛС при уменьшении ЭПР
Степень умень- шения ЭПР цели Относительное снижение дальности действия РЛС
РЛС сопровождения РЛС двухкоординат- ного поиска РЛС трехкоординат- ного поиска
10 0,56 0,32 0,18
100 0,32 0,10 0,03
1000 0,18 0,03 0.006
10000 0,10 0-01 0,0001
Исследования по снижению заметности обнаруживаемых объектов на бли-
жайшее будущее сконцентрированы в рамках следующих основных направлений:
1. Оптимизация формы объекта и отдельных его элементов. Это обес-
печивает наибольшее рассеяние падающей волны в направлениях, отличных от
направления локации. При этом основными задачами являются:
• уменьшение количества участков внешней поверхности элементов, у кото-
рых нормаль к поверхности или линии излома совпадает с направлением локации,
что достигается гЛтем замены участков двойной кривизны на конические, цилин-
дрические и плоские поверхности и отклонения нормалей к ним;
• выбор схемы компоновки элементов и узлов, исключающих ретрансляцию
волн через поверхности соседних элементов;
• исключение взаимной перпендикулярности и острых углов расположения
относительно друг друга цилиндрических и плоских поверхност ей различных эле-
ментов;
• ориентация в одном направлении нормалей к плоским и цилиндрическим
поверхностям, если невозможно отклонить их за пределы сектора локации;
• сглаживание изломов поверхностей и стыков элементов, исключение вы-
ступов, углублений, щелей;
• исключение взаимной параллельности противоположных стенок полостей
путем изменения формы сечения и изгиба канала вдоль оси [104].
2. Экранирование в направлении локации сильно отражающих объек-
тов локации достигается размещением на пути распространения волны слабо от-
Глава 3. Основы радиоэлектронного подавления 319
ражающего в обратном направлении устройства, снижающего напряженность па-
дающего поля у сильно отражающего элемента объекта. Экраны подразделяются на
рассеивающие, поглощающие и преобразующие спектр зондирующего сигнала.
Рассеивающие экраны представляют собой металлические устройства, пе-
реизлучающие падающее ЭМП в направлениях, отличных от направления локации.
Эффективность экранировки зависит от размеров и формы экрана и объекта, рас-
стояния между ними и от величины переотражения от объекта. В качестве таких
экранов наиболее часто используются:
• специальные щитки с определенных направлений локации;
• узкополосный металлодиэлектрический обтекатель для экранировки ан-
тенн;
• токопроводящее стекло перед объективами фоторегистрирующей и т елеви-
зионной аппаратуры;
• металлические сетки и линейные решетки для экранировки зеркальных ан-
тенн БРЛС от сигналов с другой поляризацией.
3. Поиск эффективных методов кратковременного или периодического
изменения ЭПР сильно отражающего элемента (модуляция во времени). Такие
методы используются для периодического снижения ЭПР во времени ряда элемен-
тов, обнаруживаемых объектами, функционировнаие которых допускает возмож-
ность их перевода в нерабочее состояние в отдельные промежутки времени (борто-
вые антенны, фотообъективы! Характер и время модуляции осуществляется с уче-
том требований функционирования прикрываемых элементов путем изменения по-
ложения этих элементов, установки временных затеняющих экранов и изменения
электрических характеристик устройства.
4. Имитация ложных ЭПР с помощью пассивных отражателей и ак-
тивных излучателей (СВЧ-генераторов):
• Имитация «большой» ЭПР малоразмерными ЛЦ. Можно использовать
устройство, представляющее собой синтетический баллон из майлара, заполненный
легким газом. На его поверхности равномерно расположены ДО по типу антенной
решетки Ван-Атта (выполнены в виде печатных схем и соединены кабелями связи).
Подобная ЛЦ вследствие своей цилиндрической формы является всенаправленной.
Время развертывания такой ЛЦ гораздо меньше времени разлета облака диполей.
• Имитация спектральных характеристик реальных целей. В качестве
цели, имитирующей большую ЭПР. которая изменяется в полете по закону, близ-
кому к реальному, можно использовать специальную ЛЦ. Для ее запуска применя-
ется ДПЛА, состоящий из нескольких ложных радиолокационных целей. В исход-
ном состоянии ЛЦ на ДПЛА укрыты съемными радиопоглощающими кожухами,
которые удаляются перед пуском, что исключает их преждевременное обнаруже-
ние. На хвосте ЛЦ устанавливаются направляющие стабилизаторы со скошенными
плоскостями, которые обеспечивают ее продольное вращение вокруг оси для изме-
нения ЭПР в полете. Внутри ЛЦ расположены крестообразные У О из алюминия,
которые ограничены в продольном направлении поперечными круглыми дисками.
• Имитация ложных целей естественного происхождения. Спектр сигналов
ЛЦ естественного происхождения (отражения от земной поверхности, гидрометео-
образований, птиц) находится в диапазоне частот AF = O...5OO Гц. На рисунке 3.82
320
Глава 3. Основы радиоэлектронного подавления
представлена структурная схема генератора радиолокационных целей естественно-
го происхождения [104] (ГШ - генератор шума; УНЧ - усилитель низкой частоты;
УМ - усилитель мощности на Л БВ; А — антенна).
СВЧ - сигнала
Рис. 3.82. Структурная схема генератора радио, юкационных целей
естественного происхождения
С выхода ФНЧ с полосой пропускания AF сигнал поступает на УНЧ с ре-
гулируемым коэффициентом усиления, который подбирается в соответствии с ре-
зультатами визуального контроля спектра шума по анализатору спектра, подклю-
ченного с выхода УМ. На второй вход ЛБВ поступает СВЧ-сигнал, который моду-
лируется по частоте так, чтобы на выходе ЛБВ имитировались сигналы ЛЦ есте-
ственного происхождения. Данное устройство можно использовать для сры ва наве-
дения ракет.
• Комбинированная ЛЦ (оптическая и пассивная радиолокационная). Из-
вестны комбинированные ЛЦ, содержащие источник видимого света для противо-
действия оптическим системам обнаружения и распознавания и металлический
светопрозрачный отражатель для РЛ имитации цели - противодействия РЛС. РЛ
отражатель выполнен из проволочной сетки с плотностью 8 ячеек на 2,54 см2 (с
размерами ячеек d » 0,1 Я . Величина ЭПР отражателя
a = 4W/3<, (3.189)
где а — размер ребра тетраэдра РЛ отражателя.
Ширина главного лепестка диаграммы обратного вторичного излучения от-
ражателя как в вертикальной, так и в горизонтальной плоскостях сост авляет ± 20°.
Для имитации ИК излучения предлагается использовать сжигание топ. шва для ре-
активных двигателей. Пламя может быть и невидимым, гак как оно можег нагре-
вать поверхность с высокой эмиссионной способностью (например, нержавеющую
сталь) [104].
• Имитация временной структуры РЛ портретов реальных целей позво-
ляет имитировать РЛ портреты объектов по дальности для РЛС с широкополосны-
ми сигналами, в которых осуществляется сжатие сигналов по длительности. На ри-
сунке 3.83 показана структурная схема устройства имитации РЛ портретов реаль-
ных целей (Ацрм - приемная антенна: УГЗ, УТЗ - устройства грубой и точной за-
Глава 3. Основы радиоэлектронного подавления
321
держки; Пр - преобразователь; М - модулятор; БЭХЦ - блок эталонов характери-
стик цели; Апрл - передающая антенна).
Рис. 3.83. Структурная схема устройства имитации РЛ портретов реальных целей
Зондирующий импульс от РЛС, для которой создается имитируемый РЛ
портрет, поступает через приемную антенну, усил итель (У). УГЗ и УТЗ. УГЗ обес-
печивает задержку по времени t, соответствующую расстоянию R до ближайшей
точки имитируемой цели t = 2R/&. Линия задержки с отводами обеспечивает ими-
тацию остальных блестящих точек цели. AM и ФМ обеспечиваются с помощью
модуляторов, на вторые входы которых через цифроамплитудные преобразователи
поступают соответствующие управляющие напряжения из БЭХЦ, где записаны ко-
ды РЛ дальностных портретов имитируемых целей на всех ракурсах от 0 до 360''.
Данное устройство (рис. 3.83) позволяет имитировать не только одномерные, но и
двумерные, а также трехмерные РЛ портреты целей. Для этого необходимо иметь
на ЛА несколько разнесенных в пространстве антенн [104].
3.16.2. Применение противорадиолокационных материалов
Применение противорадиолокационных материалов и покрытий - мощный
резерв снижения РЛ заметности. Противорадиолокационными покрытиями (ПРЛП)
называют материалы со специальными химическими и физическими свойствами,
предназначенные для насенения на защищаемые объекты в целях существенного
уменьшения ЭПР или искажения характеристик отраженного поля. Принцип дей-
ствия ПРЛП основан на явлениях интерференции, дифракции и поглощения ЭМВ в
материалах, имеющих сложную физическую и химическую структуры [4, 15, 104].
В последнее время появились принципиально новые классы материалов, та-
кие как проводящие полимеры (полианилин, полипирол и политиофен), нанострук-
турные магнитные композиты (толщина широкополоснык ПРЛП до 2 мм), угле-
родные нанотрубки (в зависимости от размеров и структуры их электропровод-
ность варьируется в широких пределах от 1 до 103 (ом см)’1), позволяющие добить-
322
Гпава 3. Основы радиоэлектронного подавления
ся заметных успехов при разработке тонких и легких широкополосных поглотите-
лей ЭМ энергии. При разработке ПРЛП их радиотехнические характеристики
должны обеспечиваться при условии, что толщина и масса материала минимальны.
Коэффициент отражения ЭМВ от границы раздела двух сред - свободного
пространства и поверхности покрытия - описывается выражением
(3.190)
(«~1)г+Г
£0 (" + 1)2 + г’
где п
е — диэлектрическая проницаемость поглощающего покрытия; ст - проводимость
материала покрытия, О-1/и-1; f -частота; е0 =8,859-10"12 Ф-м — диэлектрическая
постоянная [107].
Можно выделить следующие виды ПРЛП: радиопоглощающие материалы
(РПМ), комбинированные, неотражающие структуры. Классификация покрытий
проведена условно, так как в каждом из ПРЛП для снижения доли отраженной
энергии используются явления интерференции, дифракции и поглощения.
Радиопоглощающие материалы представляют собой неметаллические
материалы, обеспечивающие при взаимодействии ЭМВ поглощение, рассеяние и
интерференцию их энергии. По конструкционному применению обычно различают
радиопоглощающие материалы, которые наносятся на поверхность защищаемого
ЛА (противорадиолокационные покрытия), и радиопоглощающие конструкцион-
ные материалы, используемые для создания малозаметных объектов. В зависимо-
сти от электрических и магнитных свойств радиопоглощающие материалы можно
разделить на диэлектрические и магнитодиэлектрические. По принципу действия
РПМ подразделяют на поглощающие (градиентные) и интерференционные.
Поглощающие материалы состоят из основы и наполнителя и обеспечи-
вают плавное или ступенчатое изменение комплексной диэлектрической и магнит-
ной проницаемое!и. В качестве основы исполыуюзся стеклотекстолш, пенопласт,
различные каучуки. Наполнителями служат магнитные (никель-цинковые ферриты,
порошковое карбонильное железо) и немагнитные (порошок графита, угольная и
ацетиленовая сажа) материалы. В интерференционных покрытиях создаются та-
кие условия, при которых падающая и отраженная волны взаимно компенсируют
друг друга. Материал поглощающих покрытий выбирается из условия максималь-
ного преобразования в нем падающей ЭМ энергии в тепловую за счет наведения
вихревых токов, магнитногистерезисных и/или ВЧ диэлектрических потерь.
Маскирующее действие РПМ эффективно лишь в случаях, когда линейные
размеры плоских поверхностей ЛА или же радиусы кривизны их поверхност ей зна-
чительно превышают длину волны в материале покрытия 2nS[A,» 1 (5- площадь
поперечного сечения объекта). Если длина волны превышает максимальный размер
объекта, наблюдается релеевское рассеяние, примерно одинаковое } объектов с ко-
нечной и бесконечной проводимостью. Покрытие с конечной проводимостью ведет
себя как идеальный проводник, и падающая ЭМ энергия им не поглощается [19].
Глава 3. Основы радиоэлектронного подавления
323
Поглощающий материал соответствует своему назначению, если в нем от-
сутствует отражение ЭМВ от внешней поверхности, а энергия, проникающая
внутрь материала, полностью им поглощается. Выполнение этих условий достига-
ется подбором электрических свойств материала - комплексными диэлектрической
и магнитной проницаемости. Комплексный коэффициент отражения плоской
волны от границы раздела двух сред — свободного пространства и поверхности
покрытия - зависит от волновых сопротивлений [43]
z.-Zp i-#7 ,
zn+z„ 1+7Г7’
(3.191)
где Zj = ' рй =120тг , Zn = у]с / р - волновое сопротивление свободного про-
странства и поглощающего покрытия; е = 4- js, р = р}+ jp2 — комплексные ди-
электрическая и магнитная проницаемости материала покрытия соответственно.
Учитывая, что у[ёр = п + jk (п - коэффициент преломления среды, к - ко-
эффициент затухания), (3.191) можно записать в виде
K = p-n-jk (3.192)
р + п + jk
Для того чтобы покрытие полностью поглощало энергию падающих на него
волн, нужно выполнить условие К =0. Как следует из (3.192), это соответствует
случаю р = п + jk . Условие полного поглощения имеет вид
р}=п, р. =к. (3.193)
Условию (3.193) удовлетворяют покрытия, в состав которых входят веще-
ства, обеспечивающие большие потери энергии (например, ферромагнетики).
Структуру таких покрытий образуют частицы ферромагнетика, сцементированные
изоляционным материалом из немагнитного диэлектрика. Однослойные покрытия
этого типа достаточно эффективны в диапазоне метровых и дециметровых волн.
Эффективность действия покрытия повышается, если оно неоднородно и его коэф-
фициенг поглощения постепенно увеличивается от наружной поверхности покры-
тия к поверхности защищаемого объекта [15].
Для уменьшения остаточного отражения применяют1 покрытия, наружная
поверхность которых представляет собой рельефную геометрическую неоднород-
ность, состоящую из периодически повторяющихся неровностей в виде пирами-
дальных или конических шипов (рисунок 3.84). Чтобы увеличить число отражений
между шипами и, следовательно, снизить отражение от поверхности покрытия,
угол при вершине 0 выгодно делать небольшим [10].
В интерференционных покрытиях, состоящих из чередующихся слоев ди-
электрика (пластмасса, каучук) и пленки электропроводящего материала, уменьше-
ние отражения от маскируемого объекта происходит в результате интерференции
двух волн [15, 43]: отразившейся от поверхности объекта и от поверхности покры-
тия (рисунок 3.85). Падающая волна многократно отражается от границы раздела
двух сред «покрытие — объект» и поглощается в веществе покрытия. Естественно.
324
Гпава 3. Основы радиоэлектронного подавления
что при этом расстояние между отражающими поверхностями (толщина покрытия)
должно быть таким, чтобы обеспечивать сложение волн в противофазе.
Слой 1
Слой 2
Слой 3
Поверхность объекта
Поверхность
объекта
Рис. 3.85. Интерференционное
защитное покрытие
Рис. 3.84. Рельефная поглощающая по-
верхность
Суммарная напряженность поля, отраженного в направлении ист очника па-
дающей волны, равна нулю, есл и выполняются условия
= г/= (2/+ 1)4,/=1,2, 13.194)
1'1 4
где р — коэффициент затухания волны за одно прохождение поглощающего по-
крытия в прямом и обратном направлениях; |г| - модуль коэффициента отражения
покрытия; d - общая толщина покрытия; = Ае/\[ёр — длина волны в веществе
покрытия с параметрами 8 и р ; Ло - длина волны в пространстве [43].
Интерференционные покрытия тоньше поглощающих. Однако, как следует
из принципа их действия, они более узкополосны (менее универсальны), и это зача-
стую ограничивает возможности их применения. Достоинством интерференцион-
ных покрытий являются значительная механическая прочность, гибкость, сравни-
тельно малая толщина и небольшая масса.
К перспективным следует отнести гранулированные магнитные материалы,
представляющие собой наноструктурный композит, в котором металлические фер-
ромагнитные частицы (гранулы CoFeB, CoFeZr, CoTaNb нанометрового размера с
аморфной или кристаллической структурой) расположены в диэлектрической мат-
рице. С помощью различных методов получены гранулированные структуры на
основе кобальта, железа, никеля, аморфных сплавов кобальта с добавками Fe. Та.
Nb и других металлов, ферритов, дисперсионных как в неорганических - АЬОз,
SiCh. TiOj, так и в органических матрицах - аморфном гидрогенизированном угле-
роде (а-СН), полипараксилилене. Установлено существенное влияние технологии
изготовления на струкг^ру и свойства гранулированных материалов. Гранулиро-
ванные нанокомпозиты логут быть основой для нового поколения эффективных
широкополосных ПРЛП толщиной порядка миллиметра и даже менее [104].
Глава 3, Основы радиоэлектронного подавления
325
В ОАО «НИИ «Феррит-Домен» разработана технология получения тонко-
пленочных наноструктурированных РПМ нового поколения для СВЧ-диапазона от
1 ГГц до 300 ГГц, применяется принципиально новый материал на основе тонких
пленок (0.17... 1,25 мкм) аморфного гидрогенизированного углерода с ферромаг-
нитными наночастицами 3d металлов (Ni, Со, Fe и др.), нанесенных на гибкие под-
ложки из арамидной ткани (кевлар) методом ионно-плазменного магнетронного
напыления [108, 109]. На рисунке 3.86 приведен вид однослойного наноструктури-
рованного радиопоглощающего покрытия в поперечном сечении [110].
Рис. 3.86. Однослойное наноструктурированное радиопоглощающее покрытие
РПП включает основу из одного (рис. 3.86) или нескольких слоев 1 пере-
плетенных арамидных высокомодульных нитей 2, на которые вакуумным напыле-
нием нанесена пленка 3 из гидрогенизированного углерода. В пленку 3 вкраплены
ферромагнитные кластеры 4. Пленка 3 содержит ферромагнитные кластеры 4 в ко-
личестве 50-80 % массы, остальную массу пленки 3 составляет гидрогенизирован-
ный углерод. Основа может быть выполнена в виде тканого полотна.
В качестве арамидных высокомодульных нитей 2 целесообразно использо-
вать кевларовые нити (из крученых или прямых волокон), прочность которых в не-
сколько раз превышает прочность стальной проволоки той же массы и свойства
которых не изменяются до температуры 280° С. Пленка 3 выполняется обычно
толщиной 500-1500 нм. Ферромагнитные кластеры, как правило, имеют размер от
0.05 до 2,0 мкм и близкую к сферической геометрическую форму. Кластеры 4 могут
быть выполнены из любого известного ферромагнитного материала, обладающего
значительным поглощением СВЧ излучения. В качестве таких материалов могут
быть использованы кобальт, никель, ферриты [110].
Модуль коэффициента отражения (МКО) указанных РПМ в частотном диа-
пазоне 7...300 ГГц не хуже -10 дБ. В диапазоне частот 7...37.5 ГГц значение МКО
составляет от -10 дБ до —30 дБ, в оптическом и ИК-диапазоне - не хуже -20 дБ, что
позволяет с помощью одного вида покрытия решить задачи заметности в диапазо-
нах от СВЧ до оптического. Покрытия легко совместимы со сложными формами
защищаемых объектов и могут быть использованы в качестве конструкционного
материала для изготовления корпуса ЛА, в том числе беспилотных.
326
Глава 3. Основы радиоэлектронного подавления
С целью уменьшения толщины ПРЛП в его структуру вводятся частотно-
селективные поверхности (ЧСП) в виде двумерных решеток из периодически
расположенных проводящих либо резистивных элементов различной формы. Ис-
пользование ЧСП (в диапазоне до 40 ГГц и выше) дает возможность управлять эф-
фективными толщинами поглощающих слоев за счет реализации в структуре по-
крытия процессов дифракции и интерференции ЭМВ. ЧСП могут быть изготовлены
методом ионно-плазменного напыления металлов, аморфных сплавов или магнит-
ных нанокомпозитов.
Основные преимущества тонкопленочных радиопоглощающих покрытий на
основе наноструктуированных пленок перед традиционными материалами:
1) использование одного вида покрытий с высоким поглощением в сверх-
широком диапазоне частот 7...300 ГГц;
2) малая приведенная удельная масса 1-1,5 кг/м-;
3) высокие механическая прочность и термостойкость;
4) устойчивость к климатическим воздействиям и агрессивным средам, эко-
логически чистая и безотходная технология получения [108, 109].
Для создания нанокомпозитов важное значение имеет применение нанотех-
нологий при синтезе наполнителей сложного состава: 1) наночасгиц ГезОд, покры-
тых слоем немагнитного материала или полимера; 2) магнитные наночастицы, по-
крытые аморфным SiCh; 3) нанонити (нанопровода), состоящие из анизотропных
наночастиц Fe, Со, распределенных в каналах АЬОз диаметром 18...35 нм и глуби-
ной до 500 нм; 4) синтез гетерометаллических проводов (диаметр 30 нм, длина бо-
лее 10 мкм) нагреванием в автоклаве при 200° С карбонилов металлов и ацетила-
цетонатов [111].
Неотражающие структуры могут быть построены на базе антенных реше-
ток, конструкций с большим числом дифракционных элементов и неотражающих
проводящих поверхностей сложной формы, которые формируют диаграмму пере-
излучения с минимумом в направлении приема [7]. Простейшим неотражающим
устройством может служить противорадиолокационный экран из проводящего ма-
териала, устанавливаемый наклонно к направлению прихода волны. Максимум пе-
реизлучаемой энергии находится под углом, сопряженным с >тлом падения, а в
сторону источника имеет место лишь незначительное излучение за счет дифракци-
онных явлений второго и более высоких порядков.
Другим известным неотражающим устройством является проводящее тело с
вырезанными в нем канавками глубиной четверть длины волны (рисунок 3.87).
Рис. 3.87. Неотражающая структура с вырезанными канавками
Глава 3. Основы радиоэлектронного подавления
327
Если ступеньки имеют высоту, кратную целому числу полуволн, то такая
структура отражает волны, как идеальное зеркало, когда электрический вектор
перпендикулярен ребру ступеньки. Минимум переизлучаемой энергии для волн с
произвольным положением плоскости поляризации может быть получен при при-
менении клетчатой структуры, в которой углубления и ступеньки расположены в
шахматном порядке.
Хорошие результаты получаются, когда на отражающей поверхности в
шахматном порядке располагаются дифракционные элементы с полусферической
головкой (рисунок 3.88). Покрытие имеет лучшие диапазонные характеристики за
счет расположения дифракционных элементов на различной высоте от подложки
[4,15].
Рис. 3.88. Неотражающая структура с элемент ами с полусферической головкой
Малую массу и габариты имеют резонансные покрытия, являющиеся ком-
бинацией антенных решеток и интерференционных многослойных покрытий. В
многослойном интерференционном покрытии роль поглотителя играет резистивная
пленка, которая может быть заменена решеткой из диполей, нагруженных на рези-
сторы. Для расширения резонансных свойств покрытия применяют набор диполей
различной длины. Применение двух взаимно перпендикул ярных решеток исключа-
ет зависимость переизлучающих характеристик от поляризации падающих волн.
Неотражающие структуры имеют те же досгоинства и недостатки, что и интерфе-
ренционные покрытия. Наиболее перспективными являются комбинированные
многослойные покрытия.
Для нанесения покрытий используются совершенно различные технологии.
Большая часть поверхности самолета покрывается методом лакокрасочных техно-
логий. Сложнейшей задачей является изготовление ферромагнитных мелкодис-
персных наполнителей с заданными значениями магнитной проницаемости. В
настоящее время, применяя специальную технологию, можно в достаточно широ-
ких пределах изменять спектры поглощения ферромагнитных наполнителей в СВЧ-
области. Комбинируя ферромагнитные включения с включениями других типов,
создают желаемый набор широкополосных радиопоглощающих покрытий [15].
Чтобы обеспечить малую РЛ заметность самолета, широко применяются
плазменные технологии, с помощью которых создается рассеивающее покрытие
на фонаре кабины пилота. Обычное остекление откидного фонаря прозрачно для
ЭМВ, поэтому если ЭМВ падает на самолет из верхней полусферы, полость кабины
вносит значительный вклад в ЭПР при соответствующих углах наблюдения. Одно
из решений задачи малой РЛ заметности ЛА достаточно очевидно - металлизиро-
вать остекление кабины.
328 Глава 3. Основы радиоэлектронного подавления
Для уменьшения ЭПР самолета при наблюдении его с задней полусферы
необходимо уменьшить ЭПР полости выхлопного сопла двигателя. Эффективным
признано нанесение радиопоглощающих покрытий на элементы выхлопного сопла.
Единственным материалом, способным выдержать одновременно температурные
(до 1300° С) и механические нагрузки, характерные для этой части двигателя, явля-
ется керамика. Разработаны многослойные кера мические покрытия, напыляемые
на выходные элементы двигателя путем нанесения расплавленных микрочастиц
диэлектрика и металла или же полупроводника. Кроме того, температура, при ко-
торой покрытие должно сохранять свои радиофизические свойства, меняется в
очень широких пределах от 600° до 1300° С. Необходимо разрабатывать материа-
лы, диэлектрическая и магнитная проницаемости которых не менялись бы в широ-
ком температурном диапазоне. Эта задача в настоящее время частично решена:
двигатели с керамическими радиопоглощающими покрытиями стоят на борту ЛА и
испытаны в разнообразных режимах полетов.
Современные покрытия имеют переменную по профилю толщину, сложную
структуру с меняющимися значениями диэлектрической и магнитной проницаемо-
стей как по толщине, так и вдоль поверхности обшивки. С использованием совре-
менных материалов удается снизить коэффициент отражения на величину до 20 лБ
и более в широкой полосе (до 30 % от средней рабочей частоты) [19].
Радиопоглощающие экраны снижают напряженность падающего поля у
сильно отражающего участка за счет преобразования ЭМ энергии, проходящей че-
рез них, в тепловую или другой вид энергии. В качестве поглощающих экранов
применяются радиопоглощающие решетки, ионизированные и аэрозольные обра-
зования. Поглощающие решетки могут применяться в каналах воздухозаборников,
сопл и использоваться для снижения ЭПР зеркальных антенн на частотах и поляри-
зациях, отличных от параметров БРЛС.
Поглощающие ионизированные образования перед объектом или его от-
дельными элементами могут создаваться с помощью электронных пушек, электри-
ческих разрядов, радиоактивных изотопов, пиротехнических смесей. В результате
со дается плазменный экран, маскирующий объект от РЛ и ИК обнаружения. Сле-
дует отметить хорошее согласование плазменного экрана со свободным простран-
ством и обеспечение минимума коэффициента отражения радиоволн от границы
раздела двух сред. Однако создание и поддержание необходимых параметров иони-
зированного образования в атмосфере требуют значительных затрат энергии и ра-
бочего вещества (с уменьшением высоты полета эти затраты растут).
Для ЛА поглощающие аэрозольные образования могут создаваться с по-
мощью специальных компонентов, рассеиваемых на высотах их полета в виде об-
лаков. Радиомаскировка может осуществляться в течение короткого времени, что
обусловлено ограничением рабочего вещества на борту ЛА и быстрым оседанием
его. Экраны, преобразующие спектр зондирующего сигнала, в настоящее время
находятся в стадии теоретических и экспериментальных разработок [104].
Управление противорадиолокационными покрытиями. ЭМП в точке
приема (на атакуемом объекте) представляет собой суперпозицию двух полей: поля
ЛА и поля устройства управления ЭПР. с помощью которого в направлении прием-
ного устройства атакующего объекта (УР. самолета, вертолета. ДПЛА) формирует-
Глава 3. Основы радиоэлектронного подавления
329
ся необходимое значение ДОР. Требуемая ДОР может быть сформирована переиз-
лучающей пассивной решеткой, находящейся на поверхности ЛА или той его ча-
сти, которая дает наибольший вклад в значение ЭПР. С помощью фазовращателей
можно получить заданное амплитудно-фазовое распределение поля в раскрыве ре-
шетки. Для исключения зависимости ДОР от поляризации элементы решетки
должны принимать и переизлучать волны с любой поляризацией.
В качестве импедансных нагрузок используются комбинации диэлектриче-
ских, магнитных и резистивных пленок, наносимых на поверхность ЛА. Управле-
ние ДОР ЛА может быть достигнуто с помощью колебательного контура, создава-
емого металлизированными полосами, нанесенными на обшивку ЛА [20]. Поверх-
ность ЛА сначала покрывается диэлектриком, затем наносятся металлические по-
лосы. Образуется колебательный контур, настройка которого может производиться
путем изменения сосредоточенной емкости. В контур включается резистор, игра-
ющий роль поглотителя ЭМ энергии.
Средствами управления ДОР могут служить управляемые экраны и бинар-
ные покрытия, в которых электродинамические состояния различных участков по-
верхности ЛА описываются двумя значениями импедансов. Управляемые покрытия
могут быть реализованы в виде плоскослоистых сред с произвольным числом
управляемых и неуправляемых слоев. Управляемые слои представляют собой тон-
кие по сравнению с длиной волны двумерно-периодические решетки, нагруженные
активными и пассивными переключающими элементами (мощные p-i-n диоды или
сегнетокерамические конденсаторы). В качестве неуправ. [яемых элементов исполь-
зуются однородные диэлектрики без потерь или двумерно-периодические ненагру-
женные решетки. Перспективным направлением в области управляемых покрытий
является разработка полупроводниковых структур, формируемых в виде управля-
емой многослойной панели, состоящей из полупроводника, диэлектрика и металла,
оптической системы управления.
На рисунке 3.89 приведена структурная схема устройства для маскировки
маловысотных ЛА от средств оптико-визуальной разведки [112].
Рис. 3.89. Структурная схема устройст ва для маскировки маловысотн ых ЛА
Устройство содержит измеритель яркости фона (ИФ), устройство управле-
ния яркостью (УУЯ) и светоизлучающее устройство (СвУ). СвУ состоит из иод-
330
Глава 3. Основы радиоэлектронного подавления
ложки и многослойной матрицы, в которой каждый светодиод соединен с коллек-
тором соответствующего управляющего транзистора. Базы управляющих транзи-
сторов соединены между собой и подключены к выходу УУЯ, а эмиттеры подклю-
чены к корпусу ЛА.
На рисунке 3.90 изображена схема размещения светоизлучающего устрой-
ства с обтекателем на нижней поверхности ЛА [112]. При пролете ЛА в зоне ПВО
противника с помощью ИЯ измеряют яркость фона дневного неба. В УУЯ выраба-
тывается уровень сигнала, позволяющий выравнивать яркость СвУ с фоном неба.
Этот сигнал подается на управляющие транзисторы, которые изменяют уровень
яркости каждого светоизлучающего диода матрицы до требуемого значения. По-
следовательное соединение всех баз и эмиттеров между собой обеспечивает одина-
ковую яркость всех элементов матрицы (всего светоизлучающего устройства).
Рис. 3.90. Схема размещения светоизлучающего устройства
Площадь, занимаемая многослойным покрытием при ширине 1 м, составит
15 м", потребляемая мощность всего устройства составит от 7,5 до 60 Вт. Учитывая,
что тол щина одного слоя штатных авиационных лакокрасочных покрытий состав-
ляет величину порядка 20-30 мкм, а при окраске ЛА используют 2-3 слоя, то тол-
щина всего светоизлучающего устройства не должна превышать трех толщин авиа-
ционного лакокрасочного покрытия (на практике не превышает 0,5 мкм).
Управление ЭМП основано на образовании в полупроводниковой сгруктуре
совокупности элементов, отражающих и одновременно формирующих требуемое
амплитудно-фазовое распределение поля. Формирование элементов происходит за
счет повышения концентрации свободных носителей заряда в полупроводниках с
10й до 10|7...1018 см'3, что приводит к переходу участков полупроводниковой пане-
ли из диэлектрического состояния в «металлическое состояние» (т.е. состояние с
выраженными свойствами металла по отношению к падающему ЭМП). Основным
ограничением на пути использования подобных покрытий являются высокая стои-
мость и сложность системы разводки сигналов (можно устранить использованием
волоконно-оптических устройств). В качестве покрытий, управляемых электроста-
тическим полем, отметим сегнетоэлектрики, способные изменять величину ди-
электрической проницаемости е под действием приложенного электрического по-
ля. Изменение е приводит к изменению модуля и фазы отраженной волны и поз-
Глава 3. Основы радиоэлектронного подавления 33£
воляет управлять заметностью ЛА. Управляемые покрытия на основе сегнетоэлек-
триков могут быть выполнены в виде сплошного поля или в виде периодических
структур, состоящих из стержней и пластин.
Основными недостатками сегнетоэлектриков являются нестабильность их
характеристик в диапазоне температур и необходимость применения для заметного
изменения £ больших значений напряженности электрического поля, достигаю-
щих десятков кВ/см. Известны способы устранения указанных недостатков, в част-
ности, путем применения в управляемых структурах многослойных покрытий,
включающих тонкие слои (пленки) сегнетоэлектрика, и подложек с управляющими
электродами. Управляемые покрытия способны целенаправленно управлять не
только диаграммой рассеяния ЛА, но и поляризационными характеристиками поля
рассеяния. В этом случае покрытия должны обладать анизотропными электродина-
мическими свойствами. Возможно также изменение спектра падающей на ЛА вол-
ны - его перенос и расширение — при рассеянии этой волны на модулированных
управляемых покрытиях.
В США проводятся интенсивные исследования, направленные на разработ-
ку «умных обшивок» защищаемых объектов и средств компьютерной технологии
управления ЭМП. Цель этих исследований - создание многофункциональной «ум-
ной обшивки» самолета на основе интеллектуальной антенной решетки, микропро-
цессора управления, средств распознавания, РТР и РЭП [20]. Такая «умная обшив-
ка» (пятая подсистема комплекса РЭБ) позволит адаптивно управлять РЛ заметно-
стью ЛА, создавать в отраженном поле различные помехи и имитировать ЛЦ.
Главная цель «умной обшивки» заключается в гашении отраженного РЛ сшнала
посредством формирования в направлении на подавляемую РЛС второго (помехо-
вого) сигнала, равного по амплитуде отраженному и складываемому с ним в проти-
вофазе. Решающим условием реализации этого варианта РЭ «подавления» является
детальное знание ЭПР защищаемого самолета как функции пространственного угла
и несущей частоты облучения. Имея полный набор ДОР всего диапазона частот
РЛС, можно в любой момент времени определять значения амплиту, [ы и фазы от-
раженного сигнала для каждой РЛС, под каким бы ракурсом она ни наблюдала ЛА.
Проблема формирования помехового сигнала, равного по амплитуде отра-
женному сигналу, решаема уже сегодня. А вот создание необходимых фазовых со-
отношений обоих сигналов сопряжено с большими трудностями. Дело в том, что
нельзя решить эту проблему путем переизлучения сигнала РЛС с простым сдвигом
его по фазе на 180". Фазовый фронт волны отраженного сигнала, как и ЭПР, не
является постоянным, а также зависит от частоты и угла облучения, поскольку фаза
этого сигнала определяется сложением фаз парциальных сигналов, отраженных от
«блестящих точек» ЛА.
Задача предсказания точного значения фазы отраженного сигнала практиче-
ски не разрешима для обычных («заметных») самолетов с большим числом «бле-
стящих точек» [15]. Другое дело - «самолеты-невидимки». Здесь фазовые парамет-
ры переотраженного сигнала подчиняются более простым физическим закономер-
ностям; диаграмма обратного рассеяния описывается гладкой функцией в отличие
от изрезанной диаграммы ооычного самолета. Кроме того, в ходе реализации про-
1раммы «Stealth» получены обширные данные по характеристикам переотражения.
332
Глава 3. Основы радиоэлектронного подавления
Тем не менее, формирование противофазного помехового сигнала требует принци-
пиально новых технических решений и технологий, особенно при разработке раз-
ведывательной аппаратуры КРЭП, которая должна осуществлять ВЧ измерение
сигнала в широком частотном диапазоне с «точностью до фазы» и, возможно, пи-
косекундным квантованием этого сигнала по времени [20]. В зарубежной печати
отсутствуют сведения о решении такой задачи, но стремительный прогресс в обла-
сти компьютерной и СВЧ-технологий позволяет отнести эту задачу к потенциально
решаемой.
3.16.3. Уменьшение радиолокационной заметности
антенных систем
Значительный вклад в РЛ заметность объектов разведки вносят их антенные
системы. Так, самолет в зависимости от типа и назначения может нести на своем
борту до 100 и более антенн бортового РЭК [19, 23]. В состав комплекса входят:
• радиолокационный прицел, радиолокатор бокового обзора;
• автономные средства радионавигации (радиовысотомеры, доплеровский
измеритель скорости и утла сноса);
• средства ближней, дальней и спутниковой радионавигации;
• системы передачи информации и связи,
• радиолокационный визир;
• средства радио- и радиотехнической разведки;
• активные средства РЭП, радиовзрыватели;
• радиотелеметрические системы [10, 15].
Вклад антенн бортовых РЭК в ЭПР самолетов ФА составляет от 10...20 %
до 40...50 %. У ракет с ГСН в наиболее опасном секторе углов облучения в перед-
ней полусфере - от 30 % до 90 %, у крылатых ракет 50...60 %. Наибольшую ЭПР
имеют зеркальные антенны большой апертуры (антенны РЛ прицела, РЛ визира), а
также плоские антенные решетки. Подобных антенн с большой ЭПР на борту ЛА
немного (1...5). Остальные антенны имеют в основном небольшую ЭПР (0.01. .1
м“), но обладают большой (до 180' ) шириной ДОР.
Анализируя соотношения между7 антеннами как рассеивагелями и как отра-
жателями, ЭПР антенны можно представить в виде
o’o=[Vcr-p-О-^о)7^ехРЛр] > (3.195)
где сг — структурная часть ЭПР; сган1 - антенная часть ЭПР; Ко — коэффициент
отражения антенны; jtp - относительная фаза [19].
В настоящее время известны три основных направления исследований и
разработок [9, 15]. направленных на уменьшение радиолокационной заметности
антенн. Первое направление преду сматриваег такие комплексные подходы к про-
ектированию РЭС. со]j [асно которым минимизируется общее чис. ю антенн. Этого
можно достичь, используя на борту ЛА универсальные многофункциональные ан-
тенные решетки, которые одновременно могут обслуживать РЛС, средства РЭП,
Глава 3. Основы радиоэлектронного подавления
333
средства предупреждения о нападении ракет противника, опознавания «свой-
чужой», радиосвязи и т.п.
Второе направление связано с разработкой методов и средств уменьшения
заметности каждой из антенн РЭК. Применение радиопоглощающих материалов и
покрытий для снижения РЛ заметности антенн невозможно: поглощая ЭМ излуче-
ние РЛС противника, такие покрытия одновременно нарушают нормальное функ-
ционирование антенн в их рабочих диапазонах длин волн. Возможные методы и
средства уменьшения ЭПР антенн можно разделить на три основные группы:
• в антеннах используются частотно-селективные и поляризационно-
селективные структуры с неизменяемыми во времени параметрами (такие структу-
ры радиопрозрачны или отражают, как металл, на рабочих частотах и поляризациях
антенны и непрозрачны или сильно поглощают на всех других частотах и поляри-
зациях);
• ЭПР антенн уменьшают за счет ухудшения характеристик антенн в нерабо-
чие промежутки времени (для изменения характеристик антенн используются элек-
трически управляемые во времени среды или поворачиваемые металлические экра-
ны);
• невидимые для РЛС зеркальные антенны получаются, если раскрыв антен-
ны прикрыть экраном, отражающим падающую на него из внешнего пространства
волну в направлениях, не совпадающих с направлением прихода [15].
Третье направление предусматривает миниатюризацию антенн при сохра-
нении их основных рабочих характеристик. Первым техническим решением по
этому направлению было создание ферромагнитных антенн. При той же действу-
ющей высоте ферритовые приемные антенны имеют на рабочей частот ев р (дей-
ствующая проницаемость ферромагнетика) раз меньшую площадь. При уменьше-
нии длины волны р Mai нитопровода падает, а потери в нем растут. Поэтому маг-
нитные антенны в сан гиметровом диапа юне имеют существенно меньшие значения
ЭПР, чем антенны других типов, при заданной действующей высоте.
Уменьшение РЛ заметности может быть достигнуто в результате компро-
миссного выбора типа антенны при некотором допустимом ухудшении ее рабочих
характеристик. В качестве композиционных материалов используется кевлар, стек-
ловолокно, графито-кевларовое волокно и др. Затухание радиоволн в таких матери-
алах достигает 20 дБ. Недостатки композитов - высокая стоимость, недостаг очная
усталостная прочность, высокий коэффициент трения, большая удельная масса.
Необходимая толщина поглощающего покрытия зависит от несущей часто-
ты РЛС. При уменьшении мощности отраженного сигнала до 1 % от падающей
мощности толщина d определяется как
J = 1.15//? = 0,279/А , (3.196)
где £(. - диэлектрическая постоянная поглощающей сред ы; f - несущая частота: р
- постоянная за тухания [12].
Недостатки радиопоглощающих покрытии'.
1 ) при более нижих частотах реализация покрытий проблематична и прак-
тически нереальна;
334
Глава 3. Основы радиоэлектронного подавления
2 ) узкополосность (при использовании ферритового материала NZ-51
уменьшение отражаемой мощности до 1 % достигается только в диапазоне частот
0,6... 1 ГГц). Применение широкополосных сигналов может снижать эффект по-
глощающих покрытий. Используемые радиопоглощающие композитные материалы
по своим прочностным характеристикам превосходят сталь и титан и на 30 % легче
алюминия [43].
Помимо пассивного метода снижения ЭПР может применяться и активный
метод, сущность которого заключается в формировании СВЧ-излучений, амплиту-
да и фаза которых подстраиваются таким образом, чтобы максимально скомпенси-
ровать отраженный в сгорону РЛС сигнал. Одно из технических решений — уста-
новка перед локатором экрана, на поверхности которого размещены так называе-
мые частотно-избирательные структуры (система периодических отверстий
определенной формы, настроенных таким образом, что они свободно пропускают в
обоих направлениях ЭМВ в узкой полосе собственных частот локатора и полно-
стью отражают ЭМВ других частот). Вводя в эти отверстия, которые, по существу,
представляют собой открытые резонаторы, управляющие полупроводниковые си-
стемы, можно при желании «закрыть» экран, сделав его непрозрачным для всех
частот [19].
В зависимости от конкретной конструкции антенны можно использовать
плазменный экран, монтируемый внутри обтекателя. При отсутствии сигнала
управления, который может подаваться пилотом самолета или его станцией обна-
ружения облучения, экран выключен и прозрачен на всех частотах. Когда поступа-
ет сигнал, на экран подается напряжение, в нем зажигается низкотемпературная
столкновительная плазма, в резу. штате излучение частично отражается от экрана, а
частично поглощается в экране. Экран эффективен для ЭМП всех частот, меньше
плазменной. Значение плазменной частоты в таких системах может быть очень
большим. Исследования процессов, протекающих в низкотемпературной плазме,
позволили найти оптимал ьные параметры для состава газов, образующих плазму, и
оптимизировать высокоскоростную систему генерации плазмы, необходимую для
реакции на быстро меняющуюся внешнюю обстановку.
После выполнения всех мероприятий, направленных на снижение радиоло-
кационной заметности, необходима оптимизация работы комплекса бортового
РЭО. Демаскирующие признаки, вызываемые его работой, становятся существен-
ными на фоне пониженной РЛ заметности самолета. Предусматривается миними-
зация времени работы бортового РЭО в условиях излучения радиолокатора, ис-
пользования режима бистатической радиолокации [19]. Требуются скрытные прие-
мы работы по обеспечению связи ЛА, находящихся в группе.
3.16.4. Снижение заметности ЛА в оптическом диапазоне
Для скрытия оружия, военной техники от обнаружения ОЭС и защиты их от
поражения боеприпасами, оборудованными оптико-электронными ГСН, снижают
уровень излучения и рассеяния ими световой энергии. Метод определения ЭПР ЛА
в оптическом диапазоне с учетом реальных условий описан в работе [169].
Глава 3. Основы радиоэлектронного подавления
335
Для уменьшения тепловой заметности объектов (УТЗО) проводят раз-
личные организационные и технические мероприятия. К организационным меро-
приятиям УТЗО относят использование: естественных фоновых неоднородностей;
неблагоприятных погодных условий; пространственно-временных ограничений. В
качестве технических мероприятий УТЗО выделяют применение пылевых обра-
зований и теплозащитного окрашивания. По составу и свойствам теплозащитные
покрытия подразделяют на жесткие, полужесткие и эластичные. Жесткие тепло-
изоляционные покрытия в виде асбопластиков, стеклопластиков и углепластиков
применяют для защиты наружных поверхностей объектов. Полужесткие покры-
тия из полимерных материалов на основе фенольно-каучуковых связывающих ве-
ществ и эластичных материалов (резина с наполнителями) используются для за-
щиты внутренних поверхностей корпусов двигателей от газодинамического потока.
Тепловое излучение головных частей, корпусов и сопел двигателей ракет
снижают использованием абляционных (теплозащитных) покрытий, обеспечиваю-
щих унос вещества с поверхности тела при испарении, расплавлении, сублимации
(возгонке) под воздействием излучений и высокотемпературных газовых потоков.
В качестве абляционных покрытий применяются различные смолы (фенольные,
эпоксидные), а также кварц, графит, пористые тугоплавкие металлы с легкоплав-
кими наполнителями и другие материалы: 1) теплоизолирующие покрытия (ма-
стичная. формовочная, сборно-блочная, обволакивающая, литая изоляция); 2) теп-
ловые экраны (выдвижные экраны у воздухозаборников и сопел двигателей); 3)
химические присадки и теплообменные устройства.
На рисунке 3.91 проведена структурная схема устройства, реализующая
один из способов снижения оптической заметности ЛА [ИЗ]. Устройство со-
держит: вспомогательный ЛА, на борту которого находится устройство получения
изображения (УПИ) защищаемого ЛА.
ВСПОМОГА ТЕ 1ВНЫЙ Л 1
3 1ЩИП IL МЫЙ 11
HHJIIKATOPHOL УСТРОЙСТВО
Рис. 3.91. Устройство для снижения оптической заметности ЛА
336
Глава 3. Основы радиоэлектронного подавления
Выход устройства передачи изображения (УП) ориентирован в направлении
приемника изображения (ПИ). Выход ПИ подключен к индикаторному устройству,
содержащему изображения И.1 ...И.М видимых с направления наблюдения про-
тивником элементов поверхности ЛА Э.1 ... Э.М. Выходы УУ подключены ко вхо-
дам устройств управления средствами снижения заметности (УУСС3.1 ...
УУССЗ.М) элементов поверхности ЛА Э.1 ... Э.М.
В качестве УПИ и УП могут использоваться телевизионные или тепловизи-
онные системы, работающие в диапазоне оптических частот средства наблюдения
противника. В качестве ПИ и индикаторного у геройства может использоваться те-
левизионная камера. В качестве УУССЗ отдельных элементов поверхности ЛА мо-
гут использоваться распределенные по поверхности элементов ЛА источники све-
та, электрохромные покрытия (оптические характеристики которых изменяются
под воздействием электрических сигналов), управляемые полимерные покрытия.
Устройство (рис. 3.91) за счет управления уровнем заметности ЛА на основании
его же изображения, зарегистрированного и переданного на его борт, позволяет за
счет получения точной и объективной информации о его контрастном образе и
наличия обратной связи между УУ и зарегистрированным изображением повысить
эффективность снижения оптической заметности ЛА не менее чем в 3 раза [113].
На рисунке 3.92 приведен вариант структурной схемы устройства для сни-
жения оптической заметности ЛА [114].
Вспомогательный ЛА
Защищаемый ЛА
Рис. 3.92. Вариант схемы устройства для снижения оптической заметности ЛА
Выход устройства получения изображения (УПИ) соединен со входом
устройства передачи изображения (УП), выход которого ориентирован в направле-
нии приемника изображения (ПИ). Выход ПИ подключен ко входу бортового вы-
числительного устройства (БВУ), выходы которого соединены с соответствующи-
ми входами устройств управления (УУССЗ 1 ... УУССЗ?/) средствами снижения
заметности (С1 ... CN), расположенными на защищаемом ЛА. При необходимости
снижения оптической заметности защищаемого ЛА, по командам летчика вспомо-
гательный ЛА занимает положение на линии визирования защищаемого ЛА сред-
ствами наблюдения противника. В УПИ регистрируется изображение защищаемого
ЛА, которое с помощью УП передается на ПП. В БВУ содержится предварительно
рассчитанная трехмерная геометрическая модель защищаемого ЛА
Глава 3. Основы радиоэлектронного подавления 337
Для известного ракурса, с которого регистрируется изображение защищае-
мого ЛА, и его известного пространственного положения в БВУ рассчитывается его
геометрический образ. В результате в БВУ формируется реальный контрастный
образ ЛА и прилегающих к нему участков фона. Для известных яркостей N элемен-
тов поверхности ЛА и фона на выходах БВУ вырабатываются сигналы управления
1 ... N, которые подаются на входы устройств управления (УУСС31 ... УУССЗА)
средствами снижения заметности (С1 ... СУ), расположенными на защищаемом
ЛА, для обеспечения их минимального контраста с фоном [114].
Для уменьшения оптической заметности объектов в видимой области
спектра также возможно применение:
• специальное окрашивание (имитирующее, деформирующее), использование
не отражающей свет краски серого цвета;
• специальных маскирующих форм (изменение формы и внешнего вида);
• оптических искусственных масок (скрывающих, дезинформирующих);
• использование хлористой кислоты в выхлопных газах для снижения инвер-
сионного следа (в В-2 используется система обнаружения образования инверсии
LIDAR (Light Detection And Ranging) - при образовании инверсионного следа си-
стема предупреждает об этом экипаж) [19].
На самолетах пятого поколения в качестве оборонительной системы может
устанавливаться комплексная ложная цель (КЛЦ). КЛЦ эффективна во всех диа-
пазонах волн, используемых в ГСН ракет класса «воздух-воздух» и «земля-воздух».
КЛЦ представляет собой зону горения, образуемую в стороне от защищаемого ЛА
за счет использования направленной струи 1азов. В струю вводится воспламеняю-
щая жидкость (ею может быть топливо двигателя ЛА), которая затем поджигается.
Тепловое излучение зоны горения является ЛЦ для боеприпасов с ПК ГСН.
Спектральный состав горящего облака идентичен спектральному составу
излучения защищаемого объекта (используется одно и то же топливо), что не поз-
воляет ГСН отл ичать ЛЦ по спектральным признакам, а нахождение ЛЦ на фикси-
рованном расстоянии от реального объекта не позволяет ГСН селектировать ее и по
траекторным признакам. Для защиты от боеприпасов с ГСН в КЛЦ используются
плазмообразу ющие добавки, приводящие к увеличению отражения радиоволн от
зоны горения. Для лазерного диапазона волн используются мелкодисперсные по-
рошки веществ рабочих тел лазеров. В процессе горения они излучаю г ЭМВ на той
же частоте, на которой работает лазер подсветки цели, либо, не сгорая, выносятся
за пределы области горения и в процессе охлаждения излучаюг ЭМВ требуемого
диапазона.
ГЛАВА 4
ОСНОВЫ ФУНКЦИОНАЛЬНОГО РАДИОЭЛЕКТРОННОГО
ПОРАЖЕНИЯ И ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
4.1. Функциональное радиоэлектронное поражение
электромагнитным излучением
Функциональное радиоэлектронное поражение ЭМИ — функциональное
поражение РЭО, заключающееся в разрушении и/или повреждении эл емент ов РЭО
противника средствами поражения ЭМ излучением. Оно может проводиться путем
использования однократных или многократных импульсных воздействий ЭМП,
приводящих к необратимым изменениям электрофизических параметров в полу-
проводниковых или оптико-электронных элементах РЭС в результате их перегрева
или пробоя [22. 24]. В зависимости от мощности, длительности импульсов, рабочей
частоты источника ЭМИ и расстояния до РЭС электромагнитное воздействие мо-
жет быть различным - от кратковременного снижения качества функционирования
и временной потери работоспособности РЭО до его повреждения или разрушения
за счет перегрева или полевого пробоя. Поражающее воздействие ЭМИ на РЭС
осуществимо как в полосе их рабочих частот, так и по побочным каналам.
При функционал ьном поражении РЭС ЭМИ на метровых и более длинных
волнах на металлических корпусах наводятся значительные ЭДС, отказывают раз-
личные электронные схемы, исполнительные элементы. Если ФРЭПр осуществ.гя-
ется в дециметровом или сантиметровом диапазоне волн, совпадающем с рабочим
диапазоном РЭС, повреждаются входные устройства (в частности СВЧ-диоды).
Миллиметровые волны проникают в щели экранов, повреждая как входные цепи,
так и экранированные микропроцессорные устройства. При взаимодействии мощ-
ных СВЧ-колебаний с элементами и уз. [ами РЭС могут наблюдаться два эффекта:
1) наведение на контурных элемен гах (выводах полупроводниковых прибо-
ров, печатных проводниках и т.д.) СВЧ-мощности, которая приводит к электриче-
ским перегрузкам;
2) непосредственное взаимодействие СВЧ-импульсов со структурой полу-
проводникового элемента [15, 24].
Эффект воздействия средств ФРЭПр на РЭС основан на возможности изме-
нения физико-химических свойств электрорадиоматериалов при облучении их
сильными ЭМП. Необратимые изменения свойств вещества, приводящие к каче-
ственно новым образованиям с иной ЭМ структурой, происходят при значительной
энергии воздействующего ЭМП [24]. Основным отличием ФРЭПр от РЭП являют-
ся физические принципы нанесения противнику информационного ущерба. При
ФРЭПр ущерб причиняется путем необратимого (катастрофического) или обрати-
мого (восстанавливаемого) изменения физико-химической структуры элементов
РЭС вследствие воздействия ЭМП на материалы, входящие в состав электронных и
полупроводниковых приборов и других компонентов этих систем.
Глава 4. Основы ФРЭПр и ОЭП
339
Уравнение функционального поражения. Для получения необратимого
эффекта поражения РЭ объектов главным условием является создание в районе
расположения объекта поражения сильного ЭМП, плотность потока которого 77г,
соответствует критическому значению , при котором поражаемый объект вы-
ходит из строя [24]
П > П (4.1)
DA Кг 4 '
Количественно информационный ущерб определяется размерами области
Snop, в пределах которой исключается поступление данных от РЭС, поражаемого
мощным СВЧ-излучением. Эта область фактически изымается из обслуживания
информационной системой, одним из элементов которой является пораженное
РЭС. Предполагается, что ее перекрытие другими РЭС отсутствует. Обозначенную
область следует отличать от зоны поражения средства ФРЭПр — пространст ва во-
круг средства ФРЭПр, при попадании в которое РЭС поражается СВЧ-излучением
в заданной степени и с заданной вероятностью. Внутри этой зоны обеспечивается
функциональное поражение всех РЭС, имеющих одинаковые критические характе-
ристики Пкр, если 77кр < Пвх . Для определения границ зоны поражения D.|OP ис-
пользуется уравнение ФРЭПр.
В зависимости от типа средств ФРЭПр следует рассматривать два основных
способа их применения. Одноразовые средства ФРЭПр в виде ЭМБ в основном об-
ладают всенаправленным воздействием на РЭС в течение короткого времени суще-
ст вования ЭМИ. Особенностью их функционирования является отсутствие избира-
тельного воздействия на РЭС. При попадании в зону поражения любых РЭС (своих
или противника) они могут быть поражены, если только выполнено условие
77вх > 77кр. Средства ФРЭПр многократного использования (лазеры, мощные СВЧ-
установки) поражают РЭС узконаправленным лучом и действуют на объект изби-
рательно, не причиняя вреда собственным РЭС (рисунок 4.1).
ОПТИЧЕСКОЕ ИЛИ
АНТЕННО-ФИДЕРНОЕ УСТРОЙСТВО
Рис. 4.1. ФРЭПр источником сильного узконаправленного ЭМП
Под уравнением функционального поражения понимается аналитически
выраженная зависимость максимальной дальности (радиуса зоны) ФРЭПр заданно-
го РЭС от совокупности энергетических, частотных и пространственно-временных
340
Глава 4. Основы ФРЭПр и ОЭП
характеристик СВЧ-излучения оружия ФРЭПр и критической плотности потока
энергии (мощности) такого излучения, поражающей РЭС [24, 115].
Устройство ФРЭПр (лазер или мощный СВЧ-излучатель) удалено от объек-
та поражения на дальность D. Сильное ЭМП, сконцентрированное в узком телес-
ном угле а х fl, воздействует на приемник или на элементы входных устройств
(оптических, антенно-фидерных). При поражении элементов входных устройств
плотность потока энергии в месте их расположения (Дж/м2) определяется как
где Эизл =РИзгтИЗЛ - энергия ЭМП на выходе излучающего устройства средства
ФРЭПр; Ризл - мощность источника ЭМП; гизл - длительное! ь излучения; £1-а/3
- телесный угол расходимости луча; а,/3 - ширина луча во взаимно ортогональ-
ных плоскостях (радиан); Къ < 1 - коэффициент ослабления энергии ЭМП при рас-
пространении по трассе длиной D. В радиодиапазоне выражение 14.2) имеет вид
вх 4тг£>2 °’
(4.3)
где G - коэффициент усиления антенны мошного СВЧ-устройства.
Поражение РЭС произойдет при выполнении условия
^и^вх“^кр’ 0-4)
где 77кр - критическое значение плотности энергии в плоскости размещения пора-
жаемого элемента, при котором РЭС безвозвратно выходит из строя; КИ - коэф-
фициент использования ЭМП. учитывающий возможность поражения РЭС ЭМ из-
лучением, спектр которого не совпадает с рабочим частотным диапазоном РЭС
(диапазоном восприимчивости) [24]. При ФРЭПр РЭС сильным ЭМП, спектр кото-
рого не перекрывает рабочий диапазон РЭС, необходимо определять Кк с учетом
влияния на ослабление поля пространственно-временных характеристик антенно-
фидерного тракта, ДНА, частотных и поляризационных характеристик.
С учетом (4.2), (4.3) уравнение функционального поражения имеет вид
к^к,=п№. (4-5)
В уравнении функционального поражения (4.5) для оптического диапазона
Q = а/3 ; для радиодиапазона Q = 4лjG [19].
Уравнение (4.5) позволяет, как и традиционные уравнения РЭП. определять
границы зоны поражения и энергетический потенциал устройства ФРЭПр, необхо-
димых для поражения различных объектов на заданных дальностях D. Граница
зоны поражения определяется максимальной дальностью поражения Dt зч при
заданной критической плотности потока энергии Пкр, которая должна быть из-
вестна для каждого конкретного РЭС
Глава 4. Основы ФРЭПр и ОЭП
341
(4-6)
Дальность действия средства ФРЭПр может быть получена из соотношения
ФП — 11 г,
(4.7)
КР
где Ри - мощность излучения СВЧ-генератора, Вт; G - коэффициент излучения
антенны средства ФРЭПр; А - эффективная поверхность антенны приемника, м2;
> ^пр _ относительные коэффициенты усиления антенн источника и приемника в
направлении друг друга; ти - длительность генерируемого импульса; Ркр - крите-
риальный уровень поражения полупроводникового прибора на входе РЭС, Дж 181].
В работе [116] приведена формула для максимальной дальности поражения
мощным СВЧ-излучением
D = 0,78— 1-^,
max 5 1 1 D ’
Л \ гКР
где d - диаметр апертуры антенны; Л - длина волны мощного излучения; Р -
импульсная мощность СВЧ-генератора; Ркр - критериальный уровень поражения.
Зона поражения лазерным комплексом ФРЭПр представляет собой конус,
в вершине которого находится средство ФРЭПр (рисунок 4.2). Длина образующей
конуса равна D 1ах. Если комплекс ФРЭПр способен надежно сопровождать ГСН
УР узким лучом, то зона подавления на плоскости может быть представлена в виде
круга с радиусом R = Dmax. Средства ФРЭПр одноразового применения в качестве
источника сильного ЭМП используют взрывомагнитный генератор (ВМГ), который
доставляется к цели либо ракетой, либо миной, либо другим носителем ЭМ бое-
припаса (ЭМБ) [117]. Зона поражения представляет собой круг радиуса R^D^
(рисунок 4.3).
Рис. 4.2. Зона поражения оптико-
электронных средств ФРЭПр
Рис. 4.3. ФРЭПр ГС11 УР, наводящейся на
защищаемое РЭС ЭМБ
342
Глава 4. Основы ФРЭПр и ОЭП
При защите собственных РЭС от СНИО следует учитывать возможность
ФРЭПр своих средств собственным ЭМ оружием. Защищаемые РЭС не должны
находиться в зоне поражения (рис. 4.3). Подрыв ЭМБ должен быть произведен на
расстоянии о г собственного РЭС Z)cinin, превышающем максимальную дальность
поражения Dmax (Dcmin >Dmac). Дальность подрыва Dcn)ii рассчитывается с учетом
критического значения Пк?, характерного для действия ЭМБ на защищаемое РЭС.
При разработке комплексов ФРЭПр возникает задача определения энерге-
тического потенциала ЭФП средства ФРЭПр, обеспечивающего поражение РЭС на
заданной дальности /)ЗАД. Потребный энергопотенциал [24] определяется из урав-
нения (4.5) как
(4.8)
"'ч)
Из соотношения (4.8) следует, что необходимый энергетический потенциал
ЭФП устройства функционального поражения находится в сильной зависимости от
заданной дальности поражения IX к .
Критические уровни функционального поражения обычно находятся
одним из двух способов:
1) теоретически определяется Экр по типовым моделям функционального
поражения, из которых наиболее распространенной и заслуживающей доверия яв-
ляется модель Вунша - Белла [22, 24];
2) экспериментально для конкретного элемента входных устройств РЭ ап-
паратуры определяется Экр. В различных работах приводятся значения 77кр, при
которых выходят из строя различные приборы. Эти значения лежат в пределах
77кр = 1О?...1О8 Дж/см2.
Все эффекты в элементах РЭС при воздействии мощного ЭМИ можно раз-
делить на первичные (тепловой разогрев, пробой подзатворного лиэлектрика. ла-
винный и туннельный пробои) и вторичные (обратимые и необратимые (катастро-
фические отказы), регенеративного и нерегенеративного типа) [15, 22].
Катастрофические отказы вызываются напрямую (электрическое блокиро-
вание) или через тепловой вторичный пробой. Именно тепловой пробой полупро-
водниковых структур в большинстве случаев является причиной невосстанавлива-
емых отказов. Плотность вероятности функционального поражения определяется
выражением
5 W (t} 5
»;n(r) = min(»;(r),^(/)>»',(/),»;(z),n'!(r)) = i;—](l-F(0), (4.9)
TTl-fW и
где Wt(t), F}(t) — плотность и функция распределения вероятности возникновения
лавинного пробоя; W2(f), F(f) - плотность и функция распределения вероятности
возникновения туннельного пробоя; Я, (г), F,(r) - плотность и функция распреде-
ления вероятности возникновения пробоя подзатворного диэлектрика; U4(/). F4(/)
Глава 4. Основы ФРЭПр и ОЭП
343
плотность и функция распределения вероятности возникновения электронного
блокирования; W5(t), Fc(t) - плотность и функция распределения вероятности воз-
никновения теплового вторичного пробоя.
Основным показателем устойчивости элементной базы к воздействию излу-
чения ФРЭПр являются критериальные уровни поражения, определяемые вели-
чиной мощности, при которой возникают восстанавливаемые и невосстанавливае-
мые отказы. В таблицах 4.1 и 4.2 приведены энергетические уровни поражения не-
которых элементов, )злов и блоков радиоэлектронной аппаратуры (РЭА) [62].
Таблица 4.1 - Энергетические уровни поражения элементов РЭА
Тип элемента Энергия поражения (повреждения), мкДж
СВЧ диоды 0,1...10
Интегральные схемы 0,1...300
Цифровые интегральные схемы 80
Полевые транзисторы 10
Маломощные транзист оры (1...3)-104
Транзисторы средней и большой мощност и 4-Ц0...104)
Выпрямительные диоды 100...4- 10s
Быстродействующие переключающие диоды 20
Тунельные диоды 500
Кремниевые тиристоры 3000
Таблица 4.2 — Уровни функционального поражения блоков и узлов РЭА
Тип изделия Плотность потока энергии, Вт/см2 Поток энергии, Дж/см2 Длитель- ность и и пульса, с
Усилители системы управления 10...40 (1...4)- 10’2 ю-3
Узлы СУ на ИС и БИС 70...600 (0,7...6)- 10’2 io-fi
Элементы радиопередатчиков (0,1.. Л)- 105 (0.1...1)- w4 10-7
Радиоприемники (51ф = 1...2 м2) 1...100 (0,1...1)-10’6 10-7
Телевизионные системы на ви- диконах (повреждение видеоуси- лителя) (3...5)- 10- 0,6...2 (2...4)- 10‘4
Критериальные (критические) уровни функционального поражения широ-
кой номенклатуры РЭС' отличаются большим разбросом и могут составлять
0,01...5- 10' Вт'см2 [62. 116]. Типовые критериальные уровни различных полупро-
водниковых приборов приведены в работе [24, 115]. Наиболее уязвимыми являются
344
Глава 4. Основы ФРЭПр и ОЭП
СВЧ-диоды, работающие во входных трактах преобразователей частоты, инте-
гральные микросхемы и диоды с точечным контактом.
Модель поражения Вунша — Белла. СВЧ-излучение проникает в РЭС раз-
ными путями: через антенну, оптическую систему, технологические люки, отвер-
стия, щели, разъемы, цепи питания. Самый мощный «электронный удар» прини-
мают на себя элементы, расположенные на выходе приемной антенны РТ устрой-
ства или оптической системы оптоэлектронного устройства (малошумящие вход-
ные усилители и смесительные диоды, фотодиоды и фоторезисторы).
При нагревании диода мощным СВЧ-импульсом основная часть приложен-
ного к диоду напряжения падает на переходе, в нем же выделяется основная мощ-
ность. Для предсказания уровней мощности ЭМИ, вызывающих теплопоражение
(повреждение) полупроводниковых структ ур, физики Вунш (H unch) и Белл (Bell)
предложили модель, получившую широкое распространение при оценке термо-
стойкости этих структур. Авторы рассматривали плоский ИИ, расположенный в р-
л-переходе и помещенный в бесконечный полупроводник. Из решения одномерно-
го уравнения теплопроводности ими было получено выражение для уровня мощно-
сти поражения
Д = s , (4.10)
V
где Гкр — температура разрушения перехода (критическая темп ература плавления);
Д - начальная температура; ги - длительность мощного импульса; S - площадь
перехода: к - коэффициент теплопроводности; с — удельная теплоемкость; р -
плотность вещества полупроводника.
Выражение (4.10) является частным случаем обобщенной модели Вунша -
Белла, определяемой соотношениями
Р(ги) = Лт-' + Вг^!+С> (4.11)
2(ти) = / + Вг«+Сги, (4.12)
где Р{гц) - пороговое значение мощности, разрушающей полупроводниковую
структуру в результате тепловыделения; Q(r — пороговое значение энергии, раз-
рушающей полупроводниковую структуру [22, 24].
Постоянные А, В и С зависят от геометрии полупроводникового кристалла,
его эффективной площади, теплоемкости и теплопроводности материала, темпера-
туры поражения, толщины перехода. Эти постоянные определяются при аппрокси-
мации экспериментальных 1ависимостей ^(ги) и £?(ти). В зависимости от дли-
тельности импульса меняется вклад каждого из трех слагаемых, входящих в (4.11)
и (4.12). При значениях ги в интервале от 100 нс до 10 мкс наибольший вклад в
сумму вносит второе слагаемое. При 10 нс < ти < 100 нс параметры Р и Q опреде-
ляются в основном первым слагаемым, при ти >10 мкс-третьим слагаемым.
Для импульсов короче 10 нс модель Вунша - Белла также справедлива, если
импульс достаточно пологий, т.е. если длительность фронта этого импульса мала.
Глава 4. Основы ФРЭПр и ОЭП
345
Но чем больше скорость нарастания импульса, тем в меньшей степени процесс по-
ражения полупроводникового элемента укладывается в рамки тепловой модели
[24]. При коротких импульсах начинает действовать полевой 1еханизм поражения,
определяемый напряженностью электрического поля и скоростью ее нарастания.
Описание полевого механизма поражения требует привлечения аппарата нереляти-
вистской квантовой механики. Мощности ЭМИ, формируемых известными сред-
ствами ФРЭПр, могут превышать десятки ГВт, длительности ЭМИ лежат в преде-
лах от миллисекунд до наносекунд. В большинстве практических случаев функци-
ональное поражение РЭС ЭМИ имеет место при отказе хотя бы одного из основных
его полупроводниковых элементов.
Вероятность ФП полупроводникового элемента РЭС ЭМИ за время t
можно рассчитать по формуле [22]
Л>п(0 = ехР
(4-13)
где /СФП - коэффициент ФРЭПр РЭС (минимально необходимое отношение энер-
гии, поступающей на вход РЭС, к пороговой энергии Q, при котором происходит
функциональное поражение хотя бы одного элемента РЭС с эффективностью не
ниже заданной); £?Нвх(г) ~ средняя энергия, накапливаемая на элементе РЭС за
время t, приведенная к входу этого средства,
2нвх(^ = ХРги,ехР
(4.14)
где п — число импульсов, поступивших на вход РЭС за время Г; Р - мощность z-ro
импульса; тИ| - длительность z-ro импульса; f — момент поступления z-ro импуль-
са: т — постоянная времени рассеивания тепловой энергии для поражаемого эле-
мента РЭС. Формула (4.14) справедлива для случая гИ1 « гр.
Реализация электромагнитного оружия (ЭМО). Принцип действия ЭМО
основан на кратковременном ЭМ излучении большой мощности, способном выве-
сти из строя РЭС, составляющие основу любой информационной системы. Эле-
ментная база РЭС весьма чувствительна к энергетическим перетру зкам, поток ЭМ
энергии достаточно высокой плотности способен выжечь полупроводниковые пе-
реходы, полностью или частично нарушив их нормальное функционирование. Да-
же у кремниевых сильноточных биполярных транзисторов, обладающих повышен-
ной стойкостью к перегревам, напряжение пробоя составляет 15...65 В, а у арсе-
нид-галлиевы> приборов - 10... 12 В. ЗУ имеют пороговые напряжения порядка 7
В, типовые логические ИС на МОП-структурах - 7... 15 В, а микропроцессоры
обычно прекращают свою работу при 3,3...5 В [19].
ЭМО может бы гь создано как в виде стационарных и моби. юных электрон-
ных комплексов направленного излучения, так и в виде ЭМБ. доставляемых к цели
с помощью снарядов, мин, управляемых ракет, авиабомб и т.п. На рисунке 4.4 по-
346
Глава 4. Основы ФРЭПр и ОЭП
казана конструкция типового ЭМБ (900 кг: d - 0,46x3,8 м), на рисунке 4.5 - прин-
цип боевого применения типового ЭМБ [117].
В основу ЭМБ положены методы преобразования химической энергии
взрыва, горения и электрической энергии постоянного тока в энергию ЭМП высо-
кой мощности. Решение проблемы создания ЭМБ связано с наличием компактных
ИИ, которые могли бы располагаться в отсеках БЧ УР и артиллерийских снарядах.
ЭМБ могут быть использованы для воздействия на районы возможных позиций
мобильных и переносных ЗРК, в системах ближней защиты ЛА. В качестве средств
ФРЭПр РЭС ЭМП применяют устройства на основе [12, 19, 22]: генераторов излу-
чений взрывного типа и релятивистских генераторов СВЧ-излучений.
Рис. 4.5. Принцип боевого применения типового ЭМБ
Для функционального подавления ОЭС наблюдения, разведки. ЦУ, наведе-
ния и оптико-визуальных каналов оптических приборов можно использовать бое-
припас с устройством замедления, зарядом взрывчатого вещества и герметичной
капсулой из прозрачного материала, наполненной тяжелым инертным газом (ксе-
Глава 4, Основы ФРЭПр и ОЭП 347
ноном или криптоном) или смесью газов со средней молекулярной массой не менее
100 атомных единиц массы по углеродной шкале [118]. В боеприпасе используется
взрывчатое вещество бризантного типа (гексоген) с высоким энергосодержанием
(не менее 4 МДж/кг). Длительность импульса излучения для боеприпасов калибра
30...57 мм составляет 10... 15 мкс, полная мощность излучения в диапазоне про-
зрачности воздуха составляет примерно 10 МВт для 30-мм калибра и порядка 40
МВт для 57-мм калибра, что позволяет эффективно подавлять ОЭС военного
назначения в радиусе сотен метров.
По спектральным характеристикам средства ФРЭПр можно разделить на
два вида: 1) НЧ, создающие ЭМИ со спектром на частотах ниже 1 МГц; 2) ВЧ,
обеспечивающие ЭМ воздействие в СВЧ-диапазоне.
Техника реализации НЧ электромагнитного оружия. Основным техни-
ческим средством реализации мощных ЭМИ, составляющих основу ЭМО, в насто-
ящее время является генератор с взрывным сжатием магнитного поля - взрывомаг-
нитный генератор (ВМГ). По геометрии ВМГ разделяются на цилиндрические,
спиральные, плоские, коаксиальные, дисковые и др. Наиболее компактными явля-
ются спиральные ВМГ, имеющие наилучшие показатели удельной плотности энер-
гии по массе (100 кДж кг) и объему (10 кДж/см’), а также взрывные магнитодина-
мические генераторы (ВМДГ) [117].
В ВМГ с помощью взрывчатого вещества происходит преобразование энер-
гии взрыва в энергию магнитного поля с эффективностью 10...20 %. Ограниченная
спектральная полоса излучения ВМГ (несколько МГц) делает их влияние на РЭС
довольно избирательным. Было разработано и испытано много модификаций ВМГ
в США и России, обеспечивающего длительность импульса от десятков., .сотен мкс
до 100... 180 нс, пиковую мощность от единиц до десятков МВт, а производимый
генератором ток в 10... 1000 раз превышал ток, порождаемый разрядом молнии.
Генераторы со сжатием потока мощности при помощи взрывчатки (explosively
pumped flux compression generators), или FC-генераторы, были впервые продемон-
стрированы Кларенсом Фоулером в Лос-Аламосе в конце 1950-х годов.
В ВМДГ взрывчатка или ракетное топливо применяются для образования
плазменного потока, быстрое перемещение которого в магнитном поле приводит к
возникновению сверхмощных токов с сопутствующими ЭМИ. Главное преимуще-
ство ВМДГ — многоразовость применения, поскольку картриджи со взрывчаткой
или ракетным топливом могут закладываться в генератор многократно. Однако его
удельные массогабаришые характеристики в 50 раз ниже, чем у ВМГ, кроме того,
технология ВМДГ еще не достаточно проработана.
Магнитно-гидродинамические генераторы (explosive or propellant driven
magneto-hidrodynamic generators) или MH-генераторы также предполагают исполь-
зование ВВ. Принцип их действия основан на том, что в двигающемся в магнитном
поле проводнике создается электрический ток в направоении, перпендикулярном
направлению поля и вектору движению проводника. В качестве проводника ис-
пользуется струя плазмы от направленного взрыва ВВ, которая движется поперек
поля. Ток снимается электродами, имеющими контакт с плазменной струей. В по-
роховом MH-генераторе обычно используется ракетное топливо с легкоионизиру-
ющими добавками на основе калия или цезия [81].
348
Глава 4. Основы ФРЭПр и ОЭП
По принципу усиления поля или увеличения энергии ВМГ делят на два
класса [12, 24]: 1) генераторы магнитного поля; 2) генераторы электрического поля.
Структурные схемы ВМГ [12, 22] и одноразового комплекса ФРЭПр представлены
на рисунке 4.6 (СПИО, СНИО - системы предварительного и непосредственного
информационного обеспечения; САУ - система автоматического управления; НС -
носитель средства ФРЭПр).
ВХОДНОЕ КО ГЬЦО
СТАТОРНОЙ ОБМОТКИ
ВЫХОДНОЕ КОЛЬЦО
СТА ТОРНОЙ ОБМОТКИ
Рис. 4.6. Схемы генератора со взрывным сжатием магнитного поля и
одноразового комплекса ФРЭПр на основе ВМГ
Наиболее проработанный коаксиальный генератор состоит из ротора (ци-
линдрическая медная труба, заполненная взрывчатым веществом (ВВ)) и статора
(низкоомная спираль из прочного (обычно медного) провода, окружающая ротор).
Во избежание преждевременного разрушения генератора поверх статорной обмот-
ки установлен кожух из немагнитного материала (цемент, стекловолокно с эпок-
сидной смолой). Первоначальное магнитное поле в генераторе, предшествующее
взрыву, формируется током статора. Можно использовать любой источник тока
(конленсагорный блок либо FC-генератор малой мощности), способный обеспечить
импульс тока силой от единиц кА до МА.
Подрыв ВВ происходит с помощью специального генератора в момент, ко-
гда ток в статорной обмотке достигает максимума. Образующийся при этом одно-
родный взрывной фронт волны распространяется вдоль ВВ, деформируя структуру
ротора, превращая ее из цилиндрической в коническую форму. В момент расшире-
ния трубки ротора до размеров статора происходит короткое замыкание статорной
обмотки, приводящее к эффекту сжатия магнитного поля генератора и возникнове-
нию мощного импульса тока величиной порядка нескольких десятков МА. Время
нарастания тока составляет сотни мкс при пиковых токах замыкания в десятки МА
и пиковой мощности поля в десятки МВт. Степень возрастания выходного тока по
сравнению со стартовым током зависит от конструкции ВМГ и достигает несколь-
ких (более 6) десятков.
Устройства ФРЭПр РЭС на основе генераторов излучения взрывного типа
успешно реализуются в виде ЭМБ калибра 30 - 130 мм [19]. ЭМБ малого калибра
предназначены для временного ослепления РЭС, а среднего и большого калибра -
Глава 4. Основы ФРЭПр и ОЭП 349
для вывода РЭС из строя на длительное время. По характеру воздействия ЭМБ за-
нимают промежуточное положение между традиционными средствами РЭП и
средствами огневого поражения. Реализация НЧ ЭМО в эффективном варианте
требует больших антенн, поскольку ее максимальная излучаемая мощность лежит в
диапазоне частот ниже 1 МГц. Решением этой проблемы может быть применение
катушек с намотанными на них кабелями, выбрасываемыми в момент взрыва, или
точная доставка боевого средства к месту расположения поражаемого объекта.
Техника реализации СВЧ-энергии высокой мощности. Релятивистские
генераторы СВЧ-излучения включают в себя сильноточные электронные ускорите-
ли с энергией частиц 1... 10 МэВ и током 0,1... 10 МА, также собственно СВЧ-
генераторы сверхбольшой мощности (от 100 МВт до 10 ГВт). Известны 3 класса
релятивистских СВЧ-генераторов [22]: СВЧ-генераторы с виртуальным катодом
(виркаторы); релятивистские магнетроны и СВЧ-приборы со сверхразмерными
электродинамическими структурами. Все эти приборы обладают способностью
преобразовывать кинетическую энергию электронного пучка в ЭМ энергию СВЧ
диапазона. Существующие источники СВЧ-излучения способны работать как в им-
пульсном (длительностью 10 нс и более), так и в непрерывном режимах и перекры-
вать диапазон от 500 МГц до десятков ГГц. Максимальная генерируемая мощность
дости] ает нескольких МВт при непрерывном излу чении и нескольких I В г при им-
пульсном. С учетом распространения мощного СВЧ-излучения в атмосфере и
наличия освоенных промышленностью генераторов такого излучения максималь-
ная дальность ФРЭПр обеспечивается при использовании 8-миллиметрового диапа-
зона ЭМВ [119].
Появление релятивистских СВЧ-приборов со сверхразмерными электроди-
намическими структурами, имеющими поперечные размеры, превышающие рабо-
чую длину волны, обусловлено необходимостью увеличения тока в сверхмощных
генераторах до величин 1 кА, что влечет за собой возрастание поперечных разме-
ров электронных потоков и диаметра простанства дрейфа. К приборам этого класса
относятся многоволновые черенковские генераторы (МВЧГ) одночастотные про-
странственно-когерентные источники черенковского излучения, работа которых
основана на использовании синхронизма электронов и ЭМП периодической систе-
мы. Принцип действия МВЧГ на примере одного из плазменных релятивистских
генераторов (ПРГ), в котором реализуется черенковское возбуждение собственных
мод плазменного волновода, иллюстрируется рисунком 4.7 (РЭЛП - релятивист-
ский электронный поток) [22].
Импульс высокого напряжения подается на катод ускорителя (рис. 4.7).
Электронный пучок (РЭЛП) инжектируется вдоль оси круглового металлического
волновода, заполненного трубчатой плазмой. Пучок и плазма находятся в однород-
ном продольном магнитном поле, электроны пучка имеют тольок продольную со-
ставляющую скорости. Коллектор электрически соединен с волноводом. СВЧ-
волпа генерируется в плазменном волноводе, затем излучается рупором. С помо-
щью таких МВЧГ (ПРГ) могут формироваться СВЧ-излучения мощностью в сотни
МВт и более. Ориентировочная оценка массы и габаритных размеров многоволн о-
вого черенковского генератора с излучаемой мощностью 3 ГВт и длиной волны 9,7
350
Глава 4. Основы ФРЭПр и ОЭП
мм позволяет сделать вывод о том, что этот генератор (массой несколько большей
600 кг) можно установить на некоторых типах ЛА.
Гиротроны работают в миллиметровом диапазоне волн с высоким КПД,
варакторы — в сантиметровом диапазоне и имеют меньший КПД. Для тактического
СВЧ-оружия важно, чтобы генераторы были достаточно широкополосными или
перестраивались в пределах декады. Важными отличительными особенностями
виркаторов (vircators) являются их широкополосность. достигающая приблизи-
тельно 10 % от значения несущей частоты, и возможность перестройки прибора в
широкой полосе частот [81].
РЭПЛ ==Д Коллектор РЭШ1
Катод
ускорителя
Pj пор
Коаксиальный вакуумный волновод
Металлический волновод
Рис. 4.7. Схема ПРГ с возбуждением собственных мод плазменного волновода
В основу принципа действия релятивистских СВЧ-генераторов с виртуаль-
ным катодом положен эффект возбуждения СВЧ-колебаний в резонансной системе,
совмещенной с высоковольтным вакуумным диодом. Колебания возникают вслед-
ствие осцилляций релятивистских электронов в потенциальной яме между катодом
и виртуальным катодом. Высоковольтный диод помещается в резонансную систе-
му, размеры которой шачительно больше размеров катода и сетки (анода), а т акже
зазора между ними. На рисунке 4.8 приведена схема виркатора с соосным вирту-
альным катодом [12].
Рис. 4.8. Структурная схема виркатора
Глава 4. Основы ФРЭПр и ОЭП
351
Виркатор представляет собой круглый волновод, переходящий в конус. Ка-
тод представляет собой металлический цилиндрический стержень диаметром не-
сколько см. Анодом является натянутая на обод металлическая сетка с геометриче-
ской прозрачностью 0,5...0,9. При подаче на анод положительного потенциала по-
рядка 105...10° В вследствие взрывной эмиссии с катода поток электронов устрем-
ляется к аноду и проходит через него в пространство за анодом, где тормозится
собственным кулоновским полем и отражается обратно к аноду, образуя виртуаль-
ный катод на расстоянии от анода, примерно равном расстоянию до реального ка-
тода.
Отраженные электроны проходят сквозь сетку анода и тормозятся у реаль-
ного катода. В результате образуется облако электронов, циркулирующее в потен-
циальной яме между реальным и виртуальным катодами. Этот процесс сопровож-
дается фазовой группировкой и селекцией неправильнофазных электронов на като-
де и стенках диода, а модулированный по фазе поток возбуждает СВЧ-поле в резо-
нансной системе на частоте колебаний электронов или кратной ей. При этом пра-
вильнофазные электроны оседают на аноде. СВЧ-поле излучается в пространство
через диэлектрическое окно. Особенностью виркаторов является возможность пе-
рестройки в широком диапазоне путем изменения рабочего напряжения U либо
расстояния d между анодом и катодом. Соотношение
(4.15)
позволяет оценить рабочую частоту виркатора [81].
Стартовые токи в виркаторах, при которых возникает генерация, составля-
ют 1...10 кА, а выводимая СВЧ-мощность достигает единиц ГВт. Особенности фи-
зических процессов, возникающих в виркаторе, делают их наиболее приемлемыми
для генерации импульсов наносекундной длительности в длинноволновой часа и
сантиметрового диапазона. Вариант антенной системы для СВЧ-излучения вирка-
тора приведен на рисунке 4.9 [120].
Диэлектрический носовой
конический обтекатель
спиральная
антенна
Рис. 4.9. Вариант антенной системы для СВЧ-излучения виркатора
352
Глава 4. Основы ФРЭПр и ОЭП
Экспериментально от виркаторов получены мощности до 40 ГВт в санти-
метровом и дециметровом диапазонах, длительности - от десятков до сотен нано-
секунд. По сравнению с другими релятивистскими генераторами виркаторы обла-
дают целым рядом достоинств:
• отсутствие замедляющей системы и использование довольно простой каме-
ры волноводного типа;
• работа без фокусирующего магнитного поля (снижение массы и энергопо-
требления);
• соизмеримость области взаимодействия потока частиц и ВЧ поля в резона-
торе с длиной волны излучения;
• хорошее сопряжение с ВМГ как с источником запитывающего импульса
высокого напряжения;
• высокие пробойные напряженности;
• возможность ВЧ управления;
• допустимы запредельные токи [24].
Недостатком виркаторов является низкий КПД (1 ...5 %), что объясняется
принципиально многомодовым характером ЭМП в виркаторах и интерференцией
между модами. Общее число возникающих мод можно оценить из соотношения
7V = (//A)3, (4.16)
где / — диаметр резонансной об тасти; Л - длина волны.
Особенности физических процессов, протекающих в виркаторах. делают их
наиболее приемлемыми для генерации импульсов наносекундной длительности в
сантиметровом диапазоне длин волн, однако эги приборы показали свою работо-
способность и на частотах до 35 ГГц.
К достоинствам релятивистских магнетронов, способных генерировать
наносекундные импульсы сантиметрового диапазона, следует отнести высокий
КПД, относительно хорошие .массогабаритные характеристики и небольшую стои-
мость, низкий уровень побочных излучений, частотную и фазовую стабильность. В
то же время релятивистские магнетроны узкополосны (ширина полосы излучения
составляет ~ 1 % от несущей частоты) и не обеспечивают перестройку в широкой
полосе частот. В релятивистских магнетронах электронный поток возникает всл ед-
ствие взрывной эмиссии с холодного катода, вызываемой высоким напряжением
(более 1 МВ) между анодом и катодом. Значения тока достигают десятков кА. За-
медляющая структура многорезонаторного (общее число резонаторов 6, 8, 12, 16)
анодного блока длиной от Л/3 до 2Я изготавливается из нержавеющей стали,
алюминия или меди. Лучшие значения КПД релятивистких магнетронов достигали
30...35 %, однако в большинстве случаев составляли около 10 %, что существенно
превышает этот параметр для виркаторов.
Фирмой Physics International Company создан релятивистский магнетрон,
работающий в диапазоне 1 ГГц с импульной мощностью 500 МВт. длительность
импульсов 50 нс с частотой повторения 100 Гц в течение 0,5 с [81]. В Уральском
отделении Института электрофишки РАН (Екатеринбург) разработаны многоразо-
вые мобильные SOS-генераторы ЭМИ, проникающая способность излучения кото-
рых намного выше, чем у ВМГ. Принцип действия SOS-генераторов (SOS
Глава 4. Основы ФРЭПр и ОЭП
353
Semiconductor Opening Swich) основан на эффекте наносекундной коммутации
сверхплотных токов в полупроводниковых приборах.
Важными свойствами SOS-эффекта являются:
1) сочетание высокой плотности коммутируемого тока с наносекундной
длительностью его отключения;
2) сталия срыва тока характеризуется автоматическим равномерным рас-
пределением напряжения по последовательно соединенным полупроводниковым
структурам, что позволяет создавать прерыватели тока с напряжением мегавольт-
ного уровня путем простого последовательного соединения SOS-структур.
Значение коммутируемого тока SOS-диода с площадью структуры 1 см2 —
5,5 кА; время его срыва (с 0,9 до 0,1 амплитуды) - 4,5 нс; скорость коммутации -
1200 кА/мкс, что на три порядка превышает токовый градиент в обычных быстро-
действующих тиристорах. Самый мощный из разработанных SOS-диодов при пло-
щади структуры 4 см2 имеет рабочее напряжение 200 кВ и коммутирует ток 32 кА,
что соответствует коммутируемой мощности 6 ГВт [117].
На основе SOS-диодов разработана серия мощных наносекундных генера-
торов с рекордными для полупроводниковых коммутаторов параметрами. Блок-
схема генератора на SOS-эффекте приведена на рисунке 4.10.
Рис. 4.10. Блок-схема SOS-генератора
Тиристорное зарядное устройство (ТЗУ) осуществляет дозированный отбор
энергии от источника питания (ИП), которая затем за время 10... 100 мкс при
напряжении 1...2 кВ поступает на магнитный компрессор (МК). МК сжимает энер-
гию во времени до 300...600 нс и повышает напряжение до сотен кВ. SOS-диод вы-
ступает в роли оконечного УМ, переводя энергию в диапазон времени 10... 100 нс и
повышая напряжение в 2...3 раза.
Введение в состав SOS-генератора МК продиктовано необходимостью со-
гласования параметров выходного импульса ТЗУ с параметрами импульса накачки
SOS-диода. По мере сжатия энергии в МК происходит удвоение напряжения в каж-
дой ячейке. В общем случае выходное напряжение МК (без учета активных потерь
энергии) в 2” раз выше входного (и - число конденсаторных ячеек). Разработанные
SOS-генераторы позволяют в 5... 10 раз увеличивать номинальную частоту следо-
вания импульсов и выходную мощность в режиме пакета продолжительностью
30...60 с [117].
Мобильные СВЧ-средства ФРЭПр используют диапазон частот 0,5...20
ГГц, частота повторения импульсов 10 Гц при длительности импульса 200... 1000
нс. Импульсная мощность излучения может достигать 1 ...5 ГВт, энергия в импуль-
се 2... 10 кДж. КПД генераторного прибора (гираторы, виркаторы, черенковские
генераторы) 36...40 %. КПД установки в целом 20...25 %, масса 6...10 г, диаметр
354
Глава 4. Основы ФРЭПр и ОЭП
антенны 2...5 м, дальность действия - в пределах прямой видимости. СВЧ-
средства одноразового действия (ВМГ, резонансный магнетрон, виркатор) ис-
пользуют диапазон 6... 10 ГГц, мощность в импульсе 3...5 ГВт при длительности
импульса 150... 1500 нс, масса 500 кг, дальность действия - 3...4 км. Малогаба-
ритные СВЧ-средства ФРЭПр (ВМГ, ударно-волновой генератор) используют
диапазон 0.5... 100 ГГц, импульсная мощность 1...5 ГВт, длительность импульса
1... 100 нс, масса 40.. .50 кг, дальность действия 1.. .2 км [62].
Преимущество ВЧ устройств перед НЧ - возможность фокусирования гене-
рируемой ими энергии в направлении цели с помощью достаточно компактных ан-
тенных систем с механическим или электронным управлением. В перспективе
ЭМО рассматривается, прежде всего, как силовое, наступательное средство РЭБ.
Основными стратегическими и оперативными задачами, которые можно
будет решать с помощью ЭМО, являются:
1) стратегическое сдерживание агрессии;
2) дезорганизация СУ войсками и оружием противника;
3) снижение эффективности его наступательных воздушных, сухопутных и
морских действий;
4) обеспечение господства в воздухе путем поражения средств ПВО и РЭБ
противоборствующей стороны [15. 19].
В таблице 4.3 приведены характеристики релятивистских СВЧ-генераторов
и ускорителей, обеспечивающих создание элскгронных пучков (МИ - моноим-
пульс) [62].
Таблица 4.3 —Характеристики релятивистских СВЧ-генераторов и ускорителей
Тип прибора Ускоритель СВ Ч-генератор
Напря жение, МВ Ток, кА ТИ ’ нс Мощ- ность, ГВт Часто- та, ГГц ГИ ' НС Частота повто- рения кпд %
Виркатор 1 100 60 1 8...12 — МИ 1
Виркатор 0,9 70 60 0,35 8...12 30 МИ 0,6
Виркатор 1.9 35 70 1,4 3,9 40 МИ
Виркатор 1,5 80 80 4,0 6,5 40 МИ 3,3
Виркатор 10 250 180 0.5x8 10.6 180 МИ 1
Релятивистский магнетрон 1.2 50 65 6.9 4,5 20...40 — 10 1 (351 ,
Релятивистский магнетрон 0,7 20 65 3,2 2,8 20 — 1Т|
Релятивистский магнетрон 0.5...1 10...20 50 0.5...0.7 3...5 50 10 Гц 3 (15) ।
Релятивистский магнетрон 0,75 10 60 0,5 1 50 100 Гц — 1
В общем случае воздействующими факторами на элементы БЦВМ при
функциональном поражении ЭМИ являются:
Глава 4. Основы ФРЭПр и ОЭП 355
• ЭМП, протекающие через экраны;
• импульсные напряжения и токи, наводимые в цепях «жила-экран» кабелей
и воздействующие на входы оборудования и аппаратуры;
• импульсные напряжения и токи, наводимые в печатных платах ЭМП, про-
никающими через неоднородности экранов;
Анализ результатов отечественных и зарубежных исследований воздей-
ствия ЭМП наносекундного диапазона напряженностью 2... 10 кВ.м (частота следо-
вания импульсов 1 МГц) на ПЭВМ показал, что уровни наводимых напряжений
приводят к их отказам и ложным срабатываниям [121]. Оценки возможности созда-
ния комплекса СВЧ ЭМИ с применением в качестве генераторов электорвакуум-
ных приборов с мощностью излучения десятки МВт позволяют создать АФАР с
энергетическим потенциалом более 10"...1012 Вт в импульсе длительностью 1 мкс,
что позволяет с определенной вероятностью обеспечить ФРЭПр РЭС на дальности
до 12...15 км [173].
Основными недостатками средств ФРЭПр ЭМИ являются: 1) плохая
ЭМС (этот недостаток может быть ограничен разнесением РЭС в пространстве, ис-
пользованием направленных антенн и внедрением индивидуальных устройств за-
щиты от мощного ЭМИ); 2) воздействие мощного излучения на биологические
объекты [15] К достоинствам средств ФРЭПр ЭМИ можно отнести [19, 81]:
1) расширение круга решаемых задач, выведение из строя РЭС, не излуча-
ющих в пространство;
2) очень высокую степень универсальности поражения, эффективное воз-
действие на РЭС с высокой помехозащищенностью;
3) снижение в ряде случаев требований к качеству необходимой разведин-
формации (по местоположению, частотному диапазону, параметрам сигналов):
4) ненужность сложнейших средств анализа и имитации сигналов подавля-
емых РЭС;
5) внеполосность (способность проникать внутрь РЭС помимо полосы про-
пускания).
Эффективность ФРЭПр, определяемая степенью защищенности элементной
базы РЭС от воздействия мощного СВЧ-излучения, практически не зависит от их
функционального назначения. Следует отметить, что разработка и производство
средств функционального поражения относится к области ключевых технологий,
определяющих уровень оборонной техники современного государства.
4.2. Лазерные средства функционального поражения
Свойство очень узкой направленности луча лазера и высокая энер] етиче-
ская плотность излучения позволяют в принципе применять лазер в качестве сред-
ства ФРЭПр радио- и оптоэлектронных средств управления войсками и оружием
[24]. К категории особо важных относятся исследования проводимые в США в об-
ласти разработки технологии и создания средств ФРЭПр на основе лазеров и
сверхмощных генераторных приборов (виркаторы. гиротроны с мощностью излу-
чения до 10 ГВт для диапазонов 1...15 и 20...200 ГГц). Финансируются работы по
развитию технологической базы перспективных лазеров (твердотельные лазеры с
356
Глава 4. Основы ФРЭПр и ОЭП
диодной накачкой, полупроводниковые лазеры, лазеры с пиротехнической накач-
кой и др.) в рамках бюджетных статей «Lasers and Imaging Technology» программ-
ного элемента «Advanced Weapont Technology» и «High Power Semiconductor Lasers
Technology» [55].
Кислород-йодный лазер считается в настоящее время перспективным сред-
ством создания боевой системы. Кроме высокого КПД в нем привлекают экологич-
ность и простота удаления продуктов реакции. Комплекс лазерного оружия воз-
душного базирования (ЛОВБ) США на базе химического кислород-йодного (О?1)
лазера (YAL-1) предполагается размещать на хрузовом варианте самолета Boeing
747-400F. Разработана поворотная турельная установка для ЛОВБ массой 5,9 т с
сектором прицеливания 120' и главным зеркалом диаметром 1,5 м.
В комплекс ЛОВБ входят; блок наведения луча; локатор на СО?-лазере;
пост наведениия луча; пост управления лазером; 6 мощных лазерных модулей.
Практически весь объем широкофюзеляжного самолета занят аппаратурой лазера
[81]. Комплекс ЛОВБ будет иметь следующие характеристики:
• запас химических компонентов топлива силового лазера на борту ЛА до 40
выстрелов;
• среднее время облучения цели 3... 5 с;
• мощность лазера 1 (3) МВт;
• маскимальная дальность поражения до 600 км;
• среднее время прибытия в район боевых действий 48 ч;
• вес комплекса вместе с турелью более 15 т [122].
Лазеры способны генерировать ЭМВ в широком оптическом диапазоне, од-
нако как средства ФРЭПр практический интерес представляют оптические кванто-
вые генераторы, работающие в так называемых «окнах прозрачности» атмосферы,
которым соответствуют волны оптического диапазона Z~0,3...2 мкм, за исключе-
нием ^непрозрачных» участков А?0,95; 1,15; 1,3... 1,5 мкм [19]. Схема химического
лазера на HF/DF (HF и DF - молекулы фтористого водорода и фтористого дейтерия
в возбужденном состоянии), излучающего на волнах длиной 2,7 и 3,8 мкм соответ-
ственно. показана на рисунке 4.11.
Мощный химический лазер на фтористом водороде «Alpha» имеет мощ-
ность 5 МВт и управляющее зеркало диаметром 4 м. Лазер работает в непрерывном
режиме излучения, дальность действия - 3000 км, плотность энергии на потоке це-
ли до 5 кДж/см2.
Важным этапом на пути разработки ЛОВБ являлись летные испытания
мощной лазерной установки в 2010 году. На борту самолета «Boeing NKC-135»
был установлен газодинамический лазер на СО? мощностью 400 кВт, разработан-
ный фирмой «United Technologies» (масса лазера 10 т, диаметр управляющего зер-
кала 0.9 м. система наведения с выходной апертурой 61 см в диаметре). В результа-
те испытаний была разрушена ГСН ракеты класса «воздух-воздух» «Sidewinder»
(скорость 3200 км ч). При испытаниях этого лазера дальность опражения составля-
ла 35...70 км с высоты полета 10 тысяч метров [62].
Сформированное лазером ЭМП обладает высокой степенью пространствен-
но-временной когерентности. Временная когерентность поля достигает значения
Глава 4. Основы ФРЭПр и ОЭП
357
/ког~ 0,1 с, благодаря чему удается получить сигнал с узким спектром (А/10 Гц).
Высокая степень пространственной когерентности позволяет с помощью про-
стых оптических устройств концентрировать энергию поля в весьма узком телес-
ном угле [24, 123, 124].
Рис. 4.11. Схема химического лазера на HF/DF
Расходимость луча определяется выражением
п = 14.17)
4л
где а и р - угловые размеры луча (ширина луча) в ортогональных плоскостях,
радиан. Для современных лазеров угловые размеры луча оцениваются величиной
а = Р = 10...20 угловых секунд, пространственная расходимост ь луча имеет величину
0 = 1,9-10 1О...7,5-1О"10. Величина О 1 является эквивалентом энергетического ко-
эффициента усиления Gn антенны САП. Обычно Сп < 103... 10\
Можно отметить два механизма ФРЭПр радио- и оптоэлектронных средств
лазерного оружия:
1. Непосредственное поражение электронных приборов путем прямого воз-
действия сильного лазерного излучения.
2. Выведение из строя объекта за счет вторичного индуцированного излуче-
ния плазмы, порождаемой взаимодействием сильного ЭМП и твердого вещества
(например, материала обтекателя антенны). В таком случае возможно обратимое
(временное) поражение электронного устройства.
Особенности применения лазера. Лазер как оружие ФРЭПр способен
формировать ЭМИ с большой плотностью энергии, достаточной для поражения
некоторых опто- и радиоэлектронных устройств на значительных расстояниях
(около 10 км). Вследствие малого сечения луча — всего 0.2...0,8 м‘ на расстоянии
R = 20 км возникает проблема точного ею наведения па поражаемый объект или
на элемент этого объекта (например, на фотоприемник ИК ГСН). который тоже
358
Глава 4. Основы ФРЭПр и ОЭП
имеет весьма малые размеры. В состав лазерного комплекса поражения входит
устройство ОЭР и наведения луча лазера на объект поражения.
На рисунке 4.12 представлена схема бортовой авиационной системы опто-
электронного противодействия (БАСОП) типа «Немезис» (ОУО - оптическое
устройство обнаружения пуска ракеты; ОУ С — оптическое устройство сопровожде-
ния ракеты) [24, 55].
Рис. 4.12. Структурная схема комплекса оптоэлектронного поражения
БАСОП предназначена для индивидуальной защиты самолетов и вертолетов
от УР класса «земля-воздух>’ и «воздух-воздух» [125] с ПК ГСН Основным досто-
инством системы является лазерное устройство, обеспечивающее функциональное
поражение матричных приемников ИК ГСН перспективных УР, устойчивых к воз-
действию излучения широко применяемых в настоящее время ПК-ловушек и при-
боров модулированного некогерентного ИК-излучения (цезиевые дуговые лампы).
Всеракурсная (зона обзора 360' по азимуту и 100ч по углу места) оборона
ЛА обеспечивается размещением лазера на подвижной платформе турельного типа
(рисунок 4.13). На рисунке 4.13 введены обозначения: КОЭП- комплекс оптоэлек-
тронного поражения; 1 - лазер; 2 - оптическое устройство; 3 - ГСН управляемой ракеты.
Сигналы тревоги от датчиков, работающих в УФ и в ИК-диапазоне, посту-
пают в приемник, который фиксирует факт пуска ракет с любого направления на
дальности до 10 км и грубо определяет сектор атаки. Уточнение угловых координат
УР производится прецизионным пеленгатором, в состав которого входят оптиче-
ское устройство точного сопровождения и приемник детальной разведки. Сигна. ты
приемников обнаружения и детальной разведки поступают в устройство обработки
информации, в котором определяются типы целей, их приоритеты и точные про-
странственные координаты (десятые доли углового градуса). Эта информация в
Глава 4. Основы ФРЭПр и ОЭП 359
виде формуляров ЦУ поступает в устройство управления, принимающее решение о
необходимости поражения наиболее опасной цели [24].
коэп 2
луч лазера
Рис. 4.13. Схема ФРЭПр управляемой ракеты лазерным оружием
Стратегия обороны (ФРЭПр, маневр или применение других средств) в виде
команд К передается на устройство наведения луча лазера на объект поражения.
Для наведения луча лазера используются сигналы точного ЦУ, поступающие от
пеленгатора. Команды К, определяющие стратегию обороны, подаются из устрой-
ства выбора стратегии обороны на устройства выброса ЛЦ, на станции некогерент-
ных активных помех, на устройства управления заметностью ЛА и, возможно, на
некоторые другие (рис, 4,12).
Конструктивные особенности «Немезис» (головной разработчик «Norirop
Grumman») обеспечивают возможность размещения с малыми трудозатратами на
боевых и транспортных самолетах различных типов без существенной доработки
их конструктивных элементов. Точность ЦУ определяется оптическим устройством
сопровождения ракеты, которое представляет собой матричный фотоприемник с
цифровой обработкой сигналов. Точность сопровождения составляет ст = 0,2°. Но
даже такая высокая точность не обеспечивает прицельного наведения луча лазера с
шириной а=Д = 1О...2О угловых секунд на весьма малогабаритный поражаемый
элемент оптического устройства ГСН [24].
Некоторого увеличения вероятности ФРЭПр фотоприемников ГСН можно
ожидать за счет сканирования луча лазера в выбранном с помощью устройства ЦУ
телесном угле 20">20". Такое сканирование луча лазера может происходить есте-
ст венным образом из-за случайных перемещений УР и ЛА, на котором установлен
КОЭП. При этом вероятность облучения ГСН лучом лазера не превысит 2* 10'3. Ла-
зерные пучки воздействуют на поверхностный слой материала мишени. Поэтому
они разрушают тонкостенные оболочки тепловым или ударным воздействием. Ат-
мосфера прозрачна для лазерного излучения в диапазоне длин волн 0.3...2 мкм.
Необходимо учитывать такой существенный фактор, как состояние атмосферы на
участке распространения лазерного луча, определяемое как погодными условиями
в конкретный период, так и запыленностью и задымленностью отдельных учасп ков.
В большинстве случаев американские специалисты при моделировании процесса
применения лазерного оружия предполагают, что атмосфера будет уменьшать
дальность его действия как минимум на 1 % [19].
360
Глава 4. Основы ФРЭПр и ОЭП
Оценка поражающего действия лазера. Процесс поражения цели с помо-
щью лазерной системы ОЭП предусматривает несколько взаимосвязанных этапов:
1. Обнаружение и распознавание цели, определение ее пространственных
координат и параметров движения. Такие задачи могут решаться целым комплек-
сом средств (телевизионные и ИК-камеры, лазерные дальномеры) или визуальным
наблюдением. Перспективным средством обнаружения и распознавания целей яв-
ляются лазерные локаторы, обладающие высокими помехоустойчивостью и точно-
стью определения координат, а также возможностью получения изображения це-
лей, что является важным при выборе на цели наибо. iee уязвимой точки для после-
дующего наведения в эту точку лазерного луча.
2. Наведение лазерного луча и переход системы ОЭП в режим точно! о со-
провождения цели.
3. Поражение (подавление) цели лазерным излучением и контроль ее пора-
жения [55].
Плотность энергии в пучке лазерного излучения, нужная для того, чтобы
прожечь алюминиевую поверхность ракеты с эффективной толщиной 1 г см2, со-
ставляет около 1 кДж/см". Для магниевых сплавов - примерно столько же, для ти-
тановых — в 1,5 раза больше. Термодинамические характеристики и параметры не-
которых материалов авиационной и ракетной техники (некоторых веществ, на ос-
нове которых эти материалы создаются) приводятся в [24].
Порог теплового поражения можно существенно повысить, если покрыть
поверхность объекта веществом с низкой температуропроводностью (абляционное
покрытие). Такими свойствами до. тжны обладать антирадиолокационные покрытия.
С учетом влияния покрытия обычно считается, что пороговая величина теплового
поражения лазерным излучением равна Qi ~20 кДж/см2. Для эффективности по-
ражения оружие должно обеспечивать Q > Q, (энергетическое требование).
Существуют также физические ограничения на параллельность пучка ла-
зерного излучения. Минимально достижимая расходимость луча определяется ди-
фракционным пределом
О = Я/Р. (4.18)
где D - апертура излучателя (равна диаметру фокусирующего зеркала). Если луч
фокусируется в точку на поверхности мишени, то вместо точки в фока, тьной плос-
кости образуется пятно с поперечным диаметром
<p = A,RlD. (4.19)
где R — фокусное расстояние зеркальной системы [24]
Предельно возможная дальность (радиус) поражения имеет вид
Я™.=О’/Л. (4.20)
Указанная предельная дальность действия - лишь геометрически наиболее
выгодное условие для обеспечения эффективности поражения. В реальных условия
для действительного поражения требуется, чтобы плотност ь энергии на поверхно-
сти цели была бы не ниже некоторой пороговой.
Плотность энергии в районе расположения цели
Глава 4, Основы ФРЭПр и ОЭП
361
2 = ^7’ (421>
К и
где Р - мощность ИИ; г - длительность импульса; R - расстояние до цели; 0 -
угол расходимости пучка лазерного излучения (0 = а = ft ).
Для того, чтобы лазер разрушил (прожег) металлическую защитную по-
верхность корпуса цели на дальности Rmsx, его яркость В = Рт/02 должна удовле-
творять условию В = QK Rl^ (« 20 кДж/см2).
4.3. Функциональное поражение специальным
программным средством
Функциональное поражение СПС заключается в выводе из строя ил и сни-
жении эффективности функционирования компонентов систем обработки инфор-
мации РЭО противника, нарушении конфиденциальности, целостности и доступно-
сти информации путем применения СПС. К радиоэлектронным угрозам инфор-
мационной безопасности АРЭК относятся:
• перехват и дешифрирование информации в каналах радиосвязи и передачи
данных;
• РЭП радиоэлектронных систем и устройств;
• РЭП и ОЭП каналов передачи данных и линий связи;
• дезорганизаиия информационных систем и СУ;
• ввод ложной информации в каналы передачи данных и линии связи;
• вирусные «атаки» (внедрение вирусных программ в информационные и
управляющие системы);
• внедрение электронных средств перехвата информации в аппаратные сред-
ства устройств и систем [23].
Среди известных к настоящему времни разновидностей вредоносных про-
грамм наиболее опасными для БЦВМ являются электронные вирусы, которые мо-
гут не только осуществлять несанкционированные действия, но и обладают спо-
собностью к саморазмножению. Вирусные «атаки» можно рассматривать как спе-
цифическую форму РЭБ и называть ее вирусным подавлением [23]. Вирусное по-
давление может применяться для достижения следующих целей: 1) скрытого изме-
нения функций системы; 2) вывода системы из строя; 3) разрушения файлов дан-
ных, функциональных и прикладных программ.
Специальные программные средства — совокупность программных и/или
технических средств, предназначенных для нарушения (изменения) заданной тех-
нологии обработки информации и/или целенаправленного разрушения извне внут-
реннего состояния информационного вычислительного процесса в ЭВС [126].
Под поражением ЭВС понимается комплекс организационно-технических
мероприятий, направленных на нарушение нормального функционирования этих
систем путем создания преднамеренных программных помех (СПО. СПС облада-
ют рядом отличительных характсрис гик по сниженному энергопотребл гнию, высо-
кой скрытности, избирательности, авторегенерируемосч и, прозрачности, сложности
362
Глава 4. Основы ФРЭПр и ОЭП
обнаружения и контроля, обладанию эффекта «цепной реакции», относительной
простоте модернизации. Объектами поражения СПС являются:
• глобальные и локальные вычислительные сети;
• вычислительные центры;
• информационно-управляющие системы;
• отдельные ЭВМ и микропроцессорные устройства;
• системы разведки, связи, навигации и измерительной техники;
• АСУ войсками (силами) и оружием противника и программно-технические
комплексы телекоммуникационного оборудования;
• системы, предназначенные для противодействия применению СПС;
• информационные системы, базы и банки данных, используемые для обеспе-
чения боевых действий противника;
• системы радиочастотной идентификации и геоинформационного обеспече-
ния противника (DTSS, GIS);
• техника РЭБ противника [15, 19, 126].
Современные бортовые цифровые вычислительные машины ЛА (БЦВМ)
характеризуют следующие основные особенности'.
• минимальные удельные массогабаритные характеристики;
• сложный алгоритм функционирования;
• устойчивость к широком) спектру механических и других воздействий,
ЭМП, ионизирующих излучений;
• наличие в составе аппаратных средств с цифровыми, аналоговыми и
гибридными устройствами, работающими в широком интервале частот,
напряжений и токов;
• широкий спектр реализации конструкторско-технологических решений с
учетом достижений микроэлектроники;
• специальные схемотехнические решения, направленные на обеспечение
отказоусз ойчивости. стойкости к ЭМП;
• длительный срок эксплуатации [121].
Цели поражения СПС могут быть реализованы в результате вызова в ЭВС
следующих отрицательных эффектов:
• потеря ценной информации, хранимой в памяти системы;
• непредусмотренное прерывание вычислительного процесса:
• выдача на средства отображения информации ошибочных результатов
расчетных и информационных $адач;
• выдача ложной информации на УУ внешними объектами;
• передача на взаимодействующие ЭВС вредоносных программ;
• перехват циркулирующей в ЭВС информации и передача ее по каналам
утечки;
• задержка во времени решения системных и прикладных задач;
• поглощение ресурсов памяти ЭВС (иногда ее перегрузка):
• разру шение важной информации и аппаратных средств:
• дезинформирование и изменение психофизиологического состояния
операторов ЭВС;
Глава 4. Основы ФРЭПр и ОЭП
363
• снижение эффективности работы ЭВС [15, 126].
Процесс поражения СПС включает в себя следующие операции [22]:
• добывание и обработка полученной информации о ЭВС (исследование
механизмов доступа и механизмов защиты, анализ информационных процессов);
• принятие решения на поражение;
• формирование СПС;
• получение доступа к ресурсам ЭВС и ввод в нее СПС;
• непосредственное воздействие СПС на ЭВС (нарушение
конфиденциальности, нарушение целостности и доступности, несанкционирование
манипулирование информацией).
В ряде случаев СПС может формироваться после получения доступа с
учетом доступных ресурсов ЭВС. Получение несанкционированного доступа
(НСД) к ресурсам ЭВС и ввод в эти системы СПС возможен по обычным
радиоканалам, каналам спутниковой связи, телефонным линиям связи,
специальным выделенным кабельным линиям, через непосредственный доступ к
консолям ЭВС, к лазерным и магнитным носителям информации, используемым в
системе. В качестве методов поражения ЭВС по видам создаваемых СПС
выделяются подавление ЭВС процедурными и декларативными СПС. В
зависимости от элементов ЭВС. на которые направлено воздействие СПС, имеют
место следующие методы воздействия на: 1) программное обеспечение ЭВС; 2)
аппаратное обеспечение ЭВС: 3) операторов ЭВС.
Метод поражения ЭВС процедурными СПС заключается в создании СПС,
выступающих в качестве ложных управляющих программ, процедур, команд.
После получения управления ресурсами ЭВС процедурные СПС реализуют
возложенные на них функции. Эти СПС могул' самовоспроизводиться, стирать,
искажать, копировать ценную информацию, находящуюся в оперативной и
внешней памяти, выдавать ложные управляющие команды на внешние устройства,
имитировать работу истинных программ. Эффективность этого метода зависит от
возможностей получения управления ресурсами ЭВС.
Структуру обобщенного процесса поражения ЭВС процедурными СПС
можно представить в виде [22], как показано на рисунке 4 14, где приняты
обозначения: НСД - получение несанкционированного доступа; ФПП
формирование СПС; ВвС - ввод СПС в ЭВС; ДФ - реализация деструктивной
функции, в частности, разрушительного воздействия на программное обеспечение
ЭВС. В данном случае полагается, что запуск на исполнение процедурного СПС
реализуется самой системой функционального поражения.
Начало —► НСД —► ФПП
ВвС
ДФ
Конец
Рис. 4.14. Структура процесса поражения ЭВС процедурными СПС
Метод поражения ЭВС декларативными СПС предусматривает создание
программных помех, в качестве которых выступают ложные данные, сообщения,
электронные письма. При этом не предусматривается передача управления
364
Глава 4, Основы ФРЭПр и ОЭП
ресурсами поражаемой ЭВС на СПС. ЭВС работает только под управлением
собственных программ. При использовании ложных данных может произойти
непредусмотренное прерывание работы программы, выдача ложного результата.
При восприятии оператором ЭВС ложных данных в качестве истинных может быть
принято неправильное управляющее решение, приводящее к большим
материальным потерям. Из-за отсутствия свободной памяти в ЭВС при вводе
декларативных СПС возможно неконтролируемое прерывание вычислительного
процесса. Обобщенная структура процесса поражения ЭВС [22], приводящего к
такому результату, показана на рисунке 4.15.
Рис. 4.15. Структура процесса поражения ЭВС декларативными СПС
Эффективность поражения ЭВС декларативными СПС определяется
степенью подобия истинным данным и их содержанием. Чем ценнее данные, под
видом которых создаются декларативные СПС. тем выше эффективность
функционально! о поражения.
Метод воздействия СПС на программное обеспечение. В результате
воздействия СПС на ЭВС изменяются характеристики имеющегося в памяти
системы программного обеспечения, отдельные программы и данные могут быть
стерты, а другие искажены. Искажение программ в памяти ЭВС возможно как с
сохранением свойственных им функций, так и с изменением их. Эффективность
метода зависит от характеристик поражаемых программ, данных и параметров
СПС. При реализации метода воздействия на аппаратное обеспечение
вычислительных процессов первоначально изменяются характеристики
аппаратных средств, их состояние. Может изменяться состояние дисплея, принтера,
клавиатуры, других устройств ЭВС. СПС (программные помехи) дополняют
имеющееся программное обеспечение.
Метод воздействия на операторов ЭВС. Могут оыть созданы СПС не
только дезинформирующие операторов ЭВС, но и изменяющие их
психофизиологическое состояние за счет:
• имитации неисправности аппаратных средств (процессора, памяти,
клавиатуры, принтера и т.п.);
• формирования сообщения на экране монитора (текстовые сообщения,
графические изображения и т.п.);
• формирования звуковых эффектов;
• переключения режимов настройки [126].
Один из способов (вариант) применения СПС в виде этапов и выбранных
средств приведен в таблице 4.4.
Все СПС подразделяются по происхождению (преднамеренные, непредна-
меренные), среде существования (локальные, сетевые), возможности управления
ресурсами ЭВС (декларативные, процедурные), степени скрытности (скрытые, не-
замаскированные), согласованности воздействия (согласованные, несогласован-
Глава 4. Основы ФРЭПр и ОЭП
365
ные), времени нахождения в оперативной памяти (резидентные, нерезидентные),
способности самовоспроизводиться (самовоспроизводящиеся и несамовоспроизво-
дящиеся) и разрушать систему (диверсионные и неразрушающие).
Таблица 4.4 — Вариант применения СПС
Этапы Средства
Компьютерная разведка Средства для определения конфигурации и отыскания уязвимостей удаленных систем
Преодоление систем защиты и проник- новение Базы данных, содержащие программы для ис- пользования известных уязвимостей в различ- ных программных продуктах и операционных системах
Установление контроля Программы, предоставляющие удаленный до- ступ к пораженному объекту, осуществляющие скрытую закачку файлов, установку и запуск программ
Репродукция и расширение контроли- руемой области
Реализация деструктивных функций СПС, реализующие различные деструктивные функции
Оценка эффективности
По согласованности воздействия на ЭВС существуют СПС, согласованные
по времени, месту, объектам поражения, видам наносимого ущерба, времени
жизни, числу порождаемых копий и другим условиям. Для создания СПС могут
использоваться специально создаваемые или вычислительные средства общего
пользования. Их програ /гмное обеспечение должно позволять взаимодействовать с
поражемыми ЭВС, получать НСД к их ресурсам, решать задачи добывания
информации, ее обработки. В состав средств и систем поражения СПС могут
входить собственные средства связи [19].
Среди основных требований, предъявляемых к средствам и системам
поражения СПС ЭВС, выступают требования по:
• наносимому' ущербу, оперативности и оезошибочности решения задач
поражения ЭВС;
• количеству и видам одновременно поражаемых систем, каналам связи, по
которым могут создаваться СПС, видам формируемых СПС:
• наблюдаемости за поражаемой ЭВС, доступности к ее ресурсам;
• управляемости средствами функционального поражения СПС;
• скрытности функционирования, надежности, устойчивости от внешних
воздействий, защищенности, совместимости, перестраиваемое ги и возможности
дальнейшего совершенствования;
• распределенности в пространстве, мобильности, взаимодействию с другими
аналогичными системами, времени жизни;
• составу' средств и систем поражения, аппаратному' и программному
обеспечению, оперативному и обслуживающему персоналу, затратам материально-
технических, людских, финансовых и других ресурсов на создание и использование
этих средств [22].
366
Глава 4, Основы ФРЭП ? и ОЭП
При выполнении отдельных элементов программы поражения ЭВС могут
возникать отказы процесса, под которым понимается:
• остановка процесса поражения как из-за собственных ошибок программ,
так и из-за ошибок, инициируемых отказами, сбоями аппаратного обеспечения и
операторов;
• наличие ошибок в результате исполнения программы свыше допустимой
величины;
• увеличение длительности процесса свыше допустимого предела [19].
Множество средств реализации программного воздействия включает:
• сетевые атаки;
• троянские программы (внедрение программного продукта «троянский конь»
приводит к несанкционированному доступу к базе данных противника для получе-
ния разведданных);
• программы-ловушки;
• информационные бомбы («логические бомбы» - скрытые управляющие
программы, которые по определенному сигналу в установленное время уничтожа-
ют или искажают информацию, блокируют информационный ресурс или дезорга-
низуют работу технических средств):
• программы-вставки;
• компьютерные вирусы (могут внедряться дистанционно в информационные
сети противника и копировать самих себя, размножаться);
• системы информационного захвата;
• сетевые черви;
• снифферы.
В случае отказов процесса программно] о поражения ЭВС возможны
различные варианты действий по их устранению и продолжению процесса.
Математический аппарат полумарковских процессов может быть успешно
использован для расчета вероятности функционального поражения ЭВС
р„(Р) = р(рл(Р), РМ- РАО- р (0) <4.22)
и вероятностей реализации отдельных этапов процесса, от которых она зависит:
Pn(t) - вероятность доступа системы ФРЭПр к необходимым ресурсам ЭВС;
РФП(Г) - вероятность успешного формирования необходимых СПС для ЭВС; Рв(/)
- вероятность успешного ввода СПС в ЭВС; Д(г) - вероятность успешного
запуска СПС на исполнение; Рх (г) - вероятность успешной реализации СПС
спланированных деструктивных действий по дезорганизации ЭВС [19].
Особенности их расчета определяются структурами оцениваемых программ
и принятыми вариантами действий по устранению отказов процесса программного
поражения ЭВС. В интересах поражения электронных вычис штельных систем
необходимо уметь оценивать сложность задачи получения доступа к их ресурсам,
которую требуется преодолеть за заданное время. Эта сложность может быть
рассчитана по формуле
N(T) = -V.K ,1п(1-Рд(Г)), (4.23)
Глава 4. Основы ФРЭПр и ОЭП
367
где РЦ(Г) - вероятность получения доступа за время не более Т; К., -
коэффициент доступности информационно-вычислительных ресурсов ЭВС
(минимально необходимое отношение числа Nz вариантов доступа, которые
необходимо реализовать системой поражения при заданном методе их выбора, к
сложности No задачи, при котором обеспечивается вероятность доступа Рд0 к
ресурсам ЭВС не ниже заданной ).
На основании анализа ФРЭПр ЭВС можно сделать выводы:
1 . ФРЭПр СПС предусматривает создание помех ЭВС не только через
различные виды естественной, но и искусственной среды передачи данных.
2 . Цели функционального поражения ЭВС по своим масштабам могут быть
намного выше традиционных целей РЭП. СПС (программные помехи), в отличие
от других, могут храниться в поражаемых системах годами, размножаться в них,
реализовывать различные деструктивные функции.
3 . В зависимости от исходной информации о ЭВС получение ЯСД к ее
ресурсам системой ФРЭПр и воздействие на них возможно на различную глубину.
4 . Функциональное поражение СПС предусматривает смещение акцентов в
сторону учета свойств памяти поражаемых систем, хранящейся в ней информации,
процедурного характера создаваемых СПС. рассмотрения всего процесса
поражения как программы [19].
4.4. Подавление оптико-электронных систем управления
оружием
4.4.1. Краткая характеристика оптико-электронных средств
Активное развитие оптико-электронных средств (ОЭС) добывания и пере-
дачи информации военного назначения привлекает повышенное внимание со сто-
роны военных специалистов в области оптико-электронного подавления (ОЭП).
Характерной чертой современного этапа развития авиационной техники являются
интенсивное развитие оптического диапазона длин волн и широкое внедрение ла-
зерных, телевизионных и тепловизионных систем 115].
Для оптических локаторов мощность сигналов на входе приемника, отра-
женных от цели с эффективной поверхностью отражения ст на расстояние D в
секторе обзора, ограниченном телесным углом О, находится из соотношения
Д- вх = ехр(-2а£>) ,
с вх 4тгГ>4О
где Рс вх — мощность передатчика оптического локатора; А — площадь раскрыва
приемной оптики; т] — к.п.д. приемной оптики, учитывающий потери в оптической
системе; а - коэффициент ослабления ЭМВ [22].
Преимуществами ОЭС являются:
• высокие точность определения координат и вероятность распознавания цели;
(4-24)
368
Глава 4, Основы ФРЭПр и ОЭП
• большая пропускная способность, возможность работы сверхкороткими им-
пульсами для активных систем;
• узкие ДН оптических антенн;
• массогабаритные показатели [19].
Среди основных недостатков ОЭС можно выделить:
• высокое ослабление оптического излучения в атмосфере, морской воде и спе-
циальных аэрозолях;
• существенная зависимость работы от погодных условий и времени суток;
• большая зависимость коэффициента ослабления оптических сигналов а (яв-
ляется суммой коэффициентов рассеяния световой энергии и поглощения
а = ар + ап) в атмосфере и морской воде от длины волны Л;
• подверженность влиянию активных преднамеренных помех [22].
В современных и перспективных ОЭС информация о целях извлекается пу-
тем анализа ЭМП, достигающего апертуры приемного устройства. Это ЭМП в об-
щем случае образуется излучением целей (сигнал), фоновым излучением (фон) и
излучением источников преднамеренных помех (помеха). Освоение оптического
диапазона позволяет резко повысить пропускную способность каналов связи, обес-
печить высокую информативность систем наблюдения и точность наведения ору-
жия. Деление спектра ЭМВ на отдельные области представлено в таблице 4.5 [127].
Таблица 4.5- Классификация спектра ЭМВ
Области спектра Длина волны
Радиоволны: длинные средние промежуточные короткие ультракороткие микроволны 18000...2000 м 2000...200 м 200...50м 50...Юм 10 м.,.1 см 1 СМ...1 мм
Инфракрасное излучение: длинноволновое средневолновое коротковолновое 1000... 15 мкм 15... 1,5 мкм 1,5...0,76 мкм
Видимое излучение: красное оранжевое желтое зеленое голубое синее фиолетовое 760...620 нм 620...590 нм 590...560 нм 560...500 нм 500...480 нм 480. . 450 нм 450...380 нм
Ультрафиолетовое излучение 380 ..5 нм
Рентгеновское излучение 5...0,01 нм
Г амма-излучение менее 0,01 нм
Пот ок излучения [Вт], падаюший на объектив ОЭС. определяется как
Ф.=Ц 4^^со5б>, (4.25)
Глава 4. Основы ФРЭПр и ОЭП
369
(4.26)
(Л)т (Л>7Л,
где Лис, Д ъ - площади источника и входного фачка объектива; D - расстояние
до источника; £0 — яркость ИИ с учетом коэффициентов пропускания т0 (Л) опти-
ческой системы и тА(Л) промежуточной среды
Ло
где М — суммарная спектральная плотность энергетической светимости; ЛГ..Я2 -
рассматриваемый диапазон длин волн. Для расчета энергетической яркости на вхо-
де приемника можно использовать выражение
4=-ЛЛ?ДЛ-^-7дЛ), (4.27)
я
где М - средняя суммарная спектральная плотность энергетической светимости
на рассматриваемом интервале АЛ длин волн; т„(Л), тА(Л) - средние коэффици-
енты пропускания оптической системы и промежуточной среды [22].
Под энергетической яркостью £ [ Вт/см2 ср ] в данном направлении в
произвольной точке, лежащей на поверхности источника или приемника, или на
пути распространения пучка, понимается отношение элементарного потока излуче-
ния d Ф к произведению телесного угла dQ., в котором он распространяется,
площади dA , которую он оставляет и косинуса угла 0 между данным направлени-
ем и нормалью к площади dA
dQdAcosO
(4.28)
В настоящее время в авиации используются следующие ОЭС:
1) телевизионные обзорно-прицельные системы;
2) лазерные дальномеры;
3) лазерные, телевизионные и тепловизионные системы наведения и само-
наведения оружия класса чвоздух-новерхность»;
4) теплопеленгаторы;
5) лазерные, телевизионные и тепловизионные системы воздушной развед-
ки:
6) лазерные и ОЭС подавления;
7) лазерные высотомеры:
8) лазерные и телевизионные системы посадки;
9) телевизионные УУ взлетом и посадкой вертолетов;
10) лазерные и телевизионные системы отображения [127].
Возрастание роли ОЭС в военной технике обусловлено следующими при-
чинами: высокой разрешающей способностью ОЭС по сравнению с РЭС; большой
скрытностью ОЭС (большинство из них являются пассивными); созданием эффек-
тивных помех средствам, работающим в радиолиапазоне. Основными объектами
ОЭП являются разведывательно-обнаружительные средства, обеспечивающие по-
лучение данных для принятия решений и применения оружия, включая высокоточ-
370
Глава 4. Основы ФРЭПр и ОЭП
ное, а также его системы самонаведения. Необходимость создания систем ОЭП. по
мнению зарубежных специалистов, продиктована, в частности, тем, что за послед-
нее время около 90 % всех случаев поражения самолетов и верт Олегов в военных
конфликтах связано с попаданием в них УР с ИК ГСН [55].
Системы ОЭП предназначены для снижения эффективности, подавления
или функционального поражения ОЭС различного назначения (ГСН, лазерные
дальномеры и целеуказатели). ОЭП может быть достигнуто путем [124]:
1) создания оптических помех (активные и пассивные помехи, ЛЦ. тепло-
вые ловушки);
2) изменения электрических свойств распространения оптического излуче-
ния (ионизация пространства, создание поглощающих и рассеивающих сред);
3) изменения рассеивающих и излучательных свойств объекта (уменьшение
излучательной способности нагретых поверхностей объекта, уменьшение ЭПР, оп-
тическая маскировка).
Основной целью ОЭП выступает снижение эффективности оптико-
электронных средств (ОЭС), функционирующих в оптическом диапазоне ЭМВ, ко-
торый составляет А = 0,001...100 мкм:
• 0,001 ... 0,01 мкм - гамма излучени е;
• 0,01 ... 0,1 мкм - рентгеновское излучение;
• 0,1 ... 0,38 мкм-ультрафиолетовое излучение:
• 0,38 ... 0,76 мкм - видимое излучение;
• 0,76 ... 100 мкм - инфракрасное излучение [22].
ОЭП может достигаться также функциональным поражением высокочув-
ствительных приемных элементов. При создании преднамеренных помех ОЭС пре-
следуют цели маскировки и имитации полезных сигналов за счет непосредственно-
го воздействия на приемные устройства и среду распространения оптических сиг-
налов. В зависимости от видов подавляемых ОЭС и диапазона их работы выделя-
ют:
• инфракрасное (тепловое) подавление;
• лазерное подавление:
• телевизионное подавление;
• визуально-оптическое подавление.
В качестве объектов инфракрасного (ИК) подавления мотут выступать
средства ИК наблюдения и системы ИК наведения оружия. Они работают в диапа-
зоне волн 0,76... 100 мкм. Для ИК средств, функционирующих в атмосфере, верх-
няя граница используемого диапазона ограничена величиной 14 мкм, после кото-
рой имеет место практически полное поглощение ИК излучения средой. К сред-
ствам ИК подавления относят специальные носители (реактивные снаряды, пара-
шюты) с источником тепловой энергии, приборы активных тепловых маскирующих
помех и средства тепловой маскировки. Для создания активных помех могут при-
меняться мощные источники ИК энергии или оптические квантовые генераторы
(лазеры).
В качестве приемников ИК излучения используют фоторезисторы (ФР) -
полупроводниковые элементы с внутренним фотоэффектом. Падение на ФР кван-
тов ЭМ энергии определенной величины приводит к появлению на ею поверх]гости
Глава 4. Основы ФРЭПр и ОЭП 371
свободных электронов, увеличивая его проводимость. Модуляция потока лучистой
энергии приводит к модуляции тока ФР или напряжения, снимаемого с его нагруз-
ки. Важнейшими характеристиками ФР являются: зависимость сопротивления от
температуры; спектральная чувствительность; постоянная времени; мощность соб-
ственных шумов ФР, ограничивающая чувствительность приемника [19]. Мощ-
ность шумов ФР, ограничивающих чувствительность, определяется формулой Най-
квиста
Pm=4kTRT^f, (4.29)
где к =1,38-10 23 Вт с/К - постоянная Больцмана; Т - абсолютная температура; R^
- сопротивление при данной температуре; - полоса пропускания нагрузки ФР.
Применяются ФР, в которых в качестве источников фотоэлектронов используют:
сернистый свинец (PbS), теллуристый свинец (РЬТе), сурьминистый индий (InSb).
селенистый свинец (PbSe) и др.
Вероятность необнаружения объекта с помощью ИК средств наблюде-
ния в условиях маскирующих помех аппроксимируется формулой
.Рн = exp(-tzT), (4.301
где Т - время обнаружения; а - коэффициент, зависящий от площади изображе-
ния объекта на экране и контраста
Iga *-4,3 + 5,6-/C + l,6-lgr, (4.31)
где K = {L3 ~DlL3 - контраст; L , Lo — яркости экрана и изображения объекта;
Y - угловой размер изображения объекта на экране [22]. Для дезинформирования и
увода на ложные направления СУ противника с ИК средствами добывания инфор-
мации применяют ложные дезинформирующие, отвлекающие и уводящие тепло-
вые цели.
Лазерное подавление направлено на снижение эффективности функциони-
рования лазерной локации и связи, активных и полуактивных лазерных систем
наведения оружия. Эти системы в атмосфере функционируют в диапазоне 0.5 - 14
мкм. К сильным сторонам лазерных средств и систем относятся:
• высокая пространственно-временная когерен!ность излучения (возмож-
ность формировать узкие ДНА, угловая расходимость составляет единицы милли-
радиана) и отсутствие БЛ;
• высокая пиковая мощность излучения (сотни МВт);
• высокая разрешающая способность и точность измерения угловых коорди-
нат (обусловлена узкими лучами излучения);
• высокие точности измерения дальности и радиальной скорости целей (обес-
печиваются возможностью излучения коротких - единицы наносекунд - импульсов
высокой частоты) [15].
Слабыми сторонами лазерных средств выступают:
• дальность действия лазеров сизьно зависит от свойств среды, в которой
распространяется лазерное излучение, наибольшее влияние оказывают метеоусло-
вия (снег, дождь, туман);
• относительно невысокий КПД лазеров;
372
Глава 4. Основы ФРЭПр и ОЭП
• трудности создания лазеров с перестройкой по частоте, что дает возмож-
ность заблаговременно определить рабочие частоты лазерных средств противника;
• приемные устройства лазеров уязвимы от внешних помех.
К методам лазерного подавления следует отнести:
• создание активных помех, засвечивающих приемники лазерных излучений;
• маскирование полезных сигналов при помощи различных аэрозольных об-
разований;
• формирование ложных источников лазерного излучения.
Средства телевизионного и визуально-оптического подавления - это,
прежде всего, устройства дымообразования (дымаппаратура, дымшашки), приме-
няемые для оптической маскировки различных объектов и создания ЛЦ. Ложные
оптические цели для телевизионного и визуально-оптического подавления форми-
руются посредством создания макетов самолетов, ЗРК, РЛС. Анализ условий бое-
вого применения ОЭС показывает, что для создания систем ОЭП необходима по-
дробная информация о характеристиках излучающих объектов: ЛА. атакующих
ракет, излучений естественного фона подстилающей поверхности, а также условий
распространения оптического излучения в атмосфере [55].
Одним из основных средств перехвата воздушных целей являются авиаци-
онные и ЗРК малой дальности, а также ЗАК. Большинство из них оснащено ОЭС,
которые используются в этих комплексах в качестве основного или дублирующего
канала разведки и наведения оружия. Указанные средства перехвата самолетов и
верIОлегов можно разделить на следующие группы:
1) авиационные и зенитные комплексы с ракетами, оснащенными опт иче-
скими ГСН,
2) ЗРК с лазерно-лучевыми системами наведения;
3) ЗРК с командными системами наведения, в которых для обнаружения и
сопровождения цели используются оптико-визуальные, телевизионные и теплови-
зионные средства;
4) ЗАК. в системах прицеливания которых в качестве дублирующих каналов
применяются оптико-визуальные, телевизионные и тепловизионные средства [128].
К первой группе средств перехвата относятся авиационные ракетные ком-
плексы перехвата (АРКП) «Сайдвиндер А1М-9Х», ASRAAM, «Питон-5» и др., а
также ПЗРК «Стингер-RMP», «Стингер-RMP mod.2» и «Игла-С». Основные харак-
теристики этих комплексов приведены в таблицах 4.6. 4.7 (Т - траекторная, ПР -
пространственная, СП - спектральная) [128].
Таблица 4.6— Основные характеристики АРКП
Наименование характеристики Сайдвиндер AIM-9X ASRAAM IR1S-T Питон-5 A-Darter
Страна США UK Германия Израиль ЮАР
Стартовая масса, кг 85 87 90 103,6 89
Макс, скорость раке гы, м/с 1350 1350 1200 4М 4М
Макс, дальность 40 20 25 45 20
Глава 4. Основы ФРЭПр и ОЭП
373
пуска, км
Перегрузка, ед 30 40 40 50 —
БЧ тип/масса, кг ОФ/10,2 ОФ ОФ/11 ОФ/11 осколочная
Тип взрывателя ЛНВ и кон- тактный ЛНВ и контакт- ный РВ и кон- тактный ЛНВ и кон- тактный ЛНВ/РВи контактный
Система наведе- ния ИСУ, ОГС с МФПУ ИСУ, ОГС с МФПУ ИСУ, ОГС с мн/э ФПУ ИСУ+2-х диапазонная ОГС ИСУ, ОГС с многоэле- ментным ФПУ
Вид селекции цели Т, ПР Т.ПР Т, ПР Т, СП Т, ПР
Вероятность по- ражения цели 0.8 0,8 — — —
К числу ЗРК с командными системами наведения относятся ЗРК «Кроталь»,
«Роланд-2, -3», «Рапира-2000» и др. Широкое распространение находят также ЗРК
с наведением по лазерному лучу типов ADATS, RBS-90, «Старбюст» и
«Старстрик». В современной системе ПВО применяется большое количество раз-
нообразных ОЭС. Распространению ОЭС способствует их высокая эффективность
и надежность, а также дешевизна и весьма хорошие массогабаритные характери-
стики. Особую опасность ОЭС управления оружием представляют для всех типов
ЛА вследствие их значительной заметности в оптическом диапазоне ЭМВ.
Таблица 4.7- Основные характеристики ЗКР
Наименование характеристики Стингер- RMP Стинге р- RMP mod.2 Игла-С ADATS Старстрик
Макс./мин. даль- ность поражения цели, км 5.5 / 0.5 6,0 0.5 6.0/0.5 8,0/0.5 7,0/0,5
Макс./мин. высота поражения цели, км 3,5 / 0,03 3,5/0,01 3,5/0,01 5,0/0,015 5,0/-
Тип системы наведения Двухка- нальная ОГС ОГС с МФПУ Двухка- нальная ОГС По лазер- ному лучу 11о лазер- ному лучу
Рабочий диапазон длин волн, мкм 0,3...0.4 3,5...5,0 3,0...5,0 1,0...3,0 3,5...5,0 0,4...1,1 10,6 0.4...1,1 10,6
Вид селекции цели Т, СП Т,ПР СП — —
Время реакции, с 12 — 13 5...6 —
Вероятность пора- жения це 1и 0,4... 0,5 0,5...0,6 0,6...0,7 0,6...0,8 0,7...0,9
Ракеты класса «воздух-воздух» и «поверхность- воздух» с ИК ГСН, исполь-
зуемые в некомбинированном варианте, имеют дальность, как правило, до 8 км и
У14
Глава 4. Основы ФРЭПр и ОЭП
достаточно эффективны и устойчивы к воздействию преднамеренных помех. В
таблице 4.8 приведены основные характеристики некоторых ракет с ИК ГСН [62].
Таблица 4.8— Основные характеристики ракет с ИК ГСН
Наименование и класс ракеты, страна- производитель Длина, м Размах, м Диаметр, м Старт, вес, кгс Даль- ность, км Диапаз- он вы- сот, км Ско- рость, М
«Ч шарел» MIM- 72А, «поверхность- воздух», США 2,9 0,64 0,127 84 6...8 3...3,5 2,5
«С гинг ер» FIM- 92А, «поверхность- воздух», США 1,52 0,17 0,07 10 5 — >2
«Ред Ай» FIM-43A. «поверхность- воздух», США 1,2 0,14 0.075 8,2 3,5 2,5 2
«Гансам» FIM-92A. «поверхность- воздух», Япония 2,7 0,57 0,15...0.18 100 10...12 — 2
«М эджик» R-550, «воздух-воздух», Франция 2,7 0,06 0,16 90 10 — >2
«Шафрир» Мк-2, «воздух-воздух», Израиль 2,47 0,52 0,16 93 4 ..6 — —
«Ред Топ», «воз- , iyx -воздух», Великобритания 3,3 0,9 0,22 150 11 — 3
«Фалкон» AIM-4D, «воздух-воздух», США 2,0 0.51 0.16 60 8...10 — 4
В оптико-электронных приборах информация о наблюдаемом или отслежи-
ваемом объекте переносится оптическим излучением, а ее первичная обработка со-
провождается преобразованием энергии излучения в электрическую энергию. В
состав таких приборов входят как оптические, так и электронные элементы.
Вариант обобщенной схемы функционирования ОЭС представлен на ри-
сунке 4.16 [124].
Существуют ОЭС диапазона видимого излучения (оптические прицелы, те-
левизионные прицелы и визиры, телевизионные ГСН), ИК диапазона (ИК ГСН,
теплопеленгаторы, тепловизионные ГСН) и лазерные устройства (лазерные локато-
ры, дальномеры, системы подсвета целей). Мощными тепловыми излучателями яв-
ляются ЛА. В оптическом диапазоне необходимо учитывать такие его характери-
стики, как собственное излучение двигателей и обшивки ЛА, излучение стру и вы -
хлопных газов (факела), отраженное излучение Солнца, а также положительный
или отрицательный контраст с фоном [15, 19].
Глава 4. Основы ФРЭПр и ОЭП
375
Рис. 4.16. Обобщенная схема функционирования ОЭС
В ОЭС информация о наблюдаемом (отслеживаемом) объекте переносится
оптическим излучением, а первичная обработка сопровождается преобразованием
энергии излучения в электрическую, используемую для оценки параметров цели. В
состав ОЭС входят оптические и электронные элементы. По уровню использования
информации о пространственном излучении целей и фонов ОЭС УО можно разде-
лить на три группы [124].
К первой группе относятся средства и системы, в которых цели и фоны рас-
сматриваются пространственно-распределенными излучателями. В этих ОЭС фор-
мируются детальные изображения целей и фонов, и возможно наиболее полно ис-
пользовать информацию, содержащуюся в них. К первой группе можно отнести
телевизионные и оптические визуальные прицелы и визиры, тепловизионные
устройства переднего обзора, тепловизионные и телевизионные ГСН, телевизион-
ные и тепловизионные системы разведки, телевизионные и тепловизионные каналы
лазерных полуактивных систем наведения ракет.
Во вторую группу можно выделить устройства и системы, в которых то-
чечная цель наблюдается на пространственно-распределенном фоне, информация о
пространственном распределении освещенности изображения целей не использует-
ся в основном из-за дефицита разрешающей способности оптических систем (цели
в таких ОЭС УО представляются светящейся точкой! К этой группе можно отнести
ИК ГСН ракет класса «поверхность-воздух», «воздух-воздух», «поверхность-
поверхность». Вопросы ОЭП ОЭС первой и второй групп изложены в рабоге [ 124].
В третью группу входят устройства и системы, в которых анализ про-
странственного распределения излучений ни целей, ни фонов не осуществляется:
сигналы, обусловленные как фоновым излучением, так и излучением целей, про-
порциональны энергии, интегральной по поверхности фотоприемника и спектру
излучения в пределах рабочего диапазона ОЭС У О. В эту группу можно включить
лазерные ГСН, лазерные дальномеры и высотомеры.
При ведении Р ЭБ ОЭС противника следует разделять на:
• ОЭС управления оружием (системы наведения ракет классов «земля-
воздух» и «воздух-воздух»; оптические. ИК. телевизионные прицелы; лазерные си-
стемы наведения):
376
Гпава 4. Основы ФР Hip и ОЭП
• информационно-обзорные ОЭС (ОЭС слежения);
• ОЭС разведки [15, 55].
ОЭС слежения, как и вообще все ОЭС, могут быть разделены на активные и
пассивные. Пассивные системы подразделяются на системы, в которых:
• используется развертка светового луча или изображения при помощи моду-
лирующего диска или сетки, что позволяет получить информацию о простран-
ственном положении цели;
• системы мозаичного типа с использованием большого числа фотоприемни-
ков, обработка сигнала может осуществляться последовательно ил и паралл ельно.
Достоинства ОЭС слежения с мозаичной системой’.
• высокая помехозащищенность от помех естественного происхождения (фо-
нов) и средств ОЭП (ловушек, модулированных помех);
• всеракурсность (повышенная обнаружительная способность);
• возможность работы в двух и более спектральных диапазонах.
Следящие ОЭС бывают автоматические (ИК ГСН, телевизионные систе-
мы самонаведения) и полуавтоматические (ОЭС ЗРК, оп гико-электронные при-
целы ЗАК, оптические и телевизионные прицелы). Структурная схема автоматиче-
ской следящей ОЭС приведена на рисунке 4.17 (УСР - усилитель сигнала рассогла-
сования; ГОН - генератор опорного напряжения; ФПС - фильтр пространственной
селекции; СпФ - спектральный фильтр) [13, 124].
Сзруктурная схема полуавтоматической следящей ОЭС представлена на ри-
сунке 4.18 'ФПС - фильтр пространственной селекции; СпФ - спектральный
фильтр) [13, 124].
В СУ оружием ПВО и истребителей противника применяются следующие
ОЭС:
• ИК ГСН ракет класса «воздух-воздух» и «I юверхность-воздух»;
• теплопеленгаторы, лазерные, оптические и телевизионные прицелы борто-
вой СУ оружием современных истребителей;
• теплопеленгаторы. лазерные, оптические и телевизионные прицелы ЗРК:
• теплопеленгаторы для определения момента пуска ракет в БКО.
Рис. 4.17. Автоматическая следящая ОЭС
Глава 4. Основы ФРЭПр и ОЭП
377
Средства ОЭП служат для дезорганизации работы ИК, телевизионных, ла-
зерных и оптико-визуальных систем и средств разведки, наблюдения, связи и
управления оружием противника. ОЭП производится путем воздействия на ОЭС
помехами, применения ЛЦ, тепловых и оптических ловушек, аэрозолей, а также
выводом из строя ЭМ излучениями оптицеских и фоточувствительных элементов
этих средств. Средства ОЭП входят в состав комплексов групповых и индивиду-
альных средств РЭБ.
Рис. 4.18. Полуавтоматическая следящая ОЭС
Зарубежные специалисты выделяют ряд способов решения задач ОЭП, ко-
торые можно разделить на три основные группы:
1) уменьшение информации об объекте (снижение уровня энергии излуче-
ния в оптическом диапазоне спектра);
2) смещение точки наведения УР от объекта самонаведения (использование
дополнительных источников излучения для срыва процесса самонаведения или су-
щественного увеличения ошибки аппаратуры управления УР) с помощью ИК-
ловушек или ЛЦ;
3) поражение основных элементов ОЭС (использование штатных или спе-
циальных лазерных средств) [55].
Особое внимание уделяется вопросам создания средств защиты ЛА от УР с
ПК и комбинированными (РЛ и ИК) системами наведения. Планируется разрабо-
тать и совершенствовать технологии, обеспечивающие создание:
• компактных и надежных источников лазерного излучения для ИЗ ЛА;
• приемных устройств систем предупреждения экипажей ЛА об угрозе,
функционирующих в оптическом диапазоне спектра, сигнальных процессоров, ал-
горитмов селекции и идентификации типа угрозы, оценки РЭ обстановки и экс-
пертных компьютерных сисз ем;
• аппаратуры перепрограммирования алгоритмов работы средств.
В качест ве средств, обеспечивающих решение вышеуказанных задач, мож-
но выделиз ь:
• ложные тепловые цели (ЛТЦ);
• станции помех на основе некогерентных источников излучения:
• лазерные станции оптико-электронного подавления;
• средства создания аэрозольных завес [55].
Наибольший интерес с точки зрения ведения РЭБ представляют два класса
ОЭС: ИК ГСН ракет классов «воздух-воздух»' и «земля-воздух». оптико-
электронные прицелы ЗРК и ЗАК. На основе анализа способов применения и ТТХ
378
Глава 4. Основы ФРЭПр и ОЭП
ОЭС можно определить задачи и объекты ОЭП для перспективных БКО самолетов
и вертолетов, перечень которых приведен в таблице 4.9 [128].
Таблица 4.9 — Задачи и объекты ОЭП для перспективных БКО
Задачи Показатель эффективности Значение показателя эффективно- сти Объекты ОЭП
Обеспечить срыв (увели- чение ошибок) сопро- вождения самолетов и вертолетов ОЭС управ- ления, снижение числа последовательных пус- ков ЗРК, АРКП, обстре- лов ЗАК Вероятность срыва сопровождения само- летов и вертолетов. Снижение числа пус- ков УР по самолетам и вертолетам не менее 0,9 в 3...5 раз Оптико-визуальные, тепловизионные, те- левизионные и ла- зерные срс ]с гва управления оружием ЗРК, АРКП, ЗАК
Обеспечить срыв (увели- чение ошибок) наведе- ния на самолеты и верто- леты УР с ОГС Вероятность срыва наведения УР на са- молеты и вертолеты не менее 0,9 ОГС УР ЗРК, ПЗРК, АРКП
Обеспечить срыв наве- дения на самолеты и вер- толеты УР с лазеры ими, телевизионными и ком- бинированными систе- мами наведения Вероятность срыва наведения УР на са- молеты и вертолеты не менее 0.9 Лазерные, телевизи- онные и комбиниро- ванные системы наведения ЗУР
1. Некогерентные средства ОЭП:
• Тепловые ловушки (ТЛ), воздействие излучения которых на следящие ОЭС
приводит к их перенацеливанию.
• Станции активных некогереш ных помех представляют собой модулирован-
ные источники излечения, выполненные на основе электрона!рева!ельных элемен-
тов или газоразрядных ламп (ксеноновые или цезиевые газоразрядные лампы с
электронными УУ; черное тело с механическим модулятором его излучения; газо-
вая форсунка, снабженная зеркальной отражательной системой и устройством мо-
дуляции ее излучения).
Схема станции постановки модулированных помех ОЭС представлена на
рисунке 4.19 и содержит: блок управления (БУ); процессор, 1-й вход которого со-
единен с БУ, а выход связан со входом ЦАП; выход ЦАП подключен ко входу мо-
дулятора, выход которого соединен со входом импульсною источника колебаний,
имеющего датчик излучения; выход датчика излучения связан со входом АЦП [55].
С помощью процессора формируется импульсная последовательность, ко-
торая после преобразования в аналоговый сигнал с помощью электронного модуля-
тора модулирует мощный поток ИК излучения цезиевой или иной импульсной
лампы, сигналы датчика излучения которой через АЦП в виде обратной связи по-
ступают на процессор для анализа параметров модулированною излучения и их
Глава 4. Основы ФРЭПр и ОЭП
379
дальнейшей коррекции. Режим работы процессора устанавливается БУ. Процессор
формирует импульсную последовательность, имеющую как регулярную составля-
ющую, так и нерегулярную, и управляемую в широком диапазоне частот. Станция
постановки модулированных помех ОЭС [19] обеспечивает подавление ОЭС как с
АФМ, так и с ЧФМ, без ее перенастройки. Для этих станций необходимо, чтобы
помеховый сигнал незначительно превышал полезный на входе подавляемого ОЭС.
Рис. 4.19. Схема станции постановки модулированных помех ОЭС
Основными недостатками некогерентных источников помех являются:
чрезвычайная сложность получения высокого индекса модуляции и сложность по-
лучения требуемого пикового превышения помеха/сигнал в полосе пропускания
АСН.
2. Когерен гные средства ОЭП:
• Непрерывные лазеры с модуляцией излучения.
• Импульсные лазеры, излучение которых воздействует на нелинейные эле-
менты электронных схем ОЭС.
• Мощные лазерные источники, излучение которых приводит к разрушению
оптических элементов ОЭС.
В ИК ГСН современных ракет применяются различные методы борьбы с
преднамеренными помехами [15, 55], что приводит к снижению эффективности
существующих средств противодействия (ТЛ и некогерентных источников помех).
Эффективность ОЭП может быть значительно повышена при использовании коге-
рентных САП на основе лазеров. Когерентные лазерные помехи в ИК ГСН вызы-
вают значительные ошибки измерения информационных параметров, а при боль-
шой плотности энергии могут привести к выводу из строя элементов ИК ГСН.
3. Пассивные средства ОЭП:
К ним относятся устройства по снижению заметности ЛА и устройства со-
здания аэрозольных маскирующих образований. Пассивное противодействие ОЭС
управления оружием ПВО, в том числе ИК ГСН ракет и геплопеленгаторам, осно-
вано на искусственном изменении свойств среды распространения энергии и
уменьшении теплового излучения цели.
4.4.2. Законы излучения абсолютно черного и реальных
тел. Основные источники оптического излучения ЛА
Моделью абсолютно черного тела (АЧТ) может служить замкнутая полость
с идеально проводящими стенками. Излучение внутри полости обычно характери-
380
Глава 4. Основы ФРЭПр и ОЭП
зуют объемной спектральной плотностью энергии u(f), Дж/м3 Гц, а выходящее
из полости излучение — спектральной плотностью излучения r(f), Вт м" Гц.
Эти характеристики излучения АЧТ связаны соотношением
4
(4-32)
Объемная спектральная плотность энергии в полости определяется
формулой Планка
с
(4.33)
где h = 6,625 • 10' 4 Дж-с - постоянная Планка; £ = 1,38 10 23 Дж ' К - постоянная
Больцмана; Т — температура стенок полости [19]. При уменьшении температуры про-
исходит не только уменьшение спектральной плотности излучения, но и смещение мак-
симума в сторону больших длин волн. Формула Планка позволяет получить все из-
вестные законы излучения АЧТ.
В области малых частот («классическая» область) hf «кТ и
ехр(Л//kT)-\ = hf kT . Формула Планка переходит в формулу Релея-Дмсинса
u(J)df = —kTfdf. (4.34)
с
Для классической области характерно то, что энергия тепловых флуктуаций
существенно превосходит энергию фотона, и при приеме (анализе) излучения мы
имеем дело с большим числом фотонов.
В области больших частот («квантовая» область) hf »кТ, можно по-
ложить ехр(/?/ / кТ) -1~ ехр(Л/ / кТ). Формула Планка в этом случае преобразуется
в закон Вина [123]
u{f)df =—hfexp {-hf i kT\df. (4.35)
В квантовой области энергия фот она значительно больше энергии тепловых
флуктуаций и становится возможной регистрация отдельных фотонов. Используя
формулу Планка, легко получить и другие законы излучения АЧТ: закон Стефана-
Больцмана и закон смещения Вина.
Закон Стефана-Больцмана определяет зависимость интегральной по спек-
тру мощности излучения АЧТ (Вт/см2) от его температуры
сс
R(T) = \r(f)df = <тГ, (4.36)
о
2я5£4
где сг =-— = 5,6687 • 10“х Вт м2 К4 - постоянная Стефана-Больцмана.
15Л
Выражение (4.33) позволяет определить и длину волны, соответствующую
максимуму спектральной плотности излучения АЧТ. Для этого необходимо выра-
Глава 4. Основы ФРЭПр и ОЭП
381
жение (4.33) продифференцировать по f и найти /тах, при которой выполняется
условие du(f) / df = 0 . После вычислений имеем
(4.37)
кТ
f =----------= 1,03457-10" 7\
тах 0.2014Л
Поскольку f - с / Л , то длина волны (мкм), соответствующая максимуму
спектральной плотности излучения АЧТ, определяется законом смещения Вина
2898
max rrt
(4.38)
Спектр излучения реальных тел существенно отличается oi спектра излуче-
ния АЧТ. Одним из основных законов, описывающих связь между излучател ьными
характеристиками АЧТ и реальных тел, является закон Кирхгофа, сформулирован-
ный еще в 1859 году. Мощность излучения произвольно выбранного тела равна
Р = РАЧТа(Г), (4-39)
где РАЧТ - мощность излучения АЧТ; а(Т) - коэффициент поглощения реального
тела.
Закон Кирхгофа справедлив также для объемной спектральной плотности
излучения АЧТ и реального тела
«(Л = £,(П«„ (/), (4.40)
где £,(Т) ~ спектральная излучательная способность реального тела. Излучатель-
ная способность тела равна коэффициенту' поглощения при тех же значениях тем-
пературы и частоты.
Основным источником излучения ЛА являются нагретые детали и газовая
струя двигателя обшивка планера. Собственное излучение обшивки планера ЛА
определяется в основном аэродинамическим нагревом. В зависимости от конструк-
тивных особенностей двигателя, принципа его работы, высоты полета ЛА изменя-
ется и сила его излучения.
Основными источниками излучения поршневых самолетных двигателей
являются: выхлопные патрубки (Т = 500°... 1100°2£ ); выхлопные газы
(Т = 1200°... 1350йК); капоты двигателей (Т = 350о...370°К ) [15].
Мощность оптического излучения также зависит от формы, размеров и из-
лучательной способности их поверхностей, от их размешения и экранировки на
ЛА. Существенное влияние на характеристики излучения оказывает режим работы
двигателей, от которого в первую очередь зависит температура всех указанных
выше ИИ, а также форма, размер и содержание факелов выхлопных газов. Слож-
ность состава и убывание температуры выхлопной сгруи поршневого двигателя по
мере удаления от среза патрубка делают спектр ее оптического излучения практи-
чески непрерывным.
Главным источником теплового излучения самолета В-2А Spirit служат
сопла работающих двигателей, что требует специальных мер по снижению его теп-
лового излучения. Двигатели В-2 смещены к передней кромке крыла, чю позволи-
382
Глава 4. Основы ФРЭПр и ОЭП
по экранировать сопла снизу. Вместо использования традиционных сопел круглого
сечения на В-2 установлены двумерные плоские сопла, двигатели полуутоплены в
крыле. Температура выхлопных газов снижена за счет подмешивания к ним холод-
ного атмосферного воздуха (используется эффект Коанда). Сами двигатели охла-
ждаются холодным воздухом принудительно, используется также отводимый от
воздухозаборников пограничный слой воздуха [19].
Температура патрубков максимальна у коллектора (1000°...1100°£ ). Окис-
ленная при нагревании поверхность жаропрочной лист овой стали патрубков имеет
излучательную способность е = 0,8...0,9. Доля излучения патрубков в общем ба-
лансе излучения ЛА с поршневыми двигателями составляет 55...65 %. Поверхность
капота двигателя при окраске алюминиевой краской имеет излучательную способ-
ность f = 0,18...0,35 и при относительно низкой температуре (350°...370‘ К) не
влияет существенно на общую мощность оптического излучения в верхней и ниж-
ней полусферах ЛА.
Распределение энергетической силы излучения ЛА в пространстве задается
индикатрисой, представляющей собой кривую, соединяющую концы векторов
энергетической силы излучения различных точек поверхности в нормальном
направлении.
Турбореактивные двигатели (ТРД) имеют два ярко выраженных источ-
ника оптического излучения - детали двигателя, нагретые до высокой температуры,
и спутную струю. Оценить спектральную энергетическую силу излучения ТРД
можно по имеющимся сведениям о температуре и геометрических размерах двига-
телей. Температура выхлопных газов (ГВГ) является одной из важнейших характе-
ристик двигателя. При длительном полете ТВГ составляет 800°...900' К , при поле-
те с малой скоростью ТВГ может снижаться до 600°..700° К. Для инженерных
расчетов можно считать, что температура излучающей полости равна ТВГ, излуча-
тельная способность - е ъ 0,9 . Доля излучения спутной струи в общем балансе из-
лучения ТРД существенно зависит от режима работы двигателя и скорости полета
ЛА (на дозвуковых скоростях полета ЛА составляет 20...25 %) [15].
Спектр излучения факела имеет два ярко выраженных максимума на
Л ® 2,7 мкм и Z ~ 4,3 мкм, причем спектральная плотность излучения при Л 4,3
мкм в зависимости от вида топлива в 2,5... 10 раз выше, чем при Л = 2.7 мкм. Энер-
гетическая сила излучения факела зависит от числа частиц и температуры молекул
газа в спутной струе.
Температура газа после его расширения на выходе сопла Т, определяется
выражением
Т^ТДР/Р^Т, (4.41)
где Т, - температура газа в удлинительной трубе (практически равна ТВГ); Р}
давление газа в удлинительной трубе: Р, - давление газа после расширения; у -
показатель адиабаты, (отношение удельных теплоемкостей газа при постоянном
давлении и постоянном объеме).
Глава 4. Основы ФРЭПр и ОЭП
383
Для продуктов сгорания у = 1,3 , отношение Р,/Рх для современных двига-
телей при дозвуковом полете составляет 0,5. Если расширение газов происходит до
давления окружающего воздуха, то Т2 = 0,85 • 7\. Расчет энергетической силы излу-
чения спутной струи представляет определенные трудности, поскольку в различ-
ных участках факела различны температура и излучательная способность. Излуче-
ние ТРД и факела обладает ярко выраженной индикатрисой излучения. Турбовен-
тиляторные двигатели характеризуются более низкими температурами как двигате-
ля, так и факела.
Излучение ЛА вследствие аэродинамического нагрева, Любой объект,
движущийся с высокой скоростью в атмосфере, нагревается. Когда воздух обтекает
тело, вблизи его поверхности образуется пограничный слой. Поток газа в погра-
ничном слое может быть ламинарным и турбулентным. При движении объектов
в атмосфере с большими скоростями излучение этих объектов из-за нагрева стано-
вится достаточным для использования его в ИК приборах различного назначения.
Наиболее нагретыми являются те части ЛА, где поток воздуха резко тормозится.
Температура Тт этих точек поверхности ЛА. называемая температурой тормо-
жения, определяется выражением
Г =7?,(l + O.5r(r-l).W!), <4.42)
где Tt - температура окружающего воздуха; г - коэффициент восстановления, за-
висящий от условий в пограничном слое; у =1,4 - показатель адиабаты; М— число
Маха [123]. Для инженерных расчетов используют формулу Г = 7Д1 + 0,2Л7:).
4.4.3. Принципы действия оптико-электронных приборов
обнаружения и сопровождения целей
Оптические приборы обнаружения и сопровождения используются в опти-
ческих локаторах и пеленгаторах, в оптических (ОГСН) и ИК головках самонаве-
дения ракет (ИК ГСН). ИК ГСН ракеты предназначена для обнаружения, автомати-
ческого сопровождения тепловых точечных целей по угловым координатам и по-
лучения управляющих ракетой сигналов, пропорциональных угловой скорости ли-
нии визирования цели в двух взаимно перпендикулярных плоскостях. Помехо-
устойчивость ИК ГСН практически не зависит от ее конструкции, а определяется
полосой пропускания приемника лучистой энергии, размером угла зрения и т.д.
На рисунке 4.20 показан разрез оптической системы ИК ГСН [13, 124].
Поток тепловой энергии (Ф) через обтекатель (1) попадает на фокусирую-
щее зеркало (2), отражается от него, еще раз отражается от плоского зеркала (3),
проходит через отверстие в диафрагме (4), помещенной между плоским зеркалом и
модулирующим диском (МД), часто именуемым «растром» (6). Чтобы уменьшить
уровень приема энергии источников, находящихся вне поля зрения ИК ГСН, плос-
кое зеркапо закрыто зачерненной блендой (5), а отверстие в зачерненной диафрагме
выбирают равным размеру МД, помещенного в фокусе зеркала (на него падает по-
ток лучистой энергии, сфокусированный в пятно). Размеры пятна из-за аберрации
даже при пеленговании точечной цели конечны.
384
Гпава 4. Основы ФРЭПр и ОЭП
ю
Рис. 4.20. Разрез оптической системы ИК ГСН
Часть потока энергии, прошедшая через МД, фокусируется линзой (7) на
поверхности фотоприемника (на фоторезисторе или фотодиоде). Линза одновре-
менно является фильтром, исключающим попадание на фоторезист ор энергии в
видимом и верхнем ИК диапазонах, предохраняя его от разрушения. При измене-
нии положения фронта волны относительно оси оптической системы меняется и
положение пятна на МД. При этом величина отклонения цели от оси оптической
системы (рц приводит к перемещению пятна по плоскости МД.
Структурная схема амплитудно-фазового пеленгатора ИК ГСН приведена
на рисунке 4.21 (ОСФПр — оптическая система и фотоприемник; У1 - усилитель на
f0; АД - амплитудный детектор; У2 — усилитель на QCK ).
Рис. 4.21. Структурная схема амплитудно- фазового пеленга гора ИК ГСН
Если в РЛС носителями информации об угловом рассогласовании является
глубина модуляций сигнала на выходе антенны, то в ИК ГСН глубина модуляции
сигнала wc(0 частотой сканирования всегда равна единице, а носитель этой ин-
формации - амплитуда сигнала. Это обстоятельство является важным с точ ки зре-
ния оценки помехоустойчивости ИК ГСН. Оно накладывает ограничения и на вы-
бор параметров электрической схемы ИК ГСН.
Глава 4. Основы ФРЭПр и ОЭП 385
4.5. Средства оптико-электронного подавления
4.5.1. Когерентные средства оптико-электронного
подавления
В ИК ГСН современных ракет применяются различные методы борьбы с
преднамеренными помехами. Так в ИК ГСН ЗРК «Стингер» реализованы угловая и
кинематическая виды селекции, что значительно повысило их помехозащищен-
ность. Двухцветная спектральная селекция осуществляется в ИК ГСН ракеты. Этот
вид селекции предназначен для борьбы с непреднамеренными и преднамеренными
оптическими помехами. В ИК ГСН ракеты «ASRAAM» предусматривается реали-
зация спектральной, пространственной, кинематической и других видов селекции
за счет преимуществ матричной структуры фотоприемников, что значительно за-
трудняет их ОЭП. Все это приводит к снижению эффективности существующих
средств противодействия, таких, как тепловые ловушки и некогерентные источники
помех [13].
Эффективность ОЭП может быть значительно повышена при использова-
нии когерентных САП на основе лазеров, так как они позволяют генерировать по-
мехи с высокой плотностью энергии. Воздействие когерентных лазерных помех на
ИК ГСН вызывает значительные ошибки измерения информационных параметров,
а при большой плотности энергии может привести к выводу из строя различных
элементов ИК ГСН. Можно отметить следующие основные способы подавления
ОЭС противника [13, 19]:
• механическое повреждение элементов ИК ГСН;
• создание плазмы на обтекателе ракеты;
• засветка (ослепление) приемника излучения ИК ГСН;
• воздействие на систему АРУ ИК ГСН.
Пассивные системы самонаведения и принципы воздействия помех на ИК-
визир ГСН лостаточно подробно описаны в [104, 129].
Механическое повреждение элементов ИК ГСН. Воздействие лазерного
излучения с большими плозностями энергии на элементы ИК ГСН приводит к их
механическому повреждению. Наиболее уязвимыми элементами при этом являются
модулирующие диски, фотоприемники и спектральные фильтры [19]. Процесс вза-
имодействия лучистой энергии с элементами ИК ГСН можно разделить на следу-
ющие этапы:
1) поглощение лучистой энергии и переход ее в тепло;
2) нагрев материала до температуры, при которой происходит разрушение;
3) разрушение материала и разлет продуктов разрушения;
4) остывание материала после окончания действия лазерного излучения.
Одним из элементов ИК ГСН, подвергающихся лазерному излучению, яв-
ляется фотоприемник. Рассмотрение воздействия излучения большой мощности на
фо гоприемники основывается на процессах взаимодействия лазерного излучения с
полупроводниками, из которых изгоз авливают приемники излучения ИК ГСН [24]
386
Глава 4. Основы ФРЭПр и ОЭП
Экспериментальные исследования показали, что при плотности энергии ла-
зерного излучения W > (5...10)-10“? Дж/см2 и длительности импульсов г >0,3 сек
температура наружной поверхности фильтра на площади, куда попало излучение,
превышает 1273° К - температуру плавления его поверхностного слоя. При плот-
ностях энергии импульсного лазерного излучения на входном зрачке ИК ГСН по-
рядка 10'2 Дж/см2 происходит быстрый нагрев до высокой температуры приемника
излучения. Такие уровни облучения могут быть созданы лазерным источником с
энергией излучения в импульсе 200...300 Дж на дальностях 5 км.
В таблице 4.10 приведены ориентировочные значения минимальной плот-
ности энергии, необходимой для механического повреждения элементов зеркально-
линзовой системы ИК ГСН ракет и приемников излучения. Как видно из таблицы
4.10, разрушение элементов ИК ГСН требует создания лазеров с большой мощно-
стью излучения, что приводит к увеличению массы и габаритов устройства созда-
ния помех.
Таблица 4.10
Элемент Плотность потока энергии, Дж/см2
Сферическое зеркало 15
Модулирующий диск ракеты Р-ЗС 3
Модулирующий диск ракеты Р-8МТ 9
Фоторезист оры 4,5
Германиевый фильтр 15
Фоторезистор ФСД-1 9
Создание плазмы на обтекателе ракеты. При облучении обтекателей
управляемых ракет с ИК ГСН лазерным излучением с плотностью мощности по-
рядка 10 Вт/см2 вблизи поверхности обтекателя возникает мощное плазменное об-
разование. являющееся источником некогерентного оптического излучения. При
использовании импульсного лазера, обеспечивающего попадание на приемник из-
лучения ИК ГСН от плазмы энергии порядка 2...4 Дж в диапазоне 2...5 мкм, может
происходить нарушение работоспособности ИК ГСН [55].
Влияние таких энергий на приемники излучения (поликристаллические фо-
торезисторы на основе PbS с германиевыми фильтрами и монокристалл ические фо-
горезисторы на основе InSb с кремниевыми фильтрами) исследовалось экспери-
ментально. Под влиянием излучения плазмы сопротивление фоторезисторов на ос-
нове PbS увеличивается примерно на порядок, а сопротивление фоторезистора на
основе InSb уменьшается в 10... 100 раз. Такое изменение сопротивления приводит к
резкому уменьшению коэффициента передачи входного каскада ИК ГСН, а при
попадании на приемник излучения лучистой энергии-порядка 3 Дж - к полному его
«ослеплению». Процесс изменения сопротивления фот орезисторов, как подтверди-
ли эксперименты, является обратимым. Но восстановление свойств фоторезисторов
происходи г через десятки секунд и более, что с точки зрения наведения ракеты на
цель можно интерпретировать как выход ИК ГСН из строя.
Глава 4. Основы ФРЭПр и ОЭП 387
Помимо так называемого «силового» воздействия, для которого требуется
большая энергия излучения, с помощью лазеров можно вводить помеховые сигна-
лы в контур управления ракеты и обеспечить срыв слежения ИК ГСН за защищае-
мым объектом. Характерными помеховыми воздействиями для подавления ИК
ГСН с помощью импульсных лазеров являются:
• создание помех на частоте сканирования (прицельные и заградительные);
• возбуждение переходных процессов в контуре слежения ИК ГСН;
• нарушение работоспособности вследствие воздействия прерывистых помех
на АРУ (для ИК ГСН с АФМ) [13, 55].
Наименьшие требования к мощности лазера, обеспечивающего введение
помехового сигнала в контур управления ракеты, предъявляются в том случае, ко-
гда длина волны излучения лазера попадает в область спектральной чувствительно-
сти приемника излучения ИК ГСН. В настоящее время для этих целей разработаны
твердотельные и газовые химические лазеры на молекулах водорода, фтора, дейте-
рия и хлора (HF, DF, НС1).
Эффективность воздействия помеховых сигналов на ИК ГСН сильно зави-
сит от соотношения между мощностью собственного излучения ЛА и лазера, обес-
печивающего ввод помеховых сигналов. Для обеспечения срыва слежения ИК ГСН
с амплитудно-фазовым и частотным принципом выделения информации о цели
мощность излучения лазера должна превышать мощность собственного излучения
защищаемого объекта не менее чем в 101 раз. Срыв слежения практически всех со-
временных ИК ГСН происходит при частотах следования помеховых импульсов
порядка 200.. 250 Гц и длительностях импульсов (например, эрбиевого лазера) -200
мкс. Энергия лазерного излучения, без учета затухания в атмосфере, должна быть
не менее 0,6 Дж, а средняя мощность излучения лазера 150...200 Вт при СКО в
определении направления на ракету сг = 30'.
С помощью импульсного лазера можег быть осуществлена засветка
(«ослепление») перспективных многоканальных (матричных) приемников излуче-
ния ИК ГСН ракет типа «Мэджик-2», «ASRAAM» и др. В многоканальных ИК ГСН
приемники лучистой энергии размещаются в плоскости изображения целей и по-
ложение каждого соответствует дискретному значению угловой координаты цели.
Такие многоканальные следящие системы формируют пеленгационную характери-
стику типа «насыщение» или «дискриминационная характерно гика».
Воздействие на такой матричный приемник импульсного лазерного излуче-
ния с плотностью мощности на входе оптической системы в 10 раз большей, чем
плотность мощности от цели, приводит к «засветке» всего поля приемной матрицы.
Это порождает ошибки в определении координат цели и промаха ракеты Д> А,,
(Rr - радиус поражения ракеты). Матричные фотоприемники могут быть пораже-
ны лазерным излучением комплекса ОЭП [55].
4.5.2. Пассивные средства ОЭП
Пассивное противодействие ОЭС управления оружием ПВО. в том числе
ИК ГСН ракет и теплопеленгаторам, основано на искусственном изменении
свойств среды распространения лучистой энергии и уменьшении теплового излу-
388
Глава 4, Основы ФРЭПр и ОЭП
чения цели. В качестве пассивных средств ОЭП оптических, лазерных, телевизион-
ных и ИК систем наведения используются аэрозоли с определенными физико-
химическими свойствами (маскирующими, высокотемпературными, светорассеи-
вающими, поглощающими). Эффективность аэрозоли определяется как общая мас-
кирующая способность, характеризуемая площадью поверхности, которая может
быть скрыта с помощью 1 кг аэрозольного средства, что обеспечивает ослабление
излучения в видимом диапазоне длин волн в 80 раз. Эффективность белого фосфо-
ра сошавляет 1350 м2/кг, гексахлорэтановой смеси - 900 mV кг, масла, выработанно-
го из нефти, - 630 м2/кг [55].
Существуют два основных физических явления, которые могут быть ис-
пользованы для увеличения затухания ЭМ энергии в воздухе: рассеяние энергии
молекулами газов, твердыми и жидкими частицами, находящимися в воздухе; по-
глощение энергии молекулами газов и частицами. Рассеяние энергии приводит к
изменению направления распространения некоторой доли лучистой энергии за счет
наличия в среде распространения жидких или твердых частиц, а также за счет из-
менения плотности среды распространения (числа молекул или микрочастиц в еди-
нице объема). Поглощение вызывает ослабление потока за счет преобразования
части электромагнитной энергии в другие виды энергии, например, в тепловое
движение молекул, перехода атомов в возбужденное состояние и т.д.
При расчетах поглощения и рассеяния используется ослабление - обобщен-
ное понятие суммарного эффекта снижения плотности потока энергии. Ослабление
подчиняется закону
Ф(Я,Я) = Фоехр[-//(Я)я], (4.43)
где р(Я) - удельное ослабление на волне Я, имеющее размерность 1/м; R - длина
трассы распространения параллельного пучка ЭМ энергии. Ослабление ЭМ энер-
гии определяется соотношением диаметра частицы (дыма, аэрозоли) d и длины
волны Я . Если Я » d. то рассеяние ЭМВ подчиняется закону Рэлея
//(Л) = , (4.44)
где А — постоянная величина д. тя данного вида частиц.
При Я < d рассеяние оказывается не зависящим от d. Наибольшее рассея-
ние имеет место при Я = d. В связи с этим затухание лучистой энергии в ИК диапа-
зоне при дымке (диаметр частиц d-0,5 мкм) составляет 0,00013 на расстоянии
R = 10 км. В тумане или неперегретом паре максимум распределения радиусов ка-
пелек воды составляет примерно 5 мкм, что обусловливает интенсивное поглоще-
ние лучистой энергии вплоть до Я = 14 мкм. Поэтому в качестве среды, снижаю-
щей видимость целей во всем ИК диапазоне длин волн, наиболее часто рассматри-
вают искусственные аэрозольные облака, создаваемые путем периодического или
эпизодического впрыскивания в сопло двигателя самолета (вертолета) воды. Наря-
ду со снижением температуры сопла и истекающих газов вода, преобразуясь в пар.
экранирует нагретые части самолета. К пассивным методам противодействия ИК
приборам следует отнести и меры по снижению теплового излучения целей или
изменению индикатрисы излучения за счет совершенствования форм и конструк-
Глава 4. Основы ФРЭПр и ОЭП 389
ций ЛА, применение специальных материалов и покрытий, снижающих контраст
элементов поверхности самолета (вертолета) [15].
Для уменьшения интенсивности теплового излучения ЛА в секторах наибо-
лее вероятных атак ракетами с ИК ГСН применяют экранные устройства (ЭУ) [13].
Принцип действия ЭУ основан на том, что защитный экран закрывает от наблюде-
ния удлинительную трубу двигателя, а охлаждение самого экрана происходит за
счет набегающего воздушного потока. В результате индикатриса излучения дефор-
мируется в пользу защищаемого ЛА.
4.6. Ложные тепловые цели
4.6.1. Уравнение оптико-электронного подавления
Эффективность подавления ИК ГСН по энергетическому критерию оцени-
вается коэффициентом подавления АГП [15, 19]. Под коэффициентом подавления в
этом случае понимается минимально необходимое отношение плотности потока
мощности рп вх помехового сигнала [Вт/м“] к плотности потока мощности рс вх
излучения цели, при котором происходит перенацеливание ракеты на ЛТЦ. Плот-
ности рп вх и рс вх измеряются на входе фотоприемника ИК ГСН в пределах поло-
сы пропускания приемника АД^, определяемой частотной избирательностью сре-
ды распространения ЭМВ (атмосферы) и оптической системы ИК ГСН.
Плотности потоков мощности рп вх и pQ вх, воспринимаемые приемником
ИК ГСН, определяются соотношениями
ос
Рпвх =f-/nTuUW)rU)^5 (4‘45)
о
ос
Рсвх = |Уц(ЯХЛ)г(Л)б/Л, (4.46)
где У-г-цСЯ) и УЦ(Я) - спектральные плотности излучения ЛТЦ и прикрываемой
цели; </>(Л) и т(А) -характеристики избирательности оптической системы и атмо-
сферы [13]. С помощью (4.45) и (4 46) можно представить уравнение ОЭП в виде
ос
Ки = ----------------- (4.47)
|У|1(Л>(А)г(Л)б7Л
о
На рисунке 4.22 представлены типичные зависимости спектральных плот-
ностей излучения самолета-цели JU(A) и ЛТЦ У1Г..(Л), а также эквивалентная ха-
рактеристика избирательности К. = (р(Л')т(Л) системы «атмосфера-ошика» ИК
ГСН. Эффективная часть лучевых потоков pilL. вх и рс вх на рис. 4.22 выделена.
390
Глава 4, Основы ФРЭПр и ОЭП
Рис. 4.22. Энергетические характеристики цели и ИК ГСН
Анализ зависимостей на рис. 4.22 показывает, что атмосфера и оптическая
система сильно ослабляют действие помехового излучения ЛТЦ. Это связано со
смещением наиболее мощного излучения ЛТЦ влево, в сторону меньших длин
волн, вследствие большей температуры пламени (Т ~ 3000еК). Уменьшение тем-
пературы горения Т хотя и может сместить спектральною характеристику ЛТЦ в
область полосы пропускания Ал^ подавляемой ИК ГСН, однако при этом в значи-
тельной степени (приблизительно в Г4 раз) снизит и эффективность ЛТЦ.
В ОЭП часто используют понятие энергетическою коэффициента полезно-
го действия излучателя г]э, понимая под этим коэффициентом отношение плотно-
сти мощности потока излучения рвх в пределах полосы пропускания ДЛП к сум-
марной (полной) плотности потока излучения нагретого тела pY в ИК диапазоне
>]>= — , (4-48)
й
ОС
pL=jj(A)M. (4.49)
о
Приблизительно можно считать, что энергетические коэффициенты полез-
ного действия ЛТЦ и реактивного самолета (двигателя самолета) равны г] лтц ~ 0,1 и
=^0,4. Выражая коэффициент подавления Ки через энергетические коэффици-
енты полезного действия излучателей (цели и ЛТЦ), можно получить [13]
Кп=-^-^4. (4.50)
77лтц
Величина коэффициента подавления Kv является лишь энергетическим по-
казателем эффективности ОЭП и не определяет эффективность применения ЛТЦ в
целом. Интегральным показателем эффективности в данном случае является про-
мах УР или вероятность поражения ЛА ракетой с ИК ГСН.
Глава 4. Основы ФРЭПр и ОЭП 391
4.6.2. Виды ложных тепловых целей
В настоящее время тепловые ловушки (ТЛ) нашли широкое применение для
борьбы с ракетами, имеющими ИК ГСН. В ИК ГСН применяются новые материалы
(антимонид индия) с высокой чувствительностью в диапазоне 3...5 мкм. Уменьше-
ние поля зрения (FOV) ГСН вынудило разработчиков ИК ловушек создавать ЛЦ с
более быстрым воспламенением и ближе к защищаемому ЛА [130]. Воздействие
ТЛ, их еще называют ложными теплоизлучающими целями (ЛТЦ), на ИК ГСН
приводит к срыву слежения последней за атакуемым самолетом и переходу слеже-
ния за ЛТЦ. В результате воздействия ЛТЦ увеличивается промах ракеты и умень-
шается вероятность ее попадания. Для получения наибольшей вероятности перена-
целивания ИК ГСН с цели на помеху необходимо отстреливать ТЛ одновременно в
каждую четверть пространства относительно направления на атакующую ракету
ИК ГСН управляемых ракет могут подавляться как маскирующими, так и
имитирующими помехами. Цели заметны благодаря контрасту на фоне окружаю-
щей среды. Поэтому маскировка должна предусматривать либо ослабление соб-
ственного теплового излучения объекта (самолета, вертолета), либо увеличение
яркости фона за счет создания пространственно-распределенного облака, имеюще-
го достаточно интенсивное тепловое или световое излучение. Для имитации цели
создаются ЛТЦ, действие которы к подобно действию имитирующих помех, созда-
ваемых для противодействия РЛС управления оружием. Особая ценность Л ГЦ со-
стоит в том. что они могут использоваться для обороны, срывая атаку самостоя-
тельно. без привлечения других средств [13, 19].
ЛТЦ характеризуются массовыми, геометрическими, энергетическими па-
раметрами, конструктивными особенностями и составом горючей смеси. Время
горения пиросостава большинства ЛТЦ не превышает 5... 10 с [55].
Конструктивные формы ЛТЦ включают в себя:
• пиротехнические ЛТЦ, сбрасываемые с самолета с небольшой начальной
скоростью;
• ЛТЦ, выполненные в виде снарядов (противоинфракрасных снарядов), вы-
стреливаемых из пушек в направлении атакующей ракеты;
• ЛТЦ, выполненные в виде неуправляемых и УР, запускаемых с самолета;
• парашютирующие ЛТЦ;
• отрывные ЛТЦ в ви; ie аэрозольных теплоизлучающих образований и само-
воспламеняющихся топлив [15].
По способу применения ЛТЦ условно можно разделить на аэродинамиче-
ские (снаряды и ракеты) и баллистические (отстреливаемые, выбрасываемые, бук-
сируемые и топливно-выливные).
Аэродинамические ЛТЦ представляют собой небольшие ЛА. оснащенные
пиротехническими устройствами и создающие мощное ИК излучение. Преимуще-
ства а эро динамических ЛТЦ:
1) возможность получения больших мощностей теплового излучения при
малых массах и габаритах:
2) широкий диапазон высот боево! о применения (0...30 км);
3) свобода маневра самолета после выброса ТЛ;
392
Глава 4. Основы ФРЭПр и ОЭП
4) применяются против большинства типов ИК ГСН [19].
Интенсивность и спектр излучения определяются подбором состава и свой-
ствами горючих веществ, используемых пиротехническими устройствами. Подоб-
ные ЛТЦ в виде выстреливаемых пиропатронов применялись во Вьетнаме для за-
щиты самолетов В-52 и F-ll 1А (автоматы выброса ALE-27 и 29А). На вооружении
некоторых стран находятся неуправляемые снаряды массой около 1 кг, боевые ча-
сти которых содержат пиротехнические вещества. Такие снаряды на некотором
удалении от ЛА (как правило, впереди) создают яркую локально-светящуюся об-
ласть, баллистические характеристики которой близки к аналогичным характери-
стикам прикрываемого ЛА. Время горения таких ЛТЦ около 5... 10 с, что достаточ-
но для перенацеливания УР.
Баллистические ЛТЦ выбрасываются или выстреливаются из специаль-
ных пусковых устройств. Эти ловушки выполняются в виде трассирующих пушеч-
ных снарядов калибра 26...50 мм [13]. Такими снарядами можно стрелять пооче-
редно с боевыми и снарядами, начиненными дипольными или оптическими проти-
волазерными отражателями (небольшими сферами), что является достоинством
баллистических ЛТЦ. Недостатки баллистических ЛТЦ сост оят в малой интенсив-
ное! и излучения (около 1 КВт-стер), малом времени горения (около 2 с), низкой
эффективности при защите скоростных ЛА.
В отличие от аэродинамических ЛТЦ противоинфракрасные снаряды
(ПИКС) расходуют пиротехнический состав из головной части для создания более
мощного излучения. На тихоходных самолетах и вертолетах возможно применение
ЛТЦ, сбрасываемых на парашютах и буксируемых. Локальные светящиеся облака
могут создаваться за счет впрыскивания специальных легкоионизируемых веществ
в струю отходящих газов.
Эффективность применения ЛТЦ зависит от силы излучения I (Вт/стер),
которая оценивается выражением
suTAS
(4.51)
где 8 - коэффициент излучения ' обычно г ~ 1); сг - постоянная Стефана-
Больцмана; Т - температура горения; 5 - площадь поверхности горения;
Из выражения (4.49) видно, что сила излучения в наибольшей степени зави-
сит от температуры в четвертой степени и лишь линейно увеличивается с ростом
площади горения 5. Кроме того, температура влияет на спектральную плотность
излучения J (Вт/м^стер). Максимум спектральной харакгеристики J(A) смещает-
ся в сторону меньших длин волн в соответствии с законом Вина [19], что в боль-
шинстве случаев неблагоприятно сказывается на кпд ЛТЦ. Этот эффект обусловлен
тем, что максимальная спектральная плотноегь Jmas выходит за пределы полосы
пропускания АЛ оптической системы подавляемой ИК ГСН. Эффективность ЛТЦ
зависит от динамических харакгерисгик горения пиротехнического состава. Преж-
де всего, от этого зависит время горения ЛТЦ, т.е. время эффективного воздействия
на ИК ГСН.
На выбор оптимальной длительности горения /1ОР влияет гип подавляемой
ИК ГСН, характеристики прикрываемого ЛА и ракеты, ракурса атаки, сосгояния
Глава 4. Основы ФРЭПр и ОЭП
393
атмосферы и другие факторы. Продолжительность w должна обеспечивать гаран-
тированное перенацеливание УР на ЛТЦ и оценивается величиной 2 < /, ор < 7 (сек).
Если Ггор < 2 (сек), ракета не успеет перенацелиться на ЛТЦ. Если же время горе-
ния велико (больше 7 с), то после перенацеливания горение не нужно, излишне.
Горение - это быстро протекающий процесс образования плазмы из горючего ве-
щества, находящегося в агрегатном состоянии. Процесс горения можно разделить
на три фазы (рисунок 4.23).
Быстрота возгорания t обеспечивается выбором формы ЛТЦ. Вынужден-
ное воспламенение всей поверхности горючего вещества (а не только торца заряда
цилиндрической формы) уменьшает время возгорания до значения <0,2 с. Ди-
намические характеристики процесса горения зависят от скорости обдува набе-
гающим потоком воздуха. На рис. 4.22 пунктирная кривая характеризует зависи-
мость силы излучения от времени при скорости обтекания ГОБ «300 м/с. Увеличе-
ние скорости обтекания увеличивает время возгорания и снижает силу излучения
ЛТЦ.
Рис. 4.23. Динамика горения ЛТЦ
Время возгорания г, должно быть очень малым, чтобы ЛТЦ не успела вый-
ти за пределы угла зрения дер оптической системы ГСН. Если относительная ско-
рость отставания ЛТЦ ЛА равна Еотн, то при } далении ЛА от УР на расстояние Rv,
время возгорания приближенно определяется выражением (рисунок 4.24)
Off sing
' < V
отн
(4.52)
где q - ракурс атаки.
Если принять <5ff = 102, <7 = 30" . Rr = 1 км, Ега=30 м. с, то оказывается.
что время, необходимое для возгорания, составляет t <0.2 с. Скорость обтекания
ЛТЦ набегающим потоком заметно влияет на силу излучения, что иллюстриру-
ется рисунком 4.25 113].
394
Глава 4. Основы ФРЭПр и ОЭП
Рис. 4.24. Перенацеливание УР на ЛТЦ
Рис. 4.25. Зависимость интенсивности излучения от скорости ИОб
Вследствие большой отдачи тепловой энергии в набегающий поток воздуха
эффективность вбрасываемых (баллистических) Л ГЦ резко уменьшается. Поэтому
для обороны скоростных ЛА от ракет с ИК ГСН необходимо применять аэродина-
мические или буксируемые ЛТЦ. ЛТЦ могут применяться в сочетании с постанов-
кой маскирующих аэрозольных облаков вблизи ЛА, как показано на рисунке 4.26.
В этом случае аэрозольное облако ослабляет полезный сигнал на входе ИК ГСН.
уменьшая тем самым требования к энергетическим характеристикам ЛТЦ.
Рис. 4.26. Комбинированное применение ЛТЦ и маскирующих помех
По массовым, габаритным и энергетическим характеристикам ЛТЦ условно
подразделяют на легкие, средние и тяжелые. Легкие - это ЛТЦ с массой 0,1... 1 ki и
силой излучения до 5 кВт/ср, средние ЛТЦ имеют массу7 больше 1 кг и силу из. ту-
Глава 4. Основы ФРЭН > и ОЭП
395
чения до 15 кВт/ср, тяжелые ЛТЦ имеют массу в десятки кг и силу излучения
50...60 кВт/ср.
Основными показателями, определяющими эффективность боевого при-
менения ЛТЦ. являются:
1) спектральная сила излучения (зависит от состава, массы горючего, вре-
мени горения, скорости обдува и высоты боевого применения);
2) баллистические характеристики (коэффициент лобового сопротивления и
скорость отстрела) [55].
Баллистика ЛТЦ определяется начальной скоростью их отстрела, скоростью
ЛА, лобовым сопротивлением и законом свободного падения. Эффективность воз-
действия ЛТЦ на подавляемую ИК ГСН определяется принципами построения пе-
ленгатора данной ИК ГСН и способами формирования управляющих воздействий.
4.6.3. Подавление ИК ГСН с амплитудно-фазовой
модуляцией
Если в качестве анализатора изображения используется модулирующий
диск, половина которого полупрозрачна, а вторая половина выполнена в виде про-
зрачных и непрозрачных секторов, то лучистый поток источника излучения моду-
лируется по амплитуде и фазе.
Модуль комплексной амплитуды сигнала, снимаемого с приемн ика излуче-
ния, может быть представлен в виде
i/=|i/|=XFM(e)|e|,
(4.53)
где К - коэффициент усиления анализатора изображения; - модуляционная
характеристика (рисунок 4.27); $ — модуль среднего значения углового рассогла-
сования. определяемого положением цели относительно оси следящего координа-
тора ИК ГСН.
Рис. 4.27. Модуляционная характеристика F^(0)
Нелинейная функция 7\,($) описывается выражением
396
Глава 4, Основы ФРЭПр и ОЭП
0 при |0|< е,|>
ф ф 1 1 при и< Н<|02|,
1 при ы< i^hi.
0 при н>
(4.54)
где О , 02, 0. показаны на рис. 4.27 [13].
С приемника излучения модулированный сигнал, амплитуда которого зави-
сит от мощности излучения источника и величины угла рассогласования, а фаза -
от положения цели в картинной плоскости, подается на вход резонансного усили-
теля, настроенного на частоту со. Частоту со часто называют несущей частотой.
Мгновенное значение этого сигнала
и = 1/(1 + т sin cobt) sin cot, (4.55)
где m = ——----— - коэффициент глубины модуляции; со — частота огибающей.
U +U .
max min
При наличии в поле зрения ИК ГСН цели и сигналы ЛТЦ на выходе можно
представить в виде
-Un 1 +Sin(69cr + <£>ц) jSin 69Г ,
ип ~ Г к Р+ тп sin(<w0/ + )]sin col,
(4.56)
(4.57)
где /Лц и mv - коэффициенты модуляции сигналов от цели и помехи; ср и <рл
фазы сигналов от цели и ЛТЦ; Lzu и Uu - модули комплексных ампл итуд, завися-
щие от мощности излучения цели и ЛТЦ в спектральном диапазоне приемника из-
лучения, передаточных функций анализаторов изображения и глубины модуляции
лучистого потока.
Суммарный сигнал от цели и ЛТЦ на входе в усилительный тракг описыва-
ется выражением
u(t) = 1/ц sin cot + Un sin cot + sin(^(/ + ) sin cot + L/r/wn sin(fy/ + <pn) siR 0)1 •
Тогда амплитуда и фаза суммарного сигнала
L/c — -^7ц^ц + + 2С/ц(7пcos(^9y — срп),
U..т,. sine?.. + С/ПЛ7П sin69n
__ Л 1—1 —1 *1-1 11 11 '11
срс = arctg
(4-58)
(4.59)
(4.60)
С/ц777ц cos^n + cos^ri
а сигнал на выходе усилительного тракта ИК ГСН
и( (t) = Uc sin(coj + (рс).
Выражения (4.58) ... (4.60) позволяют выявить особенности ОЭП ПК ГСН с
помощью ЛТЦ. Исследуем выходные сигналы ПК ГСН при наличии в ее поле фе-
ния цели и ЛТЦ. Пусть срп = 0, тогда
Глава 4. Основы ФРЭПр и ОЭП
397
Uc = *V7U ф + а2р2 + 2а/3 cos </?п ,
гх/? sin <тх.
(рс = arctg--------------,
1 + ар cos (рЛ
(4.61)
(4.62)
где а = Un'U^ , р=тХ}/т1Х
Исходя из вида модуляционной характеристики (рис. 4.26) проанализируем
выражения (4.61) и (4.62) для трех возможных вариантов нахождения цели и ЛТЦ
на различных участках характеристики (при различных угловых координатах в по-
ле зрения ИК ГСН). Это позволит выяснить, от каких основных параметров цели и
помехи зависит выходной сигнал ИК ГСН.
Интерес представляет важный практический случай, когда изображения це-
ли и помехи находятся на участке ограничения модуляционной характеристики
(Я < 0ц < 0. и 0, < 0п <0У) — участок I на рис. 4.27. В этом случае тц = 1, ти = 1,
/3-1,
Ur Г.-----2—7-------- asincr,
—— = Jl + а + 2а cos ср}, , срс =arctg--—. (4.63)
Un 1 + acos^]
Амплитуда и фаза суммарного сигнала ИК ГСН определяются отношением
амплитуд помехового и полезного сигналов, а также фазой помехового сигнала
(рисунок 4.28). Вследствие действия помехи ИК ГСН отслеживает мнимую цель
(рисунок 4.296), местоположение которой соответствует энергетическому центру
Оэ, расположенному между целью и ЛТЦ.
Например, в точке 1 (рис. 4.28, 4.29а) при а = С’П/Г7Ц = 1, <jqu =90° фаза вы-
ходного сигнала (р( - 45 , суммарное напряжение превышает напряжение от цели в
1,4 раза. В точке 2- Uc = , tpc - 60°, хотя нами в начале принято = 0 . Так как
при полете ЛТЦ фаза (р,. не меняется в широких пределах 0 < 2тг , то анализ
зависимостей рис. 4.28 позволяет сделать вывод о том, что ИК ГСН сопровождает
эффективный центр Оэ (рис. 4.296) [13].
Рис. 4.28. Амплитуда суммы сигнала с помехой
398
Глава 4. Основы ФРЭПр и ОЭП
Эта ошибка может быть оценена выражением
л ~ о &
^ОШ ~ °ЗР . , ’
1 + а
где 20зр - угол зрения ИК ГСН [22].
(4.64)
Рис. 4.29. Фаза суммы сигнала и помехи
Амплитуда и фаза суммарного сигнала на выходе ИК ГСН с АФ.М эквива-
лентны амплитуде и фазе сигнала от некоторой мнимой цели. Для ИК ГСН, рабо-
тающих б₽з ограничений по амплитуде входного сигнала, мнимая цель является
энергетическим центром цели и помехи (с. [учай 2). Есл и изображения цели и ЛТЦ
находятся на участке 1 и а = I, то мнимая цель находится в геометрическом центре
цели и ЛТЦ. В остальных случаях амплитуда и фаза суммарного сигнала зависят
как от силы излучения цели и ЛТЦ, их фаз, так и от глубины модуляции сигнала от
цели я?ц и ЛТЦ тп . Проведенный анализ позволяет для эффекгивного подавления
ИК I СН выбрать ЛТЦ с требуемыми характеристиками (например, разгорания).
4.6.4. Подавление ИК ГСН с времяимпульсной модуляцией
В ИК ГСН с времяимпульсной модуляцией (ВИМ) лучистого потока от це-
ли сигнал ошибки на выходе угломерного устройства зависит от длительности ин-
тервалов между импульсами, принимаемыми линейным фотоприемником, выпол-
ненным в виде креста или полукреста. Приемник в виде симметричного креста (ри-
сунок 4.30) обеспечивает лучшую защиту от помех.
При отсутствии рассогласования, когда <р = 0, траекторией сканирования
(перемещения) изображения цели Ц по плоскости фотоприемника является окруж-
ность, центр которой совпадает с центром креста, состоящего их двух плеч х, - х, и
у, - у,. Радиус г0 окружности - траектории сканирования - определяется углом
начального наклона нормали сканирующего элемента (зеркала) к оптической оси
Глава 4, Основы ФРЭПр и ОЭП
399
ИК ГСН. При ср,* =0 пятно изображения цели пересекает плечи креста фотоприем-
ника через одинаковые интервалы времени т0, равные четверти периода сканиро-
вания Т = 2я/(о (рис. 4.30а, 4.306).
Рис. 4.30. Формирование изображения цели и сигналов на выходах фотоприемников при
отсутствии сопровождения =0 (а, б) и при сопровождении с ошибкой (рц Ф 0 (в, г)
На выходе фотоприемника образуется напряжение мг(/1, представляющее
собой поток импульсов с постоянным периодом т0=7г/2й) [13]. При угловой
ошибке сопровождения цели q\ £0 центр Оц сканирования пягна смещается отно-
сительно центра креста О на угловую величину (рп =ООи (рис. 4.30в). Составляю-
щие утла 4?и в декартовой системе координат имеют, соответственно, величины <рх
и ср . На выходе анализирующей оптической системы образуется поток импульсов
z/,_ (0 (рис. 4.30г), интервалы между которыми функционально связаны с угловой
ошибкой (р (. На рис. 4.306, 4.30г импульсы от горизонтальной линейки креста за-
темнены.
400
Глава 4. Основы ФРЭПр и ОЭП
В [13] показано, что (рх и <р функционально связаны с временными интер-
валами г, и т2
(4.67)
где Кх и Ку - постоянные коэффициенты.
Управляющие сигналы и ( и и каналов азимута и угла места, пропорцио-
нальные угловым координатам (рх и (р
их=К'х(рх, иу = К'у<ру (4.69)
определяют пеленгационную характеристику (ее линейный участок).
Технически не сложно измерять интервалы г, и г2 между соответствую-
щими импульсами, формируемыми в моменты пересечения пятном изображения
цели крестообразно расположенных фото][риемников (рис 4 30). Крестообразный
приемник состоит из четырех самостоятельных трактов обработки сигналов (рису-
нок 4.31) [13].
У
Рис. 4.31. Электронно-оптическая система обработки сигналов в ИК ГСН с ВИМ
Сигналы с выходов плеч Xj -х2 и j’j - у2 креста поступают в приемники
ПРМ-Х], ПРМ-%2, ПРМ-yi, ПРМ-у2. В результате суммирования выходных сигналов
этих приемников на выходе ПРМ-S образуется поток импульсов wf(r) и их (/) (рис.
4.30г), несущий информацию об угловой ошибке tp сопровождения цели. Далее
этот поток обрабатывается в сигнальном процессоре СП, который формирует
управляющие напряжения wx(^H) и и, (9?ц) каналов азимута и утла места. Для вы-
равнивания амплитуд импульсов, поступающих на вход приемника, сложит
Глава 4. Основы ФРЭПр и ОЭП
401
устройство АРУ. Для этой же цели в приемниках могут применяться ограничители
и логарифмические усилители [13, 55].
Высокая помехоустойчивость ИК ГСН с ВИМ достигается за счет того, что,
во-первых, для защиты от ЛТЦ предусматривается селекция по частоте следования
импульсов и, во-вторых, для защиты от амплитудно-модулированных помех при-
меняется глубокое ограничение входных сигналов. В последних модификациях ИК
ГСН применяются новые виды двухчастотной селекции помехового излучения и
кинематическая селекция.
Двухцветные ИК ГСН имеют два приемника. Один работает в ближнем
диапазоне волн = Л, - , а второй - в дальнем ДЛд = Л4 - ж. Ближний диапазон
волн может находиться в УФ области Л «0,4 мкм, а дальний — в окне прозрачно-
сти атмосферы 3,3....4,2 мкм. Частотные каналы ДЛБ и ДЛд выбираются в зависи-
мости от силы излучения цели и ЛТЦ в полосах пропускания оптических фильтров.
Кинематическая селекция использует измерение относительной скорости Гиш
отрыва ЛТЦ от ЛА. Если эта скорость превышает некоторое пороговое значение
I'ncp, происходит перенацеливание ИК ГСН с ЛТЦ на истинную цель.
Все виды имитационных помех ИК ГСН с ВИМ, создаваемых из одной точ-
ки пространства для самоприкрытия ЛА, малоэффективны. Это объясняется осо-
бенностями пространственно-временной обработки сигнала в ПК ГСН с ВИМ.
Управляющие напряжения угломерных каналов и и и несут информацию об уг-
ловой ошибке сопровождения цели <р|(, заложенную во временных интервалах т, и
т- импульсных потоков на выходах фотоприемников (рис. 4.30). Поскольку и и
и зависят только от взаимного расположения креста фотоприемников и цели, лю-
бая модуляция светового потока, создаваемая источником помех, не вызовет раз-
рушения полезной информации [13]. На рисунке 4.32 для примера представлен по-
ток импульсов управляющего напряжения м2(/), порождаемый помеховым источ-
ником в случае самоприкрытия.
Амплитудная модуляция не приводит к изменению интервалов г, и г2. Од-
нако, в некоторых случаях принудительное прерывание весьма мощного помехово-
го излучения может сорвать самонаведение УР, ГСН которой использует приемни-
ки с АРУ. При наличии в поле зрения оптической системы ложной цели на выходе
Прм-S (рис. 4.31) средняя частота Fcp потока импульсов управляющего сигнала
wz(/) удваивается за счет действия помехи. Если плотность потока мощности по-
мехи Рп вх на входе оптического приемника удовлетворяет уравнению ОЭП (4.45),
то сопровождение ЛА будет сорвано. Учитывая особенности обработки сигнала в
ИК ГСН с ВИМ. можно определить величину коэффициента подавления Krl = 1.
Эффективность применения ЛТЦ зависит от расположения их изображения
(пятна) на плоскости креста рис. 4.30. Для максимизации вероятносги срыва слеже-
ния ИК ГСН необходимо отстреливать ЛТЦ в каждый квадрант плоскости, нор-
мальной к направлению на атакующую ракет}. При этом изображение цели и ЛТЦ
6} дут наблюдаться в разных квадрантах креста фотоприемника. При таких услови-
402
Глава 4, Основы ФРЭПр и ОЭП
ях сопровождение ЛА становится невозможным. Буксируемые ЛТ Ц в виде светя-
щихся гирлянд также создают пространственно-распределенную помеху. Если эти
ЛТЦ мерцают, то и помеховое воздействие усиливается, если частота мерцания FM
выбрана оптимальным образом [13].
/
б)
Рис. 4.32. Управляющие сигналы ИК ГСН с ВИМ при создании AM помехи с
прикрываемого ЛА (а) при отстреле ЛТЦ (б)
Мерцающие помехи могут создаваться с помощью огнеметных устройств.
Такие устройства впрыскивают горючее вещество (например - углеводородное
топливо) в газовую струю двигателя и поджигают образовавшуюся смесь в разное
время. Достоинство такого способа состоит в возможности использования штатно-
го топлива для создания большого иыучающего объема пламени с благоприятным
спектром излучения, соответствующим Т ~1000... 1300°. Недостаток - малое время
горения (секунды), а также ограничения по высоте и по скорости.
Маскировать ЛА можно, создавая протяженные светящиеся области или
ослабляя собственное излучение, окружая маскируемый объект поглощающими
аэрозольными облаками и завесами. Первый путь малоперспективен. Его реализа-
ция связана со значительными техническими трудностями создания объемных из-
лучающих объектов с температурой, значительно превышающей температуру ат-
мосферы Т =^300". Второй путь, предусматривающий создание аэрозольных обла-
ков и завес, предпочтительнее [13].
Основными параметрами, характеризующими эффективность пассивных
маскирующих помех при подавлении ОЭС разведки, являются:
• время постановки аэрозольного образования (АО);
• время существования АО с заданными характеристиками;
Глава 4, Основы ФРЭПр и ОЭП
403
• коэффициент пропускания;
• маскирующая способность;
• коэффициент объемного рассеяния;
• индикатриса рассеяния [36].
Маскирующие облака и завесы создаются специальными аэрозольными бо-
еприпасами (бомбами, снарядами) и аэрозольными выливными приборами (АВП).
Аэрозольные поглощающие завесы большой протяженности создаются АВП. Все
виды АВП заправляются аэрозолеобразующими смесями, состоящими из аэрозоле-
образователя, горючего и окислителя. Механизм образования аэрозольной завесы
зависит от типа ЛА, АВП и состояния атмосферы. Такая завеса имеет конусообраз-
ную форму (рисунок 4.33).
Рис. 4.33. Маскирующая аэрозольная завеса
За счет воздействия атмосферы (естественной и вынужденной турбулентно-
сти) шлейф завесы удлиняется и расширяется. В зоне боевых действий маскирую-
щая завеса может быть поставлена любыми ЛА, в том числе беспилоз ными самоле-
тами и аэростатами [13, 55]. Маскирующая завеса значительно ослабляет энергию
проникающего через него светового потока. Коэффициент ослабления оценивается
величиной
*осл=е-“£, (4.70)
где а - коэффициент, зависящий от состава выливаемой жидкости (-0.01 ...0,05);
L - эффективная протяженность облака. При »100 м ослабление эффективно-
сти излучения ЛА на выходе ИК ГСН достигает значительной величины (более 10
дБ), что делает практически невозможным применение ПЗРК [55].
Одновременная маскировка и имитация ЛА достигается применением ком-
бинированных ЛТЦ подогревно-пиротехнического типа. Горение смеси в таких ло-
вушках происходит внутри замкнутого объема с выходом газов в окружающее про-
странство. Этим достигается более полная реакция горения в полости, где давление
превышает атмосферное [13]. Излучение создается догорающими на выходе части-
цами горючей смеси и корпуса ловушки.
ГЛАВА 5
РАДИОЭЛЕКТРОННАЯ ЗАЩИТА
5.1. Радиоэлектронная защита как составная часть РЭБ
Радиоэлектронная защита (РЭЗ) — совокупность действий по устранению
(ослаблению) воздействия на свои РЭО средств функционального поражения, РЭП,
поражения самонаводящимся оружием, а также по защите от непреднамеренных
радиопомех (обеспечение ЭМС своих РЭС) и от TCP противника. Основная цель
РЭЗ - обеспечение устойчивого функционирования РЭС своих СУ войсками (си-
лами) и оружием в условиях ведения противником РЭБ и взаимного влияния РЭС
друг на друга. Среди проблем РЭЗ авиационных РЭК следует отметить:
• обеспечение РЭЗ РЭС и ЭМС РЭС в составе авиационных РЭК;
• обеспечение информационной безопасности авиационных РЭК;
• организация взаимодействия экипажа (летчика) с авиационным РЭК;
• осуществление индикации и отображения информации (в реал ьном масшта-
бе времени > большого объема разнообразной и динамичной информации [23].
Радиоэлектронная защита РЭС авиационных РЭК должна осуществляться
комплексно и непрерывно. Непрерывность заключается в постоянном проведении
мероприятий по РЭЗ РЭС на этапах разработки (модернизации), испытаний, экс-
плуатации и боевом применении авиации в любых условиях. Комплексность РЭЗ
состоит в определенном сочетании технических, организационных и других видов
мероприятий.
Технические мероприятия по РЭЗ РЭС АРЭК реализуются на этапах раз-
работки РЭС и обеспечиваются экипажами ЛА в процессе боевого применения, а
также при эксплуатации РЭС путем использования специальных схем и устройся в
защиты от помех. Технические мероприятия по РЭЗ РЭС включают в себя:
• рациональный выбор полосы (номиналов) рабочих частот разрабатываемых
(модернизируемых) РЭС:
• обоснованный выбор вариантов построения (схемных решений) приемных и
передающих устройств, видов используемых сигналов, методов и способов их об-
работки;
• комплексирование устройств приема, обработки и передачи информации,
использующих различные физические принципы;
• применение устройств изменения частоты, мощности ПРД, направлений из-
лучения и приема;
• реализацию требований к характеристикам излучения и приема в широкой
полосе частот;
• внедрение новых технических решений по обеспечению эффективной рабо-
ты РЭС в условиях ведения противником РЭБ. а также непреднамеренных (взаим-
ных) помех РЭС.
Организационные мероприятия по РЭЗ РЭС АРЭК (как в составе отдель-
ных комплексов, так и группировок):
Глава 5. Радиоэлектронная защита
405
• рациональное построение СУ ЛА, оптимальный выбор способов боевого
применения РЭС;
• строгое соблюдение временных, частотных, пространственно-
поляризационных и энергетических ограничений на работу РЭС;
• согласованное применение РЭС различных принципов действия и в различ-
ных диапазонах длин волн;
• оптимальное распределение и назначение рабочих частот РЭС;
• установление и соблюдение порядка использования специальных средств и
устройств РЭЗ;
• резервирование РЭС, устройств и блоков РЭС, подверженных воздействию
мощных ЭМИ;
• рациональное размещение РЭС на ЛА;
• соблюдение установленного порядка работы, условий, приоритета и запро-
сов при работе РЭС;
• своевременное выявление и исключение (уменьшение) влияния источников
непреднамеренных (взаимных) помех;
• организация подготовки экипажей ЛА к работе с РЭС авиационных РЭК в
условиях ведения РЭБ противником и воздействия непреднамеренных (взаимных)
помех РЭС.
Предотвращение или значительное снижение степени воздействия помех на
РЭС авиационных РЭК при одиночных или групповых действиях ЛА должно до-
стигаться в результате выполнения совокупности вышеуказанных организацион-
ных и технических мероприятий [15, 23]. Мерой качества РЭЗ служат показатели
помехозащищенности, характеризующей способность РЭС эффективно работагь
при одновременном ведении противником РЭБ (РЭР и создании помех). Из содер-
жания помехозащищенности РЭС следует, что она определяется скрытностью ра-
боты РЭС и помехоустойчивостью [70]. В начале 1960-х годов была предложена
вероятностная концепция оценки помехозащищенности. В работе [131] помехоза-
щищенность РЭС предложено оценивать вероятностью
Лв = 1 “ ЛзРгЛуЛ1Д » (5 • 1)
где Рорг — вероятность того, что РЭП вообще будет организовано; РП! — вероят-
ность того, что спектр помех будет попадать в полосу приемного устройства по-
давляемого РЭС; Р11Д - вероятность подавления РЭС, т.е. вероятность того, что
мощность помехи на входе приемного устройства РЭС будет превышать значение,
достаточное для нарушения работы [132].
Вероятность Рскр называется скрытностью излучения
Р,;кр=1-Р,„. (5.2)
а вероятность Л1|5 — помехоустойчивостью РЭС
Л^-^пд- (5.3)
406
Глава 5. Радиоэлектронная защита
Учитывая (5.2) и (5.3), помехозащищенность 7% (5.1) можно записать в
развернутом виде
Рпз = 1-(1-Рскр)(1-Рпу)Р„рг, (5.4)
раскрывающем основные составляющие понятия помехозащищенности. Помехо-
защищенность РЭС определяется ее скрытностью, количественной мерой которой
является вероятность Р( кр, и помехоустойчивостью, количественной мерой кото-
рой является Рт.
В аналогичной форме введено определение помехозащищенности систем
связи и управления со сложными сигналами в [133], где принято Рорг = 1, и вероят-
ность Рпз описывается выражением
Р1з=1 ЛЛд» (5.5)
где РРЗ - вероятность разведки параметров РЭС, необходимых для организации
РЭП. Вероятность разведки Ррз в (5.5) количественно отражает свойство РЭС, ко-
торое по аналогии с (5.2) может быть названо скрытностью, т.е.
Рскр=1-Ри. (5.6)
Основным показателем помехозащищенности РЭС является вероятность
рп успешного выполнения ими решаемых задач в условиях ведения противником
РЭП, которая определяется формулой
А,з = Ауо + Рдп Опу! - РпуО ) ’ (5.7)
где р№ — вероятное гь действия специально организованных помех на РЭС; р , и
/?пу0 - вероятности успешною выполнения своих задач РЭС при условии, что на
него наряду с полезными сигналами воздействуют организованные и естественные
или только естественные помехи соответственно [132].
Вероятность рт в (5.71 характеризует скрытность работы РЭС и )ф-
фективностъ системы разведки противника. Скрытность РЭС связана с воз-
можностями системы РТР и является комплексной характеристикой алгоритма
функционирования РЭС и характеристикой возможностей системы РТР. Вероятно-
сти /\у1 и рп1П являются основными количественными показателями помехоустой-
чивости РЭС при наличии и отсутствии организованных помех. Конкретный смысл
и аналитические выражения для вероятностей рпу1 и определяются многими
факторами: целью функционирования РЭС; моделью сигналов; моделью естествен-
ных и преднамеренных помех. Для РЛС обнаружения вероятности р ^ и р]Ч в
(5.7) имеют смысл вероятностей правильного обнаружения одиночной или группо-
вой цели 1 гри фиксированном уровне ложных тревог в условиях отсу гет вия и нали-
чия помех. Для систем радиосвязи рт0 и /?nvI имеют смысл правильного (или оши-
бочного) приема в отсутствие и при наличии помех соответственно [132].
Глава 5. Радиоэлектронная защита
407
Для оценки помехозащищенности PJ LC можно использовать частные пока-
затели скрытности и помехоустойчивости, непосредственно или косвенно связан-
ные с основными показателями. Наиболее часто в качестве основного показателя
помехозащищенности обзорных РЛС используется отношение количества своевре-
менно разведанных целей Nn за определенный период боевых действий в условиях
РЭП к количеству разведанных целей N при отсутствии помех [104]
W = Nn/N. (5.8)
Данные о характере воздействия помех на обзорные РЛС показывают, что в
условиях помех в основном снижаются возможности по обнаружению целей. Вли-
яние помех на точность определения координат целей проявляется в значительно
меньшей степени.
Современные и перспективные АРЭК характеризуются высокими уровнями
интеграции и автоматизации процессов обработки информации и управления, ис-
пользованием быстродействующих БЦВМ, аналоговых и цифровых каналов ин-
формационного обмена, интенсивным обменом по каналам радиосвязи и обмена
данными с взаимодействующими ЛА, наземными и воздушными ПУ и наведения и
другими объектами. Для эффективного решения АРЭК боевых задач необходимо,
чтобы они обладали не только высокой помехозащищенностью, но и высокой ин-
формационной безопасностью как отдельных РЭС и других элементов электронных
комплексов, так и РЭС в целом. Информационная безопасность автоматизиро-
ванной системы характеризует такое состояние системы, при котором:
1) система способна противостоять дестабилизирующему воздействию
внутренних и внешних угроз;
2) функционирование и сам факт наличия системы не создают угроз для
внешней срелы и для элементов системы.
По мере развития и совершенствования средств РЭР и РЭП все более
острой становится проблема защиты информации о применяемых кодах в РЛС опо-
знавания, поэтому информационная безопасность АРЭК в значительной мере зави-
сит от надежности защиты информации в РЛС государственного опознавания.
Наилучшие результаты по обеспечению надежной защиты информации в совре-
менных РЛС опознавания с активным ответом достигаются при использовании ме-
тодов криптографического кодирования. Для кодирования импульсных сигналов в
РЛС опознавания с активным ответом, функционирующих совместно с импульс-
ными БРЛС, могут применяться различные виды модуляции параметров сигналов
запроса и ответа. Наибольшую стойкость к вскрытию методами криптоанализа и
удобство практической реализации обеспечивает метод кодирования по располо-
жению импульсов в кодовой группе [23].
Анализ тенденций развития информационных технологий показывает, что в
будущем могут появиться качественно новые (информационные) формы борьбы
информационные войны. Одним из компонентов информационной войны является
информационное оружие - совокупность методов и средств, позволяющих похи-
щать, искажать или уничтожать информацию, ограничивать или прекращать доступ
к ней законных пользователей, нарушать работу ил и выводить из строя телекомму-
408
Глава 5. Радиоэлектронная защита
никационные сети и компьютерные системы. В настоящее время в стадии разра-
ботки находятся специальные средства («информационные боеприпасы»), предна-
значенные для атаки, вывода из строя, дезориентации и дезинформации СУ оружи-
ем противника. Применение таких средств может обеспечить доступ к командным
компьютерам противника, вывод их из строя, разрушение файлов данных.
Методы и средства информационной войны могут позволить летчику ис-
требителя, внедрившегося (с помощью АРЭК и внебортовых систем) в систему ин-
формационного обмена противника, контролировать правильность своих действий,
уточнять координаты обнаруженных СУ оружием противника, выводить из строя
компьютеры его систем ПВО. При этом начальная фаза атаки в недалеком будущем
может стать скрытой, если перед атакой удастся проникнуть в компьют ерные сети
противника [23]. В качестве информационного оружия рассматриваются разраба-
тываемые принципиально новые вирусы и средства их внедрения в компьютерные
системы противника, технологии создания специальных электронных ловушек в
микросхемах, используемых в качестве элементной базы систем вооружения про-
тивника. Такие микросхемы-ловушки при получении определенной команды смо-
гут контролировать функционирование и использование этих систем или нарушать
их работу.
5.2. Основные методы помехозащиты
Помехозащищенность РЭС зависит от большого количества различных
факторов [9, 15, 22, 23, 701. Основными из них являются:
• диапазон используемых частот:
• форма и структура излучаемых и принимаемых сигналов;
• способ обработки сигналов в приемном устройстве;
• средняя мощность передающих устройств;
• направленные свойства передающих и приемных антенн и уровни их БЛ;
• кратность и возможность дублирования РЭС:
• пространственное расположение РЭС;
• организация боевого использования РЭС и др.
Все методы и способы обеспечения помехозащищенности РЭС осуществ-
ляются главным образом за счет технических мероприятий, основой которых явля-
ются объективные различия в структуре и закономерностях изменения параметров
сигналов и помех. Это позволяет за счет использования априорных данных о по-
лезных сигналах и помехах, надлежаще! о выбора схем и режимов работы РЭС се-
лектировать полезные сигналы, компенсировать в определенной степени влияние
помех. Для правильного приема полезного сигнала необходимы определенные
априорные знания о нем. Ес. ти о параметрах сигнала заранее ничего неизвестно, его
нельзя принять, так как неизвестно, чем он отличается от помех. Классификация
методов помехозащиты показана на рисунке 5.1 [15].
Под перегрузкой приемника понимается такой режим его работы, когда на
него совместно с сигналом действуют помехи большой интенсивности, в результа-
те чего его усилители работают в нелинейном режиме с отсечкой. Для защиты от
Глава 5. Радиоэлектронная защита
409
перегрузок, приводящих к нелинейным эффектам и. как следствие, к ухудшению
частотной избирательности по побочным каналам приема, в интересах сохранения
наиболее существенных признаков сигнала применяются различные схемы АРУ,
различные модификации приемников с логарифмическими амплитудными характе-
ристиками усилителей ПЧ и ограничители [9, 10, 13, 70].
Рис. 5.1. Классификация методов помехозащиты
Наиболее эффективными, как правило, являются схемы АРУ:
• АРУ с обратной связью (АРУ «назад»);
• АРУ «вперед» (для случая т , > г, );
• АРУ «по ближним шумам» (быстрая АРУ (БАРУ) по шумовой помехе,
предшествующей появлению сигнала);
• АРУ с поиском провала в спектре помехи;
• АРУ с «провалом» по частотной характеристике;
• медленная АРУ (МАРУ) (для случая » г, );
• АРУ с многократными стробами (позволяет получить постоянный уровень
выходного сигнала приемника в широком диапазоне амплитуд входных сигналов)
Принцип работы системы АРУ в приемнике основан на изменении его ко-
эффициента усиления автоматической выработкой регулирующего напряжения в
410
Глава 5. Радиоэлектронная защита
соответствии с уровнем колебаний несущей принимаемого сигнала и подачей его в
усилительные каскады.
Особенностью логарифмических усилителей является то, что их выходное
напряжение (7ВЫХ является логарифмической функцией от входного напряжения
t/BX. Для случая С/вх > L7BX0
t'Bb.x^log.^ + e, (5.9)
*^вхо
где (7вх0 - входное напряжение, соответствующее переходу от линейного участка
усиления к логарифмическому; А и В - постоянные коэффициенты. Одна из моди-
фикаций усилителя - линейно-логарифмический, в котором для слабых сигналов
прием ник линейный t/BbIX = А: С7ВХ, а для сильных - логарифмический
Цзых = l°g^Bx На линейном участке амплитудной характеристики <7ВЫЧ=<71Ч, а в
логарифмическом qEbiK > qEX (сильный сигнал подавляет помеху).
Ограничители сигнала почти не дают подавления сигнала шумом, но при
этом позволяют успешно бороться с импульсными помехами. Известно достаточно
много разновидностей схем [10, 28], использующих ограничители для уменьшения
влияния помех. Ограничение снизу применяется для подавления с. габых помех (ри-
сунок 5.2).
Рис. 5.2. 01 раничение снизу
У ограничителей снизу на выход проходят сигналы с Е{ >hc, а более сла-
бые шумовые импульсные помехи х < h0 подавляются. Ограничение сверху. Для
борьбы с мощными импульсными помехами, когда амплитуда помехи значительно
превосходит амплитуду сигнала, применяют ограничение сверху, вследсхвие чего
мощные импульсы помехи на выход схемы ограничителя не проходят. Двухпорого-
вое ограничение применяется для помехозащиты канала обнаружения [9, 70].
Амплитудно-частотная селекция с помощью схем ФОФ или ШОУ. Схемы
ФОФ (фильтр - ограничитель - фильтр) или ШОУ (широкополосная - ограничи-
тель - узкополосная) представлены на рисунке 5.3.
Первое назначение ФОФ - помехозащита приемников от мощных коротких
импульсных помех [15]. Полосы усилит елей выбираются так. чтобы Д/ - A/t ;
Д/~ш = kkf( ; k »1. Если на вход схемы ФОФ действует импульс сигнала длитель-
Глава 5. Радиоэлектронная защита
411
ности тс и помехи с длительностью гп « гс при разных уровнях хп » хс, то через
входной усилитель с широкой полосой оба импульса пройдут без искажений. После
ограничения (уровень ограничения у( ) импульсная помеха будет уменьшена по ам-
плитуде до уровня уп = у0. Фильтр с узкой полосой, согласованной с шириной
спектра сигнала, импульс сигнала не исказит, а импульс помехи расширит, умень-
шив при этом его по амплитуде примерно в к раз.
Рис. 5.3. Амплитудно-частотная селекция с помощью схем ФОФ (ШОУ)
Таким образом, отношение сигнал шум на выходе станет
^=(АГ2=(Д4/Л/ )2»<7ВХ- (5.10)
Второе назначение ФОФ - помехозащнта приемников сигналов с угловой
модуляцией от шумовых и других широкополосных помех. Третье - стабилизация
вероятности ложных тревог Рпт на выходе.
Селекция предусматривает отстройку сигнала от помех за счет использо-
вания различия в их свойствах и параметрах. Такая отстройка в конечном итоге
приводит к резкому ослаблению восприимчивости приемника по побочным кана-
лам приема. Первичная селекция как способ защиты от помех основана на исполь-
зовании отличий тех параметров сигнала и помех, которые обусловлены принци-
пом построения и функционирования РЭС [22].
Пространственная селекция предусматривает учет прихода сигнала и по-
мехи с различных направлений и обеспечивается управлением ДНА. Чем уже ДНА,
тем лучше может быть обеспечена пространственная селекция. Снижение уровня
БЛ, применение высоконаправленных антенн с электронным сканированием ос-
новного луча, использование ФАР - эффективные способы борьбы с помехами.
Первичная частотная селекция использует различие сигналов и помех по
их спектральным свойствам. Частотная селекция обеспечивается перестройкой по
частоте и максимально возможным сужением полосы пропускания приемника. Для
защиты РЭС от помех наиболее эффективным является способ быстрой перестрой-
ки частоты по случайному закону. Применяемый в РЛС способ изменения несущей
частоты и в системах связи режим ППРЧ позволяет успешно бороться с активными
помехами. Выигрыш в отношении сигнал, помеха для РЭС с ППРЧ в Кс раз по
сравнению с использованием простых сигналов достигается за счет расширения
спектра Kt = В! а (В - база сигнала; а - параметр, значения которет о лежат в пре-
делах от 1 до 2). Сужение полосы пропускания приемника достигается с помощью
412
Глава 5, Радиоэлектронная защита
подстройки гетеродина, применением высокодобротных кварцевых фильтров в ка-
налах ПЧ, а также системами слежения за частотой и скоростью ее изменения.
Временная первичная селекция используется при приеме импульсных сиг-
налов при наличии импульсных помех и основана на отличии селектируемых им-
пульсов от импульсов помех по временному положению, частоте повторения и
длительности.
Первичная амплитуоная селекция основана на различии уровней сигнала
и помех на входе приемника и осуществляется гг^тем применения схем ограниче-
ния с накоплением (интегральный прием).
Поляризационная селекция, использующая различие в поляризации при-
ходящих радиоволн сигналов и помех, осуществляется с помощью специальных
поляризационных фильтров, совмещаемых с антенной системой. Любой приемный
антенно-фидерный тракт может рассматриваться как поляризационный фильтр
[70]. Поляризационным фильтром может служить конструкция, объединяющая от-
резки прямоугольного и круглого волноводов с диэлектрической пластиной. Эскиз
такой конструкции изображен на рисунке 5.4. Длина диэлектрической пластины
равна четверти длины рабочей волны.
Рис. 5.4. Конструкция поляризационное о фильтра
Другая конструкция использует поляризационную решетку (рисунок 5.5) и
устанавливается в раскрыве антенны. Решетка представляет собой набор парал-
лельных металлических пластин шириной расе гав тенных с niai ом а. Каждая пара
пластин образует волновод. Вектор напряженности поля Е в зоне решетки тоже
раскладывается на две ортогональные компоненты: Е - параллельную пластинам
и Е - перпендикулярную им. Составляющая Е приобретет дополнительный фа-
зовый сдвиг из-за увеличенной фазовой скорости в волноводе, образованном па-
раллельными пластинами. Подбором ширины d добиваются фазового сдвига
Д<р = л / 2. а поворотом решетки относительно направления вектора Е падающей
волны изменяют вид поляризации поля на выходе.
Функциональная селекция предусматривает выделение сигналов с помо-
щью нескольких независимых каналов приема с последующей обработкой всей со-
вокупности. Оптимальный приемник, предусматривающий построение наилучшей
Глава 5. Радиоэлектронная защита
413
схемы для данного конкретного сигнала и известного вида помех, является, по су-
ти, реализацией схемы функциональной селекции сигнала от помехи.
Рис. 5.5. Поляризационный фильтр на основе решетки из металлических пластин
Структурная первичная селекция позволяет разделять помехи с сигналом,
которому при формировании на передающей стороне придана известная приемнику
форма (структура). Поскольку структура сигнала и закон изменения модулируемо-
го параметра на приемном устройстве известен, то можно осуществить оптималь-
ную (близкую к оптимальной) обработку сигнала и полностью или частично изба-
виться от помех.
Методы вторичной селекции основаны на формировании дополнительных
параметров или специальном кодировании сигналов на передающем конце с ис-
пользованием этих дополнительных признаков для выделения полезных си] налов в
приемнике из их смеси с помехами [22].
Частотная вторичная селекция основана на частотном уплотнении ра-
диоканала, т.е. на модуляции несущей частоты сигнала в передатчике дополни-
тельными поднесущими и выделением их с помощью демодуляторов и фильтров в
приемнике. Дополнительной модуляцией на передающем конце поднесущих по
времени или амплитуде в приемнике реализуется вторичная временная и ампли-
тудная селекции соответственно.
Структурная вторичная селекция основана на помехоустойчивом коди-
ровании, в том числе с использованием широкополосных сигналов. На передающем
конце сигнал кодируется с помощью избыточных кодов, структура которых из-
вестна на приемном конце, что позволяет увеличить помехоустойчивость радиока-
налов, а также обнаруживать и исправлять ошибки (если коды корректирующие). С
увеличением длины кода снижается пропускная способность каналов.
Адаптация (приспособление к внешним условиям) предусматривает авто-
матическое изменение структуры и параметров защищаемых РЭС при изменении
помеховой обстановки. Анализируя помеховую ситуацию, адаптивная система в
зависимост и от уровня помех может изменять свою пол осу пропускания, скорость
414
Глава 5. Радиоэлектронная защита
передачи сообщений, осуществлять переход на другие свободные от помех часто-
ты. Многоканальный прием использует пространственную и временную взаимную
когерентность сигналов, пришедших к приемнику по разным трассам и поэтому
наблюдаемых на разных временных интервалах. Это позволяет уменьшить вл ияние
помех, действующих на сигналы только на некоторых трассах распространения.
Компенсация помех (обычно на выходе УПЧ) применяется как последний
резерв помехозащиты, когда все остальные методы не смогли предотвратить про-
сачивание помех на выход устройств приема и обработки сигнала. Компенсация
радиопомех полностью или частично может быть достигнута различными спосо-
бами [15, 70] в зависимости от того, какие априорные данные о сигнале использу-
ются для его приема. Наиболее часто применяются три способа: 1) с помощью спе-
циального компенсационного приемника: 2) путем череспериодной компенсации;
3) посредством декорреляции помех.
Первый способ, называемый амплитудно-фазовым или когерентным, осно-
ван на применении двух приемников - основного и допол нительного (компенсаци-
онного). Основной приемник реагирует на смесь сигнала и помехи, антенна же
компенсационного приемника принимает только помеху (например, по БЛ, т. е. ис-
пользуется различие в направлениях прихода помехи и сигнала). Уровни помех на
выходе обоих приемников устанавливаются одинаковыми, а фазы - противополож-
ными. В результате помеха на выходе основного приемника компенсируется, а по-
лезный сигнал остается неизменным.
Череспериодная компенсация помех применяется для обнаружения сигна-
лов РЛС. отраженных от подвижных целей, прикрытых маскирующей дипольной
завесой. В импульсных РЛС с череспериодной компенсацией помех (рисунок 5.6)
используют ФД, на который подается опорное напряжение и п (г) и входная смесь
сигнала с помехой и (t).
BX V 7
Рис. 5.6. Череспериодная компенсация помех
На рис. 5.6 обозначено: У, У? - усилители; ВУ - вычитающее устройство.
Из-за наличия радиальной составляющей скорости и соответствующего доплеров-
ского сдвига частоты импульс цели на выходе ФД будет иметь различную ампли-
туду в каждом периоде повторения, а сигнал от маскирующей завесы будет иметь
постоянную амплитуду. При подаче на ВУ прямого сигнала с выхода ФД и задер-
жанного на период повторения получим компенсацию помехи и улучшение наблюдения
импульсов цели.
Глава 5. Радиоэлектронная защита
415
Компенсация помех путем их декорреляции может быть достигнута при ис-
пользовании двух опорных напряжений, отличающихся между собой по фазе [15]. Пре-
образование этих напряжений с входным напряжением с последующим вычитанием или
сложением приводит к снижению уровня помех в результирующем напряжении по срав-
нению с исходной смесью. Когда усложнение аппаратуры недопустимо или нежела-
тельно, прибегают к устройствам защиты РЭС, основанным на бланкировании (ри-
сунок 5.7), т. е. снижении уровня помехи или полном запирании тракта приемника во
время прохождения помехи.
Рис. 5.7. Устройство с бланкированием
В состав устройства с бланкированием входят: входное устройство, Л 3, ключ
(Кл), обнаружитель импульсной помехи, генератор бланкирующих импульсов, вы-
ходной каскад. Устройства с бланкированием отличаются схемой обнаружителя им-
пульсной помехи (она обнаруживается, как правило, по частотно-амплитудному при-
знаку), формой бланкирующих импульсов и местом расположения ключа.
Комплексирование нескольких РЛС. работающих на разнесенных часто-
тах - мощное средство помехозащиты [9. 10]. вынуждающее противника применять
заградительную шумовую помеху, которая наименее эффективна для РЭП. Повы-
шению помехозащиты способствует объединение информации от нескольких
РЛС. Если в основной РЛС. работающей на частоте /, помехой поражается ин-
формация о дальности до цели или скорости цели, прибегают к дублированию этой
информации от внешней РЛС, работающей на другой частоте f. Ф / и не подвер-
женной действию помех. Применяют различные методы объединения РЛС в еди-
ную систему как по высокой частоте (в трактах первичной обработки), так и по ин-
формации (при вторичной обработ ке).
Для систем ПВО к мерам помехозащиты также можно отнести: простран-
ственную компенсацию помех в монои ипульсных РЛС; специальные режимы по-
иска-пеленгации постановщиков помех в условиях адаптивного («негативного»)
управления мощностью помех; адаптивное управление составом, структурой, ре-
жимами работы РЛС в целом [17].
Мощный резерв повышения помехозащиты состоит в переходе от актив-
ных РЛС к активно-пассивным многоточечным РЛС (МРЛС), содержащим один
передатчик и несколько разнесенных в пространен ве приемников с приемны ми ан-
теннами. Против МРЛС не эффективны помехи, излучаемые из одной точки, а шу-
мовые помехи резко теряют свою эффективность. Пассивные каналы позволяют
416
Глава 5. Радиоэлектронная защита
применять триангуляционные методы местоопределения с дублированием инфор-
мации о дальности и скорости.
5.3. Методы повышения скрытности и помехоустойчивости
Под скрытностью понимается способность РЭС противостоять действиям
РЭР по обнаружению факта работы РЭС и определению необходимых для РЭП па-
раметров сигнала. Скрытность подразделяется на энергетическую, структурную,
информационную, пространственную, временную, частотную и др. [15].
Энергетическая скрытность РЭС характеризует его способность проти-
востоять мерам РЭР, направленным на обнаружение сигнала разведывательным
ПРМ. Разведывательные ПРМ, используемые для несанкционированного приема
сигналов, работают в широкой полосе частот, осуществляют прием сигналов на
фоне помех при недостаточной априорной информации о параметрах сигналов. Ха-
рактерной ситуацией при обнаружении сигнала средствами РЭР является отсут-
ствие априорной информации о форме разведываемого сигнала. В этом случае
единственным признаком наличия сигнала является оценка энергии (мощности)
реализации наблюдаемого процесса за время наблюдения на выходе разведыва-
тельного ПРМ.
Структурная скрытность характеризует способность РЭС противостоять
действиям РЭР. направленным на раскрытие структуры сигнала, т.е. действиям по
отождествлению сигнала с одним из известных, лля которых имеются эталонные
образцы. Эталонный образец - совокупность известных разведке параметров сиг-
нала, которые могут иметь качественный (способы кодировки и модуляции, тип
поляризации) или количественный характер (мощность, несущая частота, ширина
спектра, индекс модуляции, длительность импульсов). Для повышения структурной
скрытности необходимо располагать по возможности сравнительно большим набо-
ром используемых сигналов и достаточно часто изменять их параметры.
Информационная скрытность характеризует способность РЭС противо-
стоять действиям, направленным на несанкционированное раскрытие содержания
(смысла) передаваемой с помощью радиосигналов информации. Наличие априор-
ной и апостериорной неопределенности делает задачу раскрытия содержания пере-
даваемой информации статистической.
Пространственная скрытность определяется ДНА на излучение по полю
или по мощности. В общем случае скрытность тем выше, чем уже главный лепе-
сток ДНА и меньше уровень боковых лепестков. Существуют различные критерии
для оценки скрытности работы РЛС: уровень максимального БЛ; интеграл от
напряженности электрического поля в заданном угловом секторе; вероятность того,
что уровень излучения не будет превосходить заданного значения и др.
Основные методы повышения скрытности [15] приведены на рисунке 5.8.
Помехоустойчивость РЭС - это способность противостоять вредному
влиянию различного вила помех. В качестве основных показателей помехоустой-
чивости РЭС выступают вероятности успешного решения своих задач при условии.
Глава 5. Радиоэлектронная защита
417
что на РЭС воздействуют преднамеренные и непреднамеренные помехи. Методы
повышения помехоустойчивости [15] приведены на рисунке 5.9.
Рис. 5.8. Основные методы повышения скры гности
Частными показателями помехоустойчивости РЭС являются [22]:
• отношение эффективных мощностей сигналов и помех на выходе линейных
частей приемников;
• вероятности ложной тревоги и пропуска цели;
• вероятности ошибок при передаче дискретных сообщений;
• среднее время работы следящей системы до первого перехода в режим по-
иска;
• вероя гность срыва авюсопровождения цели и др.
Следует отметить, что помехозащищенность конкретных РЭС обеспечива-
ется сочетанием аппаратурных средств с алгоритмическими методами. Наиболее
эффективная помехозащита достигается при использовании аппаратурных
средств в разных сочетаниях [24]:
• Видеоинтеграторы для выделения слабых сигналов на фоне помех за счет
накоп. 1ения энергии последовательности принимаемых импульсов.
• Видеокорреляторы используют статические связи между полезными сигна-
лами для их выделения на фоне некоррелированных помех.
418
Глава 5. Радиоэлектронная защита
• Высококогерентные генераторы зондирующих сигналов в сочетании с коге-
рентными приемниками, обеспечивающими энергетическое отношение сигнал/шум
в у/п больше, чем при некогерентном приеме (л - число импульсов в пачке).
• Устройства, реализующие многочастотное излучение и прием сигналов при
разносе их частот на сотни МГц для уменьшения влияния флюктуаций отраженных
от цели сигналов и повышения помехоустойчивости РЛС в обмен на уменьшение
дальности действия.
• Антенны с многолучевыми ДНА. обеспечивающими скорости просмотра
зоны обзора пространства и разрешающей способности по угловым координатам.
Рис. 5.9. Методы повышения помехоустойчивости
Среди алгоритмических методов хорошо зарекомендовали себя:
1. Анализ спектральной плотности шумов в рабочем диапазоне частот для
выбора несущей частоты в области с наименьшей плотностью этих шумов, что
Глава 5. Радиоэлектронная защита
419
обеспечивает работу РЭС с максимальным для данной помеховой обстановки от-
ношением сигнал, шум.
2. Переключение поляризации сигнала с целью сделать его ортогональным
по поляризации помеховому сигналу, что может снизить мощность помехи на вхо-
де приемника РЭС на 6-7 дБ.
3. Формирование «нулей» ДНА в направлениях на постановщики активных
помех и адаптивное управление нулевыми направлениями, что позволяет снизить
воздействие помех на 10-20 дБ, а в перспективе на 20-30 дБ.
4. Логическая селекция сигналов, позволяющая ранжировать поражаемые
цели по степени важности (опасности).
5. Бланкирование приема сигналов дискретных источников помех, улучша-
ющее разрешающую способность РЛС при действии мерцающих и когерентных
двухточечных помех.
6. Программное или адаптивное распределение энергопотенциала РЛС по
зоне обзора, позволяющее реализовать метод «силового преодоления» помех [24].
Реализация перечисленных мер обеспечения помехозащищенности эквива-
лентна снижению энергии помехи, способной эффективно воздействовать на по-
давляемые РЭС, на 30...60 дБ по сравнению с ситуацией, когда такие меры отсут-
ствуют.
5.4. Системы радиоэлектронной защиты
Зашита от средств РЭПр противника — РЭЗ, заключающаяся в снижении
эффективности воздействия на свои РЭО средств функционального поражения
РЭО, РЭП и СНИО противника. Радиосистемы, реализующие принципы и методы
указанной зашиты, называются системами радиоэлектронной защиты (СРЭЗ)
[28]. К числу основных мероприятий, осуществляемых СРЭЗ. относятся следующие
виды селекции (выделения) полезных сигналов на фоне помех, вырабатываемых
РЭС противника: пространственная селекция: частотная селекция; временная се-
лекция, амплитудная селекция; подари рационная селекция.
5.4.1. Системы РЭЗ с пространственной селекцией
СРЭЗ с пространственной селекцией называются радиосистемы, вырабаты-
вающие достаточно достоверную информацию об утловом положении цели (ЛА
противника) при наличии в пространстве ПП противника. Структурная схема
СРЭЗ, выполняющая пространственную селекцию, приведена на рисунке 5-10 [28].
Антенный блок (ФАР) связан с устройством формирования ДН. программа
работы которого задается вычислителем, функционирующим под воздействием
команд блока управления и информации, получаемой в анализаторе. Цикл работы
данной СРЭЗ задается синхронизатором. Его импульсы запускают радиопередаю-
щее устройство. Импульс, отраженный от самолета противника вместе с помехами,
созданны ми противником, после прохождения РПМ поступает на устройство обра-
ботки сигналов, анализатор выявляет особенности складывающейся помеховой си-
420
Глава 5. Радиоэлектронная защита
туации. Информация с выхода анализатора подается на вычислитель, блок управ-
ления и индикатор.
Рис. 5.10. Структурная схема СРЭЗ с пространственной селекцией
Воздушные ситуации (рисунок 5.11), могущие возникнуть при осушесгвле-
нии селекции полезных (от целей) сигналов на фоне помех, подразделяются на два
класса:
• самолет противника одновременно является целью и носителем радиоси-
сземы. создающей помеху, в этом сл\чае помеха называется совмещенной (рис.
5.1 1а);
• цель (самолет противника) и самолет-носитель помеховой радиосистемы
разнесены в пространстве, в этом случае помеха называется вынесенной (рис.
5.116).
Пространственная селекция цели может быть осуществлена различными
способами: метод опережающей диаграммы направленности; трехлучевой метод;
метод с подавлением помех, поступающих по БЛ [28].
а) б)
Рис. 5.11. Воздушные ситуации: а-случай совмещенной помехи; б - случай вынесенной
помехи; 1 - самолет-носитель СРЭЗ; 2 - цель; 3 - самолет носи гель помехи
В методе опережающей ДН антенный блок (рис. 4.10) формирует две ДН -
узкую F\(a) и широкую ЕЛа), которые выполняют угловое сканирование, причем
Глава 5. Радиоэлектронная защита
421
широкая ДН опережает узкую диаграмму (рисунок 5.12). При этом широкая диа-
грамма осуществляет предварительный обзор пространства: она принимает совме-
щенные и вынесенные помехи. Если широкая ДНА принимает сигналы на одной
частоте (/,). то анализатор вырабатывает информацию об одной цели в простран-
стве (случай совмещенной помехи), если на двух и более частотах — то о цели и по-
становщике помехи. Более точное угловое положение цели определяется с помо-
щью узкой ДН.
РЭЗ с использованием опережающей антенны иллюстрируется схемой, при-
веденной на рисунке 5.13 [9].
Рис. 5.12. К методу
опережающей ДН
Рис. 5.13. Использование опережающей антенны
Антенная система имеет ДН, состоящую из двух лучей, создаваемых двумя
антеннами: узкого луча шириной Д^ (его формирует ФАР) и широкого луча Д(?2,
формируемого простой малонаправленной антенной. При сканировании по угло-
вым координатам широкий луч ДНА перемещается в пространст ве. опережая у зкий
луч. Помехи вынесенного типа принимаются опережающей антенной, анализиру-
ются по частоте и интенсивности с помощью панорамною приемника, содержаще-
го набор параллельных фильтров.
Измеритель частоты (ИЧ) определяет значения несущих частот помех, об-
наруженных панорамным приемником. СУ настройкой передатчика выбирает ча-
стоту запросного сигнала равной частоте той помехи, которая имеет минимальную
интенсивность /с ~ /ПпЧп • Если ФАР - многолучевая, один из лучей ее ДНА может
служи гь виртуальной опережающей антенной.
В трехлучевом методе исполыуется две ДН - однолучевая F\a) и двух-
лучевая F,(a), причем координата минимума F2(tz) совпадает с направлением
максимума Д(а) и обе диаграммы осуществляют одновременное сканирование по
углу (рисунок 5.14), реализуя суммарно-разностный метод измерения угловой ко-
ординаты цели. При измерении однолучевая диаграмма Д(лг) оказывается направ-
ленной в сторону цели, воздействие помех, принимаемых но любом) лепестку
двухлучевой диаграммы /й(а), оказывается достаточно сильным (особенно при
вынесенной помехе). СРЭЗ работает в так называемом моноимпульсном (одноим-
пульсном) режиме 128].
422
Глава 5. Радиоэлектронная защита
В методе с подавлением помех, поступающих по БЛ [15], участвуют две
ДНА (рисунок 5.15) - узкая F(rz), вредное воздействие БЛ которой устраняется, и
ненаправленная F2(a).
Рис. 5.14. Трехлучевой метод
Рис. 5.15. К методу с подавлением Б Л
Если помеховый сигнал, принятый по БЛ диаграммы F\a) (при отсутствии
диаграммы А (а)), окажется достаточно сильным то анализатор (рис. 5.10) осуще-
ствит измерение угловой координаты не цели, которая создает эту помеху, а глав-
ного лепестка диаграммы Л](а). Если ввести диаграмму Fda\ (с помощью быст-
рого переключения антенных элементов либо путем постановки дополнительной,
чаще всего штыревой антенны), то можно осуществить сравнение сигналов, приня-
I ых по указанным диаграммам.
Если продетектированный сигнал и}, принятый по диаграмме Е](«). боль-
ше по величине чем аналогичный сигнал и2, принятый по диаграмме F(a), то
анализатор вынесет решение «цель находится в главном лепестке Е](а)»; в про-
тивном (w, < и.) случае - «по БЛ Ft (а) принимается помеха».
В СРЭЗ с ФАР обычно сначала формируется многолучевая ДНА. работаю-
щая на прием, затем выполняется подавление сигналов, поступивших по БЛ, далее
следует многоканальный прием и быстродействующая цифровая обработка сигна-
лов, в результате которой выделяется информация об угловых координатах целей.
5.4.2. Выбор антенной системы РЛС для пространственной
селекции
В РЛС с линейным сканированием для определения углового положения
цели используется антенна с однолу'чевой ДНА (рисунок 5.16).
На единую вращающуюся платформу дополнительно устанавливают две
рупорные антенны Аз, Аз для образования дву'хлучевой ДНА с провалом в направ-
лении максимума ДНА А]. В результате можно наблюдать ПХ «на проходе» и зна-
чительно точнее определить пеленг цели по нулю ПХ.
Глава 5. Радиоэлектронная защита
423
Рис. 5.16. РЭЗ РЛС с линейным сканированием
Все современные РЛС, рассчитанные на работу в условиях РЭП, использу-
ют моноимпульсные угломерные каналы [15], которые в значительно меньшей сте-
пени подвержены воздействию помех. РЛС сопровождения можно применить ан-
тенны с широкоугольным лучом. При отсутствии помех работают две РЛС (рису-
нок 5.17).
Рис. 5.17. РЭЗ РЛС сопровождения
РЛС обнаружения, работающая на частоте /] с ДНА вида 1, выдает ЦУ-1 на
РЛС сопровождения, которая работает на частоте f2 и сопровождает цели по угло-
вым координатам антенной ДНА вида 2. В присутствии совмещенного с целью по-
становщика помех на частоте f РЛС обнаружения подавляется. ЦУ не формиру-
ются. Создается широкоугольный луч 3. который наводится на цель. При ручном
сопровождении формируются ЦУ-2 и устраняются влияния помех.
Конструкция антенных систем РЛС определ яет:
• уровень БЛ ДНА и характеристики поляри зации:
424
Глава 5. Радиоэлектронная защита
• угловую разрешающую способность;
• защищенность от помех, создаваемых средствами РЭП [9, 15].
В настоящее время имеются технические возможное! и для создания много-
лучевых антенн. Многолучевая ДНА приведена на рисунке 5.18.
Рис. 5 18. Многолучевая ДНА
Каждый луч ДНА (рис. 5.18) имеет свое назначение: 1 - основной луч даль-
него обнаружения, в пределах этого луча ДНА хорошо аппроксимируется функци-
ей F\J3) = cosec"(Д) ; 2 - карандашный лу'ч для сопровождения цели (иногда фор-
мируют два узких карандашных луча, один луч - на передачу, другой - на прием);
3 — луч наведения УР и для связи с этой ракетой (если РЛС используется в ком-
плексе управления ракетой); 4 - луч подсвета цели, используемый только на излу-
чение при работе РЛС в комплексе полуакз ивного РТ самонаведения; 5 - луч ДНА
вспомогательной антенны, используемой компенсаторами БЛ; 6 - лу'ч ДНА для
приема сигналов с непрерывным излучением; 7 - луч антенны, совпадающий с
направлением главного лепестка ДНА основной РЛС при работе только на прием: 8
- луч непрерывно] о излучения для локации низколетящих целей; 9 - луч ДНА ан-
тенны системы связи и передачи данных от РЛС на друтие подсистемы комплекса.
В ФАР применяются матричные схемы формирования лу'чей (матрицы Батлера или
Ротмана-Ленца) [9].
Структурная схема многолучевой ФАР показана на рисунке 5.19. При обра-
ботке сигнала используются многоканальные схемы. С помощью матриц формиру-
ется мно! олучевая ДНА I на прием), затем производится обработка для компенса-
ции БЛ ДНА, потом - многоканальный прием и быстродействующая цифровая об-
работка, выдающая (с помощью синхронизатора С) информацию, необходимую для
сопровождения различных целей по угловым координатам [8].
В многолучевых поисковых РЛС лучи, с направлений которых приходит
помеха, бланкируются. Если в двух соседних лучах сигнал приходи! только на
один луч, этот луч стирается. В РЛС обнаружения антенны с ДНА вида
F(/3 ) = cosec2 (Д) лучше используют мощность передатчика. На работу РЛС с та-
кими антеннами меньше влияют помехи, отраженные Землей [9].
Глава 5. Радиоэлектронная защита
425
Рис. 5.19. Многоканальная ФАР
Создание антенных систем с низким уровнем БЛ - важнейшая мера РЭЗ.
так как многие помехи просачиваются в каналы приема именно по БЛ ДНА Из-
вестны два основных пу ги создания таких антенн [15]:
1) за счет применения специальных конструкций и материалов достигаются
соответствующие амплитудно-фазовые распределения поля в апертуре;
2) сцрналы, принятые по БЛ, уменьшаются за счет компенсации.
Уменьшение уровня БЛ способствует резкому увеличению коэффициента
усиления антенны по главному лепестку ДНА и увеличивает дальность действия
РЛС. На рисунке 5.20 представлена схема с бланкированием БЛ ДНА. Антенна Ai
(основная) имеет ДНА вида (рис. 5.206) с КНД G} и уровнем БЛ G6n.
Рис. 5.20. Схема бланкирования боковых лепестков ДНА
Вспомогательная антенна А? имеет широкий луч с КУ ант енны G, > G ].
Помеха принимается БЛ антенны А] и вспомогательной антенной А?. После двух-
канального усиления и детектирования импульсы помех с амплитудами Е\ и Е?
426
Гпава 5, Радиоэлектронная защита
усиливаются и сравниваются на компараторе (рис. 5.20а), образуется разностный
импульс Е =Е\- Е2. Если Ел < 0 (помеха по вспомогательному каналу сильнее),
считают, что эта помеха приходит на основную антенну по БЛ. Компаратор вклю-
чает генератор импульсов (ГИ), который бланкирует УНЧ на время действия поме-
хи. Если Ед > 0, помеха принята главным лепестком основной антенны и бланки-
рования УНЧ не происходит.
В моноимпульсных РЛС сопровождения применяют антенные системы [9],
имеющие ДНА вида, представленного на рисунке 5.21.
Рис. 5.21. ДНА моноимпульсных РЛС
Разностная ДНА G. (a) имеет большой максимум (7Лп1ах »Сбл. В системе
компенсации БЛ разностная ДНА является вспомогательной, а суммарная - основ-
ной. Компенсация помех по БЛ имеет место в случае, когда выполняется условие
q = ^\тах/^ л » I • Компенсацию БЛ можно производить на ПЧ (когерентная ком-
пенсация) [15] (рисунок 5.22).
Рис. 5.22. Компенсация боковых лепестков ДНА на промежуточной частоте
Глава 5, Радиоэлектронная защита
427
В левом канале принимается сигнал (по главному лепестку) и вынесенная
непрерывная шумовая помеха (по БЛ основной антенны). В правом канале обраба-
тывается шумовая помеха, пришедшая на вспомогательную антенну. Колебания
помех в обоих каналах взаимно когерентны, так как создаются одним и тем же ис-
точником непрерывной шумовой помехи. Шумовые помехи в правом по схеме рис.
5.22 канале контролируются по фазе (задержке) и по интенсивности. Затем они в
виде напряжения ui на компараторе К используется для компенсации шумовой по-
мехи и\ в левом канале. Разность напряжений А = м( -и2 дает сигнал обратной свя-
зи, при помощи которой А автоматически настраивается на минимальный уровень
шума.
Использование компенсационной антенны позволяет осуществить защит у
от активной помехи, попадающей в ДН приемной АР по БЛ. ДН компенсационной
АР «накрывает» диаграмму основной в области вне ГЛ. Вычисляется коэффициент
корреляции между основным и компенсационным каналом
'ок(0 =
М [foot) ~ -Ур (7Ж (0 ~ (0)]
7 А/ [(50 (/) - Sp (/> (sK (0 - < (О)2 ]
где 5О(/) и sK(/) - сигналы, принятые в основном и компенсационном канале соот-
ветственно; и .?*(/) - среднее значение сигналов sjr) и sk(/).
С учетом коэффициента корреляции производится вычитание сигнала ком-
пенсационного канала из сигнала основного. Сигнал после компенсационной обра-
ботки имеет вид
Sres (0 — 5о(0 — 'ок (0 ' (0 •
Известны многоконтурные системы с компенсацией БЛ для нескольких по-
становщиков помех. Аналогичная схема с одним контуром компенсации может
быть выполнена по НЧ, в видеополосе. Для ослабления совмещенных шумовых
помех приходящих на антенну А] по главному лепестку, можно использовать раз-
личие в корреляции этих помех и сш налов. Многоэлементные антенны позвот [яют
компенсировать помеху за счет формирования ДНА, имеющей минимумы в
направлении на источники помехового излучения (рисунок 5.23).
Рис. 5.23. Формирование провала ДНА
428
Глава 5. Радиоэлектронная защита
В схеме две антенны - основная А. с ДНА Fx(a) и Аг с ДНА F,(a) - обра-
зуют антенную решетку. ДНА этой решетки, естественно, обличается от соответ-
ствующих диаграмм каждой из антенн
Fz(a) = ^(a) + FFF2(a), (5.11)
где Fj.(«) - суммарная ДН антенной решетки.
Если аГ1 - угловая координата ПП. то для компенсации помехи нужно вы-
полнить условие FT (сбп) = 0, с учетом (5.11)
lF(«n) = 7-(an)/f2(«n). (5.12)
При воздействии помехи от нескольких ПП следует увеличивать число
компенсационных антенн. Для подавления помех от N источников необходимо N
компенсационных антенн, решетка должна состоять из Х+1 антенны.
5.4.3. Системы РЭЗ с частотной селекцией
СРЭЗ с частотной селекцией называются радиосистемы, вырабатывающие в
соответствии с частотными признаками достаточно достоверную информацию о
дальности до самолета противника в условиях наличия помех, частота заполнения
которых совпадает с рабочей частотой СРЭЗ. Структурная схема СРЭЗ с частотной
селекцией показана на рисунке 5.24.
Рис. 5.24. Структурная схема СРЭЗ с часто гной селекцией
Под воздействием импульсов синхронизатора радиопередающее устройство
(РПД) формирует импульсы, которые, пройдя через антенный переключагель (АП)
и антенну, излучаются в пространство. Поступившие из пространства на антенну
сигналы подаются на антенный переключатель и далее на радиоприемное устрой-
ство (РПМ), с выхода которого они ввотятся на анализатор, и полученная инфор-
мация или сами сигналы высвечиваются на индикаторе.
Блок управления (БУ) по внешним командам либо в соответствии с инфор-
мацией, полученной оз анализатора, вырабатывает управляющие сит налы для
устройства перестраивания частоты (УПЧ), которое изменяет либо частоту повто-
Глава 5. Радиоэлектронная защита
429
рения Fn (при помощи подачи импульсов на синхронизатор), либо частоту запол-
нения f излучаемых импульсов путем управления перестраиваемым гетеродином
(ПГ). Частотная селекция отраженных от целей сигналов на фоне помех обычно
сводится к изменению частоты заполнения /0 излучаемых СРЭЗ импульсов или
частоты повторения 7^, этих импульсов.
Метод с изменением частоты заполнения /0 излучаемых СРЭЗ импульсов и
метод с изменением частоты повторения Fti излучаемых СРЭЗ импульсов подроб-
но описаны в [28].
5.4.4. Системы РЭЗ с временной селекцией
Системы РЭЗ с временной селекцией осуществляют достаточно достовер-
ное измерение дальности до цели при помощи выделения по временным признакам
сигнала на фоне помех Структурная схема СРЭЗ с временной селекцией изображе-
на на рисунке 5.25.
Рис. 5.25. Структурная схема СРЭЗ с временной селекцией
Излучаемые импульсы под воздействием сигналов синхронизатора форми-
руются в радиопередающем устройстве, после чего поступают в антенный пере-
ключатель и через антенну излучаются в пространство. Принятые из пространства
радиоимпульсы (как отраженные от цели, так и помеховые) с выхода антенны по-
даются на антенный переключатель и далее с выхода РПУ - на АД. Затем видеоим-
пульсы (как отраженные от цели, так и помеховые) вводятся в селектирующее
устройство, которое выполняет тот или иной вид временной селекции. СРЭЗ с вре-
менной селекцией используют 3 вида селекции [28]: по времени прихода; по часто-
те повторения; по длительности импульсов.
Селекция но времени прихода может быгь осуществлена как для прост ых,
так и для сложных импульсов. Для простых импульсов временная селекция выпол-
няется с помощью селекторных импульсов (стробов). Если требуется отсетектиро-
вать полный импульс, применяется схема, структура которой и эпюры напряжений
июбражены на рисунке 5 26.
430
Глава 5. Радиоэлектронная защита
Рис. 5.26. Структурная схема и эпюры напряжений временного селектора полного импульса
Совокупность импульсов, среди которых находится тот, который подлежит
селекции, поступает от АД на первый вход блока включения. На второй вход дан-
ного блока подается селекторный импульс, сформированный генератором по сиг-
налу, поступившему от анализатора. На выход указанного блока приходит только
отселектированный (выбранный из поступившей совокупности) импульс. Если тре-
буется отселектировать не сам импульс, а его фронты, используется (для селекции
переднего фронта) схема, структура и эпюры напряжений которой показаны на ри-
сунке 5.27.
Рис. 5.27. Структурная схема и эпюры напряжений временного селектора
переднего фронта импульса
Входной импульс, обладающий протяженными фронтами, поступает от АД
на вход дифференцирующего каскада, напряжение на выходе которого пропорцио-
нально производной по времени от данного импульса. Полученное напряжение по-
дается на первый вход блока включения. На второй вход этого блока поступает се-
лекторный импульс, выработанный генератором по сигнал) от анализатора. По-
скольку селекторный импульс совпадает во времени с передним фронтом входного
импульса, то на выходе блока включения оказывается напряжение, пропорцио-
нальное производной от переднего фронта входного импульса. Задний фронт вход-
ного импульса выделяется аналогичным образом.
Глава 5. Радиоэлектронная защита
431
В практике временной селекции нередки случаи, когда селекторный им-
пульс подается на вход РПМ (рис. 5.25). Принцип селекции и в такой ситуации
остается неизменным. Что касается сложных импульсов (например, ЛЧМ импуль-
сов), то для их временной селекции на фоне помех применяется рассмотренный
ранее фильтр сжатия, устанавливаемый в РПМ (рис. 5.25). В результате РПМ СРЭЗ
(с фильтром сжатия) вырабатывает напряжение ис (/), в котором сжатый импульс
сигнала цели всегда располагается посередине между нечетным и четным сжатыми
импульсами помехи. Данный метод весьма эффективен - с его помощью можно
отселектировать достаточно слабый (на 25 дБ ниже уровня помехи) сигнал от цели.
Временная селекция импульсов по частоте повторения. В этом случае
наиболее часто используется принцип совпадения импульсов. Структурная схема
наиболее употребительного временного селектора и эпюры, поясняющие суть его
функционирования, представлены на рисунке 5.28.
Рис. 5.28. Структурная схема временного селектора по частоте повторения импульсов
и эпюры напряжений
Последовательность отраженных от цели (заштрихованы) и помеховых им-
пульсов поступает на первую ЛЗ на ТЛ и первый вход схемы совпадений. Импуль-
сы помехи следуют хаотично. Смещенная на Гп последовательность со входа пер-
вой ЛЗ подается на вторую ЛЗ (также на Тп ) и второй вход схемы совпадений. Та
же последовательность, задержанная еще раз на Гп . с выхода второй ЛЗ поступает
на третий вход схемы совпадения. На выход схемы совпадения пройдут тол ько им-
пульсы, одновременно присутствующие на всех ее входах, т.е. импульсы цели. Им-
пульсная последовательность, представляющая собой совокупность отраженного от
цели сигнала (длительностью ти) и помеховых импульсов, поступает на вход схе-
мы дифференцирования, которая формирует короткие импульсы, соответствующие
перетнему' и заднему фронтам входных импульсов. Эти короткие импульсы пода-
ются как на первый инвертор, изменяющий полярности этих импульсов на проти-
432
Глава 5. Радиоэлектронная защита
воположные, так и на ЛЗ на тИ. Затем выходные короткие импульсы этих узлов
пос гупают на схему совпадения и второй инвертор.
Временная селекция по длительности импульсов. На рисунке 5.29 пред-
ставлена структурная схема временного селектора по длительности.
Рис. 5.29. Схема временного селектора по длительности импульсов
Короткий импульс на выходе схемы совпадения появится только в том слу-
чае, когда на обоих ее входах будут одновременно присутствовать положительные
короткие импульсы (эго случится, когда на входе селектора будет присутствовать
импульс длительности ги). Что касается второго инвертора, то он измени! поляр-
ность входных коротких импульсов на противоположные. В результате на выходе
блока включения образуется импульс длительности ти, смещенный на величину ти
относительно отраженного от цели импульса во входной (для селектора) последо-
вательности. Если импульс с выхода схемы совпадения отсутствует, то блок вклю-
чения не срабатывает. Импульсы, имеющие отличную от ги длительность, через
данный временной селектор не проходят [28].
Выходной блок включения срабатывает только от положительных импуль-
сов, поступающих на его вход: импульс с выхода схемы совпадения запускает его
(начинается формирование выходного сигнала), а импульс с выхода второго инвер-
тора останавливает его функционирование (формирование выходного сигнала за-
вершается ).
5.4.5. Системы РЭЗ с амплитудной селекцией
Системы РЭЗ с амплитудной селекцией вырабатывают достаточно досто-
верную информацию о местоположении и параметрах движения ЛА противника в
условиях дейс гвия помех. Структурная схема СРЭЗ с ампл итудной селекцией при-
ведена на рисунке 5.30.
Сигналы синхронизатора воздействуют на ПРД и вырабатываемый этим ра-
диоустройст вом сигнал излучается в пространство с помощью антенной системы
(АС). ПосIуливший из пространства на антенную систем) сигнал в смеси с поме-
хой подается на вход ПРМ и далее на анализатор, который извлекает из указанной
смеси информацию о местоположении и параметрах движения ЛА противника.
Данная информация вводится в блок управления и одновременно высвечивается на
экране индикатора. Блок управления связан с антенной сисземой. регулируя поло-
жение ДНА в пространстве.
Глава 5. Радиоэлектронная защита
433
Рис. 5.30. Структурная схема СРЭЗ с амплитудной селекцией
Амплитудная селекция обычно производится в приемном устройствне и
подразделяется на две группы [28]: активные методы (базирующиеся, в основ-
ном, на использовании различного вида АРУ); пассивные методы (основывающи-
еся, как правило, на применении ограничителей или на формировании амплитуд-
ных характеристик специальной формы), Под воздействием мощных сигналов, по-
ступивших на вход ПРМ, данное устройство может перегрузиться, т.е. перестать
реагировать на амплитудные изменения игих сигналов и утратить способность до-
носить данные изменения до анализатора. Информация, заключающаяся в указан-
ных амплитудных изменениях, будет утрачена.
Эффект упомянутой перегрузки связан с тем. что режим работы РЭ прибо-
ров, находящихся в ПРМ. при больших амплитудах входных сигналов становится
существенно нелинейным. При этом перегрузка возможна в любом каскаде ПРМ,
но чаще всего она происходит в последнем каскаде УПЧ. Одним из методов борьбы
с перегрузкой является использование АРУ [13, 15, 22, 28].
Структурная схема «АРУ вперед» показана на рисунке 5.31.
Рис. 5.31. Структурная схема «АРУ вперед»
Верхний канал «АРУ вперед» состоит из УПЧ. первого АД и УНЧ. Регули-
рованию здесь подвергается УПЧ Напряжение ПЧ поступает на усилитель, затем
на второй АД, и получившееся напряжение через фильтр подается на У НЧ Данная
схема осутцествляет эффективную защиту от помех, обладающих большей дли-
тельностью гп, чем длительность отраженного от цели сигнала гс, и приходящих
отдельно от сигнальных импульсов.
Когда на вход УНЧ поступает сигнальный импульс небольших амплитуды и
длительности т( , коэффициент УНЧ KYC имеет максимальное значение, а при по-
434
Гпава 5. Радиоэлектронная защита
явлении длинного помехового импульса (тП > гс) Кус резко уменьшается, что вле-
чет за собой значительное снижение амплитуды мощной помехи. Этот эффект до-
стигается благодаря выполнению соотношения
1/ЛГф>т(, (5.13)
где Л/;ф - полоса пропускания фильтра. Использование АРУ позволяет расширить
динамический диапазон РПУ от 20 до 100 дБ.
Другим средством расширения динамического диапазона РПУ является ис-
пользование амплитудных характеристик специальной формы (зависимостей
^вых от пвх ’ в большинстве случаев, логарифмической). В области слабых сигна-
лов (пвх мало) данная характеристика имеет линейную зависимость, а в области
сильных помех (пвх велико) - логарифмическую. Границу wBX0 перехода oi линей-
ной зависимости к логарифмическим обычно выбирают так, чтобы значение и
было на 20 дБ ниже среднеквадратической величины собственных шумов РПУ [28].
В этом случае практически весь возможный диапазон лвх приходится на
логарифмический участок, чем и обеспечивается большой динамический диапазон
по входу. Особенностью РПУ с логарифмической амплитудной характеристикой
является подавление помехи сильным сигналом, поскольку при сильном сигнале
wBX попадает на логарифмический участок характеристики.
Еще один путь успешной борьбы с импульсными помехами в РПУ сводится
к применению ограничителей. Из большого разнообразия ограничителей рас-
смотрим три наиболее часто используемые их разновидности — ограничители сни-
зу. ограничители сверху и двухпороговые ограничители. Принцип функционирова-
ния ограничителя снизу изображен на рисунке 5.32.
Рис. 5.32. Принцип ам плитудного ограничения снизу
Глава 5. Радиоэлектронная защита
435
Амплитудная характеристика ограничителя сверху показана на рисунке
5.33. Принцип функционирования такого ограничителя сходен с принципом функ-
ционирования ограничителя снизу.
Оба типа амплитудных ограничителей, объединенные в единый двухпоро-
говый ограничитель, являются основой для построения амплитудного селектора,
устраняющего слабые помеховые импульсы и пропускающего сильные импульсы
сигнала. Структурная схема амплитудного селектора, выполненного на основе
двухпорогового ограничителя, представлена на рисунке 5.34.
Рис. 5.33. Амплитудная характеристика
ограничителя сверху
Рис. 5.34. Структурная схема
амплитудного селектора на основе
двухпорогового ограничителя
Входное напряжение, представляющее собой сумму разнесенных во време-
ни импульсов сильного сигнала и слабой помехи, поступает на входы ограничите-
лей сверху и снизу. При этом напряжения ограничения, установленные в этих огра-
ничителях, селектируют по напряжению импульс сигнала от импульса помехи та-
ким образом, что части сигнального импульса проходят через указанные ограничи-
тели, после чего синхронно складываются в сумматоре. Уменьшенный но амплиту-
де импульс сигнала оказывается на выходе данного селектора, а помеховый им-
пульс на этот выход не проходит. Амплитудные ограничители обеспечивают защи-
ту не от всех видов импульсных помех, их применяют как вспомогательные узлы в
составе селекторов по длительности импульсов.
5.5. Методы защиты от поляризационных помех
Поляризация является пространственно-временной характеристикой ЭМВ:
она определяет закономерность пространственной ориентации вектора напряжен-
ности электрического (или магнитного) поля за период несущего колебания. При
анализе поляризации волны достаточно знать закон изменения ориентации только
одного из векторов напряженности ЭМВ. Обычно поляризацию оценивают по ори-
ентации вектора напряженности электрического поля Е. Поляризацию волны ха-
рактеризуют поляризационной диаграммой, представляющей собой проекцию
кривой, описываемой концом вектора Е, на плоскость, перпендикулярную направ-
лению распространения волны [70j Различают три основных вида поляризации:
линейную, круговую и эл. шптическую.
436
Глава 5. Радиоэлектронная защита
При линейной поляризации пространственная ориентация вектора Е оста-
ется неизменной, а поляризационная диаграмма представляет собой прямую ли-
нию. Круговая поляризация отличается тем, что вектор Е, имеющий постоянную
амплитуду, вращается с постоянной угловой скоростью вокруг направления рас-
пространения. При этом конец вектора описывает окружность. Период вращения
равен периоду электромагнитного колебания. У эллиптически поляризованной
волны конец вектора Е описывает при вращении эллипс. При этом модуль вектора
Е и угловая скорость его вращения претерпевают периодические изменения за пе-
риод вращения.
В зависимости от того, изменяются параметры поляризационной диаграммы
с течением времени или остаются постоянными. ЭМВ делят на три группы: полно-
стью поляризованные, частично поляризованные и неполяризованные. Полностью
поляризованной называется волна с неизменными во времени параметрами поля-
ризации. При наличии непрерывных относительно медленных изменений парамет-
ров поляризационной диаграммы (время, необходимое для заметного изменения
параметра, во много раз превышает период высокочастотных колебаний) ЭМВ
называют частично поляризованной.
Неполяризованная или хаотически поляризованная волна характеризует-
ся быстрыми флуктуациями вектора Е как по модулю, гак и по направлению вра-
щения. В этом случае поляризационная диаграмма принимает все возможные фор-
мы и ориентации, вследствие чего выделить какое-либо преимущественное ее по-
ложение не представляется возможным. Проекции е. и еу вектора Е на ортого-
нальные оси координат Ох и Оу (рисунок 5.35) можно представить в виде
ех = Ех cos(<Dpr + (рх), ev = Evcosfoyt + (pv). (5.14)
При изменении соотношения амплитудных составляющих колебаний Ех, Еу
и фазового сдвига между ними (= (рх -(pv) можно получить поляризацию любо-
го вида. Если Д<р = 0 или Дзр = я , то имеет место линейная поляризация. Если при
этом Е\ =0, Е ^0 или £д ^0, Е =0 то получаются вертикальная и горизонталь-
ная поляризация соответственно. Когда же Ех Ф 0. Ех ф 0, Д(р = 0, будет линейная
поляризация ориентации а . Угол а между осью Ох и вектором Е определяется
равенством tga = Ех/Е . Если разность фаз колебаний равна
, (5.15)
где п - целое число, и Ех - Ех., то образуется круговая поляризация.
В тех случаях, когда
(2л + 1)я
Д(рф--------- ^5.16)
Глава 5. Радиоэлектронная защита
437
или Е * Е, , а также при одновременном выполнении указанных условий форми-
руется эллиптическая поляризация. Случайные изменения величин &(р - 0, Ех, Е
приводят к возникновению хаотической поляризации.
Рис. 5.35. Поляризационная диаграмма
При различии поляризации каких-либо сигналов или сигнала помехи мож-
но, используя поляризационные селекторы (фильтры), отделить один сигнал от
другого или существенно ослабить помеху и добиться более надежного выделения
полезной информации.
Эллиптическая поляризация ЭМВ является наиболее общим видом поляри-
зации, из которого как частные случаи могут быть получены линейная и круговая
поляризации. Эллипс поляризации определяется его формой, ориентацией осей от-
носительно выбранной системы координат и направлением вращения вектора Е.
Форму эллипса обычно характеризуют коэффициентом эллиптичности, абсолютное
значение которого равно отношению малой b и большой а полуосей эллипса. В за-
висимости от направления вращения вектора Е коэффициенту эллиптичности при-
дают тот или иной знак. Если при наблюдении от источника вдоль направления
распространения волн вектор Е вращается по часовой стрелке, то волна называется
правополяризованной и считается положительной. При вращении вектора против
часовой стрелки волна называется левополяризованной и отрицательной.
Ориентация эллипса определяется значением }гла /3, образованного осью
Ох выбранной системы координат и большой осью эллипса; при однозначном
определении положения эллипса значения лежит в пределах 0 < /3 < л . При задан-
ных Д<д, Ех и получим
438
Гпава 5. Радиоэлектронная защита
1 2Е Е cosAg?
P = -arctg- ' . V. (5.17)
Z £S — n,
x i
При совпадении поляризаций приемной и передающей антенн обеспечение
наведения на поляризацию с требуемой точностью по зондирующему сигналу РЛС
не представляет проблем. Поляризация приемной антенны РЛС может не совпадать
с поляризацией передающей, реализация помехи на поляризации превращается в
серьезную проблему. Рассогласование поляризаций антенн - один из методов защи-
ты РЛС от действия помехи на кроссполяризации, основанный на использовании в
РЛС сопровождения отдельных передающей и приемной антенн. Антенны монти-
руются гак, чтобы между ориентацией их рабочих поляризаций существовало рассо-
гласование, которое практически не сказывается на качестве работы РЛС. В этом
случае наведение помехи на кроссполяризацию по зондирующем} сигналу РЛС бу-
дет неэффективным. К другим способам защиты от поляризационной помехи отно-
сятся: способ компенсации поляризационной помехи и поляризационная селекция
сигналов [12]. Способ компенсации иллюстрируется рисунком 5.36.
Рис. 5.36. Принцип компенсации поляризационных помех
На защищаемой РЛС устанавливается дополнительная антенна, ориентиро-
ванная в том же направлении, что и основная, с поляризацией, ортогональной рабо-
чей поляризации РЛС, и дополнительный приемный канал. Поляризационная поме-
ха, имеющая большую мощность, будет приниматься дополнительной антенной и
через приемно-усилительный канал подаваться на компенсатор. На тот же компенса-
тор будет поступать через основную антенну сигнал и поляризационная помеха. В
результате на выходе компенсатора (вычитающего устройства) выделяется полез-
ный сигнал. Устройство и работа компенсатора поляризационной помехи аналогична
компенсации помех, действующих по БЛ ДНА. В моноимпульсных РЛС с суммарно-
Глава 5. Радиоэлектронная защита
439
разностной обработкой сигнала такие компенсаторы должны бы гь в каждом канале.
Поляризационная составляющая отраженного от цели сигнала при этом компенси-
руется незначительно в силу случайности амплитудных и фазовых соотношений.
Поляризационная селекция основана на использовании поляризационных
решеток, устанавливаемых в раскрывах антенн РЛС, пропускающих сигналы на ра-
бочей поляризации практически без потерь и сильно отражающих сигналы с крос-
споляризацией. Иногда в качестве поляризационного фильтра применяется сам от-
ражатель антенны, для чего его изготавливают в виде системы металлических пла-
стин. ориентированных параллельно рабочей поляризации. В этом случае кросспо-
ляризационная компонента сигналов проходит через отражатель и не попадает на
вход приемника [12].
Информацию о действии поляризационной помехи на моноимпульсный пе-
ленгатор возможно снимать с выхода квадрупольного канала суммарно-разностного
моста, выходной сигнал которого при отсутс твии действия угловых помех близок к
нулю. Можно использовать несовершенство реализации передатчиков поляризаци-
онных помех с временным разделением каналов. Однако радикальным решением
защиты моноимпульсного угломера будет двухполяризационный прием, который
для своей реализации требует усложнения пеленгатора (удвоения числа приемных
каналов). Для компенсации помех на ортогональной поляризации нужна дополни-
тельная антенна, как показано на рисунке 5.37.
Рис. 5.37. Компенсация помех на ортогональной поляризации
РЛС излучает зондирующий сигнал с вертикальной поляризацией С ±.
Сильная помеха САП, совмещенной с целью, излучается на ортогональной поляри-
зации П ’. Эта помеха принимается как основной антенной РЛС с коэффициентом
усиления G р, так и вспомогательной антенной с G . Выровняв амплитуду Еп и фа-
зу ф п помехи П-1 при помощи цепи автополстройки с дискриминатором Д. можно
ее в значительной мере компенсировать, так что на выход в б. юк обработки инфор-
мации (БОИ) посту пит лишь полезный сигнал С ±.
Компенсация поляризационной помехи возможна и пос. те демодулятора не-
сущей, в видеополосе. Схема такого приемника с компенсацией показана на рисун-
ке 5.38 (АП - антенный переключатель; ЛУПЧ - логарифмический УПЧ) [9].
440
Глава 5. Радиоэлектронная защита
Рис. 5.38. Компенсация помех на ортогональной поляризации
Антенны Л, и Л2 рассчитаны на прием сигналов с ортогональными друг
другу поляризациями. Пусть от цели приходит отраженный сигнал С± с верти-
кальной, как и принято обычно в передатчике РЛС. Такой сигнал будет обработан
лишь в правом по схеме канале и пройдет на выход с минимальным ослаблением.
Если принимается мощная помеха на горизонтальной поляризации ПН, она прой-
дет через оба канала. При правильном подборе задержек Аг,, Аг, и ослаблений в
аттенюаторах помехи могут компенсироваться на выходе схемы вычисления разно-
сти. В приемнике применены логарифмические УПЧ вместо цепей АРУ.
5.6. Защита от ракет с радиоголовками самонаведения
В настоящее время СНИО представлено управляемыми ракетами класса
«воздух-земля», «воздух-воздух» и БЛА с пассивными РЛ ГСН. Современная про-
тиворадиолокационная ракета (ПРР) - это БЛА, в состав которого входят СУ. бое-
вая часть и РЛ ГСН (представляет собой станцию РТР, которая имеет АС с радио-
прозрачным обтекателем, приемник и схему обработки сигнала). Узкая ДНА в со-
четании с высоким уровнем энергии излучения делают РЛС ПВО привлекательной
целью для атаки ПРР. Схема атаки ПРР включает следующие этапы:
• обнаружение факта работы РЛС бортовой станцией РТР;
• выдача информации от станции РТР в ГСН ракеты;
• отстыковка ПРР, запуск двигательной установки:
• захват цели ГСН по данным станции РТР:
• переход на маршевый режим и самонаведение по данным РЛ ГСН;
• перевод ракеты в пикирование при угле места 20...40°. активизация кана-
лов ГСН и включение РВ;
• подрыв боевой части по сигналу РВ.
Существует два основных направления разработки ПРР:
1) создание авиационных ракет, способных поражать РЛС с дальности
50...200 км (AGM-88 HARM, AGM-88C. AGM-88D block 6, AGM-88E AARGM.
«Armiger», ALARM);
2) создание ракет ближнего действия с дальностью не более 30 км (AGM-
122 SideARM, А1М-9С Sidewinder).
Глава 5, Радиоэлектронная защита
441
Вероятность поражения РЛС в случае атаки ПРР описывается выражением
Л1ОР j = Люр w П ^пр V ’ (5.18)
i=i
где Р] юр v - вероятность поражения РЛС при срабатывании БЧ ПРР в бл ижней кон-
тактной зоне защиты; Рпр - вероятность успешного преодоления ПРР j-го типа /-Й
зоны защиты (N - 4: дальняя зона, зона активной защиты, ближняя неконтактная
зона, ближняя контактная зона) и продолжения наведения на РЛС [81].
Методы защиты РЛС от ПРР можно разделить на активные и пассивные. К
активным методам следует отнести:
• поражающее воздействие на самолет-носитель или саму ПРР:
• огневое поражение ПРР активными средствами ПВО (ИА, ЗРК и ЗА);
• поражение с помощью лазерного оружия;
• преждевременный подрыв БЧ ПРР специальными активными помехами;
• применение ЭМИ. выводящего из строя элементы ПРР;
• смещение точки наведения в сторон}' от подавляемой РЛС (использование
дополнительных источников излечения: использование различных переотражате-
лей при облучении местных предметов и ДО; постановка активных помех ГСН и
ДИСС ПРР).
Среди пассивных методов следует выделить:
1. Уменьшение информации от РЛС. поступающей на элементы всех систем
ПРР:
• повышение скрытности основного излучения РЛС;
• изменение параметров зондирующих импульсов РЛС во времени;
• уменьшение собственного теплового, внеполосного и побочного излучения
РЛС;
• ухудшение условий распространения ЭМВ между РЛС и ПРР с помощью
специальных средств;
• увеличение пространственной, структурной, частотной, временной, поляри-
зационной скрытностей;
• комплексирование ИК, ТВ, лазерных датчиков.
2. Уменьшение непосредственной уязвимости РЛС (бронирование излуча-
ющих систем и укрытие источников энергоснабжения; применение РЛС с разне-
сенными в пространстве приемниками и передатчиками).
Основу современных средств поражения ЛА противника составляют ЗРК,
состоящие из ЗУР и функционально связанных средств, обеспечивающих по данным
ЦУ: обнаружение, опознавание, захват указанной цели на автосопровождение, пуск
и наведение ракеты на эту цель для ее поражения. В силу того, что РЛС обнаруже-
ния и целеуказания является mhoi оканалъной по целям, обычно ей придается не од-
но, а несколько одноканальных по цели средств управления ЗУР. Такое сочетание
позволяет одновременно обстреливать несколько целей (по числ) одноканалы гых
средств управления ЗУР). Одноканальные по цели средства управления ЗУР могу г
обеспечить одновременное наведение на цель либо одной, либо несколько ЗУР. Как
442
Глава 5. Радиоэлектронная защита
правило, одному средству управления ЗУР придают несколько ракет, размещенных
на одной или нескольких пусковых установках. Наряду с одноканальными в настоя-
щее время применяются и многоканальные по цели и ракете ЗРК.
Важной характеристикой ЗРК является зона поражения, представляющая ту
часть пространства, в пределах которого обеспечивается поражение типовых воз-
душных целей с заданной вероятностью. Границы зоны поражения ЗРК определя-
ются досягаемостью ЗУР, их летно-баллистическими и маневренными возможно-
стями и располагаемыми перегрузками, а также точностными характеристиками
наведения ЗУР на цель [12]. Зоной пуска называется область пространства, при
нахождении цели в которой в момент пуска ракеты встреча ракеты с целью состоит-
ся в зоне поражения с заданной вероятностью поражения. Чтобы встреча ЗУР с це-
лью произошла в зоне поражения, необходимо пуск ЗУР производить заблаговре-
менно с учетом скорости цели и полетного времени ЗУР до точки встречи.
Необходимая для этого дальность обнаружения РЛС определяется следу-
ющим выражением [15]
+ <5.19)
где R - горизонтальная дальность до дальней границы зоны поражения: Ги - ско-
рость цели; / , / —работное время ЗРК и полетное время зенитной ракеты.
Время комплекса в сумме с полетным временем ракеты до точки вс гречи со-
ст ав.тяет цикл стрельбы ЗРК. Осн овное влияние это время оказывает н а положен] ю
дальней границы зоны поражения и ее глубину. В свою очередь, от глубины зоны
поражения зависит время пребывания цели в ней и возможность обстрела цели одной
или несколькими ракетами.
По способу наведения ЗУР на цель ЗРК подразделяются на комплексы с те-
ленаведением (по лучу, командное), самонаведением (пассивное, полуактивное. ак-
тивное). комбинированным наведением (теленаведение на средней дальности и са-
монаведение на конечном участке полета ракеты или инерциальным наведением и
самонаведением на конечном участке траектории полета ракеты) и наведением че-
рез ракет} (рисунок 5.39).
ЗРК с теленаведением используют две РЛС: одну для сопровождения цели, а
другую для сопровождения ракеты. Координаты цели и ракеты, полученные двумя
РЛС, поступают в счетно-решающий прибор (СРП), который рассчитывает опорную
траекторию полета ракеты, выводящую ее в упрежденную точку встречи с целью, и
при отклонении ракеты от этой траектории вырабатывает команды управления. Эти
команды передаются на борт ЗУР радиолинии управления (КРУ) с помощью коди-
рованных радиосигналов.
После дешифрирования в приемнике ракеты они подаются на автопилот, а
затем после соответствующего преобразования - на рули ракеты, корректируя ее тра-
екторию полета. В ЗРК с теленаведением объектами воздействия помех MOiyr быть
РЛС сопровождения цели, РЛС сопровождения ракеты и бортовой приемник } прав-
ления, РВ ракеты.
Глава 5. Радиоэлектронная защита
443
Рис. 5.39. Классификация способов наведения ЗУР
Постановка помех по каналам передачи команд и ответчика - наиболее
трудная задача, очень сложно сформировать помеховый сигнал, который бы совпа-
дал по времени, частоте и направлению с сигналом ракетного ответчика, а по ампли-
туде превосходил бы его. Трудности постановки помех наведению ракеты ио ко-
мандному каналу обусловливаются высокой излучаемой мощностью сит налов пере-
дачи команд и невозможностью возд ействия помехи с защищаемого ЛА по главно-
му лепестку ДНА командного канала в силу расположения его приемной антенны в
хвостовой части ракеты.
В случае самонаведения ЗУР на цель команды управления вырабатываются
непосредственно на борту УР с использованием энерт ии, отраженной или поступа-
ющей непосредственно от цели. Контур полуактивного самонаведения состоит из
РЛС визирования и подсвета цели и бортового угломерного координатора ракеты.
При пассивном самонаведении команды наведения ЗУР вырабатываются
на борту ракеты с использованием энергии, поступающей от цели. При активном
самонаведении цель облучается первичным источником энергии радиоволн, рас-
положенном на борту ЗУР, а команды управления для наведения ракеты вырабаты-
ваются с помощью энергии, отраженной от цели. При нолуактивном самонаведе-
нии цель облучается РЛС подсвета, расположенной вне ракеты и цели. Отраженные
от цели сигналы подсвета принимаются ГСН, которая пеленгует цель и вырабатывает
команды управления для наведения ЗУР. Такой метод наведения находит весьма ши-
рокое распространение в ЗРК малой и средней дальности действия. ГСН захватывает
цель либо при нахождении ЗУР на пусковой установке,. тибо в процессе полета раке-
ты. Основными объектами воздействия помех в этом случае могут быть ГСН, РВ и
РЛС подсвета цели.
В комплексах срез ней и большой дальности обычно используют комбини-
рованное наведение, котла на начальном и среднем участках траектории полета ра-
кеты используется теленаведение или инерциальное наведение, а на конечном
участке траектории осудцествляется (пассивное, полуактивное или активное) само-
444
Глава 5. Радиоэлектронная защита
наведение. Объектами воздействия помех могут быть РЛС визирования цели, РЛС
визирования ракеты, ГСН и линия передачи команд управления на ракету, РВ.
Дальнейшим развитием наведения ракет на цель является способ наведения
«через ракету», когда на ракете используется координатор, следящий за целью по
сигналам подсвета. Информация о положении линии визирования ракета-цель по
радиолинии передается с борта ракеты на наземный вычислитель, который выраба-
тывает команды управления на основе имеющейся информации от наземных РЭС и
информации, принятой от ЗУР по радиолинии. Эти команды передаются тем на
борт ракеты, где они преобразуются и подаются на рули ракеты, корректируя ее тра-
екторию. В связи с внедрением ФАР функции визирования цели, ракеты и подсвета
цели могут выполняться одним многофункциональным радиолокатором [12].
Объектами воздействия помех при использовании метода «наведения че-
рез ракету» являются:
• РЛС визирования цели или канал визирования цели многофункциональной
РЛС;
• РЛС визирования ракеты или канал визирования ракеты многофункциональной
РЛС;
• борт овой координатор;
• линия передачи команд управления и информации на рэкету;
• линия передачи информации с ракеты на наземный вычислитель;
• радиовзрыватель.
Особое место занимает использование лазерного оружия [24]. Луч лазера
распространяется практически мгновенно |со скоростью света), следовательно,
упрежденного положения цели не требуется, не нужно точно измерять дальность.
Основные фазы функционирования ЗРК показаны на рисунке 5.40.
Практически на всех фазах функционирования ЗРК возможно создание по-
мех, снижающих, в той или иной мере, эффективность и боевые возможности ЗРК в
целом. С позиций РЭБ защита от СНИО может рассматриваться как частный слу-
чай борьбы с управляемым оружием с пассивными РЛ ГСН. РТС наведения ГСН
включает в себя антенную систему на подвижной i иростабил изированной плат-
форме под радиопрозрачным обтекателем, приемник и сисз ему формирования ко-
манд управления для автопилота.
Практически все современные ГСН используют моноимпульсный принцип
определения угловых координат ИИ Такие головки имеют трехканальные прием-
ники (рисунок 5.41): в двух каналах усиливаются сигналы разностных колебаний с
выходов каждой из двух пар антенн, а в одном - суммарный сигнал всех четырех
антенн моноимпульсного пеленгатора. Сигналы ошибок по курсу и по тангажу
формируются соответствующими ФД.
Приемники современных ГСН обладают достаточно высокой чувствитель-
ностью для того, чтобы обеспечить наведение ракеты на излучение РЭС разных
типов, структур и назначения, используя для этой пели достаз очно слабое побочное
и непреднамеренное излучение [9]. Однако основное тактическое назначение таких
головок - поражение РЛС. Поэзому в литературе они называются противорадиоло-
кационными ракетами.
Глава 5. Радиоэлектронная защита
445
Рис. 5.40. Основные фазы функционирования РЭ( ЗРК
К основным методам защиты РЭС от СНИО относятся:
• функциональное поражение СНИО и его носителей;
• выключение питания передатчиков при обнаружении ракетной атаки;
• скрытие фуню тонирования РЭС;
446
Глава 5. Радиоэлектронная защита
• дезинформация СНИО (постановка помех);
• воздействие на взрыватели боевых частей СНИО.
*3 ь.
Рис. 5.41. Моноимпульсные РГСН проз иворади©локационных ракет
Функциональное поражение СНИО возможно средствами мощного ЭМИ. В
качестве способов повышения временной скрытности РЭС от СНИО наибольшее
распространение получили: использование прерывистых режимов излучения (мер-
цание, паузная работа), выключение РЭС. Общий недостаток любых способов по-
вышения временной скрытности от СНИО - ухудшение качества функционирова-
ния РЭС. Повышение пространственной скрытности РЭС от СНИО достигается
увеличением направленных свойств антенн и снижением уровня БЛ.
Дезинформация СНИО базируется в основном на использовании специ-
альных передатчиков и ЛТЦ, которые призваны отвлечь на себя СНИО. Ранее рас-
сматривались способы постановки помех моноимпульсным системам, которые до-
статочно эффективно подавляются пространственно-разнесенными помехами (ко-
герентными, некогерентными, мерцающими) [9, 12, 22].
Отдельную группу способов защиты от СНИО составляют способы воздей-
ствия на неконтактные взрыватели боевых частей СНИО. приводящие к их
преждевременному подрыву. Способы РЭП радиовзрывателей рассмотрены в 3
главе. Самые естественные и эффективные способы защиты от СНИО - маскировка
ЭМ излучения РЭС: снижение РЛ заметности и уменьшение i епловой заметности.
5.7. Радиоэлектронная защита РЭС от организованных
помех
Помехозащищенность и помехоустойчивость РЭС зависит от большого ко-
личества различных факторов:
• диапазон используемых частот;
• форма и структура излучаемых и принимаемых сигналов;
• способ обработки сигнала в приемном устройстве;
• средняя мощность передающих у стройс гв;
Глава 5. Радиоэлектронная защита
447
• ДН приемных и передающих антенн, уровень БЛ;
• кратность и возможность дублирования РЭС;
• пространственное расположение РЭС;
• организация боевого применения РЭС [15, 70].
Все способы обеспечения помехозащищенности РЭС осуществляются, как
правило, за счет технических мероприятий, основой которых являются объектив-
ные различия в структуре и закономерностях изменения параметров сигналов и по-
мех. В зависимости от того, какие параметры (данные) используются для приема
сигналов в условиях помех, все способы РЭЗ от организованных помех разделяют
на три группы [22].
1 группа. Способы защиты, основанные на учете значительных отличий в
известных параметрах сигнала и помех:
• предотвращение перегрузки приемника;
• компенсация помех;
• первичная и вторичная селекция сигнала;
• функциональная селекция и адаптация;
• комплексное использование информации от различных источников.
2 группа. Способы, использующие статистические данные о сигнале и по-
мехах (оптимизация обработки сигнала).
3 группа. Способы, основанные на помехоустойчивом кодировании сигна-
лов.
Наиболее часто применяются три способа компенсации помех'.
• с помощью специального компенсационного приемника (амплитудно-
фазовый и. щ когерентный способ);
• путем череспериодной компенсации;
• посредством декорреляции помех.
Методы защиты РЭС от помех на основе оптимизации обработки сигна-
лов различаются, прежде всего, по видам этой обработки. Традиционными разде-
лами теории и практики оптимальной обработки сигналов выступают: обнаружение
и распознавание сигналов; оценка параметров; фильтрация; разрешение сигналов.
Для оптимизации обнаружителей РЛС считают целесообразным использо-
вать критерий Неймана-Пирсона, а для систем связи более подходит критерий иде-
ального наблюдателя [15] При использовании критерия Неймана-Пирсона зада-
ется уровень ложных тревог и требуется, чтобы вероятность обнаружения при этом
была максимальной. Критерий идеального наблюдателя требует, чтобы суммар-
ная вероятность ошибки, вызванной как ложными тревогами, так и пропуском сиг-
нала, была минимальной. После того, как критерий принят, определяется опти-
мальное значение порога и устанавливается структура оптимального обнаружителя.
Оценка параметров состоит в том, что по конечному числу выборочных
значений некоторой случайной величины, вил распределения которой предполага-
ется известным, определяются значения параметров этого распределения.
Оптимальная фильтрация позволяет выделить наилучшим образом из
смеси полезного сигнала и шума само полезное воздействие, которое представляет
собой, в общем случае, реализацию некоторого случайного процесса. Критерием
448
Глава 5. Радиоэлектронная защита
оптимальности процедуры обработки является минимум среднеквадратичной
ошибки
7И|Дх2 j - -х(/)]2} = min , (5.20)
где х(Г) - процесс на выходе фильтра, а символ ЛУ {-} обозначает операцию стати-
стического усреднения. Проблема оптимального разрешения в статистическом
плане сводится к установлению факта наличия или отсутствия даннот о сигнала при
наличии мешающих сигналов с близкими значениями параметров.
Известно большое количество технических решений и конкретных схем по-
строения приемников, защищенных от помех определенного конкретного типа. В
приемниках РЛС со сжатием импульсов для помехозащиты применяется метод
«охватывающего импульса» [9]. Схема, иллюстрирующая работу приемника в со-
ответствии с этим методом, приведена на рисунке 5.42.
Рис. 5.42. Использование охватывающих импульсов для помехозащизы
Основной выход соответствует приемнику с согласованным фильтром
(СФ). сжимающим импульс с внутриимпульсной ЛЧМ или ФКМ. Когда появляется
совмещенная шумовая импульсная помеха, может возникнуть подавление несжато-
ю ЛЧМ-импульса. так как при этом q-Pu / Рс >15 дБ. В этом случае логическая
схема обнаруживает появление помехи и включает формирователь охватывающего
импульса (ОИ). В этом состоянии приемник переходит в режим слежения за оги-
бающей помехового импульса. Если ОИ очень мощный, по огибающей РЛС опре-
деляет и дальность, и пеленг не хуже, чем по сигнальному импульсу, сжатому со-
гласованным с ним фильтром.
Для подавления прицельных шумовых помех в приемниках применяют
схему мгновенного (точнее - быстрого) измерения частоты и режекции помехи
по результатам измерений [9]. Соответствующая схема приемника представлена на
рисунке 5.43. Если вместе с сигналом в полосе УРЧ наблюдается помеха с шириной
спектра АДШП «АД , анализатор помеховой обстановки фиксирует эту ситуацию,
определяет несущую частоту помехи и с помошью СУ настраивает РФ па частоту.
Глава 5. Радиоэлектронная защита
449
пораженную помехой. Приемник адаптируется к мгновенной сигнальной обстанов-
ке, не пропуская прицельную по частоте шумовую помеху на выход приемника.
Рис. 5.43. Режекция помехи по частоте
Схема системы пространственной режекции помех корреляционного типа
представлена на рисунке 5.44, на котором введены обозначения: ПФо, ПФк - поло-
совые фильтры основного и компенсационного каналов; МШУ<>, МШУ к малошу-
мящие усилители; СМкп СМк?, ОМкз - смесители компенсационного канала с по-
нижением. повышением и понижением частоты соответственно; УПЧ] i, УПЧкз,
УПЧ, - УПЧ компенсационного канала; АРКА - автоматический регулятор ком-
плексных амплитуд: ДЗ - делитель мощности на 3; X - весовой синфазный сумма-
тор мощности: НО - направленный ответвитель 1170].
Рис. 5.44. Схема системы пространственной режекции помех корреляционного типа
Выход «О» - выход АРКА для взвешенного по ампл итуле и фазе комплекс-
ного напряжения сигнала помехи. За счет когерентности помех, поступающих из
основного и компенсационного каналов, в АРКА формируется комплексное напря-
жение. которое подается на один из входов синфазного сумматора. Компенсация
помех на выходе X достигается равноамплитудностью и противофазностью помех
на его входах. Схема (рис. 5.44) на основе весового когерентного суммирования
позволяет подавить несколько помех или широкополосную помеху в полосе канала
приема до 40 МГц в диапазоне частот 3,4 ..3.9 ГГц.
450
Глава 5. Радиоэлектронная защита
Для обнаружения импульсов шумовых помех в импульсных РПУ с после-
дующим применением бланкирования этих импульсов применяются сторожевые
стробы [15]. Одна из таких схем с двумя сторожевыми стробами приведена на ри-
сунке 5.45.
Рис. 5.45. Применение сторожевых стробов
В схеме имеются два канала приема: на основной частоте fnv с полосой Д<
и канал помехозащиты, состоящий из трех фильтров - основного на частоте /пр и
двух сторожевых на частоте /ПР1 < /пр и /прэ > /пр с одинаковыми полосами Д; .
Канал помехозащиты образуют схемы ФОФ с двумя узкополосными фильтрами на
выходе. После квадратичных детекторов в компараторе сравнивается разность по-
стоянных составляющих продетектированных шумов Д = (£,(г))-^(г)\, пропор-
циональная разности мощностей, а при одинаковых Дf - и спектральных плотно-
стей шумов в полосах фильтров, настроенных на частоты /ПР1 и /прз. По этой раз-
ности можно судить о расположении спектра шумовой помехи относительно несу-
щей сигнала: если Д > 0, шумовая помеха сосредоточена на частотах ниже частоты
сигнала, если Д < 0 - выше.
Для отстройки от шумовой помехи в приемниках доплеровских РЛС в ос-
новной канал вводят два узкополосных звена - узкополосный УПЧ и схему автома-
тической селекции сигнала (АСС). Схема устройства, реализующего этот принцип,
приведена на рисунке 5.46 [9].
Выход АСС через реактивный элемент (РЭ) управляет частотой первого ге-
теродина (Г). Частота гетеродина таким образом удерживается в полосе 4f4CC. Для
защиты от совмещенных с сигналом помех возможно применение способов поме-
хозащиты. основанных на взаимодействии сигнала и помехи. Так, при
q = P}\ ‘ Р, »1 вполне можно перейти к слежению за помехой с измерением даль-
ности по переднему фронту помехового импульса, а скорости - по средней или не-
сущей частоте помехи.
Глава 5. Радиоэлектронная защита
451
Рис. 5.46. Отстройка от мощных помех в доплеровских РЛС
Для борьбы с заградительными шумовыми помехами, разнесенными по
спектру с сигналом, используют схемы, превращающие помеху из противника в
союзники. Одна из таких схем предусматривает работу приемника с отключением
гетеродина [9]. На входе смесителя действует сигнал с несущей частотой /с и за-
градительная шумовая в окрестности /п помеха. Эти частоты разнесены по частоте
на А/-/п -/с. При обычном приеме сигнал, проходящий на УПЧ. содержит сла-
бые биения колебания гетеродина с принятым сигналом и сильные биения колеба-
ния гетеродина с заградительной шумовой помехой. Заградительная шумовая по-
меха может подавить сигнал на нелинейности демодулятора после УПЧ. Для борь-
бы с нежелательным эффектом подавления можно отключить гетеродин. Тогда
роль опорно! о сигнала для смесителя берет на себя заградительная шумовая поме-
ха. В результате биения сигнала и заградительной помехи с разносом центральных
частот AX’ - /пр проходят в УПЧ. тем лучше оттеняя сигнал, чем больше интенсив-
ность помехи. Отключение ] етеродина можно использовать только при наличии
возможностей для обнаружения факта противодействия с использованием загради-
тельной шумовой помехи, а также возможности подстройки частоты сигнала под
Л=Л±Л,-
Известны также технические решения, предусматривающие использование
в качестве опорного колебания i етеродина помех, образующихся за счет отражений
от местных предметов, пришедших по БЛ и тому подобным эффектам. Все эти
принципиальные и технические решения направлены на улучшение качества прие-
ма сигнала на фоне сильных помех.
5.8. Неосновные каналы излучения и приема
Виды излучения передатчика [134] представлены на рисунке 5.47 и иллю-
стрируются рисунком 5.48. Основное излучение передатчика - это излучение, ко-
торое находится в пределах полосы частот, необходимой для передачи сообщений
или сигналов (1 на рис. 5.48). Неосновные (нежелательные) излучения передат-
чиков - это все излучения на частотах, расположенных за пределами полосы частот
основного излучения. К нежелательным относятся все показанные на рисунке 5.48
радиоизлучения, за исключением основного. Неосновные излучения делятся на
внеполосные и побочные. Внеполосные излучения характеризуются спектром ча-
стот, примыкающим к полосе частот основного излучения. Структура внеполосно-
452
Глава 5. Радиоэлектронная защита
го излучения определяется типом модуляции передающего усгройства и видом мо-
дулирующей функции.
Рис. 5.47. Виды излучения передатчика
Основными видами побочного излучения являются:
• излучения на гармониках основной частоты (5 на рис. 5.48);
• излучения на субгармониках (2 на рис. 5.48):
• комбинационные излучения (6 на рис. 5.48^;
• интермодуляционные излучения (3 на рис. 5.48);
• паразитные излучения (7 на рис. 5.48).
Внеполосные излучения являются результатом модуляции сигналов. По-
бочные излучения возникают как следствие любых нелинейных процессов в пере-
дающем устройстве, кроме процесса модуляции. Уровни нежелательных излучений
зачастую бывают недопустимо высокими.
Излучения на гармониках основной частоты /0 имеют ярко выраженные
спектральные составляющие на частотах, крагных несущей частоте
Глава 5. Радиоэлектронная защита
453
/гАР=™/о> С5'21)
где т = 2, 3...Источниками гармоник в передатчиках являются нелинейные
устройства [134].
Вследствие нелинейности характеристик выходное немодулированное ко-
лебание п(/) имеет форму, отличающуюся от гармонической, и представляет собой
сумму колебаний основной частоты и ее гармоник
w(/) = м0 + ) + £ит cos(Znmfj + (рт), (5.22)
т=2
где - коэффициенты разложения u(t) в ряд Фурье.
Излучения на субгармониках основной частоты возникают в передат-
чиках с умножителями частоты и характеризуются полосами частот, меньших в
целое число раз относительно полосы основного излучения
/сув (5-23)
Комбинационные излучения возникают в тех радиопередающих устрой-
ствах. где для формирования основного сигнала применяются нелинейные преоб-
разователи сигналов от двух и более вспомогательных генераторов [15]. Если в пе-
редатчике основное излучение на частоте /, формируется за счет преобразования
трех вспомогательных сигналов на частотах Д, f2, , то комбинационные состав-
ляющие спектра могут возникнуть на частотах
/K0M=m/±n/2±Af.. (5.24)
Интермодуляционные излучения образуются при работе разнотипных пе-
редатчиков на одну общую антенну, а также в тех случаях, когда передающие ан-
тенны различных РЭС расположены весьма близко друг от друга и не приняты эф-
фективные меры по их развязке. Мощный сигнал частоты /С1 одного из передатчи-
ков, проникая через антенную систему (или общие фидерные линии) в выходные
каскады другого передатчика, взаимодействует в нелинейных элементах передат-
чика с генерируемым сигналом частоты fC2. В результате такого нелинейного вза-
имодействия образуется интермодуляционное излучение на частоте
/инт^/а*^- (5-25)
Паразитные излучения не связаны с образованием основных колебаний.
Они имеют место при непреднамеренном выполнении условий самовозбуждения.
Такие излучения образуются за счет колебательных контуров с сосредоточенными
постоянными параметрами паразитных резонансных цепей и динатронного эффек-
та. Для данного излучения характерно, что его частоты не кратны частоте основно-
го излучения, паразитные излечения могут иметь место на частотах как ниже (лам-
повые и транзисторные генераторы), так и выше (параллельное соединение не-
скольких генераторов) основной частоты. К паразитным излучениям относятся
также случайным образом возникающие излучения за счет резких изменений пи-
454
Глава 5. Радиоэлектронная защита
тающих напряжений, электрических пробоев в высокочастотных приборах, изме-
нений режимов работы, различных переключений и др.
В общем случае из-за недостаточного технического совершенства радиопе-
редающих устройств в спектрах их излучений могут присутствовать все виды ука-
занных нежелательных излучений. Они не используются для передачи полезной
информации, с информационной точки зрения они бесполезны, а с точки зрения
ЭМС вредны, так как создают дополнительную загрузку диапазона част от и могут
бы гь одной из основных причин взаимных помех даже таким РЭС, радиоприемные
устройства которых настроены на рабочие частоты, далеко отстоящие от частот
настройки мешающего передатчика.
Мощность нежелательных излучений многих современных радиопередаю-
щих устройств может значительно превышать мощность основного излучения.
Наличие в спектре излучений радиопередающих устройств нежелательных излуче-
ний и расширение спектров излучений за счет нестабильности частоты обусл овле-
но принципами построения и схемными решениями передатчиков.
Согласно рекомендации (МККР) шириной полосы излучения (ШПИ) А/'
считается такая часть частотного диапазона, в пределах которой сосредоточено
(100 — /?)% излучаемой передатчиком средней мощности [22]. При этом 0,5 /? %
мощности излучается на частотах, лежащих выше верхней границы ШПИ и 0.5 /3
% - на частотах, расположенных ниже границы ШПИ Согласно обшим
рекомендациям МККР по уменьшению уровня внеполосного излучения
необходимо:
• применять наиболее эффективные виды модуляции;
• уменьшать девиацию частоты в передатчиках с ЧМ;
• при работе в режиме амплитудной и частотной телеграфии стремиться к
понижению крутизны фронта и сре за модуляции телеграфного сигнала;
• оптимизировать форму огибающих импульсов в соответствии с критерием
минимума БЛ спектра при заданной ширине основного лепестка.
Мощность неосновных излучений может быть значительной, поэтому эти
излучения являются одной из главных причин ЭМ несовместимости РЭС при рас-
смотрении проблемы ЭМС на всех уровнях. Все непреднамеренные помехи (НПП)
могут быть приняты по основным и неосновным каналам приема РЭС. Важнейши-
ми характеристиками любого приемника являются: чувствительность, избиратель-
ность, полоса пропускания и рабочий диапазон частот. Для оценки степени ухуд-
шения работы приемника при воздействии взаимных помех этих характеристик
становится недостаточно.
Чувствительность не может достаточно полно характеризовать работу
приемника в условиях непреднамеренных помех, которые в большинстве случаев
не являются белым шумом. Внешние помехи любого вида могут изменять качество
приема полезного сигнала, но они не могут изменить важнейший показатель каче-
ства функционирования приемника - его чувствительность, т.е. способность при-
нимать слабый полезный сигнал при отсутствии внешних помех. Поэтому для ана-
лиза ЭМС пользуются характеристикой восприимчивости приемника. Пол воспри-
имчивостью приемника понимается способносзь приемника выполнять свои
Глава 5. Радиоэлектронная защита
455
функции при определенной интенсивности помех в заданной полосе частот Л/.
Анализ зависимости восприимчивости приемника от частоты Pit(f) позволяет вы-
явить участки диапазона, где наблюдается воздействие взаимных помех. С помо-
щью зависимости P(f) определяются основные и неосновные каналы приема.
Как и радиопередающие, РПУ РЭС помимо основного канала имеют боль-
шое число неосновных каналов приема — соседних и побочных, не предназначен-
ных и не используемых для приема полезного сигнала. Наличие неосновных кана-
лов приема обусловлено недостаточной избирательностью приемников и нелиней-
ными свойствами их каскадов [134]. Неосновные каналы приема обычно имеют
место в широкой полосе частот.
Основным каналом приема (ОКП) называется полоса частот, находящихся
в полосе пропускания приемника, и предназначенная для приема сигнала. ОКП
должен обеспечить прием основного излучения передатчика и иметь полосу про-
пускания, не меньшую полосы излучения. Основной канал приема предназначен
для приема полезных сигналов в полосе частот А/ПРМ, примыкающей к несущей
частоте полешого сигнала /0. Частотная характеристика основного канала, как
правило, согласована со спектром основного излучения «своего» передатчика. Вне-
полосные излучения порождаются модуляцией сигнала, а побочные являются про-
дуктом нелинейных преобразований в тракте передатчика [134].
Каналы приема, непосредственно примыкающие к основному и обуслов-
ленные недостаточной избирательностью приемника, называются соседними кана-
лами приема (СКП).
Побочным каналом приема (ПКП) приемника называется полоса частот,
находящаяся за пределами ОКП, в которой сигнал проходит на выход приемника.
ПКП образуются за счет нелинейности смесительных и усилительных каскадов
приемника и недостаточно высокой избирательности антенных контуров УВЧ.
СКП не входят в число побочных каналов приема.
Рисунок 5.49 иллюстрирует реальную частотную избирательность типового
супергетеродинного приемника, на частотной оси показаны полосы, в которых уси-
ливается входной сигнал [9. 134].
На рисунке 5.49 помимо ОКП 1 на частоте сигнала существует много
паразитных (нежелательных) каналов [9]:
• СКП 2, полоса кот орого примыкает к частоте приема по основному каналу:
• зеркальный канал приема 3 на частоте -2/ ~/с, являющийся важным
частным случаем комбинационного канала;
• канал приема 4 по промежуточной частоте /пр;
• ПКП 5 на частотах f = 2fv + mfw (т - натуральное число);
• ПКП 6 на интермодуляционных частотах;
• ПКП 7 на субгармониках частоты ОКП fm = /с / т.
456
Глава 5. Радиоэлектронная защита
Рис. 5.49. Характеристика частотной избирательности супергетеродинного приемника
По каналам 2...5 помехи проходят непосредственно в силу квазилинейных
преобразований. Прохождение помех через каналы 6 и 7 обусловлено влиянием
нелинейностей активных элементов УРЧ. ПЧ УПЧ. Каналы приема 3...7 часто объ-
единяют под общим названием внеполосных [70]. Имеется ряд дополнительных
эффектов, вызванных нелинейностями элементов приемного тракта (например, де-
текторов), в которых модулированное колебание помехи подавляет демодуляцию
полезного сигнала, а также вызывает интерференционные помехи [9].
В супергетеродинных приемниках большинство ПКП возникает за счет вза-
имодействия мешающего сш нала и ei о гармоник с сигналом гетеродина и его гар-
мониками, т.е. связано с преобразованием частоты. Воздействующий на приемник
сигнал будет принят и проникнет на его выход, если выполняется условие
|^/с ±/г| = /пч±[«кп^пч/2 + «скп^скп]5 (5-26)
где /с - частота воздействующего сигнала; р = 1, 2, ... - номера гармоник воздей-
ствующего сигнала: fv — частоты колебаний гетеродина (основная частота и по-
бочные); а} , < 1 - коэффициент, учитывающий снижение восприимчивости при-
емника по каналам приема (за исключением соседних) за счет избирательных
свойств тракта, предшествующего смесителю, а также вида колебания гетеродина,
участвующего в образовании канала приема; а(кп <1 - коэффициент, учитываю-
щий снижение восприимчивости приемника по СКП: AFm - полоса пропускания
УПЧ на уровне 0,7; AFCKn - полоса пропускания СКП [134].
Комбинационные побочные каналы приема возникают в результате взаи-
модействия мешающего сигнала и его гармоник с напряжением гетеродина в сме-
сительном каскаде приемника. При этом на выходе смесителя возникают колебания
с частотами
Лрк = '”/п
(5.27)
Глава 5. Радиоэлектронная защита
457
где /п и /г — частоты помехового сигнала и гетеродина. Если какие-либо из частот
этой комбинации попадают в полосу пропускания УПЧ, то они не фильтруются его
контурами и проходят на выходные устройства приемника.
Интермодуляционные побочные каналы приема возникаю! в тех случаях,
когда на входе приемника действует больше чем один мешающий сигнал [134,
135]. Они обуславливаются взаимодействием двух и более мешающих сигналов с
интенсивностями, достаточными для проявления нелинейных свойств тракта, либо
взаимодействием между несколькими мешающими сигналами и сигналом гетеро-
дина приемника
/пр инт — m\fn\ — njifm ± ••• — mkfn\ ± nfv ’ 5.28)
где /Пк и /г—частоты помеховых сигналов и гетеродина.
При однократном преобразовании частоты условие возникновения интер-
модуляционных помех в общем виде можно записать как
Ли ± ЛЛ<2 ± ••• ± A/п/ ± Л| = Лпч ± [«КП.4 /2 + «скг.ДЛкп ] > (5-29)
где /?],/?,,...,/? — номера гармоник.
Особенности и опасность случаев образования ингермодуляциопных помех
определяется тем, что исходные мешающие сигналы могут недостаточно ослаб-
ляться в тракте, который предшествует нелинейному каскаду и в котором происхо-
дит интермодуляция, и образовавшиеся интермодуляционные составляющие про-
ходят на выход по каналам приема, имеющим сравнительно высокую восприимчи-
вость к помехам.
Перекрестным искажением в приемнике называется изменение структуры
спектра сигнала на выходе приемника при действии сигнала и модулированной по-
мехи, частота которой не совпадает с частотами основного и побочных каналов
приемника. Перекрестные искажения могут быть амплитудными и Лазовыми. Бло-
кированием в приемнике называется изменение уровня сигнала или отношения
сигнал/шути на выходе приемника при действии помехи, частота которой не совпа-
дает с частотами основного и побочных каналов приемника. Блокирование може!
иметь место как совместно с перекрестными искажениями, так и без них (при воз-
действии смодулированной помехи). Причиной блокирования является наличие
каскадов с нелинейной амплитудной характеристикой [15].
Все с лучаи воздействия НПП на приемник, вызывающие отрицательные по-
следствия, возможны в широкой полосе частот, значительно превышающей полосу
пропускания ОКП и тем большей, чем ху'же избирательность ВЧ приемника и ли-
нейность ее каскадов, а также чем выше уровень мешающих сигналов в этой поло-
се.
5.9. Радиоэлектронная защита РЭС и обеспечение ЭМС
В условиях боевого применения БКО мешающее воздействие непреднаме-
ренных помех проявляемся, прежде всего, в выходных устройствах приемников,
систем обработки и индикаторов, что может быть обнаружено летчиком (экипа-
458
Глава 5. Радиоэлектронная защита
жем) ЛА и вычислительными устройствами РЭС по появлению шумовых, имити-
рующих помех на экранах индикаторов РЛС или единой системы индикации, по
сбоям БЦВМ, по появлению шумов в телефонных каналах, а также искажению или
сбою (пропуску) передаваемой информации в каналах связи и управления.
Большинство современных бортовых РЭК (БРЭК) представляет собой соче-
тание в ограниченном объеме пространства радиоприемных и радиопередающих
станций радиосвязи от метровых до сантиметровых длин волн, РЛС различного
назначения, аппаратуры РТР, РЭП и государственного опознавания, навигацион-
ных средств, мощнейших вычислительных средств и дисплейных комплексов и
т.д., а также здесь же расположенных источников первичного и вторичного элек-
тропитания перечисленной аппаратуры с мощностью до сотен кВт [138].
Проблема ЭМС бортовых радиоэлектронных комплексов (БРЭК) возникает
как следствие действия ряда специфических причин'.
• загруженность диапазона частот и высокая пространственная плотность
размещения РЭС (сосредоточение в пределах одного ЛА большого количества РЭС
различного назначения, имеющих общие источники питания, антенные системы,
функциональные связи);
• одновременная работа однотипных средств на соседних ЛА боевого поряд-
ка;
• техническое несовершенство радиопередающих устройств, работа которых
сопровождается излучением помех на гармониках и субгармониках основной ча-
стоты. а также излучение вредных колебаний комбинационных частот;
• возможность воздействия излучений САП БКО на другие бортовые РЭС;
• работа бортовых РЭС различного назначения в одном частотном диапазоне;
• техническое несовершенство приемников — наличие паразитных каналов
приема;
• изменение приоритета использования одних типов РЭС над другими на раз-
личных этапах полета [15, 23].
ЭМС - это способность РЭС одновременно функционировать в реальных
условиях эксплуатации с требуемым качеством (при воздействии
непреднамеренных помех) и не создавать недопустимых радиопомех другим РЭС
[134, 135]. Под ЭМС сложных БРЭК понимается их способность к совместному
функционированию в заданных условиях эксплуатации с требуемыми тактико-
техническими характеристиками (ГТХ). Это означает, что каждое средство БРЭК
не должно создавать помехи определенного уровня, мешающие другим средствам,
и в то же время обеспечивать свою работоспособность при наличии допустимых
радиопомех со стороны входящей в комплекс аппаратуры.
Обеспечение ЭМС РЭС различного назначения является составной частью
мероприятий по РЭЗ своих РЭС управления войсками и оружием (в том числе и
средств РЭБ). Для решения проблем ЭМС важным является выявление параметров
и характеристик РЭС, существенно влияющих на возможность их совместной
работы. При этом берутся в основном характеристики передатчиков, приемников и
антенн.
Глава 5. Радиоэлектронная защита
459
Функциональная схема приемника с частотной избирательностью, удобная
для анализа характеристик ЭМС, показана на рисунке 5.50.
Рис. 5.50. Функциональная схема приемника для анализа характеристик ЭМС
Главный тракт приема представлен параллельным соединением ОКП, СКП
и ПКП. Нелинейные эффекты, которыми сопровождается демодуляция принимае-
мого сигнала, сосредоточены не в демодуляторе (ДМ), а в выходных элементах.
Решение проблемы помехоустойчивости, обусловленной недостаточной
ЭМС. т.е. межсистемными помехами, сводится к ослаблению паразитных каналов
приема (СКП, ПКП) и к защите ОКП. Большое влияние на работу РЭС оказывают
непреднамеренные помехи (НПП). Воздействие НПП (рисунок 5.51) на РЭС во
многих случаях влечет не только существенное снижение эффективности их рабо-
ты, но и приводит к срыву решаемых задач.
Рис. 5.51. Источники непреднамеренных помех
460
Глава 5. Радиоэлектронная защита
В настоящее время в связи с многообразием причин возникновения НПП,
сложностью процессов их возникновения и взаимодействия проблема защиты РЭС
от НПП (проблема ЭМС РЭС) обостряется. Наиболее существенные причины
обострения проблем ЭМС\
• Число действующих РЭС, расположенных в ограниченном и часто очень
малом пространстве, непрерывно растет.
• Заметна общая тенденция к повышению мощности передатчиков РЭС. что
связано с увеличением дальности их действия.
• Увеличение чувствительности радиоприемных устройств, что эквивалентно
росту числа мешающих РЭС.
• Число действующих источников НПП особенно велико для средств, уста-
новленных на самолетах и ИСЗ, для которых ослаблено экранирующее влияние
Земли.
• Увеличение скорости передачи информации, а также применение избыточ-
ности для улучшения ТТХ РЭС.
• Неравномерное использование ралиосредств по времени, обеспечение ЭМС
в моменты наибольшей интенсивности работы ралиосистем связано с дополни-
тельными трудностями.
• Миниатюризация радиоаппаратуры обусловлена резким уменьшением рас-
стояний между токоведущими элементами.
По виду взаимодействия с полезным сигналом все НПП подразделяются на
мультипликативные и аддитивные. К мультипликативным относятся помехи,
возникающие при блокировании и перекрестных искажениях, а к аддитивным -
помехи, появляющиеся при интермодуляции в приемнике, а также проходящие по
основным и побочным каналам приема на вход усилителя УПЧ. Всем этим источ-
никам НПП характерны свои пространственно-энергетические, частотные и вре-
менные характеристики. Для борьбы с непреднамеренными помехами в полной ме-
ре применимы рассматриваемые ранее способы защиты о г преднамеренных помех.
Сущность указанной проблемы применительно к БРЭК заключается в ана-
лизе и разработке мер по устранению помеховых ситуаций в комплексе. Проблема
ЭМС охватывает вопросы [23], основными из которых являются:
1) обоснование тактико-технических требований к РЭС БРЭК:
2) определение состава РЭС в комплексе в соответствии сею назначением;
3) разработка СУ БРЭК для наиболее эффективного использования РЭС при
действии преднамеренных и непреднамеренных помех;
4) аппаратурный и теоретический анализ ЭМ обстановки и ее прогнозиро-
вание;
5) планирование рационального использования частотного диапазона при
проектировании и эксплуатации БРЭК;
6) оценка эффективности применения РЭС и комплекса в условиях действия
НПП;
7) учет особенностей функционирования РЭС при групповых действиях
ЛА.
Глава 5. Радиоэлектронная защита
461
Действующие ГОСТы (ГОСТ 19705-89. Системы электроснабжения само-
летов и вертолетов. Общие требования и нормы качества электроэнергии; ГОСТ Р
54073-2010. Системы электроснабжения самолетов и вертолетов. Общие требова-
ния и нормы качества электроэнергии; ГОСТ В 25803-91. Радиопомехи индустри-
альные от оборудования и объектов военного назначения. Нормы и методы испы-
таний; ГОСТ РВ 6601-001-2008. Оборудование бортовое. Общие требования к вос-
приимчивости при воздействии электромагнитных помех и методики измерения;
ГОСТ РВ 6601-002-2008. Оборудование бортовое. Общие требования к допусти-
мым уровням создаваемых электромагнитных помех и методики измерения; ОСТ
В1 02760-95. Комплексы и оборудование бортовое авиационное. Общие требования
к электромагнитной совместимости и методы контроля) в самом общем виде ука-
зывают, что их требования распространяются на бортовое оборудование (БО), ис-
пытываемое БО. комплексы БО самолетов и вертолетов и на системы ЛА и его аг-
регатов [138].
Если считать, что ГОСТами заданы требования на разрабатываемые БРЭК,
то требования на составляющие этот комплекс каждые отдельные самостоятельные
системы должны иметь меньшие, чем допустимые по ГОСТ} излучения полей
(напряженностей) или кондуктивные помехи в виде токов и напряжений в сетях
электропитания, линиях управления, связи и коммутации. Каждый блок или кон-
структивно самостоятельная единица (КСЕ) также должны иметь еще более мень-
шие значения помеховых излучений, чтобы суммарно выполнялись требования к
параметрам ЭМС, заданные по ГОСТу для комплекса в целом. Чем сложнее БРЭК,
тем выше требования (меньше допустимый уровень паразитных излучений ЭМ по-
лей и токов) к каждой КСЕ по отношению к заданному по ГОСТу значению для
БРЭК в целом.
Допустимый уровень напряженности поля помех каждой КСЕ или съем-
ного блока определяется как
£ксе^^-. (5.30)
\!пк
где п - число подсистем комплекса: к - число КСЕ в каждой подсистеме комплек-
са.
ГОСТы оговаривают допустимую напряженность Е [дБ-мкВ-м]. поэтому
EKCE = EroCT-101g(^)- (5-3D
При оценке допустимых значений Ексе важно знать ее значения во всем
требуемом диапазоне частот (до 18 ГГц), поскольку некоррелированность помех
излучения от разных КСЕ позволяет уменьшить ужесточение требований к допу-
стимым Ексг на разной частоте [138].
Основные отличия процесса защиты РЭС от НПП по сравнению с предна-
меренными помехами состоят в следующем [22]:
• НПП чаще всею «продукты» собственной системы или создаются источни-
ками, характеристики которых хорошо известны;
462
Глава 5. Радиоэлектронная защита
• НПП по своим структурным свойствам существенно уступают преднаме-
ренным (организованным);
• процесс возникновения НПП непосредственно зависит от принимаемых
решений по управлению РЭС, реализуемых организационных и технических меро-
приятий по защите от этих помех.
Оценка ЭМС РЭС в составе АРЭК подразделяется на парную, групповую и
комплексную [23]. При парной оценке ЭМС РЭС анализируется воздействие одной
непреднамеренной помехи, создаваемой ПРД РЭС1, на ПРМ РЭС: (наиболее про-
стой и часто используемый на практике вид оценки ЭМС). Парная оценка ЭМС
РЭС обычно включает в себя несколько этапов отбора потенциально несовмести-
мых источников излучения (ПРД) и ПРМ РЭС и исключения из дальнейшего ана-
лиза неопасных источников помех. К основным относятся этапы частотного и
энергетического анализа помех, после выполнения которых может проводиться
дополнительный анализ с целью уточнения полученных результатов.
Групповая оценка предусматривает учет взаимодействия совокупности
взаимных помех, создаваемых ПРД одного или нескольких РЭС, на ПРМ одного
РЭС. При комплексной оценке у читывается влияние взаимных помех, обусловлен-
ных функционированием всей совокупности РЭС в составе АРЭК.
Для количественной оценки ЭМС РЭС в составе АРЭК разработан ряд ме-
тодов и методик. При этом задача количественной оценки степени обеспечения
ЭМС РЭС предусматривает следующий порядок ее решения:
1) оценка помеховой обстановки;
2) оценка качества функционирования отдельных РЭС;
3) оценка качества функционирования РЭС в составе АРЭК при комплекс-
ной оценке обеспечения ЭМС.
Помеховая обстановка оценивается путем выявления потенциально несов-
местимых объектов РЭС, расчетом энергетических характеристик НПП, воздей-
ствующих на приемные устройства РЭС. а также расчетом вероятностных характ е-
ристик помех. Вероятностную оценку помеховой обстановки производят при необ-
ходимости учета случайных факторов возникновения помех. Кроме возможных
значений мощности НПП рассчитывают вероятности частотного, пространственно-
го и временного совпадений сигнала и непреднамеренной помехи. При оценке
ЭМС в качестве первичных материалов составляют частотные карты, на кото-
рых изображаются спектральные плотности излучений возможных источников по-
мех (основных и неосновных излучений РЭС) и ХЧИ основных и неосновных кана-
лов приема.
В таблице 5.1 приведен типовой перечень параметров по ЭМС, которые
должны быть измерены для каждого КСЕ (блока или шкафа) изделия как требуют
отечественные ГОСТы [138].
Ужесточение требований ГОСТ к параметрам ЭМС приводит, помимо
необходимости разработки аппаратуры с меньшими уровнями паразитных излуче-
ний, к лучшей экранировке изделий и повышенным требованиям к фильтрации по-
мех в электроцепях, повышению чувствительное!и и частотного диапазона работы
измерительной аппаратуры.
Глава 5. Радиоэлектронная защита
463
Таблица 5.1 - Типовой перечень параметров ЭМС
Виды измеряемых параметров Характеристики оцениваемых параметров
Оценка эмиссии кондуктивных радиопомех в цепях электропита- ния и в жгутах линий связи, управления и коммуникации 1. Измерение уровней напряжения помех, создавае- мых в цепях питания в диапазоне частот от 10 кГц до 100 МГц. 2. Измерение уровней тока помех, создаваемых в жгутах линий связи в диапазоне частот от 0,15 до 30 МГц.
Оценка эмиссии излучаемых ра- диопомех от блоков, изделий и комплексов Измерение уровней напряженное ги электрического поля излучения радиопомех в диапазоне частот от 0.01 МГц до 18 ГГц
Оценка устойчивости (восприим- чивость) к кондуктивным и излу- чающим помехам 1. Восприимчивость к НЧ синусоидальному воздей- ствию помех на провода цепей питания в диапазоне частот от 30 Гц до 150 кГц на соответствие требова- ниям ГОСТ РВ 6601-001-2008 (ВП1). 2. Восприимчивость к ВЧ синусоидальному воздей- ствию на провода линий связи и цепи питания в диа- пазоне частот от 10 кГц до 200 МГц на соответствие требованиям ГОСТ РВ 6601-001-2008 (ВП2). 3. Восприимчивость к импульсному воздействию на провода линий связи и цепи питания на соответствие требованиям ГОСТ РВ 6601-001-2008 (ВИЗ). 4. Восприимчивость к импульсному воздействию за- тухающего синусоидального сигнала на провода ли- ний связи и цепи питания на соответствие требовани- ям ГОСТ РВ 6601-001-2008 (ВП4). 5. Восприимчивость к воздействию излучения элек- трическою поля в диапазоне частот от 2 МГц до 18 ГГц на блоки и соединительные провода на соответ- ствие ГОСТ РВ 6601-001-2008 (ВИ 1).
Оценка внеполосных и побочных радиоизлучений издел ия Измерение уровней внеполосных и побочных радио- излучений
Оценка эмиссии и устойчивости к искажениям питающей цепи 200 В 400 Гц и + 27 Сохранение работоспособности аппаратуры в соот- ветствии с ГОСТ 19705-89 (Приложение 5) и ГОСТ Р 54073-2010
Оценка коэффициента экраниро- вания корпусов унифицирован- ных шкафов, блоков, устройств и изделий Измерение коэффициента экранирования корпусов шкафов и блоков в диапазоне частот от 10 кГц до 18 ГГц
Оценка заземзения и металлиза- ции Измерение значений переходных сопротив. юний
Оценка устойчивости к электро- статическому разряду ГОСТ Р 51317.4.2-2010 Совместимость технических средств электромагнитная. Устойчивость к электро- статическим разрядам. Требования и методы испыта- ний
464
Глава 5. Радиоэлектронная защита
Обеспечение ЭМС РЭС в составе АРЭК достигается организационными и
техническими мероприятиями, проводимыми на этапах исследований, проекти-
рования, испытаний, эксплуатации и боевого применения РЭК и направленными на
ослабление непреднамеренных помех РЭС до уровней, гарантирующих требуемую
эффективность функционирования комплекса. Решение проблемы ЭМС РЭС в
авиационном РЭК закладывается еще на этапах его проектирования и разработки
путем принятия соответствующих мер и проведения организационных мероприя-
тий (разработка мер по частотной, временной, пространственной и поляризацион-
ной регламентациям работы РЭС; обоснование требований к системам у правления
комплексом, которые должны исключить совместную работу мешающих друг дру-
гу систем; определение условий целесообразного использования существующих
РЭС в разрабатываемом комплексе).
Организационные мероприятия по обеспечению ЭМС РЭС.
На этапе разработки [ 134]:
• определение минимального количества и состава РЭС, исходя из назначе-
ния. общей стр> ктуры комплекса и его ТТХ;
• планирование разработки РЭС в соответствии с тактико-техническими тре-
бованиями (ТТТ) в части ЭМС:
• руководство разработкой по выполнению ТТТ в части ЭМС:
• планирование и организация состава и размещения РЭС в составе РЭК.
На этапе эксплуатации и боевого применения'.
• анализ и учет ЭМ обстановки при боевом применении РЭК;
• выявление и устранение источников помех:
• регламентация по частотам, времени, по уровню мощности, режимам рабо-
ты РЭС:
• пространственное ограничение;
• распределение литеров БРЛС, ра ?нос частот в боевых порядках ЛА;
• своевременная смена кодов, частот , программ;
• определение возможности выключения одного РЭС при работе других;
• выключение РЭС после их взаимодействия;
• выбор маршрутов полета, на которых допустимо сокращение работы РЭС
для решения задач связи и навигации;
• использование на отдельных этапах вместо РЭС нерадиотехнических изме-
рителей или дублирующих средств;
• контроль соблюдения режимов работы РЭС [15, 23].
Организационные мероприятия основаны на применении частотных, вре-
менных и пространственных ограничений, накладываемых на функционирование
мешающих РЭС. а также включают мероприятия по выявлению и устранению ис-
точников НПП и контролю соблюдения режимов работы РЭС Важным организа-
ционным мероприятием для обеспечения ЭМС РЭС в АРЭК на этапе его проекти-
рования и разработки является определение их минимального количества и со-
става, исходя из назначения, общей структуры комплекса и его ТТХ. При выборе
РЭС учитываются спектральные характеристики их излучений и каналов приема,
возможности регулирования параметров сигналов и каналов приема в необходимых
Глава 5, Радиоэлектронная защита
465
полосах частот. После выбора РЭС производится предварительный анализ основ-
ных помеховых ситуаций, ситуаций взаимного влияния РЭС и выполняется пред-
варительная оценка ЭМС, по результатам которой выявляются заведомо несовме-
стимые РЭС. При оценке ЭМС в качестве первичных материалов составляются ча-
стотные карты и матрицы взаимных влияний РЭС [23].
Большое внимание в совершенствовании организационных мер обеспечения
ЭМС РЭС уделяется развитию методов оптимального частотного планирования,
позволяющих не только обеспечивать ЭМС, но и минимизировать объем необхо-
димого для их работы частотного ресурса, способствуя тем самым ослаблению де-
фицита частот [136].
Выделение полос частот как мера защиты от НПП РЭС осуществляется
Международным союзом электросвязи (МСЭ) и заключается в закреплении от-
дельных полос частот за районами Земного шара (или странами). Распределение
полос частот осуществляется также МСЭ и внутригосударственными радиоча-
стотными органами и заключается в закреплении отдельных полос частот РЧС за
радиослужбами для работы РЭС, принадлежащих этим службам. Присвоение ча-
стот или полос частот реализуется государственными радиочастотными орга-
нами и заключается в закреплении (присвоении) частот или полос конкретным
РЭС.
Назначение рабочих частот. На стадии эксплуатации может решаться во-
прос о централизованном выборе и закреплении за отдельными средствами рабочих
частот из числа возможных к использованию (с последующим их утверждением), а
также вопросы оперативного выбора конкретной частоты из числа разрешенных
для работы конкретного РЭС [136. 137]. Частотный разнос предусматривает
определение и назначение обоснованных частотных ограничений: рациональное
распределение частот, выбор законов перестройки рабочих частот во времени. Пра-
вильный выбор и рациональное распределение РЭС является одним из эффектив-
ных способов обеспечения ЭМС в АРЭК.
Пространственное ограничение заключается в распределении рабочих
секторов работы РЭС и применяется для уменьшения уровней помех путем сниже-
ния эквивалентной чувствительности приемных устройств за счет использования
направленных свойств антенных систем несовместимых РЭС.
Регламентация работы РЭС по времени. В тех случаях, когда за счет про-
странственного и частотного ограничений не удается обеспечить ЭМС, используют
временные ограничения. К временным ограничениям относятся согласование рабо-
ты РЭС во времени и положение временного запрета работы РЭС - потенциа: тьных
источников НПП. В этом случае определяются РЭС, выполняющие в определенные
периоды времени наиболее важные задачи. На эти периоды необходимо выключать
менее важные мешающие РЭС.
Ограничение режимов работы РЭС устанавливаются, как правило, цен-
трализовано и заключаются в определении общих правил эксплуатации РЭС ком-
плекса. К таким правилам относятся установленные приоритеты в использовании
РЭС и общие ограничения на применение всех РЭС. Во всех случаях запрет на ра-
боту должен накладываться на те средства, которые непосредственно не связаны с
466
Глава 5. Радиоэлектронная защита
выполнением боевой задачи в данный период времени и выключение которых не
приведет к снижению эффективности войск.
Контроль соблюдения режимов работы РЭС заключается в определении
различных энергетических ограничений (определение минимального значения
энергетического потенциала РЭС, обеспечивающего устойчивую работу). Выявле-
ние и устранение источников НПП позволяет исключить или снизить их влияние
на РЭС до приемлемого уровня.
Технические мероприятия по обеспечению ЭМС РЭС приведены на ри-
сунке 5.52.
Технические мероприятия по обеспечению ЭМС проводятся на всех жиз-
ненных этапах разработки и эксплуатации РЭС: на этапах научно-
исследовательских работ, разработки опытных и серийных образцов, эксплуатации
и боевого применения [15].
Задание тактико-технических требований РЭС в части ЭМС. На этапе
разработки РЭС определяющее значение имеет задание тактико-технических тре-
бований по ЭМС с учетом безусловного выполнения норм и стандартов по ЭМС.
Создание стандартов, относящихся к области ЭМС. оказывает влияние на даль-
нейшее развитие стандартизации. В настоящее время такие стандарты разработаны
для ряда технических характеристик передатчиков, приемников и антенн РЭС. эле-
ментной базы.
Рис. 5.52. Технические мероприятия по обеспечению ЭМС РЭС
Существующая нормативно-техническая документация охватывает следу-
ющие вопросы [15]:
Глава 5. Радиоэлектронная защита
461
1. Нормирование параметров радиоизлучений РЭС'.
• мощности радиопередающих устройств;
• плотности потока мощности;
• допустимого отклонения частоты;
• полосы частот излучения;
• спектра и уровня (мощности) внеполосных излучений;
• уровня и абсолютных значений побочных излучений;
• шумовых характеристик передатчиков.
2. Нормирование параметров приемников РЭС
• чувствительности;
• восприимчивости по основному и побочным каналам приема;
• избирательности, измеряемой односигнальным, двухсигнальным и много-
сигнальным методами;
• полосы пропускания;
• помехозащищенности от индустриальных помех по цепям электропитания,
управления и коммутации.
3. Нормирование характеристик элементной базы.
• побочных колебаний;
• внетрактовых излучений:
• шумовых характеристик элементов передатчиков и приемников;
• линейности харамеристик (индекса линейное!и, степени восприимчивости
к помехам).
4. Нормирование характеристик ЭМС антенно-фидерных устройств.
5. Нормирование уровней и других характеристик индустриальных по-
мех (излучений гетеродинов, ВЧ генераторов).
6. Организационно-методическое и общетехническое нормирование
(критерии и методики расчета эффем ивности использования радиочастотного ре-
сурса, организационно-технические основы координации и планирования радиоча-
стотных выделении, терминология ЭМС).
Уменьшение неосновных излучений передатчиков достигается:
• фильтрацией промеж} точными и антенными контурами;
• улучшением избирательности умножительных каскадов и оптимизации их
работы;
• разработкой возбудителей по специальным схемам;
• изменениями параметров цепей паразитного самовозбуждения;
• применением устройств согласования и развязки.
Все способы совершенствования приемников в плане борьбы с НПП под-
разделяют на две группы:
1. Способы совершенствования характеристик частотной избирательности
(ХЧИ) в широкой полосе частот (реализую гея в ВЧ тракте (ВЧТ) и УПЧ).
2. Способы защиты от НПП, проникших на выход тракта УПЧ.
Основой технических способов защиты приемников от НПП путем совер-
шенствования ХЧП выступает повышение порогов восприимчивости к этим поме-
468 Глава 5. Радиоэлектронная защита
хам. Это достижимо двумя основными методами: улучшением линейности ВЧТ
приемника и снижением уровней НПП, проникающих на выход ВЧТ. Улучшение
линейности ВЧТ приводит к тому, что нелинейные явления в нем наступают при
более высоких уровнях НПП. Это достигается следующими путями:
• использованием в каскадах ВЧТ более .мощных электронных приборов;
• снижением коэффициента усиления каскадов, содержащих нелинейные
элементы;
• применением отрицательной обратной связи:
• использованием в смесителях более совершенных приборов (диодов с барь-
ером Шотки, балансных схем).
Основными способами защиты от НПП, проникающих на выход УПЧ. вы-
ступают технические решения по оптимальной обработке сигналов. Для защиты от
импульсных НПП широко используют схему ШОУ. Одной из наиболее эффектив-
ных мер защиты от НПП, имеющих неравномерный энергетический спектр в поло-
се частот, не превышающей полосы частот полезного сигнала, является режекция
помехи.
Синхронизация работы группы РЭС, использу ющих одинаковые или до-
статочно близкие несущие частоты, является достаточно эффективным способом
защигы от несинхронных импульсных помех, создаваемых РЛС и другими актив-
ными средствами.
Перечень технических характеристик РЭС, влияющих на ЭМС
1. Для передающих устройств:
• рабочие частоты;
• основное излучение через антенну;
• главный лепесток ДНА при излучении на рабочих частотах;
• временной режим работы на изл учение;
• боковые и задние лепестки ДНА при излучении на рабочих частотах;
• внеполосное и побочное излучение через антенну;
• ДНА на частотах внеполосных и побочных излучений;
• излучение помимо ант енны;
• восприимчивость к помехам, вызывающим интермодуляционные излуче-
ния;
• восприимчивость к помехам по цепям питания, управления, коммутации,
заземления;
• нест абильность частоты излучения;
• ЭМ излучение оборудования (индустриальные помехи).
2. Для приемных устройств:
• рабочие частоты;
• ХЧИ по ОКП:
• главный лепесток ДНА при приеме на рабочих частотах;
• временной режим работы на прием;
• боковые и задние лепестки ДНА при приеме;
• ХЧИ по соседнему и побочным каналам приема;
Глава 5. Радиоэлектронная защита
469
• ХЧИ по блокированию;
• ХЧИ по перекрестным искажениям и интермодуляции;
• ДНА на частотах соседних и побочных каналов приема, блокирования, пе-
рекрестных искажений и интермодуляции;
• восприимчивость к помехам помимо антенн;
• восприимчивость к помехам по цепям управления, питания, коммутации в
заземления;
• радиоизлучение и нестабильность частоты гетеродина;
• ЭМ излучение оборудования (индустриальные помехи) [134].
Обеспечение ЭМС отдельного РЭС решается в первую очередь путем при-
менения технических мер, так как они позволяют практически мгновенно, без тер-
риториального перемещения РЭС, без ограничений по пространству осуществить
его РЭЗ. Они направлены; на снижение мощности излучения мешающего сигнала,
на уменьшение степени распространения помех в пространстве путем совершен-
ствования антенно-фидерного тракта РЭС, а также на ослабление помех непосред-
ственно в приемнике РЭС с испол ьзованием специальных устройств.
Наряду с рационапьной комплектацией РЭС авиационного РЭК и правиль-
ным выбором рабочих частот разрабатываются меры по обеспечению временной,
пространственно-поляризационной и энергетической совместимостей РЭС в соста-
ве данного комплекса с учетом взаимных помех, возникающих при групповых дей-
ствиях ЛА [23]. Для улучшения ЭМС применяется ряд технических решений, пред-
принимаемых с целью компенсации недостатков РЭС, проявляющихся в составе
АРЭК:
• применение дополнительных средств фильтрации и ВЧ развязки в антенно-
фидерных трактах;
• фильтрация вспомогательных цепей, цепей электропитания, блокировки,
управления и сигнализации;
• поэлементное, блочное и полное ЭМ экранирование РЭС комплекса:
• экранирование элементов электронно-вычислительных устройств. БЦВМ и
т.д.
Проблема обеспечения ЭМС РЭС авиационных РЭК становится еще более
сложной при боевом применении групп ЛА [23]. В настоящее время затраты по
обеспечению ЭМС составляют 5... 10 % от стоимости разработки изделия в целом
[138].
ГЛАВА 6
АВИАЦИОННЫЕ КОМПЛЕКСЫ И СРЕДСТВА
РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ
6.1. Общая характеристика бортовых комплексов обороны
воздушных судов военного назначения
В зависимости от степени интеграции отдельных элементов аппаратуры
РЭБ в различные группы можно выделить несколько категорий таких групп:
устройства, средства, комплексы и системы РЭБ. Устройством называется сово-
купность элементов (модулей), решающих простейшие задачи [15, 19]. Примером
устройства служат схема запоминания и воспроизведения частоты в САП, антенна
станции РТР и др. В соответствии с ГОСТ 52003-2003 «Уровни разукрупнения
РЭС. Термины и определения» радиоэлектронное устройство - РЭС, представ-
ляющее собой совокупность функционально и конструктивно законченных сбороч-
ных единиц и используемое для решения технической задачи в соответствии с его
назначением.
Система РЭБ - совокупность функционально связанных комплексов РЭБ,
средств РЭБ и средств, обеспечивающих их применение объединенных единой ор-
ганизацией функционирования и общим управлением для выполнения задач РЭБ.
Комплекс РЭБ — комплекс военной техники, представляющий собой совою пность
функционально связанных средств РЭБ и средств, обеспечивающих их применение,
объединенных единой организацией функционирования и общим управлением для
выполнения задач РЭБ. Средство РЭБ - образец военной техники, предназначен-
ный для выполнения определенной задачи РЭБ. Средегвом РЭБ является САП.
В соответствии с Федеральными авиационными правилами инженерно-
авиационного обеспечения государственной авиации (приказ МО РФ № 44 от
09.09.2004 г.) комплексы и средства РЭБ включают:
• аппаратуру непосредственной РЭР, предупреждения экипажа об облучении
и пуске ракет, управления средствами РЭП;
• РЭ, ПК и лазерные системы и САП для индивидуальной и групповой
обороны;
• аппаратуру обнаружения и ЦУ (ля ракет «воздух-РЛС»;
• радиоаппаратуру помех разового применения;
• аппаратуру создания помех РЭС.
Комплексы и средства РЭР включают:
• аппаратуру радио-. РТ. РЛ. оптико-электронной (телевизионной, лазерной,
многоспектральной;, радиационной разведки;
• оптико-телевизионные визиры, входящие в комплексы разведки;
• аппарату оу оперативной индикаци и;
• бортовую аппаратуру управления и обработки информации;
• бортовые вычисли гели разве, тки;
Глава 6. Авиационные комплексы и средства РЭП
471
• бортовую аппаратуру передачи и ретрансляции информации;
• системы управления люками средств разведки.
В Федеральных авиационных правилах инженерно-авиационного обеспече-
ния государственной авиации приводятся следующие определения.
Бортовое устройство РЭБ - законченная сборочная единица, включающая
блоки, приборы, агрегаты и реализующая какие-либо частные технические задачи.
Бортовая система РЭБ - функционально связанные устройства, блоки, агрегаты,
предназначенные для решения одной или нескольких частных задач РЭБ. Борто-
вой комплекс РЭБ (БК РЭБ) — функционально связанные бортовые системы и
устройства, объединенные общими алгоритмами и централизованными вычисли-
тельными системами, предназначенные для решения одной или нескольких част-
ных задач РЭБ различными способами. Назначение и состав БК РЭБ определяется
боевыми задачами, способами боевых действий и боевыми возможностями ЛА, на
которых БК РЭБ размещен. Под понятием бортового комплекса обороны (БКО)
понимается совокупность БК РЭБ и средств огневого поражения противника [55].
К основным задачам системы защиты авиации необходимо отнести:
• разведку РЛС противостоящей системы ПВО;
• формирование единых для всех элементов системы картин радиоэлектрон-
ной и тактической обстановки;
• оценку степень угрозы элементов системы ПВО и определение атакуемых
ЛА из состава боевого порядка:
• определение оптимальных (рациональных) способов РЭП и огневого пооа-
женпя РЛС с использованием СНИО (противорадиолокационных ракет):
• управление параметрами создаваемых помех;
• выработку рекомендаций по изменению параметров боевого порядка и реа-
лизация защитного маневрирования [4, 12, 17, 18].
Средства РЭБ могут быть автономными и неавтономными. Автономные
средства РЭБ предназначены для решения самостоятельных задач (забрасываемые
ППОД), неавтономные - для решения простых задач в составе БК РЭБ (устройство
выброса средств РЭП). Средства РЭБ, находящиеся на вооружении, в зависимости
от решаемых задач подразделяются на индивидуальные, групповые и индивиду-
ально-взаимные.
Индивидуальные средства РЭБ предназначены для защиты самолетов,
вертолетов и других ЛА, на которые они установлены, от обнаружения и пораже-
ния огневыми средствами ПВО противника путем нарушения работы (снижения
эффективности фу [кционирования) РЭС управления оружием. С высокой степенью
достоверности на основе многочисленных исследований по оценке эффективности
применения средств РЭБ можно утверждать - средства индивидуальной и индиви-
дуально-взаимной защиты снижают вероятность поражения до 0,2...0,3 [139]. Объ-
ектами РЭП индивидуальными средствами РЭБ являются:
• РЛС УО ЗРК большой, средней и малой дальности и ЗАК;
• БРЛС самолетов и вертолетов;
• ИК и лазерные прицелы зенитных средств и бортового оружия;
• РЛГСН и ИК ГСН управляемых ракет:
• РВ и оптические взрыватели средств поражения [16, 22].
472
Глава 6. Авиационные комплексы и средства РЭП
Групповые средства РЭБ предназначены для обеспечения прорыва (пре-
одоления) ПВО противника боевыми порядками авиационных соединений и частей
путем РЭП РЭС управления войсками и оружием ПВО и авиации противника, а
также его средств РЭБ и разведки. Групповые средства РЭБ устанавливаются на
специальных самолетах, вертолетах РЭБ дальней, фронтовой, армейской, морской
и военно-транспортной авиации, на боевых самолетах ДА, ДПЛА, автоматических
аэростатах, а также на объектах наземного и морского базирования. Групповые
средства РЭП. нарушающие целераспределение, уменьшают число атак средств
поражения на 30 ... 40 % [140].
Объектами РЭП групповыми средствами РЭБ являются:
• РЛС и средства связи управления оружием ПВО:
• средства связи в составе РЭО СУ общевойсковыми объединениями, соеди-
нениями и частями противника;
• РЛС обнаружения, определения высоты, опознавания, наведения истреби-
телей и целеуказания ЗРК и ЗАК;
• радиолинии органов управления системы ПВО и радиоизлучающие сред-
ства связи и чокации в составе РЭО СУ авиацией противника;
• РЛ ГСН и ПК ГС Н управляемых ракет;
• пассивные РЭС обнаружения и сопровождения постановщиков активных
помех;
• РВ средств поражения, средства РЭР и РЭБ:
• РЭС разведывательно-ударных комплексов (РУК) I19. 55].
Индивидуально-взаиушые средства РЭБ имеют такое же назначение. как
и индивидуальные средства. В состав индивидуально-взаимных средств РЭБ входят
индивидуальные средства, дополненные аппаратурой информационного обмена
между защищаемыми ЛА. Индивидуально-взаимную защиту может реализовать
пара ударных самолетов посредством совместной постановки мерцающей помехи
(помеха создается путем поочередного включения ПП).
Назначение и состав самолетного или вертолетного БКО определяются бое-
выми задачами, способами боевых действий и боевыми возможностями ЛА. на ко-
тором размещен комплекс. При создании современных БКО используют базовый и
модульный принципы построения, а также принцип унификации. Сущность базово-
го принципа заключается в использовании при разработке ряда комплексов РЭБ
базовой конструкции и постоянной составляющей (стационарной части) в составе
базового комплекса РЭБ, решающего определенный минимум задач РЭБ, характер-
ных для назначения ЛА. Комплексы индивидуальных средств РЭБ. разработанные
для размещения на определенных тинах ЛА, получили название базовых бортовых
комплексов обороны (ББКО). Состав ББКО определяется чипом ЛА и его назначе-
нием. Модульный принцип позволяет осуществить построение БКО методом про-
ектирования с использованием базового набора аппаратных и программных моду-
лей, что дает возможность создавать оптимальную по составу и интеллекту струк-
туру комплекса.
Принцип унификации включает в себя следующие положения:
• универсальность конструкций аппаратных и программных модулей с воз-
можностью использования их в составе ЛА различного назначения:
Глава 6. Авиационные комплексы и средства РЭП
473
• стандартизация каналов информационного обмена и высокоскоростной сре-
ды передачи больших массивов данных;
• создание единой автоматизированной технологии разработки и модерниза-
ции БКО для любого типа ЛА.
БКО может наращиваться за счет включения в его состав различных
устройств РЭБ (САП другого диапазона волн, отдельных модулей станций развед-
ки. устройств выброса средств РЭП и др.). Как стационарная, так и наращиваемая
части комплекса могут размещаться в контейнере или внутри фюзеляжа самолета
[55] Согласно американским источникам на боевых самолетах нового поколения
исключается . побая внешняя подвеска оборудования. Наращивание БКО позволяет
значительно расширить задачи, решаемые комплексом, и увеличить его эффектив-
ность. Однако следует иметь в виду, что усиление БКО может происходить только
за счет сокращения топлива и вооружения на борту1 ЛА. Поэтому в каждом кон-
кретном случае необходимо проводить оптимизацию удельного веса БКО в общей
системе вооружения с учетом огневой мощи ЛА, расхода топл ива и массогабарит-
ных характеристик вооружения и средств РЭБ.
В работе [168] предложен аналитический метод определения полезной
нагрузки ЛА межд) аппаратурой РЭП и средствами повышения боевой живучести
и вооружения при выполнении полетного задания. Показано, что эффективность
совместного применения средств РЭП и вооружений максимальна при отношении
веса аппаратуры РЭП к вооружению, равным 0.5.
Базовый и модульный принципы построения БКО, а т акже внедрение циф-
ровой техники, значительно сокращают объем работ по их модернизации, отвечают
требованиям стандартизации и унификации АРЭО, позволяют оперативно реагиро-
вать на изменение вооружения и тактики противника (модернизация логики управ-
ления производится сменой алгоритмов БЦВМ, введением новых команд и связей).
БКО ударных самолетов и самолетов-постановщиков помех отличаются как
по составу средств РЭБ. так и по решаемым задачам. БКО ударных самолетов ФА
включает, как правило, индивидуальные средства РЭБ, которые устанавливаются
на каждом самолете. В некоторых случаях на ударных самолетах могут
размещаться групповые средства РЭБ. решающие задачи коллективно-групповой
зашиты (подавление РЭС управления оружием и войсками). Тяжелые самолеты
(ВТА, ДА) вооружаются комплексами индивидуальных и групповых средств РЭБ.
Это объясняется спецификой выполнения задач этими типами самолетов на
большом удалении от линии фронта [55].
Специальные вертолеты и самолеты-постановщики помех оснащаются
комплексами групповых и индивидуальных средств РЭБ. Групповые средства РЭБ
этих ЛА решают задачи коллективно-групповой защиты при борьбе с РЭС
управления войсками и оружием противника. Индивидуальные средства РЭБ в
основном подавляют РЭС управления оружием. Однако они могут быть
использованы и для борьбы с РЭС управления войсками.
474
Глава 6. Авиационные комплексы и средства РЭП
6.2. Основные функции бортовых комплексов обороны
воздушных судов военного назначения
Современный КБО ВС военного назначения выполняет следующие функции'.
• осуществляет сбор информации о РЭ обстановке на маршруте полета и в
районе удара и о состоянии собственных средств РЭБ;
• производит анализ и оценку информации, распознает РЭС ПВО и
отображает на индикаторах результаты анализа;
• производит оценку степени угрозы выявленных РЭС и выбирает РЭС для
огневого поражения или РЭП, определяет целесообразные виды маневра и способы
применения средств РЭБ;
• управляет средствами РЭБ:
• контролирует эффективность и работоспособность КБО [55, 140].
В соответствии с выполняемыми задачами БКО имеет четыре
функционально связанные подсистемы [19]:
1) подсистему информационного обеспечения (ПИО), представляющую
собой совокупность средств РЭР (средства обнаружения и пеленгации: РЛ.
лазерного, ПК и ультрафиолетового излучения!;
2) подсистему управления (ПУ). основу которой составляют ЭВМ,
устройства управления и индикации во взаимодействии с бортовым РЭО и
системой управления вооружением;
3) подсистему контроля (ПК), состоящую из устройств контроля
технического состояния и боевой эффективности БКО;
4) подсистему исполнительных устройств (ПИУ). состоящую из
совокупности средств РЭП и УУ заметностью и включающую:
• станцию активных РЛ помех на основе цифровой радиочастотной памяти (digi-
tal radio frequency memory - DRFM);
• устройство отстреливания активных РТ ловушек, патронов с ложными тепло-
выми целями и ДО;
• устройство формирования искусственных пространственно распределенных
ПО1. ющающих образований;
• устройство выброса активных бу ксируемых РЛ и ИК ловушек;
• авиационные ЛЦ на основе реактивных авиационных ракет и ракет с РЛ ГСН;
• передатчик активных РЛ помех для обеспечения ГЗ в контейнерном варианте;
• контейнеры с передатчиком дополнительных диапазонов, включая миллимет-
ровый ;
• контейнер с ОЭК подавления в ИК и лазерном диапазонах длин волн и обеспе-
чения ультрафиолетовой маскировки;
• лазерное оружие, оружие функционального поражения, выводящее из строя
радиоаппаратуру атакующих средств перехвата (АСП) [29].
Состав и назначение различных подсистем зависят от назначения и от обла-
сти применения БКО. Для БКО различают несколько способов интеграции
устройств и средств. Наиболее прогрессивными являются построения БКО на осно-
Глава 6. Авиационные комплексы и средства РЭП
475
ве централизованной, иерархической или гибридной интеграции различных систем
и устройств [19].
Централизованный принцип интеграции характеризуется наличием еди-
ной системы обработки информации и управления на базе цифровых ЭВМ. Напри-
мер, комплекс РЭБ AN/ALQ-161 содержит центральную ЭВМ и еще 9 быстродей-
ствующих процессоров, обеспечивающих управление приемниками и передатчи-
ками комплекса в реальном масштабе времени. Иерархический принцип интегра-
ции заключается в построении ряда подчиненных друг другу устройств, средств и
подсистем, комплексов так, что задачи устройств, средст в и подсистем, комплексов
низшего ранга вытекают из задач устройств, средств и подсистем, комплексов бо-
лее высокого ранга. Каждый из подчиненных комплексов управляется собственной
системой управления в соответствии с поставленной задачей. Принцип закладыва-
ется, когда невозможно организовать сбор информации и управление из одного
центра. Основное преимущество иерархического принципа состоит в возможности
рационального построения ряда систем различной сложности. Каждый уровень
сложности удобно сопоставить с соответствующим иерархическим уровнем. Недо-
статок иерархической системы - труд ность ее адаптации, значительное время про-
хождения команд.
Гибридный принцип интеграции предусматривает как подчиненность ком-
плексов и взаимный обмен информацией снизу вверх и сверху вниз, так и возмож-
ность централизованно! о сбора информации и управления подчиненными звенья-
ми. Гибридный принцип наиболее часто используется при построении современ-
ных и перспективных БКО.
Различные составные части БКО ЩИО, ПУ, ПИУ, ПК. самолетные и верто-
летные комплексы РЭП и др.) могут размещаться на разнотипных ЛА и на земле.
При этом их объединение в комплекс или систему РЭБ происходит на этапе выпол-
нения боевой задачи. Примером такого объединения может служить расстановка
самолетов-постановщиков помех в едином боевом порядке с самолетами-
носителями управляемого оружия класса «воздух - РЛС», предназначенного для
уничтожения РЭС [19, 55].
Для современных самолетов характерным является наличие функциональ-
ной связи БКО с другими бортовыми комплексами и РЭК в целом [23]. Различные
устройства РЭБ могут использоваться в интересах решения задач навигации, связи,
управления оружием. ФАР и передатчики РЛС могут применяться .для целей РЭБ
на этапе прорыва ПВО, а при нанесении удара передатчики САП могут использо-
ваться для наращивания энергетического потенциала РЛС при решении задач
управления оружием. В ИРЭК ресурсы различных комплексов и систем будут пе-
рераспределяться в интересах выполнения конкретной боевой задачи. Комплекси-
рование информации повышает вероятность непоражения ЛА, оборудованного
ИРЭК. при атаке истребителя-перехватчика не менее чем на 20 %, увеличивает
точности наведения оружия и эффективность выполнения боевой задачи - доставки
оружия в заданну ю точку пространства [141].
Целевая функция для синтеза состава ИРЭК и выбора технических i [арамет-
ров его устройств может быть предел авлена в виде
476
Глава 6. Авиационные комплексы и средства РЭП
Л>РЭК - ААжо + А А >
(6-1)
где Рирэ1< - эффективность выполнения комплексом возложенных на него задач;
РБКО - вероятность непоражения самолета атакующим средством перехвата (АСП)
при защите его БКО, входящим в состав ИРЭК; Д , Д - коэффициенты значимо-
сти задач, решаемых отдельными устройствами ИРЭК; п - число устройств ИРЭК;
коэффициенты До, Д. ( / = 1,и) могут быть нормированы относительно единицы; Р
— вероятность выполнения поставленных задач z-м усгройством ИРЭК [139].
Вероятность непоражения самолета РБКО, оборудованном БКО, в общем ви-
де определяется формулой [142]
и т
л№=1-^ПП(1-х#)
/=1 7=1 |_ *=1
(6-2)
где Рт — вероятность наведения средства перехвата на ЛА системой ПВО; S -
вероятность срыва /-го этапа атаки (до пуска ракет и применения пушечного во-
оружения) /-м циклом помех, создаваемых исполнительной подсистемой БКО: Р -
вероятность поражения защищаемого ЛА ракетой с k-м типом ГСН или пушкой; т,
/7, 2 - число этапов атаки, циклов помех и типов ГСН (пушки) соответственно.
Выражение (6.2) учитывает противодействие со стороны БКО АСП на всех
этапах атаки без учета нротивоистребительного и противоракетного маневрирова-
ния ЛА. С учетом противоистребительного и противоракетного маневров выраже-
ние (6.2) приобретает вид [29]
т Л
Лко=1-^г,(1-5им)(1-51.м)ПП(1-5»)
i=i у=1 L *=i
(6.3)
Противодействие БКО на этапе после пуска ракет АСП производится с уче-
том: 1) РЭП ГСН ракет в соответствующем диапазоне длин волн; 2) срыва этапа
пуска расходуемыми средствами; 3) уничтожения ракет АСН управляемым от
БРЛС оружием (оборонительными ракетами, пушками) [55]. При наличии перечис-
ленных мер защиты ЛА после пуска ракет АСП Р, определяется выражением
(6.4)
где Pi]k — полигонная вероятность наведения ракет: Sy3Jc - вероятность уничтоже-
ния ракет с к-й ГСН; I - число циклов помех или расходуемых средств; Рпг, - веро-
ятность перенацеливания ракет с z-й ГСН; // - число ракет в залпе.
Все вероятности в выражениях (6.2). (6.3). (6.4), обозначенные буквами S с
индексами, являются условными, т.е. полученными при условии успешного реше-
ния задач исполнительной системой РЭР и зависящими от работы ее вероятност-
ных показателей: вероятностей обнаружения Р)БН . опознавания Д)П , мест оол реле-
Гпава 6. Авиационные комплексы и средства РЭП
477
ления Ром . Для их учета вероятности 5 должны быть домножены на средние зна-
чения указанных вероятностей РиБН -Роп • РиМ [29].
Максимизация Рирэк сводится к нахождению локальных максимумов РБКО и
Д (/ = 1,77) по выбранным структурам устройств ИРЭК. Аналогично оптимизиру-
ются и технические параметры устройств. Базовый ИРЭК для самолетов ДА (рису-
нок 6.1), как правило, должен иметь три составные части [139]: БКО, БРЛС и аппа-
ратуру детального или оперативного РЭ контроля (РК). В этом случае выражение
(6.1) принимает вид
АрЭК = ААкО + ААрлс + > (6-5)
где РБРЛС и Ррк - вероятность выполнения задач БРЛС и аппаратурой РК в составе
ИРЭК; Д и р - коэффициенты значимости задач, решаемых БРЛС и аппаратурой
РК. Коэффициенты значимости ориентировочно равны Д=0,7; Д =0,2 и
А = 0,1.
Рис. 6.1. Минимальный состав ИРЭК для защиты самолета ДА
Для получения высоких показателей вероятности функционирования ИРЭК
(Php,k>0,9) согласно (5.5) необходимо обеспечить выполнение условия
р - р =РВ1Г >0,9. Это означает, что атаки средств перехвата системы ПВО
ЬКО brJK РК 7 11
должны отражаться с вероятностью > 0,95 (при трех-пяти атаках за вылет по само-
лету ДА), а вероятность выполнения этапов функционирования БРЛС и аппаратуры
РК должна лежать в интервале 0,95...0,99 [139].
Наиболее эффективную зашит} ЛА обеспечивает максимальный состав
ИРЭК (рисунок 6.2), включающий в себя: буксируемые или отстреливаемые в ППС
478
Глава 6. Авиационные комплексы и средства РЭП
ловушки для перенацеливания на них ракет; ДПЛА-постановщики помех для пре-
одоления системы ПВО; ОЭС для разведки АСП и подавления оптических ГСН
ракет; САП со сверхширокополосными (СШП) сигналами; возможность реализа-
ции коллективного и группового методов защиты ЛА [55].
На рис. 6.2 обозначено: АПО — алгоритмическое и программное обеспече-
ние для реализации методов коллективной и групповой защиты в части применения
разностно-дальномерных способов мгновенного местоопределения АСП; АФПр —
аппаратура формирования ЭМИ для функционального поражения (блокировки сра-
батывания) РЭС У О АСП; АПНП - аппаратура постановки негативных помех.
Рис. 6.2. Максимальный состав ИРЭК для чащи. ы само юта ДА
Введение в состав ИРЭК стратегических самолетов ДПЛА-постановщиков
помех позволяет преодолеть систему ПВО без предварительного использования
ударной авиации: сначала запускаются ДПЛА - постановщики помех для активиза-
ции системы ПВО и создания многоточечные помех, а затем с самолетов «второй
волны» атакуются цели без захода в зону ПВО [55].
Минимально-необходимый базовый состав перспективного ИРЭК самолета
ДА представлен на рисунке 6.3 [143].
В обобщенном виде перспективный ИРЭК (рис. 6.3) включает 4 канала:
• информативный (БПЛА; системы детального и или общею (СДО) радио-
технического контроля (РТК); бортовая система обороны (БСО) в составе исполни-
тельного РТК (ИРТК); ОЭС разведки - теплопеленгатор (ТП), лазерный дальномер
(ЛД), тепловизор (ТВЗ) и др.; БРЛС, СГО «свой-чужой»; навигационно-
пилотажный комплекс (НПК));
• управляющий (центральная многопроцессорная БЦВМ. пульты, мно-
гофункциональный индикаторы (МФИ) блок межаппаратурной временной регла-
ментации (МАВР):
• исполнительный (САП, АПП, ВТО, кинематика ЛА);
Глава 6. Авиационные комплексы и средства РЭП
479
вспомогательный (телекодовая связь (ТКС);
КВ и УКВ связь с центрами
управления (ЦУО)).
Рис. 6.3. Минимально-необходимый базовый состав перспективною ИРЭК самолета Д \
Концептуальные алгоритмы работы каналов перспективного ИРЭК самоле-
та ДА приведены в работе [143]. Оценка эффективности перспективного ИРЭК с
учетом концептуальных алгоритмов его работы показала, что перспективный ком-
плекс отражает в 2 раза большее число атак при одинаковом запасе расходуемых
средств по сравнению с существующими КРЭП. При этом вероятность непораже-
ния самолета ДА в одной атаке повышается до 1.5 раз. Расчеты показали, что даль-
нейшее повышение вероятности непоражения самолета ДА в одной атаке до 1,7 раз
по сравнению с существующими КРЭП возможно при переходе на многопозицион-
ные комплексы (МП ИРЭК), размещаемые на группе защищаемых самолетов, при
реализации режима мерцания.
Отметим, что аналитические модели выбора технических параметров БКО
декомпозированы в три уровня с учетом.
• обобщенных показателей эффективности составных частей БКО (первый
уровень);
480
Глава 6. Авиационные комплексы и средства РЭП
• технических параметров аппаратуры, входящих в показатели эффективно-
сти составных частей БКО (второй уровень);
• массогабаритных характеристик аппаратуры, определяющих величину тех-
нических параметров (третий уровень) [142].
Степень взаимосвязи бортовых и наземных систем и БКО определяется бое-
вой задачей и РЭ обстановкой в зоне боевых действий. В некоторых случаях назем-
ные и бортовые системы и БКО могут функционировать независимо друг от друга
[55]. Например, при действии самолетов ДА в глубоком тылу противника харак-
терным является автономная работа БКО. Основное управление БКО в воздухе
предусматривается с помощью радиолиний управления и средств связи ведущих
самолетов групп. В процессе предварительной подготовки к выполнению боевого
задания в память ЭВМ ведущих самолетов закладываются исходные данные о ПВО
противника, полученные в процессе ведения всех видов разведки.
В полете с помощью бортовой аппаратуры РЭР и ПИО проводится
непосредственная разведка РЭС противника, производится анализ РЭ обстановки,
определяются типы РЭС и объекты РЭБ, выбираются способы и средства РЭП из
состава комплексов групповых и индивидуальных средств РЭБ, вырабатываются
команды yi травления исполнительными системами, оценивается эффективность
ведения РЭБ. В процессе выполнения полетного задания выявляются ранее
неизвестные РЭС противника. Одновременно с подавлением РЭС разведданные о
них и состояний БКО передаются на наземные и воздушные КП. где они
использутотся для пополнения и коррекции сведений о противнике, для принятия
мер по РЭЗ своих РЭС, а также для оценки эффективности проводимых
мероприятий по РЭБ. Жизненный цикл БКО (этапы НИР, ОКР, испытания
производство и эксплуатация) определяется условиями быстро меняющейся РЭ
обстановки. Основное требование на стадиях НИР. ОКР и производства -
выполнение тактико-технических требований в заданные сроки с минимальными
затратами. Цикл эксплуатации должен иметь наибольшую продолжительность.
Разбиение БКО на функциональные узлы и блоки, выделение наиболее об-
щих функциональных связей между ними позволяют упорядочить технические ре-
шения но построению БКО - унифицировать схему функционально-блочного по-
строения и перейти на функционально-блочный принцип конструирования средств
на этапах ОКР. Применение функционально-блочного принципа позволяет увели-
чить серийность выпуска блоков (модулей) и приводит к снижению стоимости
комплексов на 20...30 % и сокращению сроков разработки на 40...60 % [13].
6.3. Авиационные комплексы индивидуальных и
групповых средств РЭБ
Оборудование РЭБ воздушного базирования подразделяется на системы и
средства индивидуальной (ИЗ) и групповой (ГЗ) защиты Системами и средствами
ИЗ, предназначенными для защиты от ракет классов «земля-возду'Х" и <<воздух-
воздух», в той или иной мере оснащаются все ЛА, а сложными системами и сред-
ствами РЭБ групповой защиты оснащаются специализированные ЛА, предназна-
ченные для решения задач РЭБ из зоны барражирования или при следовании с
Глава 6. Авиационные комплексы и средства РЭП
481
ударной группой. К наиболее современным интегрированным системам ИЗ отно-
сятся система AN/ALR-94 истребителя F/A-22 и система РЭБ истребителя F-35
[144].
6.3.1. Комплексы индивидуальных средств РЭБ
Индивидуальные средства РЭБ, объединенные в БК РЭП, и БКО использу-
ются, как правило, для обороны ЛА от поражения активными средствами ПВО.
Защита авиации от атак активными средствами ПВО будет обеспечиваться в рам-
ках индивидуальной, взаимной, коллективной и групповой защиты в сочетании с
применением СНИО [17, 19, 24, 55].
Под индивидуальной понимается вид защиты, предусматривающий созда-
ние помех РГСН атакующей ЗУР и (или) РЛС УО с атакуемого ЛА с целью срыва
наведения или достижения заданного значения промаха ЗУР, а также создание по-
мех с вынесенных относительно защищаемого ЛА буксируемых радиолокационных
ловушек и отстреливаемых передатчиков помех. ИЗ предусматривает эффективное
применение БКО на основе информации о РЭ обстановке, получаемой всеми ин-
формационными системами РЭК обороняющегося ЛА.
Под взаимной понимается вид защиты, предусматривающий создание по-
мех РГСН атакующей ЗУР и (или) РЛС УО с нескольких ЛА с целью срыва наведе-
ния или достижения промаха ЗУР по любом} из ЛА - участников защиты, а также
скрытия состава и координат участников защиты и ЛА, расположенных в непо-
средственной близости от них. Коллективная защита предусматривает создание
помех РЛС обнаружения и сопровождения с большей части ЛА боевого порядка с
целью скрытия состава и координат ЛА. Групповая защита предусматривает созда-
ние помех РЛС обнаружения, сопровождения и наведения с одного из ЛА боевого
порядка с целью скрытия сос гава и координат всех и. ти заданной части ЛА боевого
порядка и срыва наведения или достижения промаха ЗУР.
Указанные виды защиты из боевых порядков реализуются с применением
как относительно низкопотенциальных средств, предназначенных для индивиду-
альной защиты, так и высокопотенциальных средств гр}пповой зашиты. При сов-
местном применении они образуют разнообразные комбинированные виды защи-
ты: индивидуально-взаимную, взаимно-групповую, коллективно-групповую [17].
Индивидуально-взаимная оборона (ИВО) осуществляется экипажами ЛА
тактических групп при ведении группового боя на основе совместного и согласо-
ванною применения комплексов РЭБ и оружия ЛА, объединенных в тактическую
группу. Проведение ИВО требует интенсивного обмена информацией о РЭ обста-
новке между РЭК ЛА, входящих в тактическую группу. Коллективно-групповая
оборона (КТО) ос} ществляется совмесшыми действиями экипажей ЛА боевого
порядка и специальных ЛА РЭБ (постановщиков помех) с применением оружия и
комплексов индивидуальных и групповых средств РЭБ. КГО предполагает усиле-
ние тактической группы путем включения в ее состав специальных ЛА РЭБ и/или
наращивание БКО линейных самолетов групповыми средствами РЭБ. КГО позво-
ляет осуществлять действия не только по отражению атак огневых средств ПВО, но
и по их предотвращению [55].
482
Глава 6, Авиационные комплексы и средства РЭП
Оборона ЛА от поражения ЗУР, ЗАК и бортовым оружием истребителей
при преодолении ПВО требует размещения на самолетах и вертолетах различных
средств РЭБ, объединенных в единый комплекс, решающий задачу обеспечения
прорыва ПВО противника с учетом априорной и текущей информации о боевой
обстановке, состоянии собственных сил и средств РЭБ, тактических приемах про-
тивника и эффективности принятых мер по обороне ЛА. Объединение различных
средств БКО в единый комплекс с адаптивным алгоритмом работы дает возмож-
ность при отказе одного из средств комплекса оперативно с помощью СУ осу-
ществлять замену одного средства РЭБ на другое, одного комплекса помех на дру-
гой. Это значительно повышает надежность комплекса и сохраняет его высокую
эффективность при выходе из строя отдельных устройств БКО.
Комплекс индивидуальных средств РЭБ применяется в сочетании с различ-
ными видами маневра и огнем. Средства БКО в основном предназначены для по-
давления РЭС УО. В некоторых случаях возможно использование БКО для РЭП
РЭС управления войсками. Комплексы индивидуальных средств РЭБ кроме оборо-
нительных решают и наступательные задачи. В оборонительных и наступательных
операциях применение БКО существенно снижает потери авиации. Стационарная
часть комплекса индивидуальных средств РЭБ обычно состоит из:
• станции непосредственной РЭР и, в частности, непосредственной РТР;
• аппаратуры предупреждения экипажа об облучении;
• аппаратуры предупреждения экипажа о пуске ракет:
• станций и ПП, работающих в различных диапазонах ЭМВ;
• устройств выброса средств РЭП (ЛЦ, ЛТЦ, снарядов);
• устройств управления заметностью ЛА в различных диапазонах ЭМВ;
• аппаратуры управления, контроля и индикации.
БКО представляет собой многофункциональный унифицированный ком-
плекс. обеспечивающий эффективную защиту самолетов и вертолетов не только в
традиционном РЛ диапазоне, но и оптическом. Наращивание БКО может происхо-
дить за счет: 1) САП в контейнерном исполнении; 2) устройств выброса расходуе-
мых средств РЭБ; 3) дополнительных устройств информационного обеспечения
[19, 55J.
Современный многофункциональный интегрированный унифицированный
БКО представлен на рисунке 6.4 (МФПИ - многофункциональный пульт-
индикатор, ЛСП - лазерная станция подавления. УВ ЛТЦ - устройство выброса
ЛТЦ) [55].
БКО (рис. 6.4) включает в себя информационную подсистему (аппаратуру
РТР, аппаратуру обнаружения лазерного облучения (АОЛО), УФ и ИК обнаружи-
тели факта пуска УР) и исполнительную подсистему (станцию активны к РЛ помех,
устройство выброса перспективных авиационных расходуемых средств - тепловых
ловушек и РЛ отражателей, когерентные и некогерентные станции оптоэлектрон-
ных помех). Особое место в составе комплекса занимает система направленного
противодействия средствам наведения ракет - лазерная станция подавления. Обе
подсистемы объединяются в интегрированный БКО под управлением единого
устройства управления, выполняющего функции вычислителя и реализующего
Глава 6. Авиационные комплексы и средства РЭП
483
специальный алгоритм функционирования комплекса с учетом оценки и анализа
степени реальных угроз.
Рис. 6.4. Многофункциональный интегрированный БКО
Интегрированный комплекс строится на базе отдельных современных
средств и имеет открытую архитектуру [55]. Вариант построения интегрированного
БКО возду шного базирования представлен на рису нке 6.5 [19].
Рис. 6.5. Вариант построения интегрированного БКО
На рис. 6.5 обозначено: АС - антенная система; МУК - модуль управления
и контроля; МФП - модуль формирования помех; МОС - модуль обработки сигна-
лов; ПУ - подсистема управления; МВУК — модуль выработки управляющих ко-
манд; БД - база данных; МВОИ - модуль вторичной обработки информации;
484
Глава 6. Авиационные комплексы и средства РЭП
МТОИ - модуль третичной обработки информации; БИ - блок информации от ИР-
ЭК и АСУ авиацией; PC - расходуемые средства.
Интегрированная система РЭБ <INEWS>> предназначена для обеспечения
ИЗ самолетов малой заметности и интегрирована в единый комплекс БРЭО. Ко-
манды, поступающие от самолетной экспертной системы на автоматическое задей-
ствование средств РЭП и ОЭП, задаются системе «INEWS» в ходе выполнения бое-
вых задач. Схема взаимодействия системы РЭБ с другими подсистемами БРЭО
приведена на рисунке 6.6 [62].
Рис. 6.6. Схема взаимодействия системы РЭБ с другими подсистемами БРЭО
На рис. 6.6. обозначено: СРВИ - сеть распределения визуальной информа-
ции; БЗУ - буферное запоминающее устройство; РЭП, ОЭП - средства РЭП и ОЭП
(ПП, УВ, ИК-ловушки, ППОД); И - информация о РЭ обстановке; ПКС - програм-
мируемый коммутатор сигналов; ПОАФ - подсистема обработки, анализа сигналов
и формирования помех; СОД - сеть обмена данных межд\ подсистемами; УП -
управляющий процессор; ЦМШУД - цифровая мультиплексорная шина управле-
ния данными; СУБН - система управления боевой нагрузкой; ШРВИ — цифровая
шина распределения визуальной информации; ПОД - подсистема обработки дан-
ных; СУП - система управления полетом, двигателем и электроснабжением: ОУ -
органы управления комплексом РЭО; ЦМШ - цифровая мультиплексорная шина.
На рисунке 6.7 представлен состав БКО и его связи с другими системами.
На рис. 6.7 введены обозначения: ИУС - информационно-управляющая си-
стема; СИО - система информационного обмена; МИРЭС, МИОЭС - многофунк-
циональная интегрированная РЭС (ОЭС); РД - радиодиапазон; ОД - оптический
диапазон; АМиус, АМрд, АМод, АМио - аппаратурные модули ИУ С РД. ОД и СИО
соответственно; ВМиус, ВМрд, ВМод, ВМио - вычислительные модули ПУ С, РД.
ОД и СИО соответственно: ПМиус, ПМрд, ПМод. ПМио - программные модули
ИУС. РД. ОД и СИО соответственно; ИППСрд (ИППСод) - интегрированная прие-
мопередающая система РД (ОД); ИУПК - информационно-управляющее поле ка-
Глава 6. Авиационные комплексы и средства РЭП
485
бины; ИС ПНСО - интегрированная система навигации, посадки, связи и опознава-
ния; КУО - комплекс управления оружием; АВ - авиационное вооружение [55].
Рис. 6.7. Состав БКО и его связи с другими системами
Примерный состав комплекса J13 современного тактического истребителя
США приведен на рисунке 6.8 (БУ - блок управления; МФИ - многофункциональ-
ный индикатор; ЦП - центральный процессор; ППОс, ППОм - приемники преду-
преждения об облучении в см и мм диапазонах длин волн соответственно; ЦМШ -
цифровая мультиплексорная шина: УВ — устройство выброса ПРЛО, ИК-ловушек и
ППОД; ПРМик - ИК-приемник; РЛСд - доплеровская РЛС: ПЛИ - приемник лазер-
ного излучения: СОЭП - станция ОЭП: СРЭП - станция РЭП) [62].
Рис. 6.8. Состав комплекса современного тактического истребителя
Структурная схема многофункционального КРЭП современного истребите-
ля представлена на рисунке 6.9. На рис. 6.9 введены обозначения: СО - сигнал об-
наружения изделия ФПУ; РТП - радиотехнические параметры; УУОИ устройство
486
Глава 6. Авиационные комплексы и средства РЭП
управления и обработки информации; МПАУ - магистраль приемно-
анализирующих устройств; УФАЛ - устройство формирования активных помех
(АП); МКИО - мультиплексорный канал информационного обмена; ИН - импульс
настройки; МИО — магистраль информационного обмена; ВЧП - СВЧ помеха.
Рис. 6.9. Структурная схема многофункционального КРЭП современного истребителя
На рисунке 6.10 приведена структурная схема устройства индивидуальной
защиты ЛА от управляемые ракет (УР) с оптическими головками самонаведения
(ОГСН) [145]. На рис. 6.10 обозначено: 1 - УР с ОГСН; 2 - бортовое }стройство
обнаружения и сопровождения (БУОС) УР; 3 - ИК излучатель; 4 - измеритель яр-
кости фона дневного неба: 5 — датчик регистрации освещенности поверхности ЛА:
6 - бортовое ВУ; 7 - УУ мощностью УФ из пучения; 8 — УФ излучатель.
Рис. 6.10. Структурная схема устройства ИЗ (а), зависимости мощности излучения
источника помех от времени суток и сезона (б)
1 — летом; 2 — весной; 3 — зимой
б)
Излучения ИК излучателя и УФ излучателя ориентированы в направлении
на ОГСН ракеты. Мощность ИК и?пучателя (когерентный (лазерный) или некоге-
рентный источник) должна превышать мощность излучения двигателя ЛА. Борто-
вое ВУ может быть выполнено с возможностью определения разницы между ярко-
Глава 6. Авиационные комплексы и средства РЭП
487
стью фона и поверхностью ЛА и выдачи сигналов управления для обеспечения ми-
нимального (нулевого) контраста поверхности ЛА с фоном. В качестве УФ излуча-
теля может быть использован источник лазерного излучения, формирование УФ
излучения в котором осуществляется путем преобразования основного излучения
твердотельного лазера на кристалле YAG Nd4'.
БУ ОС атакующей ракеты фиксирует факт пуска и координаты траектории
полета ракеты. По информации о координатах ракеты с БУ ОС подается команда на
запуск ИК излучателя для подавления ИК канала ОГСН. Одновременно с БУ ОС
подается сигнал на вход измерителя яркости фона дневного неба, датчиком реги-
страции освещенности поверхности ЛА измеряют освещенность в УФ диапазоне
длин волн. В бортовом ВУ вычисляется величина разностной яркости между фоном
дневного неба и поверхностью ЛА, в УУ мощностью УФ излучения вырабатывает-
ся управляющий сигнал, который подается на вход УФ излучателя для срыва наве-
дения ракеты. За счет того, что происходит динамичное (в процессе полета УР) вы-
равнивание яркости поверхности ЛА и фона, величина воспринимаемого контраста
не будет превышать 0,1. В этом случае вероятность обнаружения ЛА составит не
более 0,5 [145].
Средства комплекса индивидуальных средств РЭБ в основном предназначе-
ны для подавления РЭС управления оружием. Радиоэлектронное подавление РЭС
управления оружием ПВО противника индивидуальными средствами РЭБ может
осуществляться следующими способами [12, 19, 55]: 1) созданием активных помех
из боевых порядков (самоприкрытие и взаимное прикрытие); 2) выбросом (отстре-
лом) ЛЦ и ЛТЦ из боевых порядков в ЗПС; 3) отстрелом ПРЛ отражателей в ППС
пушечными и неуправляемыми реактивными снарядами (основными особенностя-
ми этого тактического приема является необходимость осуществления маневра по
высоте, направлению для выполнения пространственного условия эффективности).
В некоторых случаях возможно использование комплекса индивидуальных
средств РЭБ для РЭП РЭС управления войсками. Комплексы индивидуальных
средств РЭБ кроме оборонительных задач решают и наступательные задачи.
6.3.2. Комплексы групповых средств РЭБ
Комплексы групповых средств РЭБ, как правило, состоят на вооружении
специальных самолетов и вертолетов-постановщиков помех. Отдельные групповые
средства РЭБ могут входить в состав БКО ударных самолетов (например, станции
маскирующих и имитирующих помех). Основным назначением комплекса группо-
вых средств РЭБ является радиоэлектронное подавление РЭС управления войсками
и оружием ПВО и авиации противника, его РУК, средств РЭБ и РЭР [19]. Комплекс
групповых средств РЭБ состоит из четырех основных подсистем:
1) подсистемы информационного обеспечения;
2) подсистемы управления:
3) подсистемы исполнительных устройств;
4) подсистемы контроля [55].
Комплексы групповых средств Р ЭБ, объединенные в систему РЭБ, получа-
ют ЦУ от воздушного или наземного пункта управления. ЦУ передается с помо-
488
Глава 6. Авиационные комплексы и средства РЭП
щью комплексов и средств связи в виде цифрового формуляра и содержит инфор-
мацию о типе, основных характеристиках, местоположении и степени важности
объекта РЭБ. На основании анализа внешней информации и разведданных, полу-
ченных ПИО. после оценки возможностей ПИУ формируются команды управления
конкретным исполнительным устройством.
Наиболее эффективным является совместное применение комплексов груп-
повых и индивидуальных средств РЭБ в самом начале оборонительных действий,
когда за счет применения САП различных диапазонов ЭМВ имеется возможность
практически мгновенно адекватно ответить на действия противника.
6.4. Основные подсистемы БКО
6.4.1. Подсистема информационного обеспечения
Основу подсистемы информационного обеспечения (ПИО) составляет
станция непосредственной РТР (СНРТР) и аппаратура разведки в ИК и оптическом
диапазонах длин волн. В состав ПИО мог^т входить специализированные РЛС,
станции РТР и ЦУ систем, которые предназначены для обеспечения огневого по-
ражения объектов. Создание перспективного ИРЭК самолета предполагает объеди-
нение информационных ресурсов всех борзовых комплексов для выполнения раз-
личных задач на маршруте полета. ПИО служит для оценки радиоэлектронной об-
становки и состояния собственных средств РЭБ. ПИО решает следующие задачи'.
• производит обнаружение сигналов облучающих РЭС:
• измеряет параметры этих сигналов;
• определяет тип обнаруженных РЭС:
• определяет степень опасности (угрозы) облучающи х РЭС;
• определяет местоположение РЭС;
• предупреждает о ракетной атаке противника;
• определяет тип и координаты атакующих объектов;
• определяет фазу атаки и момент пуска атакующей ракеты:
• создает формуляр ЦУ, содержащий пространственные и частотно-
временные характеристики обнаруженных РЭС;
• выдает необходимую информацию в ПУ (на индикатор боевой обстановки и
другие индикаторы или пульты управления) [19, 55].
ПИО обеспечивает информацией все остальные системы РЭБ. Эта инфор-
мация используется для:
1 ) обеспечения рационального управления всеми устройствами ПИУ;
2 ) ЦУ ракетам «воздух-РЛС» и средствам ФРЭПр:
3 ) выполнения необходимого противоракетного, противозенитного или
противорадиолокационного маневров;
4 ) организации мероприятий по индивидуальной, индивидуально-взаимной
и коллективно-групповой обороне;
5 ) опенки эффективности мероприятий по РЭБ.
Информация о РЭ обстановке поступает в БКО не только от собственных
средств РЭР, но и по каналам радиосвязи от средств разведки других самолетов
Глава 6. Авиационные комплексы и средства РЭП
489
боевого порядка, а также наземных пунктов управления. ПИО может включать в
свой состав аппаратуру оповещения об облучении, СН РТР, станции разведки и пе-
ленгаторы, работающие в оптическом диапазоне волн. В состав ПИО могут входить
разведывательные устройства САП.
На индикаторные устройства БКО выдается информация о РЭ обстановке,
об атакующих средствах противника, степени их опасности и приоритетах проти-
водействия, состоянии и режимах работы устройств комплекса (об исправности
устройств, запасе расходуемых средств, подаче электропитания и т.д.) [55].
6.4.2. Подсистема управления
ПИО обеспечивает информацией о РЭ обстановке подсистему управления
(ПУ), которая на основании этой информации и анализа состояния бортовых
средств РЭБ решает задачу выбора целесообразных способов РЭБ, назначает режи-
мы работы ПИУ, выдает рекомендации экипажу по способам боевых действий.
Подсистема управления решает задачи оптимального (рационального) распределе-
ния временного и энергетического ресурсов средств активных помех, распределе-
ния ресурса расходуемых средств и выбора оптимальных (рациональных) парамет-
ров боевого порядка. Команды на применение активных помех и расходуемых
средств с использованием подсистемы связи и передачи данных выдаются на эле-
менты ПИУ.
Формализованная постановка задач назначения способов РЭБ и параметров
боевого порядка имеет вид [ 17]
Qo, L{, JW0} = argmaxmin3ll(F. Q, L, V/, Аэмс, В, «//) (6.6)
R.Q,L В
при R Е Rpgjft , Q £?доп ’ L £ДОП ’ ^ДОП ’ ДОП ’
где Эп(...) — обобщенный показатель эффективности защиты ЛА для текущей ра-
диолокационно-тактической ситуации; /?с, R г - множества оптимальных (рацио-
нальных) и возможных (допустимых) способов подавления РЛС ПВО с кортежами
данных, определяющими виды и параметры создаваемых помех; Q О|1 - мно-
жества оптимальных (рациональных) и возможных способов огневого поражения
РЛС ПВО с использованием СНИО; Ао, £доп - множества оптимальных (рацио-
нальных) и возможных способов применения ложных целей; М , Мдоп — множе-
ства оптимальных (рациональных) и возможных параметров боевого порядка ЛА;
F3MC - множества параметров, отражающих количественные характеристики ЭМС
реализуемых способов РЭБ и их влияние на результирующую эффективность РЭБ;
В, В ,оп - множества реализуемых и возможных параметров функционирования
противостоящих средств и систем ПВО; у/ — множество параметров, характеризу-
ющих вклад ИЗ в результирующую эффективность.
Основу ПУ составляет быстродействующая ЭВМ, которая решает задачу
целераспределения в соответствии с принятым алгоритмом функционирования
БКО. На индикаторных устройс гвах от ображается вся информация о РЭ обстановке
490
Глава 6. Авиационные комплексы и средства РЭП
(пространственные координаты, типы и степень опасности РЭС, частотно-
временные параметры РЭС, зона подавления, координаты постановщиков помех и
других самолетов боевого порядка). Во время преодоления ПВО подсистема управ-
ления решает следующие задачи:
• принимает решение о способах РЭБ; определяет опасные и главные цели
подавления;
• производит выбор алгоритма работы исполнительной подсистемы и ком-
плекса помех в зависимости от ракурса атаки, типа атакующего средства, скорости
и высоты полета;
• выдает ЦУ ИК-пеленгатору для определения момента пуска ракет и пере-
дающим устройствам САП;
• вырабатывает команд) на противоракетный или противозенитный маневр;
• перестраивает алгоритмы работы комплекса при выходе из строя устройств
БКО;
• вырабатывает команды на отстрел расходуемых средств РЭБ и пуск лову-
шек;
• выдает команды на управление заметностью ЛА;
• обеспечивает ЭМС БКО и РЭК [15.55].
Для оценки степени угрозы применяются различные критерии. Таким кри-
терием может быть минимальное отношение тек)щей дальности до атакующего
объекта к радиус) поражения
rm=D(t>/R . (6.7)
При сравнении атакующих объектов наибольшую угрозу представляет тот,
для которого Коп имеет минима. шное значение. Частным критерием является так-
же скорость сближения обороняемого самолета с атакующими истребителями: мак-
симальная скорость характеризует наиболее опасный атакующий объект [19].
Наиболее полный (интегральный) критерий степени угрозы должен учитывать со-
вокупность пространственно-временных и энергетических характеристик принима-
емых сигналов, кинематических характеристик атакующих объектов, высоты поле-
та и др.
Существуют две схемы обороны ЛА: маневр и РЭП. Маневр может бьпь
обходным, противоракетным, противозенитным или противорадиолокационным.
Обходной маневр возможен лишь в том случае, когда боевое задание и боевая об-
становка (информация о местоположении РЭС противника) позволяют его рассчи-
тать и выполнить. При определении возможностей обхода зоны действия ЗРК ана-
лизируется расстановка средств ПВО противника на маршруте полета по данным
ПИО и предварительным разведданным, получаемым с пункта управления [55].
Противоракетный, противозенитный или противорадиолокационный ма-
невры могут эффективно применяться как самостоятельно, так и в сочетании с ра з-
личными комплексами помех. Обход и все виды маневра могут быть единственно
возможными мероприятиями при полном отказе БКО.
ПУ поддерживает боевую эффективность БКО на максимальном уровне.
При выбранном критерии эффективности максимальная боевая эффективность
Глава 6, Авиационные комплексы и средства РЭП
491
комплекса достигается путем управления векторами аТ =[ala2...aj...an],
/3Т = [Р \рг...р Рт\ таким образом, чтобы максимизировался функционал
Э = Э[а(0,/?(0]=Э_, (6.8)
где а (г) - вектор технических параметров, i = \,N\ P(f) - вектор оперативно-
тактических параметров, j = \,М ; т - знак транспонирования; t — время. Сигналы
управления по шинам связи передаются на объекты управления и изменяют пара-
метры а.', Р и способ использования ограниченных ресурсов комплекса, прежде
всего энергетических и расходуемых.
В современных и перспективных БКО реализуется централизованно-
иерархическая схема управления, согласно которой СУ может управлять только
частью устройств непосредственно (из центра), а частью - последовательно,
передавая команды через различные уровни подчинения (например, по схеме
ПУ—»ПИУ—>САП). На рисунке 6.11 представлена упрощенная схема
трехуровневой СУ БКО [55].
ВНЕШНЯЯ ИНФОРМ. шия
И КОМАНДЕ!
Рис. 6.11. Схема трехуровневой СУ БКО
Все три уровня управления (прямой, функциональный и организационный)
характеризуются четкой системой подчиненносги по принципу «сверху-вниз».
Решение на управляющее воздействие верхняя управляющая система принимает
после анализа состояния нижестоящих систем. В некоторых случаях (например,
при внезапно возникшей угрозе) верхняя управляющая система может в
централизованном порядке передать команду на любое устройство комплекса без
учета иерархии. Самым нижним уровнем управления является прямое управление
параметрами, имеющее задачей целенаправленное изменение параметров БКО в
492
Глава 6. Авиационные комплексы и средства РЭП
процессе реализации предварительно выбранного плана РЭБ. Высшим уровнем
управления является организационное руководство состоянием комплекса с учетом
динамики развития РЭ обстановки, информации от внешних источников, команд с
ПУ РЭБ и информации о боевой эффективности комплекса. Промежуточный
уровень управления направлен на оптимизацию функциональных режимов
комплекса: перераспределения функций огневого поражения и РЭП, разведки и
РЭП, перераспределения энергетических, временных, спектральных ресурсов.
Задача распределения РЭС между САП комплекса по приоритетам сводится
к формированию такого алгоритма распределения, при котором обеспечивается
максимум целевой фрикции, определяемой в виде показателя эффективности
решения задачи, соответствующей поставленной цели. В зависимости от вида
целевой функции и ограничений, налагаемых при постановке задачи, оптимальный
алгоритм распределения САП может быть определен методами линейного,
нелинейного или динамического программирования. При использовании методов
линейного программирования в качестве целевой выбирается функция
Л' м
= > (6-9)
где с. - степень угрозы z-й РЛС по отношению к у-й САП; р - вероятность
подавления z-й РЛС помехами, создаваемыми у-й САП; х - количествоу-х САП.
распределяемых для подавления z-й РЛС: при г. =1 предполагается, что /-я САП
распределена для подавления z-й (одной) РЛС.
Максимизация целевой функции (6.9) проводится при наложении
ограничений
(610)
м
(611)
Ограничение (6.10) означает, что на подавление z-й РЛС может быть
назначено не более определенного количества САП. равного а . Ограничение (6.11)
означает, чтоу-я САП может подавлять не более чем b РЛС. Соотношения (6.10) и
(6.11) учитывают как возможности САП, так и помехоустойчивость подавляемых
РЛС. Оптимальный алгоритм распределения САП формируется в виде матрицы
соответствия возможностей САП по подавлению системы РЛС. Этот алгоритм
реализуется путем выдачи команд управления СУ соответствующего уровня.
Современные системы управляемого оружия могут гибко изменять свои
режимы работы, располагать несколькими способами наведения ракет, или же ра-
кеты могут наводиться, несмотря на срывы АС, используя в эти моменты для наве-
дения информацию из памяти бортового процессора [55]. В результате эффектив-
ность ПП с жесткой логикой управления ресурсами оказывается недостаточной.
Для повышения эффективности помех необходима адаптация, т.е. введение
в процесс создания помех обратной связи почти в реальном масштабе времени,
Глава 6. Авиационные комплексы и средства РЭП 493
учитывающей состояние подавляемой РЛС при воздействии помех. В идеальном
случае современный БКО представляет собой точный инструмент, автоматически
контролирующий излучение РЛС при воздействии помех. При этом анализируется
излучение подавляемой РЛС для ее идентификации, оценки состояния и динамики
работы. Априорная информация состояний РЛС и тактическая информация вместе
с текущими данными о «поведении» РЛС подвергаются обработке в ЭВМ и, таким
образом, реализуется адаптивное взаимодействие между БКО и подавляемой РЛС.
В этом случае БКО является элементом замкнутого контура (рисунок 6.12).
Рис. 6.12. Структурная схема замкнутой системы РЭБ
Процессор сигналов обрабатывает информацию о сигналах подавляемой
РЛС, которая поступает в устройство оценивания переменных величин, характери-
зующих состояние угрозы. Устройство оценивания также определяет, в какой сте-
пени реагирование РЛС на воздействие помех приближается к желаемому, т.е. про-
изводит оценку эффективности выбранной стратегии постановки помех. Контрол-
лер на основе этой информации управляет работой ПП в реальном масштабе вре-
мени. При этом РЛС рассматривается как управляемый объект, определенным об-
разом реагирующий на входное воздействие - сигнал ПП. который в данном случае
выступает как управляющий элемент. Задача заключается в установлении опти-
мального контроля сигнала помехи с целью воздействия на поведение РЛС в жела-
емом направлении.
Создание ИРЭК на борту ЛА может потребовать комплексирования суще-
ственно большего количества фазовых координат, т.е. еще большей размерности
вектора состояния. Внедрение цифровых устройств обработки сигналов выявило их
существенные преимущества перед аналоговыми системами:
• уменьшились габариты и масса аппаратуры;
494
Глава 6. Авиационные комплексы и средства РЭП
• появились устройства с высокой стабильностью инструментальных харак-
теристик, что практически исключило необходимость регулировок в аппаратуре
при ее эксплуатации;
• стала возможной реализация сложных вычислительных алгоритмов при
приемлемых габаритах вычислительного устройства [55].
Типовые значения быстродействия существующих и перспективных циф-
ровых ЭВМ для различных носителей приведены в [15]. На рисунке 6.13 показана
структурная схема ПУ БКО (СП — специализированный процессор; ФЦУ — форму-
ляр ЦУ; УС - устройство сопряжения; Д1 и Дз - диспетчеры; 3; - у-я заявка, у=1,
2.../V; БЗУ| и БЗУг - буферные ЗУ; ПЗУ - постоянное ЗУ; ППЗУ - перепрограмми-
руемое ЗУ; ПУ — пульт управления; ВЗУ - внешнее ЗУ; УД - устройство докумен-
тирования; СС - средства (комплексы) связи: Пу-у-я программа для формирования
у-го комплекса помех; К7 -у-я команда ПИУ) [13, 19].
Рис. 6.13. Структурная схема ПУ БКО
Информация от ПИО в виде ФЦУ поступает через УС и диспетчер Д1 на
БЗУ]. Диспетчер Д1, который может входить в состав СП, принимает ФЦУ в виде
заявок на обслуживание и размещает их в порядке приоритетов в БЗУ|. В ячейках
БЗУ1 образуется очередь заявок 31, 3?, ... Зд/. Диспетчер Дз предназначен для выбора
из очереди заявок первоочередной заявки 3^=, на обслуживание и вызова соответ-
ствующей программы П для этой заявки. СП проводит необходимые вычисления
по программе П, и формирует команды К для работы ПИУ и других устройств
БКО. САП настраиваются на нужные частоты и в соответствии с полученной ко-
мандой К. создают оптимальный комплекс помех. Устройства выброса средств РЭБ
начинают работать по заданной программе. Летчику выдастся информация о необ-
ходимом маневре. Команды К, при организации ИВО передаются по каналам СС на
Глава 6. Авиационные комплексы и средства РЭП
495
другие самолеты. ФЦУ, заявки 31, З2, ... 3% команды Ki, К2, ... К.\ передаются по
информационным шинам во ВЗУ и УД. ОЗУ предназначено для хранения проме-
жуточных результатов, вычислений и команд К7. В ПЗУ хранится неизменяемая
часть программы работы ПУ БКО. ППЗУ служит для хранения изменяемой части
программы. Эта часть программы может изменяться при предварительной подго-
товке ЛА или во время выполнения боевого задания. ПЗУ и ППЗУ формируют ал-
горитмы работы БКО на всех этапах выполнения боевого задания.
При автоматическом управлении в основу алгоритма может быть положен
программный или адаптивный принцип управления. Программный принцип
управления закладывается в БКО на этапе проектирования. Изменения в программе
могут производиться в процессе эксплуатации и боевого применения комплекса. В
полете с помощью ПИО производится опознавание типа атакующего объекта и вы-
бирается комплекс по матрице соответствий: «тип атакующего объекта - комплекс
помех» [15]. Недостатками программного способа управления являются жесткость
алгоритма и неполное использование возможностей исполнительной подсистемы
при знании пространственно-временных характеристик атакующих объектов.
Адаптивный принцип управления БКО позволяет наиболее полно реали-
зовать потенциальные возможности комплекса, но требует достоверного опознава-
ния типа атакующего средства ПВО и определения его пространственно-
временных координат. Использование адаптивного алгоритма в БКО является бо-
лее перспективным. Предусматривается адаптация на двух уровнях: 1) «быстрая»
адаптация со сменой алгоритмов в полете с помощью пультов управления БКО; 2)
«медленная*, адаптация, предусматривающая смен} алгоритмов, обновление биб-
лиотеки РЭС противника и своих РЭС модернизацию отдельных устройств и узлов
БКО в процессе эксплуатации.
К адаптивному БКО предъявляются требования наличия гибкой структуры
для адаптации к быстро меняющейся обстановке; применения адаптивно-
программного способа управления, при котором управление осуществляется на ос-
нове информации о подавляемых РЭС по алгоритмам, корректируемым ПИО;
управления мощностью помехи; выбора временной и частотной структуры помехо-
вых сигналов, исходя из необхоцимосги одновременного подавления нескольких
РЭС, работающих на разных частотах [19].
В 70-х годах XX века самолет, летящий на высоте 12000 м, облучался при-
мерно 40 тысячами импульсов в секунду. В 80-х годах плотность облучения воз-
росла до (1...2) миллионов имп./с, а в начале XXI века - до (10...20) миллионов
имп./с. Справиться с селекцией, фильтрацией и анализом поступающей информа-
ции в этих условиях может только специализированный процессор. САП самолетов
F-15 различных модификаций ALQ-135 (V) имеет 20 параллельно работающих
процессоров. Разработан сигнальный процессор, размещаемый в стандартном бло-
ке (14,6x16,0x1,5) см’ и имеющий быстродействие более 3,3 млрд, операций в се-
кунду. Такое быстродействие способно обеспечить адекватную реакцию средств и
систем РЭБ на быстро меняющуюся РЭ обстановку.
Внедрение цифровой техники в БКО началось именно с ПИО. Главным уз-
лом СНРТР является центральный процессор. Он осуществляет обработку сигна-
лов, поступивших на приемник станции разведки, и цифровое управление поста-
496
Глава 6. Авиационные комплексы и средства РЭП
новкой помех. Работа центрального процессора базируется на использовании двух
файлов - формуляров ЦУ, записанных в его ЗУ. Один файл, именуемый «гревож-
ным», содержит библиотеку сигналов различных типов РЛС и режимов их работы с
номерами приоритетов. Другой файл — файл «реакций»’ - содержит библиотеку оп-
тимальных видов помех против соответствующих режимов работы различных РЛС
[55]. Распознавание типов РЛС и режимов их работы происходит сравнением пото-
ка цифровых слов-дискрипторов сигналов предварительных (сигнальных) процес-
соров с библиотечными данными, хранящимися в ЗУ. На основе сравнения оцени-
вается текущая РЭ обстановка и в соответствии с ней выбирается сценарий РЭП.
Функциональная схема центрального процессора показана на рисунке 6.14.
Рис. 6.14. Функциональная схема центрального процессора
Центральный процессор обслуживает сотни РЛС и ГСН. включая режимы
их работы. Обозначая каждый тип РЛС соответствующей прописной буквой латин-
ского алфавита, можно условно представить множество РЛС в виде алфавита: А, В,
С, D, Е... При обнаружении РЛС соответствующего типа центральный процессор
определяет приоритет (очередность ее РЭП). Первоочередными объектами подав-
ления являются информационные каналы СУ оружием - РЛС стрельбовых ком-
плексов. ГСН ракет и КРУ.
Простейший («последовательный») алгоритм функционирования цифровой
САП дает возможность в каждый данный момент времени обслужить лишь одну
заявку. При многоканальной структуре i [ифровой САП в зависимости от приорите-
тов разведанных РЛС одновременно могул1 обслуживаться (подавляться) несколько
РЛС. САП, в которых на приемной и передающей сторонах используются многока-
нальные цифровые устройства запоминания и воспроизведения сигналов (ЦУЗВС)
на основе матричных диаграммообразующих схем (ДОС), могут одновременно по-
давлять несколько разнотипных РЛС [19. 55].
В таблице 6.1 приведен перечень параметров, вычисляемых за время пере-
хвата одного импульса, и необходимое количество информации, заключенное в
Глава 6. Авиационные комплексы и средства РЭП
497
каждом параметре [20]. Эта информация представляется в виде цифрового кодово-
го слова.
Таблица 6.1 - Перечень параметров и необходимое количество информации,
заключенной в каждом параметре
Параметры Количество информации, бит Разрешение
Время перехвата, нс 25 50
Несущая частота, МГц 18 1
Поляризация, град 16 1
Амплитуда, дБ 7 1
Направление на РЛС (пеленг), град 9 1
Длительность импульса, нс 13 50
Влд излучения (импульсный, непрерывный, квазинепрерывный) 8 —
Общая длина с: юва 96 —
Идентификация угрожающих РЛС производится на основе анализа их сиг-
налов, перехватываемых обнаружительным приемником. Данные сигналы проходят
«инвентаризацию» в предварительном (сигнальном) процессоре. Это значит, что их
параметры измеряются и представляются в формате цифрового кодового слова
(дискриптора), причем каждый параметр оценивается определенным количеством
информации. Следует подчеркнуть, что к данным, приведенным в таблице 6.1, сле-
дует относиться достаточно осторожно. Такой важный параметр, как пеленг ИИ (9
бит), вряд ли может быть менее информативным, чем поляризация (16 бит) и дли-
тельность импульса (13 бит).
Управление БКО производит БЦВМ. входящая в ПУ. В оперативною па-
мять БЦВМ закладывается необходимая информация. ПУ осуществляет автомати-
ческую смену программ работы комплекса в зависимости от сложившейся тактиче-
ской обстановки без вмешательства экипажа. На индикатор БКО выдается следую-
щая информация: 1) факт облучения; 2) пространственное положение РЭС и ата-
кующего средства ПВО; 3) фаза атаки, тип средства и степень угрозы средства; 4)
текущее расстояние до атакующего объекта: 5) момент пуска ракеты: 6) момент
вхождения ЛА в опасную зону: 7) траектория движения атакующей ракеты: 8) со-
стояние средств РЭБ [19]. При необходимости экипажу выдается команда на вы-
полнение маневра.
По окончании действия выбранного комплекса помех производится кон-
троль его эффективности по срыву сопровождения защищаемого ЛА. Для этого
ПИО проводит доразведку и выдает информацию в БЦВМ. где проверяется соот-
ветствие параметров принятого сигнала прежним (до постановки помех). При соот-
ветствии производится повторный цикл создания помех данной РЛС или ГСН с тем
же или другим комплексом помех. При срыве атаки цикл создания помех прерыва-
498
Глава 6. Авиационные комплексы и средства РЭП
ется. БКО переходит в режим ожидания и готовности создания помех новому РЭС
противника.
В ручном режиме производится установка необходимых органов управле-
ния БКО по данным ПИО. Управление в данном случае включает:
• наведение ИК-пеленгаторов на объекты ПВО, местоположение которых
предварительно определяется ПИО и другими средствами разведки;
• наведение на РЭС ПВО приемных и передающих антенн СНРТР и САП;
• применение средств функционального поражения;
• контроль ТС БКО, эффективности БКО и ЭМС БКО и РЭК.
БКО обеспечивает необходимой информацией (характеристики облучаю-
щих РЭС и степень их опасности; предупреждения о ракетной атаке; данные о ра-
боте членов экипажа с аппаратурой РЭБ; информация о надежности средств РЭБ)
систему объективного контроля РЭК. БКО через каналы обмена данными (инфор-
мацией) осуществляет обмен информацией с РЭК самолета для решения следую-
щих задач в сложной сигнальной обстановке:
1) выдачу информации о РЭ обстановке и техническом состоянии всех под-
систем БКО;
2) получение дополнительной информации от различных систем РЭК в ин-
тересах РЭБ:
3) распределение объектов РЭБ между БКО ЛА группы ПП;
4) обеспечение рационального расхода энергоресурсов средств РЭБ и обес-
печение ЭМС;
5) обеспечение тренажною режима работы БКО и РЭК для обучения эки-
пажа работе в сложной тактической и РЭ обстановке [55].
6.4.3. Подсистема исполнительных устройств
ПИУ предназначена для решения задач радио- и оптико-электронного по-
давления или поражения РЭС; РЭЗ бортовых РЭС: противодействия TCP против-
ника. В состав ПИУ входят:
• САП различных диапазонов ЭВМ, создающие помехи РЛС различного
назначения. КРУ и линиям связи, СГО, радионавигационным системам;
• станции (средства) ОЭП, основным назначением которых является наруше-
ние функционирования ОЭС противника:
• устройства выброса средств РЭБ (ПРЛ отражателей; ЛТЦ; ЛЦ, имитирую-
щих самолеты и боевые порядки самолетов);
• устройства управления заметностью ЛА и создания аэрозольных облаков и
образований, изменяющих условия распространения ЭМВ;
• устройства, предназначенные для РЭЗ бортовых РЭС;
• устройства, предназначенные для противодействия техническим средствам
разведки противника;
• управляемые и неуправляемые средства поражения РЭС противника (раке-
ты «воздух-РЛС» с ГСН на ИИ);
• средства функционального поражения [15, 19].
Глава 6. Авиационные комплексы и средства РЭП
499
Основу ПИУ современных и перспективных БКО составляют САП. Различ-
ный принцип построения РЭС управления оружием, большое их разнообразие и
применение многочисленных схем и способов помехозащиты требуют от перспек-
тивных САП создания комплексов различных помех обнаружшельным и измери-
тельным каналам РЭС. САП, используемые в БКО, могут иметь или не иметь раз-
ведывательные устройства [55].
САП первого типа (с собственной разведывательной аппаратурой) способ-
ны функционировать автономно или по командам, поступающим от ПУ БКО. САП
второго типа (не имеющие разведывательной аппаратуры) могут осуществлять по-
давление РЭС только при управлении со стороны ПУ БКО и при поступлении со-
ответствующей информации от ПИО. Значительное увеличение энергетического
потенциала РЛС и применение широкополосных сигналов привело к необходимо-
сти существенного увеличения энергопотенциала САП. Однако жесткие ограниче-
ния на массогабаритные характеристики БРЭО и современное состояние элемент-
ной базы радиоэлектроники дают лишь один путь значительного повышение энер-
гопотенциала - только за счет роста КНД передающих антенн.
Последнее в условиях размещения САП на ЛА может быть достигнуто, если
в качестве антенных устройств будут использованы различные типы ФАР [13]. По-
скольку увеличение КНД достигается путем сужения ДНА, то эз о требует точности
пеленгации РЭС с ошибкой, не превышающей 1...3 градуса, и управления ДН при-
емо-передающих антенн.
Структурная схема С ^П. имеющей повышенный энергопотенциал, пред-
ставлена на рисунке 6.15. На рис. 6.15 введены обозначения: A । - широконаправ-
ленная антенна: Апг и Ап.р- узконаправленные приемная и передающая антенны: У
- предварительный усилитель; УАУ - устройство анализа и управления [19].
Рис. 6.15. Структурная схема САП с аппаратурой РТР
Антенны А, и Апр вместе с пеленгат ором служат для определения угловых
координат облучающих РЛС. УАУ определяет тип и степень опасности РЛС и
наводит с помощью ДОС луч Ап,р на подавляемую РЛС. Сигналы, поступающие с
У, используются в ЦУЗВС дпя формирования ВЧ образа помехи. Модуляторы
наделяют помеховый сигнал соответствующим видом помеховой модуляции. ЦУ-
ЗВС существенно расширили набор функций различных РЭС и улучшили показа-
тели эффективности их функционирования. Использование ЦУЗВС позволяет по-
500
Глава 6. Авиационные комплексы и средства РЭП
выситъ эффективность РЭП за счет создания сигналоподобных помех, наиболее
стойких к применяемым мерам помехозащиты [55].
В некоторых САП используются двухрежимные мини-ЛБВ (для импульс-
ных и непрерывных сигналов), отличающиеся широким частотным диапазоном,
перекрываемым одной лампой 6,5... 18 ГГц, малыми габаритами 2 дм3, большим
сроком безотказной работы и эксплуатации (срок эксплуатации доведен до 80000
часов). САП имеет информационные и управляющие связи со всеми подсистемами
БКО. Комплексы помех (виды, наборы помех) могут выбираться автоматически
или вручную. Достоинством САП со встроенной аппаратурой РТР является воз-
можность работы как в автономном режиме, так и в составе БКО. Это повышает
живучесть БКО, однако приводит к усложнению аппаратуры и к излишнему дубли-
рованию информационных функций [19].
На рисунке 6.16 приведена структурная схема САП, в состав которой аппа-
ратура РТР не входит.
ФЦУ
ПИО
Рис. 6.16. Структурная схема САП без аппаратуры РТР
ВЧ сигнал РЛС, принятой на обслуживание, на ПЧ /ПР поступает в САП на
схему коммутации каналов (CKKi). Понижение рабочей частоты РЛС до значений
/Т|р необходимо для обеспечения работы цифровых устройств САП. CKKi подклю-
чает ко входу ЦУЗВС 1,...ЦУЗВСу сигналы ПЧ, поступающие с выходов соответ-
ствующих частотных каналов приемника (ПРМ) ПИО. В УУ по командам управле-
ния Ку, поступающим от ПУ, формируются j правляющие сигналы, под действием
которых включаются ЦУЗВС (все или некоторые) в зависимости от числа обслужи-
ваемых РЛС и ширины спектра их сигналов. За счет параллельной работы ЦУЗВС
имеется возможность обрабагывать, запоминать и воспроизводить значительное
Глава 6. Авиационные комплексы и средства РЭП 501
количество сигналов разнотипных РЛС, в том числе и работающих со сложными
широкополосными сигналами [20].
Цифровой формуляр ЦУ (ФЦУ), поступающий одновременно от устройства
ЦУ (УЦ) ПИО на УУ САП и на устройство сопряжения ПУ. используется для вы-
бора режима работы САП и комплекса помех. Восстановленный ВЧ сигнал подав-
ляемой РЛС на частоте подается на модуляторы Mi,...Му, где по командам с
УУ проводится соответствующая модуляция помехового сигнала с параметрами
модуляции, оптимальными для подавления выбранной РЛС. Воспроизведенный
помеховый сигнал на частоте /пр подается на «свой» смеситель (CMi,...CM-.), где
смешивается с сигналом соответствующего гетеродина (Г) СН РТР ПИО. Распре-
деление сигналов по соответствующим смесителям осуществляет схема коммута-
ции каналов СККг- В результате преобразования сигналов ПЧ /пр и гетеродина
спектр помехи переносится в диапазон, занимаемый спектром полезного сигнала
подавляемой РЛС. После усиления в усилителях У1,...Уу помеха излучается через
антенное устройство САП в направлении на подавляемую РЛС.
Для организации индивидуально-взаимной защиты помеховые сигналы мо-
гут ретранслироваться на другие ЛА. Одновременно с излучением помех по сигна-
лам управления включаются и другие устройства ПИУ: средства функциональною
поражения, автомат выброса средств РЭБ (пачек ДО, ЛЦ и ловушек), устройства
управ, юния заметностью и др. 119].
6.4.4. Подсистема контроля БКО
ПК БКО выполняет две функции: контролирует состояние и боевую эффек-
тивность всех подсистем и устройств БКО. Под состоянием БКО понимается сте-
пень соответствия требованиям или параметрам, установленным нормативно-
технической документацией БКО. Как правило, состояние БКО определяется сте-
пенью его работоспособности [55]. Контроль состояния БКО обеспечивается си-
стемой встроенного контроля (ВСК). Функциональные узлы ВСК размещаются в
составе БКО совместно с контролируемыми устройствами. Работа ВСК строится по
дискретно-аналоговому7 принципу: работа одной части функциональных устройств
ВСК обеспечивается дискретными кодами, а другой части - непрерывными (анало-
говыми ) электрическими или радиосигналами.
Измерительная информация в ВСК в цифровом или аналоговом виде посту-
пает в устройства оценки измеряемого параметра, сравнивается с эталонными зна-
чениями и поступает в ПУ и на устройства регистрации. В ПУ измерительная ин-
формация используется для принятия решения на способы РЭБ с учетом выявлен-
ных отказов некоторых устройств БКО. Кроме того, данная информация поступает
на индикаторные устройства БКО для оповещения оператора (летчика) обо всех
видах отказов аппаратуры РЭБ.
ВСК кроме задачи контроля могут использоваться для поиска отказавших
элементов, прогнозирования состояния, автоматической коррекции параметров,
определения надежности и коэффициента готовности. Отдельные устройшва ВСК
обеспечивают работу БКО в гренажном режиме. Оценка боевой эффективности
БКО проводится ПК по критериям боевой и технической эффективности.
502
Глава 6. Авиационные комплексы и средства РЭП
При выполнении боевого задания ПК периодически осуществляет оценку
степени надежности всех средств и систем БКО. а также выполняет задачу «обрат-
ной связи», контролируя эффективность мероприятий по РЭБ. С помощью СНРТР,
специализированной РЛС, ИК-пеленгаторов и оптико-электронных разведыватель-
ных устройств ПИО формирует в виде цифровых кодов сигналы, несущие инфор-
мацию об эффективности БКО: текущем промахе атакующей ракеты; ошибках
наведения антенн и о других характеристиках [13, 55].
На основании этой информации вычислительные устройства ПК определя-
ют значение показателя эффективности по приняюму критерию и сравнивают его с
пороговым значением. По оценкам результатов эффективности РЭБ корректируют-
ся управляющие команды, формируемые подсистемой управления.
Если эффективность БКО меньше допустимого значения, то УУ изменяет
режимы работы и параметры БКО в соответствии со сложившейся обстановкой.
6.5. Бортовой комплекс обороны как система массового
обслуживания
При эксплуатации и боевом применении средств, систем и комплексов РЭП
полезно представление БКО в виде системы массового обслуживания (СМО) [53].
В общем случае СМО - это система, на вход которой поступает поток заявок на
обслуживание, а на выходе системы формируется поток обслуженных заявок. В
состав СМО обязательно входят один или несколько каналов обслуживания. В си-
стемах массового обслуживания с ожиданием может также формироваться очередь
заявок на обслуживание. Длина очереди, как правило, ограничивается некоторым
количеством мест, достаточным для организации нормального функционирования
системы. Для бесконечного количества мест в очереди также известны некоторые
теоретические формулы, однако бесконечная очередь означает переполнение си-
стемы, поэтому данный случай рассматривать не принято.
Обобщенная структура СМО приведена на рисунке 6.17.
Рис. 6.17. Обобщенная структура системы массового обслуживания
В теории массового обслуживания заявки могут быть произвольного проис-
хождения. Важны лишь временные харак геристики входящего потока, так как они
определяют нагрузку на систему. Также важны временные характеристики самих
каналов обслуживания, но при этом физические особенности процесса обслужива-
ния не учитываются. В качестве характеристик каналов принимаются характери-
стики формируемых ими потоков обслуженные заявок. Таким образом, определя-
ющими понятиями при моделировании БКО как системы массового обслуживания
Глава 6. Авиационные комплексы и средства РЭП
503
являются понятия стохастического потока событий (как входящего, так и выходя-
щего), его свойств и характеристик.
Поток событий - это последовательность некоторых событий во времени
(в нашем случае, последовательность появления очередных заявок на обслужива-
ние БКО). Основной особенностью стохастического потока, в отличие от де-
терминированного, является то, что время появления очередного события наперед
неизвестно. Мы можем лишь наблюдать поведение потока до текущего момента
времени / , либо провести несколько отдельных экспериментов, в ходе которых
фиксировать поведение потока событий.
На основе наблюдений рассчитываются вероятностные характеристики для
интервалов времени между событиями (математическое ожидание и?т « ГСР, дис-
персия сг, , закон распределения вероятностей). Именно распределение вероятно-
стей определяет вид потока и позволяет строить предположения о наиболее вероят-
ном времени свершения очередного события. Величина Л = 1/Г(р называется ин-
тенсивностью потока событий (потока заявок на обслуживание БКО).
С целью анализа процесса функционирования СМО в отношении стохасти-
ческого потока (неважно, идет ли речь о потоке заявок или о потоке обслуженных
заявою принято делать ряд предположений. Во-первых, пред] [слагается, что имеет
мест о свойство ординарности потока. Это означает, что в любой момент времени
вероятность отновременного свершения двух и более событий пренебрежимо мала.
Во-вторых, считается, что рассматриваемый поток обладает свойством стацио-
нарности. Это означает, что его статистические характеристики неизменны. Если
же характеристики (например, интенсивность потока Л » все же изменяются во
времени, то процесс аппроксимируют кусочно-стационарным представлением и
задачу решают для каждого интервала представления в отдельности.
Важнейшим же свойством стохастического потока является свойство от-
сутствия последействия или наличия последействия в потоке. Это свойство го-
ворит о том, влияет ли на дальнейшее течение процесса множество его предыду-
щих состояний, или только последнее, текущее состояние. Если поток обладает
свойством отсутствия последействия, то его ближайшее буду щее зависит только от
состояния в текущий момент времени и от статистических характеристик потока.
Это свойство тесно связано с законом распределения вероятности для интервала
времени между событиями в потоке как случайной величины. Большинство зако-
нов распределения положительно определенной случайной величины (Вейбулла,
логарифмически нормальное, Эрланга и др.) соответствуют наличию последей-
ствия в потоке.
Единственный закон распределения, определяющий отсутствие после-
действия, — это экспоненциальный закон распределения. Распределение плотности
вероятности экспоненциального закона имеет вил
f(T) = Ae~AT, (6.12)
а функция распределения вероятности
Г(7’) = 1-е’лг, (6.13)
где Т - случайная величина, временной интервал между событиями в потоке.
504
Гпае а 6, Авиационные комплексы и средства РЭП
Можно видеть, что при Т = 0 значение функции F(T) = 0. Это свидетель-
ствует об ординарности потока (вероятность одновременного поступления двух и
более заявок пренебрежимо мала). С возрастанием значения Т вероятность
наступления очередного события возрастает и асимптотически стремится к едини-
це. То есть, чем больше интервал ожидания, тем вероятнее случится очередное со-
бытие. Для БКО как системы массового обслуживания целесообразно входящий
поток заявок считать ординарным, стационарным и обладающим свойством отсут-
ствия последействия. Поток, обладающий перечисленными свойствами, называется
простейшим или стационарным пуассоновским потоком.
Практика показывает, что поток заявок удовлетворительно аппроксимиру-
ется простейшим потоком. Такое представление потока заявок для современных
РЭС оправдывается также тем, что простейшие потоки являются наиболее «тяже-
лыми» для обслуживания СМО. Система массового обслуживания, спроектирован-
ная для простейших потоков заявок, оказывается способной работать с непростей-
шими потоками, имеющими такую же интенсивность. Простейшими также счита-
ются и выходящие потоки обслуженных заявок на выходе каждого канала СМО, а
также и СМО в целом. Распределение плотности вероятности потока обслуженных
заявок на выходе каждого канала СМО описывается экспоненциальным законом
/() = Р ™&~РТоы. ), (6.14)
где р=\\ ТОБ(: СР - интенсивность обслуживания заявок в канале; ГОЕС ср - среднее
время обслуживания заявки в канале.
Для многоканальной СМО в целом также справедливо распределение вида
(6.14), так как сумма простейших потоков на выходе системы есть простейший по-
ток. Если каналы идентичны между собой, то интенсивность суммарного выходя-
щего потока равна Л р, где N — количество каналов СМО.
Модель средств РЭП из состава БКО J1A может рассматриваться как одно-
канальная СМО, если любое из возможных РЭС противника обслуживается в по-
рядке единой очереди в соответствии с приоритетом целеуказания. Даже при мно-
гоканальной радиотехнической разведке (РТР) во всем рабочем диапазоне частот
средства РЭП из состава БКО ЛА не могут быть представлены моделью многока-
нальной СМО, гак как одновременно в любой части диапазона сигналы РЛС про-
тивника не могут быть приняты, обработаны и каждой РЛС не могут быть созданы
помехи. С другой стороны, модель средств РЭП из состава БКО целесообразно
представлять в виде модели многофазной СМО [146].
Обобщенная структура многофазной СМО приведена на рисунке 6.18. На
первой фазе обслуживания осуществляется разведка и целеуказание, на второй фа-
зе - собственно радиоподавление РЛС противника самолетными станциями помех.
Рассмотрим обе фазы более подробно. Для обслуживания заявки в ФЦУ в качестве
времени обслуживания заявки понимается время Тоы , отсчитываемое от момента
поступления на вход ПИО сигнала РЛС до момента начала создания помех этой
РЛС. Быстродействие БКО определяется главным образом быстродействием ПУ.
Важнейшими характеристиками обслуживания заявки в ФЦУ, как первой фазы
СМО, являются верояз ность обслуживания заявки р0, вероятность отказа в обслу-
Глава 6. Авиационные комплексы и средства РЭП
505
живании /?1)ТК, относительная пропускная способность системы q и абсолютная
пропускная способность Q.
Рис. 6.18. Обобщенная структура многофазной СМО
В соответствии со сказанным выше, математическая модель ФЦУ, отража-
ющая динамику смены ее состояний, может быть представлена в виде дифференци-
альных уравнений Колмогорова-Чепмена
^^=-ЛР0(7) + ^(Г), (6.15)
at
^1 = -(1Ри)+ЛР^П, (6.16)
dt
определяющих вероятности состояний Р(/) и P{t) одноканальной СМО с отказа-
ми. Здесь Р[t] - вероятность того, что ФЦУ свободно для обслуживания; Рц) -
вероятность тою, что ФЦУ занят обслуживанием поступившей заявки [147].
Вероятность обслу живания заявки в ФЦУ через время t имеет вид
А=-2!_+-^-ехр[-(Л+ ;/)/]. (6.17)
Я + р А + р
В установившемся режиме (когда t » р)
А=“- (618)
л + р
Остальные параметры ФЦУ как СМО первой фазы обслуживания связаны с
вероятностью р{. следующими соотношениями:
Ротк=1-Ро> (619)
Q = Xq = Лр,. (6.20)
В то время, как ри - вероятность обслуживания одной отдельно взятой за-
явки, относительная пропускная способность q - это доля обслуженных заявок из
общего числа посту пивших на вход системы. Абсолютная пропускная способность
Q - это количество заявок, обслуживаемых системой в единицу времени.
Из уравнения (6.18) следует, что ~1 только при р »Л . хотя из интуи-
тивных соображений представляется, что при одинаковой интенсивности потока
заявок и интенсивности обслуживания (Л = р ) все заявки бу тут обработаны. Одна-
ко, в этом случае р, =0,5 (Заявка может быть обслужена или не обслужена с оди-
506
Глава 6. Авиационные комплексы и средства РЭП
наковой вероятностью). Следовательно, для получения достаточно высокой веро-
ятности обслуживания ра = 0,90...0,95 необходимо проектировать ПУ со значи-
тельным запасом по быстродействию [55].
Среднее время обслуживания заявки в БКО определяется соотношением
Т 1~р«
1 ОБС СР ,
Aft
(6.21)
Если приемлемая вероятность обслуживания р, =0,90, то 7^-С[> ~0,1Л
т.е. БКО должен иметь быстродействие, превышающее интенсивность входящего
потока в десять раз. Количество целей, обслуживаемых БКО в единицу времени
(абсолютная пропускная способность) равна
N бко = Лрп = —. (6.22)
Л + р
По аналогии с понятием нагрузки СМО в теории массового обслуживания
можно ввести величину коэффициента К3 загрузки БКО
J 3
р
Подставляя (6.23) в (6.22), можно получить
— . 1
Л БКО — Л,---- .
l + tf3
(6.23)
(6.241
Рациональное использование вычислительных ресурсов ПИО и ПУ имеет
место при максимальном значении интенсивности обслуживания р, что приводит
к минимизации значения коэффициента загрузки Kj при неизменной интенсивно-
сти входящего потока Л. В этом случае возрастает как относительная, так и абсо-
лютная пропускная способность БКО.
Повысить эффективность системы возможно также за счет снижения интен-
сивност и входящего потока заявок. При этом несколько снизится количество об-
служенных в единицу времени БКО заявок (поскольку их меньше поступает и на
вход), зато существенно возрастет вероятность обслуживания каждой заявки р0,
определяемая согласно (6.18), и доля обслуженных заявок q . В БКО разрежение
потока входящих заявок может быть достигнуто путем снятия с очереди ложных и
второстепенных целей [55].
После того, как сигналы РЛС обнаружены, проведен анализ радиоэлектрон-
ной обстановки (РЭО) и распознаны объекты действий, осуществляется формиро-
вание помехового сигнала. Помеховые сигналы излучаются передающими антен-
нами САП в соответствующем направлении. Среднее время излучения tr помехо-
вого сигнала ограничено. Оно определяется рядом условий как технического, так и
методологического характера. Время /п можно рассматривать как среднее время
обслуживания объекта действий одной САП.
Глава 6. Авиационные комплексы и средства РЭП
507
Аналогично первой фазе обслуживания математическая модель станции
помех одного ЛА, отражающая динамику смены ее состояний, может быть также
представлена в виде дифференциальных уравнений Колмогорова-Чепмена [2], в
которых ДО) - вероятность того, что станция помех свободна для обслуживания;
ДО) - вероятность того, что станция помех занята обслуживанием поступившей
заявки; Л - средняя плотность потока сигналов, поступающих на станцию помех от
РЛС, работающих в режиме обзора; ц =1/7П - средняя плотность потока помехо-
вых сигналов, из. 1учаемых бортовой САП.
Если подавление РЛС АСУ войсками (силами) ПВО осущешвляется груп-
пировкой однотипных САП, то при условии обеспечения их ЭМС динамику изме-
нения состояний группировки можно определить, представляя ее в виде многока-
нальной системы массового обслуживания с отказами. Предполагая стационар-
ность процесса обслуживания, можно определить вероятности подавления РЛС
АСУ в том случае, когда в группировке станций помех имеется АСУ РЭБ. В случае
группировки САП с АСУ вероятность Рпод подавления РЛС
р
1 НОЛ
Сх
(6.25)
где а = —; 2 - средняя плотность потока сигналов РЛС АСУ, подлежащих подав-
Р
лению; гп - среднее время создания помех одной из станций группировки: п - ко-
личество САП в группировке.
Если АСУ РЭБ в группировке станций помех отсутствует, а управление
САП в группировке децентрализовано, то вероятность подавления Р*од любой из
РЛС АСУ, создающих поток сигналов со средней плотностью 2,
<6'26)
1+-
п
Полученные оценки показателей СМО первой и второй фазы обслуживания
позволяют сделать вывод о качестве функционирования той или иной системы, о
соответствии поставленным целям характеристик конкретной аппаратуры, вклю-
ченной в сост ав системы. Возвращаясь к началу рассуждений, необходимо вспом-
нить, что все приведенные выше оценки получены в предположении, что потоки
событий в системе являются простейшими. Однако, в целом ряде случаев весьма
важно учитывать фактор последействия в потоках. В особенности это касается по-
токов обслуэкенных заявок, посколыг время, затрачиваемое на обслуживание каж-
дой заявки в ФЦУ либо в САП, приблизительно одинаково. Поэтому и события,
заключающиеся в окончании обслуживания заявок, могул наступать через более
или менее регулярные интервалы времени.
508
Гпава 6. Авиационные комплексы и средства РЭП
Наряду с исходными допущениями в отношении простейших потоков, дей-
ствующих в системе, часто все же весьма важно учитывать фактор последействия в
потоках обслуженных заявок [148]. Для учета фактора последействия в потоках
обслуженных заявок могут применяться коэффициенты коррекции )Р показате-
лей СМО. Графики зависимостей коэффициента коррекции К{.ор, на которые необ-
ходимо умножить классические результаты с целью получения параметров немар-
ковской многоканальной СМО, вероятности отказа СМО с учетом последействия
от нагрузки системы а = Х/р приведены на рисунке 6.19. Индекс переменной по
оси ординат соответствует количеству заявок, которые могут ожидать обслужива-
ния [146].
Рис. 6.J9. Зависимость коэффициента К} ор от нагрузки СМО
Характер полученных зависимостей определяется несколькими факторами.
При увеличении нагрузки вероятность отказа РоТК в любом случае стремится к
единице. Поэтому и коэффициент коррекции . также стремится к единичному
значению. При уменьшении нагрузки до нуля, напротив, вероятность отказа P(j k
стремится к нулю как в марковской системе, так и в системе с последействием.
Следовательно, коэффициент коррекции также обращается в единицу
lim^KOP =limKkOt. -1 •
р—>0 р->ОС
Экстремум функциональной зависимости наблюдается при нагрузках СМО,
близких к единице. Это отвечает наиболее вероятным режимам работы системы,
когда вероятность отказа составляет величину порядка 7ЭОТК =0,05...0,2. Увеличе-
ние значения вероятности отказа в обслуживании заявки в 1,5-2 раза исключитель-
но по причине той или иной дисциплины обслуживания в канале представляется
весьма существенным для оценки возможностей СМО при ее разработке и проек-
тировании. Полученные результаты находят также практическое подтверждение,
поскольку из опыта проектирования известна целесообразность 15-20 % запаса
пропускной способности системы с целью обеспечения требуемых показателей
[146]. Графики зависимостей коэффициента коррекции А\ор, от нагрузки для
двухканальной СМО приведены на рисунке 6.20. Последнее число в наименовании
каждой кривой характеризует последейсгвие в потоке обслуживания К л.
Глава 6. Авиационные комплексы и средства РЭП
509
Рис. 6.20. Зависимость коэффициента А\0Р 2 от нагрузки двухканальной СМО:
а) - для последействия Кц;. = 2...8; б) - для Л?пд = 10. 15. 20 и 200
Полученные зависимости свидетельствуют о сохранении в многоканальных
СМО тенденций, выявленных для одноканальных систем. Коэффициенты коррек-
ции вероятности отказа СМО имеют явно выраженный максимум в наиболее акту-
альной области нагрузок системы, составляющих а = (0.6...0,8)/? (/? - количество
каналов СМО). При )том значения самого коэффициента коррекции составляют
величину до 1,6... 1,7. Таким образом, подтверждается тезис о настоятельной необ-
ходимости учитывать фактор последействия в потоках обслуженных заявок с це-
лью получения адекватных оценок параметров СМО.
Рассмотренные особенности функционирования систем и комплексов РЭП
из состава БКО как многофазной СМО позволяют сделать ряд важны х выводов от-
носительно оценки возможностей средств РЭП и возможных путей их улучшения:
• Повышение эффективности системы возможно за счет снижения интенсив-
ности входящего потока заявок. При этом несколько снизится количество обслу-
женных в единицу времени БКО заявок, зато существенно возрастет вероятность
обслуживания каждой заявки pt и доля обслуженных заявок q В БКО разрежение
потока входящих заявок можст быть достигнуто путем снятия с очереди ложных и
второстепенных (менее значимых) целей.
• Если подавление РЛС АСУ войсками (силами) ПВО противника осуществ-
ляется группировкой однотипных САП, то весьма существенный эффект может
быть достигнут путем объединения САП в рамках единой системы с объединенным
управлением группировкой.
• При проектировании системы всегда целесообразно предусматривать 15-20
% запас относительной пропускной способности системы. Это позволит обеспечить
уверенность в выполнении боевой задачи, поставленной в реальных условиях.
6.6. Станции радиотехнической разведки
Анализ технических характеристик систем воздушной РТР как существую-
щих, так и проектируемых, позволяет определить основные параметры, главным
образом определяющие их эффективность, а также массу: диапазон волн
510
Глава 6. Авиационные комплексы и средства РЭП
(AmaxMmin )’ среднее значение длины волны диапазона волн Лср; суммарный сектор
приема уср; погрешности пеленгации в каждом из п секторов и т поддиапазонов;
средняя по секторам и поддиапазонам погрешность пеленгации сгср; чувствитель-
ность приемников, приемный потенциал; годы начала и конца разработки [55].
Соотношения, аппроксимирующие зависимость массы станции ВРТР от ос-
новных технических параметров, определяющих ее эффективность, приведены в
[149]. Структурная схема станции РТР приведена на рисунке 6.21.
Рис. 6.21. Структурная схема станции РТР
Основной модуль состоит из: азимутальных антенн точного пеленгатора (2-
4 шт., в зависимости от требуемого сектора обзора), азимутальных ант енн грубого
пеленгатора (4 шт.), угломестных антенн (2 шт.), СВЧ-блоков точного пеленгатора
(2-4 шт.), СВЧ-блоков грубого пеленгатора (4 шт.), СВЧ-блоков угломестного ка-
нала (2 шт.). Центральный пост ОМ конструктивно объединяет: блок приемника,
блок обработки информации и блок питания [55].
Функционально ОМ можно разделить на: 2 независимых пеленгатора в
азимутальной плоскости (грубый и точный), которые являются амплитудными пе-
ленгаторами; угломестный пеленгатор; обнаружитель непрерывных и квазинепре-
рывных сигналов; схему контроля; вычислитель и источник вторичных питающих
напряжений. Аппаратура построена по модульному принципу и в зависимости от
требований заказчика, а дополнительно могут быть включены мгновенный измери-
тель частоты и точный пеленгатор в передней полусфере. Антенны и СВЧ-блоки
грубого и точного пеленгаторов размещаются для обзора в передней полусфере
(ППС) в законцовках крыла, антенны и СВЧ-блоки грубого пеленгатора для обзора
в задней полусфере (ЗПС) - в киле самолета. Антенны и СВЧ-блок угломестного
канала размещаются на крыле самолета, посты основного модуля и наращиваемого
устройства - в закабинных отсеках.
Глава 6. Авиационные комплексы и средства РЭП
511
Суммарная ДНА точного пеленгатора по азимуту показана на рисунке 6.22;
суммарная ДНА грубого пеленгатора по азимуту - на рисунке 6.23.
Рис. 6.22. Суммарная ДНА точного
пеленгатора по азимуту
Рис. 6.23. Суммарная ДНА грубого пеленга-
тора по азимуту
Сечение суммарной ДНА угломестного канала в вертикальной плоскости
показано на рисунке 6.24.
Рис. 6.24. Сечение суммарной ДНА угломестного канала в вертикальной плоскости
Блок обработки информации ОМ производит: селекцию принятых сигна-
лов; определение шпа и степени опасности РЛС; выдачу информации об обнару-
женных РЛС на индикацию и в СОК; прием информации от пилотажно-
навигационного комплекса (ПНК); управление режимами работы станции.
Блок включает в себя следующие функциональные части: селектор входной
информации; микро-ЭВМ селектора: центральная микро-ЭВМ; устройство обмена
по каналу RS-232C; приемник и передатчик последовательного двуполярного кода.
Основой НУ является блок обработки информации. Блок по составу аналогичен
блоку ОМ и отличается программным обеспечением. Блок обработки информа-
ции НУ обеспечивает: связь с ОМ и БРЭО самолета, а также взаимодействие с бло-
ком преобразования и у правления по 27-разрялной шине параллельным кодом.
Блок преобразования и управления предназначен для:
512
Глава 6. Авиационные комплексы и средства РЭП
• преобразования 24-разрядного параллельного кода в аналоговые сигналы
для взаимодействия с пассивной радиолокационной головкой самонаведения
(ПРГС) ПРР и БРЭО самолета;
• приема аналоговых сигналов из изделий ПРГС ПРР и БРЭО, их преобразо-
вания в 24-разрядный код;
• приема импульсных сигналов и измерения времени их прихода.
Блок преобразования и управления включает в себя:
• приемник разовых команд, нормализатор уровня импульсных сигналов и
приемо-передатчик аналоговых сигналов;
• передатчик разовых команд и схема формирования сигналов управления;
• устройство обмена информацией по импульсному каналу;
• приемо-передатчик разовых команд, приемник аналоговых сигналов.
Сопряжение станции РТР с внешними системами самолета (системой нави-
гации, бортовой автоматизированной системой контроля, аппаратурой управления
средствами РЭП, БРЛС, аппаратурой управления и ЦУ ПРР1 осуществляется по
линиям связи двухполярным последовательным кодом.
Схема разведывательного приемника САП ИЗ показана на рисунке 6.25.
Рис. 6.25. Блок-схема разведывательного приемника САП ИЗ
На рис. 6.25 введены обозначения: АС - антенная система; БП - блок пита-
ния; АК — авиационный комплекс; ЭК — электронный коммутатор; 1 - супергетеро-
динный тюнер; 2 — приемник верхнего диапазона; 3 - сигнал ответвителя передат-
чика помех САП; 4 - приемник нижнего диапазона; 5 - сигнал обнаружения облу-
чения РЛС; УПЧ - усилитель промежуточной частоты; ЭЛИ - электронно-лучевой
индикатор обстановки: 6 - сигналы команд управления; 7 — сигнал логарифмиче-
Глава 6. Авиационные комплексы и средства РЭП
513
ского усилителя; 8 — сигнал линейного усилителя; ПСП - предварительный сиг-
нальный процессор; ЦП - центральный процессор; 9 - сигнал автономного управ-
ления; 10 - сигналы кодов режимов постановки помех; БУ - блок управления; 11
бланкирование излучения самолетной РЛС; 12 - бланкирование излучения аппара-
туры опознавания и радионавигационной системы; 13 - цифровые данные; 14 -
опорные сигналы времени; 15 - схема бланкирования мешающих сигналов; 16 -
сигналы внешнего управления; ЭВМ - бортовая ЭВМ управления самолезом; 17 -
данные о положении антенны РЛС.
Разведывательный приемник (рис. 6.25) состоит из трех основных блоков:
приемника верхнего диапазона, приемник нижнего диапазона и процессорного.
Управление блоками, полосой перестройки и выбором центральной частоты осу-
ществляет процессорный блок, состоящий из ПСП и универсальной перепрограм-
мируемой ЭВМ. ПСП обрабатывает видеосигналы приемных каналов для распо-
знавания вида угрозы и пеленгования ее источника. Цифровые данные о временных
и энергетических параметрах этих сигналов поступают в ЭВМ, которая управляет
работой САП [19].
На рисунке 6.26 приведена структурная схема широкополосной станции
РТР с высокой чувствительностью [150].
Рис. 6.26. Структурная схема широкополосной станции РТР с высокой чувствитез ьностью
514
Гпава 6. Авиационные комплексы и средства РЭП
Станция РТР (рис. 6.26) содержит: АФУ — антенно-фидерное устройство;
СЧ - синтезатор частот; РПУ(Ш), РПУ(У) - широкополосное и узкополосное РПУ
соответственно; ПРЧм — преобразователь частоты многоканальный; БК - блок
коммутаторов; ЧР - частотный разветвитель; ДЛМ - детектор логарифмический
многоканальный; УЦОИ - устройство цифровой обработки информации; УПО -
устройство первичной обработки; устройство межканальной обработки; УАУ -
устройство анализа и управления; УОПС - устройство определения параметров
сигнала; П - переключатель; ПрФ - преобразователь Фурье; ЭПр - электропривод;
МП - многоканальный приемник; АРМ - автоматизированное рабочее место; АПД
- аппаратура передачи данных.
В состав АФУ входит пеленгационная антенна (ПА) и антенна компенсации
приема по БЛ. ПА представляет собой зеркальную антенну и «-канальный облуча-
тель, имеет узкую ДН по азимуту (1...30) и многолучевую по углу места. Количе-
ство лучей по углу места определяется требованиями к сектору обзора и точностью
пеленгования. Блок датчиков азимута обеспечивает выдачу информации о текущем
положении главного луча ПА с высокой точностью (1-2 угловых минут).
Вариант структурной схемы вертолетной станции РТР с расширенными
функциональными возможностями (измерение несущей частоты, распознавание и
селекция сложных сигналов) показан на рисунке 6.27 [55].
Рис. 6.27. Вариант построения вертолетной станнии РТР
Глава 6. Авиационные комплексы и средства РЭП 515
Приемник содержит приемную антенну (Апр), первый смеситель (СМ1),
второй вход которого через первый гетеродин (Г1) соединен с выходом блока пере-
стройки (БП), усилитель первой промежуточной частоты (УПЧ1), обнаружитель
(ОБН) второй вход которого через первую линию задержки (Л31) соединен с его
выходом, ключи (Кл1...Кл5), СМ2, второй вход которого соединен с выходом Г2,
УПЧ2, удвоитель фазы (УФ), первый и второй измерители ширины спектра
(ИШМ1, ИШС2), блок сравнения ширины спектра (БСШС). частотный детектор
(ЧД), выход которого подключен к входу анализатора параметров принимаемого
сигнала (А), второй фазовый детектор (ФД2), узкополосные фильтры (Ф4, Ф5), де-
литель фазы на 2 (ДФ), измеритель частоты (ИЧ), блок сравнения кодов (БСК) и
запоминающий блок (ЗБ). К выходу А последовательно подключены устройство
запоминания и обработки информации (УЗОИ) и телеметрическое устройство (ТУ),
выход которого является выходом станции [55].
Пеленгаторное устройство включает два пеленгаторных канала, каж. 1ы й
из которых содержит Апр, смеситель (СМ), УПЧ1, перемножитель (ПМ), узкопо-
лосный фильтр (УФ). К выходу первого УФ подключены третий перемножитель
(ПЗ), третий узкополосный фильтр (УФЗ) и первый фазометр (ФМ). К выходу вто-
рого узкополосного фильтра подключены Л32, фазовый детектор (ФД) и второй
фазометр (ФМ). Вторые входы фазометров (ФМ) соединены с выходом опорного
генератора (ОГ), а выходы подключены к УЗОИ. Двигатель (ДВ) кинетически свя-
зан с винтом верто. юта и ОГ.
В [152] описана вертолетная станция РТР, в которой повышение помехо-
устойчивости и достоверности приема сигналов разведуемых РЭС достигается пу-
тем подавления . южных сигналов (помех), принимаемых по дополнительным кана-
лам (каналу прямого прохождения, зеркальному, комбинационным и интермодуля-
ционным каналам).
Станция РТР обеспечивает не только точное и однозначное определение
местоположения РЭС противника, но и позволяет измерить несущую частоту раз-
ведуемых сигналов, а также осуществить распознавание и селекцию сложных сиг-
налов с фазовой манипуляцией и ЛЧМ. Для распознавания и селекции сложных
сигналов используется метод, основанный на сравнении ширины их амплитудных
спектров на основной и удвоенной частотах.
6.7. Станции активных помех
Определяющим элементом современного авиационного КРЭП являются ав-
томатические САП с системой информационного обеспечения, позволяющей осу-
ществлять управление в динамике РЭБ как средствами активных и пассивных по-
мех, так и средствами ОЭП. Основными объектами подавления самолетных (верто-
летных) САП являются РЛС системы ПВО различного назначения (управления
войсками, оружием и др.} [2, 12].
На рисунке 6.28 приведен вариант структурной схемы автоматической
САП. Приведенный вариант построения станции позволяет формировать помехо-
вые сигналы как для подавления РЛС СУ войсками ПВО, так и РЛС СУ оружием
[2]. На рис. 6.28 обозначено: Апрм, Апрд - приемные и передающие антенны; ПРМ
516
Глава 6. Авиационные комплексы и средства РЭП
НРТР — приемник станции непосредственной РТР; ГВЧ — генераторы (усилители)
высокой частоты; ЦЭВМ - центральная ЭВМ; БС ОЭР - бортовые сред ства ОЭР;
СН - средства навигации; СОД - система обмена данными.
Рис. 6.28. Вариант структурной схемы автоматической САП
На приемные антенны СНРТР и САП пост у пает поток сигналов от РЛС, яв-
ляющихся в данном случае объектами действий. Число РЛС (например, в АСУ вой-
сками ПВО) достаточно велико, режимы их работы, во многом, независимы, что
позволяет считать поступающий поток сигналов от РЛС, работающих в режиме
обзора, пуассоновским. Бортовую автоматическую САП отдельно взятого самоле-
та, осуществляющую подавление РЛС АСУ войсками ПВО, можно рассматривать
как одноканальную СМО с отказами.
Одноканальность в данном случае имеет место, в основном, вследствие
ограниченных возможностей по развязке между передающими и приемными
устройствами на одном ЛА. В то же время совокупность С.АП, размещенных на
разных самолетах боевого порядка, при определенных способах применения, мо-
жет рассматриваться как многоканальная СМО с отказами. Среднее время излуче-
ния /п помехового сигнала ограничено. Оно определяется рядом условий как тех-
нического, так и методологического характера. Время , можно рассматривать как
среднее время обслуживания объекта действий одной станцией помех.
Подсистема исполнительных устройств БКО может включать САП. созда-
ющие помехи РЛС различного назначения, ГСН ракет, линиям радиоуправления и
связи, системам опознавания, радионавигационным системам [19]. В САП БКО
применяется широкий набор маскирующих, имитирующих и комбинированных
помех. Станции заградительных помех создают помехи с шириной спектра А/ _,
превышающей полосу пропускания приемника А/^1Р примерно в 10 раз
АЛ-юдА1Р.
(6.27)
Глава 6. Авиационные комплексы и средства РЭП
517
В режиме создания прицельных помех ширина спектра помехи согласована
с полосой пропускания приемника Л/”п ~ Л/"ПР - Прицельно-заградительную помеху
обычно реализуют в режиме скользящей по частоте помехи, средняя частота кото-
рой изменяется в заданном рабочем диапазоне.
Станции прямошумовых помех. Типовая схема станции прямошумовых
помех приведена на рисунке 6.29.
Рис. 6.29. Функциональная схема станции ПШП
В качестве первичных источников шума могут использоваться различные
устройства: резисторы, полупроводники (диоды, транзисторы ), газоразрядные лам-
пы и др. Наиболее широкое применение нашли тиратроны, работающие в магнит-
ном поле. После предварительного усиления помехового сигнала осуществляется
операция переноса его спектра по шкале частот в отведенный участок рабочего
диапазона так, что /mjn < /п < /тач. Сначала первичный спектр переносится в НЧ
область диапазона частот щтем смешения напряжения первичного источника шума
с сигналом гетеродина. Затем спектр сигнала смещается в нужный участок рабоче-
го диапазона частот с помощью операции умножения частоты.
Станции прицельно-заградительных помех. Упрощенная функциональ-
ная схема такой станции приведена на рисунке 6.30.
Рис. 6.30. Схема станции прицельно-заградительных помех
Приемное устройство работает, как правило, с одной всенаправленной ан-
тенной Лпр. Приемное устройство является многоканальным, что позволяет произ-
водить РТР одновременно во всем рабочем диапазоне частот. А ,А2,...,АУ - антен-
ны ПП. В зависимости от ширины частотною диапазона возможно использование
одной ФАР. Устройство управления выбирает требуемый режим подавления, обес-
518
Глава 6. Авиационные комплексы и средства РЭП
печивает наведение генераторов помех на частоты выбранных для подавления РЛС,
включает и выключает модуляторы соответствующих передатчиков помех. Блок
защиты обеспечивает ЭМС. Обычно станции создают ЧМШП. Станции прицельно-
заградительных помех применяются в комплексах групповых средств РЭБ.
Станции комбинированных имитационно-маскирующих помех. Схема
станции комбинированных имитационно-маскирующих помех (КИМ-помех) пред-
ставлена на рисунке 6.31.
Рис. 6.31. Функциональная схема станции КИМ-помех
Главным звеном станции является ЦУЗВС. Наделяя принятый сигнал раз-
личными видами помеховой модуляции, формируют имитирующую помеху. Мас-
кирующая помеха формируется с учетом равномерного эпергетического спектра.
Непременное условие эффективности КИМ-помехи — это совпадение средней ча-
стоты помехи с частотой принятого сигнала.
На рисунке 6.32 представлена структурная схема САП с управляемой мощ-
ностью излучения (Лпрм, Лпрд- приемное и передающее антенное устройство; ВУУ
- входное усилительное устройство; ПП - источник питания; ВхУПЧ, ВУПЧ -
входное и выходное устройство преобразования частоты соответственно; ЦФС -
цифровой формирователь сигналов: УАФС - устройство адаптивного формирова-
ния сигнала; КП - квадратурный преобразователь; УМ - усилитель мощности; УКУ
- устройство контроля и управления параметрами излучения) [55].
Рис. 6.32. Структурная схема САП с управляемой мощностью излучения
Глава 6. Авиационные комплексы и средства РЭП 519
Увеличение энергопотенциала САП и необходимость одновременного по-
давления нескольких РЛС, разнесенных в пространстве на углы, превышающие ши-
рину луча передающей антенны, являются основными причинами активного осна-
щения КРЭП ФАР. ФАР САП имеют ряд особенностей по сравнению с антенными
решетками, используемыми в других устройствах:
• такие ФАР должны работать в широком диапазоне частот и обеспечивать
широкий пространственный сектор сканирования;
• необходимо одновременно формировать несколько лучей для приема и по-
давления сигналов от РЭС;
• ФАР САП должны иметь сравнительно большую ширину парциальных лу-
чей и использовать ограниченное число излучателей;
• ФАР должны обеспечивать управление поляризацией излучаемых сигналов;
• ФАР САП необходимо проектировать с учетом необходимости адаптации к
контрмерам, предпринимаемым подавляемыми РЛС, так как при непрерывном со-
провождении антенна должна быть постоянно направлена на цель, что исключает
возможность одновременного сопровождения нескольких целей, угловое расстоя-
ние между которыми превышает разрешающую способность РЛС [19].
Использование ФАР в САП обладает рядом достоинств:
• повышенной эффективной мощностью излучения.
• высокой гибкостью управления пространственным положением луча;
• широкой полосой пропускания;
• высокими скоростью и частотой переключения луча:
• возможностью создания шумовых и импульсных помех одновременно;
• возможностью реализации новых методов и способов РЭП [20, 62].
Дискретное сопровождение, допускающее временное разделение процессов
измерения текущих координат и параметров движения целей, позволяет сопровож-
дать большое количество объектов. При работе в таком режиме в простейшем слу-
чае РЛС производит обзор пространства по жесткой программе: ДНА непрерывно
сканирует по азимуту, и координаты целей измеряются «на проходе», т.е. без оста-
новки луча антенны, по пачке отраженных импульсов. При воздействии помех РЛС
может перейти в режим обзора пространства по гибкой программе. При этом ФАР
САП также должна изменить свой режим работы, должна адаптироваться к смене
режимов РЛС.
Адаптация ФАР достигается специальным весовым суммированием сигна-
лов ее элементов путем подбора коэффициентов. При этом в общем случае объем
вычислений оптимальных весовых коэффициентов адаптивной ФАР зависит от чис-
ла ее элементов и определяется выражением [20]
Q = qN3, (6-28)
где Q - число операций для вычисления весовых коэффициентов; N - число эле-
ментов (излучателей) ФАР: q - постоянный коэффициент, который зависит от ме-
тода вычислений.
520
Глава 6. Авиационные комплексы и средства РЭП
Адаптация режима работы ФАР должна происходить за минимальное время
т. Если г задано из тактических соображений, то число управляемых элементов
ФАР ограничивается величиной
N < , (6.29)
где /7В - производительность вычислителя весовых коэффициентов (число опера-
ций в единицу времени).
Увеличение числа элементов ФАР на порядок требует увеличения произво-
дительности вычислителя на 3 порядка. Жесткие требования, предъявляемые к ха-
рактеристикам адаптивных ФАР, приводят к тому, что в настоящее время в САП
применяются пассивные и активные ФАР с небольшим количеством элементов.
В САП применяются пассивные и активные ФАР. Пассивные ФАР не со-
держат усилителей или генераторов помеховых сигналов. Различают проходные и
отражательные пассивные ФАР. назначением которых в САП является формирова-
ние заданной ДНА. Широкое применение нашли пассивные ФАР на основе линзо-
вых ДОС. В состав активных ФАР обязательно входят активные элементы (усили-
тели, управляемые ВЧ генераторы), выполняемые часто в виде единого блока с
управляемыми пассивными элементами (ФВ, направленными ответвителями, атте-
нюаторами и др.).
На рисунке 6.33 приведена структурная схема САП с пассивными ФАР
(ФАР, - приемная ФАР; П - пеленгатор; ФАР? - передающая ФАР; АН - анализатор. А -
широконаправ. генная антенна; PITS - радиоприемное у стройство; М - моду лятор).
Рис. 6.33. Структурная схема САП с пассивными ФАР
ФАР[ и пеленгатор служат для определения угловых координат подавляемой
РЛС. Управляющий сигнал с выхода пеленгатора используется в ДОС для формиро-
вания с помощью ФАР? нужной ДНА на передачу. В ДОС широко применяются
быстродействующие процессоры. Широконаправленная антенна. РПУ и анализа! ор
определяют несущую частоту РЛС, временные и фазовые параметры принимаемых
сигналов. ВЧ сигнал, воспроизведенный ЦУЗВС, с помощью модулятора наделяет-
ся помеховой модуляцией и излучается в направлении подавляемой РЛС решеткой
ФАР?. В состав САП могут входить несколько ЦУЗВС, приемных и передающих
ФАР. Энергопотенциал САП с пассивной ФАР определяется как
П = PG^p, (6.30)
где Р - мощность ПП; СФАР = .У(7И - коэффициент усиления передающей ФАР; А
число элементов решетки; коэффициент усиления отдельного излучателя.
Выражение (6.30) можно записать в виде
Глава 6. Авиационные комплексы и средства РЭП
521
n = NPGn. (6.31)
К пассивным ФАР относятся переизлучающие решетки, представляющие
собой систему типа «антенна - ретранслятор» и обеспечивающие переизлучение
принимаемого сигнала в направлении РЭС. С их помощью можно ретранслировать
сигналы РЭС и в направлениях, не совпадающих с направлением приема. Пассив-
ные переизлучающие ФАР обладают целым рядом достоинств'.
• могут переизлучать падающую волну в любом заданном направлении;
• способны модулировать переизлучаемые сигналы по амплитуде, фазе и ча-
стоте;
• могут управлять поляризацией переизлучаемых сигналов;
• они достаточно экономичны (дешевы) и просты в производстве.
Пассивные ФАР обладают существенным с точки зрения РЭБ недостатком
- это невозможность увеличения энергетического потенциала САП на несколько
порядков вследствие ограничений на мощность Р выходного усгройства и число
излучателей N. Значительный прирост энергетического потенциала САП может
быть достигнут: при использовании активных ФАР (А ФАР). Энергопотенциал
САП с АФАР может быть определен как
n = P,GliN\ (6.32)
где Р, - мощность активного элемента решетки.
Квадратичная зависимость от А' свидетельствует о возможности получения
значительного потенциала при небольшом значении Рг Так, при Л =10 Вг,
Л=100 и (7Г =10 следует, что 77 = 1 МВт. Среди перспективных САП следует
выделить САП с многолучевыми антенными решетками (МАР). МАР состоит из
ряда излучателей И,, И?,..., РП, ДОС и набора генераторов П, Гг,..., Гу.
Структурная схема многолучевого передатчика заградительных шумовых
помех приведена на рисунке 6.34, где обозначено: УУ - устройство управления ре-
жимами; П - СВЧ-переключатель; М - модулятор; ПРМ - всенаправленный прием-
ник; К - ключ; ПР1, ПР2, ... ПР?/ - приемники; ППБЛ — подавитель приема по БЛ;
Ml, М2, ... МЛ - модуляторы; КМ1, КМ2, ... КМЛ - коммутаторы; ИП1, ПП2, ...
ИПМ - источники питания; КА], КА?, ... К Ад/ - карцинотроны (лампы обратной
волны I [62].
Сигнал, принятый лучом с амплитудой, превышающей пороговый уровень
детекторного приемника, вызывает на выходе этого ПРМ и соответствующей схе-
мы формирования строб-импульса, открывающего П. РЛ сигнал с определенного
направления, поступающий на П, открывает фидерную линию соответствующего
антенного луча. Сигналы, принимаемые САП с нескольких направлений, открыва-
ют несколько СВЧ-переключателей, и излучаемая мощность помех распределяется
по нескольким направлениям на источники РЛ сигналов. Передатчик выполняется,
как правило, на ЛОВ, модулируемых генератором шума, спектр часют которого
составляет 50 кГц...5 МГц. Существует несколько режимов (А, Б, 3, Г) создания
прицельной помехи в многолучевой САП.
Режим А Помеховый сигнал излучается в направлении подавляемой РЛС.
Если одновременно работают несколько РЛС, то срабатывают только те переключа-
522
Глава 6. Авиационные комплексы и средства РЭП
тели, которые соответствуют направлениям на эти РЛС. коэффициент направленно-
го действия антенны используется с максимальной эффективностью. Основная цель
режима А — обеспечить максимальную спектральную плотность мощности помехи
для подавления РЛС сопровождения. Режим Б (создание многолучевой некоге-
рентной заградительной помехи) эффективен против поискового РЛ комплекса
ПВО, особенно когда в систему ПВО входят средства пассивного корреляционного
обнаружения, которое применяется в тех случаях, когда обнаружен факт постановки
помех ЛА противника.
Рис. 6.34. Структурная схема многолучевого передатч ика
Режим В (срыв сопровождения РЛС по угловым координатам) является эф-
фективным в борьбе с РЛС сопровождения. Сигнал РЛС принимается по какому-
либо лучу ДН МАР и проходит через усилители на ЛБВ. Необходимо переизлучить
принятый сигнал с противофазной AM на частоте сканирования. Коэффициент уси-
ления тракта достигает 100 дБ, при этом слабый входной сигнал (10*6 Вт) может
усиливаться до 10 кВт [62]. Режим В может использоваться также при создании по-
мех, уводящих по дальности. Режим Г (создание ложных целей) наиболее эффекти-
вен для дезориентации РЛС обнаружения. Задача многолучевого ПП — создание
большого числа меток на экране индикатора РЛС (используется заградительная по
частоте помеха). Режим Г - импульсный с относительно небольшим коэффициентом
заполнения.
Базовая антенная система представляет собой линейную решетку, размеры
которой зависят от требований, предъявл яемых к КУ антенны. Линейная решетка с
апертурой 85 см. работающая в диапазоне 8... 10 ГГц. имеет для каждого луча
КУ=23 дБ. Ширина каждого луча в горизонтальной плоскости составляет 2,5°, в
вертикальной плоскости - 50 ... 60' .
Глава 6. Авиационные комплексы и средства РЭП
523
В качестве излучателей АФАР используются различные типы антенн: рупо-
ры, диэлектрические стержневые антенны, спиральные излучатели различной кон-
фигурации и т.д. При создании АФАР с широким сектором сканирования, харак-
терным для САП, применяются слабонаправленные излучатели, такие как вибра-
торные, щелевые, печатные антенны и открытые концы волноводов [9, 10, 15]. Осо-
бенностью матричных ДОС является формирование в раскрыве решетки с излуча-
телями И;, Из, И\ такого амплитудно-фазового распределения поля, при котором
каждому из Nвходов соответствует свой парциальный луч.
На практике часто используют МАР с равномерным амплитудным и линей-
ным фазовым распределениями поля в раскрыве, что соответствует вееру одинако-
вых по форме ДНА, разнесенных в пространстве. В этом случае линейная эквиди-
стантная решетка имеет ДНА, соответствующую и-му каналу и равную
Fn(3><P) = ехр[М («-!)]> (6.33)
И=1
где F(6,(p) - нормированная ДНА одиночного излучателя; N — число излучателей
(элементов решетки): а, - комплексная амплитуда поля в и-м излучателе при воз-
буждении /7-го входа ДОС волной единичной амплитуды; i// = -kd sin 0 + (р,;
к = 2тг/Л — волновое число; d — расстояние между излуча! елями; 0 - угол, отсчи-
тываемый от нормали к решетке; - разность фаз полей соседних излучателей
при возбуждении //-го входа МАР.
Применение многолучевых активных антенных решеток (МААР) позво-
ляет значительно увеличить энергопотенциал САП. На рисунке 6.35 изображена
структурная схема САП с МААР, где введены обозначения: Лпр. Лпер - решетки
приемных и передающих излучат елей.
Рис. 6.35. С груктурная схема САП с МААР
В многолучевых антенных решетках САП в основном применяются ДОС
оптического и матричного типа. Входная и выходная ДОС формируют веер лучей,
причем при попадании сигнала облучающей РЛС в и-й приемный луч на /?-м выхо-
де схемы выбора каналов образуется ВЧ сигнал с несущей частотой, равной частоте
РЛС. После усиления и соответствующей обработки он наделяется помеховой мо-
дуляцией и поступает на л-й вход выходной ДОС, которая формирует на выходе
необходимое амплитудно-фазовое распределение. Поле, образующееся на выходе
ДОС, усиливается системой выходных усилителей. Если выходные усилители не
вносят искажений в амплитудно-фазовое распределение поля на их входах, го си-
524
Глава 6. Авиационные комплексы и средства РЭП
стема излучателей Л ер формирует ДН, луч которой совпадает с и-м приемным лу-
чом (от РЛС). САП «отвечает» излучением помехи в направлении на РЛС.
Среди ДОС матричного типа в МАР наибольшее распространение получили
матрицы Батлера (параллельные ДОС) и матрицы Бласса (последовательные ДОС).
Достоинство МАР на основе матрицы Батлера - возможность составления ДОС из
одинаковых делителей мощности, например мостов, и набора фиксированных ФВ.
Недостатки: невозможность реализации амплитудных распределений, обеспечива-
ющих ДН с низким уровнем боковых лепестков, и частотно-зависимое положение
парциальных лучей в пространстве [20].
Параллельные матричные ДОС позволяют формировать веер ортогональ-
ных лучей, положение которых смещается на угол Д0 в зависимости от изменения
длины волны на величину ДЯ
А 1
А0 = —-/£0, (6.34)
Z
где 0 - угол, отсчитываемый от нормали к решетке (0 < 70°).
Частотная зависимость имеет место даже при использовании в таких ДОС
частотно-независимых НО и ФВ. Изменение частоты приводит к неоднозначности
отсчета пеленга. Однако для ретрансляционной схемы, представ]генной на рисочке
6.36. когда пеленг РЛС определяется аналогичной приемной МАР, частотное кача-
ние луча не сказывается на эффективности подавления, так как при этом не имеет
значения, по какомх приемном} луч\ осуществляется прием сигналов. Веер прием-
ных и передающих лучей поворачивается синхронно.
Матричные схемы ДОС последовательного типа (матрицы Бласса) форми-
руют веер ортогональных частотно-независимых лучей (направления лучей незави-
симы от частоты). Изменение частоты сказывается лишь на ширине парциальных
лучей. Элементы решетки могут размещаться на произвольных поверхностях, обра-
зуя конформные решетки, что очень важно для ЛА. Общим недостатком МАР на
основе матричных ДОС является наличие большого числа НО, ФВ и сложной фи-
дерной системы.
Для матрицы Бласса число направленных ответвителей Мцо - N~, для
модифицированной матрицы Бласса (число излучателей равно числу ее входов)
N2 - N
Мно=—^—, (6.35)
для матрицы Батлера
MHO=lwiog2/V. (6.36)
Число ФВ для матрицы Батлера
AU=y(log,..V-l). (6.37)
На рисунке 6.36 показана схема САП на сопряженных МААР для создания
шумовых (генераторных и ответных) и имитационных помех [9].
Глава 6. Авиационные комплексы и средства РЭП
525
____N
ЮС
А-канальный
коммутатор
п
А-канальный
коммутатор
ПРМ! ПРМЛ
и А'
Задающие
генераторы
АЦП
А’
£> Обработка
— целеуказания
Рис. 6.36. САП для создания ш} мовых и имитационных помех
Схема адаптивная (по количеств} формируемых лучей, по энергетике в
каждом луче, по тип}' помех, излучаемых в каждом луче). МААР имеет по 20 лучей
в секторе 120° (один комплект) с параметрами Д(Э0 = 10°...12°, 6п=15...2О дБ.
Верхняя цепь с ГПФ и модуляторами создает в каждом луче заранее выбранную
модуляционную ответную шумовую или имитирующую помеху. Нижняя по схеме
цепь предназначена для создания модуляционной шумовой помехи генераторного
типа. Схема управления с ЦВМ просто включает и-канальный задающий генератор
(ЗГ) и устанавливает код несущей частоты для каждого луча.
Полоса оперативной РТР должна составлять &fr = 1 ГГц, эта полоса разби-
вается на и полос по Д/11П =50 МГц. Приемники прямого усиления выполняются в
единой конструкции с элементами МААР и имеют чувствительность (- 55...- 65)
дБ, динамический диапазон (- 50...- 60) дБ. ГПФ выполняются как цифровые син-
тезаторы модулирующих колебаний, управляемые от ЦВМ. Время задержки ответ-
ной помехи относительно момента обнаружения факта облучения должно состав-
лять А/ = 1 мкс [19].
РЛС со сжатием импульса в качестве схемы защиты применяют дифферен-
цирование импульса помехи с целью выделения его переднего фронта и последу-
526
Глава 6. Авиационные комплексы и средства РЭП
ющей селекции [15]. Чтобы нейтрализовать эту схему, в каналах импульсно-
шумовой («накрывающей») помехи и «повторителя» (канал ретрансляции) исполь-
зуют ФИ (формирователь переднего фронта импульса), чтобы растянуть фронт из-
лучаемого импульса помехи в 5... 10 раз и за счет этого исключить возможность его
дифференцирования схемой защиты. МК (микроконтроллер) предусматривает
управление программируемым генератором вида помехи и является своеобразным
синтезатором помехи. Он представляет собой устройство программиру емой памяти
(PROM - Programmable Read-Only Memories), в которой записаны цифровые коды
всего набора видов модулирующих помеховых сигналов (несколько десятков ви-
дов) [20].
Структурная схема САП ИЗ (САП «Гардения») показана на рисунке 6.37.
Рис. 6.37. Структурная схема САП индивидуальной зашиты
На рис. 6.37 введены обозначения: Апрм - приемные антенны (4 шт. - 2
установлены у основания килей (ЗПС) и 2 в наплывах левой и правой плоскости);
УА - усилитель-анализатор; БДВЧ - блок долговременного воспроизведения ча-
стоты (Л-201-1); БПУАМ - блок предварительного усиления, анализа и модуляции
(Л-201-ОЗМ): БКЗЧ - блок кратковременного запоминания частоты (Л-201-19);
УМод - усилитель-модулятор (Л-201-11); БУП - блок управления и программиро-
вания (Л-201-12); ПУ - пульт управления; УМ - выходной усилитель мощности (У-
52125); Анрд - передающие антенны (4 шт. — установлены в законцовках левой и
правой плоскости: 2 для ППС, 2 для ЗПС) [55].
По принципу действия САП является ретранслятором, принимает сигналы
от облучающих самолет РЛС и ГСП, анализирует и запоминает их, наделяет дан-
ные сигналы соответствующим видом модуляции и излучает в направлении РЛС
(ГСН) помеховые сигналы [19]. Условно в станции можно выделить 3 основных
канала создания помех:
- 1 канал обеспечивает создание шумовых помех РЛС с импульсными, не-
прерывными и квазинепрерывными видами излучаемых сигналов;
2 канал обеспечивает создание уводящих по скорости и угловым коорди-
натам помех РЛС с непрерывными и квазинепрерывными сигналами:
- 3 канал обеспечивает создание водящих помех по дальности и скорости
РЛС и ГСН с импульсными сигналами.
Для подавления импульсных и импульсно-доплеровских РЛС используется
способ создания помех, позволяющий изменять мощность помехи в зависимости от
Глава 6, Авиационные комплексы и средства РЭП
527
того, на каком расстоянии от РЛС находятся объекты, прикрываемые помехами.
Способ создания помех заключается в том, что в СП принимают радиоимпульсы
подавляемых РЛС, измеряют угловые координаты РЛС относительно СП (азимут и
угол места), измеряют периоды следования радиоимпульсов при подавлении им-
пульсных РЛС или длительности пачек радиоимпульсов, имеющих одинаковый
период следования. При подавлении импульсно-доплеровских РЛС излучают ра-
диоимпульсы помехи в ответ на каждый радиоимпульс импульсной РЛС или в от-
вет на первый импульс каждой пачки радиоимпульсов импульсно-доплеровской
РЛС с задержкой относительно момента их приема. Возможный вариант построе-
ния СП, реализующий указанный способ, представлен на рисунке 6.38 [55].
Рис. 6.38. Структурная схема станции помех
На рис. 6.38 введены обозначения: Апрм - приемная антенна: ПР - разведы-
вательный приемник; ПРл - приемник режима радиолокации; ВКУ - вычислитель-
но-командное устройство; ФП - формирователь импульса помехи; К - коммутатор;
ИП - источник питания выходного усилителя: ЗГ - задающий генератор передат-
чика; ПрУ - предварительный усилитель передатчика: ДМ - делитель мощности;
ВУ - выходной усилитель передатчика: С - сумматор; Апрд - передающая антенна.
Радиоимпульсы РЛС, подлежащей подавлению, поступают на Апрм, а с нее
на вход ПР и ВКУ. По команде ВКУ ЗГ генерирует серию радиоимпульсов, кото-
рые усиливаю!ся Пру и ВУ и излучаю! ся Ацрд в направлении на подавляемую РЛС.
Импульсы, отраженные от РЛС или объекта, на котором она установлена, прини-
маются Апрм, усиливаются и детектируются ПРл и поступают в ВКУ. Здесь опре-
деляется время запаздывания отраженных импульсов по отношению к моменту их
излучения. В ВКУ вычисляются задержка излучения помехи, длительность излуче-
ния с максимальной мощностью и станция переводится в режим создания помех.
Помеховый сигнал генерируется непрерывно ЗГ и усиливается ПрУ. С вы-
хода ПрУ сигнал поступает на ДМ, имеющий два вых о, [а. С одного из них сигнал,
имеющий мощность Р^, через С поступает на Апрд. С другого выхода сигнал,
имеющий мощность Рп зх/ Ку (Kv- коэффициент усиления ВУ), подается на вход
ВУ. Когда на ВУ поступает питающее напряжение, на выходе усилителя действует
помеховый импульс с мощностью Ртах, который в С суммируется с помехой, по-
ступающей с ДМ, и поступает на Апрд. Поскольку Ртак » Рт1П, то можно считать,
528
Глава 6. Авиационные комплексы и средства РЭП
что при подаче на ВУ импульса питающего напряжения излучается помеха с мощ-
ностью Рт1х, в паузах между импульсами — с мощностью PmL1 [55].
САП (рис. 6.38) используется для одновременного подавления нескольких
РЛС, причем средняя мощность помехи не превысит мощность при излучении с
постоянной мощностью. Техническим результатом является уменьшение средней
мощности излучения и снижение энергопотребления передатчика станции помех.
На рисунке 6.39 представлена структурная схема перспективной системы
РЭП, включающей в себя комплекс приемников многоканального типа, охватыва-
ющих диапазон частот 2...40 ГГц, разбитый на поддиапазоны 2...6, 6... 10, 10... 14,
14...18, 18...26, 26...40ГГц [31].
Рис. 6.39. Струю урная схема перспективной системы РЭП
На рис. 6.39 введены обозначения: ПФ - полосовой фильтр; МК - матрич-
ный коммутатор; ШПр - широкополосный приемник, АС - анализатор спектра;
УПр - узкополосный приемник; ИМЯ - измеритель мгновенной частоты; ИА - из-
меритель амплитуды; ЦП - центральный процессор; ППа - подсистема памяти
СВЧ-сигналов; СМ - смеситель.; ВУМ - выходной усилит ель мощности.
Специальные матричные коммутационные ИС подключают ПФ к различны
видам приемников: детекторном} с измерителем мгновенной частоты и амплитуды,
анализатору спектра, узкополосному супергетеродинному с двойным преобразова-
нием частоты с сохранением когерентности. ЦП анализирует выходные сигналы
приемников и вырабатывает управляющие коды на аппаратуру формирования по-
меховых сигналов [31].
Цифровая САП, создающая сигналоподобные фазомодулированные помехи,
может быть построена по схеме, описана в [20].
На рисунке 6.40 показана блок-схема цифрового устройства создания помех
(ЦУСАП), позволяющая формировать адекватные помеховые сигналы (каналам
обнар>жения и АС по дальности скорости и угловым координатам) для подавления
РЛС обнаружения и сопровождения [153]. На рисунке 6 40 обозначено: Апгм - при-
емная антенна (ФАР); ЦРПр - цифровой радиоприемник; ВЦП - блок цифровой
Глава 6, Авиационные комплексы и средства РЭП
529
памяти; БАФМ - блок амплитудно-фазового модулятора; ФВ - фазовращатель; РП
- радиопередатчик; Апрд - передающая антенна (ФАР); БАУ - блок анализа и
управления; БПС - блок вычисления параметров модуляций помеховых сигналов;
СОЧ - синтезатор опорных частот.
Рис. 6.40. Блок-схема цифрового у строиства создания помех
ЦУСАП содержит Л' одинаковых приемо-передающих каналов, в каждый из
которых входят излучатель приемной ФАР (Апрм/), ЦРПр, БЦП, БАФМ, ФВ. РП и
излучатель передающей ФАР (Апрд.). ЦРПр выполнены управляемыми по усиле-
нию и имеют три входа: 1 - для радиосигнала; 2 - для управления усиления сигнала
ПЧ: 3 - для сигналов опорных гетеродинов СОЧ. БЦП предназначены для запоми-
нания цифровых копий радиосигналов.
БПС имеет 2 выхода: первый для сигнала модулирующей функции по ам-
плитуде и фазе и модуляция по дальности; второй для передачи сигнала модулиру-
ющей функции по фазе преобразованного излучаемого радиосигнала (поворот
фронта его волны). БАФМ предназначено для амплитудной и фазовой модуляции
сигналов с целью введения требуемых функциональных помеховых модуляций в
цифровые копии сиг налов. В перву ю очередь такая необходимость возникает в свя-
зи с организацией доплеровских (скоростных) уводов с целью срыва сопровожде-
ния, а также для имитации ложных сигнальных отметок на этапе обнаружения и
ЦУ. БЦП выполнены на микросхемах памяти типа триггерной ячейки с адресацией
записи и считывания по запросу [153]. Устройство (рис. 6.40) создает помехи кана-
лам обнаружения и сопровождения РЛС по дальности, скорости, угловым коорди-
натам (азимуту и углу места). В запоминающее устройство ЭВМ вводится библио-
тека параметров всех известных РЛС и режимов их работы (библиотека угроз). Эта
ЭВМ выявляет тип и степень yipojbi, определяет приоритеты и стратегию радио-
электронного подавления, вид и мощность помехи на каждую цель в порядке сни-
жающейся приоритетности.
530
Глава 6. Авиационные комплексы и средства РЭП
Формирование помех полностью цифровым способом посредством комму-
тируемой матричной логической структуры позволяет перепрограммировать весь
процесс РЭП, включая пространственно-временную модуляцию помеховых сигна-
лов, настройку по частоте, калибровку по мощности и момент излучения помехи
[144, 154]. А это значит, что по мере совершенствования средств ПВО и авиации
потенциального противника нет необходимости создавать новую аппаратуру РЭП;
достаточно изменять (обновлять) её математическое (программное) обеспечение.
Сделаем два замечания по поводу концепции применения САП для защиты
малозаметных самолетов [15, 20].
1. Такие достоинства станции, как всеракурсное подавление РЭС противни-
ка и величина мощности помехи, способная обеспечить необходимое превышение
ее над полезным сигналом для подавления информационных каналов РЭС, обора-
чиваются недостатками при защите ЛА, изготовленных по технологии Stelth. Все-
ракурсность и большая мощность помехи являются демаскирующими признаками
самолетов, играя роль своеобразных «маяков» для РЭС обнаружения и перечерки-
вая тем самым достоинства «невидимых» ЛА. Это не значит, что малозаметные ЛА
не нуждаются в БКО (обязательное присутствие ПИО на таких ЛА не вызывает со-
мнений).
Скорее всего, будет сделан акцент на другие способы и средства создания
помех. В частности, повысится роль ЛЦ. оборудованных активными и пассивными
ретрансляторами сигналов РЛС, облучающих малозаметные ЛА. Шире станет об-
ласть применения РЛ ловушек (управляемых, буксируемых и сбрасываемых), а
также забрасываемых ППОД . В любом случае 11И помеховых сигналов, обеспечи-
вающие защиту малозаметных ЛА, должны находиться вне защищаемых объектов.
В концепцию защиты вписывается использование пассивных помех, создаваемых
путем выбрасывания в больших количествах ДО и тепловых ловушек.
2. Эффективность РЭП РЭС противника зависит не только от технических
характеристик САП. Большое значение имеет тактика преодоления ПВО и воздуш-
ного боя, которая определяет как выбор видов и параметров помех, так и способов
их постановки.
При наличии одних и тех же средств индивидуальной и групповой защиты
выбор рациональной тактики РЭБ может существенно повысить эффективность
этой борьбы. Реализация же разработанных тактических приемов ведения РЭБ не-
возможна без использования самых современных принципов и технологий постро-
ения цифровых комплексов и систем РЭП.
6.8. Показатели эффективности БКО и его подсистем
Авиационные комплексы, системы и средства РЭБ в ходе боевых действий
решают вполне конкретные функциональные задачи на соответствующем иерархи-
ческом уровне. Для оценки эффективности БКО необходимо задаться определен-
ными критериями и показателями. Показатели эффективности оценивают количе-
ственно степень достижения цели, а критерий эффективности является правилом
(или условием) с помощью которого по показателю эффективности выбирается
наибол ее предпочтительный вариант решения стоящих перед БКО задач.
Глава 6. Авиационные комплексы и средства РЭП 531
Оценка эффективности БКО производится, прежде всего, на основании со-
поставления ожидаемых позитивных Р[а(/),р(г)] и негативных JV[ct(r), Р(/)] ре-
зультатов его функционирования. Показатель эффективности задается в виде
Э = Э[Ла(0,р(Г)]Л[а(0,₽(г)]], (6.38)
где а(/) — вектор технических параметров; Р(У) - вектор оперативно-тактических
параметров. Функция Э = Э[Р,7У] или ее среднее значение может выступать как
обобщенный показатель эффективности БКО.
Сложность решения задач оценки эффективности БКО, связанная с
многообразием средств РЭБ и условий их боевого применения, делают
невозможным проведение оценки их эффективности по какому-либо одному
единственному критерию. Необходимо пользоваться несколькими критериями и
соответствующими показателями в зависимости от поставленной цели. Для оценки
эффективности БКО используются теоретические и экспериментальные методы.
Получение достоверных теоретических оценок эффективности БКО обычно
наталкивается на значительные трудности, связанные с невозможностью точно
определить адекватную математическую модель комплекса, поскольку нельзя
учесть все многообразие условий его работы в динамично меняющейся
оперативно-тактической и РЭ обстановке боевых действий. Более детальные
характеристики эффективности БКО получаются в результате имитационного
математического моделирования, которое предусматривает решение
стохастических уравнений, описывающих функционирование БКО в
противоборстве с противником.
Экспери ментальные методы включают в себя лабораторные и летные ис-
пытания. Лабораторные испытания проводятся на стендах (установках), состоя-
щих из комплекса РЭБ, физических моделей объектов РЭБ и контрольно-
измерительных приборов. При лабораторных (стендовых) испытаниях анализиру-
ется качество функционирования отдельных устройств и подсистем БКО, проверя-
ются принятые при проектировании технические решения и определяются пути
совершенствования комплекса. Летные испытания проводятся на заключительном
этапе создания БКО и на всем протяжении жизненного цикла функционирования
комплексов. Из-за ограниченности времени и допустимых затрат не удается полу-
чить всестороннюю оценку эффективности комплекса (вследствие того, что в каче-
стве объекта РЭБ используются собственные РЭС, характеристики которых часто
не совпадают с соответствующими характеристиками РЭС противника) [13].
Степень решения этих задач БКО в конкретных условиях и за конкретный
промежуток времени дает некоторый эффект. Под эффектом понимается
результат целенаправленного действия ЛА, на котором находится БКО. Под
эффективностью понимают способность (свойства) выполнить поставленные
задачи в заданных условиях (ограничениях) за определенное время [15].
Эффективность БКО - это степень его приспособленности к выполнению боевых
задач в заданных условия боевого применения (внешняя среда, противник и др.)
[155]. Эффективное гь определяет степень реализации потенциальных
возможностей БКО на определенном интервале времени и дает эффект с учетом
затраченного ресурса (энергетического, частотного, материально] о).
532
Глава 6. Авиационные комплексы и средства РЭП
Эффективность боевого применения сил оценивается величиной
нанесенного противнику ущерба и выполнением поставленных боевых задач,
величиной понесенных потерь и временем, затрачиваемым на выполнение задач
[156]. Эффективность БКО - мера соответствия комплекса своему назначению по
решению стоящих задач информационного обеспечения применения оружия и
обеспечения боевой устойчивости ЛА [55]. При оценке эффективности боевого
применения авиационных комплексов и средств РЭБ следует различать три степени
дезорганизации работы РЭС: срыв, нарушение и затруднение управления
(наведения) [13].
Срыв управления (наведения) — это степень подавления (дезорганизации),
при которой противник теряет управление войсками и не может эффективно при-
менять управляемое оружие. Срыв достигается снижением надежности (вероятно-
сти) управления, что обеспечивается поражением (выводом из строя) не менее по-
ловины наиболее важных пунктов управления и РЭС, а также РЭП большинства
оставшихся РЭС. Нарушение управления - это степень дезорганизации, при кото-
рой противник периодически теряет управление войсками и оружием в отдельных
звеньях управления и на отдельных направлениях действий своих войск. Наруше-
ние достигается снижением надежности управления, что обеспечивается поражени-
ем не менее значительного количества наиболее важных РЭС и РЭП большинства
сохранившихся РЭС. Затруднение управления — это степень дезорганизации, при
которой имеют место перебои в управлении войсками и оружием, сокращается об-
мен информацией в различных звеньях и нарушается централизованная работа си-
стем управления противника. Затруднение управления достигается снижением
надежности управления. Это обеспечивается поражением до наиболее важных РЭС
и РЭП до половины оставшихся РЭС.
При разработке, эксплуатации и боевом применении БКО первостепенное
значение придается выбору показателей эффективности проектируемых и
эксплуатируемых БКО. Показатель эффективности БКО - величина,
используемая для качественно-количественной оценки какого-либо из свойств
(группы свойств) комплекса. Совокупность показателей эффективности может
быть свернута в единый интегральный показатель, используемый для качественно-
количественной оценки эффективности комплекса в целом [156].
Правильный выбор показателя эффективности определяет глубину и
качество исследований, проектирования и испытаний средств РЭБ. Особое
значение имеет выбор соответствующего показателя при планировании боевого
применения БКО. В этом случае выбранный тот или иной показатель
эффективности БКО может оказать влияние на выполнение боевой задачи.
Основным принципом выбора показателя эффективности РЭБ является его
строгое соответствие цели, которая должна быть достигнута в результате выполне-
ния боевой задачи. Показатель эффективности должен быть мерой достижения це-
ли действий, мерой успешности выполнения задачи. Выполнение многих действий
военного характера сопровождается элементами случайности. Исход планируемо-
го, даже организованного строгим образом действия не может быть точно предска-
зан, будет случайным [35]. Поэтому в качестве показателей эффективности прини-
маются неслучайные характеристики случайной величины.
Глава 6. Авиационные комплексы и средства РЭП 533
В частности, для оценки ожидаемой эффективности боевых действий могут
быть приняты следующие два типа показателей эффективности [157]. Первый —
вероятность события, если задача решается достижением определенного эффекта:
нанесением (предотвращением) определенного ущерба (уничтожение ЛА против-
ника, сохранение боеспособности обороняемого ЛА, уничтожение не менее задан-
ного числа целей и др.). Например, если поставлена задача уничтожить (поразить)
истребитель противника, то показателем эффективности может быть вероятность
поражения истребителя противника. Второй - математическое ожидание (среднее
значение), если задачей является нанесение (предотвращение) возможно большего
ущерба. Например, если поставлена задача уничтожить возможно большее число
истребителей боевого порядка противника, то показатель эффективности - матема-
тическое ожидание числа уничтоженных истребителей.
Для оценки эффективности элементарных действий (обнаружение цели, вы-
дача ЦУ. классификация цели и др.) бывает достаточно одного-единственного по-
казателя. Для оценки больших по объему, сложных по физической сущности явле-
ний возникает необходимость привлечения нескольких показателей эффективно-
сти, один из которых должен быть основным, остальные-дополнительными.
Основной показатель должен соответствовать главной цели действий, до-
стижением которой решается поставленная задача. Дополнительные - характеризо-
вать состояние сил и средств, пространственно-временные и другие условия или
ограничения. Если истребителю ФА поставлена задача уничтожить истребитель
противника, то основным показателем будет вероятность уничтожения истребителя
противника, а дополнительными могут быть вероятность сохранения собственной
боеспособности, время решения задачи, расход боеприпасов и др.
Совокупность значений показателей эффективности (или интегральный по-
казатель эффективности), как правило, позволяет сравнить технические комплексы
между собой на основе критерия. Критерий — это правило (мера) выбора, на осно-
ве которого по совокупности рассматриваемых показателей проводится сравни-
тельная оценка альтернатив и выбор предпочтительного варианта альтернативы в
соответствии с ее назначением (целью) [156]. Критерий - правило выбора реше-
ния, наиболее предпочтительного среди рассматриваемых в заданных условиях
сравнения (среди существующих альтернатив) [158].
БКО должен решать совокупность задач, которые определяются назначени-
ем ЛА, для каждого этапа полета: 1 этап - взлет; 2 этап — полет в зону выполнения
основной задачи; 3 этап - выполнение задачи; 4 этап - возвращение на аэродром; 5
этап - посадка).
При условии, что БКО должен обеспечивать выполнение задач на всех эта-
пах полета и эти этапы независимы, вероятность выполнения задач БКО в целом
может быть представлена в виде произведения вероятностей выполнения за-
дач БКО на различных этанах полета
Лжо ~ I I ^БКО ЭТ I ’ (6.39)
где Р^о эт. - вероятность выполнения задач на z-м этапе полета.
534
Глава 6. Авиационные комплексы и средства РЭП
Вероятность РБКОЭТ, можно представить как произведение вероятностей
выполнения задач подсистемами БКО, а последние - как усреднение вероятностей
выполнения задач подсистемами в отдельных секторах. При независимости работы
подсистем БКО
5
^БКО ЭТ / — 1 1 ^СЕК е ^СИС СЕК е (*^, О > (6.40)
S(0.z) 0
где ЛГгы<е - нормирующие коэффициенты важности секторов; 5(0,z) - обозначает
зависимость множества подсистем БКО, участвующих в выполнении задач от про-
странственного сектора и этапа полета.
Зависимости показателей эффективности подсистем БКО от их технических
характеристик достаточно подробно рассматриваются в монографии [156].
На практике возникает необходимость оценить эффективность того или
иного БКО по некоторому критерию, учитывающему как его боевую (техническую)
эффективность, так и стоимость. Такая потребность связана с поиском оптималь-
ной структуры комплекса или способов его применения, которые позволяют вы-
полнять поставленные задачи при наименьших затратах на разработку, эксплуата -
цию и боевое применение БКО. Стоимость БКО зависиг от его состава и характе-
ристик систем и устройств, входящих в комплекс.
На стоимость БКО влияют следующие основные факторы [13]:
• принципы | концепция) разработки БКО,
• принципы пространственно-временной обработки информации (принципы
синтеза приемопередающих устройств, СУ и т.д.);
• принципы обеспечения надежности:
• элементная база;
• конструктивные и технологические особенности производства комплекса;
• время, отпускаемое на разработку комплекса;
• методы, используемые при проектировании комплекса;
• принципы, заложенные в стратегию эксплуатации комплекса;
• принципы боевого применения комплекса.
На стоимость средств, систем и комплексов РЭБ влияют параметры'
• число САП и станций РТР, входящих в состав комплекса или систем РЭБ;
• пропускная способность САП, станций РТР (в частности, число подавляе-
мых РЭС противника);
• рабочая длина волны;
• ширина рабочего диапазона волн САП или станции РТР; энергетический
потенциал САП (мощность, коэффициент усиления антенны);
• коэффициент качества маскирующих и имитирующих помех;
• чувствительность приемников:
• кратность резервирования отдельных устройств;
• точность измерения пространственно-временных параметров сигналов.
Основными устройствами, влияющими на стоимость БКО, являются:
• передающие устройства САП (особенно выходные каскады - ЛОВ, ЛБВ);
Глава 6. Авиационные комплексы и средства РЭП
535
• передающие и приемные антенные системы (особенно ФАР и другие остро-
направленные многолучевые и сканирующие антенны);
• системы информационного обеспечения (станции РТР и ОЭР, теплопелен-
гаторы и др.);
• устройства запоминания и воспроизведения сигнала;
• автоматизированные системы управления РЭБ (ЭВМ, входящие в состав
БКО) [13].
Оценка стоимостных характеристик проведена в работе [159], в которой
выделены две группы методов определения цены на изделия радиоэлектронной
техники, соответствующие затратному и ценностному ценообразованию. Стои-
мость оборудования определяется выражением
С = (РВ,В:)£сДЛГп„-1), (6.41)
где N - число комплектующих изделий; В} - удельный вес стоимости опытного
образца; В, - коэффициент перехода к стоимости серийного образца; хН/у, х ,
х ' - значения основных параметров комплектующих изделий новой разработки,
аналога и максимально достижимые; ;V. - число используемых для оценки пара-
метров;
-V,
EAi* ..Ay
Н/у mdX /у х — х х — х
/С,у,=1 + ^----------. А,. (6 42)
При оценке стоимости вариантов БКО в качестве комплектующих изделий
должны рассматриваться элементы комплекса, в качестве объектов-аналогов - ап-
паратура РТР, САП, ОЭП, устройств выброса ЛЦ и др., в качестве величин х н..,
хл.., х ajj - их технические характеристики. Технический риск создания элементов
при этом учитывается путем соответствующего увеличения стоимости комплекту-
ющих [156].
Стоимость передатчиков, приемников и антенн САП можно оценить как
= с
'-'ПРД А
(6.43)
АНТ
С
° АНТ А
(6.44)
(6.45)
536
Глава 6. Авиационные комплексы и средства РЭП
где СПРДА, САНТА, СПРМА - стоимости предыдущих аналогов передатчиков, прием-
ников и антенн; Ргр, РСРА — мощности рассматриваемого передатчика и его анало-
га; S\, 5\нта - площадь раскрыва рассматриваемой антенны и ее аналога; Тш, ТША
- шумовая температура рассматриваемого приемника и его аналога [13].
Безразмерные коэффициенты а, [3, у определяются путем статистического
анализа имеющихся данных о стоимости изучаемых устройств. Они имеют порядок
1...3. Чем шире диапазон возможных изменений параметров Рср, SA и 7Ш, тем
грубее будут аппроксимации (6.43), (6.44) и (6.45).
Стоимость САП определяется суммой затрат на разработку (стоимость
схемно-конструктивной разработки аппаратуры, изготовления и испытания опыт-
ного образца, на серийное изготовление и ее эксплуатацию). Прямой расчет стои-
мости САП является весьма трудоемким и зависит от множества факторов. Стои-
мость САП, отличающихся друг от друга основными характеристиками, может
быть оценена по стоимости известного аналога САП, пересчитанной с учетом раз-
личий исследуемой САП и ее аналога по значениям энергетических потенциалов,
полос рабочих частот и количества одновременно подавляемых целей (пропускным
способностям) в соответствии с выражениями
Q = Q.A(KC)B, (6.46)
Р G п F
£ = 1п, 11 г' +1п —+ 1п/Г —(6.47)
Ча
где ССА - стоимость известного аналога САП; Кс — коэффициент изменения стои-
мости, зависящий от схемно-конструктивных и технологических решений при со-
здании и серийном производстве САП, элементной базы, сложившихся цен на ком-
плектующие изделия; л, иА - число подавляемых целей САП и ее аналогом (их
пропускная способность); Рп^п/(^п^п)А ~ относительное изменение энергетиче-
ского потенциала САП по сравнению с пот енциалом аналога; = t\F/ AFa - от-
носительное изменение полосы рабочих частот САП по сравнению с аналогом; FlP,
Л ра _ средние рабочие частоты САП и ее аналога соответственно [13].
Если принять допущение, что САП и ее аналоги имеют одинаковые рабочие
диапазоны частот, то выражение (6.47) примет вид
В = 1п-^&- +1п—. (6.48)
(5<?п)Л «Л
Стоимость всех N САП, входящих в состав БКО, будет равна сумме стои-
мост и каждой САП
Сс=Сс^(Кс.)\ (6.491
1=1
g =ln -Lln-^ + lnr -5g-. (6.50)
(РпСп)Л «Л Л«.
Глава 6. Авиационные комплексы и средства РЭП
537
Аналогично оценивается стоимость станций РТР, входящих в состав БКО
или применяемых отдельно,
CPTP=CPTPA(FP)£, (6.51)
т Р F
Е = In— + In-^- + ln/Т, —, (6.52)
т Р * F
A J minA РА
где СРТРА - стоимость известного аналога станции РГР; Кр - коэффициент измене-
ния стоимости, зависящий от схемно-конструктивных и технологических решений
при создании и серийном производстве станции РТР, элементной базы, сложив-
шихся цен на комплектующие изделия; т, и?А - число обнаруживаемых целей
станцией РТР и ее аналогом; Pmir, Рт п А - чувствительность приемного устройства
станции РТР и ее аналога; К,,. =Af /Af\ - относительное изменение полосы раз-
ведки станции РТР по сравнению с аналогом; Е, FPA - средние частоты разведки
станции РТР и ее аналога [13].
Полученные выражения для оценки стоимости позволяют с достаточной
степенью точности прогнозировать стоимость разработки и эксплуатации средств
БКО в зависимости от технических характеристик и конкретных условий техниче-
ской реализации САП. станции РТР. системы управления и др. устройств. Варьиро-
вание данных характеристик дает возможность изменять стоимость БКО, отыски-
вая приемлемый (оптимальный) вариант построения его с точки зрения стоимост-
ной оценки. При этом изменения характеристик систем и средств БКО однозначно
приведу т к изменению его эффективности при подавлении конкретного типа РЭС.
Среди собственных показателей эффективности БКО можно выделить:
• дальность эффективной РЭР;
• дальность эффективного действия помех;
• вероятности обнаружения и РЭП РЭС противника;
• время реакции средств РЭБ, входящих в состав БКО;
• продолжительность работы средств РЭБ, входящих в состав БКО:
• одновременное число подавляемых и защищаемых объектов;
• полоса частот, в которой одновременно могут наблюдаться и подавляться
объекты противника;
• виды разведываемых сигналов и виды (комплексы) создаваемых помех;
• скрытность функционирования:
• надежность и степень унификации отдельных блоков и модулей;
• модернизационный и экспортный потенциал;
• затраты технических, частотных, энергетических ресурсов;
• стоимость и др. [15, 55],
Все показатели эффективности БКО в общем случае носят вероятностный
характер. На них влияют многие случайные факторы. Применительно к БКО необ-
ходимо говорить о системе (иерархии) показателей эффективности. Под системой
показателей эффективности понимают некоторую совокупность показателей с
набором связей между ними, обладающим определенным способом их упорядоче-
ния (от единичных до комплексных!.
538
Глава 6. Авиационные комплексы и ср едства РЭП
Частный (единичный) показатель эффективности - показатель
эффективности, определяющий степень реализации возможности БКО (составной
части) применительно к пригодности удовлетворять определенные потребности по
одному из свойств БКО (составной части). Номенклатура частных показателей
может быть многочисленной (энергопотребление, массогабаритные, вероятность
обнаружения сигнала, точность измерения параметров сигнала и т.д.).
Комплексный показатель эффективности — показатель эффективности,
определяющий степень реализации возможности БКО применительно к
пригодности удовлетворять определенные потребности по нескольким его
свойствам (степень дезорганизации СУ войсками и оружием, нанесенный
(предотвращенный) ущерб и т.д.). Показатель боевой эффективности является
всегда комплексным, так как интегрально определяет степень выполнения
поставленных боевых задач с учетом всех свойств и особенностей БКО [55].
6.9. Перспективы развития БКО
РЭБ становится наиболее эффективным, быстрореализуемым, экономиче-
ски выгодным, а порой и единственно возможным средством, нейтрализующим
техническое превосходство противостоящей стороны в информационной и техно-
логической сферах [86].
Основной прирост боевык потенциалов в ближайшей перспективе будет
возможен за счет использования интетлектуальных систем управления войсками и
оружием, а также применения средств вооруженной борьбы, использующих нетра-
диционные способы воздействия на противника. К таким средствам вооруженной
борьбы, прежде всего, относится авиационная техника РЭБ, представляющая собой
сложный объект, характеризуемый высокой наукоемкостью. Современные авиаци-
онные средства, комплексы и системы радиоэлектронного подавления (РЭП) на
нынешнем этапе развития находятся в состоянии интенсивного совершенствования.
В долгосрочной перспективе (2020-2025 годы) объем задач, возлагаемый на авиа-
цию ВВС, не только не уменьшится, а увеличится в 1,3... 1.5 раза за счет количе-
ственного увеличения объектов воздействий Г160].
Оснащение боевых самолетов и вертолетов средствами и комплексами РЭБ
способно многократно повысить боевой потенциал и снизить возможные потери.
При этом стоимость техники РЭБ составляет единицы процентов по отношению к
стоимости основных видов вооружения. При разработке авиационных комплексов
РЭБ необходимо учитывать следующие важнейшие факторы:
• назначение ЛА;
• ограничения, накладываемые конструкцией, массогабаритными характери-
стиками ЛА;
• ограничения, накладываемые экипажем;
• степень связи характеристик комплекса с его эффективностью;
• априорные сведения об объектах РЭБ, тенденциях их развития и тактике
применения;
• взаимосвязь характеристик комплекса со способами боево] о применения
ЛА;
Глава 6. Авиационные комплексы и средства РЭП
539
• состояние элементной базы;
• выделяемые на создание комплекса средства;
• сроки разработки [13, 15].
Степень влияния перечисленных факторов на разработку комплексов может
быть различной. Например, стоимость комплекса иногда не так важна, если стоит
вопрос о весьма срочной разработке нового комплекса в качестве ответной меры на
качественное изменение оружия противника. При проектировании комплексов
групповых средств РЭБ их массогабаритные характеристики не так ограничивают-
ся, как в случае разработки БКО.
Из достаточно широкого круга задач, стоящих перед современными авиа-
ционными средствами и комплексами РЭБ, можно выделить задачи, определяющие
ряд принципиальных особенностей их построения:
• «жесткая» целесообразность перекрытия диапазонов работы всех РЛС об-
наружения, ЦУ, управления оружием, РЭС связи и навигации;
• функциональная необходимость одновременного выполнения большого ко-
личества сложных задач - прием и высокоточный анализ сигналов РЭС. определ е-
ние их координат, типа, режима работы и степени опасности, подавление нескол ь-
ких угрожающие РЭС (синтез помеховых сигналов и формирование направленного
излучения), взаимодействие с БРЭО и экипажем [53].
Указанные задачи определяют принципиальные особенности построения
перспективных авиационных средств и комплексов РЭБ [86. 161]:
• сверхширокополосность РТ части аппаратуры (более 3 октав);
• необходимость реализации параллельной сигнальной обработки принимае-
мых РТ сигналов в мгновенной полосе частот, равной нескольким ГГц;
• максимальное увеличение функциональной плотности исполнения аппара-
туры для снижения ее массогабаритных показателей и обеспечения возможности
интеграции с другой бортовой аппаратурой;
• предельная унификация базовых цифровых элементов аппаратуры, позво-
ляющая снизить себестоимость, облегчить процессы модификации и модернизации
аппаратуры.
Указанные особенности перспективной аппаратуры авиационных средств и
комплексов РЭБ определяют целесообразность ее построения на основе цифровых
сверхширокополосных устройств сигнальной обработки, позволяющих в макси-
мальной степени реализовать приведенные выше особенности и дополнительно
получить возможность быстрой реструктуризации аппаратуры обработки путем
перезаписи проектов сигнальной обработки в программируемых логических инте-
гральных схемах (ПЛИС), а также многократно повысить точностные характери-
стики аппаратуры.
За последние годы в области развития средств РЭП РЛС на перспективу как
минимум до 2015 года наметился существенный прогресс в рамках трех классов
защиты (индивидуальной, индивидуально-взаимной и групповой). Этот прогресс
обусловлен разработкой направлений:
• оп гимальное управление ресурсами подавления (формирование по отноше-
нию к каждой конкретной РЛС соответствующих видов помех с параметрами, га-
рантирующими эффективное подавление);
540
Глава 6. Авиационные комплексы и средства РЭП
• обеспечение эффективного выбора приоритетности объектов РЭП (избира-
тельное подавление РЛС, исходя из степени угрозы для защищаемого ЛА) [55].
На рисунках 6.41 и 6.42 приведена динамика повышения энергетического
потенциала САП и расширения типажа формируемых помех
Рис. 6.41. Динамика повышения
энергетического потенциала САП
Рис. 6.42. Динамика расширения
типажа формируемых помех
Техническая реализация наиболее перспективных ироне л ур РЭП РЛС
включает в себя:
1) периодическую постановку помех (период создания помехи определяется
временем доразведки и излучения помехи с заданными параметрами - процедура
типа «Цикл»);
2) обеспечение функционирования в системе РЭП алгоритма подавления,
включающего в себя своевременный расчет параметров помех (моментов начала и
окончания создания помехи, частоты, мощности, ширины спектра и направления
создания) и формирование помехи с требуемыми характеристиками сигналов -
процедура типа «Конвейер»;
3) обеспечение в системе РЭП процедуры преобразования входного сигнала
с помощью местного гетеродина в сигнал промежуточной частоты, аналого-
цифровом преобразовании, стробировании, запоминании фазовой структуры сигна-
ла и формировании помехи путем модуляции сигнала по амплитуде и фазе с за-
держкой по времени излучения - процедура типа «DRFM» (цифровая радиочастот-
ная память) [55].
Для защиты ЛА от ЗРК необходимо решить ряд задач, совокупность кото-
рых может быть квалифицирована как оптико-электронное противодействие по за-
мкнутому циклу [86]:
• обнаружение с высокой степенью надежности факта пуска и определение с
необходимой точностью угловых координат атакующей ракеты;
• сопровождение атакующей ракеты с ГСН на траектории с точностью, необ-
ходимой для наведения помехового излучения;
• генерацию лазерного излучения, содержащего ряд длин волн, находящихся
в пределах спектральных диапазонов ОГСН современных и новых поколений ЗРК;
Глава 6. Авиационные комплексы и средства РЭП
541
• обеспечение противодействия в течение времени, достаточного для того,
чтобы помеховое воздействие на СУ ГСН приводило к срыву процесса наведения;
• генерацию лазерного излучения подавления с плотностью потока мощности
значительно выше (на порядки), чем плотность потока мощности ИК излучения
самолетов и вертолетов в соответствующем спектральном диапазоне для обеспече-
ния удовлетворительного соотношения (сигнал помехи/сигнал от цели);
• генерацию лазерного излучения с мощностью, достаточной для формирова-
ния отраженного излучения от ГСН атакующей ракеты (это дает возможность си-
стеме противодействия селектировать ракеты с оптическим наведением от других
угроз, измерять дальность до атакующей ракеты, а также осуществлять оценку ре-
зультатов противодействия).
Для разработки авиационных средств и комплексов РЭБ имеют значения
многие характеристики подавляемых РЭС:
• диапазон рабочих частот;
• тип сигнала (импульсный с малой или большой скважностью, непрерыв-
ный, непрерывный с ЧМ и т.д.);
• эффективная излучаемая мошность передатчика РЛС;
• вид внутриимпу.тьсной модуляции сигналов (ЛЧМ, ФКМ):
• использование скачкообразной перестройки несущей частоты РЛС или ра-
бота на разнесенных частотах:
• дчительность импульса, модуляция длительности импульсов, использова-
ние групп импульсов;
• период повторения импульсов, модуляция периода повторения;
• модуляция сигнала из-за сканирования антенного луча;
• характеристики ДНА в главном луче и в БЛ;
• поляризационные характеристики антенной системы РЭС:
• способ сопровождения цели по угловым координатам;
• способ наведения ракет;
• способность работать в пассивном режиме по импульсным и непрерывным
сигналам;
• местоположение, максимальная дальность действия и др.;
• имеющиеся сведения о назначении РЭС;
• способы защиты от воздействия помех и их характеристики [13, 15, 19, 55].
Среди обобщенных требований к средствам создания помех выделяют:
1. Обеспечение перекрытия широкого (до 10...20 ГГц) диапазона несущих
частот при ведении разведки и подавления.
2. Обеспечение перекрытия большого секюра разведки и создания помех.
3. Обеспечение разведки и квазиодновременного подавления большого
числа РЛС.
4. Обеспечение высокого энергопотенциала при создании помех из
вынесенной точки.
5. Обеспечение подавления РЛС с перестройкой параметров зондирующих
сигналов при времени реакции, сравнимом с временем изменения сигнальной
обстановки [162].
542
Глава 6. Авиационные комплексы и средства РЭП
Анализ опыта ведения боевых действий ведущими зарубежными странами в
локальных конфликтах и войнах последнего десятилетия показывает, что радиоло-
кационные системы и средства, вносящие основной вклад в информационное обес-
печение применения средств ПВО и ВТО, в прогнозируемый период до 2025 года
будут развиваться в следующих направлениях:
• увеличение дальности обнаружения и числа одновременно сопровождаемых
целей;
• повышение точности измерения координат и разрешающей способности;
• адаптивный обзор зоны действия требуемой конфигурации;
• автоматическое распознавание класса и типа цели;
• эффективное обнаружение малозаметных объектов;
• повышение защищенности от активных и пассивных помех и СНИО;
• максимальная оптимизация функционирования [163].
К направлениям расширения информационных возможностей БРЛС следует
отнести:
• оптимизация процедур просмотра антенной зоны ответственности;
• использование сложных многочастотных зондирующих сигналов;
• оптимизация алгоритмов первичной и вторичной обработки сигналов, обес-
печивающих увеличение объема извлекаемой информации:
• ком плексирование с датчиками другой физической природы;
• расширение состава внешних источников информации (АВАКС, НРЛС. РМ.
ГЛОНАСС, GPS);
• оптимизация процедур выбора режимов работы (адаптация, экспертные со-
ветующие системы);
• повышение эффективности средств помехозащиты;
• увеличение информативности систем индикации;
• многопозиционные РЛС;
• траекторное управление наблюдением [55].
Реализация указанных направлений будет обеспечиваться за счет:
1) применения твердотельных АФАР с программным электронным скани-
рованием луча и цифровым преобразованием сигналов в элементах решетки;
2) реализации оптимальных (квазиоптимальных) адаптивных алгоритмов
цифровой обработки РЛ информации в условиях РЭП;
3) использования в многофункциональных РЛС режимов навигации, опо-
знавания, наведения оружия и обмена информацией;
4) перехода к наземным и авиационным многопозиционным РЛС и систе-
мам пассивного и активно-пассивного типа, совместно ведущим РЛ наблюдение
цели [163].
Среди имеющихся проблем создания перспективных средств и систем РЭБ
можно выделить три группы, отличающиеся содержанием и методами (технологи-
ями) их решения: энергетические, информационные и функциональные [55, 161].
Сущность энергетических проблем заключается в сложности реализации
требуемых энергетических характеристик БКО при заданных ограничениях (по
массе, габаритам, энергопотреблению) и существующей элементной базе. Одним из
Глава 6. Авиационные комплексы и средства РЭП
543
путей их решения является применение АФАР, имеющих высокий коэффициент
усиления. Принципиальными особенностями построения АФАРдля аппаратуры
РЭБ являются:
• возможность адаптивного управления формой ДНА для реализации различ-
ных режимов работы и формирования провалов в направлении на источники ак-
тивны помех;
• расширенная в 7...8 раз полоса рабочих частот (30...40 % центральной ча-
стоты для АФАР и 5... 6 % - для ФАР);
• повышенная в 15...20 раз мощность излучения, снимаемая с одинаковой
апертуры;
• необходимость одновременного формирования нескольких независимых
лучей для обслуживания пространственно-разнесенных объектов воздействия;
• существенно сниженные потери (до 15... 17 дБ) при обработке сигнала:
• конформость и малая величина ЭПР;
• высокая надежность (среднее время наработки на отказ сравнимо со сроком
службы самолета) [165].
АФАР выполняется на приемопередающих модулях (ППМ) и формирует
несколько лучей ДН как на прием, так и на передач} за счет использования опреде-
ленных законов возбуждения излучателей. На рисунке 6.43 приведена схема ППМ с
обработкой сигналов на несущей частоте. На рис. 6.43 введены обозначения: А -
антенна ППМ: ВМУ - входной малошумящий усилит ель; АП - антенный переклю-
чатель; ФВ - фазовращатель; С — сумматор СВЧ-chi налов; У - усилитель; УП -
управляющий процессор: Р - разветвитель излучаемых помеховых сигналов;
DRFM - цифровое устройство запоминания частоты; УМ - выходной усилитель
мощности; АТ - программируемый аттенюатор; ПУ - предварительный усилитель
мощности [162].
Рис. 6.43. Схема приемопередающего модуля
В DRFM проводится оцифровка, сортировка и запоминание сигналов разве-
данных РЭС. формирование помехового сигнала по приоритету угроз, и после об-
рабогки проводится восстановление разведанных сигналов в аналоговой форме,
модуляция их и последующее излучение в направлении на цель. Разветвитель излу-
чаемых сигналов развод пт уси. генный сигна. г по передающим модулям для оконча-
тельного усиления и излучения мощности в пространство в направлении цели. В
544
Глава 6. Авиационные комплексы и средства РЭП
настоящее время ППМ разработаны до частот 20...30 ГГц и выше, усилители мощ-
ности — до 60 ГГц и выше, малошумящие усилители - до 40 ГГц и выше, многораз-
рядные фазовращатели и программируемые аттенюаторы - до 20 ГГц и выше. Ряд
зарубежных фирм достиг уровня технологического процесса в 0,04...0,06 мкм, что
ускорит продвижение данного перспективного направления в область более высо-
ких частот.
АФАР при наличии соответствующей элементной базы (мощных полупро-
водниковых СВЧ-усилителей и переключателей) позволяют получить энергетиче-
ский потенциал практически любого уровня. Расчеты показывают, что в ближай-
шее время при наличии соответствующей электронной компонентной базы может
быть создана САП с энергетическим потенциалом до 10lfl Вт [161].
В качестве усилителей в сверхширокополосной АФАР могут использовать-
ся ЛБВ либо твердотельные усилители. В последние годы активно развивается
направление создания широкозонных полупроводниковых материалов (карбида
кремния и нитрида галлия) и приборов на их основе. Это должно повысить выход-
ную мощность усилителей на порядок и в несколько раз увеличить их коэффициент
полезного действия. Актуальной задачей является разработка ряда мощных усили-
телей и монолитных интегральных схем на арсениде и нитриде галлия для сверх-
широкополосных усилителей [161].
Проблемы информационного характера обусловлены тем. что техниче-
ские характеристики существующей системы РЭР не позволяют организовать на
должном уровне информационное обеспечение систем и средств РЭБ. Прежде все-
го. это относится к достоверности определения объектов воздействия и назначения
им соответствующих приоритетов обслуживания при функционировании в с.юж-
ной динамично меняющейся РЭ обстановке. Решение этой проблемы видится в пе-
реводе большинства составных частей аппаратуры на цифровую обработку. Пока-
заны реальные возможности и эффективность технологии быстродействующей
цифровой аппаратуры РЭБ на базе перепрограммируемых логических интеграль-
ных схем (ПЛИС) с переходом на этапе серийного производства на специализиро-
ванные СБИС типа «система на кристалле». Актуальным представляется разработ-
ка быстродействующих АЦП и ЦАП с тактовыми частотами ] ГГц и выше и раз-
рядностью 12... 14 разрядов, а также перепрограммируемых логических интеграль-
ных схем типа ПЛИС серии Virtex 6 фирмы Xilings.
Функциональные проблемы связаны с необходимостью одновременного
(квазиодновременного) подавления РЭС. имеющих различные пространственные и
сигнальные признаки, при жестком ограничении на время их обслуживания в ди-
намике РЭ конфликта. Преодолеть указанные трудности можно путем применения:
• антенных устройств с независимым управлением пространственными кана-
лами создания помех;
• многоканальных приемопередающих устройств, работающих в широком
диапазоне частот с параллельным анализом каналов;
• быстродействующих систем определения и воспроизведения радиосигналов
(DRFM).
В перспективе актуально создание систем DRFM базового построения в
плане унификации ее технических параметров для применения бол ьшинством раз-
Гпава 6. Авиационные комплексы и средства РЭП 545
работников техники РЭБ. В новой технике РЭБ, основанной на АФАР с цифровым
формированием лучей, система будет интегрироваться с устройствами формирова-
ния помех в формате малогабаритных приемопередающих модулей АФАР [161].
Развитие средств РЭБ авиационного базирования в последние годы сосре-
доточено на совершенствовании средств и комплексов РЭБ, позволяющих увели-
чить вероятность выполнения боевой задачи при минимальных потерях ЛА. Ос-
новными факторами при этом являются следующие:
1) комплексная оптимизация характеристик средств РЭБ и снижения замет-
ности с учетом особенностей объектов защиты, массогабаритных и энергетических
ограничений;
2) глубокая функциональная и аппаратурная интеграция РЭС различного
назначения в составе БКО с целью совершенствования алгоритмов обработки ин-
формации и принятия решения, высокоэффективного решения задач РЭБ;
3) построение аппаратуры по принципам, обеспечивающим наращивание ее
по функциональным возможностям и техническим параметрам, что позволяет
наилучшим образом проводить их последующую модернизацию;
4) повышение точности пеленгации и моноимпульсное измерение частоты
ИИ, необходимое для угловой селекции РЛС с целью совершенствования инфор-
мационной поддержки бортового ВТО. в частности ЦУ ракетам с РЛ ГСН;
5) реализация регулируемой чувствительности аппаратуры РТР КБО для
осуществления ЦУ ракетам с РЛ ГСН по БЛ ДНА РЭС и организации эффективно-
го применения расходуемых средств;
6) резкое повышение качества адаптации параметров помех к характеристи-
кам каналов подавляемых РЭС по несущей частоте, поляризации, спектру и за-
держке в реальном масштабе времени для обеспечения скрытности применения
помех и минимальных энергетических потерь;
7) формирование конфликтно-устойчивых видов помех с улучшенными
имитационными свойствами на основе DRFM, нейтрализующих возможные виды
обработки информации в объектах подавления;
8) расширение рабочих частотных диапазонов БКО и освоение новых диа-
па юнов для сокращения аппаратуры помех и расширения номенклатуры подавляе-
мых средств;
9) обеспечение возможности обмена информацией между БКО различных
ЛА, позволяющего формировать пространственно-распределенные помехи при за-
щите строя ЛА;
10) «дозированное» по мощности излучение помех и обеспечение практиче-
ски мгновенного наведения ДНА передатчиков помех;
11) разработка аппаратуры создания когерентных и некогерентных помех,
излучаемых с одного или нескольких ЛА, для противодействия угломерным коор-
динаторам вне зависимости от применяемого способа пеленгации;
12) разработка быстродействующих спецпроцессоров и применение высо-
копроизводительных борговых ЭВМ с целью обеспечения высокой пропускной
способности и уменьшения времени реакции на вновь возникающие угрозы:
13) разработка широкополосных передатчиков, в том числе с применением
активной ФАР. с высоким КПД, с пониженным уровнем внеполосных и побочных
546
Гпава 6. Авиационные комплексы и средства РЭП
излучений, с малым уровнем собственных шумов для улучшения массогабаритных
и энергетических характеристик аппаратуры и обеспечения ЭМС на борт} ЛА;
14) формирование облака искусственных пространственно распределенных
поглощающих образований (ОРПО), позволяющих уменьшить ЭПР защищаемого
объекта и создать области пространственной информационной неопределенности;
15) массированное и комплексное применение средств создания активных
помех и расходуемых средств РЭБ нового поколения (передатчиков и ретранслято-
ров одноразового действия, авиационных ЛЦ, буксируемых ловушек), существенно
усложняющих РЭ обстановку и приводящих к дефициту временного ресурса РЛС
при обслуживании истинных целей;
16) разработка номенклатуры узлов и блоков 5-го поколения в модульном
исполнении для формирования нового класса средств РЭБ для малоразмерных объ-
ектов широкого применения [15, 103].
Наблюдается устойчивая тенденция объединения многочисленных радио-
технических и оптико-электронных средств (средств радиолокации, РЭБ, государ-
ственного опознавания, радионавигации, передачи данных, лазерных, ИК, УФ и
других датчиков информации) на одном ЛА в единый интегрированный радиоэлек-
тронный комплекс (ИРЭК). Такое объединение возможно только при наличии цен-
трализованного управления с помощью БЦВМ с бо. гьшими ресл рсами быстродей-
ствия и памяти.
Только цифровые ЭВМ с высоким быстродействием и большим объемом
оперативной памяти способны управлять рес> рсами авиационных комплексов РЭБ.
включающими:
• совокупност ь станций активных помех (САП);
• расходуемые средства (дипольные отражатели (ДО), передатчики помех од-
норазового действия (ППОД), буксируемые активные радиолокационные ловушки,
противорадиолокационные УР, снаряды с ЭМ боевой частью);
• средства функционального поражения РЭС (СВЧ и лазерное оружие функ-
ционального поражения);
• распределение энергетического потенциала САП для одновременного по-
давления нескольких РЭС;
• способность быстрого изменения ориентации и ширины лучей ДНА (ФАР)
САП в заданных секторах пространства;
• способность управления последовательностью создания помех нескольким
РЭС одной САП.
Реализация аппаратурной интеграции позволит:
1) повысить эффективность применения ЛА за счет существенного повы-
шения уровня интеллектуальной поддержки экипажа и адаптации структуры РЭК к
текущим условиям функционирования;
2) использовать принципиально новые возможности по функционированию
в качестве элемента пространственно распределенной системы защиты;
3) повысить помехозащищенность и ЭМС подсистем информационною
обеспечения и обмена информацией комплекса, возможность работы в различных
частотных диапазонах и со сложными сигналами:
Глава 6. Авиационные комплексы и средства РЭП
547
4) снизить заметность ЛА на основе комплексной оптимизации характери-
стик заметности антенных систем и планера с обеспечением управления заметно-
стью в различных диапазонах ЭМВ;
5) обеспечить высокий уровень модернизационного потенциала и адаптации
характеристик БКО к условиям выполнения задач [19. 55].
Принципы построения «большой» схемы интеграции, т.е. комплексирова-
ния устройств и систем в составе РЭК, известны [23]. Повышение уровня и глуби-
ны шпеграции устройств и систем в составе ИРЭК достигается реализацией сле-
дующих принципов комплексирования'.
• принципа совмещения функций различных РТ систем, приводящего к появ-
лению совмещенных систем и многофункциональных комплексов;
• принципа функционального и структурного объединения технических
средств, измеряющих одни и те же либо взаимно связанные (например, через опе-
раторы дифференцирования или интегрирования) параметры.
В качестве основы построения используется совместная первичная опти-
мальная обработка информации от РТ и оптико-электронных измерителей при их
объединении с нерадиотехническими датчиками. Работу ИРЭК может организовать
только центральный управляющий процессор, что лишний раз подтверждает акту-
альность проблемы внедрения цифровой техники в БКО.
Потенциальные возможности РЭП для радиоэлектронной защиты ЛА — это:
• индивидуальная защита;
• индивидуально-взаимная защита:
• групповая защита от РЭС управления оружием;
• использование специализированных постановщиков помех;
• создание пространственно-распределенного поля помех;
• использование расходуемых средств РЭБ (ловушки, диполи);
• снижение ЭПР, в том числе активная нейтрализация сигнала;
• создание объемно-распределенных пространственных образований, реали-
зуемое с помощью нанотехнологий;
• поражение мощным ЭМ импульсом:
• поражение СНИО, огневое поражение [164].
Одной из перспективных тенденций развития РЭБ является интегрирование
воздушных, наземных, морских и космических средств РЭБ в единую сеть. Кон-
цепция интеграции базируется в основном на развитии цифровых направлений тех-
ники РТР и активного РЭП. Предусматривается возможность мгновенного опозна-
вания ИИ и, при необходимости, создание им помех разными способами:
• точечная постановка маломощных активных помех;
• использование объектов ложной информации (ложные цели или сообще-
ния);
• внедрение пакетов алгоритмов, которые могут брать на себя командование
сетями противника и. возможно, управление датчиками проз ивника.
Для авиационных средств РЭБ перспективными являются 1акже:
• применение специальных видов помех РЛС с пространственной компенса-
цией помех:
548
Глава 6. Авиационные комплексы и средства РЭП
• оптимальное адаптивное управление ресурсами системы защиты ЛА по со-
ставу и динамике их использования;
• использование бортовых многофункциональных РЛС в качестве высокопо-
тенциальных средств помех и информационной поддержки системы помех,
в частности для сопровождения атакующих ЗУР на траектории;
• комплексный учет применения разнородных средств РЭБ - САП. пассив-
ных помех, ЛЦ, противорадиолокационных ракет [17].
Разработка цифрового когерентного приемника с функциями пеленгатора
ИИ обеспечит возможность совмещения функций РТР и РЭП в одном элементе и
тем самым решить задачи обнаружения и анализа угрозы с одновременной поста-
новкой помех нескольким целям, создавая предпосылки временного и простран-
ственного управления ресурсами подавления. Возможность когерентного цифрово-
го приемника на базе технологии DRFM позволит сымитировать для РЛС против-
ника фантомы цели со всеми необходимыми характеристиками, особенностями
«портрета» цели по отражательной способности, динамики движения, протяженно-
сти (геометрических размеров), спектральных характеристик объекта.
Решение проблемы создания широкополосного когерентного цифрового
приемника, работающего в реальном масштабе времени при современной сложной
фоно-целевой обстановке, позволит обеспечить защиту ЛА от современного и пер-
спективного управляемого оружия [164].
В настоящее время сложились объективные предпосылки для достижения
качественно новых результатов в теории и i [рактике развития комплексов и систем
РЭБ. Важнейшие направления в РИО представлены в таблице 6.2 [55].
Таблица 6.2 — Радиоэлектронно-информационное обеспечение
Направления Пути реализации
Интеграция сил и средств РЭБ со средствами разведки и ог- невого поражения в едином информационно- коммуникационном простран- стве всех видов ВС • реализация сетецентрич еских систем сбора, обработки и доведения до потребителей информации о РЭО • внедрение защищенных компьютерных технологий для анализа РЭО и принятия решений • разработка ал) оритмов и программ поддержки приня- 1 ия решений на основе методов иск} сственного интеллек- та
Создание систем РТР (пассив- ной локации) для достоверно- го вскрытия РЭО и высоко- точного определения местопо- ложения объектов • создание корреляционно-базовых разностно- дальномерных комплексов пассивной локации • разработка однопозиционных комплексов, существен- но повышающих точность определения местоположения целей за счет измерения крутизны фронт а падающей вол- ны • создание систем искусст венного интеллекта для анали- за РЭО
Совершенствование системы мониторинга сигналов в раз- личных физических полях • создание единой государственной инфраструктуры сбора, обобщения и доведения результатов мониторинга • обеспечение мониторинга в РЧ и оптическом диапазо- нах
Глава 6. Авиационные комплексы и средства РЭП
549
Перспективная СПТРТ будет включать в себя как проверенные временем
технические решения — приемник прямого усиления, супергетеродинный прием-
ник. так и перспективные направления - комплексирование приемника прямого
усиления и супергетеродинного, что позволит обеспечить высокую чувствитель-
ность приема ВЧ-сигналов. Динамика изменения основных тактико-технических
характеристик самолетных станций РТР приведены в таблице 6.3 [86].
Таблица 6.3 — Основные ТТХ самолетных станций РТР
Наименование характеристики 2000 2005 2010 2015
Эквивалентная мощность шумов в полосе 1 МГц, мВт 10-8 ю-10 ю-11 Ю-12
Точность пеленгования на частоте 3 ГГц, град (СКО) 2 0,2 0,1 0,05
Время анализа параметров одного РЭС, мс 50 1 0,01 0.005
Ширина диапазона частот, октав 12 14 16 18
Кол-во РЭС в памяти, тыс. ед. 0,5 4 10 15
Важнейшие направления в РЭПр приведены в таблице 6 4 [55].
Таблица 6.4 - Радиоэлектронное поражение
Направления Пути реализации
Создание нового к iacca БРЭК, совмещающих возможности РЭС разведки, управления ору- жием и СП Реализация информационно-аппаратной интеграции задач в интересах создания устройств, работающих в режимах: • РЛР и наведения оружия • радио- и РТР • постановки помех
Создание пространственно- распределенных систем защиты объектов и их сигнальной мас- кировки Разработка системы активных помех, формирующей ложную си) нально-информационную обстановку в группировке дтя защиты своих войск и объектов
Создание твердотельной эле- ментной базы нового поколения в инт ересах повышения эффек- тивности среде гв РЭБ Создание ряда широкополосных АФАР на основе твер- дотельных приемно-передающих модулей в гибридно- моно. штном исполнении
Освоение новых участков ра- диочастотного и оптически о диапазонов • создание электровакуумной и твердотельной широ- кополосной приемно-передаюшей аппаратуры мм и субмм диапазонов • создание высокоэффективных средств разведки и подавления в ПК и УФ диапазонах, в т.ч. на основе приемных матриц, излучающих диодов и лазеров
Создание новых носит е тей для размещения средств РЭБ, обес- печивающих увеличение даль- ности разведки и подавления Разработка ДИЛА ново] о поколения с использованием алгоритмов на основе искусственного интеллекта
Функциональное поражение РЭС и ОЭС сверхмощными • разработ ка сверхмощных релятивистских СВЧ гене- раторов
550
Глава 6, Авиационные комплексы и средства РЭП
СВЧ импульсами и ЭМИ нано- и микросекундной длительно- сти • создание малогабаритных ВМГ нового поколения • создание полупрово, шиковых генераторных прибо- ров сверхвысокой мощности
Направления и основные пути создания перспективной конфликтно-
устойчивой техники РЭП РЛС приведены в таблице 6.5 [166].
Таблица 6.5 — Направления создания техники РЭП РЛС
Направления Пути реализации
Обеспечение энергетиче- ской избыточности • использование мощных электровакуу .пых приборов и антенн с большими КНД • использование МАР и АФАР • создание помех из нескольких точек пространства • приближение средств помех к объекту подавления • использование РЛС для создания помех
Обеспечение информаци- онной избыточности • разведка всех параметров РЭО, в том числе координат ПИ в реальном масштабе времени • запоминание и воспроизведение когерентн ых и сверхши- рокополосных сигналов
Обеспечение част отной избыточности • использование приемо-передающей элементной базы с широкополосиостью 2 октавы и более • применение широкополосных ФАР • создание двухдиапазонных антенных систем
Обеспечение возможно- стей перманентной мо- дернизации • использование принципа открытой архитектуры при вы- боре функционально-технической стру кт уры комп, зекса • обеспечение ЭМС, информационной и программной сов- местимости технических устройств
Повышение уровня си- стемной организации • обеспечение функционально-технического сопряжения разнородных комплексов РЭП при решении общих задач • аппаратурная интеграция комплексов РЭП с РЭС защи- шаемых объектов
Использование помех, обеспечивающих пере- вод РЛС в нештатный режим работы • создание комбинированных помех, переводящих систему в режим СДЦ, в том числе с использованием ракет- постановщиков помех • сочетание нестационарных маскирующих и имитирую- щих помех высокой плотности • создание поляризационных и когерентных помех • создание помех, использующих конструктивные особен- ности РЛС
Развитие средств РЭП, инвариантных к пара- метрам излучаемых РЛС сигналов • создание пассивных и активных ретрансляционных ло- вушек и ложных целей • развитие оружия, самонаводящегося по излучениям РЛС • создание сре. ictb функционального поражения РЛС и изменения условий распространения ЭМВ • снижение заметности защищаемых объектов и комплекс- ная оптимизация среде гв РЭП и снижения замет ноет и
Глава 6. Авиационные комплексы и средства РЭП
551
Реализация вышеуказанных направлений развития техники РЭП РЛС долж-
на обеспечить возможность создания нового поколения комп, [ексов и систем РЭП,
в том числе:
• адаптивных КРЭП для индивидуально-взаимной защиты (ИВЗ) ЛА от ВТО
с РЛ и комбинированными ГСН, аппаратурно интегрированных с БРЭО защищае-
мых объектов;
• многофункциональных адаптивных пространственно распределенных си-
стем РЭП для ИВЗ многоэлементных объектов от РЭР и ВТО;
• многофункциональных пространственно распределенных систем РЭП,
средств РЭР, радионавигации, связи и управления оружием «воздух-поверхность»
для защиты войск и объектов инфраструктуры, информационно и функционально
сопряженных с СУ ПВО;
• средств РЭП с новыми физическими принципами формирования ЭМИ для
функционального поражения РЛС [15].
Динамика изменения основных ТТХ САП ИЗ самолетов стратегической
авиации приведена в таблице 6.6 [86].
Таблица 6.6- Основные ТТХ САП ИЗ самолетов стратегической авиации
Наименование характеристики 2000 2005 2010 2015
Ширина диапазона частот, октав 8 10 14 30
Энерт етический потенциал в непрерывном ре- жиме. кВт 120 200 350 400
Энергетический потенциал в импульсном ре- жиме. кВт 500 800 1000 1200
Верхняя граничная частота, ГТц 50 100 100 100
Кол-во одновременно подавляемых РЭС в ра- бочем диапазоне 15 20 25 30
Масса, кг 700 500 150 100
В таблице 6.7 представлены основные требования к бортовым компькл ерам
ЛА пятого поколения согласно данным [27, 167].
Таблица 6.7 - Основные требования к бортовым компьютерам ЛА
Каналы БЦВМ
Производительность, OIL С Емкость ОЗУ, Мбайт Емкость ПЗУ, Мбайт
РЭБ 50 млн >500 1
РЭР 1 млрд 50 1
Опознавание 10 млн 40 I
БРЛС 40 млн 1600 1
Для сокращения разрыва между достижениями противника по созданию
средств перехвата воздушных целей, оснащенных ОЭС и системами разведки и
наведения оружия, и разработкой отечественных БКО самолетов и вертолетов
необходимо провести ряд мероприятий, основные направления которых приведены
552
Глава 6. Авиационные комплексы и средства РЭП
в таблице 6 8 [128].
Таблица 6.8 — Основные направления развития средств ОЭП перспективных
БКО самолетов и вертолетов
Объекты ОЭП Направления разви- тия Пути разработки
ОГС со спектральной селекци- ей УР АРКП «Сайдвиндер AIM-9R», ПЗРК «Игла-С» Создание низкотемпе- ратурных ЛТЦ Использование в ЛТЦ низко- температурных пирофорных излучателей или излучателей на основе углеводородных топлив
Двухканальные ОГС. работа- ющие в ИК и УФ диапазонах длин волн, УР ПЗРК «Стин! ер- RMP» Создание многоспек- тральной станции по- давления на некоге- рентных источниках излучения Использование в излучающих модулях станции разнотип- ных газоразрядных ламп
ОГС с матричными ФПУ УР АРКП «Сайдвиндер А1М-9Х», ПЗРК «Стингер-RMP mod.2» Создание лазерной станции ОЭП для функционального по- ражения оптических элементов ОГС ракет Разработка химических и твердотельны х лазеров высо- кого энергопотенциала, а также систем точного наве- дения лазерного излучения на основе матричных ФПУУФ и ИК диапазонов
Оптико-визуальные, телевизи- онные и тепловизионные сред- ства сопровождения целей си- стем наведения ЗРК «ADATS», «Рапира-2000», «Роланд-3», ЗАК «Гепард» Создание вертолетного устройства аэрозольной защиты и дымовой НАР направленного отстрела Разработка аэрозолеобразу- ющих составов для формиро- вания быстродействующих широкодиапазонных завес в оптическом и РЛ диапазонах длин волн
Эффективность применения средств ОЭП существенно увеличивается при
использовании средств снижения заметности ЛА в оптическом диапазоне. Основ-
ные направления развития средств снижения заметности самолетов и вертолетов
представлены в таблице 6.9 [128].
Разработку БКО перспективных самолетов и вертолетов следует проводить
по пути создания интегрированной радиоэлектронной системы, использующей раз-
ведывательную информацию, поступающую как от БКО, так и от бортовых подси-
стем УО и навигации. Для обеспечения защиты самолетов и вертолетов от ЗРК с
командными системами наведения ракег в качестве средства групповой защиты
возможно использовать неуправляемые авиационные ракеты калибра 80 мм, сна-
ряженные аэрозольным дымообразующим составом. На этапе обнаружения это
приводит к уменьшению вероятности (дальности) обнаружения и распознавания
защищаемых объектов, а на этапе сопровождения целей - к увеличению ошибок
измерения их угловых координат вплоть до срыва слежения или исключению пуска
и наведения управляемого оружия. Другим возможным перспективным направле-
нием защиты вертолетов является создание комплекса активной защиты с исполь-
зованием артиллерийских снарядов, снаряженных малогабаритными поражающими
Глава 6. Авиационные комплексы и средства РЭП
553
элементами [128]. Необходимая информация для стрельбы в заданную область мо-
жет быть получена с помощью ИК или УФ пеленгаторов сопровождения атакую-
щих ракет, имеющих точность определения угловых координат в единицы милли-
радиан.
Таблица 6.9 — Основные направления развития средств снижения заметности
самолетов и вертолетов
Объекты ОЭП Направления разви- тия Пути разработки
Оптико-визуальные и телевизион- ные средства сопровождения целей систем наведения ЗРК «ADATS», «Рапира-2000», «Роланд-3», ЗАК «Гепард» Создание управляемых средств снижения за- метности в видимом диапазоне длин волн Разработка элек гро- хромных и люминес- центных покрытий
Тепловизионные средства сопро- вождения целей систем наведения ЗРК «ADATS», «Рапира-2000», «Роланд-3», ЗАК «Гепард». ОГС с матричными ФПУ УР АРКП «Сайдвиндер А1М-9Х», ПЗРК «Стингер-RMP mod.2 » Создание управляемых средств снижения за- метности в ИК диапа- зоне длин волн Разработка покрытий с се активными излуча- тельными характери- стиками
Двухканальные ОГС, работающие в ИК и УФ диапазонах длин волн, УР ПЗРК «Стингер-RMP» Создание управляемых средств компенсации отрицательного кон- траста цели в УФ диа- пазоне Разработка многослой- ных матриц светоизлу- чающих диодов в УФ диапазоне
Перспективным направлением изменений условий распространения и отра-
жения ЭМВ яв. ыется создание спецбоеприпасов с аэрозольным наполнением, обес-
печивающих изменение условий распространения радиоволн и воздействующих на
функционирование РЭС. С этой целью разрабатываются новые спецкомпозиции
аэрозольных систем, обеспечивающие ослабление напряженности ЭМП. и новые
композиции и покрытия, обеспечивающие интенсивное поглощение ЭМВ [55]. Для
защиты собственных РЭС и ОЭС от СНИО и активных помех различных диапазо-
нов ЭМВ разрабатываются методы и устройства пространственно-сигнальной ими-
тации защищаемых объектов с целью отвлечения атакующих элементов ВТО, а
также устройств пространственно-сигнальной селекции помеховых сигналов.
Анализируя тенденции развития технологий по разработке и созданию но-
вых РПМ. можно отметить, что современные поглощающие материалы позволят в
ближайшей перспективе обеспечить: 1) коэффициент отражения ЭМ излучения (в
диапазоне 1... 10 ГГц) порядка - 30... - 40 дБ независимо от направления зондиро-
вания и поляризации сигнала; 2) коэффициент отражения в УФ, видимом и ИК
диапазонах менее 0,1 дБ, причем отражение будет носить диффузионный характер.
Можно прогнозировать, что в ближайшей перспективе будут созданы мно-
гофункциональные маскировочные покрытия, работающие одновременно в радио-
локационном, УФ, оптическом и ИК диапазонах волн [55, 104].
Приложение
СИСТЕМЫ И СРЕДСТВА РЭБ ВОЗДУШНЫХ СУДОВ
1. Система радиопротиводействия «Омуль» предназначена для индивидуально-
взаимной защиты самолетов ФА путем создания преднамеренных активных помех РЭС У О,
входящим в ЗРК, ЗА и авиационно-ракетные комплексы [74]. Система предназначена для
оснащения самолетов СУ-30 и СУ-25. Система формирует следующие виды помех: шумо-
вые (узкополосные, широкополосные), уводящие по дальности, уводящие по скорости,
мерцающие, перенацеливающие на подстилающую поверхность; ответно-импульсные
(имитационные), комплексы помех с программируемой структурой.
Особенности размещения и обслуживания: размещение в двух контейнерах на внеш-
них точках крыла самолета (на стандартных подкрыльевых подвесках) или внутри фюзеля-
жа самолета; поиск неисправностей с точностью до блока при предполетной и послеполет-
ной подготовках, измерение параметров и проведение регламентных работ системы РЭП
осуществляется встроенными средствами в сочетании со стандартными приборами.
Система «Омуль» спроектирована по блочно-модульному принципу с открытой архи-
тектурой и распределенной вычислительной системой. Анализ сигнальной обстановки и
формирование помех системой «Омуль» осуществляется цифровыми устройствами, что
позволяет перепрограммировать весь процесс РЭП. включая модуляцию сигнала помех,
настройку по частоте, регулировку уровня мощности и момент излучения.
Основные характеристики системы РЭП «Омуль»
Диапазон частот G - J
Сектор защиты в ППС и ЗПС по азимуту / по углу места, град 120/60
Пропускная способность, сигналов не менее 4
Рабочий диапазон температур, °C -60 ... +60
Напряжение питания от бортсети, В:
переменного трехфазного тока 400 Гц 200
постоянного тока 27
Масса, кг 66
2. Малогабаритный цифровой комплекс РЭП «Кедр» предназначен для индивиду-
альной защиты самолетов тактической авиации от ракет класса «воздух-воздух» и «земля-
воздух» с РЛ и ИК ГСН [74, 140]. В состав малогабаритного (не более 130 кг) КРЭП «Кедр»
входят: станция предупреждения об облучении; малогабаритная с ганция помех типа МСП
418К; аппаратура ЦУ и управления ГСН противорадиолокационных ракет; система преду-
преждения о ракетном нападении. Основные особенности комплекса: обеспечение преду-
преждения об облучении; обмен информацией с бортовым оборудованием для оптимизации
ЭМС и реализации единой системы индикации и конгроля; создание маскирующих и ими-
тационных помех, а также многократных помех, имитирующих ЛЦ с различными скоро-
стями, дальностями и угловыми координатами; выдача ЦУ и управление ГСН противолока-
ционных ракет; взаимодействие с буксируемыми ловушками, автоматами выброса ДО и
ЛТЦ; встроенный самоконтроль, обслуживание без контрольно-проверочной аппара гуры.
3. Автоматизированный комплекс защиты самолетов «Хибины» характеризуется
предварительным iгмитационным математическим моделированием его функционирования
на борту самолета в сложной боевой обстановке, позволившей провести значительную оп-
тимизацию исходно переусложненной структуры КРЭП [55]. Неразрывно с созданием вы-
числительной структуры издезия было связано решение другой проблемы - разработкой
Приложение. Системы и средства РЭБ воздушных судов 555
системы индикации и управления комплекса, что позже обеспечило успешную информаци-
онную стыковку «Хибин» («Хибины- 10В», «Хибины-М10», «Хибины-Мб», «Хибины-60») с
бортовым РЭО самолета (Су-27, Су-33). Наращиваемый состав «Хибин» по сути являлся
альтернативой специализированному самолету-постановщику помех с КРЭП «Кавказ», на
разработку которого требовались значительно большие затраты. Для введения наращивае-
мого состава в структуру «Хибин» требовалась сравнительно небольшая доработка, не счи-
тая разработки самих контейнеров наращиваемого состава. КРЭП Л-265 «Хибины-М»
предназначен для самолета Су-35С. КРЭП «Хибины-У» размещен на самолете Су-30СМ.
Для двух контейнеров (У1 и У2) наращиваемого состава, рабочий частотный диапазон
которых совпадал с частотным диапазоном «Хибин», своей исполнительной РТР (ИРТР1
для ЦУ не требовалось. Эти контейнеры по сути своей представляли передающие устрой-
ства повышенной мощности (САП КС-418Э). Для других двух контейнеров с рабочим ча-
стотным диапазоном, отличающимся от частотного диапазона «Хибин», требовалась не
просто отдельная в аппаратурном смысле ИРТР, но и логика рабогы ее должна была быть
иной, поскольку подавляемые средства относились к другому классу [55]. В состав КРЭП
«Хибины» входят: система РЭР (аппаратура РТР. пеленгатор и приемник обнаружения диа-
пазона «5432» устройство управления и обработки информации, устройство формирования
активных помех, передающие устройства, широкополосный блок точного запоминания ча-
стоты, вычислительная многопроцессорная подсистема.
4. Комплекс РЭП Л175В предназначен для зашиты самолетов гипа Су-34 от пораже-
ния средствами ПВО противника [74]. Многофункциональный комплекс РЭП Л175В пред-
ставляет собой интегральную систему с модульным принципом построения. Комплекс
обеспечивает высокий уровень боевой живучести самолетов в условиях современных бое-
вых действий.
ТТХ комплекса Л175В
Длина контейнера, мм 4950
Диаметр контейнера, мм 350
Масса, кг 300
Область покрытия в ЗПС, ППС ±45''
Диапазон частот РЭР. ГГц 1.2...40
Диапазон частот РЭП, ГГц 4...18
Потребляемая мощность, кВт 3,6
5. Многофункциональный комплекс РЭП Л175ВЭ самолета Су-32 предназначен для
защиты от поражения современными и перспективными зенитными и авиационными сред-
ствами ПВО противника [86]. КРЭП Л175ВЭ представляет собой новое поколение техники
РЭБ с модульной аппаратно-программной архитектурой построения, имеет многоуровне-
вую мультипроцессорную систему управ, гения с применением цифровых методов обработ-
ки радиосигналов. Передающие устройства аппаратуры активных помех комплекса РЭП
Л175ВЭ построены на основе активных антенных решеток высокой мощности.
6. Интегрированная система РЭБ «1NEWS» (integrated electronic warfare system)
предназначена для обеспечения ИЗ самолетов малой заметности ОПР ЛА. выполненных по
технологии «Сгеле» (в частности, самолет F-22), составляет 10’2 м2 в диапазоне частот
1...20 ГГц) от УР и огня ЗА за счет постановки активных и пассивных помех радиолокаци-
онным и оптоэлектронным средствам системы ПВО противника. В ее состав включены сле-
дующие подсистемы: обнаружительный приемник диапазона частот 2...40 ГГц; доплеров-
ская РЛС обнаружения и предупреждения о пуске УР; приемники предупреждения о пуске
УР с многоспектральными чувствительными элементами диапазона 2...5 мкм и 6...20 мкм:
556
Приложение. Системы и средства РЭБ воздушных судов
передатчики РЭ помех диапазона частот 2. ..18 ГГц и 20. ..40 ГГц; УВ ПРЛО; ИК-ловушки и
ППОД; аппаратура обработки и анализа сигналов, управляющий процессор [162J.
7. Бортовой комплекс обороны «Президент-С» предназначен для защиты ЛА раз-
личного класса и назначения от поражения авиационными ракетными, зенитными ракетны-
ми и зенитными артиллерийскими комплексами путем обнаружения факта угроз и противо-
действия атакующим средствам [86]. Комплекс «Президент-С» является экспортным вари-
антом комплекса самозащиты «Витебск». БКО «Президент-С» включает в себя следующие
станции (блоки), которые могут быть размещены в качестве основных и дополнительных
опций в различных сочетаниях в зависимости от типа и назначения ЛА:
• устройство управления (цифровое УУ комплексом и перепрограммирования его рабо-
ты, осуществляет комплексный контроль и обработку информации, выдает команды защи-
ты и наведения всем элементам БКО);
• станция предупреждения о радиолокационном облучении (СПО);
• станция предупреждения о лазерном облучении (СПЛО - для обнаружения факта из-
лучения, распознавания его типа и определения координат облучающих средств);
• станция предупреждения о ракетной атаке (СПРА - используются УФ пеленгаторы
раннего обнаружения пуска и сопровождения координат атакующей ракеты);
• станция активных радиопомех (САП);
• некогерентная СОЭП (для защиты ЛА от поражения путем формирования направлен-
ных помех ИК диапазона в рабочем секторе);
• лазерная станция ОЭП (ЛСОЭП);
• устройство выброса авиационных расходуемых средств: противорадиолокационные
патроны, патроны 1 [К излучения, патроны с передатчиками помех одноразового использо-
вания (ППОИ) [55, 86].
Для самолетов дальней, военно-транспортной и фронтовой авиации в качестве допол-
нительной опции может быть использована активная буксируемая радиолокационная ло-
вушка (АБРЛ). Па отдельных ЛА могут дополнительно устанавливаться: многофункцио-
нальный пульт-индикатор и устройство согласования. Конструктивно аппаратура БКО
«Президент-С» выполнена в виде блоков (станций), которые могут размещаться как внутри
самолета (вертолета), так и на внешних узлах крепления. Все системы БКО «Президент-С»
тесно интегрированы для оптимизации их одновременной работы. БКО «Президент-С»
имеет открытую архитектуру, что обеспечивает возможность будущей модификации. БКО
осуществляет выдачу команд управления ресурсами противодействия и обмен информаци-
ей с бортовыми системами вертолета (самолета).
Станция активных радиопомех (САП) предназначена для защиты вертолетов (само-
летов) от поражения средствами зенитно-артиллерийских, зенитно-ракетных, авиационно-
ракетных комплексов с РЛ системами обнаружения и наведения, имеющих на вооружении
ракеты классов «земля-воздух», «воздух-воздух» с РЛ ГСН, путем формирования РЭ помех
в рабочем секторе и диапазоне длин волн. Станция активных радиопомех осуществляет по-
давление РЛС УО на этапах обнаружения, сопровождения, наведения и атаки [551.
Лазерная станция оптико-электронного подавления (ЛСОЭП) предназначена для
индивидуальной защиты военно-транспортных самолетов, вертолетов, самолетов ФА от УР
класса «воздух - воздух» и «земля - воздух» с ИК ГСН при работе совмес гно с комп: гексом
РЭО ЛА [86]. Конструктивно станция может располагаться внутри фюзе гяжа ЛА или на
внешних подвесках. ЛСОЭП содержит следующие составные части: 1) бортовая лазерная
установка, выполненная на основе многоспектрального твердотельного или газового
(например, DF НЮ лазера; 2) опгико-механический блок: 3) блок управления; 4) блок пита-
ния; 5) блок системы предупреждения о пуске ракег. ЛСОЭП обеспечивает последователь-
Приложение. Системы и средства РЭБ воздушных судов
557
ное подавление не менее двух одновременно атакующих ракет класса «земля - воздух» и
«воздух - воздух» с ИК ГСН (по предварит ельному целеуказанию) во всем диапазоне даль-
ностей и ракурсов их боевого применения по обороняемому самолету (вертолету).
ТТХ станции активных радиопомех «Президент-С»
Рабочий сектор по азимуту - по углу места, град 120/60
Диапазон рабочих частот. ГГц G...J
Энергетический потенциал, Вт свыше 150
Количество одновременно подавляемых РЭС, не менее 4
Энергопотребление станции по цепи 115^200 В, 400 Гц, ВА 2500
по цепи 27 В, Вт 300
Масса станции, кг 51,5
Станция функционирует в дежурном и рабочих режимах. В дежурный режим станция
переводится при включении бортового питания, при этом обеспечивается селекчия целей и
их сопровождение. В рабочий режим станция переводится по команде бортового комплекса
РЭО. при этом обеспечивается сопровождение и подавление целей [55].
ТТХлазерной станции ОЭП
Вероятное гь обнаружения и сопровождения це. гей, 0,9
Дальность действия, м 500...5000
Рабочий сектор по азимуту (при использовании 2 станций), град 360
по углу места, град 90
Обнаружение самолетов типа F-14, F-15, F-16, F-18, F-4E, F-9, F- 12. «Мираж-2000». ATF. Миг-24 (экспортный вариант). Су-27 (экспортный вариант ) (по предварительному целеуказанию) в диапазоне дально- стей пуска с них ра- кет с ИК ГСН
Энергопогребление (в леж. режиме) по цепи 115/200 В. 400 Гц, ВА по цепи 27 В, Вт 2000 1000
Энергопотребление (в раб. режи ме) по цепи 115- 200 В, 400 Гц, ВА по цепи 27 В. Вт 5000 1000
Масса станции (в зависимости от типа ЛА), кг 100.. 150
В пределах своих возможностей при информационно-командном обмене с КРЭП и
прицельно-навигационном комплексом самолета .ЛСОЭП выполняет основные функции'. 1)
обнаружение в заданной зоне обзора атакующих ракет класса «земля-воздух» и «воздух-
воздух» с ИК ГСН по предварительному ЦУ и выдачу в комплекс РЭП их угловых коорди-
нат и номера цели; 2) сопровождение и функциональное поражение обнаруженных ракет с
ИК ГСН с учетом указаний от комплекса РЭП о приоритетности подавляемой цели; 3) со-
провождение а гакующих самолетов в зоне предварительного ЦУ от комплекса РЭП с выда-
чей информации о факте пуска ими ракет; 4) предотвращение пуска ракет с ИК ГСН с под-
вески атакующего самолета; 5) определение факта подавления ракет с ИК ГСН на основе
явления «обратного блеска» облучаемых ракет [86].
ТТХ станция предупреждения о лазерном облучении
Рабочий сектор (с 4 ОЭБ) по азимуту / по yr. iy места, град 360/90
Точность определения пеленга, град не менее 11
Энергопотреб гение по цепи 27 В, В г 80
Масса, кг 17
558
Приложение, Системы и средства РЭБ воздушных судов
Передатчики помех одноразового использования (ППОИ) предназначены для обес-
печения индивидуатьной защит ы ЛА в ППС и/ил и ЗПС от УР с РЛ ГСН [86].
Тактико-технические характеристики ППОИ
Диапазон рабочих частот сантиметровый
Коэффициент усиления, дБ 50...60
Энергетический потенциал, В г ДО 2
Время работы, сек ДО 6
Масса, не более, кг 6
Электропитание автономное
Активная буксируемая радиолокационная ловушка (АБРЛ) предназначена для обес-
печения индивидуальной защиты ЛА в ППС и/или ЗПС от управляемых ракет с РЛ I СП
путем перенацеливания атакующей ракеты на буксируемую ловушку [55. 86].
Принцип работы БКО «Президент-С» основан на сочетании мощного узконаправлен-
ного модулированного соответствующим образом ИК излучения (имитирующая помеха)
СОЭП (DIRCM) с одновременным воздействием ЛТЦ (уводящая пом еха). СП базируется на
цезиевой газовой лампе, сост оящей из двух конструкций из сапфирового стекла, простран-
ство между которыми заполнено неоном. Используется импульсно-моду. [ированное подав-
ление в двух ИК диапазонах с уровнями мощности 3,0 и 1.2 кВт соответственно, частота
модуляции от 0.1 до 1 кГц. Время реагирования около 0,1 с [55]. Уникальность комплекса
«Президент-С» состоит в реализации единого алгоритма работы подсистем обнаружен] [я и
противодействия атакующим ракетам с ИК 1 СП.
Тактико-техп ические характеристики АБРЛ
Диапазон часто! сантиметровый
Коэффициент усиления, дБ 60...70
Энергетический потенциал, Вт 3...12
Сектор защиты в ППС/ЗПС по азимуту / по уг ту места, град +60...-60/+22,5...-22,5
Время работы, мин 5...10
Время работы при каждом включении, с 7...10
Масса ловушки, кг 5
Длина буксировочного гроса, м 150
Электропитание по трос-кабелю
Размещенные на ЛА ИК излучатели по команде пеленгатора ориентируются на при-
ближающуюся ракету и в сочетании с ЛТЦ создают специально модулированным узкона-
правленным ИК-chi на юм непреодолимую для СУ ПЗРК помеху, приводящую к гарантиро-
ванному промаху ракеты. В то же время экипаж ЛА оповещается об атаке. Система генери-
рует речевое сообщение и выводит на экран многофункционального пульта-индикатора
графическую информацию.
ТТХустройства выброса
Тип отстреливаемых патронов инфракрасный
Калибр отстреливаемых патронов, мм 26, 50
Количест во патронов, шт до 128
Режим работы автоматический, ручной
Энер] опотребление по цепи 115 200 В, 400 Гц, ВА по цепи 27 В, Вт 500 500
Масса, кг 32,7
Приложение. Системы и средства РЭБ воздушных судов
559
ТТХ станции оптико-электронного подавления
Рабочий сектор (1 ОЭБ) по азимуту / по углу места, град 360/90 (-60...+30)
Длина волны, мкм 3...5
Ширина луча, град не более 11
Масса / с механическим интерфейсом, кг 80/110
ТТХ УФ пеленгатора
Рабочий сектор (4 ОЭБ) по азимуту / по углу местаа, град 360 / 90
Диапазон обнаружения пуска ракет, км на всех дальностях ПЗРК
Энергопотребление по цепи 27 В, Вт 120 ... 150
Масса, кт 20 ... 25
В результате согласованной работы всех подсистем комплекса ГСН ракеты теряет ис-
тинный сигнал о цели. Все реальные пуски ПЗРК по вертолету был и радикально парирова-
ны БКО «Президент-С» за 100-200 метров до цели. БКО «Президент-С» может устанавли-
ваться на вертолетах МИ-8, Ка-50, Ка-52 и Ка-252. При этом БКО универсален - его архи-
тектура позволяет адаптировать комплекс для установки на любой вертолет, в том числе и
иностранного производства без потери показателя эффективности. В 2011 году начато се-
рийное производство БКО «Президент-С» для комплектации вертолетов Ка-52 и Мн-8. БКО
«Президент-С» успешно демонстрировался на международной выставке вооружения ЕВ-
POCA'I OPI1-2010 в Париже.
8. Бортовой комплекс обороны БКО-2 «Карпаты» предназначен для ИЗ самолетов
ФА типа Су-24М от поражения средствами ПВО вероятного противника с радио- и ИК. си-
стемами наведения оружия при ведении им боевых действий [55]. В состав БКО-2 «Карпа-
ты» входят
• СПО-15 «Береза» - с ганция предупреждения об облучении, производит разведку ата-
кующих средств по азимуту и углу места, присваивает условный тип атакующему средству
(по параметрам сигнала облучения), определяет относительную мощность сигнала и диапа-
зон частот атакующего средства:
• ТП «Мак-УЛ1» - унифицированный теплопеленгагор, производит определение факта
пуска ракеты с заданного направления по ИК излучению факела двигателя;
• АПП-50-А - автомат помеховый пиротехнический, производит отстрел патронов с ДО
и ИК ловушками по специальным командам:
• СПС-161 (СПС-162) - станция помеховая самолетная, производит прием и передачу
сигналов РЛС (ГСН). наделяя сигналы для передачи заданными помехами:
• ВСС-Ф - вычислитель специализированный самолетный, производит обработку сигна-
лов СПО-15 и ТП «МАК-УЛ1» и по специальному алгоритму с учетом характеристик поле-
та самолета вырабатывает и распределяет команды управления устройствами в БКО.
БКО-2 «Карпаты» обеспечивает: 1) обнаружение комплексов перехвата ПВО против-
ника (КППП), работающих в непрерывном, импульсном и квазинепрерывном режимах из-
лучения, в секторах: ±60° со стороны 111IC и ЗПС по азимуту относи гельно оси симметрии
самолета (ОСС), ±30° со стороны ППС и ЗПС по углу места относительно ОСС; 2) обнару-
жение факта пуска ракет в секторах: -60° со стороны ППС и ЗПС по азимуту относительно
ОСС, 0--35п со стороны ППС и ЗПС по углу места относительно ОСС: 3) защиту самолета
путем подавления К111111 в секторах: ±60р со стороны ППС и ЗПС по азимуту и ±30° со сто-
роны ППС и ЗПС по углу места относительно ОСС; 4) индикацию боевой обстановки эки-
пажу; 5) индикацию рекомендуемого направления оборонительного маневра [55].
560 Приложение. Системы и средства РЭБ воздушных судов
9. Комплекс средств РЭП Су-ЗОМКИ предназначен для его индивидуальной и груп-
повой защиты от комплексов ПВО класса «воздух-воздух» и «поверхность-воздух» путем
противодействия СУ оружием ПВО противника посредством создания активных радиопо-
мех, применения ДО и ЛТЦ а также информационного обеспечения применения изделий
77П [55]. КС РЭП обеспечивает'. 1) обнаружение воздушных и наземных (надводных) РЭС
противника; 2) определение типов, азимута и режимов работы РЭС по библиотеке угроз; 3)
ранжирование РЭС противника по степени их опасности в соответствии с библиотекой
угроз; 4) формирование единой РЭ тактической обстановки на основе централизованной
обработки в модуле МОУ информации от САП 518, СПО «Tarang-ЗО», системы «C1DAS» и
БРЛС; 5) обнаружение пуска и сопровождение атакующей ракеты класса «поверхность-
воздух», оповещение экипажа об атаке УР и об. [учении лазерными СУ оружием (при нали-
чии на борту системы «CIDAS»); 6) управление работой САП 518М, СПО «Tarang-ЗО» и
формирование команд управления УВ-30МКИ в автоматическом режиме; 7) выбор номеров
программ отстрела в автоматическом и полуавтоматическом режимах работы УВ-30МКИ в
соответствии с библиотекой КС РЭП; 8) возможность экипажу вручную управлять работой
системы, в том числе: разрешать (запрещать) излучение активных радиопомех; выбирать
режим индивидуальной/групповой защиты; начать (отменять) радиопротиводействие обна-
руженным РЭС; задавать помер программы отстрела ДО и ЛТЦ выдавать команду на их
отстрел из УВ расходуемых средств; 9) одновременную работу с РЛСУ на прием и передачу
под управлением системы обеспечения ЭМС (изделие К130); 10) выдач) информации ЦУ от
СПО «Tarang-ЗО» для применения изделий 77П; И) формирование звукового сигнала для
предупреждения экипажа о переходе РЭС УО ПВО противника в режим АС цели и о ракет-
ной атаке; 12) выдач)’ информации для индикации на МФИ текущей РЭ тактической обста-
новке; 13) автоматическую проверку исправности аппаратуры КС РЭП с помощью ВСК; 14)
выдачу информации для записи парамегров обнаруженных и подавляемых РЭС, включая
неопознанные, выдачу информации об отказах аппаратуры КС РЭП для индикации на си-
стеме контрольно-измерительной системе сигнализации (КИСС); 15) выдач) информации
для послеполетного анализа, контроля работоспособности КС РЭП и оценки правильное!и
действий экипажа.
Состав КС РЭП Су-ЗОМКИ.
• СПО «Tarang-ЗО», станция активных помех САП 518М;
• аппаратура управления и ЦУ прот иворадиолокационным ГСН изделий АУЦ-30-01;
• система предупреждения о пуске ракет и предупреждения о лазерном облучении
«CIDAS»;
• устройство выброса УВ-30МКИ;
• система обеспечения ЭМС (изде. me К130) [55].
Основные характеристики системы «Tarang-ЗО»
Зона обзора по азимуту / по уг.ту места, град 0...360/±30
СКО определения направления на РЛС по азимуту, град не более 10
СКО измерения частоты сигнала, МГ ц 5,6
Количество одновременно сопровождаемых целей в реальном мас- штабе времени, не менее 16
Количество одновременно инд ицируемых целей ДО 6
Чувствительность, дБм минус 47
Библиотека угрожающих объектов, шт. 128
Время непрерывной работы, час 10
Потребляемая мощность, ВА. не более 500
Приложение. Системы и средства РЭБ воздушных судов
561
Основные технические данные устройства выброса УВ-ЗОМКИ
Тактовая частота процессоров 1806ВМ2 / AT89S82252AT, МГц 5/11
Количество типов патронов 3
Количество патронов в одном БВ, шт. 14
Количество БВ, шт. 7
Общее количество патронов, заряжаемых в БВ УВ-ЗОМКИ, шт. 98
Калибр патронов, мм 50
Индикация ост атка патронов с точностью ДО 1
Время ускоренного отстрела полного комплекта патронов, с 1...2
Время готовности по включению питания, мин, не более 1
Количество предварительно программируемых и оперативно выби- раемых в полете программ 99
Потребляемая мощность по постоянному току. Вт: в дежурном состоянии не более при отстреле патронов не более 100 350
Время проверки УВ-ЗОМКИ с помощью ВСК. не более, мин 1
Время реакции УВ-ЗОМКИ (от поступления команды на отстре. i па- тронов до подачи сш нала на электровосп таменитель патрона), нс более, с 0,1
Возможность непрерывной работы, час 10
Технические характеристики изделия АУЦ-30
Сектор управления РЛ ГСН относительно направления полета по ази- муту / по углу места, град ±30 ' -•Ю...+ 5
Количество одновременно наводимых РЛ ГСН 2
Максимальное количество управляемых РЛ ГСН 6
Время готовности, мин, не более 2
Потребляемая мощность по цепи +27 В, Вт, не более 100
Потребляемая мощность по цепи — 115В 400 Гц. ВА. не более 200
Масса изделия, кг, не более 12,5
Время готовности, мин, не более 2
10. Система защиты самолета «MANTA». Система «MANTA» (MANpads Threat
Avoidance) преназначена для защиты гражданских ВС, военно-транспортных и транспорт-
но-заправочных самолетов от ЗУР с ИК ГСН, в том числе перспективных [86J. По мнению
зарубежных специалистов, наиболее эффективным средством защиты самолетов от ЗУР с
ИК ГСН в настоящее время считаются лазерные системы защиты. Основные компоненты
системы «MANTA»: 1) лазерная станция постановки помех ALJS; 2) электронно-оптическая
система; 3) процессор; 4) система энергоснабжения.
Цикл работы системы «MANTA»:!) обнаружение пуска ЗУР; 2) переход на АС цели: 3)
сопровождение цели; 4) созтание помех и уничтожение ЗУР; 5) подготовка к отражению
новой атаки. Основа системы «MANTA» - автоматическая бортовая лазерная станция по-
становки помех ALJS (Airborne Laser Jamming System), создающая кодированное многос-
пектральное помеховое излучение в ИК-диапазоне (кодированное мультиспектральное из-
тучение импульсно-периодическо] о ла ?ера). При этом происходит засветка ИК-приемника
ГСН, в тракте обработки формируется ложный сигнал, приводящий к отклонению рулей
ракеты с последующим срывом слежения [55, 86].
562
Приложение. Системы и средства РЭБ воздушных судов
Лазерная станция, оснащенная встроенным устройством самоконтроля, функциониру-
ет в дежурном (переводится при включении бортового питания, обеспечивая обзор задан-
ного пространства и поиск целей) и рабочем (по команде СУ при обнаружении цели, обес-
печивая сопровождение и подавление цели) режимах. В состав станции ALJS входят: В
система предупреждения о пуске ракет; 2) источник помехового лазерного излучения; 3)
оптико-механический блок для обнаружения ракеты по данным системы обнаружения пус-
ков ракет и ее АС; 4) блок управления и питания. Лазерное излучения и канал слежения и
наведения расположены на одной оптической оси, что дает возможность наводить лазерный
луч непосредственно на ГСН без задействия дополнительных устройств. Прием ПК-
излучения от атакующей ракеты, а также наведение лазерного излучения осуществляется
через одно выходное зеркало.
Основные характеристики лазерной системы «MANTA»
Дальность обнаружения и подавления ЗУР ПЗРК «Стингер» В диапазоне их применения
Зоны работы (2 станции ALJS) по азимуту / по углу места, град 360/-30 ...+60
Количество одновременно подавляемых атакующих ракет внутри установленной зоны действия (2 станции ALJS) 4
Масса системы (2 станции ALJS), кг не более 215
Энергопотребление в дежурном / рабочем режиме. кВт по цепи 115/200 В, 400 Гц по цепи 27 В менее 0,2 / 3,1 менее 1
В станции ALJS используется импульсно-периодический электроразрядный HF-DF ла-
зер с замкнутым циклом смены рабочей смеси, который дает прямое мультидиапазонное
излучение. В каждом диапазоне происходит генерация многих спектральных линий, что не
требует предвари гельной настройки лазера, а также делает невозможным защиту ИК ГСН с
помощью фильтров. Система «MANTA» комплектуется высокотехнологичными подсисте-
мами для обеспечения сертификации по европейским стандартам. Система защиты ALJS/
MANTA успешно прошла наземные и летные испытания, проведенные НАТО осенью 2011
года в рамках испытаний EMBOW XIII в испытательном ценгре Генеральной дирекции по
вооружениям Франции (DGA) в Бискароссе [86].
11. Бортовой комплекс защиты вертолетов «Кольчуга» предназначен для обеспе-
чения ИЗ и индивидуально-взаимной защиты верт олетов от поражения: переносными ЗРК
типа «Стингер», «Стингер-пост», «Мистраль», «РедАй», «Стрела», «Игла»; ЗРК ближнего
действия типа «Чапарэлл», «Роланд-2», «Кроталь», «Усовершенствованный Хок»; артилле-
рийскими комплексами типа «Вулкан», «Гепард»; вертолетами типа АН-64, самолетами F-
15, F-16, F-18 путем создания преднамеренных помех РЛС, ИК и РЛ ГСН, входящим в со-
став этих комплексов [55, 74]. Защита осуществляется путем обнаружения факта угрозы и
противодействия атакующим ракетам. Комплекс «Кольчуга» решает следующие задачи:
предупреждение экипажа вертолета об угрозе атаки; выдача данных об источнике угрозы;
создание активных и пассивных помех. Эти задачи выполняют ся в диапазоне высот приме-
нения вертолетов от 0 до 6000 м над уровнем моря при скоростях полета до 350 км;ч.
В состав комплекса защиты вертолетов «Кольчуга» входят следующие системы: УУ -
устройство управления комплексом; ПРО - приемник обнаружения излучений в радиолока-
ционном диапазоне: ПЛО - приемник обнаружения излучений в лазерном диапазоне: ОФПР
- обнаружитель факта пуска ракет (излучений в ультрафиолетовом диапазоне); РПП - ра-
диолокационный постановщик помех, ППИ - постановщик помех инфракрасный; УВРС -
устройство выброса расходуемых средств. Устройс1во выброса помеховых патронов обес-
II иложение. Системы и средства РЭБ воздушных судов
563
печивает смешанный боекомплект патронов противорадиолокационных, инфракрасных и
активных отстреливаемых ловушек калибра 26 и 50 мм в количестве, необходимом для эф-
фективной защит ы вертолета.
Основные характеристики бортового комп гекса защиты «Кольчуга»
Информационные системы
В радиодиапазоне: сектор обзора, град. 360 х 90
дальность обнаружения, % 120 от дальности действия
диапазон, ГГц 1,2...18
В лазерном диапазоне: сектор обзора, град 360 х 90
определение пеленга с точностью, град 10
В УФ диапазоне: сектор обзора, град 360 х 90
дальность обнаружения, км 15
точность определения пеленга, мин 12...14
Исполнительные системы
В радиодиапазоне: сектор, град. 120 х 60
энергопотенциал, Вт 300... 1000
диапазон, ГГц 4...18
В оптическом диапазоне: сектор защиты, град 360 х 90
ширина луча, град. до 7
сила излучения в ИК щапазоне, кВ'Сср 1,4
12. Станция РТР (СПО) Л-150 «Пастель» предназначена для обнаружения излучения
РЛС и предупреждения экипажа об облучении самолета РЛС обнаружения и управления
оружием и выполняет следующие функции [19, 74]:
• обнаружения и определения направления на ЗРК. ЗАК. авиационно-ракетный комплекс
(АРК) по радиоизлучению их РЛС с импульсными, квазинепрерывными и непрерывными
видами излучения, работающих в режиме поиска, сопровождения, подсвета ракет (в том
числе и на проходе);
• определения вида излучения, режима работы, радиотехнических параметров, распо-
знавания типов РЛС и типов комплексов, в которые они входят;
• ранжирования обнаруженных РЛС по степени их опасности;
• управления средствами РЭП;
• управления наведением 6 головок ПРР и выдачи им данных ЦУ:
• выдачи экипажу информации на индикатор о наиболее опасных РЛС и об управлении
пуском ракет на всех этапах наведения и ЦУ ПРР;
• выдачи сигналов звуковой сигнализации экипажу об облучении самолета РЛС.
Основные характеристики станции РТР Л-150
Сектор обзора по азимуту / по углу места, град 0...360/±30
Диапазон частот, ГГц 1,2...40
Количество типов РЛС, оперативно программируемых (банк данных) 128 и более
Количество одновременно наводи мых ПРР 2
Сектор поиска ПРР, град. ±30
Масса изделия Л-150. кг 47.2
ОМ/НУ 35/12,2
Станция Л-150 «Пастель») состоит из двух функционально законченных модулей:
станции предупреждения об облучении (СПО) - основного модуля (ОМ) с функциями one-
564
Приложение, Системы и средства РЭБ воздушных судов
ративной РТР и выдачи информации об обнаруженных РЛС; аппаратуры управления и ЦУ
- модуля наращиваемого усгройства (НУ) [55] Изготавливаются и поставляются варианты
Л-150 для самолетов Су-25СМ, Су-27СМ, Су-30МКК, Су-30МКМ Су-30МКИ, Су-30МКИ
(А), Су-34, Су-35, МиГ-29СМТ, МиГ-29К, МиГ-31, Ил-76 (78), Ан-70, различных вертоле-
тов (Ми-28, Ми-35, Ка-52).
13. Бортовая станция радиотехнической разведки Л-150-28 предназначена для об-
наружения и предупреждения экипажа об облучении вертолета Ми-28 РЛС наземных, кора-
бельных и бортовых комплексов обнаружения и управления оружием, средствами активной
разведки и РЭБ, определения их характеристик, степени опасности и информационного
обеспечения экипажа о радиотехнической обстановке [55]. Виды принимаемы* сигналов:
непрерывные, им пульсные, квазинепрерывные.
Основные ТТХ станции РТР Л-150-28
Сектор анализа РЛ обстановки по азимуту / по углу места, град 0 ... 360/±30
Диапазон частот, ГГц 1,2...18
Максимальная ошибка / СКО пеленгования, град в диапазоне 1,2... 8,0 ГГц в диапазоне 8,0... 18,0 ГГц 45 / 15 30/ 10
Длительность импульсов, мкс 0,2...200
Частота повторения импульсов, кГц с минимальной скважностью 3,5 с минимальной скважностью 1,5 0,1...200 200...320
Количество распознаваемых типов РЛС 128
Вероятность распознавания РЛС 0,9
Время готовности к работе, мин, не более 2
Время непрерывной работы, ч, не более 12
Напряжение электропитания постоянным током. В переменным током 400 Гц 27 115
Станция Л-150-28 работает в следующих режимах определения текущей радиолокаци-
онной обстановки: ОБЗОР, СОПРОВОЖДЕНИЕ, ТИПОВЫЕ, ВСТРОЕННЫЙ КОНТРОЛЬ.
14. Малогабаритная станция помех МСП 418К в однокон гейнерном исполнении
предназначена для индивидуальной и индивидуально-взаимной защиты самолетов тактиче-
ской авиации семейства МиГ-29 путем создания преднамеренных активных помех РЭС У О,
входящим r зенитно-ракетные, зенит но-артиллерийские и авиационно-ракетные комплексы
[74, 103]. В МСП 418К используется цифровой канал когерентного приемника по техноло-
гии цифровой радиочастотной памяти (DRFM). Технология DRFM является главным эле-
ментом современных средств РЭБ и в основном определяет их тактико-технические и мас-
согабаригные характеристики. Она обеспечивает создание маскирующих и имитационных
помех, имитирующих ЛЦ с различными скоростями, дальностями и угловыми координата-
ми. Состав станции МСП 418К'. блок цифрового когерентного приемника; антенные по-
сты ППС и ЗПС; блок мгновенного измерения частоты (МИЧ); устройство цифровой ра-
диочастотной памяти УЦРП): процессор; блок сопряжения с бортовым РЭО самолета: блок
усилителя передатчика; блок вторичных источников питания и интерфейсов [55].
Отличительными особенностями САП МСП 418К являются [103]: 1) оригинальная
структура построения с обеспечением работы в одном контейнере и излучением сигнала в
ППС и ЗПС с возможностью работы по одному принятому импульсу в широкой полосе ча-
стот; 2) применение цифровых методов обработки сигналов в реальном масштабе времени с
использованием технологии цифрового запоминания и воспроизведения сю налов; 3) ком-
Приложение. Системы и средства РЭБ воздушных судов
565
плексная микроминиатюризация с использованием технологий «система на кристалле»; 4)
унифицированные конструкторские решения на основе модулей и блоков в конструктиве
«Евростандарт»; 5) оригинальный контейнер, обеспечивающий прием и передачу сигналов
при достаточно большом энергопот енциале станции; 6) малые массогабаритные характери-
стики (масса РТ части составляет примерно 60 кг).
Основные технические и эксплуатационные особенности MCI1 418К:
• создание маскирующих и имитационных помех, имитирующих ЛЦ с различными ско-
ростями. дальностями и угловыми координатами;
• оптимизация рабочих режимов с элементами конструкции самолета в части ЭМС,
• представление информации о режимах работы в единую систему индикации и кон-
троля ЛА;
• обеспечение системой встроенного самоконтроля, позволяющей проведение ТО стан-
ции без использования дополнительной контрольно-поверочной аппаратуры;
• способность адаптации к современным самолетам различных фирм-прои ^водителей.
Основные технические характеристики МСП 418К
Диапазон рабочих частот. ГГц 4 ... 18
Энергопотенциал, Вт, не менее 500
Чувствительное гь приемника, дБ/Вт минус 55 (с предварительным усилением — минус 86)
Сектор создания помех (в ППС/ЗПС) по азимуту, град по yi лу места, град ± 45 = 30
Динамический диапазон входных сигналов, дБ 40
Габариты контейнера, мм 230 х 225 х 3800
Время готовности к работе, мин, не более 5
Масса, кг 150
Функционирование станции в части ЭМС оптимизировано с авионикой самолета-
носителя, а также системы единой индикации и контроля. МСП 418К имеет систему встро-
енного самоконтроля, техническое обслуживание осуществляется без дополнительной кон-
трольно-проверочной аппаратуры. Станция может быть адаптирована к современным само-
летам-истребителям других фирм-производи гелей.
15. Станция активных помех САП 518 предназначена для ИЗ и ГЗ самолетов типа
Cj-ЗОМКИ от поражения современными и перспективными зенитными и авиационными
средствами ПВО противника путем подавления самолет ных БРЛС, РЛС У О ЗРК, РЛС об-
наружения и целеуказания, входящих в различ ные звенья оповещения и управ, тения систе-
мы ПВО противника, РЛ ГСН ракет [86]. Станция работает в автоматическом непрерывном
режиме и в ручном режиме, позволяя экипажу выбирать режим САП 518 ИЗ или ГЗ. Авто-
матическая компьютерная система станции позволяет вести перехват, анализ, категориро-
вание, приоритезацию и инициирование оптимального ответного прог иводействия несколь-
ким угрозам в плотной сигнальной обстановке посредством шумовых интегральны х, актив-
ных имитационных помех. В станции предусмотрено перепрограммирование априорных
данных библиотеки угроз (количество данных библиотеки угроз - 1024) и параметров видов
помех на стоянке самолета с помощью flash-карты [55].
Состав САП 518 включает в себя: приемный (РТУ 51811) и передающий (РТУ 518Л)
контейнеры, блоки аппаратуры фюзеляжно! о размещения - м< пуль обработки и управления
<МОУ) и блок компенсации потерь (БКП). САП 518 построена на современных технических
решениях с применением:
566
Приложение» Системы и средства РЭБ воздушных судов
• широкополосных многолучевых активных антенных решеток, обеспечивающих высо-
кий энергопотенциал помех в выбранном направлении излучения;
• многолучевых, многоканальных широкополосных РПУ, позволяющих осуществлять
обзор возможных угроз во всем рабочем секторе и диапазоне частот с определением их ос-
новных параметров (направление, несущая частота, длительность импульса, наличие ВИМ
и др.) и степени угрозы;
• многоканальных ЦУЗВС РЛС (DRFM), позволяющих воспроизводить точные копии
сигналов одновременно нескольких РЛС противника с наделением их необходимой поме-
ховой модуляцией и обеспечивающих адаптивное подавление каждой РЛС в зависимости
от вида ее излучения и режима работы;
• современных вычислительных устройств с программным обеспечением, позволяющим
оптимизировать работу в режиме разведки и создания помех, осуществлять выбор наиболее
опасных целей и программ их РЭП, осуществляй, обмен с другими системами ЛА и переда-
вать необходимые данные для отображения на экране МФИ [55].
Основные функции станции САЛ 518М-. 1) обнаружение излучающего радара: 2)
определение направления излучающего радара; 3) определение режима работы радара и
приоритета угрозы; 4) выбор типа помех; 5) воспроизведение сигналов излучающего радара
с приданием им помеховой модуляции и последующей их передачей в направлении излуча-
теля; 6) возможность регистрации получаемых сигналов и подавляемых излучателей.
Типы подавляемых сигналов'. 1) импульсные (длительностью от 0.1 до 300 мс, в том
числе с внутриимпу [ьсной ЧМ или ФКМ. с быстрой перестройкой частоты от импульса к
импульсу и быстрой перестройкой частоты повторения импульсов); 2) квазинепрерывные;
3) непрерывные. Типы формируемых помех-, шумовая заградительная помеха; шумовая
прицельная по частоте и спектру помеха; уводящая по дальности помеха; шумовая накры-
вающая импульс цели помеха; уводящая по скорости помеха; многократные ответные по-
мехи (многочисленные цели); прицельная по частоте сканирования помеха; шумовая в диа-
пазоне доплеровских частот; комбинации двух и более перечисленных выше помех.
САП 518 работает в двух режимах', рабочем режиме и режиме контроля. Оперативная
проверка работоспособное] и осуществляет ся с помощью системы ВСК. В рабочем режиме
станция САП 518 по данным полетного задания и реальной РЛ обстановки выбирает поло-
сы приема, их последовательность и длительности циклов приема. Дескрипторы обнару-
женных сигналов, формируемые приемником, передаются в блок МОУ для записи. В при-
емном контейнере формируется каталог обнаруженных угроз, в котором дескришоры угроз
упорядочены по степени опасности. Это осуществляется сравнением каждого дескриптора с
библиотекой угроз и определением их типов и режимов работы. Сигналы, полученные от
обнаруженных излучателей, а также информация на подавление излучателей вместе с их
параметрами записываются и могут использоваться для перепрограммирования библиотеки
угроз. Из каталога обнаруженных угроз выбирается до 8угроз с высшими приоритетами для
подавления.
По типам и режимам работы выбираются программы формирования помех. Затем
настраивается приемная и передающая аппаратура контейнеров: подключение лучей к ка-
налам модуля формирования помех, настройка каналов модуля формирования помех в со-
ответствии с выбранными угрозами и программами формирования помех; подключение
помеховых каналов к соответствующим каналам пере, (атчиков.
В процессе работы приемник получает от модуля формирования помех информацию
об изменении параметров yipo3. По сопоставлению информации в зависимости от склады-
вающейся обстановки блок управления и сопряжения принимает решение о снятии с подав-
ления менее опасных угроз и назначении на подавление более опасных угроз.
Приложение. Системы и средства РЭБ воздушных судов
567
В режи ме контроля модуль первичной обработки измеряет параметры контрольного
сигнала, формирует дескриптор сигнала, сравнивает его с параметрами контрольного сиг-
нала и оценивает исправность всех измерителей. Контрольный сигнал передается в переда-
ющий контейнер РТУ 518Л и используется для проверки каналов передатчика. Результаты
контроля передаются для записи в систему объективного контроля и отображения на МФИ
В процессе работы блок управления и интерфейса записывает в энергонезависимую
память для послеполетной обработки следующую информ ацию: 1) каталог обнаруженных
угроз, включая неопознанные, с указанием их параметров и режимов работы; 2) данные о
подавляемых угрозах и рабочие частоты угроз; 3) данные о режимах работ станции САП
518; 4) данные о работоспособности станции САП 518; 5) направление на угрозу и режим
работы угрозы: 6) номер помеховой программы; 7) продолжительность импульса или не-
прерывного излучения; 8) частоту повторения импульса и ее изменение, амплитуду сигнала;
9) координаты самолета.
Основные технические данные станции САЛ 518М
Параметр Значение
Диапазон частот, ГГц E...J
Рабочий сект ор в ППС и ЗПС: азимут / угол места ±-15°/±30°
Сектор зоны обзора по углу места + 10е...-30°
Чувствительность по импульсному сигналу, дБ мВт по непрерывному сигналу, дБ мВт -60 ...-65 -60 ...-75
Мгновенная полоса перекрытия по частоте (ширина полосы DRFM), МГц 1000
Количество угроз, одновремен но подавляемых помехами 8
Кол ичество данных библиотеки угроз 1024
16, САП «Сорбция» предназначена для защиты самолетов от поражения средствами
ПВО противника с РЭС наведения путем подавления БРЛС самолетов, РЛС управления
оружием зенитных комплексов, радиолокационных ГСП УР [74]. САП Л005-С обеспечива-
ет высокую боевую живучесть самолетов типа Су-27. Су-30, Су-ЗОМКИ. Су-33. Су-35 [55,
103]. САП работает в автоматическом режиме и может подавлять несколько опасных РЭС
противника в ППС и ЗПС одновременно. В Л005-С «Сорбция^ впервые в мире была приме-
нена технология цифровой обработки радиосигналов и формирования помех DRFM. Высо-
кая чувствительность приемной аппаратуры и высокая мощность излучения активных по-
мех станции Л005-С позволяют: обнаруживать излучение угрожающих РЛС и подавлять их
помехами до взятия ими самолета на сопровождение: обеспечивать защиту группы самоле-
тов, не оснащенных САП [86]. Многоканальный супергетеродинный приемник решает сле-
дующие задачи: 1) поиск по частоте и прием сигналов РЭС в рабочем секторе; 2) определя-
ет направление на РЭС и вид излучения; 3) выбор наиболее опасного РЭС в данной обет а-
новке; 4) подключение выбранных лучей антенны ко входу приемника и выходу ПП.
Решаемые задачи системой определения и воспроизведения частоты: замена принима-
емых импульсных и квазинепрерывных сигналов непрерывным сигналом той же несущей
частоты, формирование сигналов, сопряженных по спектру с сигналами облучающих РЭС.
Основные характеристики САП «Сорбция»
Постановка помех ППСиЗПС
Диапазон волн, см 3
Энергетический потенциал, В г 1000
568
Приложение, Системы и средства РЭБ воздушных судов
В основу селекции в станции «Сорбция» был положен принцип распознавания режима
работы РЛС при выборе претендента на подавление по частоте повторения зондирующих
импульсов: НЧП, СЧП или ВЧП до непрерывного излучения, с предоставлением приорите-
та последним [19, 74]. УУ лучами подключает вход УМ к излучателю передающей антенны
с номером, совпадающим с номером канала приемного устройства, по которому принима-
ются сигналы РЭС подлежащие подавлению [55]. В передающей антенне отсутствуют ком-
пенсационные облучатели.
17. Станция активных помех «Гардения 1ФУЭ» предназначена для индивидуально-
взаимной защиты самолетов фронтовой авиации путем создания преднамеренных активных i юмех
РЛС УО, входящих в зенитно-ракетные, зенитно-артиллерийские и авиационные ракетные коми иксы,
бортовым РЛС, а также РЛ ГСН ракет [74, 86]. РЭП РЛС У О может осуществляться при их рабо-
те как в режиме «поиск» (обнаружение цели), так и в режимах «захват» и «сопровождение
цели». САП «Гардения» (Л-2031 предназначена для установки на СУ-27. СУ-30, МиГ-29. САП «Гар-
дения 1ФУЭ» может устанавливаться в фюзеляже или в подвесных контейнерах на ралшчных типах
самолетов российского производства. Состав станции определяется условиями размещения (внутри
фюзеляжа или в подвесных контейнерах). САП Л-203 создает следующие комплексы помех-. 1)
РЛС с непрерывным и квазинепрерывным излучением, работающим в режиме поиска и за-
хвата на сопровождение; 2) РЛС с непрерывным и квазинепрерывным излучением, работа-
ющим в режиме сопровождения; 3) РЛС с непрерывны м и квазинепрерывным излучением,
работающим в режиме поиска и захвата на сопровождение; 4) РЛС с импульсным излуче-
нием, работающим в режиме поиска, захвата и АС; 5) мерцающих помех РЛС и РЛ I СП
ракет при полете самолета в паре; 6) ГСН ракет: 7) перенацеливания ГСН ракет на подсти-
лающую поверхность (земную, водную) при полете на высотах от 50 до 500 м («антипод»).
Основные характеристики CAI1 «Гардения 1ФУЭ»
Диапазон рабочих частот (длин волн), ГГц (см) 10,34-7,14(2,9-4,2)
Сектор защиты (ППС или ЗПС) по азимуту / по углу мест а, град 120 / 60
Пропускная способность, количество сигналов 2...4
Время реакции САП, мс 0,6... 1,6
Масса (без кабелей и СВЧ тракта), кг не более 70
Время непрерывной работы, ч, не более 4
Выходная мощность передатчика, не менее. Вт 65
Энергопотребление по цепи 115? 200 В, 400 Гц, ВА по цепи 27 В. Вт менее 1300 менее 350
Рабочий диапазон температур, град -60 ... +60
Виды помех САП «Гардения 1ФУЭ»: ответная импульсная (усилительная и генера-
торного типа); мерцающая; помеха «антипод» (подсвет подстилающей поверхности при
высоте полета 50. ..500 м); шумовая непрерывная; уводящая по дальности и скорост и
18. САП 14 предназначена для ИЗ и ГЗ самолетов типа Су-30МКИ от поражения со-
временными и перспективными зенитными и авиационными средствами ПВО противника
[86]. Автоматическая компьютерная система станции позволяет вести перехват, анализ, ка-
тегорирование, приоритезацию и инициирование оптимального ответного противодействия
нескольким угрозам в плотной сигнальной обстановке посредством шумовых интеграль-
ных, активных имитационных помех. В станции предусмотрено перепрограммирование
априорных данных библиотеки утроз и параметров видов помех на стоянке самолета с по-
мощью flash-карты [55]. САП 14 построена на современных технических решениях. Кон-
тейнерная станция ГЗ САП 14 позволяет вести перехват и анализ сигналов РЛС и осуществ-
лять радиопротиводействие. Состав САП 14 - приемно-передающий контейнер, МОУ
Приложение. Системы и средства РЭБ воздушных судов
569
19. Станция активных помех КС-418Э предназначена для защиты самолетов типа
Су-24 от поражения средствами ПВО противника с радиоэлектронными системами наведе-
ния [86]. САП работает в автоматическом режиме и обеспечивает подавление наиболее
опасных РЛС зенитных комплексов и БРЛС самолетов. Контейнерная станция КС-418Э
имеет несколько независимых каналов подавления, посроенных с использованием техноло-
гии цифровой обработки и записи радиосигналов (DRFM).
20. Станция «Фасоль» прямошумовых помех СПС-5 предназначена для создания за-
градительных помех РЛС дальнего обнаружения и наведения в диапазоне метровых волн.
Устанавливается на самолетах и вертолетах как групповое средство РЭБ [55].
Тактико-технические характеристики
Ширина спектра помехового сигнала 20 МГц на уровне 0,25 по мощносз и
Мощность передатчика, Вт 30
Масса, кг 36
21. Станция «Букет» предназначена для подавления РЛС в 10 см диапазоне частот.
Станция вырабатывает ЧМШП (прицельная шириной 30 МГц; заградительная - 150 МГц).
Помеховое воздейс гвие - засветка индикатора помехой кругового обзора. Помеха излучает-
ся в нижнюю полусферу самолет а. Станция может работать в автоматическом или полуав-
томатическом режиме. Основными составными частями станции являются: разведыватель-
ный приемник; анализатор; устройство наведения; 4 передатчика. Дальность действия око-
ло 40 км [55]. Приемник (беспоисковый) предназначен для определения и запоминания не-
сущих частот сигналов, облучающих РЛС Состоит из 30 одинаковых каналов, которые
своими полосами пропускания перекрывают весь рабочий диапазон станции. Частота опре-
деляется по номеру сработавшего канала. Канал представляет собой супергетеродинный
приемник. Анализатор предназначен для оценки радиолокационной обстановки и выбора
режима подавления РЛС. Каналы разведывательного ПРМ нагружены на канальные ЗУ
анализатора. 30 каналов станции разбиты на 6 групп по 5 каналов (для перекрытия групп по
5 каналам спектрами заградительных помех). Выходные сигналы ЗУ групп подаются на
средние ключи групп ПРМ наведения, на сумматор заградительного режима и на обший
сумматор, предназначенный для определения необходимого числа заградительных помех.
22. Станция «Сирень» предназначена для защиты самолетов ФА от УР классов «воз-
дух-воздух» и «земля-воздух». Помеховое воздействие: нарушение работы каналов АСД.
АСС и АСН. В приемнике станции с целью повышения различимости сигналов РЭС на
фоне шумов применена схема окраски сигналов. Станция «Сирень-Д» может устанавли-
ваться на Ту-16 [19, 55].
Основные тактико-технические характеристики
Типы подавляемых сигналов РЭС импульсный, непрерывный и квазинепрерывный
Диапазон волн, см 3
Мощность помехового сигнала, Вт 20
23. Станция «Азалия» активных скользящих помех СПС-61...66 предназначена для
подавления РЛС в см и лц диапазоне волн [55] В станции отсутствует разведывательный
приемник, поэтому несущая частота помехи непрерывно изменяется в пределах рабочего
диапазона станции («скользит»). В станции время помехового воздействия случайно изме-
няется, что затрудняет подстройку приемника подавляемой РЛС и приводит к снижению
верояз ноет и обнаружения цели. Станции «Азалия», «Лось» - основа вертолетного комплек-
са «Бизон» («Просека») [19].
570
Приложение. Системы и средства РЭБ воздушных судов
Тактико-технические характеристики
Вырабатывает ЧМШП маскирующая, заградительная
Мощность передатчика, Вт 150'250
Ширина спектра помехового сигнала. МГц 240
ДН по азимуту / по углу места, град. 360/180
Масса, кг 200
Время работы, час 10
24. Вертолет-постановщик помех Ми-17ПГЭ предназначен для ГЗ ЛА и наземных
объектов от средств воздушного нападения и ПВО противника путем подавления сверх-
мощными радиопомехами РЭС противника из зон барражирования вертолета (вне досягае-
мости ракет ПВО противника) [55, 86]. Высокая чувствительность и высокий энергетиче-
ский потенциал САП Л001ПГЭ, построенной на базе многолучевых антенных решеток, ис-
пользующей цифровые устройства формирования помех (по технологии DRFM), обеспечи-
вают гарантированный прием сигналов РЭС противника и их эффективное РЭП во всей
зоне ответственности. Виды создаваемых помех: прицельные по частоте и направлению,
сопряженные со спектром принимаемых сигналов (по технологии DRFM' Применение вер-
толета-постановщика помех Ми-17ПГЭ позволяет обеспечить снижение потерь ударных
самолетов, в том числе не имеющих средств РЭП (или оснащенных уст аревшими средства-
ми РЭП), в 2,5...3 раза. Вертолет-постановщик помех Ми-17ПГЭ оснащен САП Л001Г1ГЭ и
обеспечивает: 1) прикрытие своих истребителей при отражении налета авиации противника;
2) прикрытие от средств ПВО своих ударных самолетов, действующ их по наземным объек-
там противника; 3) прикрытие наземных объектов от средств РЛР противника; 4) ведение
РТР и РЭП нескольких РЭС различного назначения, в том числе самолетных БРЛС (самоле-
тов типа F-15, F-16, F-I8 и др.), РЛС управления ЗРК (типа «Хок» и др.). РЛ ГСН ракет
(классов «земля-воздух» и «воздух-воздух»); 5) ведение РТР и РЭП нескольких РЭС раз-
личного назначения.
Основные характеристики Ми-17ШЭ
Энергетический потенциал САП, Вт до 105
Количество одновременно подавляемых РЭС, разнесенных по про- странству и частотному диапазону до 8
Рабочий сектор по азимуту / по углу места, т рад 25/12
Аппаратура вертолета-постановщика помех Ми-РПГЭ может размещаться на самоле-
тах и вертолетах других типов, а также на объектах наземного базирования
25. Вертолет-постановщик помех Ми-8МТПИ оснащен высокопотенциальной САП
Л-161, предназначенной для создания помех обзорным РЛС [86]. В качестве передающих
устройств в САП Л-161 впервые использованы многоканальные твердотельные АФАР
сверхвысокой мощности. В САП «Смальга-ВМ» впервые были разработаны и применены
мощные p-i-n диодные переключатели для подключения аппаратуры станции к антеннам
правого (левого) борта [140]. С целью увеличения функциональны к возможностей станции
«Смальта-ВМ» была проведена ее модернизация, в результате чего была создана станция
шумовых помех «Колокольчик» с расширенным рабочим диапазоном частот. Рабочий j (иа-
пазон частот станции «Колокольчик» был разбит на 4 поддиапазона. Работа в выбранном
диапазоне осуществлялась за счет переключения частотных поддиапазонов бортовым опе-
ратором РЭБ в зависимости от диапазона рабочих частот наземных ЗРК противника. Ин-
формация о наличии облучаюшего сигнала в одном из частотных поддиапазонов станции
«Колокольчик» выводилась на световое табло ПУ станцией.
Приложение. Системы и средства РЭБ воздушных судов
571
Основной недостаток аппаратуры «Смальта-Н», «Смальта-В», «Смальта-ВМ» (Ми-8),
«Колокольчик» - невозможность подавления РЭС, работающих в квазинепрерывном и им-
пульсном режимах излучения сигналов. Именно поэтому потребовалось доработать аппара-
туру «Смальта-ВМ» [19]. Результатом доработки станции «Смальта-ВМ» стала САП
«Смальта-У», позволяющая эффективно противодействовать РЭС с любым режимом излу-
чения. Для определения и запоминания частоты сигнала в ст анции «Смальта-У» применяет-
ся поисковый метод электронной перестройки частоты генераторов как с использованием
ЛОВ, так и генераторов на диодах Ганна. Для сокращения времени поиска частоты сигнала
в аппаратуре применена трехступенчатая система поиска. Для определения направления
принятого сигнала с точностью ширины луча многолучевой антенны в аппаратуру станции
дополнительно введена система определения направления. Станция «Смальта-ПГ» может
усганаливаться на вертолете Ми-8СМВ ГТГ [55].
26. Станция активных помех «Икебана-1», размещаемая на вертолете Ми-8МТПИ,
предназначена для подавления или существенного затруднения работы РЛС обнаружения и
ЦУ вероятного противника путем постановки помех из зон барражирования [140]. Управ-
ление станцией осуществляется с пульта управления, размещенного в кабине пилота Ос-
новные особенности станции «Икебана-1»: 1) высокий энергетический потенциал; 2) срав-
нительно высокие точности определения частот ИИ и направления на РЛС; 3) антенная си-
стема представляет собой многолучевые активные антенные решетки (АР), причем в каче-
стве акт ивных элементов передающей АР используются УМ на полупроводниковы к прибо-
рах: 4) возможность электропитания станции от бортовых генераторов вертолета при работе
в воздухе и от автономного агрегата, установленного на борту вертолета, при работе на
земле; применение отечественной твердотельной элементной базы [19].
27. Вертолетная САП «Рычаг-БВ1» была разработана на основе функциональных
блоков базовых конструкций (ФББК) с исно. [ьзованием активных многолучевых антенных
решеток. Конструкция ФББК разрабатывалась из условий обеспечения их самостоятельного
изготовления и поставки. На базе ФББК возможно было создание средств РЭП в интересах
всех родов войск, что подтверждается созданием станции «Рычаг-БВ1» на основе ФББК и
использованием ФББК в интересах ВМФ и сухопутных войск [140]. Отличительной осо-
бенностью станции «Рычаг-БВ1», размещаемой на вертолете Ми-8МТПР, является го, чт о в
ее состав включена система анализа и управления, которая обеспечивает: анализ РТ пара-
метров принятых сигналов в реальном масштабе времени: выбор вида помехи для подавле-
ния РЭС; управление излучением помехи по частоте и направлению, соответствующим ча-
стоте и направлению принятого сигнала; запрет / разрешение выдачи помехи по выбранной
совокупное! и параметров принятых сигналов; выбор РЭС для подавления, одновременное
подавление РЭС вероятного противника, работающего в импульсном, квазинепрерывном и
непрерывном режимах излучения.
28. Контейнерные станции активных помех предназначены для повы шения боевой
живучести самолетов различных типов, не имеющих средств РЭП или оснащенных уста-
ревшими средствами РЭП, которые не способны эффективно противодействовать совре-
менным комплексам ПВО [74]. Существуют контейнерные станции ИЗ и групповой (эс-
кортной) защиты, размещаемые на одном пли нескольких самолетах группы. Подвеска кон-
тейнерных СП эскорта на самолетах, оснащенных индивидуальными средствами РЭЕ
обеспечивает значительное наращивание боевых возможностей самолетов при прорыве
ПВО противника. Контейнерные САП работают в автоматическом режиме и могут подав-
лять мощными помехами несколько наиболее опасных РЭС ПВО противника одноьре ек-
но. В станциях применены самые современные технологии, в гом числе, сверхзплрокопо-
лосные активные антенные решетки, цифровая обработка сигналов и формирования помех.
572
Приложение, Системы и средства РЭБ воздушных судов
распределенная мультипроцессорная система обработки информации. Контейнерная САП
размещается на стандартных точках внешней подвески.
29. Ультрафиолетовый пеленгатор Л-370-2 предназначен для определения факта
пуска ракет и угловых координат в момент пуска атакующих ракет классов «земля-воздух»,
«воздух-воздух» по излучению факела двигателя ракеты [55].
ТТХ УФ пеленгатора Л-370-2
Рабочий сектор по азимуту / по углу места, град 360! от 0 до - 60
Время выдачи информации с момента облучения, с от 0,35 до 6
СКО определения угловых координат, град, не более 0,5
Вероятное гь обнаружения цели 0,95
Время готовности к работе, мин. не более 2
Время непрерывной работы, ч 5
Электропитание, В 27
В состав комплекта изделия Л-370-2 входят: 1) четыре блока Л-370-2-01 (блоки уста-
новлены в носовой (2 шт.) и в хвостовой части фюзеляжа (2 шт.) на левом и правом борту);
2) блок Л-3 70-01Э (устройство управления и индикации) (блок установлен по правому бор-
ту в гаргроте) Изделие Л-370-2 осуществляет обнаружение, пеленгование и селекцию ис-
точников УФ излучения. При обнаружении источников УФ излучения, их сигналы обраба-
тываются в блоке Л-370-01Э и выдаются на МФИ в кадре БКО Ка-52.
30. Станция оптико-электронного подавления СОЭП Л-166В1А (Испанка) предна-
значена для отражения атак ПЗРК первого поколения типа «Сайдвиндер». «РедАй», «Ча-
парэл», «Питон», «Стрела-2», «Стрела-2М», «Хунинь-5». Принцип действия станции осно-
ван на генерации модулированного помехового ИК излучения со специальной структурой
сигнала. Применение СОЭП для ПЗ ЛА весьма эффективно, поскольку Л-166В1А является
не расходуемым средством, при этом обеспечивается надежная защита в течение всего по-
лета. Располагаясь непосредственно на защищаемом ЛА вблизи от сопла двигателя, СОЭП
не может быть отселектирована практически никаким видом селекции, используемым в
настоящее время в ИК ГСН [55]. СОЭП Л-166В1А штатно устанавливается на вертолетах
Ми-8, Ми-17, Ми-24. Станция генерирует модулированные шумовые помехи, принимаемые
оптической системой ракеты как собственное ИК излучение защищаемого объекта, и при
обработке в электронном тракте создающее ложный управляющий сш нал.
31. Система предупреждения о лазерном облучении Л-140 предназначена для обна-
ружения объектов с лазерным излучением, определения их типа (ракета, дальномер), угла
азимута относительно вертолета (Ка-52. Ми-28Н), угла места и предупреждения экипажа об
облучении вертолета лазерными объектами. В состав комплекта изделия Л-140 входят: В
четыре оптических блока Л-140 (ОБ) (блоки установлены в крыльевом контейнере правого
крыла, на правом и левом борту, в хвостовой части фюзеляжа); 2) четыре блока Л-140 БС
(размещаются на расстоянии не более 1 метра от блоков Л-140 ОБ); 3) блок Л-140 ЦБ (блок
установлен внутри фюзеляжа на правом борту); 4) автомат защиты сети Л-140 (АЗТ распо-
ложен в РУ ПОСТОЯННОГО ТОКА ПРАВОЕ) [55].
ТТХ системы предупреждения о лазерном облучении Л-140
Сек гор анализа лазерной обстановки по а шмуту / углу места, град 0 ... 360/ ±45
Определение дальности до объектов, м 200... 8200
Время готовности к работе, с не более 30
Время выдачи информации с момента облучения, с 1
Номинальный размер дискрета, град 15x45
Приложение. Системы и средства РЭБ воздушных судов
573
Количество дискретов по азимуту / по углу места 24/2
Погрешность определения направления излучения по азимуту, град 10
Напряжение элек гропитания постоянным током 27 В
32. Станция ОЭП Л-166С1 предназначена для эффективной защиты ЛА от ИК ГСН
ракет класса «воздух-воздух>>, «поверхность-воздух» («Sidewinder», «Chapparel», «Стрела -
2М») [19]. Вероятность попадания ракеты уменьшается практически до нуля. Л-1660 со-
стоит из излучателя и блока управления, может устанавливаться на СУ-25Т и СУ-39.
Основные характеристики станции Л-166С1
Средний срок службы систем, ч 400
Срок службы лампы, ч не менее 75
Среднее время до первого отказа, ч 100
Потребляемая мощность переменного тока (115,200 В, 400 Гц), кВт постоянного тока (27 В), Вт не более 5 не более 200
Сектор защиты по азимуту / по углу места, град 130...230 / ±50
Габаритные размеры, мм (масса, кг):
излучатель d 380x450 (не более 28)
блок управления 155x260x110 (не более 3,5)
33. Станция ОЭП Л-166В1АЭ предназначена для защиты вертолета Ми-35М от пора-
жения ракетами с ИК ГСН ?енитно-ракетнн\ комплексов типа оРед Ай». «Чапарэл» [55]. В
состав комплект изделия Л-166В1АЭ входят: блок излучателя (установлен вверху за редук-
торным отсеком); пульт управления (пульт установлен в кабине оператора справа); автомат
защиты сети (АЗС) SEAT MECY L-166V (АЗС находится на правой задней панели АЗСов.
за креслом пилота).
Основные характеристики станции Л-166В1АЭ
Диапазон температур эксплуа гации, С ±60
Коэффициент моду.тяи ии излучения, % 93
Время непрерывной работы, ч 4
Время t отовнос ги к работе, мин 5
Электропитание постоянным током напряжением, В переменным током напряжением 400 Гц, В переменным током напряжением 400 Гц. В 28,5 115 208
Зона защиты верто. тета по азимуту / по углу места, град: 30 ... 330/- 10до+30
34. Станция ОЭП Л-370-5 прелназначена для защиты вертолетов (Ка-52) от ракет
классов «воздух-воздух», «земля-воздух» типа «Сайдвиндер», «Ред Ай», «Чапарзл», «Стин-
гер» и других с ИК ГСН [55]. В состав комплекта изделия Л-370-5 входят: два излучателя
Л-370-5-03 (излучатели установлены в нижней части фюзеляжа (2 шт.) слева и справа): два
блока питания Л-370-5-02 (блоки установлены в техническом отсеке); блок управления Л-
370-5-01 (блок установлен в техническом отсеке) [55].
Изделие Л-370-5 работает только в автоматическом режиме, получая команды от блока
управления. Из [етие работает в двух режимах: дежурный и боевой. Выбор режима осу-
ществляется переключателем БР-ДЕЖУР, расположен на приборном щитке летчика-
оператора.
574
Приложение. Системы и средства РЭБ воздушных судов
Основные характеристики станции Л-370-5
Количество лучей 2
Ширина луча (по уровню 0,5), град 10
Зона защиты вертолета по азимуту / по углу места, град: 0.. 360/-60 ... + 30
Время реакции, с, не более 0,6
Время готовности (с момента включения до выхода в дежурный режим), мин, не более 5
Время непрерывной работы, ч, не менее 5
35. Станция ОЭП «КВАДРОС-КМ-01В» обеспечивает защиту вертолетов типа Ми-
24, Ми-17, Ми-8 (и других типов) от управляемых ракет с ИК ГСН, имеющих амплитудно-
фазовую (АФ), частотно-фазовую (ЧФ) и времяимпульсную (ВИ) модуляцию сигнала от
цели как с установкой, так и без установки на вертолеты экранно-выхлопных устройств.
СОЭП «Квадрос-КМ-01В» создает вокруг защищаемого ЛА управляемое четырехмерное
информационное поле, что позволяет ей управлять полетом атакующей ракеты любого типа
модуляции в соответствии с алгоритмами, заложенными в процессоре станции. Этим обес-
печивается большое отклонение ракеты oi цели или вообще невозможность схода ракеты с
пускового устройства [55]. Одно из преимуществ СОЭП заключается в возможности эффек-
тивного воздействия на ИК ГСН ракет всех типов (в том числе и со спектральной се гекци-
ей) без использования экранно-выхлопных устройств. Наибольшая эффективность угон
станции достигается в ЗПС, что несвойственно для станций, работающих совместно с
экранно-выхлопными устройствами. Преимущества СОЭП «КВАДРОС-КМ-01В»: 1) не
требуется информация о типе и частоте работы НК ГСН ракеты;2) станция работает без
системы обнаружения пусков ракет: 3) СОЭП не нужна система сопровождения выпушен-
ной ракеты; 4) СОЭП обеспечивает постоянно действующую круговую защиту ЛА; 5) не
требует обязательной установки экранно-выхлопных устройств; 6) обеспечивает надежную
защиту ЛА независимо от количества атакующих ракет.
Основные характеристики станции «КВАДРОС-КМ-01В»
Вероятность непоражения цели 0,85
Дальность эффективного воздействия на ИК ГСН, м 300...5000
Мощность излучения в диапазоне 2...5 мкм, Вт стер 300
Время готовности после включения, мин. не более 5
Масса, кг 26
Зона защиты по азимуту / по углу места, град 15...345/+20...-30
36. Станция ОЭП «АДРОС-КТ-01АВЕ» предназначена для активной защиты верто-
летов от управляемых ракет с ИК ГСН [74]. Большинство известных станций ОЭП предна-
значены. в основном, для противодействия ГСН ракет с АФМ. Требуемое превышение сш-
нала помехи над сигналом цели составляет 1,5...2, а в отдельных случаях до 20. Станция
ОЭП «АДРОС-КТ-01АВЕ» обеспечивает одновременное прот иводействие ракетам с ИК
ГСН различных типов (с АФМ, ЧФМ и ВИМ) без перенастройки и обладает повышенной
помехозащищенностью. Станция «АДРОС-КТ-01АВЕ» осуществляет срыв захвата цели на
траектории таких ракет, как «Стингер» (ЧФМ), «Игла» (ВИМ). «Игла-1» (ЧФМ), Р-60
(ЧФМ), Р-60М (ЧФМ), Р-73 (ВИМ> «Сайдвиндер» (АФМ) и других. При этом не требуется
значительного превышения энергии излучения помехи над излучением двигателей защища-
емого вертолета (сигнал от цели). Эффективная работа станции основана на новом способе
ОЭП и новой конструкции модулятора с электронным управлением на основе программи-
руемых процессоров.
Приложение. Системы и средства РЭБ воздушных судов
575
Основные характеристики станции «АДРОС-КТ-01АВЕ»
Вероятность срыва атаки вертолета ПЗРК «Стингер» 0,7...0,8
Время полного срыва захвата ПЗРК «Стингер», с 0,5...0,8
Мощность, кВт, не менее 3,0
Спектральный диапазон излучения, мкм 1,8...5,5
Масса, кг 25
Питание от бортовой сети вертолета, В:
трех фазной 200 (400 Гц)
однофазной 115 (400 Гц)
постоянного тока 27
Зона защиты круговая
37. Станция ОЭП «Защита ИК» предназначена для ОЭП систем наведения ракет с
тепловыми ГСН [74J. Станция ОЭП «Зашита ИК» контейнерного исполнения оснащена ИК
излучателями нового поколения с концентрацией кинетической и тепловой энергии сверх-
звуковых газовых струй - так называемыми газ о, щнамическими теплогенераторами (ГДТП.
Газоструйные ИК излучатели ГДТГ обеспечивают поток ИК излучения от 200 до 4500
Вт/Ср в диапазоне длин волн 1-15 мкм. Это значительно превышает мощность ИК излуче-
ния в гаком диапазоне всех созданных электрических НК излучателей (ламповых, спираль-
ных и др.), разработанных странами НАГО. I азоцинамический способ нагрева излучающей
твердотельной стенки ГДТГ в несколько раз эффективнее электрического нагрева. В стан-
ции применена импульсная модуляция сигнала, при этом интенсивность помехового ИК
излучения в 2-10 раз превышает аналогичное значение собственного теплового излучения
ЛА. В состав станции входят: передатчик ИК излучения для формирования помехового
сигнала, содержащий газоструйный излучатель; электронно-механический модулятор; элек-
тронно-информационный блок управления и пульт контроля параметров.
Главный недостаток существующих станций подавления тепловых ГСН. работающих
на принципе преобразования электрической энергии в тепловую, заключается в низком
уровне мощности помехового ИК излучения. Для лазерных систем защиты характерно:
наличие больших «мертвых зон» по углу места, высокая мощность потребляемой энергии
от борта ЛА (от 5 до 20 кВт), значительная погрешность определения координат ЗУР по
азимуту и углу места на участке самонаведения. Станция «Защита ИК» свободна от этих
недостатков. Основные преимущества станции «Зашита ИК»: противодействие всем типам
ПЗРК от взлета до посадки ЛА: не требует системы предупреждения о ракетной атаке: уни-
версальна для применения на любых самолет ах и вертолетах.
Станция ОЭП «Защита ИК» обеспечивает защиту ЛА в течение всего времени полета.
Она расположена на ЛА. и ее излучение не может быть отселектировано обработкой, ис-
пользуемой в современных системах наведения с тепловыми (ИК) ГСН.
38. Активная буксируемая ловушка «Блесна» предназначена для ИЗ транспортных
самолетов и других ЛА с небольшой скоростью полета [74]. По сравнению с ловушкой
«Бл изнец» имеет больший энергопо генциал излучаемых помеховых сигналов.
Основные характеристики АБРЛ «Блесна»
Энергетический потенциал, Вт до 20
Сектор защит ы ППС и ЗПС
Время работы, мин до 10
Время развертывания, с 30
Вероятность срыва ат аки УР с РГС 0.9
Срок сохраняемости, лет 10
576 Приложение. Системы и средства РЭБ воздушных судов
Габариты (мод. 1 / мод. 2), мм d 80x460/<7136x 580
Масса ловушки с тросом, кг до 12
39. Активная отстреливаемая ловушка «Близнец» предназначена для защиты само-
летов ФА [74]. Ловушка имеет два варианта исполнения - для защиты ЛА в ППС и ЗПС.
Основные характеристики
Энергетический потенциал, Вт до 3
Сектор защиты по азимуту / по углу места, град: ±45 '±20
Время работы, с ДО 10
Вероятность срыва атаки УР с РГС 0,9
Способ отстрела штатные УВ калибра 50 мм
Срок сохраняемости, лет 10
40. Активная буксируемая ловушка «Блеск» предназначена для защиты высокоско-
ростных ЛА [74]. По сравнению с ловушкой «Блесна» у нее у меньшены габариты и масса, а
энергопотенциал помехового сигнала находится в пределах 5 Вт.
41. Устройство выброса УВ-26 предназначено для зашиты ЛА от УР путем постанов-
ки помех системам наведения и исполнит ельным механизмам УР в оптическом и радиодиа-
пазоне ЭМВ [74]. В состав устройства УВ-26 входяг: пульт управления (ПУ); блок фикси-
рованных программ (БФП): блок управления (БУ); блок предохранительных выключателей
(БПВ); распределители, блоки выброса (БВ) патронов; запасные части, инструмент и при-
надлежности. Параметры программ отстрела, а также тип и калибр помеховых па гронов
выбираются перед полетом с учетом полетного задания и имеющейся информации о сред-
ствах нападения. Установка трех выбранных программ в устройстве выброса УВ-26 произ-
водится при наземной подготовке ЛА. При необходимости программы могут быть опера-
тивно изменены во время полета. Расходуемые средства, применяемые в устройстве, вы-
полнены в виде патронов цилиндрической формы калибра 26 и 50 мм со средней массой
100 г и 1 кг соответственно. Конструкция УВ-26 и схематические решения обеспечивают
вариантное исполнение (набор модулей), широкие программные возможности, цифровую
индикацию текущего остатка патронов, встроенный контроль работоспособности.
Основные характеристики УВ-26
Количество:
возможных программ отстрела 575
предварительно устанавливаемых для оперативного выбора программ 3
изменяемых параметров в каждой программе 3
патронов в залпе 1 ... 8
одновременно снаряжаемых патронов 8 ... 512
отстрелов на каждый ствол для калибра 26 / 50 мм 700 / 250
Интервалы отстрела между залпами, с 0.05 ... 8
Максимальная продолжительность программы, с 120
Потребляемая мощность оз источников:
постоянного тока (24-30 В), Вт 50
переменного тока (115 В. 400 Гц), В-А до 200
Габаритные рашеры. мм (масса, кг) ПУ 146x64x176 (1.2)
БФП 134x64x105 (0,53)
БУ 248x260x110(4.23)
Приложение. Системы и средства РЭБ воздушных судов 577
БПВ 66x94x90 (0,35)
распределителей 150x308x95 (1,37)
БВ для 32 патронов калибра 26 мм 128x722x62 (6.5)
БВ для 16 патронов калибра 50 мм 255x1063x74(15,5)
Вариантное исполнение обеспечивает устройство на самолетах и вертолетах различ-
ных типов. Приняты меры по обеспечению безопасности технического обслуживания и
быстрому снаряжению устройства патронами. Количество распределителей, тип и ко. 1иче-
ство блоков выброса зависят от комплектации. Распределители входят в состав при ком-
плектации устройства блоками выброса для обоих типов патронов. Каждый распределитель
обеспечивает работу двух блоков выброса для 32 патронов калибра 26 мм или 4 (либо двух)
блоков выброса дтя 16 патронов калибра 50 мм.
42. Устройство выброса УВ-ЗА предназначено для защиты ЛА от УР путем поста-
новки помех системам наведения и исполнительным механизмам УР в оптическом и радио-
диапазонах ЭМВ [74]. В состав устройства УВ-ЗА входят ПУ, задатчик программ (ЗП), ко-
мандно-информационный блок (КИБ), блок предохранительных выключателей (БПВ), бло-
ки выброса (БВ) патронов, запасные части, инструмент и принадлежности.
Основные характеристики УВ-ЗА
Количество:
возможных программ отстрела с фиксированными параметра- ми предварительно запоминаемых свыше 50000
для оперативного выбора программ 8
изменяемых параметров в каждой программе 5
патронов в залпе 1 ... 8
одновременно снаряжаемых патронов 8 ... 512
отстрелов на каждый ствол для калибра 26 мм / 50 мм 700 / 250
Интервалы отстрела между залпами, с 0.025 ... 16
Максимальная продолжительность программы, с 28
Время хранения в памяти параметров программ и информации о текущем остатке патронов, годы до 1
Потребляемая мощность оз источников:
постоянного тока (24-30 В). кВт 1.2
переменного тока (115 В, 400 Гц), кВА 0,5
Габаритные размеры, мм (масса, кг) ПУ 146x64x104 (0.6)
ЗП 186x221x212(5,5)
КИБ 172x373x214(9.8)
БПВ 94x90x66 (0,35)
БВ: для 32 патронов калибра 26 мм 130x384x172 (7.4)
для 8 патронов калибра 50 мм 130x384x285(9 5)
Параметры программ отстрела, а также тип и калибр помеховых патронов выбирают-
ся перед полетом с учетом полетного задания и имеющейся информации о средствах напа-
дения. Запись параметров 8 программ в программируемую память в УВ-ЗА производится
при наземной подготовке ЛА. При необходимости программы могут быть оперативно из-
менены во время полета. Расходуемые средства выполнены в виде патронов цилиндриче-
ской формы калибра 26 и 50 мм со средней массой 100 г и 1 кг соответственно.
УВ-ЗА имеет модульную конструкцию, расширенный программный набор, в том
числе программы отстрела с параметрами, изменяющимися по закону случайных чисел,
578 Приложение. Системы и средства РЭБ воздушных судов
независимое управление патронами разного типа, систему встроенного контроля, цифровую
индикацию текущего остатка патронов, энергонезависимую память, встроенную систему
учета эксплуатационного ресурса, всеклиматическое исполнение. СУ устройства при неиз-
менном составе и массе обеспечивает управление выбросом до 512 помеховых патронов.
Исполнительные модули обеспечивают как внутрифюзеляжное, так и наружное размеще-
ние. Для внутрифюзеляжного размещения предусмотрены блоки выброса со шкворневы м и
фланцевым креплением. В качестве исполнительного модуля для наружного размещения в
УВ-ЗА может быть использован блок выброса УВ26С 8750-0 на 16 патронов калибра 50 мм.
Устройство устанавливается на самолете МиГ-31.
ЛИТЕРАТУРА
1. Вакин С.А., Шустов Л.И. Основы радиопротиводействия и радиотехнической разведки.
- М.: Сов. радио, 1968. -448 с.
2. Вакин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы. Учебное пособие. Ч. 1. -
М.: ВВИА им. проф. Н.Е. Жуковского, 1998. -434 с.
3. Van Brunt L.V. Applied ECM. - EW Engineering inc., USA, 1978. - 973 p.
4. Основы теории радиоэлектронной борьбы / Под ред. Н.Ф. Николенко. - М.: Военное
издательство, 1987. - 352 с.
5. Палий А.И. Радиоэлектронная борьба. - М.: Военное издательство, 1989. - 350 с.
6. Вартанесян В.А. Радиоэлектронная разведка. - М.: Военное издательство, 1991. - 254 с.
7. Радзиевский В.Г., Сирота А.А. Информационное обеспечение радиоэлектронных систем
в условиях конфликта. - М.: ИПРЖР, 2001. - 456 с.
8. Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной разведки. 2-е
изд., испр. и доп. - М.: «Радиотехника», 2004. - 432 с.
9. Куприянов А.И., Сахаров А.В. Радиоэлектронные системы в информационном
конфликте. - М.: Вузовская книга, 2003. - 528 с.
10. Теоретические основы радиоэлектронной борьбы: Учебное пособие / А.И. Куприянов,
А.В. Сахаров -М/ Вузовская книга, 2007. - 356 с.
11. Современная ралиоэлектронная борьба. Вопросы методологии / Под ред. В.Г.
Радзиевского. - М.: «Радиотехника». 2006. - 424 с.
12. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление
информационных каналов систем управления оружием Под ред. Ю.М. Перунова. Иц. 2-е, испр
и дополн. - М.: «Радиотехника», 2008. - 416 с.
13. Радиоэлектронная борьба. Основы теории / А.И. Куприянов. Л.Н. Шустов. - М.:
Вузовская книга, 2011.- 800 с.
14. 100 лет радиоэлектронной борьбы. Основные этапы развития / Под общ. ред. А.В.
Осина. - Воронеж: ООО «Европолиграфия >\ 2004. - 440 с.
15. Принципы посгроения авиационных комплексов радиоэлектронной борьбы ' Леньшин
А.В. - Воронеж: ИПЦ В ГУ, 2011. — 480 с.
16. Чужие войны / М.С. Барабанов, И.П. Коновалов, В.В. Кулелев, В.А. Целуйко; под ред.
Р.Н. Пухова. -М.: Центр анализа стратегий и технологий, 2012. - 272 с.
17. Козлов С.В., Карпухин В.И., Лазаренков С.М. Модели конфликта авиационных систем
радиоэлектронной борьбы и противовоздушной обороны / Монография. - Воронеж: ВУНЦ ВВС
«ВВА», 2013. -468 с.
18. Авиация ВВС России и научно-технический прогресс. Боевые комплексы и системы
вчера, сегодня, завтра / Под ред. Е.А. Федосова. - М.: Дрофа. 2005. - 734 с.
19. Авиационные системы радиоэлектронного противодействия / А.В. Леньшин. - Воронеж:
ИПЦ ВГУ, 2012.-284 с.
20. Радиоэлектронная борьба. Цифровое запоминание и воспроизведение радиосигналов и
электромагнитных волн / В.Д. Добыкин. А.И. Куприянов, В.Г. Пономарев. Л.Н. Шустов: Под
общ. ред. А И. Куприянова. - М.: Вузовская книга. 2009. - 360 с.
21. Козирацкий Ю.Л., Прохоров Д.В., Козирацкий А.Ю., Голубев С.В. Основы
информационной и радиоэлектронной борьбы. Учеб, пособие. - Воронеж: ВАИУ 2009. - 192 с.
22. Осипов В.Ю., Ильин А.П., Фролов В.П., Кондратюк А.П. Радиоэлектронная борьба.
Теоретические основы: Учеб, пособие для вузов. - Петродворец: ВМИРЭ, 2006. - 302 с.
23. Яршков М.С., Богачев А.С., Меркулов В.И., Дрогалин В.В. Радиоэлектронные
комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Т. 1
Теоретические основы / Под ред. М.С Ярлыкова. - М-. Радиотехника, 2012. — 504 с.
24. Радиоэлектронная борьба. Силовое поражение радиоэлектронных систем / В.Д.
Добыкин, А.И. Куприянов, В.Г. Пономарев. Л.Н. Шустов; Пол общ. ред. А.И. Куприянова. - М.:
Вузовская книга. 2007. - 468 с.
25. Иванкин Е.Ф., Понькин В.А., Иванкин А.В. Перспективы совершенствования
радиолокационной техники на базе технологии САОРИ 7 Рацио! ехника. - 2013. - № 7. - С. 25-28.
580
Литература
26. Информационные технологии в радиотехнических системах: Учеб, пособие. - 2-е изд.,
перераб. и доп. / В.А. Васин, И.Б Власов, Ю.М. Егоров и др.; под ред. И.Б. Федорова. -М.: Изэ-
во МГТУ им. Н.Э. Баумана, 2004. - 768 с.
27. Бородин А.М., Усков Н.В. Синтез алгоритмов обработки информации для эффективного
функционирования авиационного интегрального радиоэлектронного комплекса //
Информационно-измерительные и управляющие системы. -2004. -№ 5. -Т. 2. - С. 28-40.
28. Карташкин А.С. Авиационные радиосистемы. - М: И11 РадиоСофт, 2007. - 304 с.
29. Бородин А.М., Усков Н.В. Критерий оптимальности выбора структуры и основных
технических параметров интегрального радиоэлектронного комплекса // Информационно-
измерительные и управляющие сис гемы. - 2005. - № 3. - Т. 3. - С. 31-36.
30. Шеннон К. Работы по теории информации и кибернетике. - М.: Издательство
иностранной литературы, 1963. - 614 с.
31. Душкин А.В., Лихачев В.П. Основы теории радиоэлектронного подавления и средства
радиоподавления. Часть 1. Основы радиоподавления средств радиолокации: Учеб, пособие. -
Воронеж: ВИРЭ, 2005. - 204 с.
32. Авиационные радиолокационные комплексы и системы / Под ред. П.И. Дудника. - М.:
Изд. ВВИА им. проф. Н.Е. Жуковского, 2006. — 1112 с.
33. Кульбак С. Теория информации и статистика. Пер. с англ., под ред. А.Н. Колмогорова. -
М.: Наука, 1967.-408 с.
34. Вентцель Е.С. Исследование операций. Задачи, принципы, методология. Учеб, пособие
для студ. втузов. - М.: Высшая школа. 2001. - 208 с.
35. Вентцель Е.С. Введение в исследование операций. - М.: Сов. радио. 1964. - 388 с.
36. Модели пространственного и частотного поиска. Монография / Под ред. Ю.Л.
Козирацкого. - М.: Радиотехника, 2013. - 34-1 с.
37. Мельников Ю.П. Воздушная радиотехническая разведка (методы оценки
эффективности). - М.: Радиотехника, 2005. - 304 с.
38. Тихонов В.П. Оптимальный прием сигналов. - М.: Радио и связь, 1983. - 320 с.
39. Радиоэлектронные системы. Основы построения и теория. Справочник. Изд. 2-е.
перераб. и доп. / Под ред. Я.Д. Ширмана. - М.: Радиотехника, 2007. - 512 с.
40. Пассивная радиолокация: методы обнаружения объектов. Монография / Под ред. Р.П.
Быстрова и А.В. Соколова. - М.: Радиотехника, 2008. - 320 с.
41. Верба В.С. Обнаружение наземных объектов. Радиолокационные системы обнаружения
и наведения воздушного базирования. - М.: Радиотехника. 2007. -360 с.
42. Мельников Ю.П. Методы статистического учета взаимного расположения объектов в
групповой цели и их использование при оценке помехоустойчивости бортовых РЛС //
Радиотехника. - 2002. - № 9. - С. 51 -57.
43. Куприянов А.И., Петренко П.Б., Сычев M.IL Теоретические основы радиоэлектронной
разведки: учебное пособие. -М.: Изд-во МГТУ им. Н.Э. Баумана. 2010. -381 с.
44. Демин В.П., Куприянов А.И., Сахаров А.В. Радиоэлектронная разведка и
радиомаскировка. - М.: Изд-во МАИ, 1997. - 156 с.
45. Тихомиров Н.М., Романов С.К., Леньшин А.В. Формирование ЧМ сигналов в
синтезаторах с автоподстройкой. - М.: Радио и связь, 2004. - 210 с.
46. Романов С.К., Тихомиров Н.М., Леньшин А.В. Системы импульсно-фазовой
ав голод стройки в устройствах синтеза и стабилизации частот. - М.: Радио и связь. 2010. - 328 с.
47. Гольденберг Л.М, Магюшкин Б.Д., Позяк М.Н. Цифровая обработка сигналов. - М.:
Радио и связь, 1990. — 256 с.
48. Защита радиолокационных сис гем от помех. Состояние и тенденции развития / Под ред.
А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника. 2003. - 416 с.
49. Ярлыков М С. Статистическая теория радионавигации. - М. Радио и связь. 1985. - 344 с.
50. Первачев С.В., Перов А.И. Адаптивная фильтрация сообщений. - М.: Радио и связь,
1991.-160 с.
51. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы наведения /
Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника». 2003. - 3°0 с.
Литература
581
52. Авиационные системы радиоуправления. Т. 1. Принципы построения радиоуправления.
Основы синтеза и анализа / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника»,
2003.- 192 с.
53. Оценивание дальности и скорости в радиолокационных системах. Ч. 1. / Под ред. А.И.
Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2004. — 312 с.
54. Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки
эффективности местоопределения источников излучения. - М.: «Радиотехника», 2008. —432 с.
55. Леньшин А.В., Зибров Г.В., Виноградов А.Д. Бортовые комплексы обороны воздушных
судов: учеб, пособие / Под ред. А.В. Леньшина. - Воронеж: ИПЦ «Научная книга», 2013. - 309 с.
56. Кузьмин С 3. Основы проектирования систем цифровой обработки радиолокационной
информации. - М.: Радио и связь, 1986. - 352 с.
57. Пат. ПМ 66587 РФ, G01S 7/38. Устройство цифрового запоминания частоты / Галашин
М.Е. и др. -№ 2007108318/22; заявл. 05.03.2007; опубл. 10.09.2007.
58. Цифровые системы СДЦ и их оптимизация: Монография / Ю.Н. Горбунов. - М.:
МИРЭА. 2008.- 132 с.
59. Патент 2443058 РФ, Н04К 3 00. Устройство формирования когерентной помехи ’ Сонин
А.П. - № 2010113162/08; заявл. 05.04.2010; опубл. 10.10.2011.
60. Бородин А.М., Сонин А.П. Пути построения инт егрированных бортовых
радиотехнических комплексов с цифровой обработкой радиосигналов // Информационно-
измерительные и управ тяющие системы. - 2010. — № 6. — Т. 8. - С. 58-69.
61. Кремер И.Я., Владимиров В.И., Карпухин В.И. Модулирующие (мультипликативные)
помехи и прием радиосигналов Под ред. И.Я. Кремера. - М.. С светское радио, 1972. - 480 с.
62. Перунов Ю.М., Мацукевич В.В., Васильев А. А. Зарубежные радио электронные средства
/ ПоХ ред. Ю.М. Перунова. В 4-х книгах. Кн. 2: Системы радиоэлек тронной борьбы. - М.:
Радиотехника. 2010. - 352 с.
63. Леньшин А.В.. Тихомиров Н.М. Проблемы и перспективы разработки устройств
формирования активных помех подавления РЛС с быстрой перестройкой частоты // Теория и
техника радиосвязи. - 2010. - № 1. - С. 35-42.
64. Леньшин А.В., Тихомиров Н.М. Основные направления утучшения характеристик
радиопередающих устройств станций активных помех РЛС с быстрой перестройкой рабочей
частоты // Теория и техника специальной радиосвязи. - 2010. — № 5. — С. 34-39.
65. Леньшин А.В.. Тихомиров М.П., Тихомиров НМ Улучшение характеристик
синтезаторов частот радиопередающих устройств средств радиоэлектронного подавления
Теория и техника радиосвязи. Специальный выпуск. - 2012. - № 5. - С. 84-90.
66. Борисов В.И., Зинчук В.М., Лимарев А Е. и др. Пространственные и вероятностно-
временные характеристики эффективности станций ответных помех при подавлении систем
радиосвязи / Под ред. В.И. Борисова. - М: РадиоСофт. 2008. - 362 с.
б7. Патент 2419201 РФ, H03L 7/16. Адаптивный синтезатор частот с коммутацией элементов
кольца фазовой автоподстройки / Тихомиров Н.М., Леньшин А.В. — № 2010106933/09; заявл.
24.02.2010; опубл. 20.05.2011.
68. Леньшин А.В., Тихомиров Н.М., Романов С.К.. Тихомиров М.Н. Адаптивная
компенсация помех дробности в синтезаторах с фазовой автоподстройкой частоты //
Радиотехника. - 2012. - № 5. - С. 74-78.
69. Леньшин А.В., Тихомиров Н.М , Романов С.К., Тихомиров М.Н. Помехи дробности в
синтезаторах с делителями частоты, управляемыми дельта-сит ма модул яторами //
Телекоммуникации. - 2012. - № 5. - С. 38-42.
70. Защита от радиопомех ' Под ред. М.В. Максимова - М. Советское радио. 1976. - 496 с.
71. Антипенский Р.В., Змий Б.Ф. Моделирование сигналов и их преобразований в линейных
цепях. - Воронеж: ВАИУ 2008. - 361 с.
72. Быков В.В. Эффективность совместного применения способов снижения заметности
постановщиков активных шумовых помех и мер тактической маскировки объектов в конфликте .
современными РЛС | Радиотехника. - 2001. - № 6. - С. 78-82.
582
Литература
73. Патент 2327294 РФ, Н04К 3/00, G01S 13/00. Способ радиоэлектронного подавления
сигналов радиолиний управления минно-взрывьыми устройствами / Козачок Н.И., Саввин С.А.,
Артемов М.Л. -№ 2006141232/09; заявл. 21.11.2006; опубл. 20.06.2008.
74. Энциклопедия «Оружие и технологии России. XXI век». Том 13. «Системы управления,
связи и радиоэлектронной борьбы» / Под общ. ред. министра обороны РФ С. Иванова. — М.: ИД
«Оружие и технологии», 2006. - 704 с.
75. Дятлов А П., Дятлов П.А., Кульбикаян Б.Х. Радио электронная борьба со спутниковыми
радионавигационными системами. - М.: Радио и связь, 2004. - 226 с.
76. Леньшин А.В., Сидорчук В.П. Обоснование характеристик сигналоподобной помехи
моноимпульсной радиолокационной станции И Теория и техника радиосвязи. - 2010. - № 1. - С.
74-77.
77. Леньшин А.В., Сидорчук В.П. Исследование воздействия сигналоподобной помехи на
пеленгационные характеристики моноимпульсной системы // Антенны. - 2010. -№ 6 (157). - С.
67-70.
78. Леньшин А.В., Сидорчук В.П. Особенности изменения пеленгационной характеристики
моноимпульсной системы при воздействии модуляционной помехи И Антенны. - 2011. — № 5
(168).-С. 72-75.
79. Леньшин А.В., Сидорчук В.П. Искажение пелен] ационной характеристики
моноимпульсной системы при воздействии ретрансляционной помехи // Антенны. - 2012. - № 4
(179).-С. 70-73.
80. Баринов С.П., Ельцов О.Н. Точностные характеристики моноимпульсного пеленгатора
Р., 1С в условиях когерентных и некогерентных помех // Радиотехника. — 2009. - № 6. - С. 48-51.
81. Борисов Е.Г., Евдокимов В 11 Высокоточное оружие и борьба с ним: Учебное пособие. -
СПб.: Из т-во «Лань», 2013. - 496 с.
82. Патент 6885333 В2 США, G01S 7/38. Cross-eve technique implementation / Mitchell J.
Sparrow (CHIA), Joseph Cikalo (США). -№ 10-780,141. Заявл. 17.02.2004, опубл. 26.04.2005.
83. Патент 6297^62 Bl США, GO IS 7/38. Electronic countermeasures system / Bernard H. Labbit
(США). -№ 06/058,891. Заявл. 27.06.1979. опубл. 02.10.2001.
84. Юдин Л.М., Фомичев К.И. Системы радиоэлектронного противодействия. Запоминание
высокочастотных сигналов 7 Электроника: наука, технология, бизнес. - 1999. - № 1. - С. 4 8-51.
85. Патент 2239348 РФ, G01S 13/00. F41II 11/12. Устройство для блокирования
радиовзрывателей / Богданов В.В. и др. - № 2005124091/09; заявл. 28.07.2005; опубл. 10.02.2007.
86. Радиоэлектронные технологии России. Альманах. - М.: НО «Ассоциация «Лига
содействия оборонным предприятиям», 2012. - 480 с.
87. Радиоэлектронные технологии России. Альманах. Вторая редакция. - М : НО
«Ассоциация «Лига содействия оборонным предприятиям», 2013. - 832 с.
88. Балыко Ю.П. Основные направления формирования требований к авиационной
составляющей системы опознавания объектов и подразделений своих войск на поле боя //
Сборник докладов на Пленарном заседании Всероссийской научно-практической конференции
«Академические Жуковские чтения». - Воронеж ВУНЦ ВВС «ВВА", 2013. - С. 12-26.
89. Бережной В.А., Иванцов В.А., Соломенин Е.А. Государственное опознавание: настоящее
и будущее // Национальная оборона. — 2010. - № 12. - С. 14-24.
90. Быстров А.В. Развитие национальных систем комплексной радиотехнической
и. [ентификации объектов А Журнал радиоэлектроники — 2012. — Кр 2.
91. Патент 8102302 В2 США G01S 13/00 Mode 5 detection process using phase and amplitude
correlation / Yair Alon (US), Northrop Grumman Guidance & Elrectronic Company, Inc. - №
12/784,299/ Заявл. 20.05.2010. опубл. 24.01.2012.
92. Леньшин А.В.. Лебедев В.В. Построение математической модели процесса воздействия
маскирующих помех на системы опознавания // Радиотехнические и телекоммуникационные
сис темы. - 2014. - № 2. — С. 13-19.
93. Патент 8325081 В2 США G01S 13/78. Identification friend or foe (IFF) system Cornelia F.
Rivers (US), Tomas H. Powell (US), Raytheon Company. - № 12/792,991. Заявл. 03.06.2010, опубл.
04.12.2012.
94. Патент 6885695 Bl США G01S 13 78, H04B 1 707, H04B 1/10. Multi-mode IFF receiver
Литература 583
architecture I Joseph P. Coniglione (US), BAE Systems Information and Electronic Systems Integration,
Inc. -№ 09,659,870. Заявл. 13.09.2000, опубл. 26.04.2005.
95. Леньшин A.B., Иванов С.Л., Лебедев В.В. Моделирование процесса воздействия помех
на ответчики радиолокационных систем с активны i ответом // Вестник Воронежского института
МВД России. -2012. -№ 4. -С. 81-85.
96. Леньшин А.В., Тихомиров Н.М., Лебедев В.В. Математическое моделирование процесса
противодействия системам опознавания с использованием маскирующих помех // Теория и
техника специальной радиосвязи. - 2014. -№ 1. - С. 52-62.
97. Леньшин А.В., Лебедев В.В. Подходы к оценке эффективности подавления РЛС с
активным ответом Ч Сборник докладов VII Всероссийской НТК «Радиолокация и радиосвязь». -
М.: ИРЭ им. В.А. Котельникова РАН, 2013. - С. 194-198.
98. Черняк В.С. Многопозиционная радиолокация. - М.: Радио и связь, 1993. - 416 с.
99. Канащенков А.И., Меркулов В.И., Самарин О.Ф. Многопозиционные радиолокационные
системы воздушного базирования. Возможности и ограничения И Радиотехника. - 2005. — № 9. -
С. 4-10.
100. Зайцев Д.В. Информационные подсистемы многопозиционных РЛС военного
назначения 7 Информационно-измерительные и управляющие системы. — 2007. — № 3-4. — Т. 5. —
С. 4-96.
101. Баринов С П. Анализ алгоритмов оптимальной пространственно-временной обработки
сигналов в условиях шумовых и имитирующих помех // Радиотехника. - 2013. - № 8. — С. 67-75.
102. Щербак Н. Бу ксируемые ложные цели: сверхсекретные технологии выходят на свет //
Электроника: наука, технология, бизнес. -2000. -№ 4. - С. 42-45.
103. ЦНИРТИ 65 тет . Под общ. ред. Б.С. Лобанова. - М.: ФГУП «ЦНИРГИ им. академика
А.И. Берга», 2008. - 360 с.
104. Борзов А.Б. и др. Миллиметровая радиолокация: методы обнаружения и наведения в
условиях естественных и организованных помех. - М.: Радиотехника, 2010.-376 с.
105. Патент 2170480 РФ, H01Q 17 00. Устройство радиолокационной маскировки
воздухозаборника самолетного двигателя Ковалев С.В. и др. - № 99124234/09; заявл. 18.11.1999;
опубл. 10.07.2001.
106. Патент 2362110 РФ. F41H 3/00. Устройство маскировки воздухозаборников летательного
аппарата / Афанасьева Е.М., Петешенков Э.В., Понькин В.А. — № 2008105584/02; заявл.
13.02.2008: опубл. 20.07.2009.
107. Ландау Л.Д, Лифшиц Е.М. Электродинамика сплошных сред. - М.: Наука, 1982. - 620 с.
108. Николайчук Г.А., Иванов В.П., Яковлев С.В. Радиопоглощающие материалы на основе
наноструктур II Электроника: наука, технология, бизнес. — 2010. -№ 1. — С. 92-95.
109. Луцев Л.В. Николайчук Г.А.. Петров В.В.. Яковлев СВ Многоцелевые
радиопоглощающие материалы на основе магнитных наноструктур: получение, свойства и
применение. Z Нанотехника. - 2008. -№ 2 (14). - С. 37-42.
110. Патент 2228565 РФ, H01Q 17/00. Радиопоглощающее покрытие и способ его получения /
Алексеев АТ. и др. — №2002135819/09. заявл. 19.12.2002: опубл. 10.05.2004.
111. Горшенев В.Н.. Колесов В.Н., Фионов А.С. Формирование радиопоглошаюших
композиционных материалов с применением диффузно-химического модифицирования
пористых и слоистых наполнителей // Материалы XVIII Международной научно-технической
конференции «Радиолокация, навигация, связь». Том 3. - Воронеж: ОАО «Концерн «Созвездие»-
ВГУ.-2012.-С. 1943-1951.
112. Патент 2315256 РФ, F41H 3/00. Устройство для маскировки маловысотных летательных
аппаратов / Афанасьева Е.М., Петещенков Э.В., Понькин В А. - № 2006105272/02; заявл.
20.02.2006; опубл. 20.01.2008.
113. Патент 2313757 РФ, F41H 3/00. Способ снижения оптической заметности летательных
аппаратов / Афанасьева Е.М.. Понькин В.А. — № 2006107800'02: заявл 13.03.2006: опубл.
27.12.2007.
114 Патент 2327099 РФ, F41H 3/00. Устройство снижения оптической заметности
летательных аппаратов / Афанасьева Е.М., Понькин В.А., Семенякин А.Ю. - № 2007108972 02,
заявл. 12.03.2007; опубл. 20.06.2008.
584
Литература
115. Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспективных бортовых
радиолокационных систем. Возможности и ограничения. - М: ИПРЖР, 2002. - 176 с.
116. Добыкин В.Д.. Немешин В.Ю., Никитин Р.П. Оценка максимальной дальности
функционального поражения радиоэлектронных средств мощным сверхвысокочастотным
излучением // Радиотехника. - 2008. - № 6. - С. 56-57.
117. Слюсар В.И. Генераторы сверхмощных электромагнитных импульсов в
информационных войнах// Электроника: наука, технология, бизнес. - 2002. - № 5. - С. 60-67.
118. Патент 2121646 РФ, F42B 1242. Боеприпас подавления оптико-электронных средств /
Козлов Н.П. и др. - № 97119423'02; заявл. 25.11.1997; опубл. 10.11.1998.
119. Добыкин В.Д., Никитин Р.П., Комолев С.Г. Оценка массогабаритных характеристик
многоволнового черенковского генератора как источника мощного сверхвысокочастотного
излучения // Радиотехника. - 2008. - № 6. - С. 58-59.
120. Фомичев К.И., Юдин Л.М. Электромагнитное оружие. Перспективы применения в
информационной борьбе // Электроника: наука, технология, бизнес. - 1999. - № 6. - С. 40-44.
121. Михайлов В.А. и др. Оценка стойкости бортовых вычислительных машин в условиях
воздействия сверхкоротких ЭМ полей 7 Технология ЭМС. - 2008. -№ 4. - С. 12-19.
122. Соколов Г. Перспективы развития лазерного оружия в США // Зарубежное военное
обозрение. - 2004. -№ 2. - С. 41-48.
123. Средства и системы оптико-электронного подавления: учебное пособие. Ч. 1. / Под ред.
В.М, Сидорина. -М.: ВВИА им. проф. Н.Е. Жуковского, 2008. - 148 с.
124. Авиационные лазерные и оптико-электронные системы I Под ред. В.М. Сидорина. - М.:
ВВИА им. проф. Н.Е. Жуковского, 2003. - 550 с.
125. Формирование рационального облика перспективных авиационных ракетных систем и
комплексов / РАРАН; В.В. Панов, Г.И. Горчица, Ю.П. Ьалыко и др. - М Машиностроение, -
2010.-608 с.
126. Жуматий В.П., Будников С.А., Паршин Н.В. Угрозы программно-математического
воздействия. Учеб, пособие. - Воронеж: ГУП ВО «Воронежская областная типография -
издательство им. А.А. Болховитинова». 2010, - 231 с.
127. Оптико-электронные системы авиационного вооружения: учебник для слушателей и
курсантов ВВУЗов ВВС / А.М. Краснов, Г.А. Донгаев, Е.М. Пермяков и др. Под ред. А.М.
Краснова. -М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2007. — 1272 с.
128. Артюх С.Н., Лаптев И.В., Глебов Е.В., Пахомов Л.А. Анализ возможностей и
направлений развит ия средств защиты летательных аппаратов от у прав: [яемых ракет И Сб. статей
по материалам Жуковских чтений, посвященных 165-летию со дня рождения Н.Е. Жуковского
«Авиация России: от Жуковского до сегодняшних дней». - Воронеж: ВАИУ. 2012. - С. 3-11.
129. Заикин В.В. Самонаведение: Учеб, пособие. - М.: САИНС-ПРЕСС, 2002. - 80 с.
130. Щербак Н. Противодействие зенитным управляемым ракетам с инфракрасным
наведением // Электроника: наука, технология, бизнес. — 2000. — № 5. - С. 52-55.
131. Типугин В.Н.. Венцель В.А. Радиоуправление. - М.: Сов. радио, 1962. - 751 с.
132. Борисов В.И. Помехозащищенность систем радиосвязи: основы теории и принципы
реализации. - М.: Наука, 2009. - 358 с.
133. Помехозащищенность радиосистем со сложными сигналами / Г.И. Тузов, В.А. Сивов,
В.И. Прытков и др. — М.: Радио и связь, 1985. - 264 с.
134. Владимиров В.И. Докторов А.Л., Елизаров Ф.В. и др. Электромагнитная совместимость
радиоэлектронных средств и систем / Под ред. Н.М. Царькова - М.: Радио и связь, 1985. -272 с.
135. Бакланов Ю.В. Электромагнитная сЪвместимость радиоэлектронных систем: Курс
лекций. - Иркутск: ИВАИИ, 2003. - 172 с.
136. Соловьев В.В. Методы оптимального присвоения частот. - М.: Изд-во НПФ «Гейзер»,
2000.- 133 с.
137. Соловьев В.В. Развитие методов обеспечения электромагнитной совместимости РЭС //
Радиотехника. - 2010. -№ 6. - С. 100-104.
138. Тяпкин Л.11, Симагин А.М-, Черкасов А.И. Некоторые особенности оценки
внутрифюзеляжной элеюгромаг нитной совместимости крупных бортовых радиоэлектронных
Литература
585
комплексов // Информационно-измерительные и управляющие системы. - 2014. - № 3. - Т. 12. —
С. 43-48.
139. Бороцин А.М., Лобанов Б.С., Усков Н.В. Направления развития и синтез построения
интегральных радиоэлектронных комплексов обороны самолетов дальней авиации //
I (нформационно-измерите. юные и управляющие системы. - 2012. - № 6. — Т. 10. — С. 20-27.
140. ЦНИРТИ 60 лет. Сборник статей.-М.: ФГУП «ЦПГ1РТИ им. академика А. И. Берга»,
2003.- 196 с.
141. Бородин А.М., Усков Н.В. Аппаратно-алгоритмическая модель получения и обработки
данных от информативной подсистемы бортового интегрального радиоэлектронного комплекса //
Информационно-измерительные и управляющие системы. -2006. -№ 10. —Т. 4. - С. 53-60.
142. Бородин А.М., Усков Н.В. Вопросы автоматизации проектирования бортовых систем
РЭБ для защиты летательных аппаратов // Информационно-измерительные и управляющие
системы. — 2007. - № 10. — Т. 5. - С. 41-48.
143. Бородин А.М., Лобанов Б.С., Усков Н.В. Концептуальные алгоритмы функционирования
интегрального радиоэлектронного комплекса и его составных частей, предназначенного для
защиты самолетов дальней авиации h Информационно-измерительные и управляющие системы
-2013.-№ 12.-Т. 11.-С. 3-12.
144. Евграфов В. Развитие авиационных средств РЭБ и их применение в современных
вооруженных конфликтах // Зарубежное военное обозрение. - 2011. - № 2. - С. 60-65.
145. Патент 2378603 РФ, F41H 11/02. Устройство индивидуальной ташиты летательного
аппарата от управляемых ракет с оптическими головками самонаведения ' Афанасьева Е.М. и др.
- № 20081268“ 1/02; заявл. 01.07.2008; опубл. 10.01.2010.
146. Абрамов П.Б., Леньшин А.В. Средства радиоэлектронного противодействия тетательных
аппаратов как система массового обслуживания // Вестник Воронежского института МВД
России.-2014,-№2.-С. 122-131.
147. Таха, Хемди А. Введение в исследование операций. 7-е издание / Пер. с англ. - М.:
Издательский дом «Вильяме». — 2005. - 912 с.
148. Абрамов П.Б. Леньшин А.В. Оценка параметров многоканальных систем массового
обслуживания с учетом последействия в потоках обслуженных заявок // Вестник Воронежского
института МВД России. - 2013. - № 2 - С. 130-135.
149. Мельников Ю.П., Попов С.В. Методика приближенной оценки зависимости массы
авиационных станций радиотехнической разведки от характеристик, определяющих их
эффективность // Радиотехника. - 2010. - 3. - С. 83-89.
150. Патент 2390946 РФ. Н04К 3700. Широкополосная станция радиотехнической разведки с
высокой чувствительностью Перунов Ю.М. и др. -№ 2008115818Ю9; заявл. 21.04.2008; опубл.
27.05.2010.
151. Патент 2313911 РФ Н04К 3'00. Станция радиотехнической разведки / Заренков В. А. и
др. -№ 2006127503 '09; заявл. 20.07.2006; опубл. 27.12.2007.
152. Патент 2321177 РФ, НО^К 3,00. Станция радиотехнической разведки / Дикарев В.И. и
др. -№ 2006138895 '09; заявл. 30.10.2006; опубл. 27.03.2008.
153. Патент 2349^26 РФ, G01S 7<’38. Цифровое устройство создания активных помех /
Горбунов Ю.Л. - № 2007130936'09; заявл. 13.08.2007; опубл. 20 03.2009.
154. Мы не побоялись быть первыми. К 50-летию ФНПЦ ФГУП «КНИРТИ» / Под общ. ред.
Е.С. Качанова. — М.: ООО «Издательство «Лесная новь». 2007. — 292 с.
155. Методология системных военно-научных исследований авиационных комплексов / В.С.
Платунов. — М.: Изд-во «Дельта», 2005. - 344 с.
156. Мочалов С.А. Автоматизированный синтез многофункциональной интегрированной
радиоэлектронной системы в составе комплекса бортового оборудования летательного аппарата
ВМФ (методология исследования). — С Пб.: «Любавич». 2012. — 250 с.
157. Абчук В.А.. Матвейчук Ф.А., Томашевский Л.П. Справочник по иссдедованию операций
/ Под общ. ред. Ф.А. Матвейчука. - М.: Военное издательство, 1979. — 368 с.
158. Барковский В.И., Скопец Г.М., Степанов В.Д. Методология формирования технического
облика экспортно ориентированных авиационных комплексов \ Под ред. В.И. Барковского. - М.:
Физмаглит, 2008. -244 с.
586
Литература
159. Капустин А.В. Метод обоснования цены на новые изделия микроэлектронной техники //
Радиотехника. - 2011. - № 1. - С. 90-94.
160. Бонин А.С., Чунихин А.Е. Перспективные авиационные комплексы: проблемы создания
и боевого применения, Военная мысль. - 2011. - № I. - С. 62-71.
161. Маевский Ю.И. Научно-технические проблемы развития систем и средств
радиоэлектронной борьбы И Тем. сборник «Радиоэлектронная борьба в Вооруженных Силах
Российской Федерации». - М.: ООО «Компания «Информационный мост», 2013. - С. 122-124.
162. Козлов С.В., Усков А.В. Способы повышения эффективности функционирования
радиолокационных систем в конфликтных условиях с использованием конструктивно-схемных
недостатков средств помех И VII Всероссийская НТК «Радиолокация и радиосвязь»: сб. докл. —
М.: Институт радиотехники и электроники им. В.А. Котельникова РАН, 2013. - С. 334-338.
163. Щербаков А.Н. Современная и перспективная техника радиоподавления средств и
систем радиолокации в интересах защиты воздушных и наземных объектов ВВС . Сб. статей по
материалам Жуковских чтений, посвященных 165-летию со дня рождения Н.Е. Жуковского
«Авиация России: от Жуковского до сегодняшних дней». - Воронеж; ВАИУ. 2012. - С. 72-78.
164. Лобанов Б.С. 70 лет на фронте радиоэлектронной борьбы И Тематический сборник
«Радиоэлектронная борьба в Вооруженных Силах Российской Федерации». - М.: ООО
«Компания «Информационный мост», 2013. - С. 142-143.
165. Гриб В.Н. Проблемные вопросы создания авиационных комплексов радиоэлектронной
борьбы И Сб. докл. на Пленарном заседании Всероссийской научно-практической конференции
«Академические Жуковские чтения». - Воронеж: ВУНЦ ВВС «ВВА», 2013. - С. 71-77.
166. Баринов С.П., Карпухин В.И. Методы обоснования и направления развития техники
радиоподавления радиолокации И Радиотехника. - 2010. - № 6. - С. 74-79.
167. Кутахов В.П. Архитектура ралиоавионики легате тьных аппаратов пятого поколения //
Радиотехника. - 2002. - № 8. - С. 87-91.
168. Бородин А.М., Усков Н.В. Вопросы оптимального распределения массы средств
радиоэлектронной борьбы и повышения боевой живучести на борту летательного аппарата //
Информационно-измерительные и управляющие системы. - 2008. - № 12. — Т. 6. — С. 23-28.
169. Хмаров И.М. Метод определения эффективной поверхности рассеяния летательных
аппаратов с учетом реальных условий / Радиотехника. - 2010. - № 11. - С. 79-84.
170. Егоров И.П., Русаков П.В., Павлов В.В., Ганзий Д.Д. Система пространственной
режекции помех на основе когерентного весово! о суммирования Ч Радиотехника. - 200". - № 11.
-С. 3-5.
171. Андросов В.А.. Софийский В.Д., Филязов С А., Шабатура Ю.М. Принципы построения
комплексной модели применения авиационных средств радиоэлектронной борьбы //
Ра тиотехника. - 2012. - № 10. - С 119-122.
172. Радзиевский В.Г. Направления развития методологии обоснования средств радио- и
радиотехнической разведки при разведывательно-информационном обеспечении
радиоэлектронной борьбы // Радиотехника. - 2010. - № 6. - С. 67-'73.
173. Быстров Р.П.. Дмитриев В.Г., Перунов Ю.М. Использование средств радиоэлектронной
борьбы для снижения боевых возможностей беспилотных летательных аппаратов И Успехи
современной радиоэлектроники. - 2014. - № 1. - С. 15-22.
587
ОГЛАВЛЕНИЕ
Введение............................................................. 3
Список основных сокращений........................................... 7
Глава 1. Общие положения радиоэлектронной борьбы..................... 9
1.1. Цели, задачи и составные части РЭБ.............................. 9
1.2. Условия ведения РЭБ............................................ 19
1.3. Радиолокационные системы как объекты РЭБ........................ 21
1.4. Частные и обобщенные критерии оценки эффективности РЭБ......... 33
1.4.1. Оперативно-тактические критерии........................... 35
1.4.2. Информационные криз ерии ................................ 45
1.4.3. Энергегические критерии. Коэффициент подавления.......... 54
1.4.4. Военно-экономические критерии............................ 59
1.5. Показатели эффек гивности РЭБ.................................. 61
Глава 2. Радиоэлектронная разведка.................................. 64
2.1. Задачи радиоэлектронной разведки. Критерии эффективности воздушной
разведки............................................................ 64
2.2. Разведывательные и демаскирующие признаки объектов............. 74
2.3. Типовые характеристики РЛС как объекта ВРТР.................... 76
2.4. Задачи и организация радиолокационной разведки ................ 79
2.5. Работа средств разведки в сложной сигнальной обстановке........ 83
2.6. Обобщённая структурная схема станции воздушной РТР............. 88
2.7. Дальность воздушной РТР........................................ 91
2.8. Способы построения приемоанализирующей аппаратуры.............. 93
2.9. Методы определения местоположения РЭС........................ 108
2.9.1. Триангуляционный метод.................................. 109
2.9.2. Разностно-дальномерный метод........................... 115
2.9.3. Кинематический метод определения местоположения........ 119
2.9.4. Дальномерный и дальномерно-угломерный методы............ 122
2.10. Методы определения дальности до РЭС.......................... 123
2.11. Пеленгация РЭС средствами ВРТР............................... 126
2.12. Методы обзора пространства средствами ВРТР.................. 136
2.12.1. Беспоисковые методы обзора пространства................ 137
2.12.2. Поисковые методы обзора пространства................... 138
2.13. Способы определения частоты сигналов разведываемых РЭС противни-
ка 142
2.14. Функциональные методы измерения несущей частоты ........................ 146
2.15. Устройства запоминания и воспроизведения сигналов........... 150
2.15.1. Аналоговые устройства запоминания и воспроизведения парамет-
ров сигналов................................................... 152
2.15.2. Рециркуляторные устройства запоминания и воспроизведения ча-
стоты 157
2.15.3. Устройства запоминания, использующие задержку волны... 162
588
2.15.4. Цифровые устройства запоминания и воспроизведения высокоча-
стотных сигналов................................................ 166
2.15.5. Принцип действия цифровых устройств запоминания и воспроиз-
ведения радиолокационных сигналов DRFM ......................... 173
Глава 3. Основы радиоэлектронного подавления........................ 181
3.1. Классификация радиоэлектронных помех........................... 181
3.2. Создание активных помех РЛС обнаружения целей.................. 186
3.3. Энергетические соотношения при создании активных помех РЛС и ра-
диоголовкам самонаведения........................................... 195
3.4. Активные помехи РЛС управления войсками........................ 201
3.5. Способы создания активных помех для подавления РЛС обнаружения
целей............................................................... 221
3.6. Создание активных помех командным радиолиниям, линиям навигации и
радиосвязи.......................................................... 226
3.7. Активные помехи РЛС, работающим в режиме сопровождения......... 230
3.8. Виды помех моноимпульсным РЛС и способы их создания............ 242
3.9. Создание активных помех каналу дальности....................... 254
3.10. Создание активных помех каналу скорости....................... 259
3.11. Способы создания помех радиовзрывателям....................... 263
3.12. Создание активных помех для подавления РЛС с активным ответом. 269
3.13. Радиоэлектрон ное подавление многопозиционных РЛС............. 283
3.14. Воздействие на среду распространения и отражения электромагнитных
волн................................................................ 202
3.15. Противодействие РЛС с использованием радиолокационных ложных
целей и ловушек..................................................... 302
3.16. Снижение заметности летательных аппаратов военного назначения. 311
3.16. L Радиолокационная заметность ЛА и методы уменьшения эффек-
тивной поверхности рассеяния.................................... 313
3.16.2. Применение противорадиолокационных материалов........... 321
3.16.3. Уменьшение РЛ заметности антенных систем................ 332
3.16.4. Снижение заметности ЛА в оптическом диапазоне........... 334
Глава 4. Основы функционального радиоэлектронного пораже-
ния и оптико-электронного подавления................................ 338
4.1. Функциональное радиоэлектронное поражение электромагнитным излу-
чением ............................................................. 338
4.2. Лазерные средства функционального поражения.................... 355
4.3. Функциональное поражение СПС................................... 361
4.4. Подавление оптико-электронных систем управления оружием........ 367
4.4.1. Краткая характеристика оптико-электронных средств....... 36^
4.4.2. Законы излучения абсолютно черного и реальных тел. Основные
источники оптического излучения ЛА.............................. 379
4.4.3. Принципы действия оптико-электройных приборов обнаружения и
сопровождения целей............................................. 383
4.5. Средства оптико-электронного подавления........................ 385
589
4.5.1. Когерентные средства оптико-электронного подавления...... 385
4.5.2. Пассивные средства оптико-электронного подавления........ 387
4.6. Ложные тепловые цели........................................... 389
4.6.1. Уравнение оптико-электронного подавления................. 389
4.6.2. Виды ложных тепловых целей............................... 391
4.6.3. Подавление ИК ГСН с амплитудно-фазовой модуляцией........ 395
4.6.4. Подавление ИК ГСН с времяимпульсной модуляцией........... 398
Глава 5. Радиоэлектронная защита.................................... 404
5.1. Радиоэлектронная защита как составная часть РЭБ................ 404
5.2. Основные методы помехозащиты................................... 408
5.3. Методы повышения скрытности и помехоустойчивости............... 416
5.4. Системы радиоэлектронной защиты................................ 419
5.4.1. Системы РЭЗ с пространственной селекцией................. 419
5.4.2. Выбор антенной системы РЛС для пространственной селекции. 422
5.4.3. Системы РЭЗ с частотной селекцией........................ 428
5.4.4. Системы РЭЗ с временной селекцией........................ 429
5.4.5. Системы РЭЗ с амплитудной селекцией...................... 432
5.5. Методы защиты от поляризационных помех......................... 435
5.6. Защита от ракет с радиого. ювками самонаведения................ 440
5.7. Радиоэлектронная защит а РЭС от организованных помех........... 446
5.8. Неосновные каналы излучения и приема........................... 451
5.9. Радиоэлектронная защита РЭС и обеспечение ЭМС.................. 457
Глава 6. Авиационные комплексы и средства радиоэлектронного
противодействия..................................................... 470
6.1. Общая характеристика БКО воздушных судов военного назначения... 470
6.2. Основные функции БКО воздушных судов военного назначения....... 474
6.3. Авиационные комплексы индивидуальных и групповых средств РЭБ... 480
6.3.1. Комплексы индивидуальных средств РЭБ..................... 481
6.3.2. Комплексы групповых средств РЭБ.......................... 487
6.4. Основные подсистемы БКО........................................ 488
6.4.1. Подсистема информационного обеспечения................... 488
6.4.2. Подсистема управления ................................... 489
6.4.3. Подсистема исполнительных устройств...................... 498
6.4.4. Подсистема контроля БКО.................................. 501
6.5. Бортовой комплекс обороны как система массового обслуживания... 502
6.6. Станции радиотехнической разведки.............................. 509
6.7. Станции активных помех......................................... 515
6.8. Показатели эффективности БКО и его подсистем................... 530
6.9. Перспективы развития БКО....................................... 538
Приложение. Системы и средства РЭБ воздушных судов.................. 554
Литература.......................................................... 579
Научное издание
Леньшин Андрей Валентинович
БОРТОВЫЕ
СИСТЕМЫ И КОМПЛЕКСЫ
РАДИОЭЛЕКТРОННОГО
ПОДАВЛЕНИЯ
Подписано в печать 18.07.2014. Формат 70x100/16.
Усл. печ. л. 47,94. Тираж 1000 экз. Заказ 296.
ООО Издательско-полиграфический центр
«Научная книга»
394030, г. Воронеж, ул. Среднемосковская, 326, оф. 3
Тел. +7 (473) 200-81-02, 200-81-04
http://www.n-kniga.ru. E-mail: zakaz@n-kniga.ru
Отпечатано в типографии ООО ИПЦ «Научная книга».
394026, г. Воронеж, Московский пр-т, 116
Тел. +7 (473) 220-57-15, 238-02-38
http://www.n-kniga.ru. E-mail: typ@n-kniga.ru
ЛЕНЬШИН
Андрей Валентинович
родился 16 мая 1963 года в городе
Воронеже. В 1980 году поступил на
физический факультет Воронежского
государственного университета.
Окончил Ростовское высшее военное
командно-инженерное училище Ракетных войск (1985), адъюнктуру
Воронежского института МВД России (1999), Российскую академию
государственной службы при Президенте Российской Федерации
(2006). С 1985 по 1995 год проходил службу на командно-инженерных
должностях в Военно-космических силах на космодроме «Байконур».
Доктор технических наук, профессор кафедры авиационных
радиоэлектронных комплексов ВУНЦ ВВС «Военно-воздушная
академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж).
Автор более 200 научных работ (из них 6 монографий и 4 учебных
пособия) в области радиоэлектронной борьбы, проектирования
устройств синтеза частот и формирования сигналов.